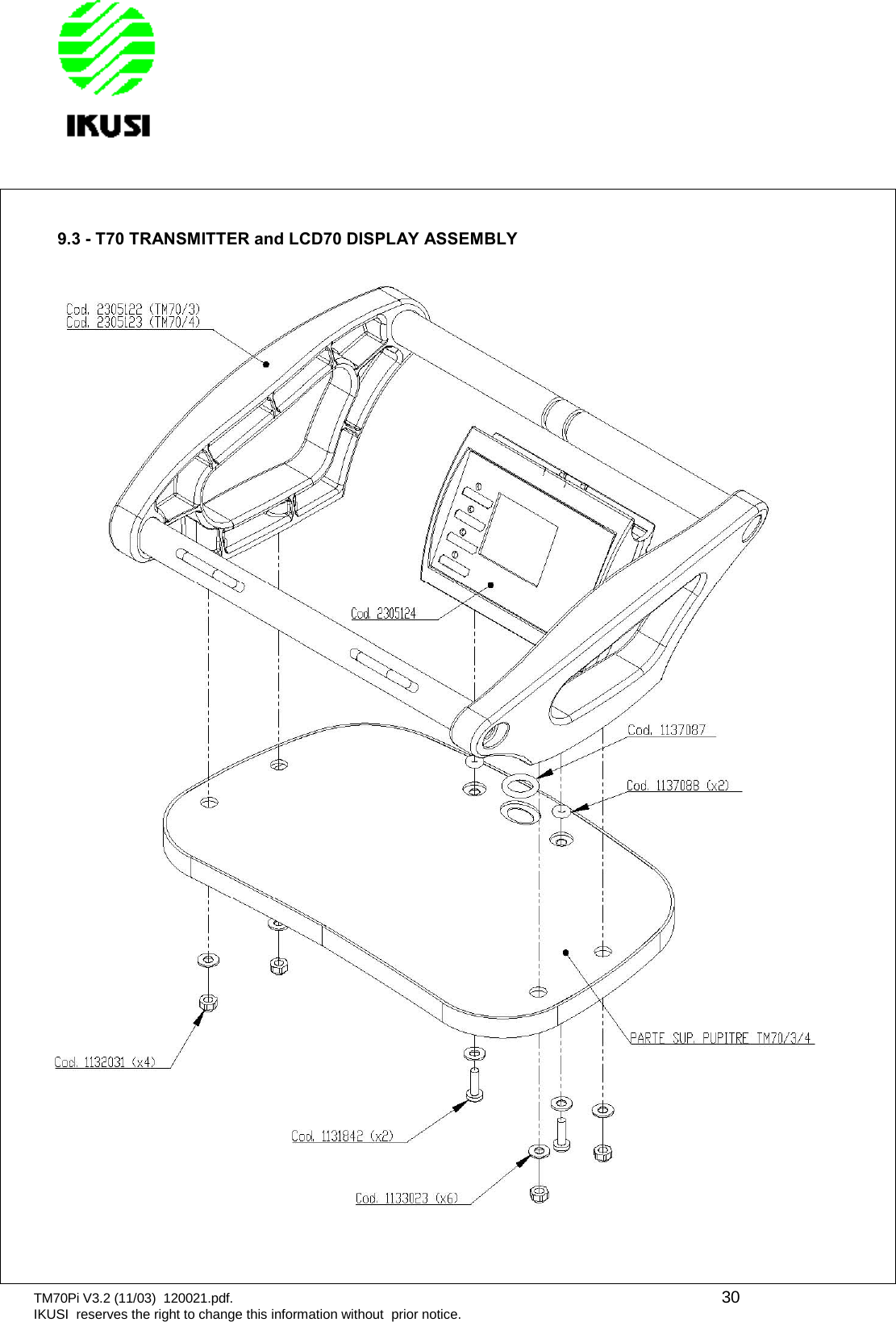
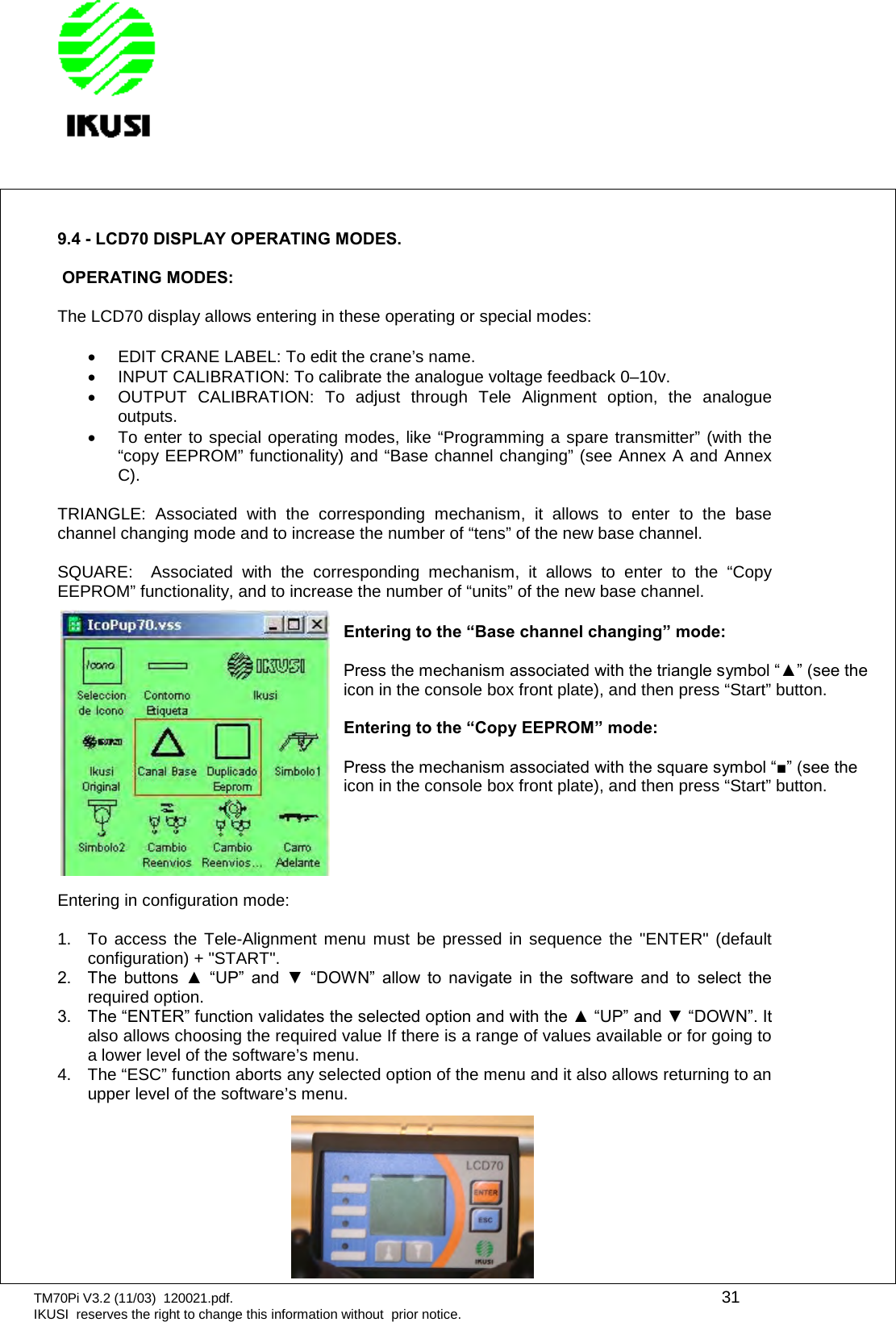
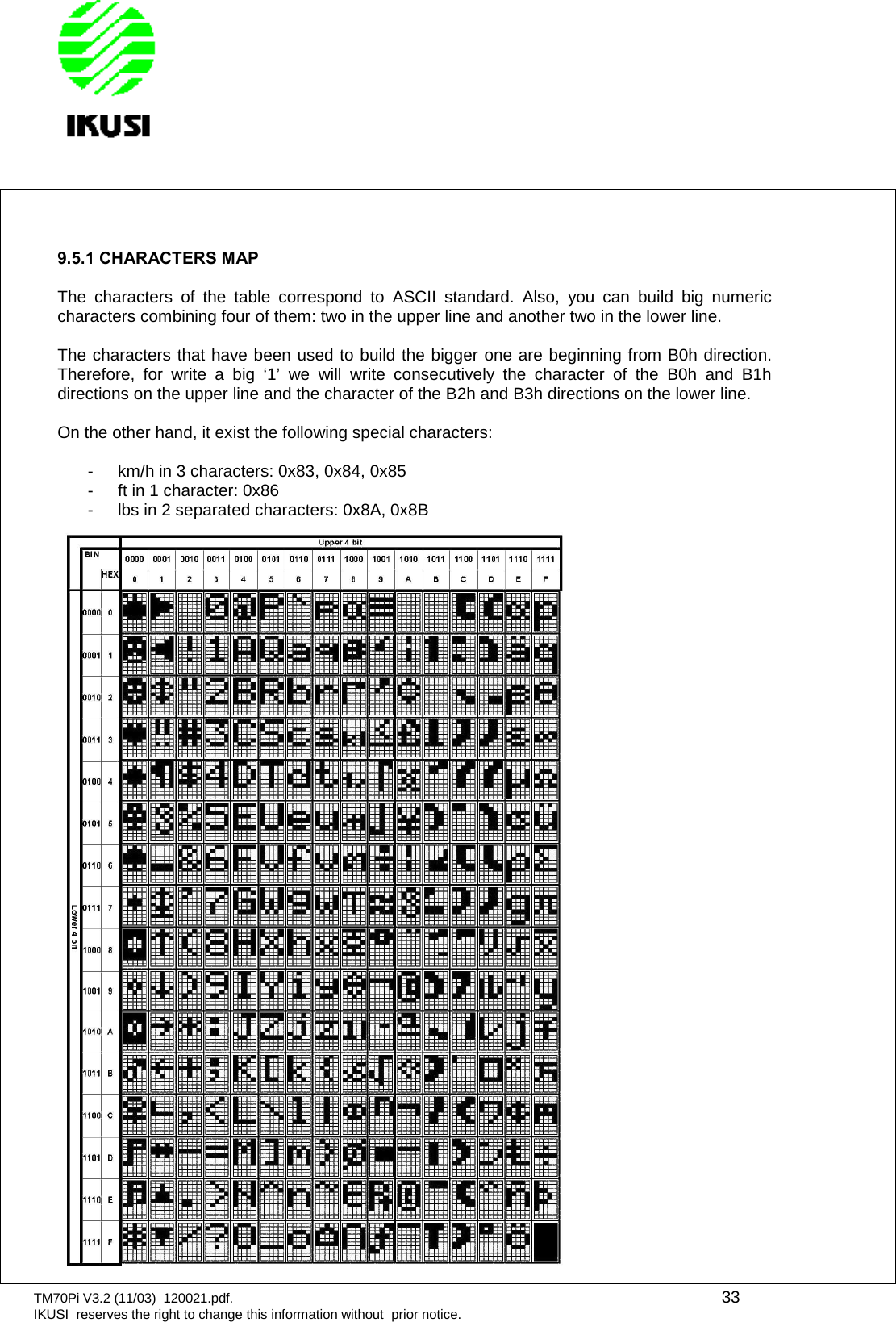
IKUSI ELECTRONICA S L TR800CE-MCX ISM BAND TRANSCEIVER MODULE WITH MCX CONNECTOR User Manual CERTIFICATE OF COMPLIANCE
IKUSI-Angel Iglesias ISM BAND TRANSCEIVER MODULE WITH MCX CONNECTOR CERTIFICATE OF COMPLIANCE
UserManual.wiki
>
IKUSI ELECTRONICA S L
>
TR800CE MCX User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation