Graupner and KG MX-12 Computer System Graupner HoTT User Manual 33112 mx12 HoTT 2 GB indd
Graupner GmbH & Co. KG Computer System Graupner HoTT 33112 mx12 HoTT 2 GB indd
UserManual.wiki
>
Graupner and KG
>
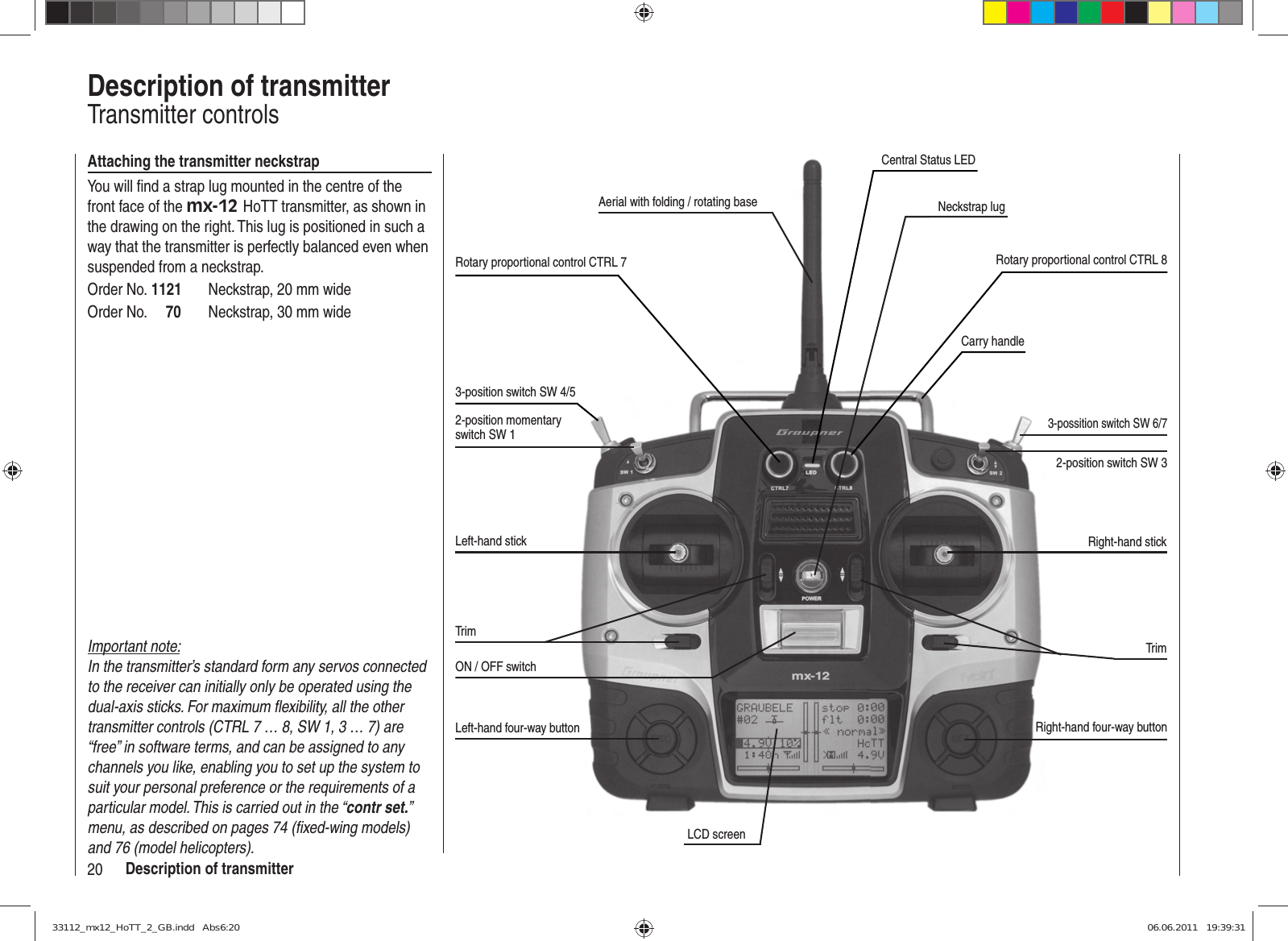
