Graupner and KG MC-20 COMPUTER SYSTEM GRAUPNER/SJ HOTT User Manual ZKZ MC 20 Manual
Graupner GmbH & Co. KG COMPUTER SYSTEM GRAUPNER/SJ HOTT ZKZ MC 20 Manual
Users Manual

33020.mc-20 HoTT.2.en
Programming Manual
o
Pro
Pro
mc-20
mc-20

2Table of contents
Code lock ...................................................... 31
Secret mode .................................................. 32
Display contrast ........................................ 32
Language selection
Voice update............................................. 32
Change of display language ..................... 33
Firmware update via SD card ................... 36
Joystick calibration ................................... 36
Telemetry data display ................................... 36
Commissioning the transmitter ................................ 42
Firmware update via PC ..................................... 43
Commissioning the receiver .................................... 46
Receiver system power supply ........................... 47
General charging notices ................................... 49
Firmware update ................................................ 50
Installation notices ................................................... 52
Term defi nitions ....................................................... 54
Assigning transmitter controls, switches
and control switches ................................................ 56
Digital trim ............................................................... 58
Winged models ........................................................ 60
Receiver layout ................................................... 61
Helicopter models .................................................... 64
Receiver layout ................................................... 65
Program descriptions
Loading a new memory location .............................. 66
»Model select« ....................................................... 69
»Copy / Erase« ....................................................... 70
Erase model ....................................................... 70
Copy model ¼ Model ......................................... 70
Export to SD card ............................................... 71
Import from SD card ........................................... 72
Copy fl ight phase ................................................ 72
Changes ............................................................. 73
»Suppress codes« ................................................. 74
»Suppress models«............................................... 75
»Basic settings, model«
Winged model .................................................... 76
Binding receivers ........................................... 77
General notices
Table of contents ....................................................... 2
Environmental protection notices .............................. 3
Safety notices ............................................................ 4
Safety notices and handling regulations for
Lithium-Ion (LiIo) and Lithium-Polymer
(LiPo) batteries .......................................................... 7
Foreword .................................................................. 10
Remote control set description ................................ 11
Technical data .......................................................... 14
General operating notices
Transmitter .......................................................... 16
Opening the transmitter housing ...................16
Transmitter power supply...............................16
Recommended chargers ...............................17
Battery operation timer in display .................. 18
Lithium battery, CR 2032 ............................... 18
Joystick length adjustment ............................18
Joystick conversions ......................................19
Holder bracket for transmitter straps ............. 20
Installing additional controls, switches, etc. ... 20
Aligning the antenna ...................................... 20
Transmitter description
Front side.......................................................21
Face-side connectors
Charger socket ......................................... 22
DSC (Direct Servo Control) ...................... 22
mini-USB connector ................................. 23
Data socket .............................................. 23
Card slot (data storage) ........................... 23
Headset connector ................................... 24
ext. PPM ................................................... 25
SPI ........................................................... 25
Inside the transmitter ..................................... 26
Display and key pads .................................... 28
Operating the "data terminal" ........................ 29
Shortcuts ....................................................... 30
Warnings in the display ................................. 30
Function fi elds in the display ......................... 31
Table of contents
Range test ..................................................... 80
Helicopter model ................................................ 84
Binding receivers ........................................... 85
Range test ..................................................... 88
»Model type« .......................................................... 94
»Helicopter type«................................................... 98
»Servo adjustment« ............................................ 102
»Stick mode«
Winged model .................................................. 104
Helicopter model .............................................. 106
»Control adjust«
Winged model .................................................. 108
Helicopter model .............................................. 112
Throttle limit function ................................... 117
Idle setting ................................................... 117
Throttle limit in combination with AR
in the »Stick mode menu« ......................... 119
»Dual Rate / Expo«
Winged model .................................................. 120
Helicopter model .............................................. 124
»Channel 1 curve«
Winged model .................................................. 128
Helicopter model .............................................. 131
»Switch display« .................................................. 134
»Control switch« .................................................. 135
»Logical switches« .............................................. 138
How do I program a fl ight phase? .......................... 140
»Phase settings«
Winged model .................................................. 142
Helicopter model .............................................. 146
»Phase assignment« ........................................... 148
»Phase trim« (winged model) ............................... 150
»Non-delayed channels«..................................... 151
»Timers (general)«............................................... 152
»Flight phase timers«.......................................... 156
What is a mixer ...................................................... 159
»Wing mixers« ..................................................... 160
1 aileron ............................................................163
1 aileron and 1 camber fl ap ..............................164
2 ailerons ..........................................................166
3
Table of contents
2/4 ailerons and 1/2/4 camber fl aps .................168
»Helicopter mixer« .............................................. 176
Adjusting the throttle and pitch curve ............... 187
Autorotation setting ........................................... 190
General remarks about freely progr. mixers .......... 192
»Free mixers« ...................................................... 193
Linear mixers .................................................... 197
Exponential mixers ........................................... 199
Examples .......................................................... 201
»MIX active/phase«.............................................. 204
»Mix only Channel« ............................................. 205
»Dual mixer« ........................................................ 206
»Swashplate mixer« ............................................ 208
»Fail Safe« ............................................................ 208
»Teacher/pupil« ................................................... 210
Connection schematic ...................................... 213
Wireless HoTT system ..................................... 214
»Transmitter output« ........................................... 218
»Profi -trim«
Winged model .................................................. 220
Helicopter model .............................................. 222
»Trim memory«
Winged model .................................................. 224
Helicopter model .............................................. 226
»Telemetry« .......................................................... 228
Setting & dataview ............................................ 229
Satellite mode of two receivers ................... 238
Sensor/s ...................................................... 239
Selecting sensor/s ............................................ 240
RF status view .................................................. 241
Select voice update .......................................... 242
»Channel sequence« ........................................... 244
»Multichannel«..................................................... 246
»Ring Limiter«...................................................... 250
»MP3-Player« ....................................................... 254
»General basic settings« .................................... 256
»Servo display« ................................................... 262
»Servo test« ......................................................... 263
»Code lock« ......................................................... 264
»Info display« ....................................................... 266
Environmental protection notices
The symbol on this product, its operating instructions
or packaging gives notice that this product may not
be discarded as common household waste at the end
of its service life. It must be turned over to a recycling
collection point for electric and electronic apparatus.
The materials can be recycled according to their
markings. You make an important contribution to
protection of the environment by utilizing facilities for
reuse, material recycling or other means of exploiting
obsolete equipment.
Batteries must be removed from the
unit and disposed of separately at an
appropriate collection point.
Please inquire with local authorities
about the responsible waste collection
locations.
This manual serves only as a source of information
and can be changed without prior notifi cation.
Graupner accepts no responsibility or liability for
errors or inaccuracies which may be contained in
the information section of this manual.
Programming examples
Introduction ............................................................ 268
Winged model
First steps ......................................................... 270
Incorporating an electric drive .......................... 276
C1 joystick switchover between
Electric motor and butterfl y .......................... 279
Electric motor and airbrake ......................... 282
Timer activation by control or switch ................. 284
Parallel operating servos .................................. 286
Using fl ight phases
Example 1 ................................................... 288
Example 2 ................................................... 292
8-fl ap wings ...................................................... 298
Delta and fl ying wing models ............................ 301
F3A model ........................................................ 304
Helicopter model .................................................... 308
Appendix
FCC declaration ..................................................... 318
Conformity declaration ........................................... 319
Guarantee certifi cate ............................................. 320

4Safety notices
In order to enjoy your modeling hobby for a long time,
please read these instructions thoroughly and give
particular attention to the safety notices. You should
also register right away at https://www.graupner.de/
de/service/produktregistrierung.aspx since this is
the only way for you to automatically receive current
information about your product via email.
If you are a beginner with remote controlled model
aircraft, ships or cars, you should really ask an
experienced model pilot for assistance.
If this remote control system changes ownership,
these instructions should surely be included with
remote control system.
Intended usage
This remote control system may only be used for the
purpose intended by the manufacturer, i.e. for the
operation of unmanned remote controlled models.
Any other usage is not permissible.
Safety notices
SAFETY IS NO ACCIDENT
and
REMOTE CONTROLLED MODELS ARE NOT TOYS
… because even small models can cause substantial
property damage and/or personal injuries if they are
not handled properly - even if caused by third parties.
Technical defects of an electrical or mechanical
nature can lead to unexpected startup of a motor and/
or parts being hurled through the air to pose a danger
of injury to you and to others.
Short circuit conditions are to be avoided absolutely!
A short circuit condition may not only destroy parts
of the remote control system but, depending on
the circumstances and the battery energy involved,
may also pose acute danger of incineration or even
explosion.
All motor-driven parts, such as aircraft or ship
propellers, helicopter rotors, open gearboxes etc.
represent a constant danger. Contact with these parts
must be avoided. A rapidly turning aircraft propeller
can, for example, sever a fi nger. Also pay attention
that other objects do not come into contact with
driven parts.
When a drive battery is connected or a motor is
running: never get into the danger zone of driving
mechanisms.
Be sure to pay attention that motors do not start
up unintentionally while performing programming
operations. Disconnect the fuel supply or battery
terminals to motors before programming.
Protect all units from dust, dirt, moisture and other
foreign parts. Never expose these units to vibrations
or excessive hot or cold temperatures. Remote
control operation may only be performed under
"normal" outdoor temperatures, i.e. within a range of
-15 °C to +55 °C.
Avoid mechanical jarring and pressure stresses.
Always check units for damage to housings and
cables. Do not use units which have been damaged
or become wet, even after they are dry again.
Only those components and accessories which
we recommend may be used. Always use original
Graupner plug and jack connectors which are made
for one another out of the same materials.
When routing cables, pay attention that they are
not stressed, unduly kinked or broken. The sharp
edges of adjacent parts also represent a hazard for
insulated conductors.
Be sure that all plug and jack connections are fi rmly
seated. Do not pull on the cable to disconnect a
plugged connector.
No modifi cations whatsoever may be made to units.
Modifi cations will void the operating permit and all
insurance protection.
Installing the receiver
The receiver is to be installed with a cushion of foam
rubber to afford protection against jarring; in aircraft
models behind a strong rib, for a car or ship model
the location must be protected against dust and
spray water.
The receiver may not be mounted in direct contact
with the hull or chassis as this would allow motor
vibrations and/or roadway jarring to be transferred
directly to the receiver. When a receiver system is
installed in a model with a combustion motor, all
receiver parts should always be protected against the
intrusion of exhaust gases and oil residue. Above all,
this applies to the model's ON/OFF switch, which is
typically built into the model's outer surface.
Position the receiver such that connecting cables to
the servos and the power supply are routed with a
bit of slack and that the receiver's antenna is at least
5 cm away from any large metal parts or wiring except
for other receiver wires/cables. In addition to steel,
this also includes carbon fi ber parts, servos, electric
motors, fuel pumps and all sorts of cables, etc.
Optimally the receiver should be placed at a readily
accessible location that is well away from all other
equipment. Under no circumstances may a servo
cable be wrapped around the antenna or routed close
to it.
Make sure that cables near the antenna cannot move
about during fl ight.
Routing the receiver's antenna
The receiver and its antennas must be positioned
as far away as possible from drives of any kind. If
the model's hull is made of carbon fi ber material, the
ends of the antennas must extend outside of the hull.
The orientation of antennas is not critical.
Nevertheless, a vertical (upright) installation of receiver
antennas is advantageous. In the case of diversity
antennas (two antennas), the second antenna should
be oriented at a 90° angle to the fi rst antenna.
Safety notices
Be sure to pay attention!

5
Safety notices
Pre-start checks
Before switching the receiver on, be sure the throttle
control is at its Stop/Idle position.
Always switch the transmitter on fi rst
and then the receiver.
Always switch the receiver off fi rst
and then the transmitter.
If this sequence is not maintained, such that the
receiver is still switched on when the corresponding
transmitter is switched to "OFF", then the receiver
may respond to other transmitters or general radio
frequency noise. This can cause the model to
execute uncontrolled operations that may cause
personal injuries and/or property damage.
In particular, for models equipped with a mechanical
gyro:
before switching off the receiver, disconnect the
model's power supply to prevent the motor from
revving up unintentionally.
The residual spin of a gyro often produces
so much voltage that the receiver may falsely
interpret a throttle signal! This will then cause the
motor to start up unexpectedly.
Range test
Perform checks for proper operation and range
before every session. Secure the model adequately
in place and ensure that no one is in front of the
model.
Perform a complete functional test on the ground
and execute a complete simulated fl ight to exclude
the possibility of system faults or problems with the
model's programming. When doing this, be sure to
follow the notices provided on pages 80 and 88.
Never operate the transmitter in Model mode, i.e.
for fl ying or driving, without an antenna. Be sure the
antenna is fi rmly seated in its socket.
Operating a winged aircraft, helicopter, ship or
car
Never fl y over spectators or other pilots. Never
endanger humans or animals. Never fl y in the vicinity
of high-voltage wires. Do not operate the model in the
vicinity of sluice locks or where real boats or ships
are operating. Do not operate a model on public
streets or highways, paths or plazas, etc.
Monitoring transmitter and receiver batteries
You must stop running the model to recharge
the transmitter's battery no later than when low
transmitter battery voltage triggers the "Batt must be
recharged!!" display and acoustic signal.
Check the charge in batteries routinely, particularly
the receiver's battery. Do not wait until the
movements of controlled mechanisms are noticeably
slower. Replace expended batteries before they
cause problems.
The battery manufacturer's charging instructions
are always to be followed, this includes mandatory
adherence to the length of charging time. Never leave
batteries being charged unattended.
Never attempt to charge primary batteries (non-
rechargeable batteries) because they can explode.
All secondary batteries (rechargeable batteries) must
be charged before every session. To avoid short
circuit conditions, fi rst connect the charger cable's
banana plugs, polarity correct, into the charger and
thereafter connect the charger cable's plugs to the
transmitter and receiver batteries.
Disconnect all power sources from the model when it
is not to be used for an extended period of time.
Never attempt to use defective batteries, damaged
batteries or mixed-type battery combinations as
a single group. Do not use mixed combinations
of old and new batteries or batteries of different
manufacture.
Servo installation
Always mount servos with the provided rubber
vibration-damper parts. Only in this manner can these
parts be protected against excessively hard vibrations.
Installing control rods
Control rods must be installed such that they operate
freely and smoothly. It is particularly important that
all rudder levers are able to move to their full limits,
i.e. not otherwise mechanically blocked.
In order to be able to stop a running motor at any
time, control rods must be adjusted such that the
carburetor tap is completely closed when the joystick
and trim wheel are brought into their end idle position.
Pay attention that no metal parts, e.g. as a result of
rudder actuation, vibration, rotating parts, etc., rub
against one another. Metal-to-metal contact causes
electrical "noise" which can interfere with the correct
operation of the receiver.
Transmitter antenna orientation
Transmission fi eld strength is minimal in an imaginary
line extending straight out from the end of the
transmitter's antenna. This means that "pointing"
the transmitter's antenna directly toward the model
will not produce good reception but rather degrade
reception.
When multiple remote controls are operating
simultaneously, pilots should position themselves in
a loose group. Pilots standing off to themselves not
only endanger their own models but those of others
as well.
However, when 2 or more pilots using 2.4 GHz
remote control systems are closer than 5 m to one
another this can lead to return channel overdrive
which, in turn, will trigger a range warning much too
early. Increase your distance between one another
until the range warning ceases.

6Safety notices
Capacity and operating time
The rule: "capacity is reduced with every successive
recharging", applies to all batteries. Internal resistance
increases at low temperatures to further reduce
capacity. As a consequence, the battery's ability to
provide current and hold its voltage is reduced.
Frequent charging or the use of battery maintenance
programs can also result in gradual loss of battery
capacity. Therefore the capacity of batteries should
be checked at regular intervals, not in excess of
every six months, and replaced if performance is
found to be signifi cantly defi cient.
Purchase only genuine Graupner batteries!
Interference suppression for electric motors
All conventional electric motors produce sparks
between their collector and brushes. Depending on
the type of motor involved, this may cause more or
less interference with the functionality of the remote
control system.
The electric motors of a properly built system should
therefore have interference suppression features.
For electric drive models it is particularly important
that every one of its motors is provided with proper
interference suppression. Interference fi lters
extensively suppress such disturbances and should
always be included.
Follow the respective recommendations included in
the motor's operating and installation notices.
For further details about interference fi lters, refer to
the Graupner RC main catalog or in Internet at
www.graupner.de.
Servo interference fi lters for extension cables
Order no. 1040
The servo interference fi lter is necessary when an
extended-length servo cable is used. This fi lter is
attached directly to the receiver output. In critical
cases a second fi lter can be attached to the servo.
Using electronic speed controllers
Choosing the right electronic controller is largely a
matter of matching controller performance to the
motor to be controlled.
In order to prevent an overload or damage to the
speed controller, its current rating should be at least
half of the maximum locked-rotor current draw of the
motor to which it is connected.
Particular attention is appropriate for so-called "tuning
motors". Because of their low-turns coils these
motors can draw a multiple of their rated current
in a locked-rotor condition and this can lead to the
destruction of the speed controller.
Electric ignition systems
Combustion motor ignition systems also produce
interference that can negatively infl uence remote
control functionality.
Always supply power to an electric ignition system
from a separate, dedicated battery.
Use only interference-suppressed spark plugs, spark
caps and shielded ignition leads.
Mount the receiver suffi ciently far away from ignition
system components.
Static charges
A remote control system will be destroyed by the
magnetic shock waves produced by a lightning strike
- even if the storm is miles away. Therefore …
… stop fl ying right away if a storm is approaching.
Static charging via the antenna also represents a
lethal hazard.
Attention
In order to fulfi ll FCC HF emission requirements •
for mobile transmitters, a distance of at least
20 cm must be maintained between this system's
antenna and other persons when this system is
operating. Operation of this system at a lesser
distance is therefore not recommended.
To avoid disturbance caused by the electrical •
characteristics and emissions of other transmitters,
keep at least a 20 cm distance from other
transmitters.
Operation of the remote control system requires a •
correct program setting for the given country in the
Safety notices

7
Safety notices
transmitter unit. This is necessary for compliance
with diverse regulations like FCC, ETSI, CE etc.
Follow the respective instructions provided for this
with the transmitter and receiver.
Prior to every fl ight, perform a complete functional •
test, range test and execute a complete simulated
fl ight in order to exclude the possibility of system
faults or problems with the model's programming.
Never program the transmitter or receiver while •
the model is being operated.
Care and maintenance
Never clean the housing, antenna, etc. with cleaning
agents, gasoline, water or similar means. Use only a
dry, soft cloth.
Components and accessories
As manufacturer of this equipment Graupner GmbH &
Co. KG recommends only components and accessories
which have been tested and approved by Graupner
for their suitability, functionality and safety. If this
recommendation is followed, Graupner accepts
responsibility for the product.
Graupner cannot accept any responsibility for
the parts or accessories of other manufacturers
which have not been approved and Graupner
cannot evaluate every individual product made by
other companies to assess if they are safe to use.
Liability exclusion / damage compensation
This manual serves only as a source of information
and can be changed without prior notifi cation.
Graupner accepts no responsibility or liability for
errors or inaccuracies which may be contained in this
manual.
Graupner cannot monitor compliance with the
assembly instructions, the operating instructions or
the conditions and methods under which remote
control components are installed, operated, utilized
or maintained. Therefore Graupner accepts no form
Safety notices and handling regulations for Lithium-Ion
(LiIo) and Lithium-Polymer (LiPo) batteries
of liability for loss, damage or costs consequential
to incorrect usage or operation or which can be
attributed to same.
Unless otherwise prescribed by law, the obligation
of Graupner to provide damage compensation,
regardless of legal grounds, is limited to the invoice
value of the quantity of Graupner goods contributing
directly to the damage-inducing event. This does not
apply if Graupner is found to be subject to unlimited
liability pursuant to binding legal stipulations with
respect to intent or gross negligence. As applicable
for all highly technical products, observance of the
following safety notices and handling instructions is
essential for a long service life, fault-free operation,
and harmless utilization of lithium/polymer batteries.
These instructions are to be safeguarded. If the unit is
transferred to another user, these instructions should
certainly be passed along to the new user.
General notices
LiIo-/LiPo batteries require particularly attentive •
handling. This applies to charging, discharging as
well as for storage and other handling. Adherence
to the following special specifi cations is necessary:
Incorrect handling can lead to explosions, fi re, •
smoke and poisoning hazards. Furthermore,
disregard for instructions and warnings can lead to
performance losses and other defects.
The battery's capacity is reduced by every charge/•
discharge cycle. Storing the battery at temperatures
which are too high or too low can also lead to a
gradual reduction in capacity. In model operation,
battery capacity drops to about 50 … 80 % of new
battery capacity after about 50 charge/discharge
cycles – even though all charge/discharge rules are
followed. This is due in part to the high discharge
currents and inductive currents caused by motors.
Battery packs may only be connected in series or •
parallel in exceptional cases as cell capacities and
charged state can differ too greatly. This is why the
battery packs we deliver are selected.
Special notices for charging LiIo-/LiPo batteries
from Graupner
Since• Graupner GmbH & Co. KG cannot supervise
the correct charging and discharging of cells,
the entire guarantee is void in cases of improper
charging or discharging.
Never leave batteries being charged unattended.•
Only approved chargers with appropriate charging •
cables may be used for charging LiIo-/LiPo
batteries. Any manipulation to the charger or
charger cables can lead to severe damage.
The maximum charging capacity must be limited •
to 1.05 times the battery's capacity.
Example: 700 mAh battery = 735 mAh max.
charging capacity
Use only the outlet-charger included with the set •
or a specially designed charger/discharger from
Graupner to charge and discharge LiIo-/LiPo
batteries, refer to page 17 or www.graupner.de.
Ensure the settings for the number of cells or for •
fi nal charging voltage and fi nal discharge voltage
are correct. Be sure to observe the operating
instructions for your charger/discharger.
Other handling notices
The battery to be charged must be placed on a •
non-combustible, heat resistant, non-conducting
surface during the charging process. Combustible
or readily ignited objects are to be kept away from
the charging confi guration. Batteries may only be
charged under supervision.
LiIo-/LiPo batteries connected in series within •
a pack may only be charged as a group if the
voltage of individual cells do not differ by more
than 0.05 V. The LiIo battery included with the
set, order no. 33000.1 (changes reserved), is
equipped with a special safety circuit such that

8Safety notices
Discharging below 2.5 V per cell damages cells •
permanently and is therefore to be avoided
absolutely. The mc-20 HoTT transmitter switches
itself off when its power supply voltage reaches its
lower limit of 3.3 V. Short circuit conditions are to be
avoided absolutely. Permanent short circuits lead
to destruction of the battery, high temperatures and
perhaps even self-ignition may follow.
During discharge, battery temperature must not •
rise, in any case, to over +70 °C. Otherwise,
better cooling or a lower rate of discharge must
be introduced. The temperature can easily be
checked with the infrared thermometer, order no.
1963. The battery must never be discharged via
the transmitter's charging socket. This socket is
not suitable for this purpose.
Other handling notices
Never short-circuit the battery. A short-circuit •
allows very high current to fl ow and this heats up
the cells. This will lead to loss of electrolyte, the
production of gases and perhaps even explosions.
In the vicinity of, or while handling, Graupner
LiIo-/LiPo batteries, avoid electrically conducting
surfaces because of the danger of creating a
short-circuit condition.
Handling connectors:•
These connectors are not as robust as for other
batteries. This applies particularly to the plus pole
connector. The connections can easily be broken
off. Due to thermal transfer, the connector tabs
may not be soldered directly.
Cell connection:•
Direct soldering on battery cells is not permitted.
The heat of direct soldering can damage battery
components, such as separator or isolator.
Battery connections should only be made by
industrial spot welding. A professional repair made
by the manufacturer or distributor is necessary to
replace missing or torn-off cables.
Replacing individual battery cells:•
The replacement of battery cells may only be
made by the manufacturer or distributor and never
by the user himself.
Damaged cell usage:•
Damaged cells may never be used or returned to
service.
Characteristics of damaged cells include: •
damaged housing packing, deformed battery cells,
electrolyte or leaking electrolyte. In these cases,
further use of the battery is not permissible.
Damaged or useless cells are hazardous waste •
items and must be appropriately disposed.
General warning notices
Batteries must never be put in fi re or burned. •
Battery cells must not be submerged in liquids, •
such as water, seawater or beverages. Any contact
with liquids, of whatever nature, is to be avoided.
Individual battery cells and batteries are not toys •
and must therefore not get into the hands of
children. Batteries/cells must be kept out of the
reach of children.
Batteries must not get into the vicinity of babies or •
small children. If a battery is swallowed, immediately
go to a doctor or emergency medical facility.
Batteries must not be put in a microwave oven or •
put under pressure. Smoke, fi re and more can be
the consequences.
Never dismantle a LiIo-/LiPo battery. Dismantling •
a battery can cause internal short-circuits. Gas,
fi re, explosions and other problems can result.
The electrolyte and electrolytic vapors in LiIo-/LiPo •
batteries are harmful. Absolutely avoid all direct
contact with electrolytes. If electrolytes come
into contact with skin, eyes or other body parts,
immediately wash out or rinse out with generous
amounts of fresh water then be sure to consult
"compensation" for voltage differences between
individual cells, by way of an otherwise typical
balancer plug connection, is not necessary.
Under these conditions • Graupner LiIo-/LiPo
batteries can be charged with a maximum of 2C
(the value 1C corresponds to the cell capacity)
charging current. At a voltage of maximum 4.2 V
per cell and above, charging must continue a
constant voltage of 4.2 V per cell until charging
current drops below 0.1 … 0.2 A.
Charging voltage over 4.20 V per cell must be •
avoided absolutely as the cell would otherwise be
permanently damage and could cause a fi re. In
order to prevent the over-charging of individual cells
in a pack, a cut-off voltage between 4.1 V … 4.15 V
per cell should be set to increase service life.
Never attempt to charge battery cells with the •
wrong polarity. Abnormal chemical reactions take
place when batteries are charged with reversed
polarity and the battery will be useless. This can
cause breaks, smoke and fl ames.
The permissible temperature range for charging •
and storing LiIo-/LiPo batteries is 0 … +50 °C.
Storage: LiIo-/LiPo cells should have a 10 … 20 % •
charge capacity when stored. If cell voltage drops
below 3 V, then LiIo-/LiPo cells must absolutely
be recharged to a capacity of 10 … 20 % of full
capacity. Otherwise, further deep-discharging of
the battery will make it useless during storage in a
discharged state.
Special notices for discharging LiIo-/LiPo
batteries from Graupner
A continuous current rate of about 1C does not •
represent a major problem for Graupner LiIo-/LiPo
batteries. For larger currents, please follow the
catalog specifi cations. In any case, observe the
maximum current rating for the connector system,
see maximum discharge current on the battery.
9
Safety notices
a doctor.
Batteries built into equipment must always be •
removed from that equipment when it is not
currently in use. Alway switch off equipment after it
is used to prevent deep discharging. Always charge
batteries before it is too late. Store batteries on a
non-combustible, heat resistant, non-conducting
surface! Deep-discharged LiIo-/LiPo batteries are
defective and may no longer be used!
Notice for remote control set mc-20 HoTT
Order no. 32032
This remote control set is factory equipped with a
Lilo transmitter battery (changes reserved). Once
the factory preset voltage limit of 3.60 V has been
reached, a warning will appear in the display.
Disposal of used batteries:
Some countries have laws requiring that all used
batteries be turned over to an authorized collection
center.
Disposing of batteries along with common household
garbage is forbidden. Old batteries can be turned into
communal collection centers for disposal at no charge
or they can be returned to one of our dealerships or
anywhere else where batteries of that given type are
sold. Used batteries we have delivered can also be
sent back to us, at your cost, through the mail. Use
the return address below:
Graupner GmbH & Co. KG
Service: Used batteries
Henriettenstr. 94-96
D-73230 Kirchheim unter Teck
This represents an essential contribution to
environmental protection.
Caution:
Damaged batteries require among other things,
special packaging, because they are very toxic!

10 Foreword
mc-20 the Newest Generation of Remote Control Technology
The technical advances across the entire spectrum
of model building is an ever-present challenge to
design engineers. This is why the introduction of
new transmission technology in the 2.4 GHz band
represents a new milestone.
The HoTT-System (Hopping Telemetry Transmission)
developed by Graupner is a synthesis of know-how,
engineering and testing done around the world by
professional pilots.
Established Graupner HoTT techniques theoretically
permit over 200 models to be operated at the same
time. However, because of the interspersed radio-
frequency utilization permitted by certifi cation for the
2.4 GHz ISM band, this number is signifi cantly lower
in practical application. Nevertheless, in general
more models can be operated simultaneously in the
2.4 GHz band than would be the case in conventional
35 or 40 MHz frequency bands. The real limiting
factor is – as often before – is still likely to be the
size of available operating space (i.e. airspace for
aircraft). Alone the fact that it is no longer necessary
to coordinate transmitting frequencies with other
pilots in the vicinity (which is sometimes quite diffi cult
in broken landscapes, such as on hillside slopes)
represents an enormous boost for remote control
operating security.
Bidirectional communication between transmitter
and receiver, by way of a return channel built into
the receiver, permits convenient access to data and
programming in the HoTT receiver. For example,
this makes it possible to swap receiver outputs or to
divide up control functions among multiple servos
(channel mapping). Servo travel and servo rotation
directions in the receiver can also be matched to
one another with these facilities. Telemetry data,
like VARIO and GPS data, can be called up from
optionally available modules.
Based on the mc-24 Graupner/JR computerized
remote control system, the mc-20 HoTT remote
control system has been especially developed for
experienced RC pilots All conventional model types
can be readily operated with the mc-20 HoTT
system, regardless of whether the model is a winged
aircraft, helicopter, ship or land vehicle.
Complex mixed-control functions of guiding surfaces
are often necessary for winged aircraft (rudder,
elevators) and helicopter models (swashplate).
Thanks to modern computer technology, very diverse
model requirements can be programmed in the
simplest conceivable manner with touch-sensitive
keys (CAP Touch). Simply select the given model
type from the mc-20 HoTT program and its software
will assemble all signifi cant mixer functions and
coupling functions automatically. This eliminates
the need for separate modules in the transmitter
to implement complex coupled functions and also
makes sophisticated mechanical mixer mechanisms
in the model unnecessary. For example, this makes
the mc-20 HoTT transmitter fully equipped with both
software and hardware to operate the well-known
NAUTIC modules on the receiver side. The "channel
sequencer" is new. It permits the operation of up to
three servos to be automated.
The mc-20 HoTT system offers optimal security and
reliability without having to forgo great operating
convenience. The mc-20 HoTT remote control
system has 80 model memory locations. Additional
fl ight-phase-specifi c settings can be stored in every
model memory location. For example, such settings
can be made for various parameters that can be
called up to implement particular fl ight maneuvers at
the "press of a button". Additional model memories
can be stored on the SD card, which is included
standard with the set. Even telemetry data can be
recorded for subsequent evaluation on a PC.
Since the mc-20 HoTT is equipped with two
displays, the lower display has been optimized for
comprehensible, simple operation of the software.
The graphic representation of mixer functions
is particularly helpful. The upper display allows
telemetry data to be called up from the receiver.
Functionally-related options are clearly arranged
by content in a simple organization. The clear,
comprehensible program structure permits a beginner
to quickly become familiar with the various functions
and able to use all options pertinent to his level of
expertise with remote control models.
This handbook describes every menu in detail. There
are tips, many notices and programming examples to
supplement the descriptions and also explanations
for model specifi c technical terms, like transmitter
control, dual rate, butterfl y, and so on.
Please observe the safety notices and technical
notices. Read through the instructions attentively.
Before usage, test all functions by simply attaching
servos to the receiver included in the set. While doing
this, observe respective notes on page 68. This will
help you learn the essential operating techniques and
functions of the mc-20 HoTT.
Always handle your remote controlled model with a
sense of responsibility so that you do not endanger
yourself or others.
The Graupner team wishes you much pleasure
and success with your mc-20 HoTT, the newest
generation of remote control systems.
Kirchheim-Teck, December 2011

11
Remote control set description
metsySretupmoC mc-20
-zHG4.2niteslortnocetomerlennahc23 Graupner-HoTT technology
(Hopping Telemetry Transmission)
Technology that enthralls
The superior functional security of Graupner
HoTTTechnology accomplished with bidirectional
communications between transmitter and
receiver with integrated telemetry, freely
programmable voice output via headset
connector, and ultra-fast response times.
PrQITCOOKPIKUUKORNKſed by a programming
technique implemented with capacitive touch
buttons.
High contrast, 8 line, graphic display for perfect
presentation of all parameter settings. Switch
on/off of blue back-lighting at will. A second,
independent display for presentation of telemetry
data. Storage of telemetry data on a micro
SD memory card.
4096 steps of 12-bit resolution on the channel
signal assures extreme control sensitivity.
USB connection to read and write the model's
memories as well as fQTOCMKPIſrmware updates
Integrated• Graupner HoTT 2.4 GHz transmission
system
Maximum interference immunity made possible b •
optimized frequency hopping through as many as
75 channels and wider channel spread
Intelligent data transfer with correction function•
Over 200 systems can be used simultaneously•
The HoTT technique of bidirectional •
communication between sender and receiver,
as well as the fastest possible transmission rate
(10 ms) assures extremely short reaction times.
5 different languages (German, English, French,•
Italian and Spanish) available per software
update. For the availability of a given language,
refer to the download area.
80 model memories with storage for all model-•
speciſc programs and parameter settings
Seven switches (two 3-way switches, three 2-way•
switches and two 2 pushbutton switches) as well
as three digital actuators are already built-in and
can be used as desired
A function encoder with two touch-sensitive,•
four-way keys ("CAP Touch") permit simpliſed
programming and precise settings
Key-lock function to prevent unintentional•
operation.
Voice and, as applicable also MP3 ſle, output over•
headset output or loudspeaker
Simple, very fast model-independent binding•
Extremely fast rebinding, even at maximum•
distance
Range: test and warning function•
Under-voltage warning•
Extremely wide receiver operating voltage range•
of 3.6 V to 8.4 V (functional to 2.5 V)
Fail-safe, free channel assignment (channel •
mapping), mixer functions and all servo settings
are simple to program

12 Remote control set description
Binding of any number of receivers to the channel •
expansion (32 channels maximum)
As many as four servos can be controlled •
simultaneously as a block in the SAME operating
mode with a servo cycle time of 10 ms (digital
servos only).
Thanks to cycle time reduced down to as little •
as 10 ms, extremely short response times are
achieved.
Real-time telemetry evaluation in the transmitter •
display Additionally, telemetry data can also be
selectively displayed by the SMART-BOX.
Additional HoTT features of the mc-20
Super-fast response time through use of a fast •
main processor for data transmission.
Micro-SD card for storage of telemetry data and •
for additional functions
Obsolescence-proof through update capability over •
USB interface as well as via the micro-SD card
The included Lilo battery (changes reserved) •
has a capacity of over 6000 mAh. This makes
extremely long fl ight times possible and also
reduces the number of charging repetitions.
Modulation changeover per software: e.g. from •
"EXT. PPM" (e.g. Weatronic) to HoTT at the press
of a button.
Swashplate limiting: This function limits the •
swashplate's tilt angle to prevent the potential for
mechanical collision in helicopter 3D operation at
full-limit roll and pitch-axis
Ring-limiter: • functions similar to swashplate
limitation but is used for control of up to three
Voith-Schneider drives in ship models
Channel sequencer for automating servo motion •
sequences of up to three servos, e.g. to automate
the lowering of landing gear or to extend/retract
drives in self-launching gliders
Multi-channel function for operating • Graupner
product line NAUTIC modules
Digital trimming with pseudo »analog« endless •
pinions, effective per specifi c fl ight-phase
Auto-trim function. The current joystick positions •
for trimming fi xed-wing or helicopter models will
be stored in trim memory at the press of a button.
(Model »compensation«, activate switch and
release joystick. The correction will be blended in
»gently« upon return of the joystick.
C1 changeover, brake/elec. motor: This •
changeover can be implemented very easily via
enhanced fl ight phase programming. The pilot
determines the joystick positions (forward/rear) at
which the motor is to switched off or the airbrakes
are to be retracted.
16 control functions maximum•
Simplifi ed arrangement of operating elements, •
such as joysticks, external switches, proportional
controls and trim levers as control functions
Protection against obsolescence is provided •
by virtue of a fast 32-bit operating system with
modern fl ash memory that can be updated.
Blue back-lighted MULTI-DATA-GRAPHIK-LCD •
monitor with signifi cantly better legibility under
unfavorable light conditions
CONVENIENCE MODE SELECTOR to simplify •
changeovers between operating modes 1 … 4
(e.g. throttle left/throttle right)
Two freely programmable mixers for fi xed-wing •
or helicopter models, each with freely selectable
input and output functions; four curve mixers
with innovative 8-point curve technology for
easy to set and adjust curve values at up to
eight points for throttle, pitch, tail or other non-
linear characteristics. The arithmetic unit in the
CPU employs an ingenious method of calculating
polynomial approximations for truly-rounded, ideal
MPC (multi-point curve) mixer curves
Bi di f b f i t th h l d t li NAUTIC d l
Computer System mc-20
32 channel remote control set in 2.4 GHz Graupner-HoTT technology
(Hopping Telemetry Transmission)
Shifting curve mixer points can be done along •
both axes with the CAP touch pad keys
Eight fl ight-phase programs can be individually •
adapted for each model and given a name. The
switchover time is programmable separately.
SUPER SERVO menu with a perfect overview •
of all servo setting data and simple parameter
correction at four "levels": direction of rotation,
mid-point setting, separate servo travel on both
sides and separate travel limiting on both sides for
16 servos with a total of 96 setting options
SUPER-DUAL-RATE, EXPO and EXPO/DUAL-•
RATE menu with 36 potential setting variants for
three servo functions and six fl ight phases
Practice-optimized multi-function menu for •
aerofoils and helicopter models. Entry of the
number of aileron and fl ap servos automatically
programs all necessary mixer functions in the
multi-function "Wing mixers" menu. Differential
aileron mixer, butterfl y mixer, dual-fl ap mixer,
automatic gyro set function and other special
functions
Helicopter swashplate mixer for 1, 2, 3, or 4 point •
steering.
Selectable cycle time: 10 ms or 20 ms/30 ms, •
depending on receiver and operating mode
A convenient timers menu with a system of eight •
stopwatches, alarm timer, countdown timer, laps
counter and so on. Two running timers and one
lap timer can be displayed at the same time in
large characters.
Stopwatch with history: In addition to the lap •
counter there is a "Time 1" which captures the
switch-on time and a "Time 2" which records the
ON and OFF times separately
Channel mapping• in the receiver allows free
distribution of control functions.
The travel distance and rotation direction settings •
13
Remote control set description
integrated into the receiver make it possible, for
example, to match up mapped servos with one
another
The programmable fail-safe functions »Hold«, •
»Off« and »Move to preset positions« that are built
into the receiver for every individual servo channel
can be set separately
A slot for FAT or FAT32 formatted SD and SDHC •
memory cards is available on the transmitter for
log fi les and model programs
Model programs
Transmitter operating time timer•
Flight phase switch assignments: six switches, two •
with a priority function. Every switch combination
can be named freely. This makes the number of
fl ight phases independent of the number of fl ight
phase switches.
Tail type normal, V-tail, Delta/fl ying-wing and 2 HR •
Sv 3+8 (which immediately makes two coupled
elevator servos available without using free mixers
or dual mixers)
Flap count 4 AIL/4 FL: Full support of eight wing •
servos, even without use of free mixers
Flight phase switching cutoff delay: •
the delay time can be switched off for individual
channels on a fl ight-phase basis (e.g. for motor
off in electric models or to activate/deactivate
helicopter head lock).
Ten additional, user defi nable phase names: aside
from the prescribed fl ight phase names, the user
can also freely assign up to ten phase names of
his own choice.
Enhanced transmitter control menu: option to •
assign input-side mid-point setting for C1 control +
trim as a transmitter control. A single input can be
assigned to two switches for a true 3-way switch
function.
Wing mixers: New concept for the multi-fl ap menu •
to simplify settings of one to eight wing servos on
a fl ight-phase specifi c basis in a comprehensible
manner without requiring the use of free mixers
»Info« sub-option in the Base setup model menu •
Any kind of additional information about every
model can be entered here. This additional
information will then appear in the newly designed
model select function
»Logical switches«: this function permits two •
switches to be coupled as »and« or »or« logic
functions. The result can be employed as a
virtual switch. Typical application: The activation
of certain functions should only be possible in
conjunction with other functions, e.g. wheel brake
can only be activated when the landing gear is
down. A number of functions which are normally
independent of one another, are to be put in their
base settings by way of an »Emergency switch«.
This program automation can be activated by
multiple switches that also select the appropriate
program.
Servo-middle setting range extended to ±125 %•
Number of fl ight phases: (fi xed-wing: 8, helicopter: •
7 + AR)
Settable »Throttle too high« warning threshold •
in the helicopter menu, programmable switch-on
warning
Time-frame can only be stopped, and thus also •
erased, (if the timer switch is in its OFF position)
by touching the center ESC key while the ef or
cd selection keys are also being touched.
Phase trim for all axes of fi xed-wing models •
possible
Hotkey for servo display: one tap on the • e and
f keys of the left CAP touch pad (touch sensitive
keys) will call up the servo display directly from
virtually all menus.
Servo occupancy swap on the receiver output•
CAP TOUCH operating elements with key lock •
function to prevent unintentional operation.
CAP TOUCH display change from the main menu •
to the telemetry main menu via ESC.
Numerous telemetry displays, programming •
functions and evaluation functions are presented
directly in the transmitter's screen
Graphic presentation of model icons for the model •
type display (fi xed-wing/helicopter)
Built-in connector sockets for PC-USB interface, •
headset, SMART BOX, external RF module,
DSC system. Prepared for teacher/pupil operation.
Teacher/pupil system with or without cable for •
complete transfer; all settings are made on the
teacher transmitter.
Additional functions are planned for •
implementation via software update.
14 Remote control set description
ehtrofatadlacinhceT - HoTT transmitter
Frequency band 2.4 … 2.4835 GHz
Modulation FHSS
Region EURO or FRANCE,
see page 261
Control functions 16 functions, 4 of these can be
trimmed
Temperature range -10 … +55 °C
Antenna collapsible
Operating voltage 3.2 … 4.8 V
Current draw about 500 mA
Range up to about 4 000 m
Dimensions about 252 x 252 x 60 mm
Weight about 1,685 g with transmitter
battery
Receiver GR-32 Dual HoTT
Graupner HoTT 2.4 GHz technology gives the dual-
receiver a new Hopping Telemetry Transmission high-
frequency section with state-of-the-art components
and software. The dual-receiver has two complete
receiver sections and additional hardware antenna
diversity. Reception is always switched over to
the better antenna signal and, for transmitting,
the antenna last used for receiving will always be
used. Thus it is assured that return channel data
is transmitted via the better positioned antenna.
Parameters for receiver supply voltage, receiver
temperature and signal strength are transmitted
without any additional sensors.
The receiver has a connector for telemetry sensors
and one for sum signal input or output.
The receiver has six battery inputs to make it an
excellent power source for even high-load servos.
Accessories
Order No.
Description
71.26 Transmitter straps, Graupner HoTT
72.40 Transmitter straps, deluxe
Teacher/pupil cable for mc-20 HoTT
see page 213
Replacement parts
Order No.
Description
3080 Aluminum transmitter case, HoTT,
400x300x150 mm
33000.1 Transmitter battery, ƀat LiIo, single cell six-
pack/6000 3.7 V TX
33002.1 Micro-SD card, 2 GB for HoTT transmitter
33032.2 Transmitter metal hanger for mc-20
33032.3 Hand rests for mc-20 (2 piece)
33801 HoTT transmitter antenna
Technical data for the GR-32 Dual HoTT receiver
Order no. 33516
Operating voltage 3.6 … 8.4 V*
Current draw about 140 mA
Frequency band 2.4 … 2.4835 GHz
Modulation FHSS
Antenna 2 x 2 diversity antennas,
about 145 mm long, about
115 mm of this length
encapsulated and about
30 mm active
Plug-in servos 16
Plug-in sensors up to four sensors
Temperature range about -10 … +55 °C
Range up to about 5 000 m
Dimensions about 63 x 30 x 14 mm
Antenna length 4 x wire 145 mm (active
antennae 30 mm)
Weight about 24 g
* The speciſcation for permissible operating voltage range applies
only to the receiver. Please note in this context that receiver
input voltage is applied without regulation to connected servos
but the voltage range for most connectible servos (speed
controls, gyros, etc.) is only 4.8 to 6 V.
The set, order no. 33032, includes
Microcomputer transmitter• mc-20 HoTT with
built-in LiIo single cell six-pack/6000 mAh/3.7 V
transmitter battery (change reserved)
Electric outlet charger (4.2 V, 500 mA)•
Graupner• bidirectional receiver, GR-32 Dual
HoTT (order no. 33516) for connection of up to 16
servos
USB adapter/interface (order no.•7186.6) including
suitable USB cable for connection to a PC and an
adapter cable for receiver updates
Micro-SD card (2 GB) with an adapter for a card •
reader
Sturdy aluminum transmitter case with foam•
cushioning (order no. 3080)
Other accessories in Internet at www.graupner.de.
Contact or visit your local dealer. He will be glad to
provide advice.
Thildtf th
mc 20 H TT t itt ThilTh t d 33032 i l d
Computer System mc-20
32 channel remote control set in 2.4 GHz Graupner-HoTT technology
(Hopping Telemetry Transmission)
33020, includes
15
For your notes
16 General operating notices
General operating notices
Transmitter
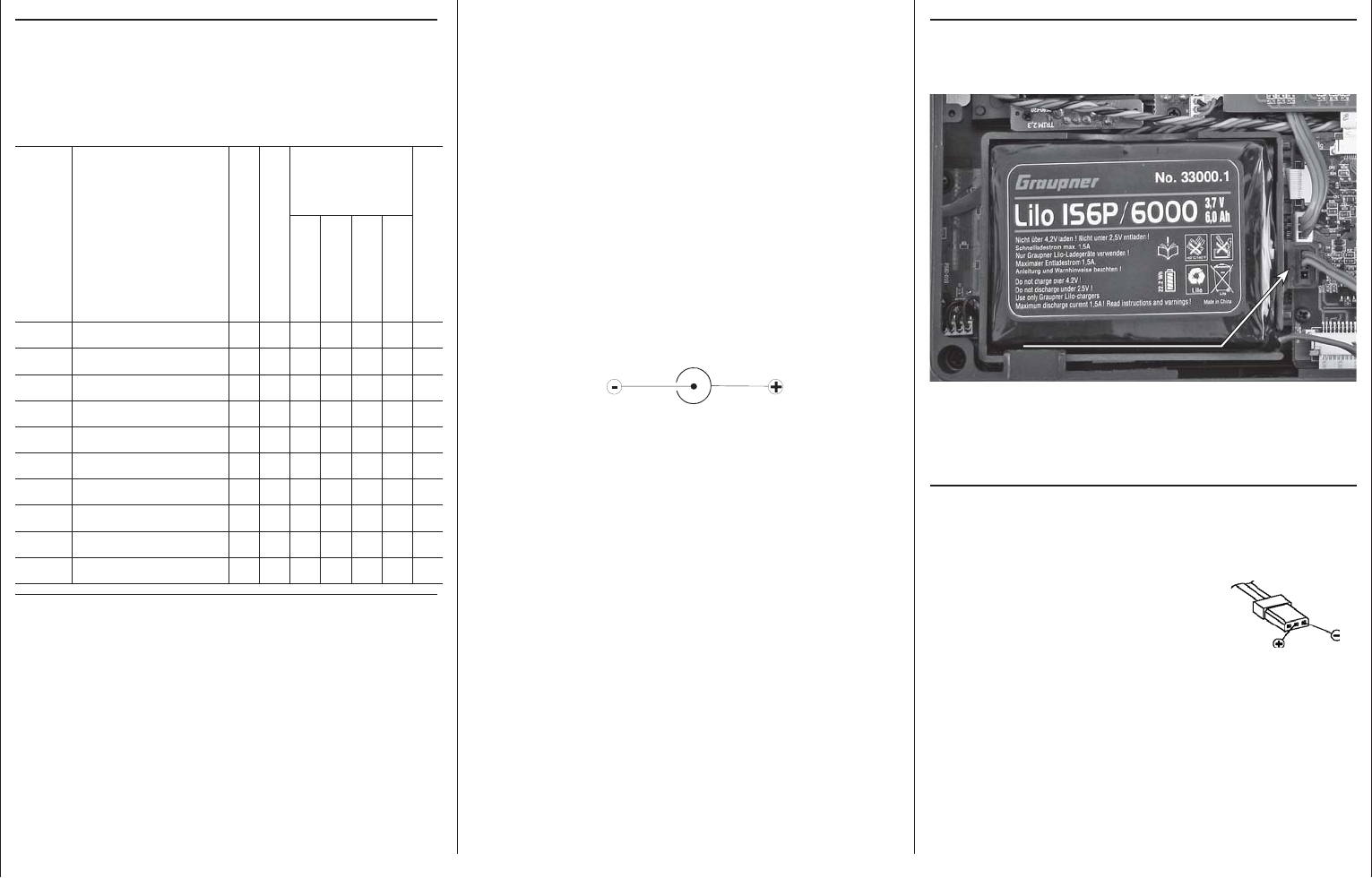
Transmitter power supply
The mc-20 HoTT transmitter is equipped with
a high-capacity, rechargeable LiIo 1s6p/6000
3.7V TX battery (order no. 33000.1) as standard
equipment. (changes reserved) However, the
standard built-in battery is not charged upon
delivery of the transmitter.
When the transmitter is used, its battery voltage
should be monitored by way of the indicators provided
in the LCD display. If the voltage level preset in the
"Battery warning" line of the »General basic settings«
menu, page 260, (default setting 3.60 V) is underrun,
an acoustic signal will be sounded and a warning
message will appear in the display.
#01 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
3.5V
0:00.0
00
0
0
0:00h
M
V
Batt must
be re-
charged!!
No later than now, operation must be terminated so
the battery can be charged again.
Note:
Be sure the correct battery type is set in the »General
basic settings« menu, page 260!
The standard setting for this is "Lith.".
Charge the transmitter battery with the plug-in
charger.
The transmitter's rechargeable LiIo battery can be
charged by way of the charger socket located behind
a cover on the left, front side of the transmitter – as
viewed from the front – with the included plug-in
charger (order no. 32032.4).
Depending on the state of discharge, the included
plug-in charger (4.2 V/500 mA) requires up to about
15 hours to fully recharge the transmitter battery.
Never use plug-in chargers from other manufacturers
or chargers intended for other battery types. Charger
output voltage which is too high or possibly even
different plug polarity, see further below, can cause
immense damage. We recommend that this plug-in
charger be appropriately labeled.
Also observe the safety notices provided on pages
4 … 7.
The transmitter must be switched "OFF" during
the entire charging procedure. Never switch on the
transmitter when it is connected to the charger. Even
a brief interruption to charging can cause charging
voltage to rise to a level that will immediately damage
the transmitter with over-voltage. Also for this reason,
be sure all connectors are always plugged in securely
and have good contact.
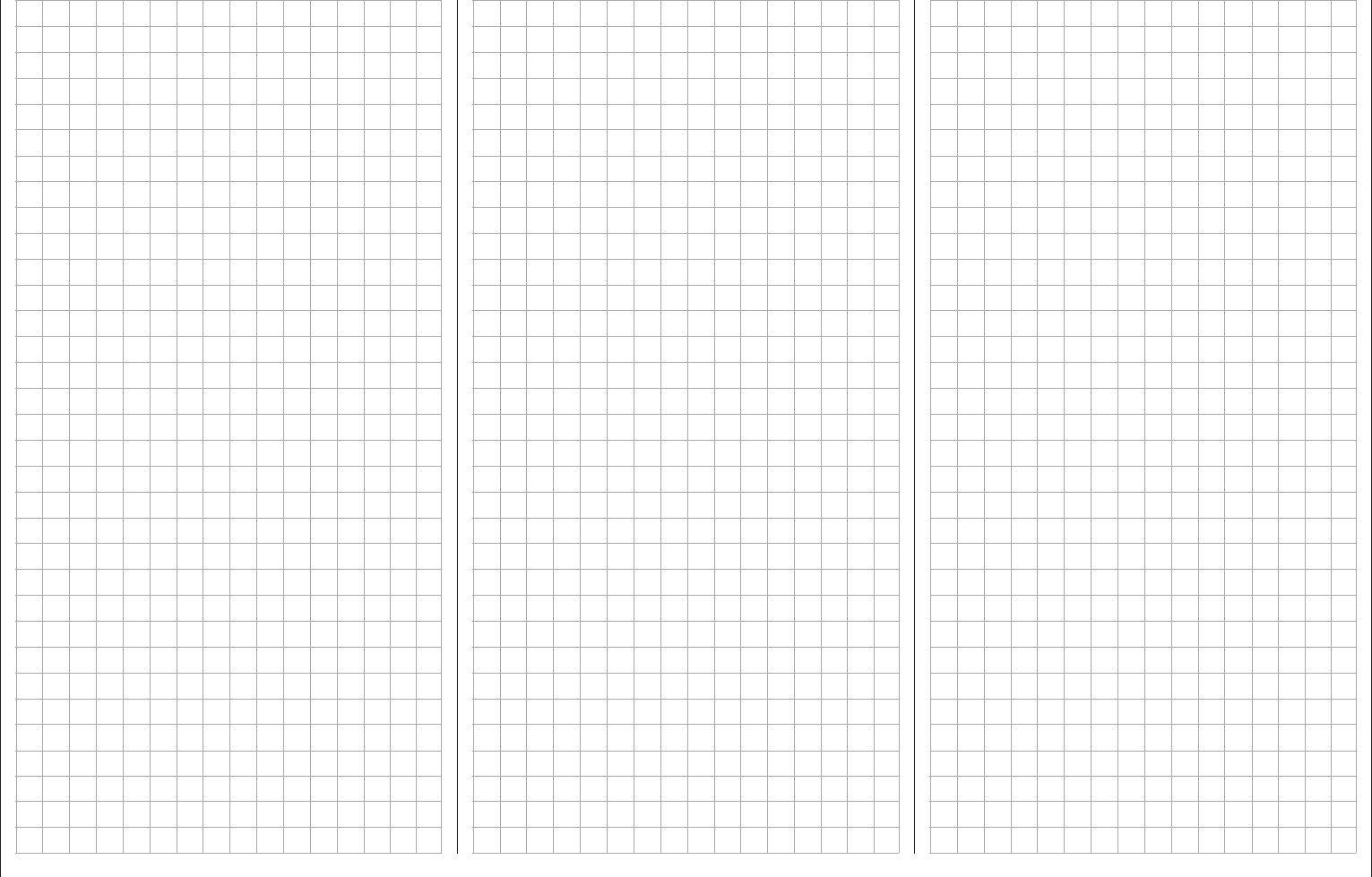
Opening the transmitter housing
Switch off the transmitter before opening it (power
switch to »OFF«). Push both housing base latches in
the opposite the direction of the arrow marks, toward
the inside, to their limits. Now tilt the transmitter
somewhat to the rear so the housing base can fl ip
open and can be unhooked. Close the transmitter's
housing base by fi rst hooking it to the underside, fl ip
the base closed then push both latches toward the
outside. When closing the base, pay attention that no
cables are pinched.
Notes:
Make no modifi cations of any kind to the •
circuit boards as this will void the guarantee
as well as the unit's offi cial permit.
Be sure not to touch the circuit boards with •
any metallic objects. Do not touch contacts
with your fi ngers.
Before performing any tasks inside the •
transmitter, disconnect the transmitter's battery
(see next page) to avoid potential short circuit
damage to the transmitter's circuit boards.
17
General operating notices
Charging with automatic chargers
To achieve quicker recharging of the single cell LiIo
battery, Graupner automatic chargers can also be
used. The table below shows a selection of these
chargers.
Recommended chargers (accessory)
Order
No. Designation
Input voltage 220 V
Input voltage 12 V
suitable for
battery types
integr. balancer
NiCd
NiMH
LiPo/LiIo
lead battery
6411 Ultramat 8 xxxxx
6463 Ultramat 12 plus x x xxxx
6464 Ultramat 14 plus x x x xxxx
6466 Ultra Trio plus 14 x x x xxxx
6468 Ultramat 16S x x x xxxx
6469 Ultra Trio Plus 16 xxxxx x
6470 Ultramat 18 x x x xxxx
6475 Ultra Duo Plus 45 x x x xxxx
6478 Ultra Duo Plus 60 x x x xxxx
6480 Ultra Duo Plus 80 x x x xxxx
Charger cable, order no. 3022 is additionally needed for the
transmitter and charger cable, order no. 3021 is additionally
needed for the receiver.
Other charger units and details about the listed chargers can
be found in the Graupner RC main catalog or in Internet at
www.graupner.de.
The charger socket is equipped standard with a
diode to protect against reversed polarity. Original
Graupner automatic chargers also detect battery
voltage polarity.
Observe the confi guration notices for the charger
used.
First connect the charger cable's banana
plugs to the charger and only then connect
the cable's other end into the charging jack
on the transmitter. Never allow the bare ends
of the banana plugs to come into contact with
one another when the other end of the cable is
plugged into the transmitter.
Charging current may not exceed 1.5 A as
otherwise the diode, and perhaps other
components, could be damaged. If necessary,
limit the current at the charger.
mc-20 HoTT charging jack polarity
The charger cables on the market from other
manufacturers often have different polarities.
Therefore use only an original Graupner charger
cable, order no. 3022.
Removing the transmitter's battery
To remove the transmitter's battery, fi rst unlatch the
cover of the battery compartment on the rear side of
the transmitter housing then remove the cover.
Take out the transmitter's battery then disconnect the
transmitter battery's connector by carefully pulling on
the supply line cable.
Inserting the transmitter's battery
The battery connector is protected against a
reverse polarity connection by two slanted edges,
see illustration. When correctly plugged in, the
unconnected pin of the connector is at the bottom,
as shown in the illustration. The plus
pole (red lead) is in the middle and
the minus pole (brown or black lead)
is toward the antenna side.
Never try to force the connector
onto its circuit-board socket.
Place the battery into its
compartment and close the transmitter's cover.
Transmitter
connector polarity
Battery connector
Battery connector
18 General operating notices
Battery operation timer at the bottom left of the
screen
This timer shows the transmitter's cumulative operating
time since the transmitter's battery was last charged.
This timer is automatically reset to "0:00" when the
transmitter is switched on and its battery voltage is
signifi cantly higher than when the transmitter was last
used, e.g. because the battery was charged.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Lithium battery, CR 2032
On the side of the transmitter board opposite the
transmitter battery there is a fi xture containing a
lithium battery, type CR 2032, which can be replaced
by the user.
This battery maintains the date and time settings
during a transmitter power supply outage, for
example when the transmitter's main battery is being
replaced.
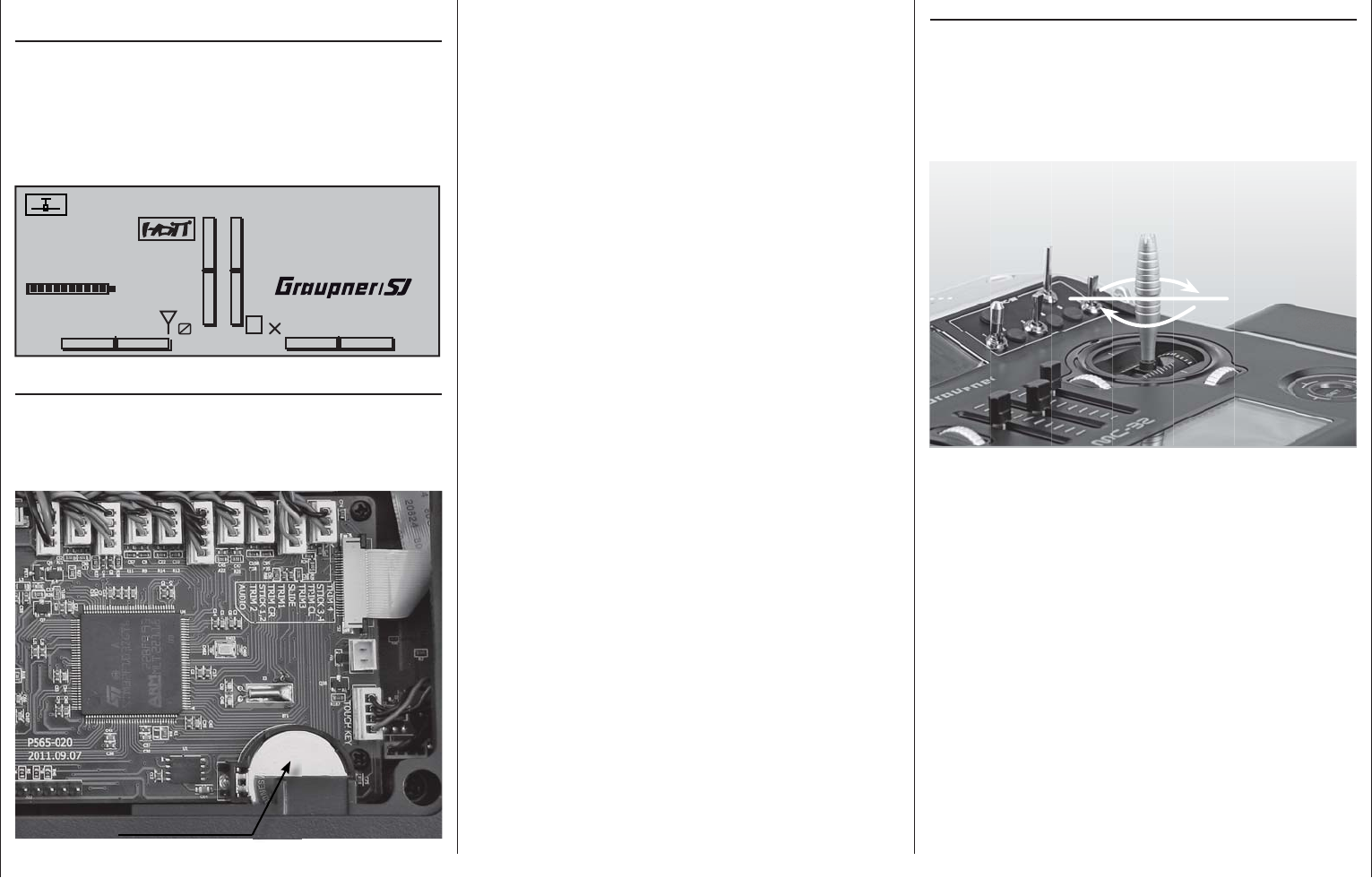
Joystick length adjustment
The length of both joysticks can be continuously
adjusted to adapt these transmitter controls to the
pilot's preference.
Hold the lower half of the knurled grip in place then
turn the upper section to release its counter-locked
threads.
Now pull up or push down on the joystick's end to the
desired length. When the length is suitable, tighten
the counter-locked threads of the upper and lower
sections again.
Lithium battery
Lithium battery
19
General operating notices
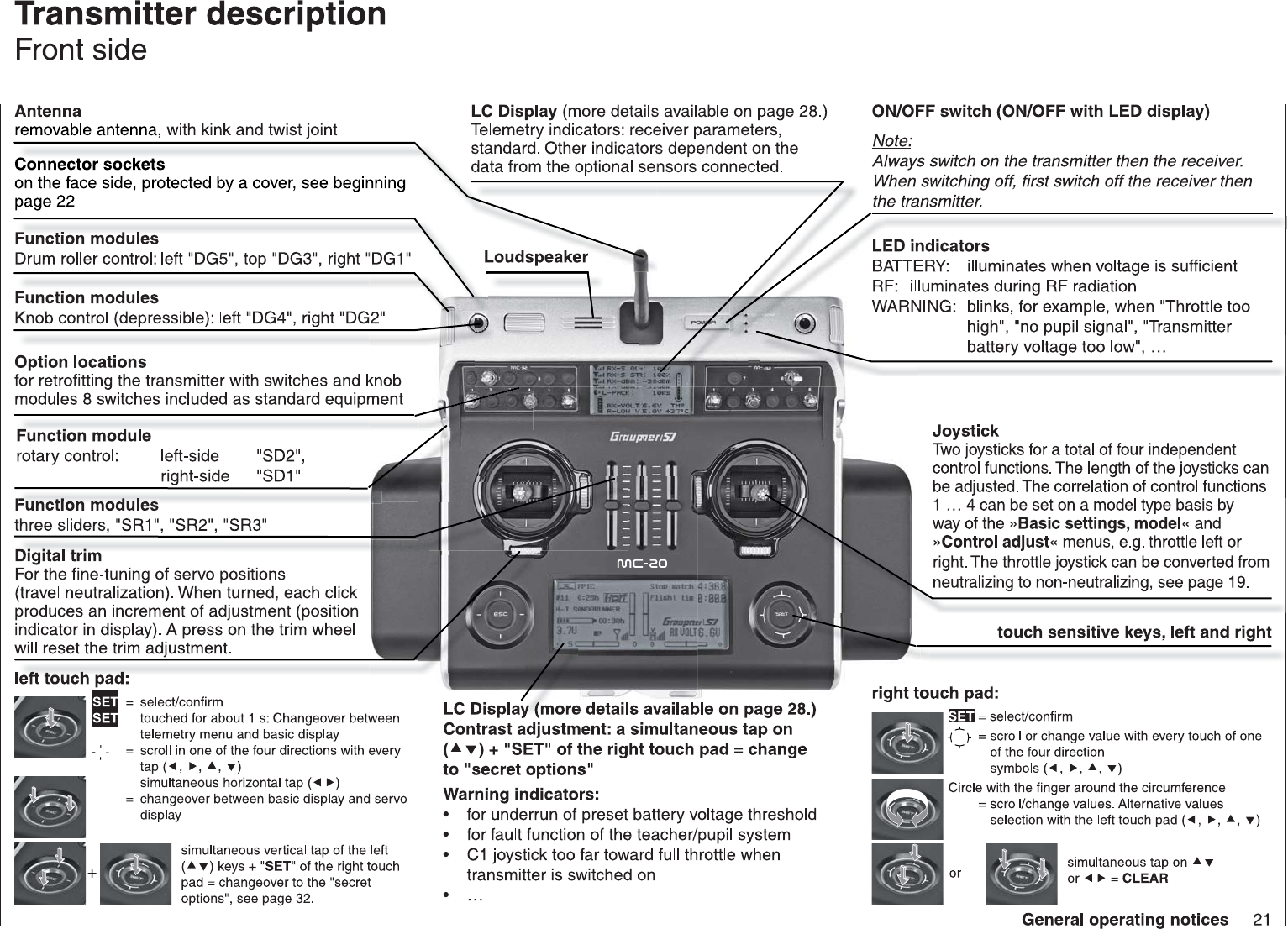
Joystick restoring force
The joystick's restoring force can also be adjusted
to the pilot's preference. The adjustment is located
next to the return springs, see markings in the fi gure
below.
Spring force for the given direction of motion can
be adjusted by turning the respective screw with a
Phillips screwdriver.
clockwise = stronger return,•
counter-clockwise = weaker return.•
Note:
The aggregate for the right joystick is a mirror image
of the left joystick so corresponding screws for the
right joystick are located to the right of the middle.
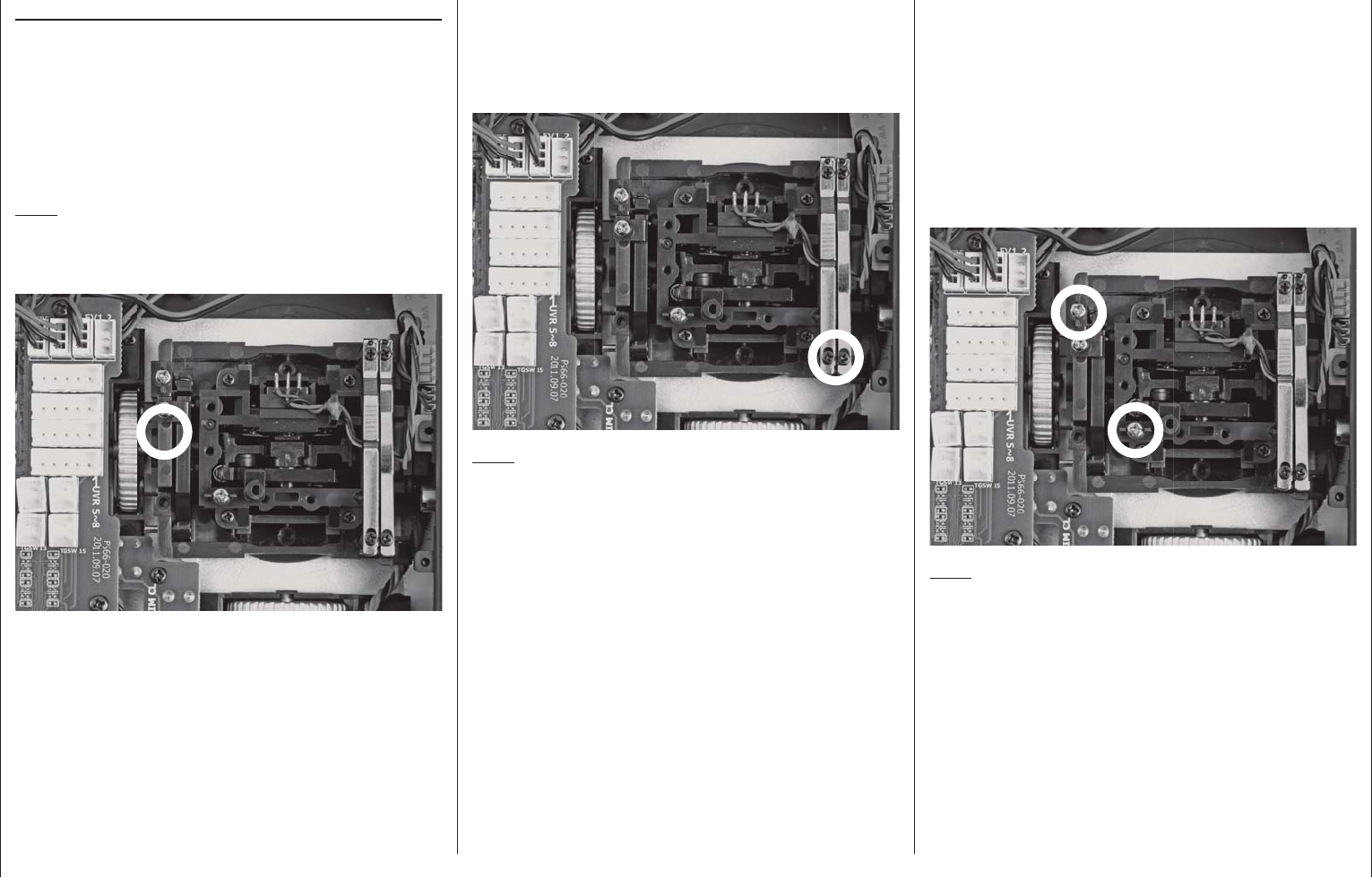
Joystick conversions
Neutralization
Both the left and the right joystick can be confi gured
for neutralized or non-neutralized operation. Open the
transmitter.
To change the joystick's factory setting, locate the
screw shown in the fi gure below enclosed in a white
circle.
Note:
The aggregate for the right joystick is a mirror image
of the left joystick so the corresponding screw for the
right joystick is on the right side just below the middle.
Now turn this screw down until the respective joystick
is free to move from limit to limit - or turn the screw
out until the joystick again completely self-restoring.
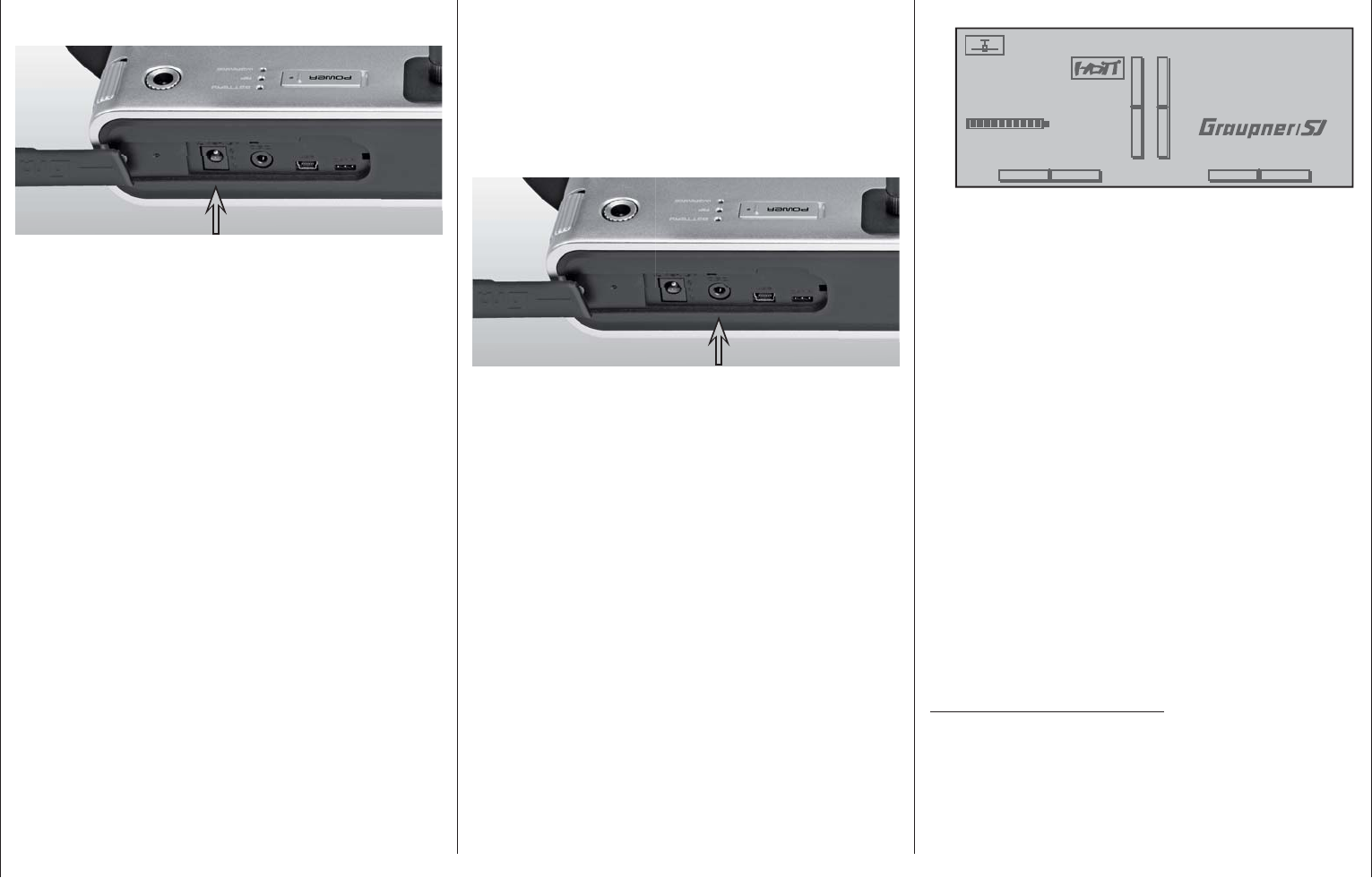
Brake spring and ratchet
The outboard screw of the two marked in the next
fi gure adjusts the braking force and the inboard screw
adjusts the strength of the ratchet for the respective
joystick.
Note:
The aggregate for the right joystick is a mirror image
of the left joystick so corresponding screws for the
right joystick are located at the top left.
vertical
vertical
horizontal
horizontal

20 General operating notices
Holder bracket for transmitter straps
A stable transmitter hanger for fastening neck
straps is standard equipment on the mc-20 HoTT
transmitter.
To unfold the holder brackets, fi rst press both
brackets inward a bit near where they are lettered
then turn them upward by 90 °. The brackets will
automatically lock into position.
If you have a neck strap fastened to the holder
bracket with key-rings, fi rst press lightly on the right
holder bracket to release its latch so it can be folded
down then do the same with the left holder bracket.
Afterward, press both brackets SIMULTANEOUSLY
into the recess.
The following straps are available as accessories:
Order no. Description
71.26 Transmitter straps, Graupner HoTT
72.40 Transmitter straps, deluxe
Installation of switches, switch modules and knob
modules
There are a total of 20 holes in the transmitter's
housing available for mounting accessory modules.
To be safe, always disconnect the transmitter battery
before installation to avoid short circuit conditions.
Be sure to pay attention that soldered points on the
transmitter board do not come into contact with metal
objects!
Unoccupied holes in the transmitter's housing are
closed with blind plugs. These can easily be pulled
out from the outside with one's fi ngernails.
Insert the accessory switch, etc. through a hole in the
housing from the inside.
Accessory switches, potentiometers, etc. are
fastened into place by screwing a nut onto the
threaded shaft protruding though the housing and
tightening it with a suitable wrench. If the control has
a knob, it can be reattached after the nut is tightened
down. Trim nut wrench (order no. 5733) is well suited
for tightening down these nuts.
Trim nut wrench (order no. 5733) is well suited
for tightening down switch element trim nuts.
Aligning the antenna
The removable, articulated antenna is to be screwed
into the ball-joint connector then aligned by hand.
The antenna exhibits very limited fi eld strength
straight out from its end, pointing it directly toward the
model is wrong.
When screwing in the antenna, pay attention that the
center pin in the antenna socket does not get bent or
pressed back in the socket.
22 General operating notices - Face-side connections
telemetry data and symbols will be suppressed.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
DSC
The transmitter's upper display will show the
message "CANNOT RECEIVE DATA" during this
time.
Thus the transmitter is ready for operation.
In contrast, the mc-20 HoTT transmitter in teacher
mode is to be switched on prior to plugging in the
respective cable.
Connect the other end of the cable to the desired 3.
unit in compliance with the given operating
instructions for that unit.
Important:
Pay attention that all plugs are inserted
securely into their respective sockets and
use only the prescribed 2-pole TRS connector
plugs on the DSC-side.
In the line "DSC Output" in the »4. Basic settings,
model«, page 81 or 88 or the line "Pre-set DSC
Output" in the »General basic settings«, page
258, – depending on the number of functions
transferred – one of the following modes can be
set: PPM10, PPM16, PPM18 or PPM24. Default
setting: PPM10.
Notice about fl ight simulators:
Because of the myriad of fl ight simulators available
on the market, it may be necessary to have the
contact layout of the audio plug or DSC module
appropriately modifi ed by Graupner Service.
DSC / Direct Servo Control
The acronym "DSC" is a carryover which stands for
the original "Direct Servo Control" function. However,
in HoTT systems the "direct servo control" function
is no longer available via a diagnose cable due to
technical reasons.
Once the left face-side cover has been moved
away, the mc-20 HoTT transmitter's DSC socket is
accessible:
The standard two-pole DSC jack in the mc-20 HoTT
transmitter is used as the teacher or pupil jack as well
as an interface to fl ight simulators.
To ensure a proper DSC connection, please
observe:
Make any necessary menu changes.1.
Refer to the section beginning on page 210 to
adapt the mc-20 HoTT transmitter to a teacher/
pupil system.
When operating a fl ight simulator or when 2.
operating the mc-20 HoTT transmitter as a pupil
transmitter, ALWAYS leave the transmitter's ON/
OFF switch in the "OFF" position as only in this
position does the transmitter's RF module remain
inactive after the DSC cable is inserted. This also
reduces the transmitter's power consumption
somewhat.
Only the "
Battery
" LED should remain constantly
illuminated and the transmitter's basic display
should show the character string "DSC" below the
operating time clock. At this time, the display of
Face-side connections
Charger jack
The mc-20 HoTT transmitter's charger jack becomes
accessible after turning the left face-side cover away.
The transmitter's rechargeable LiIo battery can be
charged by way of the charger socket located behind
a cover on the left, front side of the transmitter – as
viewed from the front – with the included plug-in
charger (order no. 32032.4).
Maximum permissible charging current with Graupner
automatic chargers: 1.5 A.
Never use plug-in chargers from other manufacturers
or chargers intended for other battery types. Charger
output voltage which is too high or possibly even
different plug polarity, see further below, can cause
immense damage.
More information about charging the transmitter's
battery can be found on page 16. Observe the
safety notices on pages 7 … 9 when handling lithium
batteries.
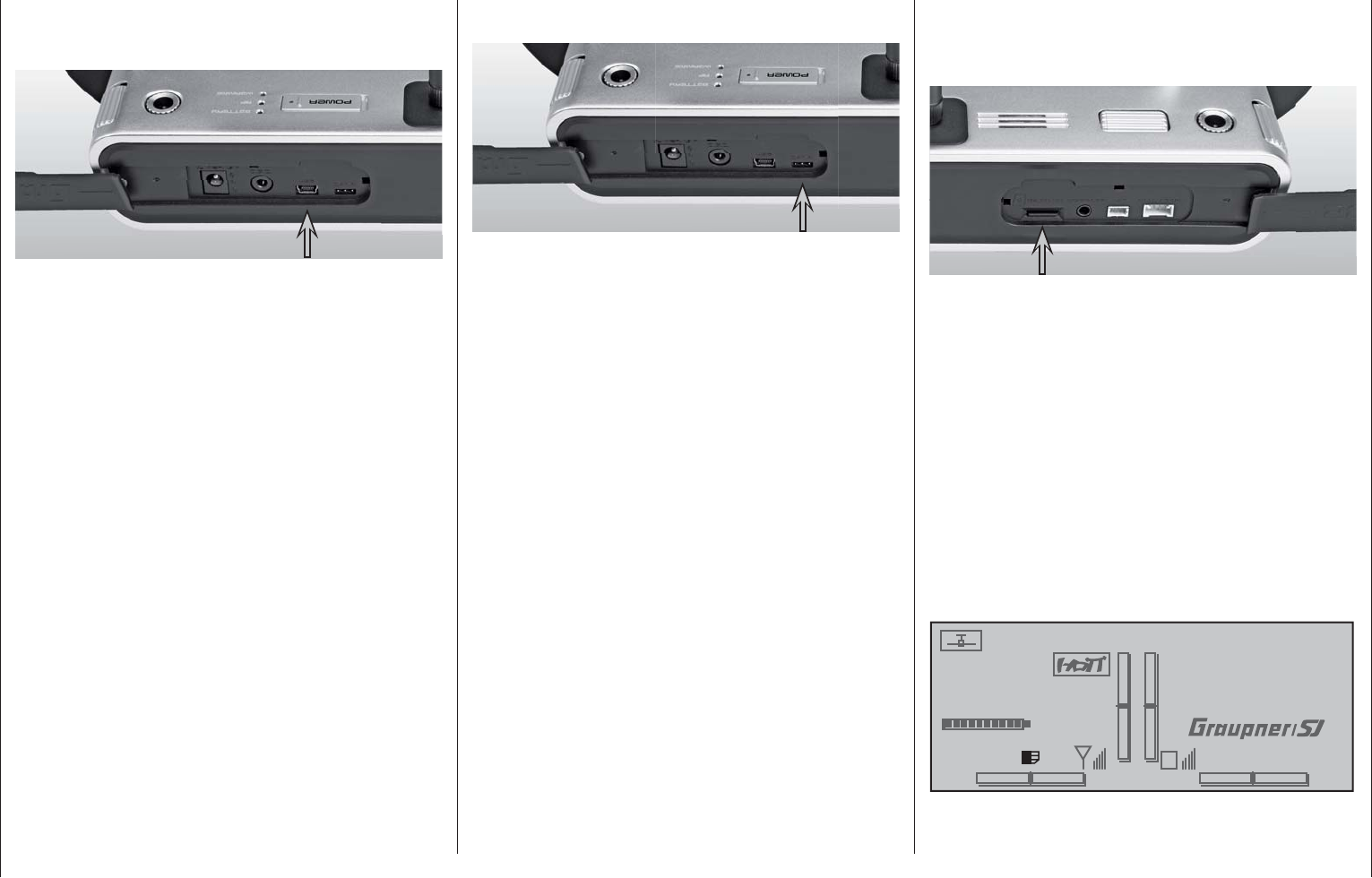
23
General operating notices - Face-side connections
Card slot
micro SD and micro SDHC
The mc-20 HoTT transmitter's card slot for type
micro-SD and micro-SDHC memory cards becomes
accessible once the right face-side cover has been
turned away.
All conventional micro SD memory cards up to
2 GB and micro SDHC cards up to 32 GB storage
capacity can be used. However, as a manufacturer we
recommend the use of memory cards no larger than
4 GB as this is completely adequate for all normal
situations.
The type of memory card to be used in the transmitter
is that known in conjunction with digital cameras and
cell phones. It is to be pushed into the slot, contacts
up, until it latches, see photos above.
Once the memory card has been inserted, the
transmitter's cover fl ap can be closed again.
The stylized image of a memory card will appear in
the basic setup screen to indicate the presence of the
inserted memory card.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
VRX VOLT 4.8V
Removing the memory card
Press the SC card a bit further into the card slot to
The so-called "DATA jack" is located at the right of
this group of connector sockets.
This jack is intended for connection of the optional
Smart-Box, order no. 33700.
Details about the Smart-Box can be found with the
given product in the Graupner RC main catalog or in
Internet at www.graupner.de.
Data jack
Connector jack for software updates as well as
for changing date and time from a PC with a
Windows XP, Vista or 7 operating system.
The USB cable, order no. 32032, which is included
with the set is to be connected to this jack. The
procedure for carrying out a software update via
a PC is described on page 43.
The PC software required, as well as the suitable
USB driver, can be found on the download page for
the given product on the Graupner website at
www.graupner.de.
Once the necessary driver and software is installed
on the PC, this USB connection can be used
to update the transmitter or even just to set the
transmitter's date and time.
To set the transmitter's date and time by way of this
jack, refer to the »Info display« menu, beginning
page 266.
Mini-USB connector
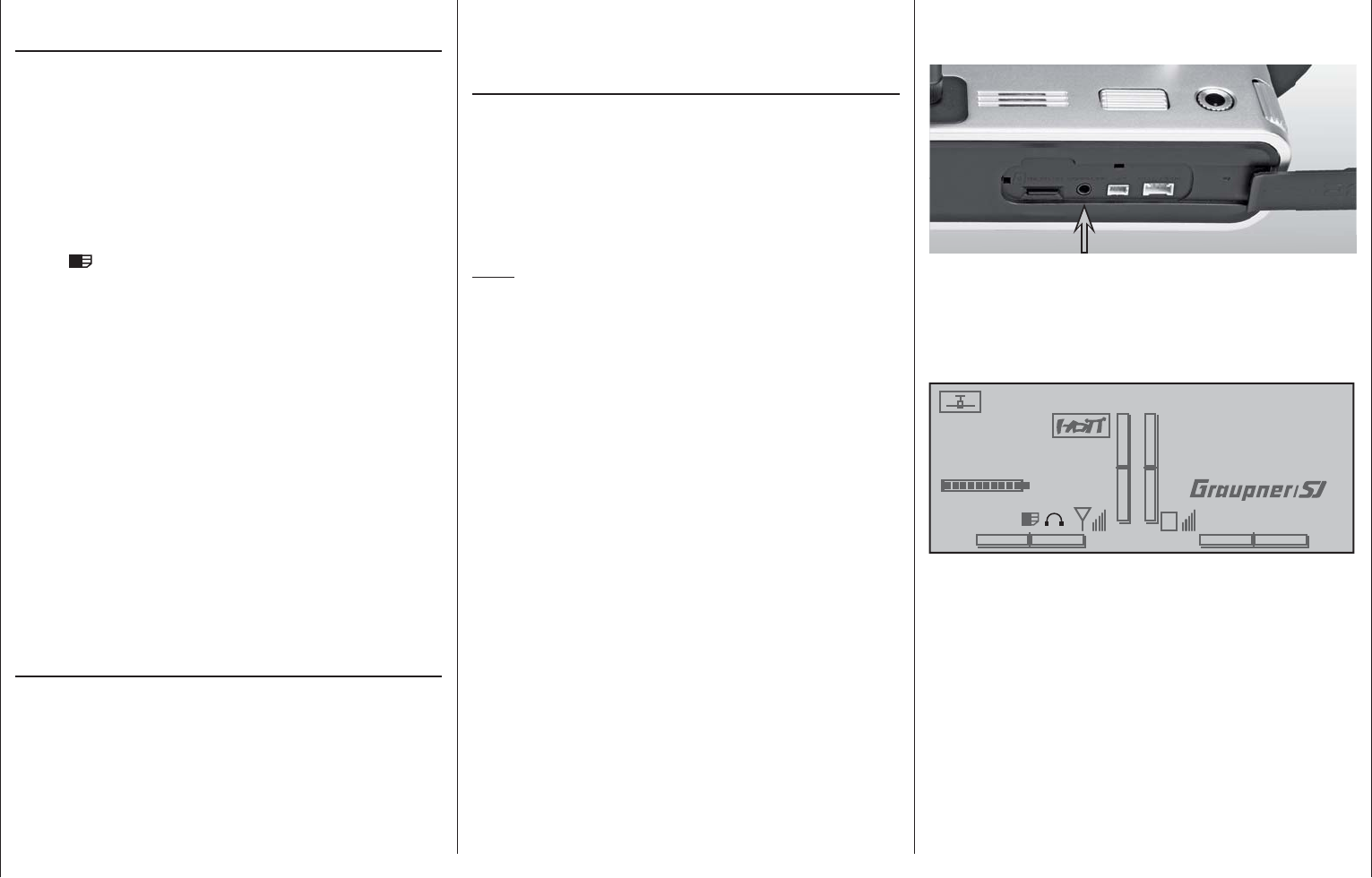
24 General operating notices - Face-side connections
voice packet of a different language at any time. More
information about this can be found in the section
»SECRET MODE« beginning on page 32.
Importing/exporting model memories
Any model memory can be stored to an inserted
memory card or from an inserted card into the
transmitter. This feature is intended to support data
exchange between identical transmitters or even use
as data backup. More information about this can be
found in the section »Copy / Erase« beginning on
page 71.
Note:
Some special symbols that can be used in model
names are subject to specifi c restrictions associated
with the FAT or FAT32 fi le system used by the
memory cards and these special symbols will be
replaced during the copy process with a tilde (~).
Once the right face-side cover has been moved away,
the mc-20 HoTT transmitter's headset connector is
accessible:
The jack is intended for connecting conventional
earplugs or a headset by way of a 3.5 mm TRS
plug. (not included in the set) An appropriate symbol
will appear in the basic display when a headset is
connected.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
VRX VOLT:4.8V
The transmitter's acoustic signals as well as those
signals associated with the telemetry menu are
output via this connection. These announcements
are made in German language by default. More
about this can be found under "Voice output" in the
section »SECRET MODE« beginning on page 32 and
»Telemetry« beginning on page 228.
The volume of signals and voice output sent to
the headset can be adjusted individually in the
lines "Voice volume", "Vario volume", and "Touch-
beeps vol." of the »General basic settings« menu,
page 259.
Headset connector
release the slot's latch then pull out the memory card.
Data acquisition / storage
The storage of data on the SD card is coupled to the
fl ight timer. If this timer is started – when a suitable
memory card is inserted in the card slot and a
telemetry link to the receiver exists – data acquisition
is also started. Data acquisition will stop again when
the fl ight timer is stopped. The fl ight timer is started
and stopped as described in the section "Timers
(general)" on page 153.
While data acquisition is ongoing, the on-screen card
image will blink continuously at a slow rate.
The amount of data written on the memory card is
presented as a black bar graph which grows from left
to right as data fi lls the memory card.
After a data acquisition session is fi nished, there
will be an (empty) folder "Models" and a "LogData"
folder on the memory card. Within the "LogData"
folder there will be log fi les in sub-folders that are
designated with names in the format 0001_year-
month-day.bin, 0002_year-month-day.bin, etc. If a
model memory folder is still "unnamed" when the
memory card is removed from the transmitter and
inserted into the card slot of a PC or laptop, the
respective log fi les can be found in a sub-folder
designated "NoName". There is a PC program
available on the transmitter's download web page at
www.graupner.de with which the stored data can be
evaluated on a compatible PC.
Importing voice fi les
As mentioned in section "Headsets", here at the right,
the transmitter's acoustic signals as well as those
signals and announcements associated with the
telemetry menu can be output by way of the headset
connector. These announcements are made in
German language by default. These announcements
are summarized in a voice packet which is stored in a
transmitter-internal memory but can be replaced by a
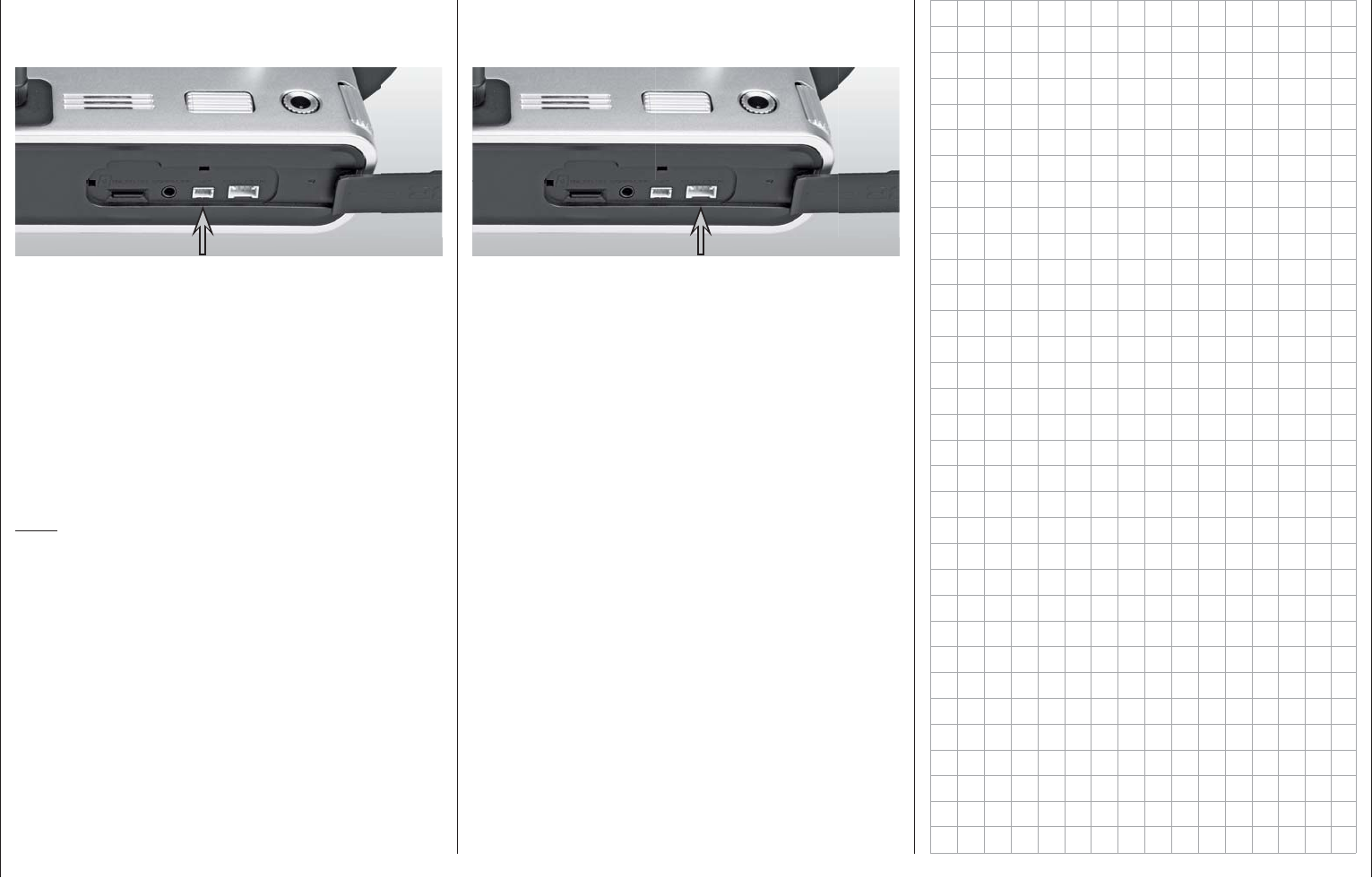
25
General operating notices - Face-side connections
An external RF module, for example a WEATRONIC
module, can be connected to this jack, see illustration
below.
An external RF module, for example a WEATRONIC
module, can be connected to this jack.
If an external RF module is attached, then switching
between the external module and the internal HoTT
RF module is accomplished in the "Module" line
of the »Basic settings, model« menu, page 77
or 85, by selecting either "HoTT" or "EXT.PPM". If
necessary, the signal provided on this connection
can be inverted by selecting the appropriate option
for the line "ext. PPM signal" in this same menu, see
page 83 or 92.
Note:
The "INT PPM" socket located inside the transmitter
is also suitable for this purpose. However, a
connecting cable must be passed through to the
outside of the transmitter housing by way of one of
the module openings originally intended for a switch.
EXT.PPM
The designation "SPI" stands for an interface for
future applications. This socket is currently non-
functional and may not be connected.
SPI
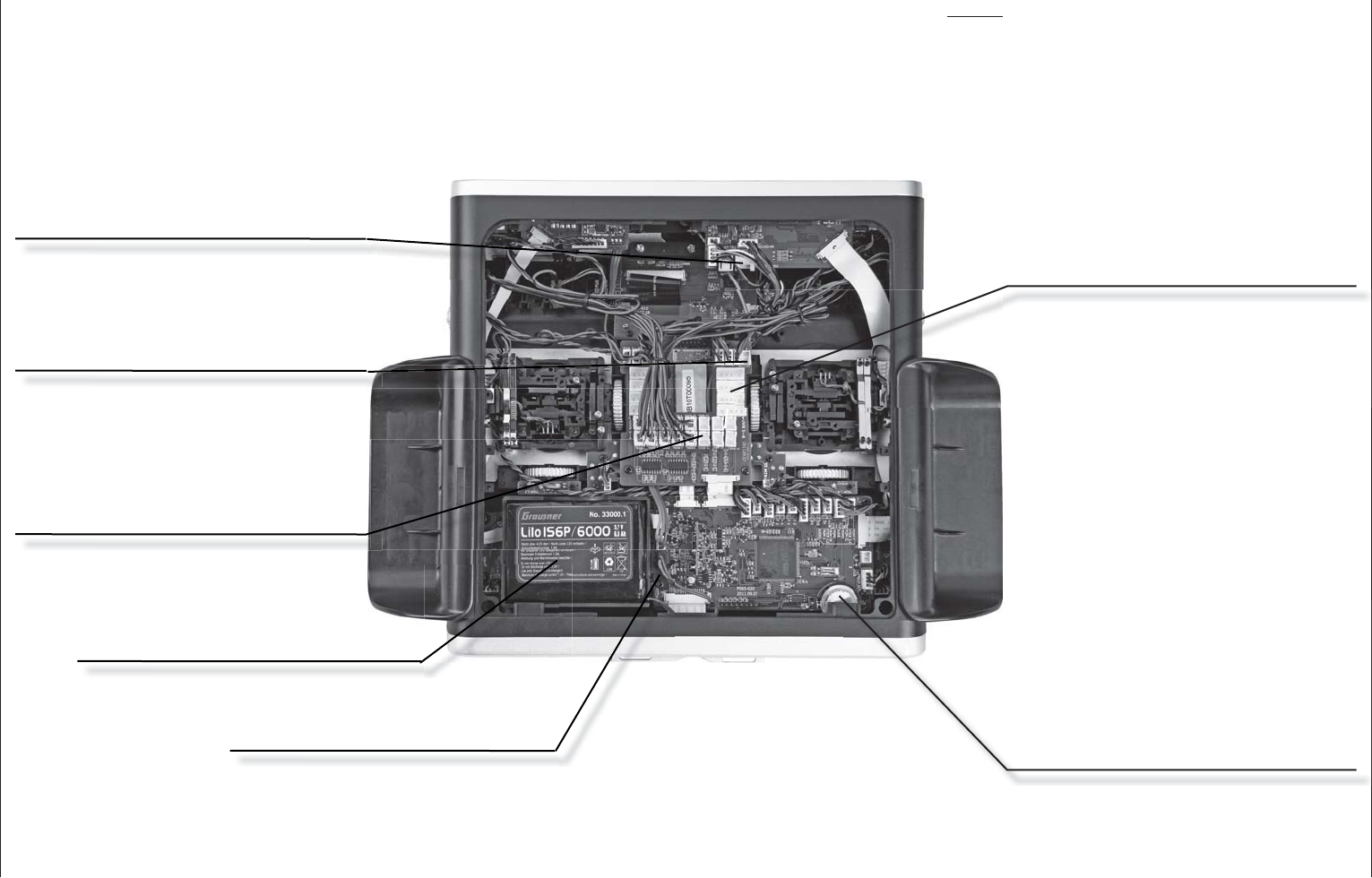
26 General operating notices - Face-side connections
Bottom side transmitter interior
Notes:
Disconnect the transmitter battery at its
connector when performing any type of work
inside the transmitter. Never allow solder points
to come into contact with objects as this can
create short circuit conditions.
All jacks and plugs not described are to be left
unconnected.
Transmitter battery plug
For charging the battery and a list of
suitable automatic chargers, see page 17
Lithium battery CR2032
(not rechargeable)
Independent backup for the transmitter's
date and time settings, see »Info display«
menu on page 266.
Transmitter battery
Observe charging rules, see page 16
Plug-in locations
Six free plug-in locations for additional
switches are standard, see page 21
These switch plug-in locations can
be used in any sequence.
Plug-in location
One free plug-in location for a proportional
rotary control module, order no. 33001.11
INT PPM plug-in location
One free plug-in location for connecting
an additional – internal – RF module
Lithium battery
C
R2032
(
not rechar
g
eable
)
I
n
d
e
p
en
d
ent
b
acku
pf
or the transmitter's
date and time settin
g
s, see »In
f
o display«
m
enu on page
26
6
.
Plug-in locations (UVR, 5-pole)
eight free plug-in locations for future
rotary control installations.
27
For your notes
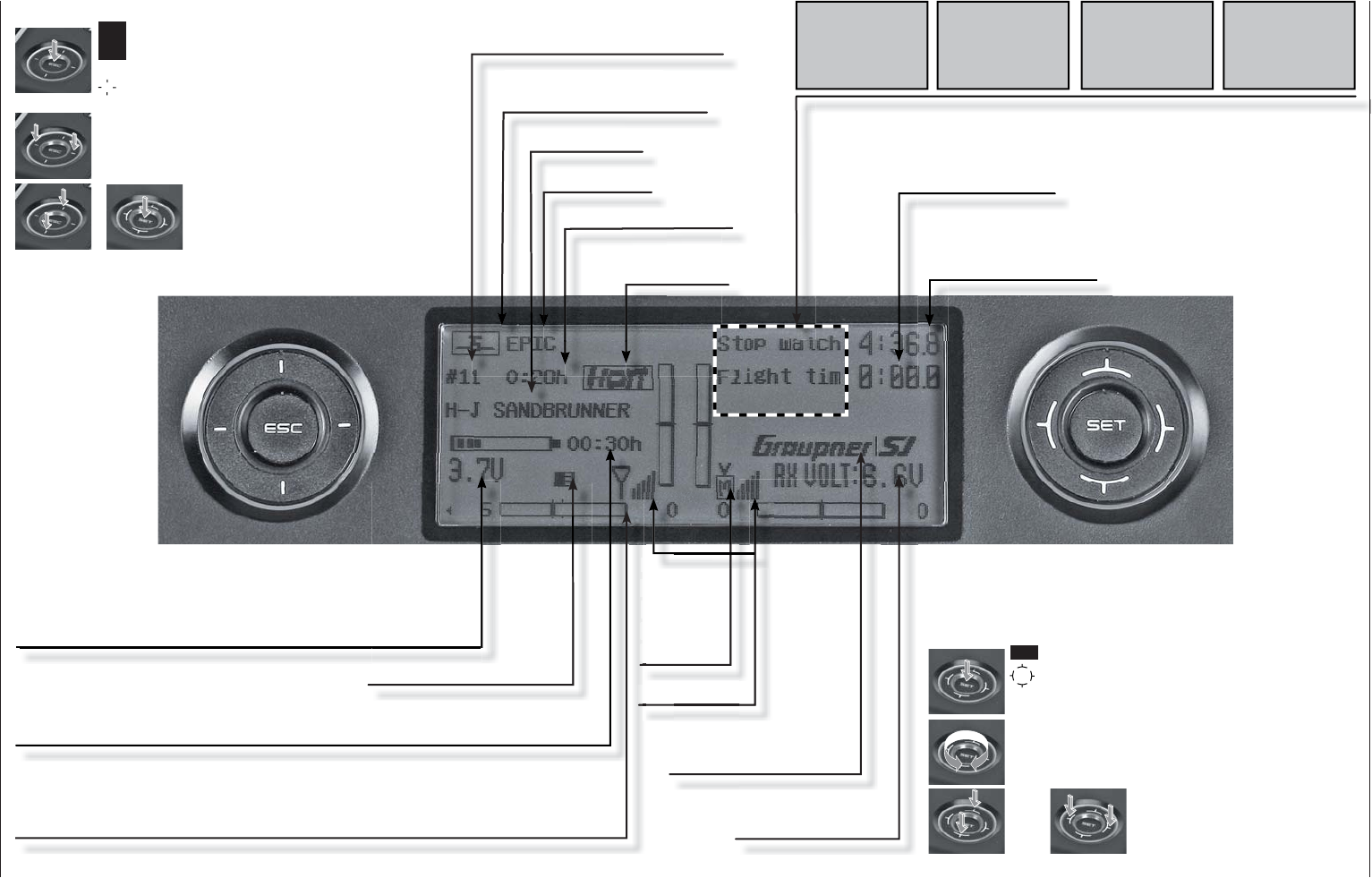
28 Transmitter description - Display and keypad
Display and keypad
Stopwatch in min:s
(upward/downward)
Flight timer in min:s
Model memory location 1 … 80
Transmitter battery voltage with dynamic bar indicator. If the
lithium battery voltage underruns the 3.60 V (adjustable)
threshold a warning message will appear and an acoustic
warning will sound. (switchover for NiMH batteries.)
Transmitter operating time This will automatically be reset to zero after a
charging process.
Model type indicator
winged model, helicopter
Display diagram for all four digital trim levers with numeric indicator and
direction indicator
Graupner|SJ logo or
fl ight phase name
Model name
Operating mode
HoTT/PPM
Receiver battery
voltage RX-SPG
de
Model operating time
Owner name
micro-SD card inserted
Signal strength
M=Model
operation
P = Pupil
(pupil trans-
mitter)
=
M
No
pupil
signal!
Throttle
too
high!
Batt. must
be re-
charged!!
Fail Safe
setup
t.b.d.
A selection of potential warnings and notices. More about this on page 30.
left touch pad:
+
SET = select/confi rm
SET touched for about 1 s: Changeover between
telemetry menu and basic display
= scroll one of the four directions with every tap:
(e,f,c,d)
simultaneous horizontal tap (ef)
= changeover between basic display and servo
display
simultaneous vertical tap of the left
(cd) keys + "SET" of the right touch
pad = changeover to the "secret
options", see page 32.
SET = select/confi rm
= scroll or change value with every touch of one
of the four direction symbols (e,f,c,d)
Circle with the fi nger around the circumference
= scroll/change values. Alternative values
selection with the left touch pad (e,f,c,d)
simultaneous tap on cd
or ef = CLEAR
right touch pad:
or
M
o
d
e
l
t
y
pe
i
n
di
cator
wi
n
g
e
d
mo
d
e
l
,
h
e
li
copter
m
o
d
m
e
a
tin
g
m
T/
PP
M
e
r
a
TT
a
t
i
ng t
im
a
M
o
d
e
l
nam
e
O
p
e
Ho
T
M
o
d
e
l
oper
O
wner nam
e
T
ransmitter battery voltage with dynamic bar i
n
ithium battery volta
g
e underruns the 3.60 V (
a
t
hreshold a warnin
g
messa
g
e will appear and
w
arning will sound.
(
switchover for NiMH batte
T
ransmitter operating time This will automatically be reset to zero after a
ch
arg
i
ng process
.
D
isplay diagram
f
or all
f
our digital trim levers with numeric indicator and
d
irection indicato
r
n
dicator. If the
a
djustable)
an acoustic
ries.
)
m
m
icro-
S
D card inserte
d
S
S
M
M
M
o
o
o
P
P
P
(
(
(p
m
m
m
G
raupn
e
fl
i
g
ht ph
a
er|S
J
logo or
J
a
se nam
e
a
l stren
gt
t
h
Model
a
tio
n
P
u
p
il
il trans-
e
r)
Model
29
Transmitter description - Display and keypad
Operating the "data terminal"
Entry keys ESC and SET
Display symbols
Displayed telemetry symbols
the active model memory has not yet been
"bound" to a HoTT receiver. More about the
"Binding" process can be found on page 77
and 85.
Switched off on RF transmitter side
blinking antenna symbol:
The last receiver bound to the active model is
inactive or out of range
M x no telemetry signal to receive
Msignal strength indicator of the connection to
the model
P signal strength indicator of the connection to the
pupil transmitter in the display of the teacher
transmitter for wireless teacher/pupil operation
Keys left of the display
ESC• key
each brief tap on the ESC key will cause a
stepwise return in function selection or even
further to the base screen. Any changes made to
settings remain.
Momentarily touching the ESC key for about 1 s
while in the base screen will open and close the
Telemetry menu.
Selection keys • ef cd
A tap on one of these keys will scroll, 1.
appropriate for the given arrow direction,
through lists, such as through the model
selection list or the multi-function list or within
menus though the menu's lines.
A brief simultaneous tap on the 2. ef keys will
cause a switch from the transmitters base
screen, as well as from almost any menu
position, into the »Servo display« menu.
Keys to the right of the display
S•ET key
After switching the transmitter on, a brief tap 1.
on the SET key will cause a jump from the
displayed base screen to the Multi-function
menu. In the same manner, a selected menu
can now be called up with the SET key.
Within menus having settings, activate / 2.
deactivate (confi rm) the given setting fi elds with
a tap on the SET key.
Selection keys • ef cd
1. "Scrolling" through the Multi-function menu
and menu lines within the Basic Settings menu
analogous to the selection keys of the left touch
pad or by "circling" over the four selection keys.
2. Select or set parameters in setting fi elds after
their activation with a tap on the SET key,
whereby the fc and ed keys will have the
same given function. In this case it is completely
irrelevant which of these two keys are used.
A brief simultaneous tap on the 3. cd oref keys
will set a changed parameter value in the entry
fi eld back to its default value (CLEAR).
Notes:
Touching the given touch pad does not itself •
initiate the given action but rather the end of the
touch.
In the event the touch pads do not exhibit any •
functionality immediately after switching the
transmitter off and then on again right away, this
is not a fault. Just switch the transmitter off again
then wait for several seconds before switching it
on again.
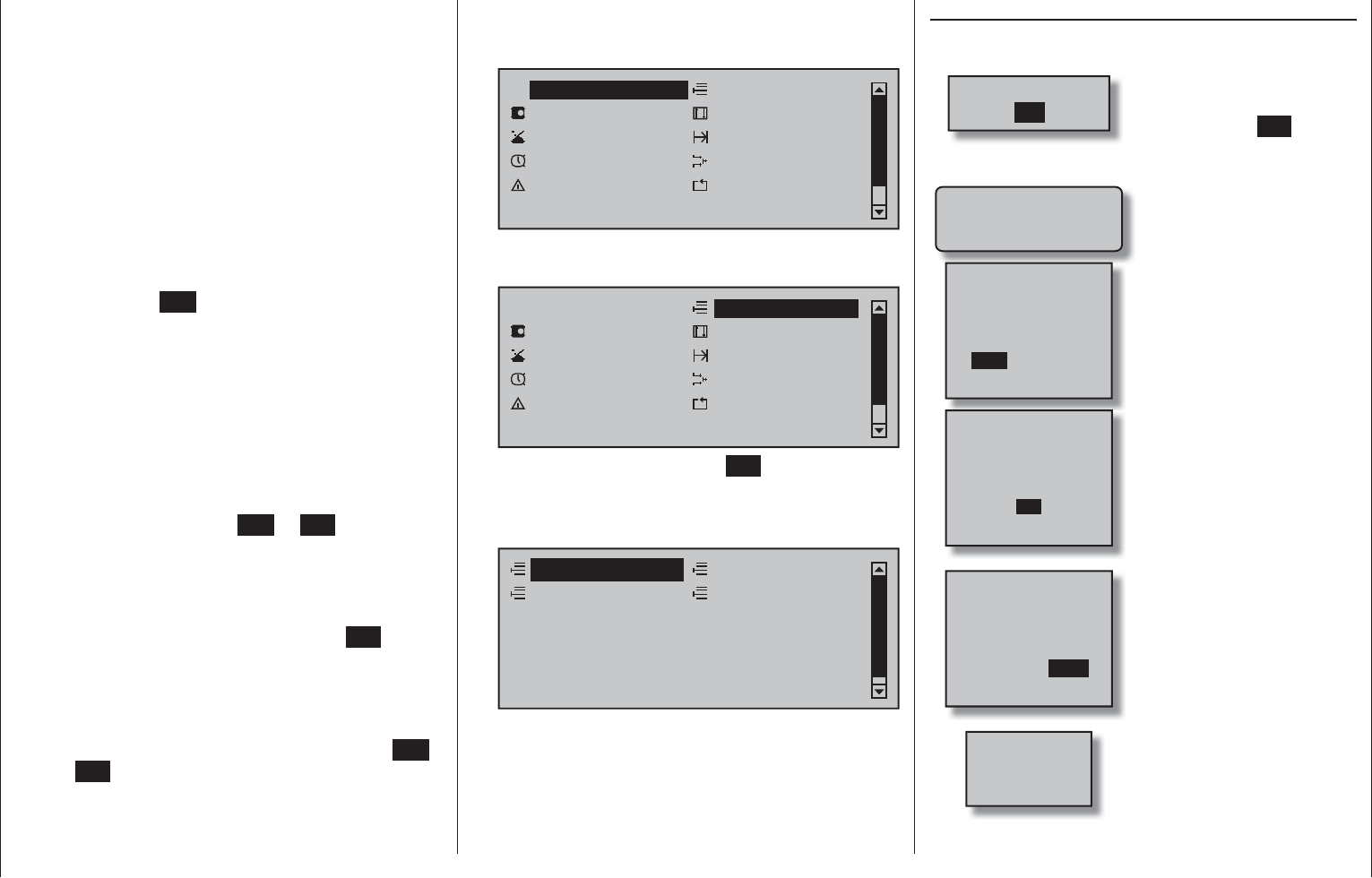
30 Transmitter description - Shortcuts and warning notices
Shortcuts
The following key combinations can be used to
directly call up certain menus and options:
CLEAR•
A brief simultaneous tap on the cd or ef
keys of the right touch pad will reset a changed
parameter value in the active entry fi eld back to its
default value.
»• Servo display«
A brief simultaneous tap on the ef keys of the
left touch pad will change from the transmitter's
base screen or from almost any menu position to
the »Servo display« menu, see page 262.
»• Telemetry« menu
Tap the center ESC key of the left touch pad for
about 1 s to call up the »Telemetry« menu from
the transmitter's base screen or return to the base
screen again, see text beginning on page 228.
Graphic display of telemetry data•
Briefl y touching one of the selection keys of the
left or right touch pad will cause a jump from the
base screen directly to the transmitter's graphic
display of telemetry data or will allow paging back
and forth between individual graphic displays.
A brief tap on the center ESC or SET key will
cause a return back to the base screen.
»• SECRET MODE«
(language selection and contrast)
Touch and hold the cd selection keys of the left
touch pad then momentarily touch the SET key of
the right touch pad, see text beginning on the next
double-page.
Entry lockout•
Entry lockout is activated and deactivated from the
base screen by simultaneously touching the ESC
and SET keys for about 2 s.
Quick-Select•
From the multi-function list, a jump can be made
into a "Structure overview" by way of a brief,
simultaneous tap on the cd or ef keys of the
right touch pad. Menus are arranged in clear
groups in this overview.
Memory
Base servo sett. Transm. controls
Switches Flight phases
Timers Mixers
Special funct. Global functions
All codes
Now the desired group can be selected with the
cd selection keys of the left or right touch pad …
Memory
Base servo sett. Transm. controls
Switches Flight phases
Timers Mixers
Special funct. Global functions
All codes
… then fi nally tap the center SET key of the right
touch pad briefl y. As soon as the key is released,
only the respective generic term for the given
menu will remain listed. For example:
Copy / Erase
Supress codes Supress models
Model select
Warning notices
BIND. N/A
OK
"Bind not available"
A receiver has not yet been
bound to the currently
active model memory. A
brief tap on the SET key
will cause a direct jump to
the appropriate option.
CAN‘T
RECEIVE
DATA
No bound receiver in
range
OFFON
Please select
RF on/off? Only for a receiver that
has already been bound:
Please select RF "on" or
"off"?
RF
MUST BE
OFF
OK
Prompt to switch off RF
transmission
(A bound receiver can
only be replaced by
another receiver when RF
transmission is switched off.)
ACT
TRAINER
Wireless Link
INH
Is the "wireless teacher/
pupil connection" that
was active when the
transmitter was last used
to be continued, ACT
(active, i.e. continue) or
switched off INH (inhibit,
i.e. discontinue)?
Batt. must
be re-
charged!!
Operating voltage is
too low
Warning notices
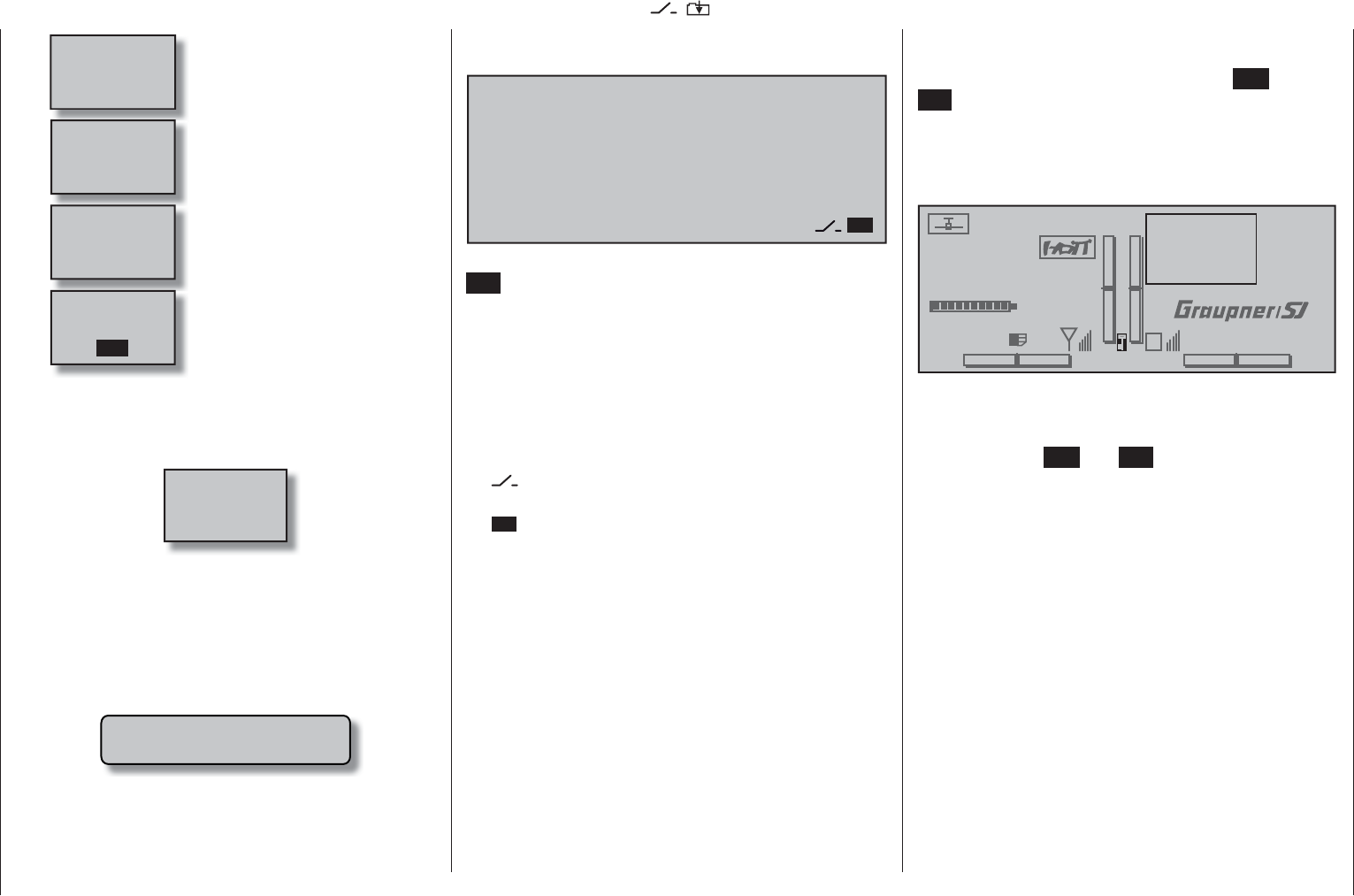
31
Transmitter description - Function fi elds and entry lockout
Fail Safe
setup
t.b.d.
Failsafe has not yet been
activated
Throttle
too
high!
Helicopter throttle joystick
or limiter too high
No
pupil
signal
Connection between
teacher and pupil is
interrupted
SD-CARD
INSERT
OK
No SD or SDHC memory
card in the card slot or
card is not legible
The transmitter has not been operated within •
the time period specifi ed by the "Stick warning"
line of the »General basic settings« menu, see
page 260. The message …
!Stick!
…, die "WARNING" LED at the right next to the
on/off switch will blink and an acoustic warning will
sound. If the transmitter is not operated within the
next minute, the transmitter will switch itself off.
If battery voltage is too low, a model switch is •
blocked for reasons of safety. An appropriate
message will appear in the screen:
not possible now
voltage too low
A lockout for the touch keys, and thus protection
against inadvertent use of all setting options, can be
established by touching and holding the ESC and
SET keys simultaneously for about two seconds while
the mc-20 HoTT transmitter is in its basic display.
This lockout condition is indicated by a key symbol,
located at the intersection point of the trim bars,
which is displayed in reverse video.
#01 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Unlock by
ESC
and SET
RX VOLT:4.9V
The lockout is effective immediately but controls
remains operationally ready.
This lockout can be removed by again touching
and holding the ESC and SET keys for about two
seconds. A lockout condition is also removed the next
time the transmitter is switched on.
Entry lockout
Depending on the given menu, certain function fi elds
will appear on the bottom display line.
CLR SEL SET STO SYM ASY
A marked function is activated with a tap on the
SET key.
Function fi elds
CLR• (clear) erase
SEL• (select): selection
SET• (set) "set" or adjust a value
STO• (store): store (e.g. control position)
SYM• set values symmetrically
ASY• set values asymmetrically
• switch fi eld symbol
(assignment of all types of switches)
• within a menu, change to the
second page, (menu continuation)
Function fi elds in the display
SEL,STO,SYM,ASY, ,
32 Transmitter description - Secret mode
The mc-20 HoTT transmitter's »SECRET MODE«
menu can be called up from almost any menu
position by touching and holding the cd selection
keys of the left touch pad and the SET key of the right
touch pad for at least 3 seconds. This will produce
the display shown below.
¿SECRET MODE¿
TOP LCD CONTRAST
VOICE UPDATE
0
FIRMWARE UPDATE
CALIBRATION
BOTTOM LCD CONTRAST 0
TOP / BOTTOM LCD CONTRAST
Following a tap on the center SET key of the right
touch pad, a selected "… CONTRAST" line can be
used to adjust the contrast of the given display to
meet personal preference with the selection keys, as
described in more detail on page 259. Another tap on
the SET or ESC key will return to line selection.
The line …
VOICE UPDATE
As mentioned in section "Headsets" on page 24,
the transmitter's acoustic signals as well as those
signals and announcements associated with the
telemetry menu can be output by way of the headset
connector. These announcements are made in
German language by default. These announcements
are summarized in a voice packet which is stored in a
transmitter-internal memory but they can be replaced
by a voice packet of a different language at any time.
At the time of this manual's printing, the standard
SECRET MODE
Language selection and display contrast
SD card delivered with the set includes the following
languages:
German•
English•
French•
Italian•
Spanish•
The given active language packet can be swapped out
either with the PC program available as a download
from the transmitter's web page at www.graupner.de
or with the SD card, as described below. If not
already done, insert the SD card or SDHC card into
the transmitter as described on page 23. Once the
memory card is inserted in the transmitter, switch the
transmitter on with RF switched off.
ON
Please select
RF on/off?
OFF
Language change
Use the selection keys of the left or right touch pad to
select the line "VOICE UPDATE" line.
¿SECRET MODE¿
TOP LCD CONTRAST
VOICE UPDATE
0
FIRMWARE UPDATE
BOTTOM LCD CONTRAST 0
Use the center SET key of the right touch pad to
switch to the selection page for the "VOICE UPDATE"
line.
FILE LIST
VOICE_FRANCE.VDF
VOICE_GERMAN.VDF
VOICE_ITALIANO.VDF
VOICE_SPAIN.VDF
VOICE_ENGLISH.VDF
Now use the cd keys of the left or right touch pad to
choose the desired language, for example:
FILE LIST
VOICE_FRANCE.VDF
VOICE_ITALIANO.VDF
VOICE_SPAIN.VDF
VOICE_ENGLISH.VDF
VOICE_GERMAN.VDF
Confi rm the choice with another tap on the center SET
key of the right touch pad. The selected language
packet will be loaded into the transmitter's memory.
¿SECRET MODE¿
TOP LCD CONTRAST
VOICE UPDATE
0
FIRMWARE UPDATE
BOTTOM LCD CONTRAST 0
22/100%
I
The loading process is fi nished as soon as the
progress bar at the lower edge of the display
disappears.
33
Transmitter description - Secret mode
¿SECRET MODE¿
TOP LCD CONTRAST
VOICE UPDATE
W
FIRMWARE UPDATE
BOTTOM LCD CONTRAST W
When this process is ſnished, switch off the transmitter.
All settings stored in the transmitter remain intact
after a change of language has been made.
Notes:
If the warning …•
RF
MUST BE
OFF
OK
… appears, then the transmitter's RF radiation
is still active. Jump to the »Base setup model«
menu, select the "RF transmit" line, select its
"OFF" option then repeat the procedure
If the warning …•
SD-CARD
INSERT
OK
… appears then the transmitter does not detect
a memory card in its card slot or the card found
cannot be read.
If the selection window is empty …•
FILE LIST
… then the transmitter could not ſnd an
appropriate ſle on the inserted memory card.
Check the contents of the SD card's "VoiceFile"
directory on a PC or laptop.
ETADPUERAWMRIF
egaugnalyalpsidegnahC
Important notice:
Be sure to check the charge status of your
transmitter's battery or charge its battery as a
precaution before every update. Also backup
all occupied model memories so they can be
restored if that should become necessary.
¿SECRET MODE¿
TOP LCD CONTRAST
VOICE UPDATE
0
FIRMWARE UPDATE
BOTTOM LCD CONTRAST 0
In the same manner as described above in the
section "VOICE UPDATE", this menu item can be
used to update or change the transmitter's ſrmware,
including its display language. At the time of this
manual's printing, the standard SD card delivered
with the set includes the following languages:
German•
English•
A French, Italian and Spanish version are to be
implemented at a later point in time.
Appropriate updates and information can be found on
the mc-20 HoTT transmitter's product page under the
Download link at www.graupner.de.
FILE LIST
MC-20_1V234_ENGLISH.BIN
MC-20_1V234_FRENCH.BIN
MC-20_1V234_DEUTSCH.BIN
Now use the cd selection keys of the left or right
touch pad to choose the desired ſrmware version, for
example:
FILE LIST
MC-20_1V234_FRENCH.BIN
MC-20_1V234_DEUTSCH.BIN
MC-20_1V234_ENGLISH.BIN
Conſrm the choice with another tap on the center
SET key of the right touch pad. The loading of
ſrmware into the transmitter's memory will be started
and following two displays, visible only very brieƀy,
which only make reference to the ſrmware update …
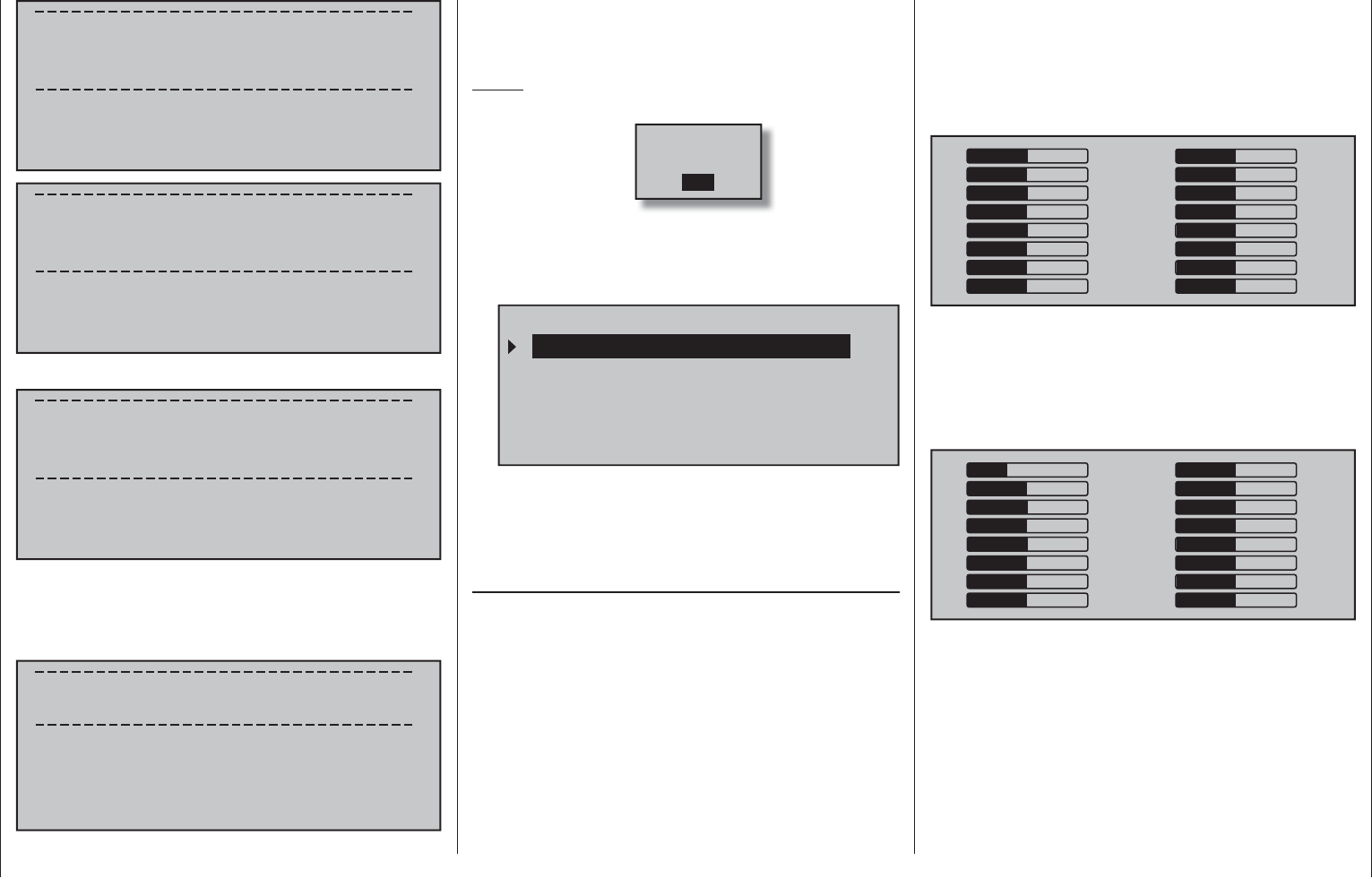
34 Transmitter description - Secret mode
¾
¾
¾
¾
¾
¾
Firmware Download
Prozess Start
Please Wait....
¾
¾
¾
¾
¾
¾
Boot Download
Success!!!
Please Wait....
…, the message:
¾
¾
¾
¾
¾
¾
Firmware
Downloading...
Progress 023/275
… will appear in the display. As soon as the counter
to the left of the "/" character reaches the value
shown on the right as the volume to be loaded, the
message …
¾
¾
¾
¾
Firmware Upgrade
Success!!!
… will appear. After a few seconds this message
will be erased and the transmitter will automatically
restart. The transmitter is now again operational.
Notes:
If the warning …•
SD-CARD
INSERT
OK
… appears then the transmitter does not detect
a memory card in its card slot or the card found
cannot be read.
If the selection window is empty …•
FILE LIST
… then the transmitter could not fi nd a suitable
fi rmware fi le on the inserted memory card. Check
the contents of the SD card's "Firmware" directory
on a PC or laptop.
JOYSTICK CALIBRATION
If you feel the neutral position of your self-calibrating
joysticks (controls 1 … 4) are not exactly 0 % of
their control travel, then this can be checked and, if
necessary, corrected as follows.
Jump to the »Model select« menu and initialize
a free model memory as described on page 69.
Whether the model to be initialized is a winged
aircraft or a helicopter is irrelevant.
Wait for the notices which typically appear in the
transmitter's base screen following a model change
then jump to the »Servo display« menu, for example
by simultaneously touching the ef keys of the left
touch pad (WITHOUT any interim changes to trim
settings or other program settings).
If all four of your transmitter's joystick functions are
still self-neutralizing, this display should ideally look
like the one shown below.
1
3
5
7
9
11
13
15
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2
4
6
8
10
12
14
16
Otherwise the graph bars show current setting
percentages for joystick control functions which are
not self-neutralizing – typically for the "C1" throttle/
brake or throttle/pitch joystick. For example, if the
throttle/brake joystick is in its "quarter-throttle"
position, the display would appear as shown below.
1
3
5
7
9
11
13
15
0
0
0
0
0
0
0
0
–50
0
0
0
0
0
0
0
2
4
6
8
10
12
14
16
One after the other, put both joysticks into each
of their four possible limit positions without
exerting force at the limit position. In each of
these eight possible limit positions, the – side
dependent – indication for exactly -100 % or +100 %
should be displayed. For example, if transmitter
control 2 is at its right limit and the other three joystick
functions are in their respective middle positions
then the transmitter's display should look like the one
shown below.
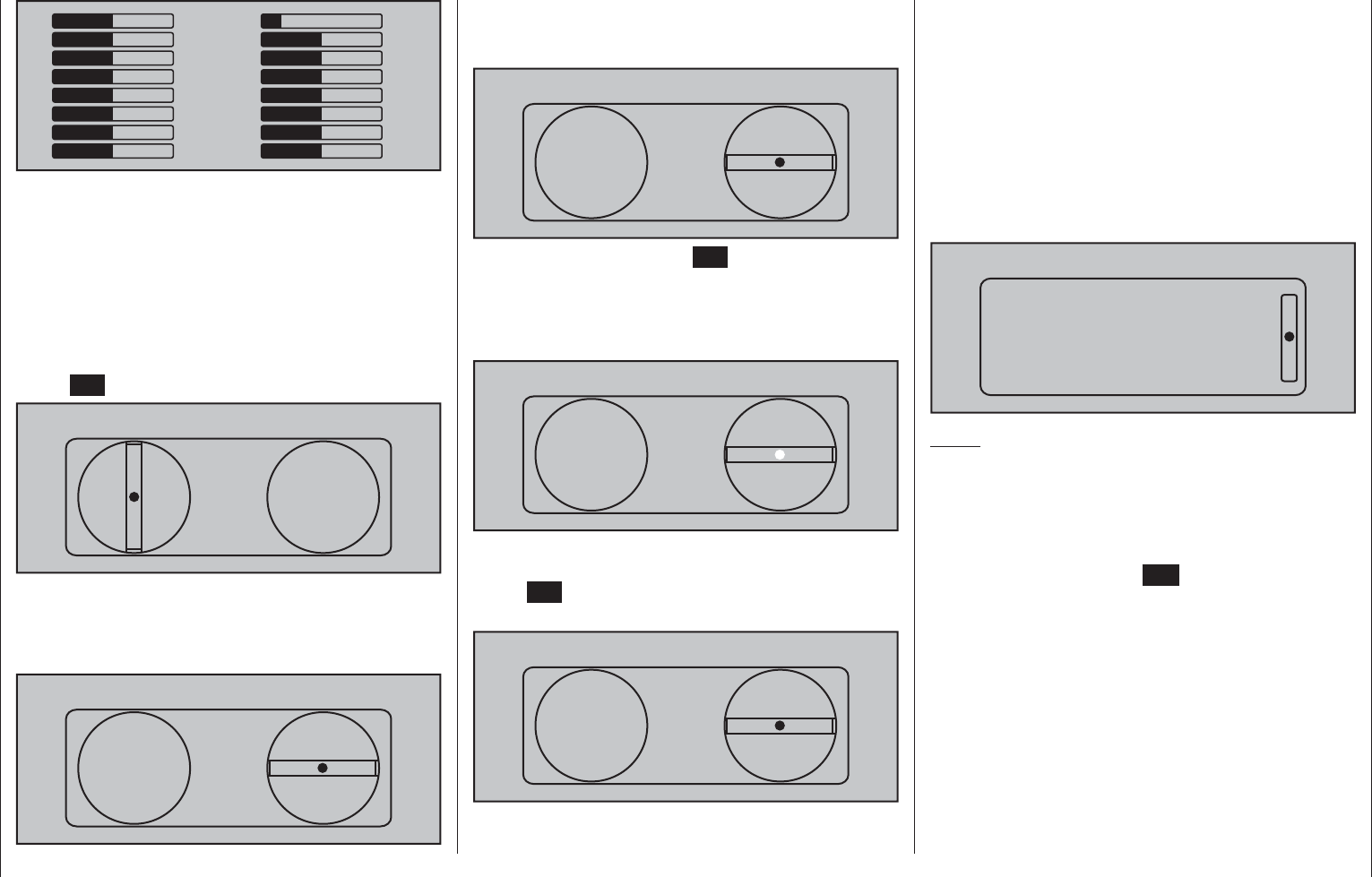
35
Transmitter description - Secret mode
1
3
5
7
9
11
13
15
–100
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2
4
6
8
10
12
14
16
Regardless of the number of self-neutralizing joystick
functions available on your transmitter, if these
checks produce four 0 % results and eight 100 %
results then your transmitter's joysticks are optimally
calibrated. You can terminate this process then, if
appropriate, delete the model memory just created.
Otherwise jump (as described at the outset of the
previous double page) to the "Stick calibration" line
in the »SECRET MODE« menu then briefl y touch the
center SET key of the right touch pad.
STICK CALIBRATION
0%
d
c
The ef selection keys of the right touch pad will
now allow you to cyclically select the four calibrated
joystick planes, e.g. the left/right plane of the right
joystick.
STICK CALIBRATION
0%
d
c
Now position the right joystick – without exerting extra
force – to its left limit corresponding with the on-
screen blinking arrow pointing to the left.
STICK CALIBRATION
+102%
d
c
… and briefl y tap the center SET key of the right touch
pad. This concludes this example calibration of the
right joystick's left limit. The circle in the middle of the
stylized joystick plane will now blink as confi rmation of
the calibration.
STICK CALIBRATION
+100%
d
c
Now release the self-neutralizing joystick so it can
return to its center position and then tap again on the
center SET key to calibrate the joystick's centered
position. The right triangle marker will begin to blink.
STICK CALIBRATION
0%
d
c
Repeat the calibration process for the right limit of the
right joystick. The other joystick planes are calibrated
analogously.
Proceed similarly to calibrate the three sliders
mounted in the middle console and the two
proportional rotary controls on the sides of the
transmitter. The calibration options for these fi ve
proportional controls can be reached by repeatedly
tapping on the e or f selection keys of the right
touch pad until the desired calibration position is
reached, e.g..:
LEVER CALIBRATION
0%
d
c
Notes:
Correct any bad calibrations by repeating the •
respective process.
Within a given joystick plane, each of the three •
calibration positions can be selected directly with
the cd selection keys of the left or right touch pad.
Briefl y touching the center ESC key of the left touch
pad will terminate the process and return to the sub-
menu "Stick calibration".
36 Transmitter description - Telemetry data display
The mc-20 transmitter has two independent displays;
a large display for operating the transmitter and a
smaller display just below the antenna socket for
the graphic display of telemetry data. The telemetry
display is activated automatically as soon as the
transmitter receives telemetry data from the receiver
via the return channel.
#01 0:00h
Stopwatch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
If however, at the lower edge of the base display, only
"X" – as shown in the fi gure above – is displayed at
two locations instead of " " then the telemetry display
will show the warning …
CAN‘T
RECEIVE
DATA
… which will be replaced shortly thereafter with the
Graupner|SJ logo and the transmitter names …
mc32
… to indicate there is no receiver with a responding
telemetry connection within range. Switch on the
model's receiver system or bind a receiver to the
active model memory as described in detail on
page 77 and 85.
#01 0:00h
Stop watch
Flight tim
K78
0:00
4.1V
0:00
00
0
0
0:00h
M
VRX VOLT:4.8V
When a telemetry connection exists, the upper display
will automatically present the "Receiver" screen …
RX–S QUA: 100%
RX–S STR: 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
L–PACK: 10ms
CH OUTPUT TYPE:ONCE
R-LOW V:4.6 +22°C
… which is described in more detail in a section by
the same name on the next page.
Sensor Select
Up to four sensors can be connected, in any
combination, to a telemetry-capable receiver.
However, the data output by these sensors must be
(as described on page 240) selected in the »SENSOR
SELECT« sub-menu of the »Telemetry« menu …
SENSOR SELECT
RECEIVER
GENERAL MODULE
VARIO MODULE
ELECTRIC AIR.MOD
GPS
… in order to activate their display. This data from
the selected sensors is then appropriately prepared
for illustration by the graphic indicators as described
below. Furthermore, only sensors activated in
the »SETTING & DATAVIEW« sub-menu of the
»Telemetry« menu, beginning page 229, according
to the instructions included with the given sensor will
be responsive.
To switch between the screens for activated sensors
in the »SENSOR SELECT« sub-menu of the
»Telemetry« menu, tap briefl y on one of the cd
selection keys of the left or right touch pad …
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
GENERAL
ELECT. AIR
VARIO
GPS
RECEIVER
… and, after the selected screen has been displayed,
use one of the cd two keys to select the line of
the desired sensor. If no sensor is activated, then
all display lines and sensors described in the next
column, except for the "RECEIVER" line, are blended
out of the display and the selection list:
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
GENERAL
ELECT. AIR
VARIO
GPS
RECEIVER
The selection can be confi rmed right away by
activating the center SET key of the right touch pad
or by simply waiting until, after a brief pause, the
main display of the given selected sensor appears
automatically.
Note:
The sequence of the below described displays
is a consequence – starting from the given main
display – of taps on the f key.
More details about the following named modules
can be found in the appendix and in Internet at
Telemetry data display
37
Transmitter description - Telemetry data display
www.graupner.de in the web page for the given
product.
RECEIVER
RX–S QUA: 100%
RX–S STR: 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
L–PACK: 10ms
CH OUTPUT TYPE:ONCE
R-LOW V:4.6 +22°C
This screen presents the »RX DATAVIEW« of the
Telemetry menu's »SETTING & DATAVIEW« sub-
menu, see page 229, with data processed and
displayed graphically.
The displayed items are as follows:
Value Explanation
RX-S QUA signal quality in %
RX-S ST signal strength in %
RX-dBm Reception power in dBm
TX-dBm transmit power in dBm
V PACK Indicates the longest time span in ms
in which data packages are lost in the
transmission from the transmitter to the
receiver.
RX-VOLT current operating voltage of the
receiver's power supply in volts
M-RX V Lowest receiver operating voltage since
last startup, in volts
TMP the thermometer depicts the receiver's
current operating temperature
GENERAL MODULE
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
RECEIVER
GENERAL
ELECT. AIR
VARIO
GPS
0.0V
BAT1
BAT2
0.0V T2 0°C
T1 0°C
E FUEL F
CELL.V
1:0.00
2:0.00
3:0.00
4:0.00
5:0.00
6:0.00
0
0.0V
BAT1
BAT2
0.0V T2 0°C
T1 0°C
E FUEL F
ALT
0m
0m1
0m3
0.0A
POWER
0.0V
0
If attached to the receiver, this screen will display the
data acquired by a General-Engine module, order no.
33610, , or a General-Air module, order no. 33611.
More details about these modules can be found in
the appendix or in Internet at www.graupner.de in the
web page for the given product.
Depending on how this module is equipped with
sensors, this screen can permanently display the
data shown in the table below.
The current voltage of up to two batteries (BAT1
and BAT2), the measurement results of up to two
temperature sensors (T1 and T2) and a fi ll level gage
for the fuel tank.
An alternating display along the screen's right edge
will display a list of current cell voltages for a LiPo
battery with up to six cells or operational data (current
altitude with respect to the starting location, ascent/
decent m/1 s and m/3 s, current current being
drawn in amperes and current voltage of the battery
connected to the sensor).
The displayed items are as follows:
Value Explanation
BAT1 /
BAT2
battery 1 or 2
FUEL fuel level / tank gage
E / F empty /full
T1 / T2 temperature of sensor 1 or 2
CELL V cell voltage of cells 1 … max. 6
ALT current altitude
0m1 m/1 s ascent/decent rate
0m3 m/3 s ascent/decent rate
A current draw i amperes
V battery voltage
Battery and load indicators
0.0V
0.0A
0mAh
0ml
This display depicts current voltage, current current
draw and, if attached, the expended capacity of
"Batt 1" connected to the General-Engine module
(order no. 33610) or General-Air (order no. 33611)
module as well as the fuel consumed in ml.
38 Transmitter description - Telemetry data display
SENSOR 1
0.0V
0°C
SENSOR 1
If attached, this display depicts currently measured
voltage and temperature from a temperature/voltage
sensor, order no. 33612 or 33613, connected
to "T(EMP)1" of the General-Engine module
(order no. 33610) or the General-Air module (order
no. 33611).
SENSOR 2
0.0V
0°C
SENSOR 2
If attached, this display depicts currently measured
voltage and temperature from a temperature/voltage
sensor, order no. 33612 or 33613, connected to
"T(EMP)2" of the General-Engine module (order
no. 33610) or the General-Air module (order no.
33611).
Rotary speed sensor
U/min
0
00
If attached, this display depicts the measured
rotary speed of a speed sensor (order no. 33615
or 33616) attached to a General-Engine module
(order no. 33610) or a General-Air module (order no.
33611).
Note:
The appropriate blade count must fi rst be set in the
module's telemetry menu before the correct speed
can be displayed.
Vario
0.0
0m
m
s
If attached, this display will depict the altitude (in
m) relative to location, starting location as well as
the current rate of ascent/descent (in m/s) data
originating from a Vario integrated into a General-
Engine module (order no. 33610) or General-Air
module (order no. 33611).
ELECTRIC AIR MODULE
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
RECEIVER
GENERAL
ELECT. AIR
VARIO
GPS
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 0°C
T1 0°C
0
1L0.00
2L0.00
3L0.00
4L0.00
5L0.00
6L0.00
ALT 0m
7L0.00
0.0V 0A
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 0°C
T1 0°C
0
1H0.00
2H0.00
3H0.00
4H0.00
5H0.00
6H0.00
ALT 0m
7H0.00
0.0V 0A
If attached to the receiver, this display will depict the
data acquired by an Electric-Air module, order no.
33620. More details about this module can be found
in the appendix or in Internet at www.graupner.de in
the web page for the given product.
Depending on how this module is equipped with
sensors, this screen can permanently display the
data shown in the adjacent table.
The current voltage of up to two batteries (BAT1 and
BAT2), up to two temperature measurements (T1
and T2), current altitude with respect to the starting
location, the model's ascent/decent rate in m/1 s and
m/3 s and, in the middle of the screen, the current
draw currently being taken from a power source.
Along the right edge of the screen is a table of
alternating values for cell voltages at balancer
connections (L) or voltages for up to 7 attached
battery cell packs (H).
The displayed items are as follows:
Value Explanation
V current voltage
A current current
BAT1 /
BAT2
battery 1 or 2
ALT current altitude
m/1 s m/1 s ascent/decent rate
m/3 s m/3 s ascent/decent rate
T1 / T2 temperature of sensor 1 or 2
39
Transmitter description - Telemetry data display
L or H cell voltage of cells 1 … max. 14
L = balancer connection 1
H = balancer connection 2
AKKU 1
0.0V
0.0A
0mAh
This display depicts current voltage, current current
draw and, if attached, the expended capacity of
"Batt 1" connected to the Electric-Air module (order
no. 33620).
SENSOR 1
0.0V
0°C
SENSOR 1
If attached, this display depicts currently measured
voltage and temperature from a temperature/voltage
sensor (order no. 33612 or 33613) connected
to "T(EMP)1" of the Electric-Air module (order
no. 33620).
SENSOR 2
0.0V
0°C
SENSOR 2
If attached, this display depicts currently measured
voltage and temperature from a temperature/voltage
sensor (order no. 33612 or 33613) connected
to "T(EMP)2" of the Electric-Air module (order
no. 33620).
Vario
0.0
0m
m
s
If attached, this display will depict the altitude
(in m) relative to location, starting location as well
as the current rate of ascent/descent (in m/s) data
originating from a Vario integrated into a Electric-
Air module (order no. 33620).
VARIO
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
RECEIVER
GENERAL
ELECT. AIR
VARIO
GPS
RXSQ
0
MAX
0m
MIN
0m
ALT
0
H
L
m/1s
0.0
m/3s
0.0
m/10s
0.0
If attached to the receiver, this display will depict the
data acquired by a Vario module, order no. 33601.
The displayed items are as follows:
Value Explanation
ALT current altitude
RXSQ Signal strength of the signal received
by the receiver in %, see page 230.
MAX the preset maximum altitude limit
relative to starting location at which,
when exceeded, will cause an audible
warning to be sounded
MIN the preset minimum altitude limit
relative to the starting location at which,
when underrun, will cause an audible
warning to be sounded
m/1 s m/1 s ascent/decent rate
m/3 s m/3 s ascent/decent rate
m/10 s m/10 s ascent/decent rate
Vario
0.0
0m
m
s
If attached, this display will depict altitude relative
to location or starting location (in m) as well as the
current rate of ascent/decent (in m/s) from data
acquired by a Vario module (order no. 33601).
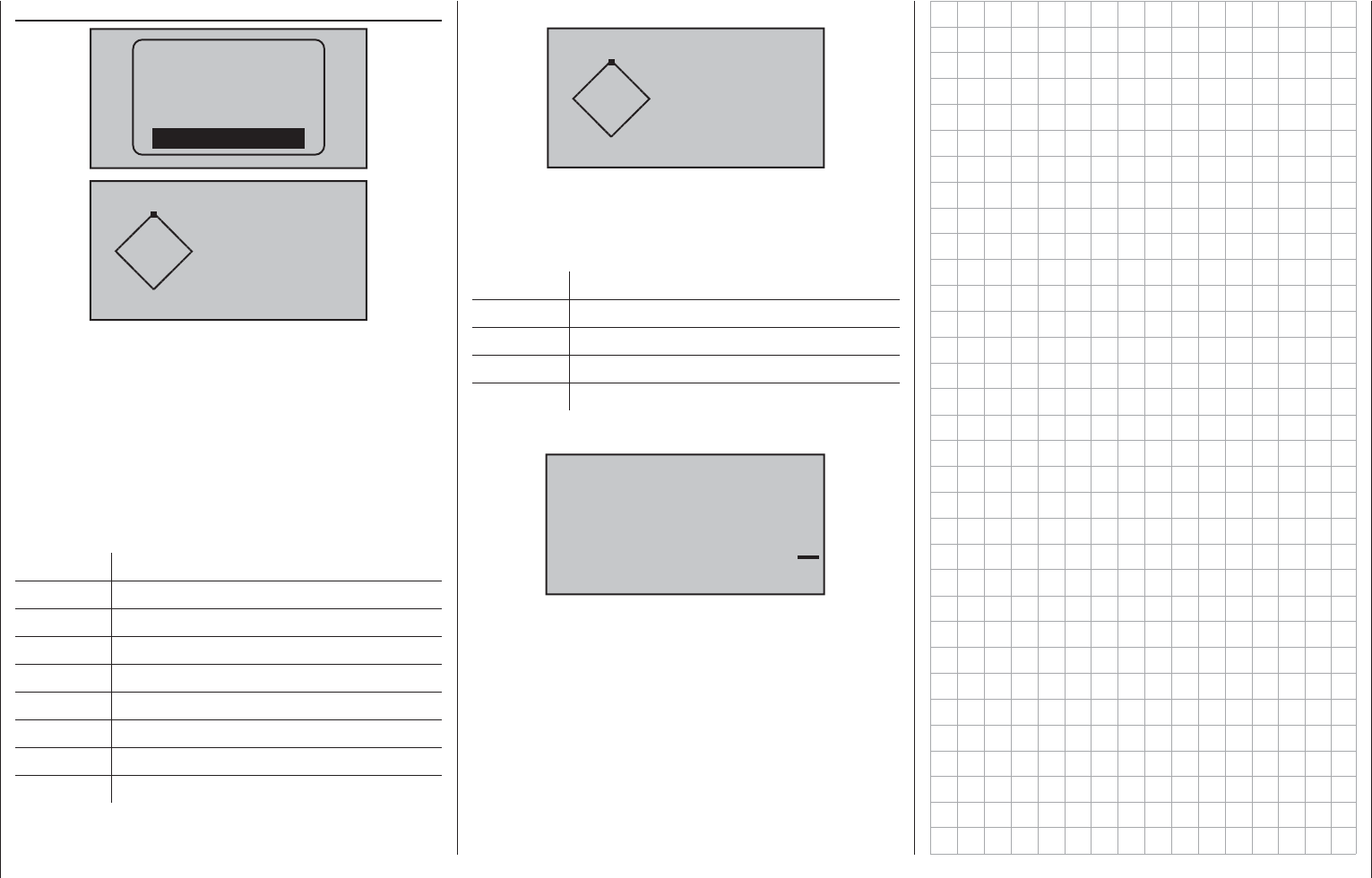
40 Transmitter description - Telemetry data display
GPS
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–SPG.:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
RECEIVER
GENERAL
ELECT. AIR
VARIO
GPS
NRXSQ 0
DIS 0m
ALT 0m
0.0m/1s
0m/3s
0m/10s
N 0°00.0000
O 0°00.0000
WE
S
Kmh
0
If attached to the receiver, this display will depict the
data from a GPS module with integrated Vario, Order
No. 33600.
Aside from the model's current position and speed,
the center section of this screen will also display
current altitude with respect to the starting location
as well as the model's current ascent/decent rate in
m/1 s, m/3 s and m/10 s, current reception quality
and the model's distance from its starting location.
The displayed items are as follows:
Value Explanation
W / N / O / S west / north / east / south
Kmh speed
RXSQ return channel signal strength
DIS distance
ALT current altitude with respect to starting
m/1 s m/1 s ascent/decent rate
m/3 s m/3 s ascent/decent rate
m/10 s m/10 s ascent/decent rate
GPS
N
WO
S
Kmh
0
km/h
DIS
m
m/s
ALT
m
0
0
0.0
0
If attached to the receiver, this display will depict the
data from a GPS module with integrated Vario, Order
No. 33600.
The displayed items are as follows:
Value Explanation
km/h speed
DIS horizontal distance in m
m/s ascent/decent rate in m/s
ALT altitude relative to starting location in m
Vario
0.0
0m
m
s
If attached, this display will depict the altitude (in m)
relative to location, starting location as well as the
current rate of ascent/descent (in m/s) from data
originating from the Vario integrated into the
GPS-/Vario module (order no. 33600).
41
For your notes
42 Commissioning the transmitter
Preliminary remarks
The Graupner HoTT system theoretically permits
simultaneous operation of more than 200 models.
However, because of the interspersed radio-
frequency utilization permitted by certifi cation for the
2.4 GHz ISM band, this number is signifi cantly lower
in practical application. Nevertheless, in general
more models can be operated simultaneously in the
2.4 GHz band than would be the case in conventional
35 or 40 MHz frequency bands. The real limiting
factor is – as often before – is still likely to be the
size of available operating space (i.e. airspace for
aircraft). Alone the fact that it is no longer necessary
to coordinate transmitting frequencies with other
pilots in the vicinity (which is sometimes quite diffi cult
in broken landscapes, such as on hillside slopes)
represents an enormous boost for remote control
operating security.
Battery charged?
Since the transmitter is delivered with an empty (not
charged) battery, the battery must fi rst be charged
according to the charging instructions on page 16.
Otherwise a warning tone will be sounded and an
appropriate message will be blended into the basic
display if the low voltage threshold set in the
"Battery warning" line of the
»General basic settings« menu
(see page 260) is underrun.
Transmitter startup
After being switched on, the message shown below
will appear in the transmitter's screen for about two
seconds.
OFFON
Please select
RF on/off?
Within this brief period there is an opportunity to switch
RF transmission off by using the c or f key of the
right touch pad to shift the position of the fi eld shown
in inverse video to the right so that ON is in standard
video and OFF is presented in inverse video.
ON
Please select
RF on/off?
OFF
Now switch the RF module off by tapping on the
center SET key of the right touch pad.
The telemetry display just below the antenna socket
will then briefl y show the message …
CAN‘T
RECEIVE
DATA
… and in parallel to this, the transmitter's basic
display will appear similar to that shown below:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
00:00h
M
V
The symbol combination means that the currently
active model memory has already "bonded " with a
Batt. must
be re-
charged!!
Commissioning the transmitter
Preliminary remarks about the mc-20 HoTT transmitter
Graupner-HoTT receiver but there is no connection
to that receiver at the moment. (In this example,
RF transmission has been switched off.)
If, however, the transmitter is switched on without
switching RF transmission off, the symbolic antenna
mast will blink. At the same time, an acoustic warning
will sound until a connection is established with the
respective receiver. As soon as the connection is
established, the "X" at the base of the symbolic antenna
will be replace with a fi eld strength indicator, for
example , and the visual and acoustic warnings will
cease.
If a telemetry connection has also been established
for the incoming signal, that is output by the receiver
in the model, then the right side of this same screen
line will display a similar indication of signal strength
for this reception of the receiver's transmitted signal
(M ) as well as the current voltage of the receiver's
power supply.
On the other hand, if the symbol combination 6
appears in in the display and the front display shows
the message "Can't receive data" then the currently
active model memory is not "bound" to any receiver
at the moment.
Under-voltage warning
If the transmitter's voltage drops below a certain
value set in the »General basic settings« menu
(page 260), 4.7 V by default, there will be visual and
acoustic under-voltage warnings issued.
Important notices:
The transmitter in the set is already preset, •
as delivered, with default values which are
correct for operation in most European
countries (except France).
If the remote control system is to be operated
in France then the transmitter's "Region"
setting MUST be changed over to "FRANCE"
mode, see page 261. IN NO CASE may the
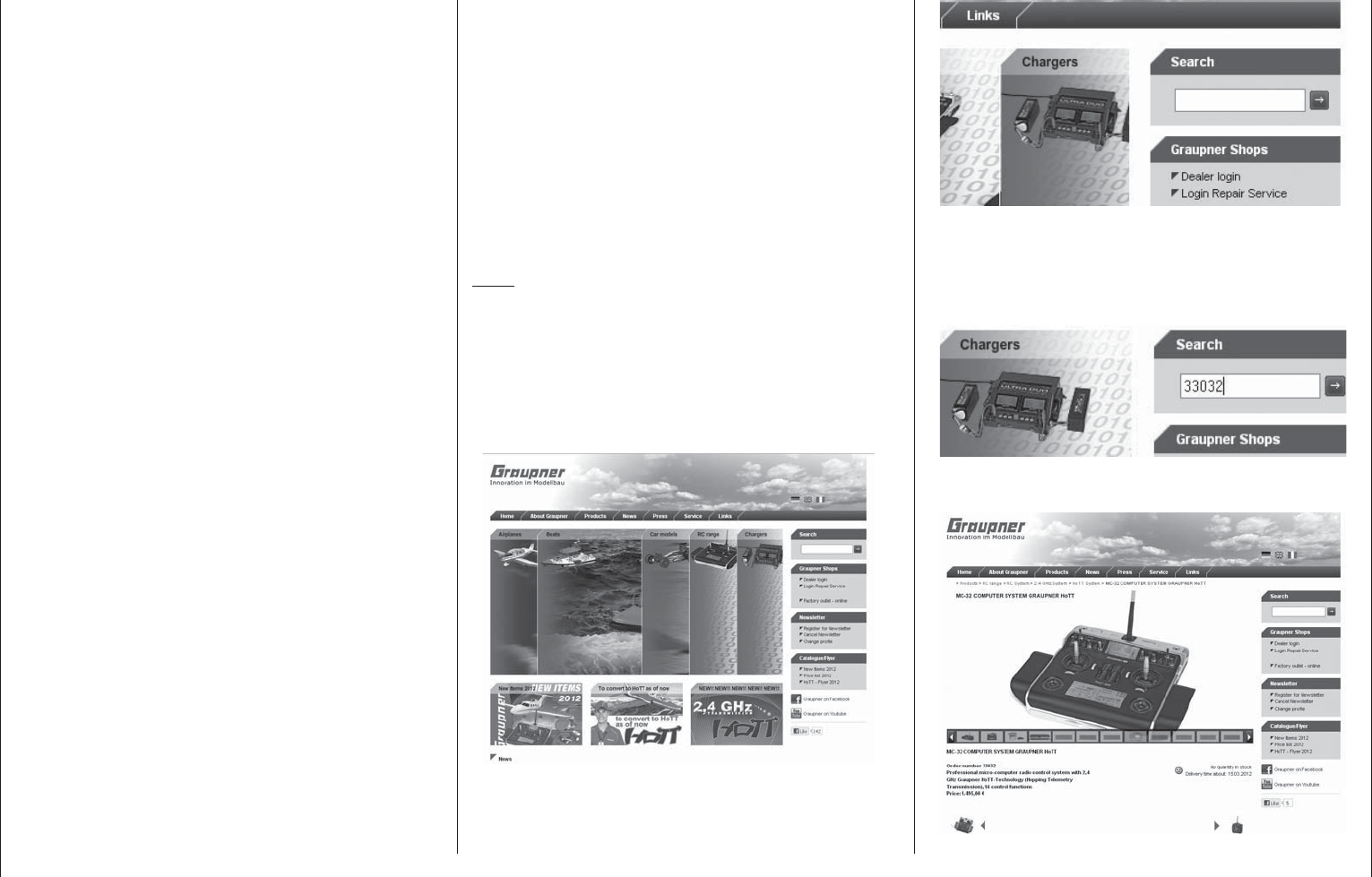
43
Commissioning the transmitter
Universal/EUROPE mode be used IN FRANCE.
As many as 16 servos can be attached to the •
standard receiver included with the mc-20
HoTT 2.4 Set. The specifi c receiver included
in the set has already been bound to the set's
transmitter at the factory.
In order to achieve the greatest possible
fl exibility but still preclude unnecessary
inadvertent operator errors, control channels
5 … 16 have not been assigned to any
controls. This means that servos connected
by way of these channels will remain in their
middle positions until an operator element
has been assigned. Practically all mixers are
initially inactive for this same reason. More
about this can be found on page 108 (winged
aircraft) or 112 (helicopter models).
The fundamental procedure for initial •
programming of a new model memory location
can be found on page ?? and the programming
examples that begin on page 268.
When the remote control system is switched •
on, being bonded or when making settings,
that the transmitter's antenna is always far
enough away from the receiver's antennas.
If the transmitter's antenna is brought too
close to the receiver's antennas this will cause
receiver over-modulation and its red LED will
illuminate. At the same time the return channel
will drop out and, as a consequence, the fi eld
strength indicator in the transmitter's screen
will be replaced by an "x" and the receiver's
current battery voltage display will show 0.0 V.
The remote control is then in Fail-Save mode,
see page 208, i.e. servos will remain in their
current positions until a new, valid signal
can be received. In such a case, increase
the distance (between the transmitter and
the model containing the receiver) until the
indicators are again "normal".
Transmitter fi rmware updates are carried out either
as described under "FIRMWARE UPDATE / Change
display language" in the section »Secret mode« on
page 33 or as described below with the help of a PC
running a Windows XP, Vista or 7 operating system. This
second method connects the transmitter to the PC via its
5-pole mini-USB interface connector, located behind the
transmitter's left front cover – as viewed from the front –
and, if this method is chosen, it is done at one's own risk.
Current software and information is available in
Internet at www.graupner.de under the Download link
for the given product.
Note:
You will automatically be notifi ed of new updates
per email after registering your transmitter at
https://www.graupner.de/de/service/produktregistrierung.
The aforementioned "given product page" is most
easily reached by entering "www.graupner.de" into
your Internet browser's address line then pressing the
ENTER key on your PC or laptop keyboard.
On the so-called "homepage" for Graupner, click on
one of the "fl ags" to switch the website to a language of
your choice, e.g. the British fl ag for English. Afterwards
locate the entry fi eld with the title "Search".
Place the cursor in this fi eld with a mouse click then
enter a search keyword, e.g. the article number
printed on the type plate located on the rear side of
the transmitter.
Another press of the ENTER key on the PC or laptop
will open the sought page:
Transmitter fi rmware updates
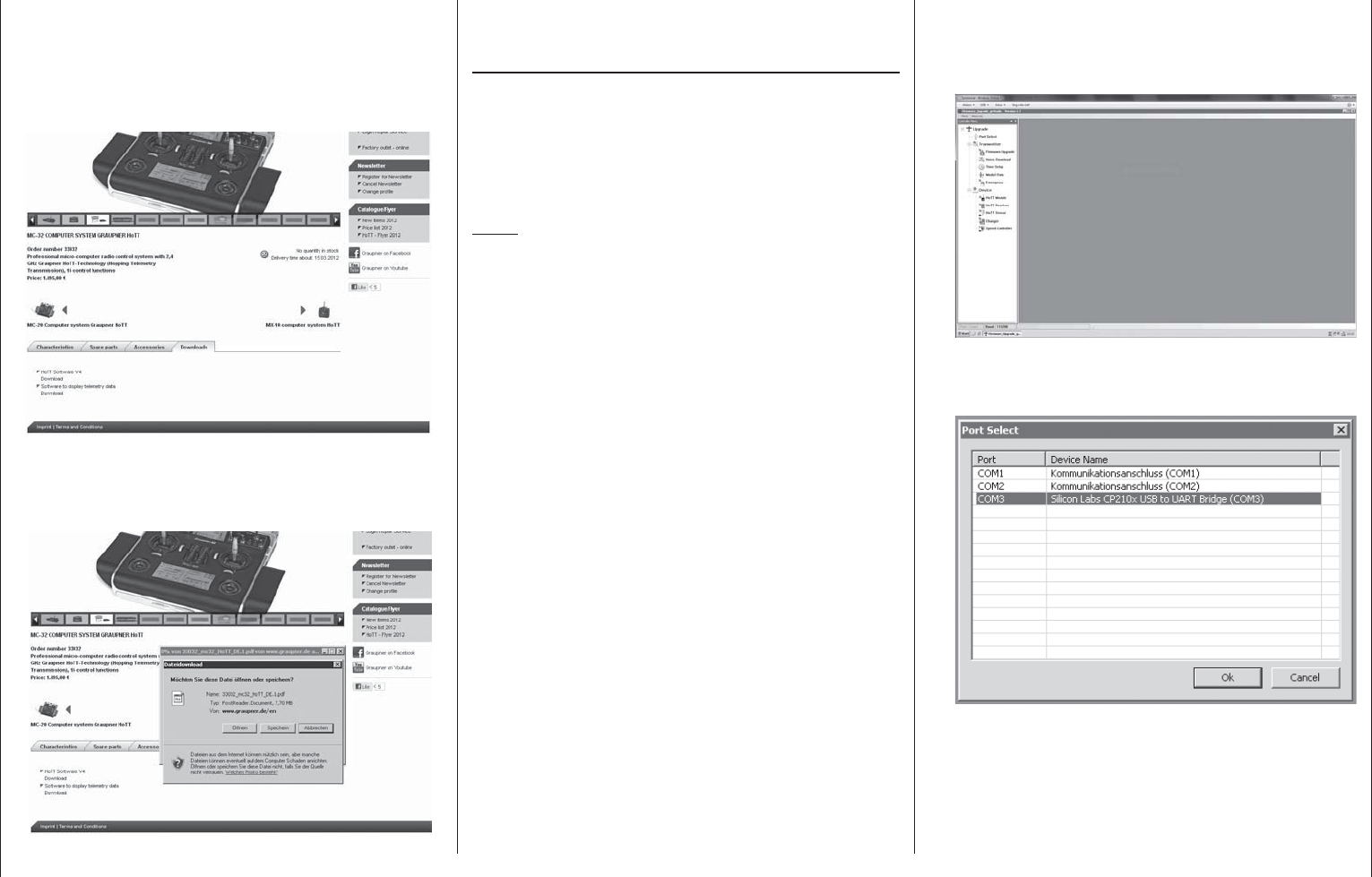
44 Commissioning the transmitter
Now use your Internet browser's vertical scroll
bar to move down the page a bit until the tabs
"Characteristics", "Spare parts" "Accessories" and
"Downloads" appear. Because the "Downloads" tab is
still missing on the mc-20 HoTT transmitter's page at
the time of this manual's printing:
Now search here for the necessary fi le/s and start
the download with a double-click on the "Download"
control button beneath the selected fi le.
Store the fi le on your computer in a directory of your
choice.
Updating mc-20 HoTT software
The USB interface cable, order no. 7168.6
(included with the set), will be needed to update the
transmitter's software via the transmitter's face-side
USB interface connector. This cable's connector
is to be directly plugged into the 5-pole mini-USB
connector socket on the rear side of the transmitter.
Note:
Be sure to check the charge status of your
transmitter's battery or charge its battery as a
precaution before every update. Also backup
all occupied model memories so they can be
restored if that should become necessary.
Installing drivers1.
Install the required driver software, included in the
"USB Drivers" folder of the program packet, onto
your PC or laptop so your computer can handle
the transmitter's integrated USB interface.
Start driver installation with a double-click on
the respective fi le and follow the on-screen
instructions. Once this software has been
successfully installed, the computer must be re-
started. Drivers only need to be installed once.
Installing the software up-loader2.
Unpack the fi le "Firmware_Upgrade_grStudio_
Ver-XX.zip" in a suitable directory then execute
the "Firmware_Upgrade_grStudio_Ver-XX.exe"
program fi le with a double-click on its fi lename.
Follow the instructions provided by the installation
wizard.
Establishing a transmitter-to-PC connection3.
With the transmitter switched off, connect the
USB cable by way of its 5-pole mini-USB socket to
the rear side of the transmitter.
Updating4. mc-20 HoTT transmitter software
Start the "Firmware_Upgrade_grStudio_Ver-X.X"
program from the directory where it is located.
Use the selection sequence "Menu", "Port Setup"
or open the "Controller Menu" and click on "Port
select".
Now in the "Port select" window, select the COM
port connected to the USB interface. The correct
port can be recognized by its designation "Silicon
Labs CP210x USB to UART Bridge" in the "Device
Name" column. In the above example this would
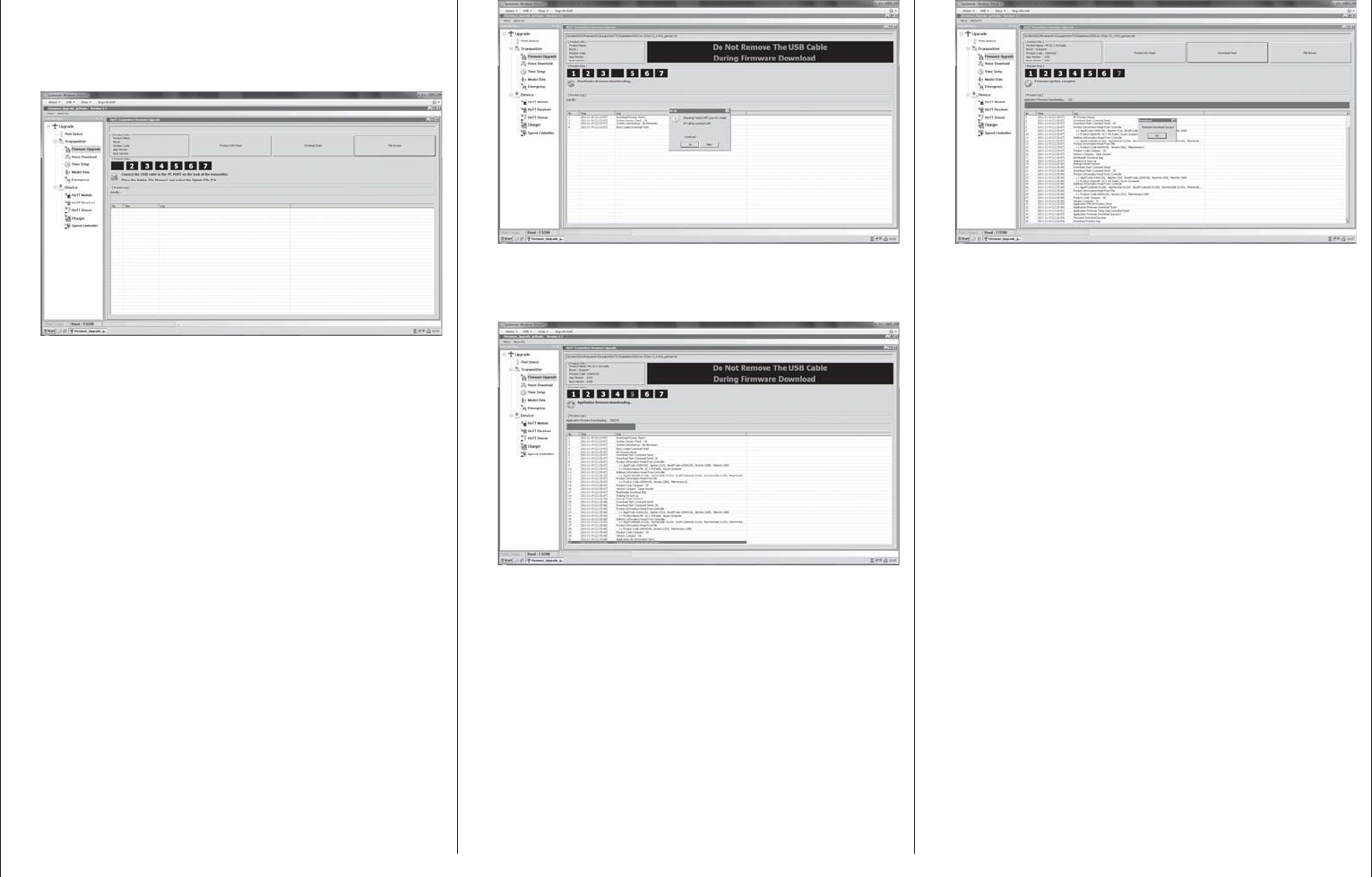
45
Commissioning the transmitter
be the "COM 3" port.
Now call up menu option "Firmware Upgrade"
from "Menu" or open the "Controller Menu" and
click on "Firmware Upgrade".
Click on the button labeled "File Browse" and
select the desired fi rmware update fi le with a ".bin"
fi lename extension from the "Open fi le" window.
Firmware fi les are product-specifi cally coded,
i.e. if you should accidentally select a fi le which
does not correspond to the product (e.g. receiver
update fi le instead of a transmitter update fi le), the
"Product code error" popup window will appear
and the block the update process from starting.
Now switch on the transmitter then start the
transmitter update by clicking on the "Download
Start" button.
After a brief period a warning will appear stating
that the transmitter's RF transmission will now be
interrupted and that, because of this, any receiver
system currently in operation should be switched
off. Switch off your receiver system if it is switched
on then click on "Yes".
This will start the actual update process. A progress
bar will begin to operate above a sequence of
running text lines.
Do not terminate the update process before the
progress bar has reached its right end and the
"Firmware Download Success" message appears.
Click on "OK". Subsequently switch off the
transmitter and disconnect the USB cable
between the transmitter and the PC or Laptop.
If the progress bar hangs up without showing any
further progress, close the program and repeat
the update process. Be sure to watch for any error
messages that may appear.
46 Receiver initialization
Receiver initialization
Preliminary remarks about the GR-32 DUAL receiver
Receiver system
The mc-20 HoTT remote control set includes a type
GR-32 DUAL, 2.4 GHz bidirectional receiver for
connecting up to 16 servos.
After switching on this HoTT receiver, should "its"
transmitter not be within range or switched off, then
the receiver's red LED will illuminate continuously for
about 1 s then begin to blink slowly. This indicates the
receiver has not (yet) established a link to a Graupner
HoTT transmitter. If a link has been established, the
green LED will illuminate continuously and the red
LED will extinguish.
In order to establish a link to the transmitter, the
Graupner HoTT receiver must fi rst be "bound" to
"its" particular model memory in "its" Graupner
HoTT transmitter. This procedure is known as
"binding". This "binding" linkage is only necessary
once for each receiver/model memory combination.
Refer to pages 77 or 85. The "binding" procedure
has been done at the factory for model memory
1 of the units delivered together as a set so this
"binding" procedure will only be necessary to link
additional receivers or if a memory location change
becomes necessary (and – e.g. after a change of
transmitter – can be repeated anytime).
On-board voltage display
The current voltage of the receiver's power supply will
be shown in the right side of the transmitter's screen
if a telemetry link exists between the receiver and
transmitter.
Temperature warning
Should the receiver's temperature sink below an
adjustable threshold (default value -10 °C) or rise
above an adjustable threshold (default value +55 °C)
, an acoustic warning will be issued by the transmitter
in the form of a uniform beep of about 1 s duration.
The aforementioned threshold limits are stored and
adjusted in the receiver.
Servo connections and polarity
Graupner HoTT receiver servo connections are
numbered. The connectors used are keyed against
polarity reversal. Pay attention to the small side
chamfers when plugging in these connectors. Never
use force.
The four outer, vertical connectors, designated with
"B + -" are intended for battery connections.
Do not reverse the polarity of this connection.
Reversed polarity could destroy the receiver and
devices attached to it.
The supply voltage is bussed across (i.e. common
for) all numbered connections. The function of
every individual channel is determined by the
transmitter used, not by the receiver. It is not only
the throttle servo connection which is different for
every manufacturer and model type. For example, in
Graupner remote control systems the throttle servo is
on channel 1 for winged aircraft and on channel 6 for
helicopter models.
Concluding notices:
The signifi cantly greater servo resolution •
characteristic of the HoTT system produces a
noticeably fi rmer response behavior in comparison
to previous technology. Please take the time to
familiarize yourself with this sensitive behavior.
If you have a speed controller with integrated •
BEC* arranged in parallel with the receiver battery,
its positive pole (red cable) may to be removed
from the 3-pole connector. Be sure to look for
notices about this in the instructions for the speed
controller used.
With a small screwdriver, carefully lift up the the
connector's center latch (1) just a bit then pull out
the red lead (2) and tape it up
with insulation tape to prevent
possible short circuits (3).
Follow the installation instructions on page 52 for the
receiver, the receiver antenna and for mounting the
servo.
Reset
To execute a reset of the receiver, press and hold the
SET button on the receiver's top-side while switching
the power supply on.
If a receiver reset is done while the transmitter is
switched off or on a receiver which is not bound,
the receiver's LED will slowly blink red for about
2 or 3 seconds. Now release the button again. The
binding process can now be initiated right away on the
transmitter-side.
If reset is done on a bound receiver and the
corresponding model memory is active in the
powered on transmitter, the LED will illuminate in
green after 2 or 3 seconds as an indication that
the transmitter/receiver system is again ready for
operation. Now release the button again.
Please note the following:
A receiver RESET will cause ALL receiver
settings, except for binding information, to return
to their factory settings.
Therefore if a RESET is triggered unintentionally,
any custom settings that had been present in
the receiver before the reset will have to be
established again by way of the Telemetry menu.
A deliberate RESET is recommended, especially
if a receiver is to be "transferred" into another
model. This is a rather simple method to eliminate
settings which are no longer applicable.
* Battery Elimination Circuit
rot
1
23
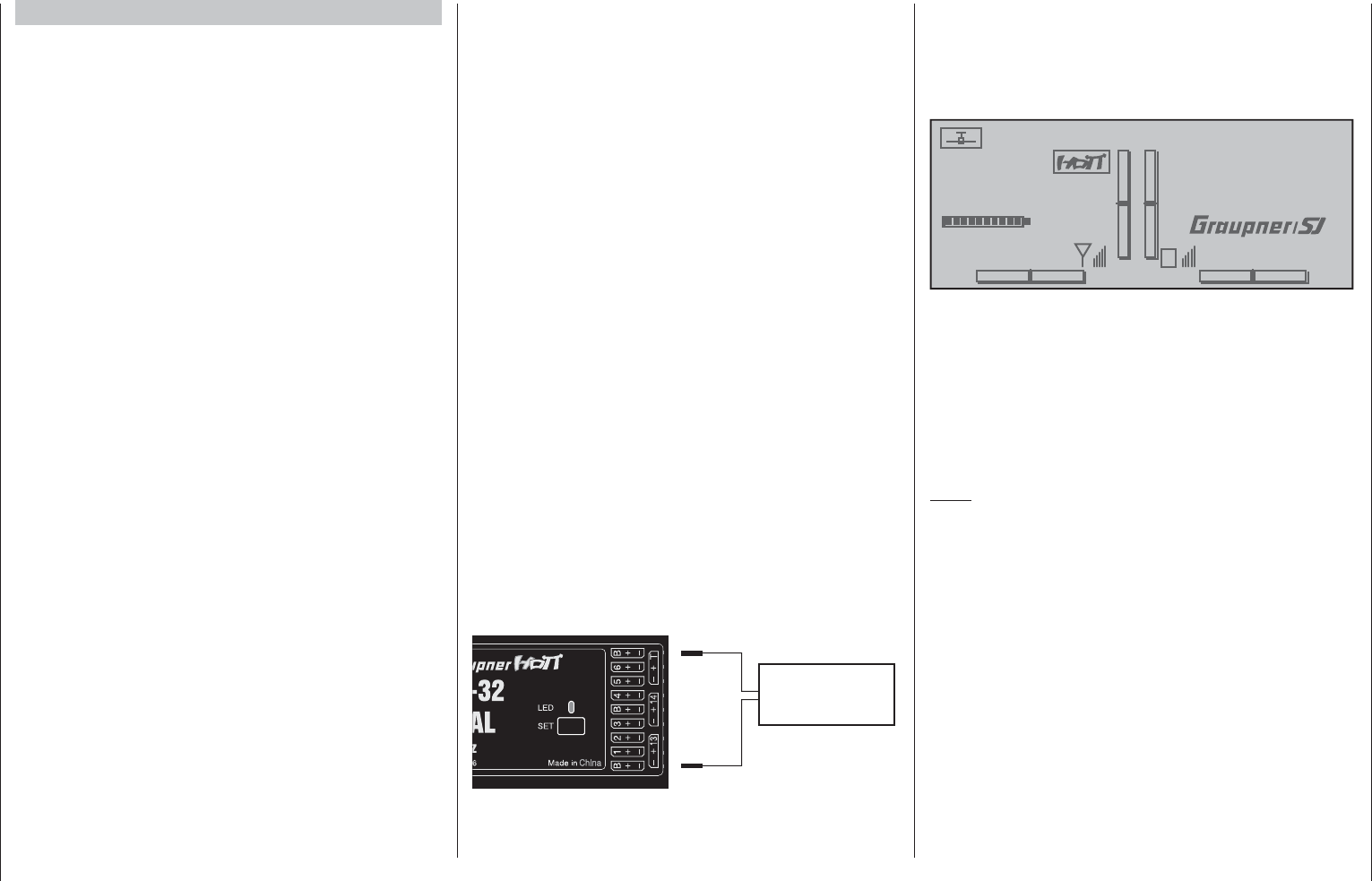
47
Receiver initialization
Receiver power supply
Among other aspects, the safe operation of a model
depends on a reliable power supply. In the event
that, despite smooth operating rods, fully charged
battery, battery leads with adequate cross-section,
minimum contact resistances at connectors, etc.,
the transmitter indicates repeated receiver voltage
collapses or is receiver voltage is generally too low;
please give attention to the following notices.
Give primary attention to fully charged batteries when
model operation is to be started. Be sure that the
contact surfaces of connectors and switches really
are low resistance. If necessary, measure the voltage
drop across installed switch cables when they are
under load because even new heavy-duty switches
can cause a voltage drop of up to 0.2 V. This value
can increase in contacts by factors as a consequence
of aging and oxidation. The constant vibrations and
jarring also takes its toll on contacts to produce a
creeping increase of contact resistance.
Servos present another possible problem source.
Even rather small servos like a Graupner/JR DS-281
can draw up to 0.75 A of current when it is blocks
under load. Just four of these servos in a "foam"
model can therefore load down the on-board power
supply by as much as 3 A …
Therefore you should choose a power supply which
will not break down under greater loads but rather
always deliver suffi cient voltage. To "calculate"
necessary battery capacity you should always fi gure
on at least 350 mAh for every analog servo and at
least 500 mAh for every digital servo.
For example, from this point of view a battery with
1400 mAh would be the absolute minimum to power
a receiver system with a total of 4 analog servos. But
be sure to also consider the receiver itself into the
calculation because its bidirectional functionality will
draw about 70 mA of current too.
In any case, it is recommended that several of the six
available connections designated "- +/B" be used for
the supply of power. (These connections are ONLY
intended for battery connections.)
Connect the power supply preferably by way of
the socket/s which are close to connectors of
attached servos. Where only high-power servos are
connected, it may be necessary to use all receiver
battery connections to connect as many as three
PRX receiver power supplies (depending on battery
power). Even where only two batteries are used via 1
PRX it is preferable to use the receiver connections
closest to the servos which draw the most current.
The fi gure below shows an example of a stabilized
receiver power supply (PRX-5A, order no. 4136) for
the connection of two batteries. As an alternative
solution, a switch could be inserted with power supply
cables to two receiver connectors. Such a double
connection not only reduces the risks associated with
a cable break but also ensures a more uniform supply
of power to attached servos.
If a separate battery is connected to each receiver
battery connection, be absolutely sure the batteries
have the same voltage and power rating. Never
connect different battery types or batteries charged
to signifi cantly different levels to the receiver. This
can lead to effects similar to short circuit conditions.
In such cases, insert voltage stabilizers, such as the
PRX-5A receiver power supply, between the batteries
and the receiver.
PRX receiver power
supply, stabilized
Order No. 4136
For reasons of safety, do not use battery boxes or dry
cell batteries.
The voltage of the on-board power supply will be
displayed at the bottom right of the transmitter's
screen while the model is in operation.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
VRX VOLT:4.8V
If the adjustable warning threshold (default value
3.60 V) set in the Telemetry menu, see page 260,
is underrun, a visual and an acoustic under-voltage
warning will be issued.
Despite this feature, be sure to check the condition
of the battery at regular intervals. Do not wait for
the warning to be issued before recharging the
battery.
Note:
An overview of available batteries, chargers and
current source test instruments can be found in
the Graupner RC main catalog or in Internet at
www.graupner.de. A selection of suitable Compter
chargers are listed in the table on page 17.
Receiver power supply

48 Receiver initialization
Charging the receiver battery
Charger cable, order no. 3021, can be plugged
directly onto the receiver's battery for charging. If
the battery in the model is connected by way of
an order no. 3046,3934,3934.1 or 3934.3 power
supply cable, then charging can be accomplished
via the charging jack or special charging connector
integrated into the switch. The switch in the power
supply cable must be in its "OFF" position for
charging.
Receiver battery
connection polarity
Receiver system power supply
NiMH 4-cell battery packs
In compliance with the aforementioned conditions,
your Graupner HoTT receiver system can be readily
operated with traditional 4-cell battery packs as long as
the packs have adequate capacity and voltage level.
NiMH 5-cell battery packs
Five-cell battery packs offer a greater voltage
tolerance than do 4-cell packs.
However, be aware that not every servo available on
the market is able to tolerate the voltage level output
by a 5-cell pack over the long term, this is particularly
true when the battery pack is freshly charged. Some of
these servos react to this with a noticeable "grinding"
sound.
Therefore pay attention to the specifi cations of the
servos you use before making a choice for a 5-cell
battery pack..
LiFe 6.6 V batteries with 2 cells
From a contemporary perspective, these new cells
are the very best choice.
LiFe cells are also available in hard plastic casings
to protect them from mechanical damage. Like LiPo
cells, LiFe cells can be quick charged in suitable
chargers and they are comparatively robust.
This type of secondary cell battery is also rated for
a signifi cantly greater number of charge/discharge
cycles than, for example, LiPo batteries The nominal
6.6 V output of a 2-cell LiFe battery pack does
not present a problem for either Graupner HoTT
receivers nor for those servos, speed controllers,
gyros and other devices which have been specifi cally
approved for operation in this – higher – voltage range.
Please note however that practically all servos,
speed controllers, gyros and other devices built
in the past and most such devices currently still
offered on the market have only a permissible
voltage range of 4.8 to 6 V. Use of these batteries
in conjunction with these devices demand use of
a stabilized voltage regulator, e.g. the PRX, Order
No. 4136, see appendix. Otherwise there is danger
that attached devices will incur damage within a short
period of time.
LiPo 2-cell packs
For a given capacity, LiPo batteries are lighter than,
for example, NiMH batteries. LiPo batteries are also
available in hard plastic casings to protect them from
mechanical damage.
The comparatively high nominal voltage, 7.4 V, for
a 2-cell LiPo pack does not present a problem for
either Graupner HoTT receivers nor for those servos,
speed controllers, gyros and other devices which
have been specifi cally approved for operation in
this – higher – voltage range. Please note however
that practically all servos, speed controllers,
gyros and other devices built in the past and
most such devices currently still offered on the
market have only a permissible voltage range
of 4.8 to 6 V. Use of these batteries in conjunction
with these devices demand use of a stabilized
voltage regulator, e.g. the PRX, Order No. 4136, see
appendix. Otherwise there is danger that attached
devices will incur damage within a short period of
time.
49
Receiver initialization
General charging notices
The charging instructions for the charger as well •
as for the battery from its manufacturer to be
observed.
Pay attention to the maximum permissible •
charging current specifi ed by the battery's
manufacturer. In order to prevent damage to the
transmitter, charging current should never exceed
1 A. If necessary, limit the current at the charger.
If the transmitter battery is nevertheless to be •
charged at a current rate in excess of 1 A, then it is
imperative that this is done outside the transmitter.
Otherwise there is a risk of damage to the
transmitter's board due to overloading its printed
circuit paths and/or overheating of the battery.
If an automatic charger is to be used for charging, •
perform several test charging procedures to ensure
the fl awless functionality of its automatic shut-off.
This applies particularly if you want to charge the
standard installed NiMH battery with an automatic
charger unit intended for NiCd batteries Monitor the
charger's shut-off behavior if it has that option.
Do not execute a battery discharge or battery •
maintenance program through the charger jack.
The charger jack is not suitable for this purpose.
Alway connect the charger cable to the charger •
fi rst and then to the receiver or transmitter battery.
This avoids the possibility of shorting the bare
banana plug ends together.
If the battery heats up signifi cantly, check the •
battery's condition, replace the battery or reduce
the charging current.
Never leave a charging battery unattended.•
Follow the safety notices and handling •
instructions provided on page 7.
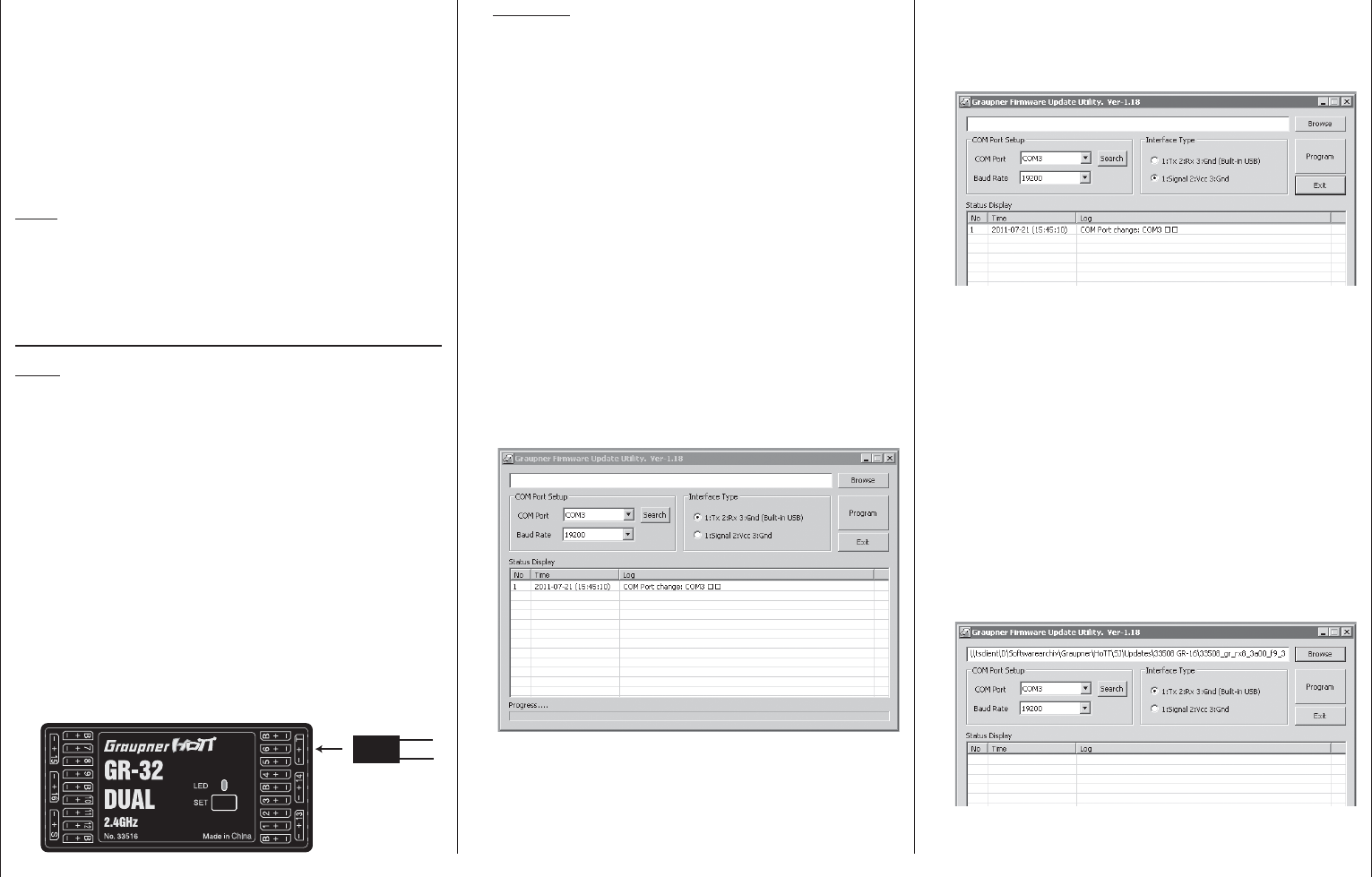
50 Receiver initialization
Receiver fi rmware updates are made by way of the
connector located on the side of the receiver and
the help of a PC running under Windows XP, Vista
or Windows 7. The optional USB interface cable
needed for this is order no.7168.6 along with adapter
cable, order no.7168.6A. The programs and fi les also
needed can be found in Internet on the Graupner
website at www.graupner.de under the downloads for
the particular product.
Note:
After registering your receiver at
https://www.graupner.de/de/service/produktregistrierung,
you will automatically receive notifi cation of future
updates per email.
Updating receiver fi rmware
Note:
Before any update procedure, be sure to check the
charged status of the receiver's battery. If necessary,
charge the battery before beginning with an update.
Installing drivers1.
If not already done, install the required driver
software for the USB interface, order no. 7168.6,
as described on page 43.
Establishing a receiver / PC connection2.
Connect the USB interface cable, order no.
7168.6, via the adapter cable, order no. 7168.6A,
with the "- + T" connector on the receiver. These
connectors are protected against polarity reversal
so pay attention to the small chamfers on the
sides of connectors. Do not use brute force, these
connectors should latch in rather easily.
Adaptor cable
Order No. 7168.6A
if available:
disconnect the central, red braid
Receiver fi rmware updates
Caution:
If the adapter cable is still has wires for all
three poles, cut the red insulated wire for the
middle connector pin of the adapter cable,
Order No. 7168.6A.
Afterward, connect the USB interface with the
included USB cable to the PC or laptop (PC USB/
mini-USB interface connector). A red LED on
the interface board should illuminate for a few
seconds even though the connection is made
correctly.
If not already off, now switch the receiver off.
Firmware update utility program3.
On the PC, start the "Graupner_Firmware_Update_
Utility_VerX.XX.exe" program with a double-click.
This program is located among the fi les in the
"Firmware-Updater" folder. (At the time of printing
for this manual, this program's current version
is 1.18 and it can be started without fi rst being
installed.)
In the "COM Port Setup" group box, select the
COM port to which the USB interface is connected.
If you are not sure whic h selection is correct, press
the "Search" control, choose the connection labeled
"Silicon Labs CP210x USB to UART Bridge" from
the popup window and then activate "OK". The
"Baud Rate" setting should be "19200".
Afterwards, click on the "Signal 2:Vcc3:Gnd" radio
button in the "Interface Type" group box.
Now click on the control labeled "Browse" that is
located at the top right corner of the window. From
the "Open fi le" window which appears, select the
appropriate fi rmware update fi le for your receiver.
Such fi les always have the ".bin" fi lename extension.
Typically this fi le can be found in the folder whose
name is prefi xed with the order number of the
receiver to be updated. This folder should contain
the ZIP fi le that was downloaded and unpacked.
Its fi lename should also be prefi xed with the order
number of the receiver to be updated. For the
standard GR-32 DUAL receiver included in this set,
the directory would be designated "33516_16CH_
RX". The fi lename will appear in the corresponding
window.
Firmware fi les are product-specifi cally coded, i.e.
if a wrong fi le is accidentally selected which does
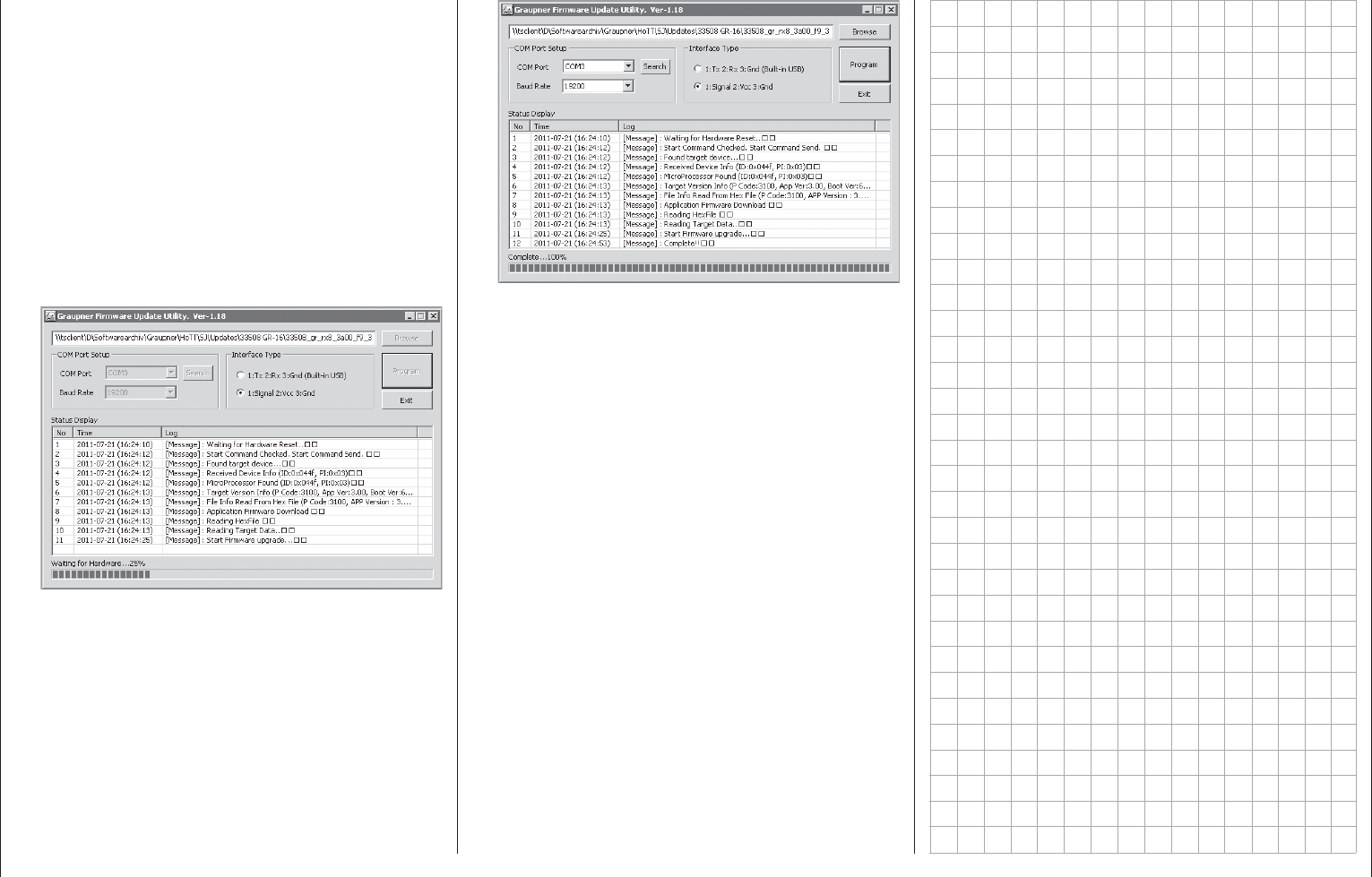
51
Receiver initialization
not correspond to the product (e.g. a transmitter
update fi le instead of a receiver update fi le), the
"Product code error" popup window will appear
and the update process will not start.
Activate the control labeled "Program". Wait for
the progress bar to start. Depending on the speed
of the computer being used, this may take several
seconds. Now switch on the receiver while holding
its SET button down. After a few seconds the
"Found target device …" message will appear
in the status display. Now you can release the
receiver's button. The actual fi rmware update
will begin autonomously after this message has
appeared.
However, if the receiver is not detected, the "Target
device ID not found" popup window will appear.
If this process terminates before reaching the
100 % mark, switch off your receiver's power supply
then try to start the update process all over again.
Do this by performing the above steps again.
The status display and progress bar will show you
the progress of the fi rmware update. The update
is concluded when the text "Complete … 100 %“
or "Complete!!" appears in the bottom line of the
status display.
Both LEDs on the receiver will illuminate during
the update process. Upon successful conclusion
of the update process, the green LED will
extinguish and the red LED will begin to blink.
Switch the receiver off and remove the interface
cable. Repeat this procedure for any other
receivers present.
Receiver initialization4.
Following a successful update process you MUST
perform a receiver initialization procedure before
using the receiver again. This is necessary for
reasons of safety.
Do this by pressing and holding the receiver's SET
button then switching the receiver's power supply
on. Now release the SET button again. When you
subsequently switch the receiver on again, the
receiver's green LED will illuminate continuously
for about 2 or 3 seconds. Except for binding
information, all other settings that may have been
programmed into the receiver will now be reset
to factory defaults and will have to be re-entered
again if they are needed.
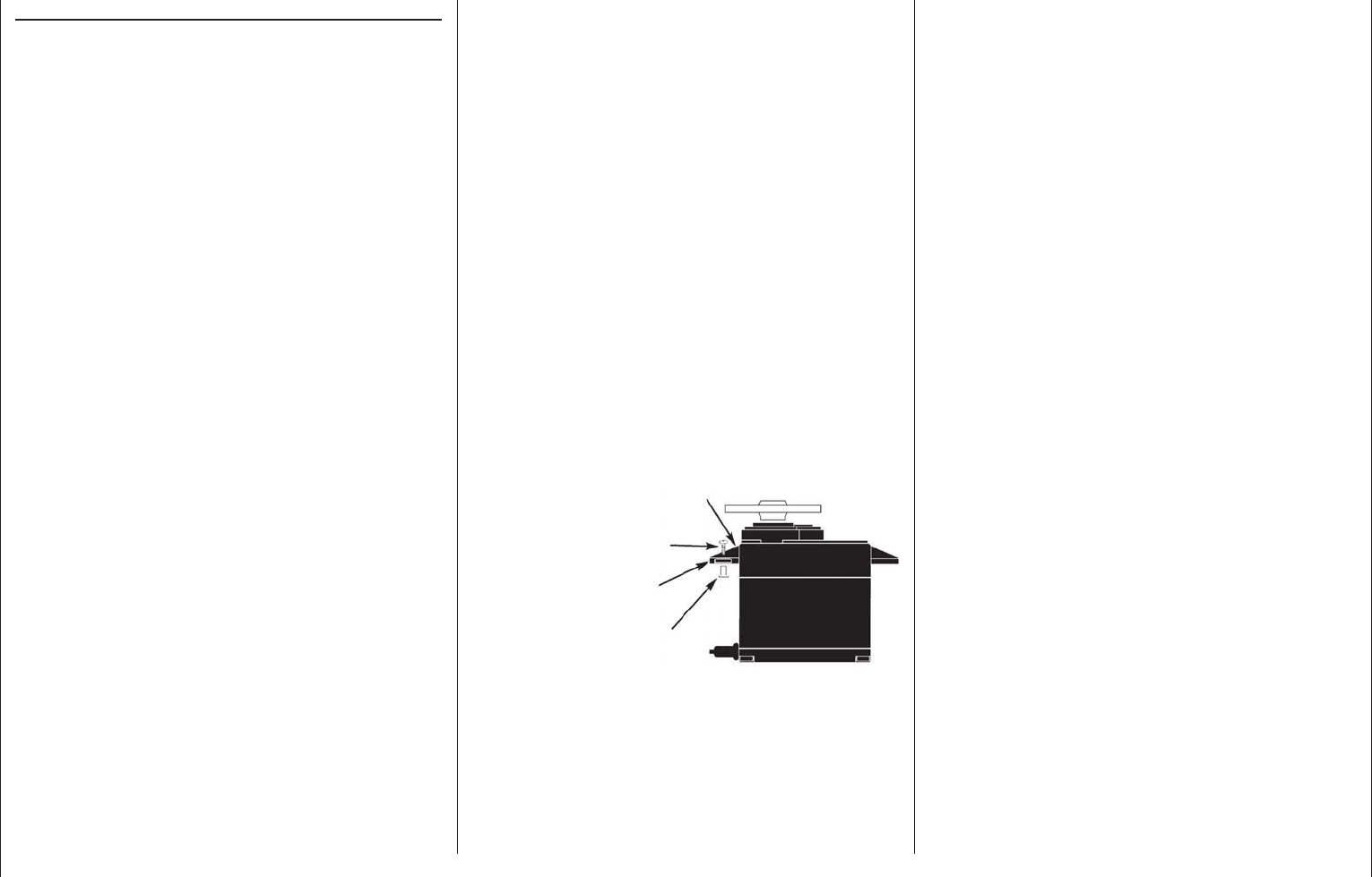
52 Installation notices
In order to prevent uncontrolled movements of servos
connected to the receiver during startup
always fi rst switch on the transmitter
and then the receiver
and when fi nished with operation
fi rst switch off the receiver
and then the transmitter.
When programming the transmitter, be sure that
electric motors cannot start running without control
or that a combustion motor equipped with automatic
starting cannot start up unintentionally. To be safe,
disconnect the receiver's drive battery or, in the case
of a combustion motor, disconnect the fuel supply.
Several notices and suggestions for installing
remote control components into a model are
provided below.
Wrap the receiver in a foam rubber pad that is at 1.
least 6 mm thick. Attach the foam rubber to the
receiver with rubber bands so it will be protected
against vibration and/or the jars of a hard landing.
All switches must be installed such that they are 2.
not affected by exhaust gases or vibration. The
switch knob must be freely accessible over its
entire range of movement.
Mount servos on rubber bushes/spacers with 3.
hollow brass bearings to protect them from
vibration. Do not tighten the fastening screws
down too tight as this would negate the vibration
protection to be provided by the rubber bush/
spacer. Only when servo fastening screws are
properly tightened will this arrangement provide
security and vibration protection for your servos.
The fi gure below shows how a servo is mounted
properly. The brass bearings are to be pushed into
the rubber bushes/spacers from below.
Servo mounting lug
Retaining screw
Rubber grommet
Tubular brass spacer
Servo arms must be free to move throughout their 4.
entire range of motion. Pay attention that there are
no objects which could hinder servo arm motion.
The sequence in which servos are connected to the
receiver depends on the type of model. Follow the
connection layouts provided for this on pages 61 and 65.
Also observe the safety notices provided on pages 4 … 9.
Installation notices
Receiver installation
Regardless of which Graupner receiver system you
use, the procedure is always the same.
Please pay attention that the receiver's antennas
must be mounted at least 5 cm away from all large
metal parts or any wiring that is not directly routed
out of the receiver itself. In addition to steel parts, this
also includes carbon fi ber parts, servos, fuel pumps
and all kinds of cables etc. Optimally the receiver
should be placed at a readily accessible location
that is well away from all other equipment. Under no
circumstances may servo cables be wrapped around
the antennas or routed close to it.
Please note that cables are subject to the
acceleration forces which occur during fl ight and
these forces may cause such cables, to shift in
position. Therefore be sure the cables in the vicinity
of the antennas are not able to move. Such moving
cables can cause reception disturbances.
Tests have shown that vertical (upright) antennas
provide the best results during wide-range fl ights. In
the case of diversity antennas (two antennas), the
second antenna should be oriented at a 90° angle to
the fi rst antenna.
The connectors designated "B + -" on the GR-
32 DUAL HoTT receiver are intended for battery
connections. The power supply is bussed across
all numbered connections so it can be attached
at any of these 16 connectors. However, due to
additional voltage losses associated with the traverse
connectors, connections 13 through 16 should not be
used for connecting the receiver's battery.
The function of every individual channel is determined
by the transmitter used, not by the receiver. However,
channel assignments can be changed in the receiver
by programming done in the »Telemetry« menu.
Nevertheless, it is recommended this be done on the
transmitter side via the "Transmitter output" option,
see page 218.
53
For your notes
54 Term defi nitions
Term defi nitions
Control function, control, function input, control channel, mixer, switch, control switch, fi xed switch
To make use of this mc-20 HoTT manual easier, a
number of the terms used repeatedly throughout this
manual have been defi ned below.
Control function
A "control function" is to be perceived – initially
independent of its signal path – as a signal intended
to affect a given control function. For example, this
could be for throttle, rudder or aileron in a winged
aircraft or pitch, roll or crow for a helicopter.
A control function signal can be applied directly over
a single control channel or also through a mixer and
then applied over multiple control channels. A typical
example of multiple control channels is separately
operated aileron servos or the use of two roll or crow
servos in helicopters. The control function explicitly
includes the infl uence of the control's mechanical
travel on the respective servo. This can not only
be spread or compressed by software but even the
travel characteristic can be modifi ed from linear to
extremely exponential.
Control
"Controls" include all operating elements on the
transmitter, which are directly activated by the pilot,
that impose an effect on servos, speed controllers
etc. connected to the receiver. This includes:
both• joysticks for control functions 1 through
4, whereby these four functions can be freely
swapped around for both model types ("winged
aircraft" and "helicopters") by way of software
"Mode" settings, e.g. throttle left or right. The
joystick function for throttle/airbrake control is often
also referred to as the C1 control (channel 1).
both proportional controls located on the •
transmitter's sides, which are, for example,
given the designations SD1 (right-side "rotary
slider") and SD2 (left-side "rotary slider") in the
»Control adjust« menu, page 108 and 112.
the three • proportional sliders in the middle console
designated SR1 … 3, for example as shown in the
»Control adjust« menu, page 108 and 112,
all fi ve • proportional rotary controls on the
transmitter's front side, which are, for example,
given the designations DR1 … 5 in the
»Control adjust« menu, page 108 and 112,
the switches present, if they are assigned to a •
control channel in the »Control adjust« menu.
The proportional operating elements produce a direct
effect on servos which is commensurate with the
control's position whereas switch modules can only
effect a two or three increment change.
Just which of these controls and switches operate which
of the servos 5 … 16 (max.) is freely programmable.
Important notice:
Inputs 5 … 15 for helicopters and 5 … 16 for
winged aircraft are generally "free", i.e. not
assigned, in the transmitter's basic programming.
Function input
This is an imaginary point in the signal path and
must not be considered the same as the point on
the circuit board where the transmitter control is
connected. The choice of "Stick mode" and settings
in the »Control adjust« menu have their effect
"downstream" of these imaginary connection points.
Thus differences between the physical control's
number and the number of the downstream control
channel can indeed emerge.
Control channel
From the point at which a signal contains all control
information necessary for a particular servo – whether
directly from the physical control or indirectly by way
of a mixer – the term "control channel" is used. This
signal is only yet to be infl uenced by settings made in
the menus »Servo adjustment« and »Transmitter
output« before it leaves the transmitter's RF module.
Once it arrives at the receiver, this signal may still
be modifi ed by settings made in the telemetry menu
before fi nally being applied as a control quantity for
the respective servo.
Mixer
The transmitter's software contains a variety of mixer
functions. These can be used to apply one control
function to multiple servos or, conversely, to apply
multiple control functions to a single servo. Please
look over the numerous mixer functions in the text
beginning on page 159 of this manual.
Switches
The four standard toggle switches, the two 3-way
switches and both push-button switches can also
be incorporated into control programming. However,
these switches are generally intended for switching
program options, e.g. to start and stop timers, to
switch mixers on and off, or as a teacher/pupil
switchover, etc. Each of these switches can be
assigned any number of functions.
Appropriate examples are detailed in the manual.
Control switches
Since it is very practical to have some functions
automatically switched on or off for a certain control's
position (e.g. switch on/off of a stopwatch for
acquisition of model run time, automatic extension of
spoilers and other possibilities), eight control switches
have been integrated into mc-20 HoTT software.
These software switches, designated "C1 … C8", are
merely defi ned by virtue of their contact state along
the physical control's course of travel by the touch of
a key. The switching action can be correlated to the
physical control's travel direction by software.
Of course control switches can also be freely
combined with the aforementioned physical switches
to solve even more complex problems.
There is a series of instructive examples which make
55
Term defi nitions
this programming child's play. Learn about this by
taking advantage of the programming examples
beginning on page 268.
Logical switches
These functions permit two switches, control switches
and/or logical switches or any combination of these to
be combined with one another to create logical "AND"
and "OR" functionality. A total of 8 logical switches,
"L1 … L8" can be programmed, see page 138.
Fixed switches FXI and FX
This type of switch turns a function, e.g. a timer,
permanently on (closed fi xed switch) or off (open fi xed
switch) or they can provide a fi xed input signal for a
control function, e.g. FXI = + 100 % and FX = -100 %.
For example, in fl ight phase programming, these
fi xed switches can be used to switch a servo or speed
controller between two settings.
56 Physical control, switch and control switch assignments
Physical control, switch and control switch assignments
Principle procedure
Maximum fl exibility is offered by the mc-20 Hott
system when it comes to assigning standard
equipment operating elements to certain functions.
Since the assignment of controls and switches is
done in the same way, even though different menus
may be involved, it is appropriate at this point to
explain the fundamental programming technique so
that users can concentrate on the particular contents
when reading the detailed menu descriptions.
Physical control and switch assignments
The third column of the »Control adjust« menu
can be used to assign transmitter inputs 5 … 16 to
operate servos, both in any given joystick direction
(C1 … C4) as well as to assign any present control
or switch. After tapping on the center SET key of the
right touch pad, the window shown below will appear
in the display.
Gewünschten Schalter
oder Geber betätigen
Now simply move the desired control or switch.
Notes:
The control will only be recognized beyond a certain
amount of travel. Therefore these controls can be
moved back and forth until the correct assignment
is shown in the display. If adjustment travel is
insuffi cient, activate the control in the other direction.
On the other hand, if the »Control switch« menu,
page 135, is used to assign a control, the message
shown below will appear:
Move desired
control adj.
Important notice:
Controls to be assigned MUST be pre-assigned in
the »Control adjust« menu to one of the inputs 5
through 16!
Switch assignment
Wherever programming permits a switch to be
assigned, a switch symbol will appear in the screen's
bottom display line.
Use the selection keys in the left or right touch pad to
select the appropriate column.
How to assign a switch
Briefl y touch the 1. SET key of the right touch pad.
The message shown below will appear in the
screen.
Move desired switch
to ON position
(ext. switch: ENTER)
Now it is only necessary to put the selected switch 2.
into the desired "ON" position or, as described
at the right in "Assignment of external switches",
to select a switch from the list of "External
switches". This concludes the assignment. The
switch symbol to the right of the switch's number
indicates the current state of the particular switch.
Changing switch action
If the activation of a switch is to result in the opposite
action, put the switch or joystick in the desired OFF
position, again activate the switch assignment and
reassign the switch again so it will respond with the
desired action.
Clear switch
A switch which has been assigned as described
under point 1 can be cleared with a brief
simultaneous tap on the cd or ef key combination
in the right key pad (CLEAR).
Assignment from the "external switch" list
Those menus in which the message …
Move desired switch
to ON position
(ext. switch: ENTER)
… appears permit the assignment of switches
belonging to the so-called "external switches".
Do this by confi rming the message text with the
SET key. A new window will appear with a list of the
eight control switches "C1 … C8", followed by two
so-called "FX" fi xed switches and the eight inverted
switches "L1 … L8".
M wünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C3C1
Use the selection keys in the left or right key pad to
select the desired switch then assign it with a brief
tap on the center SET key of the right touch pad.
Notes:
Switching for some special functions may •
be better implemented from a certain freely
programmable control position rather than
switching them manually with a normal switch.
To this end, there are a total of 8 so-called "control
switches", C1 … C8, available whose switching
direction can be established, even inverted, in the
»Control switch« menu, page 135.
Two switches and/or also control switches can be •
combined with one another to form the logical "AND"
or "OR" functions via the »Logical switch« menu,
see page 138. A total of 8 logical switches "L1 … L8"
(as well as another 8 inverted logical switches with
inverted switching direction) are available.
The result of a logical switch function can also
be used as an input for another logical switch
function. Refer to the appropriate menu for more
details about this.
57
Physical control, switch and control switch assignments
The two FX switches switch a function on "FXI" or •
off "FX " permanently.
All other switches mentioned can have multiple •
assignments. Pay attention that you do not
UNINTENTIONALLY assign reciprocally confl icting
functions to a single switch. If necessary, note
down the given switch functions.
Typical applications:
Shut-off of an on-board glow plug heater upon •
underrun or overrun of an idle threshold point
programmed for the C1 joystick. In this case
the glow plug heater switch is controlled by a
transmitter mixer.
Automatic switch on/off of the timer to measure •
pure "fl ight time" for a helicopter by way of a
control switch on the throttle limiter.
Automatic switch off of the "AI • ¼ Rud" when
brake fl aps are extended, for example to adapt
the roll of a model to the ground when making a
landing on a slope without inducing a change of
fl ight direction due to infl uence on the rudder.
Extending landing fl aps with elevator trim adjustment •
during a landing as soon as the throttle stick is
moved beyond its switch point.
Switch on/off of the timer for measuring the •
operating time of electric motors.
58 Digital trimming
Digital trimming
Functional description and description of C1 cut-off
Digital trim with visible and audible indicators
Both joysticks are equipped for digital trimming. By
default, turning trim wheels will offset the joystick's
neutral position by 4 increments (out of a possible
100 steps per side). This offset is also reported
acoustically. A brief press on the trim wheel will
reset an existing trim offset back to "0". Any other
"zero points" can be specifi ed with the help of the
»Trim memory« menu. If fl ight phases have been
created and each assigned with a fi tting name in
the »Phase settings« and »Phase assignment«
menus, then these names will appear at the bottom
left in the »Trim memory« menu and their trim values
will be stored on a fl ight-phase specifi c basis.
The default 4-steps per click increment range placed
in every new model memory upon initialization can
be changed at any time in the »Stick mode« menu,
page 104 or 106, separately for each joystick plane,
in a range of 1 … 10 for fi xed-wing models and in
a range of 0 … 10 for helicopter models. (A trim
function can be deactivated by selecting "0" steps,
which can be advantageous in helicopters with
certain gyro systems.)
Current trim values are automatically stored
when a model memory change is made.
Furthermore, – except for the trim of the throttle/
airbrake joystick, the so-called "C1"(channel 1)
control function – digital trim can be set to operate
globally or on a fl ight-phase specifi c basis within a
memory location. This choice is made, separate for
each joystick plane, in the second column of the
»Stick mode« menu, page 104 or 106.
Notes:
Finding the mid-point position during a fl ight is •
easy and can be done without even looking at the
display. A brief press on the trim wheel will reset
trim to "0" or, in the »Trim memory« menu, will
reset a stored fl ight-phase specifi c trim value.
The "cut-off trim" function, known from other •
Graupner remote control systems in the mc and
mx series, and typically described in this section
can be realized with the help of the "Thr. CutOff"
option in the »Basic settings, model« menu,
see page 81 and 90.
59
For your notes
60 Winged models
Winged models
Convenient support is provided for up to four aileron
servos and four fl ap servos on normal models or, for
V tail and fl ying wing/delta models, up to two aileron/
elevator servos plus four fl ap servos.
The majority of motorized and glider models belong
to the tail unit type "normal" and are equipped with
one servo each for elevator, rudder and ailerons
in addition to a motor throttle or electronic speed
controller (or for brake fl aps in the case of a glider
model). Beyond this, tail unit type "2 HR Sv 3+8"
permits the connection of two elevator servos to
receiver outputs 3 and 8.
"V-tail" is to be selected from the »Model type« menu
if the model has a V-tail instead of a "normal" tail.
This V-tail option provides coupled control functions
for elevator and rudder such that both tail fl aps – each
controlled by a separate servo – are able to handle
both elevator and rudder functionality.
For delta and fl ying wing aircraft models, aileron and
elevator functionality is affected by way of a common
rudder fl ap on the trailing edge of each side (right and
left) of the wing. The program contains appropriate
mixer functions for both servos.
If ailerons, and conditionally the fl aps, are each
actuated with two separate servos then settings can
be made for differentiated control of all aileron and
fl ap pairs in the »Wing mixers« menu, i.e. settings
for downward rudder throw independent of upward
throw. And fi nally, the positioning of fl aps can also
be controlled by one or even more of the three
proportional sliders or the seven proportional rotary
controls.
Alternatively, there is a phase-dependent trim function
available for fl aps, ailerons and elevators in the
»Phase trim« menu.
Up to 8 fl ight phases can be programmed into each of
the 80 model memory locations.
Except for C1 trim, digital trim will be stored on a
fl ight-phase basis. C1 trim permits easy location of a
carburetor idle setting.
Two timers are always available for fl ight operation.
The transmitter operating time expired since the last
battery charge is also displayed.
All transmitter controls and switches can be assigned
in the »Control adjust« menu to inputs 5 … 16 with
almost no restrictions.
The "Dual Rate" and "Exponential" functions for
ailerons, rudder and elevators are separately
programmable and each are convertible between the
two variations on a specifi c fl ight-phase basis.
In addition to 8 freely allocatable linear mixers, 4 curve
mixers (»Free mixers« menu) and 4 dual mixers
(»Dual mixer« menu) there are also fl ight-phase
dependent 8-point curves available to control channel
1 (throttle/brake), see »Channel 1 curve« menu).
Depending on the number of wing servos, fi xed-
defi nition mix and coupling functions can be selected
from a list in the »Wing mixers« menu.
Multi-fl ap menu: control of fl aps as ailerons, •
the infl uence aileron trim on fl aps controlled as
ailerons, fl ap differentiation, fl ap function throw
magnitude for all aileron and fl ap pairs, ailerons
controlled as fl aps, elevator mixer ¼ fl aps
Brake settings: butterfl y, differential reduction, •
elevator curves
aileron• ¼ rudder mixer
fl aps •¼ elevator mixer
E
l
e
v
a
t
o
r
F
l
a
p
F
l
a
p
E
l
e
v
a
t
o
r
F
l
a
p
A
i
l
e
r
o
n
A
i
l
e
r
o
n
F
l
a
p
A
i
l
e
r
o
n
R
u
d
d
e
r
E
l
e
v
a
t
o
r
A
i
l
e
r
o
n
left
right
E
l
e
v
a
t
o
r
F
l
a
p
F
l
a
p
E
l
e
v
a
t
o
r
A
i
l
e
r
o
n
R
u
d
d
e
r
A
i
l
e
r
o
n
F
l
a
p
Airbrake Flap
Airbrake Elevator
Airbrake-Function 1
left
right
Rudder/Elevator
V-Tail
AI
FL
FL
AI
Brake FL, FL2
Brake Elevator
Brake AI, AI2
AI
FL
FL2
AI
FL
FL2
AI2
F
L
J
A
I
F
L
I
A
I
E
L
I
F
L
RU I AI
EL I AI
E
L
J
F
L
AI2
A
I
J
F
L
A
I
I
F
L
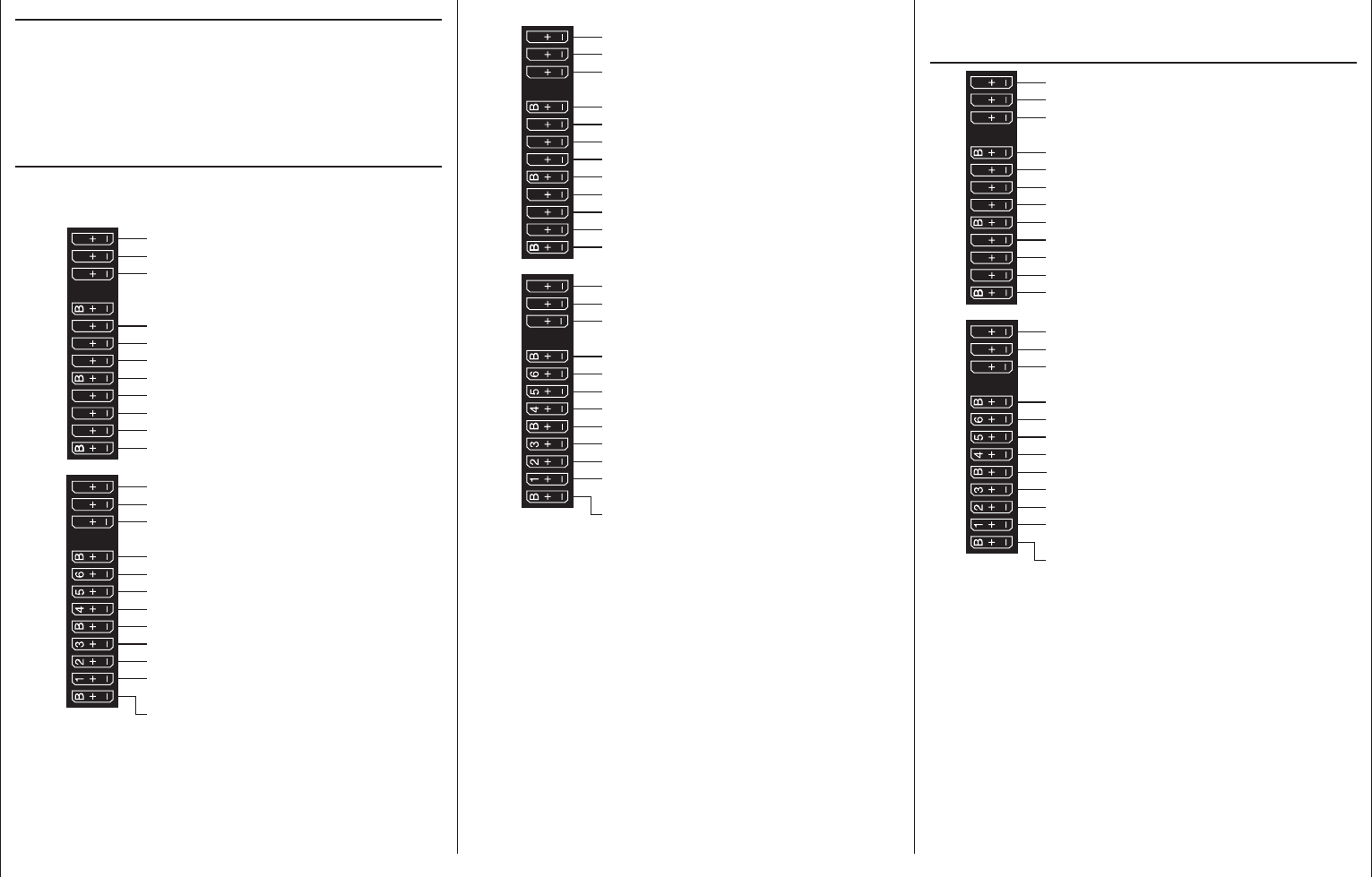
61
Winged models / Receiver layout
Installation notices
Servos MUST be connected to the receiver in the
sequence illustrated here.
Outputs which are not used are simply left empty. Also
be sure to follow the notices on the next pages.
Winged aircraft with and without motor having up
to 2 aileron servos and up to 4 fl ap servos …
… and tail plane type " normal" or "2 elevator
servos"
Receiver power supply
free or AIL2 left or aux. function
free or AIL2 right or aux. function
Rudder
Aileron or left aileron
Elevator or 1st elevator
free or 2nd Elevator or aux. function
Receiver power supply
Airbrake or throttle servo
or speed controller (electric motor)
Right aileron or aux. function
Flap or left flap
Right flap or free or aux. function
free or left flap2 or aux. function
free or flap2 right or aux. function
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
free or aux. function
free or aux. function
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
… and tail plane type " V tail unit"
Receiver power supply
free or left AIL2 or aux. function
free or right AIL2 or aux. function
Aileron or left aileron
free or 2nd elevator or aux. function
Receiver power supply
Airbrake- or throttle servo
or speed controller (electric motor)
Right aileron or aux. function
Flap or left flap
Right flap or free or aux. function
free or left flap2 or aux. function
free or right flap2 or aux. function
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
free or aux. function
free or aux. function
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
Left elevator/rudder
Right elevator/rudder
Delta/fl ying wing aircraft models with and without
motor having up to two aileron/elevator servos
and up to 2 fl ap/elevator servos
Receiver power supply
Receiver power supply
Airbrake- or throttle servo
or speed controller (electric motor)
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
free or aux. function or AIL2 / left EL
free or aux. function or AIL2 / right EL
free or aux. function
free or flap / left elevator
free or flap / right elevator
free or aux. function or flap2 / left EL
free or aux. function or flap2 / right EL
free or aux. function
free or aux. function
AIL / elevator left
AIL / elevator right
free or aux. function
free or rudder
62 Winged models - Servo direction wrong
Because of orientation differences for installed servos
and their rudder linkages, the actuating direction of
some servos may be initially backward. The table
below provides remedies.
Model
type
Servo
direction
wrong
Remedy
V tail Rudder and
elevator reversed Reverse polarity of
servos 3 & 4 in the
»Servo adjustment«
menu
Rudder correct,
elevators reversed Swap servos 3 & 4 on
the receiver
Elevators correct,
rudder reversed Reverse polarity of
servos 3 & 4 in the
»Servo adjustment«
menu AND swap them
on the receiver
Delta,
fl ying
wing
Elevator and aileron
reversed Reverse the polarity
of servos 2 & 3 in the
»Servo adjustment«
menu
Elevator correct,
aileron reversed Reverse polarity of
servos 2 & 3 in the
»Servo adjustment«
menu AND swap them
on the receiver
Aileron correct,
elevators reversed Swap servos 2 & 3 on
the receiver
All "program descriptions" for menus relevant to a
winged aircraft model are marked with a winged
aircraft symbol …
… so only these menus need to be dealt with to
program a winged aircraft model.
63
For your notes
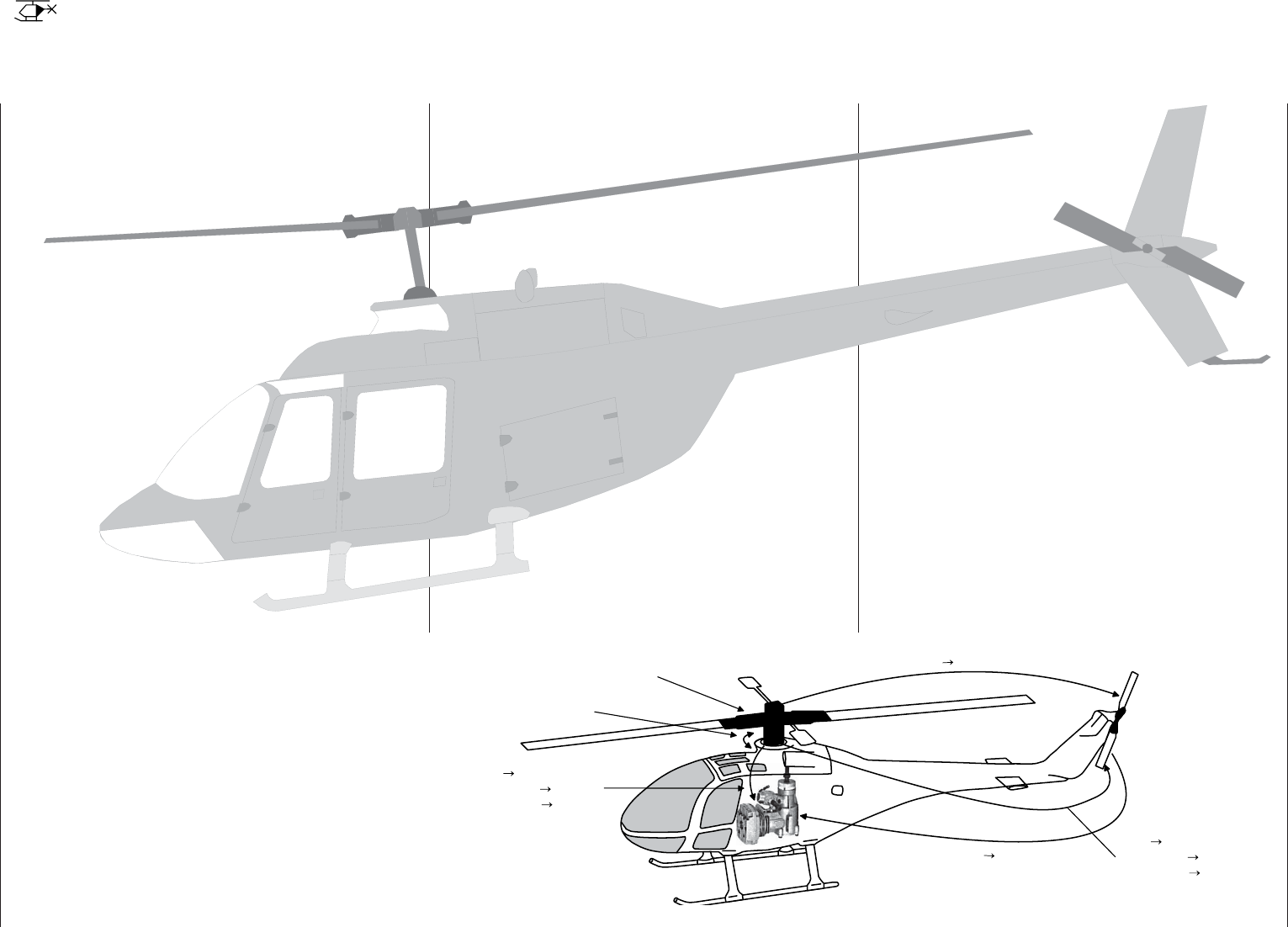
64 Helicopter models
Helicopter models
The advanced developments incorporated into the
transmitter as well as those now in helicopter models
and their components like gyros, speed regulators,
rotor blades, etc. make it possible to master a
helicopter even in 3D acrobatic fl ight. On the other
hand, a beginner needs only a few settings to get
started with hovered fl ight training then, step-by-
step, take advantage of mc-20 HoTT features with
increasing expertise.
The mc-20 HoTT program can operate all
conventional helicopters having 1 … 4 servos for
pitch control.
Seven fl ight phases plus autorotation are available
within a model memory, see menus »Control adjust«,
»Phase settings« and »Phase assignment«.
As with winged aircraft, here too, in addition to the
basic screen's standard timers there are additional
timers as well as a lap counter with fl ight-phase-
dependent stopwatch functionality which are available
for selection (menus »Timers (general)« and »Fl.
phase timers«).
Except for pitch/throttle trimming, digital trimming can
be stored as "global" for all fl ight phases or as "fl ight
phase specifi c". C1 trim permits easy location of an
idle setting.
The control assignments for inputs 5 … 16 is made
separately for each fl ight phase (»Control adjust«
menu).
A fl ight phase copy function is helpful during fl ight
trials (»Copy / Erase« menu).
"Dual Rate" and "Exponential" functions can be
coupled for roll, nick and tail rotor and programmable
in two variations in every fl ight phase.
There are 8 freely assignable linear mixers. There
are also 4 curve mixers that can be programed and
these can also be switched on or off, depending on
the fl ight phase, in the »MIX active/phase« menu.
Beyond this, there are also 4 dual mixers available.
The »Helicopter mixer« menu provides fl ight-
phase-dependent 8-point curves for the non-linear
characteristics pitch, throttle and tail rotor mixer as
well as two independent swashplate mixers each for
roll and nick. Independent of this, the control curve
of the channel 1 joystick can be defi ned with up to a
total of 8 points in every fl ight phase. The beginner
will initially only adapt the hover fl ight point to the
control middle for the non-linear characteristics.
Pre-programmed mixers in the »Helicopter mixer«
menu:
Pitch curve (8-point curve)1.
C12. ¼ throttle (8-point curve)
Channel 1 3. ¼ tail rotor (8-point curve)
Tail rotor 4. ¼ throttle
Roll5. ¼ throttle
Roll6. ¼ tail rotor
Pitch-axis7. ¼ throttle
Pitch-axis8. ¼ tail rotor
Gyro suppression9.
Swashplate rotation10.
Swashplate limiter11.
The "Throttle limit" function (input Tl16 in the
»Control adjust« menu) allows the motor to be
started in any fl ight phase. The right-side proportional
rotary slider is assigned to input "Tl16" by default.
This "throttle limiter" establishes – depending on its
given position – the maximum possible throttle servo
position. This makes it possible for the motor to be
controlled in the idle range, if necessary even by the
proportional regulator. The throttle curves become
effective only when the proportional regulator is
pushed toward the full throttle direction.
Collective
Pitch Curve
Swashplate
Rotation
Roll Throttle
Pitch-Axis Throttle
Channel 1 Throttle
Roll Tail Rotor
Pitch-Axis Tail Rotor
Channel 1 Tail Rotor
C
h
a
n
n
e
l
1
T
a
i
l
R
o
t
o
r
T
a
i
l
R
o
t
o
r
T
h
r
o
t
t
l
e
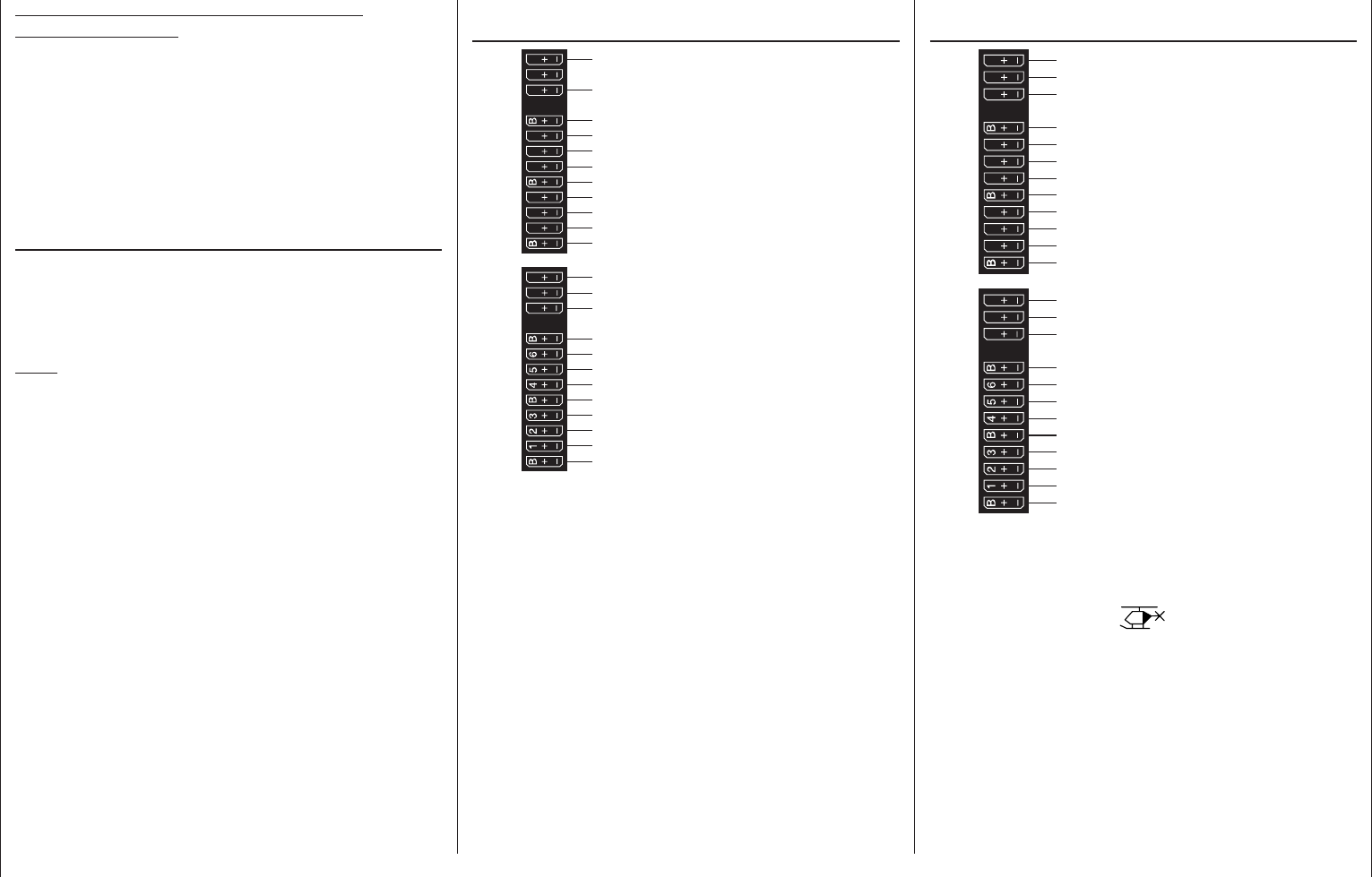
65
Helicopters / Receiver layout
Notice for those transitioning from older
Graupner systems:
In comparison to previous receiver layouts, servo
connector 1 (pitch servo) and servo connector 6
(throttle servo) have exchanged places. Servos must
be connected to receiver outputs as illustrated at the
right in the bottom fi gure. Outputs which are not used
are simply left empty. More details about respective
swashplate types can be found on page 98 in the
»Helicopter type« menu.
Installation notices
Servos MUST be connected to the receiver in the
sequence illustrated here.
Outputs which are not used are simply left empty.
Also be sure to follow the notices on the next pages.
Note:
A speed control is also to be connected to receiver
output "6" in order to take full advantage of the
throttle limiter's convenience and safety features, see
text beginning on page 117. See page 181 about this.
Receiver allocation for helicopter models with
1 to 3 swashplate servos
Receiver power supply
Receiver power supply
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
Tail rotor servo (gyro system)
Roll-1 servo
Pitch-axis 1 servo
frei or speed governor or aux. function
Collective pitch or roll 2 or pitch-axis 2 servo
free or aux. function
Throttle servo or speed controller
Gyro gain
Receiver allocation for helicopter models with
4 swashplate servos
Receiver power supply
Receiver power supply
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or speed governor or aux. function
Throttle servo or speed controller
Gyro gain
Tail rotor servo (gyro system)
Roll 1 servo
Pitch-axis 1 servo
Roll 2 servo
Pitch-axis 2 servo
All menus relevant to helicopter models are marked
in the "program descriptions" section with a helicopter
symbol …
… so only these menus need to be dealt with to
program a helicopter model.
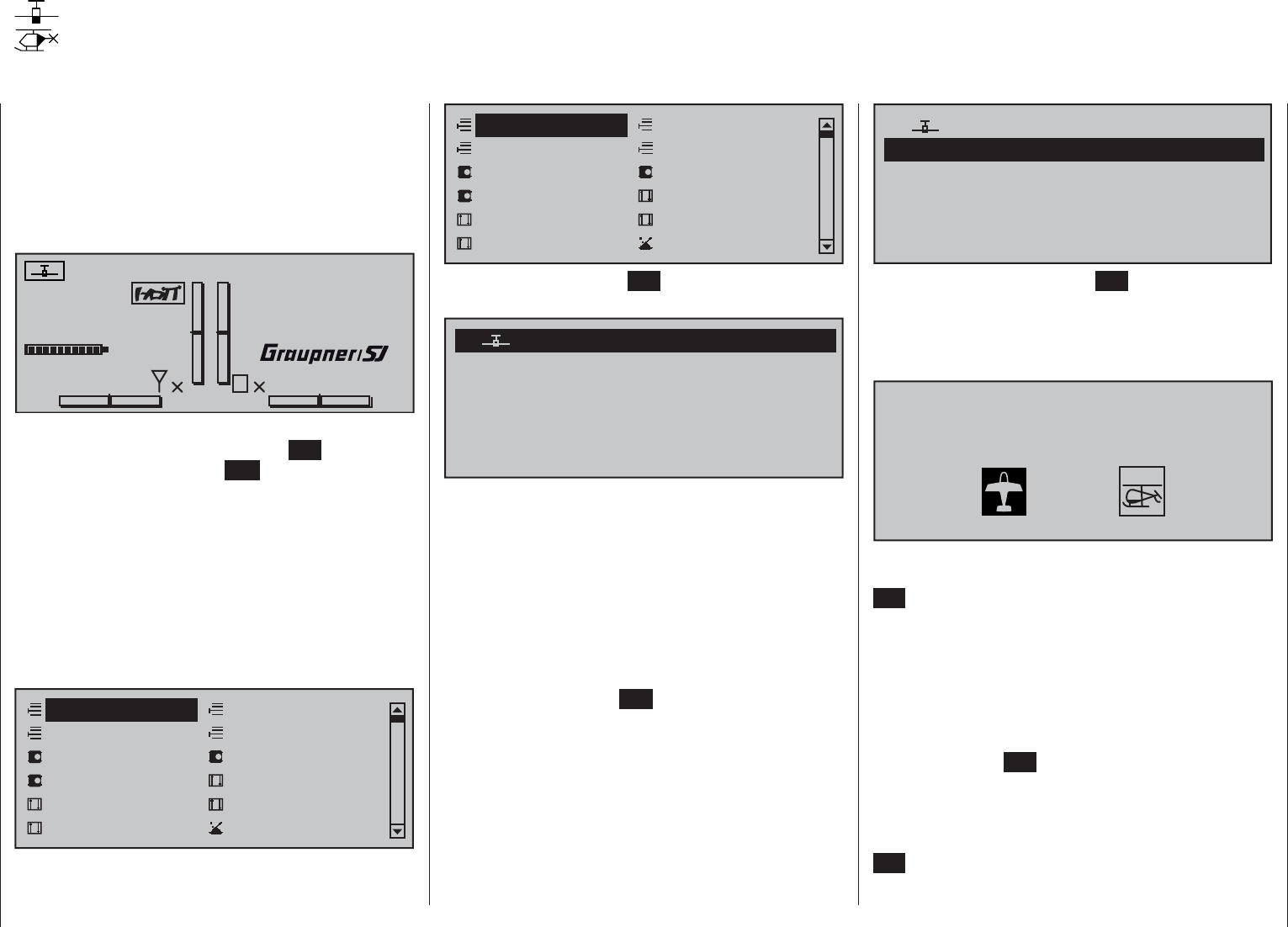
66 Detail program description - Loading a new memory location
Anyone who has worked through to this part of
the manual has certainly already tried out a bit of
programming. Nevertheless a detailed description of
every menu should not be left out.
This section begins with the loading of a "free"
memory location, a procedure which would be
performed if a new model was being "programmed".
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
RX VOLT:0.0v
00
0
0
00:00h
M
V
From the basic display, a jump to the "Multi-function
list" is made with a tap on the center SET key of the
right touch pad. (The center ESC key of the left touch
pad will cause a jump back to the basic display.)
By default, when the multi-function list is called for
the fi rst time after switching on the transmitter, the
»Model select« menu option will be active and
displayed in inverse video. Otherwise use the cd
or ef selection keys of the left or right touch pad to
select the »Model select« menu option , whereby the
upper of the two following fi gures shows a selection
list for a fi xed-wing model and the lower shows the
selection list for a helicopter model.
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Model select Copy / Erase
Suppress codes Suppress models
Base setup model Model type
Detail program description
Loading a new memory location
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Model select Copy / Erase
Suppress codes Suppress models
Base setup model Helicopter type
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
03
04
05
¿¿¿ free¿¿¿
02
01
06
E16
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
00:12h
In the transmitter's delivered state, the fi rst model
memory is initialized to the "fi xed-wing model" type
and the receiver in the delivery is "bound" to this
model. The time display located near the line's middle
indicates the overall operating time of the respective
model memory.
The remaining memory locations, marked with
"ÄÄÄfreeÄÄÄ", are still unoccupied and therefore
also "non-bound". If you wish to program a fi xed-wing
model then, after leaving the »Model select« menu
with a tap on the center ESC key of the left touch pad,
programming of the model can begin right away … or
now use the c or d keys of the left or right touch pad
to select one of the free memory locations …
03
04
05
01
06
R16
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
00:12h
¿¿¿ free¿¿¿
02
… and then tap on the center SET key of the right
touch pad to confi rm the choice.
Afterward you will be prompted to select the basic
model type, i.e. either "winged model" or "helicopter
model".
Select model type ( free model memory )
Use the e or f keys of the left or right touch pad to
select the basic model type then tap on the center
SET key of the right touch pad. This initializes the
selected model memory with the selected model type
and the display will return to the base screen. The
memory location is now accordingly occupied.
However, if you wish to begin with a helicopter,
select one of the memory locations marked
"ÄÄÄfreeÄÄÄ" with the c or d keys of the left or
right touch pad then confi rm the selection with a brief
tap on the center SET key of the right touch pad. You
will be now be prompted to specify the basic model
type, in this case the "helicopter model". Select the
appropriate symbol with the e or f keys of the left
or right touch pad then again tap briefl y on the center
SET key of the right touch pad to confi rm the choice.
This initializes the selected model memory with the
67
Detail program description - Loading a new memory location
Further details about binding a receiver can be
found on page 77 or 85.
At the right and above the aforementioned "BIND. •
N/A" warning message, the warning …
Fail Safe
setup
t.b.d.
… will appear (also for just a few seconds) to
indicate that no no failsafe settings have yet been
made. More about this can be found on page 208.
If the screen should display the warning …•
Throttle
too
high!
… then move the throttle joystick, or the limiter for
a helicopter, (by default this is rotary slider SD1)
into its idle position.
Whether or not this warning appears also depends
on the settings selected for the "Motor on C1"
and "Pitch min." options in the »Model type«
menu, see page 94, or »Helicopter type« menu,
see page 98. For winged aircraft models, select
"None" to deactivate this message if you have no
motor
to enter.
If the transmitter already has occupied model •
memories then sub-menus of the »Copy / Erase«
menu will display a pictograph of the selected
model type at the respective memory location
followed by a blank line or the model name which
was entered in the »Basic settings, model«
menu, page 76 or 84. To the right of this will be as
display of the model operating time and, if present,
"Info" about the model.
If battery voltage is too low, the model switchover •
cannot be made due to reasons of safety. An
selected model type and you can now program your
model into this model memory.
Changing over to another model type is still possible
if you fi rst erase this memory location (»Copy /
Erase« menu, page 70).
Notes:
If, from the base screen, the currently active model •
memory is to be erased then immediately after the
erase action one of the two model types, "Winged"
or "Heli" must be defi ned. You cannot avoid this
selection even if you switch the transmitter off.
When the transmitter is switched on again the
undesired occupation of the that model memory will
have to be erased from another memory location.
If a non-active memory location is erased, it will
subsequently be marked as "999free999" in the
"Model select" menu.
After the selected model memory is initialized with •
the desired model type, the display will switch to
the base screen of the freshly occupied model
memory. At this time the warning …
BIND. N/A
OK
… will appear for several seconds as notifi cation
that a binding connection to a receiver is "not
available". A brief tap on the center SET key of
the right touch pad will cause a direct jump to the
appropriate option.
Model name
Stick mode 1
n/a
BASIC SETTINGS, MODEL
Info
n/a
n/a
Module bind
HoTT
SEL BD1 BD2 BD3 BD4
appropriate message will appear in the screen:
not possible now
voltage too low
As a basic principle, there are four different ways to
assign the four control functions, aileron, elevator,
rudder and throttle or brake fl aps for winged models
as well as rolling, pitching, tail rotor and throttle/
pitch for helicopter models, to the two joysticks. Just
which of these methods is used depends on the
preferences of the individual model pilot. This function
is set for the currently active model memory in the
"Stick mode" line of the »Basic settings, model«
menu, page 76 or 84.
Model name
Stick mode 1
n/a
BASIC SETTINGS MODEL
Info
n/a
n/a
Module bind
HoTT
SEL
If this setting is desired as a default for future models,
the setting can also be entered into the »General
basic settings« menu, page 258:
Owners name
Pre-set stick mode
Pre-set DSC Output
1
GENERAL BASIC SETTINGS
PPM10
SEL
Pre-set modulation HoTT
It should be noted here once again that, in the interest
of greatest fl exibility in combination with the prevention
of unintentional operating errors, no controls are
preassigned to control channels 5 … 16 by default.
This means that, in the system's delivered state,
68 Detail program description - Loading a new memory location
only servos attached to receiver outputs 1 …
4 can typically be operated by the two joysticks
and that any servos attached to receiver
connectors 5 … 16 (max) will remain in their
middle positions. A newly initialized helicopter
model is also able to more-or-less move servo
6 – depending on the position of the right-side
proportional rotary slider, which is the default throttle
limiter control. With either model type, this situation
will only change after appropriate assignments have
been made in the »Control adjust« menu.
On the other hand, if a newly initialized model
memory is to be put into operation then it MUST
fi rst be appropriately "connected" with one or more
receivers before the servos attached to the receiver/s
can be operated. More about this can be found in the
section "Binding" on page 77 or 85.
A fundamental description of programming steps
for a winged aircraft model can be found in the
programming examples section beginning on 268,
or for helicopter models beginning on page 308.
The menu descriptions below are arranged in the
sequence individual menus are listed in the multi-
function list.
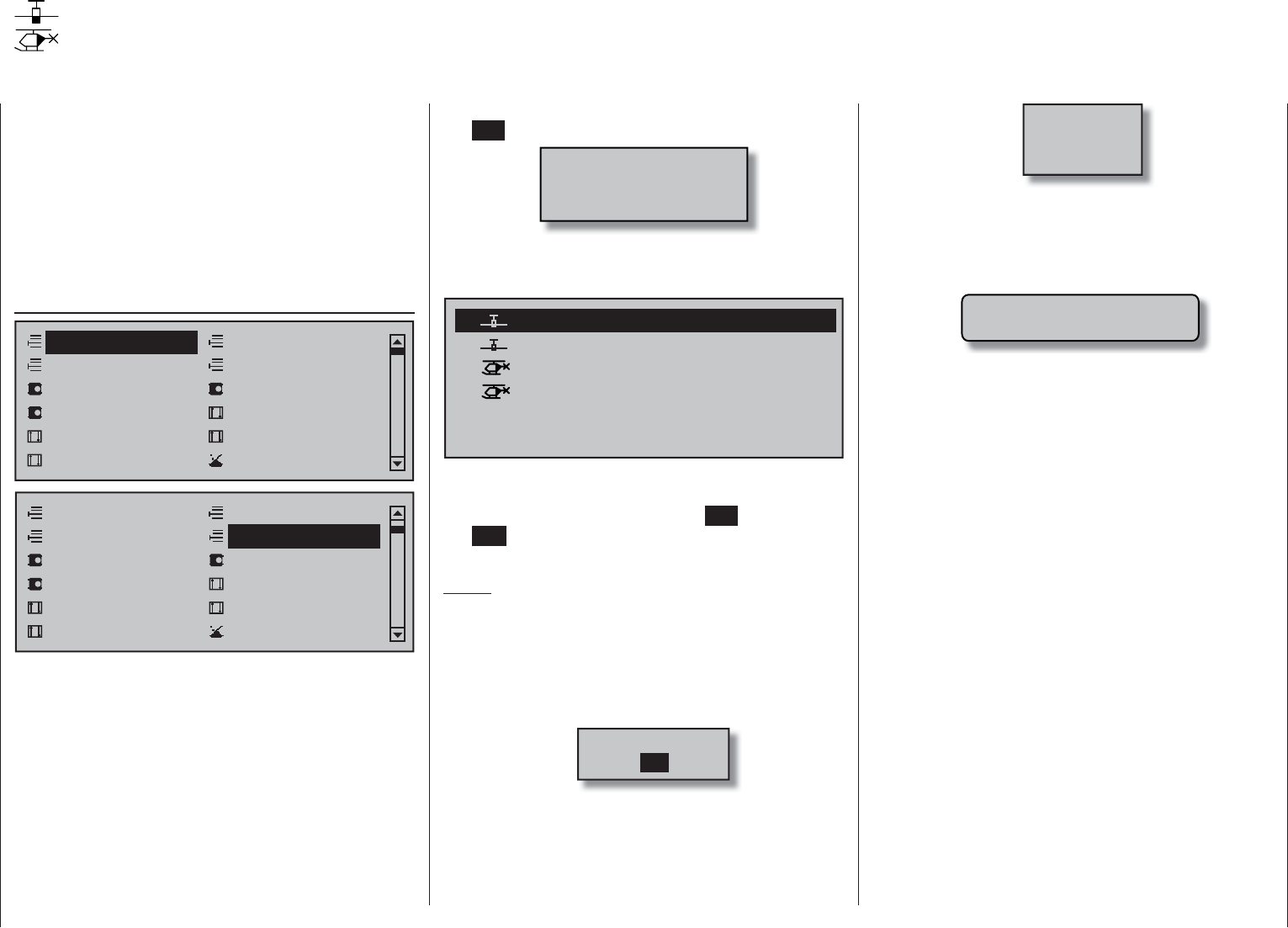
69
Detail program description - Model select
Model select
Call up model 1 … 80
The basic operation of the transmitters keys was
explained on pages 28 and 29 and, on the previous
double-page, explanations were provided for
navigating to the multifunction list and about how
to make allocations for a new model memory. At
this point we now wish to begin with the "normal"
description of individual menu items in the sequence
they are arranged in the transmitter. Therefore we will
begin with the menu …
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Model select Copy / Erase
Suppress codes Suppress models
Base setup model Model type
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Model type
As many as 80 complete model settings, including
digital trim values for the trim wheel, can be stored.
Trimming is stored automatically such that a
switchover from one model to another does not cause
a loss of current trim settings. To the right of the
model number, each occupied model memory line in
this display shows a pictograph of the model type as
well as the model's name entered for the model in its
»Basic settings, model« menu, page 76 or 84. The
code, if present, for the receiver "bound" to the model
memory location will appear after the model number.
Select the »Model select« menu with the selection
keys of the left or right touch pad then briefl y tap on
the SET key of the right touch pad.
Attention!
Switch-OFF
the Receiver first!
If this message appears, there is a telemetry connection
to an operationally ready receiver system. Switch that
receiver system off.
03
04
Ultimate
02 00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
05
06
01 01:23hR16Graubele 1234g/080811
Now, with the cd selection keys of the left or right
touch pad, select the desired model memory from the
list and activate it with a tap on the SET key. A tap on
the ESC key will cause a return to the previous menu
page without activating a model change.
Notes:
If, after a model change, the "Throttle too high" •
warning appears, the throttle/pitch joystick (C1)
or the throttle limiter – by default, the right-side
proportional rotary slider – is too far in the full
throttle direction.
If a model change causes the message …•
BIND. N/A
OK
… to appear then binding settings should be
checked.
If a model change causes the message …•
Fail Safe
setup
t.b.d.
… to appear then respective failsafe settings
should be checked.
If battery voltage is too low, the model switchover •
cannot be made due to reasons of safety. An
appropriate message will appear in the screen:
not possible now
voltage too low
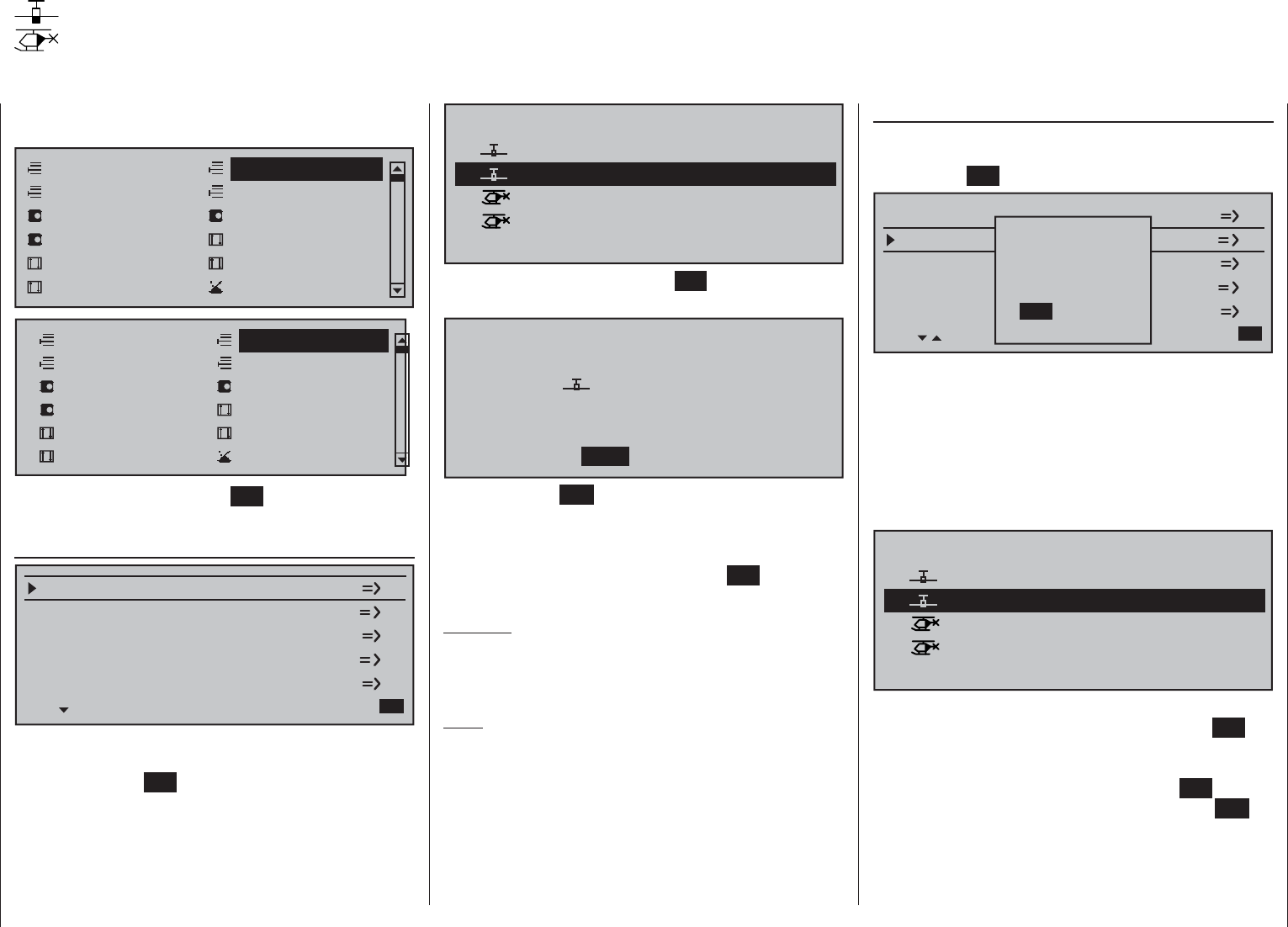
70 Detail program description - Copy / Erase
Copy model ¼ model
Select the »Copy model ¼ model« sub-menu with
the cd selection keys of the left or right touch pad
then tap the SET key.
Copy flight en kopieren
Erase model
Copy modelodell –> Modell
Export to SD-Karte
Import fromn von SD-Karte
=>
OFFON
Please select
RF on/off?
If the message shown above should appear, the
transmitter's RF module is still active. Switch the RF
module off as described on page 80 then also, if a
receiver system is currently switched on, switch off
that receiver too. This is to be done for reasons of
safety.
Choose the model to be copied with the cd selection
keys of the left or right touch pad …
03
04
05
01
¿¿¿ free¿¿¿
01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
Copy from model:
… then, following the change into the "Copy to
model" window caused by another tap on the SET
key of the right touch pad, the destination memory
can be selected with the cd selection keys of the left
or right touch pad. Yet another tap on the SET key
will then confi rm the copy process or a tap on ESC
key will cause the copy to be canceled. A memory
location which is already occupied can be overwritten.
03
04
01 01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
Select model to be erased :
… whereby another tap on the SET key will cause the
confi rmation request …
Model really
Ultimate
to be erased?
NO YES
02
… to appear. A NO response will cause the process
to be canceled and a return to the previous screen.
Selecting the YES response with the f selection key
of the left or right touch pad followed by confi rmation
of the selection with a brief tap on the SET key will
erase the selected model memory.
Caution:
This erase process cannot be undone. All data
in the selected model memory will be erased
completely.
Note:
If the currently active model memory is to be
erased, a model type "Winged" or "Heli" must be
defi ned immediately after the erase process. If,
however, an inactive memory location is erased, it
will subsequently appear in "Model select" list as
"ÄÄÄfreeÄÄÄ".
Copy / Erase
Erase or copy model ¼ model, copy from or to SD card, copy fl ight phases, store/cancel changes
Use the cd selection keys of the left or right touch
pad to select the »Copy / Erase« menu …
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Model select Copy / Erase
Suppress codes Suppress models
Base setup model Model type
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Model select Copy / Erase
Suppress codes Suppress models
Base setup model Helicopter type
… then briefl y tap the center SET key of the right
touch pad.
Erase model
Copy flight phase
Erase model
Copy model –> model
Export to SD
Import from SD =>
Select the "Erase model" sub-menu with the cd
selection keys of the left or right touch pad then
briefl y tap on the SET key.
Choose the model to be erased with the cd
selection keys of the left or right touch pad …
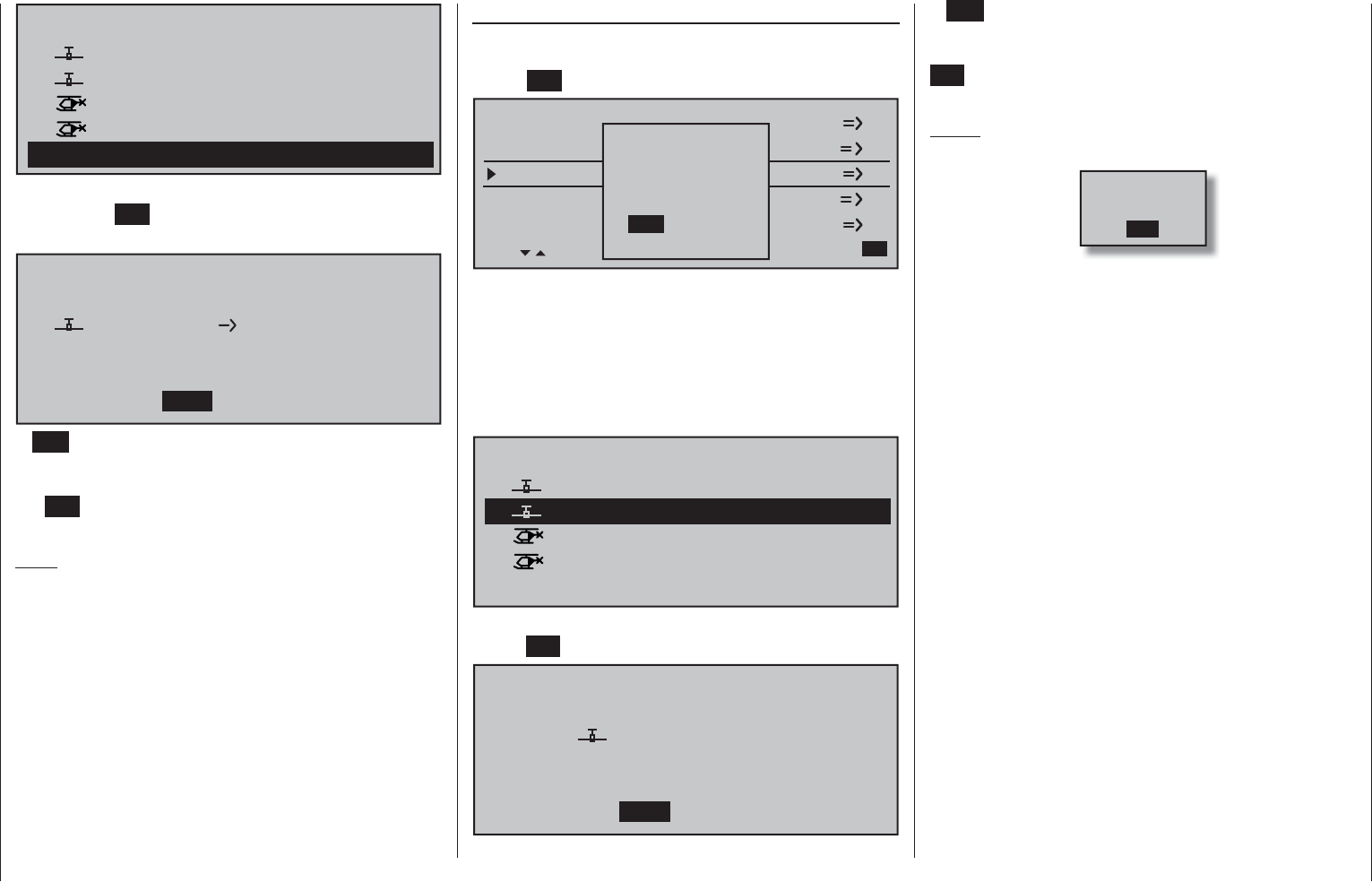
71
Detail program description - Copy / Erase
03
04
01 01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
Copy to model:
¿¿¿ free ¿¿¿
05
After confi rming the selected model memory with
a tap on the SET key, a confi rmation request will
appear:
Model really
Ultimate
to be copied?
NO YES
02 05 ¿¿¿ free¿¿¿
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected and confi rmed with a tap on
the SET key then the selected source model will be
copied into the selected model memory destination.
Note:
In addition to model data, binding data is also copied
by this process. This means that a receiver system
which was/is bound to the original model memory can
also be operated by its copy without establishing the
bond again.
Exporting to SD card
Use the cd selection keys of the left or right touch
pad to select the »Export to SD« sub-menu then tap
on the SET key.
Copy flight sen kopieren
Erase model
Copy modeModell –> Modell
Export to SDach SD-Karte
Import from von SD-Karte
=>
OFFON
Please select
RF on/off?
If the message shown above should appear, the
transmitter's RF module is still active. Switch the
RF module off as described on page 80 then also, if a
receiver system is currently switched on, switch off that
receiver too. This is to be done for reasons of safety.
Choose the model to be exported with the cd
selection keys of the left or right touch pad …
03
04
05
01
¿¿¿ free¿¿¿
01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
export to SD-Card:
After confi rming the selected model memory with a tap
on the SET key, a confi rmation request will appear:
Model really
Ultimate
export?
NO YES
02
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected then confi rmed with a tap on the
SET key, the selected model will be copied to the SD
card.
Notes:
Should the notice …•
SD-CARD
INSERT
OK
… appears instead of a screen for model
selection, there is no SD card in the transmitter's
card slot, see page 23.
In addition to model data, binding data is also •
copied by this process. This means that a receiver
system which was/is bound to the original model
memory can also be operated in the SAME
transmitter by its copy without establishing the
bond again.
An exported fi xed-wing model will be stored on •
the memory card in the \\Models\mc-20 folder
with a fi lename format of "aModelname.mdl"
and a helicopter model with a fi lename format
of "hModelname.mdl". On the other hand, if a
"nameless" model is exported, its data will be
stored on the memory card under "ahNoName.
mdl" or "hNoName.mdl", as appropriate.
Some special characters that can be used in •
model names are subject to specifi c restrictions
associated with the FAT or FAT32 fi le system used
by the memory cards and these special characters
will be replaced during the copy process with a
tilde (~).
A model fi le already on the memory having •
the same name as the fi le to be copied will be
overwritten without warning.
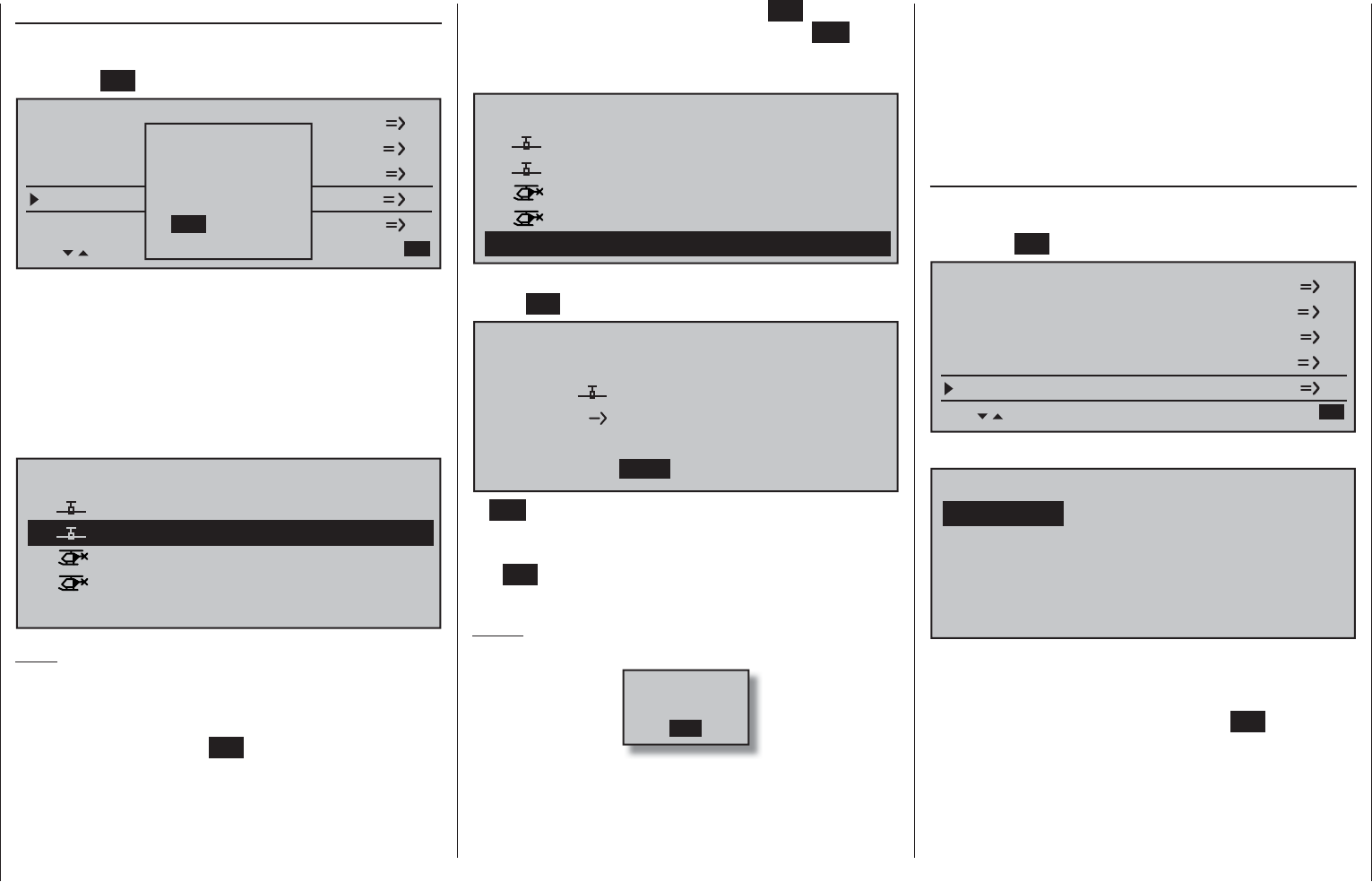
72 Detail program description - Copy / Erase
pad then confi rmed with a tap on the SET key, or the
process can be canceled with a tap on the ESC key.
A memory location which is already occupied can be
overwritten.
03
04
01 01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
Import to model:
¿¿¿ free ¿¿¿
05
After confi rming the selected model memory with a tap
on the SET key, a confi rmation request will appear:
model
Extra 300
import?
NO YES
05 ¿¿¿ free¿¿¿
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected and confi rmed with a tap on
the SET key then the selected source model will be
imported into the selected destination model memory.
Notes:
If the message …•
SD-CARD
INSERT
OK
… appears instead of a screen for model
selection, there is no SD card in the transmitter's
Importing from SD card
Use the cd selection keys of the left or right touch
pad to select the »Import from SD« sub-menu then
tap on the SET key.
Copy flight sen kopieren
Erase model
Copy modell –> Modell
Export to mnach SD-Karte
Import from von SD-Karte
=>
OFFON
Please select
RF on/off?
If the message shown above should appear, the
transmitter's RF module is still active. Switch the RF
module off as described on page 80 then also, if a
receiver system is currently switched on, switch off that
receiver too. This is to be done for reasons of safety.
Select the model to be imported from the SD memory
card with the cd selection keys of the left or right
touch pad.
03
04
01 11/06/06 06:06
Extra 300
02
Soarmaster
11/07/07 07:07
T-Rex 250
BellCobra
11/08/08 08:08
11/09/09 09:09
import from SD-CARD:
Note:
The export date posted at the right end of each model
name line is represented in the format "year/month/
day".
After another tap on the SET key of the right touch
pad, the "import from SD-CARD" window will appear.
Now the destination memory location can be selected
with the cd selection keys of the left or right touch
card slot, see page 23.
In addition to model data, binding data is also •
imported by this process. This means that a
receiver system which was/is bound to the original
model memory can also be operated in the SAME
transmitter by its copy without establishing the
bond again.
Copy fl ight phase
Select the »Copy fl ight phase« sub-menu with the
cd selection keys of the left or right touch pad then
tap on the SET key.
Copy flight phase
Erase model
Copy model –> model
Export to SD
Import from SD =>
In the "Copy fl ight phase" sub-menu …
7
Copy from phase:
3
5=>
=>
2
4
6
1
8
… the fl ight phase to be copied (1 … 8 for fi xed-wing
models or 1 … 7 for helicopter models) is selected
with the selection keys of the left or right touch pad
then confi rmed with a brief tap on the SET key of the
right touch pad. In the next window to appear …
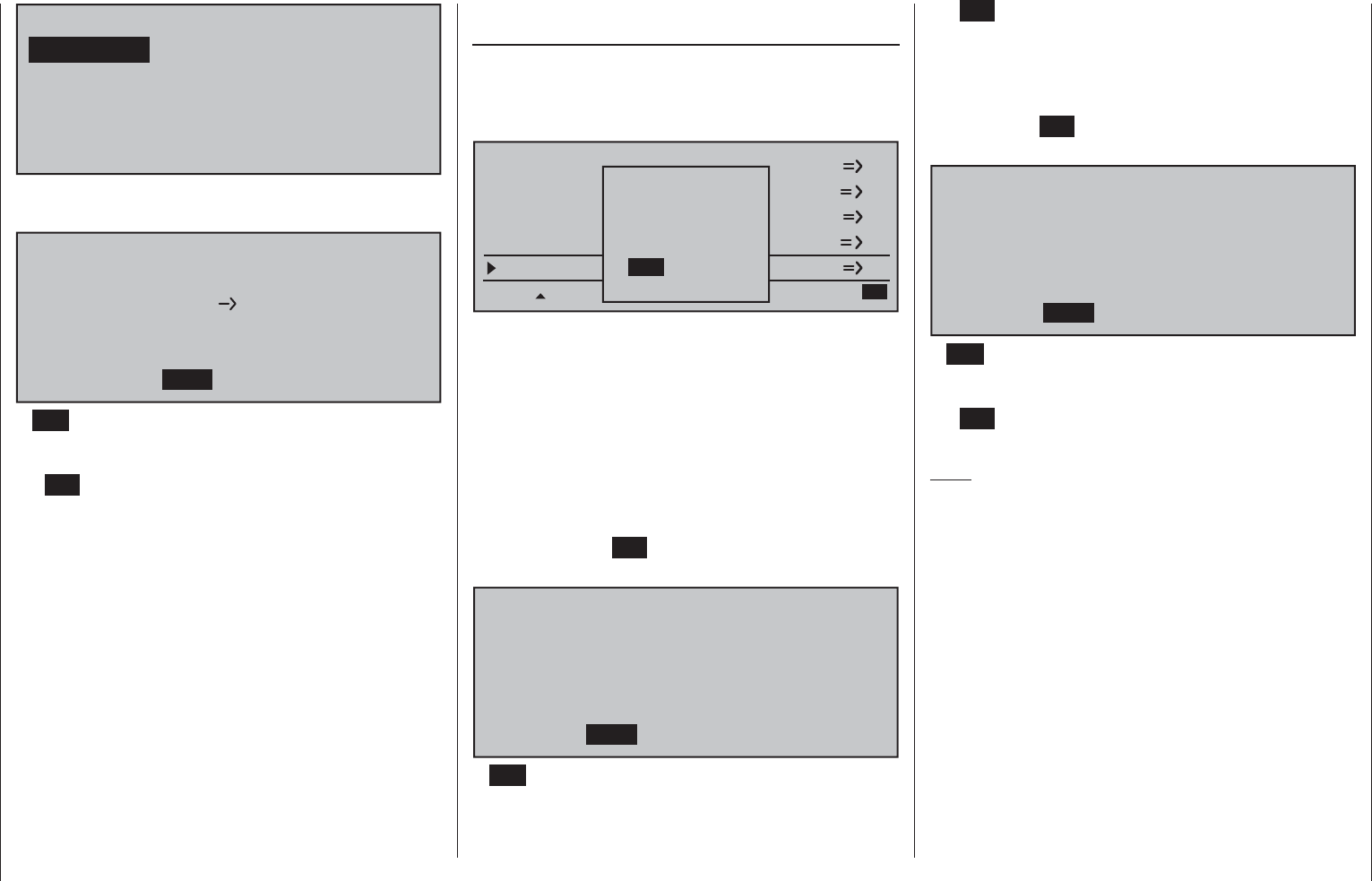
73
Detail program description - Copy / Erase
7
Copy to phase:
3
5=>
=>
2
4
6
1
8
… a destination must be selected and it must be
confi rmed too. Another confi rmation request will follow:
Phase to:
to be copied?
NO YES
1 normal 2 Thermik
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected and confi rmed with a tap on
the SET key then the selected source model will be
imported into the selected destination model memory.
Storing changes permanently
Undoing changes
These two sub-menus permit programming changes
to be backed up immediately or to be undone
(restored) to the state when the model was called up
or the state of the last backup.
Copy flight en kopieren
Export to SD
Import fromvon SD-Karte
=>
Store changes ft speichern
Undo changesgig machen
OFFON
Please select
RF on/off?
If the message shown above should appear, the
transmitter's RF module is still active. Switch the RF
module off as described on page 80 then also, if a
receiver system is currently switched on, switch off that
receiver too. This is to be done for reasons of safety.
Data is only backed up by "Store change" or a
switch from one model to another in the »Model
select« menu. Switching the transmitter on or off
will not store the permanently. To store changes
permanently, select the appropriate line then briefl y
tap on the center SET key of the right touch pad. The
confi rmation request shown below will appear:
Programming changes to be
NO YES
store permanently?
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected and confi rmed with a tap on
the SET key then the changes made since the last
backup or model change will be stored permanently.
If, however, the changes made since the last
backup or model change are to be canceled, then
select the line "Undo change". Following a brief tap
on the center SET key of the right touch pad, the
confi rmation request shown below will appear:
Programming changes to be
NO YES
reset to original?
A NO response will cancel the process and return
the screen to the originating screen. If the fYES
response is selected and confi rmed with a tap on
the SET key then the changes made since the last
backup or model change will be stored permanently.
Note:
When the transmitter is switched off, any changes
made will not be lose but they are not permanently
stored either. This means that a subsequent "cancel
changes" would reset memory to the state of the last
"permanent backup" (or model change).
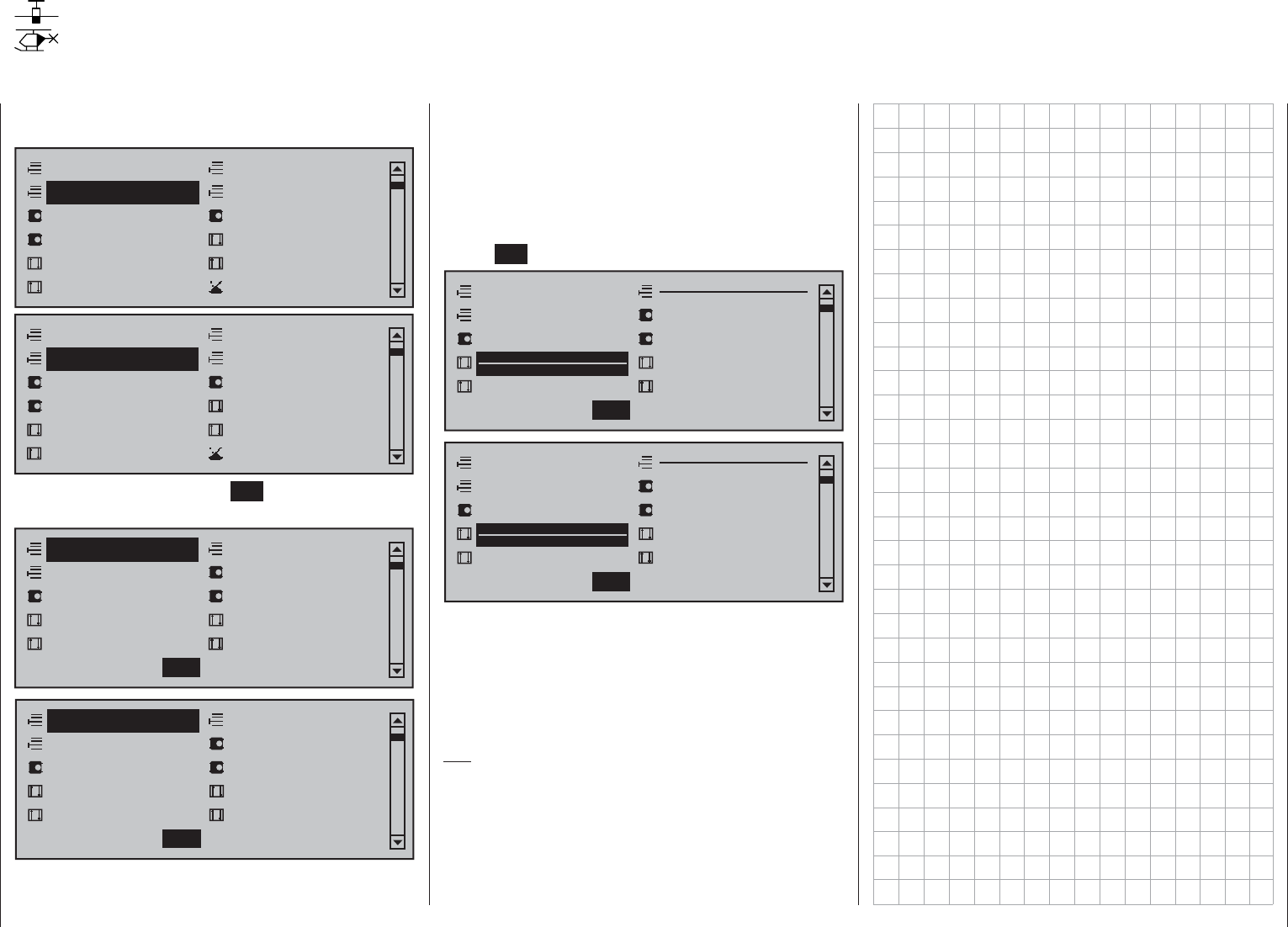
74 Detail program description - Suppress menus
Suppress menus
Suppression of menus in the multifunction list
Use the cd selection keys of the left or right touch
pad to select the »Suppress codes« menu …
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Model type
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Helicopter type
… then briefl y tap the center SET key of the right
touch pad.
Copy / Erase
Model select
Servo adjustment
Stick mode Control adjust
Dual Rate / Expo Channel 1 curve
Suppress models Base setup model
Model type
Suppress : SET
Copy / Erase
Model select
Servo adjustment
Stick mode Control adjust
Dual Rate / Expo Channel 1 curve
Suppress models Base setup model
Helicopter type
Suppress : SET
In the menu which then appears, menu items which
are no longer needed or those which should not
be changed, can be blocked from appearing in th
multifunction list.
The option to be suppressed/displayed is selected
with the selection keys of the left or right touch pad
then its status is switched over with a tap on the
center SET key of the right touch pad.
Copy / Erase
Model select
Servo adjustment
Stick mode Control adjust
Dual Rate / Expo Channel 1 curve
Suppress models Base setup model
Model type
Suppress : SET
Copy / Erase
Model select
Servo adjustment
Stick mode Control adjust
Dual Rate / Expo Channel 1 curve
Suppress models Base setup model
Helicopter type
Suppress : SET
This can reduce the multi-function list considerably, in
some cases to only a few menus, thus substantially
improving clarity of the multi-function list. Options are
not deactivated by being suppressed. They will simply
no longer appear in the list. This also blocks direct
access to these functions.
Tip:
If you wish to forgo access-blockage to the multi-
function list altogether, suppress the »Code lock«
menu in the multi-function list by way of this menu as
a precautionary measure. It is then not so easy for an
unauthorized person to lock up the transmitter.
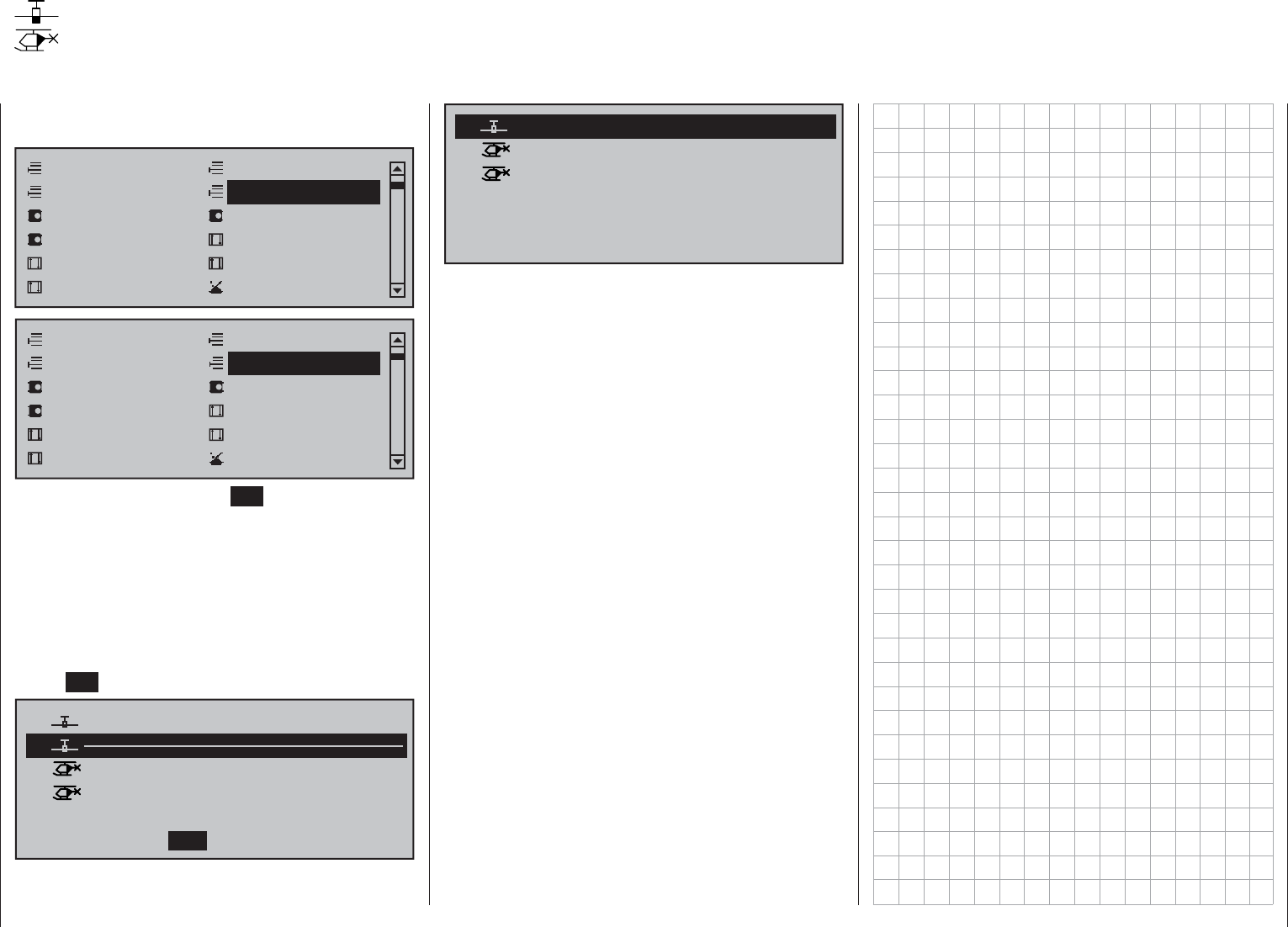
75
Detail program description - Suppress models
Suppress models
Suppression of model memory locations
Use the cd selection keys of the left or right touch
pad to select the »Suppress models« menu …
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Model type
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress Models
Base setup model Helicopter type
… then briefl y tap the center SET key of the right
touch pad.
Model memories which are rarely needed or to
which access is to be blocked for other reasons can
be hidden from the model selection list. This also
clarifi es the overview layout for model selection.
The model to be suppressed/displayed is selected
with the selection keys of the left or right touch pad
then its status is switched over with a tap on the
center SET key of the right touch pad.
03
04
05
01
¿¿¿ free ¿¿¿
01:23hR16
Ultimate
02
Graubele 1234g/080811
00:44hR12
Starlet
BELL47G
00:33hR08
00:22hR08
Test
trim needed
Suppress : SET
A model memory which is "stricken through" will no
longer appear in the »Model select« menu.
03
04
Starlet
BELL47G
00:33hR08
00:22hR08
trim needed
¿¿¿
free
¿¿¿
¿¿¿
free
¿¿¿
05
06
01 01:23hR16Graubele 1234g/080811
free
¿¿¿ ¿¿¿
07
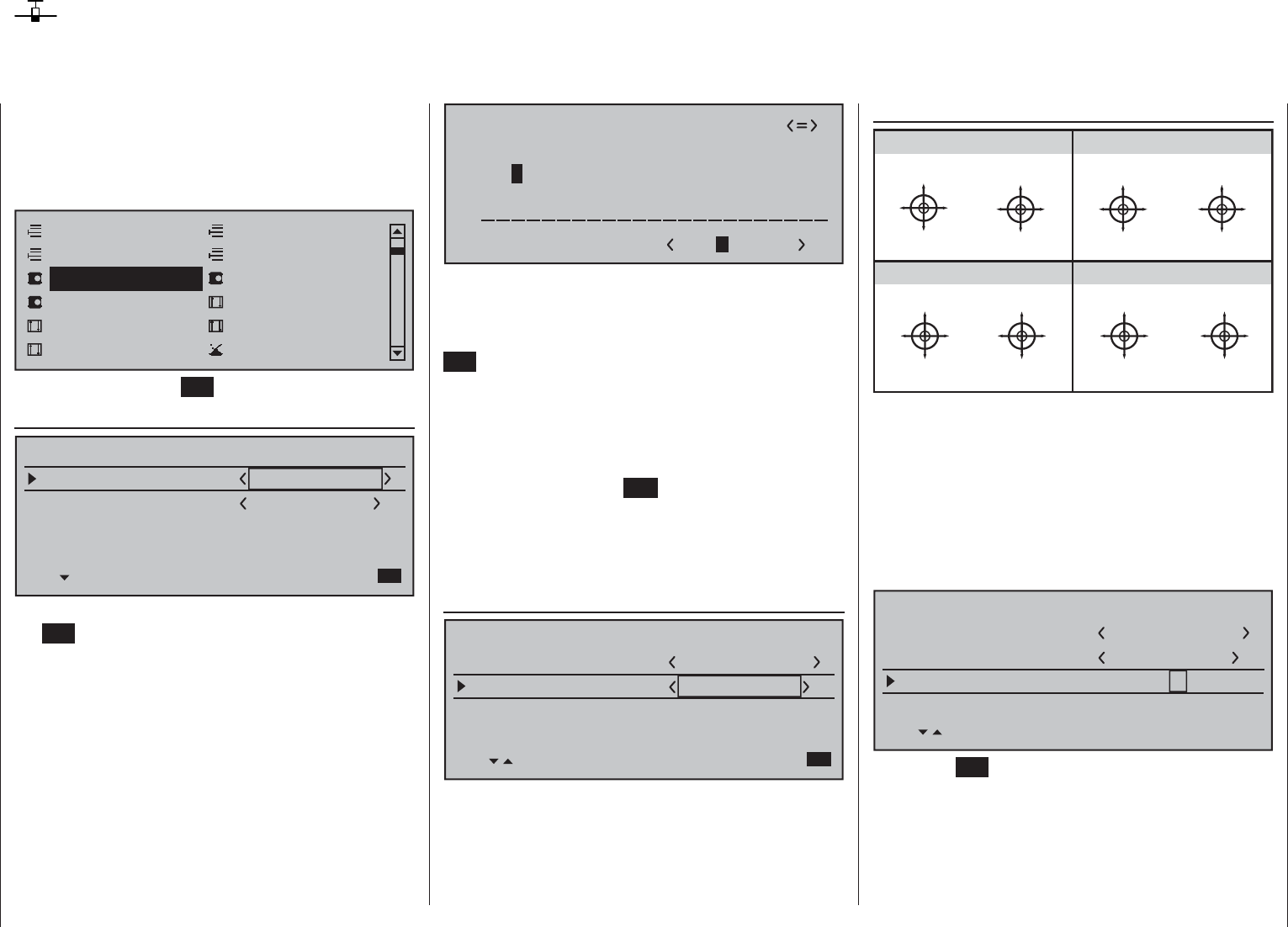
76 Detail program description - Base setup models | Winged models
Base setup model
Model-specifi c base settings for winged aircraft models
Before programming specifi c parameters, there are
some basic settings to be made which effect the
currently active model memory.
Use the selection keys of the left or right touch pad to
select the »Basic settings, model« menu …
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Model type
… then tap the center SET key of the right touch pad.
Model name
Model name
Stick mode 1
n/a
BASIC SETTINGS,MODEL
Info
n/a
n/a
Module bind
HoTT
Change to the next screen page with a brief tap on
the SET key of the right touch pad. This will open a
screen of characters for entry of the model's name.
A maximum of 13 characters can be used to specify
a model name.
!"#$%&’()
Model name Graub
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
Now the desired characters can be selected with the
selection keys of the left touch pad. Move to the next
position to select the next character with a tap on the
f selection key of the right touch pad or its center
SET key. A simultaneous tap on the cd or ef keys
of the right touch pad (CLEAR) will place a space
character at the current position.
Positioning to any character position within the entry fi eld
can be done with the ef keys of the right touch pad.
A return to the previous menu screen is accomplished
with a tap on the center ESC key of the left touch
pad.
A model name entered in this manner will appear in
the base screen of the »Model select« menu and in
the sub-menus of the »Copy / Erase« menu item.
Info
Model name
Stick mode 1
n/a
BASIC SETTINGS,MODEL
Info
n/a
n/a
Module bind
HoTT
Graubele
Every model can be given a supplementary note of
up to 12 characters (maximum) by following the same
procedure as already described for creating a "Model
name". This info note will appear as a supplement in
the »Model select« menu and in the sub-menus of
the »Copy / Erase« menu item.
Stick mode
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
elev. down
elev. up
left rudder
right rudder
full throttle
idle
left aileron
right aileron
full throttle
left rudder
right rudder
idle
elev. down
elev. up
left aileron
right aileron
elev. down
elev. up
left aileron
right aileron
Motor Vollgas
idle
left rudder
right rudder
full throttle
idle
left aileron
right aileron
elev. down
elev. up
left rudder
right rudder
There are four fundamental options for assigning
the four control functions (aileron, elevator, rudder
and throttle/brake fl ap) for a winged aircraft model
to the two joysticks. Just which of these options is
chosen depends on the individual preferences of the
individual model pilot.
Use the cd selection keys of the left or right touch
pad to select the "Stick mode" line. The option fi eld
will be framed.
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
SEL
Graubele
1234g/111111
Tap on the SET key. The currently displayed stick
mode will be displayed in inverse video. Now use the
selection keys of the right touch pad to select from
among options 1 through 4.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the display to stick
mode "1".
77
Detail program description - Base setup models | Winged models
to the transmitter will fall into Fail-safe mode
during the transmitter-side "binding" period.
"Binding" multiple receivers per model
Multiple receivers per model can be bound if desired,
whereby respective mc-20 HoTT programs offer the
potential for managing up to four receivers directly
and for dividing up the transmitter's 16 control
channels (max) in any arrangement among these
receivers under menu control. Refer to additional
details further down in this section. First bind the
receivers individually as described below.
However, in subsequent operation only one of
these receivers will establish a telemetry bond to
the transmitter; the one which was activated in the
"TELEMETRY RCV" line of the »Telemetry« menu.
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
Any telemetry sensors which may be built into the
model should therefore be connected to this receiver
because the transmitter only receives and evaluates
data from the return channel of the receiver activated on
this line. The second, and all other receivers, operate in
parallel but are fully independent in slave mode.
"Binding" transmitter and receiver
Use the cd selection keys of the left or right touch
pad to move into the "Module" line. The marker frame
will be positioned by default to the column for the next
free binding channel. In the example shown in the
figure below, the marker frame is positioned above the
column label "BD2" because the binding channel in the
column labeled "BD1" is already in use by default for
the receiver which was delivered with the set.
Another tap on the SET key will again deactivate
option selection so a change to another line can be
affected.
Module
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Graubele
1234g/111111
SEL BD1 BD2 BD3 BD4
The mc-20 transmitter has a HoTT RF module as
standard equipment. In addition to the built-in module,
there is a connector for an external RF module
behind one of the two front cover fl aps (see page 25)
and a switchover to an external module connected
there can be affected per software. To do this, use the
selection keys of the left or right touch pad to move
the marker frame left to the "Module" selection fi eld
above the "SEL" column label.
HoTT
Graupner HoTT receivers must be "instructed"
to communicate exclusively with a certain model
(memory) in a Graupner HoTT transmitter. This
procedure is known as "binding" and must only be
done once for every new receiver/model-memory-
location combination (and can be repeated anytime).
Important notices:
During the binding procedure be sure the •
transmitter's antenna is always far enough
away from the receiver's antenna. To be on the
safe side, keep them at least one meter apart.
Otherwise there is a risk of a faulty connection to
the return channel and malfunctions will result.
When binding additional receivers, note that any •
other –switched on– receivers already bound
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Graubele
1234g/111111
SEL BD1 BD2 BD3 BD4
If not already off, now switch the receiver on. The red
LED on the receiver will blink.
Press and hold the SET button on the receiver while
the LED continues to blink red for about 3 seconds
then, after about another 3 seconds, begins to blink
red/green. The SET button on the receiver can now
be released. As long as this LED blinks red/green, the
receiver is in bind mode.
Now, within this 3 second period, start the so-called
"receiver binding" process for the receiver to the
currently active model memory with a brief tap on the
center SET key of the right touch pad. At this time,
the screen's display will blend in a message window
for the duration of the "binding" process.
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Graubele
1234g/111111
SEL BD1 BD2 BD3 BD4
FINDING...
If the receiver's LED, again blinking red, changes
within about 10 seconds to continuous illumination
in green, the binding process has been successfully
completed. Your model-memory to receiver
combination is now operationally ready. At this time
the screen will now display " bind " (bound) instead of
"n/a" (not attached).
78 Detail program description - Base setup models | Winged models
Model name
Stick mode 1
bind
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Graubele
1234g/111111
SEL BD1 BD2 BD3 BD4
On the other hand, should the LED on the receiver
blink red for longer than about 10 seconds, the
binding process has failed. In this case the screen
will continue to show the status as "n/a". If this should
happen, try changing the position of antennas then
repeat the entire procedure.
Binding other receivers
The binding channel you have chosen is already
bound (as indicated by the "bind" status). with
another binding channel. After initiating the RF
bind process, instead of displaying "BINDING", the
message shown below appears.
Model name
Stick mode 1
geb.
BASIC SETTING,MODEL
Info
n/a
n/a
Module geb.
HoTT
Graubele
1234g/111111
SEL BD1 BD2 BD3 BD4
RF
off
OK
is turned
Drop down two lines in the screen and switch off the
RF module as described on the page in section "RF
module". Afterward, return again to the "Module" line
and restart the binding process as described above.
Alternatively, the transmitter can be switched off
briefl y then, after switching it back on again, respond
to the message window that appears …
OFFON
Please select
RF on/off?
… with "OFF" …
ON
Please select
RF on/off?
OFF
… then confi rm the selection with a brief tap on the
center SET key of the right touch pad. From the
base screen jump again into the "Module" line of
the »Basic settings, model« menu and restart the
binding process.
Dissolving a bond
Proceed as described above to initiate the binding
process but WITHOUT fi rst putting a receiver in
binding readiness.
EXT. PPM
Important notice:
With the activation of the value fi eld in the context
of the following described changeover, any
existing bonds to HoTT receivers which may be
effective for the currently active model memory
will be lost.
Activate the fi rst value fi eld in the "Module" line with a
tap on the center SET key of the right touch pad then
use the selection keys to choose "EXT. PPM" instead
of "HoTT". In parallel with the selection of "EXT.
PPM", the other four value fi elds will be replaced by
the type of modulation pre-selected in the line »DSC
Output«, see page 81.
Model name
Stick mode 1
BASIC SETTING,MODEL
Info
Module
Graubele
1234g/111111
SEL
PPM10
EXT. PPM
This change also suppresses the lines for the options
(described below): »HoTT«, »Rcv Ch Map«, »RF
module« and »RF range test« and, in the basic
display, "PPM" will be displayed instead of "HoTT".
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
RX VOLT:0.0v
00
0
0
00:00h
M
V
PPM
Graubele
H-J Sandbrunner
Receiver channel mapping
As long as there is at least one "bound" receiver in
the "Module" line, the next line down will be the "Rcv
Ch map" line.
Model name
Stick mode 1
BASIC SETTING,MODEL
Info
Graubele
1234g/111111
SET SET SET SET
Rcv Ch map R16 R08 n/a
n/a
As mentioned in the introduction to the "Binding
receivers" section, this menu item of the mc-20 HoTT
offers both the opportunity to freely divide up the
transmitter's control channels within a receiver as well
as the opportunity to distribute the transmitter's 16
79
Detail program description - Base setup models | Winged models
control channels across as many as four receivers.
This redistribution is subsequently referred to as
"mapping" or "channel mapping" (channel correlation).
Select the receiver to be "mapped" with the selection
keys of the left or right touch pad then tap briefl y on
the center SET key of the right touch pad.
Channel mapping within a receiver
Analogous to the channel correlation function in
the »Telemetry« menu on page 232, described as
"Channel Mapping", it is very simple to use this menu
item to freely assign the transmitter's control channels
present on the receiver's inputs to any specifi c
receiver outputs (servo connections) for the bound
receiver designated by the column labeled BD1.
RECEIVER CHANNEL MAP BIND1
Rx Input Ch 1
Rx Input Ch 2
Rx Input Ch 3
Rx Input Ch 4
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
After selection of the desired output with the selection
keys of the left or right touch pad, the appropriate
value fi eld will be framed. Briefl y tap on the center
SET key of the right touch pad. The current setting
will be displayed in inverse video. Now use the
selection keys of the right touch pad to select the
desired input channel's respective transmitter output,
see page 218.
Note:
The number of lines available in the list (outputs)
corresponds to the maximum number of servos which
can be attached to the given receiver.
BUT CAUTION: If, for example, "2AIL" has been
specifi ed in the "Aileron/camber fl aps" line of the
»Model type« menu then the transmitter will have
allocated control function 2 (ailerons) to control
channels 2 & 5 for the left and right ailerons. The
corresponding receiver inputs to be assigned in this
case would be channels 2 & 5, refer to the example
below.
Examples:
You would like to control each aileron of a large •
model with two or more servos.
Assign each of the appropriate outputs (servo
connections) to one and the same input (control
channel). In this case, depending on left or right
wing, as the respective input to one of the two
default aileron control channels (2 or 5).
You would like to control the rudder of a large •
model with two or more servos.
Assign each of the appropriate outputs (servo
connections) to one and the same input (control
channel). In this case, the default rudder channel
(4), see fi gure bottom right.
Important notice:
The mc-20 HoTT transmitter's »Tx. output swap«
option permits the transmitter's 16 control functions
to be freely swapped in a similar manner or even
permits multiple outputs to be assigned to the same
control function. To keep controls manageable,
however, we strongly recommend using only one of
the options at a time.
Channel assignment on other receivers
As already mentioned, the "Rcv Ch map" menu
option can be used to freely distribute the mc-20
HoTT transmitter's 16 control channels across up
to four receivers, whereby the numbering of outputs
(servo connections) as well as the maximum number
of available lines (outputs) will correspond to the
maximum number of servo connections available on
the given receiver.
RECEIVER CHANNEL MAP BIND2
Rx Input Ch 16
Rx Input Ch 16
Rx Input Ch 16
Rx Input Ch 16
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
After selection of the desired output with the selection
keys of the left or right touch pad, the respective input
fi eld will be framed. Tap the center SET key of the
right touch pad. The current setting will be displayed
in inverse video. Now select the desired input
channel with the selection keys of the right touch pad.
For example, suitable to the above rudder example.
RECEIVER CHANNEL MAP BIND2
Rx Input Ch 4
Rx Input Ch 4
Rx Input Ch 4
Rx Input Ch 4
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
Note:
The number of lines available in the list (outputs)
corresponds to the maximum number of servos which
can be attached to the given receiver.
RF transmit
This menu line provides an option for manually
switching the transmitter's RF transmission on and
off to specifi c models while the transmitter is in
operation. For example, to save power while a model
is being programmed. If this line option was set to
OFF, it will be canceled (i.e. set to ON) the next
time the transmitter is switched on.
If necessary, use the cd selection keys of the left or
right touch pad to move into the " RF transmit " line
80 Detail program description - Base setup models | Winged models
then activate the option with a brief tap on the center
SET button of the right touch pad.
Stick mode
Module
1
bind
bind n/a
n/a
HoTT
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
BASIC SETTING,MODEL
The right selection keys can now be used to choose
between OFF and ON. Another tap on the center SET
key of the right touch pad will conclude the entry.
Range test
The built-in range test reduces transmission power
to an extent that a functional test can be carried out
even within a distance of less than 100 m.
Perform a range test on the Graupner HoTT system
according to the following instructions. If necessary,
have someone assist you in carrying out the range test.
Preferably, the receiver already bound to the 1.
transmitter should be installed into the model in its
intended position.
Switch remote control on and wait for the green 2.
LED to light up on the receiver/s. Now servo
movements can be observed.
Place the model on a level surface (pavement, 3.
low-cut grass or bare ground) such that receiver
antennas are at least 15 cm above ground level.
It may be necessary to put something under the
model to raise it up enough for this.
Hold the transmitter at hip level and at some 4.
distance from one's body. Do not point the
antenna directly at the model but rather turn and/
or kink the antenna's end so that it is oriented
vertically during the test.
If necessary, use the 5. cd selection keys of the left
or right touch pad to reach the "RF range test" line
in the menu then start range test mode with a tap
on the center SET key of the right touch pad.
Module bind
bind n/a
n/a
HoTT
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
RF range test 99s
BASIC SETTING,MODELL
When the range test has been initiated,
the transmitter's transmission power will be
signifi cantly reduced and the LED just to the right
of the main switch on the transmitter, marked RF,
will begin to blink; this will also be accompanied by
acoustic tones. At the same time, the timer in the
transmitter's display will start counting down and
every 5 seconds a two-frequency tone will sound.
Five seconds prior to the end of the range test
a three-frequency tone will sound once every
second. After expiration of the range test's 99th
second the transmitter will again be switched to
full output power and the LED just to the right
of the main switch on the transmitter will again
illuminate constantly.
Move away from the model while manipulating 6.
the joysticks during this timespan. If you notice an
interruption anytime while still within a distance of
about 50 m, try to reproduce this malfunction.
If there is a motor in the model, it may be necessary 7.
to switch it on to further check noise immunity.
Continue moving away from the model until 8.
perfect control is no longer possible.
Wait at this distance for the remainder of the test 9.
period with the still-operationally-ready model
to expire. After the range test is ended it should
again respond correctly to all RC controls. If this
is not 100 % the case, do not use the system.
Contact your area's Graupner GmbH & Co. KG
service partner.
Perform the range test before each fl ight and, in 10.
doing so, simulate all servo movements which
also take place during fl ight. The range must
always be at 50 m on the ground in order to
assure safe model operation.
Caution:
Never start the range test on the transmitter
during normal operation of the model.
DSC output
If necessary, use the cd selection keys of the left
or right touch pad to switch to the "DSC Output" line
then, with a brief tap on the center SET key of the
right touch pad, activate the value window:
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
RF range test 99s
DSC Output PPM10
BASIC SETTING,MODEL
Now you can use the right selection keys to choose
between four types of modulation "PPM10", "PPM16",
"PPM18" and "PPM24". Touch the center SET key of
the right touch pad again to complete the entry.
This choice primarily infl uences the maximum
number of control channels which can be attached to
the DSC (direct servo control) socket, and thus also
available to a fl ight simulator or teacher/pupil system.
By selecting "PPM10" this will be control channels
1 … 5, for "PPM16" channels 1 … 8, for "PPM18"
channels 1 … 9 and for "PPM24" channels 1 … 12.
81
Detail program description - Base setup models | Winged models
Motor cutoff (Thr. CutOff)
Note:
This menu line is suppressed if "None" or "None/inv"
is selected for the "Motor on C1" line.
Depending on the "idle forward or back" choice
made in the "Motor on C1" line of the »Model type«
menu, this motor "cut off" option can be coupled to
a switch for throttling down a speed controller or to
move a servo on the carburetor of a motor to the OFF
position. This option not only replaces the"Cut-off
trim" function known from other Graupner mc and
mx transmitters but also serves as an Emergency-
OFF function at the same time, which was not
possible with the"Cut-off trim" function.
This motor OFF position (Thr. CutOff) is specifi ed in
the left column fi eld over the column label SEL and
its value is to be established through trial and error.
A speed controller or throttle servo will only take on
this preset position when a certain servo position
or threshold is underrun and a switch is activated.
This is done by setting the desired servo position
(threshold value) into the middle column fi eld, directly
over the column label STO, then selecting the
appropriate
ON/OFF switch function in the right column.
If the percentage value specifi ed for the middle •
column is greater than the current servo position,
i.e. the current servo position lies below the
threshold, the switchover will occur as soon as the
switch is put into its ON position.
If the percentage value specifi ed for the middle •
column is less than the current servo position, i.e.
the current servo position is above the threshold,
the speed controller will initially reduce motor
speed or close the carburetor's throttle servo
only to the extent dictated by the value in the
left column as soon as the servo's position once
underruns the threshold (max. +150 %) after the
switch is changed over to its ON position.
The speed controller or throttle servo will remain in
this cut-off position only until the selected switch is
again changed over followed by a one-time throttle
servo or speed controller movement beyond the
preset threshold with the throttle/brake joystick
control.
The factory setting for the left column is -100 % for
the throttle servo "cut-off" position and a threshold of
+150 % servo position setting in the middle column.
BASIC SETTING,MODEL
SEL SET STO SET
RF transmit on
RF range test 99s
DSC Output PPM10
–––
Thr. CutOff +150%–100%
Programming procedure
To change the throttle servo's preset "cut-off"
position, tap on the center SET key of the right touch
pad. The current setting will be displayed in inverse
video. Now use the selection keys of the left or right
touch pad to set a value at which the motor is reliably
"off". If a combustion motor is involved, be sure the
throttle servo does not perform mechanical runout,
e.g. -125 %.
BASIC SETTING,MODEL
SEL SET STO SET
RF transmit on
RF range test 99s
DSC Output PPM10
–––
Thr. CutOff +150%–125%
The – upper – preset value in the middle column
ensures the motor can be stopped, throughout the
maximum possible positioning range of the servo or
speed controller, alone by the switch to be assigned
in the right column.
However, if you wish to set a lower threshold, by
which an underrun will cause the throttle servo or
speed controller with closed switch to switch into
the cut-off position, reduce the preset servo travel
from +150 % by placing the throttle servo or speed
controller into the desired position with the throttle/
brake joystick then touch the center SET key of the
right touch pad.
BASIC SETTING,MODEL
SEL SET STO SET
RF transmit on
RF range test 99s
DSC Output PPM10
–––
Thr. CutOff +150%–125%
Finally, use the column at the right to specify a
switch with which you can cut off the motor directly
(emergency) or which will be activated by the threshold.
BASIC SETTING,MODEL
SEL SET STO SET
RF transmit on
RF range test 99s
DSC Output PPM10
Thr. CutOff +100%
–125% 8
Notes:
Be sure the throttle servo does not run out •
mechanically when the cut-off function is
activated.
A threshold over +100 % is reached by temporarily •
increasing the travel for servo 1 in the »Servo
adjustment« menu to over 100 % then, after
storing the threshold, change servo travel back to
82 Detail program description - Base setup models | Winged models
the original value.
Power-on warning
BASIC SETTING,MODEL
SET SET
RF range test 99s
DSC Output PPM10
Motor Stop +100%
–125% 8
Thr. CutOff –––
When a switch, a control switch or a logical switch
is assigned in this line as described in the section
"Assigning transmitter controls, switches and control
switches" on page 56, the respective switch or control
position will be polled and an appropriate warning
will be blended into the basic display under some
conditions. In combination with logical switches,
almost any switch setting can be called up for
transmitter switch on.
#01 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
4.1V
0:00.0
00
0
0
00:00h
M
V
!Warning!
Graubele
H-J Sandbrunner
Auto trim
BASIC SETTING,MODEL
SET SET
DSC Output PPM10
Thr. CutOff +100%
–125% 8
Power on warning L1
Auto trim –––
The "Auto trim" option makes it possible to trim a
model quickly and without complications, e.g. in the
context of a fi rst-fl ight or even after (major) repairs, etc.
Typically such test fl ights are initially fl own with joysticks
counter operated until the desired state of fl ight is
achieved. This generally involves working the trim
controls during the fl ight to "unburden" the joysticks.
This is exactly what the "Auto trim" function is for.
After the desired fl ight attitude has been achieved
via control functions 2 … 4 (aileron, elevator and
rudder), the switch assigned to "Auto trim" – ideally
one of the standard-equipment momentary switches
in the switch panels – is to be activated ONCE. At the
instant the switch is activated, the joystick offsets from
their neutral positions will be determined and adopted
as trim values. However, this does not take place
instantaneously but rather within about 1 second.
During this period after the switch has been activated,
the joysticks should be returned to their normal
positions.
Notes:
Due to the complex interaction inherent to multi-•
fl ap models, the Auto trim function for ailerons
is deactivated if "2AIL 2FL" and "2AIL 4FL" or
"4AIL 2FL" and "4AIL 4FL" is selected in the
"Aileron/camber fl aps" line of the »Model type«
menu.
Be sure that during the switch assignment, the •
joysticks for aileron, elevator and rudder are in
their neutral positions as otherwise their offsets
from neutral will be adopted right away in trim
memory as the trim value.
Since EVERY activation of the Auto trim switch •
has a cumulative effect, after concluding an "auto
trim" fl ight, the assigned auto trim switch should
be deactivated for reasons of safety. Otherwise
there is a residual danger that the "Auto trim"
function could be activated accidentally.
ext. PPM signal
BASIC SETTING,MODEL
SET SET
Thr. CutOff +100%–125% 8
Power on warning L1
Auto trim –––
ext. PPM signal normal
SEL
Some RF modules which can be connected to the
external (page 25) or internal (page 26) connectors
for other RF modules require an inverted input signal.
Be sure to follow the respective module's installation
instructions for this.
The choice of "inverted" instead of the default preset
"normal" allows for appropriate adaptation of the
provided PPM signal.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the display to
"normal".
83
For your notes
Auto timer reset
BASIC SETTING,MODEL
SET SET
Power on warning L1
Auto trim –––
ext. PPM signal normal
SEL
Auto timer reset yes
The "yes/no" setting made in this line determines
whether or not all of the transmitter's timers (except
for "Model time" and "Transmitter operating time") are
automatically reset to their given starting values when
the transmitter is switched on.
A simultaneous tap on the cd or ef keys of the right
touch pad (CLEAR) will reset the display to "yes".
84 Detail program description - Base setup models | Winged models
Before programming specifi c parameters, there are
some basic settings to be made which effect the
currently active model memory.
Use the selection keys of the left or right touch pad to
select the »Basic settings, model« menu …
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup model Helicopter type
… then tap the center SET key of the right touch pad.
Model name
Model name
Stick mode 1
n/a
BASIC SETTINGS,MODEL
Info
n/a
n/a
Module bind
HoTT
Change to the next screen page with a brief tap on
the SET key of the right touch pad. This will open a
screen of characters for entry of the model's name.
A maximum of 13 characters can be used to specify
a model name.
!"#$%&’()
Model name Starle
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
Now the desired characters can be selected with the
selection keys of the left touch pad. Move to the next
position to select the next character with a tap on
the f of the right touch pad or its center SET key. A
simultaneous tap on the cd or ef keys of the right
touch pad (CLEAR) will place a space character at
the current position.
Positioning to any character position within the entry
fi eld can be done with the ef keys of the right touch
pad.
A return to the previous menu screen is accomplished
with a tap on the center ESC key of the left touch
pad.
A model name entered in this manner will appear in
the base screen of the »Model select« menu and in
the sub-menus of the »Copy / Erase« menu item.
Info
Model name
Stick mode 1
n/a
BASIC SETTINGS,MODEL
Info
n/a
n/a
Module bind
HoTT
Starlet
Every model can be given a supplementary note of
up to 12 characters (maximum) by following the same
procedure as already described for creating a "Model
name". This info note will appear as a supplement in
the »Model select« menu and in the sub-menus of
the »Copy / Erase« menu item.
Stick mode
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
pitch axis
tail rotor
pitch axis
tail rotor
throttle
roll
roll
throttle
tail rotor
tail rotor
throttle throttle
pitch axis
pitch axis
roll
roll
pitch axis
pitch axis
roll
roll
Motor/Pitch
throttle
tail rotor
tail rotor
throttle
throttle
roll
roll
pitch axis
pitch axis
tail rotor
tail rotor
Basically there are four different ways to assign the
four helicopter control functions, roll, nick, tail rotor
and throttle/pitch to the two joysticks. Just which of
these is used depends on the preferences of the
individual model pilot.
Use the cd selection keys of the left or right touch
pad to select the "Stick mode" line. The option fi eld
will be framed.
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
SEL
Starlet
1234g/111111
Tap on the SET key. The currently displayed stick
mode will be displayed in inverse video. Now use the
selection keys of the right touch pad to select from
among options 1 through 4.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the display to
stick mode "1".
Base setup model
Model-specifi c base settings for helicopter models
85
Detail program description - Base setup models | Winged models
Another tap on the SET key will again deactivate
option selection so a change to another line can be
affected.
Module
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Starlet
1234g/111111
SEL BD1 BD2 BD3 BD4
The mc-20 transmitter has a HoTT RF module as
standard equipment. In addition to the built-in module,
there is a connector for an external RF module
behind one of the two front cover fl aps (see page 25)
and a switchover to an external module connected
there can be affected per software. To do this, use the
selection keys of the left or right touch pad to move
the marker frame left to the "Module" selection fi eld
above the "SEL" column label.
HoTT system
Graupner HoTT receivers must be "instructed"
to communicate exclusively with a certain model
(memory) in a Graupner HoTT transmitter. This
procedure is known as "binding" and must only be
done once for every new receiver/model-memory-
location combination (and can be repeated anytime).
Important notices:
During the binding procedure be sure the •
transmitter's antenna is always far enough
away from the receiver's antenna. To be on the
safe side, keep them at least one meter apart.
Otherwise there is a risk of a faulty connection
to the return channel and malfunctions will
result.
When binding additional receivers, note that any •
other –switched on– receivers already bound
to the transmitter will fall into Fail-safe mode
during the transmitter-side "binding" period.
"Binding" multiple receivers per model
Multiple receivers per model can be bound if desired,
whereby respective mc-20 HoTT programs offer the
potential for managing up to four receivers directly
and for dividing up the transmitter's 16 control
channels (max) in any arrangement among these
receivers under menu control. Refer to additional
details further down in this section. First bind the
receivers individually as described below.
However, in subsequent operation only one of
these receivers will establish a telemetry bond to
the transmitter; the one which was activated in
the "TELEMETRY RCV" line of the »Telemetry«
menu, for example:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
Any telemetry sensors which may be built into the
model should therefore be connected to this receiver
because the transmitter only receives and evaluates
data from the return channel of the receiver activated on
this line. The second, and all other receivers, operate in
parallel but are fully independent in slave mode.
"Binding" transmitter and receiver
Use the cd selection keys of the left or right touch
pad to move into the "Module" line. The marker frame
will be positioned by default to the column for the next
free binding channel. In the example shown in the
fi gure below, the marker frame is positioned above the
column label "BD2" because the binding channel in the
column labeled "BD1" is already in use by default for
the receiver which was delivered with the set.
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Starlet
1234g/111111
SEL BD1 BD2 BD3 BD4
If not already off, now switch the receiver on. The red
LED on the receiver will blink.
Press and hold the SET button on the receiver while
the LED continues to blink red for about 3 seconds
then, after about another 3 seconds, begins to blink
red/green. The SET button on the receiver can now
be released. As long as this LED blinks red/green, the
receiver is in bind mode.
Now, within this 3 second period, start the so-called
"receiver binding" process for the receiver to the
currently active model memory with a brief tap on the
center SET key of the right touch pad. At this time,
the screen's display will blend in a message window
for the duration of the "binding" process.
Model name
Stick mode 1
n/a
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Starlet
1234g/111111
SEL BD1 BD2 BD3 BD4
FINDING...
If the receiver's LED, again blinking red, changes
within about 10 seconds to continuous illumination
in green, the binding process has been successfully
86 Detail program description - Base setup models | Winged models
completed. Your model-memory to receiver
combination is now operationally ready. At this time the
screen will now display " bind " (bound) instead of "n/a"
(not attached).
Model name
Stick mode 1
bind
BASIC SETTING,MODEL
Info
n/a
n/a
Module bind
HoTT
Starlet
1234g/111111
SEL BD1 BD2 BD3 BD4
On the other hand, should the LED on the receiver
blink red for longer than about 10 seconds, the
binding process has failed. In this case the screen
will continue to show the status as "n/a". If this should
happen, try changing the position of antennas then
repeat the entire procedure.
Binding other receivers
The binding channel you have chosen is already
bound (as indicated by the "bind" status). with
another binding channel. If, after initiating the RF bind
process, the message shown below appears in the
screen instead of displaying "BINDING"
Model name
Stick mode 1
geb.
BASIC SETTING,MODEL
Info
n/a
n/a
Module geb.
HoTT
Starlet
1234g/111111
SEL BD1 BD2 BD3 BD4
RF
off
OK
is turned
Drop down two lines in the screen and switch off the
RF module, as described several columns further
below in the section "RF module". Afterward, return
again to the "Module" line and restart the binding
process as described on the previous page.
Alternatively you can briefl y switch off the transmitter
then, after switching it back on again, respond to the
message window that appears …
OFFON
Please select
RF on/off?
… with "OFF" …
ON
Please select
RF on/off?
OFF
… then confi rm the selection with a brief tap on the
center SET key of the right touch pad. From the
base screen jump again into the "Module" line of
the »Basic settings, model« menu and restart the
binding process.
Dissolving a bond
Proceed as described above to initiate the binding
process but WITHOUT fi rst putting a receiver in
binding readiness.
EXT. PPM
Important notice:
With the activation of the value fi eld in the context
of the following described changeover, any
existing bonds to HoTT receivers which may be
effective for the currently active model memory
will be lost.
Activate the fi rst value fi eld in the "Module" line with a
tap on the center SET key of the right touch pad then
use the selection keys to choose "EXT. PPM" instead
of "HoTT". In parallel with the selection of "EXT.
PPM", the other four value fi elds will be replaced by
the type of modulation pre-selected in the line »DSC
Output«, see page 88.
Model name
Stick mode 1
BASIC SETTING,MODEL
Info
Module
Starlet
1234g/111111
SEL
PPM10
EXT. PPM
This change also suppresses the lines for the options
(described below): »HoTT«, »Rcv Ch Map«, »RF
module« and »RF range test« and, in the basic
display, "PPM" will be displayed instead of "HoTT".
#02 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
00:00h
M
V
Starlet
PPM
H-J Sandbrunner
Receiver channel mapping
Stick Mode
Module
1
bind
BASIC SETTING,MODEL
bind
Info
n/a
n/a
HoTT
SET SET SET SET
2345g/090911
Rcv Ch Mapgang R16 R08 n/a
n/a
As mentioned in the introduction to the "Binding
receivers" section, this menu item of the mc-20 HoTT
offers both the opportunity to freely divide up the
transmitter's control channels within a receiver as well
87
Detail program description - Base setup models | Winged models
as the opportunity to distribute the transmitter's 16
control channels across as many as four receivers.
This redistribution is subsequently referred to as
"mapping" or "channel mapping" (channel correlation).
Select the receiver to be "mapped" with the selection
keys of the left or right touch pad then tap briefl y on
the center SET key of the right touch pad.
Channel mapping within a receiver
Analogous to the channel correlation function in
the »Telemetry« menu on page 232, described as
"Channel Mapping", it is very simple to use this menu
item to freely assign the transmitter's control channels
present on the receiver's inputs to any specifi c
receiver outputs (servo connections) for the bound
receiver designated by the column labeled BD1.
RECEIVER CHANNEL MAP BIND1
Rx Input Ch 1
Rx Input Ch 2
Rx Input Ch 3
Rx Input Ch 4
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
After selection of the desired output with the selection
keys of the left or right touch pad, the respective
input fi eld will be framed. Briefl y tap the center SET
key of the right touch pad: The current setting will be
displayed in inverse video. Now use the selection
keys of the right touch pad to select the desired input
channel's respective transmitter output, see page 218.
Note:
The number of lines available in the list (outputs)
corresponds to the maximum number of servos which
can be attached to the given receiver.
BUT CAUTION: If you wish to operate two servos
with one control function, for example such as
transmitter control function 2 (roll) which is divided
up into control channels 1 & 2 for left and right roll
servos for the "3Sv(2Roll)" option in the »Heli type«
menu; then "map" the corresponding transmitter
outputs, in this case for channels 1 & 2 (= inputs to
the receiver) accordingly.
Important notice:
The mc-20 HoTT transmitter's »Tx. output swap«
option permits the transmitter's 16 control functions
to be freely swapped in a similar manner or even
permits multiple outputs to be assigned to the same
control function. To keep controls manageable,
however, we strongly recommend using only one of
the options at a time.
Channel assignment on other receivers
As already mentioned, the "Rcv Ch map" menu
option can be used to freely distribute the mc-20
HoTT transmitter's 16 control channels across up
to four receivers, whereby the numbering of outputs
(servo connections) as well as the maximum number
of available lines (outputs) will correspond to the
maximum number of servo connections available on
the given receiver.
RECEIVER CHANNEL MAP BIND2
Rx Input Ch 16
Rx Input Ch 16
Rx Input Ch 16
Rx Input Ch 16
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
After selection of the desired output with the selection
keys of the left or right touch pad, the respective input
fi eld will be framed. Tap the center SET key of the
right touch pad. The current setting will be displayed
in inverse video. Now select the desired input
channel with the selection keys of the right touch pad.
For example, appropriate for the above example with
roll servos:
RECEIVER CHANNEL MAP BIND2
Rx Input Ch 1
Rx Input Ch 2
Rx Input Ch 16
Rx Input Ch 16
Rx Output Ch 1
Rx Output Ch 2
Rx Output Ch 3
Rx Output Ch 4
Note:
The number of lines available in the list (outputs)
corresponds to the maximum number of servos which
can be attached to the given receiver.
RF transmit
This menu line provides an option for manually
switching the transmitter's RF transmission on and
off to specifi c models while the transmitter is in
operation. For example, to save power while a model
is being programmed. If this line option was set to
OFF, it will be canceled (i.e. set to ON) the next
time the transmitter is switched on.
If necessary, use the cd selection keys of the left or
right touch pad to switch to the "RF module" line then,
with a brief tap on the center SET key of the right
touch pad, activate the value window:
Stick mode
Module
1
bind
bind n/a
n/a
HoTT
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
BASIC SETTING,MODEL
The right selection keys can now be used to choose
between OFF and ON. Another tap on the center SET
key of the right touch pad will conclude the entry.
88 Detail program description - Base setup models | Winged models
of the main switch on the transmitter, marked RF,
will begin to blink; this will also be accompanied by
acoustic tones. At the same time, the timer in the
transmitter's display will start counting down and
every 5 seconds a two-frequency tone will sound.
Five seconds prior to the end of the range test
a three-frequency tone will sound once every
second. After expiration of the range test's 99th
second the transmitter will again be switched to
full output power and the LED just to the right
of the main switch on the transmitter will again
illuminate constantly.
Move away from the model while manipulating 6.
the joysticks during this timespan. If you notice an
interruption anytime while still within a distance of
about 50 m, try to reproduce this malfunction.
If there is a motor in the model, it may be 7.
necessary to switch it on to further check noise
immunity.
Continue moving away from the model until 8.
perfect control is no longer possible.
Wait at this distance for the remainder of the test 9.
period with the still-operationally-ready model
to expire. After the range test is ended it should
again respond correctly to all RC controls. If this
is not 100 % the case, do not use the system.
Contact your area's Graupner GmbH & Co. KG
service partner.
Perform the range test before each fl ight and, in 10.
doing so, simulate all servo movements which
also take place during fl ight. The range must
always be at 50 m on the ground in order to
assure safe model operation.
Caution:
Never start the range test on the transmitter
during normal operation of the model.
DSC output
If necessary, use the cd selection keys of the left
or right touch pad to switch to the "DSC Output" line
then, with a tap on the center SET key of the right
touch pad, activate the value window:
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
RF range test 99s
DSC Output PPM10
BASIC SETTING,MODEL
Now you can use the right selection keys to choose
between four types of modulation "PPM10", "PPM16",
"PPM18" and "PPM24". Touch the center SET key of
the right touch pad again to complete the entry.
This choice primarily infl uences the maximum
number of control channels which can be attached to
the DSC (direct servo control) socket, and thus also
available to a fl ight simulator or teacher/pupil system.
By selecting "PPM10" this will be control channels
1 … 5, for "PPM16" channels 1 … 8, for "PPM18"
channels 1 … 9 and for "PPM24" channels 1 … 12.
Autorotation
Autorotation is that state of descending fl ight in
which the pitch of main rotor blades are set such that
the rotor's speed matches the natural forces of air
fl owing through, like a windmill. This built-up energy
can be used for "recovery" lift to brake a descent by
appropriate blade pitch adjustment.
Autorotation is a means by which real and model
helicopters are able to land safely in emergency
situations, e.g. in the event of a motor failure. However,
the prerequisite for this is a well-trained pilot familiar
with the helicopter's characteristics. Quick reaction and
good perceptiveness are necessary because the rotor's
inertia can only be used once to generate recovery lift.
Range test
The built-in range test reduces transmission power
to an extent that a functional test can be carried out
even within a distance of less than 100 m.
Perform a range test on the Graupner HoTT system
according to the following instructions. If necessary,
have someone assist you in carrying out the range test.
Preferably, the receiver already bound to the 1.
transmitter should be installed into the model in its
intended position.
Switch remote control on and wait for the green 2.
LED to light up on the receiver/s. Now servo
movements can be observed.
Place the model on a level surface (pavement, 3.
low-cut grass or bare ground) such that receiver
antennas are at least 15 cm above ground level.
It may be necessary to put something under the
model to raise it up enough for this.
Hold the transmitter at hip level and at some 4.
distance from one's body. Do not point the
antenna directly at the model but rather turn and/
or kink the antenna's end so that it is oriented
vertically during the test.
If necessary, use the 5. cd selection keys of the left
or right touch pad to reach the "RF range test" line
in the menu then start range test mode with a tap
on the center SET key of the right touch pad.
Module bind
bind n/a
n/a
HoTT
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
RF range test 99s
BASIC SETTING,MODELL
When the range test has been initiated,
the transmitter's transmission power will be
signifi cantly reduced and the LED just to the right
89
Detail program description - Base setup models | Winged models
When this technique is evaluated during
competitions, the motor must be switched off for
autorotation. On the other hand, for training mode
it is advantageous to keep the motor at idle for
autorotation.
The Autorotation switch causes a switchover to the
autorotation fl ight phase in which control of "throttle"
and "pitch" are separate and all mixers which have
an effect on the throttle servo are switched off.
Corresponding parameter settings are made in the
»Helicopter mixer« (see text beginning page 176);
refer also to the "Principle of the Auto. C1 Pos." topic
which follows.
The "Autorotation" name is permanently assigned to
phase 1 and it is included in the base screen of all
fl ight phase dependent menus. This name can NOT be
changed. It is only possible to assign a switch to this
option at the right of this display, as described on page
56. If a switch is assigned, it will have absolute
priority over all other fl ight-phase switches.
BASIC SETTING,MODEL
SET SET
RF transmit on
RF range test 99s
DSC Output PPM10
–––
Autorotation
More about fl ight-phase programming can be found
in the text beginning on page 176 in the»Helicopter
mixer« section.
Autorotation C1 position
The autorotation fl ight-phase can alternatively be
activated by a threshold point for the C1 throttle/pitch
joystick. To do this, use the cd selection keys of the left
or right touch pad to move into the "Autorot. C1-Pos."
line.
As soon as this display line has been selected, its
value fi eld, located above the column label STO will
be framed.
BASIC SETTING,MODEL
STO SET
RF range test 99s
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. 0% –––
Move the C1 joystick into the desired threshold
switchover position then tap the center SET key of the
right touch pad. The current value will be displayed,
e.g.:
BASIC SETTING,MODEL
STO SET
RF range test 99s
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. -55% –––
After this has been done, use the selection keys to
move into the column above the switch symbol then
assign a switch to this fi eld, as described on page 56
in section "Switches, controls and control switches".
Preferably one of the two self-restoring switches
BASIC SETTING,MODEL
STO SET
RF range test 99s
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. –55% 4I
Once this activation switch is closed, the fi rst
occurrence of a threshold underrun will cause the
program to switch over to "Autorotation" and then
remain independent of C1 position in this fl ight phase
until the activating switch, in this example switch 4, is
again "OFF".
"Autorot. C1-Pos." has precedence over all other
fl ight-phase switches.
Corresponding parameter settings for …
pitch servos•
throttle servo•
tail rotor servo•
swashplate rotation, if available•
gyro setting•
… are made in the »Helicopter mixer« menu,
page 176.
Cut-off
Within the framework of autorotation settings for
the mc-20 HoTT transmitter's helicopter program,
there are parameters for an emergency "Thr. CutOff"
of the throttle servo or motor actuator, refer to the
programming proposal on page 314. However, this
option is not available if an idle position is specifi ed
in the "Throttle position AR" line of the »Helicopter
mixer« menu instead of an (emergency) OFF
position; for example, to avoid restarting the motor
after every landing during autorotation practice.
This option not only replaces the"Cut-off trim" function
known from other Graupner mc and mx transmitters
but also serves as an Emergency-OFF function at the
same time, which was not possible with the"Cut-off
trim" function.
Depending on the "forw./rear" choice made for the
"Pitch min" line of the »Helicopter type« menu, this
"Thr. CutOff" option can be coupled to a switch for
throttling down a speed controller or a carburetor
servo to the motor OFF (or idle) position.
This cut-off (or idle) position is specifi ed in the left
column's fi eld, above the SEL column label, and its
value is to be established through trial and error.
90 Detail program description - Base setup models | Winged models
A speed controller or throttle servo will only take on
this preset position when a certain servo position
or threshold is underrun and a switch is activated.
This is done by setting the desired servo position
(threshold value) into the middle column fi eld,
directly over the column label STO, then selecting
the appropriate ON/OFF switch function in the right
column.
If the percentage value specifi ed for the middle •
column is greater than the current servo position,
i.e. the current servo position lies below the
threshold, the switchover will occur as soon as the
switch is put into its ON position.
If the percentage value specifi ed for the middle •
column is less than the current servo position, i.e.
the current servo position is above the threshold,
the speed controller will initially reduce motor
speed or close the carburetor's throttle servo
only to the extent dictated by the value in the
left column as soon as the servo's position once
underruns the threshold (max. +150 %) after the
switch is changed over to its ON position.
The speed controller or throttle servo will remain in
this cut-off position only until the selected switch is
again changed over followed by a one-time throttle
servo or speed controller movement beyond the
preset threshold with the throttle/brake joystick
control.
The factory setting for the left column is -100 % for
the throttle servo "cut-off" position and a threshold of
+150 % servo position setting in the middle column.
BASIC SETTING,MODEL
SET SET
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. 0% –––
SEL STO
–––
Thr. CutOff +150%–100%
Programming procedure
To change the throttle servo's preset "cut-off" position,
tap on the center SET key of the right touch pad. The
current setting will be displayed in inverse video. Now
use the selection keys of the left or right touch pad to
set a value at which the motor is reliably "off" without
a startup of the throttle servo. For example -125 %:
BASIC SETTING,MODEL
SET SET
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. 0% –––
SEL STO
–––
Thr. CutOff +150%–125%
The – upper – preset value in the middle column
ensures the motor can be stopped, throughout the
maximum possible positioning range of the servo or
speed controller, alone by the switch to be assigned
in the right column.
However, if a lower threshold is preferred, at which
an underrun will cause the throttle servo or speed
controller with closed switch to enter the throttle cut-
off position for a closed switch condition – by default
the right-side proportional rotary slider – put the
throttle/pitch joystick into the desired position then tap
on the center SET key of the right touch pad.
BASIC SETTING,MODEL
SET SET
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. 0% –––
SEL STO
–––
Thr. CutOff +150%–125%
Finally, use the column at the right to specify a
switch with which you can cut off the motor directly
(emergency) or which will be activated by the
threshold.
BASIC SETTING,MODEL
SET SET
DSC Output PPM10
–––
Autorotation
Autorot. C1-Pos. 0% –––
SEL STO
Thr. CutOff +100%
–125% 8
Notes:
Be sure the throttle servo does not run out •
mechanically when the cut-off function is
activated.
A threshold over +100 % is reached by •
temporarily increasing the travel for servo 1 in the
»Servo adjustment« menu to over 100 % then,
after storing the threshold, change servo travel
back to the original value.
91
Detail program description - Base setup models | Winged models
Marking
BASIC SETTING,MODEL
SET SET
–––
Autorotation
Autorot. C1-Pos. 0% –––
SEL STO
Thr. CutOff +100%
–125% 8
Marker key –––
When activated, the "Marker key" will place a marker
in the "Pitch" curve, as well as in the "Channel 1 ¼
Throttle" and "Channel 1 ¼ Tail rotor" mixer curves
of the »Helicopter mixer« menu, to mark the current
pitch joystick position of the pitch joystick and it takes
on the form of a vertical dashed line. This marker
is helpful for setting curve points at the right places
during fl ight testing, e.g. the hovering point
One of the two standard momentary contact switches
mounted into the switch panels should be the
preferred choice of switch assignment.
Example:
The hovering point is to be placed at the midpoint of
the throttle/pitch joystick for the «Hover» fl ight phase
but it is found to be still located above control middle
during fl ight testing. Press the switch in this position
and, after the landing, examine, for example, the
Pitch curve in the »Helicopter mixer« menu, page
176.
Pitch
Curve
off Point
Output
Input –30%
–30%
?+
–
100
¼O U T P U T
The continuous vertical line shows the joystick's
current position. Its position in this example lies at
-30 % (= input) of control travel and, because of its
(still) linear control curve, produces an output signal
which is also -30 % (= output).
On the other hand, the dashed vertical line represents
the joystick position at which the marker switch was
pushed.
Move the joystick to this marker line to read the input
and output values for the found hovering point. The
marker points of the other two mixer curves are read
similarly. Now these three curves can be alternately
modifi ed as necessary in order to correct the hovering
point. Curve point "1" in this simple example can be
raised at the curve's midpoint to the output value that
was determined to be the hovering point in the Pitch
graph.
Power-on warning
BASIC SETTING,MODEL
SET SET
–––
Autorot. C1-Pos. 0% –––
SEL STO
Thr. CutOff +100%
–125% 8
Marker key –––
Power on warning
When a switch, a control switch or a logical switch is
assigned in this line, as described on page 56 in the
section "Assigning transmitter controls, switches and
control switches", the respective switch or control
position will be polled when the transmitter is switched
on and an appropriate warning will be blended into the
basic display under some conditions. In combination
with logical switches, almost any switch setting can be
called up for transmitter switch on.
#02 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
4.1V
0:00.0
00
0
0
00:00h
M
V
!Warning!
Starlet
H-J Sandbrunner
Auto trim
BASIC SETTING,MODEL
SET SET
–––
–––
SEL STO
Thr. CutOff +100%
–125% 8
Marker key
–––
Power on warning
Auto trim
The "Auto trim" option makes it possible to trim a
model quickly and without complications, e.g. in the
context of a fi rst-fl ight or even after (major) repairs, etc.
Typically such test fl ights are initially fl own with
joysticks counter operated until the desired state of
fl ight is achieved. This generally involves working
the trim controls during the fl ight to "unburden" the
joysticks.
This is exactly what the "Auto trim" function is for.
After the desired fl ight attitude has been achieved via
control functions 2 … 4 (aileron, elevator and rudder),
the switch assigned to "Auto trim" – ideally one of
the standard-equipment momentary switches in the
switch panels – is to be activated ONCE. At the instant
the switch is activated, the joystick offsets from their
neutral positions will be determined and adopted
as trim values. However, this does not take place
instantaneously but rather within about 1 second.
During this period after the switch has been activated,
the joysticks should be returned to their normal
positions.
92 Detail program description - Base setup models | Winged models
Notes:
Be sure that during the switch assignment, the •
joysticks for aileron, elevator and rudder are in
their neutral positions as otherwise their offsets
from neutral will be adopted right away in trim
memory as the trim value.
Since EVERY activation of the Auto trim switch •
has a cumulative effect, after concluding an "auto
trim" fl ight, the assigned auto trim switch should
be deactivated for reasons of safety. Otherwise
there is a residual danger that the "Auto trim"
function could be activated accidentally.
ext. PPM signal
BASIC SETTING,MODEL
SET SET
Power on warning –––
Auto trim –––
ext. PPM signal normal
SEL
Marker key –––
Some RF modules which can be connected to the
external (page 25) or internal (page 26) connectors
for other RF modules require an inverted input signal.
Be sure to follow the respective module's installation
instructions for this.
The choice of "inverted" instead of the default preset
"normal" allows for appropriate adaptation of the
provided PPM signal.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the display to
"normal".
Auto timer reset
BASIC SETTING,MODEL
SET SET
Power on warning –––
Auto trim –––
ext. PPM signal normal
SEL
Auto timer reset yes
The "yes/no" setting made in this line determines
whether or not all of the transmitter's timers (except
for "Model time" and "Transmitter operating time")
are automatically reset to their given starting values
when the transmitter is switched on.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the display to
"yes".
93
For your notes
94 Detail program description - Model type | Winged models
This "Model type" menu is used to establish the type
of model to be programmed. This also activates
all characteristic mixers, coupling functions, etc.
in preparation for subsequent programming of the
specifi ed model type.
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Briefl y tap the center SET key of the right touch pad:
Motor at C1
After selecting the "Motor at C1" line with the cd
selection keys of the left and right touch pad, the
corresponding entry fi eld will be framed.
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
Briefl y tap the center SET key of the right touch pad:
The current setting will be displayed in inverse video.
Now use the selection keys of the right touch pad to
select from among the following four options:
"none" For operation of a model without a
propulsion.
The warning "Throttle too high",
see page 30, is deactivated and
the "Brake settings" sub-menu of
the »Wing mixers« (beginning
page 172) is available without any
restrictions.
"Thr. min. rear": The idle position for the throttle/
brake fl aps joystick (C1) is to the
rear, i.e. toward the pilot.
The warning "Throttle too high", see
page 30, as well as the "Thr. CutOff"
option in the »Basic settings,
model« menu, see page 81, are
activated and the "Brake settings"
sub-menu of the »Wing mixers«
menu, beginning page 172, will be
available if the entry in the "Motor"
column of the »Phase settings«
menu, page 142, for the currently
active fl ight phase is "none".
"Thr. min. fwd.": The idle position for the throttle/
brake fl aps control stick (C1) is at
the front, i.e. away from the pilot.
The warning "Throttle too high", see
page 30, as well as the "Thr. CutOff"
option in the »Basic settings,
model« menu, see page 90, are
activated and the "Brake settings"
sub-menu of the »Wing mixers«
menu, beginning page 172, will be
available if the entry in the "Motor"
column of the »Phase settings«
menu, page 142, for the currently
active fl ight phase is "none".
Notes:
Be sure to pay attention during the •
programming procedures that motors do not
start up unintentionally. Disconnect the fuel
supply or battery terminals to motors before
programming.
C1 trimming will operate according to the choice •
made between "normal" or only "back" or "fwd.",
that is, either over the control's entire travel path
or only in the respective idle direction.
Tail type
After selecting the »Tail type« line with the cd
selection keys of the left or right touch pad, the
corresponding entry fi eld will be framed.
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
Briefl y tap the center SET key of the right touch pad:
The current setting will be displayed in inverse video.
Now select the type appropriate for the model with
the selection keys of the right touch pad.
"normal": Elevators and rudder are each
operated by a single servo.
"V-tail": Elevator and rudder control is
affected by way of two separate,
articulated, V-shaped rudders. The
coupling function for rudder and
elevator control will be automatically
taken over by the program. The
relationship of rudder-to-elevator
proportion is set in the »Dual Rate /
Expo« menu, page 120, and servo
travel in the »Servo adjustment«
menu, page 102.
If, beyond this, there is a desire to
also make differentiation for rudder
throw then the V-tail should be
alternatively controlled via the »Dual
mixer« menu, page 206. In this case
however, the tail type entry specifi ed
here must be "normal".
"ELEVON": Aileron and elevator control is
operated by one or two servos
Model type
Establishing winged aircraft model type
95
Detail program description - Model type | Winged models
per wing half. However, elevator
trimming is also affected by
selecting the "2AIL 2FL" option – see
below – but only on servos 2 & 3.
"2ELSv3+8": This option is intended for models
with two elevator servos. The servo
connected to output 8 will operate
in parallel with servo 3 to actuate
elevators. Elevator trim affects both
servos.
Note on "2ELSv3+8":
One control, which assigns input 8 by
way of the »Control adjust« menu, is
then disconnected from servo "8" by
software for reasons of safety i.e. it is
made ineffective.
Aileron/camber fl aps
After selecting the »Aileron/camber fl aps« line with
the cd selection keys of the left or right touch pad,
the corresponding entry fi eld will be framed.
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
Briefl y tap the center SET key of the right touch pad:
The current setting will be displayed in inverse video.
Now use the selection keys of the right touch pad to
select the number of wing servos to be programmed
for the model.
Available Control channel used
1AIL 2
1AIL 1FL 2 | 6
In the majority of cases the default setting for
"input 1" will remain as it is and the brake will be
operated by way of the non-neutralizing C1 joystick.
However, use of input 7, 8 or 9 makes it possible to
operate the brake in an alternative manner, even by
way of a supplementary control, if the C1 stick is to
be used for something else.
The neutral point (offset) can be set to any desired
position. This is done by placing the control for input 1,
7, 8 or 9 into the position at which the landing fl aps are
to be retracted, i.e. closed, then setting this "Offset"
point in the column above the column label STO.
The selection of this offset point in this context
determines not only the control position at which the
brake system is to be retracted, i.e. closed, but also
also the activation direction of the C1 joystick for
extending the brake system.
Brake offset values with a "+" prefi x will cause •
fl aps affected by the "Brake settings" option of
the »Wing mixers« menu to be extended when
the C1 joystick is moved from front to rear, in the
direction of the pilot.
Brake offset values with a "-" prefi x will cause •
fl aps affected by the "Brake settings" option of
the »Wing mixers« menu to be extended when
the C1 joystick is moved from rear to front, in the
direction away from the pilot.
If the offset point is not set at the far end of control
element travel, the remainder of travel to the end
point will be "free travel", i.e. this "free travel" will
no longer infl uence any mixer available for "Brake
settings" in the »Wing mixers« menu. This idle path
ensures that all brake settings remain at "neutral",
even with minor deviations from the limit of the brake
fl ap control. At the same time, the effective control
path is automatically spread to 100 %.
2AIL 2 & 5
2AIL 1FL 2 & 5 | 6
2AIL 2FL 2 & 5 | 6 & 7
2AIL 4FL 2 & 5 | 6 & 7 / 9 & 10
4QR 2WK 2 & 5 / 11 & 12 | 6 & 7
4AIL 4FL 2 & 5 / 11 & 12 | 6 & 7 / 9 & 10
Depending on the option selected here, the given
mixers needed and their settings will be activated in
the »Wing mixers« menu, beginning page 172.
Tips:
Settings for all wing fl ap pairs (Al and Al2, FL and •
FL2) can be trimmed on a fl ight-phase basis in
both the »Phase trim« menu as well as in the
Wing mixers« menu, page 172.
The functionality of all wing fl ap pairs (Al and Al2, •
FL and FL2) can also be operated by way of the
"Throttle/brake-fl ap joystick" if this stick has not
been assigned to other use, e.g. for certain brake
settings, see »Wing mixers« menu, page 172.
To confi gure this it is only necessary to assign
"Control 1" to input 6 in the »Control adjust«
menu, page 108. (If it is preferable to operate fl aps
with switches, one of the transmitter's two or three
position switches are good for this purpose.)
Brake Offset
This function not only has potential for gliders and
electric models but also for models with combustion
motors and landing fl aps.
The mixers described in the »Brake settings« line of
the »Wing mixers« menu can be operated by the C1
joystick ("input 1") or another transmitter operating
element which has been assigned to input 7, 8 or 9 in
the »Control adjust« menu. In this latter case, retain
the "GL" default setting for the "Type" column in the
»Control adjust« menu so the selected control can
operate independent of fl ight phase.
96 Detail program description - Model type | Winged models
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+90%
SEL
Tip:
Preferably, the servo intended for operating any
airbrake fl aps that may be on the model should be
connected to the receiver output operated by the
brake input channel, e.g. connect airbrake servo onto
(free) receiver output 8 if input 8 has been chosen
for the "brake", etc. A second airbrake servo is most
conveniently operated by way of a free mixer.
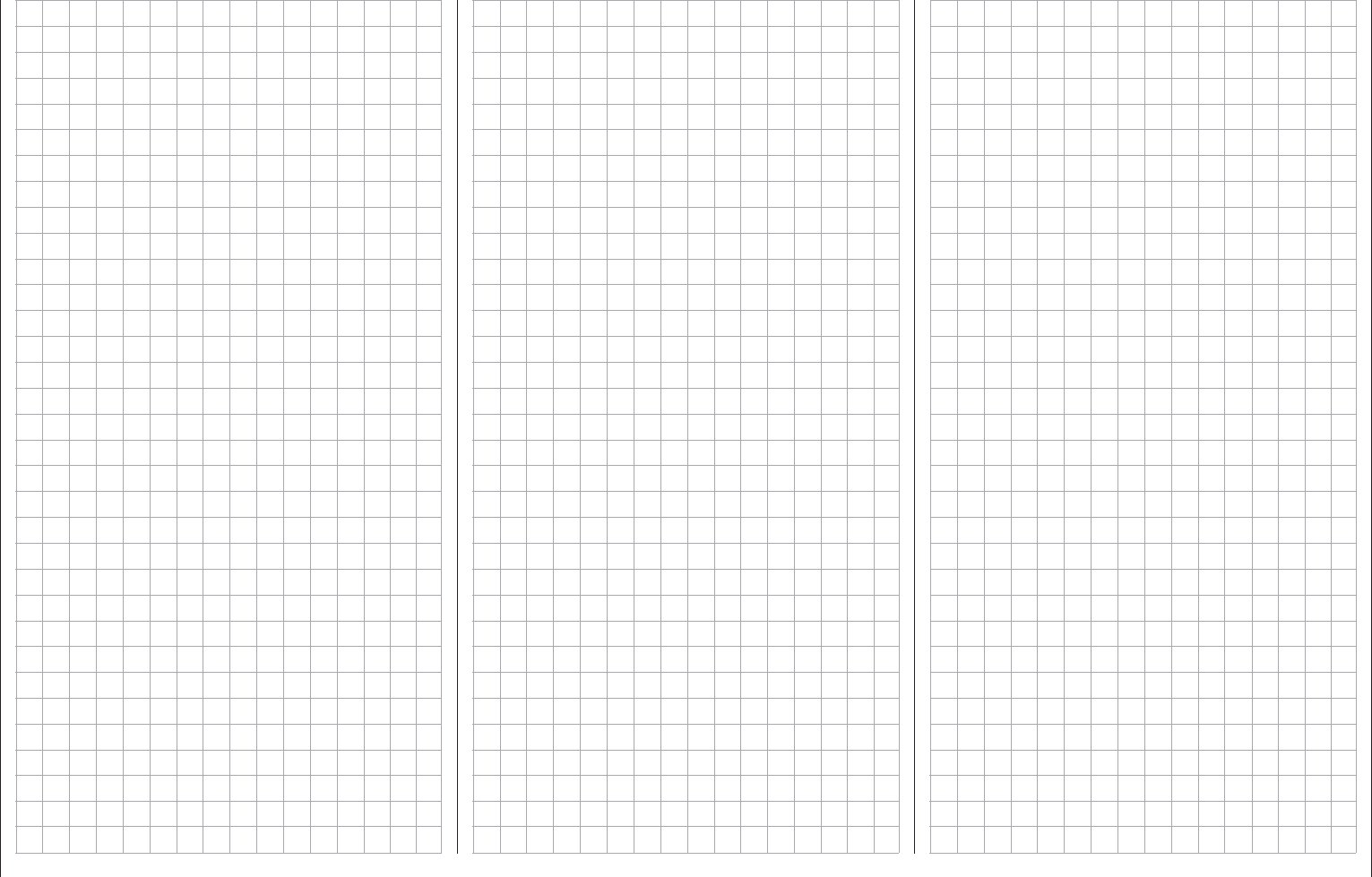
97
For your notes
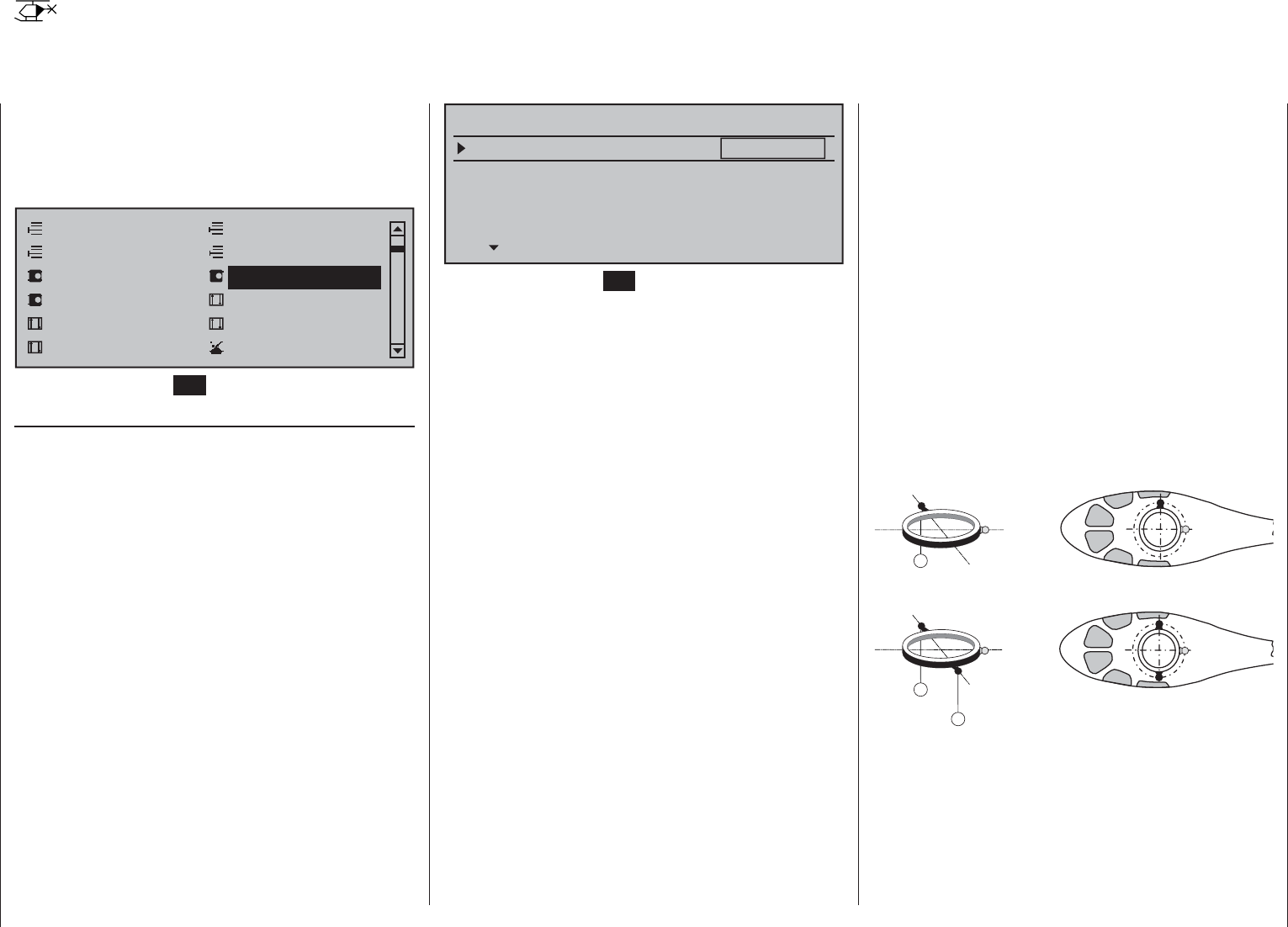
98 Detail program description - Helicopter type
Helicopter type
Establishing helicopter model type
This "Model type" menu is used to establish the type
of model to be programmed. This also activates
all characteristic mixers, coupling functions, etc.
in preparation for subsequent programming of the
specifi ed model type.
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Briefl y tap the center SET key of the right touch pad:
Swashplate type
Control of the swashplate will require an appropriate
program variant which corresponds to the number of
servos operating pitch control.
In the meantime this selection is also infl uenced
by the type of control exercised on swashplate
servos. Since Flybar systems generally do not
require transmitter-side swashplate mixers, when
such a system is in use, "1 Servo" is generally to be
selected as the swashplate type, regardless of the
actual number of swashplate servos present. In this
context, be sure the Flybar system complies with
the included adjustment instructions as otherwise
there is a risk the helicopter will not fl y.
After selecting the »Swashplate type« line with the
cd selection keys of the left or right touch pad, the
entry fi eld will be framed.
Linearis. swashpl.
Swashplate type
no
1 Servo
Rotor direction right
HELTYPE
Pitch min. rear
SEL
Briefl y tap the center SET key of the right touch pad.
The current setting for number of pitch servos will be
displayed in inverse video. Now choose the variant
needed with the selection keys of the right touch pad.
"1 Servo": A Flybar system is in use or the
swashplate is tipped with one servo
each for roll and pitch-axis. Pitch
control will be affected by one
separate servo.
(Since helicopter models, like Flybar
systems, which are operated with only
1 pitch servo, neither need any of the
three swashplate servos for pitch,
pitch-axis and roll NOR the transmitter's
mixer functions for pitch, pitch-axis and
roll, the »Swashplate mixer« menu
option will be suppressed in the Multi-
function menu.)
"2 Servo": Two roll servos will displace the
swashplate axially to affect pitch
control; nick control will be decoupled
by a mechanical compensation rocker.
"3Sv(2Roll)": Symmetric three-point control of
the swashplate with three, radially
offset articulation points, each offset
by 120 °, connected to one pitch-
axis servo (front or rear) and two
roll servos (left and right). All three
servos push the swashplate axially to
affect pitch control.
"3Sv (140°)": Asymmetrical three-point control of
the swashplate is affected at three
articulation points connected to one
nick servo (rear) and two roll servos
(front left and right). All three servos
push the swashplate axially to affect
pitch control.
"3Sv (2Nick)": Symmetric three-point control as
described above but radially offset
by 90°, one lateral roll servo and two
pitch-axis servos, front and rear.
"4Sv (90°)": Four-point swashplate control
affected by two roll servos and two
nick servos.
Simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the option back to
"1 Servo".
Swashplate type: 1 Servo
2
Swashplate type: 2 Servos
2
1
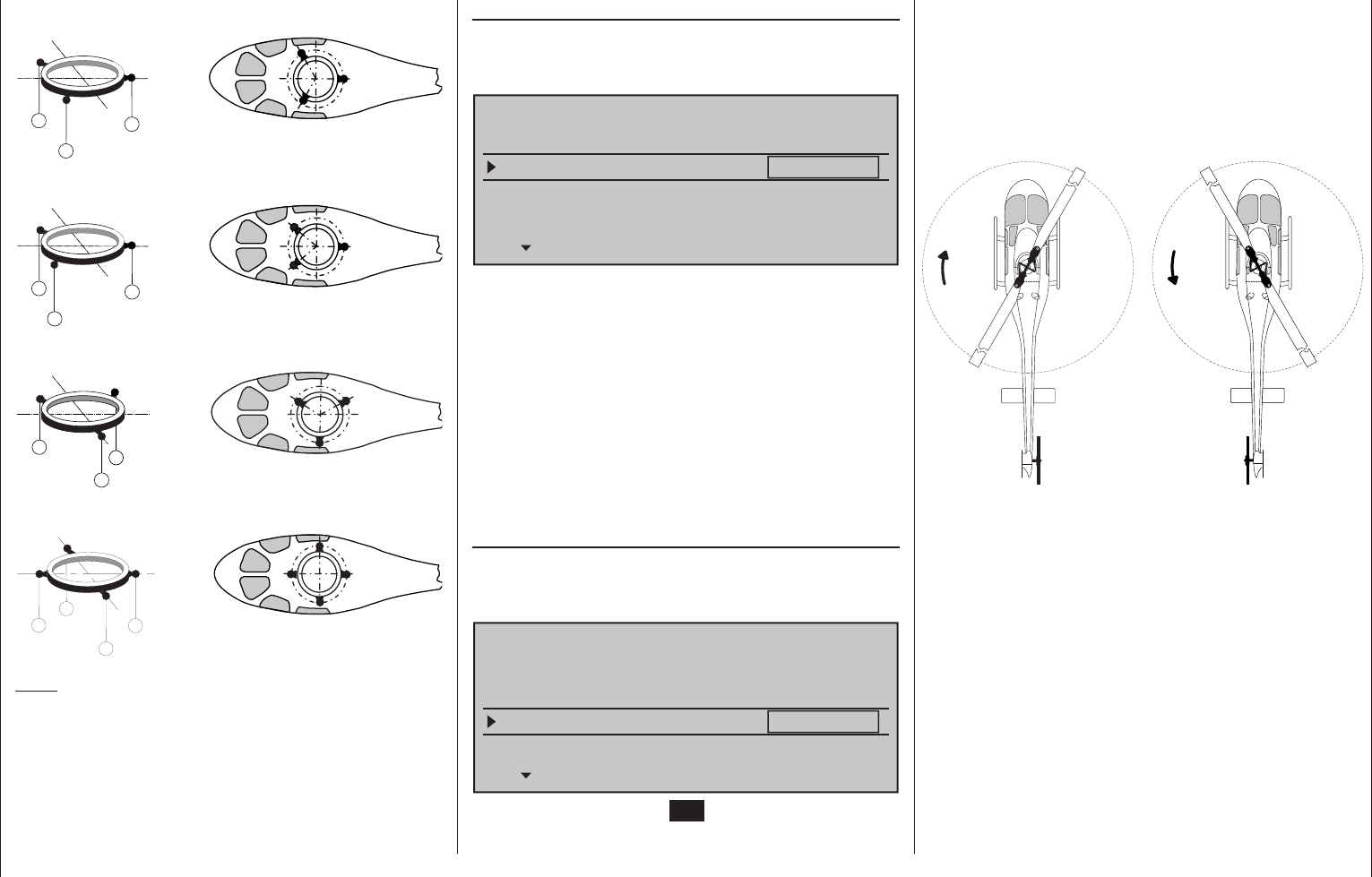
99
Detail program description - Helicopter type
Swashplate type: 3 Servos (2 Roll)
3
1
2
Swashplate type: 3 Servos (140°)
3
1
2
Swashplate type: 3 Servos (2 Nick)
3
2
1
Swashplate type: 4 Servos (90°) 2 Nick / 2 Roll
2
5
1
3
Note:
Except for the "1 Servo" choice, swashplate mixer
proportions must also be set in the»Swashplate
mixer« menu, page 208.
Swashplate linearizion
After selecting the »Linearis. swashpl.« line with the
cd selection keys of the left or right touch pad, the
entry fi eld will be framed.
Linearis. swashpl.
Swashplate type
no
1 Servo
Rotor direction right
HELTYPE
Pitch min. rear
SEL
The "yes" entry will prevent undesired side effects
such as pitch change due to a roll function or tension
between swashplate servo rods.
This type of tension can arise when effected servos
strain for different displacement positions due to
travel which deviates from one another.
Linearizing will require a bit of familiarization on the
part of the pilot because, in order to linearize the
entire rotation travel of the servo arm, servo travel
is reduced in small control movements – similar to a
pronounced exponential setting.
Rotor direction
After selecting the »Rotor direction« line with the cd
selection keys of the left or right touch pad, the entry
fi eld will be framed.
Linearis. swashpl.
Swashplate type
no
1 Servo
Rotor direction right
HELTYPE
Pitch min. rear
SEL
After a tap on the center SET key, the main rotor's
direction of rotation is entered in the »Rotor direction«
line with the selection keys of the right touch pad:
"right": The main rotor turns clockwise when
viewed from above.
"left": The main rotor turns counter-clockwise
when viewed from above.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will set the option to "right".
right-
turning
left-
turning
This entry is necessary for the correct orientation of
torque and power compensation mixer settings made
in the »Helicopter mixer« menu:
Pitch,
Channel 1 ¼ Throttle,
Channel 1 ¼ Tail rot.,
Tail rotor ¼ Throttle
Roll ¼ Throttle
Roll ¼ Tail rot.
Pitch ¼ Throttle,
Pitch-axis ¼ Throttle
Pitch-axis ¼ Tail rotor
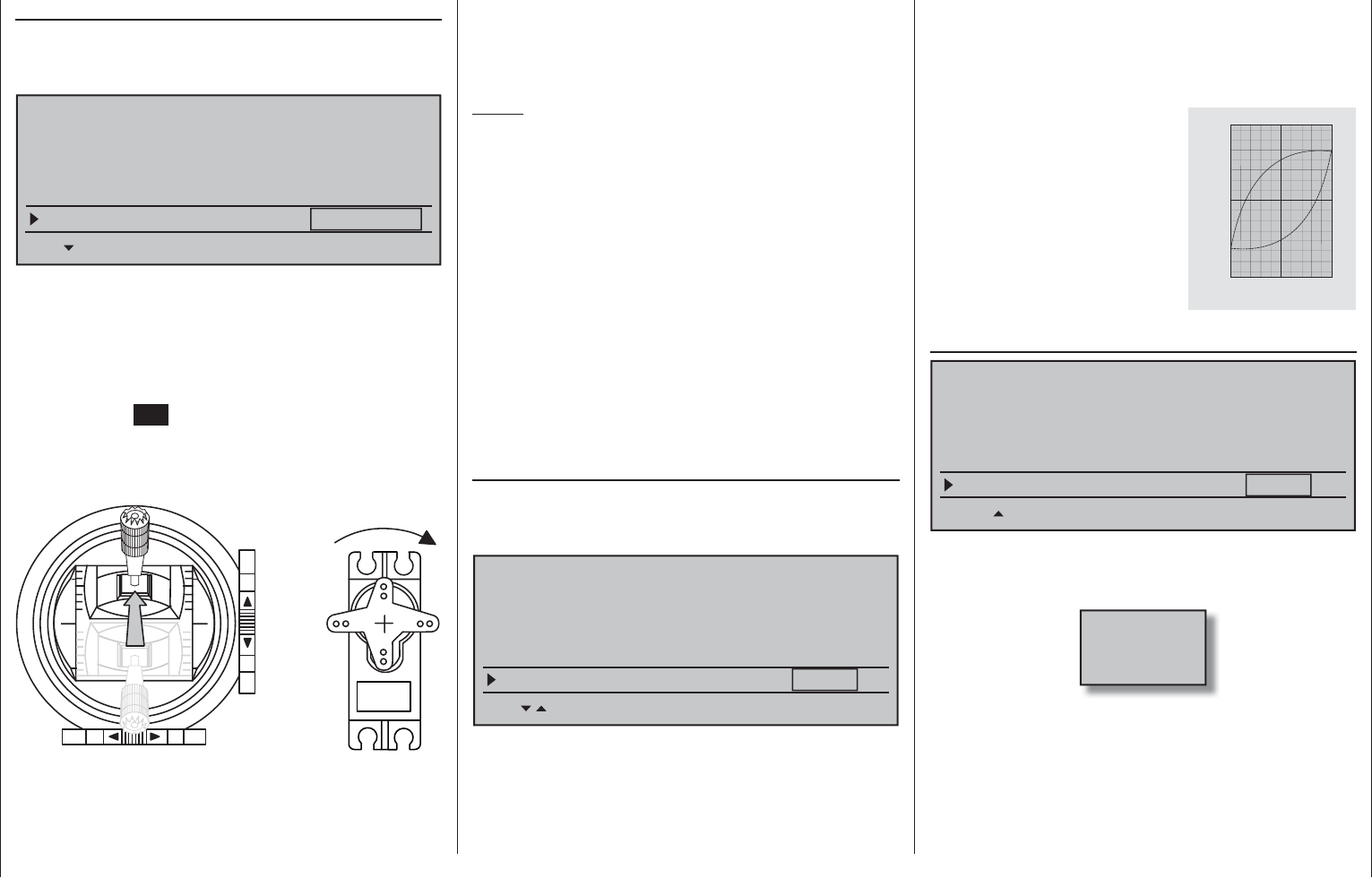
100 Detail program description - Helicopter type
Pitch min
After selecting the »Pitch min.« (pitch minimum) line
with the cd selection keys of the left or right touch
pad, the entry fi eld will be framed.
Linearis. swashpl.
Swashplate type
no
1 Servo
Rotor direction right
HELTYPE
Pitch min. rear
SEL
The »Pitch min.« line is used to adapt the actuation
direction of the throttle/pitch joystick to personal
control preferences. All other helicopter program
options which involve throttle and pitch functions, e.g.
throttle curve, idle trimming, tail rotor mixer, etc., are
dependent on this setting.
Tap the center SET key of the right touch pad. The
operating direction of the throttle/pitch joystick will be
displayed in inverse video. Now choose the variant
needed with the selection keys of the right touch pad.
Pitch
These mean:
"fwd.": minimum pitch setting when the pitch
joystick (C1) is "forward", i.e. away from
the pilot.
"rear": minimum pitch setting when the pitch
joystick (C1) is "back", i.e. toward the pilot.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will set this option to "rear".
Notes:
C1 trimming affects only the throttle servo. •
The so-called "throttle limit" is set by default, see •
text beginning page 117, by way of input "GL16" in
the »Control adjust« menu with which the throttle
servo can be limited, independent of the pitch
servo, in the full throttle direction.
Since a given user's models will typically be •
operated with the same pitch-min direction, this
specifi cation can be conveniently preselected
in the "transmitter-specifi c" »General basic
settings« menu, page 259. This specifi cation will
then be adopted automatically when a new model
memory is created in the »Helicopter type« menu
but, if desired, can be adapted on a model-specifi c
basis as described.
Expo throttle limit
After selecting the »Expo throttle lim.« line with the
cd selection keys of the left or right touch pad, the
entry fi eld will be framed.
Linearis. swashpl. no
Rotor direction right
HELTYPE
Pitch min. rear
SEL
Expo throttle lim. 0%
The "Throttle limit" function described in the »Control
adjust« menu, see page 117, can be assigned an
exponential characteristic curve.
A pitch progression rate between -100 % and +100 %
can be set with the selection keys.
For example, it is practical to have the throttle
limit – by default, the right-side proportional rotary
slider – also regulate the idle setting. Further details
about the throttle limit can be found in the text for the
»Control adjust« menu beginning page 112.
An example of two exponential
throttle limit curve characteristics
for 100 % servo travel.
continuous line:
negative exponential values;
dashed line:
positive exponential values
"
$
&
#
" $ &
Throttle limit warning
Rotor direction right
HELTYPE
Pitch min. rear
SEL
Expo throttle lim. 0%
Thr. limit warning –70%
If the carburetor is open too far when the transmitter
is switched on, an acoustic warning will be sounded
and a warning will be presented in the display.
Throttle
too
high!
The »Thr. limit warning« option permits the setting of
a variable for the critical position of the throttle servo
between 0 % and -100 %, above which the warning
will be issued. The reference point for this option is
the "fwd." or "rear" Pitch min. joystick position set in
this menu.
101
Detail program description - Helicopter type
A default value of -70 % control travel is provided.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
back to the default value.
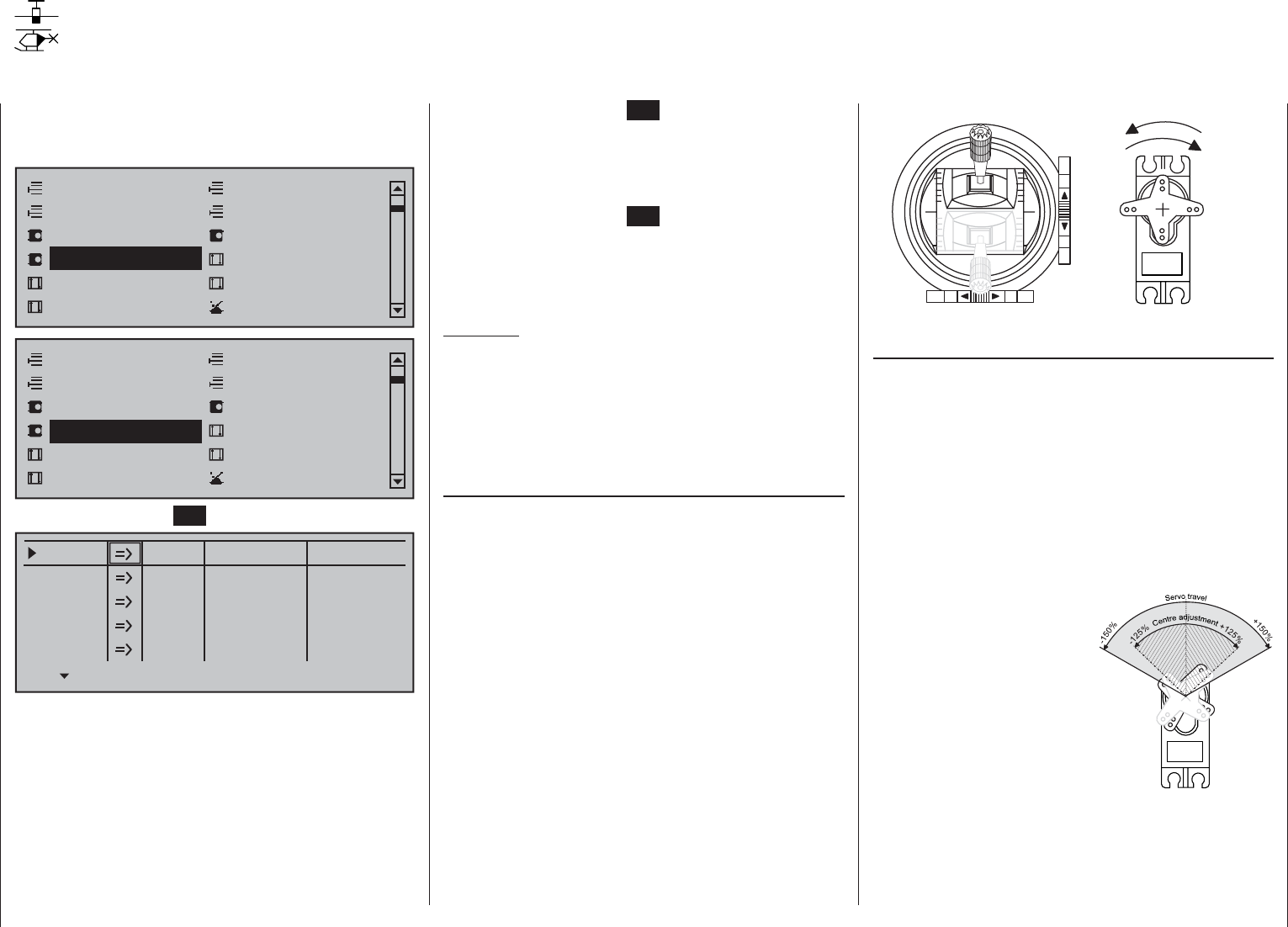
102 Detail program description - Servo adjustment
normal
reverse
d
normal
reversed
Column 3 "cent."
The servo midpoint (center) setting is intended for
adapting a non-standard servo (a servo whose
midpoint position does not correspond to a pulse
length of 1.5 ms, i.e. 1500 μs), as well as for minor
adjustments, e.g. for the fi ne tuning of the neutral
position of model rudders.
Independent of trim wheels and any mixer settings,
the neutral point can be shifted in a range of -125 bis
+125 % within a maximum servo travel of ± 150 %.
Independent of all other trim and mixer settings, this
setting is always based directly on the respective
servo.
Note that extreme offsets of
the neutral point can lead
to one-sided restrictions of
servo travel because overall
travel is limited by both
electronic and mechanical
aspects to a maximum of
±150 %.
A simultaneous tap on the
cd or ef keys of the right
touch pad (CLEAR) will reset the entry fi eld value
displayed in inverse video back to "0 %".
Briefl y tap the center 3. SET key of the right touch
pad. The corresponding input fi eld is shown
highlighted.
Use the selection keys of the right touch pad to set 4.
the desired value.
Briefl y tap the center 5. SET key of the right touch
pad to complete data entry.
A simultaneous tap on the 6. cd or ef keys of the
right touch pad (CLEAR) will any setting made
back to its respective default value.
Important:
Servo designation numerals are based on the
respective receiver outputs to which they are
connected, provided that no swapping of transmitter
and/or receiver outputs has been specifi ed. This
means that even a change of stick mode will not
effect the numbering of servos.
Column 2 "rev"
The direction in which a servo turns is adapted to
the practical reality of the given model so that the
assembly of control rods and joints do not need to
accommodate a specifi c servo rotation direction.
Rotation direction is symbolized by the "=>" and "<="
character combinations. Servo rotation direction must
be specifi ed before making settings for the options
which follow below.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset rotation direction
back to "=>".
This menu is used to set the direction, neutralization,
travel and limit parameters for a given selected servo
exclusively.
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Briefl y tap the center SET key of the right touch pad:
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
Begin setting servo parameters in the left column.
Basic procedure:
Select the desired servo, 1 … 16, with the 1. cd
selection keys of the left or right touch pad.
If necessary, use the 2. ef selection keys of the
left or right touch pad to reach the desired column
then, if desired, move the respective control out of
its midpoint to make an asymmetric setting.
Servo adjustment
Servo direction, midpoint, travel and limit
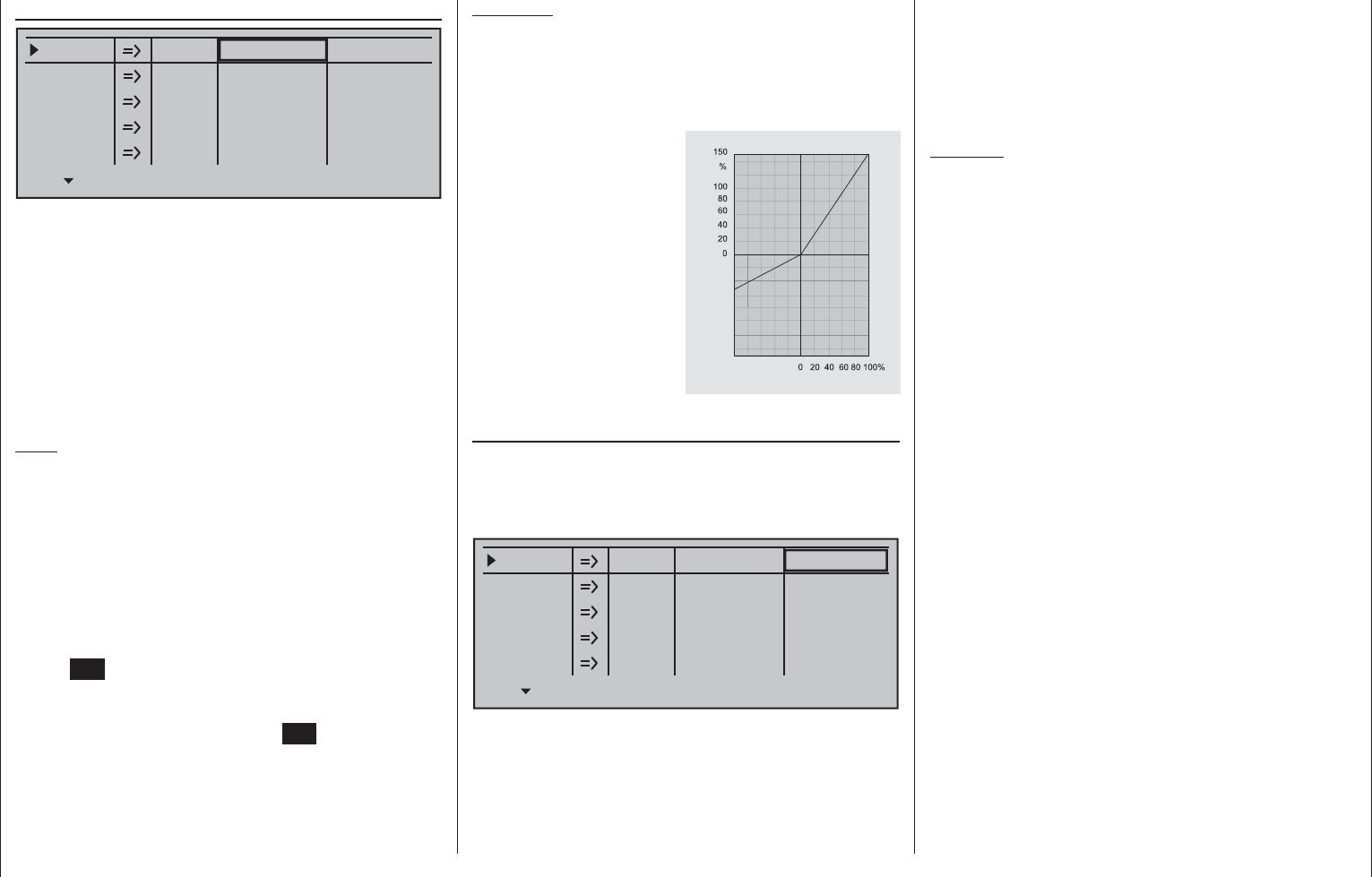
103
Detail program description - Servo adjustment
Column 4, "–travel+"
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
This column is used to set servo travel symmetrically
or asymmetrically for each side. The setting range is
0 … 150 % of normal servo travel. The values set are
based on the settings that have been made for the
"midpoint" column.
To create a symmetric travel path, i.e. control-side
independent travel, the respective control (joystick,
proportional control or switch) is to be put into a
position which covers travel to both sides of the
marked frame.
Note:
It may be necessary to fi rst assign a control attached
to one of the control channels 5 … 16. If necessary,
this is to be done in the »Control adjust« menu, see
page 108 or 112.
To set asymmetric travel, the respective control
(joystick, proportional control or switch) is to be
moved to the side on which the marked frame only
includes the value to be changed.
The value setting is activated with a brief tap on the
center SET key of the right touch pad. The value fi eld
is shown highlighted. Values can be changed with
the selection keys of the right touch pad. Complete
the entry with a tap on the center SET key of the right
touch pad.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the changed
parameter displayed in inverse video back to "100 %".
Important:
In contrast to settings made with the »Control
adjust« menu, all settings made in this menu affect
exclusively the respective servo, independent of
how the control signal for this servo is produced, i.e.
directly by a joystick or by way of any mixer functions.
The adjacent fi gure shows
and example of a side-
dependent servo setting,
-50 % and +150 %. Transmitter control travel
Servo travel
Column 5 "–limit+"
The "– limit +" column is reached by moving the
marker frame, with the f selection keys of the left or
right touch pad, to the right beyond the "– travel +"
column.
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
To create a symmetric limit, i.e. control-side
independent limit, the respective control (joystick,
proportional control or switch) is to be put into a position
such that the marker frame covers both sides of the
travel setting.
To set asymmetric travel, the respective control
(joystick, proportional control or switch) is to be
moved to the side where it is to be set such that the
marker frame only includes the value to be changed.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the entry fi eld
value displayed in inverse video back to "0 %".
Example:
A servo is controlled separately by two controls over
a mixer and but, for model-specifi c reasons, must
only be operated over a servo travel path of 100 %
because, for example, the rudder would mechanically
collide with the elevator if moved more than 100 %.
As long as only one control is used at a time, this is
no problem. But this does become a problem when
the signals are summed by the simultaneous use of
both controls (e.g. aileron and rudder) to total travel
in excess of 100 %. The linkage and servos could be
strained excessively …
To prevent this, the travel should certainly be limited
by way of an individual travel limit. In the case of the
rudder used in the example, this would be a value
slightly less than 100 % – because it is assumed the
rudder would collide at 100 %.
104 Detail program description - Joystick setting | Winged models
Both joysticks are equipped for digital trimming.
When turning trim wheels, every "click" will shift the
joystick's neutral position by a certain value.
The current position is shown on the screen and
the adjustment is also made "audible" with acoustic
tones. This makes fi nding the mid-point during fl ight
easy, without looking at the screen. If the mid-point is
overrun, a brief motion pause will be inserted.
Current trim values are automatically stored when a
model memory change is made.
Furthermore – except for global control
function trimming of the throttle/brake joystick,
commonly referred to as control function "C1"
(channel 1) – digital trimming is effective within a
model memory location selectively as either a global
parameter (i.e. consistent in all fl ight phases) or as
a fl ight-phase specifi c parameter. This specifi cation
as "global" or "phase" is made in the »Stick mode«
menu described here, whereas software-side C1
trimming is generally set to "global", i.e. independent
of fl ight phases.
This setting is visualized in the base screen by a
"shadow" on trim bars:
shadow present = global,•
no shadow = fl ight phase dependent.•
In two corresponding fi gures below, elevator
trim – shown in the middle text column with its default
setting "global" – then in the right column set to fl ight
"Phase" specifi c.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
RX VOLT:4.9V
Joystick setting
Setting stick mode 1 through 4
Use the selection keys on the left or right touch pad
to scroll to the »Stick mode« option in the multi-
function menu:
Model select
Servo adjustmentStick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Open this menu option with a tap on the center SET
key of the right touch pad.
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
This menu, adapted for winged models, permits the
four digital trim wheels to be set and their trim effects
to be assigned, selectively, as a "deceleration" factor
to control functions 1 through 4.
The desired line can be reached by using the
selection keys of the left or right touch pad. Once the
appropriate function fi eld has been selected and then
the center SET key of the right touch pad is touched
briefl y, the fi eld will appear in inverse video and the
desired setting can be made with the selection keys
of the right touch pad.
Trim
Except for "Channel 1", this column can be used to
switchover trim effect from "GL(obal)" to "PH(ase)"
and vice versa.
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
Phase 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
"Global": The position of the respective trim wheel
is effective "globally" for all fl ight-phases
programmed for the given model, page 140.
"Phase": The position of the respective trim wheel
is effective on a phase-specifi c basis and
will be automatically stored upon change
of fl ight phase so that the setting is again
available following a return to this fl ight
phase.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the option back to
"Global".
Trim steps
The four digital trim wheels shift the neutral point of
the respective joystick in the given direction by one
adjustable increment, as set here, for each "click".
This is where the increment size (step) can be
adjusted for a given direction, whereby maximum trim
travel, independent of the selected number of trim
steps, is always about ±30 % of control travel.
After selecting the "Tr. step" column (trim steps) and
the desired trim control with the cd selection keys
of the left or right touch pad, the corresponding entry
fi eld will be framed.
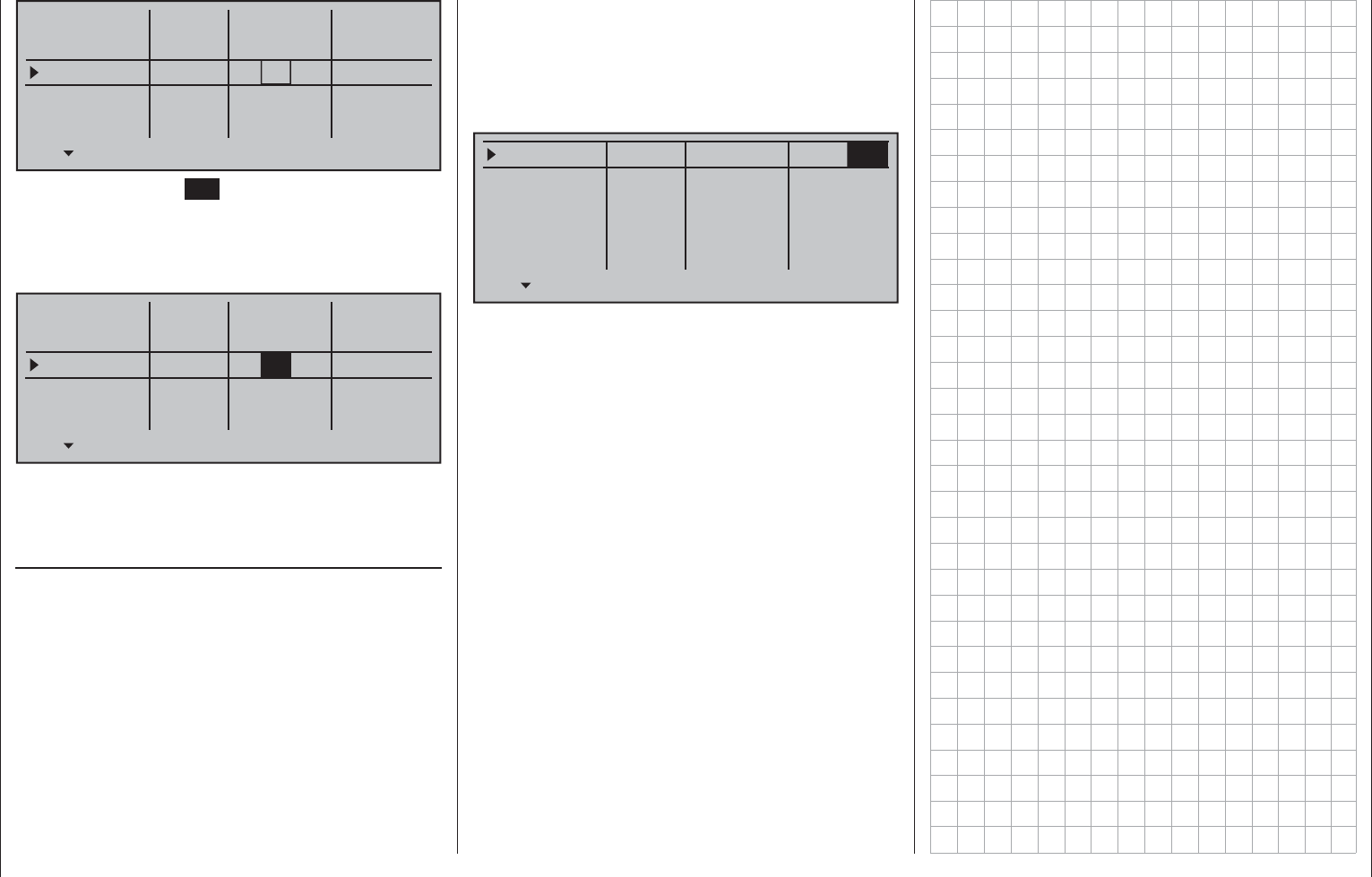
105
Detail program description - Joystick setting | Winged models
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
Phase 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
Briefl y tap the center SET key of the right touch pad.
The current setting will be displayed in inverse video.
Now select the desired value, between 1 and 10,
with the selection keys of the right touch pad. For
example:
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
Phase 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
8
4
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset any change made
to the active fi eld back to "4".
Time
The rate of control signal change with respect to the
speed of joystick motion can be infl uenced by the
entries made in the "– time +" column. Each joystick
movement direction, i.e. joystick control channels
1 through 4, can be set individually. This means
that respective servos will then follow rapid control
position changes only at an accordingly delayed
rate. This time delay has a direct effect on the control
function and therefore also any servos controlled by
this function.
The time can be programmed symmetrically for both
sides or separate for each control direction. This
setting has a programmable range of 0 s to 9.9 s. In
the case of side-separate settings, the joystick is to
be moved to the respective side so that the inverse
video fi eld will switch between sides to the one for
which the change is to be made – for example, even
to ensure gentle rev-up of the propulsion motor
despite a (too) fast motion of the C1 stick.
global
Channel 1
Aileron
Elevator
Rudder
Tri m
1.1s
Tr. step – time +
global 0.0s
Phase 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
8
4
On the other hand, for reasons of safety, the motor
cut-off should always be "immediate".
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset any change made
to the active fi eld back to "0.0 s".
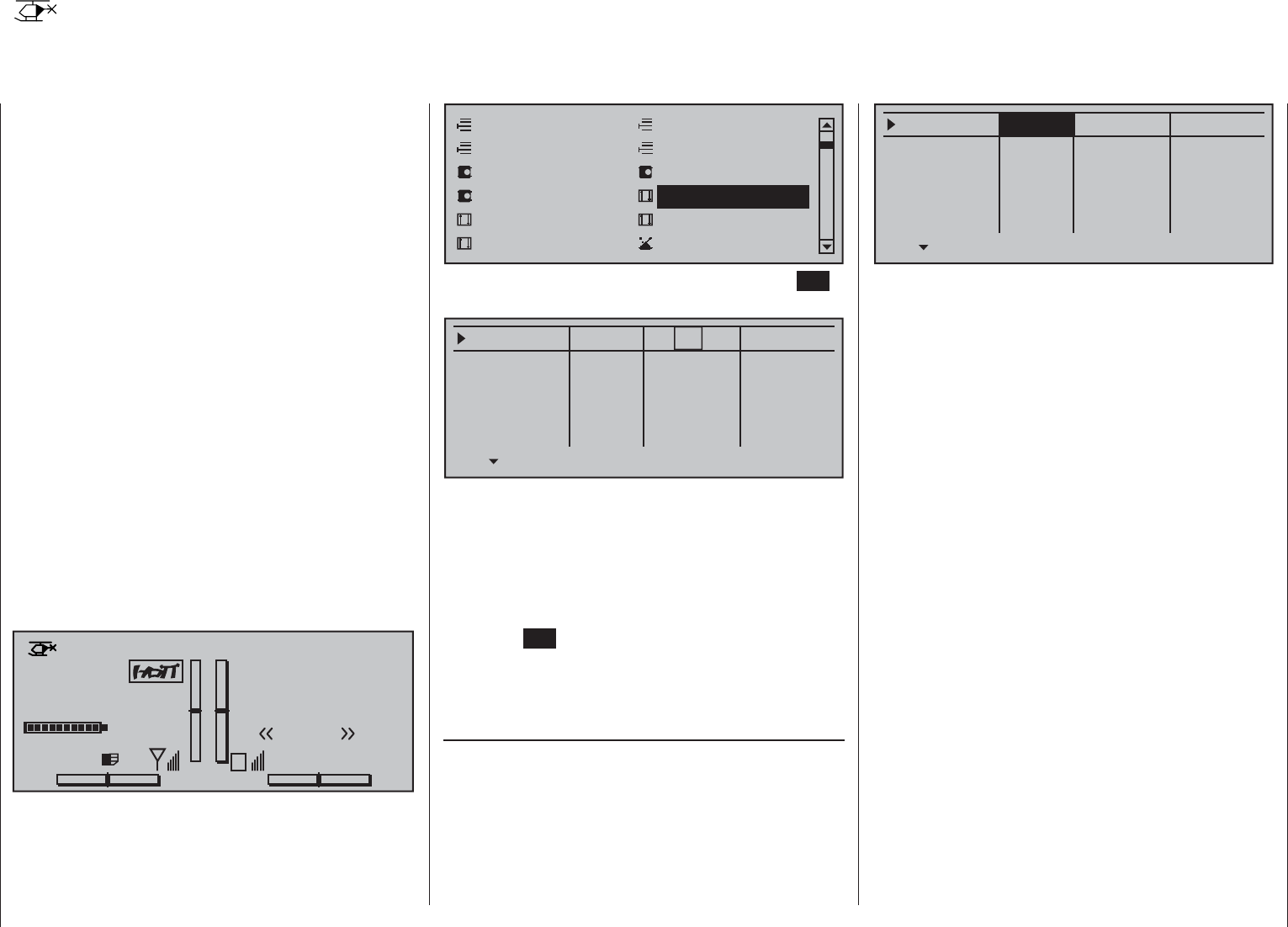
106 Detail program description - Joystick setting | Helicopters
Both joysticks are equipped for digital trimming.
When turning trim wheels, every "click" will shift the
joystick's neutral position by a certain value.
The current position is shown on the screen and
the adjustment is also made "audible" with acoustic
tones. This makes fi nding the mid-point during fl ight
easy, without looking at the screen. If the mid-point is
overrun, a brief motion pause will be inserted.
Current trim values are automatically stored when a
model memory change is made.
Furthermore – except for trimming the throttle/brake
joystick – digital trimming is effective selectively either
as a global parameter, i.e. consistent in all fl ight
phases, or as a fl ight-phase specifi c parameter. This
specifi cation as "Global" or "Phase" is made in the
»Stick mode« menu described here, whereas throttle
trimming is always made "global" by software, i.e.
independent of fl ight phases.
This setting is visualized in the base screen by a
"shadow" on trim bars:
shadow present = global,•
no shadow = fl ight phase dependent.•
In the following fi gure, pitch-axis trimming is used as
an example of fl ight-phase dependence – presented
at the left in its default Mode 1.
0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
H-J Sandbrunner
Normal
#02
Starlet
RX VOLT:4.9V
Use the selection keys on the left or right touch pad
to scroll to the »Stick mode« option in the multi-
function menu:
Joystick setting
Setting stick mode 1 through 4
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Open this menu option with a tap on the center SET
key of the right touch pad.
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
This menu, adapted for helicopter models, permits
the four digital trim wheels to be set and their trim
effects to be assigned, selectively, as a "deceleration"
factor to control functions 1 through 4.
The desired line can be reached by using the
selection keys of the left or right touch pad. Once the
appropriate function fi eld has been selected and then
the center SET key of the right touch pad is touched
briefl y, the fi eld will appear in inverse video and the
desired setting can be made with the selection keys
of the right touch pad.
Trim
These setting variations are confi gured to
accommodate the needs of helicopter models, which
is why the following alternative options are available
for the "Thr." line:
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
"Thr trim": (throttle limit)
C1 trimming operates as idle trimming
when the "throttle limit" function
regulates the motor for starting, see
»Control adjust« menu, page 117.
"Throttle AR": (Throttle Autorotation)
C1 trim operates as idle trim exclusively
in the «Autorot» fl ight phase.
This makes it possible to assign a
principle (fi xed) preset AR throttle
position in the »Helicopter mixer«
menu, page 176, e.g. during
autorotation practice with the trim
wheel "varied".
A simultaneous tap on the cd or ef
keys of the right touch pad (CLEAR)
will reset the option back to "Thr trim".
"Pitch": Due to internal coupling, C1 trimming
acts equally on all pitch servos available
without infl uencing the throttle servo.
On the other hand, the trim effects of respective
digital trim controls for the lines "Roll", "Pitch ax"
and "Tail rot." can be switched over from "Gobal" to
"Phase" and vice versa.
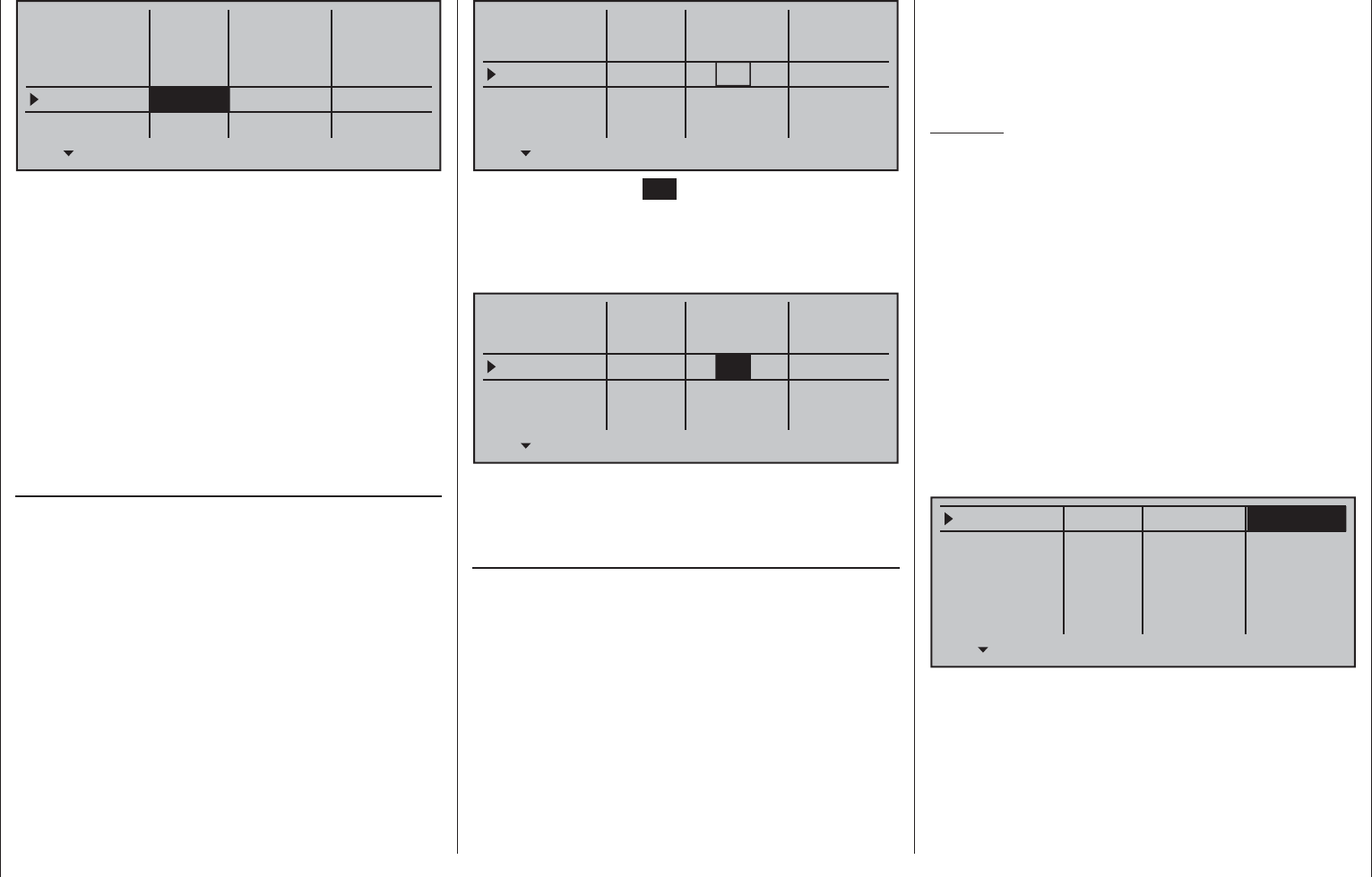
107
Detail program description - Joystick setting | Helicopters
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
Phase 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
"Global": The position of the respective trim
wheel is effective "globally" for all fl ight-
phases programmed for the given model,
page 140.
"Phase": The position of the respective trim wheel
is effective on a phase-specifi c basis and
will be automatically stored upon change
of fl ight phase so that the setting is again
available following a return to this fl ight
phase.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the option back to
"Global".
Trim steps
The four digital trim wheels shift the neutral point of
the respective joystick in the given direction by one
adjustable increment, as set here, for each "click".
This is where the increment size (step) can be
adjusted for a given direction, whereby maximum trim
travel, independent of the selected number of trim
steps, is always about ±30 % of control travel.
After selecting the "Tr. step" column and the desired
trim control with the cd selection keys of the left or
right touch pad, the corresponding entry fi eld will be
framed.
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
Phase 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
Briefl y tap the center SET key of the right touch pad.
The current setting will be displayed in inverse video.
Now select the desired value, between 0 and 10,
with the selection keys of the right touch pad. For
example:
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
Phase 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
0
4
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset any change made
to the active fi eld back to "4".
Time
The rate of control signal change with respect to the
speed of joystick motion can be infl uenced by the
entries made in the "– time +" column. Each joystick
movement direction, i.e. joystick control channels
1 through 4, can be set individually. This means
that respective servos will then follow rapid control
position changes only at an accordingly delayed
rate. This time delay has a direct effect on the control
signal and therefore also commensurately on any
servos controlled by the effected controls.
The time can be programmed symmetrically for both
sides or separate for each control direction. This
setting has a programmable range of 0 s to 9.9 s. In
this latter case, the given stick control is to be moved
to the respective side so that the inverse video fi eld
will switch between sides to the one for which the
change is to be made.
Example:
All three servos are to be actuated for swashplate
pitch control, e g. a "Pitch" control movement for a
"3Sv (2Roll)" swashplate. However, travel for the
middle servo is greater than that of the other two
servos on the shorter lever.
A rash "Pitch" control movement would not operate
the nick servo in the middle as quickly as it would
the two roll servos on the shorter lever. This would
cause a momentary control motion in the "nick"
direction. However, if response time for the "pitch"
control function were to be reduced by at least the
positioning time for the servo in the middle then all
three servos would reach their proper positions at
the same time. The necessary delay times typically
amount to only a few tenths of a second. For
example:
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
4.4s
Tr. step – time +
global 0.0s
global 0.0s
Phase 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
0
4
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset any change made
to the active fi eld back to "0.0 s".
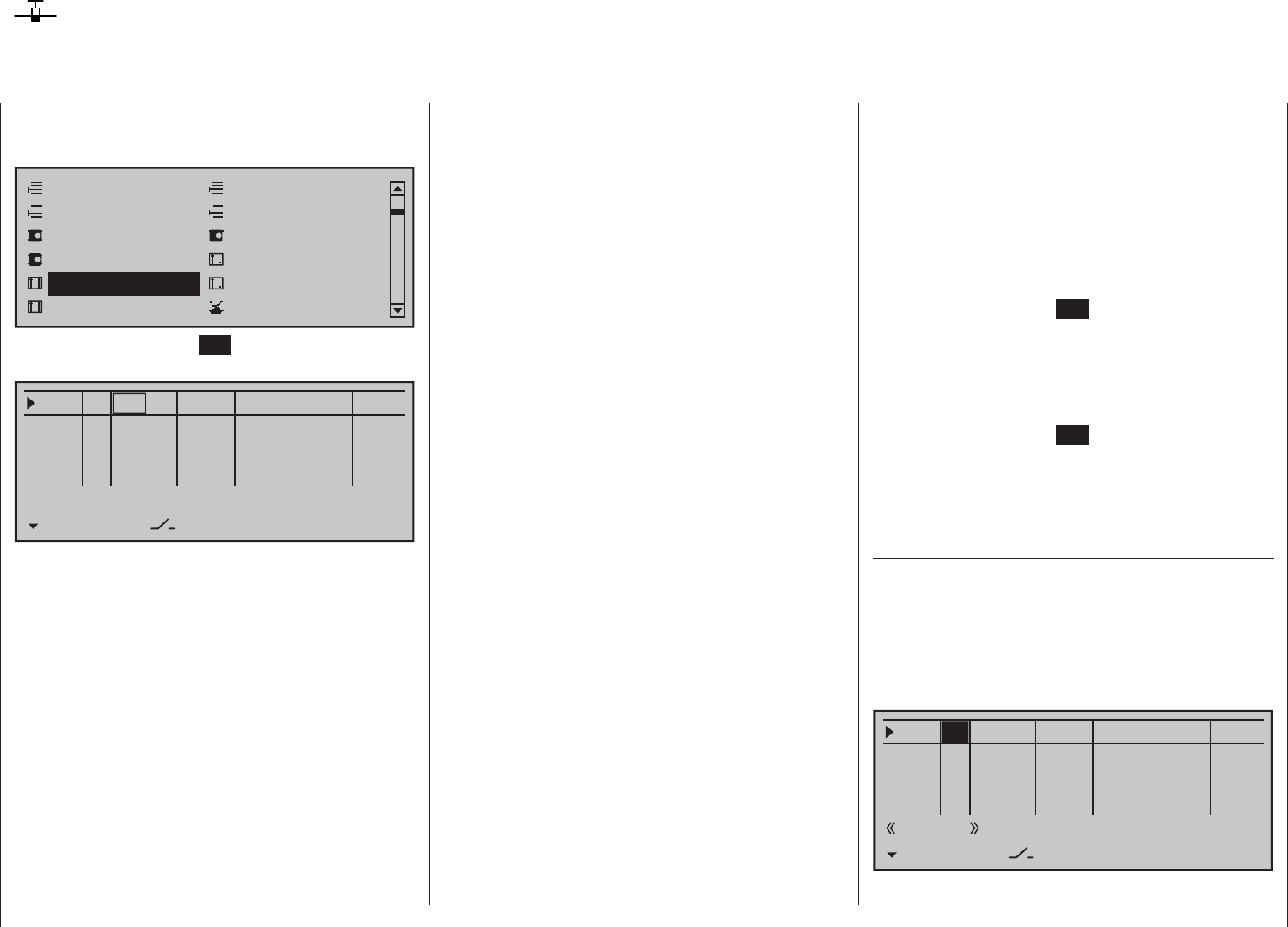
108 Detail program description - Control adjust | Winged models
Control adjust
Basic procedure for transmitter control and switch assignment
Use the selection keys on the left or right touch pad
to scroll to the »Control adjust« option in the multi-
function menu:
Model select
Servo adjustmentStick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
0% +100%I5
I6
I7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
In addition to the two joysticks for control functions
1 to 4 and their trim wheels, the mc-20 HoTT
transmitter also has other controls as standard
equipment:
two 3-way switches•
two 2-way switches•
two unlockable 2-way switches•
two self-restoring 2-way switches•
three proportional sliders on the middle console, •
designated SR 1 … 3 in the menu
two side-mounted "rotary sliders", designated SD1 •
and 2 in the menu
two depressible "rotary controls", designated DG2 •
and 4 in the menu
three roller-shaped rotary controls, designated as •
DG1, DG3 and DG5 in the menu
In contrast to the two joysticks which, when initialized
for a new model memory as a "Winged aircraft"
model type will already be confi gured to operate the
servos connected to receiver outputs 1 … 4, these
"other" operating elements initially remain inactive.
Thus, at least in the system's delivered state – as
already mentioned on page 68 – or even after
initialization of a new model memory with an "aircraft"
model type and its "binding" to the receiver intended
for installation, only those servos connected to
the two joysticks by way of receiver outputs 1 … 4
are able to be operated; any servos which may be
connected to receiver outputs 5 … 16 will initially
remain inactive in their middle positions.
While this may appear a bit awkward at fi rst glance
… this is the only way to ensure a completely
free selection from among "additional" operating
elements while, at the same time, not requiring the
"deactivation" of unused operating elements. This is
because
the only way to ensure an unused operating
element can have no effect on the model, even if
operated by accident, is to make it inactive, i.e.
not assigned to any function.
All of the aforementioned operating elements can be
freely assigned in this »Control adjust« menu, see
page 54, to any function input just to accommodate
personal requirements. Equally, this also means
that each of these operating elements can also be
assigned to to multiple functions at the same time,
as needed. For example: the exact same toggle
switch assigned to an input in this menu can, at the
same time, also have an assignment in the »Timers
(general)« menu as an "On/Off" switch, etc.
Furthermore, all inputs can be selectively set to global
or fl ight-phase specifi c operation if they have been
defi ned for fl ight-phases in the »Phase settings«
menu, page 142, and »Phase assignment« menu,
page 148. The names assigned to given fl ight phases
then appear in the second-from-the-bottom display
line, e.g. «Normal».
Basic procedure
Use the 1. cd selection keys of the left or right
touch pad to select the desired input, "I5 … I16".
If necessary, use the 2. ef selection keys of the
left or right touch pad to change to the desired
column.
Briefl y tap the center 3. SET key of the right touch
pad. The corresponding input fi eld is shown
highlighted.
Operate the chosen operating element or set the 4.
desired value with the selection keys of the right
touch pad.
Briefl y tap the center 5. SET key of the right touch
pad to complete data entry.
A simultaneous tap on the 6. cd or ef keys of the
right touch pad (CLEAR) will any setting made
back to its respective default value.
Column 2, "TYP"
Similar to the previously described »Stick mode«
menu, this column can be used to defi ne whether
further settings for the given input are to have a
"GL(obal)" or a "PH(ase-specifi c)" effect. Do this by
using the selection keys of the left or right touch pad
to select the desired input 5 through 16 in the column
labeled "TYP".
0% +100%I5
I6
I7
EI
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
109
Detail program description - Control adjust | Winged models
"GL": The settings for the input in question affect
all fl ight phases programmed (if any) and
thus act "globally" on the model memory in
question.
"PH": The settings for this input take effect per
fl ight phase and must therefore be confi gured
separately for each fl ight phase.
Note:
See page 140 for more information about fl ight
phases.
Column 3, "Transmitter control/switch
assignment"
Select an input, 5 through 16, with the cd selection
keys of the left or right touch pad.
Transmitter control assignment
Use the selection keys to move into the column
labeled SEL. After completing the activation of
transmitter control assignment by tapping the center
SET key of the right touch pad , the message shown
below will appear in the display:
0% +100%I5
I6
I7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Move desired
control adj.
Now actuate the desired transmitter control: The
notice window will disappear and the designation
of the selected transmitter control will appear in the
transmitter control assignment window.
0% +100%I5
I6
I7
EI
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
S11 ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Alternatively, the center SET key of the right touch
pad can be tapped for a second time while the notice
window, see above, is still on the display:
0% +100%I5
I6
I7
EI
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Now use the selection keys of the left or right touch pad
to select the desired input out of the list if the respective
plug-in location on the transmitter board is occupied or
switch the entry to "fr" if the input is to be decoupled
from a transmitter control. In this case, or even when a
non-existent transmitter control is assigned, the servo
corresponding to this input will be in its neutral position
and can only be controlled via mixers.
0% +100%I5
I6
I7
EI
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
S11 ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Switch assignment
If the input is to be actuated like a switch module, the
input can alternatively be assigned to a switch.
A simple switch can be used to switch back and forth
between two limit values, for example motor On/Off.
A 2-way momentary or toggle switch, see appendix,
achieves the same effect as a 2-channel switch
module, for example motor Off/Half/Full.
Use the selection keys to move into the column
above the switch symbol label. Briefl y tap the
center SET key of the right touch pad to activate the
option for assigning a switch.
0% +100%I5
I6
I7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
---
fr
fr
fr
---
---
---
Offset
GL fr
Normal
Move desired switch
to ON position
(ext. switch: ENTER)
Actuate the desired toggle switch from its "OFF"
to its "ON" position or, for a 3-way switch,
beginning from its middle position, assign a switch
direction – preferably the "second" direction. This
means, if a function is to be switched on by moving
the switch forward two positions, i.e. away from the
pilot, then begin from the switch's middle position and
move the switch away from the pilot.
The display will then present the switch number
together with a symbol indicating the given switch
direction. At the same time, the column label in the
footer line will change from SEL into another switch
symbol.
110 Detail program description - Control adjust | Winged models
0% +100%I5
I6
I7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL ---
Normal
7
Now put the 3-way switch back into its middle position.
Move the marker frame as necessary to the left into
the column labeled with the new switch symbol, briefl y
tap on the center SET key of the right touch pad then
assign the switch's other switch direction by once
again starting from the middle position but this time
move the switch in the other direction.
The display will now present the given switch number
together with a symbol indicating the given switch
direction.
0% +100%I5
I6
I7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Erasing a transmitter control or switch
assignment
A simultaneous tap on the cd or ef keys of
the right touch pad (CLEAR) while on an input
line with an active transmitter control or switch
assignment – see above fi gures – will reset the given
input back to "fr" and "---".
Tips:
When assigning switches, pay attention to the •
desired switching direction and also that all
unused inputs remain "free" or are again reset to
"free". This is necessary to ensure that inadvertent
actuations of these unused controls cannot cause
malfunctions.
The travel setting described below allows the •
appropriate end state to be established for an
assigned switch.
Column 4, "Offset"
The control center for the given control, i.e. its zero
point, can be changed in this column. The adjustment
range lies between -125 % and +125 %.
0% +100%I5
I6
I7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the entry fi eld
value displayed in inverse video back to "0 %".
Column 5, "– travel +"
This column is used to set servo travel symmetrically
or asymmetrically for each side. The setting range is
±125 % of normal servo travel.
Select an input, 5 through 16, with the cd selection
keys of the left or right touch pad.
To set symmetric travel, i.e. control-side independent
travel, the respective operating element (transmitter
control or switch) is to be put into a position in which
the travel setting will be covered on both sides by the
marker frame.
0% +100%E5
E6
E7
E8
Typ
+100%
0.0 0.0
– Weg + –Zeit+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
To set asymmetric travel, the respective operating
element (transmitter control or switch) is to be moved
to the side to be set such that the marker frame only
includes the value to be changed.
0% +100%I5
I6
I7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
The value setting is activated by briefl y touching the
center SET key of the right touch pad. The value
fi eld/s will be displayed in inverse video. Values can be
changed with the selection keys of the right touch pad.
0% +111%I5
I6
I7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8

111
Detail program description - Control adjust | Winged models
0% +88%I5
I6
I7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Another brief tap on the center SET key of the right
touch pad will complete the entry.
Negative and positive parameter values are possible
in order to appropriately adapt the control's direction
or effect.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the changed
parameter displayed in inverse video back to
"+100 %".
Important:
In contrast to servo travel settings, changing the
control travel setting affects all "downstream" mixer
and coupling inputs, i.e. any and all servos actuated
by the given transmitter control.
Column 6, "–time+"
Each of the function inputs 5 … 16 can be assigned
a symmetrical or asymmetric time delay of between 0
and 9.9 s.
Move the marker frame to the right beyond the
column labeled "– travel +" with the f selection key
of the left or right touch pad.
To set a symmetric, i.e. control-side independent,
time delay, the respective operating element
(transmitter control or switch) is to be put into a
position in which the time setting is covered on both
sides by the marker frame.
0% +111%I5
I6
I7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
To set an asymmetric time delay, move the given
transmitter control (proportional control or switch)
as necessary to the side to be set such that only the
value to be changed is covered.
0% +111%I5
I6
I7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Briefl y tap the center SET key of the right touch
pad to activate value setting. The value fi eld will be
displayed in inverse video. Use the selection keys of
the right touch pad to change the value in a range of
0.0 to 9.9 s.
Another brief tap on the center SET key of the right
touch pad will complete the entry.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the changed
parameter displayed in inverse video back to 0.0.
112 Detail program description - Control adjust | Helicopters
Control adjust
Basic procedure for transmitter control and switch assignment
Use the selection keys on the left or right touch pad
to scroll to the »Control adjust« option in the multi-
function menu:
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
0% +100%I5
Thr6
Gyr7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
I15 GL 0% +100%
+100%
0.0 0.0
fr ---
…
…
…
…
…
…
…
…
…
Tl16 GL 0% +100%
+100%
0.0 0.0
Lv1 ---
In addition to the two joysticks for control functions
1 to 4 and their trim wheels, the mc-20 HoTT
transmitter also has other controls as standard
equipment:
two 3-way switches•
two 2-way switches•
two unlockable 2-way switches•
two self-restoring 2-way switches•
three proportional sliders on the middle console, •
designated SR 1 … 3 in the menu
two side-mounted "rotary sliders", designated SD1 •
and 2 in the menu
two depressible "rotary controls", designated DG2 •
and 4 in the menu
three roller-shaped rotary controls, designated as •
DG1, DG3 and DG5 in the menu
In contrast to the two joysticks which, even for
a newly initialized "Helicopter" model type will
automatically use the servos attached to receiver
outputs 1 … 4 and 6, the aforementioned "other"
operating elements – except for the standard
assignment of servo 6 to the right-side proportional
slider, designated in this menu as SD1 (throttle
limiter) – are initially inactive.
One of the effects of this is that (as already
mentioned on page 68) with a factory-fresh
system – as with a newly initialized model memory
for a "Helicopter" model type following its "binding" to
the intended receiver – only those servos connected
to receiver outputs 1 … 4 and – depending on the
position of the throttle limiter – servo 6 can be moved
by the two joysticks. Any servos connected to plug-in
locations 5 and 7 through 15, on the other hand, will
simply remain at their center positions.
While this may appear a bit awkward at fi rst glance
… this is the only way to ensure a completely
free selection from among "additional" operating
elements while, at the same time, not requiring the
"deactivation" of unused operating elements. This is
because
the only way to ensure an unused operating
element can have no effect on the model, even if
operated by accident, is to make it inactive, i.e.
not assigned to any function.
All of the aforementioned operating elements can be
freely assigned in this »Control adjust« menu, see
page 54, to any function input just to accommodate
personal requirements. Equally, this also means
that each of these operating elements can also be
assigned to to multiple functions at the same time,
as needed. For example: the exact same toggle
switch assigned to an input in this menu can, at the
same time, also have an assignment in the »Timers
(general)« menu as an "On/Off" switch, etc.
Furthermore, all inputs can be selectively set to global
or fl ight-phase specifi c operation if they have been
defi ned for fl ight-phases in the »Phase settings«
menu, page 142, and »Phase assignment« menu,
page 148. The names assigned to given fl ight phases
then appear in the second-from-the-bottom display
line, e.g. «Normal».
Note:
As a rule, input 6 must kept "free" for a helicopter
model. On this, see "Throttle" on the next double
page.
Basic procedure
Use the 1. cd selection keys of the left or right
touch pad to select the desired input: I5, Thr6,
Gyr7, I8 … 15 or Tl16.
If necessary, use the 2. ef selection keys of the left
or right touch pad to select the desired column.
Briefl y tap the center 3. SET key of the right touch
pad. The corresponding input fi eld is shown
highlighted.
Operate the chosen operating element or set the 4.
desired value with the selection keys of the right
touch pad.
Briefl y tap the center 5. SET key of the right touch
pad to complete data entry.
A simultaneous tap on the 6. cd or ef keys of the
right touch pad (CLEAR) will any setting made
back to its respective default value.
113
Detail program description - Control adjust | Helicopters
in its neutral position and can only be controlled via
mixers.
0% +100%I5
Thr6
Gyr7
E8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
S11 ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Switch assignment
If the input is to be actuated like a switch module, the
input can alternatively be assigned to a switch.
A simple switch can be used to switch back and forth
between two limit values, for example motor On/Off.
A 2-way momentary or toggle switch, see appendix,
achieves the same effect as a 2-channel switch
module, for example motor Off/Half/Full.
Use the selection keys to move into the column
above the switch symbol label. Briefl y tap the
center SET key of the right touch pad to activate the
option for assigning a switch.
0% +100%I5
Thr6
Gyr7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
---
fr
fr
fr
---
---
---
Offset
GL fr
Normal
Move desired switch
to ON position
(ext. switch: ENTER)
Actuate the desired toggle switch from its "OFF"
to its "ON" position or, for a 3-way switch,
beginning from its middle position, assign a switch
direction – preferably the "second" direction. This
means, if a function is to be switched on by moving
the switch forward two positions, i.e. away from the
pilot, then begin from the switch's middle position and
move the switch away from the pilot.
Column 2, "typ"
Similar to the previously described »Stick mode«
menu, this column can be used to defi ne whether
further settings for the given input are to have a
"GL(obal)" or a "PH(ase-specifi c)" effect. Do this by
using the selection keys of the left or right touch pad
to select the desired input 5 through 16 in the column
labeled "TYP".
0% +100%I5
Thr6
Gyr7
E8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
"GL": The settings for the input in question affect
all fl ight phases programmed (if any) and
thus act "globally" on the model memory in
question.
"PH": The settings for this input take effect per
fl ight phase and must therefore be confi gured
separately for each fl ight phase.
Note:
See page 142 for more information about fl ight
phases.
Column 3, "Transmitter control/switch
assignment"
Using the cd selection keys of the left or right touch
pad to select an input: I5, Thr6, Gyr7, I8 … 15 or
Tl16.
Transmitter control assignment
Use the selection keys to move into the column
labeled SEL. After completing the activation of
transmitter control assignment by tapping the center
SET key of the right touch pad , the message shown
below will appear in the display:
0% +100%I5
Thr6
Gyr7
I8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Move desired
control adj.
Now actuate the desired transmitter control: The
notice window will disappear and the designation
of the selected transmitter control will appear in the
transmitter control assignment window.
0% +100%I5
Thr6
Gyr7
E8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
S11 ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Alternatively, the center SET key of the right touch
pad can be tapped for a second time while the notice
window, see above, is still on the display:
0% +100%I5
Thr6
Gyr7
E8
TYP SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
Offset
GL
Normal
Now use the selection keys of the left or right touch
pad to select the desired input out of the list if the
respective plug-in location on the transmitter board
is occupied or switch the entry to "fr" if the input is to
be decoupled from a transmitter control. In this case,
or even when a non-existent transmitter control is
assigned, the servo corresponding to this input will be
114 Detail program description - Control adjust | Helicopters
The display will then present the switch number
together with a symbol indicating the given switch
direction. At the same time, the column label in the
footer line will change from SEL into another switch
symbol.
0% +100%I5
Thr6
Gyr7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL ---
Normal
7
Now put the 3-way switch back into its middle position.
Move the marker frame as necessary to the left into
the column labeled with the new switch symbol, briefl y
tap on the center SET key of the right touch pad then
assign the switch's other switch direction by once
again starting from the middle position but this time
move the switch in the other direction.
The display will now present the given switch number
together with a symbol indicating the given switch
direction.
0% +100%I5
Thr6
Gyr7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) while on an input line with
an active transmitter switch assignment – see above
fi gure – will reset the input back to "fr" and "---".
Tips:
When assigning switches, pay attention to the •
desired switching direction and also that all
unused inputs remain "free" or are again reset to
"free". This is necessary to ensure that inadvertent
actuations of these unused controls cannot cause
malfunctions.
The travel setting described below allows the •
appropriate end state to be established for an
assigned switch.
Column 4, "offset"
The control center for the given control, i.e. its zero
point, can be changed in this column. The adjustment
range lies between -125 % and +125 %.
0% +100%I5
Thr6
Gyr7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the entry fi eld
value displayed in inverse video back to "0 %".
Column 5, "–travel+"
This column is used to set servo travel symmetrically
or asymmetrically for each side. The setting range is
±125 % of normal servo travel.
Use the cd selection keys of the left or right touch
pad to select an input: I5, Thr6, Gyr7, I8 … 15 or
Tl16.
To set symmetric travel, i.e. control-side independent,
put the respective operating element (proportional
control or switch) into a position where the marker
frame encloses both sides of the travel setting.
0% +88%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
To set asymmetric travel, the respective control
(proportional control or switch) is to be moved to
the side to be set such that the marker frame only
encloses the value to be changed.
0% +100%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Briefl y tap the center SET key of the right touch pad
to activate value setting. The value fi eld is shown
highlighted. Values can be changed with the selection
keys of the right touch pad.
0% +111%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
115
Detail program description - Control adjust | Helicopters
Thr6
0% +88%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
In principle, the helicopter program also permits
the individual inputs to be assigned to any existing
transmitter control (proportional controls and
switches).
However, please note here that some of the inputs
available on this menu are already assigned to
helicopter-specifi c functions, and therefore cannot be
re-assigned in this way.
Nevertheless, the receiver layout on page 65 indicates
that the throttle servo or the speed controller of an
electrically-powered helicopter must be connected
to receiver output "6", since control channel "6" is
reserved for motor power regulation.
Unlike a fi xed-wing model aircraft, the throttle servo
or speed controller is not directly controlled by the
joystick or other transmitter control but rather by a
complex mixer system, see »Helicopter mixer« menu
beginning page 176. Furthermore, the "Throttle limit
function" described on the next page also infl uences
this mixer system.
Assigning a transmitter control or switch on the
"Throttle" line, or to its supplementary control signal,
would unnecessarily "confuse" this complex mixer
system. For this reason the "Throttle" input MUST
be left "free".
0% +88%I5
Thr6
Gyr7
I8
TYP
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Another brief tap on the center SET key of the right
touch pad will complete the entry.
Negative and positive parameter values are possible
in order to appropriately adapt the control's direction
or effect.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the changed
parameter displayed in inverse video back to
"+100 %".
Important:
In contrast to altering servo travel, changing the
control travel setting affects all "downstream" mixer
and coupling inputs, i.e. any and all servos that could
be actuated by the transmitter controls concerned.
Column 6, "– time +"
Each of the function inputs, I5 … 16, can be assigned
a symmetric or asymmetric time delay of between 0
and 9.9 s.
Move the marker frame to the right beyond the
column labeled "– travel +" with the f selection key
of the left or right touch pad.
To set a symmetric time delay, i.e. control-side
independent, move the affected transmitter control
(proportional control or switch) as necessary to a
position such that the marker frame encloses both
sides of the time setting.
0% +111%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
To set an asymmetric time delay, move the affected
operating element (transmitter control or switch) as
necessary to a position such that the marker frame
encloses only the value to be changed.
0% +111%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Briefl y tap the center SET key of the right touch pad
to activate value setting. The value fi eld is shown
highlighted. Values can be changed with the selection
keys of the right touch pad.
Another brief tap on the center SET key of the right
touch pad will complete the entry.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the changed
parameter displayed in inverse video back to 0.0.
116 Detail program description - Control adjust | Helicopters
" Gyr7"
0% +88%I5
Thr6
Gyr7
I8
TYP
+111%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
Normal
7
8
Most of the latest gyro systems not only feature
infi nitely variable proportional gyro gain setting, but
also offer a choice of two separate types of gain
mode on the transmitter.
If the gyro in use also has this feature then this menu
option provides the opportunity to specify both a
"normal" gyro effect as well as a "heading-lock mode"
in the "Offset" column within a range of ±125 %.
Such a specifi cation can include a certain effect to
fl y normal, slow fl ights with maximum stability or the
reduction of the gyro effect for fast circuit fl ights and
aerobatics.
To proceed as described above, use fl ight phase
switching to enter different settings on the "Gyro" line.
Important notice:
The value of this option is identical to the offset
value set in the "Gyro offset" option of the
»Helicopter mixer« menu, page 185. For this
reason, any changes made always affect the
other menu directly, and vice versa.
Beginning with these preset – static – fl ight phase-
specifi c settings, a transmitter control assigned to the
"Gyr7" line, for example one of the middle console
sliders, can be used to vary the gyro effect around
the respective "offset point". The center point of the
control corresponds to the setting specifi ed by the
offset. If the transmitter control is moved from this
center point in the direction of full travel, gyro gain
increases proportionally; it diminishes when moved
in the opposite direction. This provides a fast and
straightforward method of adjusting gyro effect even
in fl ight – e.g. to suit changing weather conditions – or
to test-fl y optimal settings. Furthermore, the range
of the gyro's effect within transmitter control travel in
both directions can be restricted by software.
In this context, be sure to comply with the
instructions accompanying the gyro, otherwise
there is a risk the helicopter will be impossible to fl y.
Adjusting the gyro sensor
To achieve the maximum possible level of
stabilization for the helicopter with the gyro along the
vertical axis, observe the following:
The controls should have as little friction and •
"play" as possible.
There should be no "spring" in the control linkage.•
Use a strong and – in particular – a fast servo. •
When the gyro sensor detects a model rotation, the
faster its response – a corresponding corrective
change to tail rotor thrust – takes effect, the further
the gyro gain adjuster can be moved without causing
the tail of the model to start oscillating, and the better
the model's stability about its vertical axis. If the
response is slower, there is a risk that the model's tail
will start to oscillate even at low gyro gain settings.
Here, further reductions to gyro gain will need to be
made – either by using the default value under "Gyro"
or the associated transmitter control – to eliminate the
oscillation.
If the model is fl ying forward at high speed or
hovering in a powerful headwind, the net result of the
stabilizing effect of the vertical fi n combined with the
gyro may also lead to an overreaction that once again
manifests itself through tail oscillation. To achieve
optimum gyro stabilization under all conditions, make
use of the option to adapt gyro effect with one of the
transmitter's proportional controls.
117
Detail program description - Control adjust | Helicopters
not only provides a convenient means to start and
stop the motor but may also prove to be more than
an insignifi cant safety improvement! For example,
just imagine what could happen if, while carrying the
helicopter to the take-off site with the motor running,
the C1 joystick were to be inadvertently operated …
If the carburetor or speed controller is open too
far when the transmitter is switched on, an audible
warning will be sounded and the basic display will
show the message:
Throttle
too
high!
Tip:
Take advantage of the »Servo display« to observe
the infl uence of the throttle limit control. The »Servo
display« screen can be reached from almost any
menu position with a simultaneous tap on the ef
selection keys of the left touch pad, Bear in mind that
servo output 6 controls the throttle servo on the mc-
20 HoTT!
Basic idle setting
Put the throttle limit into its "full throttle" position by
pushing the throttle limit regulator – by default, the
right side proportional slider SD1 – all the way to its
forward position limit. Set the throttle/pitch joystick to
the maximum pitch position and also check the sub-
menu "Channel 1 CURVE" of the menu …
»Helicopter mixer« (page 176 … 191)
… to ensure that a standard throttle curve is active. If,
for example, the standard throttle curve has already
been changed following the initialization of a model
memory then this must be at least temporarily reset
to the values "Point L = -100 %", "Point 1 = 0 %" and
"Point H = +100 %":
"Tl16"
The proportional slider SD1, mounted on the right
side of the transmitter, is assigned by default to input
"Tl16".
0%
I13 +100%
I14
I15
Tl16
TYP
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
Offset
GL
Normal
0.0 0.0
fr ---
SET
This pre-assignment makes it unnecessary to
program the two fl ight phases as may be familiar from
use of other remote control systems – one "with idle-
up" and one "without idle-up" – because the mc-20
HoTT program offers a much more fl exible approach
to fi ne-tuning and optimizing increases to system
rotational speed below the hover point than the so-
called "idle-up". If it is nevertheless preferable for
the helicopter to be programmed "with idle-up", then
deactivate the "throttle limit" function described below
by setting input "Tl16" to "fr".
Meaning and application of "throttle limit"
As already mentioned under "Throttle", and in
contrast to fi xed-wing models, the power output of
a helicopter's drive system is not controlled directly
with the C1 joystick, but only indirectly via the throttle
curve settings in the »Helicopter mixer« menu
or – if the model features a speed controller – via that
mechanism.
Note:
Of course for different fl ight phases, fl ight phase
programming can be used to set individual throttle
curves.
Nevertheless, both methods of output control de facto
result in the helicopter carburetor never approaching
Throttle limit function
anything near its idle speed under "normal" fl ight
conditions, and that the motor can therefore neither
be started or stopped cleanly without some other
means of intervention.
The "throttle limit" feature resolves this problem
elegantly by using a separate transmitter control – by
default the SD1 proportional slider mounted on the
right side of the transmitter – to limit the throttle servo
or the output level of a speed controller. In this way,
it is possible to "throttle back" with the throttle limit
control, even as far as the idle setting, at which point
the trim control for the throttle/pitch joystick takes
over or directly shuts off an electric drive. Conversely,
the throttle servo or speed controller can only open
up to its full-throttle position if the throttle limit control
has also released the full servo travel path.
The value set on the (right-hand) plus side of the
"travel" column must therefore always be set high
enough to ensure that the maximum setting of the
throttle limit control never restricts the full-throttle
position achievable with throttle curve settings – which
typically means setting a value in the range +100 % to
125 %.
0%
I13 +100%
I14
I15
Tl16
TYP
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +125%
+100%
0.0 0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
Offset
GL
Normal
0.0 0.0
fr ---
SET
The value on the (left-hand) minus side of the
"travel" column should be set so that the throttle limit
control can safely cut off an electric drive or close a
carburetor suffi ciently to cut off a combustion motor
in conjunction with – digital – C1 trim. Because of this,
leave this value (initially) at +100 %.
Furthermore, this variable "limitation" of throttle travel
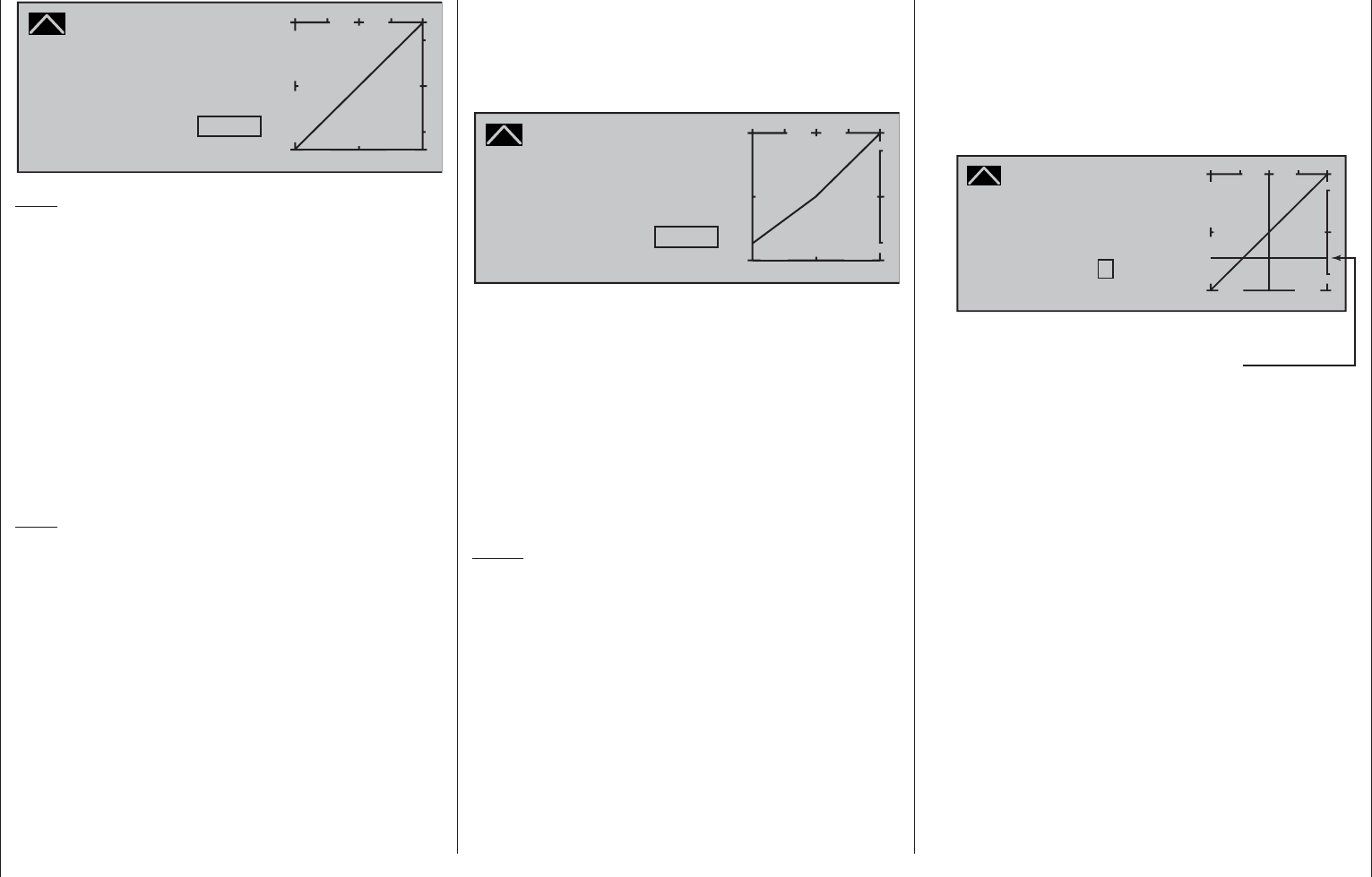
118 Detail program description - Control adjust | Helicopters
Channel 1 CURVE
Curve
off Point
Output
Input +100%
+100%
H+
–
100
¼O U T P U T
0%
+100%
Note:
Since throttle trim has no effect if the throttle limiter is
open, its position here is meaningless.
Now – without starting the combustion motor – adjust
the throttle servo, preferably mechanically and,
if necessary, also by way of the servo 6 travel
adjustment option in the »Servo adjustment« menu,
so that the carburetor is completely open.
Now close the throttle limiter completely by moving
the side proportional slider all the way to its rear limit.
Use the trim wheel of the Throttle/Pitch joystick to
place the trim position marker into the motor OFF
position or actuate the "Thr. CutOff" option, see
page 90.
Note:
In contrast, when the throttle limiter is closed,
the position of the throttle/collective pitch stick is
meaningless. It can therefore remain at the maximum
collective pitch position so that, when adjusting
carburetor linkages, the throttle limiter alone can be
used to switch between full throttle (throttle limiter
open) and "Motor OFF" (throttle limiter closed).
Now, with the throttle limiter closed, adjust the
carburetor linkages so that the carburetor is (just)
completely closed. Take extreme care to ensure that
the throttle servo does not become mechanically
blocked in either of its end positions (full throttle/
motor OFF).
To complete this basic confi guration, the idle trim
adjustment range must now be matched against point
"L" on the throttle curve. Do this by setting Point "L"
of the "Channel 1 CURVE" mixer, in the »Helicopter
mixer« menu, to about -65 to -70 %.
Channel 1 CURVE
Curve
off Point
Output
Input –100%
–66%
L+
–
100
¼O U T P U T
0%
–66%
To confi gure a smooth transition from the idle trim
to the throttle curve exactly, the collective pitch stick
should be moved to and fro slightly at its minimum
position with the throttle limiter closed and the idle
trim fully open. The throttle servo must not move as
well! Any further adjustments to the throttle curve
must of course be made later in fl ight.
The motor is always started with the throttle limiter
fully closed, whereby idle is set exclusively by using
the trim wheel of the throttle/pitch joystick and the
motor is shut off by the "Thr. CutOff" option.
Notes:
Take advantage of the »• Servo display« to
observe the infl uence of the throttle limit control.
The »Servo display« screen can be reached from
almost any menu position with a simultaneous
tap on the ef selection keys of the left touch
pad, Bear in mind that servo output 6 controls the
throttle servo on the mc-20 HoTT!
A servo connected to output 16 can be used, •
independently of this, for other purposes by
means of mixers, provided that this servo is
decoupled from the operating element specifi ed
by function input 16 via the »Mix only channel«
menu; see page 205.
The throttle restriction set by the throttle limiter •
is shown as a horizontal bar in the throttle curve
diagram on the second display page of the
"Channel 1 CURVE" option in the »Helicopter
mixer« menu (see page 180). The output signal
for the throttle servo cannot be higher than the
level set by the horizontal bar:
Channel 1 CURVE
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
0%
actual
position of the
Throttle limiter
The above diagram shows precisely this scenario:
in the above example, the throttle limit control
is set to about -60 % and thus restricts the
movement of the throttle servo to about -60 % of
full travel.
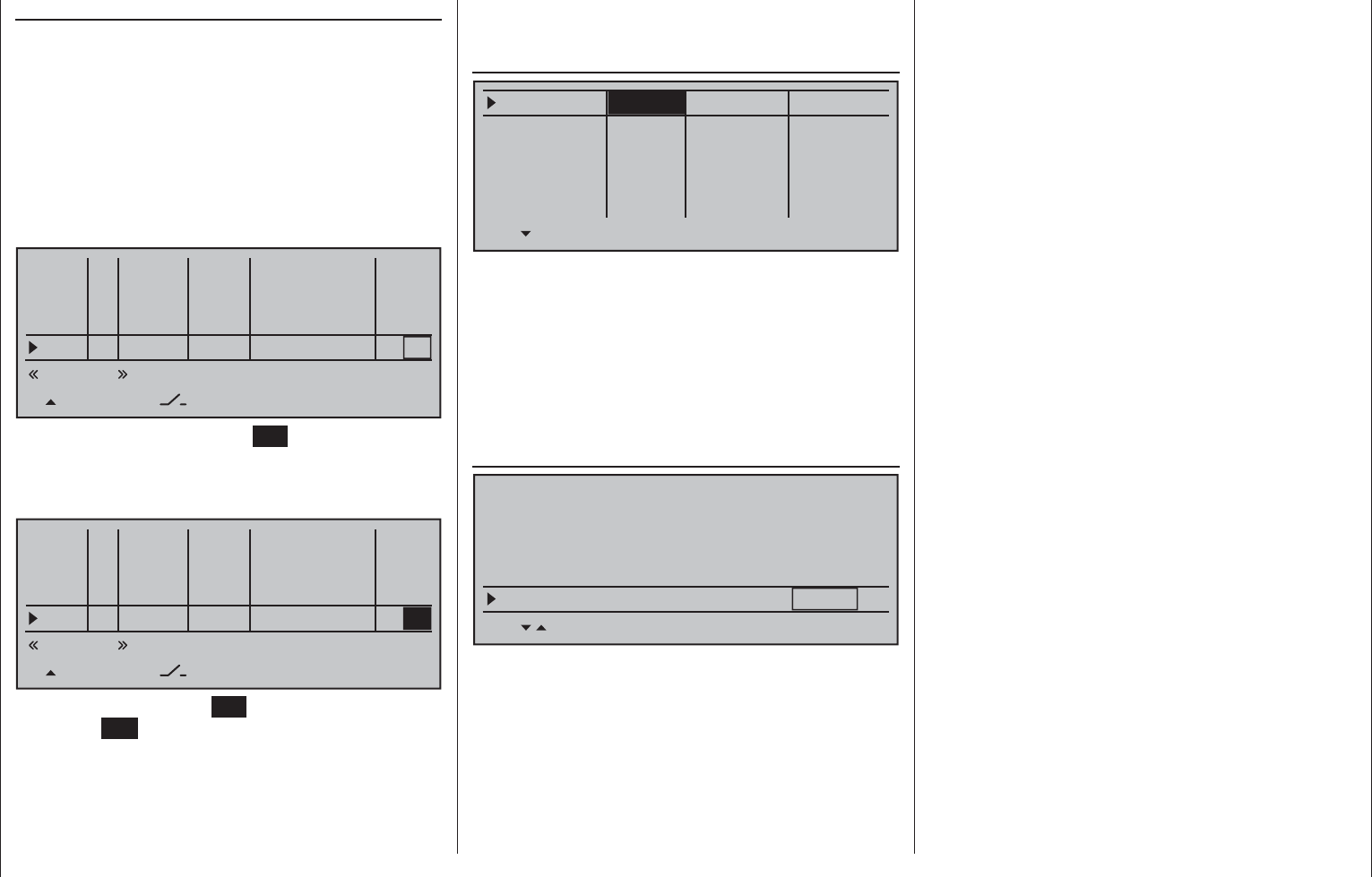
119
Detail program description - Control adjust | Helicopters
Time delay for the throttle limiter
To safely prevent the carburetor from opening too
rapidly, assign the throttle limiter input "Tl16" to a
time delay that takes effect only in the direction of full
throttle. This applies especially if the throttle limiter is
controlled by a switch rather than, as preset, with the
right-side proportional rotary slider.
To set a delay time, push the throttle limit control to
its forward limit or move the switch into its full-throttle
position then use the selection keys of the left or right
touch pad to select the "–time+" column.
0%
I13 +100%
I14
I15
Tl16
TYP
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
Offset
GL
Normal
0.0 0.0
fr ---
0.0
SET
After a brief tap on the center SET key of the right
touch pad, the selection keys of the left or right touch
pad can be used to select the desired time delay, e.g.
5 seconds.
0%
I13 +100%
I14
I15
Tl16
TYP
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
Offset
GL
Normal
0.0 0.0
fr ---
5.0
SET
A brief tap on the center SET key of the right touch
pad or the ESC key of the left touch pad will complete
the entry.
As already explained on page 106, when "Thr AR" is
selected in the "Pitch/thr" line of the …
»Stick mode« (page 106)
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
Thr AR
… menu then digital trim of the throttle/pitch joystick
is only active for the «Autorotation» fl ight phase. As
a consequence, the motor's idle speed cannot be
regulated in the "normal" fl ight phases with the C1
trim control. To ensure the availability of suffi cient
setting options, use of the "Expo throttle limiter" is
recommended.
The exponential curve characteristic offered by the …
»Helicopter type« (page 98)
Linearis. swashpl. no
Rotor direction right
HELTYPE
Pitch min. rear
SEL
Expo throttle lim. 0%
… menu's sub-menu can be used to alter the control
behavior of the throttle limit control such that the latter
provides suffi ciently sensitive regulation of the idle
setting and can also stop the motor.
In this case, with a completely closed throttle
limiter – in contrast to the previously described
setting – use the »Control adjust« menu set the "-"
side of the column labeled "- travel +" for the "Tl16"
Throttle limit in combination with "Thr AR" in the »Stick mode«
menu
line such that the throttle limiter fully closes the
carburetor, i.e. the motor is safely switched off at this
control position.
Following this, move the throttle limit control to its
center point and change the % value of the "Expo
thro lim." line in the »Helicopter type« menu, page
98, until the carburetor is in a position suitable for
starting the motor. Now start the motor, and adjust the
value if necessary until the motor idles reliably in this
throttle limit control position.
The value for the plus side of the "- travel +" column
should be increased, as described before, to +125 %
so that the full-throttle position of the throttle servo is
also reliably released from the throttle limiter.
Finally, set an asymmetrical time delay of, say
4.0 seconds, so the motor also picks up speed
gradually even if the side proportional slider is pushed
forward too quickly. Select the time preset to correlate
to how far the carburetor opens up at the minimum
collective pitch position. The value set is to be
optimized by testing.
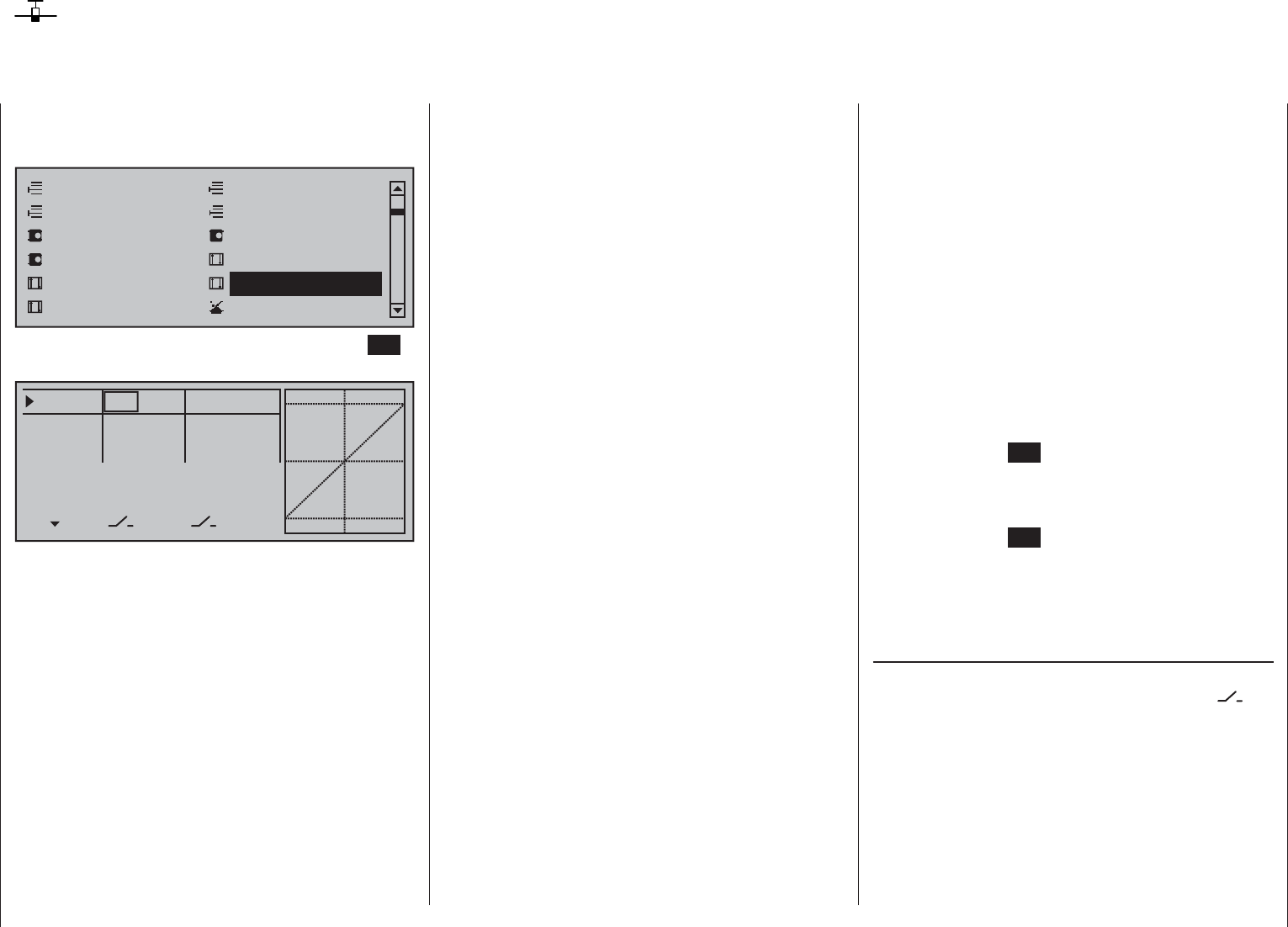
120 Detail program description - Dual Rate / Expo | Winged models
Dual Rate / Expo
Confi gurable control characteristics for aileron, elevator and rudder
Use the selection keys of the left or right touch pad to
scroll to the »Dual Rate / Expo« menu option in the
Multi-function menu:
Model select
Servo adjustmentStick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Open this menu option with a tap on the center SET
key of the right touch pad.
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
––––––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
The Dual-Rate-/Expo function permits fl ight-phase
dependent switching and control over the defl ection
and characteristics of the aileron (Ail), elevator (Ele)
and rudder (Rud) (control functions 2 … 4) by way of
switches.
The »Channel 1 curve« menu, see text beginning
page 128, can be used to set an individual curve
characteristic for control function 1 (throttle/brake)
with up to 8 separately programmable points.
Similar to control travel settings in the »Control
adjust« menu, Dual Rate operates directly on the
respective control function, independent of whether
it is an individual servo or multiple servos connected
via complex mixer and coupling functions.
The control travel for each switch position can be set
to between 0 and 125 % of normal full travel.
Expo, on the other hand, enables fi ner-grained
control of the model for values larger than 0 % around
the center position of the primary control function
(aileron, elevator and rudder), without forfeiting full
movement at the end-points of joystick travel. For
values less than 0 %, the reverse is true: control
increases around the neutral position and diminishes
towards the end-points. The degree of "progression"
can therefore be set within a total range of -100 %
to +100 %, where 0 % equates to the normal, linear
control characteristics.
Rotary-output servos, now generally commonplace,
offer another application. This is because the actual
control surface movement is not linear: as the
rotational angle of the output disc or lever increases,
the control surface rate of travel over the control
linkage continually decreases – depending on the
position of the linkage point on the output disc. This
effect can be counteracted with Expo values greater
than 0 % such that rotational angle travel increases
over-proportionally with increasing joystick throw.
The Expo setting also affects the relevant control
function directly, whether this controls a single servo
or multiple servos – via any number of mixer and
coupling functions.
For both Dual Rate and Expo functions, switch
assignment can be set up in any way desired, which
therefore permits the triggering of multiple functions
using one and the same switch. This, in turn, offers
the opportunity to link the triggering of Dual Rate and
Expo functions to a single switch: this offers many
advantages – particularly for very high-speed models.
The graphic screen displays the curve characteristics
directly. After selecting the appropriate line, the dotted
vertical line will follow the movement of the respective
joystick so a better evaluation of the transmitter-
control-travel dependent curve value can be made.
Flight phase-dependent Dual Rate and Expo
settings
If fl ight phases are set up in the »Phase settings«
and »Phase assignment« menus and each assigned
a name,e.g. "Normal", the name in question will
be displayed at the bottom left of the display. Just
actuate the respective switch to switch between fl ight
phases.
Basic procedure
Switch to the desired fl ight phase then use the 1.
cd selection keys of the left or right touch pad
to select the desired line: "Aileron", "Elevator" or
"Rudder".
Use the 2. ef selection keys of the left or right
touch pad to change into the column labeled
"EXPO".
Tap the center 3. SET key of the right touch pad. The
corresponding input fi eld is shown highlighted.
Use the selection keys of the right touch pad to set 4.
the desired value.
Tap the center 5. SET key of the right touch pad to
complete the entry.
A simultaneous tap on the 6. cd or ef keys of the
right touch pad (CLEAR) will any setting made
back to its respective default value.
Dual Rate function
If a switchover between two variants is desired,
assign a switch in the column labeled with the
switch symbol (as described in the section "Assigning
transmitter controls, switches and control switches"
on page 56).
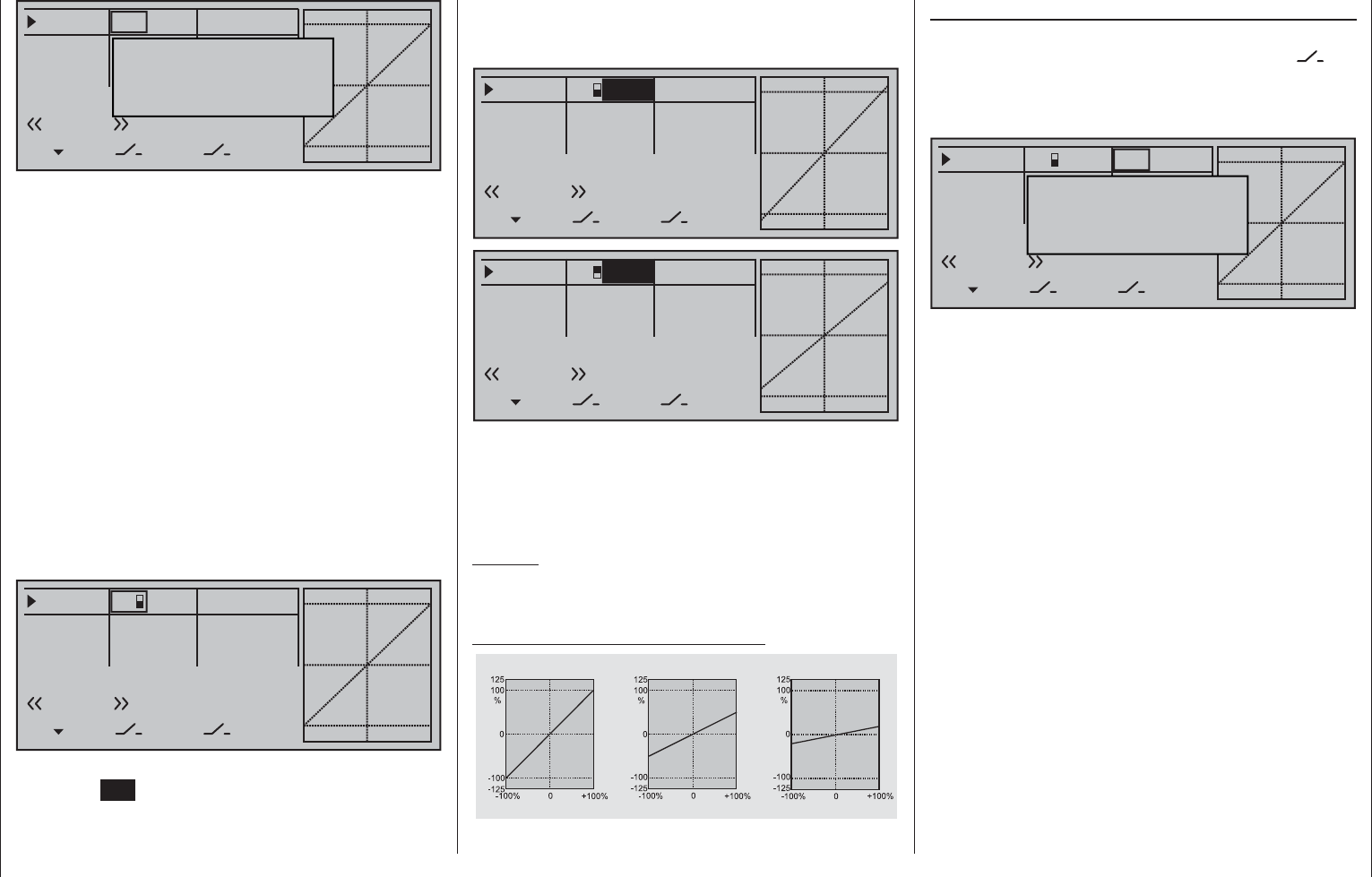
121
Detail program description - Dual Rate / Expo | Winged models
bottom edge of the display in order to separately
change the dual-rate values shown in inverse video
for each of the two switch positions.
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
EXPO
SEL
3
Normal
111%
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
EXPO
SEL
3
Normal
88%
At the same time, the Dual-Rate curve will be
presented in the graph. A simultaneous tap on the
cd or ef keys of the right touch pad (CLEAR) will
reset a changed entry fi eld value displayed in inverse
video back to "100 %".
Caution:
For safety reasons, Dual Rate value settings should
not be less than 20 %.
Some examples of Dual Rate values:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Dual Rate = 100% Dual Rate = 50% Dual Rate = 20%
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
––––––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Normal
If necessary, this may also be one of the transmitter
control switches C1 … C8 or C1i … C8i or one of the
logical switches L1 … L8 or L1i … L8i from the list of
"expanded switches".
The switch so assigned appears on the display,
together with a switch icon that indicates the switch's
switching direction.
In the case of "C" or "L" switches, the joystick or
another transmitter control or a certain switching
logic can itself be used as a switch. However, such a
control switch must have been appropriately defi ned
in the »Control switch« menu, see page 135, and a
logical switch must have been appropriately defi ned
in the »Logical switch« menu, see page 138.
Whichever switch has been assigned … the
respective switch will appear in the display together
with a switch symbol indicating the switch's direction
if actuated, e.g. in the «Normal» fl ight phase.
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
3
Normal
Once the value fi eld has been activated with a brief
tap on the SET key of the right touch pad, use the
selection keys of the left or right touch pad to move
into the Dual-Rate value column labeled SEL at the
Exponential function
If a switchover between two variants is desired,
assign a switch in the column labeled with the
switch symbol (as described in the section "Assigning
transmitter controls, switches and control switches"
on page 56).
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Normal
3
If necessary, this may also be one of the transmitter
control switches C1 … C8 or C1i … C8i or one of the
logical switches L1 … L8 or L1i … L8i from the list of
"expanded switches".
The switch so assigned appears on the display,
together with a switch icon that indicates the switch's
switching direction.
In the case of "C" or "L" switches, the joystick or
another transmitter control or a certain switching
logic can itself be used as a switch. However, such a
control switch must have been appropriately defi ned
in the »Control switch« menu, see page 135, and a
logical switch must have been appropriately defi ned
in the »Logical switch« menu, see page 138.
Whichever switch has been assigned … the
respective switch appears on the display together
with a switch icon that indicates the switch's
respective direction when moved.
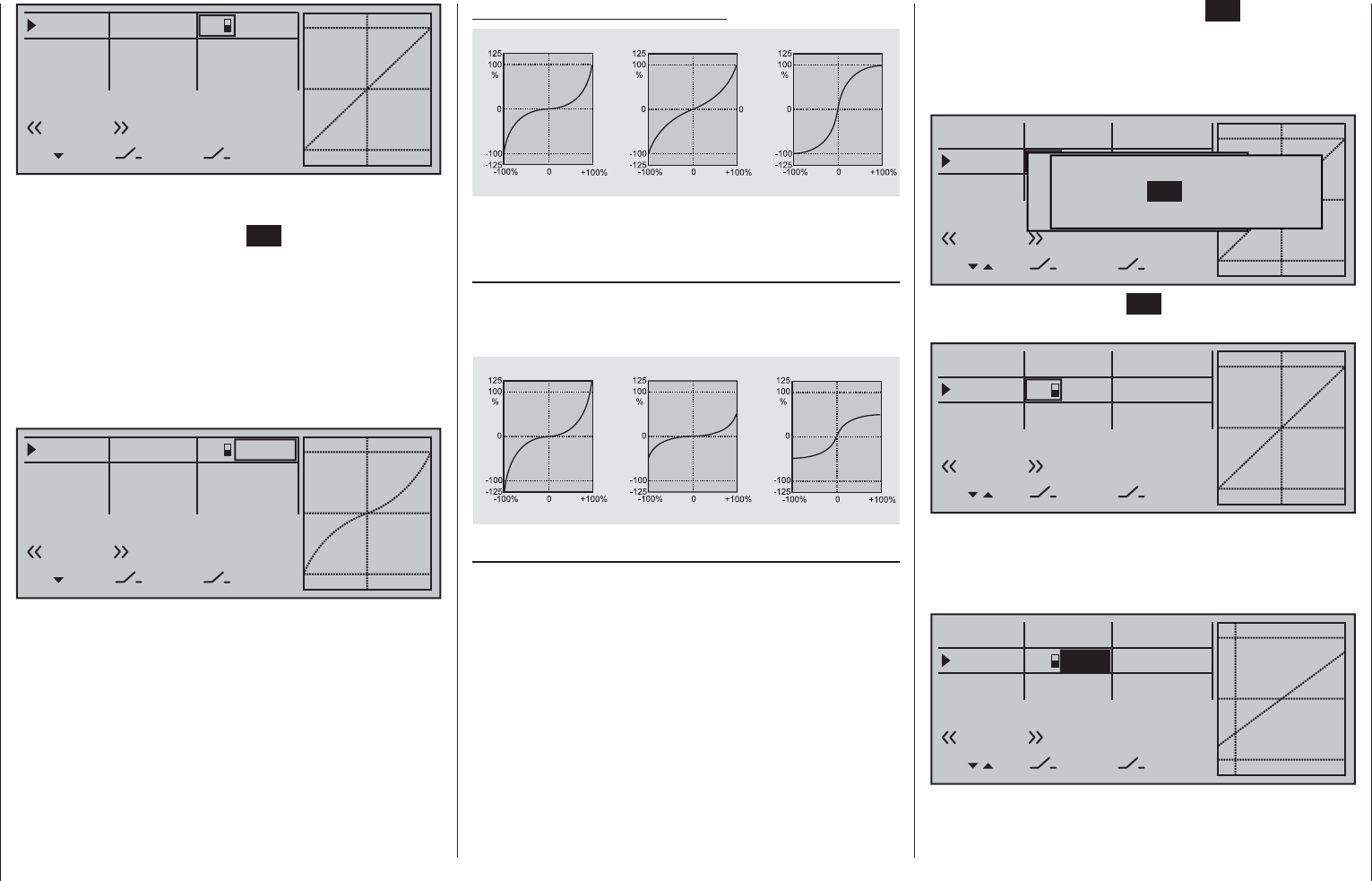
122 Detail program description - Dual Rate / Expo | Winged models
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Normal
3
Select the right-hand column at the lower edge of the
display marked with SEL and activate the value fi eld
with a brief tap on the center SET key of the right
touch pad, the selection keys on the left or right touch
pad can now be used to alter the Expo value shown
in the highlighted fi eld, separately for each of the two
switch positions.
Now, for example, there is an opportunity to fl y with
a linear curve characteristic with the switch in one
direction, and to preset a value other than 0 % for the
other switch direction:
+50%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Normal
3
At the same time, the Expo curve will be presented
in the graph. A simultaneous tap on the cd or ef
keys of the right touch pad (CLEAR) will reset a
changed entry fi eld value displayed in inverse video
back to "0 %".
Some examples of Expo values:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Expo = +100% Expo = +50% Expo = –100%
In each of these examples, the Dual Rate value
equals 100 %.
Combining Dual Rate and Expo
If values have been entered for both the Dual Rate
and the Expo function, the effects of both functions
will overlap, for example, as follows:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Expo = +100%, DR = 125% Expo = +100%, DR = 50% Expo = –100%, DR = 50%
Asymmetric setting of Dual Rate and Expo
To make an asymmetric setting, i.e. a Dual Rate
or Expo setting dependent on the direction of
the respective joystick, fi rst access the »Control
switch« menu and assign one of the C1 … C8
control switches – "C3", for example – to the desired
transmitter control, e.g. control 3 for the elevator
function. Do not change the switching point for
the joystick's neutral position (0 %). Now return
to the "Dual Rate / Expo" menu and select the
corresponding control function ("Elevator" in this
example).
Now, with a brief tap on the center SET key of the
right touch pad, activate the switch assignment
and change to the expanded switches then use the
selection keys to move on to the previously defi ned
"C3" control switch.
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
––––––
–––
SEL
–––
–––
–t–
100%
100%
100%
EXPO
SEL
Moewünschten Schalter
toe die EIN Position
(erw. Schalter: SET)
Normal
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C1 C3
A brief tap on the center SET key of the right touch
pad will confi rm the assignment of this switch.
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
G3
Normal
Now use one of the selection keys to move into the
right column then move the elevator joystick into its
appropriate end-point to enter a separate Dual Rate
value for each direction, e.g. for "Up elevator" …
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
77%
100%
EXPO
SEL
G3
Normal
… and "Down elevator":
123
Detail program description - Dual Rate / Expo | Winged models
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
111%
100%
EXPO
SEL
G3
Normal
The vertical dashed line shows the current elevator
joystick position.
Set the Expo values as necessary in the same
manner.
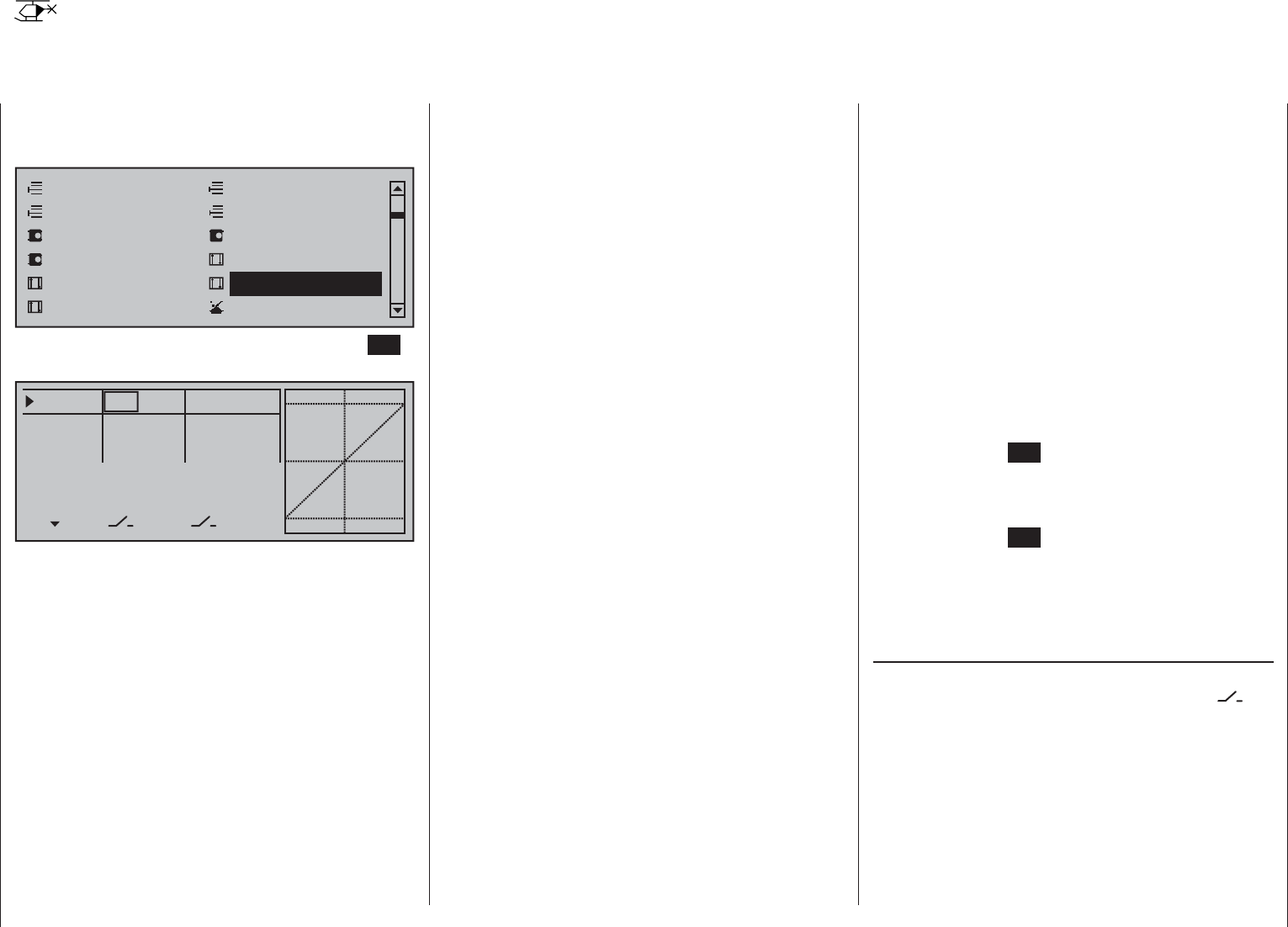
124 Detail program description - Dual Rate / Expo | Helicopters
Dual Rate / Expo
Confi gurable control characteristics for roll, pitch-axis, tail rotor
Use the selection keys of the left or right touch pad to
scroll to the »Dual Rate / Expo« menu option in the
Multi-function menu:
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Open this menu option with a tap on the center SET
key of the right touch pad.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
––––––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
The Dual Rate / Expo function permits switching or
controlling of control travels and characteristics for
the control functions roll, pitch-axis, tail rotor, i.e.
control functions 2 … 4; it is switch-driven and fl ight-
phase independent.
An individual curve characteristic for control function
1 (motor/collective pitch), featuring up to 8 separately
programmable points, can be set either in the
»Channel 1 curve« menu or separately for throttle
and pitch in the »Helicopter mixer« menu, see text
beginning page 176 and 312.
Similar to control travel settings in the »Control
adjust« menu, Dual Rate operates directly on the
respective control function, independent of whether
it is an individual servo or multiple servos connected
via complex mixer and coupling functions.
The control travel for each switch position can be set
to between 0 and 125 % of normal full travel.
Expo, on the other hand, enables fi ner-grained
control of the model for values larger than 0 %
around the center position of the primary control
function (roll, pitch-axis, tail rotor), without forfeiting
full movement at the end-points of joystick travel.
For values less than 0 %, the reverse is true: control
increases around the neutral position and diminishes
towards the end-points. The degree of "progression"
can therefore be set within a total range of -100 %
to +100 %, where 0 % equates to the normal, linear
control characteristics.
Rotary-output servos, now generally commonplace,
offer another application. This is because the actual
control surface movement is not linear: as the
rotational angle of the output disc or lever increases,
the control surface rate of travel over the control
linkage continually decreases – depending on the
position of the linkage point on the output disc. This
effect can be counteracted with Expo values greater
than 0 % such that rotational angle travel increases
over-proportionally with increasing joystick throw.
The Expo setting also affects the relevant control
function directly, whether this controls a single servo
or multiple servos – via any number of mixer and
coupling functions.
For both Dual Rate and Expo functions, switch
assignment can be set up in any way desired, which
therefore permits the triggering of multiple functions
using one and the same switch. This, in turn, offers
the opportunity to link the triggering of Dual Rate and
Expo functions to a single switch: this offers many
advantages – particularly for very high-speed models.
The graphic screen displays the curve characteristics
directly. Once you select a menu line, the dotted
vertical line follows the movement of the respective
joystick, so you can clearly see the dependency of
the curve value on the transmitter control.
Flight phase-dependent Dual Rate and Expo
settings
If fl ight phases are set up in the »Phase settings«
and »Phase assignment« menus and each assigned
a name,e.g. "Normal", the name in question will be
displayed at the bottom left of the display. In this
scenario, you can operate the corresponding switch
to switch between fl ight phases.
Basic procedure
Switch to the desired fl ight phase then use the 1.
cd selection keys of the left or right touch pad
to select the desired line: "Roll", "Pitch ax" or
"Tail rot".
Use the 2. ef selection keys of the left or right
touch pad to change into the column labeled
"EXPO".
Tap the center 3. SET key of the right touch pad. The
corresponding input fi eld is shown highlighted.
Use the selection keys of the right touch pad to set 4.
the desired value.
Tap the center 5. SET key of the right touch pad to
complete the entry.
A simultaneous tap on the 6. cd or ef keys of the
right touch pad (CLEAR) will any setting made
back to its respective default value.
Dual Rate function
If a switchover between two variants is desired,
assign a switch in the column labeled with the
switch symbol (as described in the section "Assigning
transmitter controls, switches and control switches"
on page 56).
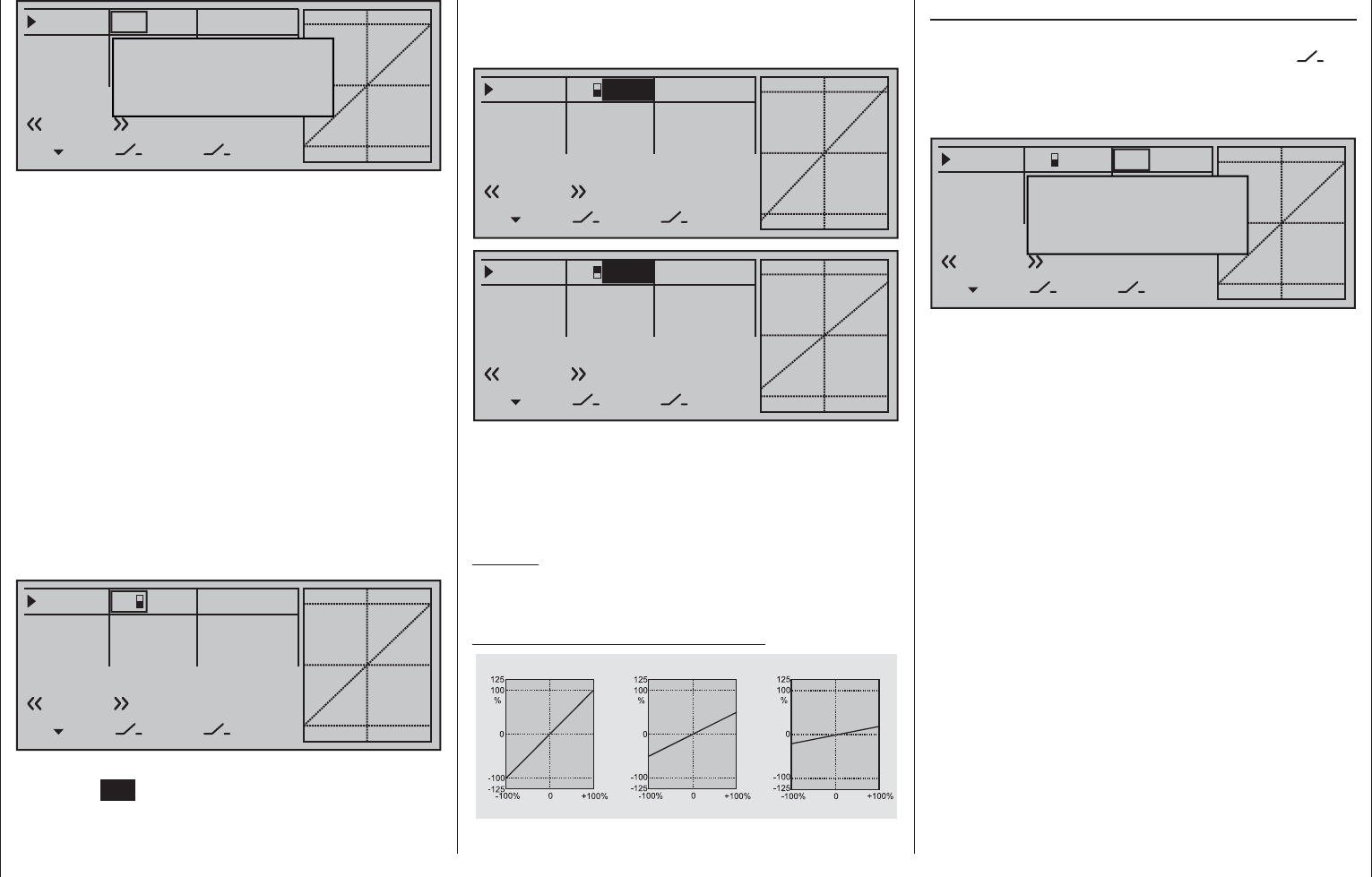
125
Detail program description - Dual Rate / Expo | Helicopters
Exponential function
If a switchover between two variants is desired,
assign a switch in the column labeled with the
switch symbol (as described in the section "Assigning
transmitter controls, switches and control switches"
on page 56).
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Normal
3
If necessary, this may also be one of the transmitter
control switches C1 … C8 or C1i … C8i or one of the
logical switches L1 … L8 or L1i … L8i from the list of
"expanded switches".
The switch so assigned appears on the display,
together with a switch icon that indicates the switch's
switching direction.
In the case of "C" or "L" switches, the joystick or
another transmitter control or a certain switching
logic can itself be used as a switch. However, such a
control switch must have been appropriately defi ned
in the »Control switch« menu, see page 119, and a
logical switch must have been appropriately defi ned
in the »Logical switch« menu, see page 138.
Whichever switch has been assigned … the
respective switch appears on the display together
with a switch icon that indicates the switch's
respective direction when moved.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
––––––
–––
SEL
–––
–––
–
100%
100%
100%
EXPO
SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Normal
If necessary, this may also be one of the transmitter
control switches C1 … C8 or C1i … C8i or one of the
logical switches L1 … L8 or L1i … L8i from the list of
"expanded switches".
The switch so assigned appears on the display,
together with a switch icon that indicates the switch's
switching direction.
In the case of "C" or "L" switches, the joystick or
another transmitter control or a certain switching
logic can itself be used as a switch. However, such a
control switch must have been appropriately defi ned
in the »Control switch« menu, see page 119, and a
logical switch must have been appropriately defi ned
in the »Logical switch« menu, see page 138.
Whichever switch has been assigned … the
respective switch will appear in the display together
with a switch symbol indicating the switch's direction
if actuated, e.g. in the «Normal» fl ight phase.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
3
Normal
Once the value fi eld has been activated with a brief
tap on the SET key of the right touch pad, use the
selection keys of the left or right touch pad to move
into the Dual-Rate value column labeled SEL at the
bottom edge of the display in order to separately
change the dual-rate values shown in inverse video
for each of the two switch positions.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
EXPO
SEL
3
Normal
111%
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
EXPO
SEL
3
Normal
88%
At the same time, the Dual-Rate curve will be
presented in the graph. A simultaneous tap on the
cd or ef keys of the right touch pad (CLEAR) will
reset a changed entry fi eld value displayed in inverse
video back to "100 %".
Caution:
For safety reasons, Dual Rate value settings should
not be less than 20 %.
Some examples of Dual Rate values:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Dual Rate = 100% Dual Rate = 50% Dual Rate = 20%
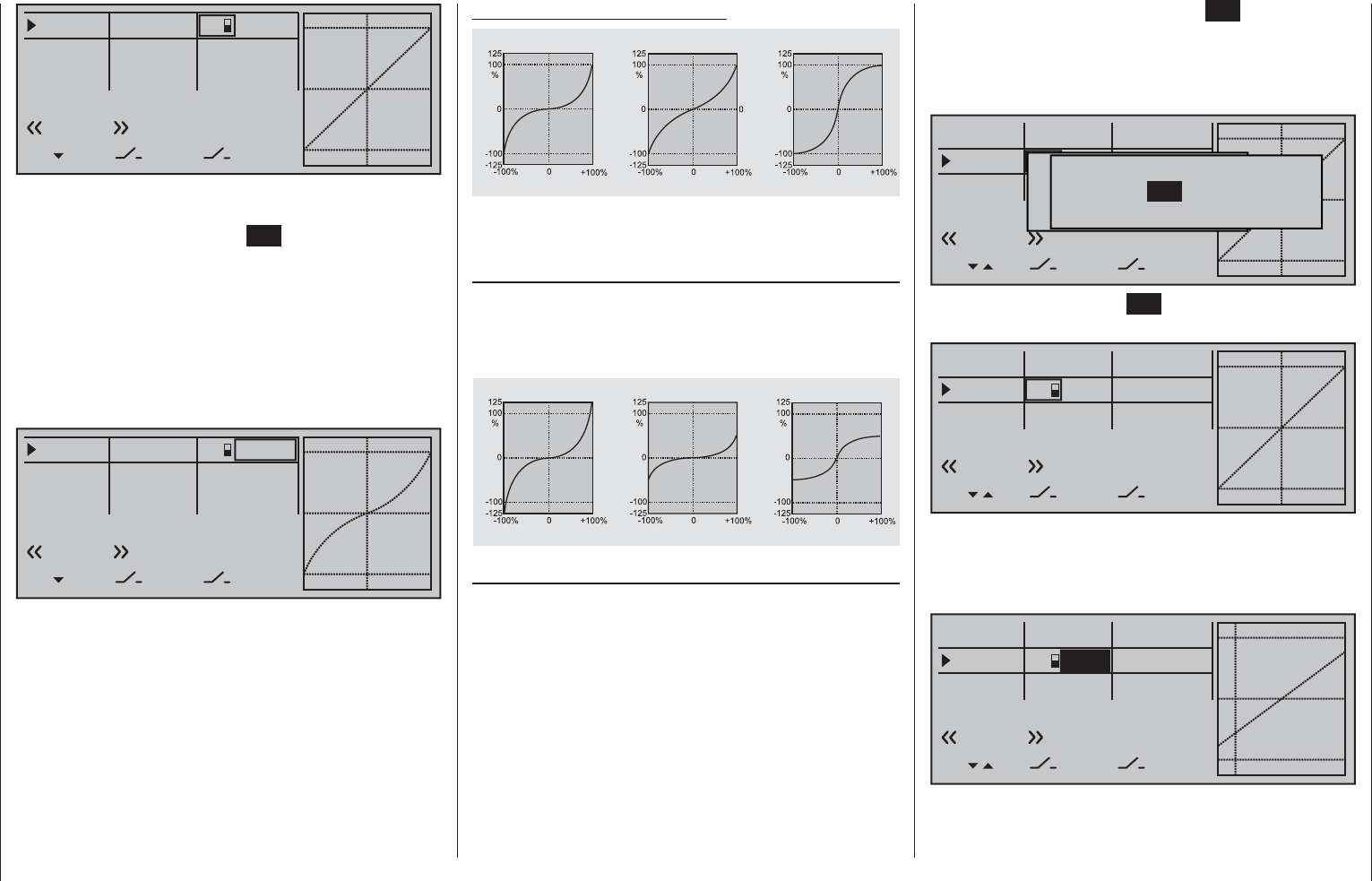
126 Detail program description - Dual Rate / Expo | Helicopters
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Normal
3
Select the right-hand column at the lower edge of the
display marked with SEL and activate the value fi eld
with a brief tap on the center SET key of the right
touch pad, the selection keys on the left or right touch
pad can now be used to alter the Expo value shown
in the highlighted fi eld, separately for each of the two
switch positions.
Now, for example, you have the opportunity to fl y with
a linear curve characteristic with the switch in one
direction, and to pre-set a value other than 0 % in the
other switching direction:
+50%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Normal
3
At the same time, the Expo curve will be presented
in the graph. A simultaneous tap on the cd or ef
keys of the right touch pad (CLEAR) will reset a
changed entry fi eld value displayed in inverse video
back to "0 %".
Some examples of Expo values:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Expo = +100% Expo = +50% Expo = –100%
In each of these examples, the Dual Rate value
equals 100 %.
Combining Dual Rate and Expo
If you have entered values for both the Dual Rate
and the Expo function, the effect from on function
is superimposed on the other, as shown in these
examples:
Servo travel
Servo travel
Servo travel
Stick deflection Stick deflection Stick deflection
Expo = +100%, DR = 125% Expo = +100%, DR = 50% Expo = –100%, DR = 50%
Asymmetric setting of Dual Rate and Expo
To make an asymmetric setting, i.e. a Dual Rate
or Expo setting dependent on the direction of
the respective joystick, fi rst access the »Control
switch« menu and assign one of the C1 … C4
control switches – "C3" for example – to the desired
transmitter control, e.g. control 3 for the pitch
function. Do not change the switching point for
the joystick's neutral position (0 %). Now return
to the "Dual Rate / Expo" menu and select the
corresponding control function ("Pitch ax" in this
example).
Now, with a brief tap on the center SET key of the
right touch pad, activate the switch assignment
and change to the expanded switches then use the
selection keys to move on to the previously defi ned
"C3" control switch.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
––––––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Moünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Normal
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C1 C3
A brief tap on the center SET key of the right touch
pad will confi rm the assignment of this switch.
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
G3
Normal
Now use one of the selection keys to move into the
right column then move the pitch-axis joystick to the
appropriate end-point in order to enter a separate Dual
Rate value for each direction, e.g. for "Pitch-axis up" …
0%
0%
0%
Roll
Pitch ax
Tail rot
DUAL
–––
–––
SEL
–––
–––
–––
100%
77%
100%
EXPO
SEL
G3
Normal
and "Pitch-axis down":
127
Detail program description - Dual Rate / Expo | Helicopters
0%
0%
0%
Roll
Nick
Tail
DUAL
–––
–––
SEL
–––
–––
–––
100%
111%
100%
EXPO
SEL
C3
Normal
The vertical dashed line shows the current pitch axis
joystick position.
Set the Expo values as necessary in the same
manner.
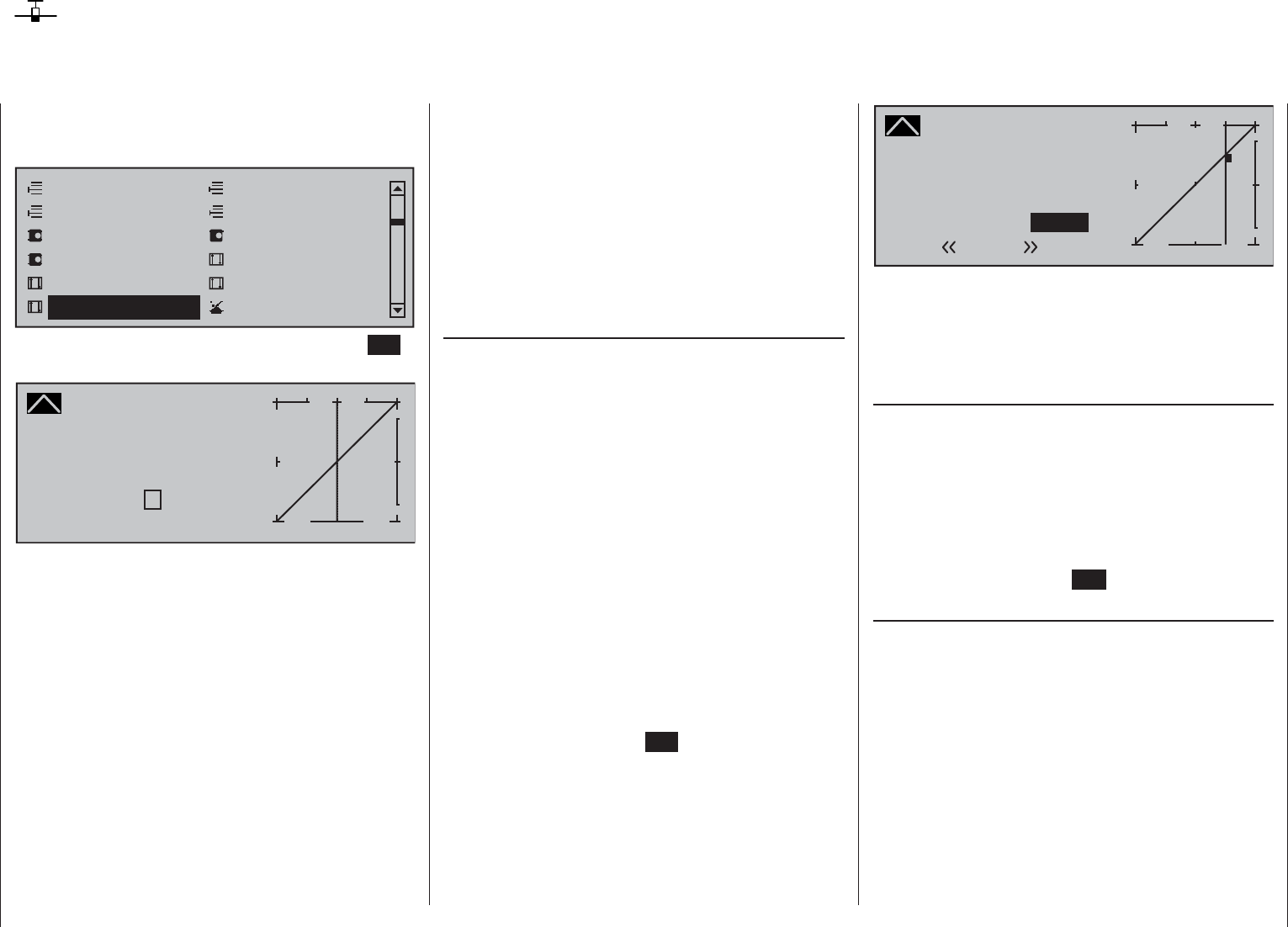
128 Detail program description - Channel 1 curve | Winged models
Channel 1 curve
Control characteristics for throttle/spoiler joystick
Using the selection keys of the left or right touch pad,
scroll to the »Channel 1 curve« menu option in the
Multi-function menu:
Model select
Servo adjustmentStick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Open this menu option with a tap on the center SET
key of the right touch pad.
Channel 1 C U R V E
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
Since the carburetor response or the effect of the
airbrakes or spoilers is often non-linear, you can make
compensatory adjustments to these in this menu.
The menu therefore enables you to change the
control characteristics of the throttle / airbrake
joystick, regardless of whether this control function
affects the servo connected to control channel 1
directly or affects multiple servos via various mixers.
If fl ight phases have been specifi ed in the »Phase
settings« and »Phase assignment« menus (see
pages 142 and 148) this option can be adapted on
a fl ight-phase basis. The given fl ight phase name,
e.g. «normal», will be shown at the bottom left of
the screen.
The control curve can be defi ned by up to 8 points
(termed "reference points" below) placed anywhere
along the path of joystick travel. While the on-screen
graph considerably simplifi es the process of setting
and adjusting the reference points, we recommend
that you set fewer reference points to begin with.
In the basic software set-up, 2 reference
points – namely the end-points at the bottom end
of joystick travel ("L", low = -100 % travel) and
the top end of joystick travel ("H", high = +100 %
travel) – defi ne a linear characteristic curve.
First, switch to your chosen fl ight phase, if necessary.
Setting reference points
By moving the transmitter control (throttle/airbrake
joystick), you can reposition the vertical line in the
graph between the two end-points "L" and "H". The
current joystick position is also displayed in numerical
form on the "Input" line (-100 % to +100 %). The point
at which this line crosses the curve is termed the
"Output", and can be varied at the reference points
within the range -125 % to +125 %. The control signal
altered in this way will then affect all subsequent
mixer and coupling functions.
In the example above, the joystick is at 0 % of control
travel and also generates an output signal of 0 %,
since the characteristic curve is linear.
Up to 6 additional reference points can be set
between the two end-points "L" and "H", although the
distance between neighboring reference points must
not be less than approx. 25 %.
Move the joystick. If a question mark can be seen in
the "Point" frame, then the next reference point can be
set with a tap on the center SET key of the right touch
pad. Simultaneously, the "?" is replaced by a number
and the value fi eld to the right of the reference point
number will be shown in inverse video.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
+50%
2+
–
100
¼O U T P U T
1
+50%
Normal
2
The order in which you generate the (maximum) 6
reference points between the end-points "L" and
"H" is irrelevant, since the reference points are
continuously renumbered automatically from left to
right as they are entered.
Erasing reference points
To delete one of the reference points (1 to max. 6),
use the joystick to move the vertical line into the
vicinity of the reference point in question. As soon
as the reference point number and its corresponding
value on the "Point" line are displayed in inverse
video, see fi gure above, these can be erased with a
simultaneous tap on the cd or ef keys of the right
touch pad (CLEAR). Complete the operation with a
brief tap on the center key ESC of the left touch pad.
Changing reference point values
Move the joystick into the range of the reference point
that is to be changed: "L" (low), 1 … 6 or "H" (high).
The number and current curve value of this point are
displayed. The reference point value displayed in
inverse video can be changed in a range of -125 % to
+125 % without infl uencing the neighboring reference
points.
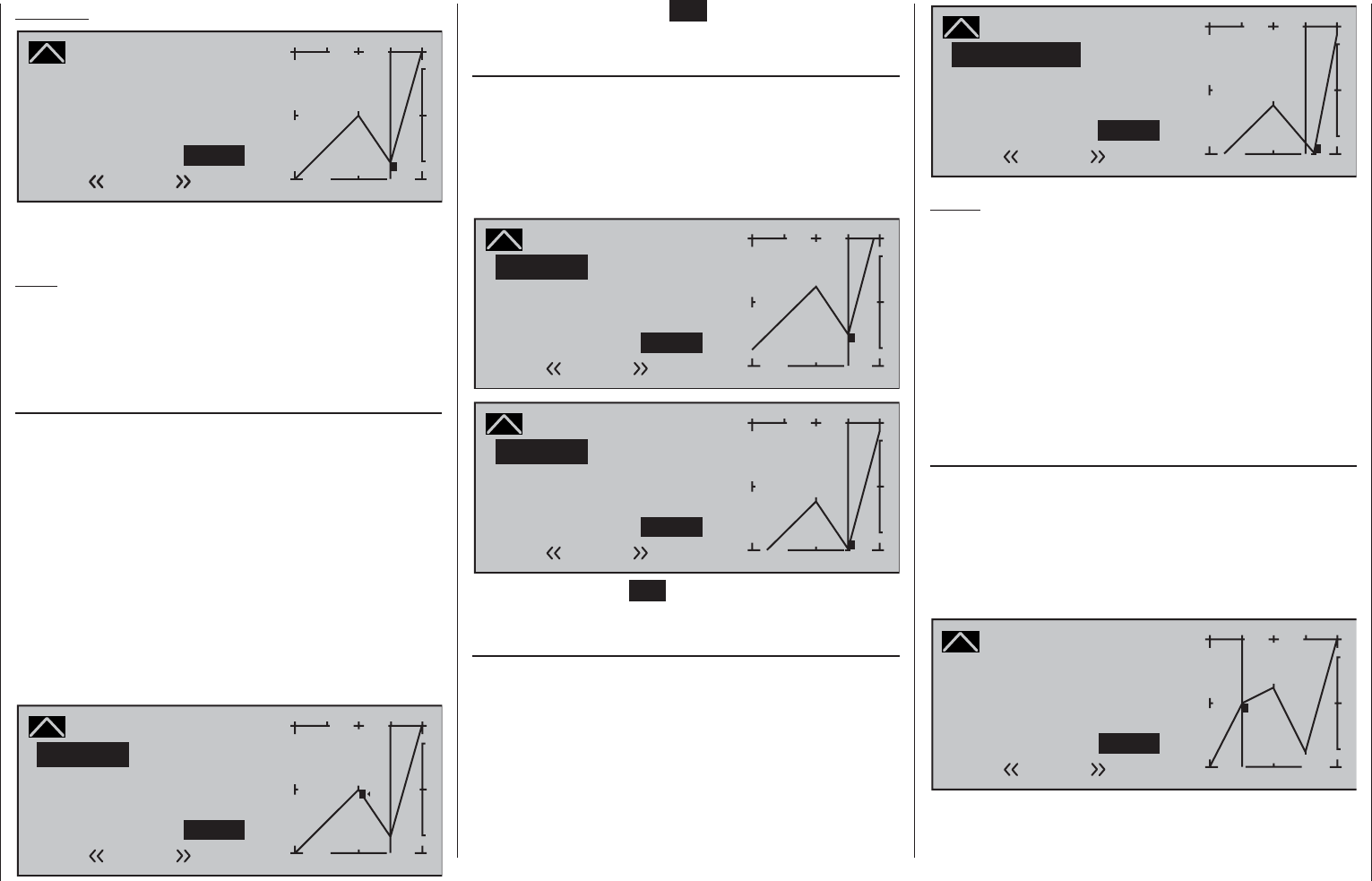
129
Detail program description - Channel 1 curve | Winged models
Example:
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–75%
2+
–
100
¼O U T P U T
1
–75%
Normal
2
In this sample screen image, reference point "2" has
been set to -75 %.
Note:
If the joystick does not coincide with the exact
reference point, please note that the percentage
value on the "Output" line always relates to the
current joystick position.
Trim point function
Alternatively, jumping through active reference points,
in ascending or descending order, can be done with
the ef selection keys of the left touch pad. Note
that "active" reference points are those which have
already been set. When a jump is made from one to
another, the point value fi eld for the jump's destination
reference point in the screen's Point line will be
displayed in inverse video and its position in the graph
will be marked with the point's number (L, 1 … max.
6 and H) in inverse video and a small triangle. The
selection keys on the right touch pad can then be used
to change the reference point jumped to as described
above, entirely independently of the control position.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–75%
1+
–
100
¼O U T P U T
0% 2
Normal
Trim point
1
One touch on the center ESC key of the left touch
pad terminates this trim point function.
Trim offset function
When a value fi eld is active, i.e. in inverse video, it is
not only possible, as previously described, to jump to
and change a reference point already set with the ef
selection keys of the left touch pad but also an existing
curve can be vertically repositioned with the cd keys
of the left touch pad within a range of ±25%.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–50%
2+
–
100
¼O U T P U T
–50%
1
Normal
Trim offset
2
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–100%
2+
–
100
¼O U T P U T
–100%
1
Normal
Trim offset
2
A tap on the center ESC key of the left touch pad will
also terminate this function.
Trim x-axis function
This function is activated by tapping the left (e) or
right (f) selection key of the right touch pad with
an active (i.e. inverse video) value fi eld. You can
then use the selection keys on the right touch pad to
reposition the active point horizontally or vertically as
you wish.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–83%
2+
–
100
¼O U T P U T
–100%
1
Normal
Trim X-axis
2
Notes:
If the point is repositioned horizontally further •
away from the current control position than
approx. ±25 %, a "?" sign will reappear in the line
Point. This question mark does not refer to the
repositioned point, however: instead, it signifi es
that a further point can be set at the current
control position.
Please note that the percentage value on the •
"Output" line always relates to the current joystick
position and not to the position of the point.
Smoothing the Channel 1 curve
In the example below, sample reference points have
been set:
reference point 1 to 0 %,
reference point 2 to +25 % and
reference point 3 to -75 %
as described in the last section.
Channel 1 C U R V E
Curve
off Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
2
3
Normal
1
This "jagged" curve profi le can be smoothed
automatically simply by pressing a button.
130 Detail program description - Channel 1 curve | Winged models
Do this – from a situation as illustrated – with a brief
tap on the d selection key of the left touch pad. This
will cause a switchover from "(Curve) off" to "(Curve)
on" (or vice versa).
Channel 1 C U R V E
Curve
on Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
Normal
2
3
1
Note:
The curves shown here are for demonstration
purposes only and are not at all representative of
real throttle or airbrake curves. A specifi c application
example can be found in the programming examples
on page 274.
131
Detail program description - Channel 1 curve | Helicopters
Channel 1 curve
Control characteristics for throttle/collective pitch stick
Using the selection keys of the left or right touch pad,
scroll to the »Channel 1 curve« menu option in the
Multi-function menu:
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Open this menu option with a tap on the center SET
key of the right touch pad.
Channel 1 C U R V E
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
Since the carburetor response or the effect of
collective pitch is often non-linear, you can make
compensatory adjustments to these in this menu.
The menu therefore enables modifi cation of the
control characteristics of the motor/collective pitch
joystick, regardless of whether this control function
affects the servo connected to control channel 1
directly or affects multiple servos via various mixers.
If fl ight phases have been specifi ed in the »Phase
settings« and »Phase assignment« menus (see
pages 142 and 148) this option can be adapted on
a fl ight-phase basis. The given fl ight phase name,
e.g. «normal», will be shown at the bottom left of
the screen.
The control curve can be defi ned by up to 8 points
(termed "reference points" below) placed anywhere
along the path of joystick travel. While the on-screen
graph considerably simplifi es the process of setting
and adjusting the reference points, we recommend
that you set fewer reference points to begin with.
Please note that the curve characteristic you set
here acts as the input signal for specifi c mixers in the
»Helicopter mixer« menu, page 176.
»Heli-Mixer«
C1 ¼
C1¼ Tail rotor
C-1-
curve Pitch
Thr
Pitch-
stick
In the basic software set-up, 2 reference points–
namely the end-points at the bottom end of joystick
travel ("L", low = -100 % travel) and the top end of
joystick travel ("H", high = +100 % travel)–defi ne a
linear characteristic curve.
First, switch to your chosen fl ight phase, if necessary.
Setting reference points
By moving the transmitter control (motor/collective
pitch stick), you can reposition the vertical line in the
graph between the two end-points "L" and "H". The
current joystick position is also displayed in numerical
form on the "Input" line (-100 % to +100 %). The point
at which this line crosses the curve is termed the
"Output", and can be varied at the reference points
within the range -125 % to +125 %. The control signal
altered in this way will then affect all subsequent
mixer and coupling functions.
In the example above, the joystick is at 0 % of control
travel and also generates an output signal of 0 %,
since the characteristic curve is linear.
Up to 6 additional reference points can be set
between the two end-points "L" and "H", although the
distance between neighboring reference points must
not be less than approx. 25 %.
Move the joystick. If a question mark can be seen in
the "Point" frame, then the next reference point can be
set with a tap on the center SET key of the right touch
pad. Simultaneously, the "?" is replaced by a number
and the value fi eld to the right of the reference point
number will be shown in inverse video.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
+50%
2+
–
100
¼O U T P U T
1
+50%
Normal
2
The order in which you generate the (maximum) 8
reference points between the end-points "L" and
"H" is irrelevant, since the reference points are
continuously renumbered automatically from left to
right as they are entered.
Erasing reference points
To delete one of the reference points (1 to max. 6), use
the joystick to move the vertical line into the vicinity
of the reference point in question. As soon as the
reference point number and its associated value is
shown on the "Point" line (see screen image above),
following activation of the value fi eld on the "Point"
line now in inverse video with a simultaneous tap on
thecd or ef keys of the right touch pad (CLEAR) it
can be erased. Complete the operation with a brief tap
on the center key ESC of the left touch pad.
Changing reference point values
Move the joystick into the range of the reference point
that is to be changed: "L" (low), 1 … 6 or "H" (high).
The number and current curve value of this point are
displayed. Activate the value fi eld with a brief tap on
the center SET key of the right touch pad. The point
value fi eld is now highlighted and can be set within
132 Detail program description - Channel 1 curve | Helicopters
the range -125 % to +125 %, and without infl uencing
the neighboring reference points.
Example:
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–75%
2+
–
100
¼O U T P U T
1
–75%
Normal
2
In this sample screen image, reference point "2" has
been set to -75 %.
Note:
If the joystick does not coincide with the exact
reference point, please note that the percentage
value on the "Output" line always relates to the
current joystick position.
Trim point function
Alternatively, jumping through set reference points can
be done with the ef selection keys of the left touch
pad in either ascending or descending order, whereby
the number of the jump's destination reference point
in the graph will be marked with the point's number,
1 … max. 6, in inverse video. The selection keys on
the right touch pad can then be used to change the
reference point jumped to as described above, entirely
independently of the control position.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–75%
1+
–
100
¼O U T P U T
0% 2
Normal
Trim point
1
One touch on the center ESC key of the left touch
pad terminates this trim point function.
Trim offset function
When a value fi eld is active, i.e. in inverse video, it is
not only possible, as previously described, to jump to
and change a reference point already set with the ef
selection keys of the left touch pad but also an existing
curve can be vertically repositioned with the cd keys
of the left touch pad within a range of ±25%.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–50%
2+
–
100
¼O U T P U T
–50%
1
Normal
Trim offset
2
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–100%
2+
–
100
¼O U T P U T
–100%
1
Normal
Trim offset
2
A tap on the center ESC key of the left touch pad will
also terminate this function.
Trim x-axis function
This function is activated by tapping the left (e) or
right (f) selection key of the right touch pad with
an active (i.e. inverse video) value fi eld. You can
then use the selection keys on the right touch pad to
reposition the active point horizontally or vertically as
you wish.
Channel 1 C U R V E
Curve
off Point
Output
Input +50%
–83%
2+
–
100
¼O U T P U T
–100%
1
Normal
Trim X-axis
2
Notes:
If the point is repositioned horizontally further •
away from the current control position than
approx. ±25 %, a "?" sign will reappear in the line
Point. This question mark does not refer to the
repositioned point, however: instead, it signifi es
that a further point can be set at the current
control position.
Please note that the percentage value on the •
"Output" line always relates to the current joystick
position and not to the position of the point.
Smoothing the Channel 1 curve
In the example below, sample reference points have
been set:
reference point 1 to 0 %,
reference point 2 to +25 % and
reference point 3 to -75 %
as described in the last section.
Channel 1 C U R V E
Curve
off Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
2
3
Normal
1
This "jagged" curve profi le can be smoothed
automatically simply by pressing a button.
133
Detail program description - Channel 1 curve | Helicopters
Do this – from a situation as illustrated – with a brief
tap on the d selection key of the left touch pad. This
will cause a switchover from "(Curve) off" to "(Curve)
on" (or vice versa).
Channel 1 C U R V E
Curve
on Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
Normal
2
3
1
Note:
The curves shown here are for demonstration purposes
only and are not at all representative of real throttle
curves. For real-world application examples, see the
programming examples on pages 274 and 313.
134 Detail program description - Switch display
Switch display
Displaying switch positions
Use the selection keys on the left or right touch pad
to scroll to the »Switch display« option in the multi-
function menu:
Model select
Servo adjustmentStick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelModel type
Model select
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Copy / Erase
Suppress codes Suppress models
Base setup modelHelicopter type
Open this menu option with a tap on the center SET
key of the right touch pad.
Switch
Contrl
1
C1 C2 C3 C8
2345678910
11 12 13 14 15 16
switch
C4 C5 C6 C7
This feature is used to check the functions and
give an overview of switches 1 … 16 and the
programmable control switches C1… C8.
If a switch is pressed, the switch number is revealed
by one of the display items changing from an OFF
to an ON symbol (or vice versa). To improve the
legibility of this screen, a closed switch fi eld is also
shown in inverse video (i.e. on a dark background).
For control switches C1 … C8, activation of the
corresponding transmitter control – which must have
been previously assigned on the »Control switch«
menu – will reveal the control switch number and
direction.
Note:
Switch numbering 1 to 16 as shown here corresponds
to the labeling of switch plug-in locations on the
transmitter's circuit board. The numbering of the
switches has no effect on the programming of the
transmitter, however.
135
Detail program description - Control switches
Control switches
Programming the control switches
Use the selection keys on the left or right touch pad
to scroll to the »Control switch« option in the multi-
function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Suppress codes Suppress models
Base setup model Model type
Control switch Logical switch
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch Display
Suppress codes Suppress models
Base setup model Helicopter type
Control switch Logical switch
Open this menu option with a tap on the center SET
key of the right touch pad.
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Geb. 1
Geb. 1
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
free
free
With many functions, it makes sense not to trigger
their actuation by using one of the normal switches,
but to trigger them automatically by the specifi c,
freely programmable position of a transmitter control
or joystick.
Typical applications:
On/Off switching of an on-board glow plug in •
conjunction with the carburetor setting and/or
motor speed. (The glow plug heater switch for this
will be controlled by a transmitter-side mixer.)
Switching a stopwatch on or off to measure the •
simple running time of electric motors
Automated switch-off of a combi "aileron •¼ rudder"
mixer when extending the airbrakes, e.g. so as to
match the bank attitude of the model to the ground
slope when landing on a ridge, without the direction
of fl ight also being affected by the rudder (if the
mixer were active).
Lowering landing fl aps, adjusting elevator trim •
and/or executing specifi c Dual Rate, Exponential
and Differential switchings when coming in to land,
as soon as the throttle joystick is moved beyond
the switching point. If required, a control switch
can be overridden using a separately assigned
switch in the 5th column.
The mc-20 HoTT program is equipped with a total of
eight so-called control switches ("C1" to "C8").
Accordingly, anywhere where switches can be
assigned you have the option not only of using
the 16 possible transmitter switches, but also of
choosing and assigning one of the "C1" … "C8"
control switches from the list of expanded switches
– as described in the section "Assigning transmitter
controls, switches and control switches" on page 56.
Furthermore, combining a control switch with an
additional switch (as described later) also permits
more complex switching permutations.
Basic procedure:
If no transmitter control is assigned, the 1.
corresponding input fi eld of the column labeled
SEL (second column from the left) will be empty.
Use the selection keys of the left or right touch 2.
pad to select the line for the desired control switch
(1 to 8).
Briefl y tap the center 3. SET key of the right touch
pad.
Move your selected transmitter control.4.
The associated transmitter control number
appears in the input fi eld of the column above the
left switch icon.
Use the selection keys on the left or right touch pad 5.
to move to the right into the column labeled STO.
Move the transmitter control to the desired switching 6.
point then briefl y tap on the center SET key of the
right touch pad to save the switching point.
Complete the remaining settings such as 7.
switching direction, etc.
Exit from the menu with a tap on the center 8. ESC
key of the left touch pad.
Assigning a transmitter control to a control switch
Using the selection keys on the left or right touch
pad, select your chosen line (1 to 8). Following a fi nal
tap on the center SET key of the right touch pad to
activate the control assignment, the message shown
below will appear in the display:
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Geb. 1
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
frei
free
free
frei Move desired
control adj.
For example, the right-side proportional slider is now
to be assigned to control switch "C1", the default
throttle limiter for a helicopter model memory. So just
move this control in any direction. As soon as this is
detected, the control name appears on the display:
136 Detail program description - Control switches
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
Resetting a control switch back to "free"
To reset a control switch back to "free", make sure
the display is as below …
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
Move desired
control adj.
… then, with a brief simultaneous tap on the cd or
ef keys of the right touch pad (CLEAR), the entry
for a control will be erased.
Defi ning the switching point
Using the f selection key of the left or right touch
pad to move the marker frame into the column
labeled STO (store).
Move the selected transmitter control to the position
at which the switching point, i.e. the switch between
OFF/ON, should trigger and briefl y tap the center
SET key of the right touch pad. The current position
is displayed, for example "+85 %":
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
+85%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
The switching point can be altered at any time with
another tap on the center SET key of the right touch
pad.
Note:
Do not, however, set a switching point at a transmitter
control's travel end-point, since this makes reliable
switching impossible. If a 2-way or 3-way switch is
used to operate a control switch, the switch point
should be programmed in advance with one of the
transmitter's proportional controls.
First, assign the corresponding proportional control
in the 2nd column and set the switching point in such
a way that will ensure the subsequent confi guration
for the 2-way or 3-way switch will reliably exceed
this value. If you do not, the switching function will
be unreliable, since the control switch triggers only
if a value unambiguously fails to meet or exceeds
the value set! To complete the procedure, cancel the
transmitter control assignment then assign the 2-way
or 3-way switch.
Setting the switching direction
The switching direction of the control switch is
changed as required in the 4th column. Use the f
selection key of the left or right touch pad to move the
marker frame into the column labeled SEL (select).
Following a brief tap on the center SET key of the
right touch pad, the switch direction can by changed
back-and-forth between "normal" and "reversed" with
the selection keys of the left or right touch pad.
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
+85%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
+85%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
A simultaneous tap on the cd or ef keys of
the right touch pad (CLEAR) will reset the switch
direction back to "=>".
The current switch position of the control switch is
displayed in the leftmost column by the switch icon
next to the number of the control switch.
Notes:
In this example control switch"C1" is open as long •
as transmitter control "Lever 1" (the throttle limiter
for a helicopter) is less than +85 % of control travel.
It closes once the switching point is exceeded, i.e.
by a value over +85 % and up to the upper limit.
In the above example with the switching direction •
reversed, control switch "C1" remains closed while
the transmitter control is at less than +85 % of full
travel. As soon as the switching point is exceeded,
in this example a value between +85 % and the
upper travel end-point , "C3" will open.
If a control switch – e.g. "C1" – has multiple •
assignments, you should bear in mind that the
switching direction set here applies to all C3
switches.
137
Detail program description - Control switches
The switch state can also be inverted by reversing •
the control in the »Control adjust« menu.
Combining a control switch with a switch
The control switch can be overridden by a further
switch, so that e.g. in certain fl ight situations
the function to be triggered can be activated
independently of the control position and thus the
position of the control switch.
Change to the value fi eld in the 5th column, the
column above the rightmost switch symbol. In the
simplest case, select one of the switches mounted
in the two switch panels, as described in the section
"Assigning transmitter controls, switches and control
switches" on page 56. The number of this switch,
e.g. "10", appears on the display in the next-to-the
last column at the right, together with a switch icon
indicating the switch's current state.
While this switch is open, the "C1" control switch
is active, i.e. it triggers at the switching point; if the
switch is closed, the control switch now remains
permanently closed as well, independently of the
control position and switching direction:
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Lever1
free
+85%
STO
–––
–––
10
SEL
C1
C2
C3
C4
free
free
Combining two control switches
For more complex applications, however, it can
prove necessary to override this control switch with a
second control switch.
Example:
Control switch "C1" will now be assigned to control
function 3 (= control 3) instead of its previous
assignment "Lever1". The switching point is at its
center point, i.e. at 0 %. The switch chosen in the
next-to-the-last right column is "C2" from the list of
expanded switches. This "C2" control switch will now
be allocated in its own line to the middle proportional
slider "Slide2", whose switch-point is +50 % liege:
SEL
+50%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Cnt. 1
Slide2
0%
STO
–––
–––
C2
SEL
C1
C2
C3
C4
free
free
The switching directions indicated in the fourth column
from the left will now show control switch "C2" as being
closed as long as joystick (control 3) and/or "Slide 2"
are located on the other side of their switch-points.
This diversity of switching options certainly offers you
enough scope for specialized applications to suit any
type of model
.
.
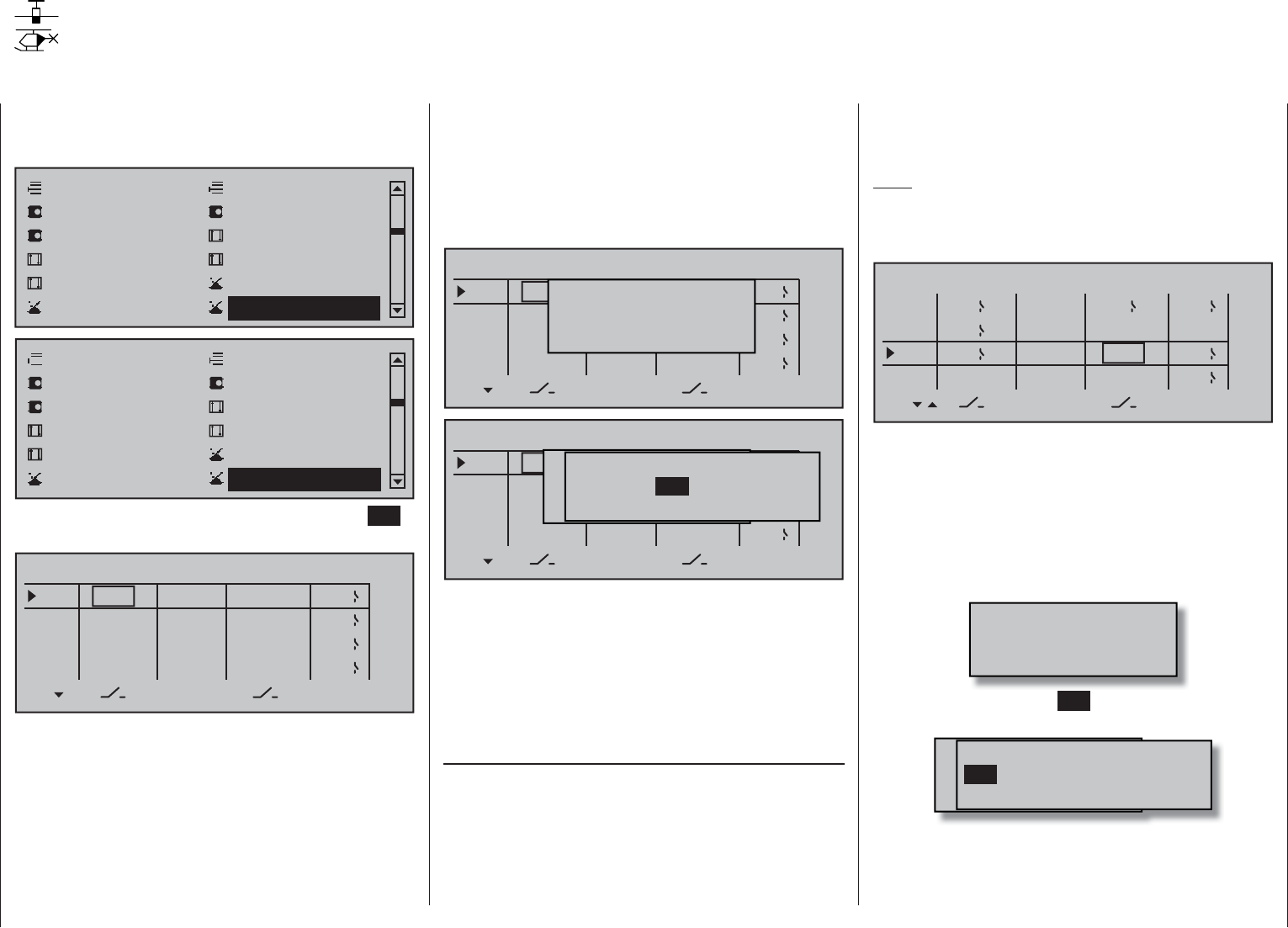
138 Detail program description - Logical switches
Logical switches
Programming logical switches
Use the selection keys on the left or right touch pad
to scroll to the »Control switch« option in the multi-
function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Suppress codes Suppress models
Base setup model Model type
Control switch Logical switch
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch Display
Suppress codes Suppress models
Base setup model Helicopter type
Control switch Logical switch
Open this menu option with a tap on the center SET
key of the right touch pad.
AND
AND
AND
L1
L2
L3
–––
L4
LOGICAL SWITCHES
AND
–––
–––
–––
SEL
L1
L2
L3
L4
–––
–––
–––
–––
These functions permit two switches, control switches
and/or logical switches or any combination of these to
be combined with one another to create logical "AND"
and "OR" functionality. A total of 8 logical switches,
"L1 … L8" can be programmed.
The result of such a logical switch function – shown
in the display's rightmost column – can be used as
another switch function. Allocation of a switch to
a logical function is done in the familiar manner in
the columns labeled by the two switch symbols,
as described in the section "Assigning transmitter
controls, switches and control switches" on page56.
That is, by moving the respective switch from OFF to
ON or, after a tap on the center SET key of the right
touch pad, by selecting one of the expanded switches
with the selection keys.
UND
UND
AND
L1
L2
L3
–––
L4
LOGICAL SWITCHES
UND
–––
–––
–––
SEL
L1
L2
L3
L4
–––
–––
–––
–––Move desired switch
to ON position
(ext. switch: ENTER)
UND
UND
UND
L1
L2
L3
–––
L4
LOGICAL SWITCHES
UND
–––
–––
–––
SEL
G1
G2
G3
L4
–––
–––
–––
–––
Mowünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C1 C3
Potential applications for this:
Multiple functions, which are normally independent •
of one another, are to be put into a defi ned state
by way of an »Emergency switch«.
The establishment of dependencies for initiating a •
switch-on warning, see »Basic settings, model«
menu.
"AND" / "OR"
Once a given value fi eld has been activated in the
column labeled SEL, the "AND" and "OR" logic
operator can be selected with the selection keys.
"AND" function: The logical switch is only closed
when both input switches are
closed.
"OR" function: The logical switch is closed
when at least one of the input
switches is closed.
Note:
The difference between AND and OR logic switches
is made clear by the settings and input states of the
display fi gure below.
OR
AND
AND
L1
L2
L3
–––
L4
LOGICAL SWITCHES
AND
L2I
4I
2
SEL
L1
L2I
L3
L4
–––
L1
3
1
"L3" is only closed when both the "L1" and "L2"
switches are closed. This means that both switches,
1 and 2, must be closed and, at the same time, either
3 or 4.
In order to make these logical switches usable, they
can be specifi ed in those menus which use switches
by calling them up via the additional "expanded
switches" selection menu.
Move desired switch
to ON position
(ext. switch: ENTER)
A brief tap on the center SET key of the right touch
pad will afford access to the expanded switches.
M wünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C3C1
Now use the selection keys to pick the desired control
switch "C1 … C8", fi xed switch "FX" or logical switch
"L1 … L8" or the respected inverted switch "C1i …
C8i", "FXi" or "L1i … L8i", for example, "L3i":
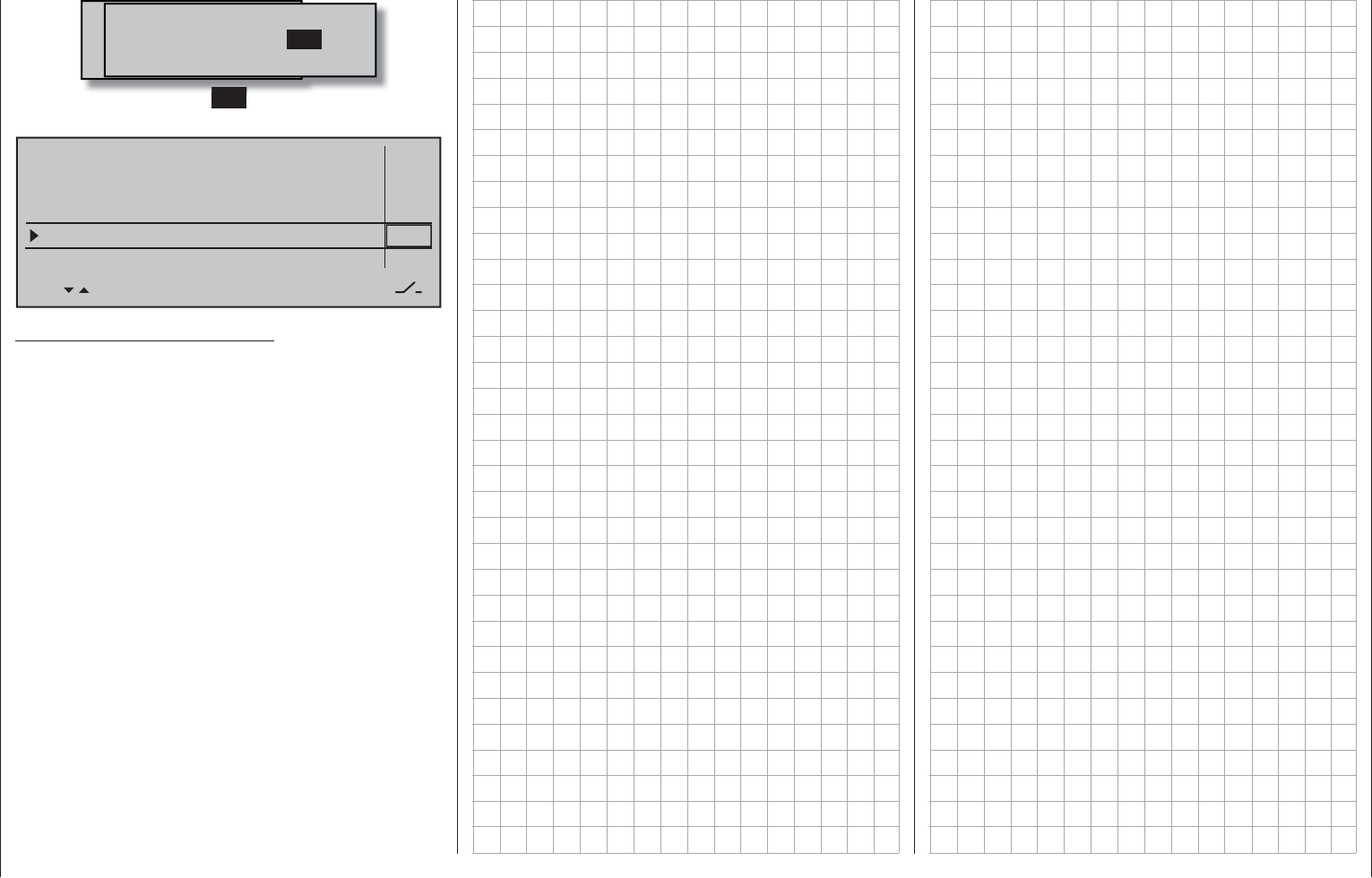
139
Detail program description - Logical switches
Moewünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C8i L2i L4i
L5i L6i L7i L1 L2
C7i L1i
L8i
L3i
A brief tap on the center SET key of the right touch
pad will adopt the selected switch into the menu.
Model time
Batt. time
Top :
Centr:
Stop watch
Flight time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
L3I
L3I
Alarm
Timer
Remark about inverted switches:
Selection of an inverted switch for a switch
assignment, e.g "L1i" instead of "L1", simply specifi es
the opposite switch direction (state), i.e. non-inverted
usage results in a certain switch activating a particular
function when it is in its switched-on state but
inverted usage results in a certain switch activating a
particular function when it is in its switched-off state.
Such applications arise when, for example, one and
the same switch is to switch one function on but, at
the same time, it is to switch a second function off,
and vice versa. Logical switches permit other, quite
complex, switching options to be created.
140 How is a fl ight phase programmed?
How is a fl ight phase programmed?
The concept of fl ight phase programming
General information on fl ight phase programming
During a fl ight, you will often want to apply different
settings – e.g. fl ap or trim settings for a fi xed-wing
aircraft or collective pitch and throttle servo settings
for a helicopter – at particular times in the fl ight (e.g.
take-off, approach, hover, auto-rotate, etc.). With mc-
20 HoTT, you can access such presets automatically
using switches or control switches.
Flight phases are also of great utility during fl ight
testing. You can confi gure various set-ups and then
switch between them during the fl ight: this enables
you to identify the most appropriate program set-up
for your model quickly and easily.
The basic programming procedure is a three-
stage process
First, you have to set up the different fl ight phases, 1.
i.e. you assign names to phases 1 … max. 8.
Each name is then shown in all phase-specifi c
menus and also on the basic display. To avoid
abrupt transitions when switching between the
various phases, you can also program a period
of time during which a "soft" transition to the next
phase takes place.
For fi xed-wing aircraft programs, these settings
are made in the »Phase settings« menu. The
programming of helicopters begins with either
the »Basic settings, model« menu, if you wish
to set up autorotation or, otherwise, with the
»Phase settings« menu.
In the second stage, you use the »2. Phase
assignment« menu to set up the required "phase
switches".
Once these are set, you can then move to the 3.
fl ight phase-dependent menus (see the tables
below) to start programming the settings for the
individual fl ight phases.
List of fl ight phase-relevant menus for fi xed-wing
programs:
Menu Page
»Control adjust« 108
»Dual Rate / Expo« 120
»Channel 1 curve« 128
»Phase settings« 142
»Phase assignment« 148
»Phase trim« 150
»Non-delayed channels« 151
»Flight phase timers« 156
»Wing mixers« 160
»MIX active/phase« 204
»Trim memory« 224
List of fl ight phase-relevant menus for helicopter
programs:
Menu Page
»Control adjust« 112
»Dual Rate / Expo« 124
»Channel 1 curve« 131
»Phase settings« 146
»Phase assignment« 148
»Non-delayed channels« 151
»Flight phase timers« 156
»Helicopter mixer« 176
»MIX active/phase« 204
»Trim memory« 226
All other menus are model-specifi c and thus cannot
be programmed separately for each fl ight phase.
Accordingly, changes you make in all other menus
apply uniformly to all fl ight phases for that specifi c
model. In some cases it may be desirable to use the
»Suppress codes« menu (see page 74) to remove
non-alterable menus from the multi-function list
while programming fl ight phases. Two examples of
fl ight phase programming can be found in the text
beginning on page 288.
141
How is a fl ight phase programmed?
142 Detail program description - Phase settings | Winged models
Phase settings
Setting up fl ight phases
Setting up fl ight phases
When you set up fl ight phases for fi xed-wing
aircraft models, you start with this menu. You
assign individual phases a name and also assign
a period of time for a (soft) transition into each
phase. Note that – depending on your model and
your settings – switch times much longer than the
default 0.1 s have proven useful. You can also set up
several phases with names and transition times even
if you don't currently have a use for them, since the
decision as to which of the "occupied" phases you
activate is made only on the »Phase assignment«
menu (page 148) when setting "phase switches".
Whether or not one of the phases 1 … 8 currently has
an assigned switch and the state of the switch can be
seen in the "status" column at the far right.
Symbol Meaning
– No switch assigned
+ Phase can be accessed via switch
¾Indicates the phase currently active
Note:
The "Copy fl ight phase" option on the »Copy / Erase«
menu is a useful aid when programming the various
fl ight phases. First, you need to determine the
parameters for a specifi c fl ight phase; these are then
copied to the next fl ight phase, where they can then be
modifi ed as appropriate.
"Name" column
Briefl y tap on the center SET key of the right touch
pad then assign the needed phases (phase 1 up to
maximum of 8 phases) by picking their names from
the selection list with the selection keys of the left or
right touch pad. In addition to this standard pool of
names, the »General basic settings« menu, page
261, permits up to 10 names of personal preference
to be defi ned.
Use the selection keys of the left or right touch pad
to scroll to the »Phase settings« menu option in the
multi-function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Base setup model Model type
Control switch Logical switch
Phase settings Phase assignment
Within one model memory, the mc-20 HoTT lets
you program up to 8 discrete groups of settings for
various conditions met during the fl ight. The grouped
settings are typically termed "fl ight phases" and are
programmed in the corresponding menus.
Depending on the setting "Throttle min. forward/
back" or "None" in the "Motor on C1" line of the
»Model type« menu, calling up the »Phase settings«
menu option will cause the transmitter's display to look
like one of the two variants shown below …
Motor on C1 "none"•
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim Sw. time
–
–
–
–
¾
Motor on C1 "Throttle min front/rear"•
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw. time
Motor
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
The order in which phases 1 to max. 8 are assigned is
entirely irrelevant and you can leave gaps as you wish.
Nonetheless, you should always start with "Phase 1",
the "Normal phase", which is always active if …
… no phase switch is set in the »• Phase
assignment« menu or if
no phase has been assigned to specifi c •
combinations of switches.
The defi nition of the phase name "Normal" could
therefore be a useful one to adopt for "Phase 1".
The names themselves have absolutely no technical
signifi cance for programming; their only purpose is to
help you to identify which phase is active at any time
and are thus displayed in all fl ight phase-dependent
menus and also on the transmitter's basic display.
Column "Fl.ph.Tim" or "Timer"
In addition to the standard timers on the basic screen
display, other timers are also available whose settings
are confi gured in the »Flight phase timers« menu,
page 156.
Clk 1, Clk 2, Clk 3, Lap, Time1, Time2
The fl ight phase timers "Clk 1 … 3" plus "Time1"
and "Time2" run only in the fl ight phase to which
they have been assigned in this menu. During other
fl ight phases they are stopped (and hidden) and the
assigned stop/start switch then has no effect.
The lap counter, once started, continues to run
through changes of phase, however, although it can
be stopped during any fl ight phase via the center
ESC key of the left touch pad.
While you can obviously record lap times using "Lap"
and a switch, the two timers "Time1" and "Time2"
have the following meaning:
Time 1
This timer will only measure time during which
the switch or control switch assigned in the "Lap
time/Tim tab" line of the »Flight phase timers«
menu, page 156, is "closed". The frequency at
which the switch is activated is shown on the
143
Detail program description - Phase settings | Winged models
basic display. This counter fi eld is highlighted
as soon as the switch for the "Time1" timer is
"opened", i.e. the timer is stopped:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Lap 00 0.0s
RX VOLT:4.9V
When necessary, the selection keys can be
used to access and read the sequence of
switching times.
Application:
Measurement of e.g. motor switch-on times, if
the same switch also actuates the motor.
Time 2
This timer stores both the "off" and the "on"
periods for the associated switch, i.e. every
switch actuation in either direction will cause a
record to be written for the timer, the timer will
be reset then starts incrementing by "1" again
as time passes.
Each time count can be suspended with the
center ESC key of the right touch pad, without
actuating the switch itself. Activating the
switch, in turn, increments the counter by 1 and
restarts the "Time 2" timer.
In order to read out the time memory with the
selection keys, the "Time 2" timer must fi rst be
suspended by using the ESC key of the right
touch pad.
Application:
In addition to the motor runtimes, for example,
the unpowered glide times between these
could also be recorded.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset suspended timers
shown in the basic display.
"Motor" column
Note:
This column is only available if "forward/back" is
present in the "Motor on C1" line of the »Model type«
menu.
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw. time
Motor
0.1s
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal
Launch
Dist.
yes
"yes" The motor connected to receiver output 1 will
be controlled by the C1 joystick (throttle/brake
stick).
The brake system to be set up on the »Wing
mixers« menu is deactivated:
BRAKE SETTINGS
Normal
off
The motor connected to receiver output 1 is
decoupled from the C1 joystick (throttle/brake
stick) and is held in its OFF position – as
specifi ed by the setting "Throttle min. forward
/ back" – automatically.
The brake system to be set up in the »Wing
mixers« menu is activated and is actuated by
the C1 joystick.
Elevator curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
WK
0%
Diff.- reduct
Note:
The settings available depend on the number
of control surface servos selected on the
line "Ailerons/Camber-changing fl aps in the
»Model type« menu.
"Sw. time" column
When you switch between fl ight phases, it is
advisable to use this column to program a switch time
for a "soft" transition INTO (!) the respective phase.
Accordingly, there is also an option for specifying a
different time for the switchover from any phase to,
for example, Phase 3 than for a switchover to Phase
1.
Use the f selection key of the left or right touch pad
to move the marker frame to the right beyond the
column labeled "Timer" and, if applicable, also the
column labeled "Motor".
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw. time
Motor
0.1s
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal
Launch
Dist.
yes
Following a brief tap on the center SET key of the
right touch pad, the switchover time value in the fi eld
displayed in inverse video can be changed within a
range of 0 and 9.9 s.
144 Detail program description - Phase settings | Winged models
Example:
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw. time
Motor
0.1s
yes 0.1s
yes 1.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal
Launch
Dist.
yes
The switchover time from any other phase to Phase 1
«normal» will take 2.2 s.
The time for a switchover from, for example, Phase 1
to Phase 3, is set to 1.1 s and the time for a switchover
from Phase 1 or 3 to Phase 2 "Launch" is 1.5 s.
Such asymmetric transition times can be useful when,
e.g. switching between extremely different fl ight
phases, such as between aerobatics and normal fl ight.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the time in the
currently active value fi eld back to 0.1.
Note:
The "switch time" set here applies uniformly to all
settings that are specifi c to fl ight phases, and thus
to all mixers activated in the »Wing mixers« menu,
see page 160. Accordingly, the transition between
fl ight phase-specifi c mixers does not occur abruptly.
However, if individual servos are to be switched
without a delay then these can be defi ned accordingly
in the »Non-delayed chan« menu (see page 151).
145
For your notes
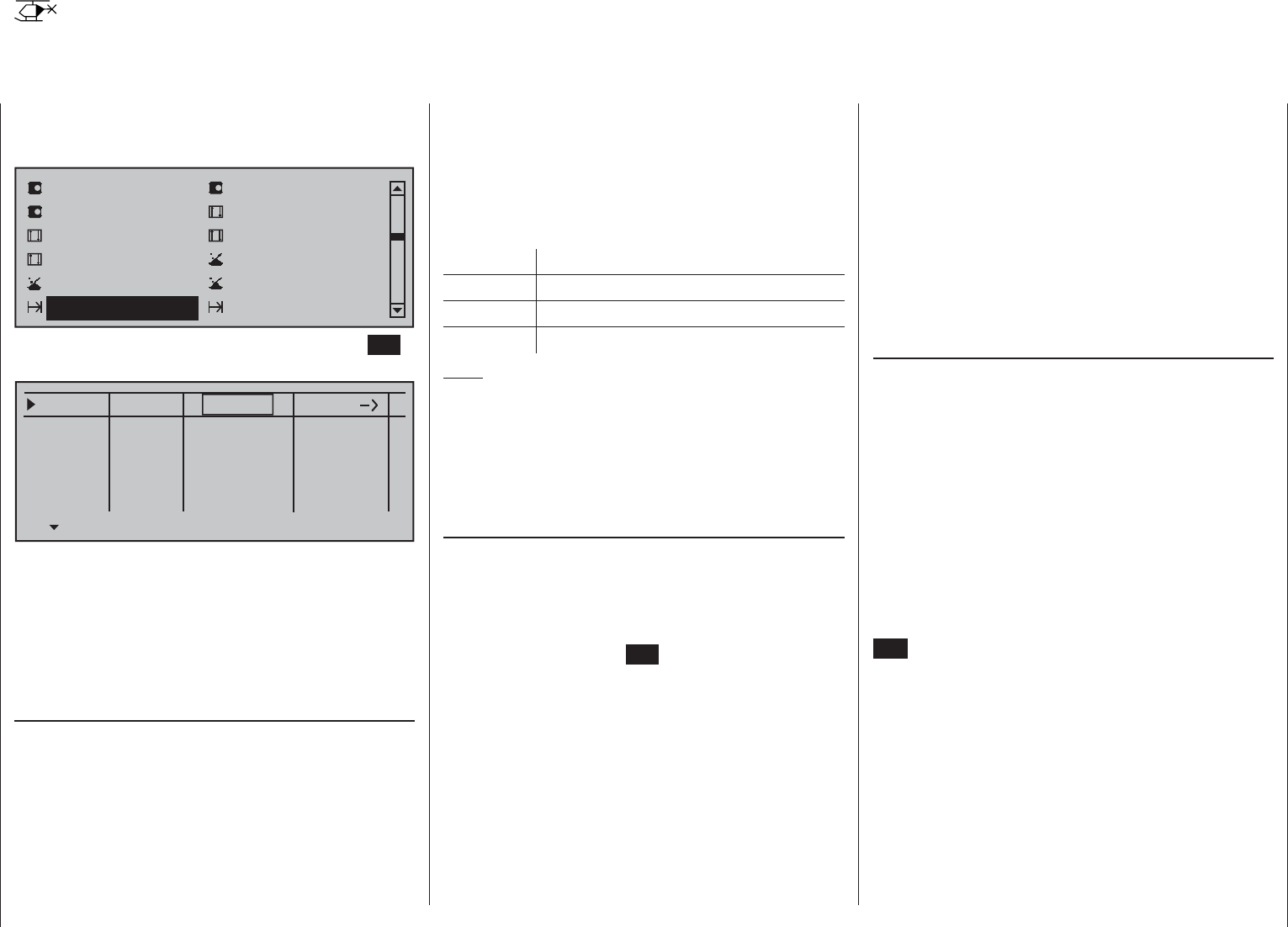
146 Detail program description - Phase settings | Helicopters
Use the selection keys of the left or right touch pad
to scroll to the »Phase settings« menu option in the
multi-function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Base setup model Helicopter type
Control switch Logical switch
Phase settings Phase assignment
Open this menu option with a tap on the center SET
key of the right touch pad.
Phase 1
Phase 2
Phase 3
Phase 4
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim. Sw.time
–
–
–
–
¾
Autorot Autorot
Within one model memory, the mc-20 HoTT lets
you program up to 7 discrete groups of settings for
various conditions met during the fl ight. These are in
addition to the auto-rotation fl ight phase that can be
set up in the »Basic settings, model« menu. The
grouped settings are typically termed "fl ight phases"
and are programmed in appropriate menus.
Setting up fl ight phases
When you set up fl ight phases for helicopter models,
you start with this menu. You assign individual phases
a name and also assign a period of time for a (soft)
transition into each phase. Note that – depending on
your model and your settings – switch times much
longer than the default 0.1 s have proven useful.
You can also set up several phases with names and
transition times even if you don't currently have a
use for them, since the decision as to which of the
Phase settings
Setting up fl ight phases
"occupied" phases you activate is made only on the
»Phase assignment« menu (page 148) when setting
"phase switches".
The "Status" column, second from the left, shows which
one of the phases 1 … 7, including the autorotation
phase this is 8, has already been assigned to a switch,
plus the current status of that switch:
Symbol Meaning
– No switch assigned
+ Phase can be accessed via switch
¾Indicates the phase currently active
Note:
The "Copy fl ight phase" option on the »Copy /
Erase« menu is a useful aid when programming the
various fl ight phases. First, you need to determine the
parameters for a specifi c fl ight phase; these are then
copied to the next fl ight phase, where they can then
be modifi ed as appropriate.
"Name" column
The fi rst line, and thus the fi rst fl ight phase, is
reserved for autorotation fl ight, see »Basic settings,
model« menu. Accordingly, the predefi ned name
cannot be changed.
Use the selection keys to move to the line "Phase 1".
Briefl y tap on the center SET key of the right touch
pad then assign the needed phase (phase 1 up to
maximum of 7 phases) by picking the respective
name from the selection list with the selection keys of
the left or right touch pad. In addition to this standard
pool of names, the »General basic settings« menu,
page 261, permits up to 10 names of personal
preference to be defi ned.
The order in which phases 1 to max. 7 are assigned is
entirely irrelevant and you can leave gaps as you wish.
Nonetheless, you should always start with "Phase 1",
the "Normal phase", which is always active if …
… no phase switch is set in the »• Phase
assignment« menu or if
no phase has been assigned to specifi c •
combinations of switches.
The defi nition of the phase name "Normal" could
therefore be a useful one to adopt for "Phase 1".
The names themselves have absolutely no technical
signifi cance for programming; their only purpose is to
help you to identify which phase is active at any time
and are thus displayed in all fl ight phase-dependent
menus and also on the transmitter's basic display.
"ph. Tim." column
In addition to the standard timers on the basic screen
display, other timers are also available whose settings
are confi gured in the »Flight phase timers« menu,
page 156.
Clk 1, Clk 2, Clk 3, Lap, Time1, Time2
The fl ight phase timers "Clk 1 … 3" plus "Time1"
and "Time2" run only in the fl ight phase to which
they have been assigned in this menu. During other
fl ight phases they are stopped (and hidden) and the
assigned stop/start switch then has no effect.
The lap counter, once started, continues to run
through changes of phase, however, although it can
be stopped during any fl ight phase via the center
ESC key of the left touch pad.
While you can obviously record lap times using "Lap"
and a switch, the two timers "Time1" and "Time2"
have the following meaning:
Time1
This timer will only measure time during which
the switch or control switch assigned in the
"Lap time/Tim tab" line of the »Flight phase
timers« menu, page 156, is "closed". The
frequency at which the switch is activated
is shown on the basic display. This counter
fi eld is highlighted as soon as the switch for
the "Time1" timer is "opened", i.e. the timer is
stopped:
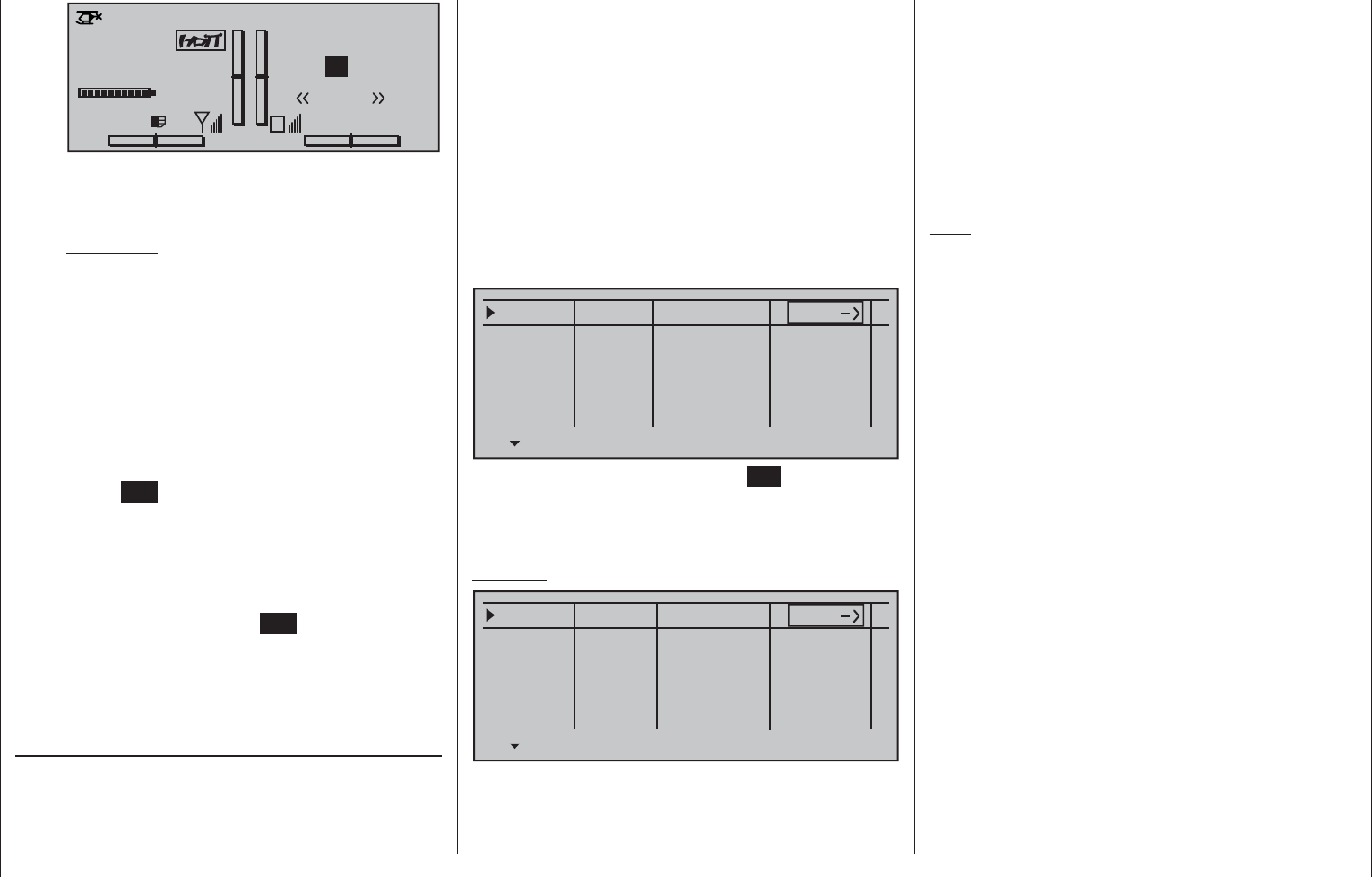
147
Detail program description - Phase settings | Helicopters
#02 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Starlet
H-J Sandbrunner
Normal
Lap 00 0.0s
RX VOLT:4.9V
When necessary, the selection keys can be
used to access and read the sequence of
switching times.
Application:
Measurement of (e.g.) fl ight phases with
increased motor speed, if the same switch is
used to actuate fl ight phase switching.
Time2
This timer stores both the "off" and the "on"
periods for the associated switch, i.e. every
switch actuation in either direction will cause a
record to be written for the timer, the timer will
be reset then starts incrementing by "1" again
as time passes.
Each time count can be suspended with the
center ESC key of the right touch pad, without
actuating the switch itself. Activating the
switch, in turn, increments the counter by 1 and
restarts the "Time2" timer.
In order to read out the time memory with the
selection keys, the "Time2" timer must fi rst be
suspended by using the ESC key of the right
touch pad.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset suspended timers
shown in the basic display.
"Sw. time" column
When you switch between fl ight phases, it is
advisable to use this column to program a switch time
for a "soft" transition INTO (!) the respective phase.
Accordingly, there is also an option for specifying a
different time for the switchover from any phase to,
for example, Phase 3 than for a switchover to Phase
1.
However, for reasons of safety, transition into the
autorotation fl ight phase should ALWAYS be set
to switch without any time delay. The arrow "->"
in the column labeled "Sw.time" at the end of the
"Autorot" line indicates that a delay can be set when
transitioning FROM (!) autorotation INTO (!) another
phase.
Use the f selection key of the left or right touch pad
to move the marker frame to the right beyond the
"Sw.time" column.
Phase 1
Phase 2
Phase 3
Phase 4
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim. Sw.time
–
–
–
–
¾
Autorot Autorot
Following a brief tap on the center SET key of the
right touch pad, the switchover time value in the fi eld
displayed in inverse video can be changed within a
range of 0 and 9.9 s.
Example:
Phase 1
Phase 2
Phase 3
Phase 4
5.5s
3.0s
2.0s
4.0s
0.1s
Name Fl.ph.Tim. Sw.time
+
+
–
–
¾
Autorot Autorot
Normal
Hover
Speed
A delay of 5.5 s applies when switching FROM auto-
rotation into any other phase. A delay of 0.0 s always
applies when switching TO auto-rotation.
The switchover time from any other phase to Phase 1
«normal» will take 3.0 s.
When switching from e.g. Phase 1 to Phase 3, the
switch time is set to 4.0 s.
Such asymmetric transition times can be useful when,
e.g. switching between extremely different fl ight
phases, such as between aerobatics and normal fl ight.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the time in the
currently active value fi eld back to 0.1.
Note:
The "switch time" set here applies uniformly to all
settings that are specifi c to fl ight phases, and thus
to all mixers activated in the »Wing mixers« menu,
see page 160. Accordingly, the transition between
fl ight phase-specifi c mixers does not occur abruptly.
If you want individual servos to be switched without
a delay, however, defi ne these accordingly in the
»Non-delayed channels« menu (see page 151).
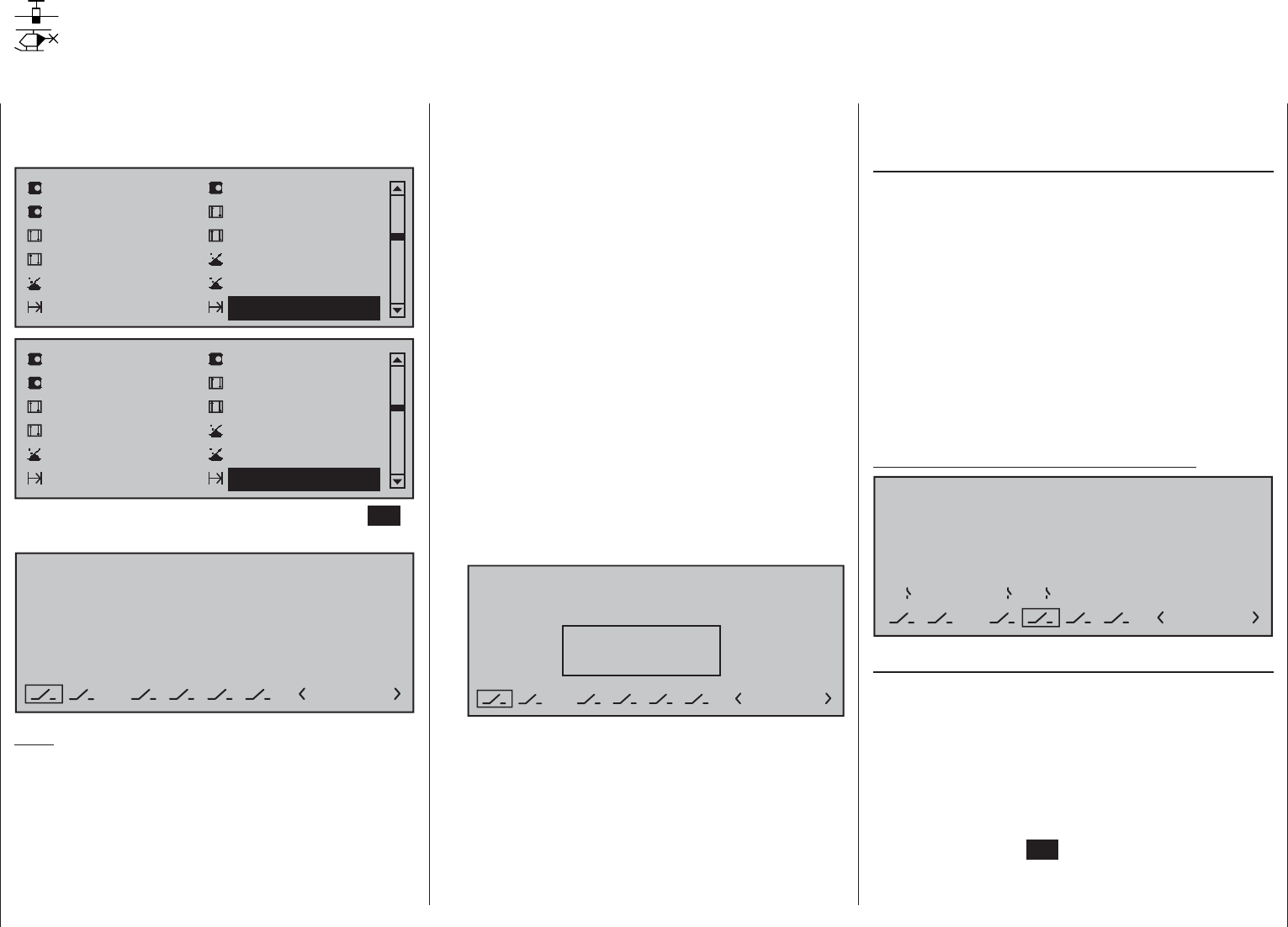
148 Detail program description - Phase assignment
Phase assignment
Setting up fl ight phases
Use the selection keys of the left or right touch pad to
scroll to the »Phase assignment« menu option in the
multi-function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Base setup model Model type
Control switch Logical switch
Phase settings Phase assignment
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Base setup model Helicopter type
Control switch Logical switch
Phase settings Phase assignment
Open this menu option with a tap on the center SET
key of the right touch pad.
PHASEASSIGNMENT
prior
C
1 Normal
combi
ABDEF
Note:
A phase name appears to the right of the phase
number at the bottom right of the display only if you
have assigned the name beforehand on the »Phase
settings« menu.
In the »Phase settings« menu, described above
separately for fi xed-wing and helicopter models, you
will have set up names for your phases. On this menu
– which is identical for both model types – you must
now specify the switches or switch combinations that
you want to use to trigger each phase. One exception
for helicopter menu: one of the two auto-rotation
switches must be set on the menu »Basic settings,
model«.
Please note the following priorities:
If• no fl ight phase switches nor these names have
been assigned in this menu, the model is in fl ight
phase "1". Accordingly, by the time you start
programming fl ight phases, you should therefore
have already given this fl ight phase the phase
name "Normal".
Independent of the phases with allocated switch •
settings made in this menu, the autorotation phase
(only present for the "Helicopter" model type and
to be assigned a switch in the »Basic settings,
model« menu) always (!) takes precedence.
Accordingly, as soon as the auto-rotation switch
in question is activated, the following warning
appears:
PHASEASSIGNMENT
prior
C
1 Normal
Kombination
ABDEF
Autorot
Phase switch "A" is given priority over all •
subsequent switch positions, from "B" to "F"
Phase switch "B" is given priority over all •
subsequent switch positions, from "C" to "F"
3-way switches should • always be assigned from
the middle position.
Therefore use switch "A" and/or switch "B" only if you
wish to change from any other fl ight phase – apart
from the helicopter's autorotation phase – directly into
the phase that is assigned to this switch.
Programming fl ight phase switches
Once you have confi gured your desired switch
position, "A" to "F", using the selection keys on the
left or right touch pad, a switch (whether a "normal"
switch or an expanded switch) is then assigned
as described in the section "Assigning transmitter
controls, switches and control switches" (page 56).
The order in which assignment is made is irrelevant:
you must ensure only that you assign what are,
for you, the "correct" switches. (In the helicopter
program, for example, you should also take care
to ensure you do not use this menu to re-assign
any auto-rotation switch already assigned on the
»Basic settings, model« menu.)
Example: 4 fl ight phases with phase priority
PHASEASSIGNMENT
prior
C
1 Normal
combi
ABDEF
267
Assigning fl ight phases to switch positions
Now that names have been assigned to the fl ight
phases (1 … max. 8) in the »Phase settings« menu
and also programmed switches in this menu, but …
at the bottom right of the display screen, you only
see <1 Normal > – regardless of the positions the
switches are in!?
Use the selection keys on the left or right touch pad to
move the marker frame down and to the right and then
briefl y tap the center SET key of the right touch pad:
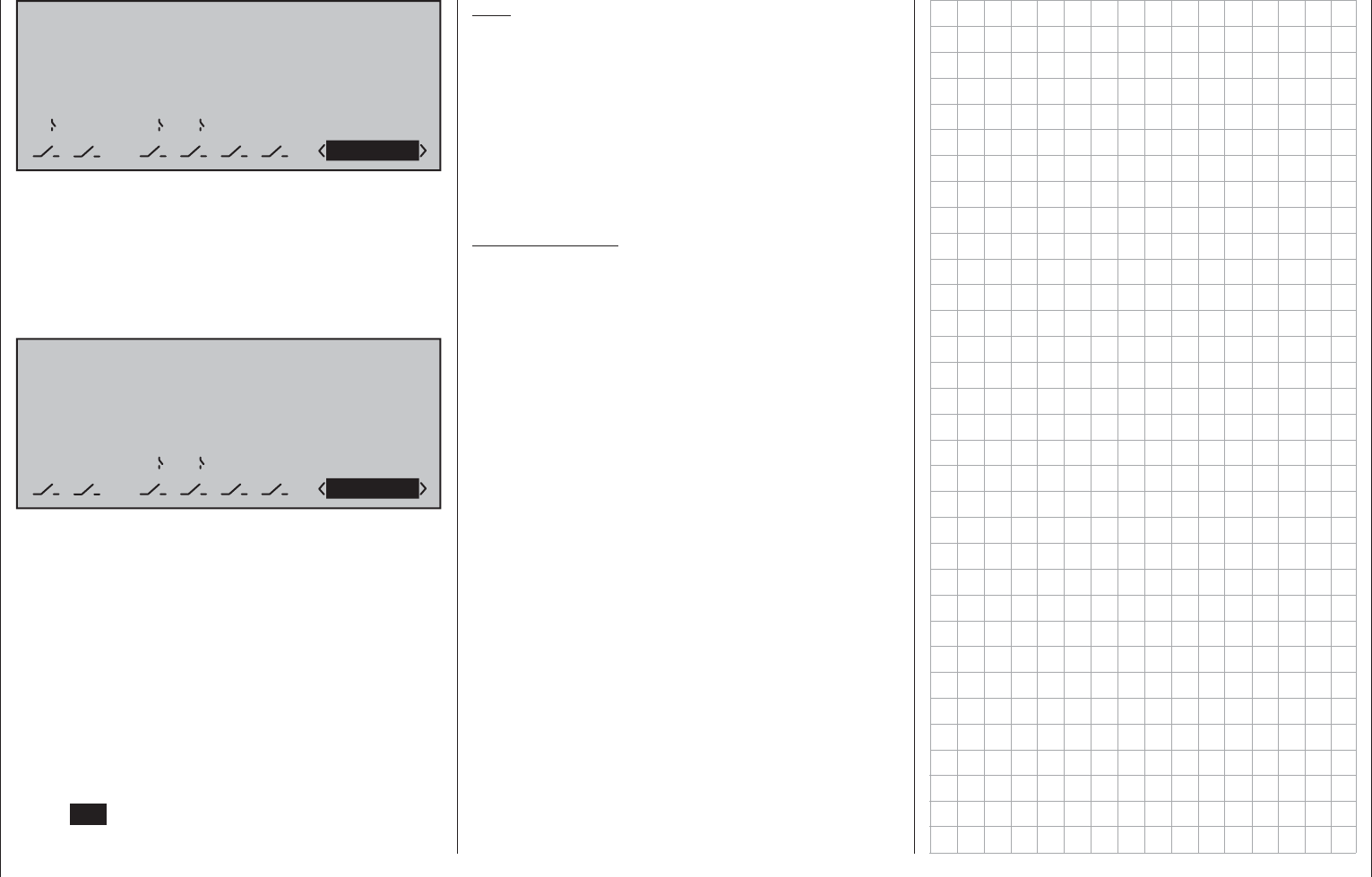
149
Detail program description - Phase assignment
PHASEASSIGNMENT
prior
C
1Normal
combi
ABDEF
267
Now close one (or more, as required) of the switches
that you have assigned, and assign one of the fl ight
phase names from the list you selected beforehand
on the »Phase settings« menu to this switch position
or combination.
Here, for example, we assign the "Launch" phase to
the closed ("I") priority switch "A" …
PHASEASSIGNMENT
prior
C
2 Launch
combi
ABDEF
2I 6 7
… if, for example, we wish to switch to this phase
regardless of the "C" … "F" switch positions, because
the same switch activates an electric motor, etc.
Use the same approach to set the other switches or
combinations of switches.
Theoretically – for the situation where all three are
closed – you could use the three single switches
shown in the example to defi ne an additional
fi fth fl ight phase on the »Phase settings« menu.
However, since this example assumes just four fl ight
phases, you can leave the default phase name as «1
Normal» for this switch position.
Leave this menu in the familiar way, with a tap on the
center ESC key of the left touch pad.
Tips:
If you have named more phases than you •
currently have switches defi ned for then this is not
really problematic. You can repeat and change
your switch assignment as you wish at any point in
time. And you can also name additional phases at
any time and then assign switches to them.
When assigning switches, check whether the •
switches are already otherwise assigned to ensure
that you avoid duplicate assignments.
Important notice:
Before a phase switch is assigned, the model
settings confi gured are now to be found in the
fl ight phase «1 Normal», i.e. all fl ight phase-
dependent menus are reset to the standard
confi gurations for all other fl ight phases.
To avoid having to start from scratch in every
fl ight phase, you can copy over these standard
settings by using the command "Copy fl ight
phase" on the "Copy / Erase" menu to replace
them with fl ight data obtained from the «Normal»
fl ight phase. You then need only to make further
fl ight phase-specifi c changes to the settings.
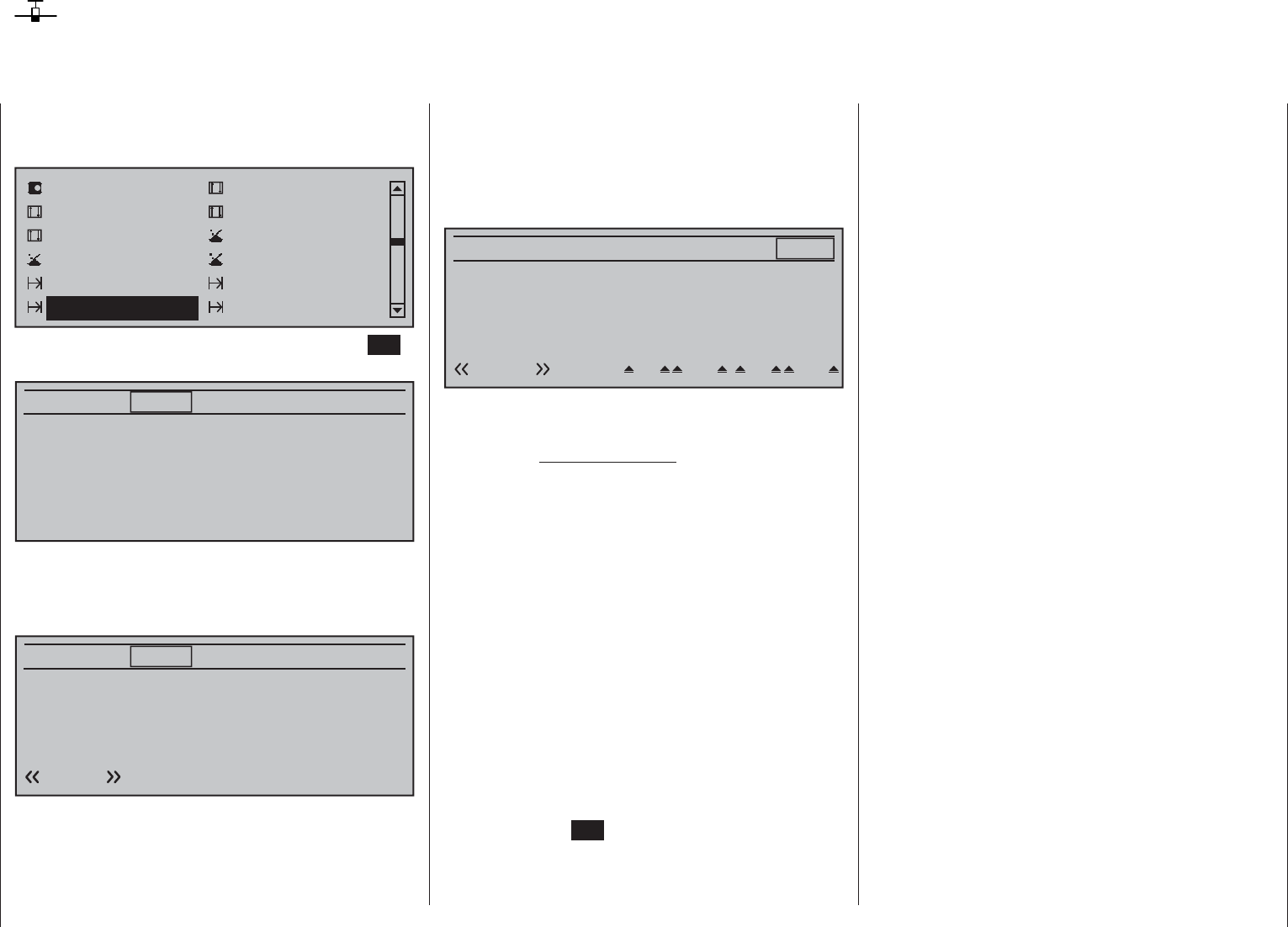
150 Detail program description - Phase trim | Winged models
Phase trim
Flap settings specifi c to fl ight phases
Use the selection keys of the left or right touch pad to
scroll to the »Phase trim« menu option in the multi-
function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Open this menu option with a tap on the center SET
key of the right touch pad.
¿Normal 0%
ELEV
Depending on the settings made on the "Aileron/
camber fl aps" line of the »Model type« menu, page
94, and in the »Phase settings« menu, page 142, this
menu offers at least one control function for ELEV …
¿Normal 0%
ELEV
Normal
… and, with the maximum of 4 for ELEV, AI, Al2,
FL and FL2 a total of fi ve control functions for fl ight-
phase-specifi c trim settings. The setting of the fl ight
phase switches, to be defi ned beforehand in the
»Phase assignment« menu, determines the line
that is chosen. An asterisk marks the fl ight phase
currently active. At the same time, the name of the
respective fl ight phase is also shown at the bottom
left of the screen. You can enter settings only for the
currently active fl ight phase, e.g.:
¿Normal 0%
ELEV
Normal
0%
0%
0%
AI FL FL2
Launch
Thermal
Dist.
0% 0%
0%
0%
0% 0%
0%
0%
0% 0%
0%
0%
0%
AI2
0%
0%
0%
In the column labeled "ELEV" a phase-specifi c
elevator trim setting can be stored.
Important notice:
Settings made in this column have an
immediate effect on elevator trim and,
accordingly, the trim setting display. In
turn, the elevator trim control affects the
values of this column either "globally"
or "phase-specifi cally", depending on
the "global/phase" setting made on the
"Elev" line of the »Stick mode« menu.
Columns "Al", "Al2", "Fl", "Fl2"
The values in these columns (max. 4)
are identical to those in the "Fl.pos"
(fl ap position) line on the "Multi-fl ap menu"
within the »Wing mixers« menu. For this
reason, any changes made always affect
the other menu directly – and vice versa.
After selecting the appropriate column with the
selection keys of the left or right touch pad and a brief
tap on the center SET key of the right touch pad, these
values can be entered, independent of one another,
with the selection keys within a range of ±150 %.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in the currently active value fi eld back to 0 %.
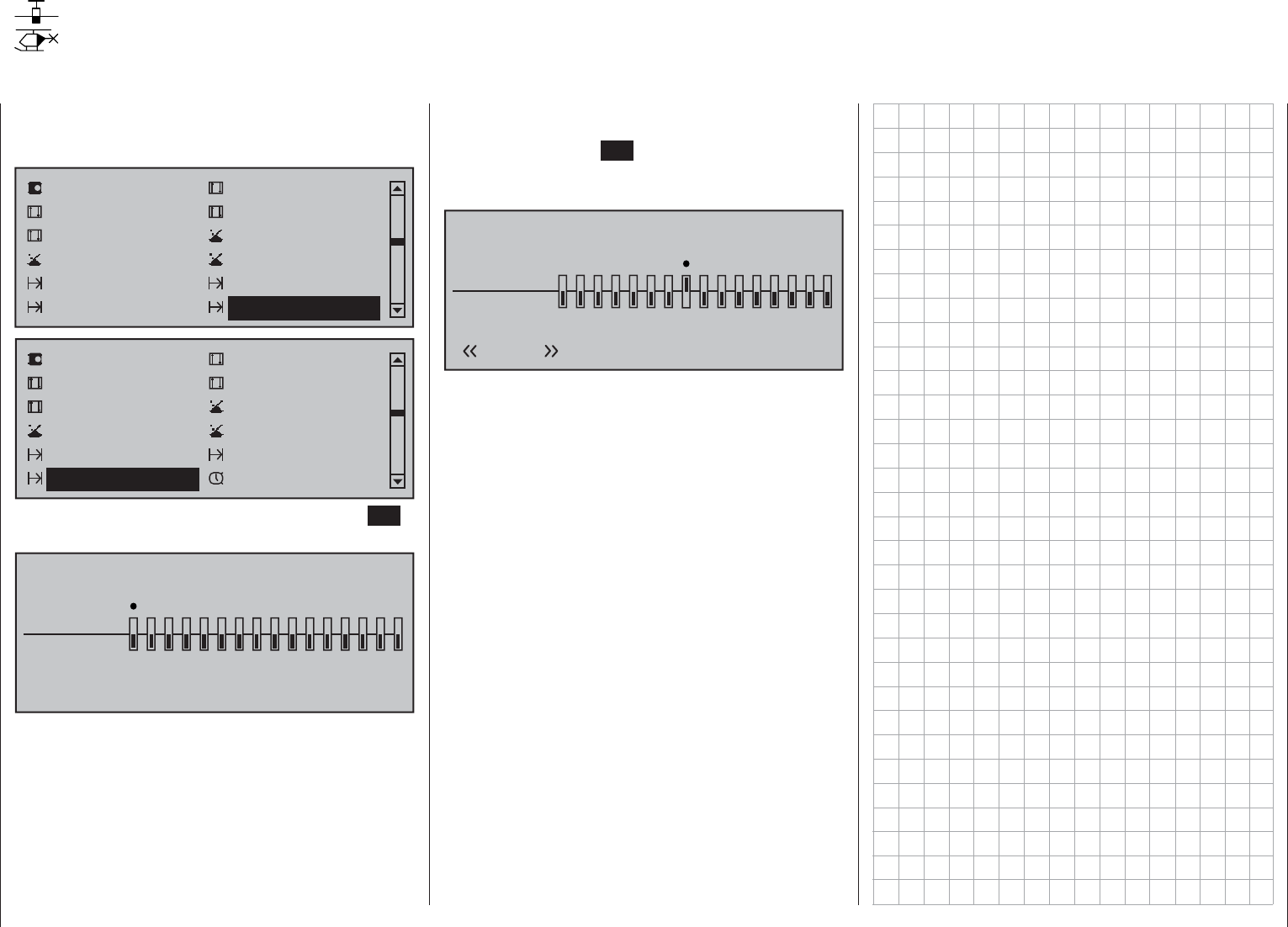
151
Detail program description - Non-delayed channels
Non-delayed channels
Channel-dependent delays to switching
Use the selection keys of the left or right touch pad to
scroll to the »Phase trim« menu option in the multi-
function menu:
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Open this menu option with a tap on the center SET
key of the right touch pad.
NONDELAYED CHANNELS
non-delayed
normal
1234567 8 9 10111213141516
On the »Phase settings« menu, you will have set the
necessary switch times for fl ight phase transitions.
In this menu, you can now deactivate the transition
delay set previously, per fl ight phase and for
individual control channels – e.g. for the motor
channel for electric models or heading-lock systems
for helicopter gyros, etc.
Switch over to the corresponding fl ight phase. This is
shown at the bottom left of the display.
Use the selection keys of the left or right touch pad
to move the " " onto the corresponding channel then
briefl y tap the center SET key of the right touch pad.
The switch icon changes from "normal" to "non-delay"
and vice versa.
NONDELAYED CHANNELS
non-delayed
normal
1234567 8 9 10111213141516
Normal
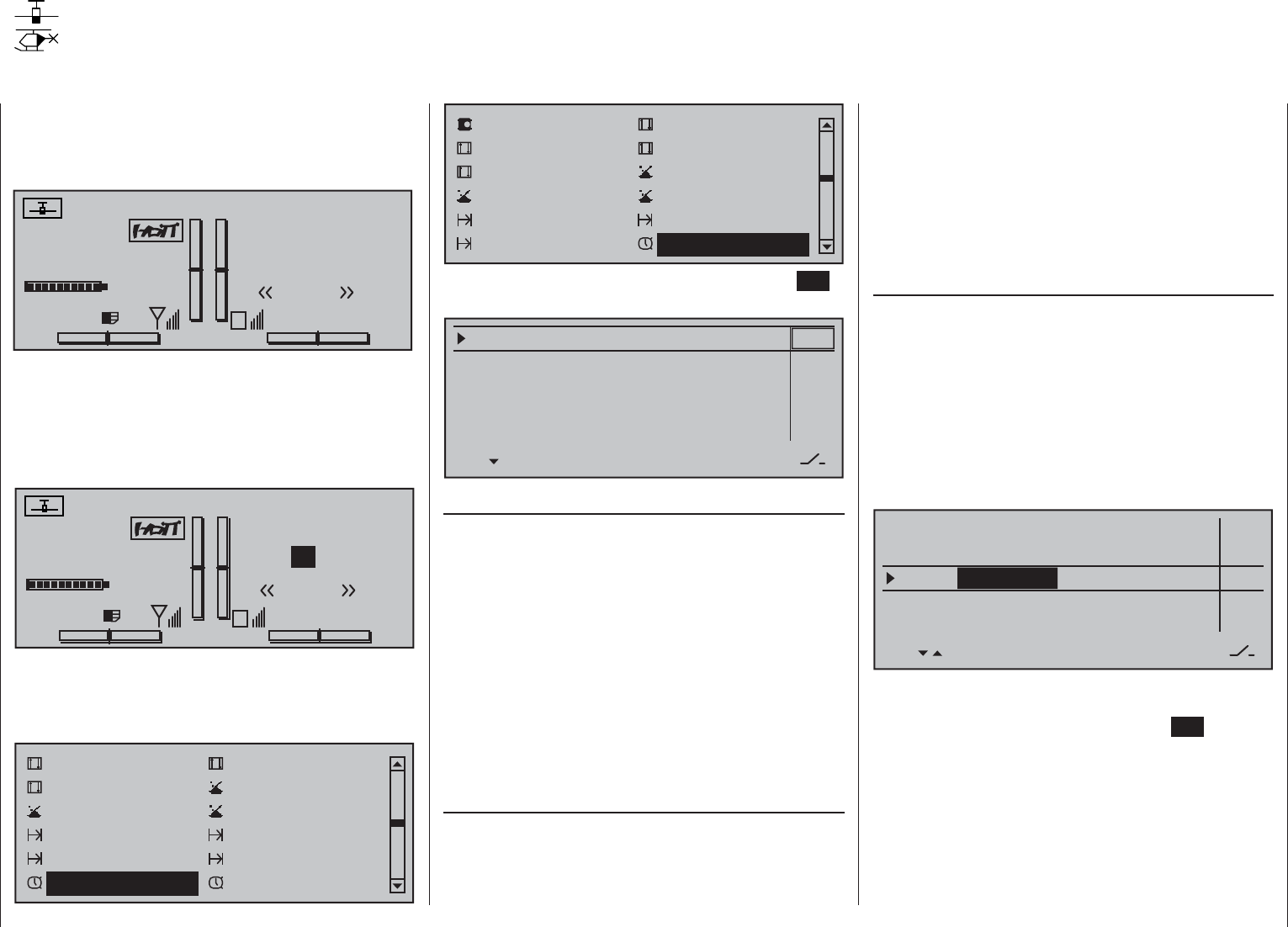
152 Detail program description - Timers (general)
Timers (general)
Timers on the basic display
The default transmitter display shows a total of three
timers. These are: the transmitter operating time on
the left of the display, plus a "Top" and a "Centr" timer
on the right of the display:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Runde 00
RX VOLT:4.9V
Another, fl ight-phase specifi c timer can also be
confi gured with settings in the two menus »Flight
phase timers«, page 156, and »Phase settings«,
pages 142 and 146. This optional fl ight phase timer –
such as the lap time timer – appears underneath the
"Centr" (fl ight time) timer:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Lap 00 0.0s
RX VOLT:4.9V
To confi gure the "Top" and/or "Centr" timer, use the
selection keys on the left or right touch pad to access
the menu option »Timers (general)« in the Multi-
function menu:
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Servo adjustment Stick mode
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Open this menu option with a tap on the center SET
key of the right touch pad.
Model time
Batt. time
Top :Stop watch
Centr:Flight tim
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
–––
–––
CLR
" Model time"
This timer shows the currently registered total
access time to the currently active model memory
location. If necessary, this automatic time acquisition
can also be infl uenced by assigning an on/off
switch to this "Model time" timer in the rightmost
column labeled with the switch symbol. This timer
can then be switched on and off as desired. This
switch is assigned (and erased again as required)
as described in the section "Assigning transmitter
controls, switches and control switches" on page 56.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the time back to
"0:00 h".
" Batt. time"
This operating hours timer records the transmitter's
total switch-on time since the last time the battery
was charged, thus monitoring the transmitter battery.
A switch cannot be assigned to this function.
This timer is automatically reset to "0:00 h" when the
transmitter detects that the voltage of the battery is
signifi cantly higher than the last time it was switched
on, e.g. as a result of a charge process or the
installation of a replacement battery.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will also reset this time back
to "0:00 h".
"Top" and "Centr"
These two timers are located at the top right of the
basic display (see the screen image immediately to
the left) and can be assigned a different name; their
function and mode of operation varies according to
the name you give them. Independently of the name
each is given, the "Top" and "Centr" timer can be
programmed to run any length of time forwards or
backwards – see further below.
Use the selection keys of the left or right touch pad to
select the line for the "Top" or "Centr" timer.
Model time
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
–––
–––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
Now use the selection keys of the left or right touch
pad to select your desired timer and complete your
selection with another tap on the center SET key of
the right touch pad:
"Stop watch" or "Motor(run)time"
Both of these two timer variants can be started and
stopped using any of the available switches.
The timer defi ned as "Stopwatch" or "Motor runtime"
sums the "ON" times continually, so that once your
aircraft has landed, you can read off the sum of all
switch "ON" times since the timer was last reset.
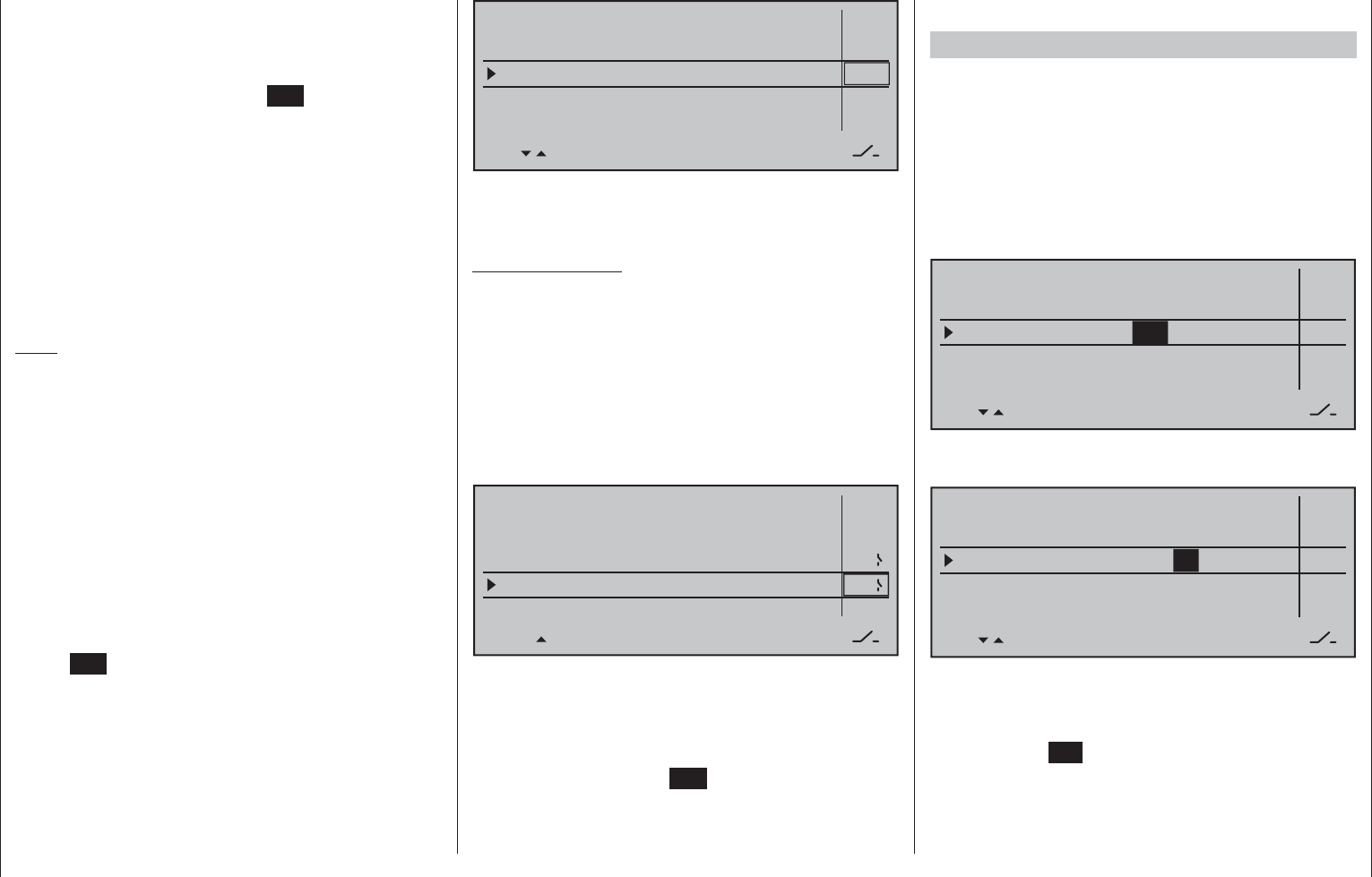
153
Detail program description - Timers (general)
"Flight tim"
This timer is especially for measuring fl ight time: it
can be started with an assigned switch and stopped
(once the switch has been re-opened) on the basic
display with a tap on the center ESC key of the left
touch pad. Once in a stopped state, it can be reset to
its starting value with a simultaneous tap on the cd
or ef keys of the right touch pad at the same time
(CLEAR).
If you wish to assign a control switch, you must fi rst
defi ne the switch on the»Control switch« menu and
specify the switching point along the travel of the
transmitter control. As an example, the timer can then
be started by "opening the throttle" or by opening the
throttle limiter for helicopter models.
Note:
The combination of the fl ight time timer and
stopwatch means that you can glance at the display
at any time and see how long you have been fl ying
since the timers were started, plus the total motor
runtime within this particular period of fl ight time.
"Time frame"
The time frame timer is intended primarily for use
by competition pilots, who are frequently given a
timeframe within which they must complete certain
tasks. The timer is started in precisely the same way
as the fl ight time timer. To stop the timer, fi rst ensure
the timer switch is at its OFF position. Then touch and
hold the cd or ef selection keys then touch the
center ESC key.
Switch assignment
Use the f selection key of the left or right touch
pad to move the marker frame next to the triangle
as shown in the screen image shown below to the
rightmost column of the relevant line:
Model time
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
–––
–––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
Here, you assign a switch as described in the section
"Assigning transmitter controls, switches and control
switches" (page 56).
Typical application:
The "stop watch" and "fl ight timer" are both to be
started simultaneously using the C1 stick as soon as
a user-defi ned switching point is exceeded.
For this purpose, defi ne a control switch, e.g. "C1", in
the »Control switch« menu, page 135. To complete
the procedure, you select this from the expanded
switches (see the section "Assigning transmitter
controls, switches and control switches" on page 56)
and assign it to both these lines:
Model time
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
Alarm
Timer
G1
G1
Top : Stop watch
Centr: Flight tim
The stopwatch will now stop when the stick is below
the switching point and resume running above the
switching point. The same is not true for the fl ight
time timer, however, which also starts the fi rst time
the switching point is exceeded. It can be stopped
(with a tap on the center ESC key of the left touch
pad) only once the stopwatch is stopped; it can then
be reset to its starting value with a simultaneous
tap on the cd or ef keys of the right touch pad
(CLEAR).
Switchover between "forward" and "backward"
Timer runs forwards (stopwatch function)
Following switch assignment, if the stopwatch shown
on the basic display is started with the initial value of
"0:00", then it will run forwards for max. 180 min and
59 s and then restart from 0:00.
Timer runs backwards (countdown function)
In the – left – minutes fi eld, select a start time between
0 and 180 min …
Model time
Batt. time
Timer
–––12:34h
1:23h
180:00
0:00
0s
0s
–––
–––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
… and in the – right – seconds fi eld, select a start time
between 0 and 59 s (or any combination of these):
Model time
Batt. time
Timer
–––12:34h
1:23h
180:59
0:00
0s
0s
–––
–––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
Procedure
Select the desired input fi eld with the 1. ef
selection keys of the left or right touch pad.
Now tap on 2. SET in the center of the right
touch pad.
Make a time selection in the inverse video minutes 3.
or seconds fi eld with the selection keys of the right
touch pad.
154 Detail program description - Timers (general)
Complete the entry with a tap on the center 4.
SET key.
A simultaneous tap on the 5. cd or ef keys of the
right touch pad (CLEAR) will reset any setting
made back to "0" or "00".
Following a switch back to the basic display (by 6.
tapping the center ESC key of the left touch
pad as many times as required), make sure
the stopwatch is stopped then simultaneously
tap on the cd or ef keys of the right touch
pad (CLEAR) to switchover the stopwatch to
the "timer" function. Look at the top right in the
following fi gure.
#01 0:00h
Stop watch
Flight tim
K78
10:01.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Runde 00
RX VOLT:4.9V
After the assigned switch is activated, the stopwatch
starts at the initial value set and runs backward
("countdown clock function"). Once the timer reaches
zero it does not stop, but continues to run to enable
you to read off the time elapsed after it reached 0:00.
To make this absolutely clear, the timer is shown
highlighted.
"Alarm" timer
The "Alarm" column is accessed by moving the
marker frame to the right with the f selection key of
the left or right touch pad until it is over the column
labeled "Alarm". In the "Alarm" column a time
between 5 and 90 seconds (in 5-second increments)
can be defi ned. This is the amount of time the timer is
to count down before issuing an acoustic signal. This
eliminates the need to repeatedly check the display
continually during the fl ight.
Model time
Batt. time
Timer
–––12:34h
1:23h
180:59
0:00
90s
0s
–––
–––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset any settings made
back to "0 s".
Audible signal sequence
30 s before zero: Triple beep
Single beep every two seconds
20 s before zero: Double beep
Single beep every two seconds
10 s before zero: Single beep
Single beep every second
5 s before zero: every second a single beep at a
higher frequency
zero: longer beep signal and
changeover of display presentation
to inverse video
Resetting suspended timers
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset timers which have
already been suspended.
Notes:
Timers that are running backwards are shown on •
the basic display with a fl ashing colon (:) between
the minutes and the seconds fi elds.
A typical application, "Timer activation via the C1 •
joystick", can be found on page 284.
An interim timer function change becomes •
active after timer/s have been suspended and
subsequently reset by a simultaneous tap on the
cd or ef keys of the right touch pad (CLEAR).
Remember that the timer switches also remain •
active during programming.
A simultaneous tap on the • cd or ef keys of the
right touch pad (CLEAR) will reset the previously
stopped timer to its programmed initial value, refer
to sections "Alarm" and "Timer".
155
For your notes
156 Detail program description - Fl. phase timers
Fl. phase timers
Selecting and setting
A description of how timers are assigned to a fl ight
phase has already been provided in the text for the
»Phase settings« menu, page 142 and 146. The
same section has also described the properties of
"Time1" and "Time2". This section now proceeds to
describe "Timer 1, 2 and 3" and the "lap counter/time
table" timer variants.
The additional, fl ight phase-specifi c timer selected
is displayed on the basic display underneath the
"center" timer, as shown below:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Timer 100 0:00.0
RX VOLT:4.9V
On this menu …
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
… you can now program "Clks 1 … 3" as stopwatches
(i.e. timers that run forward) or as countdown/alarm
timers (i.e. timers that run backwards). You can assign
any switch to these timers, and the same is true of the
"lap counter/timetable" timer:
Timer 1
Timer 2
Timer 3
Lap time/Tim tab
–––
0:00
0:00
0:00
Lap display
0s
0s
0s
–––
–––
–––
–––
AlarmTimer
The fl ight phase timers "Timer 1 … 3" and the
"Time1"/"Time2" timers (described in the »Phase
settings« section, pp. 142 and 146) run only in the
fl ight phase to which they have been assigned. They
are also shown as appropriate on the basic display.
During other fl ight phases they are stopped (and
hidden) and the assigned stop/start switch then has
no effect.
The lap counter, once started, continues to run
through changes of phase (as discussed further
below), however, although it can be stopped during
any fl ight phase via the center ESC key of the left
touch pad.
Clks 1, 2 and 3
These timers are started and stopped via a switch or
control switch. To do so, fi rst use the selection keys
to select the appropriate column via the switch icon
at the bottom right. Then set the switch that you want
by briefl y tapping the center SET key of the right
touch pad, as described in the section "Assigning
transmitter controls, switches and control switches"
(p. 56). Here, too, a control switch offers you the
option of activating the timer via one of the joysticks
or proportional controls. The switching point along
the transmitter control travel is set on the »Control
switch« menu (page 135).
Remember that the timer switches also remain active
in programming mode.
Switching between "forwards" and "backwards"
Stopwatch mode (timer runs forwards)
In this mode, the timer starts at the initial value "0:00"
(min:sec) when you operate the assigned switch. If
it reaches the maximum time of 180 min. and 59 s, it
will re-start at "0:00".
"Countdown" (timer runs backwards)
Following the activation of the corresponding value
fi elds (by tapping the center SET key of the right
touch pad), if a time in minutes (maximum 180 min)
and/or a time in seconds (maximum 59 s, right fi eld)
is set, then the timers will run backwards from this
initial value following the activation of the assigned
switch (see section "Assigning transmitter controls,
switches and control switches" on page 56), i.e.
a "countdown" function will apply. Once the timer
reaches zero it does not stop, however, but continues
to run (highlighted) so you can read off the time
elapsed after reaching zero.
Note:
Timers that are running backwards are shown on the
basic display with a fl ashing colon (:) between the
minutes and the seconds fi elds.
A simultaneous tap on thecd or ef keys of the
right touch pad (CLEAR) will reset entry values in the
currently active fi eld back to zero.
"Alarm" timer
Timer 1
Timer 2
Timer 3
Lap time/Tim tab
–––
0:00
0:00
0:00
Lap display
0s
0s
0s
–––
–––
–––
–––
AlarmTimer
157
Detail program description - Fl. phase timers
The input fi eld in the "Alarm" column is activated with
a tap on the center SET key of the right touch pad.
In this fi eld, use the selection keys on the left or right
touch pad to defi ne a time between 5 and 90 seconds
(in 5-second increments) before zero is reached: at
this point an audible signal will be emitted, which
eliminates the need for you to check the screen
continually during the fl ight.
Audible signal sequence
30 s before zero: Triple beep
Single beep every two seconds
20 s before zero: Double beep
Single beep every two seconds
10 s before zero: Single beep
Single beep every second
5 s before zero: every second a single beep at a
higher frequency
zero: longer beep signal and changeover
of display presentation to inverse
video
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset entry values
entered in the currently active fi eld to "0 s".
Note:
If timer functionality has been changed at any point,
then the new changes to settings are made active
only after the timer(s) have been stopped on the
basic display then making a simultaneous tap on the
cd or ef keys of the right touch pad (CLEAR) to
reset them.
Like the two standard timers positioned above it, this
third, phase-specifi c timer is reset to its starting value
with a simultaneous tap on the cd or ef keys of
the right touch pad (CLEAR). It is stopped in all fl ight
phases at the same time, even if it has not been
stopped separately in the other fl ight phases.
Lap counter/timetable
Timer 1
Timer 2
Timer 3
Lap time/Tim tab
–––
0:00
0:00
0:00
Lap display
0s
0s
0s
–––
–––
–––
–––
AlarmTimer
On the "Lap time/tim tab" line, assign a switch only
as described in the section "Assigning transmitter
controls, switches and control switches" (page 56).
Preferably, make use of one of the two momentary
switches which are included as standard equipment
in the switch panels. The lap count is incremented
each time by one lap while simultaneously (and
automatically) the lap time elapsed during this lap
is stopped (and recorded). This momentary switch
simultaneously starts the stopwatch for the next lap.
As the timer is triggered, the lap or switch impulse
counter is shown highlighted.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Lap 11 2:34.5
RX VOLT:4.9V
"Time1" and "Time2" operate in the same manner; for
more details please read the section on the »Phase
settings« menu option.
Up to 99 lap times can be recorded and accessed,
each with a maximum duration of 99 minutes and
59.9 seconds.
To stop the timer in question, tap the center ESC key
of the left touch pad on the basic display after the
fl ight is over. The lap or switch impulse counter is now
shown in "normal" mode:
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Graubele
H-J Sandbrunner
Normal
Lap 12 1:23.4
RX VOLT:4.9V
A simultaneously tap on the cd or ef keys of
the right touch pad at the same time (CLEAR) will
reset the counter to "00" and deletes the stored
times. However, the timers must have been stopped
before this.
Notes:
If you have selected a normal switch to operate •
the lap counter, take care to ensure that this
switch is set to "OFF" before touching the center
ESC key of the left touch pad.
If you should forget to switch off the lap counter in •
a phase which is now not currently active, simply
touch the center ESC key of the left touch pad.
To swap between the basic display and the
"Lap Display" …
01
02
03
04
SEL
01:23.4
02:34.5
03:45.6
05 SEL
04:56.7
05:67.8
07
08
09
10
00:00.0
00:00.0
00:00.0
11
12
00:00.0
00:00.0
00:00.0
06 06:78.9
13
14
15
16
00:00.0
00:00.0
00:00.0
17
18
00:00.0
00:00.0
00:00.0 1/6
… go to the line …
158 Detail program description - Fl. phase timers
Lap Display
Timer 1
Timer 2
Timer 3
Lap time/Tim tab
–––
0:00
0:00
0:00
Lap display
0s
0s
0s
–––
–––
–––
–––
AlarmTimer
… and use the switch assigned. You assign this
switch as described in the section "Assigning
transmitter controls, switches and control switches"
(page 56).
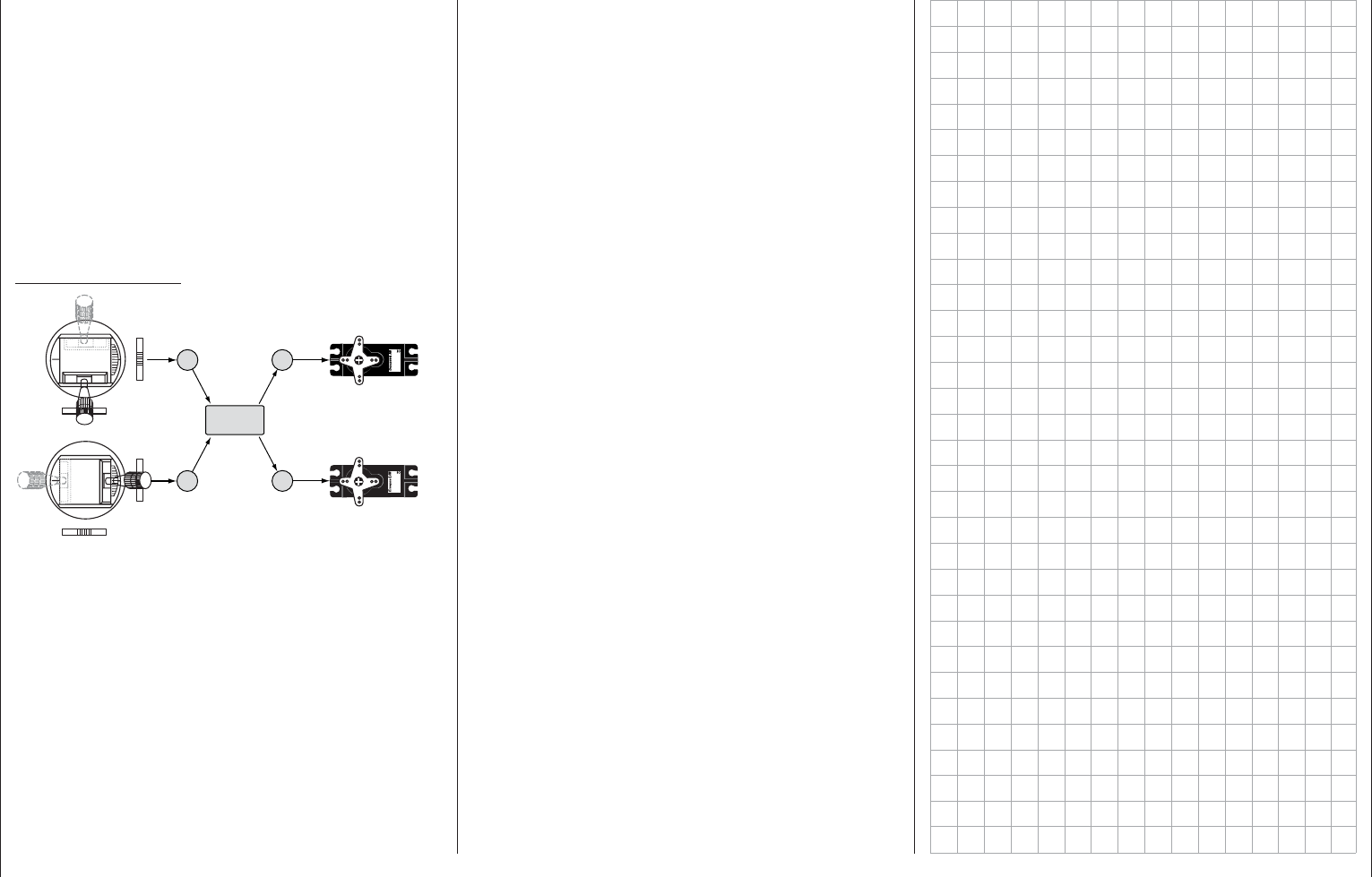
159
What is a mixer?
What is a mixer?
Basic functionality
With many models, a mix of the model's functions
is often desirable, i.e. coupling aileron to rudder or
coupling two servos together, in cases where rudder
control surfaces with the same functionality are to be
controlled together using a single servo. In all cases,
the signal fl ow at the "output" of the control function
on the transmitter control-side "branches" – , this also
means: "downstream" of transmitter control options
such as e.g. »Dual Rate / Expo«, »Control adjust«,
»Channel 1 curve« etc. – in order for the signal to
have its predefi ned effect on the "input" of another
control channel and thus on another receiver output.
Example: V-tail mixer
33
4
Servo 4,8 V
C 577
Best.-Nr. 4101
Servo 4,8 V
C 577
Best.-Nr. 41 01
4
V-tail mixer
Control function inputs
Control channels
(receiver outputs)
Elevator stick
Rudder stick
Right rudder / elevator
Left rudder / elevator
Rudder
Elevator
Elevator
Rudder
Rudder
Elevator
The mc-20 HoTT transmitter software contains a
large number of pre-programmed coupling functions
as standard, which are designed to mix together two
(or more) control channels. Accordingly, the mixer
named in the example just above can be activated in
the "Tail" line of the »Model type« menu by selecting
"V-tail".
In addition, for each model memory in the fi xed-
wing and helicopter programs , the software makes
available a total of eight freely programmable linear
mixers, four freely programmable curve mixers and
four dual mixers.
Also be sure to read the general remarks about "free
mixers" in this manual, beginning on page 192.
160 Detail program description - Wing mixers
»Mix only channel« (see page 205) and use it
for another purpose with the help of a "free mixer"
(see page 193).
If "2AIL" is set in the »•Model type« menu, page
94, then fl ight-phase dependent fl ap functionality
can be achieved with appropriate offset settings for
input 5 in the »Control adjust« menu, page 108.
For almost any menu option, you have the option •
of checking your settings by switching to the
servo display screen, which is accessed with a
simultaneous tap on the ef selection keys of
the left touch pad.
Caution:
With aileron actuation the bars of the »Servo
display« move in the same manner and in the
opposite manner with camber changing fl ap
actuation.
Note that if two fl ap servos have been selected, •
any transmitter control assigned to input 7 will be
decoupled in the software in order to avoid errors
in operating the fl aps. The same applies to input
10 and the selection "2AIL 4FL".
A range of options are available for positioning •
fl aps. You can …
a) … simply accept one position per fl ight phase,
by setting only the corresponding trim values.
b) … vary the fl aps positioned by a) with a
transmitter control assigned to "Input 6" in
the »Control adjust« menu, (page 108),
and if desired by also selecting fl ight-phase
dependency "PH" in the "Type" column.
The selected transmitter control directly controls
the two fl ap servos located on receiver outputs 6
and 7 and, as required, also the two FL2 servos
connected to outputs 9 and 10 – assuming that
corresponding fl aps have been specifi ed on the
"Aileron/camber fl aps" line in the »Model type«
menu. This transmitter control indirectly
»Phase assignment«, page 148 menus, and these
fl ight phases have been given names, the fl ight
phase names will appear along the bottom display
edge, e.g. «Normal».
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
All options can then also be programmed specifi c to a
fl ight phase.
Comments:
In the »• Model type« menu, (page 94), control of
the brake fl ap mixer can be reprogrammed from
control input 1 to 7, 8 or 9 and a corresponding
offset point can be set.
Braking with raised ailerons and, if present, •
lowered fl aps (crow system) can be implemented
by making appropriate settings on the "Crow" line
of the "Brake settings" sub-menu.
If you would like to alternate between the C1 stick •
controlling an electric drive system and a butterfl y
system, then you can use the options in the
"Motor" column on the »Phase settings« menu –
refer to the example on page 279.
You can also use the opportunity to set switch •
times for a "soft" transition from fl ight phase to
fl ight phase on the »Phase settings« menu (see
page 142).
If your model features multiple wing fl aps and a •
"crow / butterfl y system" (see below), but without
additional airbrakes, then you can separate output
1 (usually freed up by the above system) from
control function input 1 (throttle/brake stick) on the
Wing mixers
Calibrating the wing fl ap system
Within the menu tree of the menu …
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
… the sub-menus and options available depend
entirely on the number of aileron and fl ap servos set
up on the »Model type« menu, page 94 …
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 2AIL
M O D E L T Y PE
Brake Offset Input 1+100%
SEL
… which means that the only settings listed are the
ones that can actually be confi gured. The resulting
menu structure gains not only in clarity but also
prevents potential programming errors.
For example, if "2AIL" has been preset, display of the
»Wing mixers« menu would appear (without camber
fl aps) as shown below:
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
If various fl ight phases are envisioned in the
settings of the »Phase settings«, page 142, and
161
Detail program description - Wing mixers
controls the fl ap position of the ailerons via the
percentage value entered in the "Ail" (and "Ail2")
column on the "FLAP" line of the multi-fl ap menu.
However, in order to improve control sensitivity
for fl ap settings, travel should be reduced to
about 25 % in "Input 6" line of the »Control
adjust« menu.
c) … alternatively, you can also leave the default
entry of "0 %" in the "AILE" (and "AIL2") column
on the "FLAP" line of the multi-fl ap menu, and
use the »Control adjust« menu to assign both
input 6 and input 5 to the same transmitter
control. You can then set the degree to which
both fl ap pairs are affected, optionally making
this fl ight phase-dependent by selecting "PH"
in the "Type" column, with the respective travel
adjustment.
Basic programming procedure
Select the desired line with the 1. cd selection keys
of the left or right touch pad.
Depending on the line selected, the bottom line of
the display will either show the "Next page" icon
(
) or a switch icon.
Depending on the line selected, you will either 2.
switch to the next page – on which you carry out
the same procedure as below – or the desired
value fi eld is activated by tapping the center SET
key of the right touch pad.
Use the selection keys to set the mixer ratio or 3.
degree of differential.
To confi gure symmetrical mixer values, move the
transmitter control or joystick to its center position,
so that the marker frame surrounds both value
fi elds. To confi gure asymmetric values, move the
transmitter control/joystick to the corresponding side.
Negative and positive parameter values are
possible, in order to be able to adjust the
respective function to the direction of servo
any mixers on the "Brake settings" sub-menu.
Otherwise, the mixer travel is expanded back to
100 % automatically.
All other mixers in the »Wing mixers« menu have
their neutral point with the control at its center, i.e.
they have no effect at this control position. The value
set is mixed in at full travel.
Mixer functions
The individual options in the »Wing mixers« menu
are discussed below, separately for single-, dual-
and multi-fl ap models. Before we start, a number of
remarks on the differentials for ailerons and fl aps:
Aileron differential
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
Fl-Pos.
Diff.
Ail-tr
AI
Normal AILE
+100%
WK2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL +100%
0% +100%
For aerodynamic reasons, the drag generated on
an aileron oriented downwards is greater than that
generated by the same aileron when it is oriented
upwards by the same amount. One effect of this
unequal distribution of drag produces is a yawing
motion around the vertical axis and, accordingly, a
"turning away" from the intended direction of fl ight,
which is why this undesirable side effect is also
rotation or fl ap orientation.
A simultaneous tap on the 4. cd or ef keys of the
right touch pad (CLEAR) will reset the entry value
in the given active (inverse video) fi eld back to its
default value.
Complete the entry with a tap on the center 5. ESC
key of the left touch pad or the center SET key of
the right touch pad.
Assigning switches
Wing mixers "Aileron 2 ¼ 4 rudder" and "Flaps 6 ¼
3 elevator" can be made optionally on/off switchable
by way of a switch or expanded switch. Accordingly,
when the respective line is selected, the familiar
switch symbol ( ) will appear on the lower edge of
the screen.
Switching delays
The delay time or switch time confi gured on
the »Phase settings« menu, page 142, for the
respective fl ight phase also affects all wing mixers
and thus avoids abrupt changes to fl ap confi gurations
when switching between the fl ight phases.
Mixer neutral points (Offset)
For all mixers on the "Brake settings" sub-menu, the
"brake offset" to be set on the »Model type« menu is
to be confi gured to the transmitter control position at
which the airbrakes are retracted.
Accordingly, in the "Brake offset" line of the »Model
type« menu, see page 94, specify Input 1, 7, 8 or
9 and the offset to accommodate personal piloting
habits. When selecting "input 1", please note also
that you may need to specify your desired "Throttle
min" position "forward/back" before establishing the
offset point in the "Motor at C1" line.
Note:
If the offset is not set right at the end of the
transmitter travel, the rest of the travel is a "dead
zone", i.e. the transmitter control does not infl uence
162 Detail program description - Wing mixers
used today offers considerable benefi ts.
The degree of differential can be changed at any
time, for example, and, in extreme circumstances,
the downward defl ection of an aileron, in what is
termed a "split" position, can be suppressed entirely.
This approach not only reduces or even suppresses
"adverse yaw", but can, in certain circumstances,
even generate a positive yaw: in such cases, an
aileron command will generate a yaw about the
vertical axis in the direction of the turn. For large
glider models in particular, this approach lets such
aircraft fl y "clean" turns using just the ailerons, which
is not otherwise possible unaided.
The adjustment range of -100 % to +100 % makes it
possible to set a differential appropriate for each side,
regardless of the direction of rotation of the aileron
servos. While "0 %" corresponds to a normal linkage,
i.e. no differential, "-100 %" or "+100 %" represents
the "split" function.
For aerobatic fl ying, low absolute values are required
to ensure the model rotates exactly along its
longitudinal axis when an aileron command is given.
Values near to the center (-50 % or +50 %) are typical
for facilitating turns in thermals. The split setting
(-100 %, +100 %) is popular with slope fl iers, where
ailerons alone are often used for turning the model.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Note:
Negative values are not usually necessary if channels
are assigned properly.
Diff. (Differentiation)
WK-Pos.
Diff.
QR-Tr.
QR
Normal QR
+100%
WK2
WK
+100%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
WK +100%
0% +100%
0%
The "cAId" (topmost) line in the Multi-fl ap menu can
be used to set the extent to which the fl aps act as
ailerons and follow the aileron joystick.; this value is
entered as a percentage. The fl aps differential – to
be set on the line "Diff." (two lines below) – works in
a similar way to the aileron differential, i.e. where an
aileron command acts on the fl aps, the respective
defl ection downwards can be reduced.
The adjustment range of -100 % to +100 % makes
it possible to set a differential appropriate for each
side, regardless of the direction of rotation of the
servos. A value of 0 % is equal to normal linkage, i.e.
the servo travel downwards is the same as the travel
upwards. A value of -100 % to +100 % means that
travel downwards will be reduced to zero for aileron
commands affecting the fl aps ("split" mode).
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Note:
Negative values are not usually necessary if channels
are assigned properly.
termed "adverse yaw". This effect is naturally greater
on the comparably long aerofoils possessed by model
gliders, compared to e.g. powered aircraft models,
which generally have relatively short moment arms.
For the former, it must normally be compensated for
by making a simultaneous rudder defl ection in the
opposite direction. However, this rudder defl ection
also generates drag and therefore further degrades
fl ight characteristics.
If, on the other hand, a differential is applied to the
aileron orientations, by giving the aileron oriented
downwards a smaller defl ection than the aileron
oriented upwards, the (undesirable) adverse yaw can
be reduced – and possibly entirely negated. However,
the basic precondition for this is that each aileron
must have its own servo present, which can therefore
also be embedded straight into the aerofoils. In
addition, the shorter linkage paths produce an
additional benefi t: reproducible aileron confi gurations
that also exhibit less "play".
0% (normal)
50% (differential)
100% (Split)
Unlike mechanical solutions, which not only
commonly need to be designed and built in when
constructing the model but also produce a slightly
increased "play" in the control system for strong
differentials, the transmitter-based differential typically
163
Detail program description - Wing mixers
Model type: "1AIL"
If you have entered "1AIL" for the "Aileron/camber
fl aps" line on the »Model type« menu (page 94),
then the "Wing mixers menu" on your transmitter will
match the following screen image:
Brake settings
Aileron 0%
WING MIXERS
–––
rudder
24
Normal
From the fi rst line on this display screen, you can
switch to the sub-menu with a brief tap on the center
SET key of the right touch pad …
Brake settings
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu
(page 94)
AND the "Motor" column of the »Phase
settings« menu, (page 142) are set to "yes" for the
currently active fl ight phase. Switch the fl ight phase if
required:
Elevat. curve
BRAKE SETTINGS
Normal
Since you cannot set up a butterfl y or aileron
differential in a model with only a single aileron servo,
this menu offers no further confi guration options with
the exception of a "pointer" to the "Elevat curve" sub-
menu. Therefore, move ahead from here with another
Typically, this mixer is set so that the rudder is
defl ected to the same side as the upward-oriented
aileron, and you will fi nd that setting a value of
around 50 % is usually highly appropriate.
Settings are always made symmetrically relative to
the neutral point of the aileron joystick.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
tap on the center SET key of the right touch pad:
Brake
Curve
off Point
Output
Input –100%
0%
L+
–
100
¼O U T P U T
0%
Elevator
Normal
If required, i.e. if you have the feeling that you will need
to set pitch trim compensation when the airbrakes are
extended, you can program an appropriate automatic
mixer affecting the elevator at this point.
For detailed instructions on setting a curve mixer,
please refer to the »Channel 1 curve« menu option
text beginning page 128.
Aileron 2 ¼ 4 rudder
Brake settings
Aileron 0%
WING MIXERS
–––
rudder
24
Normal
Here, you can set the degree to which the rudder
follows commands acting on ailerons. This is used
in particular in connection with aileron differential to
suppress adverse yaw and thus make it easier to fl y
"clean" curves. You can of course still issue separate
commands to the rudder.
The adjustment range of ± 150 % lets you set the
direction of defl ection as appropriate. Optionally, this
mixer can be activated and deactivated with of the
switches or a control switch that is not self-restoring
so the model can be controlled with only the ailerons
or rudder if desired.
164 Detail program description - Wing mixers
To confi gure the setting, fi rst position the brake control
in the brake position at full travel (i.e. its end-point).
Then, briefl y tap the center SET key of the right touch
pad and enter a suitable value using the selection keys
on the left or right touch pad. To ensure a suffi ciently
strong braking effect, note that you should try to lower
the fl ap as low as is mechanically possible.
From the second line on this display screen, you
can switch to the sub-menu "Elevat curve" by briefl y
tapping the center SET key of the right touch pad:
Brake
Curve
off Point
Output
Input –100%
0%
L+
–
100
¼O U T P U T
0%
Elevator
Normal
If required, i.e. if you have the feeling that you
will need to set pitch trim compensation when
the airbrakes are extended, you can program an
appropriate automatic mixer affecting the elevator at
this point.
For detailed instructions on setting a curve mixer,
please refer to the »Channel 1 curve« menu option
text beginning page 128.
Aileron 2 ¼ 4 rudder
Brake settings
Aileron 0%
WING MIXERS
Elevator flaps 0%0%
–––
–––
rudder
2
3
4
6
Normal
Flaps elevator 0%0% –––
63
Here, you can set the degree to which the rudder
follows commands acting on ailerons. This is used
in particular in connection with aileron differential to
suppress adverse yaw and thus make it easier to fl y
"clean" curves. You can of course still issue separate
commands to the rudder.
The adjustment range of ± 150 % lets you set the
direction of defl ection as appropriate. Optionally, this
mixer can be activated and deactivated with of the
switches or a control switch that is not self-restoring
so the model can be controlled with only the ailerons
or rudder if desired.
Typically, this mixer is set so that the rudder is
defl ected to the same side as the upward-oriented
aileron, and you will fi nd that setting a value of
around 50 % is usually highly appropriate.
Settings are always made symmetrically relative to
the neutral point of the aileron joystick.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Elevator 3 ¼ 6 fl aps
Brake settings
Aileron 0%
WING MIXERS
Elevator flaps 0%0%
–––
–––
rudder
2
3
4
6
Normal
Flaps elevator 0%0% –––
63
To provide support for the elevator for tight turns
and aerobatics, this mixer can be used to make the
fl ap function follow controls sent to the elevator. The
mixer direction chosen must ensure that the fl aps are
defl ected downwards when the elevator is oriented
upwards and vice versa for a downward-oriented
elevator – i.e. in opposite directions. This mixer can
be made optionally on/off switchable with one of the
switches or a control switch that is not self-restoring.
To confi gure symmetrical mixer values, move
Model type: "1AIL 1FL"
If you have entered "1AIL 1FL" for the "Aileron/
camber fl aps" line on the »Model type« menu (page
94), then the "Wing mixers menu" on your transmitter
will match the following screen image:
Brake settings
Aileron 0%
WING MIXERS
Elevator flaps 0%0%
–––
–––
rudder
2
3
4
6
Normal
Flaps elevator 0%0% –––
63
From the fi rst line on this display screen, you can
switch to the sub-menu with a brief tap on the center
SET key of the right touch pad …
Brake settings
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu
(page 94) AND the "Motor" column of the »Phase
settings« menu, (page 142) are set to "yes" for the
currently active fl ight phase. Switch the fl ight phase if
required:
Elevat. curve
BRAKE SETTINGS
Normal
Crow
QR
0%
WK2
0%
FLAP
0%
Appropriate to the model type selected, you can now
enter a suitable value in the "Crow" line to lower the
fl ap when you activate the brake control – which is
typically the C1 joystick.
165
Detail program description - Wing mixers
the elevator joystick to its center position, so that
the marker frame surrounds both value fi elds. To
confi gure asymmetric values, move the joystick to
the corresponding side.
Values in the range -150 % to +150 % are possible,
so as to adjust the function to the direction of servo
rotation or direction of fl ap defl ection.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
The "typical" values confi gured for this mixer are
single-digit or low two-digit values.
Flaps 6 ¼ 3 elevator
Brake settings
Aileron 0%
WING MIXERS
Elevator flaps 0%0%
–––
–––
rudder
2
3
4
6
Normal
Flaps elevator 0%0% –––
63
This mixer is used to set elevator (pitch-trim)
compensation when a fl ap command is given. This
typically enables you to adjust the model's airspeed
automatically when fl aps are lowered.
If you have used the »Control adjust«, page 108, to
assign Input 6 to a transmitter control or switch then
this also affects this mixer.
Depending on the position of the fl ap control, either
a symmetrical or asymmetric setting within the range
±150 % is possible.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
If required, the mixer can be switched on or off by
assigning a switch in the right column.
The values confi gured for this mixer are typically in
the single-digit range.
Model type: "2AIL"
If you have entered "2AIL" for the "Aileron/camber
fl aps" line on the »Model type« menu (page 94),
then the "Wing mixers menu" on your transmitter will
match the following screen image:
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
From the fi rst line on this display screen, you can
switch to the sub-menu with a brief tap on the center
SET key of the right touch pad …
Brake settings
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu
(page 94) AND the "Motor" column of the »Phase
settings« menu, (page 142) are set to "yes" for the
currently active fl ight phase. Switch the fl ight phase if
required:
Elevator curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
WK
0%
Diff.- reduct
Depending on the model type selected, setting
options will now be available in the "Crow" and
"Diff(erential)reduct(ion)" lines for the column
labeled "AILE". These options should be utilized by
…
… putting the transmitter control for "Brake" •
(refer to the »Model type« menu description on
page 94) – typically the C1 joystick – in its limit
position in the brake direction. Switch to the "Crow"
line, briefl y tap on the center SET key of the right
touch pad and use the selection keys on the left
or right touch pad to set a value that moves the
aileron upwards as far as possible to brake the
model or, if you are using airbrakes as the main
braking system, the aileron should be set to elevate
only minimally to provide an extra braking effect.
Note:
To reliably prevent the servos mechanically
striking their end-stops – which draws a heavy
current – you can set an appropriate limit value
in the column labeled "– limit +" in the »Servo
adjustment« menu, page 102.
… then fi nally, moving to the "Diff. reduct" line, set a •
% value there which is greater than or equal to that
value set (or to be set) in the "Aileron differential"
line of the display screen "before" this one.
In this way, you can suppress the aileron
differential when braking, thus ensuring that you
can count on suffi cient aileron response despite
your ailerons being defl ected upwards.
From the lowest line, "Elevator curve", you can switch
to setting the "Elevator curve" mixer by briefl y tapping
the center SET key of the right touch pad:
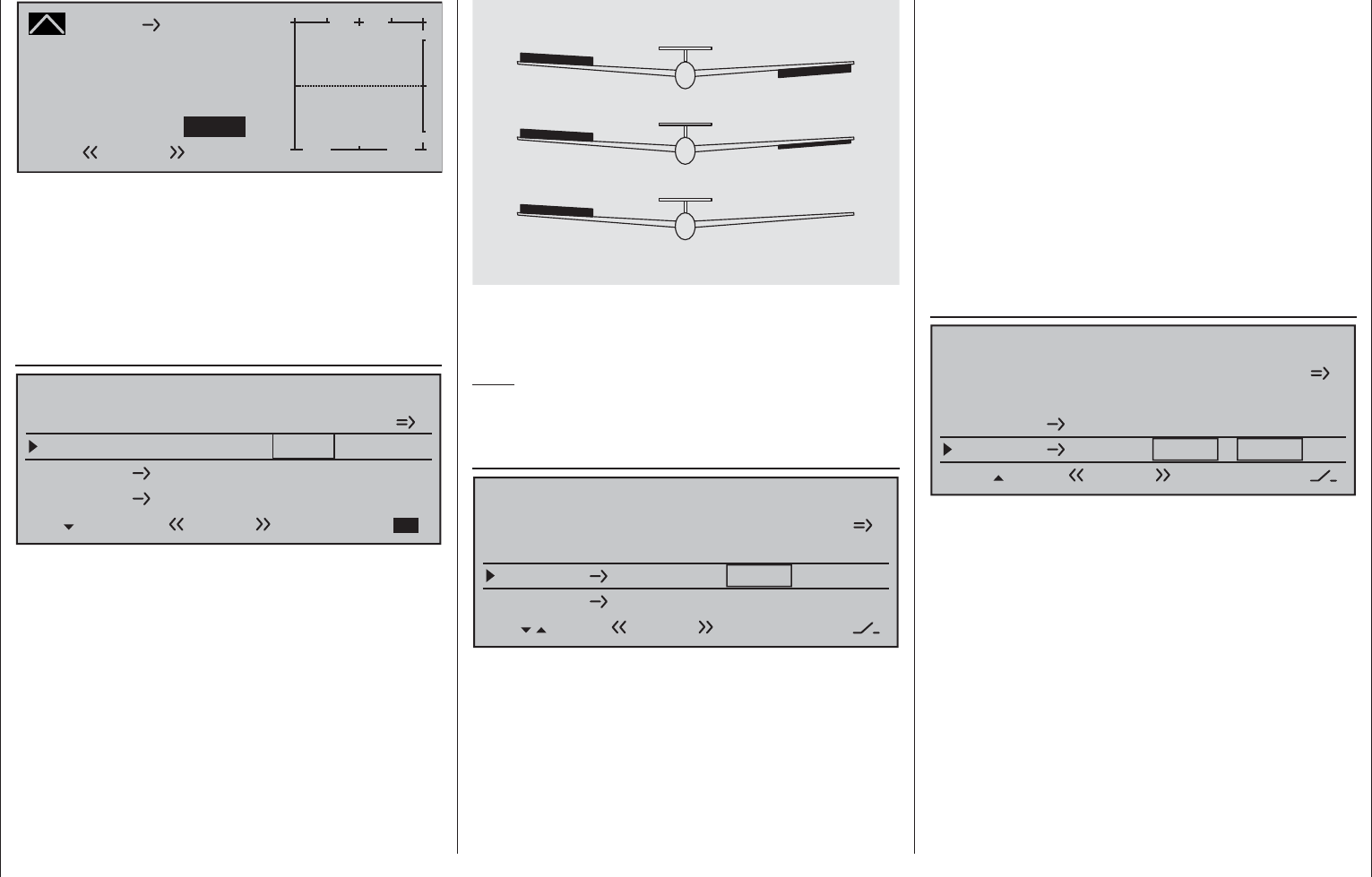
166 Detail program description - Wing mixers
Brake
Curve
off Point
Output
Input –100%
0%
L+
–
100
¼O U T P U T
0%
Elevator
Normal
If required, i.e. if you have the feeling that you will need
to set pitch trim compensation when the airbrakes are
extended, you can program an appropriate automatic
mixer affecting the elevator at this point.
For detailed instructions on setting a curve mixer,
please refer to the »Channel 1 curve« menu option
text beginning page 128.
Aileron differential
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
The adjustment range of ±100 % makes it possible
to set the correct direction of differential, regardless
of the direction of rotation of the aileron servos.
While "0 %" corresponds to a normal linkage, i.e. no
transmitter-side differential, "-100 %" or "+100 %"
represents the "split" function.
For aerobatic fl ying, low absolute values are required
to ensure the model rotates exactly along its
longitudinal axis when an aileron command is given.
Values near to the center (-50 % or +50 %) are typical
for facilitating turns in thermals. The split setting
(-100 %, +100 %) is popular with slope fl iers, where
ailerons alone are often used for turning the model.
0% (normal)
50% (differential)
100% (Split)
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in an active (inverse video) fi eld back to 0 %.
Note:
Negative values are not usually necessary if channels
are assigned properly.
Aileron 2 ¼ 4 rudder
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
Here, you can set the degree to which the rudder
follows commands acting on ailerons. This is used
in particular in connection with aileron differential to
suppress adverse yaw and thus make it easier to fl y
"clean" curves. You can of course still issue separate
commands to the rudder.
The adjustment range of ± 150 % lets you set the
direction of defl ection as appropriate. Optionally, this
mixer can be activated and deactivated with of the
switches or a control switch that is not self-restoring
so the model can be controlled with only the ailerons
or rudder if desired.
Typically, this mixer is set so that the rudder is
defl ected to the same side as the upward-oriented
aileron, and you will fi nd that setting a value of
around 50 % is usually highly appropriate.
Settings are always made symmetrically relative to
the neutral point of the aileron joystick.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Elevator 3 ¼ 5 aileron
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
To provide support for the elevator for tight turns
and aerobatics, this mixer can be used to make the
aileron function follow controls sent to the elevator.
The mixer direction chosen must ensure that the
fl aps are defl ected downwards when the elevator is
oriented upwards and vice versa for a downward-
oriented elevator – i.e. in opposite directions. This
mixer can be made optionally on/off switchable with
one of the switches or a control switch that is not
self-restoring.
To confi gure symmetrical mixer values, move
the elevator joystick to its center position, so that
the marker frame surrounds both value fi elds. To
confi gure asymmetric values, move the transmitter
control to the corresponding side.
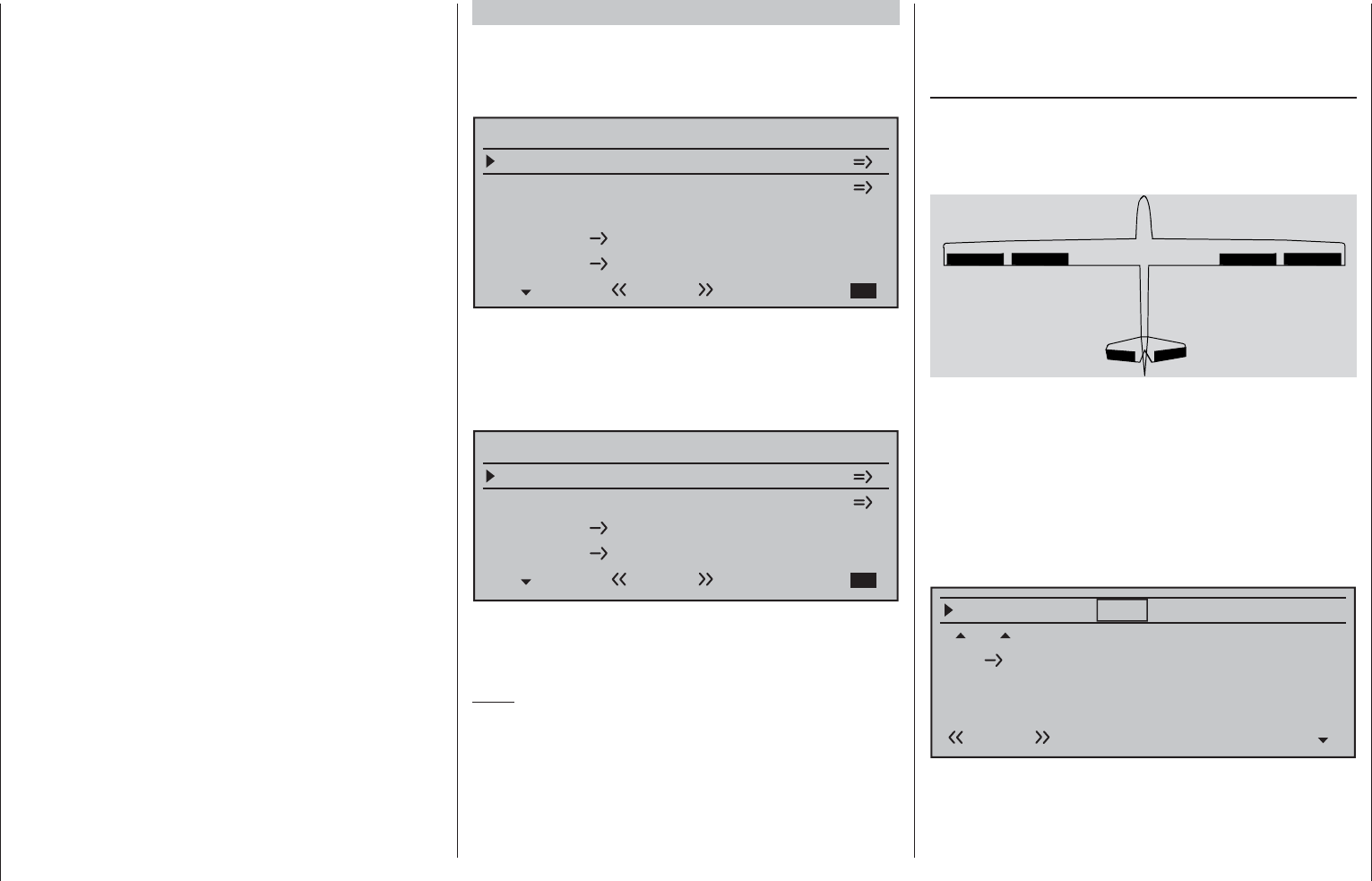
167
Detail program description - Wing mixers
Values in the range -150 % to +150 % are possible,
so as to adjust the function to the direction of servo
rotation or direction of aileron defl ection.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
The "usual" values for this mixer are in the low two-
digit range.
Model type: "2/4AIL 1/2/4FL"
If you have entered "2AIL 1FL" for the "Aileron/
camber fl aps" line on the »Model type« menu
(page 94), then the "Wing mixers menu" on your
transmitter will match the following screen image:
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Flaps elevator 0%0%
–––
–––
rudder
2
6
4
3
Normal
Multi-flap menu
If, on the other hand, "2/4AIL 1/2/4FL" has been
entered for the "Aileron/camber fl aps" line of the
»Model type« menu, page 94, then the "Wing mixers
menu" on the transmitter should correspond to the
fi gure below:
Brake settings
Aileron 0%
WING MIXERS
Flaps elevator 0%0%
–––
–––
rudder
2
64
3
Normal
Multi-flap menu
Regardless of the combination of aileron and fl ap
servos you choose, all of the parameters available
can be adjusted separately for each fl ight phase.
Note:
For almost any menu option, you have the option
of checking your settings by switching to the servo
display screen, which is accessed with a simultaneous
tap on the ef selection keys of the left touch pad.
If you do, note however that the vertical lines on the
»Servo display« move in the same direction for
ailerons and in the opposite direction for fl aps.
Before we address the details of this menu we would
like to provide a brief explanation of the different
display modes for the multi-flap menu:
Model type: "2 AIL 1 FL"
If servos have been connected to the receiver as
described on page 61 and selected accordingly in the
»Model type« menu, page 94, then the abbreviations
"AILE" and "FLAP" refer to the following fl aps:
AI
left
FL FL AI
right
Since the options available on the wing mixer menu
and its sub-menus vary according to the number of
fl ap servos specifi ed on the »Model type« menu,
page 94, the list contains only those set-up options
available for the given model.
Therefore, with a preset to "2AIL 1FL", the options for
setting aileron functions to fl aps will be suppressed,
as will all setting options throughout the (right-side)
column labeled "FL2".
Fl.pos
AILE
FL
0%
Normal
HR WK
WK2
FLAP
+100%
0% 0%
+100%
+100%
+100%
0%0%
0%
0%
0%0%
In addition, the settings for "Aile(ron) diff(erential)"
are not found on the "multi-fl ap menu", as with "2AIL
2/4FL", but one level higher in the "Wing mixers"
menu, see the screenshot at top left.
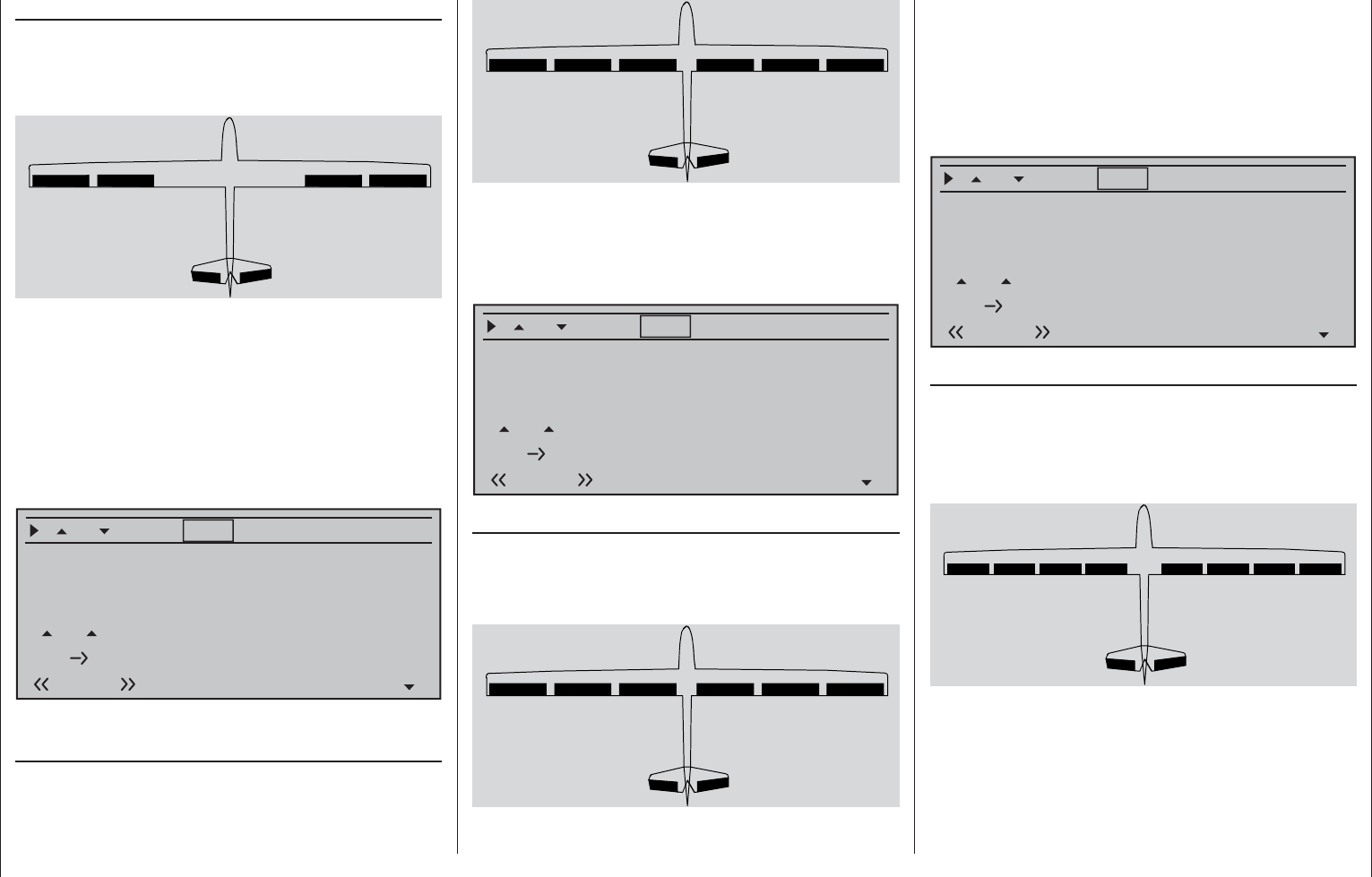
168 Detail program description - Wing mixers
Model type: "2AIL 2FL"
If servos have been connected to the receiver as
described on page 61 and selected accordingly in the
»Model type« menu, page 94, then the abbreviations
"AILE" and "FLAP" refer to the following fl aps:
AI
left
FL
left
FL
right
AI
right
Since the options available on the wing mixer menu
and its sub-menus vary according to the number of
fl ap servos specifi ed on the »Model type« menu,
page 94, the list contains only those set-up options
available for the given model.
Therefore, with a preset to "2AIL 2FL", all options
for setting options for a second set of fl ap pairs will
be suppressed throughout the (right-side) column
labeled "FL2".
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
WK2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL
El Fl
+100%
+100%
+100%
+100%
0%0%
0%
0%
0%0% 0%
0%
Model type: "2AIL 4FL"
If servos have been connected to the receiver as
described on page 61 and selected accordingly in the
»Model type« menu, page 94, then the abbreviations
"AILE", "FLAP" and "FL2" refer to the following fl aps:
AI
left
FL
left
FL2
left
FL2
right
FL
right
AI
right
Since the options available on the wing mixer menu
and its sub-menus vary according to the number of
fl ap servos specifi ed on the »Model type« menu,
page 94, the list contains only those set-up options
available for the given model.
Fl.pos
Diff.
Ail-tr
AI
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL
El Fl
+100%
+100%
+100%
+100%
0%0%
0%
0%
0%0% 0%
0%
Model type: "4AIL 2FL"
If servos have been connected to the receiver as
described on page 61 and selected accordingly in the
»Model type« menu, page 94 , then the abbreviations
"AILE", "AILE2" and "FL" refer to the following fl aps:
AI
left
AI2
left
FL
left
FL
right
AI2
right
AI
right
Since the options available on the wing mixer menu
and its sub-menus vary according to the number of
fl ap servos specifi ed on the »Model type« menu,
page 94, the list contains only those set-up options
available for the given model.
Therefore, with a preset to "4AIL 2FL", all options
for setting options for the fi rst and second set of
aileron pairs as well as those for the fl ap pair will be
displayed throughout.
FL.pos
Diff.
Ail-tr.
Al
Normal AILE
+100%
FL
AILE2
0%
+100% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% +100% 0%
0%
FL
El Fl
+100%
+100%
0%
0%
0%0%
0%
0%
0%0% 0%
0%
Model type: "4AIL 4FL"
If servos have been connected to the receiver as
described on page 61 and selected accordingly in the
»Model type« menu, page 94 , then the abbreviations
"AILE", "AILE2", "FLAP" and "FL2" refer to the
following fl aps:
AI
left
AI2
left
FL
left
FL2
left
FL2
right
FL
right
AI2
right
AI
right
Since the "4AIL 4FL" selection represents the
maximum possible number of wing servos, in addition
to the columns labeled "AILE" and "AILE2" there will
now also be columns available labeled "FLAP" and
"FL2.
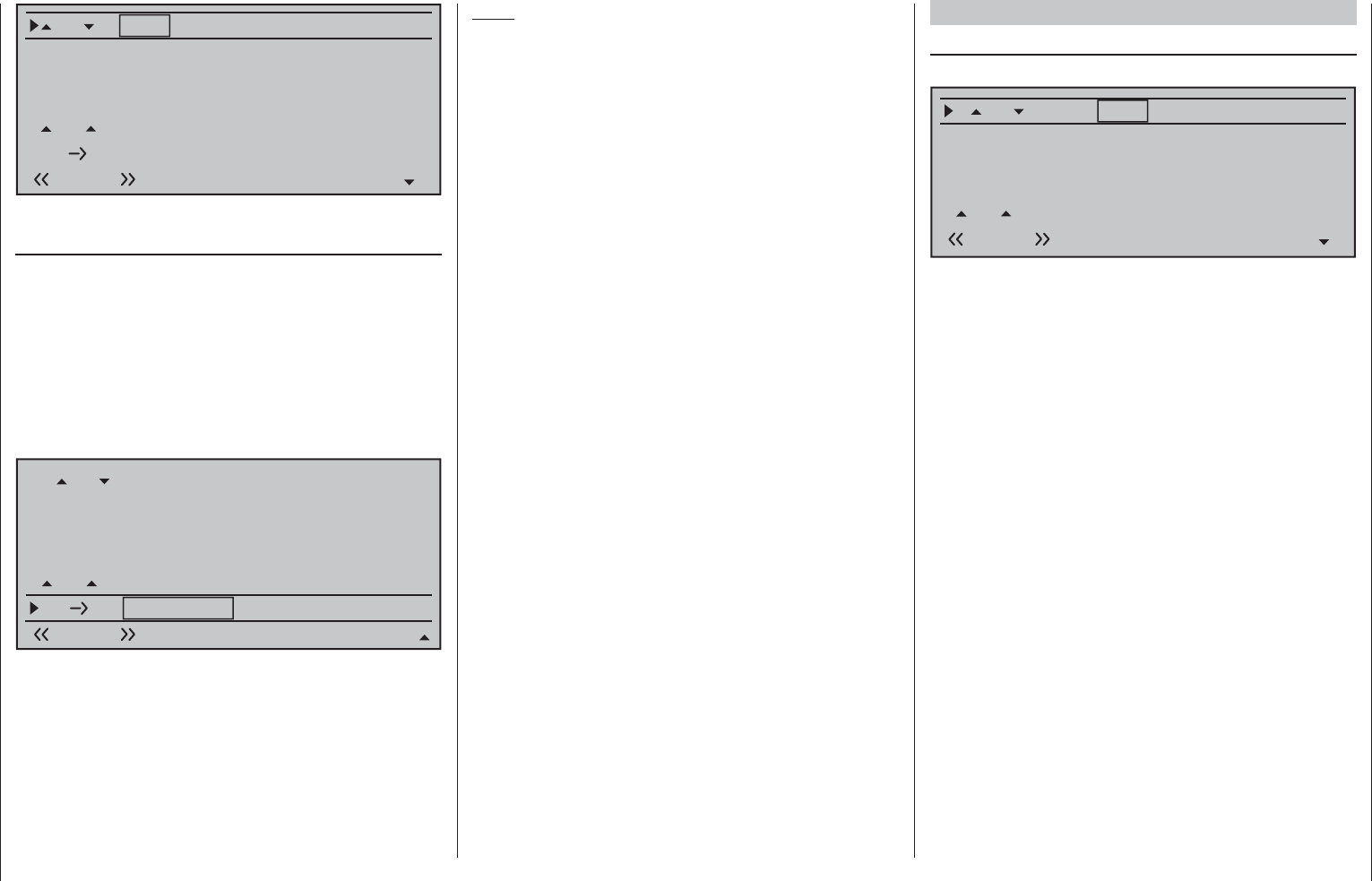
169
Detail program description - Wing mixers
Fl.pos
Diff.
Ail-tr
AI
Normal AILE
+100%
FL2
0 0%+100+100%+100+100%+100+100%
0% 0%
0%0%
0%
0%
0%
+100% 0% 0%
0%
FL
AILE2 FLAP
+100%
+100%
0%
0%
El Fl 0 0%+100+100%+100+100%+100+100%
Delta/fl ying wing type models with more than two
wing fl aps
If the "ELEVON" tail type (for a delta-wing or fl ying
wing model) has been selected and number of wing
fl aps in the "Aileron/camber fl aps" line of the »Model
type« menu conforms to that menu's description, then
activation of the elevator joystick will normally result in
as little movement for both ailerons as for the inside
fl aps (FL) and, if present, (FL2). The reason for this is
the default mixer ratio of 0 % for all wing fl aps set for
the "EL¼FL" mixer found in the "Multi-fl ap" menu:
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL
El Fl
+100%
+100%
+100%
+100%
0%0%
0%
0%
0%0% 0%
0%
Accordingly, you must fi rst specify your desired
elevator control on the "EL ¼ FL" line. Take care to
ensure that up/down activation occurs in the right
sequence.
Note:
The "Brake settings" sub-menu (see next double
page) is also suitable for setting up the butterfl y
(crow) function with delta and fl ying wing models. In
fi ne-tuning the defl ection of the fl ap pairs AIL, FL and
(if present) FL2, however, ensure that the moments
created by one pair of fl aps compensate the moments
created by the other pair of fl aps in each case. For
example: the "up" effect of ailerons when defl ected up
should be compensated by a "down" effect from fl aps
when they are lowered.
Multi-fl ap menu
VAIW (Aileron ¼camber fl aps)
(suppressed by "2AIL 1FL")
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
The "VAIW" line can be used to make fl ight-phase
dependent settings for the percentage of aileron
action to result for the camber fl ap pair "FLAP" and, if
present, also "FL2" when aileron control is exercised.
(In the "AILE" column it is also possible to adjust the
defl ection of the aileron pair, if required.) Normally,
however, the fl aps should follow the ailerons with less
of a defl ection, i. e. the mixer ratio should be smaller
than 100 %.
The adjustment range of -150 % to +150 % means
the direction of defl ection can be adjusted, depending
on the direction of rotation of the servos, to suit the
ailerons.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in the
fi gure.
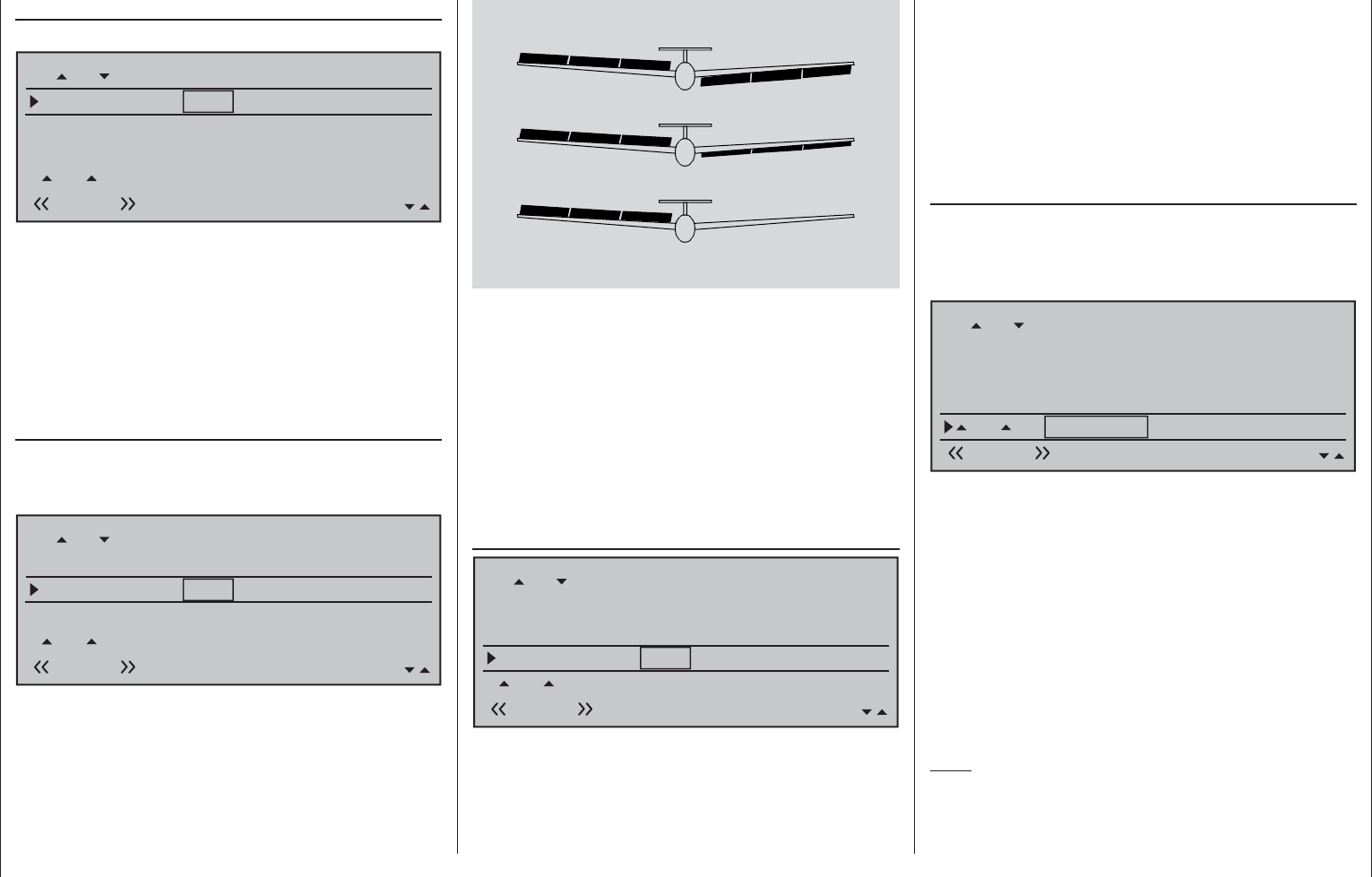
170 Detail program description - Wing mixers
AiI-tr. (aileron trim)
(suppressed by "2AIL 1FL")
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
In this line, you specify the percentage rate with
which aileron trim is to affect "AILE", "FLAP" and – if
present – "FLAP2".
The available range of values is -150 % to +150 %,
relative to the adjustment range of the trim wheel.
A simultaneous tap on the cd or ef keys of the right
touch pad (CLEAR) will reset the given active (inverse
video) fi eld to its default value shown in the fi gure.
Diff. (Differential for aileron function)
(With "2AIL 1FL", at one level higher in the
»Wing mixers« menu, see fi gure on the previous
double page.)
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
On this line, you set the aileron differential, plus the
differential for the FLAP and FLAP2 wing fl aps – if the
latter are being activated as ailerons.
0% (normal)
50% (differential)
100% (split)
AI FL FL2 FL2 FL AI
If you are unsure about the meaning of differential
travel, please read the appropriate explanation at the
start of this section on page 161.
The setting range of -100 % to +150 % permits correct
differentiation direction adjustment regardless of the
direction of rotation of aileron and fl ap servos.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in
the fi gure.
Fl.pos (fl ap position)
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
Here, you set the fl ight phase-specifi c wing fl ap
positions for all of the fl aps present on the model
in question. In this way, you can specify the fl ap
positions that apply to each fl ight phase.
The adjustment range of -100 % to +100 % makes
it possible to set the correct direction of travel
regardless of the direction of rotation of the aileron
and fl ap servos.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in the
fi gures.
VFLV(effect of fl aps)
This line specifi es the percentage of effect produced
on aileron and fl aps by the settings (if applicable, also
fl ight-phase dependent settings) made for Input 6 in
the »Control adjust« menu, page 108.
Fl.pos
Diff.
Ail-tr
Al
Normal AILE
+100%
FL2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
For each fl ap pair, you can defi ne either a
symmetrical or an asymmetric effect. Position the
transmitter control accordingly – either centrally or to
the relevant side.
If each travel adjustment is left at +100 % on the
»Control adjust« menu, page 108, then values
between 5 % and 20 % should generally be suffi cient
here.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in the
fi gures.
Note:
By default, NO transmitter control is assigned to input
6 on the »Control adjust« menu. However, you can
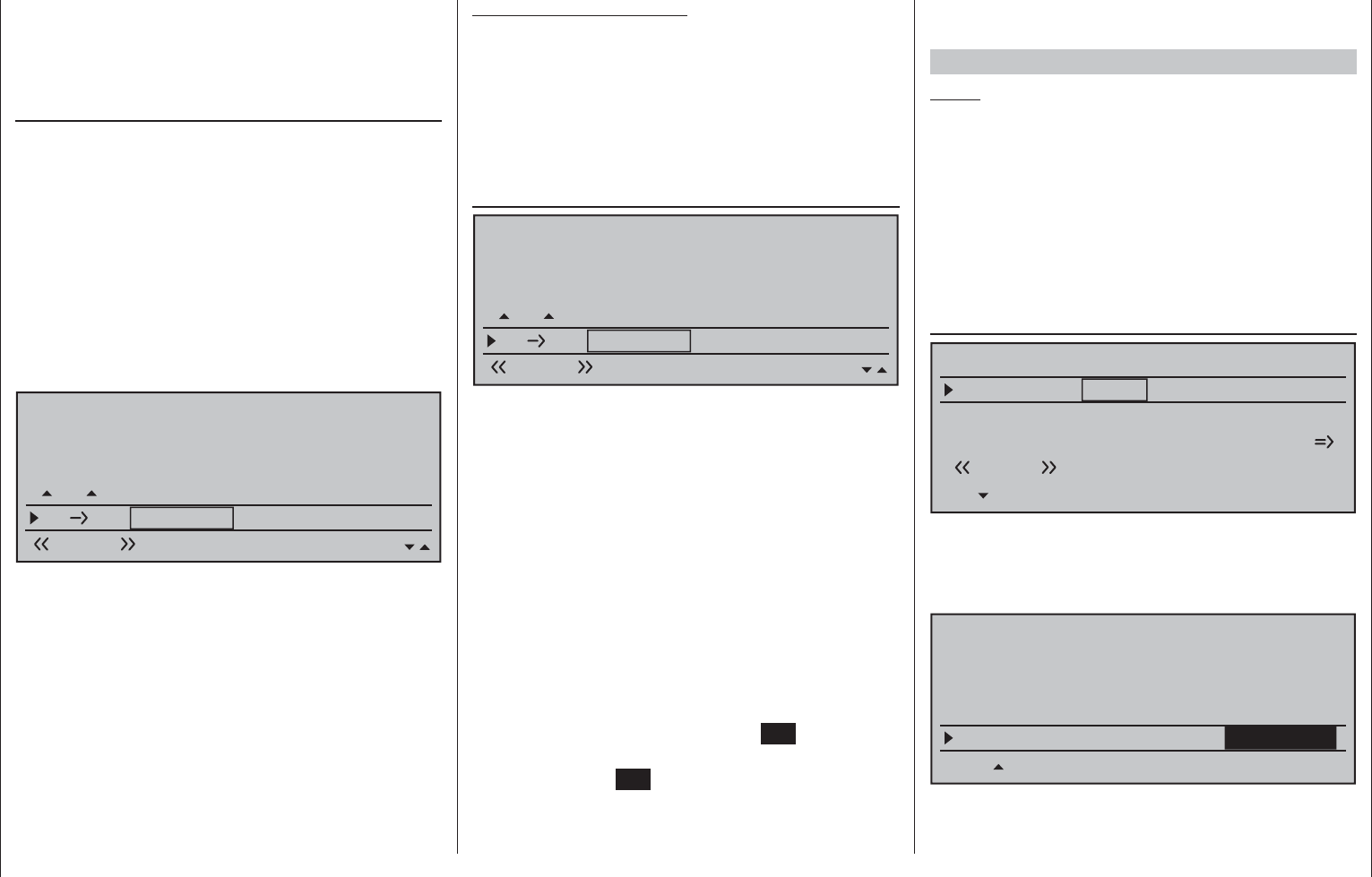
171
Detail program description - Wing mixers
assign a transmitter control or switch to this input
at any time – also in a fl ight phase-dependent way
– thus enabling different fl ap settings within a fl ight
phase; see also example 2 on page 292.
El ¼ Fl (elevator ¼fl ap)
To provide support for the elevator for tight turns
and aerobatics, this mixer can be used to make the
fl ap function follow controls sent to the elevator. The
mixer direction chosen must ensure that the fl aps are
defl ected downwards when the elevator is oriented
upwards and vice versa for a downward-oriented
elevator – i.e. in opposite directions.
For each fl ap pair, you can defi ne either a
symmetrical or an asymmetric effect. Position the
transmitter control accordingly – either centrally or
to the relevant side. Values in the range -150 % to
+150 % are possible:
Fl.pos
Diff.
Ail-tr
Normal AILE FL2
FLAP
0%
+100%
0%
+100%
0%
+100%
0%
0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
El Fl +100%
+100%
0%
0%
0%0%
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in the
fi gures.
The "usual" values for this mixer are in the low two-
digit range.
If a switch is assigned in the next line, "El ¼ FL"
then the effect produced on fl aps can be switched on
and off with the elevator.
Important general notice:
Do not let control surfaces and servos strike their
mechanical end-stops when large defl ections
are set! This is especially relevant in relation
to the functions "VAIW", "VFLW" and possibly
"VFL2W". Use the "- limit +" option (travel limit)
available in the "Servo adjustments" menu
(page 102), as required.
El ¼ Fl offset (elevator)
Fl.pos
Diff.
Ail-tr
Normal AILE FL2
FLAP
0%
+100%
0%
+100%
0%
+100%
0%
0%
+100% 0% 0%
0%
FL +100%
+100%
0%
0%
0%0%
El Fl +100%
+100%
0%
0%
0%0%
A value entered into the "El" ¼ Fl" line offers support
to the elevator during tight curves and aerobatics.
This "El" ¼ Fl offset" line determines the offset
value introductory point where this percentage of
effect on fl aps is to take place for elevator action.
• With an offset value of 0%, fl aps will be affected
by elevator action beginning with the neutral
position of the elevator joystick by the percentage
set in the "El" ¼ Fl".
• With an offset value other than 0 %, fl aps will be
affected by movement of the elevator joystick,
in either the "up" or "down" direction, only after
reaching the preset offset point.
To set this offset point, put the elevator joystick at
the offset point to be set (in either of the two possible
directions). A brief tap on the center SET key of the
right touch pad will store this position.
Tap on the center SET key of the right touch pad with
the elevator joystick in its centered position to set the
offset value back to 0 % again. If a switch is assigned
in column "Switch", the effect produced on fl aps can
be switched on and off with the elevator.
Brake settings
Notes:
The "Brake settings" menu is switched "off" if: •
"Motor on C1 forward / back" in the »Model type«
menu (page 94) AND the "Motor" column of the
»Phase settings« menu, (page 142) are set to
"yes" for the currently active fl ight phase. Switch
the fl ight phase if required:
The "brake mixers" described below can also – •
and should also – be confi gured to be specifi c to
individual fl ight phases.
Crow
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
FLAP
0%
Diff. reduct
FL2
0% 0%
0%
The "Crow" mixer function is actuated by control
function 1, 7, 8 or 9, depending on the input assigned
on the "Brake Offset" line in the »Model type« menu
(see page 94).
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 2AIL2FL
M O D E L T Y PE
Brake Offset +100%
SEL
Input 1
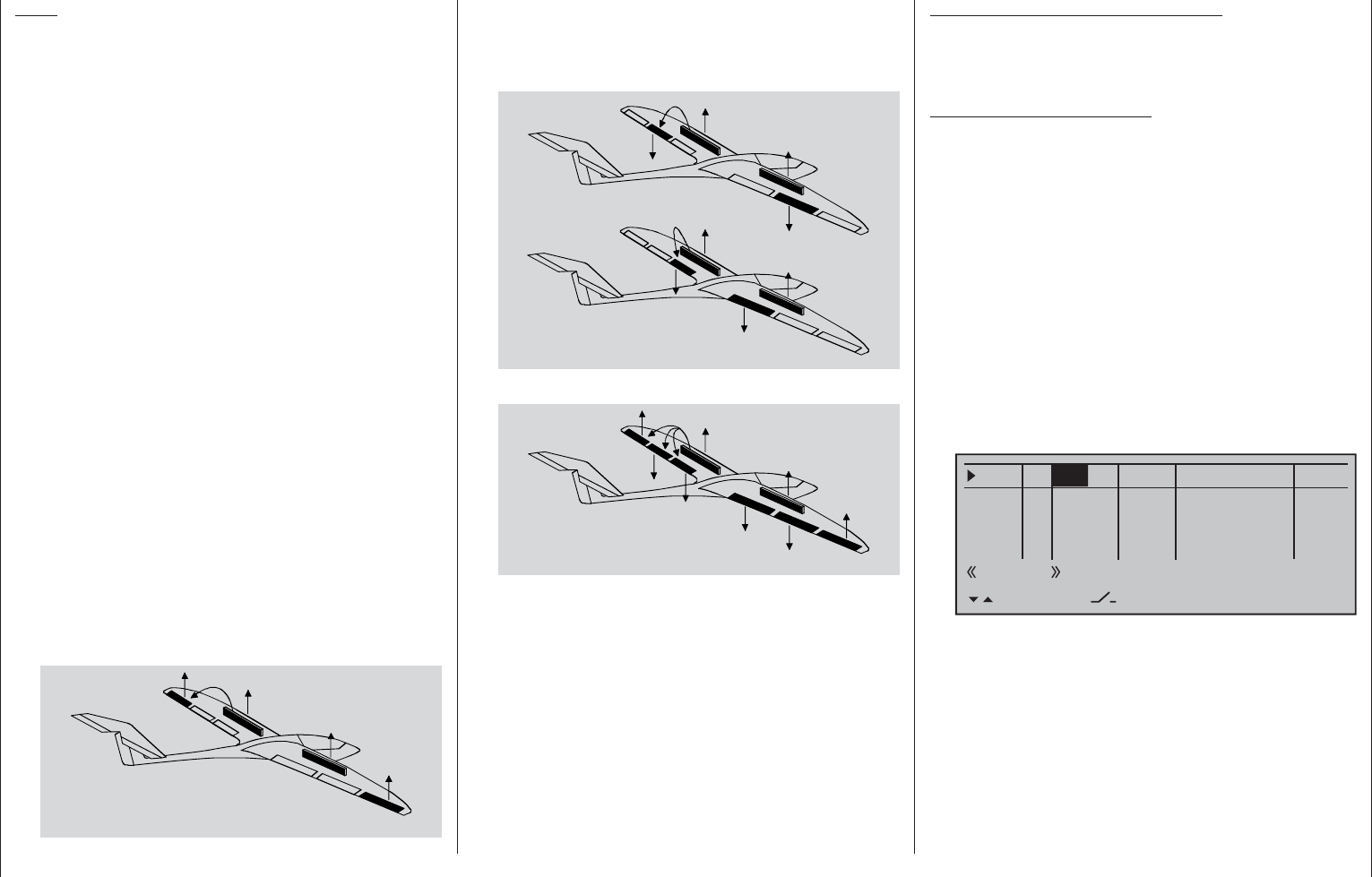
172 Detail program description - Wing mixers
Note:
The Offset, i.e. the activation direction, is also set in
the »Model type« menu, pager 94. This offset should
be set to about +90 % of stick travel (if the C1 joystick
is used, this is generally located at the forward
position of the stick). To extend the fl aps, the stick
must therefore be moved back towards the pilot. The
remaining joystick travel of around 10 % then has no
effect, although it is not "lost", since the control travel
is automatically expanded back to 100 %.
Use the select fi elds of the columns labeled "AILE",
"FLAP", "FL" and, if present, "FL2" to specify the
extent and the direction that corresponding fl ap
pairs are to follow when the airbrake control (control
function 1, 7, 8 or 9) is operated. If the model has no
airbrakes, leave the corresponding receiver output
free or set it in the »Mix only channel« menu to
"MIXonly" to be able to use it elsewhere.
Values in the range -150 % to +150 % are possible.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset the given active
(inverse video) fi eld to its default value shown in the
fi gure.
"AILE" column•
When braking the model as it comes in to land,
neither of the two aileron fl aps should ever be
defl ected more than half of the possible travel
upwards, to ensure that enough travel is available
to control the model along its longitudinal axis
(aileron function).
AI
FL
FL2
FL2
FL
AI
"FLAP" (and "FLAP2") column•
As the model is braked on the landing approach,
both pairs of fl aps can be set to defl ect by different
amounts, e.g.:
AI
FL
FL2
FL2
FL
AI
AI
FL
FL2
FL2
FL
AI
Combining AILE and FLAP for "Crow"•
AI
FL
FL2
FL2
FL
AI
Though the airbrake mixers are set as described
above, there is a special fl ap constellation, called
"crow position" or "butterfl y", that can also be set. This
airbrake setting causes both ailerons move moderately
upward while the fl aps move downward as far as
possible. Another mixer – see below, under the section
"Elevat. curve" – is then used to trim the elevator such
that the fl ight speed does not change signifi cantly in
comparison to the normal fl ight position. Otherwise,
there is a danger that the model loses too much speed
and then, after the braking system is retracted (e.g.
to extend a landing approach that was too short, for
example), pancakes or even stalls.
A tip for "seeing" the effect of brakes:
lift the fl aps and look over and under the surface from
the front. The larger the surface projected by the lifted
fl ap, the greater the braking effect achieved.
Tips for activating airbrakes:
When, in addition to aileron and camber fl ap •
servos, there is also a built-in servo for actuating
wing airbrakes, it can be most simply connected
to that receiver output – if free – whose input has
been selected for the brake function, i.e. either
on 1, 7, 8 or 9. If this is not possible then, as
an alternative, use a free mixer to connect the
selected brake control channel with the airbrake
servo.
To activate two airbrake servos, the best approach •
is to leave one servo on output 1 and to connect
the second servo to a free output of your choice
– for example, output 9. You then also assign this
output to transmitter control 1 (as standard) on the
»Control adjust« menu, page 108, see fi gure.
0% +100%I9
I10
I11
I12
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
Cn1 ---
fr
fr
fr
---
---
---
offset
GL
Normal
As you do, leave the settings for offset, travel,
etc. at their default values. Also leave the default
"GL" value in the column labeled "TYP" so that
the second airbrake, like the fi rst, operates in the
same way across all fl ight phases.
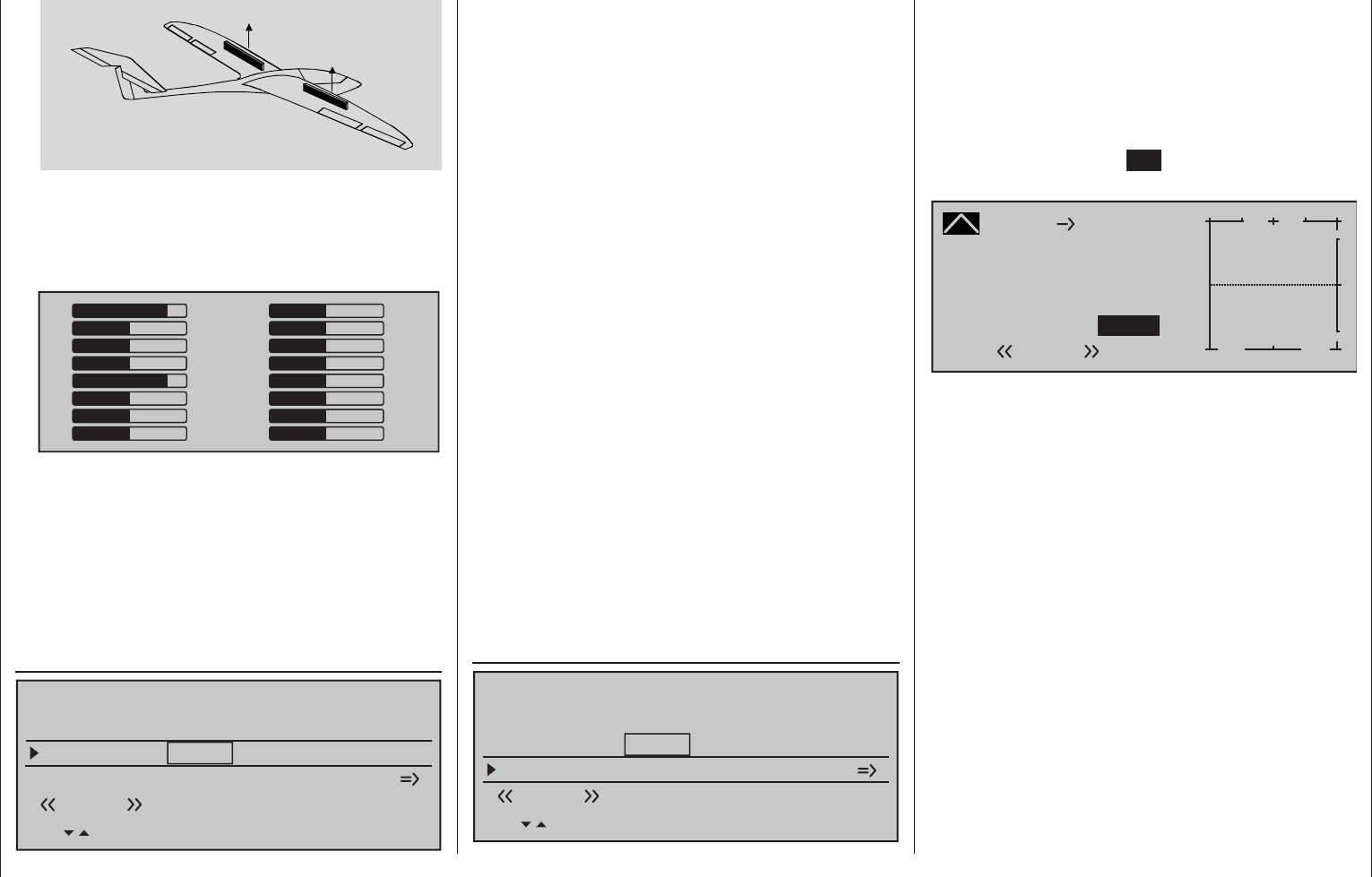
173
Detail program description - Wing mixers
AI
FL
FL
AI
Servo 1
Servo 9
You can assure yourself that this works as
stated by accessing the »Servo display« menu,
accessible from almost any menu level with a brief
simultaneous tap on the ef keys on the left touch
pad (see page 262):
1
3
5
7
9
11
13
15
0
0
0
0
0
0
0
0
+100
0
0
0
+100
0
0
0
2
4
6
8
10
12
14
16
If this relatively simply variant should prove
impossible for whichever reasons, then the
alternative is a solution with two free mixers – and
potentially involving the »Mix only channel«
menu, page 205.
In either case, however, the airbrake travels must
then be fi ne-tuned on the »Servo adjustment«
menu, page 102.
Diff. reduct
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
FLAP
0%
Diff. reduct
FL2
0% 0%
0%
Earlier, we discussed the problems with the butterfl y
(crow) confi guration. Namely: that with the use of
aileron differential, the aileron effect can be strongly
(negatively) affected by the aileron elevation. This is
fi rstly because further defl ection of the one aileron
upwards is (almost) no longer possible and secondly
because the downward-defl ected aileron – depending
on the elevation and degree of differential
confi gured – is often unable to achieve even its
"normal" position.
To be able to restore the effect of the aileron altered
in this way as far as possible, you should ensure
that you make use of the automated "Differential
reduction" feature. This feature continuously reduces
the degree of aileron differential as the airbrake
system is extended. The feature is confi gurable and
can even be set to suppress differential entirely.
A value of 0 % means that the "aileron differential" set
at the transmitter remains fully in force. An entry that
equals the % value set for aileron differential means
the differential is fully eliminated once the butterfl y
function is at maximum travel, i.e. with fl aps fully
extended. Setting a reduction value greater than the
aileron differential confi gured will eliminate the latter
even before the full travel of the airbrake joystick.
Values can be set in the range 0 to 150 %.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Elevat. curve (Brake ¼ Elevator)
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
FLAP
0%
Diff. reduct
FL2
0% 0%
0%
If the airbrake control – to be set to 1, 7, 8 or 9 on the
"Brake Offset" line of the »Model type« menu, page
95 – is used to extend the fl aps as described previously
for the "Brake settings" menu, this will often have a
negative effect on the aircraft model's airspeed. This
mixer can be used to compensate this type of effect by
applying a corrective value to the elevator.
A brief tap on the center SET key of the right touch
pad will switch to the display screen shown below:
Brake
Curve
off Point
Output
Input –100%
0%
L+
–
100
¼O U T P U T
0%
Elevator
Normal
Setting notices for "Elevat. curve" (Brake ¼
Elevator)
The offset set in the »Model type« menu, page 94,
affects this mixer.
The vertical line on the display that indicates the
position of the airbrake control only moves from
the edge of the graph when the confi gured offset
is exceeded. In doing so, airbrake control travel is
automatically expanded back to 100 %, as described
in the »Model type« menu.
Accordingly, the mixer's neutral point always lies on
the left edge, independently of the offset confi gured.
Now adjust the elevator curve in the direction of the
opposite end-point in accordance with requirements.
Note that this method for setting the 5-point curve
mixer follows the same principles that are applicable
to the curve mixers, already described on page 128 in
the context of the »Channel 1 curve« menu.
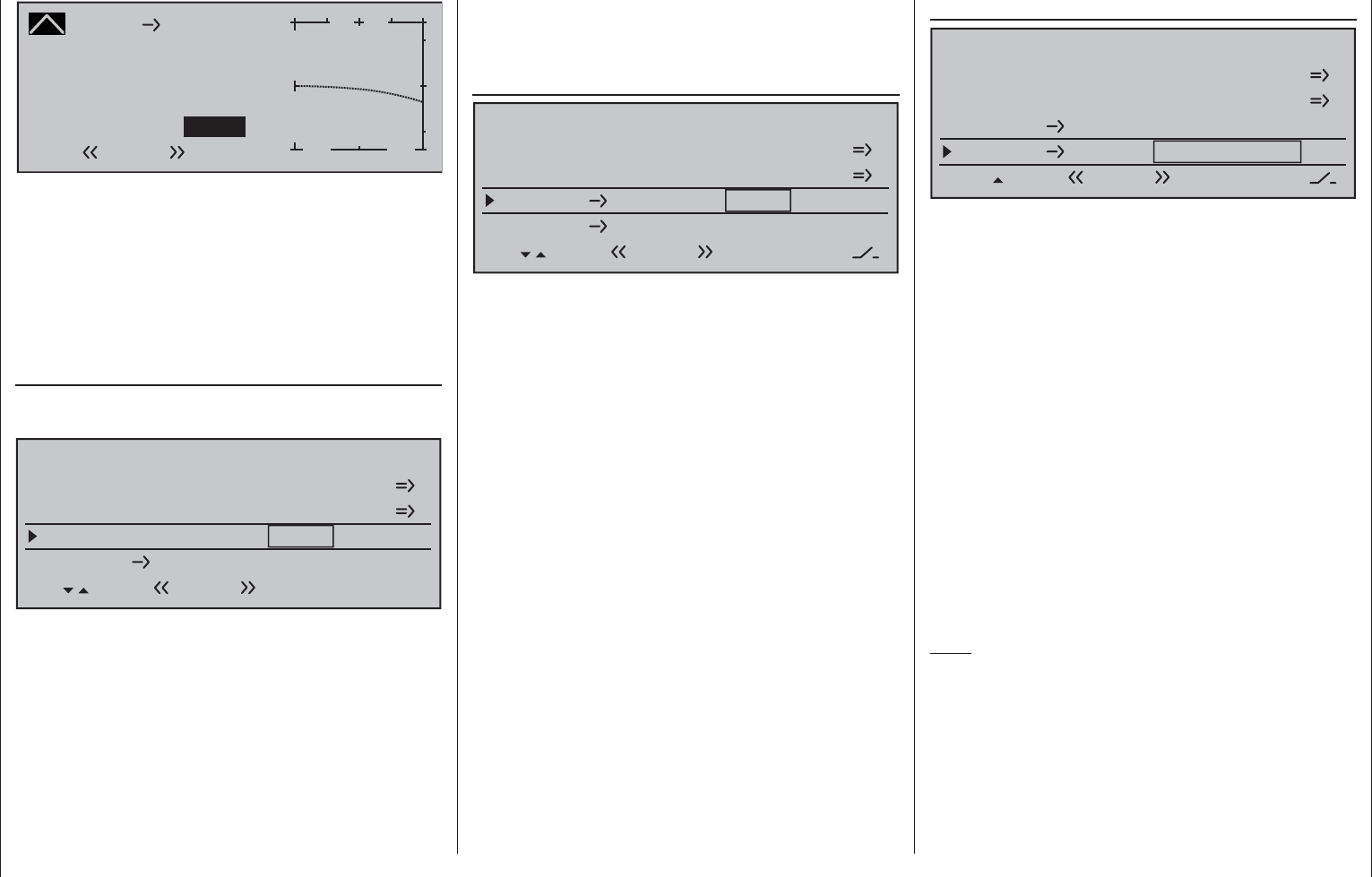
174 Detail program description - Wing mixers
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Aileron 2 ¼ 4 rudder
Brake settings
Aileron 0%
WING MIXERS
–––
rudder
24
Normal
Multi-flap menu
Flaps elevator 0%0% –––
63
Here, you can set the degree to which the rudder
follows commands acting on ailerons. This is used
in particular in connection with aileron differential to
suppress adverse yaw and thus make it easier to fl y
"clean" curves. You can of course still issue separate
commands to the rudder.
The mixer direction is typically chosen to ensure that
the rudder moves in the direction of the aileron that is
defl ected upwards.
Settings are always made symmetrically relative to
the neutral point of the aileron joystick.
The adjustment range of ± 150 % lets you set the
direction of defl ection as appropriate. Optionally, this
mixer can be activated and deactivated with of the
switches or a control switch that is not self-restoring
so the model can be controlled with only the ailerons
or rudder if desired.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in an active (inverse video) fi eld back to 0 %.
A value of around 50 % is generally an excellent
starting point.
Flaps 6 ¼ 3 elevator
Brake settings
Aileron 0%
WING MIXERS
–––
rudder
24
Normal
Multi-flap menu
Flaps elevator 0%0% –––
63
When setting camber-changing fl aps, one side-effect
can be to generate moments causing movement
around the transverse axis. Equally, however, it may
also be desirable that e.g. your aircraft model opts for
a more pacey fl ight style with the fl aps slightly raised.
This mixer can be used to achieve both results.
With this mixer, the extension of the fl aps – depending
on the value confi gured – automatically ensures
the elevator position follows suit. Symmetrical or
asymmetrical settings relative to the neutral point of
the fl ap control are possible.
If required, the mixer can be switched on or off by
assigning a switch in the right column.
Values can be set in the range 150 to 150 %. The
"typical" values confi gured for this mixer are single-
digit or low two-digit values.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in a given active (inverse video) fi eld back to 0 %.
Note:
If a transmitter control or switch has been assigned
in the »Control adjust« menu, as described under
"VFLW" on page 171, then that setting will also have
an effect on this mixer.
Brake
Curve
off Point
Output
Input +100%
–25%
H+
–
100
¼O U T P U T
–25%
Elevator
Normal
The selected setting should certainly be tried out in
suffi cient altitude and, if necessary, readjusted. When
doing this, be sure to pay attention that the model
does not slow down too much while the brake system
is extended! Otherwise, you run the risk that, after the
braking system is retracted, e.g. to extend a landing
approach that was too short, for example, your model
pancakes or even stalls.
Aileron differential
(Only for "2AIL 1FL". For the "2AIL 2/4 FL" selection,
this is included on the Multi-fl ap menu, see page170.)
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
–––
rudder
24
Normal
Multi-flap menu
On this line you can set the aileron differential for the
two aileron servos.
If you are unsure about the meaning of differential
travel, please read the appropriate explanation at the
start of this section on page 161.
The setting range of -100 % to +150 % permits correct
differentiation direction adjustment regardless of the
direction of rotation of aileron and fl ap servos.
175
For your notes
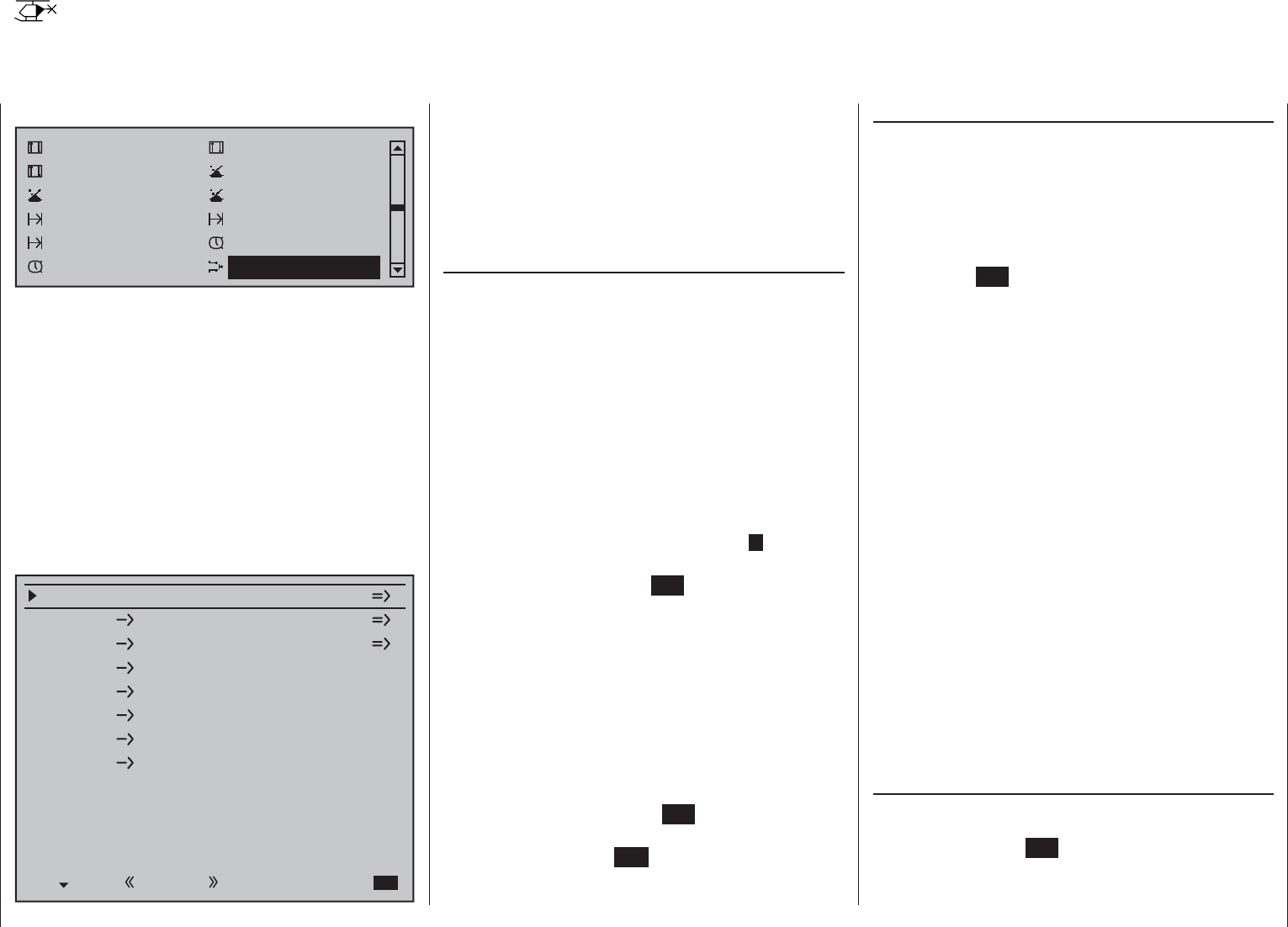
176 Detail program description - Helicopter mixer
Helicopter mixer
Flight phase-specifi c setting of collective pitch, throttle and tail rotor
In this menu …
Control adjust Dual Rate / Expo
Channel 1 curve Switch display
Control switch Logical switches
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
… all of the fl ight phase-specifi c helicopter mixers are
described, with the exception of the mixers for auto-
rotation fl ight (discussed from page 190 onward.)
These mixers are used for the basic set-up of a
model helicopter.
For fl ight phase programming, see the menus:
»• Basic settings, model«, page 84
»• Phase settings«, page 146
»• Phase assignment«, page 148
When the switch for a specifi c fl ight phase is
actuated, then the name of the given fl ight phase,
e.g. «Normal», will be displayed at the lower left edge
of the display screen:
Channel 1
Channel 1
Pitch
Gas
Heckrotor
Tail rot. 0%
Roll 0%
Gas
Roll
Gas
Heckrotor
Nick
Nick
Gas
Heckrotor
Swashplate rotation
Swashplate limiter
0%
0%
0%
0°
Off
Gyro suppression 0%
Gyro offset 0%
Normal
In each of these fl ight phases – with the exception
of the auto-rotation phase – the typical helicopter
mixing and coupling functions shown in the screen-
shot above are available for setting up the model
helicopter. These functions are described in the fi rst
part of this comprehensive chapter.
General information on mixers,
(see also pages 159 and 192)
An arrow "¼" indicates a mixer. A mixer "branches
off" the signal fl ow of a control function at a
particular point, in order to use this fl ow to cause a
predetermined effect on a further control channel
and, ultimately, the receiver output. "Pitch ax ¼ Tail
rot" mixer means, for example, that when the pitch-
axis joystick is actuated, the tail rotor servo must also
react within the scope of its setting.
Basic programming procedure:
Select the mixer by using the selection keys of the 1.
left or right touch pad.
Depending on the mixer involved, the bottom
display line will show either SEL or the ¨ (indicating
a change to a second page is necessary).
A brief tap on the center 2. SET key of the right touch
pad will permit direct settings for linear mixer
ratios. Use the selection keys to set the mixer
ratio.
Otherwise you will need to switch to the second
screen page where you can set up the appropriate
curve mixer.
A simultaneous tap on the cd or ef keys of
the right touch pad (CLEAR) will reset a changed
value in a given active (inverse video) fi eld back to
0 %.
Another tap on the center 3. SET key of the right
touch pad will complete the entry.
A tap on the center 4. ESC key of the left touch pad
will cause a return to the previous display page.
Description of helicopter mixers
To set collective pitch curves as well as the two
mixers, "Channel 1 ¼ Throttle" and "Channel 1 ¼
Tail rotor", there are curve mixers available in all
fl ight phases. Accordingly, these mixers also permit
the programming of non-linear mixing ratios along
the path of joystick travel, if required. Switch to the
display screen for curve settings with a brief tap
on the center SET key of the right touch pad, see
description below.
The curve is set up basically in the same way as the
Channel 1 curve for helicopters, but we will describe
it again here in detail using pitch confi guration as
an example, to save you having to leaf through the
manual.
In the remaining lines, fi rst activate the value fi eld and
then use the selection keys of the left or right touch
pad to set a mixer value in the value fi eld (inverse
video).
The settings available are rounded off with the
"Swashplate limiter" option: This option can be set to
restrict maximum defl ection of the swashplate servo
in the sense of a limiter. Together, these settings
confi gure the basic set-up of the helicopter model.
In the "Autorotation" fl ight phase as described
on page 190, however, the mixers "Channel 1 ¼
Throttle" and "Channel 1 ¼ Tail rot" are not needed
and therefore switched to a confi gurable default
value.
Changed parameters can be reset to their respective
default values at any time with a simultaneous tap on
the cd or ef keys of the right touch pad (CLEAR).
Pitch (Pitch curve (Channel 1 ¼ Pitch))
If necessary, use the cd selection keys of the left or
right touch pad to move to the "Pitch" line then tap
briefl y on the center SET key of the right touch pad.
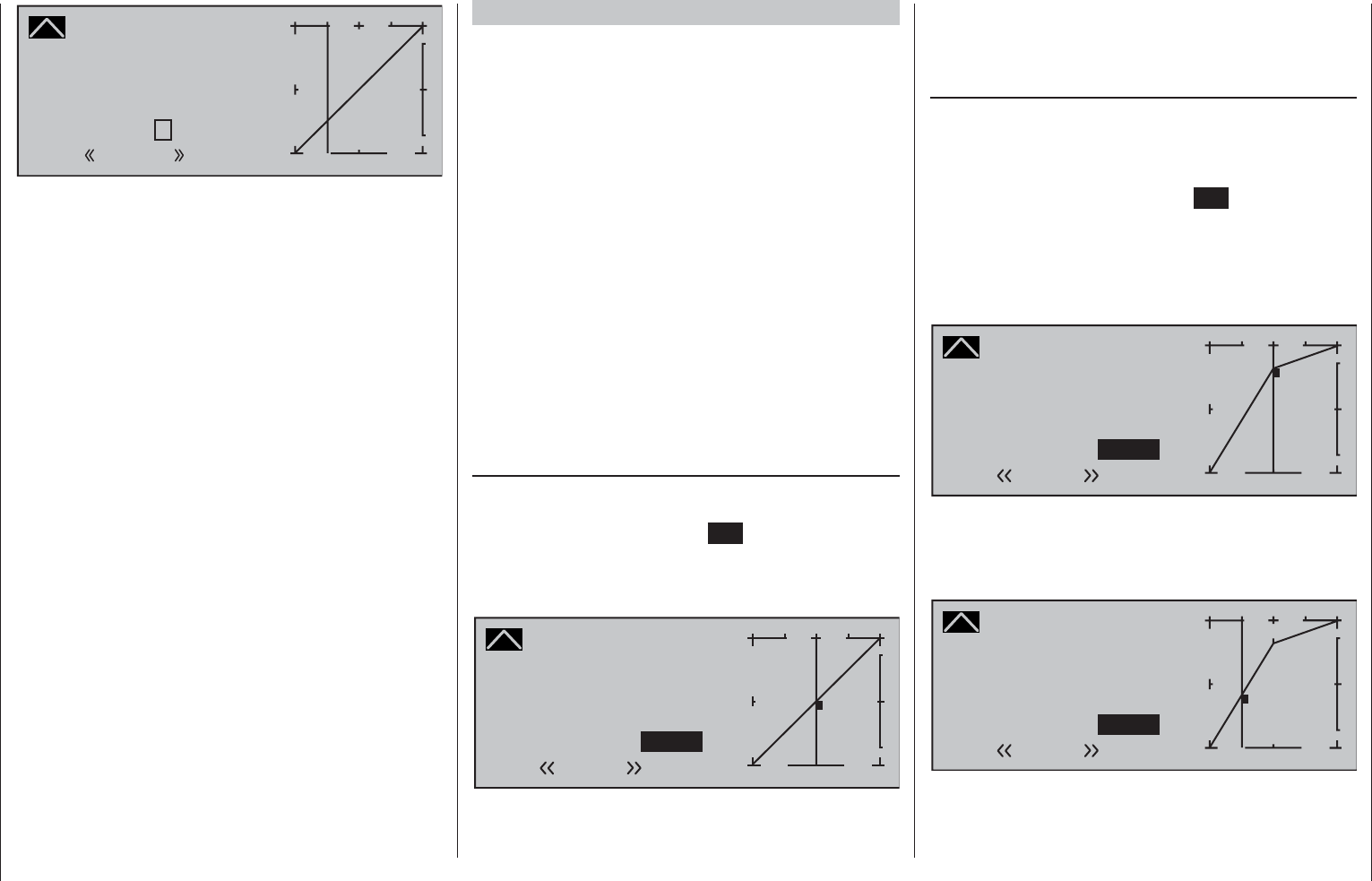
177
Detail program description - Helicopter mixer
Pitch
Curve
off Point
Output
Input –50%
–50%
?+
–
100
¼O U T P U T
0%
Normal
Unlike the »Channel 1 curve« menu, this display is
only associated with the control curve of pitch servos,
whereas the the "Channel 1 curve" affects all servos
controlled by the throttle/pitch joystick.
Note that the output signal of the "Channel 1
curve" option thus functions as an input signal for
the collective pitch curve programmed here: In the
graph, the vertical line is synchronized with the
throttle/collective pitch stick and therefore follows
the current Channel 1 curve characteristic.
The control curve can be defi ned (separately per
fl ight phase) by up to 8 points, termed "reference
points", placed at any point along the joystick travel.
Initially, however, fewer reference points are
adequate for setting up the collective pitch curve. We
recommend beginning with three reference points to
start with. These three points, namely the two end-
points "Pitch low (L)" (= -100 % control travel) and
"Pitch high (H)" (= +100 % control travel) plus a point
at the center of control travel still to be set, defi ne an
initially linear profi le for the pitch curve.
Programming details
First, switch to your chosen fl ight phase, e.g. «Normal».
The throttle/collective pitch stick is used to move
the vertical line in the graph between the two end-
points "Point L" (minimum pitch at -100 %) and "Point
H" (maximum pitch at +100 % control travel): at the
same time, the current joystick position is shown
numerically on the "Input" line (-100 % to +100 %).
The point at which the vertical line crosses the
curve is termed the "Output", and can be varied at
the maximum of 8 reference points within the range
-125 % to +125 %. A control signal modifi ed in this
way affects only the collective pitch servos.
In the example to the left, the joystick is at exactly 0 %
of control travel and also generates an output signal
of 0 %, since the characteristic curve is linear.
Up to six additional reference points can be set
between the two end-points "L" and "H", although the
distance between neighboring reference points must
not be less than approx. 25 %.
Setting reference points
Move the joystick. If the display shows a framed
question mark, then you can set the next reference
point with a tap on the center SET key of the right
touch pad. Simultaneously, the "?" is replaced by
its number and the value fi eld to the right of the
reference point number is highlighted:
Pitch
Curve
off Point
Output
Input 0%
0%
1+
–
100
¼O U T P U T
0%
Normal
1
The order in which up to six reference points
are generated between the end-points "L" and
"H" is irrelevant since these reference points are
continuously renumbered automatically from left to
right as they are entered.
Confi guring reference points
To confi gure a point, use the joystick to move the
vertical line onto the point you wish to change.
The number and current curve value of this point
are displayed on the left side of the display, on the
"Point" line. Briefl y tap the center SET key of the
right touch pad. Use the selection keys on the right
touch pad to change the current curve value shown
in the highlighted fi eld. The possible range is -125 %
to +125 % and changes do not affect neighboring
reference points.
Pitch
Curve
off Point
Output
Input 0%
+75%
1+
–
100
¼O U T P U T
+75%
Normal
1
In this sample screen image, reference point "1" has
been set to +75 %.
If you wish, however, other points can also be set. At
-50 %, for example …
Pitch
Curve
off Point
Output
Input –50%
–12%
1+
–
100
¼O U T P U T
–12%
Normal
2
1
… and/or a further point at +50 %:
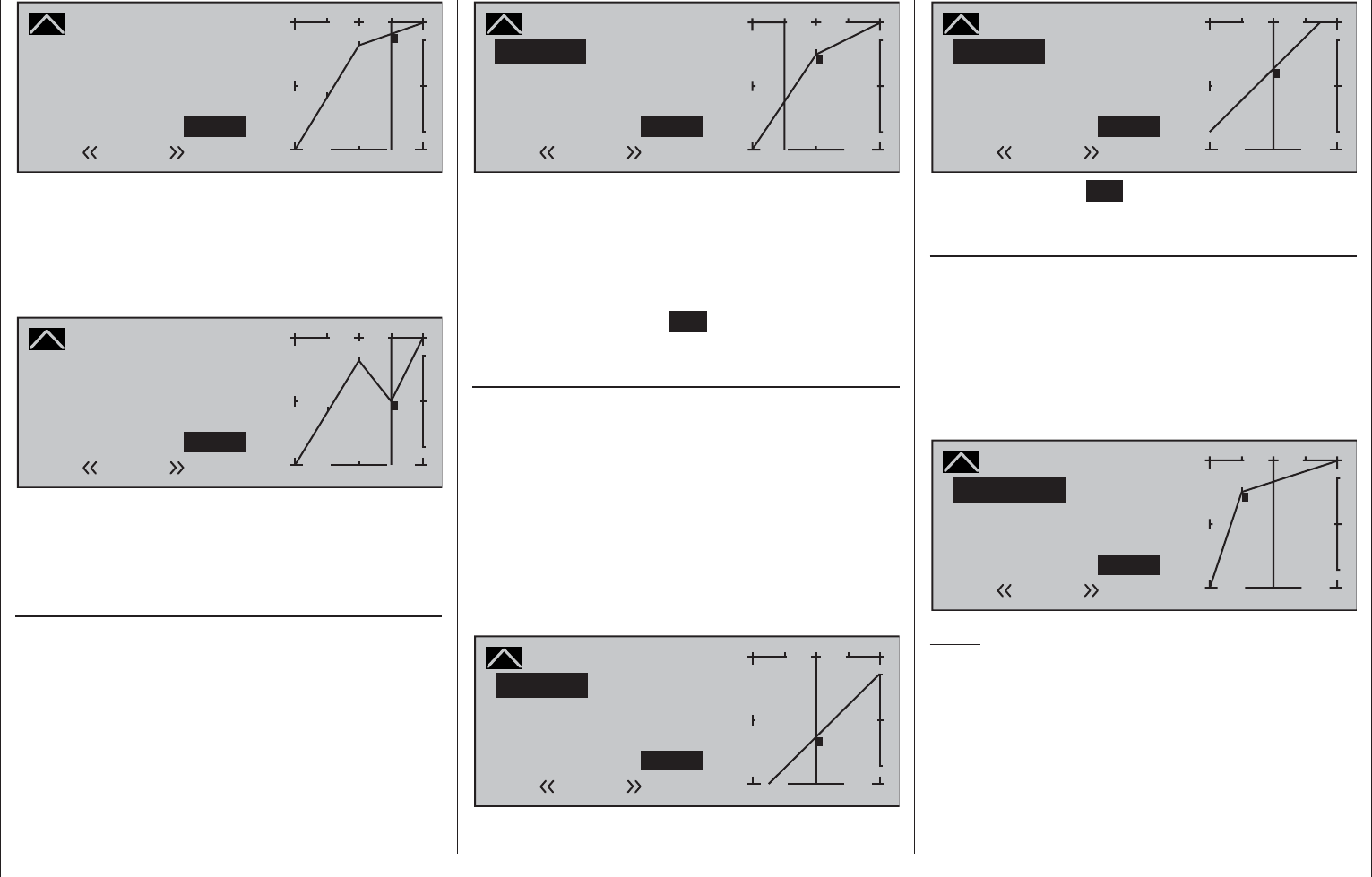
178 Detail program description - Helicopter mixer
Pitch
Curve
off Point
Output
Input +50%
+88%
3+
–
100
¼O U T P U T
2
+88%
Normal
1
3
To do so, use the joystick to move to the
corresponding area. As soon as a "?" appears in the
marker frame on the "Point" line, the respective point
can be set by touching the selection keys of the right
touch pad. Just as with other points, this can be set
…
Pitch
Curve
off Point
Output
Input +50%
0%
3+
–
100
¼O U T P U T
2
0%
Normal
1
3
… or, reset again with a simultaneous tap on the cd
or ef selection keys of the right touch pad (CLEAR).
The "L" and "H" points, on the other hand, CANNOT
be deleted.
Trim point function
Alternatively, a jump up or down to reference
points already set, L, 1 … max. 6 and H, can be
accomplished by using the ef selection keys on the
left touch pad. The selection keys on the right touch
pad can then be used to change the reference point
jumped to as described above, entirely independently
of the control position.
Pitch
Curve
off Point
Output
Input –50%
–25%
1+
–
100
¼O U T P U T
+50%
Normal
Trim point 1
In this simple example, the pitch joystick – represented
by the vertical line – is halfway between "Pitch minimum"
and the midpoint of control travel (input = -50 %).
However, "Point 1" will be relocated to control center at
a point value of +50 %, resulting in a momentary output
value of -25 %.
One touch on the center ESC key of the left touch
pad terminates this trim point function.
Trim offset function
When a value fi eld is active, i.e. in inverse video, it is
not only possible, as previously described, to jump
up or down to reference points already set with the
ef selection keys of the left touch pad and to make
a change with the selection keys of the right touch
pad, but also an existing curve can be vertically
repositioned within a range of ±25 % through use of the
cd keys on the left touch pad. Starting with a point
value for "Point 1" at 0 %, the control curves in both of
the following fi gures have been vertically shifted within
the ±25 % range by the trim offset function:
Pitch
Curve
off Point
Output
Input 0%
–25%
1+
–
100
¼O U T P U T
–25%
Normal
Trim offset
1
Pitch
Curve
off Point
Outputg
Input 0%
+25%
1+
–
100
¼O U T P U T
+25%
Normal
Trim offset
1
A tap on the center ESC key of the left touch pad will
also terminate this function.
Trim x-axis function
This function is activated by tapping the left (e) or
right (f) selection key of the right touch pad with
an active (i.e. inverse video) value fi eld. You can
then use the selection keys on the right touch pad to
reposition the active point horizontally or vertically as
you wish. In the fi gure below, "Point 1" which was just
shifted to +50 % with the trim point function, will now
be shifted to the left:
Pitch
Curve
off Point
Output
Input 0%
+67%
?+
–
100
¼O U T P U T
+50%
Normal
Trim X-axis 1
Notes:
If the point is repositioned horizontally further •
away from the current control position than
approx. ±25 %, a "?" sign will reappear in the line
Point. This question mark does not refer to the
repositioned point, however: instead, it signifi es
that a further point can be set at the current
control position.
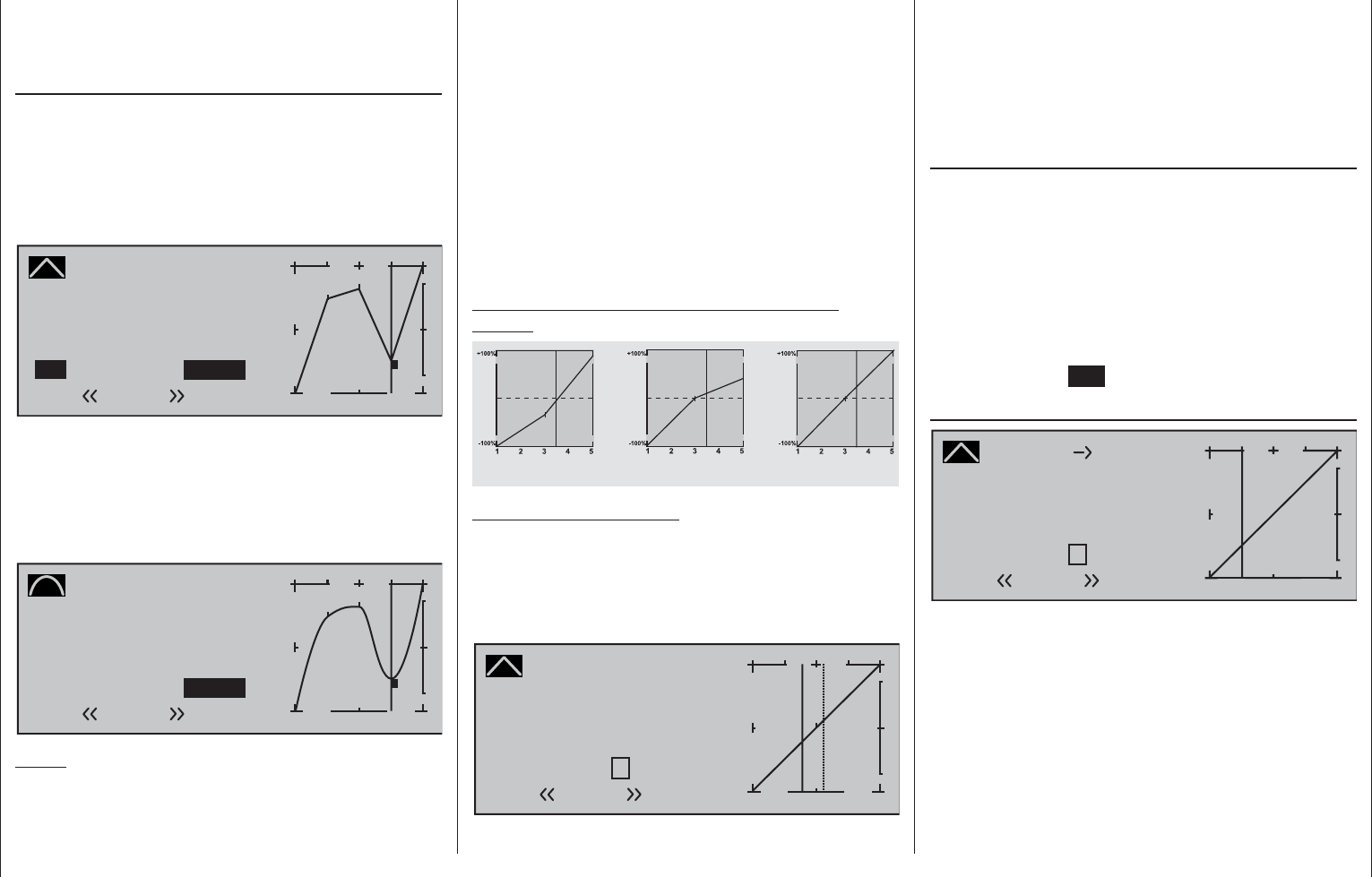
179
Detail program description - Helicopter mixer
Please note that the percentage value on the •
"Output" line always relates to the current joystick
position and not to the position of the point.
Smoothing the collective pitch curve
In the example below, sample reference points have
been set …
reference point 1 to +50 %,
reference point 2 to +75 % and
reference point 3 to -50 %
… as described in the last section.
Pitch
Curve
off Point
Output
Input +50%
–50%
3+
–
100
¼O U T P U T
2
–50%
Normal
1
3
This "jagged" curve profi le can be smoothed
automatically simply by pressing a button.
Do this – from a situation as illustrated – with a brief
tap on the d selection key of the left touch pad. This
will cause a switchover from "(Curve) off" to "(Curve)
on" (or vice versa).
Pitch
Curve
on Point
Output
Input +50%
–50%
3+
–
100
¼O U T P U T
2
–50%
Normal
1
3
Notes:
If the joystick does not coincide with the exact •
reference point, please note that the percentage
value on the "Output" line always relates to the
current joystick position.
The fi gures on these pages show control curves •
created only for the purpose of illustration. Please
note, therefore, that the curve characteristics
displayed do not in any way represent real-life
collective pitch curves. A specifi c application
example can be found in the programming
examples on page 312.
The following three graphs show typical 3-point pitch
curves for various fl ight phases, such as hovering,
aerobatics and 3D fl ight.
The vertical bar depicts the current joystick position.
Please note that trim values greater than +100 % and
less than -100 % cannot be presented in the display.
Sample collective pitch curves for various fl ight
phases:
Output
Output
Output
Control travel Control travel Control travel
Aerobatics 3DHover
Notice about marker keys:
If marker keys have been set in the »Basic settings,
model« menu, page 91, touching a key while in
this graph will set a dashed vertical line to show the
position of the C1 joystick at the time the key was
pressed.
Pitch
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
1
0%
Normal
Move the C1 joystick (continuous line) to the marker
line in order to read out the input and output values.
If the marker line, for example, indicates momentary
hovering fl ight and this is to be put exactly in control
center then it is only necessary to transfer the
"output" value of the marker line, in this example, shift
control center to reference point "1".
Erasing reference points
To delete one of the reference points (1 to max. 6), use
the joystick to move the vertical line into the vicinity
of the reference point in question. As soon as the
reference point number and its associated value is
shown on the "Point" line (see screen image above),
following activation of the value fi eld on the "Point"
line now in inverse video with a simultaneous tap on
thecd or ef keys of the right touch pad (CLEAR) it
can be erased. Complete the operation with a brief tap
on the center key ESC of the left touch pad.
Channel 1 ¼ Throttle (Throttle curve)
Channel 1
Curve
off Point
Output
Input +25%
+25%
?+
–
100
¼O U T P U T
+50%
Throttle
Normal
Unlike the »Channel 1 curve« menu, this display is
only associated with the control curve of the throttle
servo, whereas the the "Channel 1 curve" affects all
servos controlled by the throttle/pitch joystick.
Note that the output signal of the "Channel 1
curve" menu thus functions as an input signal for
the throttle curve programmed here: In the graph,
the vertical line is synchronized with the throttle/
collective pitch stick and therefore follows the
current Channel 1 curve characteristic.
The throttle curve can also be defi ned (separately
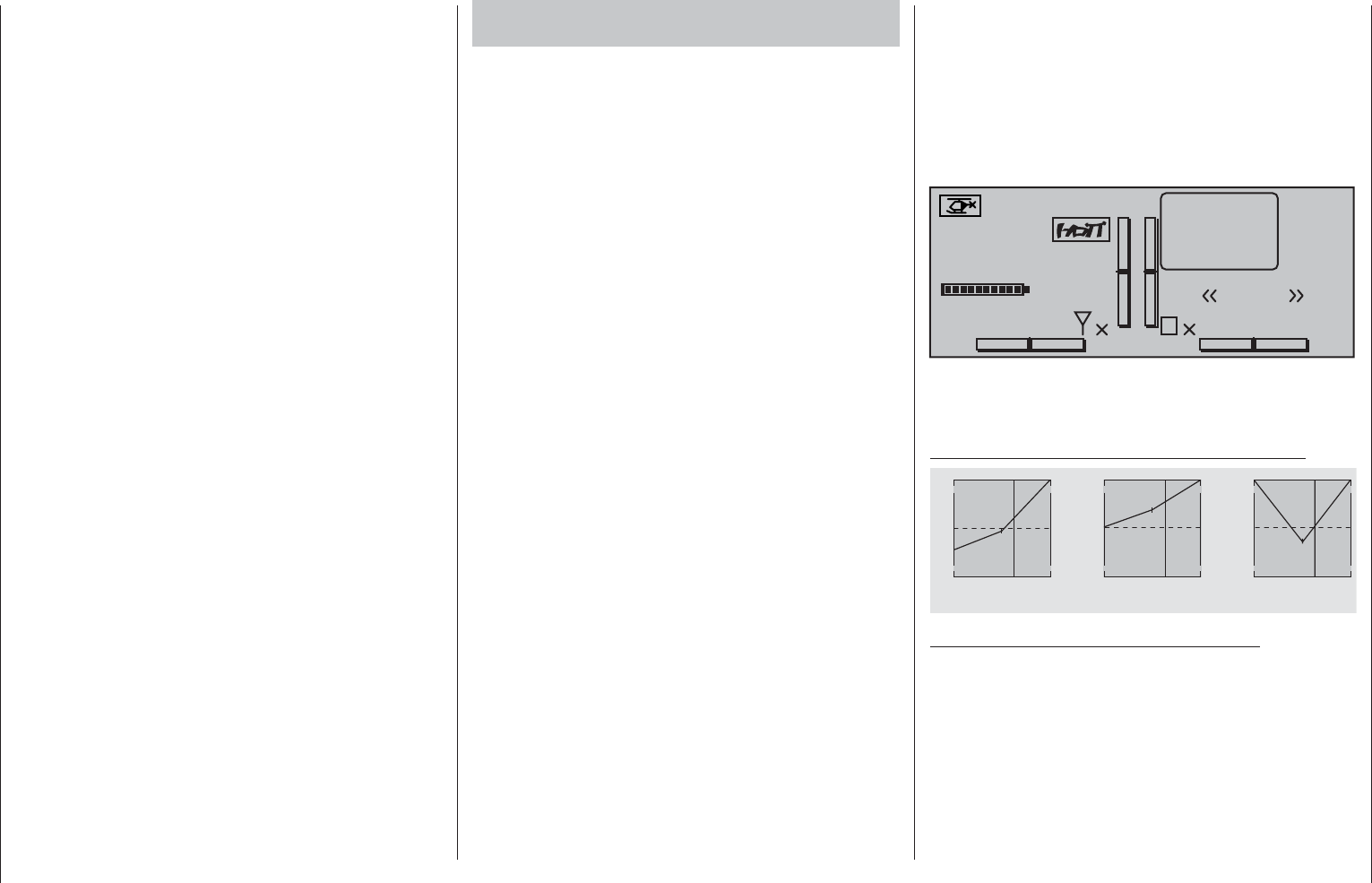
180 Detail program description - Helicopter mixer
per fl ight phase) by up to 8 points, termed "reference
points", placed at any point along the joystick travel.
The reference points are defi ned, adjusted and
erased in the usual way, as explained in the previous
section on the collective pitch curve. Start by defi ning
the throttle curve with three points, namely the points
"L" and "H" at the extremes, plus the Point "1" still
to be set in the control center in order to match the
motor power curve to the collective pitch curve.
Helicopter with carburetor or electric drive
system with speed CONTROLLER
This setting relates only to the control curve of the
throttle servo or the speed controller.
Setting the throttle curve to suit a helicopter equipped
with a speed controller is discussed in the following
section.
As with the confi guration of the collective pitch curve
(see previous page), the throttle curve can also be
defi ned by up to 8 points.
In each case, set the control curve so that •
when the throttle/collective pitch stick is in its
end position, the carburetor is fully open or the
controller of an electrically-powered helicopter is
set to maximum (except for auto-rotation fl ight,
see page 190).
For the hover point, which is normally at the •
control center, the carburetor setting or power
control for the speed controller must be matched
to the collective pitch curve so that the correct
system rotational speed is obtained.
At the minimum position of the throttle/collective •
pitch stick, the throttle curve must fi rst be
confi gured so that a glow motor runs at a speed
considerably higher than idle speed and the clutch
is fi rmly engaged.
Starting and stopping of the motor – whether
combustion or electric drive – always takes place
within the given fl ight phase as a consequence
of the throttle limiter and the "Thr. CutOff" option
(see below).
This makes it unnecessary to program the two fl ight
phases that may be familiar to you from using other
remote control systems – namely "with idle-up" and
"without idle-up", and with the associated "waste" of a
fl ight phase for this purpose – since the mc-20 HoTT
program offers a much more fl exible approach to fi ne-
tuning and optimizing increases to system rotational
speed below the hover point than the "idle-up"
approach taken by older mc remote control systems.
Ensure that the throttle limiter is closed before
starting a motor with carburetor, i.e. so that the
carburetor can be adjusted within the idle range
only with trim. Ensure that you follow the safety
instructions on page 189 at all times. If the throttle is
set too high when switching on the transmitter, you
will receive audible and visible warnings!
#02 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
4.1V
0:00.0
00
0
0
00:00h
M
V
Starlet Thr too
high!
H-J Sandbrunner
Normal
The following three graphs show (typical) 3-point
throttle curves for various fl ight phases, such as
hovering aerobatics and 3D fl ight.
Sample throttle curves for various fl ight phases:
+100% +100% +100%
-100%
-100%
-100%
Output
Output
Output
234 51234 51234 51
Control travel Control travel Control travel
Hover Aerobatics 3D
Notes on using the "throttle limit" function:
The throttle limit function should be used in any •
case (»Control adjust« menu, page 117). At the
rear limit of the default transmitter control, the
right-side throttle limit proportional rotary slider,
the throttle servo is completely decoupled from the
throttle curve, the motor is at idle and will respond
only to C1 trim. This option permits the motor
to be started in any fl ight phase and to shut the
motor off with the "Thr. CutOff" option.
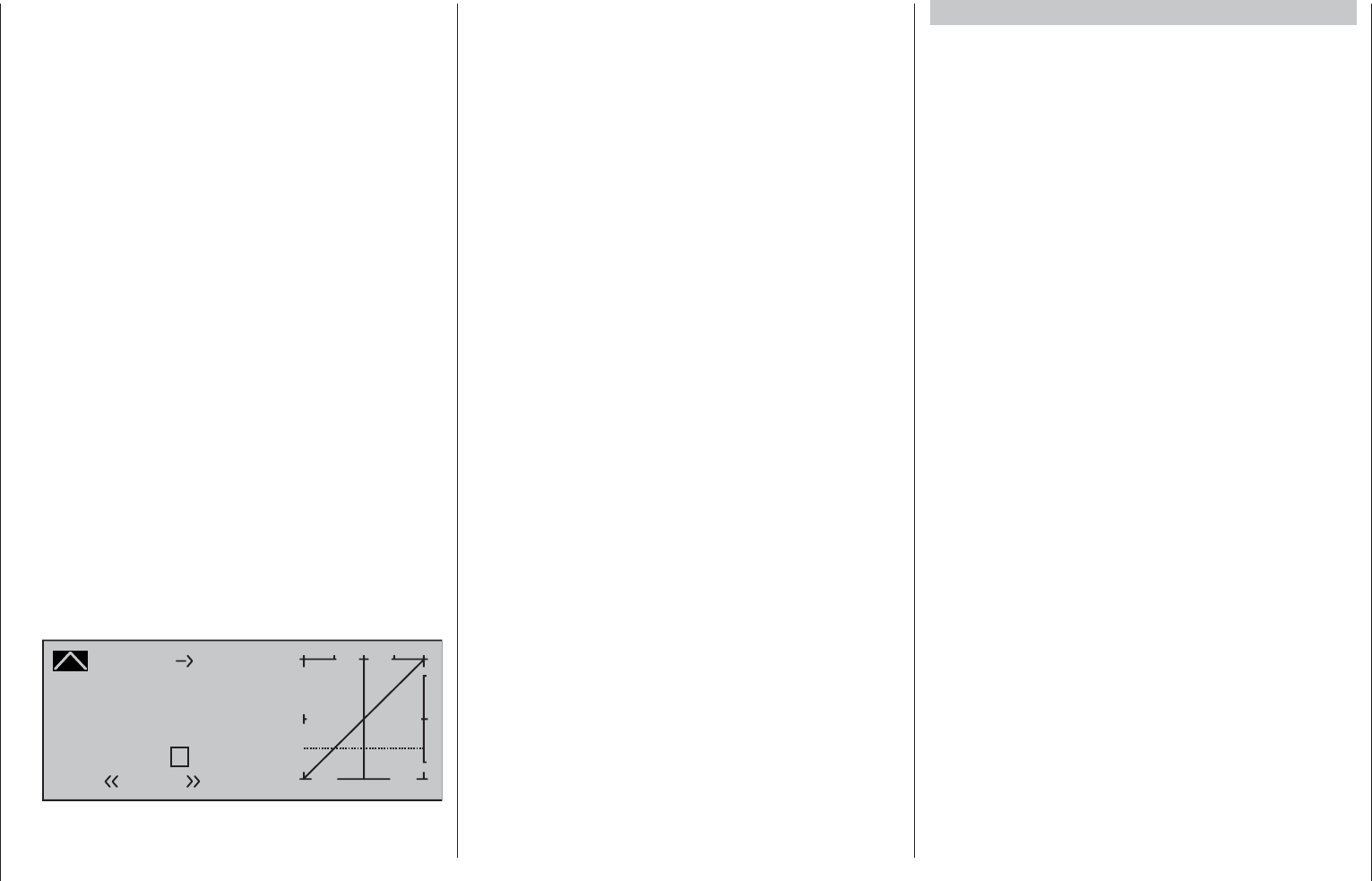
181
Detail program description - Helicopter mixer
Once the motor has started, push the throttle
limiter s l o wly in the direction of the opposite
end-point to put actuation of the throttle servo fully
under the control of the throttle/collective pitch
joystick once again. In order to prevent the throttle
servo from being restricted by the throttle limiter in
the full throttle direction, set control travel on the
plus-side of the column labeled "travel" to +125 %
in the "Tl16" line of the »Control adjust« menu.
Leave the default value of "GL" in the "Type"
column alone, however, to confi gure this setting
globally for all fl ight phases.
For a more fi nely-tuned control travel curve for
the throttle limit control, you can also use the
"Expo throttle limiter" (page 100). This gives
you the option of defi ning the idle setting at the
throttle limit control's center position, as readily
determined both visually and audibly.
Set the throttle limiter to its center position and
adjust the "EXPO thro lim." value as far as is
needed until the motor is idling smoothly with
the throttle limit control set at its center point. In
this position, the motor will then start without any
problems. To switch off, turn or push the throttle
limit control – that is, without C1 cutoff trim – to its
rearmost end-point. As you do, ensure that the
affected servo cannot hit an end-stop mechanically.
The throttle restriction set by the throttle limiter is
made visible as a horizontal bar in the diagram:
Channel 1
Curve
off Point
Output
Input +50%
+50%
?+
–
100
¼O U T P U T
+50%
Throttle
Normal
The output signal for the throttle servo can never
be higher than that set by the horizontal bar. In
this example, about a maximum of +25 %.
Since electric drive systems have no need for an •
idle setting, the basic confi guration of settings
for an electrically-powered helicopter merely
involves making sure that the control range of the
throttle limiter is both higher and lower than the
adjustment range of the speed controller (usually
-100 % to +100 %) by a safe margin. If necessary,
therefore, adjust the "travel" setting of the throttle
limiter as appropriate on the "Tl16" line of the
»Control adjust« menu. Leave the default value
of "GL" in the "Type" column alone, however, to
confi gure this setting globally for all fl ight phases.
Fine-tuning of the throttle curve itself, however,
must take place in fl ight – as with a glow-powered
helicopter.
If you wish to record the fl ight time of a (glow-•
powered) helicopter, you can assign a control
switch to the throttle limit slider, and then use this
to switch a timer on and off; see page 135.
For auto-rotation fl ight, an automatic switch-over
is made from this mixer to a confi gurable default
value; see page 190.
Helicopter with speed CONTROLLER
Unlike speed controllers, which merely adjust output
level in a manner similar to a carburetor, a speed
regulator keeps speed in the system it monitors
constant by regulating its output autonomously. In
the case of combustion motor powered helicopters,
the regulator therefore controls the throttle servo
itself as appropriate or, for an electric helicopter, the
motor's speed controller. Therefore, speed regulators
do not need a traditional throttle curve but rather only
a speed setting. A deviation from the preset speed
will therefore only take place if the level of output
required exceeds the maximum level available.
Usually, receiver output 8 is reserved for connecting a
speed regulator; refer to the receiver layout on page
65. However, if this connection is used there will be no
throttle limit function because the throttle limit function
can only be implemented via the "Channel 1 ¼
Throttle" mixer which is on the – then unused – output 6.
To make the comfort and safety features of a throttle
limiter available, a speed regulator should be
connected to receiver output 6 (contrary to the general
connection notices) and only requires appropriate
adaptation to the throttle curve so it can take over the
task of the "conventional" transmitter control.
Since in this case the "throttle curve" only regulates
the target speed of the motor controller and this
target motor speed should typically remain constant
over the entire collective pitch adjustment range, the
"Channel 1¼ Throttle" mixer must be used to set a
horizontal line – i.e. every (pitch) input value will result
in the same ("throttle") output value – whose "height"
is defi ned by the target motor speed.
First, therefore, the reference points "1" to "6" – if
present and set – are erased. Following this, the
reference points "L" (input = -100 %) and "H"
(input = +100 %) are then each set to the same
value, for example:
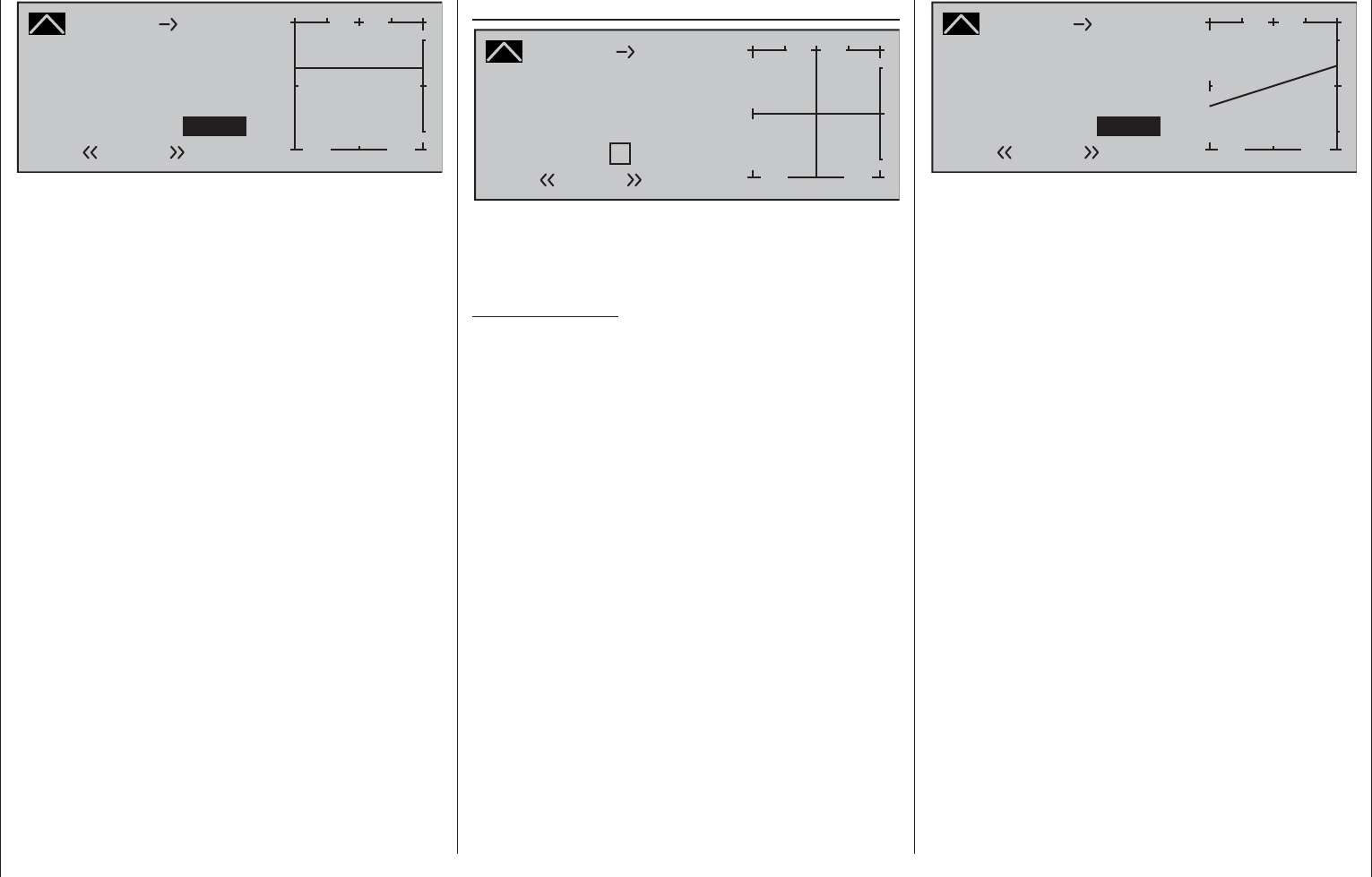
182 Detail program description - Helicopter mixer
Channel 1
Curve
off Point
Output
Input 0%
+66%
L+
–
100
¼O U T P U T
+66%
Throttle
Normal
The value to be set depends both on the speed
controller used and on the target motor speed that is
desired, and can, of course, be varied according to
the fl ight phase.
For auto-rotation fl ight, an automatic switch-over
is made from this mixer to a confi gurable default
value; see page 190.
Channel 1
Curve
off Point
Output
Input +100%
+30%
H+
–
100
¼O U T P U T
+30%
Tail rot.
Normal
Starting with values of -30 % for point "L" and +30 %
for point "H", the mixer is to be confi gured in such
a way that the helicopter, even during prolonged
vertically ascending or descending fl ights, does not
deviate from the yaw axis as a result of the main
rotor's altered torque while hovering. For hovered
fl ight, trim should only be affected by way of the
(digital) tail rotor trim wheel.
For a reliable torque compensation setting, it is
essential that the collective pitch and throttle curves
have been set up correctly, i.e. that the rotor speed
remains constant over the collective pitch's full
adjustment range.
This third curve mixer applies only to the control
curve of the tail rotor servo when the throttle/
collective pitch stick is moved, whereas the "Channel
1 curve" (see page 131) acts on all servos that are
affected by the throttle/collective pitch stick. Note that
the output signal of the "Channel 1 curve" option also
functions as an input signal for the tail rotor curve
programmed here: In the graph, the vertical line is
synchronized with the throttle/collective pitch stick
and follows the current Channel 1 curve characteristic
from the »Channel 1 curve« menu.
In the auto-rotation fl ight phase this mixer is
automatically switched off.
Channel 1 ¼Tail rot. (static torque compensation)
Channel 1
Curve
off Point
Output
Input 0%
0%
+
–
100
¼O U T P U T
0%
Tail rot.
?
Normal
The default approach here is to preset a torque
compensation curve with a linear mixer ratio of a
uniform 0 %, as is required for a gyro sensor working in
"heading lock mode" – see the screen image above.
Important notice:
In this context, ensure that you comply with
the instructions on adjusting your gyro: if not,
you risk making adjustments that render your
helicopter impossible to fl y.
If, on the other hand, you use your gyro sensor in
the "normal" operating mode, or if it only has what is
termed "normal mode", then confi gure the mixer as
follows:
As with the confi guration of the collective pitch curve
(see page 176), the control curve of the tail rotor
can also be defi ned by up to 6 points. If required,
therefore, you can modify the mixer at any time
and preset both symmetrical and asymmetric mixer
ratios both above and below the hover point. Before
you do, however, ensure you have entered the
correct direction of rotation for the main rotor on the
»Helicopter type« menu.
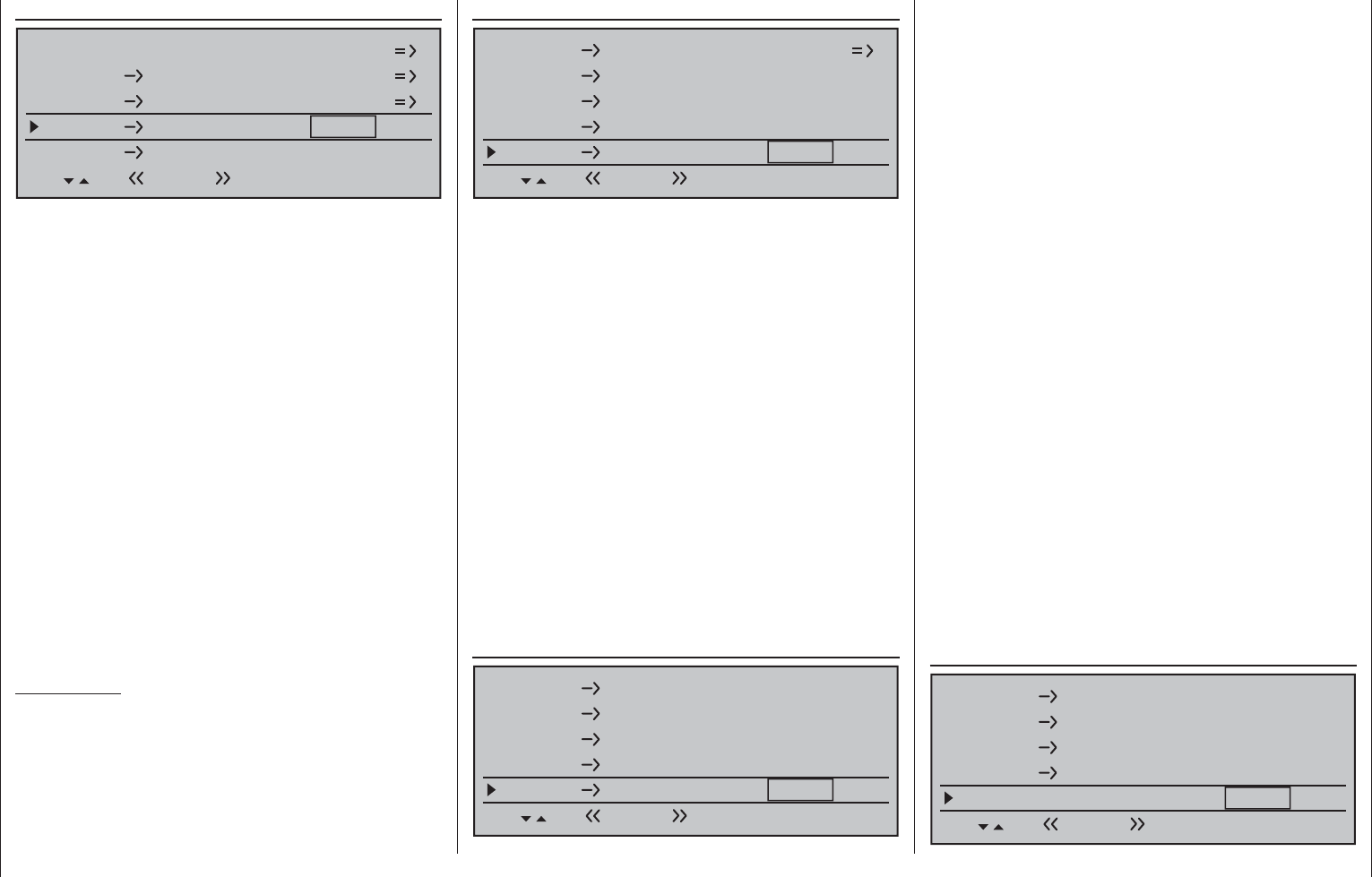
183
Detail program description - Helicopter mixer
Tail rotor ¼ throttle
Channel 1
Channel 1
Pitch
Throttle
Tail rot.
Tail rot. 0%
Roll 0%
Throttle
Throttle
SEL
Normal
While the tail rotor normally compensates for the
effect of main rotor torque on the fuselage, it is also
used to control the helicopter around the vertical axis.
Increasing tail rotor thrust requires a corresponding
adjustment to motor power, however, to avoid a fall-
off in system rotational speed.
This mixer sets the extent to which the throttle
follows the tail rotor. The throttle will follow on one
side only, to the side on which the tail rotor thrust is
increased. The setting range is therefore 0 to +100 %.
The direction depends on the main rotor's direction
of rotation (left or right), and this must fi rst be set
correctly on the »Helicopter type« menu. For left-
hand rotation systems, the throttle follows the tail
rotor when the tail rotor joystick is moved to the left,
and vice versa for right-hand rotation systems.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in an active (inverse video) fi eld back to 0 %.
In the auto-rotation fl ight phase this mixer is
automatically switched off.
Set-up notes:
To set the mixer value accurately you should either fi rst
fl y several high-speed pirouettes against the direction
of main rotor rotation or, if a strong wind is blowing,
hover at right angles to the wind with a suffi ciently
large tail rotor defl ection. Set the mixer value so that
there is no fall-off in system rotational speed.
Increasing pitch is not the only change that requires a
corresponding torque compensation via the tail rotor:
major cyclic control movements also require this, e.g.
if the swashplate is tilted in any direction. Here, too,
the mc-20 HoTT program lets you confi gure settings
for both types of tilt movement (roll and pitch-axis)
separately.
For advanced aerobatics in particular, which involve
very large control defl ections in the pitch-axis
controls, e.g. the "Bo-turn" (vertical pull-up followed
by tipping over around the pitch-axis) and tight loops,
the uncompensated torque present in these fl ights
causes the model to turn to a greater or lesser degree
around the yaw axis. This spoils the appearance of
the maneuver.
These two mixers permit static torque compensation
to be activated by the swashplate tilting in any
direction. The mixers work by always increasing tail
rotor thrust, starting from the center point of the roll
and pitch-axis sticks, i.e. they always generate a tail
rotor defl ection in the same direction regardless of
the direction of the command.
The mixer value can be varied within the range 0 to
+100 %.
The mixer direction is determined automatically by
your defi nition of the direction of main rotor rotation
on the »Helicopter type« menu, page 98.
In the auto-rotation fl ight phase this mixer is
automatically switched off.
Gyro suppression
Roll 0%
Throttle
SEL
Roll Tail rot.
Nick Throttle
0%
0%
Nick Tail rot. 0%
Gyro suppression 0%
Normal
Roll ¼ Throttle and Pitch axis ¼ Throttle
Channel 1 Tail rot.
Tail rot. 0%
Roll 0%
Throttle
Throttle
SEL
Roll Tail rot.
Nick Throttle
0%
0%
Normal
Increasing collective pitch is not the only change that
requires the throttle to follow suit: major cyclic control
movements also require this, i.e. if the swashplate is
tilted in any direction. The mc-20 HoTT program lets
you adjust the degree of throttle follow separately for
roll and pitch-axis controls.
This offers particular advantages in aerobatic fl ying,
e.g. when fl ying a roll: here, with moderate collective
pitch values and the carburetor only about half-open,
cyclic control travels are nonetheless executed that
require much higher performance from the motor.
The mixer value can be varied within the range 0 to
+100 %. The correct mixer direction is automatically
taken into account.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset a changed value
in an active (inverse video) fi eld back to 0 %.
In the auto-rotation fl ight phase this mixer is
automatically switched off.
Roll ¼ Tail rot. and Pitch axis ¼ Tail rot.
Tail rot. 0%
Roll 0%
Throttle
Throttle
SEL
Roll Tail rot.
Nick Throttle
0%
0%
Nick Tail rot. 0%
Normal
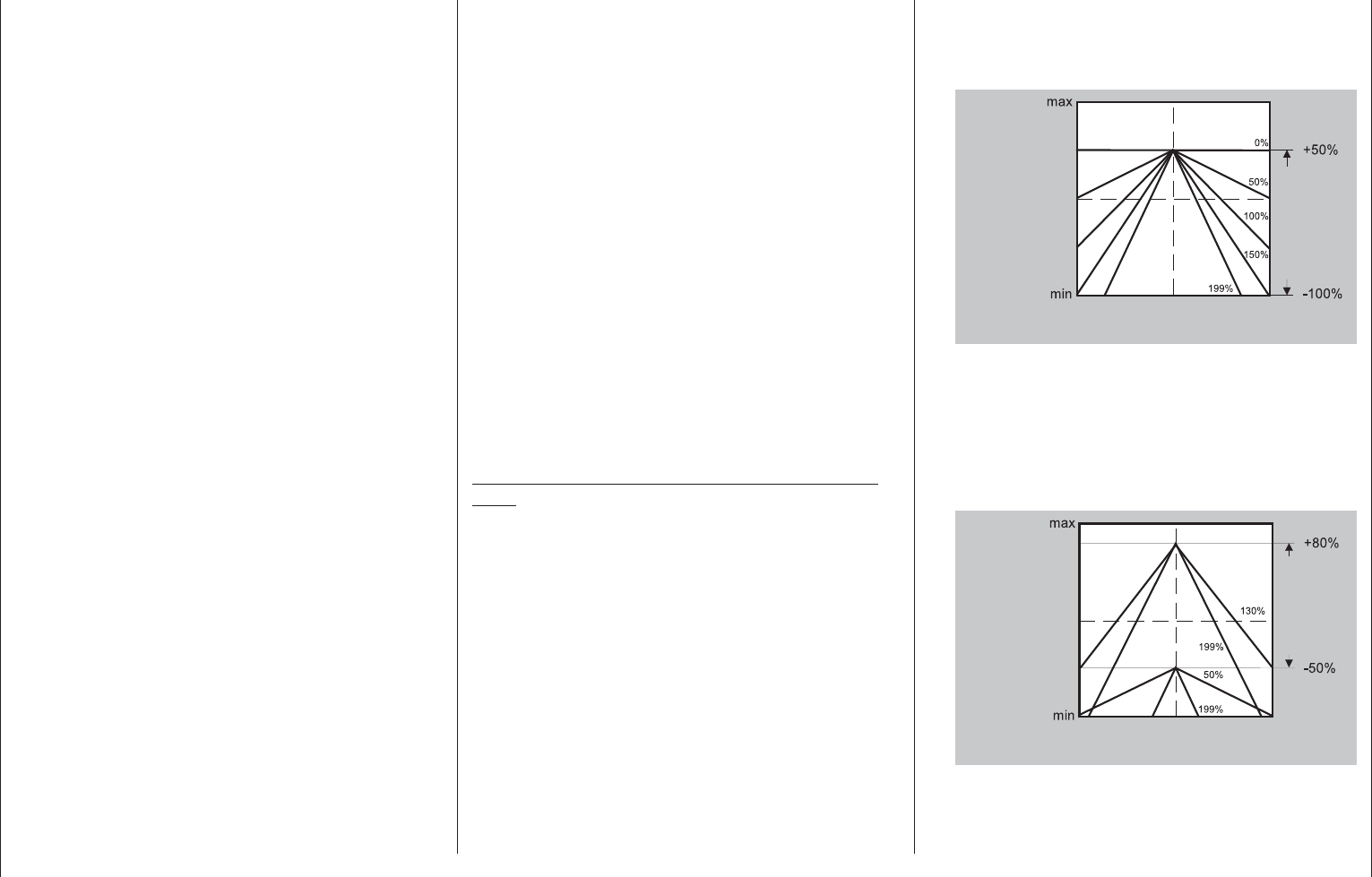
184 Detail program description - Helicopter mixer
Important: in normal situations, this function
should not be used if your model is fi tted with a
modern gyro system. In this context, ensure that
you comply with the instructions on adjusting your
gyro: if not, you risk making adjustments that render
your helicopter impossible to fl y. This menu has
nonetheless been retained in order to cater to a full
range of requirements and fl ying habits.
With this option, the effect of the gyro sensor
("gyro") can be varied according to the tail rotor
joystick position; this assumes the use of a gyro
system whose gyro gain can be controlled from the
transmitter via an auxiliary channel. This channel will
be channel 7 for Graupner remote control systems.
The gyro suppression function reduces gyro gain in a
linear progression as the pilot increases the tail rotor
defl ection. Without gyro suppression – i.e. when set
to 0 % – the gyro effect is constant, regardless of the
joystick position.
With a transmitter control assigned on the "Gyr7"
line on the »Control adjust« menu (page 116),
e.g. one of the proportional sliders mounted in the
middle console; as applicable, also made fl ight-phase
dependent and/or with infi nitely variable gyro effect
between minimum and maximum. In this case, gyro
gain is maximum at full defl ection of the slider, and
zero at the opposite end-point.
Of course, the software lets you limit the gyro gain
range on both sides by altering the transmitter
control travel.
Depending on the transmitter control's position, the
gyro gain at full travel on the tail rotor joystick is:
"current control position
minus
gyro suppression value".
Accordingly, if the transmitter control is at the
neutral point, and gyro suppression is set to 100 %,
the gyro gain is reduced to zero as the tail rotor
if the assigned transmitter control is moved to the
+50 % position (as shown here); and only at >150 %
suppression is gain reduced to zero with the slider
at this position, well before full tail rotor defl ection.
Exemple:
+50 %
Í Gyro gain Î
left
Stick deflection tail rotor
centre right
Range of
transmitter
control 7
Linear gyro suppression with reduced control •
travel, e.g. -50 % to +80 % of full travel.
Gyro gain is infi nitely variable within these transmitter
control limits. Here too, for purposes of illustration,
we plot gyro gain values in relation to tail rotor
defl ection for various parameter values of gyro
suppression.
Exemple:
+80 %
Í Gyro gain Î
left
Stick deflection tail rotor
centre right
Range of
transmitter
control 7
Adjusting the gyro sensor
To achieve the maximum possible level of
stabilization for the helicopter with the gyro along the
defl ection increases. For values between 100 % and
the maximum value of 199 %, the gyro can be fully
suppressed – depending on the transmitter control
position – well before full defl ection of the tail rotor;
see the diagram on the next page.
For the Graupner/JR gyro NEJ-120 BB, order no.
3277, both the upper and the lower values are set via
rotary controls: control 1 sets the minimum gyro gain
at the bottom position of the slider; control 2 sets the
maximum gain at the top end-point of the slider; the
transition between these two values occurs roughly in
the middle of the slider travel.
In contrast, the PIEZO 900, PIEZO 2000 and
PIEZO 3000 gyro systems feature proportional,
infi nitely variable adjustment of gyro gain; see below
for typical diagrams.
As an example, the option to confi gure fl ight
phase-specifi c – and static – gyro gain gives you
the opportunity to exploit maximum stabilization for
normal, slow fl ying, but to reduce gyro gain for fast
circuits and aerobatics.
Samples of various gyro settings and confi guration
notes
Linear gyro suppression: 0 % to 199 %. •
With the tail rotor joystick in the center position,
the resulting gyro effect is set using the selected
transmitter control. Using a proportional rotary
control or slider, the effect is infi nitely variable
between zero ("min") and maximum ("max"),
provided transmitter control travel is not restricted.
With full tail rotor defl ection, the effective gyro gain
is as follows:
"current control position
minus
gyro suppression value".
This means that at 0 % gyro suppression, gyro
gain is constant for tail rotor joystick movement;
at 50 % suppression, gyro gain is reduced to half
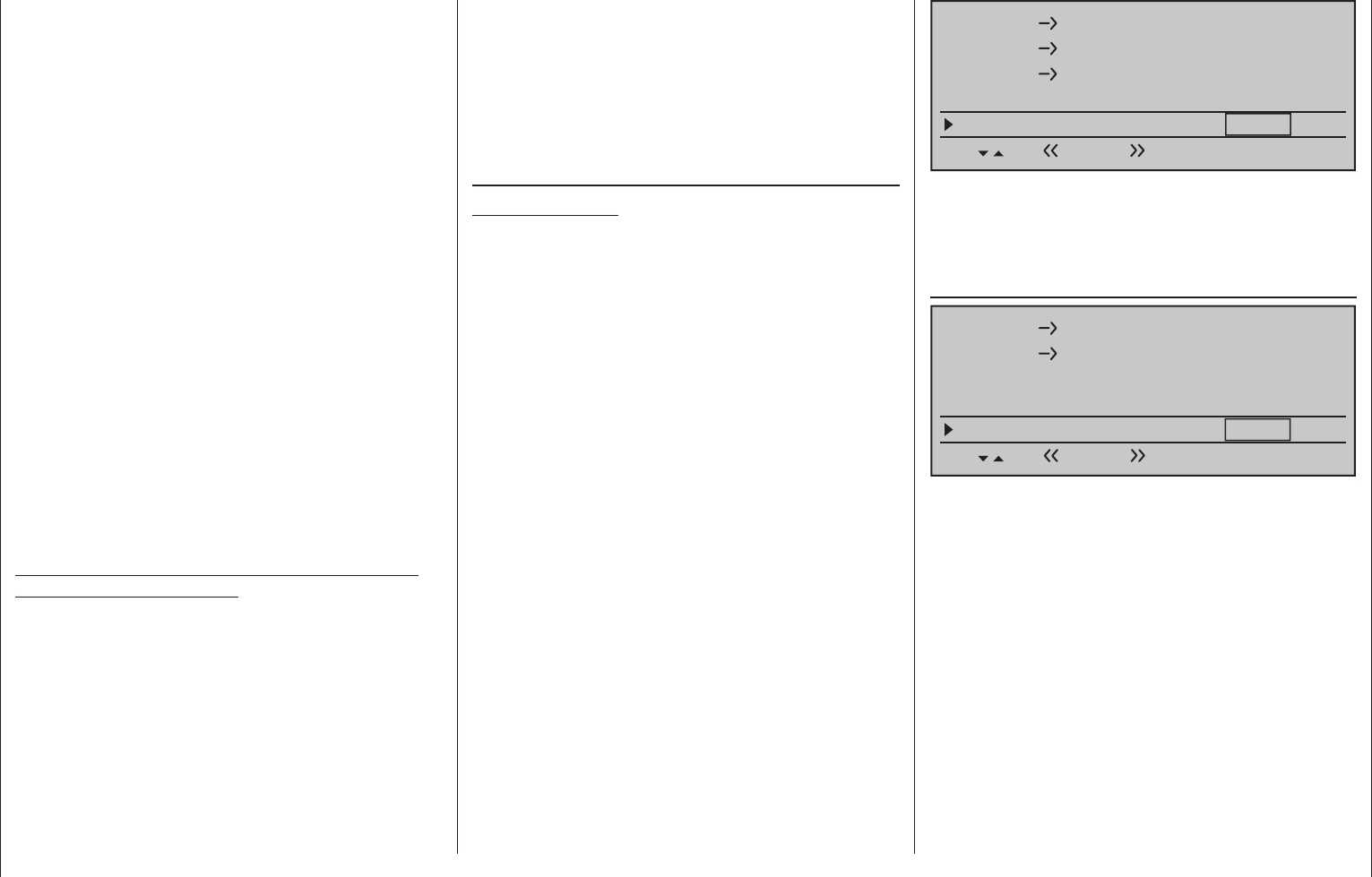
185
Detail program description - Helicopter mixer
vertical axis, observe the following:
The controls should have as little friction and •
"play" as possible.
There should be no "spring" in the control linkage.•
Use a strong and comparably fast servo. •
When the gyro sensor detects a model rotation, the
faster its response – a corresponding corrective
change to tail rotor thrust – takes effect, the further
the gyro gain adjuster can be moved without causing
the tail of the model to start oscillating, and the better
the model's stability about its vertical axis. If the
response is slower, there is a risk that the model's tail
will start to oscillate even at low gyro gain settings.
Here, further reductions to gyro gain will need to be
made to eliminate the oscillation.
If the model is fl ying forward at high speed or
hovering in a powerful headwind, the net result of the
stabilizing effect of the vertical fi n combined with the
gyro may also lead to an overreaction that once again
manifests itself through tail oscillation. To achieve
optimum gyro stabilization under all conditions, you
can make use of the option to adjust gyro gain from
the transmitter using a transmitter control assigned to
input "7", in connection with gyro suppression and/or
the two settings on the Gyro NEJ-120 BB.
Further notes on gyros with confi gurable multilevel
gyro gain (e.g. NEJ-120 BB)
Since you cannot specify the gyro gain from the
transmitter proportionally via the transmitter control,
the gyro's own control 1 must be used to set the
(weaker) gyro gain (e.g. for aerobatics) and control
2 the stronger gyro gain (e.g. for hovered fl ight).
Even though a proportional control is used for control
function 7, only a switch-over between these two
values takes place and the setting is therefore not
proportional.
You should therefore advance control 2 to the point
where the model is on the brink of oscillating when
hovering in calm conditions, and advance control 1 to
SEL
Roll Tail rot.
Nick Throttle
0%
0%
Nick Tail rot. 0%
Gyro suppression 0%
Gyro offset 0%
Normal
Based on these fl ight-phase specifi c (offset) settings,
gyro gain can also be infi nitely varied by a transmitter
control assigned in the "Gyr7" line of the »Control
adjust« menu, page 116.
Swashplate rotation
SEL
Nick Throttle 0%
0%
Nick Tail rot.
0%
Gyro suppression
0%
Swashplate rotation 0°
Gyro offset
Normal
Some rotor head control systems make it necessary
to incline the swashplate in a different direction from
the intended inclination of the rotor plane when
a cyclic control command is given. If your model
features a four-bladed main rotor, for example, you
may need to use this menu to set up a software-
driven 45° rotation of the control linkage to the right,
so that the pushrods from the swashplate to the
rotor head can be set exactly vertical, ensuring that
the blade control system works correctly, without
unwanted differential effects. This eliminates the need
to make mechanical changes to the control linkages.
Negative angles equate to a virtual rotation of the
rotor head to the left; positive angles a virtual rotation
to the right.
the point where the model does not oscillate with its
tail even when fl ying at maximum speed into a strong
headwind. Depending on the state of the weather
and the fl ight program planned, you can also switch
over the gyro gain from the transmitter – also with
gyro suppression dependent on tail rotor defl ection if
required.
Gyro offset
Important notice:
The value of this option is identical to the offset
value set in the "Gyr7" line of the »Control
adjust« menu, page 116. For this reason, any
changes made always affect the other menu
directly – and vice versa.
Most of the latest gyro systems not only feature
infi nitely variable proportional gyro gain setting, but
also offer a choice of two separate types of gain
mode on the transmitter.
If the gyro in use has at least one of these features
then this alternative offset setting provides an
opportunity to preset both "normal" gyro gain as well
as, as appropriate, to specify a "heading-lock mode"
whereby, even within this pre-selection, gyro gain can
be reduced by a particular gain type for normal, slow
fl ight with maximum fl ight stabilization, fast circuit
fl ights and aerobatics.
To proceed as described above, use fl ight phase
switching to enter different settings on the "Gyro
offset" line. Values between -125 % and +125 % are
possible:
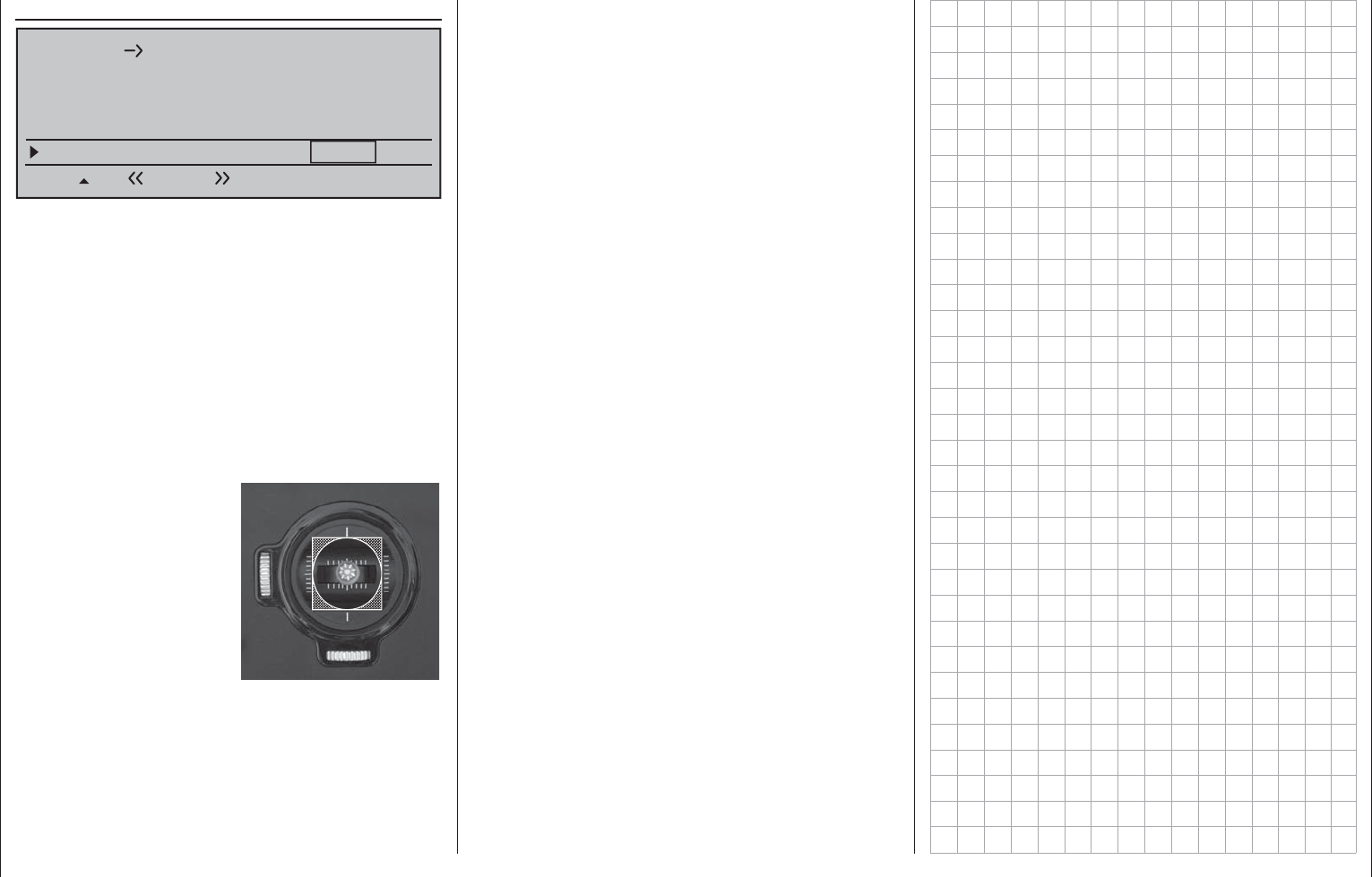
186 Detail program description - Helicopter mixer
Swashplate limiter
SEL
0%
Nick Tail rot.
0%
Gyro suppression
0%
Swashplate rotation 0°
Swashplate limiter off
Gyro offset
Normal
This function works like a circular mechanical
surround acting upon the stick which controls the
swashplate, restricting the normally square stick
travel to a circular range. In fact, if the helicopter is
set up in such a way that the defl ections for roll and/
or pitch-axis exploit the maximum travel mechanically
possible, e.g. for 3D helicopters, then the total tilt
applied to the swashplate if full roll and pitch-axis
commands are applied simultaneously will be
considerably greater (141 % in numerical terms). The
swashplate mechanism may then strike its end-stops
and, in the worst case, the ball-links could even be
disengaged.
The mc-20 HoTT
transmitter contains a
confi gurable software
function for limiting the
total swashplate travel,
i.e. it restricts the tilt angle
of the swashplate from
100 % (the travel is limited
to the value obtainable
either with roll or pitch-
axis alone) to 149 % (no effective limit). In addition,
the function can be set to "Off" and hence completely
deactivated. The swash limiter can also be confi gured
per model and per fl ight phase.
This software solution is therefore much more fl exible
than a physical circular surround attached to the stick
unit: the latter can, in any case, only be used if the roll
and pitch-axis functions are controlled by a common
stick unit.
The adjacent sketch illustrates the effect for a 100 %
setting. the cross-hatched area of travel is curtailed
and appears as a "dead zone".
If this function is used, "Dual Rate" should be set to
100 % and Dual Rate values above 100 % should also
not be used. If not, and you set a swashplate limit of
100 %, for example, then swashplate movement will
be restricted even if roll and pitch-axis commands are
given separately.
Setting range: 100 … 149 % and "off".
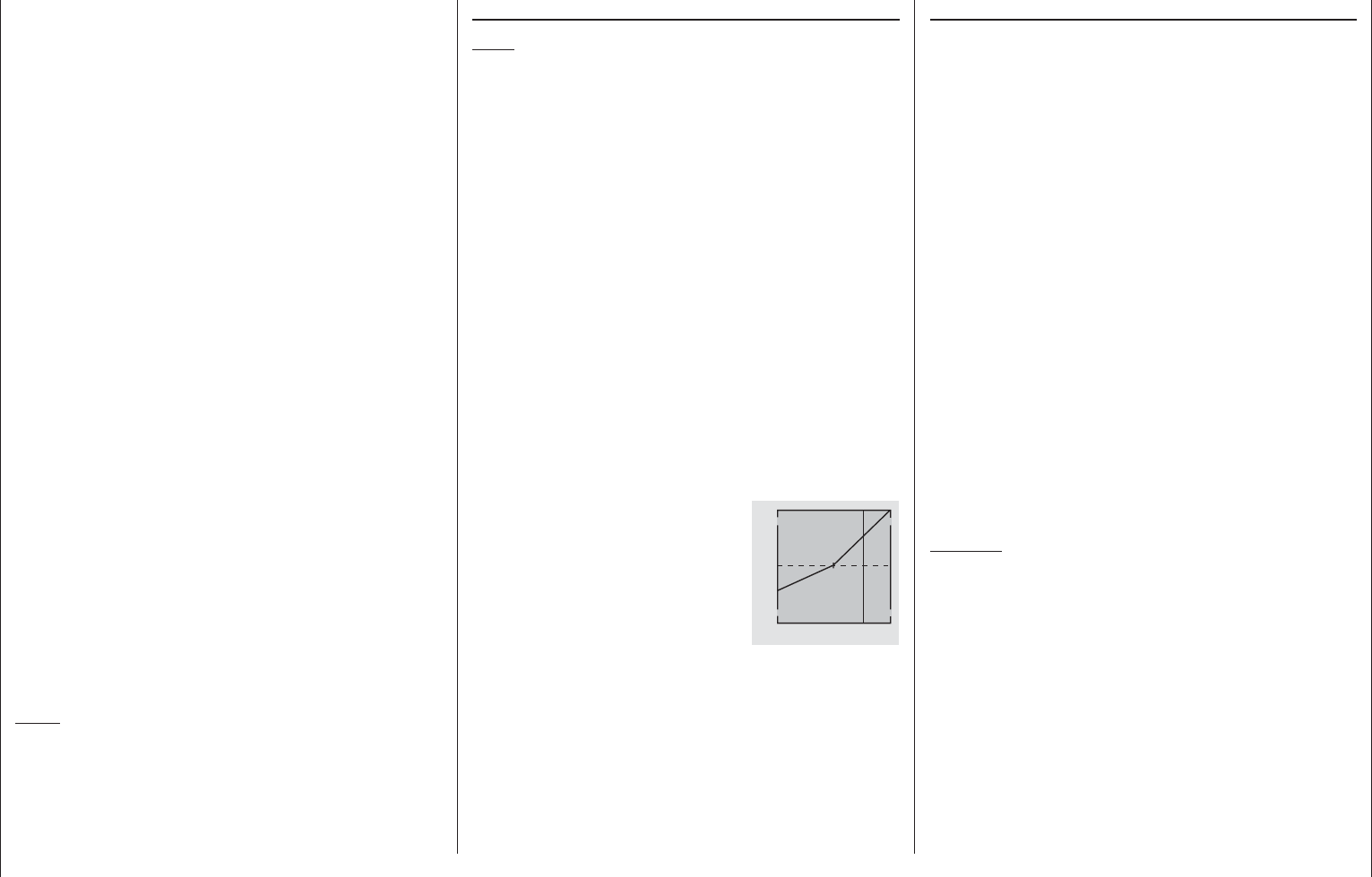
187
Detail program description - Helicopter mixer
Fine-tuning the throttle and collective pitch curve
Practical approach
Although the throttle and collective pitch control
systems are based on separate servos, they are
always operated together by the throttle/pitch joystick
(except during autorotation fl ight). This coupling is
performed by the helicopter program automatically.
In the mc-20 HoTT program, the trim wheel of control
function 1 acts principally only on the throttle servo.
However, in the »Stick mode« menu (see page 106)
a decision can be made if this should be used for idle
trimming as part of the throttle limit function, or for
idle trimming during the auto-rotation phase ("throttle
AR").
The process of fi ne-tuning throttle and collective
pitch, i.e. setting the motor power curve to match
the collective blade pitch setting, is the most
important aspect of setting up a model helicopter.
The mc-20 HoTT software provides for independent
confi guration of the throttle, collective pitch and torque
compensation curves, in addition to the C1 control
curve (»Channel 1 curve« menu, page 131).
While these curves can be modeled using up to
six points, fewer points are generally suffi cient. We
recommend starting with three-point curves to begin
with. This involves setting individual values for the
center point and other (optional) reference points,
and for the two end-points ("L", "low", and "H", "high")
of the throttle/collective pitch stick: together, these
defi ne the control curves.
Before setting the throttle and collective pitch
function, the rods of all servos should be
mechanically pre-adjusted correctly according to the
set-up instructions for the given helicopter.
Note:
The hover point should normally be set to the
center position of the throttle / collective pitch
stick. In special cases, e.g. for "3D" fl ight,
deviating hover points can also be programmed.
For example, one point for normal fl ight attitude
above the center and one point for inverted fl ight
attitude below the center.
Idle setting and throttle curve
Note:
Since electric drive systems have no need for
an idle setting, motor idling does not need to be
calibrated. Fine-tuning of the throttle and collective
pitch curve(s), however, must take place as for glow-
powered helicopters.
The idle setting, whose detailed description begins
on page 117, always takes place with the throttle
limiter closed – normally with the trim wheel of the
C1 function and only in special cases is the throttle
limiter itself also utilized (as standard, the CTRL 6
proportional rotary control).
The programming of a corresponding value for the "L"
point of the throttle curve acts to set the descent speed
of the motor, without infl uencing the hover confi guration.
Here, for example, fl ight phase programming can be
used to set different throttle curves. This increased
system rotational speed below the hover point proves
to be useful in certain circumstances, e. g. for fast,
steep landing approaches with greatly reduced
collective pitch, and for aerobatics.
The fi gure depicts a curve with a
slightly changeable throttle setting
below the hover point at the control
center.
+100%
-100%
OUTPUT
234 51Control travel
Different throttle curves are programmed to be
fl ight-phase dependent in order to achieve the given
optimal adaptation to hovering fl ight as well as
aerobatics:
Low system rotational speed with smooth, gentle •
control response and low noise when hovering
Higher rotor speed for aerobatics with motor power •
set close to the maximum. In this case, the throttle
curve must also be adjusted in the hover range.
Basic set-up procedure
Even though pitch and throttle curves can be set
electronically over a wide range with the mc-20 HoTT
transmitter, all linkage in the model should already
be mechanically pre-adjusted correctly according to
the instructions for the given helicopter. Experienced
helicopter pilots will be glad to help with this basic
set-up.
The carburetor linkage must be set so that the throttle
is just past the fully open setting with collective pitch
set to maximum or, for electric helicopters, with the
speed controller set to full. When the throttle limiter is
closed, however, it must be possible to just close off
the carburetor using the C1 trim wheel (rapid throttle
setting of the "digital trim", see page 58 ), without the
servo mechanically striking its end-stop. For electric
helicopters, it must be possible to cut the electric
motor's speed controller safely with the throttle limiter
closed.
Take great care when confi guring these settings,
by adjusting the control linkage as required and/or
altering the linkage point on the servo or carburetor
lever. Only then should the throttle servo's fi ne-tuning
be electronically optimized.
Caution:
Inform yourself thoroughly about the dangers and
safety precautions applicable to handling motors
and helicopters before starting the motor for the
fi rst time!
With this basic set-up complete, the motor should
be started in accordance with the motor operating
instructions: idling can then be confi gured using
the trim wheel of the throttle/collective pitch stick.
The preset idle position will be displayed on the
transmitter's basic display by a horizontal bar next
to the C1 trim wheel position indicator. Refer to the
description of digital trim on page 58 of this manual.
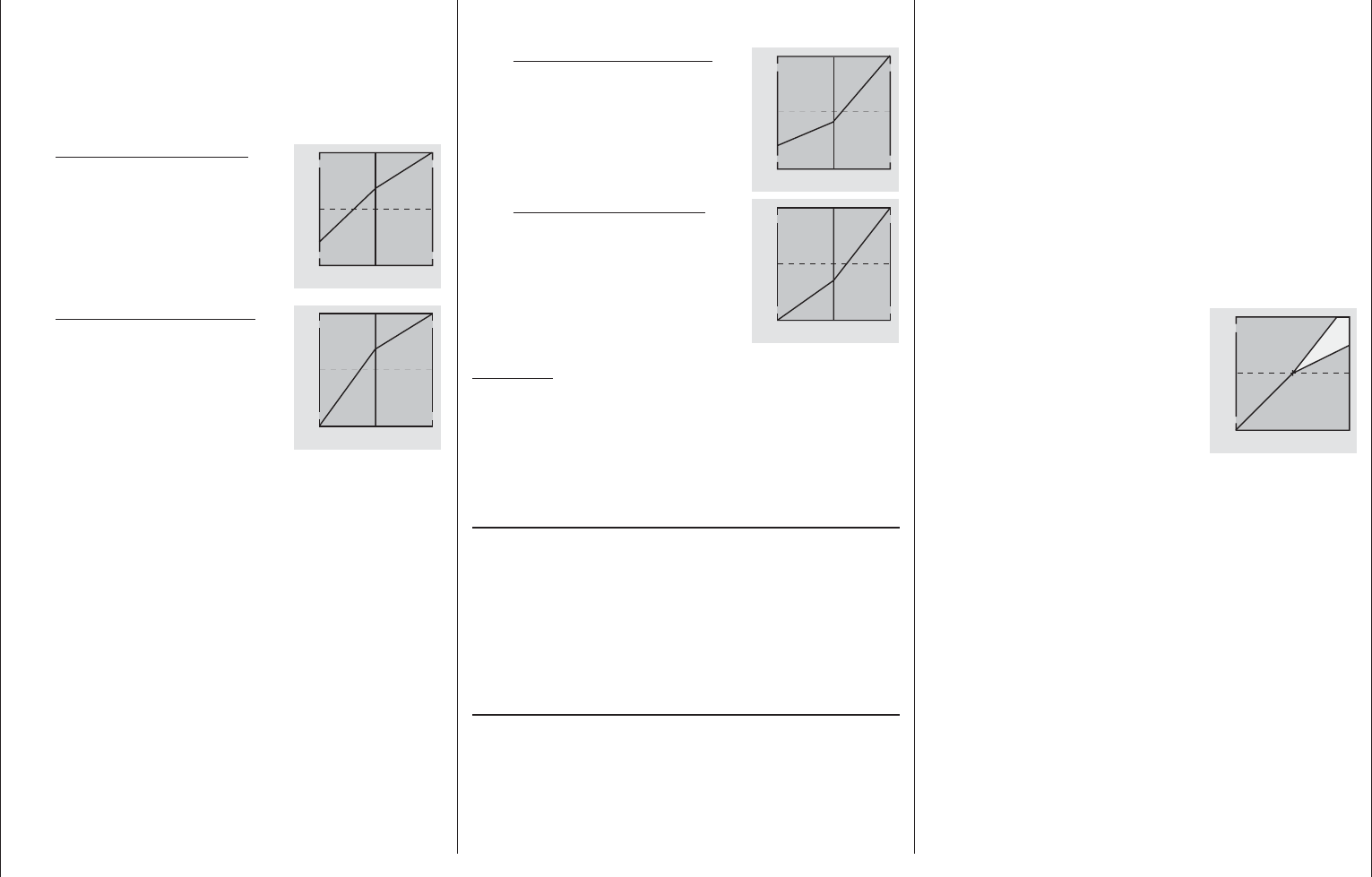
188 Detail program description - Helicopter mixer
the collective pitch stick to its end-point. Compared to
the hover confi guration, motor speed should remain
unchanged.
If motor speed falls off in the climb, even with the
drive system working at full power and therefore
no further power increase is possible, then reduce
maximum blade pitch angle at full defl ection of the
collective pitch stick, i.e. the value of point "H".
Conversely, the attack angle should be increased if
motor speed is to increase while climbing. Therefore,
on the "Pitch" graph page, put the vertical line on
Point "H" by moving the pitch joystick then change
this point's value appropriately with the cd selection
keys of the right touch pad.
This diagram shows only the
changes when setting the maximum
collective pitch value.
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
Then bring the model back to hover, which should,
in turn, be achieved with the C1 stick at its center
point. If the hover fl ight point is now achieved only by
moving the pitch joystick away from its center point
toward "higher" values then this deviation should
be compensated by increasing the hover-fl ight pitch
value – i.e. for point "1" – a little until the model once
again hovers with the joystick at its center point.
Conversely, if the model hovers below the mid-
point, correct this by reducing the angle of attack
appropriately.
It may also be necessary to correct the carburetor
opening for the hover point (point "1") with "C1 ¼
throttle".
The model should lift off the ground with the collective
pitch stick roughly at its center point and hover
roughly at the expected rotational speed. If this is not
the case, proceed as follows:
1. The model does not lift off until the collective
pitch stick is above the center point.
a) Rotational speed is too low
Remedy: On the graph page
for "Channel 1 ¼Throttle"
increase the value for
point "1".
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
b) Rotational speed is too high
Remedy: Increase the blade
angle of attack pitch by
increasing the value of point
"1" on the "Pitch" graph page.
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
2. The model lifts off before the center point is
reached.
a) Rotational speed is too high
Remedy: Decrease the
carburetor opening by
reducing the value of point
"1" on the graph page for
"Channel 1 ¼Throttle".
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
b) Rotational speed is too low
Remedy: Decrease the blade
angle of attack pitch by
reducing the value of point "1"
on the graph page for "Pitch".
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
Important:
These settings must be reconfi gured until the model
hovers at the correct rotational speed with the
throttle/collective pitch stick at its center point. The
confi guration of all other model parameters depends
on these settings being made correctly!
Standard set-up
Standard set-up is completed on the basis of the
basic set-up described above, whereby the model
hovers in normal fl ight at the correct rotational speed
with the throttle/collective pitch stick set to its center
point: This means a set-up with which the model
is capable of both hovering and fl ying circuits in all
phases while maintaining a constant rotational speed.
Climb settings
The combination of throttle hover setting, collective
pitch setting for the hover and the maximum collective
pitch setting (point "H") now permits, in a simple
manner, a means of attaining a constant rotational
speed from hovering right through to maximum climb.
First, perform a prolonged, vertical climb by moving
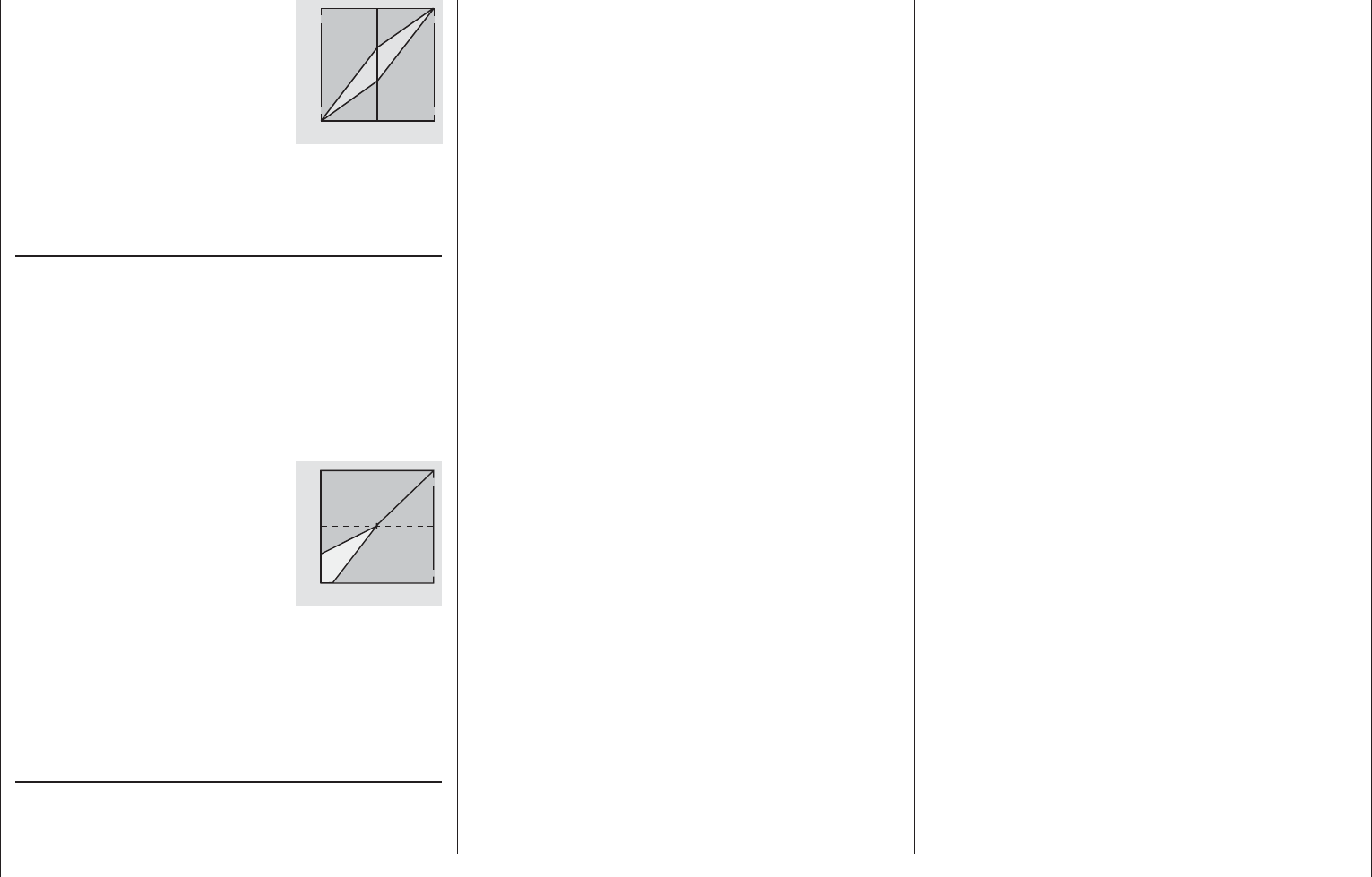
189
Detail program description - Helicopter mixer
Therefore, after the motor is started, system rotational
speed should be increased s l o wly by way of the
throttle limiter. If a switch has been assigned to the
throttle limiter, always ensure the »Control adjust«"
menu (page 112) is used to program a time constant
of about 5 seconds to run up system rotational
speed (opening the throttle limiter). Do not, however,
program a delay for closing the throttle limiter. Leave
the default value of "GL" in the "Type" column alone,
however, to confi gure this setting globally for all fl ight
phases.
be a visual and an acoustic warning if the carburetor
is open too wide when the transmitter is switched
on. Otherwise, if the carburetor or speed controller is
open too far when the motor starts, there is a danger
that the motor will run up to speed immediately
after starting, and the centrifugal clutch will engage
immediately.
Accordingly,
always hold the rotor head
fi rmly when starting.
Nevertheless, if the motor is accidentally started with
the carburetor too wide open, the golden rule is this:
Don't panic!
Hold the rotor head securely!
Don't let go!
Instead, close the throttle limiter immediately, even
if this risks damaging the drive system (in the worst
case scenario).
YOU must ensure
the helicopter never moves
in an uncontrolled manner.
The costs of repairing a clutch, a gearbox or even the
motor itself are negligible in comparison to the injuries
and damage that an uncontrolled model helicopter
can cause if it is allowed to thrash about with spinning
rotor blades.
Always make sure no other person
is present in the
helicopter's hazard area.
The switchover from idle to a fl ight setting with
increased system rotational speed must not take
place abruptly. This will cause the rotor to accelerate
very quickly, resulting in premature wear to the clutch
and gear train. Since the main rotor blades are
generally mounted on a freewheeling unit, they will
be unable to keep pace with such rapid acceleration;
they will respond by swinging far out of their normal
position and may even cause a boom strike.
This diagram shows only the
change to the hover point, i. e.
collective pitch minimum and
maximum are both left at -100 %
or +100 %.
+100%
-100%
OUTPUT
234 51Control travel
Modify these settings until they really result in a
constant rotational speed over the full control range
between hovering and climbing fl ight.
Descent setting
The descent setting should now be confi gured by
placing the model in a steady descent from forward
fl ight at a considerable altitude by fully reducing
collective pitch; adjust the collective pitch minimum
value (point "L") so that the model descends at an angle
of 60° … 70 °. Therefore, on the "Pitch" graph page, put
the vertical line on Point "L" by moving the pitch joystick
then change this point's value appropriately with the
selection keys of the right touch pad.
This diagram shows only the
changes when setting the minimum
collective pitch value.
+100%
-100%
OUTPUT
234 51Control travel
Hover
point
Once the model can fl y this maneuver properly, set
the value for "Throttle min" – the value for point "L"
on the graph page for "C1 ¼ throttle" – so that the
rotational speed neither increases nor decreases.
This completes the set-up procedure for throttle and
collective pitch.
Some important closing remarks
Before starting the motor, ensure that the throttle
limiter is fully closed: this ensures that the carburetor
now responds only to the C1 trim wheel. There will
190 Detail program description - Helicopter mixer / Auto-rotation settings
Helicopter mixers
Auto-rotation setting
Auto-rotation permits both full-size and model
helicopters to land safely in a crisis, e. g. if the motor
should fail. Moreover, if the tail rotor should fail,
cutting the motor and landing using auto-rotation is
also the only possible way to avoid a high-speed,
uncontrollable rotation around the vertical axis
and a resulting catastrophic crash – which is why a
switchover TO the auto-rotation phase takes place
immediately.
When the switchover to the auto-rotation phase is
made, the Helicopter mixer menu screen changes as
follows:
Pitch
–90%
Tail rot. offset AR 0%
Thr. position AR
Gyro suppression
Swashplate rotation
Swashplate limiter
0%
0°
AUS
Gyro offset 0%
Autorot
During auto-rotation fl ight, the main rotor is no longer
driven by the motor but only by its own momentum and
the the airfl ow through the rotor plane during descent.
Since the energy stored by a rotor kept spinning in this
way is rapidly consumed if the helicopter fl ares, pilots
must not only have experience in handling helicopter
models but must also consider carefully how the
relevant functions should be confi gured.
The advanced pilot should therefore practice auto-
rotation landings at regular intervals. Not only to be
able to demonstrate mastery of the maneuver at
competitions, but also to ensure the pilot can can
land the helicopter undamaged from a great height if
the motor should fail. For this purpose, the program
provides a range of adjustment options designed to
help the pilot fl y a motorized model in its unpowered
state. Note that the auto-rotation settings comprise a
complete seventh fl ight phase, which provides access
to all the fl ight phase- specifi c confi guration options,
and to trims, collective pitch curve settings, etc.,
in particular. The following functions have special
features not present in the powered fl ight phases:
Pitch (Collective pitch curve (C1 ¼ Pitch))
In powered fl ight, the maximum blade pitch angle is
limited by available motor power. In auto-rotation,
however, it is limited only by the point at which airfl ow
ceases over the main rotor blades. Greater maximum
collective pitch must therefore be set to ensure
suffi cient thrust when fl aring the helicopter even as
rotational speed is falling off. To do so, briefl y tap
the center SET key of the right touch pad to switch
to the "Pitch" graph page and then use the joystick
to move the vertical line to point "H". Start by setting
a value that is about 10 to 20 % greater than your
"normal" maximum value for collective pitch. Initially,
however, do NOT set a value that is considerably
greater than for normal fl ight, since, if this is done,
the behavior of the collective pitch controls may then
be very unfamiliar following the switchover. Indeed,
there is a danger that the pilot will oversteer during
the fl are and the model will balloon: this will case the
rotor speed to collapse at a considerable altitude and
the model will then crash to the ground. The value
can always be readjusted later after fl ying some test
auto-rotations.
The minimum value for collective pitch can differ
from that set for normal fl ight. This depends on the
pilot's usual style for normal fl ight. For auto-rotation,
however, always set a suffi ciently generous minimum
value for collective pitch at point "L" to ensure
the model can be brought out of forward fl ight at
moderate speed into a descent at an angle of around
60 … 70 degrees when collective pitch is reduced to
a minimum. If, like most helicopter pilots, you have
used this kind of setting for normal fl ight anyway, then
this value can simply be transferred.
If, however, you normally let your model "fall" at a
shallower angle, then you should increase the value
at point "L", and vice versa.
Approach angle for
various wind conditions
Approach angle
in moderate
wind
no wind
45°
60°
75°
in strong
wind
As a rule, the collective pitch stick itself is not
positioned right at the bottom of its travel for auto-
rotation. Instead, it is typically between the hover
position and the bottom end-point. This offers the
pilot an option for further adjustment, e. g. via pitch
inclination through pitch-axis controls.
The approach can be shortened by pulling back
slightly on the pitch-axis joystick and gently reducing
pitch or by extending the approach by pushing
forward on the pitch-axis joystick and carefully
increasing pitch.
Throttle setting AR
Although pilots will be expected to cut the glow
motor completely during competitions, This is rather
inconvenient during training sessions because the
motor must be restarted after every practice auto-
rotation landing.
Therefore, for training sessions, set this line's value
such that a combustion motor is held at a safe idle
without the clutch engaging during the auto-rotation
phase; electric drive systems should be set safely to
"Off".
Note:
The "Motor Stop" option in the »Base setup model«
menu offers an alternative "Emergency STOP"
191
Detail program description - Helicopter mixer / Auto-rotation settings
function.
Tail rotor AR
In normal fl ight, the tail rotor is set so that it
compensates for motor torque while the model is
hovering. It therefore generates some a certain
amount of thrust even in its normal position. The
level of thrust is then varied by the tail rotor control
system, and also by the various mixers which provide
all manner of torque compensation, while the tail rotor
trim is also used to compensate for varying weather
conditions, fl uctuations in system rotational speed
and other infl uences.
For auto-rotation, however, the main rotor is not
driven by the motor, but by the "windmill" principle.
Since this, in turn, does not generate any torque
for which the tail rotor must compensate, all
corresponding mixers are switched off automatically.
Since the absence of torque in auto-rotation also
means the above-mentioned thrust is superfl uous,
however, a different tail rotor confi guration is also
required:
Cut the motor and place the helicopter on the ground
in a level attitude. With the transmitter and receiving
system switched on, select the fl ight phase "Auto-
rotation" and then fold the tail rotor blades down. Now
change the value on the "Tail rotor" line until the tail
rotor blade angle of attack is zero degrees. Viewed
from the tail, the tail rotor blades should be parallel to
one another.
Depending on the friction and running resistance
of the gearbox, the fuselage may still yaw slightly,
however. This relatively slight torque must then be
corrected if necessary by adjusting the tail rotor
blade pitch angle. This value will always be a fi gure
between zero degrees and a pitch angle opposed to
the pitch angle in normal fl ight.

192 General notes on freely programmable mixers
The previous pages have described a wealth of
ready-to-use built-in coupling functions, in the context
of the two menus »Wing mixers« and »Helicopter
mixers«. The fundamental signifi cance of mixers and
the principle by which they work are described on
page 159. The following section provides information
about the so-called "free mixers".
In addition to the pre-programmed mixers mentioned
above, the mc-20 HoTT also offers a number of
freely programmable mixers in every model memory
location, whose inputs, outputs and mixer ratios can
be defi ned to meet one's own requirements. These
include:
8 linear mixers, numbered 1 through 8•
4 curve mixers, numbered 9 through 12•
These 12 mixers are certainly adequate for most
applications and are certainly suffi cient when the
potential of the pre-programmed coupling functions
are utilized. In the »Mix active/phase« menu (see
page 204), each of these 12 mixers can be activated
or deactivated separately for each fl ight phase.
For the "free mixers", the signal present at any control
function (1 to 16) can be assigned as the input signal
or,for a so-called "switch channel" (see further below),
the signal from any switch can be utilized. The signal
that is present at the control channel and passed
to the mixer input is always infl uenced by its own
transmitter control and by any control characteristic
that may have been set, e. g. those specifi ed by
the »Dual Rate / Expo«, »Channel 1 curve« and
»Control adjust« menus.
The mixer output acts on a control channel (1
to – depending on receiver type – a maximum of 16)
that can also be assigned freely. Before this channel
routes the signal to the servo, it can only still be
infl uenced by the »Servo adjustments« menu, i.e.
by the the servo reverse, neutral point offset, servo
travel and servo travel limit functions, and possibly by
»Tx. output swap«.
One control function can be used for any number of
mix inputs simultaneously: if, for example, several
mixers are to be switched to act in parallel.
Conversely, it is possible for any number of mixers to
affect one and the same control channel. Particularly
in the latter case, however, it is very important to
ensure that the servo concerned does not strike its
mechanical end-stops when several mixer signals
accumulate excessively. For safety's sake, it may
therefore be necessary to set an appropriate travel
limit in the »Servo adjustments« menu.
For more complex applications, mixers can be switched
in sequence. In this case, it is not the (transmitter)
signal at the "output" of a control function which forms
the input signal of the "series-wired" mixer, but the
(mixed) signal "further back" at the "input" of a control
channel. The following description of the free mixers
includes several examples of this type.
In the software, one "free mixer" is always initially
activated. Optionally the mixer can also be assigned to
an ON/OFF switch. Since there are so many functions
to which switches can be assigned, be careful to avoid
(undesired) multiple assignments to a single switch.
The two key mixer parameters are:
… the • mixer ratio, which defi nes the extent to
which the input signal acts on the output of the
control channel connected to the mixer output.
The mixer ratio for linear mixers can be set as
symmetrical or asymmetric. Curve mixers can also
be confi gured with up to 8 points to suit one's own
application and even implement extremely non-
linear curves.
…• the neutral point of a mixer, which is also
referred to as the "offset".
The offset is that specifi c point along the
movement of a transmitter control (joystick,
proportional control or switch) at which the
mixer no longer infl uences the control channel
connected to its output. Normally, the neutral
point is the center point of the transmitter control.
However, the offset can also be set at any other
point along the control travel. Since there are no
restrictions on the design of the curve mixers,
setting a mixer neutral point only makes sense for
the 8 linear mixers.
Switch channel "S" as a mixer input
Occasionally, however, only a constant control signal
is required at the mixer output, e.g. for a slightly
increased "up-elevator" trim when the aero-tow
release is closed – fully independently of its normal
trim setting.
In this case a switch is assigned both to the aero-
tow release and the mixer; it is then used not only
to open and close the release, but also to pass the
desired trim signal to the elevator via the mixer ratio.
To identify this special arrangement, this mixer input
control function in the program is designated "S" for
"Switch channel".
In addition, if the corresponding "target channel"
should now no longer be infl uenced by its "normal"
transmitter control, isolate the latter from the function
input of the affected control channel by way of the
»MIX-only channel« menu (page 205). Here too, for
clarifi cation of this there is an example of the function
provided in the following menu description.
General notes on freely programmable mixers
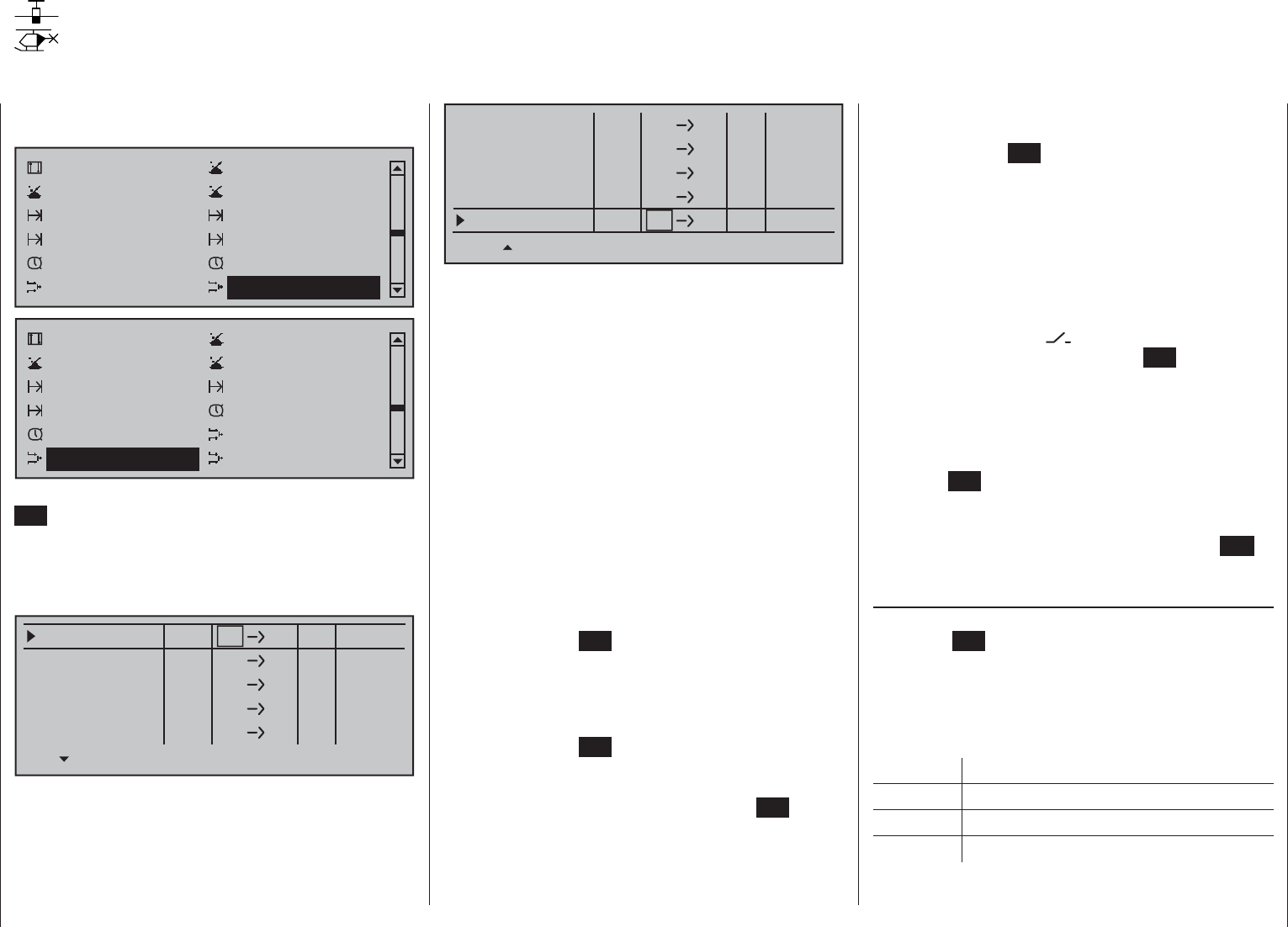
193
Detail program description - Free mixers
Using the selection keys on the left or right touch pad,
page to the menu option …
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX aktiv / Phase
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option.
Regardless of the model type selected, each of the
80 model memory locations offers eight linear mixers
(LinearMIX 1 …8) …
??
LinearMIX 1
Mitte
??
––––
from – Begr. +
??
??
––––
??
??
––––
??
??
––––
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
… and 4 curve mixers (CurveMIX 9 … 12), which
also offer non-linear control characteristics:
??
LinearMIX 8
Mitte
??
––––
from – Begr. +
??
??
––––
??
??
––––
??
??
––––
??
??
––––
CurveMIX 9
CurveMIX10
CurveMIX11
CurveMIX12
In addition, the »MIX active/phase« menu (page 204)
permits the independent activation and deactivation
of only particular mixers for specifi c fl ight phases.
On the "Free mixers" menu, the blocked mixers
are then suppressed in the corresponding fl ight
phase. If you are hunting for a mixer that is
not shown, you should therefore switch to the
appropriate fl ight phase!
In this fi rst section, however, we will concentrate on
how to program the fi rst screen page of the "free
mixers". We will then move on to the method of
programming mixer ratios, both for linear mixers and
curve mixers, as found on the second screen page of
this menu.
Basic programming procedure
Select the mixer you want by using the 1. cd
selection keys on the left or right touch pad.
Tap the center 2. SET key of the right touch pad. The
input fi eld on the line marked "fr" at the lower edge
of the screen is now shown highlighted.
Use the selection keys on the right touch pad to 3.
select the "fr" mixer input.
Tap the center 4. SET key of the right touch pad;
using the f selection key of the left or right touch
pad, switch to the column marked "to" at the lower
edge of the screen then tap the center SET key of
the right touch pad once again.
The input fi eld "to" is shown highlighted.
Use the selection keys on the right touch pad to 5.
select the "to" mixer output.
Tap the center 6. SET key of the right touch pad.
Optionally use the eselection key of the left or
right touch pad to switch to the column marked
"ty" at the lower edge of the screen in order to
include the trim of the respective joystick in the
mixer input signal ("Tr" for trim or "P" for phase)
and/or to add series switching for mixers …
… and/or use the f selection key of the left or
right touch pad to change the column marked
with the switch icon on the lower edge of the
screen. To do this, tap the center SET key of the
right touch pad once again and assign a switch
as described in the section "Assigning transmitter
controls, switches and control switches" (page 56).
Using the 7. f selection key of the left or right touch
pad, switch to the column "Settings" then tap the
center SET key of the right touch pad.
Defi ne the mixer ratios on the second screen 8.
page.
Return to the fi rst page by using the center 9. ESC
key of the left touch pad.
" fr"
After selecting a mixer line and a subsequent tap on
the center SET key of the right touch pad, select one
of the control functions, 1 … 16 or S, for the value
fi eld now in inverse video with the selection keys of
the right touch.
For the sake of clarity, control functions 1 … 4 are
marked as follows when setting wing mixers:
C1 Throttle/airbrake stick
AI Aileron stick
EL Elevator stick
RU Rudder stick
… and, for the helicopter program:
Free mixers
Freely-programmable linear and curve mixers
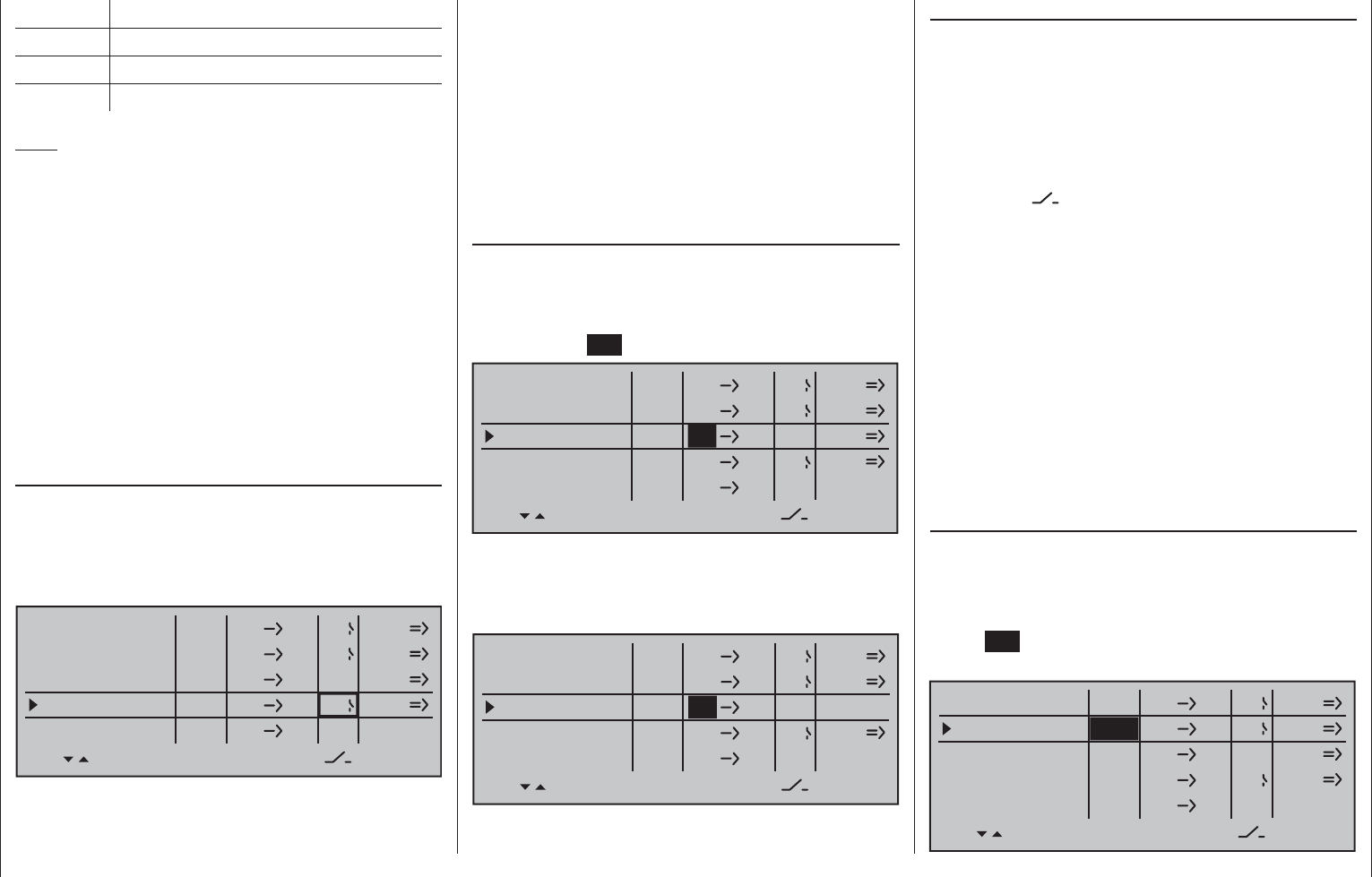
194 Detail program description - Free mixers
Mixer switches
In the sample screen image shown above, switches
"4" and "2" have been assigned to linear mixers 1 and
4 and to mixer 2 of the control switch "G4".
The switch symbol to the right of the switch number
shows the current switch state.
Any mixers not assigned to a switch, as indicated
by an empty cell for the column marked by the
switch icon on the screen's bottom line, are
fundamentally active!
A switch must be assigned to LinearMIX 4 if you
wish to switch between two fi xed mixer values (still
to be set) that correspond to the two end-points of
a (proportional) transmitter control. Accordingly, the
"switch channel" mixer cannot also be switched "on"
or "off" as with the other mixers.
If you intend to assign a control switch (G1 … G4)
as a switch, then please note that you must defi ne
this appropriately BEFOREHAND in the »Control
switch« menu. If you do not, you will assign an
undefi ned control switch and therefore one that
functions as a fi xed switch.
" Ty"
Including the trim
For control functions 1 … 4, you can also allow
trimming of the digital trim wheel for the given joystick
effect the mixer's input. In this case, briefl y tap the
center SET key of the right touch pad then use the
selection keys to select "Tr" in the inverse video fi eld:
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
Tr
off
off
off
1 Throttle/collective pitch stick
2 Roll stick
3 Pitch-axis stick
4 Tail rotor stick
Note:
If you select any of the control functions 5 … 16 for
fi xed-wing models or 5, 7 … 16 for helicopter models,
do not forget to assign a transmitter control for each
of these in the »Control adjust« menu!
"S" as switch channel
Selecting "S" (switch channel) in the fr column has
the effect of passing a constant input signal to the
mixer input, e.g. in order to add a little more "up-
elevator" trim when the aero-tow release is closed, as
mentioned on the previous page.
After assigning a control function or the "S" switch
channel in the "fr" column, the following is also
displayed …
" to "
… on the lower edge of the screen.
Use this column's input fi eld to specify the destination
of the mixer, i.e. assign mixer output, to one of the
control channels. At the same time, additional fi elds
will appear in the bottom line of the screen:
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
off
off
off
In this example, four mixers have already been
defi ned. The second mixer is already familiar in
principle as "Elevat curve" from the "Brake settings"
sub-menu of the »Wing mixers« menu and the third
is familiar from the line "Tail" ("2ELSv3+8") of the
»Model type« menu. As a general rule, however, you
should fi rst make use of the pre-programmed mixers.
However, if you need asymmetric mixer ratios, want
to program non-linear curves or need to offset the
mixer neutral point, then you should set or leave the
pre-programmed mixers at "0 %" and replace these
with free mixers.
Erasing mixers
To erase a previously-defi ned mixer, select the
appropriate line with the cd selection keys on the
left or right touch pad , switch to the "fr" column, if
necessary, with the ef selection keys then briefl y
tap the center SET button on the right touch pad:
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
off
off
off
The fi eld in the " fr " column for the mixer you want to
delete will now be shown in inverse video: tap both
cd selection keys or ef on the right touch pad at
the same time (CLEAR):
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
??
??
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
off
off
off
––––
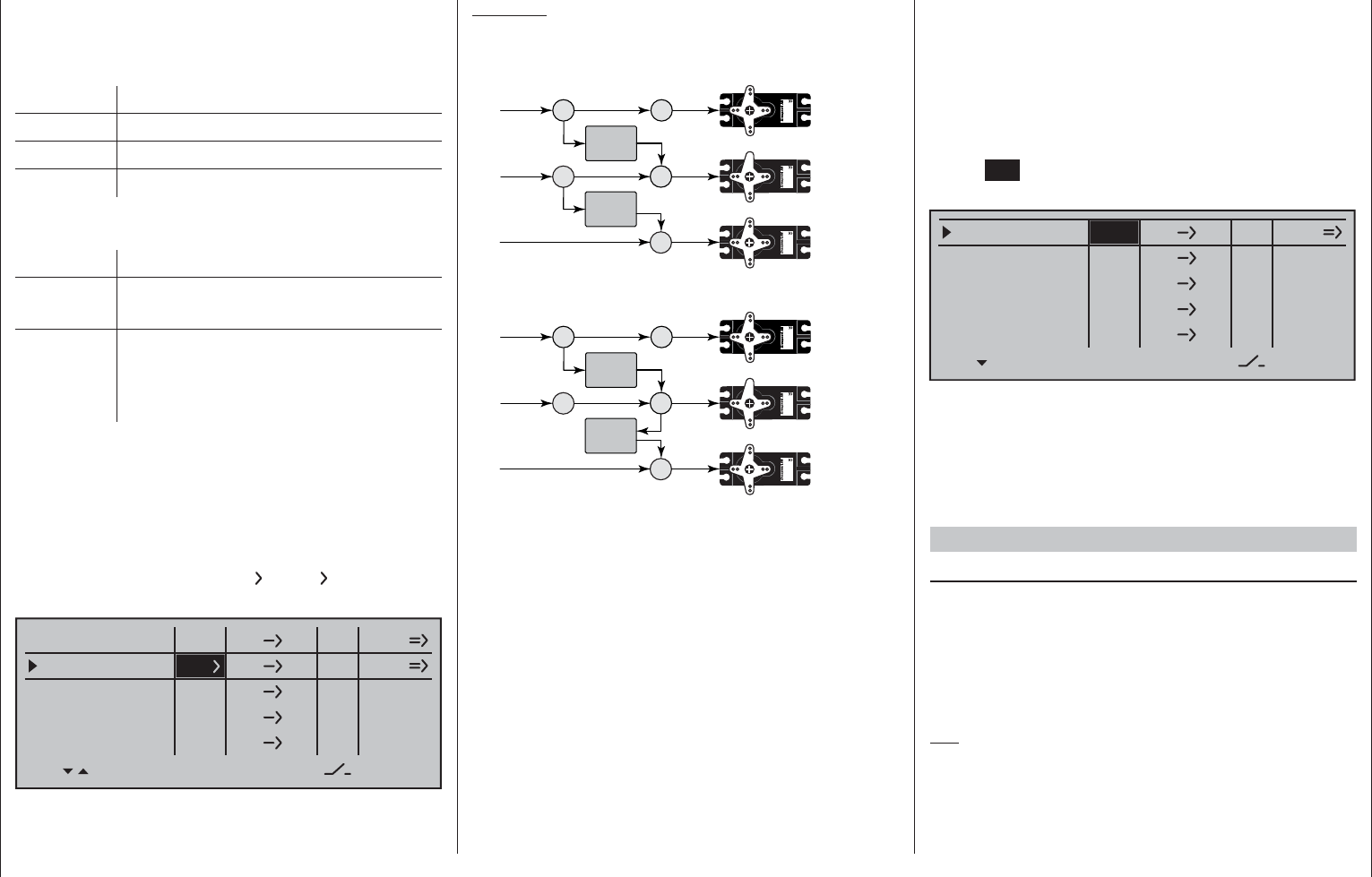
195
Detail program description - Free mixers
Example:
Two mixers (MIX 6 ¼ 7 and 7 ¼ 8):
a) WITHOUT series switching:
6 6
7
Servo 4,8 V
C 577
Best.-Nr. 41 01
Servo 4,8 V
C 577
Best.-Nr. 41 01
7
8
Servo 4,8 V
C 577
Best.-Nr. 41 01
MIX 1
MIX 2
b) The same mixers WITH series switching:
6 6
7
Servo 4,8 V
C 577
Best.-Nr. 41 01
Servo 4,8 V
C 577
Best.-Nr. 41 01
7
8
Servo 4,8 V
C 577
Best.-Nr. 41 01
MIX 1
MIX 2
In this highly simplifi ed example, if mixer 2 is
switched in series, then it does not "take over" solely
the transmitter signal of control function 7 – as shown
under a) – but, instead, the entire (mixed) signal
present at the servo side of control channel 7, as
shown under b). It then directs this in accordance
with its confi gured mixer ratio forwards to control
channel 8. In this case, the effect of transmitter
control "6" extends as far as output "8". This kind of
serial linkage can be extended as far as you wish.
For example, another mixer "8 ¼ 12" can be used
to route the control signal from "6" as far as output
"12", taking into consideration the associated mixer
ratios. Of course, even with an active serial link,
each separate mixer can still be controlled via the
transmitter control assigned to the mixer input. Fixed-
wing and helicopter mixers also work in the same
way, when set up to switch "in sequence".
Including phase trim
If you wish to apply the FLAP channel ("6") or FLAP2
channel ("9") trim values stored in the »Phase trim«"
menu – fl ight phase dependent – then fi rst tap the
center SET key of the right touch pad and use its
selection keys to select "P":
11
LinearMIX 1
type
6
from – Begr. +
??
??
??
??
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
Tr
––––
––––
??
??
––––
P
Depending on the mixer value confi gured, a mixer
can, as shown in the example above, route the signal
from a fl ap control present (e.g.) on input 6 to control
channel 11, while also applying the FLAP trim value
set on the »Phase trim« menu (page 150) for the
respective fl ight phase.
Other special features of free mixers
Mixer input = mixer output
If you set up a mixer whose input is the same as
its output, e.g. "C1 ¼ C1", you can achieve some
very special effects in conjunction with the option of
switching a free mixer on and off in any way you like.
A typical application of this can be found at the end of
this section, as Example 2 on page 202.
Tip:
If you separate a control function, e.g. "9", from
control channel 9" using the »MIX-only channel«
menu (see page 205), then servo response is
defi ned only by the mixer ratio (yet to be specifi ed)
The effect of the C1 trim wheel on mixer output will
depend on the function assigned in the »Model type«
menu (page 94), in the "Motor on C1" column for
fi xed-wing models …
Trim Effect on mixer output
None linear over full trim wheel travel
Forward Only effective if C1 stick is forward
Back Only effective if C1 stick is back
… or on the "Pitch" line of the »Stick mode« menu
for helicopter models:
Trim Effect on mixer output
AR
(Thr-AR)
linear over full trim wheel travel
TL
(throttle
limit)
only effective at minimum position of
the assigned throttle limit control (the
right side proportional rotary control as
standard)
Switching mixers in series
As already explained on page 192, you can also
switch mixers in series: Where mixers are switched
in "sequence", the "input signal" of a control channel
already on its way to the servo "branches off" and
is directed to a further channel. In the "ty" column,
select the right angle bracket " " or "Tr ", if the trim
should also act simultaneously on the mixer input:
7
LinearMIX 1
type
6
from – Begr. +
8
7
??
??
??
??
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
Tr
––––
––––
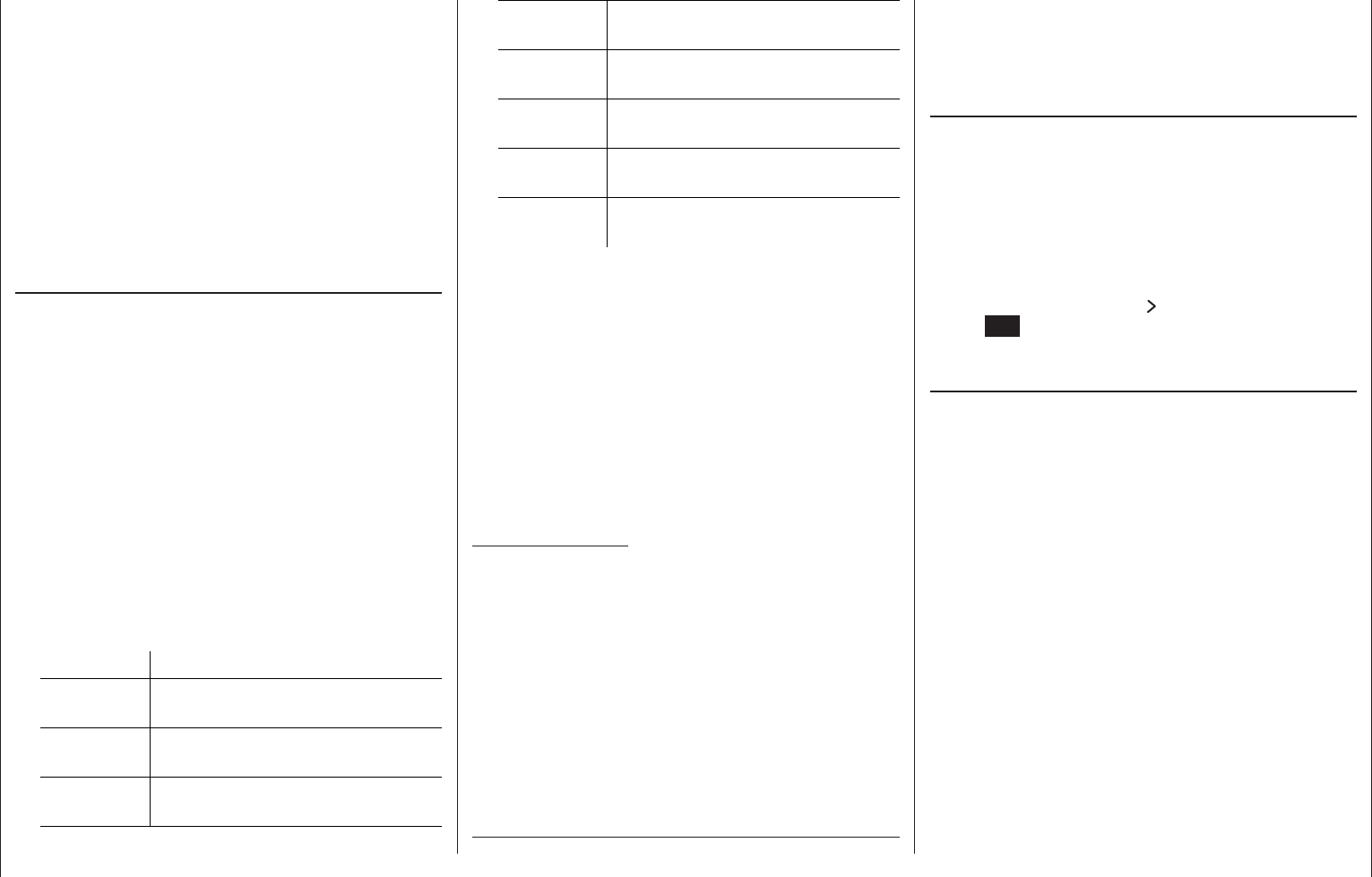
196 Detail program description - Free mixers
N.N.* ¼ 7 servo pair 6 + 7 responds with an
aileron function
N.N.* ¼ 9 servo pair 9 + 10 responds with a
fl ap function
N.N.* ¼ 10 servo pair 9 + 10 responds with an
aileron function
N.N.* ¼ 11 servo pair 11 + 12 responds with a
fl ap function
N.N.* ¼ 12 servo pair 11 + 12 responds with
an aileron function
Model helicopters:•
With helicopter mixers, collective pitch control
may be provided by up to 4 servos connected
to receiver outputs 1, 2, 3 and 5, depending on
helicopter type. The software links these together
to control collective pitch, roll and pitch-axis.
Other than within the »Helicopter mixers«
menu, it is not advisable to mix a free mixer into
these channels because this can lead to very
complex interactions. One of the few exceptions is
"Collective pitch trim using a separate transmitter
control" – see example 3 on page202.
Important notices:
With serial links in particular, remember that •
that the travels of the individual mixers are
cumulative if multiple stick commands are
made simultaneously: there is a risk that the
servo(s) may strike a mechanical end-stop. If
necessary, reduce "servo travel" to avoid this;
alternatively, set "Travel limit" on the "Servo
adjustments" menu and/or reduce mixer values.
Take advantage of the ever-present option •
to switch over to the transmitter's »Servo
display«" menu (see page 262). This menu
is reached from almost any menu with a
of the mixer programmed on the same channel.
Thus, with linear mixers LinearMIX 1 … 8 or curve
mixers CurveMIX 9 … 12, 8-point control curves can
be defi ned for any transmitter control in a manner
analogous to that described in the »Channel 1
curve« menu and these can also be used in fl ight
phase switching if needed. This method of "linking" is
not only also switchable but can even be subject to a
delay by assigning an appropriate delay in the "– time
+" column of the »Control adjust« menu.
Mixer output affecting default software coupling
of aileron, camber-changing fl ap or collective
pitch servos
Before we start specifying the mixer ratio, we must
fi rst give some thought to what happens if we permit
a mixer to affect the default software coupling of
aileron, camber-changing fl ap or collective pitch
servos:
Fixed-wing models:•
Depending on the number of wing servos available
on the "Aile/fl aps" line of the »Model type« menu,
control channels 2 and 5 are connected via special
mixers for the "aileron" function, 6 and 7 for the
"fl ap" function, outputs 9 and 10 (if present) for the
FLAP2 servos and 11 and 12 for AI2 servos.
If mixer outputs are programmed to affect these
kinds of couplings, then their effect on the
respective fl ap pair derived from the "receiving"
control channel must be accounted for:
Mixer Effect
N.N.* ¼ 2 servo pair 2 + 5 responds with an
aileron function
N.N.* ¼ 5 servo pair 2 + 5 responds with a
fl ap function
N.N.* ¼ 6 servo pair 6 + 7 responds with a
fl ap function
brief, simultaneous tap on the ef keys of
the left touch pad. This menu gives you the
opportunity to check the effects of all of your
settings on a single screen.
Mixer ratios and mixer neutral point
Now that we have explained the wide-ranging nature
of the mixer functions, the following section describes
how to program linear and non-linear mixer curves.
For each of the 12 available mixers, the mixer curves
are programmed on a second page of the screen
display. Use the selection keys cd on the left or
right touch pad to select the desired mixer line. If
necessary, use the touch pad's selection keys to
move to the right column (= ) then briefl y tap the
center SET key of the right touch pad to access the
graph page.
LinearMIX 1 … 8: Setting linear mixer values
As a practical example, we will now defi ne a linear
mixer curve to resolve the following problem:
For a motorized aircraft model, the two servos
connected to receiver outputs 6 and 7 – defi ned on
the "Aile/fl aps" line of the »Model type« menu as "…
2FL" – are to be used for actuating landing fl aps. That
is; when a transmitter control is moved, they must
defl ect downwards only. This requires a simultaneous
elevator trim, however.
First allocate, for example, input 6 to the leftmost
slider control SR1 located in the middle of the console
by making settings in the »Control adjust« menu.
A transmitter control on input 6, – as shown in the
above table – will control the two servos connected
to receiver outputs 6 and 7 by default as fl aps. Leave
the default value of "GL" in the "Type" column alone,
however, to confi gure this setting globally for all fl ight
phases – as is the case for the free mixer.
* N.N. = Nomen Nominandum (the name to be stated)
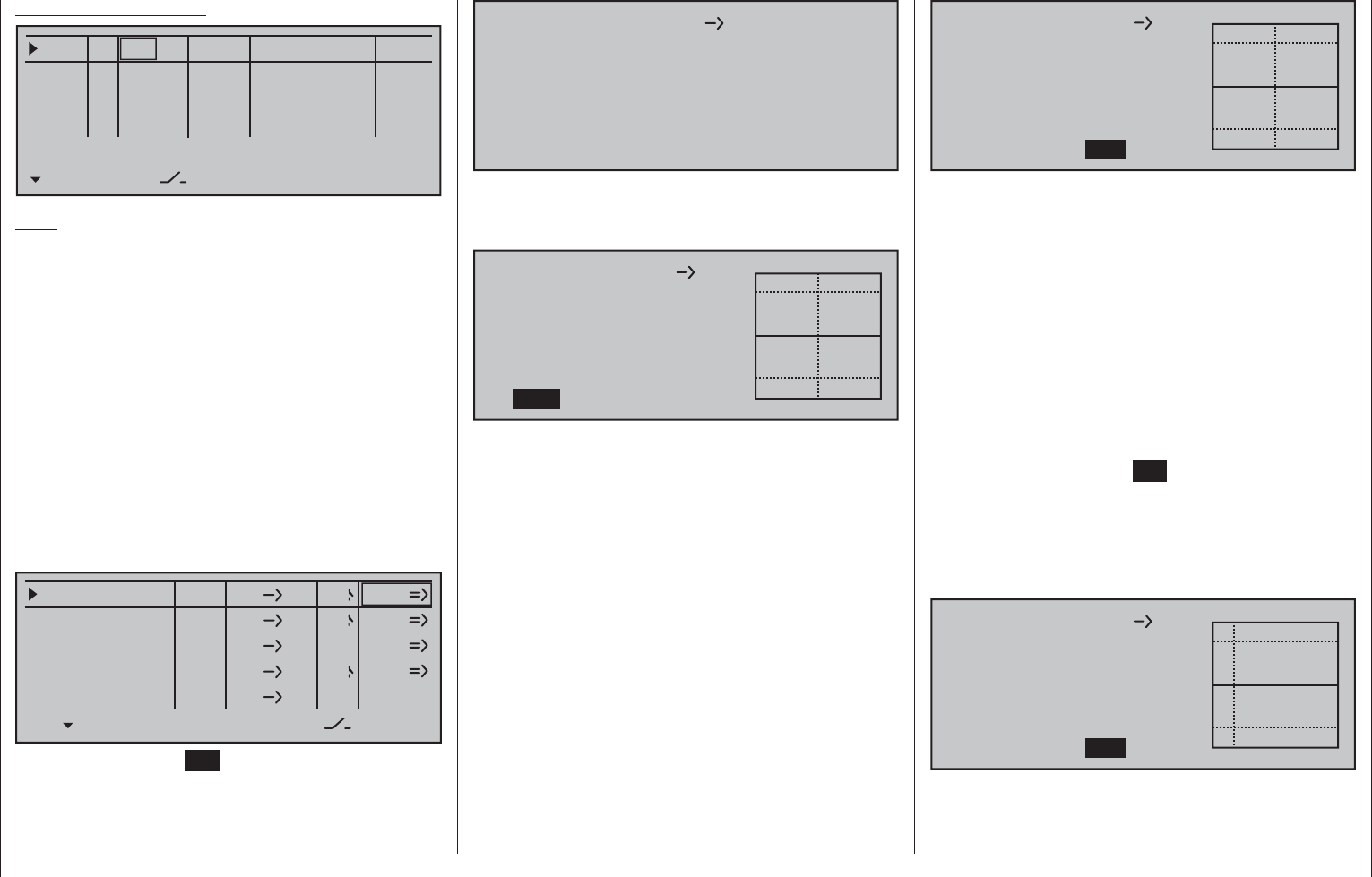
197
Detail program description - Free mixers
»Control adjust« menu
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
S11 ---
fr
fr
fr
---
---
---
offset
GL
Normal
Note:
Note that if two fl ap servos have been selected,
any transmitter control assigned to input 7 will be
decoupled in the software in order to avoid errors
in operating the fl aps. However, in the interests of
safety, you should make a habit of leaving all inputs
not currently required to "free", or of resetting these
back to "free"!
Start by moving this transmitter control to its forward
limit and adjust the landing fl aps so that they are
retracted or closed in this position. If you now move
the dial to the rear, the fl aps should move downward;
if not the direction of servo rotation must be adapted.
We now turn our attention to the fi rst mixer shown in
the screen image on page 194 ("6 ¼ EL"), to which
switch 4 was assigned:
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
off
off
off
Briefl y tap the center SET key of the right touch pad
to open the second screen page:
Linear MIX 1 EL
6
off
If this screen appears, the mixer has not yet been
activated in combination with the assigned toggle
switch – "4", in this example. If so, operate the switch:
6
Mix input
0%
Offset
0%
EL
Linear MIX 1
0%
SYM ASY SET
STO
The continuous vertical line represents the current
position of the transmitter control linked to input
6. (However, it is not visible in the above graphic
because it is at the left edge since slider control SR1,
in this example assigned to input 6 (see previous
page), is at its forward limit.) The dotted vertical line
in the middle of the diagram indicates the position of
the mixer neutral point – see under "Offset", below.
The solid horizontal line shows the mixer ratio, which
currently has the value zero over the entire stick
travel; accordingly, the elevator will not yet follow the
movement of the fl aps.
First, the …
Offset (mixer neutral point)
… should be defi ned. Switch over to STO for this by
using the f selection key of the left or right touch pad:
6
Mix input
0%
Offset
0%
EL
Linear MIX 1
0%
SYM ASY SET
STO
The dotted vertical line in the middle of the diagram
indicates the position of the mixer neutral point
("Offset"), i.e. the specifi c point along the control
travel at which the mixer does NOT infl uence the
control channel connected to its output. The default
position for this point is at the control center.
However, since in our example the fl aps should be
closed or retracted with the slider control at its forward
limit and therefore the elevator should not be further
infl uenced in this position, the mixer neutral point must
be relocated to precisely this point. To do so, push the
slider control used (in this example, slider control SR1)
to its forward limit if you have not already done so,
then briefl y tap the center SET key of the right touch
pad. The dotted vertical line moves across to this point,
the new mixer neutral point, which by defi nition always
retains the "initial" value of zero.
However, to better illustrate our example, we now
wish to set this "Offset" value to only -75 %.
6
Mix input
0%
Offset
–75%
EL
Linear MIX 1
0%
SYM ASY SET
STO
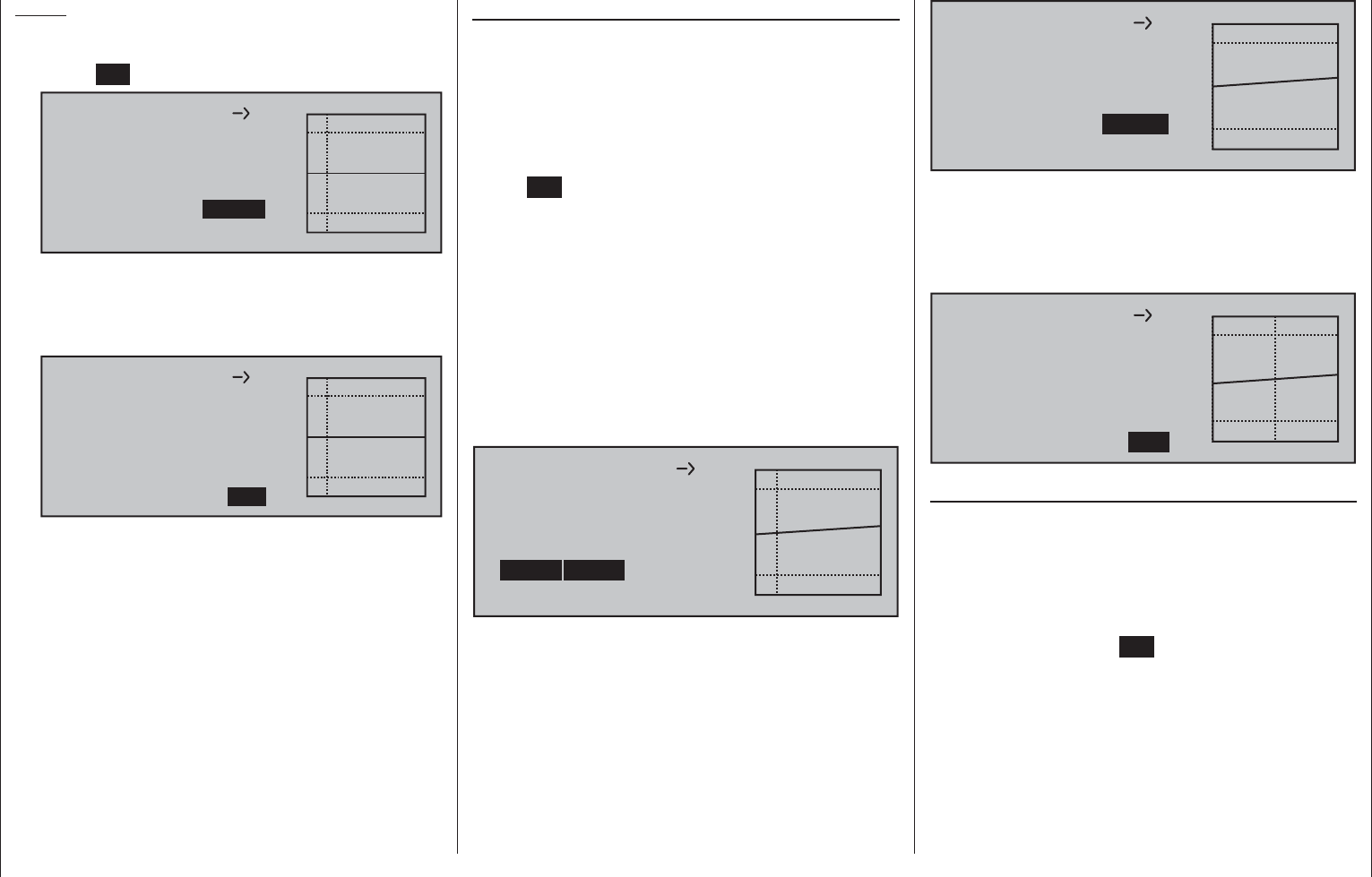
198 Detail program description - Free mixers
Notes:
By selecting • SET with the f selection key of the
left or right touch pad followed by a tap on the
center SET key of the right touch pad …
6
Mix input
0%
Offset
EL
Linear MIX 1
0%
SYM ASY SET
STO
–75%
… the offset value can be set manually or
adjusted in 1 % increments with the selection keys
on the left or right touch pad.
By selecting • SET …
6
Mix input
0%
Offset
EL
Linear MIX 1
0%
SYM ASY STO
–75%
SET
… – see previous fi gure – set the mixer's neutral •
point automatically back to control center with a
simultaneous tap on both the cd or ef selection
keys of the right touch pad (CLEAR).
Symmetrical mixer ratios
The next task is to defi ne the mixer values above and
below the mixer neutral point – starting from its current
position.
If necessary, use selection keys ef on the left or
right touch pad to select the SYM fi eld in order to
establish a mixer value which is symmetric to the
offset point just set. Following a brief tap on the
center SET key of the right touch pad, set both SYM
fi elds (now in inverse video) via the selection keys
of the right touch pad to values between -150 % and
+150 %. Note that the mixer value set always refers
to the input signal of the respective transmitter control
(control signal)! Negative mixer values reverse the
direction of the mixer.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will erase the mixer
ratio in the inverse video fi eld.
The "optimum" value in our example will certainly
need fl ight-testing.
6
Mix input Offset
EL
Linear MIX 1
SYM ASY STO
–75%
SET
–20% –20%
Earlier, we set the mixer neutral point at -75 % of
control travel: as a result, the elevator ("EL") will
exhibit a (slight) down-elevator effect even at the
neutral point of the landing fl aps and this is naturally
undesirable. Accordingly, you should reposition the
mixer neutral point to -100 % of control travel, as
described earlier.
6
Mix input
+20%
Offset
EL
Linear MIX 1
+20%
SYM ASY SET
STO
–100%
If the offset, now -100 %, is reset to 0 % of control
travel by using selection key f on the left or right
touch pad to select the SET fi eld then tapping either
the selection key combination cd or ef on the right
touch pad (CLEAR), the following screen will appear:
6
Mix input
+20%
Offset
EL
Linear MIX 1
+20%
SYM ASY STO
0%
SET
Asymmetric mixer ratios
In many cases, however, we require different mixer
values on each side of the mixer neutral point.
Do this by fi rst resetting the offset of the mixer used
in the example, "6 ¼ EL" again to 0 %,if necessary,
refer to the fi gure above. Now select the ASY fi eld
with the selection key f on the left or right touch
pad then tap the center SET key of the right touch
pad. If slider control SR1, assigned to input 6 in
this example, is now moved in each corresponding
direction, the mixer ratios for each of the two control
directions, i.e. left and right of the established offset
point, can be adjusted with the selection keys of the
right touch pad:
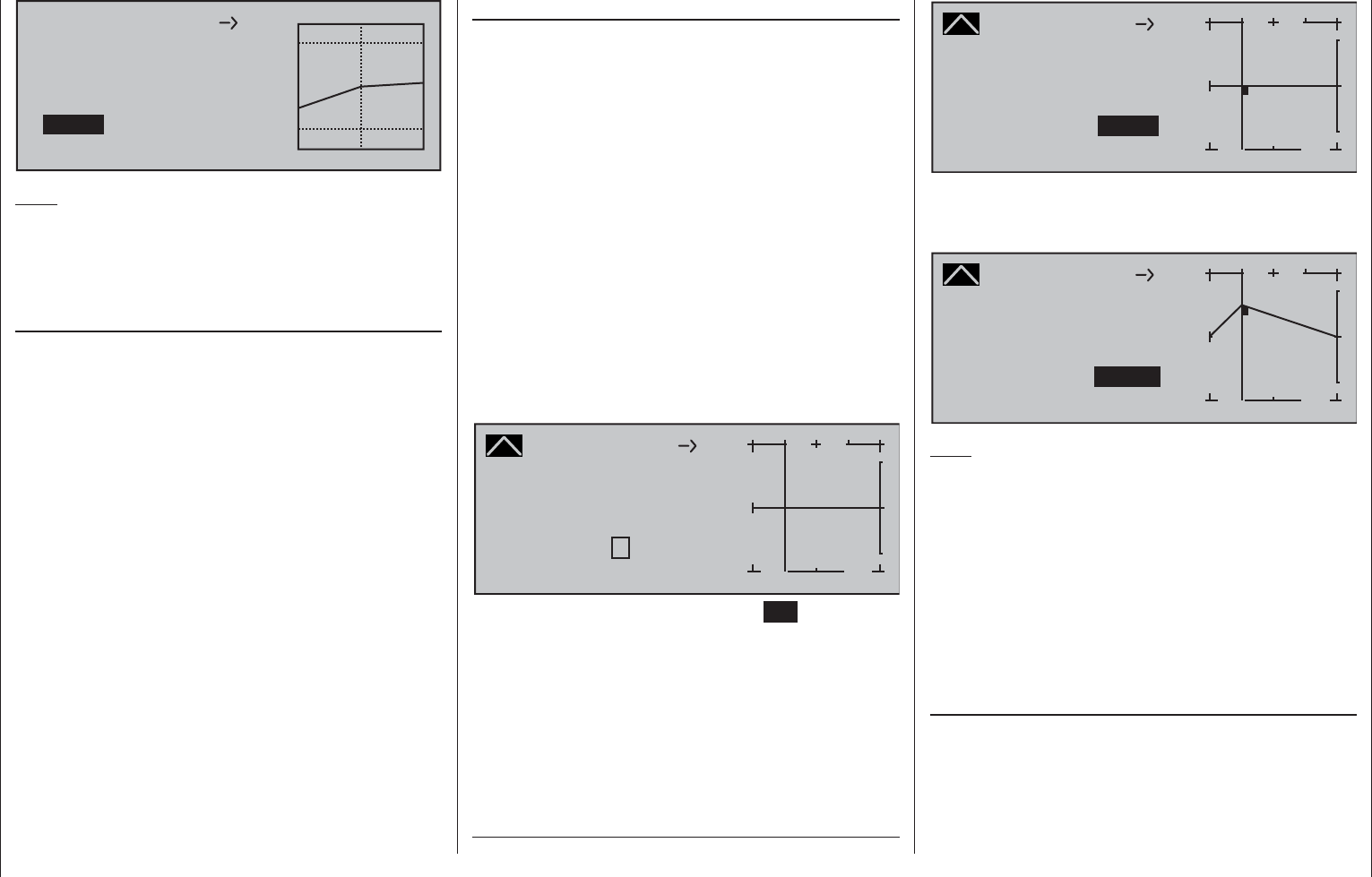
199
Detail program description - Free mixers
6
Mix input Offset
EL
Linear MIX 1
SYM ASY STO
0%
SET
–55% –20%
Note:
If you are using a type "S ¼ N.N.*" switch channel
mixer you will need to actuate the assigned switch.
The vertical line then jumps between the left and
right side.
Setting curve mixers 9 … 12
These four curve mixers allow the defi nition of
extremely non-linear mixer curves by placing up to six
freely positionable points between the two endpoints
"L" (low = -100 % control travel) and "H" (high =
+100 % control travel) along the control travel.
If you have already read the »Channel 1 curve« menu
description or about programming 8-point curves in the
»Helicopter mixers« menu, you can safely skip the
following description.
Programming details
The control curve is defi ned by up to 8 points,
known as "reference points". In the default software
confi guration, 2 reference points are already defi ned,
namely only the two end-points, "L" and "H"; see the
next screen image.
The following section applies to "any" mixer to which
we wish to assign a non-linear curve characteristic.
The examples shown in the following section
are merely illustrative, however, and they do not
represent real-life mixer curves.
Setting reference points
When you move the transmitter control assigned to
the mixer input – here control function 8 – a vertical
line in the graph follows the movement between the
two end-points. The current control position is also
shown numerically on the "Input" line. The point at
which this line intersects with the curve in question
is named the "Output" and can be varied between
-125 % and +125 % by setting reference points; see
further below. This control signal acts on the mixer
output.
In the above example, the transmitter control is on
input 8 at -50 % of control travel. The output signal
continue to show 0 %, however, since no value has
yet been entered.
Up to six additional reference points can be set
between the two end-points "L" and "H", although the
distance between neighboring reference points must
not be less than approx. 25 %.
Curve MIX 9
Curve
off Point
Output
Input –50%
0%
?+
–
100
¼O U T P U T
0%
810
When you now briefl y tap the center SET key of the
right touch pad, the "?" is replaced by a point number
and the value fi eld to the right is activated, i.e.
presented in inverse video:
Curve MIX 9
Curve
off Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
810
1
Using the selection keys on the right touch pad you
can now change the point value within a range of
±125 %, e.g.::
Curve MIX 9
Curve
off Point
Output
Input –50%
+50%
1+
–
100
¼O U T P U T
+50%
810
1
Note:
If the joystick does not coincide with the exact
reference point, please note that the percentage
value on the "Output" line always relates to the
current joystick position.
Continue in this way to set other reference points.
Note that the order in which you generate the
(maximum) four reference points between end-points
"L" and "H" is irrelevant, since the reference points
are continuously renumbered automatically from left
to right as they are entered.
Erasing reference points
To erase one of the reference points between "L"
and "H", use the transmitter control in question
to move the vertical line onto or into the vicinity
of the reference point in question. The reference
point number and associated reference point value
* N.N. = Nomen Nominandum (the name to be stated)
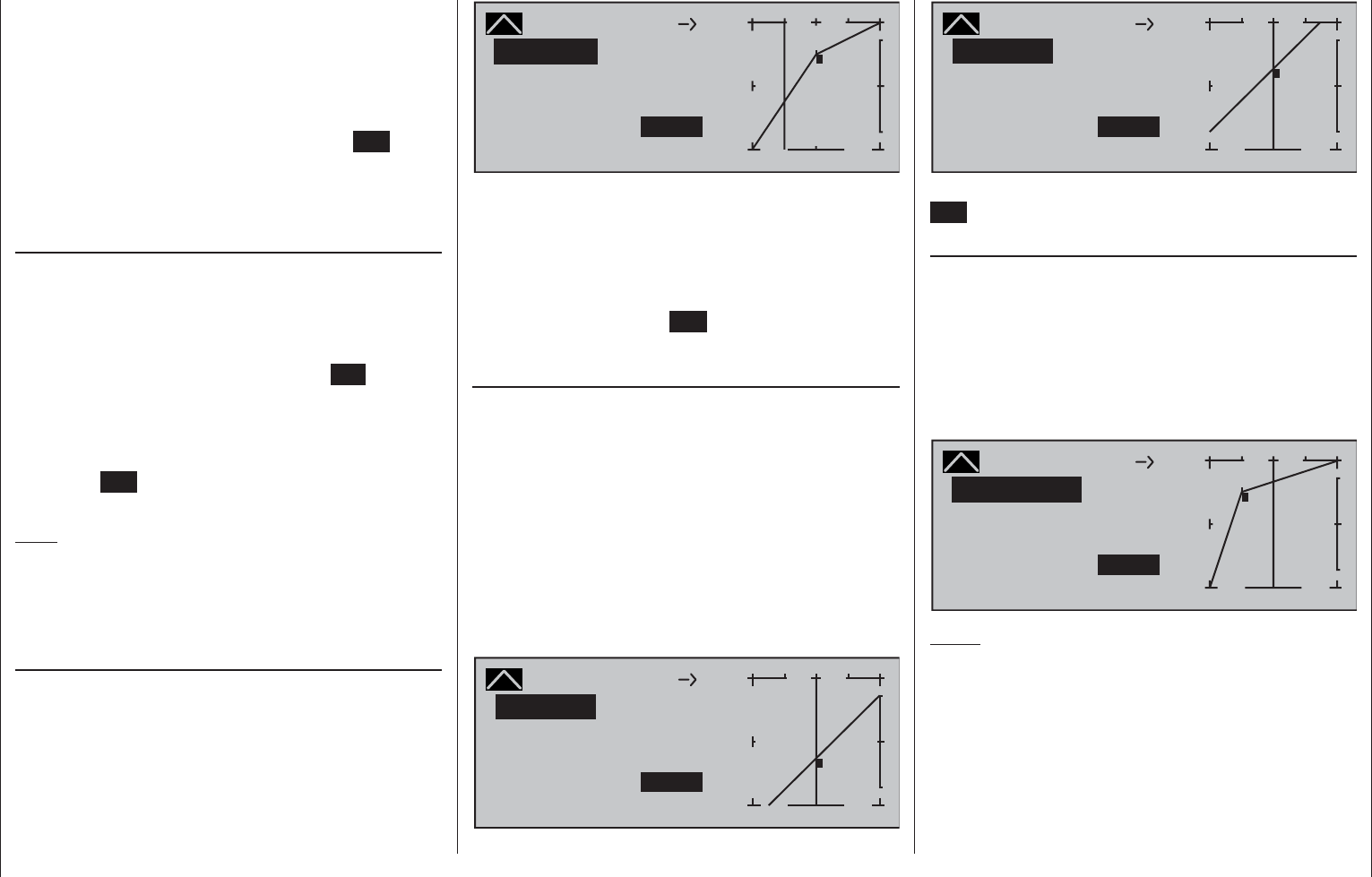
200 Detail program description - Free mixers
are shown on the "Point" line. The value fi eld is
highlighted, see screen image above.
Now tap the two selection keys cd or ef on the
right touch pad at the same time (CLEAR).
The selected reference point is erased, and the
numbering of the remaining reference points is
updated as required. Briefl y tap the center ESC key
of the left touch pad to complete the procedure.
Note that the reference points "L" and "H" cannot be
erased.
Changing reference point values
To change reference point values, use the associated
transmitter control to move the vertical line onto
the point you wish to change: "L", 1 … 6 or "H".
The number and current curve value of this point
are displayed. After activating the value fi eld on the
"Point" line by briefl y tapping the center SET key, use
the selection keys on the right touch pad to change
the current curve value shown in the highlighted fi eld.
The possible range is -125 % to +125 % and changes
do not affect neighboring reference points. Briefl y tap
the center ESC key of the left touch pad to complete
the procedure.
Note:
If the joystick does not coincide with the exact
reference point, please note that the percentage
value on the "Output" line always relates to the
current joystick position.
Trim point function
Alternatively, a jump up or down to reference
points already set, L, 1 … max. 6 and H, can be
accomplished by using the ef selection keys on the
left touch pad. The selection keys on the right touch
pad can then be used to change the reference point
jumped to as described above, entirely independently
of the control position.
Curve
off Point
Output
Input –50%
–25%
1+
–
100
¼O U T P U T
+50%
Normal
Trim point
Curve MIX 9 810
1
In this simple example, slider control
SD1 – represented by the vertical line – is halfway
between the forward limit and the midpoint of control
travel (input = -50 %). However, "Point 1" will be
relocated to control center at a point value of +50 %,
resulting in a momentary output value of -25 %.
One touch on the center ESC key of the left touch
pad will terminate this trim point function.
Trim offset function
When a value fi eld is active, i.e. in inverse video, it is
not only possible, as previously described, to jump
up or down to reference points already set with the
ef selection keys of the left touch pad and to make
a change with the selection keys of the right touch
pad, but also an existing curve can be vertically
repositioned within a range of ±25 % through use of
the cd keys on the left touch pad. Starting with a
point value for "Point 1" at 0 %, the control curves
in both of the following fi gures have been vertically
shifted within the ±25 % range by the trim offset
function:
Curve
off Point
Output
Input 0%
–25%
1+
–
100
¼O U T P U T
–25%
Normal
Trim offset
Curve MIX 9 810
1
Curve
off Point
Output
Input 0%
+25%
1+
–
100
¼O U T P U T
+25%
Normal
Trim offset
Curve MIX 9 810
1
You can also exit this function by tapping the center
ESC key of the left touch pad.
Trim x-axis function
This function is activated by tapping the left (e) or
right (f) selection key of the right touch pad with
an active (i.e. inverse video) value fi eld. You can
then use the selection keys on the right touch pad to
reposition the active point horizontally or vertically as
you wish. In the fi gure below, "Point 1" which was just
shifted to +50 % with the trim point function, will now
be shifted to the left:
Curve
off Point
Output
Input 0%
+67%
?+
–
100
¼O U T P U T
+50%
Normal
Trim X-axis
Curve MIX 9 810
1
Notes:
If the point is repositioned horizontally further •
away from the current control position than
approx. ±25 %, a "?" sign will reappear in the line
Point. This question mark does not refer to the
repositioned point, however: instead, it signifi es
that a further point can be set at the current
control position.
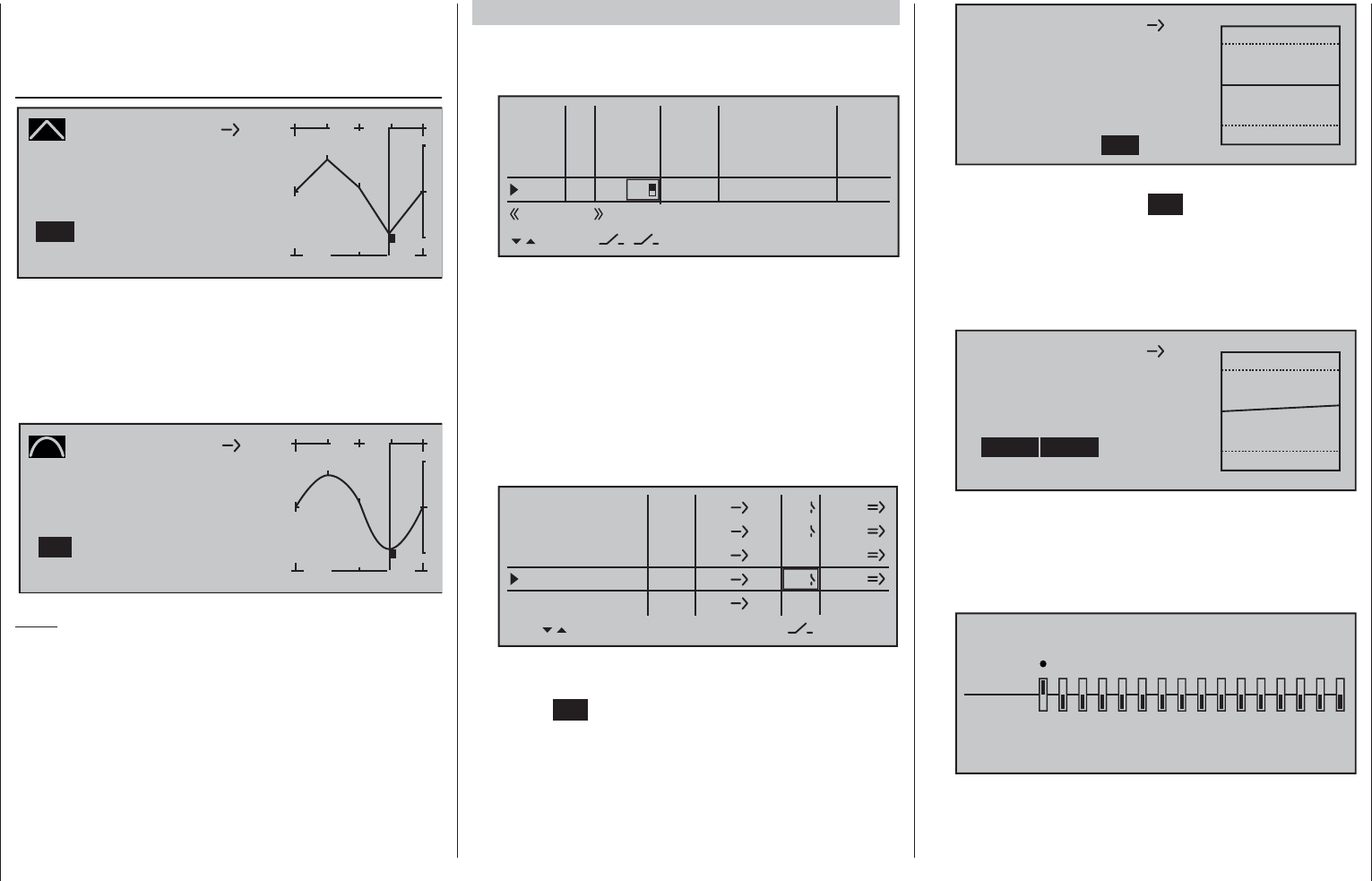
201
Detail program description - Free mixers
Please note that the percentage value on the •
"Output" line always relates to the current joystick
position and not to the position of the point.
Smoothing the curve
Curve MIX 9
Curve
Point
Output
Input +50%
–75%
3+
–
100
¼O U T P U T
2
–75%
810
1
off 3
This "angular" curve profi le created in the example
can be smoothed automatically simply by pressing a
button. Do this – from a situation as illustrated – with a
brief tap on the d selection key of the left touch pad.
This will result in a switchover from "(Curve) off" to
"(Curve) on" (or vice versa):
Curve MIX 9
Curve
Point
Output
Input +50%
–75%
3+
–
100
¼O U T P U T
–75%
810
on
2
1
3
Note:
The curves shown here are for demonstration
purposes only and are not at all representative of real
mixer curves. For real-world application examples, see
the programming examples on pages 274 and 313.
Examples:
To open and close an aero-tow, a switch, e.g. SW 1.
2, has already been assigned to control channel 8
in the »Control adjust« menu:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
fr
---
---
---
Offset
GL
---
Normal
2
Subsequent aero-tow fl ying has proven that you
always have to fl y with the up-elevator held slightly
in during the tow. The solution will be to set up a
mixer that applies slight up-elevator trim to the
elevator servo connected to receiver output 3 when
the aero-tow release is closed. The screen-shot will
be familiar from page 194: here, the fourth linear
mixer has been set up for this function, with the
switch channel "S" as mixer input: Move the selected
switch to the OFF position and then switch …
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
2
off
off
off
… to the mixer confi guration page.
Here select STO under "Offset" then tap the
center SET key of the right touch pad briefl y …
depending on the selected travel setting in the
»Control adjust« menu and the switch setting,
the offset value will jump to +X % or -X %, for
example:
S
Mix input
0%
Offset
EL
Linear MIX 4
0%
SYM ASY STO
–100%
SET
Now change left to SYM under "Mixer ratio" then
tap briefl y on the center SET key of the right touch
pad. The value fi elds are now highlighted. After
you have moved the selected switch to the mixer
ON position, use the selection keys on the right
touch pad to set the required symmetrical mixer
ratio, for example:
S
Mix input Offset
EL
Linear MIX 4
SYM ASY STO
–100%
SET
+10% +10%
2. If a multi- fl ap wing featuring a "crow or butterfl y
system" with (additional) airbrakes is intended,
and this brake system is to be tested with and
without airbrakes, then simply set channel 1 to
"MIX-only" …
MIX ONLY CHANNEL
MIXonly
normal
1234567 8 9 10111213141516
… and follow this by programming a free mixer
"C1 ¼ C1" to restore control over the airbrakes
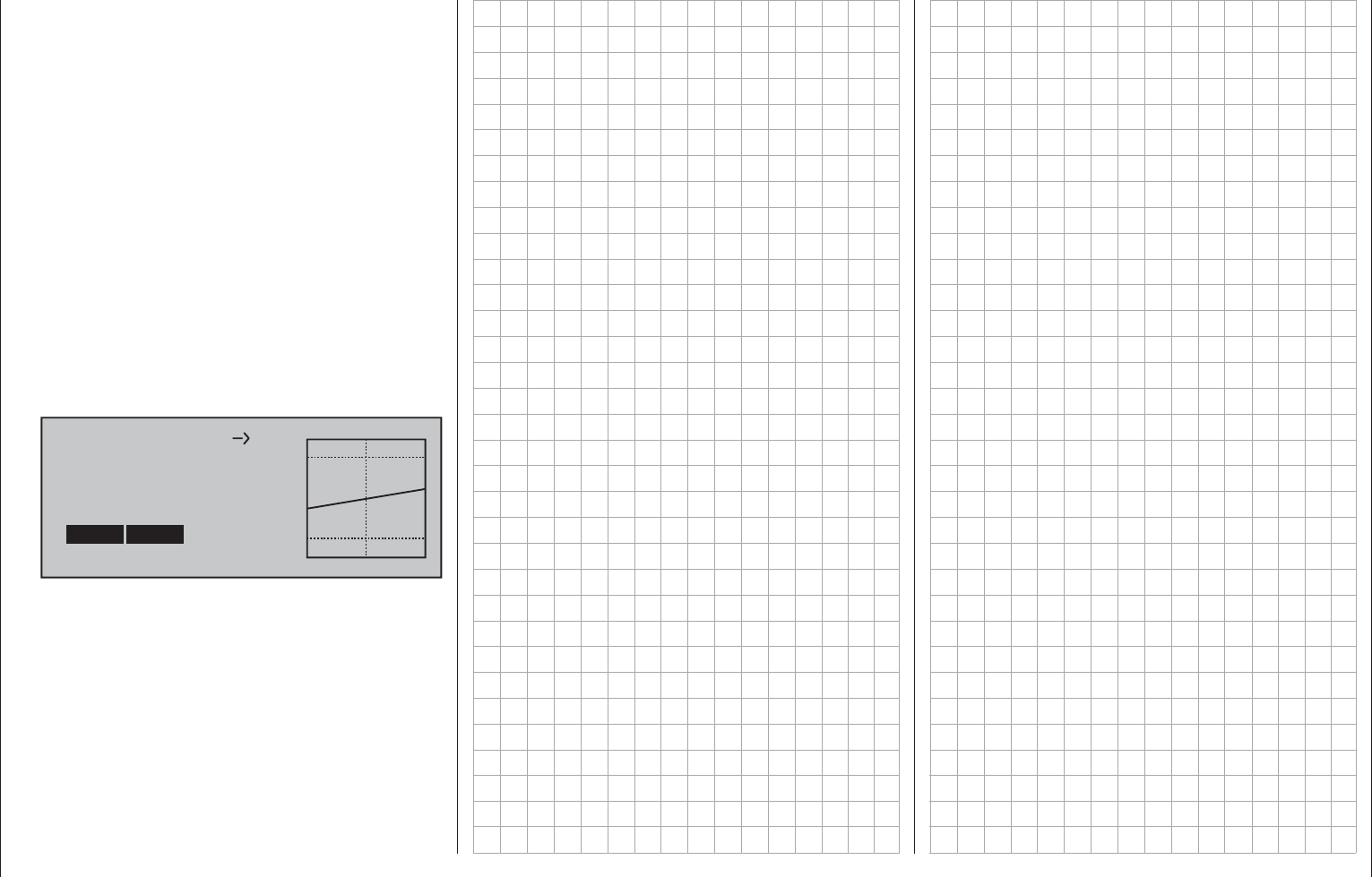
202 Detail program description - Free mixers
via servo 1. If you also assign a switch to this
mixer, then you will be able to switch this mixer on
and off as you please.
3. The fi nal example applies to model helicopters:
In the helicopter program, if you wish affect pitch
trim with a proportional control, e.g. one of the
slider controls in the middle of the console, then
assign one of these controls to this function in
the »Control adjust« menu; for example the
"I9" input. (However, leave the default value
of "GL" in the "Type" column as it is so this
confi guration, analogous to the free mixer yet to
be programmed, will be applicable globally for all
fl ight phases.) Finally, simply defi ne a LinearMIX
"9 ¼ 1" with a symmetric mixer ratio of, for
example, 25 %. Due to the internal coupling, this
transmitter control then acts equally on all of the
model's collective pitch servos without affecting
the throttle servo.
9
Mix input Offset
1
Linear MIX 5
SYM ASY STO
0%
SET
+25% +25%
Decouple the assigned transmitter control from
control channel 9 in the »MIX-only channel«
menu to ensure that any servo connected to
receiver output 9 can no longer be operated by
this transmitter control; see also page 205.
203
For your notes
204 Detail program description - MIX active/phase
MIX active/phase
Selecting mixers for fl ight phases
Using the selection keys on the left or right touch pad,
page to the menu option …
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX only channel
Channel 1 curve Switch display
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option.
LinearMIX 1
LinearMIX 2
LinearMIX 3
6EL
C1 EL
LinearMIX 4
3 8
SEL
yes
SEL
yes
yes
yes
MIX ACTIVE IN PHASE
The "free mixers" on the previous menu can be
enabled and disabled for specifi c fl ight phases.
You therefore have complete freedom in assigning
specifi c mixers only to specifi c fl ight phases.
Switch to your chosen fl ight phase and use the
selection keys to page through this menu. The mixers
on the »Free mixers« menu are displayed in the
center column.
Following the activation of the value fi eld by briefl y
tapping the center SET key of the right touch pad,
if the respective mixer is set to "no" by using the
selection keys on the left or right touch pad, then this
mixer is deactivated in the fl ight phase shown at the
bottom of the display and, simultaneously, removed
from the »Free mixers« menu list:
LinearMIX 1
LinearMIX 2
LinearMIX 3
6EL
C1 EL
LinearMIX 4
3 8
SEL
yes
SEL
yes
yes
MIX ACTIVE IN PHASE
no
If a mixer is "lost" in the »Free mixers« menu …
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
EL
S
??
??
––––
LinearMIX 2
LinearMIX 4
LinearMIX 5
LinearMIX 6
to Adjust
4
C4
7
off
off
off
??
??
––––
… then you should either switch through the fl ight
phases until it appears again … or, alternatively,
switch to this menu and temporarily reactivate the
mixer you are looking for:
EL
LinearMIX 1
type
6
from – Begr. +
EL
C1
8
3
EL
S
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
4
C4
7
off
off
off
205
Detail program description - MIX-only channel
MIX-only channel
Separating control functions from control channels for all fl ight phases
Using the selection keys on the left or right touch pad,
page to the menu option …
Control switch Logical switch
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX only channel
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
MIX-only channel Dual mixer
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option.
MIX ONLY CHANNEL
MIXonly
normal
1234567 8 9 10111213141516
This menu can be used to interrupt the normal signal
fl ow between the input side control function and the
output side control channel, therefore the "classic"
control-to-servo connection is actually separated.
Use the potential offered by this fl ight phase
independent menu, particularly to keep one of the
control channels "free" in all fl ight phases from
assignment to a transmitter control or switch for
specifi c fl ight phases in the »Control adjust« menu.
Conversely of course, such a joystick, transmitter
control or switch "robbed" of its servo can still be
used freely as a control in other way – indeed even in
fl ight phase dependence – , refer to the programming
examples at the end of this section.
A joystick, transmitter control or switch robbed of its
servo by setting the channel to "MIX only" will then
namely affect mixer inputs only …
… and the servo connected to a channel set to
"MIX only" is then also only accessible from the
mixers programmed to its control channel, i.e. "(with)
MIX(ers) only".
Accordingly, for any channel set to "MIX only", you
can utilize both its control function and its control
channel entirely independently of one another for any
special functions you need; see the examples at the
end of this section.
Use the selection keys on the left or right touch pad
to select the desired channel from 1 to 16 ( ) then
briefl y tap the center SET key of the right touch pad,
to switch at will between "normal" ( ) and "MIX only"
() modes:
MIX ONLY CHANNEL
MIXonly
normal
1234567 8 9 10111213141516
Examples:
For model glider aircraft without airbrakes, the •
butterfl y function (page 172) is generally used as a
landing aid. Just as with "normal" airbrakes, this is
generally controlled using the C1 stick. While the
(airbrakes) servo typically connected to channel 1
is then generally absent as a rule, receiver output
1 is still not "free", since the control signal of the
brake stick is still present at this location.
Its control signal – which in this specifi c case is not
desired – can be decoupled from control channel
"1" to thus "free up" this channel from the C1
joystick signal by setting channel 1 to "MIX only"
in the »MIX-only channel« menu. This makes
it possible to use control channel "1", together
with receiver connection "1", at any time for other
purposes, via freely-programmable mixers – e.g.
to connect up a speed controller.
If your model has built-in airbrakes, however, and •
you would like to perhaps test the performance
of a butterfl y system with and without airbrakes,
simply set channel 1 to "MIX only" and program a
free mixer "C1 ¼ C1", so as to restore your ability
to control the airbrakes via servo 1. If you also
assign a switch to this mixer, then you will be able
to switch this mixer on and off as you please.
206 Detail program description - Dual mixers
Dual mixers
Same-sense/opposite-sense mixing of two control channels
Using the selection keys on the left or right touch pad,
page to the menu option …
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Control switch Logical switch
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
MIX-only channel Dual mixer
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option.
Diff.
DUAL MIXER
Mixer 1
Mixer 2
?? ??
Mixer 3
Mixer 4
?? ??
?? ??
?? ??
0%
0%
0%
0%
The four fl ight phase independent dual mixers couple
a V-tail mixer in a similar manner …
33
4
Servo 4,8 V
C 577
Best.-Nr. 4101
Servo 4,8 V
C 577
Best.-Nr. 41 01
4
V-tail mixer
Control function inputs
Control channels
(receiver outputs)
Elevator stick
Rudder stick
Right rudder / elevator
Left rudder / elevator
Rudder
Elevator
Elevator
Rudder
Rudder
Elevator
… a same-sense "cc" and an opposite-sense
"cd" control function, although they permit any
channel to be used and offer differential travel for the
opposing function.
Important notice:
Since the same and opposite sense infl uences
of the given input on the two servos or rudder
fl aps – coupled to one another by the dual mixer – are
determined by, among other things, their installation
situation and the direction of rotation specifi ed in
the »Servo adjustment« menu, the symbols "cc"
and "cd" are to be perceived more as synonyms
rather than as consistently appropriate defi nitions!
Accordingly, if wing fl aps are defl ected in the wrong
direction, simply swap the two inputs or use the
"servo reverse" option in the »Servo adjustment«
menu; see page 102.
In the software, the V-tail mixer already mentioned is
supplemented by other "dual mixers" for realization
of the two aileron servos on receiver outputs 2 and
5 and for the fl ap pairs on outputs 6 and 7, possibly
also 9 and 10. These are activated via the aileron
stick and the transmitter control that has been
assigned to input "6" on the »Control adjust« menu.
In the same way, the four freely-programmable
dual mixers on this menu can be used to couple
two further control functions, a feature that would
otherwise only be possible with time-consuming
programming of free mixers.
Here, we will use a "V-tail with rudder differential" as
our example to explain the programming of a dual
mixer (see also the examples on page 286):
Diff.
DUAL MIXER
Mixer 1
Mixer 2
EL RU
Mixer 3
Mixer 4
?? ??
?? ??
?? ??
+25%
0%
0%
0%
Depending on activation, both servos move in the
sense of elevators or rudder fl aps. The differentiation,
according to dual mixer confi guration, is only effective
for rudder activation. In this case, both corresponding
trim wheels are effective. No additional free mixers
are required for this arrangement. When using this
mixer, however, the tail type MUST be entered as
"normal" on the "Model type" menu.
Tip:
All settings can be checked directly in the »Servo
display« menu, which can be accessed from almost
any other menu by simultaneously tapping the ef
keys on the left touch pad.
Example:
Model with two rudders, with differential travel and
outward movement (e.g. swept-back fl ying wing):
207
Detail program description - Dual mixers
Diff.
DUAL MIXER
Mixer 1
Mixer 2
8 RU
Mixer 3
Mixer 4
?? ??
?? ??
?? ??
+75%
0%
0%
0%
When a rudder command is given, the second servo
connected to output 8 follows suit. (With this type of
programming, differential travel can be confi gured
for the rudders.) In this case, too, trim from the
rudder stick affects both servos. If the rudders are
also required to defl ect outwards when the airbrakes
are activated, then you should assign the C1 stick
(transmitter control 1) to input 8 on the »Control
adjust«" menu. Afterwards, change to the "Offset"
column then modify the offset value until both
rudders are again in their neutral positions. It may
be necessary to "play" a bit with the offset and travel
adjustments.
208 Detail program description - Swashplate mixer and Fail-safe
Using the selection keys on the left or right touch pad,
page to the menu option …
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free Mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option:
SWASH MIXER
Pitch
Roll
Pitch ax.
+61%
+61%
+61%
SEL
Note:
If "1 servo" is selected on the "Swashplate" line of the
»Helicopter type«" menu, this option is not shown on
the multi-function menu.
The number of servos installed in your helicopter for
pitch control was established in the Swashplate line
of the »Helicopter type« menu, see page 98. This
information is used to automatically couple together
the functions for roll, pitch-axis and collective pitch,
so that you do not need to defi ne any other mixers
yourself.
For helicopter models with only a single collective
pitch servo, this "Swashplate mixer" menu option is of
course superfl uous because the software controls a
total of three swashplate servos for pitch, nick and roll
independently of one another, i.e. without a mixer. In
Swashplate mixer
Collective pitch, roll, pitch-axis mixer
this scenario, this menu option is therefore no longer
available to you from the multi-function menu. With
all other swashplate linkages employing 2 … 4 pitch
servos, mixer ratios and mixer directions are set up
by default as shown above. The default is +61 % in
each case but the value can be varied from -100 % to
+100 % if required by briefl y tapping the center SET
key of the right touch pad and its selection keys.
Simultaneously tapping both cd or ef selection
keys on the right touch pad (CLEAR) will reset the
mixer ration in inverse video again to the +61 %
default value.
If the swashplate control system (collective pitch,
roll and pitch-axis) does not respond to the joysticks
properly, you should alter the mixer directions
("+" or "-") before trying to correct the directions
of servo rotation.
Note:
Ensure that changed mixer values do not result in the
servos mechanically striking their end-stops.
Using the selection keys on the left or right touch pad,
page to the menu option …
Phase settings Phase assignment
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Phase settings Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free Mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
… on the multi-function menu. Briefl y tap the center
SET key of the right touch pad to open this menu
option:
FAIL SAFE
Pos
hold
1234567 8 9 10111213141516
DELAY : 0.25s STO
The higher level of operating safety exhibited by
the HoTT system when compared to traditional
PPM technology results from the fact that the
microprocessor built into the HoTT receiver not only
exclusively processes the signals of "its" transmitter,
but can also clean up "dirty" control signals that it
receives. Only when these signals become too error-
prone or garbled due to outside interference does the
processor automatically replace the disrupted signals
Fail-safe
Fault condition setpoints
209
Detail program description - Swashplate mixer and Fail-safe
with the last received correct signal, temporarily
stored in the receiver. This feature is confi gured by
the settings as described below. This feature also
suppresses brief interference caused by e.g. local
drops in fi eld strength, which otherwise result in the
familiar "glitches". In this case, the red LED lights up
on the receiver.
If you have selected a PCM transmission mode for
the active model memory but have not yet carried
out the fail-safe programming, you will see a warning
message on the screen when you switch on the
transmitter:
Fail Safe
setup
t.b.d.
Programming procedure
The "Fail Safe" function determines the behavior of
the receiver if communication between the transmitter
and the receiver is disrupted. Receiver outputs 1 …
16 can optionally …
preserve the current position ("hold"):1.
if communication is disrupted, all servos
programmed to "hold" mode remain at the
positions judged to be the last valid positions by
the receiver until the receiver picks up another
valid control signal, or
move to a freely selectable position ("Pos") if 2.
interference should occur, following the expiry of
the "time delay".
Use selection keys ef on the left or right touch pad
to select the desired servo connection 1 bis 16 ( )
then briefl y tap the center SET key of the right touch
pad to freely switch between "hold" ( ) and "Pos"
mode ( ):
FAIL SAFE
Pos
hold
1234567 8 9 10111213141516
DELAY : 0.25s STO
Following this, use the selection keys ef on the left
or right touch pad to select the "DELAY" option shown
at the bottom of the display …
FAIL SAFE
Pos
hold
1234567 8 9 10111213141516
DELAY : 0.25s STO
… and then briefl y tap the center SET key of the right
touch pad. Now use the touch pad's selection keys to
make your choice from the four possible time delays
(0.25 s, 0.5 s, 0.75 s and 1 s) offered.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will reset the inverse
video fi eld to its default value 0.25 s.
Afterwards, select the STO fi eld at the bottom right
of the display with the ef selection keys on the left
or right touch pad. Now put the servos which have
been switched into position mode into their desired
positions SIMULTANEOUSLY with the respective
operating elements.
Briefl y tap the center SET key of the right touch
pad to store these positions as the fail-safe setting
for the receiver, so that it can revert back to them if
interference is experienced.
Successful storage of the positions is confi rmed
briefl y on the screen:
FAIL SAFE
Pos
hold
1234567 8 9 10111213141516
DELAY : 0.25s STO
Position stored
Attention:
Please note that decisive fail-safe settings are •
stored in the receiver! Therefore, following a
change of receivers, these fail-safe settings
should be renewed and in the previous
receiver they should be erased, if necessary
per Reset, see page 46.
Ensure you make use of this safety net by •
at least programming the following for a fail-
safe incident: for glow-powered models, set
the motor throttle position to idle; for electric
models, set the motor function to stop, or
"Hold" for helicopter models. If interference
should occur, the model is then less likely
to fl y off on its own and cause damage to
property or even personal injury. Consider
asking an experienced pilot for advice.
210 Detail program description - Teacher/pupil
Teacher/pupil
Connecting two transmitters for trainer mode with a trainer lead
The mc-20 HoTT transmitter is equipped
standard – as viewed from the front, under the left
front fl ap – with a DSC socket. This is not only usable
for connecting fl ight simulators – as described on
page 22 – but also to integrate the transmitter into a
cable-coupled teacher/pupil system.
To accommodate the settings necessary for this,
scroll with the selection keys on the left or right touch
pad to the »Teacher/pupil« menu option in the
Multifunction menu:
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Briefl y tap the center SET key of the right touch pad
to open this menu option:
TRAINER /student
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
Note:
The screen image shown above shows the menu
in its initial state: No transmitter controls have been
released by the pupil ( ) and no switch is assigned
("SW: ---" bottom left in the screen image).
When assigning control functions, the usual
conventions must be observed:
Channel Function
1 Motor throttle/collective pitch
2 Aileron/roll
3 Elevator/pitch-axis
4 Rudder/tail rotor
Teacher-pupil settings
Up to twelve function inputs (see "Term defi nitions"
on page 54) of the teacher transmitter "T" can be
individually or in any combination transferred to the
pupil transmitter "P".
The lower display line, designated with "T", therefore
indicates the function inputs with which control
functions 1 … 4 (joystick functions for fi xed-wing and
helicopter models) are permanently connected as
well as inputs 5 … 12, which can be freely assigned
in the »Control adjust« menu.
Note:
Just which controls are assigned to any inputs turned
over to the pupil is basically of no consequence.
However, their assignment in the »Control adjust«
menu is possible only when the trainer mode
connection is inactive.
Use the ef selection keys of the left or right touch
pad to select the function inputs 1 through 12 for
transfer to the pupil( ) then briefl y tap center SET
key of the right touch pad for each switch to be
switched between "T(eacher)"( ) and "P(upil)" ( ):
TRAINER /student
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
To be able to carry out the transfer, you must then
assign a trainer mode switch on the left of the display.
Do this by placing the marker just to the right of
the "P"at the bottom left of the screen display by
using the selection keys of the left or right touch pad
then assign a switch as described in the section
"Assigning transmitter controls, switches and control
switches" on page 56.
Preferably you should utilize one of the two standard
momentary switches on the switchboard to allow
a return of control to the teacher transmitter at any
time.
TRAINER /Teacher
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
–
No
pupil
signal
Since at this early stage of programming a trainer
system it is unlikely that an operational pupil
transmitter is connected to the teacher transmitter,
the transmitter responds immediately to the switches
closed during the switch assignment process with
appropriate visual and audible warning notices. You
should therefore re-open the switch you have just
assigned:
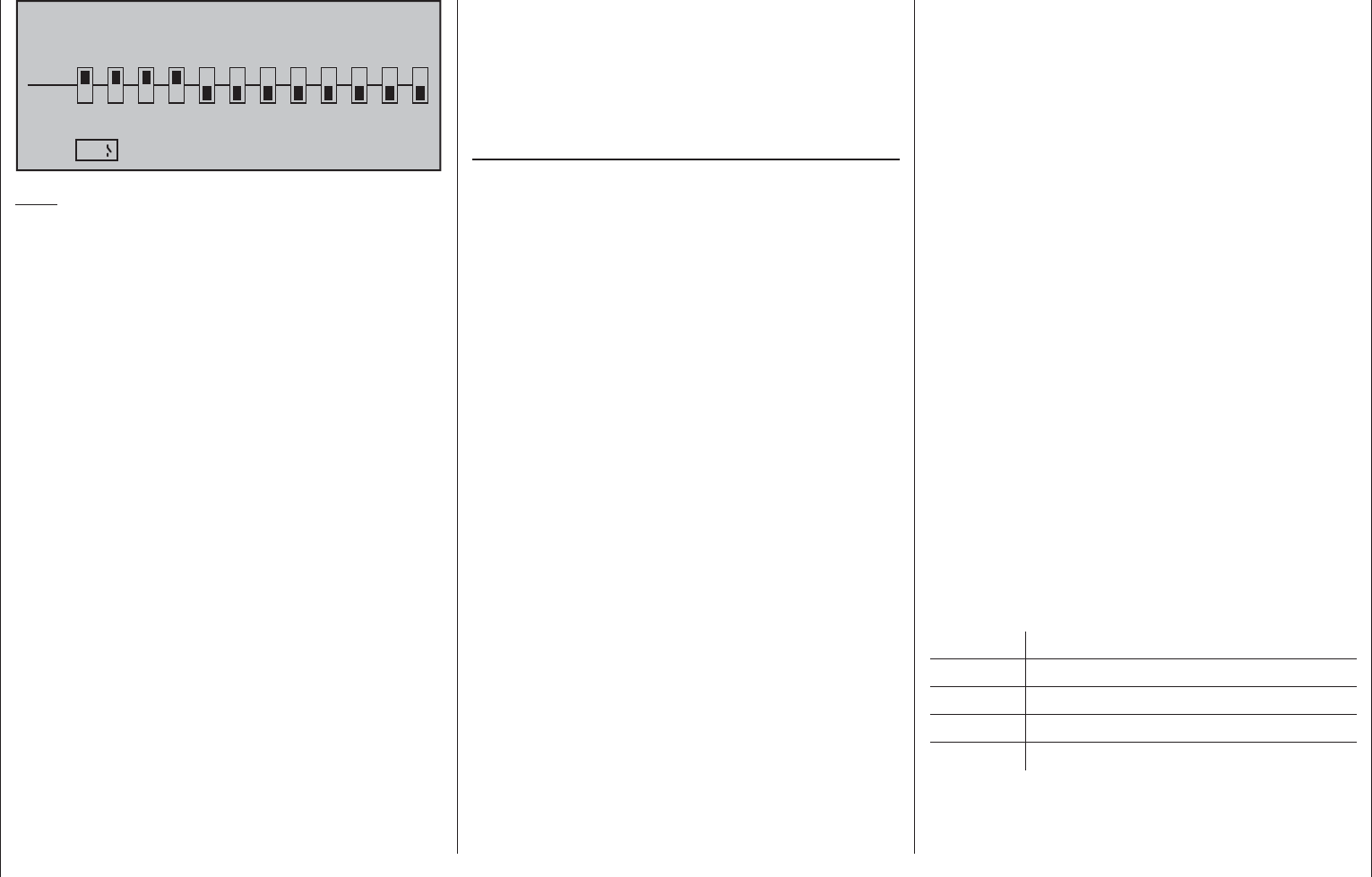
211
Detail program description - Teacher/pupil
TRAINER /Teacher
P
T
2345
BIND:
SW:
1
n/a
678910
11 12
9
Ä
Note:
The switch assignment just described also
determines the transmitter used to issue the teacher
and pupil functions, respectively. For this reason, a
pupil transmitter must NEVER be assigned a switch
on this menu. The header line therefore also
switches from "Teacher / Pupil" to "Teacher /
Teach" once a switch has been assigned.
The model to be controlled by the pupil must be
programmed completely – i.e. with all its functions
including trims and any mixer functions – in one of
the model memories of the mc-20 HoTT teacher
transmitter. The HoTT receiver of the model in
question must also be "bound" to the teacher
transmitter, since the latter ultimately controls the
model, even in pupil mode.
ALWAYS ENSURE YOU SWITCH ON THE mc-20
HoTT teacher transmitter FIRST BEFORE
PLUGGING THE CONNECTION CABLE INTO
THIS UNIT. Otherwise the RF module will not be
activated.
The mc-20 HoTT teacher transmitter can be
connected to any suitable pupil transmitter, even
transmitters using the "traditional" 35/40 MHz range.
This means, for example, that a mc-20 HoTT
teacher transmitter can indeed also be connected to
amc-24 pupil transmitter.
However, if the pupil-side connection is NOT made
via a two-pole DSC socket but rather via a three-
pole trainer socket (for example, out of the Graupner
product line), then the basic prerequisite for a
correct connection to a pupil transmitter which is
completely independent of the type of modulation
used in the teacher transmitter must ALWAYS be
set to modulation type PPM (10, 16, 18 or 24) in
the pupil transmitter.
Pupil transmitter set-up
The model to be controlled by the pupil must be
programmed completely, i.e. with all its functions
including trims and any mixer functions, in one
of the model memories of the teacher transmitter
and, if applicable, the HoTT receiver of the model
in question must also be "bound" to the teacher
transmitter. In principle, a mc-20 HoTT pupil
transmitter can also be connected to a teacher
transmitter operating on the "traditional" 35/40 MHz
bands. This is possible because the PPM signal
required by the teacher transmitter is available in the
(pupil) transmitter's DSC socket.
Almost any transmitter with at least four control
functions from previous and current Graupner series
can be used as a pupil transmitter. More detailed
information can be found in the RC main catalog and
on the www.graupner.de website.
If required, the pupil transmitter should be fi tted
with the connection module for pupil transmitters.
This is to be connected to the transmitter board in
accordance with the supplied installation instructions.
Information on the pupil modules required in each
case can be found in the Graupner RC main catalog
and on the www.graupner.de website.
The connection to the teacher transmitter is made
using the appropriate lead; see the following
double page.
The control functions of the pupil transmitter
MUST act directly on the control channels, i.e. the
receiver outputs, without intermediary mixers.
If you are using an "mc" or "mx" series transmitter,
it is best to activate a free model memory with the
required model type ("Fixed-wing" or "Heli"). Assign
the model name "Pupil" and set up the stick mode
(mode 1 … 4) and "Throttle min. forward/back" to suit
the pupil's preferences. All other settings are left at
their default values, however. If you have selected
the "Helicopter" model type, you must also set the
throttle/ collective pitch direction and idle trim on the
pupil transmitter. All other settings, including mixer
and coupling functions, are confi gured exclusively on
the teacher transmitter, which in turn transmits them
to the model.
If the pupil transmitter is a mx-20 HoTT or mc-20
HoTT series model then it may also be necessary
to adapt the type of modulation in the "DSC output"
line of the »Base setup model« menu in order to
accommodate the number of control channels to
be transmitted. For example, the signal packet for
modulation type "PPM10" contains only control
channels 1 … 5 but not channel 6. However, if this
channel is to be used by the pupil then a modulation
type must be selected in which it is included.
For transmitters of type "D" and "FM" it is necessary
to check servo operating directions and their control
correlations. It may be necessary to reconnect cables
appropriately. All mixers must also be switched off or
set to "zero".
When assigning control functions, the usual
conventions must be observed:
Channel Function
1 Motor throttle/collective pitch
2 Aileron/roll
3 Elevator/pitch-axis
4 Rudder/tail rotor
If other control functions are to be transferred to the
pupil transmitter in addition to the functions of the two
212 Detail program description - Teacher/pupil
dual axis sticks (1 … 4), access the »Control adjust«
menu in the pupil transmitter and assign those inputs
which correspond to enabled function inputs 5 …
12 as shown in the »Teacher/pupil« menu of the
teacher transmitter. Afterwards, assign the operating
elements appropriately.
Important:
If you should forget to assign a transmitter •
control on the pupil side, then the affected
servo or servos will remain in the center
position when the transfer is made to the pupil
transmitter.
The pupil transmitter must always be operated •
in PPM mode, regardless of the RF connection
type used between the teacher transmitter and
the model.
If the transmitter is connected using a DSC •
socket on the pupil side, ALWAYS leave the
pupil transmitter's On/Off switch in the "OFF"
position: this is the only way to guarantee
that no RF signal is sent from the pupil
transmitter's transmitter module, even after the
DSC lead has been plugged in.
Trainer mode operations
Both transmitters are connected to one another
using a suitable lead (see summary on next page):
The plug marked "M" (master) must be inserted
into the socket on the teacher transmitter, and the
plug marked "S" (student) into the pupil transmitter's
socket. (Note that not all leads may have such "M"
and "S" labeling.)
Important notices:
Check that the model aircraft is operational •
and check that all functions issue the correct
commands BEFORE setting up trainer mode.
The ends of the trainer lead, usually marked •
as either "S" or "M", terminate in a three-pole
TRS jack. Do not insert these jacks into a DSC
system socket, as it is not suitable for this
application. The DSC socket is exclusively
designed for cables with 2-pole TRS jacks.
Checking functionality
Activate the assigned trainer mode switch:
The trainer mode system is working properly if the •
display now changes from "¾ L" to "¾ S".
However, if the •WARNING LED at the right, next
to the transmitter's On/Off switch, blinks and
an acoustic signal sounds off at the same time,
then the connection between pupil and teacher
transmitters is faulty.
The basic display also displays the following
warning notice …
No
pupil
signal
… and the left side of the screen display for the
»Teacher/pupil« menu will change to show
"-Pupil". In this case, all control functions are
retained by the teacher transmitter automatically,
regardless of switch position: this ensures the
model is always under control.
Possible faults:
Pupil transmitter not ready•
Interface in pupil transmitter not correctly •
connected in place of the RF module
Cables connected wrongly: see right for cable •
connections
Pupil transmitter not switched over to PPM (10, •
16, 18, 24) mode
Other possible faults:
Teacher transmitter not properly "bound" to HoTT •
receiver in training model
Trainer cables
4179.1 for trainer operation between any two
Graupner transmitters equipped with DSC
sockets – distinguished by a two-pole TRS
jack at both ends.
3290.7 trainer cable for connecting a teacher
transmitter with DSC socket (e.g. mc-20
HoTT) or a transmitter retrofi tted with an
optional DSC module, order no. 3290.24) to
aGraupner pupil transmitter with an opto-
electronic system pupil socket – identifi able
by the mark "S" on the side of the three-
pole TRS jack.
3290.8 trainer cable for connecting a pupil
transmitter with DSC socket (e.g. mc-20
HoTT) or a transmitter retrofi tted with an
optional DSC module, order no. 3290.24)
to a Graupner teacher transmitter with an
opto-electronic system teacher socket –
identifi able by the mark "M" on the side of
the three-pole TRS jack.
Further details about the cables and modules
mentioned in this section for teacher and pupil
transmitters can be found in the respective transmitter
handbook, in the Graupner RC main catalog or in
Internet at www.graupner.de.
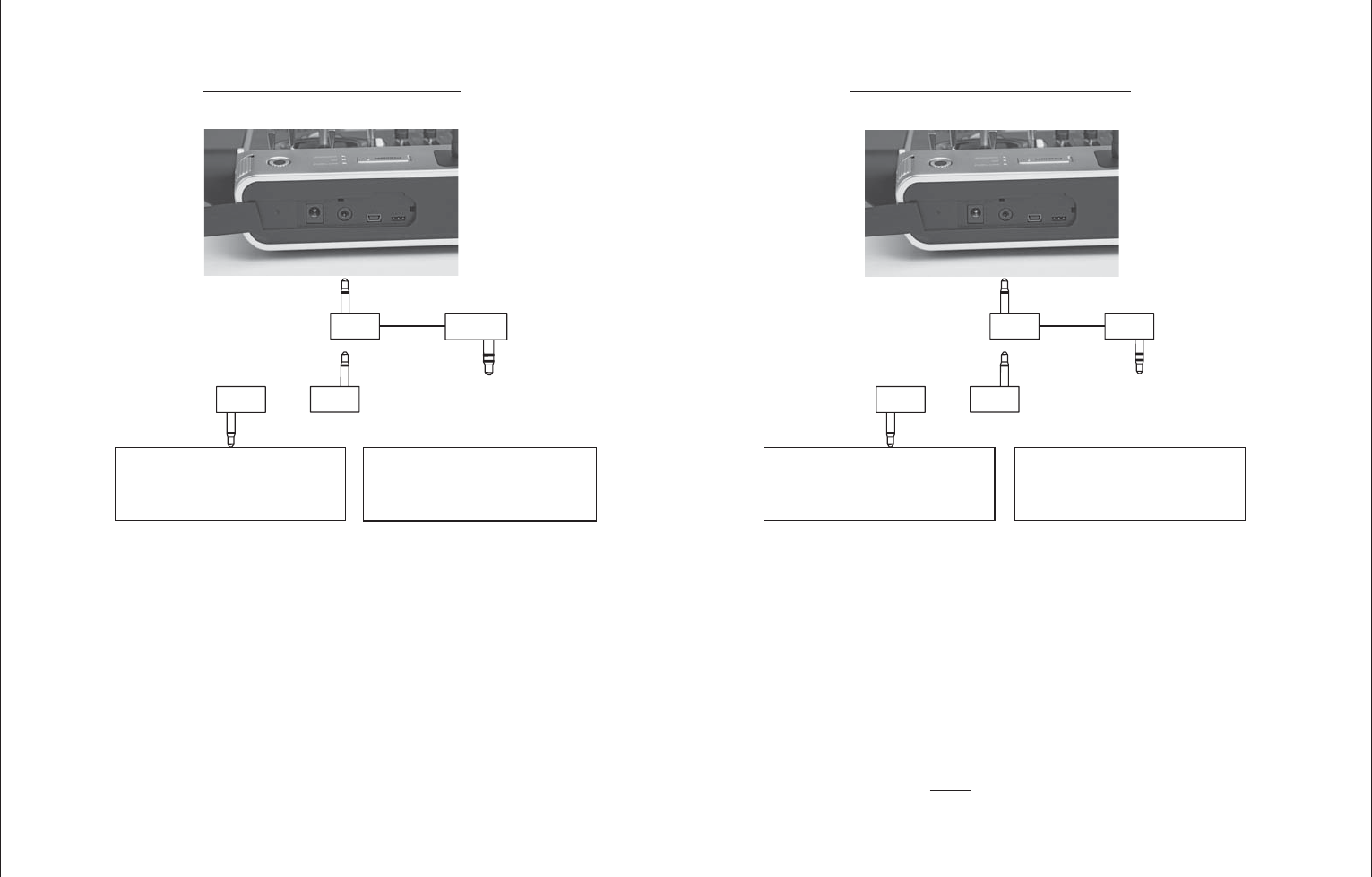
213Detail program description - Teacher/pupil
Trainer mode with the mc-20 HoTT transmitter
Due to the continuous improvements made to the product range, please consult our website at www.graupner.de for the latest information
Teacher transmitter
with DSC socket
Teacher transmitter with
teacher module, order
no. 3290.2, 3290.19, 3290.22
Teacher/pupil cable,
order no. 3290.8
M
Pupil transmitter mc-20 HoTT
mx-12 HoTT,
mx-16 HoTT,
mx-20 HoTT and
mc-20 HoTT
mc-19 through mc-24,
mx-22(iFS), mx-24s
Pupil transmitter
with DSC socket
Pupil transmitter with pupil
module, order no. 3290.3,
3290.10, 3290.33
D 14, FM 414, FM 4014,
FM 6014, mc-10 … mc-24,
mx-22(iFS), mx-24s
S
Teacher transmitter mc-20 HoTT
mx-12 HoTT,
mx-16 HoTT,
mx-20 HoTT and
mc-20 HoTT
Note:
The lists present the possible transmitters/transmitter
combinations at the time of going to press.
Teacher/pupil cable,
order no. 4179.1
Teacher/pupil cable,
order no. 3290.7
Teacher/pupil cable,
order no. 4179.1
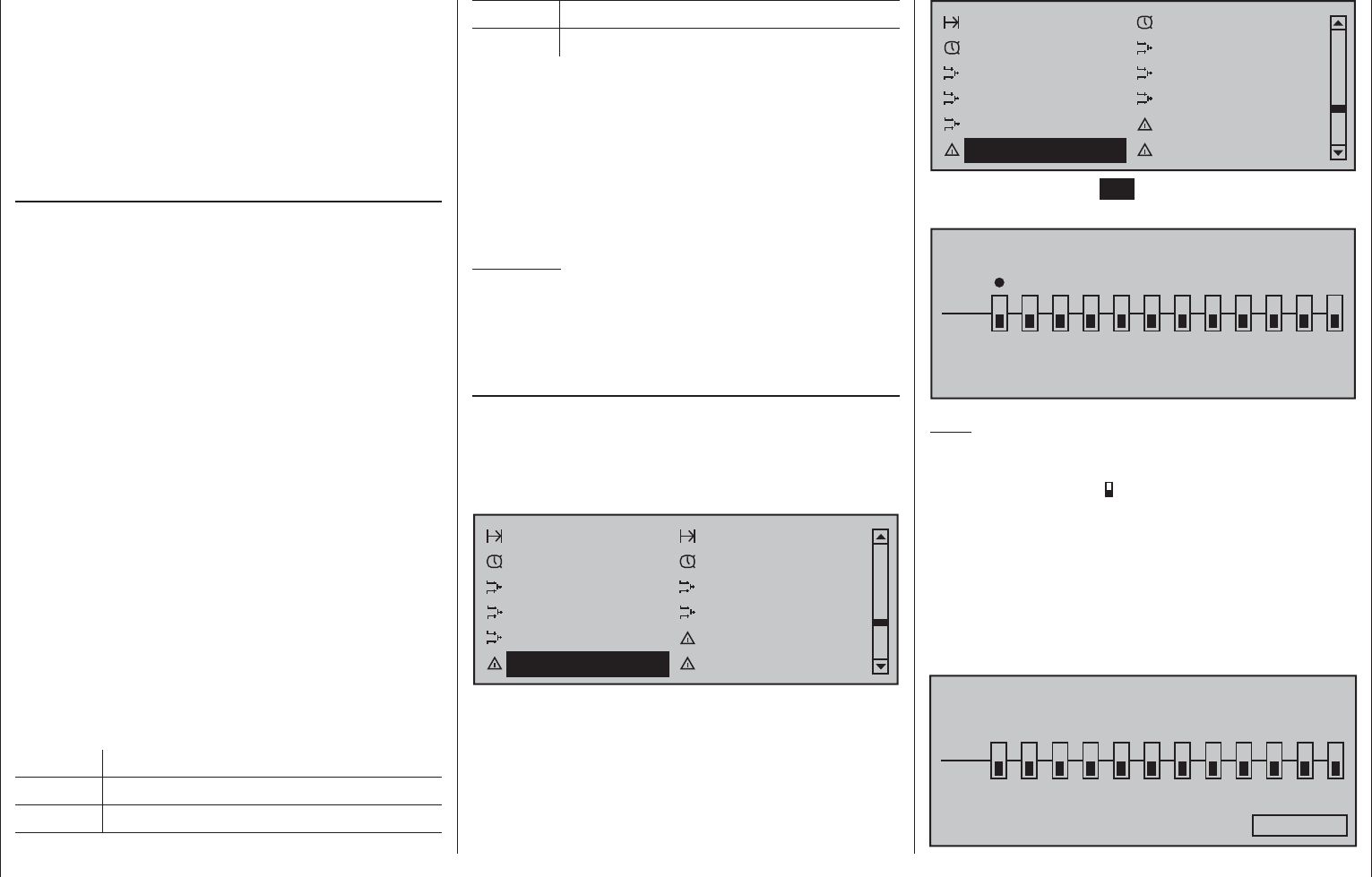
214 Detail program description - Teacher/pupil
Wireless HoTT system
Wireless operation of the mc-20 HoTT trainer
mode system is also possible. To do so, the teacher
transmitter must be "connected" to a pupil transmitter
as described below. Prior to this, however, the
training model's receiver must be bound to the PUPIL
transmitter. This confi guration is possible between
transmitters which have the "BIND:" option in the
»Teacher/pupil« menu.
Preparing for training mode
Teacher transmitter
The training model must be programmed completely,
i.e. with all of its functions including trims and any
mixer functions, in one model memory of the HoTT
teacher transmitter. The model to be used for
training must therefore be under the complete
control of the teacher transmitter. The fi nal step
in preparation, however, is to bind the training
model to the pupil transmitter. For a detailed
description of the binding process, please
consult pages 77 and 85.
Pupil transmitter
If you are using an "mc" or "mx" series transmitter,
it is best to activate a free model memory with the
required model type ("Fixed-wing" or "Heli"). Assign
the model name "Pupil" and set up the stick mode
(mode 1 … 4) and "Throttle (or collective pitch) min.
forward/back" to suit the pupil's preferences. All
other options are left at their default values. All other
settings, including all mixer and coupling functions,
are confi gured exclusively on the teacher transmitter,
which in turn transmits them to the model.
When assigning control functions, the usual
conventions must be observed:
Channel Function
1 Motor throttle/collective pitch
2 Aileron/roll
3 Elevator/pitch-axis
4 Rudder/tail rotor
If other control functions are to be transferred to the
pupil transmitter in addition to the functions of the two
dual axis sticks (1 … 4), access the »Control adjust«
menu in the pupil transmitter and assign those inputs
which correspond to enabled function or transmitter
control inputs 5 … 12 as shown in the »Teacher/
pupil« menu of the teacher transmitter. Afterwards,
assign the operating elements appropriately.
Important:
If you should forget to assign a transmitter
control on the pupil side, then the affected servo
or servos will remain in the center position when
the transfer is made to the pupil transmitter.
Preparing the teacher and pupil transmitters
Once you have bound the training model to the pupil
transmitter, now switch on the teacher transmitter. On
both transmitters, use the selection keys on the left or
right touch pad, page to the »Teacher/pupil« menu
option on the multi-function menu:
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Briefl y tap the center SET key of the right touch pad
to open this menu option:
TRAINER /student
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
Note:
The screen image shown above shows the menu
in its initial state: No transmitter controls have been
released to the pupil ( ) and no switch has been
assigned
("SW: ---" bottom left in the screen image).
Pupil transmitter
Use the selection keys on the left or right touch pad
to move the marker frame to the "BIND" input fi eld. If
there is a switch shown at the right of "S:" then this
must fi rst be erased, see screen image:
TRAINER /student
P
T
2345
BIND:
SW:
1
n/a
678910
11 12
Ä
–––
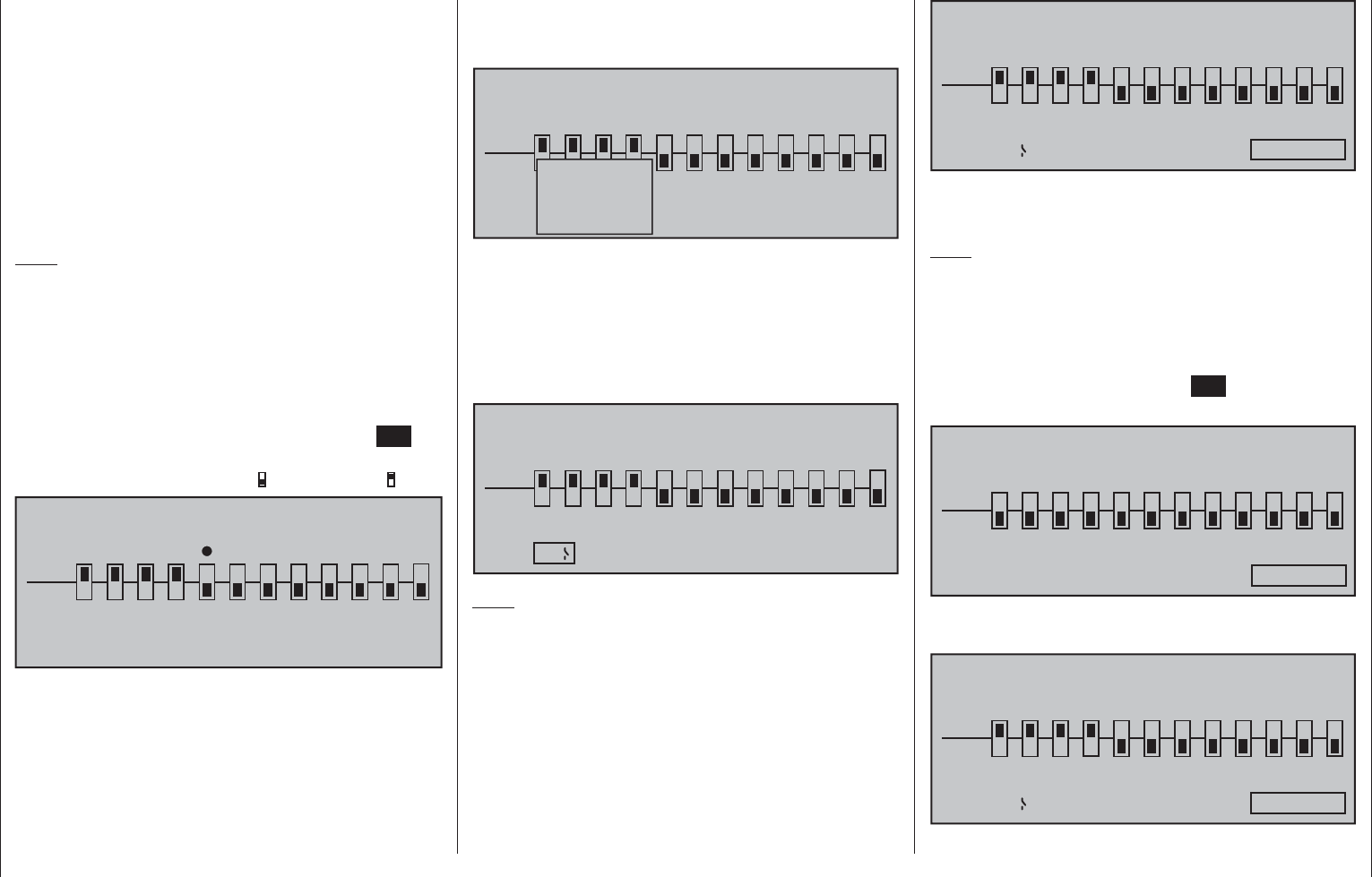
215
Detail program description - Teacher/pupil
Teacher transmitter
Up to twelve function inputs (see "Term defi nitions"
on page 54) of the teacher transmitter "T" can be
individually or in any combination transferred to the
pupil transmitter "P".
The lower display line, designated with "T", therefore
indicates the function inputs with which control
functions 1 … 4 (joystick functions for fi xed-wing and
helicopter models) are permanently connected as
well as inputs 5 … 12, which can be freely assigned
in the »Control adjust« menu.
Note:
Just which controls are assigned to any inputs turned
over to the pupil is basically of no consequence.
However, their assignment in the »Control adjust«
menu is possible only when the trainer mode
connection is inactive.
Use the ef selection keys of the left or right touch
pad to select the function inputs 1 through 12 for
transfer to the pupil ( ) then briefl y tap center SET
key of the right touch pad for each switch to be
switched between "T(eacher)"( ) and "P(upil)" ( ):
TRAINER /student
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
To be able to carry out the transfer, you must now
assign a trainer mode switch. Do this by placing the
marker frame just to the right of the "P" at the bottom
left of the screen display by using the selection keys
of the left or right touch pad then assign a switch
as described in the section "Assigning transmitter
controls, switches and control switches" on page 56.
Preferably you should utilize one of the two standard
momentary switches on the switchboard to allow
a return of control to the teacher transmitter at any
time:
TRAINER /Teacher
P
T
2345
BIND:
SW: –––
1
n/a
678910
11 12
–
No
pupil
signal
Since at this stage of programming the wireless
trainer system no connection yet exists to a pupil
transmitter, the transmitter responds immediately to
the switches closed during the switch assignment
process with appropriate visual and audible warning
notices. You should therefore re-open the switch you
have just assigned:
TRAINER /Teacher
P
T
2345
BIND:
SW:
1
n/a
678910
11 12
9
Ä
Note:
The switch assignment just described also
determines the transmitter used to issue the teacher
and pupil functions, respectively. For this reason, a
pupil transmitter must NEVER be assigned a switch
on this menu. The header line therefore also
switches from "Teacher / Pupil" to "Teacher /
Teach" once a switch has been assigned.
Using the selection keys on the left or right touch pad,
now move the marker frame to the right, to "BIND:
n/a":
TRAINER /Teacher
P
T
2345
BIND:
SW:
1
n/a
678910
11 12
9
Ä
Binding the pupil transmitter to the teacher
transmitter
Note:
The distance between the two transmitters should not
be too great during the binding process. If necessary,
change the positions of the transmitters and initiate
the binding process again.
Initiate the "BINDING" process from the pupil
transmitter by tapping the center SET key of the right
touch pad …
TRAINER /student
P
T
2345
BIND:
SW:
1
Binding
678910
11 12
Ä
–––
… and repeat this immediately on the teacher
transmitter:
TRAINER /Teacher
P
T
2345
BIND:
SW:
1
Binding
678910
11 12
9
Ä
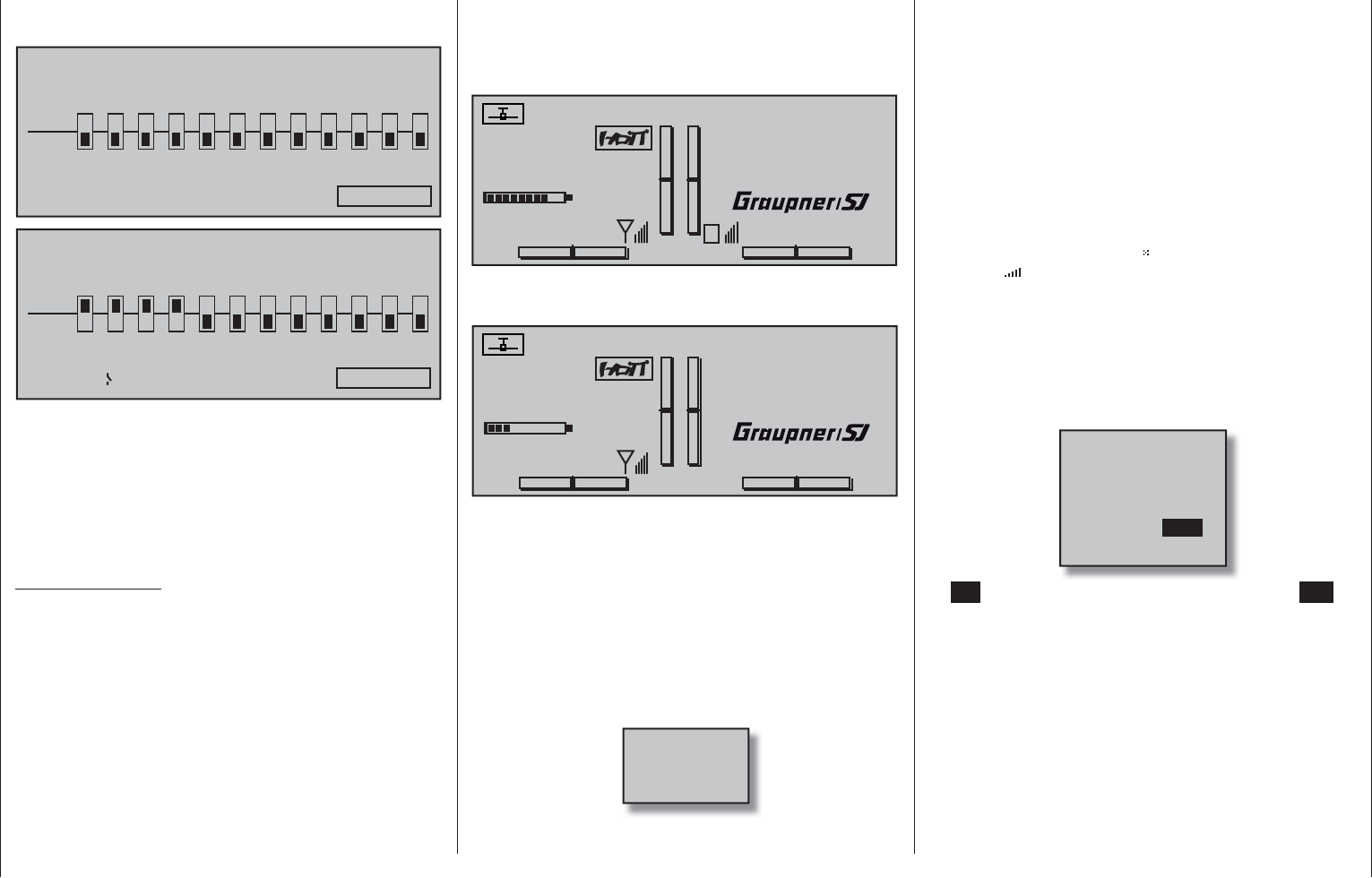
216 Detail program description - Teacher/pupil
As soon as this process is complete, both screens
will show "ON" instead of the fl ashing "BINDING":
TRAINER /student
P
T
2345
BIND:
SW:
1
on
678910
11 12
Ä
–––
TRAINER /Teacher
P
T
2345
BIND:
SW:
1
on
678910
11 12
9
Ä
You can return to the basic display on both screens
and start the training session after carefully checking
all of the relevant functions.
If neither transmitter or only one transmitter displays
"ON", this means the binding process has failed: try
changing the positions of both transmitters and then
repeat the entire procedure.
Important notice:
Check that the model aircraft is operational
and check that all functions issue the correct
commands BEFORE setting up trainer mode.
During the …
Training session
… the teacher and pupil can maintain a variable
distance from one another. The "reach of signal"
(max. 50 m) should not be exceeded under any
circumstances, however, no one else should be
standing between the teacher and the pupil since
these persons could reduce the connection range of
the return channel used by the two transmitters.
In this operating mode, the basic display of the
teacher transmitter is as shown below …
#01 0:24h
Stop watch
Flight tim
K78
0:00.0
3.9V
0:00.0
00
0
0
1:23h
P
V
RFC–Teacher
Graubele
… and the pupil transmitter's display will look
something like this:
#01 0:24h
Stop watch
Flight tim
K78
0:00.0
3.7V
0:00.0
00
0
0
4:32h
RFC–student
Schüler
If, however, the connection between the teacher
and pupil transmitters should be lost during the
training session, then the teacher transmitter will
automatically assume control of the model.
If the trainer mode switch is in the "Pupil" position
when connectivity is lost, the Warning LED on the
teacher transmitter will blink and audible warning
signals will also be sounded for as long as the signal
is lost. The basic display also displays the following
warning notice:
No
pupil
signal
However, if only the character string "HF –" blinks on
the transmitter's basic display accompanied by the
audible warning signals, the pupil signal has been
lost but the trainer mode switch is set to the "Teacher"
position.
In both cases, your fi rst step should be to reduce
the distance between the two transmitters. If this
does not help, then you should land immediately and
establish the cause.
If both transmitters are operational and the receiver
system is switched off, then the teacher transmitter's
basic display will show the icons instead of the
"familiar" . The antenna icon will also fl ash and an
audible warning signal will sound twice per second.
Resuming trainer mode
If you switch off one or both transmitters during the
session – for whatever reason – then the basic display
of the transmitter(s) shows the following question
after being switched back on:
ACT
TRAINER
Wireless Link
INH
If "INH" (set) is confi rmed by tapping the center SET
key of the right touch pad or, alternatively, by waiting
for approx. two seconds until the message disappears.
then you will reset the transmitter in question back to
its "normal" operating mode. You will then have to re-
establish a connection between the teacher and pupil
transmitters.
If, on the other hand, the selection keys on the left or
right touch pad are used to select "ACT" …
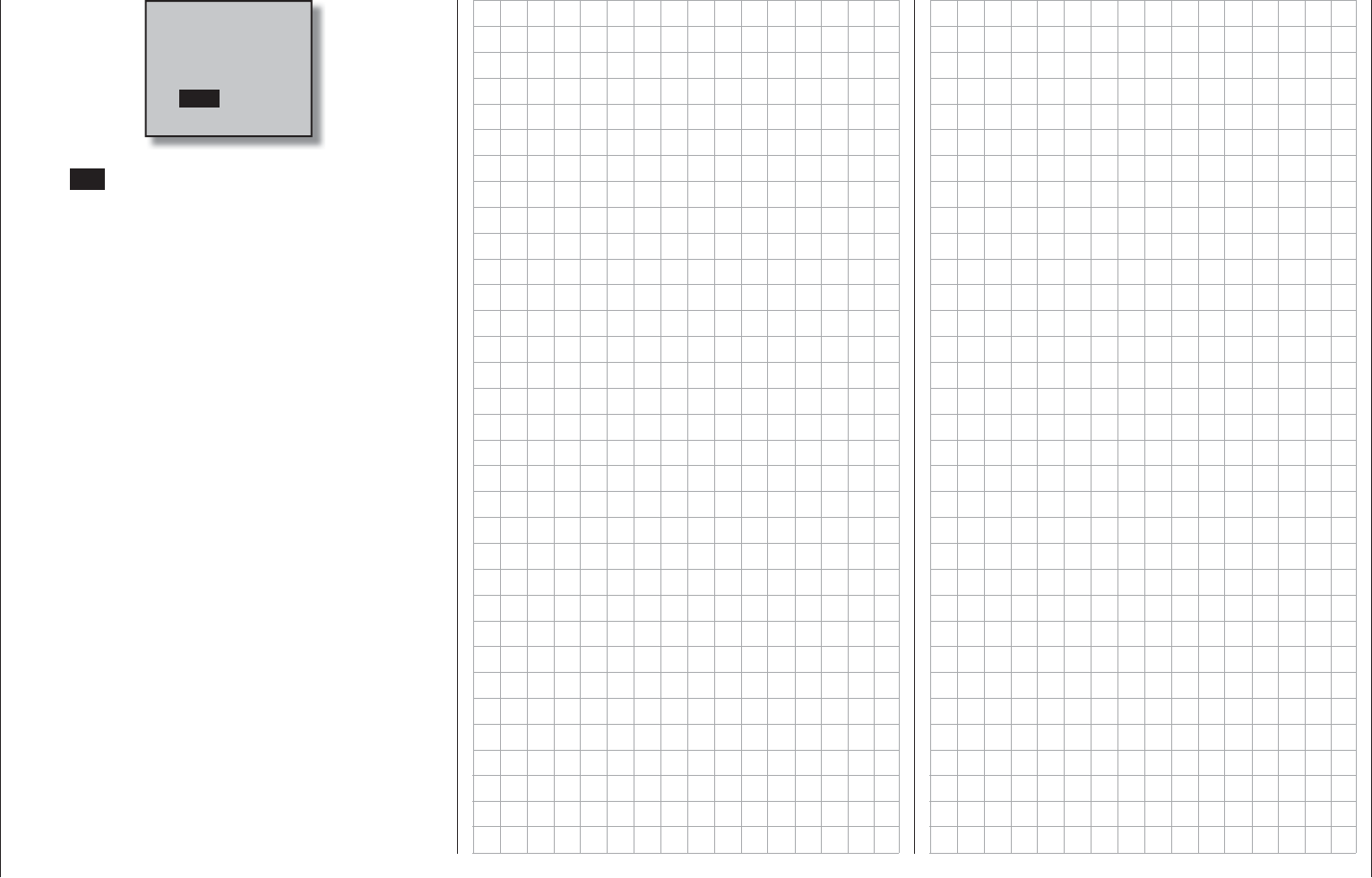
217
Detail program description - Teacher/pupil
Please select
Trainer link?
INHACT
… and this selection is confi rmed by tapping the
center SET key of the right touch pad, then the
existing teacher connection is restored. The same
approach is used if the transmitter is confi gured as a
pupil transmitter.
218 Detail program description - Tx. output swap
Using the selection keys on the left or right touch
pad, page to the menu option »Tx. output swap« Tx.
output swap on the multi-function menu:
Phase trim Non-delayed chan
Timers (general) Fl. phase timers
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Non-delayed chan Timers (general)
Fl. phase timers Helicopter mixer
Free mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Briefl y tap the center SET key of the right touch pad
to open this menu option.
Tx. output swap
To achieve maximum fl exibility regarding receiver
socket assignment, the mc-20 HoTT program offers
you the option of swapping servo outputs 1 to 16 as
you please.
This option lets you distribute the transmitter's 16
"control channels" to any of the transmitter outputs
1 … 16. If you do, you must remember that the
»Servo display« screen – accessible from almost any
menu option by simultaneously tapping the e and f
keys on the left touch pad – refers exclusively to the
"control channels" as preset by the receiver socket
assignment: it therefore does NOT take any output
swaps into account.
Tx. output swap
Swapping the outputs on the transmitter
Servo
Servo
Servo
Servo
1
2
3
4
1
2
3
4
Output
Output
Output
Output
TRANSFER OUTPUT
SEL
Use the cd selection keys on the left or right touch
pad to select the channel/output combination to be
changed then briefl y tap the center SET key of the
right touch pad. You can now use the right selection
keys to assign your selected (control) channel to the
desired output, confi rming this with the SET key …
Servo
Servo
Servo
Servo
6
2
3
4
1
2
3
4
Output
Output
Output
Output
TRANSFER OUTPUT
SEL
… or, by tapping the cd or ef selection keys on
the right touch pad at the same time (CLEAR), you
can restore the original assignment.
Any subsequent changes, such as servo travel
adjustments, Dual Rate / Expo, mixers etc., must
always be performed in accordance with the
original receiver socket assignment!
Example:
In the mc-20 HoTT helicopter program, the outputs
for a collective pitch servo and the throttle servo
are swapped around, compared to some older
GRAUPNER/JR mc units. The throttle servo now
occupies transmitter output "6" and the collective
pitch servo output "1". Perhaps, however, you wish
to retain the previous confi guration? In this case, you
will swap over channels 1 and 6 as appropriate, so
that (control) channel 6 is located on output 1 and
vice versa – as shown above:
Note:
"Channel Mapping" (channel assignment) is the
receiver-side channel correlation function integrated
into the mc-20 HoTT transmitter's telemetry menu.
With channel mapping, the transmitter's control
channels (16 maximum) can be freely distributed
to multiple receivers or receiver outputs having the
same control function, for example to operate two
servo controls per aileron surface instead of just
being able to control one servo, etc. To keep controls
manageable, however, we strongly recommend using
only one of the options at a time.
219
For your notes
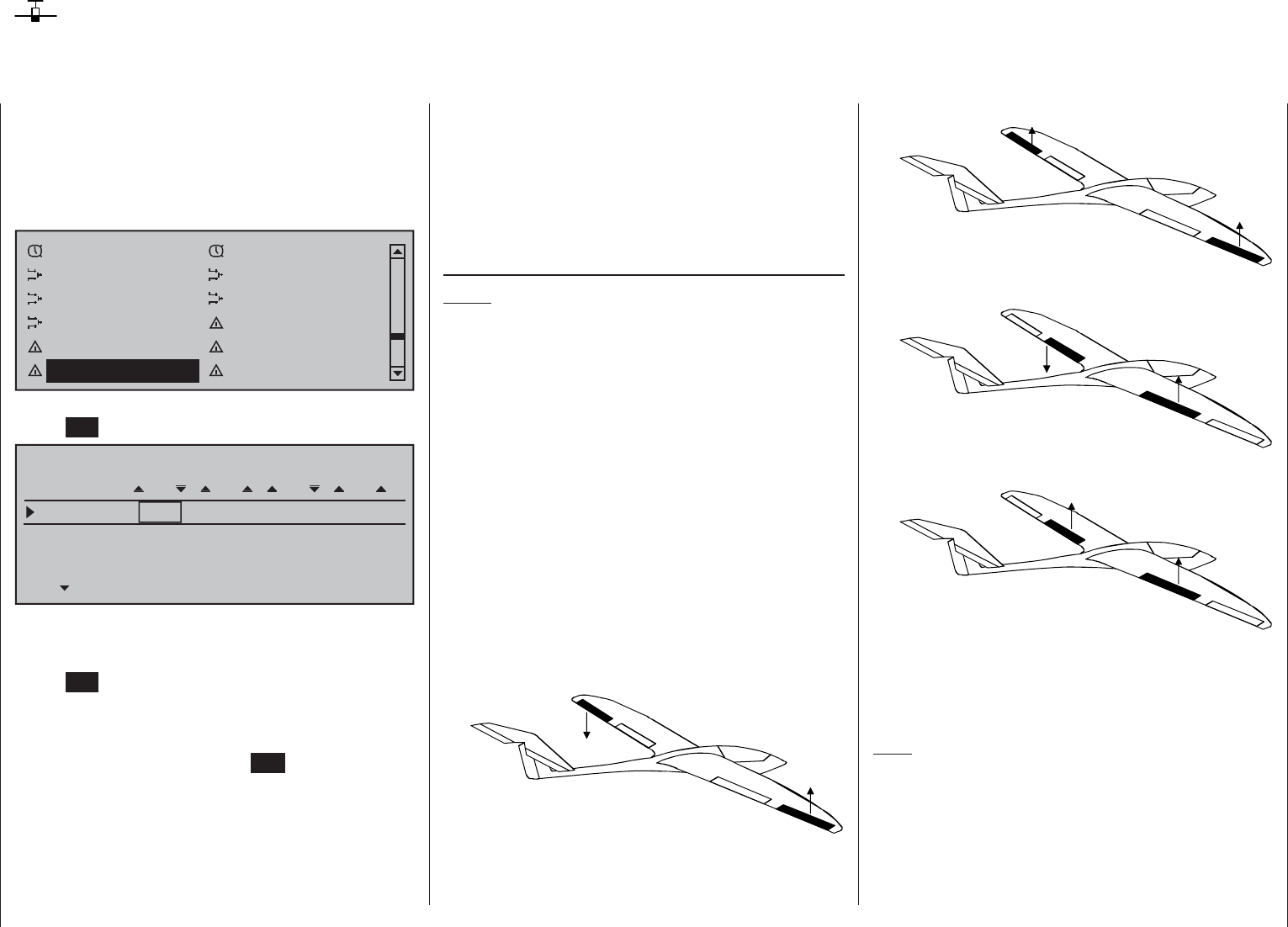
220 Detail program description - Profi -trim | Winged models
Profi -trim
Flaps and aileron trimming
The mc-20 HoTT transmitter has an integrated
software function for direct trimming of all fl aps and
ailerons.
Using the selection keys on the left or right touch pad,
page to the »Profi -trim« menu option in the multi-
function menu …
Timers (general) Fl. phase timers
Wing mixers Free Mixer
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
… then open this menu option with a brief tap on the
center SET key of the right touch pad.
PRO TRIM
AI
AI FL
FL
Tri m off off off off
ctl sw free
on/off –––
SET SET SET SET
free free free
To set the desired option, move the marker frame
onto the desired line or column with the selection
keys of the left or right touch pad then briefl y tap the
center SET key of the right touch pad. Select the
desired entry in the fi eld now displayed in inverse
video with the selection keys on the left or right touch
pad or move the desired transmitter control. Conclude
the procedure with a tap on the ESC key.
Programming is done in three steps.
First of all, in the "Trim" line it will be established just
which fl ap pair is to be trimmed as "AI" and/or "FL". The
"Control" line specifi es the control channel over which
the given trim function is to be performed and, fi nally,
a switch is defi ned in the "ON/OFF" line by which this
profi -trim function can be switched on or off globally.
Trim
Notes:
Please note that, depending on the number of •
aileron and fl ap servos specifi ed in the »Model
type« menu (page 95), some settings cannot
be used. For example, with only 1 aileron and/
or 1 fl ap servo there is no aileron fl ap activation
possible, and the opposite is also true. Since
this is the case, a number of settings in various
columns remain ineffective.
Pay attention to potential double-assignments •
when making trim control choices.
The trim functions which can be activated (ON) or
deactivated (OFF) on the fi rst line of this menu,
either individually or in any combination, make pre-
fl ight corrections to aileron and fl ap settings quick
and easy, without the complexity of having to call up
individual setting options.
Individually, these are functions for …
Trim of the • aileron function for aileron ("cAId")
Trim of the • fl ap function for aileron ("cAIc")
Trim of the • aileron function for fl aps ("cFLd")
Trim of the • fl ap function for fl aps ("cFLc")
Tap on the cd or ef selection keys of the right
touch pad at the same time (CLEAR) to reset the
value of the fi eld displayed in inverse video back to
"OFF".
Note:
Regardless of a switch's ON/OFF setting (see further
below), the reset of a value fi eld in the "Trim" line has
the effect an immediate return of the affected trim
function to its original reference point.
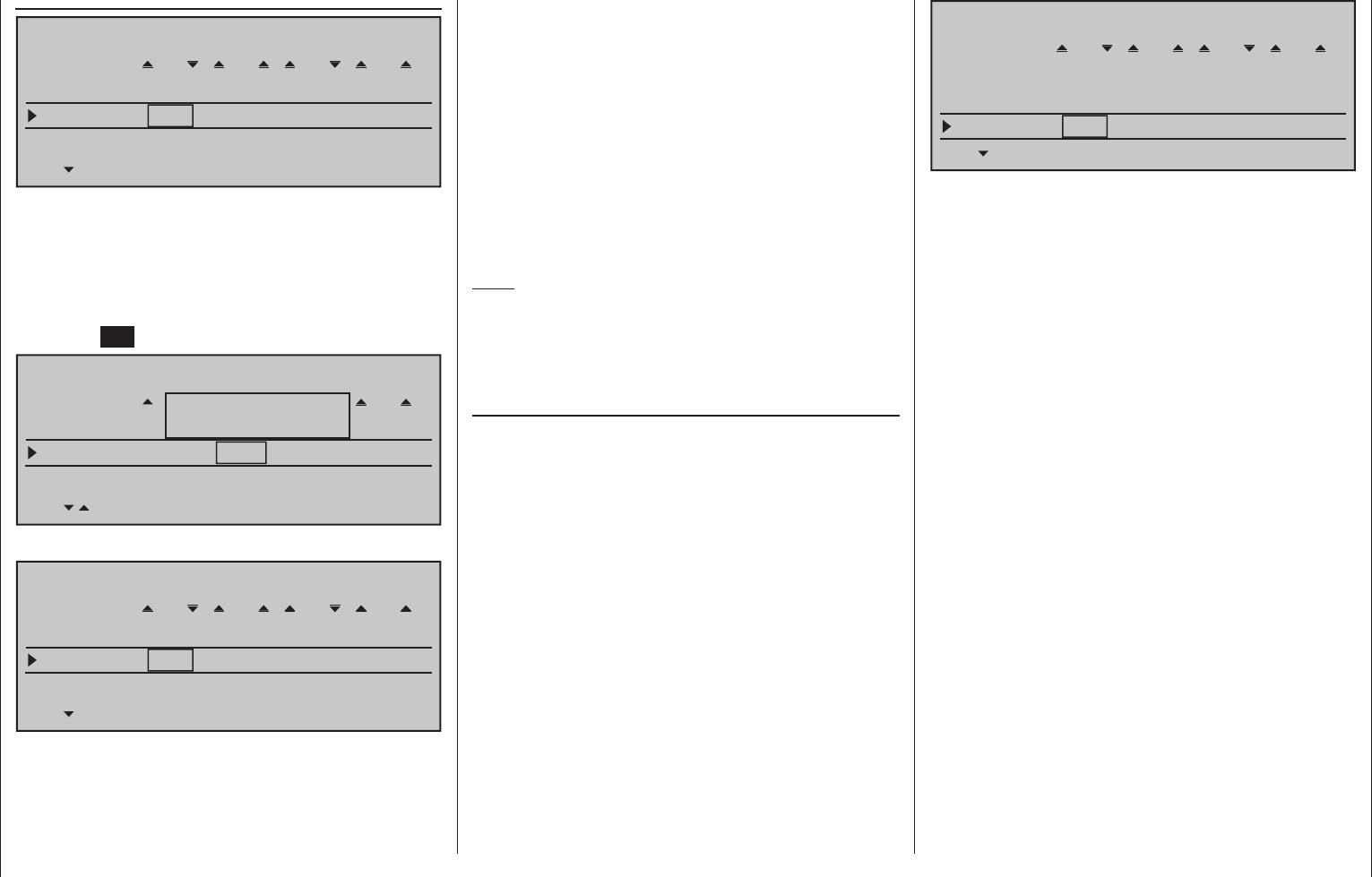
221
Detail program description - Profi -trim | Winged models
Control
PRO TRIM
AI
AI FL
FL
Tri m act act off off
ctl sw free
on/off –––
SET SET SET SET
free free free
The second line of this menu is for selecting
transmitter control assignments which appear
advantageous from the many controls available on
the transmitter.
To assign a transmitter control, use the selection keys
to navigate to the desired column then tap briefl y on
the center SET key of the right touch pad …:
PRO TRIM
QR
AI FL
WK
Tri m actN AUS AUS off
ctl sw Lever1
on/off –––
SET SET SET SET
free free free
Move desired
control adj.
… and move the desired transmitter control:
PRO TRIM
AI
AI FL
FL
Tri m act act off off
ctl sw Tvr1
on/off –––
SET SET SET SET
Tvr2 free free
The mid-point position of enabled proportional
controls corresponds to the programmed fl ap setting.
The trim range for a given transmitter control is
about ±25 %. However, these "trim" controls are
only effective when, as described in section "ON/
OFF" further below, has been assigned to a profi -trim
switch and switched on.
With trims switched on, make a test fl ight to
determine the optimal setting then open the ON/
OFF switch to secure the setting against inadvertent
maladjustment. Now as long as the ON/OFF switch
remains open or is erased, the located trim values will
retain their settings.
An active transmitter control assignment can be
erased with a simultaneous tap on the cd or ef
selection keys of the right touch pad (CLEAR).
Note:
Trim values retain their settings until the next closure
of the ON/OFF switch, even then when the trim
functions in the "Control" line have been temporally
reset to "free".
ON/OFF
The "ON/OFF" line is used to assign a switch which
permits the profi -trim function to be switched on/
off globally. This assignment is done in the manner
described in the section "Assigning transmitter
controls, switches and control switches" on page 56.
In this context, pay attention to the following
dependencies:
Only when the ON/OFF switch in the "Trim" line is •
set to "ON" will the trim functions assigned to trim
controls in the "Transm. controls" line be able to
affect trim within a range of ±25 %.
As soon as the ON/OFF switch is opened or •
erased, the current trim positions will be stored
and the selected trim controls become ineffective.
A tap, at the same time, on the cd or ef selection
keys of the right touch pad (CLEAR) when a switch
assignment is active will reset a fi eld's value back to
"---":
PRO TRIM
AI
AI FL
FL
Tri m act act off off
ctl sw Tvr1
on/off –––
SET SET SET SET
Tvr2 free free
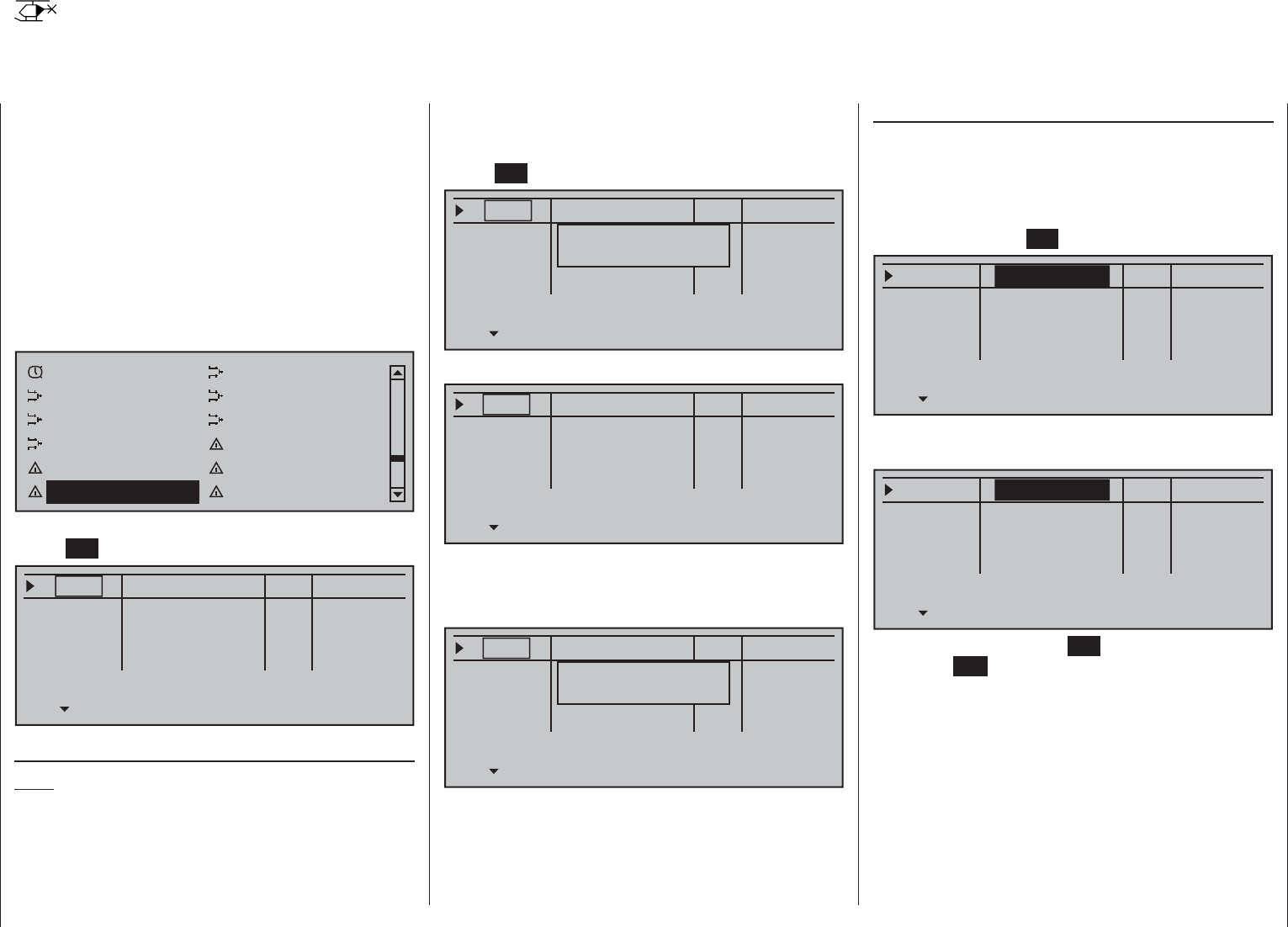
222 Detail program description - Profi -trim | Helicopters
Profi trim
Pitch, throttle, tail-rotor, and C1 curve trimming
The mc-20 HoTT transmitter's software has an
integrated function for additional trimming of 8-point
curves; in Heli programs »Channel 1 curve« page
131, and »Helicopter mixer« page 176. These are
intended for "Pitch" curves "Channel 1 ¼ Throttle"
and "Channel 1 ¼ Tail. rot.".
This feature, named »Profi trimm« because of its
functional similarity to the Profi -Trim module for the
mc-24 but only available on that transmitter as a
retrofi t option. Select this feature from the multi-
function menu with the selection keys of the left or
right touch pad …
Fl. phase timers Helicopter mixer
Free mixer MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
… then open this menu option with a brief tap on the
center SET key of the right touch pad.
Mixer Point Phase
free
free
free
free
None
None
None
None
L1
1
1
1
L
L
L
"Trim control" column
Note:
Pay attention to potential double-assignments when
making trim control choices.
This menu's fi rst line is for assigning those transmitter
controls (from the many available on the transmitter)
which appear most advantageous for this purpose.
To assign a transmitter control, use the selection keys
to navigate to the desired line then tap briefl y on the
center SET key of the right touch pad …
Mixer Point Phase
free
free
free
free
None
keiner
keiner
None
L1
1
1
1
L
L
L
Move desired
control adj.
… then move the desired transmitter control:
Mixer Point Phase
Slide1
free
free
free
None
None
None
None
L1
1
1
1
L
L
L
Erase trim control
Select the transmitter control assignment in the
appropriate line as already described, e.g.:
Mixer Point Phase
Slide1
free
free
free
None
keiner
keiner
None
L1
1
1
1
L
L
L
Move desired
control adj.
A tap, at the same time, on the cd or ef selection
keys of the right touch pad (CLEAR) will now reset
the fi eld's value back to "free".
"Mixer" column
There are a total of four value fi elds in this column. For
each of these fi elds a helicopter mixer can be selected,
individually or in any combination, from a list.
To do this, use the selection keys on the left or right
touch pad to change to the desired value fi eld. Then
briefl y tap the center SET key of the right touch pad …
Mixer Point Phase
Slide1
free
free
free
None
None
None
L1
1
1
1
None
L
L
L
… and select the desired mixer with the selection
keys of the left or right touch pad:
Mixer Point Phase
Slide1
free
free
free
None
None
None
L1
1
1
1
Pitch
L
L
L
Another tap on the center SET key of the right touch
pad or the ESC key of the left touch pad will conclude
the entry. This procedure is the same for the other
menus.
A tap, at the same time, on the cd or ef selection
keys of the right touch pad (CLEAR) will reset a fi eld
displayed in inverse video back to "None".
223
Detail program description - Profi -trim | Helicopters
"Point" column
The lines of the column "Mixer" were used to select
one or mixers. Now, in the "Point" column, the
reference points to be trimmed will be set.
To do this, use the selection keys on the left or right
touch pad to move to the desired value fi eld. Then
briefl y tap the center SET key of the right touch pad …
Mixer Point Phase
Slide1
free
free
free
None
None
None
L1
1
1
1
Pitch
L
L
L
If a undefi ned point is selected – in the basic version,
only points "L" and "H" are set – the respective
regulator will remain ineffective.
The point offset (in a maximum range of about
±12 %) for the selected mixer will simultaneously be
displayed in the curve diagrams of the »Helicopter
mixer« menu so that the offset can also be checked
visually.
Phase
The rightmost column is used, if desired, to determine
which programmed fl ight phase the given regulator
is to be active. The number preceding fl ight phase
names, in the example "1" (Normal)", are based
on the phase numbers as found in the »Phase
assignment« menu on page 148:
Mixer Point Phase
Slide1
free
free
free
None
None
None
L1
1
1
1
Pitch
L
L
L
However, the current position of the regulator
will be – contrary to the corresponding fi xed-wing
program – set to a new zero point when …
by a change of fl ight phase, individual or all trim •
controls become active or
the given trim control is erased or•
meanwhile the function assigned in the "Mixer" •
column is to be changed.
In all of these cases, the current regulator position will
be stored and automatically overridden, i.e. adopted
into the curve characteristic, by the pre-programmed
curve points specifi ed by the »Channel 1 curve«
and »Helicopter mixer« menus. In this manner it
is possible to simultaneously optimize up to four
arbitrary curve points during the fl ight.
The memory storage option described here is, for
example, useful during the fi rst test fl ights of a new
model as this permits the "fl own" fl ight corrections to
be immediately recorded in the program.
However, in order to have a clearly defi ned reference
point prior to the fi rst time a store is done, it is important
to put all regulators into their middle positions.
But always be careful that, after repeated stores,
servo travel is not too severely restricted on one side.
Check and correct the control linkage if necessary.
Sometimes, despite an optimal basic setting for the
model, it becomes necessary to temporarily change
reference points, for example, when the weather
has changed and the motor requires a short-term
correction or even when the muffl er gets a leak
unexpectedly, etc. Of course, in all of these cases,
the corrected settings should not be stored via
the Profi trim option. Storage can be prevented by
ensuring that the regulator is in its middle position
before activation or deactivation.
Note:
Yet another point, independent of this, can be
regulated via the "Trim function" through use of
the selection keys. This is described in detail along
with the programming of 8-point curves in section
»Channel 1 curve« on page 131.
224 Detail program description - Trim memory | Winged models
Trim memory
Storing the current trim position
Use the selection keys on the left or right touch pad
to scroll to the menu option »Trim memory« menu
option in the multi-function menu:
Timers (general) Fl. phase timers
Wing mixers Free Mixer
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Briefl y tap the center SET key of the right touch pad
to open this menu option:
TRIM MEMORY
Aileron
Elevator
0%
0%
Channel 1 0%
Rudder
Trim Pos.
0%
0%
0%
0%
0%
SET
This menu permits selective storage of the given
current position for the four digital trim controls in
order to return them afterward to their visual middle
points. This makes the last stored trim positions in the
respective middle positions of trim wheels for control
functions 1 … 4 available again following a model
memory location change or after long fl ight pauses.
This memory store process is effective on a fl ight-
phase specifi c basis for the currently active model
memory location and is not to be stored globally.
Therefore, as soon as fl ight phases have been
defi ned in the »Phase settings« and »Phase
assignment menus, the given active fl ight phase
will be displayed on the screen's bottom line. For
example:
TRIM MEMORY
Aileron
Elevator
0%
0%
Channel 1 0%
Rudder
Trim Pos.
0%
0%
0%
0%
0%
SET
Normal
Storing trim positions
The model has been fl ight tested and trimmed
during the test fl ights. Current trim positions are
now displayed in the column "Trim Pos." located
approximately in the middle of the display. (The trim
range is about ±30 % of total control travel.) The right
column displays trim memory content, currently fi lled
uniformly with 0 % because values have not yet been
stored. Therefore, the display appears as follows:
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
-7%
0%
0%
0%
0%
SET
Normal
Now use the selection keys on the left or right touch
pad to move to the line where a trim value is to be
written into trim memory, e.g. the elevator trim value:
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
-7%
0%
0%
0%
0%
SET
Normal
Now, with a brief tap on the center SET key of the
right touch pad, activate the SET column's selected
value fi eld. The message "Please press trim"
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
0%
Please
press trim
will then appear briefl y in the display.
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
0%
Now briefl y press the trim wheel for the elevator's
joystick to accept the trim value.
TRIM MEMORY
Aileron
Elevator
+5%
0%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
+3%
Another brief tap on the center SET key of the right
touch pad or the center ESC key of the left touch pad
will fi nish the procedure.
Now, if desired, change the fl ight phase and repeat
the procedure. Perform the same procedure for the
other control functions, as necessary.
225
Detail program description - Trim memory | Winged models
Erasing stored trim positions
Use the selection keys on the left or right touch pad
to move to the line where a trim value is to be erased
from trim memory, e.g.:
TRIM MEMORY
Aileron
Elevator
+5%
0%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
+3%
Now briefl y tap on the center SET key of the right
touch pad to activate the value fi eld.
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
+3%
Please
press trim
As previously described, the message "Please
press trim" will appear briefl y. After his message has
disappeared, simultaneously tap on the cd or ef
selection keys of the right touch pad (CLEAR) to
reset the value fi eld again back to "0 %".
However, if you do not erase a trim memory before
storing a new value, the new value will be added to
the stored value. Although this an "elegant" way to
effectively offset servo throw beyond the normal trim
range of about ±30 %, do keep in mind that excessive
offsets for servo travel can lead to anomalies including
one-sided restriction. It is then prudent to check control
linkages and make corrections as necessary.
226 Detail program description - Trim memory | Helicopters
Use the selection keys on the left or right touch pad
to scroll to the menu option »Trim memory« menu
option in the multi-function menu:
Fl. phase timers Helicopter mixer
Free mixer MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Briefl y tap the center SET key of the right touch pad
to open this menu option:
TRIM MEMORY
Roll
Pitch ax.
0%
0%
Pitch/thr 0%
Tail rot.
Trim Pos.
0%
0%
0%
0%
0%
SET
This menu permits selective storage of the given
current position for the four digital trim controls in
order to return them afterward to their visual middle
points. This makes the last stored trim positions in the
respective middle positions of trim wheels for control
functions 1 … 4 available again following a model
memory location change or after long fl ight pauses.
This memory store process is effective on a fl ight-
phase specifi c basis for the currently active model
memory location and is not to be stored globally.
Therefore, as soon as fl ight phases have been
defi ned in the »Phase settings« and »Phase
assignment menus, the given active fl ight phase
will be displayed on the screen's bottom line. For
example:
TRIM MEMORY
Roll
Roll ax.
0%
0%
Pitch/thr 0%
Tail rot.
Trim Pos.
0%
0%
0%
0%
0%
SET
Normal
Storing trim positions
The model has been fl ight tested and trimmed
during the test fl ights. Current trim positions are
now displayed in the column "Trim Pos." located
approximately in the middle of the display. (The trim
range is about ±30 % of total control travel.) The right
column displays trim memory content, currently fi lled
uniformly with 0 % because values have not yet been
stored. Therefore, the display appears as follows:
TRIM MEMORY
Roll
Roll ax.
+5%
+3%
Pitch/thr 0%
Tail rot.
Trim Pos.
-7%
0%
0%
0%
0%
SET
Normal
Now use the selection keys on the left or right touch
pad to move to the line whose trim value is to be
written into trim memory, e.g. the pitch-axis trim
value:
TRIM MEMORY
Roll
Roll ax.
+5%
+3%
Pitch/thr 0%
Tail rot.
Trim Pos.
-7%
0%
0%
0%
0%
SET
Normal
Now, with a brief tap on the center SET key of the
right touch pad, activate the SET column's selected
value fi eld. The message "Please press trim"
TRIM MEMORY
+5%
+3%
0%
Trim Pos.
–7%
0%
0%
0%
SET
Normal
0%
Please
press trim
Roll
Roll ax.
Pitch/thr
Tail rot.
will then appear briefl y in the display.
TRIM MEMORY
Roll
Roll ax.
+5%
+3%
Pitch/thr 0%
Tail rot.
Trim Pos.
-7%
0%
0%
0%
0%
SET
Normal
Now briefl y press the trim wheel for the elevator's
joystick to accept the trim value.
Trim memory
Storing the current trim position
227
Detail program description - Trim memory | Helicopters
TRIM MEMORY
Roll
Roll ax.
+5%
0%
Pitch/thr 0%
Tail rot.
Trim Pos.
-7%
0%
0%
+3%
0%
SET
Normal
Another brief tap on the center SET key of the right
touch pad or the center ESC key of the left touch pad
will fi nish the procedure.
Now, if desired, change the fl ight phase and repeat
the procedure. Perform the same procedure for the
other control functions, as necessary.
Erasing stored trim positions
Use the selection keys on the left or right touch pad
to move to the line where a trim value is to be erased
from trim memory, e.g.:
TRIM MEMORY
Roll
Roll ax.
+5%
0%
Pitch/thr 0%
Tail rot.
Trim Pos.
-7%
0%
0%
+3%
0%
SET
Normal
Now briefl y tap on the center SET key of the right
touch pad to activate the value fi eld.
TRIM MEMORY
Aileron
Elevator
+5%
+3%
Channel 1 0%
Rudder
Trim Pos.
–7%
0%
0%
0%
SET
Normal
+3%
Please
press trim
As previously described, the message "Please
press trim" will appear briefl y. After his message has
disappeared, simultaneously tap on the cd or ef
selection keys of the right touch pad (CLEAR) to
reset the value fi eld again back to "0 %".
However, if you do not erase a trim memory before
storing a new value, the new value will be added to
the stored value. Although this an "elegant" way to
effectively offset servo throw beyond the normal trim
range of about ±30 %, do keep in mind that excessive
offsets for servo travel can lead to anomalies including
one-sided restriction. It is then prudent to check control
linkages and make corrections as necessary.
228 Detail program description - Telemetry
Telemetry
Read-in and settings for telemetry data
The receiver's settings, as well as optional telemetry
sensor settings, can be called up and programmed
in real-time by way of the »Telemetry« menu.
Communication with the transmitter is accomplished
over the return channel built into the HoTT receiver.
As many as four sensors can be attached, if
necessary via V or Y adapter cables, to receivers
with current fi rmware of types: GR-12S HoTT
(order no. 33505), GR-12 HoTT (order no. 33506),
GR-16 (order no. 33508), GR-24 HoTT (order
no. 33512) and GR-32 DUAL (order no. 33516).
The update capability of these and future receivers,
which can be performed by the user, will keep the
respective »Telemetry« menu up to date with the
latest version and ensure enhancement with future
functions or languages.
Note:
After registering your product at https://www.
graupner.de/de/service/produktregistrierung you are
automatically informed of new updates.
Important notices:
This manual is based on the functions available at •
the time of printing.
As already indicated in the section "Binding •
multiple receivers" on page 77 and 85, multiple
receivers per model can be bound into the system
as necessary. However, only the receiver
selected in the line "TELEMETRY RCV" of
the "Telemetry" menu is able to establish
a telemetry connection to the transmitter!
However, that also means the inverse, that only this
receiver can be addressed through the Telemetry
menu! If necessary, therefore, the selection must
be changed before settings can be made on a
specifi c receiver:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
When adjusting the settings of the remote •
control, make absolutely sure that the
transmitter antenna is always far enough
away from the receiver antennae! To be on the
safe side, keep them at least one meter apart.
Otherwise there is a risk of a faulty connection
to the return channel and malfunctions will
result.
Since the telemetric data between transmitter •
and receiver is only exchanged after the fourth
data package, the data transmission requires a
certain amount of time for technical reasons, so
the reaction to the operating keys and changes
to settings take place with a delay. Therefore, the
delay is not due to an error.
Programming on the model or on sensors may •
only take place if the model is on the ground. Only
carry out the settings with the motor switched
off and the battery disconnected! Otherwise,
undesired programming cannot be ruled out.
For example, a servo test initiated accidentally
could cause the model to crash and cause
personal injury and/or property damage. Observe
the safety instructions on pages 4 … 7 of this
manual and the respective separate manuals.
All settings (such as fail-safe, servo direction •
reversal, servo travel, mixer and curve settings,
etc.) made through the »Telemetry« menu are
stored only in the receiver and therefore are
adopted along with it if it is implemented as a
receiver in another model. Therefore, to be on the
safe side, re-initialize your HoTT receiver if you
want to use the receiver in a different model; see
"Reset" on page 46.
Only program the servo direction reversal, •
servo travel, mixer and curve settings through
the mc-20-specifi c standard menus »Servo
adjustment« page 102, »Dual Rate / Expo«
page 120 or page 124, »Channel 1 curve«
page 128 or 131, and so on. Otherwise, the
settings superimpose one another, which can
lead to complexity or even problems in the later
operation.
The channel assignment function, called "Channel •
mapping", integrated into the »Telemetry« menu
of the mc-20 HoTT transmitter can also freely
distribute control functions over multiple receivers
or even distribute a single control function over
multiple receiver outputs, such as two servos per
aileron instead of only one individual servo, etc.
We also recommend exercising extreme during
the programming.
229
Detail program description - Telemetry
Telemetry
The menus gathered under the heading »Telemetry«
can be called up from the mc-20 HoTT transmitter's
basic display with a tap of about one second duration
on the center ESC key of the left touch pad. The
same menus can, like other transmitter menus, also
be opened in the multifunction menu with a tap on the
center SET key of the right touch pad:
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Free mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Basic operation
Operating the »Telemetry« menu is essentially the
same as for the remaining mc-20 HoTT transmitter
menus. The few differences are described in the
following:
The ef selection keys of the left or right touch pad
can be used to switch between individual pages
of the Telemetry menu. Corresponding directional
indicators can be found at top right of each display
page in the form of angled brackets ( ), refer to the
fi gures below. If only one angled bracket is visible,
you are on either the fi rst or last respective page.
In this case, changing pages is only possible in the
indicated direction.
Menu lines in which parameters can be changed are
identifi ed with the aforementioned angled bracket ( ).
The " " pointer will jump a line forward or back with
a tap on the cd selection keys of the left or right
touch pad. Lines to which a jump cannot be made
are unalterable.
In order to change a parameter, briefl y touch the
center SET key of the right touch pad (the parameter
will be displayed in inverse video), change the value
within the permissible adjustment range via the
selection keys of the right touch pad and adopt the
value with another tap on the SET key. A brief tap on
the center ESC key of the left 4-way pad will cause a
return to the starting position again.
Now use the cd selection keys of the left or right
touch pad to pick the desired sub-menu. However, if
the message …
OK
CAN NOT
RECEIVE
DATA
… appears instead of the desired sub-menu after
touching the center SET key of the right touch pad
then no connection has been established with a
receiver. Therefore, switch on your receiver system
or, if applicable reconnect the addressed receiver as
described on page 77 or 85 or activate it as described
under "Important Notices" on the previous page.
On the fi rst display page of the sub-menu overwritten
with …
RX DATAVIEW
…
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
… no settings can be made. This page is only
provided for information:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
Value Explanation
S-QUA signal quality in %
S-dBm Reception power in dBm
S-STR signal strength in %
R-TEM. Receiver temperature in °C
L PACK
TIME
Indicates the time in ms in which the
longest data package is lost during the
transmission from the transmitter to the
receiver
R-VOLT Current operating voltage of the
receiver in volts
SETTINGS/DISPLAYS
230 Detail program description - Telemetry
L.R-VOLT Lowest operating voltage of the
receiver since it was last turned on, in
volts
SENSOR1 Indicates values of optional telemetric
sensor 1, in volts and °C
SENSOR2 Indicates values of optional telemetric
sensor 2, in volts and °C
Signal quality (S-QUA)
The signal quality (S-QUA) is sent "live" over the
receiver's return channel to the transmitter and
indicates the signal strength in %.
Reception power (S-dbm)
Reception power (S-dbm) is indicated with negative
values, which means a value of zero is the maximum
value (= best reception) and the lower the values are,
the poorer the reception power! The range test before
operation, among other things, is important for this.
Note:
With negative numbers the evaluation of a number is
reversed: The higher the number following the minus
symbol, the lower the value is. Therefore, a reception
power of -80 dBm, for example , is poorer than one of
-70 dBm.
Perform the range test as described on page 80 and
88 before each fl ight and, in doing so, simulate all
servo movements which also take place during the
fl ight. The range must be at least 50 m on the ground
with the range test activated. At this distance, the
value shown under "S-dBm" in the "RX DATAVIEW"
display may not be greater than -80 dBm in order to
guarantee safe operation. The model should never
be operated with a lower value (e.g. -85 dBm). Check
the installation of the receiver system and the position
of the antenna.
The reception power should not drop below -90 dBm
during operation. Otherwise, reduce the distance of the
model. Normally, however, the acoustic range warning
(peep tone interval 1 s) is triggered before this value is
reached in order to guarantee safe operation.
Signal strength (S-STR)
The signal strength (S-STR) is displayed in %. In
general, an acoustic range warning (peep tone
interval 1 s) is issued as soon as the receiver signal
becomes too week in the return channel. However,
since the transmitter has a signifi cantly higher
transmission power than the receiver, the model can
still be safely operated. For the sake of safety, the
distance to the model should be reduced until the
warning tone goes silent again.
Receiver temperature (R-TEM.)
Make sure the receiver remains within the permissible
temperature range during all fl ight conditions (ideally
between -10 and 55 °C).
The receiver temperature limit, at which a warning
is issued, can be adjusted in the sub-menu »RX
SERVO TEST« under "ALARM TEMP+" (50 … 80 °C
and "ALARM TEMP-" (-20 … +10 °C). When the
value is under-run or over-run, an acoustic signal
sounds (continuous peep tone) and "TEMP.E" will
appear at the top right of all "RX" receiver sub-menus.
Additionally, the parameter "R-TEM" will be displayed
in inverse video on the »RX DATAVIEW« display
page.
Data packages (L PACK TIME)
Indicates the longest time span in ms in which data
packages are lost in the transmission from the
transmitter to the receiver. In practice, that is the
longest time span in which the remove control system
has entered into fail-safe mode.
Receiver operating voltage (R-VOLT)
Always check the operating voltage of the receiver.
Never operate or even start your model if the
operating voltage is too low.
The receiver low voltage warning can be adjusted
between 3.0 and 6.0 volts in "ALARM VOLT" of the
»RX SERVO TEST« sub-menu. If this range is under-
run, an acoustic signal is sounded (repetitive double
peep tone (long/short)) and "VOLT.E" will appear at
the top right of all »RX …« receiver sub-menus.| In
addition, the parameter "R-VOLT" will be displayed in
inverse video in the »RX DATAVIEW« sub-menu.
The current receiver battery voltage is also displayed
in the default display, see page 28.
Minimum receiver operating voltage (L.R-VOLT)
"L.R-VOLT" indicates the minimum operating voltage
of the receiver since the last time it was switched on.
If this voltage should deviate signifi cantly from the
current "R-VOLT" operating voltage, the receiver
battery may be too heavily encumbered by the
servos. The consequence is voltage drops. In this
case, use a more powerful voltage supply in order to
achieve maximum operational safety.
Sensor 1 + 2
Indicates the values of optional telemetric sensors
1and 2, if present, in volts and °C. A description of
these sensors can be found in the appendix.
RX SERVO
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
LIMIT– : 150%
OUTPUT CH: 01
LIMIT+ : 150%
PERIOD : 20msec
It is very important that you read the notices on page
228 before doing any programming on this display
231
Detail program description - Telemetry
page.
Value Explanation Possible
settings
OUTPUT
CH
Channel selection 1 … depending
on receiver
REVERSE Servo reversal OFF / ON
CENTER Servo center in μs if active
(inverse),
dependent on
control position
TRIM Trim position in μs
deviating from the
CENTER position
-120 … +120 μs
LIMIT– Travel limit on the "–"
side of servo travel
in % servo travel
30 … 150 %
LIMIT+ Travel limit on the "+"
side of servo travel
in % servo travel
30 … 150 %
PERIOD Cycle time in ms 10 or 20 ms
OUTPUT CH (channel selection)
If applicable, select the line "OUTPUT CH" with the
selection keys. Touch the SET key of the right touch
pad. The value fi eld is shown highlighted. Now set
the desired channel (e.g. 01) with the selection keys
on the right touch pad. The following parameters
are always based on the channel set here.
Reverse (servo reversal)
Set the rotational direction of the servo connected to
the selected servo channel: ON / OFF
CENTER (servo center)
The active value fi eld (inverse video) in the "CENTER"
line shows the current impulse time in μs for the
control channel selected in the "OUTPUT CH" line.
The displayed value depends on the current position
of the control infl uencing this control channel and, if
applicable, the position of its trimming.
A channel impulse time of 1500 μs corresponds to the
standard center position and thus the conventional
servo center.
In order to change this value, select the "CENTER"
line then touch the SET key. Now move the
respective transmitter control, joystick and/or trim
wheel to the desired position and store the current
control's position with another tap on the SET key.
This position is saved as the new neutral position.
TRIM (trim position)
In the "TRIM" line" you can carry out the fi ne
adjustment of the neutral position of a servo
connected to the control channel selected in the
"OUTPUT CH" line using the selection keys of the
right touch pad in 1 μs increments. The value in the
"CENTER" line can be adjusted by the TRIM value
set here in a range of ± 120 μs.
Factory setting: 0 μs.
LIMIT–/+ (side dependent travel limit -/+)
This option is provided for the adjustment of a side-
dependent limit (limiting) of the servo travel (rudder
throw) of the servo connected to the control channel
selected in the "OUTPUT CH" line.
The settings for both directions are separate but both
are in a range of 30 … 150 %.
Factory setting: 150 % each.
PERIOD (cycle time)
In this line you determine the time interval of the
individual channel impulse. This setting is adopted for
all control channels.
With the use of only digital servos, a cycle time of
10 ms can be set..
In mixed operation or with use of only analog servos,
20 ms should absolutely be set, because the latter
can otherwise be "over-strained" and react with
"shaking" or "quivering" as a result.
RX FAIL SAFE
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 01
MODE : HOLD
F.S.POS. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500sec
The description of this menus necessitates a few
words of warning in advance:
"Do nothing" is the absolute worst thing to be done in
this regard. "HOLD" is prescribed in the base setup
model of the HoTT receiver.
In the event of a failure, in the best case scenario the
model fl ies straight ahead for an indefi nite amount of
time and then hopefully "lands" somewhere without
causing signifi cant damage! However, if something
like this happens in the wrong place at the wrong
time, the model may become uncontrollable and
"tear" across the fl ight fi eld completely out of control,
putting the pilot and spectators at risk.
Therefore, it would obviously be benefi cial to program
the the function "Motor off" at the very least, in order
to prevent such risks. If necessary, seek the advice of
an experienced pilot in order to fi ne a "logical" setting
for your model.
And then another brief notice regarding the three
possible versions of the mc-20 HoTT transmitter for
the setting of Fail Safe:
The easiest, and recommended, way to fail-safe
settings is the use of the »Fail Safe« menu, which
can be reached from the multifunction menu, see
page 208.
Similarly, in order to achieve the same result
somewhat more laboriously, the "FAIL SAFE ALL"
option described on the following pages is also
available.
232 Detail program description - Telemetry
In addition, there are the relatively elaborate methods
of the of the individual adjustment using the options
"MODE", "F.S.Pos." and "DELAY". The description of
these variants begins with the "MODE" option further
below.
Value Explanation Possible
settings
OUTPUT
CH
Output channel
(servo connection
of the receiver)
1 … depending
on receiver
INPUT CH Input channel
(channel
coming from the
transmitter)
1 … 16 %
MODE Fail-Safe mode HOLD
FAIL SAFE
OFF
F.S.POS. Fail-safe position 1000 … 2000 μs
DELAY Reaction time
(delay)
0.25, 0.50, 0.75
and 1.00 s
FAIL
SAFE ALL
Save of the Fail-
safe
Positions of all
control channels
NO / SAVE
POSITION Display of the
saved Fail-safe
position
Between approx
1000 and 2000 μs
OUTPUT CH (servo connection)
In this line you select the respective OUTPUT CH
(servo connection of the receiver) to be set.
INPUT CH (selection of the input channel)
As already mentioned on page 228, the 16 control
functions of the mc-20 HoTT transmitter can
be arbitrarily distributed to multiple receivers, if
necessary, or even assigned to multiple receiver
outputs with the same control function. For example,
this might be used in order to be able to control two
servers for each aileron fl ap or an oversize rudder
with linked servos instead of an individual servo.
Distribution to multiple HoTT receivers, in turn, offers
the advantage of not having to use a long servo
cable, e.g. for large models. In this case, bear in
mind that only the receiver selected in the line "TEL.
EMPF." through the »Telemetry« menu can be
addressed!
The 16 control channels (INPUT CH) of the mc-20
HoTT can be appropriately managed through so-
called " Channel Mapping" (channel assignment)
whereby a different control channel is assigned to the
servo connection selected in the OUTPUT CH line for
the receiver in the INPUT CH line. BUT CAUTION: If,
for example, "2AIL" is specifi ed in the transmitter on
the "Aileron/camber fl aps" line of the »Base setup,
model« menu then control function 2 (Aileron) will
already be assigned in the transmitter to control
channels 2 and 5 for distribution to the left and right
ailerons. The receiver's corresponding INPUT CH,
which must also be mapped, would be the channels
02 and 05 in this case; see the following example.
Examples:
You would like to control each aileron of a large •
model with two or more servos.
You would like to control each aileron of a large •
model with two or more servos.
Assign one of the two standard aileron
control channels 2 or 5 as INPUT CH to the
corresponding OUTPUT CH (servo connections)
depending on the left or right bearing surface.
You would like to control the rudder of a large •
model with two or more servos.
Assign the same INPUT CH (control channel)
to the corresponding OUTPUT CH (servo
connections). In this case, this is the standard
rudder channel 4.
MODE
The settings of the options "MODE", "F.S.Pos." and
"DELAY" determine the behavior of the receiver in the
event of a failure in the transmission from transmitter
to receiver.
The setting programmed under "MODE" is always
based on the channel set in the OUTPUT CH line.
The factory setting for all servos is "HOLD".
For each selected OUTPUT CH (servo connection of
the receiver) you can choose between:
FAI(L) SAFE•
With this selection, in the event of a failure the
corresponding servo moves to the position shown
in the "POSITION" line for the remainder of the
failure until the "Delay time" set in the "DELAY"
line has lapsed.
HOLD•
With a setting of "HOLD", in the event of a failure
the servo maintains the last correctly received
servo position for the duration of the failure.
OFF•
With a setting of "OFF", in the event of a failure
the receiver discontinues the retransmission
of (temporarily stored) control impulses for the
respective servo output for the duration of the
failure. In other words, the receiver switches the
impulse line "off".
BUT CAUTION: Analog servos and even some
digital servos no longer put up any resistance
against the previous control pressure during the
failure of the control impulse and are more or less
pushed out of their position as a result.
F.S.POS. (Fail-safe position)
For each OUTPUT CH (receiver servo connection),
set the position the given servo should assume in
"FAI(L) SAFE" mode, i.e. in the event of a failure, via
233
Detail program description - Telemetry
the "F.S.POS." line. This is done by fi rst activating
the value fi eld (inverse representation) with a tap on
the SET key of the right touch pad then using the
selection keys of the right touch pad to choose the
servo position. The adjustment takes place in 10-μs
increments.
Factory setting: 1500 μs (servo center).
Important notice:
The function "F.S.POS." has an additional meaning in
all three modes, "OFF", "HOLD" and "FAI(L) SAFE"
in the event that the receiver is switched on, but (still)
does not receive a valid signal.
The servo immediately travels to the fail-safe position
predefi ned in the "Position" line. In doing so, the
landing gear, for example, is is prevented from
retracting of the receiver is accidentally switched on
while the transmitter is switched off. In normal model
mode, on the other hand, the corresponding servo
behaves in accordance with the set "MODE" in the
event of a failure.
DELAY
(fail-safe reaction time or delay)
Here you adjust the delay time after which the servos
should move to their predetermined positions in the
event of a signal interruption. This setting is adopted
for all channels and only pertains to the servos
programmed to the "FAIL SAFE" mode.
Factory setting: 0.75 s.
FAIL SAFE ALL (global fail-safe setting)
This sub-menu allows servo fail-safe positions to
be established at the "push of a button" in a similar
manner to that described on page 208 for the »Fail
Safe« menu.
Switch to the "FAIL SAFE ALL" line and activate the
value fi eld by touching the center SET key of the right
touch pad. "NO" will be displayed in inverse video.
Then adjust the parameter to "SAVE" with one of the
selection keys of the right touch pad. Now, using the
operating elements of the transmitter, move all servos
to the desired fail-safe position you assigned or want
to assign in the line "MODE" "FAI(L) SAFE". The
current position of the control for the channel which
was just set is shown in the bottom "Position" line:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: SAVE
After a tap on the center SET key of the right touch
pad, the display will change again, from "SAVE" to
"NO". The saved the positions of all servos affected
by this measure and adopted them in parallel to the
line "F.S.Pos." and the display then immediately
shows the following for the current OUTPUT CH
(servo connection):
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: NO
Switch off the transmitter and check the fail-safe
positions based on the servo throws.
"Fail Safe" in combination with "Channel Mapping"
In order to ensure that the mapped servos – that is
to say servos which are controlled from a common
control channel (INPUT CH) – react the same way
even in the event of a failure, the corresponding
settings of the INPUT CH determine the behavior of
the mapped servos!!!
Therefore, the servo connections 6, 7 and 8 of a
receiver are mapped with one another, whereby the
OUTPUT CH (servo connections) 06, 07 and 08
are assigned as INPUT CH of the same respective
control channel "04" …
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.POS. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 06
POSITION : 1670sec
FAIL SAFE ALL: NO
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.POS. : 1230sec
DELAY : 0.75sec
OUTPUT CH: 07
POSITION : 1670sec
FAIL SAFE ALL: NO
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.POS. : 1770sec
DELAY : 0.75sec
OUTPUT CH: 08
POSITION : 1670sec
FAIL SAFE ALL: NO
… the INPUT CH 04 determines the fail-safe behavior
of these three servos connected to the control
channel 4 completely independently of the individual
settings of the respective OUTPUT CH:
234 Detail program description - Telemetry
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.POS. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1670sec
FAIL SAFE ALL: NO
This is also the case, for example, if this is mapped
with INPUT CH 01:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1420sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1670sec
FAIL SAFE ALL: NO
In this case, the servo connection 04 would, in turn,
react according to the fail-safe settings of CH 01.
The reaction or delay time set in the "DELAY" line,
on the other hand, always applies uniformly for all
channels set to "FAI(L) SAFE".
RX FREE MIXER
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX FREE MIXER
MASTER CH: 00
SLAVE CH : 00
S–TRAVEL–: 100
S–TRAVEL+: 100
MIXER : 1
RX WING MIXER
TAIL TYPE: NORMAL
Value Explanation Possible settings
MIXER Mixer selection 1 … 5
MASTER
CH
Signal source or
source channel
0, 1 … depending
on receiver
Value Explanation Possible settings
SLAVE CH Target channel 0, 1 … depending
on receiver
S-TRAVEL– Admix negative 0 … 100 %
S-TRAVEL+ Admix positive 0 … 100 %
RX WING
MIXER
TAIL TYPE
tail type NORMAL,
V-TAIL (V-LW)
ELEVON
(vertical/horizontal
mixer for delta and
fl ying wing)
MIXER
Up to three mixers can be programmed
simultaneously. Use "MIXER" to switch between
mixers 1 … 5.
The following settings in this display always for just
the mixer selected in the "MIXER" line.
Important notice:
If you have already programmed mixer functions
in the »Wing mixer« or »Free mixer«" Free mixer
" menus, make absolutely sure that these mixers
do not overlap with those in the menu "RX FREE
MIXER"!
MASTER CH ("from")
According to the same principles described in the
section "Free mixer" on page 192, the signal applied
at the MASTER CH (signal source or source channel)
is mixed to a variable extent to the SLAVE CH (target
channel).
Select "00" if no mixer should be set.
SLAVE CH ("to")
The signal of the MASTER CH (source channel)
is mixed proportionally to the SLAVE CH (target
channel). The mix ratio will be determined by the
percentages entered in the lines "TRAVEL–" and
"TRAVEL +".
Select "00" if no mixer should be set.
TRAVEL–/+ (proportion of the admix in %)
With the settings of these two lines the percentage
of the admix is specifi ed in relation to the MASTER
signal separately for each direction.
RX WING MIXER TAIL TYPE (tail unit type)
The following model types are also available in the
"Tail" line of the »Model type« menu, on page 94 and
should, preferentially, be preset there. In this case,
always leave the TAIL TYPE set to NORMAL.
However, if you would prefer to use the mixer
integrated in the receiver, you can select the already
pre-adjusted mixer functions for the corresponding
model type:
NORMAL•
This setting corresponds to the classic aircraft
type with rear tail unit and separate rudder and
elevator. No mixer function is necessary for this
model type.
V-TAIL (V-tail unit)•
With this model type the elevator and rudder
control functions are connected, so that each
of the two tail unit fl aps – each controlled with a
separate servo – assume both the elevator and
rudder function.
The servos are normally connected to the receiver
as follows:
OUTPUT CH 3: Left V-tail servo
OUTPUT CH 4: Right V-tail servo
If the servo's direction of rotation is incorrect,
please observe the notices on page 62.
ELEVON (delta/fl ying wing models)•
The servos connect at the outputs 2 and 3 assume
the aileron and elevator function. The servos are
normally connected to the receiver as follows:
OUTPUT CH 2: Left horizontal/vertical
235
Detail program description - Telemetry
OUTPUT CH 3: Right horizontal/vertical
If the servo's direction of rotation is incorrect,
please observe the notices on page 62.
RX CURVE (EXPO)
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX CURVE
TYPE : B
CURVE1 CH : 02
TYPE : B
CURVE2 CH : 03
TYPE : B
CURVE3 CH : 04
Value Explanation Possible settings
CURVE1,
2 or 3 CH
Channel
assignment of the
respective curve
setting
1 … depending on
receiver
TYPE Curve type A, B, C
see fi gure
Expo = +100%
–100% +100%
0
–100% +100%
0
Expo = –100%
TYPE A
–100% +100%
0
–100% +100%
0
linear
–100% +100%
0
–100% +100%
0
TYPE B
TYPE C
DR = 125% DR = 70%
Servo travel
Control travel
Servo travel
Control travel
Servo travel
Control travel
Normally a non-linear control function, if applicable, is
used for the aileron (channel 2), elevator (channel 3)
and rudder (channel 4). These channel defaults also
correspond to the factory settings. BUT CAUTION:
This assignment only applies when, on the transmitter
side, neither "2HRSv3+8" is specifi ed in the "Tail
type" line nor is "2AIL" or 2AIL 2FL" specifi ed in the
"Aileron/camber fl aps" line of the »Base settings«
menu. Otherwise, assignments will have already
been made in the transmitter for control function 3
(elevator), which will then be split between control
channels 3 & 8, or control function 2 (aileron), which
will then be split between control channels 2 & 5 for
the left and right ailerons. The corresponding control
channels (INPUT CH) in the receiver would in both
cases be channels 03 & 08 or 02 & 05.
Therefore if, for example, "2AIL" has been specifi ed
on the transmitter side and the intent here is to utilize
the RX CURVE option instead of the mc-20 HoTT
transmitter's individually adjustable »Dual Rate /
Expo« menu (see page 120 or 124), then two curves
must be set:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX CURVE
TYPE : B
CURVE1 CH : 02
TYPE : B
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
Otherwise, the left and right ailerons have different
control characteristics.
With the RX CURVE function you can manage the
control characteristics for up to three servos:
CURVE 1, 2 or 3 CH•
Select the desired control channel (INPUT CH) of
the fi rst servo.
The following setting in TYPE only pertains to the
channel selected here.
TYPE
Select the servo curve:
A: EXPO = -100 % and DUAL RATE = 125 %
The servo reacts strongly to movements of the
joystick around the neutral position. As the rudder
throw increases, the curve becomes fl atter.
B: Linear setting.
The servo follows the joystick movement linearly.
C: EXPO = +100 % and DUAL RATE = 70 %
The servo reacts weakly to the joystick
movements around the neutral position. As the
rudder throw increases, the curve becomes
steeper.
Note:
The control characteristics programmed here also
affect the mapped receiver outputs.
5CH FUNCTION: "SERVO" or "SENSOR"
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 03
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Some receivers have a specifi c servo connection
which has been made switchable rather than an
independent telemetry connection. Thus, for example,
on the GR-12 receiver included with the mx-12 HoTT
set, order no. 33112, , servo connector 5 has an extra
"T" mark and can be alternatively connected …
Servo
Sensor OR
… not only via an order no. 7168.6Aadaper cable
to upgrade the receiver but also connected to a
telemetry sensor.
However, in order for the receiver to correctly
recognize the given connected device correctly, servo
connection 5 (in this case) MUST be appropriately set
236 Detail program description - Telemetry
for either "SERVO" or "SENSOR".
This switchover is accomplished by moving the d
with the selection key of the left or right touch pad
until the " " symbol is at the left margin of the bottom
line then tapping on the center SET key of the right
touch pad.
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 03
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Now use one of the cd selection keys on the right
touch pad to select the alternative setting "SENSOR".
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 03
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SENSOR
Another tap on the center SET key of the right touch
pad will close the selection and, with appropriate
repetitive taps on the center ESC key of the left touch
pad, a return to the transmitter's basic display is
accomplished.
RX SERVO TEST
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
TEST : STOP
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUT TYPE:ONCE
Value Explanation Possible
settings
ALL-MAX Servo travel on the
"+" side for all servo
outputs for the
servo test
1500 … 2000 μs
ALL-MIN Servo travel on the
"-" side for all servo
outputs for the
servo test
1500 … 1000 μs
TEST Test procedure START / STOP
ALARM
VOLT
Alarm threshold
of the receiver
undervoltage
warning
3.0 … 6.0 V
factory setting:
3.8 V
ALARM
TEMP+
Alarm threshold for
excessively high
temperature of the
receiver
50 … 80 °C
Factory setting:
70 °C
ALARM
TEMP–
Alarm threshold
for excessively low
temperature of the
receiver
-20 … +10 °C
Factory setting:
-10 °C
CH
OUTPUT
TYPE
Channel sequence ONCE, SAME,
SUMI, SUMO
ALL-MAX (servo travel on the "+" side)
In this line you set the maximum servo travel on the
plus side of the control travel for the servo test.
2000 μs corresponds to the full throw; 1500 μs
corresponds to the neutral position.
Make sure that the servos do not overrun
mechanically during the test routine.
ALL-MIN (servo travel on the "-" side)
You adjust the maximum servo travel on the minus
side of the control path for the servo test in this line.
1000 μs corresponds to the full throw; 1500 μs
corresponds to the neutral position.
TEST
You start and stop the servo test integrated in the
receivers in this line.
A brief tap on the center SET key of the right touch
pad will open the entry fi eld:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUT TYPE:ONCE
TEST : STOP
Now, with one of the selection keys of the right touch
pad, select START:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUT TYPE:ONCE
TEST : START
A brief tap on the center SET key of the right touch
pad will now start the test run. The input fi eld is
237
Detail program description - Telemetry
shown as "normal" again:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUT TYPE:ONCE
TEST : START
To stop the servo test, reactivate the entry fi eld as
described above, select STOP and confi rm this
selection with the SET key of the right touch pad.
ALARM VOLT (receiver undervoltage warning)
The receiver voltage is monitored through ALARM
VOLT. The interval can be adjusted between 3.0 and
6.0 Volt. If the set alarm threshold is undercut, an
acoustic signal is issued (interval peep tone long/
short) and "VOLT.E" blinks in the top right of all »RX
…« displays:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
VOLT.E
The parameter "R-VOLT" is also represented
inversely in the »RX DATAVIEW« display:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :03.7V
RX DATAVIEW VOLT.E
ALARM TEMP +/- (recommended temperature
monitoring)
These two options monitor the receiver temperature.
A lower threshold "ALARM TEMP-" (-20 … +10 °C) and
an upper threshold "ALARM TEMP+" (50 … 80 °C)
can be programmed. When these specifi cations are
exceeded or undercut, an acoustic signal (continuous
peep tone) sounds and "TEMP.E" appears in the top
right of all receiver displays. In addition, the parameter
"R-TEM" is shown inversely on the "»RX DATAVIEW«"
display page.
Make sure that your receiver remains within the
permissible temperature range during all fl ight
conditions (ideally between -10 and 55 °C).
CH OUTPUT TYPE (connection type)
Here you select how the receiver outputs are
controlled.
• ONCE
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:ONCE
The servo connections of the receiver are
controlled successively. This is recommended for
analog servos.
This setting automatically operates servos in a
20 ms cycle – or in a 30 ms cycle for a 12 channel
receiver (order no. 33512) – , regardless of what is
set or displayed in the "PERIOD" line of the »RX
SERVO« screen!
• SAME
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:SAME
The servo connections of the receiver are
controlled in parallel in blocks of four. This
means channels 1 through 4, 5 through 8 and
9 through 12 each receive the control signals
simultaneously.
This is recommended for digital servos when
multiple servos are used for one function (e.g.
aileron), so that the servos can run absolutely
synchronized.
When only using digital servos, we recommend
setting the "PERIOD" line of the »RX SERVO« to
10 ms in order to be able to utilize the fast reaction
of digital servos. With the use of analog servos or
in mixer mode, "20 ms" must be selected!
With this setting, pay particular attention to the
suffi cient dimensioning of the receiver current
supply. Since up to four servos can always
operate simultaneously, the requirement is higher.
• SUMO (sum signal OUT)
A HoTT receiver confi gured as SUMO permanently
generates a so-called sum signal from the control
signals of all of its control channels and provides
this by default to the accompanying GR-32 DUAL
receiver on servo connection 8.
On receivers whose display shows "SUMO" at the
top right, an additional two-digit number appears …
238 Detail program description - Telemetry
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:SUMO 12
… after confi rmation of "SUMO" with a brief tap
on the center SET key of the right touch pad,
the active fi eld changes to the right for channel
selection. With this selection you specify the
highest of the transmitter channels contained in
the SUMO signal:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:SUMO 12
Either confi rm the default with another tap on the
center SET key of the right touch pad or use the
selection keys to pick another channel between
04 and 16 and confi rm that with SET.
Receiver outputs will be controlled successively
in a 20 ms cycle (30 ms with the GR-32 DUAL
receiver, order no. 33516), even if 10 ms is set in
the "PERIOD" line of the the »RX SERVO« screen.
Primarily intended for the "Satellite mode" of
two HoTT receivers, as described below, the
sum signal generated by the SUMO-designated
receiver can also be used, for example, to
control of Flybar systems (provided they have an
appropriate input) or to control fl ight simulators via
an adapter cable, order no. 33310
In …
Satellite mode
… two HoTT receivers are connected to one
another through a three-wire connecting cable
(order no. 33700.1 (300 mm) or 33700.2 (100 mm))
at receiver-type-specifi c servo connections. Type
GR-16 and GR-32 DUAL receivers, for example,
are to be connected with one another at servo
output 8. More detailed information can be found
on the Internet at www.graupner.de.
This connection transmits all channels of the
HoTT receiver confi gured as SUMO as well as
those of the receivers designated as satellites
continuously to the second HoTT receiver, which
is to be programmed as …
• SUMI (sum signal IN)
… the designation for the main receiver.
Therefore, the signal always goes toward SUMI:
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:SUMI
The receiver defi ned as SUMI, however, only uses
the sum signal coming from SUMO in the event of
a failure of receipt if at least one channel in SUMI
is programmed to fail-safe.
If the receiver programmed as the SUMO satellite
receiver has a reception outage, the servos
connected to this receiver assume the fail-safe
positions which were programmed into the satellite
receiver, completely independent of the main
receiver.
On the other hand, if two receivers have a
reception outage simultaneously, the fail-safe
settings in the current receiver software at the
time this manual went to print (in principle, the
SUMO's fail-safe settings) become effective. In the
individual case, however, interactions cannot be
ruled out, which is why we urgently recommend
performing an appropriate test BEFORE
commissioning a model.
This receiver combination is recommended if, for
example, one of the two receivers is installed in
the model at an unfavorable position for receiving
or as a result of nozzles, carbon fi ber material
or the like, there is the danger that the receipt
signal is weakened due to the fl ight position, so
that interruptions of the range must be taken into
account.
Therefore, make sure to connect the most
important control functions to the main receiver
programmed as SUMI, so that, in the event of
a failure, the model remains controllable when
the SUMO satellite receiver no longer receives a
signal.
Telemetry data, such as the voltage of the on-
board electricity supply, on the other hand, is only
sent to the transmitter by the satellite receiver
confi gured as SUMO. Therefore, telemetry
sensors are to be connected to the satellite
receiver (SUMO).
Each receiver should be connected with its own
supply line from the common voltage supply. With
receivers with a high current load, it may even be
benefi cial to connect them with two supply lines to
the same current supply.
On the other hand, if each of the two receivers
should be supplied from
its own voltage source,
the center cable must be
removed from one of the
two plugs of the satellite
cable; see fi gure.
rot
1
23
If you would like to carry out additional
239
Detail program description - Telemetry
programming, such as fail-safe settings,
disconnect the three-pole satellite connection
between the two receivers and switch on only
the relevant receiver. It may be necessary to also
change the connection sequence.
Setting/displaying sensors
If, in addition to a "receiver", at least one sensor
is selected in the »Telemetry« menu's »SENSOR
SELECT« sub-menu (described below) then
its settings can be read in and changed on the
previously described receiver screens.
However, to actually gain access to this data, the
selected sensor/s must be connected to the receiver
system and this receiver system must have an active
telemetry connection.
If, as described in the next section, there is at least
one sensor activated which has the support of current
fi rmware, then it is possible to directly switch between
individual modules. However, if sensors with older
fi rmware are in use, it may be necessary to select
"etc." instead of the direct sensor selection.
In either case, tap the c or d selection key of the left
touch pad …
RECEIVER
VARIO
etc.
… then use the same keys to select up or down for
the desired module, for example:
VARIO
GPS
Receiver
If the selected module, in this case a Vario module,
is active then on the last receiver screen ("RX
SERVO TEST"), at the top right there will also be
an additional " " symbol pointing to the right. This
symbol is located just to the right of the left-pointing "
" symbol and is the visible indicator that additional
display screens can be accessed.
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRI RCV BIND. 1
VOLT.E
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUT TYPE:ONCE
Now use one of the f selection keys on the left or
right touch pad to switch to the selected sensor's
displays and check or change its settings as
described in the manual delivered with the sensor.
240 Detail program description - Telemetry
SENSOR SELECT
Selecting sensors
After selection of the desired menu line with the cd
selection keys of the left or right touch pad …
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
VOLT.E
… and a subsequent tap on the center SET key of
the right touch pad, the selected sub-menu will open.
SENSOR SELECT
RECEIVER
GENERAL MODULE
VARIO MODULE
ELECTRIC AIR.MOD
GPS
This menu option can be used to determine which
of the graphic displays described on page 36, as
well as those described previously for sub-menu
»SETTINGS/DISPLAYS«, can be selected and which
remain hidden.
Activate ( ) or deactivate ( ) the display of
respective sensors by selecting the desired lines with
the cd selection keys of the left or right touch pad
then tapping on the center SET key of the right touch
pad, e.g.:
SENSOR SELECT
RECEIVER
GENERAL MODULE
VARIO MODULE
ELECTRIC AIR.MOD
GPS
241
Detail program description - Telemetry
After selection of the desired menu line with the cd
selection keys of the left or right touch pad …
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
VOLT.E
… and a subsequent tap on the center SET key of
the right touch pad will open the selected sub-menu.
This provides a visualization of the quality of the
connection of transmitter and receiver:
E100%
SL 22
P 10
RL 41
4.8RS
S 95%
4.8RM
0 1 2 3 4 5 6 7 8 9 A B C D E
Top row: Reception power of the channels
1 … 75 of the 2.4 GHz band in dBm
coming from the receiver to the
transmitter.
Bottom row: Reception power of the channels
1 … 75 of the 2.4 GHz band in dBm
coming from the transmitter to the
receiver.
Comments:
Since reception power is measured and presented •
in dBm, reception power is increasingly worse
the higher the bar is and vice versa; refer also to
"Reception power (S-dBm)" on page 230 about
RF STATUS VIEW
this.
The points above the bars mark the poorest •
reception since switching on the transmitter or
the last reset of the display with a simultaneous
tap on thecd or ef keys of the right touch pad
(CLEAR).
Additional fi gures are shown to the left of the graphic
representation of the reception power. These mean:
Value Explanation
E Signal quality in % of the signal received
from the receiver
S Signal quality in % of the signal received
by the receiver
SL Reception power in dBm
P Number of lost data packages of the
receiver
RL Reception power in dBM of the signal
received by the receiver
RS Current operating voltage of the receiver
in volts
RM Lowest receiver operating voltage since
last startup, in volts
242 Detail program description - Telemetry
After selection of the desired menu line with the cd
selection keys of the left or right touch pad …
TELEMETRY
SETTING & DATAVIEW
SENSOR SELECT
RF STATUS VIEW
VOICE TRIGGER
TELEMETRY RCV BIND. 1
VOLT.E
and a subsequent tap on the center SET key of the
right touch pad will open the selected sub-menu.
REPEAT
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
–––
–––
VARIO –––
1sec
In order to be able to start the voice output through
the headphone connection, at the very least the
"REPEAT" line must be assigned to a switch. The
takes place as described in the section "Switch and
control switch assignments" on page 56:
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
–––
–––
VARIO –––
1SEC
Move desired switch
to ON position
(ext. switch: ENTER)
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
–––
VARIO –––
1sec 3
With this switch you can have the last respective
voice trigger repeated for the duration of the time
set to the left of the switch, as long as the assigned
switch is closed:
TRIG
With a switch assigned to this line, preferably
one of the two pushbuttons, switch the selected
voice messages in rotation on to the next voice
message for the below-described "TRANSMITTER",
"RECEIVER" and "SENSOR" options, as described
below.
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
VARIO –––
1sec 3
1
VARIO
If the "VARIO MODULE" line is activated ( ) in the
»SENSOR SELECT« sub-menu, as described on
page 240, a switch assigned to one of these lines
can be used to call up vario-specifi c voice messages
for the headset connection which are completely
independent of other voice messages, i.e. voice
messages triggered by altitude changes, such as the
message "slowly ascend/descend".
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
VARIO
1sec 3
1
8
TRANSMITTER
After selection of the desired menu line with the cd
selection keys of the left or right touch pad …
VOICE TRIGGER
REPEAT
TRIG
TRANSMIT
VARIO
1sec 3
1
8
and a subsequent tap on the center SET key of the
right touch pad will open the selected sub-menu.
VOLT:
MODELTIME:
BATTERYTIME:
TIMER(GE.)CENTER:
TIMER(GE.)TOP:
TIME:
PHASE TIMER:
Here, after selection of the desired line with the cd
selection keys of the left or right touch pad and a
subsequent tap on the center SET key of the right
touch pad, the selected voice message can be
activated ( ) or deactivated ( ).
VOICE TRIGGER
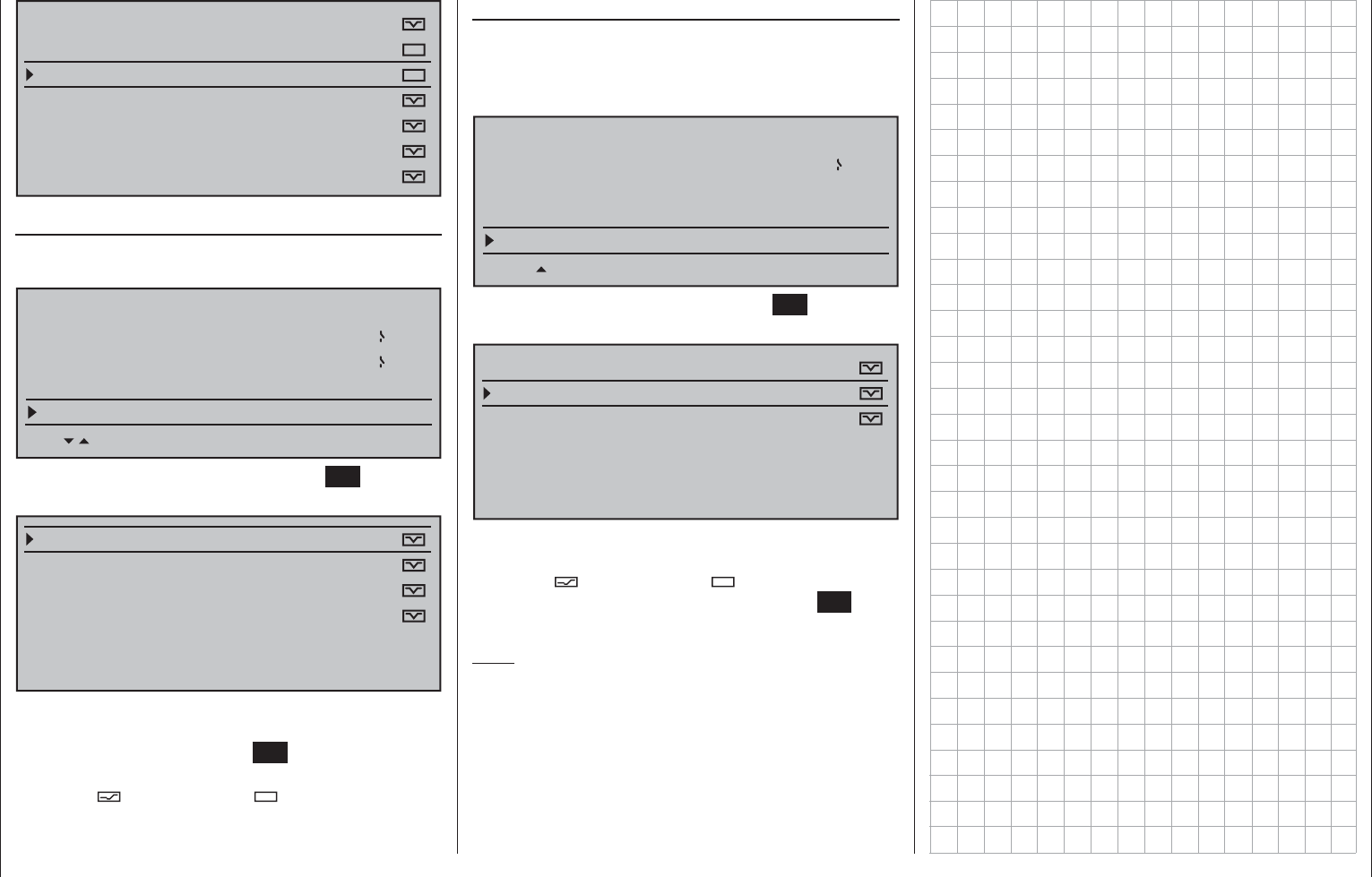
243
Detail program description - Telemetry
VOLT:
MODELTIME:
BATTERYTIME:
TIMER(GE.)CENTER:
TIMER(GE.)TOP:
TIME:
PHASE TIMER:
RECEIVER
After selection of the desired menu line with the cd
selection keys of the left or right touch pad …
VOICE TRIGGER
TRIG
TRANSMIT
VARIO
1
8
RECEIVER
… and a subsequent tap on the center SET key of
the right touch pad will open the selected sub-menu:
TEMP:
STRENGHT:
VOLT:
FLUGZEITUHR:
LOWVOLT:
UHRZEIT:
Here, after selection of the desired line with the cd
selection keys of the left or right touch pad and a
subsequent tap on the center SET key of the right
touch pad, the selected voice message can be
activated ( ) or deactivated ( ).
SENSOR
This line only appears if a sensor was fi rst activated
in the »SENSOR SELECT« sub-menu. For example,
if the »VARIO« sensor is selected then the selections
for the "VARIO" line will be opened …
VOICE TRIGGER
TRANSMIT
VARIO 8
RECEIVER
VARIO
when a subsequent tap on the center SET key of the
right touch pad calls up the sub-menu.
ALT:
MAXALT:
MINALT:
FLUGZEITUHR:
VOLT MINIMUM:
UHRZEIT:
As described in the column at the left, these menus
also allow every offered voice message to be
activated ( ) or deactivated ( ) by selecting the
desired line followed by a tap on the center SET key
of the right touch pad.
Note:
The selection made here is completely independent
of the "VARIO" voice triggers.
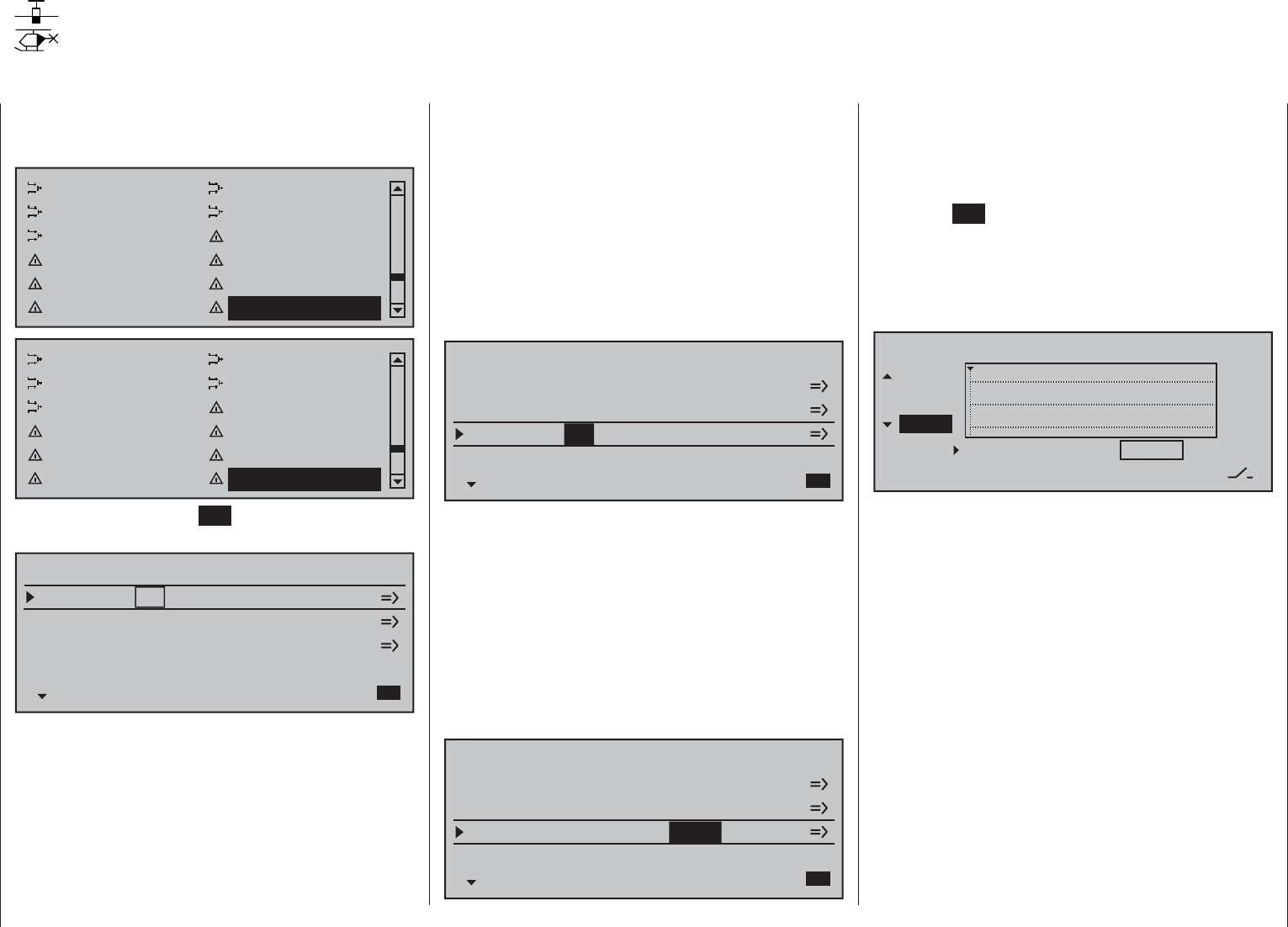
244 Detail program description - Channel sequencer
Channel sequencer
Programming the motion sequences of up to 3 servos
Use the selection keys on the left or right touch pad
to scroll to the »Channel sequence« menu option in
the multi-function menu:
Wing mixers Free mixers
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Free mixers MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
CHANNEL SEQUENCER
Channel
Channel
INACT
INACT
SET
Channel
channel
INACT
14
15
16
The »Channel sequence« menu option can be used
to execute up to 9 exactly coordinated steps for up
to three servos over a period of up to 30 seconds.
Such a sequence can be triggered by a single switch
and begin at an initial servo position which is freely
adjustable. For example, this makes the opening
of undercarriage doors, complete with subsequent
extension of the retractable gear, just as simple to
program as opening a wheel well with renewed closing
of one undercarriage door once the landing gear has
been lowered or to program the raising of a cockpit
canopy with subsequent head turns and waving
performed by the pilot. However, the prerequisite for
all these actions is the "parsing" of the desired motion
sequence into practical, individual steps.
Programming procedure
On this menu option's fi rst display page, see fi gure
below left, either accept the three preset channels,
14 … 16, or select an available channel, 5 … 16, for
each line to form any other desired combination, e.g.:
CHANNEL SEQUENCER
Channel
Channel
INACT
INACT
SET
Channel
channel
INACT
10
11
12
With a simultaneous tap on the cd or ef selection
keys of the right touch pad (CLEAR), the given
channel is reset back to 5, 6 or 7.
The next step makes the control channels needed
for the channel sequence available. This is done
in the "SET" column by changing settings from
"INACT" to "ACT" and thus making the individual
channels "available" to the program for sequencing.
Conversely, this also means that channels defi ned as
"active" in the »Channel sequence« menu are not
available for other purposes.
CHANNEL SEQUENCER
Channel
Channel
ACT
ACT
SET
Channel
channel
ACT
10
11
12
With a simultaneous tap on the cd or ef selection
keys of the right touch pad (CLEAR), the given
channel is reset back to "INACT".
Once control channels and their activity statuses
have been set, switch to the right column then tap on
the center SET key of the right touch pad to reach
the second page, the »Channel sequence« menu's
choreography page. Since the call-up of the second
page in this example was issued from the "Servo 12"
line, this servo remains the object of focus after the
page change.
Channel sequencer
TIME
STEP
10
11
12
0
POS
–––
0%
The previous display page permitted the selection
of participating servos and their incorporation into
the sequence. This display page will now be used
to establish the sequence of steps for participating
servos, beginning with initial positions yet to be
defi ned. The step number, from "0f" to a maximum
of "e9", will be shown in the column labeled "STEP"
near the bottom left of the display.
Step 0: Setting initial position
Keep the focus of attention on "Servo 12" or change
to any other of the three servos by using the cd
keys of the left touch pad, e.g. upward to "Servo 10".
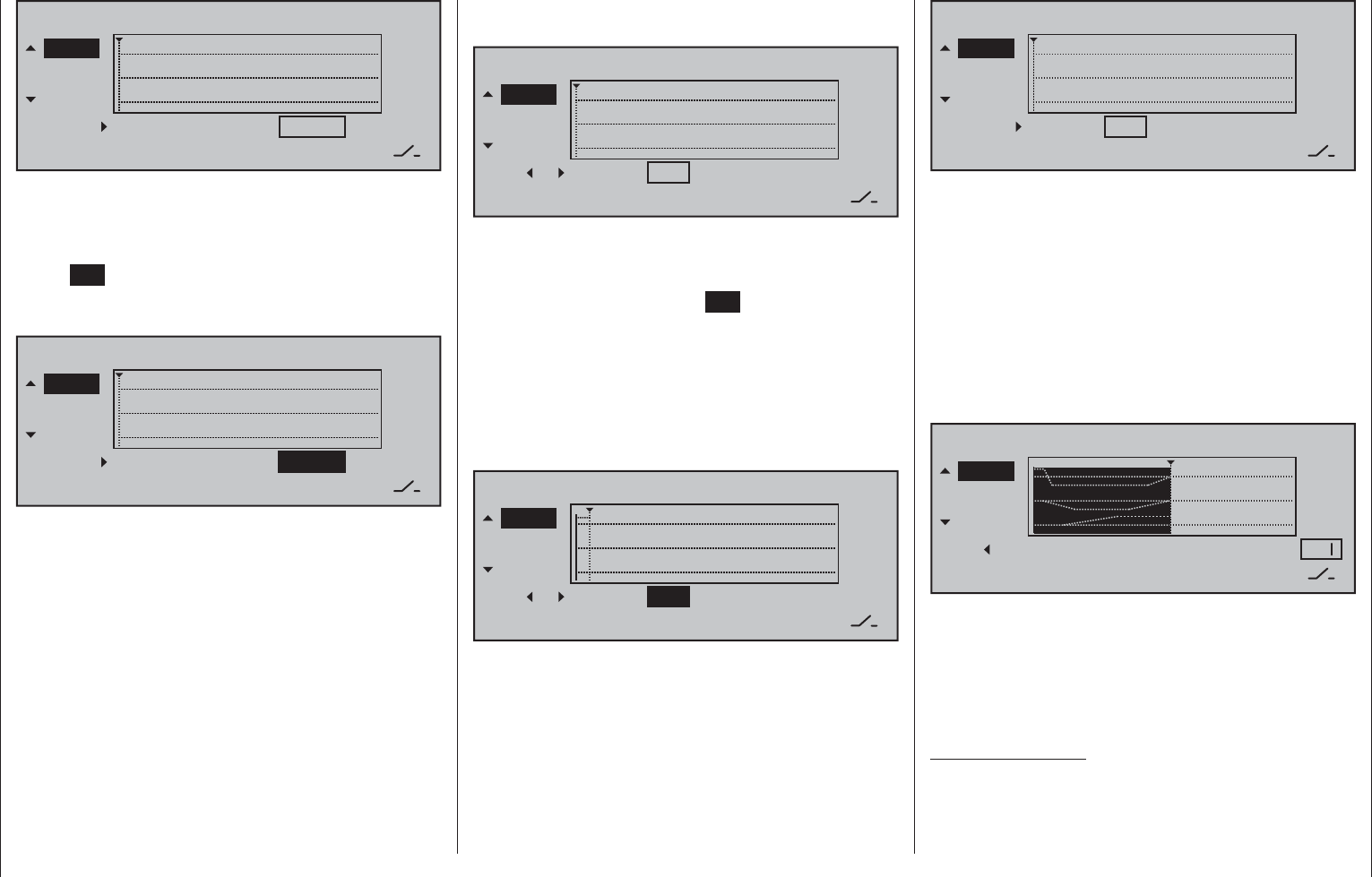
245
Detail program description - Channel sequencer
Channel sequencer
TIME
STEP
11
12
0
POS
–––
0%
10
Use one of the cf selection keys of the right touch
pad, as necessary, to shift the marker frame to the
right from the column "TIME" to the value fi eld above
the column labeled "POS" then, after a tap on the
center SET key of the right touch pad, alter this value
within a range of ±100 % until the servo is in the
desired initial position. For example:
Channell sequencer
TIME
STEP
11
12
0
POS
–––
10
+90%
Repeat this procedure as necessary for the other two
servos.
With a simultaneous tap on the cd or ef selection
keys of the right touch pad (CLEAR), the given
position value will be reset back to"0 %".
Step 1: fi rst event
Now that initial positions have been established, the
fi rst step can be set. This is a matter of defi ning what
is to be done, or not done, fi rst, following a certain
span of time.
Do this by fi rst using the cd selection keys of the left
touch pad to select one of the servos. Now tap the
f key of the left touch pad. The step number, which
was previously indicated by a "0" is now replaced
by a "1" and the value "0.0s" will appear in the fi eld
above "TIME".
Channel sequencer
TIME
STEP
11
12
1
POS
–––
10
+90%
0.0s
Use the selection keys of the right touch pad as
necessary to shift the marker frame to the "TIME"
column.
Now briefl y tap on the center SET key of the right
touch pad to set the activation time into the value
fi eld for the "TIME" column, e.g. 1.5 s. The current
position in time is represented in the graphic by the
dotted vertical line. It will move to the right according
to the time setting and, at the same time, the course
of servo positions will be presented as dotted lines
between time-point "0" and time-point "1".
Channel sequencer
TIME
STEP
11
12
1
POS
–––
10
+90%
1.5s
Now set the desired servo positions for the end of the
fi rst time span (with the same procedure as already
described for "Step 0") or leave one or more of these
servos in the same position they were in for the
previous step.
A simultaneous tap on the cd or ef keys of the right
touch pad (CLEAR) will reset the inverse video value
displayed if the TIME fi eld back to "blank" and erase
the current sequence, in this example only Step "1".
Channel sequencer
TIME
STEP
11
12
0
POS
–––
10
+90%
0.0s
Step 2 …
Repeat the previously described procedure for
every other step to be defi ned until the servos have
reached their terminal positions.
Switch assignment
In conclusion, assign the sequence of events created
to a switch (as described on page 56 in the section
"Assigning transmitter controls, switches and control
switches") with which the servos can be switched
between their initial and terminal positions.
Channel sequencer
TIME
STEP
11
12
8
POS
10
0%
0.0s 2
As soon as this switch is closed, the servos'
sequence of movements can be followed in the
graphic. The servo curves will be shown in inverse
video according to the preset time windows. All
movements will sequence in reverse when the switch
is opened again.
Important notices:
The sequence shown is only for demonstration •
purposes and is not at all representative of a real
sequence of servo movements.
246 Detail program description - Channel sequencer
The settings made in the "POS" value fi eld •
replace the otherwise "conventional" transmitter
control signal. Therefore it is necessary, before
programming such a sequence, to check in the
»Servo display« menu to make sure none of the
channels planned for the sequence are actuated
by any other transmitter operating element. If this
were to be the case, it could lead to unpredictable
excursions in the motion sequence.
The settings made in the »• Servo adjustment«
and »Tx. output swap« menus are not affected
by settings in this menu.
When preparing and creating a sequence, •
be absolutely sure the servos do not collide
mechanically. If necessary, use the "Travel limit"
option in the »Servo adjustment« menu.
Multi-channel
Channel multiplier for special functions
The mc-20 HoTT transmitter has an integrated multi-
function channel built into the transmitter's software.
This facility permits up to two control channels to be
used for up to four or eight special functions Every
available switch (including the so-called expansion
switches, see page 56) or transmitter control can be
assigned on the transmitter side.
On the receiver side, the following modules are
available as accessories, whereby at one time a
maximum of two modules can be operated via the
»Multi-channel« menu.
NAUTIC-Expert, switching module, order no. 4159
The NAUTIC-Expert switching module expands a
servo's functionality to 16 switched functions. By
appropriately wiring the connecting cable, loads can
either be operated from a common power supply or
also separately by multiple power sources.
NAUTIC-Multi-Prop mini-decoder order no. 4142.N
The 1/4 C-NAUTIC-Multi-Prop mini-decoder expands
a proportional function to four proportional functions.
Light module order no. 2381
A module for switching the light signals of rail, road
and airborne vehicles with true authenticity.
Sound switch for vehicle models order no. 2382.F
start, stop and supplementary sounds as well as
typical vehicle signals
Sound switch for ship models order no. 2382.S
start, stop and supplementary sounds as well as
typical ship signals
Further information can be found in Internet at
www.graupner.de. Use the search mask by entering
the respective order no. Alternatively, contact or visit
your local dealer.
Use the selection keys on the left or right touch pad
to scroll to the menu option »Multichannel« menu
option in the multi-function menu:
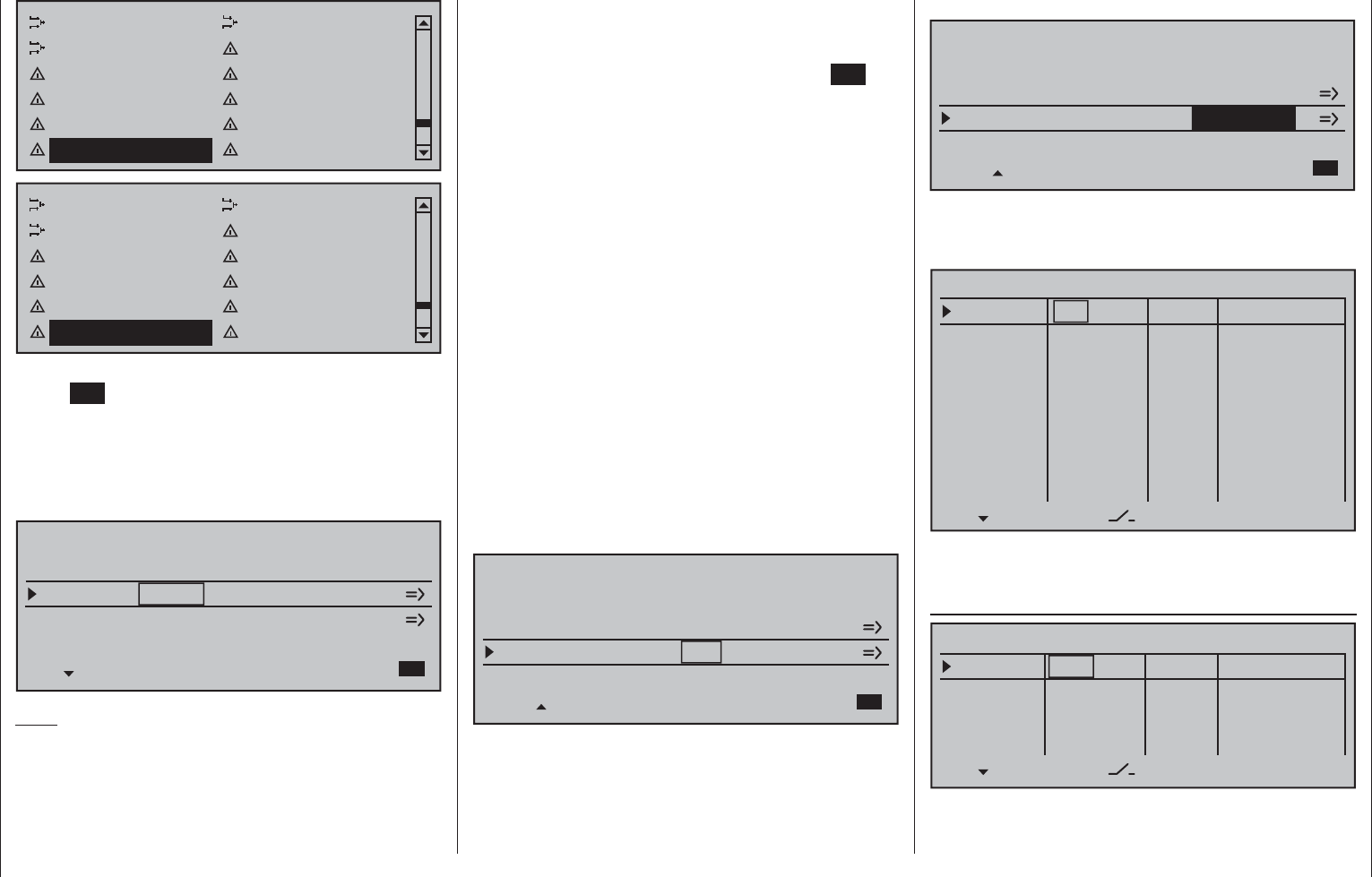
247
Detail program description - Multi-channel
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
… then open this menu option with a brief tap on the
center SET key of the right touch pad.
Here, in the second column from the left, each of the
two multi-channel functions can be activated ("ACT")
or deactivated ("INACT") as desired and in the third
column the given function can be assigned to one of
the transmitter channels, C5 through C8, in a list.
MULTICHANNEL
MULTIC1
MULTIC2
INACT
INACT
C5
C6
SET SEL
MULTIC 4CH
MULTIC 4CH
SEL
Note:
When a changeover is made to the »Servo display«
or if »Servo adjustment« is used to select the
"-travel+" or "-lim +" columns for these previously set
channels, their respective cells will fl ash to indicate
that these channels have been activated in the
»Multichannel« menu. The preset values of 100 % or
150 % should not be changed.
Prior to channel selection, please observe the
following notices:
Switch to the 1. "SETTINGS/DISPLAYS" line of the
»Telemetry« menu and tap on the center SET key
of the right touch pad:
on the "RX SERVO" page, select the "20 msec" •
setting in the last line "PERIOD", see page
231.
On the "RX SERVO TEST" display page, •
select the "SAME" option for the last line "CH
OUT TYPE", see page 238.
The control channel used may not be used as an 2.
input nor as an output channel for any mixer! For
example, if C5 is selected, be sure that the "Aile/
fl aps" line of the »Model type« menu is preset
to "1AIL" or that the "Swashplate type" line of the
»Helicopter type« menu is preset to "1 servo".
The channel settings intended for NAUTIC control 3.
channel purposes in the »Control adjust« and
»Servo adjustment« menus are to be left as
they are or reset back to their original settings.
Do not assign any transmitter control or switch to
the respective input either. Also be sure that the
servo's direction of rotation is not reversed. Leave
the servo middle at 0%.
MULTICHANNEL
MULTIC1
MULTIC2
ACT
ACT
C5
C6
SET SEL
MULTIC 4CH
MULTIC 4CH
SEL
In the next column to the right, make a separate
channel count specifi cation for each of the two multi-
channels; "MULTIC 4C." for the NAUTIC-Multi-Prop
mini decoder, order no. 4142.N or "MULTIC 8C."
for the NAUTIC-Expert switching module, order no.
4159.
MULTICHANNEL
MULTIC1
MULTIC2
ACT
ACT
C5
C6
SET SEL
MULTIC 4CH
SEL
MULTIC 8CH
Afterward, use the right arrow symbol at the bottom
line's right end to switch over to the second page of
settings for the »Multichannel« menu:
MULTICH 2
–––
SEL Offset
Input 1
Input 2
Input 3
Input 4
Input 5
Input 6
Input 7
Input 8
fr
fr
fr
fr
fr
fr
fr
fr
–––
–––
–––
–––
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
This menu page is now used for making individual
settings for "MULTICH 1" and "MULTICH 2".
Column 2, "Control"
–––
SEL Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel+
fr
MULTICH 2
Use the arrow keys to move to the column over SEL.
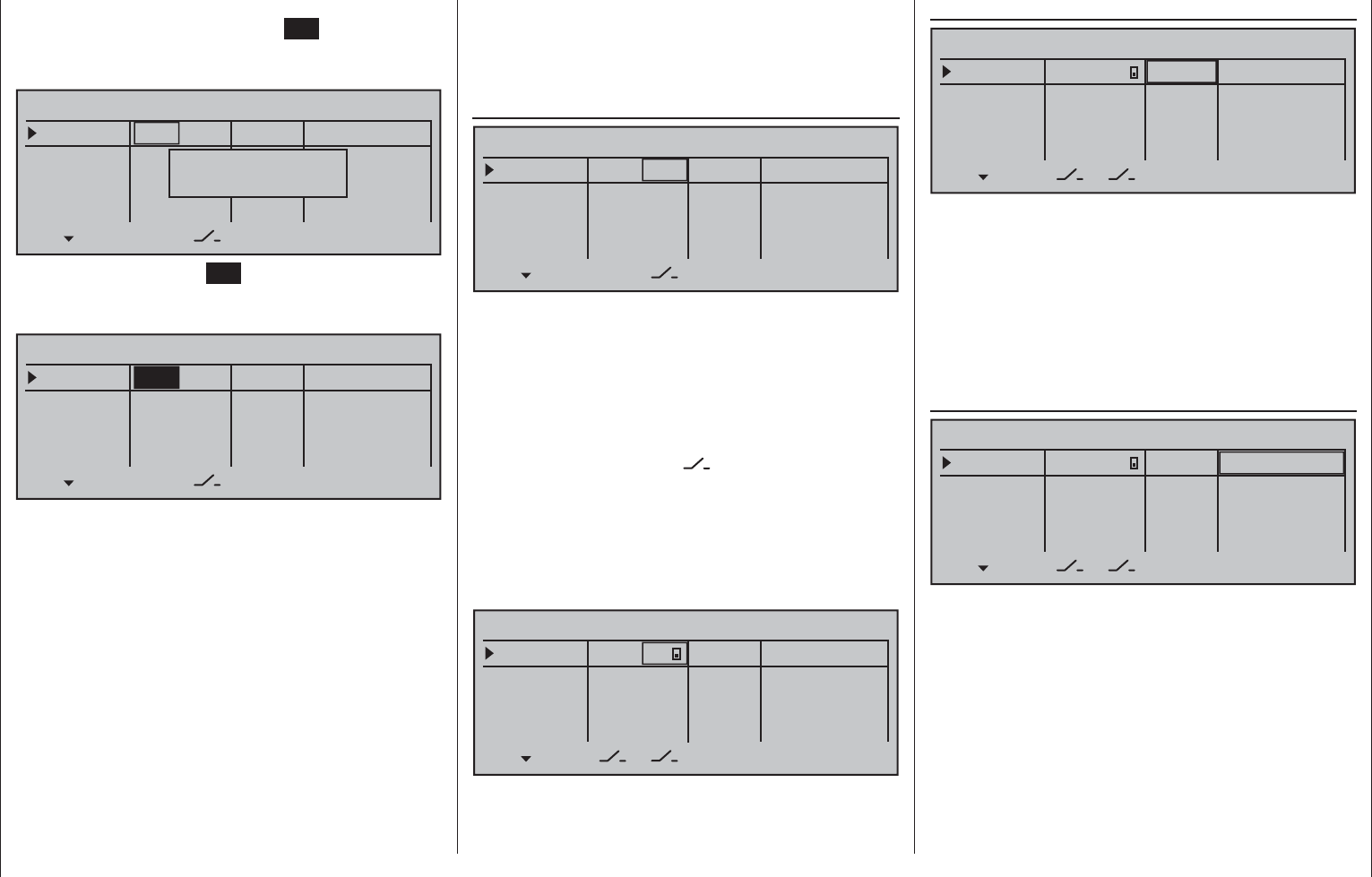
248 Detail program description - Multi-channel
and then connected as necessary.)
If a Nautic-Expert switching module (order no. 4159) is
present, the assigned proportional control will function
like a switch when it is put near its limit position.
Column 3, "Switch"
–––
SEL Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
fr
MULTICH 2
This column is used to assign each of the inputs
used, 1 through 8 (maximum), to any switch available
on the transmitter. These assignments are done
as described in the section "Assigning transmitter
controls, switches and control switches" on page 56:
Any controls which were previously assigned in the
second column will be erased. In this case, instead
of SEL, the switch symbol will be displayed at the
bottom of the 2nd column such that now a second
"normal" switch, or even a transmitter control switch,
logical switch, … can be assigned as needed from
the group of "expanded switches". In general it is
suffi cient to assign a simple switch or transmitter
control.
–––
Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
3
MULTICH 2
Column 3, "Offset"
–––
Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
3
MULTICH 2
The control center for the given control, i.e. its zero
point, can be changed in this column. The adjustment
range lies between -100 % and +100 %.
Simultaneously tapping on the cd or ef keys of
the right touch pad (CLEAR) will reset the value
displayed in inverse video back to its "0 %" value.
Leave the offset setting at 0 % while making switch
assignments.
Column 3, "–travel+"
–––
offset
INPUT 1
INPUT 2
INPUT 3
INPUT 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
3
MULTICH 2
Finally, transmitter control travel is set for both sides
in the rightmost column "-travel+". The range for this
lies between -100 % and +100 %. To accomplish this,
push or turn the respective transmitter control in the
given direction. This will set the "travel" for each given
direction individually.
If the assignment is for a switch, leave the setting at
the default value of 100 %.
After completing the activation of transmitter control
assignment by tapping the center SET key of the right
touch pad , the message shown below will appear in
the display:
–––
SEL Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
fr
MULTICH 2
Move desired
control adj.
Alternatively, the center SET key of the right touch
pad can be tapped for a second time while this
message is on display:
–––
SEL Offset
Input 1
Input 2
Input 3
Input 4
fr
fr
fr
–––
–––
–––
+100%
+100%
+100%
+100%
+100%
+100%
+100%
+100%
0%
0%
0%
0%
– travel +
fr
MULTICH 2
Now the desired transmitter control can be selected
with the selection keys on the left or right touch pad.
If the selected control has an assignment, it can be
disconnected from a transmitter control switching its
fi eld to "fr".:
transmitter control 1 … 4 (CH 1 …4)•
slider control 1 … 3 in the middle of the console •
(SR1 … 3)
depressible, roller-shaped proportional speed •
control (DG1 … 5)
side proportional control control (SD1 and SD2)•
(Function inputs "UV1" through "UV8", which are also
in the selection list, can be selected at a later time
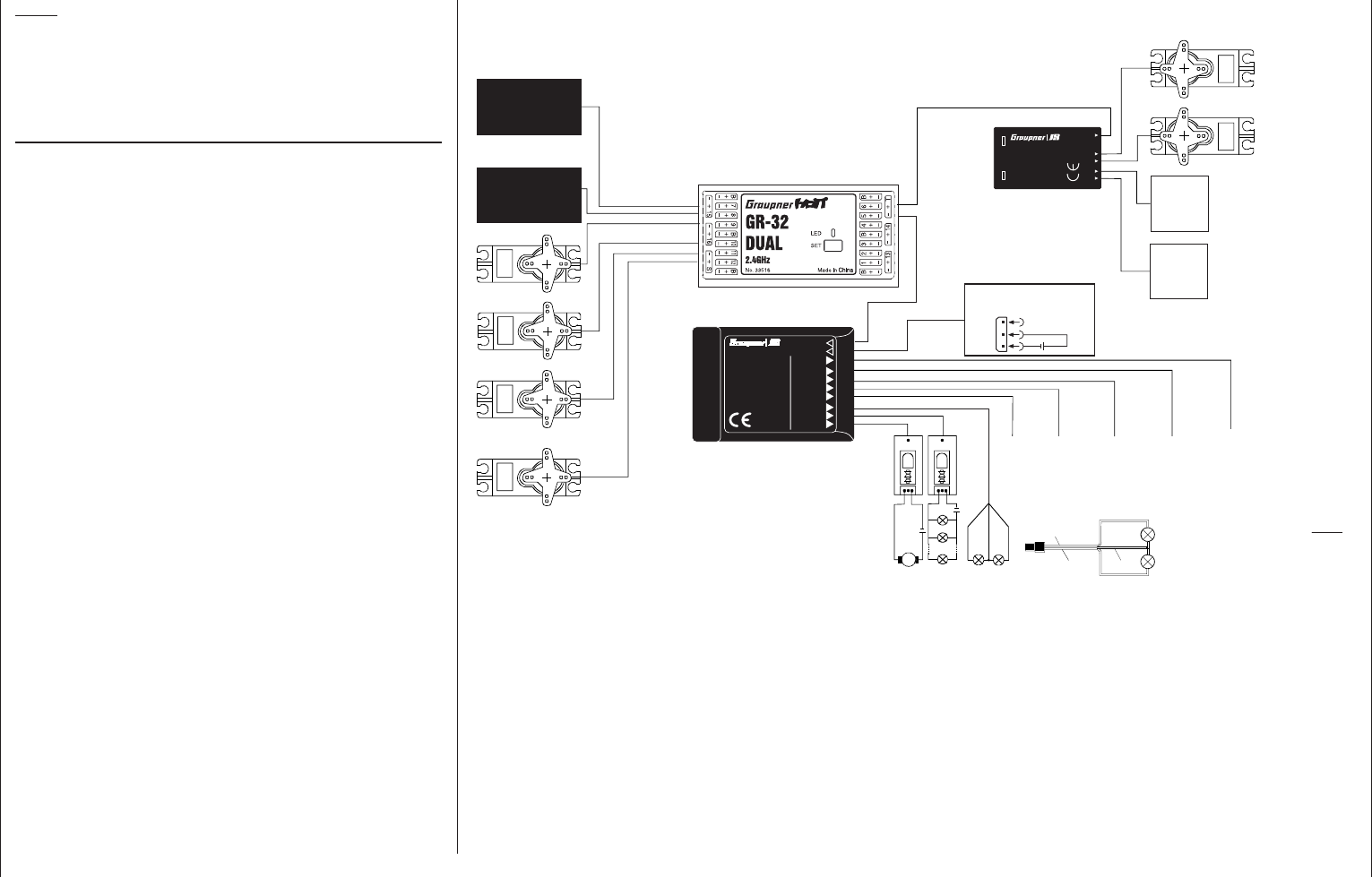
249
Detail program description - Multi-channel
Note:
Due to technical reasons, servos connected to a 1/4
C NAUTIC Multi-Prop mini decoder may operate
somewhat hesitatingly. This is not a fault.
Connection notes for the
Nautic-Expert switching module, order no. 4159
As many as 16 switched functions can be controlled
per switching module.
Eight loads, like lamps, LEDs, etc. – but not electric
motors – , with a load current of up to 0.7 A each can
be connected directly.
Two switch functions per connector socket are
possible via the three conductor cable, order no.
3941.6 , see bottom right fi gure.
Electric motors and loads drawing substantial current
should be connected by other means, e.g. via
switching modules. Ask your dealer about this.
M
6 (output: 5 ... 8)
5 (output 5 ... 8)
(Receiver power supply to the „B + -“
marked terminals)
Best.-Nr. 4159
Max. 8 x 0,7 A
Batt. 3...30V
NAUTIC - Expert
Schaltbaustein
2 - 16 K
Empfänger
1- H -2
1- G -2
1- F -2
1- E -2
1- D -2
1- C -2
1- A -2
1- B -2
Best.-Nr. 4142.N
1/4 K
NAUTIC
Multi-Prop-
Mini-Decoder
RX
S 4
S 3
S 2
S 1
external power-
supply 3 ... 30 V
- +
+
-
Current consumption of directly
connected consumer units
(but no electric motors)
max. 0,7 A (total max. 8 x 0,7 A).
Wiring for direct connection of two consumer units at one output
3-pole cable with flat connector Order No. 3941.6
red
brown
orange
consumer
unit
max. 0,7 A
consumer
unit
max. 0,7 A
additional modules e.g....
Switching module high voltage SXH Order No. 3970
Switching module multi function SXM Order No. 3971
Switching module
high voltage
SXH Order No. 3970
Switching
module
SXH
Switching
module
SXM
Switching module
multi function
SXM Order No. 3971
Soundswitch
Order No. 2382
Light module
Order No. 2381
7 (output: 5 ... 8)
8 (output: 5 ... 8)
additional servos, speed controller,
sail winch, ... also on this side
The figure shows an example of the connectivity of the ' 2-16 C NAUTIC
Expert Switch building block "," 1/4 K NAUTIC Multi-Prop Mini-Decoder ",
" light module "and" sound switch ". Two of these modules in parallel can
be operated using the menu »Multi channel« on output 5 ... 8.
Before first time operation of the NAUTIC modules make the above described settings.
Connection example with the Graupner HoTT GR-16 receiver
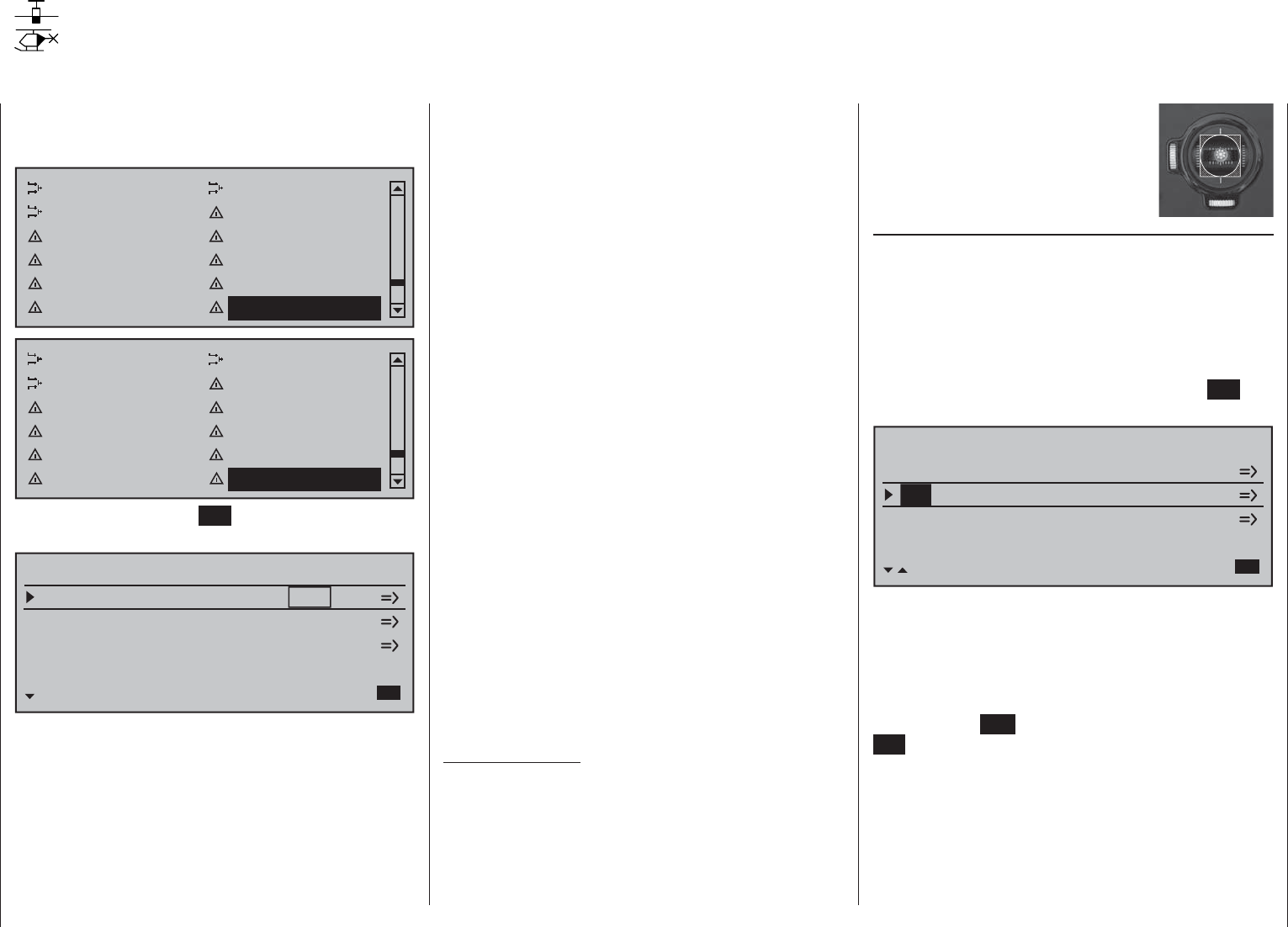
250 Detail program description - Ring limiter
Ring Limiter
Control of Voith Schneider propellers in model ships
Scroll with the selection keys on the left or right touch
pad to the menu option »Ring limiter« in the multi-
function menu:
MIX active/phase MIX-only channel
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
RING LIMIT
4
4
9
11
SET
4
Input
3
3
3
3
XY
4
10
12
X
Output
Y
OFF
OFF
OFF
This »Ring limiter« is primarily intended for the
control of up to three so-called Voith Schneider
propellers in ship models. These are positioned
beneath the ship where they are exposed to a free
fl ow of water in all directions. The control of these
drives and turning their vertically oriented propeller
blades is done with two servos per Voith Schneider
propulsion unit whereby, for mechanical reasons,
the propellers of this type offered by Graupner under
order nos. 2358 and 2358.BL have a maximum
control travel limitation of 4 mm each.
As long as the joysticks for forward/reverse and left/
right are operated individually (see section "Column
Input") this is no problem because travel for the
two servos can be appropriately adjusted, both
mechanically as well as in the »Servo adjustment«
menu. However, this becomes problematic when, for
example, one joystick is 100 % forward and, at the
same time, the other joystick is pushed completely
to the right to arithmetically produce a 141 % sum for
the two servo travel vectors. The mechanical controls
of the Voith Schneider propellers will collide with their
limits; in best case only drawing an unnecessary
amount of electric current, in worst case causing
damage or even bursting the linkage..
In order to avoid this problem, the mc-20 HoTT
transmitter has a maximum of three "ring limiters"
available in the "SET" column of this option's fi rst
display page (see fi gure at left) that can be switched
"ON" or "OFF" individually. In the fi rst line on the
setting page for a given "ring limiter", its maximum
travel can then be set for a range of between 25 and
125 %. The second line provides a setting for the size
of limitation of overall defl ection between:
0 % circular limit ( )
100 % no limit ( )
(limitation is strictly a matter of the given
joystick's mechanical stop)
Important notice:
When this function is used, leave the respective
setting values in the »Dual Rate / Expo« and
»Servo adjustment» menus at 0 and 100 % or
reset them back to their default values.
The adjacent sketch illustrates the
effect for a 0 % setting. The cross-
hatched area of travel is curtailed
and appears as a "dead zone".
Column, "Input"
With the standard preset control mode 1, all three
ring limiters are pre-assigned to inputs 3 (forward/
reverse) and 4 (left/right) which are actuated by the
left joystick. However, this pre-assignment can be
replaced anytime by any other transmitter control
combination. Use the selection keys on the left or
right touch pad to move the marker frame to the
desired value fi eld then briefl y tap the center SET key
of the right touch pad:
RING LIMIT
4
9
11
SET
4
Input
3
3
3
3
XY
4
10
12
X
Output
Y
OFF
OFF
OFF
4
Select the desired control channel (1 … 12) for the
value fi eld now displayed in inverse video by using
the cd or ef selection keys. However, do not
forget that if a control channel in the range of 5 … 12
is selected, it must also be assigned to a control in
the »Control adjust« menu, see page 108. Briefl y
tap the center ESC of the left touch pad or the center
SET key of the right touch pad to conclude your entry.
In principle, the other inputs are to be handled in the
same manner.
A tap on the cd or ef keys of the right touch pad
at the same time (CLEAR) will reset the active value
fi eld back to its given default value.
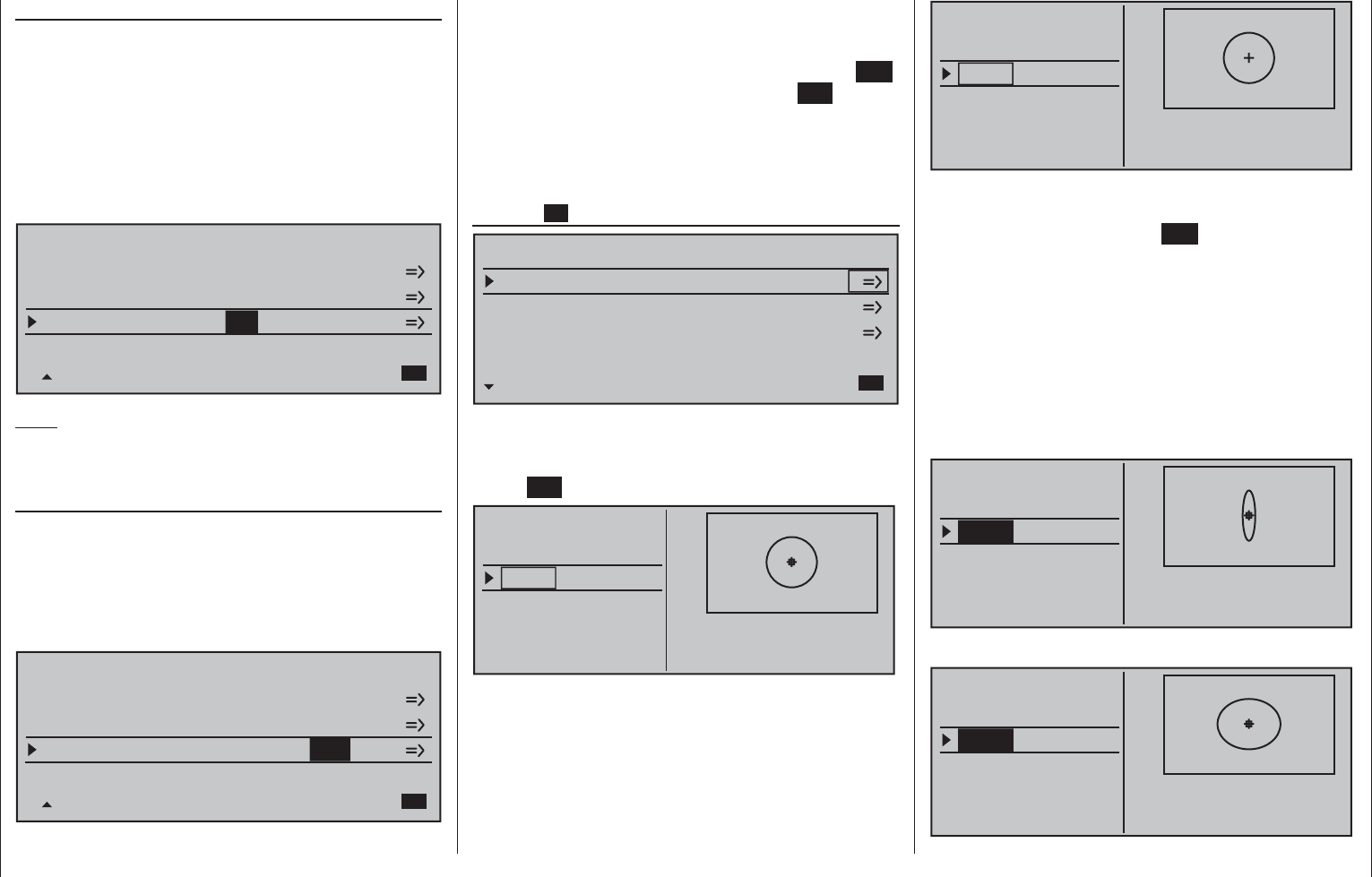
251
Detail program description - Ring limiter
Column, "Output"
The three ring limiters are pre-assigned to receiver
outputs 3/4, 9/10 and 11/12 by default, whereby the
outputs in column "X" are for the forward/reverse
function and the outputs in column "Y" are for the left/
right function. However, this preset combination of
receiver outputs can be replaced as necessary by
any other combination at any time. This is essentially
done in the same manner as described previously
under "Input", for example:
RING LIMIT
4
9
SET
4
Input
3
3
3
3
XY
4
10
6
X
Output
Y
OFF
OFF
OFF
4
7
Note:
Watch out for undesirable overlaps if you use one of
the outputs within a mixer.
Column, "SET"
The SET column is used to determine just which of
the ring limiters is to be "OFF" and which are to be
"ON", i.e. active. Use the selection keys on the left
or right touch pad to move the marker frame to the
desired value fi eld in the SET column then briefl y tap
the center SET key of the right touch pad:
RING LIMIT
4
9
SET
4
Input
3
3
3
3
XY
4
10
6
X
Output
Y
OFF
OFF
4
7OFF
In the value fi eld now displayed in inverse video,
make a choice between the two options, "ON" and
"OFF", with the cd or ef selection keys then
conclude the entry with a brief tap on the center ESC
key of the left touch pad or on the center SET key of
the right touch pad.
A tap on the cd or ef keys of the right touch pad
at the same time (CLEAR) will reset the active value
fi eld back to its "OFF" default value.
Column
¨
RING LIMIT
4
9
SET
4
Input
3
3
3
3
XY
4
10
6
X
Output
Y
ON
ON
4
7ON
Following a selection of one of the three lines with
the selection keys, switch to the settings page for the
selected ring limiter (1 … 3) with a brief tap on the
center SET key of the right touch pad.
0%
Ring Limit 1
max-X
0%
100% 100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
CH 3
If, however, the small diamond at the center of the
circle in the fi gure above (which represents the
current joystick position) is not visible …
0%
Ring Limit 1
max-X
0%
100% 100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
CH 3
… then the respective ring limiter is still switched
"OFF". In this case, switch back to the previous page
with a brief tap on the center ESC key of the left
touch pad then switch the respective ring limiter "ON"
as previously described.
Programming procedure
The two upper value fi elds – labeled at the bottom
left of the display as "max-X" or "max-Y", depending
on the position of the marker frame – are used to
specify separate settings for each of the two control
functions, "left/right" and "forward/reverse" within a
range of 25 …
0%
Ring Limit 1
max-X
0%
100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
25%
CH 3
… and 125 %:
0%
Ring Limit 1
max-X
0%
100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
125%
CH 3
252 Detail program description - Ring limiter
In practice, the setting is made by changing the given
value until the respective servos in the model just
reach the point where they no longer move.
A tap on the cd or ef keys of the right touch pad at
the same time (CLEAR) will reset the changed value in
the active value fi eld back to its "100 %" default value.
In the next line down – labeled at the bottom left of
the display as " <=> -X" or " <=> -Y", depending
on the position of the marker frame – the setting
values, in a range from 0 % and a maximum of 125 %,
affect the form of limitation between "circular" and
"rectangular", whereby a setting value here may
never be greater than the value of the fi eld above it.
Ring Limit 1
0%
100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
100%
{–X
0%
CH 3
Ring Limit 1
0%
100%
CH 4
VSP OUT X VSP OUT Y
0% 0%
100%
{–X
100%
CH 3
A tap on the cd or ef keys of the right touch pad at
the same time (CLEAR) will reset the changed value
in the active value fi eld back to its "0 %" default value.
When fi nished with these settings, switch back to
the fi rst display page for this option then repeat this
procedure, as applicable, for the lines of ring limiter
2 or 3.
Final note:
This option can, of course, also be used as necessary
and applicable for fi xed-wing models.
253
For your notes
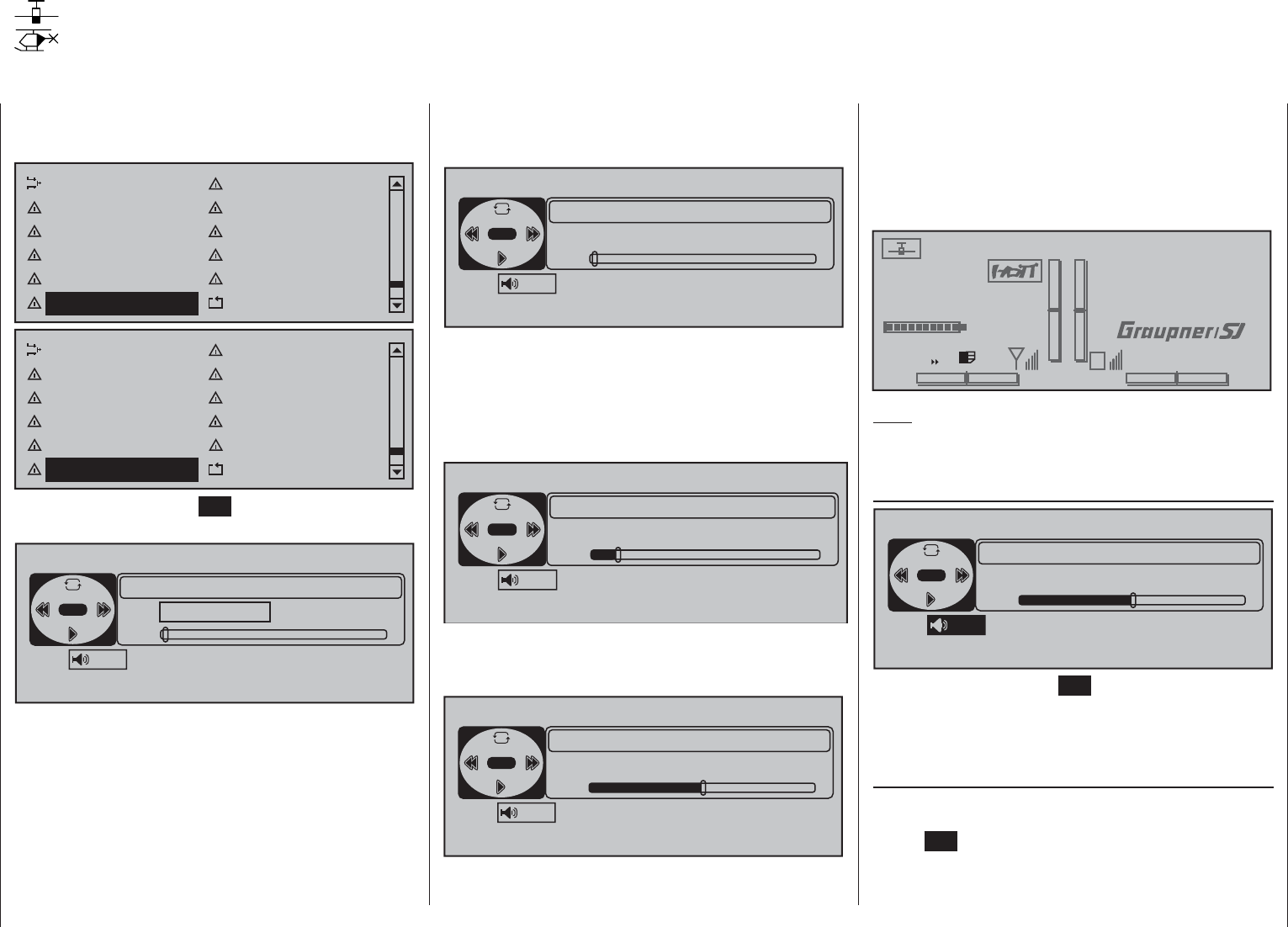
254 Detail program description - MP3 player
MP3 player
Replay program for MP3 fi les, such as music fi les
Scroll with the selection keys on the left or right touch
pad to the menu option »Ring limiter« in the multi-
function menu:
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swapg
Profi trim Trim memeory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
MP3-PLAYER
VOLUME ALBUM
00/00
TRACK
00/00
No files 0kbps
ESC
A
15
If the message "No fi les" appears near the middle of
the display when this menu option is called then the
transmitter has been unable to fi nd any suitable MP3
fi les on the SD card. If this should happen, use a PC
or laptop to check the content of the "MP3" directory
on the SD card and copy suitable MP3 fi les into this
directory if it is empty.
Therefore, insert a SD card containing MP3 fi les in
a directory named "MP3" and, after switching the
transmitter on, open the »MP3-Player« menu option.
MP3-PLAYER
VOLUME ALBUM
00/00
TRACK
00/00
0kbps
ESC
A
15
Briefl y tap the d key of the left touch pad to start
replay of the fi rst MP3 fi le of album 1. The replay will
start immediately, however, the display of data about
the number of albums and titles as well as playing
time for the current MP3 fi le – depending on the size
of the MP3 fi le – will only appear after some delay.
MP3-PLAYER
VOLUME ALBUM
01/04
TRACK
01/02
0kbps
ESC
A
15
The automatic replay of album 1 will continue to run
until it is stopped with a tap on the d key of the left
touch pad …
MP3-PLAYER
VOLUME ALBUM
01/04
TRACK
01/02
6:54/12:21 128kbps
ESC
A
15
sing, sing.mp3
… or the the transmitter is switched off.
During ongoing replay, the menu can be exited at
any time and the transmitter can be used without
restriction. The ongoing MP3 replay is visualized in
the transmitter's basic display by virtue of a "MP3"
display label shown at the left of the SD card symbol
and an animated triangle beneath that display label.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
VRX VOLT:4.8V
MP3
Note:
If voice output is activated it will be blended in with
the playing MP3 fi le.
Volume
MP3-PLAYER
VOLUME ALBUM
01/04
TRACK
01/02
6:54/12:21 128kbps
ESC
ASing, sing, sing.mp3
15
After a tap on the center SET key of the right touch
pad to activate the value fi eld, the volume of replay
can be regulated within a range of "0" (= mute) to
"30" (very loud).
Album
Use the selection keys of the right touch pad to move
to the value fi eld above "ALBUM" and briefl y tap the
center SET key of the right touch pad:
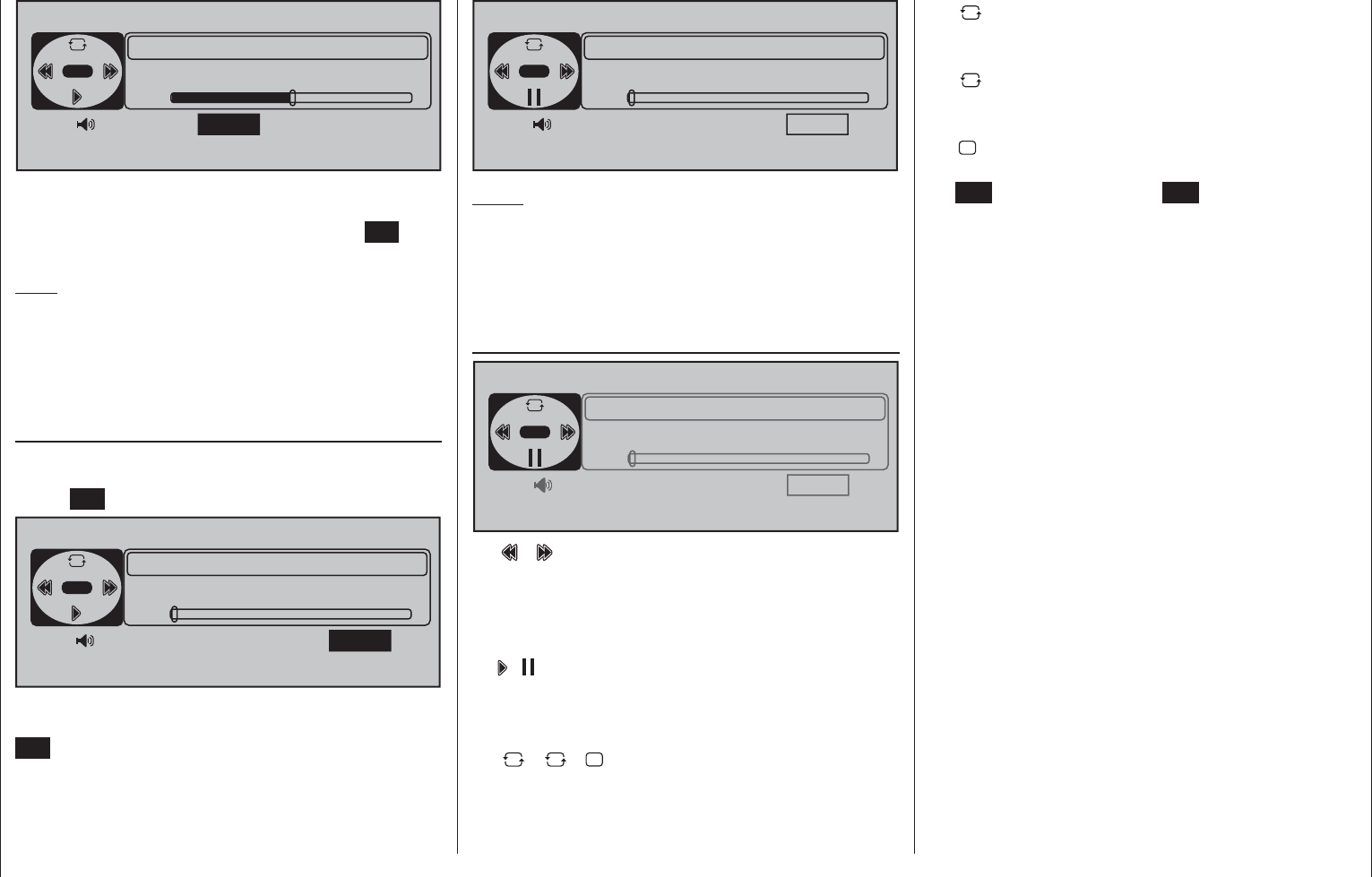
255
Detail program description - MP3 player
MP3-PLAYER
VOLUME ALBUM TRACK
01/02
6:54/12:21 128kbps
ESC
A
15
sing, sing.mp3
02/04
Use the cd selection keys of the right touch pad to
select the desired album number (from 1 to a maximum
of 10) in this value fi eld. Briefl y tap the center SET key
of the right touch pad to confi rm the selection.
Note:
The number of albums is a consequence of the
number of fi les present in subdirectories of the "MP3"
directory on the SD card, not the sum of album
names which may be stored in identically named
meta-data fi elds of the MP3 fi le.
Title
Use the selection keys of the right touch pad to move
to the value fi eld above "TRACK" and briefl y tap the
center SET key of the right touch pad:
MP3-PLAYER
VOLUME ALBUM TRACK
0:00/2:34 128kbps
ESC
A
15
Track01.mp3
02/04 01/02
Now select the desire title by using the cd selection
keys on the right touch pad. Briefl y tap the center
SET key of the right touch pad to start this selection.
MP3-PLAYER
VOLUME ALBUM TRACK
0:00/3:45 128kbps
ESC
A
15
Track01.mp3
01/23 02/23
Notes:
The title displayed will be the fi lename of the MP3 •
fi le, not any identically named title which may be
stored in the MP3 fi le as a meta-data fi eld.
The number of the title per album is a consequence •
of the number of MP3 fi les per directory.
MP3 player operator fi eld
MP3-PLAYER
VOLUME ALBUM TRACK
0:00/3:45 128kbps
ESC
A
15
Track01.mp3
01/23 02/23
•
Analogous to corresponding keys on a MP3 and
other players, jump one title forward or back for
each tap on one of the ef selection keys of the
left touch pad.
• /
Analogous to corresponding keys on a MP3 and
other players, start and stop the MP3 player with a
tap on the d selection keys of the left touch pad.
A
• / 1 / 1
Switch between these three options with the c
selection keys of the left touch pad.
AReplay of the selected album will repeat in
an endless loop until it is either stopped or
the transmitter is switched off.
1Replay of the current title will repeat in an
endless loop until it is either stopped or the
transmitter is switched off.
1 Replay will stop automatically at the end of
play for the current title.
ESC A tap on the center ESC key of the left
touch pad will exit the menu option without
stopping any replay that may be running.
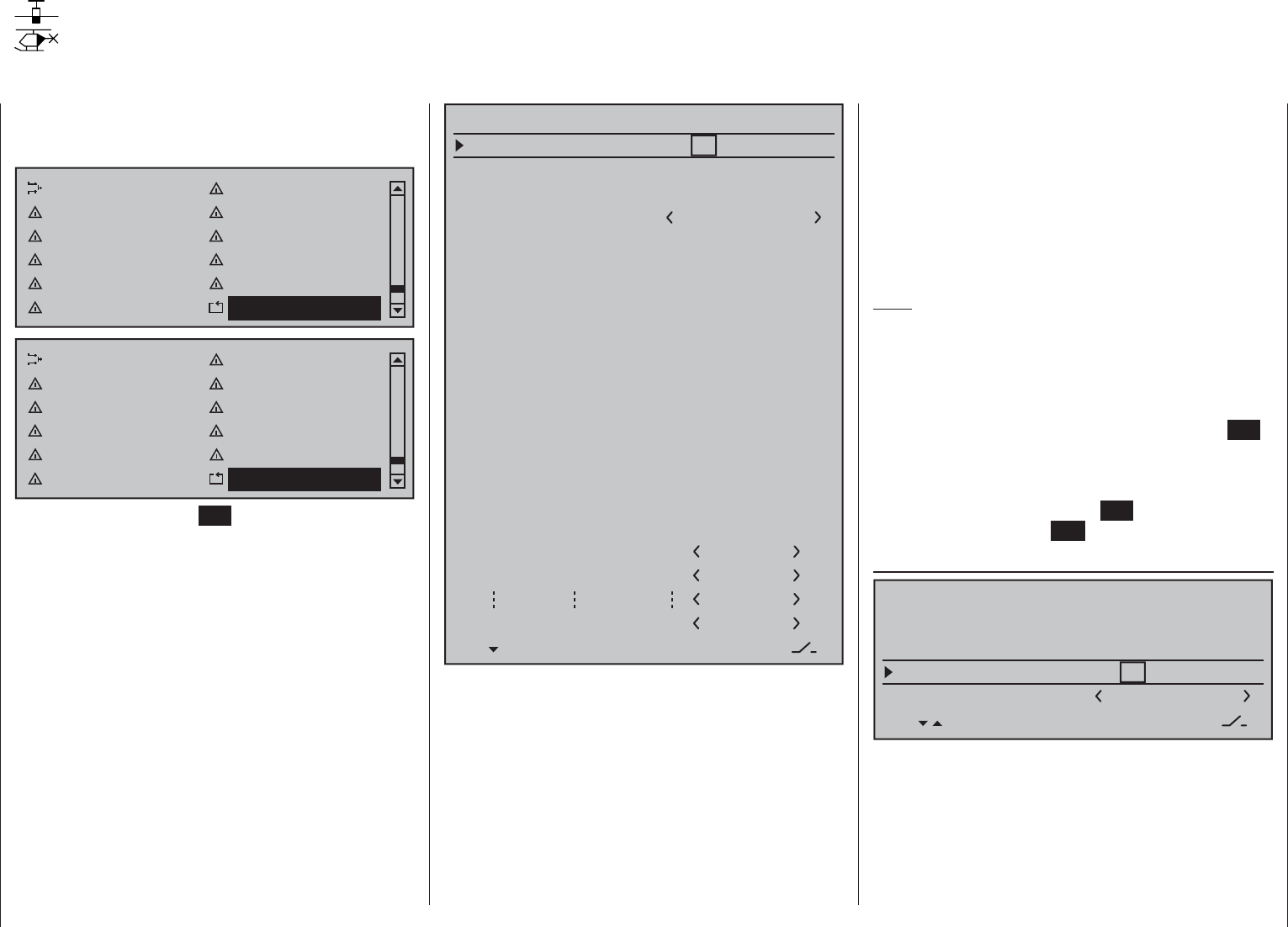
256 Detail program description - Basic settings
Use the selection keys on the left or right touch pad
to scroll to the »Basic settings« menu option in the
multi-function menu:
Dual mixer Fail-safe adjust
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Swashplate mixer Fail-safe adjust
Teacher / pupil Tx. output swapg
Profi trim Trim memeory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
Battery type
Battery warning
Touch Sense
Top LCD Contrast
Li-Io
Display light
Region
2
3.60V
0
EURO
unlim.
GENERAL BASIC SETTINGS
Owners name H-J Sandbrunner
Pre-set stick mode 1
Pre-set DSC Output PPM10
Pre-set Pitch min rear
Stick warning: unlim.
Pre-set modulation
Own phase name
Own phase name
HoTT
2
10
Bottom LCD Contrast 0
Own phase name 1
Voice volume
Vario volume
Touch-beeps vol.
7fr –––
SEL SEL
7fr –––
7fr –––
Power-on/off beep yes
Basic settings are made in this menu. Transmitter-
specifi c settings, such as volume regulation for
acoustic signals and voice messages output via the
built-in speaker or headset connector, the owner's
name, country setting and even specifi cations for new
model memories. The settings made in this menu on
the lines …
"Pre-set stick mode",•
"Pre-set modulation",•
"Pre-set DSC Output" and•
"Pre-set Pitch min"•
… therefore have no infl uence whatsoever on already
existing model memories; instead, they are only
defaults which are automatically adopted into newly
initialized model memories and can be changed
there individually at any time in the »Basic settings,
model« and »Helicopter type« menus. A change
to the "Pre-set" settings in value fi elds of this menu
therefore only affects those model memories created
new at a later time.
Note:
The settings in this menu are only specifi ed once
in the entire transmitter. Therefore, after opening
this menu in another model memory, the last valid
settings always appear.
Select the desired line with the cd selection keys
of the left or right touch pad then tap the center SET
key of the right touch pad. The value in the fi eld now
displayed in inverse video can be changed. After a
change has been made, the entry can be concluded
with another tap on the center SET key of the right
touch pad or the center ESC key of the left touch pad.
Voice volume / Vario volume / Touch-beeps vol.
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Voice volume
Vario volume
Touch-beeps vol.
7 fr –––
7fr –––
7fr –––
SEL SEL
These three lines can be used to individually set the
volume of the three groups of acoustic signals and
voice messages. This involves selection from among
a total of three variants, whereby each of the variants
offer two or three options for individually regulating
volume even after leaving this menu.
Basic settings
Basic transmitter settings
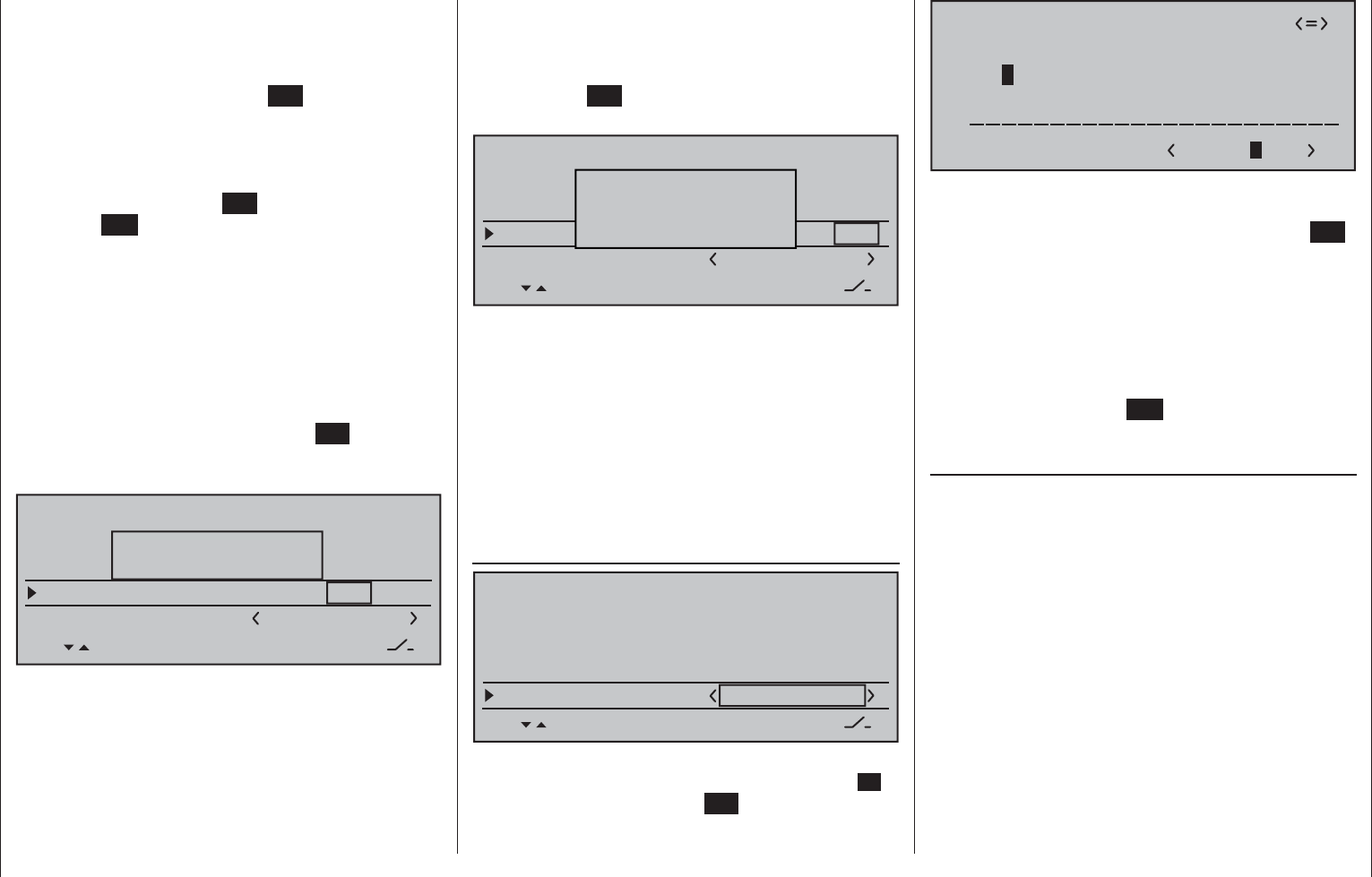
257
Detail program description - Basic settings
Pre-setting a value
Use the selection keys on the left or right touch pad
to move the marker frame to the desired value fi eld in
the column above the left SEL at the display's lower
edge then briefl y tap the center SET key of the right
touch pad. The desired volume for the selected group
can be specifi ed in increments between 0 and 10
in the value fi eld now displayed in inverse video by
using the selection keys of the left or right touch pad.
Another tap on the center SET key of the right touch
pad or the ESC key of the left touch pad will conclude
the process.
Following a simultaneous tap on the cd or ef keys
of the right touch pad (CLEAR), the display will return
to its "7" default value.
via rotary control
Use the selection keys on the left or right touch pad
to move the marker frame to the desired value fi eld in
the column above the right SEL label at the display's
lower edge then briefl y tap the center SET key of the
right touch pad. The message shown below will then
appear in the display:
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Voive volume
Vario volu
Touch-beeps vol.
7 fr –––
7fr –––
7fr –––
SEL SEL
Move desired
control adj.
Now turn the desired rotary control, for example, the
right retractable knob DG2. Afterward, this knob can
be used anytime to incrementally regulate volume for
the selected group between 0 and 10.
Following a simultaneous tap on the cd or ef keys
of the right touch pad (CLEAR), the display will return
to its "fr" default value.
via three position switch
Use the selection keys on the left or right touch pad
to move the marker frame to the column above the
switch symbol at the display's lower edge then briefl y
tap the center SET key of the right touch pad. The
message shown below will then appear in the display:
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Voice volume Sprache
Vario volumetöne
Touch-beeps
7 fr –––
7fr –––
7fr –––
SEL SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Now, assign a switch as described on page 56 in the
section "Assigning transmitter controls, switches and
control switches". Ideally a self-neutralizing three
position switch, e.g. like that offered by Graupner
under order no. 33001.5. Afterward, this switch can
be used anytime to incrementally regulate volume for
the selected group between 0 and 10.
Following a simultaneous tap on the cd or ef keys
of the right touch pad (CLEAR), the display will return
to its "---" default value.
Owner
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Voice volume
Vario volume
Touch-beeps vol.
7 fr –––
7fr –––
7fr –––
SEL SEL
Up to 15 characters can be used to specify the
owner's name. Change to the next screen page (
¨
)
with a brief tap on the center SET key of the right
touch pad:
!"#$%&’()
Owners name
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
H-J Sandb
Select the desired characters with the selection
keys of the left touch pad. With a brief tap on the f
selection key of the right touch pad or its center SET
key, move to the next position in which a character
can be selected. A simultaneous tap on the cd or
ef keys of the right touch pad (CLEAR) will place a
space character at the current position.
Positioning to any character position within the entry
fi eld can be done with the ef keys of the right
touch pad.
A brief tap on the center ESC key of the left touch
pad will cause a return to the previous menu page.
Pre-set stick mode
As a basic principle, there are four different ways to
assign the four control functions, aileron, elevator,
rudder and throttle or brake fl aps for winged models
as well as rolling, pitching, tail rotor and throttle/pitch
for helicopter models to the two joysticks. Just which
of these options is chosen depends on the individual
preferences of the individual model pilot.
Use the cd selection keys of the left or right touch
pad to select the "Stick mode" line. The option fi eld
will be framed.
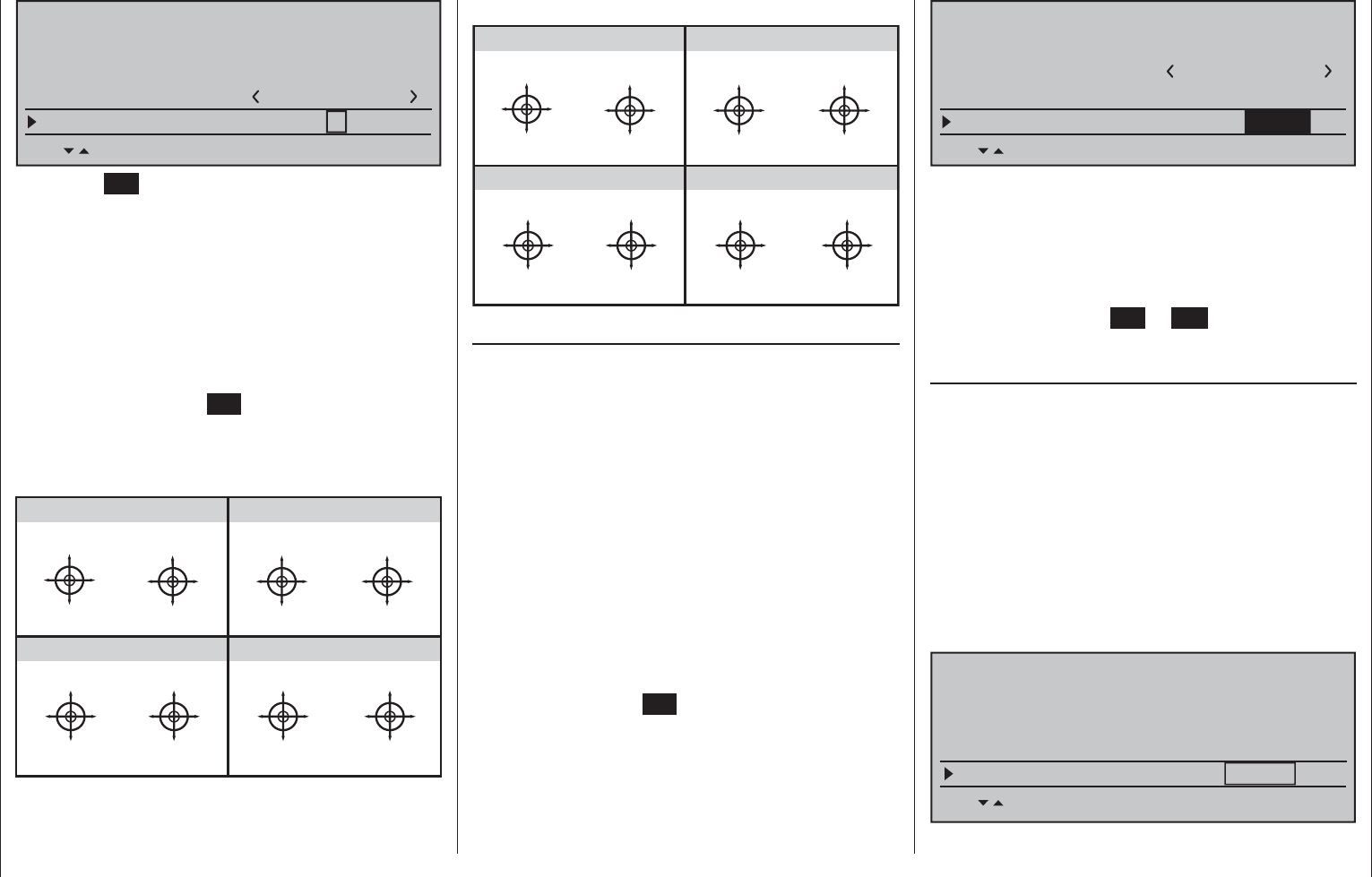
258 Detail program description - Basic settings
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Voice volume
Vario volume 7fr –––
7fr –––
Pre-set stick mode 1
H-J Sandbrunner
SEL
Tap on the SET key briefl y. The currently displayed
stick mode will be displayed in inverse video. Now
use the selection keys of the right touch pad to select
the variant, from 1 to 4, you most frequently use. In
the future this will be used for newly initialized model
memories, but can be changed on an individual basis
for up to 80 model memories.
Following a simultaneous tap on the cd or ef keys
of the right touch pad (CLEAR), the display will return
to stick mode "1".
With another tap on the SET key, the selection fi eld
will be deactivated again to permit a change to
another line.
Winged model stick mode
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
elev. down
elev. up
left rudder
right rudder
full throttle
idle
left aileron
right aileron
full throttle
left rudder
right rudder
idle
elev. down
elev. up
left aileron
right aileron
elev. down
elev. up
left aileron
right aileron
Motor Vollgas
idle
left rudder
right rudder
full throttle
idle
left aileron
right aileron
elev. down
elev. up
left rudder
right rudder
Helicopter model stick mode
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
pitch axis
tail rotor
pitch axis
tail rotor
throttle
roll
roll
throttle
tail rotor
tail rotor
throttle throttle
pitch axis
pitch axis
roll
roll
pitch axis
pitch axis
roll
roll
Motor/Pitch
throttle
tail rotor
tail rotor
throttle
throttle
roll
roll
pitch axis
pitch axis
tail rotor
tail rotor
Pre-set modulation
Standard equipment for the mc-20 transmitter
includes a HoTT transmitter module and, under
the right front cover – as viewed from the front – a
connector socket for an external RF module, see
page 25. Additionally, a transmitter-internal iFS RF
module can be installed and connected. On a model-
specifi c basis, the transmitter can be set to use the
modulation of any one of these three RF modules by
appropriately selecting "HoTT", "EXT. PPM" or "INT.
PPM" in the "Pre-set modulation" line of the »Basic
settings, model« menu. The most frequently used
variant should logically be selected for the "Pre-set
modulation" line in the "General Basic Settings"
menu. In the future this will be used for newly
initialized model memories, but can be changed on
an individual basis for up to 80 model memories.
Briefl y tap the center SET key of the right touch pad:
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Touch-beeps vol. 7fr –––
Pre-set stick mode 1
H-J Sandbrunner
Pre-set modulation HoTT
SEL
Now use the selection keys of the right touch pad to
select the variant from among "HoTT", "EXT. PPM"
and "INT. PPM".
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will return the display back
to modulation "HoTT".
With a brief tap on the SET or ESC key, the selected
fi eld is deactivated to permit a switch to another line.
Pre-set DSC Output
In the line with the same name in the »Basic
settings, model« menu, a separate specifi cation
can be made from among the available modulation
types which is specifi c to each model memory and
will then provided at the DSC socket. This choice
primarily infl uences the maximum number of control
channels which can be attached to the DSC (direct
servo control) socket, and thus also available to a
fl ight simulator or teacher/pupil system. By selecting
"PPM10" this will be control channels 1 … 5, for
"PPM16" channels 1 … 8, for "PPM18" channels 1 …
9 and for "PPM24" channels 1 … 12.
SET SET SEL SET
Rcv Ch Map R16 R08 n/a
n/a
RF transmit on
RF range test 99s
DSC Output PPM10
BASIC SETTING,MODEL
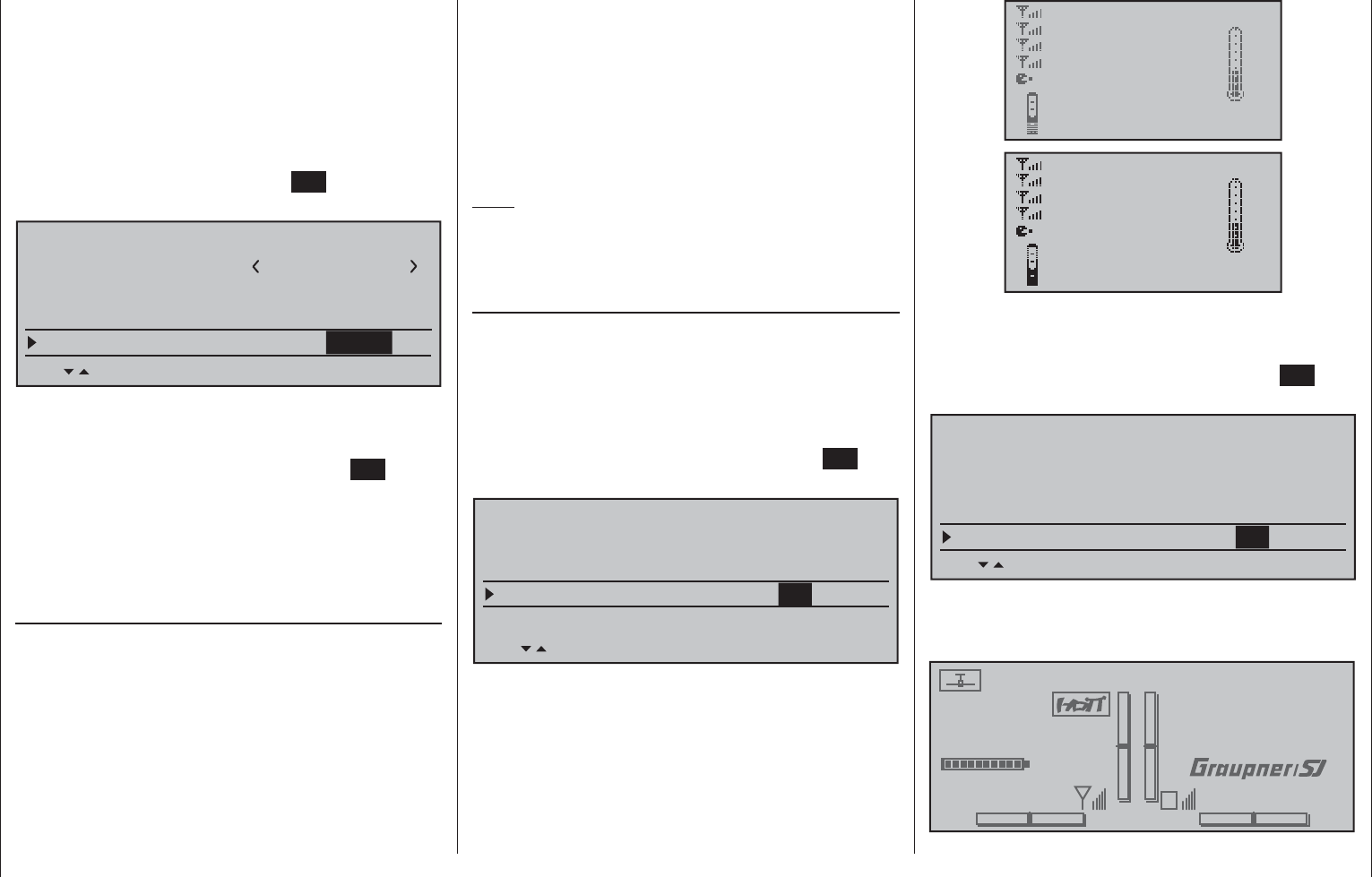
259
Detail program description - Basic settings
In a manner similar to "Pre-set stick mode, in this
»General basic settings« menu the selection made
for the "Pre-set DSC Output" line will determine which
of the four possible modulation types will be adopted
as the default variant for a newly initialized model
memory.
If necessary, use the cd selection keys of the left
or right touch pad to switch to the "DSC Output" line
then, with a brief tap on the center SET key of the
right touch pad, activate the value window:
H-J Sandbrunner
GENERAL BASIC SETTINGS
Owners name
Pre-set stick mode 1
H-J Sandbrunner
Pre-set modulation HoTT
SEL
Pre-set DSC Output PPM10
Now a choice can be made from among the four
possible modulation types: "PPM10", "PPM16",
"PPM18" and "PPM24", with the selection keys of the
right touch pad. Another tap on the center SET key of
the right touch pad will conclude the entry.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will reset this option back to
"PPM10".
Pre-set Pitch min
(only relevant to helicopter models)
In a manner similar to the previously described
options "Stick mode" and "DSC Output", enter
the preferred actuation direction for the throttle/
pitch joystick on this line so the choice will already
be present by default for model memories newly
initialized in the future. The functionality of all other
helicopter program options (to the extent they affect
throttle and/or pitch) are dependent on this setting; in
other words the throttle curve, idle trim, Channel 1 ¼
tail rotor mixer, etc.
This means:
"fwd.": minimum front pitch setting, the pitch
joystick (C1) points away from the pilot.
"back": minimum rear pitch setting, the pitch
joystick (C1) points towards the pilot.
A simultaneous tap on the cd or ef keys of the
right touch pad (CLEAR) will set this option to "rear".
Note:
The C1 joystick's control direction for "Throttle min
front/rear" in the fi xed-wing program can be changed
individually in the »Model type« menu.
Contrast, upper display / lower display
In assure optimal legibility of mc-20 HoTT displays
under all weather and temperature conditions, their
contrast settings can be adjusted separately.
Contrast for the forward display, located between the
switch panels, is adjusted by selecting the "Top LCD
contrast" line with the selection keys of the left or right
touch pad then briefl y tapping on the center SET key
of the right touch pad.
Pre-set DSC Output PPM10
SEL
Top LCD contrast 0
Bottom LCD contrast 0
GENERAL BASIC SETTINGS
Pre-set Pitch min. rear
Now display contrast can be adjusted in the value
fi eld displayed in inverse video within a range of ±20
by using the selection keys of the right touch pad.
RX–S QUA: 100%
RX–S STR: 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
L–PACK: 10ms
CH OUTPUT TYPE:ONCE
R-LOW V:4.6 +22°C
RX–S QUA: 100%
RX–S STR: 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
L–PACK: 10ms
CH OUTPUT TYPE:ONCE
R-LOW V:4.6 +22°C
Contrast for the rear display, located between the
touch pads, is adjusted by selecting the "Bottom LCD
contrast" line with the selection keys of the left or right
touch pad then briefl y tapping on the center SET key
of the right touch pad.
Pre-set DSC Output PPM10
SEL
Top LCD contrast 0
Bottom LCD contrast 0
GENERAL BASIC SETTINGS
Pre-set Pitch min. rear
Now display contrast can be adjusted in the value
fi eld displayed in inverse video within a range of ±20
by using the selection keys of the right touch pad.
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
H-J Sandbrunner
Graubele
RX VOLT:4.9V
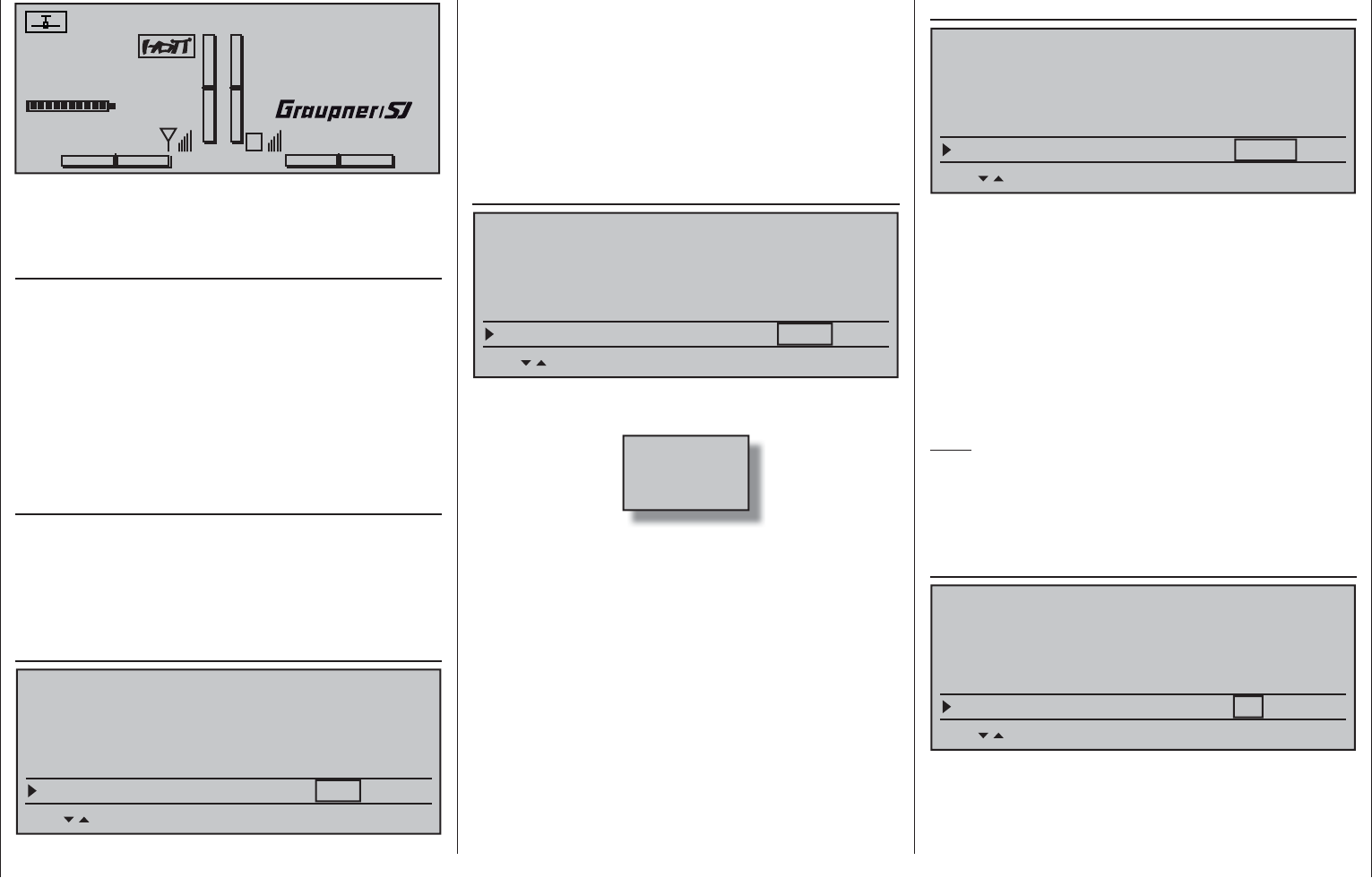
260 Detail program description - Basic settings
#01 0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
H-J Sandbrunner
Graubele
RX VOLT:4.9V
Simultaneously tapping the cd or ef selection
keys of the right touch pad (CLEAR) will reset the
inverse video fi eld back to "0".
Display light
This line determines how long the transmitter
display's backlight illumination is to remain on after
switching the transmitter on or after the last activation
of a transmitter operating element.
Available options are "unlim(ited)", "30 s", "60 s",
"120 s" and "off".
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will reset the inverse
video fi eld to "unlimited".
Power on/off beep
A power on/off beep for the transmitter can be
switched on ("yes") and off ("no") in this line.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will switch this option
shown in inverse video back to "yes".
Battery type
SEL
Bottom LCD contrast 0
Battery type Li-Io
Display light unlim.
Power-on/off beep yes
GENERAL BASIC SETTINGS
This line specifi es whether transmitter power is
provided by a four-cell NiMH battery or a single-cell
LiPo battery. As a consequence of this setting, the
next line will offer a suitable voltage range for the
"Battery warning" threshold.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will switch this option
shown in inverse video back to "Lith.".
Battery warning threshold
SEL
Battery type Li-Io
Display light unlim.
Power-on/off beep yes
GENERAL BASIC SETTINGS
Battery warning 3.60V
You can arbitrarily specify the warning threshold for
the display …
Batt. must
be re-
charged!!
… – contingent on the battery type selection in the line
above – in increments of 0.01 volt between 4.50 and
5.50 V (NimH battery) or 3.40 and 4.20 V (LiIo/LiPo
battery). Make sure that you do not enter a value
which is too low, so that you still have suffi cient time
to safely land your model in the event of a battery
warning.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will switch the fi eld
shown in inverse video back to its factory setting,
4.70 V (NiMh) or 3.60 V (Lith.).
Power-on warning
SEL
Battery type Li-Io
Power-on/off beep yes
GENERAL BASIC SETTINGS
Battery warning 3.60V
Stick warning unlim
In this line you can determine how long the
transmitter should wait after the last actuation of an
operating element until the activation of an optical
and acoustic power-on warning before the transmitter
switches off automatically one minute later.
The values "unlim(ited)", "30 s" and 1, 5, 10, 20, 30
and 60 minutes are optional selections.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will reset the inverse
video fi eld to "unlimited".
Note:
To restart the transmitter after an automatic shut-off,
fi rst push the transmitter's power switch to the right
into its "OFF" position then, after about fi ve seconds,
again into its "ON" position (toward the antenna).
Touch Sense
SEL
Battery type Li-Io
GENERAL BASIC SETTINGS
Battery warning 3.60V
Stick warning unlim
Touch Sense 2
In this line you can select the touch sensitivity of the
touch pads in a range from 1 to 10. The lower this
number is, the more sensitive the touch pad will be to
taps and vice versa.
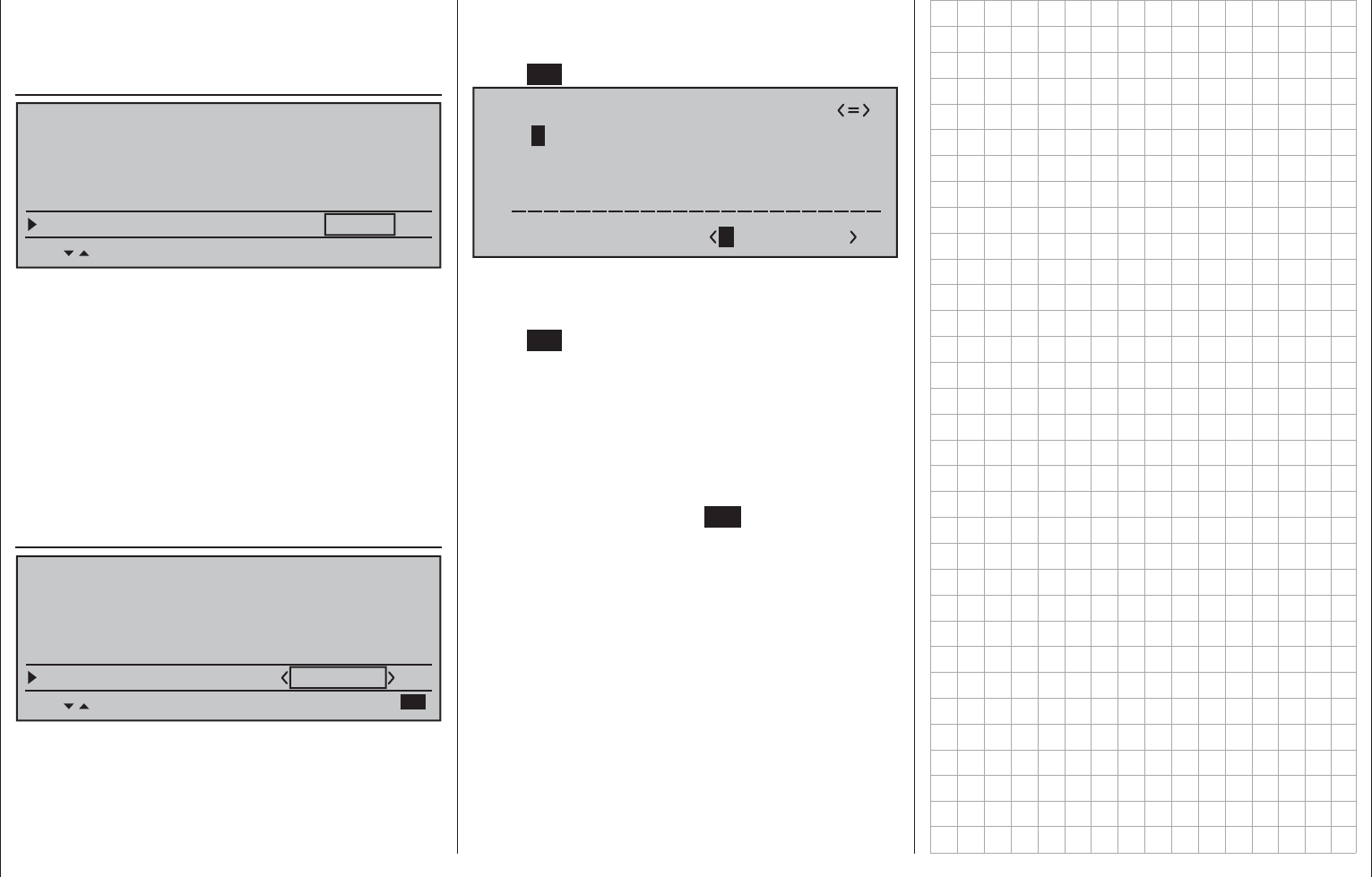
261
Detail program description - Basic settings
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will reset the fi eld
shown in inverse video back to "2".
Region
SEL
GENERAL BASIC SETTINGS
Battery warning 3.60V
Stick warning unlim
Touch sense 2
Region EURO
The region is needed for compliance with various
regulations (FCC, ETSI, IC etc.). In France, for
example, the operation of a remote control is only
permitted within a limited frequency band. Therefore,
region MUST be changed to "France" for the
transmitter whenever it is operated in France. In
no case may the Universal/EURO mode be used in
France!
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) will reset the fi eld
shown in inverse video back to "Euro".
Own phase name 1 … 10
GENERAL BASIC SETTINGS
Stick warning unlim
Touch sense 2
Region EURO
Own phase name 1
Up to ten phase names can be freely specifi ed
for one's own use. Each of these can be up to 7
characters long. The characters of the name are
assembled by selecting them from a list. In addition to
the standard names, these additional names will then
also be available in all model memory locations.
If possible, new phase name entries should begin
with the "Own phase name 1" line.
Change to the character table with a brief tap on the
center SET key of the right touch pad:
!"#$%&’()
Own phase name
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
A
Now the desired characters can be selected with the
selection keys of the left touch pad. With a brief tap
on the f selection key of the right touch pad or its
center SET key, move to the next position in which a
character can be selected. A simultaneous tap on the
cd or ef keys of the right touch pad (CLEAR) will
place a space character at the current position.
Positioning to any character position within the entry
fi eld can be done with the ef keys of the right touch
pad.
A return to the previous menu page is accomplished
with a brief tap on the center ESC key of the left
touch pad.
262 Detail program description - Servo display
Servo display
Display of the servo position
Use the selection keys on the left or right touch pad
to scroll to the menu option »Servo display« menu
option in the multi-function menu:
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Servo display Servo test
Briefl y tap the center SET key of the right touch pad
to open this menu option.
1
3
5
7
9
11
13
15
0
0
0
0
–100
0
0
0
–100
0
0
0
+100
0
0
0
2
4
6
8
10
12
14
16
However, the visual display of current servo positions
can not only be opened by selecting this menu, but
also – directly from the transmitter's base screen
as well as nearly all other menu positions – with a
simultaneous tap on the ef keys of the left touch
pad. A brief tap on the center ESC key of the left
touch pad will cause a return to the respective point
from which it was called.
The current position of each servo is displayed in a
bar diagram between -150 % and +150 % of normal
travel with consideration for the control and servo
settings, the dual-rate/expo functions, the interplay
of all active linear and curve mixers, etc. 0 %
corresponds precisely to the servo center position.
This way, you can quickly check your settings without
having to switch on the receiver. However, this does
not absolve you from fi rst carefully testing all program
steps, as well as on the model, prior to the fi rst
operation of the model in order to eliminate errors!
For winged models the display takes place
according to the following scheme:
Bar 1 = Throttle/brake servo
Bar 2 = Aileron or left aileron
Bar 3 = Elevator
Bar 4 = Rudder
Bar 5 = Right aileron
Bar 6 = Camber-changing fl ap (left) / free
channel
Bar 7 = Right camber-changing fl ap / free
channel
Bar 8 = Free channel / second elevator servo
Bar 9 = Free channel / Left FL2
Bar 10 = Free channel / Right FL2
Bar 11 = Free channel / Left AI2
Bar 12 = Free channel / Right AI2
Bar 13 = Free channel
Bar 14 = Free channel
Bar 15 = Free channel
Bar 16 = Free channel
… and for helicopter models:
Bar 1 = Pitch or roll (2) or pitch (2) servo
Bar 2 = Roll (1) servo
Bar 3 = Pitch (1) servo
Bar 4 = Tail servo (gyro)
Bar 5 = Pitch (2) servo / free channel
Bar 6 = Throttle servo or speed controller
Bar 7 = Gyro sensitivity / free channel
Bar 8 = Speed controller / free channel
Bar 9 = Free channel
Bar 10 = Free channel
Bar 11 = Free channel
Bar 12 = Free channel
Bar 13 = Free channel
Bar 14 = Free channel
Bar 15 = Free channel
Bar 16 = Free channel
Notes:
However, please note that the servo display is •
only based on the original sequence of servos.
This means that any swapping of outputs
which may have been implemented, in either
the »Transmitter output« menu or »Receiver
output« menu, is not taken into account.
Please also note that, by default, bar diagram •
tracking is opposite to the left/right movements of
a joystick.
The number of channels shown in this menu •
correspond to the 16 control channels available
in the mc-20 HoTT transmitter. However, the
number of actually usable channels depends
on the receiver type as well as the number of
servos connected to it and, therefore, may be
considerably lower under certain circumstances.
Use this display during the model programming, •
because you can immediately check all settings
on the transmitter. However, this does not absolve
you from fi rst carefully testing all program steps,
as well as on the model, prior to the fi rst operation
of the model in order to eliminate errors!
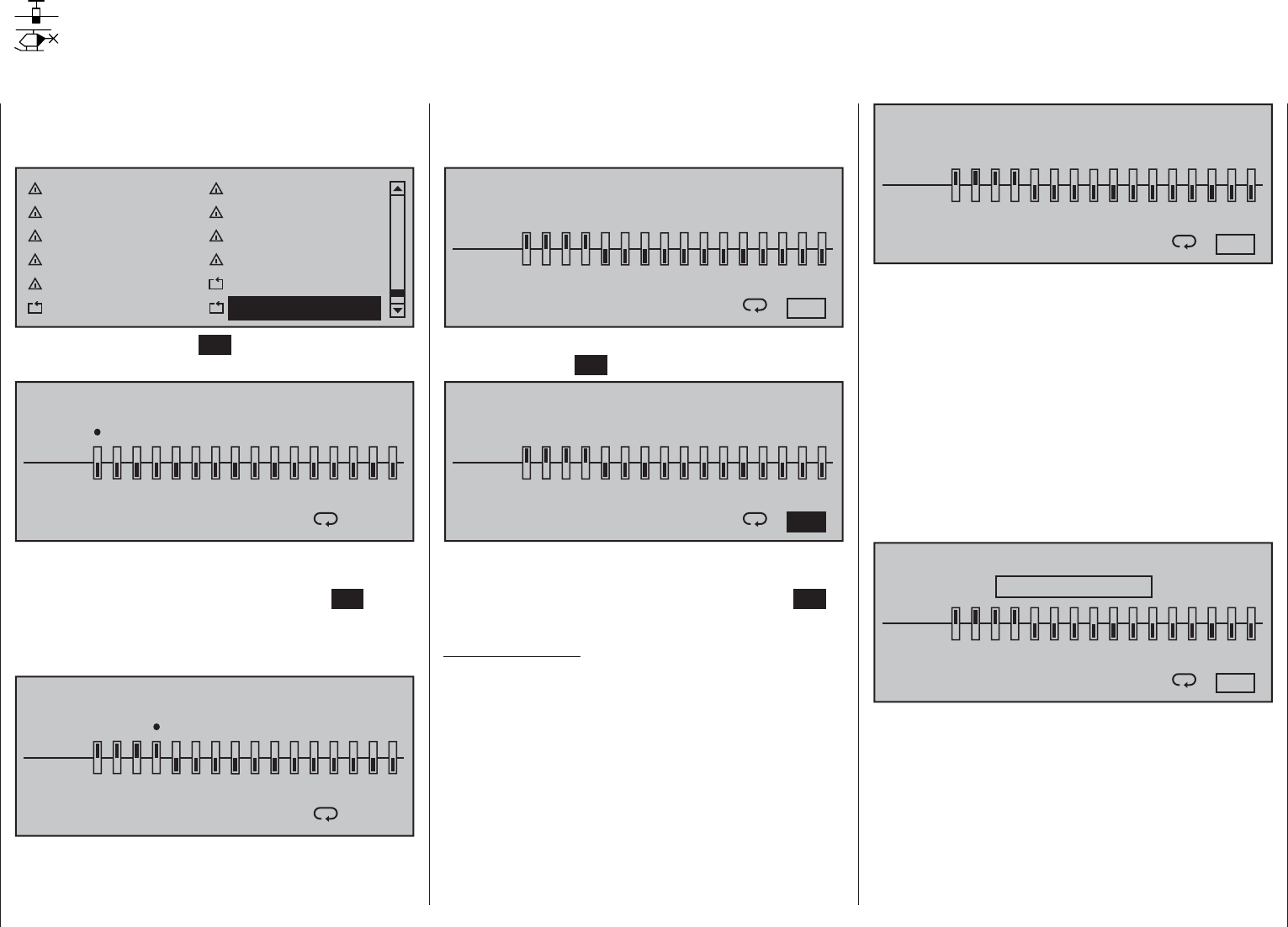
263
Detail program description - Servo test
Servo test
Function test of Servo 1 … 16
Use the selection keys on the left or right touch pad
to scroll to the menu option »Servo test« menu
option in the multi-function menu:
Teacher / pupil Tx. output swap
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Servo display Servo test
Tap briefl y on the center SET key of the right touch
pad to open this menu option:
SERVOTEST
activ
off
1234567 8 9 10111213141516
: 0.5s
Any of the inputs 1 … 16 can be activated for the servo
test by selecting with the selection keys of the left or
right touch pad and then briefl y tapping the SET key of
the right touch pad. As soon as you have set only one
of the inputs 1 … 16 to "active", the following notice
appears at the bottom of the display screen:
SERVOTEST
activ
off
1234567 8 9 10111213141516
: 0.5s
CLR = act./deact.
A simultaneous tap on the cd or ef selection keys
of the right touch pad (CLEAR) would now start and
stop, for example, a servo test of input "1" with a
cycle time of 0.5 s.
To change cycle time, select the loop symbol at the
bottom right of the display with the selection keys of
the left or right touch pad.
SERVOTEST
activ
off
1234567 8 9 10111213141516
: 0.5s
CLR = act./deact.
Once this value fi eld has been activated with a brief
tap on the center SET key of the right touch pad …
SERVOTEST
activ
off
1234567 8 9 10111213141516
CLR = act./deact. :0.5s
… the motion cycle can be changed for the value fi eld
shown in inverse video within a range of 0.5 s and
3.0 s in 0.5 s increments. Briefl y tap the center SET
key of the right touch pad to close time selection.
Important notice:
The shut-off of the transmitter does not
automatically end an active servo test. Therefore,
always stop a servo test manually BEFORE
SHUTTING OFF the transmitter, because the
servo test is otherwise restarted after switching
on the transmitter again.
SERVOTEST
activ
off
1234567 8 9 10111213141516
CLR = act./deact. : 2.5s
The "servo test" function, started with a simultaneous
tap on the cd or ef selection keys of the right
touch pad (CLEAR), automatically operates the
servos as though the corresponding transmitter
controls were being simultaneously and continuously
moved back and forth between -100 % and +100 %
during the preset time. All active mixing and coupling
functions in the respective model memory, therefore,
are effective and the servos move within the specifi ed
servo paths and servo delimitations.
As soon as the servo test has been started by a
simultaneously tap on the cd or ef selection keys
of the right touch pad (CLEAR) a window will open:
SERVOTEST
activ
off
1234567 8 9 10111213141516
CLR = act./deact. : 2.5s
Servo test act.
Another tap simultaneously on the cd or ef
selection keys of the right touch pad (CLEAR) will
terminate the test.
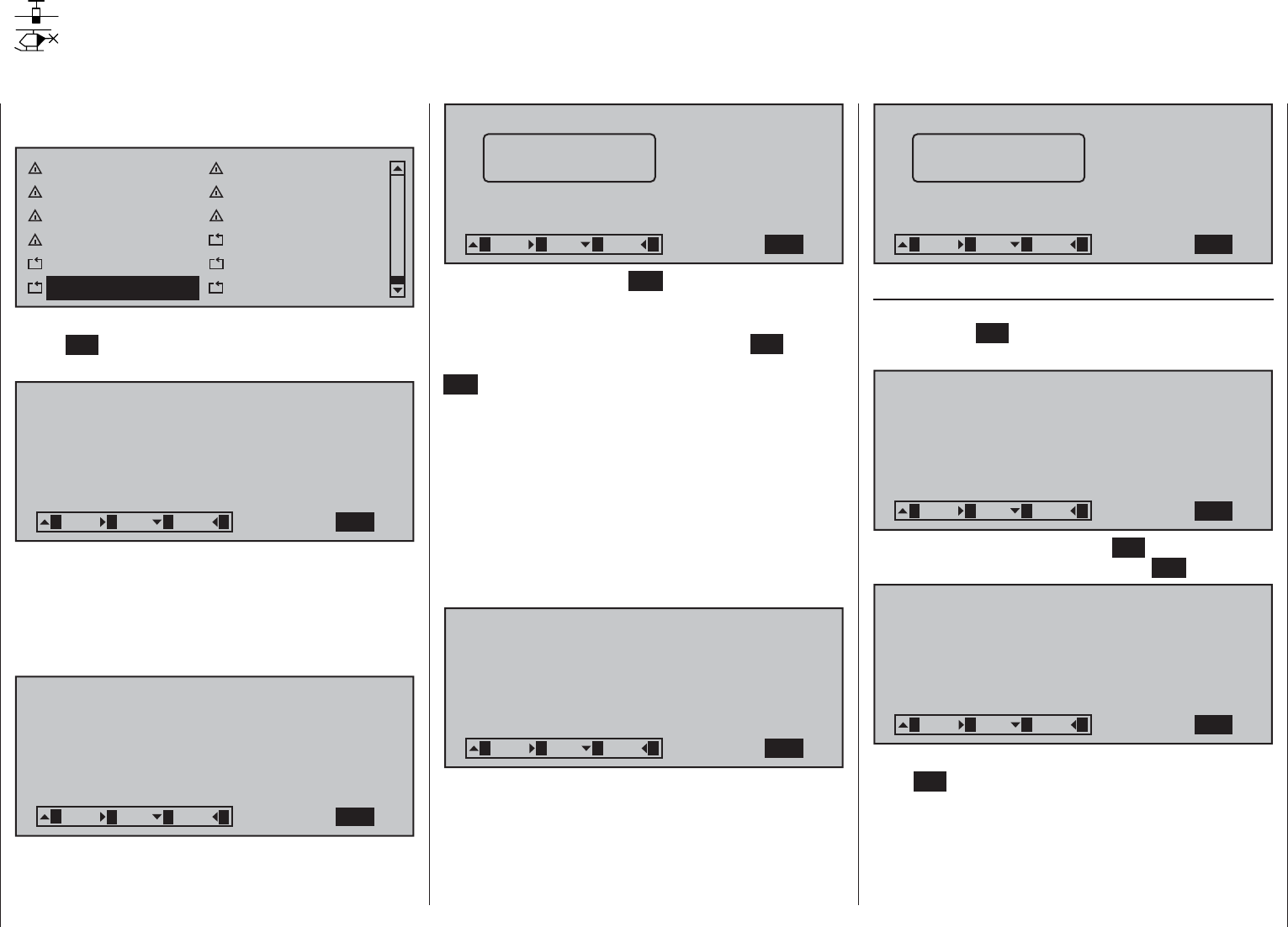
264 Detail program description - Entry lockout
Entry lockout
Locking the multifunction menu
Use the selection keys of the left or right touch pad to
scroll to menu option …
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Servo display Servo test
Code lock Info display
… in the multi-function menu. Tap briefl y on the
center SET key of the right touch pad to open this
menu option:
CODE LOCK
Desired (new) access code: (_ )
SET
321 3 4
Access to the multifunction menu can be locked
against unauthorized use by a four-digit secret code
comprised of the numbers 1 to 4. This code lock is
entered by way of the selection keys of the left touch
pad according to the scheme shown in the display, for
example :
CODE LOCK
Desired (new) access code: (123_)
CLR
321 3 4
As soon as another tap of a left touch pad selection
key occurs after the fourth number has been entered,
the message shown below will appear in the display:
CODE LOCK
Bitte Geheimzasccess code: (1234)
CLR3
21 3 4
Memorise access
code carefully
A brief tap on the center ESC key of the left touch
pad will confi rm the entered secret code and exit the
menu.
On the contrary, a brief tap on the center SET key of
the right touch pad will confi rm the currently active
CLR fi eld at the bottom right of the display and thus
erase the entered digits.
Make note of the secret code and keep it safe.
Otherwise, the transmitter must be sent in to
Graupner service for decoding.
The lock becomes active the next time the transmitter
is switched on. However, the control remains ready
for operation. However, a call-up of the multi-function
menu, and thus also a model change, can no longer
be accomplished without entering the correct number
combination.
CODE LOCK
Desired (new) access code: (_ )
SET
321 3 4
A renewed attempt following an incorrect entry is only
possible after the lapse of a time-out.
CODE LOCK
Bitte Geheimzacccess code: (4321)
CLR3
21 3 4
Input error
Time lock
Deletion of the secret code
If the secret code is to be erased later on, tap twice
on the center SET key of the right touch pad right
after calling up this menu option.
CODE LOCK
Desired (new) access code: (1234)
CLR3
21 3 4
The fi rst activation of the center SET key of the right
touch pad will erase the secret code (CLR):
CODE LOCK
Desired (new) access code: (_ )
SET
321 3 4
and the second activation will confi rm the empty entry
fi eld (SET). The message shown will appear in the
display:
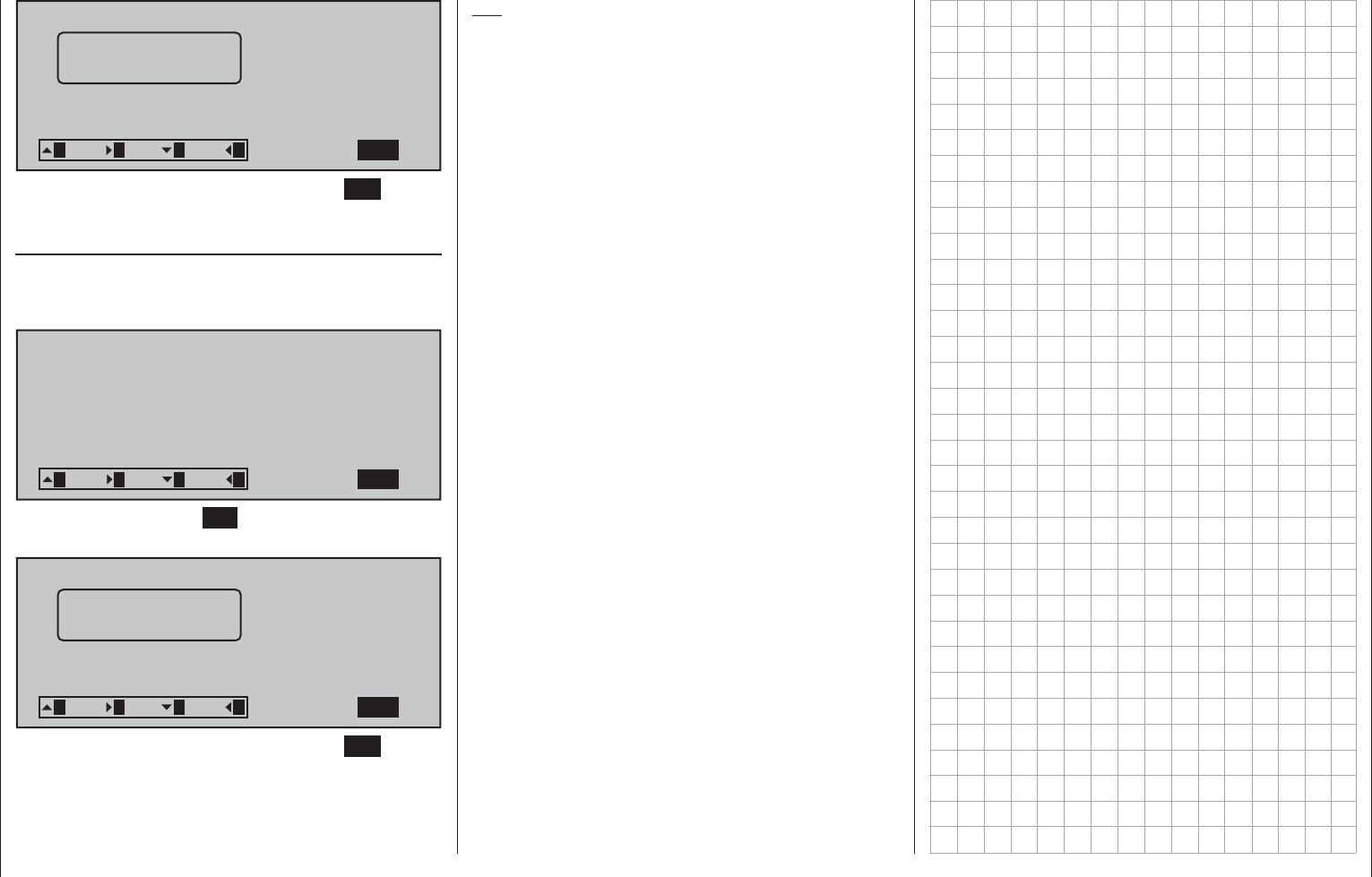
265
Detail program description - Entry lockout
CODE LOCK
Bitte Geheimzaccess code: (_ )
SET3
21 3 4
Memorise access
¾¾¾¾¾ ¾¾¾¾¾
none
Now exit the menu with a brief tap on the ESC key of
the left touch pad.
Leaving the menu without input of a secret code
To leave the menu opened out of curiosity or by
accident when no other key has been touched.
Therefore, the display appears as follows:
CODE LOCK
Desired (new) access code: (_ )
SET
321 3 4
Tap once on the center SET key of the right touch
pad. The following display appears:
CODE LOCK
Bitte Geheimzaccess code: (_ )
SET3
21 3 4
Memorise access
¾¾¾¾¾ ¾¾¾¾¾
none
Now exit the menu with a brief tap on the ESC key of
the left touch pad.
Tip:
If you generally want to dispense with a programming
lock, that option should be removed from the
multifunction menu by way of »Suppress menus«.
This will prevent unauthorized persons from entering
a secret code "on the sly".
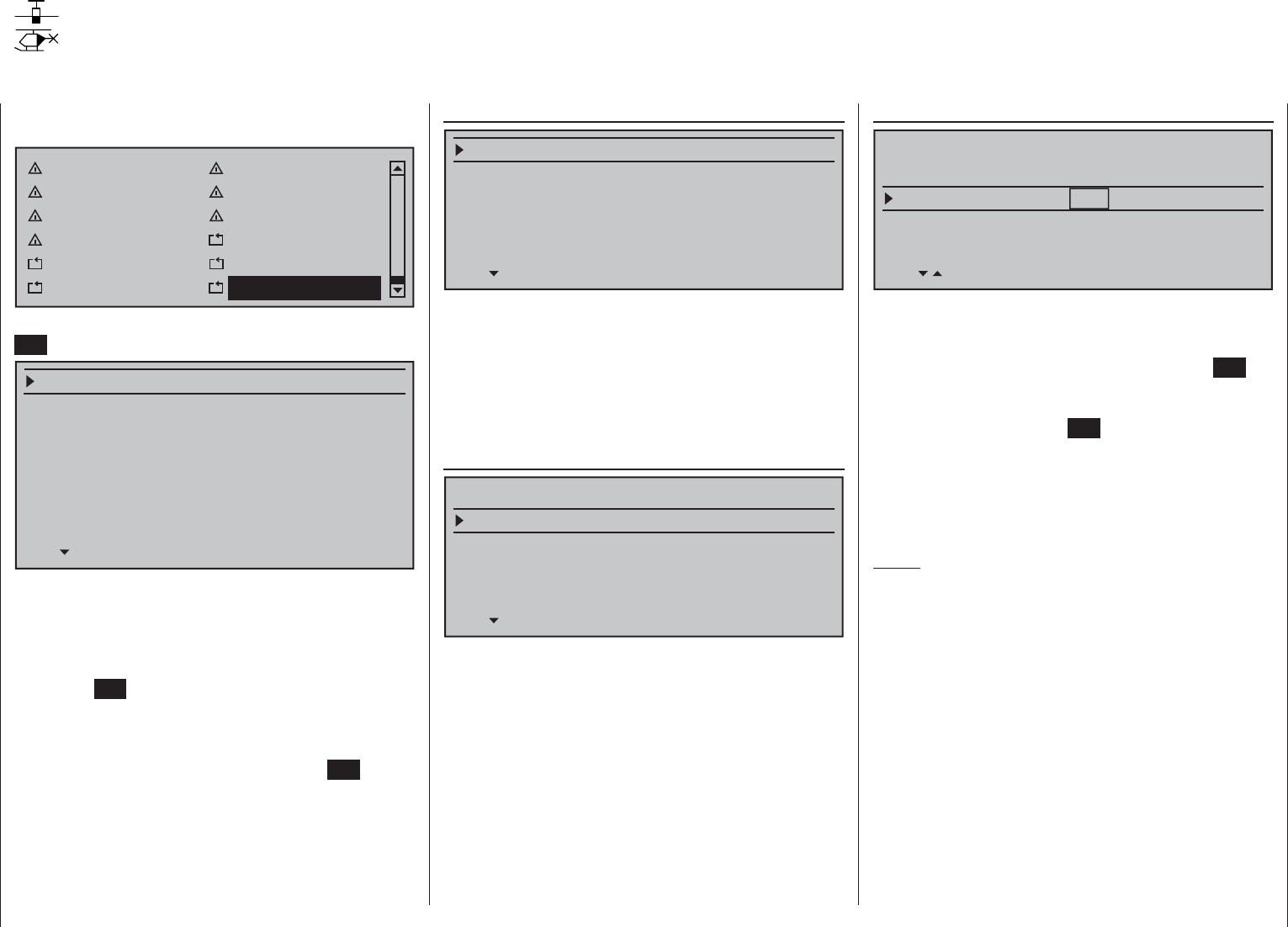
266 Detail program description - Info display
Info display
Transmitter ID, date, time and memory card
Use the selection keys of the left or right touch pad to
scroll to menu option …
Profi trim Trim memory
Telemetry Channel sequence
Multichannel Ring limiter
Mp3 player Basic settings
Servo display Servo test
Code lock Info display
… in the multi-function list. A brief tap on the center
SET key of the right touch pad will open this menu:
RFID
Firmware Version
date
time
SD-CARD
available
1.234
1933MB
99%
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
Transmitter-specifi c information is shown in this menu
and – insofar as necessary and benefi cial – can also
be changed.
Select the appropriate line with the cd selection
keys of the left or right touch pad then briefl y tap on
the center SET key of the right touch pad. The given
default value in the value fi eld displayed in inverse
video can now be changed – insofar possible and
necessary – with the selection keys of the right touch
pad followed by another tap on the center SET key to
conclude the entry.
RFID
RFID
Firmware Version
date
time
SD-CARD
1.234
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
The RF identifi cation number of the transmitter is
shown in this line. It is transmitter-specifi c, is only
issued once per transmitter and cannot be changed.
During the connection process, this is sent to the
receiver, among other things, so that it is always
capable of identifying the radio signals of "its"
transmitter.
Firmware Version
RFID
Firmware Version
date
time
SD-CARD
1.234
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
The current version number of the transmitter
software is shown in this line.
Through a comparison of the number shown here
with the update version offered on the Internet
download page of the corresponding product under
www.graupner.de, you can determine whether a
current update of the transmitter operating system is
available.
If applicable, the version number is also required for
inquiries with the service department.
Date
RFID
Firmware Version
date
time
SD-CARD
1.234
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
If necessary, select this line with the selection keys
of the left or right touch pad and, as necessary,
select the month or date fi eld. After activating the
respective value fi eld with a tap on the center SET
key of the right touch pad, the year, month or day can
be set with the selection keys of the right touch pad.
Another tap on the center SET key of the right touch
pad will close the given entry. Years ranging from
2000 through 2135 are available for selection.
The abbreviated day of the week to the right outside
in brackets is automatically generated from the
respective date.
Notes:
If the transmitter is connected to a PC as •
described on page 43, the date and time can
also be set through the PC program provided for
the respective product via the Internet page at
www.graupner.de.
The date and time are protected against data •
loss due to power failure by a buffer battery for
situations like a battery change, see page 18.
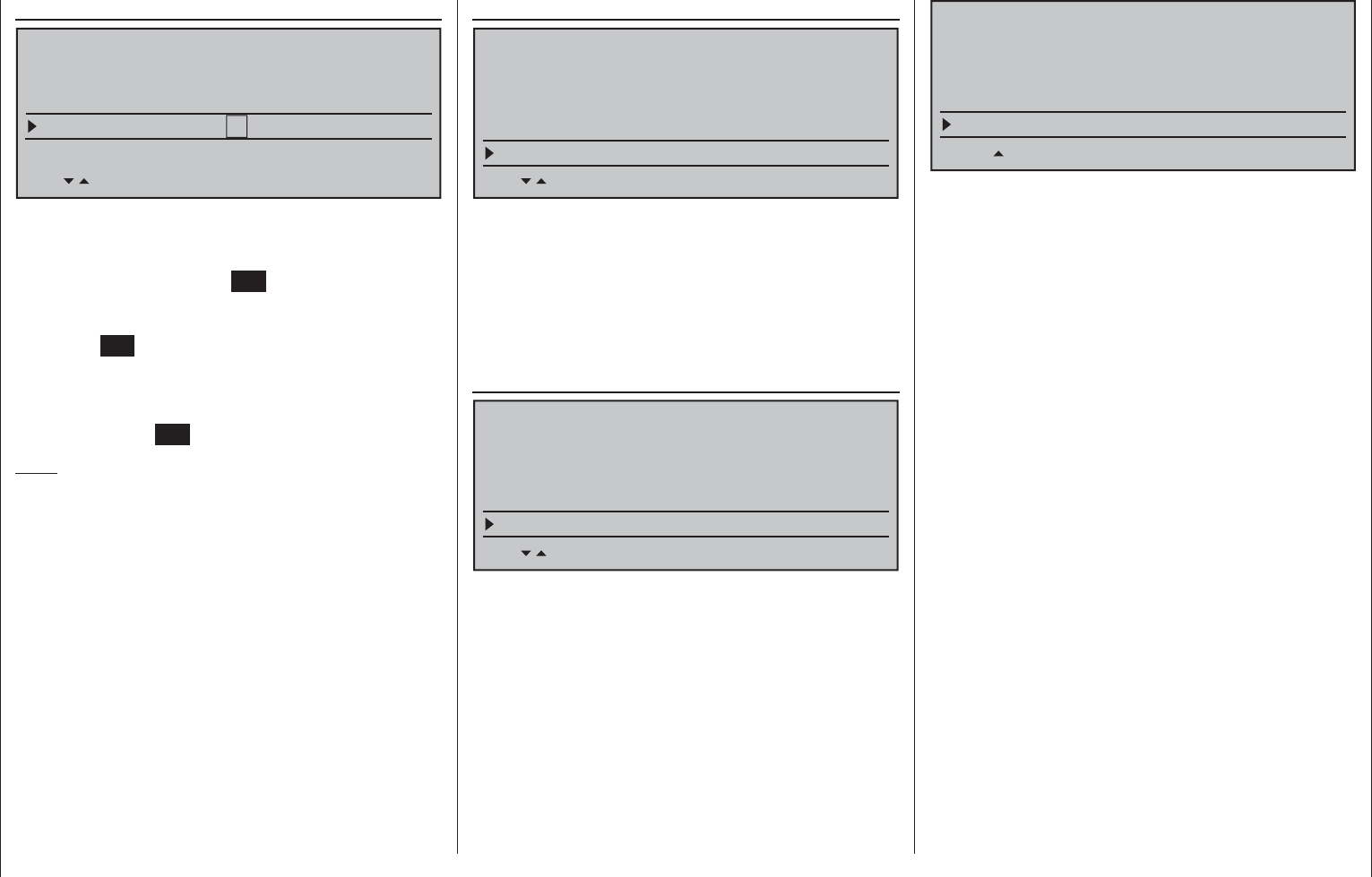
267
Detail program description - Info display
Time
RFID
Firmware Version
date
time
SD-CARD
1.234
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
If necessary, select this line with the selection keys
of the left or right touch pad and, as applicable, the
minute fi eld. After activation of the respective value
fi eld by a tap on the center SET key of the right touch
pad, the hour or minute can be adjusted with the
selection keys of the right touch pad. Another tap on
the center SET key of the right touch pad will close
the given entry.
In contrast, the seconds display cannot be set
directly; it can only be restarted at "00" with a brief
tap on the center SET key of the right touch pad.
Note:
If the transmitter is connected to a PC as •
described on page 43, the date and time can
also be set through the PC program provided for
the respective product via the Internet page at
www.graupner.de.
The date and time are protected against data •
loss due to power failure by a buffer battery for
situations like a battery change, see page 18.
SD card
RFID
Firmware Version
date
time
SD-CARD
1.234
ABCDEF12
2011/11/11(Fr )
11:22:33s
1943MB
In this line the memory capacity of a memory card
inserted in the transmitter, if applicable, is shown
in MB.
Depending on the memory capacity of the inserted
micro SD or micro SDHC memory card, it may take
several minutes until the correct value is shown after
switching on the transmitter.
available
Firmware Version
date
time
SD-CARD
1.234
2011/11/11(Fr )
11:22:33s
1943MB
available 1933MB
Display of the available storage space in MB.
As mentioned before, display of the available storage
space – depending on the capacity of the inserted
memory card – does not appear until some time has
passed after switching on the transmitter.
The display of the available storage space in relation
to the total memory capacity is shown in the line
below:
date
time
SD-CARD
2011/11/11(Fr )
11:22:33s
1943MB
available 1933MB
99%
As mentioned before, display of the available storage
space – depending on the capacity of the inserted
memory card – does not appear until some time has
passed after switching on the transmitter.
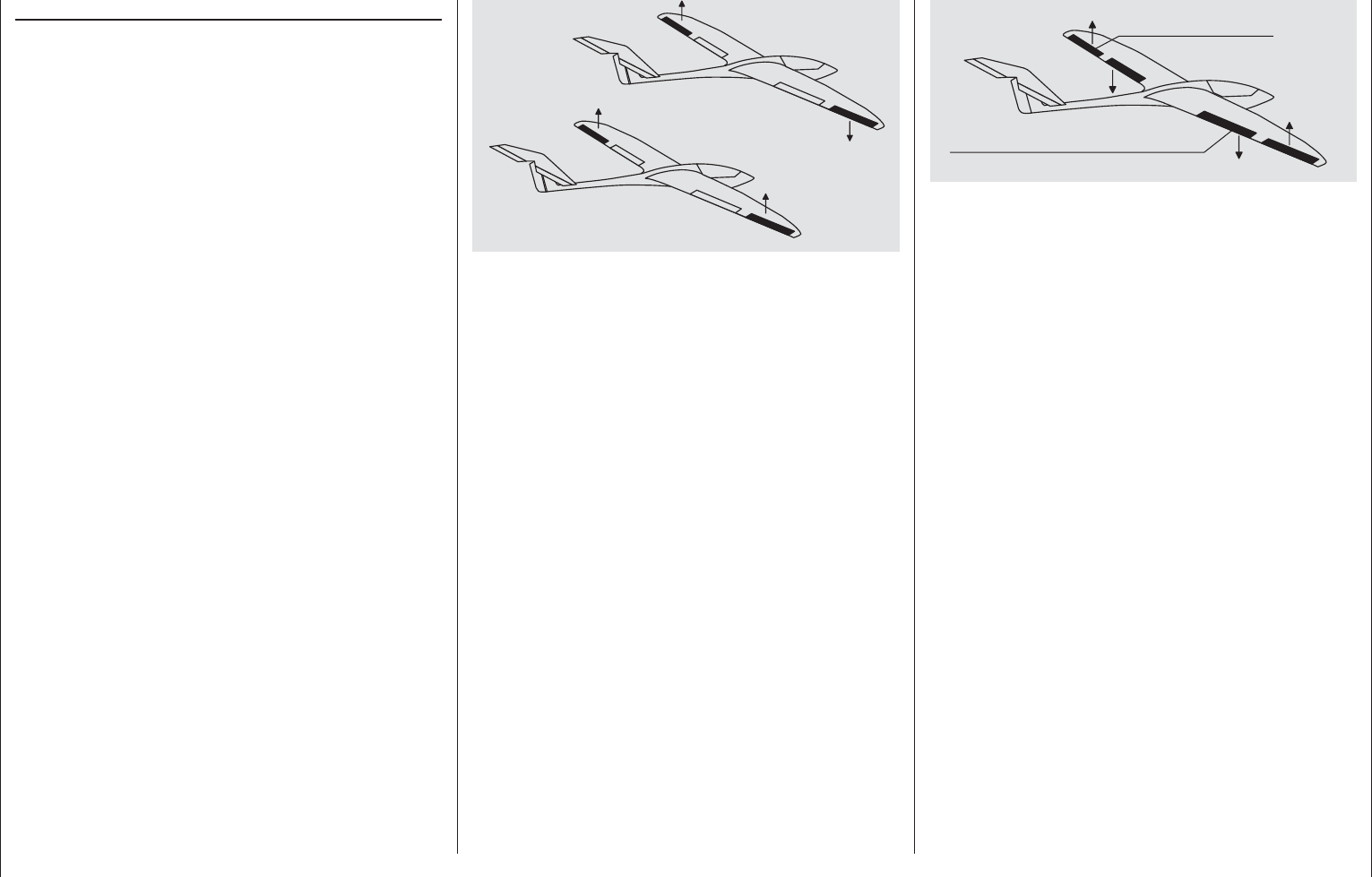
268 Programming examples - Winged models
mc-20 HoTT programming
Preparatory measures based on the example of a winged model
Programming models in an mc-20 HoTT …
… is easier than it may appear at fi rst!
The primary prerequisite for "clean" programming,
and this applies not only to the mc-20 HoTT but is
also a principle for all programmable transmitters, is a
mechanically correct installation of all remote control
components in the model! Therefore, it should be
ensured no later than on connection of the linkages
that the servos are in their respective neutral position
and their rudder lever is also in the desired position.
Otherwise you should loosen the rudder and re-
fasten it with an offset of a few lobes. If servos are
positioned with the help of a servo tester, e.g. RC
tester, order no. 2894.12, then the "correct" positions
can be determined very easily.
The possibility of changing the neutral position of a
servo in practically every modern transmitter is only
intended for fi ne-tuning. Greater deviations from "0"
can result to further asymmetries in the course of
the further signal processing in the transmitter. In the
same manner: A car with a bent chassis does not get
any straighter if only the steering wheel is trimmed to
"straight"!
An additional important point is the adjustment of
the rudder paths: This should take place through
a corresponding adjustment of the steering points,
insofar as possible. Ultimately this is far more effi cient
than extensive efforts with the path adjustments in the
transmitter! In this case: Path adjustments serve fi rst
and foremost for to compensate for the manufacturer-
stipulated tolerances for the servos and their fi ne-
tuning, and less for the compensation of carelessness.
If two separate aileron servos are used for a
winged model, the ailerons, controlled through
the corresponding activated wing mixer – see the
following pages – can be assigned with both the fl ap
function and raised with the brake fl aps – however this
would make more sense in a glider or electro glider
than in a motor model.
In this case the rudder arms – starting from the neutral
position – should be tilted forward one lobe, pointing
toward the nose, set to the respective servo.
The mechanical differentiation achieved through this
asymmetric assembly contributes to the fact that the
brake effect of the elevated ailerons increases with
their defl ection and, therefore, does not normally
require a greater path upward than downward.
Correspondingly, when planning to operated
separately controlled fl ap servos, they should also be
integrated into a crow system. Since the brake effect
of this fl ap position referred to as a "crow position"
is infl uenced less by the elevated ailerons than the
downward defl ection of the fl aps, the rudder arms
should be installed somewhat toward the rear in
this case, tilted toward the trailing edge. As a result,
there is a greater available path for the downward
defl ection. With such a combination of lowered fl aps
with raised ailerons, however, the latter should only
be elevated moderately, because they have more of
a stabilizing and controlling function than a braking
function in this type of crow system.
A "tip" for seeing the brake effect in this connection:
lift the fl aps and look over and under the surface from
the front. The greater the projected surface of the
protruding rudder, the greater the brake effect.
Outboard ailerons
Inboard camber-changing flaps
(Similar asymmetric installation of rudder arms can
be meaningful, e.g. for open-cowl fl aps or landing
fl aps, even in a motorized model.)
If a model is completed and mechanically attuned
in this respect, you can basically begin with the
programming of the transmitter. The following
examples, an attempt is made to follow the practice
of fi rst describing the general basic settings and then
fi ne-tuning or specializing them in the subsequent
steps. After the initial fl ight and over the course of the
further fl ying in of a model, it may be necessary to
occasionally adjust some of the settings. As a pilot's
experience increases, however, so does the desire for
enhancements and expansions of settings. For this
reason, the sequence of options is not always adhered
to or some options are even mentioned multiple times.
Of course, just the opposite can also be the case,
that not everyone of the described steps is relevant
for a certain model, just as some users may miss the
description of a certain step for their model …
whatever the case may be, you should consider a
logical assignment of the control mechanisms before
you begin with the model programming.
For models in which the emphasis is on the "motor",
regardless of whether it is powered by an electric or
combustion motor, there should be no problem in this
respect, because the assignment of the two joystick
units essentially lies in the four basic functions
"Power regulation (= throttle)", "Side", "Altitude" and
"Transverse"! However, in the menu …
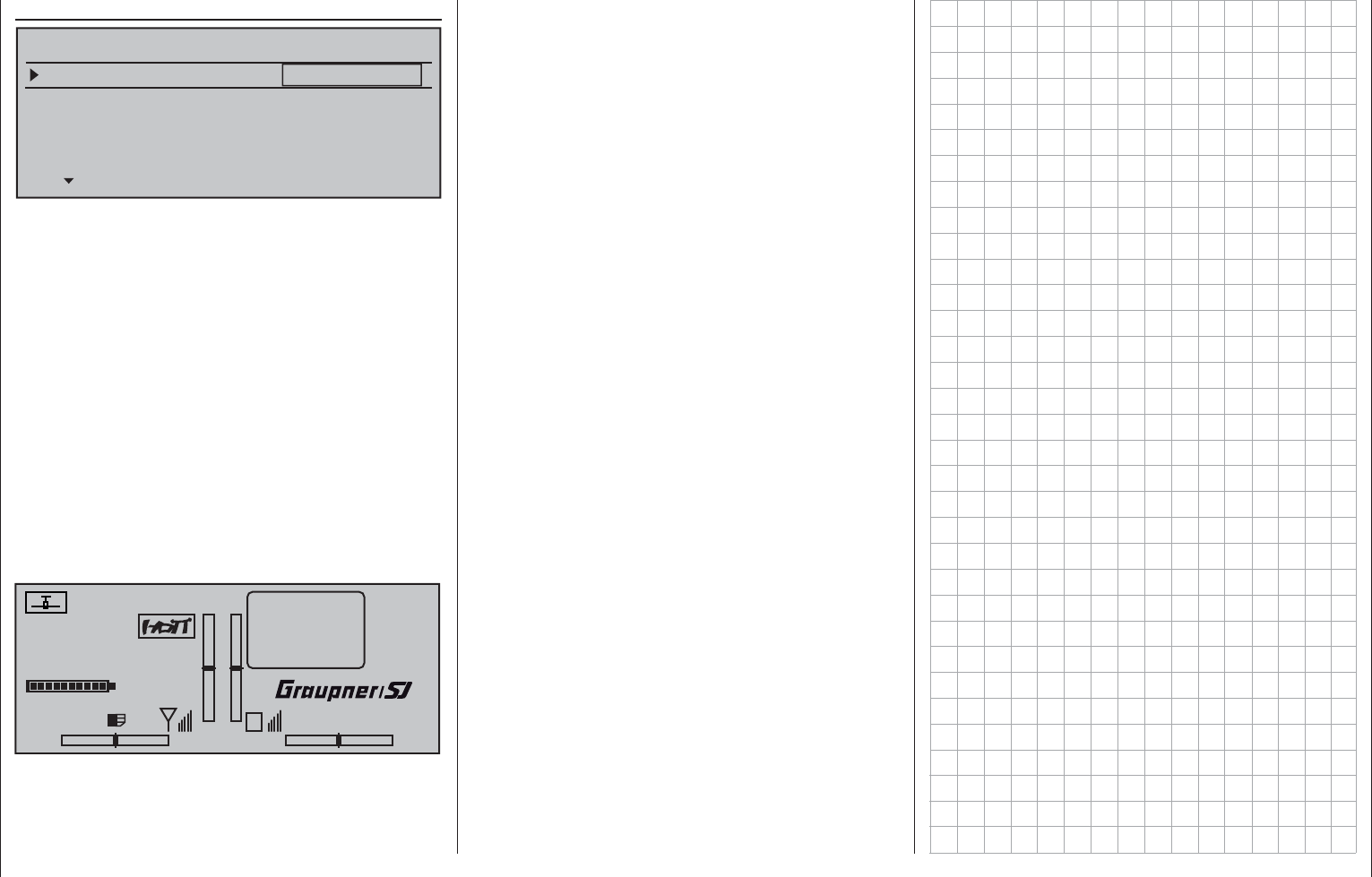
269
Programming examples - Winged models
»Model type« (beginning on page 94)
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
… you should determine whether you would like
the minimum throttle position in the "front" or "rear",
because "none (motor)" is entered by the program in
the creation of a model memory as a basic principle.
The difference between "none" and "idle front/rear"
is not only the effect on C1 trimming, which covers
the entire scope of joystick travel with "none" but with
"idle front/rear" only has an effect in the idle direction.
In the process, the "effective direction" of the C1
joystick is adapted accordingly, so that with a change
from "front" to "rear" or vice versa, the rotational
direction of the throttle servo or brake system do not
have to be adapted as well. In addition, with an "idle
front/rear" setting, a warning indication appears in
the display for safety reasons and issues a warning
beep, if the throttle joystick is too far in the full-throttle
direction:
#01 0:00h
Stoppuhr
Flugzeit
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
Throttle
too
high!
H-J Sandbrunner
Graubele
RX VOLT:4.9V
In any case, it will be necessary to give some thought
to "special functions".
With electro gliders, on the other hand, it is only
occasionally different. In this regard, one must ask
how the drive and brake system are actuated. Certain
solutions have shown to be practical and others have
shown to be less practical.
For example, it is certainly less practical, if you have
to release a joystick for the approach of a glider
model in order to be able to appropriately control
the spoilers or a crow position using one of the other
controls. It may be more advantageous to either
design the function of the C1 joystick to be switchable
(see Example 4, beginning on page 279) or to leave
the control of the brake system at the joystick and to
control the motor through one of the other controls or
even with a switch! Since this type of model does not
normally have a motor, and just a "start assistance"
function to either "lift" the model in the sky with full
force or, in any case, to "tow" it with "half" force by a
wind fi eld, When this is also mounted in a convenient
to grip location, the motor can be switched on and
off without letting loose of one of the joysticks – even
during the landing approach.
If you cannot decide to have your Graupner service
location retrofi t a three-function control switch, order
no. 33000.13, for this purpose then use preferably
the single-pole, three-function switch, order no.
33001.25, and mount it to the side of the sender
opposite from the hand in which you hold the model.
In other words: If the model is started from the right
hand, the motor switch should be mounted on the left
side and vice versa.
The idea is the same for the control of fl aps,
regardless of whether only ailerons or fl aps covering
the entire wingspan (combinations) are raised or
lowered. A 3-position switch with a long grip generally
suffi ces for control of camber fl aps, preferably
mounted outboard on the throttle/brake joystick side
There it is always accessible without having to let
loose of the joystick.
If everything is now in order, you can begin with the
programming.
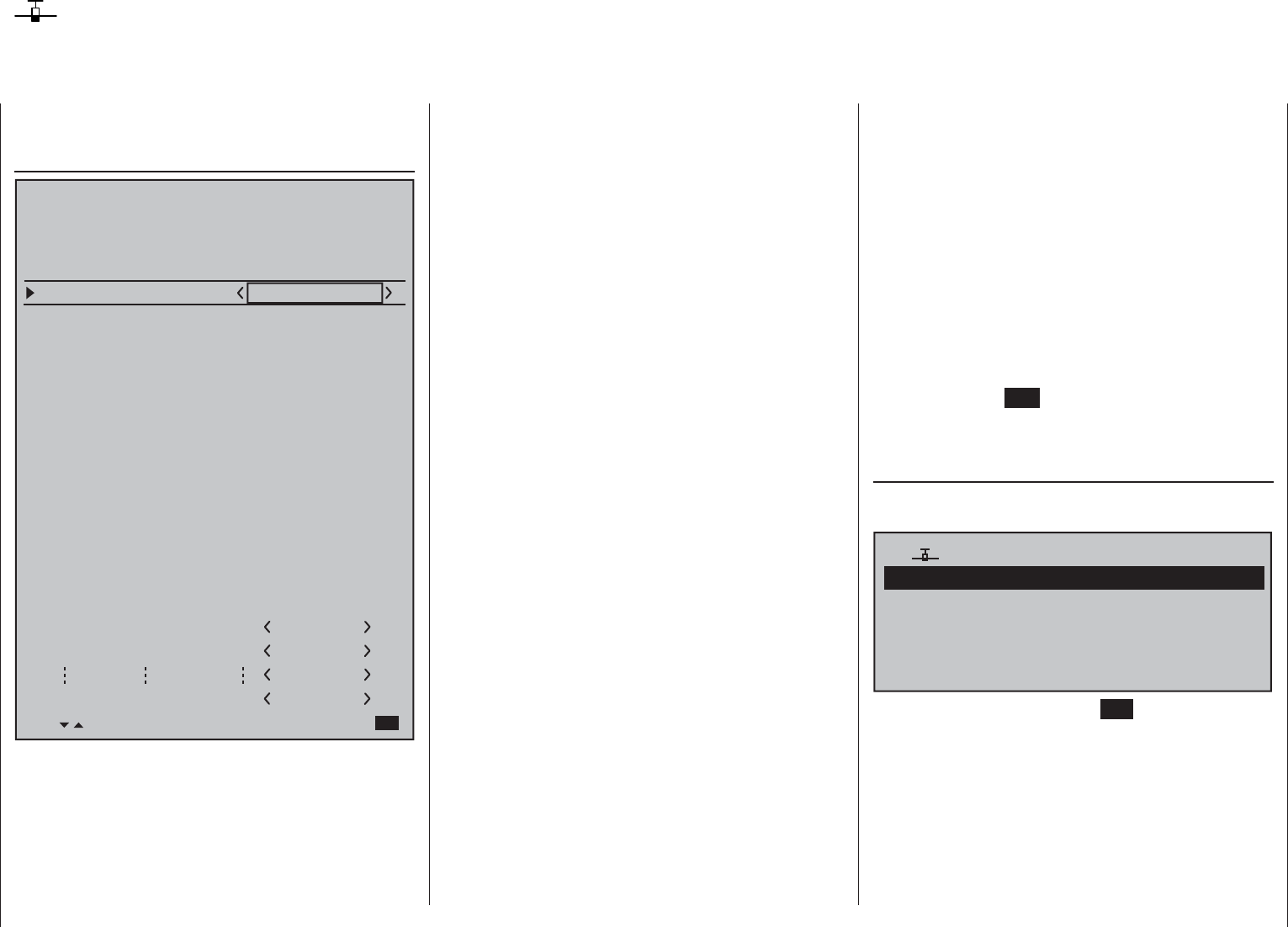
270 Programming examples - Winged models
Initial steps for the programming of a new model
Example: Winged model with two ailerons and – initially – without motor propulsion
In the context of initial commissioning a new
transmitter, in the selection menu …
»General basic settings« (page 256)
Battery type
Battery warning
Touch Sense
Top LCD contrast
Li-Io
Display light
Region
2
3.60V
0
EURO
unlim
GENERAL BASIC SETTINGS
Owners name H-J Sandbrunner
Pre-set stick mode 1
Pre-set DSC Output PPM10
Pre-set Pitch min rear
Stick warning unlim
Pre-set modulation
Own phase name
Own phase name
HoTT
2
10
Bottom LCD contrast 0
Own phase name 1
Voice volume
Vario volume
Touch-beeps vol.
7fr –––
SEL SEL
7fr –––
7fr –––
Power-on/off beep yes
… some basic information should be entered. This
serves various purposes:
The fi rst three lines of this menu can be used to
individually regulate, in increments between 0 and
10, the volume of voice and signal output emitted via
the built-in loudspeakers or the transmitter's headset
connector. The fourth line of this menu is used to
record the transmitter owner's name and the lines
"Pre-set stick mode", "Pre-set modulation", "Pre-
set DSC Output" and "Pre-set Pitch min" are for the
storage of pre-set values used as defaults for new
models. These are then adopted on the activation of
a new model memory in its basic settings, but can be
changed there at any time.
The "Top / Bottom LCD Contrast" lines can be
used to adapt the contrast of respective displays to
ambient light conditions as necessary by changing
the standard pre-set "0" in a range of ±20 (as an
alternative to the line with the same name in the
»Secret mode« menu page 32).
The setting in the "Display light" line determines
how long display lighting remains illuminated after
the transmitter is switched on or after the last key
actuation.
The selection of "yes/no" in the "Power-on/off beep"
line determines whether the "recognition melody" is
to sound when the transmitter is switched off or on
again.
The "Battery type" line indicates to the transmitter
whether its power comes from a four-cell NiMH
battery or a single-cell LiPo battery and the "Battery
warning" line can be used to individually set the
threshold for the battery warning. Make sure that you
do not enter a value which is too low, so that you still
have suffi cient time to safely land your model in the
event of a battery warning.
If necessary, the "Stick warning" line can be used to
determine how long the transmitter should wait after the
last activation of an operating element before issuing
a visual and acoustic stick warning, followed about a
minute later by the transmitter switching itself off.
On the other hand, the setting made in the "Touch
Sense" line is merely a personal comfort setting. The
lower this number is, the more sensitive the touch
pad will be to taps and vice versa.
In contrast, the setting in the "Region" line is anything
but a matter of taste and is determined by statutory
regulations: Therefore, when in France, only
commission the transmitter with the "France"
setting.
The ten "Own phase name" lines can be used to
create one's own phase names, which are then
valid throughout the transmitter, if none of the pre-
set phase names appear appropriate. An entry itself
is accomplished – as also for owner's name – by
switching to a second display page and selecting the
necessary characters from a character list.
This menu can be exited after completing "general
settings" with a return to the multi-function menu by
way of the center ESC key of the left touch pad.
To program a new model, now use the selection keys
of the left or right touch pad to switch to the menu …
"Model select" (page 69)
…, and use the selection keys of the left or right
touch pad to select a free model memory location.
03
04
05
01
06
R16
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
00:12h
¿¿¿ free¿¿¿
02
Right after a tap on the center SET key of the right
touch pad to confi rm this selection, the type of model
to be programmed will be requested:
271
Programming examples - Winged models
Select model type ( free model memory )
Since the objective is to work with a winged model
in this section, the symbol for a winged model is to
be confi rmed with a tap on the center SET key of
the right touch pad. The display switches back to the
base screen.
Notes:
Of course, you can also use the predefi ned default •
"winged model" supplied with the receiver as
model memory 01 for the programming of your
fi rst model.
Once the "Select model type" option has been •
opened, the process can no longer be canceled!
Even if you switch off the transmitter, this selection
must be made! After a selection has been made,
the selected model memory can only be made
"free" again by subsequent erasing.
If battery voltage is too low, the model switchover •
cannot be made due to reasons of safety. An
appropriate message will appear in the screen:
not possible now
voltage too low
Once this fi rst hurdle has been taken, the binding of
the receiver built into the model to this model memory
can be done in the menu …
»Basic settings, model« (page 76 … 83)
. To this end, switch to the line "Module".
Model name
Stick mode 1
n/a
BASIC SETTINGS, MODEL
Info
n/a
n/a
Module n/a
HoTT
SEL BD1 BD2 BD3 BD4
Note:
After confi rmation of the model selection in the base
screen, if you confi rm the message appearing in the
screen for a few seconds …
BIND. N/A
OK
… with a tap on the SET key of the right touch pad,
this line is accessed automatically.
In this line the binding process between model
memory and receiver is initiated, as described in
detail on page 77. Otherwise, you cannot address the
receiver.
Afterward, use the c selection key of the left or right
four-way pad to move up to the fi rst line and begin
with the actual model programming in the "Model
name" line.
Model name
Stick mode 1
n/a
BASIC SETTINGS,MODEL
Info
n/a
n/a
Module bind
HoTT
The "Model name" can now be entered here and,
on the next line, an informative note about the model
can be entered if necessary in the same manner, by a
brief tap on the center SET key of the right touch pad
to switch to the character table.
!"#$%&’()
Model name Graub
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
The pre-sets for "Stick mode", "Modulation" and
"DSC Output" are adopted from data stored in the
»General basic settings« menu and these should
be reviewed and changed as necessary.
In the menu …
Model type
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
… the principle arrangement of the servos in
the model is selected and communicated to the
transmitter. The following selections are available:
"Motor at C1"
"none"•
Trimming works independently of the joystick
position and the "Brake settings" sub-menu of the
»Wing mixers« menu, beginning page 160", is
available without limitation.
The "Throttle too high" warning message, see
page 30 and/or 94, and the "Motor stop" option
are deactivated.
272 Programming examples - Winged models
"(Idle) front or rear“•
C1 trimming is affected in the front or rear and the
"Motor stop" option is activated.
If the throttle joystick is too far in the full throttle
direction when the transmitter is switched on,
this will be indicated with the warning message
"Throttle too high".
In parallel with this, the "Brake settings" sub-menu
of the »Wing mixers« menu, beginning page 160,
will only then be available if the "Motor" column of
the »Phase settings« menu, page 142, has the
entry "none" for the currently active fl ight phase.
In the next two lines, the principle arrangement of the
servos in the model is selected and communicated to
the transmitter:
Tail type
Motor on C1
Normal
None
Aileron/camber flaps 1 AIL
M O D E L L T Y PE
Brake Offset Input 1+100%
SEL
Tail type: "normal", "V-tail", "Delt/fl .wing" or "2
Sv EL 3+8"
Aileron/camber fl aps:
1, 2 or 4 AI servos and 0, 1, 2 or 4 FL
servos
Since we want to actuate the brake system of the
"Brake settings" sub-menu under the »Wing mixers«
menu with the C1 joystick, we will leave the outer
right setting in the "Brake Offset" line with "Input 1".
With the "Offset value" to the left of this, you should
only place the mixer neutral point at the point where
the brake system is retracted or inactive. If, in the
process, the offset is not place completely at the end
of the control path, the rest of the path is "idle travel",
which means the mixer is not infl uenced in this range
of the joystick movement.
By now at the latest, servos should be plugged into
the receiver in the standard Graupner’ish sequence:
Empfängerstromversorgung
frei oder QR2 links oder Sonderfunktion
frei oder QR2 rechts oder Sonderfunktion
Seitenruder
Querruder oder Querruder links
Höhenruder oder 1. Höhenruder
frei oder 2. Höhenruder od. Sonderfunktion
Empfängerstromversorgung
Bremsklappen- oder Motorservo
oder Regler bei Elektroantrieb
Querruder rechts oder Sonderfunkt.
Wölbklappe oder Wölbklappe links
Wölbklappe rechts od. frei oder Sonderf.
frei oder WK2 links oder Sonderfunktion
frei oder WK2 rechts oder Sonderfunktion
13 14 T 15 16 S
77 8910 11 12
Empfängerstromversorgung
frei oder Sonderfunktion
frei oder Sonderfunktion
Telemetrieanschluss
Empfängerstromversorgung
frei oder Sonderfunktion
frei oder Sonderfunktion
Anschluss für SUMO / SUMI-Verbindung
Empfängerstromversorgung
Empfängerstromversorgung
Comments:
If a V-tail unit should move incorrectly either "high/•
low" or "left/right", please observe the information
in the table on page 62 in the right column. The
same process applies for the ailerons and fl aps.
The settings described in the following are based •
on a model with "normal" tail unit and "none
(motor)". The settings are adopted for models
with a V-tail with practically no changes at all.
However, the transfer of this information is not so
simple for delta/fl ying-wing models. Therefore, a
special programming example for this model type
is provided on page 301.
In the menu …
»Servo adjustment« (page 102)
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
… servos can now be adapted for appropriate
"direction of rotation", "neutral position", "travel"
and "limitation" to the requirements of the model.
In this sense, all settings which serve to compensate
servos and make minor adaptations to the model are
"necessary".
Notes:
The maximum possible throw of a Graupner servo •
is 150 % per side, based on both mechanical and
electrical reasons. For example, if the the sum of
the values of the columns "Center" and "Servo
travel" exceed this limit, the respective servo can
no longer follow the control commands starting
from this point. Therefore, please bear in mind that
mixers and settings in the »Dual Rate / EXPO«
menu also have an infl uence on servo travel.
The settings options provided in this menu •
for asymmetric servo travel do NOT serve for
achieving differentiations for ailerons and/or fl aps.
There are options better suited for this purpose in
the »Wing mixers« menu.
In the last column, "- limit +", the basic settings of
150 % can, and perhaps should be, signifi cantly
reduced.
273
Programming examples - Winged models
The values entered in this position act as a quasi
"limiter", whereby the setting is actually for which
point of travel the respective servo may not exceed,
so that it does not start up mechanically and thus
unnecessarily draw current. In this case it is the end
of available mechanical play on the servo, rudder
and/or steering which is decisive for the value to be
set.
An example of this would be the selection of a
model with cruciform tail, with which the rudder
moves in a wedge-shaped cutout of the elevator. In
order to prevent the rudder on the elevator starting
up and possibly blocking it, the travel is normally
mechanically adjusted (at the linkage) so that
the rudder does not start with the full throw of the
joystick. As long as the rudder is only controlled
with the corresponding joystick, there will not be
any further problems with this. But at the moment,
when in addition to the normal rudder signal a mixer
also infl uences the rudder, such as an "aileron 2 ¼
4 rudder" mixer (aileron to rudder), it is possible that
the two signals can sum to an excessive extent.
A correctly set limit of travel intercedes precisely at
this point and thus reliably prevents the mechanical
starting of the rudder. The limit of travel should,
however, not be too small, so that the rudder throw is
permanently and excessively limited.
Of course, the travel on both sides could, of course,
also be reduced to the that a start-up would not even
occur with an addition of the maximum values. With
this method, however, the prevention of an actually
occurring event would result in a permanent reduction
of the normal rudder throw.
The menu …
»Stick mode« (page 104)
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
In addition to the generally interesting adjustment of
the increments in the column "Tr. step" (number of
trim increments for each "trim wheel click") for digital
trimming – separate adjustments for each of the four
trim wheels – in the case of the (later) programming
of fl ight phases in the second column of this menu
you can select whether the trimming of transverse,
altitude and side should operate "globally" in equal
measure over all fl ight phases or separately in each
(fl ight) "phase".
The "Time" column, on the other hand, is not of
interest for this initial programming.
The settings made up to this point are suffi cient
to permit basic fl ight of winged and motorized
models – though the latter does require a correctly
set idle joystick direction in the "Motor on C1" line
of the »Model type« menu. However, the "fi ne-
tuning" is still missing. The fi ne-tuning certainly adds
to the enjoyment of fl ying over the course of time.
Therefore, if you can already fl y your model safely,
you should delve into the menu…
»Wing mixers« (page 160 … 175)
… where various options are available, depending on
the specifi cations made in the »Model type« menu,
page 94.
Since this section deals with a model having only 2
servos in the wings, the Multi-fl ap menu beginning on
page 170 is not shown.
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Therefore, we begin with the "Brake settings" sub-
menu:
off
BRAKE SETTINGS
If this display appears, you model is equipped with
a motor, contrary to the assumption of this section,
and therefore you have selected "front/rear" instead
of "none" in the line "Motor on C1" of the »Model
type« menu, page 94. Therefore, change this setting
temporarily or change the "yes" entry in the "Motor"
column of the »Phase settings« menu, page 142, to
"no" for the currently active fl ight phase – Phase 1 in
this case.
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw.time
Motor
0.1s
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
no
…
274 Programming examples - Winged models
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AILE
0%
WK2
0%
WK
0%
Diff. reduct
After this statement about mutual dependencies,
back to the topic:
If the ailerons are to be elevated for braking, an
appropriate value is entered into the "Crow" line after
activating the "AILE" column's value fi eld. In addition,
a value should always be entered in the line below
it, "Diff.Reduct" (differentiation reduction), which
corresponds to the value you entered or would like to
enter on the fi rst page of the »Wing mixers« menu in
the line "Aile.diff." (see fi gure above)! With this entry,
on actuation of the brake joystick, the set aileron
differentiation is hidden again proportionally in order
to increase the downward the throw of the raised
ailerons and thus signifi cantly improve its effect in the
braking phase.
A setting of the " Elevat. curve" mixer is then only
necessary if the fl ight speed of the model changes
too dramatically on actuation of the brake system. In
any case, you should try out the setting at a suffi cient
and readjust, if necessary, whereby you should focus
less on the fl ight position than on maintaining the
"normal" fl ight speed of the model. Otherwise there
is the risk that the model plunges when engaging
the brake system, because it became too slow in the
meantime:
Brake
Curve
off Point
Output
Input +100%
–25%
H+
–
100
¼O U T P U T
–25%
Elevator
Normal
After exiting the "Brake settings", the "Aileron
differentiation can be set:
This serves to eliminate the negative torque. The
downward defl ected aileron normally generates
a higher level of resistance during the fl ight than
when defl ected upward the same distance, whereby
the model is pulled to the "wrong" side. In order to
prevent this, with the input of a differentiation of the
travel of the respective servo defl ected downward is
reduced accordingly. A value between 20 and 40 %,
in this case, seldom arises, however, the "correct"
setting must be sought.
The option "AI 2 ¼ 4 RU" (aileron ¼ rudder)
also serves a similar purpose, as well as for the
comfortable control of a model. A value of about
50 % is a practical initial value. However, this function
should be made switchable with the assignment of
a switch if you ever have aerobatic fl ight ambitions.
(The author, for example, switches off this mixer
"automatically" when switching to the "Speed" fl ight
phase, in which he assigns both options to the same
switch accordingly.)
The last option in the »Wing mixers« menu, the
"El 3 ¼6 Fl" mixer, is not yet of interest at the
moment.
If the model-specifi c settings were made thus far,
the initial start can be considered. If course, at fi rst
you should perform a "dry run", meaning you should
carefully check all the settings once again on the
ground. Incorrect programming can damage more
than just the model! In case of doubt, ask the advice
of an experienced model pilot.
If you should fi nd during the testing that one or
multiple settings must be made for the adjustment of
the rudder effects to your control habits, the control
throws are too long or short on the whole, you should
adjust this in the …
»Dual Rate / Expo« (page 120)
… to your own requirements and habits.
"Dual Rate" establishes a relationship between
joystick travel and control travel, see page 120:
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
––––––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
On the other hand, if the maximum throws are OK
and only the reactions around the center position
are to strong for more sensitive controls, then the
"exponential" functions comes (additionally) into play:
0%
0%
0%
Aileron
Elevator
Rudder
DUAL
–––
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Move desired switch
to ON position
(ext. switch: ENTER)
Normal
3
If a switch is also assigned, switching can even take
place between two dual-rate/expo settings during the
fl ight.
275
Programming examples - Winged models
This is similar for the option …
»Channel 1 curve« (page 128)
Channel 1 C U R V E
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
With this option, one or multiple points of the control
curve of the throttle/brake joystick can be infl uenced
in such a way that a pleasant or even purposeful
behavior is guaranteed.
An example of this would be the "dead" travel of
spoilers. The fl aps fi rst pass through this after a
certain "idle travel" of the brake joystick from the
wing. With a corresponding "bending" of the curve,
the "dead' travel is covered more quickly. The
spoilers come out from the wing earlier and then
the remaining travel can be controlled with greater
sensitivity. (This also applies for the control of a motor
in the same manner, which can be controlled through
C1 as an alternative.)
Finally, the receiver's behavior in the event of a failure
should certainly be established in the menu…
»Fail Safe« (page 208)
FAIL SAFE
Pos
hold
1234567 8 9 10111213141516
DELAY : 0.25s STO
… because "doing nothing" is the worst thing which
can be done for a winged model.
In the transmitter's home position, "Hold" is specifi ed
and "Hold" means that the receiver continuously
sends the last correctly recognized control impulse to
the servos in the model. In the best case scenario the
model fl ies straight ahead for an indefi nite amount of
time and then hopefully "lands" somewhere without
causing signifi cant damage! However, if something
like this happens in the wrong place at the wrong
time, the model may become uncontrollable and
"tear" across the fl ight fi eld completely out of control,
putting the pilot and/or spectators at risk. Therefore,
it would obviously be benefi cial to program the the
function "Motor off" at the very least, in order to
prevent such risks.
With electro gliders, on the other hand, the fail-safe
setting "motor off" can also be used, for example, for
outlanding, to reliably stop the motor or its propeller
by immediately switching off the transmitter after the
landing.
The author usually prefers a "braking fi nish" within
eyeshot to fl oating off "somewhere else".
276 Programming examples - Winged models
Integration of an electric drive into the model programming
An electric drive can be controlled in different ways:
The simplest method to integrate one such drive into
the model programming is with the use of a throttle/
brake joystick (C1). However, since this is already
specifi ed for the brake system in the course of the
model programming described above, either the
switchable solution described beginning on page 279
or even the use of an alternative control is possible.
As a suitable alternative, one of the two 3-position
switches would be better than one of the
proportionals controls. However, either one of the two
side proportional rotary controls are also well suited
to activation of a motor without having to let go of the
joystick. An alternative would also be one of the two-
stage switches. Basically, whatever switch is used
should be located where it is within convenient reach.
Before we turn to the individual examples, it is
important must be noted that all inputs in the
»Control adjust« menu can be selectively
programmed as fl ight-phase specifi c ("PH" in the
"Type" column) or model memory specifi c ("GL" in the
"Type" column)!
However, since the drive should usually be
available depending on the current fl ight phase,
we recommend leaving the standard default "GL"
("global") in the "Type" column which your are using.
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
offset
GL
Normal
A common option in the following examples 1 … 5,
the automatic tracking of the elevator trimming in
the power fl ight, should also be mentioned at the
beginning of this section:
If it becomes apparent after the initial power fl ights
that the model must be continuously corrected with
the elevator while the motor is switched on, this
situation can be corrected by setting a free mixer and
adjusting it accordingly. For this purpose, switch to
the menu …
»Free mixers«
… and program one of the linear mixers, Linear MIX
1 … 8, or even one of the curve mixers, Curve MIX 9
… 12, from "channel controlling the motor" according
to "Ele", for example:
EL
LinearMIX 1
Typ
8
from – Begr. +
??
??
??
??
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
––––
––––
??
??
––––
On its second screen page, the required – usually
low – correction value is entered:
8
Mix input Offset
+
–
100
¼O U T P U T
0%
EL
Linear MIX 1
+4%
SYM ASY SET
STO
+4%
Note:
The adjustment of a curve mixer is described in
detail in the section »Channel 1 curve« starting on
page 128.
Example 1
Proportional control usage
If one of these controls is used, the connection is very
simple. Only the motor controller (speed control) has
to be connected to a free servo connection 5 … 16 of
the receiver.
Bear in mind that, depending on the model type and
number of aileron and fl ap servos, the output 2 + 5 or
6 + 7 are already linked.
Therefore connect your speed controller to the next
free input and assign the selected input – for example,
"Inp. 8" – to one of the transmitter's proportional
controls, for example the left-side proportional rotary
control. This is done in the menu …
»Control adjust« (page 108)
Select the desired line with the cd selection keys
of the left or right touch pad. A tap on the the center
SET key of the right touch pad will activate "Switch
and control assignment". Now move the selected
proportional control. After a short time, an entry, e.g.
"Cn2", will appear in the inverse video fi eld.
277
Programming examples - Winged models
one column to the right, to the "- time +" column then
move the selected control close to "full throttle" so the
marker frame is only placed around one value fi eld.
Now enter a value of at least 1 s …
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0
GL
GL
GL
fr ---
fr
fr
Cn2
---
---
---
offset
GL
Normal
1.0
… with which a movement of the proportional control
in the "ON" on direction which is too fast is processes
move gently, and you can check immediately this by
switching to the »Servo display«.
Note:
No delay is entered on the "OFF" side, so that the
drive can be switched off instantly at any time. This
does not additionally stress the drive, because it
merely "runs down".
The adjustment of the appropriate control travel and
directions for the motor control (speed control) is
normally carried out in the »Control adjust« menu
in the "- travel +" column. Alternatively, these settings
can also be made in the menu …
»Servo adjustment« (page 102)
+100% 100%Servo 4
Servo 5
Servo 6
Servo 7
Servo 8
Rev cent.
100%
150% 150%
– travel + – limit +
+100% 100%
100%
150% 150%
+100% 100%
100%
150% 150%
+100% 100%
100%
150% 150%
+100% 100%
100%
150% 150%
.
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
Cn2
---
---
---
offset
GL
Normal
However, since propulsion must usually be available,
independent of the current fl ight phase, leave the
default value "GL" in the "Typ" column – as already
mentioned earlier in this section.
If applicable, for necessary adjustment of appropriate
control travel for the motor control (speed control),
use one of the arrow keys to switch to the right into
the "- travel +" column.
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
Cn2
---
---
---
offset
GL
Normal
This fi elds of this column can be use to set the travel
required, even asymmetric if necessary.
A simultaneous tap on the ef keys of the left
touch pad now will switch over to the »Servo
display« where the selected proportional control
can be activated to watch the the bars for channel 8
"wander" from one side to the other and back.
However, if the proportional control is moved
too fast – in practice – the resulting sudden motor
acceleration can briefl y strain the entire drive train
(too much). In this case, be sure to enter a value in
the "- time +" column to counteract such a condition.
Therefore, using one of the selection keys, switch
Example 2
2-way switch usage
This variant realizes a purely ON/OFF function.
On the receiver side, either a simple electronic
switch or – if a gentle motor start-up, for example, is
desired – an appropriate motor control (speed control)
is required.
With the exception of assigning a different
operating element, the settings required for this
are essentially the same as those described under
Example 1. Therefore, the same comments and
recommendations also apply.
Apart from the infi nitely variable motor control under
Example 1 and the two-stage motor control in this
example, the selection of the two transmitter control
types only has an effect on the type of timer control,
see page 284.
Only the nature of the assignment and representation
of the selected switch in the display of the menu …
»Control adjust« (page 108)
As in example 1, change over to the line of a free
input, activate the "Switch and control assignment" in
the second column, page 56, then move the selected
switch, in this case for example switch 2, from the
desired motor OFF position in the direction of motor
ON.
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
2
---
Here again – as already mentioned earlier in this
section – leave the standard default "GL" in the "Typ"
column.
278 Programming examples - Winged models
The setting of the appropriate control travel for the
motor control (speed control) is made in the "- Travel
+" column. If the motor should up gently with the use
of a motor control (speed control), an appropriate
delay time can be set – as described in Example 1 – in
the "- time +" column:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0
GL
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
2
--- 1.1
All other settings – as already mentioned earlier in
the example – are made analogous to Example 1.
Therefore, the same comments and recommendations
also apply.
Note:
No delay is entered on the "OFF" side, so that the
drive can be switched off instantly at any time. This
does not additionally stress the drive, because it
merely "runs down".
Example 3
3-way switch usage
This variant realizes a three-stage speed setting,
such as Motor OFF, "half" and full power.
A corresponding motor control (speed control) is
required on the receiver side.
The required settings are basically the same as those
described under Example 1 and 2. Therefore, the
same comments and recommendations also apply.
Apart from the infi nitely variable motor control under
Example 1 and the three-stage motor control in this
example, the selection of the operating element only
has an effect on the type of clock control, see page
284, and the nature of the assignment.
Here again – as already mentioned earlier in this
section – leave the standard default "GL" in the "Typ"
column.
Put the desired 3-way switch into its middle position
then activate "Switch and control assignment" above
the column with the switch symbol, as described on
page 56. Now put the selected 3-way switch forward,
out of its middle position:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
7
---
Now put the activated switch from its forward position
back into its middle position.
Now move the marker frame to the left and into the
column above the column now labeled with a second
switch symbol instead of the previous label SEL.
Reactivate "Switch and control assignment" for this
column then move the 3-way switch out of its middle
position toward the rear:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
7
8
The setting of the appropriate control travel for the
motor control (speed control) is made in the "- travel
+" column. The motor should rev up gently with a
motor control (speed control), to this end a suitable
delay time can be set – as described in examples 1
and 2 – in the "- time +" column:
All other settings–as already mentioned
earlier in the example–are made analogous to
Example 1. Therefore, the same comments and
recommendations also apply.
Note:
By shifting the neutral position and subsequent
adjustment of travel, the "half throttle position" can be
infl uenced in the »Control adjust« menu by reducing
travel from the offset value on the side to which the
neutral point has been shifted and adding it to the
other side. For example, an offset value of -20 %
results in +80 % on the minus side of the travel setting
and +120 % on the plus side, and vice versa.
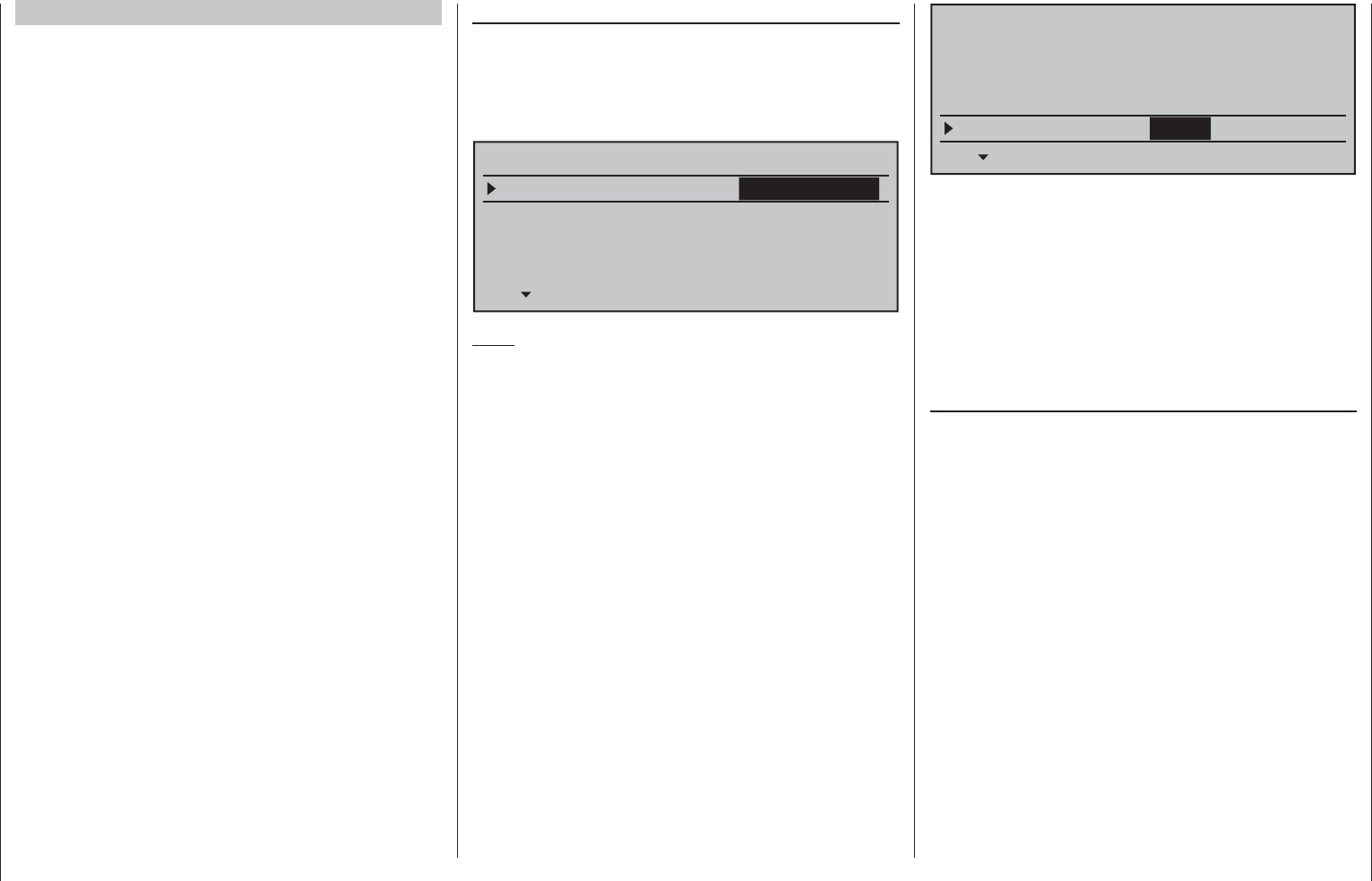
279
Programming examples - Winged models
Tail type
Motor on C1
Normal
Aileron/camber flaps 1 AIL
M O D E L T Y P E
Brake Offset Input 1
-90%
SEL
Thr. min front
This idle path ensures that all brake settings remain
at "neutral", even with minor deviations from the
limit of the brake fl ap control. At the same time,
the effective control path is automatically spread to
100 %.
For this reason, in the next step it must be ensured
that the infl uence of the C1 joystick on the motor can
be infl uenced. For this purpose, switch to the menu
…
»Phase settings« (page 142)
... and assign a meaningful name, such as "Normal",
from the list for "Phase 1" after activation of the
selection fi eld in the "Name" column. The asterisk
in the second column indicates which phase is
currently active. As long as no phase switch has
been assigned, this is always Phase 1. "Phase 2"
can be given, appropriate to the example, the name
«Landing».
In the "Ph.Tim" column you can assign a so-called
fl ight phase timer for the measurement of the motor
running time and/or the gliding times as necessary
for each phase. You could, for example, assign one
of the "Timers 1 … 3" to the "Normal" fl ight phase in
order to measure the total motor runtime via the C1
joystick:
»Model type« (beginning page 94)
Here you fi rst specify in the "motor" line whether the
throttle minimum position (= Motor "OFF" position)
should be at the "front" or "rear" - as already
discussed: In the following programming example,
"Motor OFF" and "Brake OFF" are combined at "front":
Tail type
Motor on C1
Normal
Aileron/camber flaps 1 AIL
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
Thr. min front
Note:
With the selection of "Throttle min front/rear" the
trimming will then only have an effect in the "idle"
direction of the motor and is not the same as with the
"none" entry, having the same effect at every position
of the C1 joystick. Since the C1 trimming is not
normally used with electric drives, however, this has
no further relevance.
You adjust the "according to your model, in this case
"normal".
In the "Aileron/fl aps" line you enter the correct
number of aileron and fl ap servos – in this example
"2 AIL".
In the last line you leave the standard entries for the
selection of "Brake retracted = front". On the other
hand, if the preference is for "Brake retracted = rear",
select the "Brake offset" line and defi ne the offset
point – as described on page 95 – as "rear". In the
process, if the offset point is not placed completely
at the end of the control travel, the remainder of the
travel is "idle" up to this limit.
Control E-motor and crow alternately with C1 joystick
Example 4
Before we discuss the programming of this fourth
example or turn the to the expansion of the previously
described basic programming, a few words should be
said about the position of the throttle/brake joystick
with "Motor OFF" or "Brake OFF". Normally the C1
control joystick is moved forward for the throttle
control and backward for the extension of the brake.
However, if for this type of "traditional" assignment,
for example, a switchover of the brake system is to
take place for the "Motor OFF" condition (joystick
"back") then a switchover to "full brake" would take
place immediately after the pre-set switchover time
specifi ed in the »Phase settings« menu, and the
opposite will take place when "brakes retracted" is
switched over to propulsion causing the motor to
switch over to "full power" within this time range …
A "glider pilot" can make the best of this
"Emergency" – normally with "brake retracted =
front" – by switching to motor "ON" only if necessary
so that power decreases, if applicable (and hopefully
not forgetting to push the C1 joystick "forward" again
when switching back). A typical "motor pilot", on the
other hand, operates in the opposite manner, only
switching to the brake if necessary, etc... You can
also combine the "Zero point" of both systems to
avoid confusion, whereby a "glider pilot" would tend
prefer the "front" and a "motor pilot", on the other
hand", would likely prefer the "rear".
Whichever the case may be, the mc-20 HoTT
transmitter permits both variants. In the following text,
however, the combination of the two "OFF" positions
to "front" is assumed. However, if you have a different
preference, it is not a problem: The only difference
from the described version lies in the logical selection
of "Throttle min rear/front" and, if applicable, of a
corresponding brake offset in the menu …
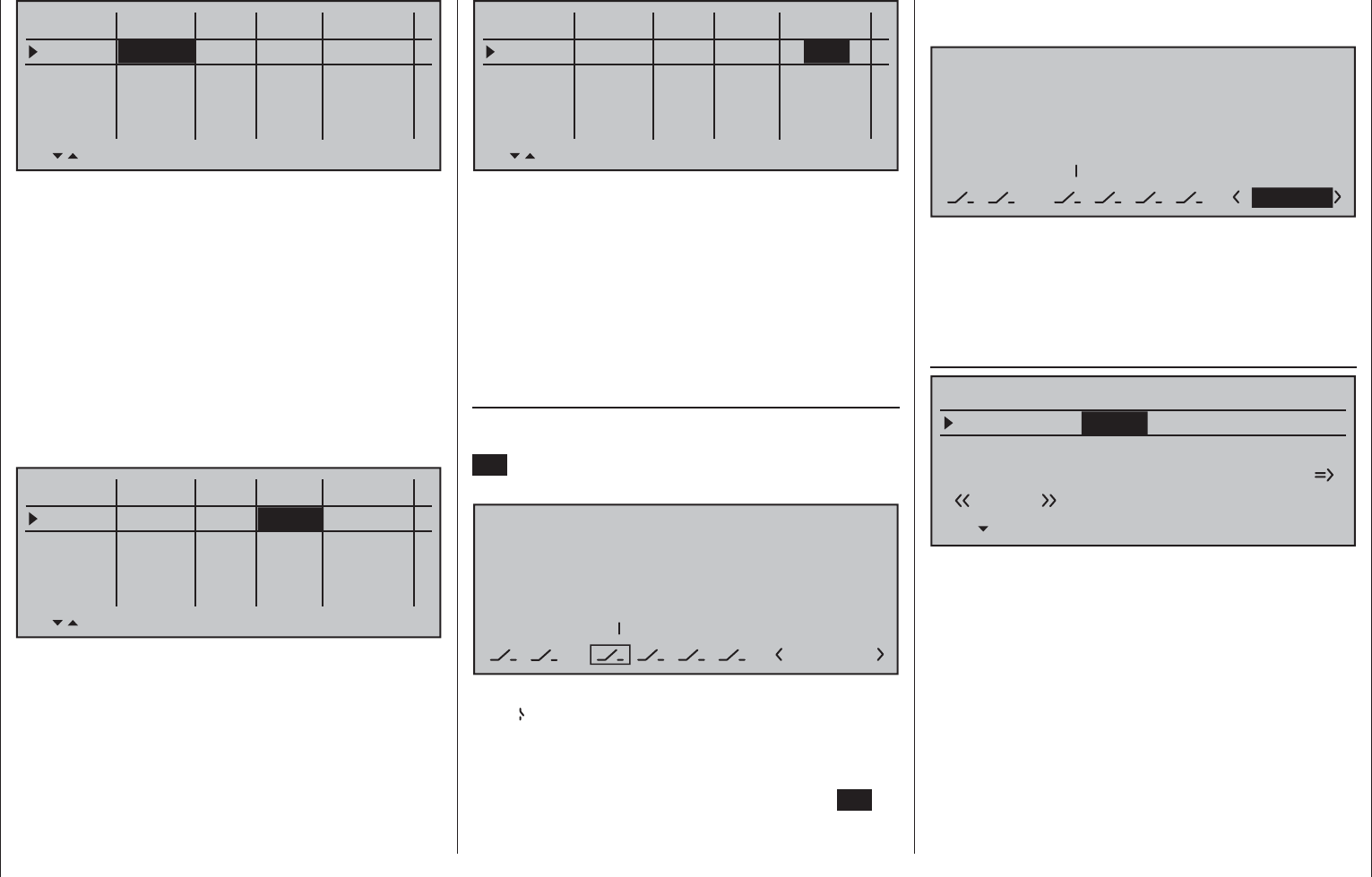
280 Programming examples - Winged models
the phase for the front switch position "normal" and
"landing" for the rear position (or vice versa):
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
27
2
2Landing
These phase names then appear in all fl ight-phase
dependent menus and, of course, also in the base
screen of the transmitter.
Now switch to the «Landing» fl ight phase and in the
"Crow" line of the sub-menu …
»Brake settings« (page 172)
Elevat. curve
BRAKE SETTINGS
Landing
Crow
QR
WK2
0%
WK
0%
Diff. reduct.
0%
… of the »Wing mixers« menu, set the desired
throw of the ailerons by actuation of the C1 joystick
("brake") upward. Then, if applicable, switch to the
"FL" column in order to specify the desired through
of the fl aps with C1 actuation downward (hidden in
the fi gure above). This fl ap position is referred to as
"Crow position" or "Butterfl y; see also page 172.
In the line "Diff. reduct." (differentiation reduction),
enter a value which corresponds to the value entered
or want to enter on the fi rst page of the »Wing
mixers« menu in the "Aile.diff." line.
With the "Elevat curve" mixer the normally occurring
"Upward tilting" of the model on the raising of the
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw.time
Motor
yes 1.1s
no 1.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal Clk1
Landing
Then you must assigned these two fl ight phases
to a switch with which you can switch between the
two fl ight phases during the fl ight. In this case, a
single switch is suffi cient. It should be easy to reach,
however, so that you can still switch between "motor"
and "brake" during a landing approach, for example,
without having to release a joystick.
The assignment of the selected switch takes place in
the menu …
»Phase assignment« (page 148)
Select the switch symbol under "C" with one of the
selection keys. Following a brief tap on the center
SET key of the right touch pad, actuate the desired
switch, e.g "2".
PHASEASSIGNMENT
Prior.
C
1 Normal
combi
ABDEF
27
2
Both switch positions, in other words ON (I) and
OFF ( ), are initially assigned at the bottom right of
the display to phase «1 Normal». Select this value
fi eld with one of the selection keys then activate the
phase selection list that was set up in the »Phase
settings« menu with a brief tap on the center SET
key of the right touch pad. For example, you name
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw.time
Motor
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal Clk1
Landing
Then the timer is controlled through a corresponding
control switch to be defi ned on the C1 joystick. As
soon as you switch to the "Landing" fl ight phase, this
fl ight phase timer is automatically stopped and hidden
in the base screen. More about this can be found on
page 156.
Now move the marker frame over the "Ph.Tim"
column to the "Motor" column to the right. Here you
can decide with "yes/no" in which phase the motor is
controlled by the throttle/brake joystick and the brake
system to be adjusted in the "Brake settings" sub-
menu of the »Wing mixers« menu should be shut off
(= "yes") and vice versa (= "no"):
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
Name Timer Sw.time
Motor
yes 0.1s
no 0.1s
yes 0.1s
yes 0.1s
yes 0.1s
–
–
–
–
¾
Normal Clk1
Landing
Now move the marker frame once more to the
right and enter an appropriate switching time after
activation of the value fi eld of the "Sw.Time" column;
for example:
281
Programming examples - Winged models
ailerons can be automatically suppressed. The
suitable correction values for the respective value
must be tested out through fl ight. Set this mixer so
that the fl ight speed of the model does not change too
much with the brake system extended in comparison
with the "normal" fl ight speed. Otherwise, there is
the risk, among other things, that the model plunges
when the brake system is retracted, e.g. for the
extension of a landing approach which is too short.
If everything is correctly set so far, only the motor is
controlled with the C1 joystick in the "Normal" fl ight
phase, whereas this should be switched off in the
fl ight phase "landing" (Servo 1 in »Servo display«
independent of "Throttle min front/rear" to -100 %
or adequately for a servo travel setting deviating by
100 %, if necessary). In this fl ight phase the C1 joystick
then only controls the raising of the ailerons and, if
applicable, the lowering of the fl aps with the neutral
point in the C1 control position selected per offset.
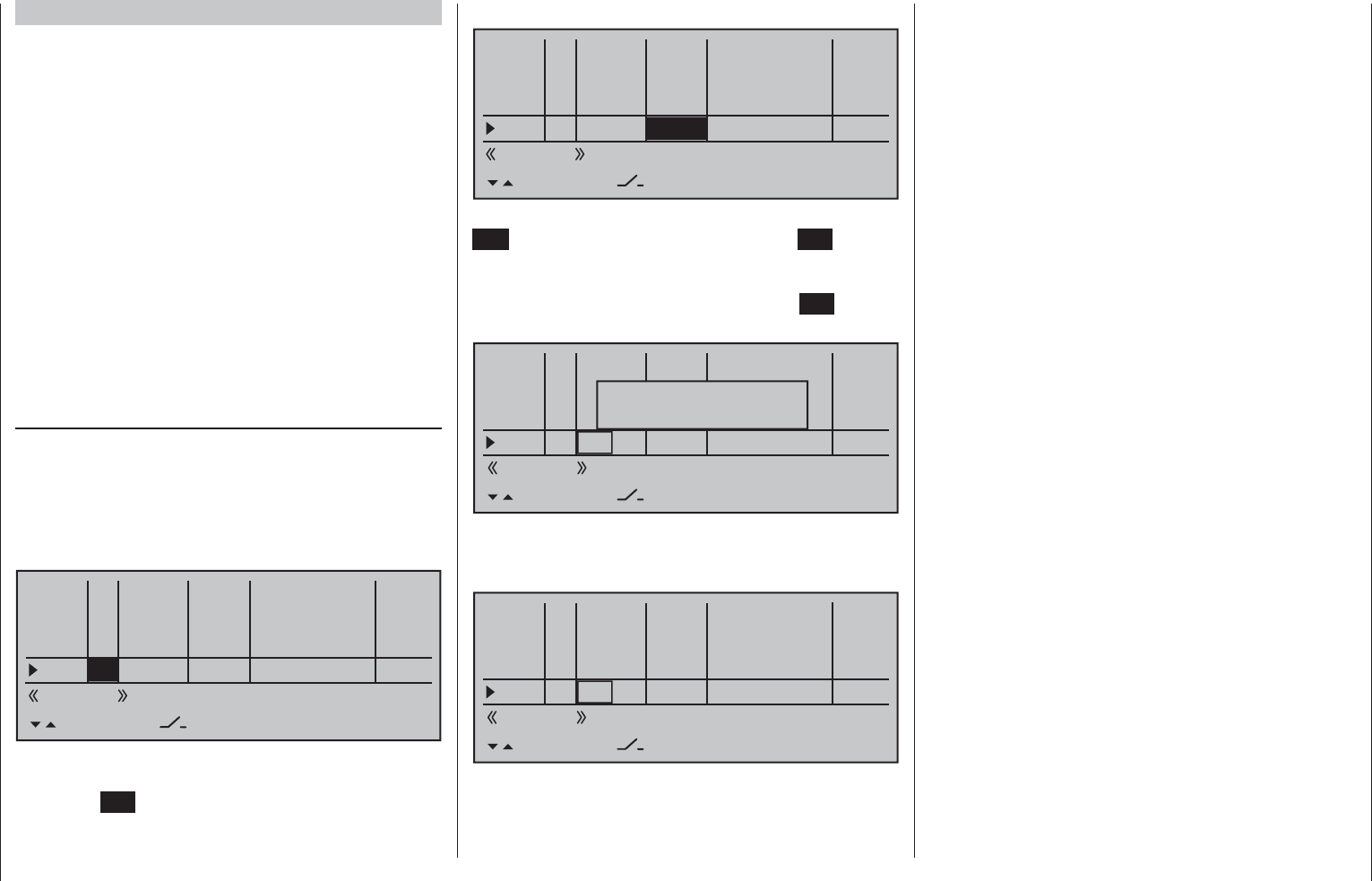
282 Programming examples - Winged models
C1 joystick switchable between E-motor and spoiler
Example 5
If, contrary to the assumptions of the preceding
Example 4, the model has additional spoilers or only
spoilers, they can be incorporated into the control of
the model by means of the following programming.
Do this by programming the menus »Model type«,
»Phase settings« and »Phase assignment« in
the same manner as described under Example 4.
The settings described there in the "Brake settings"
sub-menu of the »Wing mixers« menu are only
then relevant if an additional crow system is to be
employed in parallel with the spoilers.
With the settings described under Example 4, the
control of the E-motor and, if applicable, that of a
crow system will function as usual. Only the control
of a spoiler connected to Output 8, for example, must
additionally be programmed. For this purpose, switch
to the menu …
»Control adjust« (page 108)
… and switch into the «normal» fl ight phase.
Now use the selection keys to switch to the left into
the "Typ" column to set the parameter in this line, e.g.
"I8" from "GL(obal)" to "PH(ase)", so that the settings
too follow become effective on a fl ight-phase specifi c
basis.
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
PH
SEL
fr ---
Afterward, switch to the "Offset" column and,
following activation of the value fi eld with a brief
tap on the SET key of the right touch pad, change
the offset value for this Input 8 value fi eld now
displayed in inverse video until the spoilers are again
"retracted", e.g.:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
-95% +100%
+100%
0.0 0.0
GL
GL
fr ---
fr
fr
---
---
offset
GL
Normal
PH
SEL
fr ---
Confi rm this setting with a brief tap on the center
ESC key of the left key pad or the center SET key
of the right touch pad then switch to the left into the
column above SEL. Now switch to the fl ight phase
«Landing» then briefl y tap on the center SET key of
the right touch pad. The display shows the window …
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
+100%
+100%
0.0 0.0
GL
GL
fr ---
fr
fr
---
---
offset
GL
Landing
PH
SEL
fr --- 0%
Move desired
control adj.
Now move the C1 joystick As soon as this is
recognized, "Cn1" will appear in the display instead
of "fr":
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
+100%
+100%
0.0 0.0
GL
GL
fr ---
fr
fr
---
---
offset
GL
Landing
PH
SEL
Cn1 --- 0%
Leave the offset value in this fl ight phase
at "0 %". It may be necessary to change the leading
symbol of the travel setting to reverse the control
direction. Do this by switching the travel setting from
+100 % to -100 % in the "travel" column.
Now we are practically fi nished. Check the
programming in the »Servo display« menu, which
you can reach from the base screen of the transmitter
as well as nearly every other menu position with a
simultaneous tap on ef keys of the left touch pad.
You will discover that "Servo 1" (motor control) is
controlled in the "Normal" phase and in the "landing"
phase only the spoiler is controlled at "Servo 8" and,
if applicable the aileron and fl ap servos – just as we
intended.
283
For your notes
284 Programming examples - Timer confi rmation with control or switch
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Cnt. 1
free
–85%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
In order to assign the control switch you just crated to
the desired timer, switch to the menu …
»Timers (in general)« (page 152 … 154)
… and select the line "Top" with the selection keys.
This is the standard line assigned to the stopwatch.
In this line, move the marker frame over the "Timer"
column to the right, to the column above the switch
symbol, using the appropriate selection key of the left
or right touch pad. Now tap twice on the center SET
key of the right touch pad: The fi rst tap will activate
the switch assignment, the second tap will call up the
list of "expanded switches":
Model time
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
–––
–––
Alarm
Timer
Top :Stoppuhr
Centr.Mitte :Flugzeit
Movwünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C3C1
Now select the previously programmed control
switch, C1 in the example, and assign it to the timer
with a brief tap on the center SET key of the right
touch pad:
Modeltime
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s –––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
C1
The timer in the base screen now starts with
movement of the C1 joystick toward full throttle
and stops if you pull the C1 joystick back over the
switching point.
Example 1 of the preceding pages
If you have decided to continue with the model
programming described on the previous pages in
Example 1 on page 276, fi rst switch to the menu …
»Control switch« (page 135)
… and select the line of a control switch which has
not been assigned yet with the selection keys. After
activation of the control assignment with a brief tap
on the center SET key of the right touch pad, the
following window will appear:
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Geb. 1
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
frei
free
free
frei Move desired
control adj.
Now simply move the respective proportional control,
e.g. the left side proportional rotary control from
its motor "OFF" position toward the motor "ON"
direction.
Thereafter, change to the column above STO by
using the appropriate selection key, move the
selected control near its motor "OFF" position then
Examples 4 and 5 of the preceding pages
If model programming is to be continued for
Example 4, page 279 or Example 5, page 282
as described on previous pages or, completely
independent of this example programming, the
C1 joystick (throttle/brake joystick) is to be used for
power regulation, then a control switch can be used
to automatically start and stop the stopwatch. For this
purpose, fi rst switch to the menu …
»Control switch« (page 135)
… and select the line of a control switch which has
not been assigned yet with the selection keys. After
activation of the control assignment with a brief tap
on the center SET key of the right touch pad, the
following window will appear:
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Geb. 1
0%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
frei
free
free
frei Move desired
control adj.
Now simply move the C1 joystick (throttle/brake
joystick) from the motor "OFF" position in the motor
"ON" direction.
Thereafter, change to the column above STO by
using the appropriate selection key, move the C1
joystick close to its motor "OFF" position then set
the switch-point at the selected position with a brief
tap on the center SET key of the right touch pad.
The switch's state will be displayed at the right of the
control number, e.g.:
Timer confi rmation with control or switch
285
Programming examples - Timer confi rmation with control or switch
set the switch-point at the selected position with a
brief tap on the center SET key of the right touch pad.
The switch status is shown to the right of the control
number:
SEL
0%
0%
0%
C1
C2
C3
–––
C4
CONTROL SWITCH
Slide2
free
–85%
STO
–––
–––
–––
SEL
C1
C2
C3
C4
free
free
Note:
Now place the switching point; but do not put it at the
limit position of the control, because safe switching is
not assured when doing so.
Ct1 used in the example here should be "closed"
in the "full throttle" direction and "open" below the
switching point.
Now switch to the menu …
»Timers (in general)« (page 152 … 154)
… and select the line "Top"with the selection keys.
This is the standard line assigned to the stopwatch.
In this line, move the marker frame over the "Timer"
column to the right, to the column above the switch
symbol, using the appropriate selection key of the left
or right touch pad. Now tap twice on the center SET
key of the right touch: The fi rst tap will activate the
switch assignment, the second tap will call up the list
of "expanded switches":
Model time
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s
–––
–––
Alarm
Timer
Top :Stoppuhr
Centr.Mitte :Flugzeit
Movwünschten Schalter
to die EIN Position
(erw. Schalter: SET)
Control/Logic/fix switch
C2 C4 C5 C6
C7 C8 FX FXi L1 L2
C3C1
Now select the previously programmed control switch
"C1" then tap on the center SET key of the right
touch pad.
Modeltime
Batt. time
Timer
–––12:34h
1:23h
0:00
0:00
0s
0s –––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
C1
The stopwatch in the basic display now starts with
movement of the proportional rotary control toward
full throttle and stops if it is turned back again over
the switch-point.
Examples 2 and 3 of the preceding pages
If you control your motor with a switch, on the other
hand, you do not need the described control switch
described above. It is completely suffi cient if you
assign the same switch to the timer, so that it also
begins to run when you switch on the motor.
Tip:
If the motor run time for an E-model is limited by the
battery capacity, you can have the stopwatch count
down. Enter the maximum permissible motor run time
in the "Timer" column, e.g. "5 min", and shortly before
expiration of permissible time, e.g. "30 s" before,
have the transmitter issue an acoustic warning signal:
Model time
Batt. time
Timer
–––12:34h
1:23h
5:00
0:00
30s
0s –––
Alarm
Timer
Top : Stop watch
Centr: Flight tim
7
286 Programming examples - Parallel operating servos
Parallel operating servos
A second servo running in parallel is often required,
such as when brake fl aps or spoilers installed in the
wings or the left and right elevator or a double fi n
should be actuated by a servo or a large rudder fl ap
should be simultaneously controlled by two servos
due to high throw forces.
In principle, this task could also be solved by
connecting the servos together on the model side
using V-cable. However, the disadvantage here is
that servos combined in this manner can no longer
be adjusted individually and separately from the
transmitter – thus negating the potential for fi nely
tuning respective servos to one another with a
computerized remote control system. A similar
situation is given for the so-called "Channel mapping"
feature of the »Telemetry« menu. Here too there are
certain limitations involved when compared to the
transmitter's adjustment possibilities.
The fi rst example, therefore, describes the coupling
of two brake or spoiler servos, the second describes
the operation of two or more throttle servos and the
third describes the coupling of two elevator servos.
The "two rudder servos" example on the next page
describes the coupling of two rudder servos, whereas
Variant 1 is preferable for applications of this type
because the use of a cross-mixer« is quicker and
easier to program. In contrast, the second variant,
also described on the next page, additionally permits
asymmetric and/or non-linear curves through use of
the »Free mixer« menu.
Two brake or spoiler servos
In a situation where there is one installed servo for
operation of brake fl aps and/or spoilers in each wing
half then the pre-set linear control characteristics
for the »Channel 1 curve« menu should remain
unchanged.
Then connect one of the two servos to Output 1,
provided for this purpose by standard, and the
second to an arbitrary free receiver connection
5 … 16, such as Output "8". Subsequently switch
to the menu …
»Control adjust« (page 108)
… and, using the selection keys, assign "Control 1" in
the Input 8 line :
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
Cn1
---
---
---
offset
GL
Normal
Since the spoiler on Output 1 can normally only be
operated on a fl ight-phase dependent basis, it is
strongly recommended that the "Typ" column for the
input used is left at its "GL" default setting.
Also the remaining values should be left at their
default settings. If necessary, carry out the required
servo travel adjustments in the »Servo adjustment«
menu. There you can also adjust the travel of servo
1 and 8 to one another, if necessary.
Multiple-motor aircraft
As described above, a model can also be operated
with two or more motors.
The fi rst throttle servo and/or the fi rst motor control
is connected as usual to (receiver) Output 1 and
each additional throttle servo and/or each additional
motor control is connected to a free (receiver) Output
6 … 12. The inputs of respective assigned control
channels are then each assigned to Control 1; for
example :
0% +100%I9
I10
I11
I12
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
---
Cn1
---
---
---
offset
GL
Normal
Cn1
Cn1
Cn1
Important notice:
Since the motor control unit should be available
regardless of a currently active fl ight phase, make
sure to leave the standard default "GL" in the "Type"
column.
Two elevator servos
Two elevator servos should be switched in parallel.
According to the receiver assignment plan, see
page 61, the receiver output 8 is intended for the
connection of the second elevator servo.
This would be taken into account on the software side
in the pre-confi guration of a corresponding mixer. You
can fi nd this in the …
"Model type" (page 94)
In this menu, switch to the "Tail" line using the
selection keys, activate the value fi eld with a brief tap
on the center SET key of the right key pad then select
the entry "2ELSv3+8":
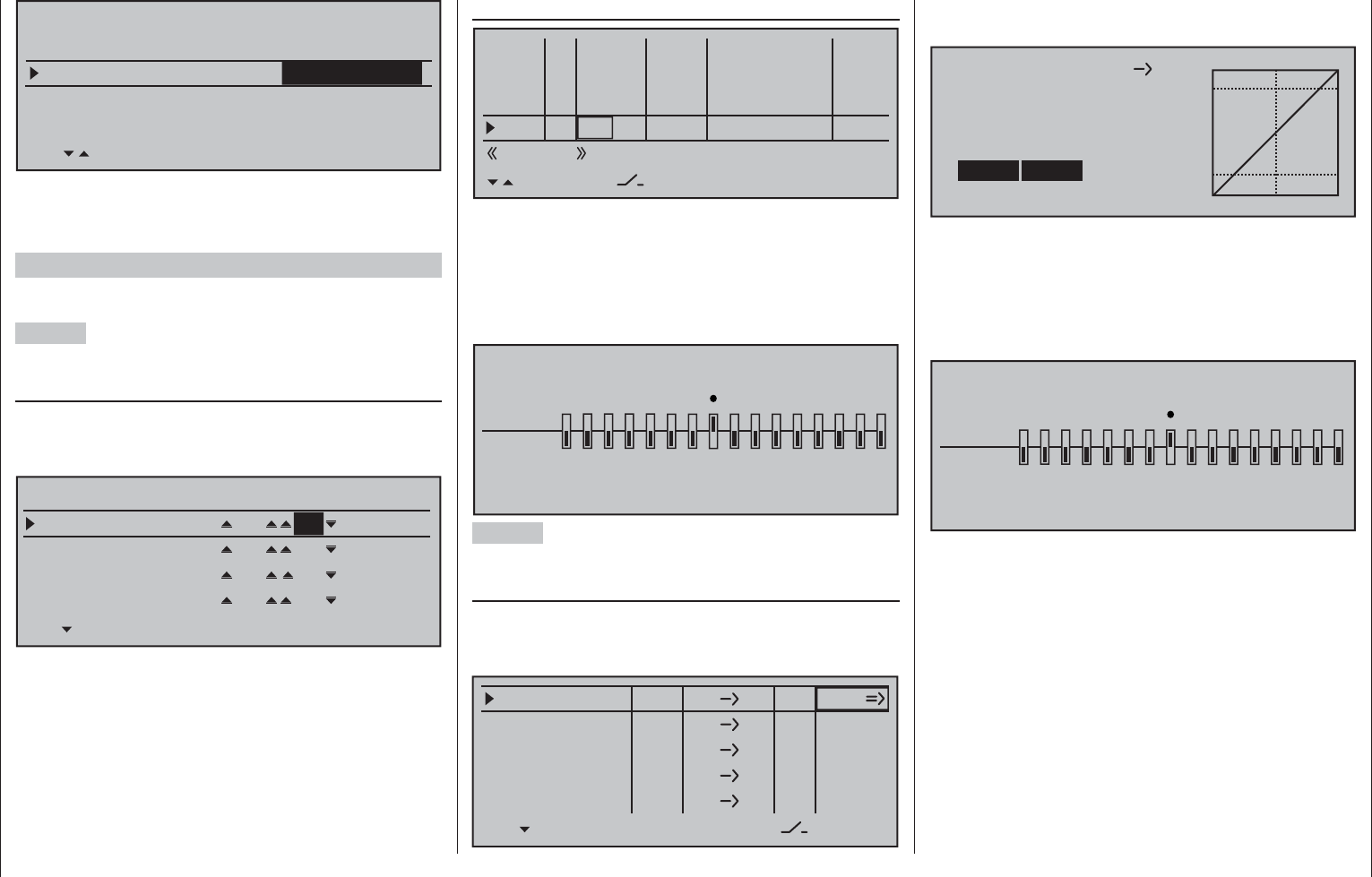
287
Programming examples - Parallel operating servos
Tail type
Motor on C1 none
Aileron/camber flaps 1 QR
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
2 EL Sv 3+8
Then do the fi ne-tuning for travel of the two
servos "in the now familiar manner" in the
»Servo adjustment« menu.
Two rudders
We want to switch two rudders "in parallel". The
second rudder is located at the free receiver output 8.
Variant 1
In the menu …
»Dual mixer« (page 206)
… select one of the cross-mixers and enter "8" and
"RU" in its left and center value fi elds, as shown in
the fi gure:
Diff.
DUAL MIXER
Mixer 1
Mixer 2
8RU
Mixer 3
Mixer 4
?? ??
?? ??
?? ??
0%
0%
0%
0%
The same defl ection "cc", which would take
place through "Input 8" must not have an effect here.
Therefore, you should make absolutely sure in the …
»Control adjust« (page 108)
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
offset
GL
Normal
… that "Input 8" "GL(obal)" is set to "free" so the
control function is separate from the control channel
over all fl ight phases.
Alternatively, Input 8 can be set to "no control" in
the »Mix only channel« menu on a fl ight-phase
independent basis by setting Channel 8 to "MIXonly".
MIX ONLY CHANNEL
MIXonly
normal
1234567 8 9 10111213141516
Variant 2
This variant uses the …
»Free mixers« (beginning page 193)
… menu to set a "Tr RU ¼ 8". In the "Type" column,
select the setting "Tr" so that the rudder trimming
affects both rudder servos:
8
LinearMIX 1
type
RU
from – Begr. +
??
??
??
??
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
––––
––––
??
??
––––
Tr
Afterwards, switch to the graphic screen and set a
symmetric mix of +100 %.
RU
Mix input Offset
8
Linear MIX 1
SYM ASY STO
0%
SET
+100% +100%
Here too, "Input 8" should also be programmed – if
applicable, for all fl ight phases – to "free" by way
of the »Control adjust« menu. However, control
function "8" can be separated from control channel
"8" more easily in the fl ight-phase independent »Mix
only channel« menu, page 205:
MIX ONLY CHANNEL
MIXonly
normal
1234567 8 9 10111213141516
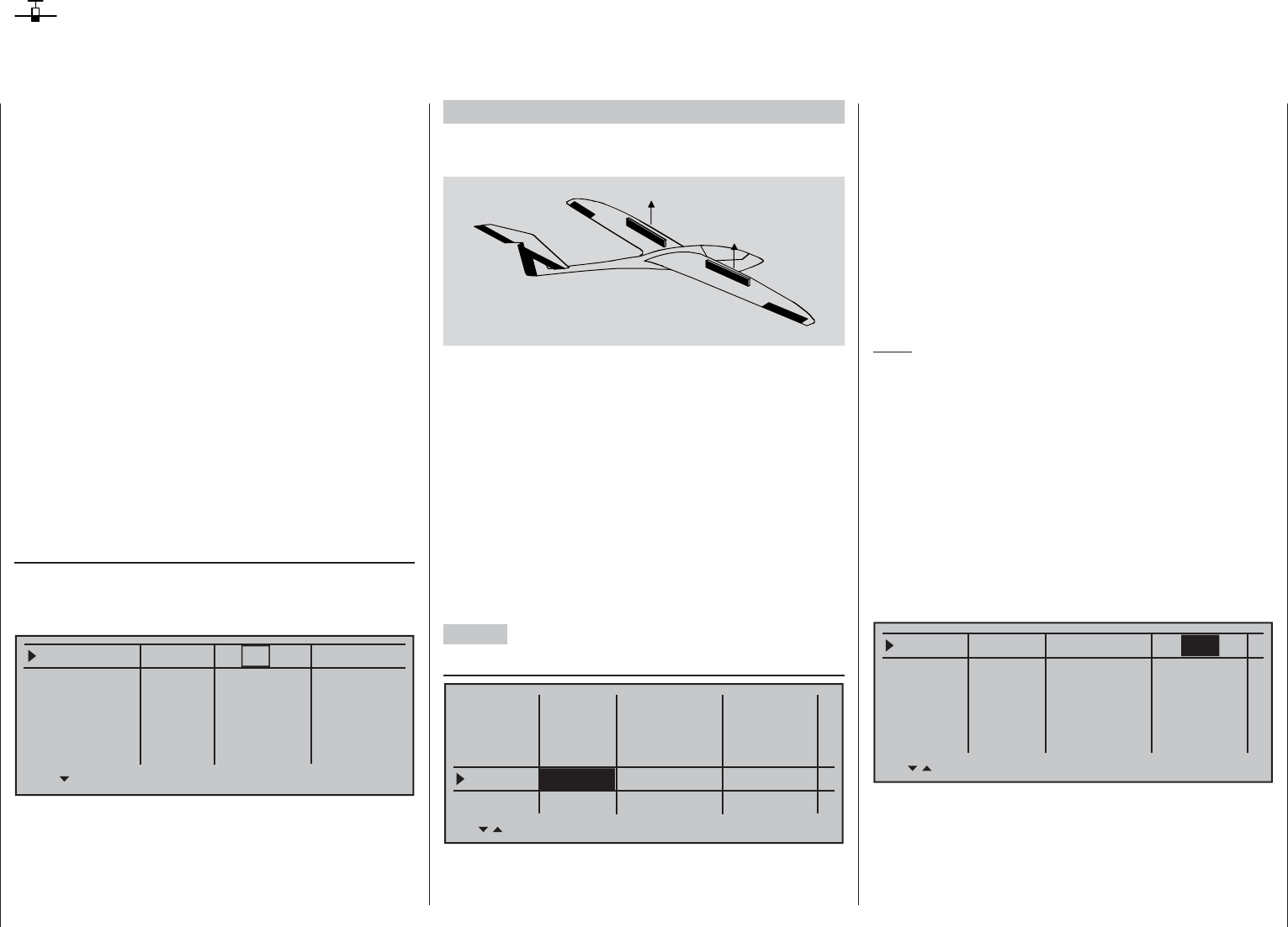
288 Programming examples - Using fl ight phases
Using fl ight phases
Up to 8 different fl ight phases (fl ight conditions) can
be programmed with settings independent of one
another within each the model memory.
Each of these fl ight phases can be called with
a switch or a switch combination. This makes it
possible to program different settings for various fl ight
states, such as «Normal», «Thermal», «Speed»,
«Distance», etc., then make in-fl ight changeovers
in a most convenient manner. However, with the
fl ight phase programming you can also make slight
modifi cations, e.g. of mixers, to try out by switching
during the fl ight in order to fi nd the optimal settings
for each model more easily.
Before actual programming of fl ight phases can
begin, consideration should be given to whether
the digital trimming of transverse, altitude and side
should be "GL(obal)" – in other words, applicable to all
fl ight phases – or per "PH(ase)" – in other words, each
fl ight phase individually variable.
If you decide in favor of a phase-specifi c trimming of
the elevator, for example, switch the menu …
»Stick mode« (page 104)
… and change the standard "global" default accordingly.
The same applies for the number of trimming steps in
the "Tr. step" column:
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
Example 1 …
… continuing with the previous programming of
an electric glider with 2 aileron servos.
AI
AI
EL
RU
Control of the electric motor is accomplished,
independent of the C1 joystick, with one of the two
side proportional rotary controls or one of the two
standard 3-way switches mounted into the switch
panels. The motor's speed control is connected to
receiver output 8 as described on page 276 and
continued in Examples 1 and 2 This is why "none"
was selected for the "Motor on C1" line in the »Model
type« menu. This not only causes the column "Motor"
in the »Phase settings« menu to be unavailable
but also allows all options to be available without
restriction in the "Brake settings" sub-menu of the
»Wing mixers« menu.
1st Step
»Phase settings« (page 142)
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
0.1s
0.1s
0.1s
0.1s
0.1s
Name Timer Sw.time
–
–
–
–
¾
Normal
Thermal
Speed
Launch
Initially, one or multiple fl ight phases are provided
with a specifi c identifi cation ("Name") for the
respective fl ight status. This identifi cation has no
infl uence on the programming of the transmitter; it
only serves for an improved differentiation of the
individual fl ight phases and is shown later in all fl ight-
phase dependent menus and in the base screen.
The selection of the respective line, a name and the
setting of the switchover time is done in the "usual"
manner, with a tap on the appropriate key(s) of the
two four-way touch pads.
Note:
With the exception of Phase 1, which should always
be assigned with the name "Normal" since it is
always active, if the fl ight phases are deactivated, it
is completely irrelevant which name is assigned to
which phase!
In everyday use by a model pilot, three to a maximum
of four fl ight phases are usually completely suffi cient:
"Start" with the climb settings•
"Thermal" for "Flying high",•
"Normal" for normal conditions and •
"Speed" for high gear.•
In the "Sw.time" column (switching time) …
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
1.0s
0.1s
0.1s
0.1s
0.1s
Name Timer Sw.time
–
–
–
–
¾
Normal
Thermal
Speed
Launch
… a "blend-in" time can be established for the time in
which a changeover from any other fl ight phase into
this given fl ight-phase is to be accomplished in order
to permit a "smooth" transition for different servo
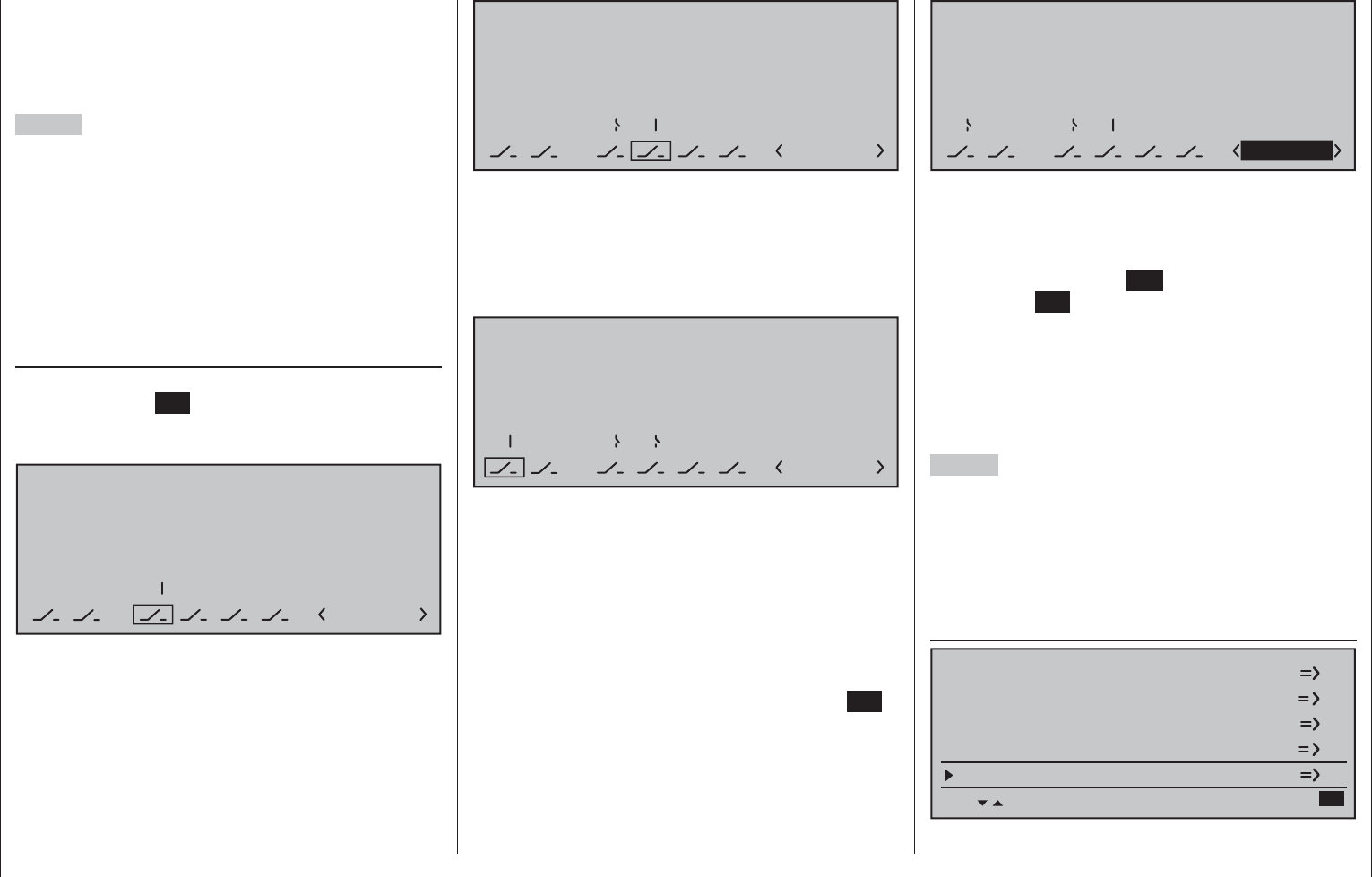
289
Programming examples - Using fl ight phases
positions. Thus, an increased stress of the model
under certain circumstances with a "hard" change of
rudder or fl ap positions, for example, is prevented
The "Status" column shows you the currently active
fl ight phase with an asterisk "¾".
2nd Step
In order to actually be able to switch between the
individual fl ight phases, the assignment of one or
multiple switches is necessary. Either one of the two
three-way switches is ideally suited for switching
between up to three fl ight phases.
Each of the two switch end positions starting from the
center position will be assigned to one of the fl ight
phase switches A … F. The assignment of the switch
takes place in the menu …
»Phase assignment« (page 148)
First select "C" with the marker frame. Then briefl y
tap on the center SET key of the right touch pad and
move the switch from its center position to one of its
end-positions, for example, downward:
PHASEASSIGNMENT
Prior.
C
1 Normal
combi
ABDEF
27
6
Move the switch back to the center position and
then select "D", and after activation of the switch
assignment, move the switch to the other limit position,
for example, to the top:
PHASEASSIGNMENT
Prior.
C
1 Normal
combi
ABDEF
27
67
Now the 3-way switch is programmed.
Now and additional switch could be assigned for the
"start" fl ight phase, if applicable. In this case under
"A", so that the "start" phase is always switched
to from every other fl ight phase in parallel to the
switching-on of the motor:
PHASEASSIGNMENT
Prior.
C
1 Normal
combi
ABDEF
27
67
2
The given switch positions must then be assigned
to respective fl ight phases (names). Although some
fl ight phases have already been assigned to names,
the phase name «1 Normal» will always initially
appear at the right in the display; see the fi gures
above.
First move the 3-way switch to one of its limit
positions, for example to the top, and switch with the
marker frame in the display down to the right to set
the fl ight phase name. Briefl y tap on the center SET
key of the right touch pad to activate the entry fi eld
then select the desired fl ight phase for this switch
position, in this example «2 Thermal», with the
selection keys:
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
27
67
2
2 Thermal
Proceed in the same manner for the other switch limit
position, which is assigned the name "3 Speed".
If applicable move Switch 2 and assign this switch
combination the name "4 Start".
A brief tap on the center ESC of the left touch pad
or the center SET key of the right touch pad will
complete the time name assignment.
The fl ight-phase dependent model settings made
before the assignment of phase switches are now in
the fl ight phase «1 Normal». This is the phase which
is called with the open «Start» switch in the center
position of the 3-way switch.
3rd Step
In order to not have to carry out all previously made
settings for the model in the "new" fl ight phase
from the ground up, we recommend fi rst copying
the already tested programming of the fl ight phase
"Normal" to the other fl ight phases. This is carried out
in the menu …
»Copy / Erase« (page 72)
Copy flight phase
Erase model
Copy model –> model
Export to SD
Import from SD =>
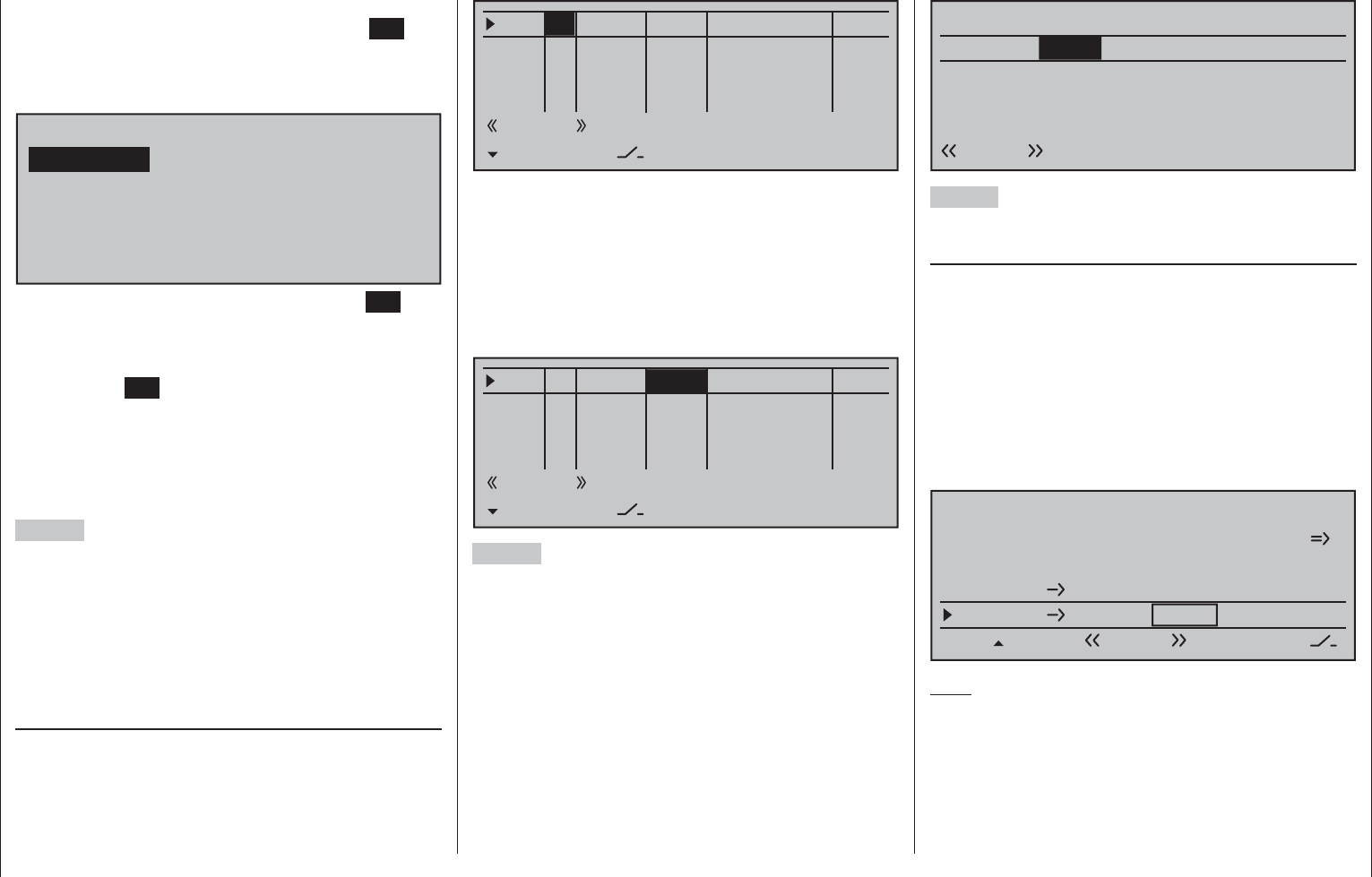
290 Programming examples - Using fl ight phases
Here, select the "Copy fl ight phase" menu item with
the selection keys then briefl y tap the center SET key
of the right touch pad.
In the window which now appears, "Copy from
phase", "1 Normal" is selected …
7
Copy from phase:
3
5=>
=>
2
4
6
1
8
normal Thermal
Speed Launch
… and a subsequent brief tap on the center SET
key of the right touch pad will change the display to
"Copy to phase". Now the target is to be selected
(initially "2 Thermal") and confi rmed by another tap
on the center SET key of the right touch pad. After
confi rmation of the subsequent safety query, all
settings are copied according to the selection.
Proceed in the same manner with the other two
phases ("1 Normal" to "3 Speed" and "1 Normal" to
"4 Start").
4th Step
Now three or four phases are programmed, the
settings are also copied and there is even a "soft"
transfer, but … there are still no fl ight-phase specifi c
settings.
Now, if applicable, in order to adapt the fl ap positions
to the different requirements of the individual fl ight
phases, in the menu …
»Control adjust« (page 108)
… the standard default "GL" is fi rst changed to "PH"
for "Phase" in the type column:
0% +100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
offset
PH
Normal
Then switch to the "Offset" column and make the
settings deviating from the "Normal" fl ight phase for the
ailerons. However, switch to the desired fl ight phase
beforehand, whose name is shown at the bottom in
the display, appropriate to the switch position. Both
positive and negative throw changes are possible.
These settings are to be made separately for each
fl ight phase:
+100%I5
I6
I7
I8
Typ SEL
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr ---
fr
fr
fr
---
---
---
offset
PH
Thermal
–7%
5th Step
Any necessary phase-specifi c trimming of the
elevator is made with the help of the digital trimming
of the elevator joystick. This requires that you have
at least set the elevator trimming to "Phase" in the
»Stick mode« menu – as already shown in this
programming example.
Alternatively, these settings can also be made in the
»Phase trim« menu …
¿
Normal 0%
EL
Thermal
0%
0%
0%
AI WK WK2
Thermal
Speed
Launch
0%
0%
0%
0% 0%
0%
0%
0% 0%
0%
0%
0%
QR2
0%
0%
0%
0%
6th Step
In the menu …
»Wing mixers« (beginning page 160)
… the fl ight phase name of the newly activated fl ight
phase appears at the bottom edge of the display. If
the switch position is now changed, the name of the
fl ight phase selected with the switch appears, but
with the previously copied settings of the fl ight phase
"Normal". Here you set you values phase-specifi cally
for the aileron differentiation, the share of the mixture
of transverse to side, and if applicable, also a mixture
of altitude to transverse. (The latter increases the
agility over the transverse axis when "Turning".)
Aileron differential
Brake settings
+33%
Aileron +55%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
Note:
The list of displayed options depends on the number
of servos entered in the "Ailerons/fl aps" line in the
»Model type« menu.
Now switch to the sub-menu …
291
Programming examples - Using fl ight phases
Aileron differential
Brake settings
+33%
Aileron +55%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
… and enter the raised height of aileron brakes for
individual fl ight phases in the "Crow" line.
With "D.red" (differentiation reduction), you should
enter the value previously set in the aileron
differentiation line in order to suppress it again while
breaking.
In the "Elevat curve" sub-menu, enter a correction
value for the elevator, see page 150.
Note:
The "Brake settings" sub-menu of the »Wing
mixers« menu is switched "off" when: for the "Motor
at C1 front/rear" column of the »Model type« menu
(page 94) AND for the "Motor" column of the »Phase
settings« menu (page 142), a "yes" is entered for the
currently active fl ight phase. Change the fl ight phase,
if applicable.
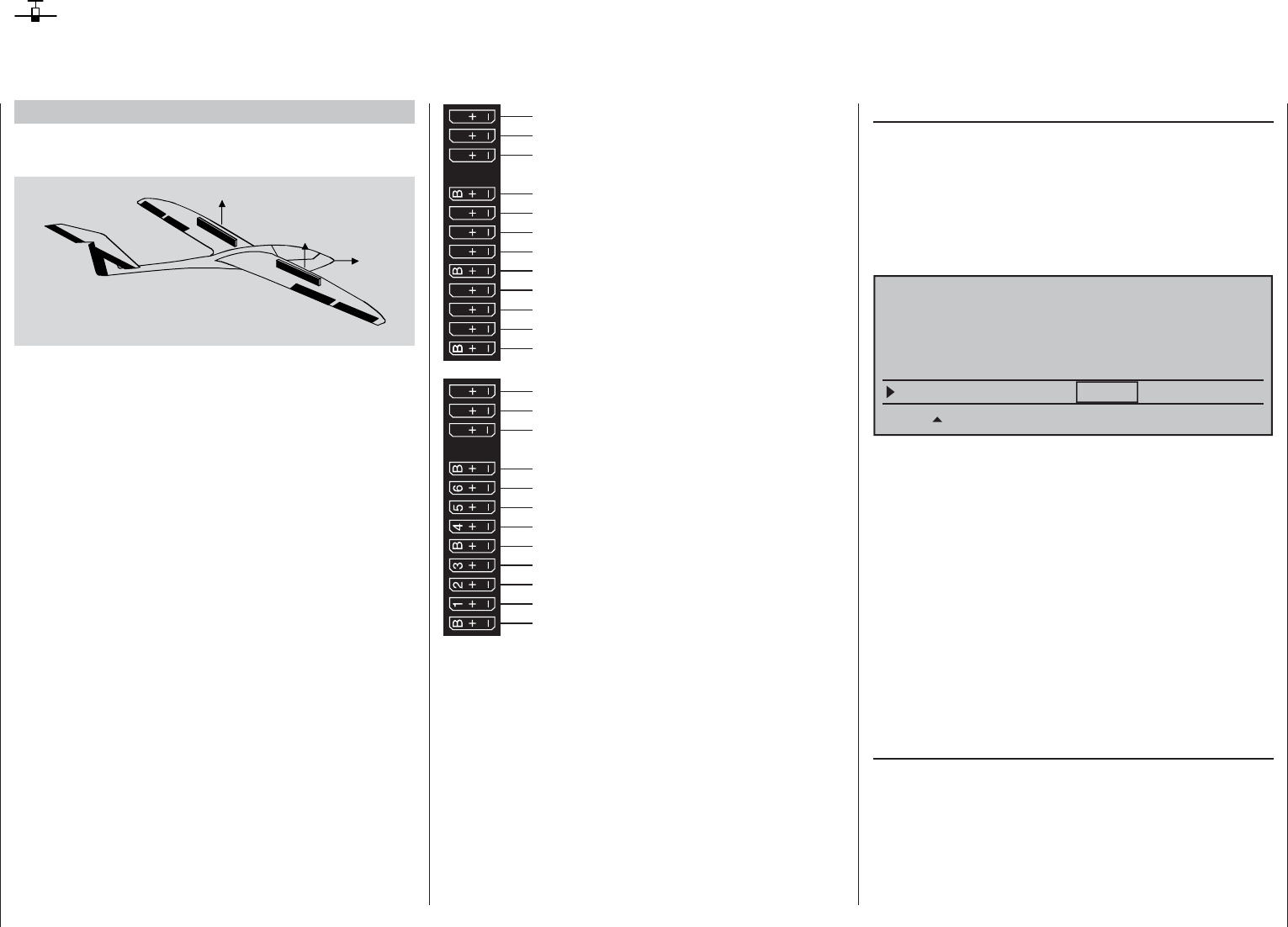
292 Programming examples - Using fl ight phases
Example 2 …
Glider with four fl ap wings, two large fl aps and
tow coupling
AI
FL
FL
AI
EL
RU
The following example is based on the assumption
that you have already mechanically pre-adjusted the
model and you have already ensured the correct
defl ection of all rudders or checked this again in the
scope of this programming and made adjustments,
if applicable, through servo switching at the receiver
and/or through the »Servo adjustment« menu.
This programming example is based on an
assignment of the receiver connections in accordance
with the following diagram:
Receiver power supply
free or aux. function
free or aux. function
Rudder or elevator/rudder right
Left aileron
Elevator or elevator/rudder left
2nd airbrake or free or aux. function
Receiver power supply
Airbrake or 1st airbrake
Right aileron
Left flap
Right flap
Aero-tow release or free or aux. function
free or aux. function
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
free or aux. function
free or aux. function
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
Begin with the new programming of the model in a
free model memory location.
Essentially, the »Basic settings, model« menu is
used to bind the receiver to the transmitter. Enter a
model name and select or review the selection of
appropriate stick mode. Later on this menu will also
be used to activate the range test before the start of
fl ight operations.
In the menu …
"Model type" (page 94)
… leave "Motor to C1" at "none" and the tail type at
"Normal". Set "2 AIL 2 FL" into the "Aileron/camber
fl aps" line.
In the "Brake" line, program or leave "In1", because
the brake and spoiler fl ap servos connected to 1 + 8
should be activated later with the corresponding C1
joystick as the control:
Tail type
Motor on C1
Normal
none
Aileron/camber flaps 2AIL 2FL
M O D E L T Y P E
Brake Offset Input 1+90%
SEL
STO
The setting in the "Brake Offset" value fi eld defi nes
the neutral position of all mixers specifi ed by the
"Brake settings" sub-menu of the »Wing mixers«
menu. Place this neutral point at approx. +90 %,
insofar as the brake fl aps should be retracted in the
front position of the C1 joystick. The remaining path
between +90 % and the full throw of the joysticks,
+100 %, is then assigned as idle travel. This assures
that the rudders or fl aps addressed by the mixers of
"Brake settings" remain in their "normal" positions
even for slight deviations from the limit position of
the C1 control. At the same time, the effective control
path is automatically spread to 100 %.
In the menu …
»Control adjust« (page 108)
… assign a switch, for example Input 9, to operate
the aero-tow coupling. In order for this switch to work
independently of the fl ight phase, leave the standard
default "GL" in the "Type" column of this input. With
"– Travel +" you can adjust the control travel for the
switching of the switch:
Using fl ight phases
293
Programming examples - Using fl ight phases
0% +100%I6
I7
I8
I9
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
---
---
---
offset
GL fr
Normal
10
---
With a simultaneous tap on the ef keys of the left
touch pad, the setting can be checked in the »Servo
display«.
Since the C1 control should actuate Servo 8
simultaneously with Servo 1, establish this link by
way of the »Control adjust« menu.
For this reason, also switch to the line before and
assign "Control 1" to Input 8.
0% +100%I6
I7
I8
I9
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
Cn1
---
---
---
---
offset
GL fr
Normal
10
SEL
However, please note in this connection, that a non-
linear control curve programmed in the »Channel
1 curve« menu has as little effect on this input as
brake offset set to less than 100 %, which you can
check very easily in the »Servo display« menu.
You can reach this from nearly every menu position
with a simultaneous tap on the ef keys of the left
touch pad:
The travel, and if applicable also the direction of
rotation, for spoiler servo 1 as well as the second
spoiler servo connected to Output 8 can be adjusted
in the menu …
Servo adjustment (page 102)
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
In the Multi-fl ap menu of the …
»Wing mixers« (beginning page 160)
… you now enter the fi rst mixer values for the four
wing fl aps; for example:
FL-Pos.
Diff.
AI-Tr.
AI
Normal AI
+100%
WK2
FL
0%
+66% 0%
+100%
0%
+100%
0%
+100%
+33%
0%
+33%0%
+100% +66% 0%
0%
FL +100%
0% +100%
Note:
The parameter values shown here are model-
dependent and must be determined by test fl ights.
In the …
cAId determines the percentage share with
which the two fl ap pairs "AI" and "FL" are
to respond to aileron steering. Also check
whether the ailerons are defl ected in the
right direction during the adjustment of the
parameter values.
The adjustment range from -150 % …
+150 % enables the correct throw direction
adjustment regardless of the direction of
rotation of the servos.
AI-Tr. determines the percentage share with which
aileron trimming should effect the AI and FL.
Diff. the entry to specify aileron steering
differentiation for AI and FL fl aps is
made here. Refer to page 161 about the
signifi cance of differentiation.
The adjustment range from -100 % …
+150 % enables the correct differentiation
direction adjustment regardless of the
direction of rotation of the aileron and fl ap
servos.
FL-Pos. The fl ight-phase specifi c positions for all
camber fl aps present on the given model
are set in this line. In the process, you can
determine the positions the fl aps assume
for each fl ight phase.
Note:
The values appearing in this line are based
on the same data set as in the comparable
position in the »Phase trim« menu, which
is why changes always take effect in both
directions.
cFLc Since all inputs in the »Control adjust«
menu are set to "free" by default, neither
the ailerons nor the camber fl aps can be
operated with these default settings. In this
respect, you also leave the default entry here.
However, if fl ap positions are to be varied
with a switch or proportional control by
the position specifi ed in the "FL-Pos." line,
assign the desired control to Input 6 in the
»Control adjust« menu and set the desired
reaction to the movement of the control
selected for this purpose by way of
a percentage in this line.
HR¼WK
this mixer induces a partial reaction from
aileron (AI) and camber fl aps (FL) during
elevator activation.
294 Programming examples - Using fl ight phases
The mixing direction is to be selected
so that all fl aps are defl ected downward
with the elevator pulled up and defl ected
upward with the elevator pushed down (=
hydroplane). The mix proportion is normally
in the low double-digit range.
Now, within the »Wing mixers« menu, switch to the
"Brake settings" …
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AI
+22%
WK2
0%
FL
+66%
Diff. reduct.
WK2
+33% 0%
+33%
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu
(page 94) AND the "Motor" column of the »Phase
settings« menu, (page 142) are set to "yes" for the
currently active fl ight phase. Change the fl ight phase,
if applicable.
Crow Further above in this text section, the C1
joystick was set for brake fl ap steering.
In this line you determine the share
with which the AI and FL should be
included on actuation of C1 in the
manner that both ailerons are defl ected
"slightly" upward and both fl aps are
defl ected as far downward as possible.
Now with a simultaneous tap on the
ef keys of the left touch pad, a
change to the »Servo display« menu
can be affected for observation of servo
movements and, in particular, to ensure
that no infl uence on the fl aps takes
place above the adjusted brake offset,
e.g. +90 % and beyond to the throw
limit of the C1 control ("Idle travel" of
the C1 joystick).
Diff. reduct. The value previously entered into
the aileron differentiation line should
also be entered in this "Differentiation
reduction" line to fade this out during
braking.
Elevat. curve
This line is used for the entry of any
correction factor that may be required
for the elevator, see page 174.
Insofar as necessary, again check all fl ap throws and,
by way of the »Servo adjustment« menu, adjust the
servo center, the servo travel and the travel limit.
It may also be time to start the initial fl ight testing,
insofar as all global settings – that is to say, all fl ight-
phase independent settings – are completed.
Two additional fl ight phases are now to be set
up below, each of which requires a somewhat
different fl ap position.
Therefore, switch to the menu …
»Phase settings« (page 142)
… and activate the assignment of phase names in
the "Name" column with a brief tap on the center SET
key of the right touch pad:
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim. Sw. time
–
–
–
–
¾
Now give Phase 1 – the "Normal phase" – that is also
the phase which includes the previous settings, the
name "Normal", which you select from a list with the
selection keys.
Phase 2 is given the name "Thermal" and Phase 3 is
given the name "Speed". Now conclude the entries
with a brief tap on the ESC key of the left touch pad
or the SET key of the right touch pad:
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim. SW. time
–
–
–
–
¾
Normal
Thermal
Speed
Now move the marker frame beyond the "Fl.ph.Tim"
column to the right into the column "Sw. time" and set
a "switching time" from any other phase into the given
phase in order to avoid an abrupt phase change; in
other words to avoid erratic changes of fl ap positions.
Now try out different switching times. In this example
we have specifi ed 1 s in each case:
Phase 1
Phase 2
Phase 3
Phase 4
Phase 5
1.0s
1.0s
1.0s
0.1s
0.1s
Name Fl.ph.tim. Sw. time
–
–
–
–
¾
Normal
Thermal
Speed
Whether or not one of the phases 1 … 8 currently has
an assigned switch and the state of the switch can be
seen in the "status" column at the far right.
Symbol Meaning
– No switch assigned
+ Phase can be called via switch
¾Indicates the currently active phase
Since, except for phase 1, all other phases are still
designated with a "-" symbol, now switch in the
menu to …
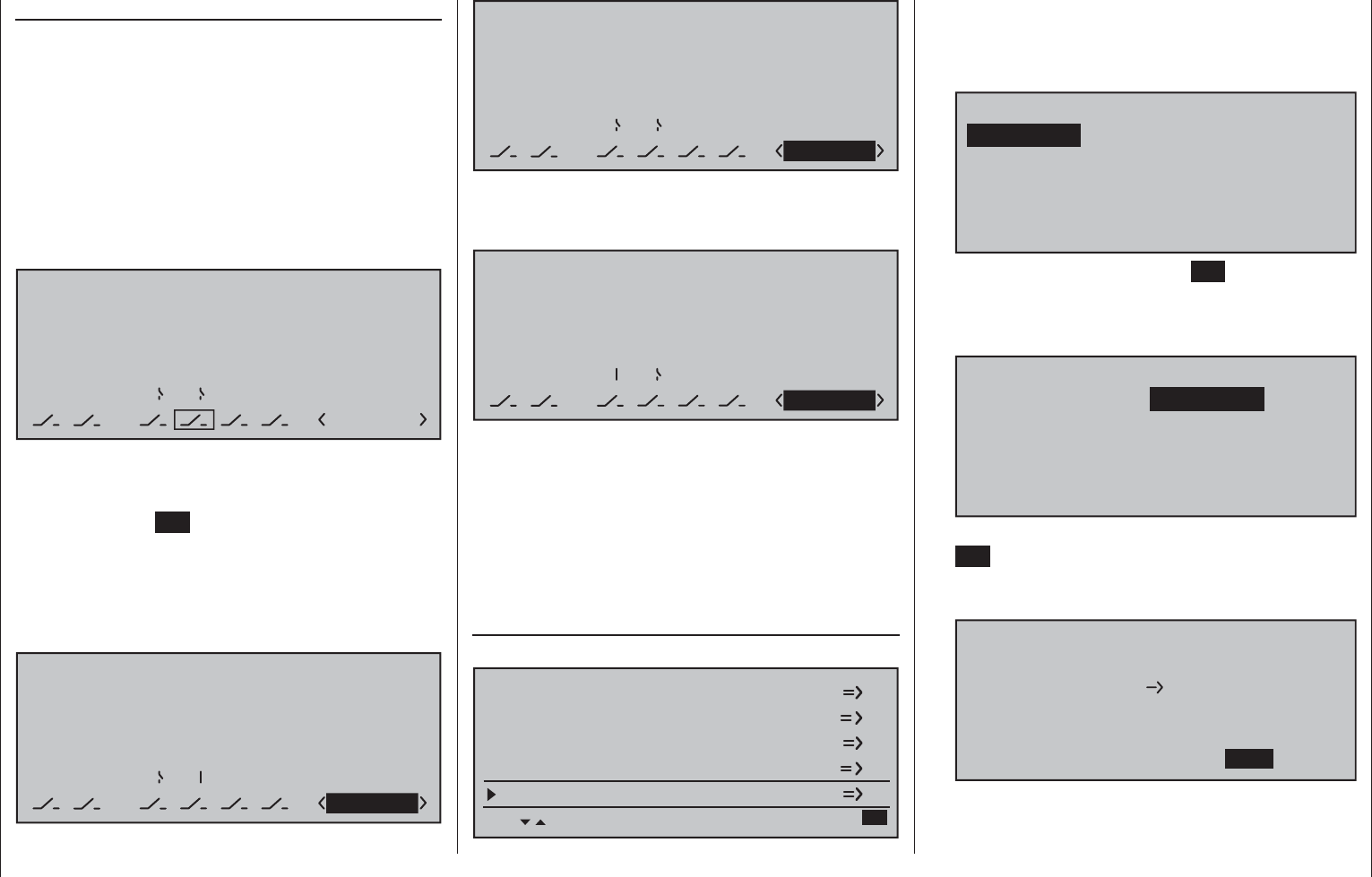
295
Programming examples - Using fl ight phases
»Phase assignment« (page 148)
… and assign the previously defi ned fl ight phases
to appropriate switches with which a selection from
among three phases is possible.
Since there is no particular priority here, assign
for example switch "C" in the display to one of the
two end settings of one of the two 3-way switches.
Afterward put the selected switch again into its middle
position, activate the switch assignment under "D"
then move the selected 3-way switch again out of its
middle position and into the other end position, as
shown below:
PHASEASSIGNMENT
Prior.
C
1 Normal
combi
ABDEF
267
After the switch assignment is complete, use the
selection keys to switch to the bottom right and
activate the assignment of phase names with a brief
tap on the center SET key of the right touch pad.
Now close switch "7" by moving the selected 3-way
switch forward.
Assign the name "<2 Thermal>" to this switch
position and leave the name of its "OFF" position
as "<1 normal>".
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
267
2 Thermal
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
267
1 Normal
Finally, move the 3-way switch to the rear toward its
"6 o'clock position" and assign this switch position the
name "<3 Speed>":
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
267
3 Speed
The phase names selected in the programming are
now shown, depending on the switch status, in all
fl ight-phase dependent menus, see the table on
page 140.
Since we have already made some settings in fl ight-
phase dependent menus, such as in the »Wing mixers«
menu, we will now copy these settings to the «Thermal»
fl ight phase. For this purpose, open the menu …
»Copy / Erase« (page 72)
… and switch to the "Copy fl ight phase" line:
Copy flight phase
Erase model
Copy model –> model
Export to SD
Import from SD =>
All eight possible fl ight phases are listed in "Copy
from phase":
Select the fl ight phase to be copied, e.g. 1.
"1 Normal".
7
Copy from phase:
3
5=>
=>
2
4
6
1
8
Normal Thermal
Speed
With a brief tap on the center 2. SET key of the right
touch pad, switch the window to entry of the target
memory "Copy to phase".
Select phase "2 Thermal" as the target:3.
7
Kopieren to phase:
3
5=>
=>
4
6
1
8
Normal
Speed
Thermal
2
Confi rm the selection 4. with a brief tap on the center
SET key of the right touch pad.
A security query follows, who should be confi rmed 5.
with "Yes":
Phase to:
to be copied?
NO
1 Normal 2 Thermal
YES
Then repeat the process with fl ight phase "3 Speed".6.
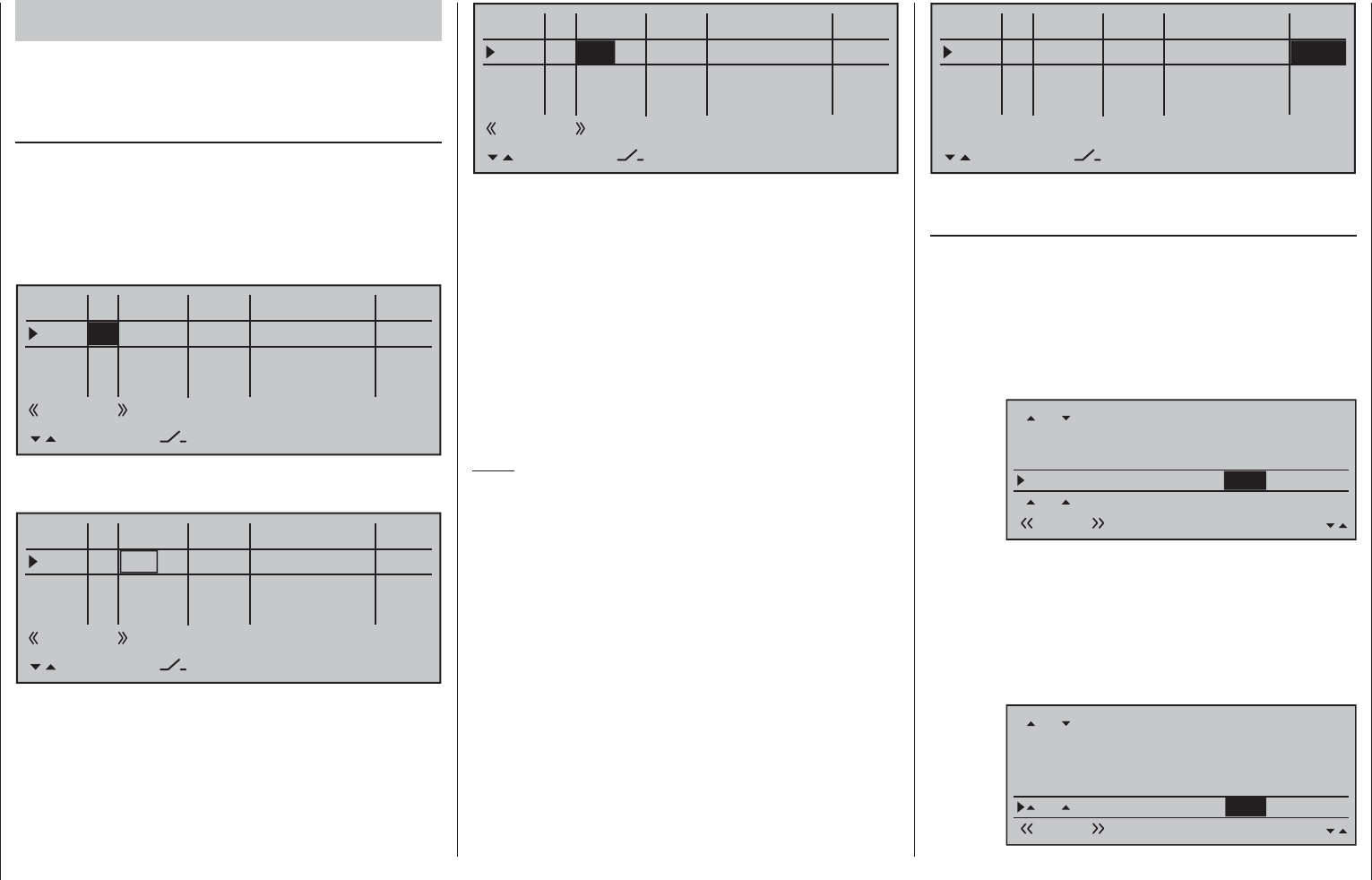
296 Programming examples - Using fl ight phases
Now we will program the required settings in the
fl ight phase "Thermal" as an example.
In order to vary camber fl ap positions in the
«Thermal» phase, it is merely necessary to switch
over to the menu …
»Control adjust« (page 108)
… then change Input 6 – as described beginning on
page 108 – from "GL(obal)" to "PH(ase)" and fi nally
assign it to an operating element.
To do this, fi rst use the selection keys to switch into
the "Typ" column for "I6" and change this setting from
"GL" to "PH".
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
fr
Cn1
fr
---
---
---
offset
GL fr
Thermal
PH
---
SEL
Thereafter change one column to the right into the
column above SEL …
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
fr
Cn1
fr
---
---
---
offset
GL fr
PH
---
SEL
Thermik
… and now assign this input, as described in the
section "Assigning transmitter controls, switches and
control switches" on page 56, the left proportional
slider in the middle console to, for example:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL Cn1
fr
---
---
---
offset
GL fr
PH
---
SEL
Sl1
Thermal
This control will allow the ailerons (2 + 5) and camber
fl aps (6 + 7) to be continuously adjusted (as camber
fl aps) with a mixer ratio yet to be set via the »Wing
mixers« menu.
If you assign the still free second three-stage switch
to Input 6 instead, you can call three different FL
positions of the ailerons (AIL) and camber changing
fl aps (FL) as well as three elevator positions (Elev)
in the "Thermal" fl ight phase, see the following
page. (These three switch positions correspond to
the center position and the two limit positions of the
previously mentioned proportional rotary control.)
Note:
The FL and AIL fl ap positions in the two limit switch
positions or in the switch center depend on the value
set in the column "- Travel +" as well as the offset
value and the mixer proportion set in the "Multi-fl ap
menu" of the »Wing mixers« menu, see further
below.
Leave the (control) "- travel +" at its standard
symmetric settings of + 100 % and the offset value at
0 %. Specifying a symmetric or asymmetric time for
smooth switching between the three switch positions
- in the example "1.0 s 1.0 s" - in the column "- Time
+" is recommended:
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL Cn1
fr
---
---
---
offset
GL fr
Normal
PH
---
SEL
Sl1 1.0 1.0
In the "Multi-fl ap menu" of the …
»Wing mixers« (beginning page 160)
… menu, subsequently change only the values for
"FL.pos" and "cFLc" in the «Thermal» fl ight phase:
FL.pos It is here that AI and FL positioning takes
place during the «Thermal» fl ight phase
in the event that the assigned control
(proportional control or 3-way switch) is in
its neutral or middle position.
FL.pos
Diff.
Ail-tr.
AI
Thermal AI
+100%
WK2
FL
0%
+66% 0%
+100%+100%
–9%
+100%
+33%
0%
+33%0%
+100% +66% 0%
0%
FL +100%
0% +100%
–11%
cFLc Enter in this line the the share of infl uence
for aileron and camber fl ap servos, when
used as camber fl aps, is to be produced by
the selected control (see above) or 3-way
switch. Be sure to set these values high
enough that the fl aps can be controlled with
appropriate sensitivity, for example:
Fl.pos
Diff.
AiI-tr.
AI
Thermal AI
+100%
WK2
FL
0%
+66% 0%
+100%+100%
–9%
+100%
+33%
0%
+33%0%
+100% +66% 0%
0%
FL +20% +25%
–11%
+25%
+20%
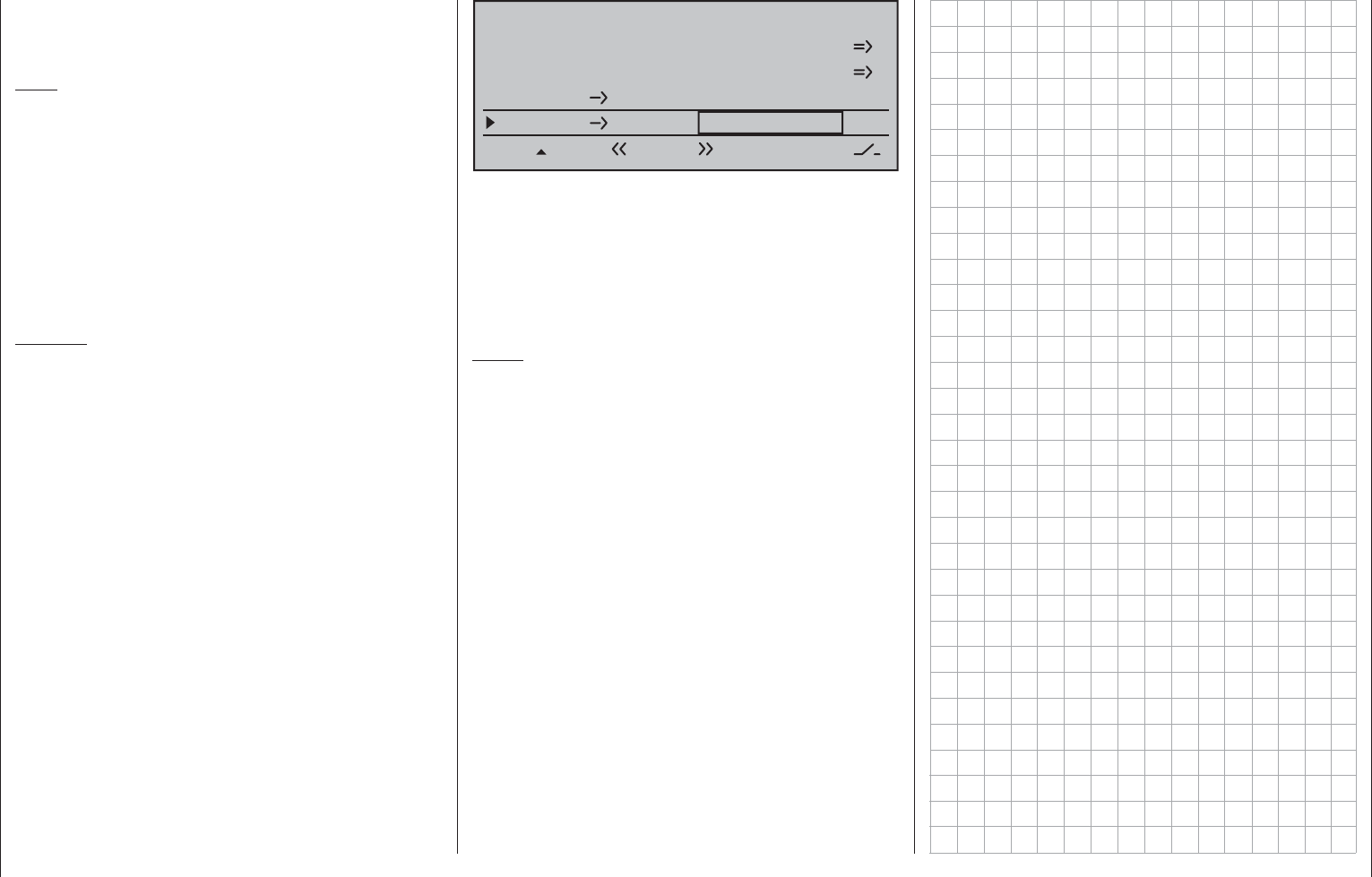
297
Programming examples - Using fl ight phases
A simultaneous tap on the cd or ef key
combination of the right touch pad (CLEAR) will reset
changed values back to their standard default values.
Note:
Due to the improved lift distribution, the degree of
mix ratios should be set so that the camber fl aps are
slightly "lower" than the ailerons.
With a simultaneous tap on the ef keys of the left
touch pad, the reaction of the AI and FL servos can
be checked in the »Servo display« by actuation
of the selected camber fl ap control. (Push the C1
joystick to the front position so that the "AIL" and "FL"
fl ap positions can be better followed on actuation of
the corresponding control.)
Caution:
With aileron actuation the bars of the »Servo
display« move in the same manner, for camber
fl ap actuation they will move in the opposite
manner.
In the control's middle position, the – example's – •
"FL-pos." setting only has a -9 % effect for the AI
and -11 % for the FL.
In one transmitter control end-position, AI and FL •
are again closer to the neutral position because
the mix ratio specifi ed in the example reduces the
FL.pos setting, whereas …
… in the other limit position, AIL and FL reach •
the maximum downward offset prescribed by the
mixer percentage.
In order to set a – corrective – admix for the elevator,
exit the "Multi-fl ap menu" and return to the base
screen of the »Wing mixers« menu:
Brake settings
Aileron +50%
WING MIXERS
Flaps aileron +5%+5%
–––
–––
rudder
2
64
3
Thermal
Multi-flap menu
In the two limit positions of the three-stage switch
the elevator is moved symmetrically in this example
with +5 % (true to side). If, on the other hand, you
use a proportional control, the elevator is defl ected
according to the degree for the control position.
Then make the settings for the "Speed" fl ight phase
in the same manner.
Notes:
The digital trimming of transverse, altitude •
and side work independently of these
settings – depending on the setting selected in
the»Stick mode« menu, page 104 – "global" or for
each "phase".
All setting values are model-dependent. Carry out •
the settings on your fi nished model and/or during
the fl ight.
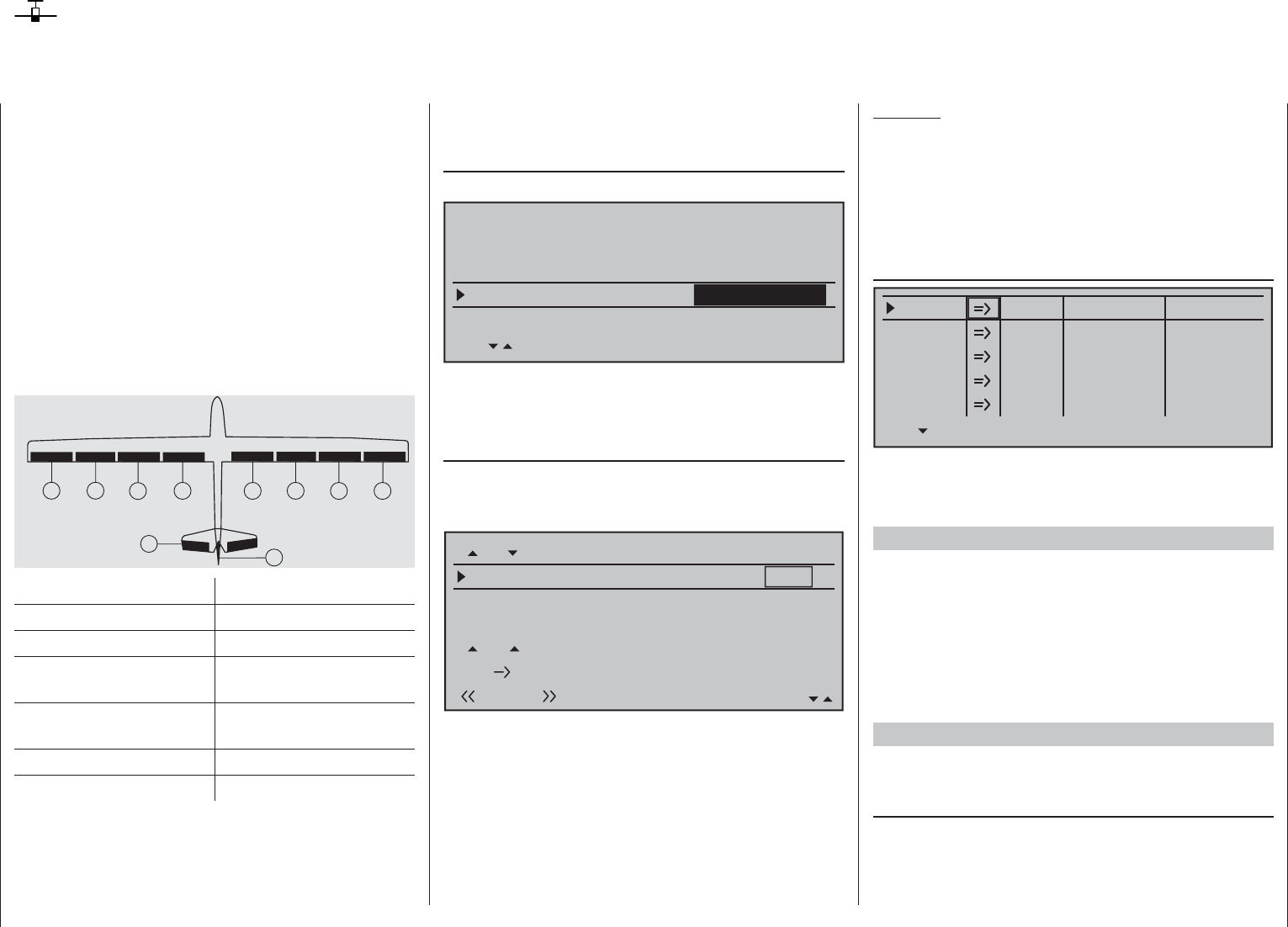
298 Programming examples - Eight-fl ap wing
Eight-fl ap wing
The standard features of the mc-20 HoTT support
convenient control of up to 8 servos for aileron/
camber fl ap functions.
In the following we will consider a model without
motor drive and without spoilers in the wings. The
example is also based on the assumption that the
model is already mechanically pre-adjusted, that
the defl ection of all rudders to the correct side has
been verifi ed, that these items will be checked again
in the context of programming and that adaptations
will be made as necessary via servo swapping at the
receiver and/or in the Servo adjustment menu.
The servos should be connected to a suitable
receiver as follows:
7
25
612
11
34
910
Rudder Receiver output
Aileron 2 + 5
Aileron 2 11 + 12
Camber changing fl aps
(exterior) 6 + 7
Camber changing fl aps 2
(interior) 9 + 10
Elevator 3
Rudder 4
For the control of all fl aps, up to two additional
proportional controls are required in addition to
the two joysticks or, alternatively up to two 2-way
switches.
In order to be able to control all servos, fi rst switch to
the menu …
"Model type" (page 94)
… and select "4AIL 4FL" in the "Ailerons/fl aps" line.
Tail type
Motor on C1
Normal
none
Aileron/camber flaps
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
4 AIL 4 FL
In order to also actuate camber fl ap servos 6 + 7
(FL) and 9 + 10 (FL2) as ailerons, set the appropriate
values in the "Multi-fl ap menu" of the …
»Wing mixers« (beginning page 160)
… menu, whereby aileron control of the two camber
fl ap pairs is set in the "cAId" line and the "Ail-tr."
line is used to adapt aileron trimming.
FL.pos
Diff.
Ail-tr.
AI
Normal AILE
+100%
FL2
0 0%+100+100%+100+100%+100+100%
+77% +55%
0%0%
0%
0%
0%
+100% +77% +55%
0%
FL
AILE2 FLAP
+88%
+88%
0%
0%
EL FL 0 0%+100+100%+100+100%+100+100%
Any previous settings can be checked in the »Servo
display« menu, which can be called from almost any
menu position with a brief simultaneous tap on the
ef keys of the left touch pad.
The servos 6 + 7, 9 + 10 and 11 + 12 now move •
for the aileron control just like servos 2 + 5. Aileron
trimming also affects all of these servos.
The C1 joystick only actuates the servo connected •
to receiver output 1.
Caution:
With aileron actuation the bars of the "Servo
display" move in the same manner and in the
opposite manner with camber changing fl ap
actuation.
The necessary fi ne-tuning of the servos is carried out
in the …
»Servo adjustment« (page 102)
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
… if necessary.
In doing so, the basic programming of the eight-fl ap
wing is completed.
Camber fl ap positioning and fl ight phases
First program two or more fl ight phases in the
»Phase settings« and »Phase assignment« menus.
Also take this opportunity to change the standard
default "global" for trim in the »Stick mode« menu,
page 104 to "phase", thus allowing modifi cations to
meet individual preferences.
An example of fl ight phase programming can be
found on page 288.
One camber changing fl ap setting per fl ight phase
If one camber fl ap position per fl ight phase is
suffi cient, then in the Multi-fl ap meun" of the …
»Wing mixers« (beginning page 160)
… menu, use the "FL.pos" line to adjust the camber
fl ap position(s) of servo pairs "AILE" (2 + 5), "AIL2"
(11 + 12), "FLAP" (6 + 7) and "FL2" (9 + 10) for each
programmed fl ight phase to meet your preferences.
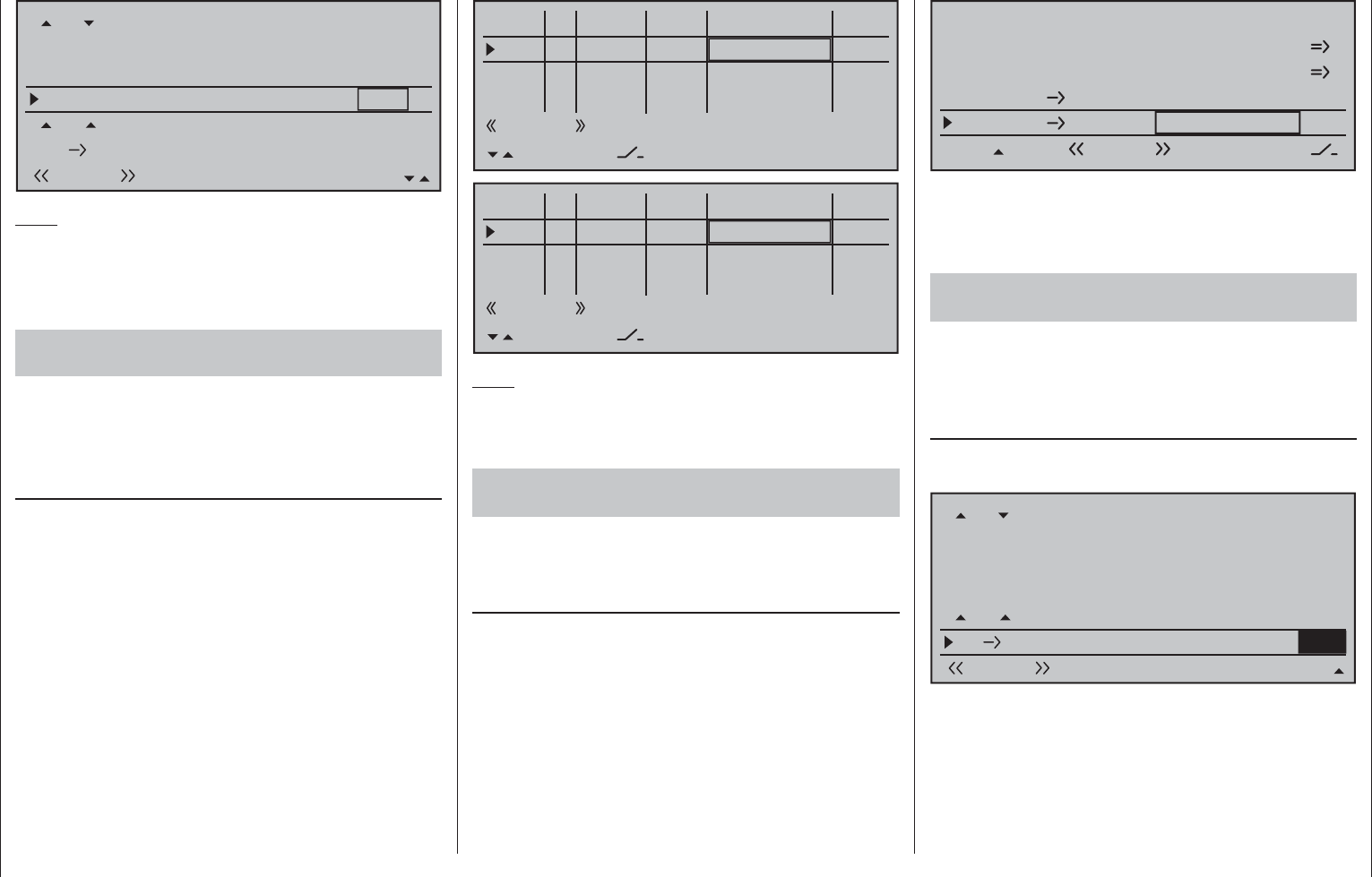
299
Programming examples - Eight-fl ap wing
FL.pos
Diff.
Ail-tr.
AI
Thermal AILE
+100%
FL2
0 0%+100+100%+100+100%+100+100%
+77% +55%
–9%–7%
–5%
0%
0%
+100% +77% +55%
0%
FL
AILE2 FLAP
+88%
+88%
0%
–12%
EL FL 0 0%+100+100%+100+100%+100+100%
Note:
Whether positive or negative values must be set in
the "FL.pos" line depends on the installation of the
servos, among other things.
However, if the alternative …
variable camber fl ap positions per fl ight phase with
a proportional rotary control setting is preferred,
… then the basic settings for all 8 fl aps can be
additionally varied on a fl ight-phase basis by way of a
single control.
This is accomplished via the …
»Control adjust« (page 108)
… menu, by assigning the same transmitter control in
every fl ight phase to inputs 5, 6 and 11, for example
the proportional slider, and in parallel, reducing travel
to about 50 % or even less so that the trimming of
fl aps has appropriate sensitivity. Deviating throw
travel for individual fl ap pairs can also be matched to
one another on a fl ight-phase specifi c basis by way
of travel settings in a menu. For this purpose, you
only have to switch the corresponding inputs from the
standard default "GL" (global) to "PH" (phase):
0% +25%I5
I6
I7
I8
Typ
+25%
0.0 0.0
– travel + –time+
0% +25%
+25%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL fr
fr
---
---
---
offset
PH Sl1
PH
---
SEL
Sl1
Thermal
0% +100%I10
I11
I12
I13
Typ
+100%
0.0 0.0
– travel + –time+
0% +25%
+25%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL fr
fr
---
---
---
offset
GL fr
PH
---
SEL
Sl1
Thermal
Note:
With the use of a switch, set the respective
"Deviation" of the offset point symmetrically or
asymmetrically in the "- Travel +" column.
Elevator compensator with actuation of the
camber changing fl aps
If it should become evident in the fl ight that a
correction of the elevator is necessary after setting
the fl aps, this correction can be made in the …
»Wing mixers« (beginning page 160)
... For this purpose, select the line "FL ¼ EL" and
enter an appropriate fl ight-phase specifi c value, for
example:
Brake settings
Aileron +50%
WING MIXERS
Flaps aileron +5%+5%
–––
–––
rudder
2
64
3
Thermal
Multi-flap menu
If you have assigned the same control to the inputs
5, 6 and 11 – as specifi ed above – all eight fl aps move
simultaneously while the elevator follows the set
degree of mixture.
Camber changing fl ap movement on elevator
actuation
Camber changing fl ap movement on elevator
actuation – normally only used in "High gear" to
increase the agility over the transverse axis – is also
carried out in the "Multi-fl ap menu" of the...
»Wing mixers« (beginning page 160)
... menu. Enter the desired fl ight-phase dependent
values in the line "EL ¼ FL":
FL.pos
Diff.
Ail-tr.
AI
Thermal AILE
+100%
FL2
0 0%+100+100%+100+100%+100+100%
+77% +55%
–9%–7%
–5%
0%
0%
+100% +77% +55%
0%
FL
AILE2 FLAP
+88%
+88%
0%
–12%
EL FL 5 5%+107+107% +9+ 9% +111+11%
In addition to the two camber changing fl ap pairs
(servos 6 + 7 and 9 + 10), the two aileron pairs
(servos 2 + 5 and 11 + 12) are now tracked with
the degree of mixture corresponding to the camber
changing fl aps – normally opposite the elevator.
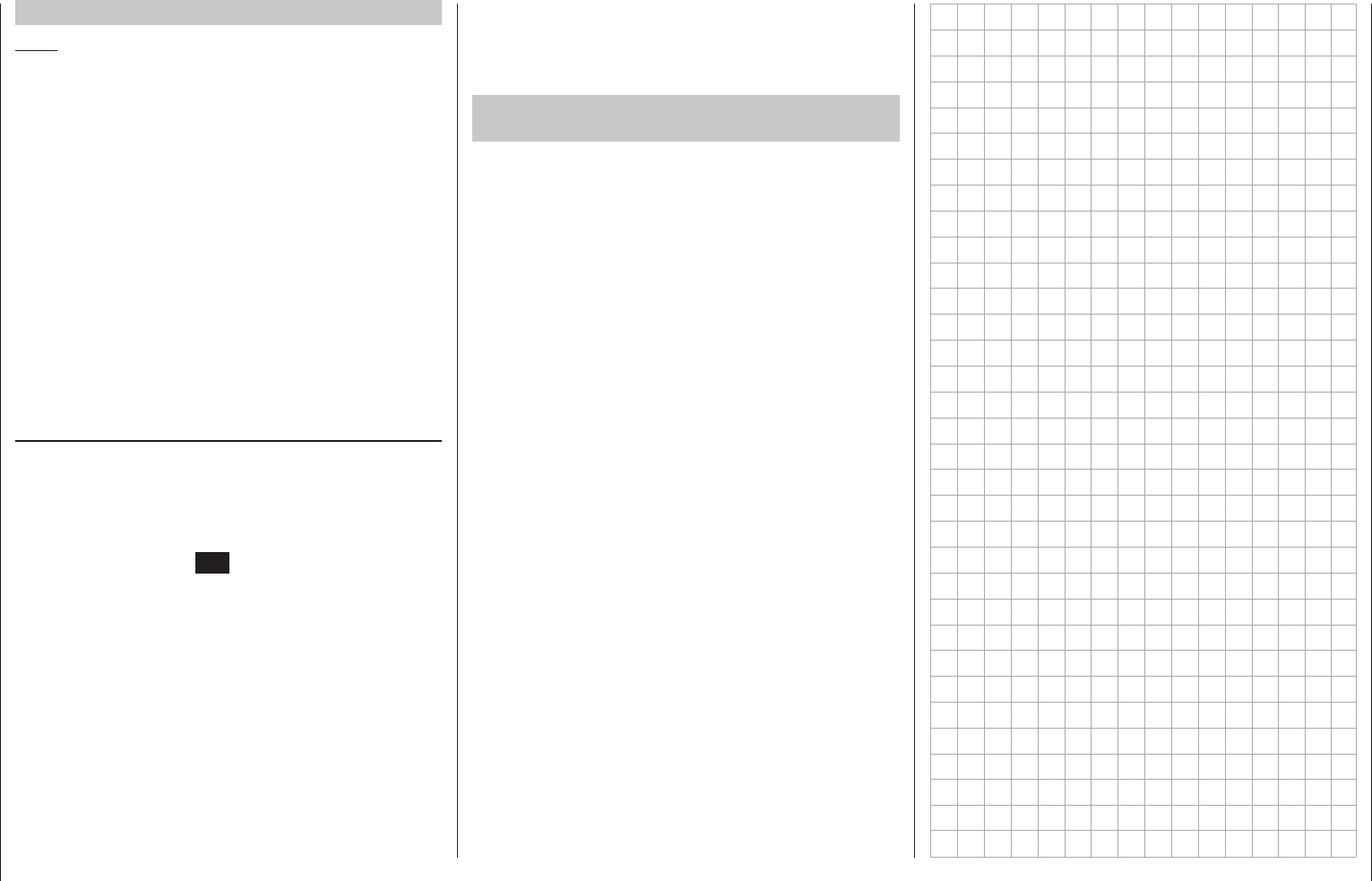
300 Programming examples - Eight-fl ap wing
Brake settings
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu,
page 94, AND the "Motor" column of the »Phase
settings« menu, page 142, are set to "yes" for the
currently active fl ight phase. Change the fl ight phase,
if applicable.
The "Brake settings" sub-menu of the »Wing
mixers« menu is also fl ight-phase specifi c and can
be used to extend aileron pairs (2 + 5) and (11 + 12)
upward as well as camber fl ap pairs "FL" (6 + 7) and
"FL2" (9 + 10) downward, whereas the elevator is
trimmed in parallel to this, see page 174.
In order for the brake system to react to the C1
joystick as desired, however, the mixer neutral
point (offset) of the brake system must be adjusted
accordingly. This takes place in the menu …
"Model type" (page 94)
After selecting the "Brake Off." line, the C1 joystick is
to be moved to the position at which the mixer for the
brake system is to take effect – normally just before
the forward limit position – and after selecting the
appropriate value fi eld, the setpoint is defi ned with a
brief tap on the center SET key of the right touch pad.
If the C1 joystick is not moved over this point toward
the pilot, all mixers of the brake system are carried
along according to their respective degree of mixing.
Below this point the mixer remains inactive, whereas
the selection of "dead travel" is possible.
If the model has additional brake fl aps or spoilers and
your receiver has another free Output 1, you can also
control this through the C1 joystick by connecting the
spoiler servo to receiver Output 1.
However, if you control the left and right spoiler each
with its own servo, and not together, the receiver
Output 8 is still available for the connection of the
second spoiler servo. In this case, program the
connection to the second spoiler servo as described
in the section "Servos running in parallel" on
page 286.
Reduction of the aileron and camber changing
fl ap differentiation
For the improvement of the aileron effect in the crow
position, you should automatically suppress any
programmed aileron differentiation.
For this purpose, use "differentiation reduction" in
the "Brake settings" of the »Wing mixers« menu
to continuously reduce the degree of the aileron
differentiation within an adjustable range when
rudders are brought into crow position with the C1
joystick. For more about this, see text beginning on
page 174.
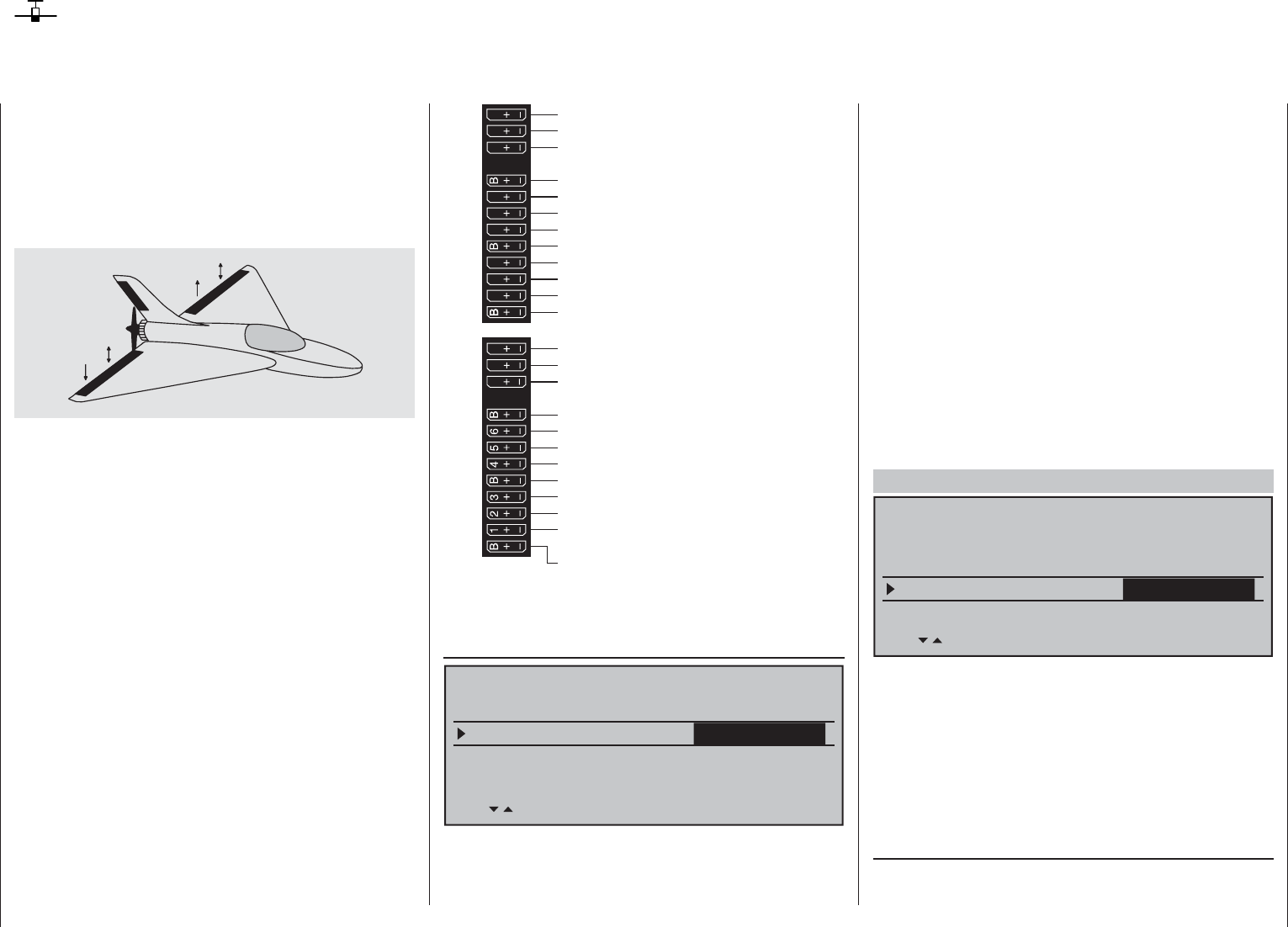
301
Programming examples - Delta and fl ying wing
Of course, the general comments regarding the
installation and the adjustment of the RC system
to a model at the beginning of the wing model
programming on page 268 also applies for delta and
fl ying wing models! Similarly, the comments for test
fl ying and fi ne-tuning the settings to the programming
of fl ight phases also apply.
left
right
Delta and fl ying wing models differ signifi cantly
from a "normal" fl ight model due to their unique
characteristic shape and geometry. The differences in
the servo arrangement, on the other hand, are more
subtle. For example, with "classic" delta/fl ying wing
models, only two rudders are normally provided. They
are responsible for both "transverse" and "height/
depth", like the side rudder/elevator function on a
V-tail unit.
With more elaborate designs, on the other hand, it
may be the case that one (or two) interior rudders
have only an elevator function and the exterior
ailerons only support the height/depth function, under
certain circumstances. Even with a 4, or indeed up
to 8, fl ap wing the use of camber fl ap functions and/
or even a crow system is nowadays entirely possible.
In all these cases, however, the following assignment
of the receiver outputs should be used, see also
page 61. Unneeded outputs a simply left free:
Receiver power supply
Receiver power supply
Airbrake- or throttle servo
or speed controller (electric motor)
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
free or aux. function or AIL2 / left EL
free or aux. function or AIL2 / right EL
free or aux. function
free or flap / left elevator
free or flap / right elevator
free or aux. function or flap2 / left EL
free or aux. function or flap2 / right EL
free or aux. function
free or aux. function
AIL / elevator left
AIL / elevator right
free or aux. function
free or rudder
According to the assignment of the receiver outputs,
in the menu …
»Model type« (page 94)
Tail type
Motor on C1 none
Aileron/camber flaps 2 AIL
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
Delt/fl.wing
Delta and fl ying wing
… the necessary settings are made:
"Motor an C1" "none" or "Throttle min front/rear"
"Tail type" "Delt/fl .wing"
"Aileron/camber fl aps"
"2AIL" (appears automatically).
To the extent necessary, expand
default "2 AIL" by 4 AIL or 1, 2 or 4
camber fl aps ("1 FL", "2 FL" or "4 FL").
"Brake" stays as is, only interesting for a
delta wing or fl ying wing of type
"2/4 AIL 1/2/4 FL". In this case, refer
to the text under "Brake offset" on
page 95.
These model type specifying settings primarily affect
the functions made available in the »Wing mixers«
menu. Therefore, the options are discussed separately
for two-fl ap and multi-fl ap models in the following:
Delta/fl ying wing of the type: "2AIL"
Tail type
Motor on C1 none
Aileron/camber flaps
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
Delt/fl.wing
2 AIL
By retaining the standard default "2 AIL" in the
"Aileron/camber fl aps" line, elevator and aileron
control, including the trim function, are automatically
mixed by percentage on the software side. However,
on the transmitter side, the percentage effect of the
elevator and aileron joystick can be infl uenced in the
»Dual Rate / Expo« menu, page 120.
Settings in the menu …
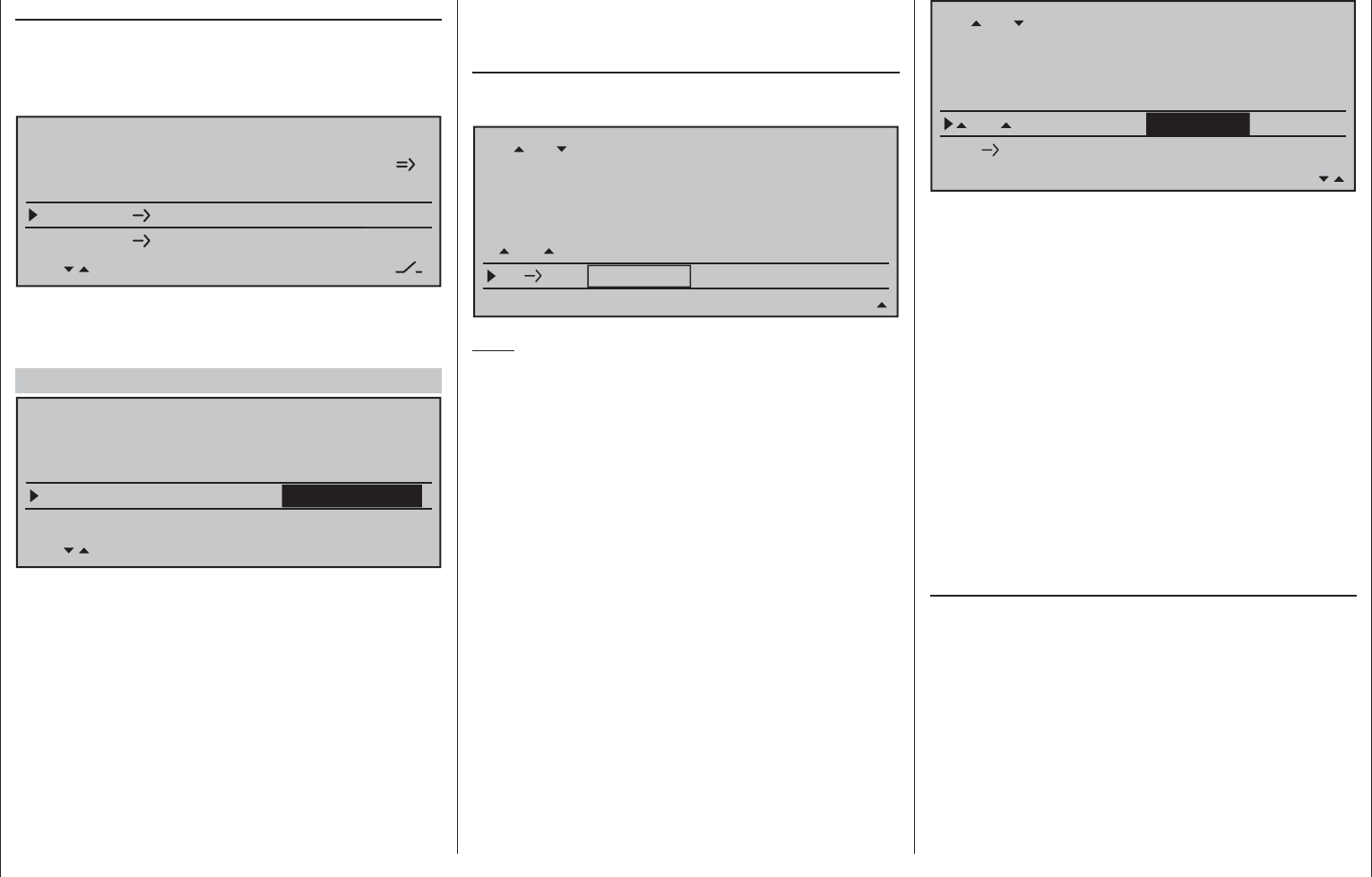
302 Programming examples - Delta and fl ying wing
This is only then achieved for "2/4 AIL 1/2/4 FL"
when, in the "Multi-fl aps menu", the …
»Wing mixers« (beginning page 160)
… menu is set appropriately in the "HR ¼ WK" line to
"Aileron, camber fl aps" or, if applicable, "Camber fl ap 2":
FL.pos
Diff.
Ail-tr.
AI
Normal AILE
+100%
WK2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL
EL FL
+100%
+100%
+100%
+100%
0%0%
0%
0%
0%0% 0%
0%
Note:
Contrary to the separately set aileron trimming, see
below, the trimming is transferred proportionally to the
set mixer value with the mixer "EL ¼ FL".
The following settings are model-specifi c and
may not be adopted without checking that they
are correct!
In the top line of this "Multi-fl ap menu", analogous to
"normal" four, six or eight fl ap wings, the effect of the
aileron joystick will be set to aileron, camber fl ap and,
if applicable to FL2. One line below, in the line "Ail-
tr." line, will set the infl uence of aileron trimming on
ailerons and camber changing fl aps.
The setting of a differentiation is rather tricker due to
the model type and should only take place based on
a feel for the fl ight behavior of the model.
The line "cFLc" should then be set to the
standard default of +100 % in the "FLAP" (or "FL2")
column – as shown – to 0 %, just to be safe.:
»Wing mixers« (beginning page 160)
… are, if need be, advantageous with the "Aileron
¼ Rudder" mixers and are "played' with a great deal
of "feel" for fl ying behavior with minor differentiation
values.
Aileron differential
Brake settings
0%
Aileron 0%
WING MIXERS
Elevator aileron 0%0%
–––
–––
rudder
2
3
4
5
Normal
Due to the specifi c idiosyncrasies of this model type,
additional settings lead to moments which cannot be
compensated.
Delta/fl ying wing of the type: "2 / 4 AIL 1 / 2 / 4 FL"
Tail type
Motor on C1 none
Aileron/camber flaps
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
Delt/fl.wing
2 AIL 2 FL
With delta/fl ying wing constructions with more than
two fl aps, more moments can be compensated for.
For example, the "lifting" moment caused by the
raising of the ailerons (= elevator effect) can be
compensated for with camber changing fl aps lowered
correspondingly wide ( = hydroplane effect).
If you decide in favor of this model type and have
assigned the receiver outputs in accordance with the
connection plan shown above, the aileron function of
the two (exterior) aileron servos will function correctly
immediately, but not the elevator function of the two
aileron servos and, if applicable, the (interior) camber
changing fl aps.
FL.pos
Diff.
Ail-tr.
AI
Normal AILE
+100%
WK2
FLAP
0%
0% 0%
+100%
0%
+100%
0%
+100%
0%
0%
0%0%
+100% 0% 0%
0%
FL
EL FL
+100%0%
0%
0%0%
0%
0%
0%0% 0%
0%
Even though all inputs are set to "free" by default
in the »Control adjust« menu, should a control be
assigned sometime by mistake … then it will at least
have no effect.
The last line, "EL ¼ FL", was explained at the
beginning of this section.
In principle, the author of this manual had
programmed a delta model years ago operated
with the mc-20 and a crow system as landing
assistance … entirely without tilting moments
through correspondingly attuned wing mixers "Brake
¼ Aileron" and "Brake ¼ Camber fl ap", whereby
"Aileron" refers to the exterior rudder pair and
"Camber fl ap" refers to the interior rudder pair.
To achieve this now with the mc-20 Hott also, switch
to "Brake settings" in the …
»Wing mixers« (beginning page 160)
… menu, and enter the values for the ailerons to be
raised and the "fl aps" to be lowered in the "Crow"
line so that the occurring moments compensate
one another and the altitude of the model remains
stable. In the process, however, you should leave the
fl aps with enough "play" for the elevator function!!!
Therefore, do not utilize the entire servo travel for the
crow alone; for example:
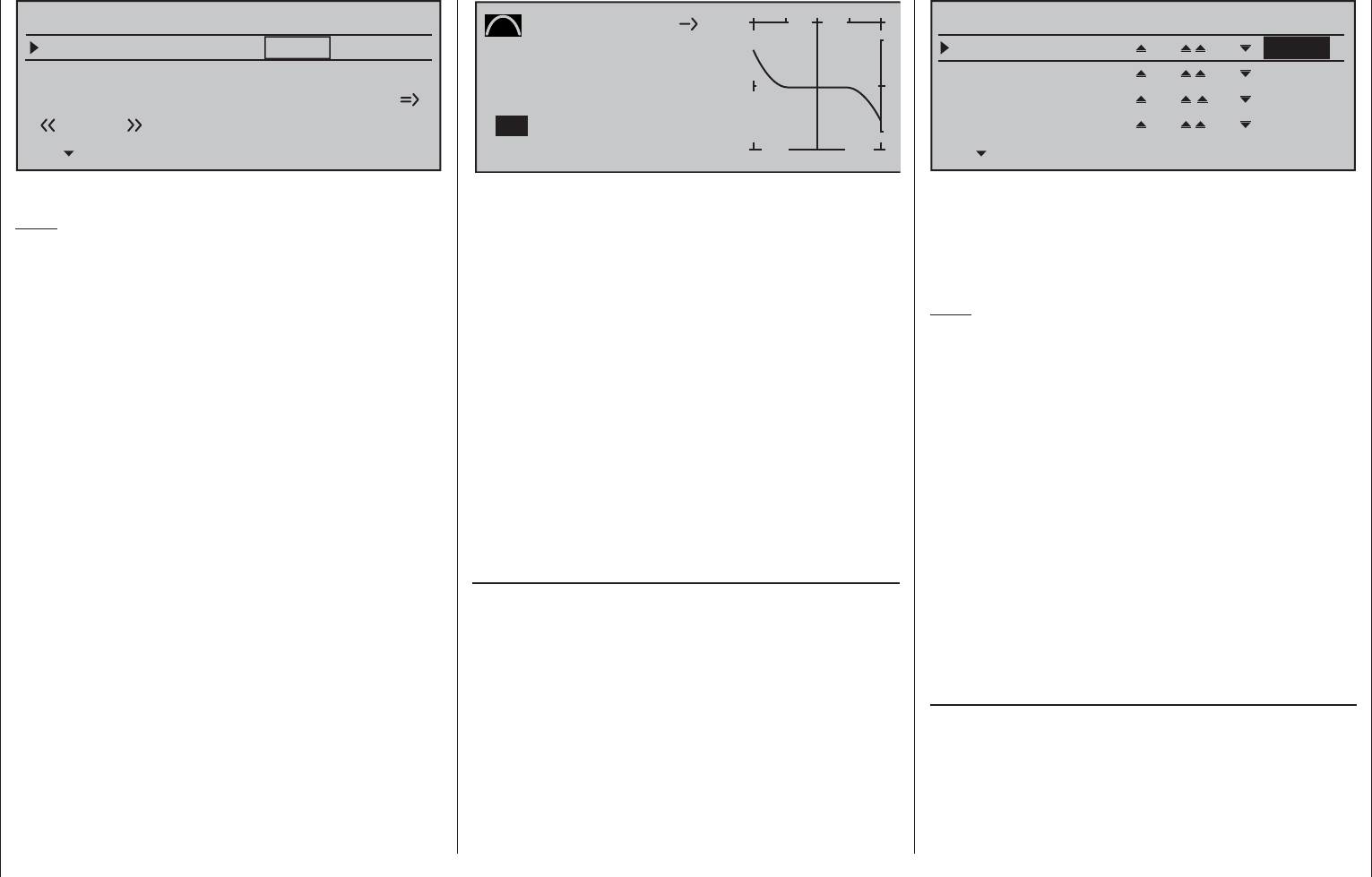
303
Programming examples - Delta and fl ying wing
Elevat. curve
BRAKE SETTINGS
Normal
Crow
AILE
+55%
WK2
0%
FLAP
+44%
Diff. reduct
WK2
0% 0%
0%
You can ignore all other settings in this menu.
Note:
The "Brake settings" menu is switched "off" if: "Motor
on C1 forward / back" in the »Model type« menu
(page 94) AND the "Motor" column of the »Phase
settings« menu, (page 142) are set to "yes" for the
currently active fl ight phase. Change the fl ight phase,
if applicable.
Similarly, a modern, tapered fl ying wing air craft can
also be operated. With some of these models there
are also interior and exterior rudders: The prior is in
front of the center of gravity and the latter is behind.
A downward throw of the central rudder(s) increases
the ascending forces and has an elevator effect.
An upward throw has the opposite effect. On the
exterior ailerons, on the other hand, the effect is just
the opposite: A downward throw shows an elevator
effect and vice versa. With appropriate adjustment of
the "leading" mixer to the setting of curve mixers in
order to achieve a supporting effect from the external
rudder pair with only extreme joystick defl ection in the
height/depth direction, "everything" is possible here.
The author of this manual uses a curve mixer for his
model, which is defi ned by a total of four points:
Curve MIX 9
Curve
Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
2
0%
EL 5
1
3
off
In this example the two interpolation points 1 and 2
are each at 0 % as well as the left edge point at +60 %
and the right edge point at -65 %. In conclusion, the
curve was rounded.
In this case: Regardless of which type of servo
arrangement was selected, any type of differentiation
should be set with caution! On a tail-less model,
differentiations show a single-sided height/depth
elevator effect, so we urgently recommend beginning
at least the initial fl ights with a setting of 0 %! Over
the course of the further fl ight testing, under certain
circumstances it may be advantageous to experiment
with differentiations deviating from zero.
With larger models, rudders in the winglets - the
"ears" mounted on the wing ends - can be benefi cial.
If these are controlled with two separate servos, with
the use of one of the mixers in the menu ...
»Dual mixer« (page 206)
… the rudder signal can be "split" very easily and
even differentiated, whereby the second rudder servo
is connected to one of the still free receiver outputs.
For a model with a "Delt/fl .wing" tail type, receiver
output "5" should still be unoccupied and it can then
be used as indicated below:
Diff.
DUAL MIXER
Mixer 1
Mixer 2
5RU
Mixer 3
Mixer 4
?? ??
?? ??
?? ??
+66%
0%
0%
0%
Differentiation is necessary in this case because,
when fl ying curves, the respective exterior rudders
will have a greater curve radius than the interior
rudders, so this is comparable to the front wheel
positions on a car when driving in curves.
Note:
The rudder can only be differentiated as programmed
above!
If these two rudders are also to defl ect outward upon
actuation of a brake system with the C1 joystick,
this can be achieved, for example, by setting an
additional mixer "C1 ¼ 5" with an appropriate travel
setting. Set the mixer's offset according to personal
preference, "front" (+100 %) or "rear" (-100 %),
because the winglet rudder should defl ect outward
only for proportional extension.
Independent of this, fi nish up by uncoupling the
"false" control function from the control channel
to which the second servo was connected – even
though all inputs in the »Control adjust« menu
are "free" by default – by way of the fl ight-phase
independent menu …
»MIX-only channel« (page 205)
... for safety's sake! In keeping with the above
example, control channel 5 should therefore be set to
"MIX only".
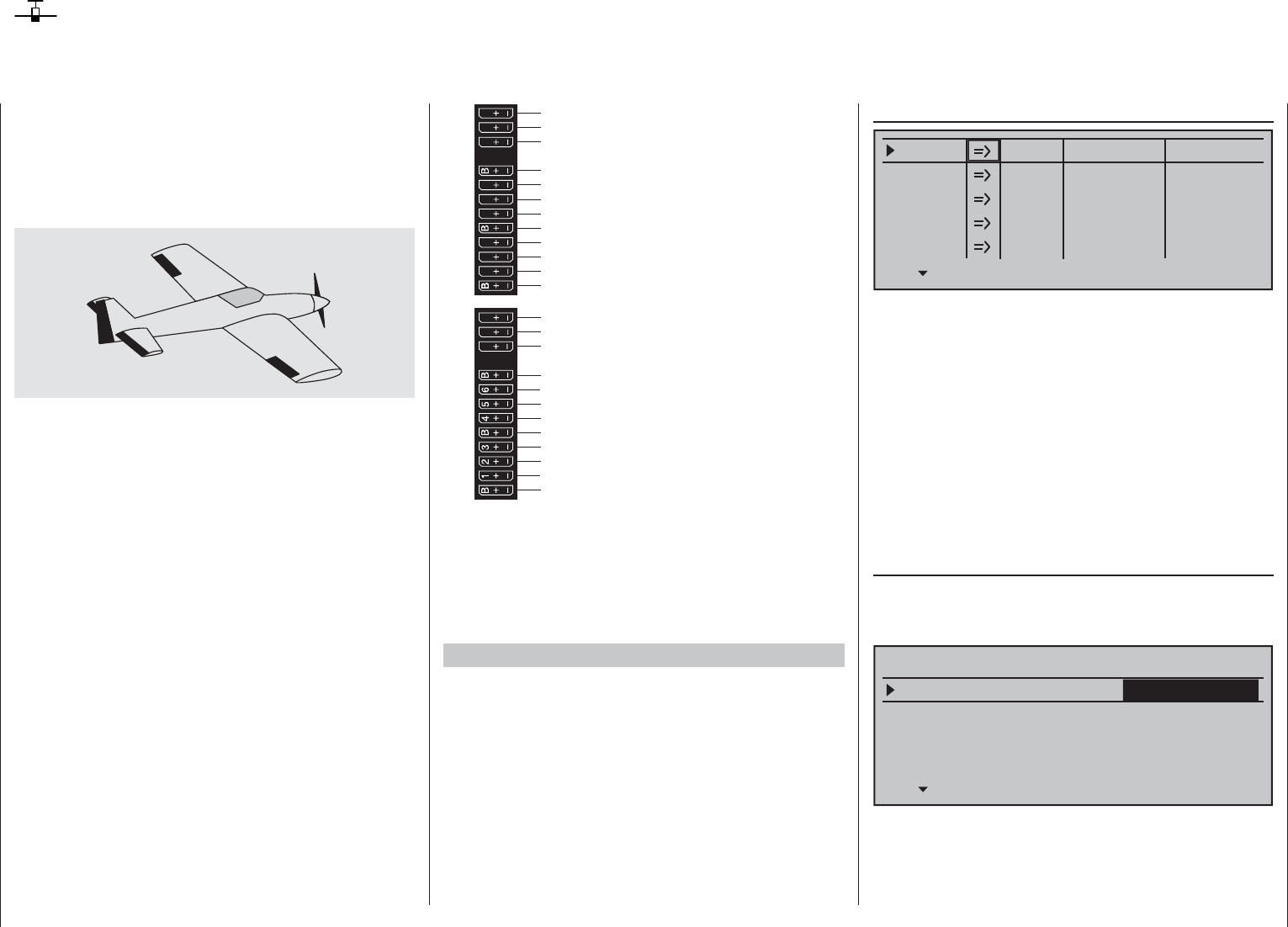
304 Programming examples - F3A model
F3A model
F3A models are a part of the group of motor-driven
winged models. They are powered by a combustion
or electric motor. Models with electric motors can be
used in both the electric acrobatic class F5A and are
also competitive in the international model acrobatic
class F3A.
The basic comments and notices for the mechanical
installation of a remote steering system, which was
already referred to in the fi rst programming example
on page 268, also applies, of course, for F3A models
and does not need to be mentioned here again.
Faultlessly constructed F3A models exhibit a largely
neutral fl ying behavior. Ideally, they react with a good
nature but precisely to control movements without the
individual fl ight axes infl uencing one another.
F3A models are controlled with ailerons, elevator
and rudders. Normally, each aileron is actuated
by a separate servo. There is also the regulation
of the drive output of the motor (throttle function)
and a retractable landing gear in many cases. The
assignment of the channels 1 to 5, therefore, do not
differ from the previously described winged models.
The additional "Retractable landing gear" function is
to be provided on one of the auxiliary channels 6 to
9. It is best to actuate the landing gear with a switch
without center position. In addition, another mix offset
for the carburetor can – if necessary – be provided.
You normally use one of the two proportional
controls on the transmitter, which actuates one of the
unassigned auxiliary channels.
Receiver power supply
free or aux. function
free or aux. function
Rudder
Aileron or left aileron
Elevator or 1st elevator
free or 2nd elevator or aux. function
Receiver power supply
Throttle servo or speed controller (electric motor)
Right aileron
free or landing gear or aux. function
free or fuel mixture or aux. function
free or aux. function
free or aux. function
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
free or aux. function
free or aux. function
Telemetrieanschluss
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
With the assignment of auxiliary channels at the
transmitter, we recommend making sure that the
operating elements required for this are easily
within reach, because during fl ight – especially in
competition – you have "very little time" to release the
joystick.
Programming procedure
Since the basic programming of the transmitter was
already described in detail on pages 268 … 275, only
F3A-specifi c tips are added here.
In the menu …
»Servo adjustment« (page 102)
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
… the settings for the servos are carried out.
Experience has shown that working with at least
100 % servo throw is benefi cial, because the control
precision is signifi cantly better if greater servo travel
is used. This should already be taken into account
during the construction of the model in the design
of the rudder linkages. Check the servo's direction
of rotation. The servo center should be adjusted
mechanically, insofar as possible.
Any corrections can be made on the software side in
the third column during the initial test fl ights.
Through the menu …
"Model type" (page 94)
… the idle trim is activated for Channel 1 (normally
"rear", because full throttle is "front"). The trimming
then only works in the idle direction:
Tail type
Motor on C1
Normal
Aileron/camber flaps 1 AIL
M O D E L T Y P E
Brake Offset Input 1+100%
SEL
Thr. min rear
The remaining settings are made or left as shown in
the fi gure.
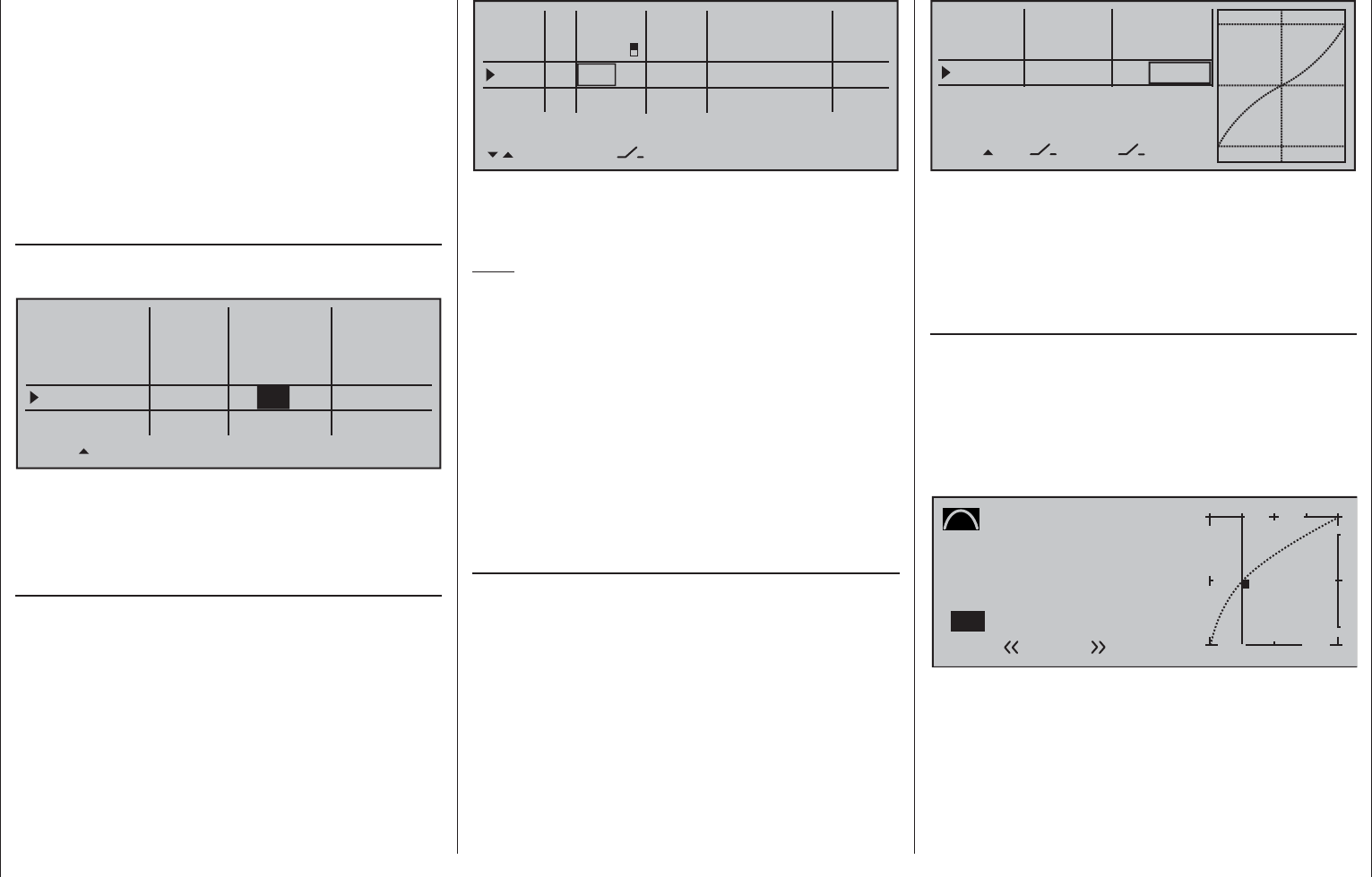
305
Programming examples - F3A model
After the model is test-fl own and trimmed, we
recommend reducing trim travel for the elevator and
ailerons The model has signifi cantly less of a reaction
to a movement of the trim wheel. "Over-trimming"
can be avoided, because with full trim travel, under
certain circumstances, the movement by just one
trimming step can have too strong of an effect:
Therefore, the model which previously pulled slightly
to the left, hangs somewhat to the right after the
trimming. For this purpose, switch to the menu …
»Stick mode« (page 104)
… and reduce the number of trim steps in the "Tr.s
tep" column appropriately:
global
Channel 1
Aileron
Elevator
Rudder
Tri m
0.0s
Tr.s tep – time +
global 0.0s
0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
Phase
2
It may also be necessary to assign appropriate
operating elements and inputs for other model
features, e.g. retractable landing gear, fuel-mix, etc.
Make these assignments with the …
»Control adjust« (page 108)
… menu where a specifi c input can be assigned to an
operating element, for example, the landing gear can
be assigned to an ON/OFF switch on Input 6 and the
fuel-mix can be assigned to one of the proportional
sliders in the middle console, e.g. the center slider
to Input 7. However, since it involves fl ight-phase
independent settings, leave the standard default "GL"
in the "Type" column:
+33%
+33%
+33%
Aileron
Elevator
Rudder
DUAL
–––
SEL
–––
–––
–––
100%
100%
100%
EXPO
SEL
Normal
–––
(Some experts even use up to a +60 % exponential
ratio.)
Since (some) combustion motors do not react linearly
to movements of the throttle joystick, through the
menu …
»Channel 1 curve« (page 128)
… a "bowed" or, in other words, non-linear throttle
curve can be set. Four-cycle motors with Roots
pumps, in particular, such as OS Max FS 120, require
a steep ascension of the curve in the lower speed
range. However, the corresponding values must be
adapted. The C1 control curve for the motor could
appear as follows:
Channel 1 C U R V E
Curve
Point
Output
Input –50%
0%
1+
–
100
¼O U T P U T
0%
Normal
on
1
Only three interpolation points, "L" at -100 %, "H" at
+100 % and "1" at -50 % give the control travel the
rounded curve above.
Basic procedure:
Move the C1 joystick and, along with it the vertical •
line in the graph display, toward idle to about
0% +100%I5
I6
I7
I8
Typ
+100%
0.0 0.0
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL fr
Sl2
---
---
---
---
offset
GL fr
Normal
2
SEL
The control travel of the operating elements must be
adapted and can also be reversed with a negative
travel setting.
Note:
A delay time can be specifi ed for raising and lowering
the retractable landing gear, however, such a time
delay is not effective for landing gear servo C 713 MG,
order no. 3887.
F3A models fl y comparatively fast and thus react
"harshly" to the control movements of the servos.
However, since small control movements and
corrections are not optically perceptible, because this
results in inevitable point deductions in competition,
we recommend setting an exponential control
characteristic of the joystick. For this purpose,
switch to the menu …
»Dual Rate / Expo« (page 120)
Experience has shown positive results with values of
approx. + 30 % on the ailerons, elevator and rudders,
which you set in the right column with the selection
keys. In order to be able to control the F3A model to
run smoothly and cleanly:
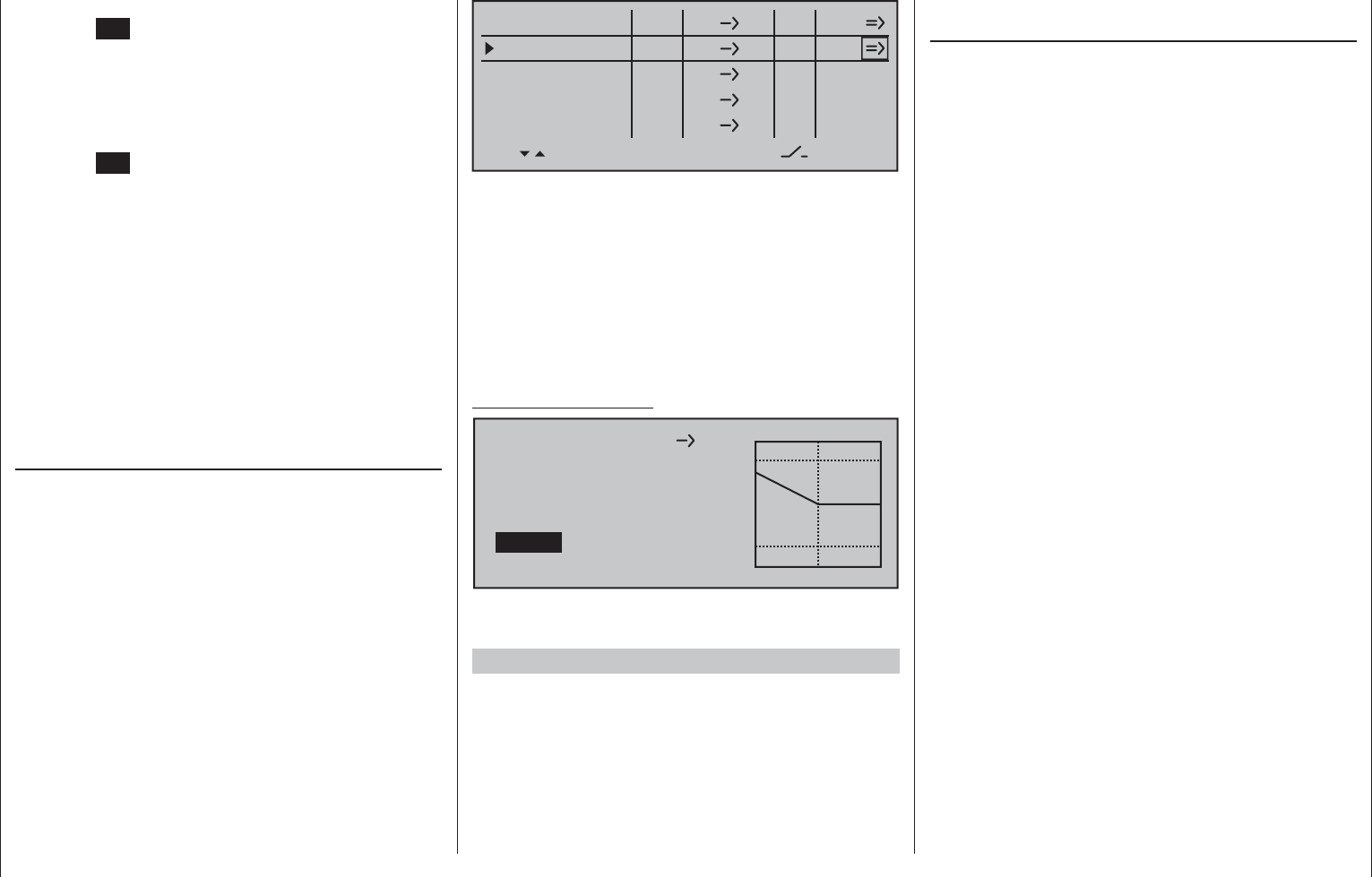
306 Programming examples - F3A model
-50 % of control travel then briefl y tap on the
center SET key of the right touch pad.
In order to attain the curve shape shown, raise this •
point with the selection keys to approx. 0 % in the
inverse video value fi eld in the "Point" line.
Finally, round the characteristic curve by moving •
the marker frame left, select with a brief tap on the
center SET key of the right touch pad then change
the value from "Off" to "On" with the selection
keys.
If additional interpolation points between the left ("L")
and right ("H") end are necessary, repeat Steps 2 and
3 analogously.
Since F3A models normally have two aileron servos,
experience has shown that it is benefi cial to move
both ailerons upward somewhat when landing. In the
process, the model usually approaches somewhat
slower and, above all, more steadily for the landing.
In order to do this it is necessary to program mixers
through the menu …
»Free mixers« (beginning page 193)
... accordingly.
The ailerons are extended as landing assistance
depending on the position of the throttle stick, starting
from approximately half throttle toward idle. The
further the joystick is moved toward idle, the more
the ailerons defl ect upward. Just the opposite applies
when "throttling"; the ailerons are retracted again in
order to prevent a sudden rise of the model.
In order to prevent the model from climbing with the
aileron landing fl aps extended, the elevator must be
mixed in somewhat.
For this purpose, set the two linear mixers shown
in the following display. The activation of the mixers
takes place with one and the same switch, such
as "8", to which both mixers must be assigned with
identical switching direction.
5
LinearMIX 1
type
C1
from – Begr. +
EL
C1
??
??
??
??
??
??
––––
LinearMIX 2
LinearMIX 3
LinearMIX 4
LinearMIX 5
to Adjust
Tr
––––
––––
Then switch to the second respective display screen
in order to adjust the respective mixing degrees. In
both cases the mixer neutral point is at the C1 control
center.
Enter 0 % above the control center after selection of
the ASY fi eld for both mixers and below the control
center toward idle for:
MIX 1: -60 % ... -80 % and
MIX 2: -5 % ... -10 % ...
Example Linear MIX 1:
C1
Mix input
0%
Offset
0%
5
Linear MIX 1
–70%
SYM ASY SET
STO
With this, the base setup model of an F3A model is
concluded.
Compensation of model-specifi c errors
Unfortunately, there are nearly always minor model-
specifi c "errors" through the mixers of a computer
remote control which must be compensated for.
However, before you begin with these settings,
it should be ensured that the model is faultlessly
constructed, optimally balanced over the longitudinal
and transverse axes and the down thrust and side
thrust are correct.
Infl uence of longitudinal and transverse axes by
the rudder
The actuation of the rudder often infl uences the
behavior of the longitudinal and transverse axes. This
is particularly disruptive in so-called knife-edge fl ying,
in which the lift of the model with the rudder defl ected
should be created by the fuselage alone. In the
process, the model can rotate and change directions
as though it were controlled with the ailerons and
elevator. Therefore, a correction over the transverse
axis (elevator) and/or the longitudinal axis (ailerons)
must be made, if applicable.
This can also be done easily with the »Free mixers«
available in the mc-20 HoTT system. For example, if
the model drifts away to the right over the longitudinal
axis with the rudder extended in knife-edge fl ying, the
aileron can be defl ected slightly to the left with the
mixer. Changes in direction over the transverse axis
can be performed analogously with a mixer on the
elevator:
Correction over the transverse axis (elevator)•
Linear MIX 3: "Rudd ¼ Elev"
Asymmetric setting. The appropriate values must
be tested in fl ight.
Correction over the longitudinal axis (aileron)•
Linear MIX 4: "Rudd ¼ AIL"
Asymmetric setting. The appropriate values must
be tested in fl ight.
Relatively small mixer values are usually suffi cient
in this case, the range lies below 10 %, but can vary
from model to model. With the use of curve mixers,
the mix ratios can be adapted even more precisely
to the corresponding throw of the rudder. Again, no
values are indicated for this, because this would be
model-specifi c.
307
Programming examples - F3A model
Vertical ascent and descent
Some models have a tendency to deviate from the
ideal line in vertical ascents and descents.
In order to compensate for this, it is necessary to
have a center position of the elevator dependent
on the throttle joystick position. If, for example, the
model begins to hold off on its own in the vertical
descent with a throttled motor, some elevator must be
mixed in at this throttle position.
For this purpose, program a free mixer "C1 ¼ Elev".
The corresponding mixer values are normally under
5 % and must also be tested in fl ight.
Turning away over the longitudinal axis in idle
If the throttle is reduced, the model may begin to turn
away over the longitudinal axis in idle. This can be
counteracted with the aileron.
However, the more elegant solution is to correct this
effect with a free mixer "C1 ¼ Ail".
The input values here are usually very low (approx. 3 %)
and the settings should be made in calm weather.
It often suffi ces to only use the mixer between
half throttle and idle. Therefore program the mixer
asymmetrically, if applicable.
Turning away with the ailerons/landing fl aps
extended
If you move the ailerons upward for the landing, the
result is often a turning away over the longitudinal
axis due to various servo paths of the aileron servos
or due to design precisions. Therefore, the model
begins to automatically hang the left or right wing.
This is also easy to compensate for with a mixer
"C1 ¼ AIL" depending on the position of the
ailerons/landing fl aps.
The mixer must be switched on and off with the
same switch with which you can switch the aileron/
landing fl ap function on and off (see previous page).
Therefore, it only works with the aileron/landing fl ap
function activated. The appropriate value must be
tested in fl ight.
One additional comment regarding …
"FAIL-SAFE setting"
You utilize the safety potential of this option by the
safety potential by programming at least the motor
throttle position for combustion models to idle and
the motor function for electrically powered models to
stop for a Fail-Safe case. If interference should occur,
the model is then less likely to fl y off on its own and
cause damage to property or even personal injury. If
you additionally program the fail-safe positions of the
rudders to that the model fl ies in gently sinking circles
in the event of a failure, there is a good chance that
the model even lands relatively gently on its own in
the event of a continuing connection failure. You also
have suffi cient time to re-establish the connection
if the entire 2.4 GHz frequency band is temporarily
disrupted.
In the receiver's condition as supplied, however,
the servos maintain their last validly recognized
position ("hold") in the event of a fail-safe situation. As
described on page 208, you can defi ne a "Fail-safe
position" for each receiver servo output (Fail-safe
mode).
Summary
The settings described on this page are especially
useful for the "expert" who would like to have an
entirely neutral, precisely fl ying F3A model acrobatic
model at his or her disposal.
It should be mentioned this takes a lot of time, effort,
instinct and know-how. Experts even program during
the fl ight. To do this, however, is not suggested
for an advanced beginner who ventures into an
F3A acrobatic model. It would be best to turn to an
experienced pilot and carry out the settings step by
step until the model has the desired neutrality in its
fl ight behavior. Then the pilot can begin to learn the
not always easy to perform acrobatic fi gures with a
model which fl ies faultlessly.
308 Programming examples - Helicopter models
Helicopter models
With this programming example, you must have
already covered the description of the individual
menus and you must be familiar with the use of the
transmitter. In addition, the helicopter's mechanical
construction should correspond exactly to the
corresponding manual. The electronic capabilities
of the transmitter should by no means be used to
straighten out rough mechanical imprecision.
As is often the case in life, there are also various
ways and possibilities to achieve a specifi c goal
when programming the mc-20 HoTT. The following
example should provide you with a clearer structure
for logical programming. If there are multiple
possibilities, the simplest and most clearly arranged
solutions are recommended fi rst. In order for the
helicopter to function faultlessly later on, you are, of
course, free to try out other solutions which may be
better for you.
The programming example is based on the
clockwise-rotating STARLET 50 helicopter from
Graupner with three pivot points each offset 120 °
of the swashplate type "3sv(2 Roll)", beginner
adjustment without increased throttle curve; without
heading-lock gyro system and without transmitter-
side gyro infl uence of the "normal operating mode"
and without speed regulator.
This simple program was also consciously selected
to demonstrate that a helicopter which fl ies really
well can also be attained with relatively little
(programming) effort.
However, we do not want to dispense entirely with the
enhancement possibilities: Therefore, after the basic
description, you will fi nd adjustment information for
the gyro effect, the speed regulators and for the fl ight-
phase programming.
Note:
If you are not interested in the combustion helicopter
described here, but a electric helicopter, please
continue reading anyhow! With the exception of the
omitted idle settings, you can practically adopt most
of the settings described in the following unchanged.
In the scope of the initial commissioning of a new
transmitter, in the selection menu …
»General basic settings« (page 256)
Battery type
Battery warning
Touch Sense
Top LCD Contrast
Li-Io
Display light
Region
2
3.60V
0
EURO
unlim.
GENERAL BASIC SETTINGS
Owners name H-J Sandbrunner
Pre-set stick mode 1
Pre-set DSC Output PPM10
Pre-set Pitch min rear
Stick warning: unlim.
Pre-set modulation
Own phase name
Own phase name
HoTT
2
10
Bottom LCD Contrast 0
Own phase name 1
Voice volume
Vario volume
Touch-beeps vol.
7fr –––
SEL SEL
7fr –––
7fr –––
Power-on/off beep yes
… some basic information should be entered. This
serves various purposes:
The fi rst three lines of this menu can be used to
individually regulate, in increments between 0 and
10, the volume of voice and signal output emitted via
the built-in loudspeakers or the transmitter's headset
connector. The fourth line of this menu is used to
record the transmitter owner's name Select the
characters for this from an extensive character list on
the second display screen, which can be reached via
309
Programming examples - Helicopter models
the
symbol with a brief tap on the center SET key
of the right touch pad:
!"#$%&’()
Owners name
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
H-J Sandb
The pre-set for "Stick mode" can be selected
according to the criteria described on page 258.
The same applies to the pre-sets for "Modulation"
and "DSC Output".
The pre-set for "Pitch min" is a matter of personal
control habits.
The pre-sets established here for "Stick mode",
"Modulation", "DSC Output" and "Pitch forward/
back" will be initially adopted when a new model
memory is created but they can also be freely
changed within a given model memory location to any
other available option.
The settings in the "Top/Bottom LCD Contrast" lines
determine the legibility of the given displays under
poor light conditions and the setting in the "Display
light" line determines how long display lighting
remains illuminated after the transmitter is switched
on or after the last key actuation.
The selection of "yes/no" in the "Power-on/off beep"
line determines whether the "recognition melody" is
to sound when the transmitter is switched off or on
again.
The "Battery type" line specifi es whether the
transmitter is supplied with current from a "NiMH or a
“Lith." battery, and the "Battery warning" line below it
specifi es the voltage at which the transmitter's low-
voltage warning should trigger. Do not enter a value
that is too low here, so you have enough time to land
your helicopter.
The setting made in the "Stick warning" line
determines how long the transmitter will wait after the
last actuation of an operating element before issuing
visual and acoustic warning signals to indicate it
is still switched on. Following the warning, you still
have about one minute to actuate the transmitter so
the warning will abate. Otherwise the transmitter will
switch itself off when this minute expires.
The value set in the "Touch Sense" line is a matter
of adapting the transmitter to personal preferences.
And, in the event the transmitter is to be operated in
France, the setting in the "Region" line is important:
The legal regulations in France require that the
"FRANCE" option is selected instead of the default
setting "EURO".
Later on, the ten "Own phase name" lines can be
used to create one's own phase names if none of the
pre-set phase names appear appropriate.
Once these settings have been taken care of,
commissioning continues with the menu …
"Model select" (page 69)
Use the selection keys to pick a free memory
location …
03
04
05
01
06
R16
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
¿¿¿ free¿¿¿
00:12h
¿¿¿ free¿¿¿
02
… and call it up with a brief tap on the center SET
key of the right touch pad. In the display which then
appears, use the f key of the left or right touch pad …
Select model type (free model memory)
… to select the "helicopter" model type. The display
immediately switches to the base screen if the
selection is confi rmed by a brief tap on the center
SET key of the right touch pad.
Notes:
If the "Select model type" option has been •
opened, the process cannot be canceled. Even
if you switch off the transmitter, this selection
must be made! In any case, you can undo this
by subsequently deleting the respective model
memory.
If the "Throttle too high" warning appears, it can •
be erased by turning the right-side proportional
rotary control to its forward limit.
If battery voltage is too low, the model switchover •
cannot be made due to reasons of safety. An
appropriate message will appear in the screen:
not possible now
voltage too low
Once this fi rst hurdle is cleared, the connection of the
receiver built into the model at this model memory
must be made in the menu …
310 Programming examples - Helicopter models
… which must be assembled from characters available
on the second page of the "Model name" line:
!"#$%&’()
Model name Starle
@ACDEFGHIJKLMNOPQRSTUVWXYZ[¥]^_
?+,–./0123456789:;¾
¢ÇüéâäàåçêëèïîìÄÅÉæÆôöòûùÖÜ
`abcdefghijklmnopqrstuvwxyz{|}~
After entering the "Model name", the settings
adopted from »General basic settings« for "Stick
mode" and "DSC Output" are to be checked and
changed as necessary for the given memory location.
The entry fi eld in the "Info" line can be used if needed
for a notice of up to 15 characters in length. This
notice will then be helpful in the selection of models
and so on.
Another option is to be activated in the
"Autorotation" line. Even if you are not an advanced
pilot, the autorotation switch should at least be set as
an emergency shutoff switch for the motor.
Do this by selecting the "Autorotation" line with a
brief tap on the center SET key of the right touch
pad, activate the switch assignment, assign a 2-way
switch, e.g. "2", an put it in its "ON" position.
BASIC SETTINGS, MODEL
SET SET
RF transmit on
RF range test 99s
DSC Output PPM10
2I
Autorotation
The selected switch should be in a location on the
transmitter which is easily within reach – without letting
loose of a joystick – e.g. above the pitch joystick.
»Basic settings, model« (page 84 … 92)
... To this end, switch to the line "Module".
Model name
Stick mode
Module
1
n/a
BASIC SETTINGS, MODEL
n/a
Info
n/a
n/a
Starlet
SEL
HoTT
BD1 BD2 BD3 BD4
2345g/090911
Note:
After confi rmation of the model selection in the base
screen, if you confi rm the message appearing in the
screen for a few seconds …
BIND. N/A
OK
… with a tap on the SET key of the right touch pad,
this line will be accessed automatically.
The line "Module" initiates a binding process between
model memory and receiver, as described in detail on
page 88. Otherwise, you cannot address the receiver.
Afterward, use the c selection key of the left or right
four-way pad to move up to the fi rst line and begin
with actual model programming in the "Model name"
line. Now give the model memory an appropriate
name, …
Model name
Stick mode
Module
1
n/a
BASIC SETTINGS, MODEL
n/a
Info
n/a
n/a
Starlet
SEL
HoTT
BD1 BD2 BD3 BD4
2345g/090911
Note:
More more information about the setting of this
"emergency shutoff", see the beginning of the second
following double-page.
Another tip:
Make a habit of giving all switches a common switch-
on direction; then a quick glance over the transmitter
prior to the fl ight should suffi ce – all switches off.
Setting options for the "Autorotation C1 position",
"Motor stop", "Marking" and "Stick warning" are not
yet of particular interest …
… and the "Auto Trim" line should only be assigned
to a switch if "Initial trimming" is to be performed
on the helicopter in the context of a trimming fl ight.
Following such a fl ight, this switch should be erased
once again, for reasons of safety.
Additional settings specifi c to helicopters are made in
the menu …
»Helicopter type« (page 98)
In the "Swashplate type" line, select control for
swashplate or pitch function. In this example:
"3Sv(2rol)".
The "Linearis. swashpl." line is not yet of interest.
In the "Rotor direction" line, it is established whether
the rotor – as viewed from above – turns to the right
(clockwise) or left (counter-clockwise). In other words,
whether it rotates counterclockwise or clockwise. In
this example "right".
Check the default for "Pitch min", which was adopted
from »General basic settings«, to confi rm that the
entry "front" or "rear" is in keeping with personal
preferences or should be changed.
311
Programming examples - Helicopter models
Linearis. swashpl.
Swashplate type
no
1 Servo
Rotor direction right
HELTYPE
Pitch min. rear
SEL
Both "Expo throttle lim." as well as "Thr. limit
warning", in bottom line of this display, are currently
of no interest.
By now, the servos should be plugged into the
receiver in the intended sequence:
Receiver power supply
Receiver power supply
13 14 T 15 16 S
77 8910 11 12
Receiver power supply
Telemetry connection
Receiver power supply
free or aux. function
free or aux. function
SUMO / SUMI-connection
Receiver power supply
Receiver power supply
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
free or aux. function
Tail rotor servo (gyro system)
Roll 1 servo
Pitch-axis 1 servo
free or speed governor
or aux. function
Roll 2 servo
free or aux. function
Throttle servo or speed controller
Gyro gain
Note:
Please note that on the newer Graupner-mc- and
mx- remote control systems, the fi rst pitch servo and
the throttle servo are swapped in comparison to older
systems.
Mix ratios and mix directions for swashplate pitch, roll
and nick servos are already pre-adjusted to +61 % in
the menu …
»Swashplate mixer« (page 208)
SWASH MIXER
Pitch
Roll
Pitch ax.
+61%
+61%
+61%
SEL
. If the swashplate mixer should not follow joystick
movements properly, fi rst change the mixing
directions from "+" to "-" before changing servo
directions in the menu …
»Servo adjustment« (page 102)
0% 100%Servo 1
Servo 2
Servo 3
Servo 4
Servo 5
Rev cent.
100%
150% 150%
– travel + – limit +
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
0% 100%
100%
150% 150%
... This menu can also be used to adapt travel and
direction for individual servos. However, one must
attempt to retain 100 % servo travel so as to achieve
the best possible resolution and control accuracy. The
direction of travel is determined with "Rev." and, in
the process, make sure that the direction is correct.
The tail rotor servo must run so that the nose (!) of
the helicopter follows the tail joystick direction.
In the menu …
»Stick mode« (page 106)
Thr trim
Pitch/thr
Roll
Pitch ax
Tail rot.
Tri m
0.0s
Tr. step – time +
global 0.0s
global 0.0s
global 0.0s
0.0s
0.0s
0.0s
0.0s
4
4
4
4
… the column "Tr. step" is used to set the increment
size of each "click" on the digital trim keys.
The C1 trimming only affects the throttle servo for
the helicopter. At this point there is no need to go
into the particulars of this trimming ("cut-off trim")
once again. Please read more about this on page 58.
(Thanks to digital trimming, trim values can be saved
automatically when a model change is affected. In
the mc-20 HoTT system these can even be stored
automatically when a change of fl ight phase takes
place.).
An additional setting which is specifi c to helicopters
can also be made in this menu in which you determine
which function the trim slider on the pitch joystick
should have. This is accomplished by selecting the
"Throttle limit" setting in the "Throttle" line or leaving
it as it is. This roughly corresponds to trim for the
familiar idle trim function. If the trim indicator marker is
moved all the way forward by "turning" the trim wheel
(remember: "pitch min rear" = "throttle forward") the
throttle limit will later take over the throttle limit for
throttle enable seamlessly in the menu …
312 Programming examples - Helicopter models
»Control adjust« (page 112 … 119)
0%
I13 +100%
I14
I15
Tl16
Typ
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
offset
GL
Normal
0.0 0.0
fr ---
SET
… where input "Tl16" is assigned and all other inputs
are "fr(ee)" by default.
This "Tl16" input serves as the throttle limiter. Its
effect is exclusively on output "6", where the throttle
servo is connected. The throttle limiter is assigned by
default to the right-side proportional rotary control.
Once again, as a reminder:
With the user of the "throttle limiter" function, you •
do not have to program a fl ight phase "throttle pre-
selection".
The throttle limiter does not control the throttle •
servo; it only limits the travel of the throttle servo
in the full throttle direction according to its position.
The throttle servo is generally controlled from
the pitch joystick via »Helicopter mixer« menu
setting/s for throttle curve/s, which is why input
6 must absolutely remain "free". Refer to pages
180 through 182 in this manual about this.
The C1 trimming also affects only the throttle servo •
for the helicopter. At this point there is no need to
go into the particulars of this trimming once again.
Please read more about this on page 58. (Thanks
to the digital trimming, trim can be automatically
saved values with a model changeover as well as
with a change of the fl ight phase).
A detailed description of the idle run base setup •
model and the adjustment of idle and throttle limit
can be found beginning on page 117.
Then switch to the "travel" column with the f
selection key of the left or right touch pad and
increase the now inversely highlighted value from
+100 % to +125 % with a fully opened throttle limiter
with a brief tap on the center SET key of the right
touch pad:
0%
I13 +100%
I14
I15
Tl16
Typ
+100%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0%
+100%
0.0 0.0
GL
GL
GL
fr
fr
Lv1
---
---
---
offset
GL
Normal
0.0 0.0
fr ---
+125%
SET
In doing so, it is assured that the throttle limiter
releases the entire throttle travel with the pitch
joystick later during fl ight.
Adjustment notice for electric helicopters:
Since electric drive systems have no need for an
idle setting, the basic confi guration of settings for
an electrically-powered helicopter merely involves
making sure that the control range of the throttle
limiter is both higher and lower than the adjustment
range of the speed controller (usually -100 % to
+100 %) by a safe margin. If necessary, therefore,
the adjustment of the "travel" setting of the throttle
limiter described above must be modifi ed accordingly,
for example, to symmetric 110 %. The further
adjustment, however, can take place analogously to
the combustion helicopter described here.
With this process, you have not carried out the basic
settings for the transmitter as they are needed again
later for further model programming.
The actual helicopter-specifi c settings take place
primarily in the menu …
»Helicopter mixer« (page 176 … 191)
Channel 1
Channel 1
Pitch
Throttle
Tail rot.
Tail rot. 0%
Roll 0%
Throttle
Roll
Throttle
Tail rot.
Nick
Nick
Throttle
Tail rot.
Swashplate rotation
Swashplate limiter
0%
0%
0%
0°
off
Gyro suppression 0%
Gyro offset 0%
Normal
The "Pitch" function appears right in the fi rst line. A tap
on the center SET key of the right touch pad will cause
a switch to the corresponding sub-menu. The graphic
representation of the pitch curve appears here; it is
initially only defi ned by the points "L" and "H":
Pitch
Curve
off Point
Output
Input –50%
–50%
?+
–
100
¼O U T P U T
0%
Normal
Now place point "1" in the center with a brief tap on
the center SET key of the right touch pad:
313
Programming examples - Helicopter models
Pitch
Curve
off Point
Output
Input 0%
0%
1+
–
100
¼O U T P U T
1
0%
Normal
Always try to make due with these three points
initially; more points can "over-complicate" the matter
and are more of a burden at this point.
The reference point for the hovering should generally
be the mechanical center position of the pitch joystick,
because this position comes closest to the normal
control feel. Although the curve adjustment enables
other settings, you must know exactly what you
are doing. First set the pitch joystick in the center.
The servos which you had previously set according
to manufacturer specifi cations have their levers at
positioned perpendicularly to the servo housing
(normally). A hovering pitch value of 4° to 5° is now
mechanically set at the control rods to the rotor blades.
In principle, all known helicopters fl y with this setting.
Then move the pitch joystick towards maximum pitch
until the limit position. (The vertical line shows you
the current joystick position.) Now change the pitch
curve's point "H" with the selection keys of the right
touch pad such that the main rotor's blades have a
maximum pitch of about 9°. A value of +50 % should
be about right.
Pitch
Curve
off Point
Output
Input +100%
+50%
1+
–
100
¼O U T P U T
1
+50%
Normal
Note:
A rotor blade adjustment gage, such as the Graupner
pitch gage, order no. 61, is quite useful for reading
the angle.
Now move the pitch joystick toward the pitch
minimum position until its limit position. Depending
on the ability of the pilot, adjust the value of point "L"
so that the blade angle of approach is 0 to -4°. Now a
slightly pitched line arises at the hovering points, the
so-called pitch curve, which can appear as follows:
Pitch
Curve
off Point
Output
Input –100%
–75%
1+
–
100
¼O U T P U T
1
–75%
Normal
Now you can, if you like, move the marker frame
upward with the selection keys to the "Curve" line
and after activation of the value fi eld with a brief tap
on the center SET key of the right touch pad, set the
curve function of the mixer to "on".
Pitch
Curve
Point
Output
Input –100%
–75%
1+
–
100
¼O U T P U T
1
–75%
Normal
on
If you now switch to autorotation phase – at the
bottom left of the display the fl ight phase name
"Autorot" appears – the "old" pitch curve is again:
Pitch
Curve
off Point
Output
Input –50%
–50%
?+
–
100
¼O U T P U T
1
0%
Autorot
Now carry out the same setting as before in the
normal phase. Only at point "H“ – at maximum
pitch – is it possible to increase pitch angle by about
2°. In doing so, you will have somewhat more of an
angle to catch the model later on (1).
After setting pitch curve, move the autorotation
switch back then return to the helicopter mixer menu
selection with a brief tap on the center ESC key
of the left touch pad. In that display, change to the
"Channel 1 ¼Throttle" line to set the throttle curve.
The adjustment range for idle trim must fi rst be
matched to the throttle curve. Do this by putting the
pitch joystick into its minimum position then set point
"L" to about +15 %.
Channel 1
Curve
off Point
Output
Input 0%
+15%
L+
–
100
¼O U T P U T
Throttle
Normal
+15%
With the throttle limiter closed and idle trim completely
open, move the pitch joystick back and forth somewhat
at the minimum limit position. The throttle servo
may not move with it in the process. No you have
established a seamless transition from the idle trim to
the throttle curve. The further settings along the throttle
curve must be carried out later in fl ight.
314 Programming examples - Helicopter models
If you switch from this graphic to the autorotation
phase for testing purposes, the following appears
instead of the accustomed representation:
off
C1 Throttle
Autorot
That means that this mixer is switched off and the
throttle servo is switched to a fi xed value, which can
be adjusted as follows:
Return to the menu list with a tap on the ESC key. As
long as you are still in the autorotation phase, new
sub-menus are listed; specifi cally:
Pitch
–90%
Tail rot. offset AR 0%
Throttle position AR
Gyro suppression 0%
Gyro offset 0%
SEL
Autorot
The line "Thr. setting AR" is important. Enter the value
to the right, depending on servo direction, to either
approximately +125 % or -125 %.
Pitch
–125%
Tail rot. offset AR 0%
Throttle position AR
Gyro suppression 0%
Gyro offset 0%
SEL
Autorot
In doing so, the motor is safely switched off in the
autorotation phase (in case of emergency). Later,
when you have gained enough experience to practice
the autorotation fl ight, a more stable idle can be
entered here.
Adjustment notice for electric helicopters:
Since the motor must also be shut off for electrically
powered helicopters in case of an emergency, this
setting is adopted without change.
The further sub-menus are not important at the
moment. By switching off "autorotation", it returns to
the fi rst menu list.
Select the "Channel 1 ¼Tail rot." settings page
in order to set static torque compensation for the
tail rotor. In this case, also work with a maximum of
three interpolation points; everything else is reserved
for the experienced pilot. Do this by changing the
heading-lock systems from their intended uniform
pre-setting of 0 % at point "L" (minimum pitch) to
-30 % and at the opposite end, at point "H" to +30 %
(maximum pitch). These values may have to be
corrected in fl ight. It may also be necessary to set
point "1" in the middle.
Channel 1
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
Tail rot.
Now, for testing purposes, switch back to the
autorotation phase. Here the setting is also
deactivated; the tail servo no longer reacts to pitch
movements (no torque usually arises when the main
rotor is not powered). All additional interpolation
points are not currently of importance yet.
If, contrary to the default setting, the gyro has a
transmitter-side sensitivity setting, another free
proportional control will be needed. This can be
assigned in the …
»Control adjust« (page 112 … 119)
… menu to "Gyr7" input. Activate the control
assignment with a brief tap on the center SET key of
the right touch pad then move the selected control
until its control number appears in the display:
0%
I5 +88%
Thr6
Gyr7
I8
Typ
+111%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
Sl1
fr
---
---
---
offset
GL
Normal
0.0 0.0
SET
fr ---
Conclude this entry with a brief tap on the ESC key of
the left touch pad then change to the column "- travel
+" with the f selection key of the left or right touch
pad. After a tap on the center SET key of the right
touch pad, the gyro's maximum sensitivity can be set
in the value fi eld displayed in inverse video, e.g. to
50 %. To this end, move the selected control into its
middle position or, if applicable also to the side, such
that only one value fi eld is displayed in inverse video:
0%
I5 +88%
Thr6
Gyr7
I8
Typ
+111%
– travel + –time+
0% +100%
+100%
0.0 0.0
0% 0.0 0.0
0% +100%
+100%
0.0 0.0
GL
GL
GL
fr
Sl1
fr
---
---
---
offset
GL
Normal
0.0 0.0
SET
fr ---
+50%
+50%
This produces a fi xed value for as long as the control
remains at the right limit position. The correct value
must be adjusted in fl ight.
315
Programming examples - Helicopter models
In the process, however, always observe the
adjustment instructions accompanying your gyro
sensor, because your helicopter will not be able
to fl y otherwise!
To conclude this initial programming, a few words
should be mentioned about the menu …
»Channel 1 curve« (page 131)
Channel 1 C U R V E
Curve
off Point
Output
Input 0%
0%
?+
–
100
¼O U T P U T
0%
This function is a type of "convenient exponential
curve" for the throttle/pitch joystick and the mixer
functions connected to it.
If ever, this curve should only be applied "cautiously"
at the very end, when all adjustments have been
made. It should never be used for the throttle/pitch
adjustment! The over-lapping result in "nasty" effects.
With this, all helicopter-specifi c settings which can be
made on the "workbench" are now completed. The
further fi ne-tuning must take place in fl ight. The fl ight-
tested, (hopefully) minor (digital) trim settings are
automatically saved.
Larger deviations should fi rst be mechanically
adjusted or adjusted according to the previously
discussed settings.
Further settings
Following this programming example, you have
provided a helicopter with a basic adjustment for the
hovering training and simple trips. Depending on
your knowledge and experience as a pilot, additional
functions can, of course, also be activated.
If you want to fl y at different speeds and with different
trimming, you activate the so-called "fl ight phases",
which can be called with assigned switches as
an alternative to the previously described "normal
phase". For this purpose, fi rst open the menu …
»Phase settings« (page 146)
… whereby the symbols appearing in the second
column, sometimes only after a switch assignment in
the »Phase assignment« menu, have the following
meanings:
"–": no phase switch present
"+": phase switch present
"¾": currently active phase
Phase 1
Phase 2
Phase 3
Phase 4
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim. Sw.time
–
–
–
–
¾
Autorot Autorot
However, consider in advance whether these are to
be implemented with individual switches or, more
reasonably, with 3-way switches because as many
as 7 fl ight phases can be activated in addition to
the autorotation phase. The latter possibility is more
logical and usually more clearly laid out.
The "Autorot" line is already selected in the fi gure
above. When activated, the autorotation phase
always has precedence over any other phases you
assign switches to.
However, in the "Name" column you fi rst assign
"meaningful" names to Phases 1 to 3, which are
adopted from a list. These identifi cations serve for the
better differentiation and are shown later in the base
screen and for all fl ight-phase dependent menus, for
example:
Phase 1
Phase 2
Phase 3
Phase 4
0.1s
0.1s
0.1s
0.1s
0.1s
Name Fl.ph.Tim Sw. time
–
–
–
–
¾
Autorot Autorot
Normal
Hover
Speed
Then, in the fourth column from the left, enter the
switching time with which the FROM phase should
switch TO the next respective phase. Approximately
1 s should suffi ce:
Phase 1
Phase 2
Phase 3
Phase 4
1.1s
1.1s
1.1s
0.1s
Name Fl.ph.Tim Sw. time
–
–
–
–
¾
Autorot Autorot
Normal
Hover
Speed 1.1s
This value can also be adjusted later according to
your personal preferences. Please observe in the
process that TO the autorotation phase, whose
name is defi ned as "Autorot", is switched without a
time delay. If necessary, enter the time with which a
change FROM the autorotation phase to a different
phase should be affected.
In order to be able to switch between the individual
fl ight phases, the assignment of the individual
switches or the three-stage switch is necessary.
The assignment of the switch takes place in the
menu …
»Phase assignment« (page 148)
Under "C" and "D", for example, assign the one of the
two standard 3-way switches mounted into the switch
panels, e.g.:
316 Programming examples - Helicopter models
PHASEASSIGNMENT
prior.
C
1 Normal
combi
ABDEF
67
Now the given switch position must be assigned to
the respective fl ight phase in the »Phase settings«
menu. Since these phases already have names,
the name «1 Normal» will initially appear at the right
in the display. If the already assigned autorotation
switch was activated, the following warning message
appears in the display:
PHASEASSIGNMENT
prior.
C
1 Normal
Kombination
ABDEF
67
Autorot
As a reminder:
The autorotation phase has absolute precedence.
Therefore, move the autorotation switch back again
then put the selected switch, in the example the
three-stage switch connected to switch plug-in
locations 6 and 7, initially to one of its limit positions.
Now use the selection keys to change to the bottom
right and activate this entry fi eld:
PHASEASSIGNMENT
prior.
C
combi
ABDEF
267
1 Normal
Now use the selection keys to select the desired fl ight
phase for this – for example "2 Hover" …
PHASEASSIGNMENT
prior.
C
combi
ABDEF
267
2 Hover
… and confi rm this selection with a brief tap on the
center SET key of the right touch pad or go ahead
and put the switch into its other limit position and
defi ne the name for this new switch position, such as
«3 Speed».
PHASEASSIGNMENT
prior.
C
combi
ABDEF
267
3 Speed
The switch's middle position then receives the name
"1 Normal":
PHASEASSIGNMENT
Prior.
C
combi
ABDEF
267
1 Normal
Note:
Exchanged or different name assignments for the
three switch positions are, of course, also possible.
Thus, for example, implementation of a programmed
speed controller (as described beginning in the next
column) can make a sequence like "normal / hover /
acro" quite logical.
The model settings made before the assignment of
a phase switch are now in the fl ight phase "Normal".
This is the phase which is called after the above
defi nition in the switch center position.
This normal setting, which was already tested in
fl ight, can be copied to a different fl ight phase so that
fl ying can take place in the same manner in every
phase at fi rst. For this purpose, use the menu …
»Copy / Erase« (page 72)
Copy flight phase
Erase model
Copy model –> model
Export to SD
Import from SD =>
With the operation of the fl ight phases, it is possible
to carry out changes in the phase-dependent menu
for each individual phase. Since the mc-20 HoTT
system has digital trimming, in addition to the fl ight-
phase dependent menu settings in the helicopter
317
Programming examples - Helicopter models
program, the trim positions of roll, nick and tail rotor
joystick can also be selected for storage on a fl ight-
phase dependent basis, see »Stick mode« menu,
page 106:
0:00h
Stop watch
Flight tim
K78
0:00.0
4.1V
0:00.0
00
0
0
0:00h
M
V
H-J Sandbrunner
Normal
#02
Starlet
RX VOLT:4.9V
Enhancement recommendation: Rotational speed
regulator
At some point in time you may want to install a
rotational speed regulator in the helicopter, such as
mc-Heli-Control, in order to be able to fl y with speeds
automatically kept at a constant. In the process, it
is logical to couple the individual rotational speeds
with the fl ight phases so that further additional
adjustments are possible.
It is mandatory for the transmitter-side programming
that the rotational speed regulator was installed
and programmed according to the manufacturer's
instructions. Of course, the mc-20 HoTT here too
offers multiple possibilities to realize various speeds
in individual phases. A practical proposal which
retains the throttle limiter function can be found
beginning on page 181.
If you have adjusted your helicopter according to
this programming principle, it is not yet a competition
helicopter, but it already permits sophisticated fl ying.
You should only activate additional functions if
the model fl ies faultlessly so that the (desired)
improvements are also easy to follow. Insofar as
possible, activate individual functions on an individual
basis so that you can actually recognize and attribute
the change. Bear in mind that it is not the quantity
of functions used that distinguishes good pilots, but
what they can do in terms of fl ying with relatively little.
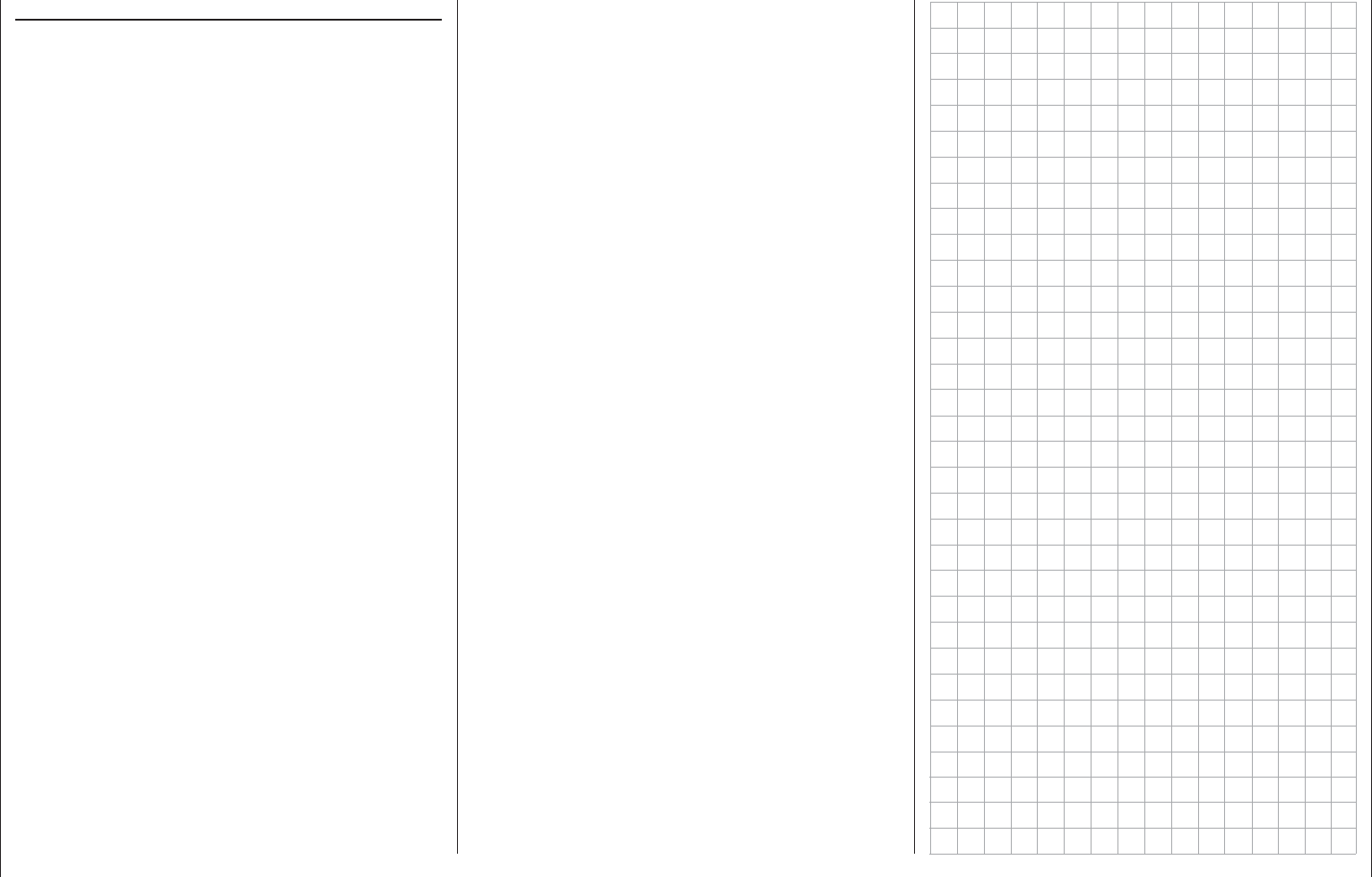
318 FCC Information
FCC Information
Graupner mc-20 HoTT #33020
FCC ID: ZKZ-MC-20
FCC Statement
This device complies with Part 15C of the FCC 1.
Rules. Operation is subject to the following two
conditions:
(1) This device may not cause harmful
interference.
(2) This device must accept any interference
received, including interference that may cause
un desired operation.
Changes or modifi cations not expressly approved 2.
by the party responsible for compliance could void
the user‘s authority to operate the equipment.
NOTE
This equipment has been tested and found to
comply with the limits for a Class B digital device,
pursuant to Part 15 of the FCC Rules. These limits
are designed to provide reasonable protection against
harmful interference in a residential installation. This
equipment generates uses and can radiate radio
frequency energy and, if not installed and used in
accordance with the instructions, may cause harmful
interference to radio communications. However, there
is no guarantee that interference will not occur in a
particular installation. If this equipment does cause
harmful interference to radio or television reception,
which can be determined by turning the equipment
off and on, the user is encouraged to try to correct
the interference by one or more of the following
measures:
Reorient or relocate the receiving antenna.•
Increase the separation between the equipment •
and receiver.
Connect the equipment into an outlet on a •
circuit different from that to which the receiver is
connected.
Consult the dealer or an experienced radio/TV •
technician for help.
FCC Radiation Exposure Statement
This equipment complies with FCC radiation
exposure limits set forth for un uncontrolled
envirionment. Thisequipment should be installed and
operated with a minimum distance of 20 cm between
the antenna and your body.
319Declaration of Conformity
Declaration of Conformity
Konformitätserklärung gemäß dem Gesetz über Funkanlagen und
Telekomunikationsendeinrichtungen (FTEG) und der Richtlinie 1999/5/EG (R&TTE)
Declaration of Conformity in accordiance with the Radio and Telecomunikations Terminal Equipment
Act (FTEG) and Directive 1999/5/EG (R&TTE)
Graupner GmbH & Co. KG
Henriettenstraße 94-96
D-73230 Kirchheim/Teck
erklärt, dass das Produkt:
declares that the product
Geräteklasse: 2
Equipment class
den grundlegenden Anforderungen des § 3 und den übrigen einschlägigen Bestimmungen des
FTEG (Artikel 3 der R&TTE) entspricht.
complies with the essential requirements of § 3 and the other relevant provisions of the FTEG (Article 3 of the
R&TTE Directive).
Angewendete harmonisierte Normen:
Harmonised standards applied
EN 60950:2006
EN 301 489-1 V1.7.1
EN 301 489-3 V1.4.1
EN 300 328 V1.7.1
Health and safety requirements pursuant to § 3 (1) 1. (Article 3 (1) a))
Protection requirement concernig electromagnetic compatibility
§ 3 (1) 2, Artikel 3 (1) b))
Measures for the efficient use of the radio frequency spectrum
§ 3 (2) (Article 3 (2))
Kirchheim, 14. November 2011 Stefan Graupner, Geschäftsführer
Stefan Graupner, Managing Director
Graupner GmbH & Co. KG Henriettenstraße 94-96 D-73230 Kirchheim/Teck Germany
Tel: 07021/722-0 EMail: info@graupner.deFax: 07021/722-188
Gesundheit und Sicherheit gemäß § 3 (1) 1. (Artikel 3 (1)a))
Schutzanforderungen in Bezug auf elektromagnetische
Verträglichkeit § 3 (1) 2, Artikel 3 (1) b))
Maßnahmen zur effizienten Nutzung des Frequenzspektrums
§ 3 (2) (Artikel 3 (2))
mc-20 HoTT - No. 33020
GR-32 Dual HoTT - No. 33516
0678
320 Warranty Certifi cate
Graupner GmbH & Co. KG, Henriettenstrasse 94 - 96,
D-73230 Kirchheim/Teck guarantees this product for
a period of 24 months from date of purchase. The
warranty is only valid for the material or functional
defects already present at the time of the purchase
of the product. Schäden, die auf Abnützung,
Überlastung, falsches Zubehör oder unsachgemäße
Behandlung zurückzuführen sind, sind von der
Garantie ausgeschlossen. Die gesetzlichen Rechte und
Gewährleistunsansprüche des Verbrauchers werden
durch diese Garantie nicht berührt. Bitte überprüfen Sie
vor einer Reklamation oder Rücksendung das Produkt
genau auf Mängel, da wir Ihnen bei Mängelfreiheit die
entstandenen Unkosten in Rechnung stellen müssen.
Graupner GmbH & Co. KG, Henriettenstrasse 94 -
96. D-73230 Kirchheim/Teck, Germany guarantees
this product for a period of 24 months from date
of purchase. The guarantee applies only to such
material or operational defects which are present at
the time of purchase of the product. Damage due to
wear, overloading, incompetent handling or the use of
incorrect accessories is not covered by the guarantee.
The user´s legal rights and claims under guarantee are
not affected by this guarantee. Please check the product
carefully for defects before you are make a claim or
send the item to us, since we are obliged to make a
charge for our cost if the product is found to be free of
faults.
La société Graupner GmbH & Co. KG,
Henriettenstraße 94-96, D-73230 Kirchheim/Teck, accorde
sur ce produit une garantie de 24 mois à compter de la
date d’achat. La garantie ne s’applique qu’aux défauts
de matériel et de fonctionnement du produit acheté. Les
dommages dus à une usure, à une surcharge, à l’emploi
d’accessoires non compatibles ou à une manipulation non
conforme sont exclus de la garantie. Cette garantie ne
remet pas en cause les droits légaux des consommateurs.
Avant toute réclamation ou retour de matériel, vérifi ez
précisément les défauts ou vices constatés, car si le
matériel est conforme et qu’aucun défaut n’a été constaté
par nos services, nous nous verrions contraints de
facturer le coût de cette intervention.
Garantie-Urkunde
Warranty certifi cate / Certifi cat de garantie
mc-20 HoTT Set
Order no. 33020
Übergabedatum:
Date of purchase/delivery:
Date d’achat :
Name des Käufers:
Owner´s name:
Nom de I`acheteur :
Straße, Wohnort:
Complete address:
Adresse complète :
Firmenstempel und Unterschrift des Einzelhändlers:
Stamp and signature of dealer:
Cachet et signature du détaillant :
Warranty Certifi cate
Servicestellen / Service / Service après-vente
Graupner Zentralservice
Graupner GmbH & Co. KG
Henriettenstrasse 94 - 96
D-73230 Kirchheim
Service hotline
(+49) 0 18 05 47 28 76*
Monday … Friday
9:30 - 11:30 & 13:00 - 15:00
United Kingdom
Graupner Service
Brunel Drive
GB, NEWARK, Nottinghamshire
NG242EG
(+44) 16 36 61 05 39
Sverige
Baltechno Electronics
Box 5307
S 40227 Göteborg
(+46) 31 70 73 00 0
Schweiz
Graupner Service
Wehntalerstrasse 37
CH 8181 Hoeri
(+41) 43 26 66 58 3
Luxembourg
Kit Flammang
129, route d’Arlon
L 8009 Strassen
(+35) 23 12 23 2
France
Graupner France
Gérard Altmayer
86, rue St. Antoine
F 57601 Forbach-Oeting
(+33) 3 87 85 62 12
Espana
Anguera Hobbies
C/Terrassa 14
E 43206 Reus (Tarragona)
(+34) 97 77 55 32 0
info@anguera-hobbies.com
Ceská Republika
Slovenská Republika
RC Service Z. Hnizdil
Letecka 666/22
CZ 16100 Praha 6 - Ruzyne
(+42) 2 33 31 30 95
Belgie/Belgique/Nederland
Jan van Mouwerik
Slot de Houvelaan 30
NL 3155 Maasland VT
(+31) 10 59 13 59 4
Italia
GiMax
Via Manzoni, no. 8
I 25064 Gussago
(+39) 030 25 22 73 2 * 0.14 cent / minute from a
German Telecom landline.
Calling price variations
possible for calls from cell
phones or from the land-
lines of other providers.
Wir gewähren auf dieses Erzeugnis eine Garantie von
This product is warrantied for
Sur ce produit nous accordons une garantie de 24 Monaten
months
mois
321For your notes
322 For your notes
323For your notes
HOPPING.TELEMETRY.TRANSMISSION
GRAUPNER GMBH & CO. KG
POSTFACH 1242
D-73220 KIRCHHEIM/TECK
GERMANY
http://www.graupner.de
Changes and delivery options reserved. Available only
through dealerships. A directory of suppliers will be
provided. No liability is accepted for print errors.
Printed in Germany PN.QC-01
Although the information provided in these instructions has
been carefully scrutinized for viability, no form of liability can
be accepted for errors, omissions or print errors. Graupner
reserves the right to change the described hardware and
software features at any time without prior notifi cation.