FBL Helicopter World Review
2016-04-26
: Graupner Fbl Helicopter World Review FBL Helicopter World Review RADIOS
Open the PDF directly: View PDF ![]() .
.
Page Count: 5

First of all we should point out that the
Graupner R&D team in Germany did all the
programming of the FBL system. Experienced
helicopter pilots from the European and Asian
scene supported them by extensive flight tests
and improving internal control algorithms. The
hardware is manufactured, like most electronic
devices coming from Graupner/SJ, at their
headquarters located at South Korea.
The Graupner flybarless system is based on
2.4 GHz HoTT receivers (usable for pattern
and helicopter applications), that are equipped
with 3-axis gyro sensors right from the factory.
These receivers are the GR-24 Pro 12-channel
(3xG+3A+3M+Vario) and the new, 9-channel
GR-18 (3xG+3A+3M+Vario). I will mainly focus
on the GR-24 Pro receiver, because it is a perfect
choice up to 700/800 size machines, but small
enough to fit 450 size helicopters.
According to information from Graupner/SJ it is
not finally decided whether to bring out the metal
cased GR-18 ‘3D’, shown at the Nürnberg Toy
Fair. Nevertheless the plastic housing is totally
up to the job and saves weight. The helicopter
flybarless software can be downloaded very
easily from their homepage and transferred to the
gyro-equipped receiver via the update manager
PC program (as used with other Graupner
REVIEW
At the ROTOR Live 2014 fair in Germany,
Graupner launched their HoTT
flybarless system for model helicopters
by demonstrating it on the flight line
and it created lots of interest. Of particular
interest is its total integration into existing 2.4
GHz HoTT gyro receivers by simply doing a free
of charge software update. It also offers the
ability to perform model setup and parameter
adjustments wirelessly and very comfortably
via the radio, which has to be regarded as a
groundbreaking feature in the industry. We
checked out further details and want to show
how the Graupner SAS works in practice.
Graupner/SJ’s
FBL System
More ToTal InTegraTIon: The all-new graupner hoTT flybarless sysTeM
rS/ptureS Fred Annecke
2
Graupner-SJs FBL_MHWJUL14.indd 20 22/5/14 11:43:42

collective, you check the correct collective, cyclic
and rudder effective stick directions by using
the Tx servo reverse menu. Tx sub trims remain
untouched as the flybarless system zeros all stick
functions (=> yaw rate defaults) during every
boot up sequence. Gyro ‘Axis Assignment’ is an
easy job… Using the gimbal sticks, we select
roll, elevator and rudder in sequence and when
tilting the helicopter towards the correspondent
HoTT devices). When buying a new HoTT gyro
receiver, pattern and helicopter applications are
implemented and ready to run out of the box.
Updating an existing device takes a few seconds
and existing adjustments will not be overwritten.
A particular highlight is that the whole
communication and adjustment of the SAS
software is via the Tx telemetry menu, in my case
a mx-20, or mz-24 HoTT. Thanks to bidirectional
data transfer, there is no need for a separate user
interface, smart phone or even push buttons on
the unit itself. The transmitter is present anyway
and acts as a wireless data terminal with an
easily read display. All FBL related model data
and adjustments are stored in the receiver itself.
One of the most important demands of the
Graupner developers was making the initial setup
of a new model as easy as possible without
losing flight performance later on. For this the
Graupner flybarless software is divided in two
layers, the ‘Base Setup’ and ‘Expert Mode’.
When doing the initial setup of a new model
helicopter, the first step is to switch the bound
HoTT receiver to ‘Heli’ mode. Having done this,
the flybarless software is active and ready for
adjustments. As with all other inputs, this is done
by using the Tx telemetry, going through Base
Setup menu first. The menu structure itself is
built like a book, which can be thumbed through
forwards or backwards from page 1 to 4, by
pressing the transmitter buttons.
On each of these theme specific ‘pages’,
related sub points are listed. Electronic
swashplate mixing is performed inside the
receiver/flybarless system itself, so the Tx has
to be set to 1 servo swashplate (no mixing). All
servos need to be plugged into the receiver in a
given order, as shown in the manual.
All basic steps that have to be done first are
listed on the last two pages of the Base Setup
menu! This makes some sense (?) because these
points are only necessary once for a given model,
so control loop related parameter settings can be
reached very quickly on the first pages without
going a long way round (*).
After selecting the swashplate type (90°, 120°,
135° or 140°) and rotational direction (initiates
the correct pitch => rudder/cyclic => rudder feed
forward direction and pirouette compensation),
the next point is to set the servo travels. By
collecting all three (or four) servos together in a
group, you can go through all the possible norm/
rev combinations by simply clicking one button –
thus avoiding the irritating trial and error of setting
the servo direction individually.
Having obtained the same directions for
Graupner/SJ’S FBL SyStem
Graupner/SJ’s
FBL System
The brand new 9 servo GR-18 gyro receiver with integrated SAS serves 8 channels at the front
and 1 at the rear, which can alternatively be used for external telemetry devices
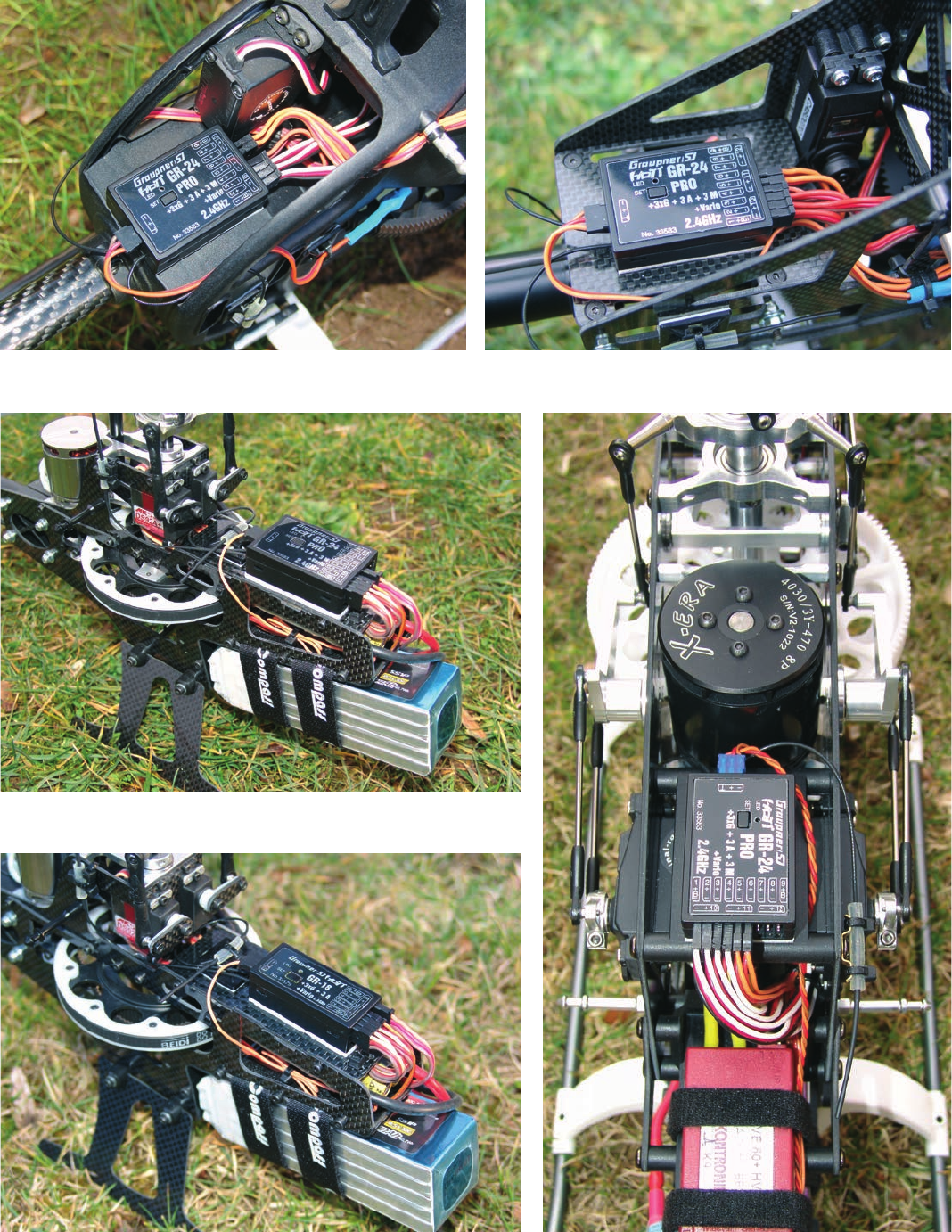
The GR-24 Pro serves 12 servos and external
telemetry sensors can be plugged in
On top we have the UHF PCB (giving 2.4
GHz antenna diversity), lower PCB with servo
signal processing and sensor arrangement.
