Hottinger Bruel and Kjaer T40S7TOS9 T40-S7TOS9 Torquemeter User Manual A3276 80
Hottinger Baldwin Messtechnik GmbH T40-S7TOS9 Torquemeter A3276 80
User Manual
Mounting Instructions | Montageanleitung
English Deutsch
T40FM
Hottinger Baldwin Messtechnik GmbH
Im Tiefen See 45
D-64239 Darmstadt
Tel. +49 6151 803-0
Fax +49 6151 803-9100
Email: info@hbm.com
Internet: www.hbm.com
Mat.: 7-2001.3276
DVS: A3276-8.0 HBM: public
02.2015
E Hottinger Baldwin Messtechnik GmbH.
Subject to modifications.
All product descriptions are for general information only.
They are not to be understood as a guarantee of quality or
durability.
Änderungen vorbehalten.
Alle Angaben beschreiben unsere Produkte in allgemeiner
Form. Sie stellen keine Beschaffenheits- oder Haltbarkeits
garantie dar.
Mounting Instructions | Montageanleitung
English Deutsch
T40FM

2A3276-8.0 HBM: public T40FM
English
1 Safety information 4........................................
2 Markings used 11............................................
2.1 Symbols on the transducer 11..................................
2.2 The marking used in this document 12...........................
3 Applications 13..............................................
4 Structure and Mode of Operation 14..........................
5 Mechanical installation 19....................................
5.1 Important precautions during installation 19......................
5.2 Conditions on site 20..........................................
5.3 Installation orientation 21......................................
5.4 Installation options 21.........................................
5.4.1 Installation without dismantling the antenna ring, FCC option with
antenna shielding cover 22.....................................
5.4.2 Installation with subsequent stator mounting, Option 7, Code S 23...
5.5 Preparing for the rotor mounting 24.............................
5.6 Mounting the rotor 27..........................................
5.7 Installing the stator 31.........................................
5.8 Mounting the rotational speed flange (rotational speed measuring
system only) 38..............................................
6 Electrical Connection 41.....................................
6.1 General information 41........................................
6.2 EMC protection 41............................................
6.3 Pin Assignment 43............................................
6.4 Supply Voltage 50............................................

T40FM A3276-8.0 HBM: public 3
7 Shunt signal 52..............................................
8 Functionality testing 53......................................
8.1 Rotor status, LED A (upper LED) 54.............................
8.2 Stator status, LED B (lower LED) 55............................
9 Loading capacity 56.........................................
10 Maintenance 58..............................................
11 Waste disposal and environmental protection 59..............
12 Dimensions 60..............................................
12.1 T40FM without speed measurement, Option 7, Code S 60.........
12.1.1 T40FM 15 kNm - 25 kNm 60...................................
12.1.2 T40FM 30 kNm - 50 kNm 62...................................
12.1.3 T40FM 60 kNm - 80 kNm 63...................................
12.2 T40FM with speed measurement, Option 7, Code S 64............
12.2.1 T40FM 15 kNm - 25 kNm 64...................................
12.2.2 T40FM 30 kNm - 50 kNm 66...................................
12.2.3 T40FM 60 kNm - 80 kNm 68...................................
12.3 T40FM with rotational speed measurement and reference signal,
Option 7, Code S 70..........................................
12.3.1 T40FM 15 kNm - 25 kNm 70...................................
12.3.2 T40FM 30 kNm - 50 kNm 72...................................
12.3.3 T40FM 60 kNm - 80 kNm 74...................................
13 Order numbers, Accessories 76..............................
14 Specifications 78............................................
15 Supplementary Technical Information 88......................

Safety information
4A3276-8.0 HBM: public T40FM
1 Safety information
FCC Compliance & Advisory Statement
Important
Any changes or modification not expressly approved in
writing by by the party responsible for compliance could
void the user’s authority to operate the device. Where
specified additional components or accessories else
where defined to be used with the installation of the
product, they must be used in order to ensure compliance
with FCC regulations.
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions: (1)
this device may not cause harmful interference, and (2)
this device must accept any interference received, includ
ing interference that may cause undesired operation.
The FCC identifier or the unique identifier, as appropriate,
must be displayed on the device.
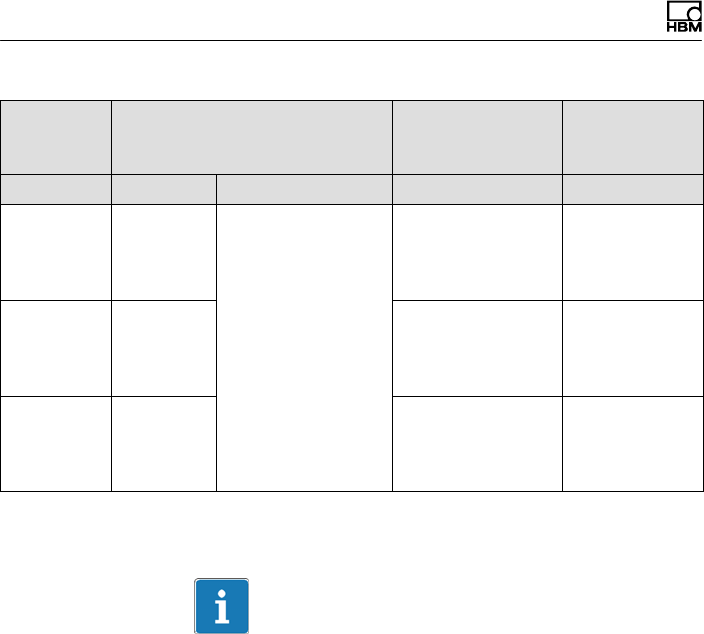
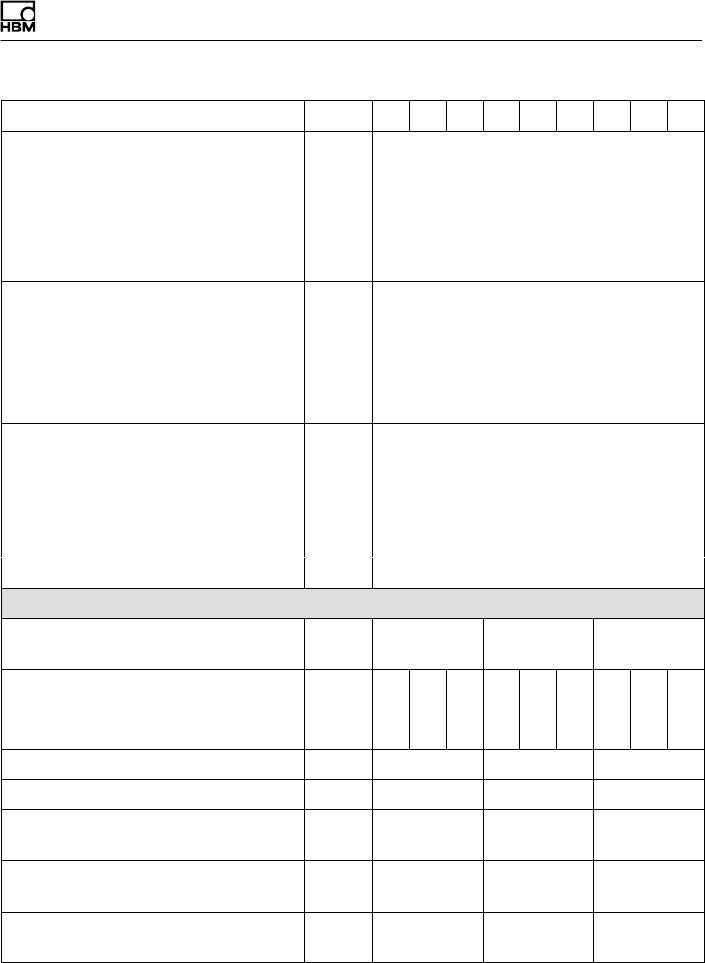
Model Measuring range FCC ID IC
T40S7 15 kNm, 20 kNm,
25 kNm
2ADAT−T40S7TOS9 12438A−T40S7TOS9
T40S8 30 kNm, 40 kNm,
50 kNm
T40S9 60 kNm, 70 kNm,
80 kNm
Safety information
T40FM A3276-8.0 HBM: public 5
Label example with FCC ID and IC number.
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the FCC Rules. Opera
tion is subject to the following two conditions: (1) This
device may not cause harmful interference, and (2) this
device must accept any interference received, including
interference that may cause undesired operation.
Label
Fig. 1.1 Location of the label on the stator of the device
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the FCC Rules. Operation is
subject to the following two conditions: (1) This device may not
cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause
undesired operation.
Fig. 1.2 Example of the label

Safety information
6A3276-8.0 HBM: public T40FM
This device complies with Industry Canada standard
RSS210.
This device complies with Industry Canada
license−exempt RSS standard(s).Operation is subject to
the following two conditions: (1) this device may not
cause interference, and (2) this device must accept any
interference, including interference that may cause unde
sired operation of the device.
Cet appareil est conforme aux norme RSS210 d’Industrie
Canada.
Cet appareil est conforme aux normes d’exemption de
licence RSS d’Industry Canada. Son fonctionnement est
soumis aux deux conditions suivantes : (1)cet appareil ne
doit pas causer d’interférence et (2) cet appareil doit
accepter toute interférence, notamment les interférences
qui peuvent affecter son fonctionnement.
Appropriate use
The T40FM torque flange is used exclusively for torque,
angle of rotation and power measurement tasks within
the load limits stipulated in the specifications. Any other
use is not appropriate.
Stator operation is only permitted when the rotor is in
stalled.
The torque flange may only be installed by qualified per
sonnel in compliance with the specifications and with the
safety requirements and regulations of these mounting
instructions. It is also essential to observe the applicable
legal and safety regulations for the application con
cerned. The same applies to the use of accessories.
The torque flange is not intended for use as a safety
component. Please also refer to the section: "Additional
safety precautions". Proper and safe operation requires

Safety information
T40FM A3276-8.0 HBM: public 7
proper transportation, correct storage, siting and mount
ing, and careful operation.
Load carrying capacity limits
The data in the technical data sheets must be complied
with when using the torque flange. The respective spe
cified maximum loads in particular must never be ex
ceeded. For example, the values stated in the specifica
tions must not be exceeded, e.g. for
SLimit torque
SLongitudinal limit force, lateral limit force or limit bend
ing moment
STorque oscillation width
SBreaking torque
STemperature limits
SLimits of the electrical load-carrying capacity.
Use as a machine element
The torque flange can be used as a machine element.
When used in this manner, it must be noted that, to favor
greater sensitivity, the transducer is not designed with the
safety factors usual in mechanical engineering. Please
refer here to the section "Loading capacity limits" and to
the specifications.
Accident prevention
According to the prevailing accident prevention regula
tions, once the transducers have been mounted, a cover
ing agent or cladding has to be fitted as follows:
SThe covering agent or cladding must not be free to
rotate.

Safety information
8A3276-8.0 HBM: public T40FM
SThe covering agent or cladding should prevent
squeezing or shearing and provide protection against
parts that might come loose.
SCovering agents and cladding must be positioned at a
suitable distance or be so arranged that there is no
access to any moving parts within.
SCovering agents and cladding must still be attached
even if the moving parts of the torque flange are in
stalled outside people's movement and working range.
The only permitted exceptions to the above requirements
are if the torque flange is already fully protected by the
design of the machine or by existing safety precautions.
Additional safety precautions
The torque flange cannot (as a passive transducer) im
plement any (safety-relevant) cutoffs. This requires addi
tional components and constructive measures, for which
the installer and operator of the plant is responsible. The
electronics conditioning the measurement signal should
be designed so that measurement signal failure does not
subsequently cause damage.
The scope of supply and performance of the transducer
covers only a small area of torque measurement techno
logy. In addition, equipment planners, installers and oper
ators should plan, implement and respond to safety en
gineering considerations in such a way as to minimize
residual dangers. Pertinent national and local regulations
must be complied with.
General dangers of failing to follow the safety
instructions
The torque flange corresponds to the state of the art and
is reliable. Transducers can give rise to residual dangers
if they are incorrectly operated or inappropriately moun

Safety information
T40FM A3276-8.0 HBM: public 9
ted, installed and operated by untrained personnel. Every
person involved with siting, starting-up, operating or re
pairing a torque flange must have read and understood
the mounting instructions and in particular the technical
safety instructions. The transducers can be damaged or
destroyed by non-designated use of the transducer or by
non-compliance with the mounting and operating instruc
tions, these safety instructions or any other applicable
safety regulations (safety and accident prevention regula
tions), when using the transducers. Transducers can
break, particularly in the case of overloading. The break
age of a transducer can also cause damage to property
or injury to persons in the vicinity of the transducer.
If the torque flange is not used according to the desig
nated use, or if the safety instructions or specifications in
the mounting and operating instructions are ignored, it is
also possible that the transducer may fail or malfunction,
with the result that persons or property may be adversely
affected (due to the torques acting on or being monitored
by the torque flange).
Conversions and Modifications
The transducer must not be modified from the design or
safety engineering point of view except with our express
agreement. Any modification shall exclude all liability on
our part for any damage resulting therefrom.
Selling on
If the torque flange is sold on, these mounting instruc
tions must be included with the torque flange.

Safety information
10 A3276-8.0 HBM: public T40FM
Qualified Personnel
Qualified personnel means persons entrusted with siting,
mounting, starting up and operating the product, who
possess the appropriate qualifications for their function.
This includes people who meet at least one of the three
following requirements:
1. Knowledge of the safety concepts of automation tech
nology is a requirement and as project personnel, you
must be familiar with these concepts.
2. As automation plant operating personnel, you have
been instructed how to handle the machinery. They
are familiar with the operation of the equipment and
technologies described in this documentation.
3. As system startup engineers or service engineers,
they have successfully completed the training to qual
ify them to repair the automation systems. You are
also authorized to ground and label circuits and equip
ment and place them in operation in accordance with
safety engineering standards.
Markings used
T40FM A3276-8.0 HBM: public 11
2 Markings used
2.1 Symbols on the transducer
Read and note the data in this manual
CE mark
The CE mark enables the manufacturer to guarantee that
the product complies with the requirements of the relev
ant EC directives (the Declaration of Conformity can be
found on the HBM website at www.hbm.com under HBM
doc).
Label example
Label example with FCC ID and IC number. Location of
the label on the stator device.
Statutory waste disposal mark
The electrical and electronic devices that bear this sym
bol are subject to the European waste electrical and elec
tronic equipment directive 2002/96/EC. The symbol indic
ates that, in accordance with national and local
environmental protection and material recovery and re
cycling regulations, old devices that can no longer be
used must be disposed of separately and not with normal
household garbage, see also Chapter 11, Page 59.
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the
FCC Rules. Operation is subject to the
following two conditions: (1) This device
may not cause harmful interference, and
(2) this device must accept any interfer
ence received, including interference that
may cause undesired operation.
Markings used
12 A3276-8.0 HBM: public T40FM
2.2 The marking used in this document
Important instructions for your safety are specifically iden
tified. It is essential to follow these instructions in order to
prevent accidents and damage to property.
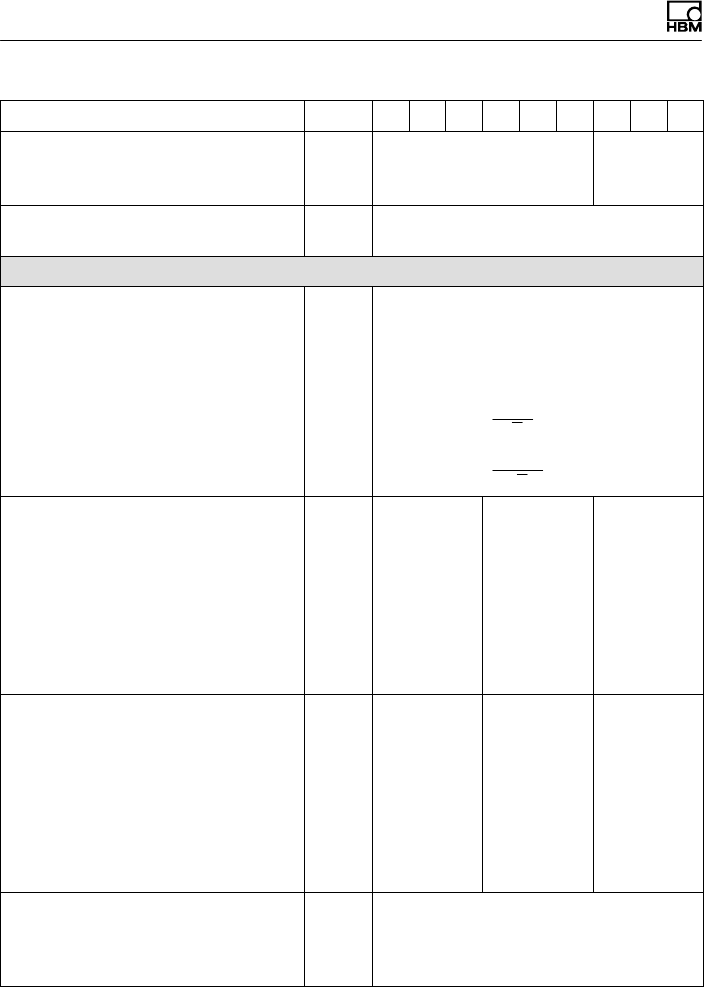
Symbol Significance
WARNING This marking warns of a potentially dangerous situ
ation in which failure to comply with safety require
ments can result in death or serious physical injury.
CAUTION This marking warns of a potentially dangerous situ
ation in which failure to comply with safety require
ments can result in slight or moderate physical injury.
Note This marking draws your attention to a situation in
which failure to comply with safety requirements
could lead to damage to property.
Important
This marking draws your attention to important in
formation about the product or about handling the
product.
Tip
This marking indicates application tips or other in
formation that is useful to you.
Information
This marking draws your attention to information
about the product or about handling the product.
Emphasis
See …
Italics are used to emphasize and highlight text and
identify references to sections, diagrams, or external
documents and files.

Applications
T40FM A3276-8.0 HBM: public 13
3 Applications
The T40FM torque flange measures static and dynamic
torques on stationary and rotating shafts. Test beds can
be extremely compact because of the compact design of
the transducer. This offers a very wide range of applica
tions.
The T40B torque flange is reliably protected against elec
tromagnetic interference. It has been tested according to
harmonized European standards and/or complies with
US and Canadian standards. The product carries the
CE mark and/or FCC label.

Structure and Mode of Operation
14 A3276-8.0 HBM: public T40FM
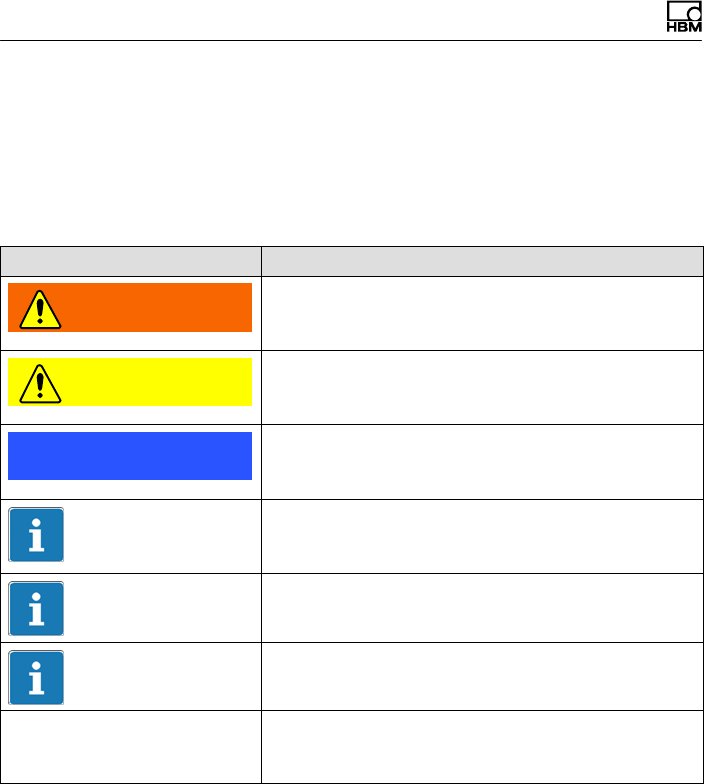
4 Structure and Mode of Operation
The torque flange consists of two separate parts: the ro
tor and the stator. The rotor comprises the measuring
body and the signal transmission elements.
Strain gauges (SGs) are installed on the measuring body.
The rotor electronics for transmitting the bridge excitation
voltage and the measurement signal are located centrally
in the flange. The transmitter coils for contactless trans
mission of excitation voltage and measurement signal are
located on the measuring body's outer circumference.
The signals are sent and received by a separable an
tenna ring. Separable antenna ring not for Option 7,
Code U. The antenna ring is mounted on a housing that
contains the electronics for voltage adaptation and the
signal conditioning.
Connector plugs for the torque and rotational speed sig
nals, the voltage supply and digital output, are located on
the stator. The antenna segments (ring) should be moun
ted concentrically around the rotor (see Chapter 5).
Structure and Mode of Operation
T40FM A3276-8.0 HBM: public 15
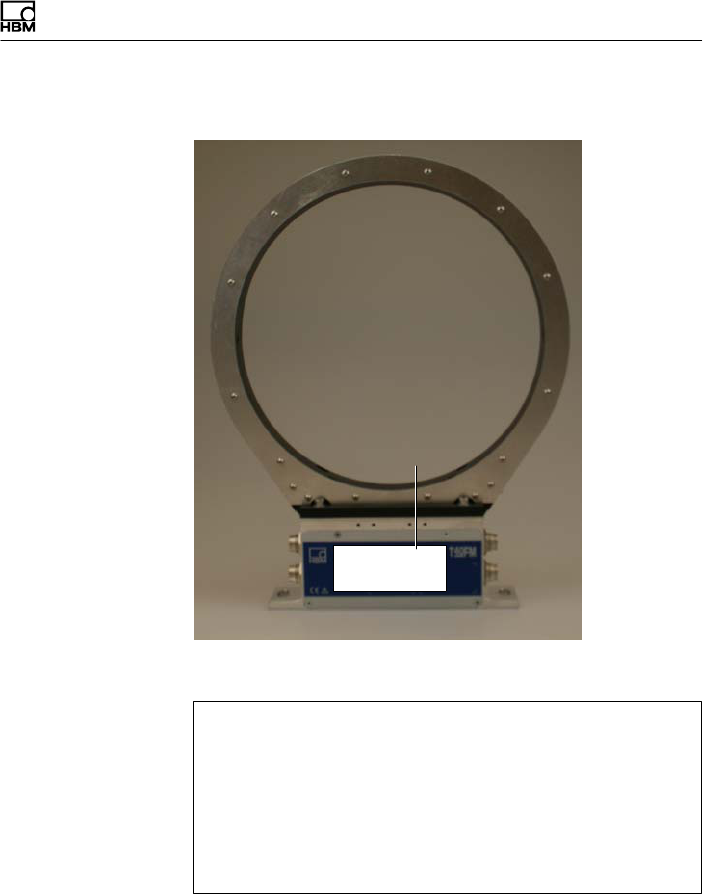
Antenna segments
Rotor
Connector
plugs
Stator
housing
Identification plate
Connector plugs
Fig. 4.1 Mechanical construction without a rotational speed
measuring system, Option 7, Code S
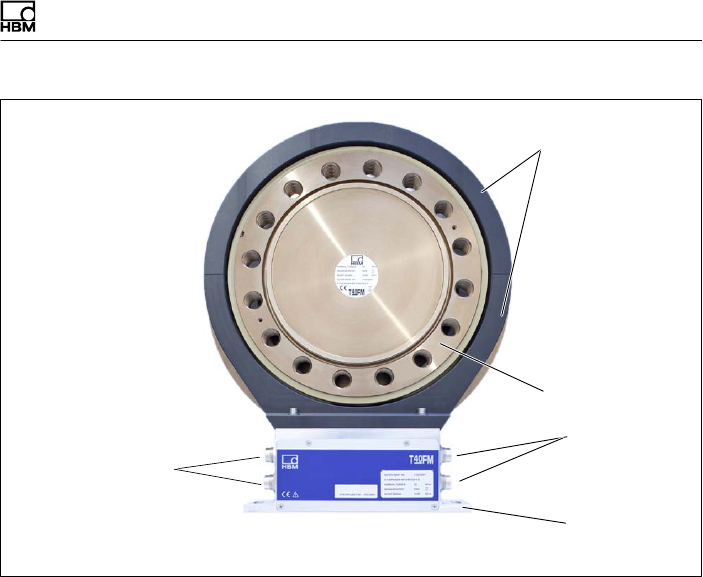
The rotational speed sensor is mounted on the stator in
Option 6 with a rotational speed measuring system. The
customer mounts the rotational speed disc between the
measuring body and customer flange. The rotational
speed is measured magnetically with an AMR sensor and
magnetic tape.
Structure and Mode of Operation
16 A3276-8.0 HBM: public T40FM
Antenna segments
Rotor
Connector
plugs
Stator
housing
Identification plate
Connector plugs
Sensor head for
measuring
rotational speed
Rotational speed
disc
Fig. 4.2 Mechanical construction with a speed measuring
system, Option 7, Code S
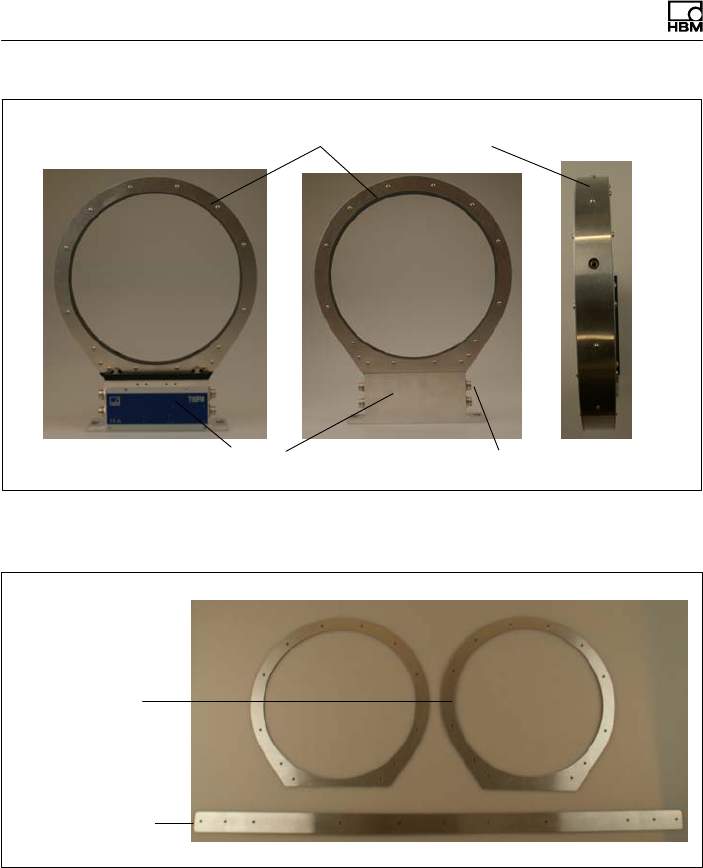
Structure and Mode of Operation
T40FM A3276-8.0 HBM: public 17
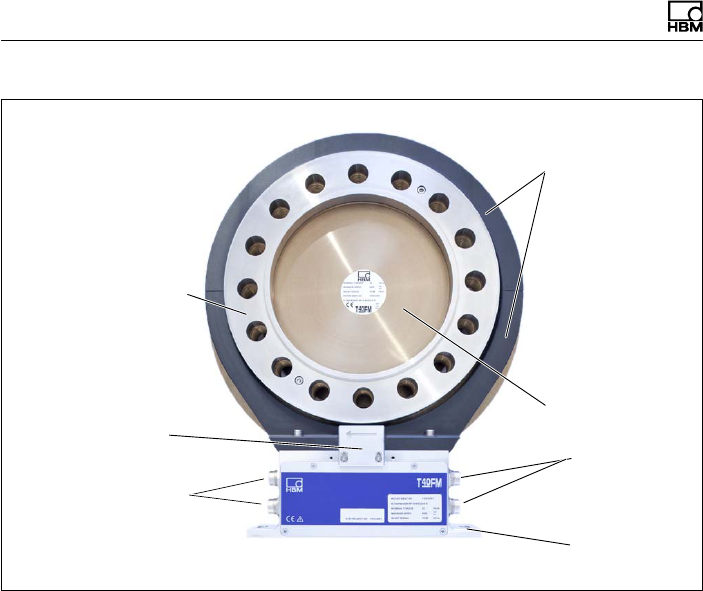
Stator housing
Antenna segments with mounted shielding plates
Connector plugs
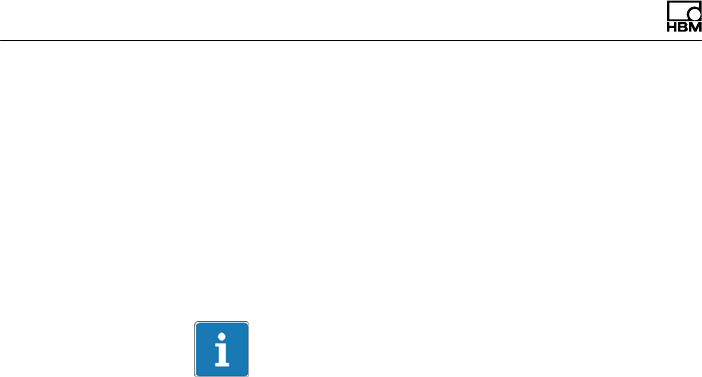
Fig. 4.3 Mechanical construction of Stator with mounted
shielding plates without rotational speed, FCC option
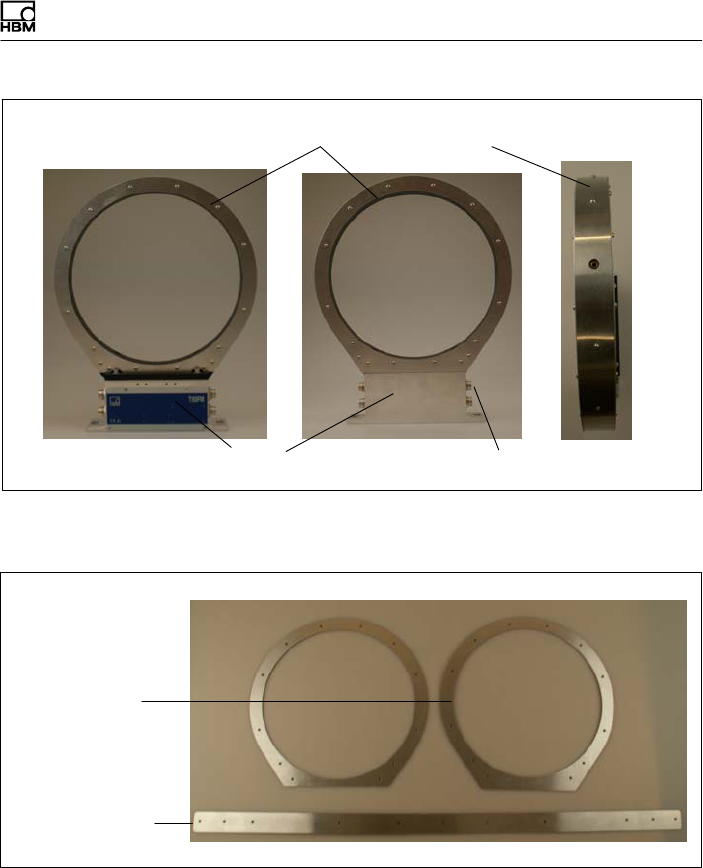
Dismounted shielding
plates
Axial shielding
plates
Radial shielding
plate
Fig. 4.4 Individual shielding plates, FCC option
Structure and Mode of Operation
18 A3276-8.0 HBM: public T40FM
Important
The use of the shielding plates are important to ensure
compliance with FCC regulations. If the shielding plates
has to be removed for any purpose (e.g. installation or
maintenance), they must be replaced in the original posi
tion before the product is used.
Mechanical installation
T40FM A3276-8.0 HBM: public 19
5 Mechanical installation
5.1 Important precautions during
installation
Notice
A torque flange is a precision measuring element and
therefore needs careful handling. Dropping or knocking
the transducer may cause permanent damage. Make
sure that the transducer cannot be overloaded, including
while it is being mounted.
SHandle the transducer with care.
SCheck the effect of bending moments, critical rota
tional speeds and natural torsional vibrations, to pre
vent the transducer being overloaded by resonance
sharpness.
SMake sure that the transducer cannot be overloaded.
WARNING
There is a danger of the transducer breaking if it is over
loaded. This can cause danger for the operating person
nel of the system in which the transducer is installed.
Implement appropriate safety measures to avoid over
loads and to protect against resulting dangers.
SUse a threadlocker (medium strength, e.g. LOCTITE)
to glue the screws into the counter thread to exclude
Mechanical installation
20 A3276-8.0 HBM: public T40FM
prestressing loss due to screw slackening, in the
event of alternating loads.
SComply with the mounting dimensions to enable cor
rect operation.
An appropriate shaft flange enables the T40FM torque
flange to be mounted directly. It is also possible to mount
a joint shaft or relevant compensating element directly on
the rotor (using an intermediate flange when required).
Under no circumstances should the permissible limits
specified for bending moments, lateral and longitudinal
forces be exceeded. Due to the T40FM torque flange's
high torsional stiffness, dynamic shaft train changes are
kept to a minimum.
Important
Even if the unit is installed correctly, the zero point adjust
ment made at the factory can shift by up to approx. 0.5%
of the characteristic value. If this value is exceeded, we
advise you to check the mounting conditions. If the resid
ual zero offset when the unit is removed is greater than
1% of the sensitivity, please send the transducer back to
the Darmstadt factory for testing.
5.2 Conditions on site
The T40FM torque flange must be protected against
coarse dirt particles, dust, oil, solvents and moisture.
There is wide ranging compensation for the effects of
temperature on the output and zero signals of the trans
ducer (see Chapter 14 "Specifications"). If there are no
static temperature ratios, for example, because of the
temperature differences between the measuring body

