SebestaSolutionsManual Solution Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 58
Instructor’s Solutions Manual
to
Concepts of Programming Languages
Sixth Edition
R.W. Sebesta
2
Preface
Changes to the Sixth Edition
The goals, overall structure, and approach of this sixth edition of Concepts of Programming Languages
remain the same as those of the five earlier editions. The principal goal is to provide the reader with the tools
necessary for the critical evaluation of existing and future programming languages. An additional goal is to
prepare the reader for the study of compiler design. There were several sources of our motivations for the
changes in the sixth edition. First, to maintain the currency of the material, much of the discussion of older
programming languages has been removed. In its place is material on newer languages. Especially
interesting historical information on older programming languages has been retained but placed in historical
side boxes. Second, the material has been updated to reflect the fact that most students now come to this
course with a basic understanding of object-oriented programming. We shortened the discussion of basics
and expanded the discussion of advanced topics.
Third, reviewer comments have prompted several changes. For example, the material on functional
programming languages has been reorganized and strengthened. Also, we have added a programming
exercises section at the end of most chapters to give students experience with the concepts described in the
book and to make the concepts more realistic and appealing. The book now has a new supplement: a
companion Web site with a few small language manuals, interactive quizzes for students, and additional
programming projects. Finally, interviews with the designers of recent languages that have achieved
widespread use appear in several places in the book. These show the human side of language development.
Four specific changes distinguish the sixth edition text from its predecessor. First, the material on
implementing subprograms has been condensed, largely because the virtual disappearance of Pascal and
Modula-2, as well as the shrinking usage of Ada, has made the implementation of nested subprograms with
static scoping less important. All of the relevant Pascal examples were rewritten in Ada. Second, Chapter 14
has been expanded to cover both exception handling and event handling. This change was motivated by the
great increase in interest and importance of event handling that has come with the wide use of interactive
Web documents. Third, the introduction to Smalltalk has been eliminated because we believe the syntactic
details of Smalltalk are no longer relevant to the material of the book. Fourth, there are numerous significant
changes motivated by the aging of existing programming languages and the emergence of new programming
languages. There is now little mention of Modula-2, Pascal, and the ALGOLs. Also, the coverage of Ada
and Fortran has been whittled down to the more interesting of their features that do not appear in other
popular languages. New material on JavaScript, PHP, and C# has been added where appropriate. Finally,
most chapters now include a new section, Programming Exercises.
The Vision
This book describes the fundamental concepts of programming languages by discussing the design issues
of the various language constructs, examining the design choices for these constructs in some of the most
common languages, and critically comparing design alternatives.
Any serious study of programming languages requires an examination of some related topics, among which
are formal methods of describing the syntax and semantics of programming languages, which are covered in
Chapter 3. Also, implementation techniques for various language constructs must be considered: Lexical
and syntax analysis are discussed in Chapter 4, and implementation of subprogram
linkage is covered in Chapter 10. Implementation of some other language constructs is discussed in various
other parts of the book.
3
The following paragraphs outline the contents of the sixth edition.
Chapter Outlines
Chapter 1 begins with a rationale for studying programming languages. It then discusses the criteria used
for evaluating programming languages and language constructs. The primary influences on language
design, common design tradeoffs, and the basic approaches to implementation are also examined.
Chapter 2 outlines the evolution of most of the important languages discussed in this book. Although no
language is described completely, the origins, purposes, and contributions of each are discussed. This
historical overview is valuable because it provides the background necessary to understanding the practical
and theoretical basis for contemporary language design. It also motivates further study of language design
and evaluation. In addition, because none of the remainder of the book depends on Chapter 2, it can be read
on its own, independent of the other chapters.
Chapter 3 describes the primary formal method for describing the syntax of programming language, BNF.
This is followed by a description of attribute grammars, which describe both the syntax and static semantics
of languages. The difficult task of semantic description is then explored, including brief
introductions to the three most common methods: operational, axiomatic, and denotational semantics.
Chapter 4 introduces lexical and syntax analysis. This chapter is targeted to those colleges that no longer
require a compiler design course in their curricula. Like Chapter 2, this chapter stands alone and can be read
independently of the rest of the book.
Chapters 5 through 14 describe in detail the design issues for the primary constructs of the imperative
languages. In each case, the design choices for several example languages are presented and evaluated.
Specifically, Chapter 5 covers the many characteristics of variables, Chapter 6 covers data types, and
Chapter 7 explains expressions and assignment statements. Chapter 8describes control statements, Chapters
9 and 10 discuss subprograms and their implementation. Chapter 11 examines data abstraction facilities.
Chapter 12 provides an in-depth discussion of language features that support object-oriented programming
(inheritance and dynamic method binding), Chapter 13 discusses concurrent program units, and Chapter 14
is about exception handling and event handling.
The last two chapters (15 and 16) describe two of the most important alternative programming paradigms:
functional programming and logic programming. Chapter 15 presents an introduction to Scheme, including
descriptions of some of its primitive functions, special forms, and functional forms, as well as some examples
of simple functions written in Scheme. Brief introductions to COMMON LISP, ML, and Haskell are given to
illustrate some different kinds of functional language. Chapter 16 introduces logic programming and the
logic programming language, Prolog.
To the Instructor
In the junior-level programming language course at the University of Colorado at Colorado Springs, the
book is used as follows: We typically cover Chapters 1 and 3 in detail, and though students find it
interesting and beneficial reading, Chapter 2 receives little lecture time due to its lack of hard technical
content. Because no material in subsequent chapters depends on Chapter 2, as noted earlier, it can be
skipped entirely, and because we require a course in compiler design, Chapter 4 is not covered.
Chapters 5 through 9 should be relatively easy for students with extensive programming experience in C++,
Java, or C#. Chapters 10 through 14 are more challenging and require more detailed lectures.
Chapters 15 and 16 are entirely new to most students at the junior level. Ideally, language processors for

4
Scheme and Prolog should be available for students required to learn the material in these chapters.
Sufficient material is included to allow students to dabble with some simple programs.
Undergraduate courses will probably not be able to cover all of the last two chapters in detail. Graduate
courses, however, by skipping over parts of the early chapters on imperative languages, will be able to
completely discuss the nonimperative languages.
Supplemental Materials
The following supplements are available to all readers of this book at www.aw.com/cssupport:
?? A set of lecture notes slides. These slides are in the form of Microsoft PowerPoint source files, one
for each of the chapters of the book.
?? PowerPoint slides of all the figures in the book, should you wish to create your own lecture notes.
?? A companion web site. With the sixth edition we are introducing a brand-new supplements
package for students. To reinforce learning in the classroom, to assist with the hands-on lab
component of this course, and/or to facilitate students in a distance learning situation, the edition
will be accompanied by a comprehensive web site with the following content:
1. Mini manuals (approximately 100-page tutorials) on a handful of languages. These will
assume that the student knows how to program in some other language, giving the student
enough information to complete the chapter materials in each language. Currently manuals are
planned in C++, C, Java, and C#.
2. Lab projects. A series of lab projects will be defined for each concept taught in the book. The
solutions will be available exclusively to those teaching a course.
3. Self-grading review exercises. Using the Addison-Wesley software engine, students can
complete a series of multiple-choice and fill-in-the-blank exercises to check their understanding of
the chapter just read.
Solutions to many of the problem sets are available only to qualified instructors. Please contact your local
Addison-Wesley sales representative, or send e-mail to aw.cse@aw.com, for information about how to
access them.
Language Processor Availability
Processors for and information about some of the programming languages discussed in this book can be
found at the following web sites:
C# http://microsoft.com
Java http://java.sun.com
Haskell http://haskell.org
Scheme http://www.cs.rice.edu/CS/PLT/packages/drscheme/
Perl http://www.perl.com
JavaScript is included in virtually all browsers; PHP is included in virtually all Web servers.
All this information is also included on the companion web site.
Acknowledgements
The suggestions from outstanding reviewers contributed greatly to this book's present form. In alphabetical
order, they are:
Charles Dana, California Polytechnic State University, San Luis Obispo
Eric Joanis, University of Toronto
Donald H. Kraft, Louisiana State University
5
Dennis L. Mumaugh, DePaul University
Sibylle Schupp, Rensselaer, Polytechnic Institute
Neelam Soundarajan, Ohio State University
Ryan Stansifer, Florida Institute of Technology
Steve Stevenson, Clemson University
Virginia Teller, Hunter College CUNY
Salih Yurttas, Texas A&M University
Yang Wang, Southwest Missouri State University
Numerous other people provided input for the previous editions of Concepts of Programming Languages at
various stages of its development. All of their comments were useful and greatly appreciated. In alphabetical
order, they are: Vicki Allan, Henry Bauer, Carter Bays, Manuel E. Bermudez, Peter Brouwer, Margaret
Burnett, Paosheng Chang, John Crenshaw, Barbara Ann Griem, Mary Lou Haag, Eileen Head, Ralph C.
Hilzer, Hikyoo Koh, Jiang B. Liu, Meiliu Lu, Jon Mauney, Bruce R. Maxim, Robert McCoard, Michael G.
Murphy, Andrew Oldroyd, Rebecca Parsons, Jeffery Popyack, Steven Rapkin, Hamilton Richard, Tom Sager,
Joseph Schell, Mary Louise Soffa and John M. Weiss.
Maite Suarez-Rivas, Editor, Katherine Harutunian, Project Editor, and Juliet Silveri, Production Supervisor at
Addison-Wesley, and Daniel Rausch at Argosy, all deserve my gratitude for their efforts to produce the
sixth edition quickly, as well as help make it significantly more complete than the fifth.
Finally, I thank my children, Jake and Darcie, for their patience in enduring my absence from them
throughout the endless hours of effort I invested in writing the six editions of this book.
About the Author
Robert Sebesta is an Associate Professor in the Computer Science Department at the University of
Colorado, Colorado Springs. Professor Sebesta received a B.S. in applied mathematics from the University of
Colorado in Boulder and his M.S. and Ph.D. degrees in Computer Science from the Pennsylvania State
University. He has taught computer science for over 30 years. His professional interests are the design and
evaluation of programming languages, compiler design, and software testing methods and tools. He is a
member of the ACM and the IEEE Computer Society.
6
TABLE of CONTENTS
Chapter 1 Preliminaries 1
1.1 Reasons for Studying Concepts of Programming 2
Languages
1.2 Programming Domains 5
1.2.1 Scientific Applications 5
1.2.2 Business Applications 5
1.2.3 Artificial Intelligence 6
1.2.4 Systems Programming 6
1.2.5 Scripting Languages 7
1.2.6 Special Purpose Languages 7
1.3 Language Evaluation Criteria 8
1.3.1 Readability 8
1.3.1.1 Overall Simplicity 9
1.3.1.2 Orthogonality 10
1.3.1.3 Control Statements 12
1.3.1.4 Data Types and Structures 13
1.3.1.5 Syntax Considerations 14
1.3.2 Writability 15
1.3.2.1 Simplicity and Orthogonality 15
1.3.2.2 Support for Abstraction 16
1.3.2.3 Expressivity 16
1.3.3 Reliability 17
1.3.3.1 Type Checking 17
1.3.3.2 Exception Handling 17
1.3.3.3 Aliasing 18
1.3.3.4 Readability and Writability 18
1.3.4 Cost 18
1.4 Influences on Language Design 20
1.4.1 Computer Architecture 20
1.4.2 Programming Methodologies 22
1.5 Language Categories 23
1.6 Language Design Trade-Offs 24
1.7 Implementation Methods 25
1.7.1 Compilation 27
7
1.7.2 Pure Interpretation 30
1.7.3 Hybrid Interpretation Systems 31
1.8 Programming Environments 32
Summary 32
Review Questions 33
Problem Set 34
Chapter 2 Evolution of the Major Imperative Programming
Languages 37
2.1 Zuse's Plankalkül 38
2.1.1 Historical Background 38
2.1.2 Language Overview 40
2.2 Minimal Hardware Programming: Pseudocodes 41
2.2.1 Short Code 42
2.2.2 Speedcoding 42
2.2.3 The UNIVAC "Compiling" System 43
2.2.4 Related Work 43
2.3 The IBM 704 and Fortran 43
2.3.1 Historical Background 44
2.3.2 Design Process 44
2.3.3 Fortran I Overview 45
2.3.4 Fortran II 46
2.3.5 Fortran IV, Fortran 77, 90, and 95 46
2.3.6 Evaluation 48
2.4 Functional Programming: LISP 49
2.4.1 The Beginnings of Artificial Intelligence and List Processing 49
2.4.2 LISP Design Process 50
2.4.3 Language Overview 51
2.4.3.1 Data Structures 51
2.4.3.2 Processes in Functional Programming 52
2.4.3.3 The Syntax of LISP 52
2.4.4 Evaluation 53
2.4.5 Two Descendants of LISP 53
2.4.5.1 Scheme 54
2.4.5.2 COMMON LISP 54
2.4.6 Related Languages 54
2.5 The First Step Toward Sophistication: ALGOL 60 55
2.5.1 Historical Background 55
2.5.2 Early Design Process 56
2.5.3 ALGOL 58 Overview 56
2.5.4 Reception of the ALGOL 58 Report 57
2.5.5 ALGOL 60 Design Process 58
2.5.6 ALGOL 60 Overview 58
2.5.7 ALGOL 60 Evaluation 59
2.6 Computerizing Business Records: COBOL 61
2.6.1 Historical Background 61
2.6.2 FLOW-MATIC 62
2.6.3 COBOL Design Process 62
2.6.4 Evaluation 63
2.7 The Beginnings of Timesharing: BASIC 66
2.7.1 Design Process 66
2.7.2 Language Overview 67
8
2.7.3 Evaluation 67
2.8 Everything for Everybody: PL/I 70
2.8.1 Historical Background 70
2.8.2 Design Process 72
2.8.3 Language Overview 72
2.8.4 Evaluation 73
2.9 Two Early Dynamic Languages: APL and SNOBOL 74
2.9.1 Origins and Characteristics of APL 75
2.9.2 Origins and Characteristics of SNOBOL 75
2.10 The Beginnings of Data Abstraction: SIMULA 67 76
2.10.1 Design Process 76
2.10.2 Language Overview 76
2.11 Orthogonal Design: ALGOL 68 77
2.11.1 Design Process 77
2.11.2 Language Overview 77
2.11.3 Evaluation 78
2.12 Some Important Descendants of the ALGOLs 79
2.12.1 Simplicity by Design: Pascal 79
2.12.1.1 Historical Background 79
2.12.1.2 Evaluation 80
2.12.2 A Portable Systems Language: C 81
2.12.2.1 Historical Background 82
2.12.2.2 Evaluation 82
2.12.3 Other ALGOL Descendants 83
2.12.3.1 Modula-2 83
2.12.3.2 Oberon 85
2.13 Programming Based on Logic: Prolog 85
2.13.1 Design Process 85
2.13.2 Language Overview 86
2.13.3 Evaluation 86
2.14 History's Largest Design Effort: Ada 87
2.14.1 Historical Background 87
2.14.2 Design Process 87
2.14.3 Language Overview 89
2.14.4 Evaluation 89
2.14.5 Ada 95 91
2.15 Object-Oriented Programming: Smalltalk 92
2.15.1 Design Process 92
2.15.2 Language Overview 93
2.15.3 Evaluation 94
2.16 Combining Imperative and Object-Oriented Features: C++ 96
2.16.1 Design Process 96
2.16.2 Language Overview 97
2.16.3 Evaluation 97
2.16.4 A Related Language: Eiffel 98
2.16.5 Another Related Language: Delphi 98
2.17 An Imperative-Based Object-Oriented Language: Java 99
2.17.1 Design Process 99
2.17.2 Language Overview 100
2.17.3 Evaluation 100
2.18 Scripting Languages for the Web: JavaScript and PHP 103
2.18.1 Origins and Characteristics of JavaScript 103
2.18.2 Origins and Characteristics of PHP 105
2.19 A New Language for the New Millenium: C# 106
9
2.19.1 Design Process 106
2.19.2 Language Overview 106
2.19.3 Evaluation 107
Summary 108
Bibliographic Notes 108
Review Questions 109
Problem Set 110
Chapter 3 Describing Syntax and Semantics 113
3.1 Introduction 114
3.2 The General Problem of Describing Syntax 115
3.2.1 Language Recognizers 116
3.2.2 Language Generators 116
3.3 Formal Methods of Describing Syntax 117
3.3.1 Backus-Naur Form and Context-Free Grammars 117
3.3.1.1 Context-Free Grammars 117
3.3.1.2 Origins of Backus-Naur Form 117
3.3.1.3 Fundamentals 118
3.3.1.4 Describing Lists 119
3.3.1.5 Grammars and Derivations 119
3.3.1.6 Parse Trees 121
3.3.1.7 Ambiguity 122
3.3.1.8 Operator Precedence 123
3.3.1.9 Associativity of Operators 125
3.3.1.10 An Unambiguous Grammar for if-then-else 126
3.3.2 Extended BNF 128
3.3.3 Grammars and Recognizers 130
3.4 Attribute Grammars 130
3.4.1 Static Semantics 130
3.4.2 Basic Concepts 131
3.4.3 Attribute Grammars Defined 131
3.4.4 Intrinsic Attributes 132
3.4.5 Example Attribute Grammars 132
3.4.6 Computing Attribute Values 134
3.4.7 Evaluation 136
3.5 Describing the Meanings of Programs: Dynamic Semantics 136
3.5.1 Operational Semantics 137
3.5.1.1 The Basic Process 137
3.5.1.2 Evaluation 139
3.5.2 Axiomatic Semantics 139
3.5.2.1 Assertions 139
3.5.2.2 Weakest Preconditions 140
3.5.2.3 Assignment Statements 141
3.5.2.4 Sequences 143
3.5.2.5 Selection 144
3.5.2.6 Logical Pretest Loops 144
3.5.2.7 Evaluation 150
3.5.3 Denotational Semantics 150
3.5.3.1 Two Simple Examples 150
3.5.3.2 The State of a Program 152
3.5.3.3 Expressions 153
3.5.3.4 Assignment Statements 154
10
3.5.3.5 Logical Pretest Loops 154
3.5.3.6 Evaluation 154
Summary 155
Bibliographic Notes 155
Review Questions 156
Problem Set 157
Chapter 4 Lexical and Syntax Analysis 161
4.1 Introduction 162
4.2 Lexical Analysis 163
4.3 The Parsing Problem 167
4.3.1 Introduction to Parsing 167
4.3.2 Top-Down Parsers 168
4.3.3 Bottom-Up Parsers 169
4.3.4 The Complexity of Parsing 170
4.4 Recursive-Descent Parsing 170
4.4.1 The Recursive-Descent Parsing Process 170
4.4.2 The LL Grammar Class 173
4.5 Bottom-Up Parsing 176
4.5.1 The Parsing Problem for Bottom-Up Parsers 176
4.5.2 Shift-Reduce Algorithms 178
4.5.3 LR Parsers 178
Summary 183
Review Questions 185
Problem Set 186
Programming Exercises 186
Chapter 5 Names, Bindings, Type Checking, and Scopes 189
5.1 Introduction 190
5.2 Names 190
5.2.1 Design Issues 191
5.2.2 Name Forms 191
5.2.3 Special Words 192
5.3 Variables 193
5.3.1 Name 193
5.3.2 Address 194
5.3.2.1 Aliases 194
5.3.3 Type 195
5.3.4 Value 195
5.4 The Concept of Binding 195
5.4.1 Binding of Attributes to Variables 196
5.4.2 Type Bindings 197
5.4.2.1 Variable Declarations 197
5.4.2.2 Dynamic Type Binding 198
5.4.2.3 Type Inference 199
5.4.3 Storage Bindings and Lifetime 202
5.4.3.1 Static Variables 202
5.4.3.2 Stack-dynamic Variables 203
5.4.3.3 Explicit Heap-Dynamic Variables 204
5.4.3.4 Implicit Dynamic Variables 205
11
5.5 Type Checking 205
5.6 Strong Typing 206
5.7 Type Compatibility 208
5.8 Scope 211
5.8.1 Static Scope 211
5.8.2 Blocks 213
5.8.3 Evaluation of Static Scoping 214
5.8.4 Dynamic Scope 217
