Hetronic RXMFSESCANHS1 2.4GHz Transceiver that receives remote control signals to operate machinery User Manual
Hetronic International Inc 2.4GHz Transceiver that receives remote control signals to operate machinery
Hetronic >
User Manual
User’s Manual
RX-MFS-ESCAN-HS1
1. DESCRIPTION
RX-MFS-ESCAN-HS1 is a MFS 2.4GHz receiver with 2 CAN Interfaces, 2 independent E-Stop Relay Outputs, 2 Application Relay Outputs, 4
optional 0~10V, 0~20mA analog or 0~30V digital inputs, a USB and an optional RS232 interface. It shall be equipped with RTC and SD card
for data logging capability. It is designed for applications using CAN bus topology to integrate a number of devices and operating on 12 or 24V
battery.
The function of this device is to provide a bidirectional RF control to CAN bridge in a machine control application, along with standard Main
Contact safety functionality. Receiver and CAN settings shall be H-Link configurable and are saved to an on-board EEPROM.
RX-MFS-ESCAN-HS1 uses the MFS 2.4GHz communication protocol. The decoder receives control packets at a 1%-10% duty cycle to the
receiver and transmits one feedback packet for every control packet. The feedback packets are sent on one of the sixteen IEEE 802.15.4 ISM-
band channels, ranging from 2.405-2.480GHz. The channels and duty cycle are configured with the H-Link software. The packets are DSSS O-
QPSK modulated using an on-board surface-mount transceiver and then amplified through an on-board surface-mount bi-directional RF Front
End. The RF signal goes through a surface-mounted SMA connector, through a 50-ohm coaxial cable to an external antenna for
transmission/reception. The external antenna is a Hetronic Gainflex 2.4GHz antenna (Hetronic Part Number 56506605) with a nominal gain of
3dB.
The antenna is Model: 56506605 – Manufacturer: APEX - Gainflex Type GK 442TF R Half wave flexible dipole – maximum power
10W – TNC Plug Reverse Polarity
Antenna Gain: 3 dB
Note: Operation is subject to the following two conditions: (1) this device may not cause interference, and (2) this
device must accept any interference, including interference that may cause undesired operation of the device.
Note: The RX-MFS-ESCAN-HS1 is shipped with the FCC/IC ID label attached. The FCC/IC ID label must not be
removed. See Figure 3 for additional labeling information.
FCC ID Number: LW9-RXMFSCANHS1
IC ID Number: 2119B-RXMFSCANHS1

RSS-Gen license-exempt notice:
“This device complies with Industry Canada licence-exempt RSS standard(s). Operation is subject to the following
two conditions: (1) this device may not cause interference, and (2) this device must accept any interference,
including interference that may cause undesired operation of the device.
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de
licence. L'exploitation est autorisée aux deux conditions suivantes : (1) l'appareil ne doit pas produire de
brouillage, et (2) l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage
est susceptible d'en compromettre le fonctionnement.”
RSS-Gen antenna notice 1:
“Under Industry Canada regulations, this radio transmitter may only operate using an antenna of a type and
maximum (or lesser) gain approved for the transmitter by Industry Canada. To reduce potential radio interference
to other users, the antenna type and its gain should be so chosen that the equivalent isotropically radiated power
(e.i.r.p.) is not more than that necessary for successful communication.
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut fonctionner avec une
antenne d'un type et d'un gain maximal (ou inférieur) approuvé pour l'émetteur par Industrie Canada. Dans le
but de réduire les risques de brouillage radioélectrique à l'intention des autres utilisateurs, il faut choisir le type
d'antenne et son gain de sorte que la puissance isotrope rayonnée équivalente (p.i.r.e.) ne dépasse pas l'intensité
nécessaire à l'établissement d'une communication satisfaisante. ”
2. TECHNICAL SPECIFICATION
All specifications assume a 50Ω input and load.
Operating Temperature -20o to +70o Celsius
Storage Temperature -40o to +85o Celsius
Environmental Protection IP65
Supply Voltage Range 9-24 VDC, 3A Max
Jumpers J1, 2: Relay1,2 unswitched coil supply select
J3: RS232 Bootloader Select
J4: CAN1 termination resistor enable
J5: Main controller RTC backup battery connect
J7: CAN2 termination resistor enable
J10: Internal 5V or External Supply for digital outputs
Outputs 2x Main Contact Safety Relay (250VAC/8A max)
2x Relay Output (SPDT, 250VAC/30VDC/8A max)
4x Digital Output (24VDC/15mA max)
1x Optional Output Supply (5VDC/750mA max)
1x DK31 Safety Signal (5VDC/15mA max)
1x DK32 Safety Signal (5VDC/15mA max)
1x RS232 Interface
1x USB Device Interface
2x CAN Bus (1.5kV isolation optional)
Inputs 2x Main Contact Relay Input (250VAC/8A max)
2x Relay Input (250VAC/30VDC/8A max)
4x Analog Inputs (0-10V, 0-20mA Analog or 0-24V Digital)
1x Optional Input Supply (5-24VDC/750mA max)
1x RS232 Interface
1x USB Device Interface
2x CAN Bus
Serial Interfaces 1x RS232 Interface
1x USB Device Interface
2x CAN Bus
Note: The user is cautioned that changes or modifications not expressly approved by the party
responsible for compliance could void the user’s authority to operate the equipment.
3. FUNCTIONAL DESCRIPTION
3.1. Operation
As a standard Hetronic MFS receiver, this module is equipped with 2 microcontrollers, Main and Stop, for safety and redundant control of E-
Stop Relay outputs. The Stop controller is common to standard 2.4GHz MFS receivers. The Main controller will have full control of RF, analog
inputs, digital outputs, USB, RS232 and CAN interfaces.
There are 2 CAN interfaces, namely CAN1 and CAN2, with optional isolated supplies, RS232 interface with a 4-pin Dubox header and a USB
interface that can be used for firmware update and H-Link configurations.
CAN2 will be dedicated to J1939 protocol for possibility of controlling and monitoring other devices on the truck using J1939 protocol. CAN1
will be used as a CAN Master on CAN open protocol to control and monitor other Hetronic Slave devices.
RTC with a back-up battery shall be used to keep time for data logging of different possible events such as abnormal conditions and operating
times.
Nominal operating voltage range will be 9 to 24Vdc. Electronic control unit will remain operational within 6 to 36Vdc.
3.2. Operation
4. PCB
4.1. PCB Layers
Figure 1: RX-MFS-ESCAN-HS1 Top PCB Layer
4.2. PCB Layers
Figure 2: RX-MFS-ESCAN-HS1 PCB Layer 2
Figure 3: RX-MFS-ESCAN-HS1 PCB Layer 3
Figure 4: RX-MFS-ESCAN-HS1 Bottom PCB Layer
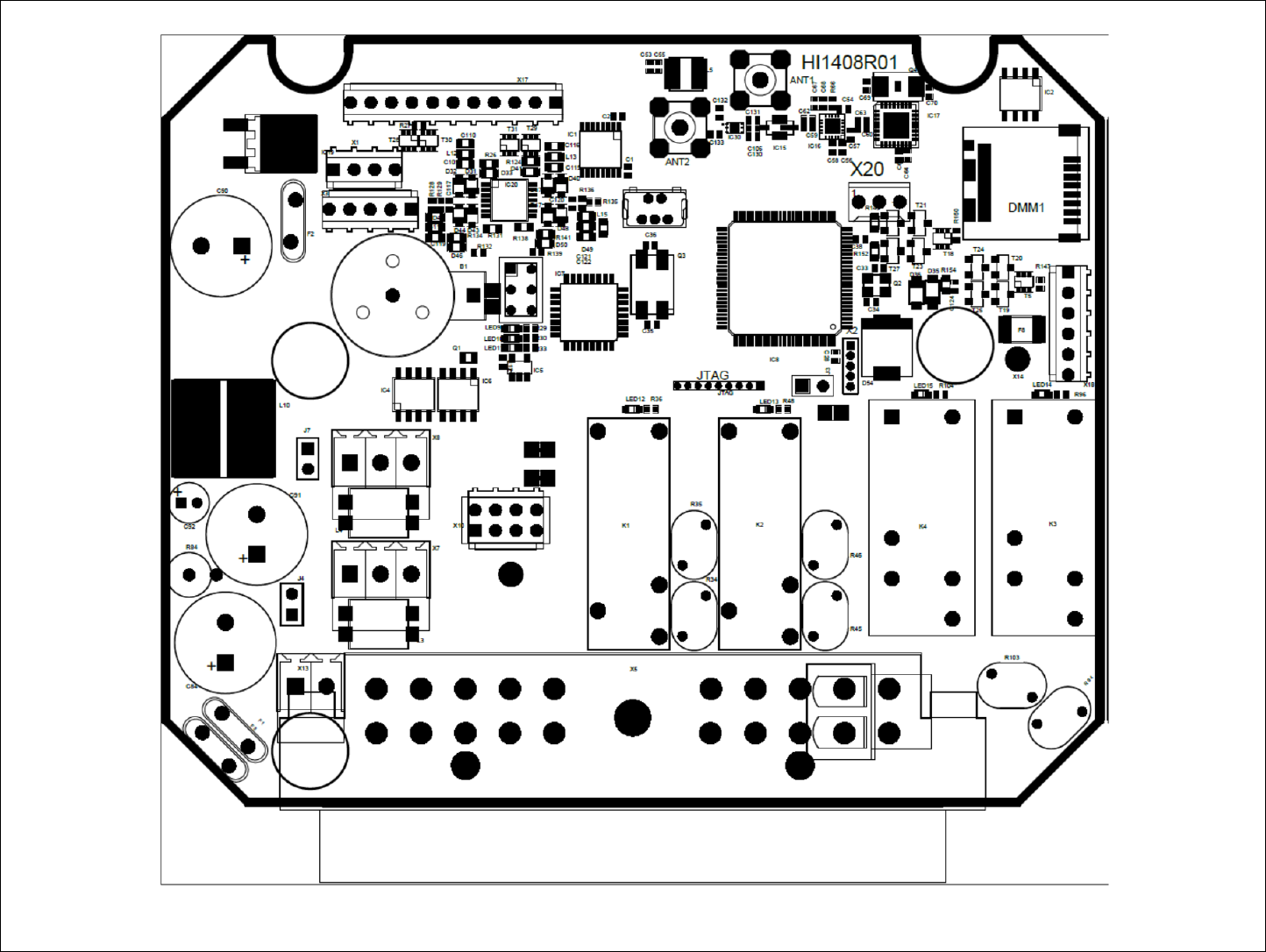
Figure 5: RX-MFS-ESCAN-HS1 Top Components
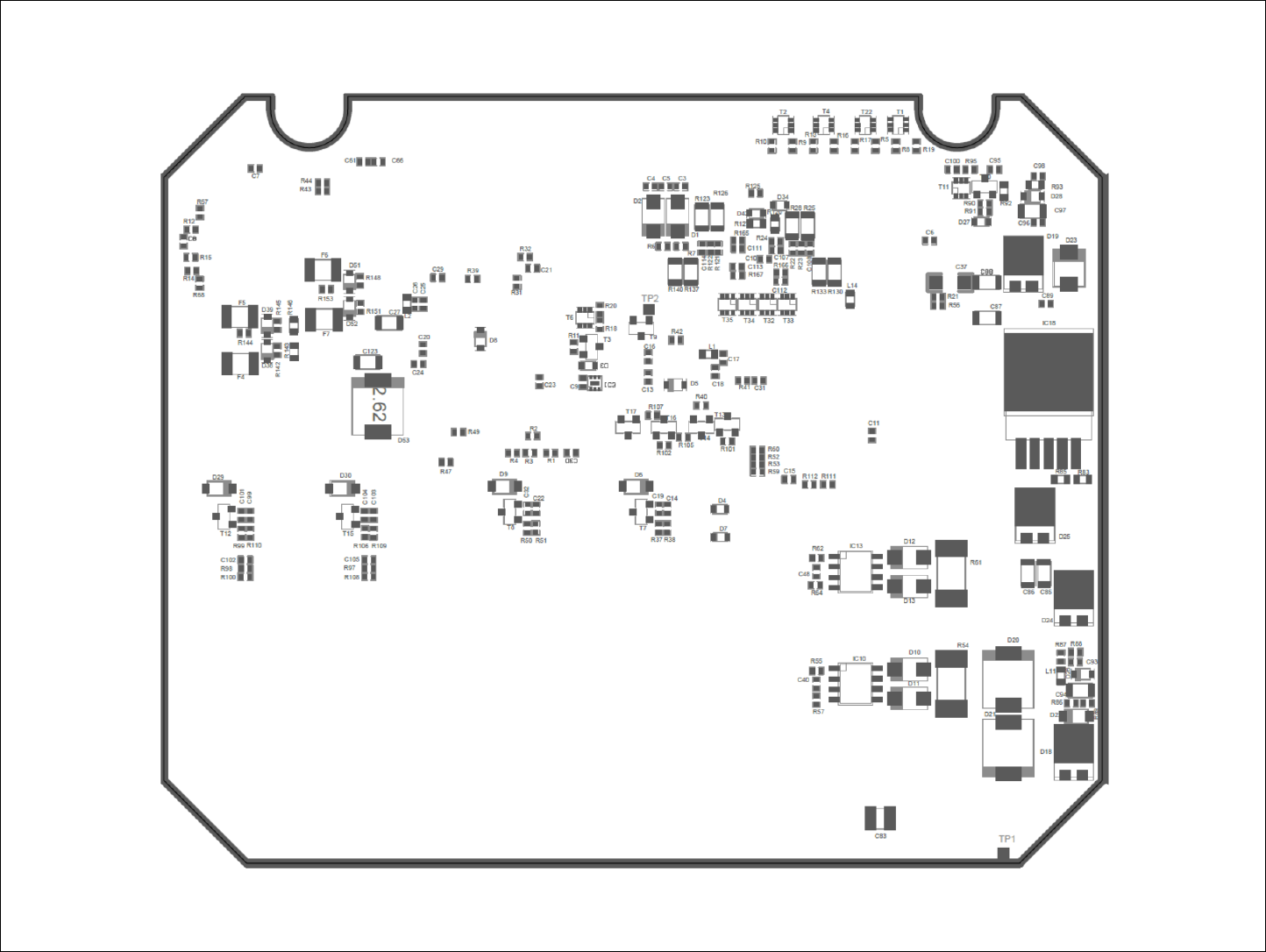
4.3. Component Placement Bottom
Figure 6: RX-MFS-ESCAN-HS1 Bottom Components