Elatec TWN3F1 RFID Reader User Manual Library
Elatec GmbH RFID Reader Library
UserManual.wiki
>
Elatec
>
TWN3F1 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

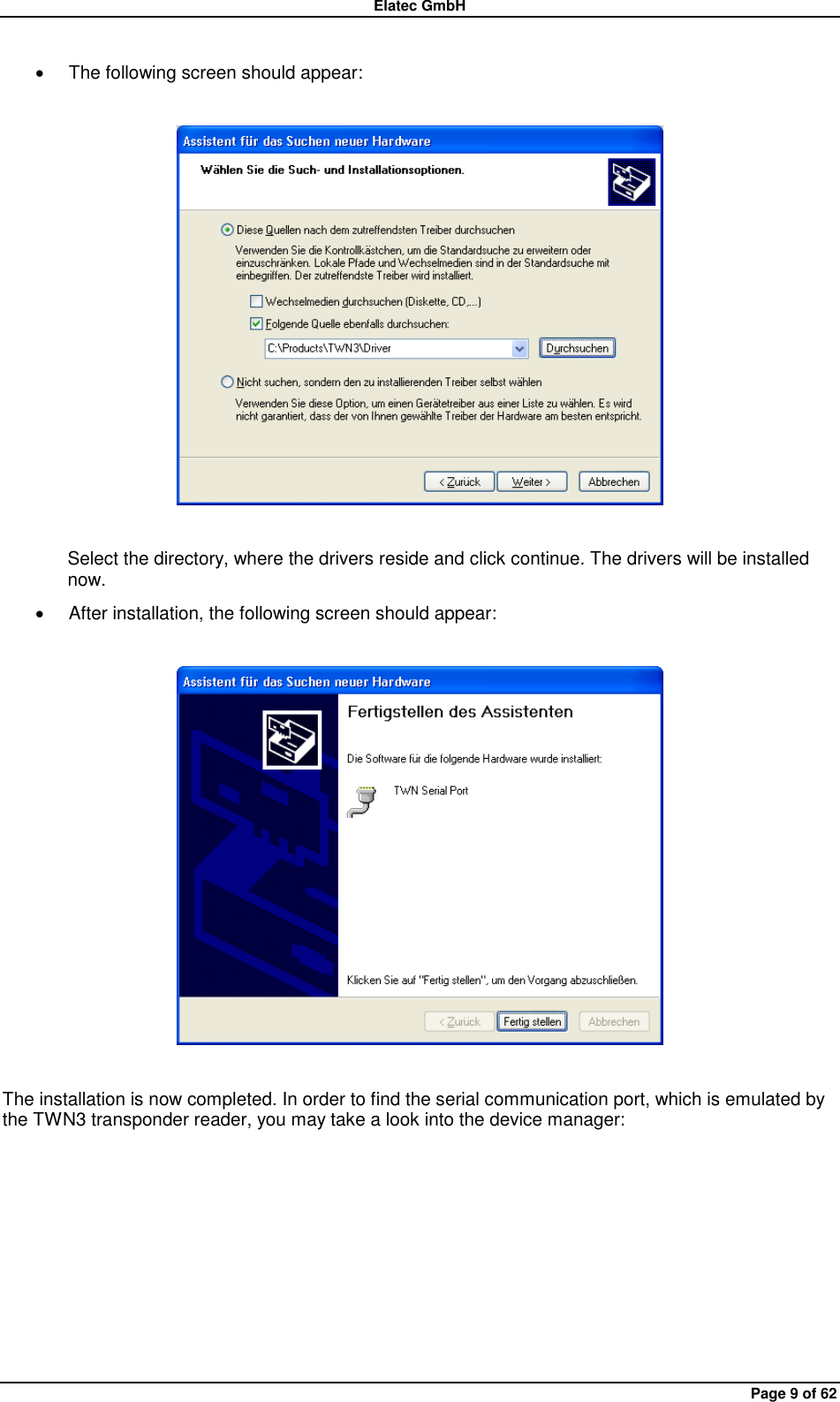
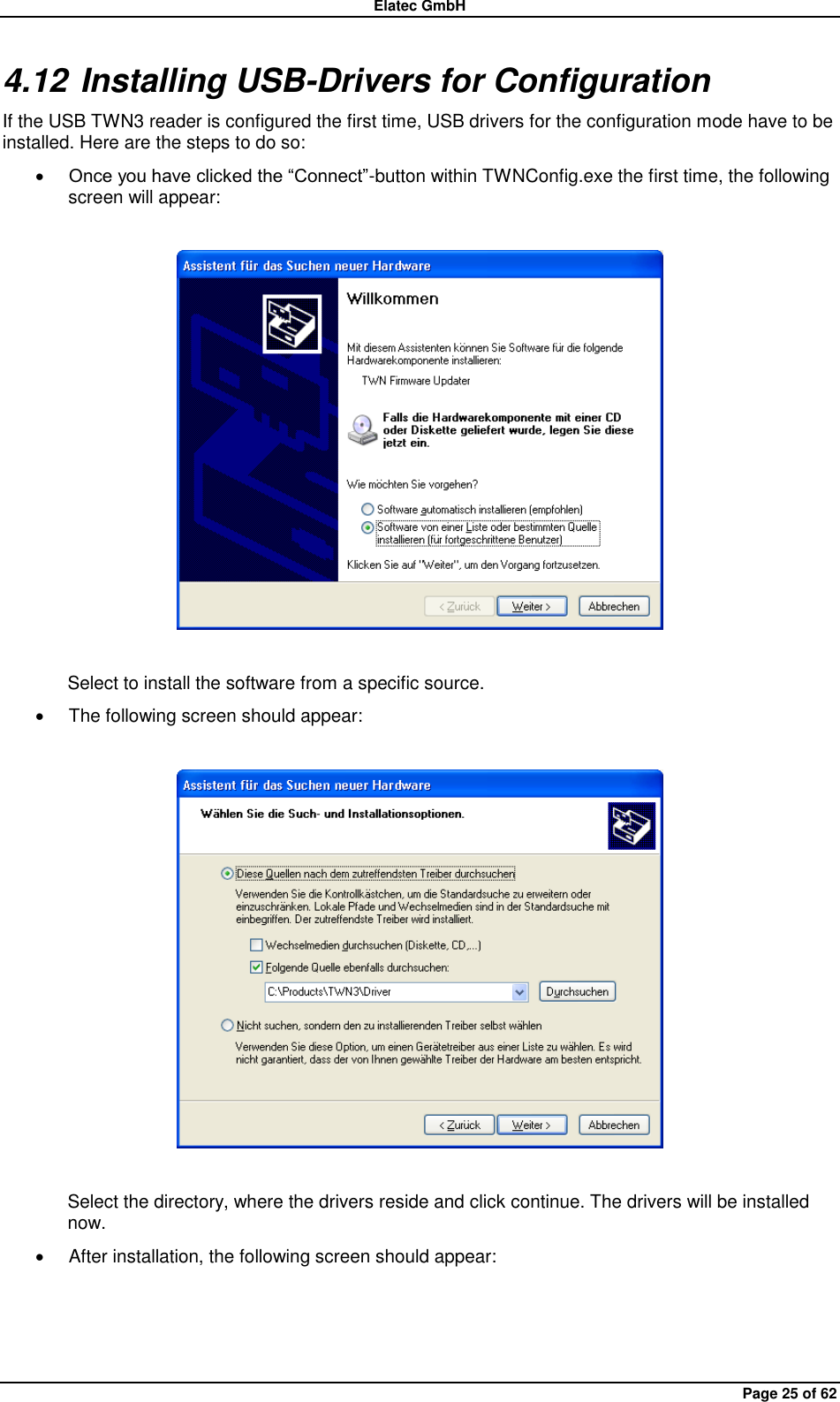
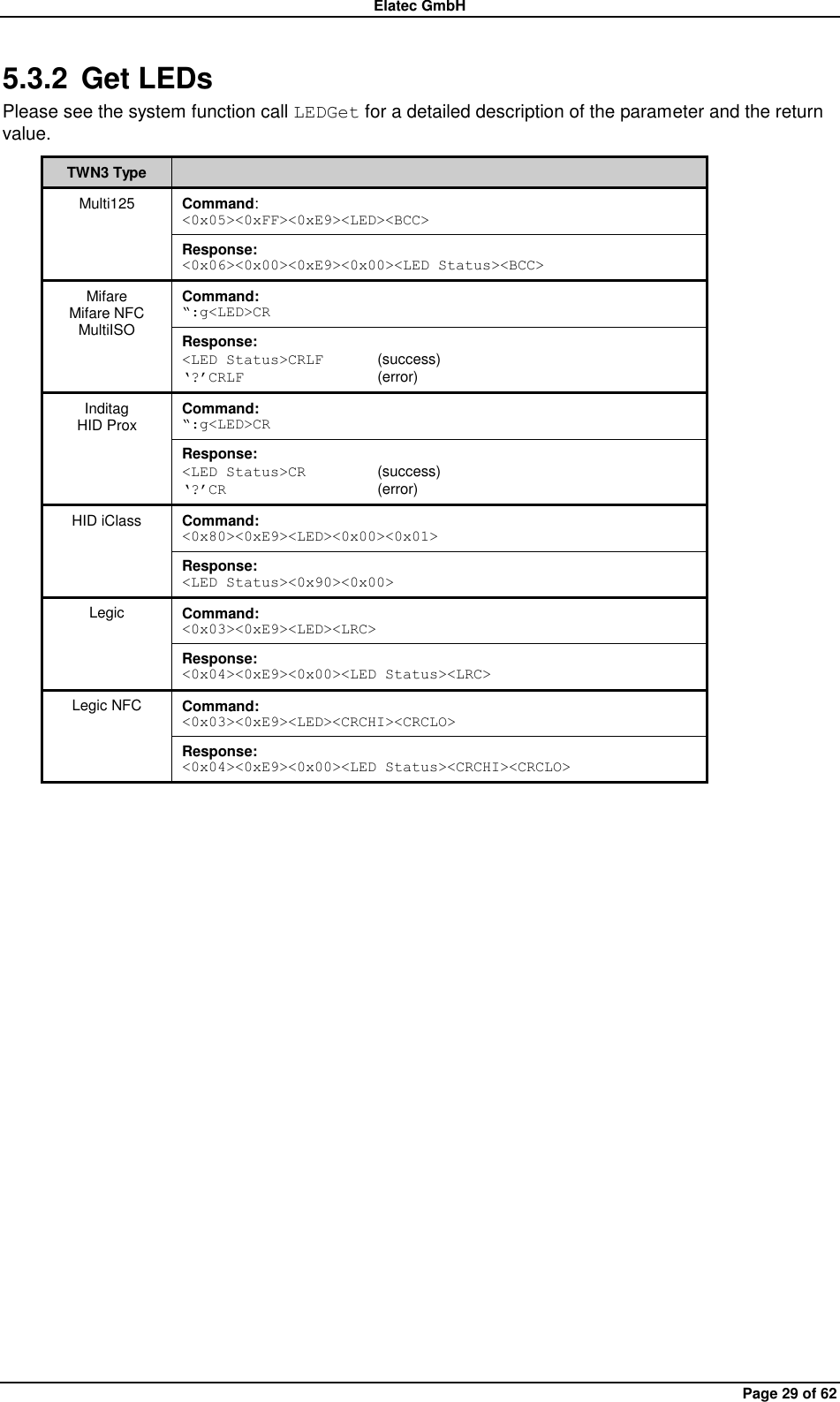
![Elatec GmbH Page 33 of 62 6.1.4.1 #include Directive Include another source file and treat it as a part of the compiled source. There are two possibilities: #include <sys.twn.h> Include the given file, which is located relative to the directory, where TWNConfig.exe resides. #include “mydefs.twn.h” Include the given file, which is located relative to the current directory 6.1.5 Functions Functions may be defined (“prototype”) in order to resolve forward references, or declared directly. The prototype of a function has the following form: (byte | void) identifier([list of arguments]); The declaration of a function has the following form: (byte | void) identifier([list of arguments]) function body The function body is a block of statements. 6.1.5.1 Return Values A function either has a return value (byte) or not (void). Following form is required to return a value: return expression; 6.1.5.2 Arguments If a function has no arguments, the list of arguments has to be left empty (do not write void). In order to declare arguments, write the list of arguments separated by commas. Arguments are passed by value or by reference. In order to pass an argument by reference instead of value, insert the „&‟ before the identifier of argument. Here are some examples of valid function prototypes: void Func1(); // No arguments void Func2(byte i); // A single argument, // which is passed by value void Func3(byte in, byte &out); // Two arguments, where in is passed by // value and out is passed by reference 6.1.5.3 System Functions A system function can only be declared as prototype. Following form: (byte | void) identifier([list of arguments]) system number; The list of available system functions is contained in the file sys.twn.h. For the script programmer there is normally no need to declare system functions on his own.](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-33.png)
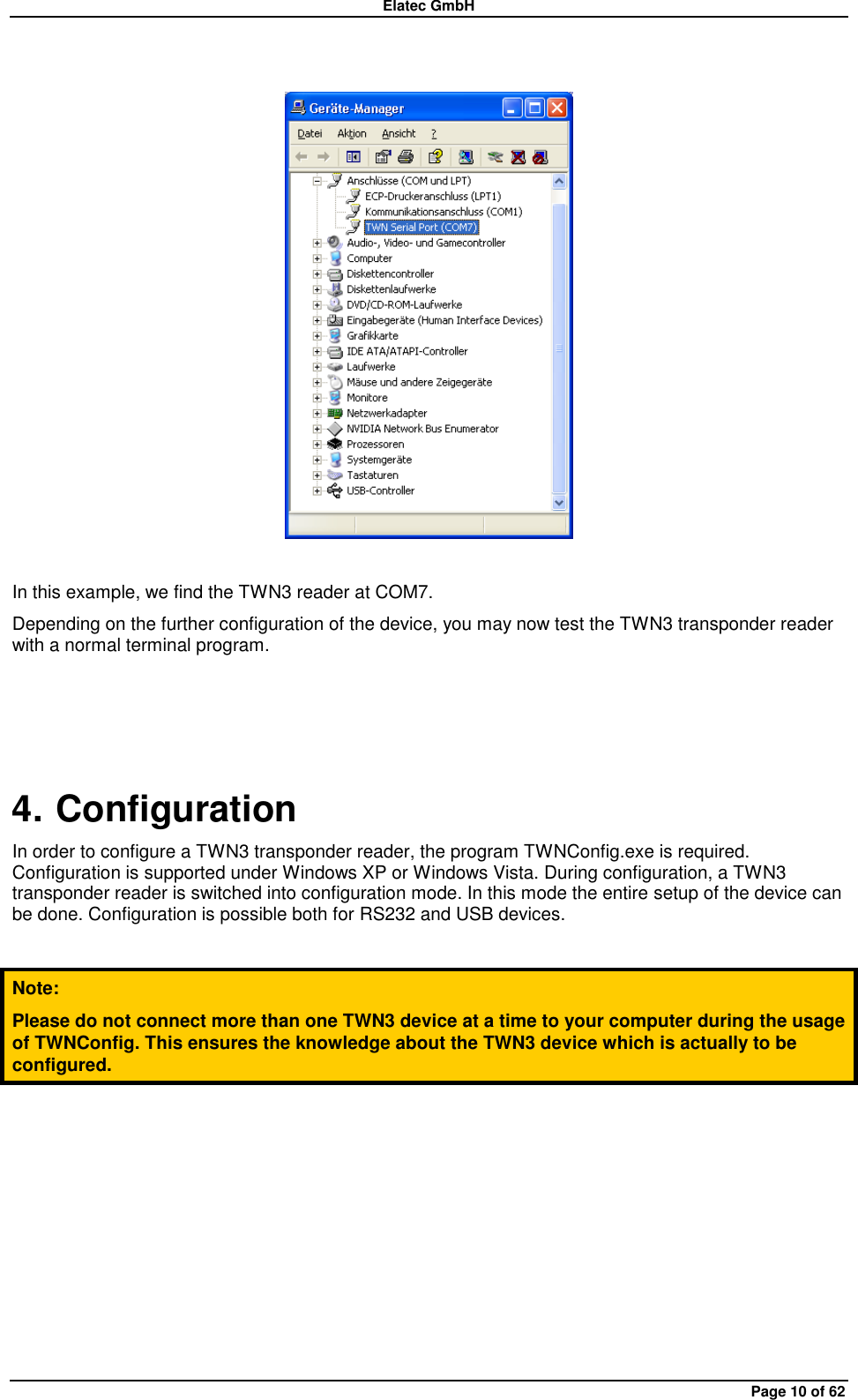
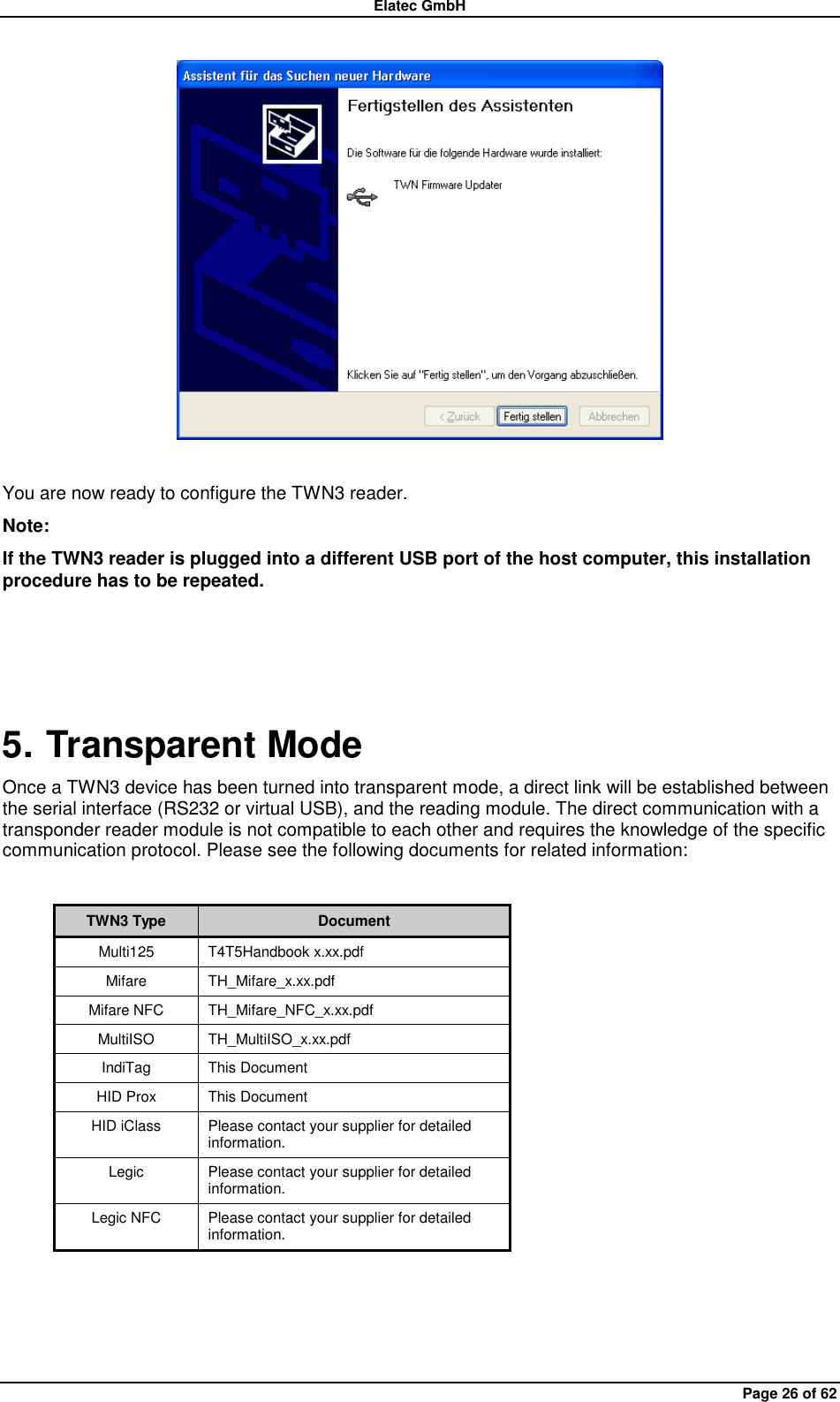
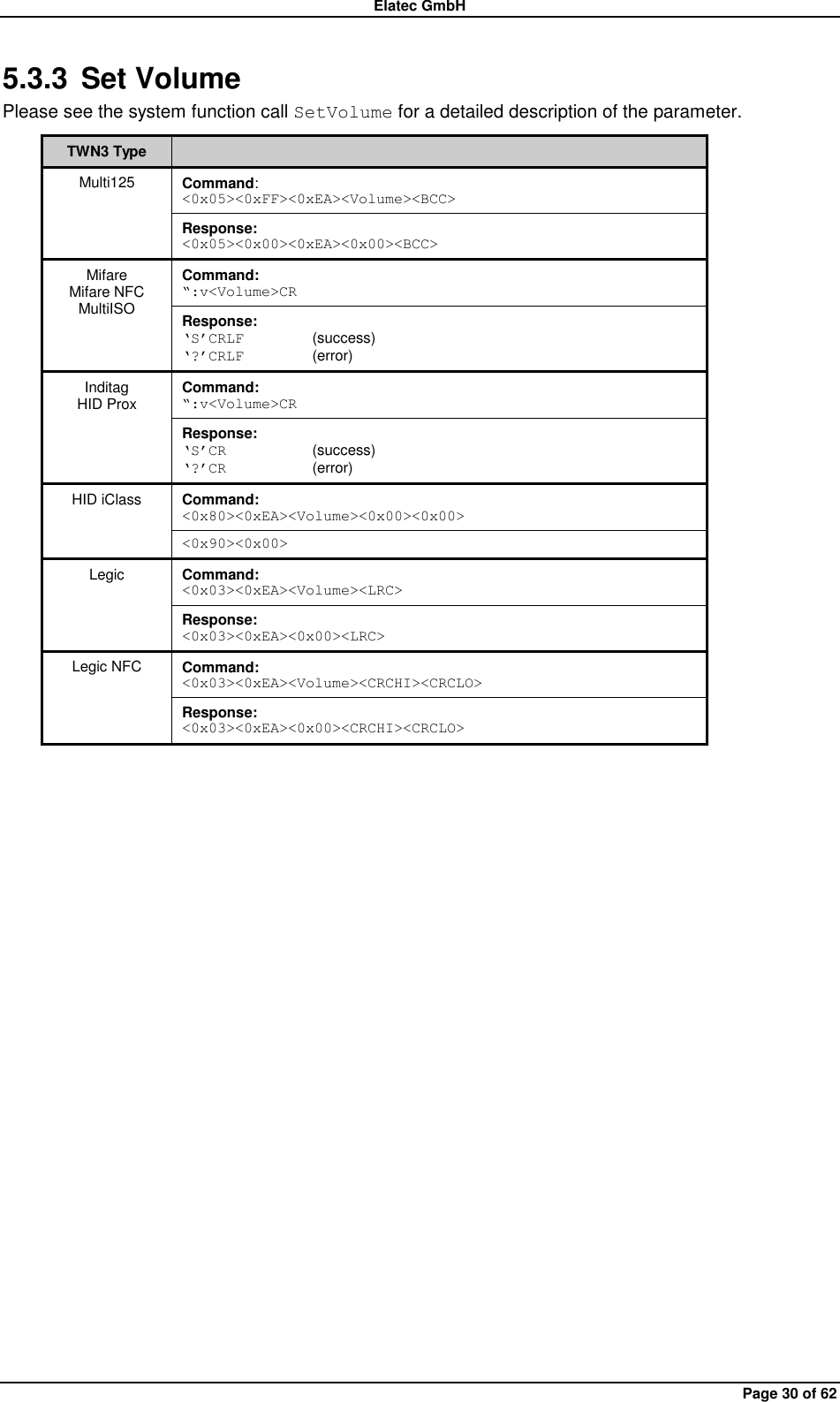
![Elatec GmbH Page 34 of 62 6.1.5.4 Function main A TWN3 script always needs the function main to be implemented. The prototype for the function main is: void main(); After internal initialization, the TWN3 reader will start execution of the script by calling this function main. 6.1.6 Statements A single statement has the form [expression]; This means, a statement is a (optional) expression followed by a semicolon. If only a semicolon without an expression is specified, it is called an empty statement. Statements can be enclosed by braces to build a block of statements. A block statement can be used wherever a single statement can be used. 6.1.6.1 if Statement An if statement has the form: if (expression) statement Statement is executed only if the result of expression is not equal to zero. 6.1.6.2 if else Statement An if else statement has the form: if (expression) statement1 else statement2 Statement1 is executed only, if the result of expression is not equal to zero. Otherwise, statement2 is executed. 6.1.6.3 while Statement A while statement has the form: while (expression) statement Statement is executed, as long as the result of expression is not equal to zero. 6.1.6.4 do while Statement A do while statement has the form: do statement while (expression); Statement is executed, until the result of expression is equal to zero.](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-34.png)
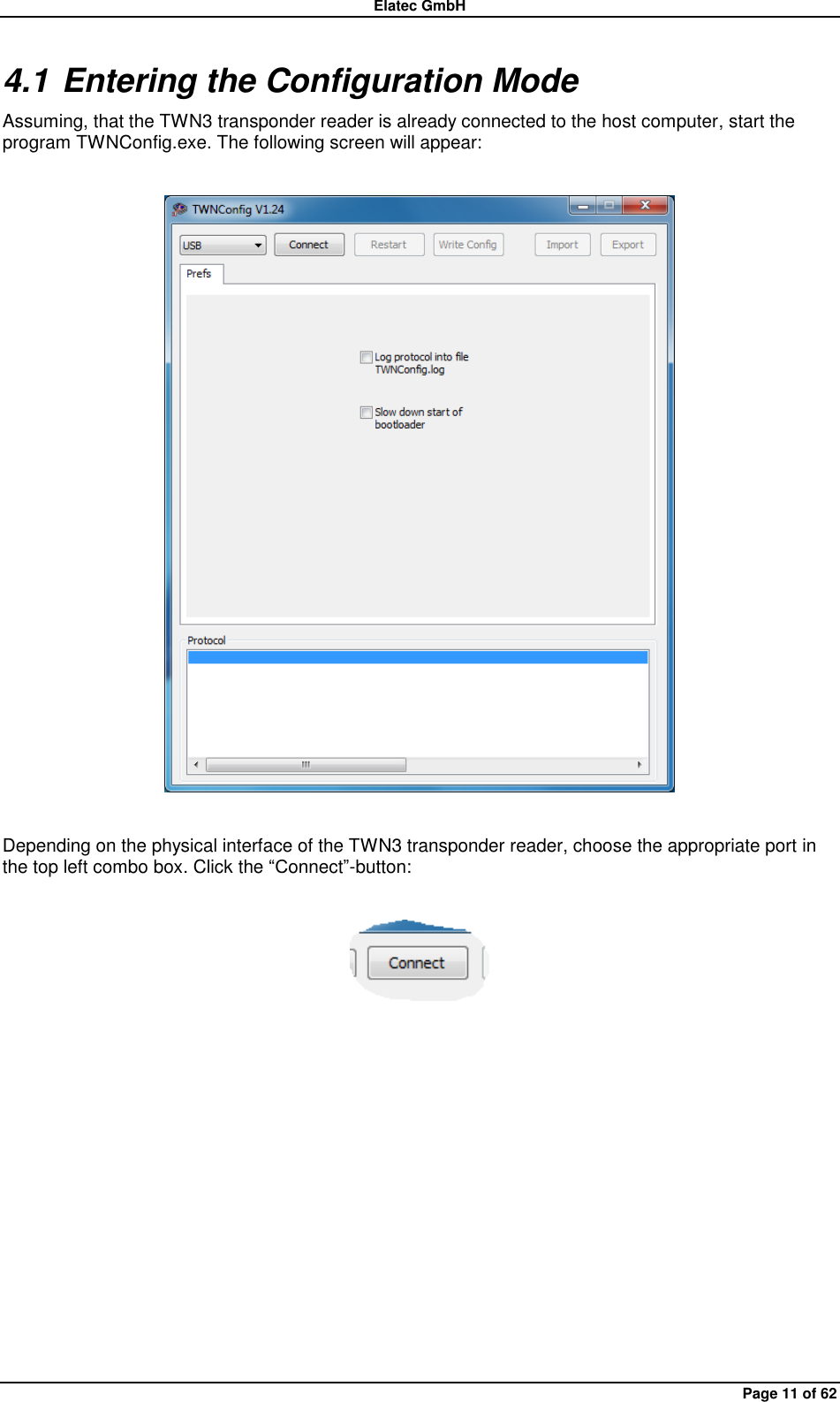
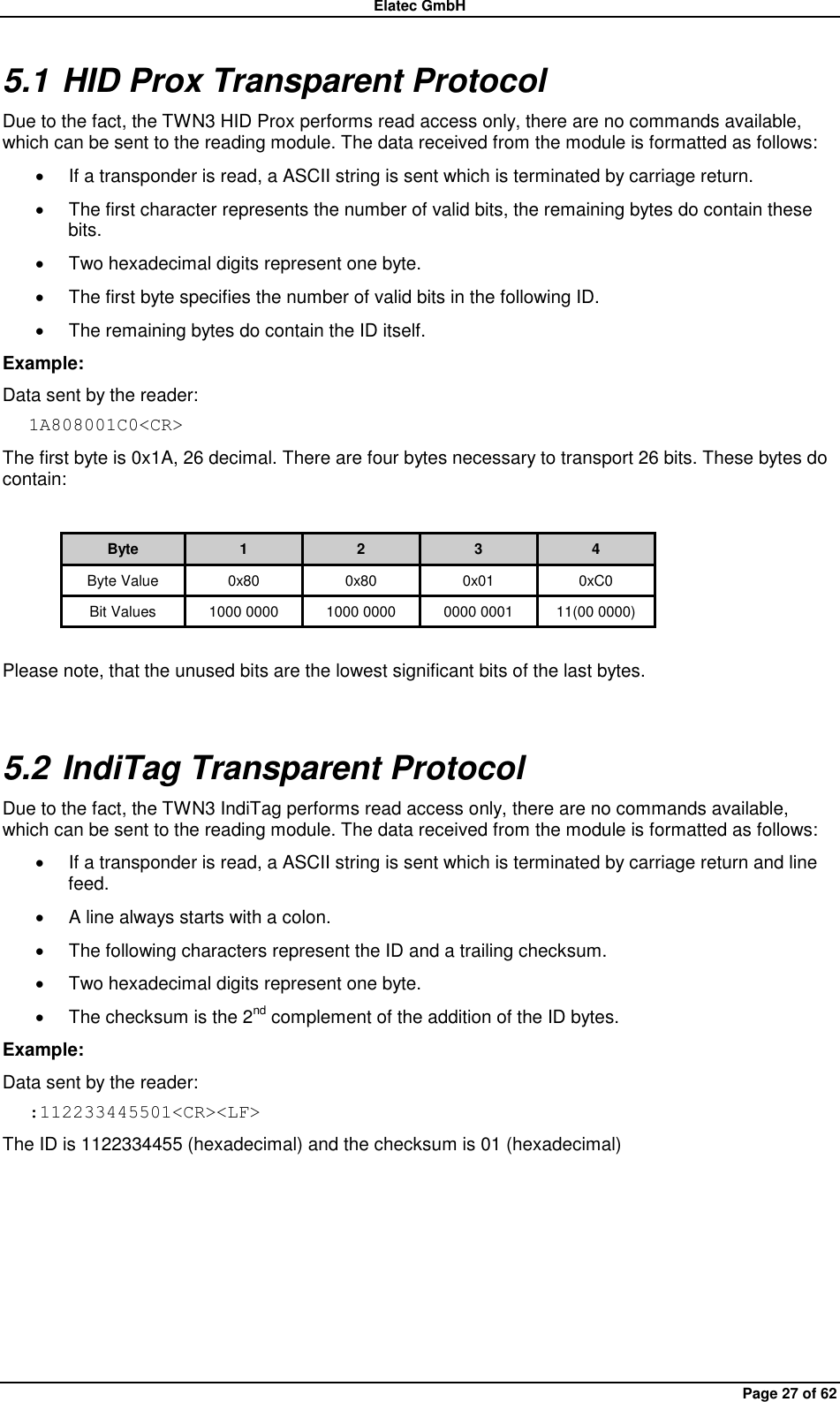
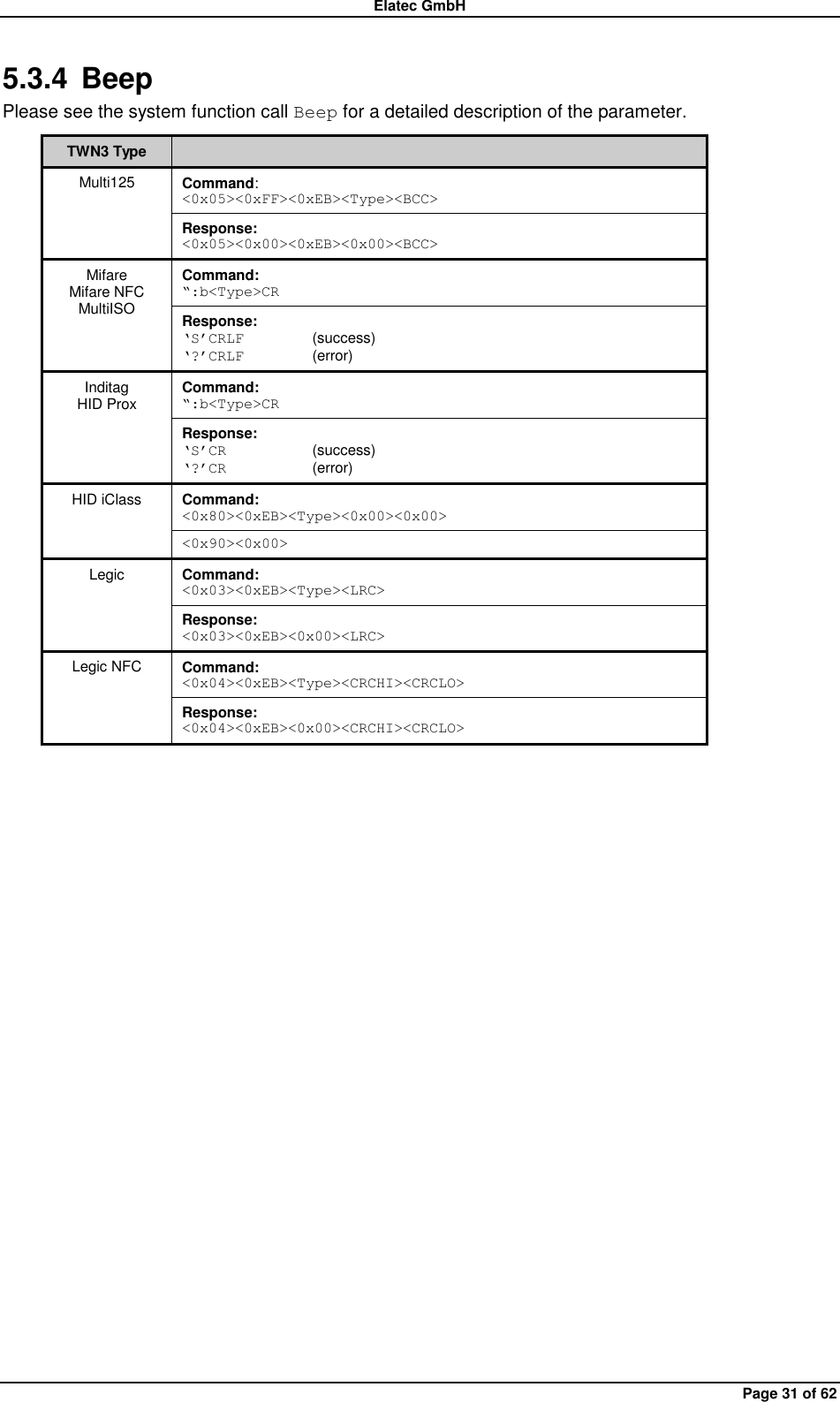
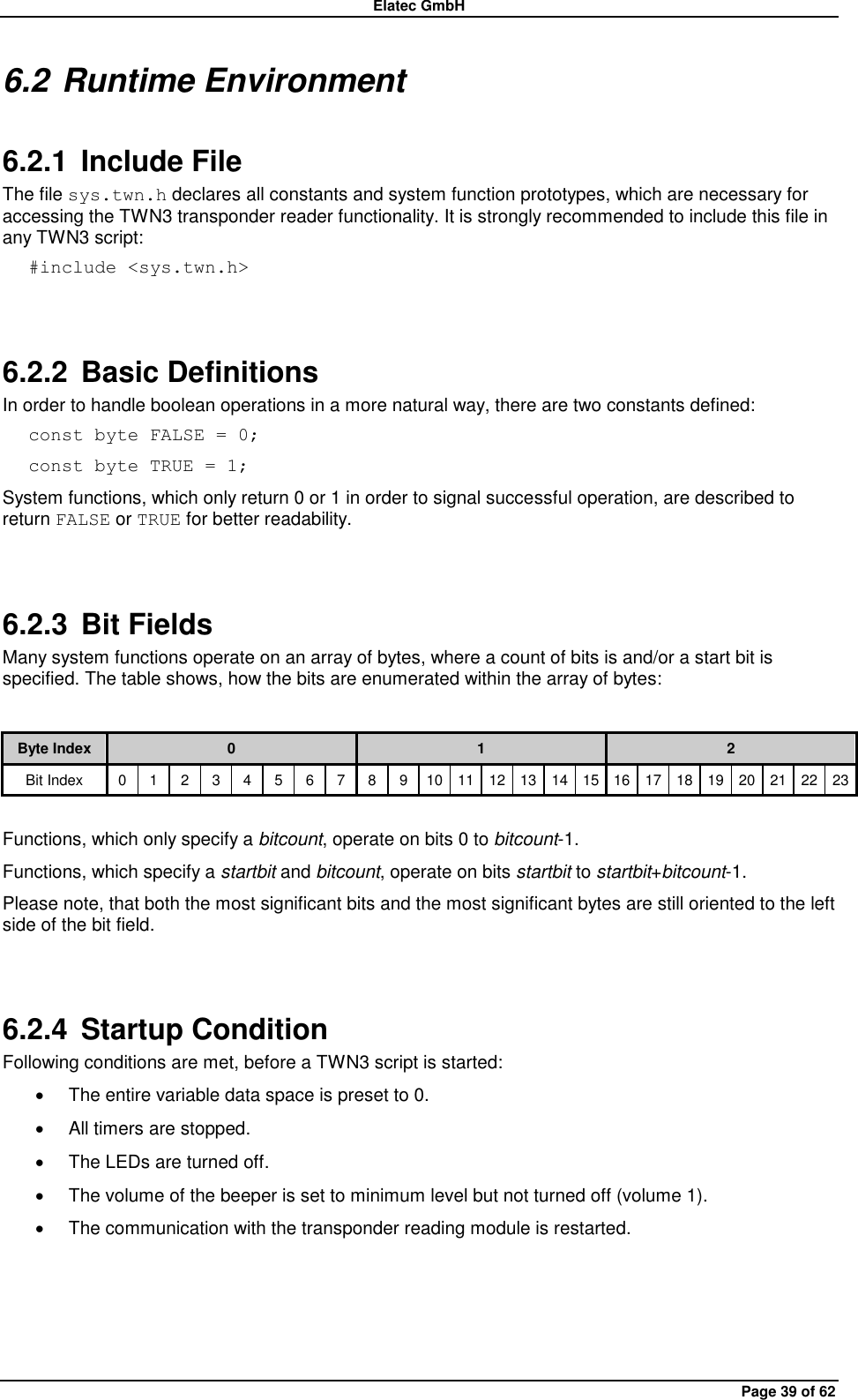
![Elatec GmbH Page 35 of 62 6.1.6.5 for Statement A for statement has the form: for ([expression1]; [expression2]; [expression3] statement As first step, expression1 is evaluated. As long as expression2 is not equal to zero, statement is executed. After execution of statement, expression3 is evaluated. Therefore, a for statement can be rewritten as while statement with exactly the same behavior: expression1; while (expression2) { statement expression3; } 6.1.6.6 switch Statement A switch statement has the form: switch (expression) { [case constant expression: [case statement]] [default: [default statement]] } The script is evaluating expression. Depending on the result of the expression the appropriate case is executed. If there is no appropriate case, the default case is executed. If there is no default label, execution is continued after the switch statement. 6.1.6.7 break Statement Form: break; The break statement can be used in while, do/while, for and switch statements (loop or switch statements). In a loop statement, control is passed directly to the next statement outside of the loop. In a switch statement, control is passed directly to the next statement outside of the switch body. 6.1.6.8 continue Statement Form: continue; The continue statement can be used in while, do/while and for statements (loop statements). It directly passes execution to the loop continuation portion of the loop statement.](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-35.png)
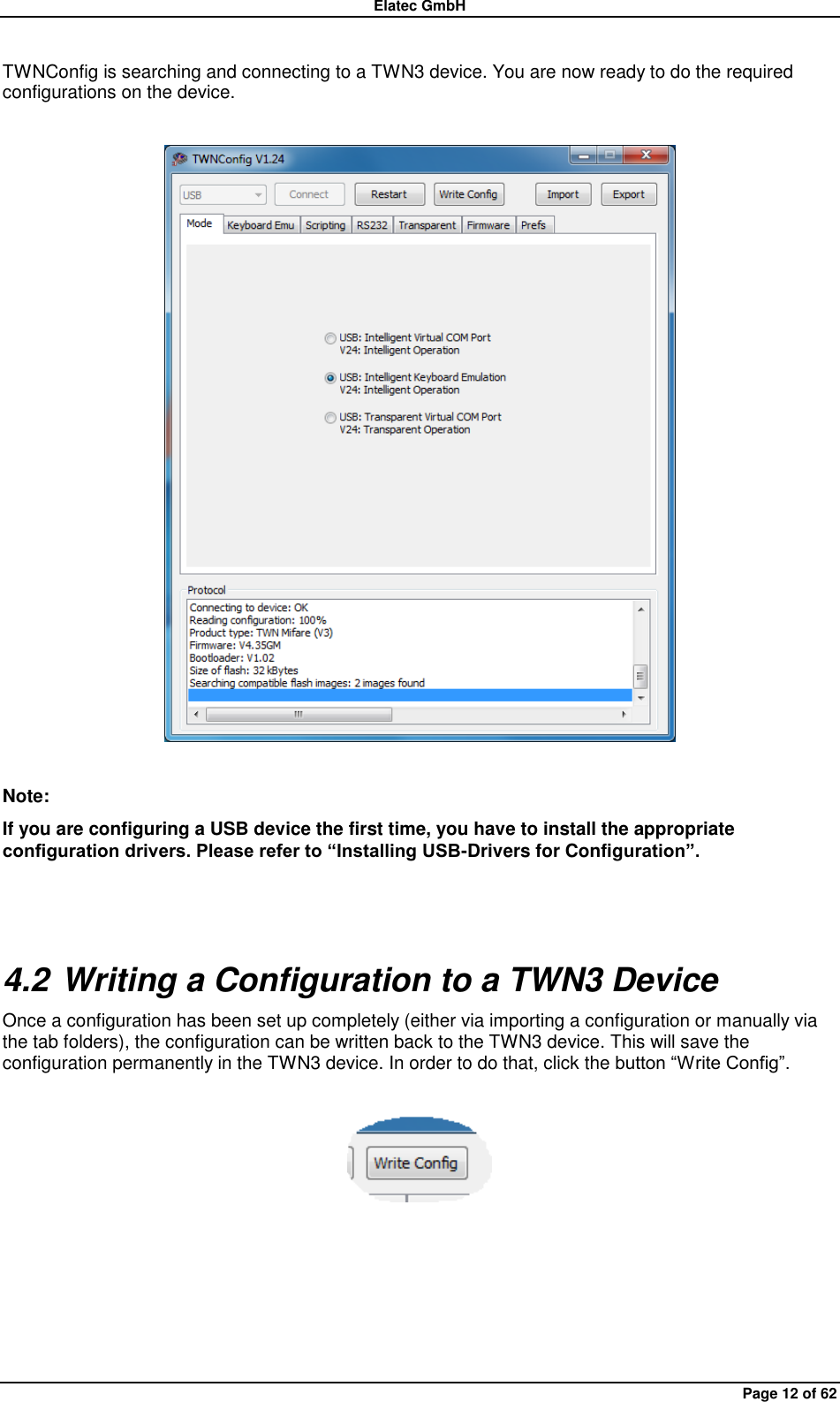
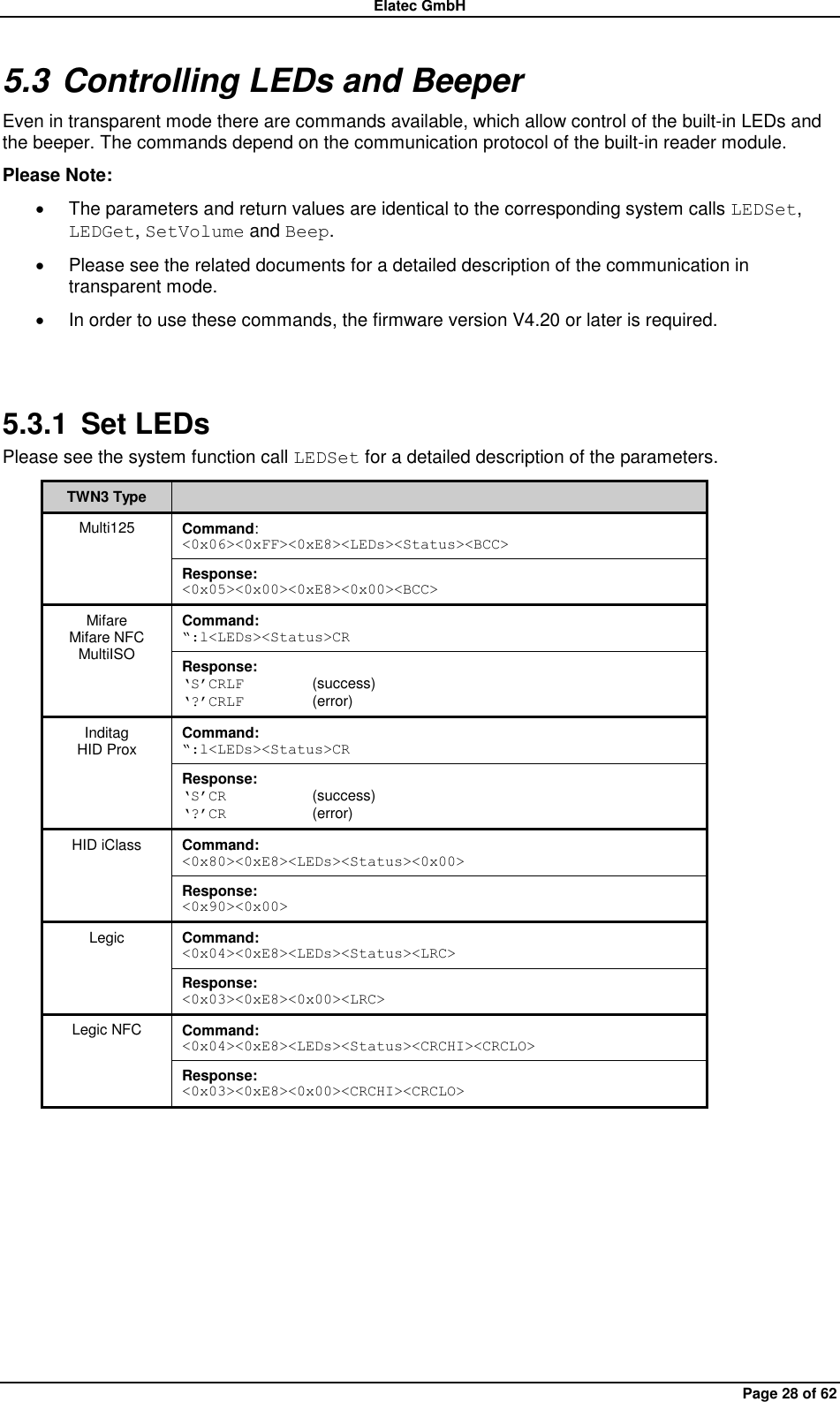
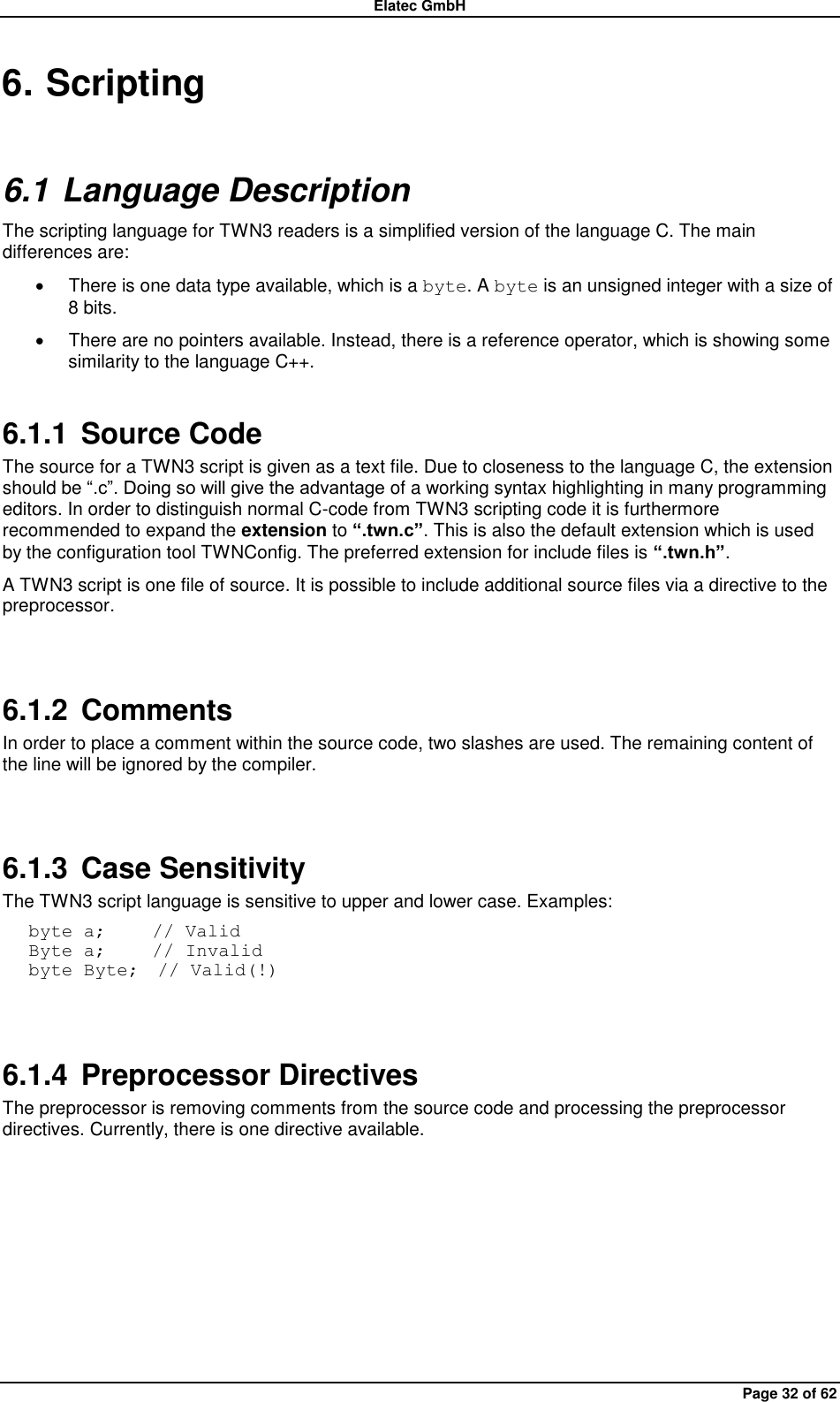
![Elatec GmbH Page 37 of 62 6.1.8 Storage Classes There are following storage classes available: Standard, const and secret. Without using any modifier, the standard storage is used. A variable, which is declared in the standard storage class, is allocated in the normal data segment. Examples: byte i; // A single integer byte a[15]; // An array of 15 bytes 6.1.8.1 const An identifier, which is declared as const can be used for calculations at compile time. There is no physical memory occupied during runtime. Typically, you would use a const for defining constants, which are used throughout a script for easier understanding and adaptation for different purposes. Example: const byte c = 15; 6.1.8.2 secret The secret data space is a read-only segment. The content of this segment is written once during programming the script into the TWN3 transponder reader. Furthermore, this segment can not be read directly by the script itself. Therefore, there is no way to simply read the content of this memory and send it to the host. There are only a few system functions, which take the content of this segment as input. Typically, the secret data space is used for keys, which are necessary for authentication to a transponder. Examples: // Some well-known factory default keys for transponders secret byte MifareKeyFF[6] = { 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF }; secret byte MifareKeyAA[6] = { 0xA0,0xA1,0xA2,0xA3,0xA4,0xA5 }; secret byte MifareKeyBB[6] = { 0xB0,0xB1,0xB2,0xB3,0xB4,0xB5 }; secret byte Hitag2Key[4] = { 'M','I','K','R' }; secret byte EM4050Key[4] = { 0x00,0x00,0x00,0x00 };](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-37.png)
![Elatec GmbH Page 38 of 62 6.1.9 Operators Following operators are available: Operator Meaning Example () Parenthesis A = B * (C + D) [] Brackets A = B[C] ! Logical Not A = !B ~ Bitwise Complement A = ~B - Unary Minus A = -B + Unary Plus A = +B * Multiplication A = B * C / Division A = B / C % Modulus A = B % C + Add A = B + C - Subtract A = B – C << Shift Left A = B << C >> Shift Right A = B >> C < Lower A = B < C <= Lower or Equal A = B <= C > Greater A = B > C >= Greater or Equal A = B >= C == Equal A = B == C != Not Equal A = B!= C & Binary And A = B & C ^ Binary Exclusive Or A = B ^ C | Binary Or A = B | C && Logical And A = B && C || Logical Or A = B || C = Assignment A = B += Addition/ Assignment A += B -= Subtraction/ Assignment A -= B *= Multiplication/ Assignment A *= B /= Division/ Assignment A /= B %= Modulus/ Assignment A %= B |= Bitwise Or/ Assignment A |= B &= Bitwise And/ Assignment A &= B ^= Bitwise Exclusive Or A ^= B <<= Shift Left/ Assignment A <<= B >>= Shift Right/ Assignment A >>= B](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-38.png)
![Elatec GmbH Page 47 of 62 void HostSendHex(byte &Data, byte BitCnt, byte Width) Convert a number, which is given as a bit field into hexadecimal ASCII format, and send it to the host. Letters are sent in upper case. Parameters: byte &Data A reference to an array of bytes, which contains the bit field byte BitCnt The number of bits, which are valid within the array of bytes. A maximum of 128 bits can be converted. byte Width Specifies the number of digits, the output should contain. If width is 0, then at least 1 digit is sent. If Width is greater than the actual width of the number to be converted, then the number is preceded by zeros. Return: None. Example: byte ID[2]; ID[0] = 0x12; ID[1] = 0x34; HostSendHex(ID,16,0); // Result is 1234 HostSendHex(ID,8,5); // Result is 00012 HostSendHex(ID,13,5); // Result is 00246 void HostSendDec(byte &Data, byte BitCnt, byte Width) Convert a number, which is given as a bit field into decimal ASCII format, and send it to the host. Parameters: byte &Data A reference to an array of bytes, which contains the bit field byte BitCnt The number of bits, which are valid within the array of bytes. A maximum of 128 bits can be converted. byte Width Specifies the number of digits, the output should contain. If width is 0, then at least 1 digit is sent. If Width is greater than the actual width of the number to be converted, then the number is preceded by zeros. Return: None. Example: byte ID[2]; ID[0] = 0x12; ID[1] = 0x34; HostSendDec(ID,16,0); // Result is 4660 HostSendDec(ID,8,5); // Result is 00018 HostSendDec(ID,13,5); // Result is 00582](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-47.png)
![Elatec GmbH Page 48 of 62 void HostSendNumber(byte &Data,byte FirstBit,byte BitCnt, byte Radix,byte MinWidth,byte MaxWidth) Convert a number, which is given as a bit field into ASCII format, and send it to the host. The conversion is made in the following sequence: 1. Convert the binary data to a number of digits, which is determined by the parameter MaxWidth. If MaxWidth is 0, then the number of digits is determined by the binary data itself. 2. If the result of the conversion is less than the number of digits specified by MinWidth, precede the converted number with zeros according to MinWidth. Parameters: byte &Data A reference to an array of bytes, which contains the bit field byte FirstBit Index of the first bit to be converted byte BitCnt The number of bits, which are valid within the array of bytes. A maximum of 128 bits can be converted. byte Radix Base for conversion, use: 2 for binary conversion 8 for octal conversion 10 for decimal conversion 16 for hexadecimal conversion Valid values are from 2 to 36. byte MinWidth Specifies the minimum number of digits, the output should contain. If MinWidth is 0, then at least 1 digit is sent. If MinWidth is greater than the actual width of the number to be converted, then the number is preceded by zeros. byte MaxWidth Specifies the maximum number of digits, the output should contain. This allows inhibit of leading digits of an output. If MaxWidth is 0, then the number of digits is determined by the given binary data itself. Return: None. Example: byte ID[2]; ID[0] = 0x12; ID[1] = 0x34; HostSendNumber(ID,0,16,16,0,4); // Result: "1234" HostSendNumber(ID,0,16,16,0,3); // Result: "234" HostSendNumber(ID,0,16,16,8,3); // Result: "00000234"](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-48.png)
![Elatec GmbH Page 54 of 62 void ConvertDigitsToBinary(byte &Dest,byte ByteCnt,byte &Source, byte DigitCnt,byte BitsPerDigit, byte Radix); Convert a packed array of digits stored in an array of bytes into a binary number. Parameters: byte &Dest A reference to an array of bytes, which receives the result of the conversion byte ByteCnt The size in bytes of Dest. byte &Source A reference to an array of bytes, where the packed array of digits is stored. byte DigitCnt The number of digits, which are stored in Source. byte BitsPerDigit The number of bits, which form one digits. byte Radix The base in which the number is stored. Return: None. Example 1: byte In,Out; In = 0x10; ConvertDigitsToBinary(Out,1,In,1,4,10); // Result: // Out = 0x0A; Example 2: byte In[2],Out[3]; In[0] = 0x12; In[1] = 0x34; ConvertDigitsToBinary(Out,3,In,4,4,10); // Result: // Out = { 0x00,0x04,0xD2 };](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-54.png)
![Elatec GmbH Page 55 of 62 byte ConvertBinaryToASCII(byte &Dest,byte &Source,byte FirstBit, byte BitCnt,byte Radix,byte MinDigits, byte MaxDigits) Convert a number, which is given as a bit field into ASCII format, and store it in an array of bytes. The conversion is made in the following sequence: 1. Convert the binary data to a number of digits, which is determined by the parameter MaxDigits. If MaxDigits is 0, then the number of digits is determined by the binary data itself. 2. If the result of the conversion is less than the number of digits specified by MinDigits, precede the converted number with zeros according to MinDigits. Parameters: byte &Dest A reference to an array of bytes, which receives the result of the conversion byte &Source A reference to an array of bytes, which contains the bit field byte FirstBit Index of the first bit to be converted byte BitCnt The number of bits, which are valid within the array of bytes. A maximum of 128 bits can be converted. byte Radix Base for conversion, use: 2 for binary conversion 8 for octal conversion 10 for decimal conversion 16 for hexadecimal conversion Valid values are from 2 to 36. byte MinDigits Specifies the minimum number of digits, the output should contain. If MinDigits is 0, then at least 1 digit is sent. If MinDigits is greater than the actual width of the number to be converted, then the number is preceded by zeros. byte MaxDigits Specifies the maximum number of digits, the output should contain. This allows inhibit of leading digits of an output. If MaxWidth is 0, then the number of digits is determined by the given binary data itself. Return: The actual number of ASCII bytes, which have been stored in the byte array Dest. Example: byte ID[2],Out[6]; ID[0] = 0x12; ID[1] = 0x34; ConvertBinaryToASCII(Out,ID,0,16,16,0,4); // Result: "1234" ConvertBinaryToASCII(Out,ID,0,16,16,0,3); // Result: "234" ConvertBinaryToASCII(Out,ID,0,16,16,8,3); // Result: "00000234" byte ScanHex(byte &Data, byte ByteCnt) Convert an array of bytes containing ASCII characters which represent hexadecimal numbers into their binary representation. The conversion is done in place. This means that after successful conversion, number of valid is half of the given count of ASCII characters (two hex digits represent one binary byte). Parameters: byte &Data Reference to an array of bytes which is the destination for the operation. byte ByteCount Number of (ASCII-) bytes to be converted. Return: Number of successful converted bytes.](https://usermanual.wiki/Elatec/TWN3F1/User-Guide-1536491-Page-55.png)