5.8.5 Evaluation of Dynamic Scoping 218
5.9 Scope and Lifetime 219
5.10 Referencing Environments 220
5.11 Named Constants 222
5.12 Variable Initialization 223
Summary 224
Review Questions 225
Problem Set 226
Programming Exercises 231
Chapter 6 Data Types 233
6.1 Introduction 234
6.2 Primitive Data Types 235
6.2.1 Numeric Types 236
6.2.1.1 Integer 236
6.2.1.2 Floating-Point 236
6.2.1.3 Decimal 237
6.2.2 Boolean Types 238
6.2.3 Character Types 238
6.3 Character String Types 239
6.3.1 Design Issues 239
6.3.2 Strings and Their Operations 239
6.3.3 String Length Options 241
6.3.4 Evaluation 241
6.3.5 Implementation of Character String Types 242
6.4 User-Defined Ordinal Types 243
6.4.1 Enumeration Types 243
6.4.1.1 Designs 244
6.4.1.2 Evaluation 245
6.4.2 Subrange Types 246
6.4.2.1 Designs 246
6.4.2.2 Evaluation 247
6.4.3 Implementation of User-Defined Ordinal Types 247
6.5 Array Types 247
6.5.1 Design Issues 248
6.5.2 Arrays and Indices 248
6.5.3 Subscript Bindings and Array Categories 249
6.5.4 Array Initialization 251
6.5.5 Array Operations 252
6.5.6 Rectangular and Jagged Arrays 254
6.5.7 Slices 254
6.5.8 Evaluation 255
6.5.9 Implementation of Array Types 256
6.6 Associative Arrays 260
12
6.6.1 Structure and Operations 261
6.6.2 Implementing Associative Arrays 264
6.7 Record Types 264
6.7.1 Definitions of Records 265
6.7.2 References to Record Fields 266
6.7.3 Operations on Records 266
6.7.4 Evaluation 267
6.7.5 Implementation of Record Types 268
6.8 Union Types 268
6.8.1 Design Issues 269
6.8.2 Discriminated versus Free Unions 269
6.8.3 Ada Union Types 269
6.8.4 Evaluation 271
6.8.5 Implementation of Union Types 271
6.9 Pointer and Reference Types 271
6.9.1 Design Issues 272
6.9.2 Pointer Operations 273
6.9.3 Pointer Problems 274
6.9.3.1 Dangling Pointers 274
6.9.3.2 Lost Heap-Dynamic Variables 275
6.9.4 Pointers in Ada 275
6.9.5 Pointers in C and C++ 276
6.9.6 Pointers in Fortran 95 277
6.9.7 Reference Types 278
6.9.8 Evaluation 279
6.9.9 Implementation of Pointer and Reference Types 279
6.9.9.1 Representations of Pointers and References 280
6.9.9.2 Solutions to the Dangling Pointer Problem 280
6.9.9.3 Heap Management 281
Summary 285
Bibliographic Notes 286
Review Questions 286
Problem Set 287
Programming Exercises 288
Chapter 7 Expressions and the Assignment Statement 291
7.1 Introduction 292
7.2 Arithmetic Expressions 293
7.2.1 Operator Evaluation Order 293
7.2.1.1 Precedence 294
7.2.1.2 Associativity 295
7.2.1.3 Parentheses 298
7.2.1.4 Conditional Expressions 298
7.2.2 Operand Evaluation Order 299
7.2.2.1 Side Effects 299
7.3 Overloaded Operators 301
7.4 Type Conversions 303
7.4.1 Coercion in Expressions 303
7.4.2 Explicit Type Conversions 305
7.4.3 Errors in Expressions 305
7.5 Relational and Boolean Expressions 306
13
7.5.1 Relational Expressions 306
7.5.2 Boolean Expressions 307
7.6 Short-Circuit Evaluation 308
7.7 Assignment Statements 310
7.7.1 Simple Assignments 310
7.7.2 Conditional Targets 310
7.7.3 Compound Assignment Operators 311
7.7.4 Unary Operator Assignments 311
7.7.5 Assignment as an Expression 312
7.8 Mixed-Mode Assignment 313
Summary 314
Review Questions 314
Problem Set 315
Programming Exercises 317
Chapter 8 Statement-Level Control Structures 319
8.1 Introduction 320
8.2 Selection Statements 321
8.2.1 Two-Way Selection Statements 321
8.2.1.1 Design Issues 322
8.2.1.2 The Control Expression 322
8.3.1.3 Clause Form 322
8.2.1.4 Nesting Selectors 322
8.2.2 Multiple Selection Constructs 324
8.2.2.1 Design Issues 325
8.2.2.2 Examples of Multiple Selectors 325
8.2.2.3 Multiple Selection Using if 328
8.3 Iterative Statements 329
8.3.1 Counter-Controlled Loops 330
8.3.1.1 Design Issues 330
8.3.1.2 The Do Statement of Fortran 95 331
8.3.1.3 The Ada for Statement 332
8.3.1.4 The for Statement of the C-Based Languages 333
8.3.2 Logically Controlled Loops 335
8.3.2.1 Design Issues 335
8.3.2.2 Examples 335
8.3.3 User-Located Loop Control Mechanisms 337
8.3.4 Iteration Based on Data Structures 340
8.4 Unconditional Branching 342
8.4.1 Problems with Unconditional Branching 342
8.5 Guarded Commands 343
8.6 Conclusions 347
Summary 348
Review Questions 348
Problem Set 349
Programming Exercises 350
Chapter 9 Subprograms 353
9.1 Introduction 354
14
9.2 Fundamentals of Subprograms 354
9.2.1 General Subprogram Characteristics 354
9.2.2 Basic Definitions 355
9.2.3 Parameters 356
9.2.4 Procedures and Functions 359
9.3 Design Issues for Subprograms 360
9.4 Local Referencing Environments 361
9.5 Parameter-Passing Methods 363
9.5.1 Semantics Models of Parameter Passing 363
9.5.2 Implementation Models of Parameter Passing 364
9.5.2.1 Pass-by-Value 364
9.5.2.2 Pass-by-Result 364
9.5.2.3 Pass-by-Value-Result 365
9.5.2.4 Pass-by-Reference 365
9.5.2.5 Pass-by-Name 367
9.5.3 Parameter-Passing Methods of the Major Languages 368
9.5.4 Type-Checking Parameters 371
9.5.5 Implementing Parameter-Passing Methods 373
9.5.6 Multidimensional Arrays as Parameters 374
9.5.7 Design Considerations 378
9.5.8 Examples of Parameter Passing 378
9.6 Parameters That Are Subprogram Names 381
9.7 Overloaded Subprograms 383
9.8 Generic Subprograms 384
9.8.1 Generic Subprograms in Ada 385
9.8.2 Generic Functions in C++ 387
9.8.3 Generic Subprograms in Other Languages 388
9.9 Design Issues for Functions 389
9.9.1 Functional Side Effects 389
9.9.2 Types of Return Values 389
9.10 User-Defined Overloaded Operators 389
9.11 Coroutines 390
Summary 393
Review Questions 393
Problem Set 394
Programming Exercises 395
Chapter 10 Implementing Subprograms 397
10.1 The General Semantics of Calls and Returns 398
10.2 Implementing “Simple” Subprograms 399
10.3 Implementing Subprograms with Stack-Dynamic Local Variables 401
10.3.1 More Complex Activation Records 401
10.3.2 An Example without Recursion 403
10.3.3 Recursion 406
10.4 Nested Subprograms 407
10.4.1 The Basics 409
10.4.2 Static Chains 409
10.4.2 Displays 416
10.5 Blocks 417
10.6 Implementing Dynamic Scoping 419
10.6.1 Deep Access 419
10.6.2 Shallow Access 420
15
Summary 422
Review Questions 423
Problem Set 423
Chapter 11 Data Abstraction 427
11.1 The Concept of Abstraction 428
11.2 Introduction to Data Abstraction 429
11.2.1 Floating-Point as an Abstract Data Type 429
11.2.2 User-Defined Abstract Data Types 430
11.2.3 An Example 431
11.4 Design Issues for Abstract Data Types 432
11.4 Language Examples 433
11.4.1 Abstract Data Types in Ada 433
11.4.1.1 Encapsulation 433
11.4.1.2 Information Hiding 433
11.4.1.3 An Example 437
11.4.2 Abstract Data Types in C++ 439
11.4.2.1 Encapsulation 439
11.4.2.2 Information Hiding 439
11.4.2.3 An Example 440
11.4.2.4 Evaluation 442
11.4.3 Abstract Data Types in Java 442
11.4.4 Abstract Data Types in C# 443
11.5 Parameterized Abstract Data Types 445
11.5.1 Ada 445
11.5.2 C++ 446
11.6 Encapsulation Construct 448
11.6.1 Introduction 448
11.6.2 Nested Subprograms 448
11.6.3 Encapsulation in C 448
11.6.4 Encapsulation in C++ 449
11.6.5 Ada Packages 450
11.6.6 C# Assemblies 450
11.7 Naming Encapsulations 451
11.7.1 C++ Namespaces 451
11.7.2 Java Packages 452
11.7.3 Ada Packages 453
Summary 453
Review Questions 454
Problem Set 455
Programming Exercises 456
Chapter 12 Support for Object-Oriented Programming 457
12.1 Introduction 458
12.2 Object-Oriented Programming 458
12.2.1 Introduction 458
12.2.2 Inheritance 459
12.2.3 Polymorphism and Dynamic Binding 460
12.3 Design Issues for Object-Oriented Language 461
12.3.1 The Exclusivity of Objects 461
16
12.3.2 Are Subclasses Subtypes? 462
12.3.3 Type Checking and Polymorphism 463
12.3.4 Single and Multiple Inheritance 463
12.3.5 Allocation and Deallocation of Objects 464
12.3.6 Dynamic and Static Binding 465
12.4 Support for Object-Oriented Programming in Smalltalk 465
12.4.1 General Characteristics 465
12.4.2 Type Checking and Polymorphism 466
12.4.3 Inheritance 466
12.4.4 Evaluation of Smalltalk 467
12.5 Support for Object-Oriented Programming in C++ 467
12.5.1 General Characteristics 469
12.5.2 Inheritance 470
12.5.3 Dynamic Binding 474
12.5.4 Evaluation 476
12.6 Support for Object-Oriented Programming in Java 477
12.6.1 General Characteristics 477
12.6.2 Inheritance 478
12.6.3 Dynamic Binding 479
12.6.4 Evaluation 479
12.7 Support for Object-Oriented Programming in C# 479
12.7.1 General Characteristics 479
12.7.2 Inheritance 480
12.7.3 Dynamic Binding 480
12.7.4 Evaluation 481
12.8 Support for Object-Oriented Programming in Ada 95 481
12.8.1 General Characteristics 481
12.8.2 Inheritance 482
12.8.3 Dynamic Binding 483
12.8.4 Evaluation 484
12.9 The Object Model of JavaScript 485
12.9.1 General Characteristics 485
12.9.2 JavaScript Objects 486
12.9.3 Object Creation and Modification 486
12.9.4 Evaluation 488
12.10 Implementation of Object-Oriented Constructs 488
12.10.1 Instance Data Storage 488
12.10.2 Dynamic Binding of Method Calls to Methods 488
Summary 491
Review Questions 492
Problem Set 493
Programming Exercises 494
Chapter 13 Concurrency 495
13.1 Introduction 496
13.1.1 Multiprocessor Architectures 497
13.1.2 Categories of Concurrency 498
13.1.3 Motivations for Studying Concurrency 499
13.2 Introduction to Subprogram-Level Concurrency 499
13.2.1 Fundamental Concepts 499
13.2.2 Language Design for Concurrency 503
13.2.3 Design Issues 503
17
13.3 Semaphores 503
13.3.1 Introduction 503
13.3.2 Cooperation Synchronization 504
13.3.3 Competition Synchronization 506
13.3.4 Evaluation 508
13.4 Monitors 508
13.4.1 Introduction 508
13.4.2 Competition Synchronization 510
13.4.3 Cooperation Synchronization 510
13.4.4 Evaluation 513
13.5 Message Passing 513
13.5.1 Introduction 513
13.5.2 The Concept of Synchronous Message Passing 513
13.5.3 The Ada Synchronous Message-Passing Model 514
13.5.4 Cooperation Synchronization 519
13.5.5 Competition Synchronization 520
13.5.6 Task Termination 521
13.5.7 Priorities 521
13.5.8 Binary Semaphores 522
13.5.9 Protected Objects 522
13.5.10 Asynchronous Message Passing 524
13.5.11 Evaluation 524
13.6 Java Threads 525
13.6.1 The Thread Class 525
13.6.2 Priorities 527
13.6.3 Competition Synchronization 528
13.6.4 Cooperation Synchronization 528
13.6.5 Evalation 532
13.7 C# Threads 532
13.7.1 Basic Thread Operations 532
13.7.2 Synchronizing Threads 533
13.7.3 Evaluation 534
13.8 Statement-Level Concurrency 534
13.8.1 High-Performance Fortran 534
Summary 536
Bibliographic Notes 537
Review Questions 538
Problem Set 539
Programming Exercises 540
Chapter 14 Exception Handling and Event Handling 541
14.1 Introduction to Exception Handling 542
14.1.1 Basic Concepts 543
14.1.2 Design Issues 545
14.2 Exception Handling in Ada 548
14.2.1 Exception Handlers 548
14.2.2 Binding Exceptions to Handlers 549
14.2.3 Continuation 550
14.2.4 Other Design Choices 551
14.2.5 An Example 552
14.2.6 Evaluation 554
14.3 Exception Handling in C++ 554
18
14.3.1 Exception Handlers 554
14.3.2 Binding Exceptions to Handlers 555
14.3.3 Continuation 556
14.3.4 Other Design Choices 556
14.3.5 An Example 556
14.3.6 Evaluation 558
14.4 Exception Handling in Java 558
14.4.1 Classes of Exceptions 558
14.4.2 Exception Handlers 559
14.4.3 Binding Exceptions to Handlers 559
14.4.4 Other Design Choices 562
14.4.5 An Example 563
14.4.6 The finally Clause 565
14.4.7 Evaluation 566
14.5 Introduction to Event Handling 566
14.5.1 Basic Concepts of Event Handling 567
14.6 Event Handling with Java 567
14.6.1 Java Swing GUI Components 568
14.6.2 The Java Event Model 570
Summary 574
Bibliographic Notes 575
Review Questions 575
Problem Set 576
Programming Exercises 578
Chapter 15 Functional Programming Languages 579
15.1 Introduction 580
15.2 Mathematical Functions 581
15.2.1 Simple Functions 581
15.2.2 Functional Forms 582
15.3 Fundamentals of Functional Programming Languages 583
15.4 The First Functional Programming Language: LISP 584
15.4.1 Data Types and Structures 584
15.4.2 The First LISP Interpreter 586
15.5 An Introduction to Scheme 587
15.5.1 Origins of Scheme 587
15.5.2 The Scheme Interpreter 588
15.5.3 Primitive Numeric Functions 588
15.5.4 Defining Functions 589
15.5.5 Output Functions 590
15.5.6 Numeric Predicate Functions 591
15.5.7 Control Flow 591
15.5.8 List Functions 593
15.5.9 Predicate Functions for Symbolic Atoms and Lists 596
15.5.10 Example Scheme Functions 597
15.5.11 Functional Forms 601
15.5.11.1 Functional Composition 601
15.5.11.2 An Apply-to-All Functional Form 602
15.5.12 Functions That Build Code 602
15.6 COMMON LISP 603
15.7 ML 604
15.8 Haskell 607
19
15.9 Applications of Functional Languages 611
15.10 A Comparison of Functional and Imperative Languages 612
Summary 612
Bibliographic Notes 613
Review Questions 614
Problem Set 614
Programming Exercises 615
Chapter 16 Logic Programming Languages 617
16.1 Introduction 618
16.2 A Brief Introduction to Predicate Calculus 618
16.2.1 Propositions 619
16.2.2 Clausal Form 621
16.3 Predicate Calculus and Proving Theorems 621
16.4 An Overview of Logic Programming 624
16.5 The Origins of Prolog 625
16.6 The Basic Elements of Prolog 626
16.6.1 Terms 626
16.6.2 Fact Statements 627
16.6.3 Rule Statements 628
16.6.4 Goal Statements 629
16.6.5 The Inferencing Process in Prolog 629
16.6.6 Simple Arithmetic 632
16.6.7 List Structures 635
16.7 Deficiencies of Prolog 640
16.7.1 Resolution Order Control 640
16.7.2 The Closed-World Assumption 643
16.7.3 The Negation Problem 643
16.7.4 Intrinsic Limitations 645
16.8 Applications of Logic Programming 646
16.8.1 Relational Database Management Systems 646
16.8.2 Expert Systems 646
16.8.3 Natural Language Processing 647
Summary 648
Bibliographic Notes 648
Review Questions 649
Problem Set 649
Programming Exercises 650
20
Answers to Selected Problems
Chapter 1
Problem Set:
3. Some arguments for having a single language for all programming domains are: It would
dramatically cut the costs of programming training and compiler purchase and maintenance; it
would simplify programmer recruiting and justify the development of numerous language
dependent software development aids.
4. Some arguments against having a single language for all programming domains are: The
language would necessarily be huge and complex; compilers would be expensive and costly to
maintain; the language would probably not be very good for any programming domain, either in
compiler efficiency or in the efficiency of the code it generated.
5. One possibility is wordiness. In some languages, a great deal of text is required for even
simple complete programs. For example, COBOL is a very wordy language. In Ada,
programs require a lot of duplication of declarations. Wordiness is usually considered a
disadvantage, because it slows program creation, takes more file space for the source
programs, and can cause programs to be more difficult to read.
7. The argument for using the right brace to close all compounds is simplicity—a right brace
always terminates a compound. The argument against it is that when you see a right brace in a
program, the location of its matching left brace is not always obvious, in part because all
multiple-statement control constructs end with a right brace.
8. The reasons why a language would distinguish between uppercase and lowercase in its
identifiers are: (1) So that variable identifiers may look different than identifiers that are names
for constants, such as the convention of using uppercase for constant names and using
lowercase for variable names in C, and (2) so that catenated words as names can have their first
letter distinguished, as in TotalWords. (I think it is better to include a connector, such as
underscore.) The primary reason why a language would not distinguish between uppercase and
lowercase in identifiers is it makes programs less readable, because words that look very similar
are actually completely different, such as SUM and Sum.
10. One of the main arguments is that regardless of the cost of hardware, it is not free. Why
write a program that executes slower than is necessary. Furthermore, the difference between a
well-written efficient program and one that is poorly written can be a factor of two or three. In
many other fields of endeavor, the difference between a good job and a poor job may be 10 or
20 percent. In programming, the difference is much greater.
15. The use of type declaration statements for simple scalar variables may have very little effect
on the readability of programs. If a language has no type declarations at all, it may be an aid to
readability, because regardless of where a variable is seen in the program text, its type can be
determined without looking elsewhere. Unfortunately, most languages that allow implicitly
declared variables also include explicit declarations. In a program in such a language, the
declaration of a variable must be found before the reader can determine the type of that variable
when it is used in the program.
21
18. The main disadvantage of using paired delimiters for comments is that it results in diminished
reliability. It is easy to inadvertently leave off the final delimiter, which extends the comment to
the end of the next comment, effectively removing code from the program. The advantage of
paired delimiters is that you can comment out areas of a program. The disadvantage of using
only beginning delimiters is that they must be repeated on every line of a block of comments.
This can be tedious and therefore error-prone. The advantage is that you cannot make the
mistake of forgetting the closing delimiter.
Chapter 2
Problem Set:
6. Because of the simple syntax of LISP, few syntax errors occur in LISP programs.
Unmatched parentheses is the most common mistake.
7. The main reason why imperative features were put in LISP was to increase its execution
efficiency.
10. The main motivation for the development of PL/I was to provide a single tool for computer
centers that must support both scientific and commercial applications. IBM believed that the
needs of the two classes of applications were merging, at least to some degree. They felt that
the simplest solution for a provider of systems, both hardware and software, was to furnish a
single hardware system running a single programming language that served both scientific and
commercial applications.
11. IBM was, for the most part, incorrect in its view of the future of the uses of computers, at
least as far as languages are concerned. Commercial applications are nearly all done in
languages that are specifically designed for them. Likewise for scientific applications. On the
other hand, the IBM design of the 360 line of computers was a great success--it still dominates
the area of computers between supercomputers and minicomputers. Furthermore, 360 series
computers and their descendants have been widely used for both scientific and commercial
applications. These applications have been done, in large part, in FORTRAN and COBOL.
14. The argument for typeless languages is their great flexibility for the programmer. Literally
any storage location can be used to store any type value. This is useful for very low-level
languages used for systems programming. The drawback is that type checking is impossible, so
that it is entirely the programmer's responsibility to insure that expressions and assignments are
correct.
18. A good deal of restraint must be used in revising programming languages. The greatest
danger is that the revision process will continually add new features, so that the language grows
more and more complex. Compounding the problem is the reluctance, because of existing
software, to remove obsolete features.
Chapter 3
22
Instructor's Note:
In the program proof on page 149, there is a statement that may not be clear to all, specifically,
(n + 1)* … * n = 1. The justification of this statement is as follows:
Consider the following expression:
(count + 1) * (count + 2) * … * n
The former expression states that when count is equal to n, the value of the later expression is
1. Multiply the later expression by the quotient:
(1 * 2 * … * count) / (1 * 2 * … * count)
whose value is 1, to get
(1 * 2 * … * count * (count + 1) * (count + 2) * … * n) /
(1 * 2 * … * count)
The numerator of this expressions is n!. The denominator is count!. If count is equal to n, the
value of the quotient is
n! / n!
or 1, which is what we were trying to show.
Problem Set:
2a. <class_head> ? {<modifier>} class <id> [extends class_name]
[implements <interface_name> {, <interface_name>}]
<modifier> ? public | abstract | final
2c. <switch_stmt> ? switch ( <expr> ) {case <literal> : <stmt_list>
{case <literal> : <stmt_list> } [default : <stmt_list>] }
3. <assign> ? <id> = <expr>
<id> ? A | B | C
<expr> ? <expr> * <term>
| <term>
<term> ? <factor> + <term>
| <factor>
<factor> ? ( <expr> )
23
| <id>
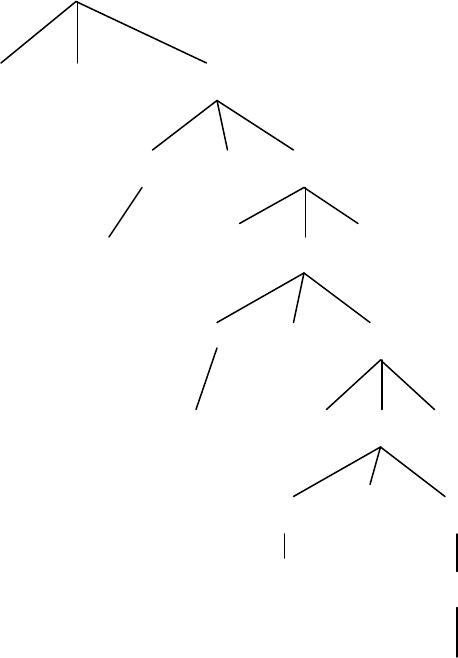
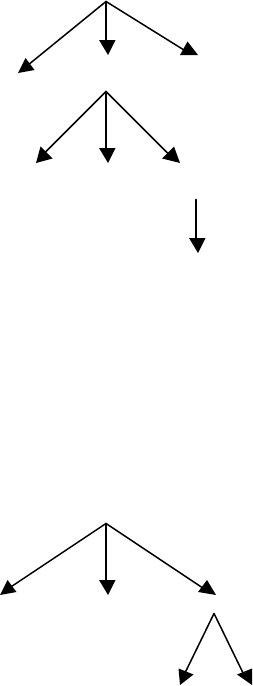
6.
(a) <assign> => <id> = <expr>
=> A = <expr>
=> A = <id> * <expr>
=> A = A * <expr>
=> A = A * ( <expr> )
=> A = A * ( <id> + <expr> )
=> A = A * ( B + <expr> )
=> A = A * ( B + ( <expr> ) )
=> A = A * ( B + ( <id> * <expr> ) )
=> A = A * ( B + ( C * <expr> ) )
=> A = A * ( B + ( C * <id> ) )
=> A = A * ( B + ( C * A ) )
24
<assign>
A
<id> := <expr>
<id> *<expr>
A((expr) )
<id> +<expr>
B(<expr> )
<id> *<expr>
C<id>
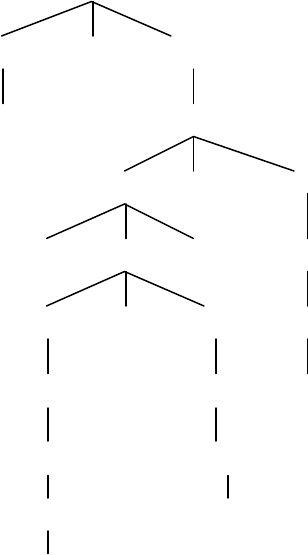
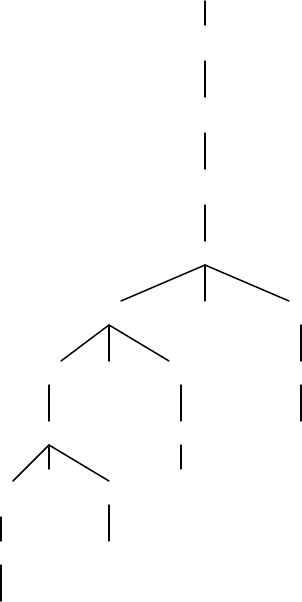
7.
(a) <assign> => <id> = <expr>
=> A = <expr>
=> A = <term>
=> A = <factor> * <term>
=> A = ( <expr> ) * <term>
=> A = ( <expr> + <term> ) * <term>
=> A = ( <term> + <term> ) * <term>
=> A = ( <factor> + <term> ) * <term>
25
=> A = ( <id> + <term> ) * <term>
=> A = ( A + <term> ) * <term>
=> A = ( A + <factor> ) * <term>
=> A = ( A + <id> ) * <term>
=> A = ( A + B ) * <term>
=> A = ( A + B ) * <factor>
=> A = ( A + B ) * <id>
=> A = ( A + B ) * C
<assign>
A
<id> := <expr>
A<term>
<factor> *<term>
(<expr> )<factor>
<expr> +<term> <id>
<term> <factor> C
<factor> <id>
<id> B
26
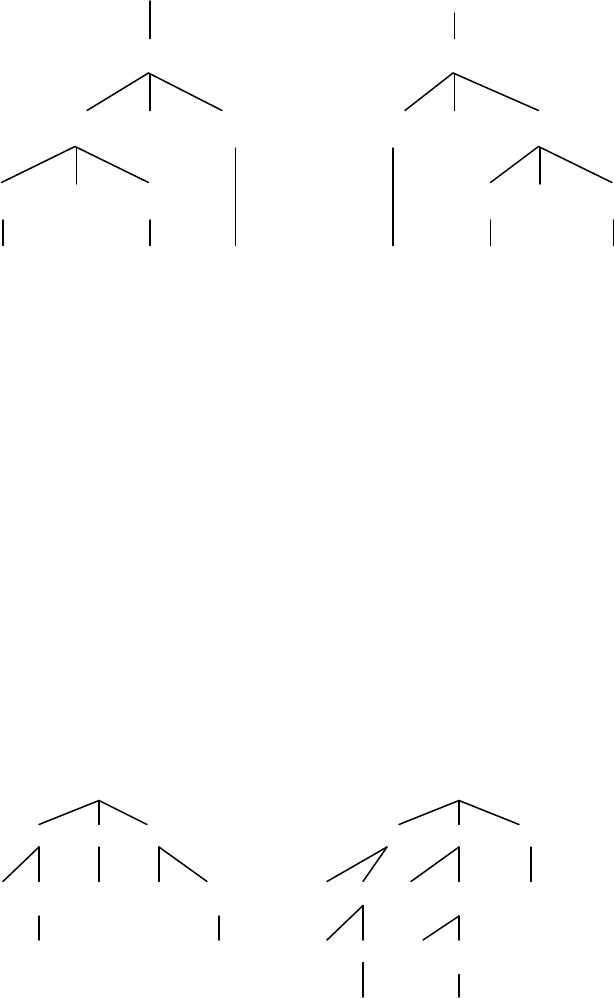
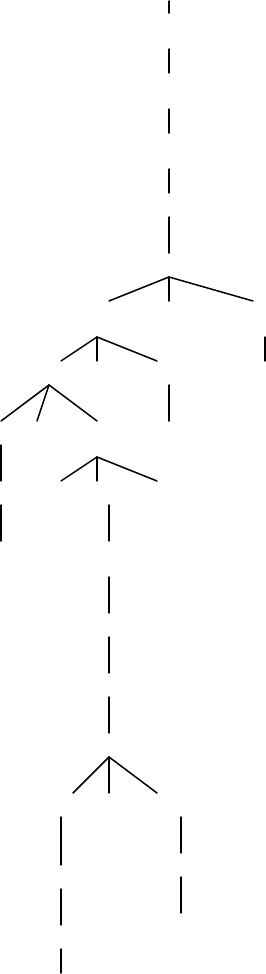
8. The following two distinct parse tree for the same string prove that the grammar is
ambiguous.
a b c a b c
<A> + <A> <A> + <A>
<A> + <A> <A> + <A>
<A> <A>
<S> <S>
9. Assume that the unary operators can precede any operand. Replace the rule
<factor> ? <id>
with
<factor> ? + <id>
| - <id>
10. One or more a's followed by one or more b's followed by one or more c's.
13. S ? a S b | a b
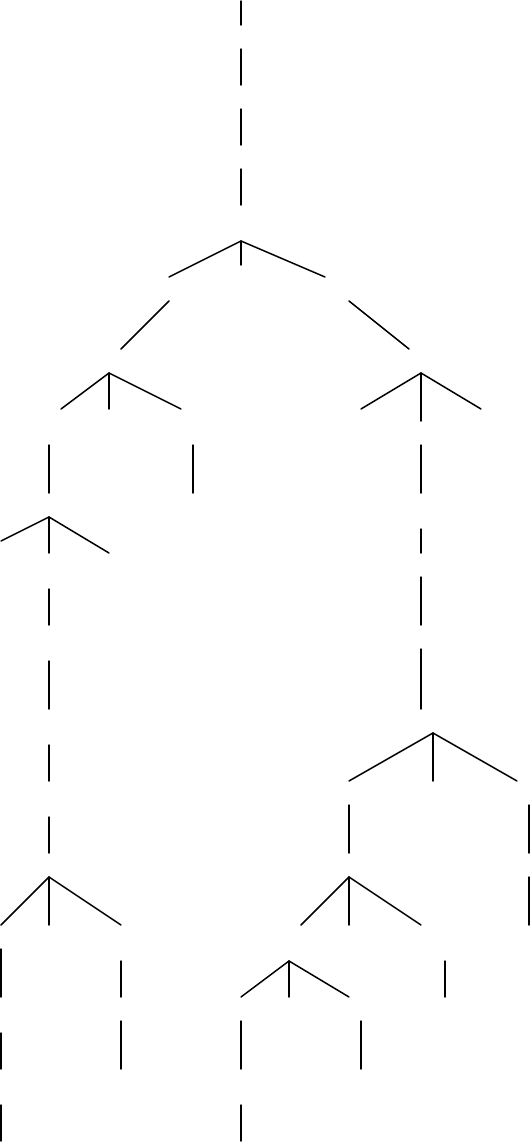
14.
S S
a b
ABCA B C
aAbcCaAbBc
a caAbB
27
16. <assign> ? <id> = <expr>
<id> ? A | B | C
<expr> ? <expr> (+ | -) <expr>
| (<expr>)
| <id>
18.
(a) (Pascal repeat) We assume that the logic expression is a single relational expression.
loop: ...
...
if <relational_expression> goto out
goto loop
out: ...
(b) (Ada for) for I in first .. last loop
I = first
loop: if I < last goto out
...
I = I + 1
goto loop
out: ...
(c) (Fortran Do)
K = start
loop: if K > end goto out
28
...
K = K + step
goto loop
out: ...
(e) (C for) for (expr1; expr2; expr3) ...
evaluate(expr1)
loop: control = evaluate(expr2)
if control == 0 goto out
...
evaluate(expr3)
goto loop
out: ...
19.
(a) a = 2 * (b - 1) - 1 {a > 0}
2 * (b - 1) - 1 > 0
2 * b - 2 - 1 > 0
2 * b > 3
b > 3 / 2
(b) b = (c + 10) / 3 {b > 6}
(c + 10) / 3 > 6
c + 10 > 18
c > 8
(c) a = a + 2 * b - 1 {a > 1}
29
a + 2 * b - 1 > 1
2 * b > 2 - a
b > 1 - a / 2
(d) x = 2 * y + x - 1 {x > 11}
2 * y + x - 1 > 11
2 * y + x > 12
20.
(a) a = 2 * b + 1
b = a - 3 {b < 0}
a - 3 < 0
a < 3
Now, we have:
a = 2 * b + 1 {a < 3}
2 * b + 1 < 3
2 * b + 1 < 3
2 * b < 2
b < 1
(b) a = 3 * (2 * b + a);
b = 2 * a - 1 {b > 5}
2 * a - 1 > 5
2 * a > 6
a > 3
30
Now we have:
a = 3 * (2 * b + a) {a > 3}
3 * (2 * b + a) > 3
6 * b + 3 * a > 3
2 * b + a > 1
n > (1 - a) / 2
21a. Mpf(for var in init_expr .. final_expr loop L end loop, s)
if VARMAP(i, s) = undef for var or some i in init_expr or final_expr
then error
else if Me(init_expr, s) > Me(final_expr, s)
then s
else Ml(while init_expr - 1 <= final_expr do L, Ma(var := init_expr + 1, s))
21b. Mr(repeat L until B)
if Mb(B, s) = undef
then error
else if Msl(L, s) = error
then error
else if Mb(B, s) = true
then Msl(L, s)
else Mr(repeat L until B), Msl(L, s))
21c. Mb(B, s) if VARMAP(i, s) = undef for some i in B

31
then error
else B', where B' is the result of
evaluating B after setting each
variable i in B to VARMAP(i, s)
21d. Mcf(for (expr1; expr2; expr3) L, s)
if VARMAP (i, s) = undef for some i in expr1, expr2, expr3, or L
then error
else if Me (expr2, Me (expr1, s)) = 0
then s
else Mhelp (expr2, expr3, L, s)
Mhelp (expr2, expr3, L, s)
if VARMAP (i, s) = undef for some i in expr2, expr3, or L
then error
else
if Msl (L, s) = error
then s
else Mhelp (expr2, expr3, L, Msl (L, Me (expr3, s))
22. The value of an intrisic attribute is supplied from outside the attribute evaluation process,
usually from the lexical analyzer. A value of a synthesized attribute is computed by an attribute
evaluation function.
23. Replace the second semantic rule with:
<var>[2].env ? <expr>.env
<var>[3].env ? <expr>.env
<expr>.actual_type ? <var>[2].actual_type
predicate: <var>[2].actual_type = <var>[3].actual_type
32
Chapter 4
Problem Set:
1.
(a) FIRST(aB) = {a}, FIRST(b) = {b}, FIRST(cBB) = {c}, Passes the test
(b) FIRST(aB) = {a}, FIRST(bA) = {b}, FIRST(aBb) = {a}, Fails the test
(c) FIRST(aaA) = {a}, FIRST(b) = {b}, FIRST(caB) = {c}, Passes the test
3.
(a) aaAbb
S
a A b
a A B
b
Phrases: aaAbb, aAb, b
Simple phrases: b
Handle: b
(b) bBab S
b B A
a b
Phrases: bBab, ab
Simple phrases: ab

33
Handle: ab
5. Stack Input Action
0 id * (id + id) $ Shift 5
0id5 * (id + id) $ Reduce 6 (Use GOTO[0, F])
0F3 * (id + id) $ Reduce 4 (Use GOTO[0, T])
0T2 * (id + id) $ Reduce 2 (Use GOTO[0, E])
0T2*7 (id + id) $ Shift 7
0T2*7(4 id + id ) $ Shift 4
0T2*7(4id5 + id ) $ Shift 5
0T2*7(4F3 + id ) $ Reduce 6 (Use GOTO[4, F])
0T2*7(4T2 + id ) $ Reduce 4 (Use GOTO[4, T])
0T2*7(4E8 + id ) $ Reduce 2 (Use GOTO[4, E])
0T2*7(4E8+6 id ) $ Shift 6
0T2*7(4E8+6id5 ) $ Shift 5
0T2*7(4E8+6F3 ) $ Reduce 6 (Use GOTO[6, F])
0T2*7(4E8+6T9 ) $ Reduce 4 (Use GOTO[6, T])
0T2*7(4E8 ) $ Reduce 1 (Use GOTO[4, E])
0T2*7(4E8)11 $ Shift 11
0T2*7F10 $ Reduce 5 (Use GOTO[7, F])
0T2 $ Reduce 5 (Use GOTO[0, T])
0E1 $ Reduce 2 (Use GOTO[0, E])
--ACCEPT--
Programming Exercises:
1. Every arc in this graph is assumed to have addChar attached. Assume we get here only if
charClass is SLASH.
other
/ * * /

34
start slash com end return COMMENT
other
return SLASH_CODE
3. int getComment() {
getChar();
/* The slash state */
if (charClass != AST)
return SLASH_CODE;
else {
/* The com state-end state loop */
do {
getChar();
/* The com state loop */
while (charClass != AST)
getChar();
} while (charClass != SLASH);
return COMMENT;
}
Chapter 5
Problem Set:
2. The advantage of a typeless language is flexibility; any variable can be used for any type
values. The disadvantage is poor reliability due to the ease with which type errors can be made,
coupled with the impossibility of type checking detecting them.
3. This is a good idea. It adds immensely to the readability of programs. Furthermore, aliasing
can be minimized by enforcing programming standards that disallow access to the array in any
executable statements. The alternative to this aliasing would be to pass many parameters, which
is a highly inefficient process.