Mechanical installation
T40FM A3276-8.0 HBM: public 21
and the flange, the values given in the specifications can
be exceeded. In this case, ensure static temperature ra
tios by cooling or heating, depending on the application.
As an alternative, check if thermal decoupling is possible,
e.g. by means of heat radiating elements such as multiple
disc couplings.
5.3 Installation orientation
The torque flange can be installed with any orientation.
With clockwise torque, the output frequency is 60 …
90 kHz for Option 5, code DU2 (Option 5, code SU2: 10
… 15 kHz; Option HU2: 240 … 360 kHz). In conjunction
with HBM amplifiers or when using the voltage output, a
positive output signal (0 V …+10 V) is present. In the
case of the rotational speed measuring system, an arrow
is attached to the stator housing to clearly define the dir
ection of rotation: if the measurement flange turns in the
direction of the arrow, connected HBM measuring amplifi
ers deliver a positive output signal.
5.4 Installation options
There are basically two options for mounting the torque
flange: with or without dismantling the antenna ring. We
recommend mounting as described in Chapter 5.4.1. If
mounting in accordance with Chapter 5.4.1 is not pos
sible, (e.g. in the case of subsequent stator replacement),
you will have to dismantle the antenna ring (only possible
for Option 7, Code S). It is essential in this case to com
ply with the notes on assembling the antenna segments
(see Chapter 5.4.2).
Mechanical installation
22 A3276-8.0 HBM: public T40FM
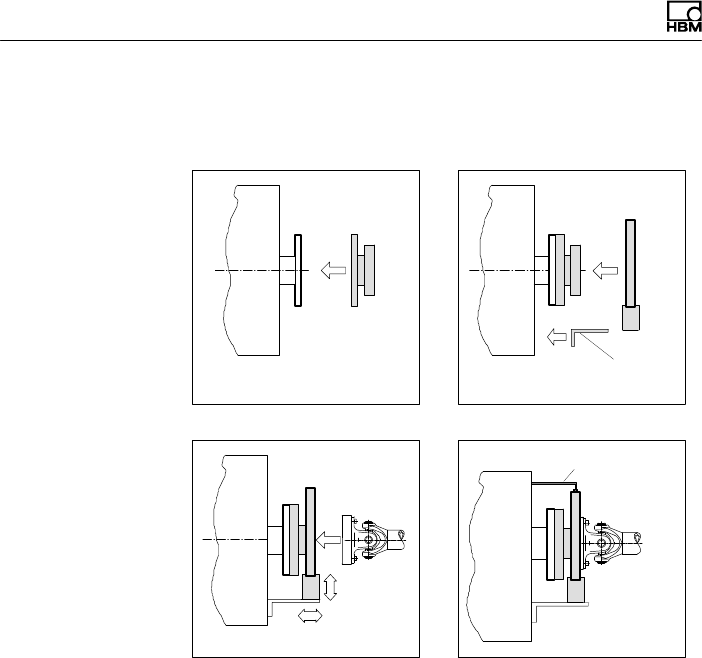
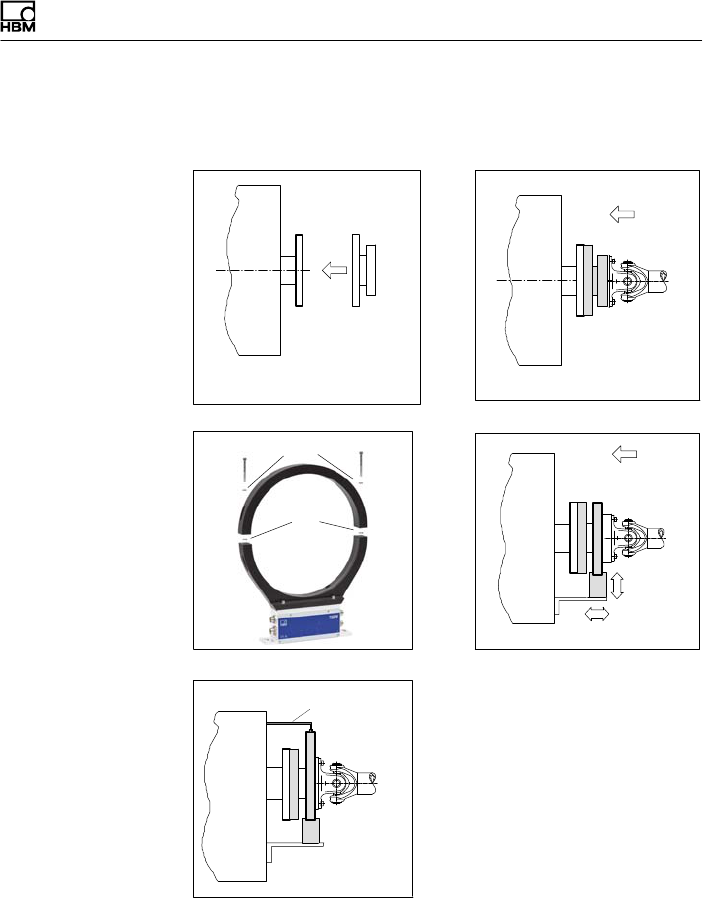
5.4.1 Installation without dismantling the antenna
ring, FCC option with antenna shielding cover
1. Install rotor 2. Install stator
3. Finish shaft train installation
Mounting supplied by
customer
Support supplied by customer
4. Fit support
Mechanical installation
T40FM A3276-8.0 HBM: public 23
5.4.2 Installation with subsequent stator mounting,
Option 7, Code S
2. Install shaft train
3. Dismantle antenna segment 4. Install antenna segment
1. Install rotor
4. Fit support
Fan-type
lock
washers
Washers
Support supplied by customer
Mechanical installation
24 A3276-8.0 HBM: public T40FM
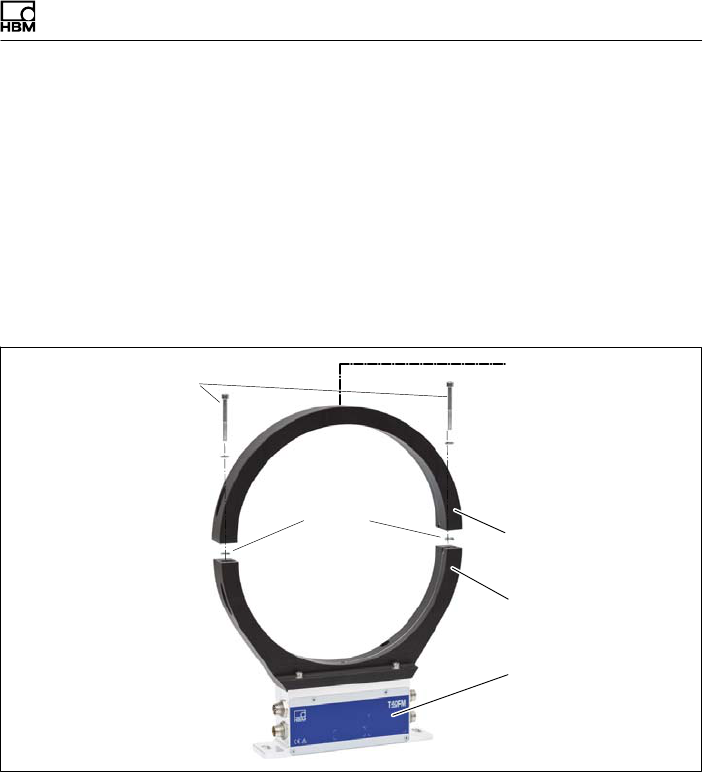
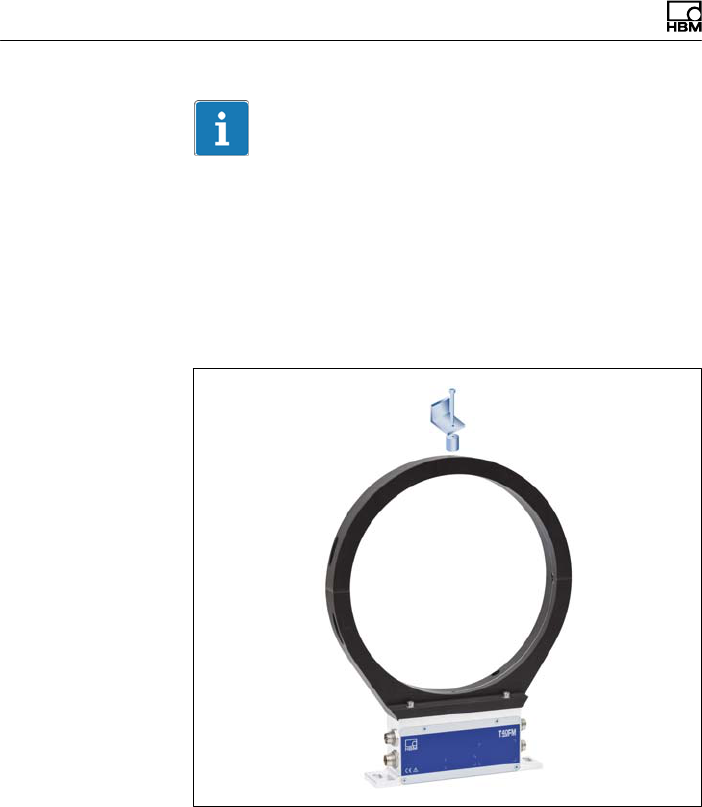
5.5 Preparing for the rotor mounting
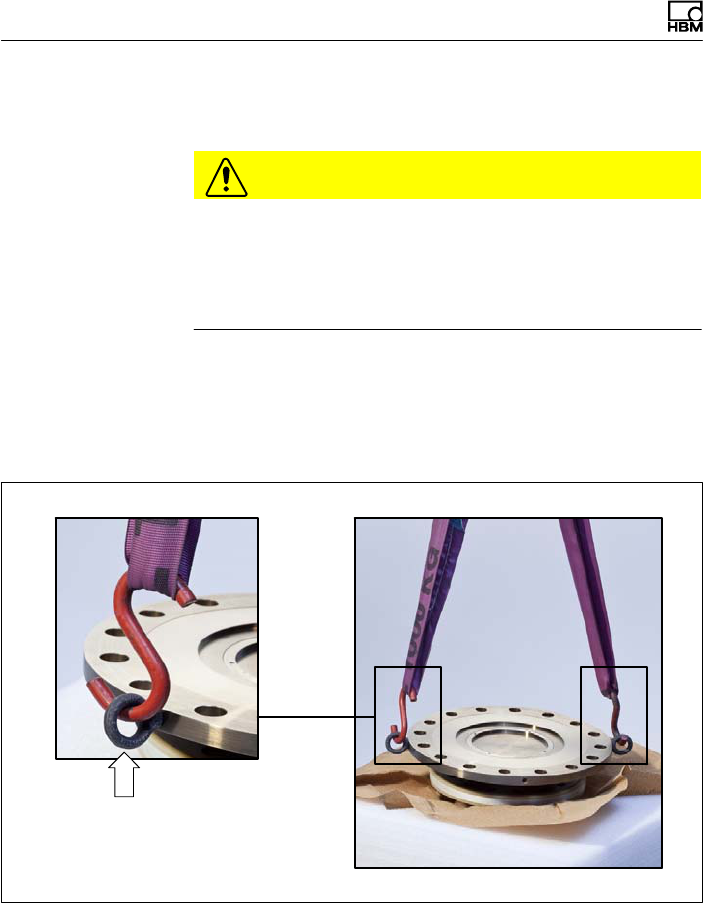
CAUTION
The rotor is very heavy (depending on measuring range:
18kg … 39kg)!
Use a crane or other suitable lifting equipment to lift it out
of its packaging and install it.
Two eye bolts are screwed into the rotor as transport and
mounting aids. Hook the lifting equipment to these eye
bolts as this ensures that the rotor is lifted horizontally out
of the packaging (see Fig. 5.1).
Transport and mounting eye bolts
Fig. 5.1 Transport and mounting eye bolts on the rotor
Mechanical installation
T40FM A3276-8.0 HBM: public 25
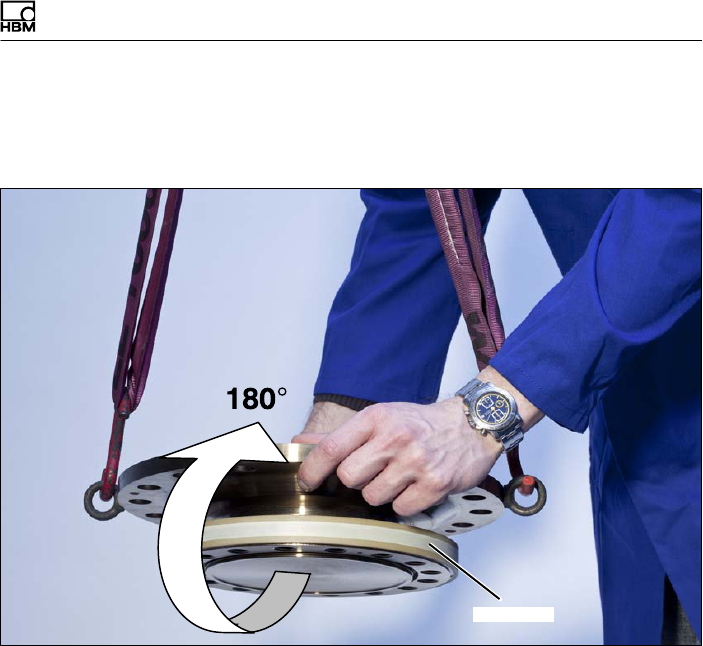
1. Lift the rotor out of the packaging, rotate horizontally
by 180_, so that flange B is pointing upwards (see
Fig. 5.1).
Flange B
Fig. 5.2 Rotating the rotor
2. Place the rotor carefully onto a clean and stable table.
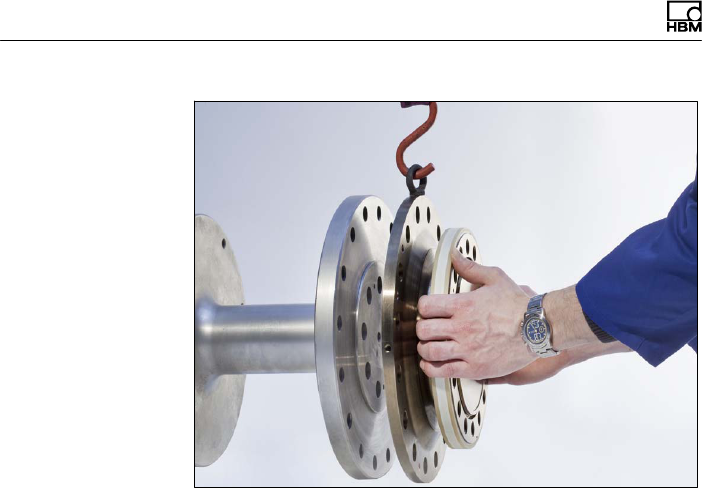
3. If the rotor is to be installed horizontally as shown in
Fig. 5.3, remove one mounting eye bolt. Both mount
ing eye bolts can initially remain in the flange for ver
tical installation.
Mechanical installation
26 A3276-8.0 HBM: public T40FM
Fig. 5.3 Rotor installation (horizontal)
4. Clean the plane faces of the transducer flange and the
counter flange.
For safe torque transfer, the faces must be clean and
free from grease. Use a piece of cloth or paper
soaked in solvent. Make sure that no solvent drips into
the inside of the transducer and that the transmitter
coils are not damaged during cleaning.
5. Fasten the lifting equipment to the mounting eye
bolt(s).
6. Carefully lift up the rotor and move it to the mounting
position (see Fig. 5.1).
Mechanical installation
T40FM A3276-8.0 HBM: public 27
5.6 Mounting the rotor
Tip
Usually the rotor type plate is no longer visible after in
stallation. This is why we include with the rotor additional
stickers with the important characteristics, which you can
attach to the stator or any other relevant test-bench com
ponents. You can then refer to them whenever there is
anything you wish to know, such as the shunt signal. To
explicitly assign the data, the identification number and
the size are engraved on the rotor flange, where they can
be seen from outside.
Notice
Make sure during installation that you do not damage the
measuring zone marked in Fig. 5.4 by using it to support
tools or knocking tools against it when tightening screws,
for example. This can damage the transducer and pro
duce measurement errors, or even destroy the trans
ducer.
1. Prior to installation, clean the plane faces of the trans
ducer flange and the counter flange.
For safe torque transfer, the faces must be clean and
free from grease. Use a piece of cloth or paper
soaked in solvent. When cleaning, make sure that you
do not damage the transmitter winding.
Mechanical installation
28 A3276-8.0 HBM: public T40FM
Fastening bolt (10.9);
note maximum thread reach Y!
Hexagon socket screw (Z)
DIN EN ISO 4762 (10.9)
Flange A
Measuring zone
Fig. 5.4 Bolted rotor connection
2. For the connection of flange A (see Fig. 5.4), use DIN
EN ISO 4762 property class 10.9 hexagon socket
screws of a suitable length (dependent on the
connection geometry, see Tab. 5.1 on Page 30).
We recommend fillisterhead screws DIN EN ISO
4762, blackened, smoothheaded, permitted size and
shape variance in accordance with DIN ISO 4759,
Part 1, product class A.
3. Fasten all screws with the specified torque (Tab. 5.1
on Page 30).
4. Now remove the eye bolt(s) used for transportation
and mounting.
Mechanical installation
T40FM A3276-8.0 HBM: public 29
Important
Keep them in a safe place for future dismounting.
5. There are relevant tapped holes on flange B for con
tinuing the shaft train mounting. Again use screws of
property class 10.9 and tighten them with the pre
scribed torque, as specified in Tab. 5.1, Page 30.
Important
Use a threadlocker (medium strength, e.g. LOCTITE) to
glue the screws into the counter thread to exclude
prestressing loss due to screw slackening, in the event of
alternating loads.
Notice
Comply with the maximum screw-in depth as per
Tab. 5.1, Page 30. Otherwise significant measurement
errors may result from torque shunt, or the transducer
may be damaged.
Mechanical installation
30 A3276-8.0 HBM: public T40FM
Measuring
range
Fastening screws Maximum thread
reach Y of screws
in flange B
Prescribed
tightening
moment
kNVm Z1) Property class mm NVm
15
20
25
M18
10.9
30 400
30
40
50
M20 40 560
60
70
80
M22 45 760
1) DIN EN ISO 4762; black/oiled/mtot=0.125
Tab. 5.1 Fastening screws
Important
Dry screw connections can result in different and higher
friction factors (see VDI 2230, for example). This means
a change to the required tightening moments.
The required tightening moments can also change if you
use screws with a surface or property class other than
that specified in Tab. 5.1, as this affects the friction factor.
Mechanical installation
T40FM A3276-8.0 HBM: public 31
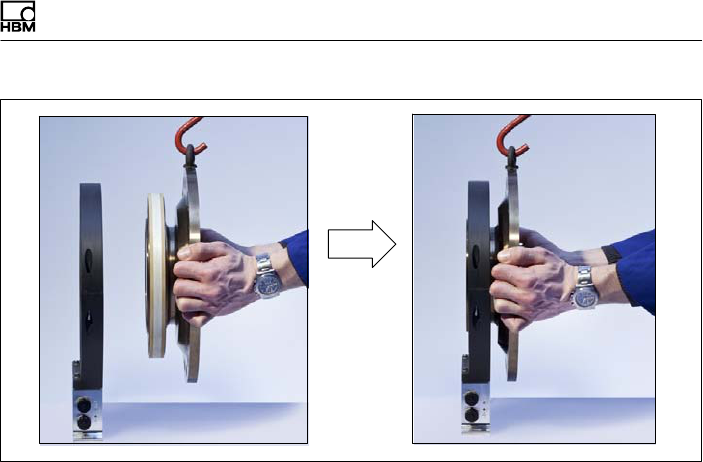
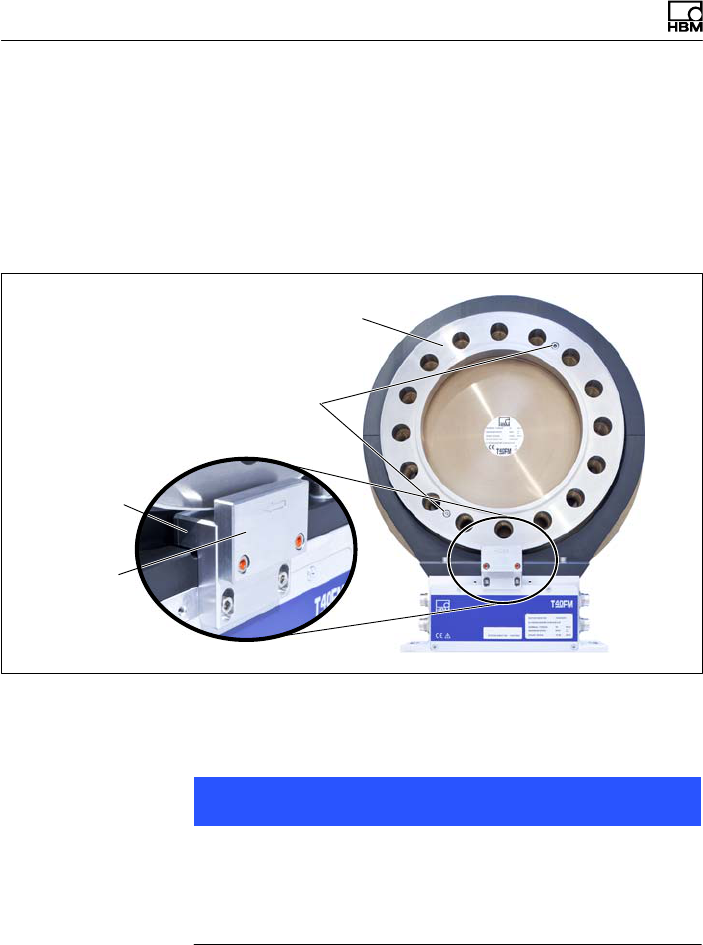
5.7 Installing the stator
On delivery, the stator has already been installed and is
ready for operation. The upper antenna segment can be
separated from the stator, for example, for maintenance
or to facilitate stator mounting, only for Option 7, Code S.
If your application does not require the stator to be dis
mantled, proceed as described in points 2., 5., and 6 for
Option 7, Code S.
Fan-type lock
washers
M5 hole for fixing the
antenna segment
Stator housing
upper
Antenna segment screws
with washers (M5)
lower
Antenna segments
Fig. 5.5 Bolted connection of the antenna segments on the
stator, Option 7, Code S
Mechanical installation
32 A3276-8.0 HBM: public T40FM
Stator housing
Antenna segments with mounted shielding plates
Connector plugs
Fig. 5.6 Mechanical construction of Stator with mounted
shielding plates without rotational speed, FCC option
Dismounted shielding
plates
Axial shielding
plates
Radial shielding
plate
Fig. 5.7 Individual shielding plates, FCC option

Mechanical installation
T40FM A3276-8.0 HBM: public 33
Important
The use of the shielding plates are important to ensure
compliance with FCC regulations. If the shielding plates
has to be removed for any purpose (e.g. installation or
maintenance), they must be replaced in the original posi
tion before the product is used.
Important
If the shielding plates has to be removed for installation
or maintenance, tighten the screws to fix the shielding
plates with a tightening torque of 1.6 Nm.
Stator housing
lower antenna segment
Antenna wire
Fig. 5.8 Stator housing and lower antenna segment with
antenna wire, Option 7, Code S
1. Undo and remove the bolted connections (M5) on the
upper antenna segment.
There are fan-type lock washers between the antenna
segments: make sure that they do not get lost.
2. Use an appropriate mounting base to install the stator
housing in the shaft train, so that there is sufficient
Mechanical installation
34 A3276-8.0 HBM: public T40FM
opportunity for horizontal and vertical adjustments. Do
not fully tighten the bolts yet.
3. Now use two hexagon socket screws to mount the
upper antenna segment removed in Point 1 on the
lower antenna segment.
Make sure that the two fan-type lock washers are in
serted between the antenna segments (these ensure
that there is a defined contact resistance)!
Important
To make sure that they function perfectly, the fan-type
lock washers (A5.3-FST DIN 6798 ZN/galvanized) must
be replaced after the bolted antenna connection has
been loosened three times.
4. Now tighten all the bolted antenna segment connec
tions with a tightening torque of 5 N⋅m.
5. Then align the antenna to the rotor in such a way that
the antenna encloses the rotor more or less coaxially
and the antenna wire in the axial direction has the
same position as the center of the transmitter winding
on the rotor.
To make alignment easier, the outer edge of the stator
antenna segment and the outer edge of the stator
winding carrier should be on the same line (in align
ment). Conform to the permissible alignment toler
ances stated in the specifications.
Mechanical installation
T40FM A3276-8.0 HBM: public 35
Fig. 5.9 Alignment of the rotor with the stator, Option 7,
Code S and FCC option
6. Now fully tighten the bolted stator housing connection.
Prevention of axial stator oscillation
Depending on the operating conditions, the stator may be
induced to oscillate. This effect is dependent on:
Sthe rotational speed,
Sthe antenna diameter (depends in turn on the measur
ing range),
Sthe design of the machine base.
Mechanical installation
36 A3276-8.0 HBM: public T40FM
Important
To prevent this axial oscillation, the antenna ring requires
additional support by the customer. There is a socket
(with an M5 internal thread) on the upper antenna seg
ment, which can be used for a suitable clamping device
(see Fig. 5.10).
If this is the case, the cable plug also needs some sup
port, as shown in the construction example in Fig. 5.11.
Fig. 5.10 Construction example for supporting the antenna
ring, Option 7, Code S and FCC option

Mechanical installation
T40FM A3276-8.0 HBM: public 37
Fig. 5.11 Construction example for connector terminals (for
two plugs), Option 7, Code S and FCC option
Mechanical installation
38 A3276-8.0 HBM: public T40FM
5.8 Mounting the rotational speed flange
(rotational speed measuring system
only)
The rotational speed disc (intermediate flange) is ready-
mounted on the rotor at the factory, with two (M4) screws.
Sensor head
for measuring
rotational
speed
Rotational speed disc
M4 fixing screws
Sensor head
for reference
signal
Fig. 5.12 Torque transducer with rotational speed
measurement, optional reference signal, Option 7,
Code S and FCC option
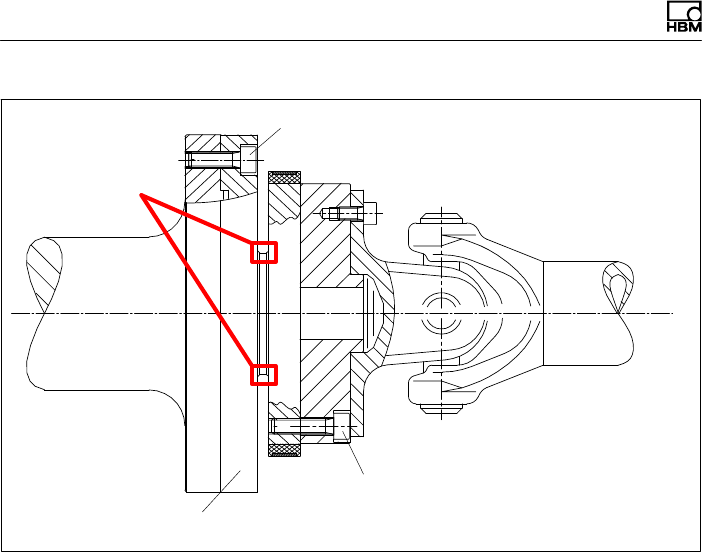
Notice
The two (M4) screws are only used to fix the rotational
speed disc. The measurement flange and the attached
speed measuring system may therefore be rotated only
after mounting.
Mechanical installation
T40FM A3276-8.0 HBM: public 39
Important
The speed measuring system uses a magnetic measur
ing principle. In applications where high magnetic field
strengths can occur, e.g. eddy-current brakes, implement
suitable measures to ensure that the maximum permiss
ibly magnetic field strength cannot be exceeded (see
Chapter 14 "Specifications", Page 78).
Stator alignment (rotational speed measuring
system, optionally with reference signal)
The rotational speed measuring system is correctly
aligned when the stator is precisely aligned for torque
measurement. A reduction in the distance between the
sensor head and magnetic ring can in some cases im
prove the signal quality when the rotor is centrally posi
tioned in the stator. To do this, loosen both screws on the
sensor head and push the sensor head in parallel as
marked with the arrows in Fig. 5.13.
The sensor for recording the reference signal is perman
ently set and must not be adjusted.
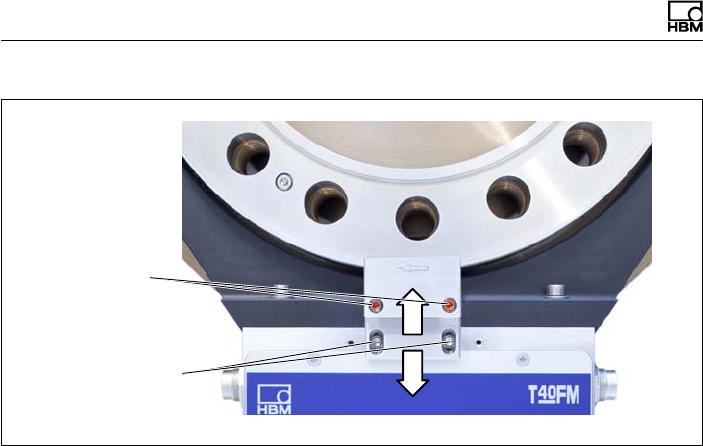
Mechanical installation
40 A3276-8.0 HBM: public T40FM
Sensor head
screws
Do not adjust
Fig. 5.13 Torque transducer with speed disc and sensor head,
and reference signal (optional), Option 7, Code S
and FCC option
Electrical Connection
T40FM A3276-8.0 HBM: public 41
6 Electrical Connection
6.1 General information
SWith extension cables, make sure that there is a
proper connection with minimum contact resistance
and good insulation.
SAll cable connectors or swivel nuts must be fully
tightened.
Important
Transducer connection cables from HBM with plugs at
tached are identified in accordance with their intended
purpose (Md or n). When cables are shortened, inserted
into cable ducts or installed in control cabinets, this identi
fication can get lost or become concealed. So the cables
must be marked beforehand, just in case.
6.2 EMC protection
Important
The transducers are EMC-tested in accordance with EC
directives and identified by CE certification. However, you
must connect the shield of the connection cable on the
shielding electronics enclosure in order to achieve EMC
protection for the measuring chain.

Electrical Connection
42 A3276-8.0 HBM: public T40FM
Special electronic coding methods are used to protect the
purely digital signal transmission between the transmitter
head and the rotor from electromagnetic interference.
The cable shield is connected with the transducer hous
ing. This encloses the measurement system (without the
rotor) in a Faraday cage when the shield is laid flat at
both ends of the cable. With other connection techniques,
an EMCproof shield should be applied in the wire area,
and this shielding should also be connected extensively
(also see HBM Greenline Information, brochure i1577).
Electrical and magnetic fields often induce interference
voltages in the measuring circuit. Therefore:
SUse shielded, low-capacitance measurement cables
only (HBM cables fulfill both conditions).
SOnly use plugs that meet EMC guidelines.
SDo not route the measurement cables parallel to
power lines and control circuits. If this is not possible,
protect the measurement cable with e. g. steel con
duit.
SAvoid stray fields from transformers, motors and con
tact switches.
SDo not ground the transducer, amplifier and indicator
more than once.
SConnect all the devices in the measuring chain to the
same protective earth conductor.
SIn the case of interference due to potential differences
(compensating currents), the connections between
supply voltage zero and housing ground must be
broken at the amplifier and a potential equalization
line established between the stator housing and the
amplifier housing (copper conductor, at least 10 mm2
wire crosssection).

Electrical Connection
T40FM A3276-8.0 HBM: public 43
SShould differences in potential between the machine
rotor and stator, because of unchecked leakage, for
example, cause interference, this can usually be over
come by connecting the rotor definitively to ground,
e.g. with a wire loop. The stator must be connected to
the same (ground) potential.
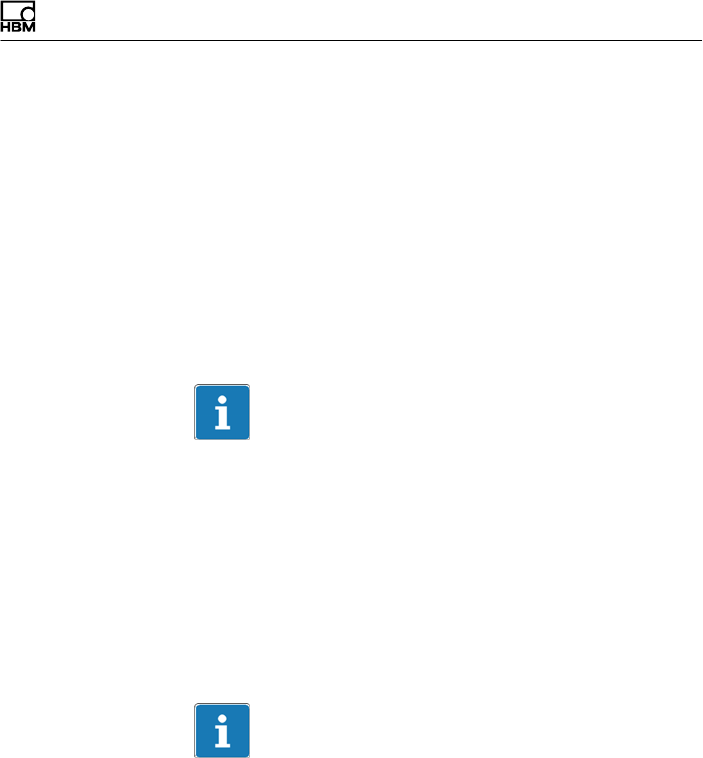
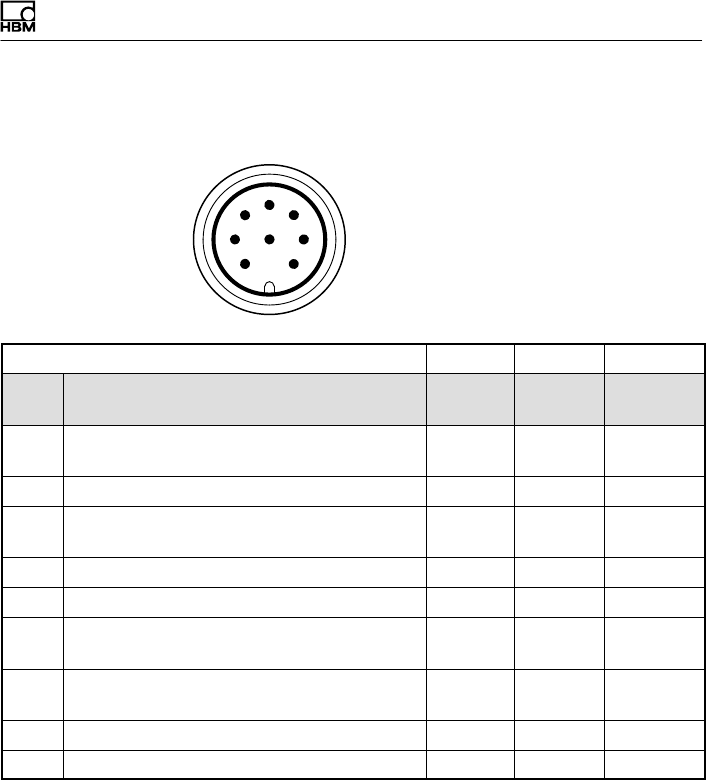
6.3 Pin Assignment
The stator housing has two 7-pin plugs, an 8-pin plug and
a 16-pin plug.
The supply voltage connections and shunt signal connec
tions of plugs 1 and 3 are each electrically interconnec
ted, but are protected against compensating currents by
diodes. There is also a self-resetting fuse (multifuse) to
protect the supply voltage connections against overload
by the stator.
Electrical Connection
44 A3276-8.0 HBM: public T40FM
Assignment for plug 1 - Supply voltage and
frequency output signal
61
572
43
Device plug
Top view
KAB153 KAB149 KAB1781)
Plug
pin
Assignment Color
code
D‐SUB‐
plug
pin
HD‐SUB‐
plug
pin
1Torque measurement signal (frequency
output; 5 V2,3)wh 13 5
2Supply voltage 0 V; bk 5 -
3Supply voltage 18 V to 30 V bu 6 -
4Torque measurement signal (frequency
output; 5 V2,3)rd 12 10
5Measurement signal 0 V; symmetrical gy 8 6
6Shunt signal trigger 5 V to 30 V gn 14 15
7Shunt signal 0 V gy 8 -
Shielding connected to housing ground
1) Bridge between 4 + 9
2) RS-422 complementary signals; with cable lengths exceeding 10 m, we recommend using a
termination resistor R = 120 ohms between the (wh) and (rd) wires.
3) RS‐422: pin 1 corresponds to A, pin 4 corresponds to B.
Electrical Connection
T40FM A3276-8.0 HBM: public 45
Notice
Torque flanges are only intended for operation with a DC
supply voltage. They must not be connected to older
HBM amplifiers with square-wave excitation. This could
destroy the connection board resistors or cause other
faults in the amplifiers.
Electrical Connection
46 A3276-8.0 HBM: public T40FM
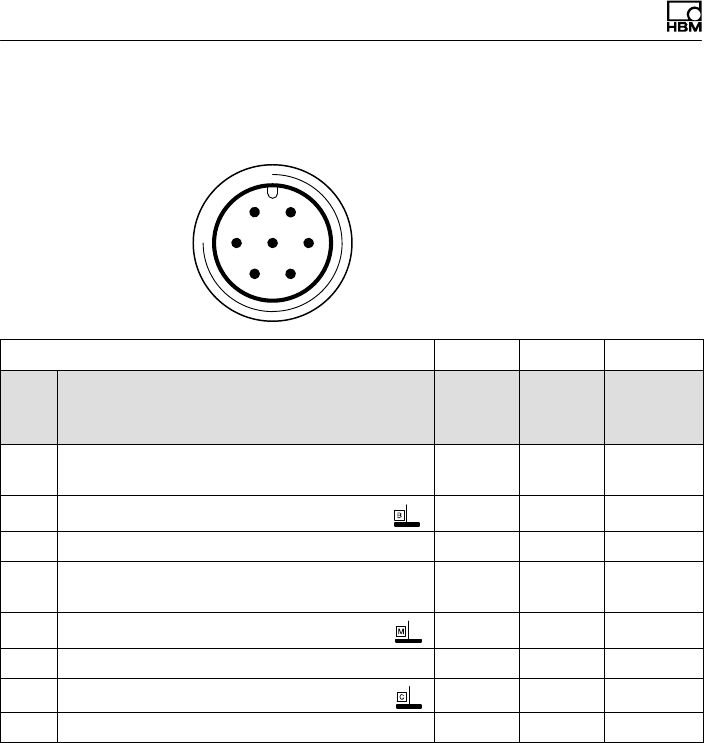
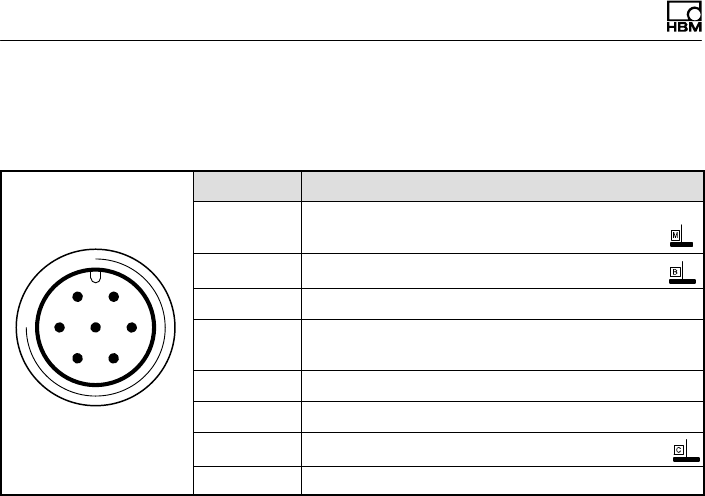
Assignment for plug 2 - Rotational speed
measurement system
6
1
5
7
2
4
38
Device plug
Top view
KAB154 KAB150 KAB1791)
Plug
pin
Assignment Color
code
D-SUB-
plug pin
HD-SUB-
plug pin
1Rotational speed measurement signal2)
(pulse string, 5 V; 0°)rd 12 10
2Not in use bl - -
3Rotational speed measurement signal2)
(pulse string, 5 V; 90°phase shifted) gy 15 8
4Not in use bl - -
5Not in use vi - -
6Rotational speed measurement signal2)
(pulse string, 5 V; 0°)wh 13 5
7Rotational speed measurement signal 2
(pulse string, 5 V; 90°phase shifted) gn 14 7
8Operating voltage zero bk/bl 3) 8 6
Shielding connected to housing ground
1) Bridge between 4 + 9
2) RS-422 complementary signals; with cable lengths exceeding 10 m, we recommend using a
termination resistor of R = 120 ohms.
3) KAB163/KAB164: color code brown (bn)
Electrical Connection
T40FM A3276-8.0 HBM: public 47
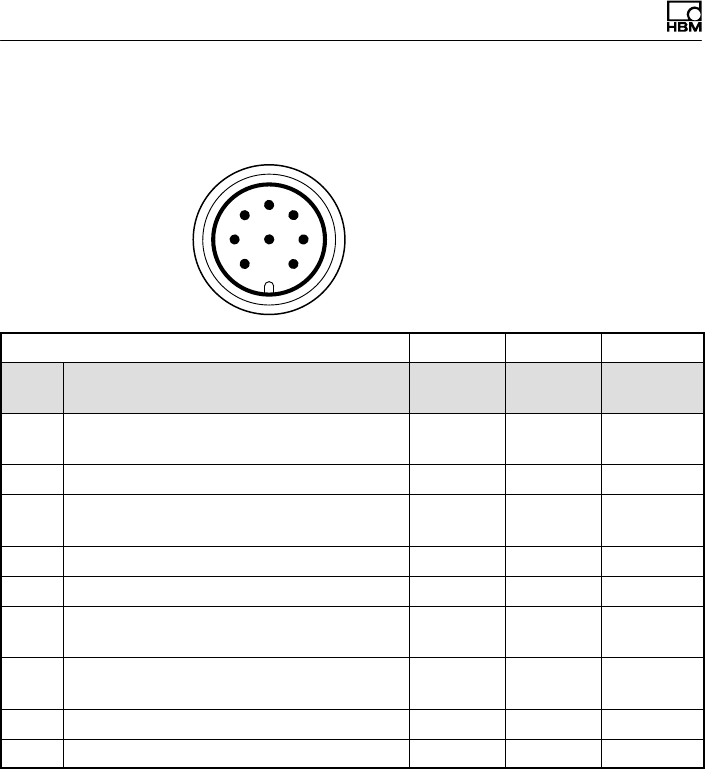
Assignment for plug 2 - Rotational speed
measurement system with reference signal
Device plug
Top view
6
1
5
7
2
4
38
KAB164 KAB163 KAB1811)
Plug
pin
Assignment Color
code
D-SUB-
plug pin
HD-SUB-
plug pin
1Rotational speed measurement signal 2)
(pulse string, 5 V) rd 12 10
2Reference signal (1 pulse/revolution, 5 V) 2) bl 2 3
3Rotational speed measurement signal 2)
(pulse string, 5 V; 90°phase shifted) gy 15 8
4Reference signal (1 pulse/revolution, 5 V) 2) bl 3 2
5Not in use vi - -
6Rotational speed measurement signal 2)
(pulse string, 5 V; 0°)wh 13 5
7Rotational speed measurement signal 2)
(pulse string, 5 V; 90°phase shifted) gn 14 7
8Operating voltage zero bl 3) 8 6
Shielding connected to housing ground
1) Bridge between 4 + 9
2) RS-422 complementary signals; with cable lengths exceeding 10 m, we recommend using a
termination resistor of R = 120 ohms.
3) KAB163/KAB164: color code brown (bn)
Electrical Connection
48 A3276-8.0 HBM: public T40FM
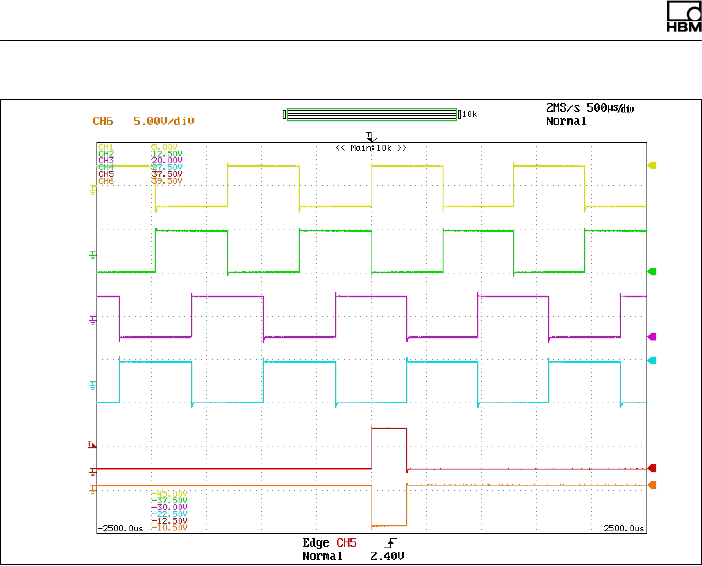
Pin 1
Pin 6
Pin 3
Pin 7
Pin 2
Pin 4
Fig. 6.1 Rotational speed signals at plug 2 (rotational speed
in the direction of the arrow)
Electrical Connection
T40FM A3276-8.0 HBM: public 49
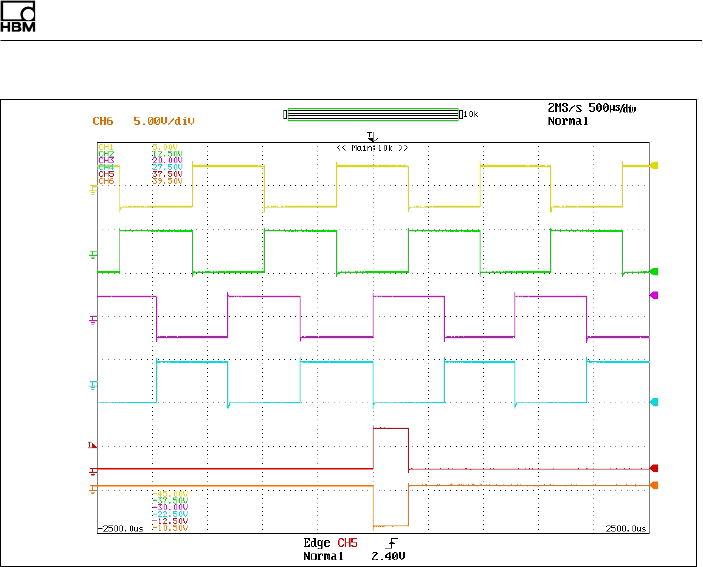
Pin 1
Pin 6
Pin 3
Pin 7
Pin 2
Pin 4
Fig. 6.2 Rotational speed signals at plug 2 (rotational speed
against the direction of the arrow)
Electrical Connection
50 A3276-8.0 HBM: public T40FM
Assignment for plug 3 - Supply voltage and voltage
output signal
61
572
43
Device plug
Top view
Plug pin Assignment
1Torque measurement signal
(voltage output; 0 V)
2Supply voltage 0 V;
3Supply voltage 18 V to 30 V DC
4Torque measurement signal (voltage output;
±10 V)
5Not in use
6Shunt signal trigger 5 V to 30 V
7Shunt signal 0 V;
Shielding connected to housing ground
Assignment for plug 4
TMC - only for connection to the TIM 40 Torque Interface
Module within HBM.
6.4 Supply Voltage
The transducer must be operated with a separated extra-
low voltage (supply voltage 18 … 30 VDC). You can sup
ply one or more torque flanges within a test bench at the
same time. Should the device be operated on a DC
voltage network1), additional precautions must be taken
to discharge excess voltages.
1) Distribution system for electrical energy with greater physical expansion (over several test
benches, for example) that may possibly also supply consumers with high nominal (rated)
currents.

Electrical Connection
T40FM A3276-8.0 HBM: public 51
The information in this Chapter relates to the self-con
tained operation of the T40FM without HBM system solu
tions.
The supply voltage is electrically isolated from signal out
puts and shunt signal inputs. Connect a separated extra-
low voltage of 18 V … 30 V to pin 3 (+) and pin 2 ( ) of
plugs 1 or 3. We recommend that you use HBM cable
KAB 8/00-2/2/2 and the appropriate sockets (see Ac
cessories). The cable can be up to 50m long for voltages
≥24V, otherwise it can be up to 20m long.
If the permissible cable length is exceeded, you can feed
the supply voltage in parallel over two connection cables
(plugs 1 and 3). This enables you to double the permiss
ible length. Alternatively, install an on-site power supply.
Important
The instant you switch on, a current of up to 4 A may flow
and this may switch off power packs with electronic cur
rent limiters.
Shunt signal
52 A3276-8.0 HBM: public T40FM
7 Shunt signal
The T40FM torque flange delivers an electrical shunt sig
nal that can be activated from the amplifier for measuring
chains with HBM components. The transducer generates
a shunt signal of about 50% of the nominal (rated) torque;
the precise value is specified on the type plate. After ac
tivation, adjust the amplifier output signal to the shunt
signal supplied by the connected transducer, to adapt the
amplifier to the transducer.
Information
The transducer should not be under load when the shunt
signal is being measured, as the shunt signal is mixed
additively.
Triggering the shunt signal
Applying a separated extra-low voltage of 5 … 30 V to
pins 6 (+) and 7 ( ) at plug 1 or 3, triggers the shunt
signal.
The nominal (rated) voltage for triggering the shunt signal
is 5 V (triggering at U > 2.5 V), but when voltages are
less than 0.7 V, the transducer is in measuring mode.
The maximum permissible voltage is 30 V, current con
sumption at nominal (rated) voltage is approx. 2 mA and
at maximum voltage, approx. 18 mA. The voltage for trig
gering the shunt signal is electrically isolated from the
supply and measuring voltage.
Tip
The shunt signal can be triggered by the amplifier or via
the operating software in HBM system solutions.
Functionality testing
T40FM A3276-8.0 HBM: public 53
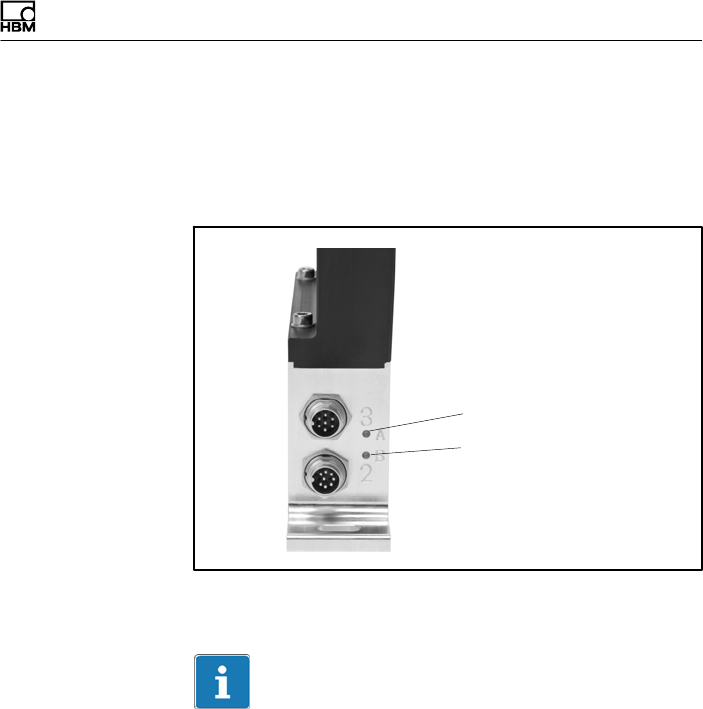
8 Functionality testing
You can check the functionality of the rotor and the stator
from the LEDs on the stator.
LED A, rotor status
LED B, stator status
Fig. 8.1 LEDs on the stator housing, Option 7, Code S and
FCC option
Important
Once the supply voltage is applied, the torque transducer
needs up to a further 4 seconds to be ready for operation.
Functionality testing
54 A3276-8.0 HBM: public T40FM
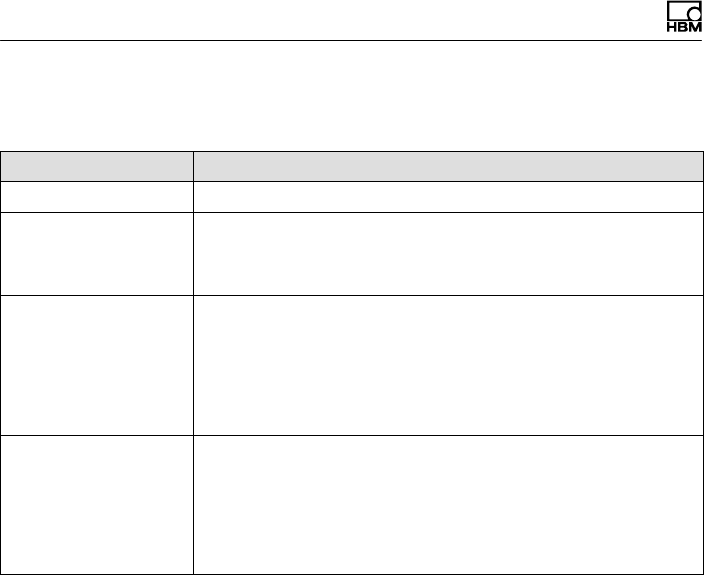
8.1 Rotor status, LED A (upper LED)
Color Significance
Green (pulsating) Internal rotor voltage values ok
Flashing orange Rotor and stator mismatched (an increasing flashing
frequency indicates the degree of misalignment)
=> Correct the rotor/stator alignment
Pulsating orange Rotor status cannot be defined
=> Correct the rotor/stator alignment
If the LED still pulsates orange, it is possible that there is a
hardware defect. The measurement signals reflect the level of
the fault.
Red (pulsating) Rotor voltage values not ok.
=> Correct the rotor/stator alignment
If the LED still pulsates red, it is possible that there is a
hardware defect. The measurement signals reflect the level of
the fault.
Pulsating means that the LED goes dark for about 20 ms
every second (sign of life), making it possible to detect
that the transducer is functioning.
Functionality testing
T40FM A3276-8.0 HBM: public 55
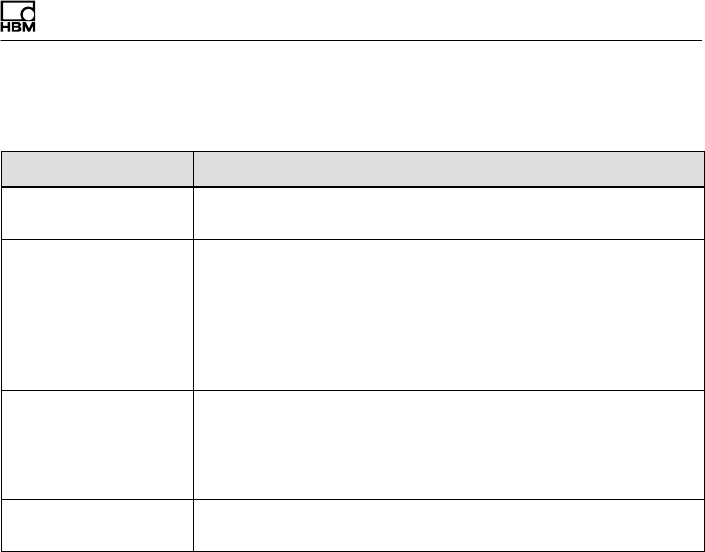
8.2 Stator status, LED B (lower LED)
Color Significance
Green
(permanently lit)
Measurement signal transmission and internal stator voltages
ok
Green, intermittently
orange.
Numerous
synchronization
defects:
permanently orange
Orange until end of defective transmission if y5 incorrect
measured values are transmitted in succession. The
measurement signals reflect the level of the defect status for
the duration of the transmission defect + for approx. another
3.3ms.
Orange
(permanently lit)
Permanently disrupted transmission, the measurement
signals reflect the level of the fault. (fout = 0 Hz, Uout = defect
level).
=> Correct the rotor/stator alignment.
Red
(permanently lit)
Internal stator defect, the measurement signals reflect the
level of the fault (fout = 0 Hz, Uout = defect level).
Loading capacity
56 A3276-8.0 HBM: public T40FM
9 Loading capacity
Nominal torque can be exceeded statically up to the limit
torque. If the nominal torque is exceeded, additional ir
regular loading is not permissible. This includes longitud
inal forces, lateral forces and bending moments. Limit
values can be found in Chapter 14 "Specifications" on
Page 78.
Measuring dynamic torque
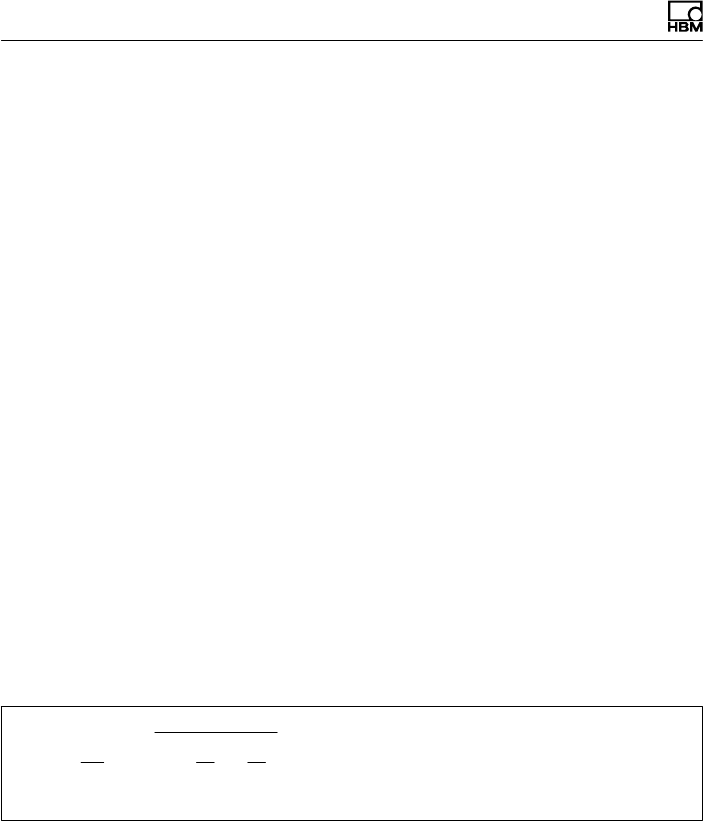
The torque flange can be used to measure static and dy
namic torque. The following apply to the measurement of
dynamic torque:
SThe T40FM calibration performed for static measure
ments is also valid for dynamic torque measurements.
SThe natural frequency f0 of the mechanical measuring
arrangement depends on the moments of inertia J1
and J2 of the connected rotating masses and the tor
sional stiffness of the T40FM.
Use the equation below to approximately determine the
natural frequency f0 of the mechanical measuring
arrangement:
f0+ 1
2p · cT ·ǒ1
J1
)1
J2Ǔ
Ǹf0= natural frequency in Hz
J1, J2= mass moment of inertia in kg⋅m2
cT= torsional stiffness in N⋅m/rad
SThe permissible mechanical vibration bandwidth
(peak-peak) can also be found in the specifications.
Loading capacity
T40FM A3276-8.0 HBM: public 57
0
+ Mnom
200% oscillation
width
- Mnom
Nominal (rated) torque Mnom as
a %
Time t
Vibration bandwidth
Vibration bandwidth
Vibration bandwidth
Fig. 9.1 Permissible dynamic loading

Maintenance
58 A3276-8.0 HBM: public T40FM
10 Maintenance
The T40FM torque flanges are maintenance-free.
Waste disposal and environmental protection
T40FM A3276-8.0 HBM: public 59
11 Waste disposal and environmental protection
All electrical and electronic products must be disposed of
as hazardous waste. The correct disposal of old equip
ment prevents ecological damage and health hazards.
Statutory waste disposal mark
The electrical and electronic devices that bear this sym
bol are subject to the European waste electrical and elec
tronic equipment directive 2002/96/EC. The symbol indic
ates that, in accordance with national and local
environmental protection and material recovery and re
cycling regulations, old devices that can no longer be
used must be disposed of separately and not with normal
household garbage.
As waste disposal regulations may differ from country to
country, we ask that you contact your supplier to determ
ine what type of disposal or recycling is legally applicable
in your country.
Packaging
The original packaging of HBM devices is made from re
cyclable material and can be sent for recycling. Store the
packaging for at least the duration of the warranty. In the
case of complaints, the torque flange must be returned in
the original packaging.
For ecological reasons, empty packaging should not be
returned to us.
Dimensions
60 A3276-8.0 HBM: public T40FM
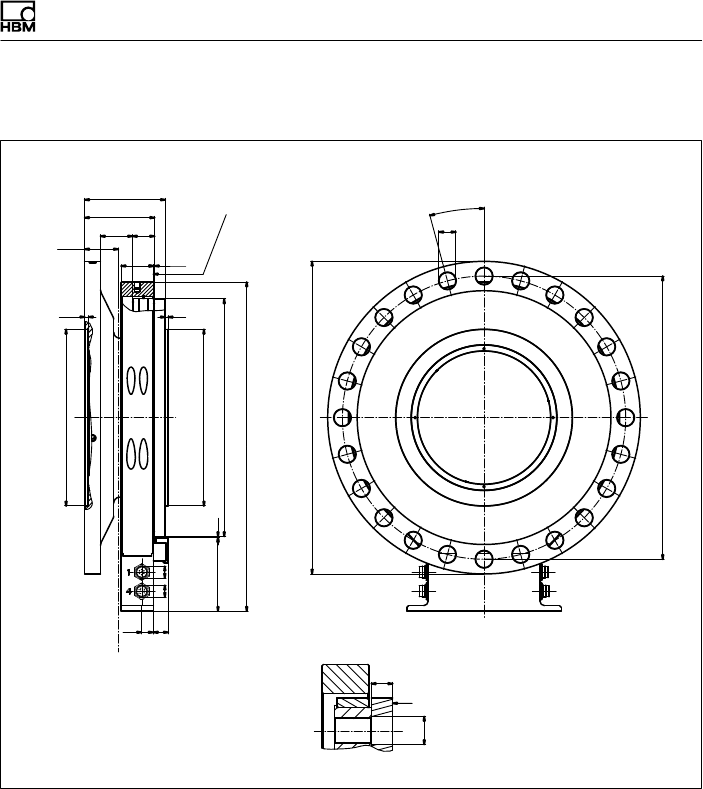
12 Dimensions
12.1 T40FM without speed measurement,
Option 7, Code S
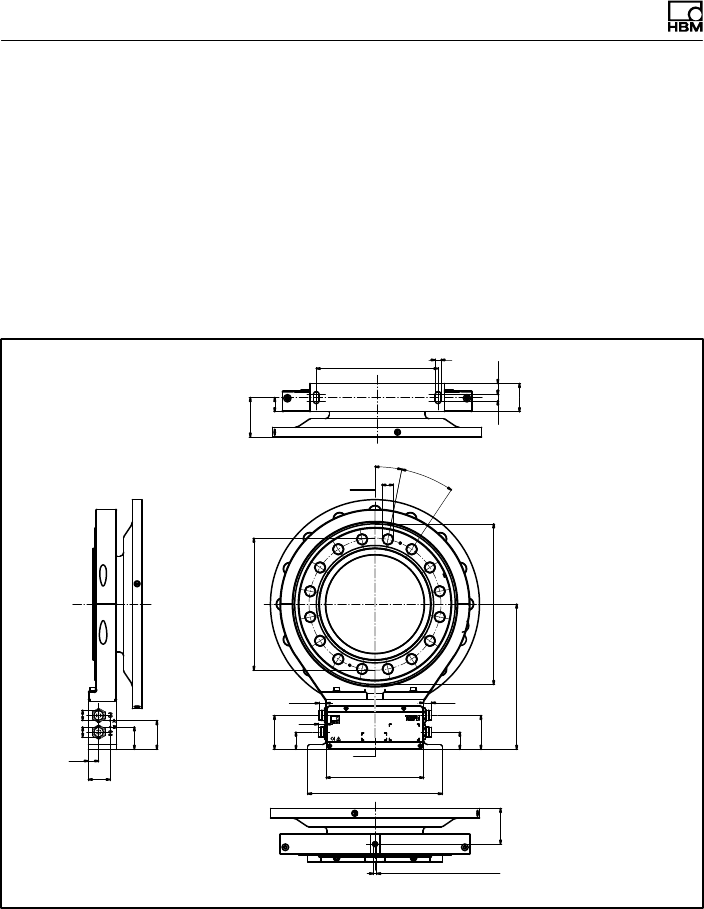
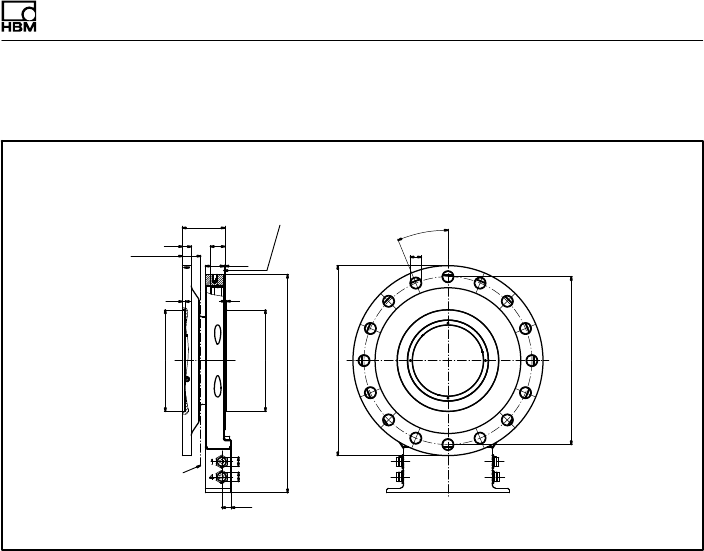
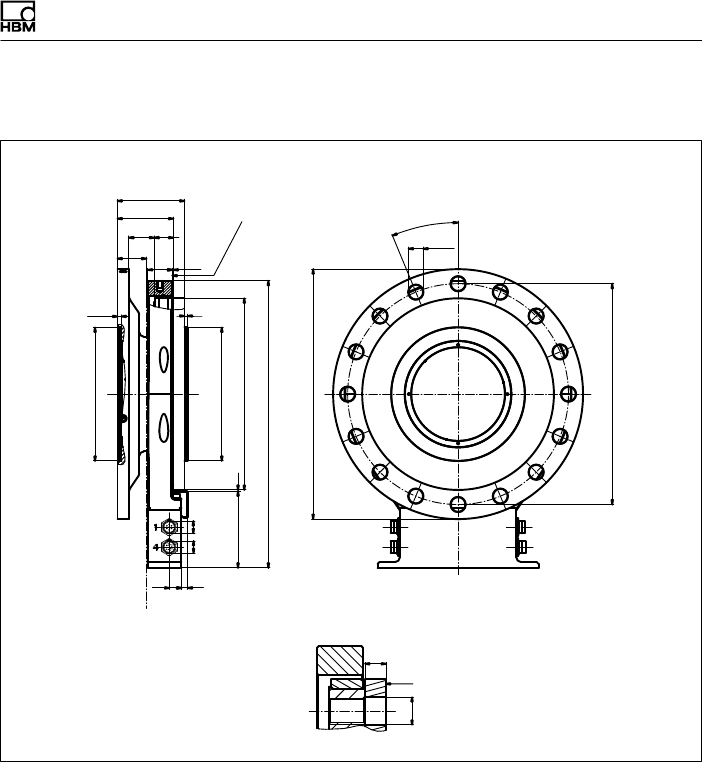
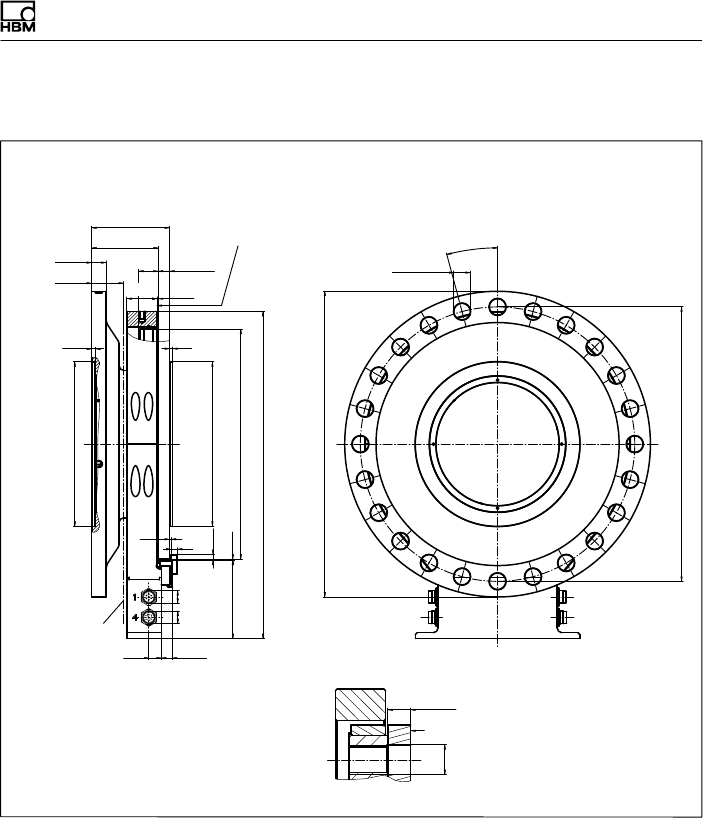
12.1.1 T40FM 15 kNm - 25 kNm
A
A16 x 22.5° = 360°
22.5°
61.5
Ø206
22
9
17
10
44
16
34
35
45
190
210
152
27
53
27
53
11.1 12
226.5
Ø250.5
11.25°
M18
Ø16
M5 for axial locking
55.5
12
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
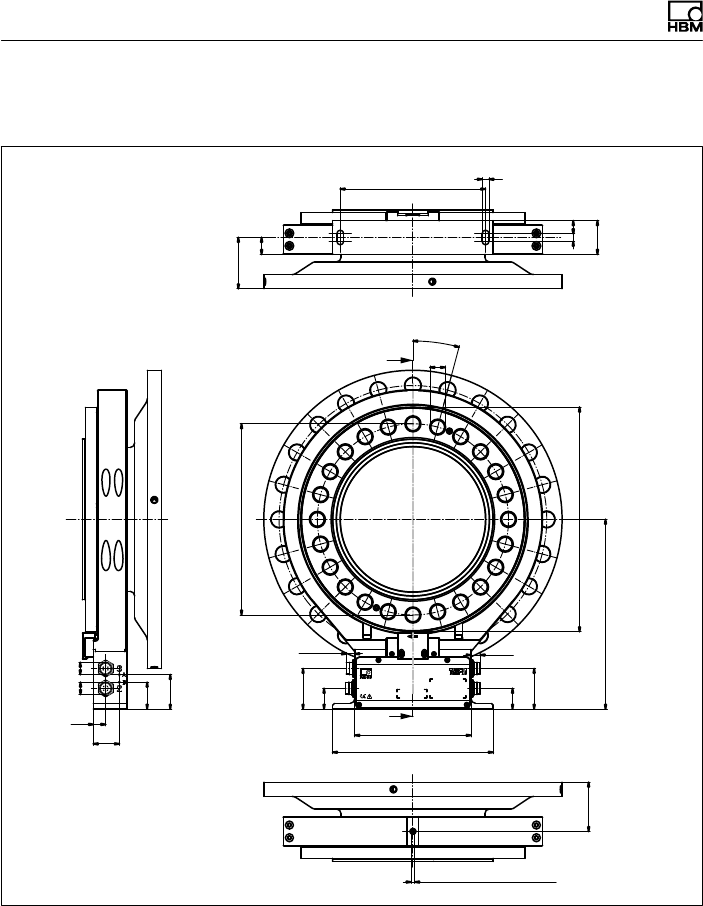
T40FM A3276-8.0 HBM: public 61
T40FM 15kNm - 25kNm, continued
Ø174g5
Ø174H6
16x22.55 = 360°
Ø326
Ø288
Alignment plane
rotor - stator
Ø19+0.2
Center of gravity
31.4
16
375
3
5.2
15
22.5°
25
73
32 1.5
Ø16
Cutaways in Section A-A
Dimensions in mm (1 mm = 0.03937 inches)
Dimensions
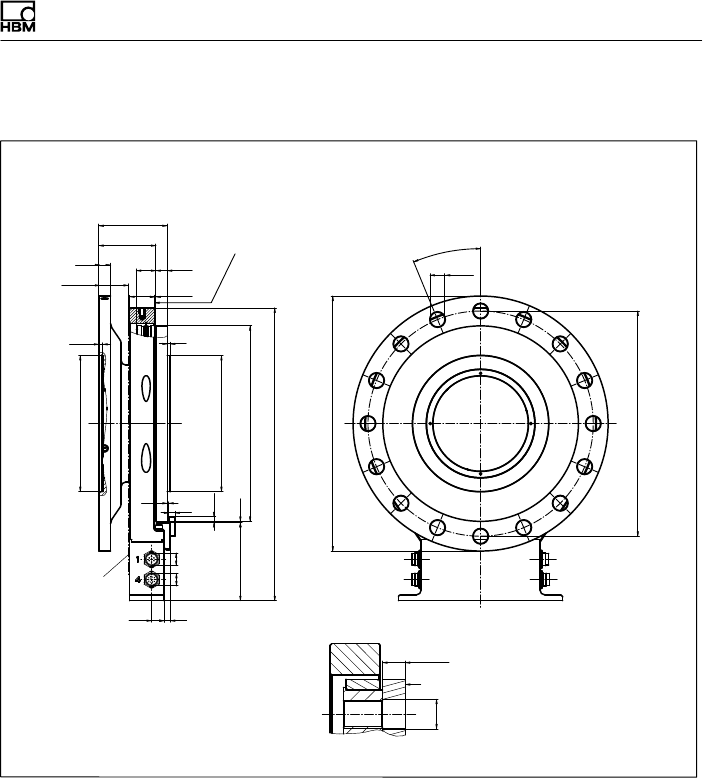
62 A3276-8.0 HBM: public T40FM
12.1.2 T40FM 30 kNm - 50 kNm
A
A
22
67
Ø250
16 34
Ø16
35
45
for axial locking
64.25
190 9
10 17
44
210
152
27
53
12
27
53
11.1
248
Ø293.5
24x15° = 360°
15°
M20
12
Center of gravity
35.2
24x15° = 360°
15°
16
Ø16
5.2 4
418
38.5
25
18.5 85
1.5
Alignment plane
rotor - stator
Ø210g5
Ø210H6
Ø21.0+0.
2
Ø390
Ø350
Cutaways in section A-A
Dimensions in mm (1 mm = 0.03937 inches)
M5
Mounting
dimensions
Dimensions
T40FM A3276-8.0 HBM: public 63
12.1.3 T40FM 60 kNm - 80 kNm
71.5
22
∅275
71.5
for axial locking
M5
∅16
16 34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11.1
263
∅323.5
24x15° = 360°
15°
M22
12
40.6
24x15° = 360°
15°
16
∅16
448
4
5.2
44
30
21.5 95
1.5
Center of gravity
Alignment plane
rotor - stator
Cutaways in section A−A
∅240g5
∅240H6
∅23+0.2
∅425
∅385
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
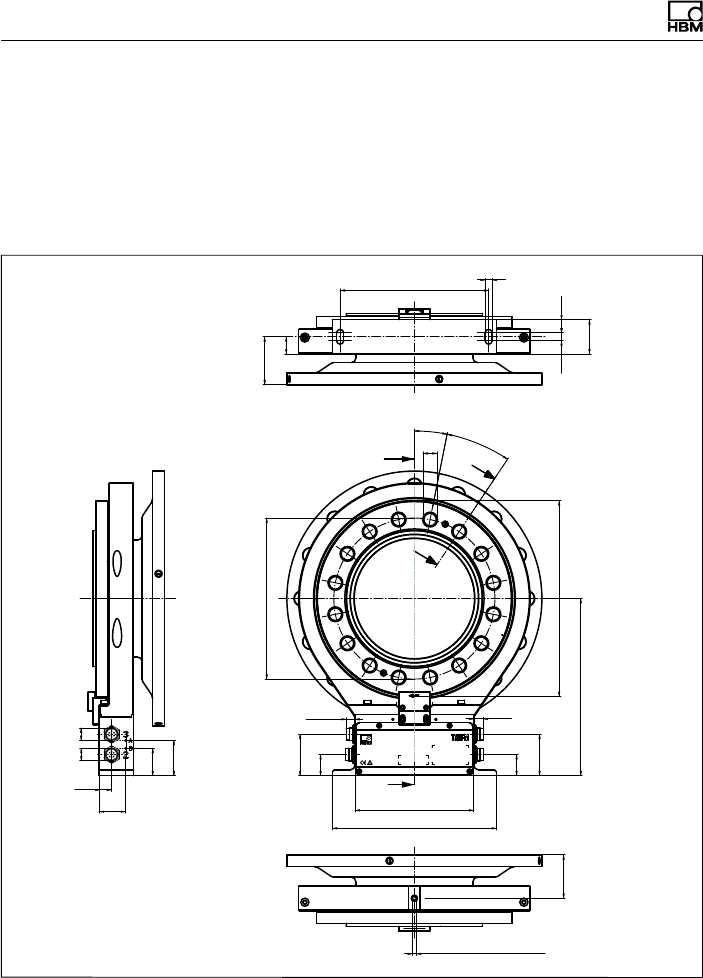
64 A3276-8.0 HBM: public T40FM
12.2 T40FM with speed measurement,
Option 7, Code S
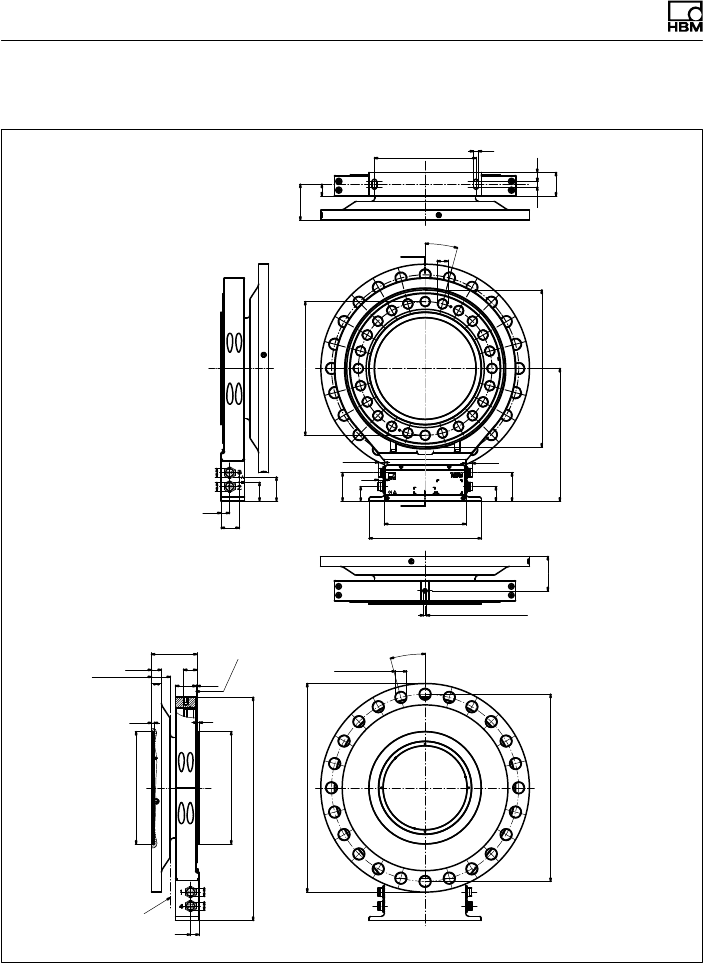
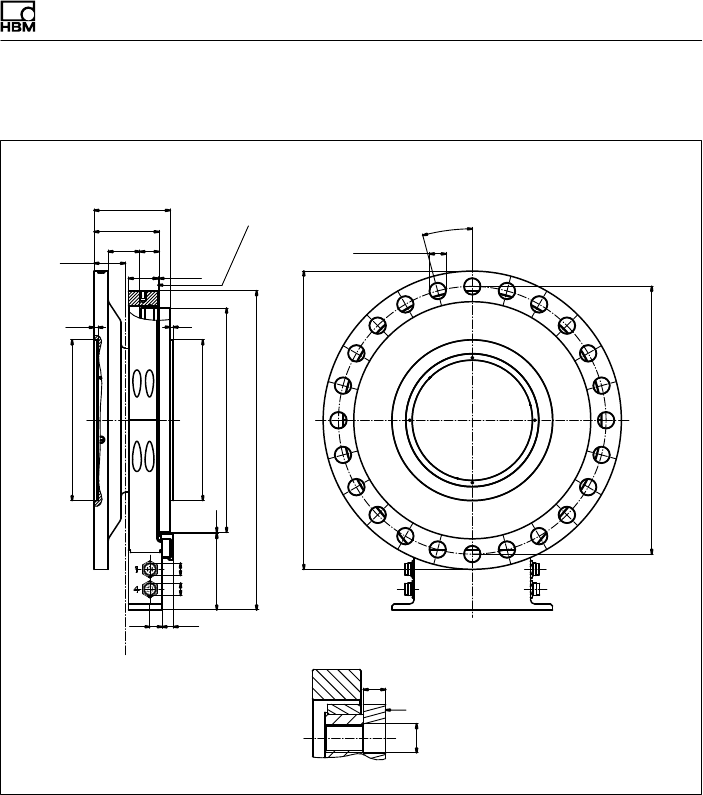
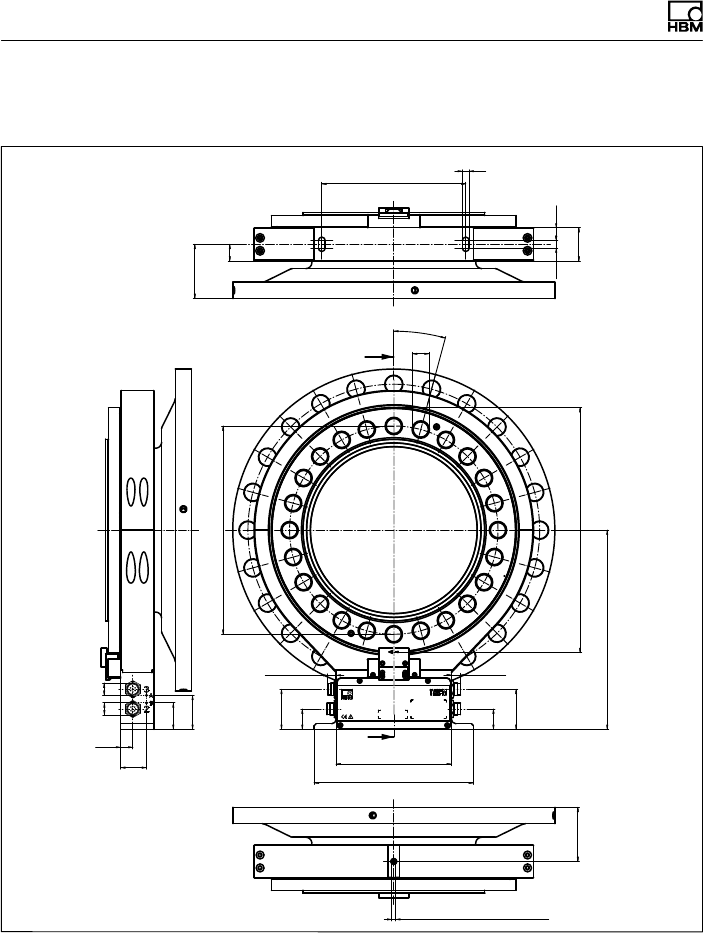
12.2.1 T40FM 15 kNm - 25 kNm
22
61.5
∅206
9
17
10
44
16
34
35
45
190
210
152
27
53
27
53
11.1 12
226.5
∅250.5
11.25°
M18
∅16
∅16
M5 for axial locking
55.5
A
A16x22.5° = 360°
22.5°
B
B
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
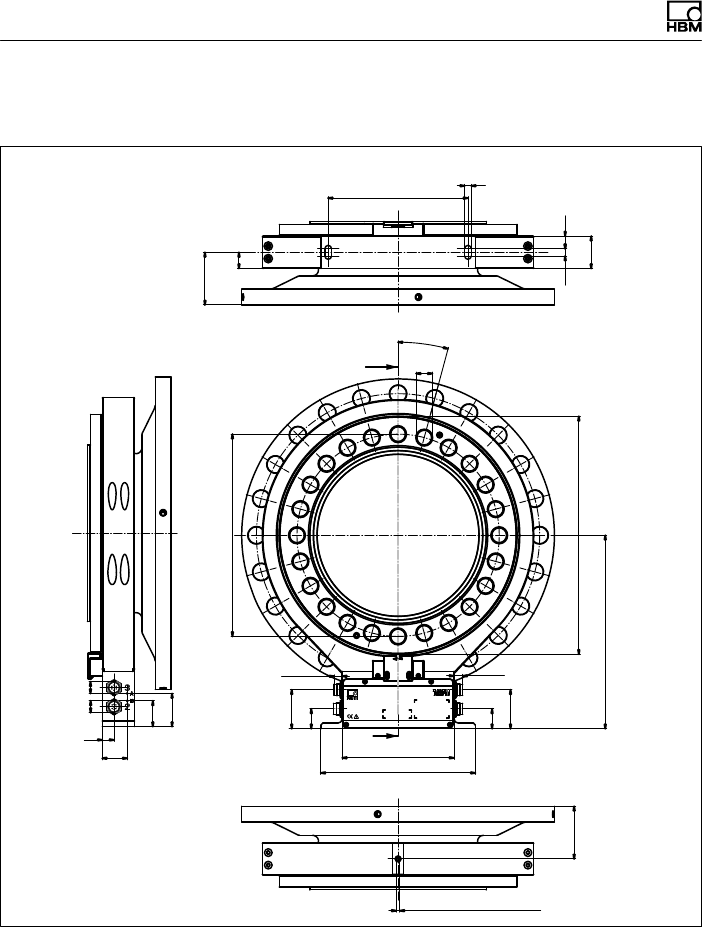
T40FM A3276-8.0 HBM: public 65
T40FM 15kNm - 25kNm, continued
∅288
37.8
14.5
∅19
16
375
173.986
173.968
∅174 g5
174.025
174.000
∅174 H6
4
5.2
87.5
∅326
16x22.5° = 360°
22.5°
∅19+0.2
∅16
∅16
2533
73
∅250
32 1.5
8
99.9 1.6
B–B
()
()
Center of gravity
Alignment plane
rotor - stator
Cutaways in section A-A
Rotational speed flange
Dimensions in mm (1 mm = 0.03937 inches)
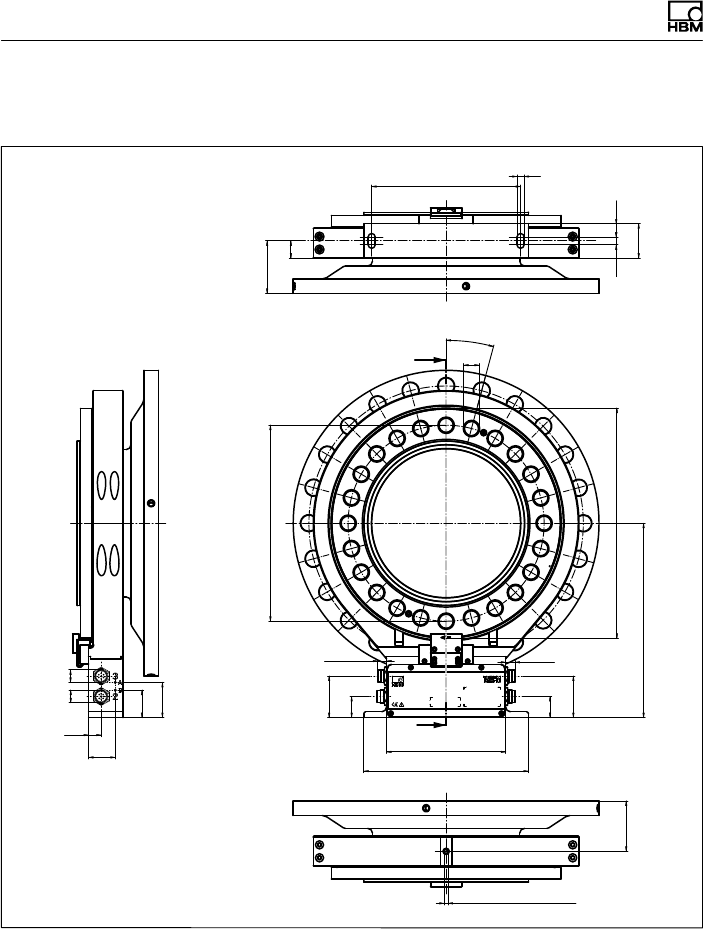
Dimensions
66 A3276-8.0 HBM: public T40FM
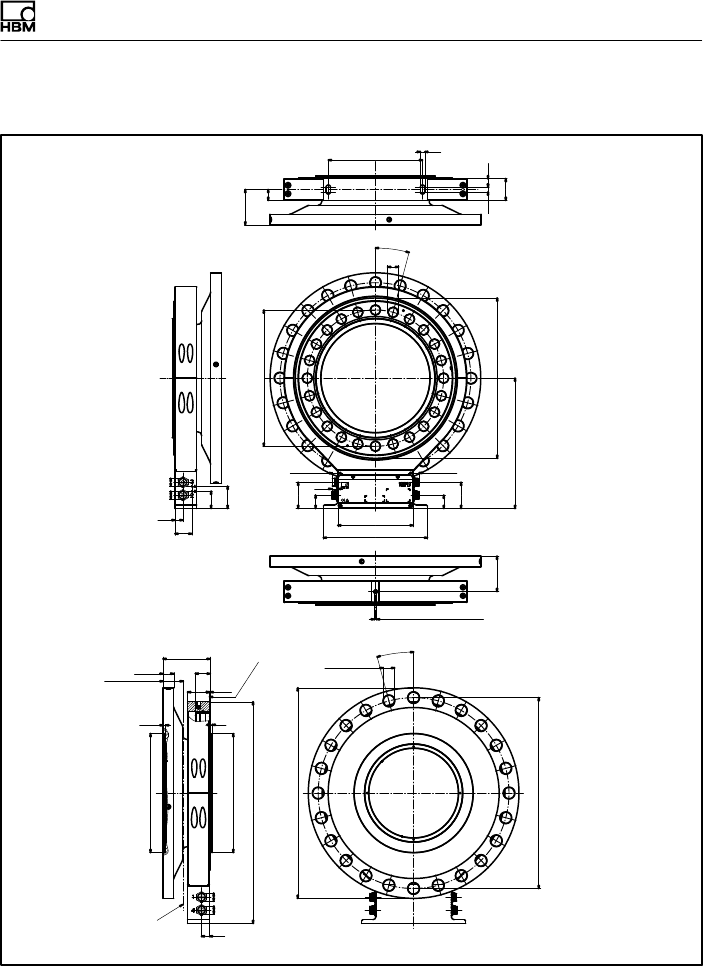
12.2.2 T40FM 30 kNm - 50 kNm
A
A
22
67
16
34
35
45
64.25
190 9
10 17
44
210
152
27
53
12
27
53
11.1
248
15°
M20
Ø293.5
24x15° = 360°
Ø16
Ø16
Ø250
M5 for axial locking
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
T40FM A3276-8.0 HBM: public 67
T40FM 30kNm - 50kNm, continued
∅210 g5
A–A
()
()
Center of gravity
Alignment plane
rotor - stator
Cutaways in section A-A
40.9
14.5
24x15° = 360°
15°
16
210.029
210.000
5.2 4
209.985
209.965
418
38.5
25
41.5
85
99.5
1.5
99.9 1.6
14.5
∅210 H6
∅390
∅350
∅21.5+0.2
∅293
∅16
∅16
∅21
Rotational speed flange
Dimensions in mm (1 mm = 0.03937 inches)
Dimensions
68 A3276-8.0 HBM: public T40FM
12.2.3 T40FM 60 kNm - 80 kNm
A
A
71.5
22
71.5
16
34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11.1
263
24x15° = 360°
15°
M22
Ø323.5
Ø16
Ø16
M5 for axial locking
Ø275
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
T40FM A3276-8.0 HBM: public 69
T40FM 60kNm - 80kNm, continued
Ø 23
()
()
Center of gravity
Alignment plane
rotor - stator
Cutaways in section A-A
A–A
45.7
14.5
24x15° = 360°
15°
+0.2
16
448
239.985
239.965
4
5.2
240.029
240.000
44
30
43.5
95
109.5
1.5
20
99.9 1.6
Ø240 H6
Ø425
Ø385
Ø240 g5
Ø323
Ø16
Ø16
Rotational speed flange
Ø 23
Dimensions in mm (1 mm = 0.03937 inches)
Dimensions
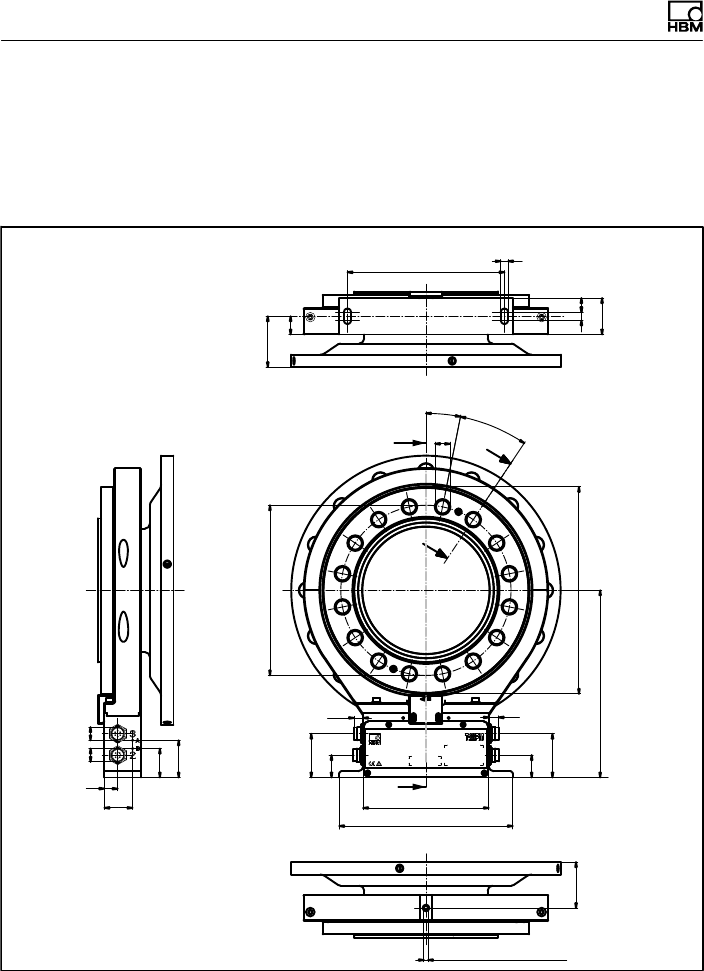
70 A3276-8.0 HBM: public T40FM
12.3 T40FM with rotational speed
measurement and reference signal,
Option 7, Code S
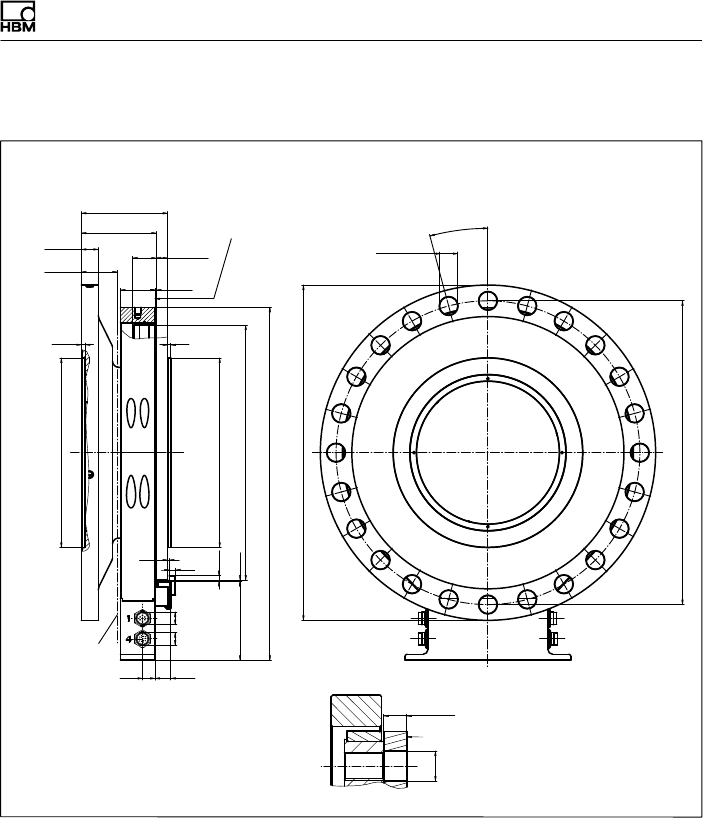
12.3.1 T40FM 15 kNm - 25 kNm
A
A
B
B16 x 22.5° = 360°
22.5°
22
61.5
∅206
9
1710
44
16
34
35
45
190
210
152
27
53
27
53
11.1 12
226.5
∅250.5
11.25°
M18
∅16
for axial locking
M5
55.5
∅16
Dimensions in mm (1 mm = 0.03937 inches)
Mounting
dimensions
Dimensions
T40FM A3276-8.0 HBM: public 71
T40FM 15kNm - 25kNm, continued
Dimensions in mm (1 mm = 0.03937 inches)
Alignment plane
rotor - stator
Center of gravity
∅288
37.8
16
375
173.986
173.968
∅174 g5 ( )
174.025
174.000
∅174 H6 ( )
45.2
87.5
15
∅326
16 x 22.5° = 360°
22.5°
∅19+0.2
∅16
∅16
25
73
∅250
32
(14.5)
1.5
8
99.9 1.6
8
2
7.3
Cutaways in section A-A
Rotational speed flange
B–B
(14.5)
∅19
Dimensions
72 A3276-8.0 HBM: public T40FM
12.3.2 T40FM 30 kNm - 50 kNm
Dimensions in mm (1 mm = 0.03937 inches)
A
A
22
67
∅250
16
34
∅16
∅16
35
45
for axial locking
M5
64.25
190 9
10 17
44
210
152
27
53
12
27
53
11.1
248
∅293.5
24 x15° = 360°
15°
M20
Mounting
dimensions
Dimensions
T40FM A3276-8.0 HBM: public 73
T40FM 30kNm - 50kNm, continued
Dimensions in mm (1 mm = 0.03937 inches)
Cutaways in section A-A
Alignment plane
rotor - stator
Center of gravity
∅350
40.9
24 x15° = 360°
15°
∅390
∅21+0.2
16
∅16
∅16
210.029
210.000
∅210 H6 ( )
5.2 4
209.985
209.965
∅210 g5 ( )
∅293
418
25 (14.5)
18.5 85
99.5
1.5
99.9 1.6
14.5
7.3
28
38.5
Rotational speed flange
A–A
∅21
(14.5)
Dimensions
74 A3276-8.0 HBM: public T40FM
12.3.3 T40FM 60 kNm - 80 kNm
Dimensions in mm (1 mm = 0.03937 inches)
A
A
Mounting
dimensions
71.5
22
∅275
71.5
M5 for axial locking
16
∅16
∅16
34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11.1
263
∅323.5
24 x15° = 360°
15°
M22
Dimensions
T40FM A3276-8.0 HBM: public 75
T40FM 60kNm - 80kNm, continued
Dimensions in mm (1 mm = 0.03937 inches)
Cutaways in section A-A
Alignment plane
rotor - stator
Rotational speed flange
Center of gravity
A–A
∅385
45.7
∅23
(14.5)
∅425
24 x15° = 360°
15°
∅23+0.2
16
∅16
∅16
448
∅323
239.985
239.965
∅240 g5 ( )
45.2
240.029
240.000
∅240 H6 ( )
44
(14.5)30
21.5 95
109.5
1.5
20
99.9 1.6
28
7.3
Order numbers, Accessories
76 A3276-8.0 HBM: public T40FM
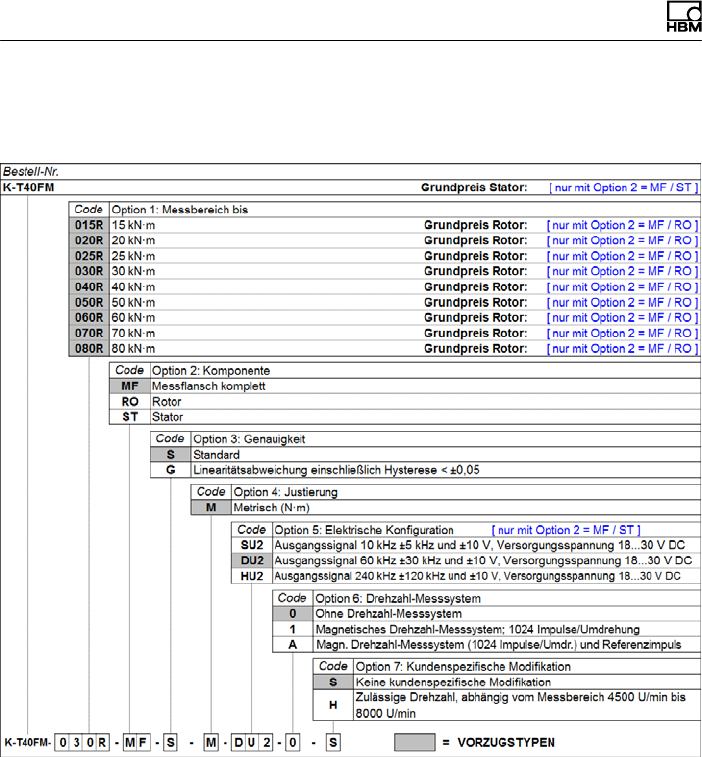
13 Order numbers, Accessories
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 77
Accessories, to be ordered separately
Article Order no.
Connection cable for torque output
Torque connection cable, 423 - D-Sub 15P, 6m 1-KAB149-6
Torque connection cable, 423 - free ends, 6m 1-KAB153-6
Connection cable for rotational speed output
Speed connection cable, 423 - D-Sub 15P, 6m 1-KAB150-6
Speed connection cable, 423 - free ends, 6m 1-KAB154-6
Speed with reference pulse connection cable, 423 8 pin - D-Sub 15P,
6m
1-KAB163-6
Speed with reference pulse connection cable, 423 8 pin - free ends,
6m
1-KAB164-6
TMC connection cable
Connection cable TIM40/TMC, 6m 1-KAB174-6
Cable sockets
423G-7S, 7 pin (straight) 3-3101.0247
423W-7S, 7-pin (angular) 3-3312.0281
423G-8S, 8-pin (straight) 3-3312.0120
423W-8S, 8-pin (angular) 3-3312.0282
Connection cable, by the meter (min. order quantity: 10 m, price per meter)
Kab8/00-2/2/2 4-3301.0071
Order numbers, Accessories
78 A3276-8.0 HBM: public T40FM
14 Specifications
Type T40FM
Accuracy class 0.1
Nominal (rated) torque Mnom kNVm 15 20 25 30 40 50 60 70 80
Nominal (rated) rotational speed
Optional
rpm
rpm
6000
8000
4000
6000
3000
4500
Torque measuring system, frequency output
Nominal (rated) sensitivity (nom
inal (rated) signal range between
torque = zero and nominal (rated)
torque)
Option SU2 kHz 5
Option DU2 kHz 30
Option HU2 kHz 120
Sensitivity tolerance (deviation of
the actual output quantity at Mnom
from the nominal (rated) sensitivity)
%" 0.2
Non-linearity incl. hysteresis, re
lated to the nom. (rated) sensitivity
For a max. torque in range:
Between 0% v. Mnom and 20%
v. Mnom
%<"0.03 (optional <"0.015)
> 20% of Mnom and 60% of
Mnom
%<"0.065 (optional <"0.035)
> 60% of Mnom and 100% of
Mnom
%<"0.1 (optional <"0.05)
Relative standard deviation of re
producibility (variability),
as per DIN 1319, related to the vari
ation of the output signal
%<"0.05
Load resistance kΩ>2
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 79
Nominal (rated) torque Mnom 807060504030252015kNVm
Output signal at zero torque
Option SU2 kHz 10
Option DU2 kHz 60
Option HU2 kHz 240
Nominal (rated) output signal
(RS-422, 5 V symmetrical)
At positive nominal (rated)
torque, Option SU2
kHz 15
At positive nominal (rated)
torque, Option DU2
kHz 90
At positive nominal (rated)
torque, Option HU2
kHz 360
At negative nominal (rated)
torque, Option SU2
kHz 5
At negative nominal (rated)
torque, Option DU2
kHz 30
At negative nominal (rated)
torque, Option HU2
kHz 120
Maximum modulation range 1
Option SU2 kHz 2.5 ... 17.5
Option DU2 kHz 15 ... 105
Option HU2 kHz 60 ... 420
Maximum bandwidth (-3dB)
Option SU2 kHz 1
Option DU2 kHz 3
Option HU2 kHz 6
Group delay
Option SU2 μs <400
Option DU2 μs <220
Option HU2 μs <150
Order numbers, Accessories
80 A3276-8.0 HBM: public T40FM
Nominal (rated) torque Mnom 807060504030252015kNVm
Temperature effect per 10 K in
the nominal (rated) temperature
range
on the output signal, related to
the actual value of the signal
span
%<"0.1
on the zero signal, related to
the nominal (rated) sensitivity
%<"0.05
Long-term drift over 48 h at refer
ence temperature, related to the
nominal (rated) sensitivity
%≤0.03
Torque measuring system, voltage output
Nominal (rated) sensitivity (span
between torque = zero and nominal
(rated) torque)
V 10
Sensitivity tolerance (deviation of
the actual output quantity at Mnom
from the nominal (rated) sensitivity)
%"0.2
Non-linearity including hyster
esis, related to the nominal (rated)
sensitivity
For a max. torque in range:
Between 0% v. Mnom and 20%
v. Mnom
%<"0.03 (optional <"0.015)
> 20% of Mnom and 60% of
Mnom
%<"0.065 (optional <"0.035)
> 60% of Mnom and 100% of
Mnom
%<"0.1 (optional <"0.05)
Relative standard deviation of re
peatability (variability),
per DIN 1319, relative to the vari
ation of the output signal
%<"0.05
Output signal at zero torque V 0
Nominal output signal
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 81
Nominal (rated) torque Mnom 807060504030252015kNVm
At positive nominal (rated)
torque
kHz 10
At negative nominal (rated)
torque
kHz -10
Maximum modulation range 2
invalid measured value
V
V
"12
13 ... 15
Load resistance kΩ>10
Residual ripple 3) mV <40 (peak-to-peak)
Temperature effect per 10 K in
the nominal (rated) temperature
range
on the output signal, related to
the actual value of the signal
span
%≤0.2
on the zero signal, relative to
the nominal (rated) sensitivity
%<"0.15
Long-term drift over 48 h at refer
ence temperature, related to the
nominal (rated) sensitivity
%<"0.03
Rotational speed measuring system
Measurement system Magnetic, via AMR sensor (Anisotropic
Resistive Effect) and magnetized
plastic ring with embedded steel ring
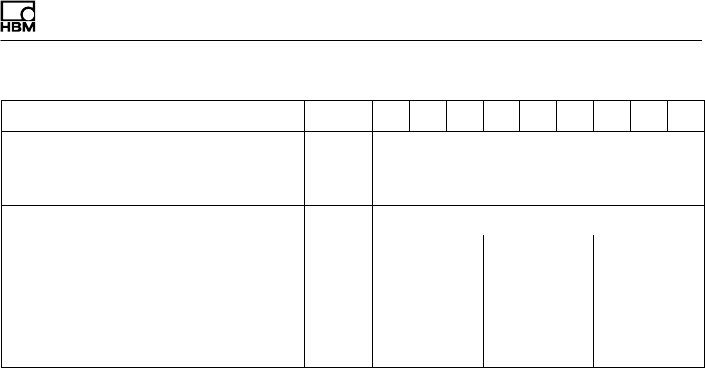
Magnetic poles 158 186 204
Maximum positional variation of
the poles "50 angular seconds
Output signal V5 V symmetrical (RS-422);
2 square-wave signals, approx. 90_
phase-shifted
Pulses per revolution 1024
Minimum rotational speed for
sufficient pulse stability rpm 0
Order numbers, Accessories
82 A3276-8.0 HBM: public T40FM
Nominal (rated) torque Mnom 807060504030252015kNVm
Pulse tolerance 4) degrees < "0.05
Maximum permissible output fre
quency
kHz 420
Group delay μs< 150
Radial nominal (rated) distance
between sensor head and mag
netic ring
(mechanical distance)
mm 1.6
Working distance range between
sensor head and magnetic ring 5) mm 0.4 … 2.5
Max. permissible axial displace
ment of the rotor to the stator 6) mm "1.5
Hysteresis of reversal in the case
of relative vibrations between
rotor and stator
Torsional vibration of the rotor degrees < approx. 0.2
Horizontal stator vibration dis
placement
mm < approx. 0.5
Load resistance 7) kΩ ≥ 2
Magnetic load limit (damage to
rotors)
Remanent flux density mT >100
Coercive field strength kA/m >100
Permissible magnetic field
strength for signal deviations
kA/m <0.1
Application limitations
Reference temperature °C +23
Nominal temperature range °C +10 … +70
Operating temperature range 8) °C -20 … +85
Storage temperature range °C -40 … +85
Permissible ambient humidity
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 83
Nominal (rated) torque Mnom 807060504030252015kNVm
Relative humidity / no condens
ation
%5 ... 95
Reference signal measuring system (zero index)
Measurement system Magnetic, with Hall sensor and magnet
Output signal V5 V symmetrical (RS 422)
Pulses per revolution 1
Minimum rotational speed for
sufficient pulse stability
rpm 2
Pulse width, approx. degrees 0.088
Pulse tolerance 9) degrees <"0.05
Group delay μs <150
Axial nominal (rated) distance
between sensor head and
magnetic ring (mechanical
distance)
mm 2.0
Working distance range between
sensor head and magnetic ring
mm 0.4 … 2.5
Max. permissible axial
displacement of the rotor to the
stator 10)
mm "1.5
Load limits11)
Limit torque kN⋅m 32 60 110
Max. limit load of measuring
body 12) kN⋅m 100 200 350
Breaking torque (static) kN⋅m >100 >200 >350
Longitudinal limit force (static) kN 60 120 240
Lateral limit force (static) kN 80 160 240
Limit bending moment (static) N⋅m 6000 12000 24000
Oscillation width per DIN 50100
(peaktopeak) 13) kN⋅m 30 32 60 100
Order numbers, Accessories
84 A3276-8.0 HBM: public T40FM
Nominal (rated) torque Mnom 807060504030252015kNVm
Protection class, as per
EN 60529 (rotor/stator)
IP 54
Shunt
Nominal (rated) trigger voltage V 5
Trigger voltage limit V 36
Calibration signal on Vmin >2.5
Calibration signal off Vmin <0.7
Tolerance of the shunt signal, re
lated to Mnom at reference temp. %<"0.05
Energy supply
Nominal (rated) supply voltage
(separated extralow voltage
(SELV))
VDC 18 ... 30
Rated current consumption
In measuring mode A<1 (typ. 0.3 at 20 V supply voltage)
In startup mode A<4 (typ. 2) for max. 50μs
Nominal (rated) power consump
tion
W<10 (typ. 6)
Maximum cable length m 50
General information
EMC
Emission
(per FCC 47 Part 15, Subpart C) 14)
Emission
(per EN 61326-1, Section 7)
RFI field strength 15) Class B
Immunity from interference,
as per EN 61326-1, EN 61326-2-3
Electromagnetic field (AM) V/m 10
Magnetic field A/m 100
Electrostatic discharge (ESD)
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 85
Nominal (rated) torque Mnom 807060504030252015kNVm
Contact discharge kV 4
Air discharge kV 8
Fast transients (burst) kV 1
Impulse voltages (surge) kV 1
Conducted interference V 10
Mechanical shock 16),
as per EN 60 068-2-72
Quantity n 1000
Duration ms 3
Acceleration (half sine) m/s2650
Vibrational stress in 3
directions 16),
as per EN 60068-2-6
Frequency range Hz 10 ... 2000
Duration h 2.5
Acceleration (amplitude) m/s2200
Mechanical data
Torsional stiffness cTkN⋅m/
rad
32050 63260 106200
Torsion angle at Mnom degrees
0.027
0.036
0.045
0.027
0.036
0.045
0.033
0.038
0.043
Stiffness in the axial direction cakN/mm 1380 1710 2280
Stiffness in the radial direction crkN/mm 3900 5080 6170
Stiffness during the bending mo
ment round a radial axis cb
kN⋅m/
deg.
94 188 290
Maximum deflection at longitud
inal limit force
mm <0.05 <0.08 <0.12
Additional maximum radial devi
ation at lateral limit force
mm <0.05 <0.05 <0.05
Order numbers, Accessories
86 A3276-8.0 HBM: public T40FM
Nominal (rated) torque Mnom 807060504030252015kNVm
Additional maximum plumb/par
allel deviation at limit bending
moment
mm <0.5 <0.7
Balance quality level, as per
DIN ISO 1940
G 6.3
Mechanical data
Permissible max. limits for relat
ive shaft vibration (peak-peak) 17)
Undulations in area of connection
flange, based on ISO7919-3
Normal operation (continuous
operation)
μms(p*p) +9000
n
Ǹ(n in rpm)
Start and stop operation/reson
ance ranges (temporary)
μms(p*p) +13200
n
Ǹ(n in rpm)
Mass moment of inertia
of rotor Jv
(around the rotary axis; does not
take flange bolts into account)
Without rotational speed meas
uring system
kg⋅m20.20 0.46 0.75
With rotational speed measuring
system
kg⋅m20.22 0.51 0.81
Proportional mass moment of in
ertia for the transmitter side
(side of the flange with external
centering)
Without rotational speed meas
uring system
% of Jv28 23 26
With rotational speed measuring
system
% of Jv37 30 32
Permissible eccentricity of the ro
tor (radially) to the center point of
the stator (without rotational speed
measuring system)
mm " 2
Order numbers, Accessories
T40FM A3276-8.0 HBM: public 87
Nominal (rated) torque Mnom 807060504030252015kNVm
Permissible axial displacement
between rotor and stator (without ro
tational speed measuring system) 18)
mm " 2
Weight
Rotor without speed measuring
system
kg 18 28 39
Rotor with rotational speed
measuring system
kg 20 32 42
Stator kg 1.8 2.1 3.0
1) Output signal range in which there is a repeatable correlation between torque and output signal.
2) Output signal range in which there is a repeatable correlation between torque and output signal.
3) Signal frequency range 0.1 to 10kHz.
4) At nominal (rated) conditions.
5) The pulse tolerance improves with reduced distance and vice versa.
6) The data refers only to a central axial alignment. Deviations lead to a change in pulse tolerance.
7) Note the necessary termination resistances as per RS-422.
8) Heat conductance via the stator base plate necessary over 70°C. The temperature of the base
plate must not exceed 85°C.
9) At nominal (rated) conditions.
10) The data refers only to a central axial alignment. Deviations lead to a change in pulse tolerance.
11) Each type of irregular stress (bending moment, lateral or longitudinal force, exceeding nominal
(rated) torque) can only be permitted up to its specified limit, provided none of the others can
occur at the same time. If this condition is not met, the limit values must be reduced. If 30% of
the limit bending moment and lateral limit force occur at the same time, only 40% of the
longitudinal limit force is permissible and the nominal (rated) torque must not be exceeded. The
effects of permissible bending moments, longitudinal and lateral forces on the measurement
result are ≤±1% of the nominal (rated) torque. The load limits only apply for the nominal (rated)
temperature range. At temperatures <10°C, the load limits must be reduced by approx. 30%
(strength reduction).
12) The data refer to static loading of the measuring body; note the bolted connection!
13) The nominal (rated) torque must not be exceeded.
14) FCC compliance on request
15) Option 7, Code S
16) The antenna ring and connector plug must be fixed.
17) The influence of radial run-out deviations, eccentricity, defects of form, notches, marks, local
residual magnetism, structural inhomogeneity or material anomalies needs to be taken into
account and isolated from the actual undulation.
18) Above the nominal (rated) temperature range ±1.5 mm.
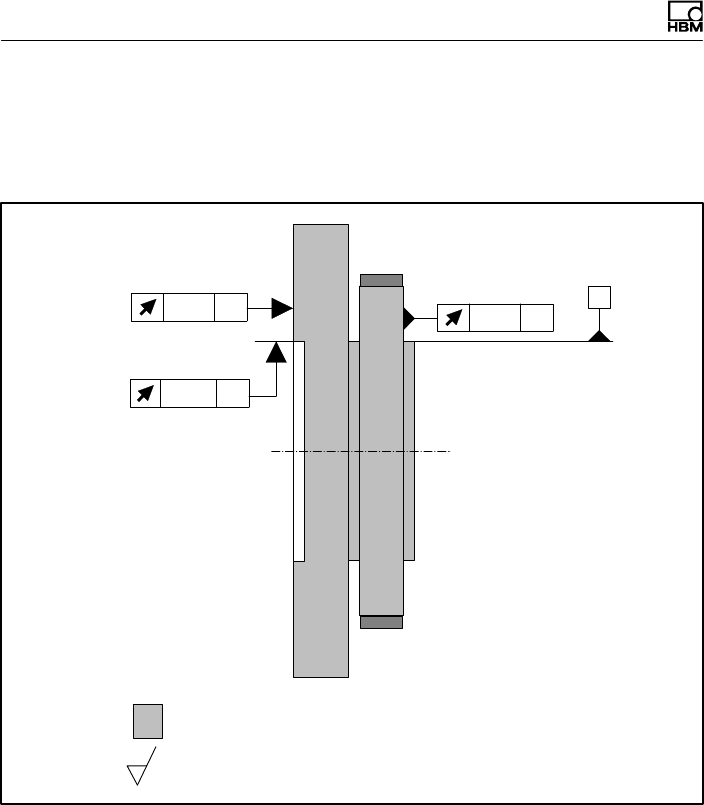
Supplementary Technical Information
88 A3276-8.0 HBM: public T40FM
15 Supplementary Technical Information
Axial and radial run-out tolerances
Internal centering
A
0.02 AB
0.02 AB
Flange A
Flange B
Hardness 47 ±2 HRC
Surface quality of the axial and radial run-out tolerances (A, B and
AB)
0.8
0.02 AB
To ensure that the torque flange retains its characteristics
once it is installed, we recommend that the customer also
chooses the specified form and position tolerances, sur
face quality and hardness for the connections provided.
Mounting Instructions | Montageanleitung
English Deutsch
T40FM

2A3276-8.0 HBM: public T40FM
Deutsch
1 Sicherheitshinweise 4......................................
2 Verwendete Kennzeichnungen 12.............................
2.1 Auf dem Aufnehmer angebrachte Symbole 12....................
2.2 In dieser Anleitung verwendete Kennzeichnungen 13..............
3 Anwendung 14..............................................
4 Aufbau und Wirkungsweise 15...............................
5 Mechanischer Einbau 20.....................................
5.1 Wichtige Vorkehrungen beim Einbau 20.........................
5.2 Bedingungen am Einbauort 21..................................
5.3 Einbaulage 22................................................
5.4 Einbaumöglichkeiten 22.......................................
5.4.1 Einbau mit nicht demontiertem Antennenring, FCC-Option mit
Antennen-Abschirmungsabdeckung 23..........................
5.4.2 Einbau mit nachträglicher Montage des Stators, Option 7, Code S 24
5.5 Rotormontage vorbereiten 25...................................
5.6 Montage des Rotors 28........................................
5.7 Montage des Stators 32.......................................
5.8 Montage des Drehzahlflansches (nur Drehzahlmesssystem) 39.....
6 Elektrischer Anschluss 42....................................
6.1 Allgemeine Hinweise 42.......................................
6.2 EMV‐Schutz 42...............................................
6.3 Steckerbelegung 44...........................................
6.4 Versorgungsspannung 50......................................
7 Shuntsignal 52..............................................
8 Funktionsprüfung 54........................................
8.1 Rotorstatus, LED A (obere LED) 55.............................

T40FM A3276-8.0 HBM: public 3
8.2 Statorstatus, LED B (untere LED) 55............................
9 Belastbarkeit 57.............................................
10 Wartung 59..................................................
11 Entsorgung und Umweltschutz 60............................
12 Abmessungen 61............................................
12.1 T40FM ohne Drehzahlmessung, Option 7, Code S 61.............
12.1.1 T40FM 15 kNm - 25 kNm 61...................................
12.1.2 T40FM 30 kNm - 50 kNm 63...................................
12.1.3 T40FM 60 kNm - 80 kNm 64...................................
12.2 T40FM mit Drehzahlmessung, Option 7, Code S 65...............
12.2.1 T40FM 15 kNm - 25 kNm 65...................................
12.2.2 T40FM 30 kNm - 50 kNm 67...................................
12.2.3 T40FM 60 kNm - 80 kNm 69...................................
12.3 T40FM mit Drehzahlmessung und Referenzimpuls, Option 7, Code S .
71
12.3.1 T40FM 15 kNm - 25 kNm 71...................................
12.3.2 T40FM 30 kNm - 50 kNm 73...................................
12.3.3 T40FM 60 kNm - 80 kNm 75...................................
13 Bestellnummern, Zubehör 77.................................
14 Technische Daten 79.........................................
15 Ergänzende technische Informationen 90.....................
Sicherheitshinweise
4A3276-8.0 HBM: public T40FM
1 Sicherheitshinweise
FCC-Konformität und Hinweis
Wichtig
Durch Änderungen, die nicht ausdrücklich schriftlich von
der für die Konformität zuständigen Person genehmigt
wurden, könnte die Berechtigung zum Betrieb des Geräts
verfallen. Sofern angegeben, müssen zusätzliche
Komponenten oder Zubehörteile, deren Verwendung bei
der Installation des Produkts an anderer Stelle vorgege
ben ist, verwendet werden, um die Einhaltung der FCC-
Vorschriften zu gewährleisten.
Dieses Gerät entspricht Teil 15 der FCC-Vorschriften.
Der Betrieb unterliegt den beiden nachstehenden
Bedingungen: (1) Dieses Gerät darf keine schädlichen
Störungen verursachen und (2) dieses Gerät muss Stö
rungen akzeptieren können, auch solche, die ein
unerwünschtes Betriebsverhalten zur Folge haben
können.
Die FCC-Kennung bzw. die eindeutige Kennung muss
am Gerät sichtbar sein.
Modell Messbereiche FCC ID IC
T40S7 15 kNm, 20 kNm,
25 kNm
2ADAT−T40S7TOS9 12438A−T40S7TOS9
T40S8 30 kNm, 40 kNm,
50 kNm
T40S9 60 kNm, 70 kNm,
80 kNm

Sicherheitshinweise
T40FM A3276-8.0 HBM: public 5
Beispiel eines Schildes mit FCC-ID und IC-Nummer.
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the FCC Rules. Opera
tion is subject to the following two conditions: (1) This
device may not cause harmful interference, and (2) this
device must accept any interference received, including
interference that may cause undesired operation.
Schild
Abb. 1.1 Position des Schildes am Stator des Geräts
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the FCC Rules. Operation is
subject to the following two conditions: (1) This device may not
cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause
undesired operation.
Abb. 1.2 Beispiel eines Schildes

Sicherheitshinweise
6A3276-8.0 HBM: public T40FM
Dieses Gerät entspricht der Industry-Canada-Norm
RSS210.
Dieses Gerät entspricht der bzw. den RSS-Normen von
Industry Canada für nicht genehmigungspflichtige
Geräte. Der Betrieb unterliegt den beiden nachstehenden
Bedingungen: (1) Dieses Gerät darf keine Störungen ver
ursachen und (2) dieses Gerät muss Störungen akzep
tieren können, auch solche, die ein unerwünschtes
Betriebsverhalten des Geräts zur Folge haben können.
This device complies with Industry Canada standard
RSS210.
This device complies with Industry Canada
license‐exempt RSS standard(s).Operation is subject to
the following two conditions: (1) this device may not
cause interference, and (2) this device must accept any
interference, including interference that may cause unde
sired operation of the device.
Cet appareil est conforme aux norme RSS210 d’Industrie
Canada.
Cet appareil est conforme aux normes d’exemption de
licence RSS d’Industry Canada. Son fonctionnement est
soumis aux deux conditions suivantes : (1)cet appareil ne
doit pas causer d’interférence et (2) cet appareil doit
accepter toute interférence, notamment les interférences
qui peuvent affecter son fonctionnement.
Bestimmungsgemäße Verwendung
Der Drehmoment‐Messflansch T40FM ist für Dreh
moment‐, Drehwinkel‐ und Leistungs‐Messaufgaben im
Rahmen der durch die technischen Daten spezifizierten
Belastungsgrenzen konzipiert. Jeder andere Gebrauch ist
nicht bestimmungsgemäß.

Sicherheitshinweise
T40FM A3276-8.0 HBM: public 7
Der Betrieb des Stators ist nur mit montiertem Rotor
zulässig.
Der Drehmoment‐Messflansch darf nur von qualifiziertem
Personal ausschließlich entsprechend der technischen
Daten unter Beachtung der Sicherheitsbestimmungen
und Vorschriften dieser Montageanleitung eingesetzt
werden. Zusätzlich sind die für den jeweiligen
Anwendungsfall geltenden Rechts‐ und Sicherheitsvor
schriften zu beachten. Sinngemäß gilt dies auch bei der
Verwendung von Zubehör.
Der Drehmoment‐Messflansch ist nicht zum Einsatz als
Sicherheitsbauteil bestimmt. Bitte beachten Sie hierzu
den Abschnitt „Zusätzliche Sicherheitsvorkehrungen“.
Der einwandfreie und sichere Betrieb setzt sachgemäßen
Transport, fachgerechte Lagerung, Aufstellung und
Montage sowie sorgfältige Bedienung voraus.
Belastbarkeitsgrenzen
Beim Einsatz des Drehmoment‐Messflanschs sind die
Angaben in den technischen Datenblättern unbedingt zu
beachten. Insbesondere dürfen die jeweils angegebenen
Maximalbelastungen keinesfalls überschritten werden.
Nicht überschritten werden dürfen z. B. die in den
technischen Daten angegebenen Werte für
SGrenzdrehmoment,
SGrenzlängskraft, Grenzquerkraft oder Grenz
biegemoment,
SSchwingbreite des Drehmoments,
SBruchdrehmoment,
STemperaturgrenzen,
Sdie Grenzen der elektrischen Belastbarkeit.

