Linx Technologies 900MCA Hummingbird MCA User Manual User Guide RC
Linx Technologies Hummingbird MCA User Guide RC
Contents
User Guide - RC
HumRCTM Series Remote
Control and Sensor Transceiver
Data Guide
Table of Contents
1 Description
1 Features
2 Ordering Information
2 Electrical Specications
4 Absolute Maximum Ratings
5 Typical Performance Graphs
10 Pin Assignments
10 Pin Descriptions
12 Theory of Operation
13 Module Description
14 Transceiver Operation
15 Transmit Operation
16 Receive Operation
16 Acknowledgement
17 Automatic Responses
17 Permissions Mask
18 The Pair Process
19 Conguring the Status Lines
19 External Amplier Control
20 Mode Indicator
20 Reset to Factory Default
21 Using the LVL_ADJ Line
22 Receiver Duty Cycle
23 Using the LATCH_EN Line
23 Using the Low Power Features
24 Triggered Transmissions
25 Frequency Hopping
26 The Command Data Interface
28 Serial Setup Conguration for Stand-alone Operation
Warning: Some customers may want Linx radio frequency (“RF”)
products to control machinery or devices remotely, including machinery
or devices that can cause death, bodily injuries, and/or property
damage if improperly or inadvertently triggered, particularly in industrial
settings or other applications implicating life-safety concerns (“Life and
Property Safety Situations”).
NO OEM LINX REMOTE CONTROL OR FUNCTION MODULE
SHOULD EVER BE USED IN LIFE AND PROPERTY SAFETY
SITUATIONS. No OEM Linx Remote Control or Function Module
should be modified for Life and Property Safety Situations. Such
modification cannot provide sufficient safety and will void the product’s
regulatory certification and warranty.
Customers may use our (non-Function) Modules, Antenna and
Connectors as part of other systems in Life Safety Situations, but
only with necessary and industry appropriate redundancies and
in compliance with applicable safety standards, including without
limitation, ANSI and NFPA standards. It is solely the responsibility
of any Linx customer who uses one or more of these products to
incorporate appropriate redundancies and safety standards for the Life
and Property Safety Situation application.
Do not use this or any Linx product to trigger an action directly
from the data line or RSSI lines without a protocol or encoder/
decoder to validate the data. Without validation, any signal from
another unrelated transmitter in the environment received by the module
could inadvertently trigger the action.
All RF products are susceptible to RF interference that can prevent
communication. RF products without frequency agility or hopping
implemented are more subject to interference. This module does have
a frequency hopping protocol built in, but the developer should still be
aware of the risk of interference.
Do not use any Linx product over the limits in this data guide.
Excessive voltage or extended operation at the maximum voltage could
cause product failure. Exceeding the reflow temperature profile could
cause product failure which is not immediately evident.
Do not make any physical or electrical modifications to any Linx
product. This will void the warranty and regulatory and UL certifications
and may cause product failure which is not immediately evident.
!
– –
1
Description
The HumRCTM Series transceiver is designed
for reliable bi-directional remote control
applications. It consists of a highly optimized
Frequency Hopping Spread Spectrum (FHSS)
RF transceiver and integrated remote control
transcoder. The FHSS system allows higher
RF output power and, therefore, longer range
than narrowband radios. It also provides
much more noise immunity than narrowband
radios, making the module suitable for use in noisy environments.
Eight status lines can be set up in any combination of inputs and outputs
for the transfer of button or contact states. A selectable acknowledgement
indicates that the transmission was successfully received. Versions are
available in the 902 to 928MHz and 2,400 to 2,483MHz frequency bands.
Primary settings are hardware-selectable, which eliminates the need for an
external microcontroller or other digital interface. For advanced features,
optional software configuration is provided by a UART interface; however,
no programming is required for basic operation.
Housed in a compact reflow-compatible SMD package, the transceiver
requires no external RF components except an antenna, which greatly
simplifies integration and lowers assembly costs.
Features
• Low power consumption
• 232 possible addresses
• 8 status lines
• Bi-directional remote control
• Analog voltage and sensor inputs
• Low power receive modes
• Selectable acknowledgements
• No external RF components
required
• No programming/tuning required
• Serial interface for optional
software operation/configuration
• Tiny PLCC-32 footprint
HumRCTM Series Remote Control
and Sensor Transceiver
Data Guide
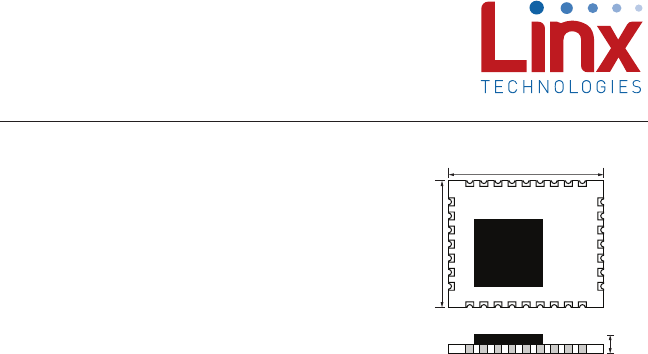
Figure 1: Package Dimensions
Revised 5/14/2015
0.45"
(11.43)
0.55"
(13.97)
0.07"
(1.78)
30 Basic Hardware Operation
32 Typical Applications
34 Power Supply Requirements
34 Antenna Considerations
35 Helpful Application Notes from Linx
36 Interference Considerations
37 Pad Layout
37 Board Layout Guidelines
39 Microstrip Details
40 Production Guidelines
40 Hand Assembly
40 Automated Assembly
42 General Antenna Rules
44 Common Antenna Styles
46 Regulatory Considerations
– – – –
2 3
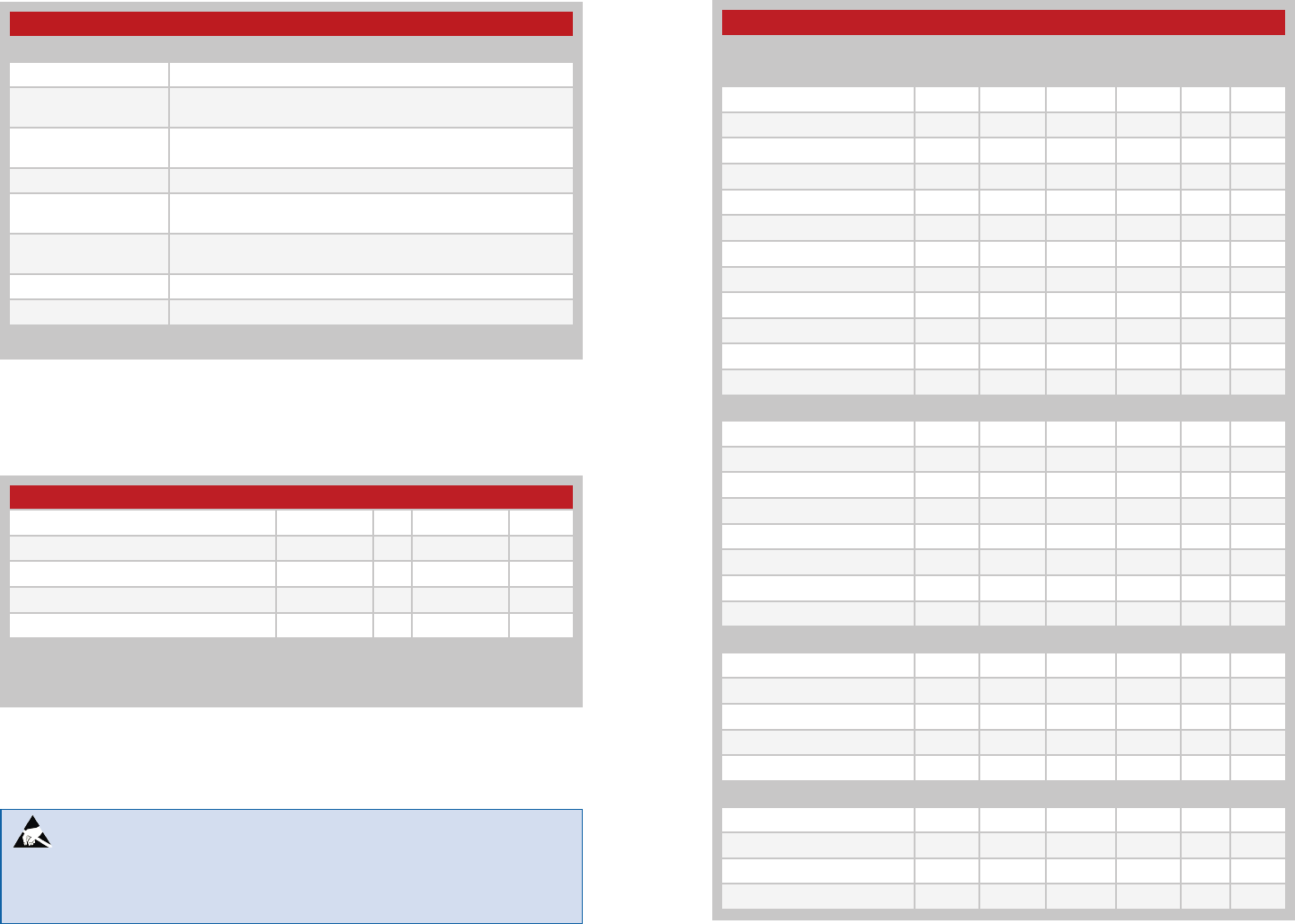
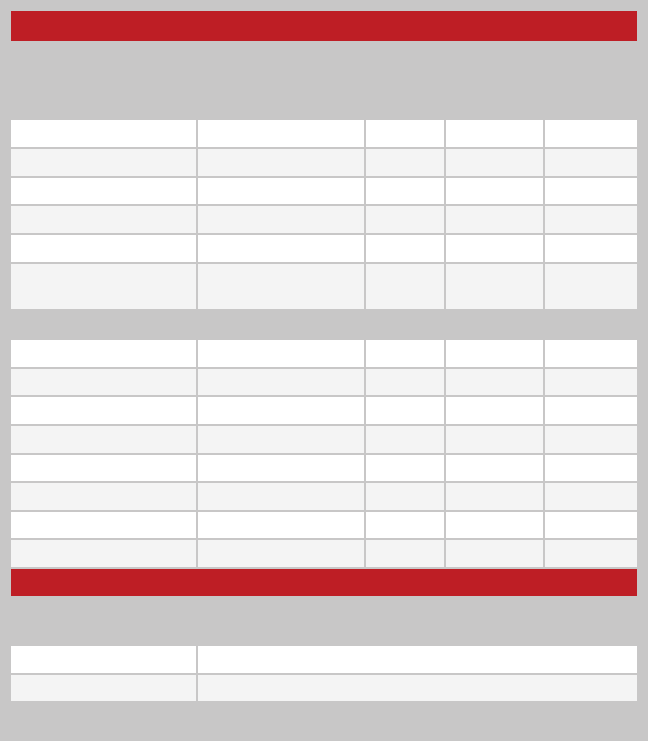
HumRCTM Series Transceiver Specifications
Parameter Symbol Min. Typ. Max. Units Notes
Power Supply
Operating Voltage VCC 2.0 3.6 VDC
Peak TX Supply Current lCCTX
2.4GHz at +1dBm 28 29 mA 1,2
2.4GHz at –10dBm 19 20 mA 1,2
900MHz at +10dBm 36 38.5 mA 1,2
900MHz at 0dBm 22 24 mA 1,2
Average TX Supply Current
2.4GHz at +1dBm 22 24 mA 1,2
900MHz at +10dBm 27.5 28.5 mA 1,2
RX Supply Current lCCRX 25.5 28 mA 1,2,3
Standby Current lSBY 0.5 1.4 µA 1,2
Power-Down Current lPDN 0.5 1.4 µA 1,2
RF Section
Operating Frequency Band FCMHz
HUM-2.4-RC 2400 2483.5 MHz
HUM-900-RC-xxx 902 928 MHz
Number of Channels 25
Channel Spacing
HUM-2.4-RC 2.03 MHz
HUM-900-RC-xxx 500 kHz
Modulation Rate 38.4 kbps
Receiver Section
Spurious Emissions -47 dBm
Receiver Sensitivity 5
HUM-2.4-RC –95 –99 dBm 5
HUM-900-RC-xxx –94 –98 dBm 5
RSSI Dynamic Range 85 dB
Transmitter Section
Output Power PO
HUM-2.4-RC 0 +1 dBm 6
HUM-900-RC-xxx +8.5 +9.5 dBm 6
Harmonic Emissions PH–41 dBc 6
Electrical SpecicationsOrdering Information
Figure 2: Ordering Information
Warning: This product incorporates numerous static-sensitive
components. Always wear an ESD wrist strap and observe proper ESD
handling procedures when working with this device. Failure to observe
this precaution may result in module damage or failure.
Absolute Maximum Ratings
Supply Voltage Vcc −0.3 to +3.9 VDC
Any Input or Output Pin −0.3 to VCC + 0.3 VDC
RF Input 0 dBm
Operating Temperature −40 to +85 ºC
Storage Temperature −40 to +85 ºC
Exceeding any of the limits of this section may lead to permanent damage to the device.
Furthermore, extended operation at these maximum ratings may reduce the life of this
device.
Absolute Maximum Ratings
Figure 3: Absolute Maximum Ratings
Ordering Information
Part Number Description
HUM-***-RC HumRCTM Series Remote Control Transceiver
HUM-900-RC-UFL HumRCTM Series Remote Control Transceiver, Certified, UFL
Connector
HUM-900-RC-CAS HumRCTM Series Remote Control Transceiver, Certified,
Castellation Connection
EVM-***-RC HumRCTM Series Carrier Board
EVM-900-RC-UFL HumRCTM Series Carrier Board with Certified module, UFL
Connector
EVM-900-RC-CAS HumRCTM Series Carrier Board with Certified module,
Castellation Connection
MDEV-***-RC HumRCTM Series Master Development System
EVAL-***-RC HumRCTM Series Basic Evaluation Kit
*** = Frequency; 900MHz, 2.4GHz
– – – –
4 5
HumRCTM Series Transceiver Specifications
Parameter Symbol Min. Typ. Max. Units Notes
Output Power Control
Range
HUM-2.4-RC 56 dB 6
HUM-900-RC-xxx 40 dB 6
Antenna Port
RF Impedance RIN 50 Ω4
Environmental
Operating Temp. Range −40 +85 ºC 4
Timing
Module Turn-On Time
Via VCC 108 ms 4
Via POWER_DOWN 57 ms 4
Via Standby 57 ms 4
Serial Command Response
Status, Volatile R/W 1 10 ms 8
Analog Input Reading 6 16 ms 8
NV Update, Factory Reset 80 110 ms 8
IU to RU Status High 50 ms 7
Channel Dwell Time 13.33 ms
Interface Section
Input
Logic Low VIL 0.3*VCC VDC
Logic High VIH 0.7*VCC VDC
Output
Logic Low, MODE_IND,
CONFIRM VOLM 0.3*VCC VDC 1,9
Logic High, MODE_IND,
CONFIRM VOHM 0.7*VCC VDC 1,9
Logic Low VOL 0.3*VCC 1,10
Logic High VOH 0.7*VCC 1,10
1. Measured at 3.3V VCC
2. Measured at 25ºC
3. Input power < –60dBm
4. Characterized but not tested
5. PER = 5%
6. Into a 50-ohm load
7. No RF interference
8. From end of command to start of
response
9. 60mA source/sink
10. 6mA source/sink
Figure 4: Electrical Specifications
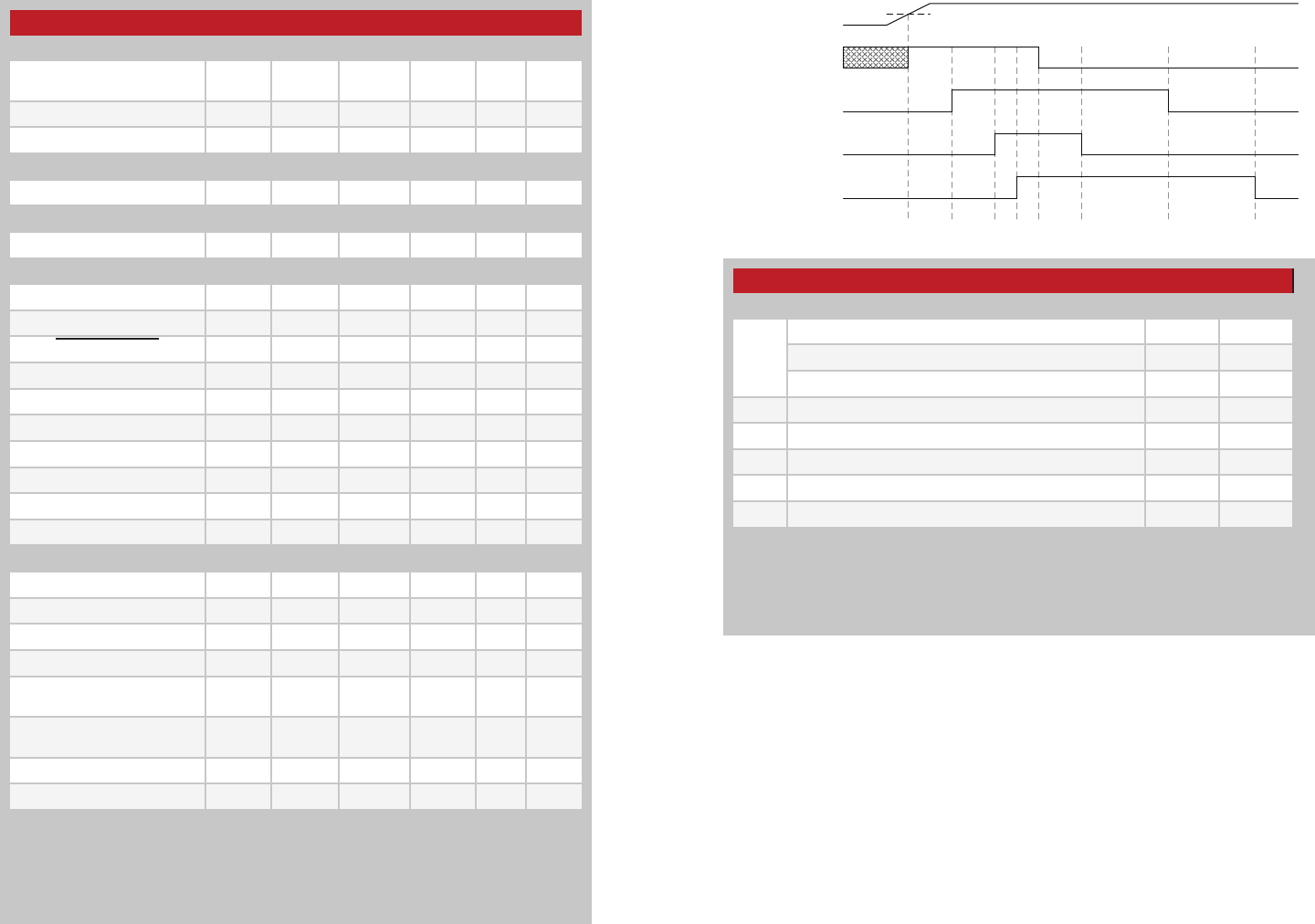
TX Vcc
TX Sx
TX MODE_IND
RX Sx
ABCDE FGH
RX MODE_IND
AB – TX Power up Response – <80ms
BC – RX Initial Response – 8 to 50ms with no interference
CD – Data Settle – 4 to 8us
EF – Data Update Delay During Active Session – 5 to 25ms
EG – Shutdown Duration – 25 to 342ms
GH – RX MODE_IND Drop – 6 to 8ms
VON
HumRCTM Series Transceiver Timings
Item Description Minimum Maximum
AB
TX Response from VCC or POWER_DOWN1,4 8ms
TX Response from Status line while IU in idle212ms
TX Response from Status line while IU / RU idle in RX31ms
BC RX Initial Response 4ms 50ms
CD Data Settle 4µs 8µs
EF Data Update Delay During Active Session 5ms 25ms
EG Shutdown Duration 25ms 342ms
GH RX MODE_IND Drop 6ms 8ms
Figure 5: HumRCTM Series Timings
1. From module off to VCC applied
2. The module is set as an IU only and is in idle pending status line activation
3. The module is set as an IU and RU and is idling in receive mode pending status line
activation or receipt of a valid packet.
4. Maximum 80ms if VCC < 2.6V
– – – –
6 7
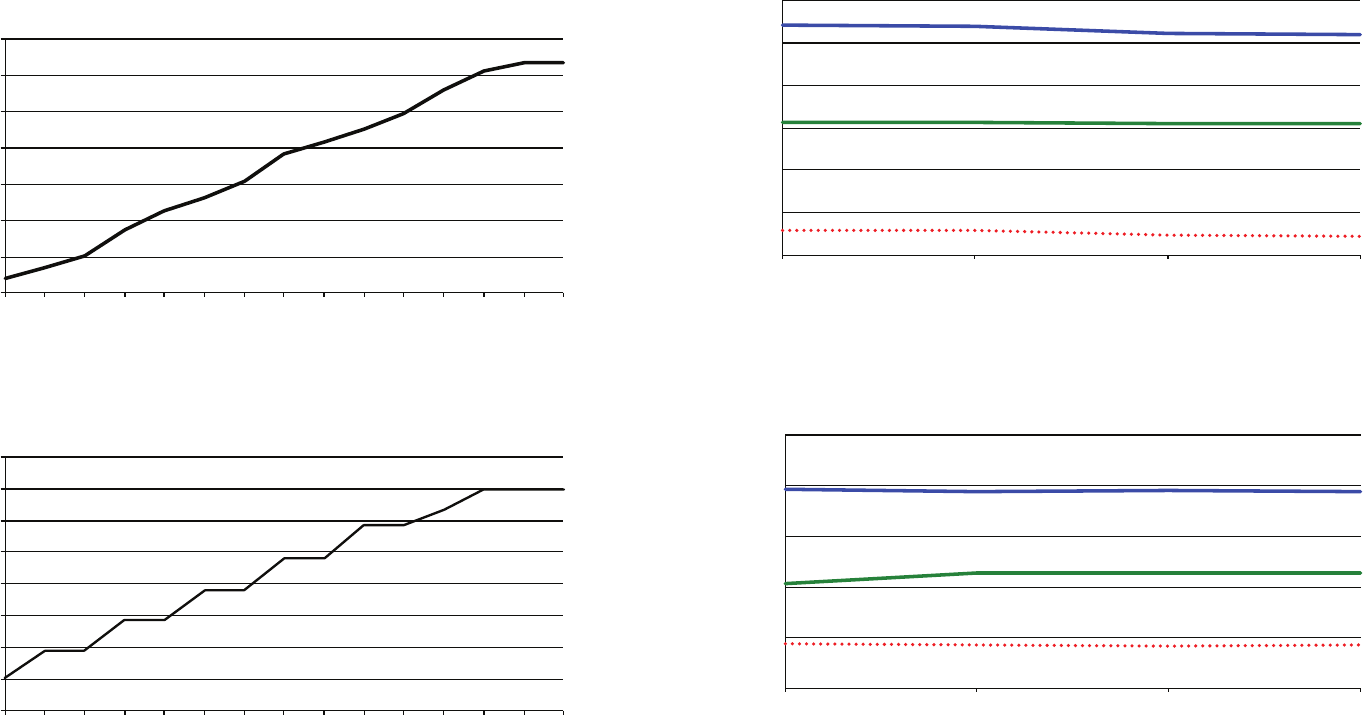
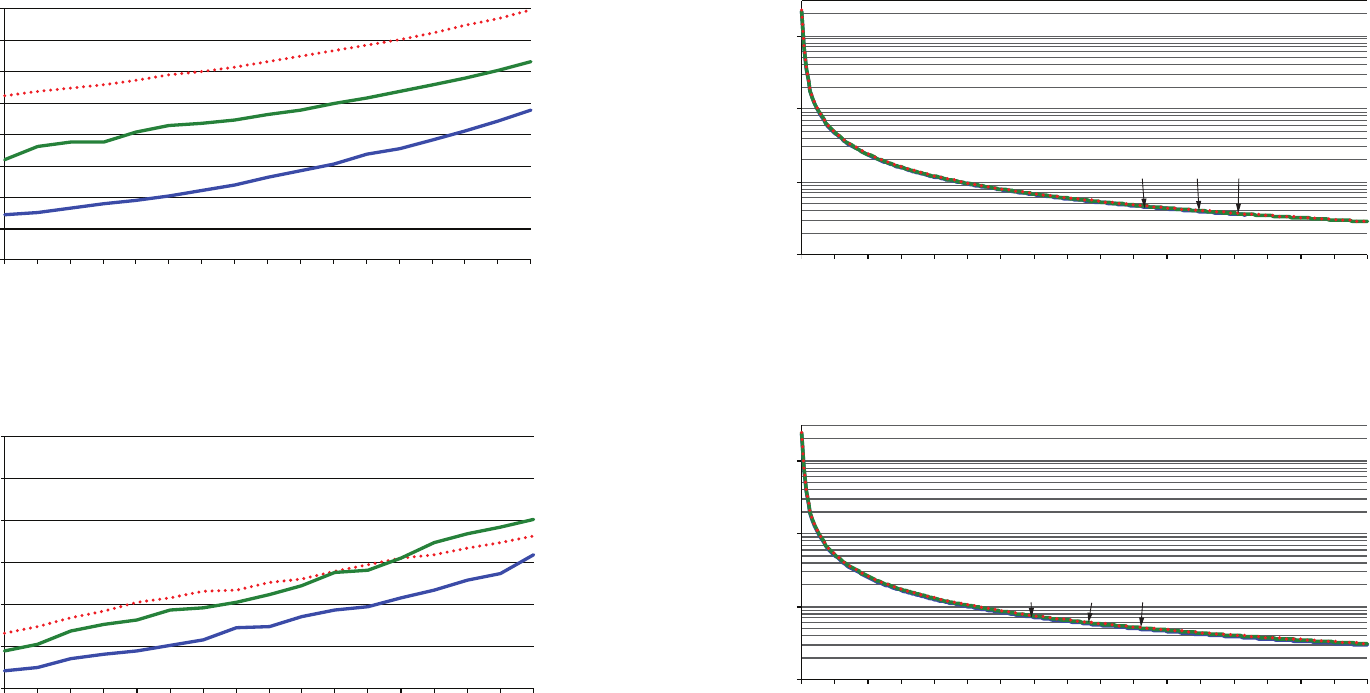
Typical Performance Graphs
-30.00
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
5.00
0.00 0.25 0.50 0.75 1.00 1.25 1.50 1.75 2.00 2.25 2.50 2.75 3.00 3.25
3.30
TX Output Power (dBm)
LVL_ADJ Voltage (V)
Figure 6: HumRCTM Series Transceiver Output Power vs. LVL_ADJ Resistance - HUM-2.4-RC
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
5.00
10.00
15.00
0.00 0.08 0.15 0.23 0.30 0.38 0.45 0.53 0.61 0.68 0.76 0.83 0.91 0.98 1.00
TX Output Power (dBm)
LVL_ADJ Voltage (V)
Figure 7: HumRCTM Series Transceiver Output Power vs. LVL_ADJ Resistance - HUM-900-RC
Figure 9: HumRCTM Series Transceiver Max Output Power vs. Supply Voltage - HUM-900-RC
8.5
9.0
9.5
10.0
10.5
11.0
2.0 2.5 3.3 3.6
TX Output Power (dBm)
Supply Voltage (V)
85°C
25°C
-40°C
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
2.0 2.5 3.3 3.6
Transmitter Output Power (dBm)
Supply Voltage (V)
85°C
25°C
-40°C
Figure 8: HumRCTM Series Transceiver Max Output Power vs. Supply Voltage - HUM-2.4-RC
– – – –
8 9
15.0
17.0
19.0
21.0
23.0
25.0
27.0
29.0
31.0
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0
Supply Current (mA)
TX Output Power (dBm)
85°C 25°C
-40°C
15.0
20.0
25.0
30.0
35.0
40.0
-30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0
15.0
Supply Current (mA)
TX Output Power (dBm)
85°C
25°C
-40°C
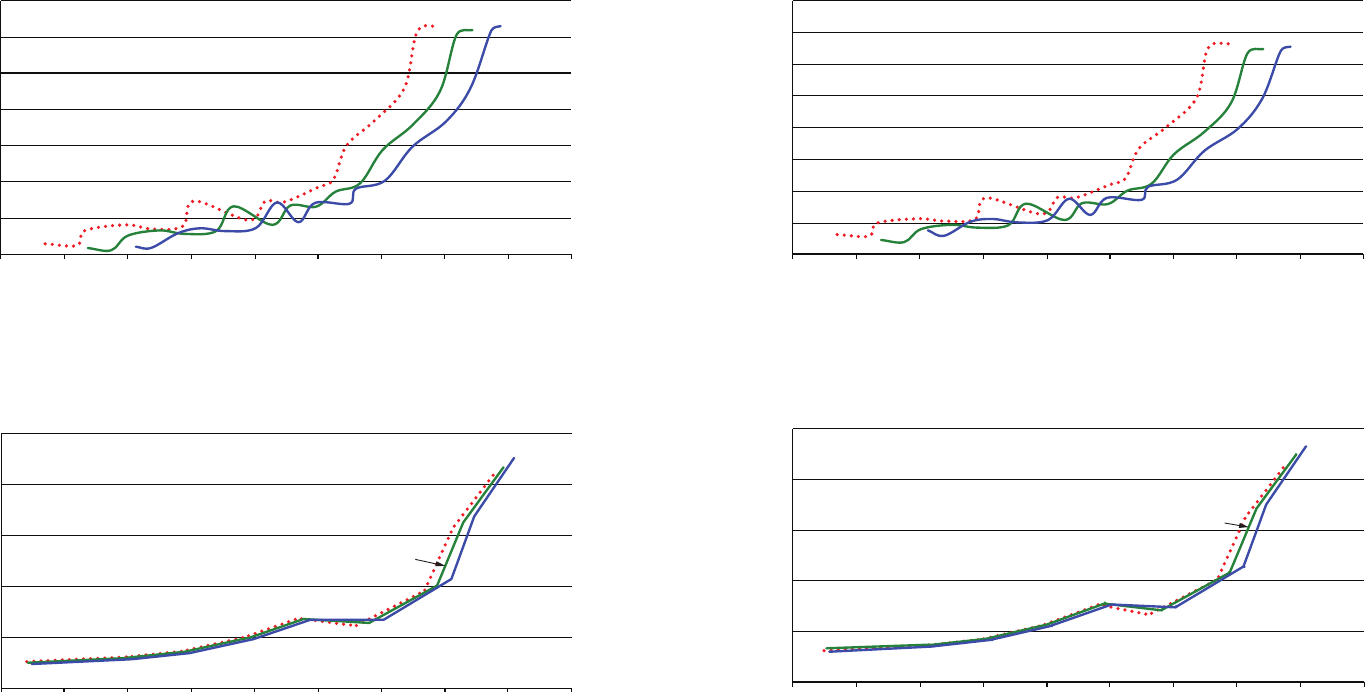
Figure 10: HumRCTM Series Transceiver Average Current vs. Transmitter Output Power at 2.5V - HUM-2.4-RC
Figure 11: HumRCTM Series Transceiver Average Current vs. Transmitter Output Power at 2.5V - HUM-900-RC
Figure 13: HumRCTM Series Transceiver Average TX Current vs. Transmitter Output Power at 3.3V - HUM-2.4-RC
Figure 12: HumRCTM Series Transceiver Average TX Current vs. Transmitter Output Power at 3.3V - HUM-900-RC
15.0
20.0
25.0
30.0
35.0
40.0
-30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0
15.0
Supply Current (mA)
TX Output Power (dBm)
85°C
25°C
-40°C
15.0
17.0
19.0
21.0
23.0
25.0
27.0
29.0
-35.0 -30.0 -25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0 10.0
Supply Current (mA)
TX Output Power (dBm)
85°C
25°C
-40°C
– – – –
10 11
20.5
21.0
21.5
22.0
22.5
23.0
23.5
2.0 2.5 3.3 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
26.5
26.7
26.9
27.1
27.3
27.5
27.7
27.9
28.1
28.3
28.5
2.0 2.5 3.3 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
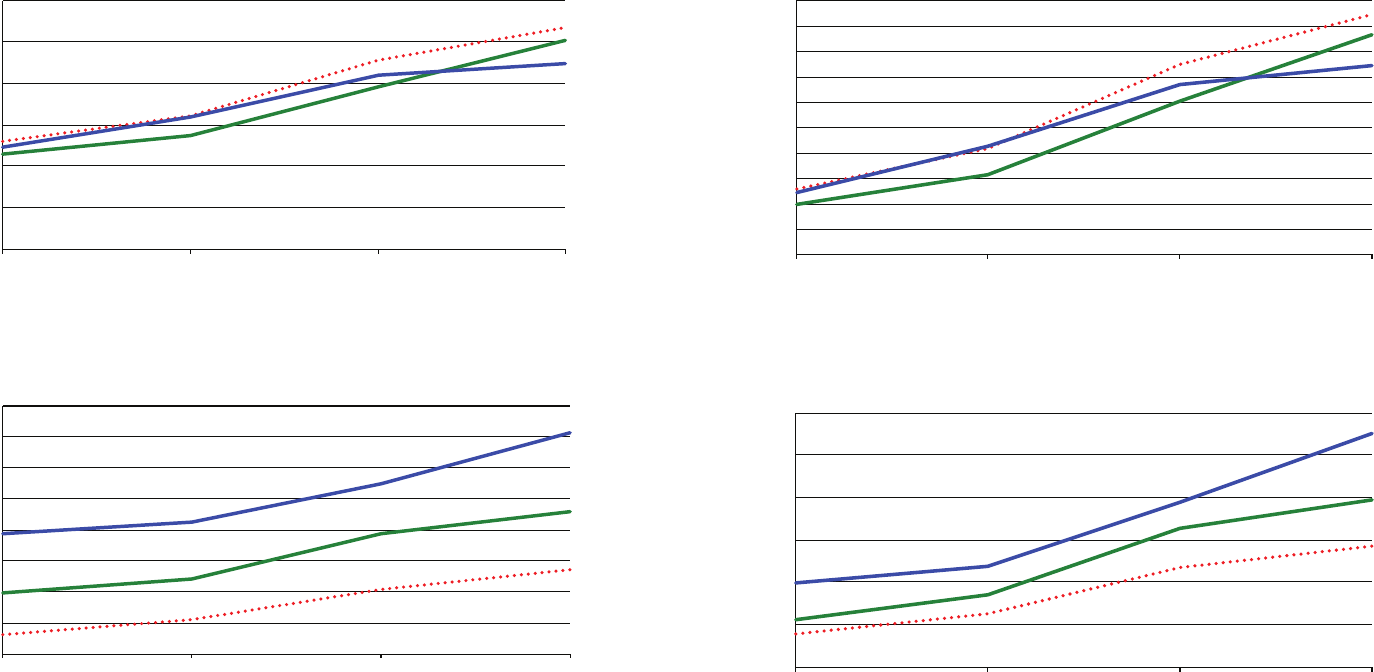
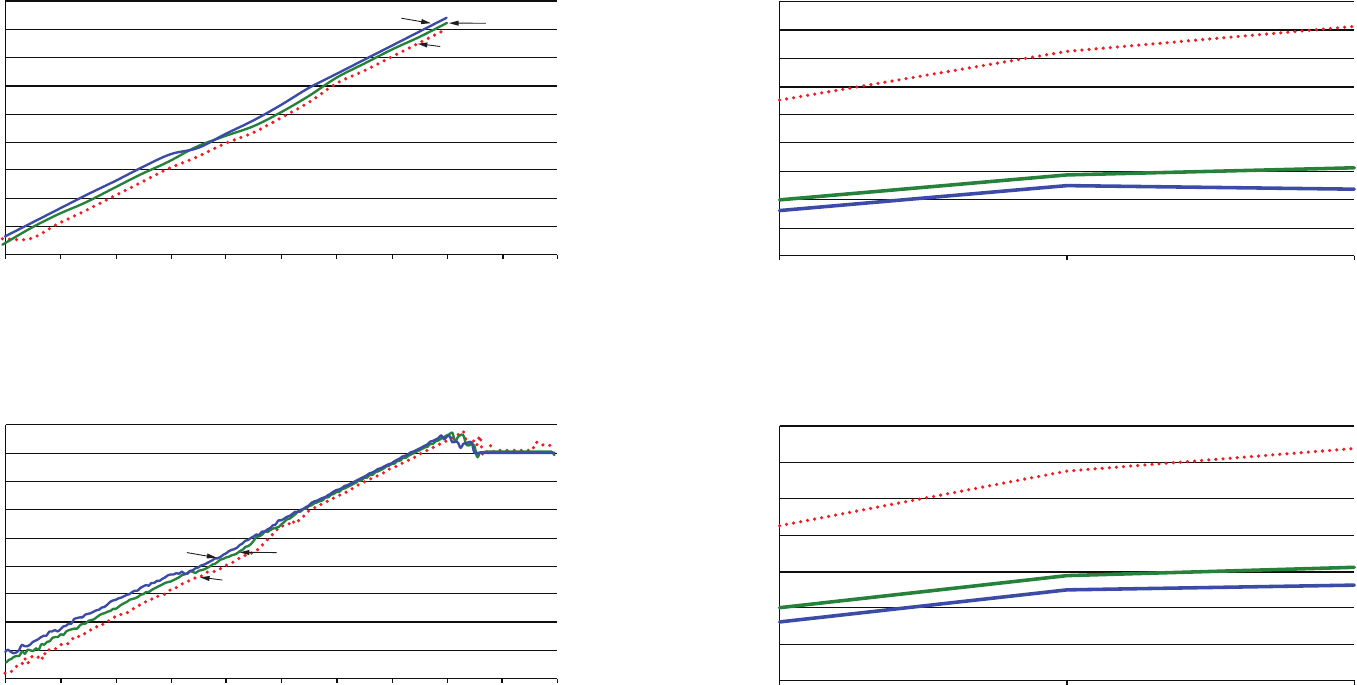
Figure 16: HumRCTM Series Transceiver TX Current vs. Supply Voltage at 0dBm - HUM-2.4-RC
Figure 17: HumRCTM Series Transceiver TX Current vs. Supply Voltage at 0dBm - HUM-900-RC
35.5
36.0
36.5
37.0
37.5
38.0
38.5
39.0
39.5
2.0 2.5 3.3 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
Figure 14: HumRCTM Series Transceiver TX Current vs. Supply Voltage at Max Power - HUM-2.4-RC
26.0
26.5
27.0
27.5
28.0
28.5
29.0
2.0 2.5 3.3 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
Figure 15: HumRCTM Series Transceiver TX Current vs. Supply Voltage at Max Power - HUM-900-RC
– – – –
12 13
0.01
0.10
1.00
10.00
0153045607590 105 120 135 150 165 180 195 210 225 240
255
Average RX Current (mA)
Duty Cycle (s)
2.5V 3.3V 3.6V
Figure 20: HumRCTM Series Transceiver Average RX Current Consumption vs. Duty Cycle - HUM-2.4-RC
0.01
0.10
1.00
10.00
0153045607590 105 120 135 150 165 180 195 210 225 240
255
Average RX Current (mA)
Duty Cycle (s)
2.5V 3.3V 3.6V
Figure 21: HumRCTM Series Transceiver Average RX Current Consumption vs. Duty Cycle - HUM-900-RC
22.00
22.50
23.00
23.50
24.00
24.50
25.00
2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
Figure 18: HumRCTM Series Transceiver RX Current Consumption vs. Supply Voltage - HUM-2.4-RC
23.00
23.50
24.00
24.50
25.00
25.50
26.00
26.50
27.00
2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
Supply Current (mA)
Supply Voltage (V)
85°C
25°C
-40°C
Figure 19: HumRCTM Series Transceiver RX Current Consumption vs. Supply Voltage - HUM-900-RC
– – – –
14 15
-105.00
-95.00
-85.00
-75.00
-65.00
-55.00
-45.00
-35.00
-25.00
-15.00
-100.00 -90.00 -80.00 -70.00 -60.00 -50.00 -40.00 -30.00 -20.00 -10.00
0.00
RSSI Reading (dBm)
Input Power (dBm)
-40°C 25°C
85°C
-105.00
-95.00
-85.00
-75.00
-65.00
-55.00
-45.00
-35.00
-25.00
-15.00
-100.00 -90.00 -80.00 -70.00 -60.00 -50.00 -40.00 -30.00 -20.00 -10.00 0.00
RSSI Reading (dBm)
Input Power (dBm)
-40°C 25°C
85°C
Figure 22: HumRCTM Series Transceiver RSSI Voltage vs. Input Power - HUM-2.4-RC
Figure 23: HumRCTM Series Transceiver RSSI Voltage vs. Input Power - HUM-900-RC
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
2.5 3.3 3.6
Standby Current (µA)
Supply Voltage (V)
-40°C
25°C
85°C
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.5 3.3 3.6
Standby Current (µA)
Supply Voltage (V)
-40°C
25°C
85°C
Figure 24: HumRCTM Series Transceiver Standby Current Consumption vs. Supply Voltage - HUM-2.4-RC
Figure 25: HumRCTM Series Transceiver Standby Current Consumption vs. Supply Voltage - HUM-900-RC
– – – –
16 17
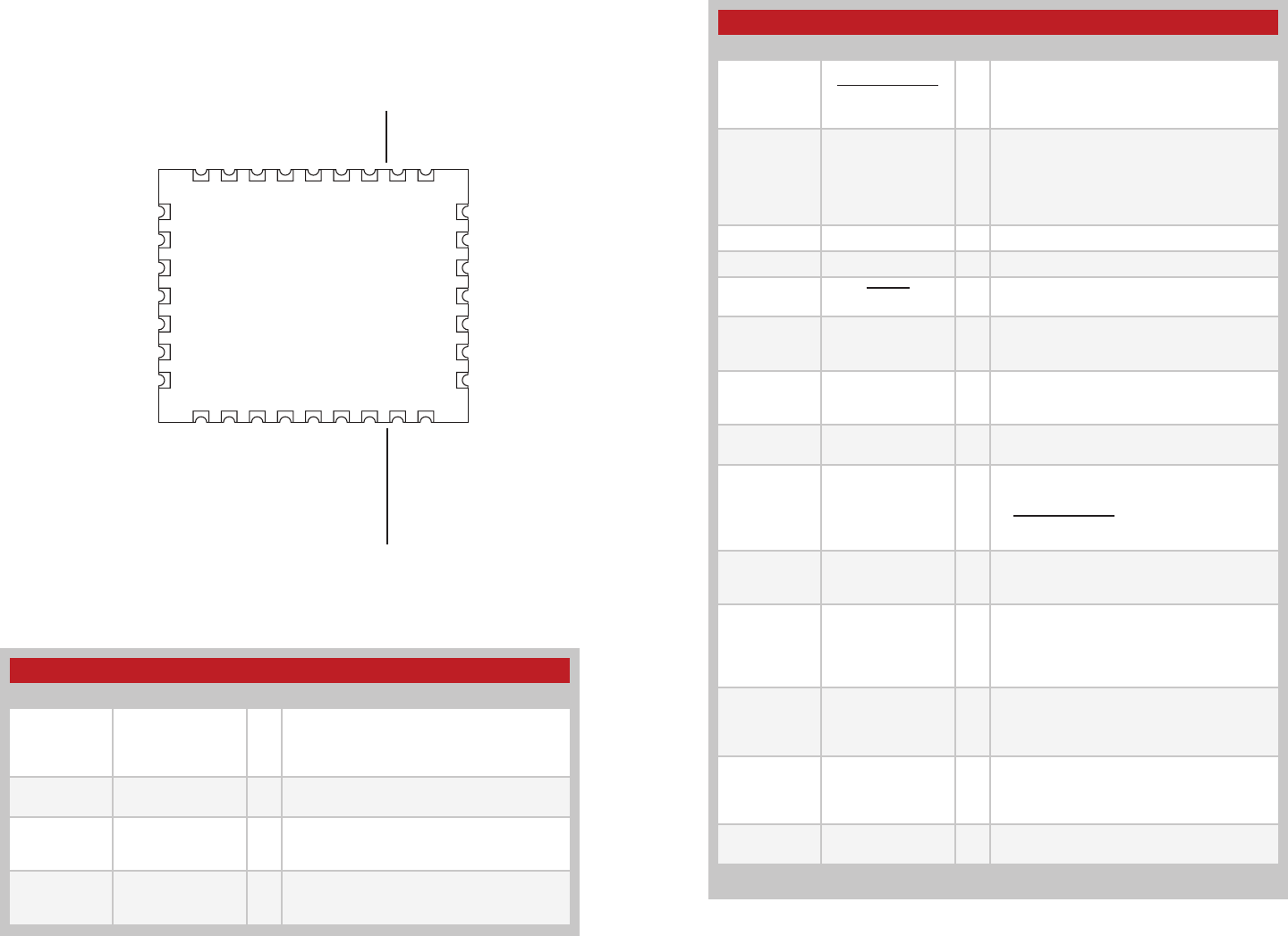
Pin Assignments
30
31
32
1
2
3
4
20
19
18
17
16
15
14
5678 9 10 11 12 13
29 28 27 26 25 24 23 22 21
ANT
GND
GND
GND
GND
GND
GND
ACK_OUT
MODE_IND
LVL_ADJ
S7
S4
S5
S6
S2
S3
S1
S0
C1
C0
GND
LATCH_EN
POWER_DOWN
ACK_EN
PAIR
CMD_DATA_IN
CMD_DATA_OUT
LNA_EN
PA_EN
GND
VCC
RESET
Figure 26: HumRCTM Series Transceiver Pin Assignments (Top View)
Pin Descriptions
Pin Number Name I/O Description
1, 2, 3, 4, 5,
6, 7, 8 S0–S71I/O
Status Lines. Each line can be configured
as either an input to register button or
contact closures or as an output to control
application circuitry.
9, 14, 15, 16,
17, 18, 20, 25 GND — Ground
10 C0 I
This line sets the input/output direction for
status lines S0-S3. When low, the lines are
outputs; when high they are inputs.
11 C1 I
This line sets the input/output direction for
status lines S4-S7. When low, the lines are
outputs; when high they are inputs.
Pin Descriptions
Pin Number Name I/O Description
12 POWER_DOWN I
Power Down. Pulling this line low places the
module into a low-power state. The module
is not functional in this state. Pull high for
normal operation. Do not leave floating.
13 LATCH_EN I
If this line is high, then the status line
outputs are latched (a received command
to activate a status line toggles the output
state). If this line is low, then the output lines
are momentary (active for as long as a valid
signal is received).
19 ANTENNA — 50-ohm RF Antenna Port
21 VCC — Supply Voltage
22 RESET I This line resets the module when pulled low.
It should be pulled high for normal operation.
23 LNA_EN 0
Low Noise Amplifier Enable. This line is
driven high when receiving. It is intended to
activate an optional external LNA.
24 PA_EN O
Power Amplifier Enable. This line is driven
high when transmitting. It is intended to
activate an optional external power amplifier.
26 CMD_DATA_OUT O Command Data Out. Output line for the
serial interface commands
27 CMD_DATA_IN I
Command Data In. Input line for the serial
interface commands. If serial control is not
used, this line should be tied to ground
or POWER_DOWN to minimize current
consumption.
28 ACK_EN I
Pull this line high to enable the module to
send an acknowledgement message after a
valid control message has been received.
29 PAIR 1I
A high on this line initiates the Pair process,
which causes two units to accept each
other’s transmissions. It is also used with
a special sequence to reset the module to
factory default configuration.
30 MODE_IND O
This line indicates module activity. It can
source enough current to drive a small
LED, causing it to flash. The duration of the
flashes indicates the module’s current state.
31 ACK_OUT O
This line goes high when the module
receives an acknowledgement message
from another module after sending a control
message.
32 LVL_ADJ I Level Adjust. The voltage on this line sets
the transmitter output power level.
1. These lines have an internal 20kΩ pull-down resistor
Figure 27: HumRCTM Series Transceiver Pin Descriptions
Pin Descriptions
– – – –
18 19
Pre-Certied Module Pin Assignments
The pre-certified version of the module has mostly the same pin
assignments as the standard version. The antenna connection is routed to
either a castellation (-CAS) or a u.FL connector (-UFL), depending on the
part number ordered.
The antenna pad is disconnected on the version with the connector. The
RF is routed as shown in Figure 28 for the version without the connector.
30
31
32
1
2
3
4
19 18
56789 10 11 12 13
29 28 27 26 25 24 23 22 21
ANT
GND
BE
RFACTV
NC
NC
NC
NC
NC
NC
NC
CRESP
EX
NC
NC
GND
CMD
POWER_DOWN
CTS
PB
CMD_DATA_IN
CMD_DATA_OUT
LNA_EN
PA_EN
GND
VCC
RESET
0.45"
(11.43)
0.812"
(20.62)
0.116"
(2.95)
Figure 28: HumRCTM Series Transceiver Pre-certified Version Pin Assignments (Top View)
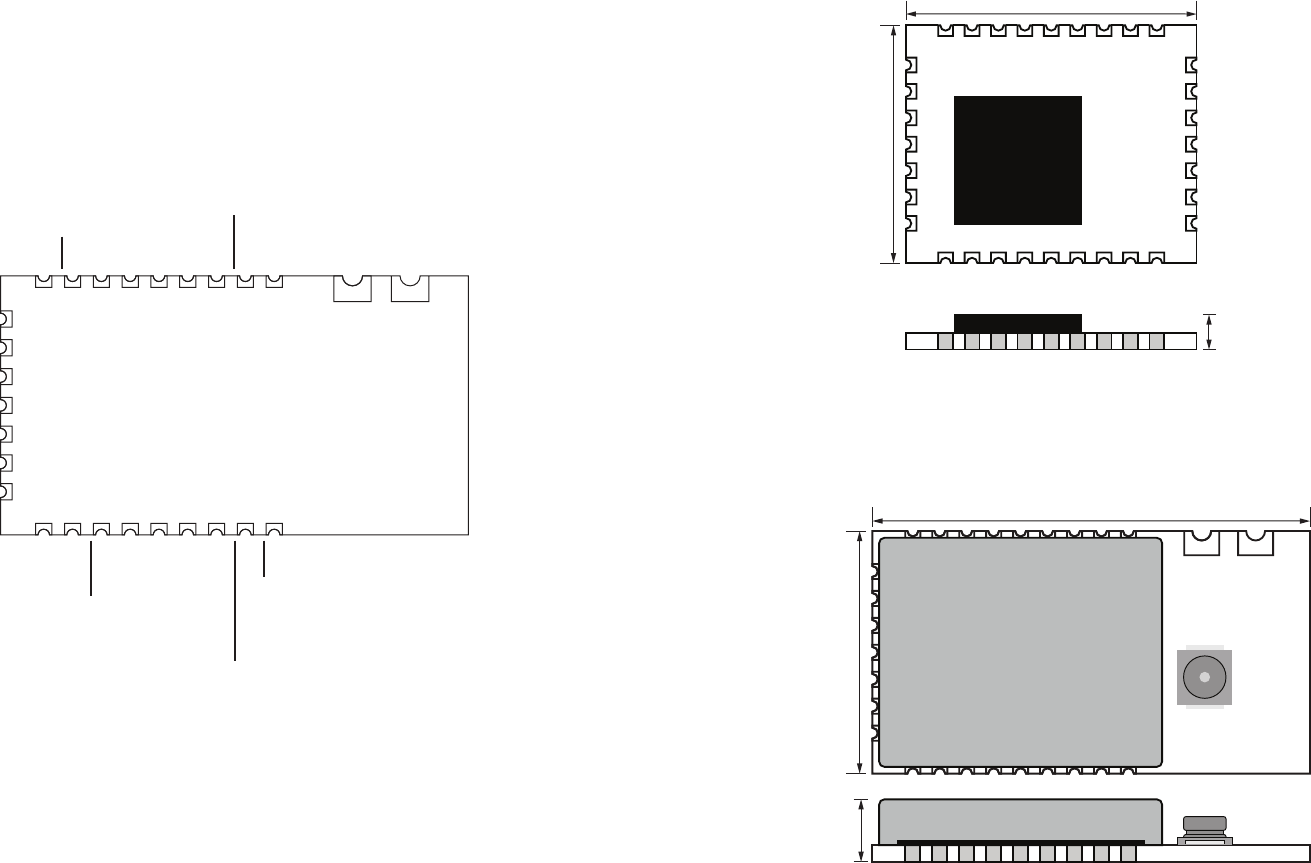
Module Dimensions
Figure 29: HumRCTM Series Transceiver Dimensions
0.45"
(11.43)
0.55"
(13.97)
0.07"
(1.78)
Figure 30: HumRCTM Series Transceiver Pre-certified Version Dimensions
– – – –
20 21
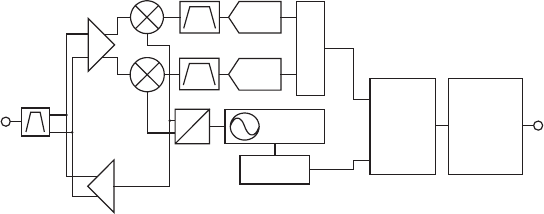
Theory of Operation
The HumRCTM Series transceiver is a low-cost, high-performance
synthesized FSK transceiver. Figure 31 shows the module’s block diagram.
The HumRCTM Series transceiver operates in the 2400 to 2483MHz
and 902 to 928MHz frequency bands. The transmitter output power is
programmable. The range varies depending on the module’s frequency
band, antenna implementation and the local RF environment.
The RF carrier is generated directly by a frequency synthesizer that includes
an on-chip VCO. The received RF signal is amplified by a low noise
amplifier (LNA) and down-converted to I/Q quadrature signals. The I/Q
signals are digitized by ADCs.
A low-power onboard communications processor performs the radio
control and management functions including Automatic Gain Control
(AGC), filtering, demodulation and packet synchronization. A control
processor performs the higher level functions and controls the serial and
hardware interfaces.
A crystal oscillator generates the reference frequency for the synthesizer
and clocks for the ADCs and the processor.
PA
LNA
0
90
FREQ
SYNTH
ADC
ADC
DEMODULATOR
MODULATOR
ANTENNA PROCESSORGPIO /
INTERFACE
INTERFACE
Figure 31: HumRCTM Series Transceiver RF Section Block Diagram
Module Description
The HumRCTM Series Remote Control module is a completely integrated RF
transceiver and processor. It has two main modes of operation: hardware
and software. Hardware operation is suitable for applications like keyfobs
where no other processor, PC or interface is present. Software operation
is more advanced and allows for more features and functionality. This
guide focuses on hardware operation with some references to software
operation. Please see Reference Guide RG-00104: the HumRCTM Series
Command Data Interface for details on software operation.
Since this module can act as both transmitter and receiver, terminology and
descriptions can get confusing. This guide uses the term Initiating Unit (IU)
to describe a module that is transmitting commands. Responding Unit (RU)
is used to describe a module that is receiving commands.
The module has 8 status lines numbered S0 through S7. These can be set
as inputs for buttons or contacts or as outputs to drive application circuitry.
When S0 is taken high on the IU, S0 goes high on the RU, and so forth. A
line that is an input on one side needs to be set as an output on the other
side.
Up to two of the lines S4, S5, S6 and S7 can be configured as analog
inputs through the Command Data Interface. The voltage on an analog
input can be transmitted upon activation of a digital input, or automatically
sent in response to a query from an IU. These are ideal for sensor-based
applications.
A trigger configuration provides self-timed periodic or limited-length
transmission when an input goes high.
The transceiver uses a Frequency Hopping Spread Spectrum (FHSS)
algorithm. This allows for higher output power and longer range than
narrow-band systems while still maintaining regulatory compliance. All
aspects of managing the FHSS operations are automatically handled by the
module.
– – – –
22 23
Transceiver Operation
The transceiver has two modes of operation: Initiating Unit (IU) that
transmits control messages and Responding Unit (RU) that receives control
messages. If all of the status lines are set as inputs, then the module is set
as an IU only. The module stays in a low power sleep mode until a status
line goes high, starting the Transmit Operation.
If all of the status lines are set as outputs, then the module is set as an RU
only. It stays in Receive Operation looking for a valid transmission from a
paired IU.
A module with both input and output status lines can operate as an IU
and an RU. The module idles in Receive Operation until either a valid
transmission is received or a status line input goes high, initiating the
Transmit operation.
When an input goes high, the transceiver captures the logic state of each
of the status lines. The line states are placed into a packet along with the
local 32-bit address. The IU transmits the control packets as it hops among
25 RF channels.
An RU receives the packet and checks its Paired Module List to see if the
IU has been paired with the module and is authorized to control it. If the
IU’s address is not in the table, then the RU ignores the transmission. If
the address is in the table, then the RU calculates the channel hopping
pattern from the IU’s address and sets its status line outputs according to
the received packet. It then hops along with the IU and updates the states
of its outputs with every packet. Its outputs can be connected to external
circuitry that activates when the lines go high.
The RU can also send an acknowledgement back to the IU. Using the
serial interface the RU can include up to two bytes of custom data with
the acknowledgement, such as sensor data or battery voltage levels.
Using the hardware control, if ACK_EN is high when a valid control packet
is received, the RU sends back a simple acknowledgement (ACK). It can
send an Acknowledge with Data (AWD) response when custom data is
programmed into the module using a serial command.
Transmit Operation
Transmit operation can be started by a status line input going high or a
serial command.
Basic remote control applications use the status line activation. The module
pulls the MODE_IND line high and repeatedly transmits control messages
containing the local address and the state of all status lines. Between
transmissions the module listens for acknowledgement messages. If an
Acknowledge (ACK) or Acknowledge with Data (AWD) message is received
for the transmitted data, the ACK_OUT line is asserted for 100ms. The
ACK_OUT timing restarts on each ACK or AWD packet that is received.
The transceiver sends control messages every 13.33ms as long as
any of the status line inputs is high, updating the status line states with
each packet. When all input lines are low, the module starts the shutoff
sequence.
During the shutoff sequence, the transmitter sends at least one packet with
all outputs off. It then continues to transmit data until the current channel
hopping cycle is complete, resulting in balanced channel use. If an input
line is asserted during the shutoff sequence, the transmitter cancels the
shutoff and extends the transmission sequence.
The Transmit Control Data and Transmit IU Packet serial commands
instruct the module to send control messages. The Transmit Control Data
command is the serial command version of taking a status line input high.
An external microcontroller can use this command to send a specified
number of packets with a specified Status byte rather than taking status
lines high.
The Transmit IU Packet command sends a packet that causes the
RU to respond with a packet that can include the readings of its two
analog inputs. This is good for reading remote sensors without having a
microcontroller on the sensor unit. This reduces the cost and development
time for remote sensor units.
The trigger configuration causes the module to send a pre-specified
number of packets when a status line input goes high. This is good for
remote monitoring and transmitting when an exception occurs without
needing a microcontroller on the remote unit.

– – – –
24 25
received bytes on its CDI for presentation to an external microcontroller
or computer. The data can include sensor values, battery voltage levels or
current status line states.
Automatic Responses
Two of the status lines can be configured as analog inputs to measure
voltage levels. An IU can send a Request Sample command to an RU to
respond with the analog measurements in the acknowledgement. This
allows a master unit to remotely read a sensor device without having to
place a microcontroller on the sensor.
The transceiver can be configured to respond with one or both analog
values through the CDI. Please see Reference Guide RG-00104: the
HumRC™ Series Command Data Interface for details on the CDI.
Permissions Mask
The HumRCTM Series Transceiver has a Permissions Mask in the RU that is
used to control which status lines an IU is authorized to control. With most
systems, if a transmitter is associated with a receiver then it has full control
over the receiver. With the Permissions Mask, a transmitter can be granted
authority to control only certain receiver outputs. If an IU does not have the
authority to activate a certain line, then the RU does not set it.
As an example, a factory worker can be given a fob that only opens the
door to the factory floor while the CEO has a fob that can also open
the executive offices. The hardware in the fobs is the same, but the
permissions masks are set differently for each fob.
The Pair process always sets the Permission Mask to full access. The mask
can be changed through the serial interface.
Receive Operation
During Receive Operation, the module waits for a valid control message
from an authorized (paired) transceiver. When a valid message is received,
it locks onto the hopping pattern of the transmitter and asserts the MODE_
IND line. It compares the received status line states to the Permission Mask
for the IU to see if the IU is authorized to activate the lines. The module sets
all authorized outputs to match the received states. Only status line outputs
are affected by received commands.
The RU then checks the state of the ACK_EN line and transmits an
acknowledgement packet if it is high. It looks for the next valid packet while
maintaining the frequency hopping timing. As long as an RU is receiving
valid commands from a paired IU, it will not respond to any other unit.
Once eight consecutive packets are missed, the RU is logically
disconnected from the IU and waits for the next valid packet from any IU.
Acknowledgement
A responding module is able to send an acknowledgement to the
transmitting module. This allows the initiating module to know that the
responding side received the command.
When the Responding Unit (RU) receives a valid Control Packet, it
checks the state of the ACK_EN line. If it is high the module sends an
Acknowledgement Packet.
If the Initiating Unit (IU) receives an Acknowledgement Packet that has
the same Address and Status Byte as in the Control Packet it originally
sent, then it pulls the ACK_OUT line high. A continuous stream of Control
Packets that triggers a continuous stream of Acknowledgement Packets
keeps the ACK_OUT line high.
Connecting the ACK_EN line to VCC causes the RU to transmit
Acknowledgement Packets as soon as it receives a valid Control Packet.
Alternately this line can be controlled by an external circuit that raises the
line when a specific action has taken place. This confirms to the IU that the
action took place rather than just acknowledging receipt of the signal.
The module can also be configured to transmit an acknowledgement with
two bytes of preset data. This feature is enabled using the Control Source
parameter through the Command Data Interface (CDI). The IU outputs the
Note: Only one RU should be enabled to transmit an acknowledgement
response for a given IU since multiple acknowledgements will interfere
with each other.
– – – –
26 27
Conguring the Status Lines
Each of the eight status lines can operate as a digital input or output.
Configuring their direction can be done in two ways. Basic operation uses
the C0 and C1 lines. When C0 is low, S0 through S3 are outputs; when C0
is high, S0 through S3 are inputs. Likewise when C1 is low, S4 through S7
are outputs; when C1 is high, S4 through S7 are inputs. This is shown in
Figure 32.
Advanced operation uses the CDI to set each line direction individually with
the Status Line I/O Mask item. In addition, the Control Source Item is used
to tell the module to use the serial command instead of the hardware line
configuration.
Up to two of the status lines in the S4 through S7 group can be configured
as analog inputs. An analog input line is used only for reading an input line
voltage and converting it to a digital value (Analog to Digital Conversion,
ADC). The analog input selection is primary, overriding digital input/output
selection. An analog input reading can be transmitted to another module
when functioning as either an IU or RU. The digitized reading must be
read through a serial command at the receiving end. The analog setting is
configured through the CDI using the Analog Input Select item.
Please see Reference Guide RG-00104: the HumRCTM Series Command
Data Interface for details on the CDI.
External Amplier Control
The HumRCTM Series transceiver has two output lines that are designed
to control external amplifiers. The PA_EN line goes high when the module
enters transmit mode. This can be used to activate an external power
amplifier to boost the signal strength of the transmitter. The LNA_EN line
goes high when the module enters receive mode. This can be used to
activate an external low noise amplifier to boost the receiver sensitivity.
These external amplifiers can significantly increase the range of the system
at the expense of higher current consumption and system cost.
The Pair Process
The Pair process enables two transceivers to communicate with each
other. Each transceiver has a local 32-bit address that is transmitted with
every packet. If the address in the received packet is not in the RU’s Paired
Module List, then the transceiver does not respond. Adding devices to
the authorized list is accomplished through the Pair process or by a serial
command. Each module can be paired with up to 40 other modules.
The Pair process is initiated by taking the PAIR line high or by sending the
Pair Control serial command on both units to be associated. Activation
on the PAIR line can either be a momentary pulse (less than two seconds)
or a sustained high input, which can be used to extend the search and
successful pairing display. With a momentary activation, the search is
terminated after 30 seconds. If Pairing is initiated with a sustained high
input, the search continues as long as the PAIR input is high.
When Pair is activated, the module displays the Pair Search sequence
on the MODE_IND line (Figure 33) and goes into a search mode where it
looks for another module that is also in search mode. It alternates between
transmit and receive, enabling one unit to find the other and respond.
Once bidirectional communication is established, the two units store each
other’s addresses in their Paired Module List with full Permissions Mask
and display the Pair Found sequence on their MODE_IND lines. The Pair
Found sequence is displayed for at least 3 seconds. If PAIR is held high,
the Pair Found display is shown for as long as PAIR is high. If a paired
unit is already in the Paired Module List, then no additional entry is added
though the existing entry’s Permissions Mask may be modified.
When Pairing is initiated, the module pairs with the first unit it finds that is
also in Pair Search. If multiple systems are being Paired in the same area,
such as in a production environment, then steps should be taken to ensure
that the correct units are paired with each other.
The Pair process can be cancelled by taking PAIR high a second time or by
issuing the Pair Control command with Cancel Pairing option.
If the address table is full when the PAIR line is raised, the Pair Table Full
sequence is displayed on the MODE_IND line for 10 seconds and neither of
the Pairing units stores an address. In this case, the module should either
be reset to clear the address table or the serial interface can be used to
remove addresses.
Status Line Direction Configuration
Line 0 1
C0 S0 through S3 are outputs S0 through S3 are inputs
C1 S4 through S7 are outputs S4 through S7 are inputs
Figure 32: MODE_IND Timing
– – – –
28 29
Mode Indicator
The Mode Indicator line (MODE_IND) provides feedback about the current
state of the module. This line switches at different rates depending on the
module’s current operation. When an LED is connected to this line it blinks,
providing a visual indication to the user. Figure 33 gives the definitions of
the MODE_IND timings.
Reset to Factory Default
The transceiver is reset to factory default by taking the Pair line high briefly
4 times, then taking and holding Pair high for more than 3 seconds. Each
brief interval must be high 0.1 to 2 seconds and low 0.1 to 2 seconds (1
second nominal high / low cycle). The sequence helps prevent accidental
resets. Once the sequence is recognized the MODE_IND line blinks the
Reset Acknowledgement defined in Figure 33 until the PAIR line goes
low. After the Reset Acknowledgement is shown and PAIR goes low, the
configuration is initialized. Factory reset also clears the Paired Module table
but does not change the local address. If the PAIR input timing doesn’t
match the reset sequence timing an Extended Pair Cancel sequence
is shown when PAIR goes low. The module reverts to normal operation
without a reset or pairing.
MODE_IND Timing
Module Status Display
Transmit Mode Solid ON when transmitting packets.
Receive Mode Solid ON when receiving packets.
Pair Search ON for 100ms, OFF for 900ms while searching for another unit
during the Pair process
Pair Found
ON for 400ms, OFF for 100ms when the transceiver has been
Paired with another transceiver. This is displayed for at least 3
seconds.
Pair Error ON for 100ms, OFF for 100ms when the address table is full and
another unit cannot be added.
Remote Pair Error
ON for 100ms, OFF for 100ms, ON for 100ms OFF for 300ms
when the remote unit’s address table is full and a Pair cannot be
completed.
Pair Cancelled ON for 100ms, OFF for 200ms, ON for 100ms when the Pair
process is cancelled.
Reset
Acknowledgement
ON for 600ms, OFF for 100ms, ON for 200ms, OFF for 100ms,
ON for 200ms and OFF for 100ms when the reset sequence is
recognized.
Extended Pair
Cancelled
Solid ON when the pairing operation is cancelled and waiting for the
PAIR line to go low.
Figure 33: MODE_IND Timing
Using the LVL_ADJ Line
The Level Adjust (LVL_ADJ) line allows the transceiver’s output power to be
easily adjusted for range control or lower power consumption. This is done
by placing a voltage on the LVL_ADJ line. This can be done using a voltage
divider or a voltage source. When the transceiver powers up, the voltage on
this line is measured and the output power level is set accordingly. When
LVL_ADJ is connected to VCC, the output power and current consumption
are the highest. When connected to ground, the output power and current
are the lowest. See the Typical Performance Graphs section (Figure 6) for a
graph of the output power vs. LVL_ADJ voltage.
Even in designs where attenuation is not anticipated, it is a good idea
to place resistor pads connected to LVL_ADJ so that it can be used if
needed. Figure 34 shows the voltages needed to set each power level and
gives the approximate output power for each level. The output power levels
are approximate and may vary part-to-part.
Power Level vs. LVL_ADJ Voltage Ratio
VLVL_ADJ/VCC ratio POUT @ 915MHz POUT @ 2.4GHz
0.00 –19.83 –27.96
0.08 –15.46 –26.50
0.15 –15.48 –24.88
0.23 –10.59 –21.32
0.30 –10.60 –18.74
0.38 –6.05 –16.94
0.45 –6.03 –14.66
0.53 –0.95 –10.82
0.61 –0.96 –9.26
0.68 4.30 –7.39
0.76 4.29 –5.26
0.83 6.66 –1.99
0.91 9.84 0.57
0.98 9.84 1.73
1.00 9.83 1.73
Figure 34: Power Level vs. LVL_ADJ Voltage Voltage Ratio
– – – –
30 31
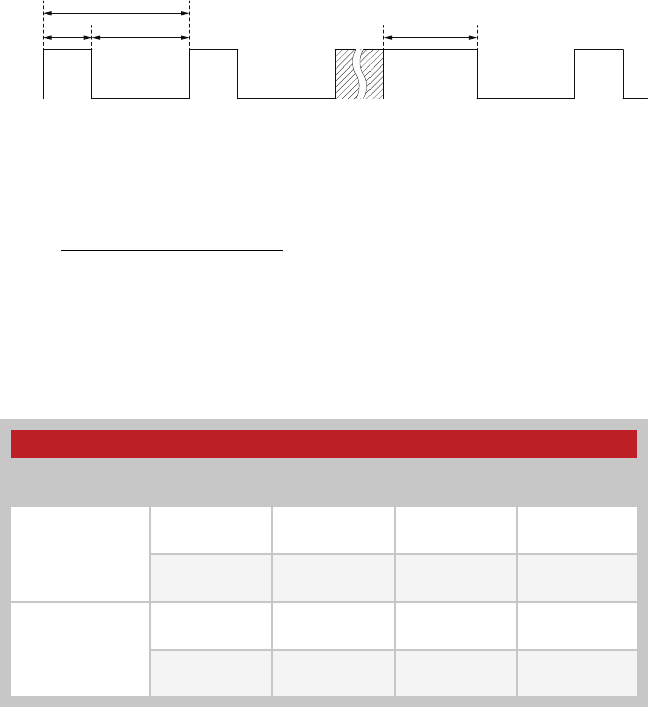
Receiver Duty Cycle
The module can be configured to automatically power on and off while
in receive mode. Instead of being powered on all the time looking for
transmissions from an IU, the receiver can wake up, look for data and go
back to sleep for a configurable amount of time. If it wakes up and receives
valid data, then it stays on and goes back to sleep when the data stops.
This significantly reduces the amount of current consumed by the receiver.
It also increases the time from activating the IU to getting a response from
the RU.
The duty cycle is controlled by the Duty Cycle serial command through the
CDI. DCycle sets the number of seconds between receiver turn-on points
as shown in Figure 35.
The module’s average current consumption can be calculated with the
following equation.
TON is fixed at about 0.326 seconds and TSBY = DCycle - TON. The receiver
current (IRX) and standby current (ISBY) vary with supply voltage, but some
typical values are in Figure 37.
DCycle
TON KeepOn
Activity
ON
Standby
TSBY
ITI TI
DCycle
AVG
ON RX SBY SBY
=×
()
+×
()
Figure 35: Receiver Duty Cycle
Figure 36: Receiver Duty Cycle Average Current Consumption Equation
HumRCTM Series Typical Current Consumption
VCC
(VDC) 2.5 3.3 3.6
HUM-2.4-RC
IRX
(mA) 21.45 21.82 22.03
ISBY
(mA) 0.00040 0.00058 0.00063
HUM-900-RC
IRX
(mA) 22.94 23.73 24.02
ISBY
(mA) 0.00040 0.00058 0.00063
Figure 37: HumRCTM Series Transceiver Typical Current Consumption
Figure 20 and Figure 21 show graphs of the average current consumption
vs. duty cycle for several supply voltages. They show that the average
current consumption can be significantly reduced with even a small duty
cycle value. This is ideal for battery-powered applications that need
infrequent updates or where response time is not critical.
The KeepOn time is used to keep the receiver on after it has completed
some activity. This activity includes completing a transmission and receiving
a valid packet. After KeepOn seconds have elapsed with no transmit or
valid receive activity, the module resumes duty cycle operation by going
into standby for DCycle seconds.
Please see Reference Guide RG-00104: the HumRCTM Series Command
Data Interface for details on configuring the receiver duty cycle.

– – – –
32 33
Triggered Transmissions
The HumRCTM Series Transceiver has a triggered transmission feature
configured through the serial interface. This causes the IU to transmit
messages as soon as a configured status line input goes high, but stop
transmissions based on configuration selection. The logic allows timed or
periodic transmissions for simple transmit-on-event conditions without an
external microcontroller or other timing logic. This reduces the required
energy and potential interference with other RF units when automatically
transmitting. The configuration options are:
1. Transmission occurs as long as input is high. This is the same as
normal, non-triggered operation.
2. Transmission lasts for the specified duration after a high-going edge,
then stops until the next high-going edge (fixed ON period).
3. Transmission starts when an input goes high, stopping when the input
goes low or the specified duration elapses, whichever occurs first. The
transmission won’t occur again until the input goes low, then high.
4. Transmission is periodic, with configured duration and interval, as long
as the trigger status line is high (periodic ON when trigger is high).
5. The transmission terminates under conditions 1–4 above, or when an
ACK is received. After an ACK no further trigger transmission occurs
until the triggered status line goes low, then high again.
6. The transmission is periodic, like condition 4, but each transmission
duration is terminated by receiving an acknowledgement.
A status input not selected for trigger timing operates normally, transmitting
as long as the input is high. It doesn’t affect the timing of periodic
transmissions, causing the two transmission requests to be logically ORed.
Receiving control messages during the off period of a triggered periodic
transmission can delay, but doesn’t cancel periodic transmission.
If there are multiple lines with edge triggers, they are logically ORed
together to generate a single trigger signal.
Please see Reference Guide RG-00104: the HumRCTM Series Command
Data Interface for details on configuring triggered transmissions.
Using the LATCH_EN Line
The LATCH_EN line sets the outputs to either momentary operation or
latched operation. During momentary operation the outputs go high for as
long as control messages are received instructing the module to take the
lines high. As soon as the control messages stop, the outputs go low.
During latched operation, when a signal is received to make a particular
status line high, it remains high until a separate activation is received to
make it go low. The transmission must stop and the module must time out
before it will register a second transmission and toggle the outputs.
When the LATCH_EN line is high, all of the outputs are latched. A serial
command is available to configure latching of individual lines.
Using the Low Power Features
The Power Down (POWER_DOWN) line can be used to completely power
down the transceiver module without the need for an external switch.
This line allows easy control of the transceiver power state from external
components, such as a microcontroller. The module is not functional while
in power down mode.
If all of the status lines are configured as inputs, then the module operates
as an IU only. It automatically goes into a low power state waiting for
one of the inputs to be asserted. This conserves battery power until a
transmission is required.
– – – –
34 35
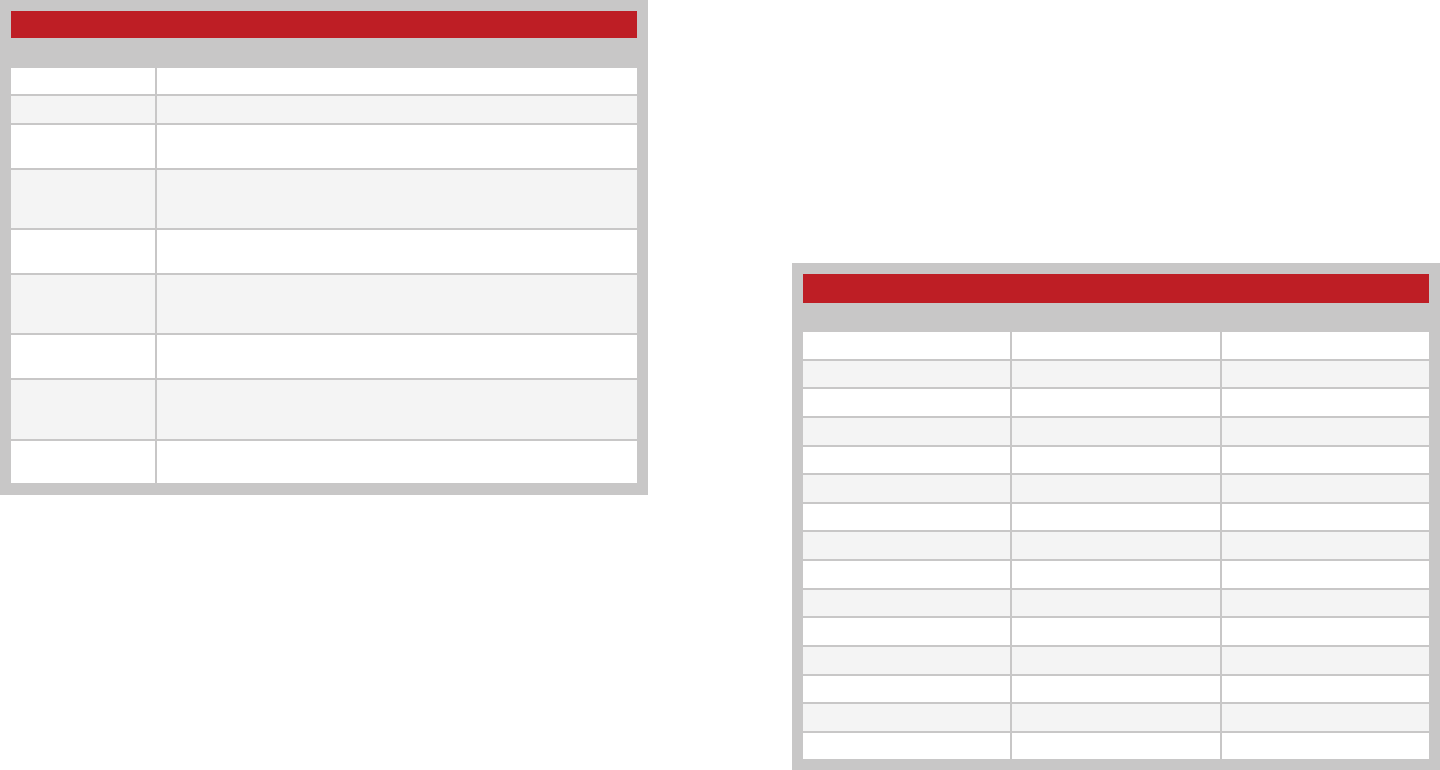
Frequency Hopping
The module incorporates a Frequency Hopping Spread Spectrum (FHSS)
algorithm. This provides immunity from narrow-band interference and
complies with FCC and IC guidelines.
The module uses 25 RF channels as shown in Figure 38. Each channel has
a time slot of 13.33ms before the module hops to the next channel. This
equal spacing allows a receiver to hop to the next channel at the correct
time even if a packet is missed. Up to seven consecutive packets can be
missed without losing synchronization.
The hopping pattern (sequence of transmit channels) is determined from
the transmitter’s address. Each sequence uses all 25 channels, but in
different orders. Once a transmission starts, the module continues through
a complete cycle. If the input line is taken low in the middle of a cycle,
the module continues transmitting through the end of the cycle to ensure
balanced use of all channels.
Frequency hopping has several advantages over single channel operation.
Hopping systems are allowed a higher transmitter output power, which
results in longer range and better performance within that range. Since
the transmission is moving among multiple channels, interference on one
channel causes loss on that channel but does not corrupt the entire link.
This improves the reliability of the system.
Channel Frequencies
Channel
Number
HUM-2.4-RC
Frequency (MHz)
HUM-900-RC
Frequency (MHz)
1 2,420.25 902.750
2 2,422.25 903.250
3 2,424.25 903.750
4 2,426.25 904.250
5 2,428.25 904.750
6 2,430.25 905.249
7 2,432.25 905.749
8 2,434.25 906.249
9 2,436.25 906.749
10 2,438.25 907.249
11 2,440.25 907.749
12 2,442.25 908.249
13 2,444.25 908.749
14 2,446.25 909.248
15 2,448.25 909.748
16 2,450.25 910.248
17 2,452.25 910.748
18 2,454.25 911.248
19 2,456.25 911.748
20 2,458.25 912.248
21 2,460.25 912.748
22 2,462.25 913.247
23 2,464.25 913.747
24 2,466.25 914.247
25 2,468.25 914.747
Figure 38: HumRCTM Series Transceiver RF Channel Frequencies
– – – –
36 37
The Command Data Interface
The HumRCTM Series transceiver has a serial Command Data Interface
(CDI) that offers the option to configure and control the transceiver through
software instead of through hardware. This interface consists of a standard
UART with a serial command set. This allows for fewer connections in
applications controlled by a microcontroller as well as for more control and
advanced features than can be offered through hardware pins alone.
The CMD_DATA_IN and CMD_DATA_OUT connect to the module’s UART.
An automatic baud rate detection system allows the interface to run at a
variable data rate from 9.0kbps to 60.0kbps, covering standard rates from
9.6 to 57.6kbps.
The Command Data Interface has two sets of operators. One is a set
of commands that performs specific tasks and the other is a set of
parameters that are for module configuration and status reporting.
The HumRCTM Series Transceiver Command Data Interface Reference
Guide has full details on each command. Some key features available with
the serial interface are:
• Configure the module through software instead of setting the hardware
lines.
• Change the output power, providing the ability to lower power
consumption when signal levels are good and extend battery life.
• Individually set which status lines are inputs and outputs.
• Individually set status line outputs to operate as momentary or latched.
• Add or remove specific paired devices.
• Individually set Permission Masks that prevent certain paired devices
from activating certain status line outputs.
• Change the module’s local address for production or tracking purposes
or to replace a lost or broken product.
• Put the module into a low power state to conserve battery power.
• Activate an automatic receiver duty cycle to conserve battery power.
• Receive the entire control message serially instead of needing to
monitor individual status lines. Get the IU address for logging access
attempts.
• Receive control messages from unpaired modules, allowing for
expansion of the system beyond the maximum of 40 paired units.
Access control and address validation can be undertaken by an
external processor or PC with more memory than the module.
• Serially configure and control acknowledge messages.
• Send and receive 2 bytes (16 bits) of custom data with each command
message and acknowledge message.
• Serially initiate transmission of control messages instead of triggering
the status line inputs.
• Set interrupts to notify an external processor when specific events
occur, such as receiving a control message.
• Read out the RSSI value for the last received packet and the current
ambient RF level.
• Query a remote unit to respond with its analog input voltage
measurements.
• Configure the module to send triggered control messages that
automatically stop transmitting based on the settings, conserving
battery power.
The serial interface offers a great deal of flexibility for use more complicated
designs. Please see Reference Guide RG-00104: the HumRCTM Series
Command Data Interface for details on the CDI. Lists of the serial
commands and parameters are shown in Figure 39 and Figure 40 for
reference.
– – – –
38 39
Command Data Interface Commands
Command Description
Read Read the current value in volatile memory. If there is no volatile
value, then the non-volatile value is returned.
Write Write a new value to volatile memory.
Read NV Read the value in non-volatile memory.
Program Program a new value to non-volatile memory.
Set Default
Configuration Set all configuration items to their factory default values.
Erase All Addresses Erase all paired addresses from memory.
Transmit Control Data Transmit a control message.
Transmit ACK Transmit an acknowledgement for received data.
Transmit AWD Transmit an Acknowledge With Data (AWD) response with two
bytes of custom data.
Transmit IU Packet Transmit a general IU packet.
NV Update Write all NV changes to NV memory
Pair Control Initiate / Cancel RF Pairing with another module
Figure 39: HumRCTM Series Transceiver Command Data Interface Commands
Command Data Interface Parameters
Parameter Description
Device Name NULL-terminated string of up to 16 characters that identifies the
module. Read only.
Firmware Version 2 byte firmware version. Read only.
Serial Number 4 byte factory-set serial number. Read only.
Local Address The module’s 32-bit local address.
Status Line I/O Mask Status lines direction (1 = Inputs, 0 = Outputs), LSB = S0, used
when enabled by Control Source.
Latch Mask Latching enable for output lines, LSB = S0, used when enabled
by Control Source.
TX Power Level TX output power, signed nominal dBm, used when enabled by
Control Source.
Control Source Configures the control options.
Message Select Select message types to capture for serial readout.
Analog Input Select Define analog sources, averaging, reference, and offset for
analog readings.
Custom Data Source Source of transmitted custom data.
Paired Module
Descriptor Sets the address and permissions mask of paired modules.
Trigger Operation Input Trigger operation.
Receiver Duty Cycle Receiver Duty Cycle control.
I/O Lines Read the current state of the status and control lines. Read only.
RSSI Read the RSSI of the last packet received and ambient level.
Read only.
LADJ Read the voltage on the LVL_ADJ line. Read only.
Module Status Read the operating status of the module. Read only.
Captured Receive
Packet Read the last received packet. Read only.
Interrupt Mask Sets the mask for events to generate a break on CMD_DATA_
OUT.
Event Flags Event flags that are used with the Interrupt Mask.
Analog Input Reading Readout of the analog input lines. Read only.
Trigger Input Status Status of Trigger Inputs. Read only.
Pairing Status Status of Last Pair attempt since power-up. Read only.
Figure 40: HumRCTM Series Transceiver Command Data Interface Parameters
Serial Setup Conguration for Stand-alone Operation
The serial interface offers access to a number of advanced features that
cannot be controlled through hardware configuration alone. However, not
all products need or use a microcontroller or processor, but would benefit
from some of the advanced features.
Many of the configuration settings can be written once and then used by
the module thereafter. This allows the modules to be configured through
a temporary serial connection and then operate in a stand-alone fashion
without a permanent serial connection.
For example, a product can have a small header or connector so that
the serial lines can be connected to a PC in production test. The PC
writes the configurations required by the application to the module and is
then disconnected. The module uses these configurations in its normal
operation.
– – – –
40 41
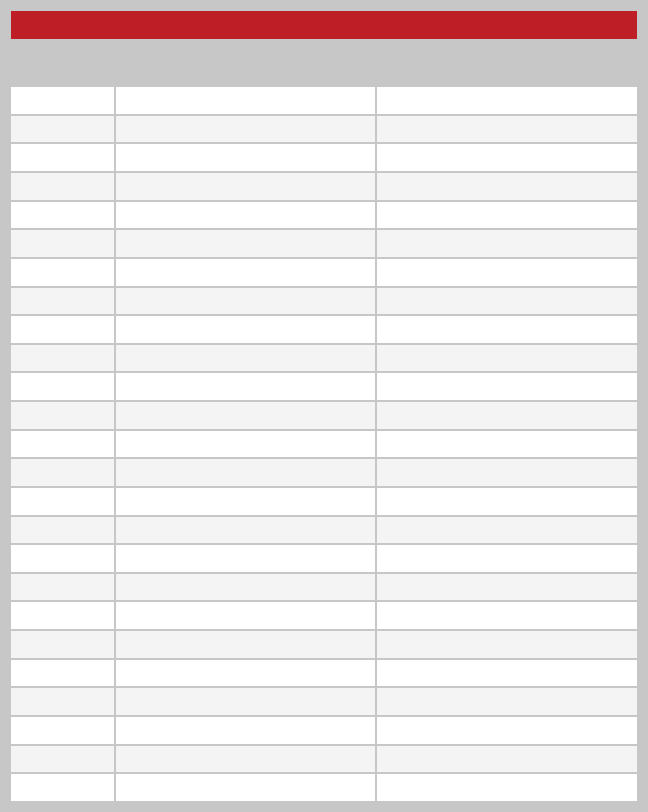
Basic Hardware Operation
The following steps describe how to use the HumRCTM Series module with
hardware only. Basic application circuits that correspond to these steps are
shown in Figure 41.
1. Set the C0 and C1 lines opposite on both sides.
2. Press the PAIR button on both sides. The MODE_IND LED begins
flashing slowly to indicate that the module is searching for another
module.
3. Once the pairing is complete, the MODE_IND LED flashes quickly to
indicate that the pairing was successful.
4. The modules are now paired and ready for normal use.
5. Pressing a status line button on one module (the IU) activates the
corresponding status line output on the second module (the RU).
6. Taking the ACK_EN line high on the RU causes the module to send an
acknowledgement to the IU. The ACK_OUT line on the IU goes high to
indicate that the acknowledgement has been received. Tying the line
to Vcc causes the module to send an acknowledgement as soon as a
command message is received.
This is suitable for basic remote control or command systems. No
programming is necessary for basic hardware operation. The Typical
Applications section shows additional example schematics for using the
modules.
The Command Data Interface section describes the more advanced
features that are available with the serial interface.
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND
GNDVCC
S4
S5
S6
S7
VCC
VCCVCCVCCVCC
GND
VCC VCC
GND
VCC
GND
VCC
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND
GND VCC
S0
S1
S2
S3
VCC
VCC
VCC
VCC
GND
VCC
GND
VCC
GND
VCC
VCC
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
VCC
Figure 41: HumRCTM Series Transceiver Basic Application Circuits for Bi-directional Remote Control
A
B
– – – –
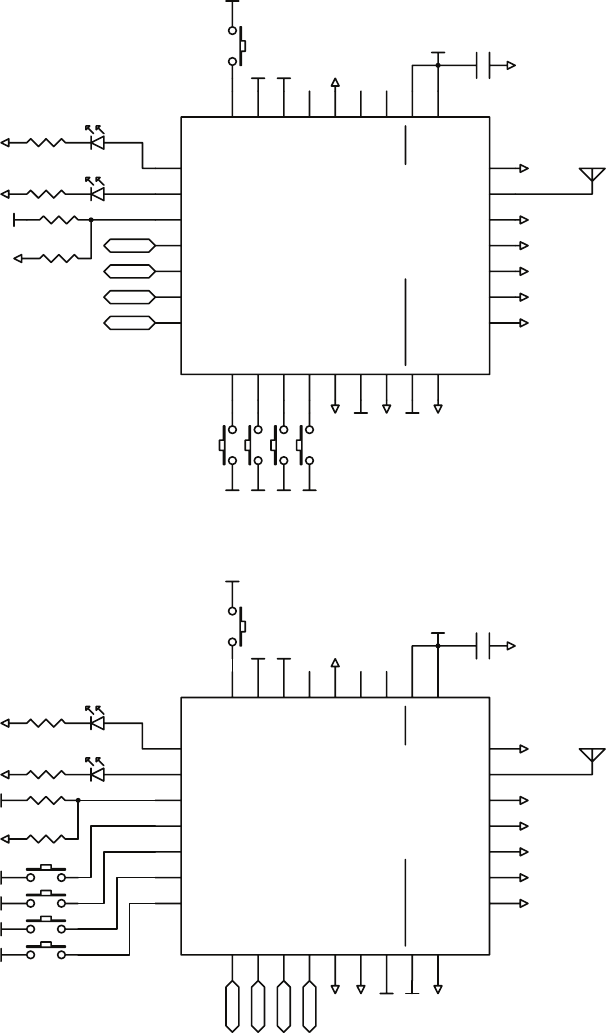
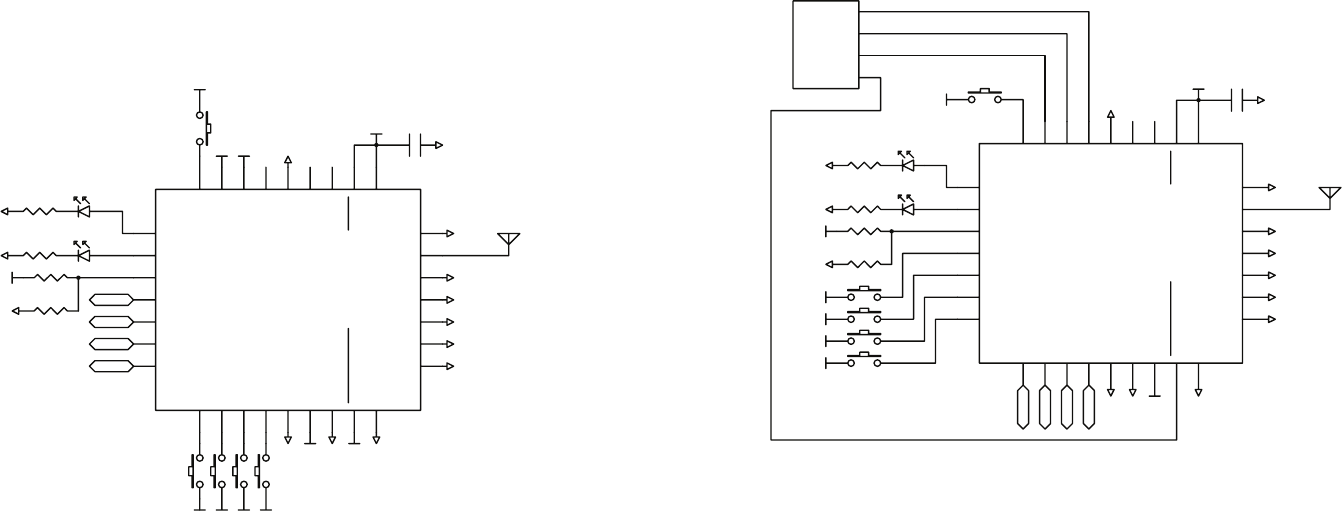
42 43
In this example, C0 is low and C1 is high, so S0–S3 are outputs and
S4–S7 are inputs. This is inverted from the circuit in Figure 42 making it the
matching device.
In this circuit, the Command Data Interface is connected to a
microcontroller for using some of the advanced features.
The microcontroller controls the state of the ACK_EN line. It can receive
a command, perform an action and then take the line high to send
Acknowledgement packets. This lets the user on the other end know that
the action took place and not just that the command was received.
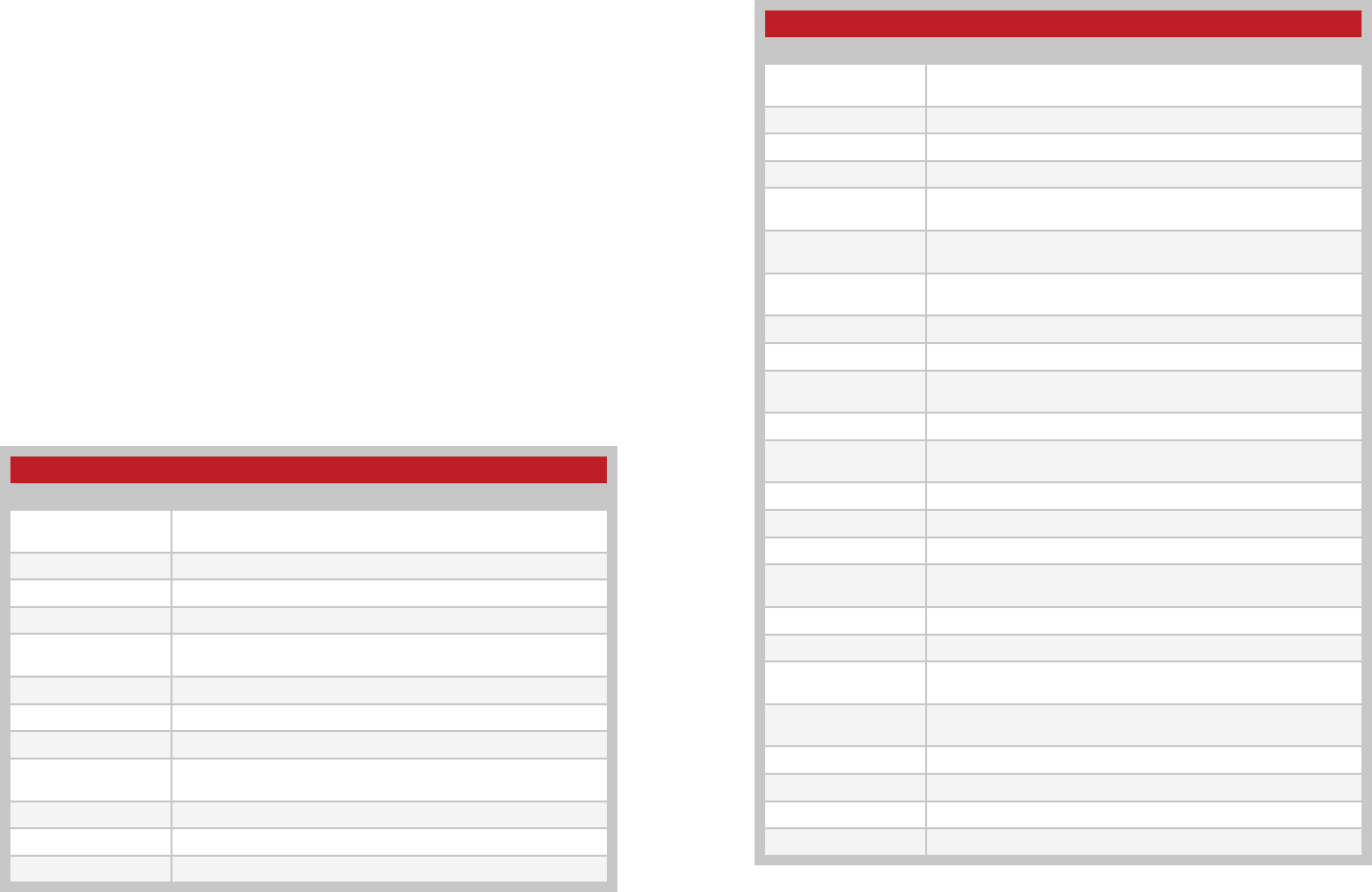
Typical Applications
Figure 42 and Figure 43 show circuits using the HumRCTM Series
transceiver.
In this example, C0 is high and C1 is low, so S0–S3 are inputs and S4–S7
are outputs. The inputs are connected to buttons that pull the lines high
and weak pull-down resistors to keep the lines from floating when the
buttons are not pressed. The outputs would be connected to external
application circuitry.
LATCH_EN is low, so the outputs are momentary.
The Command Data Interface is not used in this design, so CMD_DATA_IN
is tied high and CMD_DATA_OUT is not connected.
ACK_OUT and MODE_IND are connected to LEDs to provide visual
indication to the user.
PAIR is connected to a button and pull-down resistor to initiate the Pair
Process when the button is pressed.
ACK_EN is tied high so the module sends acknowledgements as soon as it
receives a control message.
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND
GNDVCC
S4
S5
S6
S7
VCC
GND
VCC VCC
GND
VCC
GND
VCC
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
VCCVCCVCCVCC
µ
RXD
TXD
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND VCC
S0
S1
S2
S3
GND
VCC
GPIO
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
GND
GND
GND
VCC
VCC
VCC
VCC
VCC
GPIO
GPIO
Figure 42: HumRCTM Series Transceiver Basic Application Circuit
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND
GNDVCC
S4
S5
S6
S7
VCC
GND
VCC VCC
GND
VCC
GND
VCC
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
VCCVCCVCCVCC
µ
RXD
TXD
GND
VCC
GND
GND
GND
GND
GND
GND
GND GND
GND VCC
S0
S1
S2
S3
GND
VCC
GPIO
GND 17
VCC 21
GND 18
RESET 22
LNA_EN 23
PA_EN 24
CMD_DATA_OUT 26
CMD_DATA_IN 27
ACK_EN 28
PAIR 29
S6
2
GND 25
S7
1
MODE_IND
30
ACK_OUT
31
LVL_ADJ
32
S5
3
S4
4
ANT 19
GND 20
S3
5
S2
6
S1
7
S0
8
C0
10
C1
11
POWER_DOWN
12
LATCH_EN
13
GND
9
GND 16
GND 15
GND 14
GND
GND
GND
VCC
VCC
VCC
VCC
VCC
GPIO
GPIO
Figure 43: HumRCTM Series Transceiver Typical Application Circuit with External Microprocessor

– – – –
44 45
Usage Guidelines for FCC and IC Compliance
The pre-certified versions of the HumRCTM Series module
(HUM-900-RC-UFL and HUM-900-RC-CAS) are provided with an FCC
and Industry Canada Modular Certification. This certification shows that
the module meets the requirements of FCC Part 15 and Industry Canada
license-exempt RSS standards for an intentional radiator. The integrator
does not need to conduct any further testing under these rules provided
that the following guidelines are met:
• An approved antenna must be directly coupled to the module’s U.FL
connector through an approved coaxial extension cable or to the
module’s castellation pad using an approved reference design and
PCB layer stack.
• Alternate antennas can be used, but may require the integrator to
perform certification testing.
• The module must not be modified in any way. Coupling of external
circuitry must not bypass the provided connectors.
• End product must be externally labeled with “Contains FCC ID:
OJM900MCA / IC: 5840A-900MCA”.
• The end product’s user’s manual must contain an FCC statement
equivalent to that listed on page page 45 of this data guide.
• The antenna used for this transceiver must not be co-located or
operating in conjunction with any other antenna or transmitter.
• The integrator must not provide any information to the end-user on
how to install or remove the module from the end-product.
Any changes or modifications not expressly approved by Linx Technologies
could void the user’s authority to operate the equipment.
Additional Testing Requirements
The HUM-900-RC-UFL and HUM-900-RC-CAS modules have been tested
for compliance as an intentional radiator, but the integrator is required to
perform unintentional radiator testing on the final product per FCC sections
15.107 and 15.109 and Industry Canada license-exempt RSS standards.
