Hitec RCD HFMS-72 72-73 MHz REMOTE CONTROL TRANSMITTER User Manual ROYALevo1106 GB
Hitec RCD Inc. 72-73 MHz REMOTE CONTROL TRANSMITTER ROYALevo1106 GB
UserManual.wiki
>
Hitec RCD
>
HFMS 72 User Manual
MANUAL
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
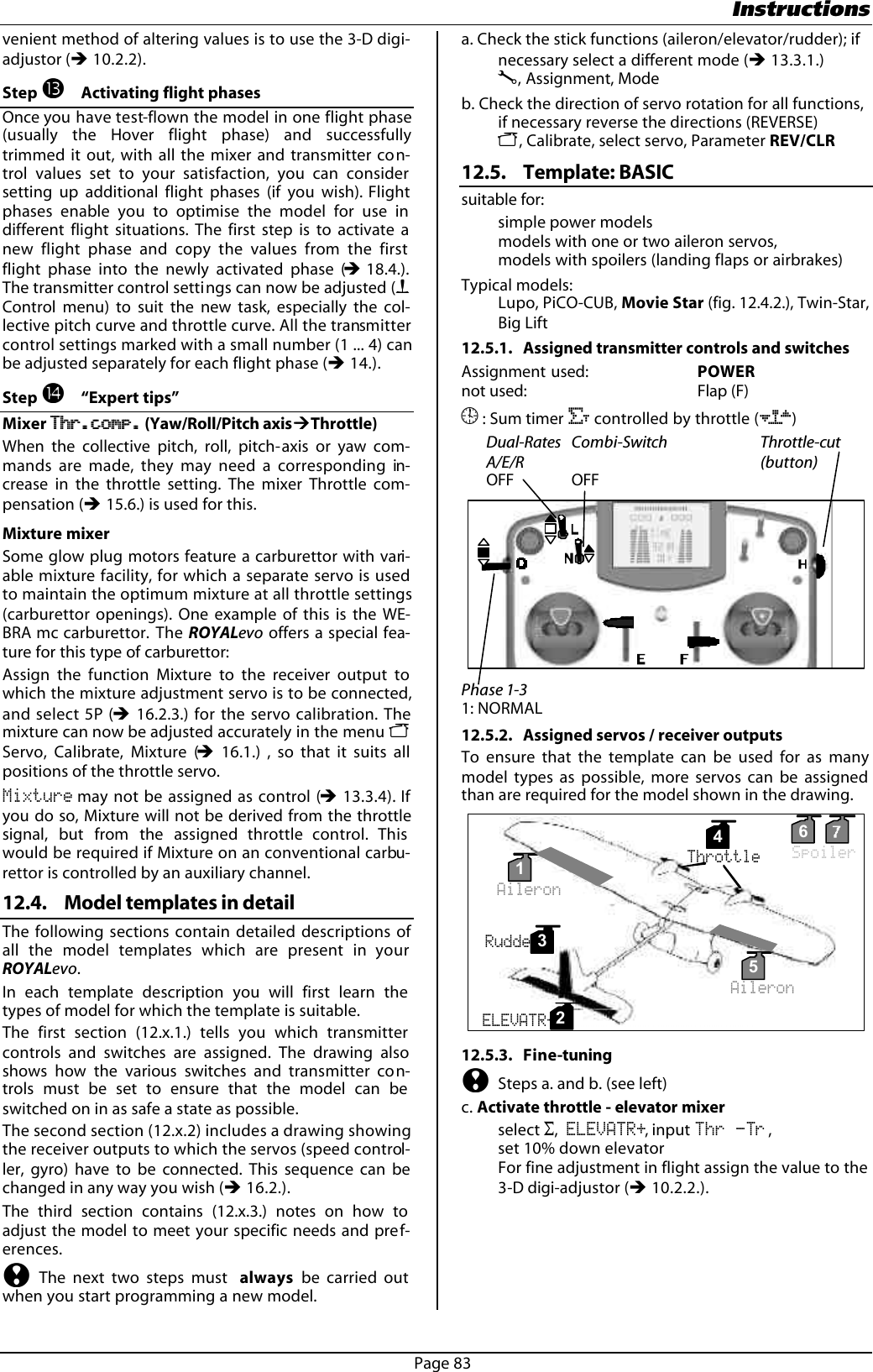
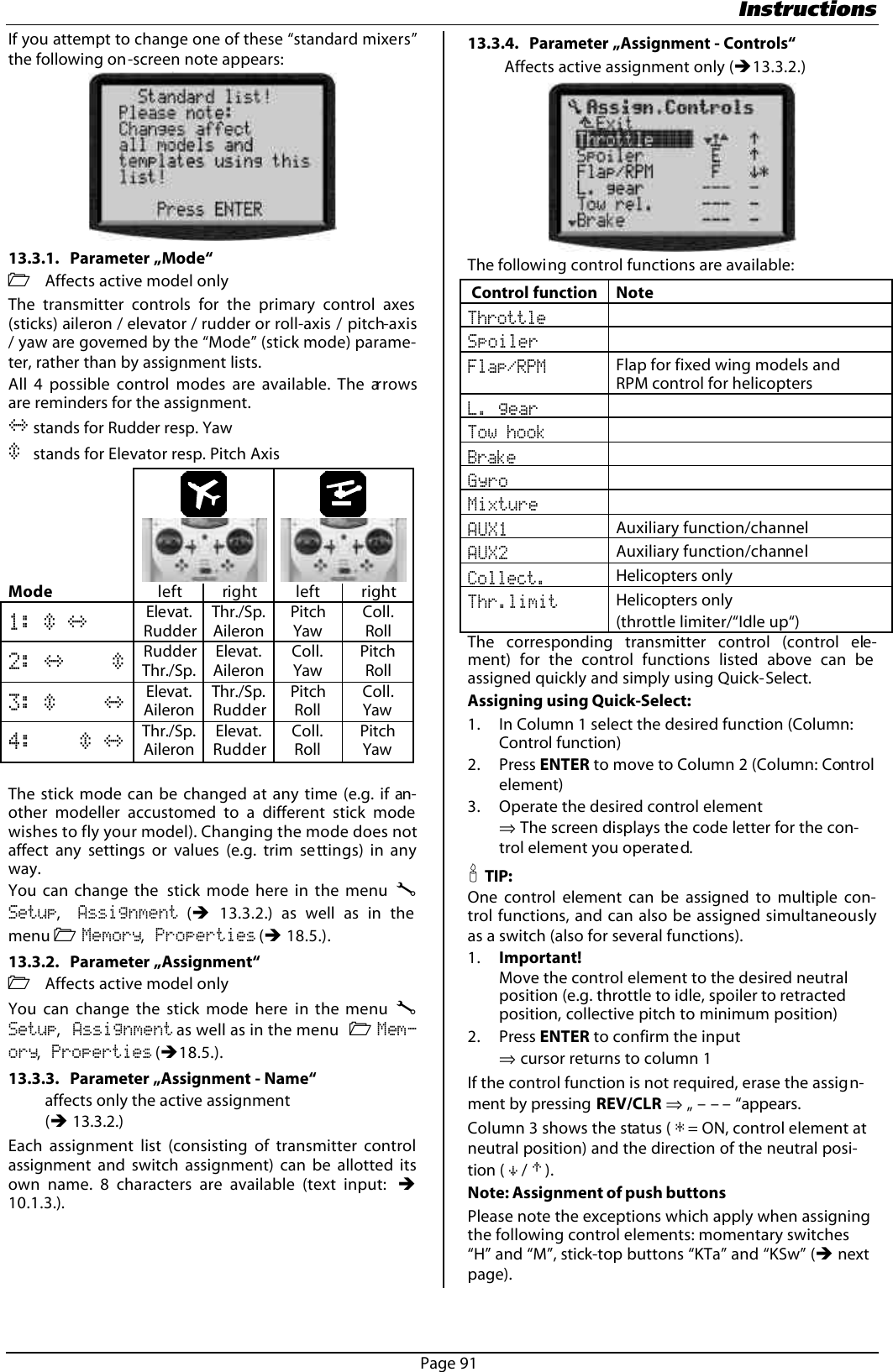
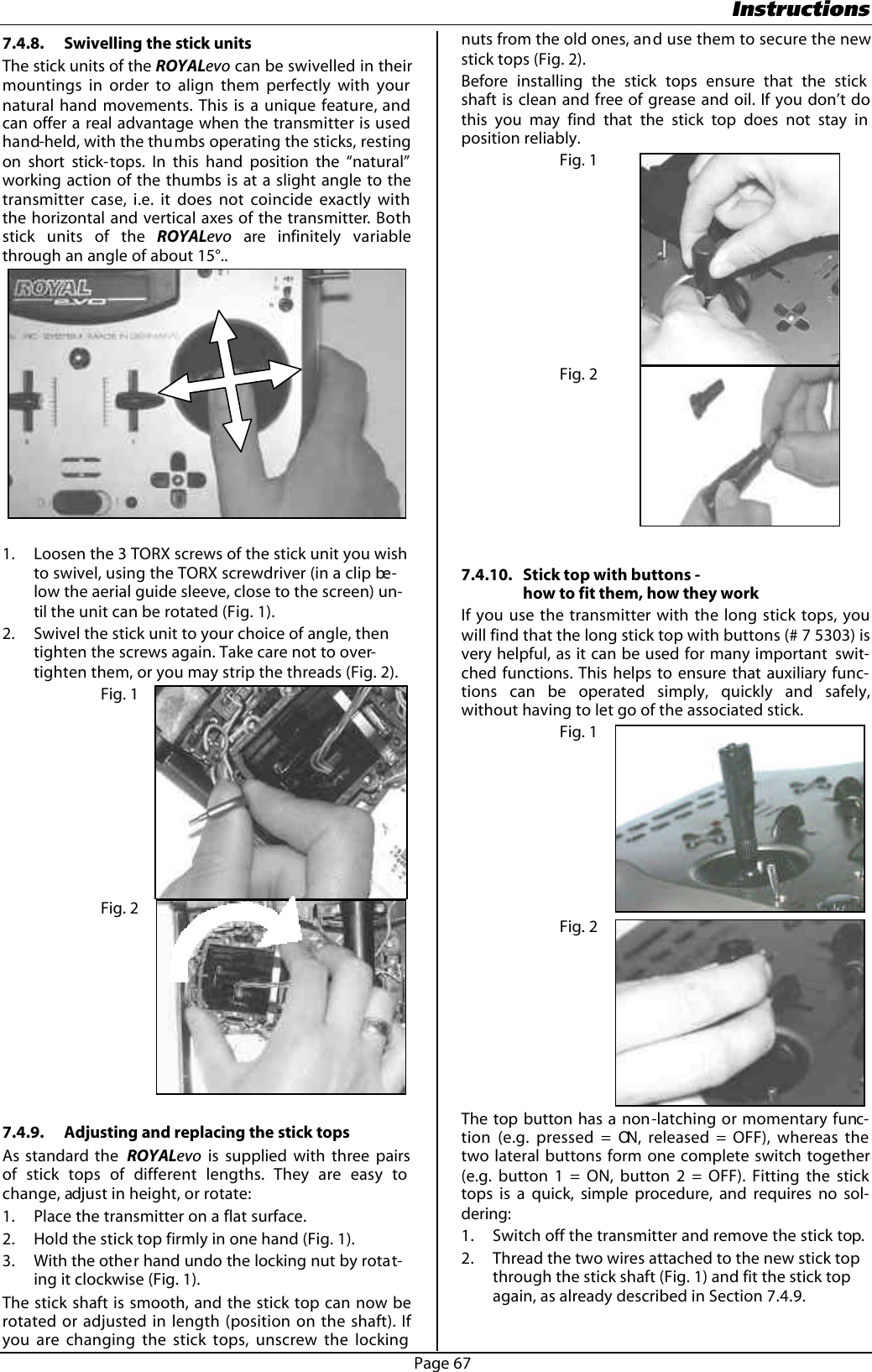
![ROYAL evo Page 60 ! We recommend that you have your radio control system transmitters and receivers checked at regular intervals (every 2 to 3 years) by an authorised MULTIPLEX Service Centre. ! If any electrical device gets damp or wet, cease operations immediately and disconnect the power supply from it. Open the case if possible and allow the unit to dry out thoroughly - pref-erably for several days. After this carry out a very careful check of all the functions. If you are not certain that all is well, send the unit to an author-ised MULTIPLEX Service Centre for checking ! The operation of this radio control system is ap-proved for use on particular channels / transmit-ter frequencies which vary from country to coun-try. In some cases there are formalities such as registration to be completed before you may use the system. Please read the notes which are sup-plied with this set on a separate sheet. 