Plastic housing is internally ‘metalized’ for
shielding reasons
GR-24 Pro (12 channels) and GR-18 (9 channels)
include SAS for model helicopters together with
the proven 2.4 GHz HoTT protocol
The GR-24 Pro is a 2.4 GHz HoTT receiver and SAS in a single housing. It comes factory equipped
with 3-axis gyro, 3-axis accelerometer and variometer, which opens the door for future interesting
options
21
Graupner-SJs FBL_MHWJUL14.indd 21 22/5/14 11:44:14
Graupner/SJ’S FBL SyStem
The Graupner receiver/SAS unit sitting in the back of my trusty Mikado
LOGO 500SE
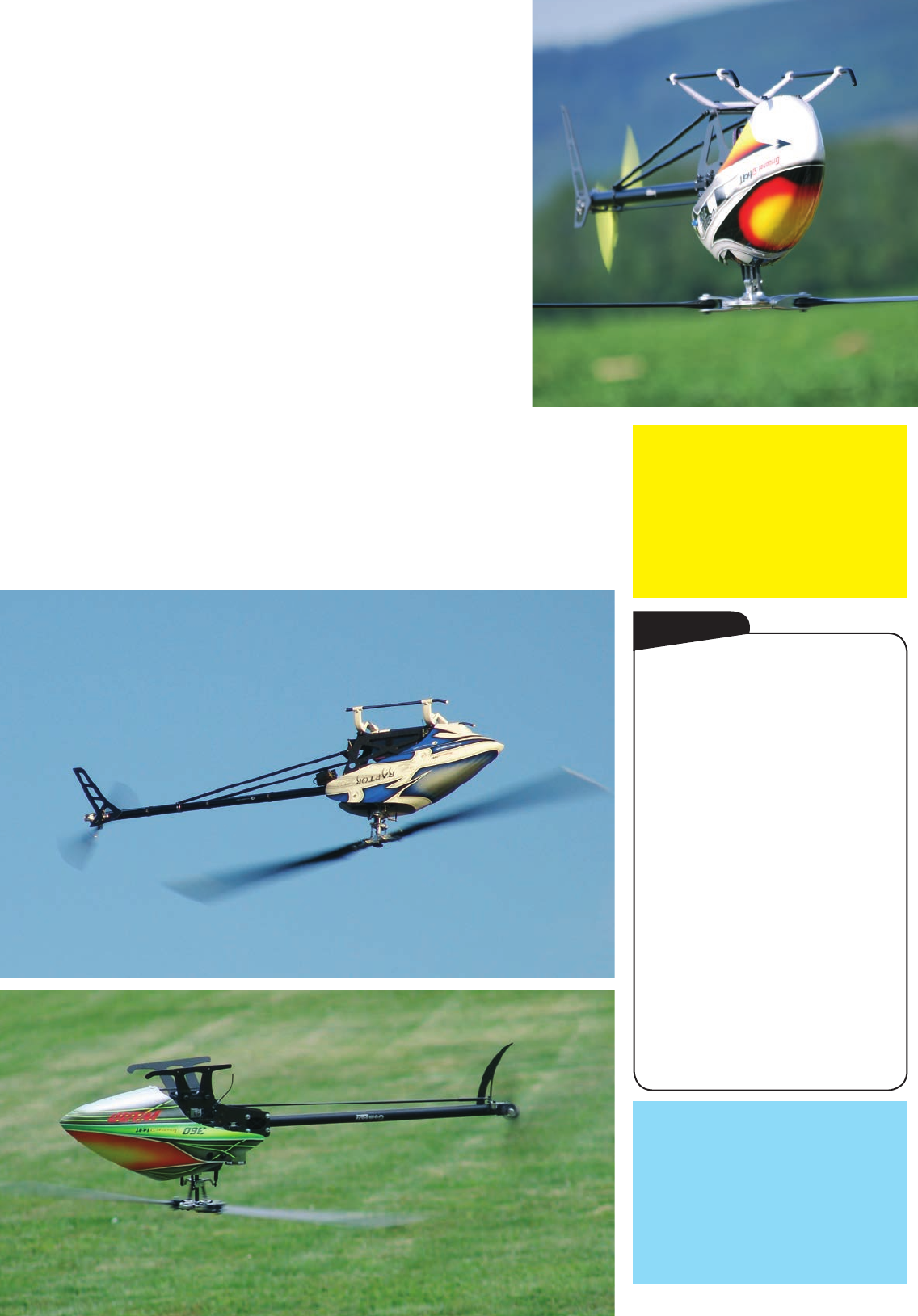
The GR-24 Pro unit performs excellently in a big 700 - my Compass 7HV
Ultimate was one of the test bench during lots of flights
A GR-24 Pro is compact enough even in a small and light helicopter like the
WARP 360 – it gave impressive flight performance using the factory settings!
The GR-18 is first choice for small helicopters like the WARP 360 The Raptor E700's chassis provides too much space for the
GR-24 Pro
22
Graupner-SJs FBL_MHWJUL14.indd 22 22/5/14 11:44:49
direction, the system stores the necessary gyro
reaction, confirms it, and it’s done.
The rest of initial setup is a familiar routine. For
older analogue and modern digital servos, we
are able to adjust the refresh rate for swashplate
and tail rotor. It is possible to run standard rudder
servos with 1.5 ms or special, narrow pulse
gyro types of 960 and 750µs. In order to get a
perfectly horizontal alignment of the swashplate
and zero collective pitch of the main blades,
the system switches off the control loops after
selecting ‘SWP S1/2/3 centre’.
Now we can perform the necessary fine
adjustment very comfortably by using fingertips
on the Tx touch pad. The same is true for the
rudder servo centre offset. A pitch gauge is a big
help while adjusting the necessary swashplate
servo travel in the menu to achieve the required
7º cyclic pitch. After this we limit the maximum
possible swashplate tilt angle without binding
and fix max. and min. collective range. The same
is done with the left/right throw limits and rudder
servo/tail pitch slider.
‘Swashplate Rotate’ is only needed for multi
blade rotors that need a virtual offset. System
internal ‘Expo’ should be left ‘YES’ as per the
factory default. This gives 25% on roll/ele, and
30% on tail in order to smooth the response
around centre a little bit for the first flights. If you
want to run your own Expo in the Tx, you simply
select system internal Expo ‘NO’ and choose
flight mode dependent values. Cyclic and rudder
yaw rates are adjusted by using the transmitter
servo travel volumes in general. As these values
can be switched using the flight mode, it is not
necessary to run bank switching in the SAS itself.
During dozens of test flights with different size
and weight helicopters, 80% travel volume/0%
Expo on swashplate and 70% travel volume/30%
Expo on rudder, was found to be good overall
values for response and smoothness. The only
control loop parameter adjustments that are
necessary in the Base Setup menu are optimising
cyclic and rudder gyro sensitivities during flight.
If you want to run a crisper cyclic response,
you increase ‘Direct Stick’ input – it could not be
simpler. Running the factory default settings and
only using the Base Setup menu, will give very
good results for most helicopters. If you want to
make the gyro sensitivity head speed dependent,
you can set an aux Tx input function for this
particular axis and change its value via the flight
mode switch.
Expert Mode
As mentioned, ‘Expert Mode’ will probably
be needed in a few cases. When switched to
‘YES’, the previously near empty Base Setup
menu pages for swashplate and tail rotor will be
filled with many more adjustment options. Now
you have direct access to internal SAS control
loop parameters (for example P: proportional,
I: integral, D: differential), each of which can be
adjusted and will change the flight characteristics
– as described in the typically extensive Graupner
user manual.
For us one interesting point might be the
‘Speedflight’ optimisation. By changing this value
you damp the tendency of some helicopters
(or better said: its particular rotor head/rubber
damper/blade stiffness combination) to track
any wavelike characteristics during high-speed
runs. ‘Hovering Stability’ comes factory preset
to ‘Normal’. High or Low makes the helicopter
more stable for beginners or more aggressive for
3D maniacs. In case you want to improve holding
power of your tail during brutal collective inputs,
you can adjust ‘Torque’ (collective and cyclic feed
forward value) on this page.
A meaningful feature is the system implemented
logging function. With this, internal parameters of
the flybarless system are continuously written to
the Tx SD card via the downlink. This data can
be a helpful in the case of problems and can be
analysed by the Graupner service team.
In Flight
Now the most important question is: how
does the Graupner flybarless system perform
during flight? To find this out, I converted several
helicopters in my fleet to the new system and
checked out their characteristics during lots of
test flights. Result: all of them were very easy
and exceptional quick to setup – thanks to the Tx
based, wireless adjustment procedure.
In all cases after having done the compulsory gyro
gain optimisation during the initial flight, the Base
Setup menu was more than adequate to get a very
well performing model. It seems that the factory
default settings were very accurately matched.
Graupner/SJ’S FBL SyStem
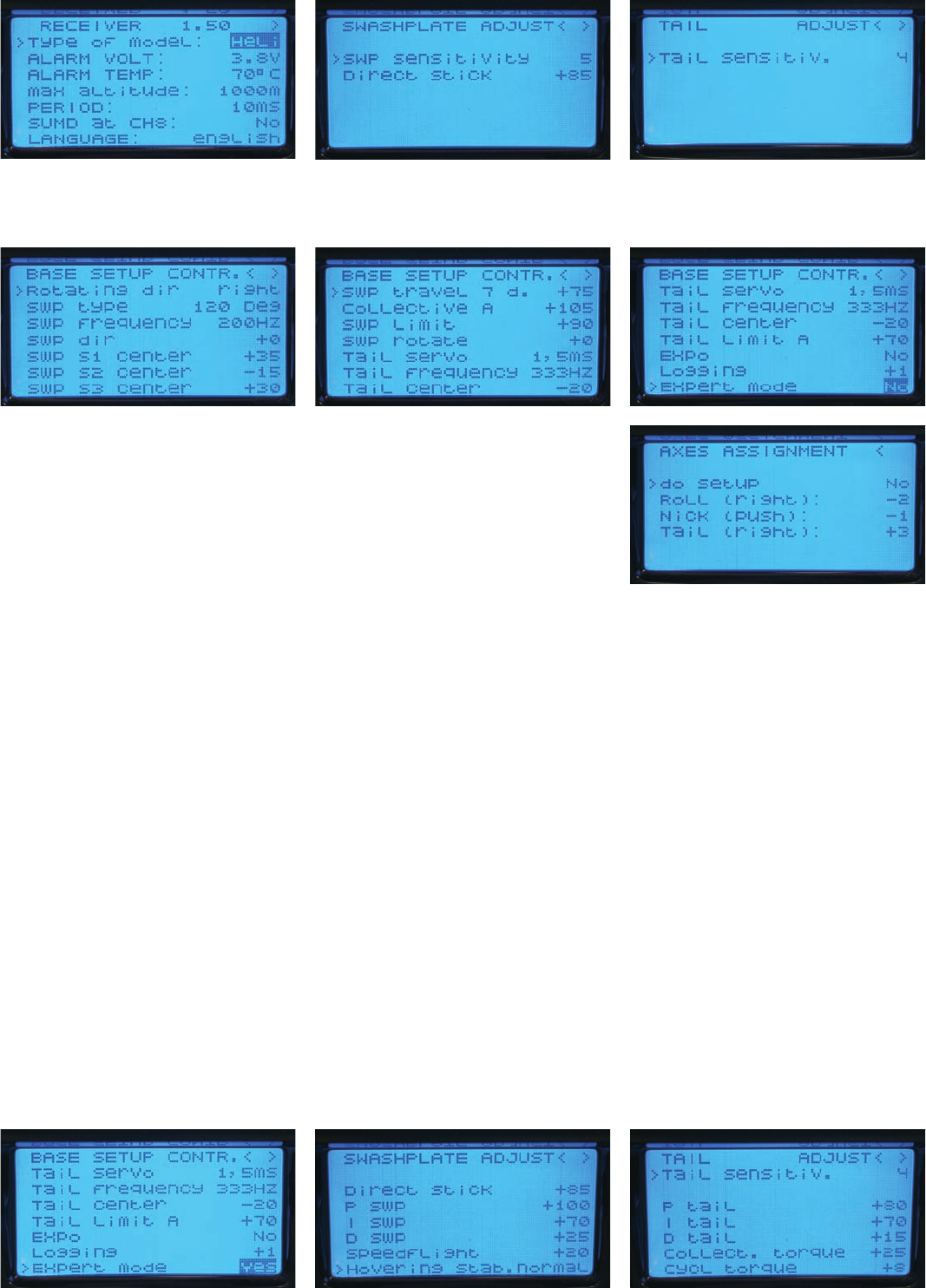
When opening the telemetry menu of a
Graupner transmitter you have access to the
receiver/SAS units, after switching to ‘Heli’ you
are in the ‘Base Setup...’
...and ‘Tail Adjust’ (Tail Gyro Sensitivity)
‘Base Setup Control’ scrolls through the initial model parameters
Gyro Axes Assignment is a single step – the
last page
...with ‘Swashplate Adjust’ (SWP Gyro
Sensitivity and Direct Stick)...
When switching to ‘Expert Mode...’ ...swashplate and tail rotor menus become live with addition control loop parameter adjustments
2
Graupner-SJs FBL_MHWJUL14.indd 23 23/5/14 09:43:34
very quickly change parameters
via telemetry, if wanted just for a
short try, is a really great bonus –
when/if anyone experiences this
you will not want to do without it!
Conclusion
From my point of view,
Graupner has done a very good
job with their HoTT GR-24
Pro and GR-18 gyro receiver
integrated flybarless system.
The wireless easy initial set up
via the transmitter together with
excellent flight performance will
ensure it becomes a serious
market contender. When taking
into account the other matching
Graupner/SJ products such
as the ESC (with integrated
telemetry) and external HoTT
sensors, we have to think about
a cleverly thought out complete radio control
system.
(*) Hint: when holding the ESC button on a
mx-20 HoTT Tx for a longer time, you will directly
enter the telemetry menu. With this little trick
you get direct, lightning quick access to the SAS
parameters. MHW
Even hard, sudden bursts of full negative pitch
during high-speed manoeuvres every time gave a
neutral dive, without any tendency for undercuts.
While mounted in my little Compass WARP 360,
the internal Expo on swash and rudder gave an
instant comfortable and relaxed flight feel without
further adjustment of the parameters.
‘Cooperation’ with the ESC governor mode
(often a problem with small models with a low
rotor mass and short tail booms) worked well
without tail wagging or slow periodic oscillation
(a previous mounted SAS needed some control
loop fine-tuning).
With the big Compass 7HV Ultimate running on
12S LiPo, after initial flights the internal Expo was
switched to ‘NO’ and all expo settings were done
in the Tx in order to get a very crisp and direct
main rotor, but a smooth tail around centre. For
the rudder I am using the very reasonably priced,
but lightning quick Graupner/SJ HBS 770BB MG
servo (high voltage, brushless motor) which does
an excellent job.
We already discussed the values for servo
travel volumes (=> yaw rate) and Expo in the
transmitter, which were also confirmed in the
Raptor E700. A total no-brainer was my GR-24
Pro equipped Mikado LOGO 500SE. Right from
the very first lift off this model gave a feeling of
stick confidence seldom felt before when flying it.
The GR-24 Pro pirouette compensation feature
seems to be a system favourite. The ability to
Graupner/SJ’S FBL SyStem
Works well in the Raptor E700
Provides confidence in the 7HV
PRODUCT GR-24 Pro (3xG+3A+3M+Vario)
SERVO CHANNELS 12
TRANSMISSION 2.4 GHz HoTT (FHSS)
OPERATING VOLTAGE 3.6 – 8.4 V
DIMENSIONS 46 x 31 x 14 mm
Internal 3-axis gyro, 3-axis accelerometer,
variometer
Aux. External sensors possible
UPDATE via Internet
WEIGHT 18 g
ORDER NO. 33583
EURO RETAIL PRICE €199.95
PRODUCT GR-18 (3xG+3A+Vario)
SERVO CHANNELS 9
TRANSMISSION 2.4 GHz HoTT (FHSS)
OPERATING VOLTAGE 3.6 – 8.4 V
DIMENSIONS 46 x 21 x 14 mm
Internal 3-axis gyro, 3-axis accelerometer,
variometer
Aux. External sensors (instead of channel 9
servo outlet selectable)
UPDATE via Internet
WEIGHT 14 g
ORDER NO. 33579
Dislike
No FBL version GR-12 (3G+3A+Vario)
receiver available
Likes
Totally integrated SAS/HoTT gyro receivers
Wireless adjustments via Tx
High performance flight characteristics
Low priced
Good in the
WARP 360 too!
Graupner/SJ products are distributed in the
UK by Logic RC, Tel: 01992 558226,
Email: mail@LogicRC.com
For further information, please visit their
website at www.LogicRC.com
UK RRP:
P-33579 GR-18+3xG+3A+Vario HoTT 9ch
receiver £139.99
P-33583 GR-24 PRO 3xG+3A+3M+Vario
HoTT 12ch receiver £169.99
2
Graupner-SJs FBL_MHWJUL14.indd 24 22/5/14 11:45:45
