GE MDS DS-MERCMIMO5 Wimax Industrial Radio User Manual 05 6302A01A Mercury MIMO Front
GE MDS LLC Wimax Industrial Radio 05 6302A01A Mercury MIMO Front
GE MDS >
User manual

Installation and Operation Guide
Technical Manual
MDS 05-6302A01, Rev. B.1
OCTOBER 2011
Covering Subscriber, Base, and Outdoor units (ODUs)
of the Mercury 16E Series
MDS Mercury Series
Secure, Long Range IP/Ethernet & Serial
Featuring Web-Based
Device Manager
Need Quick-Start instructions for this product? Please refer to publication 05-6301A01.
All GE MDS user guides are available online at www.gemds.com
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual i
TABLE OF CONTENTS
1.0 PRODUCT DESCRIPTION................................................................................................... 1
1.1 Product Models .............................................................................................................................2
1.2 Key Features .................................................................................................................................2
1.3 Key Specifications .........................................................................................................................3
2.0 QUICK-START INSTRUCTIONS.......................................................................................... 4
2.1 Connecting to the Device Manager ...............................................................................................4
2.2 Configure IP Address and Identity .................................................................................................5
2.3 Basic Connectivity .........................................................................................................................7
Setup for Maximum Throughput ......................................................................................................9
3.0 FEATURE DESCRIPTIONS ................................................................................................. 9
3.1 Security Features ..........................................................................................................................9
Overview..........................................................................................................................................9
Authentication ..................................................................................................................................9
User Authentication........................................................................................................................10
PKMv2 Device Authentication........................................................................................................10
X.509 Certificates........................................................................................................................... 11
3.2 Multiple In / Multiple Out (MIMO) Operation ................................................................................ 11
3.3 ARQ and Hybrid ARQ .................................................................................................................12
ARQ Setup.....................................................................................................................................12
HARQ Setup ..................................................................................................................................13
4.0 Performing Common Tasks................................................................................................. 14
4.1 Basic Device Management ..........................................................................................................14
USB Console .................................................................................................................................14
Using Configuration Scripts ...........................................................................................................15
Perform Firmware Upgrade ...........................................................................................................16
Instructions for Completing the Firmware Upgrade Process (Applies to all loading methods above)
17
Configuring Networking Features for VLAN...................................................................................18
Configure Serial Data Interface for TCP, UDP, MODBUS..............................................................21
Configure QOS ..............................................................................................................................25
Flow Parameters............................................................................................................................26
Quality of Service (QoS) Screen....................................................................................................27
Creating a Service Flow.................................................................................................................28
QOS Example: Low Latency..........................................................................................................28
QOS Example: Controlling Bandwidth in Video Applications.........................................................28
QOS Example: Prioritizing a Data Flow .........................................................................................29
4.2 CONFIGURE SECURITY FEATURES & INTEGRATION WITH A RADIUS SERVER ...............31
Device Management Interface Configuration.................................................................................31
ii MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
User Accounts................................................................................................................................31
4.3 RADIUS Server Configuration .....................................................................................................32
Creation of X.509 Certificates........................................................................................................33
Load X.509 Certificates..................................................................................................................33
Configure SNMPV3........................................................................................................................34
4.4 Use of the Antenna Alignment Tool .............................................................................................36
5.0 TROUBLESHOOTING........................................................................................................ 36
5.1 LED INDICATORS .......................................................................................................................36
5.2 WiMAX Statistics .........................................................................................................................37
5.3 Common Troubleshooting Scenarios ..........................................................................................37
6.0 SITE INSTALLATION GUIDE ............................................................................................. 38
6.1 General Requirements ................................................................................................................39
Mounting Considerations ...............................................................................................................40
6.2 Site Selection ..............................................................................................................................40
6.3 Equipment Grounding .................................................................................................................41
6.4 LAN Port ......................................................................................................................................41
6.5 COM1 Port ..................................................................................................................................42
6.6 Antenna & Feedline Selection .....................................................................................................42
Antennas........................................................................................................................................43
Feedlines .......................................................................................................................................43
GPS cabling & Antenna .................................................................................................................44
6.7 Conducting a Site Survey ............................................................................................................44
6.8 A Word About Radio Interference ................................................................................................45
6.9 Radio (RF) Measurements ..........................................................................................................45
Transmitter Power Output and Antenna System SWR ..................................................................46
Antenna Heading Optimization ......................................................................................................46
7.0 dBm-WATTS-VOLTS CONVERSION CHART.................................................................... 47
8.0 PERFORMANCE NOTES................................................................................................... 48
8.1 Wireless Bridge ...........................................................................................................................48
8.2 Distance-Throughput Relationship ..............................................................................................49
8.3 Data Latency—TCP versus UDP Mode ......................................................................................49
8.4 Packets-per-Second (PPS) .........................................................................................................49
8.5 Subscriber-to-Subscriber Traffic ..................................................................................................50
8.6 Interference has a Direct Correlation to Throughput ...................................................................50
8.7 Placing the Radio Behind a Firewall ............................................................................................50
9.0 INDEX OF CONFIGURATION PARAMETERS................................................................... 51
APPENDIX A—3650 MHz Band Information.............................................................................. 57
Band History ..................................................................................................................................57
Technical Details ............................................................................................................................57
U.S. Map with Exclusion Zones .....................................................................................................58

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual iii
Supported SNMP MIBs..................................................................................................................58
Accessories list ..............................................................................................................................58
APPENDIX B—Glossary of Terms and Abbreviations................................................................ 59
Copyright and Trademark
This manual and all software described herein is protected by Copyright: 2011 GE MDS, LLC. All
rights reserved. GE MDS, LLC reserves its right to correct any errors and omissions in this publi-
cation. Modbus® is a registered trademark of Schneider Electric Corporation. All other trademarks
and product names are the property of their respective owners.
FCC Part 15 Notice
The transceiver series complies with Part 15 of the FCC Rules for a Class A digital device. Oper-
ation is subject to the following two conditions: (1) this device may not cause harmful interference,
and (2) this device must accept any interference received, including interference that may cause
undesired operation. Any unauthorized modification or changes to this device without the express
approval of GE MDS may void the user’s authority to operate this device. Furthermore, the Mer-
cury Series is intended to be used only when installed in accordance with the instructions outlined
in this guide. Failure to comply with these instructions may void the user’s authority to operate the
device.
Industry Canada Notice
Industry Canada rules (SRSP 301.7) require that the power to the antenna on an 1800-1830 MHz
installation shall not exceed 2 watts in any 1 MHz channel bandwidth.
RF Exposure Notices (English and French)
1800 MHz Models
Professional installation required. The radio equipment described in this guide emits radio fre-
quency energy. Although the power level is low, the concentrated energy from a directional
antenna may pose a health hazard. Do not allow people to come closer than 0.4 meters (15 inches)
to the antenna when the transmitter is operating in indoor or outdoor environments. More informa-
tion on RF exposure is available on the Internet at www.fcc.gov/oet/info/documents/bulletins.
L'énergie concentrée en provenance d'une antenne directionnelle peut présenter un danger pour la
santé. Ne pas permettre aux gens de s'approcher à moins de 0.4 metres à l'avant de l'antenne lorsque
l'émetteur est en opération. On doit augmenter la distance proportionnellement si on utilise des
antennes ayant un gain plus élevé. Ce guide est destiné à être utilisé par un installateur profes-
sionnel. Plus d'informations sur l'exposition aux rayons RF peut être consulté en ligne à l'adresse
suivante: www.fcc.gov/oet/info/documents/bulletins
3650 MHz Models
Professional installation required. The transceiver described here emits radio frequency energy.
Although the power level is low, the concentrated energy from a directional antenna may pose a
health hazard. Do not allow people to come closer than 25 cm (9.8 inches) to the antenna when the
transmitter is operating. This calculation is based on an 18 dBi panel antenna. Additional informa-
tion on RF exposure is available on the Internet at www.fcc.gov/oet/info/documents/bulletins.

iv MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
L'énergie concentrée en provenance d'une antenne directionnelle peut présenter un danger pour la
santé. Ne pas permettre aux gens de s'approcher à moins de 25 cm à l'avant de l'antenne lorsque
l'émetteur est en opération. On doit augmenter la distance proportionnellement si on utilise des
antennes ayant un gain plus élevé. Ce guide est destiné à être utilisé par un installateur profes-
sionnel. Plus d'informations sur l'exposition aux rayons RF peut être consulté en ligne à l'adresse
suivante: www.fcc.gov/oet/info/documents/bulletins.
5800 MHz Models
Professional installation required. The radio equipment described in this guide emits radio
frequency energy. Although the power level is low, the concentrated energy from a directional
antenna may pose a health hazard. Do not allow people to come closer than 0.2 meters (8 inches)
to the antenna when the transmitter is operating in indoor or outdoor environments. More
information on RF exposure is available on the Internet at
www.fcc.gov/oet/info/documents/bulletins.
L'énergie concentrée en provenance d'une antenne directionnelle peut présenter un danger pour
lasanté. Ne pas permettre aux gens de s'approcher à moins de 0.2 metres à l'avant de l'antenne
lorsque l'émetteur est en opération. On doit augmenter la distance proportionnellement si on utilise
des antennes ayant un gain plus élevé. Ce guide est destiné à être utilisé par un installateur
professionnel. Plus d'informations sur l'exposition aux rayons RF peut être consulté en ligne à
l'adresse suivante: www.fcc.gov/oet/info/documents/bulletins
FCC Co-location Requirements: To meet FCC co-location requirements for transmitting
antennas, a 20 cm (7.87 inch) separation distance is required between the unit’s Wi-Fi and funda-
mental antennas.
Ethernet and Serial Cables
The use of shielded Ethernet and serial cables are required to ensure EMC compliance when oper-
ating this equipment.
Manual Revision and Accuracy
This manual was prepared to cover a specific version of firmware code. Accordingly, some screens
and features may differ from the actual unit you are working with. While every reasonable effort
has been made to ensure the accuracy of this publication, product improvements may also result in
minor differences between the manual and the product shipped to you. If you have additional ques-
tions or need an exact specification for a product, please contact GE MDS using the information at
the back of this guide. In addition, manual updates can often be found on our web site at
www.gemds.com.
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual v
Environmental Information
The manufacture of this equipment has required the extraction and use of natural resources.
Improper disposal may contaminate the environment and present a health risk due to hazardous
substances contained within. To avoid dissemination of these substances into our environment, and
to limit the demand on natural resources, we encourage you to use the appropriate recycling sys-
tems for disposal. These systems will reuse or recycle most of the materials found in this equipment
in a sound way. Please contact GE MDS or your supplier for more information on the proper dis-
posal of this equipment.
Product Test Data Sheets
Test Data Sheets showing the original factory test results for this unit are available upon request
from the GE MDS Quality Leader. Contact the factory using the information at the back of this
manual. Serial numbers must be provided for each product where a Test Data Sheet is required.
Battery Disposal—This product may contain a battery. Batteries must be disposed of properly,
and may not
be disposed of as unsorted municipal waste in the European Union. See the product
documentation for specific battery information. Batteries are marked with a symbol, which may
include lettering to indicate cadmium (Cd), lead (Pb), or mercury (Hg). For proper recycling
return the battery to your supplier or to a designated collection point. For more information see:
www.weeerohsinfo.com

vi MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 1
1.0 PRODUCT DESCRIPTION
The GE MDS Mercury SeriesTM transceiver is an easy-to-install
WiMAX solution offering extended range, secure operation, and
multi-megabit performance in a compact and rugged package. Mercury
is ideally suited for applications in Smart Grid Electric Utility, Oil/Gas,
Water/Wastewater, and other industrial uses in fixed location
environments where reliability, security, throughput, and range are
paramount.
Figure 1. Mercury MIMO Series Transceiver
(Top: Base Station, Bottom: Subscriber Unit)
Mercury transceivers are commonly used to convey SCADA traffic,
automated metering, distribution automation, command and control
traffic, text documents, graphics, e-mail, video, Voice over IP (VoIP),
and a variety of other application data between field devices and
WAN/LAN-based entities.
Based on multi-carrier Orthogonal Frequency Division Multiplexing
(OFDM), the transceiver features high speed/low latency, Quality of
Service (QoS), Ethernet and serial encapsulation, and MIMO-enhanced
performance. It also provides enhanced security features including
128-bit AES encryption and EAP-TLS IEEE 802.1x Device
Authentication. These features make the Mercury system the best
combination of security, range, and speed of any industrial wireless
solution on the market today.
2 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
1.1 Product Models
The Mercury transceiver is available in several different product
models:
• The indoor Base Station (BS) acts as the center of each
point-to-multipoint network. It has two RJ-45 Ethernet ports
and a DB-9 RS-232 serial port for data connections.
• The indoor Subscriber Unit (SU) acts as one of the multipoints
in the network. It also has two RJ-45 Ethernet ports and a DB-9
RS-232 serial port for data connections.
• The Outdoor Subscriber Unit (ODU) is a weatherproof ver-
sion of the standard Subscriber Unit. The ODU has one RJ-45
Ethernet port and a DB-9 serial port for data connections.
The key features and options for the various models are listed in Table 1
below.
1.2 Key Features
The Mercury transceiver supports:
• WiMAX IEEE 802.16-2005interoperability
• Scalable OFDM using 512 or 1024 subcarriers
• 2x2 MIMO on all models supporting Matrix A and Matrix B
Space Time Coding, Spatial Multiplexing, Maximum Ratio
Combining, and Maximum Likelihood Detection
• PKMv2 security including AES-CCM 128-bit encryption,
EAP-TLS, and X.509 digital certificates
• Hybrid ARQ up to Category 4
Table 1. Mercury Models and Interfaces
Interfaces Base Station Indoor Subscriber Outdoor Subscriber
Ethernet ports 2 RJ-45 Ethernet with
built-in Layer 2 switch 2 RJ-45 Ethernet with
built-in Layer 2 switch 1 RJ-45 Ethernet. May be
ordered as Power over
Ethernet or AC model
Serial port 1 DB-9 RS-232 1 DB-9 RS-232 1 DB-9 RS-232
USB 1 USB host port
1 USB device port
1 USB host port
1 USB device port
1 USB host port
WiMAX Dual TNC for MIMO Dual TNC for MIMO Internal RF connections
GPS Internal receiver with
SMA connector Optional internal receiver
with SMA connector None
Antenna External External 15 dBi panel ant. for 1800
18 dBi panel ant. for 3650
Panel antenna for 5800
Wi-Fi Optional* Optional*
* Expected availability: Late 2011
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 3
• Adaptive modulation from QPSK with 1/2-rate FEC coding to
64-QAM with 5/6-rate coding
• Quality of Service (QoS) including:
• Unsolicited Grant Service (UGS),
• Real-time polling service (RTPS),
• Non-real-time polling service (nRTPS)
• Enhanced real-time polling service (eRTPS)
• Best Effort (BE)
1.3 Key Specifications
Table 2 lists key operational specifications for the Mercury Transceiver.
Table 2. Key Specifications
Primary
Wireless IEEE 802.16E-2005 WiMAX
Local
Interfaces
(indoor
models)
Two channel WiMAX, TNC connectors
Dual 10/100 Ethernet, RJ-45, auto-sense, auto-midx
DB9 Serial Port
USB host and device ports
GPS receiver, SMA connector (Optional on Subscriber)
Local
Interfaces
(ODU models)
(1) 10/100 Ethernet, RJ-45, auto-sense, auto-midx
DB-9 Serial Port
USB Host
Frequency
Bands 1800 to 1830 MHz (Industry Canada)
3650 to 3675 MHz (FCC, Industry Canada)
5725 to 5825 MHz
Frequency
step size 250 kHz
Bandwidth 3.5, 5, 7, 8.75, and 10 MHz
RF Power
Output All models 30 dBm, except 3650 ODU at 23 dBm
5800: 23 dBm
Transmitter
Dynamic
Range
60 dB, 1 dB step size
Antenna 1800 Subscriber: 15 dBi panel, dual-polarized
1800 Base Station: 12 dBi sector, dual-polarized, 120o beamwidth
3650 Subscriber: 18 dBi panel, dual-polarized
3650 Base Station: 14 dBi sector, dual-polarized, 120o beamwidth
5800 Subscriber: 18 dBi panel, dual-polarized
5800 Base Station: 16 dBi sector, dual-polarized, 90o beamwidth
4 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
2.0 QUICK-START INSTRUCTIONS
2.1 Connecting to the Device Manager
The Mercury transceiver provides an on-board web server, known as the
Device Manager, for configuration and diagnostics. Each transceiver
needs to have some basic configuration parameters set before placing
the unit in service. To start the Device Manager, connect an Ethernet
cable from the Mercury to the PC used for configuration. The radio’s
Ethernet interfaces have auto-sense detection allowing a
straight-through or crossover cable to be used.
NOTE: The PC used for radio management must be in the radio’s
default IP Subnet for communicatio ns to take place. It can be
changed once the desired IP address is chosen.
To manage the radio, start a web browser and enter the unit’s IP address.
The transceiver defaults to an IP address 192.168.1.1 and netmask
255.255.255.0. The Mercury will prompt for a username and password.
The default entries for both of these fields are admin.
NOTE: In case of a lost password and an ina bility to login, see the
Troubleshooting section for details on resetting the password
and the unit's configuration.
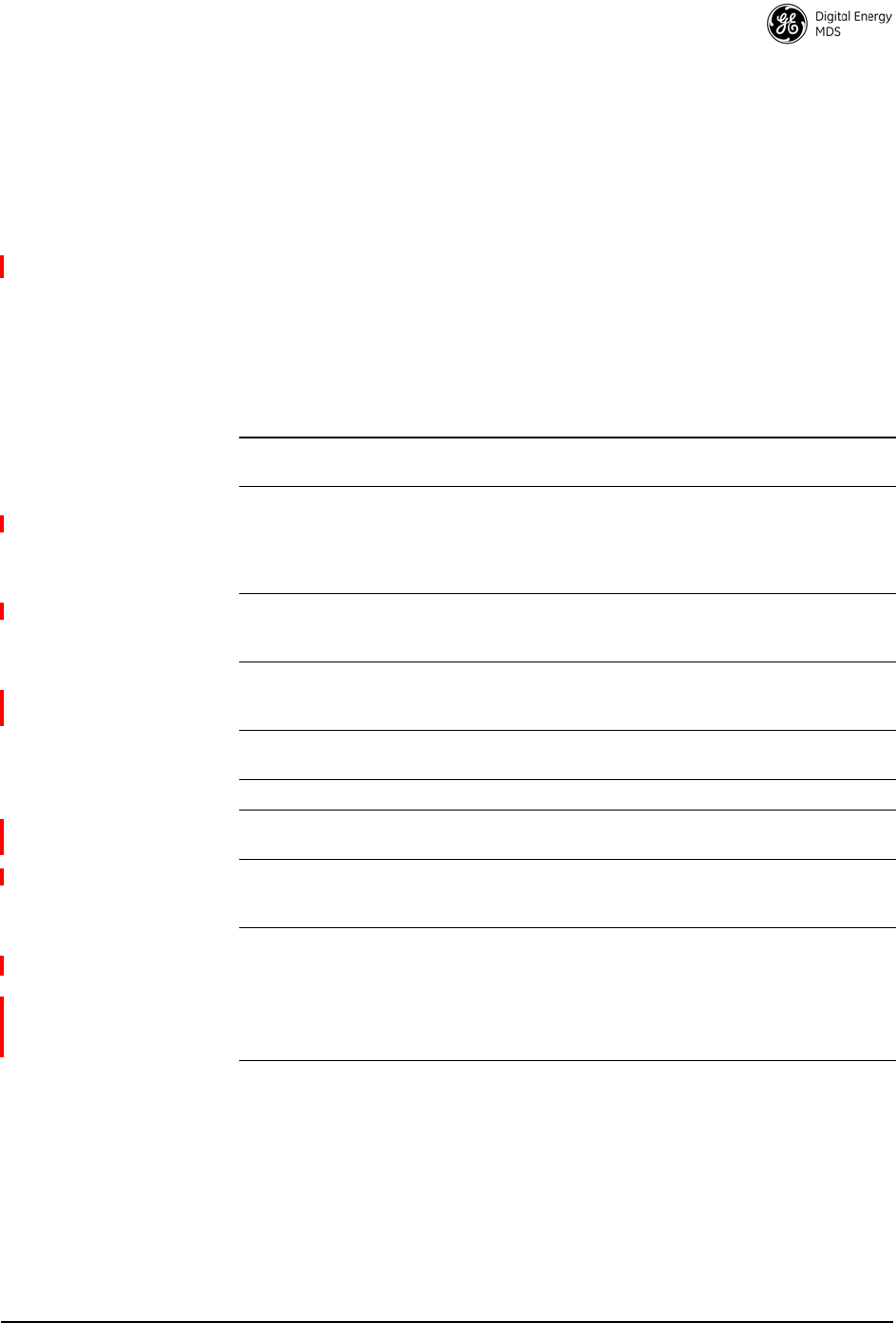
Once connected to the Device Manager, the summary page shown in
Figure 2 is displayed.
Input Power Indoor units: 10 to 60 VDC
Outdoor units:
Power over Ethernet
10 to 60 VDC
110/220 VA
Power
consumption 3650 Indoor Base Station: 14W Average, 21W Transmit
3650 Indoor Subscriber: 5W Average, 13W Transmit
3650 ODU: 5W Average, 8W Transmit
1800 Indoor Base Station: 16W Average, 25W Transmit
1800 Indoor Subscriber: 7W Average, 18W Transmit
1800 ODU: 7W Average, 18W Transmit
5800 BS: _W Average, _W Transmit
5800 SU: _W Average, _W Transmit
5800 ODU: _W Average, _W Transmit
Operating
temperature -30 to +70 C
Unit
Dimensions
(excluding
connectors)
4.5 x 7.75 x 2.75 inches
11.43 x 19.69 x 6.99 cm
Table 2. Key Specifications
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 5
Invisible place holder
Figure 2. Mercury Summary Page Example
(Shows connection after IP address has been changed)
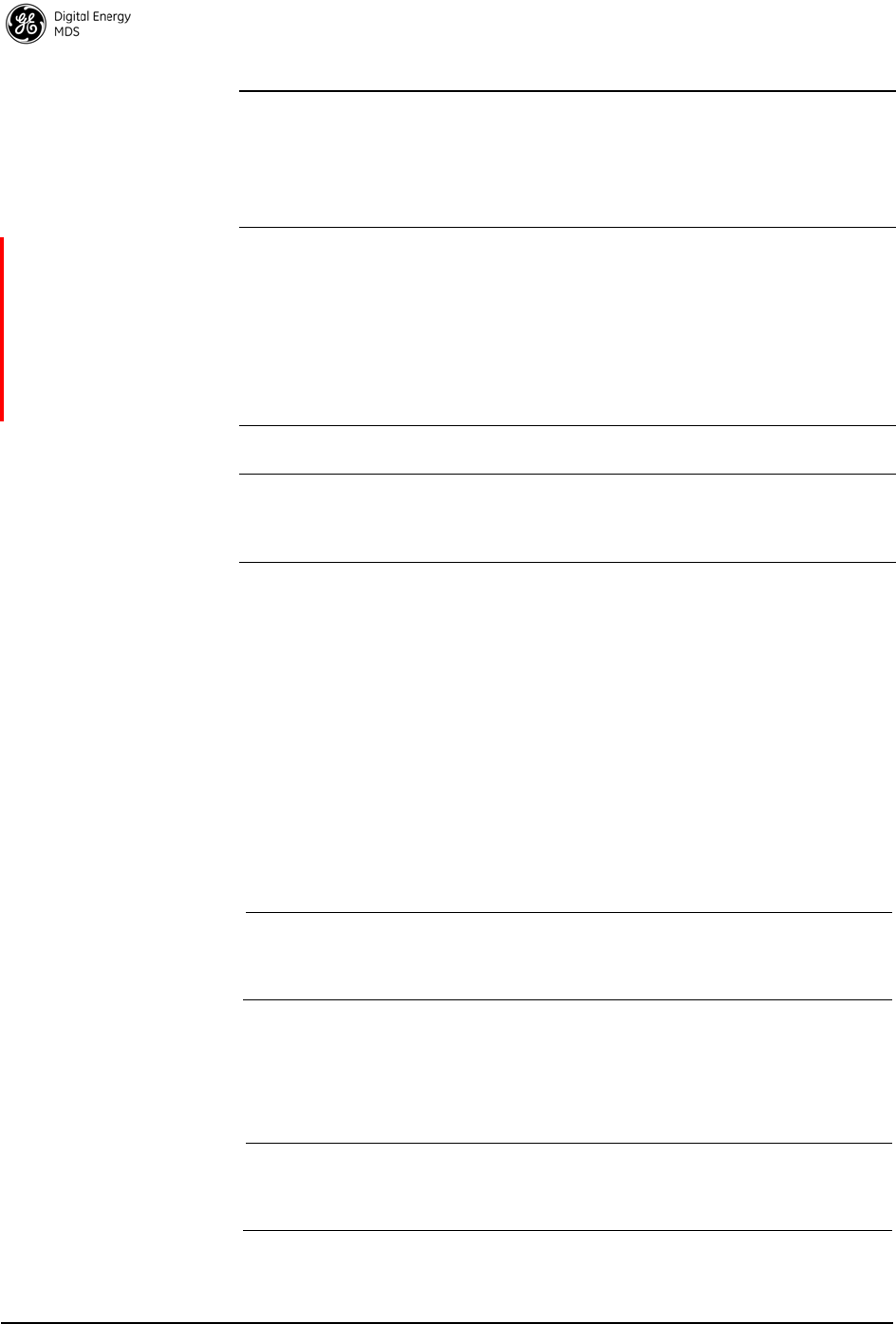
2.2 Configure IP Address and Identity
The IP Address of the unit is configured on the Configuration - IP &
Networking page. The IP address and netmask should be set according to
the network configuration defined by the system administrator. Note
that if the IP address is changed, the web browser session will need to
be re-started with the new configuration.
6 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 3. Mercury Configuration Screen
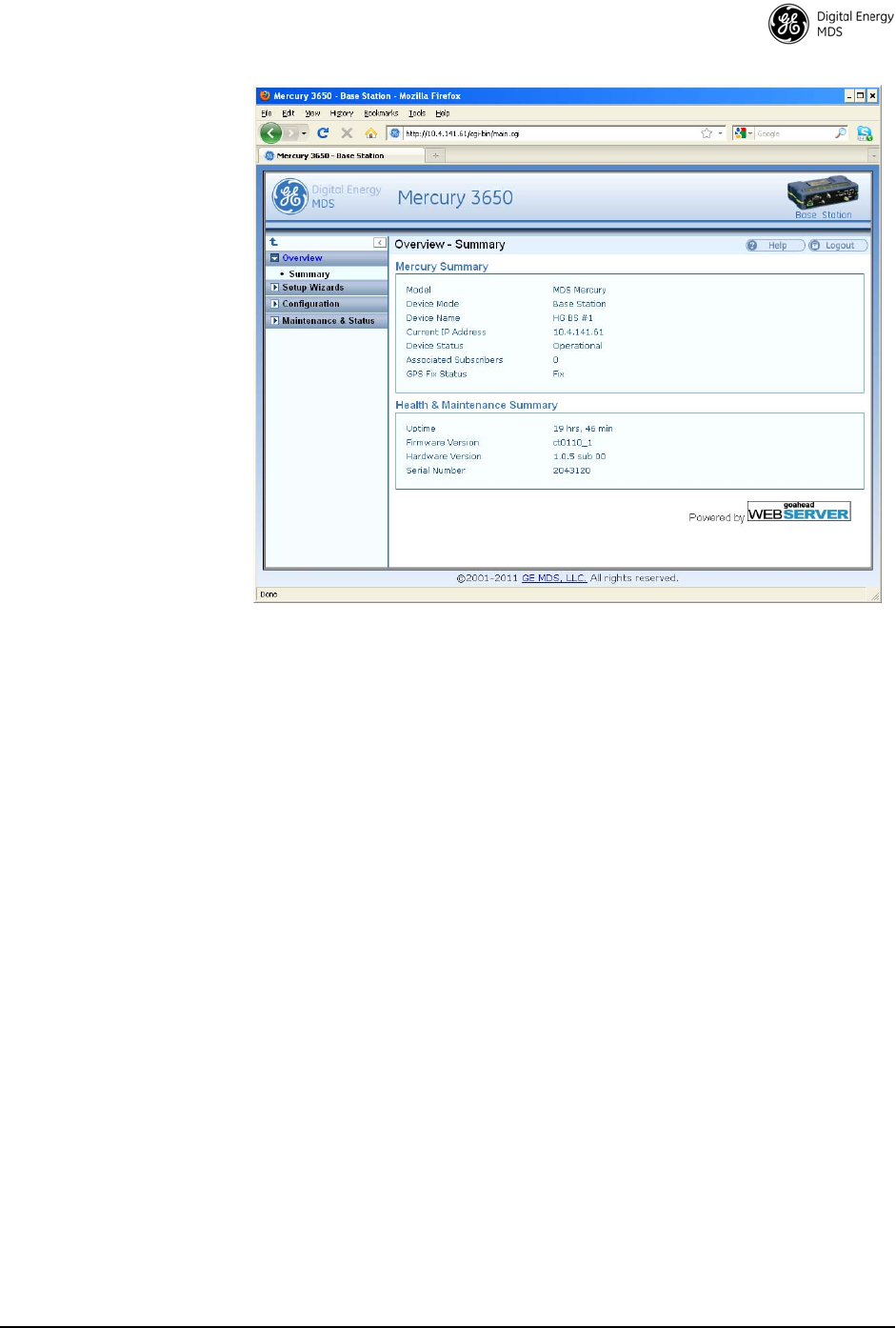
In addition to the IP address, the unit can be configured with an optional
Device Name for ease of administration. The name can be set on the
Configuration - Identity & Time page.
Invisible place holder
Figure 4. Mercury Configuration —Identity & Time
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 7
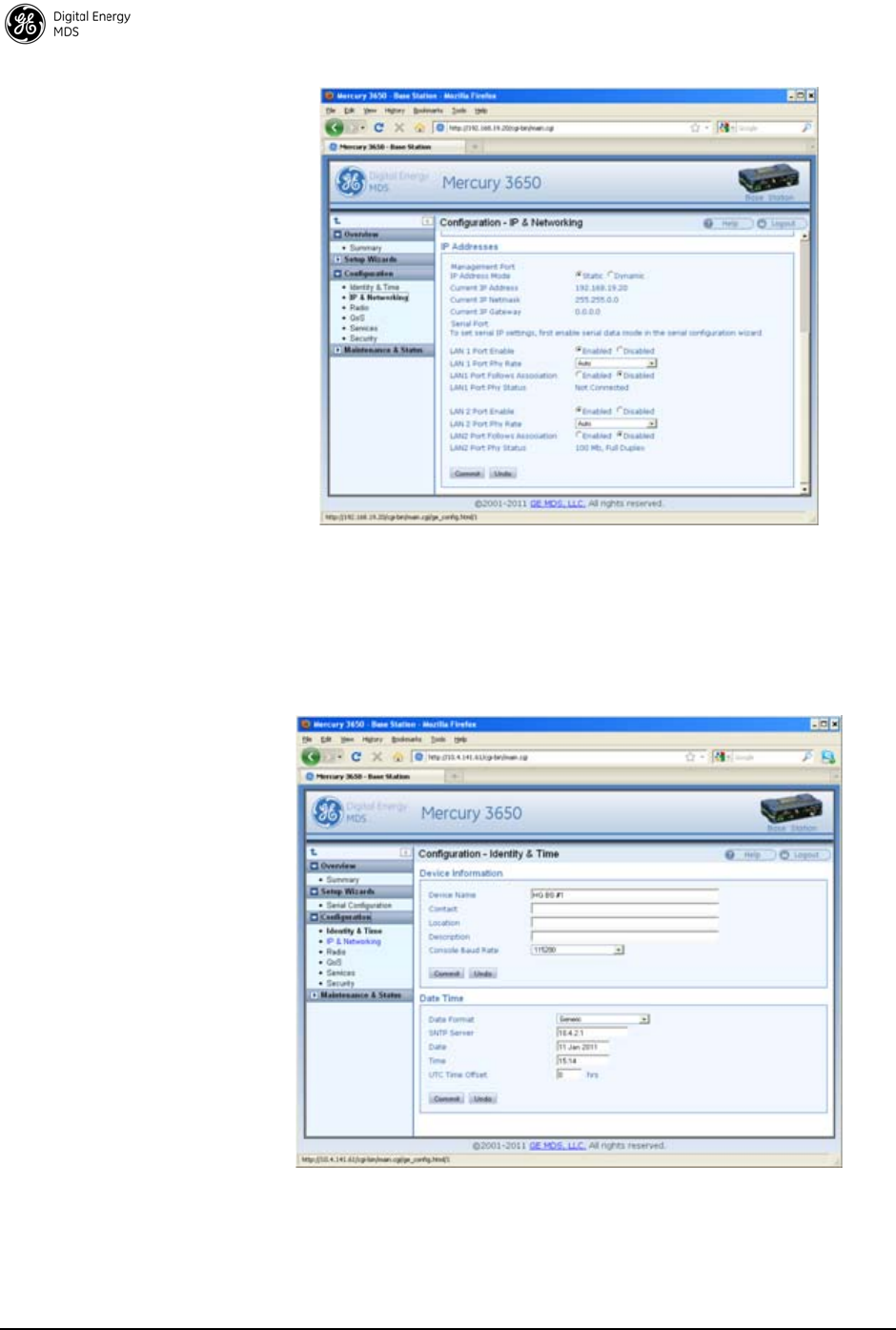
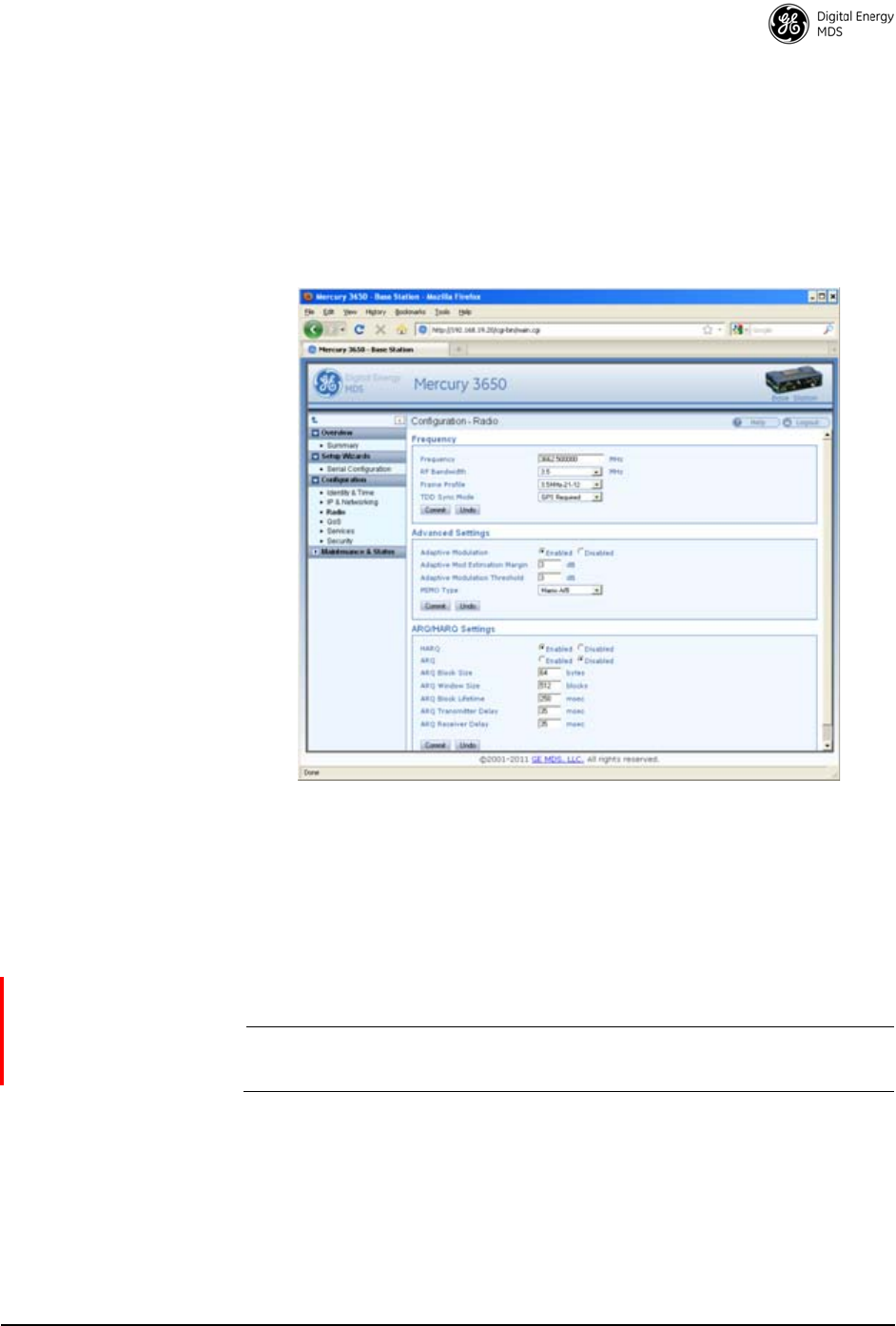
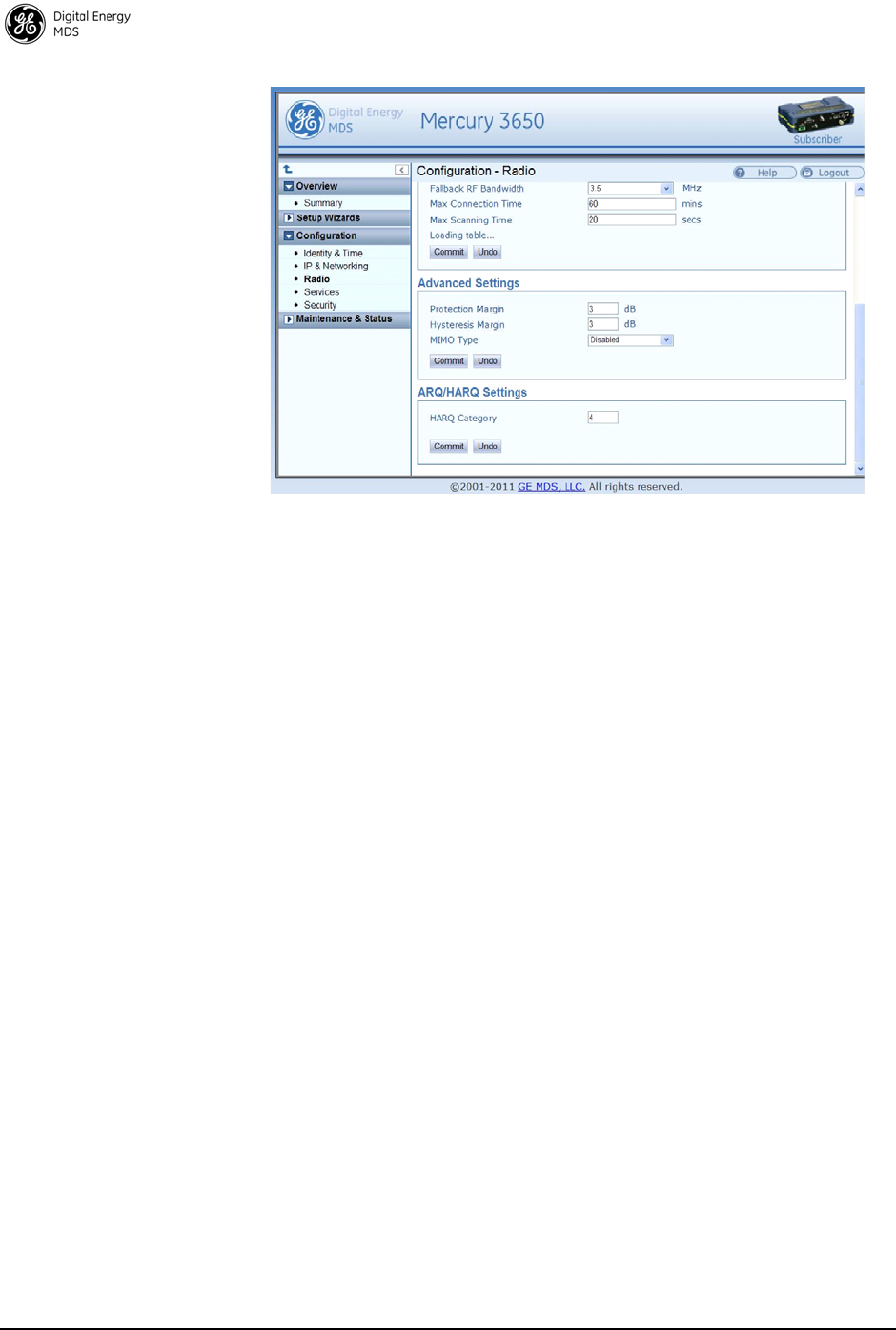
2.3 Basic Connectivity
To establish basic connectivity between a Base Station and a Subscriber,
start the configuration with the Base Station. The IP address and Device
Name will be as set from the factory (or by the previous user). The
Configuration - Radio page contains the key parameters for configuring the
WiMAX interface.
Invisible place holder
Figure 5. Mercury Configuration—Radio
The frequency defaults to 3662.5 MHz and the bandwidth is set to 3.5
MHz. These default values are sufficient to perform benchtop testing
prior to final installation. Set the frequency and bandwidth to the same
values on the Base Station and Subscriber. If performing the test on a
table, cable the units as shown in Figure 6. The attenuator cables should
be connected to the radio’s TX/RX connectors.
NOTE: The frequency default for the 1800 model is 1815 MHz. For
the 5800 model it is 5800 MHz.
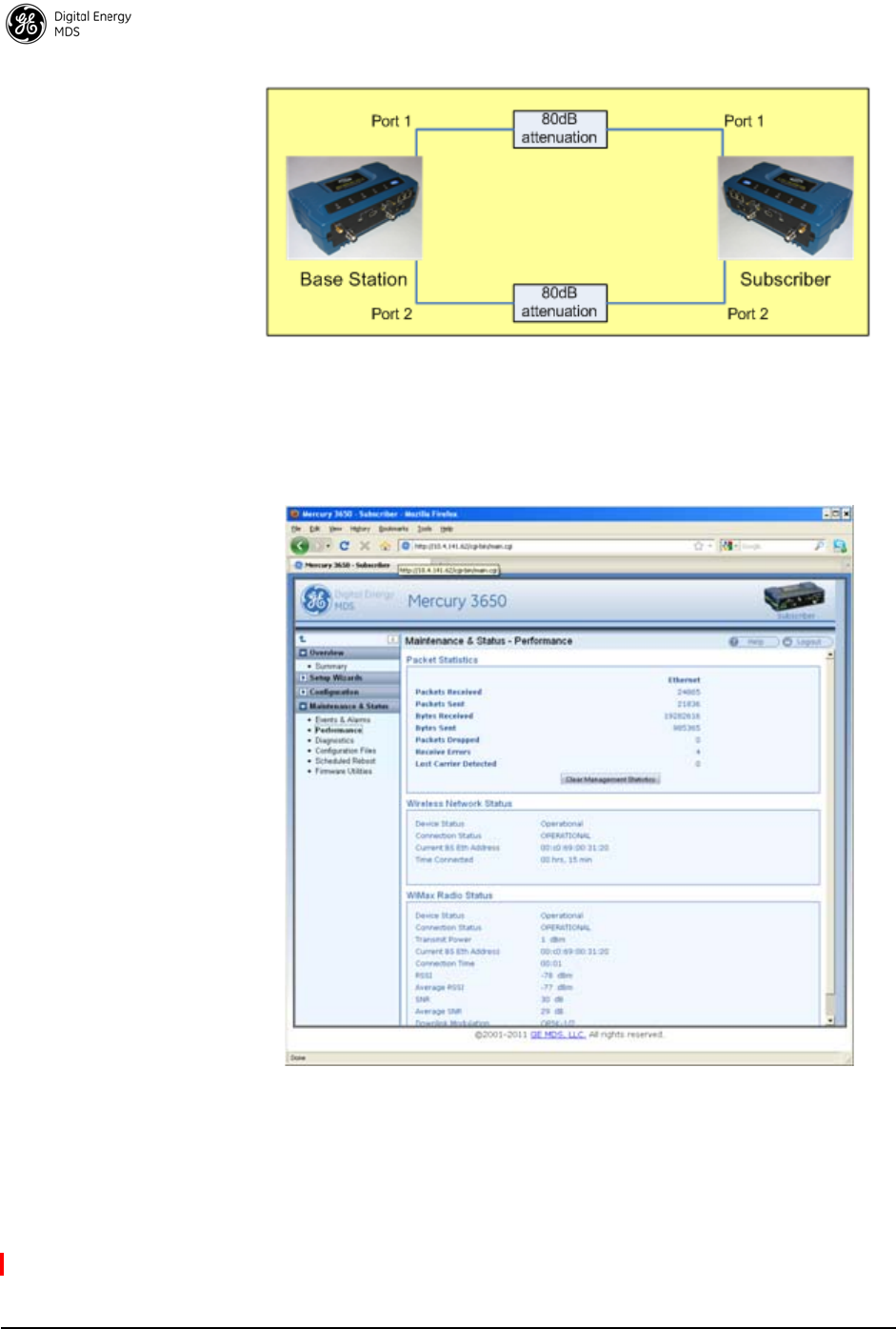
8 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 6. Benchtop Test Setup
Use the Maintenance & Status - Performance page on the Subscriber to
monitor the establishment of the link.
Invisible place holder
Figure 7. Maintenance and Status Screen
The Wireless Network Status will display a Connection Status of
OPERATIONAL when the Subscriber is successfully linked to the Base
Station. The WiMAX Radio Status pane displays the signal strength and
quality. For a cabled, benchtop test, an RSSI of -70 dBm is acceptable.
For a -70dBm signal, a signal-to-noise ratio (SNR) of 28 dB or greater
is expected.

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 9
Setup for Maximum Throughput
To demonstrate maximum throughput, several configuration changes
must be made. In addition, the link needs to be cabled according to
Figure 6, with a strong signal, that is, above -70dBm. If necessary, the
link attenuation should be adjusted to reach the desired RSSI level. The
transmit power of the Base Station should be reduced to 10 dBm to
ensure that the Subscriber only receives the signal through the cables
and not directly from enclosure to enclosure.
With this strong signal the modulation rate downlink and uplink should
be 64QAM FEC 5/6. There may need to be data flow, such as an ICMP
ping, in order to have the modems shift up to this modulation rate. Both
the Base Station and Subscriber need to be set for MIMO Type Matrix
A/B. The Base Station should have HARQ (4) enabled and ARQ
disabled. These changes are made using the Configuration - Radio page.
This setup and configuration can be used with any RF bandwidth.
Approximate aggregate throughput for each bandwidth is given below.
3.0 FEATURE DESCRIPTIONS
3.1 Security Features
Overview
The Mercury transceiver employs many security features to keep the
device, network, and data secure. Some of these features include
WiMAX PKMv2, EAP-TLS, and AES-CCM encryption on the
WiMAX interface and HTTPS, SNMPv3, and RADIUS authentication
for the configuration interfaces.
Authentication
Authentication is the process by which one network entity verifies that
another entity is who or what it claims to be and has the right to join the
network and use its services. Authentication in wireless SCADA
networks has two primary forms: User Authentication and Device
Table 3. Throughput Ratings (Nominal)
Bandwidth Aggregate
Throughput
3.5 MHz 7 Mbps
5 MHz 10 Mbps
7 MHz 15 Mbps
8.75 MHz 16 Mbps
10 MHz 17 Mbps
10 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Authentication. User authentication allows a device to ensure that a user
may access the device's configuration and services. Device
authentication allows a network server to verify that a device may access
the network.
User Authentication
The Mercury transceiver requires user login with an account and
password in order to access the Device Manager. This process can be
managed locally in which the device stores the user account information
in its on-board non-volatile memory, or remotely in which a RADIUS
server is used. The transceiver has two local accounts: operator and
admin. The operator account has read-only access to configuration
parameters and performance data. The admin user has read-write access
to all parameters and data.
NOTE: The Operator account does not have access through the web
interface. An Operator account may be used with the console,
Telnet, or SSH.
To centralize the management of user accounts, a RADIUS server may
be used. Each Mercury transceiver must be configured with the IP
address, port, shared secret, and authentication protocol of a RADIUS
server. When a user attempts to login, the credentials will be forwarded
to the RADIUS server for validation.
PKMv2 Device Authentication
The IEEE 802.16-2005 WiMAX standard uses PKMv2 for securing the
wireless channel. PKMv2 stands for Privacy Key Management version
2. The Privacy Key Management protocol is used to exchange keying
material from the Base Station to the Subscriber. This keying material is
used to encrypt data so that it is secure during transport over the air. The
encryption keys are routinely rotated to ensure security.
Initial keying material is obtained during the device authentication
process. This occurs when a Subscriber attempts to join a Base Station.
The Base Station initiates an EAP-TLS negotiation with the Subscriber
to begin the device authentication process. The Subscriber is only
allowed to transmit EAP messages until the authentication has finished
successfully. The Base Station forwards messages to the RADIUS
server where the decision to allow the Subscriber to join is made. If the
Subscriber authenticates successfully and the RADIUS server allows
the Subscriber to join the network, then the data encryption keying
material is sent to the Base Station. The Base Station then continues the
PKM protocol to further derive keying material that is used to secure
transmissions between the Base Station and the Subscriber.

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 11
The Subscriber must be configured with X.509 certificates that are
appropriate for the Public Key Infrastructure (PKI) in which they are
deployed. These certificates are used to identify and authenticate the
Subscriber to the RADIUS sever.
X.509 Certificates
A digital certificate, often known as an X.509 certificate, is a file that
contains identification data and asymmetric key material. Each
certificate contains a Common Name that identifies the user or device
that owns the certificate. The primary information in the certificate is the
public key for the user or device and a digital signature proving the
authenticity of the certificate's contents.
The Mercury transceiver uses X.509 certificates in the EAP-TLS
handshake during device authentication as described in the PKMv2
section above.
3.2 Multiple In / Multiple Out (MIMO) Operation
MIMO stands for Multiple In / Multiple Out. The Mercury transceiver
features 2x2 MIMO on all models. This means that there are two full
transmit and receive channels on each device. The use of 2x2 MIMO
causes the Mercury transceiver to have higher throughput and greater
range and coverage than single channel devices in the same
environment.
There are two operating modes that the Mercury supports. The first
mode is Matrix A in which the Mercury uses Space-Time Coding (STC)
on the transmitter to allow it to send the same data on each channel but
coded differently in order to get transmit diversity. On the receive side,
the Mercury transceiver uses Maximum Ratio Combining (MRC) to
more accurately reconstruct the received signal by using both receive
channels.
The second mode is Matrix B in which the Mercury uses Spatial
Multiplexing (SM) to send different data flows on each channel
allowing it to effectively double the amount of data transmitted. The
Mercury offers a Matrix A/B setting in which the transceivers determine
in real time which mode, Matrix A or Matrix B, to use according to the
channel conditions. This determination is made based on the SNR and
Packet Error Rate (PER).
GE MDS sells antennas that are dual-polarized for MIMO applications.
This includes sector antennas for Base Stations and panel antennas for
Subscribers. Each antenna has two feed lines, one for the vertically
polarized element, and one for the horizontally polarized element.

12 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
3.3 ARQ and Hybrid ARQ
Automatic Retransmission Request (ARQ) enables retransmission of
erroneous or lost data packets. Hybrid ARQ (HARQ) combines forward
error correction with ARQ retransmissions to improve performance at
lower RF signal levels.
With ARQ, the receiver discards erroneous packets and requests
retransmission. With HARQ, erroneous packets are saved by the
receiver and combined with the retransmitted data. Generally, HARQ
provides better throughput than ARQ. While ARQ and HARQ can be
enabled at the same time, it is not recommended to do so because
throughput will be less than if either ARQ or HARQ was enabled on its
own.
ARQ and HARQ can be enabled or disabled in the ARQ/HARQ Settings
table of the Configuration-Radio page on the Base Station.
ARQ Setup
ARQ utilizes a sliding window approach where a “window” of blocks
can be transmitted without receiving acknowledgement from the
receiver. ARQ blocks that are unacknowledged will be resent. You can
specify the block and window size at the Base Station, as well as Block
Lifetime, Transmitter Delay, and Receiver Delay.
• ARQ Block Size - The size, in bytes, of the block of data to be
considered for retransmission.
• ARQ Window Size - The number of blocks of ARQ data that
can be transmitted without receiving an acknowledgment.
• ARQ Block Lifetime - The maximum period, in milliseconds,
that the ARQ block is considered still valid and can be retrans-
mitted.
• ARQ Transmitter Delay - The amount of delay time, in millisec-
onds, at the transmitter.
• ARQ Receiver Delay - The amount of delay time, in millisec-
onds, at the receiver. The Receiver Delay taken together with
the Transmitter Delay determines the total ARQ retry timeout.
Use the Configuration - Radio page to set ARQ parameters on the Base
Station. ARQ/HARQ settings are located at the bottom of the page.
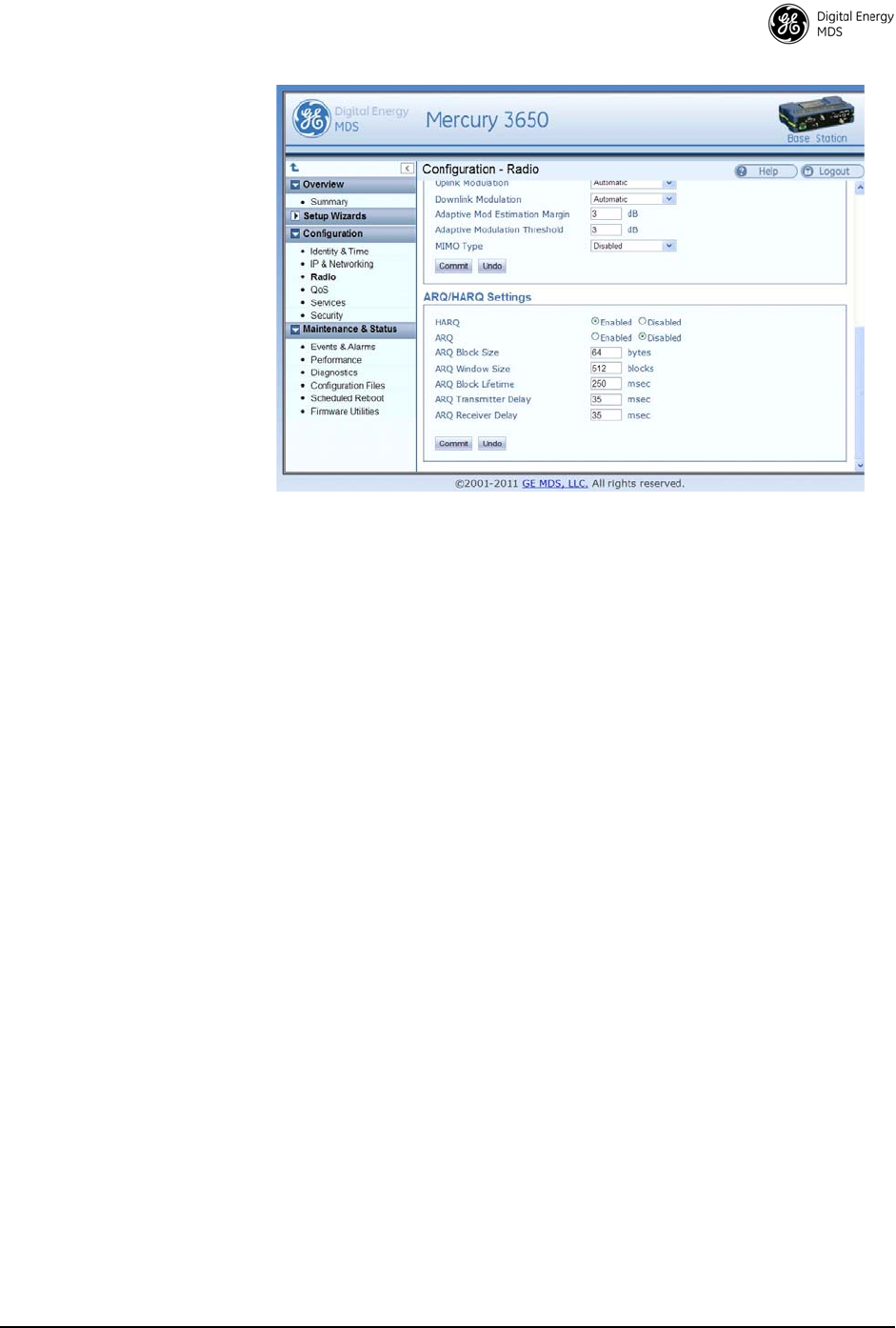
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 13
Invisible place holder
Figure 8. Configuration—Radio
(ARQ/HARQ Settings)
HARQ Setup
A HARQ Category may be set on the Subscriber. Higher category
numbers provide a higher number of HARQ channels and more bursts
per frame. Therefore, the greatest throughput will be obtained at HARQ
category 4. For more information on HARQ categories, refer to the
WiMAX Forum Protocol Implementation Conformance Statement
(PICS), or the IEEE-802.16 Standard, OFDMA Parameters.
Use the Configuration - Radio page on the Subscriber to set the HARQ
Category value. This value is located at the bottom of the page.
14 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 9. Configuration—Radio
(HARQ Category Setting)
4.0 Performing Common Tasks
4.1 Basic Device Management
There are several ways to configure and monitor the Mercury
transceiver. The most common method is to use a web browser to
connect to the device's HTTP server. This can be done by opening a web
browser and entering the Mercury's IP address. Another way to connect,
especially if the IP address is unknown, is to use the USB interface.
Simply connect a standard-A/mini-B USB cable between the Mercury
transceiver and the PC or laptop. A Windows device driver needs to be
installed if the USB console port is to be used. This driver is available
from GE MDS.
USB Console
Installing the Gadget
Serial Driver: To connect a PC or laptop to the transceiver's USB port, a serial device
driver needs to be installed on the PC or laptop. This can be done by
downloading the
gserial.zip file from the GE MDS website and extracting
the contents to a temporary folder. Next, right-click on the
gserial.inf file
and click Install. Once this is completed, the PC is ready to be connected
to the Mercury transceiver's USB device (gadget) port.
Connecting the
device to a Windows
PC:
Upon reboot or power-cycle of the transceiver, wait at least 60 seconds
before connecting it to the PC. Connect the USB Mini-B port on the
transceiver to a USB port on the PC (the USB type A connector on the
Mercury will not work). Next, on the PC, run the following:

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 15
Start>>Control Panel>>System>>Hardware>>Device Manager
Next, expand the group labeled Ports (COM & LPT). A new COM port will
appear as Gadget Serial when the device is connected. Open a new session
for the newly added COM port using a terminal program such as
PuTTY, HyperTerminal, ProComm, etc. Note that the baud rate will be
ignored as this is not an actual serial port.
Using Configuration Scripts
Configuration scripts can be used to save, restore, and copy
configurations from unit to unit. The script is a text file containing a
simple list of parameter names and values. A snippet of a configuration
file follows:
IP Address: 192.168.1.1 ; IP address of the unit
IP Netmask: 255.255.0.0 ; IP netmask of the unit
RF bandwidth: 3.5 ; WiMAX RF bandwidth
Frequency: 3662.5 ; WiMAX operating frequency
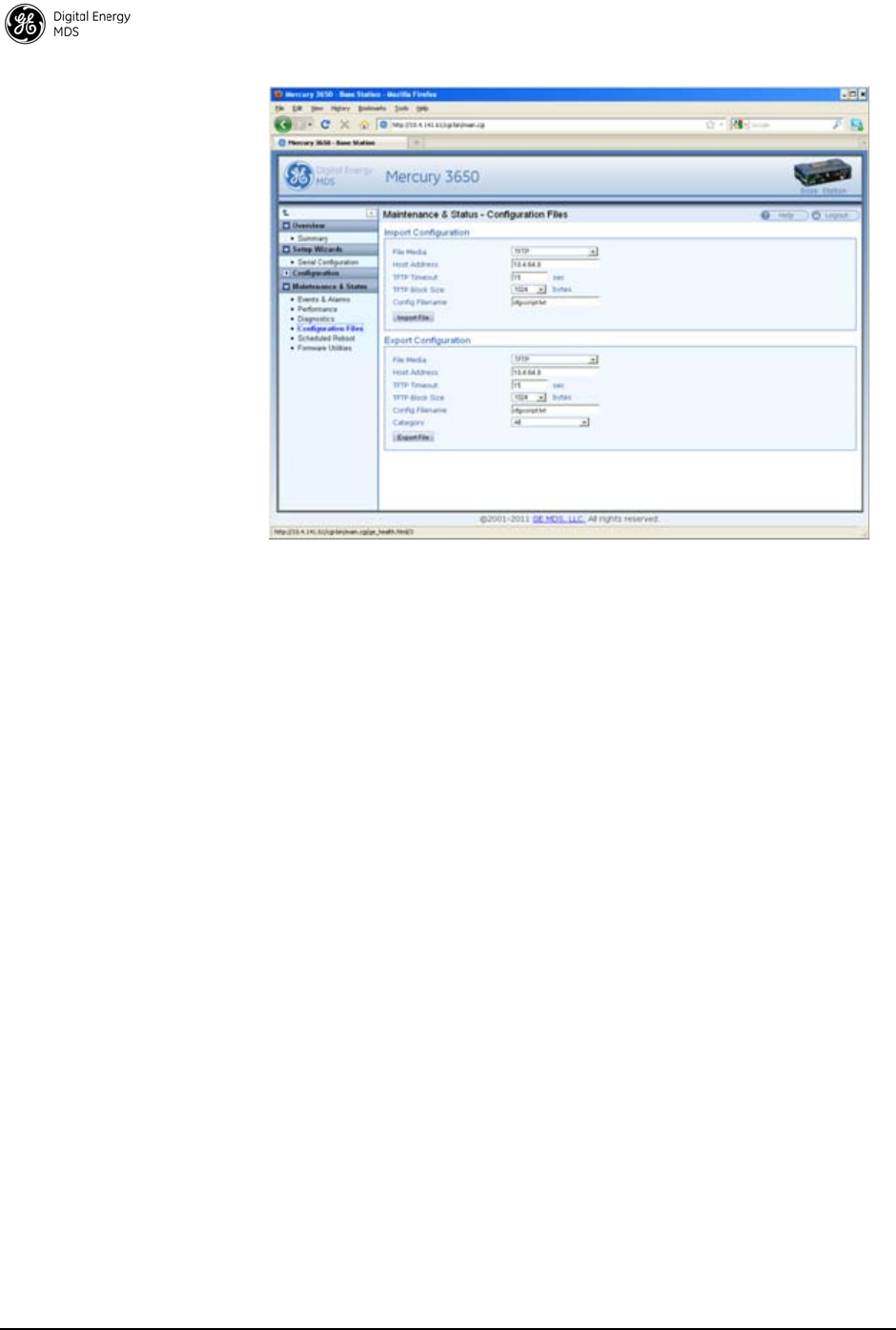
To get started with configuration files, it is easiest to have a unit
generate a file. The generated file can then be saved, modified, and/or
downloaded to another unit in identical fashion. The transceiver’s
Maintenance & Status - Configuration Files page can be used to generate the
file. The file can be transferred to and from the unit via TFTP, FTP,
SFTP, or USB flash drive. Choose the appropriate value for the File
Media parameter. If using TFTP, FTP, or SFTP, configure the Host
Address parameter with the IP address of the host server.
NOTE: A USB flash drive, if used, must be formatted for use by
Microsoft Windows (FAT32 format).
16 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 10. Maintenance & Status—Configuration Files
Perform Firmware Upgrade
New firmware is periodically released by GE MDS to deliver new
features and performance enhancements. The latest firmware can be
downloaded from the GE MDS website at www.gemds.com.
There are several ways to load new firmware on the Mercury
transceiver. The firmware file can be transferred using FTP, SFTP,
TFTP, or a USB flash drive. The selection between FTP, SFTP, or TFTP
must be made according to the user's network and security environment.
The process of loading firmware is essentially the same regardless of
network protocol chosen.
Instructions for
loading firmware
using FTP
1. Download the .mpk firmware file from GE MDS.
2. Place the .mpk firmware file on a server that has an FTP server run-
ning. Ensure that the file is placed in a folder accessible to the FTP
server.
3. Follow the instructions for configuring IP network access for the
Mercury transceiver (see “Basic Connectivity” on Page 7).
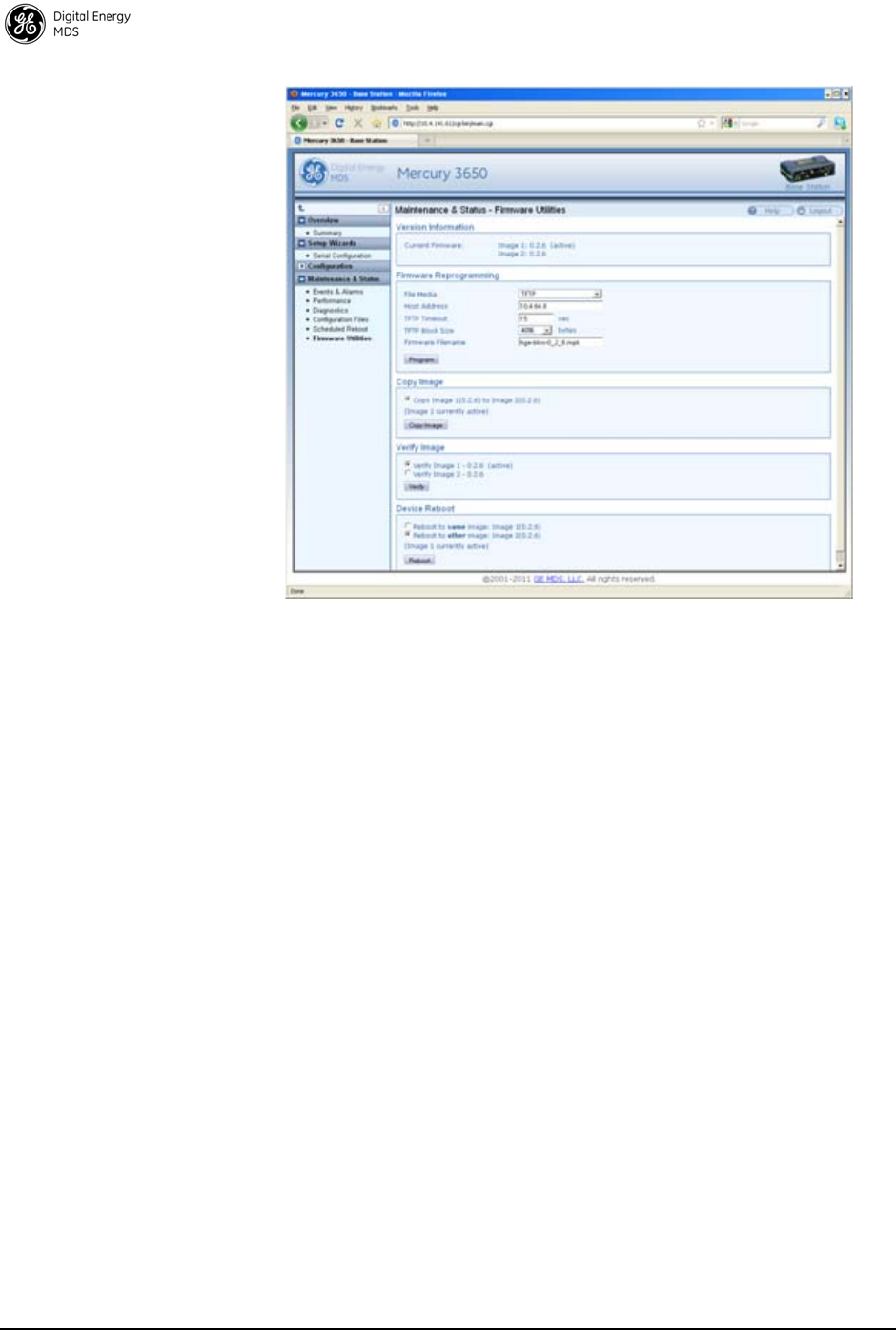
4. Navigate to the Maintenance & Status - Firmware Utilities page on the
transceiver’ Device Manager.
5. Set the Host Address to the IP address of the server on the network.
Set the Firmware Filename to the folder and filename as it appears
to the FTP server.

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 17
6. If the FTP server does not support an anonymous user, enter the
username and password for an account on the FTP server.
7. Press the Program button and wait for the file transfer to complete.
Instructions for
loading firmware
using a USB flash
drive
1. Download the .mpk firmware file from GE MDS
2. Place the .mpk firmware file on USB flash drive that is formatted for
use by Microsoft Windows (FAT32 format).
3. Navigate to the Maintenance & Status - Firmware Utilities page on the
Mercury transceiver.
4. Set the Firmware Filename to the folder and filename as it appears on
the USB flash drive.
5. Press the Program button and wait for the file transfer to complete.
Instructions for Completing the Firmware Upgrade Process
(Applies to all loading methods above)
Once the file transfer is complete, select the new image under the Device
Reboot pane (see Figure 11) and press the Reboot button. The transceiver
verifies the integrity of the new firmware image and then reboots to it.
18 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 11. Maintenance & Status—Firmware Utilities Screen
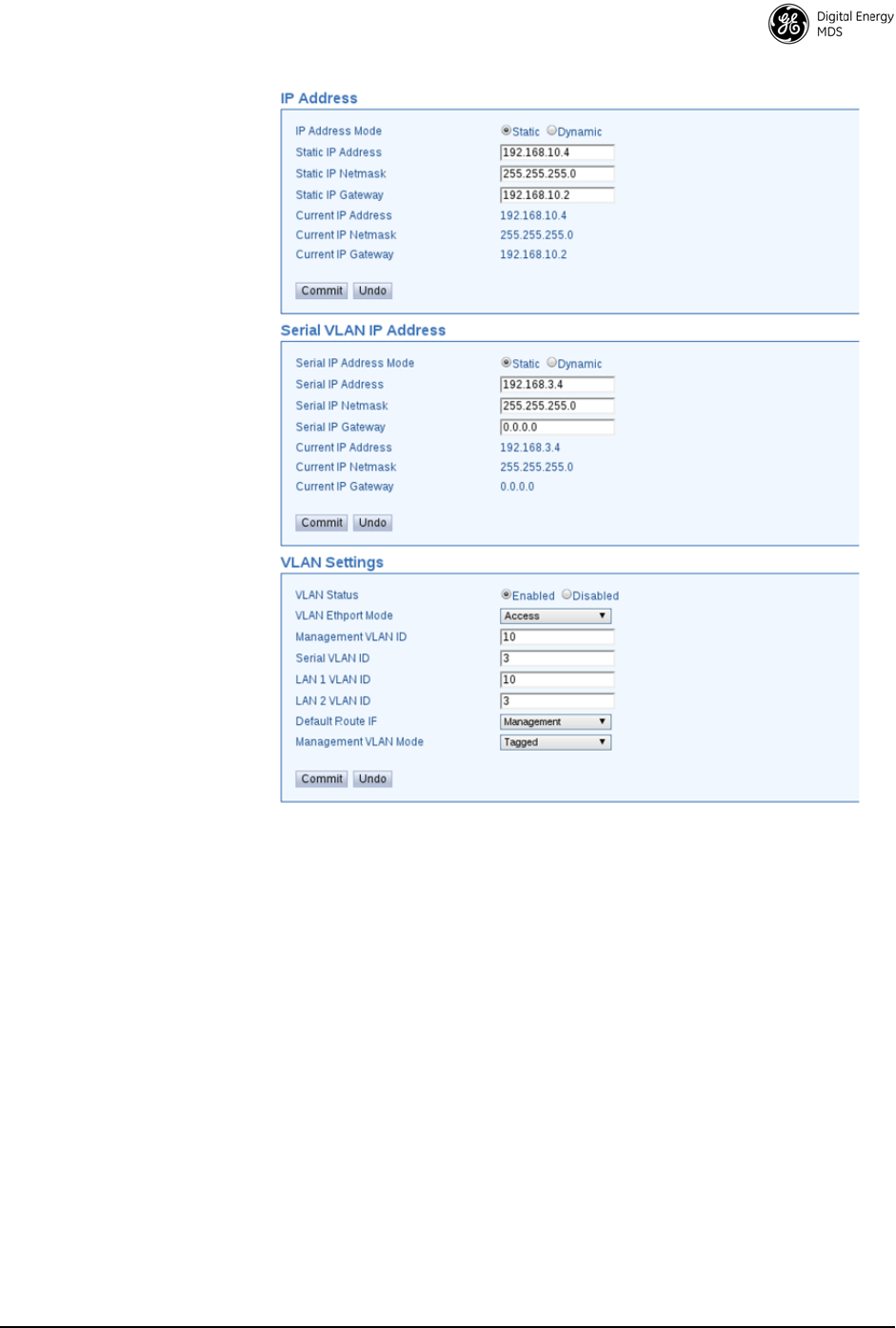
Configuring Networking Features for VLAN
The Mercury supports IEEE 802.1Q, or VLAN tagging. VLANs, or
Virtual LANs, are used to create multiple logical networks that share an
existing physical network. There are a number of parameters available
for configuring how the transceivers behave when VLAN is enabled and
they are explained below.
When VLAN is enabled, a Mercury transceiver will have two IP
addresses: one for the Management VLAN and one for the Serial
VLAN.
The Management VLAN IP address allows administrators to manage
the transceiver using the usual networked interfaces, such as Web,
telnet, and SNMP. Those services are only available through the
Management VLAN IP address while VLAN is enabled. The
Management VLAN IP Address settings are configured under the
MGMT VLAN Subnet Config Menu or the IP Address section on the
web page.