3.1. General safety notes When building the model: • All control surfaces and linkages must be installed and set up in such a way that the control surfaces move with complete freedom, and do not tend to bind or move stiffly at the extremes of travel. Do not limit the servo travel from the transmitter; it is always better to adjust the servo output arms, horns and pushrods instead. Always aim at mini-mum possible lost motion (slop) in any linkage. All these points help to minimise the load on the ser-vos, ensuring that their maximum performance is available to you, and that they will last as long as possible. This also means maximum reliability and safety for you and your models. • Receiver, battery, servos and other RC components and electronic units should be effectively protected from vibration to avoid the danger of failure of any electronic component. All the individual items are supplied with operating instructions, and these should be read thoroughly. Standard methods of avoiding vibration include balancing propellers and rotor blades before use, replacing damaged blades, installing glowplug and petrol engines with effec-tive vibration damping, replacing or repairing dam-aged motors and engines if they do not run smoothly, and so on. • Don’t place cables under tension, and don’t bend them tightly; protect all leads from rotating parts. • Keep servo leads as short as possible, and don’t use them unless absolutely necessary. If you must use extension leads which are 30 - 50 cm or more in length, fit a separation filter (ferrite ring) in each lead, and ensure that the conductors are of ade-quate cross-section to avoid voltage drop. We rec-ommend at least 0.3 mm². • Don’t coil up the receiver aerial, and do not shorten it. Never deploy the aerial parallel to conductive components such as metal pushrods, or inside a fu-selage which has a shielding effect, i.e. made of or reinforced with carbon fibre, or finished in metallic paint. Don’t deploy the aerial on top of electrically conducting model components. For large-scale models we recommend the use of a whip aerial. • Ensure that the receiver power supply is of ade-quate capacity. If you are using servos rated at up to about 40 Ncm you can calculate the required bat-tery capacity using the following rule of thumb: mAhservosofNomAhCapacity200.][ ×≥ If you have no problems with weight or space, it is always better to select the next larger size of bat-tery. • Avoid any situation in which parts made of conduc-tive material (e.g. metal linkage components or pushrods) are in contact with each other, and move against each other. This causes what is known as electrical “noise”, which can interfere with the re-ceiving system. • Avoid interference pulses due to static charges or powerful electric or electro-magnetic fields by tak-ing appropriate suppression measures. These in-clude suppressing electric motors with suitable ca-pacitors, using shielded plug caps, ignition leads and ignition units with spark-ignition petrol en-gines; keeping the RC system components, includ-ing aerial, wiring and batteries, well away from the ignition circuit. • Keep the receiving system a safe distance from high-current leads (e.g. electric power system wir-ing). High-current cables, especially those between brushless electric motors and their controllers, should be as short as possible (guide: max. 10 - 15 cm). • When you have completed a new model, carry out the programming of your transmitter in the peace and quiet of your home. Check all the functions ca-refully before flying the model. Take the time to familiarise yourself with the programming proce-dure and method of operating the transmitter be-fore you use it for the first time to control a model. Check the model regularly • Ensure that all control surfaces and mechanical linkages work smoothly, freely, and without slop. • Check that pushrods, linkages, hinges etc. are stiff enough for their purpose and in good condition. • Carry out a visual check for fractures, cracks, signs of stress in the model itself and on the components of the RC system and power system. • Check that all cables and connectors are in good condition and are making sound contact. • Check the state of the power system and its wiring, including the switch harness, and check the exter-nal condition of the cells. Regular care of the bat-tery is important: monitor its voltage and capacity using a charger and charging process designed for the battery type you are using.](https://usermanual.wiki/Hitec-RCD/HFMS-72/User-Guide-343790-Page-5.png)
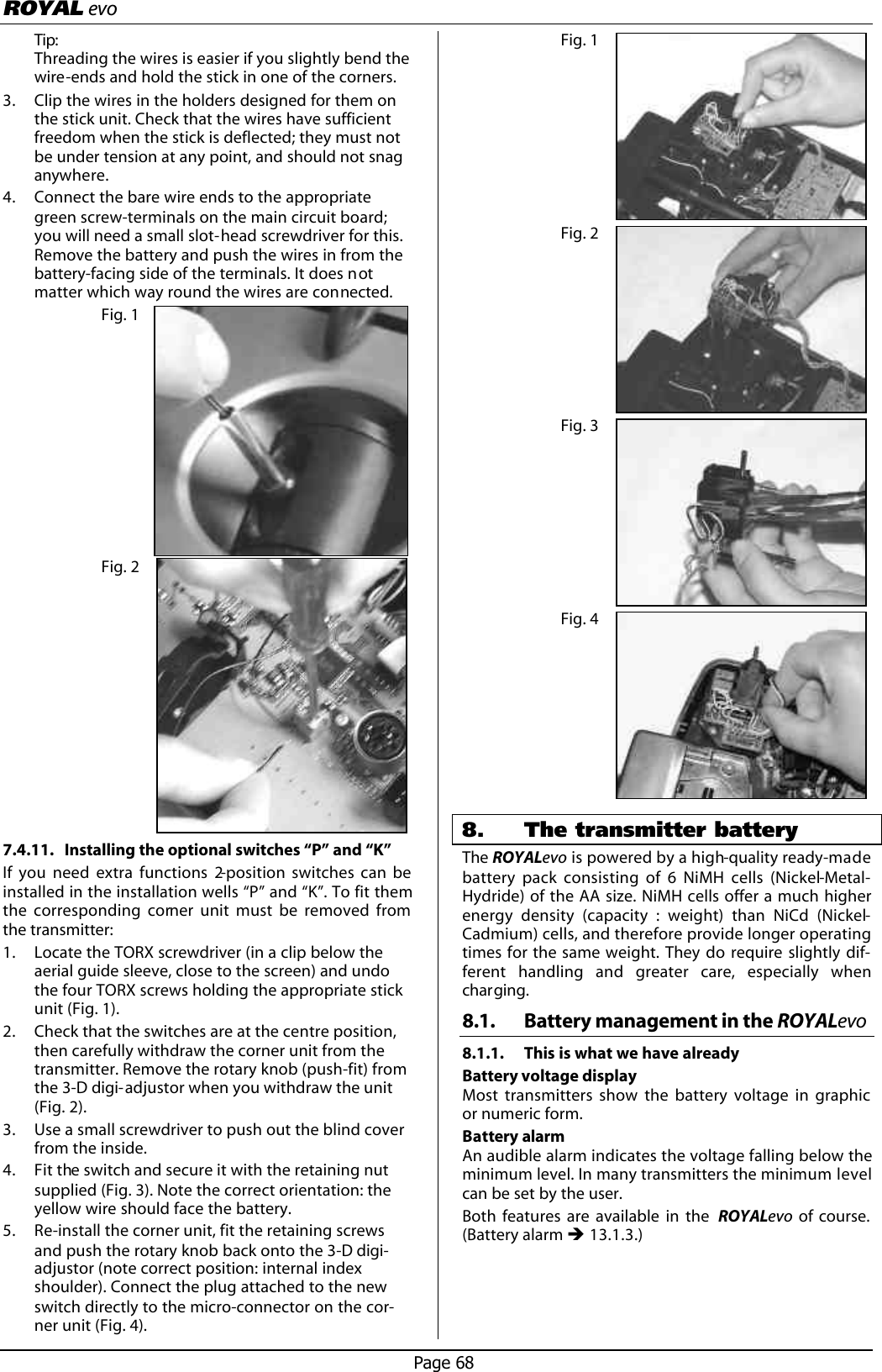
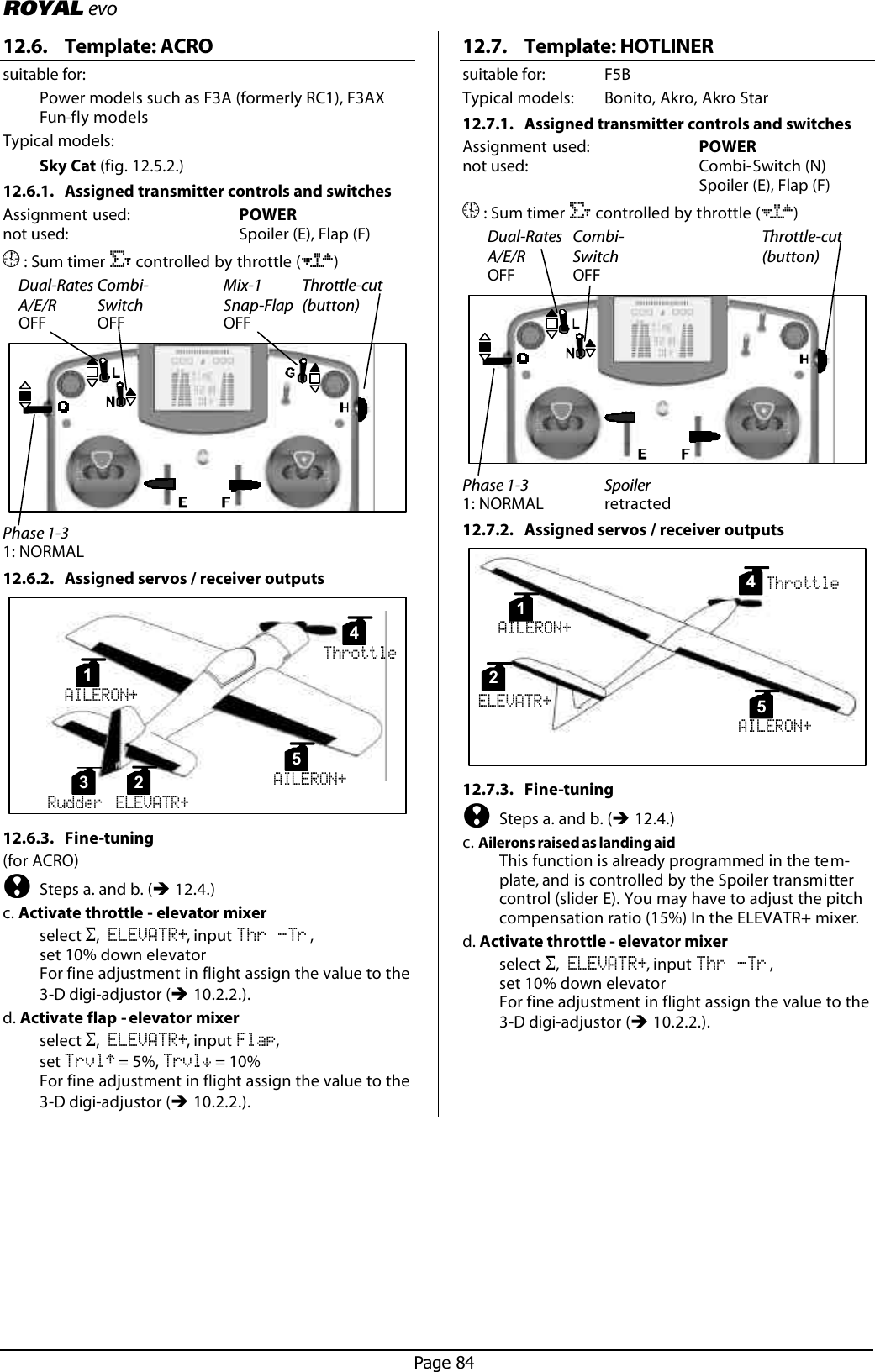
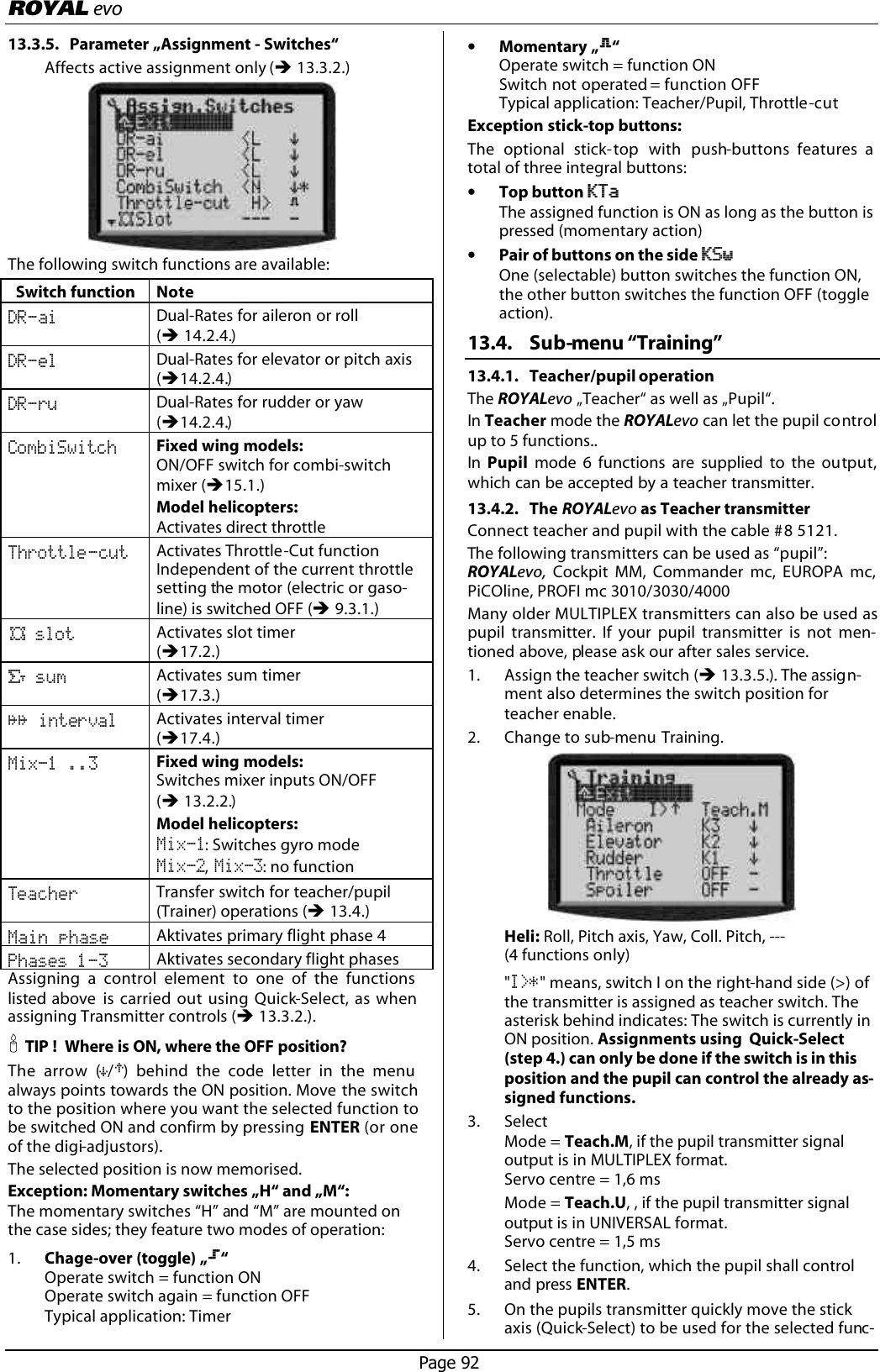
![ROYAL evo Page 70 8.4. Charging the transmitter battery !! Never connect the TX without battery to a charger! Chargers can supply high output voltages if no battery is connected. This voltages can cause dam-ages in the transmitter. ! Charging with mains chargers or 12V-chargers for max. 8 cells The battery can remain installed in the TX for charging. Connection to the charger is made via the charging socket on the back of the transmitter (è 7.2.). Use only genuine MULTIPLEX charge leads (e.g. transmitter charge lead with banana plugs # 8 6020). For details of other charge leads and battery chargers please refer to the current MULTIPLEX main catalogue. !! Charging with 12V-chargers for more than 8 cells Never charge via the charging socket! Unplug the battery from the electronics board and use the TX battery direct charge lead # 8 6021. The battery management can only work correctly