Emerson Fisher D4 Instruction Manual
2015-03-30
: Emerson Emerson-Fisher-D4-Instruction-Manual-680678 emerson-fisher-d4-instruction-manual-680678 emerson pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 38
www.Fisher.com
Errata Sheet
for
FisherrD4 Control Valve with easy-Drive™ Electric
Actuator, Instruction Manual, dated June 2013
This errata sheet provides information for the Fisher easy-Drive electric actuator. Use this in conjunction with
information provided in the (Fisher D4 Control Valve with easy-Drive Electric Actuator) instruction manual
(D103597X012) dated June 2013.
Important technical notice for easyDrive electric actuator
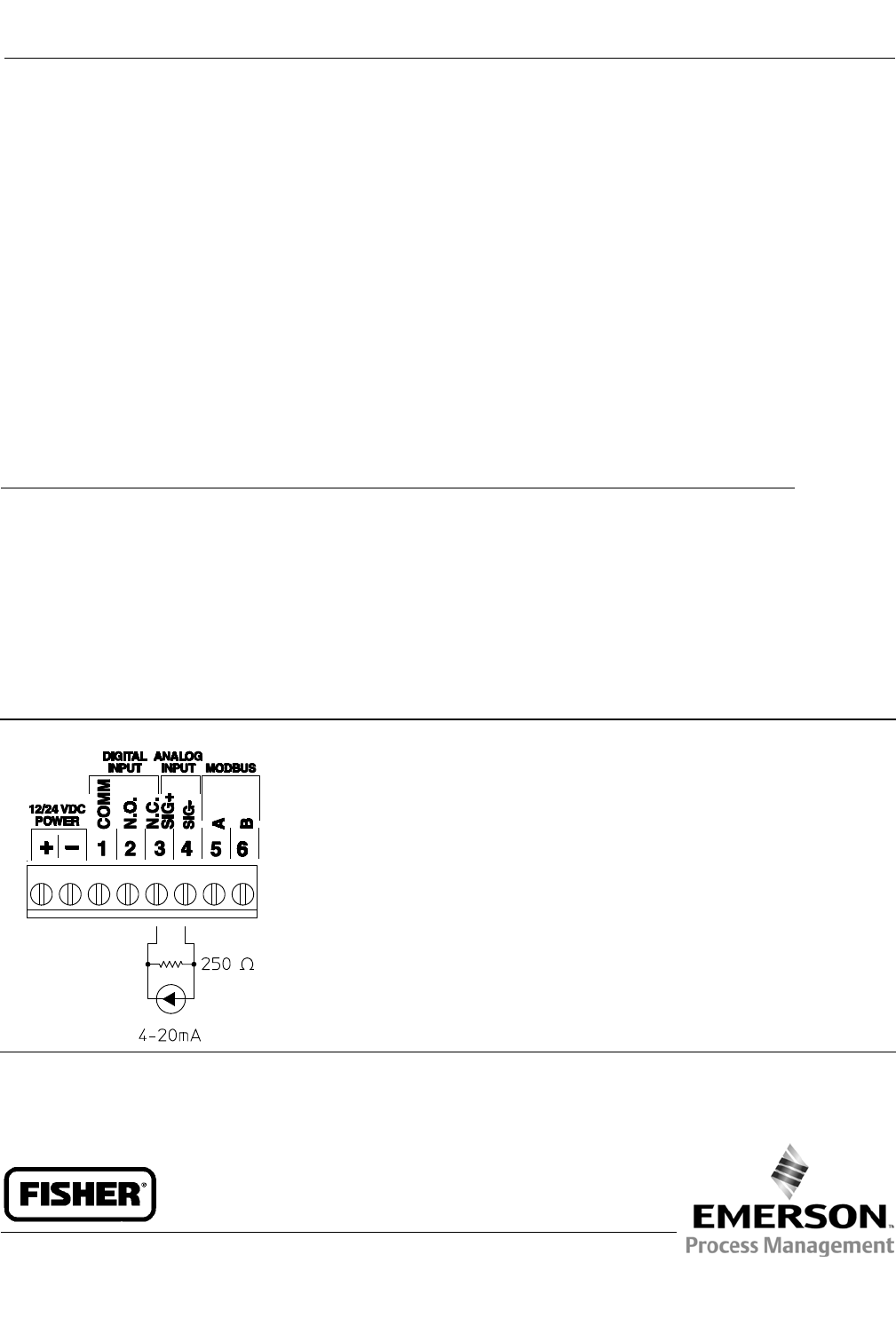
When using the easyDrive electric actuator with a 420mA control signal, the unit should always have 12/24VDC
power present on the power input terminals prior to applying the 420mA signal, unlessanexternal250Ωresistor is in
place across the analog control input terminals. Failure to do so could result in damage to the analog input circuitry.
Thefollowinginstallationandconfigurationprocedureshouldbeobservedtoensurereliableoperation.
1. Configure the local analog input control signal to 15V. This can be accomplished by the configuration software or
by setting Modbus register 40043 to 0.
2. Install a 1/4 or 1/2 watt, 250Ωresistor between terminals 3 and 4 (Analog+ and Analog )whenlandingthe420mA
control wiring on those terminals. A 220Ωor 270Ωresistor may be used as well if a 250Ωresistor is not readily
available.
Figure 1. Wiring Diagram
-continued-
Errata Sheet
E103597X012
D4 easy-Drive Electric Actuator
June 2013
Errata Sheet
E103597X012
D4 easy-Drive Electric Actuator
June 2013
2
3. Apply a 100% signal to the actuator with the resistor in place and calibrate the analog input to 100% through the
configuration software or by sending a value of 1 to register 40005.
4. Apply a 0% signal to the actuator with the resistor in place and calibrate the analog input to 0% through the
configuration software or by sending a value of 1 to register 40004.
The result of not following these installation instructions could result in permanent damage to the analog input
circuitry. This damage can result in the inability of the controller to see the control signal, resulting in the actuator
moving the valve plug to the loss of signal position.
This configuration works by providing the 420mA signal a path to follow through the resistor whether primary power
to the actuator is on or off, which prevents the voltage on the analog input terminals from rising high enough to
damage the circuitry.
Note
Do not configure the actuator to 4-20 mA with the external resistor in place, as improper operation will result.
WARNING
Use only genuine Fisher replacement parts. Components that are not supplied by Emerson Process Management should
not, under any circumstances, be used in any Fisher valve, because they may void your warranty, might adversely affect the
performance of the valve, and could cause personal injury and property damage.
Emerson Process Management
Marshalltown, Iowa 50158 USA
Sorocaba, 18087 Brazil
Chatham, Kent ME4 4QZ UK
Dubai, United Arab Emirates
Singapore 128461 Singapore
www.Fisher.com
The contents of this publication are presented for informational purposes only, and while every effort has been made to ensure their accuracy, they arenot
to be construed as warranties or guarantees, express or implied, regarding the products or services described herein or their use or applicability. All sales are
governed by our terms and conditions, which are available upon request. We reserve the right to modify or improve the designs or specifications of such
products at any time without notice.
E2012, 2013 Fisher Controls International LLC. All rights reserved.
Fisher and easy-Drive are marks owned by one of the companies in the Emerson Process Management business unit of Emerson Electric Co. Emerson Process
Management, Emerson, and the Emerson logo are trademarks and service marks of Emerson Electric Co. All other marks are the property of their respective
owners.
Neither Emerson, Emerson Process Management, nor any of their affiliated entities assumes responsibility for the selection, use or maintenance
of any product. Responsibility for proper selection, use, and maintenance of any product remains solely with the purchaser and end user.

www.Fisher.com
Fisher D4 Control Valve with easy-Drive™
Electric Actuator
Contents
Introduction 1.................................
Scope of Manual 1.............................
Description 3.................................
Specifications 3...............................
Educational Services 3.........................
Installation 4..................................
Special Instructions for “Safe Use” and Installations
in Hazardous Locations 5.....................
Startup Overview 6............................
Important Technical Notice for easy-Drive
Electric Actuator 10.........................
Default Input Signals 10........................
Configuration 10..............................
Input Configuration 10.....................
Changing the Inputs from Default Settings 11..
Modbus Setup 11.............................
Calibration Instructions 13..................
Troubleshooting 15.............................
Maintenance 16................................
Valve Plug and Seat Ring 17.....................
Valve Packing 18..............................
Parts Ordering 21...............................
Repair Kits 21..................................
Parts List 21...................................
Appendix A 25.................................
Figure 1. Fisher D4 Control Valve with easy-Drive
Electric Actuator
W9933-1
Introduction
Scope of Manual
This instruction manual provides installation, maintenance, and parts information for the Fisher D4 control valve with
easy-Drive electric actuator.
Do not install, operate, or maintain a D4 control valve with easy-Drive electric actuator without being fully trained and
qualified in valve, actuator, and accessory installation, operation, and maintenance. To avoid personal injury or
property damage, it is important to carefully read, understand, and follow all the contents of this manual, including all
safety cautions and warnings. If you have any questions about these instructions, contact your Emerson Process
Management sales office before proceeding.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
2
Table 1. Specifications
Valve Body Sizes and End Connection Styles(1)
See table 2
Maximum Inlet Pressures and Temperatures(1)
If the valve nameplate shows an ASME
pressure-temperature class, maximum inlet pressure
and temperature is consistent with the applicable
class per ASME B16.34. If the nameplate does not
show an ASME class, it will show a maximum cold
working pressure at 38_C(100_F) (for example, 293
bar [4250 psi])
Maximum Pressure Drops(1)
See table 4
Shutoff Classification per ANSI/FCI 70-2
and IEC 60534-4
Class IV
Material Temperature Capabilities(1)
Valve Body Assembly:
Standard Bonnet O-Ring: -40 to 135C(-40to275F)
Optional Fluorocarbon Bonnet O-Ring: -23 to 204C
(-10 to 400F)
Flow Characteristic
Equal percentage
Flow Direction
Flow up only
Port Diameters
See table 2
Valve Plug Travel
19 mm (0.75 inch)
Valve Plug Style
Micro-Form valve plug
Available ActuatorConfigurations
On/off (snap acting)
Positioning (flow or pressure control)
Power Requirements
12 or 24VDC, minimum 4 amp power supply required
(fuse to 5 amps)
Maximum Current Draw
4amps
Idle Current Draw
38 mA
Conduit Connections
Two 3/4 NPT connections
Stroke Length
19mm (0.75 inch)
Nominal Stroke Speed(2)
3.9 mm/s (0.15 inch/s) at 24 VDC
2.2 mm/s (0.09 inch/s) at 12 VDC
Hazardous Area Approvals
CSA (C/US): ExplosionProof Class I, Division 1,
GroupsCandD,T6,ExdIIAT6,ClassI,Zone1,AExd
IIA T6
ATEX Flameproof - Gas:
II 2 G ,Ex d IIA T6
IECEx Flameproof - Gas: Ex d IIA T6
Enclosure Rating
Type 4X and IP66
Duty Cycle
50% maximum
Enclosure Material
Cast aluminum alloy with powder coat paint
Approximate Weight:
22 - 51 kg (49 - 113 lbs), depending upon
construction
1. The pressure or temperature limits in the referenced tables and any applicable ASME code limitations should not be exceeded.
2. 10% variation can be expected, based on temperature and pressure of application.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
3
Description
TheD4controlvalvewitheasy-Driveelectricactuatorisacompact, rugged valve designed primarily for high-pressure
throttling applications. This valve is ideal for use on pressure and flow control applications within the oil and gas
production industry. The D4 valve also makes an excellent dump valve for high-pressure separators and scrubbers.
The D4 control valve meets the metallurgical requirements of NACE MR0175/ISO 15156 without environmental limits
for temperatures below 135_C(275_F). If the temperature is above 135_C (275_F), the N07718 Belleville washers will
impose some limits, as shown in table 3.
Specifications
Table 1 lists specifications for the D4 control valve with easy-Drive electric actuator. Some of the specifications for a
given control valve as it originally comes from the factory are stamped on a nameplate located on the lower actuator
enclosure.
Educational Services
For information on available courses for the Fisher D4 control valve with easy-Drive electric actuator, as well as a
variety of other products, contact:
Emerson Process Management
Educational Services, Registration
P.O. Box 190; 301 S. 1st Ave.
Marshalltown, IA 50158-2823
Phone: 800-338-8158 or
Phone: 641-754-3771
FAX: 641-754-3431
e-mail: education@emerson.com
Table 2. Valve Sizes and Connection Styles
VALVE
SIZE,
NPS
PORT
DIAMETER,
(INCHES)
SCREWED RAISED FACE (RF) FLANGED RING TYPE JOINT
(RTJ) FLANGED
4250 psi CL150 CL300 CL600 CL900 and
CL1500 CL600 CL900 and
CL1500
10.25, 0.375,
0.5, 0.75 XXXXXXX
20.25, 0.375, 0.5
0.75, 1, 1.25 XXXXXXX
X = Available construction.
Table 3. D4 Environmental Limits for NACE MR0175/ISO 15156 with Sour Trim
MAXIMUM TEMPERATURE MAXIMUM H2S PARTIAL PRESSURE COMPATIBLE WITH
ELEMENTAL SULFUR?
_C_FMPa psia
232 450 0.2 30 No
204 400 1.4 200 No
199 390 2.3 330 No
191 375 2.5 360 No
149 300 2.8 400 No
135 275 No Limit Yes
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
4
Table 4. Fisher D4 easy-Drive Maximum Pressure Drop
PORT DIAMETER MAXIMUM PRESSURE DROP(1)
mm Inch Bar psi
6.4
9.5
12.7
19.1
25.4
31.8
0.25
0.375
0.5
0.75
1
1.25
293
293
247
105
56
34
4250(1)
4250(1)
3576(1)
1518
814
495
1. Downstream pressure, P2, is limited to 2250 psig.
Installation
WARNING
Always wear protective gloves, clothing, and eyewear when performing any installation operations to avoid personal
injury.
To avoid personal injury or property damage caused by bursting of pressure-retaining parts or by uncontrolled process
fluid, be certain the service conditions do not exceed the limits shown on the valve nameplate and in table 1. Use
pressure-relieving devices required by government or accepted industry codes and good engineering practices.
Check with your process or safety engineer for any additional measures that must be taken to protect against process
media.
If installing into an existing application, also refer to the WARNING at the beginning of the Maintenance section in this
instruction manual.
WARNING
For explosionproof applications, ensure the actuator cover is properly bolted before applying power to the actuator.
Personal injury or property damage may result from fire or explosion if power is applied to the actuator with the cover
removed in a hazardous area.
For explosion-proof applications, install rigid metal conduit and a conduit seal no more than 457 mm (18 inches) from the
actuator. Personal injury or property damage may result from explosion if the seal is not installed.
Select wiring and/or cable glands that are rated for the environment of use (such as hazardous area, ingress protection, and
temperature). Failure to use properly rated wiring and/or cable glands can result in personal injury or property damage
from fire or explosion.
Wiring connections must be in accordance with local, regional, and national codes for any given hazardous area approval.
Failure to follow the local, regional, and national codes could result in personal injury or property damage from fire or
explosion.
CAUTION
When ordered, the valve configuration and construction materials were selected to meet particular pressure, temperature,
pressure drop, and controlled fluid conditions. Responsibility for the safety of process media and compatibility of valve
materials with process media rests solely with the purchaser and end-user. Since some body/trim material combinations
are limited in their pressure drop and temperature ranges, do not apply any other conditions to the valve without first
contacting your Emerson Process Management sales office.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
5
To avoid product damage, inspect the valve before installation for any damage or any foreign material that may have
collected in the valve body. Also remove any pipe scale, welding slag, or other foreign material from the pipeline.
WARNING
Avoid personal injury or property damage caused by possible actuator failure. The use of a rigidly-mounted support on the
actuator casing may cause additional stress on the actuator leading to premature wear and/or failure of the actuator
components.
CAUTION
To avoid product damage, inspect the valve before installation for any damage or any foreign material that may have
collected in the valve body. Also remove any pipe scale, welding slag, or other foreign material from the pipeline.
1. Before installing the control valve assembly, inspect it for any damage and for any foreign material that may have
collected in the valve body.
2. Remove any pipe scale, welding slag, and other foreign material from the pipeline.
3. The control valve can be installed in any position, but normally the actuator is vertical above the valve. Install the
valve so the flow direction arrow on the side of the valve indicates the direction of the process flow.
4. Install the valve following local and national piping codes when they apply to the application. For screwed
connections, treat the external pipe threads with a good grade pipe compound. For flanged valves, use suitable
gaskets between valve and pipeline flanges.
5. If continuous operation is required during maintenance and inspection, install a conventional three-valve bypass
around the valve.
Special Instructions for “Safe Use” and Installations in Hazardous
Locations
ATEX/IECEx
WARNING
To avoid static discharge from the enclosure, do not rub or clean the enclosure with solvents. To do so could result in an
explosion. Clean with a mild detergent and water only.
The enclosure is nonconducting and may generate an ignitioncapable level of electrosatic charges under certain extreme
conditions. The user should ensure that the equipment is not installed in a location where it may be subjected to external
conditions (such as highpressure steam) which might cause a buildup of electrostatic charges on nonconducting surfaces.
Additionally, cleaning of the equipment shall only be done with a damp cloth.
To avoid damage to the enclosure, when screws are fully tightened into blind holes in enclosure walls, with no washer
fitted, at least one full thread shall remain free at the base of the hole.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
6
Startup Overview
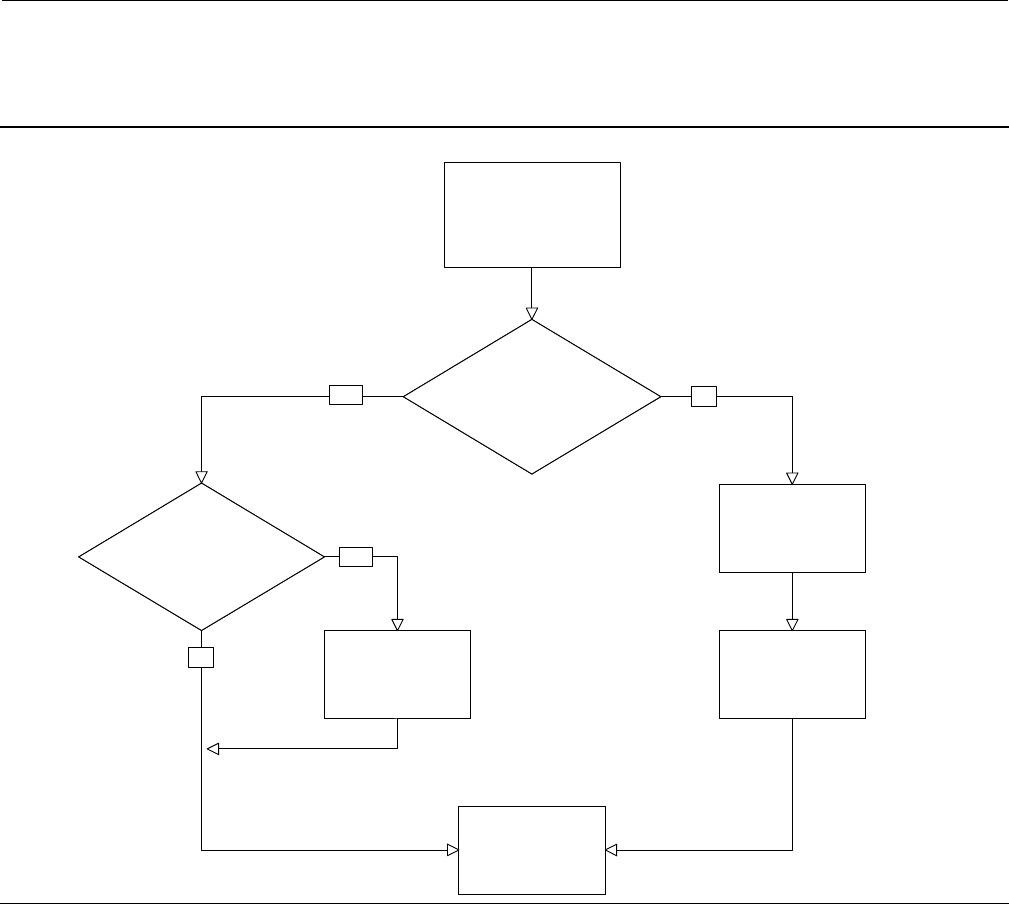
Figure 2. Flowchart
WIRE PER WIRING
INSTRUCTIONS ON
PAGES 7-9
IS YOUR CONTROL
METHOD LISTED IN
TABLE 5 ON PAGE 10?
YES NO
ARE YOU USING MODBUS
TO MONITOR REGISTERS?
PROCEED TO
MODBUS SETUP
SECTION ON
PAGE 10
PROCEED TO
MODBUS SETUP
SECTION ON
PAGE 10
PROCEED TO
STARTUP SECTION
ON PAGE 14
CHANGE INPUTS PER
INSTRUCTIONS ON
PAGE 12
YES
NO
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
7
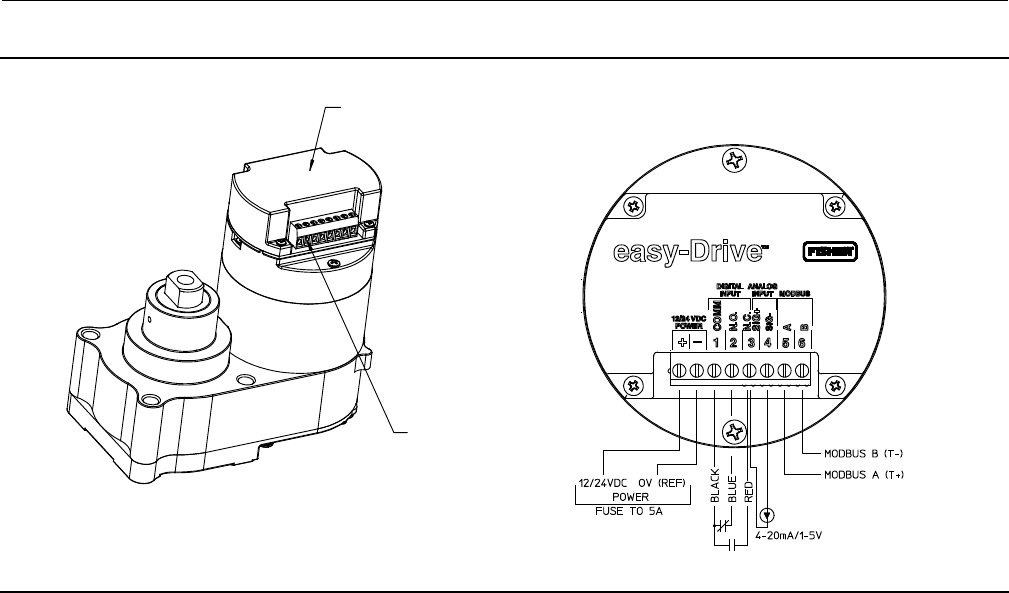
Figure 3. Fisher D4 Valve with easy-Drive Actuator Wiring Diagram
FIELD WIRING CONNECTIONS
MOTOR / GEARBOX ASSY
(GE48474)
CONTROLLER
POWER AND
CONTROL TERMINAL
GE47302-7
TOP VIEW CONTROLLER
Power Requirements
Ensure a stable DC power source is available, maintaining less than 5% ripple and sufficiently surge protected for the
application. A 4 amp (minimum) power supply is required. Use of a 36 volt transient voltage suppressor is highly
recommended.
Wiring Instructions
1. Observe local wiring requirements for hazardous location usage.
2. Conduit seals within 457 mm (18 inches) of the enclosure port are required for explosionproof installation.
3. 22AWG (0.33mm2)to12AWG(3.31mm
2) wire size required.
4. Fuse system to 5A.
5. Connect enclosure and analog signal shields.
6. Ensure power is turned off before connecting the wires.
Power
1. Connect 12 or 24 VDC reference to: —
2. Connect 12 or 24 VDC positive to: +
3. Be sure to tighten terminals sufficiently to ensure solid mechanical connection.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
8
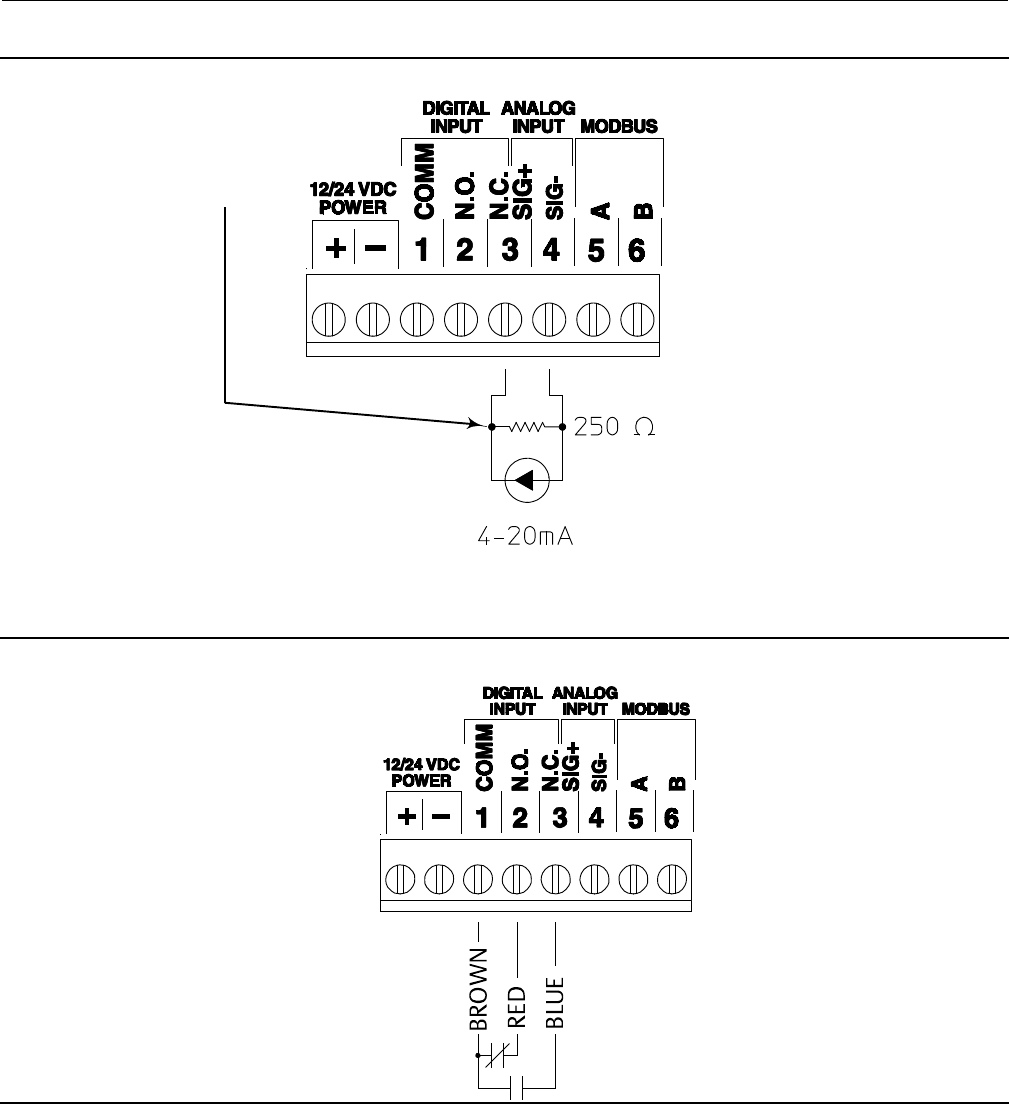
Figure 4. Wiring - Analog Input
Analog Input
(420mA: 40033=1, 40034=1, 40043=0(1))
1. Connect signal to terminal 3
2. Connect reference to terminal 4
3. Connect 250 ohm resistor between
terminals 3 and 4 as shown.
NOTE:
1. 40043=0 SETS ANALOG INPUT TO 1-5V AND ASSUMES USE OF RECOMMENDED EXTERNAL 250 OHM RESISTOR.
IF NO EXTERNAL RESISTOR IS USED, SET 40043=1.
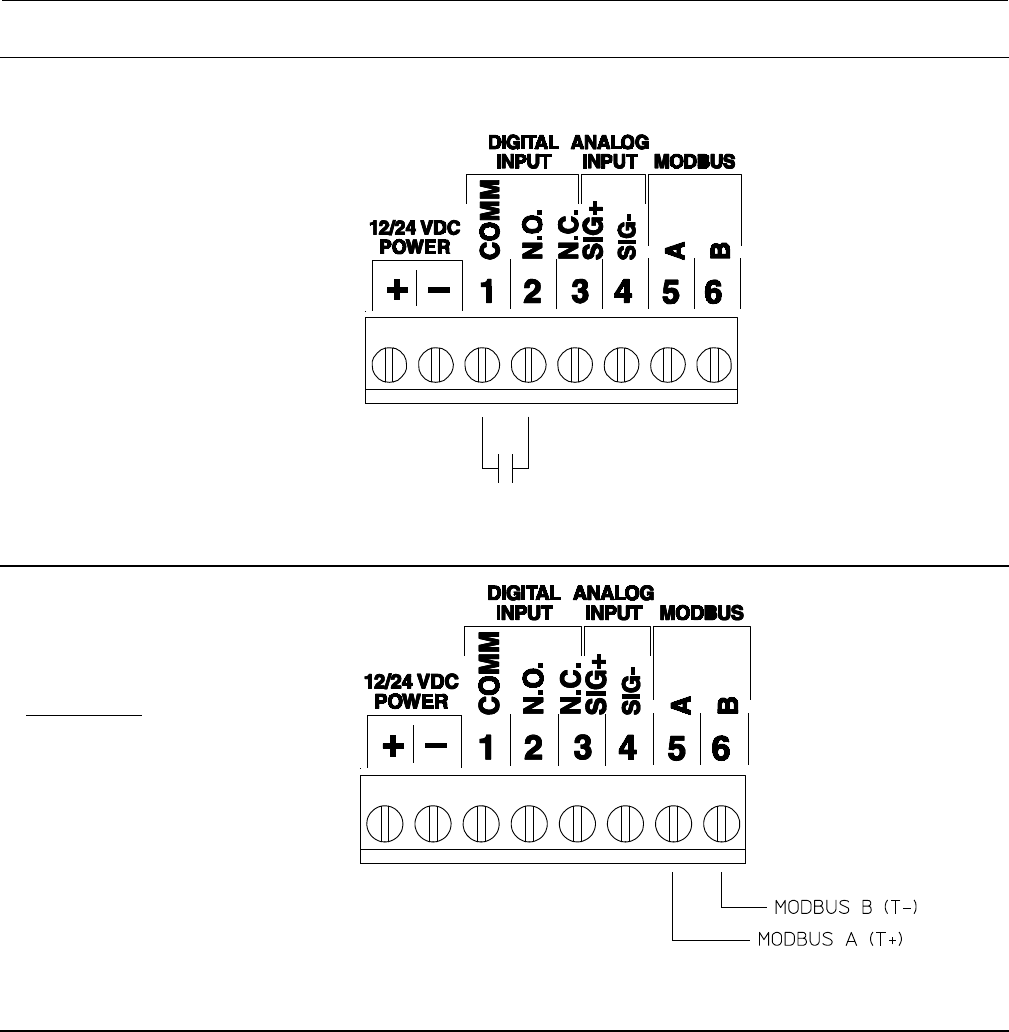
Figure 5. Wiring - L2e
L2e (dual dry contact:
40033=0, 40034=0, 40043=0)
1. Connect L2e brown wire to terminal 1 (COMM (com))
2. Connect L2e red wire to terminal 2 (N.O. (OPEN))
3. Connect L2e blue wire to terminal 3 (N.C. (CLOSE))
Your actuator may be labelled:
1. COMM
2. N.O.
3. N.C.
or
1. com
2. OPEN
3. CLOSE
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
9
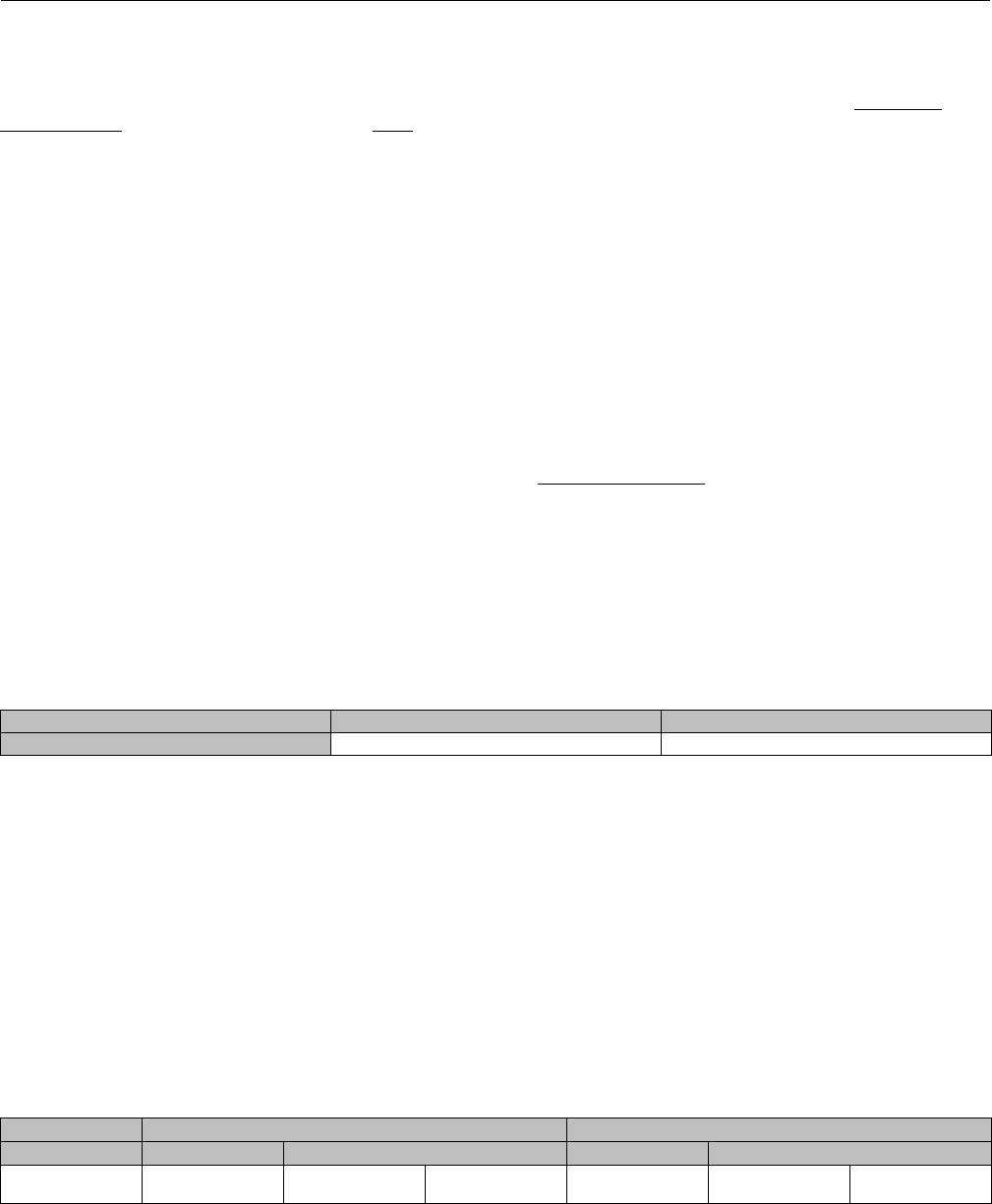
Figure 6. Wiring - Single Dry Contact
Dry Contact (single dry contact:
40033=0, 40034=0, 40043=1)
1. Connect one side of contact switch to terminal 1 (COMM)
2. Connect other side of contact switch to terminal 2 (N.O.)
Figure 7. Wiring - Modbus Input
Modbus Input: 40033=1
1. Connect Channel A (T+) to terminal 5
2. Connect Channel B (T-) to terminal 6
Modbus Defaults
Address 1
9600 Baud
Even parity
1StopBit
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
10
Important Technical Notice for easyDrive Electric Actuator
When using the easyDrive electric actuator with a 420mA control signal, the unit should always have 12/24VDC
power present on the power input terminals prior to applying the 420mA signal, unless an external 250 ohm resistor
is installed per figure 4. Failure to do so could result in damage to the analog input circuitry.
It is strongly recommended to place an external 250 ohm resistor between terminals 3 and 4 when using a 4-20mA
signal to control the actuator. When the actuator is configured to 1-5V input with an external 250 ohm resistor in
place, a 4-20mA signal may be safely used without danger to input circuitry.
This order of operation must always be maintained when powering the unit on if no external 250 ohm resistor is used:
1. 12/24VDC power on
2. 420mAcontrolsignalengaged
This order of operation must always be maintained when powering the unit off:
1. 420mAcontrolsignaldisengaged
2. 12/24VDC power off
The result of not following this order of operation could result in permanent damage to the analog input circuitry. This
damage can result in the inability of the controller to see the control signal, resulting in the actuator moving the valve
plug to the loss of signal position.
Default Input Signals
TheD4witheasyDrive comes from the factory calibrated and ready for use with the following default input signals
shownintable5.
Table 5. D4 easy-Drive Default Input Signals
CONFIGURATION ON/OFF POSITIONING
Input Signal L2e (dual dry contact) 4-20 mA
If the input signal of the application matches table 5, proceed to the Wiring Instructions section. If the input signal of
the application does not match table 5, proceed to the Configuration section.
Configuration
Input Configuration
There are 2 functional configurations available for the easyDrive electric actuator: On/Off and Positioning. It is not
possible to change an actuator from On/Off to Positioning after it has been delivered from the factory. Version 4.21
and higher firmware will allow a positioning unit to be changed to on/off.
All available input signals are shown in table 6.
Table6.AllAvailableInputSignals
CONFIGURATION ON/OFF POSITIONING
Control Source Modbus Local Modbus Local
Input Signal Modbus L2e Dual Dry
Contact (default) Single Dry Contact Modbus 4-20 mA (default) 1-5 V
If you are using the default inputs signals, and the valve has not been disassembled or adjusted in any way, there is no
need to recalibrate the assembly. You can proceed directly to Startup (page 12).
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
11
Changing the Inputs from Default Settings
All configuration within the valve is done by setting values in Modbus registers. This can be done using any Modbus
master (flow computer, PLC, PC). Configuration software, providing a visual interface to the registers, is available
through your Emerson local business partner or the Fisher website.
Modbus setup
Use the instructions in the instruction manual for the Modbus master to initiate the connection. The D4 with
easyDrive electric actuator Modbus factory defaults are Address 1, 9600 baud, even parity, 1 stop bit.
When a connection has been achieved, theactuatormaybeconfiguredtoaccepttheinputsignalovertheModbus
link (ignoring the physical inputs) and the Modbus settings may be changed to accommodate the network to which it
is attached. Other changes to functionality are possible, such as:
DLow level cutoff: 40037 (default is 5%)
DPosition upon loss of signal: 40035 (default is 0%)
See Appendix A for a full map of Modbus registers and their functions.
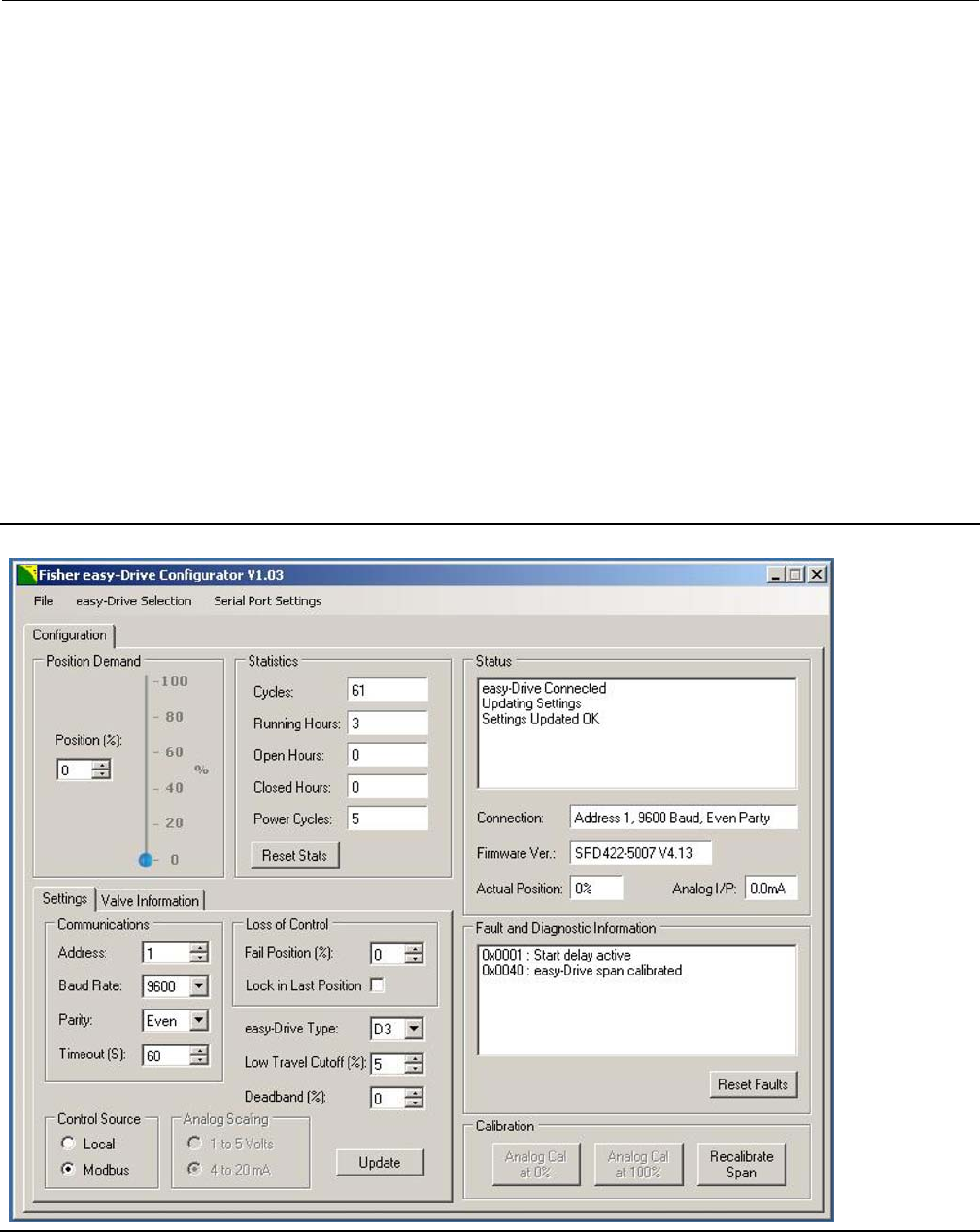
Figure 8. Fisher easy-Drive Configuration Software
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
12
Connecting using the Fisher easyDrive configuration software
The Fisher easyDrive configuration software allows configuration and diagnosing of the Fisher easyDrive electric
actuator with a graphical interface. Connect a PC to the actuator using a USB or serial to Modbus RTU converter using
the wiring instructions above. The USB or serial device will be visible in the drop menu under Serial Port Settings. Baud
rate and parity should be set to the Modbus settings of the actuator. Default actuator settings are 9600 baud and Even
parity.
Use the Fisher easyDrive configuration software (figure 8) to make the desired changes, or register values may be
changed to allow different functionality. Modbus register 40034 dictates whether the unit will respond to a physical
signal or to the value in Modbus register 40001. A value of 0 in register 40034 will result in the actuator responding to
the value in 40001 and a value of 1 will result in the actuator responding to physical control signals.
Note
If an actuator is on/off, a Modbus command of 049 in register 40001 will cause the valve to close fully, while a value of 50100 will
cause the valve to open fully.
Local to Modbus Control
Modbus
DSet register 40034 (Control Source)
D1 = Local Control
D0 = Modbus control
Configuration Software
DUse radio button to select Local Control or Modbus Control.
420mA to 15V Control
Modbus
DSet register 40043 (Analog I/P mode)
D0=15V
D1=420mA
Configuration Software
DUse radio button to select 420mA or 15V local analog control when Control Source is set to Local.
L2e (Dual dry contact) to Single Dry Contact Control
Modbus
DSet register 40043 (Analog I/P mode)
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
13
D0=L2e(Dualdrycontact)
D1=Singledrycontact
Configuration Software
DUse radio button to select L2e or Single pole local digital control when Control Source is set to Local.
Calibration Instructions
WARNING
To avoid personal injury or property damage, be aware that the valve will open fully and then close fully during the
calibration cycle.
It is not necessary to calibrate your easyDrive electric actuator prior to use from a factory shipment.
If any of the following are true, recalibration will be required (see next section)
DThe actuator has been remounted on a different valve since shipment
DDisassembly of the valve for trim or packing changes
DA new version of firmware has been loaded on the controller
The following scenarios do not require recalibrations
DNew unit from the box
DPower dips or interruptions
DChanging of control method (i.e. from 420mA to Modbus control)
DExtended periods of storage
Calibration with the use of Modbus
1. After the unit has been properly wired and fused per instructions in the Wiring section of this instruction manual,
turn power to the unit on.
2. Calibrate using Modbus:
a. Send position command of 0% to actuator to prevent unexpected motion. Valve will move to commanded
position following the calibration procedure.
b. Send a value of 1 to register 40003. Valve plug will move to fully closed. The valve plug will then return to the
commanded position.
If a Modbus connection is not available, and recalibration is desired, use the appropriate calibration method as
determined by the control method of your valve.
Calibration without the use of Modbus
1. Turn power to the actuator off

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
14
2. Wait for 10 seconds to ensure all circuits have discharged.
3. Return power to the actuator and use the appropriate calibration method for your control signal. Calibration
sequence must be done within 15 secondsofpowerbeingswitchedon.
4. For On/Off operation using L2e dualinput dry contact:
a. Closethecontacttocreateashortbetweenpins1and2—valveplugwillnotmoveatthistime.
b. Closethecontacttocreateashortbetweenpins1and3—valveplugwillmovetothelower,closedposition.
5. For On/Off operation using single dry contact:
a. Closethecontacttocreateashortbetweenpins1and2—valveplugwillnotmoveatthistime.
b. Open the contact to create an open circuit between pins 1 and 2 — valve plug will move to the lower, closed
position.
6. For positioning operation using 420mA:
a. Apply a 20mA signal between pins 3 and 4 — valve plug will not move at this time.
b. Apply a 4mA signal between pins 3 and 4 — valve plug will move to the lower, closed position.
c. If calibration of the analog input is desired to improve positional accuracy, an optional operation is listed in the
next section titled Analog Input Calibration.
7. For positioning operation using 15V:
a. Apply a 5V signal between pins 3 and 4 — valve plug will not move at this time.
b. Apply a 1V signal between pins 3 and 4 — valve plug will move to the lower, closed position.
c. If calibration of the analog input is desired to improve positional accuracy, an optional operation is listed in the
next section titled Analog Input Calibration.
8. The unit is now calibrated.
Analog Input Calibration
Improved positional accuracy may be obtained by calibrating the actuator to the analog signal input. The position of
the valve plug is linearly proportional to the analog control signal end points, with 4 mA/1V equating to fully closed
and 20 mA/5V equating to fully open.
1. Apply a 4 mA or 1V signal between pins 3 and 4 - valve plug will move to the fully open position.
2. Send a value of 1 to register 40004 or click Analog Cal at 0% in the configuration software.
3. Apply a 20 mA or 5V signal between pins 3 and 4 - valve plug will move to the fully closed position.
4. Sendavalueof1toregister40005orclickAnalog Cal at 100% in the configuration software.
5. The unit is calibrated to your analog signal.
Start Up
WARNING
To avoid personal injury or property damage, be aware that the valve will move and respond to an input signal during start
up.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
15
1. Before turning on power to the unit, be sure that a closed signal is being commanded to the unit
DDryContact: contact is open
DL2e (Dual Dry Contact): Contact closed across pins 1 & 3
DAnalog Input: signal < 4mA or 1V
DModbus: position demand = 0
2. Turn on power to the unit
3. Apply a change in position demand to ensure unit responds properly
DDryContact:
DClosed contact between pins 1 & 2 will open the valve
DDual contact / L2e only (40043=0) : Closed contact between pins 1 & 2 will open the valve. Closed contact
between pins 1 & 3 will close the valve
DAnalog Input: valve will respond to proportional demand
DModbus: valve will respond to positional demand in register 40001. 0 = fully closed and 100 = fully open.
4. If the valve does not respond as expected, proceed to Troubleshooting guide on page 15.
5. Check conduit ports
DConduit seal must be in place within 450mm (18 inches) of the enclosure
DUnused conduit ports must be sealed with an explosionproof port plug
6. Replace the cover and tighten all 8 bolts to 20 Nm(15ftlbs)
Troubleshooting
1. Unit does not move
a. Verify that 12VDC to 24VDC is present on thepowerterminalsasshownonthecover
b. Verify that all wires are firmly attached on both ends
c. Verify that wires are connected to the correct terminals - see Wiring in the manual
d. Verify mode of operation (on/off or positioning) matches control signal
e. Verify mode of control (local or Modbus) matches control signal
2. Unit does not respond to 420mA signal
a. Verify that 12VDC to 24VDC is present on thepowerterminalsasshownonthecover.
b. Verify that the 420mA signal is wired correctly and that the terminals are firmly on the wires.
c. Verify mode of operation matches control signal (local control: 40033=0, positioning: 40034=1).

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
16
d. Check the value of the analog input in register 40025 (middle right of configuration software screen) to
determine if it is 0 or greater.
i. If register 40025 shows 0 and the circuit board is green (not blue), it is possible a 420mA signal was applied
without power to the power terminals and damage to the input circuitry has occurred. Contact your Emerson
Process Management sales office for further information.
3. Unit moves to fully open when 1V signal is applied and closed when 5V signal is applied
a. Unit is likely configured as an on/off unit with local control; on/off units can not be controlled as an analog
device.
i. If on/off control is desired, use a dry contact switch to control in local mode or change to Modbus mode to
control the unit
ii. If positioning control is desired, contact your Fisher Local Business Partner to upgrade your actuator to
positioning control.
4. Diagnostics show a Motor Stall Fault
a. The easyDrive electric actuator is designed to operate in a manner consistent with a pneumatic actuator. This
means that if the valve plug can not move to its commanded position, the actuator will stop, without damage,
and issue a Motor Stall Fault warning. When the command signal changes outside of the deadband (Modbus
register 40036), it will attempt to move again. Recalibrate the actuator span per instructions in the Startup
section of this manual.
5. Position on D4 is not accurate (proportional positioning units only)
a. If the valve plug opened during calibration, it is set to a D3. Change valve type to D4 and recalibrate.
b. If the local analog input is being used (420mA or 15V), the analog inputs of the actuator may be calibrated to
match the input signal. Follow instructions in Analog Input Calibration, found in the Calibration section of this
instruction manual.
Maintenance
Refer to figure 12.
Valve parts are subject to normal wear and must be inspected and replaced as necessary. The frequency of inspection
and maintenance depends on the severity of the service conditions.
WARNING
Avoid personal injury from sudden release of process pressure or bursting of parts. Before performing any maintenance
operations:
DDo not remove the actuator from the valve while the valve is still pressurized.
DAlways wear protective gloves, clothing, and eyewear when performing any maintenance operations to avoid personal
injury.
DDisconnect any operating lines providing air pressure, electric power, or a control signal to the actuator. Be sure the
actuator cannot suddenly open or close the valve.
DUse bypass valves or completely shut off the process to isolate the valve from process pressure. Relieve process pressure
on both sides of the valve. Drain the process media from both sides of the valve.
DVent the power actuator loading pressure and relieve any actuator spring precompression.
DUse lock-out procedures to be sure that the above measures stay in effect while you work on the equipment.
DThe valve packing box may contain process fluids that are pressurized, even when the valve has been removed from the
pipeline. Process fluids may spray out under pressure when removing the packing hardware or packing rings.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
17
DCheck with your process or safety engineer for any additional measures that must be taken to protect against process
media.
WARNING
For explosionproof applications, ensure the actuator cover is properly bolted before applying power to the actuator.
Personal injury or property damage may result from fire or explosion if power is applied to the actuator with the cover
removed in a hazardous area.
Do not remove the actuator cover for 10 minutes after power is disconnected if the UPS option is installed.
For explosion-proof applications, install rigid metal conduit and a conduit seal no more than 457 mm (18 inches) from the
actuator. Personal injury or property damage may result from explosion if the seal is not installed.
Select wiring and/or cable glands that are rated for the environment of use (such as hazardous area, ingress protection, and
temperature). Failure to use properly rated wiring and/or cable glands can result in personal injury or property damage
from fire or explosion.
Wiring connections must be in accordance with local, regional, and national codes for any given hazardous area approval.
Failure to follow the local, regional, and national codes could result in personal injury or property damage from fire or
explosion.
Valve Plug and Seat Ring
Disassembly
Key Numbers are referenced in figures 11 and 12.
1. Isolatethecontrolvalvefromthelinepressure,releasepressure from both sides of the valve body (key 1), and drain
the process media from both sides of the valve.
CAUTION
The following steps are intended to prevent damage to the valve plug (key 3) and seat ring (key 2) during the removal of the
bonnet and actuator.
2. For Positioning Actuators
•Command the valve to anywhere between 10% and 20% travel.
•Isolate power and signal.
•Proceed to step 3.
For ON/OFF Actuators
•Command the valve to open or close, and cut the power when the valve is at midstroke.
•Isolate power and signal.
•Proceed to step 3.
3. Break the hammer nut (key 6) loose with a hammer. Continue turning the hammer nut by using a hammer or a
large adjustable wrench, tightened around one ear of the hammer nut. If the bonnet is stuck on the valve, continue
to unscrew the hammer nut. The hammer nut will contact the spring pins (key 7) and will force the bonnet out of
the valve. Carefully lift the actuator, bonnet, and valve plug assembly from the valve body.
WARNING
The spring pins must always be in place during valve operation. They provide a safeguard against injury when the unit is
being disassembled.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
18
4. Use a socket wrench to loosen the seat ring (key 3).
5. Remove the seat ring (key 3) and seat ring gasket (key 9) from the valve body.
6. To replace the plug, the stem nut (key 42) must be removed to expose the groove pin (key 4). Open the
explosionproof enclosure (key 60), using a 13mm wrench.
7. Remove the stem nut (key 42) using a 11/16 inch wrench; insert a punch in the hole in the stem to restrict rotation
of the stem while removing the stem nut. The travel indicator (key 32) may need to be moved to expose the hole.
8. Push the stem downward just far enough to expose the groove pin (key 4) on the plug.
9. Remove the plug by driving out the groove pin and unscrewing the valve plug from the stem.
WARNING
Becarefultoavoiddamagingtheseatingsurfaceonthevalveplugorseatringasdamageintheseareaswillallow
excessive leakage at shutoff. Avoid damaging the highly polished valve stem surface. A damaged valve stem could cut the
packing and allow process fluid to leak to the atmosphere.
Table 7. Torque for Seat Ring (Key 3)
VALVE SIZE RECOMMENDED TORQUE
NPS NSmLbfSft
1407 300
2698 515
Assembly
1. Make sure the bonnet O-ring (key 8) is on the bonnet and lubricated with lithium grease (key 49).
2. Install the plug (key 2) on the stem (key 47) and insert a new groove pin (key 4).
3. Pushtheplugandstemupwardtoensurethethreadsonthetopofthestemareexposed.Threadthestemnut(key
42) onto the top of the stem and tighten the stem nut (key 42) to 39 N•m (29lbf•ft). Insert a punch in the hole in
the stem to restrict rotation while tightening the stem nut.
4. Replace the top of the explosion proof enclosure (key 60) and tighten cap screws (key 64) to 20 N•m (15 lbf•ft).
5. Thoroughly clean the seat ring and bonnet threads in the valve body (key 1). Also clean the valve body seat ring
gasket surfaces.
6. Apply anti-seize lubricant (key 54) to the threads of the seat ring (key 3), and its mating threads in the valve body.
7. Apply anti-seize lubricant (key 54) to the seat ring gasket (key 9) and install into the valve body.
8. Screw the seat ring into the valve body. Use a socket wrench to tighten the seat ring to the torque values shown in
table7.Removeallexcesslubricant after tightening.
9. Lubricate (key 54) the threads on the valve body and hammer nut and the contact surfaces of the bonnet and
hammer nut flange. Install the bonnet and actuator assembly with pinned valve plug onto the valve body. Tighten
the hammer nut using an adjustable wrench until the nut stops turning. A few hammer blows will be required to
ensure that the assembly is tight.
Valve Packing
WARNING
Observe the warning at the start of the Maintenance section.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
19
The valve stem packing can only be accessed from within the valve body.
Disassembly
1. Disassemble the valve per steps 1 through 12 of the Valve Plug and Seat Ring Disassembly section in this instruction
manual.
2. Unscrew the packing retainer (key 10) from the bonnet (key 5).
3. Remove the five Belleville springs (key 11), packing spacer (key 14), packing (key 13), and two anti-extrusion rings
(key 12) from the bonnet, using a formed wire hook. To aid in packing removal, the stem may be removed.
4. Clean and inspect the packing box wall to ensure that thepackingsurfacesarenotdamaged.Ifthesurface
condition is damaged, and cannot be improved by light sanding, replace the bonnet by contacting your Emerson
Process Management sales office.