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 19
The Serial VLAN IP address allows SCADA networks to connect to the
Serial Terminal Server on the transceiver. The terminal server provides
access to the transceiver's local COM port so IP networks can utilize
serial devices. The terminal server is only available through the Serial
VLAN IP address while VLAN is enabled. The Serial VLAN IP
Address settings are configured under the Serial VLAN Subnet Config
Menu or the Serial VLAN IP Address section on the web page.
When configuring VLAN, Ids must be assigned to the Management
VLAN, Serial VLAN, LAN 1 Port and LAN 2 Port. The Management
VLAN Id and Serial VLAN Id cannot be the same value.
The VLAN Ethport Mode parameter determines how IP frames are
handled with respect to VLAN tagging. When the mode is set to Access,
a VLAN tag is added to IP frames that are received on that Ethernet port.
In the case of the LAN 1 port, the LAN 1 VLAN ID would be added to
the frame prior to forwarding the frame over-the-air. Likewise, the tag
is removed from the IP frame for traffic that is going to be transmitted
out of the Ethernet port. This is the mode that is most likely to be used
on Subscribers where the LAN connected to the subscriber is
non-VLAN and it would be tagged before it reaches the Base Station.
When the VLAN Ethport Mode is set to Trunk, IP frames received from
the Ethernet port are not automatically tagged. It is assumed that the
LAN that is connected to the Ethport is already tagged with VLAN Ids.
This mode is most likely to be used on Base Stations where the network
connected to the Base Station Ethports are VLAN aware.
The last mode for VLAN Ethport Mode is Auto, where the Subscriber
or Base Station can automatically determine whether or not to tag
frames based on the traffic it receives.
Management VLAN Mode determines whether or not VLAN tags will
be applied to Management frames. When the mode is set to Tagged
Mode, management frame s are expected to already have the
management VLAN Id attached to them. If management frames arrive
at the trunk port without a VLAN Id and the mode is Tagged Mode, then
those frames will be ignored. In Native Mode, management frames do
not need the VLAN tag. The frames will automatically be included in
the Native VLAN, which is the management VLAN.
The Default Route IF parameter determines which VLAN will be used
to route traffic that does not yet have an entry in the ARP table. This
parameter should be set to the VLAN that typically has the most routing
to be performed since this should help route traffic quickly through that
VLAN.
20 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
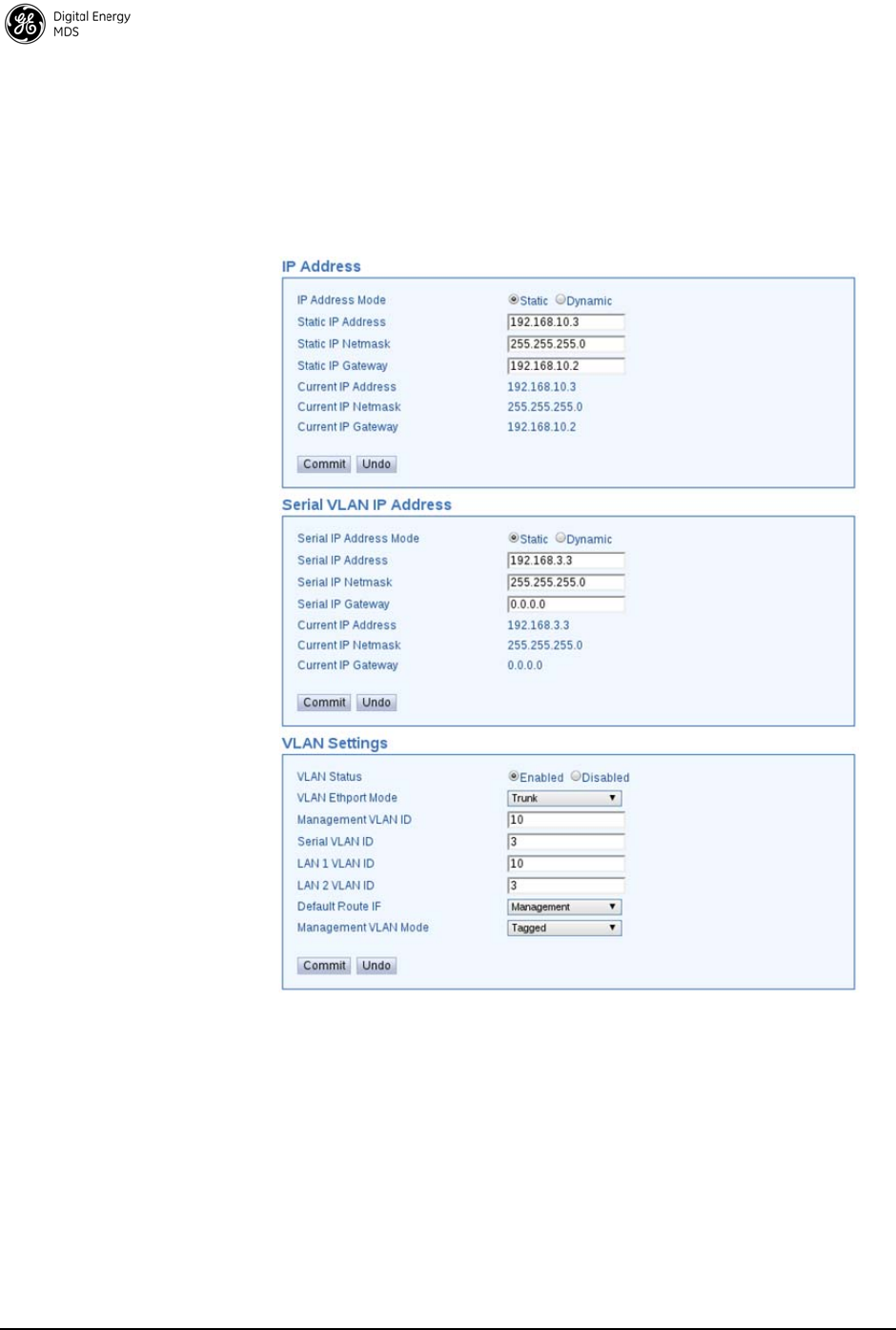
The following is an example configuration that has a VLAN enabled
network connected to the Base Station and a non-VLAN enabled
network connected to the Subscriber. This configuration would allow
VLAN enabled devices in the Base Station network to communicate
with non-VLAN devices in the Subscriber network.
The Base Station is configured as follows:
Figure 12. Base Station Configuration Settings
The Subscriber Unit is configured as follows:
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 21
Invisible place holder
Figure 13. Subscriber Unit Configuration Settings
Configure Serial Data Interface for TCP, UDP, MODBUS
Overview The transceiver includes an embedded serial device server that provides
transparent encapsulation of serial data in IP packets. In this capacity, it
acts as a gateway between serial and network-based devices. Two
common scenarios are PC applications using IP to communicate with
remote devices, and serial PC applications communicating with remote
serial device over an IP network.
Note that the transceiver's serial port is configured as Data
Communications Equipment (DCE). A null-modem cable is required if
the serial device to be connected is also DCE.

22 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Dual Purpose
Capability The transceiver's COM1 serial port is able to function as a local console
or in data encapsulation mode. When the
Com 1 Status parameter is set to
Enabled, the port operates in data encapsulation mode. It can be reverted
back to console mode by entering the escape sequence +++ at the data
mode baud rate.
TCP and UDP
Encapsulation The serial data can be encapsulated in either TCP or UDP packets. TCP
provides a connection-oriented link with end-to-end acknowledgement
of data, but with some added overhead. UDP provides a connection-less
best-effort delivery service with no acknowledgement.
Most polled protocols will be best served by UDP service since many of
these protocols have built-in error recovery mechanisms. UDP can
provide the needed multi-drop operation by means of multicast
addressing.
On the other hand, TCP services are best suited for applications that do
not have a recovery mechanism or error-correction but need the
guaranteed delivery that TCP provides while affording the extra
overhead required.
Serial Encapsulation Transparent encapsulation, or IP tunneling, provides a mechanism to
encapsulate serial data into an IP envelope. In operation, all of the bytes
received through the serial port are put into the data portion of a TCP or
UDP packet. In the same manner, all data bytes received in a TCP or
UDP packet are output through the serial port.
When data is received by the radio through the serial port, it is buffered
until the packet is received completely. There are two events that signal
an end-of-packet to the transceiver: a period of time since the last byte
was received, or a number of bytes that exceed the buffer size. Both of
these triggers are user-configurable.
One transceiver can be used for IP-to-serial encapsulation in which it
communicates with another IP-based device. On the other hand, two
transceivers can be used to create a serial-to-serial channel using TCP or
UDP between them.
TCP Client and
Server modes A TCP session has a server side and a client side. You can configure the
transceiver to act as a server, a client, or both.
TCP servers listen and wait for requests from TCP clients to establish a
session. A TCP client is an application running on a device somewhere
on the network. TCP clients actively attempt to establish a connection
with a TCP server. In the case of the transceiver, this happens whenever
data is received on the serial port.
The transceiver can also operate in Client/Server mode in which it
operates in either client or server mode, depending on which event
occurs first; either receiving data on the serial port, or receiving a
request to open a TCP connection from a remote client.

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 23
The transceiver keeps a TCP session open until internal timers that
monitor traffic expire. Once a TCP session is closed, it must be opened
again before traffic can flow. The timeout period, labeled TCP Keepalive,
is user-configurable and should be set to match the application data flow
and balance a trade-off between responsiveness and connection
overhead. TCP connection establishment can introduce a slight delay to
data delivery, as it performs handshaking between the client and server.
On the other hand, leaving a session open can waste bandwidth due to
session management packets.
UDP Multicast IP addressing provides a way to do a limited broadcast to a specific
group of devices. This is known as “multicast addressing.” Many IP
routers and switches support this functionality. Multicast addressing
requires the use of a specific set of IP addresses set apart by the Internet
Assigned Numbers Authority (IANA). UDP multicast is generally used
to transport polling protocols used in SCADA applications where
multiple remote devices will receive and process the same poll message.
As part of the multicast implementation, the radio sends IGMP
membership reports, IGMP queries, and responds to membership
queries. It defaults to V2 membership reports, but responds to both V1
and V2 queries.
The Multicast Mode parameter on the transceiver must be set
appropriately in order for the transceiver to receive multicast traffic.
Setting the Multicast Mode parameter causes the transceiver to join the
multicast group.
Data Buffering The Buffer Size and Inter-packet Delay parameters are user-configurable.
They work together to determine how many bytes are captured in a
single packet. When a number of bytes equal to the Buffer Size are
received from the serial port, those bytes are encapsulated and sent as a
TCP or UDP packet. If a delay equal to the Inter-packet Delay is
experienced after some number of bytes, then the bytes received up to
the delay are encapsulated and sent as a TCP or UDP packet.
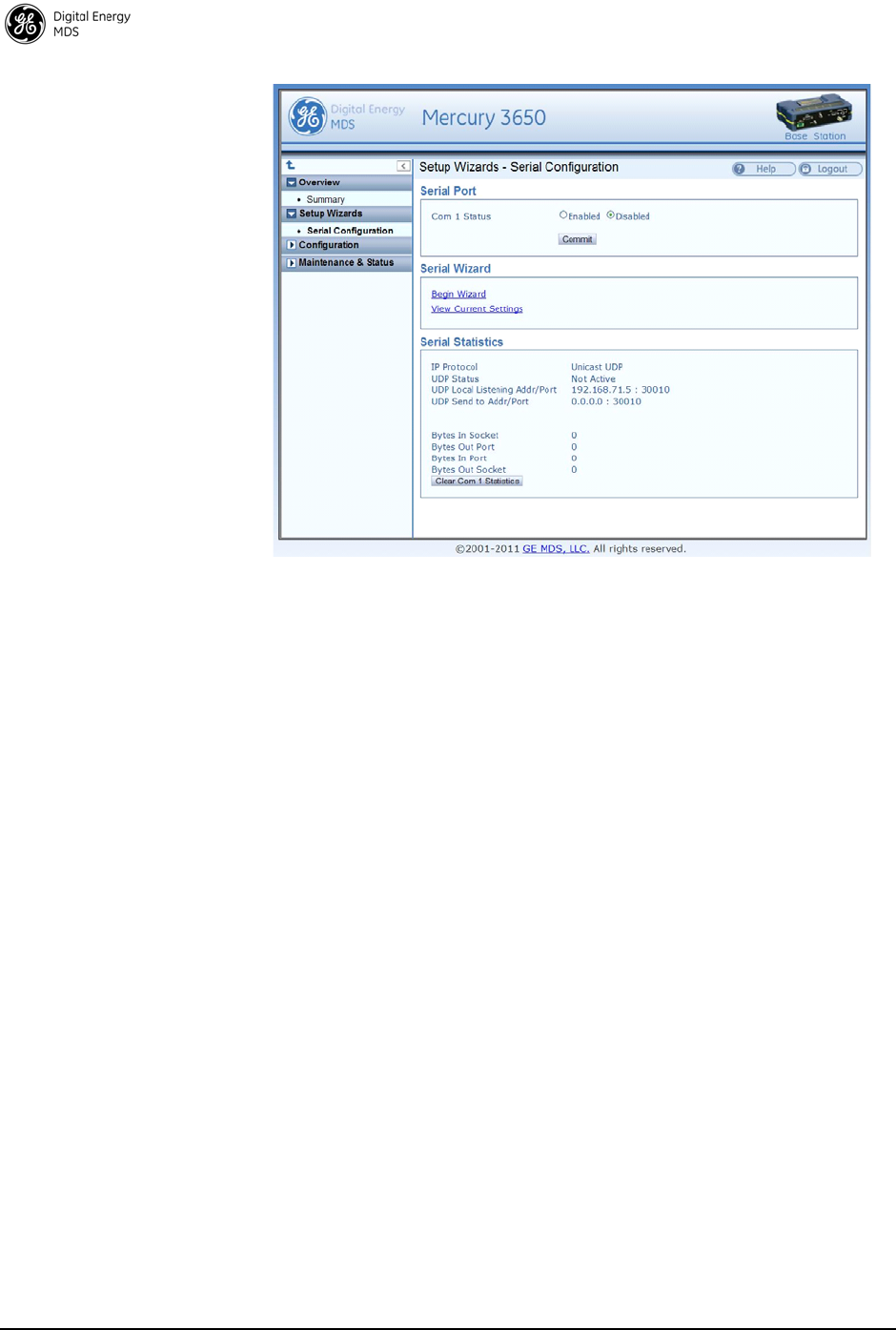
Setup Wizard The Serial Wizard handles configuration of the serial port. To access the
Serial Wizard, navigate to the Setup Wizards link on the left sidebar. The
Setup Wizard - Serial Configuration page appears.
24 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Invisible place holder
Figure 14. Setup Wizards—Serial Configuration
To begin the Serial Wizard, click the Begin Wizard link under the Serial
Wizard table.
The wizard prompts for the protocol to configure. The options are TCP,
UDP, or TCP/MODBUS.
Example: TCP Server
The following procedure describes how to setup a TCP Server.
1. Select TCP as the IP protocol.
2. Select the desired TCP mode - client or server or client/server.
3. Next, specify the local port to use for receiving TCP data from the
host. Click Continue Wizard to continue.
4. Specify the buffer size and inter-packet delay, then click Continue
Wizard.
5. Choose whether to enable or disable COM1 for communication. If
Enable is selected, COM1 operates as a TCP Server as soon as the
Serial Wizard is complete. If Disable is selected, the settings are
saved upon completion of the Serial Wizard, and COM1 may be
enabled for data transfer at a later time in the Serial Configuration
main page. Click Continue Wizard to continue.
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 25
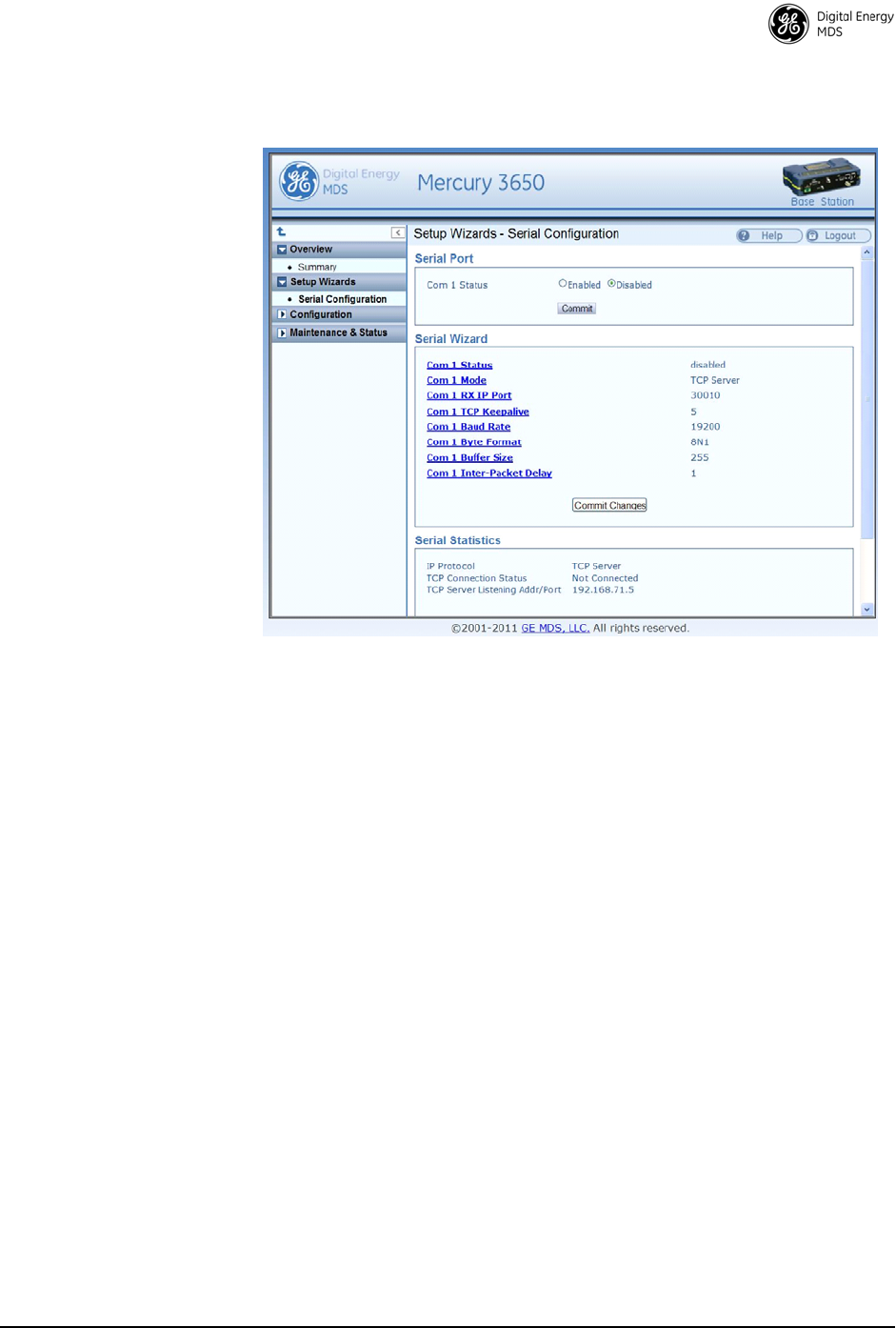
6. The current settings are shown. Click Commit Changes to apply all
settings and exit the Serial Wizard.
Invisible place holder
Figure 15. Serial Wizard's Commit Changes Screen
Configure QOS
Quality of service is configured on the Base Station through the use of
service flows. The service flows can be created through the web
interface and through the use of QoS configuration scripts. The web
interface displays the active service flows as well the user-configured
flows. Depending on the desired effect, the service flows are created
with different service types and parameters. For example, service flows
can be created to give priority to a particular traffic flow, to allocate a
specific amount of bandwidth for a traffic flow, to restrict the amount of
bandwidth, or to minimize the latency experienced by a traffic flow.
26 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Service Types WiMAX provides five types of service: Unsolicited Grant Service
(UGS), Real-time Polling Service (RTPS), Non-real time polling
Service (nRTPS), Enhanced Real-time Polling Service (eRTPS), and
Best Effort (BE). The characteristics and typical uses for service type
are given in Table 4 below.
Flow Parameters
There are several parameters to be specified when creating a service
flow. Table 5 shows which service flow parameters apply to each type
of service.
Table 4. Service Types and Characteristics
Service Type Characteristics Typical Uses
Unsolicited Grant
Service (UGS) The BS grants bandwidth to the SU without
it needing to make a request. The
bandwidth is always allocated.
Real time applications generating fixed-size
packets on a periodic basis and requiring low
latency and jitter, such as VoIP.
Real-time Polling
Service (RTPS) The BS provides specific bandwidth
request opportunities for the SU. This is
more efficient than UGS in not wasting
bandwidth but is less efficient in
request/grant of bandwidth.
Real time applications generating
variable-size packets on a periodic basis,
such as MPEG video.
Non-real time
polling Service
(nRTPS)
The BS polls the SU every one second or
less. The SU may use the polling requests
or contention requests. This is an efficient
request mechanism but does not provide
consistent bandwidth for data.
Delay-tolerant applications generating
variable-size packets on a periodic basis,
such as an FTP transfer.
Enhanced
Real-time Polling
Service (eRTPS)
Combination of UGS and RTPS in which
the BS provides bandwidth grants as in
UGS but the Subscriber can adjust the size
of the grants in order to not waste
bandwidth.
Real time applications generating
variable-size packets on a periodic basis,
such as VoIP with silence suppression.
Best Effort (BE) The Subscriber uses contention request
opportunities to request bandwidth for
data. Bandwidth is provided on a best effort
basis with no acknowledgement.
Non-real time, non-critical applications and
data flows such as web browsing.
Table 5. Flow Parameters
Parameter UGS RTPS nRTPS eRTPS BE
Min Reserved Rate (Y) Y Y Y N
Max Sustained Rate YY Y YN
Priority NY Y N
Max Latency YYN YN
Grant Interval YNN YN
Polling Interval NY Y NN
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 27
Table 6 provides a description for each of the above parameters.
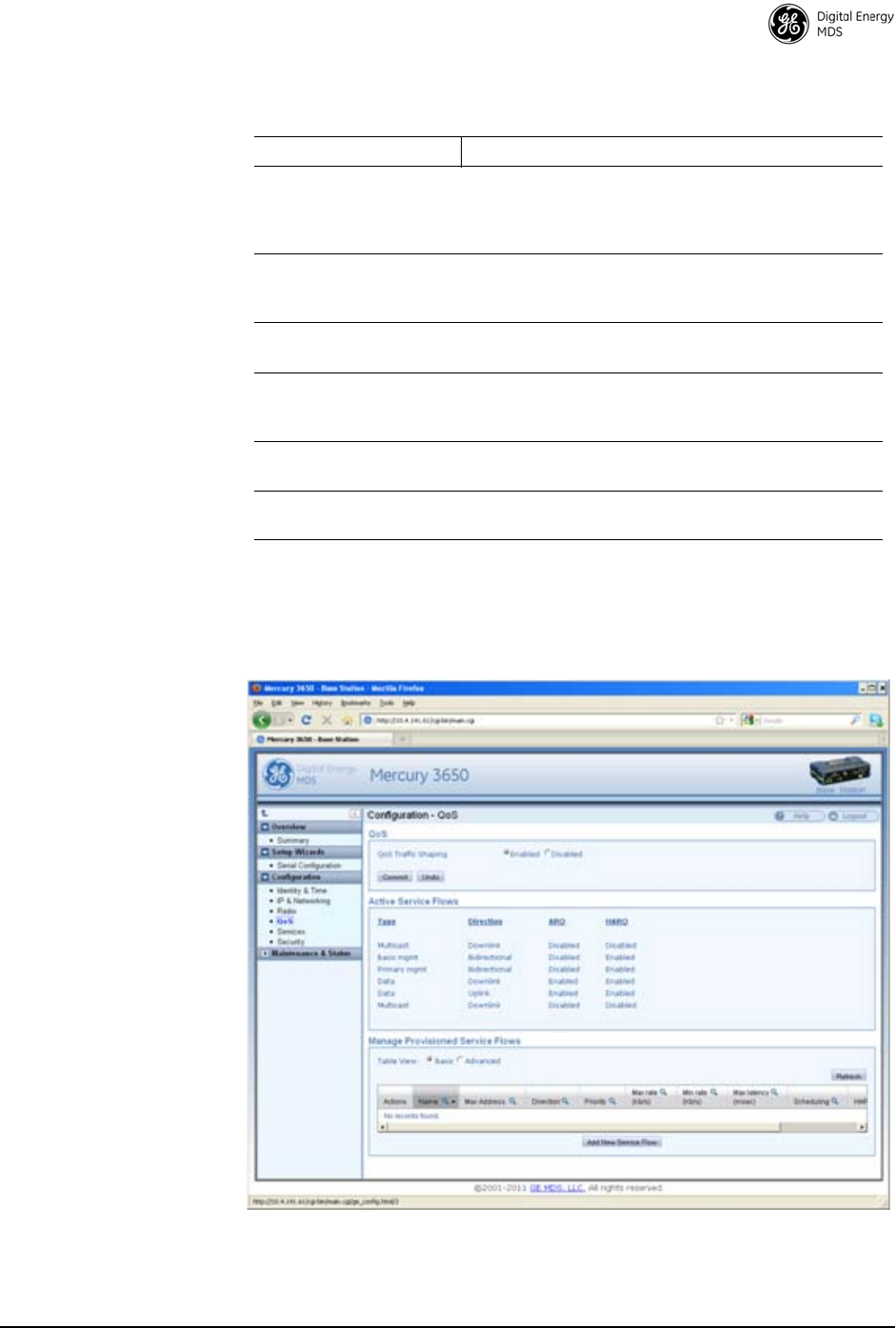
Quality of Service (QoS) Screen
The transceiver's Configuration - QoS page displays the active service
flows as well the user-configured flows.
Figure 16. Configuration-QoS Screen
Table 6. Parameter Descriptions
Parameter Description
Min Reserved Rate The minimum rate in bits per second that must be
reserved for the service flow. For UGS, the Min
Reserved Rate is set to the same value as the Max
Sustained Rate.
Max Sustained Rate The maximum rate in bits per second that the service
flow will increase to. It is used as an upper bound for
the flow.
Priority A value used to describe the priority between service
flows that have the same characteristics and settings.
Max Latency The maximum time between the reception of the
packet from the wire and its delivery to the other end
of the link.
Grant Interval The time period between successive grants by the
Base Station for a UGS or eRTPS service flow.
Polling Interval The time period between successive polls by the
Base Station for a RTPS or nRTPS service flow.
28 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
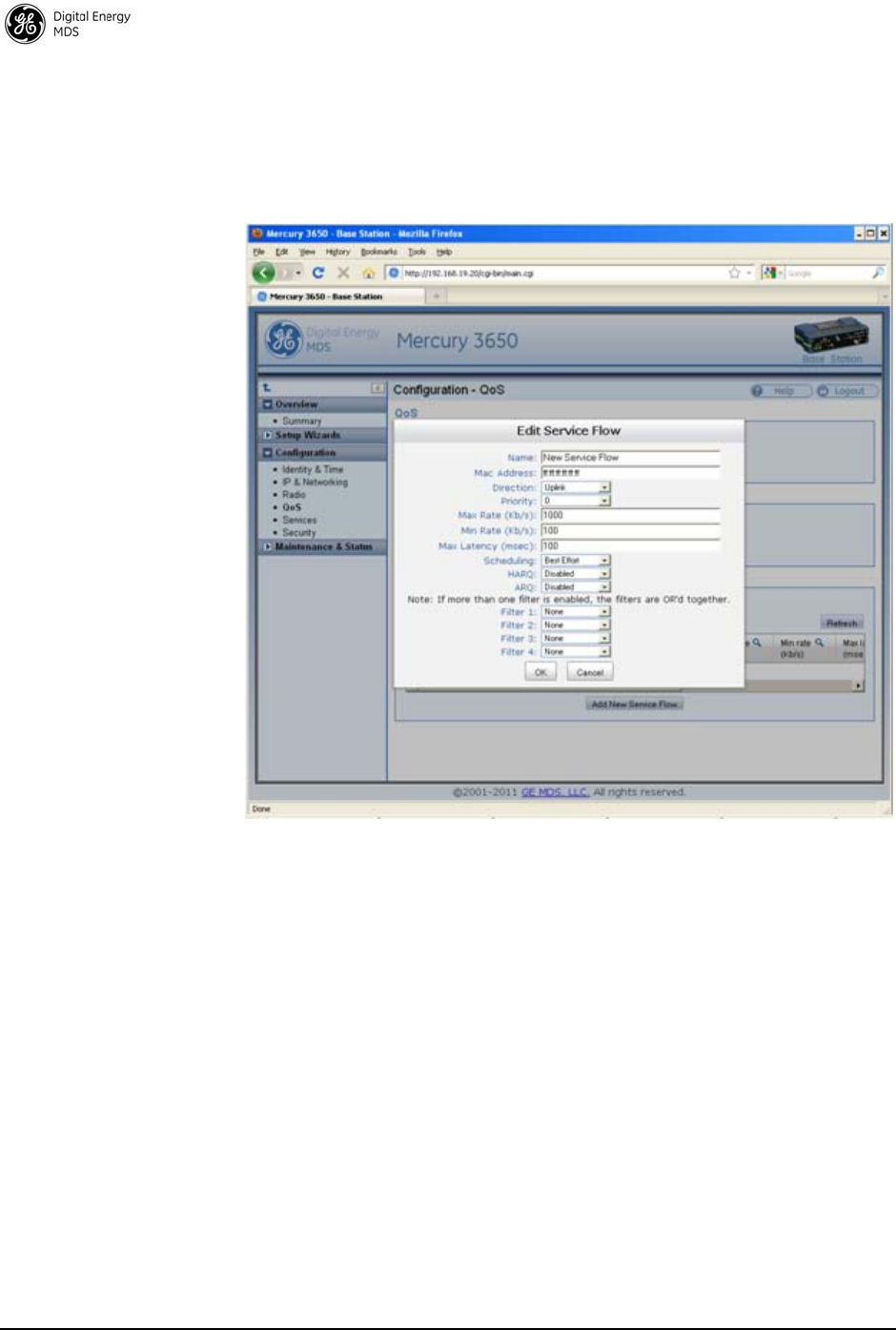
Creating a Service Flow
The Add New Service Flow button allows for a new service flow to be
created and configured. Pressing this button displays the following
dialog box.
Invisible place holder
Figure 17. Configuration QoS Screen
QOS Example: Low Latency
To create a service flow providing consistent low latency, the UGS
service type should be used. The grant interval should be set to match
the desired latency. For example, if the data source produces a packet
once every 20 milliseconds, then the grant interval should be 20
milliseconds (msec).
QOS Example: Controlling Bandwidth in Video Applications
To create a service flow that manages the bandwidth requirements of a
video stream, the Real-time Polling Service should be used. The
bandwidth-hungry nature of video needs to be balanced against the
limited bandwidth of the wireless channel. Often, a video stream does
not need to be of high quality in order to be useful. The Real-time
Polling Service allows for a minimum and maximum bandwidth to be
specified in order to bound the video stream.
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 29
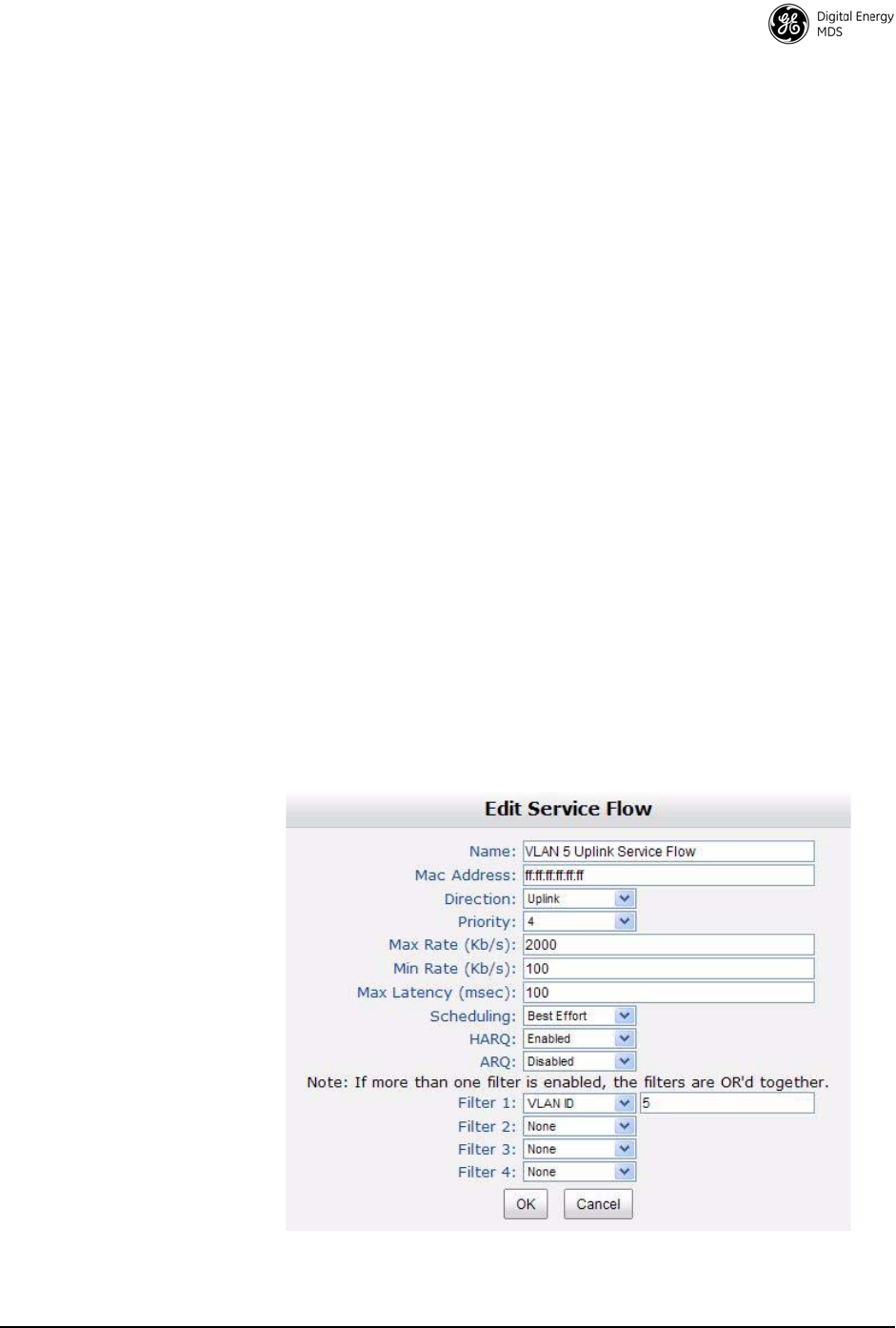
QOS Example: Prioritizing a Data Flow
In order to prioritize one traffic flow over another, the service flow
priority should be used. In this example, there are two VLANs on the
trunk at the Base Station. Suppose the user wants to treat traffic on
VLAN 5 as higher priority than traffic on VLAN 6 in the event of heavy
network traffic or congestion. To accomplish this, uplink and downlink
service flows are created that classify on VLAN ID, assigning a higher
priority to VLAN 5's service flows. The following dialog box shows the
configuration for the VLAN 5 uplink service flow. A second service
flow should be created identical to this one for the downlink.
1. Use a MAC address of FF:FF:FF:FF:FF:FF to ensure that the service
flow can be used by any subscriber. (If using all F’s, a maximum of
13 entries is allowed.)
2. Set a low minimum rate to increase the chances that both service
flows will be allocated bandwidth in the event of network conges-
tion.
3. Set Filter 1 to the appropriate VLAN ID to restrict each service flow
to the desired VLAN.
4. Set the priority of VLAN 5's service flows to a higher priority than
VLAN 6's service flows.
5. A service flow is needed for uplink and downlink traffic for each
VLAN.
Invisible place holder
Figure 18. Edit Service Flow Screen (VLAN 5)
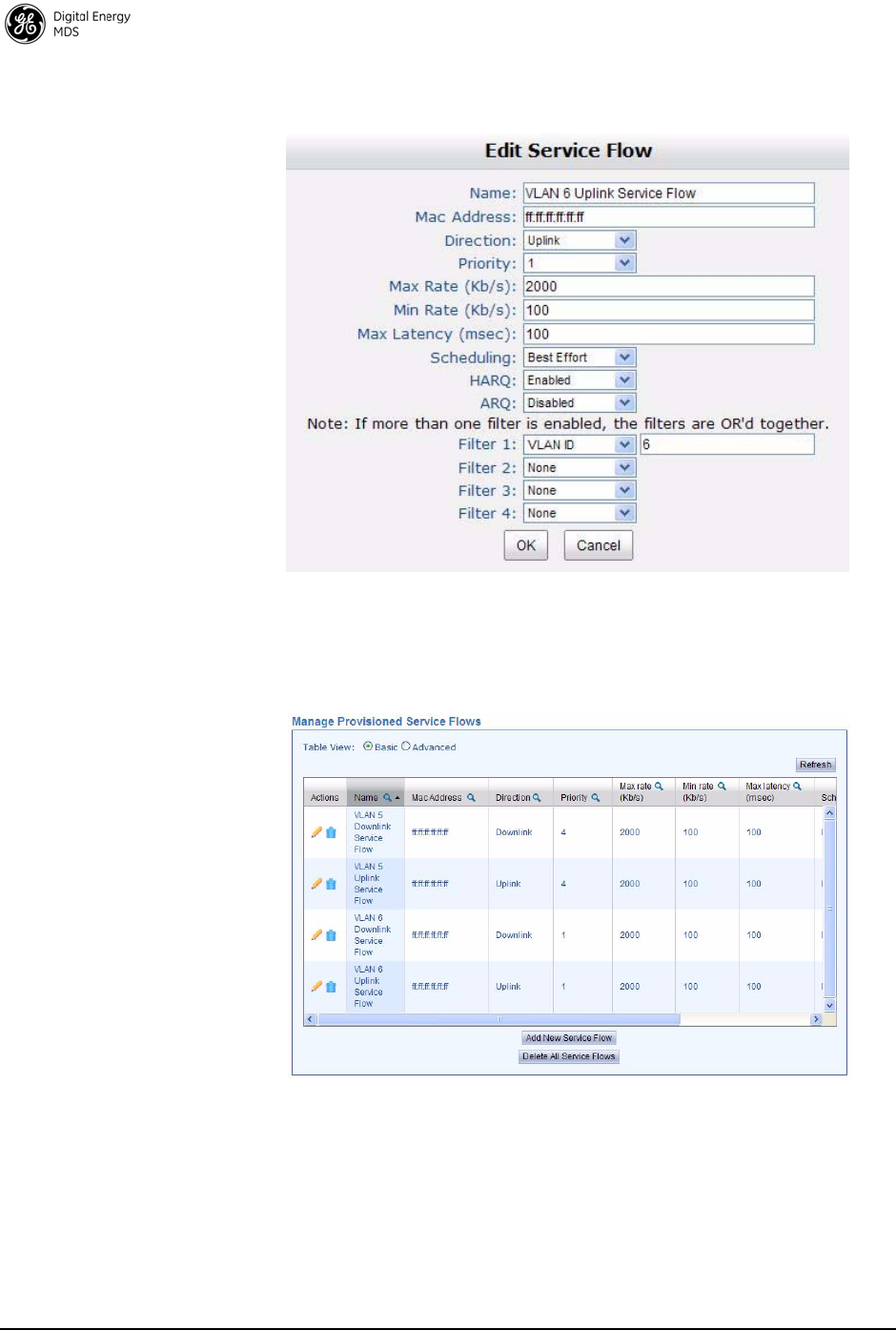
30 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
The dialog box in Figure 19 below shows the uplink service flow for
VLAN 6.
Figure 19. Edit Service Flow Screen (VLAN 6)
Once configured, the list of provisioned service flows appears similar to
that shown in Figure 20 below.
Figure 20. Manage Provisioned Service Flows
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 31
4.2 CONFIGURE SECURITY FEATURES &
INTEGRATION WITH A RADIUS SERVER
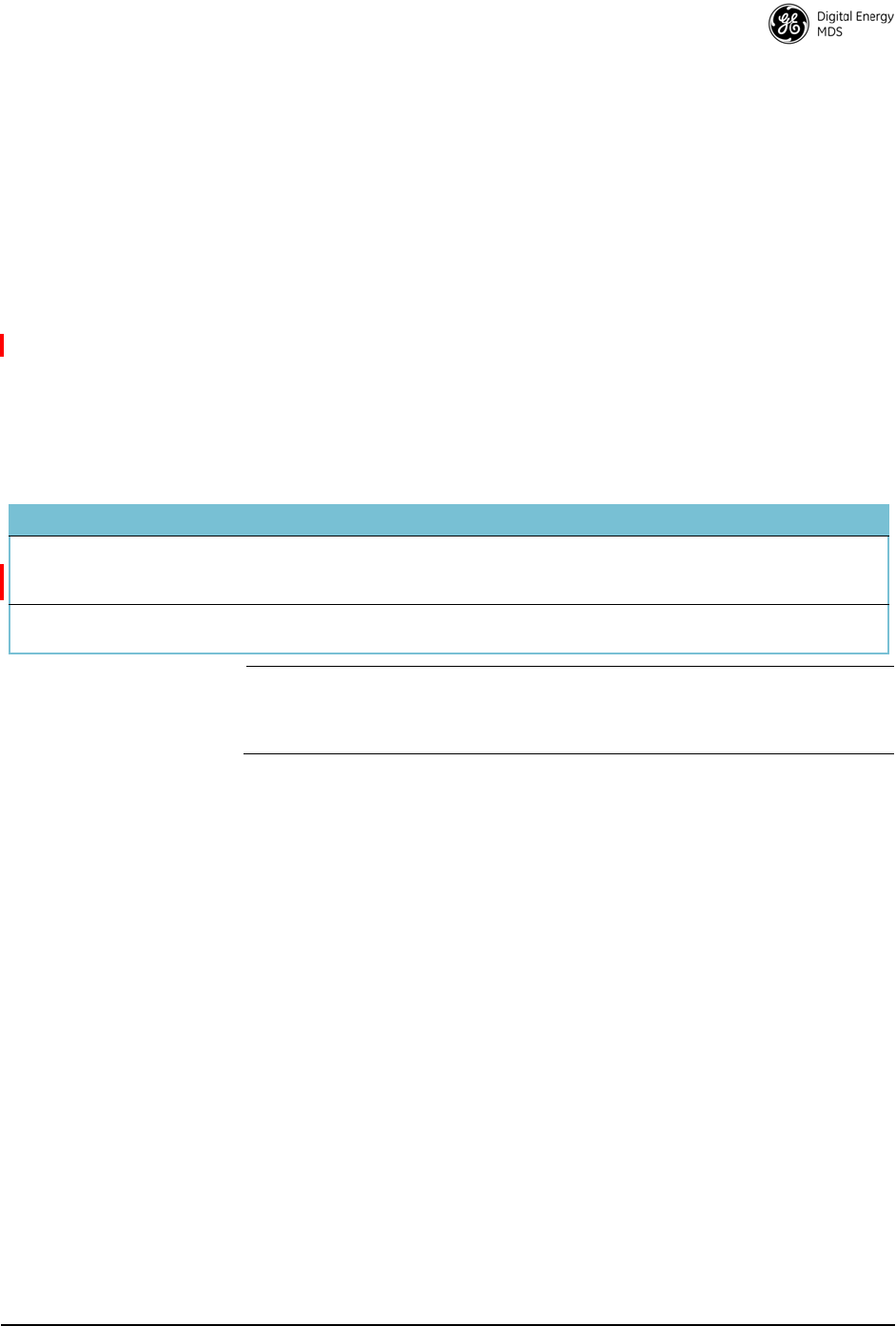
Device Management Interface Configuration
Using the Configuration - Security page, each of the device management
interfaces (HTTP, SNMP, SSH, telnet) can be enabled or disabled. For
secure installations, it is recommended that 1) the Telnet interface be
disabled, 2) the SNMP agent run in SNMPv3 mode, 3) the web server
be configured for HTTPS with MD5 digest.
User Accounts
Each Mercury transceiver has a set of local user accounts available via
console terminal management. The local accounts are as listed in the
chart below:
NOTE: In case of a lost password and an inability to login to the trans-
ceiver, see “TROUBLESHOOTING” on Page 36 for details
on resetting the password.
In addition to the local user accounts, the Mercury transceiver can be
configured to use a RADIUS server for centralized user account
management. The Configuration - Security page is used to configure the
User Auth Method to RADIUS. If the User Auth Fallback parameter is set to
Local, then the local user account information will be used if the
RADIUS server (and secondary server if configured) is unreachable.
Username Default Password Access level
operator operator Read-only access to configuration parameters and status and
performance metrics and statistics. (Applies only to Console
Terminal Management.)
admin admin Read and write access to all configuration parameters and read
access to status and performance metrics and statistics
32 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
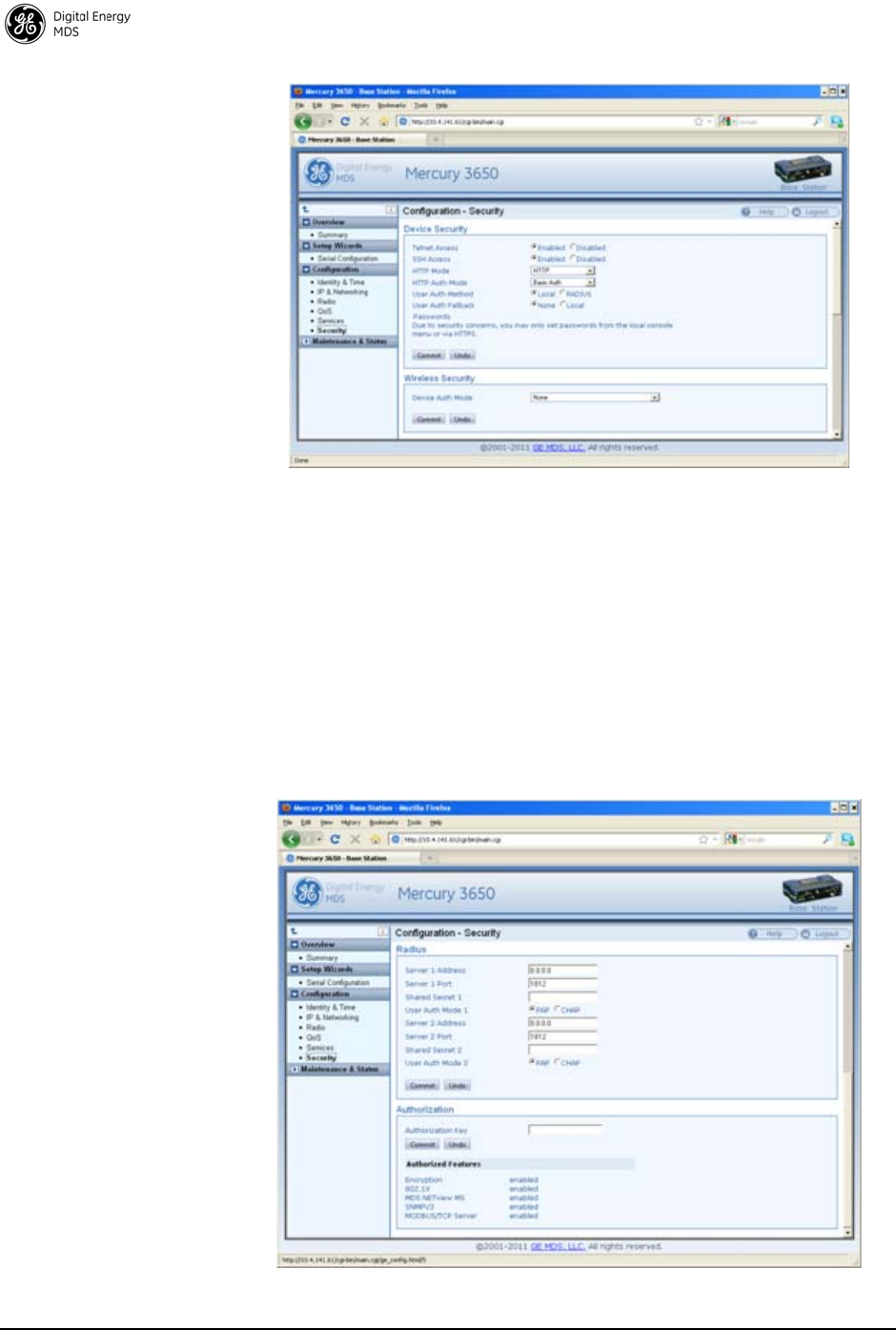
4.3 RADIUS Server Configuration
Using the Configuration - Security page, each Mercury transceiver can be
configured with one or two IP addresses for RADIUS servers. The
RADIUS server is used for user authentication and device
authentication. The IP address, port, shared secret, and authentication
protocol can be configured for each RADIUS server. If two servers are
configured, the device will use the first server for authentication
processes. However, if ICMP communication fails to the first server, the
Mercury transceiver will change over to the second server.
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 33
Creation of X.509 Certificates
Each transceiver can be loaded with a set of X.509 digital certificates in
DER format. These certificates are used in the authentication process
when joining a WiMAX network. The certificates can be loaded using
TFTP, FTP, or SFTP, as described below. Three certificates are
supported: Root CA (Certificate Authority), the Device's public
certificate, the Device's Private Key. The Common Name (CN) for the
certificate must be the serial number for the Mercury transceiver. A
domain name can be appended to the serial number for the Common
Name, for example, 2047711.mydomain.com.
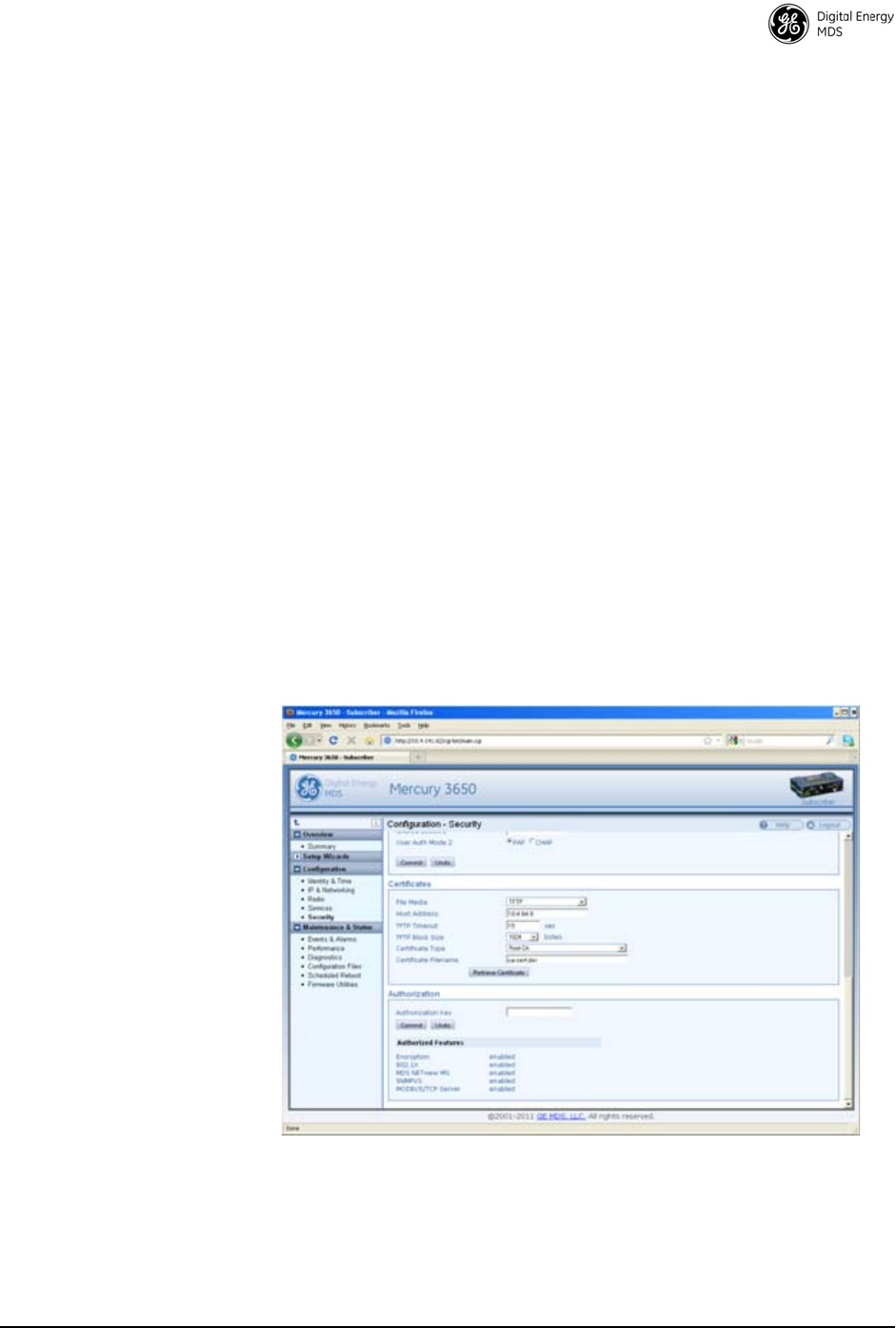
Load X.509 Certificates
The X.509 certificates can be loaded on the unit using TFTP, FTP,
SFTP, or a USB flash drive using the Configuration - Security page. Select
the appropriate File Media as TFTP, FTP, SFTP, or USB. If using one
of the network protocols, specify the IP address of the server and the
other necessary protocol parameters.
Specify the filename of the certificate as it appears on the server or USB
flash drive used. Specify the certificate type: Root CA, Public
certificate, or Private Key. Once these parameters are set, begin the
transfer by pressing the Retrieve Certificate button. Repeat this process for
each of the three certificates.
Invisible place holder
Figure 21. Configuration - Security Screen

34 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Configure SNMPV3
Overview The Mercury transceiver supports SNMP protocol version 3. Version 3
brings a higher level of security to SNMP transactions by requiring user
account name and password authentication as well as encryption of
SNMP packets. The following section describes how SNMPv3 is
implemented on the transceiver and how to configure it for integration
with PulseNET and other network management system software.
SNMPV3 SUPPORT The updated SNMP Agent now supports SNMP version 3 (SNMPv3).
The SNMPv3 protocol introduces Authentication (MD5/SHA-1),
Encryption (DES), the USM User Table, and View-Based Access (refer
to RFC2574 for full details). The SNMP Agent has limited SNMPv3
support in the following areas:
• Only MD5 Authentication is supported (no SHA-1). SNMPv3
provides support for MD5 and SHA-1.
• Limited USM User Table Manipulation. The SNMP Agent
starts with five default accounts. New accounts can be added
(SNMPv3 adds new accounts by cloning existing ones), but
they will be volatile (will not survive a power-cycle). New
views cannot be configured on the SNMP Agent. Views are
inherited for new accounts from the account that was cloned.
The SNMP Agent uses one password pair (Authentication/Pri-
vacy) for all accounts. This means that when the passwords
change for one user, they change for all users.
SNMPV3 Accounts The following default accounts are available for the SNMP Agent:
enc_mdsadmin-Read/write account using Authentication and Encryption.
auth_mdsadmin-Read/write account using Authentication.
enc_mdsviewer-Read only account using Authentication and Encryption.
auth_mdsviewer-Read only account using Authentication.
def_mdsviewer-Read only account with no Authentication or Encryption.
Context Names The following Context Names are used (refer to RFC2574 for full
details):
• Admin accounts is context_a
• Viewer accounts is context_v.
All accounts share the same default passwords:
• Authentication default password is MDSAuthPwd
• Privacy default password is MDSPrivPwd

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 35
Passwords can be changed either locally (via the console) or from an
SNMP Manager, depending on how the Agent is configured. If
passwords are configured and managed locally, they are non-volatile
and will survive a power-cycle. If passwords are configured from an
SNMP manager, they will be reset to whatever has been stored for local
management on power-cycle.
This behavior was chosen based on RFC specifications. The SNMP
Manager and Agent do not exchange passwords, but actually exchange
keys based on passwords. If the Manager changes the Agent's password,
the Agent does not know the new password. The Agent only knows the
new key. In this case, only the Manager knows the new password. This
could cause problems if the Manager loses the password. If that occurs,
the Agent becomes unmanageable. Resetting the Agent's passwords
(and therefore keys) to what is stored in flash memory upon power-cycle
prevents the serious problem of losing the Agent's passwords.
If passwords are managed locally, they can be changed on the Agent (via
the console). Any attempts to change the passwords for the Agent via an
SNMP Manager will fail when the Agent is in this mode. Locally
defined passwords will survive a power-cycle. In either case, the SNMP
Manager needs to know the initial passwords being used in order to
communicate to the Agent. If the Agent's passwords are configured via
the Manager, they can be changed from the Manager. If the passwords
are managed locally, then the Manager must be re-configured with any
password changes in order to continue talking to the Agent.
Password Mode
Management
Changes
When the password management mode is changed, the active passwords
used by the Agent may also change. Some common scenarios are
discussed below:
• Passwords are currently being handled by the Manager. The
assigned passwords are Microwave (Auth), and Rochester (Priv).
Configuration is changed to manage the passwords locally. The
passwords stored on the radio were Fairport (Auth), and Church-
ville (Priv) (if local passwords have never been used, then MDS-
AuthPwd and MDSPrivPwd are used). These passwords will
now be used by the Agent to re-generate keys. The Manager
must know these passwords to communicate with the Agent.
• Passwords are currently managed locally. The local passwords
are Fairport (Auth) and Churchville (Priv). Configuration is
changed to handle the passwords from the Manager. The same
passwords will continue to be used, but now the Manager can
change them.
• Passwords are currently managed locally. The local passwords
are Fairport (Auth) and Churchville (Priv). Passwords are changed
to Brighton (Auth) and Perinton (Priv). The Agent will immedi-
ately generate new keys based on these passwords and start
using them. The Manager will have to be re-configured to use
these new passwords.

36 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
• Passwords are currently managed locally. The local passwords
are Fairport (Auth) and Churchville (Priv). Configuration is
changed to handle the passwords from the Manager. The Man-
ager changes the passwords to Brighton (Auth) and Perinton
(Priv). The radio is then rebooted. After a power-cycle, the radio
uses the passwords stored in flash memory, which are Fairport
(Auth) and Churchville (Priv). The Manager must be re-config-
ured to use these new passwords.
4.4 Use of the Antenna Alignment Tool
The antenna alignment tool* is intended for use with the ODU
Subscriber. The tool provides status and performance indicators and is
intended for use during ODU installation and troubleshooting. The tool
features indicators for Power, Device status (Operational or Alarmed),
Link status, RSSI, and SNR. It is powered by the ODU over the USB
connection.
To get started, mount the ODU in the desired location and tighten the
mounting bracket so that it is snug but can still be moved by hand. Plug
the alignment tool into the ODU using the USB cable provided. All of
the LED indicators on the tool will light briefly while the tool powers
up. Check the Power, Device status, and Link status indicators to verify
that they are lit.
If the Device status indicators show that the ODU is Initializing, then
wait up to 1.5 minutes for the ODU to become fully Operational. If the
Link status indicator does not light, then wait for 30 seconds to give the
unit time to scan for a Base Station. If the Link indicator still does not
light, then the ODU may be significantly misaligned, there may be a
problem with the Base Station, or there may be an incorrect
configuration on the Base Station or ODU Subscriber.
*Expected availability: Late 2011
5.0 TROUBLESHOOTING
5.1 LED INDICATORS
Indicator Activity Meaning
PWR ON Primary power present
Blinking Fast Unit is alarmed
Blinking Slow Unit is intitializing
OFF No primary power
LAN ON LAN detected
Blinking Ethernet traffic
OFF No LAN connected
COM1 Blinking Data traffic
OFF No data traffic
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 37
NOTE: When the Subscriber boots up, the PWR LED will be on solid
at first, then begin blinking sl owly while the unit initialize s.
Once initialized, the LINK LED will blink slowly while the unit
scans for a Base Station. Once the unit links, the LINK LED
stays on solid.
5.2 WiMAX Statistics
The Maintenance and Status - Performance screen on both the Base Station
and Subscriber provides WiMAX Statistics. This information can be
used for diagnostics and troubleshooting of the wireless link. The WiMAX
Statistics pane provides packet and byte statistics for both the uplink and
downlink direction.
Note that the term “Downlink” refers to the wireless path from the Base
Station to the Subscriber and the term “Uplink” refers to the Subscriber
to Base Station path. In addition to the packet and byte statistics, each
unit provides packets-per-second and kilobits-per-second metrics in real
time. The Clear WiMAX Statistics button can be clicked to reset the packet
and byte counters and the rate indicators.
5.3 Common Troubleshooting Scenarios
Unit does not boot Primary power disconnected or power source has failed.
Primary power may be below 10 Vdc.
Subscriber does not
link Modem at Base Station or Subscriber may be disabled.
Base Station and Subscriber radio configurations may not match.
Base Station transmitter power may be turned down.
Base Station and Subscriber WiMAX security settings may not match.
The antenna(s) may be misaligned.
Unable to pass data
end-to-end The Subscriber may not be linked.
GPS ON Internal GPS receiver is synchronized to satellite
network
Blinking Base station is synchronizing internal clock to satellite
timing
OFF Internal GPS receiver is not synchronized
LINK (Base Station) ON The Base Station is operational and transmitting
OFF The Base Station is not transmitting
LINK (Subscriber) ON The Subscriber is linked to a Base Station
Blinking slow The Subscriber is scanning
OFF The Subscriber is not linked to a Base Station
USB ON USB activity on Host port
OFF No USB activity
38 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
An Ethernet port at the Base Station or Subscriber may be disconnected
or disabled.
The Base Station or Subscriber may be misconfigured in regard to
VLAN and VLAN trunk port settings.
The IP addressing of the source and destination devices may be
mismatched.
Weak or poor quality
signal at Subscriber The Base Station transmit power may be set too low. Check the gain and
loss in the antenna system and cabling to determine the maximum
allowable transmit power.
The antenna(s) may be misaligned.
The signal path may be too obstructed. Attempt to find a better location
for the antenna.
There may be too much interference on the channel or an adjacent
channel. Use a spectrum analyzer to view the RF activity in the band.
Move operation to a different frequency if available.
The radio hardware may be damaged. Test the unit on a bench cabled
directly (through an attenuator) to another known working unit.
Unable to login due
to lost Password The configuration, including the user account passwords for the unit,
can be reset by logging in with a special user account and entering an
authorization key. The authorization key is a cryptographic key
generated by GE MDS for the specific serial number of the device. The
key can be obtained by contacting GE MDS Technical Services.
Once the key is obtained, it can be entered in to the unit by logging in
with username authcode and password authcode. When logged in, the
unit will prompt for the authorization key. This process resets the
configuration of the device to the defaults. This causes the username and
password to be set to admin.
6.0 SITE INSTALLATION GUIDE
This section provides tips for selecting an appropriate site, choosing an
antenna system, and reducing the chance of harmful interference.
NOTE: To prevent moisture from entering the radio, do not mount the
radio with the cable connector s pointing up. Al so, dress all
cables to prevent moisture from running along the cables and
into the radio.
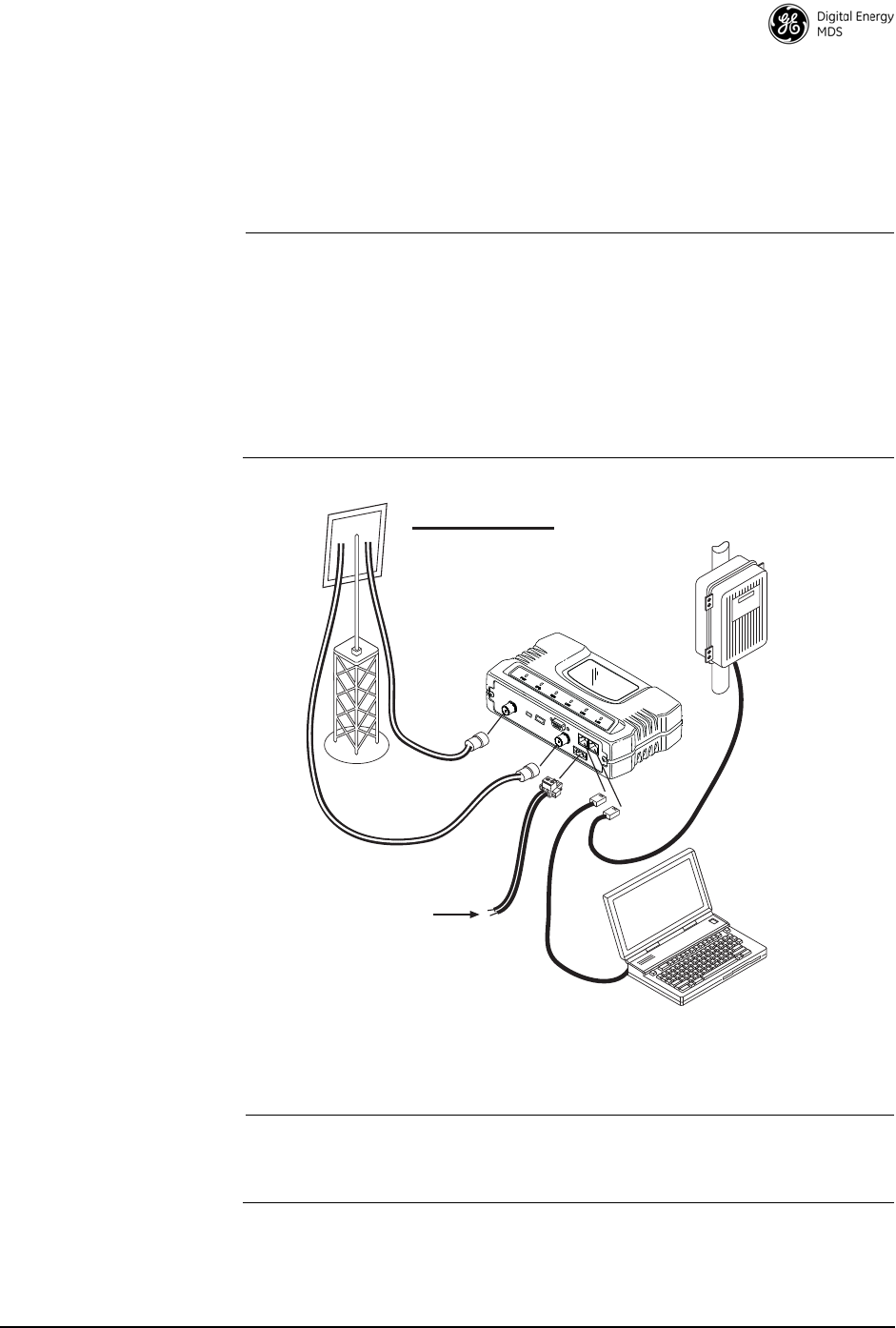
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 39
6.1 General Requirements
There are three main requirements for installing a transceiver—ade-
quate and stable primary power, a good antenna system, and the correct
interface between the transceiver and the data device. Figure 22 shows
a typical Subscriber Unit installation.
NOTE: The network port supports 10BaseT connections, but does not
support 100BaseT connections. This should not present a
problem as most hubs/switches auto-switch between 10BaseT
and 100BaseT connections. Conf irm that your hub/switch is
capable of auto-switching data rates.
To prevent Ethernet traffic from degrading transceiver
throughput performance, place the unit in a segment, or behind
routers.
Invisible place holder
Figure 22. Typical Installation with a Tower-Mounted Antenna
(SU shown; BS Similar)
NOTE: When using Power over Ethernet (PoE), do not use data lines
to carry power. Suitable power supply models are listed in the
GE MDS Accessories Guide.
ANTENNA SYSTEM
Subscriber: Directional Ant.
Base Unit: Omni Ant.
TO DC POWER SUPPLY
(1060 Vdc)
RTU/PLC
LOW-LOSS COAX
PC FOR
RADIO MANAGEMENT
Ethernet Cable
to Radio
Ethernet Cable
to Radio
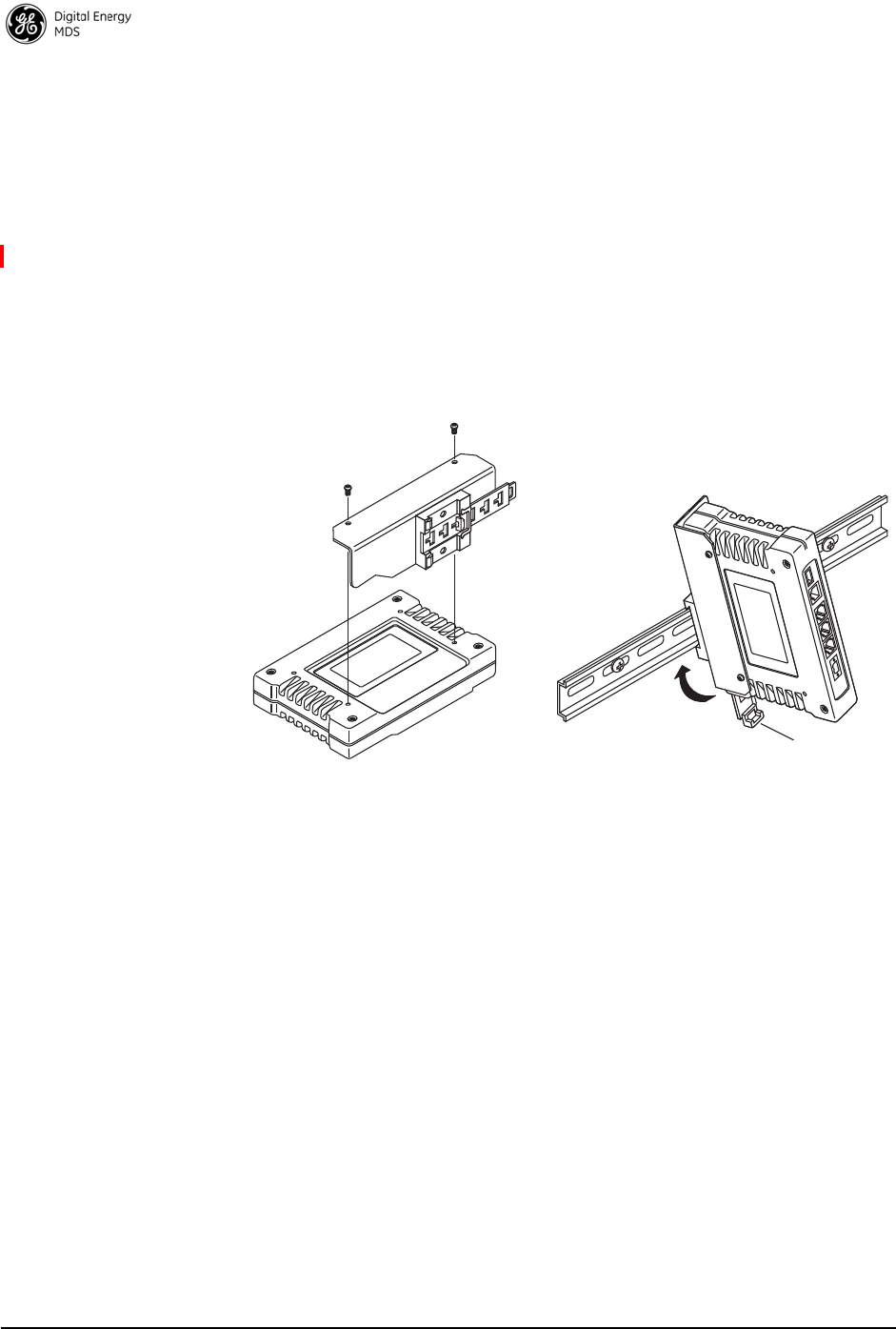
40 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Mounting Considerations
The unit is normally supplied with brackets for mounting to any flat sur-
face. If possible, choose a mounting location that provides easy access
to the connectors on the end of the radio and an unobstructed view of the
LED status indicators.
DIN Rail Mounting
Option The unit may also be mounted with an optional 35mm DIN Rail
Mounting Bracket (Part No. 03-4022A06). Equipment cabinets and
racks of recent design often employ this type of mounting. Once the DIN
bracket is mounted to the transceiver case, it allows for quick installa-
tion and removal of the radio without the need for tools of any kind.
Figure 23 shows how the DIN Rail bracket attaches to the back of the
unit’s case, and how the entire unit attaches to the mounting rail.
Invisible place holder
Figure 23. DIN Rail Mounting of GE MDS Equipment
(Unit shown is for example only, and is not a Mercury Transceiver)
6.2 Site Selection
Suitable sites should provide:
• Protection from direct weather exposure
• A source of adequate and stable primary power
• Suitable entrances for antenna, interface or other required
cabling
• Antenna location that provides as unobstructed a transmission
path as possible in the direction of the associated station(s)
These requirements can be quickly determined in most cases. A possible
exception is the last item—verifying that an unobstructed transmission
path exists. Radio signals travel primarily by line-of-sight, and obstruc-
tions between the sending and receiving stations will affect system per-
Step 1: Attach the bracket using the Step 2: Snap the assembly onto the
DIN Rail. Removal is performed by
the two screws provided. (Attach to pulling down on the release tab.
the end opposite the connectors.)
Release Tab

