Maybeck_ch1_10 Maybeck_ch1 Maybeck Ch1
User Manual: maybeck_ch1
Open the PDF directly: View PDF ![]() .
.
Page Count: 19

Stochastic models,
estimation,
and control
VOLUME 1
PETER S. MAYBECK
DEPARTMENT OF ELECTRICAL ENGINEERING
AIR FORCE INSTITUTE OF TECHNOLOGY
WRIGHT-PATTERSON AIR FORCE BASE
OHIO
ACADEMIC PRESS New York San Francisco London 1979
A Subsidiary of Harcourt Brace Jovanovich, Publishers
Chapter 1, "Introduc tion" from STOCHASTIC MODELS, ESTIMATION, AND CONTROL,
Volume 1, by Peter S. Maybeck, copyright © 1979 by Academic Press, reproduced by
permission of the publisher. All rights of reproduction in any form reserved.
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.
ALL RIGHTS RESERVED.
NO PART OF THIS PUBLICATION MAY BE REPRODUCED OR
TRANSMITTED IN ANY FORM OR BY ANY MEANS, ELECTRONIC
OR MECHANICAL, INCLUDING PHOTOCOPY, RECORDING, OR ANY
INFORMATION STORAGE AND RETRIEVAL SYSTEM, WITHOUT
PERMISSION IN WRITING FROM THE PUBLISHER.
ACADEMIC PRESS, INC.
111 Fifth Avenue, New York, New York 10003
United Kingdom Edition published by
ACADEMIC PRESS, INC. (LONDON) LTD.
24/28 Oval Road, London NW1 7DX
Library of Congress Cataloging in Publication Data
Maybeck, Peter S
Stochastic models, estimation and control.
(Mathematics in science and engineering ; v. )
Includes bibliographies.
1. System analysis 2. Control theory. 3. Estimation
theory. I. Title. II. Series.
QA402.M37 519.2 78-8836
ISBN 0-12-480701-1 (v. 1)
PRINTED IN THE UNITED STATES OF AMERICA
79 80 81 82 9 8 7 6 5 4 3 2 1
To Beverly
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 1
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
CHAPTER
1
Introduction
1.1 WHY STOCHASTIC MODELS, ESTIMATION,
AND CONTROL?
When considering system analysis or controller design, the engineer has at
his disposal a wealth of knowledge derived from deterministic system and
control theories. One would then naturally ask, why do we have to go beyond
these results and propose stochastic system models, with ensuing concepts of
estimation and control based upon these stochastic models? To answer this
question, let us examine what the deterministic theories provide and deter-
mine where the shortcomings might be.
Given a physical system, whether it be an aircraft, a chemical process, or
the national economy, an engineer first attempts to develop a mathematical
model that adequately represents some aspects of the behavior of that system.
Through physical insights, fundamental “laws,” and empirical testing, he tries
to establish the interrelationships among certain variables of interest, inputs to
the system, and outputs from the system.
With such a mathematical model and the tools provided by system and con-
trol theories, he is able to investigate the system structure and modes of
response. If desired, he can design compensators that alter these characteris-
tics and controllers that provide appropriate inputs to generate desired system
responses.
In order to observe the actual system behavior, measurement devices are
constructed to output data signals proportional to certain variables of interest.
These output signals and the known inputs to the system are the only informa-
tion that is directly discernible about the system behavior. Moreover, if a feed-
back controller is being designed, the measurement device outputs are the
only signals directly available for inputs to the controller.
There are three basic reasons why deterministic system and control theories
do not provide a totally sufficient means of performing this analysis and
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 2
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
design. First of all,
no mathematical system model is perfect
. Any such model
depicts only those characteristics of direct interest to the engineer’s purpose.
For instance, although an endless number of bending modes would be required
to depict vehicle bending precisely, only a finite number of modes would be
included in a useful model. The objective of the model is to represent the
dominant or critical modes of system response, so many effects are knowingly
left unmodeled. In fact, models used for generating online data processors or
controllers must be pared to only the basic essentials in order to generate a
computationally feasible algorithm.
Even effects which are modeled are necessarily
approximated
by a mathe-
matical model. The “laws” of Newtonian physics are adequate approximations
to what is actually observed, partially due to our being unaccustomed to
speeds near that of light. It is often the case that such “laws” provide adequate
system
structures
, but various
parameters
within that structure are not deter-
mined absolutely. Thus, there are many sources of uncertainty in any mathe-
matical model of a system.
A second shortcoming of deterministic models is that dynamic systems are
driven not only by our own control inputs, but also by
disturbances which we
can neither control nor model deterministically
. If a pilot tries to command a
certain angular orientation of his aircraft, the actual response will differ from
his expectation due to wind buffeting, imprecision of control surface actuator
responses, and even his inability to generate exactly the desired response from
his own arms and hands on the control stick.
A final shortcoming is that sensors
do not provide perfect and complete
data
about a system. First, they generally do not provide all the information
we would like to know: either a device cannot be devised to generate a mea-
surement of a desired variable or the cost (volume, weight, monetary, etc.) of
including such a measurement is prohibitive. In other situations, a number of
different devices yield functionally related signals, and one must then ask how
to generate a best estimate of the variables of interest based on partially
redundant data. Sensors do not provide exact readings of desired quantities,
but introduce their own system dynamics and distortions as well. Furthermore,
these devices are also always noise corrupted.
As can be seen from the preceding discussion, to assume perfect knowledge
of all quantities necessary to describe a system completely and/or to assume
perfect control over the system is a naive, and often inadequate, approach.
This motivates us to ask the following four questions:
(1) How do you develop system models that account for these uncertainties
in a direct and proper, yet practical, fashion?
(2) Equipped with such models and incomplete, noise-corrupted data from
available sensors, how do you optimally estimate the quantities of interest to
you?
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 3
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
(3) In the face of uncertain system descriptions, incomplete and noise-cor-
rupted data, and disturbances beyond your control, how do you optimally con-
trol a system to perform in a desirable manner?
(4) How do you evaluate the performance capabilities of such estimation
and control systems, both before and after they are actually built? This book
has been organized specifically to answer these questions in a meaningful and
useful manner.
1.2 OVERVIEW OF THE TEXT
Chapters 2-4 are devoted to the stochastic modeling problem. First Chapter
2 reviews the pertinent aspects of deterministic system models, to be exploited
and generalized subsequently. Probability theory provides the basis of all of
our stochastic models, and Chapter 3 develops both the general concepts and
the natural result of static system models. In order to incorporate dynamics
into the model, Chapter 4 investigates stochastic processes, concluding with
practical linear dynamic system models. The basic form is a linear system
driven by white Gaussian noise, from which are available linear measurements
which are similarly corrupted by white Gaussian noise. This structure is justi-
fied extensively, and means of describing a large class of problems in this con-
text are delineated.
Linear estimation is the subject of the remaining chapters. Optimal filtering
for cases in which a linear system model adequately describes the problem
dynamics is studied in Chapter 5. With this background, Chapter 6 describes
the design and performance analysis of practical online Kalman filters. Square
root filters have emerged as a means of solving some numerical precision dif-
ficulties encountered when optimal filters are implemented on restricted word-
length online computers, and these are detailed in Chapter 7.
Volume 1 is a complete text in and of itself. Nevertheless, Volume 2 will
extend the concepts of linear estimation to smoothing, compensation of model
inadequacies, system identification, and adaptive filtering. Nonlinear stochas-
tic system models and estimators based upon them will then be fully devel-
oped. Finally, the theory and practical design of stochastic controllers will be
described.
1.3 THE KALMAN FILTER:
AN INTRODUCTION TO CONCEPTS
Before we delve into the details of the text, it would be useful to see where
we are going on a conceptual basis. Therefore, the rest of this chapter will
provide an overview of the optimal linear estimator, the Kalman filter. This
will be conducted at a very elementary level but will provide insights into the
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 4
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
underlying concepts. As we progress through this overview, contemplate the
ideas being presented: try to conceive of graphic
images
to portray the con-
cepts involved (such as time propagation of density functions), and to gener-
ate a
logical structure
for the component pieces that are brought together to
solve the estimation problem. If this basic conceptual framework makes sense
to you, then you will better understand the need for the details to be developed
later in the text. Should the idea of where we are going ever become blurred
by the development of detail, refer back to this overview to regain sight of the
overall objectives.
First one must ask, what is a Kalman filter? A Kalman filter is simply an
optimal recursive data processing algorithm
. There are many ways of defining
optimal
, dependent upon the criteria chosen to evaluate performance. It will
be shown that, under the assumptions to be made in the next section, the Kal-
man filter is optimal with respect to virtually any criterion that makes sense.
One aspect of this optimality is that the Kalman filter incorporates all infor-
mation that can be provided to it. It processes all available measurements,
regardless of their precision, to estimate the current value of the variables of
interest, with use of (1) knowledge of the system and measurement device
dynamics, (2) the statistical description of the system noises, measurement
errors, and uncertainty in the dynamics models, and (3) any available informa-
tion about initial conditions of the variables of interest. For example, to deter-
mine the velocity of an aircraft, one could use a Doppler radar, or the velocity
indications of an inertial navigation system, or the pitot and static pressure
and relative wind information in the air data system. Rather than ignore any of
these outputs, a Kalman filter could be built to combine all of this data and
knowledge of the various systems’ dynamics to generate an overall best esti-
mate of velocity.
The word
recursive
in the previous description means that, unlike certain
data processing concepts, the Kalman filter does not require all previous data
to be kept in storage and reprocessed every time a new measurement is taken.
This will be of vital importance to the practicality of filter implementation.
The “filter” is actually a
data processing algorithm
. Despite the typical con-
notation of a filter as a “black box” containing electrical networks, the fact is
that in most practical applications, the “filter” is just a computer program in a
central processor. As such, it inherently incorporates discrete-time measure-
ment samples rather than continuous time inputs.
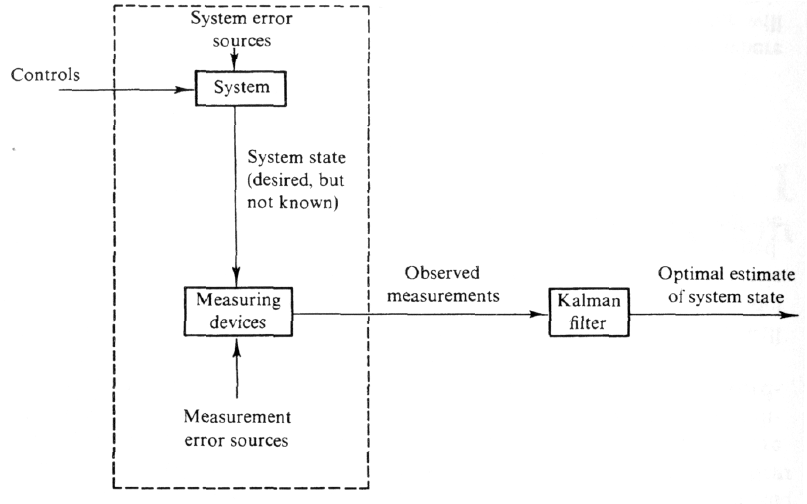
Figure 1.1 depicts a typical situation in which a Kalman filter could be used
advantageously. A system of some sort is driven by some known controls, and
measuring devices provide the value of certain pertinent quantities. Knowl-
edge of these system inputs and outputs is all that is explicitly available from
the physical system for estimation purposes.
The
need
for a filter now becomes apparent. Often the variables of interest,
some finite number of quantities to describe the “state” of the system, cannot
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 5
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
be measured directly, and some means of inferring these values from the avail-
able data must be generated. For instance, an air data system directly provides
static and pitot pressures, from which velocity must be inferred. This infer-
ence is complicated by the facts that the system is typically driven by inputs
other than our own known controls and that the relationships among the vari-
ous “state” variables and measured outputs are known only with some degree
of uncertainty. Furthermore, any measurement will be corrupted to some
degree by noise, biases, and device inaccuracies, and so a means of extracting
valuable information from a noisy signal must be provided as well. There may
also be a number of different measuring devices, each with its own particular
dynamics and error characteristics, that provide some information about a par-
ticular variable, and it would be desirable to combine their outputs in a sys-
tematic and optimal manner. A Kalman filter combines all available
measurement data, plus prior knowledge about the system and measuring
devices, to produce an estimate of the desired variables in such a manner that
the error is minimized statistically. In other words, if we were to run a number
of candidate filters many times for the same application, then the average
results of the Kalman filter would be better than the average results of any
other.
Conceptually, what any type of filter tries to do is obtain an “optimal” esti-
mate of desired quantities from data provided by a noisy environment, “opti-
mal” meaning that it minimizes errors in some respect. There are many means
of accomplishing this objective. If we adopt a Bayesian viewpoint, then we
want the filter to propagate the
conditional probability density
of the desired
FIG. 1. 1 Typical Kalman filter application
Maybeck, Peter S.,
Stochastic Models, Estimation, and Control
, Vol. 1 6
C
OPYRIGHT
© 1979,
BY
A
CADEMIC
P
RESS
, I
NC
.D
ECEMBER
25, 1999 11:00
AM
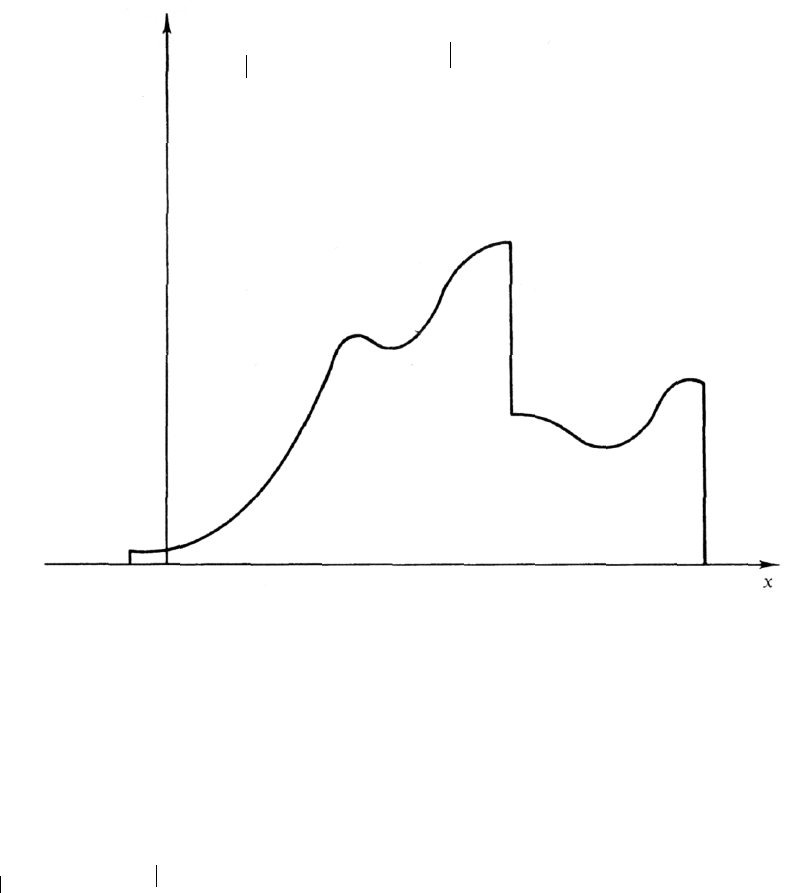
quantities, conditioned on knowledge of the actual data coming from the mea-
suring devices. To understand this concept, consider Fig. 1.2, a portrayal of a
conditional probability density of the value of a scalar quantity at time
instant ( ), conditioned on knowledge that the vector measurement at
time instant 1 took on the value ( ) and similarly for instants 2
through , plotted as a function of possible values. This is denoted as
. For example, let be the one-dimensional
position of a vehicle at time instant 1, and let be a two-dimensional vector
describing the measurements of position at time by two separate radars.
Such a conditional probability density contains all the available information
about : it indicates, for the given value of all measurements taken up
through time instant , what the probability would be of assuming any
particular value or range of values.
It is termed a “conditional” probability density because its shape and loca-
tion on the axis is dependent upon the values of the measurements taken. Its
shape conveys the amount of certainty you have in the knowledge of the value
of . If the density plot is a narrow peak, then most of the probability
“weight” is concentrated in a narrow band of values. On the other hand, if
the plot has a gradual shape, the probability “weight” is spread over a wider
range of , indicating that you are less sure of its value.
