Garmin 190 00307 00 Users Manual INTRODUCTION
Garmin-GPS-18-Specifications-Pinout Garmin-GPS-18-Specifications-Pinout Igor's of metalworking and electrical manuals
190-00307-00 to the manual 0fb5fcb1-df73-436b-af83-ceebd107a343
2015-02-28
: Garmin Garmin-190-00307-00-Users-Manual-216505 garmin-190-00307-00-users-manual-216505 garmin pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 40
- INTRODUCTION
- GPS 18 LVC & GPS 18-5Hz WIRING AND PINOUTS
- MECHANICAL CHARACTERISTICS & MOUNTING
- GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz SOFTWARE INTERFACE
- RECEIVED NMEA 0183 SENTENCES
- TRANSMITTED NMEA 0183 SENTENCES
- Sentence Transmission Rate
- Transmitted Time
- Global Positioning System Almanac Data (ALM)
- Global Positioning System Fix Data (GGA)
- GPS DOP and Active Satellites (GSA)
- GPS Satellites in View (GSV)
- Recommended Minimum Specific GPS/TRANSIT Data (RMC)
- Track Made Good and Ground Speed (VTG)
- Geographic Position (GLL)
- Estimated Error Information (PGRME)
- GPS Fix Data Sentence (PGRMF)
- Sensor Status Information (PGRMT)
- 3D Velocity Information (PGRMV)
- DGPS Beacon Information (PGRMB)
- BAUD RATE SELECTION
- MEASUREMENT PULSE OUTPUT (GPS 18 LVC & 18-5Hz ONLY)
- APPENDIX A: EARTH DATUM LIST
- APPENDIX B: BINARY PHASE OUTPUT FORMAT
- APPENDIX C: CHANGING THE BAUD RATE IN GARMIN MODE
- APPENDIX D: GPS 18 PC/ LVC/18-5Hz & WINDOWS SERIAL MOUSE ISSUE
- APPENDIX E: SENSOR CONFIGURATION SOFTWARE

GPS 18 Technical Specifications (190-00307-00) Rev. D
Garmin International, Inc.
1200 E. 151st Street
Olathe, KS 66062 USA
190-00307-00, Revision D
June 2005
GPS 18
TECHNICAL
SPECIFICATIONS
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page i
© Copyright 2004–2005
Garmin Ltd. or its subsidiaries
All Rights Reserved
Except as expressly provided below, no part of this manual may be reproduced, copied, transmitted,
disseminated, downloaded or stored in any storage medium, for any purpose without the express prior
written consent of Garmin. Garmin hereby grants permission to download a single copy of this
manual and of any revision to this manual onto a hard drive or other electronic storage medium to be
viewed and to print one copy of this manual or of any revision hereto, provided that such electronic or
printed copy of this manual or revision must contain the complete text of this copyright notice and
provided further that any unauthorized commercial distribution of this manual or any revision hereto
is strictly prohibited.
Information in this document is subject to change without notice. Garmin reserves the right to change
or improve its products and to make changes in the content without obligation to notify any person or
organization of such changes or improvements.
Garmin International, Inc.
1200 East 151st Street,
Olathe, Kansas 66062, U.S.A.
Tel. 913/397.8200 or 800/800.1020
Fax 913/397.8282
Garmin (Europe) Ltd.
Unit 5, The Quadrangle, Abbey Park Industrial Estate,
Romsey, SO51 9DL, U.K.
Tel. 44/0870.8501241
Fax 44/0870.8501251
Garmin Corporation
No. 68, Jangshu 2nd Road,
Shijr, Taipei County, Taiwan
Tel. 886/2.2642.9199
Fax 886/2.2642.9099
Web site address: www.garmin.com
RECORD OF REVISIONS
Revision Revision
Date Description ECO #
A4/5/04 Initial Release --
B6/7/04 Revise to include PGRMO 26125
C5/24/05 Add GPS 18 LVC-5m and GPS 18-5Hz 31279
D6/6/05 Add 38400 baud to field 10 of PGRMC sentence 31511

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page ii
TABLE OF CONTENTS
1 Introduction..................................................................................................................1
1.1 Cautions ............................................................................................................................................1
1.2 Limited Warranty..............................................................................................................................2
1.3 Features.............................................................................................................................................3
1.4 GPS 18 Series....................................................................................................................................4
1.4.1 GPS 18 USB...................................................................................................................................... 4
1.4.2 GPS 18 PC ........................................................................................................................................ 4
1.4.3 GPS 18 LVC, GPS 18 LVC-5m, and GPS 18-5Hz ........................................................................... 4
1.5 Technical Specifications ...................................................................................................................5
1.5.1 Physical Characteristics..................................................................................................................... 5
1.5.1.1 Size.................................................................................................................................... 5
1.5.1.2 Weight............................................................................................................................... 5
1.5.1.3 Color.................................................................................................................................. 5
1.5.1.4 Case Material..................................................................................................................... 5
1.5.1.5 Cable Length ..................................................................................................................... 5
1.5.2 Electrical Characteristics................................................................................................................... 5
1.5.2.1 Input Voltage..................................................................................................................... 5
1.5.2.2 Input Current ..................................................................................................................... 5
1.5.2.3 CMOS Serial Output Levels.............................................................................................. 5
1.5.2.4 GPS Receiver Sensitivity .................................................................................................. 6
1.5.3 Environmental Characteristics........................................................................................................... 6
1.5.4 GPS Performance.............................................................................................................................. 6
1.5.4.1 Receiver............................................................................................................................. 6
1.5.4.2 Acquisition Times ............................................................................................................. 6
1.5.4.3 Update Rate....................................................................................................................... 6
1.5.4.4 Accuracy ........................................................................................................................... 6
1.5.5 Interfaces........................................................................................................................................... 7
1.5.5.1 GPS 18 Electrical Characteristics...................................................................................... 7
1.5.5.2 Garmin Interface and Garmin USB Protocol..................................................................... 7
1.5.5.3 GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz Protocols........................................................ 7
1.5.5.4 Measurement Pulse Output (GPS 18 LVC & GPS 18-5Hz only)...................................... 7
2 GPS 18 LVC & GPS 18-5Hz Wiring and Pinouts ....................................................8
2.1 GPS 18 LVC & GPS 18-5Hz Pinout.................................................................................................8
2.2 GPS 18 LVC & GPS 18-5Hz Wiring Diagrams ...............................................................................8
3 Mechanical Characteristics & Mounting.................................................................10
4 GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz Software Interface..............................12
4.1 Received NMEA 0183 Sentences ...................................................................................................12
4.1.1 Almanac Information (ALM)...........................................................................................................12
4.1.2 Sensor Initialization Information (PGRMI)......................................................................................13
4.1.3 Sensor Configuration Information (PGRMC) ..................................................................................13
4.1.4 Additional Sensor Configuration Information (PGRMC1) ..............................................................14
4.1.5 Output Sentence Enable/Disable (PGRMO).....................................................................................14
4.2 Transmitted NMEA 0183 Sentences...............................................................................................15
4.2.1 Sentence Transmission Rate.............................................................................................................15
4.2.2 Transmitted Time.............................................................................................................................16
4.2.3 Global Positioning System Almanac Data (ALM)...........................................................................16
4.2.4 Global Positioning System Fix Data (GGA) ....................................................................................17
4.2.5 GPS DOP and Active Satellites (GSA)............................................................................................17
4.2.6 GPS Satellites in View (GSV)..........................................................................................................17
4.2.7 Recommended Minimum Specific GPS/TRANSIT Data (RMC) ....................................................18
4.2.8 Track Made Good and Ground Speed (VTG) ..................................................................................18

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page iii
4.2.9 Geographic Position (GLL)..............................................................................................................18
4.2.10 Estimated Error Information (PGRME) ...........................................................................................19
4.2.11 GPS Fix Data Sentence (PGRMF) ...................................................................................................19
4.2.12 Sensor Status Information (PGRMT)...............................................................................................19
4.2.13 3D Velocity Information (PGRMV).................................................................................................19
4.2.14 DGPS Beacon Information (PGRMB) .............................................................................................20
4.3 Baud Rate Selection........................................................................................................................20
4.4 Measurement Pulse Output (GPS 18 LVC & 18-5Hz only) ...........................................................20
4.4.1 One-Pulse-Per-Second (PPS) Output (GPS 18 LVC Only)..............................................................20
4.4.2 Five-Pulse-Per-Second Output (GPS 18-5Hz Only).........................................................................20
Appendix A: Earth Datum List ......................................................................................21
Appendix B: Binary Phase Output Format...................................................................24
Appendix C: Changing the Baud Rate in Garmin Mode.............................................29
Appendix D: GPS 18 PC/ LVC/18-5Hz & Windows Serial Mouse Issue ...................30
Appendix E: Sensor Configuration Software................................................................32
Downloading the Sensor Configuration Software............................................................................................32
Selecting a Model.............................................................................................................................................32
Connecting to the Sensor .................................................................................................................................32
File Menu.........................................................................................................................................................33
Comm Menu ....................................................................................................................................................33
Config Menu....................................................................................................................................................33
View Menu ......................................................................................................................................................34
Help Menu .......................................................................................................................................................34
LIST OF TABLES AND FIGURES
Table 1: GPS 18 LVC & GPS 18-5Hz Wire Pinout....................................................................................... 8
Figure 1: Computer Serial Port Interconnection............................................................................................. 8
Figure 2. PDA Serial Port Interconnection..................................................................................................... 9
Figure 3. Basic NMEA Device Interconnection............................................................................................. 9
Figure 4a. GPS 18 Bottom Case Dimensions, Under Mold ......................................................................... 10
Figure 4b. GPS 18 Bottom Case, Outside of Casing.................................................................................... 10
Figure 5. GPS 18 Suction Cup Mount Center Hole Dimensions.................................................................. 11
Figure 6. GPS 18 Flush Mount Dimensions................................................................................................. 11
Figure 7. GPS 18 Flush Mount Center Hole Dimensions.............................................................................11
Table 2: NMEA 0183 Output Sentence Order and Size...............................................................................15
Table 3: Characters per Second for Available Baud Rates........................................................................... 15

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 1
1 INTRODUCTION
1.1 CAUTIONS
CAUTION
The GPS system is operated by the government of the United States, which is solely responsible for its
accuracy and maintenance. Although the GPS 18 is a precision electronic NAVigation AID (NAVAID),
any NAVAID can be misused or misinterpreted, and therefore become unsafe. Use these products at your
own risk. To reduce the risk, carefully review and understand all aspects of these Technical Specifications
before using the GPS 18. When in actual use, carefully compare indications from the GPS to all available
navigation sources including the information from other NAVAIDs, visual sightings, charts, etc. For safety,
always resolve any discrepancies before continuing navigation.
FCC
Compliance
The GPS 18 complies with Part 15 of the FCC interference limits for Class B digital devices FOR HOME
OR OFFICE USE. These limits are designed to provide reasonable protection against harmful interference
in a residential installation, and are more stringent than “outdoor” requirements.
Operation of this device is subject to the following conditions: (1) This device may not cause harmful
interference, and (2) this device must accept any interference received, including interference that may
cause undesired operation.
This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in
accordance with the instructions, may cause harmful interference to radio communications. However, there
is no guarantee that interference will not occur in a particular installation. If this equipment does cause
harmful interference to radio or television reception, which can be determined by turning the equipment off
and on, the user is encouraged to try to correct the interference by one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
The GPS 18 does not contain any user-serviceable parts. Unauthorized repairs or modifications could result
in permanent damage to the equipment, and void your warranty and your authority to operate this device
under Part 15 regulations.

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 2
1.2 LIMITED WARRANTY
This Garmin product is warranted to be free from defects in materials or workmanship for one year from
the date of purchase. Within this period, Garmin will at its sole option, repair or replace any components
that fail in normal use. Such repairs or replacement will be made at no charge to the customer for parts or
labor, provided that the customer shall be responsible for any transportation cost. This warranty does not
cover failures due to abuse, misuse, accident or unauthorized alteration or repairs.
THE WARRANTIES AND REMEDIES CONTAINED HEREIN ARE EXCLUSIVE AND IN LIEU OF
ALL OTHER WARRANTIES EXPRESS OR IMPLIED OR STATUTORY, INCLUDING ANY
LIABILITY ARISING UNDER ANY WARRANTY OF MERCHANTABILITY OR FITNESS FOR A
PARTICULAR PURPOSE, STATUTORY OR OTHERWISE. THIS WARRANTY GIVES YOU
SPECIFIC LEGAL RIGHTS, WHICH MAY VARY FROM STATE TO STATE.
IN NO EVENT SHALL GARMIN BE LIABLE FOR ANY INCIDENTAL, SPECIAL, INDIRECT OR
CONSEQUENTIAL DAMAGES, WHETHER RESULTING FROM THE USE, MISUSE, OR
INABILITY TO USE THIS PRODUCT OR FROM DEFECTS IN THE PRODUCT. Some states do not
allow the exclusion of incidental or consequential damages, so the above limitations may not apply to you.
Garmin retains the exclusive right to repair or replace the unit or software or offer a full refund of the
purchase price at its sole discretion. SUCH REMEDY SHALL BE YOUR SOLE AND EXCLUSIVE
REMEDY FOR ANY BREACH OF WARRANTY.
To obtain warranty service, contact your local Garmin authorized dealer, or call Garmin Product Support at
one of the numbers shown below for shipping instructions and an RMA tracking number. The unit should
be securely packed with the tracking number clearly written on the outside of the package. The unit should
then be sent, freight charges prepaid, to any Garmin warranty service station. A copy of the original sales
receipt is required as the proof of purchase for warranty repairs.
Garmin International, Inc.
1200 East 151st Street,
Olathe, Kansas 66062, U.S.A.
Tel. 913/397.8200 or 800/800.1020
Fax 913/397.8282
Garmin (Europe) Ltd.
Unit 5, The Quadrangle, Abbey Park Industrial Estate,
Romsey, SO51 9DL, U.K.
Tel. 44/0870.8501241
Fax 44/0870.8501251

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 3
Overview
The GPS 18 series products include an embedded receiver and an antenna. Based on the proven technology
found in other Garmin 12-channel GPS receivers, the GPS 18 tracks up to 12 satellites at a time while
providing fast time-to-first-fix, precise navigation updates (five times per second for the GPS 18-5Hz, and
once per second for the GPS 18 USB, 18 PC, and 18 LVC), and low power consumption. This generation
of GPS sensors adds the capability of FAA Wide Area Augmentation System (WAAS) differential GPS.
The GPS 18’s far-reaching capability meets the sensitivity requirements of land navigation as well as the
dynamics requirements of high-performance aircraft.
The GPS 18 design uses the latest technology and high-level circuit integration to achieve superior
performance while minimizing space and power requirements. All critical components of the system
including the RF/IF receiver hardware and the digital baseband are designed and manufactured by Garmin
to ensure the quality and capability of the GPS. The hardware capability combined with software
intelligence makes the GPS 18 easy to integrate and use.
The GPS 18 series products are designed to withstand rugged operating conditions and are waterproof to
IEC 60529 IPX7, immersion in 1 meter of water for 30 minutes. These complete GPS receivers require
minimal additional components to be supplied by an OEM or system integrator. A minimum system must
provide the GPS with a source of power and a clear view of the GPS satellites. Internal FLASH memory
allows the GPS to retain critical data such as satellite orbital parameters, last-known position, date and
time. End user interfaces such as keyboards and displays are the responsibility of the application designer.
1.3 FEATURES
• 12-channel GPS receiver tracks and uses up to 12 satellites for fast, accurate positioning and low
power consumption.
• Differential DGPS capability using real-time WAAS corrections yielding position errors of less than 3
meters.
• Compact, rugged design ideal for applications with minimal space. Receiver position information can
be displayed directly on a chartplotter or PC.
• User initialization is not required. Once installed, unit automatically produces navigation data after
position fix is acquired.
• User-configurable navigation mode (2-dimensional or 3-dimensional fix).
• (GPS 18 LVC and GPS 18-5Hz only) Highly accurate measurement pulse output for precise timing
measurements: one-pulse-per-second (1 Hz) for the GPS 18 LVC or 5 Hz for GPS 18-5Hz. Pulse width
is configurable in 20 millisecond increments from 20 ms to 980 ms with 1 µs accuracy.
• Configurable for binary format carrier phase data output.
• FLASH-based program and non-volatile memory. New software revisions available through Web site
download. Non-volatile memory does not require battery backup.
• Onboard rechargeable backup battery to maintain the real-time clock for up to 3 weeks.
• Configurable parameters include expected position, current time and date, preferred position fix type
(2D, 3D, or automatic), and velocity filter time constant (none, automatic, or your choice between 2
and 255 seconds).
• Waterproof design allows continuous exposure to the prevailing weather conditions at most locations.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 4
1.4 GPS 18 SERIES
There are several different versions of GPS 18 available. Refer below for a list of the three major divisions
of the GPS 18 Series.
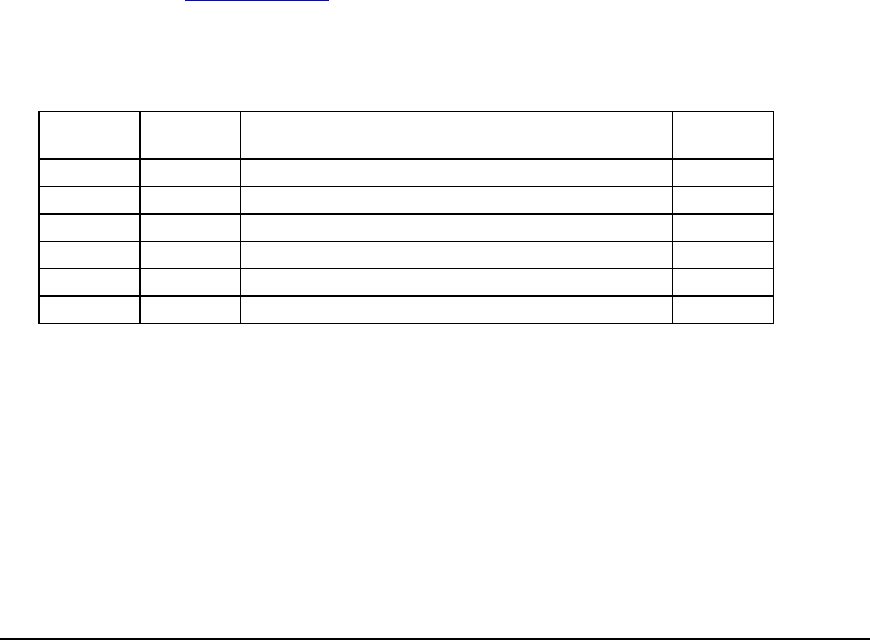
1.4.1 GPS 18 USB The GPS 18 USB interfaces to a computer with an available USB
port. Drivers are available for use on Windows computers.
Macintosh and Linux drivers are not available. After the drivers are
loaded, the device appears to the Windows operating system as a
USB-connected device and appears in Device Manager as a Garmin
USB Device.
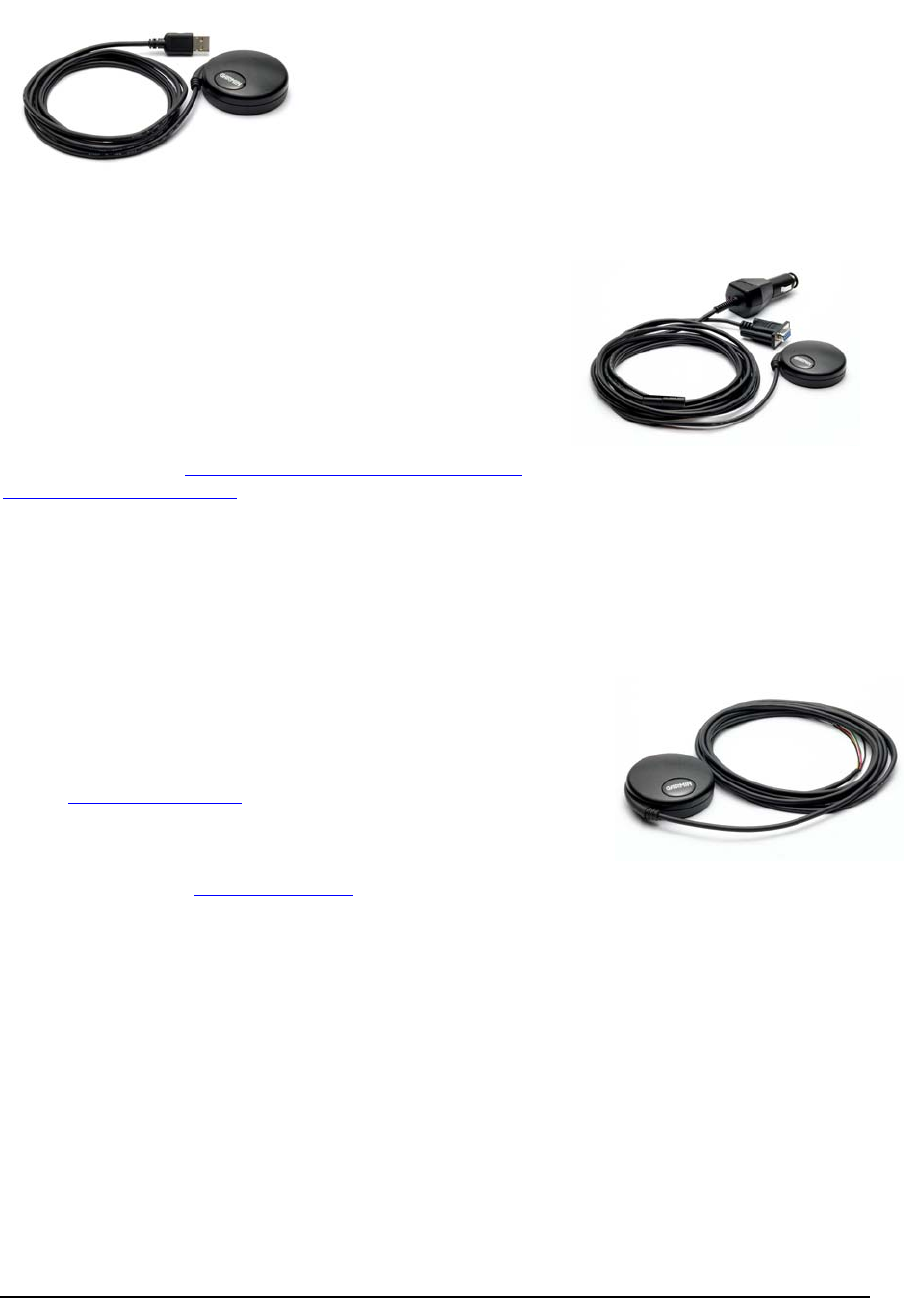
1.4.2 GPS 18 PC
The GPS 18 PC interfaces to a serial port of a computer via a DB-9
connector and receives power through a 12-volt cigarette lighter
adapter. The unit accepts TIA-232-F (RS-232) level inputs and
transmits voltage levels that swing from zero V (ground) to 5 V
TIA-232-F (RS-232) polarity.
The GPS 18 PC can cause an issue with Windows operating systems
if the DB9 connector is plugged into the computer before the
navigation software is up and running. The Windows operating
system may interpret the serial connector on the GPS 18 as a serial
mouse. Please refer to Appendix D: GPS 18 PC/ LVC/18-5Hz &
Windows Serial Mouse Issue for complete details.
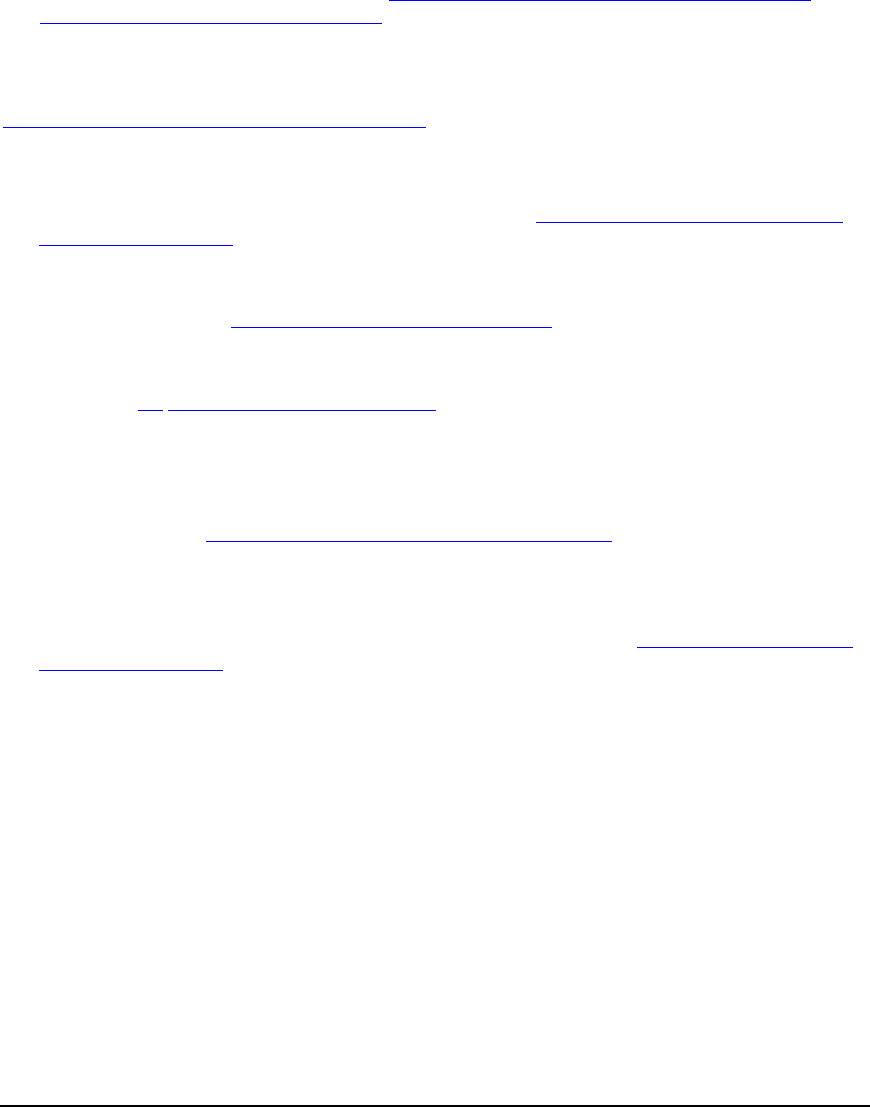
1.4.3 GPS 18 LVC, GPS 18 LVC-5m, and GPS 18-5Hz
These products interface to a serial port. The units accept TIA-232-F (RS-232) level inputs and transmit
voltage levels that swing from ground to the positive supply voltage, TIA-232-F (RS-232) polarity. They
also have reverse polarity protection. The cable contains wires for power, ground, receive, transmit, and
measurement pulse output.
At the end of the cable, the wires are terminated in a connector that is
used by Garmin for testing purposes. Most customers will remove this
connector and replace it with another connector of their own choosing.
Removing the factory installed connector and/or replacing with another
customer-supplied connector will have no affect on the warranty (see
Section 1.2 Limited Warranty). The factory-installed connector will mate
with JST right-angle PCB-mount connector (model BM06B-SRSS-TBT)
or side-entry PCB-mount connector (model SM06B-SRSS-TB). You may
obtain technical information on these PCB-mount mating connectors
from the JST Web site: http://www.jst.com/.
Note: Unless otherwise specified, all references to the GPS 18 LVC also include the GPS 18 LVC-5m.

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 5
1.5 TECHNICAL SPECIFICATIONS
Specifications are subject to change without notice.
1.5.1 Physical Characteristics
1.5.1.1 Size
61 mm in diameter and 19.5 mm in height
1.5.1.2 Weight
• GPS 18 unit only (no cable): 1.9 oz (53.9 g)
• GPS 18 USB: 3.5 oz (100.4 g)
• GPS 18 PC: 6.5 oz (184.6 g)
• GPS 18 LVC (3 meter cable): 3.9 oz (110.6 g)
• GPS 18 LVC-5m (5 meter cable): 5.7 oz (161.6 g)
• GPS 18-5Hz (5 meter cable): 5.7 oz (161.6 g)
1.5.1.3 Color
Black
1.5.1.4 Case Material
Polycarbonate thermoplastic that is waterproof to IEC 60529 IPX7 level (immersion in 1 meter of water for
30 minutes)
1.5.1.5 Cable Length
• GPS 18 USB: 2 meter
• GPS 18 PC: 2 meter
• GPS 18 LVC: 3 meter (Garmin Part Number 010-00321-05)
• GPS 18 LVC-5m: 5 meter (Garmin Part Number 010-00321-06)
• GPS 18-5Hz: 5 meter
1.5.2 Electrical Characteristics
1.5.2.1 Input Voltage
• GPS 18 USB: 4.4–5.5 V
• GPS 18 PC: 8–30 V (Automotive supply from cigarette lighter jack)
• GPS 18 LVC: 4.0–5.5 V
• GPS 18-5Hz: 4.0–5.5 V
1.5.2.2 Input Current
• GPS 18 USB: 55 mA @ 5.0 V
• GPS 18 PC: 50 mA @ 13.8 V
• GPS 18 LVC: 60 mA @ 5.0 V
• GPS 18-5Hz: 65 mA @ 5.0 V
1.5.2.3 CMOS Serial Output Levels
• GPS 18 PC: 0 V to 5 V (Asynchronous Serial, TIA-232-F (RS-232) Compatible Polarity)
• GPS 18 LVC and GPS 18-5Hz: 0 V to Vin, between 4 and 5.5 V (Asynchronous Serial, TIA-232-F
(RS-232) Compatible Polarity)

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 6
1.5.2.4 GPS Receiver Sensitivity
-165 dBW minimum
1.5.3 Environmental Characteristics
• Operating Temperature: -30°C to +80°C
• Storage Temperature: -40°C to +90°C
1.5.4 GPS Performance
1.5.4.1 Receiver
WAAS enabled; 12 parallel channel GPS receiver continuously tracks and uses up to 12 satellites (up to 11
with Measurement Pulse Output active) to compute and update your position.
1.5.4.2 Acquisition Times
• Reacquisition: Less than 2 seconds
• Warm: Approx. 15 seconds (all data known)
• Cold: Approx. 45 seconds (initial position, time, and almanac known; ephemeris unknown)
• AutoLocateTM: 5 minutes (almanac known; initial position and time unknown)
• SkySearch: 5 minutes (no data known)
1.5.4.3 Update Rate
• GPS 18 USB, PC, and LVC: 1 record per second
• GPS 18-5Hz: 5 records per second
1.5.4.4 Accuracy
• GPS Standard Positioning Service (SPS)
Position: < 15 meters, 95% typical
Velocity: 0.1 knot RMS steady state
• WAAS
Position: < 3 meters, 95% typical
Velocity: 0.1 knot RMS steady state
• Measurement Pulse Output Time: ±1 microsecond at rising edge of the pulse
• Dynamics: 999 knots velocity (only limited at altitude greater than 60,000 feet), 6g dynamics
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 7
1.5.5 Interfaces
1.5.5.1 GPS 18 Electrical Characteristics
• GPS 18 USB: USB 2.0 full-speed protocol compatible, as well as USB 1.1 full-speed protocol.
• GPS 18 PC and LVC: TIA-232-F (RS-232) compatible asynchronous receiver. Default setting is 4800
baud.
• GPS 18-5Hz: TIA-232-F (RS-232) compatible asynchronous receiver. Default setting is 19200
baud.
1.5.5.2 Garmin Interface and Garmin USB Protocol
Refer to the Garmin Device Interface Specification for information about the Garmin USB Protocol. The
document is located on the Garmin Web site at: http://www.garmin.com/support/commProtocol.html. See
also Appendix B: Binary Phase Output Format for additional information concerning access to raw pseudo-
range and carrier phase data from the GPS 18 USB.
Refer to the Garmin Device Interface Specification for details on the Garmin interface. At the time of this
printing, these specs are available from the technical suppport section of our Web site:
http://www.garmin.com/support/commProtocol.html.
1.5.5.3 GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz Protocols
• NMEA 0183 Version 2.0 or NMEA 0183 Version 2.30 (Version 2.0 is factory default, programmable
by data field 7 of the PGRMC1 sentence described in Section 4.1.4 Additional Sensor Configuration
Information (PGRMC1).
• Available NMEA 0183 output sentences include GPALM, GPGGA, GPGSA, GPGSV, GPRMC,
GPVTG, GPGLL, PGRME, PGRMF, PGRMT, PGRMV, and PGRMB (Garmin proprietary
sentences). See Section 4.2 Transmitted NMEA 0183 Sentences for format descriptions.
• Configuration and initialization is accomplished with NMEA 0183 input sentences. Allows
initialization of information such as expected position, date, time, earth datum, and differential mode.
See Section 4.1 Received NMEA 0183 Sentences for format descriptions.
• Configurable for binary data output including GPS carrier phase data.
1.5.5.4 Measurement Pulse Output (GPS 18 LVC & GPS 18-5Hz only)
• GPS 18 LVC: 1 Hz pulse with programmable width, configurable in 20 ms increments form 20 ms to
980 ms. See Section 4.1.3 Sensor Configuration Information (PGRMC) for details about configuring
the Measurement Pulse Output (or PPS) feature.
• GPS 18-5Hz: 5 Hz pulse synchronized with the time of fix. One of the five pulses will align with the
UTC second boundary. The pulse width is programmable from 20 ms to 180 ms. The PGRMC
sentence will indicate which pulse is at the top-of-the-second. See Section 4.1.3 Sensor Configuration
Information (PGRMC) for details about configuring the Measurement Pulse Output (or PPS) feature.
• 1 µs accuracy for all conditions in which the GPS 18 LVC or GPS 18-5Hz has reported a valid and
accurate position fix for at least the previous 4 seconds.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 8
2 GPS 18 LVC & GPS 18-5Hz WIRING AND PINOUTS
The GPS 18 LVC/18-5Hz interfaces to a serial port. The unit accepts TIA-232-F (RS-232) level inputs and
transmits voltage levels from ground to the input voltage, TIA-232-F (RS-232) polarity.
The GPS 18 LVC/18-5Hz wires are terminated with a six-wire connector that is used by Garmin for testing
purposes. You can remove this connector without voiding your warranty (see Section 1.2 Limited
Warranty).
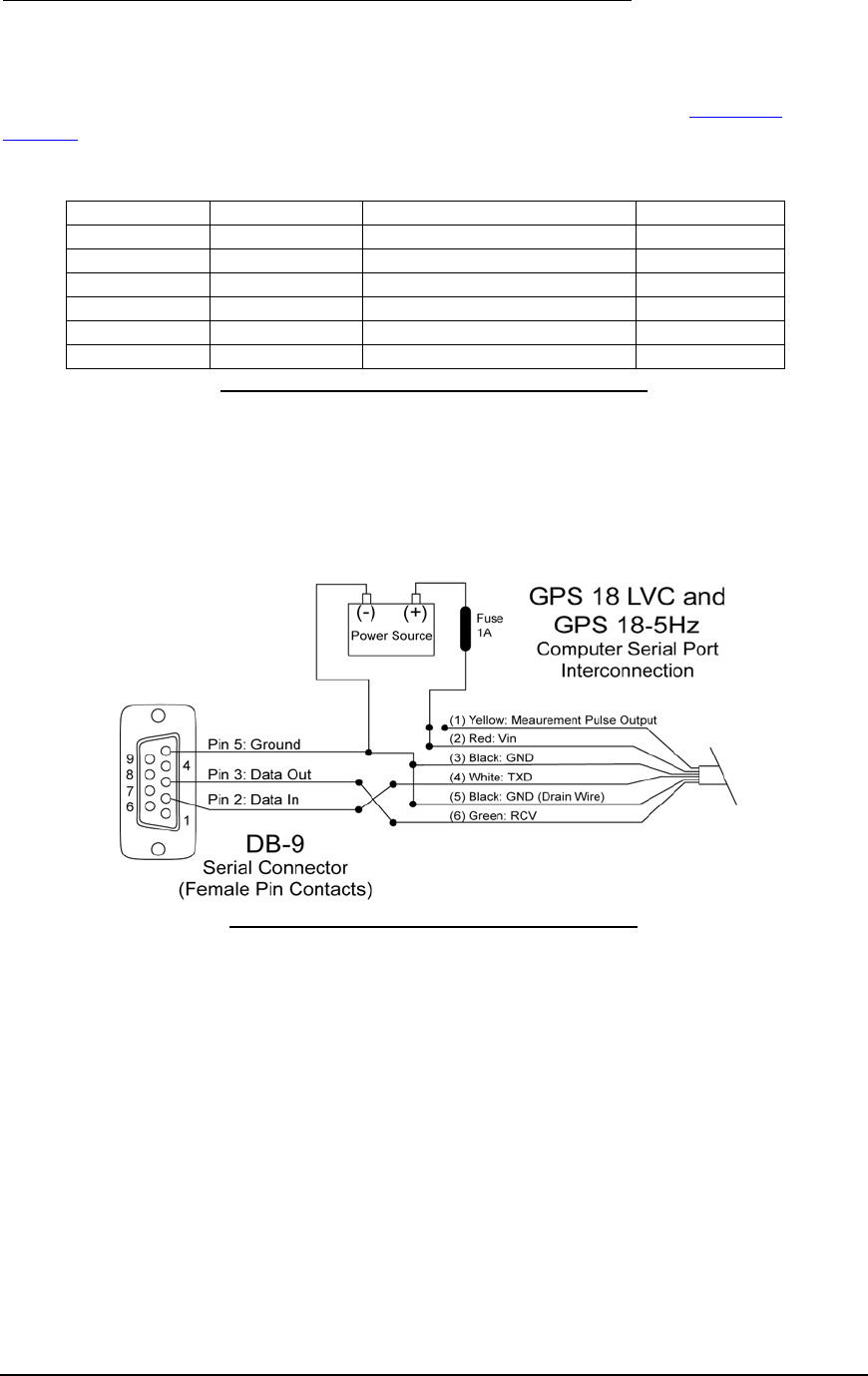
2.1 GPS 18 LVC & GPS 18-5Hz PINOUT
GPS 18 Pin # Color Signal Name Wire Gauge
1Yellow Measurement Pulse Output 28
2Red Vin 26
3Black Ground 28
4White Transmit Data 28
5Black Ground 26
6Green Receive Data 28
Table 1: GPS 18 LVC & GPS 18-5Hz Wire Pinout
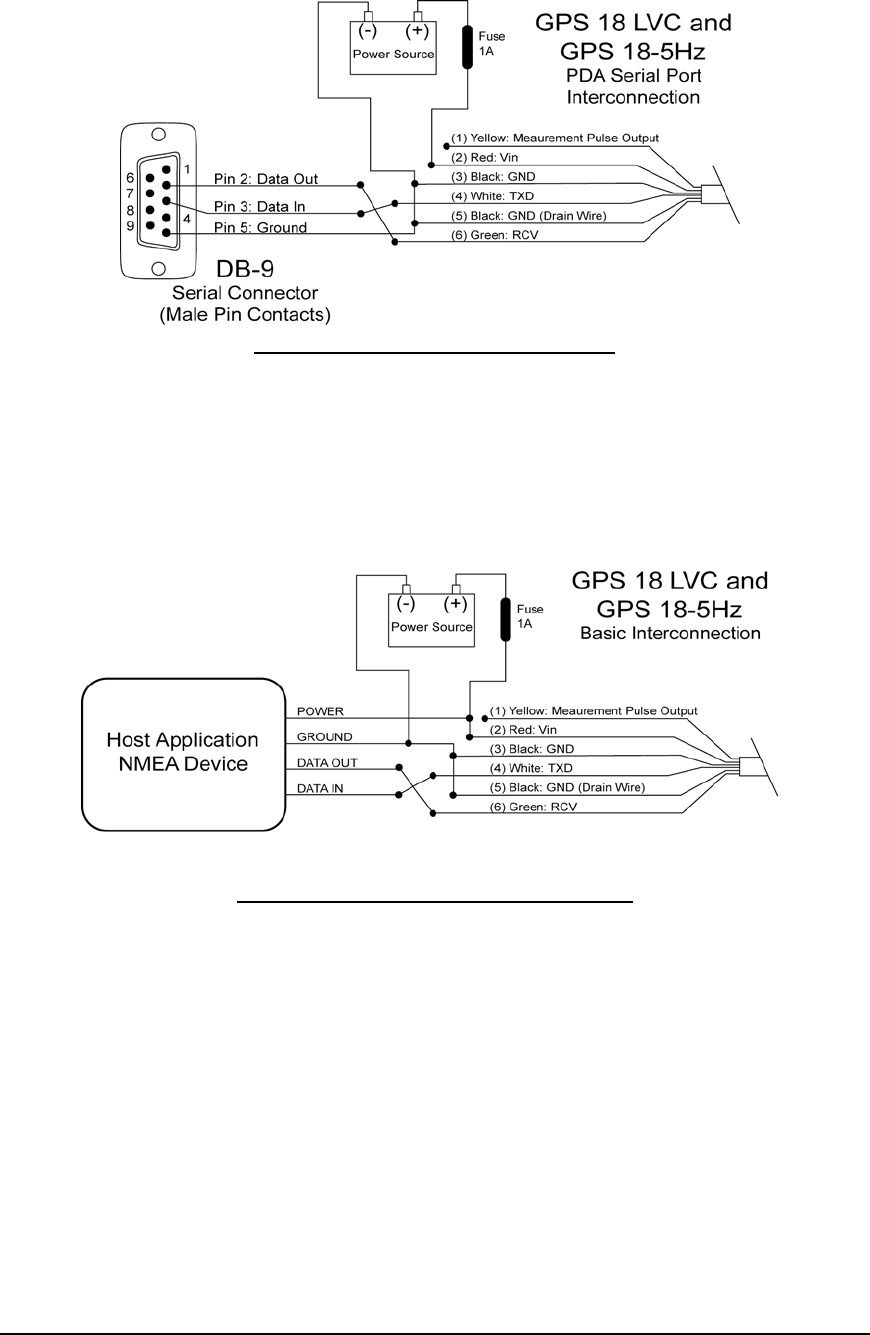
2.2 GPS 18 LVC & GPS 18-5Hz WIRING DIAGRAMS
Figure 1: Computer Serial Port Interconnection
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 9
Figure 2. PDA Serial Port Interconnection
Figure 3. Basic NMEA Device Interconnection
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 10
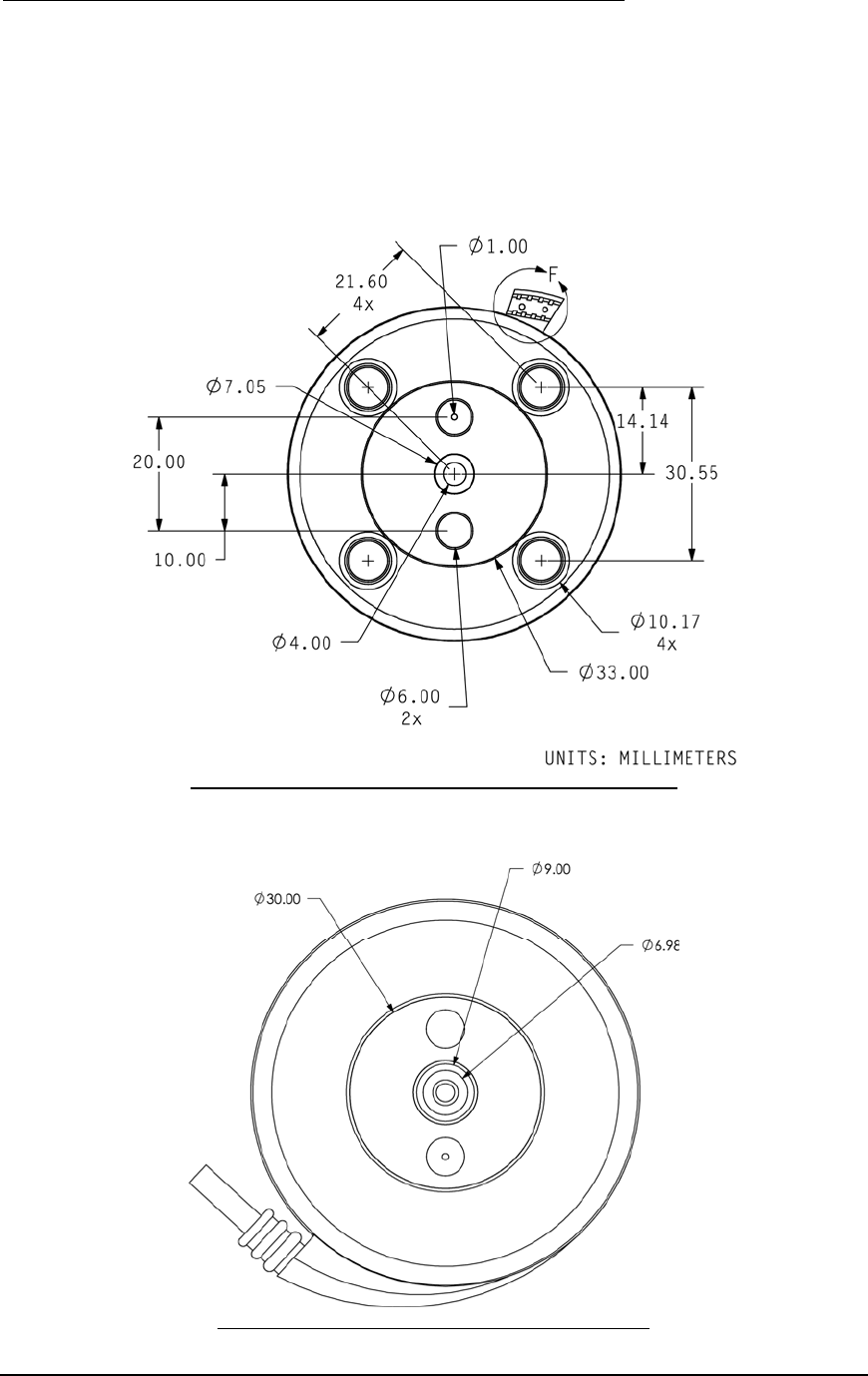
3 MECHANICAL CHARACTERISTICS & MOUNTING
The central threaded recess accepts a metric M3 threaded bolt. The recess is approximately 4 mm deep
(4.32 +/- 0.08 mm). The following drawings show example geometries for mounting hardware in case you
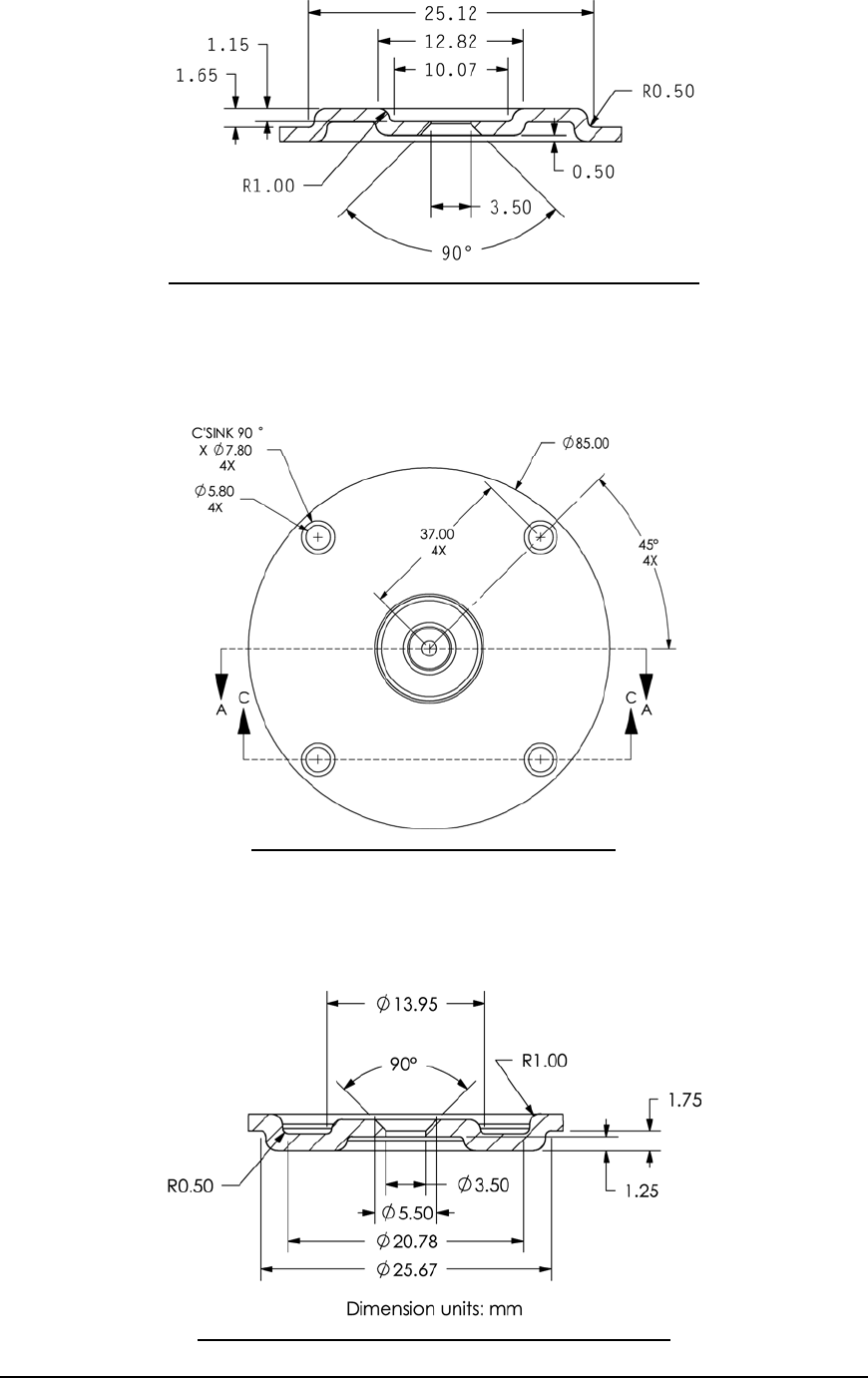
wish to design your own custom mount. Figure 5 shows mounting geometry for a mount formed from steel
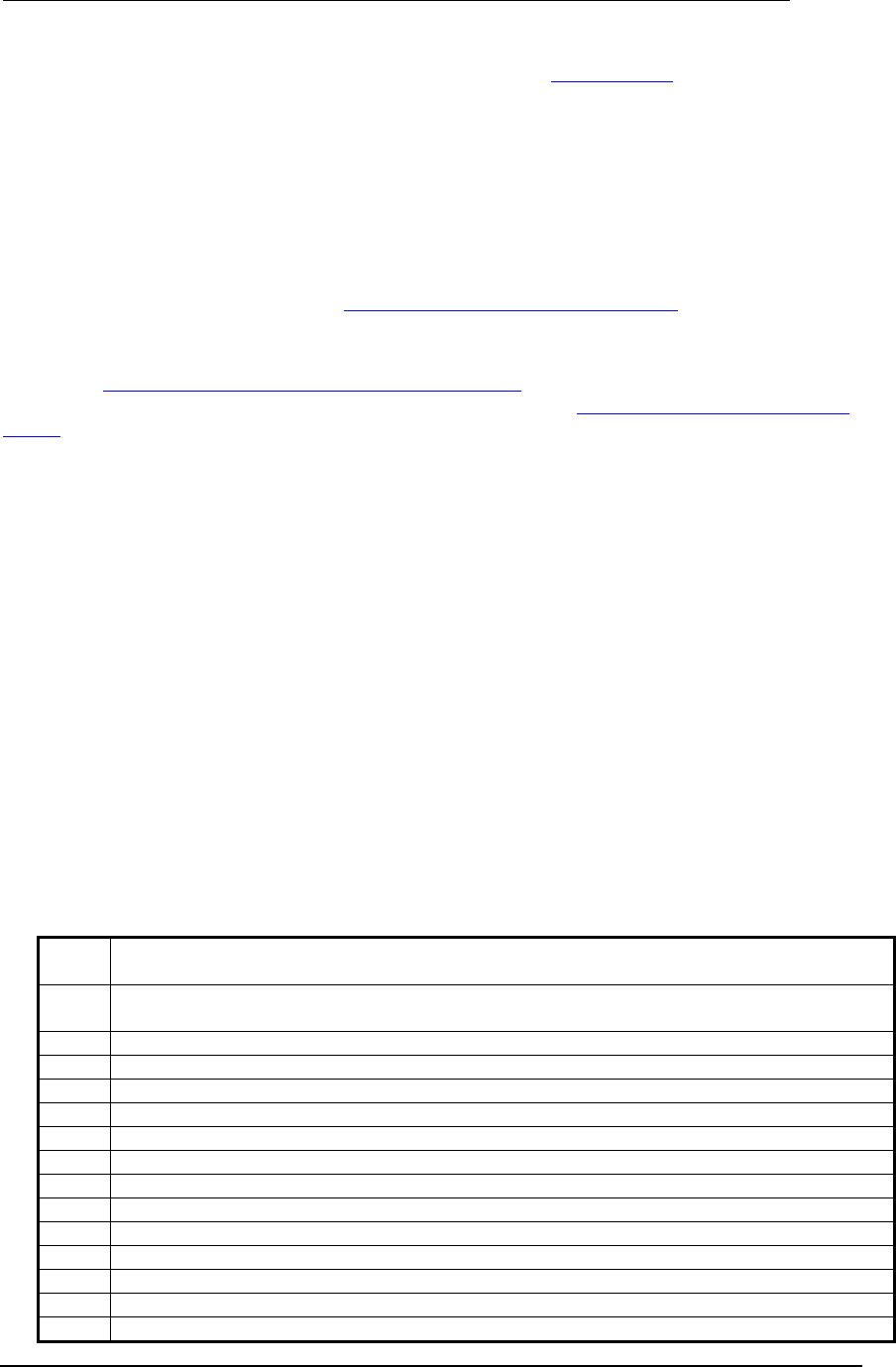
sheet metal that is 1.15 mm thick. Figure 7 shows similar mounting geometry for mount formed from
aluminum sheet metal that is 1.25 mm thick. Use caution when tightening the mounting bolt. Tightening
the mounting bolt can cause the mount to pull tight directly against the metal insert, not against the plastic
housing, which would tend to pull the insert out of the plastic. Figure 6 shows the dimensions of our GPS
18 Flush Mount, part number 010-10453-00.
Figure 4a. GPS 18 Bottom Case Dimensions, Under Mold
Figure 4b. GPS 18 Bottom Case, Outside of Casing
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 11
Figure 5. GPS 18 Suction Cup Mount Center Hole Dimensions
Figure 6. GPS 18 Flush Mount Dimensions
Figure 7. GPS 18 Flush Mount Center Hole Dimensions
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 12
4 GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz SOFTWARE INTERFACE
The interface protocol design of the GPS 18 PC, LVC, and GPS 18-5Hz products is based on the National
Marine Electronics Association’s NMEA 0183 ASCII interface specification. This standard is fully defined
in NMEA 0183, Version 2.30. Copies may be obtained from NMEA, www.nmea.org.
In addition to the standard NMEA 0183 sentences, the GPS 18 PC, LVC, and GPS 18-5Hz may also be
configured to transmit information over their serial interface using NMEA 0183 compliant Garmin
proprietary sentences. These proprietary sentences begin with the characters, “$PGRM”, instead of the
characters “$G” that are typical of the standard NMEA 0183 sentences. The characters “$P” indicate that
the sentence is a proprietary implementation and the characters and “GRM” indicate that it is Garmin’s
proprietary sentence. The letter (or letters) that follow the characters “$PGRM” uniquely identifies that
particular Garmin proprietary sentence.
It is also possible to configure the GPS 18 PC, LVC, and GPS 18-5Hz to transmit binary phase data
information over their serial interface. See Appendix B: Binary Phase Output Format for details.
The GPS 18 USB does not transmit NMEA sentences: It transmits using the Garmin USB interface. The
Garmin USB interface is discussed in the Garmin Device Interface Specification located on the Garmin
Web site at: http://www.garmin.com/support/commProtocol.html. You can configure the GPS 18 USB to
transmit binary phase data information over the USB interface. Refer to Appendix B: Binary Phase Output
Format.
The following sections describe the NMEA 0183 data format of each sentence transmitted and received by
the GPS 18 PC, LVC, and GPS 18-5Hz products.
4.1 RECEIVED NMEA 0183 SENTENCES
The following paragraphs define the sentences that can be received on the GPS sensors’ port. Null fields in
the configuration sentence indicate no change in the particular configuration parameter. All sentences
received by the GPS sensor must be terminated with <CR><LF>, the ASCII characters for carriage return
(0D hexadecimal) and line feed (0A hexadecimal). The checksum *hh is used for parity checking data and
is not required, but is recommended for use in environments containing high electromagnetic noise. It is
generally not required in normal PC environments. When used, the parity bytes (hh) are the ASCII
representation of the exclusive-or (XOR) sum of all the characters between the “$” and “*” characters, non-
inclusive. The hex representation must be a capital letter, such as 3D instead of 3d. Sentences may be
truncated by <CR><LF> after any data field and valid fields up to that point will be acted on by the sensor.
4.1.1 Almanac Information (ALM)
The $GPALM sentence can be used to initialize the GPS sensor’s stored almanac information in the
unlikely event of non-volatile memory loss or after storing longer than six months without tracking GPS
satellites.
$GPALM,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>*hh<CR><LF>
<1> Total number of ALM sentences to be transmitted by the GPS sensor during almanac download.
This field can be null or any number when sending almanac to the GPS sensor.
<2> Number of current ALM sentence. This field can be null or any number when sending almanac
to the GPS sensor.
<3> Satellite PRN number, 01 to 32
<4> GPS week number
<5> SV health, bits 17–24 of each almanac page
<6> Eccentricity
<7> Almanac reference time
<8> Inclination angle
<9> Rate of right ascension
<10> Root of semi major axis
<11> Omega, argument of perigee
<12> Longitude of ascension node
<13> Mean anomaly
<14> af0 clock parameter
<15> af1 clock parameter
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 13
4.1.2 Sensor Initialization Information (PGRMI)
The $PGRMI sentence provides information used to initialize the GPS sensor’s set position and time used
for satellite acquisition. Receipt of this sentence by the GPS sensor causes the software to restart the
satellite acquisition process. If there are no errors in the sentence, it will be echoed upon receipt. If an error
is detected, the echoed PGRMI sentence will contain the current default values. Current PGRMI defaults
(with the exception of the Receiver Command, which is a command rather than a mode) can also be
obtained by sending $PGRMIE to the GPS sensor.
$PGRMI,<1>,<2>,<3>,<4>,<5>,<6>,<7>*hh<CR><LF>
<1> Latitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-
5Hz (leading zeros must be transmitted)
<2> Latitude hemisphere, N or S
<3> Longitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-
5Hz (leading zeros must be transmitted)
<4> Longitude hemisphere, E or W
<5> Current UTC date, ddmmyy format
<6> Current UTC time, hhmmss format for GPS 18 PC/LVC; hhmmss.s format for GPS 18-5Hz
<7> Receiver Command, A = Auto Locate, R = Unit Reset
4.1.3 Sensor Configuration Information (PGRMC)
The $PGRMC sentence provides information used to configure the GPS sensor’s operation. Configuration
parameters are stored in non-volatile memory and retained between power cycles. The GPS sensor will
echo this sentence upon its receipt if no errors are detected. If an error is detected, the echoed PGRMC
sentence will contain the current default values. Current default values can also be obtained by sending
$PGRMCE to the GPS sensor.
$PGRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*hh<CR><LF>
<1> Fix mode, A = automatic, 2 = 2D exclusively (host system must supply altitude),
3 = 3D exclusively
<2> Altitude above/below mean sea level, -1500.0 to 18000.0 meters
<3> Earth datum index. If the user datum index (96) is specified, fields <4> through <8> must
contain valid values. Otherwise, fields <4> through <8> must be null. Refer to Appendix A:
Earth Datum List for a list of earth datum and the corresponding earth datum index.
<4> User earth datum semi-major axis, 6360000.000 to 6380000.000 meters (.001 meters
resolution)
<5> User earth datum inverse flattening factor, 285.0 to 310.0 (10-9 resolution)
<6> User earth datum delta x earth centered coordinate, -5000.0 to 5000.0 meters (1 meter
resolution)
<7> User earth datum delta y earth centered coordinate, -5000.0 to 5000.0 meters (1 meter
resolution)
<8> User earth datum delta z earth centered coordinate, -5000.0 to 5000.0 meters (1 meter
resolution)
<9> Differential mode, A = automatic (output DGPS data when available, non-DGPS otherwise), D
= differential exclusively (output only differential fixes)
<10> NMEA 0183 Baud rate, 1 = 1200, 2 = 2400, 3 = 4800, 4 = 9600, 5 = 19200, 6 = 300, 7 = 600,
8 = 38400 (for GPS 18-5Hz only)
<11> Velocity filter, 0 = No filter, 1 = Automatic filter, 2–255 = Filter time constant
(for example, 10 = 10 second filter)
<12> Measurement Pulse Output, 1 = Disabled, 2 = Enabled
<13> Measurement Pulse Output pulse length, (n+1)*20 ms
For 18 LVC/PC n = 0 through 48 (max. 980 ms)
For GPS 18-5Hz n = 0 through 8 (max. 180 ms)
Example: n = 4 corresponds to a 100 ms wide pulse
<14> Dead reckoning valid time 1 to 30 sec. for the GPS 18 PC/LVC
or 0.2 to 30.0 sec. for the GPS 18-5Hz
All configuration changes take effect after receipt of a valid value except baud rate and Measurement Pulse
Output mode. Baud rate and Measurement Pulse Output mode changes take effect on the next power cycle
or an external reset event.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 14
4.1.4 Additional Sensor Configuration Information (PGRMC1)
The $PGRMC1 sentence provides additional information used to configure the GPS sensor operation.
Configuration parameters are stored in non-volatile memory and retained between power cycles. The GPS
sensor will echo this sentence upon its receipt if no errors are detected. If an error is detected, the echoed
PGRMC1 sentence will contain the current default values. Current default values can also be obtained by
sending $PGRMC1E to the GPS sensor.
$PGRMC1,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>*hh<CR><LF>
<1> NMEA 0183 output time 1 to 900 (sec). Not applicable to GPS 18-5Hz, which always outputs
data at 5 Hz (200 ms)
<2> Binary Phase Output Data, 1 = Off, 2 = On.
<3> Automatic Position Averaging when Stopped, 1 = Off, 2 = On
<4> No Effect (DGPS beacon frequency: 0.0, 283.5 to 325.0 kHz in 0.5 kHz steps)
<5> No Effect (DGPS beacon bit rate: 0, 25, 50, 100, or 200 bps)
<6> No Effect (DGPS beacon scanning, 1 = Off, 2 = On)
<7> NMEA 0183 version 2.30 mode indicator, 1 = Off, 2 = On
<8> DGPS WAAS mode, W = WAAS Enabled, N = WAAS Disabled
<9> Power Save Mode, P = Power Save mode, N = Normal
<10> Adaptive Transmission Enabled, 1 = Off, 2 = On
<11> Auto Power Off, 1 = Off, 2 = On
<12> Power On with External Charger, 1 = Off, 2 = On
<13> Measurement Pulse Output Auto Off Mode, 1 = Off, 2 = On
Configuration changes take effect immediately, with the exception of Binary Phase Output Data, which
takes effect on the next power cycle or a reset event. Send the sentence “$PGRMI,,,,,,,R” to command a
reset (refer to Section 4.1.2 Sensor Initialization Information (PGRMI)). If the GPS sensor is in the Binary
data mode, it is necessary to send the following eight-byte data stream to temporarily change the data
format to NMEA 0183. Then follow by sending a PGRMC1 sentence that turns off the Binary Phase
Output Data format:
10 0A 02 26 00 CE 10 03 (Hexadecimal)
4.1.5 Output Sentence Enable/Disable (PGRMO)
The $PGRMO sentence provides the ability to enable and disable specific output sentences. The following
sentences are enabled at the factory for the GPS 18 PC and LVC: GPGGA, GPGSA, GPGSV, GPRMC,
and PGRMT.
The following sentences are enabled at the factory for the GPS 18-5Hz: GPGGA, GPGSA, GPRMC,
GPUTG, and PGRMT.
$PGRMO,<1>,<2>*hh<CR><LF>
<1> Target sentence description (for example, PGRMT, GPGSV, etc.)
<2> Target sentence mode, where 0 = disable specified sentence, 1 = enable specified sentence, 2 =
disable all output sentences, 3 = enable all output sentences (except GPALM), 4 = restore
factory default output sentences
The following notes apply to the PGRMO input sentence:
1. If the target sentence mode is ‘2’ (disable all), ‘3’ (enable all), or ‘4’ (restore defaults), the target
sentence description is not checked for validity. In this case, an empty field is allowed (for example,
$PGRMO,,3), or the mode field may contain from 1 to 5 characters.
2. If the target sentence mode is ‘0’ (disable) or ‘1’ (enable), the target sentence description field must be
an identifier for one of the sentences that can be output by the GPS sensor.
3. If either the target sentence mode field or the target sentence description field is not valid, the PGRMO
sentence will have no effect.
4. $PGRMO,GPALM,1 will cause the GPS sensor to transmit all stored almanac information. All other
NMEA 0183 sentence transmission will be suspended temporarily.
5. $PGRMO,,G will cause the COM port to change to Garmin Data Transfer format for the duration of
the power cycle. The Garmin mode is required for GPS 18 series product software updates.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 15
4.2 TRANSMITTED NMEA 0183 SENTENCES
The subsequent paragraphs define the sentences that can be transmitted by the GPS 18 PC and LVC.
4.2.1 Sentence Transmission Rate
Sentences are transmitted with respect to the user selected baud rate.
The GPS sensor will transmit each sentence (except where noted in particular transmitted sentence
descriptions) at a periodic rate based on the user selected baud rate and user selected output sentences. The
GPS sensor will transmit the selected sentences contiguously. The length of the transmission can be
determined by the following equation and Tables 2 and 3:
total characters to be transmitted
length of transmission = ---------------------------------------------
characters transmitted per second
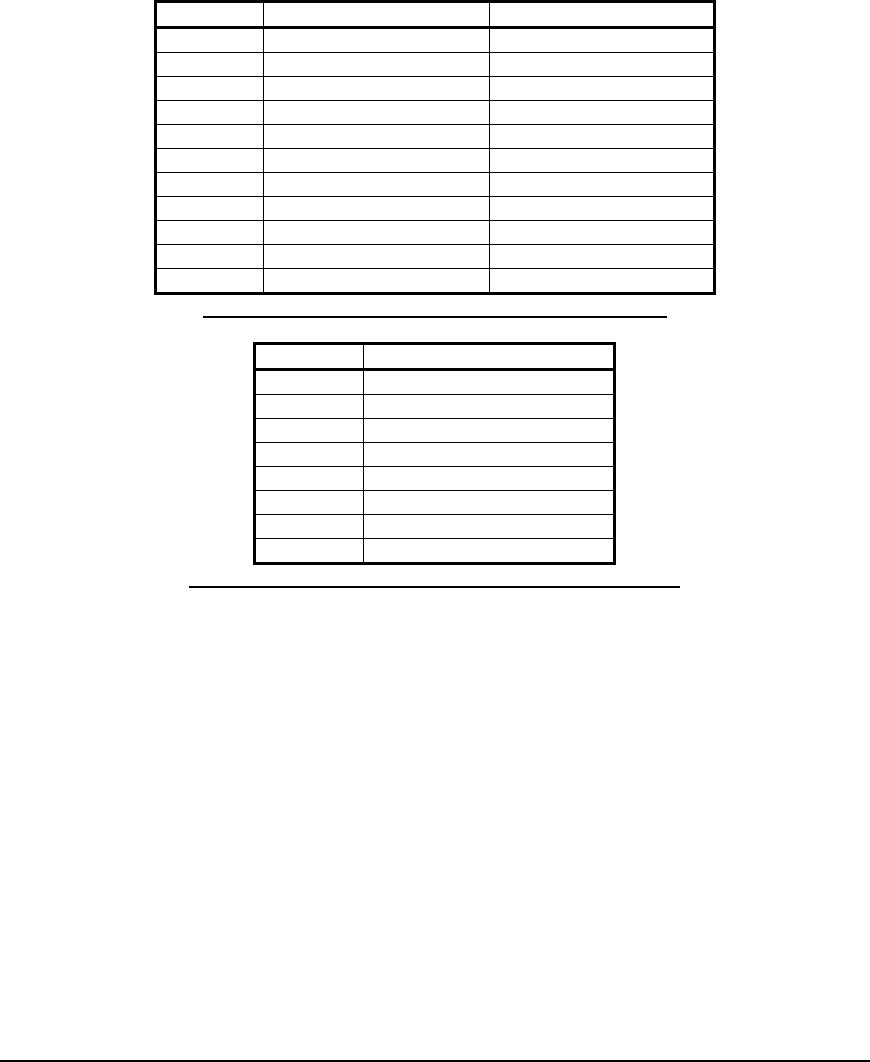
Sentence Output by Default? Maximum Characters
GPRMC 74
GPGGA 82
GPGSA 66
GPGSV (PC and LVC only) 70
PGRME (PC and LVC only) 35
GPGLL 44
GPVTG (18-5Hz only) 42
PGRMV 32
PGRMF 82
PGRMB (PC and LVC only) 40
PGRMT Once per minute 50
Table 2: NMEA 0183 Output Sentence Order and Size
Baud Characters per Second
300 30
600 60
1200 120
2400 240
4800 480
9600 960
19200 1920
38400 3840
Table 3: Characters per Second for Available Baud Rates
The maximum number of fields allowed in a single sentence is 82 characters including delimiters. Values
in the table include the sentence start delimiter character “$” and the termination delimiter <CR><LF>. For
the GPS 18 PC and LVC, the factory set defaults result in a once per second transmission at the NMEA
0183 specification transmission rate of 4800 baud. For the GPS 18-5Hz, the factory set defaults will result
in a five times per second transmission at 19200 baud.
For the GPS 18 LVC: Regardless of the selected baud rate, the information transmitted by the GPS sensor
is referenced to the one-pulse-per-second output pulse immediately preceding the GPRMC sentence, or
whichever sentence is output first in the burst (see Table 2 above).
For the GPS 18-5Hz: Regardless of the selected baud rate, the information transmitted by the GPS sensor is
referenced to the preceding five times per second output pulse.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 16
4.2.2 Transmitted Time
The GPS sensor outputs UTC (Coordinated Universal Time) date and time of day in the transmitted
sentences. Before the initial position fix, the on-board clock provides the date and time of day. After the
initial position fix, the date and time of day are calculated using GPS satellite information and are
synchronized with the measurement pulse output.
The GPS 18-5Hz outputs a UTC with a tenths-of-a-second precision: 123456.8, for example.
The GPS sensor uses information obtained from the GPS satellites to add or delete UTC leap seconds and
correct the transmitted date and time of day. The transmitted date and time of day for leap second
correction follow the guidelines in “National Institute of Standards and Technology Special Publication
432 (Revised 1990)” (for sale by the Superintendent of Documents, U.S. Government Printing Office,
Washington, D.C., 20402, U.S.A.).
When a positive leap second is required, one second is inserted at the beginning of the first hour (0h 0m 0s)
of the day that the positive leap is occurring. The minute containing the leap second is 61 seconds long. The
GPS sensor would have transmitted this information for the leap second added December 31, 1998 as
follows:
$GPRMC,235959,A,3851.3651,N,09447.9382,W,000.0,221.9,071103,003.3,E*69
$GPRMC,000000,A,3851.3651,N,09447.9382,W,000.0,221.9,081103,003.3,E*67
$GPRMC,000000,A,3851.3651,N,09447.9382,W,000.0,221.9,081103,003.3,E*67
$GPRMC,000001,A,3851.3651,N,09447.9382,W,000.0,221.9,081103,003.3,E*66
If a negative leap second should be required, one second will be deleted at the end of some UTC month.
The minute containing the leap second will be only 59 seconds long. In this case, the GPS sensor will not
transmit the time of day 0h 0m 0s (the “zero” second) for the day from which the leap second is removed.
$GPRMC,235959,A,3851.3650,N,09447.9373,W,000.0,000.0,111103,003.3,E*69
$GPRMC,000001,A,3851.3650,N,09447.9373,W,000.0,000.0,121103,003.3,E*6A
$GPRMC,000002,A,3851.3650,N,09447.9373,W,000.0,000.0,121103,003.3,E*69
4.2.3 Global Positioning System Almanac Data (ALM)
Almanac sentences are not normally transmitted. Send the GPS sensor a $PGRMO,GPALM,1 command to
initiate almanac transmission. Upon receipt of this command, the GPS sensor will transmit available
almanac information on GPALM sentences. During the transmission of almanac sentences, other NMEA
0183 data output is suspended temporarily.
$GPALM,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>*hh<CR><LF>
<field information> can be found in Section 4.1.1 Almanac Information (ALM).
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 17
4.2.4 Global Positioning System Fix Data (GGA)
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF>
<1> UTC time of position fix, hhmmss format for GPS 18 PC or LVC; hhmmss.s format for GPS 18-
5Hz
<2> Latitude, ddmm.mmmm format for GPS 18 PC/LVC; ddmm.mmmmm for GPS 18-5Hz
(leading zeros will be transmitted)
<3> Latitude hemisphere, N or S
<4> Longitude, dddmm.mmmm format for GPS 18 PC/LVC; dddmm.mmmmm for GPS 18-5Hz
(leading zeros will be transmitted)
<5> Longitude hemisphere, E or W
<6> GPS quality indication, 0 = fix not available, 1 = Non-differential GPS fix available, 2 =
Differential GPS (WAAS) fix available, 6 = Estimated
<7> Number of satellites in use, 00 to 12 (leading zeros will be transmitted)
<8> Horizontal dilution of precision, 0.5 to 99.9
<9> Antenna height above/below mean sea level, -9999.9 to 99999.9 meters
<10> Geoidal height, -999.9 to 9999.9 meters
<11> Null (Differential GPS
<12> Null (Differential Reference Station ID)
4.2.5 GPS DOP and Active Satellites (GSA)
$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR><LF>
<1> Mode, M = manual, A = automatic
<2> Fix type, 1 = not available, 2 = 2D, 3 = 3D
<3> PRN number, 01 to 32, of satellite used in solution, up to 12 transmitted (leading zeros will be
transmitted)
<4> Position dilution of precision, 0.5 to 99.9
<5> Horizontal dilution of precision, 0.5 to 99.9
<6> Vertical dilution of precision, 0.5 to 99.9
4.2.6 GPS Satellites in View (GSV)
$GPGSV,<1>,<2>,<3>,<4>,<5>,<6>,<7>,...<4>,<5>,<6>,<7>*hh<CR><LF>
<1> Total number of GSV sentences to be transmitted
<2> Number of current GSV sentence
<3> Total number of satellites in view, 00 to 12 (leading zeros will be transmitted)
<4> Satellite PRN number, 01 to 32 (leading zeros will be transmitted)
<5> Satellite elevation, 00 to 90 degrees (leading zeros will be transmitted)
<6> Satellite azimuth, 000 to 359 degrees, true (leading zeros will be transmitted)
<7> Signal to noise ratio (C/No) 00 to 99 dB, null when not tracking (leading zeros will be
transmitted)
NOTE: Items <4>,<5>,<6>, and <7> repeat for each satellite in view to a maximum of four (4) satellites
per sentence. Additional satellites in view information must be sent in subsequent bursts of NMEA 0183
data. These fields will be null if unused.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 18
4.2.7 Recommended Minimum Specific GPS/TRANSIT Data (RMC)
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF>
<1> UTC time of position fix, hhmmss format for GPS 18 PC/LVC;
hhmmss.s format for GPS 18-5Hz
<2> Status, A = Valid position, V = NAV receiver warning
<3> Latitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<4> Latitude hemisphere, N or S
<5> Longitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<6> Longitude hemisphere, E or W
<7> Speed over ground, GPS 18 PC and LVC: 000.0 to 999.9 knots, GPS 18-5Hz: 000.00 to 999.99
knots (leading zeros will be transmitted)
<8> Course over ground, 000.0 to 359.9 degrees, true (leading zeros will be transmitted)
<9> UTC date of position fix, ddmmyy format
<10> Magnetic variation, 000.0 to 180.0 degrees (leading zeros will be transmitted)
<11> Magnetic variation direction, E or W (westerly variation adds to true course)
<12> Mode indicator (only output if NMEA 0183 version 2.30 active), A = Autonomous,
D = Differential, E = Estimated, N = Data not valid
4.2.8 Track Made Good and Ground Speed (VTG)
$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh<CR><LF>
<1> True course over ground, GPS 18 PC and LVC: 000 to 359 degrees, GPS 18-5Hz: 000.0 to
359.0 degrees(leading zeros will be transmitted)
<2> Magnetic course over ground, 000 to 359 degrees, GPS 18-5Hz: 000.0 to 359.0 degrees(leading
zeros will be transmitted)
<3> Speed over ground, GPS 18 PC and LVC: 000.0 to 999.9 knots, GPS 18-5Hz: 000.00 to 999.99
knots (leading zeros will be transmitted)
<4> Speed over ground, GPS 18 PC and LVC: 0000.0 to 1851.8 kilometers per hour, GPS 18-5Hz:
0000.00 to 1851.89 (leading zeros will be transmitted)
<5> Mode indicator (only output if NMEA 0183 version 2.30 active), A = Autonomous,
D = Differential, E = Estimated, N = Data not valid
4.2.9 Geographic Position (GLL)
$GPGLL,<1>,<2>,<3>,<4>,<5>,<6>,<7>*hh<CR><LF>
<1> Latitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<2> Latitude hemisphere, N or S
<3> Longitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<4> Longitude hemisphere, E or W
<5> UTC time of position fix, hhmmss format for GPS 18 PC/LVC; hhmmss.s format for GPS 18-
5Hz
<6> Status, A = Valid position, V = NAV receiver warning
<7> Mode indicator (only output if NMEA 0183 version 2.30 active), A = Autonomous,
D = Differential (WAAS), E = Estimated, N = Data not valid
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 19
4.2.10 Estimated Error Information (PGRME)
$PGRME,<1>,M,<2>,M,<3>,M*hh<CR><LF>
<1> Estimated horizontal position error (HPE), 0.0 to 999.9 meters
<2> Estimated vertical position error (VPE), 0.0 to 999.9 meters
<3> Estimated position error (EPE), 0.0 to 999.9 meters
4.2.11 GPS Fix Data Sentence (PGRMF)
$PGRMF,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>*hh<CR><LF>
<1> GPS week number (0 to 1023)
<2> GPS seconds (0 to 604799)
<3> UTC date of position fix, ddmmyy format
<4> UTC time of position fix, hhmmss format for GPS 18 PC/LVC; hhmmss.s format for GPS 18-
5Hz
<5> GPS leap second count
<6> Latitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<7> Latitude hemisphere, N or S
<8> Longitude, ddmm.mmm format for GPS 18 PC/LVC; ddmm.mmmmm format for GPS 18-5Hz
(leading zeros must be transmitted)
<9> Longitude hemisphere, E or W
<10> Mode, M = manual, A = automatic
<11> Fix type, 0 = no fix, 1 = 2D fix, 2 = 3D fix
<12> Speed over ground, 0 to 1851 kilometers/hour
<13> Course over ground, 0 to 359 degrees, true
<14> Position dilution of precision, 0 to 9 (rounded to nearest integer value)
<15> Time dilution of precision, 0 to 9 (rounded to nearest integer value)
4.2.12 Sensor Status Information (PGRMT)
The Garmin Proprietary sentence $PGRMT gives information concerning the status of the GPS sensor.
This sentence is transmitted once per minute regardless of the selected baud rate.
$PGRMT,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>*hh<CR><LF>
<1> Product, model and software version (variable length field, for example, “GPS 18 VER 2.05”)
<2> ROM checksum test, P = pass, F = fail
<3> Receiver failure discrete, P = pass, F = fail
<4> Stored data lost, R = retained, L = lost
<5> Real time clock lost, R = retained, L = lost
<6> Oscillator drift discrete, P = pass, F = excessive drift detected
<7> Data collection discrete, C = collecting, null if not collecting
<8> GPS sensor temperature in degrees C
<9> GPS sensor configuration data, R = retained, L = lost
4.2.13 3D Velocity Information (PGRMV)
$PGRMV,<1>,<2>,<3>*hh<CR><LF>
<1> True east velocity, -514.4 to 514.4 meters/second for GPS 18 PC/LVC; -514.44 to 514.44 for
GPS 18-5Hz
<2> True north velocity, -514.4 to 514.4 meters/second for GPS 18 PC/LVC; -514.44 to 514.44 for
GPS 18-5Hz
<3> Up velocity, -999.9 to 999.9 meters/second for GPS 18 PC/LVC; -999.99 to 999.99 for GPS 18-
5Hz
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 20
4.2.14 DGPS Beacon Information (PGRMB)
NOTE: The GPS 18 products do not support PGRMB at this time.
$PGRMB,<1>,<2>,<3>,<4>,<5>,K,<6>,<7>,<8>*hh<CR><LF>
<1> Beacon tune frequency, 0.0, 283.5 to 325.0 kHz in 0.5 kHz steps
<2> Beacon bit rate, 0, 25, 50, 100, or 200 bps
<3> Beacon SNR, 0 to 31
<4> Beacon data quality, 0 to 100
<5> Distance to beacon reference station in kilometers
<6> Beacon receiver communication status (0 = Check Wiring, 1 = No Signal, 2 = Tuning, 3 =
Receiving, 4= Scanning)
<7> DGPS fix source (R = RTCM, W = WAAS, N = Non-DGPS Fix)
<8> DGPS mode, A = Automatic, W = WAAS Only, R = RTCM Only, N = None (DGPS disabled)
4.3 BAUD RATE SELECTION
Baud rate selection can be performed by sending the appropriate configuration sentence to the GPS sensor
as described in the $PGRMC Section 4.1.2 Sensor Initialization Information (PGRMI), field <10>.
4.4 MEASUREMENT PULSE OUTPUT (GPS 18 LVC & 18-5Hz ONLY)
4.4.1 One-Pulse-Per-Second (PPS) Output (GPS 18 LVC Only)
The highly accurate one-pulse-per-second (PPS) output is provided for applications requiring precise
timing measurements. After the initial position fix has been calculated, the PPS signal is generated and
continues until power down. The rising edge of the signal is aligned to the start of each GPS second within
1 µs for all conditions in which the receiver has reported a valid and accurate position for at least the
previous 4 seconds.
The NMEA 0183 sentences that follow each rising edge of the PPS signal tell when you were and where
you were at that previous rising edge of the PPS signal, beginning with the GPRMC sentence as the lead
sentence in any particular NMEA 0183 record.
Regardless of the selected baud rate, the information transmitted by the GPS 18 series products is
referenced to the pulse immediately preceding the NMEA 0183 RMC sentence.
The accuracy of the one-pulse-per-second output is maintained only while the GPS receiver is computing a
valid position fix. To obtain the most accurate results, the one-pulse-per-second output should be calibrated
against a local time reference to compensate for cable and internal receiver delays and the local time bias.
The default pulse width is 100 ms, however; it may be programmed in 20 ms increments between 20 ms
and 980 ms as described in $PGRMC Section 4.1.2 Sensor Initialization Information (PGRMI), field <13>.
4.4.2 Five-Pulse-Per-Second Output (GPS 18-5Hz Only)
The highly accurate five-pulse-per-second output is provided for applications requiring precise timing
measurements. After the initial position fix has been calculated, the GPS 18-5Hz generates the pulse signal,
which continues until power down. The rising edge of the signal is aligned to the start of each GPS second
within 1 µs for all conditions in which the receiver has reported a valid and accurate position for at least the
previous 4 seconds.
The NMEA 0183 sentences that follow each rising edge of the Measurement Pulse Output signal tell when
and where you were at that previous rising edge of the Measurement Pulse Output signal, beginning with
the GPRMC sentence as the lead sentence in any particular NMEA 0183 record.
Regardless of the selected baud rate, the information transmitted by the GPS 18-5Hz is referenced to the
preceding five times per-second output pulse.
The accuracy of the five-pulse-per-second output is maintained only while the GPS 18-5Hz can compute a
valid position fix. To obtain the most accurate results, the five-pulse-per-second output should be calibrated
against a local time reference to compensate for cable and internal receiver delays and the local time bias.

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 21
The default pulse width is 100 ms, however; it may be programmed in 20 ms increments between 20 ms
and 180 ms as described in $PGRMC Section 4.1.2 Sensor Initialization Information (PGRMI), field <13>.
APPENDIX A: EARTH DATUM LIST
The following is a list of the Garmin GPS 18 Earth datum indices and the corresponding earth datum name
(including the area of application):
0 ADINDAN–Ethiopia, Mali, Senegal, Sudan
1 AFGOOYE–Somalia
2 AIN EL ABD 1970–Bahrain Island, Saudi Arabia
3 ANNA 1 ASTRO 1965–Cocos Island
4 ARC 1950–Botswana, Lesotho, Malawi, Swaziland, Zaire, Zambia, Zimbabwe
5 ARC 1960–Kenya, Tanzania
6 ASCENSION ISLAND 1958–Ascension Island
7 ASTRO BEACON “E”–Iwo Jima Island
8 AUSTRALIAN GEODETIC 1966–Australia, Tasmania Island
9 AUSTRALIAN GEODETIC 1984–Australia, Tasmania Island
10 ASTRO DOS 71/4–St. Helena Island
11 ASTRONOMIC STATION 1952–Marcus Island
12 ASTRO B4 SOROL ATOLL–Tern Island
13 BELLEVUE (IGN)–Efate and Erromango Islands
14 BERMUDA 1957–Bermuda Islands
15 BOGOTA OBSERVATORY–Colombia
16 CAMPO INCHAUSPE–Argentina
17 CANTON ASTRO 1966–Phoenix Islands
18 CAPE CANAVERAL–Florida, Bahama Islands
19 CAPE–South Africa
20 CARTHAGE–Tunisia
21 CHATHAM 1971–Chatham Island (New Zealand)
22 CHUA ASTRO–Paraguay
23 CORREGO ALEGRE–Brazil
24 DJAKARTA (BATAVIA)–Sumatra Island (Indonesia)
25 DOS 1968–Gizo Island (New Georgia Islands)
26 EASTER ISLAND 1967–Easter Island
27 EUROPEAN 1950–Austria, Belgium, Denmark, Finland, France, Germany, Gibraltar, Greece,
Italy, Luxembourg, Netherlands, Norway, Portugal, Spain, Sweden, Switzerland
28 EUROPEAN 1979–Austria, Finland, Netherlands, Norway, Spain, Sweden, Switzerland
29 FINLAND HAYFORD 1910–Finland
30 GANDAJIKA BASE–Republic of Maldives
31 GEODETIC DATUM 1949–New Zealand
32 ORDNANCE SURVEY OF GREAT BRITAIN 1936–England, Isle of Man, Scotland, Shetland
Islands, Wales
33 GUAM 1963–Guam Island

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 22
34 GUX 1 ASTRO–Guadalcanal Island
35 HJORSEY 1955–Iceland
36 HONG KONG 1963–Hong Kong
37 INDIAN–Bangladesh, India, Nepal
38 INDIAN–Thailand, Vietnam
39 IRELAND 1965–Ireland
40 ISTS O73 ASTRO 1969–Diego Garcia
41 JOHNSTON ISLAND 1961–Johnston Island
42 KANDAWALA–Sri Lanka
43 KERGUELEN ISLAND–Kerguelen Island
44 KERTAU 1948–West Malaysia, Singapore
45 L.C. 5 ASTRO–Cayman Brac Island
46 LIBERIA 1964–Liberia
47 LUZON–Mindanao Island
48 LUZON–Phillippines (excluding Mindanao Island)
49 MAHE 1971–Mahe Island
50 MARCO ASTRO–Salvage Islands
51 MASSAWA–Eritrea (Ethiopia)
52 MERCHICH–Morocco
53 MIDWAY ASTRO 1961–Midway Island
54 MINNA–Nigeria
55 NORTH AMERICAN 1927–Alaska
56 NORTH AMERICAN 1927–Bahamas (excluding San Salvador Island)
57 NORTH AMERICAN 1927–Central America (Belize, Costa Rica, El Salvador, Guatemala,
Honduras, Nicaragua)
58 NORTH AMERICAN 1927–Canal Zone
59 NORTH AMERICAN 1927–Canada (including Newfoundland Island)
60 NORTH AMERICAN 1927–Caribbean (Barbados, Caicos Islands, Cuba, Dominican Republic,
Grand Cayman, Jamaica, Leeward Islands, Turks Islands)
61 NORTH AMERICAN 1927–Mean Value (CONUS)
62 NORTH AMERICAN 1927–Cuba
63 NORTH AMERICAN 1927–Greenland (Hayes Peninsula)
64 NORTH AMERICAN 1927–Mexico
65 NORTH AMERICAN 1927–San Salvador Island
66 NORTH AMERICAN 1983–Alaska, Canada, Central America, CONUS, Mexico
67 NAPARIMA, BWI–Trinidad and Tobago
68 NAHRWAN–Masirah Island (Oman)
69 NAHRWAN–Saudi Arabia
70 NAHRWAN–United Arab Emirates
71 OBSERVATORIO 1966–Corvo and Flores Islands (Azores)
72 OLD EGYPTIAN–Egypt

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 23
73 OLD HAWAIIAN–Mean Value
74 OMAN–Oman
75 PICO DE LAS NIEVES–Canary Islands
76 PITCAIRN ASTRO 1967–Pitcairn Island
77 PUERTO RICO–Puerto Rico, Virgin Islands
78 QATAR NATIONAL–Qatar
79 QORNOQ–South Greenland
80 REUNION–Mascarene Island
81 ROME 1940–Sardinia Island
82 RT 90–Sweden
83 PROVISIONAL SOUTH AMERICAN 1956–Bolivia, Chile, Colombia, Ecuador, Guyana,
Peru, Venezuela
84 SOUTH AMERICAN 1969–Argentina, Bolivia, Brazil, Chile, Colombia, Ecuador, Guyana,
Paraguay, Peru, Venezuela, Trinidad and Tobago
85 SOUTH ASIA–Singapore
86 PROVISIONAL SOUTH CHILEAN 1963–South Chile
87 SANTO (DOS)–Espirito Santo Island
88 SAO BRAZ–Sao Miguel, Santa Maria Islands (Azores)
89 SAPPER HILL 1943–East Falkland Island
90 SCHWARZECK–Namibia
91 SOUTHEAST BASE–Porto Santo and Madeira Islands
92 SOUTHWEST BASE–Faial, Graciosa, Pico, Sao Jorge, and Terceira Islands (Azores)
93 TIMBALAI 1948–Brunei and East Malaysia (Sarawak and Sabah)
94 TOKYO–Japan, Korea, Okinawa
95 TRISTAN ASTRO 1968–Tristan da Cunha
96 User defined earth datum
97 VITI LEVU 1916–Viti Levu Island (Fiji Islands)
98 WAKE-ENIWETOK 1960–Marshall Islands
99 WORLD GEODETIC SYSTEM 1972
100 WORLD GEODETIC SYSTEM 1984
101 ZANDERIJ–Surinam
102 CH-1903–Switzerland
103 Hu-Tzu-Shan
104 Indonesia 74
105 Austria
106 Potsdam
107 Taiwan–modified Hu-Tzu-Shan
108 GDA–Geocentric Datum of Australia
109 Dutch
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 24
APPENDIX B: BINARY PHASE OUTPUT FORMAT
In binary phase output mode, GPS 18 series products will transmit two types of packets once per second.
One record contains primarily post-process information such as position and velocity information. The
second record contains receiver measurement information. For the GPS 18 PC, GPS 18 LVC, and GPS 18-
5Hz, the records are sent at a default baud rate of 9600 baud, 8 data bits, and no parity.
To turn these records on for the GPS 18 PC, GPS 18 LVC, and GPS 18-5Hz versions, use the $PGRMC1
NMEA sentence as described in Section 4 GPS 18 PC, GPS 18 LVC, & GPS 18-5Hz Software Interface.
Refer to the Garmin Device Interface Specification for details on how to form and parse Garmin packets.
At the time of this printing, these specs are available from the technical suppport section of our Web site:
http://www.garmin.com/support/commProtocol.html.
Note: For the GPS 18-5Hz, a baud rate of 9600 is not high enough to transmit all of the packets (since they
are output at a 5 Hz rate). You will need to change the baud rate to at least 38400 to be able to transmit all
of the packets. Refer to Appendix C: Changing the Baud Rate in Garmin Mode for information.
For the GPS 18 USB, the two records must be enabled independently by commands to the unit. Refer to the
Garmin Device Interface Specification for details on how to form and parse Garmin packets over USB. At
the time of this printing, these specs are available from the technical suppport section of our Web site:
http://www.garmin.com/support/commProtocol.html. The ID of each command should be 10 decimal to
signify that the record is a command. The data portion of the packet should be one of the following:
Function Command (base 10)
Position Record On 49
Position Record Off 50
Receiver Measurement Record On 110
Receiver Measurement Record Off 111
Note that the satellite data information is also enabled when the position record is enabled.
Records sent over RS232 begin with a delimiter byte (10 hex). The second byte identifies the record type
(33 hex for a position record, 34 hex for a receiver measurement and 72 hex for a satellite data record).
The third byte indicates the size of the data. The fourth byte is the first byte of data. The data is then
followed by a checksum byte, a delimiter byte (10 hex), and an end-of-transmission character (03 hex).
Additionally, any DLEs (0x10) that appear between the delimeters are escaped with a second DLE. There
is sample code at the end of this section that will strip off the DLEs and ETXs.
RS232 Packet:
- 0x10 (DLE is first byte)
- 0x## (Record ID – single byte)
- 0x## (Number of data bytes – single byte)
- data bytes (See descriptions below)
- 0x## (2’s complement of the arithmetic sum of the bytes between the delimiters)
- 0x10 (DLE)
- 0x03 (ETX is last byte)
USB packets contain only the record ID, size, and data payload. Refer to the Garmin Device Interface
Specification for details on how to form and parse Garmin USB packets.
USB Packet:
- 0x## (Record ID – single byte)
- 0x## (Number of data bytes – single byte)
- data bytes (See descriptions below)
The data bytes of each packet contain the record specified by the record ID. A description of each record
follows.
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 25
Satellite Data Record
The satellite data has a record ID of 0x72 with 84 (0x54) data bytes. The data bytes contain the data for the
12 channels as described below. For each satellite, the following data is available:
typedef struct
{
uint8 svid; //space vehicle identification (1–32 and 33–64 for WAAS)
uint16 snr; //signal-to-noise ratio
uint8 elev; //satellite elevation in degrees
uint16 azmth; //satellite azimuth in degrees
uint8 status; //status bit-field
} cpo_sat_data;
The status bit field represents a set of booleans described below:
Bit Meaning when bit is one (1)
0The unit has ephemeris data for the specified satellite.
1The unit has a differential correction for the specified satellite.
2The unit is using this satellite in the solution.
This pattern is repeated for all 12 channels for a total of 12 X 7 bytes = 84 (0x54) bytes :
typedef struct
{
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
cpo_sat_data
} cpo_all_sat_data
The RS-232 Packet for the Satellite Record looks like:
- 0x10 (DLE is first byte)
- 0x72 (Record ID – single byte)
- 0x54 (Number of data bytes – single byte)
- cpo_all_sat_data
- 0x## (2’s complement of the arithmetic sum of the bytes between the delimiters)
- 0x10 (DLE)
- 0x03 (ETX is last byte)