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 41
formance. If you are not familiar with the effects of terrain and other
obstructions on radio transmission, the discussion below will provide
helpful background.
6.3 Equipment Grounding
To minimize the chance of damage to the transceiver and connected
equipment, a safety ground (NEC Class 2 compliant) is recommended
which bonds the antenna system, transceiver, power supply, and con-
nected data equipment to a single-point ground, keeping all ground leads
as short as possible.
Normally, the transceiver is adequately grounded if the supplied flat
mounting brackets are used to mount the radio to a well-grounded metal
surface. If the transceiver is not mounted to a grounded surface, it is rec-
ommended that a safety ground wire be attached to one of the mounting
brackets or a screw on the transceiver’s case.
The use of a lightning protector is recommended where the antenna
cable enters the building; Bond the protector to the tower ground, if pos-
sible.
6.4 LAN Port
The transceiver’s LAN Port is used to connect the radio to an Ethernet
network. The transceiver provides a data link to an Internet Pro-
tocol-based (IP) network via the Access Point station. Each radio in the
network must have a unique IP address for the network to function prop-
erly.
• To connect a PC directly to the radio’s LAN port, an RJ-45 to
RJ-45 cross-over cable is required.
• To connect the radio to a Ethernet hub or bridge, use a
straight-through cable.
The connector uses standard Ethernet RJ-45 cables and wiring. For
custom-made cables, use the pinout information in Figure 6-1 and
Table 6-1.
Figure 6-1. LAN Port (RJ-45) Pinout
(Viewed from the outside of the unit)
Table 6-1. LAN Port (IP/Ethernet)
Pin Functions Ref.
1 Transmit Data (TX) High
2 Transmit Data (TX) Low
1 2 3 4 5 6 7 8
42 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
6.5 COM1 Port
To connect a PC to the transceiver’s COM1 port use a DB-9M to DB-9F
“straight-through” cable. These cables are available commercially, or
may be constructed using the pinout information in Figure 6-1 and
Table 6-1.
Figure 6-1. COM1 Port (DCE)
(Viewed from the outside of the unit.)
6.6 Antenna & Feedline Selection
NOTE: The transceiver is a Professional Installation radio system and
must be installed by trained prof essional installers, or factory
trained technicians.
The text that follows is designed to aid the professional
installer in the proper methods of maintaining compliance with
FCC limits. Par t 15 l imits the power to +36 dBm or 4 watts
peak E.I.R.P limit. For WiMAX DTS radios, the maxiumum
allowed ERP is 1 Watt per MHz.
3 Receive Data (RX) High
4 Unused
5 Unused
6 Receive Data (RX) Low
7 Unused
8 Unused
Table 6-1. COM1 Port Pinout, DB-9F/RS-232 Interface
Pin Functions DCE
1 Unused
2 Receive Data (RXD) <—[Out
3 Transmit Data (TXD) —>[In
4 Unused
5 Signal Ground (GND)
6–9 Unused
Table 6-1. LAN Port (IP/Ethernet)
Pin Functions Ref.
1
5
96
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 43
Antennas
The equipment can be used with a number of antennas. The exact style
used depends on the physical size and layout of a system. Contact your
factory representative for specific recommendations on antenna types
and hardware sources.
In general, a sector type antenna is used at the Base Station site. This
provides equal coverage to all of the Subscriber sites.
At Remote Gateway sites and units in point-to-point LANs, a directional
Yagi (Figure 24) antenna is generally recommended to minimize
interference to and from other users. Antennas are available from a
number of manufacturers.
Invisible place holder
Figure 24. Typical Yagi Antenna (mounted to mast)
Feedlines
The choice of feedline used with the antenna should be carefully consid-
ered. Poor-quality coaxial cables should be avoided, as they will
degrade system performance for both transmission and reception. The
cable should be kept as short as possible to minimize signal loss. We
recommend using a low-loss cable type suited for the frequency of oper-
ation, such as Heliax®.
Table 6-1 lists several types of popular feedlines and indicates the
approximate signal losses (in dB) that result when using various lengths
of cable at 1800 MHz. Note that losses will be approximately doubled
for 3650 MHz and tripled for 5800 MHz. The choice of cable will
depend on the required length, cost considerations, and the amount of
signal loss that can be tolerated.
44 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
NOTE: The authority to operate th e transceiver may be void if
antennas other than those appr oved by the applicable regula-
tory authority are used. Contact your factory representative for
additional antenna information.
GPS Cabling & Antenna
The antenna to be used with the transceiver’s built-in GPS receiver
should be a 16 or 26 dBi active antenna designed for the GPS satellite
band. The GPS antenna connector delivers a 3 Vdc supply to power the
electronics in the active antenna.
6.7 Conducting a Site Survey
If you are in doubt about the suitability of the radio sites in your system,
it is best to evaluate them before a permanent installation is underway.
This can be done with an on-the-air test (preferred method); or indi-
rectly, using path-study software.
An on-the-air test is preferred because it allows you to see firsthand the
factors involved at an installation site and to directly observe the quality
of system operation. Even if a computer path study was conducted ear-
lier, this test should be done to verify the predicted results.
The test can be performed by first installing a radio and antenna at the
proposed Base Station (BS) site (one-per-system). Then visit the Sub-
scriber site(s) with another transceiver and a hand-held antenna. (A PC
with a network adapter can be connected to each radio in the network to
simulate data during this test using the PING command.)
With the hand-held antenna positioned near the proposed mounting
spot, a technician can check for synchronization with the Base Station
(shown by a lit LINK LED on the front panel) and measure the reported
Table 6-1. Length vs. Loss in Coaxial Cables at 1800 MHz
Cable Type 10 Feet
(3.05 m) 50 Feet
(15.24 m) 100 Feet
(30.48 m) 500 Feet
(152.4 m)
RG-214 1.52 dB 7.6 dB Unacceptable
Loss Unacceptable
Loss
LMR-400 0.78 dB 3.9 dB 7.8 dB Unacceptable
Loss
1/2 inch HELIAX 0.46 dB 2.3 dB 4.58 dB Unacceptable
Loss
7/8 inch HELIAX 0.26 dB 1.28 dB 2.56 dB Unacceptable
Loss
1-1/4 inch HELIAX 0.20 dB 0.96 dB 1.9 dB 9.5 dB
1-5/8 inch HELIAX 0.16 dB 0.8 dB 1.6 dB 8.00 dB

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 45
RSSI value. (See “Antenna Heading Optimization” on Page 46 for
details.) If adequate signal strength cannot be obtained, it may be neces-
sary to mount the station antennas higher, use higher gain antennas,
select a different site or consider installing a repeater station.
6.8 A Word About Radio Interference
The transceiver shares the RF spectrum with other services and devices.
As such, near 100% error-free communications may not be achieved in
a given location, and some level of interference should be expected.
However, the radio’s flexible design should allow adequate perfor-
mance as long as care is taken in choosing station location, configura-
tion of radio parameters and software/protocol techniques.
In general, keep the following points in mind when setting up your com-
munications network.
• Systems installed in rural areas are least likely to encounter interfer-
ence; those in suburban and urban environments are more likely to
be affected by other devices operating in the same spectrum.
• Use a directional antenna at remote sites whenever possible.
Although these antennas may be more costly than omnidirectional
types, they confine the transmission and reception pattern to a com-
paratively narrow lobe, that minimizes interference to (and from)
stations located outside the pattern.
• If interference problems persist, try reducing the length of data
streams. Groups of short data streams have a better chance of getting
through in the presence of interference than do long streams.
• The power output of all radios in a system should be set for the low-
est level necessary for reliable communications. This lessens the
chance of causing unnecessary interference to nearby systems.
If you are not familiar with these interference-control techniques, con-
tact your factory representative for more information.
6.9 Radio (RF) Measurements
There are several measurements that should be performed during the ini-
tial installation. These will confirm proper operation of the unit and if
recorded, can serve as a benchmark for troubleshooting should difficul-
ties appear in the future. These measurements are:
• Transmitter Power Output
• Antenna System SWR (Standing Wave Ratio)
• Antenna Heading Optimization (RSSI)
These procedures may interrupt traffic through an established network
and should only be performed by a skilled radio-technician in coopera-
tion with the network manager.

46 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Transmitter Power Output and Antenna System SWR
Introduction A proper impedance match between the transceiver and the antenna
system is important. It ensures the maximum signal transfer between the
radio and antenna. The impedance match can be checked indirectly by
measuring the SWR (Standing Wave Ratio) of the antenna system. If the
results are normal, record them for comparison for use during future
routine preventative maintenance. Abnormal readings indicate a pos-
sible trouble with the antenna or the transmission line that will need to
be corrected.
The SWR of the antenna system should be checked before the radio is
put into regular service. For accurate readings, a wattmeter suited to the
frequency of operation is required. One example of such a unit is the
Bird Model 43™ directional wattmeter with an appropriate element
installed.
The reflected power should be less than 10% of the forward power
(2:1 SWR). Higher readings usually indicate problems with the
antenna, feedline or coaxial connectors. If the reflected power is more
than 10%, check these areas for damage.
Procedure 1. Place a directional wattmeter between the radio (TX/RX connector)
and the antenna system.
2. With the transmitter keyed, measure the forward and reflected
power on the wattmeter. Reflected power should be no more than
10% of the forward power. Record these readings for future refer-
ence.
NOTE: The transmitter has a 10-minute ti mer. When in test mo de, it
will dekey after 10 minutes of continuous operation. The
Radio can also be dekeyed by temporarily disconnecting the
radio’s DC power.
3. Dekey the transmitter and disconnect the wattmeter. Reconnect the
antenna feedline to the radio.
End of procedure
Antenna Heading Optimization
Introduction The radio network integrity depends, in a large part, on stable radio
signal levels being received at each end of a data link. In general, signals
stronger than –80 dBm provide reliable communication that includes a
fade margin for signal variances. As the distance between the Base Sta-
tion and Subscriber Unit increases, the influence of terrain, foliage and
man-made obstructions become more influential and the use of direc-
tional antennas at Remote locations becomes necessary. Directional
antennas usually require some fine-tuning of their bearing to optimize
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 47
the received signal strength. The transceiver has a built-in received
signal strength indicator (RSSI) that can be used to tell you when the
antenna is in a position that provides the optimum received signal.
RSSI measurements and Wireless Packet Statistics are based on mul-
tiple samples over a period of several seconds. The average of these
measurements will be displayed by the Management System.
The path to the Management System menu item is shown in bold text
below each step of the procedure.
Procedure 1. Verify that the Subscriber is associated with the Base Unit unit by
observing that the LINK LED is on or blinking).
2. View and record the Packets Dropped and Receive Errors on the
LAN1/LAN2 Statistics window. This information will be used later.
3. Clear the LAN1/LAN2 Statistics.
4. Read the RSSI level at the Subscriber Unit.
(Maintenance & Status>>Performance>>RSSI)
5. Optimize RSSI (less negative indicates a stronger signal) by slowly
adjusting the direction of the antenna. Watch the RSSI for several
seconds after making each adjustment so that it accurately reflects
any change in the link signal strength.
6. Once RSSI is optimized, view the Packets Dropped and Receive
Error rates. They should be the same or lower than the previous
(recorded) readings.
If the RSSI peak results in an increase in the Wireless Packets
Dropped and Received Error, the antenna may be aimed at an unde-
sired signal source. Try a different antenna orientation.
End of procedure.
7.0 dBm-WATTS-VOLTS CONVERSION
CHART
Table 7-1 is provided as a convenience for determining the equivalent
voltage or wattage of an RF power expressed in dBm.
Table 7-1. dBm-Watts-Volts conversion—for 50 ohm systems
48 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
8.0 PERFORMANCE NOTES
The following is a list of points that are useful for understanding the per-
formance of the radio in your installation.
8.1 Wireless Bridge
The transceiver acts as a Layer 2 network bridge. If any radio in your
network is connected to a large LAN, such as may be found in a large
office complex, there may be undesired multicast/broadcast traffic over
the air. As a bridge, the radios transmit this type of frame.
The radio goes through a listening and learning period at start-up before
it will send any packets over either of its ports. This is about 10 seconds
after the CPU’s operating system has finished its boot cycle.
dBm V Po
+53 100.0 200W
+50 70.7 100W
+49 64.0 80W
+48 58.0 64W
+47 50.0 50W
+46 44.5 40W
+45 40.0 32W
+44 32.5 25W
+43 32.0 20W
+42 28.0 16W
+41 26.2 12.5W
+40 22.5 10W
+39 20.0 8W
+38 18.0 6.4W
+37 16.0 5W
+36 14.1 4W
+35 12.5 3.2W
+34 11.5 2.5W
+33 10.0 2W
+32 9.0 1.6W
+31 8.0 1.25W
+30 7.10 1.0W
+29 6.40 800mW
+28 5.80 640mW
+27 5.00 500mW
+26 4.45 400mW
+25 4.00 320mW
+24 3.55 250mW
+23 3.20 200mW
+22 2.80 160mW
+21 2.52 125mW
+20 2.25 100mW
+19 2.00 80mW
+18 1.80 64mW
+17 1.60 50mW
+16 1.41 40mW
+15 1.25 32mW
+14 1.15 25mW
+13 1.00 20mW
+12 .90 16mW
+11 .80 12.5mW
+10 .71 10mW
+9 .64 8mW
+8 .58 6.4mW
+7 .500 5mW
+6 .445 4mW
+5 .400 3.2mW
+4 .355 2.5mW
+3 .320 2.0mW
+2 .280 1.6mW
+1 .252 1.25mW
dBm V Po
0.2251.0mW
-1 .200 .80mW
-2 .180 .64mW
-3 .160 .50mW
-4 .141 .40mW
-5 .125 .32mW
-6 .115 .25mW
-7 .100 .20mW
-8 .090 .16mW
-9 .080 .125mW
-10 .071 .10mW
-11 .064
-12 .058
-13 .050
-14 .045
-15 .040
-16 .0355
dBm mV Po
-17 31.5
-18 28.5
-19 25.1
-20 22.5 .01mW
-21 20.0
-22 17.9
-23 15.9
-24 14.1
-25 12.8
-26 11.5
-27 10.0
-28 8.9
-29 8.0
-30 7.1 .001mW
-31 6.25
-32 5.8
-33 5.0
-34 4.5
-35 4.0
-36 3.5
-37 3.2
-38 2.85
-39 2.5
-40 2.25 .1µW
-41 2.0
-42 1.8
-43 1.6
-44 1.4
-45 1.25
-46 1.18
-47 1.00
-48 0.90
dBm mV Po
-49 0.80
-50 0.71 .01µW
-51 0.64
-52 0.57
-53 0.50
-54 0.45
-55 0.40
-56 0.351
-57 0.32
-58 0.286
-59 0.251
-60 0.225 .001µW
-61 0.200
-62 0.180
-63 0.160
-64 0.141
dBm µV Po
-65 128
-66 115
-67 100
-68 90
-69 80
-70 71 .1nW
-71 65
-72 58
-73 50
-74 45
-75 40
-76 35
-77 32
-78 29
-79 25
-80 22.5 .01nW
-81 20.0
-82 18.0
-83 16.0
-84 11.1
-85 12.9
-86 11.5
-87 10.0
-88 9.0
-89 8.0
-90 7.1 .001nW
-91 6.1
-92 5.75
-93 5.0
-94 4.5
-95 4.0
-96 3.51
-97 3.2
dBm µV Po
-98 2.9
-99 2.51
-100 2.25 .1pW
-101 2.0
-102 1.8
-103 1.6
-104 1.41
-105 1.27
-106 1.18
dBm nV Po
-107 1000
-108 900
-109 800
-110 710 .01pW
-111 640
-112 580
-113 500
-114 450
-115 400
-116 355
-117 325
-118 285
-119 251
-120 225 .001pW
-121 200
-122 180
-123 160
-124 141
-125 128
-126 117
-127 100
-128 90
-129 80 .1ƒW
-130 71
-131 61
-132 58
-133 50
-134 45
-135 40
-136 35
-137 33
-138 29
-139 25
-140 23 .01ƒW

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 49
The bridge in the transceiver operates and makes decisions about packet
forwarding just like any other bridge. The bridge builds a list of source
MAC addresses that it has seen on each of its ports.
There are a few general rules that are followed when a packet is received
on any port:
• If the destination address is a multicast or broadcast address,
forward the packet to all ports.
• If the destination address is not known, forward the packet to
all ports.
• If the destination address is known, forward the packet to the
port that the destination is known to be on.
• Spanning Tree Protocol (STP)* is used by the bridge to pre-
vent loops from being created when connecting bridges in
parallel. For example, connecting two remotes to the same
wired LAN could create a loop if STP was not used. Every
bridge running STP sends out Bridge Protocol Data Units
(BPDUs) at regular intervals so that the spanning tree can be
built and maintained. BPDUs are 60-byte multicast Ethernet
frames.
NOTE: STP will be available in 2012.
8.2 Distance-Throughput Relationship
Distance affects throughput. Because of timers and other components of
the protocol, there is a practical distance limit of 30 miles (48 km) for
reliable operation. After this, although data still flows, the throughput
will begin to drop and latency will increase, due to additional retries
between the radios. Packets may start to be dropped. Some applications
may tolerate this; others may not. Repeater stations may be used to
extend the range.
8.3 Data Latency—TCP versus UDP Mode
The latency of data passing through a network will depend on user data
message length, the overall level of traffic on the network, and the
quality of the radio path.
Under ideal conditions—and without the use of QoS—with low traffic
and good RF signal path, the latency for units operating in the TCP
mode will typically be around 50 ms in each direction.
8.4 Packets-per-Second (PPS)
The radio has a limit of approximately 800 PPS. Consider this restriction
when planning your network, especially when smaller packets are
50 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
expected to make up the majority of the traffic as is the case with VoIP
(Voice over IP).
8.5 Subscriber-to-Subscriber Traffic
When sending frames from an endpoint connected to one Subscriber to
another endpoint with a different Subscriber, the throughput will be
halved at best. This is because all frames must go through the Base Sta-
tion and thus are transmitted twice over the same radio system. There-
fore, in the previous 100-byte UDP example, the number of over-the-air
bytes will be 380 bytes (190 bytes x 2) if the frame has to go sub-
scriber-to-subscriber.
8.6 Interference has a Direct Correlation to
Throughput
Interference could be caused by other radios at the same site, in nearby
locations, or by high power transmitters such as paging systems. Such
interference will have a negative effect on data throughput of the radio
system.
8.7 Placing the Radio Behind a Firewall
Mercury radios use the port numbers listed below. If you place the radio
behind a firewall, make sure these port numbers are included in the
allowed list:
• SSH: 22 <- Management
• TELNET: 23 <- Management
• TFTP: 69 <- Reprogramming
• HTTP: 80 <- Management
• NTP: 123 <- Time server
• SNMP: 161 <- Management
• SNMP-TRAP: 162 <- Event management via traps
• HTTPS: 443 <- Management
• SYSLOG: 514 <- Event management via remote syslog
server
These well-known port numbers follow the recommendation of IANA.
For more information, go to
http://www.iana.org/assignments/port-numbers.
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 51
9.0 INDEX OF CONFIGURATION
PARAMETERS
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values
Configuration –
Identity & Time Device Name The Device Name is a
user-configurable parameter that is
used to ease configuration and
monitoring. Typically this parameter is
set to a label that makes it easy to
identify the specific unit.
<blank>
Up to 40 characters
Contact The Contact parameter is used to
indicate a contact in case of inquiry or
problem with the unit. This parameter
is used for the SNMP MIB-II object.
<blank>
Up to 40 characters
Location The Location parameter is used to
indicate the physical location of the
device. This parameter is used for the
SNMP MIB-II object.
<blank>
Up to 40 characters
Description This parameter is used for the SNMP
MIB-II object. <blank>
Up to 40 characters
Console Baud Rate This parameter controls the baud rate
of the DB-9 RS-232 serial port in
console mode.
115200 bps
2400 to 115200
Date Format The date format adjusts how the
current date is displayed. Generic
US, EUR, Generic
SNTP Server This parameter is used to set the
address of an SNTP (Simple Network
Time Protocol) server on the network.
The device will get its time of day from
the server.
0.0.0.0
Date Current date. This can be set manually
or through the use of GPS (if optional
hardware is present) or an SNTP
server.
n/a
Time Current time. This can be set manually
or through the use of GPS (if optional
hardware is present) or an SNTP
server.
n/a
UTC Time Offset The UTC Time Offset is used to adjust
the time of day to local time. For
example Eastern Standard Time has a
-5 UTC offset.
0
-12 to 12
52 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Configuration – IP
& Networking VLAN Status The VLAN Status parameter controls
whether the VLAN capability of the
device is enabled or not. Enabling the
VLAN Status allows the configuration
of trunk and access ports along with
VLAN IDs and VLAN IP Addresses.
Disabled
IP Address Mode The Mercury transceiver can be
configured with a static IP address or it
can used DHCP to obtain an IP
address from a server on the network.
Static
Static or Dynamic
Static IP Address This is the IP address that the Mercury
transceiver uses for its management
interfaces (web, SNMP, SSH, and
telnet).
192.168.1.1
Static IP Netmask This is the Netmask used in
conjunction with the Static IP Address 255.255.255.0
Static IP Gateway This is the IP address of a Gateway
device on the network used for
inter-subnet routing.
0.0.0.0
Configuration -
Radio Frequency This is the operating frequency of the
WiMAX radio interface. Frequency
range limits can be affected by
bandwidth selection.
3662.5 or 1815 MHz
3651.75 to 3670
1800 to 1830
RF Bandwidth This is the operating bandwidth of the
WiMAX radio interface. 3.5 MHz
3.5, 5, 7, 8.75, 10
Adaptive Modulation This parameter allows the WiMAX
modem to automatically choose the
modulation and FEC coding rate that
best matches the channel.
Enabled
Adaptive Modulation
Estimation Margin 3dB
0 to 100
Protection Margin 3
0 to 10
Hysteresis Margin 3
0 to 10
MIMO Type The MIMO Type parameter controls
the use of the second RF antenna port.
In Matrix A/B mode, the Mercury
transceiver automatically chooses the
appropriate operating mode according
to the packet error rate (PER)
performance of the wireless channel.
None
None, Matrix A, Matrix
A/B
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 53
Frame Profile The Frame Profile controls the amount
of time allocated to the downlink and
uplink portions of the WiMAX frame. To
operate in a WiMAX compatible mode,
choose one of the specific profiles for
the chosen RF bandwidth. The Frame
Profile can also be set to None. When
set to None, the user can set a specific
percentage for the downlink sub-frame.
None
None,
3.5MHz-21-12,
5MHZ-29-18,
5MHz-30-17,
5MHz-32-15,
7MHz-21-12,
8.75MHZ-27-15,
10MHz-26-21,
10MHz-29-18,
10MHz-32-15,
10MHz-35-12
Downlink
Percentage The percentage of the frame to be
used for the Downlink subframe. This
parameter only applies when the
Frame Profile is set to None
50
HARQ This is the Base Station parameter that
enables the use of Hybrid Automatic
Repeat Request.
Enabled
HARQ Category This is the Subscriber parameter that
selects the type of Hybrid Automatic
Repeat Request that is used.
3
1 to 4
ARQ This is the Base Station parameter that
enables the use of Automatic Repeat
Request.
Enabled
ARQ Block Size The Block Size specifies the number of
bytes that are placed into an ARQ
block. The ARQ block is the basic unit
of exchange in the ARQ protocol.
64 bytes
16 to 1024
ARQ Window Size The Window Size specifies the number
of ARQ blocks in the ARQ Window.
The ARQ Window is the number of
blocks that can be outstanding at one
time.
512 blocks
1 to 1024
ARQ Block
Lifetime The Block Lifetime specifies how long
an ARQ block is considered valid after
the block’s initial transmission. If the
receiver does not acknowledge the
block within the lifetime, the block is
discarded.
250 msec
0 to 655 msec
ARQ Transmitter
Delay 35 msec
1 to 655 msec
ARQ Receiver
Delay 35 msec
1 to 655 msec
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values
54 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Configuration-
Services DHCP Server Status This parameter enables the on-board
DHCP server. Disabled
DHCP Netmask This is the netmask that the on-board
server specifies to its clients. 0.0.0.0
DHCP starting
address This is the first IP address in the
server’s pool. 0.0.0.0
DHCP ending
address This is the last IP address in the
server’s pool. 0.0.0.0
DHCP DNS address This is the DNS server IP address that
the server specifies to its clients. 0.0.0.0
DHCP WINS
address This is the WINS server IP address that
the server specifies to its clients. 0.0.0.0
SNMP Mode This parameter specifies the
protocol(s) that the SNMP agent
should support.
Disabled
Disabled, V1-only,
V2-only, V3-only, V1-V2,
V1-V2-V3
Configuration –
Security
Telnet access This parameter allows or disallows the
TELNET interface to operate. For
secure installations, it is recommended
that TELNET be disabled.
Enabled
SSH access This parameter allows or disallows the
SSH interface to operate. Enabled
HTTP Mode The operation of the web server can be
disabled or set to HTTP or HTTPS
mode. The HTTPS mode provides a
level of security.
HTTP
Disabled, HTTP, HTTPS
HTTP Auth Mode This parameter defines the
authentication method when using
HTTPS. Basic Auth causes the user to
login with a username and password.
MD5 causes the username and
password to be passed over network
as an MD5 hash.
Basic Auth
Basic Auth, MD5
User Auth Method The username and password of a user
can be validated locally against the
information that the device has or it can
be validated using RADIUS. The use of
RADIUS requires configuration of
parameters on the RADIUS
configuration screen.
Local
Local, RADIUS
User Auth Fallback If the User Auth Method is RADIUS but
the RADIUS Server cannot be
reached, this parameter determines if
the local password information is used
to validate the user’s credentials. If this
parameter is set to None, then only the
RADIUS server can validate the
credentials.
None
None, Local
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 55
Device Auth Mode Determines if WiMAX PKMv2 security
is enabled. None
None, PKMv2
RADIUS Server 1
Address This is the IP address of the RADIUS
server. The device can also be
configured with a secondary, backup
RADIUS server.
0.0.0.0
RADIUS Server 1
Port The UDP port that the RADIUS server
is listening on. 1812
0-65535
Shared Secret 1 The secret phrase shared between the
RADIUS server and client. <blank>
User Auth Mode 1 The authentication protocol used
between the RADIUS server and client. PAP
PAP, CHAP
RADIUS Server 2
Address This is the IP address of a second
RADIUS server that will be used if the
first RADIUS server is not reachable.
0.0.0.0
RADIUS Server 2
Port The UDP port that the RADIUS server
is listening on. 1812
0-65535
Shared Secret 2 The secret phrase shared between the
RADIUS server and client. <blank>
User Auth Mode 2 The authentication protocol used
between the RADIUS server and client. PAP
PAP, CHAP
Certificate Type The Certificate Type parameter
indicates the specific certificate that is
being transferred. This can be the Root
CA (Certificate Authority), Device
Public certificate, or Private Key.
RootCA
Certificate Filename This is the filename of the certificate
that the is to be transferred. ca-cert.der
User Auth Mode 2 The authentication protocol used
between the RADIUS server and client PAP
PAP, CHAP
Certificate Type The Certificate Type parameter
indicates the specific certificate that is
being transferred. This can be the Root
CA (Certificate Authority), Device
Public certificate, or Private Key.
RootCA
Certificate Filename This is the filename of the certificate to
be transferred. ca-cert.der
Maint & Status -
Events & Alarms Syslog Server
Address The Syslog server address is an IP
address of a syslog server on the
network. When configured, all events
will be forwarded to the server for
logging.
0.0.0.0
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values
56 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Maint & Status -
Configuration
Files
File Media The File Media parameter is present on
several pages in which files are
transferred to and/or from the Mercury
transceiver. The File Media indicates
the source or the destination of the file
to be transferred. The media can be
FTP, SFTP, TFTP, or USB Flash Drive.
If using a USB Flash Drive, the drive
should be formatted to standard FAT32
format (typical for Microsoft Windows).
TFTP
Host Address The Host Address parameter is
present on several pages in which files
are transferred to and/or from the
Mercury transceiver. The Host Address
is the IP address of the FTP, SFTP, or
TFTP server to be used for the file
transfer.
0.0.0.0
TFTP Timeout If TFTP is used for file transfers, the
TFTP Timeout is used to control the
protocol timeout.
15 sec
TFTP Block Size If TFTP is used for file transfers, the
TFTP Block Size is used to control the
protocol transfer size. When
transferring file over wired LAN
interfaces, a block size of 4096 or 8192
will make the transfer go faster. When
transferring over a lossy wireless link,
the block size should be kept to 512 or
1024 to minimize packet retries.
1024 bytes
Config Filename This is the name of the text file
containing the configuration. This
filename will be used for the file
transfer.
cfgscript.txt
Maint & Status -
Firmware Utilities Firmware Filename The filename of the firmware image to
load on the Mercury transceiver. This
file will be transferred to the device
according to the File Media parameter
on the Firmware Utilities page. The
filename will have a .mpk extension
indicating that it is a GE MDS
proprietary packed format file.
mer-bkrc-x_y_z.mpk
Table 7. Configuration Parameters
Location Parameter Description Default Value
Possible Values

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 57
APPENDIX-A
3650 MHz Band Information
Band History
• Historically part of the Fixed Service Satellite (FSS) allocation
• FSS operators are considered “grandfathered” operations and
are provided protection in the form of “exclusion zones”
• About 85 users remain, mostly on East and West Coasts of U.S.
• Over 20 states with no grandfathered operations in effect
• Recently, the FCC allocated 50 MHz of this spectrum (3.65 –
3.70 GHz) for private infrastructure and rural ISP use—not con-
sumer mass deployment
• 3650 MHz is considered a “registered” band. It is neither
licensed nor unlicensed
• Industry Canada rules patterned after FCC rules
Technical Details
• 50 MHz spectrum divided in two bands of 25MHz each
• Lower 25 MHz allows “Restricted protocols”, upper 25MHz
allows “Unrestricted”
• Operation requires registration with FCC database – operators,
all fixed point installs
• EIRP: One watt per-MHz for fixed deployments. 40 mW
per-MHz for mobile operation
• Industry Canada rules allow “Restricted protocols” across the
entire 50 MHz span.
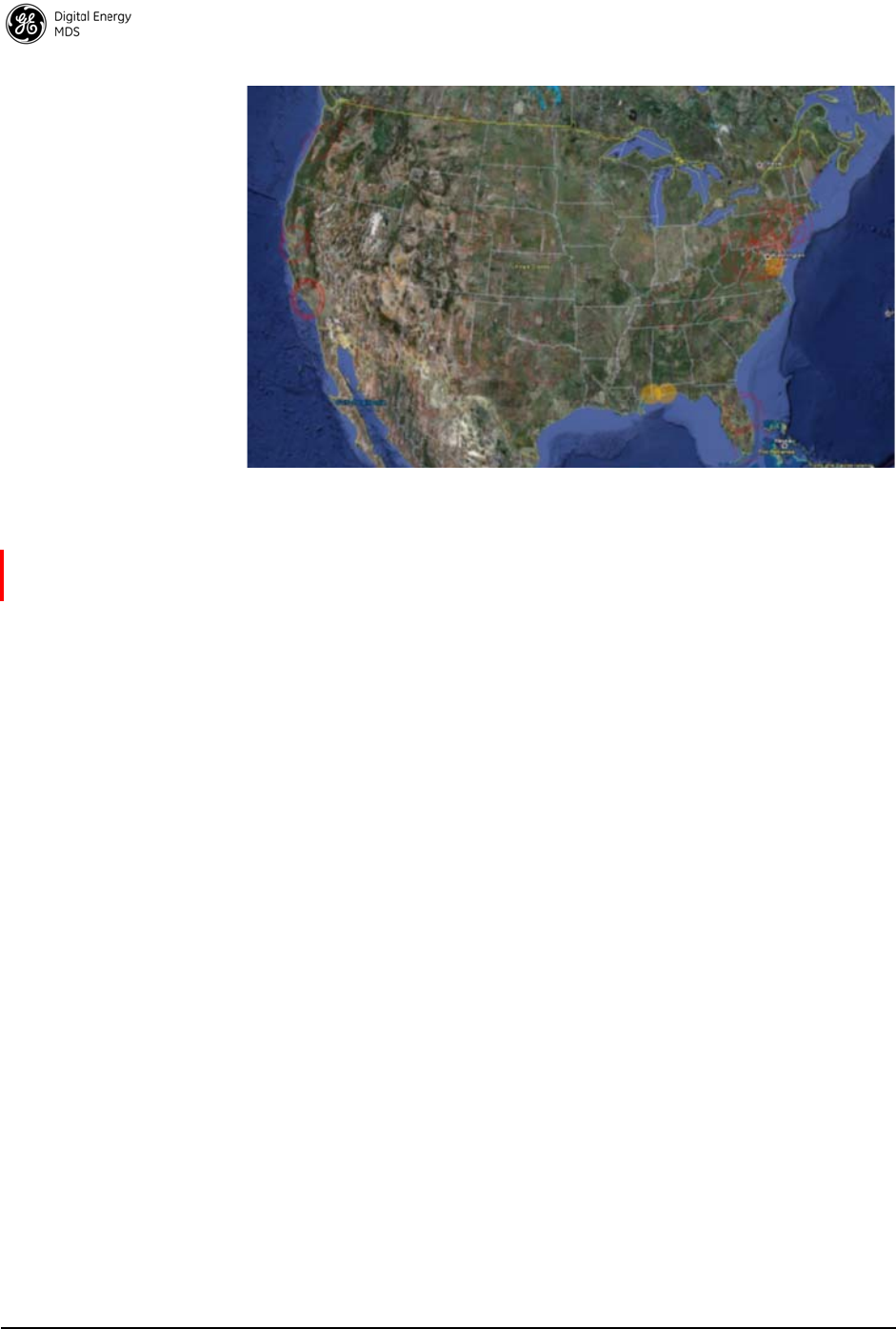
58 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
U.S. Map with Exclusion Zones
Supported SNMP MIBs
• MIB-II
• GE MDS proprietary MIBs
• WiMAX MIBs (support to be added in 2012)
Accessories list
• Antennas
•Cable
• USB cable, CAT5, serial DB9s
• RF cable
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 59
APPENDIX-B
Glossary of Terms & Abbreviations
If you are new to wireless IP/Ethernet systems, some of the terms used
in this guide may be unfamiliar. The following glossary explains many
of these terms and will prove helpful in understanding the operation of
your radio network. While not all of these terms apply to every use of
the transceiver, they are provided to give a more complete under-
standing of common wireless concepts.
Antenna System Gain—A figure, normally expressed in dB, repre-
senting the power increase resulting from the use of a gain-type antenna.
System losses (from the feedline and coaxial connectors, for example)
are subtracted from this figure to calculate the total antenna system gain.
BS—See Base Station.
Association—Condition in which the Subscriber is synchronized with
the Base Station and is ready to pass traffic.
Authorization Key—Alphanumeric string (code) that is used to enable
additional capabilities in the transceiver.
Base Station (BS)—The radio in a point-to-multipoint network that acts
as the center or “hub” station. It communicates with Subscriber Unit
(SU) stations.
Bit—The smallest unit of digital data, often represented by a one or a
zero. Eight bits (plus start, stop, and parity bits) usually comprise a byte.
Bits-per-second—See BPS.
BPDU—Bridge Protocol Data Units.
BPS—Bits-per-second (bps). A measure of the information transfer rate
of digital data across a communication channel.
Byte—A string of digital data usually made up of eight data bits and
start, stop and parity bits.
CSMA/CA—Carrier Sense Multiple Access/Collision Avoidance.
CSMA/CD—Carrier Sense Multiple Access/Collision Detection.

60 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
Cyclic Redundancy Check (CRC)—A technique used to verify data
integrity. It is based on an algorithm which generates a value derived
from the number and order of bits in a data string. This value is com-
pared with a locally-generated value and a match indicates that the mes-
sage is unchanged, and therefore valid.
Datagram—A data string consisting of an IP header and the IP message
within.
dBi—Decibels referenced to an “ideal” isotropic radiator in free space.
Frequently used to express antenna gain.
dBm—Decibels referenced to one milliwatt. An absolute unit used to
measure signal power, as in transmitter power output, or received signal
strength.
DCE—Data Circuit-terminating Equipment (or Data Communications
Equipment). In data communications terminology, this is the “modem”
side of a computer-to-modem connection. COM1 Port of the transceiver
is set as DCE.
Decibel (dB)—A measure of the ratio between two signal levels. Fre-
quently used to express the gain (or loss) of a system.
Delimiter—A flag that marks the beginning and end of a data packet.
DHCP (Dynamic Host Configuration Protocol)—An Internet stan-
dard that allows a client (i.e. any computer or network device) to obtain
an IP address from a server on the network. This allows network admin-
istrators to avoid the tedious process of manually configuring and man-
aging IP addresses for a large number of users and devices. When a
network device powers on, if it is configured to use DHCP, it will con-
tact a DHCP server on the network and request an IP address.
The DHCP server will provide an address from a pool of addresses allo-
cated by the network administrator. The network device may use this
address on a “time lease” basis or indefinitely depending on the policy
set by the network administrator. The DHCP server can restrict alloca-
tion of IP addresses based on security policies. An Access Point may be
configured by the system administrator to act as a DHCP server if one is
not available on the wired network.
DTE—Data Terminal Equipment. A device that provides data in the
form of digital signals at its output. Connects to the DCE device.
Encapsulation—Process in by which, a comple te data packet, such as
Modbus frame or any other polled asynchronous protocol frame, is
placed in the data portion of another protocol frame (in this case IP) to
be transported over a network. Typically this action is done at the receiv-
ing end, before being sent as an IP packet to a network. A similar re-

MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 61
versed process is applied at the ot her end of the network extracting the
data from the IP envelope, resulting in the original packet in the original
protocol.
Endpoint—IP address of data equipment connected to the ports of the
radio.
Equalization—The process of reducing the effects of amplitude, fre-
quency or phase distortion with compensating networks.
Fade Margin—The greatest tolerable reduction in average received
signal strength that will be anticipated under most conditions. Provides
an allowance for reduced signal strength due to multipath, slight antenna
movement or changing atmospheric losses. A fade margin of 15 to 20
dB is usually sufficient in most systems.
Fragmentation—A technique used for breaking a large message down
into smaller parts so it can be accommodated by a less capable media.
Frame—A segment of data that adheres to a specific data protocol and
contains definite start and end points. It provides a method of synchro-
nizing transmissions.
Hardware Flow Control—A transceiver feature used to prevent data
buffer overruns when handling high-speed data from the connected data
communications device. When the buffer approaches overflow, the
radio drops the clear-to-send (CTS) line, that instructs the connected
device to delay further transmission until CTS again returns to the high
state.
Host Computer—The computer installed at the master station site, that
controls the collection of data from one or more remote sites.
HTTP—Hypertext Transfer Protocol.
ICMP—Internet Control Message Protocol.
IGMP (Internet Gateway Management Protocol)—Ethernet level
protocol used by routers and similar devices to manage the distribution
of multicast traffic in a network.
IEEE—Institute of Electrical and Electronic Engineers.
Image (File)—Data file that contains the operating system and other
essential resources for the basic operation of the radio’s CPU.
LAN—Local Area Network.
Latency—The delay (usually expressed in milliseconds) between when
data is applied at the transmit port at one radio, until it appears at the
receive port at the other radio.

62 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
MAC—Media Access Control.
MD5—A highly secure data encoding scheme. MD5 is a one-way hash
algorithm that takes any length of data and produces a 128 bit “finger-
print.” This fingerprint is “non-reversible,” it is computationally infea-
sible to determine the file based on the fingerprint. For more details
review RFC 1321 using an Internet search.
MCU—Microcontroller Unit.
MIB—Management Information Base.
MIMO—Multiple In / Multiple Out.
Mobile Station—Refers to a station that moves about while main-
taining active connections with the network. Mobility generally implies
physical motion. The movement of the station is not limited to a specific
network and IP subnet. In order for a station to be mobile it must estab-
lish and tear down connections with various access points as it moves
through the access points' territory.
MTBF—Mean-Time Between Failures.
Multiple Address System (MAS)—See Point-Multipoint System.
Network-Wide Diagnostics—An advanced method of controlling and
interrogating GE MDS radios in a radio network.
NTP—Network Time Protocol.
OFDM—Orthogonal Frequency Division Multiplex.
Packet—The basic unit of data carried on a link layer. On an IP net-
work, this refers to an entire IP datagram or a fragment thereof.
Scanning—Scanning is a process used by Subscribers to detect Base
Stations on the network to which it may connect.
PING—Packet INternet Groper. Diagnostic message generally used to
test reachability of a network device, either over a wired or wireless net-
work.
Point-Multipoint System—A radio communications network or
system designed with a central control station that exchanges data with
a number of remote locations equipped with terminal equipment.
Poll—A request for data issued from the host computer (or master PLC)
to a remote radio.
Portability—A station is considered connected when it has successfully
authenticated and associated with an access point. A station is consid-
MDS 05-6302A01, Rev. A MDS Mercury 16E Technical Manual 63
ered authenticated when it has agreed with the access point on the type
of encryption that will be used for data packets traveling between them.
The process of association causes a station to be bound to an access
point and allows it to receive and transmit packets to and from the access
point. In order for a station to be associated it must first authenticate
with the access point. The authentication and association processes
occur automatically without user intervention.
Portability refers to the ability of a station to connect to an access point
from multiple locations without the need to reconfigure the network set-
tings. For example, a remote transceiver that is connected to an access
point may be turned off, moved to new site, turned back on, and,
assuming the right information is entered, can immediately reconnect to
the access point without user intervention.
PLC—Programmable Logic Controller. A dedicated microprocessor
configured for a specific application with discrete inputs and outputs. It
can serve as a host or as an RTU.
PuTTY—A free implementation of Telnet and SSH for Win32 and
Unix platforms. It is written and maintained primarily by Simon Tatham
Refer to http://www.pobox.com/~anakin/ for more information.
Remote—A transceiver in a network that communicates with an asso-
ciated Access Point.
RFI—Radio Frequency Interference.
Roaming—A station's ability to automatically switch its wireless con-
nection between various access points (APs) as the need arises. A station
may roam from one AP to another because the signal strength or quality
of the current AP has degraded below what another AP can provide.
When two access points are co-located for redundancy, roaming allows
the stations to switch between them to provide a robust network.
Roaming may also be employed in conjunction with Portability where
the station has been moved beyond the range of the original AP to which
it was connected. As the station comes in range of a new AP, it will
switch its connection to the stronger signal. Roaming refers to a station's
logical, not necessarily physical, move between access points within a
specific network and IP subnet.
RSSI—Received Signal Strength Indicator.
RTU—Remote Terminal Unit. A data collection device installed at a
remote radio site.
SCADA—Supervisory Control And Data Acquisition. An overall term
for the functions commonly provided through an MAS radio system.

64 MDS Mercury 16E Technical Manual MDS 05-6302A01, Rev. A
SCEP—Simple Certificate Enrollment Protocol. A protocol that auto-
mates the provisioning process of creating and loading x.509 digital cer-
tificates on a device.
SFTP—Secure File Transfer Protocol. A networking protocol used to
securely transfer files between a server and a client device.
SNMP—Simple Network Management Protocol.
SNR—Signal-to-Noise Ratio. A measurement of the desired signal to
ambient noise levels.This measurement provides a relative indication of
signal quality. Because this is a relative number, higher signal-to-noise
ratios indicate improved performance.
SNTP—Simple Network Time Protocol.
SSL—Secure Socket Layer.
SSH—Secure Shell.
STP—Spanning Tree Protocol.
Subscriber Unit (SU)—A radio in a point-to-multipoint network that
acts as a remote, and communicates with the Base Station (BS).
SWR—Standing-Wave Ratio. A parameter related to the ratio between
forward transmitter power and the reflected power from the antenna
system. As a general guideline, reflected power should not exceed 10%
of the forward power ( 2:1 SWR).
TCP—Transmission Control Protocol.
TFTP—Trivial File Transfer Protocol.
Trap Manager—Software that collects SNMP traps for display or log-
ging of events.
UDP—User Datagram Protocol.
UTP—Unshielded Twisted Pair.
VLAN—Virtual Local Area Network.
WINS—Windows Internet Naming Service. Part of Microsoft Win-
dows NT and 2000 servers that manages the association of workstation
names and locations with Internet Protocol addresses. It works without
the user or an administrator having to be involved in each configuration
change. Similar to DNS.
X.509 Certificates—A standardized format for digital certificates used
in security protocols and algorithms.
IN CASE OF DIFFICULTY...
GE MDS products are designed for long life and trouble-free operation. However, this equipment, as with
all electronic equipment, may have an occasional component failure. The following information will assist
you in the event that servicing becomes necessary.
TECHNICAL ASSISTANCE
Technical assistance for GE MDS products is available from our Technical Support Department during
business hours (8:30 A.M.–6:00 P.M. Eastern Time). When calling, please give the complete model
number of the radio, along with a description of the trouble/symptom(s) that you are experiencing. In many
cases, problems can be resolved over the telephone, without the need for returning the unit to the factory.
Please use one of the following means for product assistance:
Phone: 585 241-5510 E-Mail: gemds.techsupport@ge.com
FAX: 585 242-8369 Web: www.gemds.com
FACTORY SERVICE
Component level repair of this equipment is not recommended in the field. Many components are installed
using surface mount technology, which requires specialized training and equipment for proper servicing.
For this reason, the equipment should be returned to the factory for any PC board repairs. The factory is
best equipped to diagnose, repair and align your radio to its proper operating specifications.
If return of the equipment is necessary, you must obtain a Service Request Order (SRO) number. This
number helps expedite the repair so that the equipment can be repaired and returned to you as quickly as
possible. Please be sure to include the SRO number on the outside of the shipping box, and on any corre-
spondence relating to the repair. No equipment will be accepted for repair without an SRO number.
SRO numbers are issued online at www.gemds.com/support/product/sro/. Your number will be issued
immediately after the required information is entered. Please be sure to have the model number(s), serial
number(s), detailed reason for return, “ship to” address, “bill to” address, and contact name, phone number,
and fax number available when requesting an SRO number. A purchase order number or pre-payment will
be required for any units that are out of warranty, or for product conversion.
If you prefer, you may contact our Product Services department to obtain an SRO number:
Phone Number: 585-241-5540
Fax Number: 585-242-8400
E-mail Address: gemds.productservices@ge.com
The radio must be properly packed for return to the factory. The original shipping container and packaging
materials should be used whenever possible. All factory returns should be addressed to:
GE MDS, LLC
Product Services Department
(SRO No. XXXX)
175 Science Parkway
Rochester, NY 14620 USA
When repairs have been completed, the equipment will be returned to you by the same shipping method
used to send it to the factory. Please specify if you wish to make different shipping arrangements. To
inquire about an in-process repair, you may contact our Product Services Group using the telephone, Fax,
or E-mail information given above.
GE MDS, LLC
Rochester, NY 14620
Telephone: +1 585 242-9600
FAX: +1 585 242-9620
www.gemds.com
175 Science Parkway