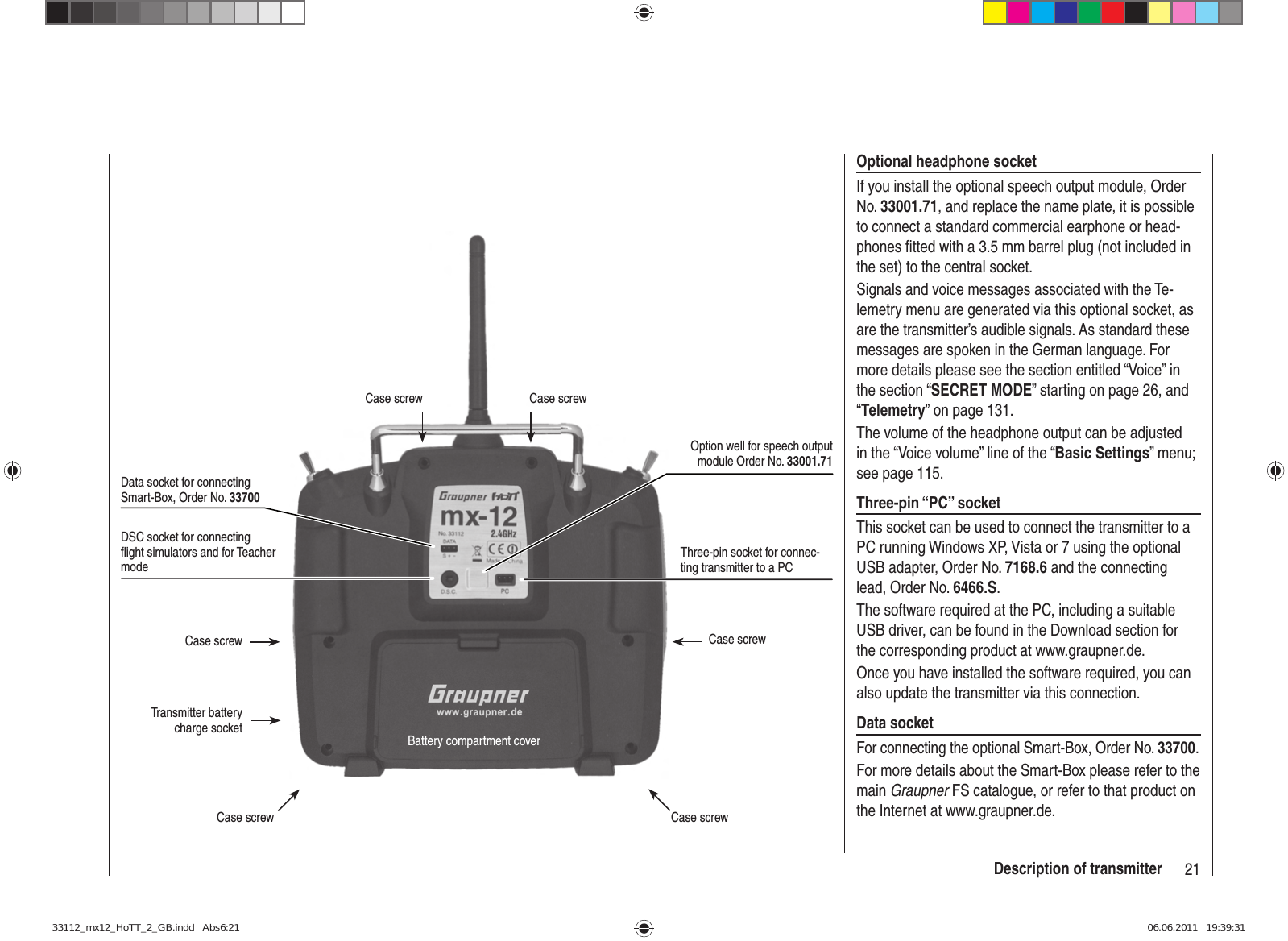
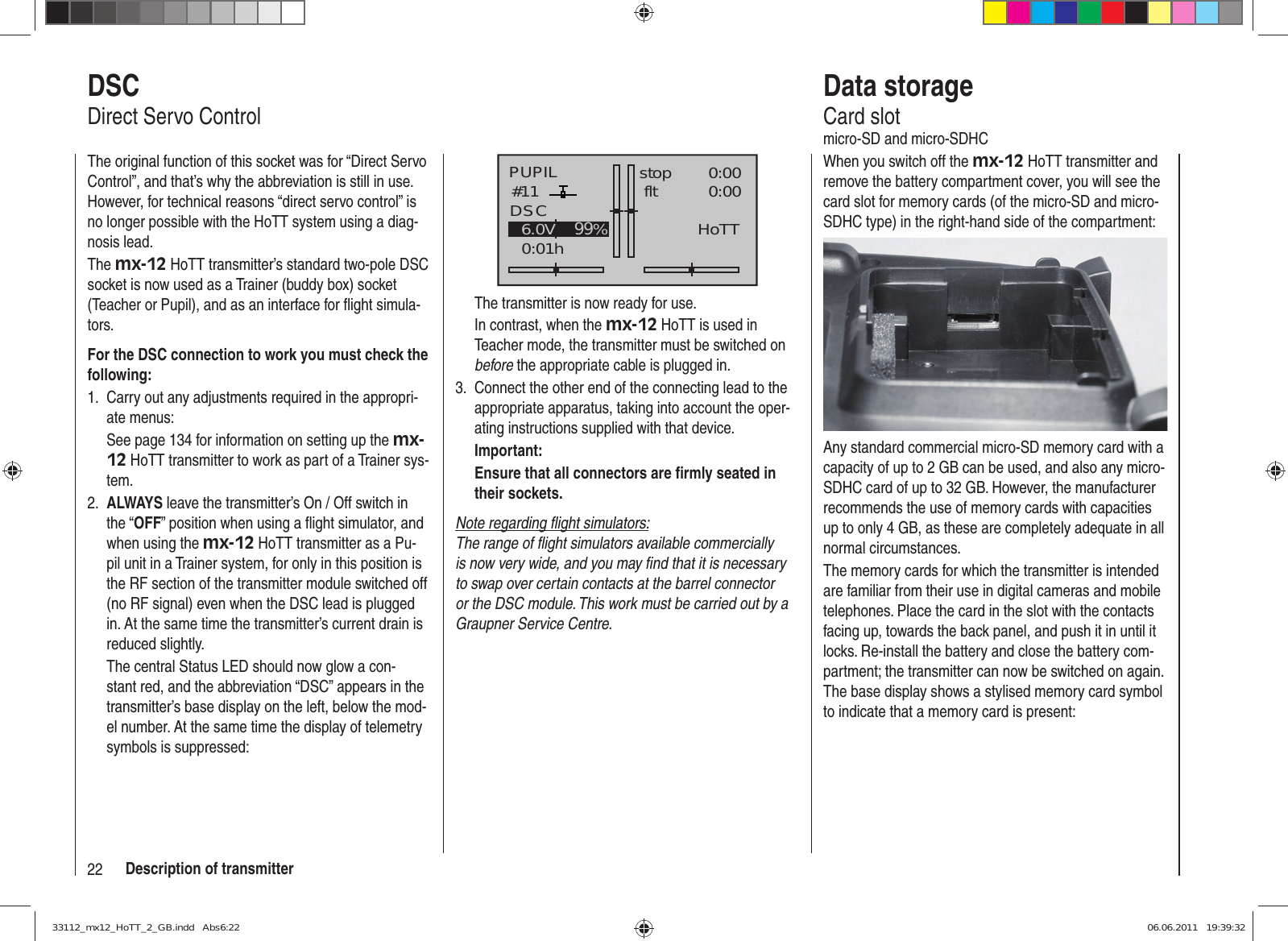
MX 12 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation