STP DRV3_DS DRV 6575 Microstepping Drive Data Sheet Surestepdrive3 Datasheet
User Manual: STP-DRV-6575 Microstepping Drive Data Sheet SureStep™ Stepping Systems User Manual - AutomationDirect
Open the PDF directly: View PDF ![]() .
.
Page Count: 2
Data Sheet: STP-DRV3_DS, 1st Ed, Rev C – 12/02/2014 For a complete user manual, please visit www.automationdirect.com
STEPPING SYSTEMS
Sheet 1 of 2
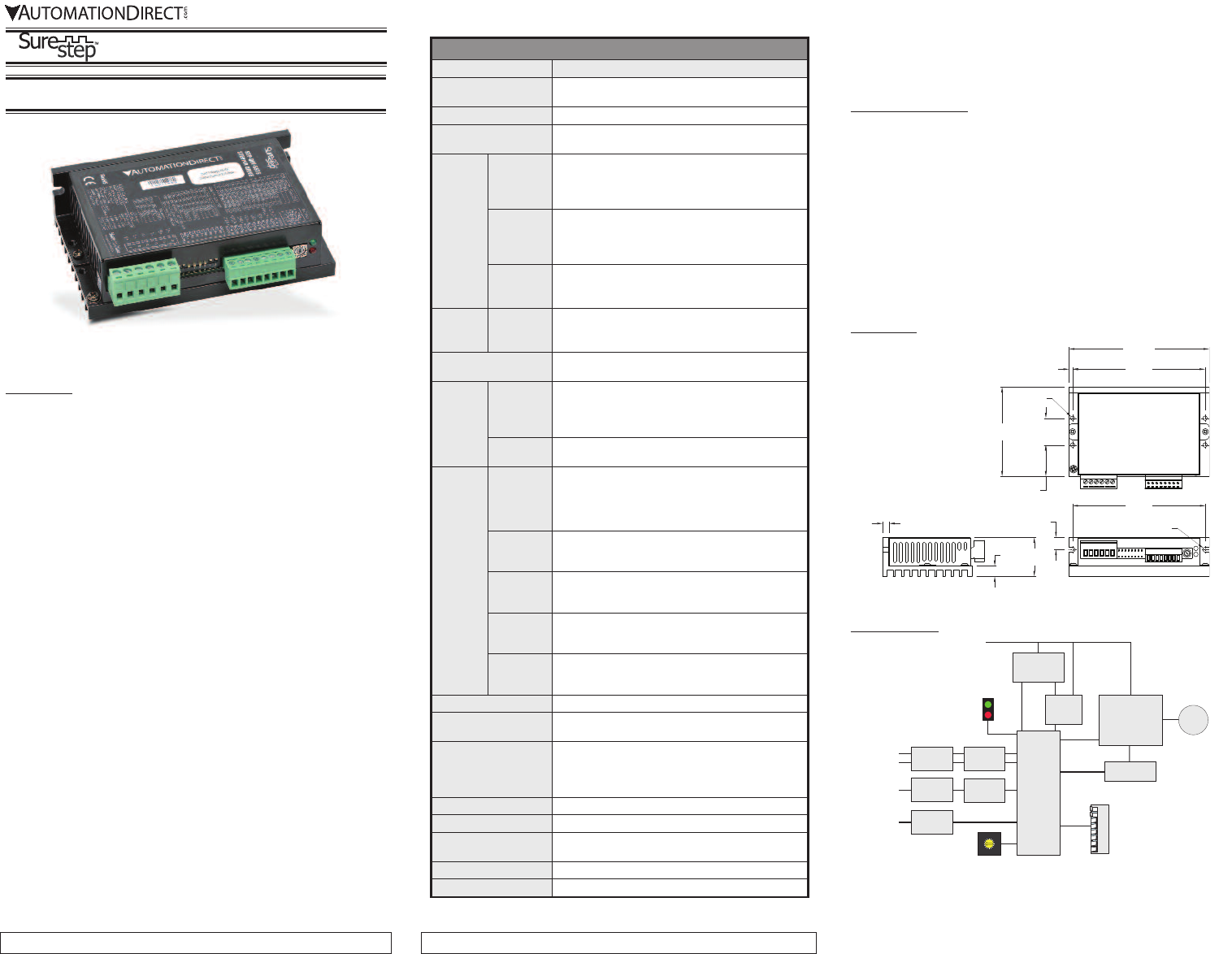
STP-DRV-6575 MICROSTEPPING DRIVE
WARNING
To minimize the risk of potential safety problems, you should
follow all applicable local and national codes that regulate the
installation and operation of your equipment. These codes vary
from area to area. It is your responsibility to determine which
codes should be followed, and to verify that the equipment, instal-
lation, and operation are in compliance with the latest revision of
these codes.
Equipment damage or serious injury to personnel can result from
the failure to follow all applicable codes and standards. We do
not guarantee the products described in this publication are suit-
able for your particular application, nor do we assume any
responsibility for your product design, installation, or operation.
If you have any questions concerning the installation or operation
of this equipment, or if you need additional information, please
call our technical support at 770-844-4200.
This publication is based on information that was available at the
time it was printed. At Automationdirect.com®we constantly
strive to improve our products and services, so we reserve the
right to make changes to the products and/or publications at any
time without notice and without obligation. This publication may
also discuss features that may not be available in certain revi-
sions of the product.
Note: STP-DRV-6575 Drives are suitable for driving 2-phase and 4-phase
stepping motors with 4, 6, or 8 leads.
Sure Step™ Microstepping Drive Specifications
Part Number STP-DRV-6575
Input Power 24–65 VDC
(external power supply required; fuse at 7A fast-acting)
Output Current 1.0–7.5 A/phase (peak of sine)
Current Controller Dual H-bridge digital MOSFET,
4-quadrant PWM at 20 kHz
Input
Signals
Step
5–24 VDC nominal (range: 4–30 VDC); optically isolated,
differential. Minimum pulse width = 250ns. Maximum
pulse frequency = 150 kHz or 2MHz (user selectable).
Function = Step or Step CW pulse.
Direction
5–24 VDC nominal (range: 4–30 VDC); optically isolated,
differential. Minimum pulse width = 250ns. Maximum
pulse frequency = 150 kHz or 2MHz (user selectable).
Function = Direction or Step CCW pulse.
Enable
5–24 VDC nominal (range: 4–30 VDC); optically isolated,
differential.
Function = disable motor when closed.
Output
Signal Fault
30 VDC / 80mA max, optically isolated photodarlington,
sinking or sourcing.
Function = closes on drive fault.
Rotary Switch Selectable
Function Select motor based on part number, or by motor current.
Jumper
Selectable
Functions
Step Pulse
Type
Step and Direction:
Step signal = step/pulse; Direction signal = direction.
Step CW & CCW:
Step signal = CW step; Direction signal = CCW step.
Step Pulse
Noise Filter Select 150 kHz or 2MHz
DIP Switch
Selectable
Functions
Current
Reduction
Reduce power consumption and heat generation by
limiting motor running current to 100%, 90%, or 80%
of maximum. Current should be increased to 120% if
microstepping.
(Torque is reduced/increased by the same %.)
Idle Current
Reduction
Reduce power consumption and heat generation by
limiting motor idle current to 90% or 50% of running
current. (Holding torque is reduced by the same %.)
Load Inertia
Anti-resonance and damping feature improve motor
performance. Set motor and load inertia range to 0–4x
or 5–10x.
Step
Resolution
For smoother motion and more precise speed, set the
pulse step resolution to 20000, 12800, 5000, 2000, 400
smooth, 400, 200 smooth, or 200 steps/rev.
Self Test
Automatically rotate the motor back and forth two turns
in each direction in order to confirm that the motor is
operational.
Drive Cooling Method Natural convection (mount drive to metal surface)
Mounting Use (2) #6 screws to mount wide or narrow side to metal
surface
Removable Connectors
Motor & Power Supply:
screw terminal blocks Phoenix Contact 1757051
Signals:
screw terminal blocks Phoenix Contact 1803633
Weight 10.8 oz [306g] – (including mating connectors)
Operating Temperature 0–85 °C [32–185 °F] – (interior of electronics section)
Ambient Temperature 0–50 °C [32–122 °F]
– (drive must be mounted to suitable heat sink)
Humidity maximum 90% non-condensing
Agency Approvals CE (EMC & LVD); RoHS
MOUNTING THE DRIVE
The STP-DRV-6575 drive can be mounted on the wide or the
narrow side of the chassis using (2) #6 screws. Fasten the drive
securely to a smooth, flat, metal surface that will help conduct
heat away from the chassis. Otherwise, forced air flow from a fan
may be required to prevent overheating. WARNING:
• Never mount the drive in a space where there is no air flow, or
where other devices can heat the surrounding air to 50°C [122°F].
• Never put the drive where it can get wet, or where metal or other
electrically-conductive particles can get on the circuitry.
• Always provide air flow around the drive. Minimum allowable
spacing between multiple drives is 0.5 in [13 mm].
DIMENSIONS
BLOCK DIAGRAM
AMPLIFIER
24-65 VDC
from external power supply
Status LEDs
Motor Selection
Current
Idle Current
Steps/Rev
Load Inertia
Self Test
STEP
DIR
OUT1
Overcurrent
Sensors
motor
EN
4
3
2
1
0
F
E
D
C
B
A
9
8
7
6
5
12345678
DSP
Voltage
Sensors
3.3/5/15V
Regulators
Digital
Filter
Optical
Isolation
Optical
Isolation
Optical
Isolation
Software
Filter
4.66
[118.4]
1.30
[33.0]
2.98
[75.6]
4.42
[112.3]
2 X R0.09
[R2.2]
0.41
[10.5]
0.22
[5.6]
0.35
[8.9]
4X Ø0.14
[Ø3.6]
4.40
[111.8]
0.13
[3.2]
0.89
[22.7]
1.04
[26.5]
Dimensions = in [mm]

Data Sheet: STP-DRV3_DS, 1st Ed, Rev C – 12/02/2014 For a complete user manual, please visit www.automationdirect.com
STEPPING SYSTEMS
Sheet 2 of 2
TYPICAL WIRING DIAGRAM
CONNECTING THE POWER SUPPLY
STP-PWR-48xx or STP-PWR-3204 power supplies from
AutomationDirect are good choices to power the step-motor drive.
If the power supply you choose does not have a fuse on the
output, you will need to install a fast-acting 7A fuse on the “+”
power supply lead.
WARNING: Do not to reverse the polarity from the power supply
to the drive. Reverse connection will destroy your drive and void
the warranty.
CONNECTING THE MOTOR
WARNING: When connecting a step motor to the STP-DRV-6575
drive, be sure that the motor power supply is switched off. When
using a motor not supplied by AutomationDirect, secure any
unused motor leads so that they can’t short out. Never discon-
nect the motor while the drive is powered up. Never connect the
motor leads to ground or directly to the power supply. (See
Typical Wiring Diagram on the back side of this data sheet for the
step motor lead color code of AutomationDirect-supplied motors.
CONNECTING THE INPUT SIGNALS
The STP-DRV-6575 drive has three inputs:
• STEP: a high speed digital input for step pulse commands;
5–24 VDC logic
• DIR: a high speed digital input for the direction signal;
5–24 VDC logic
• EN: a 5-24V input for commanding the removal of power from the
motor; also clears faults and re-enables the motor in the case of
drive faults, e.g. over-current/short-circuit faults
Note: STEP and DIR inputs can be converted to STEP CW and STEP CCW by
moving the internal jumper S3.
+
–
V+ V–
Fuse*
* External fuse not req'd when
using an STP-PWR-xxxx P/S; fuse is internal.
** CE use requires an EMI line filter.
EMI**
• Connect the green ground screw to earth ground
• Use 18 or 20 AWG wire.
VDC
Step
Motor
Power
Supply
VDC +
STP-
DRV-xxxx
Step Motor
Power Supply
–
+
Stepper Drive
VDC –
A +
A –
B +
B –
Step Motor
STP-MTR(H)-xxxxx(D)
Red
White
Green
Black
A+
A–
B+
B–
Cable Color Code 12" Motor Pigtail
with Connector
Extension Cable
with Connector
STP-EXT(H)-020
STP-PWR-xxxx
1
2
3
4
WireTerm Pin #
Motor
Power
xx VDC
Logic
Power
5VDC
SureStep Typical
Wiring Diagram
CONNECTING THE INPUT SIGNALS – STEP & DIRECTION
CONNECTING THE INPUT SIGNALS – ENABLE
CONNECTING THE FAULT OUTPUT SIGNAL
Do not connect more than 30 VDC. Current must not exceed 80 mA.
+
FAULT+
-
FAULT–
STP-DRV-
6575 Drive
5-24 VDC
Power
Supply
Load
Connecting Fault Output as Sinking Output
+
FAULT+
-
FAULT–
STP-DRV-
6575 Drive
5-24 VDC
Power
Supply
Load
Connecting Fault Output as Sourcing Output
+
FAULT+
-
FAULT–
STP-DRV-
6575 Drive
5-24 VDC
Power
Supply
1N4935
suppression
diode
relay coil
(inductive load)
Connecting STP-DRV-6575 Fault Output to Inductive Relay
+EN+
-EN–
5-24 VDC
Power
Supply
STP-DRV-6575
Drive
PNP
Proximity
Sensor
+
-
output
Connecting STP-DRV-6575 Drive EN to PNP
+EN+
-
EN–
5-24 VDC
Power
Supply STP-DRV-6575
Drive
NPN
Proximity
Sensor
+
-
output
Connecting STP-DRV-6575 Drive EN to NPN
+EN+
-EN–
5-24 VDC
Power
Supply
STP-DRV-6575
Drive
switch or relay
(closed = logic low)
Connecting STP-DRV-6575 Drive EN to Switch or Relay
DIR+ DIR+
DIR– DIR–
STEP+
STEP– STEP–
Indexer with
Differential
Outputs
(5–24 VDC)
STP-DRV-6575
Drive
STEP+ EN+
EN–
N/C
N/C
Connecting STP-DRV-6575 Drive to Indexer with Differential Outputs
(5–24 VDC) +V OUT DIR+
DIR DIR–
STEP+
STEP STEP–
Indexer
with
Sinking
Outputs
STP-DRV-6575
Drive
EN+
EN–
N/C
N/C
Connecting STP-DRV-6575 Drive to Indexer with Sinking Outputs
COM DIR–
DIR DIR+
STEP–
STEP STEP+
Indexer with
Sourcing
Outputs
(5–24 VDC)
STP-DRV-6575
Drive
EN+
EN–
N/C
N/C
Connecting STP-DRV-6575 Drive to Indexer with Sourcing Outputs
ROTARY SWITCH SETTINGS – MOTOR SELECTION
DIP SWITCH SETTINGS (FACTORY DEFAULT =ALL SWITCHES OFF)
JUMPER SETTINGS
Jumpers S3 and S4 are located on the internal circuit board.
They can be accessed by removing the drive’s front cover.
Jumper S3 – Step Pulse Type
• Jumper in “1-2” position – Step & Direction (factory default)
• Jumper in “1-3” position – Step CW / Step CCW
Jumper S4 – Step Pulse Noise Filter
• Jumper in “1-2” position – 2MHz
• Jumper in “1-3” position – 150 kHz (factory default)
Jumper S4:
Step Pulse Noise Filter
Jumper S3:
Step Pulse Type
Remove connectors and cover to access Jumpers
S3 and S4. They are located on the upper
left corner of the circuit board.
567
20000 12800
5 6 7
5000
5 6 7
2000
5 6 7
400
SMOOTH
567
400
5 6 7
200
SMOOTH
5 6 7
200
5 6 7
Step Resolution (steps/rev)
ON
100%
1 2
90%
1 2
80%
1 2
120%
1 2
Current Reduction
(Use 120% when microstepping)
ON
5-10x
3 3
0-4x
Load Inertia
ON
Idle Current
Reduction
50%
4 4
90%
ON
ON
8 8
OFF
Self Test
ON
STP-DRV-6575 Motor Selection Table
Motor Data Drive Configuration Data
Motor
STP-MTR
-xxxxx
Current
(A/phase)
Holding
Torque (oz·in)
Roter Inertia
(oz·in2)
Inductance
(mH)
Resistance
(Ω)
Torque
(mN·m)
Inertia
(g·cm2)
Current
(peak sine A)
Rotary Switch
Position
n/a reserved 0–2
n/a 1.3 custom NEMA 17 3
n/a 4.0 custom NEMA 23 4
n/a 4.0 custom NEMA 34 5
-17040 1.7 61 0.28 3.03 1.60 434 51 2.04 6
-17048 2.0 830.37 2.65 1.40 586 822.40 7
-17060 2.0 125 0.56 3.30 2.00 883 37 2.40 8
-23055 2.8 166 1.46 2.36 0.08 1172 271 3.36 9
-23079 2.8 276 2.60 3.82 1.10 1949 475 3.36 A
-34066 2.8 434 7.66 7.70 1.11 3065 1402 3.36 B
H-23079 5.6 287 2.60 1.18 0.40 2025 371 6.72 C
H-34066 6.3 428 7.66 1.52 0.25 3021 1402 7.56 D
H-34097 6.3 803 14.80 2.07 0.03 5668 2708 7.56 E
H-34127 6.3 1292 21.90 4.14 0.49 9123 4008 7.56 F
4
3
2
1
0
F
E
D
C
B
A
9
8
7
6
5
STP-DRV-6575
Microstepping Drive