Sicherheitshinweise
8A3276-8.0 HBM: public T40FM
Einsatz als Maschinenelemente
Der Drehmoment‐Messflansch kann als Maschinen
elemente eingesetzt werden. Bei dieser Verwendung ist
zu beachten, dass der Aufnehmer zu Gunsten einer
hohen Messempfindlichkeit nicht mit den im
Maschinenbau üblichen Sicherheitsfaktoren konstruiert
wurde. Beachten Sie hierzu den Abschnitt „Belast
barkeitsgrenzen“ und die technischen Daten.
Unfallverhütung
Entsprechend den einschlägigen Unfallverhütungsvor
schriften der Berufsgenossenschaften ist nach der Mon
tage des Aufnehmers vom Betreiber eine Abdeckung
oder Verkleidung wie folgt anzubringen:
SAbdeckung oder Verkleidung dürfen nicht mitrotieren.
SAbdeckung oder Verkleidung sollen sowohl Quetsch‐
und Scherstellen vermeiden als auch vor evtl. sich
lösenden Teilen schützen.
SAbdeckungen und Verkleidungen müssen weit genug
von den bewegten Teilen entfernt oder so beschaffen
sein, dass man nicht hindurchgreifen kann.
SAbdeckungen und Verkleidungen müssen auch ange
bracht sein, wenn die bewegten Teile des Dreh
moment‐Messflanschs außerhalb des Verkehrs‐ und
Arbeitsbereiches von Personen installiert sind.
Von den vorstehenden Forderungen darf nur abgewichen
werden, wenn der Drehmoment‐Messflansch schon
durch den Aufbau der Maschine oder bereits vorhandene
Schutzvorkehrungen ausreichend gesichert ist.
Zusätzliche Sicherheitsvorkehrungen
Der Drehmoment‐Messflansch kann (als passiver
Aufnehmer) keine (sicherheitsrelevanten) Abschaltungen

Sicherheitshinweise
T40FM A3276-8.0 HBM: public 9
vornehmen. Dafür bedarf es weiterer Komponenten und
konstruktiver Vorkehrungen, für die der Errichter und
Betreiber der Anlage Sorge zu tragen hat. Die das Mess
signal verarbeitende Elektronik ist so zu gestalten, dass
bei Ausfall des Messsignals keine Folgeschäden
auftreten können.
Der Leistungs‐ und Lieferumfang des Aufnehmers deckt
nur einen Teilbereich der Drehmoment‐Messtechnik ab.
Sicherheitstechnische Belange sind vom Anlagenplaner/
Ausrüster/Betreiber so zu planen, zu realisieren und zu
verantworten, dass Restgefahren minimiert werden. Die
jeweils existierenden nationalen und örtlichen
Vorschriften sind zu beachten.
Allgemeine Gefahren bei Nichtbeachten der
Sicherheitshinweise
Der Drehmoment‐Messflansch entspricht dem Stand der
Technik und ist betriebssicher. Von dem Aufnehmer
können Gefahren ausgehen, wenn er von ungeschultem
Personal oder unsachgemäß montiert, aufgestellt, einge
setzt und bedient wird. Jede Person, die mit Aufstellung,
Inbetriebnahme, Betrieb oder Reparatur eines Dreh
moment‐Messflanschs beauftragt ist, muss die
Montageanleitung und insbesondere die sicherheits
technischen Hinweise gelesen und verstanden haben.
Bei nicht bestimmungsgemäßem Gebrauch des Aufneh
mers, bei Nichtbeachtung der Montage‐ und Bedienungs
anleitung, dieser Sicherheitshinweise oder sonstiger
einschlägiger Sicherheitsvorschriften (Unfallverhütungs
vorschriften der BG) beim Umgang mit dem Aufnehmer,
kann der Aufnehmer beschädigt oder zerstört werden.
Insbesondere bei Überlastungen kann es zum Bruch des
Aufnehmers kommen. Durch den Bruch können darüber
hinaus Sachen oder Personen in der Umgebung des Auf
nehmers zu Schaden kommen.

Sicherheitshinweise
10 A3276-8.0 HBM: public T40FM
Wird der Drehmoment‐Messflansch nicht seiner Bestim
mung gemäß eingesetzt oder werden die Sicherheitshin
weise oder die Vorgaben der Montage‐ oder Bedienungs
anleitung außer Acht gelassen, kann es ferner zum
Ausfall oder zu Fehlfunktionen des Aufnehmers kommen,
mit der Folge, dass (durch auf den Drehmoment‐Mess
flansch einwirkende oder durch diesen überwachte Dreh
momente) Menschen oder Sachen zu Schaden kommen
können.
Umbauten und Veränderungen
Der Aufnehmer darf ohne unsere ausdrückliche Zustim
mung weder konstruktiv noch sicherheitstechnisch
verändert werden. Jede Veränderung schließt eine Haf
tung unsererseits für daraus resultierende Schäden aus.
Veräußerung
Bei einer Veräußerung des Drehmoment‐Messflanschs
ist diese Montageanleitung dem Drehmoment‐Mess
flansch beizulegen.
Qualifiziertes Personal
Qualifiziertes Personal sind Personen, die mit Aufstel
lung, Montage, Inbetriebsetzung und Betrieb des Pro
duktes vertraut sind und die über die ihrer Tätigkeit ent
sprechende Qualifikationen verfügen.
Dazu zählen Personen, die mindestens eine der drei
folgenden Voraussetzungen erfüllen:
1. Ihnen sind die Sicherheitskonzepte der Automa
tisierungstechnik bekannt und Sie sind als Projektper
sonal damit vertraut.
2. Sie sind Bedienungspersonal der Automatisierungs
anlagen und im Umgang mit den Anlagen
unterwiesen. Sie sind mit der Bedienung der in dieser

Sicherheitshinweise
T40FM A3276-8.0 HBM: public 11
Dokumentation beschriebenen Geräte und Technolo
gien vertraut.
3. Sie sind Inbetriebnehmer oder für den Service einge
setzt und haben eine Ausbildung absolviert, die Sie
zur Reparatur der Automatisierungsanlagen befähigt.
Außerdem haben Sie eine Berechtigung, Stromkreise
und Geräte gemäß den Normen der Sicherheits
technik in Betrieb zu nehmen, zu erden und zu kenn
zeichnen.
Verwendete Kennzeichnungen
12 A3276-8.0 HBM: public T40FM
2 Verwendete Kennzeichnungen
2.1 Auf dem Aufnehmer angebrachte
Symbole
Angaben in dieser Anleitung nachlesen und
berücksichtigen
CE‐Kennzeichnung
Mit der CE‐Kennzeichnung garantiert der Hersteller, dass
sein Produkt den Anforderungen der relevanten EG‐
Richtlinien entspricht (die Konformitätserklärung finden
Sie auf der Website von HBM www.hbm.com unter HBM
doc).
Beispiel eines Schildes
Beispiel eines Schildes mit FCC-ID und IC-Nummer.
Position des Schildes am Stator des Geräts.
Gesetzlich vorgeschriebene Kennzeichnung zur
Entsorgung
Elektrische und elektronische Geräte, die dieses Symbol
tragen, unterliegen der europäischen Richtlinie
2002/96/EG über elektrische und elektronische Altgeräte.
Das Symbol weist darauf hin, dass nicht mehr ge
brauchsfähige Altgeräte gemäß den europäischen Vor
schriften für Umweltschutz und Rohstoffrückgewinnung
getrennt von regulärem Hausmüll zu entsorgen sind,
siehe auch Kapitel 11, Seite 60.
Model: T40S7
FCC ID: 2ADAT-T40S7TOS9
IC: 12438AT40S7TOS9
This device complies with part 15 of the
FCC Rules. Operation is subject to the fol
lowing two conditions: (1) This device may
not cause harmful interference, and (2)
this device must accept any interference
received, including interference that may
cause undesired operation.
Verwendete Kennzeichnungen
T40FM A3276-8.0 HBM: public 13
2.2 In dieser Anleitung verwendete
Kennzeichnungen
Wichtige Hinweise für Ihre Sicherheit sind besonders ge
kennzeichnet. Beachten Sie diese Hinweise unbedingt,
um Unfälle und Sachschäden zu vermeiden.
Symbol Bedeutung
WARNUNG Diese Kennzeichnung weist auf eine mögliche
gefährliche Situation hin, die – wenn die Sicherheits
bestimmungen nicht beachtet werden – Tod oder
schwere Körperverletzung zur Folge haben kann.
VORSICHT Diese Kennzeichnung weist auf eine mögliche
gefährliche Situation hin, die – wenn die Sicherheits
bestimmungen nicht beachtet werden – leichte oder
mittlere Körperverletzung zur Folge haben kann.
Hinweis Diese Kennzeichnung weist auf eine Situation hin,
die – wenn die Sicherheitsbestimmungen nicht
beachtet werden – Sachschäden zur Folge haben
kann.
Wichtig
Diese Kennzeichnung weist auf wichtige Informa
tionen zum Produkt oder zur Handhabung des Pro
duktes hin.
Tipp
Diese Kennzeichnung weist auf Anwendungstipps
oder andere für Sie nützliche Informationen hin.
Information
Diese Kennzeichnung weist auf Informationen zum
Produkt oder zur Handhabung des Produktes hin.
Hervorhebung
Siehe …
Kursive Schrift kennzeichnet Hervorhebungen im
Text und kennzeichnet Verweise auf Kapitel, Bilder
oder externe Dokumente und Dateien.

Anwendung
14 A3276-8.0 HBM: public T40FM
3 Anwendung
Der Drehmoment‐Messflansch T40FM erfasst statische
und dynamische Drehmomente an ruhenden oder rotie
renden Wellen. Der Aufnehmer ermöglicht durch seine
kurze Bauweise äußerst kompakte Prüfaufbauten.
Dadurch ergeben sich vielfältige Anwendungen.
Der Drehmomentflansch T40B verfügt über einen
zuverlässigen Schutz vor elektromagnetischen Stö
rungen. Er wurde gemäß harmonisierten europäischen
Normen getestet und/oder entspricht US-amerikanischen
und kanadischen Normen. Am Produkt befindet sich das
CE-Kennzeichen und/oder das FCC-Schild.

Aufbau und Wirkungsweise
T40FM A3276-8.0 HBM: public 15
4 Aufbau und Wirkungsweise
Der Drehmoment‐Messflansch besteht aus zwei getrenn
ten Teilen, dem Rotor und dem Stator. Der Rotor setzt
sich zusammen aus dem Messkörper und den Signal‐
Übertragungselementen.
Auf dem Messkörper sind Dehnungsmessstreifen (DMS)
installiert. Die Rotorelektronik für die Brückenspeisespan
nungs‐ und Messsignalübertragung ist zentrisch im
Flansch angeordnet. Der Messkörper trägt am äußeren
Umfang die Übertragerspulen für die berührungslose
Übertragung von Speisespannung und Messsignal. Die
Signale werden von einem teilbaren Antennenring gesen
det bzw. empfangen. Abnehmbarer Antennenring nicht
für Option 7, Code U. Der Antennenring ist auf einem Ge
häuse befestigt, in dem die Elektronik für die Spannungs
anpassung sowie die Signalaufbereitung untergebracht
sind.
Am Stator befinden sich Anschlussstecker für das Dreh
moment‐ und das Drehzahlsignal, die Spannungsversor
gung und den digitalen Ausgang. Die Antennensegmente
(der Antennenring) müssen konzentrisch um den Rotor
montiert werden (siehe Kapitel 5).

Aufbau und Wirkungsweise
16 A3276-8.0 HBM: public T40FM
Antennensegmente
Rotor
Anschluss
stecker
Stator
gehäuse
Typenschild
Anschluss
stecker
Abb. 4.1 Mechanischer Aufbau ohne Drehzahlmesssystem,
Option 7, Code S
Bei der Option 6 mit Drehzahlmesssystem ist auf dem
Stator der Drehzahlsensor montiert. Kundenseitig wird
die Drehzahlscheibe zwischen Messkörper und Kunden
flansch montiert. Die Drehzahlmessung erfolgt magne
tisch mittels AMR‐Sensor und Magnetband.
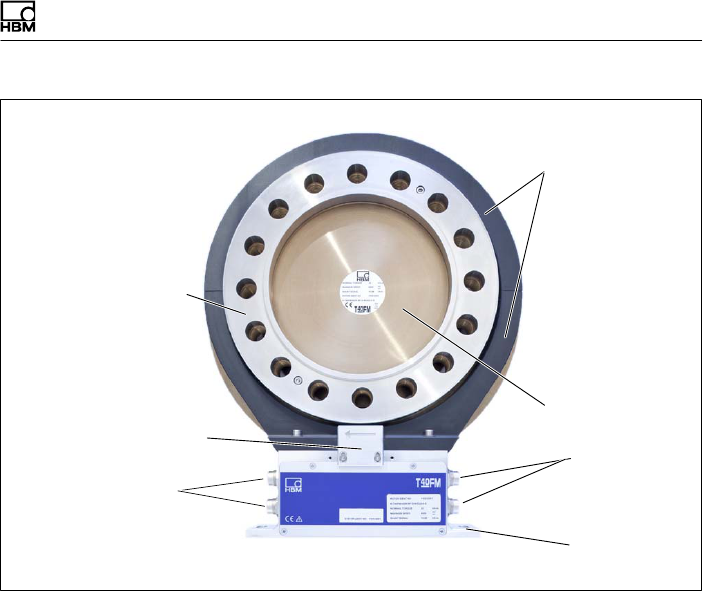
Aufbau und Wirkungsweise
T40FM A3276-8.0 HBM: public 17
Antennensegmente
Rotor
Anschluss
stecker
Stator
gehäuse
Typenschild
Anschluss
stecker
Sensorkopf für
Drehzahlmessung
Drehzahlscheibe
Abb. 4.2 Mechanischer Aufbau mit Drehzahlmesssystem,
Option 7, Code S
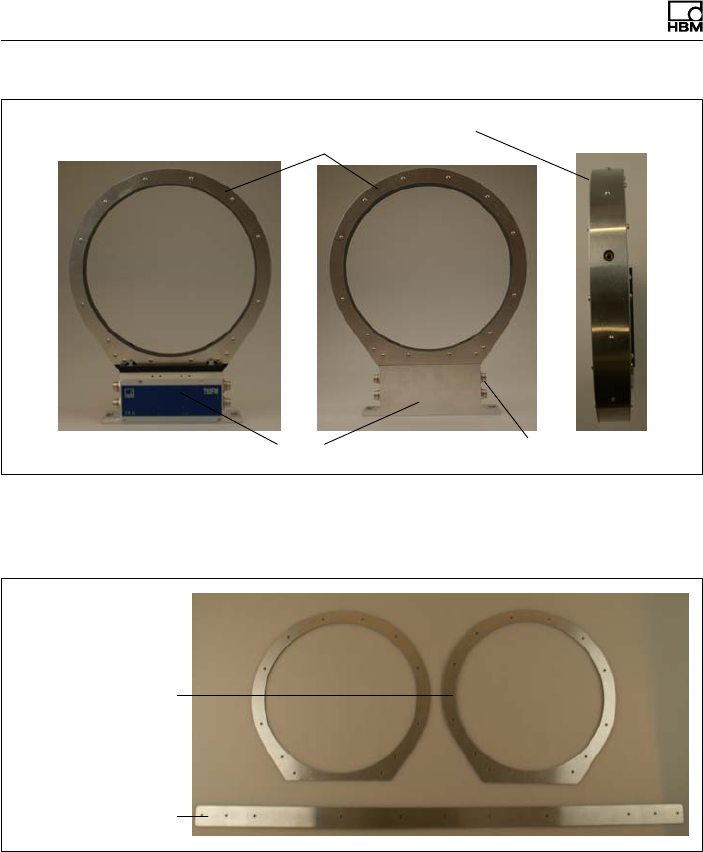
Aufbau und Wirkungsweise
18 A3276-8.0 HBM: public T40FM
Statorgehäuse
Antennensegmente mit montierten
Abschirmungsplatten
Anschlüsse
Abb. 4.3 Mechanischer Aufbau des Stators mit montierten
Abschirmungsplatten ohne Drehzahlmesssystem,
FCC-Option
Abmontierte
Abschirmungsplatten
Axiale Abschir
mungsplatten
Radiale
Abschirmungsplatte
Abb. 4.4 Einzelne Abschirmungsplatten, FCC-Option
Aufbau und Wirkungsweise
T40FM A3276-8.0 HBM: public 19
Wichtig
Um die Einhaltung der FCC-Vorschriften zu gewährleis
ten, müssen die Abschirmungsplatten unbedingt
verwendet werden. Müssen die Abschirmungsplatten zu
irgendeinem Zweck entfernt werden (z. B. zur Installation
oder Wartung), müssen sie in der ursprünglichen Position
wieder angebracht werden, bevor das Gerät in Betrieb
genommen wird.
Mechanischer Einbau
20 A3276-8.0 HBM: public T40FM
5 Mechanischer Einbau
5.1 Wichtige Vorkehrungen beim Einbau
Hinweis
Ein Drehmoment‐Messflansch ist ein Präzisions‐Mess
element und verlangt daher eine umsichtige Hand
habung. Stöße oder Stürze können zu permanenten
Schäden am Aufnehmer führen. Sorgen Sie dafür, dass
auch bei der Montage keine Überlastung des Aufneh
mers auftreten kann.
SBehandeln Sie den Aufnehmer schonend.
SPrüfen Sie den Einfluss von Biegemomenten, kri
tischen Drehzahlen und Torsionseigenschwingungen,
um eine Überlastung des Aufnehmers durch Reso
nanzüberhöhungen zu vermeiden.
SStellen Sie sicher, dass der Aufnehmer nicht
überlastet werden kann.
WARNUNG
Bei einer Überlastung des Aufnehmers besteht die
Gefahr, dass der Aufnehmer bricht. Dadurch können
Gefahren für das Bedienpersonal der Anlage auftreten, in
die der Aufnehmer eingebaut ist.
Treffen Sie geeignete Sicherungsmaßnahmen zur
Vermeidung einer Überlastung und zur Sicherung gegen
sich daraus ergebende Gefahren.
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 21
SKleben Sie die Verbindungsschrauben mit einer
Schraubensicherung (mittelfest, z. B. von LOCTITE) in
das Gegengewinde ein, um einen Vorspannverlust
durch Lockern auszuschließen, falls Wechsellasten zu
erwarten sind.
SHalten Sie die Montagemaße unbedingt ein, um einen
einwandfreien Betrieb zu ermöglichen.
Der Drehmoment‐Messflansch T40FM kann über einen
entsprechenden Wellenflansch direkt montiert werden.
Am Rotor ist auch die direkte Montage einer Gelenkwelle
oder entsprechender Ausgleichselemente (bei Bedarf
über Zwischenflansch) möglich. Die zulässigen Grenzen
für Biegemomente, Quer‐ und Längskräfte dürfen jedoch
in keinem Fall überschritten werden. Durch die hohe
Drehsteifigkeit des Aufnehmers T40FM werden dynami
sche Veränderungen des Wellenstrangs gering gehalten.
Wichtig
Auch bei korrektem Einbau kann sich der im Werk ab
geglichene Nullpunkt bis zu ca. 0,5% vom Kennwert ver
schieben. Wird dieser Wert überschritten, empfehlen wir,
die Einbausituation zu prüfen. Ist der bleibende Null
punktversatz im ausgebauten Zustand größer als 1%
vom Kennwert, senden Sie den Aufnehmer bitte zur Prü
fung ins Werk Darmstadt.
5.2 Bedingungen am Einbauort
Der Drehmoment‐Messflansch T40FM muss vor grobem
Schmutz, Staub, Öl, Lösungsmitteln und Feuchtigkeit
geschützt werden.

Mechanischer Einbau
22 A3276-8.0 HBM: public T40FM
Der Aufnehmer ist in weiten Grenzen gegen Temperatu
reinflüsse auf das Ausgangs‐ und Nullsignal kompensiert
(siehe Kapitel 14 „Technische Daten“). Liegen keine sta
tionären Temperaturverhältnisse vor, z. B. durch Tempe
raturunterschiede zwischen Messkörper und Flansch,
können die in den technischen Daten spezifizierten Werte
überschritten werden. Sorgen Sie in diesen Fällen je
nach Anwendungsfall durch Kühlung oder Heizung für
stationäre Temperaturverhältnisse. Prüfen Sie alternativ,
ob eine Temperaturentkopplung möglich ist, z. B. durch
Wärme abstrahlende Elemente wie Lamellenkupplungen.
5.3 Einbaulage
Die Einbaulage des Drehmoment‐Messflanschs ist belie
big.
Bei Rechtsdrehmoment (im Uhrzeigersinn) beträgt die
Ausgangsfrequenz bei Option 5, Code DU2 60 … 90 kHz
(Option 5, Code SU2: 10 … 15 kHz; Option HU2: 240 …
360 kHz). In Verbindung mit Messverstärkern von HBM
oder bei Nutzung des Spannungsausgangs steht ein po
sitives Ausgangssignal (0 V …+10 V) an. Beim Dreh
zahl‐Messsystem ist zum eindeutigen Bestimmen der
Drehrichtung auf dem Statorgehäuse ein Pfeil ange
bracht: Dreht der Messflansch in Pfeilrichtung, liefern
angeschlossene HBM‐Messverstärker ein positives Aus
gangssignal.
5.4 Einbaumöglichkeiten
Prinzipiell haben Sie zwei Möglichkeiten, den Dreh
moment‐Messflansch zu montieren: mit oder ohne Zerle
gen des Antennenringes. Wir empfehlen die Montage
nach Kapitel 5.4.1. Ist eine Montage nach Kapitel 5.4.1
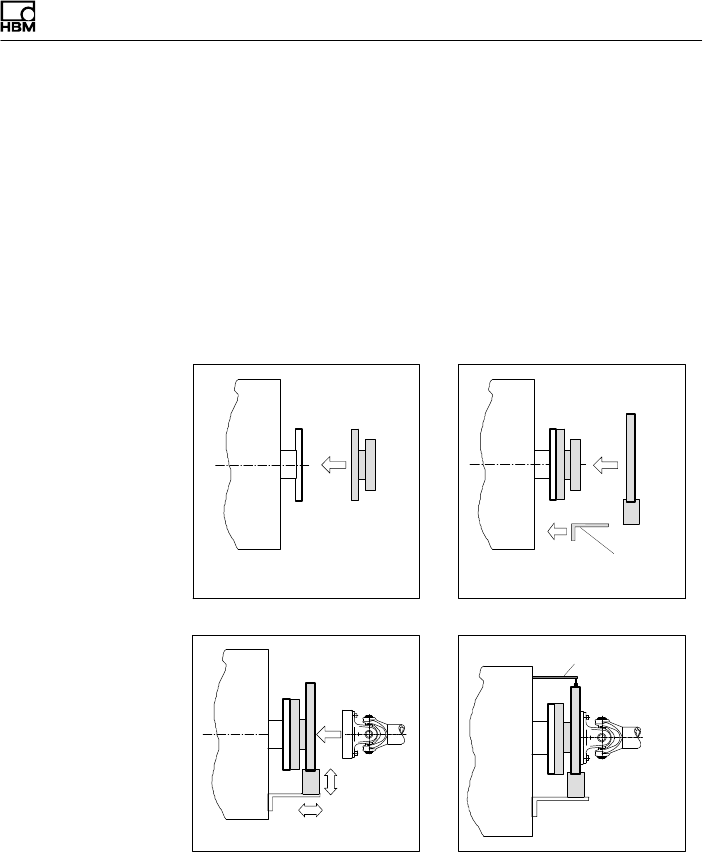
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 23
nicht möglich (z. B. bei nachträglichem Wechsel des Sta
tors), müssen Sie den Antennenring zerlegen (nur mög
lich für Option 7, Code S). Beachten Sie hierbei unbe
dingt die Hinweise zum Zusammenbau der
Antennensegmente (siehe Kapitel 5.4.2).
5.4.1 Einbau mit nicht demontiertem Antennenring,
FCC-Option mit
Antennen-Abschirmungsabdeckung
1. Rotor montieren 2. Stator montieren
3. Wellenstrang fertig montieren
Kundenseitige
Befestigung
Kundenseitige Abstützung
4. Abstützung montieren
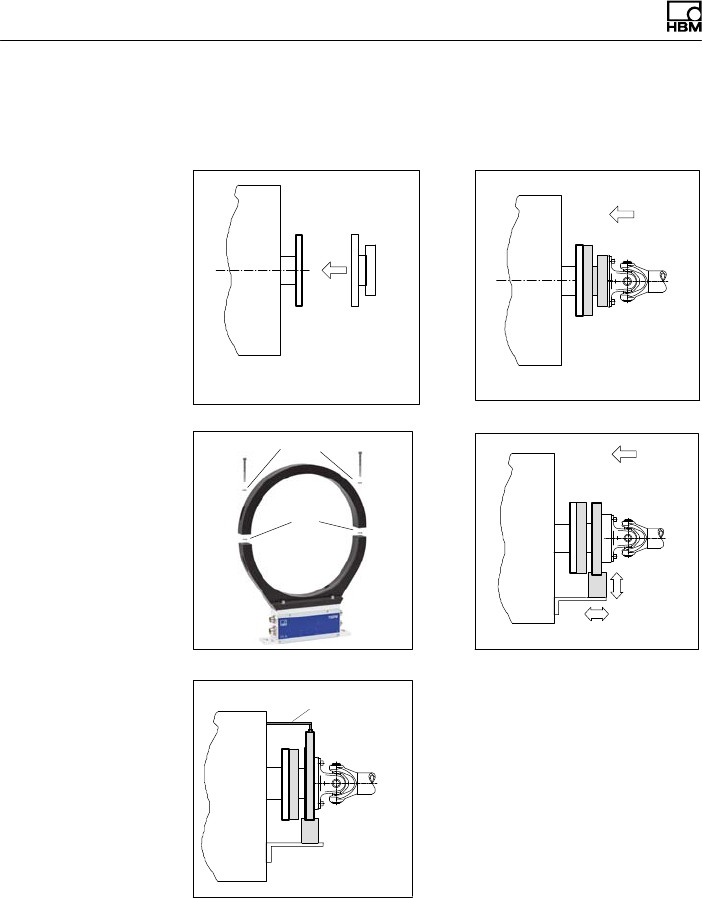
Mechanischer Einbau
24 A3276-8.0 HBM: public T40FM
5.4.2 Einbau mit nachträglicher Montage des
Stators, Option 7, Code S
2. Wellenstrang montieren
3. Antennensegment demontieren 4. Antennensegment montieren
1. Rotor montieren
Kundenseitige Abstützung
4. Abstützung montieren
Fächer
scheiben
Unterlegscheiben
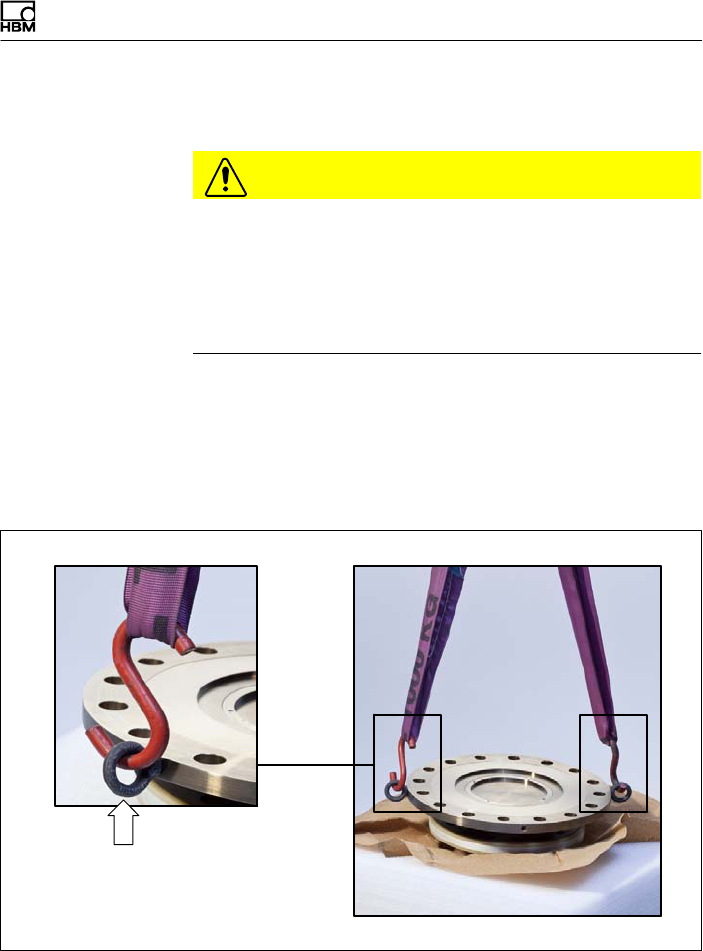
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 25
5.5 Rotormontage vorbereiten
VORSICHT
Der Rotor hat ein hohes Gewicht (je nach Messbereich
18 kg … 39 kg)!
Verwenden Sie zum Heben aus der Verpackung und zur
Montage einen Kran oder andere geeignete Hebevorrich
tungen.
Am Rotor sind als Transport‐ und Montagehilfe zwei
Ösen eingeschraubt. Haken Sie in diese Ösen das Hebe
geschirr ein, nur so ist gewährleistet, dass der Rotor
waagrecht aus der Verpackung gehoben wird
(siehe Abb. 5.1).
Transport‐ und Montageöse
Abb. 5.1 Transport‐ und Montageösen am Rotor
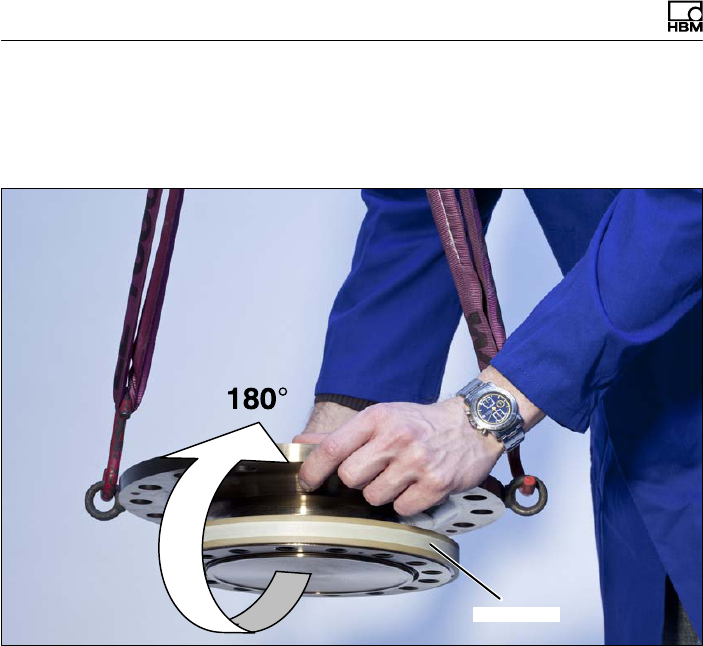
Mechanischer Einbau
26 A3276-8.0 HBM: public T40FM
1. Heben Sie den Rotor aus der Verpackung, drehen Sie
ihn horizontal um 180_, so dass Flansch B nach oben
zeigt (siehe Abb. 5.1).
Flansch B
Abb. 5.2 Drehen des Rotors
2. Legen Sie den Rotor auf einem sauberen, stabilen
Tisch vorsichtig ab.
3. Soll der Rotor waagrecht wie in Abb. 5.3 eingebaut
werden, dann entfernen Sie eine Montageöse. Bei
senkrechtem Einbau bleiben zunächst beide Monta
geösen im Flansch.
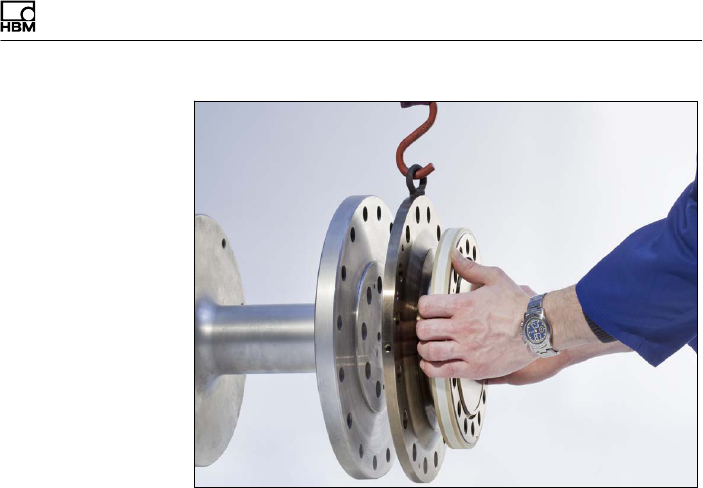
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 27
Abb. 5.3 Rotoreinbau (waagrecht)
4. Reinigen Sie die Flanschplanflächen des Aufnehmers
und der Gegenflansche.
Die Flächen müssen für eine sichere Drehmoment
übertragung sauber und fettfrei sein. Benutzen Sie mit
Lösungsmittel angefeuchtete Lappen oder Papier.
Achten Sie beim Reinigen darauf, dass kein Lösungs
mittel ins Innere des Aufnehmers tropft und die Über
tragerspulen nicht beschädigt werden.
5. Befestigen Sie das Hebegeschirr an der (den) Mon
tageöse(n).
6. Heben Sie den Rotor vorsichtig an und verfahren Sie
ihn an die Montagestelle (siehe Abb. 5.1).
Mechanischer Einbau
28 A3276-8.0 HBM: public T40FM
5.6 Montage des Rotors
Tipp
Nach der Montage ist in der Regel das Rotor‐Typenschild
verdeckt. Deshalb liegen dem Rotor zusätzliche Klebe
schilder mit den wichtigen Kenndaten bei, die Sie auf den
Stator oder andere relevante Prüfstandskomponenten
aufkleben können. Sie können dann jederzeit die für Sie
interessanten Daten ablesen, z. B. das Shuntsignal. Für
die eindeutige Zuordnung der Daten ist am Rotorflansch
von außen sichtbar eine Identifikationsnummer und die
Baugröße eingraviert.
Hinweis
Achten Sie darauf, dass während der Montage die in
Abb. 5.4 markierte Messzone nicht beschädigt wird, z. B.
durch Abstützen oder Anschlagen von Werkzeugen beim
Anziehen der Schrauben. Dies kann den Aufnehmer
beschädigen und damit zu Fehlmessungen führen oder
sogar zerstören.
1. Reinigen Sie vor dem Einbau die Flanschplanflächen
des Aufnehmers und der Gegenflansche.
Die Flächen müssen für eine sichere Drehmoment
übertragung sauber und fettfrei sein. Benutzen Sie mit
Lösungsmittel angefeuchtete Lappen oder Papier.
Achten Sie beim Reinigen darauf, dass die Über
tragerwicklung nicht beschädigt wird.
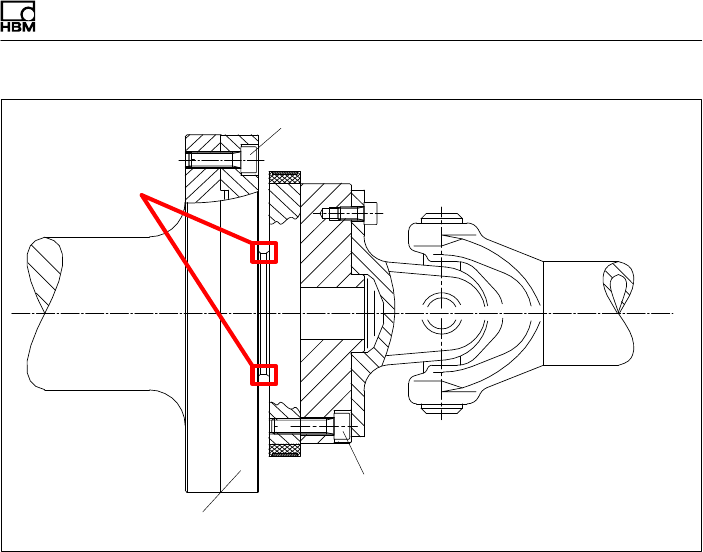
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 29
Befestigungsschraube (10.9);
maximale Einschraubtiefe Y beachten!
Innensechskantschraube (Z)
DIN EN ISO 4762 (10.9)
Flansch A
Messzone
Abb. 5.4 Verschraubung des Rotors
2. Verwenden Sie für die Verschraubung des Flanschs A
(siehe Abb. 5.4) Innensechskantschrauben DIN EN
ISO 4762 der Festigkeitsklasse 10.9 in geeigneter
Länge (abhängig von der Anschlussgeometrie, siehe
Tab. 5.1 auf Seite 31).
Wir empfehlen Zylinderschrauben DIN EN ISO 4762,
geschwärzt, glatter Kopf, zulässige Maß‐ und Formab
weichung nach DIN ISO 4759, Teil1, Produktklasse A.
3. Ziehen Sie alle Schrauben mit dem vorgeschriebenen
Drehmoment an (Tab. 5.1 auf Seite 31).
4. Entfernen Sie nun die Transport‐ und Montageöse(n).
Mechanischer Einbau
30 A3276-8.0 HBM: public T40FM
Wichtig
Bewahren Sie die Transport‐ und Montageösen für eine
spätere Demontage gut auf.
5. Am Flansch B befinden sich zur weiteren Montage
des Wellenstranges entsprechende Gewindebohrun
gen. Verwenden Sie ebenfalls Schrauben der Festig
keitsklasse 10.9 und ziehen Sie diese mit dem vorge
schriebenen Moment nach Tab. 5.1, Seite 31 an.
Wichtig
Kleben Sie die Verbindungsschrauben mit einer Schrau
bensicherung (mittelfest, z. B. von LOCTITE) in das Ge
gengewinde ein, um einen Vorspannverlust durch
Lockern auszuschließen, falls Wechsellasten zu erwarten
sind.
Hinweis
Halten Sie die maximale Einschraubtiefe nach Tab. 5.1,
Seite 31 unbedingt ein. Andernfalls kann es zu erhebli
chen Messfehlern durch Drehmomentnebenschluss oder
zur Beschädigung des Aufnehmers kommen.
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 31
Mess
bereich
Befestigungsschrauben Maximale Ein
schraubtiefe Y der
Schrauben im
Flansch B
Vorgeschriebe
nes Anzugs
moment
kNVm Z19) Festigkeits
klasse
mm NVm
15
20
25
M18
10.9
30 400
30
40
50
M20 40 560
60
70
80
M22 45 760
19) DIN EN ISO 4762; schwarz/geölt/mges=0,125
Tab. 5.1 Befestigungsschrauben
Wichtig
Trockene Schraubenverbindungen können abweichende,
höhere Reibfaktoren zur Folge haben (siehe z. B.
VDI 2230). Dadurch ändern sich die erforderlichen
Anzugsmomente.
Die erforderlichen Anzugsmomente können sich auch
ändern, falls Sie Schrauben mit anderer Oberfläche oder
anderer Festigkeitsklasse als in Tab. 5.1 angegeben
verwenden, da dies den Reibfaktor beeinflusst.
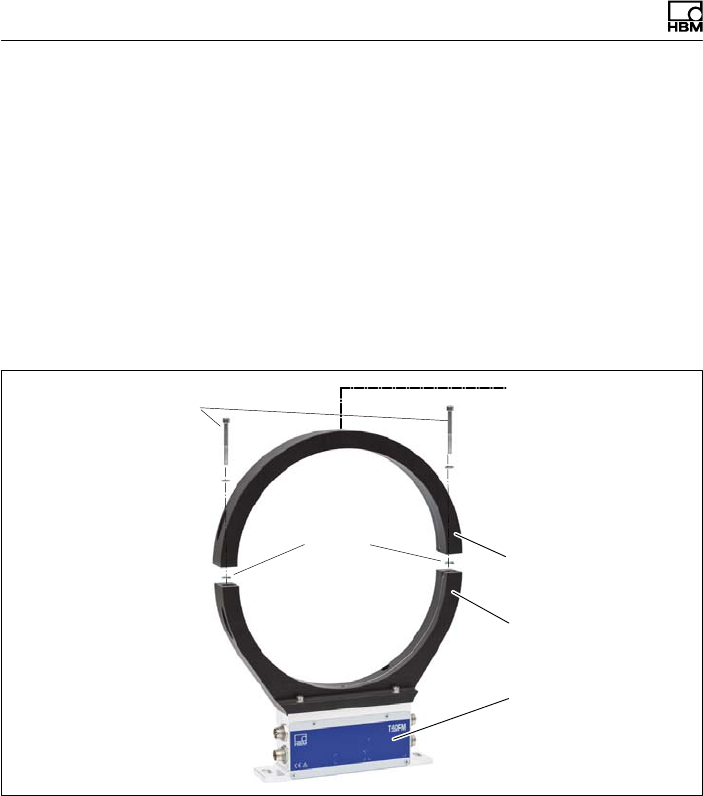
Mechanischer Einbau
32 A3276-8.0 HBM: public T40FM
5.7 Montage des Stators
Im Anlieferungszustand ist der Stator betriebsfertig mon
tiert. Sie können das obere Antennensegment vom Stator
trennen, zum Beispiel bei Wartungsarbeiten, oder um
eine leichtere Montage des Stators zu ermöglichen, nur
für Option 7, Code S.
Ist in Ihrem Fall ein Zerlegen des Stators nicht nötig, ver
fahren Sie nach den Punkten 2., 5., und 6 für Option 7,
Code U.
Fächerscheiben
Bohrung M5 zur
Fixierung des
Antennensegments
Statorgehäuse
oben
Antennensegment‐
Schrauben mit
Unterlegscheiben (M5)
unten
Antennensegmente
Abb. 5.5 Verschraubung der Antennensegmente am Stator,
Option 7, Code S
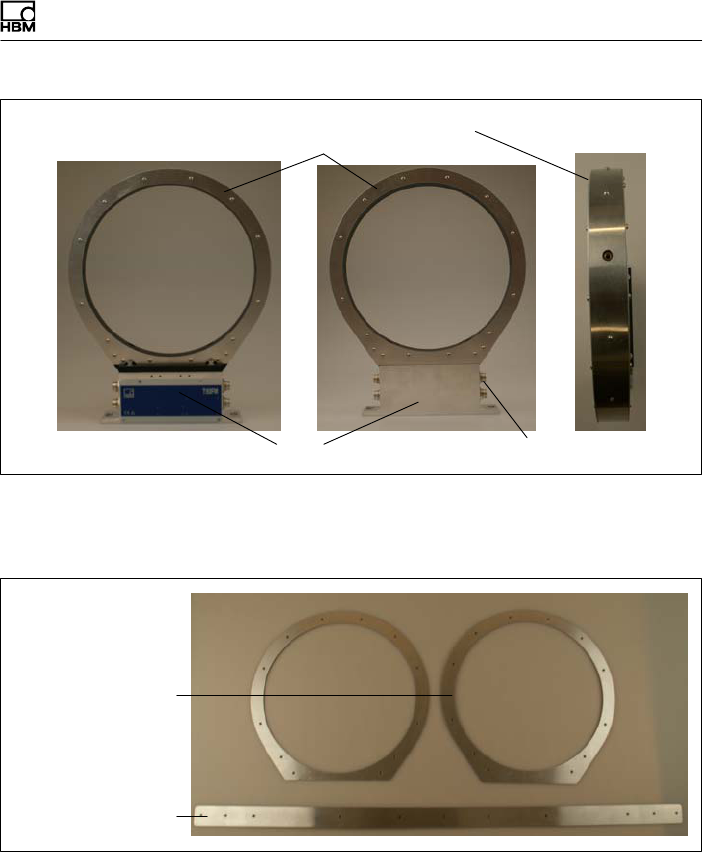
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 33
Statorgehäuse
Antennensegmente mit montierten
Abschirmungsplatten
Anschlüsse
Abb. 5.6 Mechanischer Aufbau des Stators mit montierten
Abschirmungsplatten ohne Drehzahlmesssystem,
FCC-Option
Abmontierte
Abschirmungsplatten
Axiale Abschir
mungsplatten
Radiale
Abschirmungsplatte
Abb. 5.7 Einzelne Abschirmungsplatten, FCC-Option
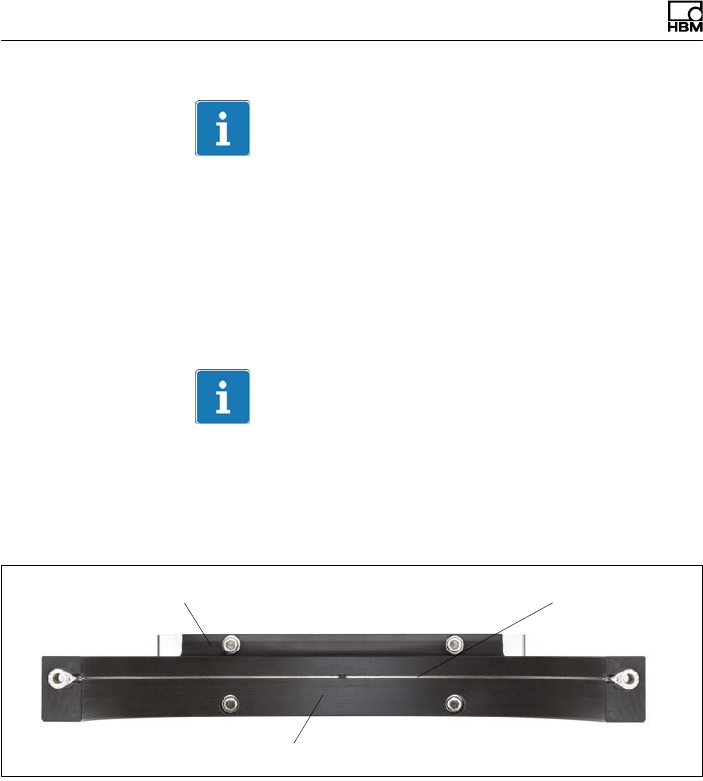
Mechanischer Einbau
34 A3276-8.0 HBM: public T40FM
Wichtig
Um die Einhaltung der FCC-Vorschriften zu gewährleis
ten, müssen die Abschirmungsplatten unbedingt
verwendet werden. Müssen die Abschirmungsplatten zu
irgendeinem Zweck entfernt werden (z. B. zur Installation
oder Wartung), müssen sie in der ursprünglichen Position
wieder angebracht werden, bevor das Gerät in Betrieb
genommen wird.
Wichtig
Wenn die Abschirmungsplatten zu Installations- oder
Wartungszwecken entfernt werden müssen, müssen die
Schrauben bei der anschließenden Montage mit einem
Anzugsmoment von 1,2 Nm festgezogen werden.
Statorgehäuse
unteres Antennensegment
Antennendraht
Abb. 5.8 Statorgehäuse und unteres Antennensegment mit
Antennendraht, Option 7, Code S
1. Lösen und entfernen Sie die Verschraubungen (M5)
am oberen Antennensegment.

Mechanischer Einbau
T40FM A3276-8.0 HBM: public 35
Zwischen den Antennensegmenten sind Fächerschei
ben angeordnet: Achten Sie darauf, dass diese nicht
verloren gehen.
2. Montieren Sie das Statorgehäuse auf einer geeigne
ten Grundplatte im Wellenstrang, sodass ausrei
chende Einstellmöglichkeiten in horizontaler und
vertikaler Richtung vorhanden sind. Ziehen Sie die
Schrauben aber noch nicht fest.
3. Montieren Sie nun das unter Punkt 1. entfernte obere
Antennensegment mit zwei Innensechskantschrauben
auf das untere Antennensegment.
Achten Sie darauf, dass zwischen den Antennenseg
menten die beiden Fächerscheiben eingelegt sind
(diese sorgen für einen definierten Übergangswider
stand)!
Wichtig
Um eine einwandfreie Funktion zu gewährleisten,
müssen die Fächerscheiben (A5,3‐FST DIN 6798 ZN/ver
zinkt) nach dreimaligem Lösen der Antennen‐Verschrau
bung erneuert werden.
4. Ziehen Sie nun alle Verschraubungen der Antennen
segmente mit einem Anzugsmoment von 5 N⋅m an.
5. Richten sie dann die Antenne zum Rotor so aus, dass
die Antenne den Rotor etwa koaxial umschließt und
der Antennendraht in axialer Richtung die gleiche
Position wie die Mitte der Übertragerwicklung auf dem
Rotor aufweist.
Um die Ausrichtung zu erleichtern, sollten die
Außenkante des Stator‐Antennensegments und die
Außenkante des Stator‐Wicklungsträgers auf einer
Linie liegen (fluchten). Beachten Sie die in den techni
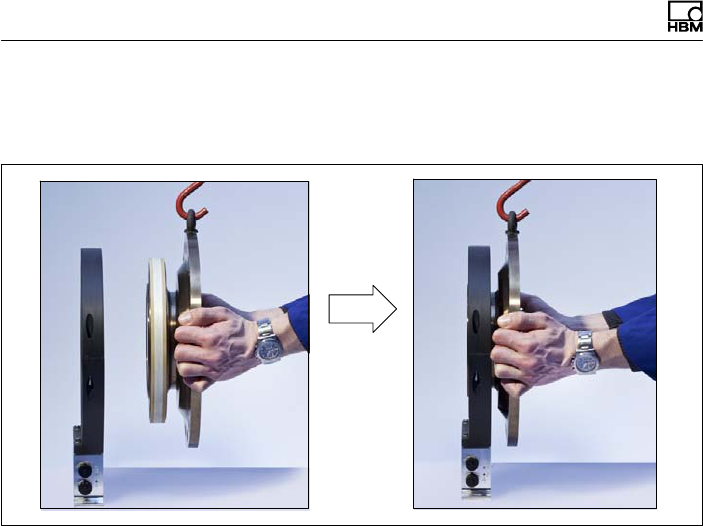
Mechanischer Einbau
36 A3276-8.0 HBM: public T40FM
schen Daten angegebenen zulässigen Ausrichtungs
toleranzen.
Abb. 5.9 Ausrichten des Rotors mit dem Stator, Option 7,
Code S und FCC-Option
6. Ziehen Sie jetzt die Verschraubung des Statorgehäu
ses fest an.
Vermeidung von Axialschwingungen des Stators
Je nach Betriebsbedingungen kann es vorkommen, dass
der Stator zum Schwingen angeregt wird. Dieser Effekt
ist abhängig von:
Sder Drehzahl,
Sdem Antennendurchmesser (abhängig vom Mess
bereich),
Sder Konstruktion des Maschinenbettes.

Mechanischer Einbau
T40FM A3276-8.0 HBM: public 37
Wichtig
Um Axialschwingungen zu vermeiden, muss der Anten
nenring kundenseitig abgestützt werden. Hierzu befindet
sich am oberen Antennensegment eine Buchse (mit M5
Innengewinde), die zur Aufnahme einer entsprechenden
Klemmeinrichtung dienen kann (siehe Abb. 5.10).
Gleichzeitig ist in diesem Fall eine Abstützung der Kabel
stecker erforderlich, ein Konstruktionsbeispiel zeigt
Abb. 5.11.
Abb. 5.10 Konstruktionsbeispiel für die Abstützung des
Antennenrings, Option 7, Code S und FCC-Option

Mechanischer Einbau
38 A3276-8.0 HBM: public T40FM
Abb. 5.11 Konstruktionsbeispiel für Steckerklemmen (für zwei
Stecker), Option 7, Code S und FCC-Option
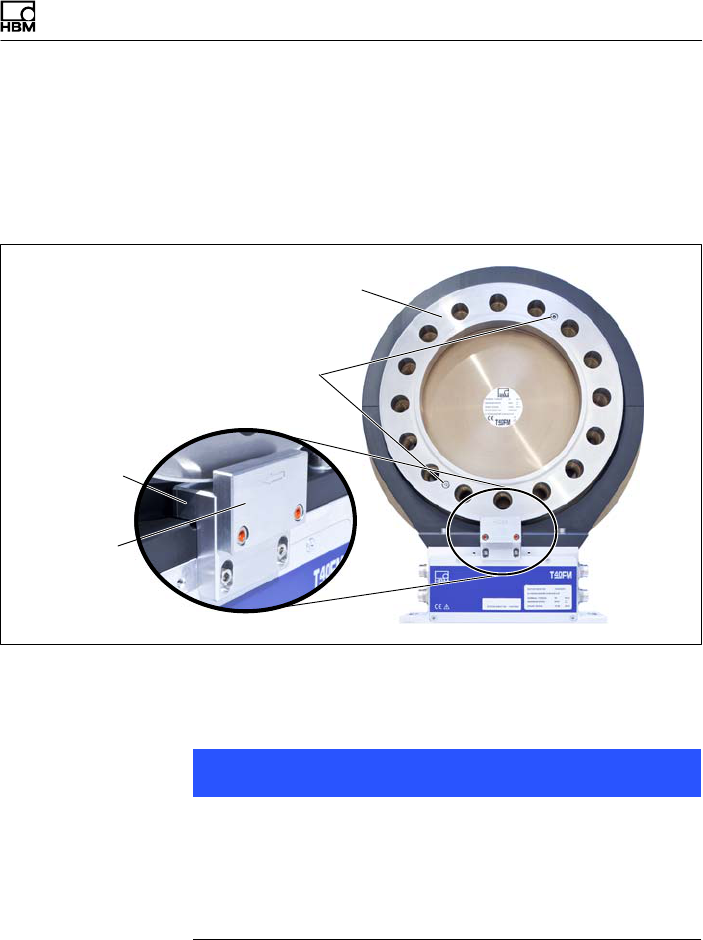
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 39
5.8 Montage des Drehzahlflansches (nur
Drehzahlmesssystem)
Die Drehzahlscheibe (Zwischenflansch) ist werksseitig
bereits am Rotor mit zwei Schrauben (M4) montiert.
Sensorkopf
für Drehzahl
messung
Drehzahlscheibe
Fixierschrauben M4
Sensorkopf
für Referenz
impuls
Abb. 5.12 Drehmomentaufnehmer mit Drehzahlmessung,
Referenzimpuls optional, Option 7, Code S und
FCC-Option
Hinweis
Die beiden Schrauben (M4) dienen ausschließlich der
Fixierung der Drehzahlscheibe. Der Messflansch mit
angeschraubtem Drehzahlmesssystem darf deshalb erst
nach der Montage des kompletten Strangs gedreht
werden.
Mechanischer Einbau
40 A3276-8.0 HBM: public T40FM
Wichtig
Das Drehzahlmesssystem verwendet ein magnetisches
Messprinzip. Treffen Sie bei Anwendungen, bei denen
hohe magnetische Feldstärken auftreten können, z. B.
bei Wirbelstrombremsen, geeignete Maßnahmen, damit
die maximal zulässige magnetische Feldstärke nicht
überschritten wird (siehe Kapitel 14 „Technische Daten“,
Seite 79).
Ausrichtung Stator (Drehzahlmesssystem, optional
mit Referenzimpuls)
Bei exakter Ausrichtung des Stators zur Drehmoment
messung ist auch das Drehzahl‐Messsystem richtig aus
gerichtet. Bei zentrischer Rotorposition im Stator kann
eine Verringerung des Abstandes zwischen Sensorkopf
und Magnetring ggf. noch zu einer Verbesserung der
Signalqualität führen. Lösen Sie dazu die beiden Schrau
ben am Sensorkopf und verschieben Sie den Sensorkopf
parallel wie in Abb. 5.13 mit den Pfeilen markiert.
Der Sensor zur Erfassung des Referenzimpulses ist fest
eingestellt und darf nicht verstellt werden.
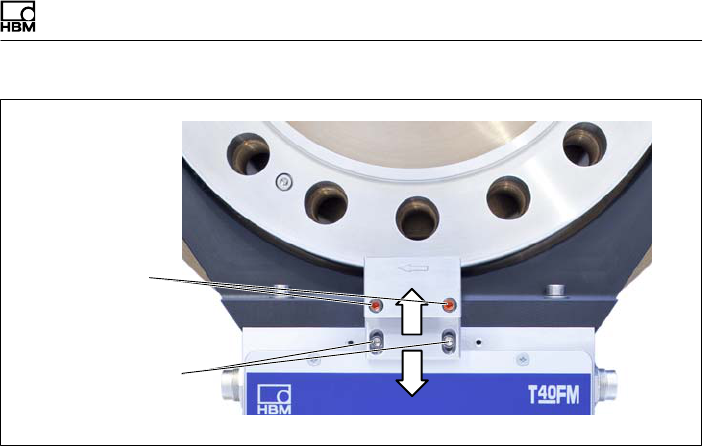
Mechanischer Einbau
T40FM A3276-8.0 HBM: public 41
Sensorkopf
schrauben
Nicht verstellen
Abb. 5.13 Drehmomentaufnehmer mit Drehzahlscheibe und
Sensorkopf sowie Referenzimpuls (optional),
Option 7, Code S und FCC-Option
Elektrischer Anschluss
42 A3276-8.0 HBM: public T40FM
6 Elektrischer Anschluss
6.1 Allgemeine Hinweise
SAchten Sie bei Kabelverlängerungen auf eine ein
wandfreie Verbindung mit geringstem Übergangs
widerstand und guter Isolation.
SAlle Kabel‐Steckverbindungen oder Überwurfmuttern
müssen fest angezogen werden.
Wichtig
Aufnehmer‐Anschlusskabel von HBM mit montierten
Steckern sind ihrem Verwendungszweck entsprechend
gekennzeichnet (Md oder n). Beim Kürzen der Kabel,
Einziehen in Kabelkanälen oder Verlegen in Schalt
schränken kann diese Kennzeichnung verloren gehen
oder verdeckt sein. Kennzeichnen Sie daher die Kabel in
diesen Fällen vor der Verlegung.
6.2 EMV‐Schutz
Wichtig
Die Aufnehmer sind gemäß EG‐Richtlinien EMV‐geprüft
und mit einer CE‐Zertifizierung gekennzeichnet. Sie
müssen jedoch den Schirm des Anschlusskabels am
schirmenden Gehäuse der Elektronik anschließen, um
den EMV‐Schutz der Messkette zu erreichen.

Elektrischer Anschluss
T40FM A3276-8.0 HBM: public 43
Die Signalübertragung zwischen Übertragerkopf und Ro
tor erfolgt rein digital und ist durch spezielle elektronische
Kodierungsverfahren gegen elektromagnetische Beein
flussungen geschützt.
Der Kabelschirm wird mit dem Aufnehmergehäuse ver
bunden. Dadurch ist das Messsystem (ohne Rotor) von
einem Faradayschen Käfig umschlossen, wenn die Schir
mung an beiden Kabelenden flächig aufgelegt wird.
Sehen Sie bei anderen Anschlusstechniken im Litzenbe
reich eine EMVfeste Abschirmung vor, bei der ebenfalls
die Schirmung flächig aufgelegt ist (siehe auch
HBMGreenlineInformation, Druckschrift i1577).
Elektrische und magnetische Felder verursachen oft eine
Einkopplung von Störspannungen in den Messkreis.
Deshalb:
SVerwenden Sie nur abgeschirmte, kapazitätsarme
Messkabel (HBM‐Kabel erfüllen diese Bedingungen).
SVerwenden Sie ausschließlich Stecker, die den
EMVRichtlinien entsprechen.
SLegen Sie die Messkabel nicht parallel zu Starkstrom‐
und Steuerleitungen. Falls das nicht möglich ist,
schützen Sie das Messkabel, z. B. durch Stahlpanzer
rohre.
SMeiden Sie Streufelder von Trafos, Motoren und
Schützen.
SErden Sie Aufnehmer, Verstärker und Anzeigegerät
nicht mehrfach.
SSchließen Sie alle Geräte der Messkette an den
gleichen Schutzleiter an.
SFalls Störungen durch Potenzialunterschiede (Aus
gleichsströme) auftreten, trennen Sie am Messver
stärker die Verbindungen zwischen Versorgungsspan
nungsnull und Gehäusemasse und legen Sie eine

Elektrischer Anschluss
44 A3276-8.0 HBM: public T40FM
Potenzialausgleichsleitung zwischen Statorgehäuse
und Messverstärkergehäuse (Kupferleitung, mindes
tens 10 mm2 Leitungsquerschnitt).
SSollten Potenzialunterschiede zwischen Rotor und
Stator der Maschine auftreten, z. B. durch unkontrol
liertes Ableiten, hilft meist das eindeutige Erden des
Rotors z. B. mittels Schleifer. Der Stator muss auf das
gleiche (Erd‐)Potenzial gelegt werden.
6.3 Steckerbelegung
Am Statorgehäuse befinden sich zwei 7‐polige Stecker,
ein 8‐poliger und ein 16‐poliger Stecker.
Die Anschlüsse der Versorgungsspannung und des
Shuntsignals der Stecker 1 und 3 sind jeweils mitein
ander galvanisch verbunden aber mit Dioden gegen Aus
gleichsströme geschützt. Die Anschlüsse der Versor
gungsspannung sind zusätzlich mit einer
selbstrückstellenden Sicherung (Multifuse) gegen
Überlast durch den Stator geschützt.
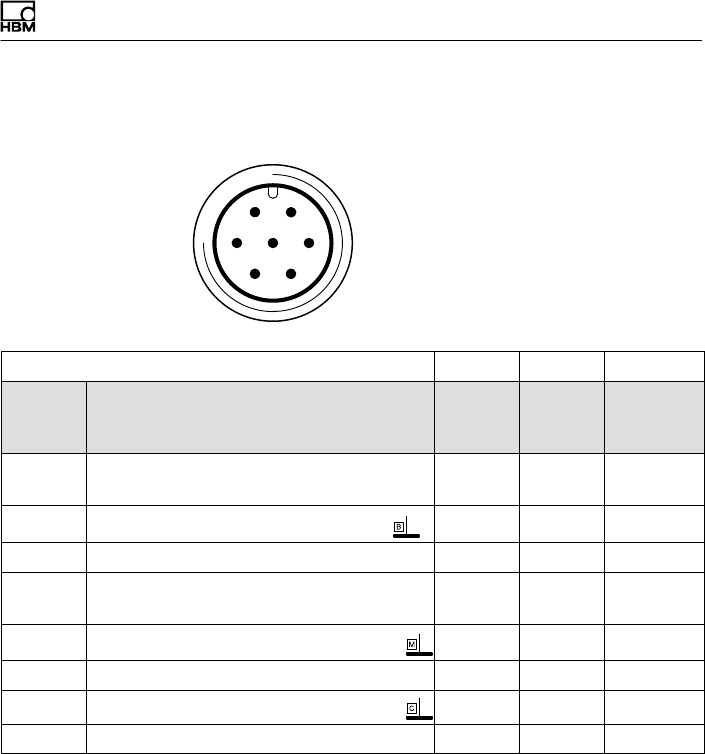
Elektrischer Anschluss
T40FM A3276-8.0 HBM: public 45
Belegung Stecker 1 - Versorgungsspannung und
Frequenz‐Ausgangssignal
61
572
43
Gerätestecker
Draufsicht
KAB153 KAB149 KAB1781)
Stecker
Pin
Belegung Ader
farbe
D‐SUB‐
Stecker
Pin
HD‐SUB‐
Stecker
Pin
1Messsignal Drehmoment
(Frequenzausgang; 5 V2,3)ws 13 5
2Versorgungsspannung 0 V sw 5 -
3Versorgungsspannung 18 V …30 V bl 6 -
4Messsignal Drehmoment
(Frequenzausgang; 5 V2,3)rt 12 10
5Messsignal 0 V; symmetrisch gr 8 6
6Shuntsignal‐Auslösung 5 V … 30 V gn 14 15
7Shuntsignal 0 V gr 8
Schirm an Gehäusemasse
1) Brücke zwischen 4 +9
2) Komplementäre Signale RS‐422; ab 10 m Kabellänge empfehlen wir einen Abschlusswiderstand
mit R = 120 Ohm zwischen den Adern (ws) und (rt).
3) RS‐422: Pin 1 entspricht A, Pin 4 entspricht B.
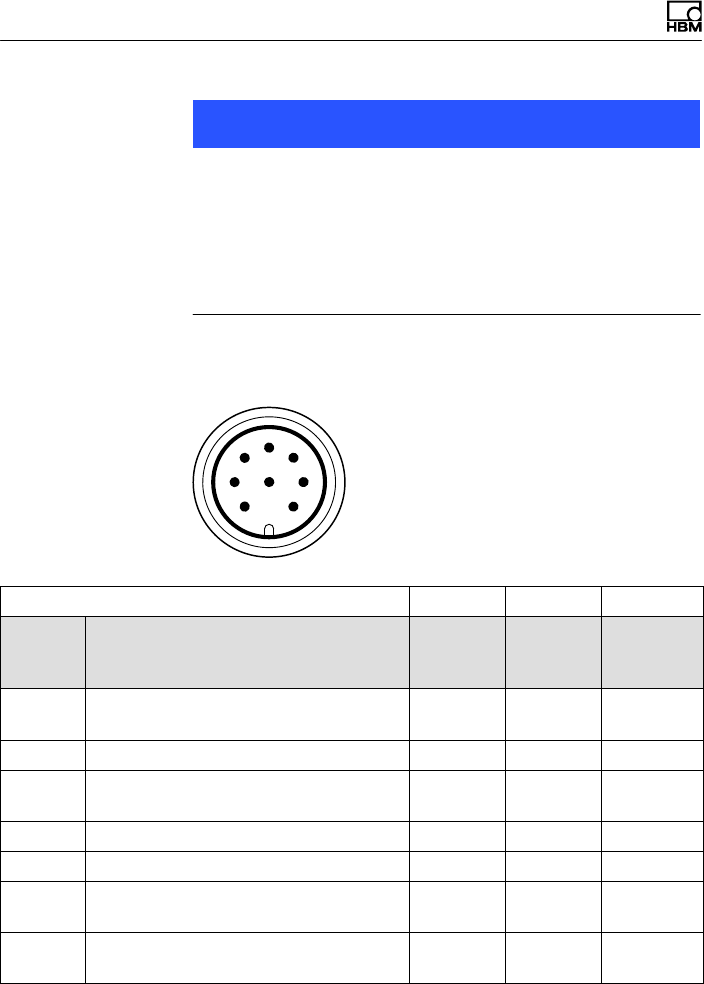
Elektrischer Anschluss
46 A3276-8.0 HBM: public T40FM
Hinweis
Die Drehmoment‐Messflansche sind nur für den Betrieb
mit DC‐Versorgungsspannung vorgesehen. Sie dürfen
nicht an ältere HBM‐Messverstärker mit Rechteck‐Spei
sung angeschlossen werden. Hier könnte es zur Zerstö
rung von Widerständen der Anschlussplatte bzw. ande
ren Fehlern in den Messverstärkern kommen.
Belegung Stecker 2 - Drehzahl-Messsystem
6
1
5
7
2
4
38
Gerätestecker
Draufsicht
KAB154 KAB150 KAB1791)
Stecker
Pin
Belegung Ader
farbe
D-SUB-
Stecker
Pin
HD-SUB-
Stecker
Pin
1Messsignal Drehzahl 2) (Impulsfolge,
5 V; 0°)rt 12 10
2Nicht belegt bl - -
3Messsignal Drehzahl 2 (Impulsfolge,
5 V; um 90° phasenverschoben) gr 15 8
4Nicht belegt sw - -
5Nicht belegt vi - -
6Messsignal Drehzahl 2)
(Impulsfolge, 5 V; 0°)ws 13 5
7Messsignal Drehzahl 2) (Impulsfolge,
5 V; um 90° phasenverschoben) gn 14 7
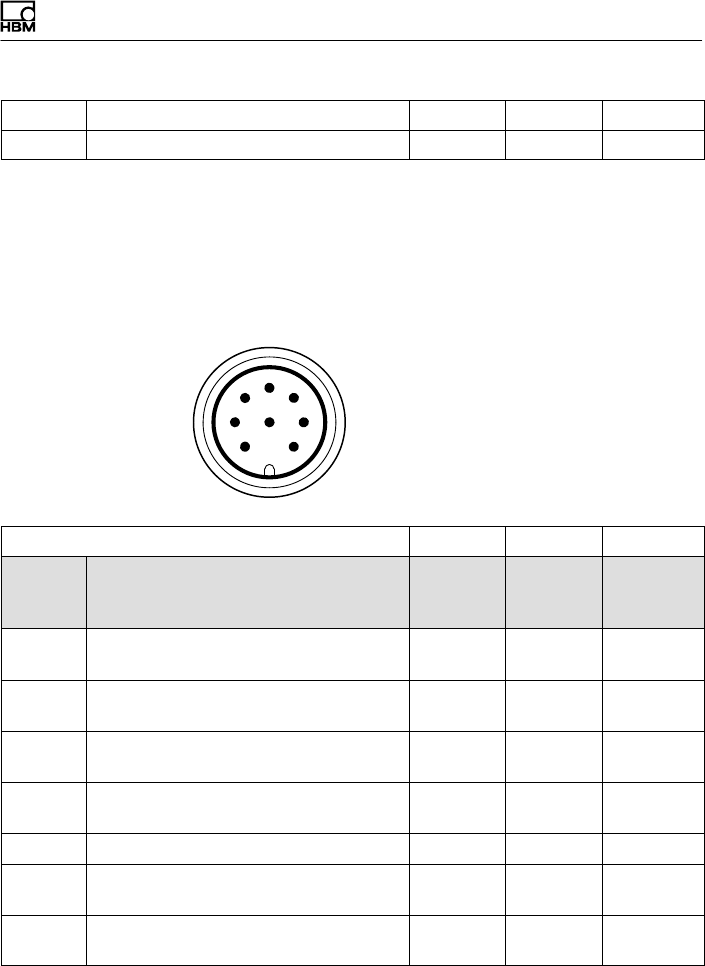
Elektrischer Anschluss
T40FM A3276-8.0 HBM: public 47
8 Betriebsspannungsnull sw/bl 3) 8 6
Schirm an Gehäusemasse
1) Brücke zwischen 4 + 9
2) Komplementäre Signale RS‐422; ab 10 m Kabellänge empfehlen wir einen Abschlusswiderstand
mit R = 120 Ohm.
3) Bei KAB163 / KAB164 Aderfarbe braun (bn)
Belegung Stecker 2 - Drehzahl‐Messsystem mit
Referenzimpuls
6
1
5
7
2
4
38
Gerätestecker
Draufsicht
KAB164 KAB163 KAB1811)
Stecker
Pin
Belegung Ader
farbe
D-SUB-
Stecker
Pin
HD-SUB-
Stecker
Pin
1Messsignal Drehzahl 2) (Impulsfolge,
5 V; 0°)rt 12 10
2Referenzsignal (1 Impuls/Umdrehung,
5 V) 2) bl 2 3
3Messsignal Drehzahl 2) (Impulsfolge,
5 V; um 90° phasenverschoben) gr 15 8
4Referenzsignal (1 Impuls/Umdrehung,
5 V) 2) sw 3 2
5Nicht belegt vi - -
6Messsignal Drehzahl 2) (Impulsfolge,
5 V; 0°)ws 13 5
7Messsignal Drehzahl 2) (Impulsfolge,
5 V; um 90° phasenverschoben) gn 14 7
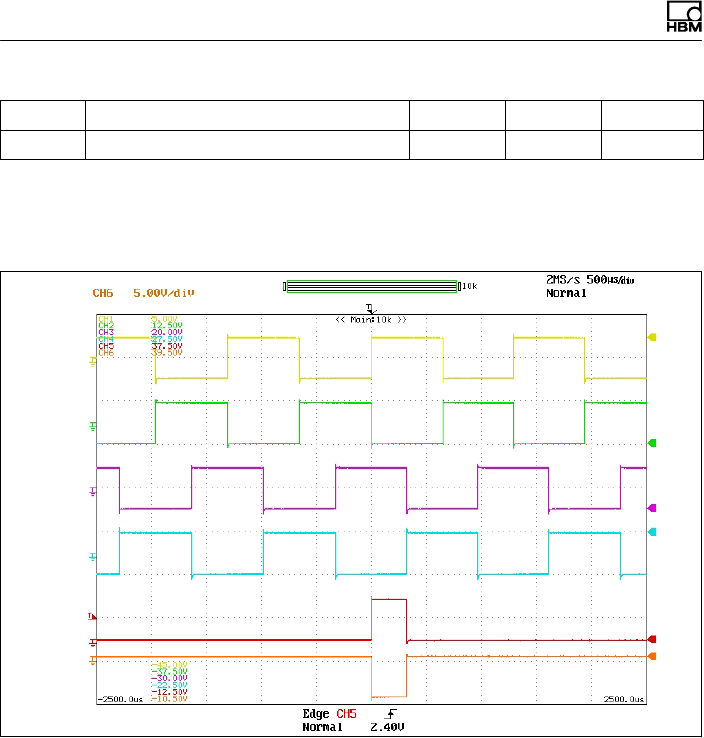
Elektrischer Anschluss
48 A3276-8.0 HBM: public T40FM
8 Betriebsspannungsnull sw 3) 8 6
Schirm an Gehäusemasse
1) Brücke zwischen 4 + 9
2) Komplementäre Signale RS‐422; ab 10 m Kabellänge empfehlen wir einen Abschlusswiderstand
mit R = 120 Ohm.
3) Bei KAB163 / KAB164 Aderfarbe braun (bn)
Pin 1
Pin 6
Pin 3
Pin 7
Pin 2
Pin 4
Abb. 6.1 Drehzahlsignale an Stecker 2 (Drehzahl in
Pfeilrichtung)
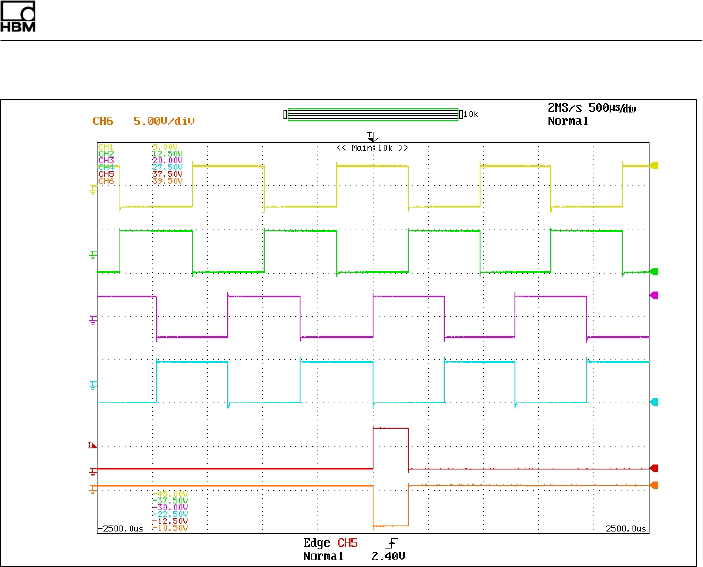
Elektrischer Anschluss
T40FM A3276-8.0 HBM: public 49
Pin 1
Pin 6
Pin 3
Pin 7
Pin 2
Pin 4
Abb. 6.2 Drehzahlsignale an Stecker 2 (Drehzahl gegen
Pfeilrichtung)
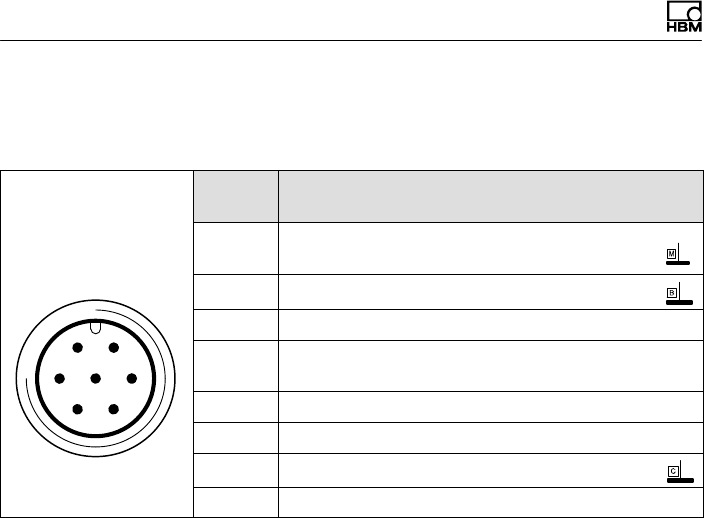
Elektrischer Anschluss
50 A3276-8.0 HBM: public T40FM
Belegung Stecker 3 - Versorgungsspannung und
Spannungs‐Ausgangssignal
61
572
43
Gerätestecker
Draufsicht
Stecker
Pin
Belegung
1Messsignal Drehmoment
(Spannungsausgang; 0 V)
2Versorgungsspannung 0 V;
3Versorgungsspannung 18 V … 30 V DC
4Messsignal Drehmoment (Spannungsausgang,
±10 V)
5Nicht belegt
6Shuntsignal‐Auslösung 5 V … 30 V
7Shuntsignal 0 V;
Schirm an Gehäusemasse
Belegung Stecker 4
TMC - nur für HBM‐interne Verbindung zum Torque Inter
face Module TIM 40.
6.4 Versorgungsspannung
Der Aufnehmer wird mit einer Schutzkleinspannung
(Nenn‐Versorgungsspannung 18 … 30 VDC) betrieben.
Sie können einen oder mehrere Drehmoment‐Messflan
sche innerhalb eines Prüfstandes gleichzeitig versorgen.
Treffen Sie zusätzliche Vorkehrungen für die Ableitung
von Überspannungen, falls Sie das Gerät an einem
Gleichspannungsnetz2) betreiben möchten.
2) Verteilsystem für elektrische Energie mit einer größeren räumlichen Ausdehnung (z. B. über
mehrere Prüfstände) das eventuell auch Verbraucher mit großen Nennströmen versorgt.
Elektrischer Anschluss
T40FM A3276-8.0 HBM: public 51
Die Hinweise dieses Kapitels beziehen sich auf den
autarken Betrieb des T40FM ohne HBM‐Systemlösun
gen.
Die Versorgungsspannung ist von den Signalausgängen
und den Shuntsignal‐Eingängen galvanisch getrennt.
Schließen Sie eine Schutzkleinspannung von 18 V …
30 V an Pin 3 (+) und Pin 2 ( ) der Stecker 1 oder 3 an.
Wir empfehlen, das HBM‐Kabel KAB 8/00‐2/2/2 und ent
sprechende Buchsen zu verwenden (siehe Zubehör).
Das Kabel darf bei Spannungen ≥24 V bis zu 50 m,
ansonsten bis zu 20 m lang sein.
Wird die zulässige Kabellänge überschritten, können Sie
die Versorgungsspannung über zwei Anschlusskabel
(Stecker 1 und 3) parallel zuführen. Damit erreichen Sie
eine Verdoppelung der zulässigen Länge. Installieren Sie
andernfalls ein Netzteil vor Ort.
Wichtig
Im Einschaltmoment kann ein Strom von bis zu 4 A flie
ßen und damit Netzteile mit elektronischer Strombegren
zung ausschalten.
Shuntsignal
52 A3276-8.0 HBM: public T40FM
7 Shuntsignal
Der Drehmoment‐Messflansch T40FM liefert ein elektri
sches Shuntsignal, das bei Messketten mit HBM‐Kompo
nenten vom Verstärker aus aktiviert werden kann. Der
Aufnehmer erzeugt ein Shuntsignal von ca. 50 % des
Nenndrehmoments, der genaue Wert ist auf dem Typen
schild vermerkt. Stellen Sie nach der Aktivierung das Ver
stärkerausgangssignal auf das Shuntsignal des ange
schlossenen Aufnehmers ein, ist der Messverstärker an
den Aufnehmer angepasst.
Information
Beim Messen des Shuntsignals sollte der Aufnehmer un
belastet sein, da das Shuntsignal additiv aufgeschaltet
wird.
Auslösen des Shuntsignals
Durch Anlegen einer Schutzkleinspannung von 5 … 30 V
an Pin 6 (+) und 7 ( ) am Stecker 1 oder 3 wird das
Shuntsignal ausgelöst.
Die Nennspannung für das Auslösen des Shuntsignals
beträgt 5 V (Auslösen bei U > 2,5 V), bei Spannungen
kleiner 0,7 V ist der Aufnehmer im Messbetrieb. Die maxi
mal zulässige Spannung beträgt 30 V, bei Nennspan
nung beträgt die Stromaufnahme ca. 2 mA, bei Maximal
spannung ca. 18 mA. Spannung für das Auslösen des
Shuntsignals ist galvanisch von der Versorgungs‐ und
der Messspannung getrennt.
Shuntsignal
T40FM A3276-8.0 HBM: public 53
Tipp
Bei HBM‐Systemlösungen kann das Shuntsignal vom
Messverstärker bzw. über die Bedien‐Software ausgelöst
werden.
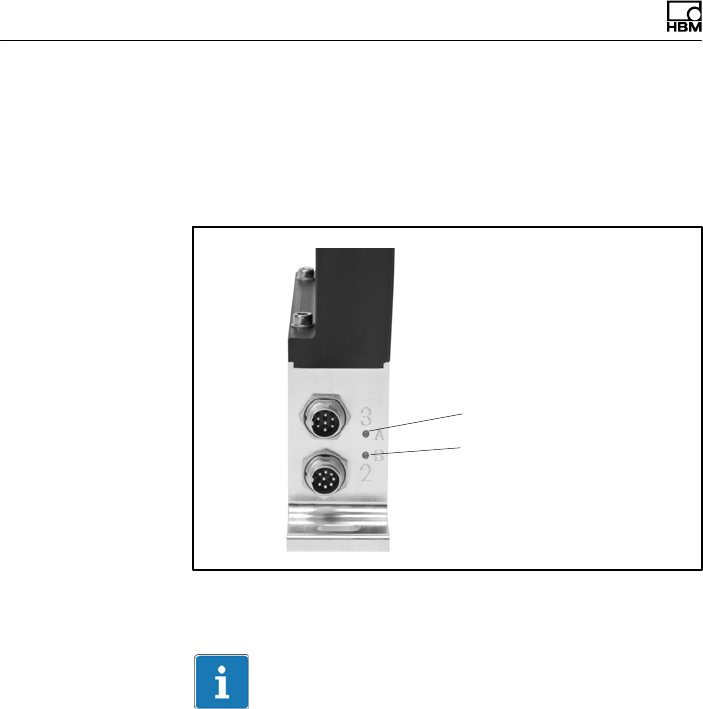
Funktionsprüfung
54 A3276-8.0 HBM: public T40FM
8 Funktionsprüfung
Durch LEDs am Stator kann die Funktion von Rotor und
Stator überprüft werden.
LED A Rotorstatus
LED B Statorstatus
Abb. 8.1 LEDs am Statorgehäuse, Option 7, Code S und
FCC-Option
Wichtig
Der Drehmomentaufnehmer benötigt nach Anlegen der
Versorgungsspannung noch bis zu 4 Sekunden, bevor er
betriebsbereit ist.
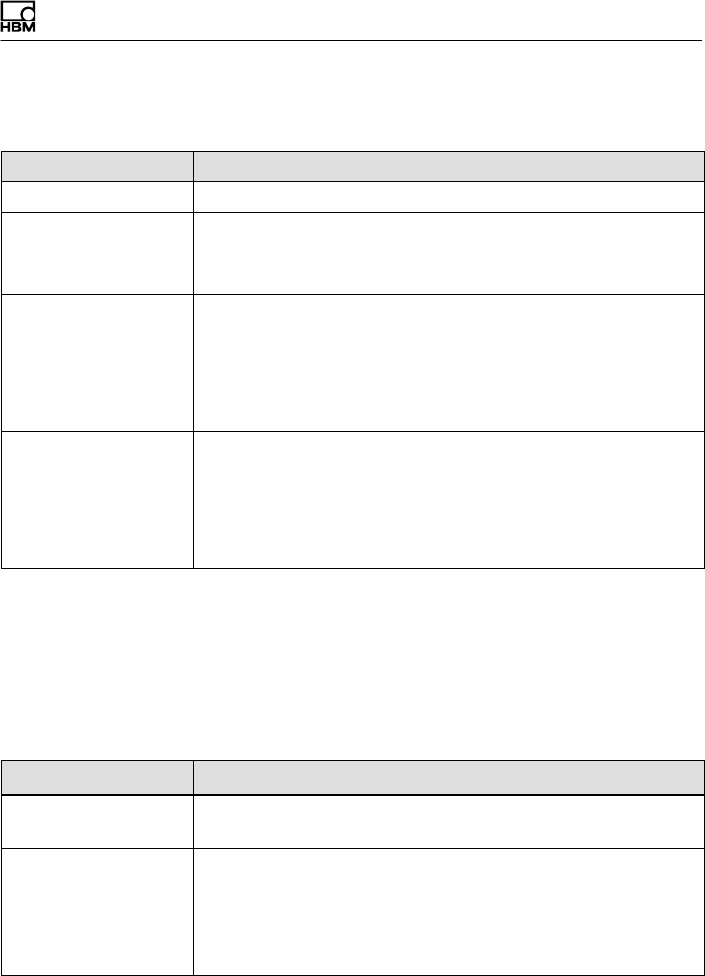
Funktionsprüfung
T40FM A3276-8.0 HBM: public 55
8.1 Rotorstatus, LED A (obere LED)
Farbe Bedeutung
Grün (pulsierend) Interne Rotor‐Spannungswerte o.k.
Orange blinkend Fehljustierung von Rotor und Stator (zunehmende Blinkfre
quenz zeigt den Grad der Dejustierung an)
=> Ausrichtung Rotor-Stator korrigieren
Orange pulsierend Rotorzustand nicht bestimmbar
=> Ausrichtung Rotor-Stator korrigieren
Falls die LED daraufhin immer noch orange pulsiert, liegt
möglicherweise ein Hardwaredefekt vor. Die Messignale neh
men den Pegel des Fehlerzustands an.
Rot (pulsierend) Rotor‐Spannungswerte nicht in Ordnung.
=> Ausrichtung Rotor-Stator korrigieren
Falls die LED daraufhin immer noch rot pulsiert, liegt mögli
cherweise ein Hardwaredefekt vor. Die Messsignale nehmen
den Pegel des Fehlerzustands an.
Pulsierend bedeutet, die LED wird pro Sekunde für ca.
20 ms dunkel geschaltet (Lebendsignal); damit ist das
Funktionieren des Aufnehmers erkennbar.
8.2 Statorstatus, LED B (untere LED)
Farbe Bedeutung
Grün
(dauerhaft leuchtend)
Messsignal‐Übertragung und interne Stator‐Spannungen o.k.
Grün, zeitweise
orange.
Bei vielen Synchroni
sationsfehlern:
dauerhaft orange
Bei fehlerhafter Übertragung von y5 Messwerten in Folge bis
zum Ende der fehlerhaften Übertragung orange. Die Messsi
gnale nehmen für die Dauer des Übertragungsfehlers + ca.
weitere 3,3 ms den Pegel des Fehlerzustands an.
Funktionsprüfung
56 A3276-8.0 HBM: public T40FM
BedeutungFarbe
Orange
(dauerhaft leuchtend)
Dauerhaft gestörte Übertragung, die Messignale nehmen den
Pegel des Fehlerzustands an. (fout = 0 Hz, Uout = Fehlerle
vel).
=> Ausrichtung Rotor-Stator korrigieren.
Rot
(dauerhaft leuchtend)
Interner Statorfehler, die Messsignale nehmen den Pegel des
Fehlerzustands an (fout = 0 Hz, Uout = Fehlerlevel).
Belastbarkeit
T40FM A3276-8.0 HBM: public 57
9 Belastbarkeit
Das Nenndrehmoment darf statisch bis zum Grenzdreh
moment überschritten werden. Wird das Nenndrehmo
ment überschritten, sind weitere irreguläre Belastungen
nicht zulässig. Hierzu zählen Längskräfte, Querkräfte und
Biegemomente. Die Grenzwerte finden Sie im Kapitel 14
„Technische Daten“ auf Seite 79.
Messen dynamischer Drehmomente
Der Drehmoment‐Messflansch eignet sich zum Messen
statischer und dynamischer Drehmomente. Beim Messen
dynamischer Drehmomente ist zu beachten:
SDie für statische Messungen durchgeführte Kalibrie
rung des T40FM gilt auch für dynamische Drehmo
mentmessungen.
SDie Eigenfrequenz f0 der mechanischen Messanord
nung hängt von den Trägheitsmomenten J1 und J2 der
angeschlossenen Drehmassen sowie der Drehsteifig
keit des T40FM ab.
Die Eigenfrequenz f0 der mechanischen Messanordnung
lässt sich aus folgender Gleichung überschlägig
bestimmen:
f0+ 1
2p · cT ·ǒ1
J1
)1
J2Ǔ
Ǹf0= Eigenfrequenz in Hz
J1, J2= Massenträgheitsmoment in kg⋅m2
cT= Drehsteifigkeit in N⋅m/rad
SDie zulässige mechanische Schwingbreite (Spitze-
Spitze) finden Sie ebenfalls in den technischen Daten.
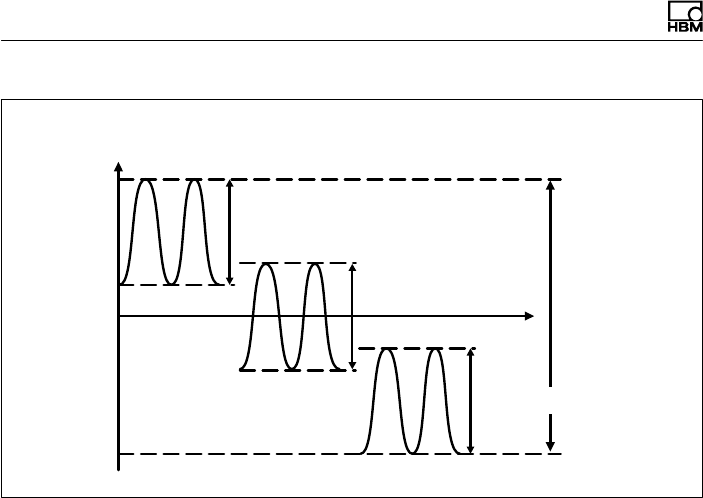
Belastbarkeit
58 A3276-8.0 HBM: public T40FM
0
+ Mnom
200 % Schwing
breite
- Mnom
Nenndrehmoment Mnom in %
Zeit t
Schwingbreite
Schwingbreite
Schwingbreite
Abb. 9.1 Zulässige dynamische Belastung

Wartung
T40FM A3276-8.0 HBM: public 59
10 Wartung
Die Drehmoment‐Messflansche T40FM sind wartungs
frei.

Entsorgung und Umweltschutz
60 A3276-8.0 HBM: public T40FM
11 Entsorgung und Umweltschutz
Alle elektrischen und elektronischen Produkte müssen
als Sondermüll entsorgt werden. Die ordnungsgemäße
Entsorgung von Altgeräten beugt Umweltschäden und
Gesundheitsgefahren vor.
Gesetzlich vorgeschriebene Kennzeichnung zur
Entsorgung
Elektrische und elektronische Geräte, die dieses Symbol
tragen, unterliegen der europäischen Richtlinie
2002/96/EG über elektrische und elektronische Altgeräte.
Das Symbol weist darauf hin, dass nicht mehr ge
brauchsfähige Altgeräte gemäß den europäischen Vor
schriften für Umweltschutz und Rohstoffrückgewinnung
getrennt von regulärem Hausmüll zu entsorgen sind.
Da die Entsorgungsvorschriften von Land zu Land unter
schiedlich sind, bitten wir Sie, im Bedarfsfall Ihren Liefe
ranten anzusprechen, welche Art von Entsorgung oder
Recycling in Ihrem Land vorgeschrieben ist.
Verpackungen
Die Originalverpackung der HBM‐Geräte besteht aus
recyclebarem Material und kann der Wiederverwertung
zugeführt werden. Bewahren Sie die Verpackung jedoch
mindestens für den Zeitraum der Gewährleistung auf. Bei
Reklamationen muss der Drehmoment‐Messflansch in
der Originalverpackung zurückgesandt werden.
Aus ökologischen Gründen sollte auf den Rücktransport
der leeren Verpackungen an uns verzichtet werden.
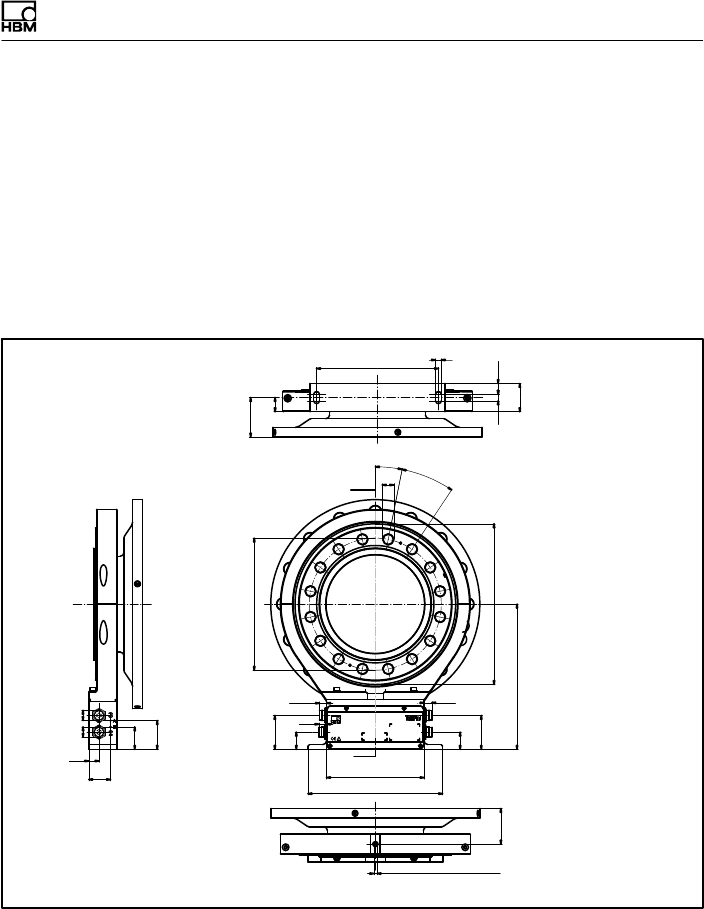
Abmessungen
T40FM A3276-8.0 HBM: public 61
12 Abmessungen
12.1 T40FM ohne Drehzahlmessung,
Option 7, Code S
12.1.1 T40FM 15 kNm - 25 kNm
A
A16 x 22.5° = 360°
22,5°
Montagemaß
61,5
Ø206
22
9
17
10
44
16
34
35
45
190
210
152
27
53
27
53
11,1 12
226,5
Ø250,5
11,25°
M18
Ø16
M5 zur Axialsicherung
55,5
12
Abmessungen in mm
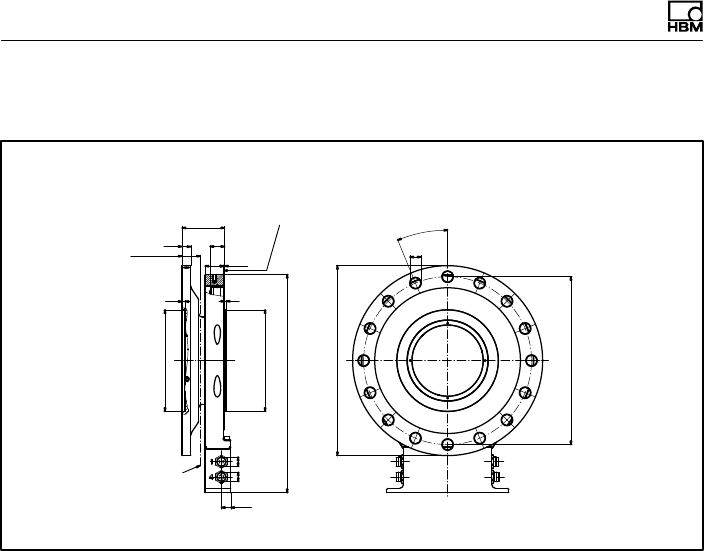
Abmessungen
62 A3276-8.0 HBM: public T40FM
T40FM 15 kNm - 25 kNm, Fortsetzung
Ø174g5
Ø174H6
16x22,55 = 360°
Ø326
Ø288
Ausrichtebene
Rotor - Stator
Ø19+0,2
Schwerpunkt
31,4
16
375
3
5,2
15
22,5°
25
73
32 1,5
Ø16
Ausbrüche in Schnitt A-A
Abmessungen in mm
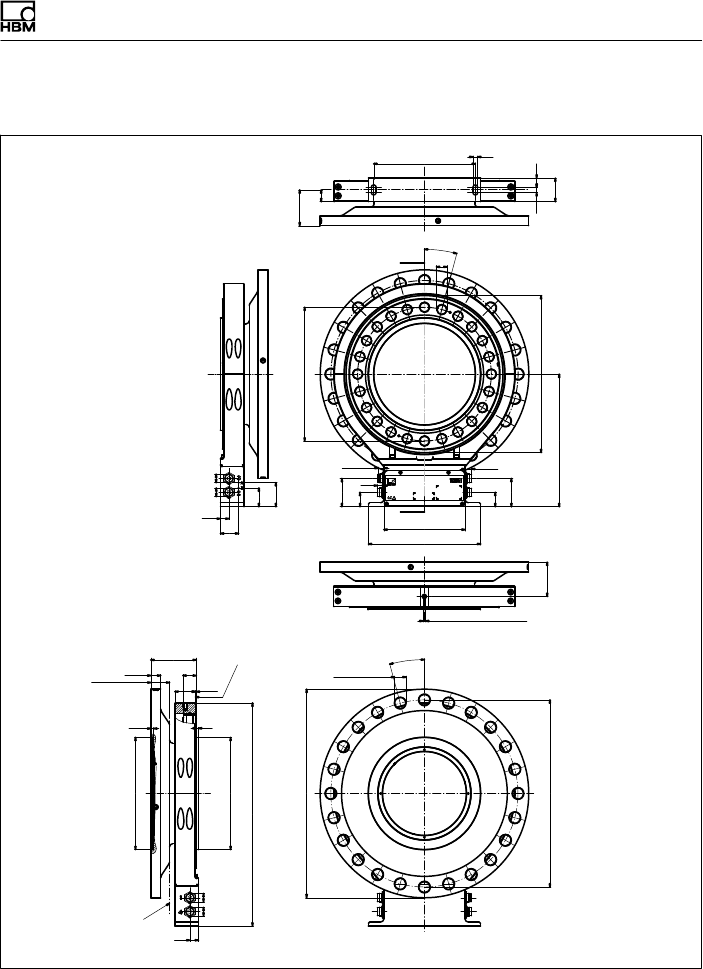
Abmessungen
T40FM A3276-8.0 HBM: public 63
12.1.2 T40FM 30 kNm - 50 kNm
A
A
22
Montagemaß
67
Ø250
16 34
Ø16
35
45
zur Axialsicherung
64,25
190 9
10 17
44
210
152
27
53
12
27
53
11,1
248
Ø293,5
24x15° = 360°
15°
M20
12
Schwerpunkt
35,2
24x15° = 360°
15°
16
Ø16
5,2 4
418
38,5
25
18,5 85
1,5
Ausrichtebene
Rotor - Stator
Ø210g5
Ø210H6
Ø21,0+0,
2
Ø390
Ø350
Ausbrücheim Schnitt A-A
Abmessungen in mm
M5
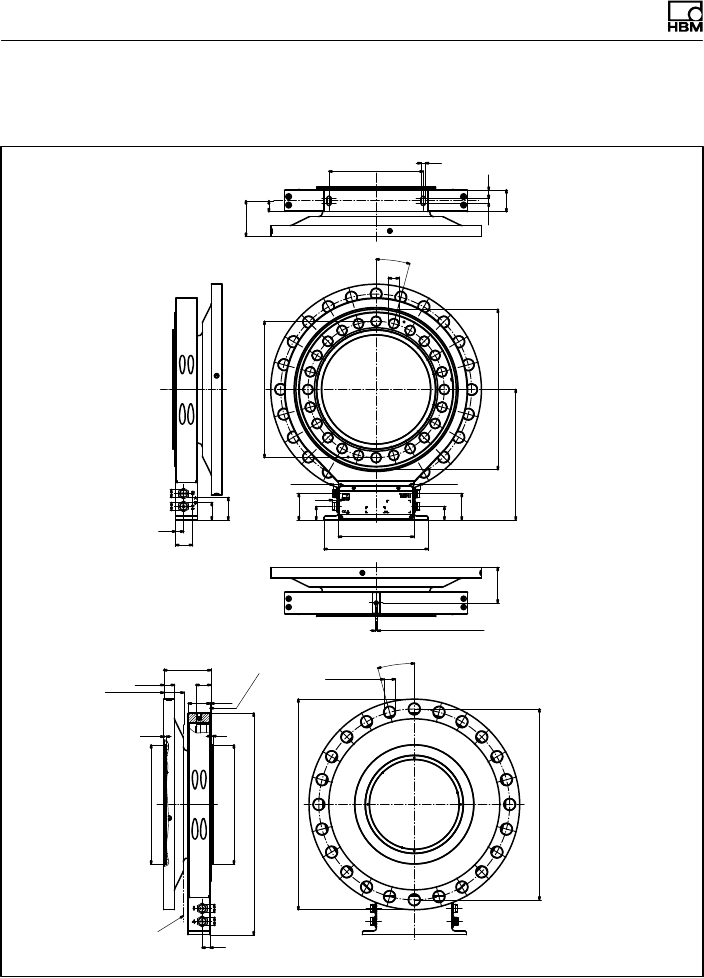
Abmessungen
64 A3276-8.0 HBM: public T40FM
12.1.3 T40FM 60 kNm - 80 kNm
Montagemaß
71,5
22
∅275
71,5
zur Axialsicherung
M5
∅16
16 34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11,1
263
∅ 323,5
24x15° = 360°
15°
M22
12
40,6
24x15° = 360°
15°
16
∅16
448
4
5,2
44
30
21,5 95
1,5
Schwerpunkt
Ausrichtebene
Rotor - Stator
Ausbrüche im Schnitt A−A
∅240g5
∅240H6
∅23+0,2
∅425
∅385
Abmessungen in mm
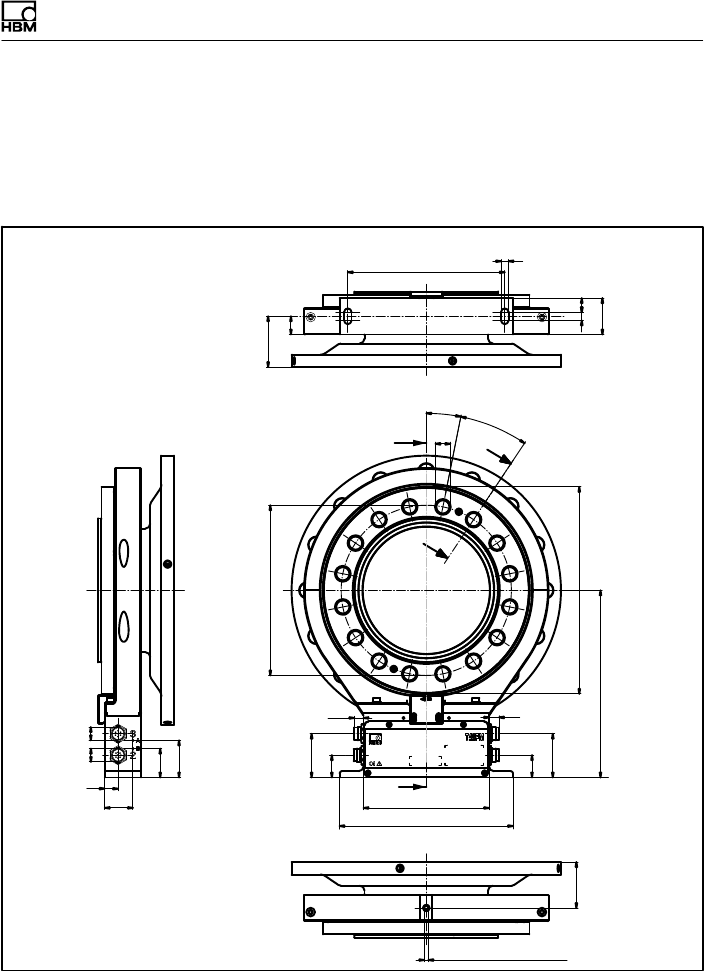
Abmessungen
T40FM A3276-8.0 HBM: public 65
12.2 T40FM mit Drehzahlmessung,
Option 7, Code S
12.2.1 T40FM 15 kNm - 25 kNm
22
61,5
∅206
9
17
10
44
16
34
35
45
190
210
152
27
53
27
53
11,1 12
226,5
∅250,5
11,25°
M18
∅16
∅16
M5 zur Axialsicherung
55,5
A
A16x22.5° = 360°
22,5°
B
B
Montagemaß
Abmessungen in mm
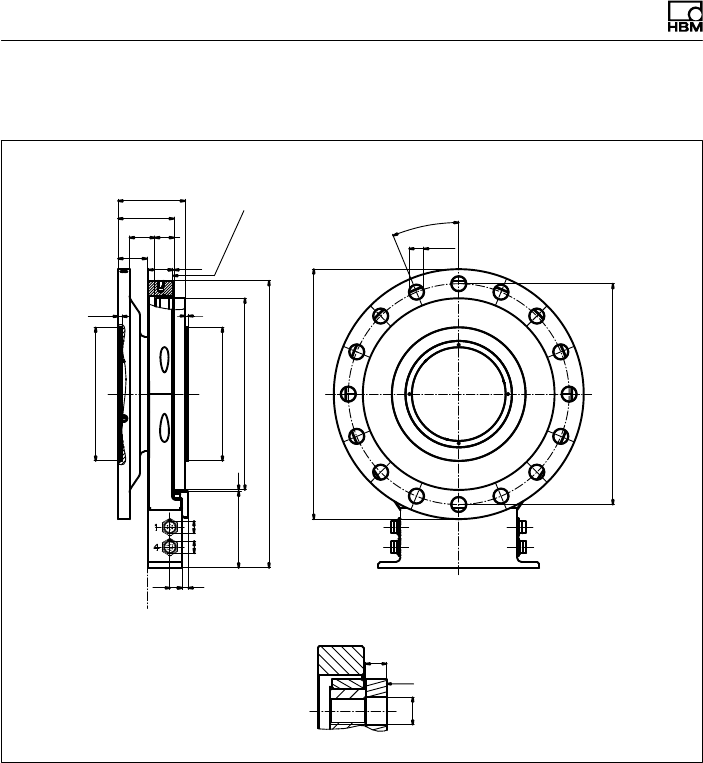
Abmessungen
66 A3276-8.0 HBM: public T40FM
T40FM 15 kNm - 25 kNm, Fortsetzung
∅288
37,8
14,5
∅19
16
375
173,986
173,968
∅174 g5
174,025
174,000
∅174 H6
4
5,2
87,5
∅326
16x22,5° = 360°
22,5°
∅19+0,2
∅16
∅16
2533
73
∅250
32 1,5
8
99,9 1,6
B-B
()
()
Schwerpunkt
Ausrichtebene
Rotor - Stator
Ausbrüche im Schnitt A-A
Drehzahlflansch
Abmessungen in mm
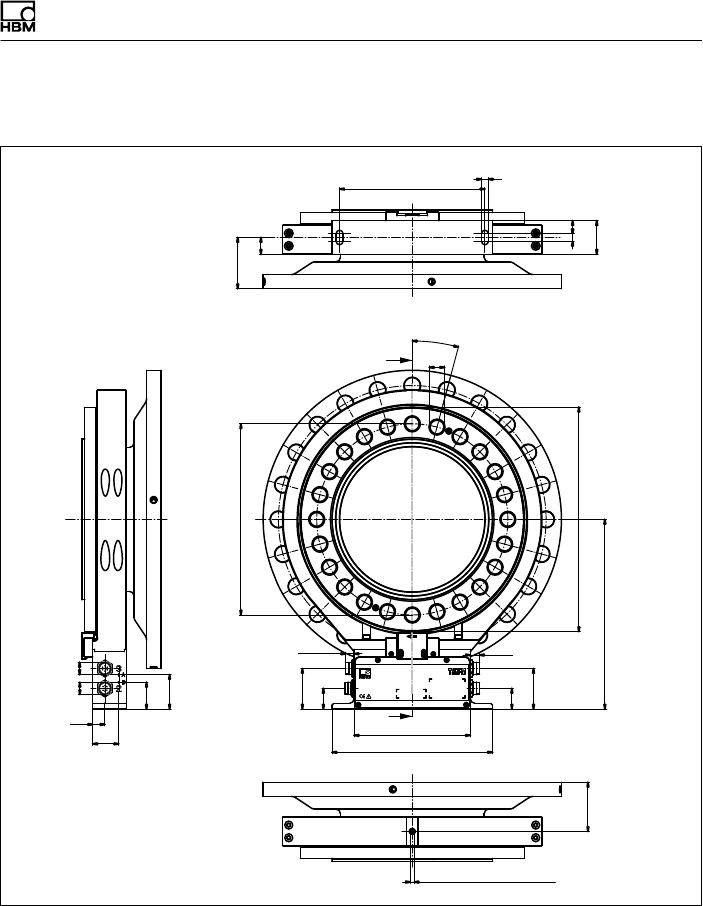
Abmessungen
T40FM A3276-8.0 HBM: public 67
12.2.2 T40FM 30 kNm - 50 kNm
A
A
22
67
16
34
35
45
64,25
190 9
10 17
44
210
152
27
53
12
27
53
11,1
248
15°
M20
Ø293,5
24x15° = 360°
Ø16
Ø16
Montagemaß
Ø250
M5 zur Axialsicherung
Abmessungen in mm
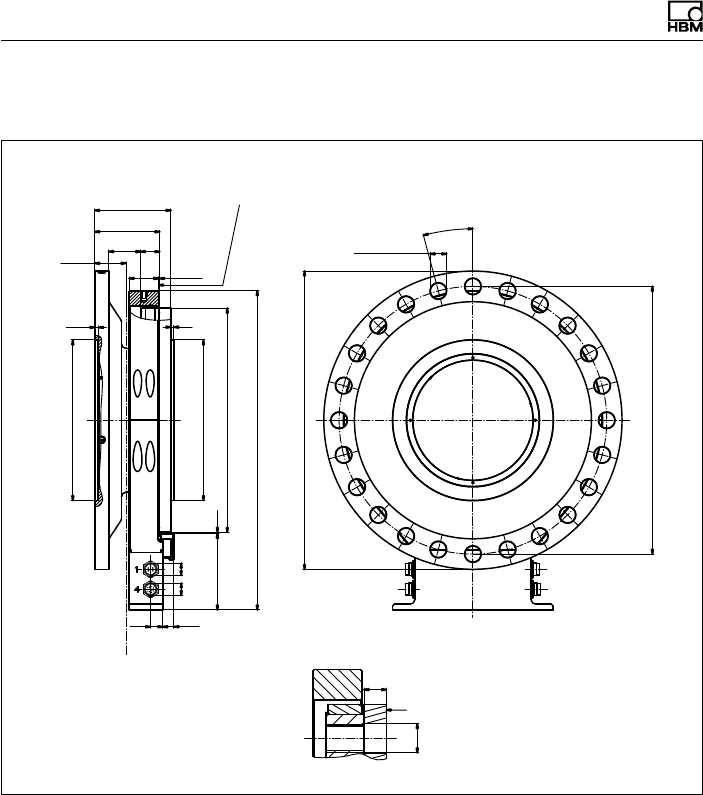
Abmessungen
68 A3276-8.0 HBM: public T40FM
T40FM 30 kNm - 50 kNm, Fortsetzung
∅210 g5
A-A
()
()
Schwerpunkt
Ausrichtebene
Rotor - Stator
Ausbrüche im Schnitt A-A
40,9
14,5
24x15° =360°
15°
16
210,029
210,000
5,2 4
209,985
209,965
418
38,5
25
41,5
85
99,5
1,5
99,9 1,6
14,5
∅210 H6
∅390
∅350
∅21,5+0,2
∅293
∅16
∅16
∅21
Drehzahlflansch
Abmessungen in mm
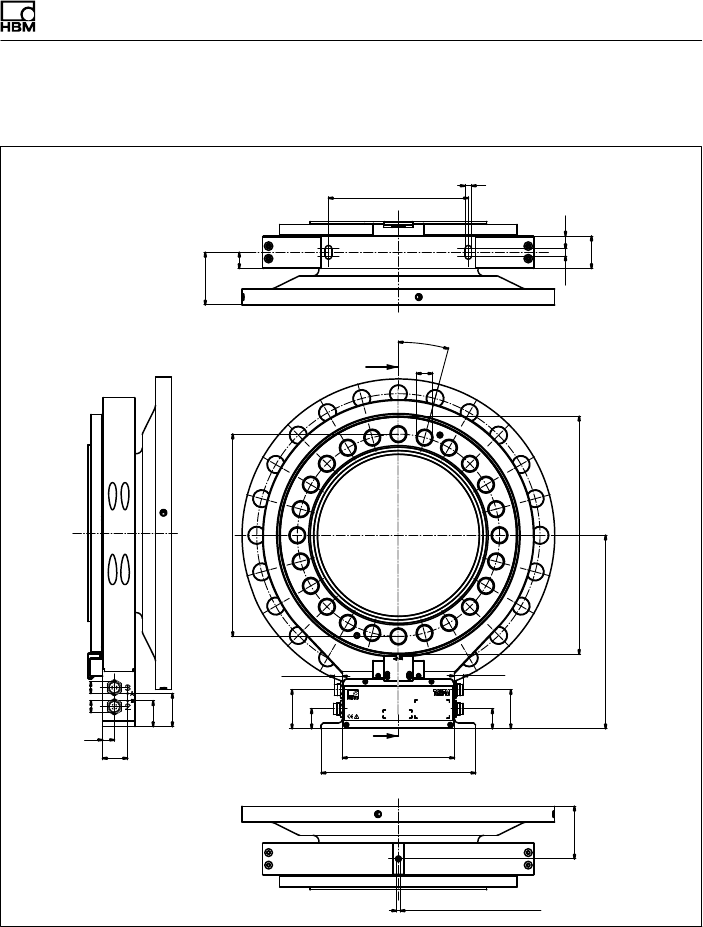
Abmessungen
T40FM A3276-8.0 HBM: public 69
12.2.3 T40FM 60 kNm - 80 kNm
A
A
71,5
22
71,5
16
34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11,1
263
24x15° =360°
15°
M22
Ø323,5
Ø16
Ø16
Montagemaß
M5 zur Axialsicherung
Ø275
Abmessungen in mm
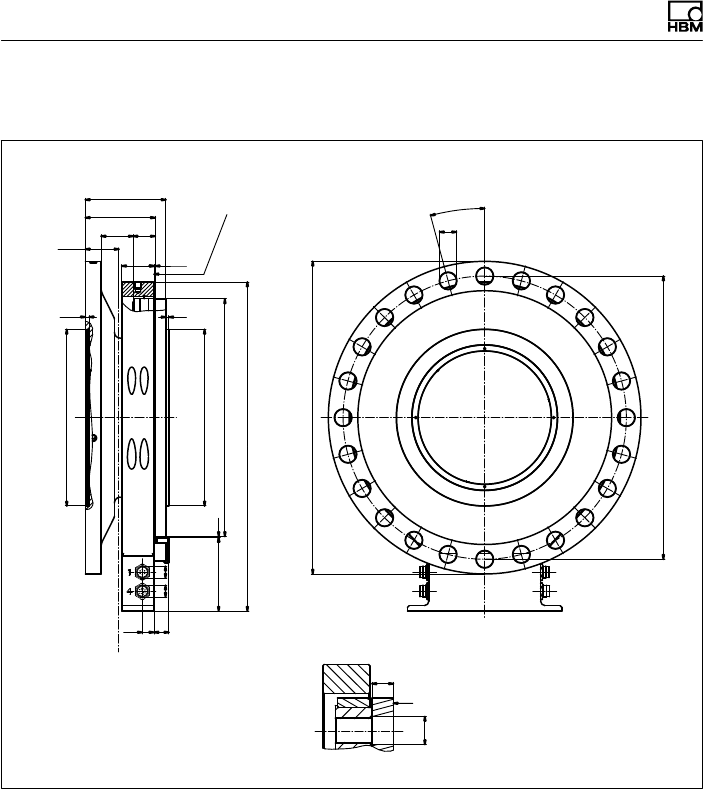
Abmessungen
70 A3276-8.0 HBM: public T40FM
T40FM 60 kNm - 80 kNm, Fortsetzung
Ø23
()
()
Schwerpunkt
Ausrichtebene
Rotor - Stator
Ausbrüche im Schnitt A-A
A-A
45,7
14,5
24x15° =360°
15°
+0,2
16
448
239,985
239,965
4
5,2
240,029
240,000
44
30
43,5
95
109,5
1,5
20
99,9 1,6
Ø240 H6
Ø425
Ø385
Ø240 g5
Ø323
Ø16
Ø16
Drehzahlflansch
Ø23
Abmessungen in mm
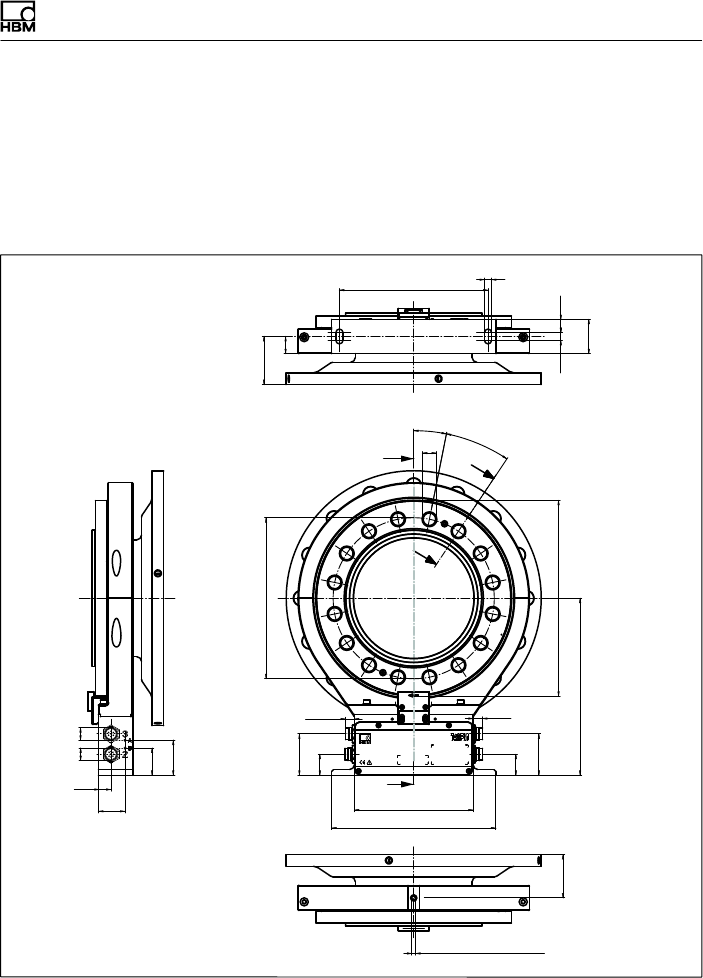
Abmessungen
T40FM A3276-8.0 HBM: public 71
12.3 T40FM mit Drehzahlmessung und
Referenzimpuls, Option 7, Code S
12.3.1 T40FM 15 kNm - 25 kNm
A
A
B
B16 x 22,5° = 360°
22,5°
22
Montagemaß
61,5
∅206
9
1710
44
16
34
35
45
190
210
152
27
53
27
53
11,1 12
226,5
∅250,5
11,25°
M18
∅16
zur Axialsicherung
M5
55,5
∅16
Abmessungen in mm
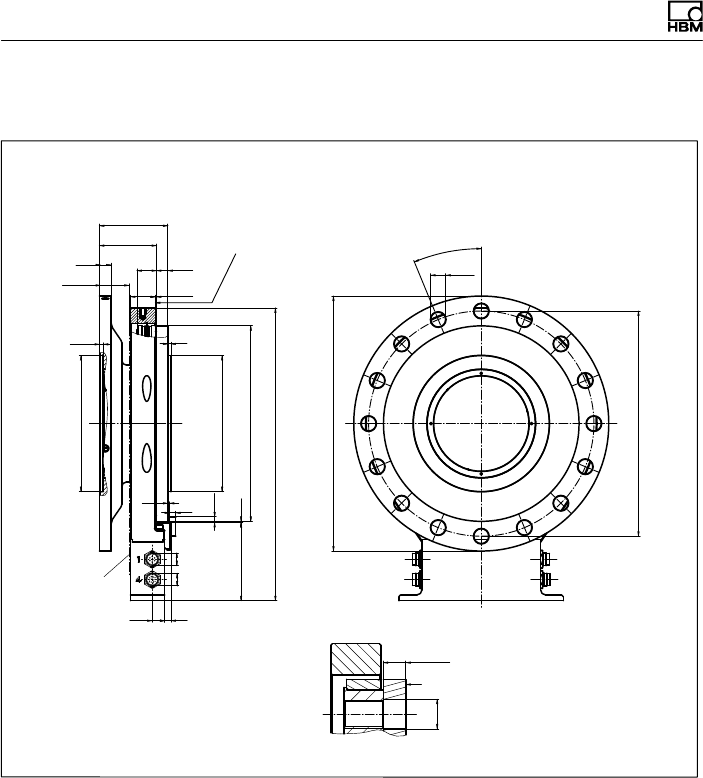
Abmessungen
72 A3276-8.0 HBM: public T40FM
T40FM 15 kNm - 25 kNm, Fortsetzung
Abmessungen in mm
Ausrichtebene
Rotor - Stator
Schwerpunkt
∅288
37,8
16
375
173,986
173,968
∅174 g5 ( )
174,025
174,000
∅174 H6 ( )
45,2
87,5
15
∅326
16 x 22,5° = 360°
22,5°
∅19+0,2
∅16
∅16
25
73
∅250
32
(14,5)
1,5
8
99,9 1,6
8
2
7,3
Ausbrüche im Schnitt A-A
Drehzahlflansch
B-B
(14,5)
∅19
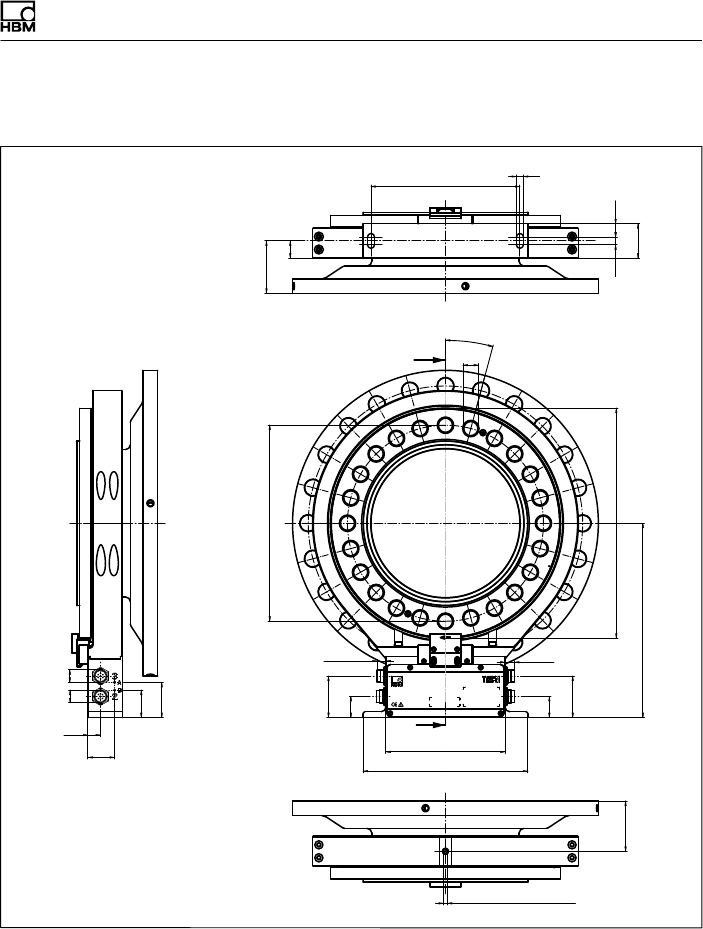
Abmessungen
T40FM A3276-8.0 HBM: public 73
12.3.2 T40FM 30 kNm - 50 kNm
Abmessungen in mm
A
A
22
Montagemaß
67
∅250
16
34
∅16
∅16
35
45
zur Axialsicherung
M5
64,25
190 9
10 17
44
210
152
27
53
12
27
53
11,1
248
∅293,5
24 x15° = 360°
15°
M20
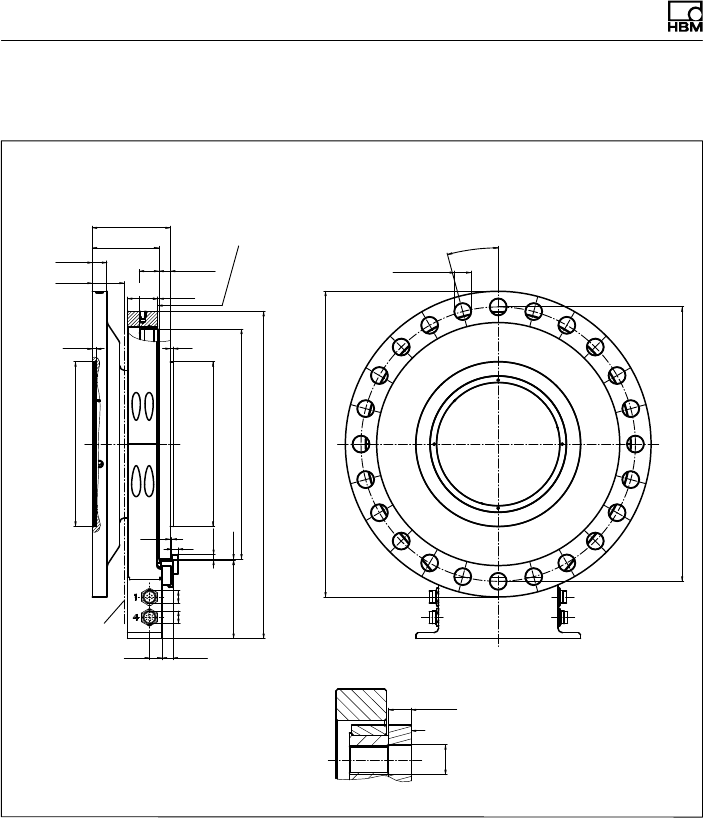
Abmessungen
74 A3276-8.0 HBM: public T40FM
T40FM 30 kNm - 50 kNm, Fortsetzung
Abmessungen in mm
Ausbrüche im Schnitt A-A
Ausrichtebene
Rotor - Stator
Schwerpunkt
∅350
40,9
24 x15° = 360°
15°
∅390
∅21+0,2
16
∅16
∅16
210,029
210,000
∅210 H6 ( )
5,2 4
209,985
209,965
∅210 g5 ( )
∅293
418
25 (14,5)
18,5 85
99,5
1,5
99,9 1,6
14,5
7,3
28
38,5
Drehzahlflansch
A-A
∅21
(14,5)
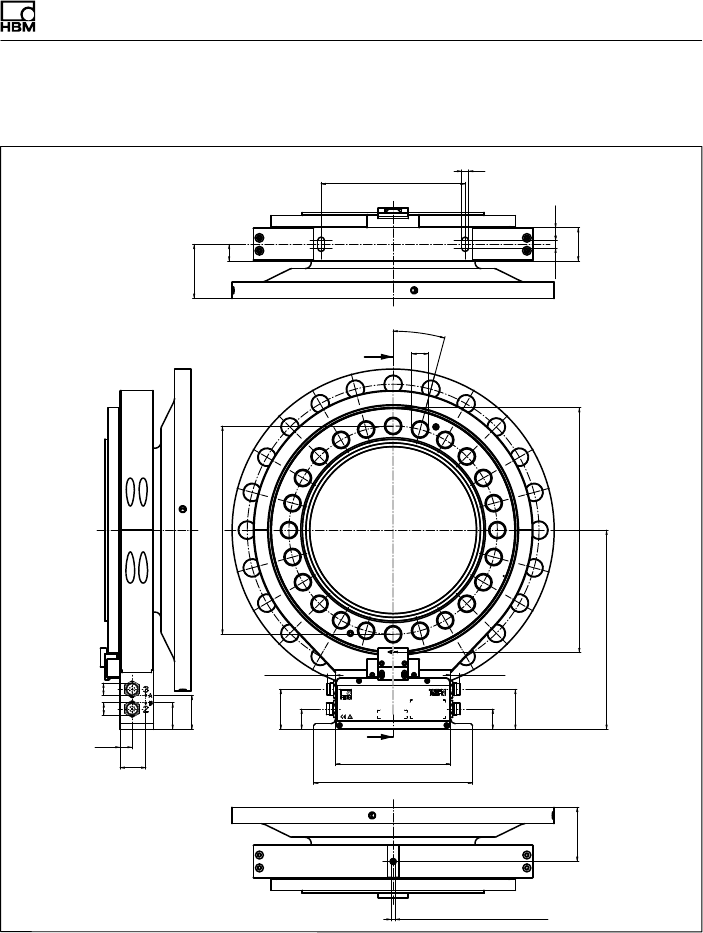
Abmessungen
T40FM A3276-8.0 HBM: public 75
12.3.3 T40FM 60 kNm - 80 kNm
Abmessungen in mm
A
A
Montagemaß
71,5
22
∅275
71,5
M5 zur Axialsicherung
16
∅16
∅16
34
35
45
190 9
10
44
17
210
152
27
53
12
27
53
11,1
263
∅323,5
24 x15° = 360°
15°
M22
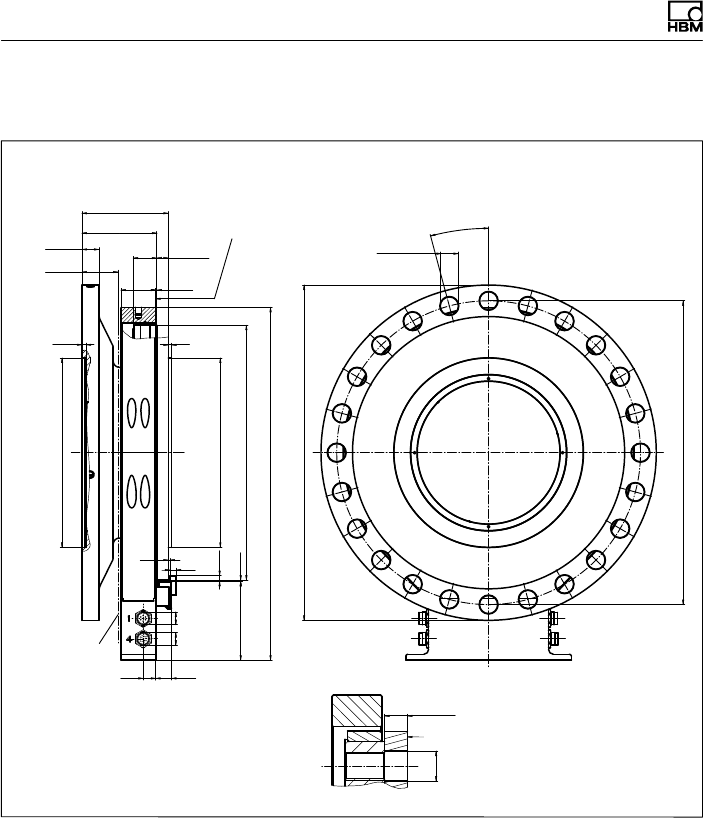
Abmessungen
76 A3276-8.0 HBM: public T40FM
T40FM 60 kNm - 80 kNm, Fortsetzung
Abmessungen in mm
Ausbrüche im Schnitt A-A
Ausrichtebene
Rotor - Stator
Drehzahlflansch
Schwerpunkt
A-A
∅385
45,7
∅23
(14,5)
∅425
24 x15° = 360°
15°
∅23+0,2
16
∅16
∅16
448
∅323
239,985
239,965
∅240 g5 ( )
45,2
240,029
240,000
∅240 H6 ( )
44
(14,5)30
21,5 95
109,5
1,5
20
99,9 1,6
28
7,3
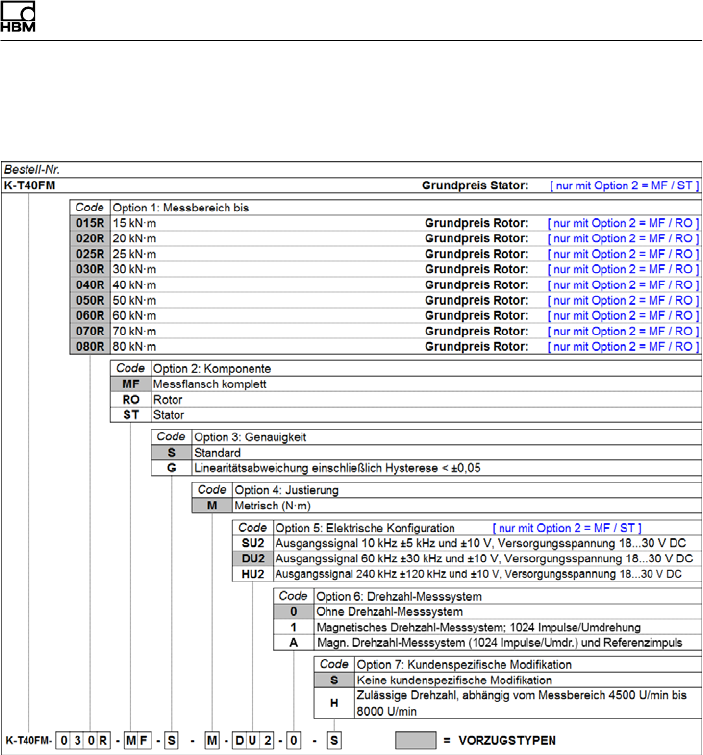
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 77
13 Bestellnummern, Zubehör
Bestellnummern, Zubehör
78 A3276-8.0 HBM: public T40FM
Zubehör, zusätzlich zu beziehen
Artikel Bestell‐Nr.
Anschlusskabel für Drehmoment‐Ausgang
Anschlusskabel Drehmoment, 423 - D‐Sub 15P, 6 m 1-KAB149-6
Anschlusskabel Drehmoment, 423 - freie Enden, 6 m 1-KAB153-6
Anschlusskabel für Drehzahl‐Ausgang
Anschlusskabel Drehzahl, 423 - D‐Sub 15P, 6 m 1-KAB150-6
Anschlusskabel Drehzahl, 423 - freie Enden, 6 m 1-KAB154-6
Anschlusskabel Drehzahl mit Referenzimpuls, 423 8‐polig - D‐Sub
15P, 6 m
1-KAB163-6
Anschlusskabel Drehzahl mit Referenzimpuls, 423 8‐polig - freie En
den, 6 m
1-KAB164-6
Anschlusskabel TMC
Anschlusskabel TIM40/TMC, 6 m 1-KAB174-6
Kabelbuchsen
423G-7S, 7‐polig (gerade) 3-3101.0247
423W-7S, 7‐polig (Winkel) 3-3312.0281
423G-8S, 8‐polig (gerade) 3-3312.0120
423W-8S, 8‐polig (Winkel) 3-3312.0282
Anschlusskabel, Meterware (Mindestbestellmenge: 10 m, Preis pro Meter)
Kab8/00-2/2/2 4-3301.0071
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 79
14 Technische Daten
Typ T40FM
Genauigkeitsklasse 0,1
Nenndrehmoment Mnom kNVm 15 20 25 30 40 50 60 70 80
Nenndrehzahl
optional
U/min
U/min
6000
8000
4000
6000
3000
4500
Drehmoment‐Messsystem, Frequenzausgang
Nennkennwert (Nennsignalspanne
zwischen Drehmoment = Null und
Nenndrehmoment)
Option SU2 kHz 5
Option DU2 kHz 30
Option HU2 kHz 120
Kennwerttoleranz (Abweichung
der tatsächlichen Ausgangsgröße
bei Mnom vom Nennkennwert)
%" 0,2
Linearitätsabweichung ein
schließlich Hysterese, bezogen
auf den Nennkennwert
Für ein max. Drehmoment im
Bereich:
Zwischen 0% v. Mnom und 20%
v. Mnom
% <"0,03 (optional <"0,015)
> 20% v. Mnom und 60% v.
Mnom
% <"0,065 (optional <"0,035)
> 60% v. Mnom und 100% v.
Mnom
% <"0,1 (optional <"0,05)
Relative Standardabweichung
der Reproduzierbarkeit
(Veränderlichkeit),
nach DIN 1319, bezogen auf die
Ausgangssignaländerung
% <"0,05
Bestellnummern, Zubehör
80 A3276-8.0 HBM: public T40FM
Nenndrehmoment Mnom 807060504030252015kNVm
Lastwiderstand kΩ>2
Ausgangssignal bei Drehmoment
null
Option SU2 kHz 10
Option DU2 kHz 60
Option HU2 kHz 240
Nennausgangssignal
(RS422, 5V symmetrisch)
Bei positvem Nenndrehmoment,
Option SU2
kHz 15
Bei positvem Nenndrehmoment,
Option DU2
kHz 90
Bei positvem Nenndrehmoment,
Option HU2
kHz 360
Bei negativem Nenndreh
moment, Option SU2
kHz 5
Bei negativem Nenndreh
moment, Option DU2
kHz 30
Bei negativem Nenndreh
moment, Option HU2
kHz 120
Maximaler Aussteuerbereich 1)
Option SU2 kHz 2,5 ... 17.5
Option DU2 kHz 15 ... 105
Option HU2 kHz 60 ... 420
Maximale Bandbreite (-3 dB)
Option SU2 kHz 1
Option DU2 kHz 3
Option HU2 kHz 6
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 81
Nenndrehmoment Mnom 807060504030252015kNVm
Gruppenlaufzeit
Option SU2 μs <400
Option DU2 μs <220
Option HU2 μs <150
Temperatureinfluss pro 10 K im
Nenntemperaturbereich
auf das Ausgangssignal, be
zogen auf den Istwert der
Signalspanne
% <"0,1
auf das Nullsignal, bezogen
auf den Nennkennwert
% <"0,05
Langzeitdrift über 48h bei Refe
renztemperatur, bezogen auf den
Nennkennwert
%≤0,03
Drehmoment‐Messsystem, Spannungsausgang
Nennkennwert (Spanne zwischen
Drehmoment = Null und Nenndreh
moment)
V 10
Kennwerttoleranz (Abweichung
der tatsächlichen Ausgangs
frequenz bei Mnom vom Nennkenn
wert)
%"0,2
Linearitätsabweichung ein
schließlich Hysterese, bezogen
auf den Nennkennwert
Für ein max. Drehmoment im
Bereich:
Zwischen 0% v. Mnom und 20%
v. Mnom
% <"0,03 (optional <"0,015)
> 20% v. Mnom und 60% v.
Mnom
% <"0,065 (optional <"0,035)
> 60% v. Mnom und 100% v.
Mnom
% <"0,1 (optional <"0,05)
Bestellnummern, Zubehör
82 A3276-8.0 HBM: public T40FM
Nenndrehmoment Mnom 807060504030252015kNVm
Relative Standardabweichung
der Reproduzierbarkeit
(Veränderlichkeit),
nach DIN 1319, bezogen auf die
Ausgangssignaländerung
% <"0,05
Ausgangssignal bei Drehmoment
null
V 0
Nennausgangssignal
Bei pos. Nenndrehmoment kHz 10
Bei neg. Nenndrehmoment kHz -10
Maximaler Aussteuerbereich 2)
ungültiger Messwert
V
V
"12
13 ... 15
Lastwiderstand kΩ>10
Restwelligkeit 3) mV <40 (Spitze/Spitze)
Temperatureinfluss pro 10 K im
Nenntemperaturbereich
auf das Ausgangssignal, be
zogen auf den Istwert der
Signalspanne
%≤0,2
auf das Nullsignal, bezogen
auf den Nennkennwert
% <"0,15
Langzeitdrift über 48h bei Refe
renztemperatur, bezogen auf den
Nennkennwert
% <"0,03
Drehzahl‐Messsystem
Messsystem Magnetisch, mittels AMR‐Sensor
(Anisotropischer‐Resistiver‐Effekt) und
magnetisiertem Kunststoffring auf
abgedecktem Stahlring
Magnetische Pole 158 186 204
Maximale Lageabweichung der
Pole "50 Winkelsekunden
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 83
Nenndrehmoment Mnom 807060504030252015kNVm
Ausgangssignal V 5 V symmetrisch (RS‐422);
2 Rechtecksignale um ca. 90_ phasen
verschoben
Impulse pro Umdrehung 1024
Mindestdrehzahl für ausrei
chende Impulsstabilität min-1 0
Impulstoleranz 4) Grad < "0,05
Maximal zulässige Ausgangs
frequenz
kHz 420
Gruppenlaufzeit μs< 150
Radialer Nennabstand zwischen
Sensorkopf und Magnetring
(mechanischer Abstand)
mm 1,6
Arbeitsbereich des Abstands
zwischen Sensorkopf und
Magnetring 5)
mm 0,4 … 2,5
Max. zulässige Axialverschie
bung des Rotors gegenüber dem
Stator 6)
mm "1,5
Hysterese der
Drehrichtungsumkehr bei
Relativschwingungen zwischen
Rotor und Stator
Drehschwingungen des Rotors Grad < ca. 0,2
Horizontale Schwingwege des
Stators
mm < ca. 0,5
Lastwiderstand 7) kΩ ≥ 2
Magnetische Belastungsgrenze
(Beschädigung der Polräder)
Remanenzflussdichte mT >100
Koerzitivfeldstärke kA/m >100
Bestellnummern, Zubehör
84 A3276-8.0 HBM: public T40FM
Nenndrehmoment Mnom 807060504030252015kNVm
Zulässige magnetische Feld
stärke für Signalabweichungen
kA/m <0,1
Einsatzgrenzen
Referenztemperatur °C +23
Nenntemperaturbereich °C +10 … +70
Gebrauchstemperaturbereich8) °C -20 … +85
Lagerungstemperaturbereich °C -40 … +85
Zulässige Feuchte
beanspruchung
Relative Feuchte ohne Betau
ung
%5 ... 95
Referenzimpuls‐Messsystem (Null‐Index)
Messsystem Magnetisch, mittels Hall‐Sensor und
Magnet
Ausgangssignal V5V symmetrisch (RS‐422)
Impulse pro Umdrehung 1
Mindestdrehzahl für
ausreichende Impulsstabilität
min-1 2
Impulsbreite, ca. Grad 0,088
Impulstoleranz 9) Grad <"0,05
Gruppenlaufzeit μs <150
Axialer Nennabstand zwischen
Sensorkopf und Magnetring
(mechanischer Abstand)
mm 2,0
Arbeitsbereich des Abstands
zwischen Sensorkopf und
Magnetring
mm 0,4 … 2,5
Max. zulässige
Axialverschiebung des Rotors
gegenüber dem Stator 10)
mm "1,5
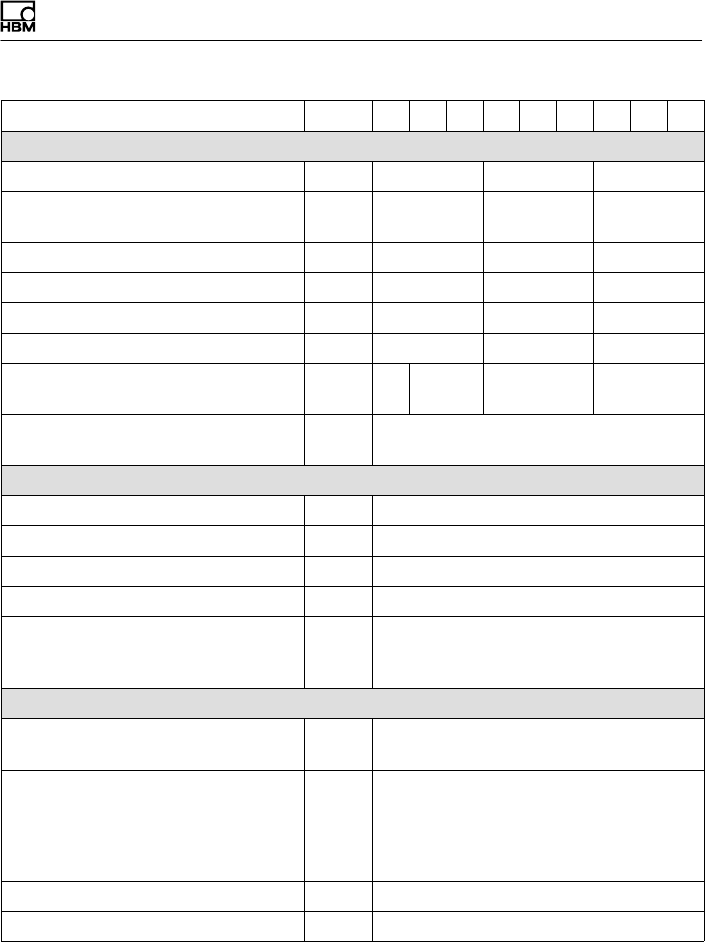
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 85
Nenndrehmoment Mnom 807060504030252015kNVm
Belastungsgrenzen 11)
Grenzdrehmoment kN⋅m 32 60 110
Maximale Grenzbelastung des
Messkörpers 12) kN⋅m 100 200 350
Bruchdrehmoment (statisch) kN⋅m >100 >200 >350
Grenzlängskraft (statisch) kN 60 120 240
Grenzquerkraft (statisch) kN 80 160 240
Grenzbiegemoment (statisch) N⋅m 6000 12000 24000
Schwingbreite nach DIN 50 100
(Spitze/Spitze) 13) kN⋅m 30 32 60 100
Schutzart nach EN 60 529
(Rotor/Stator)
IP 54
Shunt
Nennauslösespannung V 5
Grenzauslösespannung V 36
Kalibriersignal ein Vmin >2,5
Kalibriersignal aus Vmin <0,7
Toleranz des Shuntsignals, be
zogen auf Mnom bei Referenz
temperatur
%<"0,05
Energieversorgung
Netzversorgungsspannung
(Schutzkleinspannung)
VDC 18 ... 30
Stromaufnahme
Im Messbetrieb A<1 (typ. 0,3, bei 20V Versorgungs
spannung)
Im Anlaufbetrieb A<4 (typ. 2) für max. 50μs
Nennaufnahmeleistung W<10 (typ. 6)
Maximale Kabellänge m 50
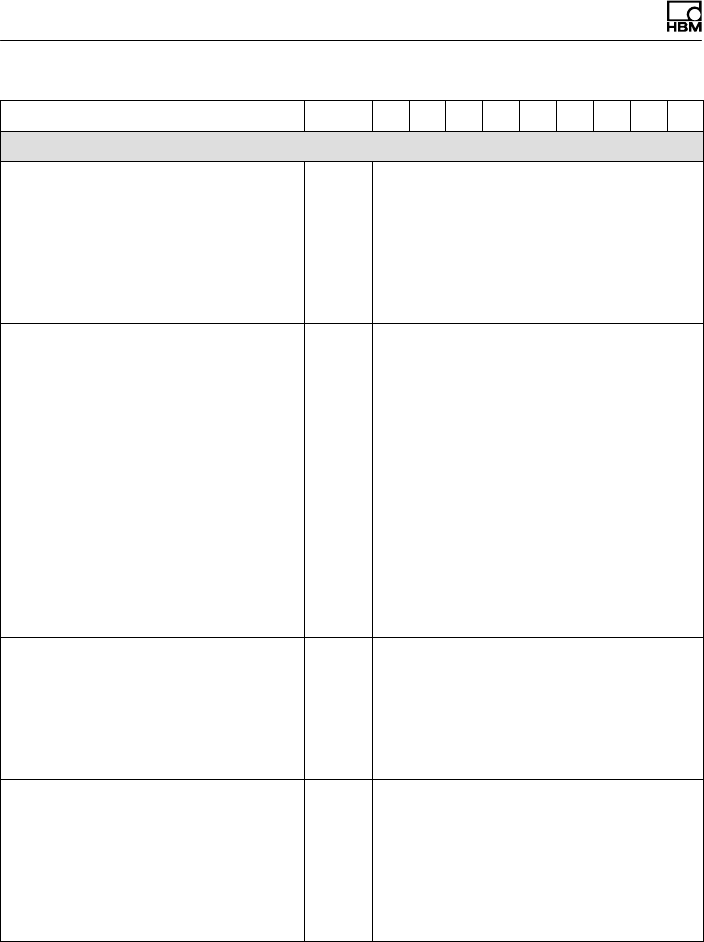
Bestellnummern, Zubehör
86 A3276-8.0 HBM: public T40FM
Nenndrehmoment Mnom 807060504030252015kNVm
Allgemeine Angaben
EMV
Emission (nach FCC 47, Teil 15,
Unterabteilung C) 14)
Emission
(nach EN 61 326‐1, Abschnitt 7)
Funkstörfeldstärke 15) Klasse B
Störfestigkeit,
nach EN 61 326‐1, EN 61 326‐2‐3
Elektromagnetisches Feld (AM) V/m 10
Magnetisches Feld A/m 100
Elektrostatische Entladungen
(ESD)
Kontaktentladung kV 4
Lufttentladung kV 8
Schnelle Transienten (Burst) kV 1
Stoßspannungen (Surge) kV 1
Leitungsgebundene Störungen V 10
Mechanischer Schock 16),
nach EN 60 068‐2‐72
Anzahl n 1000
Dauer ms 3
Beschleunigung (Halbsinus) m/s2650
Schwingungsbeanspruchung in
drei Richtungen 16),
nach EN 60 068‐2‐6
Frequenzbereich Hz 10 ... 2000
Dauer h 2,5
Beschleunigung (Amplitude) m/s2200
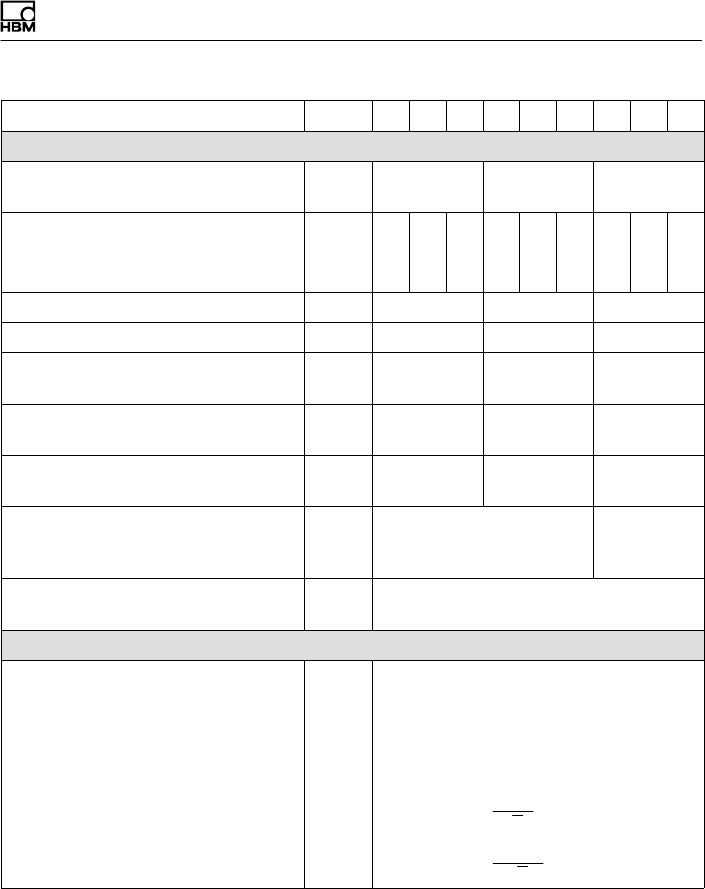
Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 87
Nenndrehmoment Mnom 807060504030252015kNVm
Mechanische Angaben
Drehsteifigkeit cTkN⋅m/
rad
32050 63260 106200
Verdrehwinkel bei Mnom Grad
0,027
0,036
0,045
0,027
0,036
0,045
0,033
0,038
0,043
Steifigkeit in axialer Richtung cakN/mm 1380 1710 2280
Steifigkeit in radialer Richtung crkN/mm 3900 5080 6170
Steifigkeit bei Biegemoment um
eine radiale Achse cb
kN⋅m/
Grad
94 188 290
Maximale Auslenkung bei Grenz
längskraft
mm <0,05 <0,08 <0,12
Zusätzlicher maximaler Rund
lauffehler bei Grenzquerkraft
mm <0,05 <0,05 <0,05
Zusätzliche maximale Plan
parallelitätsabweichung bei
Grenzbiegemoment
mm <0,5 <0,7
Auswuchtgütestufe, nach
DIN ISO 1940
G 6,3
Mechanische Angaben
Zulässiger max. Schwingweg des
Rotors (Spitze-Spitze) 17)
Wellenschwingungen im Bereich
der Anschlussflansche in
Anlehnung an ISO 7919‐3
Normalbetrieb (Dauerbetrieb) μms(p*p) +9000
n
Ǹ(n in min‐1)
Start‐ und Stoppbetrieb/Reso
nanzbereiche (temporär)
μms(p*p) +13200
n
Ǹ(n in min‐1)
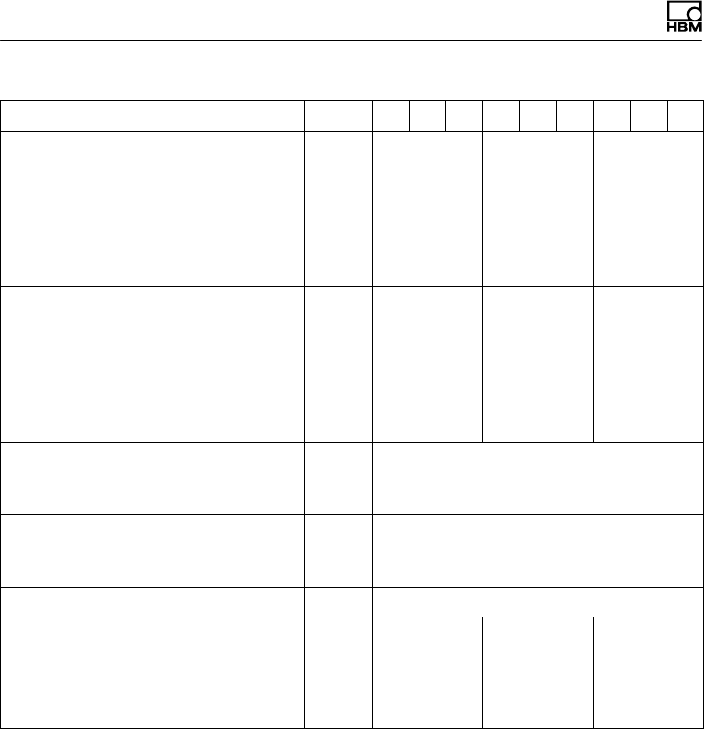
Bestellnummern, Zubehör
88 A3276-8.0 HBM: public T40FM
Nenndrehmoment Mnom 807060504030252015kNVm
Massenträgheitsmoment des
Rotors Jv
(um Drehachse, ohne Berücksichti
gung der Flanschschrauben)
ohne Drehzahlmesssystem kg⋅m20,20 0,46 0,75
mit Drehzahlmesssystem kg⋅m20,22 0,51 0,81
Anteiliges Massenträgheits
moment für Übertragerseite
(Seite des Flansches mit Außen
zentrierung)
ohne Drehzahlmesssystem % v. Jv28 23 26
mit Drehzahlmesssystem % v. Jv37 30 32
Zulässige Exzentrizität des Rotors
(radial) zum Statormittelpunkt (ohne
Drehzahlmesssystem)
mm " 2
Zulässiger axialer Verschiebe
weg zwischen Rotor und Stator
(ohne Drehzahlmesssystem) 18)
mm " 2
Gewicht
Rotor ohne Drehzahlmess
system
kg 18 28 39
Rotor mit Drehzahlmesssystem kg 20 32 42
Stator kg 1,8 2,1 3,0
1) Ausgangssignalbereich, in dem ein wiederholbarer Zusammenhang zwischen Drehmoment und
Ausgangssignal besteht.
2) Ausgangssignalbereich, in dem ein wiederholbarer Zusammenhang zwischen Drehmoment und
Ausgangssignal besteht.
3) Signalfrequenzbereich 0,1 bis 10 kHz.
4) Bei Nennbedingungen.
5) Die Impulstoleranz verbessert sich bei reduziertem Abstand und umgekehrt.
6) Die Angabe bezieht sich auf eine mittig axiale Ausrichtung. Abweichungen davon führen zu
einer veränderten Impulstoleranz.
7) Beachten Sie die gemäß RS‐422 nötigen Abschlusswiderstände.
8) Ab 70°C ist eine Wärmeableitung über die Bodenplatte des Stators erforderlich. Die Temperatur
der Bodenplatte darf 85°C nicht überschreiten.

Bestellnummern, Zubehör
T40FM A3276-8.0 HBM: public 89
9) Bei Nennbedingungen.
10) Die Angabe bezieht sich auf eine mittig axiale Ausrichtung. Abweichungen davon führen zu
einer veränderten Impulstoleranz.
11) Jede irreguläre Beanspruchung (Biegemoment, Quer‐ oder Längskraft, Überschreiten des
Nenndrehmomentes) ist bis zu der angegebenen Grenze nur dann zulässig, solange keine der
jeweils anderen Beanspruchungen auftreten kann. Andernfalls sind die Grenzwerte zu
reduzieren. Wenn je 30% des Grenzbiegemomentes und der Grenzquerkraft vorkommen, sind
nur noch 40% der Grenzlängskraft zulässig, wobei das Nenndrehmoment nicht überschritten
werden darf. Die Auswirkungen der zulässigen Biegemomente, Längs‐ und Querkräfte auf das
Messergebnis sind v"1% des Nenndrehmomentes. Die Belastungsgrenzen gelten nur für den
Nenntemperaturbereich. Bei Temperaturen <10_C sind die Belastungsgrenzen um ca. 30% zu
reduzieren (Zähigkeitsreduzierung).
12) Die Angabe bezieht sich auf eine statische Belastung des Messkörpers; Beachten Sie die
Schraubenverbindung!
13) Das Nenndrehmoment darf nicht überschritten werden.
14) FCC-Konformität auf Anfrage
15) Option 7, Code S
16) Eine Fixierung von Antennenring und Anschlussstecker ist erforderlich.
17) Beeinflussung der Schwingungsmessungen durch Rundlauffehler, Schlag, Formfehler, Kerben,
Riefen, örtlichen Restmagnetismus, Gefügeunterschiede oder Werkstoffanomalien sind zu
berücksichtigen und von der eigentlichen Wellenschwingung zu trennen.
18) Oberhalb des Nenntemperaturbereiches ±1,5 mm.
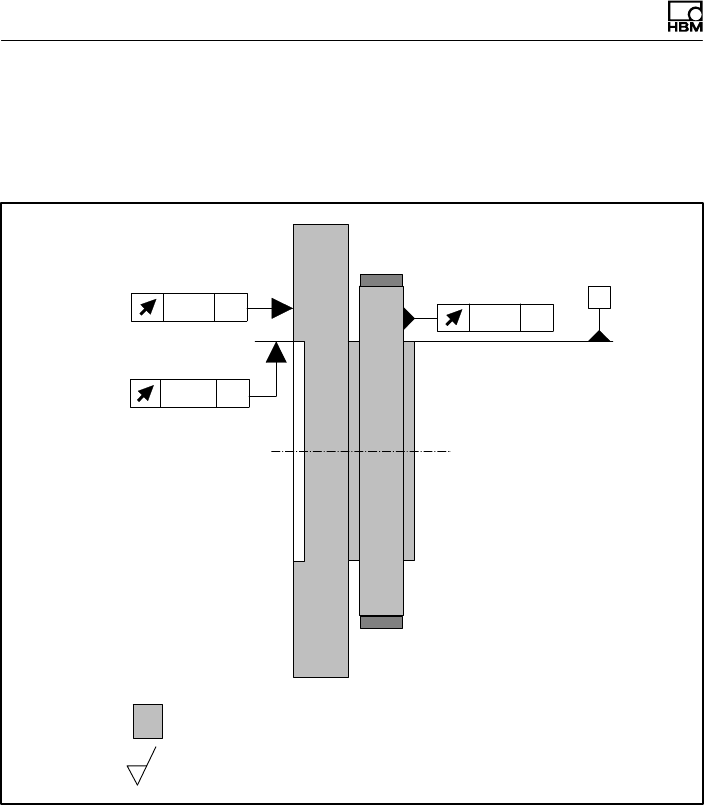
Ergänzende technische Informationen
90 A3276-8.0 HBM: public T40FM
15 Ergänzende technische Informationen
Plan‐ und Rundlauftoleranzen
Innenzentrierung
A
0,02 AB
0,02 AB
Flansch A
Flansch B
Härte 47 ±2 HRC
Oberflächengüte der Plan‐ und Rundlaufflächen (A, B und AB)
0,8
0,02 AB
Um die Eigenschaften des Drehmoment‐Messflanschs im
eingebauten Zustand zu erhalten, empfehlen wir, die
angegebenen Form‐ und Lagetoleranzen, die Oberflä
chengüte und Härte auch für die kundenseitigen
Anschlüsse zu wählen.

www.hbm.com
HBM Test and Measurement
Tel. +49 6151 803-0
Fax +49 6151 803-9100
info@hbm.com
measure and predict with confidence
A3276-8.0 HBM: public