35
5. Implicit heap-dynamic variables acquire types only when assigned values, which must be at
runtime. Therefore, these variables are always dynamically bound to types.
6. Suppose that a Fortran subroutine is used to implement a data structure as an abstraction. In
this situation, it is essential that the structure persist between calls to the managing subroutine.
8.
(a) i. Sub1
ii. Sub1
iii. Main
(b) i. Sub1
ii. Sub1
iii. Sub1
9. Static scoping: x = 5.
Dynamic scoping: x = 10
10. Variable Where Declared
In Sub1:
A Sub1
Y Sub1
Z Sub1
X Main
In Sub2:
A Sub2
B Sub2
Z Sub2
Y Sub1
X Main
In Sub3:
A Sub3
X Sub3
36
W Sub3
Y Main
Z Main
12. Point 1: a 1
b 2
c 2
d 2
Point 2: a 1
b 2
c 3
d 3
e 3
Point 3: same as Point 1
Point 4: a 1
b 1
c 1
13. Variable Where Declared
(a) d, e, f fun3
c fun2
b fun1
a main
(b) d, e, f fun3
b, c fun1
a main
(c) b, c, d fun1
e, f fun3
a main
(d) b, c, d fun1
e, f fun3
a main
(e) c, d, e fun2
f fun3

37
b fun1
a main
(f) b, c, d fun1
e fun2
f fun3
a main
14. Variable Where Declared
(a) A, X, W Sub3
B, Z Sub2
Y Sub1
(b) A, X, W Sub3
Y, Z Sub1
(c) A, Y, Z Sub1
X, W Sub3
B Sub2
(d) A, Y, Z Sub1
X, W Sub3
(e) A, B, Z Sub2
X, W Sub3
Y Sub1
(f) A, Y, Z Sub1
B Sub2
X, W Sub3
Chapter 6
Problem Set:
1. Boolean variables stored as single bits are very space efficient, but on most computers access
to them is slower than if they were stored as bytes.
2. Integer values stored in decimal waste storage in binary memory computers, simply as a
result of the fact that it takes four binary bits to store a single decimal digit, but those four bits
are capable of storing 16 different values. Therefore, the ability to store six out of every 16
possible values is wasted. Numeric values can be stored efficiently on binary memory
38
computers only in number bases that are multiples of 2. If humans had developed a number of
fingers that was a power of 2, these kinds of problems would not occur.
6. When implicit dereferencing of pointers occurs only in certain contexts, it makes the language
slightly less orthogonal. The context of the reference to the pointer determines its meaning. This
detracts from the readability of the language and makes it slightly more difficult to learn.
7. The only justification for the -> operator in C and C++ is writability. It is slightly easier to
write p -> q than (*p).q.
8. The advantage of having a separate construct for unions is that it clearly shows that unions are
different from records. The disadvantages are that it requires an additional reserved word and
that unions are often separately defined but included in records, thereby complicating the
program that uses them.
9. Let the subscript ranges of the three dimensions be named min(1), min(2), min(3),
max(1), max(2), and max(3). Let the sizes of the subscript ranges be size(1), size(2),
and size(3). Assume the element size is 1.
Row Major Order:
location(a[i,j,k]) = (address of a[min(1),min(2),min(3)])
+((i-min(1))*size(3) + (j-min(2)))*size(2) + (k-min(3))
Column Major Order:
location(a[i,j,k]) = (address of a[min(1),min(2),min(3)])
+((k-min(3))*size(1) + (j-min(2)))*size(2) + (i-min(1))
10. The advantage of this scheme is that accesses that are done in order of the rows can be
made very fast; once the pointer to a row is gotten, all of the elements of the row can be fetched
very quickly. If, however, the elements of a matrix must be accessed in column order, these
accesses will be much slower; every access requires the fetch of a row pointer and an address
computation from there. Note that this access technique was devised to allow multidimensional
array rows to be segments in a virtual storage management technique. Using this method,
multidimensional arrays could be stored and manipulated that are much larger than the physical
memory of the computer.
14. Implicit heap storage recovery eliminates the creation of dangling pointers through explicit
deallocation operations, such as delete. The disadvantage of implicit heap storage recovery is
the execution time cost of doing the recovery, often when it is not even necessary (there is no
shortage of heap storage).
Chapter 7
Problem Set:
39
1. Suppose Type1 is a subrange of Integer. It may be useful for the difference between
Type1 and Integer to be ignored by the compiler in an expression.
7. An expression such as a + fun(b), as described on page 300.
8. Consider the integer expression A + B + C. Suppose the values of A, B, and C are 20,000,
25,000, and -20,000, respectively. Further suppose that the machine has a maximum integer
value of 32,767. If the first addition is computed first, it will result in overflow. If the second
addition is done first, the whole expression can be correctly computed.
9.
(a) ( ( ( a * b )1 - 1 )2 + c )3
(b) ( ( ( a * ( b - 1 )1 )2 / c )3 mod d )4
(c) ( ( ( a - b )1 / c )2 & ( ( ( d * e )3 / a )4 - 3 )5 )6
(d) ( ( ( - a )1 or ( c = d )2 )3 and e )4
(e) ( ( a > b )1 xor ( c or ( d <= 17 )2 )3 )4
(f) ( - ( a + b )1 )2
10.
(a) ( a * ( b - ( 1 + c )1 )2 )3
(b) ( a * ( ( b - 1 )2 / ( c mod d )1 )3 )4
(c) ( ( a - b )5 / ( c & ( d * ( e / ( a - 3 )1 )2 )3 )4 )6
(d) ( - ( a or ( c = ( d and e )1 )2 )3 )4
(e) ( a > ( xor ( c or ( d <= 17 )1 )2 )3 )4
(f) ( - ( a + b )1 )2
11. <expr> ? <expr> or <e1> | <expr> xor <e1> | <e1>
<e1> ? <e1> and <e2> | <e2>
<e2> ? <e2> = <e3> | <e2> /= <e3> | <e2> < <e3>
| <e2> <= <e3> | <e2> > <e3> | <e2> >= <e3> | <e3>
<e3> ? <e4>
<e4> ? <e4> + <e5> | <e4> - <e5> | <e4> & <e5> | <e4> mod <e5> | <e5>
40
<e5> ? <e5> * <e6> | <e5> / <e6> | not <e5> | <e6>
<e6> ? a | b | c | d | e | const | ( <expr> )
41
12. (a)
<expr>
<e1>
<e2>
<e3>
<e4>
<e4> - <e5> <e6>
a
<e4> +<e5>
<e5> <e6> c
<e5> *<e6> 1
<e6> b
42
12. (b)
<expr>
<e1>
<e2>
<e3>
<e4>
<e5>
<e5> mod <e6>
<e5> /<e6>
<e5> *<e6> c
<e6> (<expr> )
c
a<e1>
<e2>
<e3>
<e4>
<e4> -<e5>
<e5> <e6>
<e6> 1
b
43
12. (c)
<expr>
<e1>
<e2>
<e3>
<e4>
<e4> &<e5>
<e5> <e6>
<e5> /<e6> (<expr> )
<e6> c<e1>
(<expr> )<e2>
<e1> <e3>
<e2> <e4>
<e3> <e4> -<e5>
<e4> <e5> <e6>
<e4> -<e5> <e5> /<e6> 3
<e5> <e6> <e5> *<e6> a
<e6> b<e6> e
a d
44
12. (d)
<expr>
<expr> and <e1>
<e1> <e2>
<e1> or <e2> <e3>
<e2> <e2> =<e3> <e4>
<e3> <e3> <e4> <e5>
-<e4> <e4> <e5> <e6>
<e5> <e5> <e6> e
<e6> <e6> d
ac
45
12. (e)
<expr>
a
<expr> xor <e1>
<e1> <e1> or <e2>
<e2> <e2> <e2> <= <e3>
<e2> ><e3> <e3> <e3> <e4>
<e3> <e4> <e4> <e4> <e5>
<e4> <e5> <e5> <e5> <e6>
<e5> <e6> <e6> <e6> 17
<e6> bcd
46
12. (f)
<expr>
<e1>
<e2>
<e3>
a
-<e4>
<e4> +<e5>
<e5> <e6>
<e6> b
13. (a) (left -> right) sum1 is 46; sum2 is 48
(b) (right -> left) sum1 is 48; sum2 is 46
Chapter 8
Problem Set:
1. Three situations in which a combined counting and logical control loops are:
a. A list of values is to be added to a SUM, but the loop is to be exited if SUM exceeds some
prescribed value.
b. A list of values is to be read into an array, where the reading is to terminate when either a
prescribed number of values have been read or some special value is found in the list.
c. The values stored in a linked list are to be moved to an array, where values are to be
moved until the end of the linked list is found or the array is filled, whichever comes first.
4. Unique closing keywords on compound statements have the advantage of readability and the
disadvantage of complicating the language by increasing the number of keywords.
47
8. The primary argument for using Boolean expressions exclusively as control expressions is the
reliability that results from disallowing a wide range of types for this use. In C, for example, an
expression of any type can appear as a control expression, so typing errors that result in
references to variables of incorrect types are not detected by the compiler as errors.
Programming Exercises:
1.
(a) Do K = (J + 13) / 27, 10
I = 3 * (K + 1) - 1
End Do
(b) for k in (j + 13) / 27 .. 10 loop
i := 3 * (k + 1) - 1;
end loop;
(c) for (k = (j + 13) / 27; k <= 10; i = 3 * (++k) - 1)
2.
(a) Do K = (J + 13.0) / 27.0, 10.0, 1.2
I = 3.0 * (K + 1.2) - 1.0
End Do
(b) while (k <= 10.0) loop
i := 3.0 * (k + 1.2) - 1.0;
k := k + 1.2;
end loop;
(c ) for (k = (j + 13.0) / 27.0; k <= 10.0;
k = k + 1.2, i = 3.0 * k - 1)
3.
