Houston Radar PD300 K-Band FMCW Ranging Radar User Manual 8 User Manual
Houston Radar LLC K-Band FMCW Ranging Radar 8 User Manual
UserManual.wiki
>
Houston Radar
>
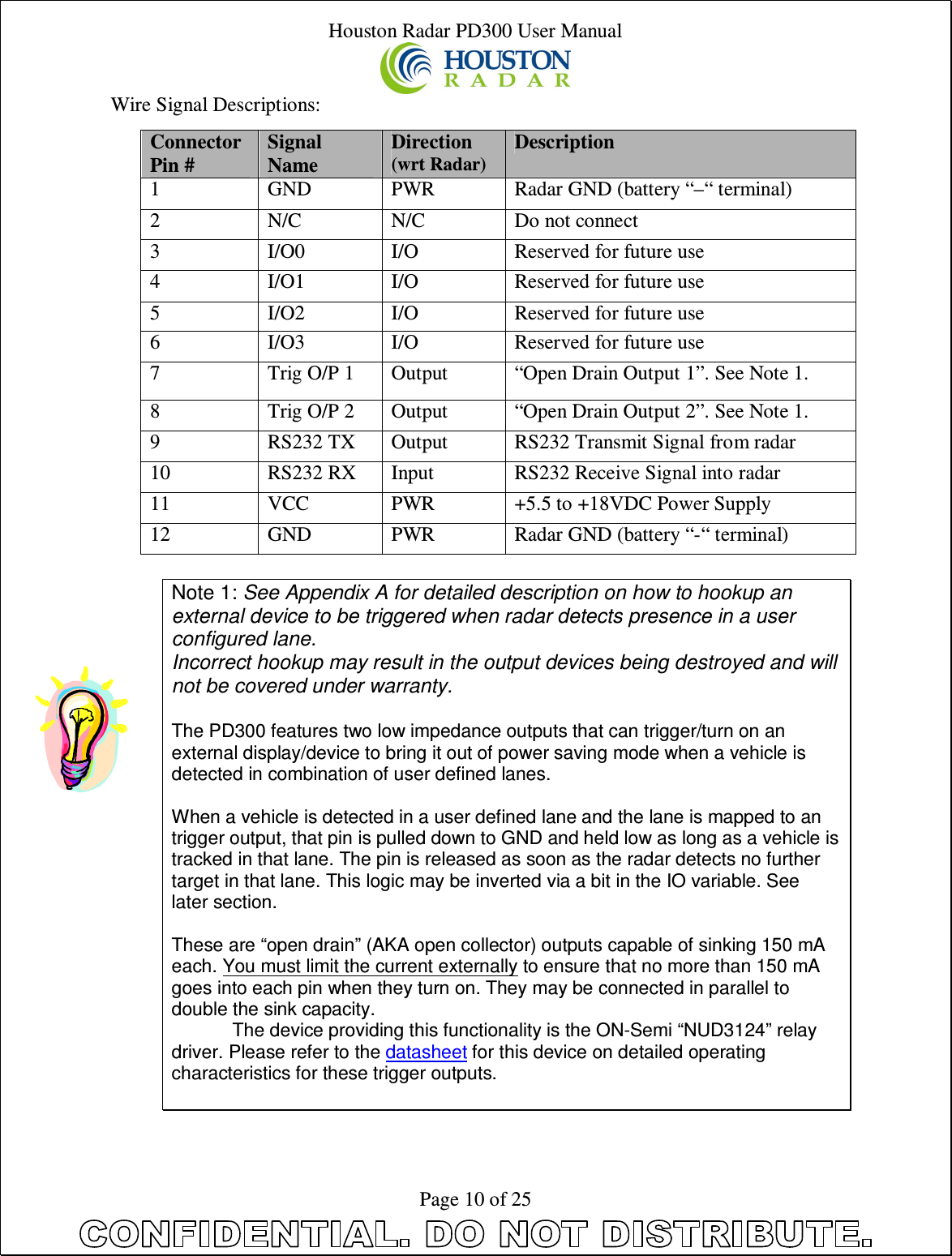
PD300 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation