Graupner and KG MC-16 ComputerSystem Graupner/SJ HoTT User Manual Manual 3
Graupner GmbH & Co. KG ComputerSystem Graupner/SJ HoTT Manual 3
UserManual.wiki
>
Graupner and KG
>
MC-16 User Manual
>
Manual 3
Contents
1.
Manual 1
2.
Manual 2
3.
Manual 3
Manual 3
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
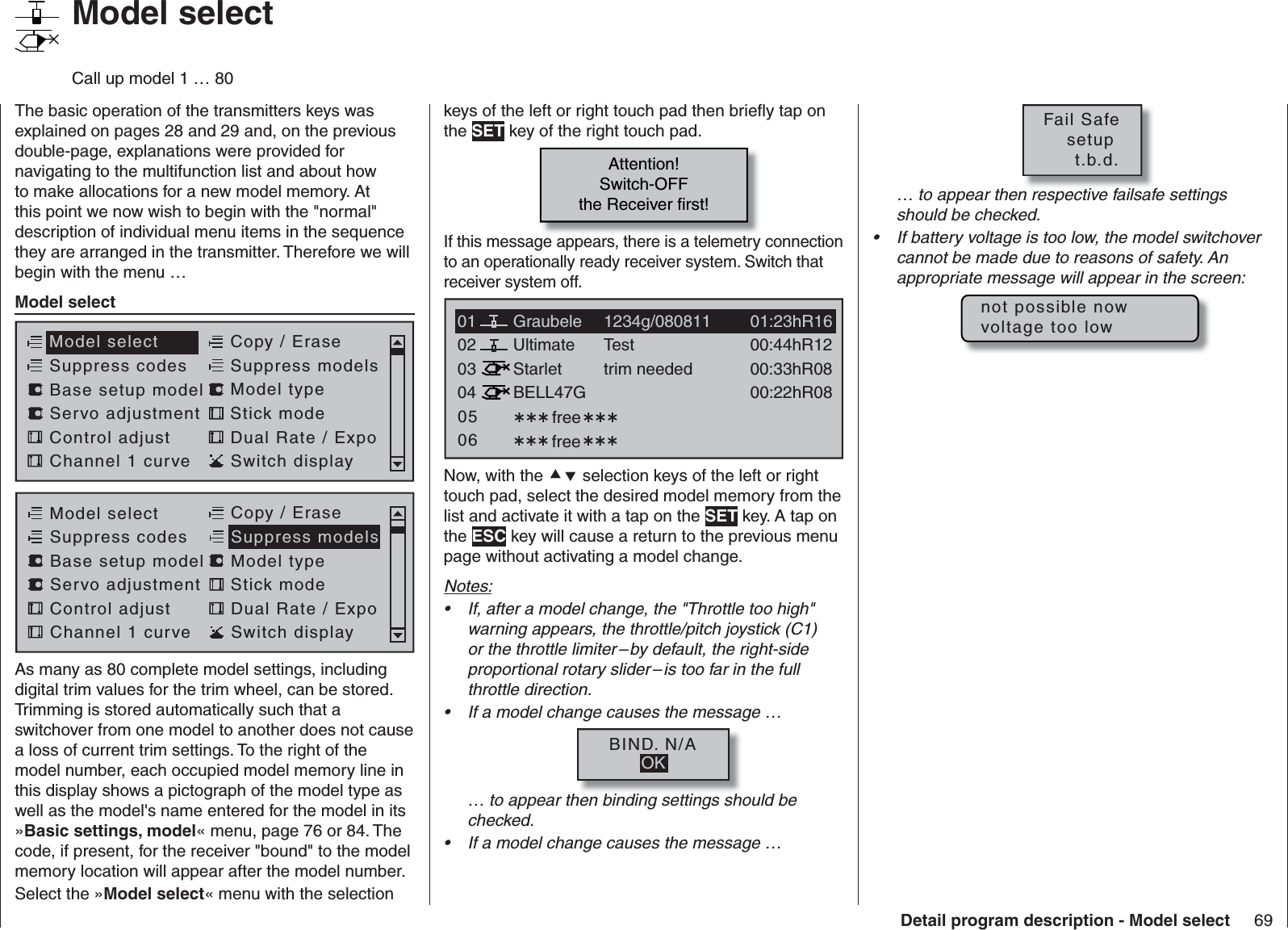
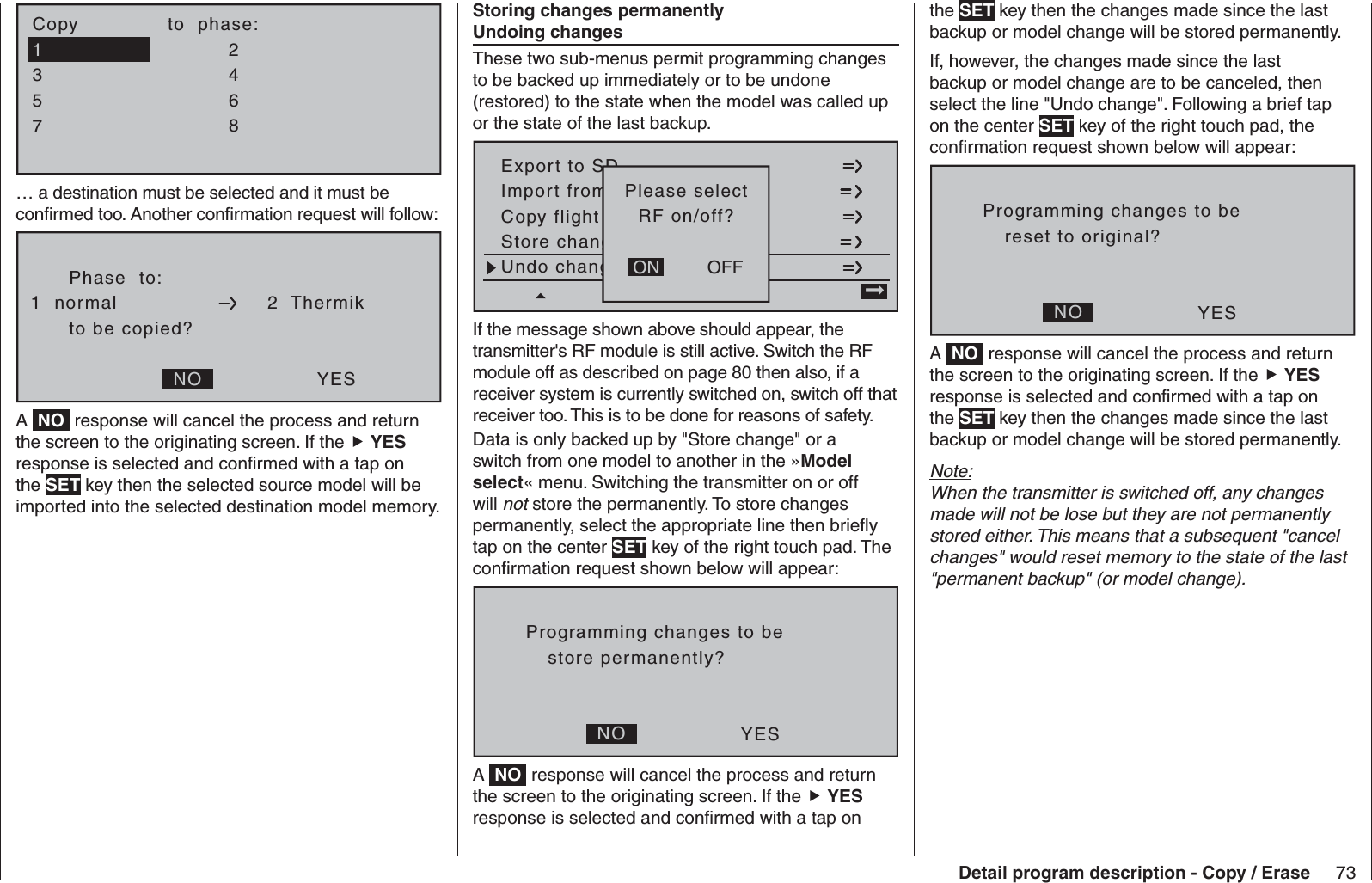
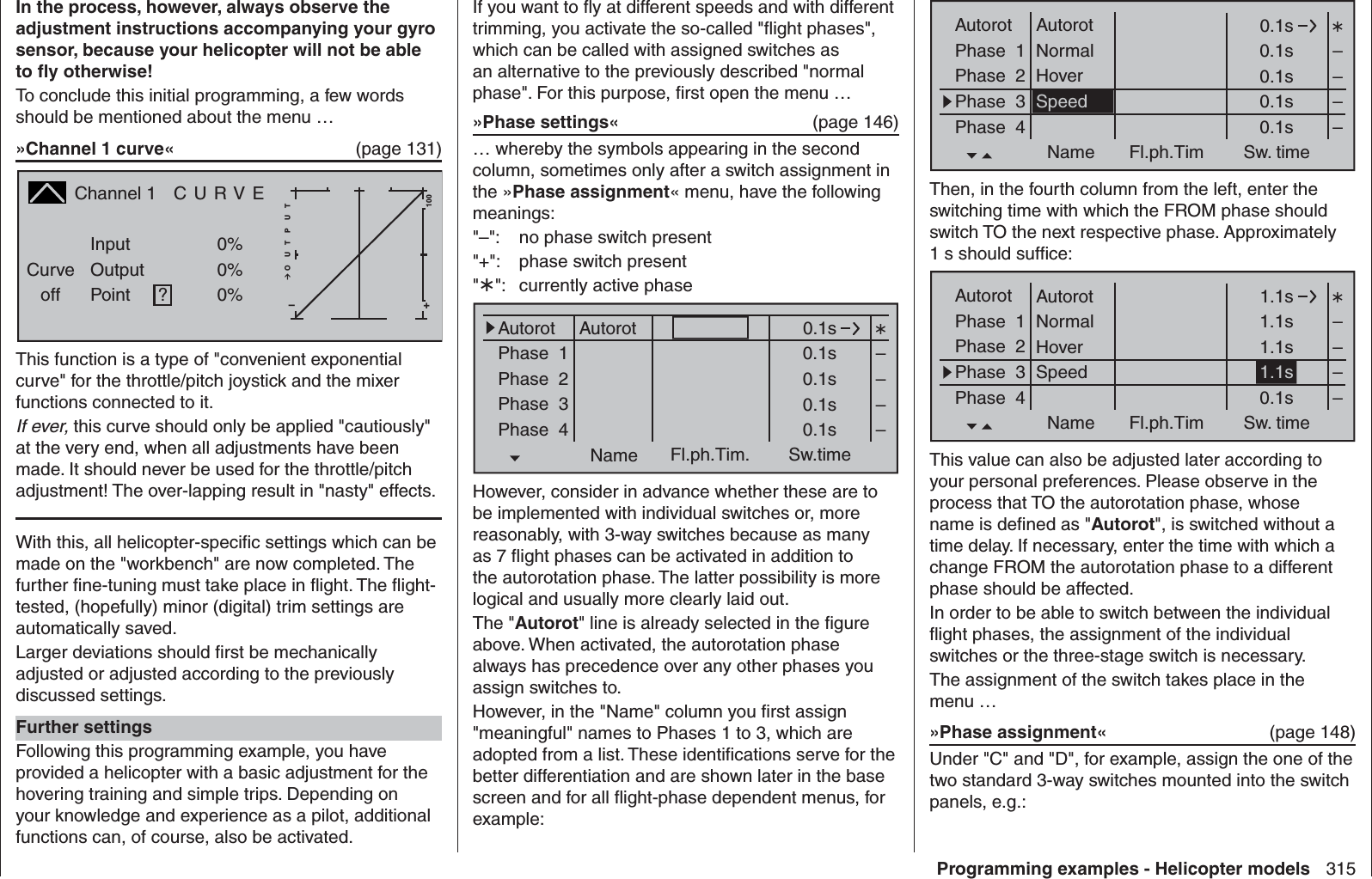
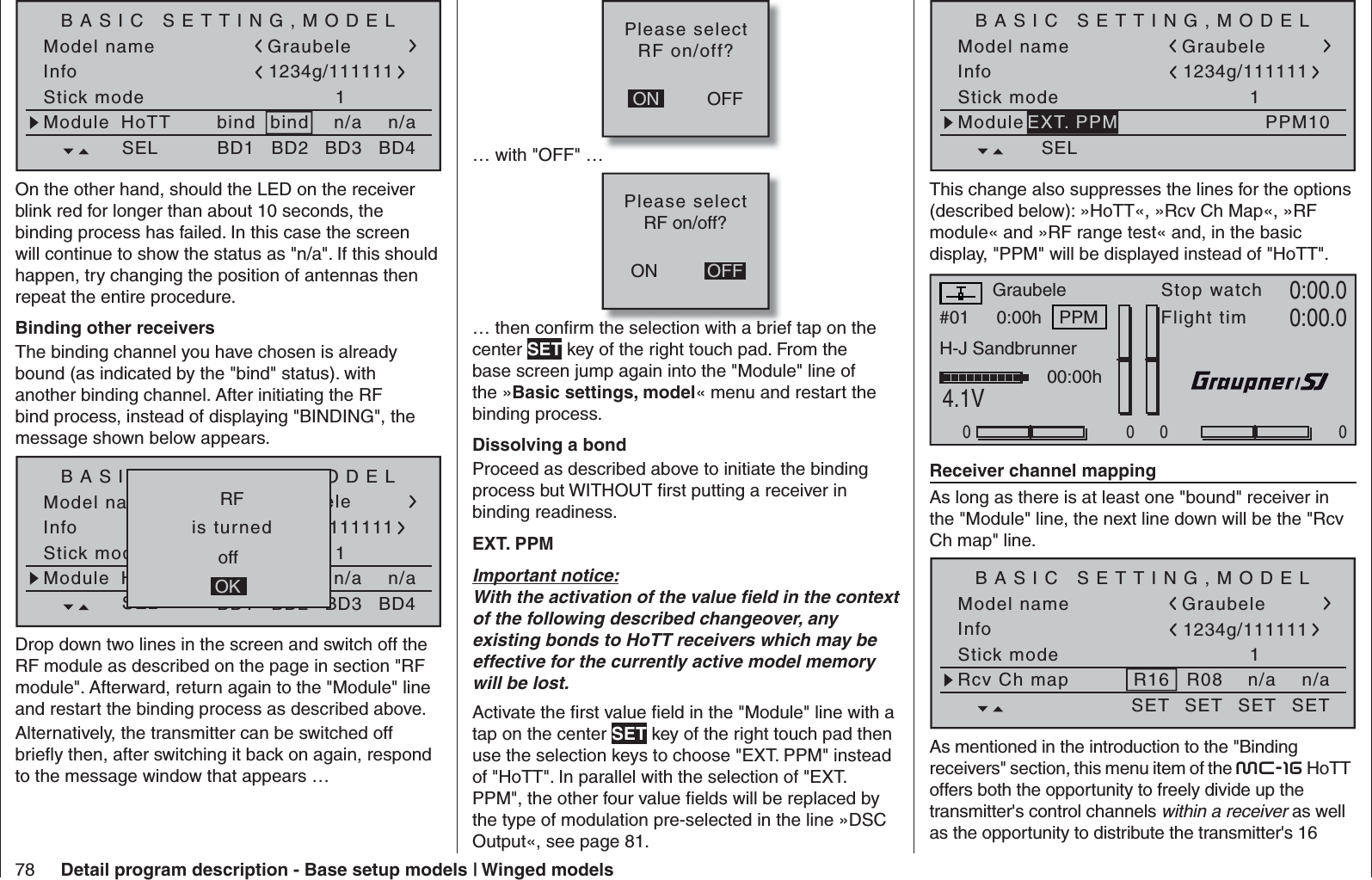
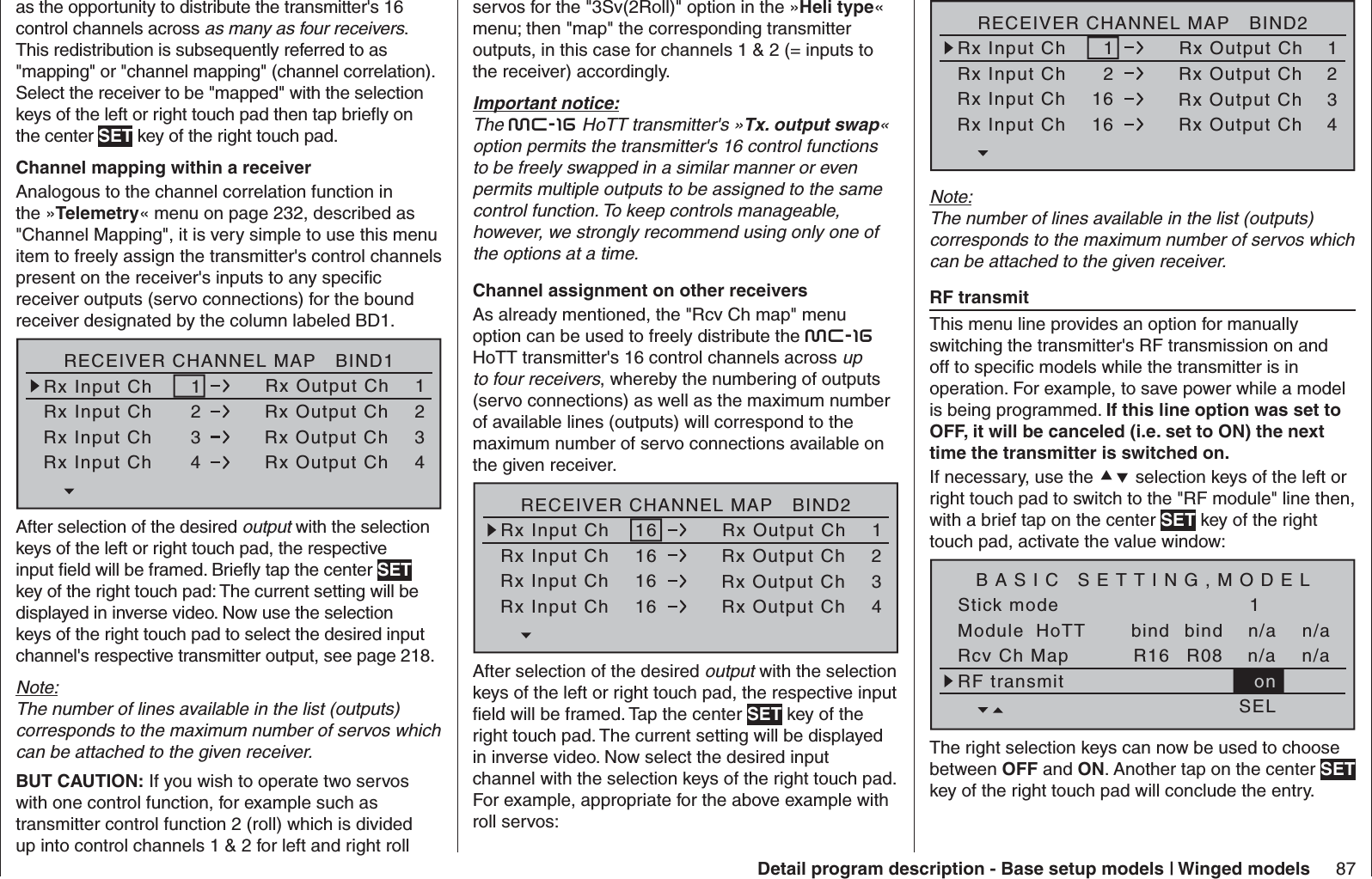
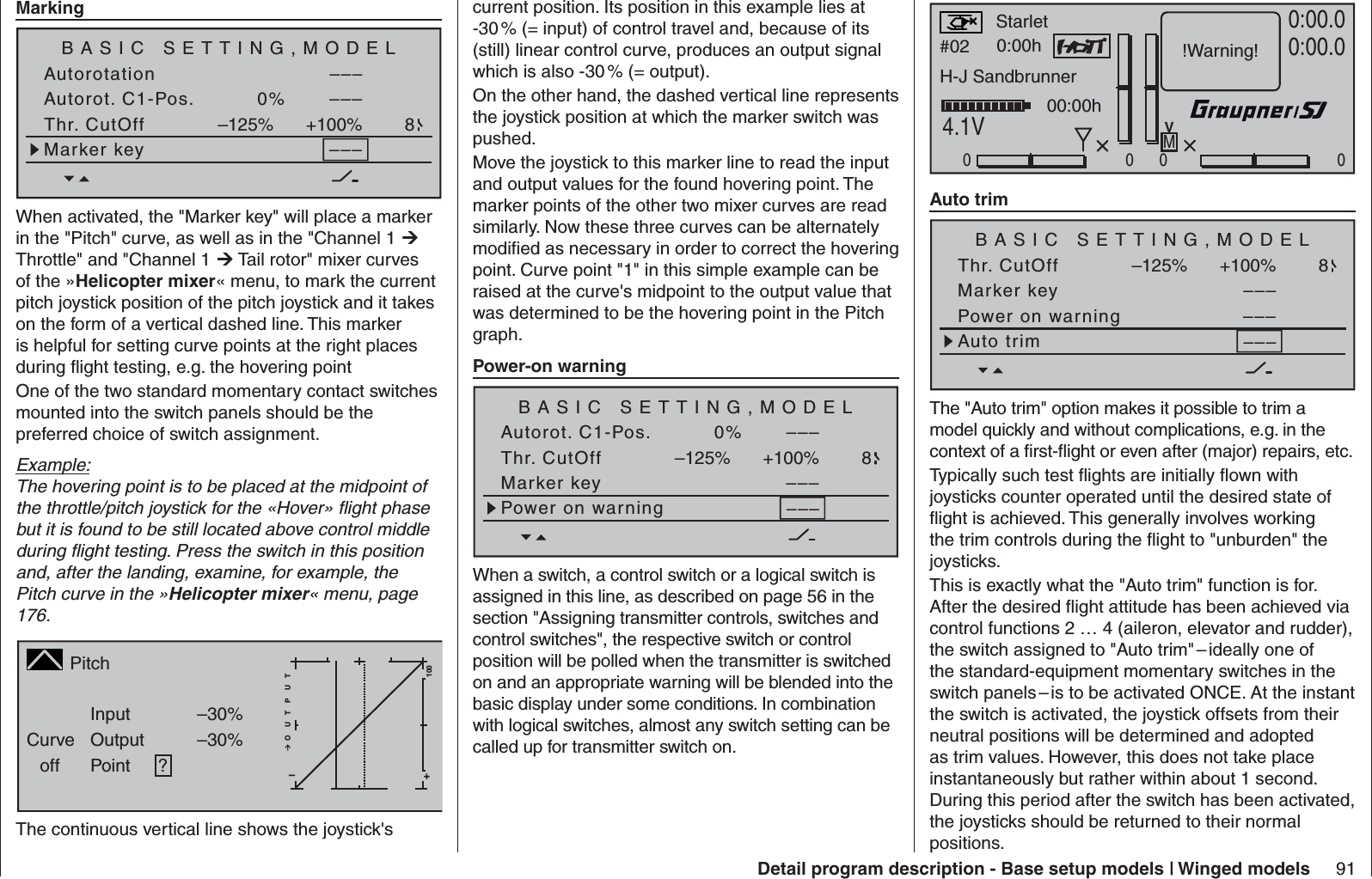
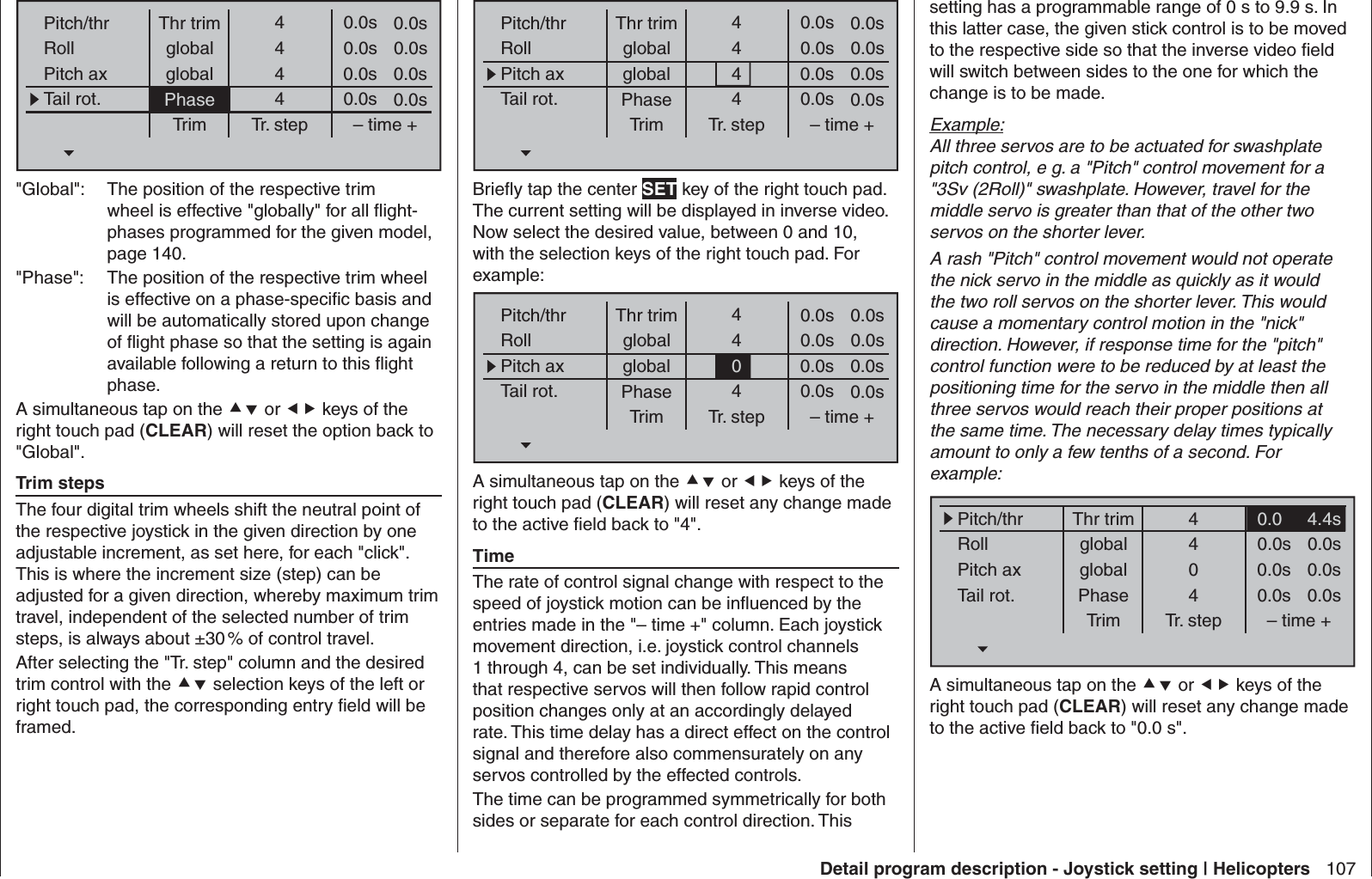
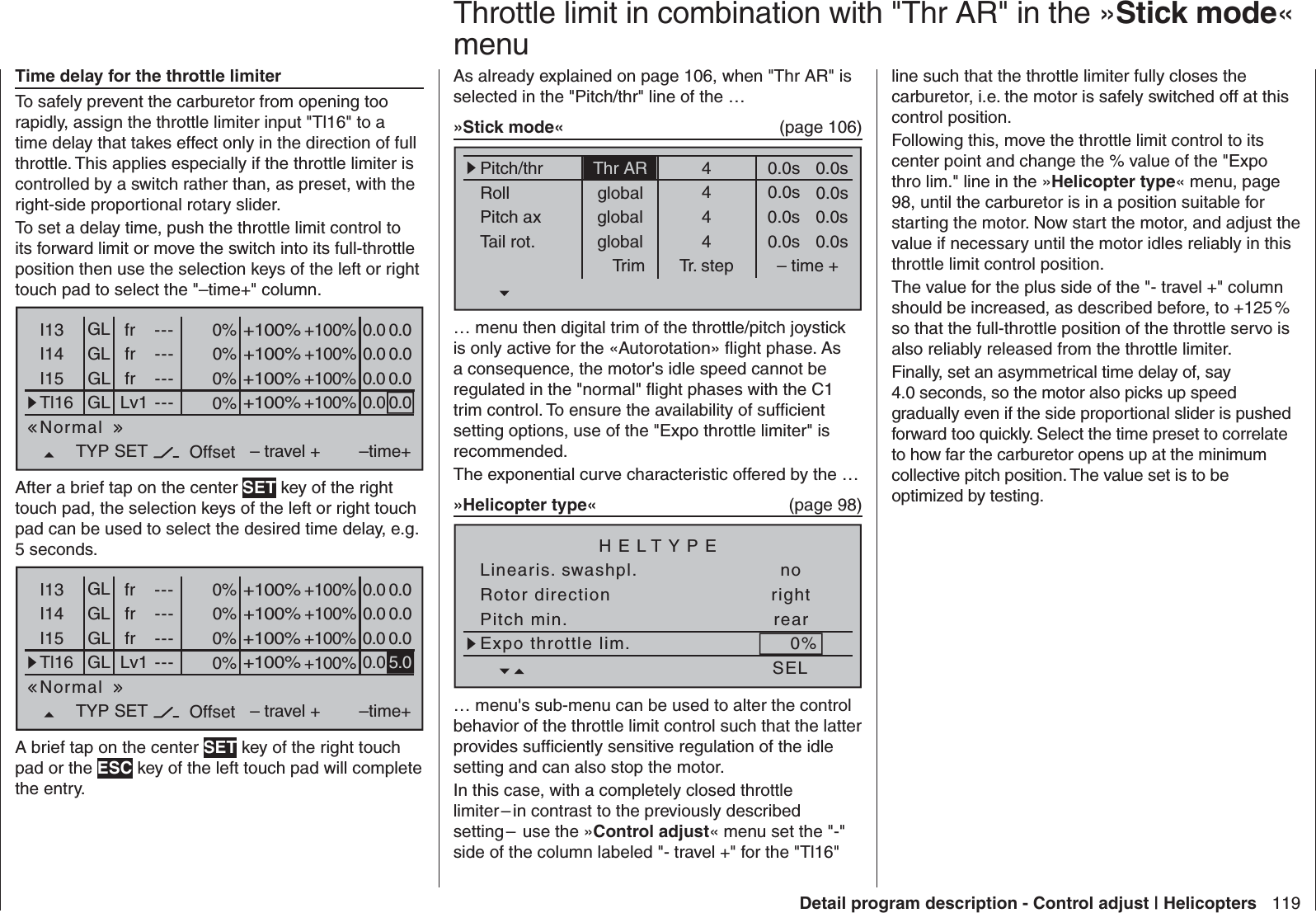
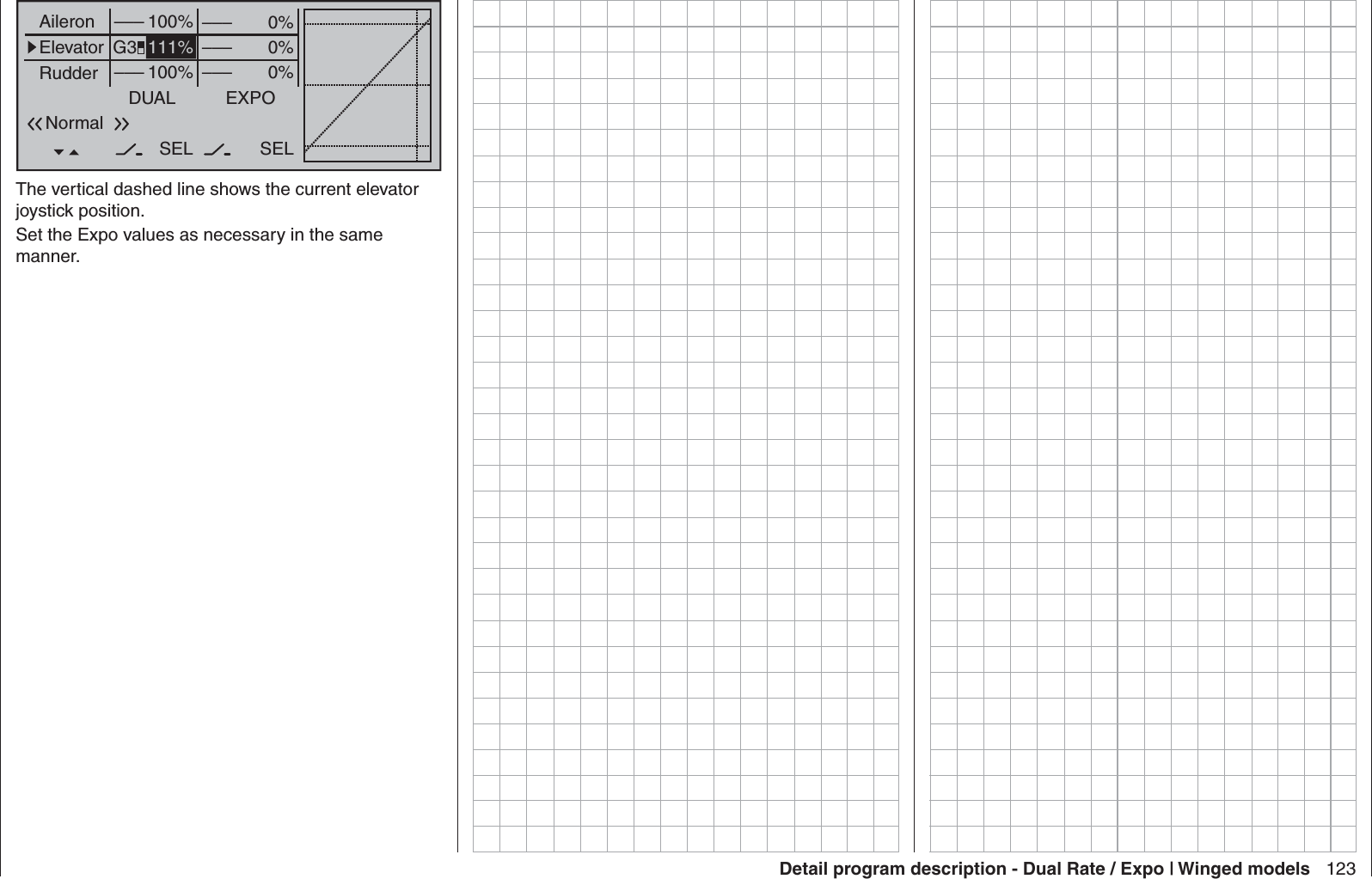
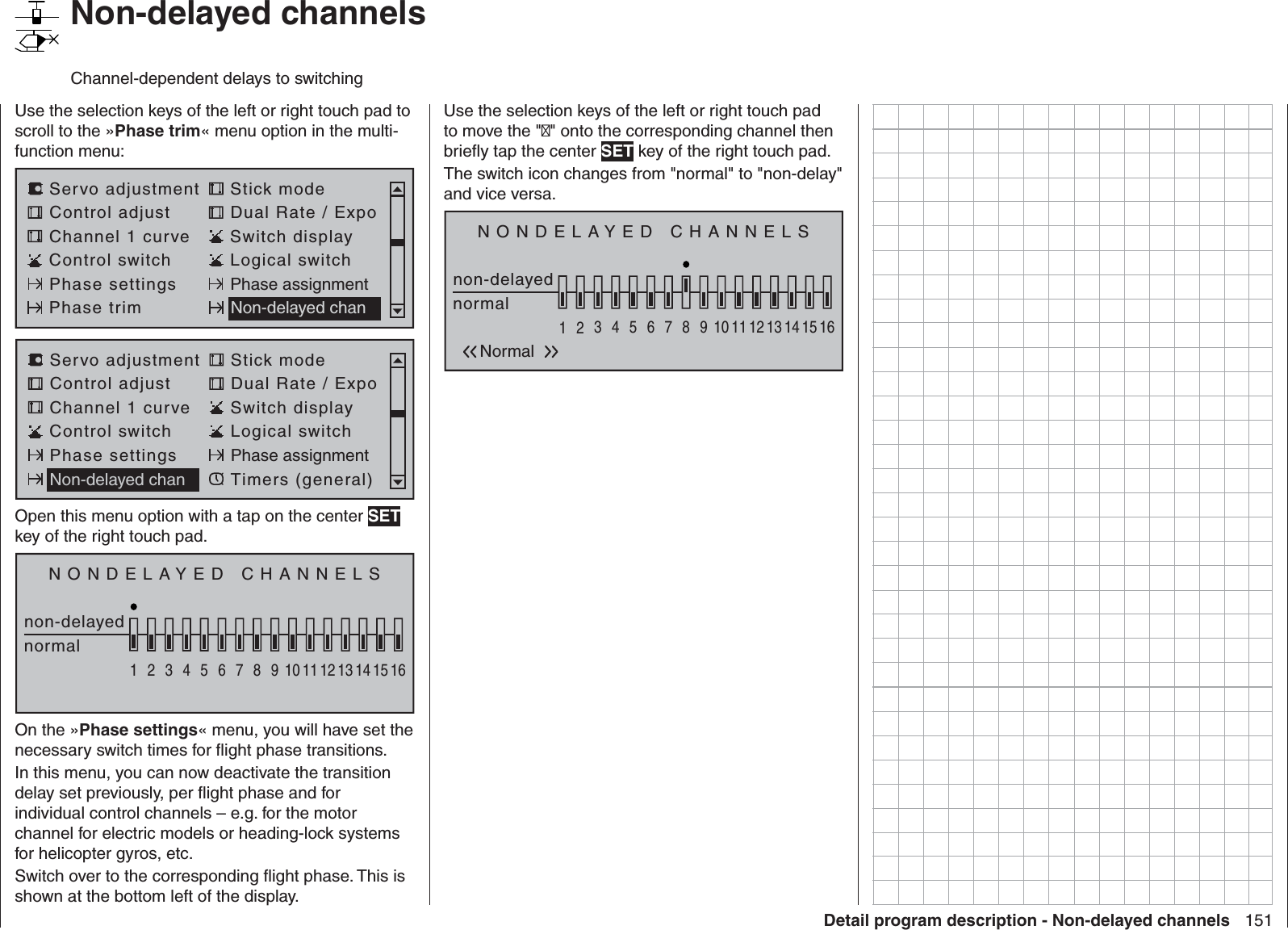
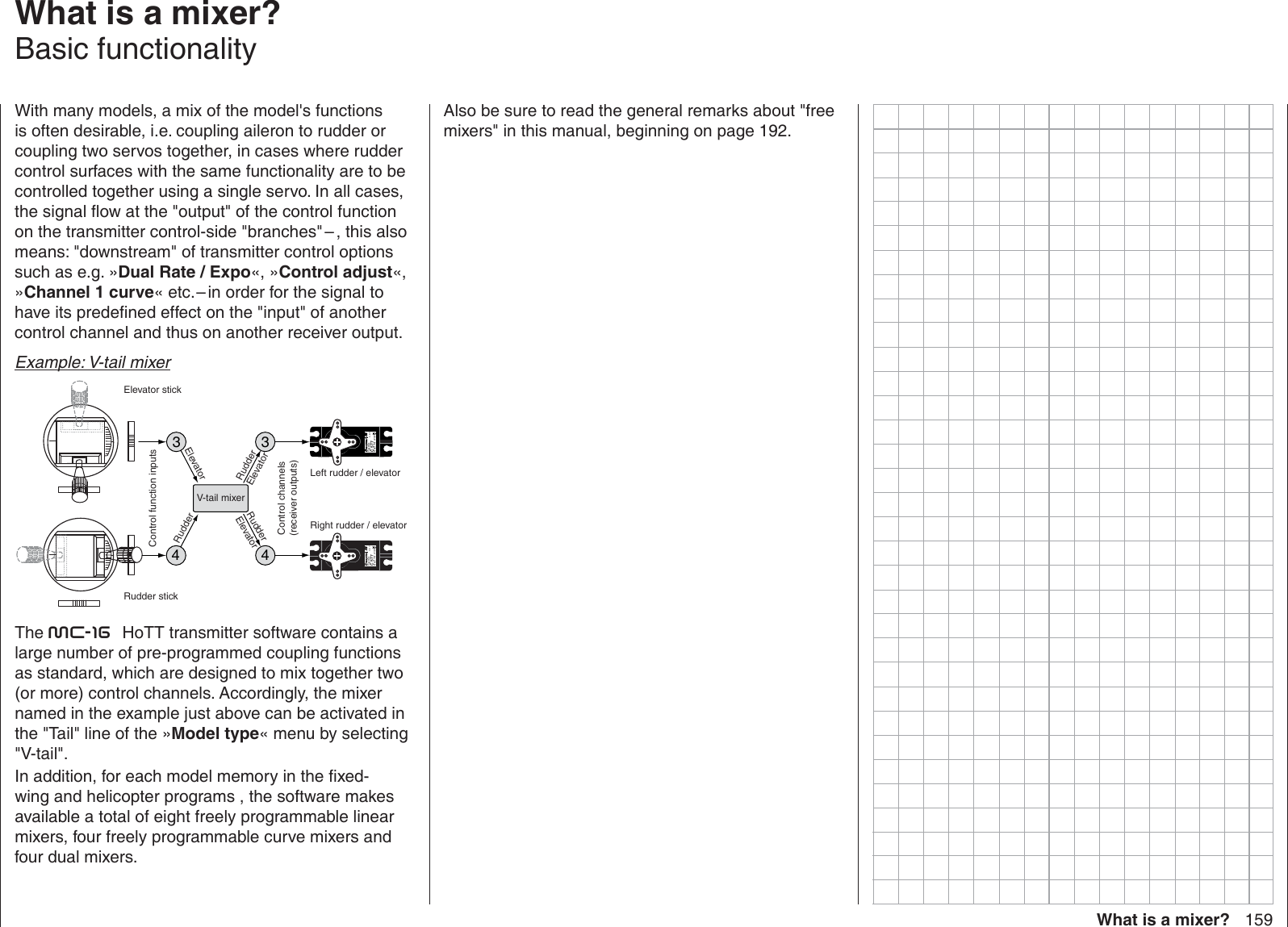
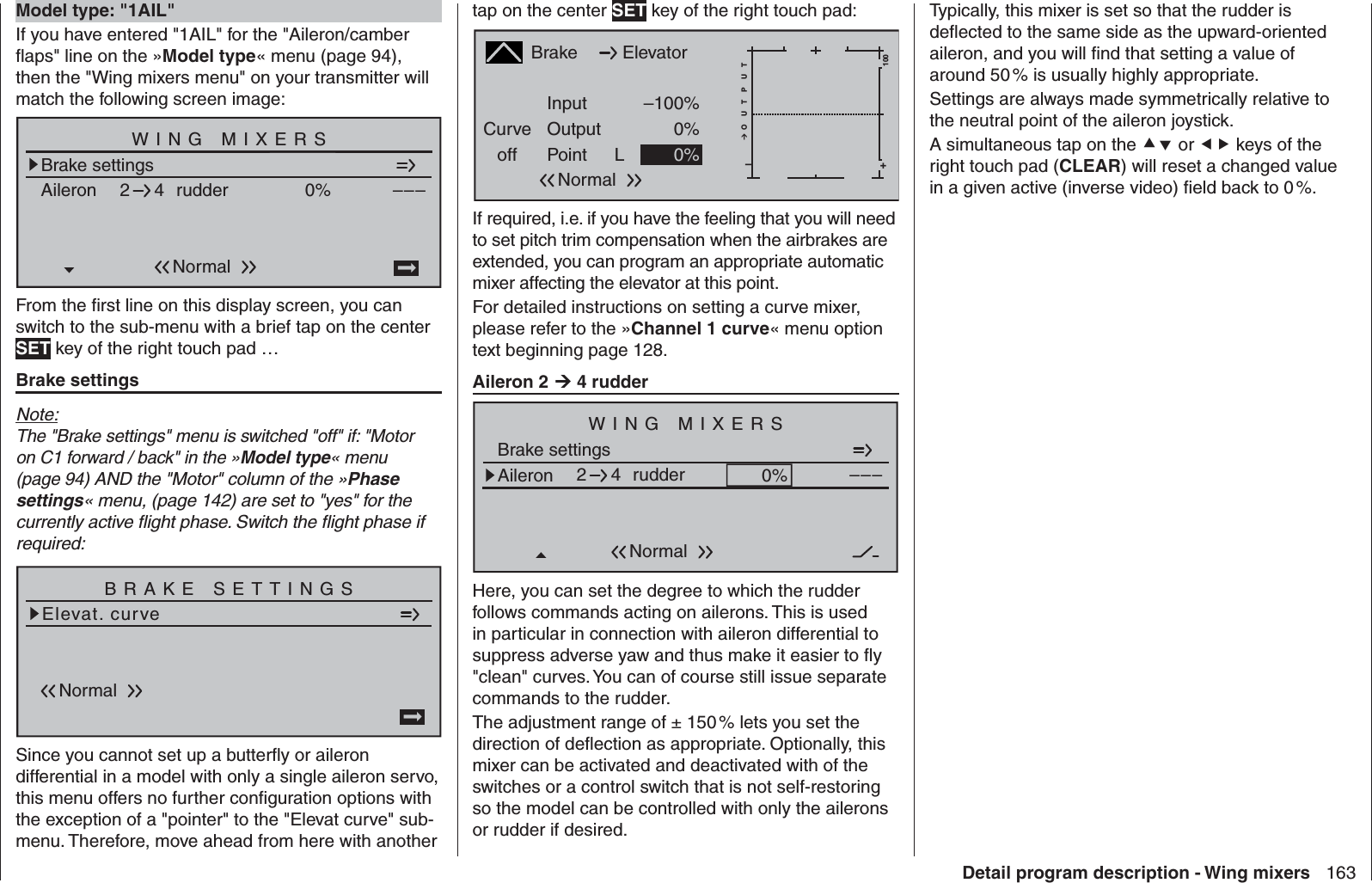
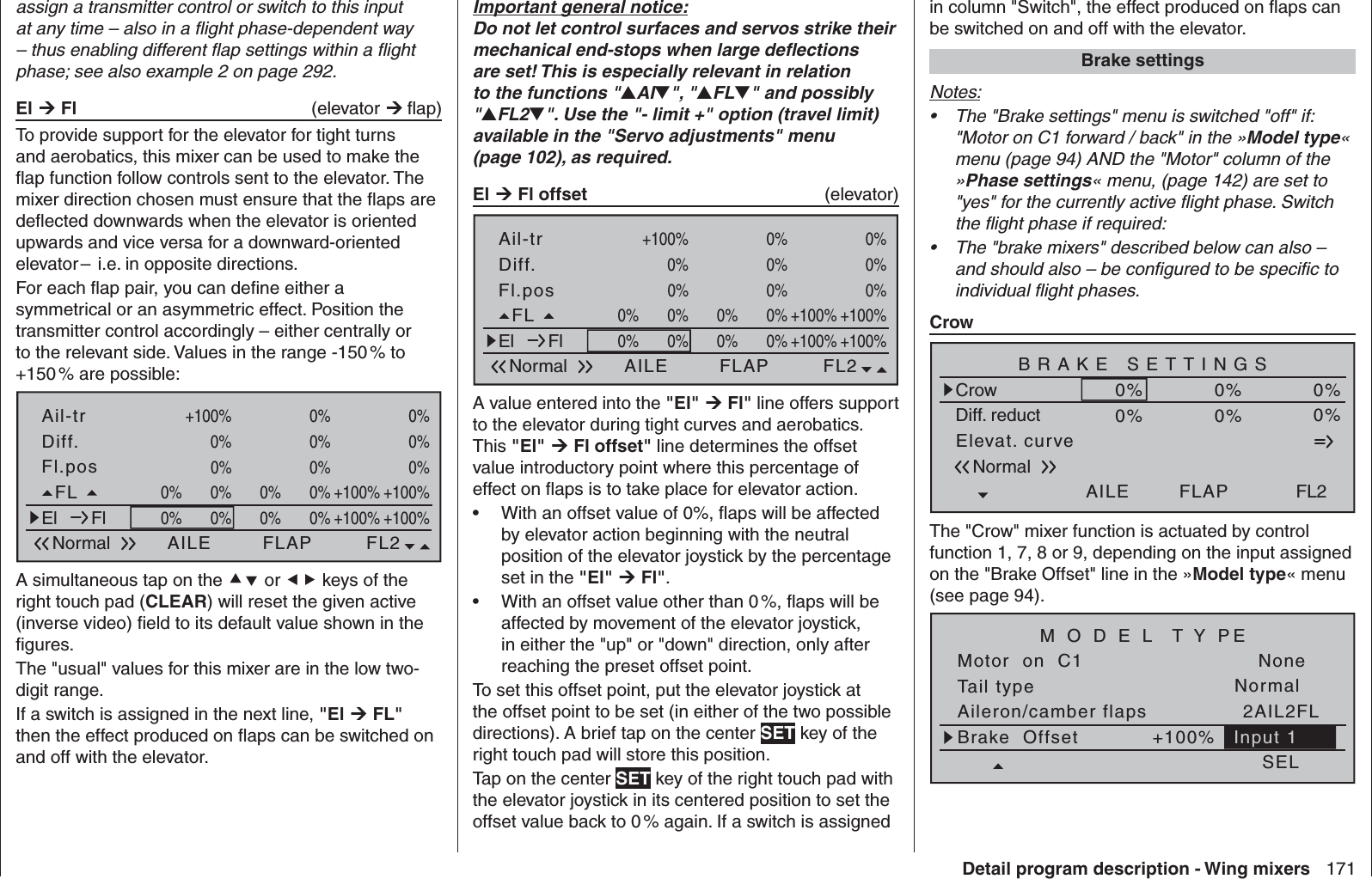
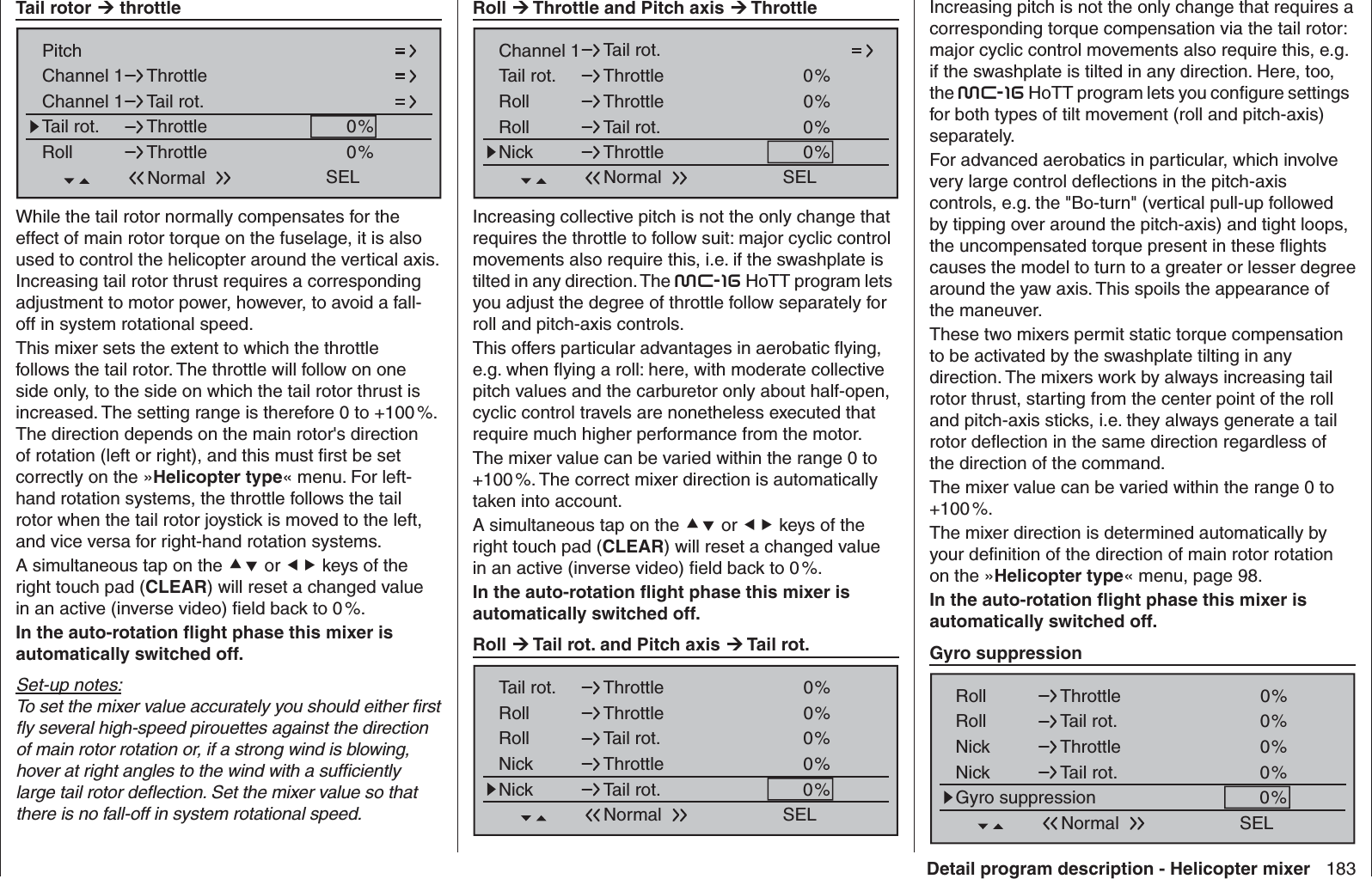
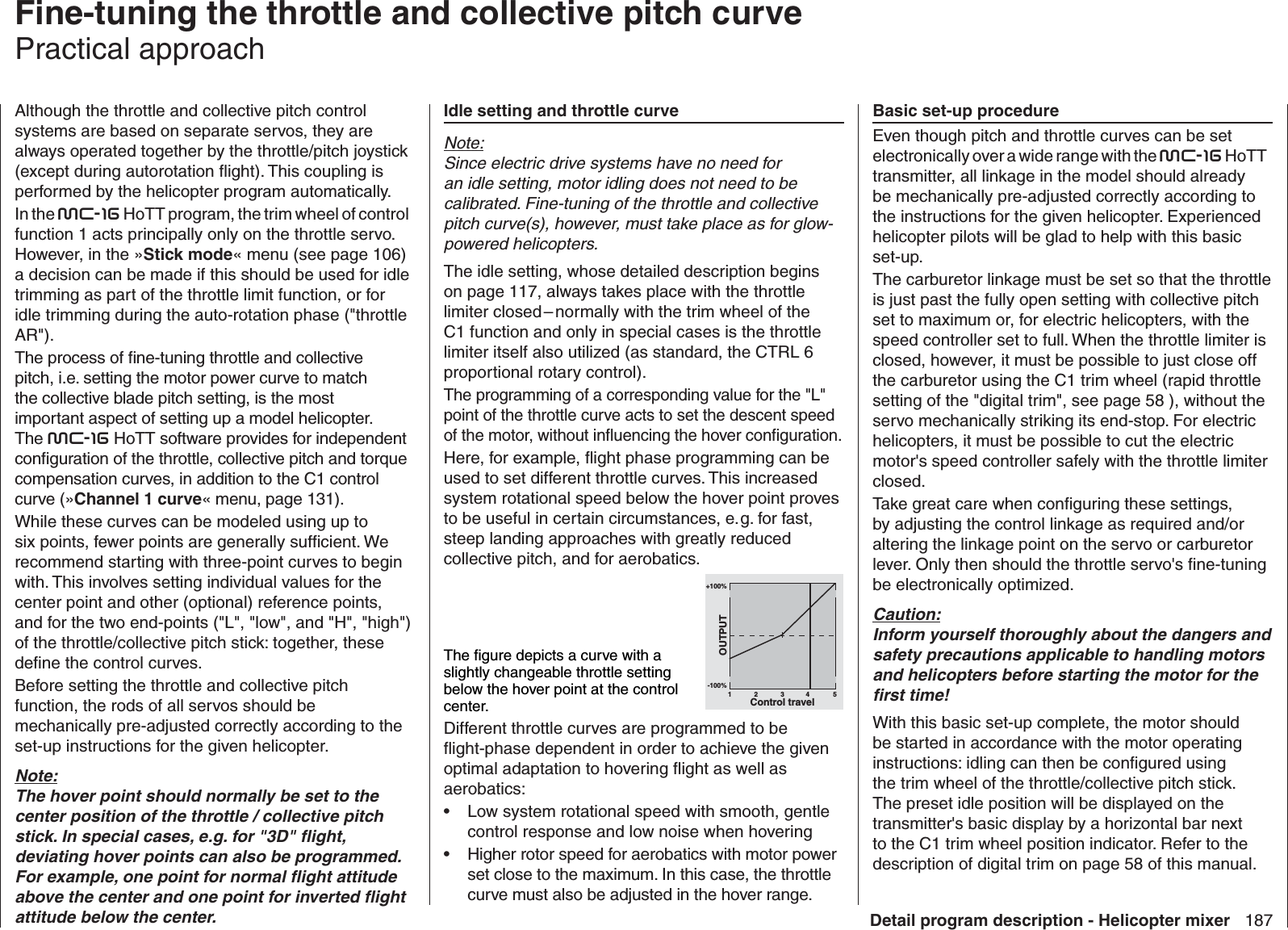
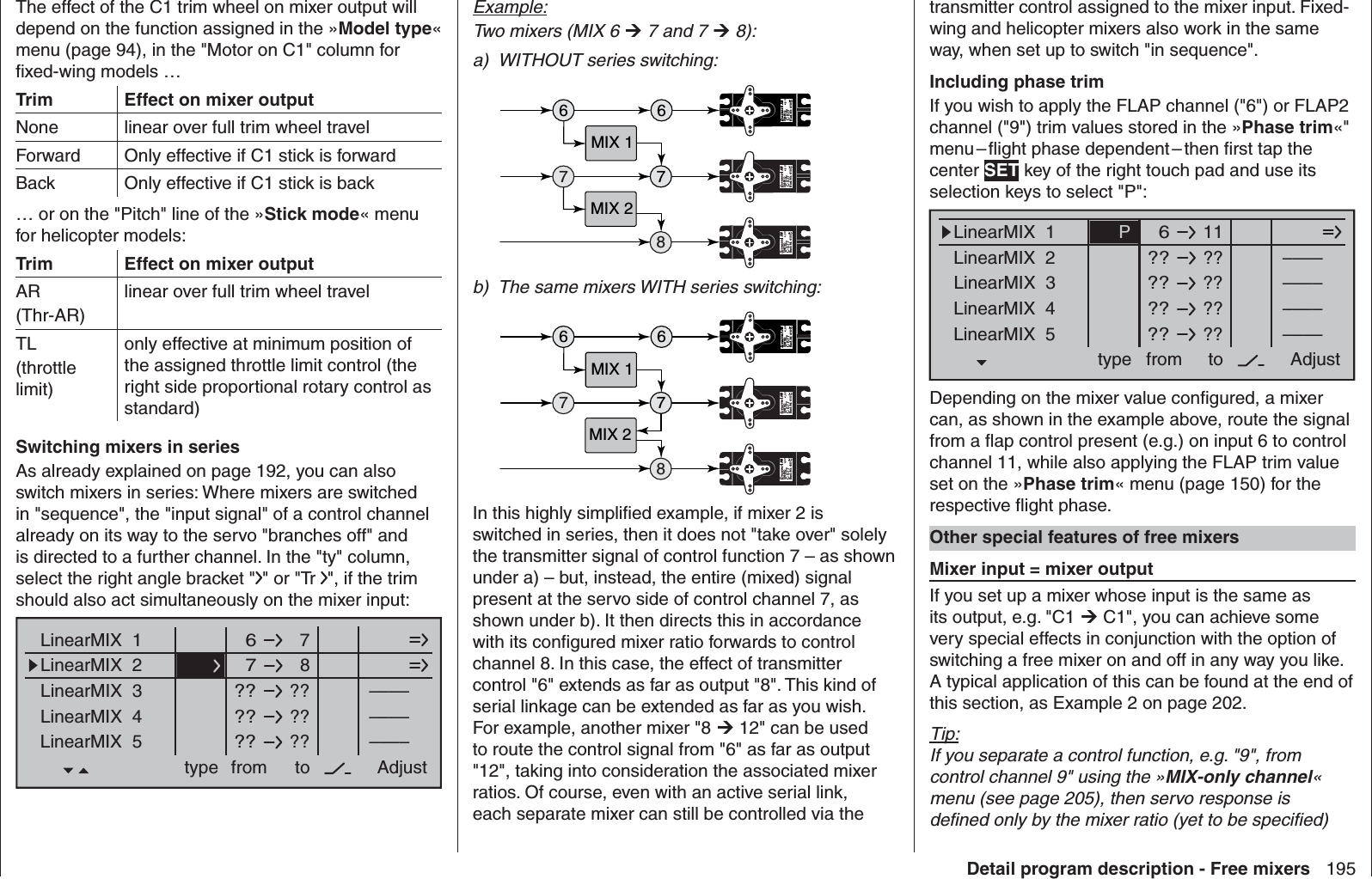
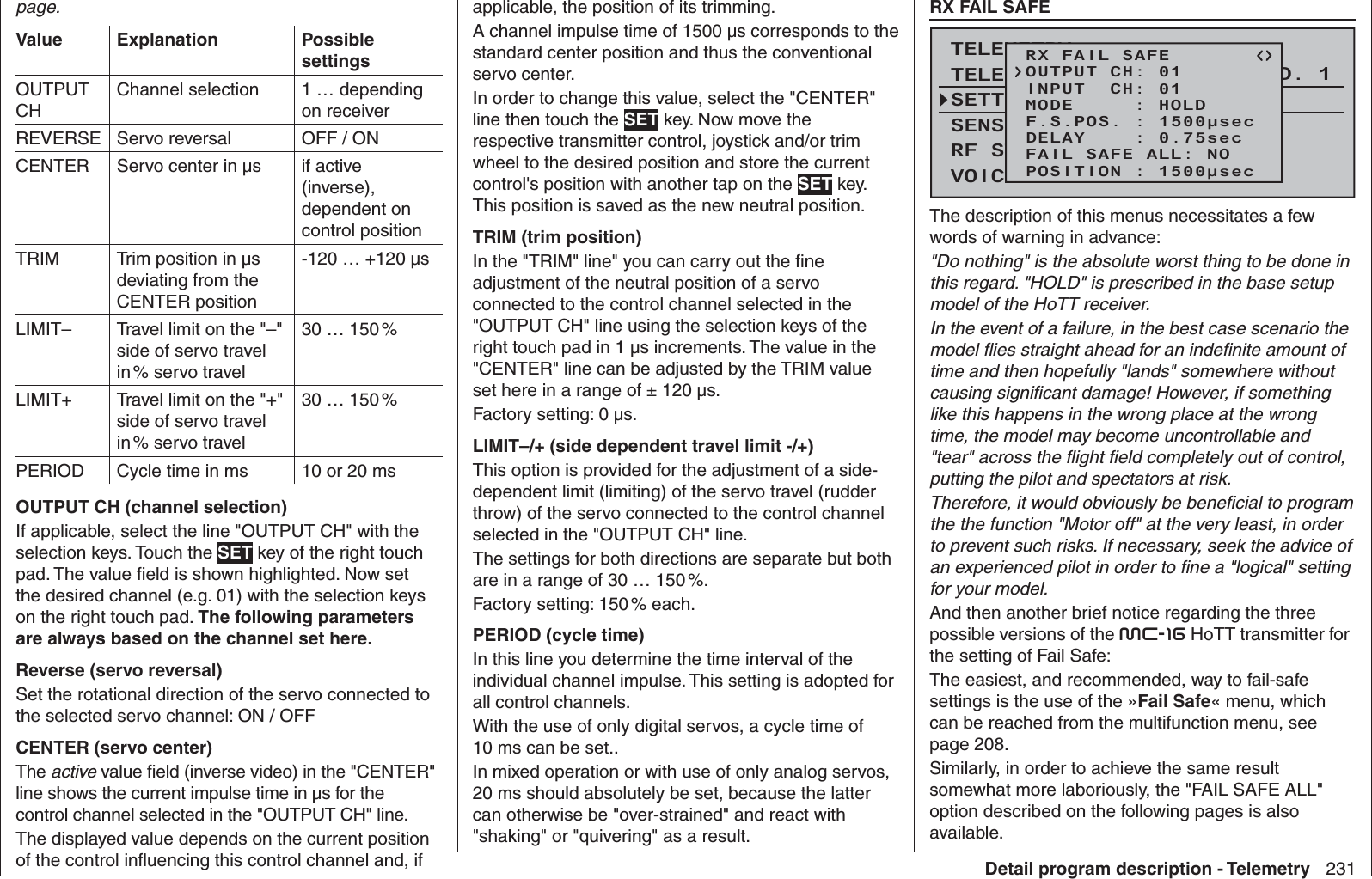
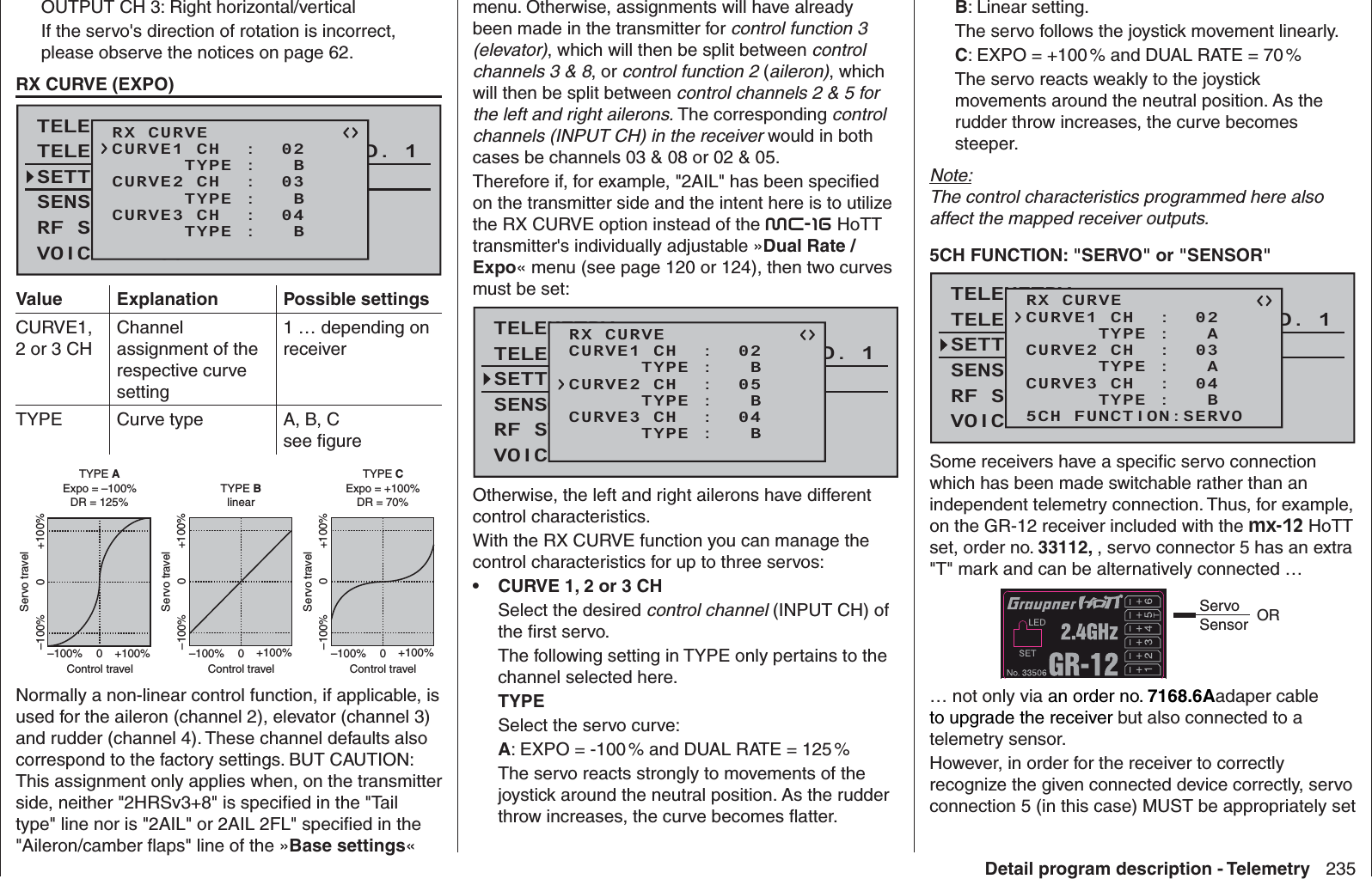
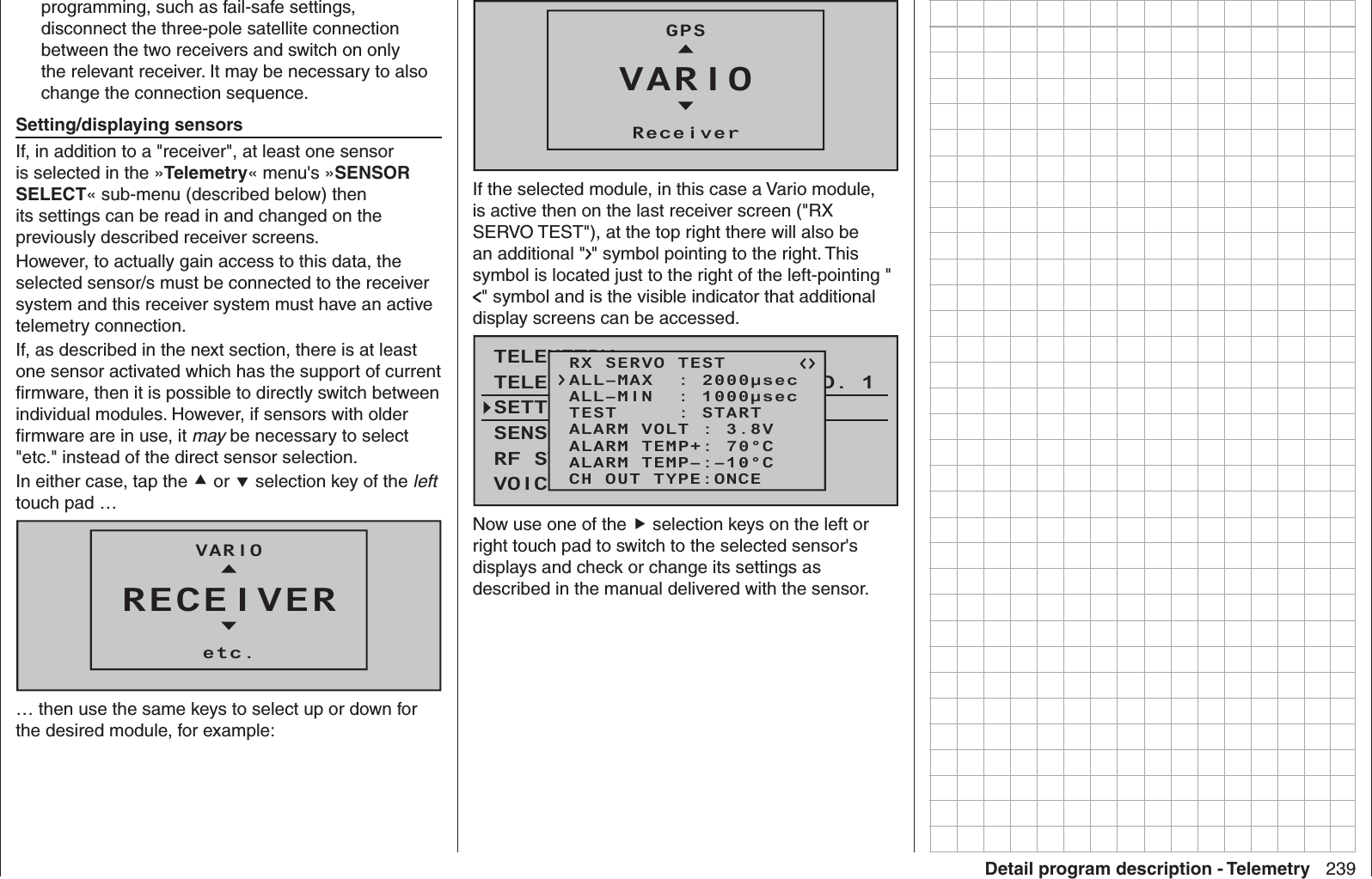
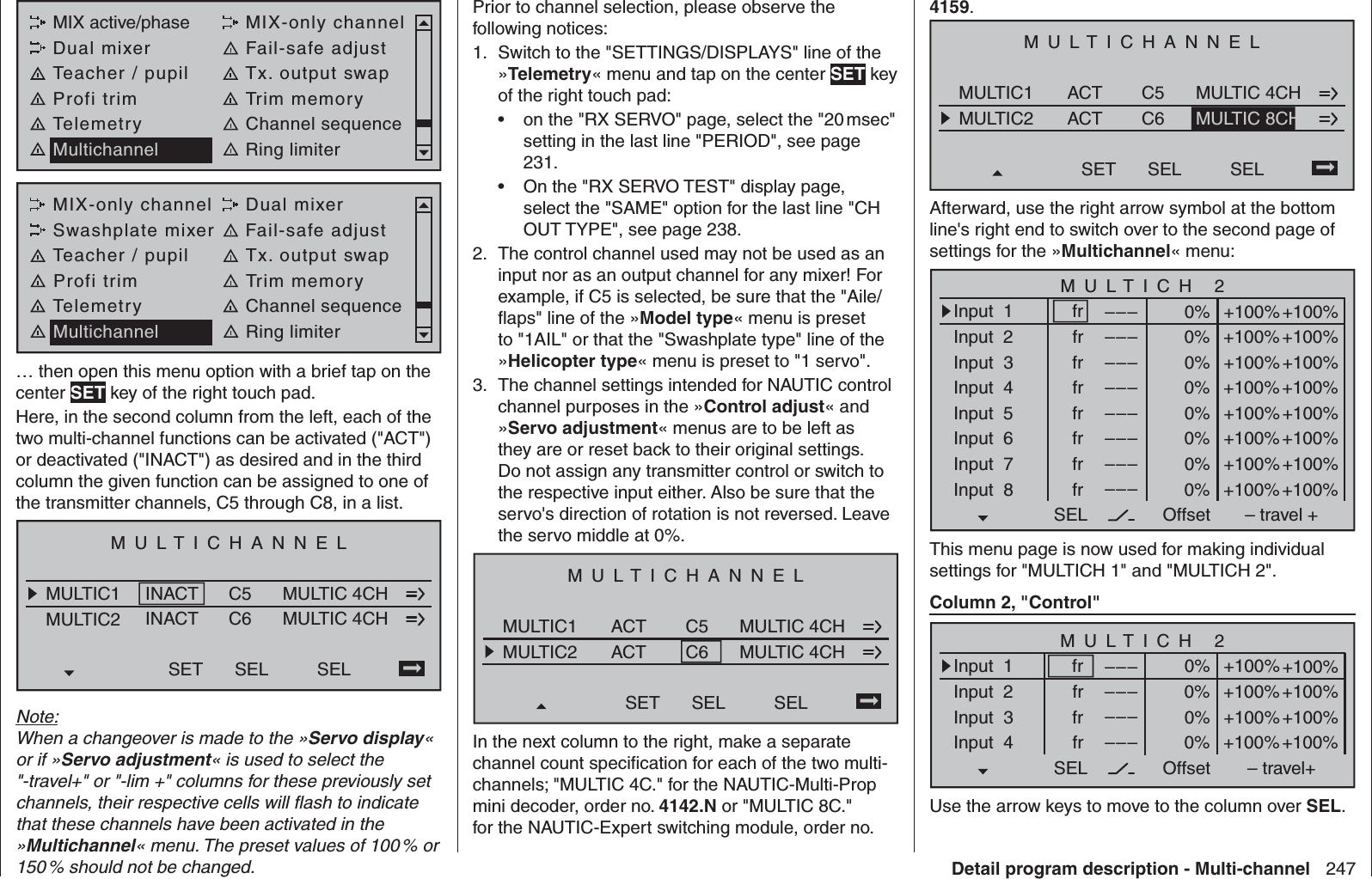
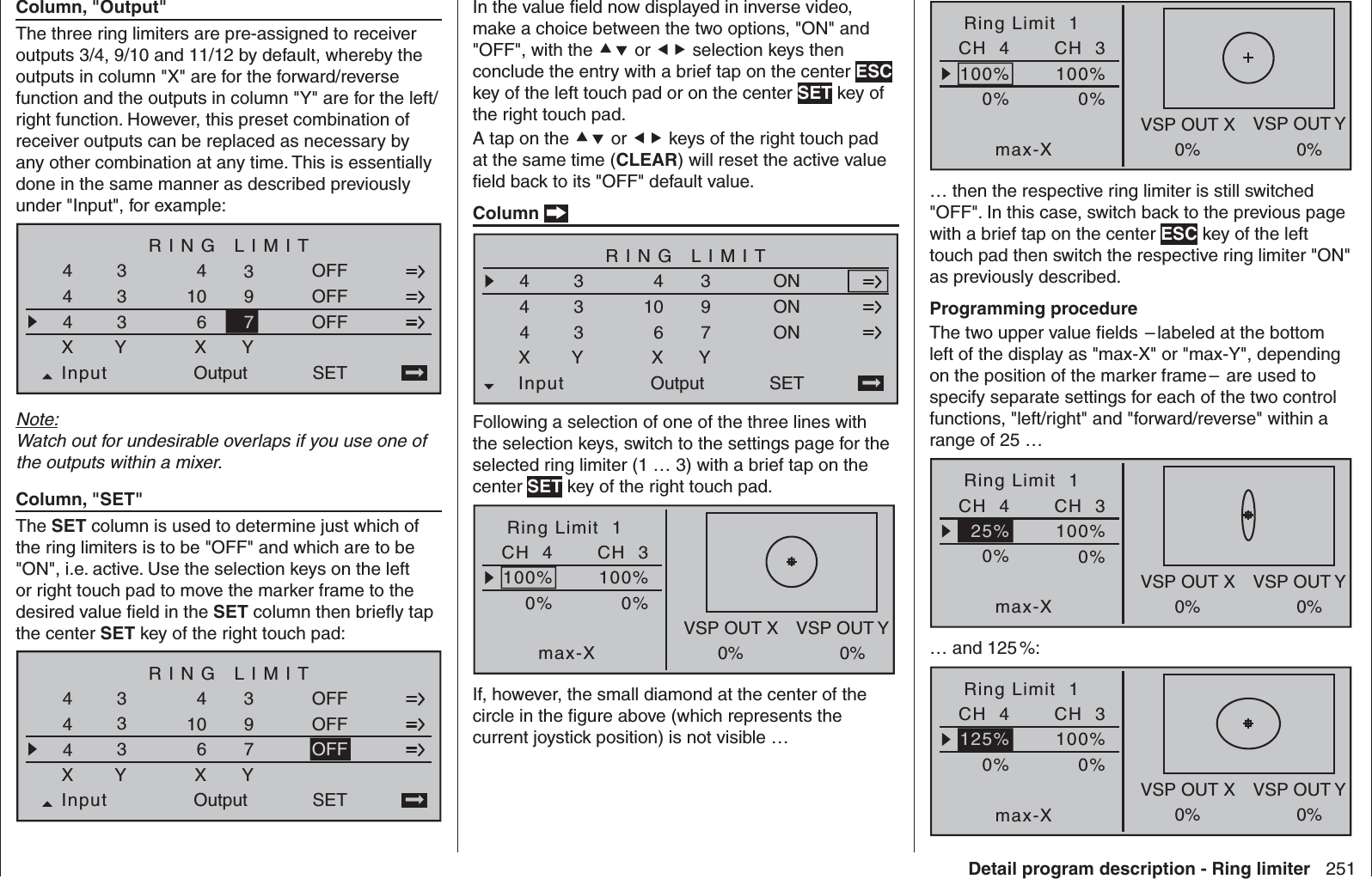
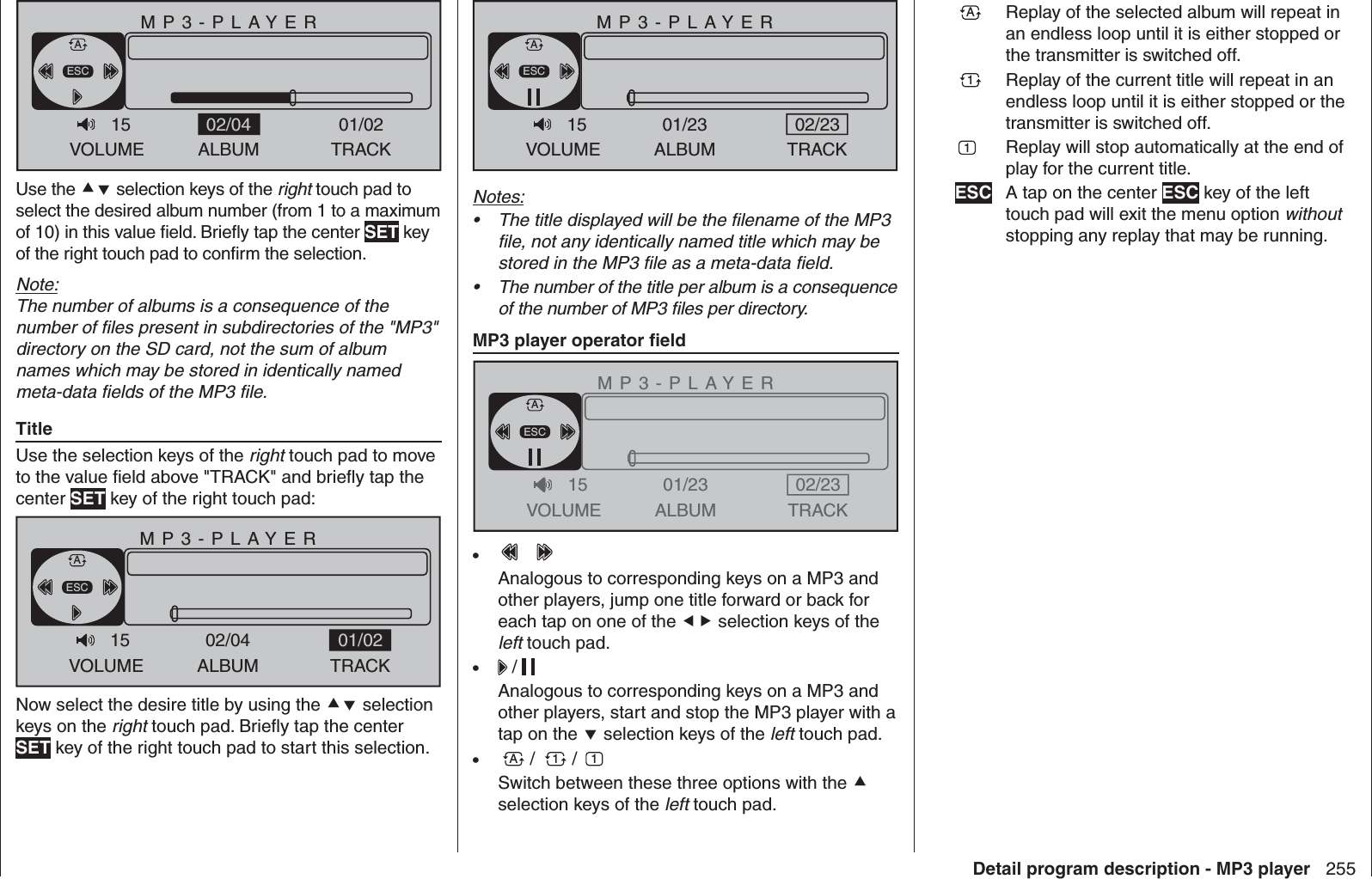
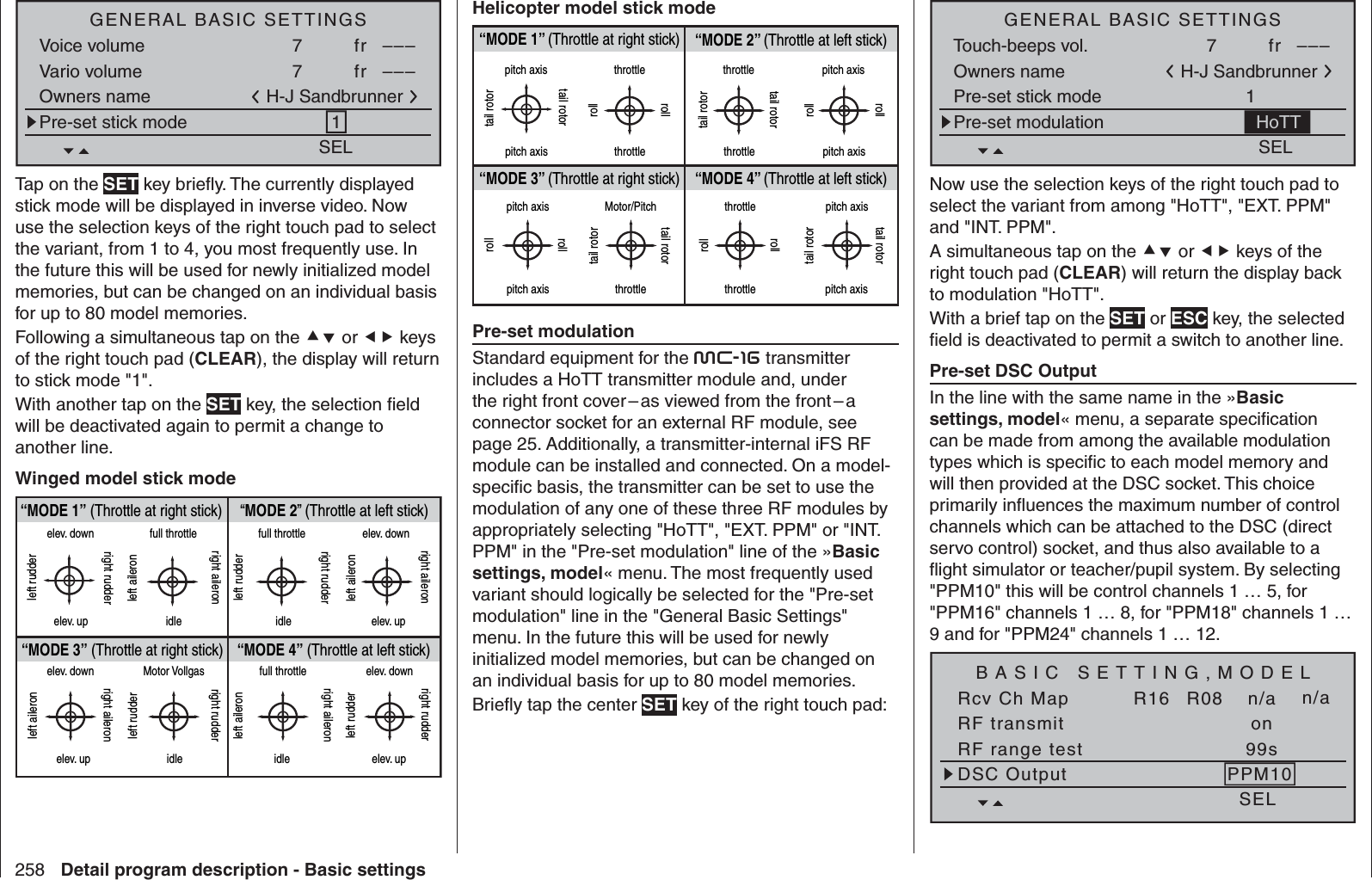
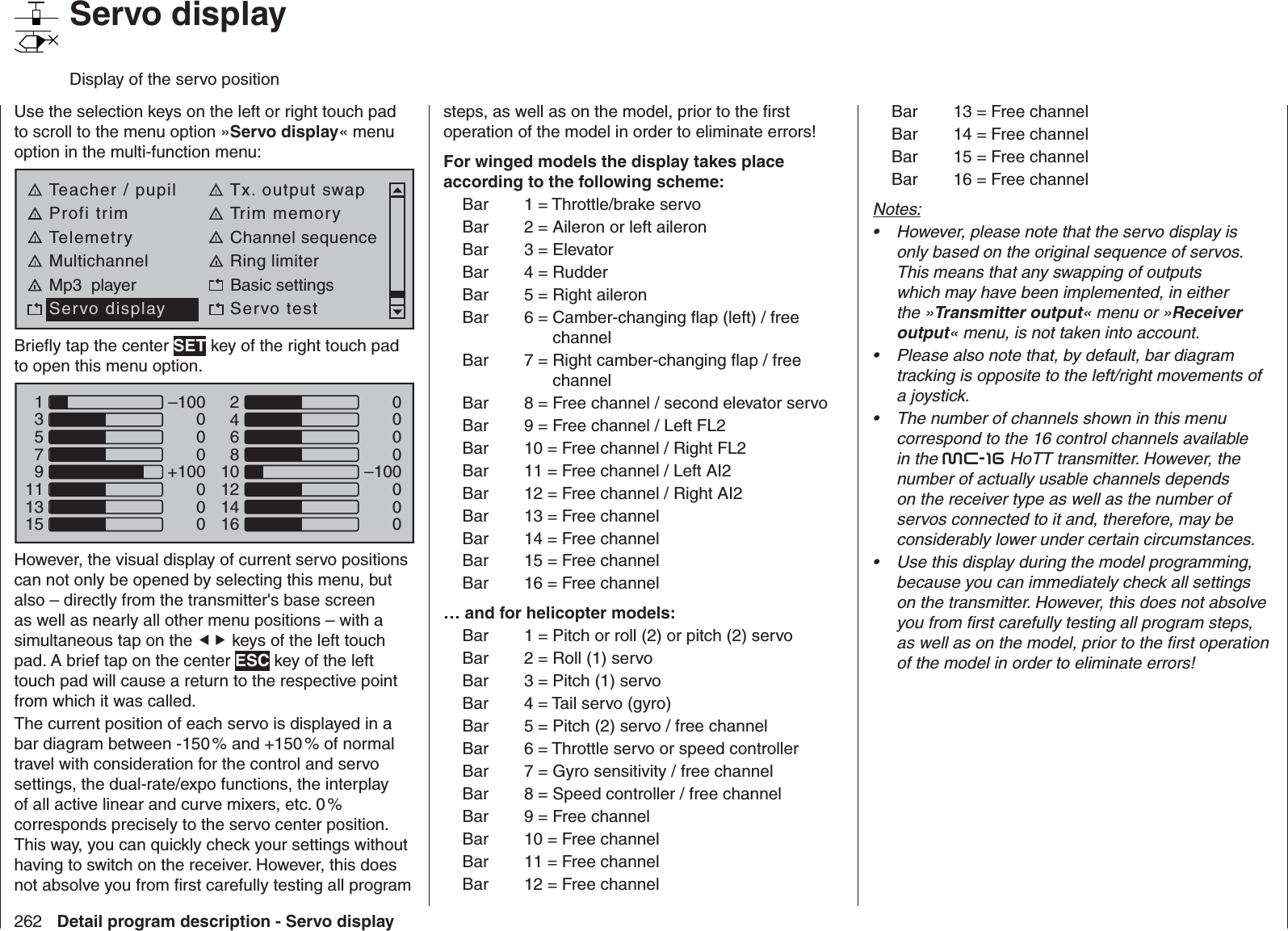
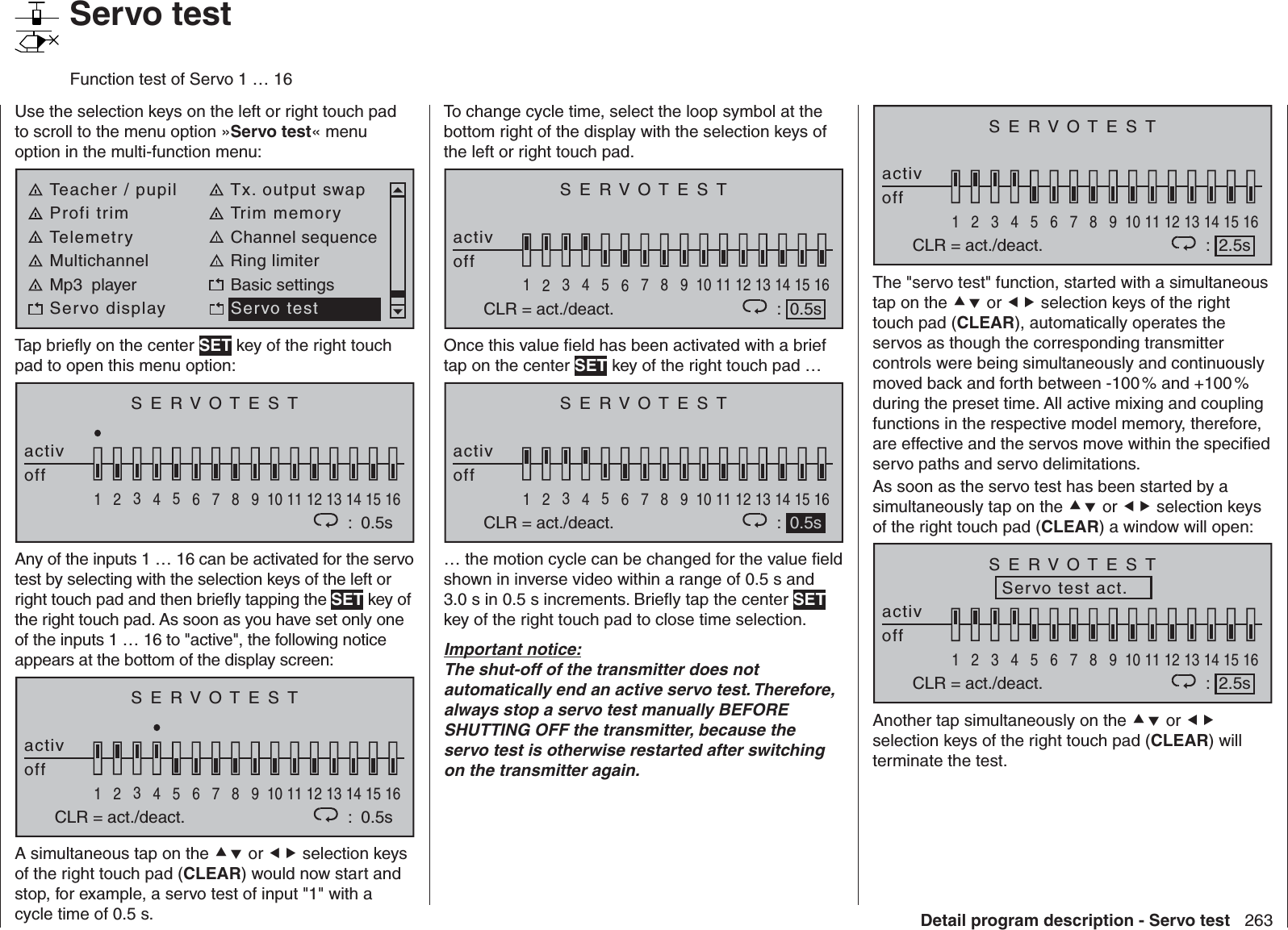
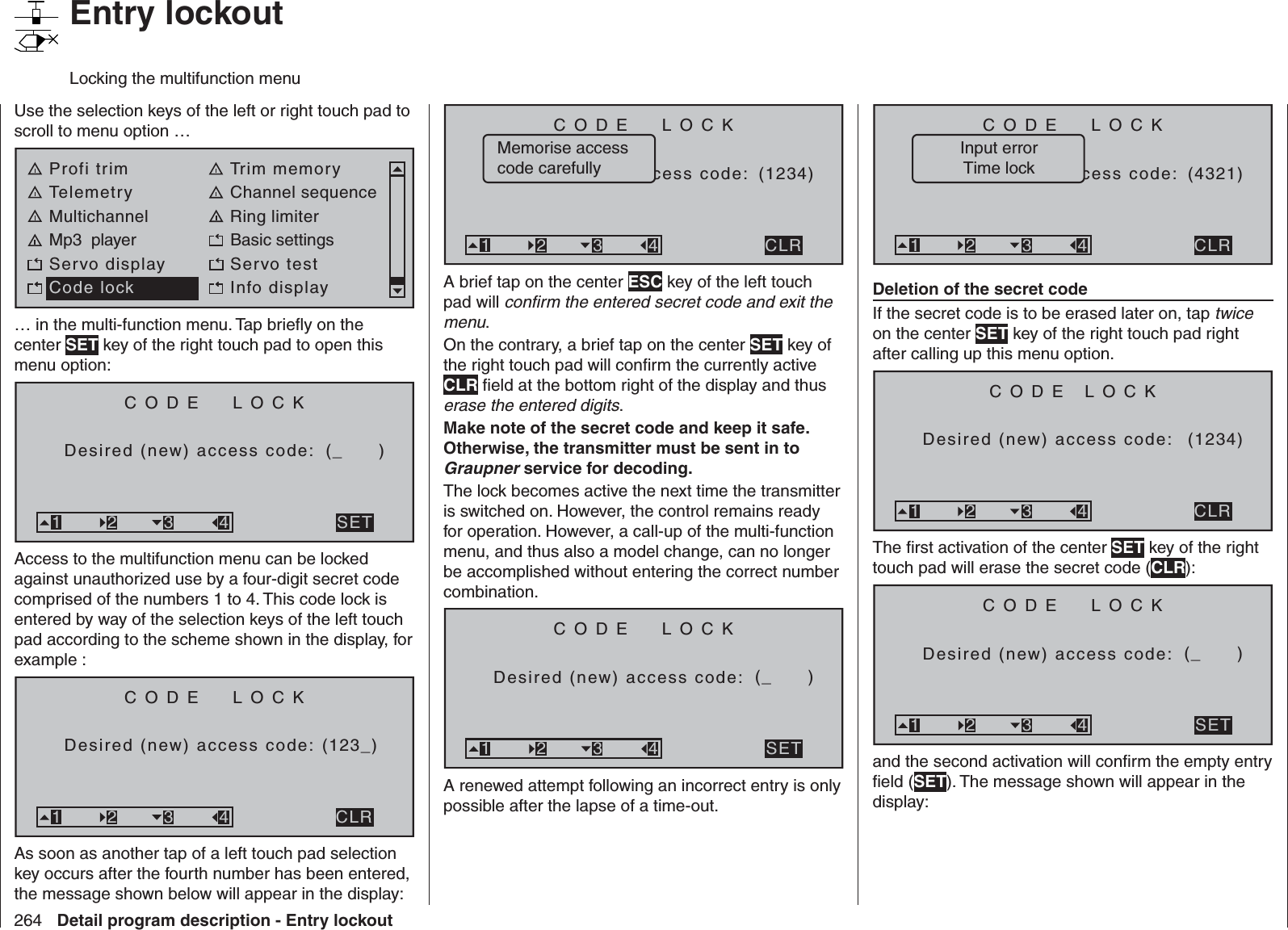
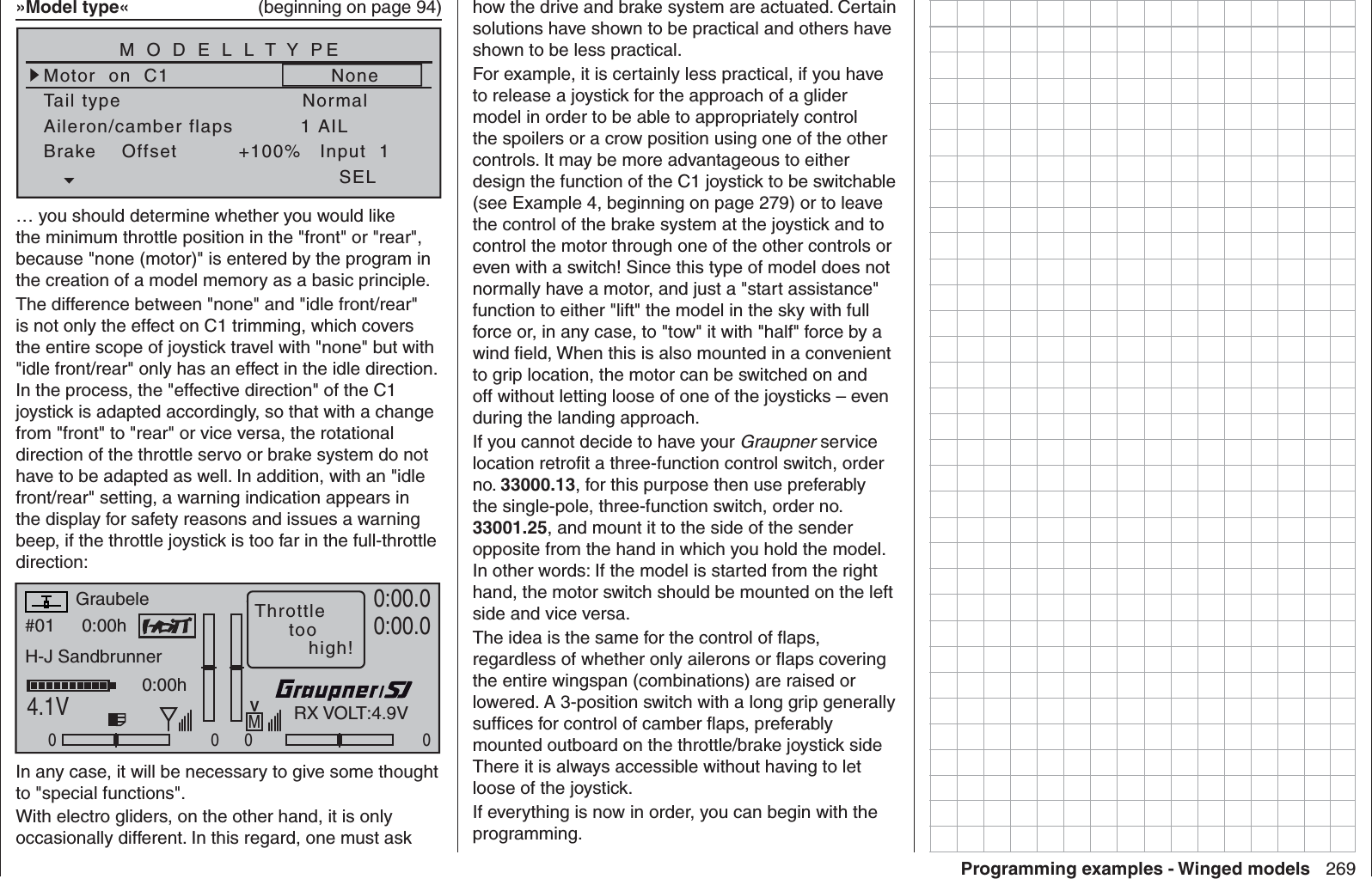
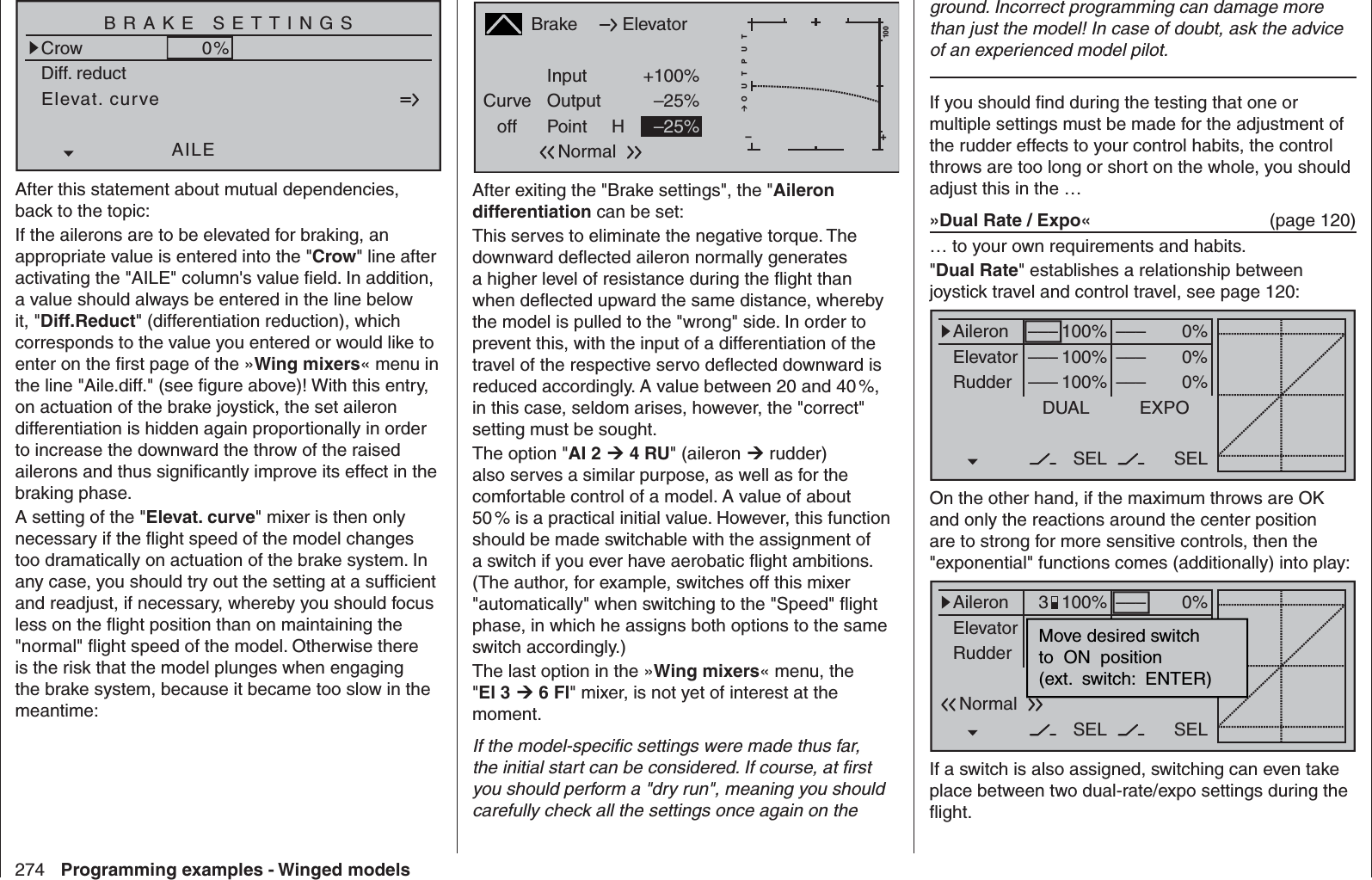
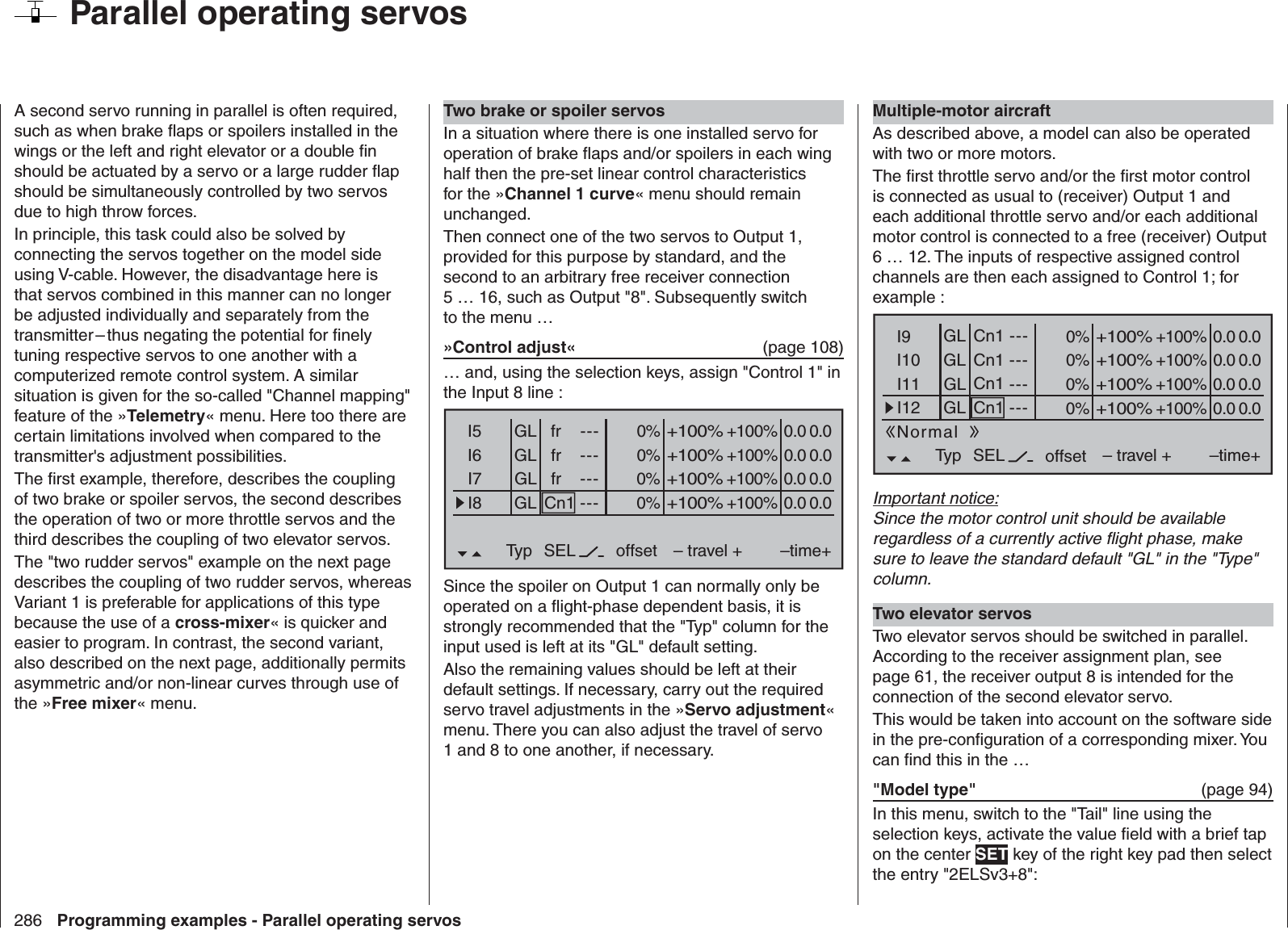
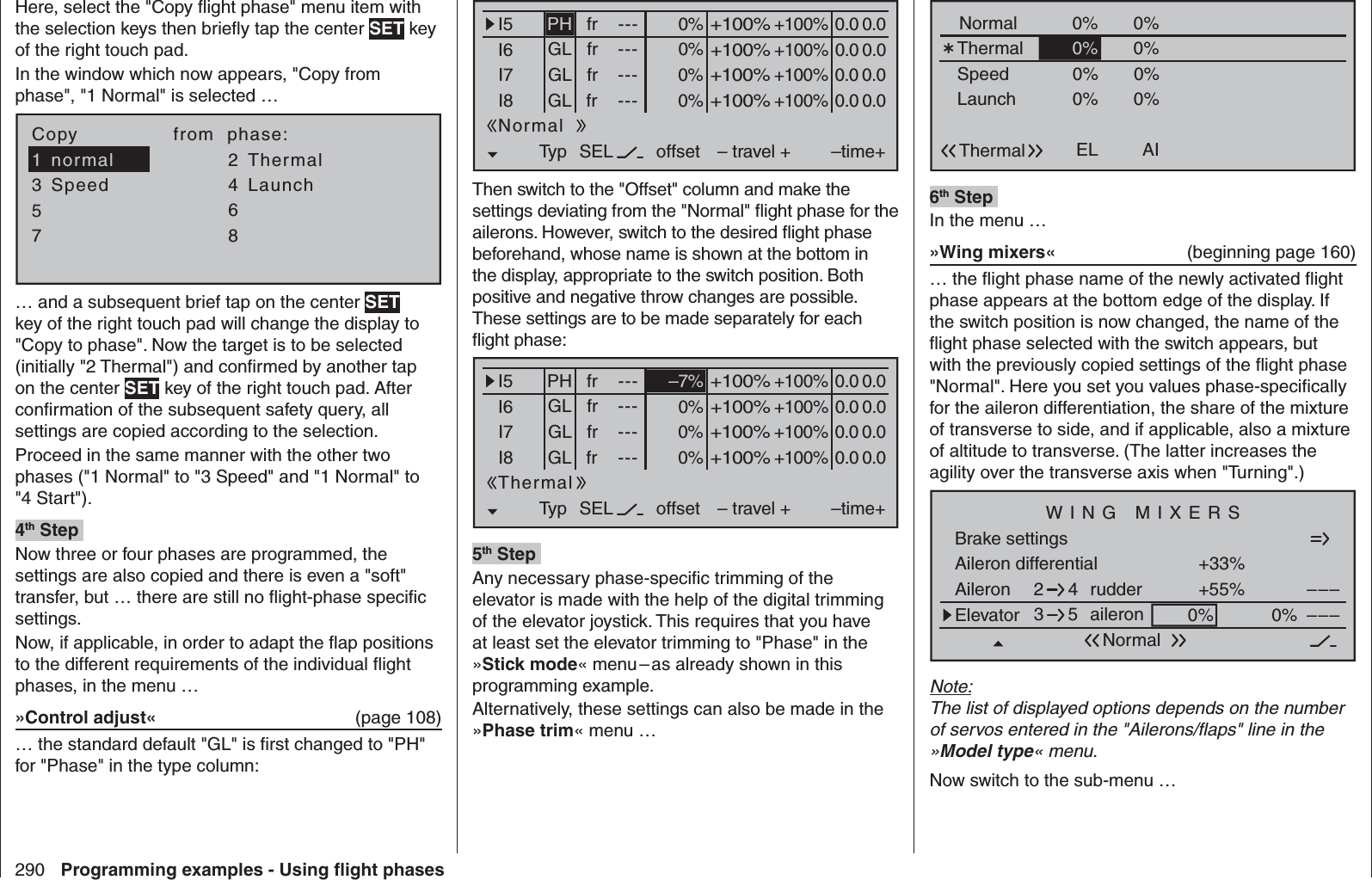
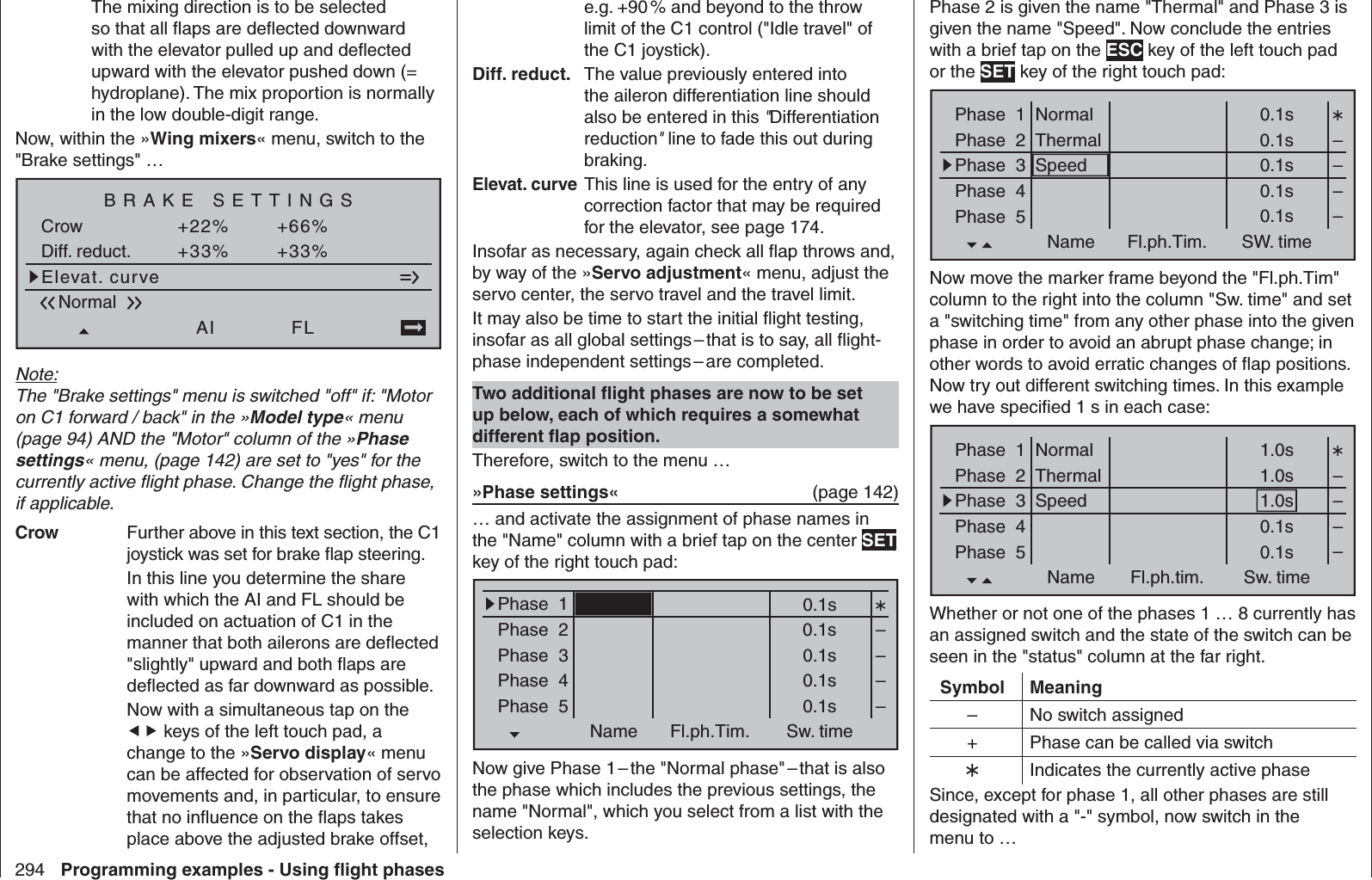
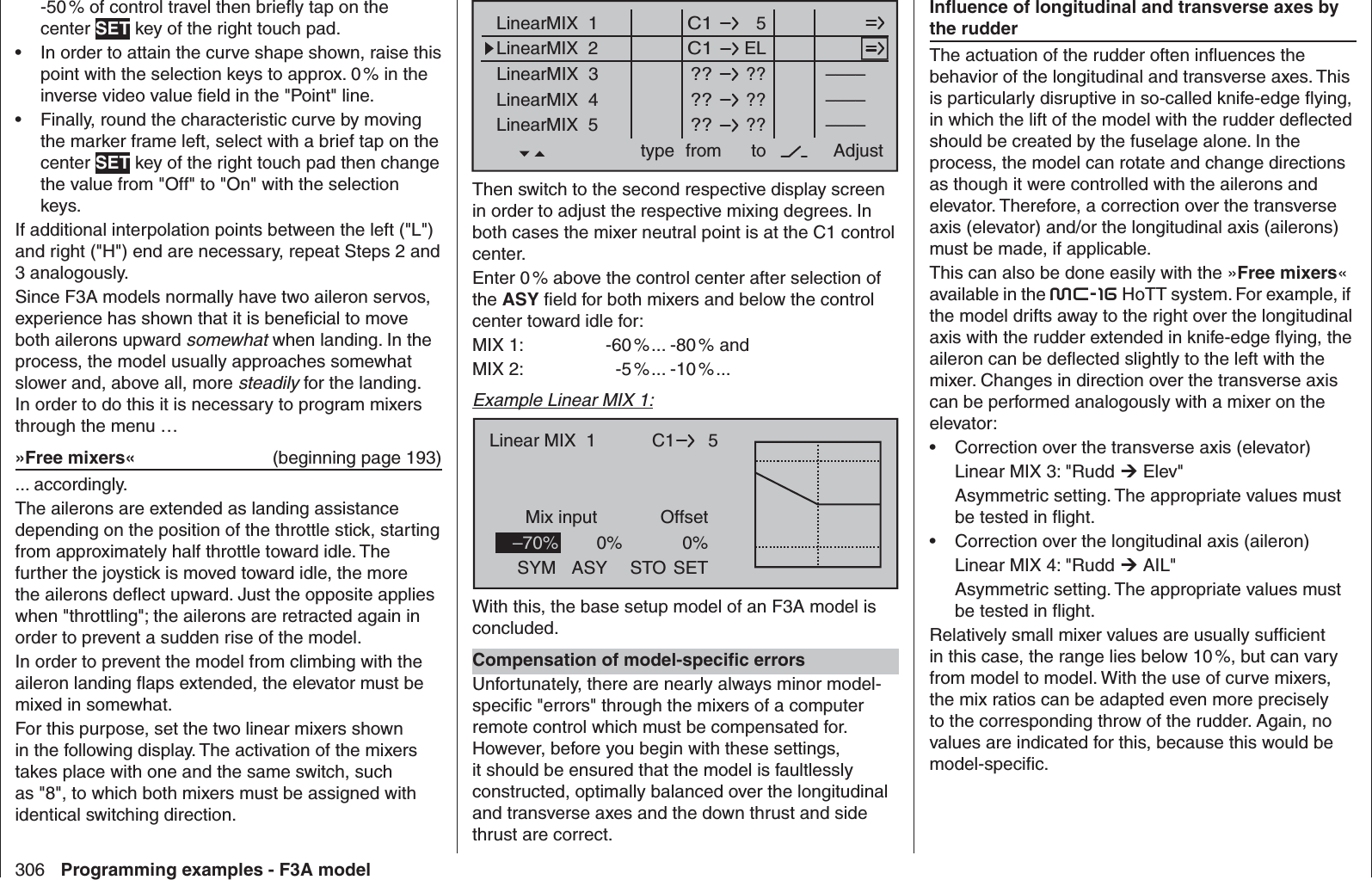
![76 Detail program description - Base setup models | Winged models Base setup modelModel-specifi c base settings for winged aircraft modelsBefore programming specifi c parameters, there are some basic settings to be made which effect the currently active model memory.Use the selection keys of the left or right touch pad to select the »Basic settings, model« menu … Model selectServo adjustment Stick modeControl adjust Dual Rate / ExpoChannel 1 curve Switch displayCopy / EraseSuppress codes Suppress models Base setup model Model type… then tap the center SET key of the right touch pad. Model name Model nameStick mode 1n/aBASIC SETTINGS,MODELInfon/an/aModule bindHoTT Change to the next screen page with a brief tap on the SET key of the right touch pad. This will open a screen of characters for entry of the model's name. A maximum of 13 characters can be used to specify a model name. !"#$%&’()Model name Graub@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~Now the desired characters can be selected with the selection keys of the left touch pad. Move to the next position to select the next character with a tap on the selection key of the right touch pad or its center SET key. A simultaneous tap on the or keys of the right touch pad (CLEAR) will place a space character at the current position.Positioning to any character position within the entry fi eld can be done with the keys of the right touch pad.A return to the previous menu screen is accomplished with a tap on the center ESC key of the left touch pad.A model name entered in this manner will appear in the base screen of the »Model select« menu and in the sub-menus of the »Copy / Erase« menu item. Info Model nameStick mode 1n/aBASIC SETTINGS,MODELInfon/an/aModule bindHoTT GraubeleEvery model can be given a supplementary note of up to 12 characters (maximum) by following the same procedure as already described for creating a "Model name". This info note will appear as a supplement in the »Model select« menu and in the sub-menus of the »Copy / Erase« menu item. Stick mode “MODE 2” (Throttle at left stick)“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)“MODE 1” (Throttle at right stick)elev. downelev. upleft rudderright rudderfull throttleidleleft aileronright aileronfull throttleleft rudderright rudderidleelev. downelev. upleft aileronright aileronelev. downelev. upleft aileronright aileronMotor Vollgasidleleft rudderright rudderfull throttleidleleft aileronright aileronelev. downelev. upleft rudderright rudderThere are four fundamental options for assigning the four control functions (aileron, elevator, rudder and throttle/brake fl ap) for a winged aircraft model to the two joysticks. Just which of these options is chosen depends on the individual preferences of the individual model pilot. Use the selection keys of the left or right touch pad to select the "Stick mode" line. The option fi eld will be framed.Model nameStick mode 1n/aBASIC SETTING,MODELInfon/an/aModule bindHoTT SELGraubele1234g/111111Tap on the SET key. The currently displayed stick mode will be displayed in inverse video. Now use the selection keys of the right touch pad to select from among options 1 through 4.A simultaneous tap on the or keys of the right touch pad (CLEAR) will reset the display to stick mode "1".](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-26.png)
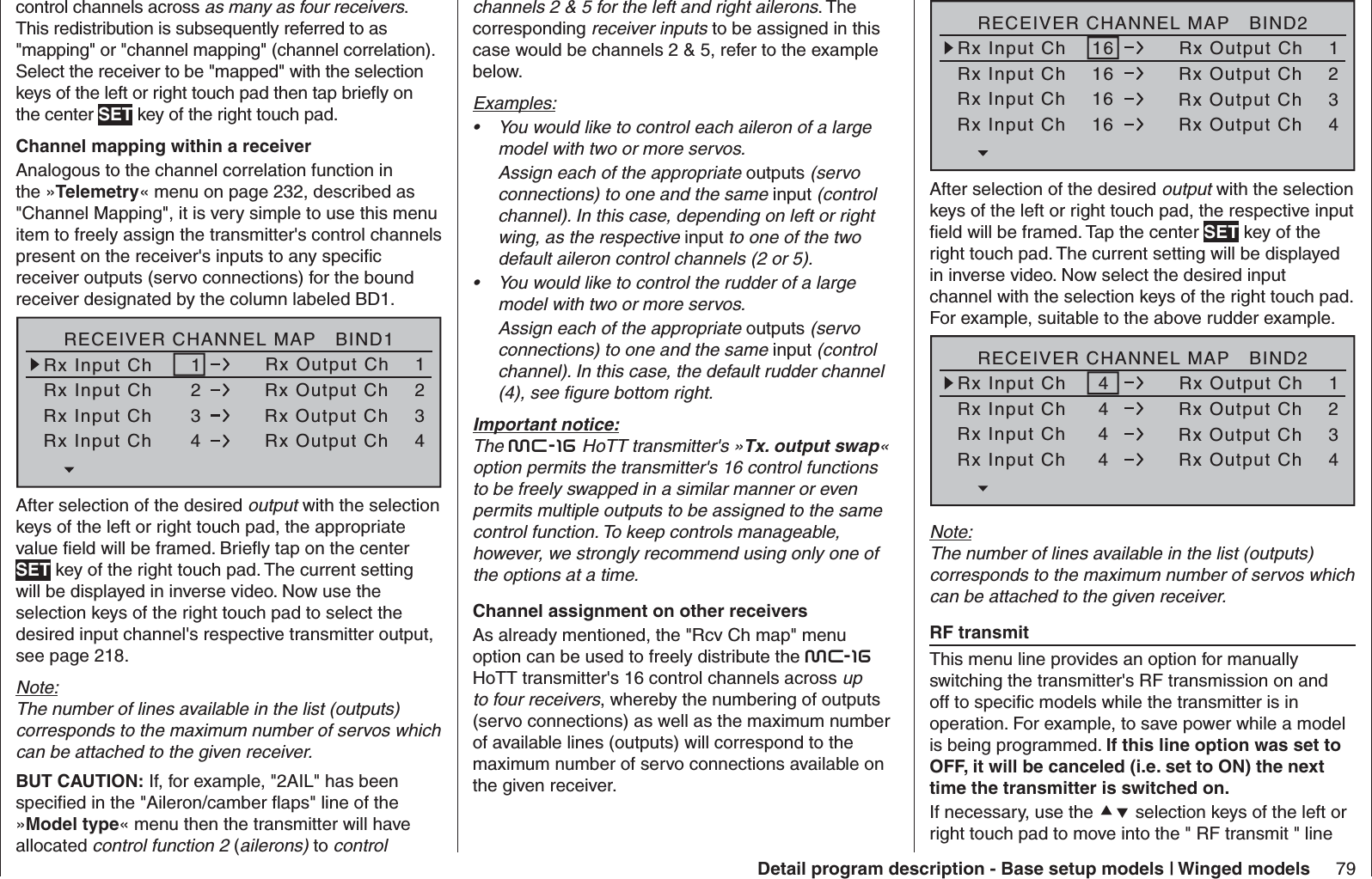
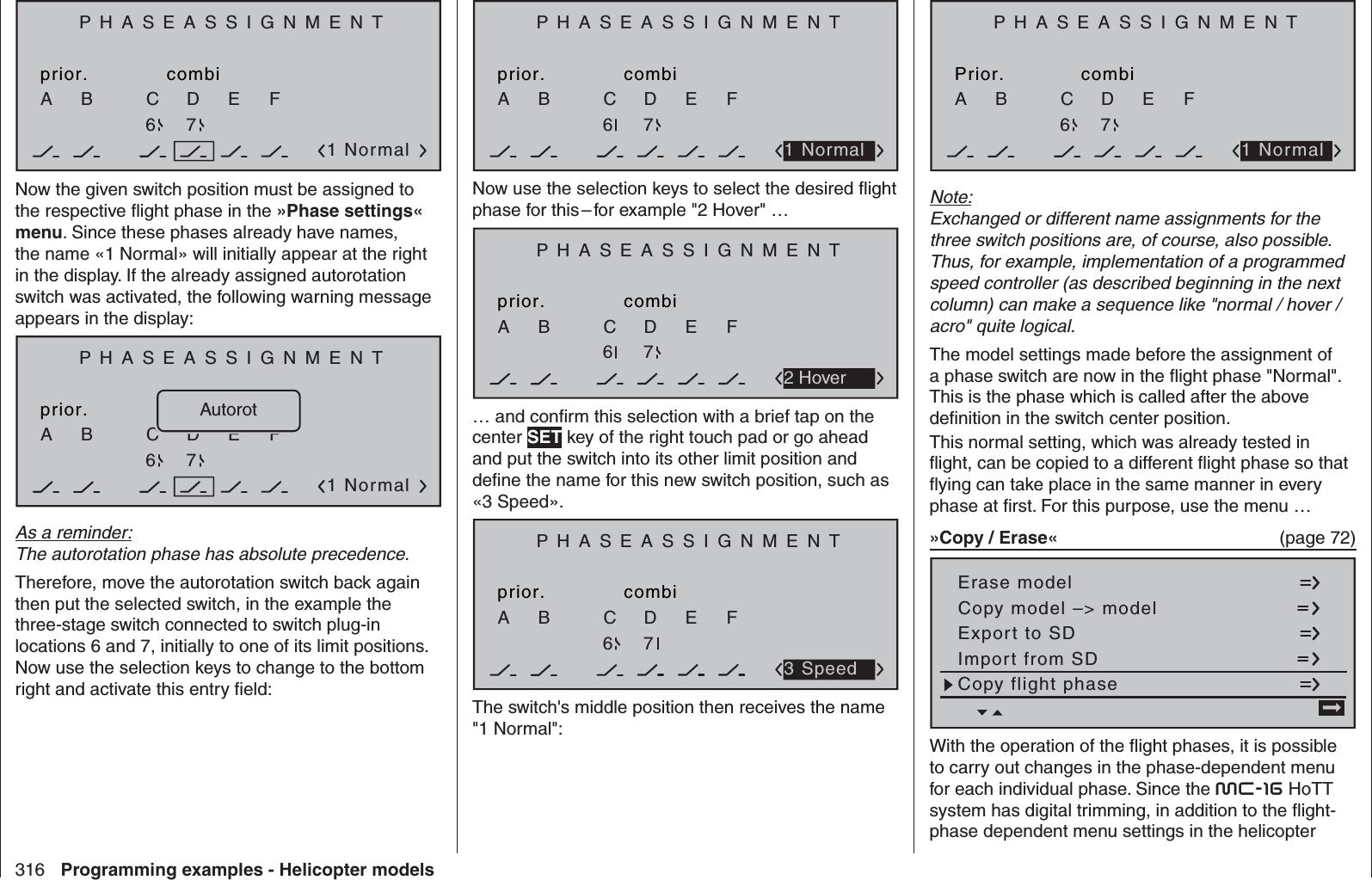
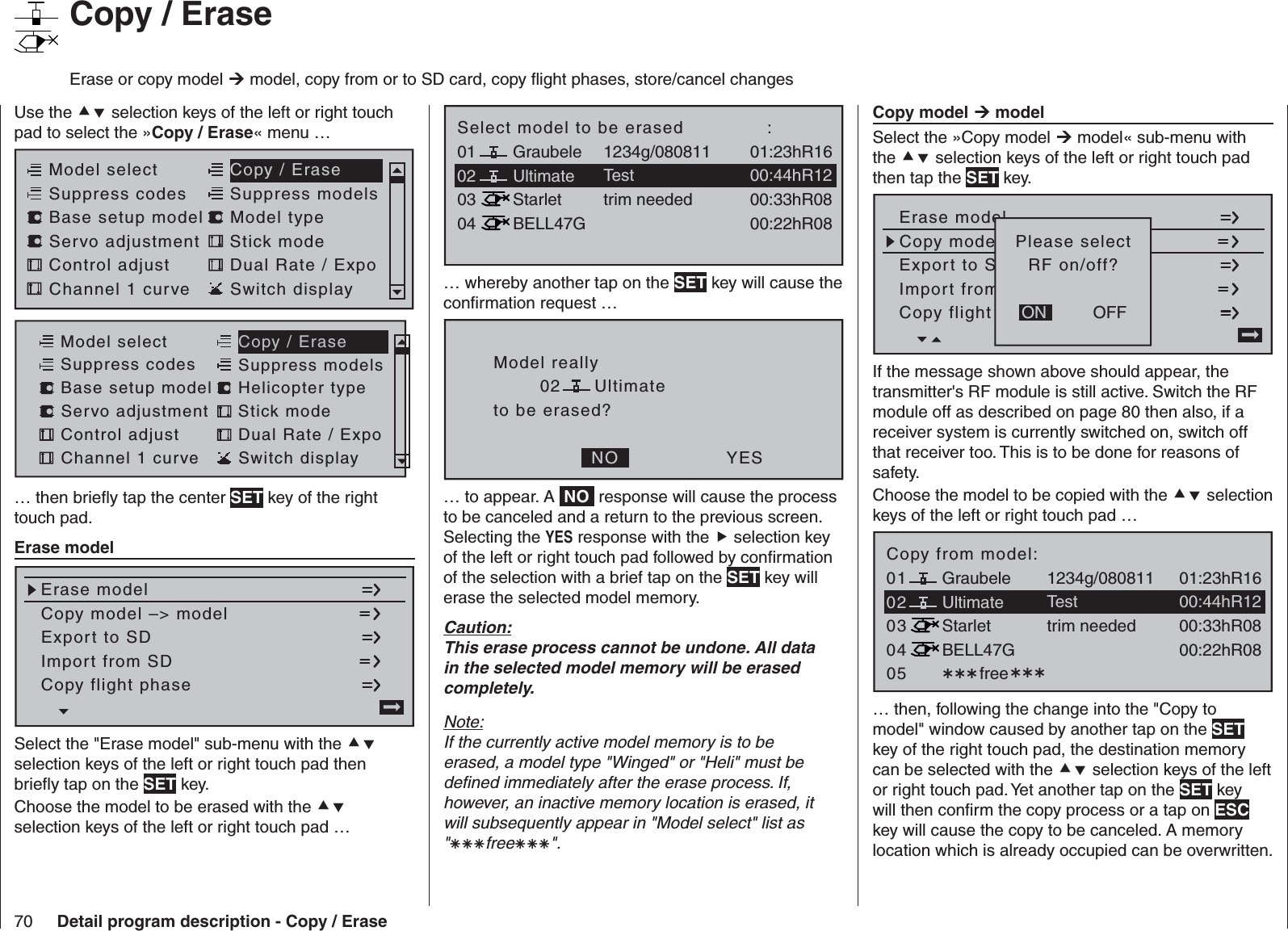
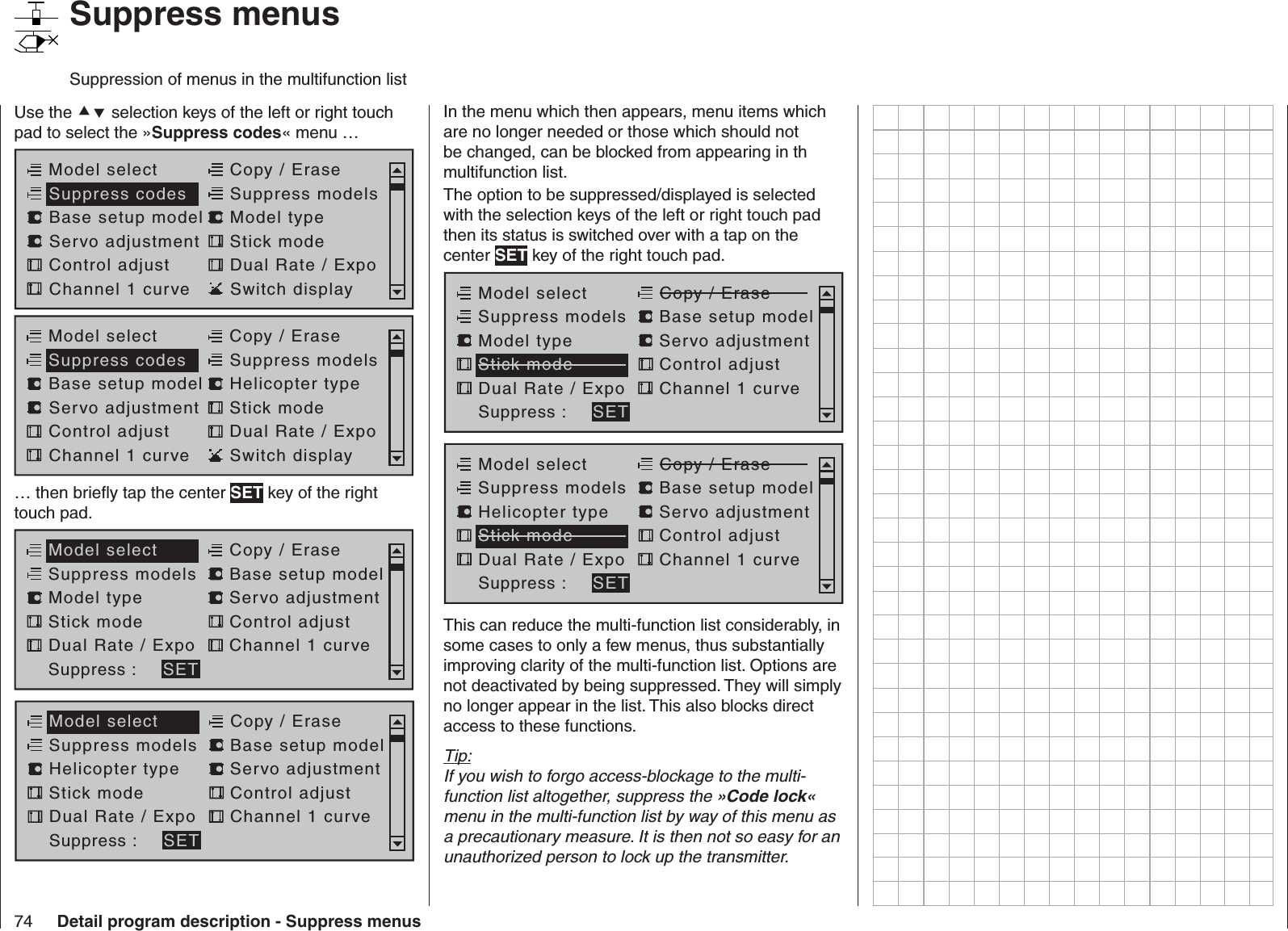
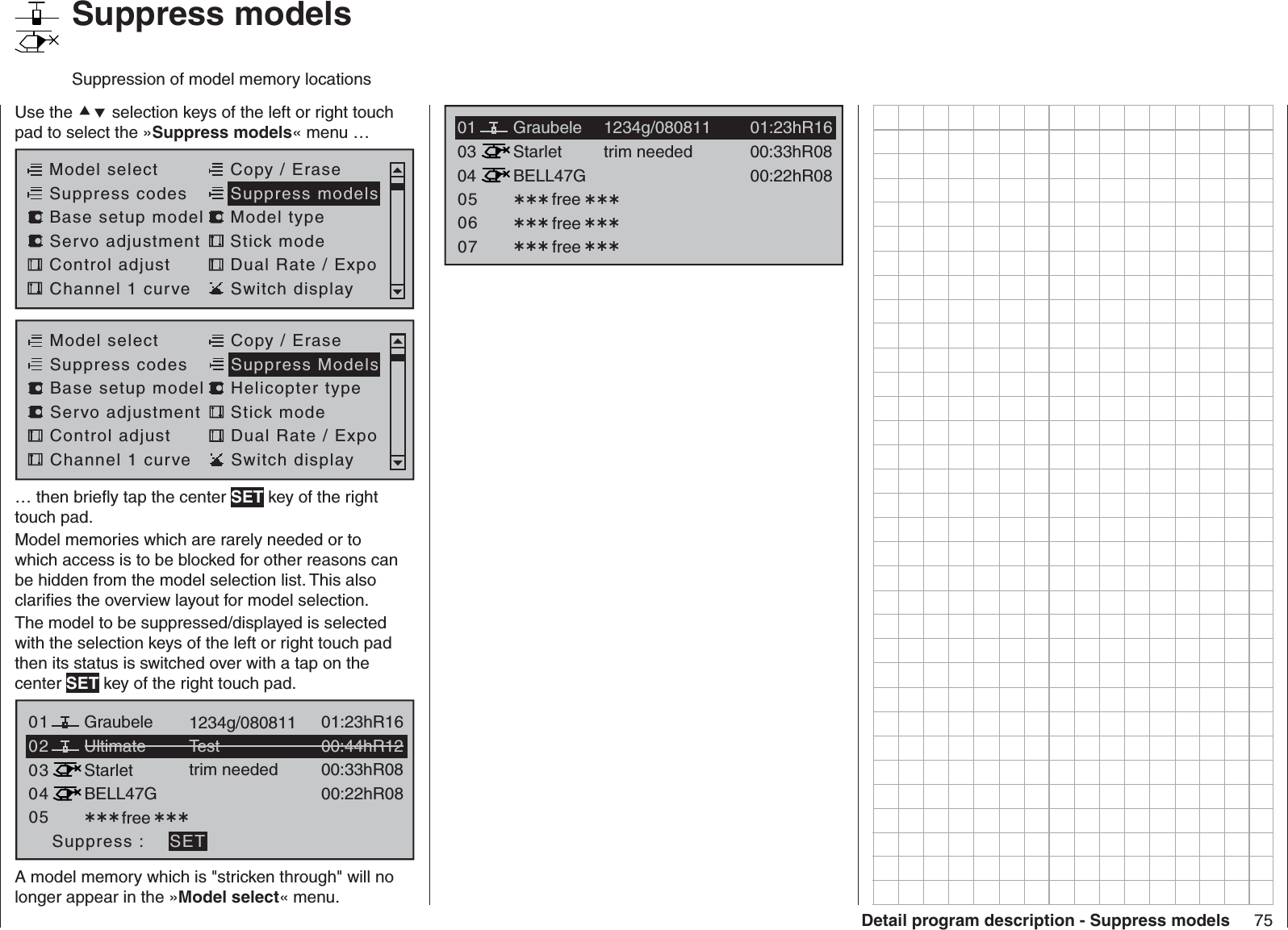
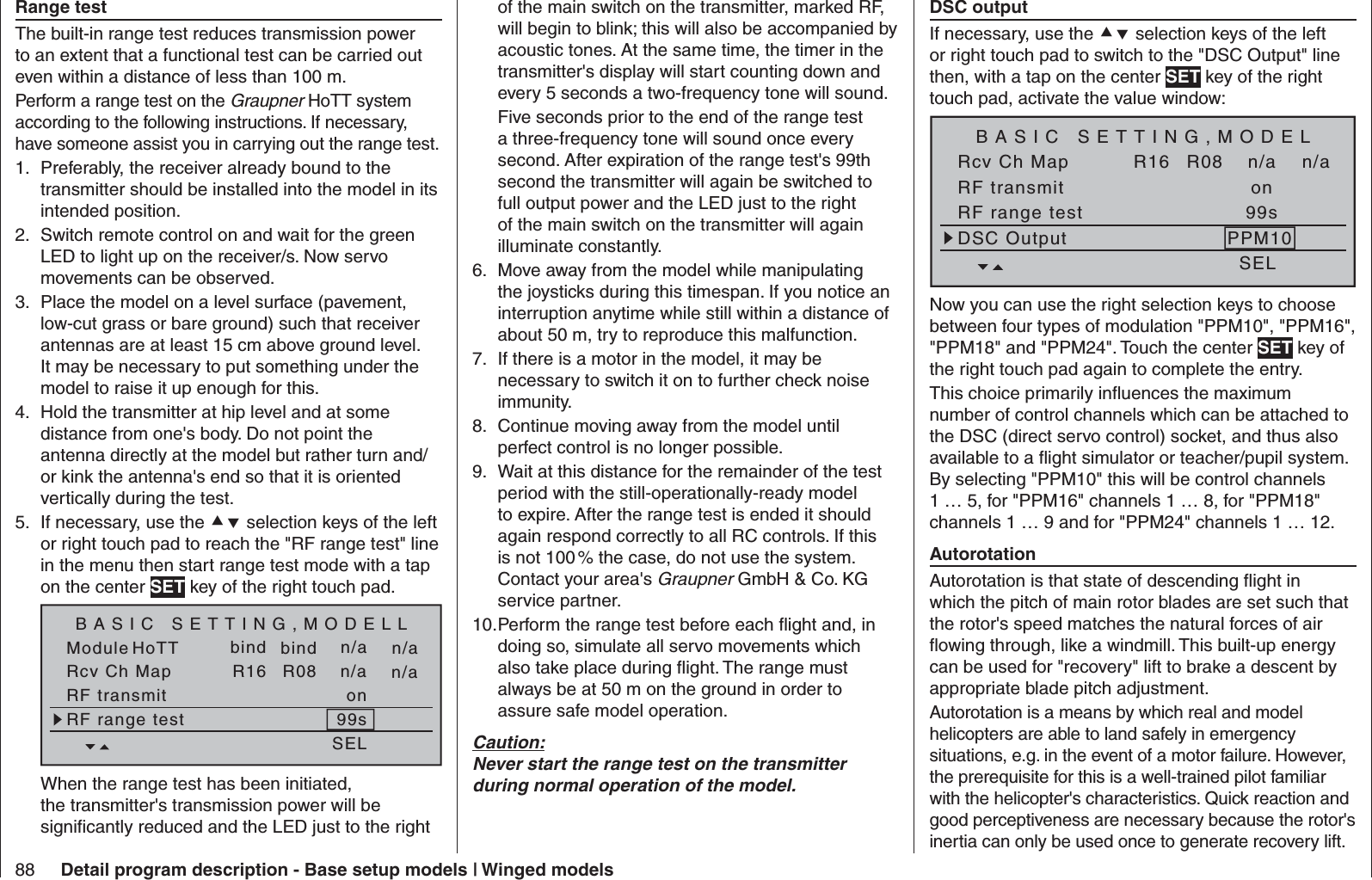
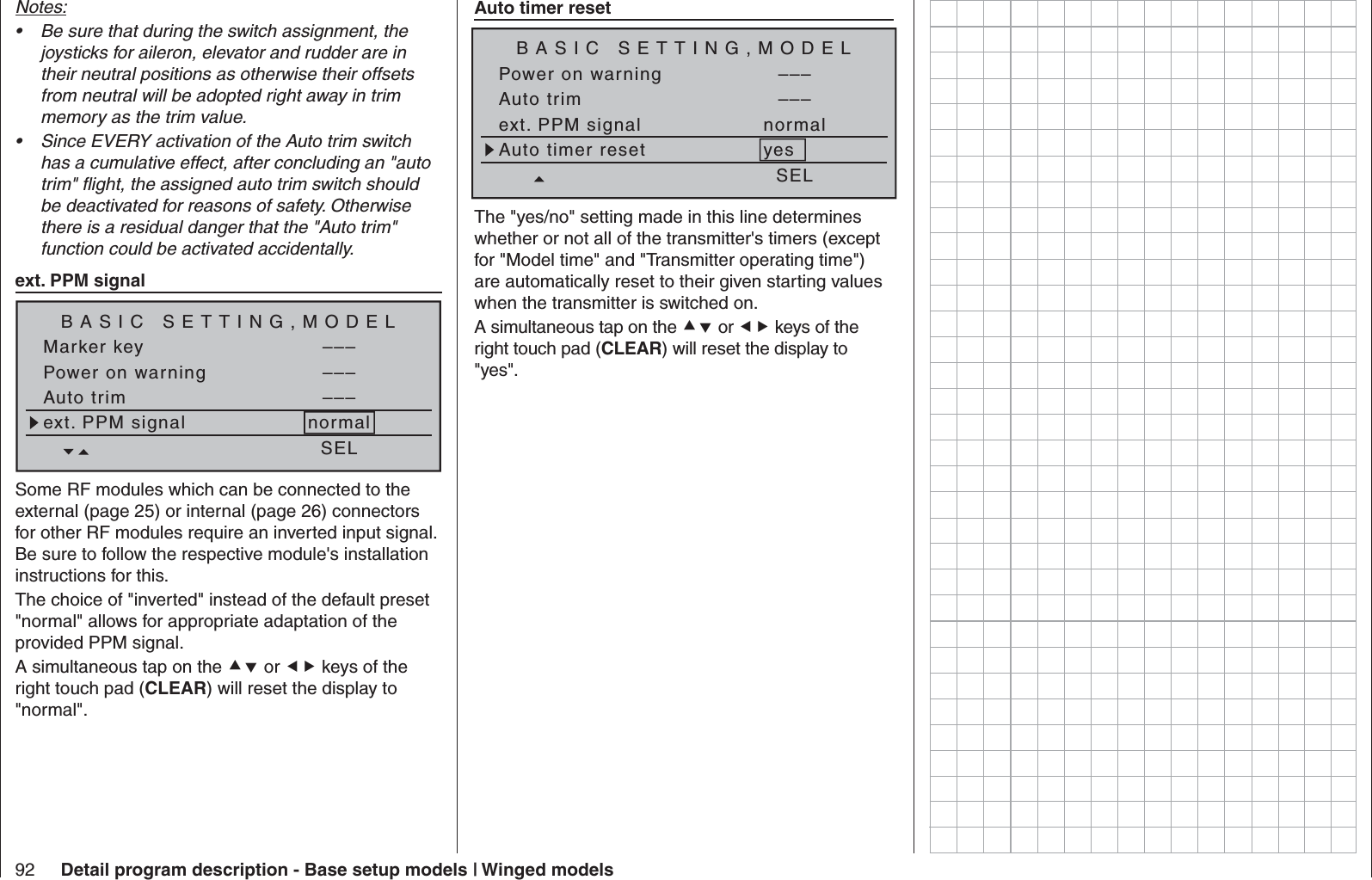
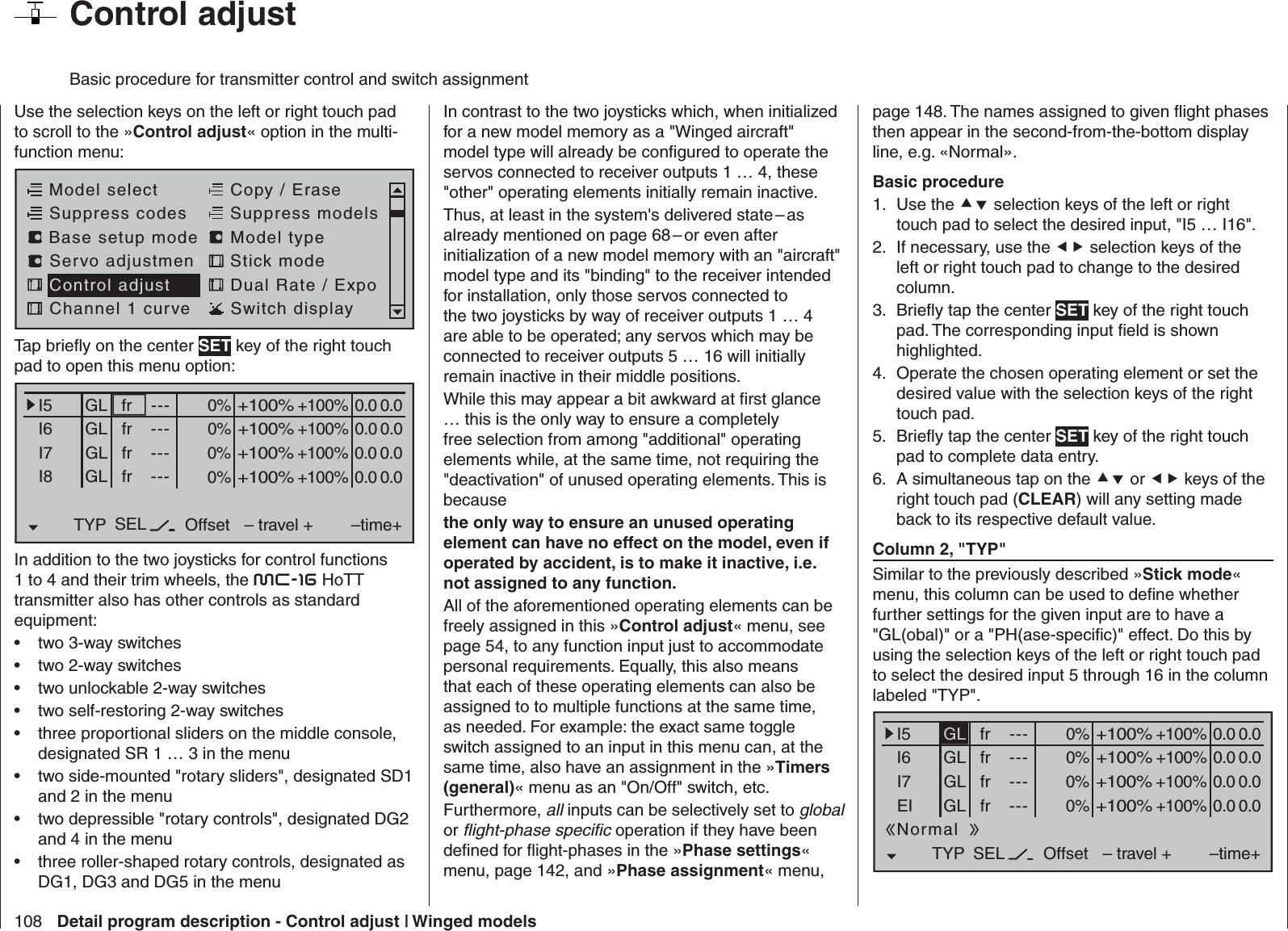
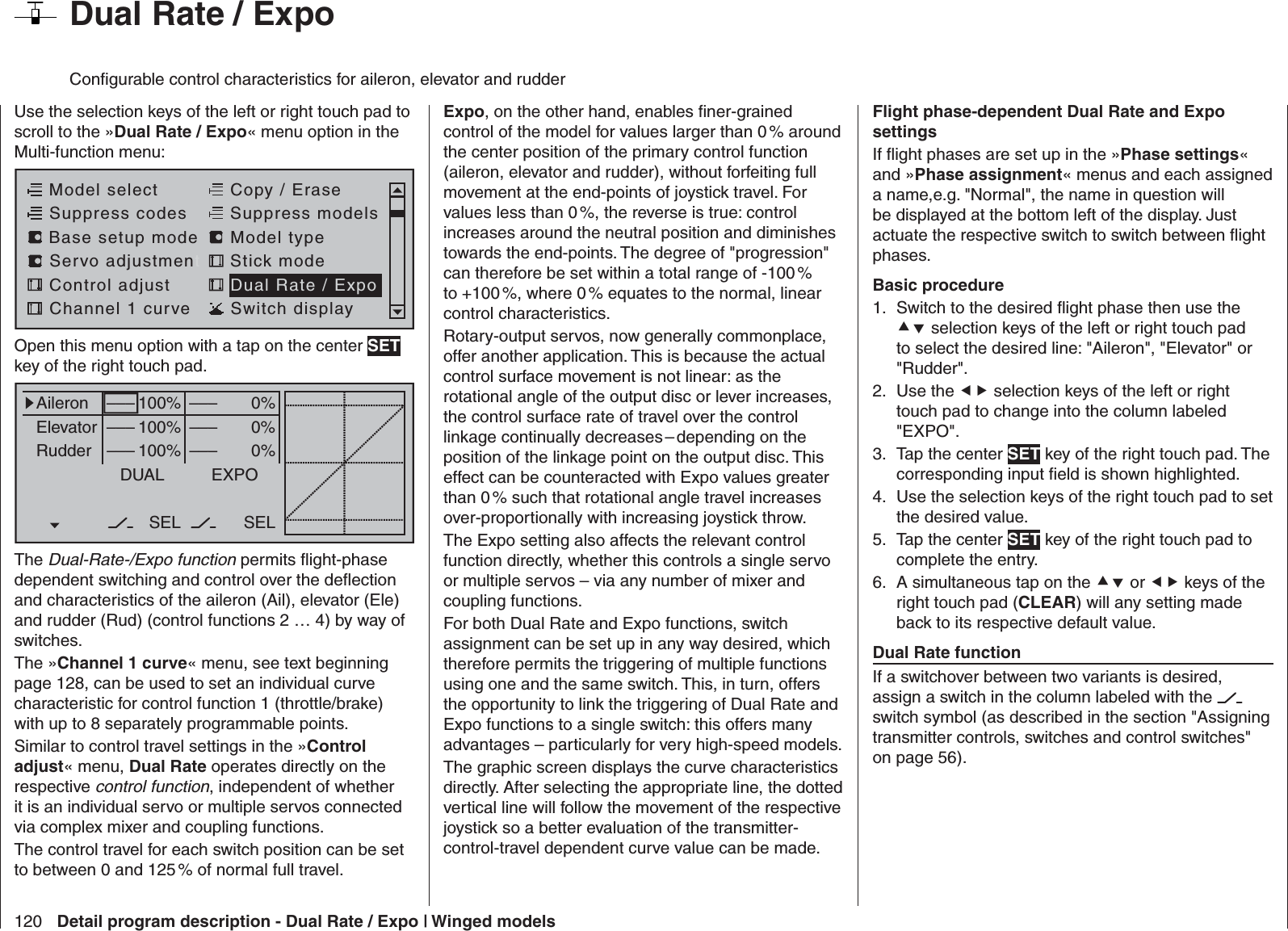
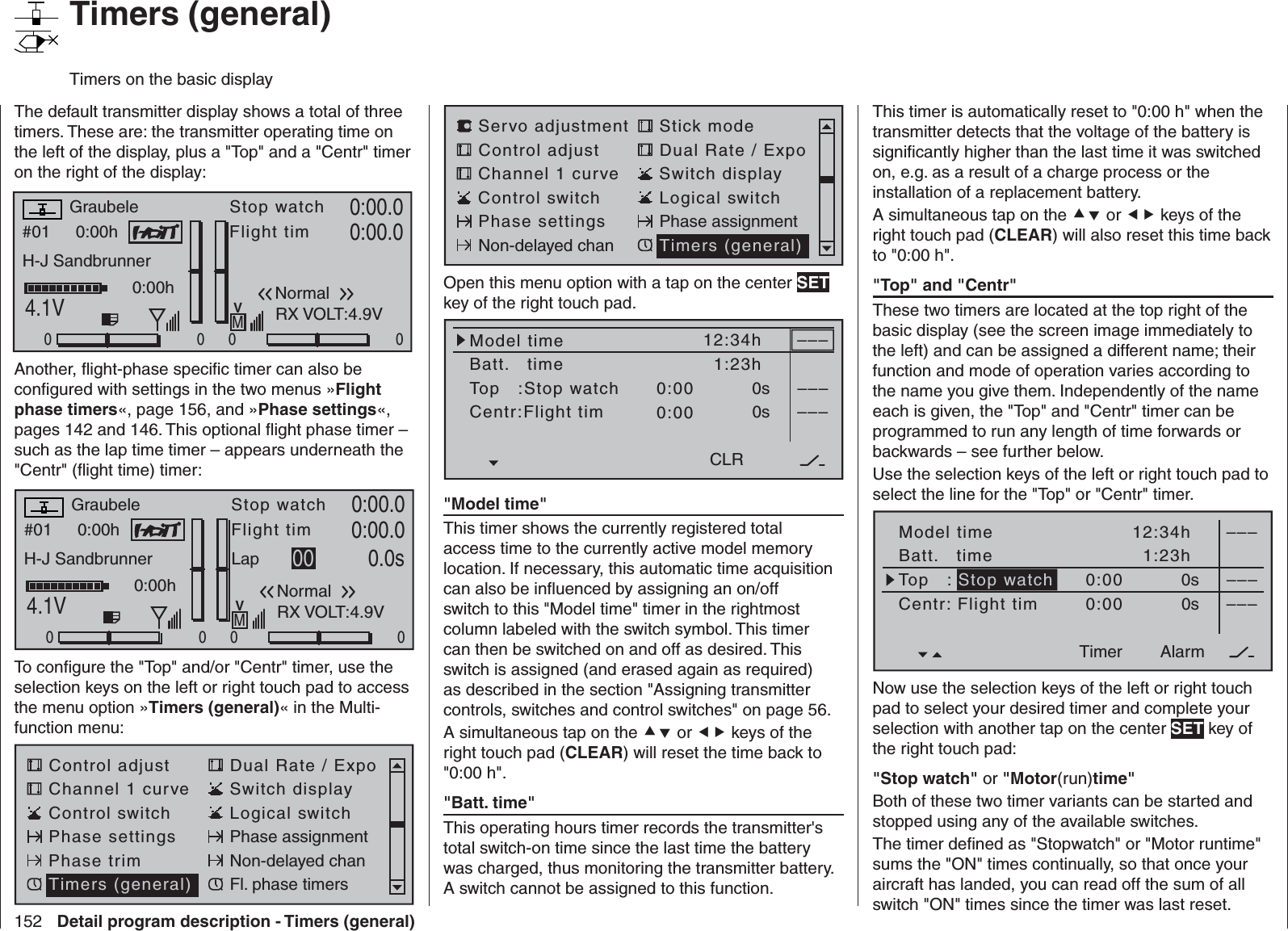
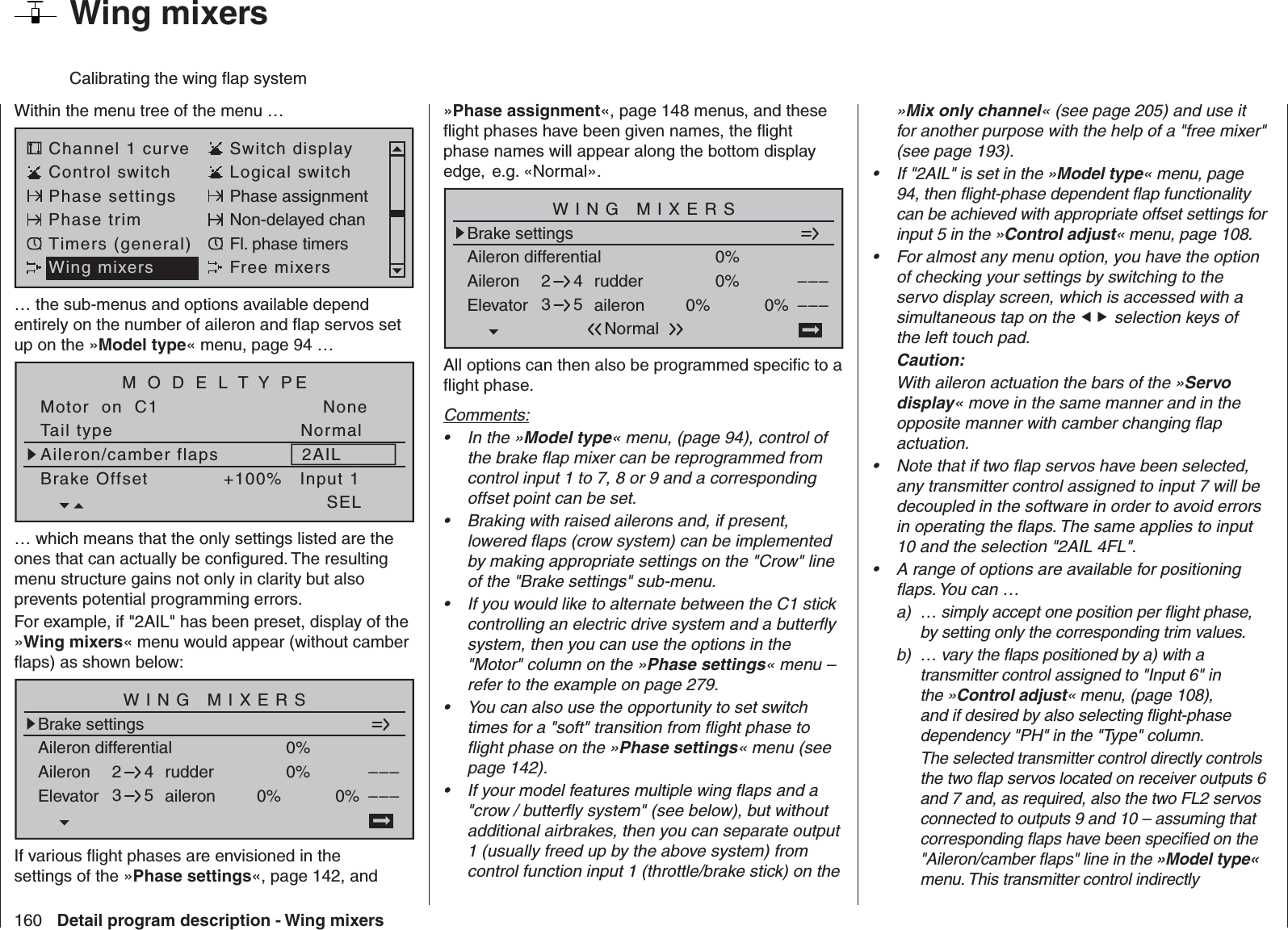
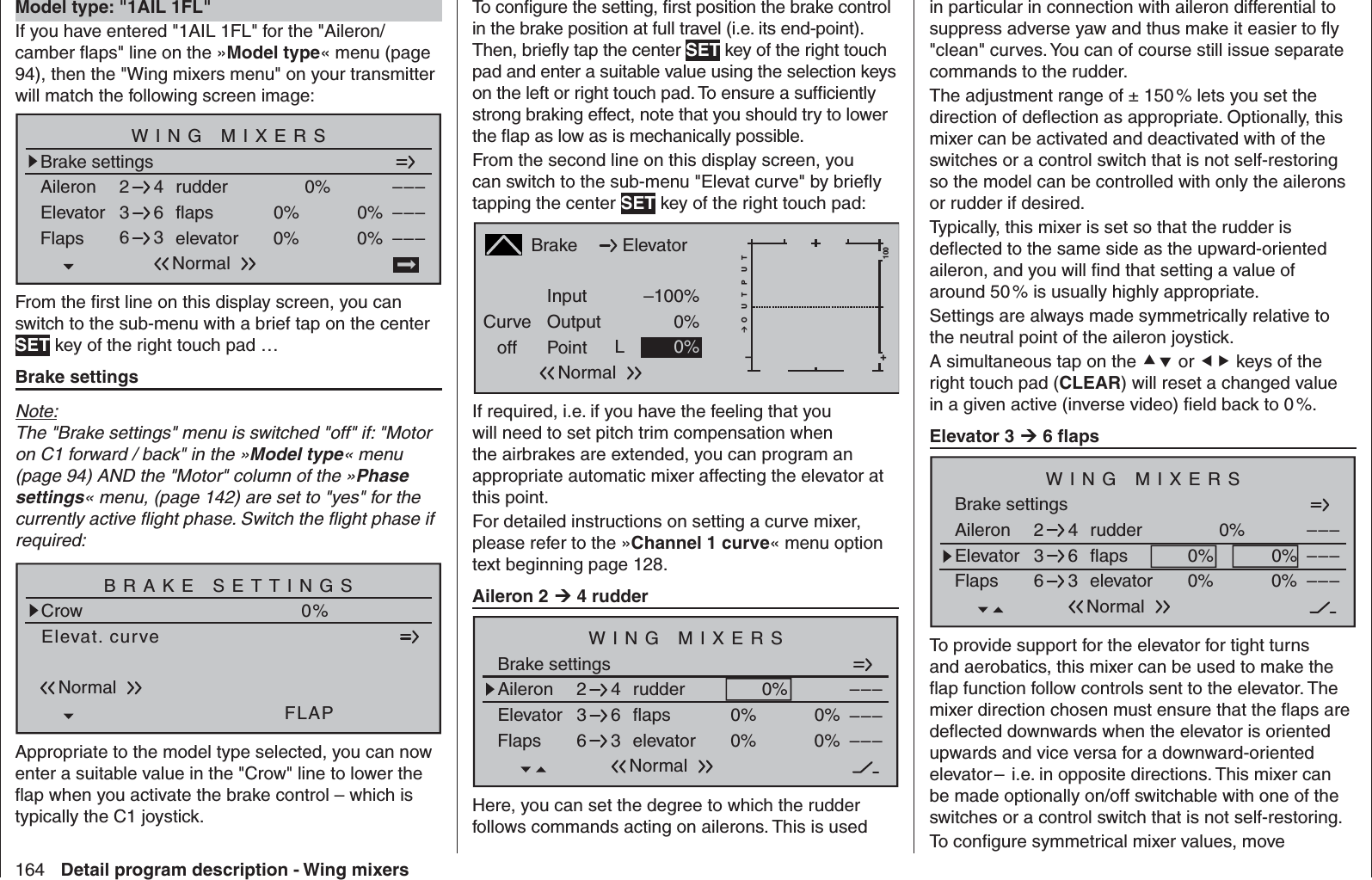
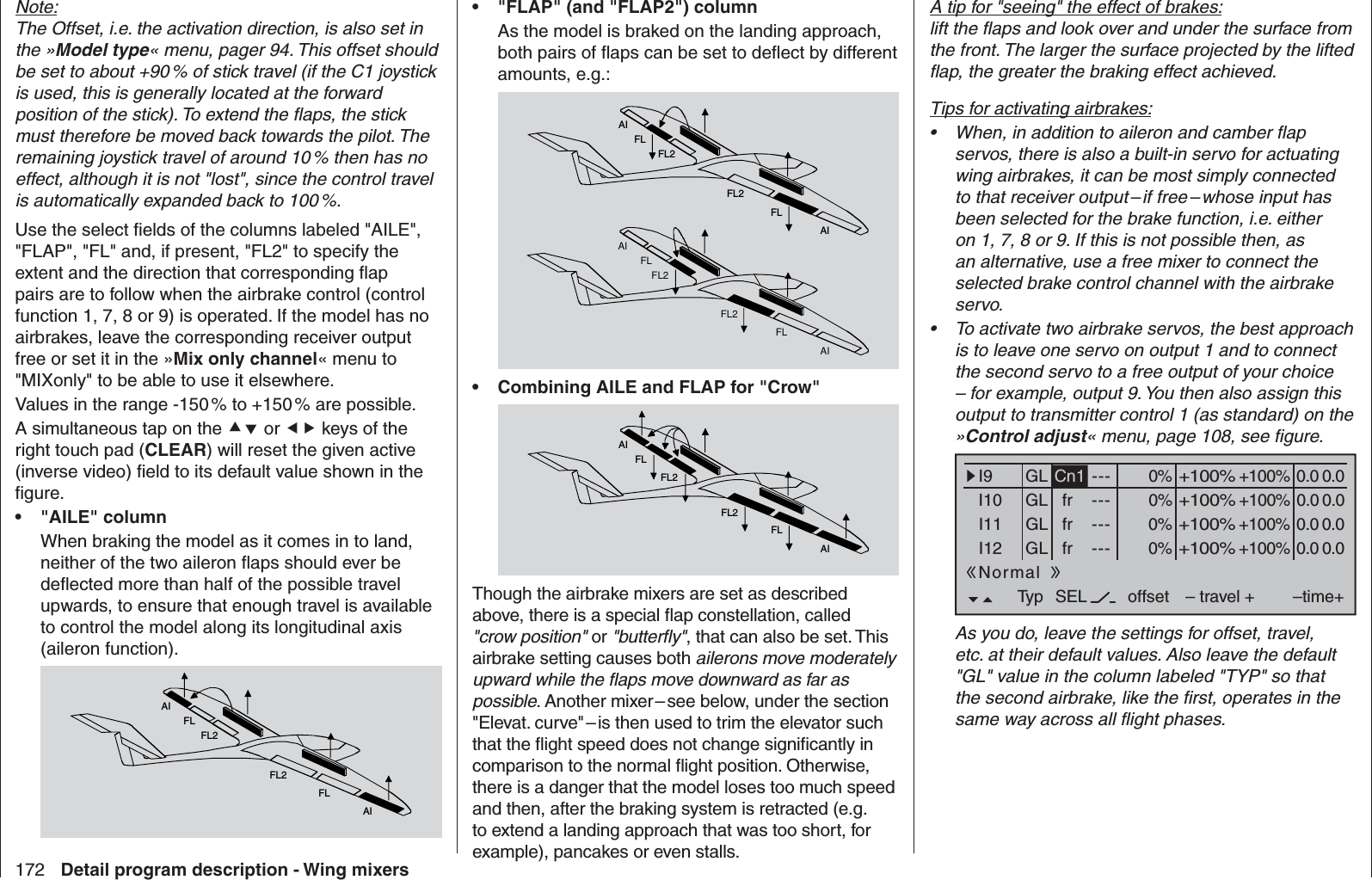
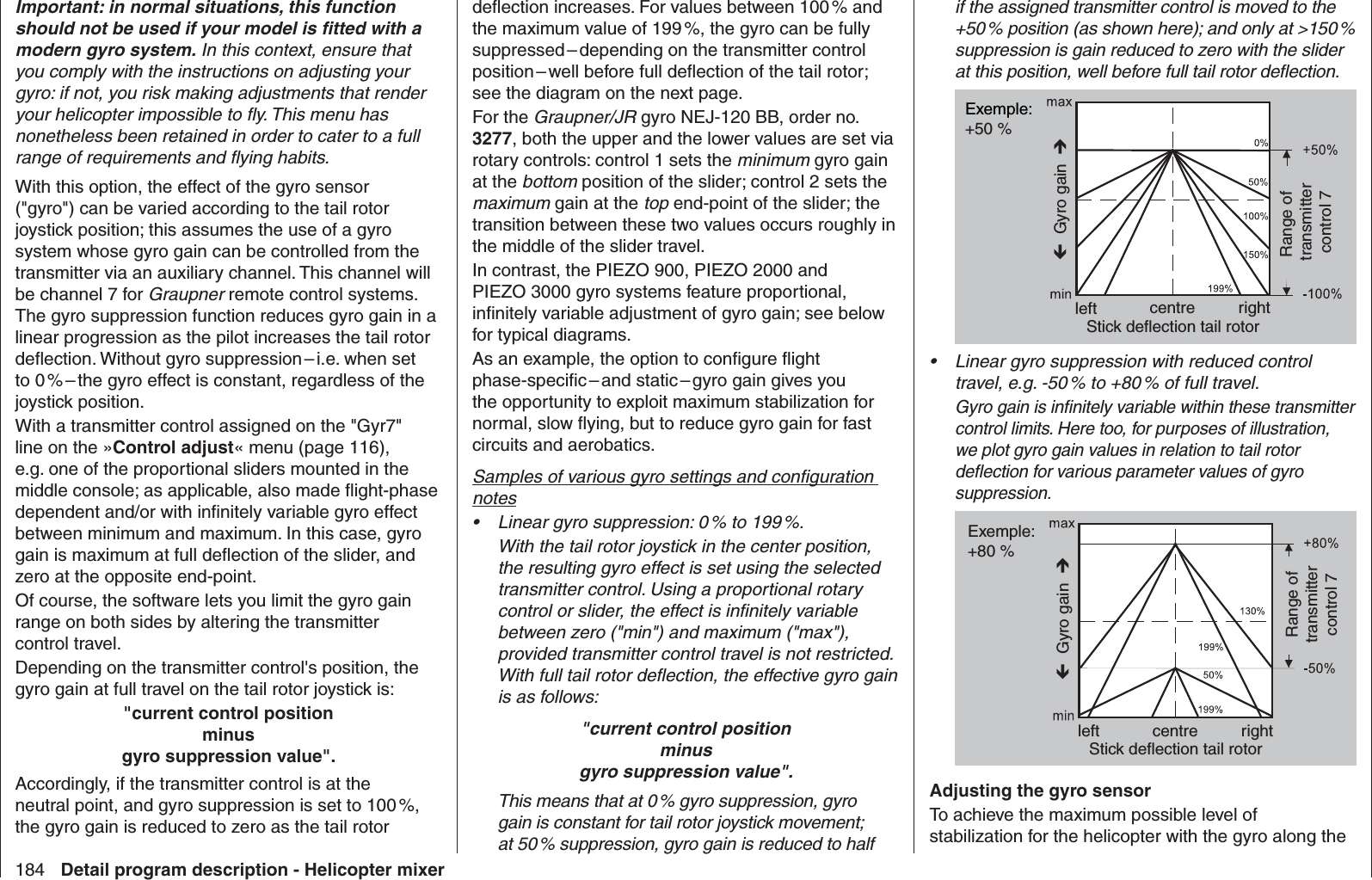
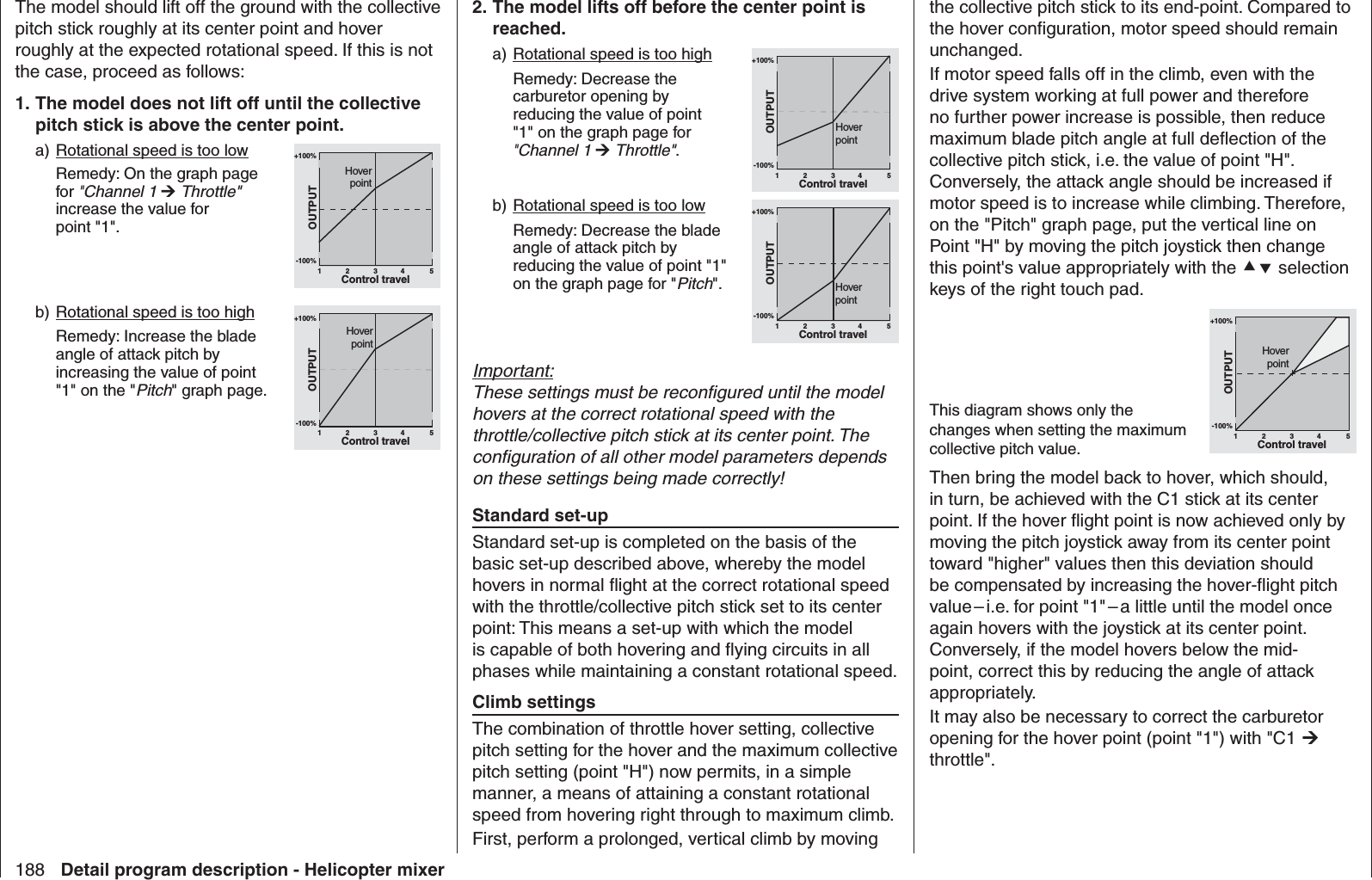
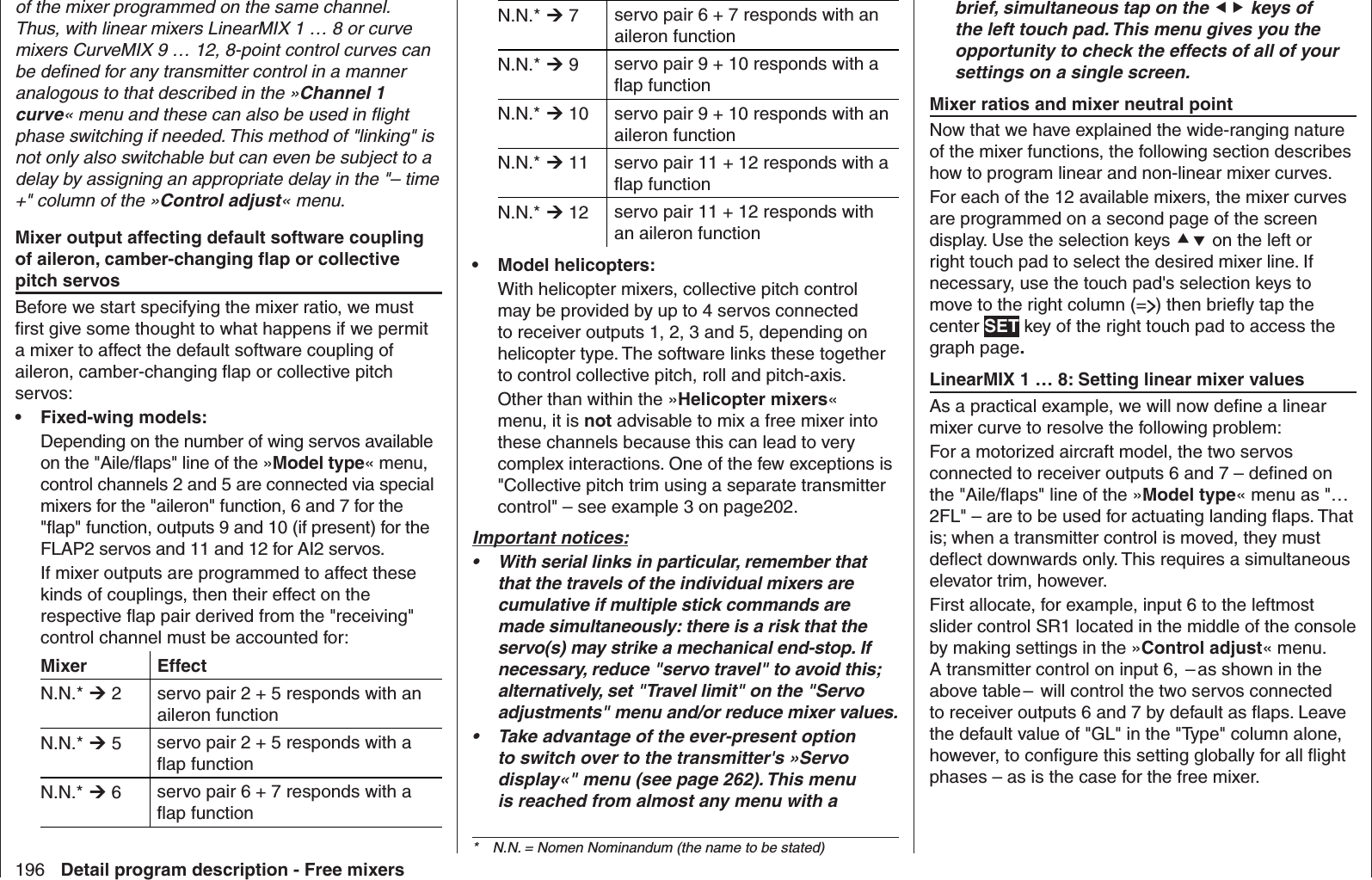
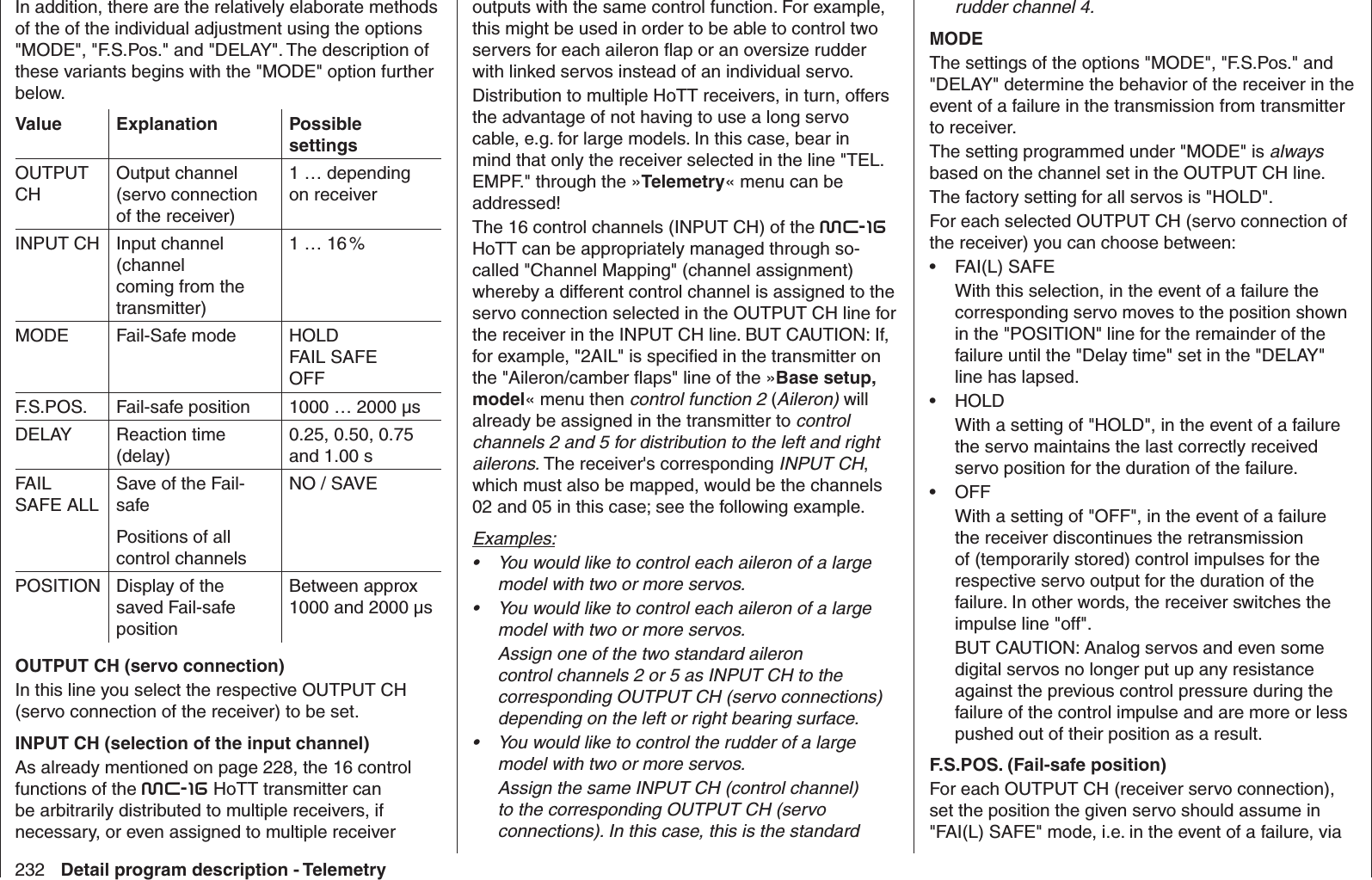
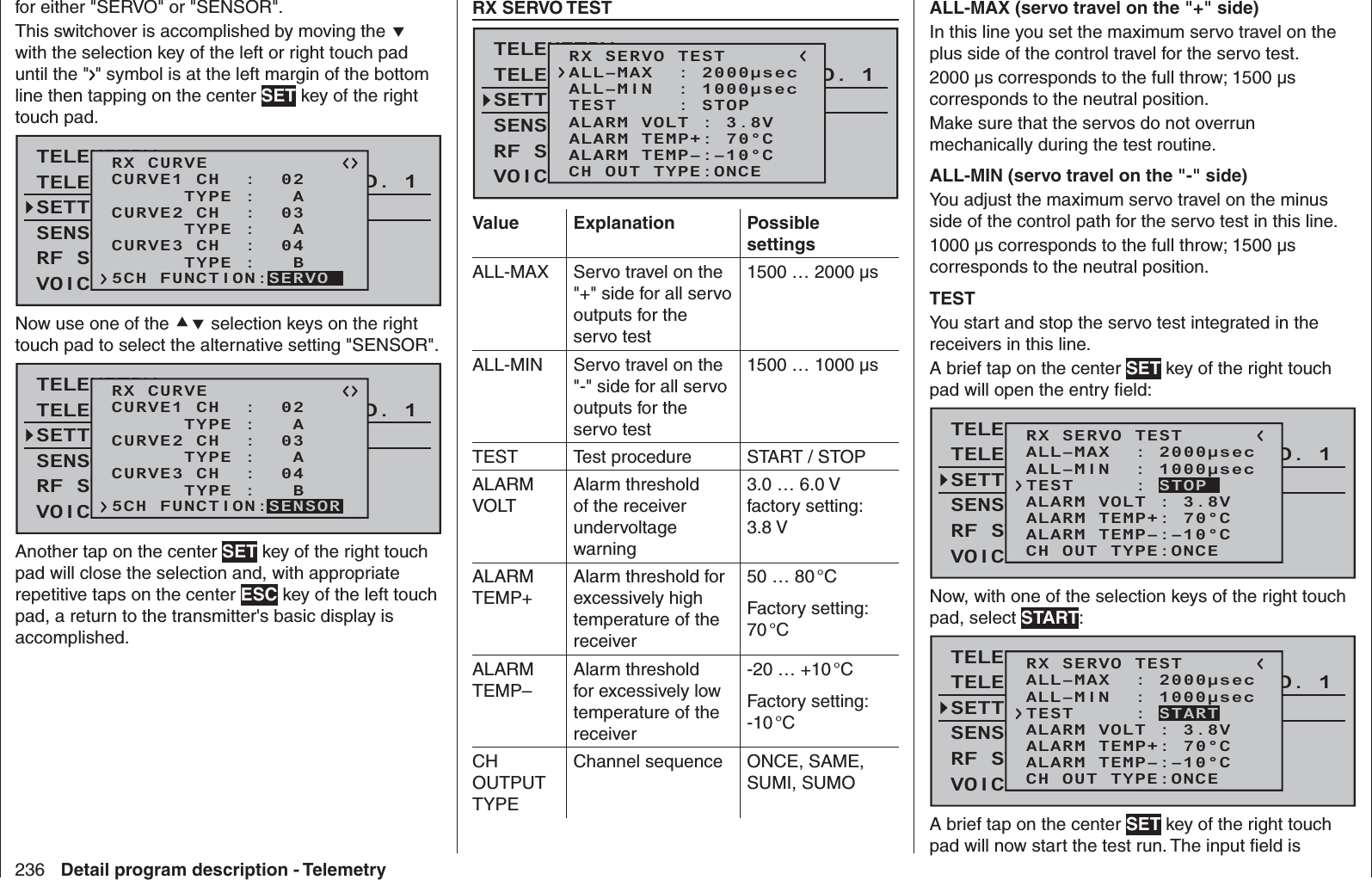
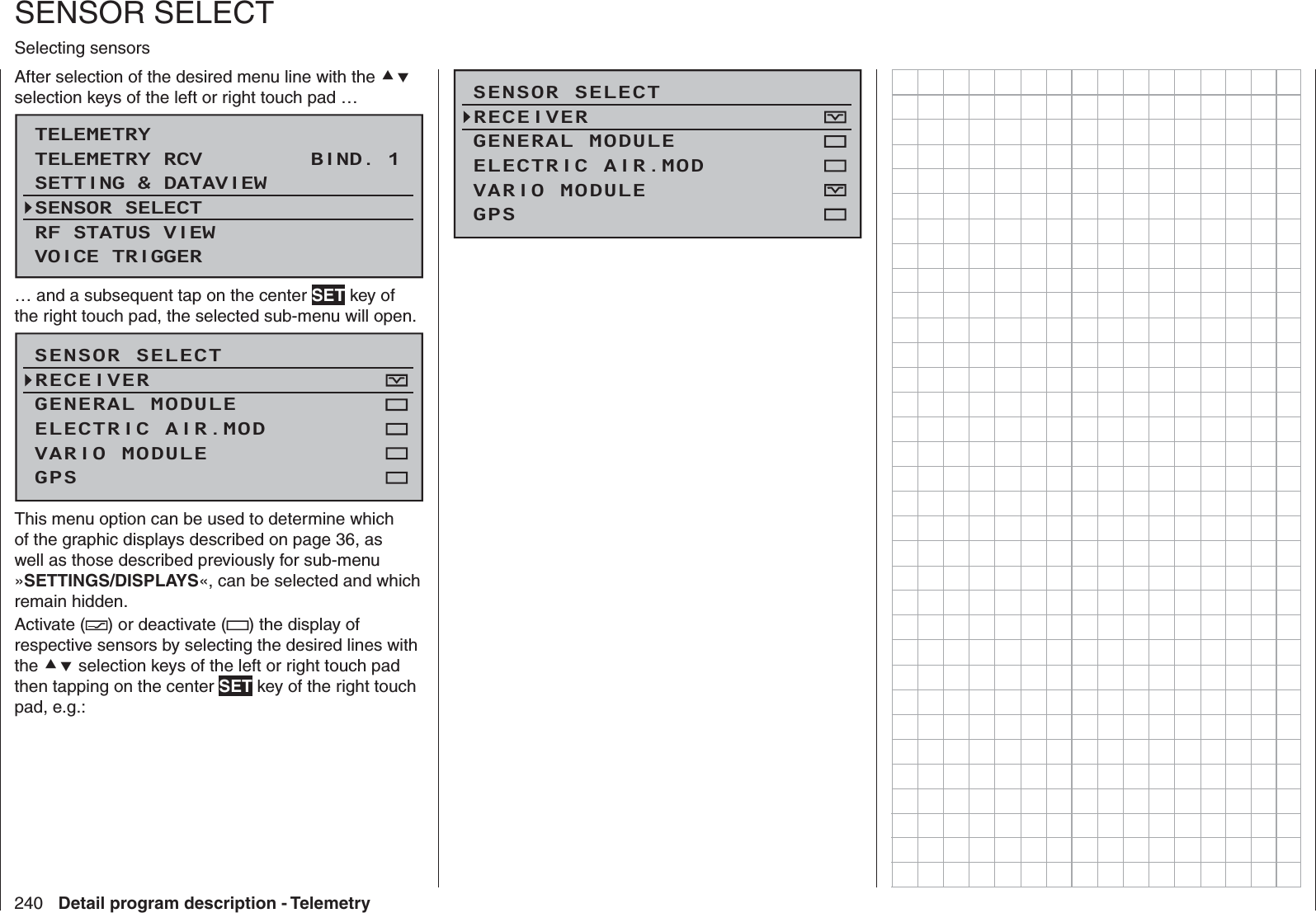
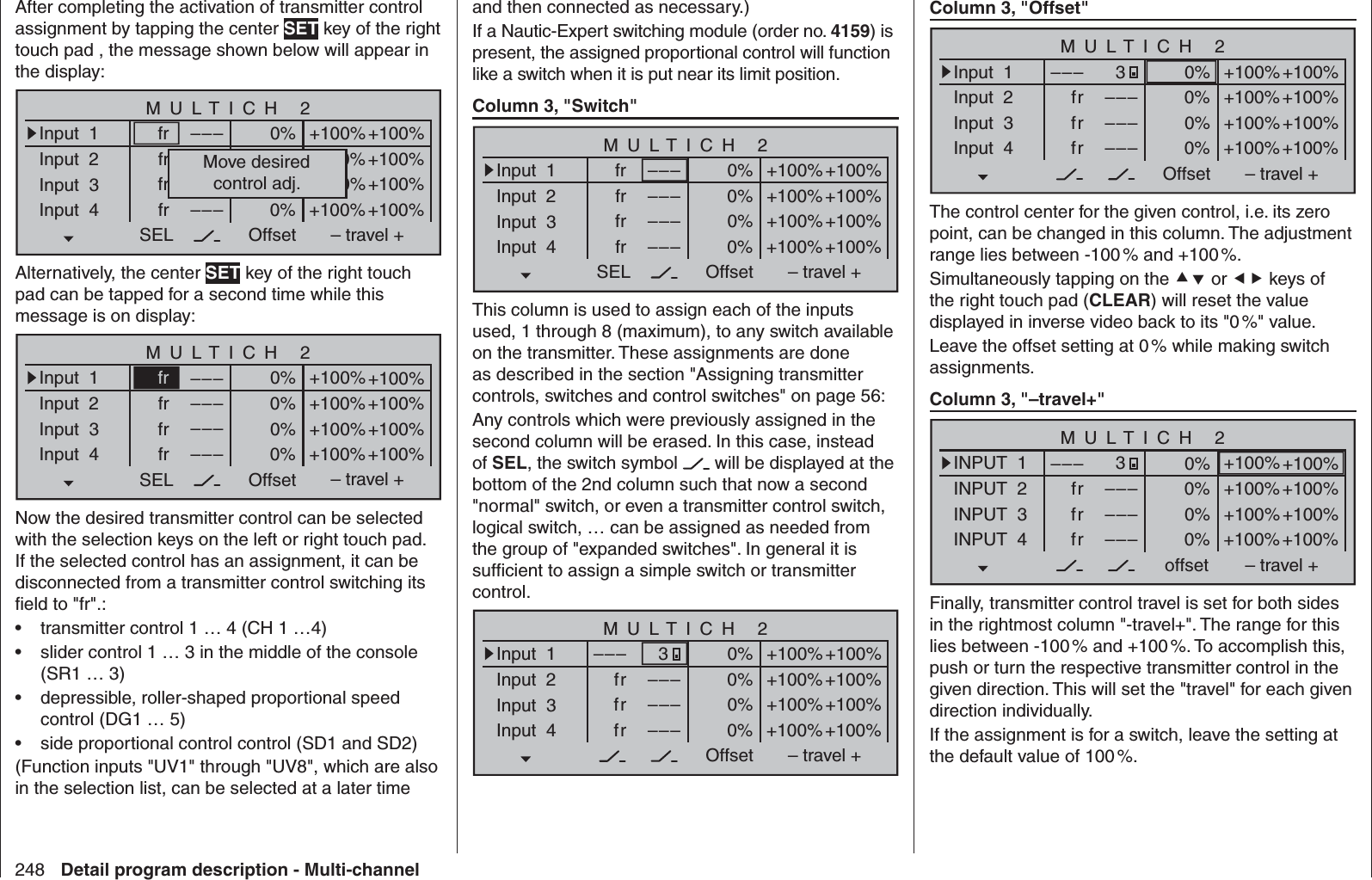
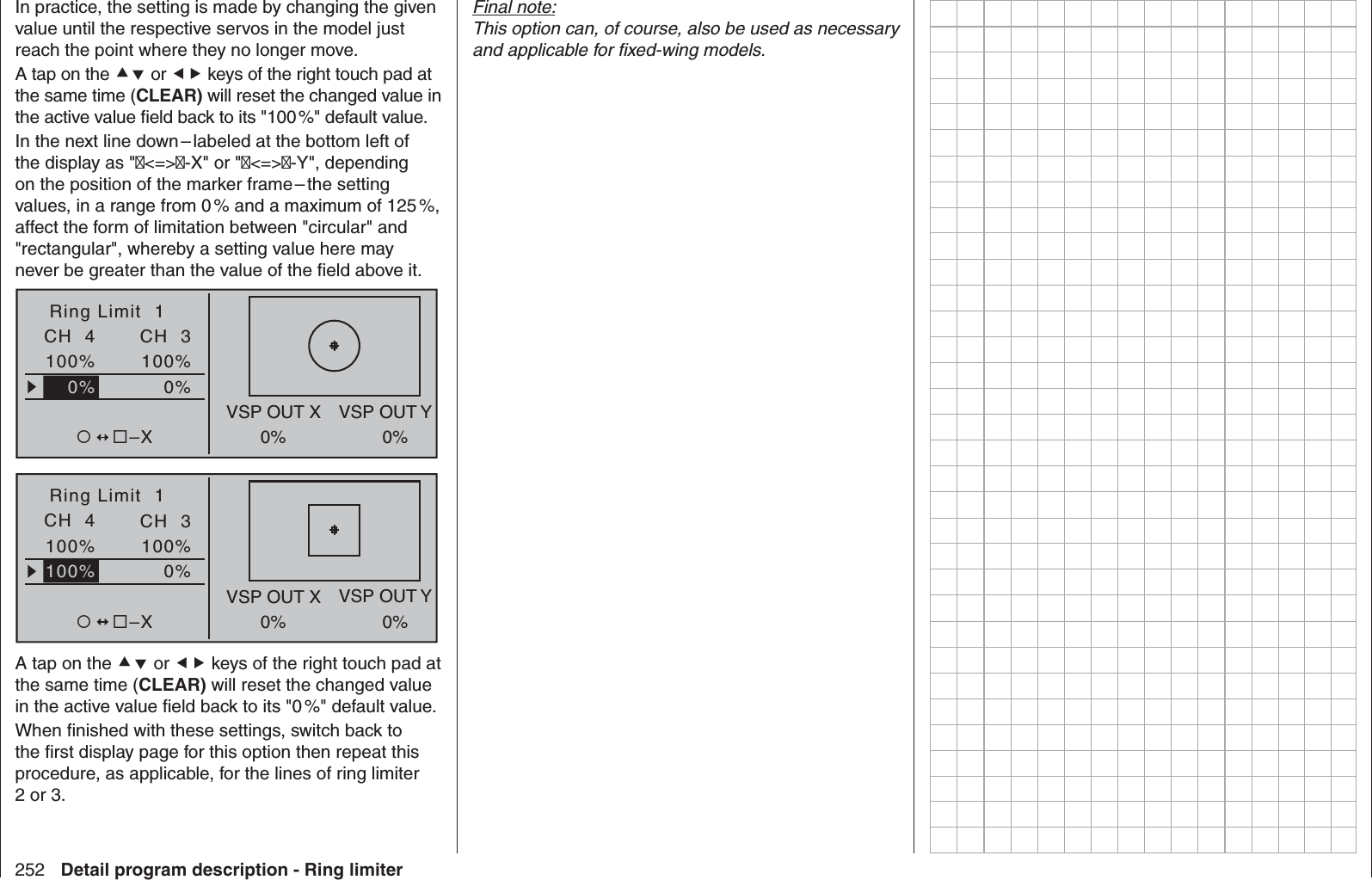
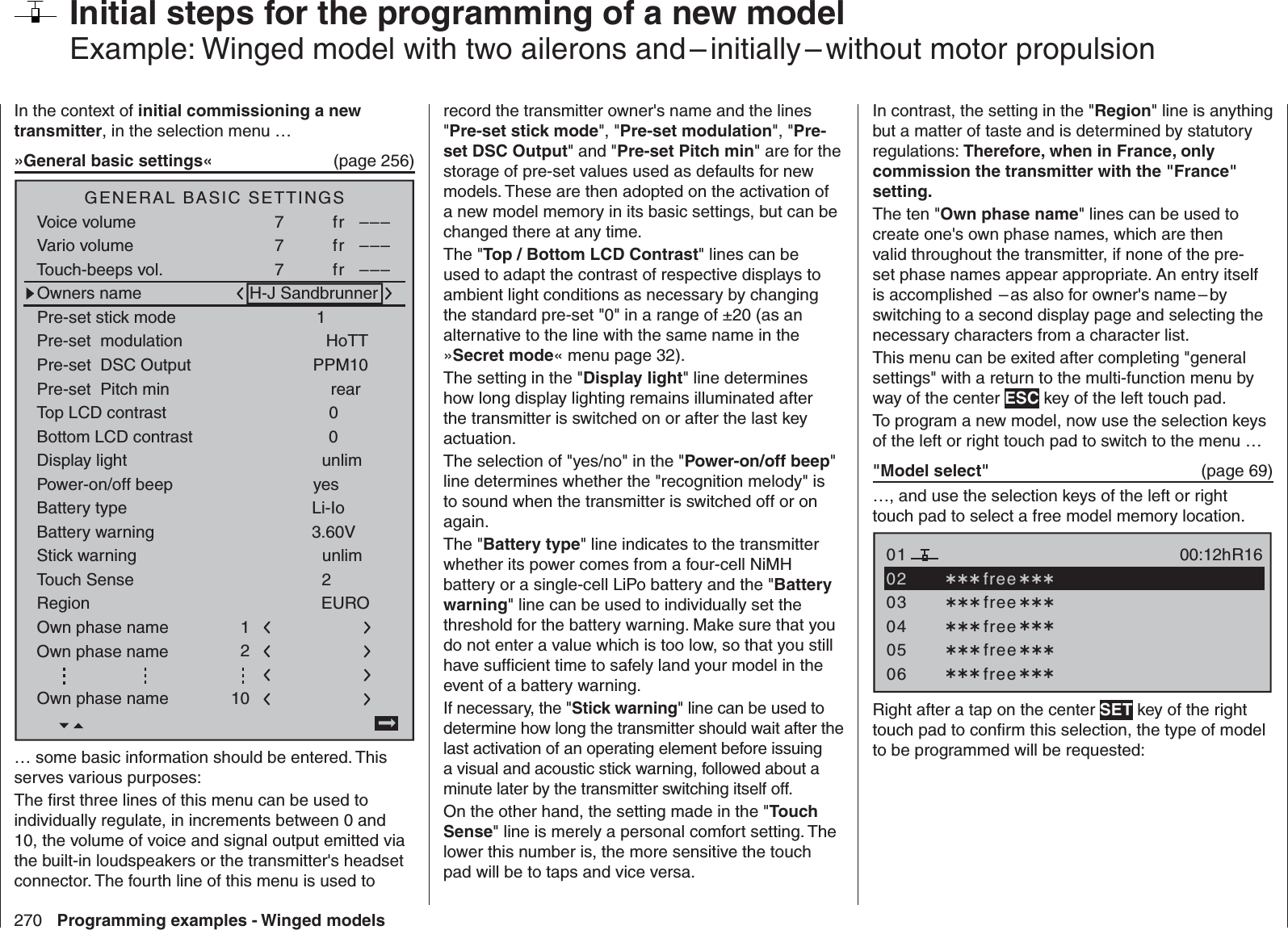
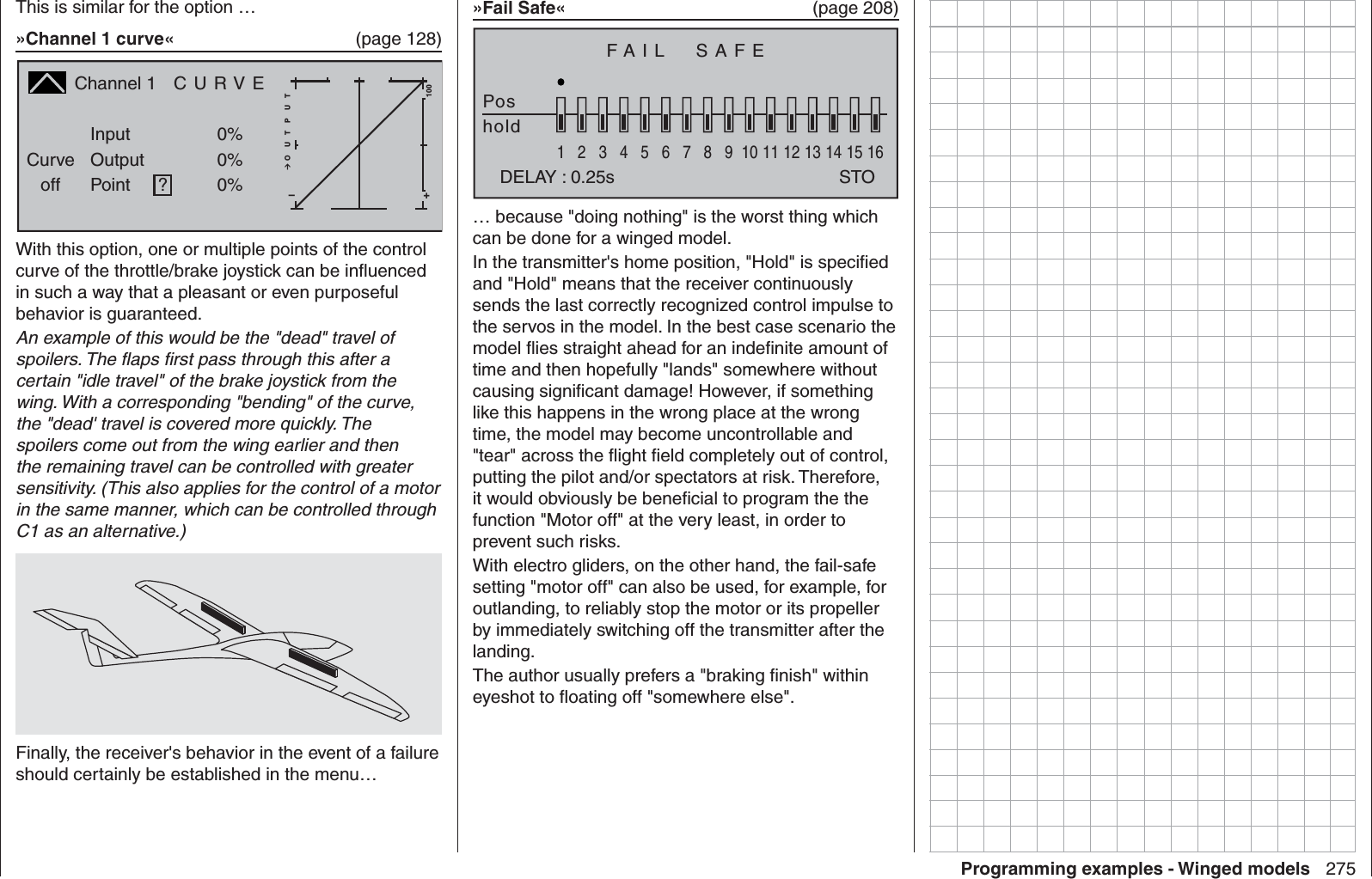
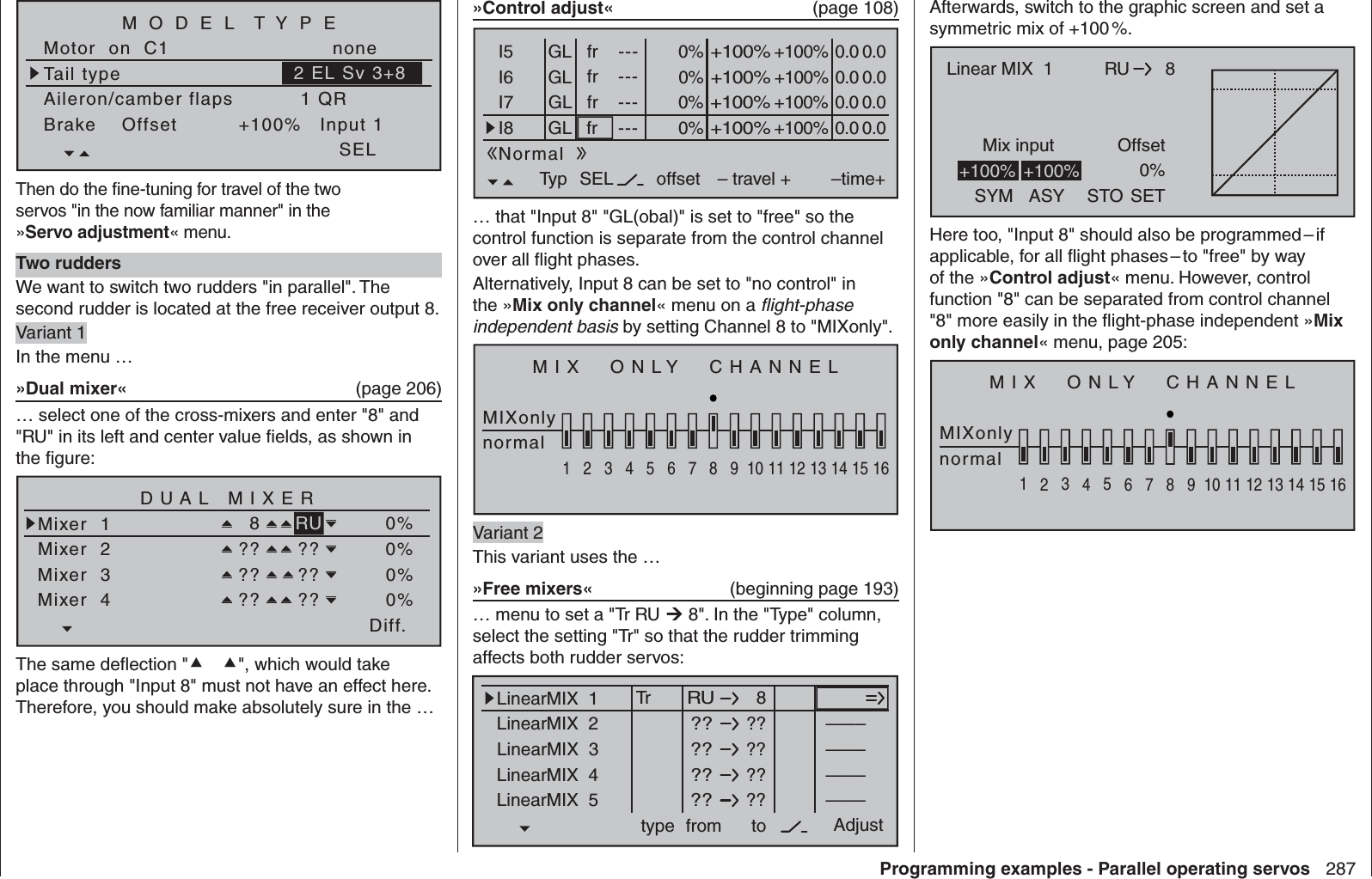
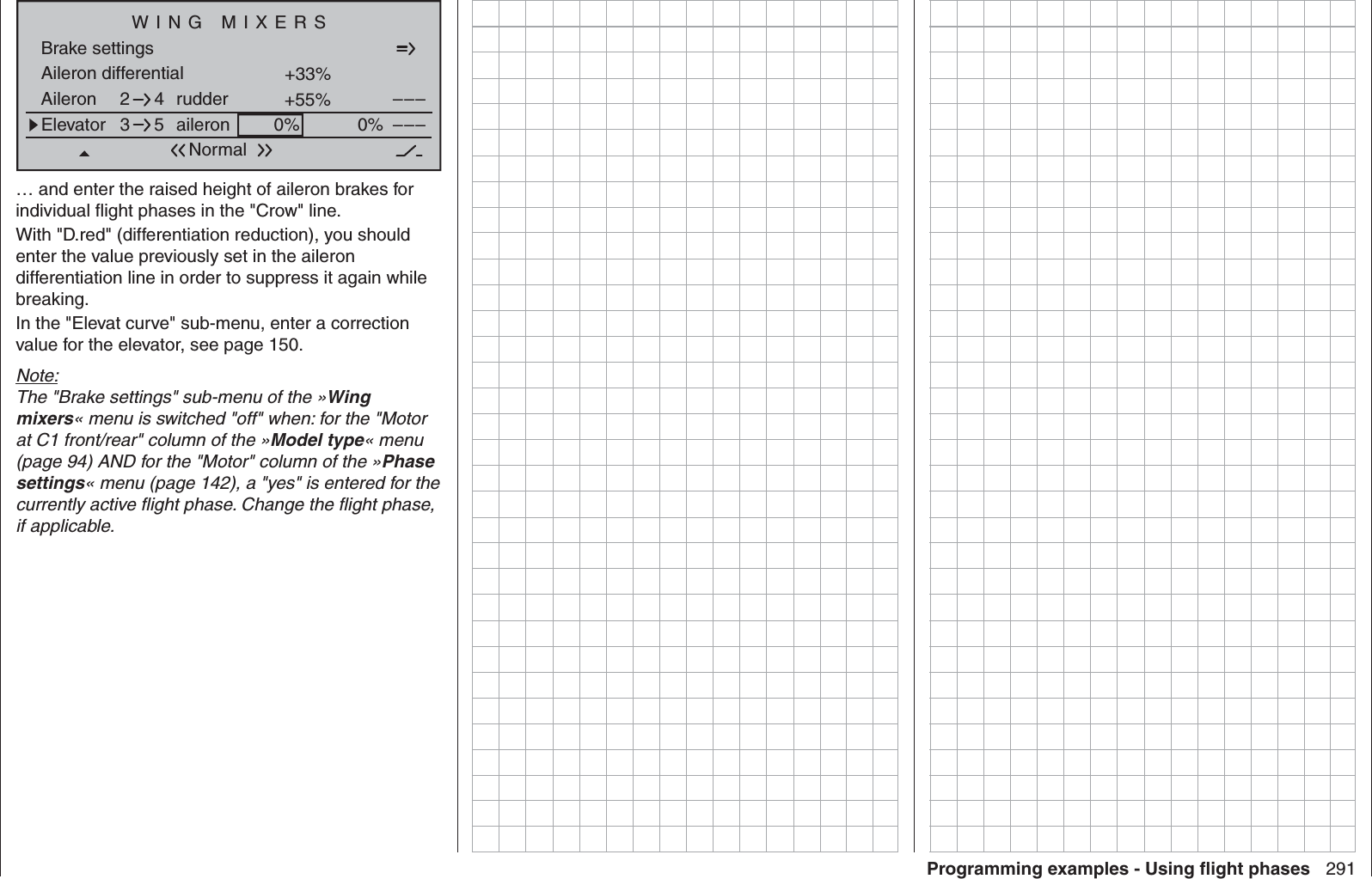
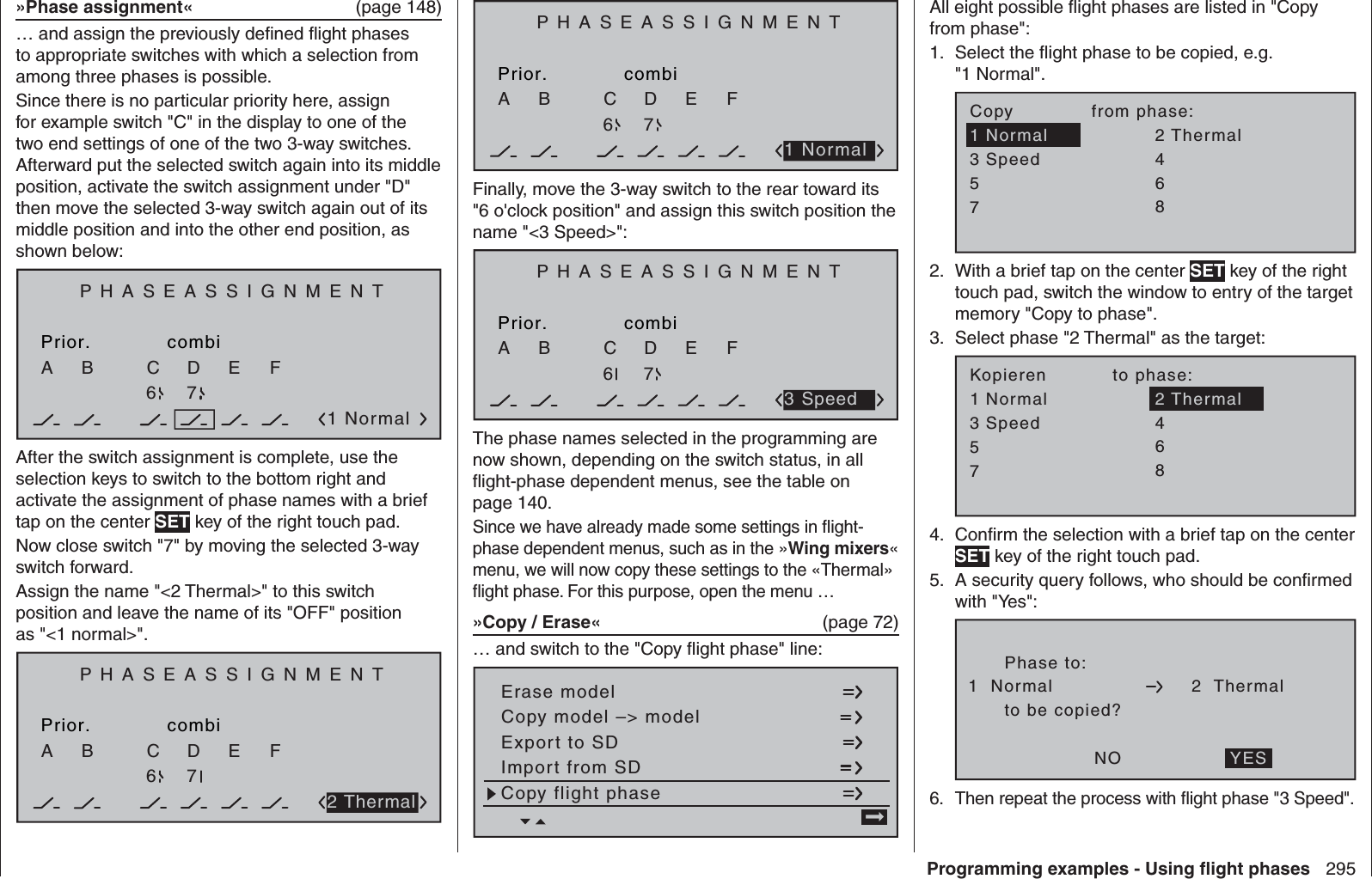
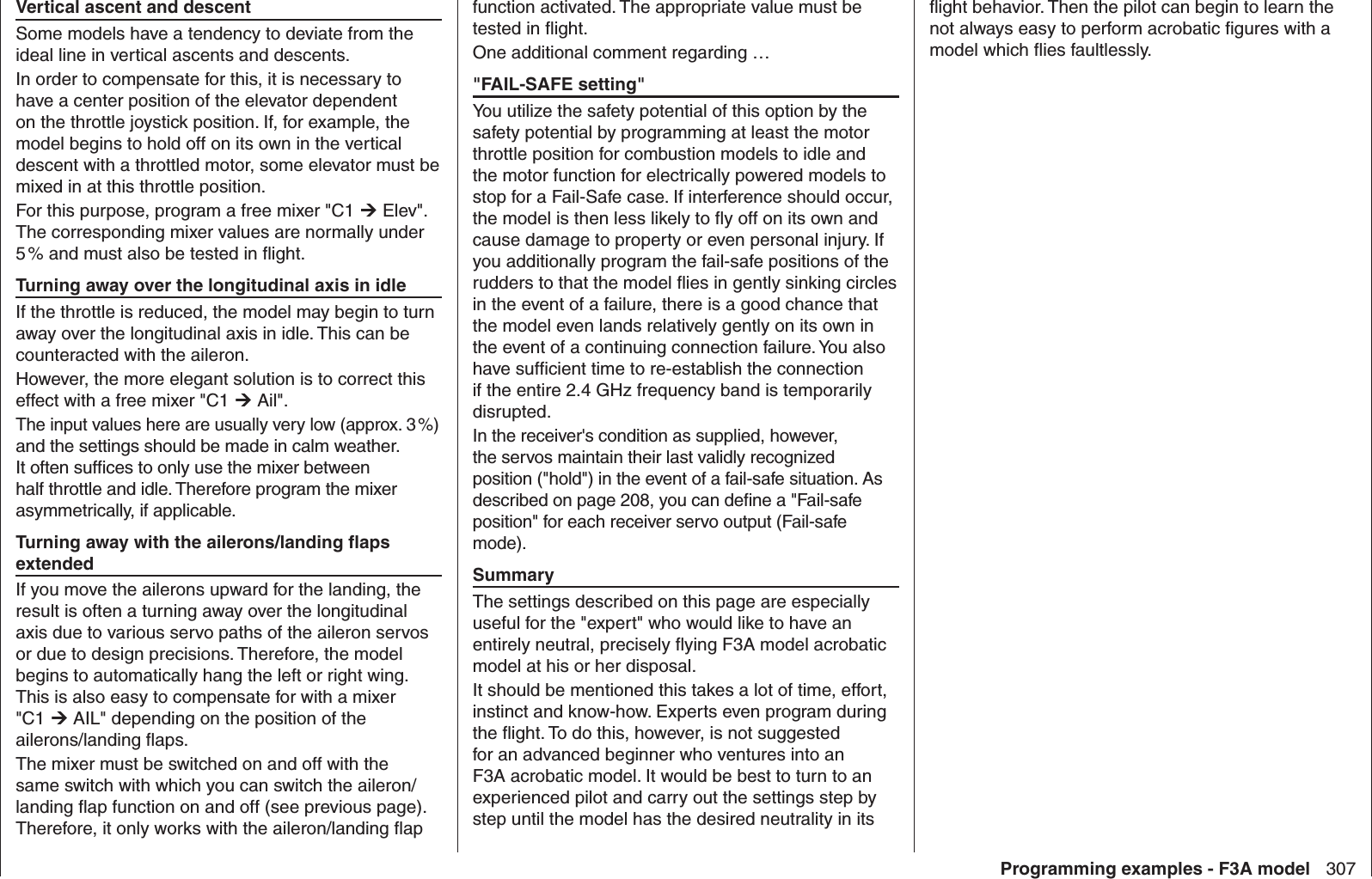
![84 Detail program description - Base setup models | Winged modelsBefore programming specifi c parameters, there are some basic settings to be made which effect the currently active model memory. Use the selection keys of the left or right touch pad to select the »Basic settings, model« menu … Model selectServo adjustment Stick modeControl adjust Dual Rate / ExpoChannel 1 curve Switch displayCopy / EraseSuppress codes Suppress models Base setup model Helicopter type… then tap the center SET key of the right touch pad. Model nameModel nameStick mode 1n/aBASIC SETTINGS,MODELInfon/an/aModule bindHoTT Change to the next screen page with a brief tap on the SET key of the right touch pad. This will open a screen of characters for entry of the model's name. A maximum of 13 characters can be used to specify a model name. !"#$%&’()Model name Starle@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~Now the desired characters can be selected with the selection keys of the left touch pad. Move to the next position to select the next character with a tap on the of the right touch pad or its center SET key. A simultaneous tap on the or keys of the right touch pad (CLEAR) will place a space character at the current position.Positioning to any character position within the entry fi eld can be done with the keys of the right touch pad.A return to the previous menu screen is accomplished with a tap on the center ESC key of the left touch pad.A model name entered in this manner will appear in the base screen of the »Model select« menu and in the sub-menus of the »Copy / Erase« menu item. InfoModel nameStick mode 1n/aBASIC SETTINGS,MODELInfon/an/aModule bindHoTT StarletEvery model can be given a supplementary note of up to 12 characters (maximum) by following the same procedure as already described for creating a "Model name". This info note will appear as a supplement in the »Model select« menu and in the sub-menus of the »Copy / Erase« menu item. Stick mode“MODE 2” (Throttle at left stick)“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)“MODE 1” (Throttle at right stick)pitch axistail rotorpitch axistail rotorthrottlerollrollthrottletail rotortail rotorthrottle throttlepitch axispitch axisrollrollpitch axispitch axisrollrollMotor/Pitchthrottletail rotortail rotorthrottlethrottlerollrollpitch axispitch axistail rotortail rotorBasically there are four different ways to assign the four helicopter control functions, roll, nick, tail rotor and throttle/pitch to the two joysticks. Just which of these is used depends on the preferences of the individual model pilot.Use the selection keys of the left or right touch pad to select the "Stick mode" line. The option fi eld will be framed.Model nameStick mode 1n/aBASIC SETTING,MODELInfon/an/aModule bindHoTT SELStarlet1234g/111111Tap on the SET key. The currently displayed stick mode will be displayed in inverse video. Now use the selection keys of the right touch pad to select from among options 1 through 4.A simultaneous tap on the or keys of the right touch pad (CLEAR) will reset the display to stick mode "1". Base setup modelModel-specifi c base settings for helicopter models](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-34.png)
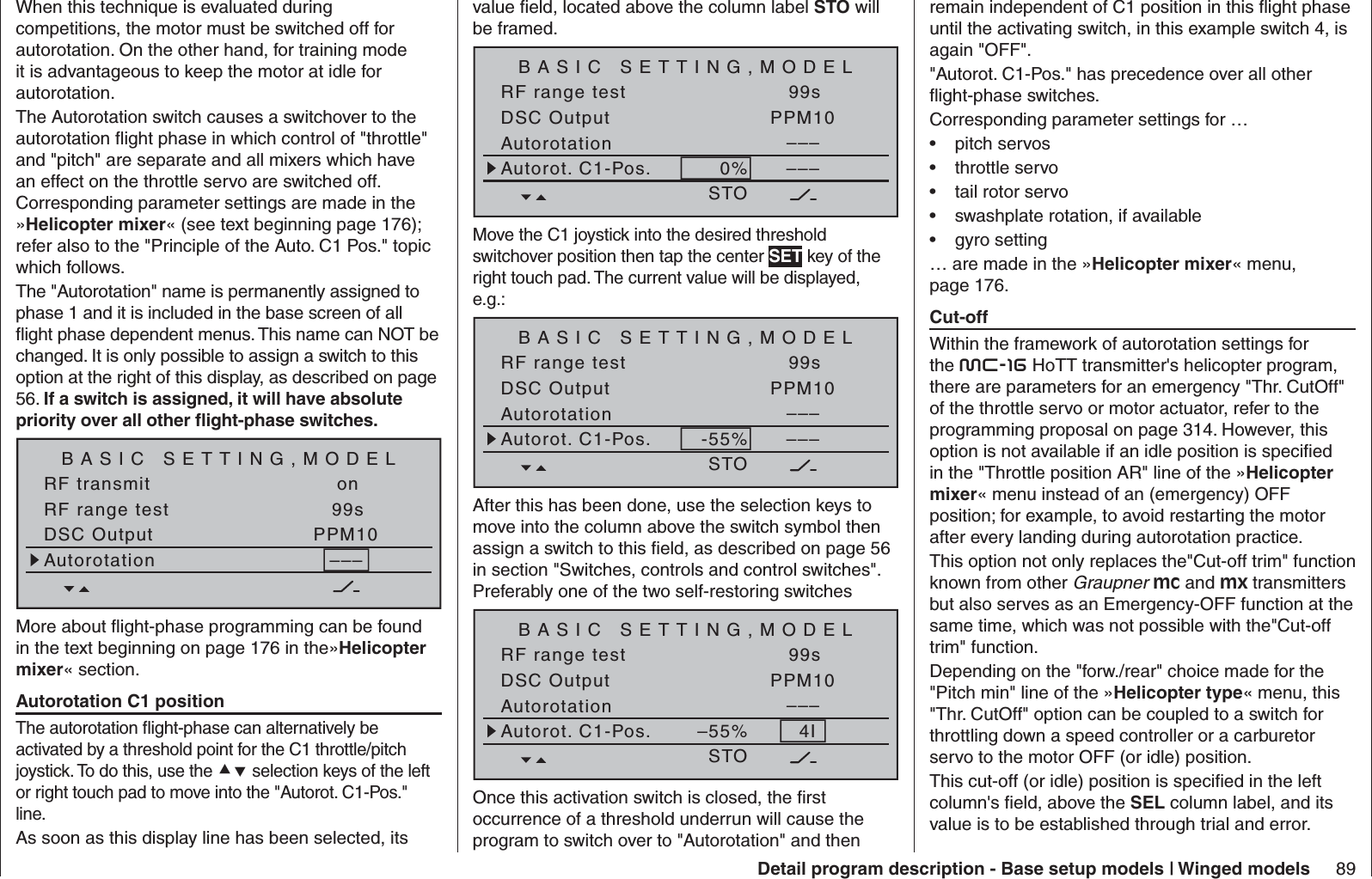
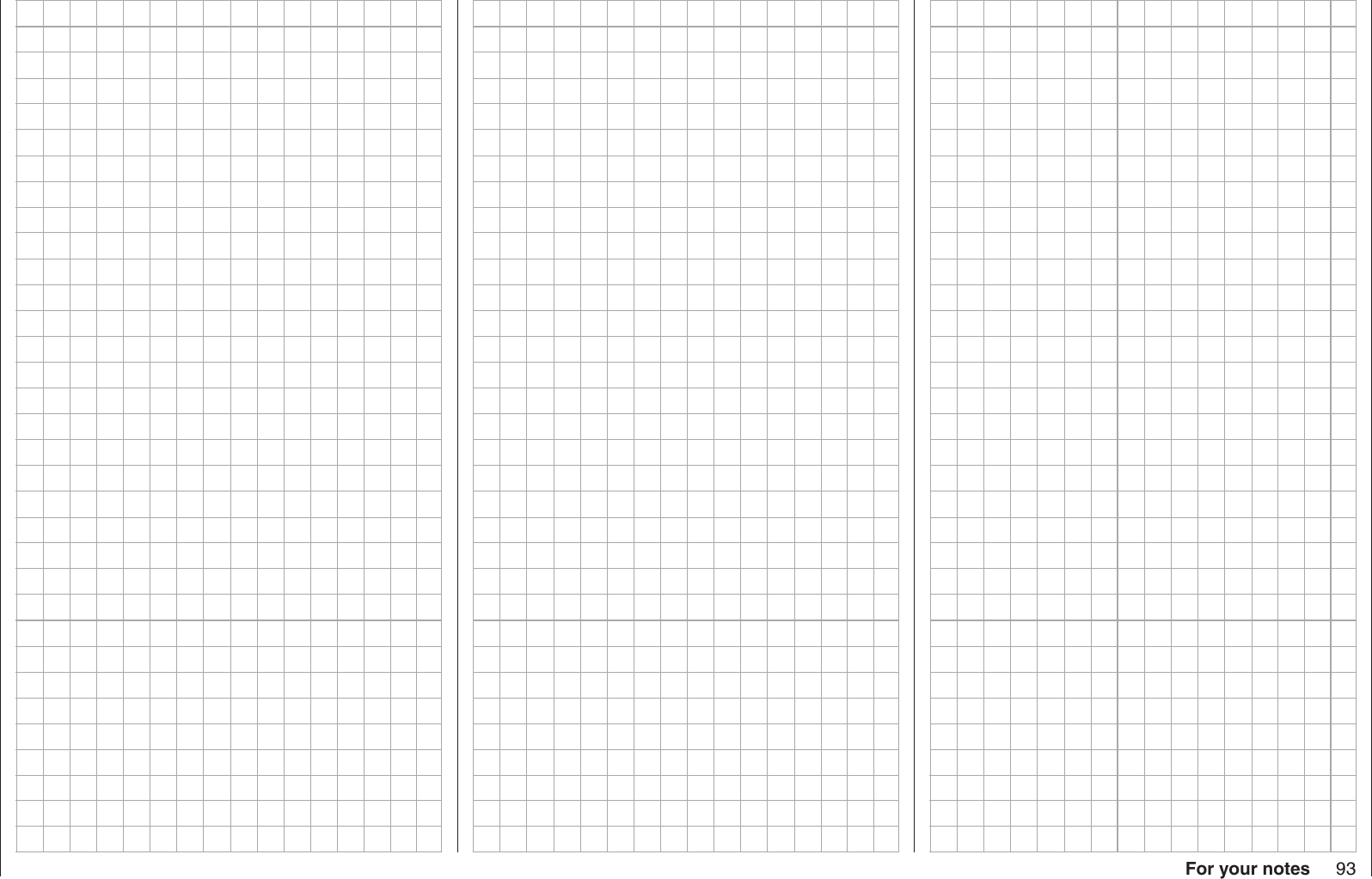
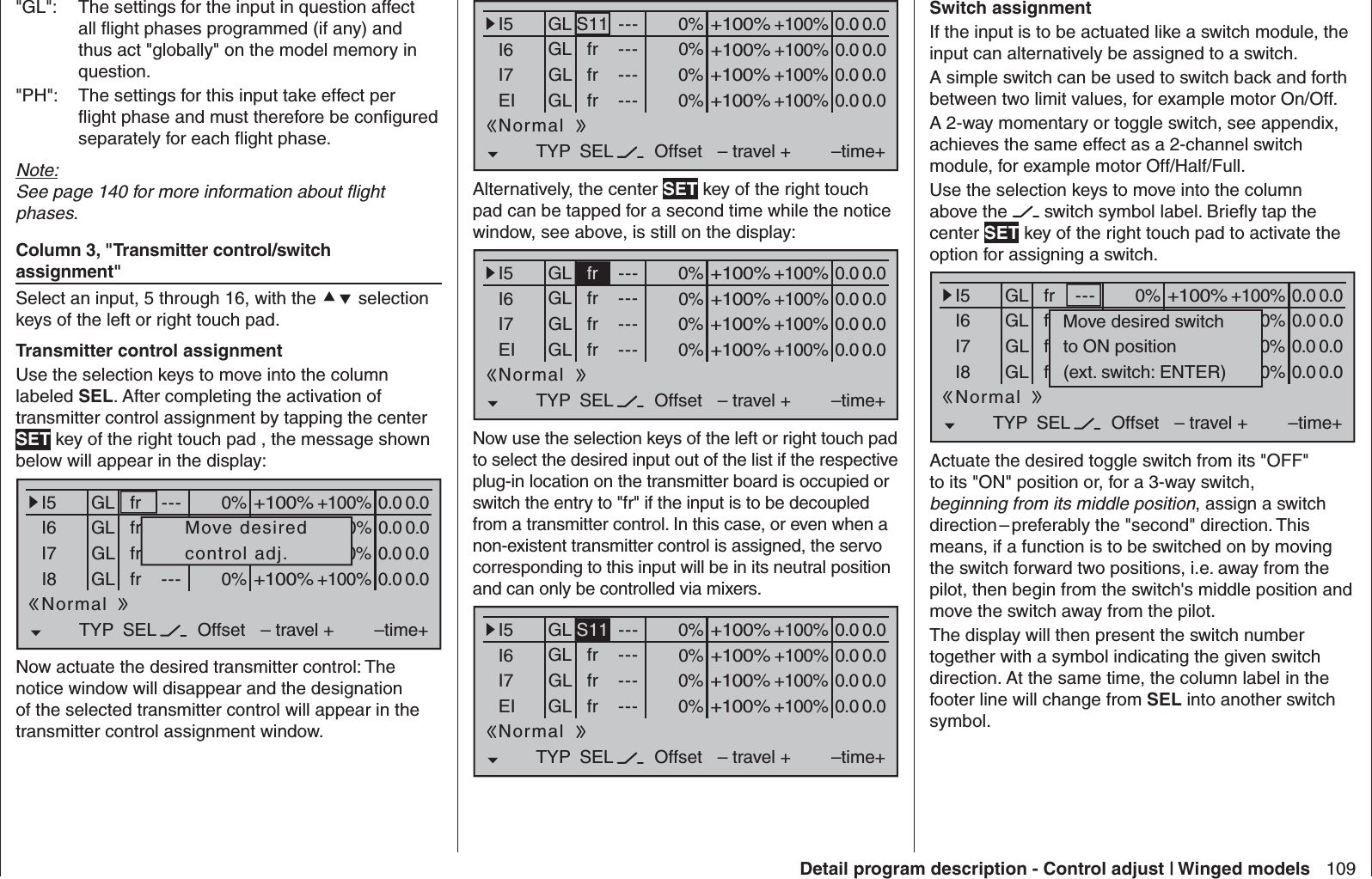
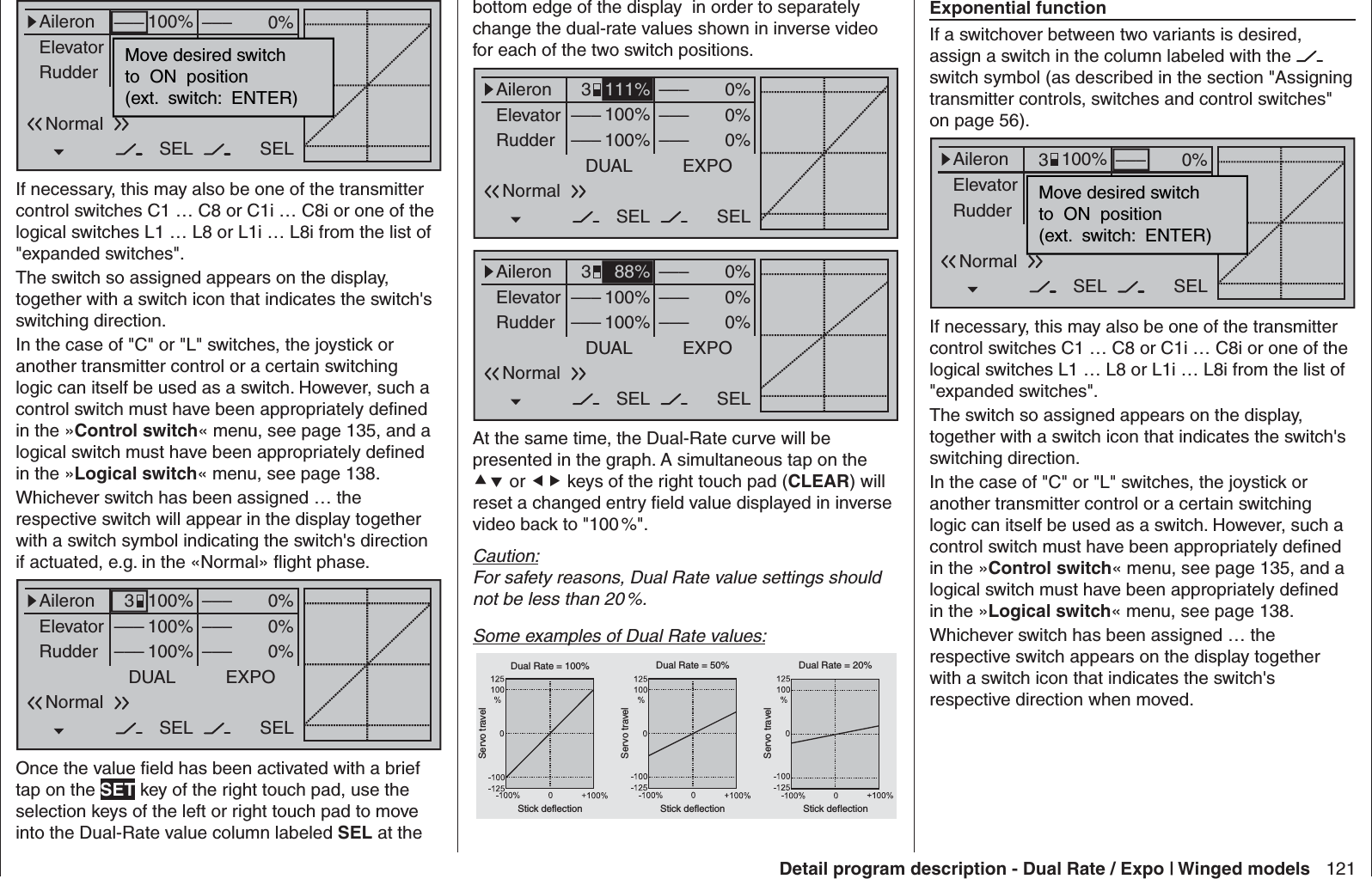
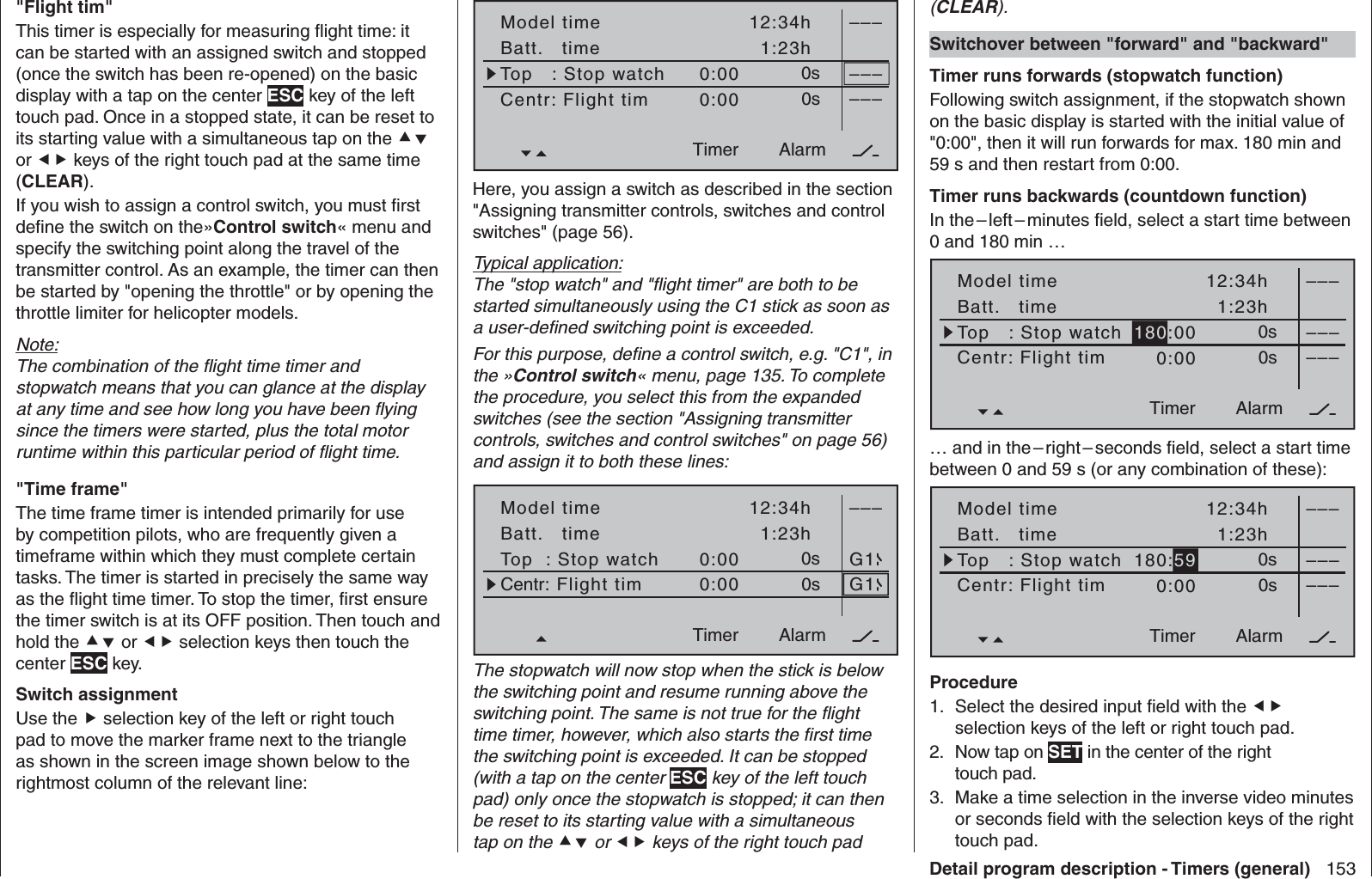
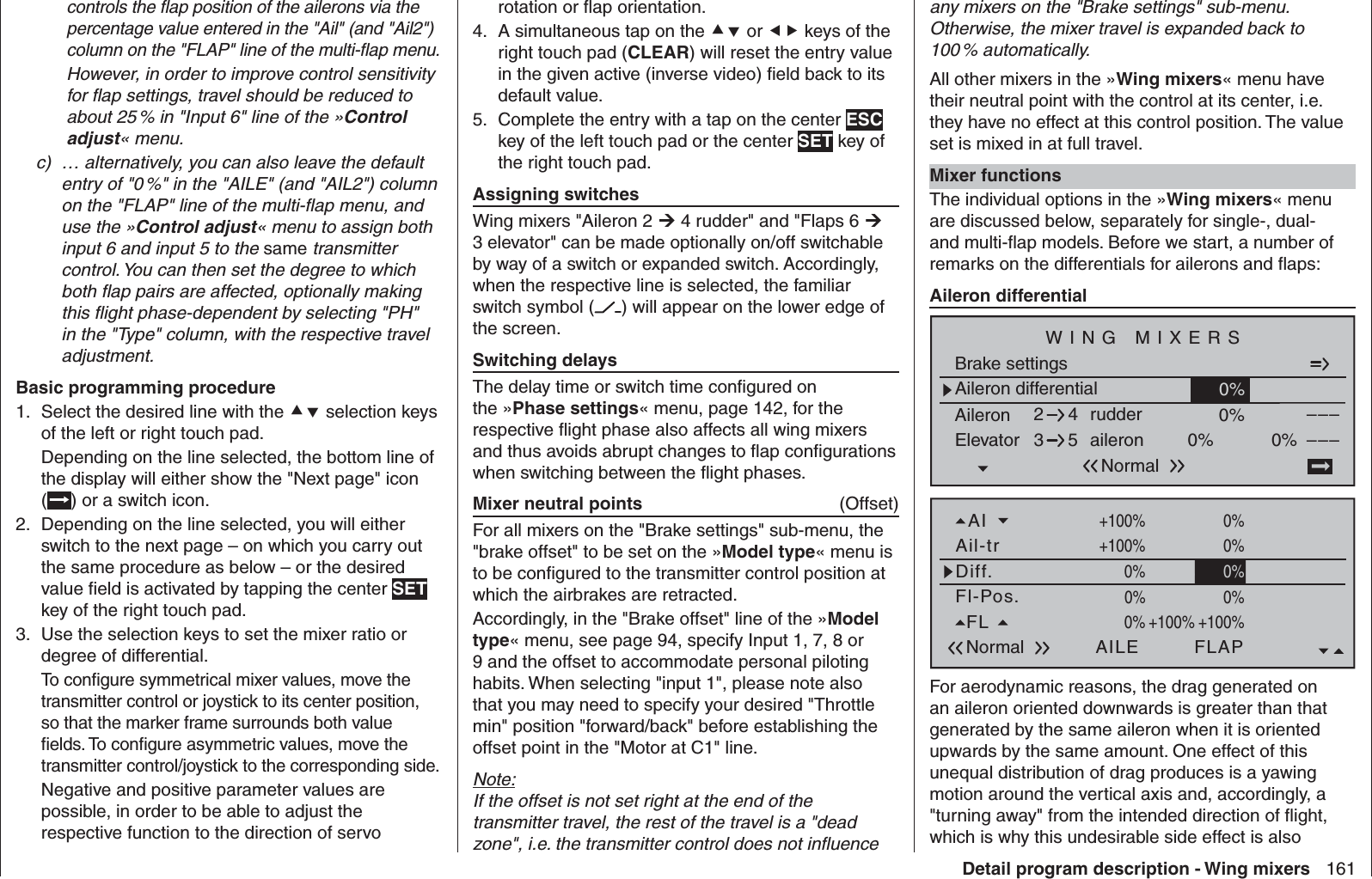
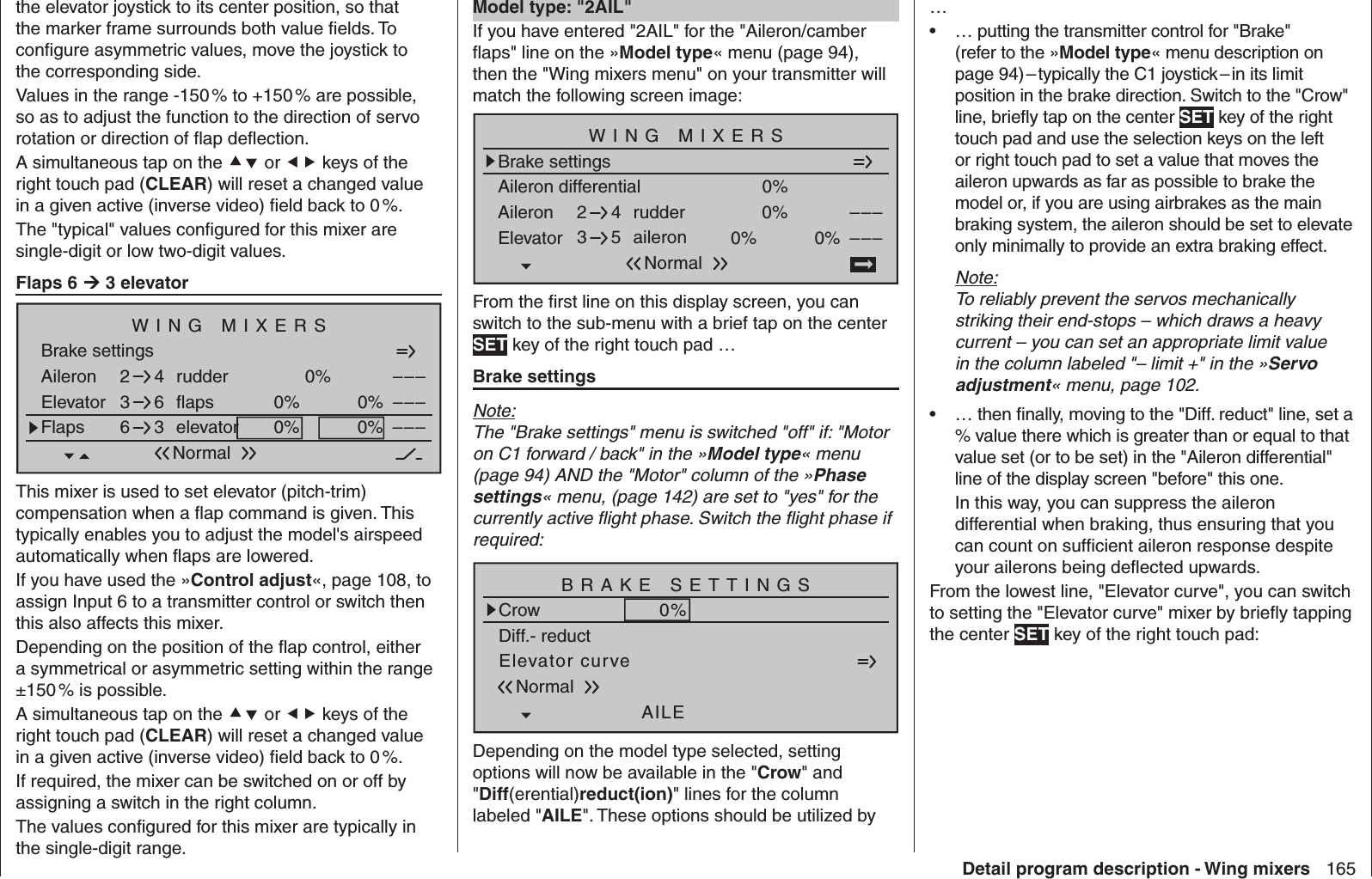
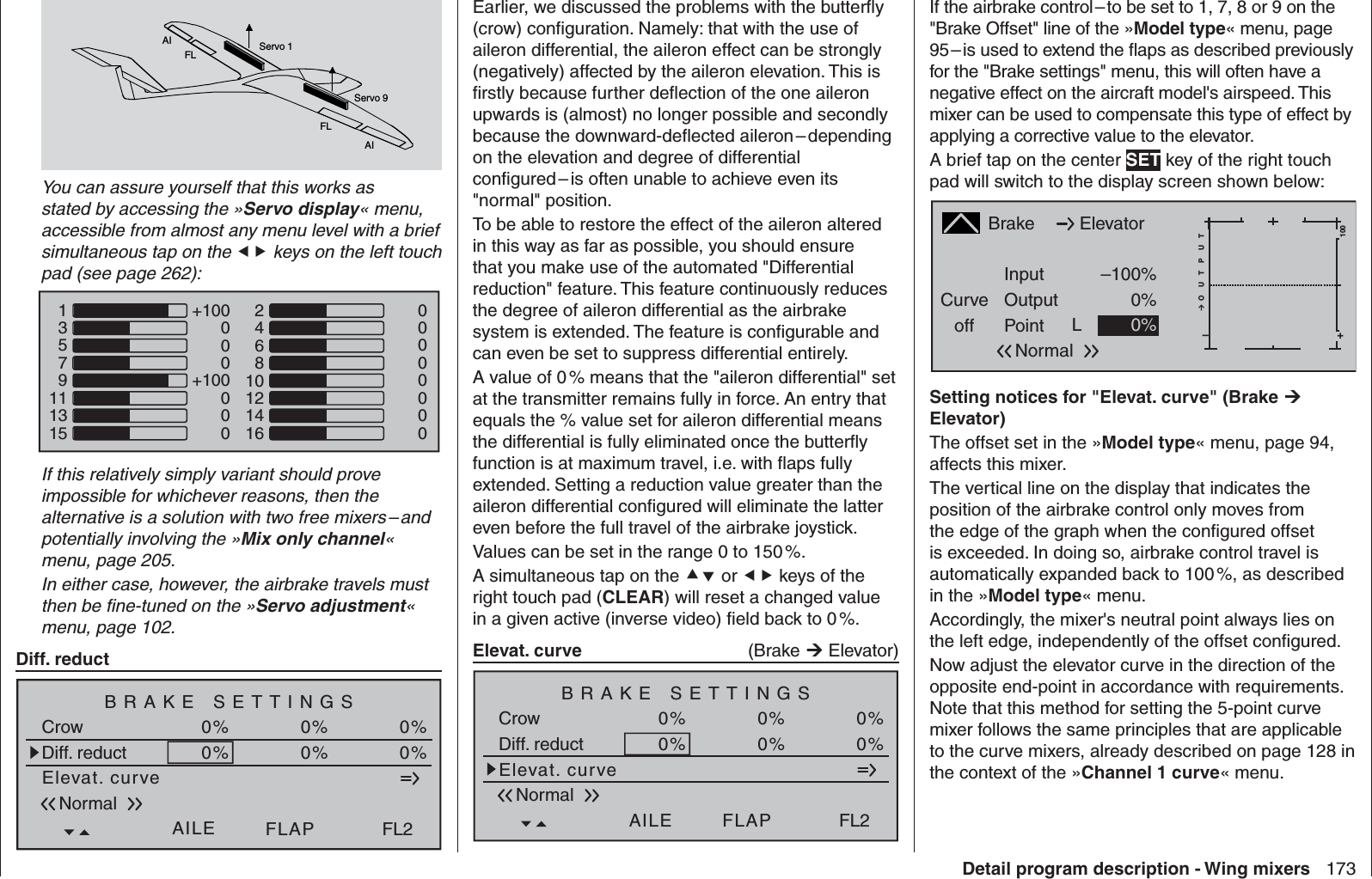
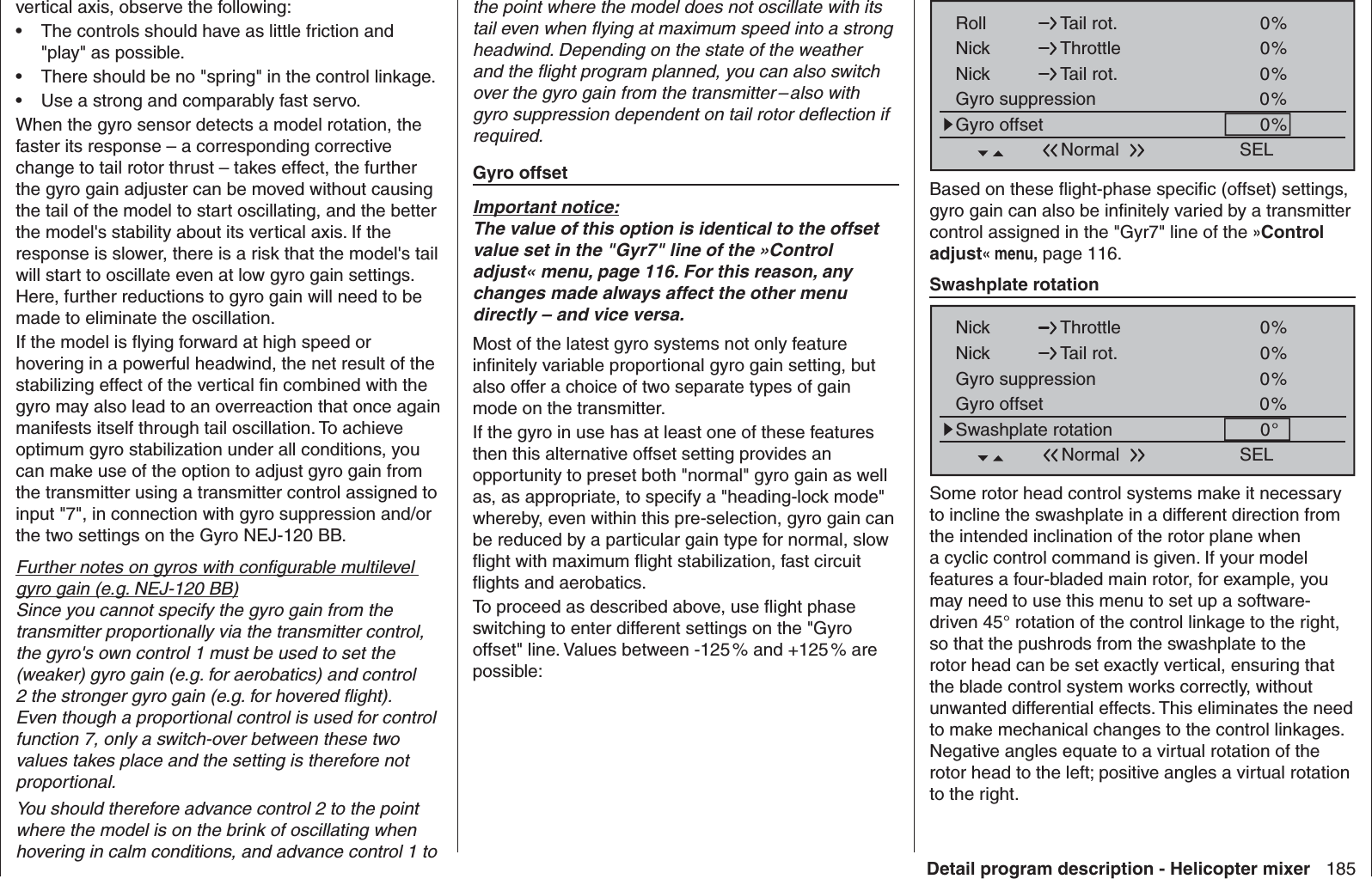
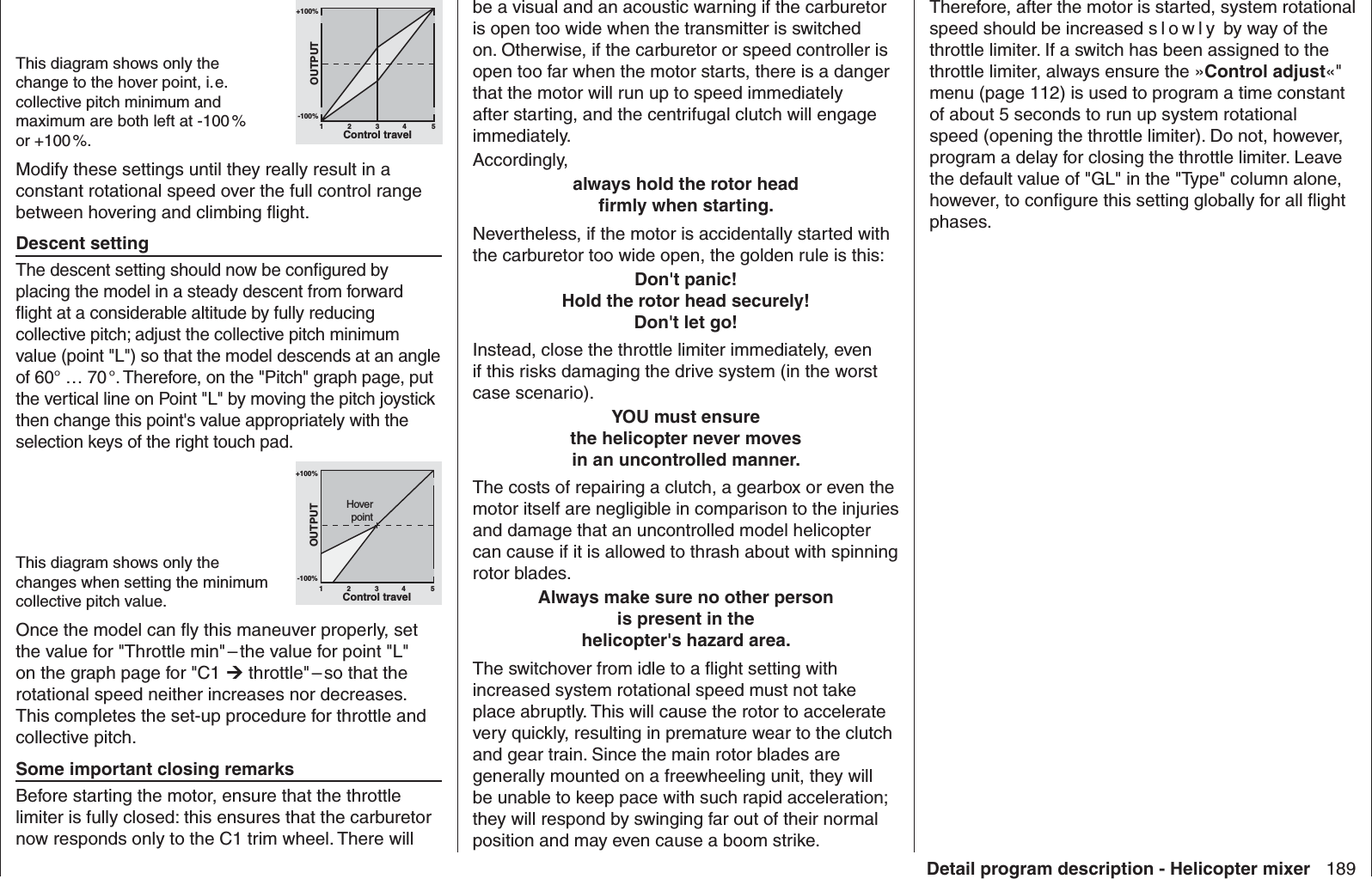
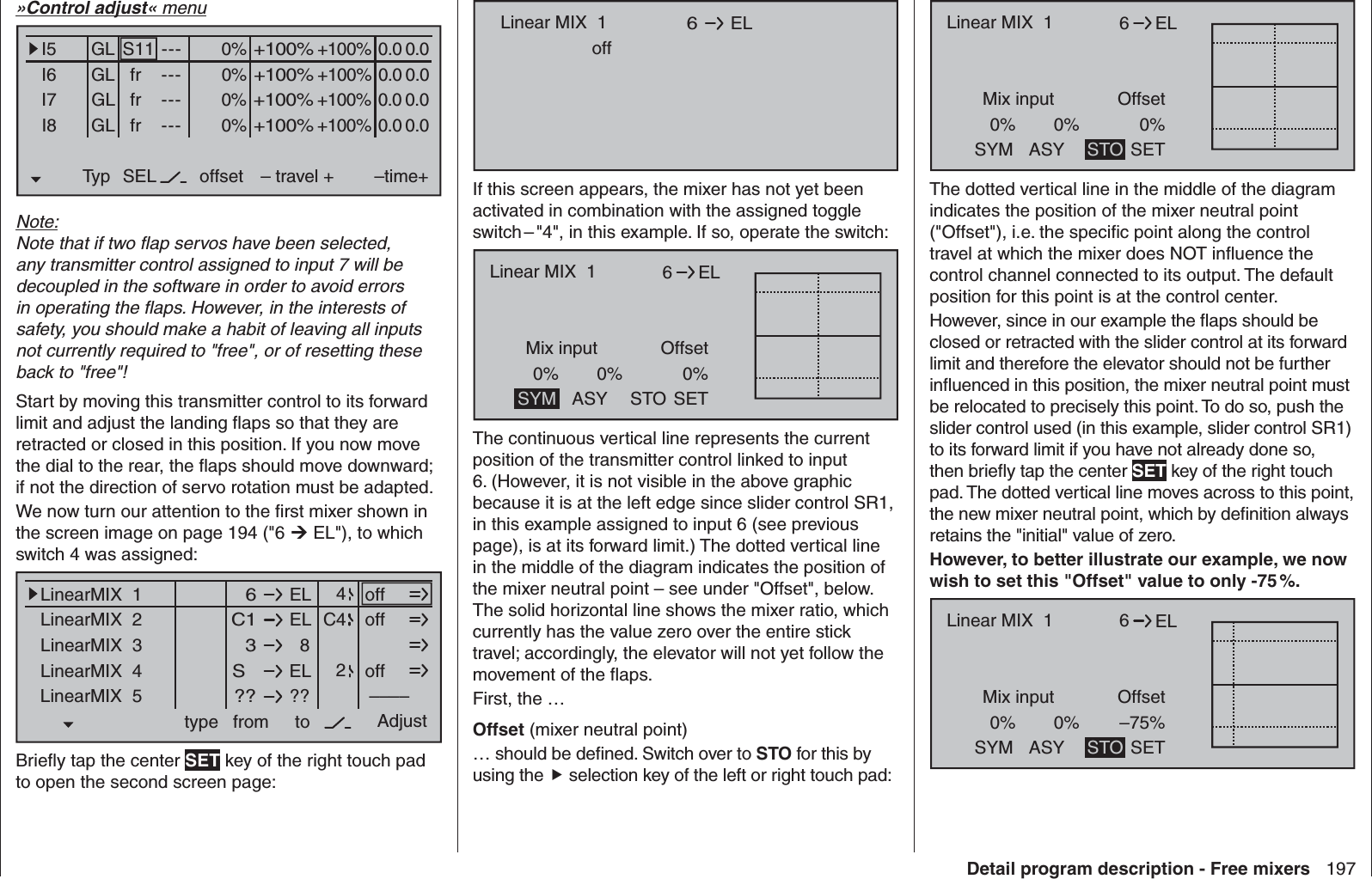
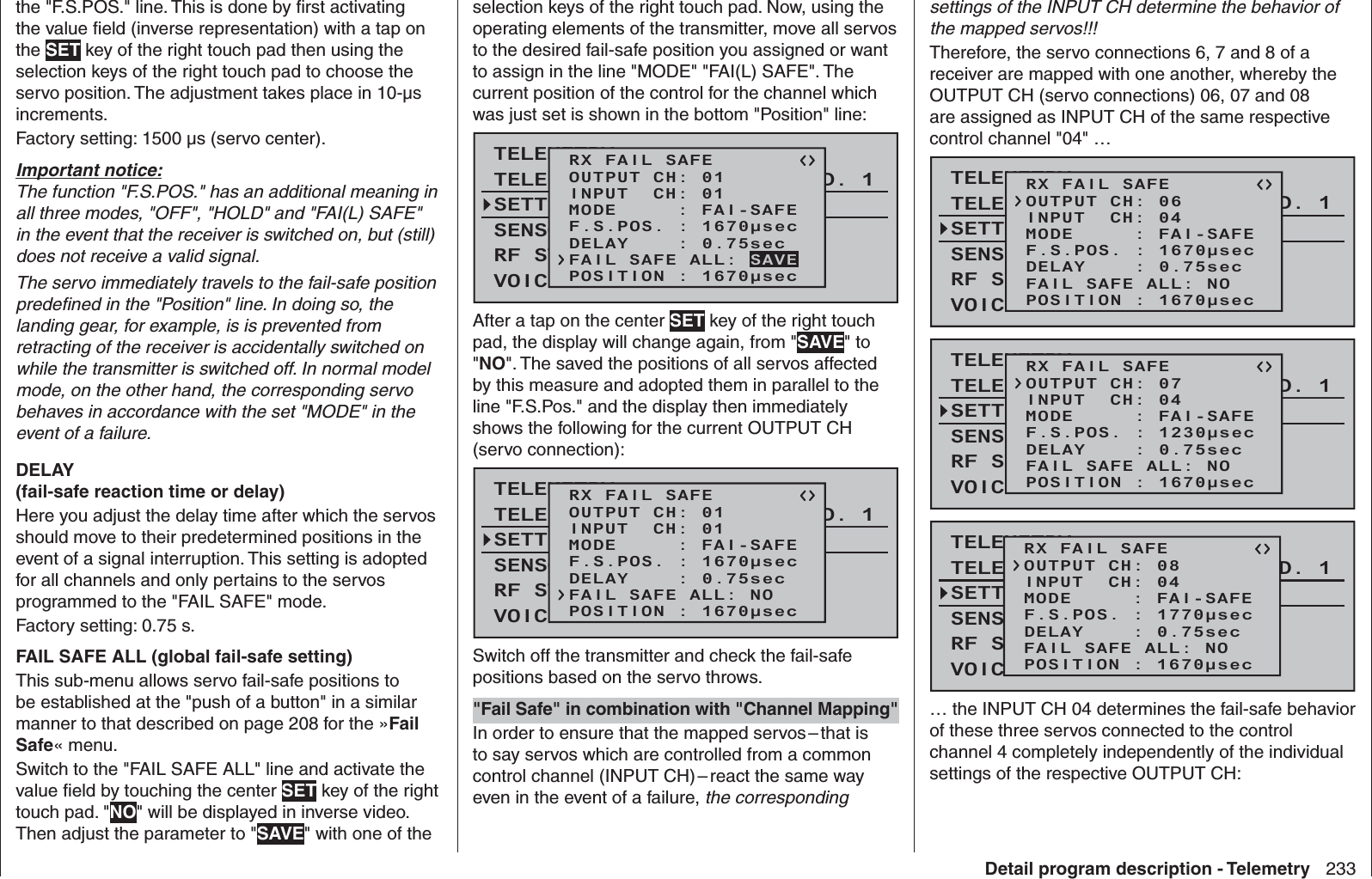
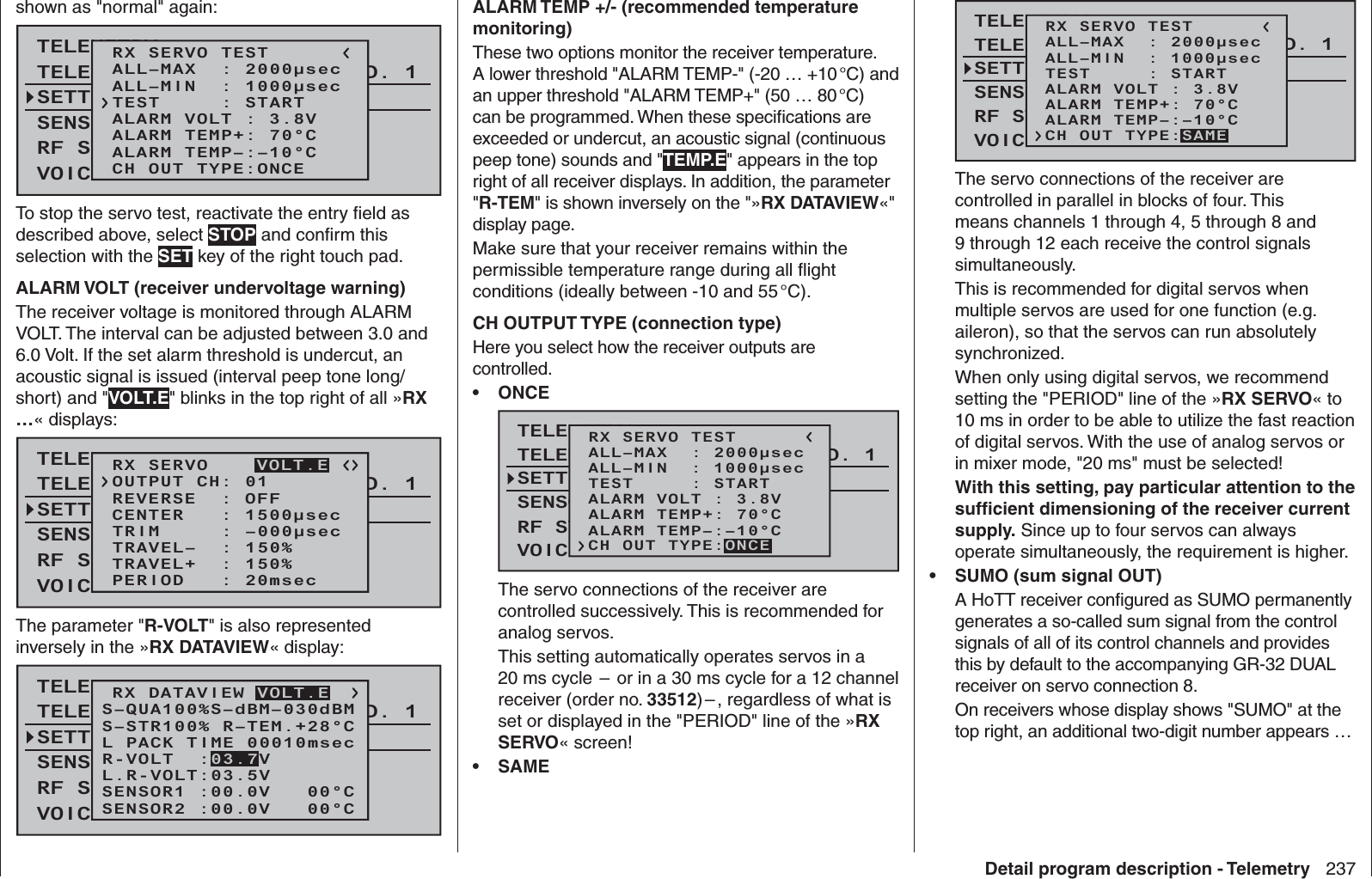
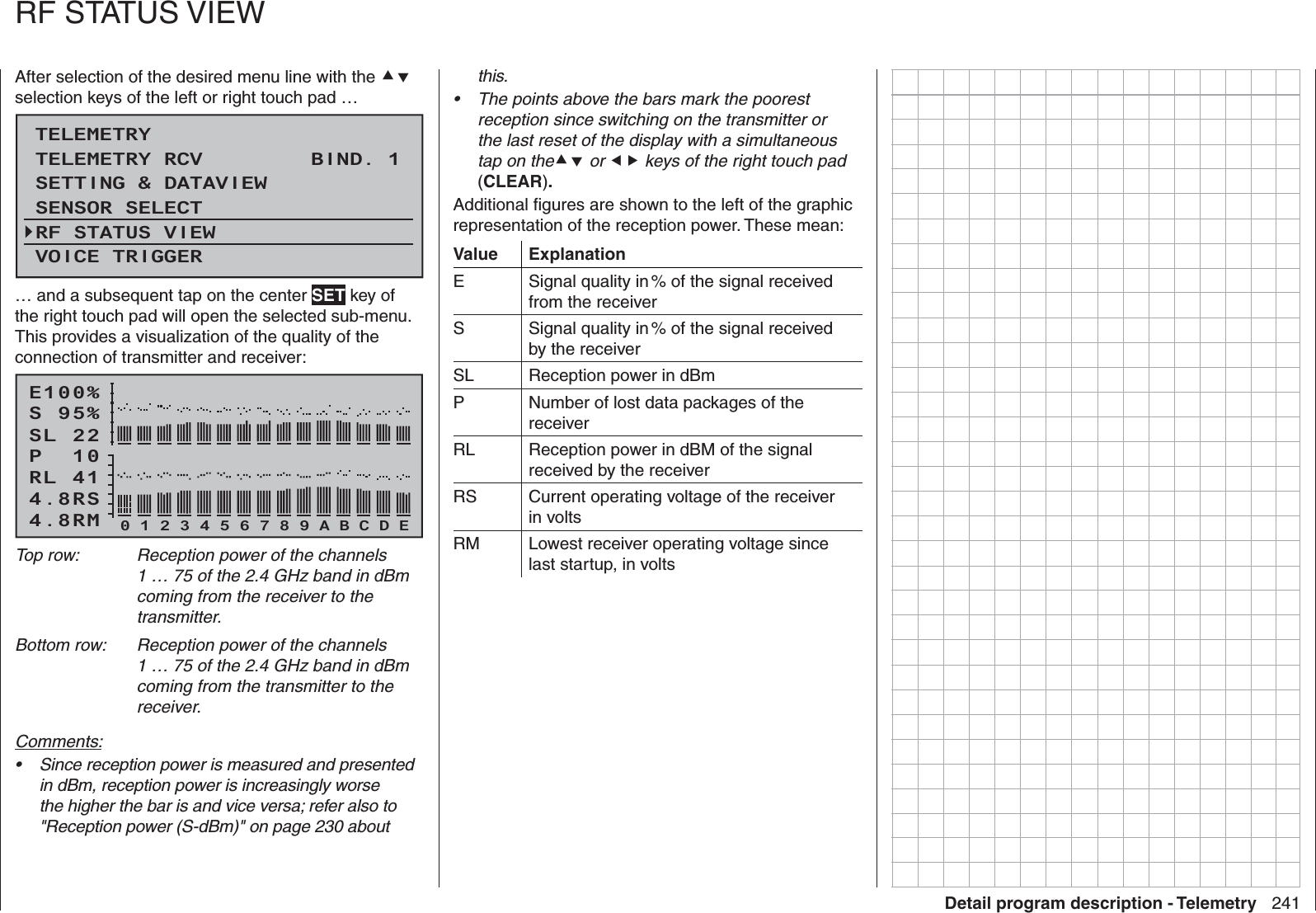
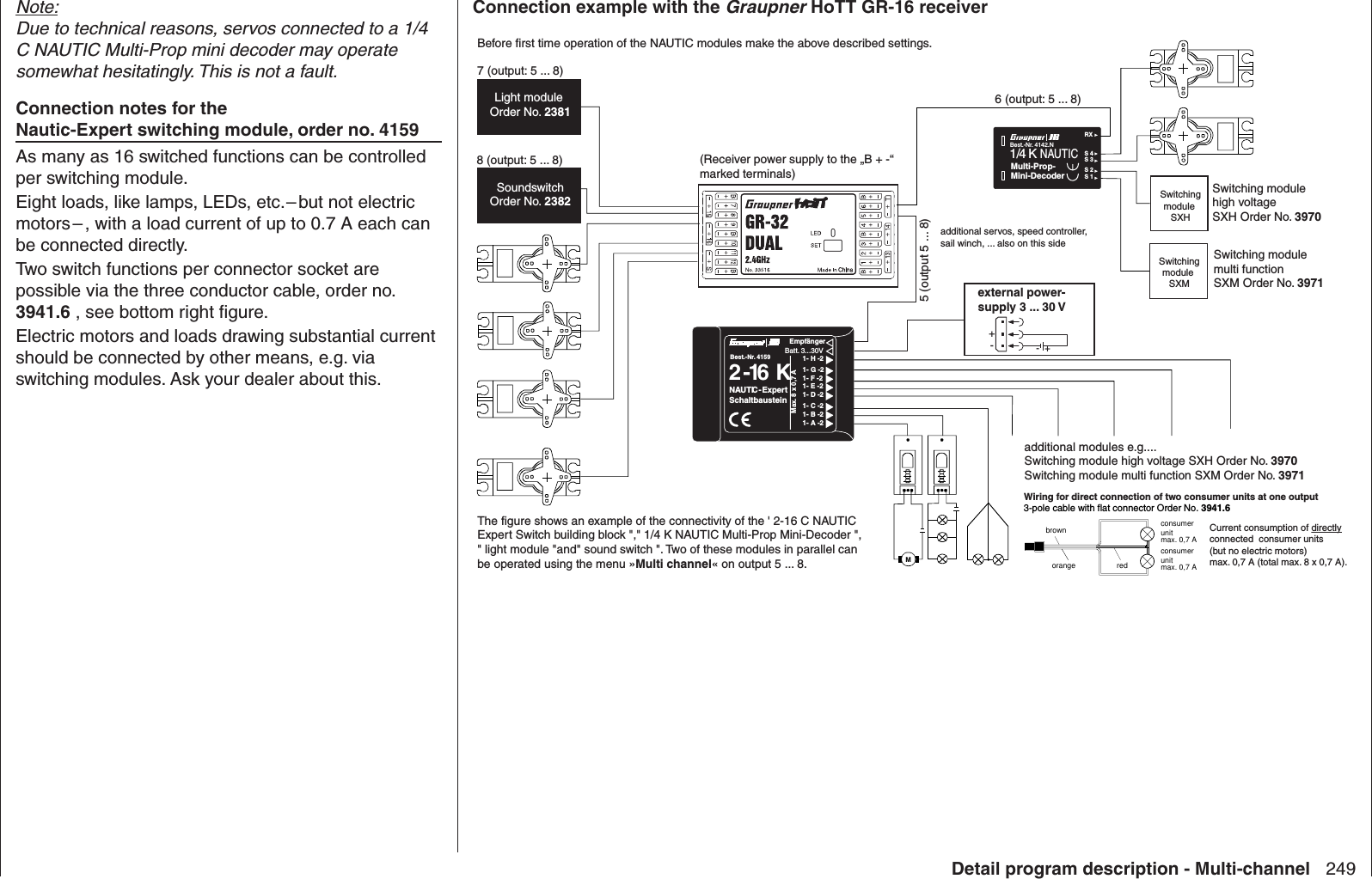
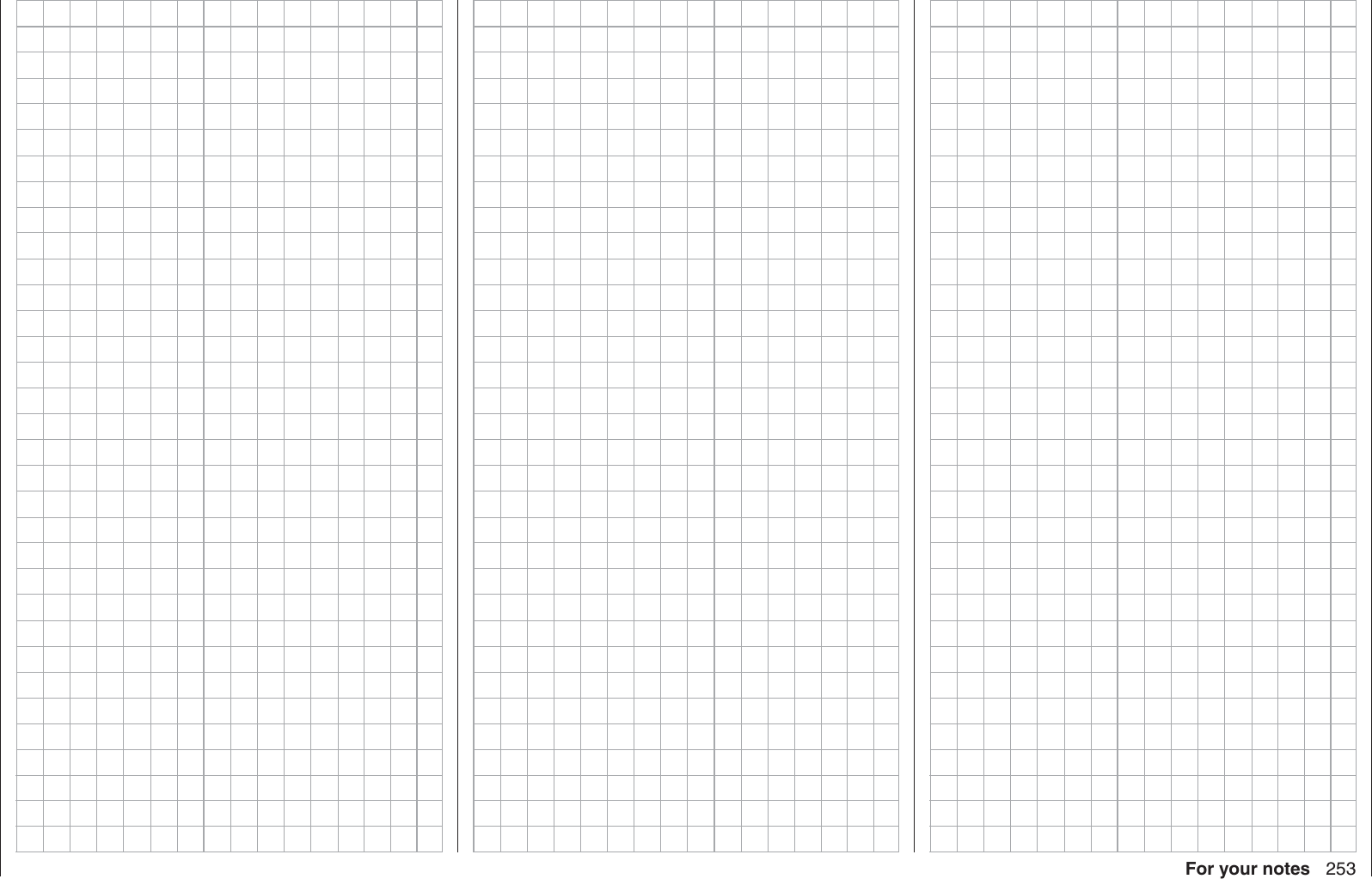
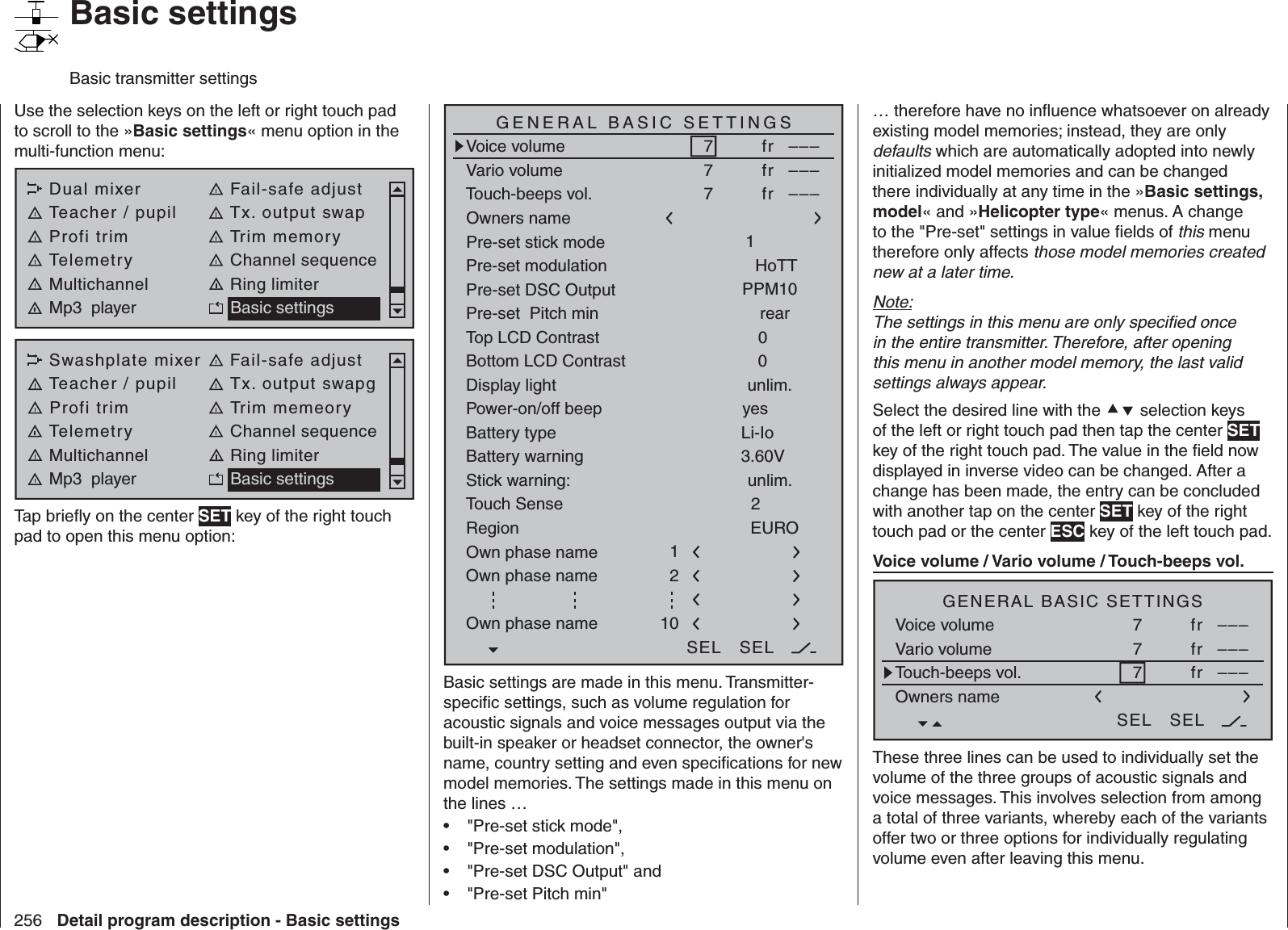
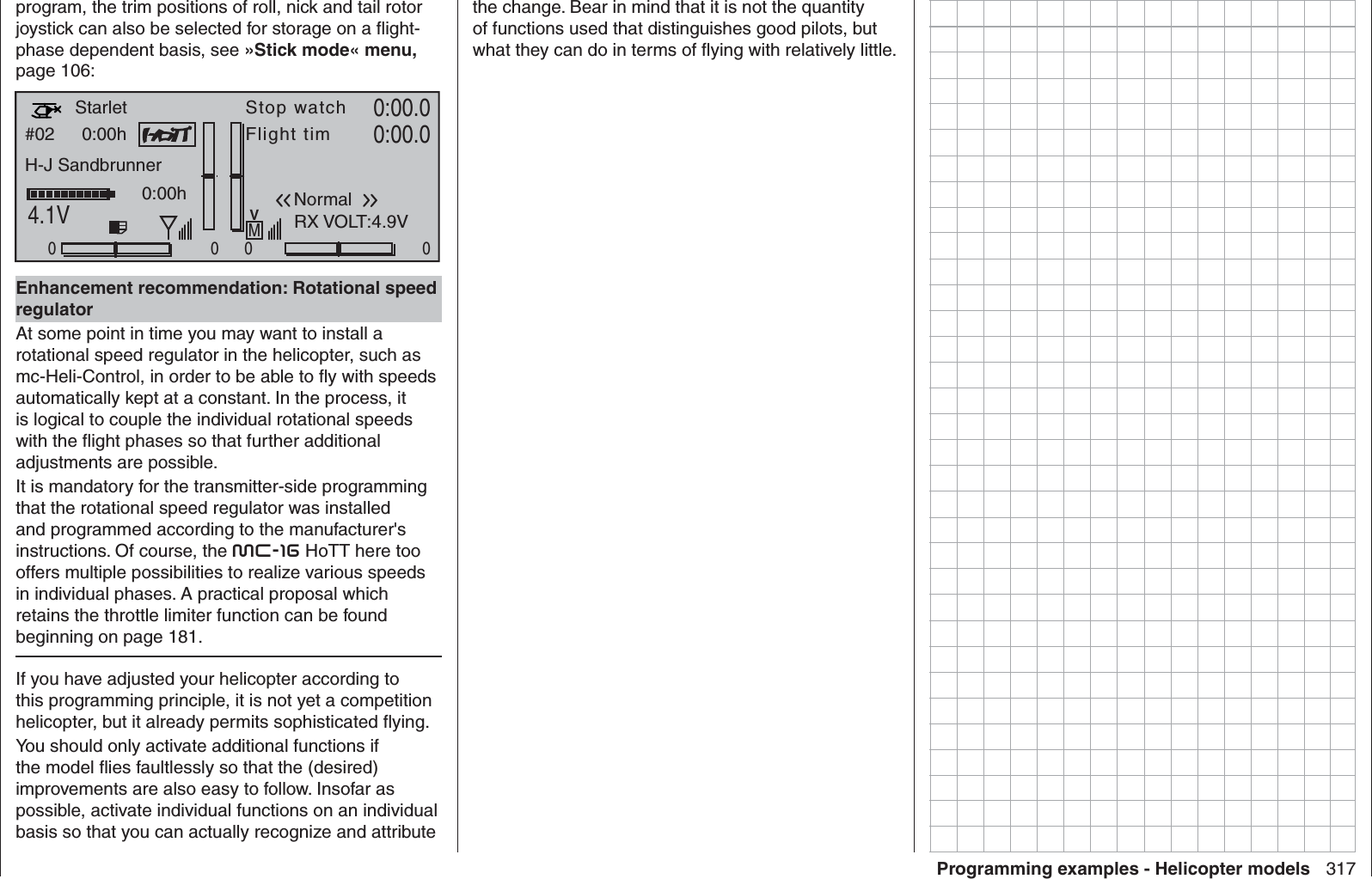
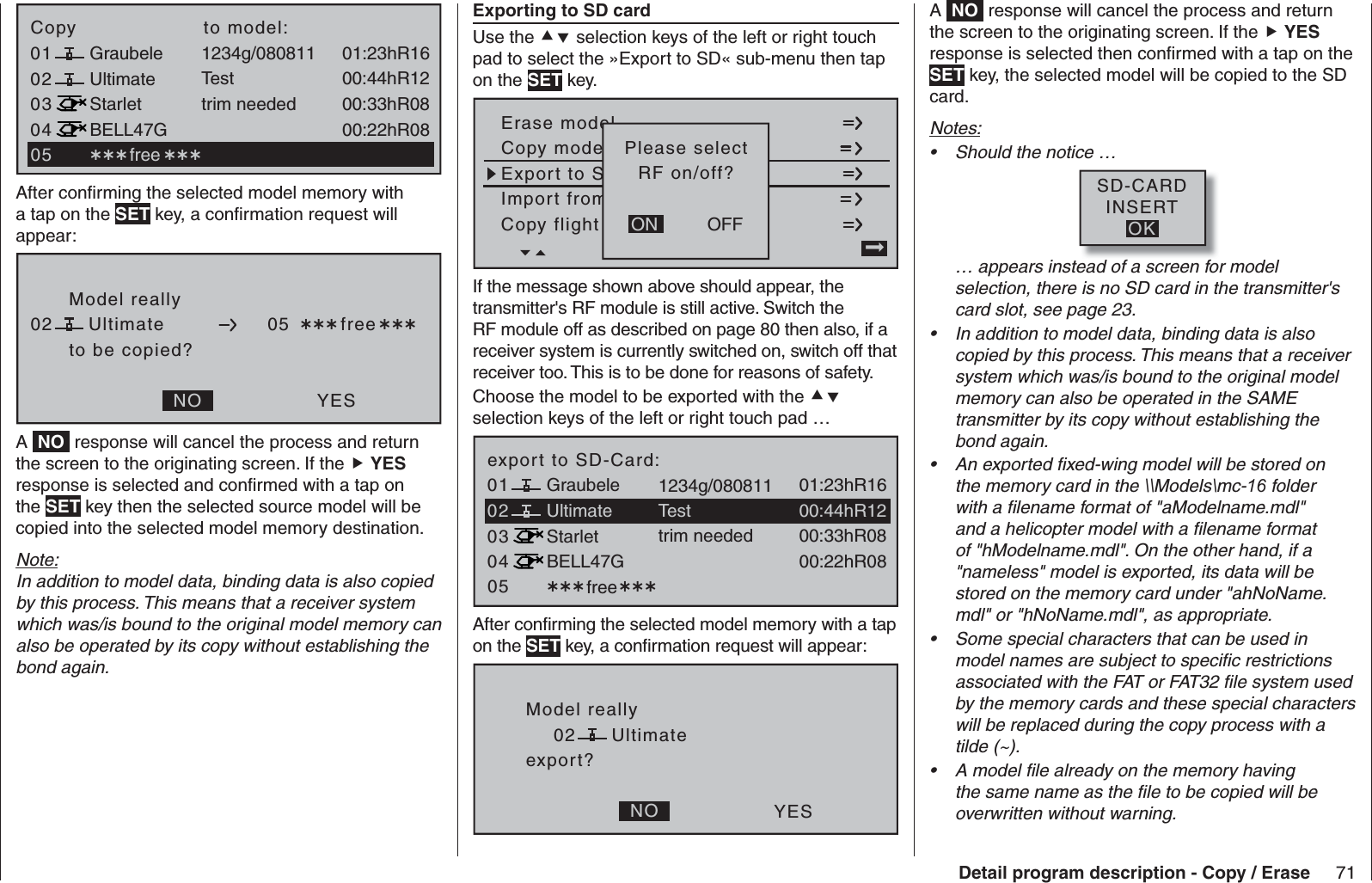
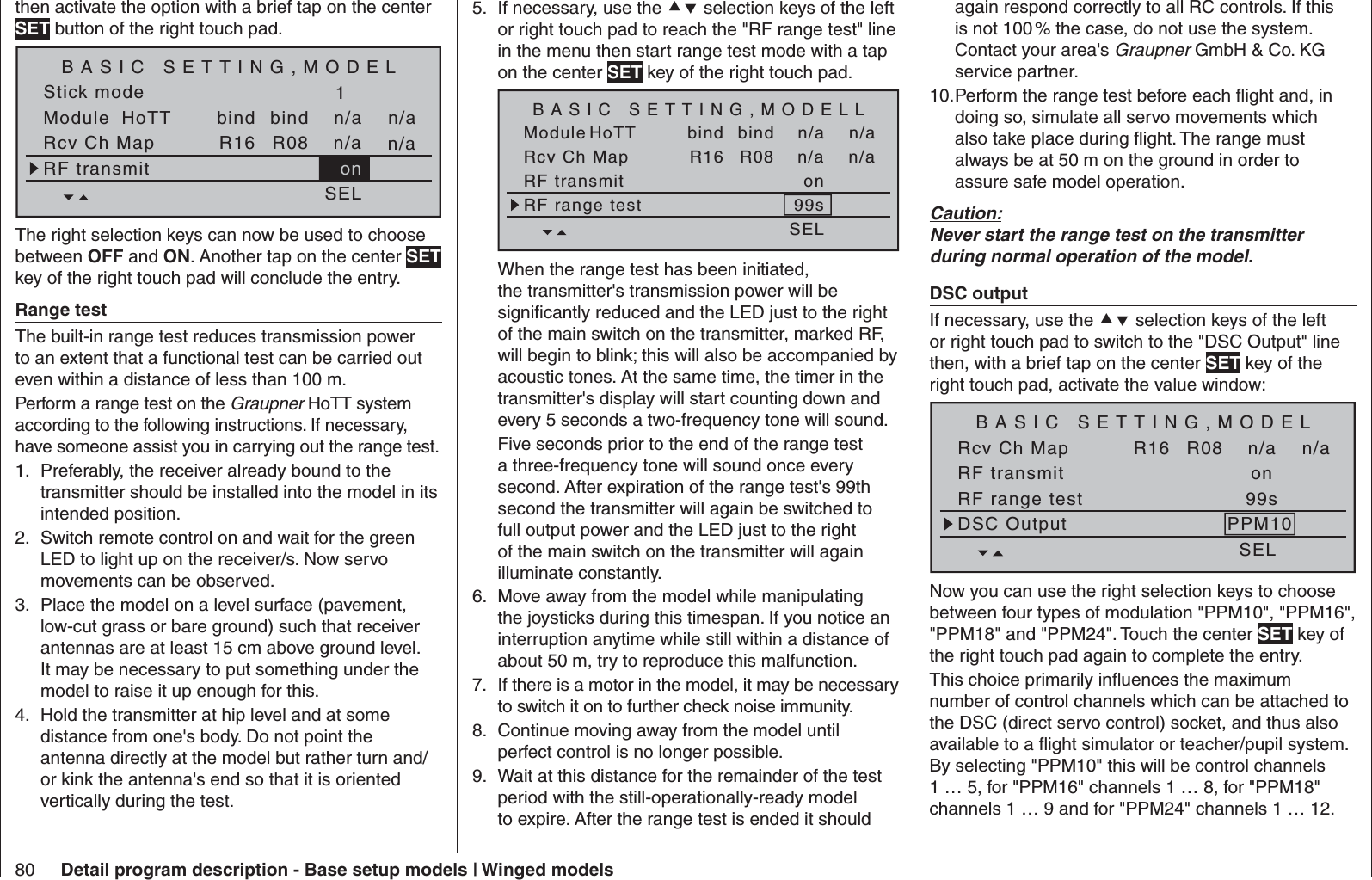
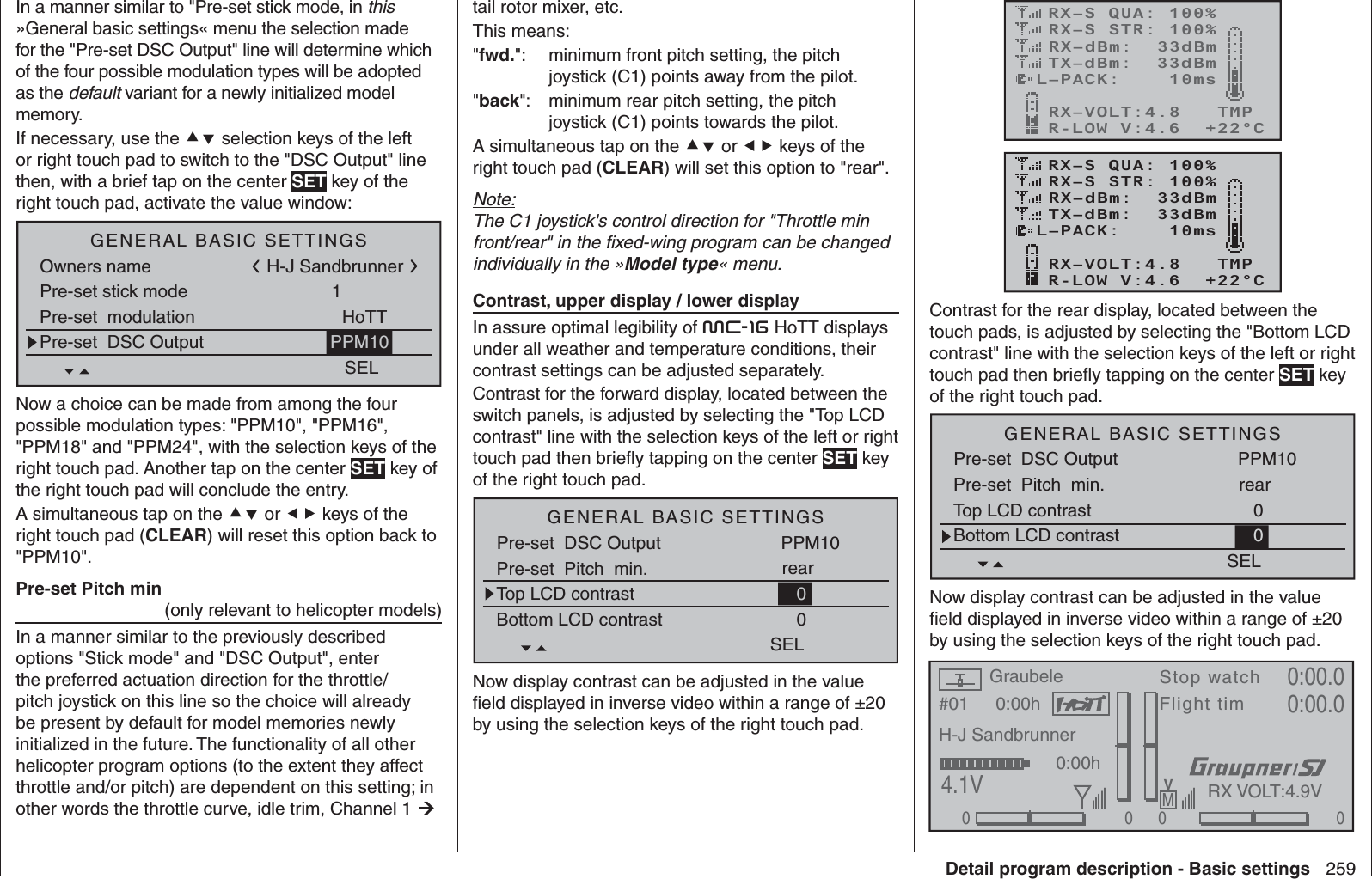
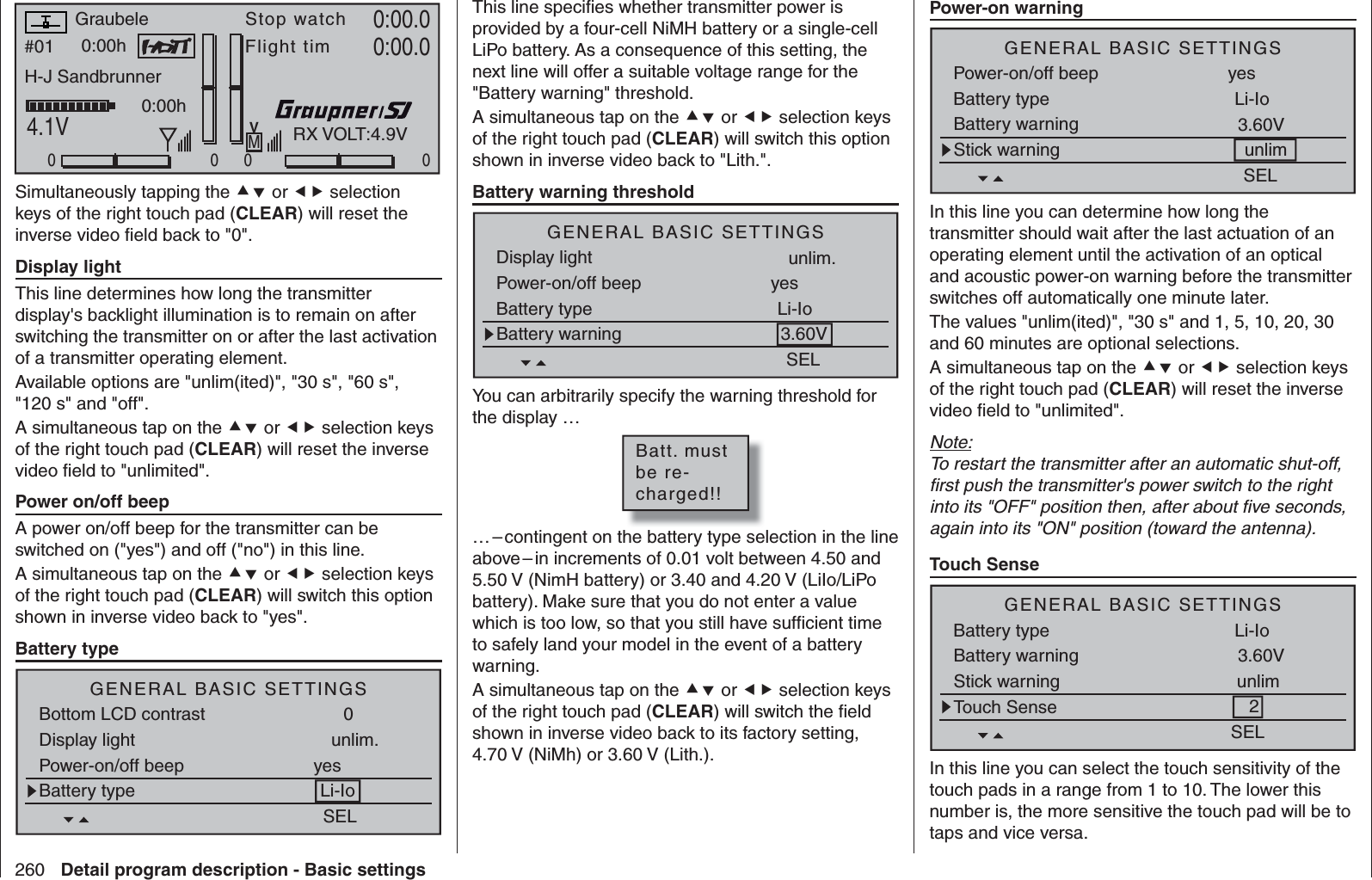
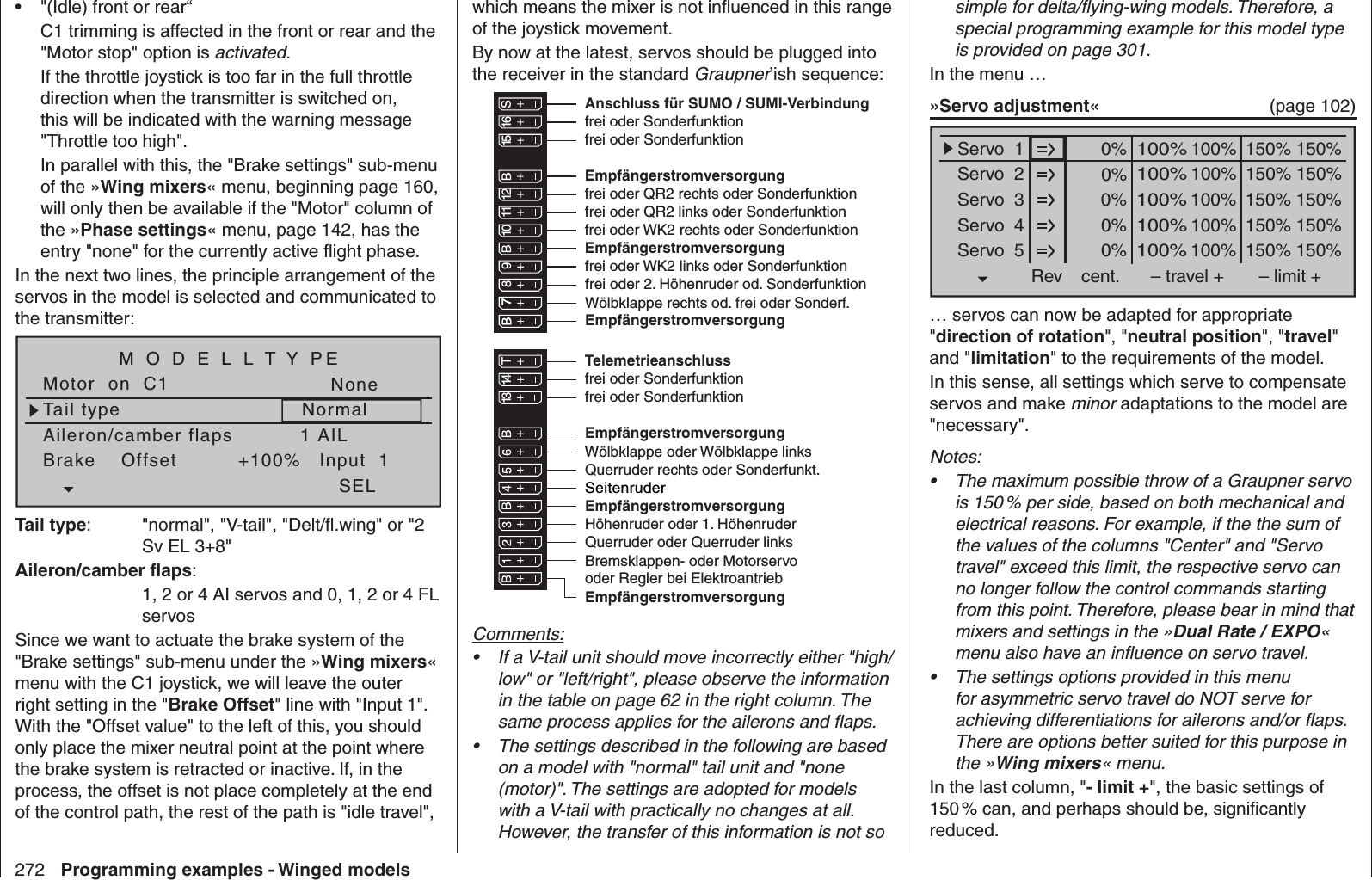
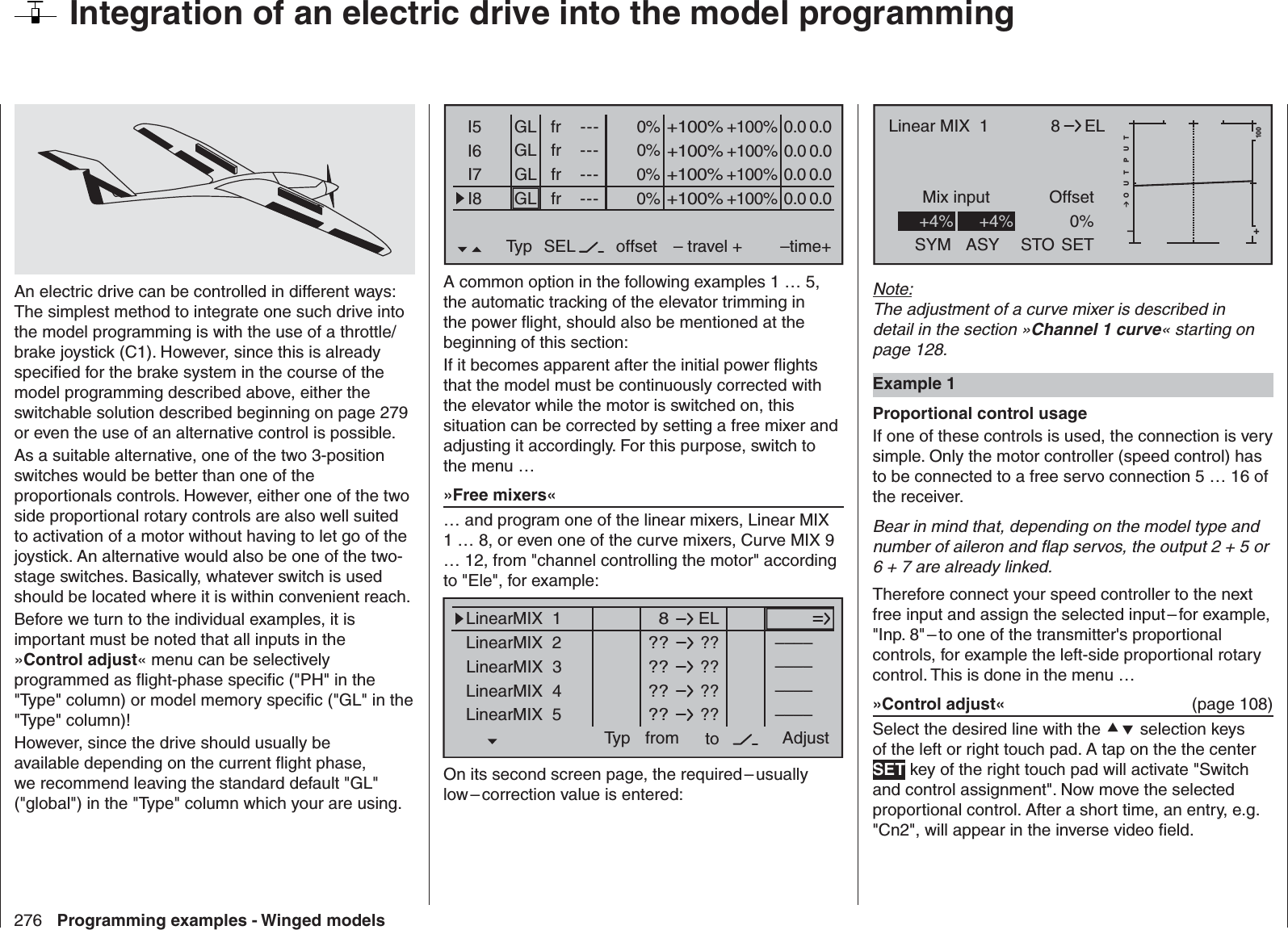
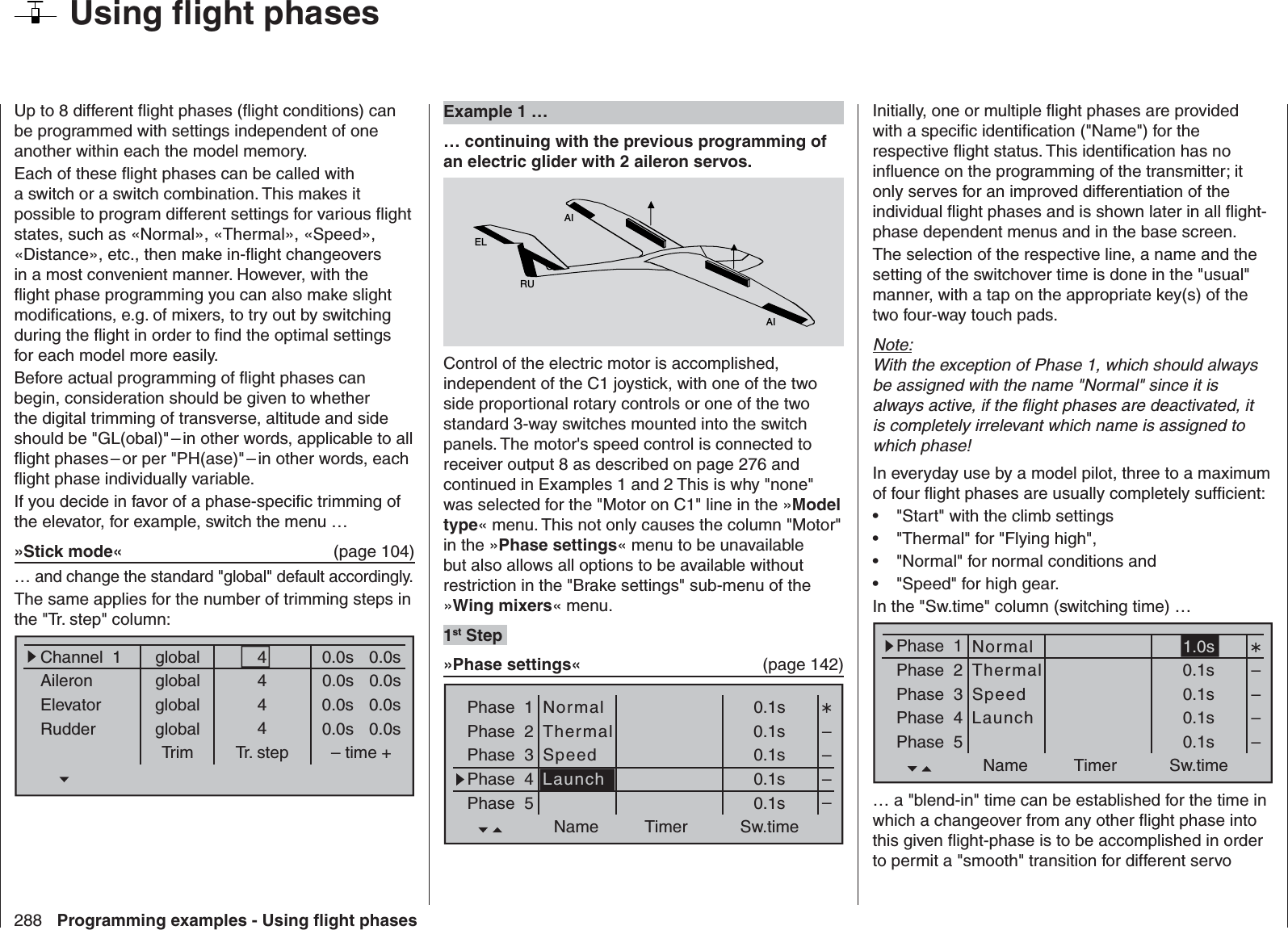
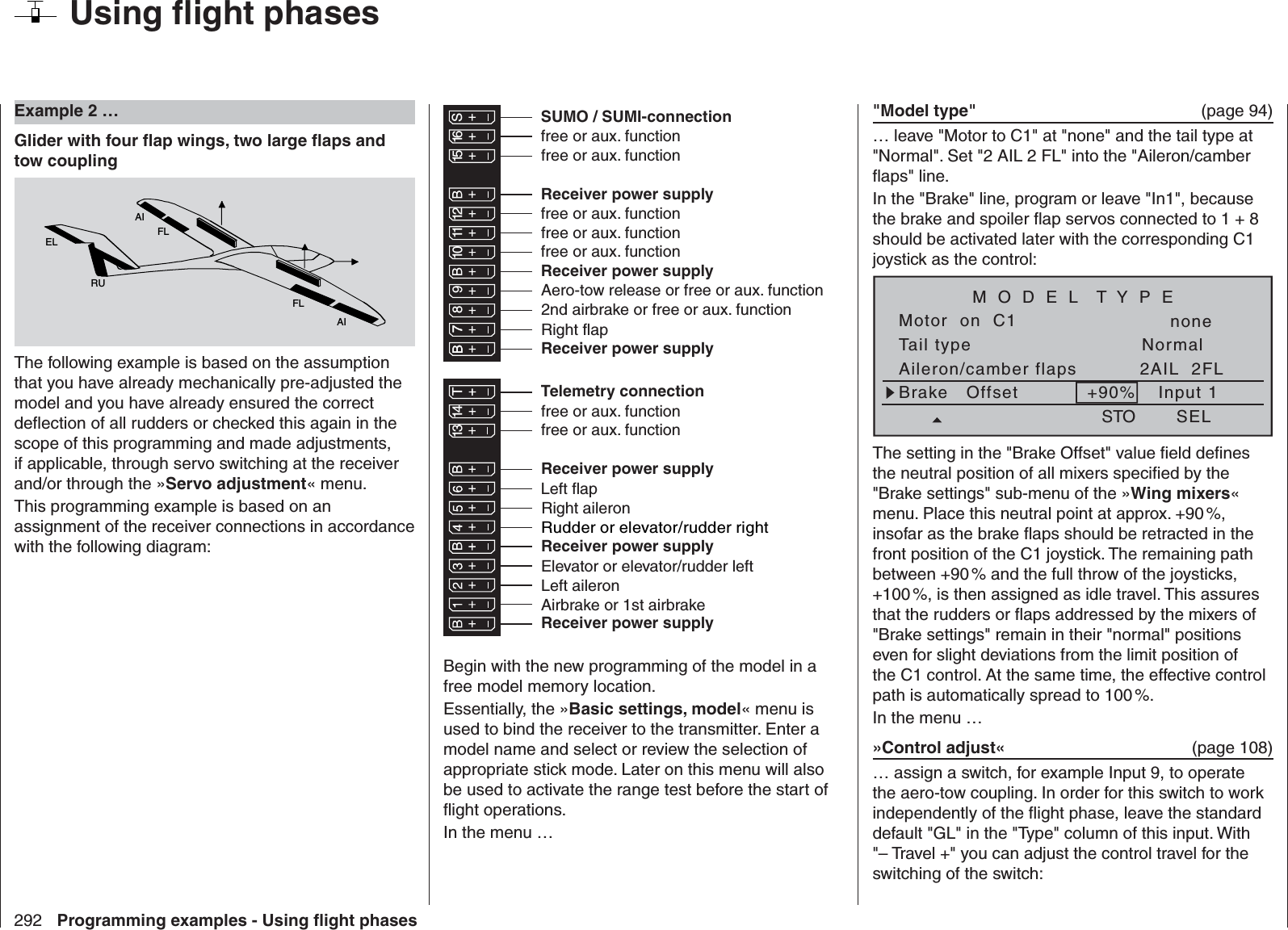
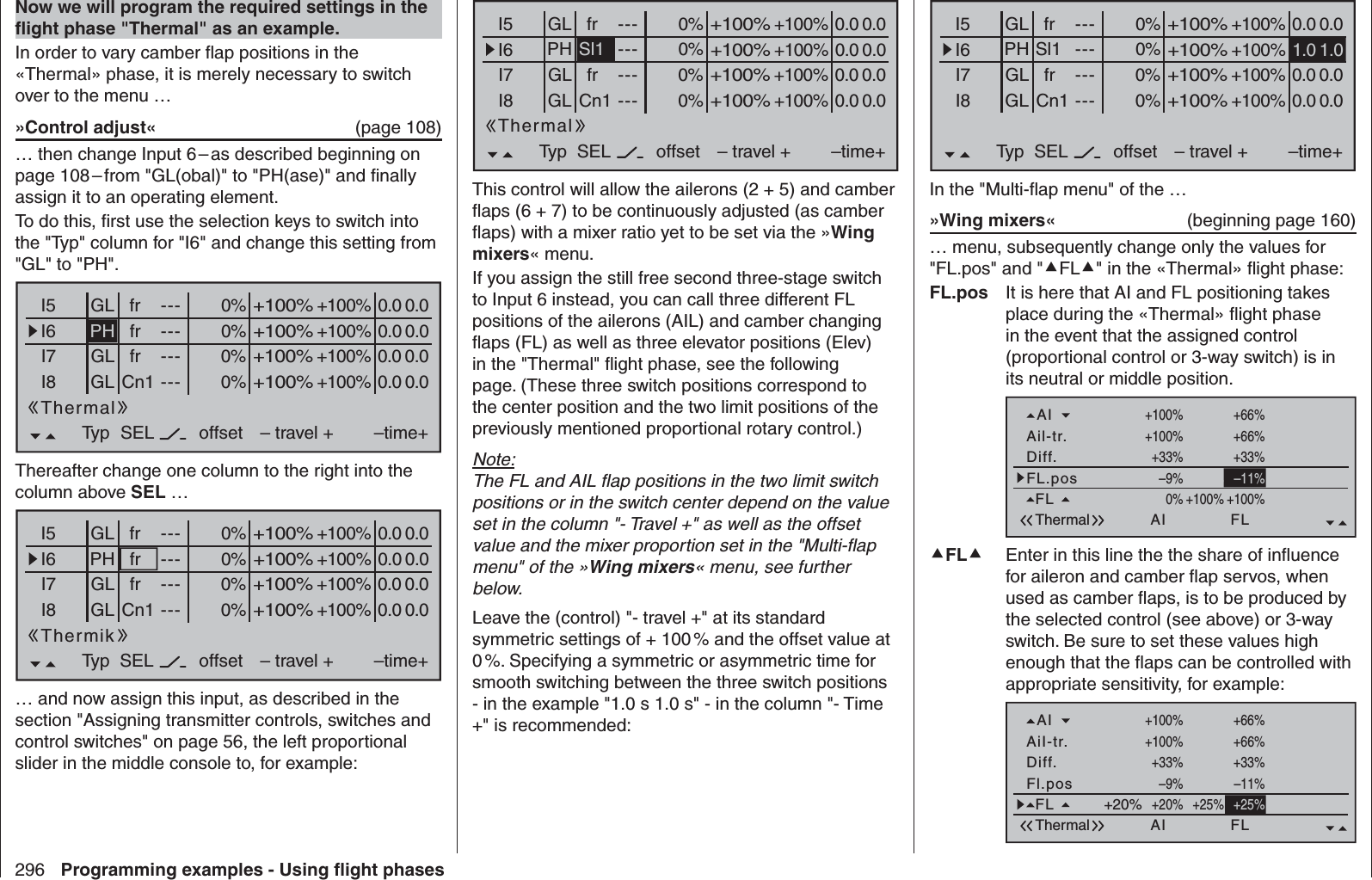
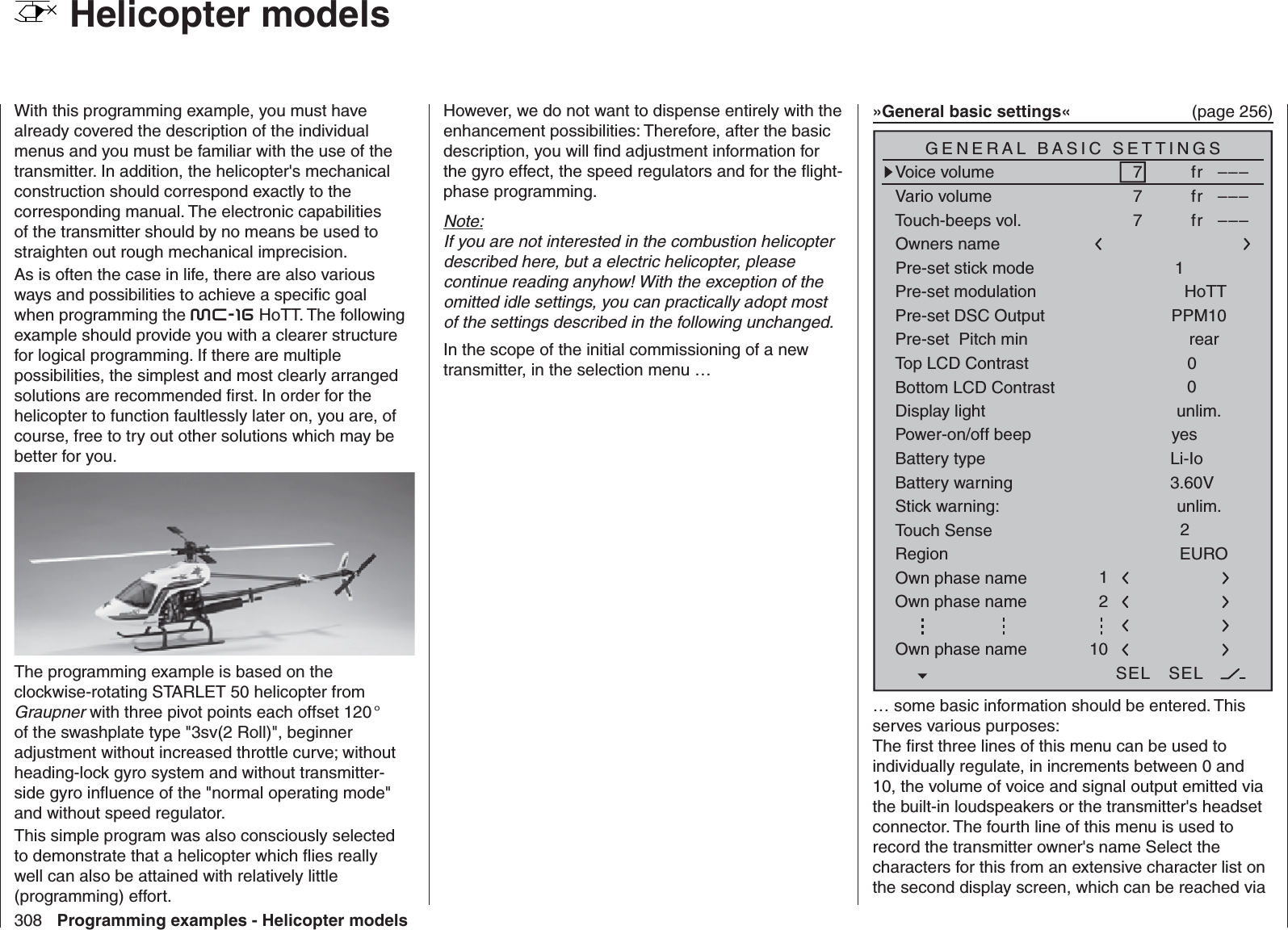
![257Detail program description - Basic settingsPre-setting a valueUse the selection keys on the left or right touch pad to move the marker frame to the desired value fi eld in the column above the left SEL at the display's lower edge then briefl y tap the center SET key of the right touch pad. The desired volume for the selected group can be specifi ed in increments between 0 and 10 in the value fi eld now displayed in inverse video by using the selection keys of the left or right touch pad. Another tap on the center SET key of the right touch pad or the ESC key of the left touch pad will conclude the process.Following a simultaneous tap on the or keys of the right touch pad (CLEAR), the display will return to its "7" default value.via rotary controlUse the selection keys on the left or right touch pad to move the marker frame to the desired value fi eld in the column above the right SEL label at the display's lower edge then briefl y tap the center SET key of the right touch pad. The message shown below will then appear in the display:H-J SandbrunnerGENERAL BASIC SETTINGSOwners nameVoive volumeVario voluTouch-beeps vol.7 fr –––7fr –––7fr –––SEL SELMove desiredcontrol adj.Now turn the desired rotary control, for example, the right retractable knob DG2. Afterward, this knob can be used anytime to incrementally regulate volume for the selected group between 0 and 10.Following a simultaneous tap on the or keys of the right touch pad (CLEAR), the display will return to its "fr" default value.via three position switchUse the selection keys on the left or right touch pad to move the marker frame to the column above the switch symbol at the display's lower edge then briefl y tap the center SET key of the right touch pad. The message shown below will then appear in the display:H-J SandbrunnerGENERAL BASIC SETTINGSOwners nameVoice volume SpracheVario volumetöneTouch-beeps7 fr –––7fr –––7fr –––SEL SELMove desired switchto ON position(ext. switch: ENTER)Now, assign a switch as described on page 56 in the section "Assigning transmitter controls, switches and control switches". Ideally a self-neutralizing three position switch, e.g. like that offered by Graupner under order no. 33001.5. Afterward, this switch can be used anytime to incrementally regulate volume for the selected group between 0 and 10.Following a simultaneous tap on the or keys of the right touch pad (CLEAR), the display will return to its "---" default value. OwnerH-J SandbrunnerGENERAL BASIC SETTINGSOwners nameVoice volumeVario volumeTouch-beeps vol.7 fr –––7fr –––7fr –––SEL SELUp to 15 characters can be used to specify the owner's name. Change to the next screen page () with a brief tap on the center SET key of the right touch pad: !"#$%&’()Owners name@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~H-J SandbSelect the desired characters with the selection keys of the left touch pad. With a brief tap on the selection key of the right touch pad or its center SET key, move to the next position in which a character can be selected. A simultaneous tap on the or keys of the right touch pad (CLEAR) will place a space character at the current position.Positioning to any character position within the entry fi eld can be done with the keys of the right touch pad.A brief tap on the center ESC key of the left touch pad will cause a return to the previous menu page. Pre-set stick modeAs a basic principle, there are four different ways to assign the four control functions, aileron, elevator, rudder and throttle or brake fl aps for winged models as well as rolling, pitching, tail rotor and throttle/pitch for helicopter models to the two joysticks. Just which of these options is chosen depends on the individual preferences of the individual model pilot.Use the selection keys of the left or right touch pad to select the "Stick mode" line. The option fi eld will be framed.](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-207.png)
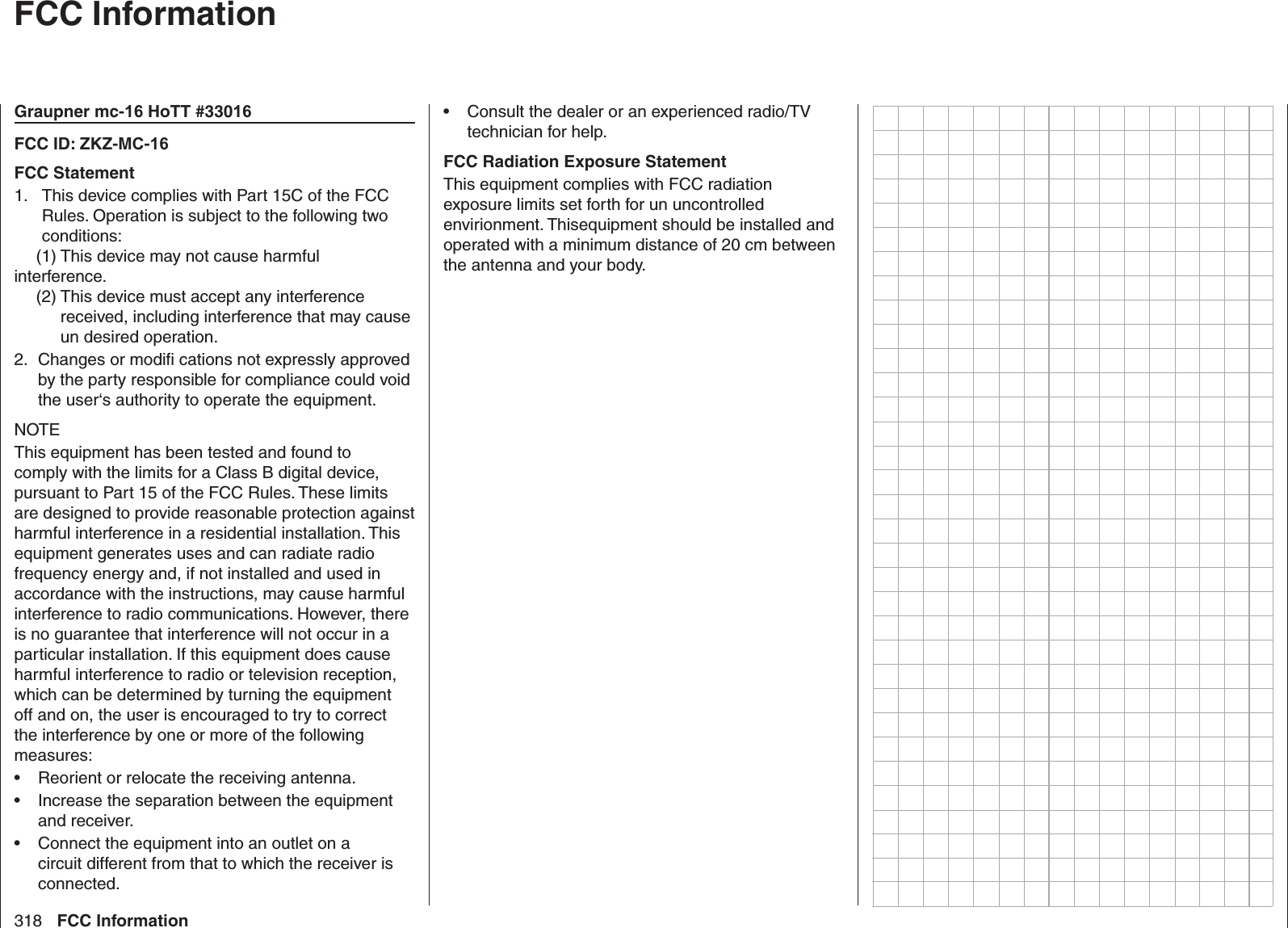
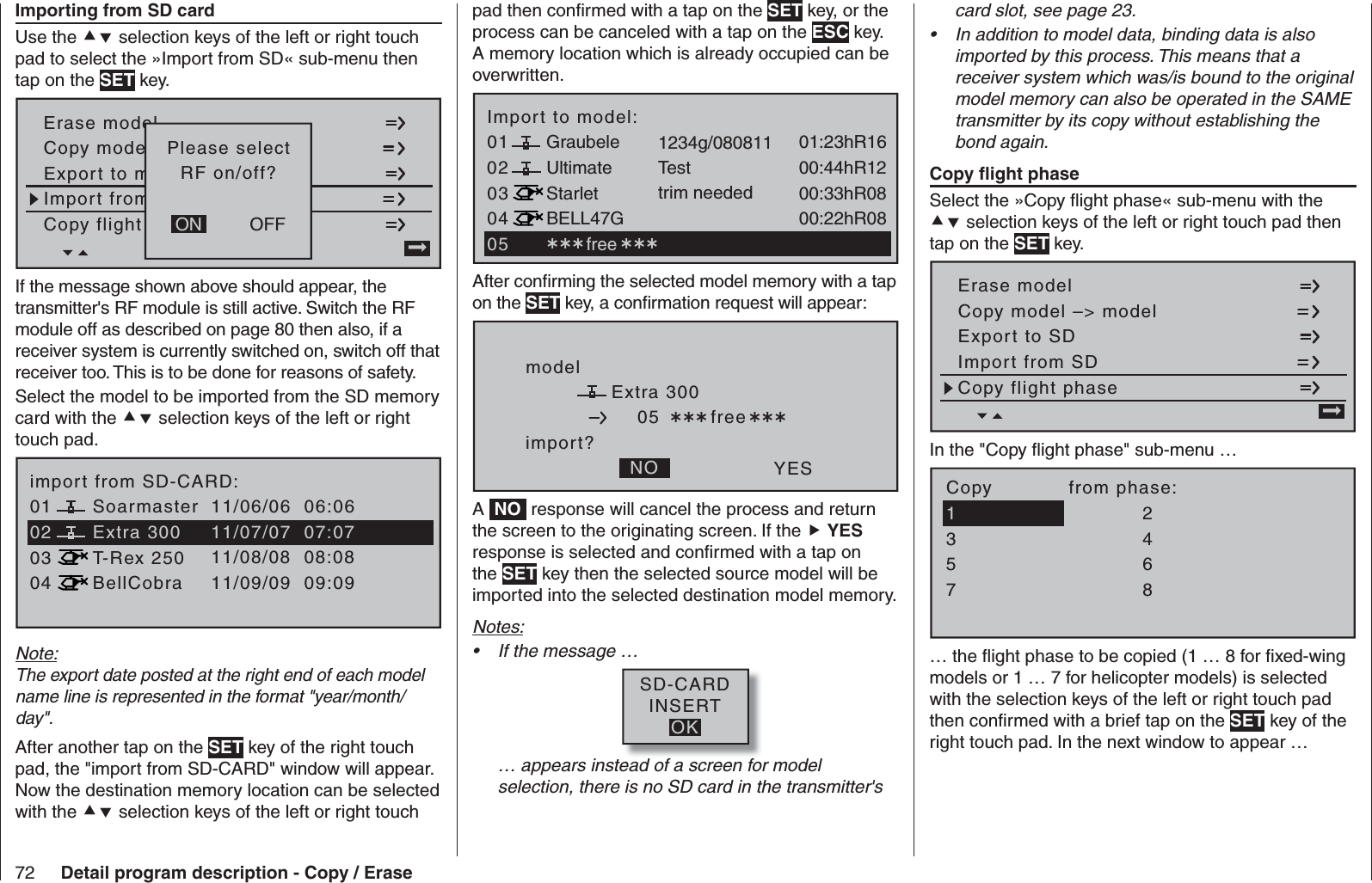
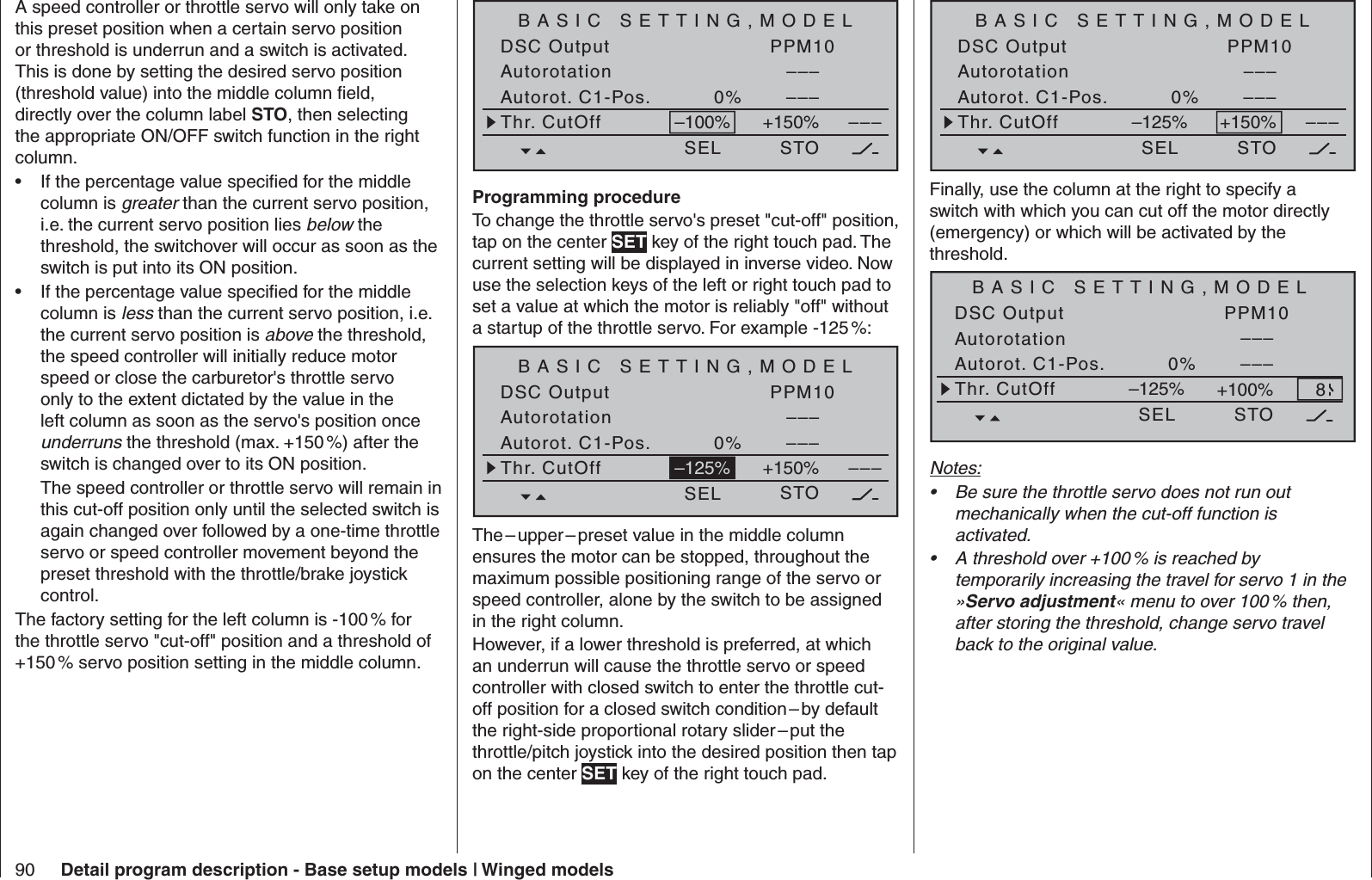
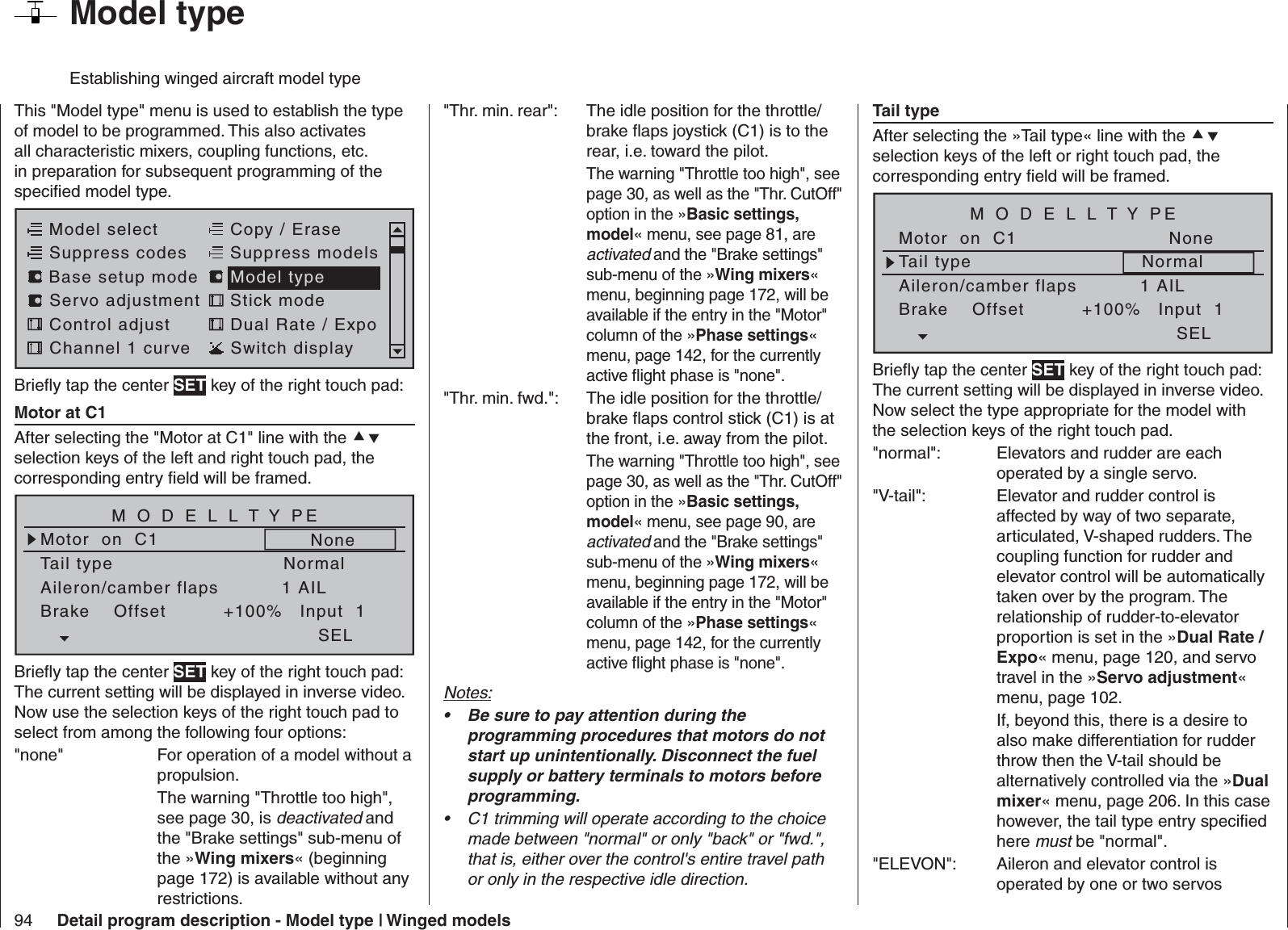
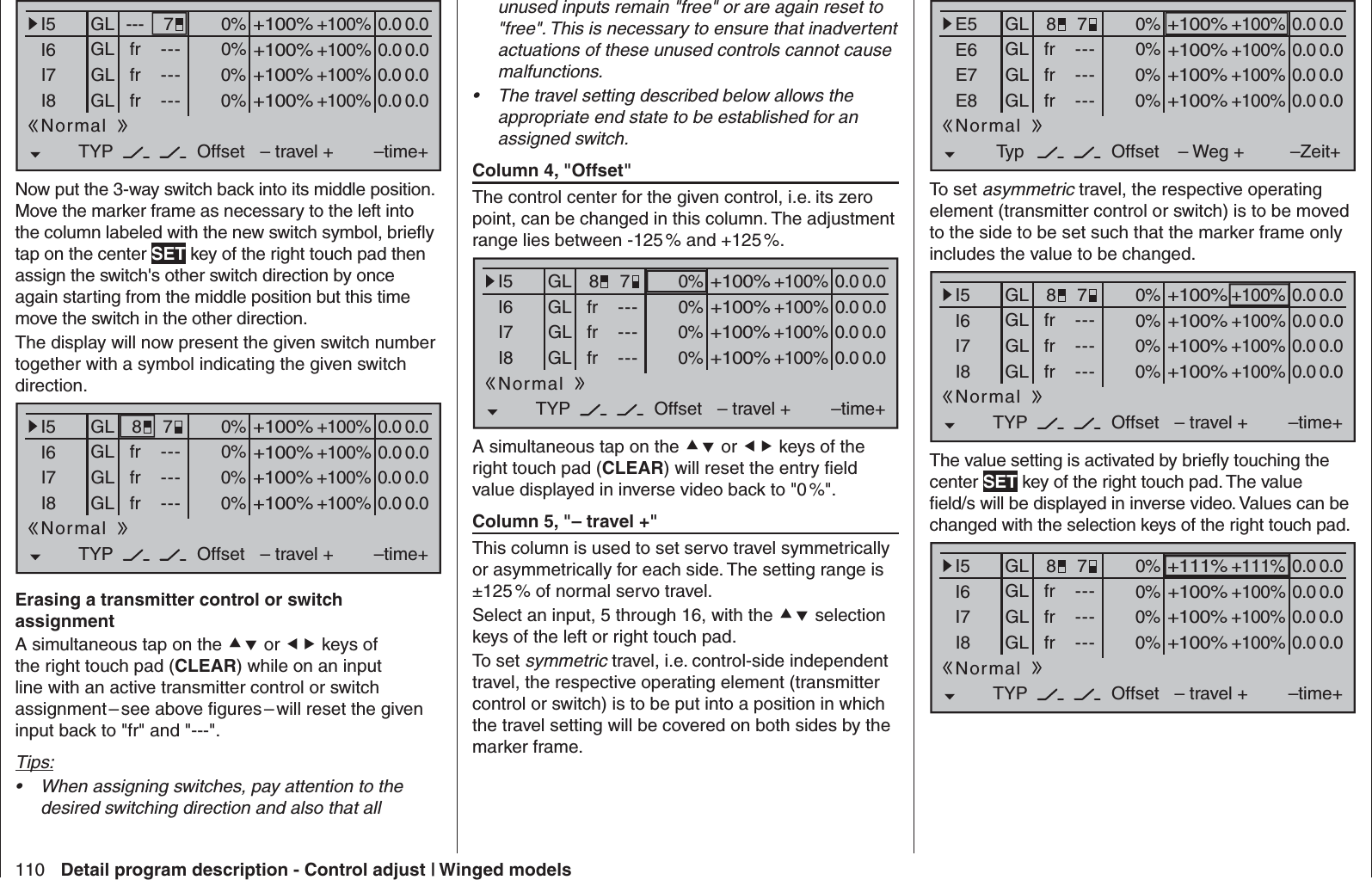
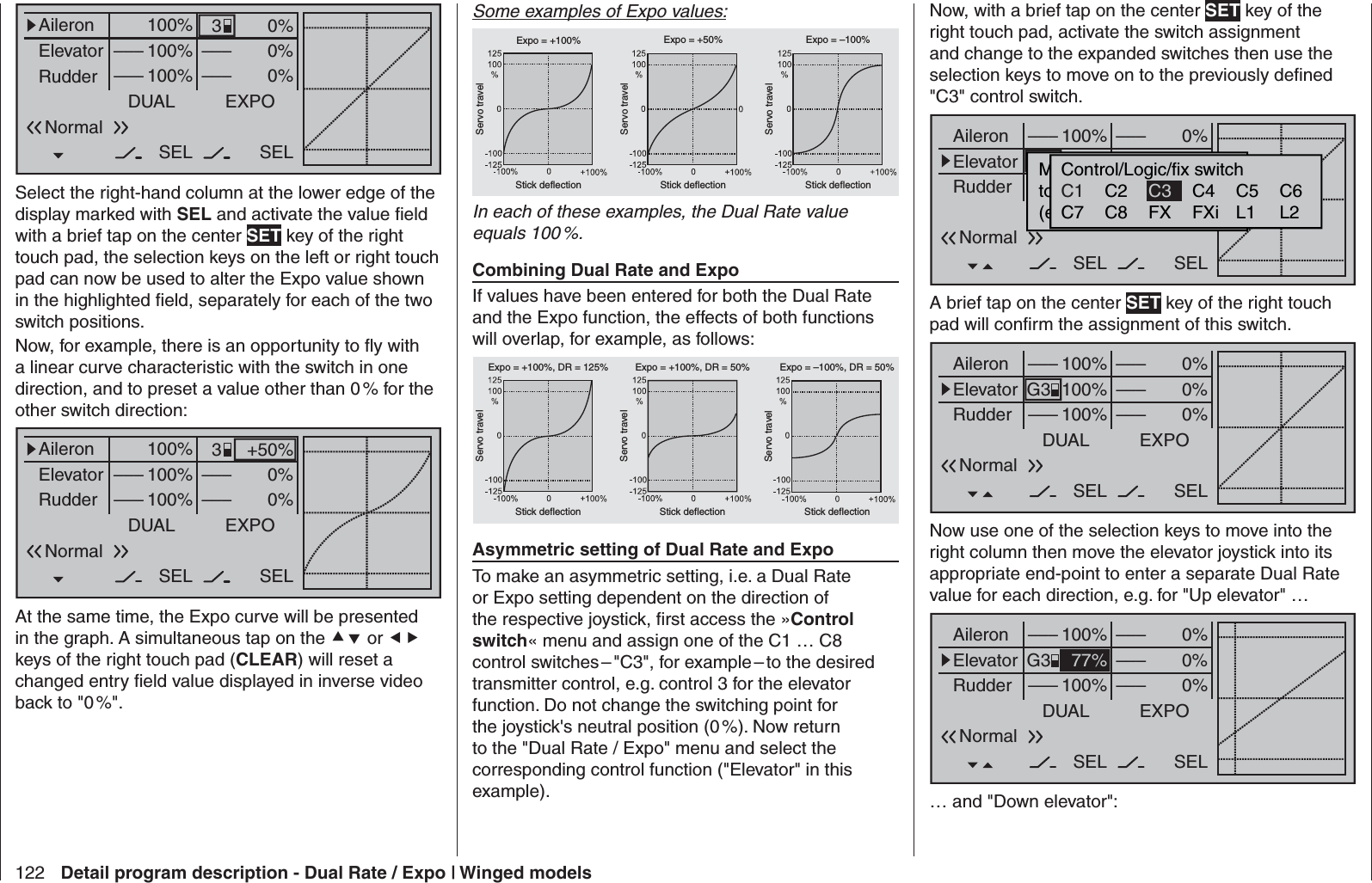
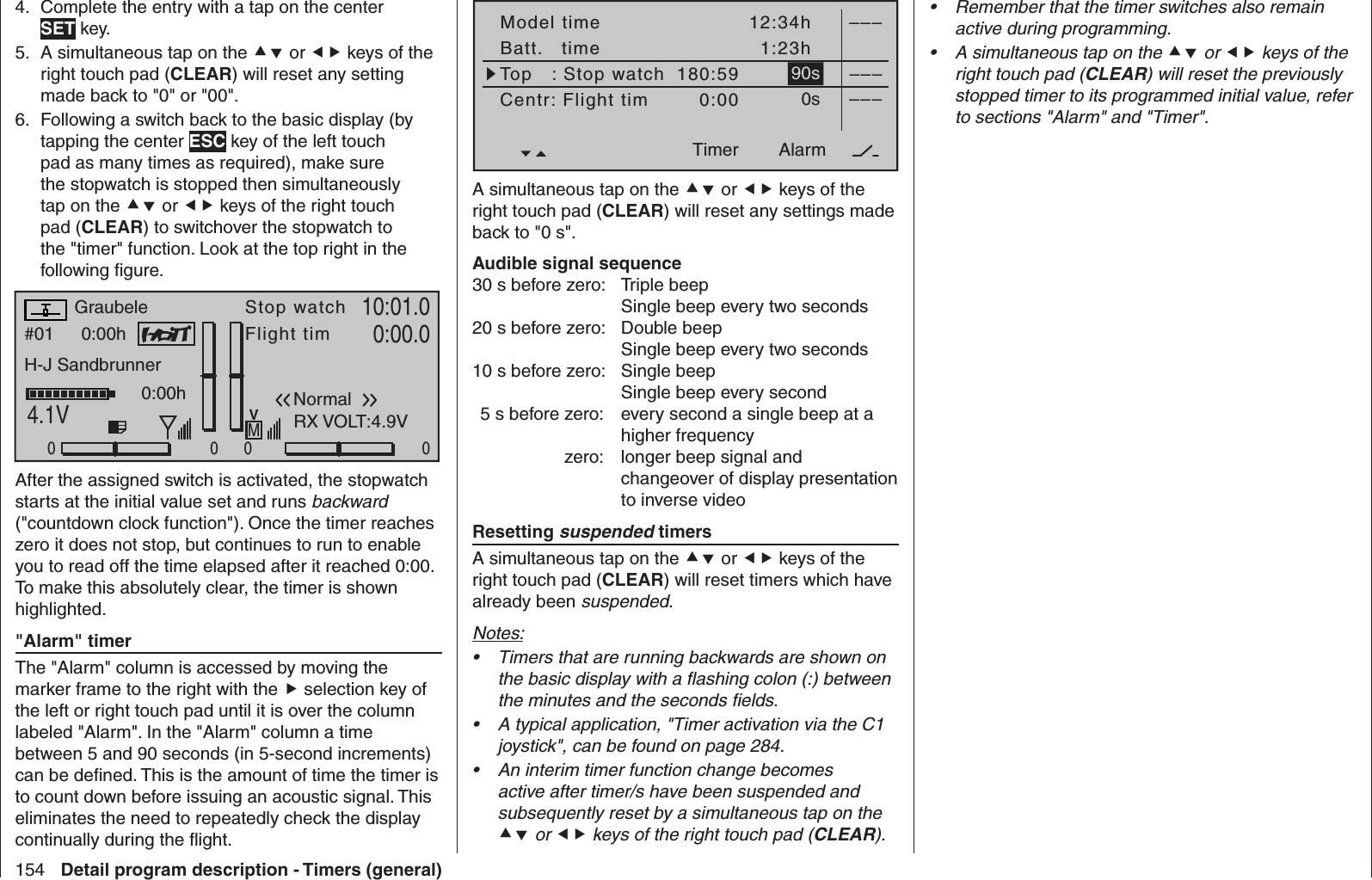
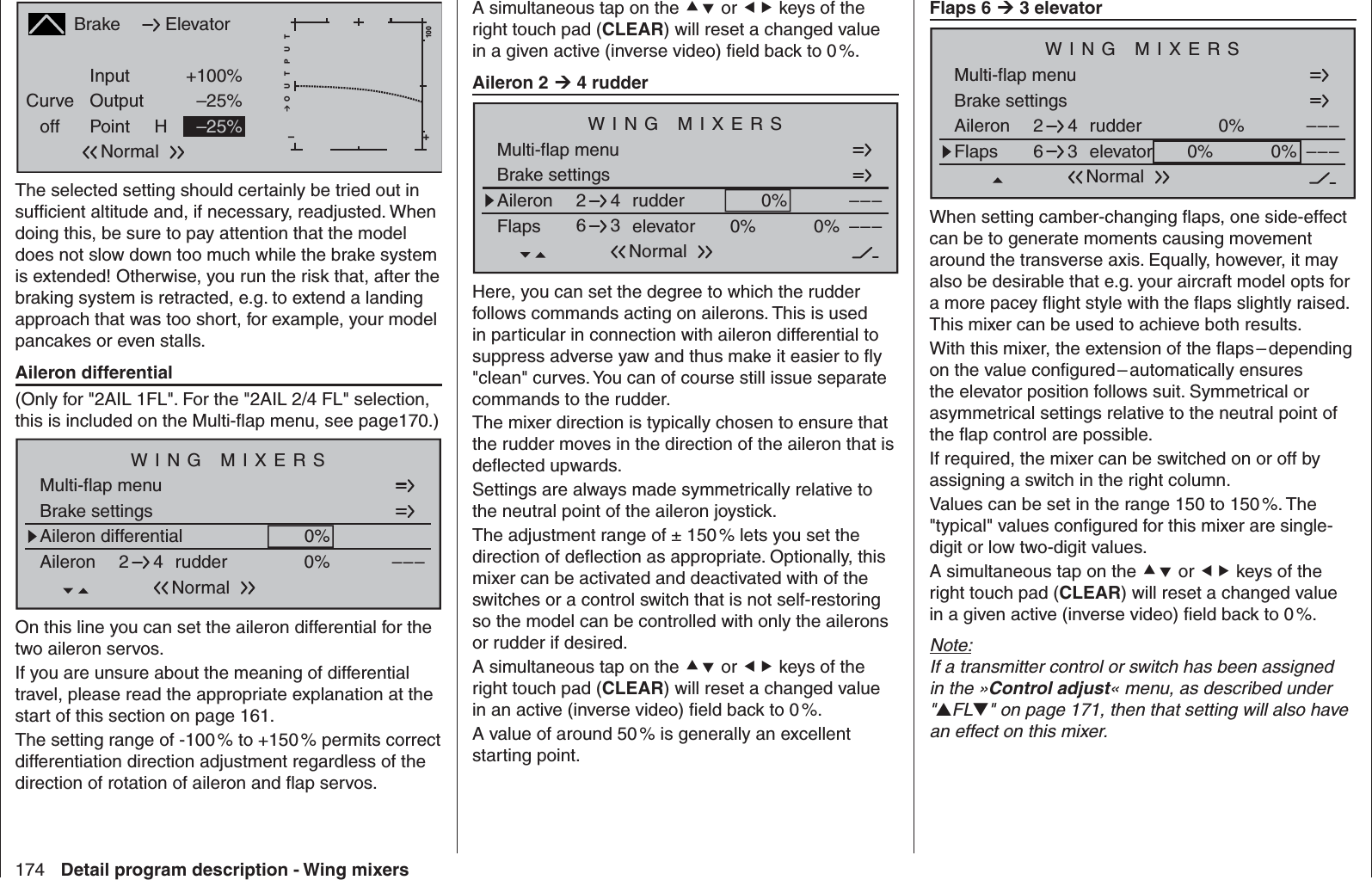
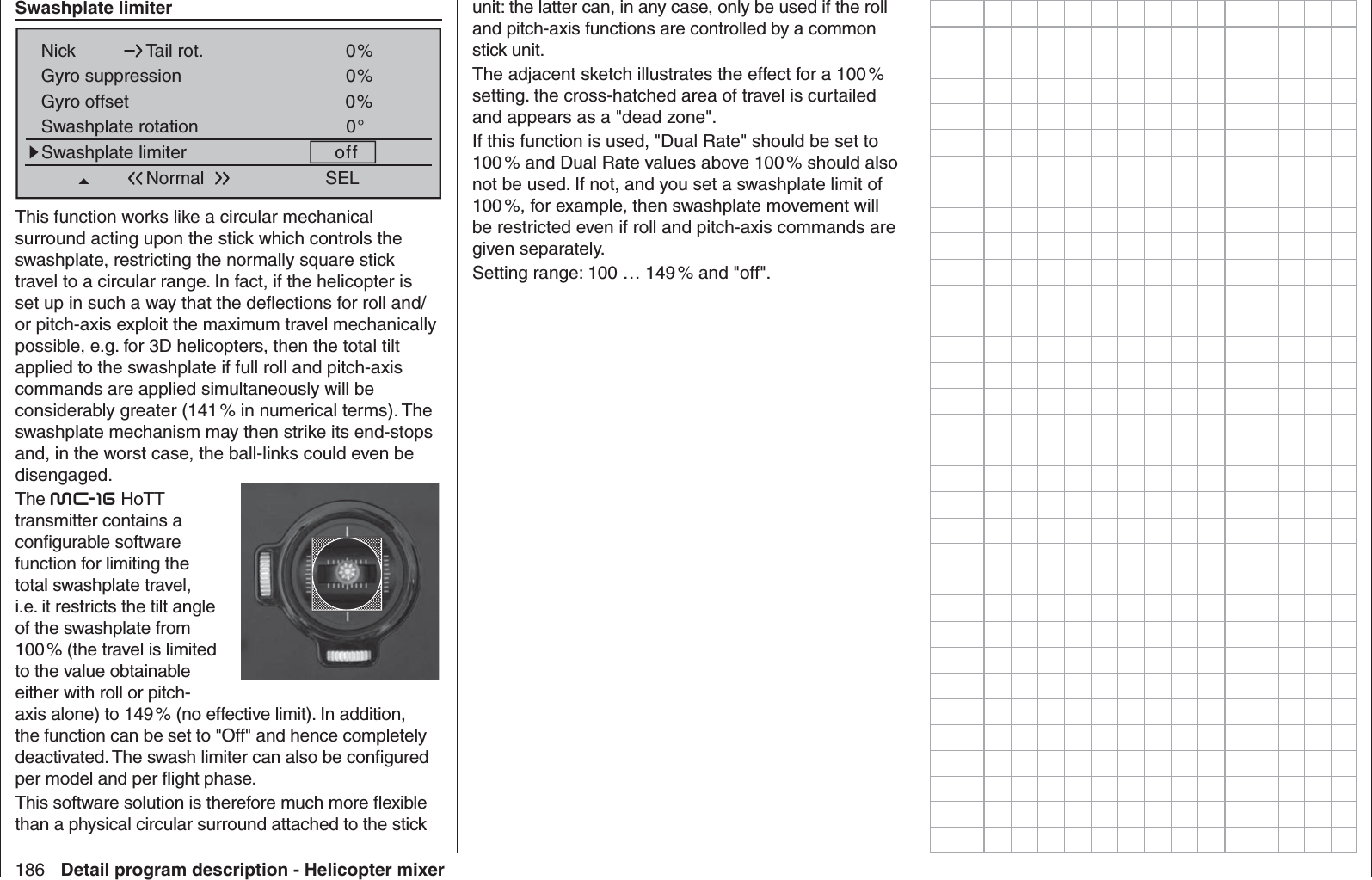
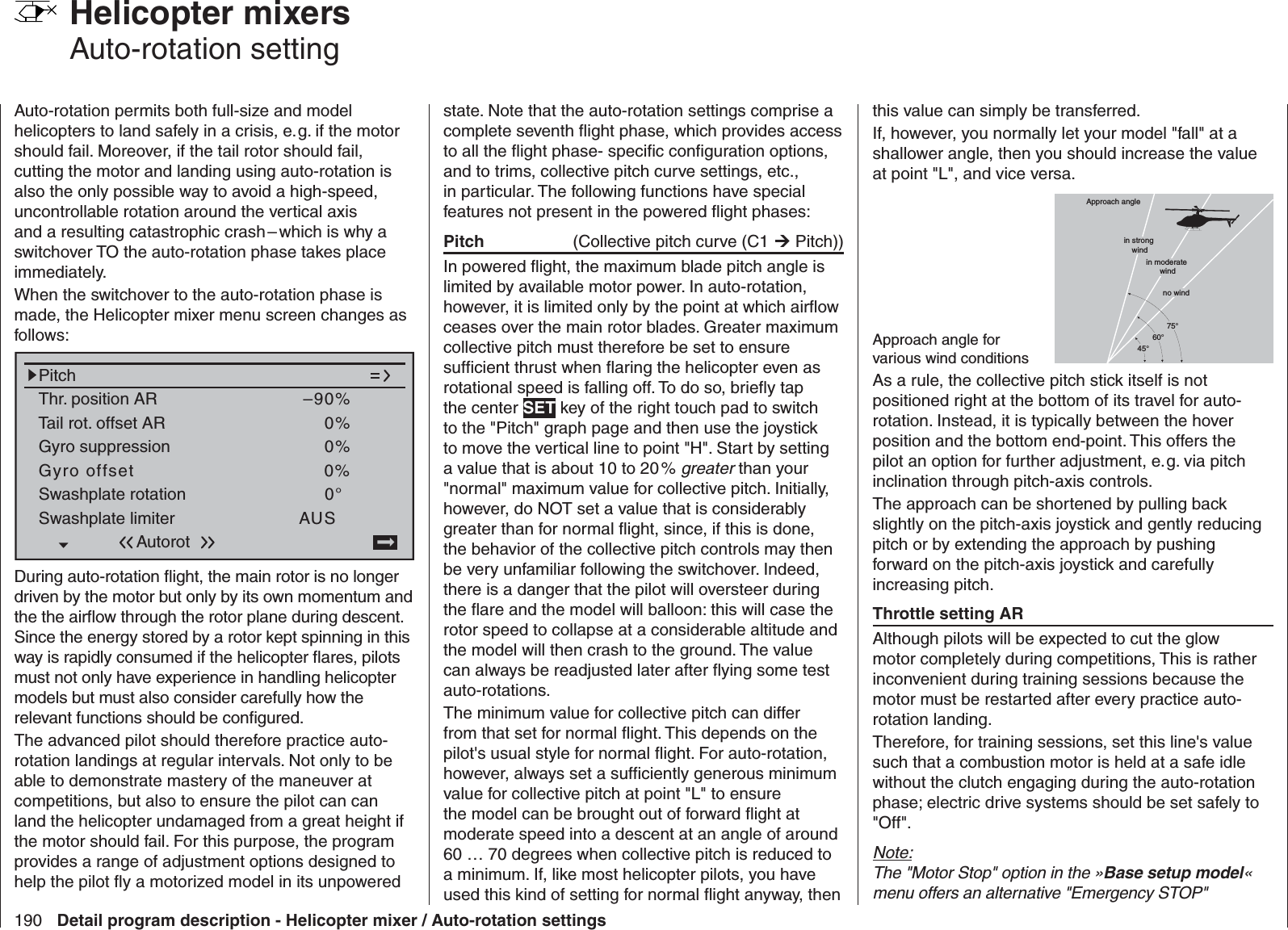
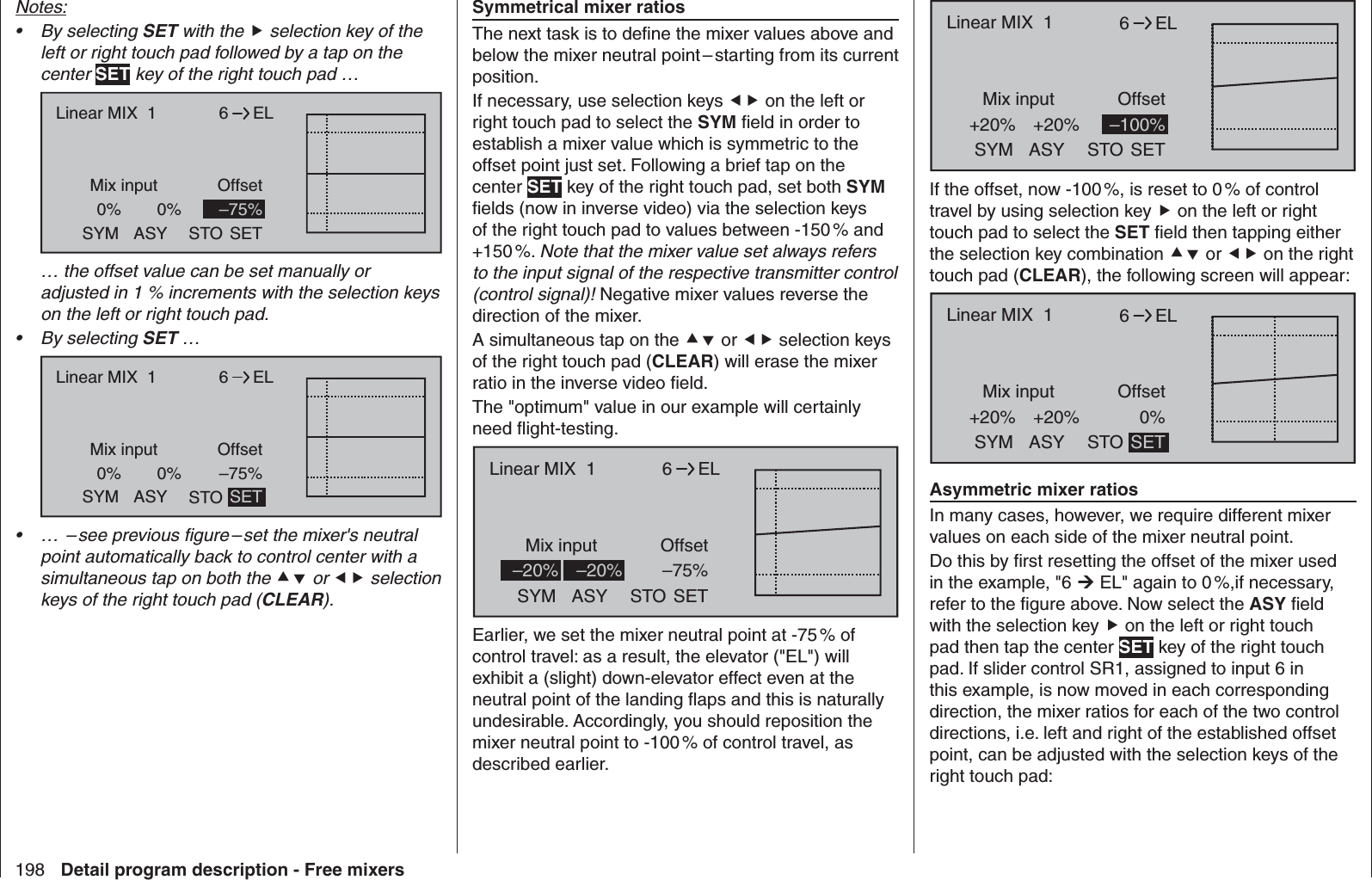
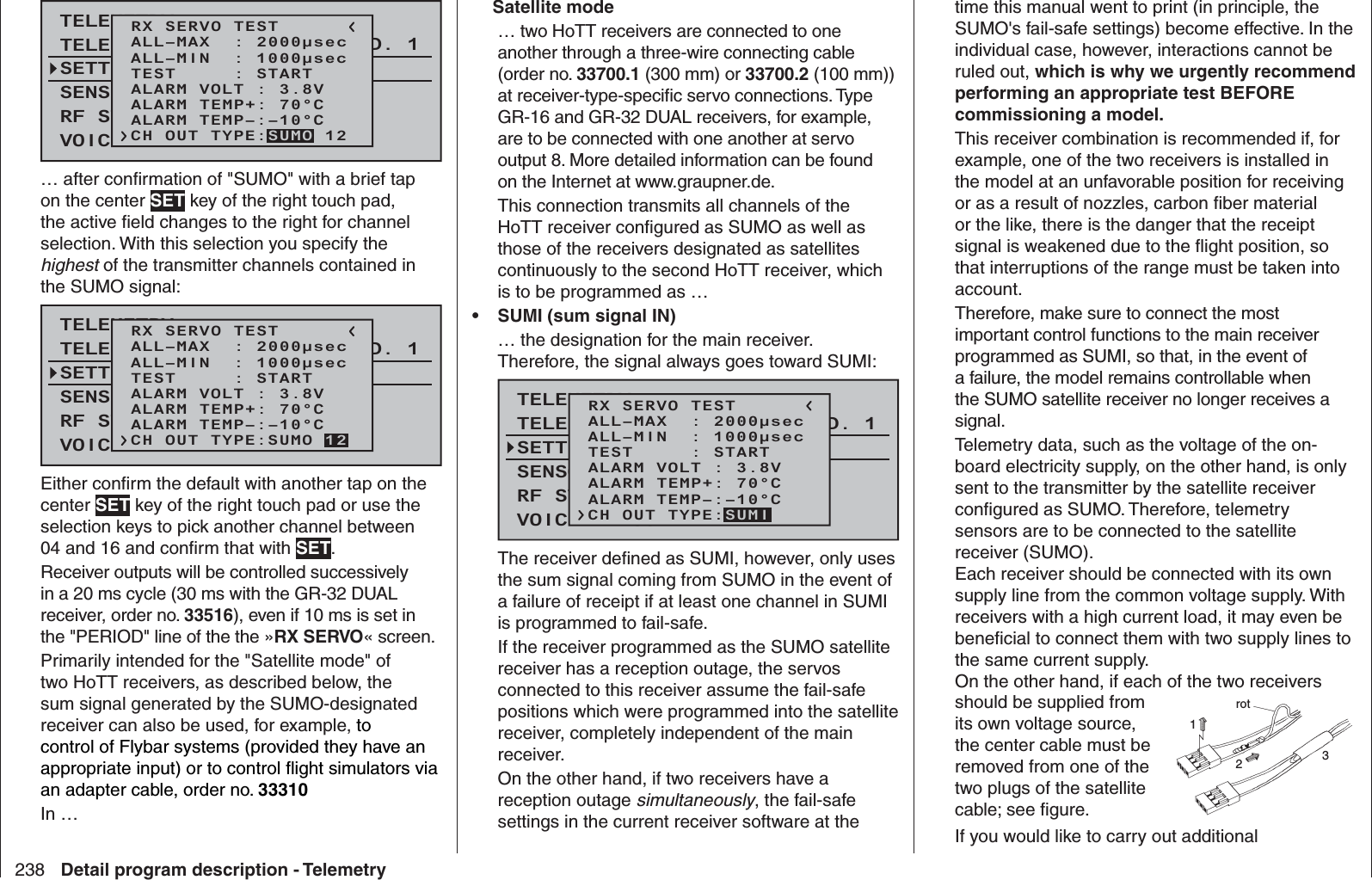
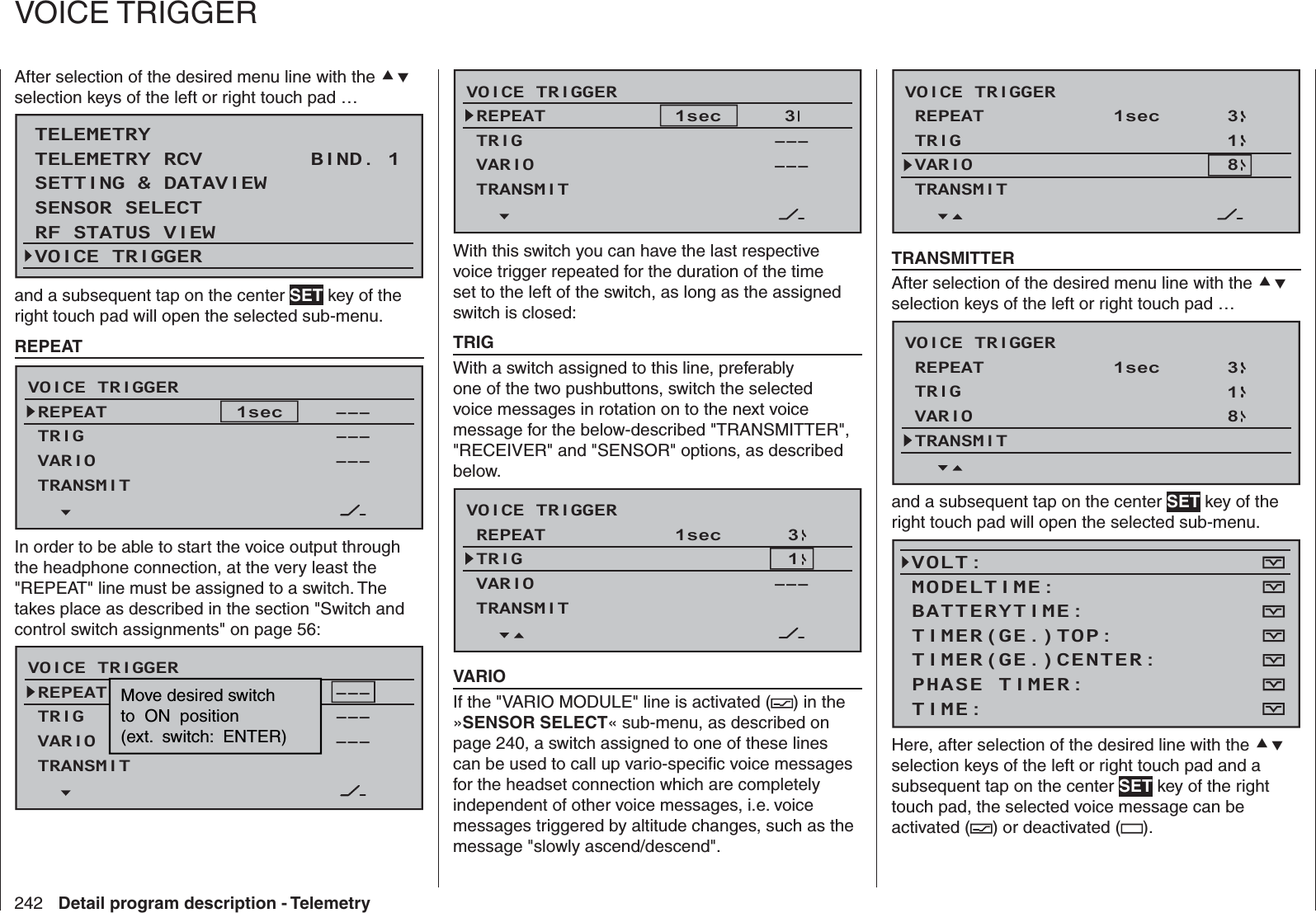
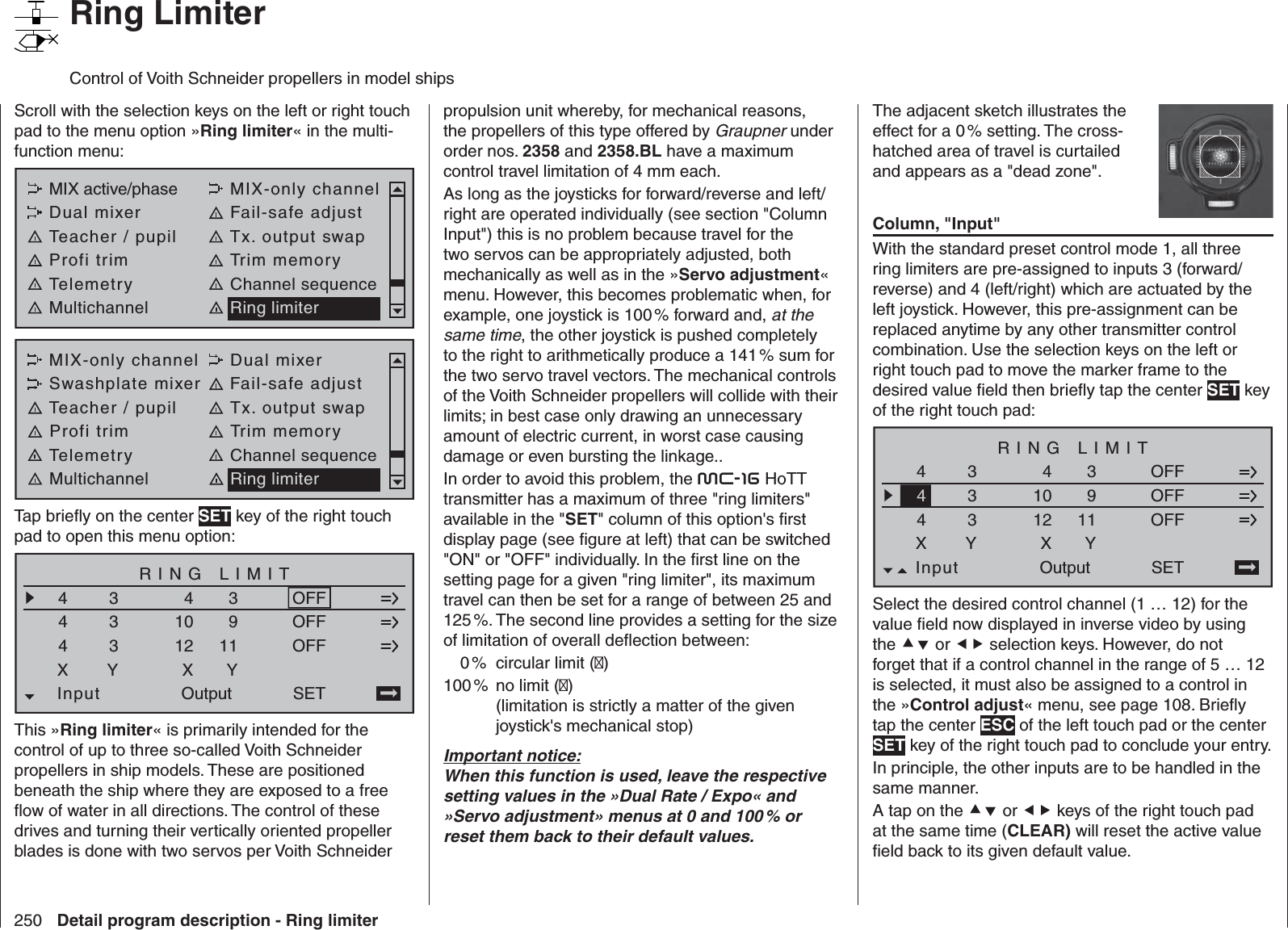
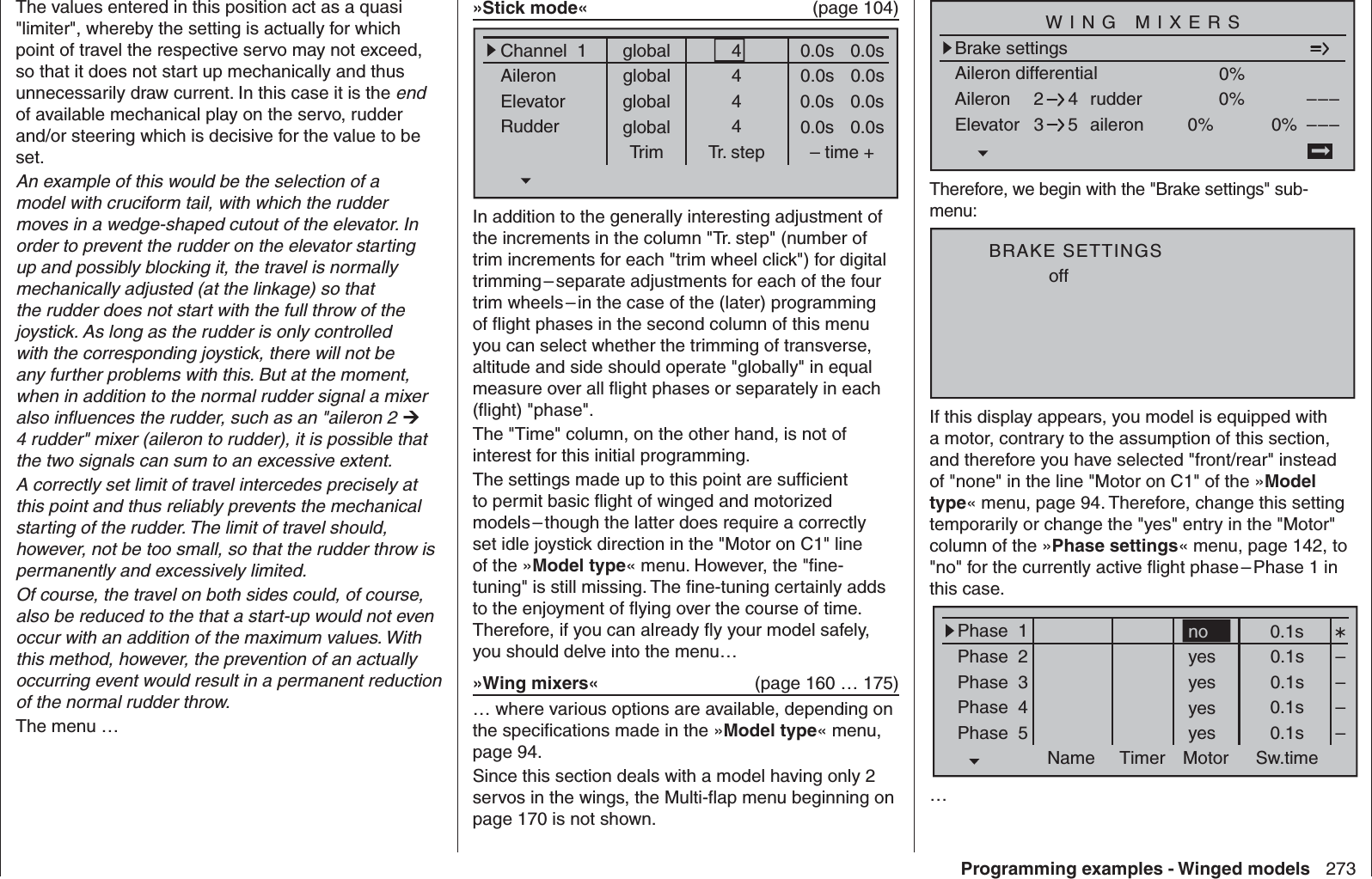
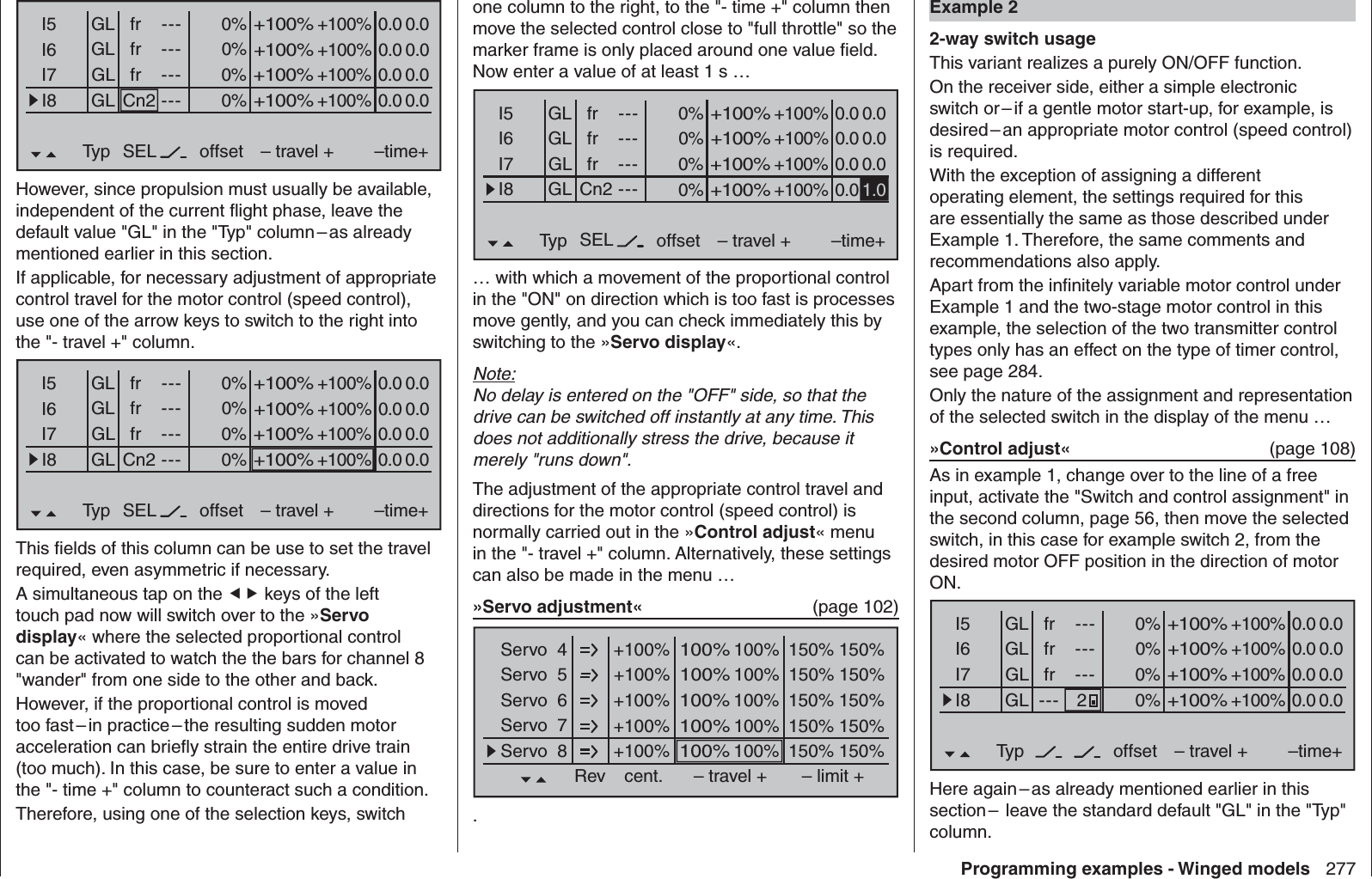
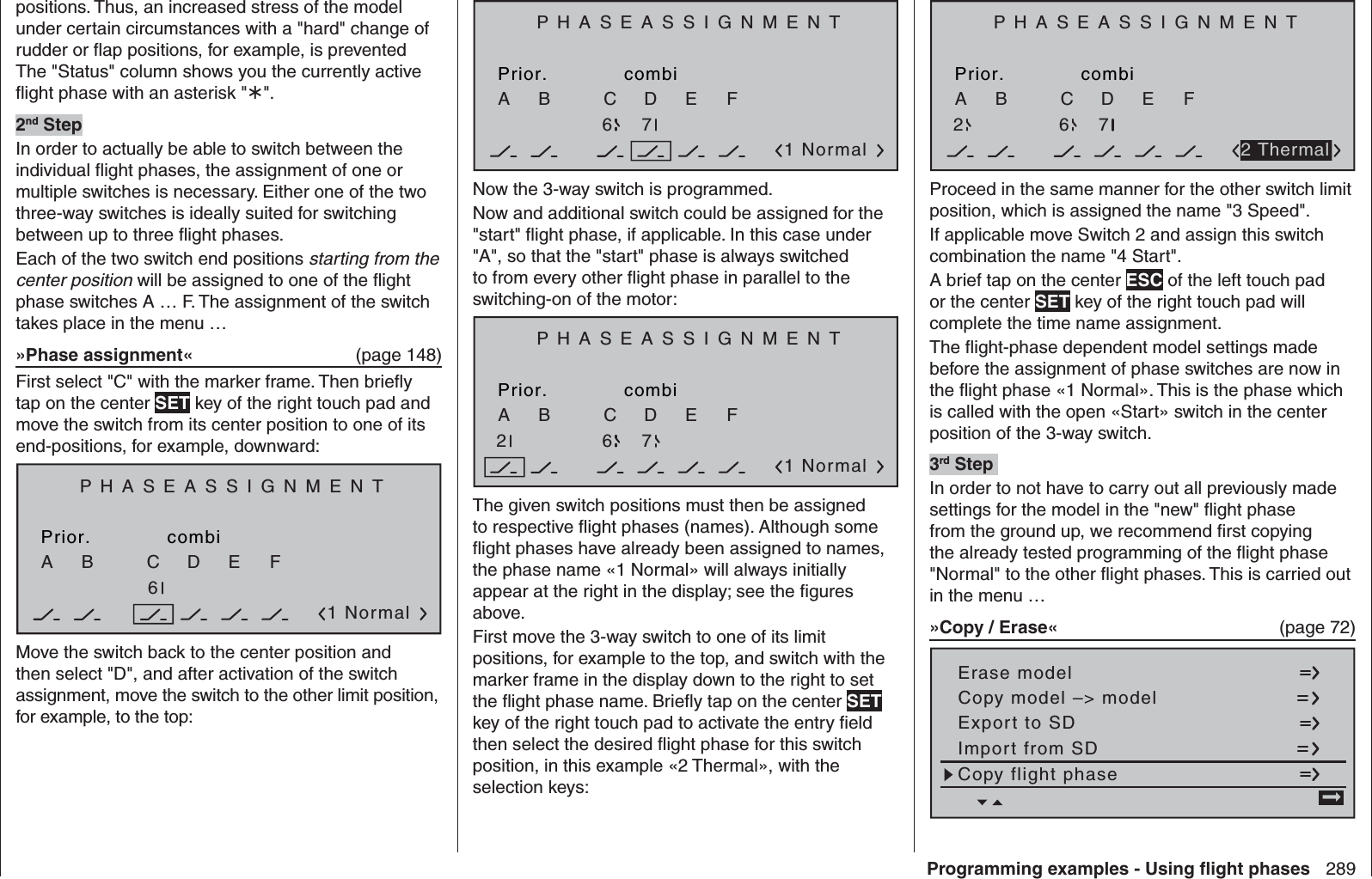
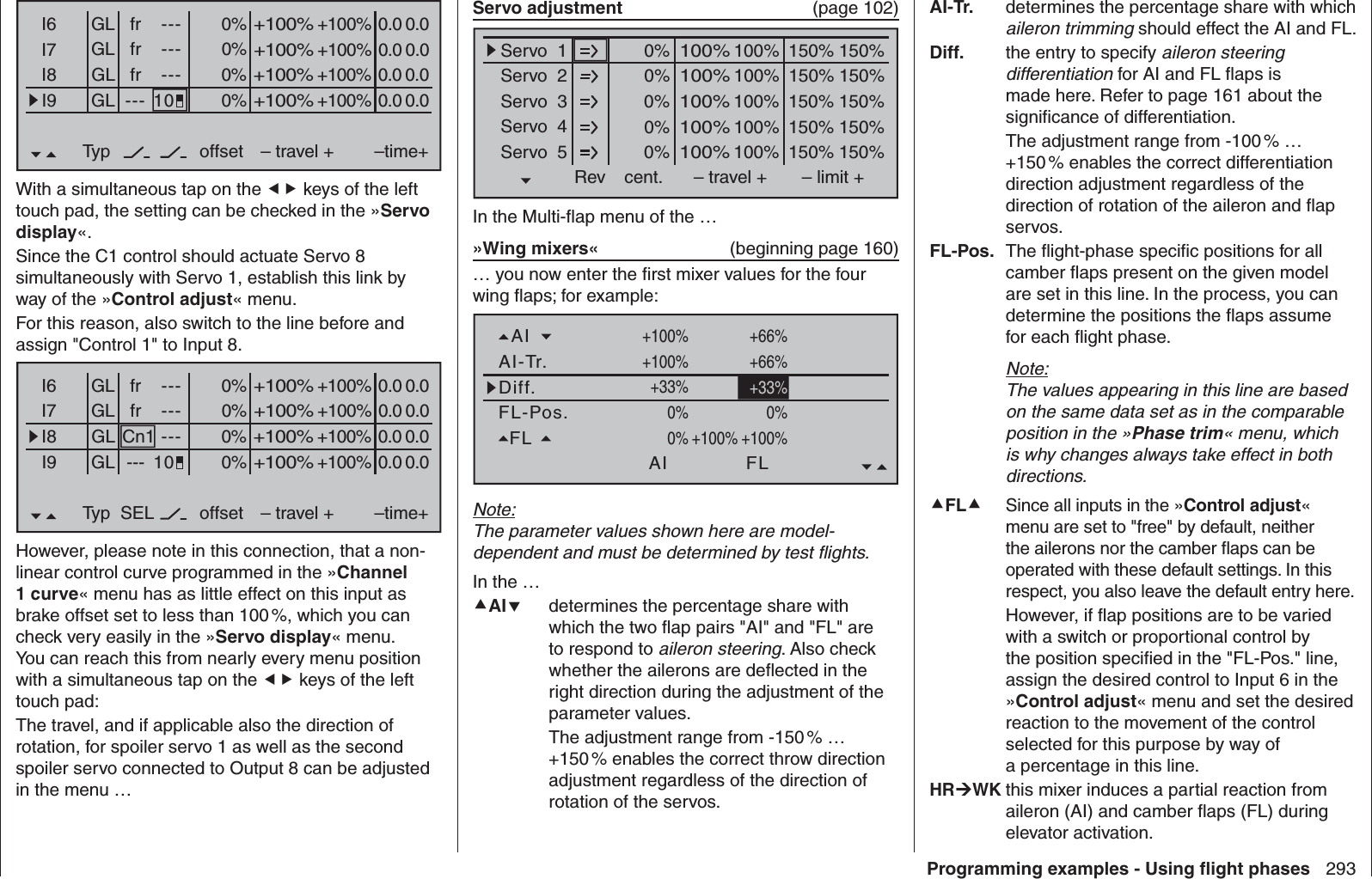
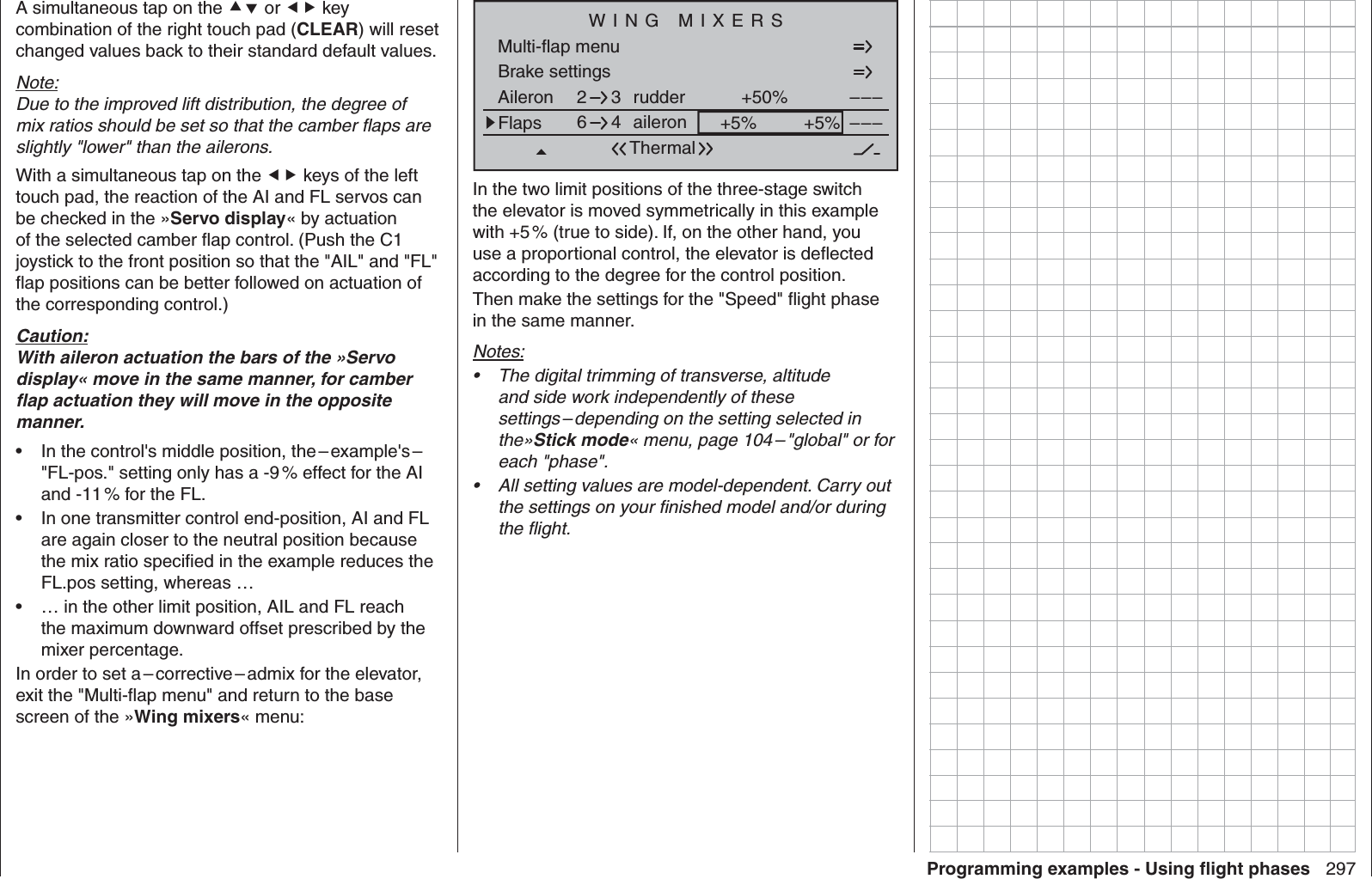
![261Detail program description - Basic settingsA simultaneous tap on the or selection keys of the right touch pad (CLEAR) will reset the fi eld shown in inverse video back to "2". RegionSELGENERAL BASIC SETTINGSBattery warning 3.60VStick warning unlimTouch sense 2Region EUROThe region is needed for compliance with various regulations (FCC, ETSI, IC etc.). In France, for example, the operation of a remote control is only permitted within a limited frequency band. Therefore, region MUST be changed to "France" for the transmitter whenever it is operated in France. In no case may the Universal/EURO mode be used in France!A simultaneous tap on the or selection keys of the right touch pad (CLEAR) will reset the fi eld shown in inverse video back to "Euro". Own phase name 1 … 10GENERAL BASIC SETTINGSStick warning unlimTouch sense 2Region EUROOwn phase name 1Up to ten phase names can be freely specifi ed for one's own use. Each of these can be up to 7 characters long. The characters of the name are assembled by selecting them from a list. In addition to the standard names, these additional names will then also be available in all model memory locations.If possible, new phase name entries should begin with the "Own phase name 1" line.Change to the character table with a brief tap on the center SET key of the right touch pad: !"#$%&’()Own phase name@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~ANow the desired characters can be selected with the selection keys of the left touch pad. With a brief tap on the selection key of the right touch pad or its center SET key, move to the next position in which a character can be selected. A simultaneous tap on the or keys of the right touch pad (CLEAR) will place a space character at the current position.Positioning to any character position within the entry fi eld can be done with the keys of the right touch pad.A return to the previous menu page is accomplished with a brief tap on the center ESC key of the left touch pad.](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-211.png)
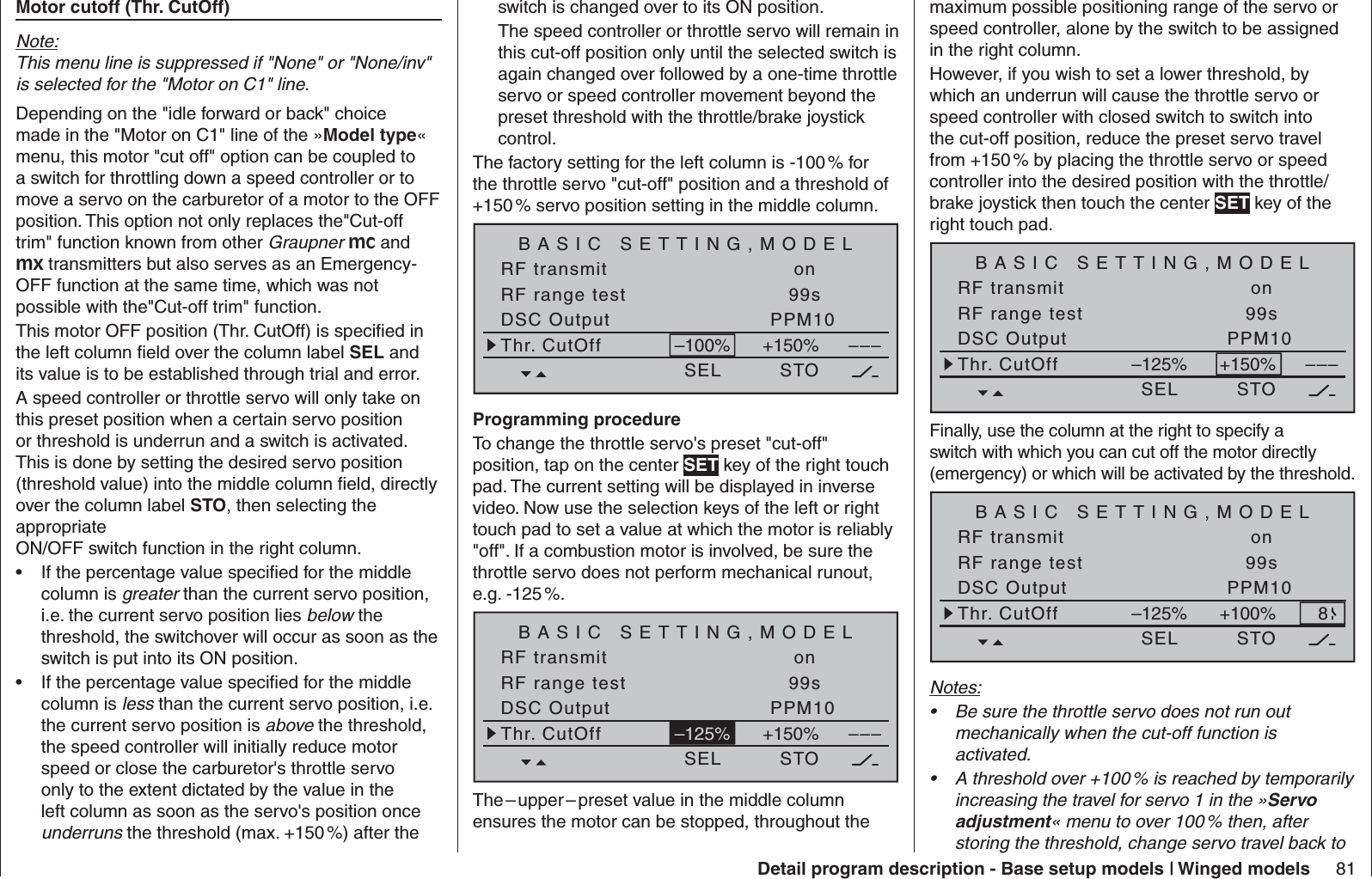
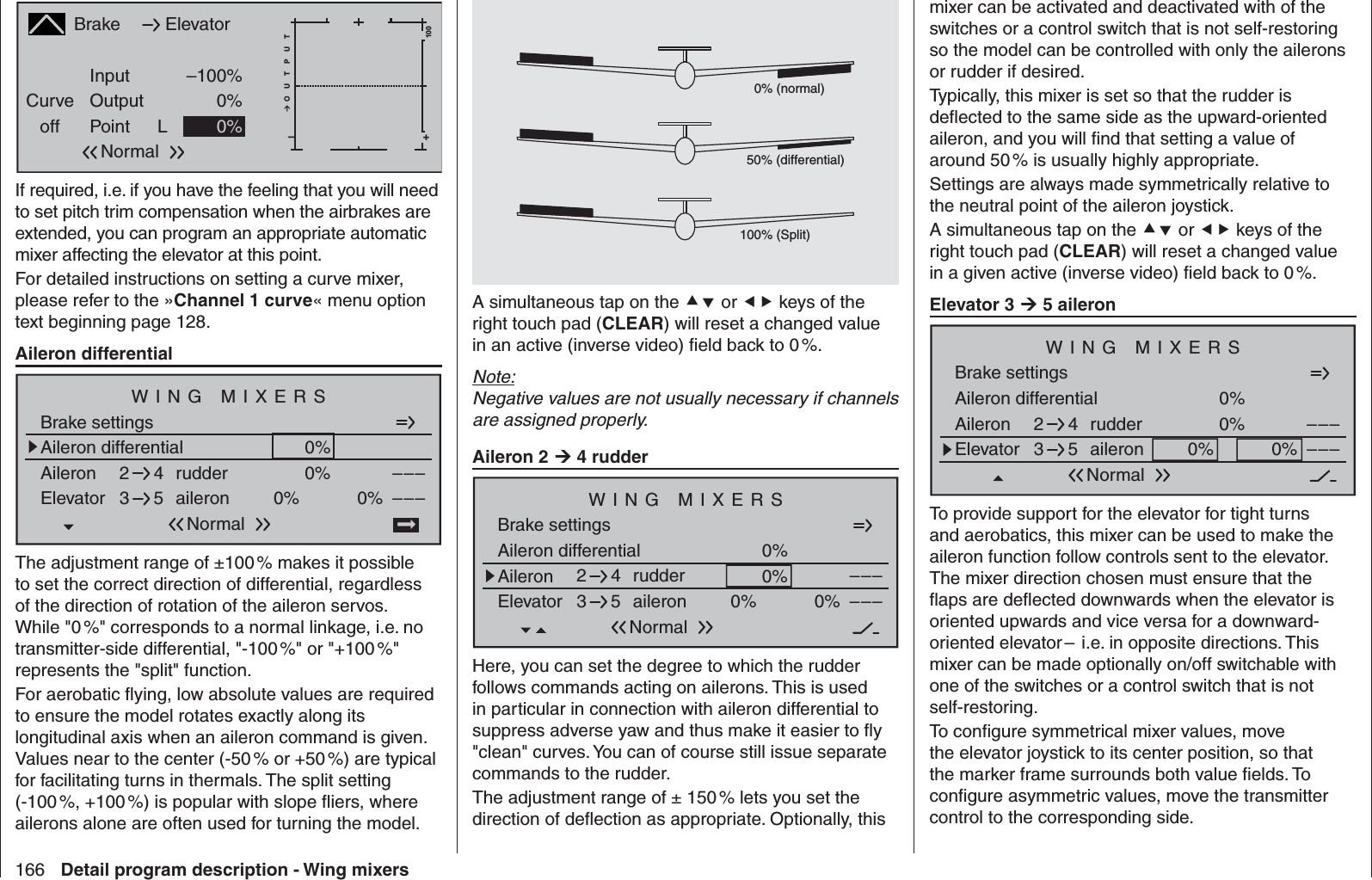
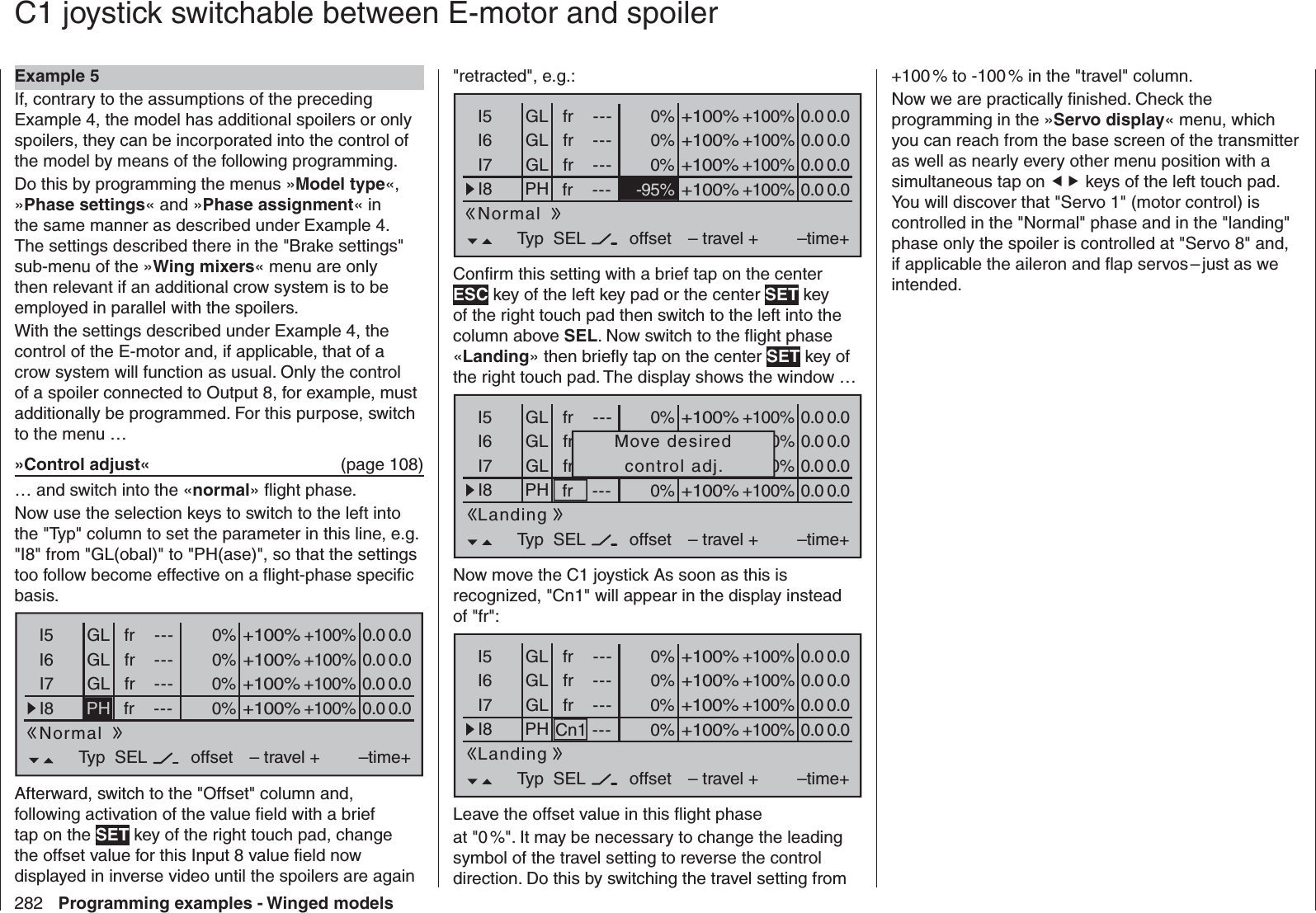
![271Programming examples - Winged modelsSelect model type ( free model memory )Since the objective is to work with a winged model in this section, the symbol for a winged model is to be confi rmed with a tap on the center SET key of the right touch pad. The display switches back to the base screen.Notes:Of course, you can also use the predefi ned default • "winged model" supplied with the receiver as model memory 01 for the programming of your fi rst model.Once the "Select model type" option has been • opened, the process can no longer be canceled! Even if you switch off the transmitter, this selection must be made! After a selection has been made, the selected model memory can only be made "free" again by subsequent erasing.If battery voltage is too low, the model switchover • cannot be made due to reasons of safety. An appropriate message will appear in the screen:not possible nowvoltage too lowOnce this fi rst hurdle has been taken, the binding of the receiver built into the model to this model memory can be done in the menu …»Basic settings, model« (page 76 … 83). To this end, switch to the line "Module".Model nameStick mode 1n/aBASIC SETTINGS, MODELInfon/an/aModule n/aHoTT SEL BD1 BD2 BD3 BD4Note:After confi rmation of the model selection in the base screen, if you confi rm the message appearing in the screen for a few seconds …BIND. N/AOK… with a tap on the SET key of the right touch pad, this line is accessed automatically.In this line the binding process between model memory and receiver is initiated, as described in detail on page 77. Otherwise, you cannot address the receiver.Afterward, use the selection key of the left or right four-way pad to move up to the fi rst line and begin with the actual model programming in the "Model name" line.Model nameStick mode 1n/aBASIC SETTINGS,MODELInfon/an/aModule bindHoTT The "Model name" can now be entered here and, on the next line, an informative note about the model can be entered if necessary in the same manner, by a brief tap on the center SET key of the right touch pad to switch to the character table. !"#$%&’()Model name Graub@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~The pre-sets for "Stick mode", "Modulation" and "DSC Output" are adopted from data stored in the »General basic settings« menu and these should be reviewed and changed as necessary.In the menu …Model typeTail typeMotor on C1NormalNoneAileron/camber flaps 1 AILM O D E L L T Y PEBrake Offset Input 1+100%SEL… the principle arrangement of the servos in the model is selected and communicated to the transmitter. The following selections are available:"Motor at C1""none"• Trimming works independently of the joystick position and the "Brake settings" sub-menu of the »Wing mixers« menu, beginning page 160", is available without limitation.The "Throttle too high" warning message, see page 30 and/or 94, and the "Motor stop" option are deactivated.](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-221.png)
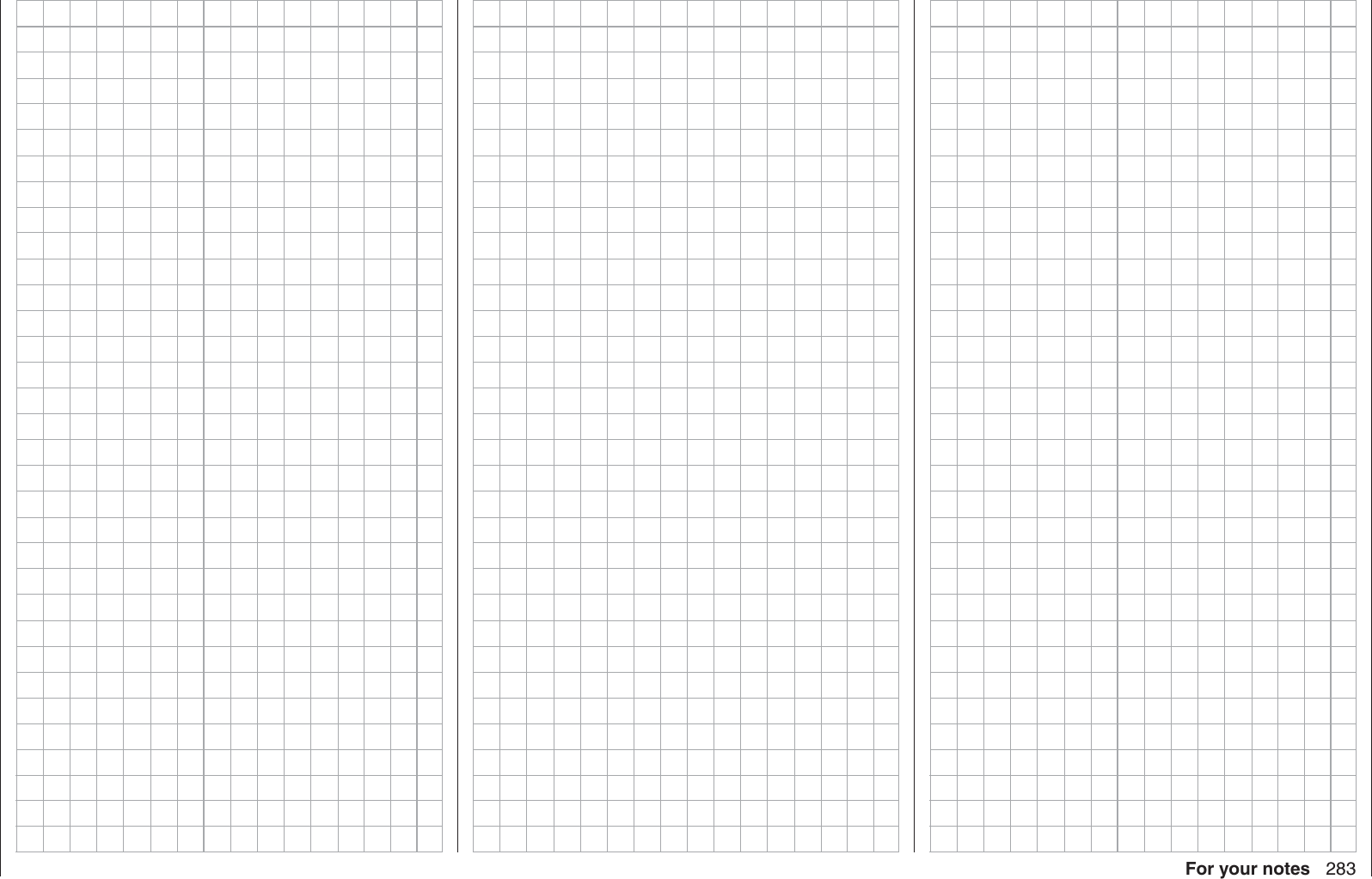
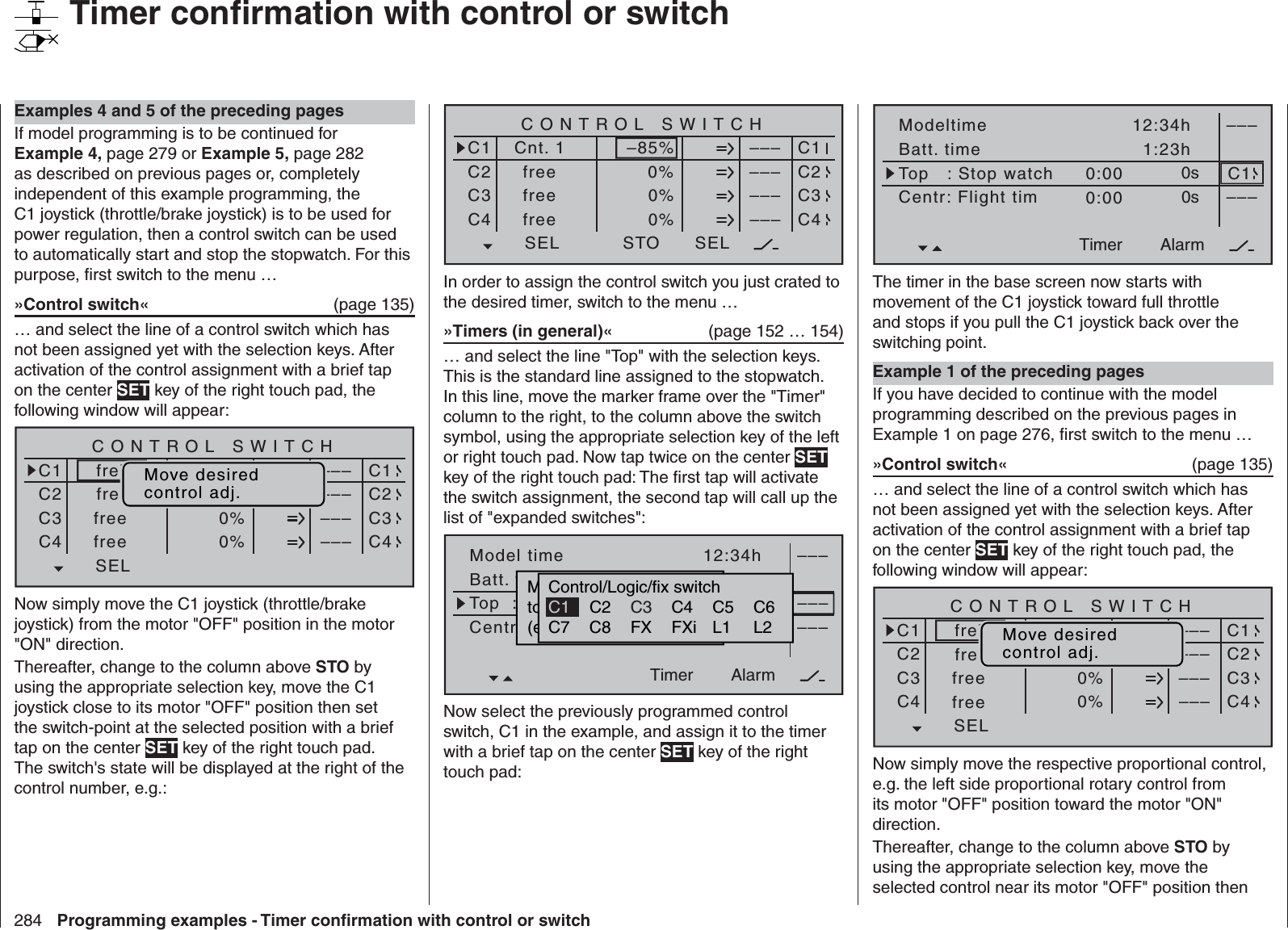
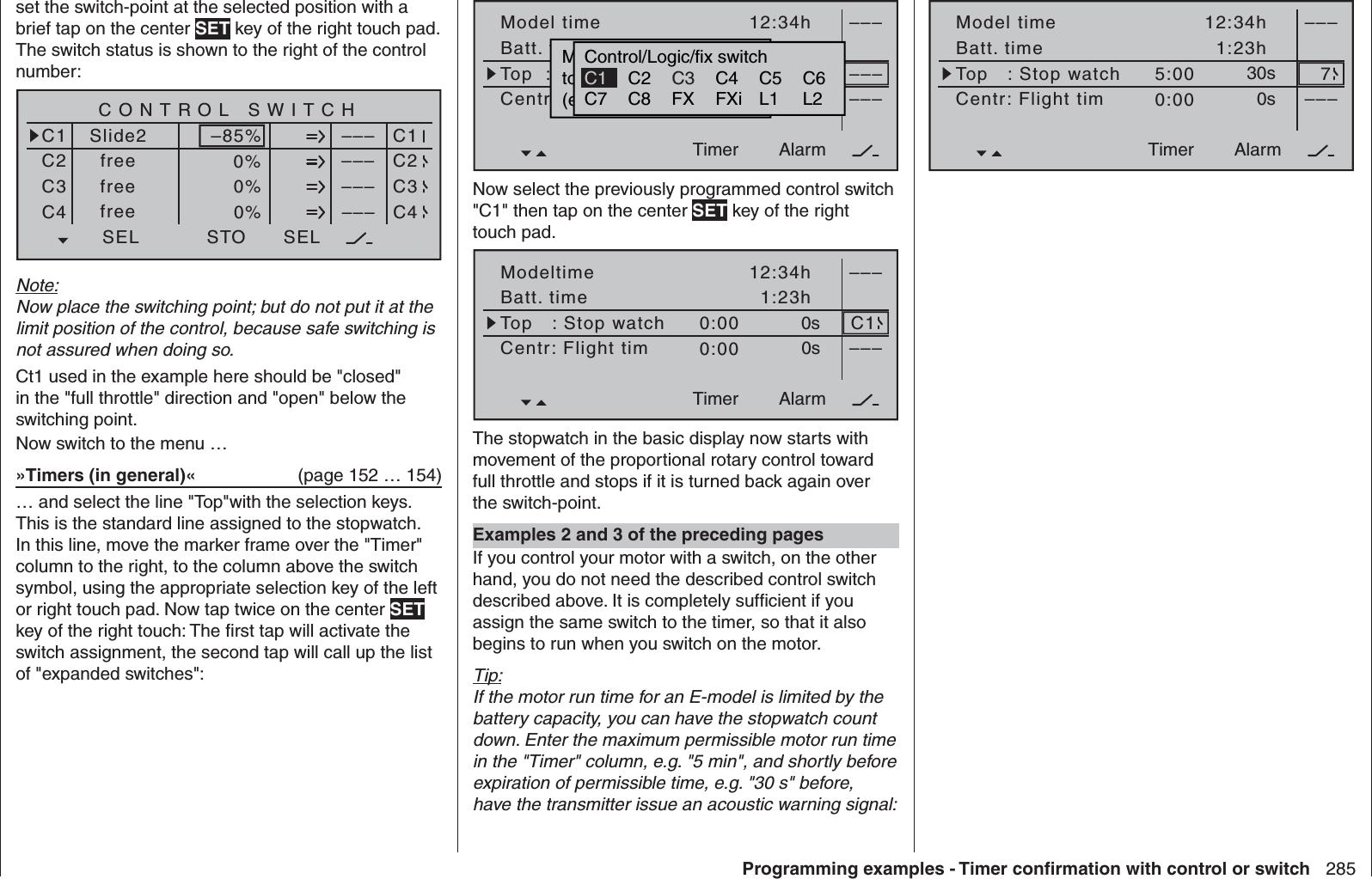
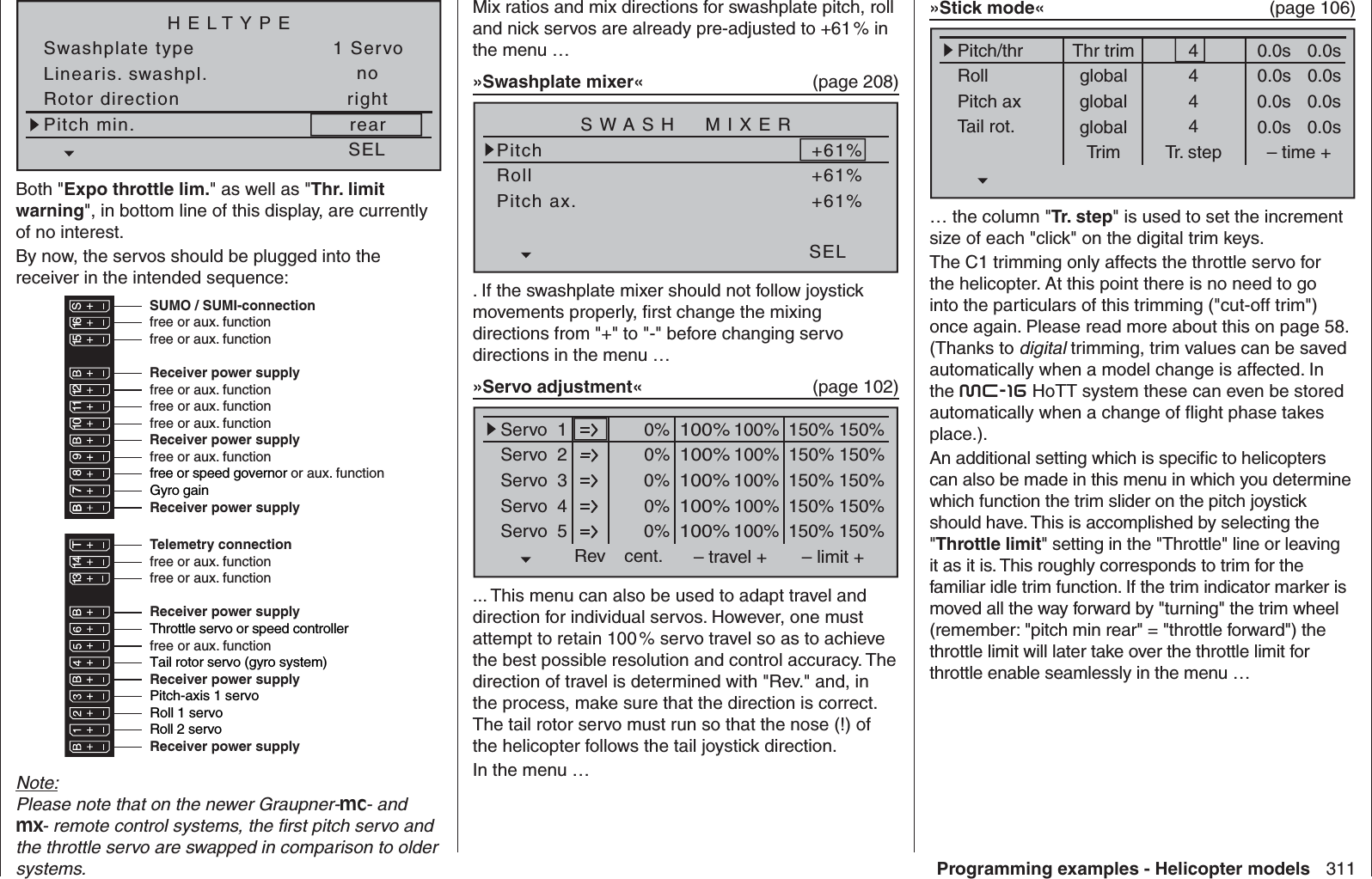
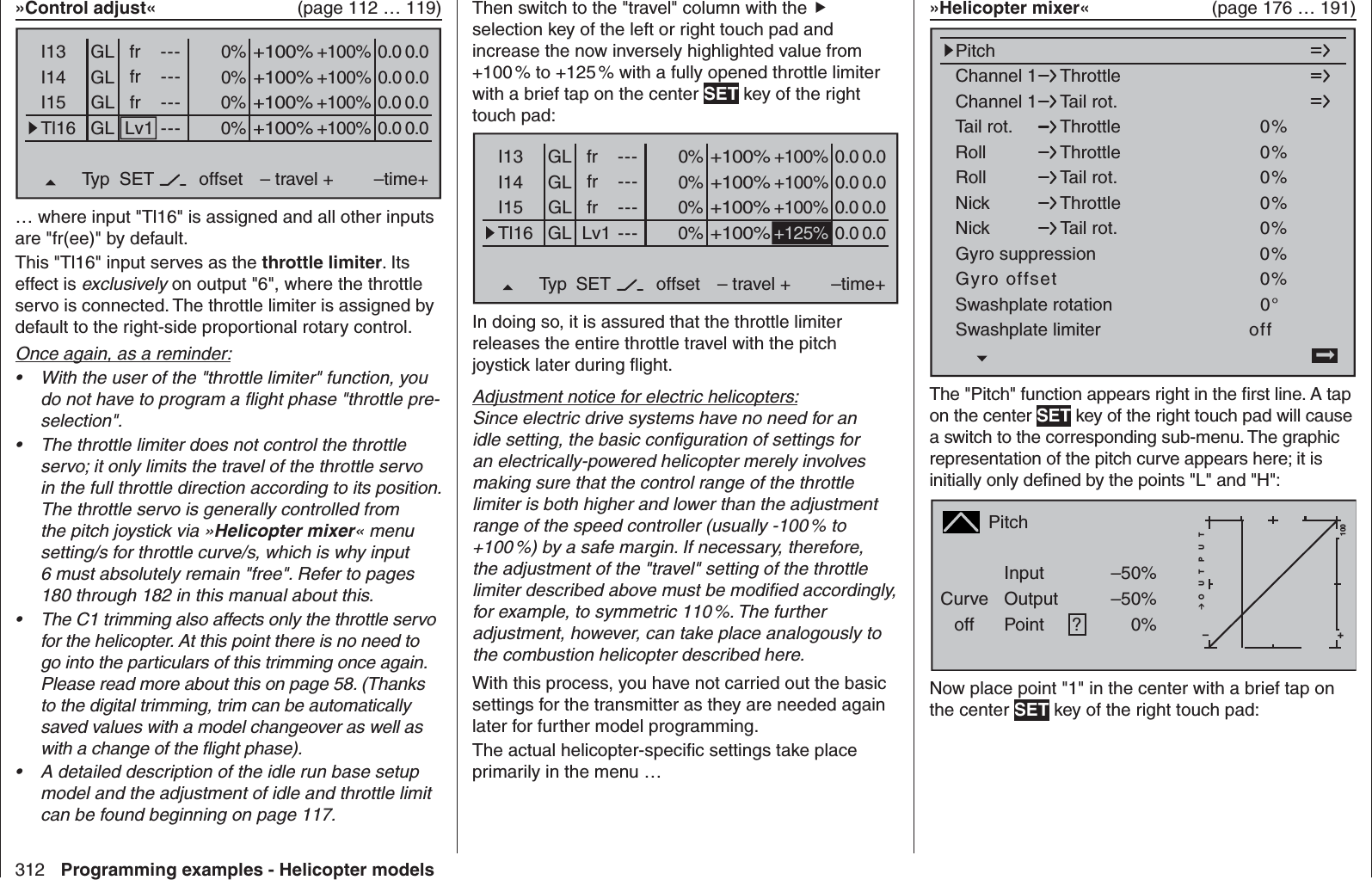
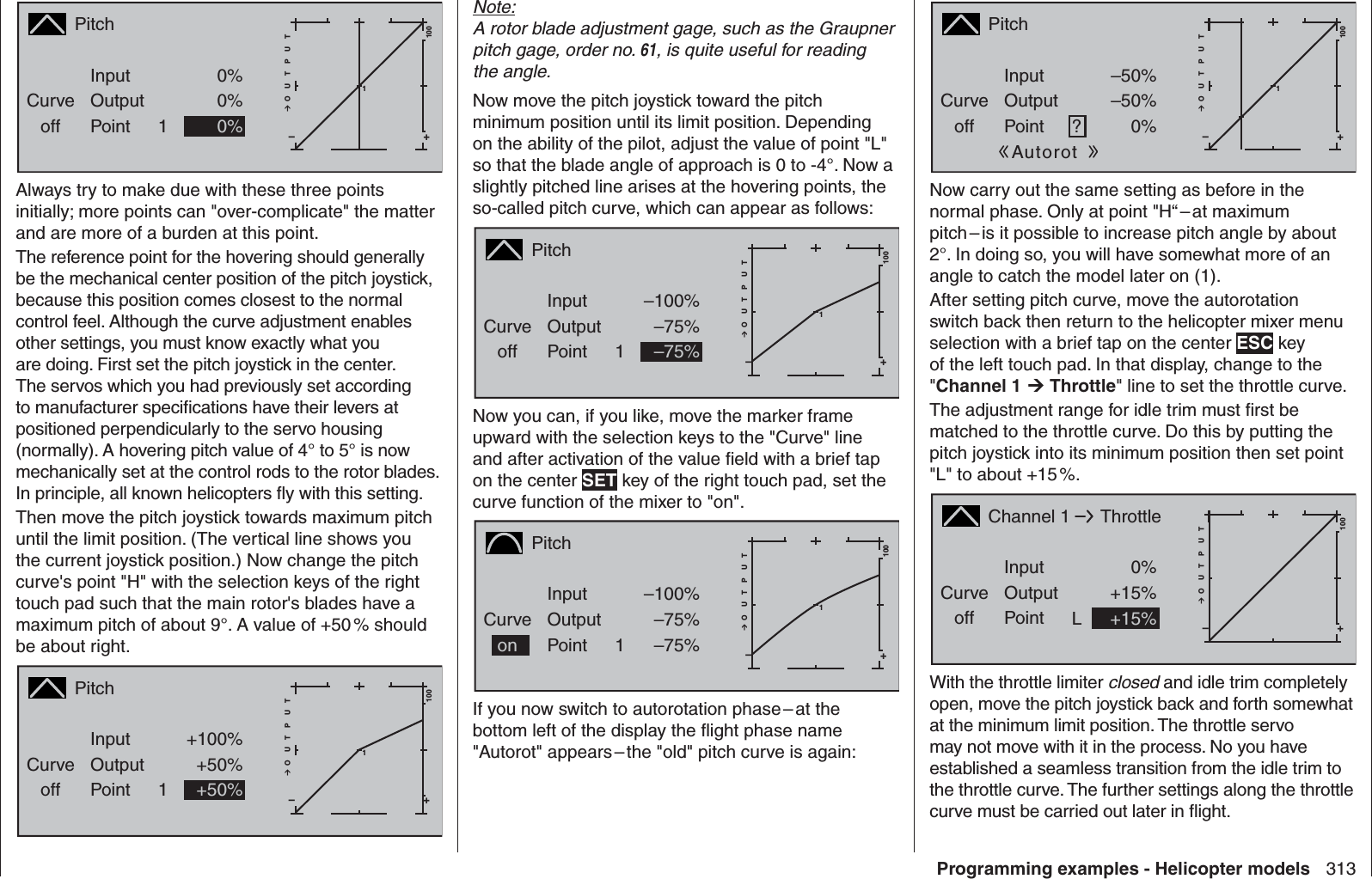
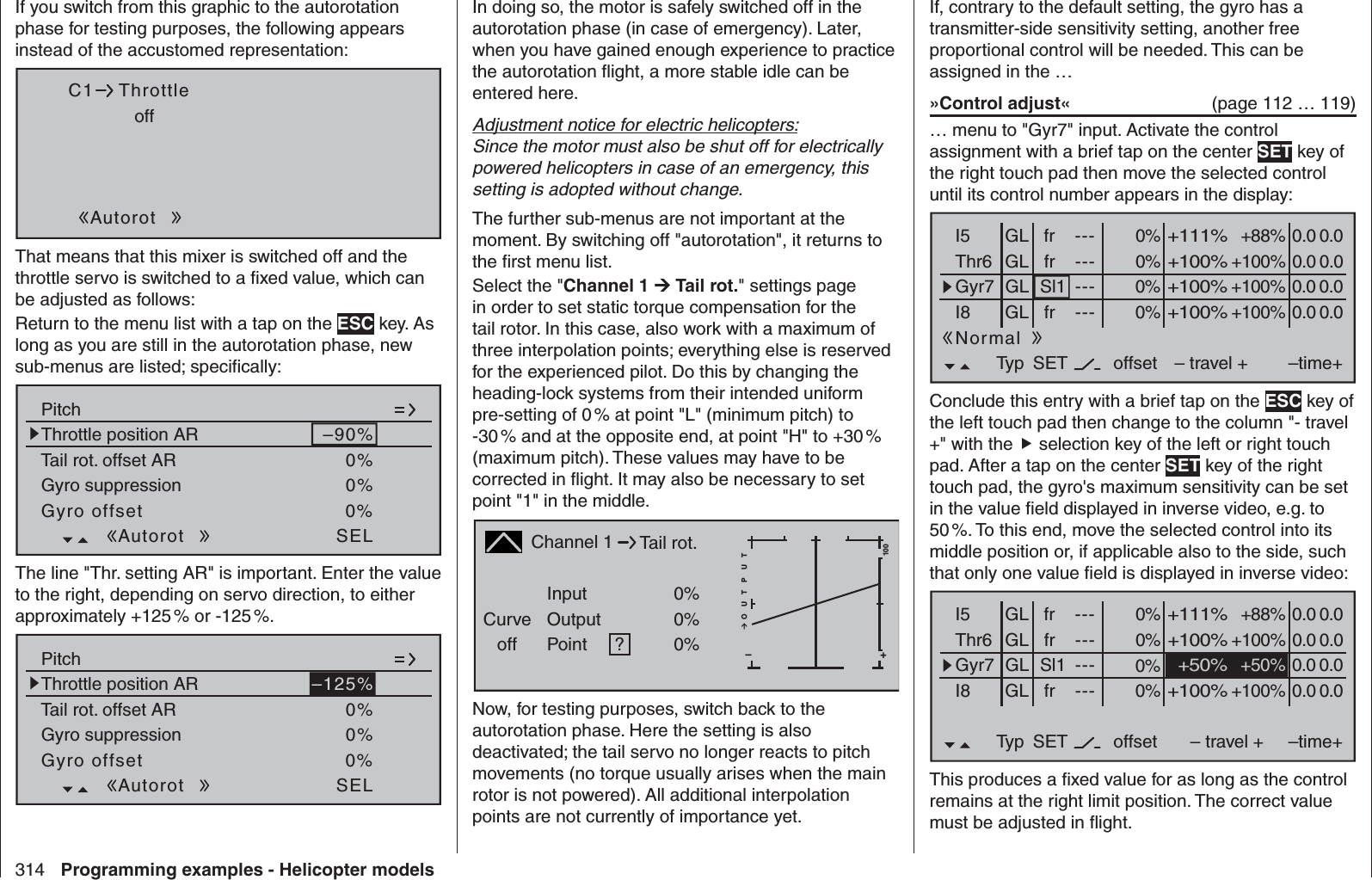
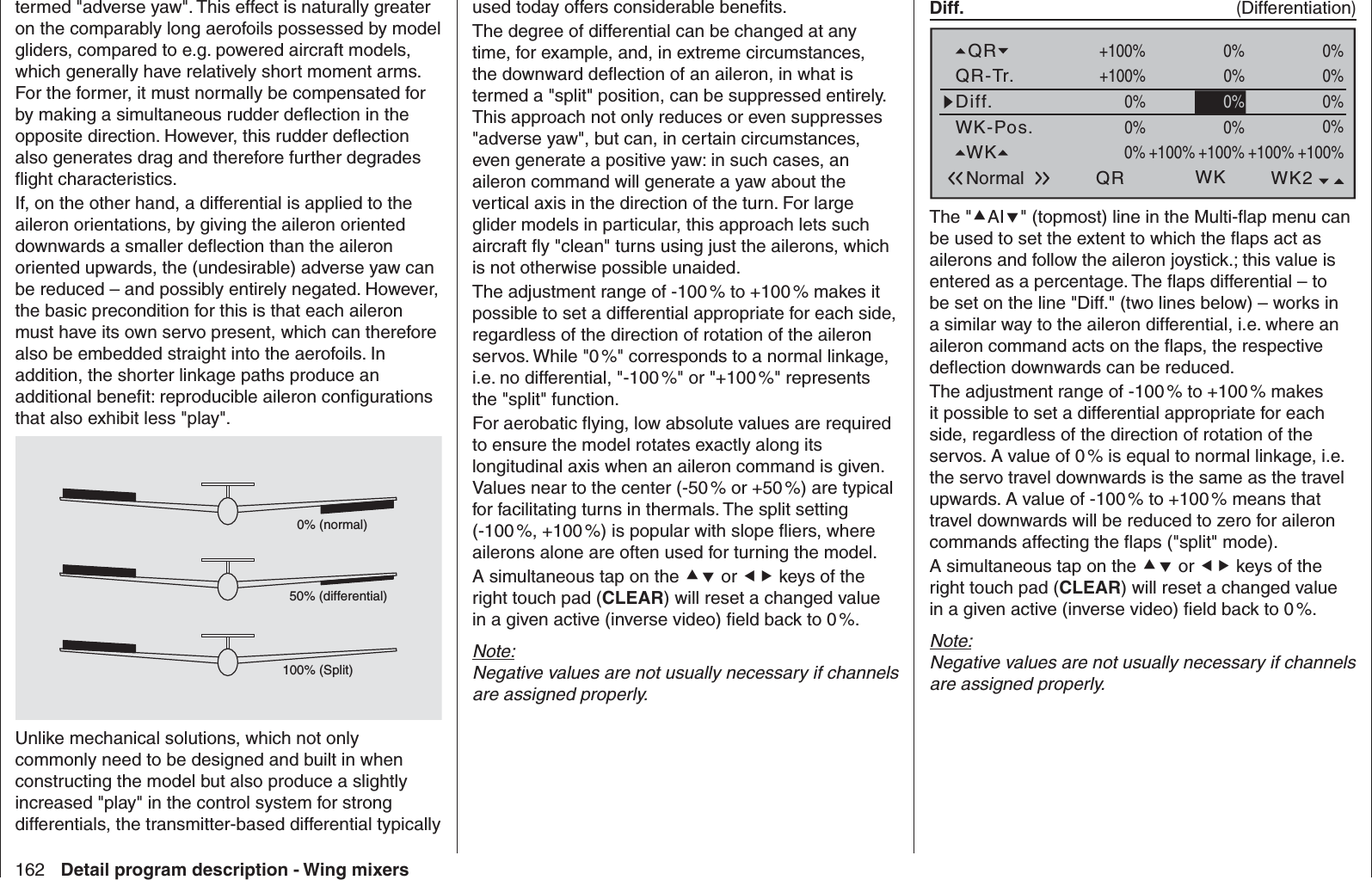
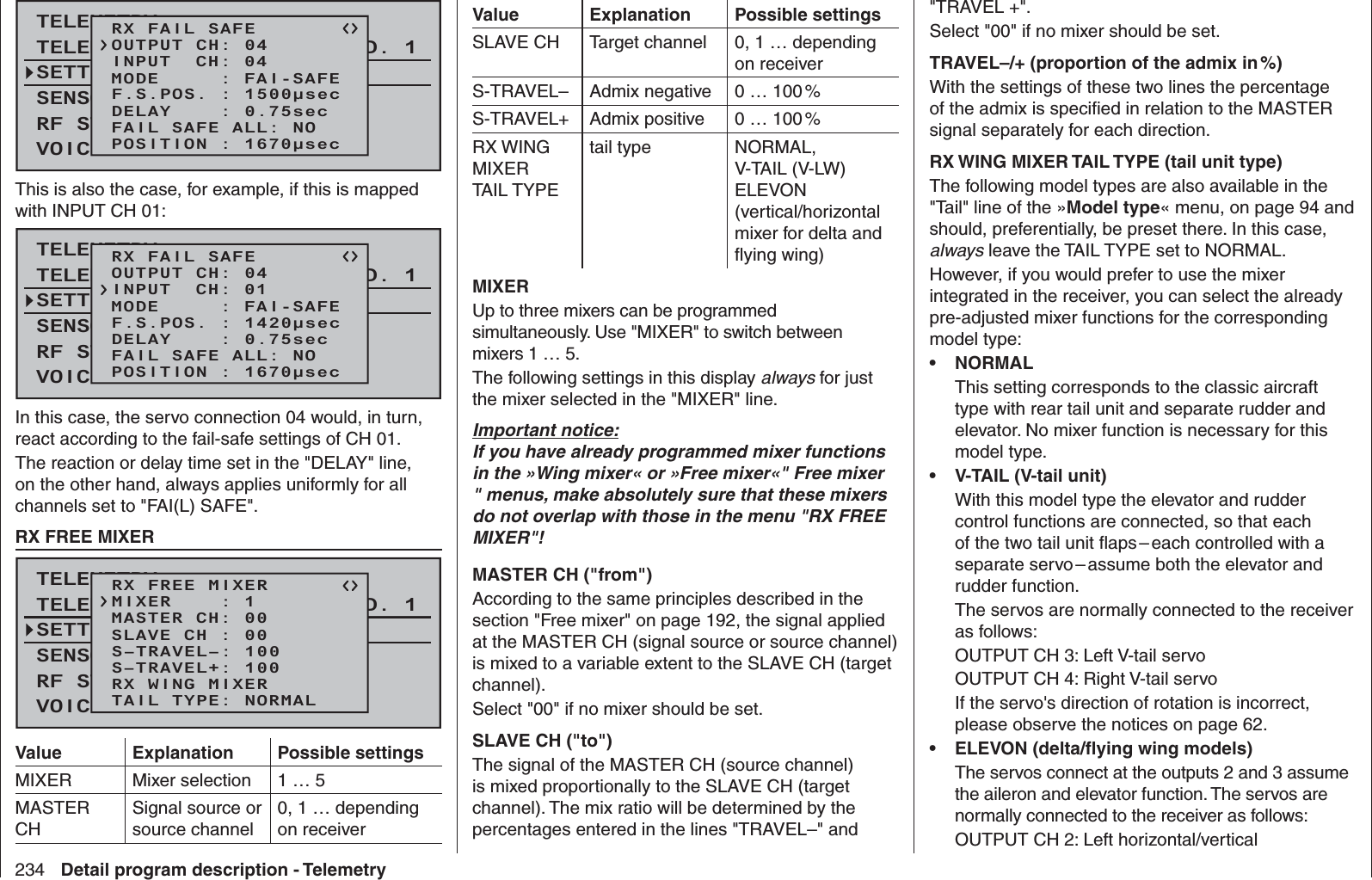
![309Programming examples - Helicopter modelsthe symbol with a brief tap on the center SET key of the right touch pad: !"#$%&’()Owners name@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~H-J SandbThe pre-set for "Stick mode" can be selected according to the criteria described on page 258.The same applies to the pre-sets for "Modulation" and "DSC Output".The pre-set for "Pitch min" is a matter of personal control habits. The pre-sets established here for "Stick mode", "Modulation", "DSC Output" and "Pitch forward/back" will be initially adopted when a new model memory is created but they can also be freely changed within a given model memory location to any other available option.The settings in the "Top/Bottom LCD Contrast" lines determine the legibility of the given displays under poor light conditions and the setting in the "Display light" line determines how long display lighting remains illuminated after the transmitter is switched on or after the last key actuation.The selection of "yes/no" in the "Power-on/off beep" line determines whether the "recognition melody" is to sound when the transmitter is switched off or on again.The "Battery type" line specifi es whether the transmitter is supplied with current from a "NiMH or a “Lith." battery, and the "Battery warning" line below it specifi es the voltage at which the transmitter's low-voltage warning should trigger. Do not enter a value that is too low here, so you have enough time to land your helicopter.The setting made in the "Stick warning" line determines how long the transmitter will wait after the last actuation of an operating element before issuing visual and acoustic warning signals to indicate it is still switched on. Following the warning, you still have about one minute to actuate the transmitter so the warning will abate. Otherwise the transmitter will switch itself off when this minute expires.The value set in the "Touch Sense" line is a matter of adapting the transmitter to personal preferences. And, in the event the transmitter is to be operated in France, the setting in the "Region" line is important: The legal regulations in France require that the "FRANCE" option is selected instead of the default setting "EURO".Later on, the ten "Own phase name" lines can be used to create one's own phase names if none of the pre-set phase names appear appropriate.Once these settings have been taken care of, commissioning continues with the menu …"Model select" (page 69)Use the selection keys to pick a free memory location …0304050106R16 free free free free00:12h free02… and call it up with a brief tap on the center SET key of the right touch pad. In the display which then appears, use the key of the left or right touch pad …Select model type (free model memory)… to select the "helicopter" model type. The display immediately switches to the base screen if the selection is confi rmed by a brief tap on the center SET key of the right touch pad. Notes:If the "Select model type" option has been • opened, the process cannot be canceled. Even if you switch off the transmitter, this selection must be made! In any case, you can undo this by subsequently deleting the respective model memory.If the "Throttle too high" warning appears, it can • be erased by turning the right-side proportional rotary control to its forward limit.If battery voltage is too low, the model switchover • cannot be made due to reasons of safety. An appropriate message will appear in the screen:not possible nowvoltage too lowOnce this fi rst hurdle is cleared, the connection of the receiver built into the model at this model memory must be made in the menu …](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-259.png)
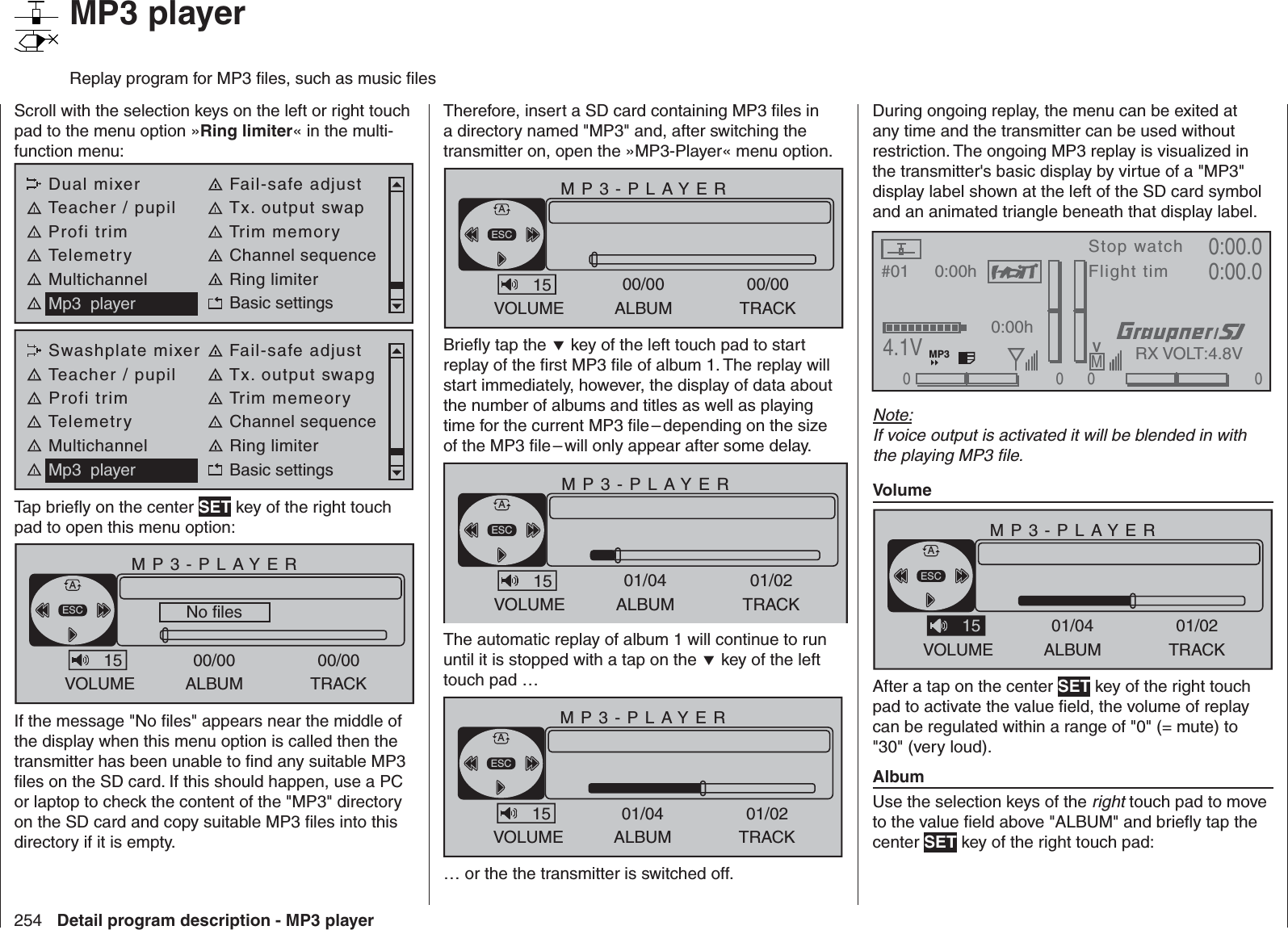
![310 Programming examples - Helicopter models… which must be assembled from characters available on the second page of the "Model name" line: !"#$%&’()Model name Starle@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_?+,–./0123456789:;¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ`abcdefghijklmnopqrstuvwxyz{|}~After entering the "Model name", the settings adopted from »General basic settings« for "Stick mode" and "DSC Output" are to be checked and changed as necessary for the given memory location.The entry fi eld in the "Info" line can be used if needed for a notice of up to 15 characters in length. This notice will then be helpful in the selection of models and so on.Another option is to be activated in the "Autorotation" line. Even if you are not an advanced pilot, the autorotation switch should at least be set as an emergency shutoff switch for the motor. Do this by selecting the "Autorotation" line with a brief tap on the center SET key of the right touch pad, activate the switch assignment, assign a 2-way switch, e.g. "2", an put it in its "ON" position.BASIC SETTINGS, MODELSET SETRF transmit onRF range test 99sDSC Output PPM102IAutorotationThe selected switch should be in a location on the transmitter which is easily within reach – without letting loose of a joystick – e.g. above the pitch joystick. »Basic settings, model« (page 84 … 92)... To this end, switch to the line "Module".Model nameStick modeModule1n/aBASIC SETTINGS, MODELn/aInfon/an/aStarletSELHoTT BD1 BD2 BD3 BD42345g/090911Note:After confi rmation of the model selection in the base screen, if you confi rm the message appearing in the screen for a few seconds …BIND. N/AOK… with a tap on the SET key of the right touch pad, this line will be accessed automatically.The line "Module" initiates a binding process between model memory and receiver, as described in detail on page 88. Otherwise, you cannot address the receiver.Afterward, use the selection key of the left or right four-way pad to move up to the fi rst line and begin with actual model programming in the "Model name" line. Now give the model memory an appropriate name, …Model nameStick modeModule1n/aBASIC SETTINGS, MODELn/aInfon/an/aStarletSELHoTT BD1 BD2 BD3 BD42345g/090911Note:More more information about the setting of this "emergency shutoff", see the beginning of the second following double-page.Another tip:Make a habit of giving all switches a common switch-on direction; then a quick glance over the transmitter prior to the fl ight should suffi ce – all switches off. Setting options for the "Autorotation C1 position", "Motor stop", "Marking" and "Stick warning" are not yet of particular interest …… and the "Auto Trim" line should only be assigned to a switch if "Initial trimming" is to be performed on the helicopter in the context of a trimming fl ight. Following such a fl ight, this switch should be erased once again, for reasons of safety.Additional settings specifi c to helicopters are made in the menu …»Helicopter type« (page 98)In the "Swashplate type" line, select control for swashplate or pitch function. In this example: "3Sv(2rol)".The "Linearis. swashpl." line is not yet of interest.In the "Rotor direction" line, it is established whether the rotor – as viewed from above – turns to the right (clockwise) or left (counter-clockwise). In other words, whether it rotates counterclockwise or clockwise. In this example "right". Check the default for "Pitch min", which was adopted from »General basic settings«, to confi rm that the entry "front" or "rear" is in keeping with personal preferences or should be changed.](https://usermanual.wiki/Graupner-and-KG/MC-16.Manual-3/User-Guide-1888593-Page-260.png)