5. Inspect the valve stem for scratches or wear, and valve plug for wear or damage. Replace if necessary.
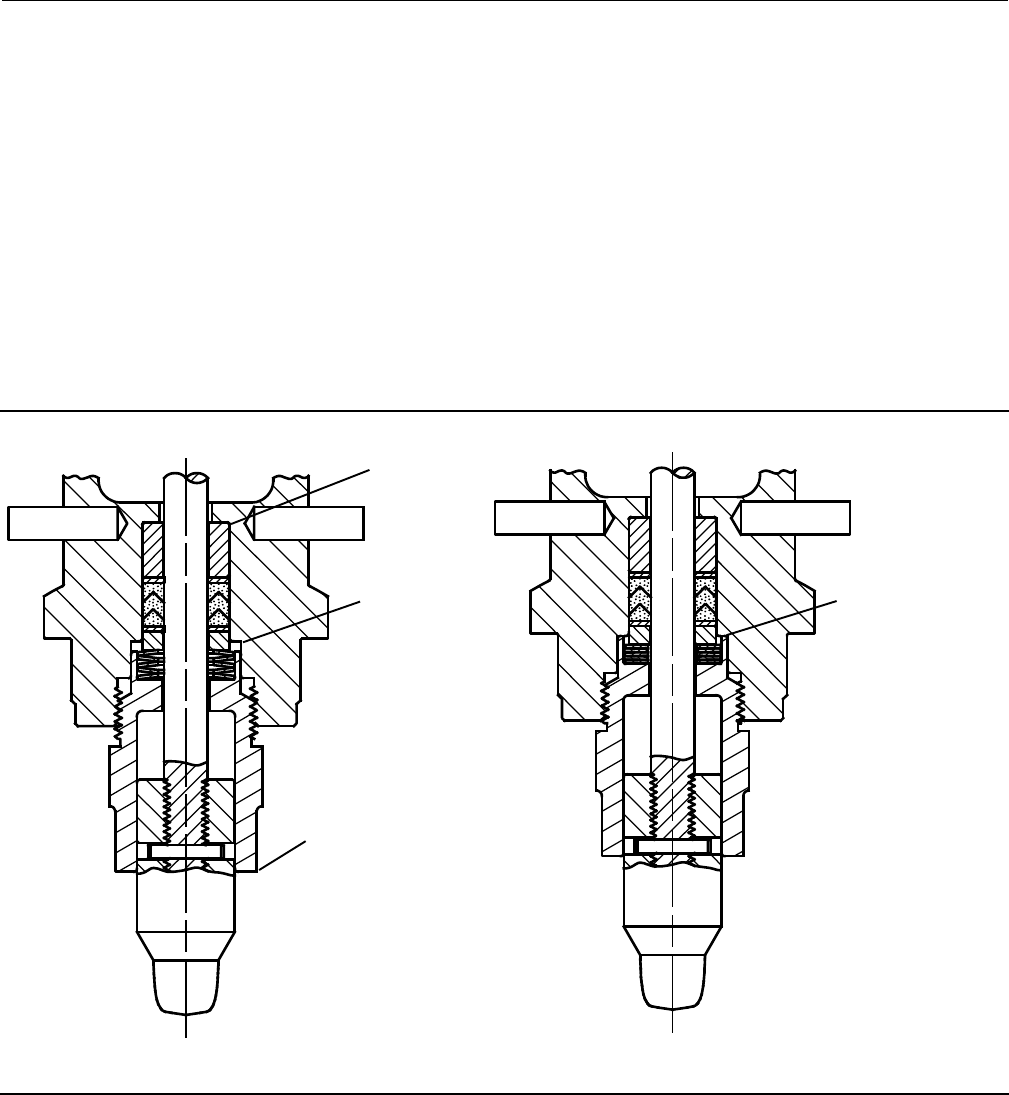
Figure 9. Fisher D4 Packing Installation
VALVE PLUG, BELLEVILLE SPRINGS, AND PACKING RETAINER
CORRECTLY INSTALLED AND TIGHTENED
BELLEVILLE SPRINGS FULLY ENCLOSED BY
THE PACKING RETAINER
PACKING RETAINER
(KEY 8)
UNTIGHTENED,
NOTE THE GAP
FULLY TIGHTENED,
NO GAP
UPPER PACKING
SPACER (KEY 48)
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
20
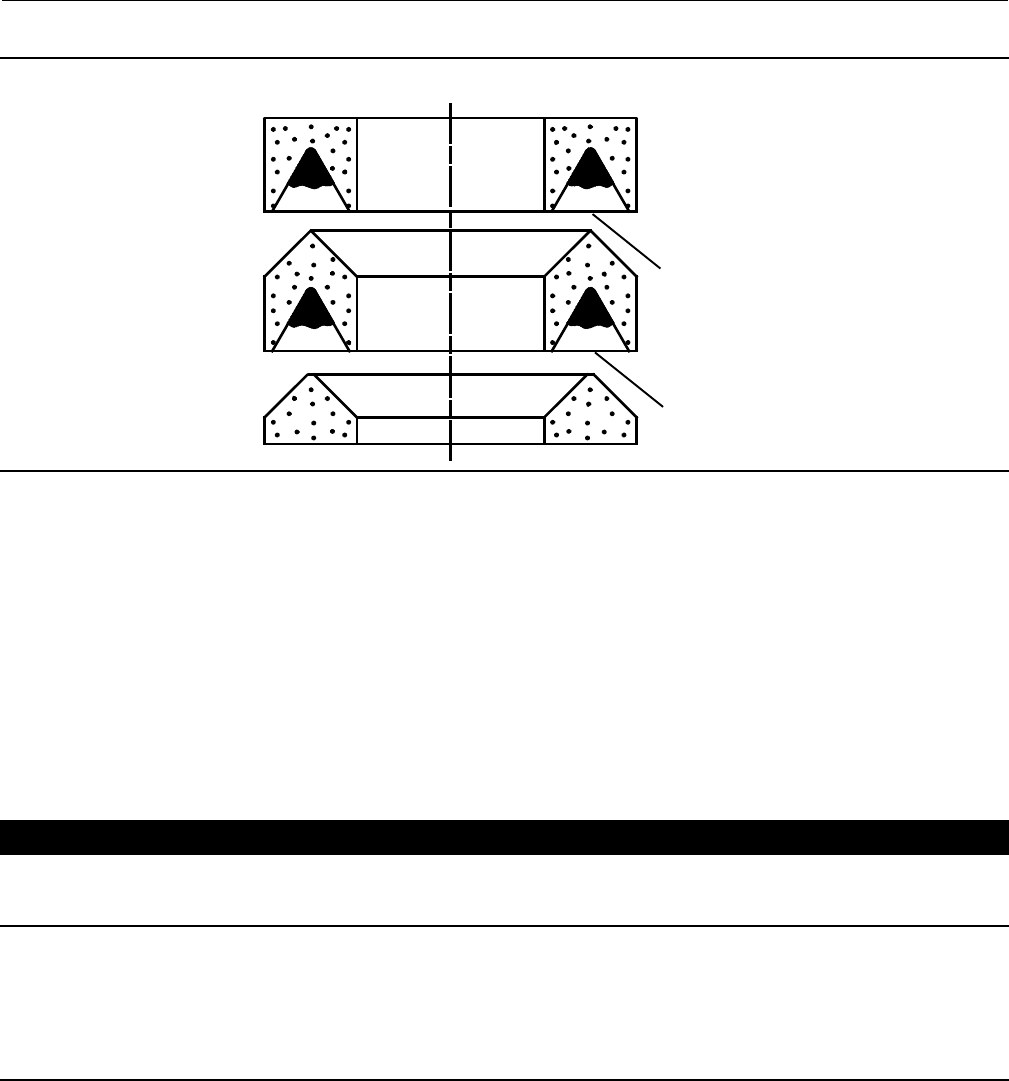
Figure 10. Lubrication Locations on Packing
FEMALE PACKING ADAPTER
MALE PACKING ADAPTER
PACKING RING LUBRICATE WITH 3mm (1/8 INCH
BEAD) OF SUPPLIED HIGH PERFORMANCE
FLUORINATED GREASE
LUBRICATE WITH 3mm (1/8 INCH
BEAD) OF SUPPLIED HIGH PERFORMANCE
FLUORINATED GREASE
Assembly
Refer to figures 9, 10, 11, and 12.
1. If the stem was removed during packing disassembly, insert the stem back into the valve/actuator assembly.
2. Ensure the upper packing spacer (key 48) is installed, as shown in figure 9.
3. Using a non-marring installation tool, such as a 12-inch length of 1/2 inch PVC pipe, push the first anti-extrusion
washer (key 12) fully into the packing box by hand. Then, use the packing spacer (key 14) to fully seat the
anti-extrusion washer by firmly tapping the packing spacer against the anti-extrusion washer with a hammer and
the PVC pipe.
4. Remove the packing spacer from the packing bore.
CAUTION
All D4 packing kits include a single use packet of high performance fluorinated grease. This is the only acceptable D4
packing lubricant.
Note
In the following procedure, carefully install each packing ring individually over the valve stem and push completely into the
packing box with a non-marring tube. A 12-inch length of 1/2 inch PVC pipe works well for this. It is recommended that the
lubricated packing rings be installed individually rather than pushed in as a set.
5. Apply a 3mm (1/8 inch) bead of the supplied high performance fluorinated grease (key 44) around the groove of
the female packing adaptor as shown in figure 10 and install over the valve stem (key 16).
6. Apply a 3mm (1/8 inch) bead of the supplied high performance fluorinated grease (key 44) around the groove of
the packing ring as shown in figure 10 and install over the valve stem.
7. Install the male packing adaptor, lower anti-extrusion washer (key 10), and lower packing spacer over the valve
stem as shown in figure 9.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
21
8. Firmly press all packing parts into the packing bore with a tube.
9. Install the five Belleville springs (key 11) over the valve stem. The Belleville springs should be single-stacked with the
inside diameter of the inner spring contacting the packing spacer (key 14), and the outside diameter of the outer
spring contacting the packing retainer (key 10).
10. Lubricate the threads of the packing retainer with anti-seize and install into the bonnet using a 1-5/8 inch wrench.
Make sure the Belleville springs are completely enclosed by the packing retainer as shown in figure 9.
11. Torque the packing retainer to 136 NSm(100lbfSft). The packing retainer has been installed correctly when a
metal-to-metal contact has been made between the packing retainer end and the bonnet (key 5). The packing
retainer threads should be completely enclosed by the bonnet.
12. Follow steps 1 through 9 of the Valve Plug and Seat Ring Assembly section in this instruction manual.
Parts Ordering
Each D4 control valve is assigned a serial number, which can be found on the nameplate. Refer to the number when
contacting your Emerson Process Management sales office for assistance or when ordering replacement parts.
WARNING
Use only genuine Fisher replacement parts. Components that are not supplied by Emerson Process Management should
not, under any circumstances, be used in any Fisher valve, because they may void your warranty, might adversely affect the
performance of the valve, and could cause personal injury and property damage.
Repair Kits
Note
All repair kits are supplied with hydrogenated nitrile bonnet O-ring. FKM
(fluorocarbon) bonnet O-ring must be ordered separately when
required.
Description Part Number
* Packing Repair Kit
Includes key numbers 4, 8, 12 (2 req'd),
13, and high performance fluorinated grease RD4X0000012
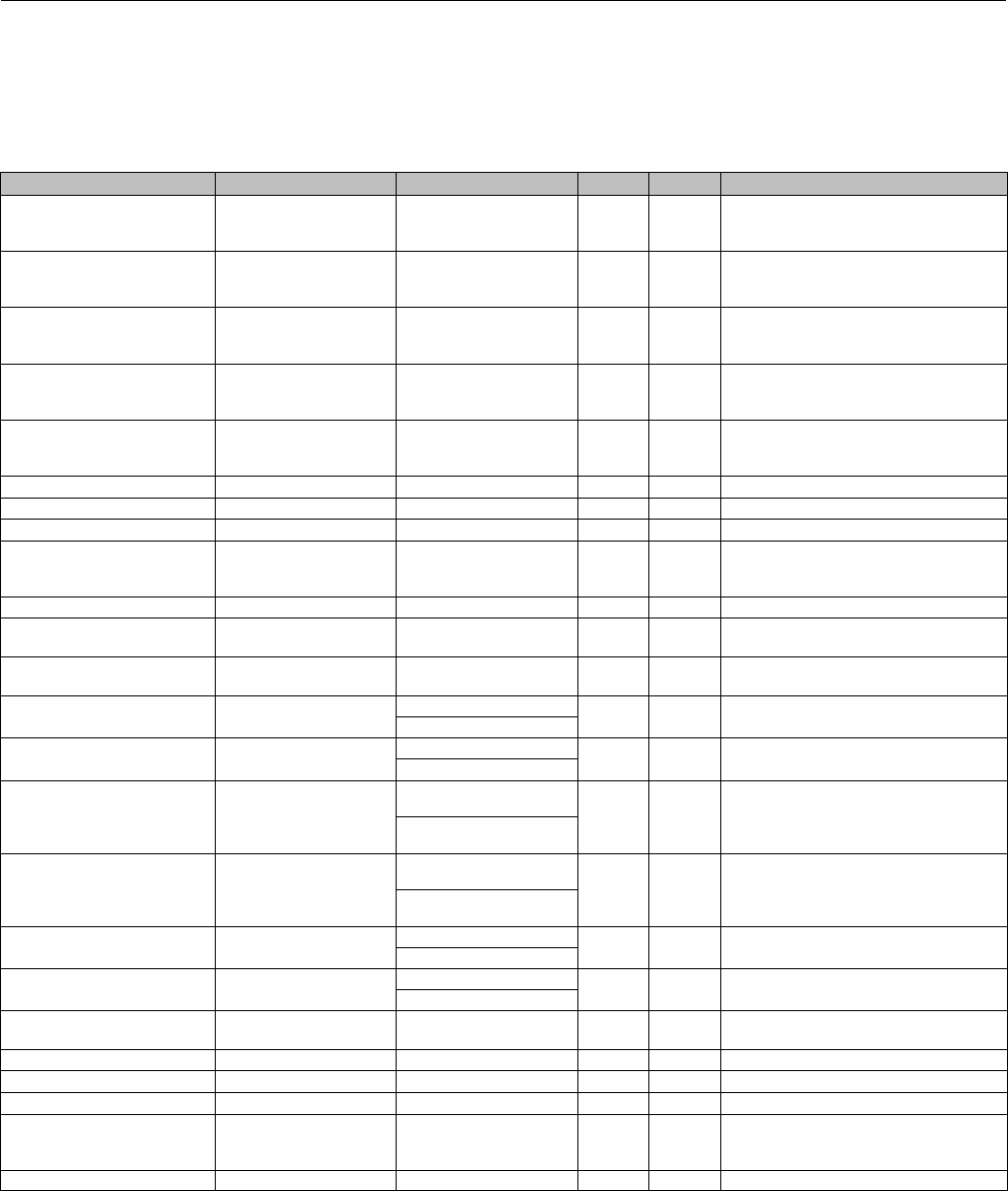
Parts List
Note
For part numbers not shown, contact your Emerson Process
Management sales office.
Key Description Part Number
1ValveBody
2* Valve Plug
S41000 / S41600 HT
NPS 1 valve
0.25 inch port diameter 20C3692X012
0.375 inch port diameter 20C3693X012
0.5 inch port diameter 20C3694X012
0.75 inch port diameter GE01557X012
NPS 2 valve
0.25 inch port diameter GE00992X012
0.375 inch port diameter GE00993X012
0.5 inch port diameter GE00994X012
0.75 inch port diameter GE01558X012
1-inch port diameter GE01561X012
1.25 inch port diameter GE01555X012
S17400 H1150 Dbl
NPS 1 valve
0.25 inch port diameter 20C3692X032
0.375 inch port diameter 20C3693X032
0.5 inch port diameter 20C3694X032
0.75 inch port diameter GE01557X032
NPS 2 valve
0.25 inch port diameter GE00992X032
0.375 inch port diameter GE00993X032
0.5 inch port diameter GE00994X032
0.75 inch port diameter GE01558X032
1-inch port diameter GE01561X032
1.25 inch port diameter GE01555X032
Tungsten Carbide
NPS 1 valve
*Recommended spare parts

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
22
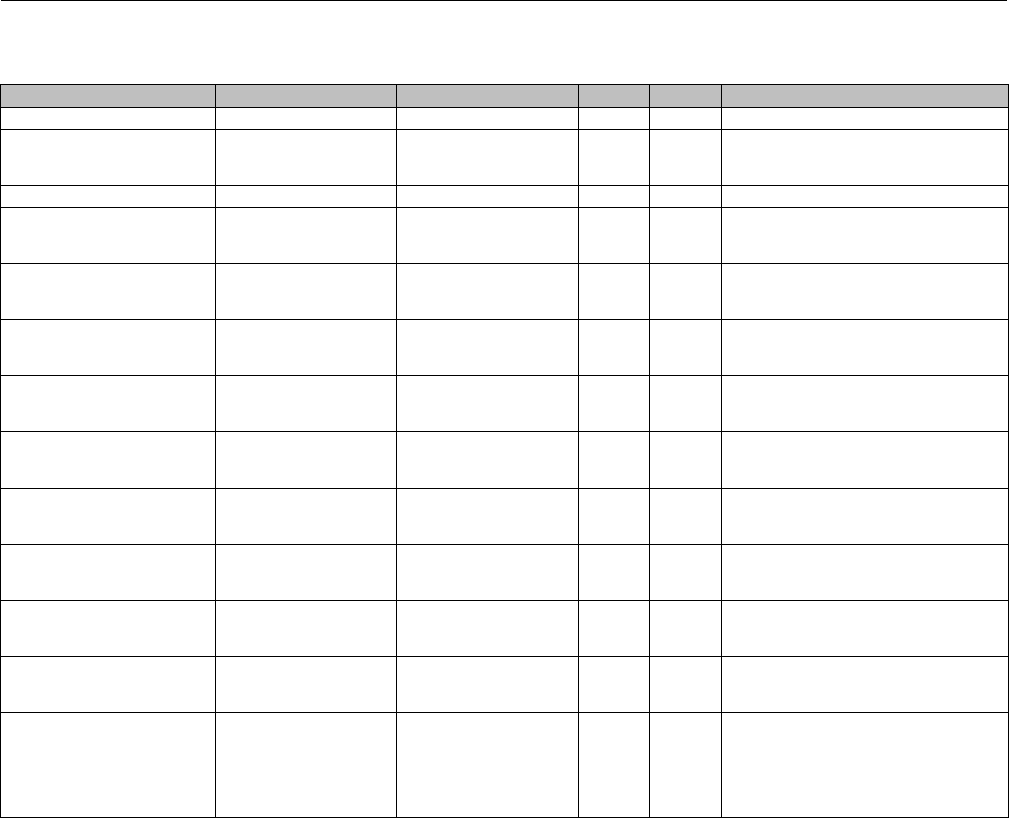
Key Description Part Number
0.25 inch port diameter 20C3696X012
0.375 inch port diameter 20C3697X012
0.5 inch port diameter 20C3698X012
0.75 inch port diameter 20C3699X012
NPS 2 valve
0.25 inch port diameter 20C3682X012
0.375 inch port diameter 20C3683X012
0.5 inch port diameter 20C3685X012
0.75 inch port diameter 20C3686X012
1-inch port diameter 20C3687X012
1.25 inch port diameter 20C3688X012
3* Seat Ring
S17400 H1150 Dbl
NPS 1 valve
0.25 inch port diameter GE00982X032
0.375 inch port diameter GE00983X032
0.5 inch port diameter GE00984X032
0.75 inch port diameter GE00985X032
NPS 2 valve
0.25 inch port diameter GE00986X032
0.375 inch port diameter GE00987X032
0.5 inch port diameter GE00988X032
0.75 inch port diameter GE00989X032
1-inch port diameter GE00990X032
1.25 inch port diameter GE00991X032
Tungsten Carbide
NPS 1 valve
0.25 inch port diameter GE07347X012
0.375 inch port diameter GE07363X012
0.5 inch port diameter GE07364X012
0.75 inch port diameter GE07365X012
NPS 2 valve
0.25 inch port diameter GE07389X012
0.375 inch port diameter GE07394X012
0.5 inch port diameter GE07397X012
0.75 inch port diameter GE07398X012
1-inch port diameter GE07399X012
1.25 inch port diameter GE07406X012
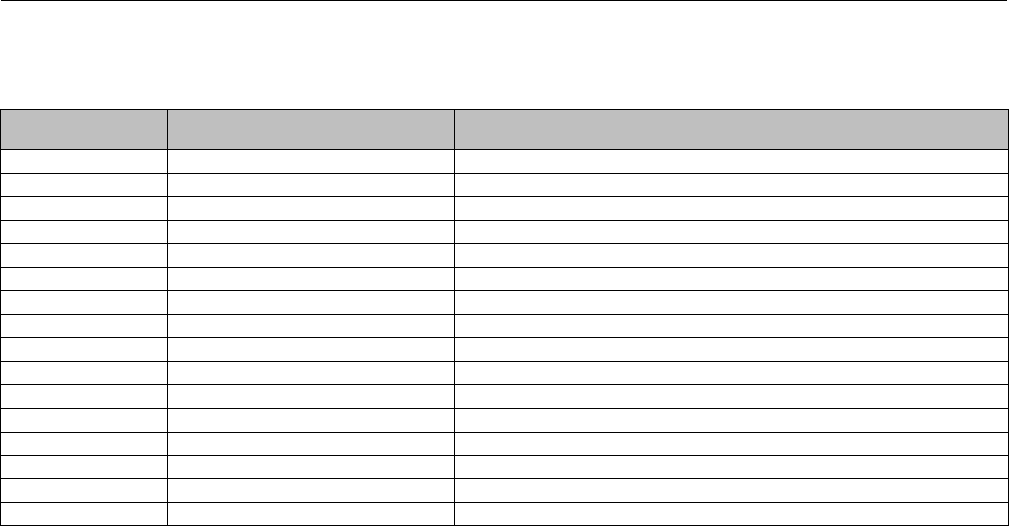
Key Description Part Number
4* Groove Pin GE01163X012
5 Bonnet
6HammerNut
7 Spring Pin
8* Bonnet O-ring
Hydrogenated Nitrile
-46 to 149_C (-50 to 300_F) 10C3680X012
FKM, -23 to 204_C(-10to400_F) 10C3680X022
9* Seat Ring Gasket
For NPS 1 valve 1B198636042
For NPS 2 valve 1B198836042
10 Packing Retainer
11 Belleville Springs, 5 req'd
12* Anti-Extrusion Washer, 2 req'd 12B6335X022
13* Packing Set 12B6667X012
14 Packing Spacer
16 Valve Nameplate
17 Drive Screw
18 O-ring 13A9576X052
19 Stem O-ring 1K7561X0072
32 Travel Indicator
42 Stem Nut
47* Valve Stem GE48549X012
48 Upper packing spacer
49 Lubricant (lithium grease)
54 Lubricant (anti-seize)
56 High Performance Fluorinated Grease
Packing Lubricant
58 Enclosure O-ring
59 Motor/gearbox/controller assembly
60 Upper Enclosure
61 Lower Enclosure
62 Motor Cap Screws (4 req'd)
63 Motor Cap Screw Washers (4 req'd)
64 Enclosure Cap Screws (8 req'd)
65 Enclosure Cap Screw Retaining Washers (8 req'd)
66 Ground Screw
68 Certification Nameplate
69 easy-Drive Label
*Recommended spare parts
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
23
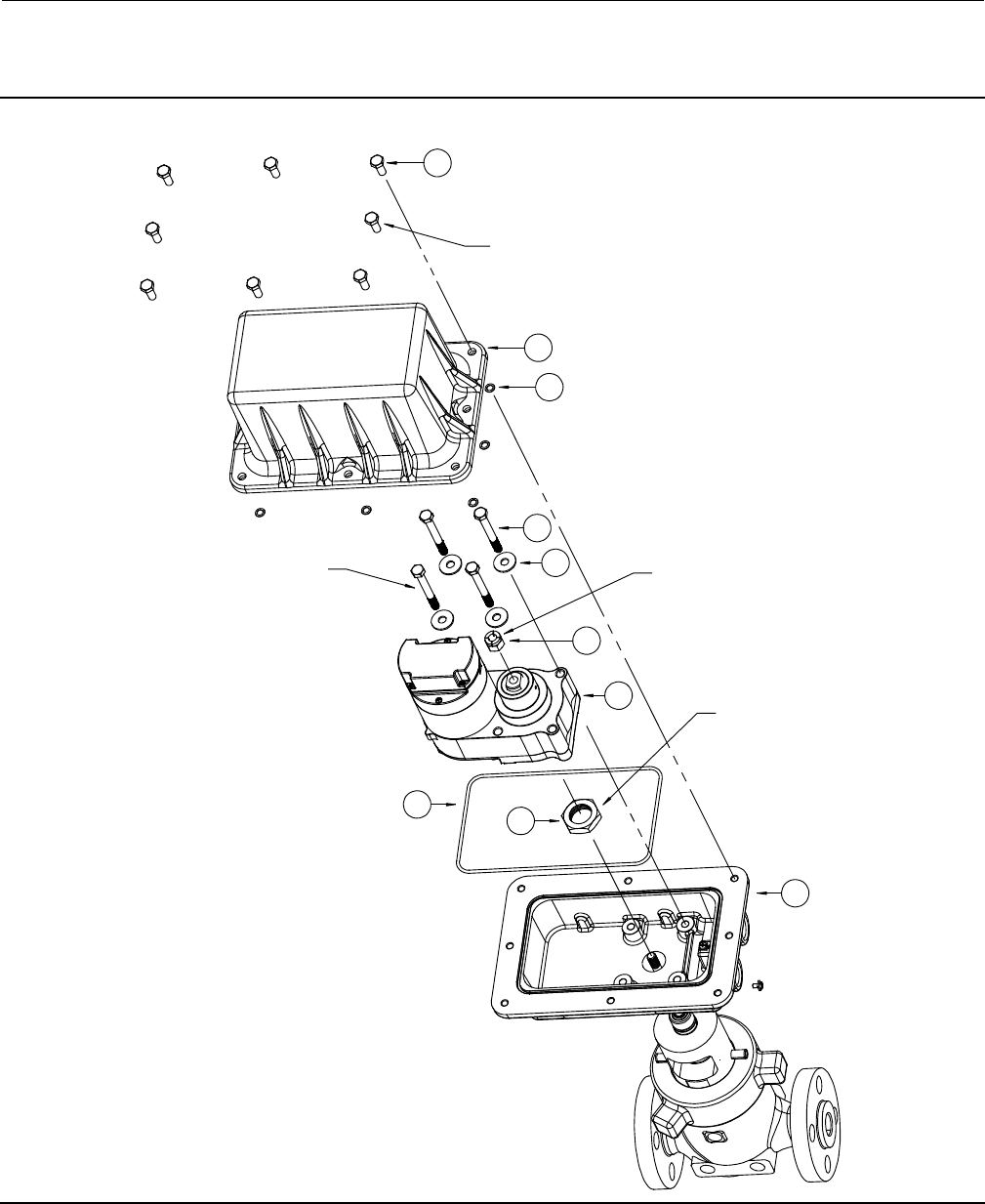
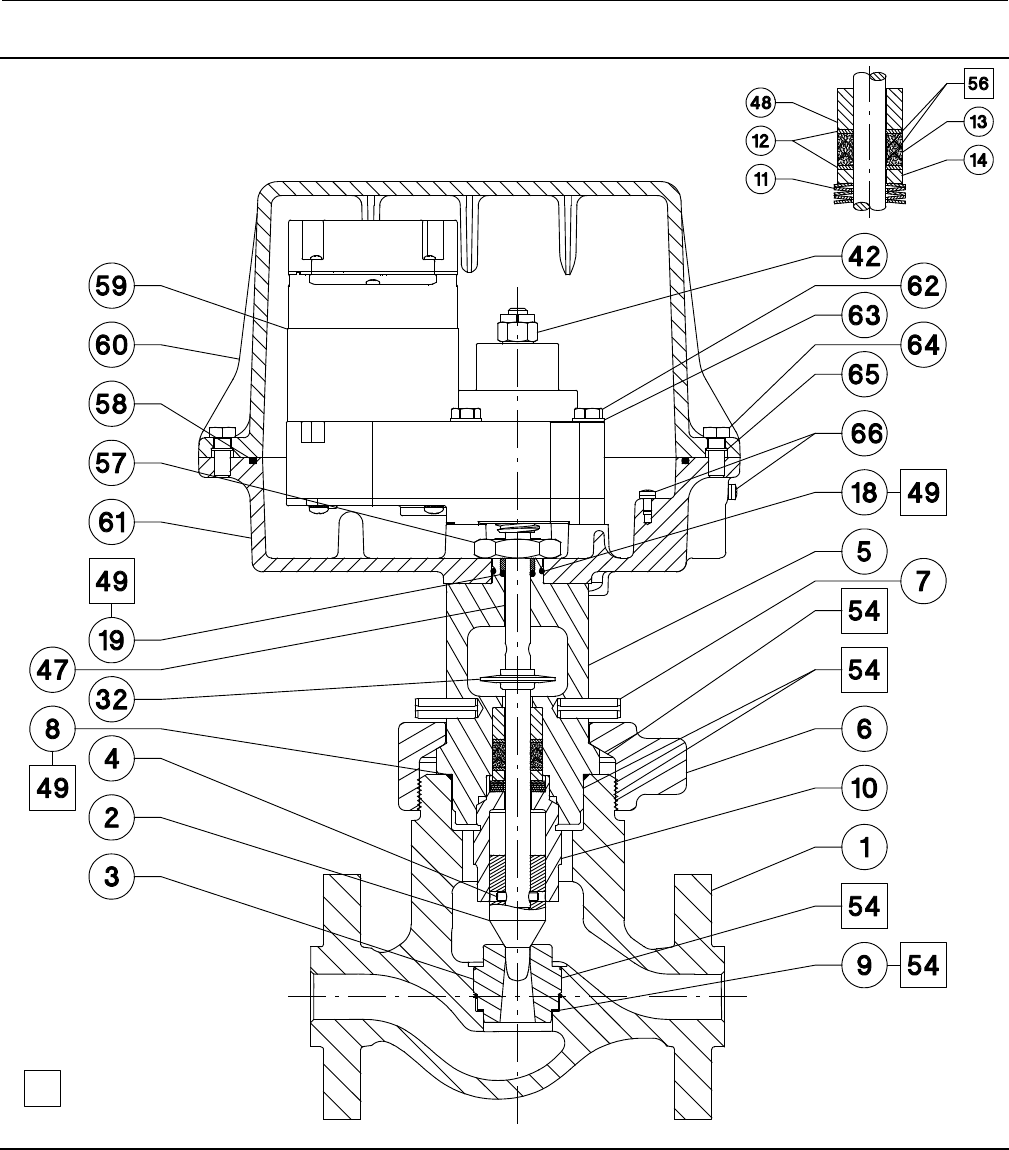
Figure 11. D4 Valve Assembly
64
60
65
62
63
27
59
58
61
20
13 mm
11/16 INCH
1-1/2 INCH
13 mm
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
24
Figure 12. Fisher D4 Valve Assembly
GE49375-B
APPLY LUBRICANT
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
25
Appendix A - Modbus
A.1 Register Summary
Table 8. Register Summary
DATA LEGAL FUNCTION CODES REGISTER (PHYSICAL) TYPE R/W DESCRIPTION
Position Demand — Proportional
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40001 (0x0000) UINT16 R/W Value 0-100 = 0-100% Position
Reset Diagnostics
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40002 (0x0001) UINT16
(BOOL) R/W 0=ResetIdle,1=ResetActive
Recalibrate Demand
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40003 (0x0002) UINT16 R/W
0=Idle,1=Resetcalibrationrequest—unit
will reset to non calibrated state and await
calibration sequence
Analog Cal at 0%
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40004 (0x0003) UINT16 R/W 0=Idle,1=Calibrateat0%
Analog Cal at 100%
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40005 (0x0004) UINT16 R/W 0 = Idle, 1 = Calibrate at 100%
Reserved 03 — Read Holding Reg 40006 (0x0005) UINT16 RRead will return power up default of 0
Reserved 03 — Read Holding Reg 40007 (0x0006) UINT16 RRead will return power up default of 0
Reserved 03 — Read Holding Reg 40008 (0x0007) UINT16 RRead will return power up default of 0
Test Register 03 — Read Holding Reg 40009 (0x0008) UINT16 R
Read will return power up default of 45964
decimal (Binary/Hex
-0b10110001110001100 / 0xB38C)
Actual Position 03 — Read Holding Reg 40010 (0x0009) UINT16 RValue 0-100 = 0-100% Position
Actual Demand 03 — Read Holding Reg 40011 (0x000A) UINT16 RValue 0-100 = 0-100% is demand to position
loop from active control source
Diagnostic Flags 03 — Read Holding Reg 40012 (0x000B) UINT16 RBit Flags — see Description in section 5.2 and
table 9
Number of cycles 03 — Read Holding Reg 40013 (LSW) (0x000C) UINT32† RNumber of movements
40014 (MSW) (0x000D)
Hours Running 03 — Read Holding Reg 40015 (LSW) (0x000E) UINT32† RTotal hours powered - version 4.13
Total minutes powered - version 4.21
40016 (MSW) (0x000F)
Hours Open 03 — Read Holding Reg
40017 (LSW) (0x0010)
UINT32† R
Total hours in open position (at 100%) -
version 4.13
Total minutes in open position (at 100%) -
version 4.21
40018 (MSW) (0x0011)
Hours Closed 03 — Read Holding Reg
40019 (LSW) (0x0012)
UINT32† R
Total hours in closed position (at 0%) -
version 4.13
Total minutes in closed position (at 0%) -
version 4.21
40020 (MSW) (0x0013)
Number of power up cycles 03 — Read Holding Reg 40021 (LSW) (0x0014) UINT32† RNumber of times power is cycled successfully
40022 (MSW) (0x0015)
Serial Number 03 — Read Holding Reg 40023 (LSW) (0x0016) UINT32† RProduct Unique Identifier 0-4294967295
40024 (MSW) (0x0017)
Analog I/P Value 03 — Read Holding Reg 40025 (0x0018) UINT16 R0-50 = 0-5V (Voltage mode I/P) 0-200 =
0-20mA(Current Loop I/P)
Firmware Project Code 03 — Read Holding Reg 40026 (0x0019) UINT16 RProject code
Firmware Document Reference 03 — Read Holding Reg 40027 (0x001A) UINT16 RDocument reference
Firmware Version 03 — Read Holding Reg 40028 (0x001B) UINT16 RVersion,MSB8bits=major,LSB8bits=minor
Diagnostic Flags History 03 — Read Holding Reg 40029 (0x001C) UINT16 R
Bit Flags — see Description in section 5.2. —
This is a history of any faults that have
occurred and is stored in memory
Reserved 03 — Read Holding Reg 40030 (0x001D) UINT16 RRead will return power up default of 0
-continued-
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
26
Table 8. Register Summary (continued)
DATA LEGAL FUNCTION CODES REGISTER (PHYSICAL) TYPE R/W DESCRIPTION
Reserved 03 — Read Holding Reg 40031 (0x001E) UINT16 RRead will return power up default of 0
Valve type
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40032 (0x001F) UINT16 R/W 1=D3,2=D4
Control Type 03 — Read Holding Reg 40033 (0x0020) UINT16 R0=On/Off,1=Proportional
Control Source
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40034 (0x0021) UINT16 R/W 0=ModbusRTURegisterCommands,1=
Local Control
Loss of control input/comms
default position
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40035 (0x0022) UINT16 R/W Value 0-100 = 0-100% Position
Valve 101 - Last Position
Deadband
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40036 (0x0023) UINT16 R/W
Value 0-100 = 0-100% Level of hysteretic
dead band applied to position control
demand
Low travel cutoff
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40037 (0x0024) UINT16 R/W Blanking from zero position in percent
Communications Timeout
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40038 (0x0025) UINT16 R/W Timeout in seconds before loss of
communications state is asserted
Communications Address
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40039 (0x0026) UINT16 R/W Modbus address in the range 1-247
(Default = 1)
Communications Baudrate
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40040 (0x0027) UINT16 R/W
0 = 300 Baud, 1 = 600 Baud, 2 = 1200 Baud, 3
= 2400 Baud, 4 = 4800 Baud, 5 = 9600 Baud,
(Default) 6 = 19200 Baud, 7 = 38400 Baud
Parity
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40041 (0x0028) UINT16
(BOOL) R/W 0=Odd,1=Even,2=None
(“None” available in version 4.21 only)
Reset Statistics
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40042 (0x0029) UINT16
(BOOL) R/W 0=ResetIdle,1=ResetActive
Local Control Mode
03 — Read Holding Reg
06 — Write Single Reg
16 — Write Multiple Reg
40043 (0x002A) UINT16 R/W
On/Off
0=L2edualdrycontact
1=Singledrycontact
Proportional
0=1-5V
1=4-20mA
UINT16 — unsigned 16 bit variable, can take value 0-65535.
UINT32 — unsigned 32 bit variable, can take value 0-4294967295.
(Reserved) — registers used for development use only.
† - 32bit register contains data that spans two registers — reads and write of data needs to be performed within the
same Modbus command function to ensure coherency of data.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
27
Table 9. Fault Register — Fault Flags Summary Table
Diagnostic Flags — Bit
Mask Value Diagnostic Flags — Binary Mask Value Description
0x8001 1000 0000 0000 0000 Fault in N.V. Memory — system has restored default settings
0x4000 0100 0000 0000 0000 Motor assembly stall
0x2000 0010 0000 0000 0000 Speed measurement fault
0x1000 0001 0000 0000 0000 System or Watchdog fault
0x0800 0000 1000 0000 0000 Overspeed condition
0x0400 0000 0100 0000 0000 Calibration span not in legal range
0x0200 0000 0010 0000 0000 Fault in N.V. Memory — system has recovered settings
0x0100 0000 0001 0000 0000 Communications Timeout
0x0080 0000 0000 1000 0000 Valve was shutdown while moving
0x0040 0000 0000 0100 0000 Valve span calibrated (informational)
0x0020 0000 0000 0010 0000 Valve position controller active (informational)
0x0010 0000 0000 0001 0000 Analog input — below 3mA/0.75V (informational)
0x0008 0000 0000 0000 1000 Motor Overspeed coast condition
0x0004 0000 0000 0000 0100 Modbuscommandhasbeensent(startsacalibratedsystem)
0x0002 0000 0000 0000 0010 Analog input initialized (system has seen input >3mA/1V
0x0001 0000 0000 0000 0001 Start delay active (within 10 second calibration window)
A.2 Diagnostic Flags
The diagnostic register holds a 16 bit value that represents 16 individual flags, when set (value ‘1’), this indicates the
following conditions have occurred or are still present, the highest 7 bits are latching and will be present in the register
even if the initial cause for the flag being set is removed. If these flags are set, a reset needs to be performed to clear
the fault.
A.2.1 Fault in NV Memory
This is a severe fault and is usually seen when the firmware is upgraded with a program that uses a different
EEPROM/Non-volatile memory map. If this is not the case then the probable cause is a fault in the memory hardware.
A.2.2 Motor Assembly Stall
Thevalveplugwasunabletomovetothecommandedposition.Thedrivehasattemptedtomovethemotorby
applying a non-zero PWM signal, and the speed has not been detected as greater than 0 with a 400ms period. This
fault latches and needs to be reset.
A.2.3 Speed Measurement Fault
The controller detected pulses that correspond to the motor going much faster than the speed the speed
measurement system is designed for — the integrity of the measurement cannot be relied upon. This fault latches and
needs to be reset.
A.2.4 System or Watchdog Fault
The software system has been reset and this flag is set at power up if the case of the reset was the onboard watchdog
either timing out OR being forced by program function call. This flag is used as an indication that this type of reset has
occurred.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
28
A.2.5 Overspeed Condition
The drive speed was detected as being over the speed 3300RPM. This fault latches and needs to be reset.
A.2.6 Calibration Span Not in Legal Range
Following a calibration the detected mechanicaltravelwasdetectedasbeingtooshortforthevalvetype.Thisfault
latches and needs to be reset.
A.2.7 Fault in NV Memory — recovered settings
This fault is similar to Fault in NV Memory but is different in that the settings were recovered, however it is possible the
fault was due to a setting being changed during a power cycle. The settings need to be validated before valve
operation.
A.2.8 Communications Timeout
This flag is set after a timeout or loss of valid communications, it will be cleared if communications is reestablished
with the valve controller. If this flag is set and the control demand is set to be taken from the Modbus then the valve
will be commanded to the ‘Loss of communications position’ in setting accessed at Modbus register 40034.
A.2.9 Valve was Shutdown while Moving
The valve was actuating while power was removed, the position information may be unreliable. Command valve to 0%
to assure position information is accurate.
A.2.10 Valve Span Calibrated
The valve is calibrated.
A.2.11 Valve Position Controller Active
The valve is being actively controlled to go to a demanded position. The speed and position control loop logic is
setting the pwm and direction demands to the ValuDrive motor.
A.2.12 Analog Input Below 3mA/0.75V
The analog input is below a set threshold of 3mA. If since being powered up this level has been met the flag ‘Analog
input initialized’ will be set. If the control source is the analog input and this flag is set then the valve will be
commanded to actuate to the ‘Loss of control input’ position.
A.2.13 Motor Overspeed Coast Condition
The drive speed was detected as being over the speed 2500RPM. The flag is cleared if the speed falls below the coast
threshold level. This flag is used purely as a diagnostic.
A.2.14 Modbus Command Initialized
The system has received a command to the Position demand register since being powered up. If Modbus is the
selected control mode the valve will be commanded to this position after the startup period.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
29
A.2.15 Analog Input Initialized
The analog input has been detected as having a control signal within the expected range of 3-20mA. If the analog
input is the selected control signal then this will activate the valve after the startup period.
A.2.16 Start Delay Active
This is a flag set during the startup phase of operation, if this is set then the valve may be recalibrated by sending the
calibration signal sequence (100% demand followed by 0%). It is cleared to indicate normal operation (recalibration will
then require a command to Modbus register 40003).
A.3 Register Description
A.3.1 40001 Position Demand — Proportional [Read & Write]
Register: 40001, Address 0x0000 (0).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a value between 0 and 100% to demand a valve position. This register will only be used by
the system if the control source (set by register 40035) is set for Modbus RTU control. If the
control type (set by register 40034) is On/Off then value will be resolved with a boolean set
operation for a Open/Closed position demand variable output (e.g. Values 0-49 = ’0’ and
50-100 = ‘100’). This variable needs to be set to 100% then 0% after a power-up to calibrate an
un-calibrated system.
A.3.2 40002 Reset Diagnostics [Read & Write]
Register: 40002, Address 0x0001 (1).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a modbus request to reset the system from a fault state (indicated if the Diagnostics flags
register has any set faults). Writing a decimal 1 to the register will start a reset process only if
the system has a fault, otherwise the write will be ignored. Once the fault reset request has
been acknowledged the register will be set to decimal 0. Bit assignments are shown in table 9.
A.3.3 40003 Recalibrate Demand [Read & Write]
Register: 40003, Address 0x0002 (2).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: Writing a value of 1 to this register will force the system to clear any calibration information and
go through a cycle of calibration.
A.3.4 40004 Analog Cal at 0% [Read & Write]
Register: 40004, Address 0x0003 (3).
Function code: 0x10 — Write Multiple registers,

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
30
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register is used to initiate a calibration of the analog to digital circuit in the system. A
write of a ‘1’ will cause the system to store the value at the analog input. This action should
be performed with a calibrated 1V or 4mA present at the analog input. If this is not performed
the system uses defaults. Values outside the range 0-1 will return an exception code.
A.3.5 40005 Analog Cal at 100% [Read & Write]
Register: 40005, Address 0x0004 (4).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register is used to initiate a calibration of the analog to digital circuit in the system. A
write of a ‘1’ will cause the system to store the value at the analog input. This action should
be performed with a calibrated 5V or 20mA present at the analog input. If this is not
performed the system uses defaults. Values outside the range 0-1 will return an exception code.
A.3.6 40004-40008 Reserved [Read Only]
Register: 40004-40008 Address 0x0003 (3) - 0x0007 (7).
Function code: 0x03 — Read Holding registers.
Description: Not used — reads will return a value of 0.
A.3.7 40009 Test Register [Read Only]
Register: 40009, Address 0x0008 (8).
Function code: 0x03 — Read Holding registers.
Description: A test register — can be used to confirm communications. Holds a power up default of 45964
(0xB38C Hex).
A.3.8 40010 Actual Position [Read Only]
Register: 40010, Address 0x0009 (9).
Function code: 0x03 — Read Holding registers.
Description: This is a value between 0 and 100% that indicates the physical position of a calibrated valve
system. If the valve is un-calibrated (indicated if the Diagnostics flags register has a cleared
calibration informational flag), then this register will read 0.
A.3.9 40011 Actual Demand [Read Only]
Register: 40011, Address 0x000A (10).
Function code: 0x03 — Read Holding registers.
Description: This is a value between 0 and 100% that indicates the demand to the position control loop from
theactivecontrolsource.
A.3.10 40012 Diagnostic Flags [Read Only]
Register: 40012, Address 0x000B (11).
Function code: 0x03 — Read Holding registers.
Description: This is a set of 16 bit flags that indicate the state of the system. The lower order byte contains
flags that cause the system to go to a fault state — actuation of the valve will not be possible

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
31
until the cause of the fault condition has been removed and the fault condition reset by writing
a reset request to register 40001. The upper order byte contains flags used to indicate the
operational status of the valve actuator. See table 9 - Fault Register for details.
A.3.11 40013-40014 Number of Open/Close Cycles [Read Only]
Register: 40013-40014, Address 0x000C (12) — 0x000D (13).
Function code: 0x03 — Read Holding registers.
Description: This is a pair of registers that hold a 32bit number indicating the number of actuations of the
valve. A cycle of moving the valve from closed to open and back closed will count as 2 cycles.
The register needs to be read using a single read function command to ensure coherency
of the data in the two registers.
A.3.12 40015-40016 Hours/Minutes Running [Read Only]
Register: 40015-40016, Address 0x000E (14) — 0x000F (15).
Function code: 0x03 — Read Holding registers.
Description: This is a pair of registers that hold a 32bit number indicating the number of hours the valve has
been powered. The register needs to be read using a single read function command to ensure
coherency of the data in the two registers. If version 4.13 firmware is installed, hours are
displayed. If version 4.21 firmware is installed, minutes are displayed.
A.3.13 40017-40018 Hours/Minutes Open [Read Only]
Register: 40017-40018, Address 0x0010 (16) — 0x0011 (17).
Function code: 0x03 — Read Holding registers.
Description: This is a pair of registers that hold a 32bit number indicating the number of hours the valve has
been in the open (100%) position. The register needs to be read using a single read function
command to ensure coherency of the data in the two registers. If version 4.13 firmware is
installed, hours are displayed. If version 4.21 firmware is installed, minutes are displayed.
A.3.14 40019-40020 Hours/Minutes Closed [Read Only]
Register: 40019-40020, Address 0x0012 (18) — 0x0013 (19).
Function code: 0x03 — Read Holding registers.
Description: This is a pair of registers that hold a 32bit number indicating the number of hours the valve has
been in the closed (0%) position. The register needs to be read using a single read function
command to ensure coherency of the data in the two registers. If version 4.13 firmware is
installed, hours are displayed. If version 4.21 firmware is installed, minutes are displayed.
A.3.15 40021-40022 Number of Power up cycles [Read Only]
Register: 40021-40022, Address 0x0014 (20) — 0x0015 (21).
Function code: 0x03 — Read Holding registers.
Description: This is a pair of registers that hold a 32bit number of times the system has been successfully
powered up. The register needs to be read using a single read function command to ensure
coherency of the data in the two registers.
A.3.16 40023-40024 Serial Number [Read Only]
Register: 40023-40024, Address 0x0016-0x0017 (22-23).
Function code: 0x03 — Read Holding registers.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
32
Description: This is a pair of registers that hold a 32 bit number that can be used to hold a unique serial
number. The register needs to be read using a single read Modbus function
transaction command to ensure coherency of the data in the two registers.
A.3.17 40025 Analog I/P value [Read Only]
Register: 40025, Address 0x0018 (24).
Function code: 0x03 — Read Holding registers.
Description: This is a register that holds a 16 bit scaled representation of the analog input. It is scaled
according to input i.e. 0-200 for 0-20.0mA and 0-50 for 1-5 V.
A.3.18 40026 Firmware Project Code [Read Only]
Register: 40026, Address 0x0019 (25).
Function code: 0x03 — Read Holding registers.
Description: This is a register that holds the SRD project code (SRD422) — 422. This is the code used in
version control of SRD documents and source code.
A.3.19 40027 Firmware Document Reference [Read Only]
Register: 40027, Address 0x001A (26).
Function code: 0x03 — Read Holding registers.
Description: This is a register that holds the SRD document code (SRD422-5007) — 5007. This code along
with the project code is used in version control of SRD documents and source code.
A.3.20 40028 Firmware Version [Read Only]
Register: 40028, Address 0x001B (27).
Function code: 0x03 — Read Holding registers.
Description: This is a register that holds the hex encoded equivalent of a four digit decimal version number
ofthefirmware,thehighorder8bitsencodethewholenumberoftheversionandthelow
order 8 bits the fraction, e.g. v1.16 would be encoded 0x0110, v2.66 would be 0x0242.
Together with the data from registers 40026- 40028 it is possible to determine the unique
identity of the code being run in the processor.
A.3.21 40029 Diagnostic Flags [Read Only]
Register: 40029, Address 0x001C (28).
Function code: 0x03 — Read Holding registers.
Description: This is a set of 16 bit flags that show the accumulation of fault flags that have occurred — as
faults are self resetting. The register is stored in non-volatile memory. The mapping is the same
as the diagnostic register at 40012. See table 9 - Fault Register for guide to values.
A.3.22 40030-40031 Reserved [Read Only]
Register: 40030-40031, Address 0x001D-0x001E (29-30).
Function code: 0x03 — Read Holding registers.
Description: Not used — reads will return a value of 0.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
33
A.3.23 40032 Valve Type [Read & Write]
Register: 40032, Address 0x001F (31).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an enumeration of the three types of valve. This is used to set up
several internal variables and constants. Writes outside of the legal range 0-2 will be rejected
with an exception code.
A.3.24 40033 Control Type [Read Only]
Register: 40033, Address 0x0020 (32).
Function code: 0x03 — Read Holding registers.
Description: This is a register that holds an enumeration of the control type — either 0 for On/Off, or 1 for
proportional control.
A.3.25 40034 Control Source [Read & Write]
Register: 40034, Address 0x0021 (33).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an enumeration of the control source — either 0 for Modbus RTU
control, or 1 for signals local to the system — decided by the contents of register 40032. Note
that if the Modbus serial link is not the active mode then the faults associated with serial
communications will be disabled, although serial communications for such activities as test and
debug monitoring of the analog input will all still function. Writes outside of the legal range
0-1 will be rejected with an exception code.
A.3.26 40035 Loss of Control Default Position [Read & Write]
Register: 40035, Address 0x0022 (34).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds a position demand 0-100% that will be applied to the position
control loop if the active control source is determined to be corrupt of out of normal
operatingspecification,thisappliestomodbuscommunicationsmessagesbeingabsentor
the analog input being un-calibrated or below 3mA/0.75V(open control loop). Writes outside
ofthelegalrange0-100willberejected with an exception code.
A.3.27 40036 Deadband [Read & Write]
Register: 40036, Address 0x0023 (35).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an integer value of percentage hysteresis used to discriminate
against noise entering the control system from the selected control source, this can take a value
of 0-100%, e.g. a value of 100 would make the system only respond to 0 or 100% demands.
Writes outside of the legal range 0-100 will be rejected with an exception code.

Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
34
A.3.28 40037 Low travel Cutoff [Read & Write]
Register: 40037, Address 0x0024 (36).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an integer value of percentage used as a clamp — any position
demand less than this value will be clamped to zero before being passed to the position control
system.
A.3.29 40038 Communications Timeout [Read & Write]
Register: 40038, Address 0x0025 (37).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds a value 0-65535 that is the number of seconds for a timeout before
the modbus serial communications channel is determined to be uncommunicative
(0 - ~18Hrs). A valid addressed message must be received by the system within this time limit
if the active control source is Modbus RTU communications. If the time without
communications is exceeded the system will fault and the valve commanded to the default
loss of communications position. A value of 0 can be used to disable this feature. If
communications is resumed then the flag will be cleared and the valve will take the refreshed
position as a demand. The use of this register is shown in table 9 - Fault Register.
A.3.30 40039 Communications Address [Read & Write]
Register: 40039, Address 0x0026 (38).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds a value 1-247 that is the Modbus address used by the system on
power up. Values outside the range 1-247 will return an exception code
A.3.31 40040 Communications Baudrate [Read & Write]
Register: 40040, Address 0x0027 (39).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds a value 4-6 that is an enumeration of the baudrate used by the
system on power up.
A.3.32 40041 Parity [Read & Write]
Register: 40041, Address 0x0028 (40).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an enumeration of the parity type used by the Modbus serial
interface — either 0 for Odd, or 1 for Even in version 4.13 firmware (version 4.21 firmware
defines 0=Odd, 1=Even, 2=None). Writes outside of the legal range will be rejected with
an exception code.
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
35
A.3.33 40042 Reset Statistics [Read & Write]
Register: 40042, Address 0x0029 (41).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register used to reset the non volatile system statistics (such as number of hours run).
Writing a value of 1 to these registers will reset the values that accessed in registers
40013-40022 to 0.
A.3.34 40043 Analog Input Mode [Read & Write]
Register: 40043, Address 0x002A (42).
Function code: 0x10 — Write Multiple registers,
0x06 — Write Single register, or
0x03 — Read Holding registers.
Description: This is a register that holds an enumeration 0-1 that sets the mode of operation for on/off and
proportional control. When in proportional mode (40033 = 1), a value of 0 sets the unit for
using a 1-5V voltage input. 1 sets up the unit for using a 4-20 mA current command input.
Thescalingofthedifferentmodesisreflectedinthescalingofthevaluereportedinregisterat
40023 —‘Analog I/P value’. When in on/off mode (40033 = 0), a value of 0 sets the unit for using
both digital inputs, optimized for using the L2e level controller. 1 sets up the unit for using a
single digital input. See Operation for further details.
A.4 Example Modbus Protocol Transactions
A.4.1 Write to Position Demand Register (40002/0x0001/1)
Writeofapositiondemandvalueof100%todeviceataddress1ontheModbusnetwork—8characters.
FIELD SLAVE
ADDRESS
FUNCTION
CODE
REGISTER
ADDRESS HI
REGISTER
ADDRESS LO
REGISTER
DATA HI
REGISTER
DATA LO CRC LO CRC HI
Index 0 1 2 3 4 5 6 7
Hex (Dec) 0x01 (1) 0x06 (6) 0x00 (0) 0x01 (1) 0x00 (0) 0x64 (100) 0xD9 (217) 0xE1 (225)
Normal response, 8 characters:
FIELD SLAVE
ADDRESS
FUNCTION
CODE
REGISTER
ADDRESS HI
REGISTER
ADDRESS LO
REGISTER
DATA HI
REGISTER
DATA LO CRC LO CRC HI
Index 0 1 2 3 4 5 6 7
Hex (Dec) 0x01 (1) 0x06 (6) 0x00 (0) 0x01 (1) 0x00 (0) 0x64 (100) 0xD9 (217) 0xE1 (225)
Write of a position demand value of 101% to device at address 1 on the Modbus network, note that this value (101% is
outside the legal range of values permitted to be written to this address, so an exception frame is generated — 8
characters.
FIELD SLAVE
ADDRESS
FUNCTION
CODE
REGISTER
ADDRESS HI
REGISTER
ADDRESS LO
REGISTER
DATA HI
REGISTER
DATA LO CRC LO CRC HI
Index 0 1 2 3 4 5 6 7
Hex (Dec) 0x01 (1) 0x06 (6) 0x00 (0) 0x01 (1) 0x00 (0) 0x65 (101) 0x18 (24) 0x21 (33)
Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
November 2013
36
Exception response, write not OK — slave device failure (Code 4), error code is function code with 0x80 added, 5
characters returned:-
FIELD SLAVE
ADDRESS
ERROR
CODE
EXCEPTION
CODE CRC LO CRC HI
Index 0 1 2 3 4
Hex (Dec) 0x01 (1) 0x06 (6) 0x00 (0) 0x18 (24) 0x21 (33)
A.4.2 Read of Actual Position (40010/0x0009/9)
Read of actual position from device at address 1 on the Modbus network using read holding register function — 8
characters.
FIELD SLAVE
ADDRESS
FUNCTION
CODE
REGISTER
ADDRESS HI
REGISTER
ADDRESS LO
QUANTITY OF
REGS HI
QUANTITY OF
REGS LO CRC LO CRC HI
Index 0 1 2 3 4 5 6 7
Hex (Dec) 0x01 (1) 0x03 (3) 0x00 (0) 0x09 (9) 0x00 (0) 0x01 (1) 0x54 (84) 0x08 (8)
Normal response (returning a value of 0%), 7 characters returned:-
FIELD SLAVE ADDRESS FUNCTION
CODE BYTE COUNT REGISTER
ADDRESS HI
REGISTER
ADDRESS LO CRC LO CRC HI
Index 0 1 2 4 5 6 7
Hex (Dec) 0x01 (1) 0x03 (3) 0x02 (2) 0x00 (0) 0x00 (0) 0xB8 (184) 0x44 (68)
Emerson Process Management
Marshalltown, Iowa 50158 USA
Sorocaba, 18087 Brazil
Chatham, Kent ME4 4QZ UK
Dubai, United Arab Emirates
Singapore 128461 Singapore
www.Fisher.com
The contents of this publication are presented for informational purposes only, and while every effort has been made to ensure their accuracy, they arenot
to be construed as warranties or guarantees, express or implied, regarding the products or services described herein or their use or applicability. All sales are
governed by our terms and conditions, which are available upon request. We reserve the right to modify or improve the designs or specifications of such
products at any time without notice.
E2012, 2013 Fisher Controls International LLC. All rights reserved.
Fisher and easy-Drive are marks owned by one of the companies in the Emerson Process Management business unit of Emerson Electric Co. Emerson Process
Management, Emerson, and the Emerson logo are trademarks and service marks of Emerson Electric Co. All other marks are the property of their respective
owners.
Neither Emerson, Emerson Process Management, nor any of their affiliated entities assumes responsibility for the selection, use or maintenance
of any product. Responsibility for proper selection, use, and maintenance of any product remains solely with the purchaser and end user.