(a) Select Case (k)
Case (1, 2)
J = 2 * K - 1
48
Case (3, 5)
J = 3 * K + 1
Case (4)
J = 4 * K - 1
Case (6, 7, 8)
J = K - 2
Case Default
Print *, 'Error in Select, K = ', K
End Select
(b) case k is
when 1 | 2 => j := 2 * k - 1;
when 3 | 5 => j := 3 * k + 1;
when 4 => j := 4 * k - 1;
when 6..8 => j := k - 2;
when others =>
Put ("Error in case, k =');
Put (k);
New_Line;
end case;
(c) switch (k)
{
case 1: case 2:
j = 2 * k - 1;
break;
case 3: case 5:
j = 3 * k + 1;
break;
49
case 4:
j = 4 * k - 1;
break;
case 6: case 7: case 8:
j = k - 2;
break;
default:
printf("Error in switch, k =%d\n", k);
}
4. j = -3;
key = j + 2;
for (i = 0; i < 10; i++){
if ((key == 3) || (key == 2))
j--;
else if (key == 0)
j += 2;
else j = 0;
if (j > 0)
break;
else j = 3 - i;
}
5. (C)
for (i = 1; i <= n; i++) {
flag = 1;
for (j = 1; j <= n; j++)
if (x[i][j] <> 0) {
flag = 0;
50
break;
}
if (flag == 1) {
printf("First all-zero row is: %d\n", i);
break;
}
}
(Ada)
for I in 1..N loop
Flag := true;
for J in 1..N loop
if X(I, J) /= 0 then
Flag := false;
exit;
end if;
end loop;
if Flag = true then
Put("First all-zero row is: ");
Put(I);
Skip_Line;
exit;
end if;
end loop;
Chapter 9
51
Problem Set:
2. The main advantage of this method is the fast accesses to formal parameters in subprograms.
The disadvantages are that recursion is rarely useful when values cannot be passed, and also
that a number of problems, such as aliasing, occur with the method.
4. This can be done in both Java and C#, using a static (or class) data member for the page
number.
5. Assume the calls are not accumulative; that is, they are always called with the initialized values
of the variables, so their effects are not accumulative.
a. 2, 1, 3, 5, 7, 9 b. 1, 2, 3, 5, 7, 9 c. 1, 2, 3, 5, 7, 9
2, 1, 3, 5, 7, 9 2, 3, 1, 5, 7, 9 2, 3, 1, 5, 7, 9
2, 1, 3, 5, 7, 9 5, 1, 3, 2, 7, 9 5, 1, 3, 2, 7, 9 (unless the addresses of the
actual parameters are
recomputed on return, in
which case there will be an
index range error.)
6. It is rather weak, but one could argue that having both adds complexity to the language
without sufficient increase in writability.
52
Chapter 10
Problem Set:
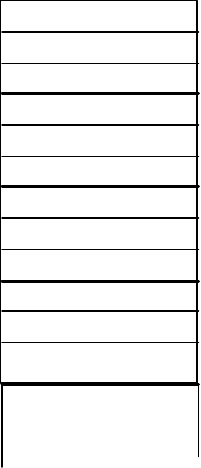
1.
return (to C)
dynamic link
static link
return (to A)
dynamic link
static link
return (to BIGSUB)
dynamic link
static link
return
dynamic link
static link
.
.
stack
ari for
BIGSUB
ari for A
ari for C
ari for B
53
2.
dynamic link
static link
return (to C)
dynamic link
static link
return (to A)
dynamic link
static link
ari for D
ari for C
ari for A
return ( to A)
ari for B
ari for A
dynamic link
static link
return (to caller)
stack
ari for
BIGSUB
parameter (flag)
dynamic link
static link
return (BIGSUB)
parameter (flag)
dynamic link
static link
return (to B)
54
4. One very simple alternative is to assign integer values to all variable names used in the
program. Then the integer values could be used in the activation records, and the comparisons
would be between integer values, which are much faster than string comparisons.
5. Following the hint stated with the question, the target of every goto in a program could be
represented as an address and a nesting_depth, where the nesting_depth is the difference
between the nesting level of the procedure that contains the goto and that of the procedure
containing the target. Then, when a goto is executed, the static chain is followed by the number
of links indicated in the nesting_depth of the goto target. The stack top pointer is reset to the
top of the activation record at the end of the chain.
6. Including two static links would reduce the access time to nonlocals that are defined in
scopes two steps away to be equal to that for nonlocals that are one step away. Overall,
because most nonlocal references are relatively close, this could significantly increase the
execution efficiency of many programs.
Chapter 11
Problem Set:
2. The problem with this is that the user is given access to the stack through the returned value
of the "top" function. For example, if p is a pointer to objects of the type stored in the stack, we
could have:
p = top(stack1);
*p = 42;
These statements access the stack directly, which violates the principle of a data abstraction.
55
Chapter 12
Problem Set:
1. In C++, a method can only be dynamically bound if all of its ancestors are marked
virtual. Be default, all method binding is static. In Java, method binding is dynamic by
default. Static binding only occurs if the method is marked final, which means it cannot be
overriden.
3. C++ has extensive access controls to its class entities. Individual entities can be marked
public, private, or protected, and the derivation process itself can impose further
access controls by being private. Ada, on the other hand, has no way to restrict inheritance
of entities (other than through child libraries, which this book does not describe), and no access
controls for the derivation process.
Chapter 13
Problem Set:
1. Competition synchronization is not necessary when no actual concurrency takes place simply
because there can be no concurrent contention for shared resources. Two nonconcurrent
processes cannot arrive at a resource at the same time.
2. When deadlock occurs, assuming that only two program units are causing the deadlock, one
of the involved program units should be gracefully terminated, thereby allowed the other to
continue.
3. The main problem with busy waiting is that machine cycles are wasted in the process.
4. Deadlock would occur if the release(access) were replaced by a wait(access) in the
consumer process, because instead of relinquishing access control, the consumer would wait for
control that it already had.
6. Sequence 1: A fetches the value of BUF_SIZE (6)
A adds 2 to the value (8)
A puts 8 in BUF_SIZE
B fetches the value of BUF_SIZE (8)
B subtracts 1 (7)
B put 7 in BUF_SIZE
BUF_SIZE = 7
Sequence 2: A fetches the value of BUF_SIZE (6)
B fetches the value of BUF_SIZE (6)
A adds 2 (8)
B subtracts 1 (5)
A puts 8 in BUF_SIZE
56
B puts 5 in BUF_SIZE
BUF_SIZE = 5
Sequence 3: A fetches the value of BUF_SIZE (6)
B fetches the value of BUF_SIZE (6)
A adds 2 (8)
B subtracts 1 (5)
B puts 5 in BUF_SIZE
A puts 8 in BUF_SIZE
BUF_SIZE = 8
Many other sequences are possible, but all produce the values 5, 7, or 8.
Chapter 14
Problem Set:
5. There are several advantages of a linguistic mechanism for handling exceptions, such as that
found in Ada, over simply using a flag error parameter in all subprograms. One advantage is
that the code to test the flag after every call is eliminated. Such testing makes programs longer
and harder to read. Another advantage is that exceptions can be propagated farther than one
level of control in a uniform and implicit way. Finally, there is the advantage that all programs
use a uniform method for dealing with unusual circumstances, leading to enhanced readability.
6. There are several disadvantages of sending error handling subprograms to other
subprograms. One is that it may be necessary to send several error handlers to some
subprograms, greatly complicating both the writing and execution of calls. Another is that there
is no method of propagating exceptions, meaning that they must all be handled locally. This
complicates exception handling, because it requires more attention to handling in more places.
Chapter 15
Problem Set :
6. y returns the given list with leading elements removed up to but not including the first
occurrence of the first given parameter.
7. x returns the number of non-NIL atoms in the given list.
Programming Exercises:
57
5. (DEFINE (deleteall atm lst)
(COND
((NULL? lst) '())
((EQ? atm (CAR lst)) (deleteall atm (CDR lst)))
(ELSE (CONS (CAR lst) (deleteall atm (CDR lst)))
))
7. (DEFINE (deleteall atm lst)
(COND
((NULL? lst) '())
((NOT (LIST? (CAR lst)))
(COND
((EQ? atm (CAR lst)) (deleteall atm (CDR lst)))
(ELSE (CONS (CAR lst) (deleteall atm (CDR lst))))
))
(ELSE (CONS (deleteall atm (CAR lst))
(deleteall atm (CDR lst))))
))
9. (DEFINE (reverse lis)
(COND
((NULL? lis) '())
(ELSE (APPEND (reverse (CDR lis)) (CONS (CAR lis) () )))
))
Chapter 16
58
Problem Set:
1. Ada variables are statically bound to types. Prolog variables are bound to types only when
they are bound to values. These bindings take place during execution and are tempoarary.
2. On a single processor machine, the resolution process takes place on the rule base, one rule
at a time, starting with the first rule, and progressing toward the last until a match is found.
Because the process on each rule is independent of the process on the other rules, separate
processors could concurrently operate on separate rules. When any of the processors finds a
match, all resolution processing could terminate.
6. The list processing capabilities of Scheme and Prolog are similar in that they both treat lists as
consisting of two parts, head and tail, and in that they use recursion to traverse and process lists.
7. The list processing capabilities of Scheme and Prolog are different in that Scheme relies on
the primitive functions CAR, CDR, and CONS to build and dismantle lists, whereas with Prolog
these functions are not necessary.
Programming Exercises:
2. intersect([], X, []).
intersect([X | R], Y, [X | Z] :-
member(X, Y),
!,
intersect(R, Y, Z).
intersect([X | R], Y, Z) :- intersect(R, Y, Z).
Note: this code assumes that the two lists, X and Y, contain no duplicate elements.
3. union([], X, X).
union([X | R], Y, Z) :- member(X, Y), !, union(R, Y, Z).
union([X | R], Y, [X | Z]) :- union(R, Y, Z).