with a permanent connection (even if the transmit-ter is switched off) between battery and electronics board to measure into (charging) or out of (operation) the battery. Chargers for more than 8 cells need voltage converters producing high voltages, which can damage the transmitter elec-tronics. Full capacity and performance NiMH batteries only produce maximum performance after a series of charge/discharge cycles (~5 cycles). The first charge/discharge cycles should be carried out at 0.1CA (150 mA). Don’t fast-charge the pack until you have done this. What means C in charging advices? C is the charging current, which supplies 100% of its nominal capacity to a battery within 1 hour. This is a current of 1500 mA for the 1500 mAh battey of the ROYALevo. Charging with this current is named 1-C-charging. This current can be derived from the nominal capacity in mAh (or Ah) by just removing the letter “h”. Standard charging This means that the pack is charged at a current within the range 0.05 to 0.2 C (75 mA to 300 mA). The charge time is then calculated from the following formula: ][ ][ ][ mArentCharge curmAhCapacityheCharge tim = Fast charging This means that the pack is charged at a current within the range 0.5 to 1 C (750 mA to 1.5 A). The charging is finished by the automatic cut-off. !! Timer-controlled charging is not permissible! !! Important with fast charging: The charger must be designed to cope with NiMH batteries, i.e. Delta Peak termination sensitivity < 5 mV/cell, or temperature-controlled termination at > 0.8°C/min. Trickle charging This means that the pack is charged at a current within the range 0.03 CA to 0.05 CA (45 to 75 mA). Automatic chargers generally switch over to this mode of charging when the fast charge phase is concluded. After max. 20 hours trickle charging must be stopped. This is the correct method of charging: 1. Switch off the transmitter 2. Switch on the battery charger designed for NiMH batteries (see left column 8.4.) and connect the charge leads. 3. Check polarity: Red plug = positive terminal (+) Blue/black plug = negative terminal (-) Connecting the charger with reversed polarity may ruin the battery! (excessive heat, escape of corrosive electrolyte, bursting of cells) 4. Connect the charge lead to the transmitter 5. Select the charge current (max. 1.5 A); alternatively set the current after starting the charge process !! Automatic fast chargers: Use manual current selection! If the fast charger should interrupt the charge proc-ess prematurely, reduce the charge current and start again. 6. If the battery becomes too hot during the charging (touching impossible) immediately interrupt the charging. 7. Disconnect the transmitter from the charger at the end of the process. 8. When you have charged the battery enter the charged-in energy in the menu L Transmitter, Batt. charge (8.1.3. a.). Note: The development of rechargeable batteries continues apace, just like other technical components. We there-fore reserve the right to supply different battery packs as standard in our transmitters, in order to keep the equipment abreast of current standards. 8.5. Maintaining and storing the transmitter battery Always store NiMH batteries in the fully charged state. This avoids the danger of deep-discharge. Store NiMH batteries at a temperature between 0°C and 30°C, in dry conditions, and out of direct sunshine. Charge unused NiMH batteries every 3 months. This compensates for the natural self-discharge rate, and again prevents deep-discharge. If you have to store a battery for a long period, we rec-ommend that you balance the cells by giving the pack several charge/discharge cycles. Protracted storage may reduce the pack’s usable capacity. 8.6. Recycling Unlike NiCd cells, NiMH cells contain no cadmium, which is a toxic heavy metal. Nevertheless, exhausted cells should not just be thrown in the domestic rubbish. Take the cells to your local specialist recycling centre. The cells must first be discharged completely and made safe against short-circuit (wrap in plastic film).](https://usermanual.wiki/Hitec-RCD/HFMS-72/User-Guide-343790-Page-15.png)