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 26
The USB Packet for the Satellite Record looks like:
- 0x72 (Record ID – single byte)
- 0x54 (Number of data bytes – single byte)
- cpo_all_sat_data
Position Record
The Position Record has a record identifier of
typedef struct
{
float alt;
float epe;
float eph;
float epv;
int fix;
double gps_tow;
double lat;
double lon;
float lon_vel;
float lat_vel;
float alt_vel;
float msl_hght;
int leap_sec;
long grmn_days;
} cpo_pvt_data;
alt Ellipsoid altitude (meters)
epe Est pos error (meters)
eph Pos err, horizontal (meters)
epv Pos err, vertical (meters)
fix 0 = no fix; 1 = no fix; 2 = 2D; 3 = 3D; 4 = 2D differential; 5 = 3D differential;
6 and greater = not defined
gps_tow GPS time of week (sec)
lat Latitude (radians)
lon Longitude (radians)
lon_vel Longitude velocity (meters/second)
lat_vel Latitude velocity (meters/second)
alt_vel Altitude velocity (meters/second)
msl_hght Mean sea level height (meters)
leap_sec UTC leap seconds
grmn_days Garmin days (days since December 31, 1989)

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 27
Receiver Measurement Record
typedef struct
{
unsigned long cycles;
double pr;
unsigned int phase;
char slp_dtct;
unsigned char snr_dbhz;
char svid;
char valid;
} cpo_rcv_sv_data;
typedef struct
{
double rcvr_tow;
int rcvr_wn;
cpo_rcv_sv_data sv[ 12 ];
} cpo_rcv_data;
rcvr_tow Receiver time of week (seconds)
rcvr_wn Receiver week number
cycles Number of accumulated cycles
pr Pseudorange (meters)
phase To convert to (0 to 359.999) multiply by 360.0 and divide by 2048.0
slp_dtct 0 = no cycle slip detected; non-zero = cycle slip detected
snr_dbhz Signal strength - db Hz
svid Satellite number (0 to 31; 119 to 138 for WAAS). Note: add 1 to offset to current svid
numbers.
valid 0 = information not valid; non-zero = information valid

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 28
DLE and ETX bytes:
Sample C code to receive the two records should filter DLE and ETX bytes as described below:
typedef enum
{
DAT,
DLE,
ETX
} rx_state_type;
/* Declare and initialize static variables */
static char in_que[ 256 ];
static int in_que_ptr = 0;
static rx_state_type rx_state = DAT;
.
.
.
void add_to_que( char data )
{
#define DLE_BYTE 0x10
#define ETX_BYTE 0x03
if ( rx_state == DAT )
{
if ( data == DLE_BYTE )
{
rx_state = DLE;
}
else
{
in_que[ in_que_ptr++ ] = data;
}
}
else if ( rx_state == DLE )
{
if ( data == ETX_BYTE )
{
rx_state = ETX;
}
else
{
rx_state = DAT;
in_que[ in_que_ptr++ ] = data;
}
}
else if ( rx_state == ETX )
{
if ( data == DLE_BYTE )
{
rx_state = DLE;
}
}
if ( in_que_ptr > 255 )
{
in_que_ptr = 0;
}
}

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 29
APPENDIX C: CHANGING THE BAUD RATE IN GARMIN MODE
In certain cases, you may need to change the default baud rate of your Garmin GPS receiver while in
Garmin mode. Follow these steps to temporarily change the baud rate.
Refer to the Garmin Device Interface Specification for details on how to form and parse Garmin packets.
At the time of this printing, these specs are available from the technical suppport section of our Web site:
http://www.garmin.com/support/commProtocol.html.
1. Turn off all requests by transmitting packet:
id = IOP_RQST_DATA (0x1C)
data = 0 (16-bit unsigned integer )
2. The GPS unit will respond by sending a packet with id = IOP_ACK_BYTE (0x06)
3. After you receive the above packet, transmit packet:
id = IOP_BAUD_RQST_DATA (0x30)
data = baud rate to change to (32-bit unsigned integer; for example, 38400)
4. The GPS unit will respond by sending a packet:
id = IOP_BAUD_ACPT_DATA (0x31)
data = highest acceptable baud rate closest to what was requested
(32-bit unsigned integer; for example, 38361 decimal)
5. Determine the actual baud rate value from the data sent in step 4. This value will be within +/- 5% of
the actual baud rate. (For example, the GPS unit might send a baud rate of 38361, which correlates to a
baud rate of 38400).
6. If the baud rate in step 5 is acceptable, transmit packet:
id = IOP_ACK_BYTE (0x06)
data = IOP_BAUD_ACPT_DATA (0x31)
7. Sleep for a small amount of time, about 100 milliseconds, to make sure the packet in (6) was
successfully transmitted to the GPS unit.
8. Close the current connection to the GPS unit and immediately open a new connection with the new
baud rate obtained in step 5.
9. Immediately after establishing a connection, transmit packet:
id = IOP_CMND_DATA (0x0A)
data = IOP_ACK_PING (0x3A)
10. The GPS will respond by sending a packet:
id = IOP_ACK_BYTE (0x06)
data = IOP_CMND_DATA (0x0A)
11. After you receive the above packet, transmit the same packet in step 9 again.
id = IOP_CMND_DATA (0x0A)
data = IOP_ACK_PING (0x3A)
12. The GPS will respond again with the same packet in step 10.
id = IOP_ACK_BYTE (0x06)
data = IOP_CMND_DATA (0x0A)
13. The baud rate has been successfully changed upon receiving the above packet. If the GPS unit does
not receive these two IOP_CMND_DATA packets within two seconds, it will reset its baud rate to
9600.

GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 30
APPENDIX D: GPS 18 PC/ LVC/18-5Hz & WINDOWS SERIAL MOUSE ISSUE
Problem: It is possible for Windows to incorrectly interpret the NMEA 0183 output of the GPS 18 PC as
the output of a Microsoft Serial BallPoint Mouse. When that happens, Windows loads drivers for the Serial
BallPoint Mouse. This causes the cursor to move erratically about the display, clicking, right clicking,
double clicking, dragging and dropping displayed items as it goes. On Windows 2000 and Windows XP,
you may not experience the problem if you wait until after the computer is booted before connecting the
GPS 18 PC to the serial communications port. This problem is not specific to the GPS 18 PC. Any NMEA
0183 device connected to a Windows computer’s serial port is likely to cause this problem. Below are
several possible solutions to this problem.
Note: If your GPS 18 PC came with Garmin nRoute™ Navigation Software, you will not have this
problem; the unit is programmed to produce data according to the binary format that is described in
Appendix B: Binary Phase Output Format.
If you wish to use a different navigation software application with your GPS 18 PC, you will need to de-
select the “Phase Output Data” option that is discussed in Solution 3 below.
Solution 1: The easiest solution is to disable the Serial BallPoint mouse in the Device Manager. Of course,
this solution assumes that you do not need to use a Serial BallPoint mouse with your computer. When the
wild mouse problem occurs follow the steps below.
1. Unplug the DB9 connector.
2. Right-click the My Computer icon on your desktop and select Properties to open Device Manager.
3. Go to the hardware tab of the resulting pop-up window and click on the Device Manager button.
4. Right-click on Serial BallPoint Mouse and choose the option to Disable (NOT uninstall) this device.
Solution 2: Do not plug the DB9 connector into the computer until the computer is turned on and the
operating system is completely booted up and running. Every time you use the GPS 18 PC/LVC, you will
need to start the computer and operating system before making the connection between the GPS 18 PC and
the computer. This solution usually works on Windows 2000 and Windows XP computers.
Solution 3: Change the default output of the GPS 18 PC/LVC so that it does not automatically send NMEA
0183 data to the computer (change the default configuration to enable “Phase Output Data”). Use the
Garmin Sensor Configuration Software, named SNSRCFG.EXE, provided on the Web site to enable
“Phase Output Data.” SNSRCFG.EXE is included with the latest GPS 18 firmware, available at
http://www.garmin.com/support/agree.jsp?product=010-00321-05.
Please note that by enabling “Phase Output Data,” the device will no longer appear as a NMEA 0183
device to your computer. As a result, mapping applications that expect to hear NMEA 0183 data will not
recognize your GPS 18 P/LVC until you re-enable the NMEA 0183 output, disabling the “Phase Output
Data” in the process.
Refer to Appendix E: Sensor Configuration Software for complete information about downloading the
Sensor Configuration Software application.
After the Sensor Configuration Software is installed and running on your computer, follow the steps below
to change the default data output of the GPS 18 PC, LVC, or 18-5Hz.
1. Select the GPS 18 PC / LVC or the GPS 18-5Hz from the
list of sensors and click OK. The Sensor Configuration
Software opens with the default configuration file for the
GPS 18, as shown on the next page.
2. Select Config > Switch to NMEA Mode (or press the F10
key).
3. Select Comm > Setup to open the Comm Setup Window.
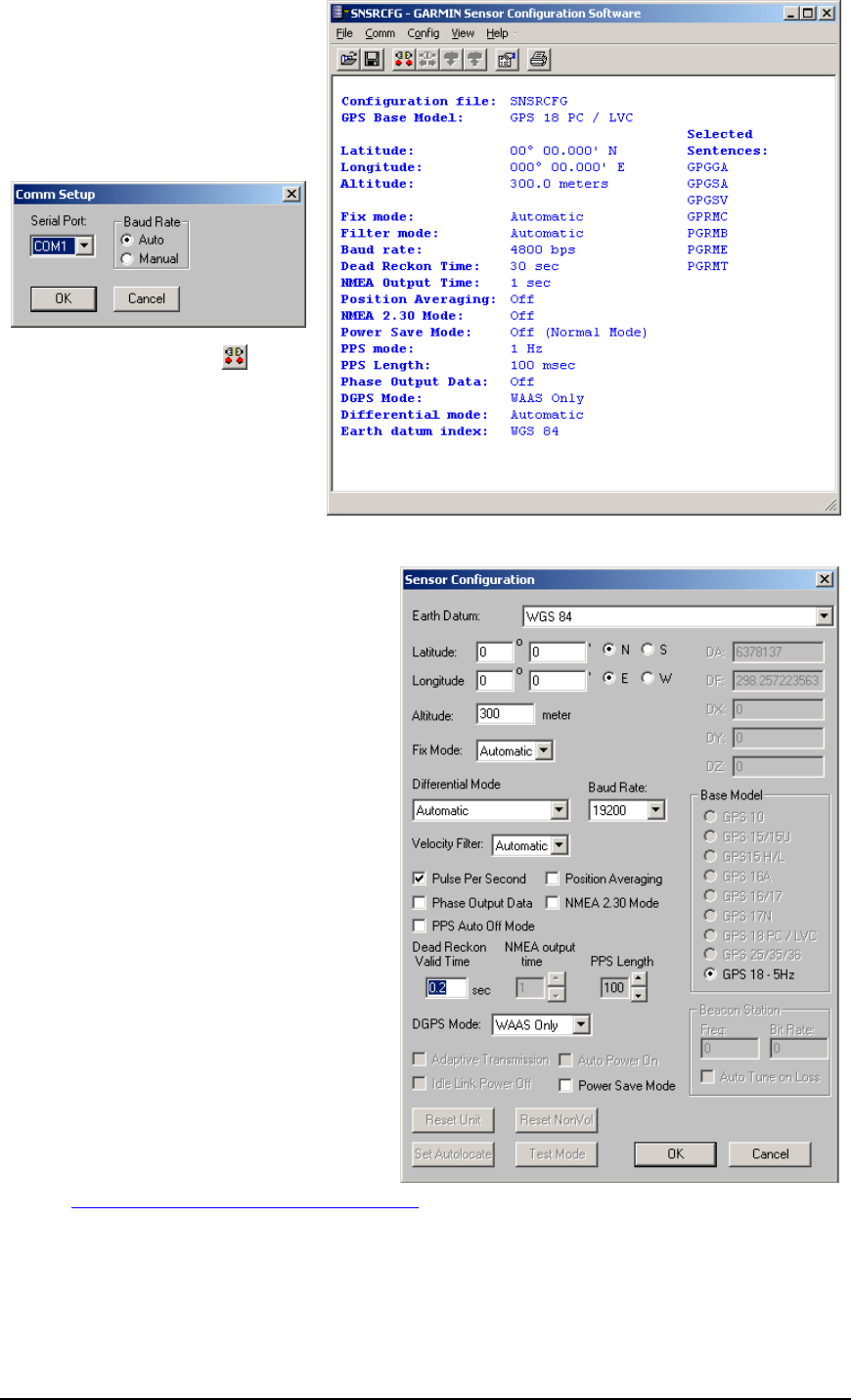
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 31
4. Select the Serial Port to which the
GPS 18 is connected. Select Auto
to have the program automatically
determine the Baud Rate, or select
Manual to manually select the
Baud Rate of the GPS 18. Click
OK when done.
5. Click the Connect icon , or
select Comm > Connect to
connect to the GPS 18.
6. To view the current programming
of the GPS 18, select Config >
Get Configuration from GPS (or
press the F8 key). The current
programming of the GPS 18 is
displayed in the window, as shown on the
previous page.
7. Open the Sensor Configuration Window by
pressing the F6 key or selecting Config >
Sensor Configuration.
8. Place a check mark in the box next to
“Binary Output Data” to change the GPS
18 to Garmin Mode. The unit will keep this
change in the programming until you
change it again in the software.
Note: Selecting Config > Switch to
Garmin Mode (or pressing the F11 key)
only changes the unit to work in Garmin
Mode until power is cycled through the unit
again. For a more permanent change, refer
to step 8 above.
9. Click OK.
10. When you are ready to upload the changes
into the GPS 18, select Config > Send
Configuration to GPS (or press the F9
key). The new configuration is then loaded
into the GPS 18.
11. You may disconnect and close the software
when finished. The software configuration
can also be saved for future reference.
Refer to Appendix E: Sensor Configuration Software for complete information about downloading the
Sensor Configuration Software application.
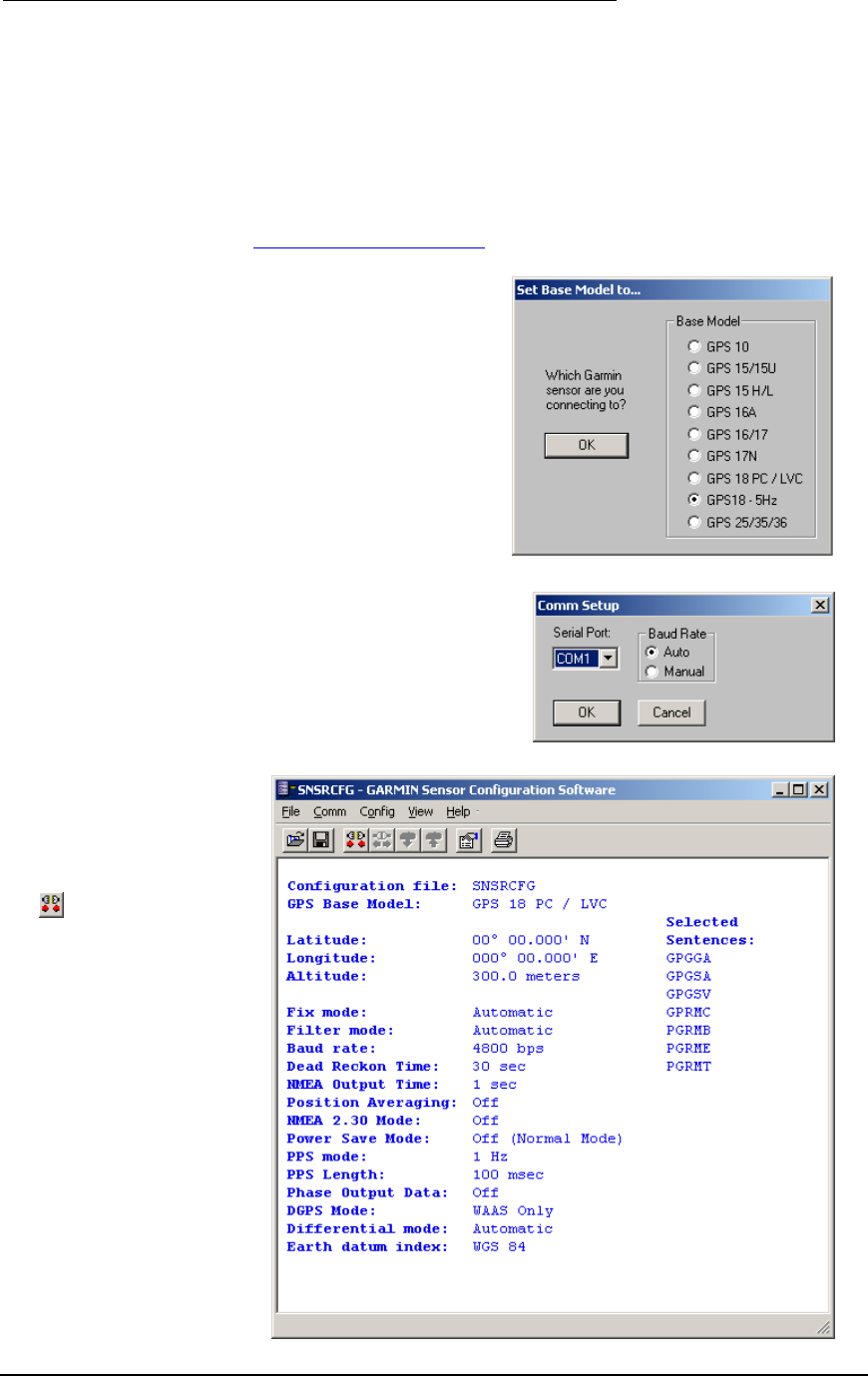
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 32
APPENDIX E: SENSOR CONFIGURATION SOFTWARE
SNSRCFG configures the GPS sensors based on user-selected parameters. Some application features
include the ability to download GPS sensor configuration, maintain different configurations in files, and
perform GPS sensor configurations quickly with the use of one function key.
This section provides a brief overview of the Sensor Configuration Software. Refer to this section when
using the software to configure your Garmin sensor.
Downloading the Sensor Configuration Software
The Garmin Sensor Configuration Software (SNSRCFG.exe) is available from the Garmin Web site. To
download the software, start at http://www.garmin.com/oem, select the GPS 18, and then select Software
Updates. The Garmin Sensor Configuration Software (SNSRCFG.exe) is included in the software update
download.
Selecting a Model
After opening the program (snsrcfg.exe), the following
screen appears. Select the radio button next to the type of
Garmin sensor you are configuring.
Connecting to the Sensor
After selecting the type of sensor, the following window
opens. This is the Main Interface Screen for the program.
To configure your sensor, you must first connect to the
sensor.
1. Select Config > Switch to NMEA Mode (or press the F10
key).
2. Select Comm > Setup to open the Comm Setup Window.
3. Select the Serial Port to which the sensor is connected.
Select Auto to have the program automatically determine
the Baud Rate, or select
Manual to manually
select the Baud Rate of the
GPS 18. Click OK when
done.
4. Click the Connect icon
, or select Comm >
Connect.
5. To view the current
programming of the
sensor, select Config >
Get Configuration from
GPS (or press the F8 key).
The current programming
of the sensor is displayed
in the window shown to
the right.
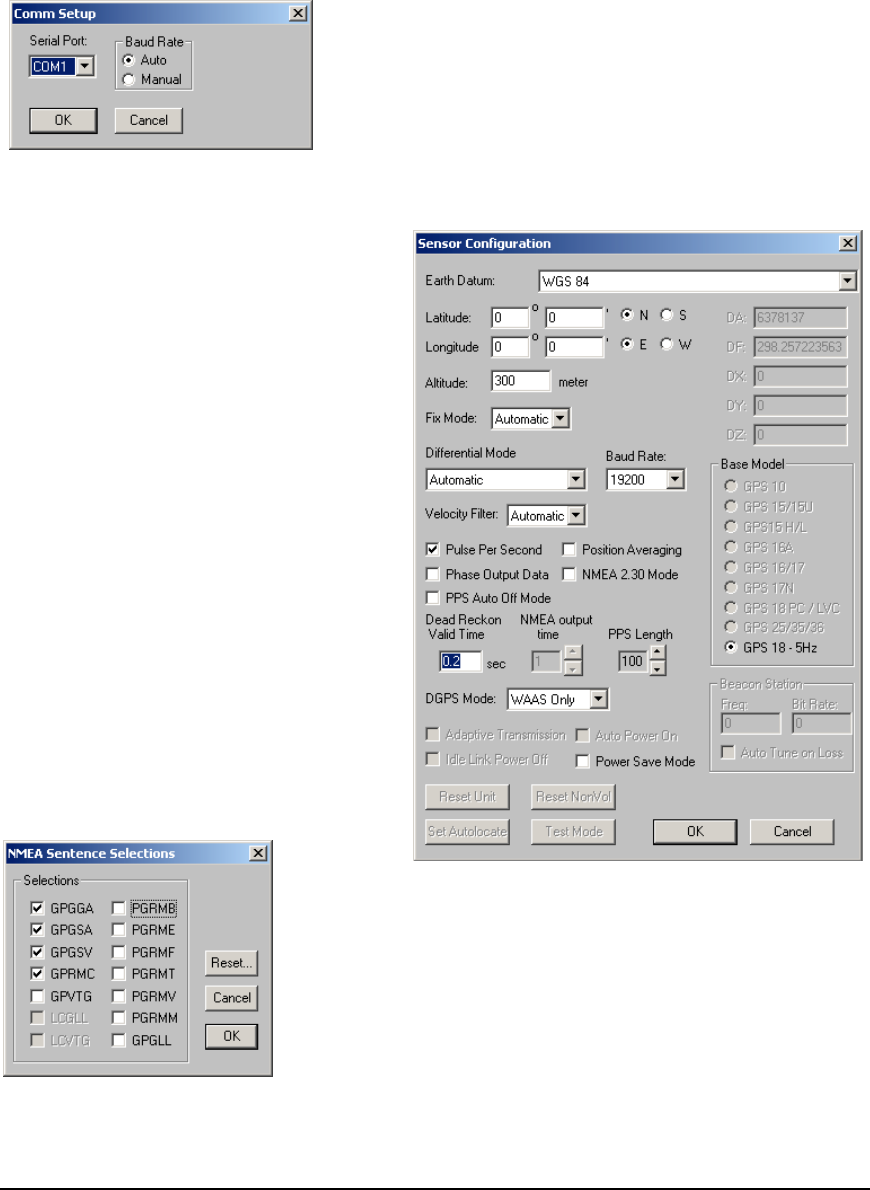
GPS 18 Technical Specifications (190-00307-00) Rev. D
Page 33
File Menu
The File Menu allows you to open, save, and print sensor configurations. The items in the File Menu work
like most Windows-based programs.
Comm Menu
The Comm (Communication) Menu allows you to set the port number, baud rate, and then connect and
disconnect from the sensor.
Setup: Opens the Comm Setup Window, shown to the left. Select
the Serial Port to which the sensor is connected from the drop-
down list. Then select Auto (the program determines the baud rate
on its own) or Manual (you then enter the baud rate) for the Baud
Rate entry.
Connect: Select Connect to connect to the sensor to change or
view the configuration.
Disconnect: Select Disconnect to disconnect from the sensor.
Config Menu
The Config (Configuration) Menu allows you
configure the sensor as it is connected.
Sensor Configuration (F6): Opens the Sensor
Configuration Window, shown to the right.
Many of the fields in this window should be left
alone. Please refer to the beginning of this
manual for clarification about some of these
fields. For the most part, this window is used to
enter a new Latitude, Longitude, and Altitude
for the sensor. This is especially helpful when
you are programming the sensor for use in a
particular geographic location.
Resetting the Unit (Reset Unit) performs a reset
on the unit, much like cycling the power.
Resetting the non-volatile memory (Reset
NonVol) will clear all of the data from the non-
volatile memory.
NMEA Sentence Selections (F7): Displays the
NMEA Sentence Selections Window. If the
sentence is enabled, a check mark appears in the
box to the left of the sentence name. Click the
box to enable or disable to the sentence.

For the latest free software updates (excluding map data) throughout the life of your
Garmin products, visit the Garmin Web site at www.garmin.com.
© Copyright 2004–2005 Garmin Ltd. or its subsidiaries
Garmin International, Inc.
1200 East 151st Street, Olathe, Kansas 66062, U.S.A.
Garmin (Europe) Ltd.
Unit 5, The Quadrangle, Abbey Park Industrial Estate, Romsey, SO51 9DL, U.K.
Garmin Corporation
No. 68, Jangshu 2nd Road, Shijr, Taipei County, Taiwan
www.garmin.com
Part Number 190-00307-00 Rev. D
Get Configuration From GPS (F8): Retrieves the current programming from the sensor. The
programming is then displayed in the Main Interface Window.
Send Configuration To GPS (F9): Sends the changes you have made to the programming to the sensor.
Switch to NMEA Mode (F10): Switches the unit to NMEA Mode. The sensor must be in NMEA Mode
when connected to this software.
Switch to Garmin Mode (F11): Switches the unit to Garmin Mode.
Update Software (F12): After you have downloaded a new software version for the sensor, you can update
the sensor with the new software. Select Update Software and then select the file using the Open dialog
box. You must locate both the *.rgn file and the updater.exe file.
View Menu
The View Menu allows you to view the NMEA sentences transmitted by the sensor. You can also
customize how the program looks by showing and hiding the Toolbar and Status Bar.
Help Menu
The Help Menu displays the software version and copyright information.