FIG. 1. 2 Conditional probability density.
fxi()z1()z2()…zi(),,, xz
1z2…zi
,,,()
x
ixi() z1()
z1z1() z1
=
ixi()
fxi()z1()z2()…zi(),,, xz
1z2…zi
,,,() xi()
zj()
j
xi()
ixi()
x
x
x
x
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 7
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
Once such a conditional probability density function is propagated, the
“optimal” estimate can be defined. Possible choices would include
(1) the mean—the “center of probability mass” estimate;
(2) the mode—the value of that has the highest probability, locating the
peak of the density; and
(3) the median—the value of such that half of the probability weight lies
to the left and half to the right of it.
A Kalman filter performs this conditional probability density propagation
for problems in which the system can be described through a linear model and
in which system and measurement noises are white and Gaussian (to be
explained shortly). Under these conditions, the mean, mode, median, and vir-
tually any reasonable choice for an “optimal” estimate all coincide, so there is
in fact a unique “best” estimate of the value of . Under these three restric-
tions, the Kalman filter can be shown to be the best filter of any conceivable
form. Some of the restrictions can be relaxed, yielding a qualified optimal fil-
ter. For instance, if the Gaussian assumption is removed, the Kalman filter can
be shown to be the best (minimum error variance) filter out of the class of lin-
ear unbiased filters. However, these three assumptions can be justified for
many potential applications, as seen in the following section.
1.4 BASIC ASSUMPTIONS
At this point it is useful to look at the three basic assumptions in the Kal-
man filter formulation. On first inspection, they may appear to be overly
restrictive and unrealistic. To allay any misgivings of this sort, this section
will briefly discuss the physical implications of these assumptions.
A linear system model is justifiable for a number of reasons. Often such a
model is adequate for the purpose at hand, and when nonlinearities do exist,
the typical engineering approach is to linearize about some nominal point or
trajectory, achieving a perturbation model or error model. Linear systems are
desirable in that they are more easily manipulated with engineering tools, and
linear system (or differential equation) theory is much more complete and
practical than nonlinear. The fact is that there are means of extending the Kal-
man filter concept to some nonlinear applications or developing nonlinear fil-
ters directly, but these are considered only if linear models prove inadequate.
“Whiteness” implies that the noise value is not correlated in time. Stated
more simply, if you know what the value of the noise is now, this knowledge
does you no good in predicting what its value will be at any other time. White-
ness also implies that the noise has equal power at all frequencies. Since this
results in a noise with infinite power, a white noise obviously cannot really
exist. One might then ask, why even consider such a concept if it does not
x
x
x
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 8
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
exist in real life? The answer is twofold. First, any physical system of interest
has a certain frequency “bandpass”—a frequency range of inputs to which it
can respond. Above this range, the input either has no effect, or the system so
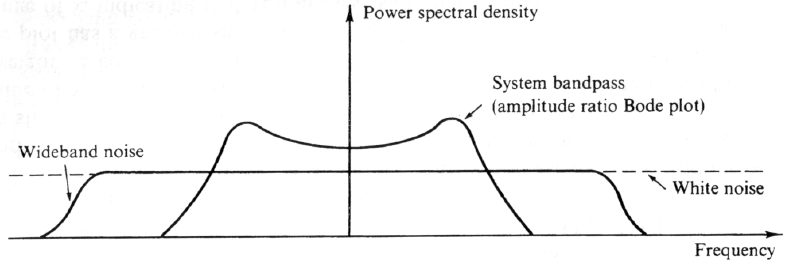
severely attenuates the effect that it essentially does not exist. In Fig. 1.3, a
typical system bandpass curve is drawn on a plot of “power spectral density”
(interpreted as the amount of power content at a certain frequency) versus fre-
quency. Typically a system will be driven by wideband noise—one having
power at frequencies above the system bandpass, and essentially constant
power at all frequencies within the system bandpass—as shown in the figure.
On this same plot, a white noise would merely extend this constant power
level out across all frequencies. Now, within the bandpass of the system of
interest, the fictitious white noise looks identical to the real wideband noise.
So what has been gained? That is the second part of the answer to why a white
noise model is used. It turns out that the mathematics involved in the filter are
vastly simplified (in fact, made tractable) by replacing the real wideband noise
with a white noise which, from the system’s “point of view,” is identical.
Therefore, the white noise model is used.
One might argue that there are cases in which the noise power level is not
constant over all frequencies within the system bandpass, or in which the
noise is in fact time correlated. For such instances, a white noise put through a
small linear system can duplicate virtually any form of time-correlated noise.
This small system, called a “shaping filter,” is then added to the original sys-
tem, to achieve an overall linear system driven by white noise once again.
Whereas whiteness pertains to time or frequency relationships of a noise,
Gaussianness has to do with its amplitude. Thus, at any single point in time,
the probability density of a Gaussian noise amplitude takes on the shape of a
normal bell-shaped curve. This assumption can be justified physically by the
fact that a system or measurement noise is typically caused by a number of
small sources. It can be shown mathematically that when a number of inde-
pendent random variables are added together, the summed effect can be de-
scribed very closely by a Gaussian probability density, regardless of the shape
of the individual densities.
FIG. 1. 3 Power spectral density bandwidths.
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 9
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
There is also a practical justification for using Gaussian densities. Similar
to whiteness, it makes the mathematics tractable. But more than that, typically
an engineer will know, at best, the first and second order statistics (mean and
variance or standard deviation) of a noise process. In the absence of any
higher order statistics, there is no better form to assume than the Gaussian
density. The first and second order statistics completely determine a Gaussian
density, unlike most densities which require an endless number of orders of
statistics to specify their shape entirely. Thus, the Kalman filter, which propa-
gates the first and second order statistics, includes all information contained
in the conditional probability density, rather than only some of it, as would be
the case with a different form of density.
The particular assumptions that are made are dictated by the objectives of,
and the underlying motivation for, the model being developed. If our objective
were merely to build good descriptive models, we would not confine our atten-
tion to linear system models driven by white Gaussian noise. Rather, we
would seek the model, of whatever form, that best fits the data generated by
the “real world.” It is our desire to build estimators and controllers based upon
our system models that drives us to these assumptions: other assumptions gen-
erally do not yield tractable estimation or control problem formulations. For-
tunately, the class of models that yields tractable mathematics also provides
adequate representations for many applications of interest. Later, the model
structure will be extended somewhat to enlarge the range of applicability, but
the requirement of model usefulness in subsequent estimator or controller
design will again be a dominant influence on the manner in which the exten-
sions are made.
1.5 A SIMPLE EXAMPLE
To see how a Kalman filter works, a simple example will now be developed.
Any example of a single measuring device providing data on a single variable
would suffice, but the determination of a position is chosen because the proba-
bility of one’s exact location is a familiar concept that easily allows dynamics
to be incorporated into the problem.
Suppose that you are lost at sea during the night and have no idea at all of
your location. So you take a star sighting to establish your position (for the
sake of simplicity, consider a one-dimensional location). At some time you
determine your location to be . However, because of inherent measuring
device inaccuracies, human error, and the like, the result of your measurement
is somewhat uncertain. Say you decide that the precision is such that the stan-
dard deviation (one-sigma value) involved is (or equivalently, the variance,
or second order statistic, is ,). Thus, you can establish the conditional prob-
ability of , your position at time , conditioned on the observed value of
t1
z1
σz1
σz1
2
xt
1
() t1
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 10
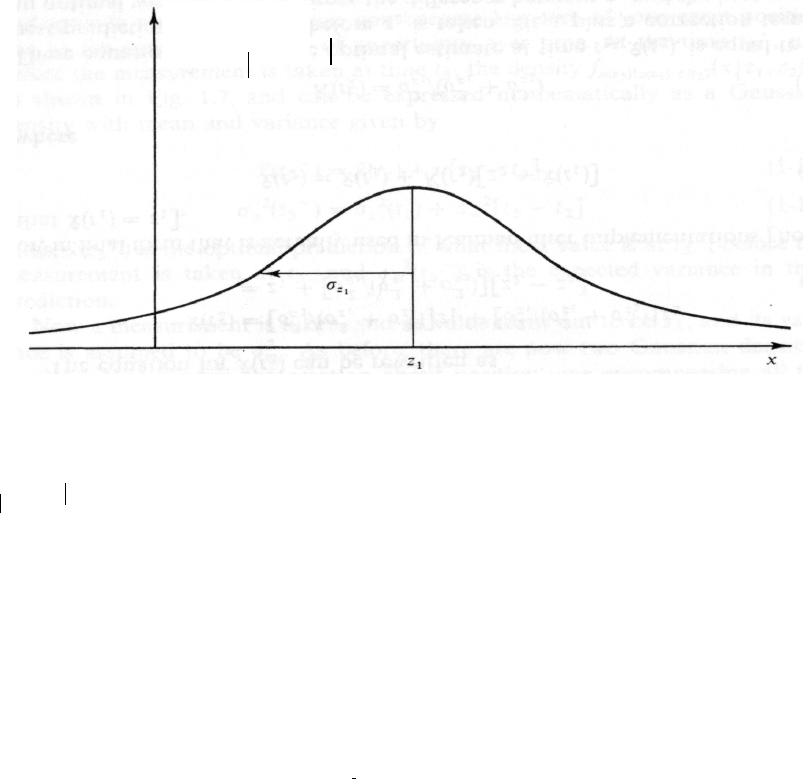
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
the measurement being , as depicted in Fig. 1.4. This is a plot of
as a function of the location : it tells you the probability of
being in any one location, based upon the measurement you took. Note that
is a direct measure of the uncertainty: the larger is, the broader the
probability peak is, spreading the probability “weight” over a larger range of
values. For a Gaussian density, 68.3% of the probability “weight” is con-
tained within the band units to each side of the mean, the shaded portion in
Fig. 1.4.
Based on this conditional probability density, the best estimate of your
position is
(1-1)
and the variance of the error in the estimate is
(1-2)
Note that is both the mode (peak) and the median (value with of the
probability weight to each side), as well as the mean (center of mass).
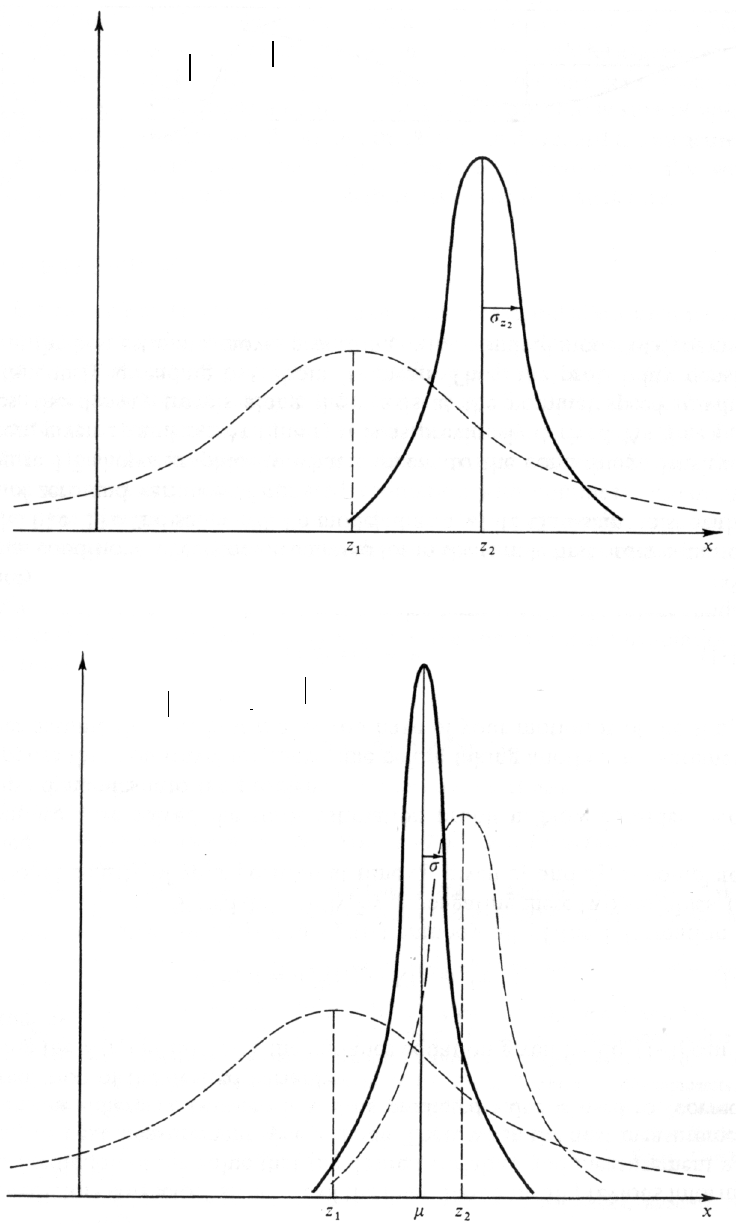
Now say a trained navigator friend takes an independent fix right after you
do, at time (so that the true position has not changed at all), and obtains
a measurement with a variance . Because he has a higher skill, assume
the variance in his measurement to be somewhat smaller than in yours. Figure
1.5 presents the conditional density of your position at time , based only on
the measured value . Note the narrower peak due to smaller variance, indi-
cating that you are rather certain of your position based on his measurement.
At this point, you have two measurements available for estimating your
position. The question is, how do you combine these data? It will be shown
subsequently that, based on the assumptions made, the conditional density of
FIG. 1. 4 Conditional density of position based on measured value .z1
fxt
1
()zt
1
()
xz
1
()
z1
fxt
1
()zt
1
()
xz
1
() x
σz1σz1
x
σ
x
ˆt1
() z1
=
σx
2t1
() σ
z1
2
=
x
ˆ12⁄
t2t1
≅
z2σz2
t2
z2
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 11
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
FIG. 1. 5 Conditional density of position based on measurement alone.z2
FIG. 1. 6 Conditional density of position based on data and .z1z2
fxt
2
()zt
2
()
xz
2
()
fxt
2
()zt
1
()zt
2
(),xz
1z2
,()
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 12
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
your position at time , , given both and , is a Gaussian density
with mean and variance as indicated in Fig. 1.6, with
(1-3)
(1-4)
Note that, from (l-4), is less than either or , which is to say that the
uncertainty in your estimate of position has been decreased by combining the
two pieces of information.
Given this density, the best estimate is
(1-5)
with an associated error variance . It is the mode and the mean (or, since it
is the mean of a conditional density, it is also termed the conditional mean).
Furthermore, it is also the maximum likelihood estimate, the weighted least
squares estimate, and the linear estimate whose variance is less than that of
any other linear unbiased estimate. In other words, it is the “best” you can do
according to just about any reasonable criterion.
After some study, the form of given in Eq. (1-3) makes good sense. If
were equal to , which is to say you think the measurements are of equal
precision, the equation says the optimal estimate of position is simply the
average of the two measurements, as would be expected. On the other hand, if
were larger than , which is to say that the uncertainty involved in the
measurement is greater than that of , then the equation dictates “weight-
ing” more heavily than . Finally, the variance of the estimate is less than
, even if is very large: even poor quality data provide some information,
and should thus increase the precision of the filter output.
The equation for can be rewritten as
(1-6)
or, in final form that is actually used in Kalman filter implementations [noting
that ]
(1-7)
where
(1-8)
These equations say that the optimal estimate at time , , is equal to the
best prediction of its value before is taken, , plus a correction term of
an optimal weighting value times the difference between and the best pre-
diction of its value before it is actually taken, . It is worthwhile to under-
stand this “predictor-corrector” structure of the filter. Based on all previous
t2t1
≅xt
2
() z1z2
µσ
2
µσ
z2
2σz1
2σz2
2
+()⁄[]z1σz1
2σz1
2σz2
2
+()⁄[]z2
+=
1σ2
⁄1σz1
2
⁄()1σz2
2
⁄()+=
σσ
z1σz2
x
ˆt2
() µ=
σ2
µσ
z1
σz2
σz1σz2
z1z2
z2z1
σz1σz2
x
ˆt2
()
x
ˆt2
() σ
z2
2σz1
2σz2
2
+()⁄[]z1σz1
2σz1
2σz2
2
+()⁄[]z2
+=
z1σz1
2σz1
2σz2
2
+()⁄[]z2z1
–[]+=
x
ˆt1
() z1
=
x
ˆt2
() x
ˆt1
() Kt
2
()z2x
ˆt1
()–[]+=
Kt
2
() σ
z1
2σz1
2σz2
2
+()⁄=
t2x
ˆt2
()
z2
x
ˆt1
()
z2
x
ˆt1
()
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 13
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
information, a prediction of the value that the desired variables and measure-
ment will have at the next measurement time is made. Then, when the next
measurement is taken, the difference between it and its predicted value is used
to “correct” the prediction of the desired variables.
Using the in Eq. (l-8), the variance equation given by Eq. (1-4) can be
rewritten as
(1-9)
Note that the values of and embody all of the information in
. Stated differently, by propagating these two variables, the
conditional density of your position at time , given and , is completely
specified.
Thus we have solved the static estimation problem. Now consider incorpo-
rating dynamics into the problem.
Suppose that you travel for some time before taking another measurement.
Further assume that the best mode1 you have of your motion is of the simple
form
(1-10)
where is a nominal velocity and is a noise term used to represent the un-
certainty in your knowledge of the actual velocity due to disturbances, off-
nominal conditions, effects not accounted for in the simple first order equa-
tion, and the like. The “noise” will be modeled as a white Gaussian noise
with a mean of zero and variance of .
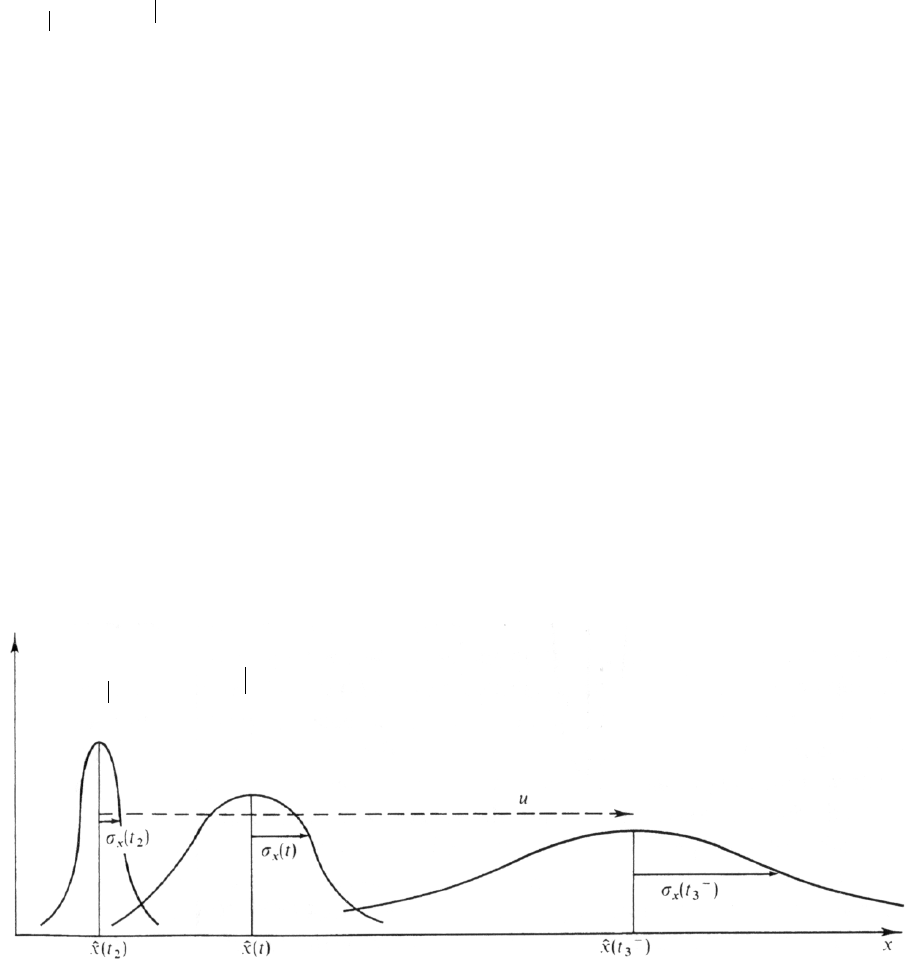
Figure 1.7 shows graphically what happens to the-conditional density of
position, given and . At time it is as previously derived. As time
progresses, the density travels along the axis at the nominal speed , while
simultaneously spreading out about its mean. Thus, the probability density
starts at the best estimate, moves according to the nominal model of dynamics,
Kt
2
()
σx
2t2
() σ
x
2t1
() Kt
2
()σ
x
2t1
()–=
x
ˆt2
() σ
x
2t2
()
fxt
2
()zt
1
()zt
2
(),xz
1z2
,()
t2z1z2
dx dt⁄uw+=
uw
w
σw
2
FIG. 1. 7 Propagation of conditional probability density.
fxt()zt
1
()zt
2
(),xz
1z2
,()
z1z2t2
xu

Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 14
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
and spreads out in time because you become less sure of your exact position
due to the constant addition of uncertainty over time. At the time , just
before the measurement is taken at time , the density is
as shown in Fig. 1.7, and can be expressed mathematically as a Gaussian den-
sity with mean and variance given by
(1-11)
(1-12)
Thus, is the optimal prediction of what the value is at , before the
measurement is taken at , and is the expected variance in that
prediction.
Now a measurement is taken, and its value turns out to be , and its vari-
ance is assumed to be . As before, there are now two Gaussian densities
available that contain information about position, one encompassing all the
information available before the measurement, and the other being the infor-
mation provided by the measurement itself. By the same process as before, the
density with mean and variance is combined with the density
with mean and variance to yield a Gaussian density with mean
(1-13)
and variance
(1-14)
where the gain is given by
(1-15)
The optimal estimate, , satisfies the same form of equation as seen previ-
ously in (1-7). The best prediction of its value before is taken is corrected
by an optimal weighting value times the difference between and the predic-
tion of its value. Similarly, the variance and gain equations are of the same
form as (1-8) and (1-9).
Observe the form of the equation for . If , the measurement noise
variance, is large, then is small; this simply says that you would tend to
put little confidence in a very noisy measurement and so would weight it
lightly. In the limit as , becomes zero, and equals ; an
infinitely noisy measurement is totally ignored. If the dynamic system noise
variance is large, then will be large [see Eq. (l-12)] and so will
; in this case, you are not very certain of the output of the system mode1
within the filter structure and therefore would weight the measurement
heavily. Note that in the limit as , and , so Eq. (1-
13) yields
(1-16)
t3
—
t3
fxt
3
()zt
1
()zt
2
(),xz
1z2
,()
x
ˆt3
—
() x
ˆt2
() ut
3t2
–[]+=
σx
2t3
—
() σ
x
2t2
() σ
w
2t3t2
–[]+=
x
ˆt3
—
() xt
3
—
t3σx
2t3
—
()
z3
σz3
2
x
ˆt3
—
() σ
x
2t3
—
()
z3σz3
2
x
ˆt3
() x
ˆt3
—
()Kt
3
()z3x
ˆt3
—
()–[]+=
σx
2t3
() σ
x
2t3
—
()Kt
3
()σ
x
2t3
—
()–=
Kt
3
()
Kt
3
() σ
x
2t3
—
()σ
x
2t3
—
()σ
z3
2
+[]⁄=
x
ˆt3
()
z3
z3
Kt
3
() σ
z3
Kt
3
()
σz3
2∞→ Kt
3
() x
ˆt3
() x
ˆt3
—
()
σw
2σx
2t3
—
()
Kt
3
()
σw
2∞→σ
x
2t3
—
() ∞→Kt
3
() 1→
x
ˆt3
() x
ˆt3
—
()1z3x
ˆt3
—
()–[]⋅+= z3
=
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 15
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
Thus in the limit of absolutely no confidence in the system model output, the
optimal policy is to ignore the output and use the new measurement as the
optimal estimate. Finally, if should ever become zero, then so does
; this is sensible since if , you are absolutely sure of your esti-
mate before becomes available and therefore can disregard the measure-
ment.
Although we have not as yet derived these results mathematically, we have
been able to demonstrate the reasonableness of the filter structure.
1.6 A PREVIEW
Extending Eqs. (1-11) and (1-12) to the vector case and allowing time vary-
ing parameters in the system and noise descriptions yields the general Kalman
filter algorithm for propagating the conditional density and optimal estimate
from one measurement sample time to the next. Similarly, the Kalman filter
update at a measurement time is just the extension of Eqs. (l-13)-(1-15). Fur-
ther logical extensions would include estimation with data beyond the time
when variables are to be estimated, estimation with nonlinear system models
rather than linear, control of systems described through stochastic models, and
both estimation and control when the noise and system parameters are not
known with absolute certainty. The sequel provides a thorough investigation
of those topics, developing both the theoretical mathematical aspects and
practical engineering insights necessary to resolve the problem formulations
and solutions fully.
GENERAL REFERENCES
1. Aoki, M., Optimization of Stochastic Systems—Topics in Discrete-Time Systems. Academic
Press, New York, 1967.
2. Aström. K. J., Introduction to Stochastic Control Theory. Academic Press, New York, 1970.
3. Bryson, A. E. Jr., and Ho. Y., Applied Optimal Control. Blaisdell, Wahham, Massachusetts,
1969.
4. Bucy, R. S., and Joseph, P. D., Filtering for Stochastic Processes with Applications to Guidance.
Wiley, New York, 1968.
5. Deutsch, R., Estimation Theory. Prentice-Hall, Englewood Cliffs, New Jersey, 1965.
6. Deyst, J. J., “Estimation and Control of Stochastic Processes,” unpublished course notes. M.I.T.
Dept. of Aeronautics and Astronautics, Cambridge, Massachusetts, 1970.
7. Gelb, A. (ed.), Applied Optimal Estimation. M.I.T. Press, Cambridge, Massachusetts, 1974.
8. Jazwinski, A. H., Stochastic Processes and Filtering Theory. Academic Press, New York, 1970.
9. Kwakernaak. H., and Sivan. R., Linear Optimal Control Systems. Wiley, New York, 1972.
10. Lee, R. C. K., Optimal Estimation, Identification and Control. M. I. T. Press, Cambridge, Mas-
sachusetts, 1964.
11. Liebelt, P. B., An Introduction to Optimal Estimation. Addison-Wesley, Reading, Massachusetts,
1967.
12. Maybeck, P. S., “The Kalman Filter—An Introduction for Potential Users,” TM-72-3, Air Force
Flight Dynamics Laboratory, Wright-Patterson AFB, Ohio, June 1972.
σx
2t3
—
()
Kt
3
() σ
x
2t3
—
() 0=
z3
Maybeck, Peter S., Stochastic Models, Estimation, and Control, Vol. 1 16
COPYRIGHT © 1979, BY ACADEMIC PRESS, INC.DECEMBER 25, 1999 11:00 AM
13. Maybeck, P. S., “Applied Optimal Estimation—Kalman Filter Design and Implementation,”
notes for a continuing education course offered by the Air Force Institute of Technology,
Wright-Patterson AFB, Ohio, semiannually since December 1974.
14. Meditch, J. S., Stochastic Optimal Linear Estimation and Control. McGraw-Hill, New York,
1969.
15. McGarty, T. P., Stochastic Systems and State Estimation. Wiley, New York, 1974.
16. Sage, A. P., and Melsa, J. L., Estimation Theory with Application to Communications and Con-
trol. McGraw-Hill, New York, 1971.
17. Schweppe, F. C., Uncertain Dynamic Systems. Prentice-Hall, Englewood Cliffs, New Jersey,
1973.
18. Van Trees, H. L., Detection, Estimation and Modulation Theory, Vol. 1. Wiley, New York, 1968.