Additional product-specific testing might be required. Please contact
the FCC or Industry Canada regarding regulatory requirements for the
application. Ultimately is it the integrator’s responsibility to show that their
product complies with the regulations applicable to their product. Versions
other than the -UFL and -CAS have not been tested and require full
compliance testing in the end product as it will go to market.
Information to the user
The following information must be included in the product’s user manual.
FCC / IC NOTICES
This product contains FCC ID: OJM900MCA / IC: 5840A-900MCA.
This device complies with Part 15 of the FCC rules and Industry Canada
license-exempt RSS standards. Operation of this device is subject to the
following two conditions:
1. This device may not cause harmful interference, and
2. this device must accept any interference received, including interference that
may cause undesired operation.
This equipment has been tested and found to comply with the limits for a Class
B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed
to provide reasonable protection against harmful interference in a residential
installation. This equipment generates, uses and can radiate radio frequency
energy and, if not installed and used in accordance with the instructions,
may cause harmful interference to radio communications. However, there is
no guarantee that interference will not occur in a particular installation. If this
equipment does cause harmful interference to radio or television reception, which
can be determined by turning the equipment off and on, the user is encouraged
to try to correct the interference by one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which
the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
Any modifications could void the user’s authority to operate the equipment.
Le présent appareil est conforme aux CNR d’Industrie Canada applicables
aux appareils radio exempts de licence. L’exploitation est autorisée aux deux
conditions suivantes:
1. l’appareil ne doit pas produire de brouillage, et
2. ’utilisateur de l’appareil doit accepter tout brouillage radioélectrique subi,
même si le brouillage est susceptible d’en compromettre le fonctionnement.
– – – –
46 47
utilisateurs, il faut choisir le type d’antenne et son gain de sorte que la
puissance isotrope rayonnée équivalente (p.i.r.e.) ne dépasse pas l’intensité
nécessaire à l’établissement d’une communication satisfaisante.
Le présent émetteur radio (HUM-900-RC-UFL, HUM-900-RC-CAS) a été
approuvé par Industrie Canada pour fonctionner avec les types d’antenne
énumérés la Figure 44 et ayant un gain admissible maximal et l’impédance
requise pour chaque type d’antenne. Les types d’antenne non inclus dans
cette liste, ou dont le gain est supérieur au gain maximal indiqué, sont
strictement interdits pour l’exploitation de l’émetteur.
Product Labeling
The end product containing the HUM-900-RC-UFL or HUM-900-RC-CAS
must be labeled to meet the FCC and IC product label requirements. It
must have the below or similar text:
Contains FCC ID: OJM900MCA / IC: 5840A-900MCA
The label must be permanently affixed to the product and readily visible to
the user. ‘‘Permanently affixed’’ means that the label is etched, engraved,
stamped, silkscreened, indelibly printed, or otherwise permanently marked
on a permanently attached part of the equipment or on a nameplate of
metal, plastic, or other material fastened to the equipment by welding,
riveting, or a permanent adhesive. The label must be designed to last
the expected lifetime of the equipment in the environment in which the
equipment may be operated and must not be readily detachable.
FCC RF Exposure Statement
To satisfy RF exposure requirements, this device and its antenna must
operate with a separation distance of at least 20cm from all persons and
must not be co-located or operating in conjunction with any other antenna
or transmitter.
Antenna Selection
Under FCC and Industry Canada regulations, the HUM-900-RC-UFL and
HUM-900-RC-CAS radio transmitters may only operate using an antenna
of a type and maximum (or lesser) gain approved for the transmitter by
the FCC and Industry Canada. To reduce potential radio interference
to other users, the antenna type and its gain should be so chosen that
the equivalent isotropically radiated power (e.i.r.p.) is not more than that
necessary for successful communication.
The HUM-900-RC-UFL and HUM-900-RC-CAS radio transmitters have
been approved by the FCC and Industry Canada to operate with the
antenna types listed in Figure 44 with the maximum permissible gain and
required antenna impedance for each antenna type indicated. Antenna
types not included in this list, having a gain greater than the maximum gain
indicated for that type, are strictly prohibited for use with this device.
Conformément à la réglementation d’Industrie Canada, le présent émetteur
radio peut fonctionner avec une antenne d’un type et d’un gain maximal
(ou inférieur) approuvé pour l’émetteur par Industrie Canada. Dans le but
de réduire les risques de brouillage radioélectrique à l’intention des autres
Figure 44: HumRCTM Series Transceiver Approved Antennas
Antennas / Antennes
Linx Part Number
Référence Linx Type Gain Impedance
Impédance Valid For
Tested Antennas
ANT-916-CW-QW ¼ Wave Whip 1.8dBi 50Ω–CAS
ANT-916-CW-HW ½ Wave Dipole Helical 1.2dBi 50ΩBoth
ANT-916-PW-LP ¼ Wave Whip 2.4dBi 50Ω–CAS
ANT-916-PW-QW-UFL ¼ Wave Whip 1.8dBi 50Ω–UFL
ANT-916-SP ¼ Wave Planar 1.4dBi 50Ω–CAS
ANT-916-WRT-RPS
ANT-916-WRT-UFL ½ Wave Dipole Helical –0.1dBi 50Ω–CAS
–UFL
Antennas of the same type and same or lesser gain
ANT-916-CW-HD ¼ Wave Whip –0.3dBi 50ΩBoth
ANT-916-PW-QW ¼ Wave Whip 1.8dBi 50ΩBoth
ANT-916-CW-RCL ¼ Wave Whip –2.0dBi 50ΩBoth
ANT-916-CW-RH ¼ Wave Whip –1.3dBi 50ΩBoth
ANT-916-CW-HWR-RPS ½ Wave Dipole Helical 1.2dBi 50ΩBoth
ANT-916-PML ½ Wave Dipole Helical –0.4dBi 50ΩBoth
ANT-916-PW-RA ¼ Wave Whip 0.0dBi 50Ω–CAS
ANT-916-USP ¼ Wave Planar 0.3dBi 50Ω–CAS
Cable Assemblies / Assemblages de Câbles
Linx Part Number
Référence Linx Description
CSI-RSFB-300-UFFR* RP-SMA Bulkhead to U.FL with 300mm cable
CSI-RSFE-300-UFFR* RP-SMA External Mount Bulkhead to U.FL with 300mm cable
* Also available in 100mm and 200mm cable length
– – – –
48 49
140
200
165
470
230
230 165
ANT-916-SP
ANT-916-PW-LP
ANT-916-PW-RA
ANT-916-CW-QW
ANT-916-CW-HW
ANT-916-WRT-RPS
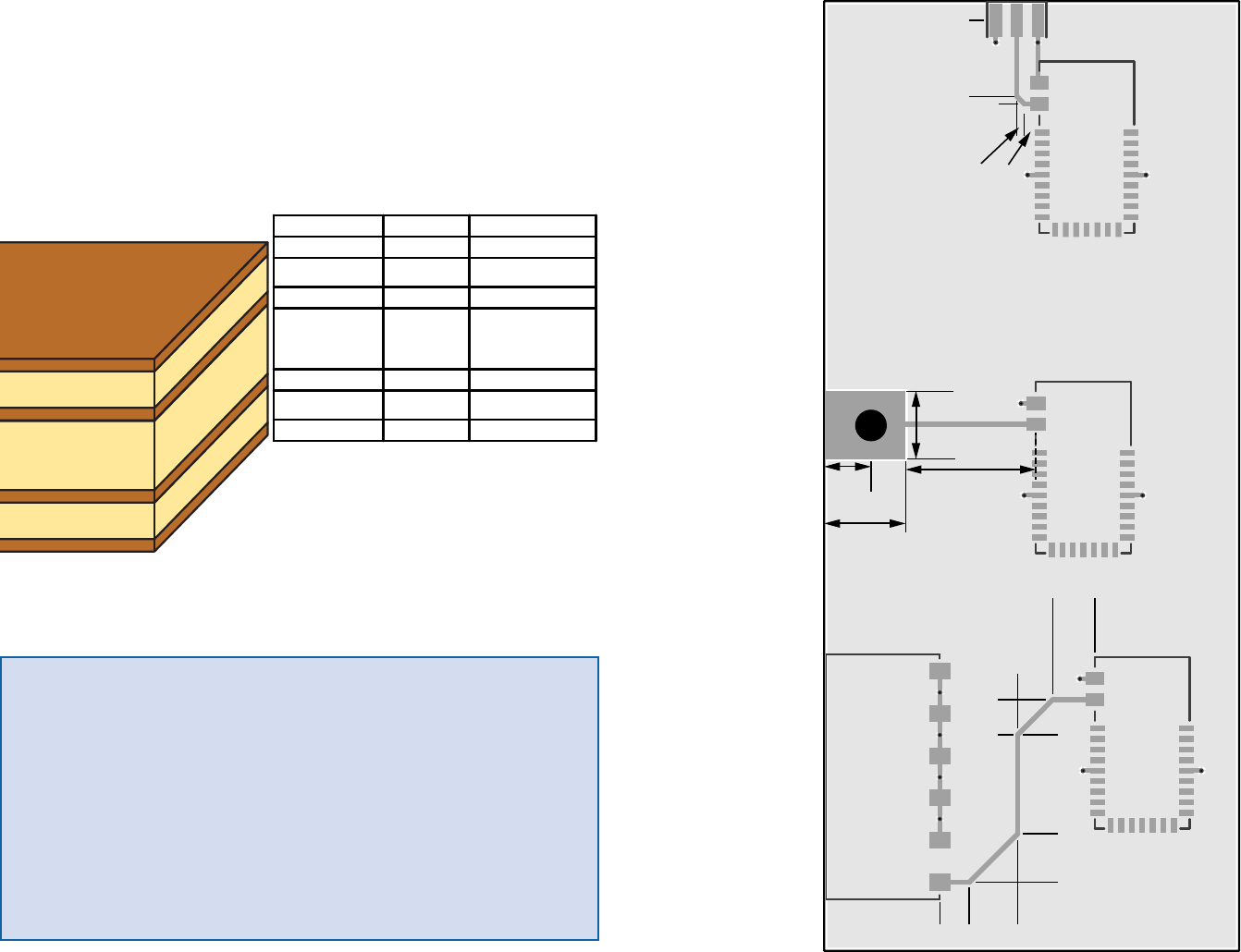
Microstrip Width = 24mil
Ground plane on Mid-Layer 1
Units are in mils
619 361
72
35 35
CONREVSMA003.062
380
320
216
Figure 46: HumRCTM Series Transceiver Castellation Version Reference Design
Figure 45: HumRCTM Series Transceiver Castellation Version Reference Design PCB Stack
Castellation Version Reference Design
The castellation connection for the antenna on the pre-certified version
allows the use of embedded antennas as well as removes the cost of
a cable assembly for the u.FL connector. However, the PCB design
and layer stack must follow one of the reference designs for the
certification on the HUM-900-RC-CAS to be valid. Figure 45 shows
the PCB layer stack that should be used. Figure 46 shows the layout and
routing designs for the different antenna options. Please see the antenna
data sheets for specific ground plane counterpoise requirements.
Top Layer
Dielectric 1
Mid-Layer 1
Dielectric 2
Mid-Layer 2
Dielectric 3
Bottom Layer
Layer Name Thickness Material
1.4mil
1.4mil
1.4mil
1.4mil
14.00mil
14.00mil
28.00mil
Copper
Copper
Copper
Copper
FR-4 (Er = 4.6)
FR-4 (Er = 4.6)
FR-4 (Er = 4.6)
Note: The PCB design and layer stack for the HUM-900-RC-CAS must
follow these reference designs for the pre-certification to be valid.
The HUM-900-RC-UFL and the HUM-900-RC-CAS must use one of
the antennas in Figure 44 in order for the certification to be valid.
The HUM-900-RC and HUM-2.4-RC have not been tested and require
full compliance testing in the end product as it will go to market.
All modules require unintentional radiator compliance testing in the end
product as it will go to market.

– – – –
50 51
Power Supply Requirements
The module does not have an internal
voltage regulator, therefore it requires a clean,
well-regulated power source. The power supply
noise should be less than 20mV. Power supply
noise can significantly affect the module’s
performance, so providing a clean power supply
for the module should be a high priority during
design.
A 10Ω resistor in series with the supply followed by a 10µF tantalum
capacitor from Vcc to ground helps in cases where the quality of supply
power is poor (Figure 47). This filter should be placed close to the module’s
supply lines. These values may need to be adjusted depending on the
noise present on the supply line.
Antenna Considerations
The choice of antennas is a
critical and often overlooked
design consideration. The range,
performance and legality of an RF
link are critically dependent upon the
antenna. While adequate antenna
performance can often be obtained
by trial and error methods, antenna
design and matching is a complex
task. Professionally designed antennas such as those from Linx (Figure
48) help ensure maximum performance and FCC and other regulatory
compliance. Please see ”General Antenna Rules” for more information.
It is usually best to utilize a basic quarter-wave whip until your prototype
product is operating satisfactorily. Other antennas can then be evaluated
based on the cost, size and cosmetic requirements of the product.
Additional details are in Application Note AN-00500.
+
10Ω
10µF
Vcc IN
Vcc TO
MODULE
Figure 47: Supply Filter
Figure 48: Linx Antennas
Interference Considerations
The RF spectrum is crowded and the potential for conflict with unwanted
sources of RF is very real. While all RF products are at risk from
interference, its effects can be minimized by better understanding its
characteristics.
Interference may come from internal or external sources. The first step
is to eliminate interference from noise sources on the board. This means
paying careful attention to layout, grounding, filtering and bypassing in
order to eliminate all radiated and conducted interference paths. For
many products, this is straightforward; however, products containing
components such as switching power supplies, motors, crystals and other
potential sources of noise must be approached with care. Comparing your
own design with a Linx evaluation board can help to determine if and at
what level design-specific interference is present.
External interference can manifest itself in a variety of ways. Low-level
interference produces noise and hashing on the output and reduces the
link’s overall range.
High-level interference is caused by nearby products sharing the same
frequency or from near-band high-power devices. It can even come from
your own products if more than one transmitter is active in the same area.
It is important to remember that only one transmitter at a time can occupy
a frequency, regardless of the coding of the transmitted signal. This type of
interference is less common than those mentioned previously, but in severe
cases it can prevent all useful function of the affected device.
Although technically not interference, multipath is also a factor to be
understood. Multipath is a term used to refer to the signal cancellation
effects that occur when RF waves arrive at the receiver in different phase
relationships. This effect is a particularly significant factor in interior
environments where objects provide many different signal reflection paths.
Multipath cancellation results in lowered signal levels at the receiver and
shorter useful distances for the link.
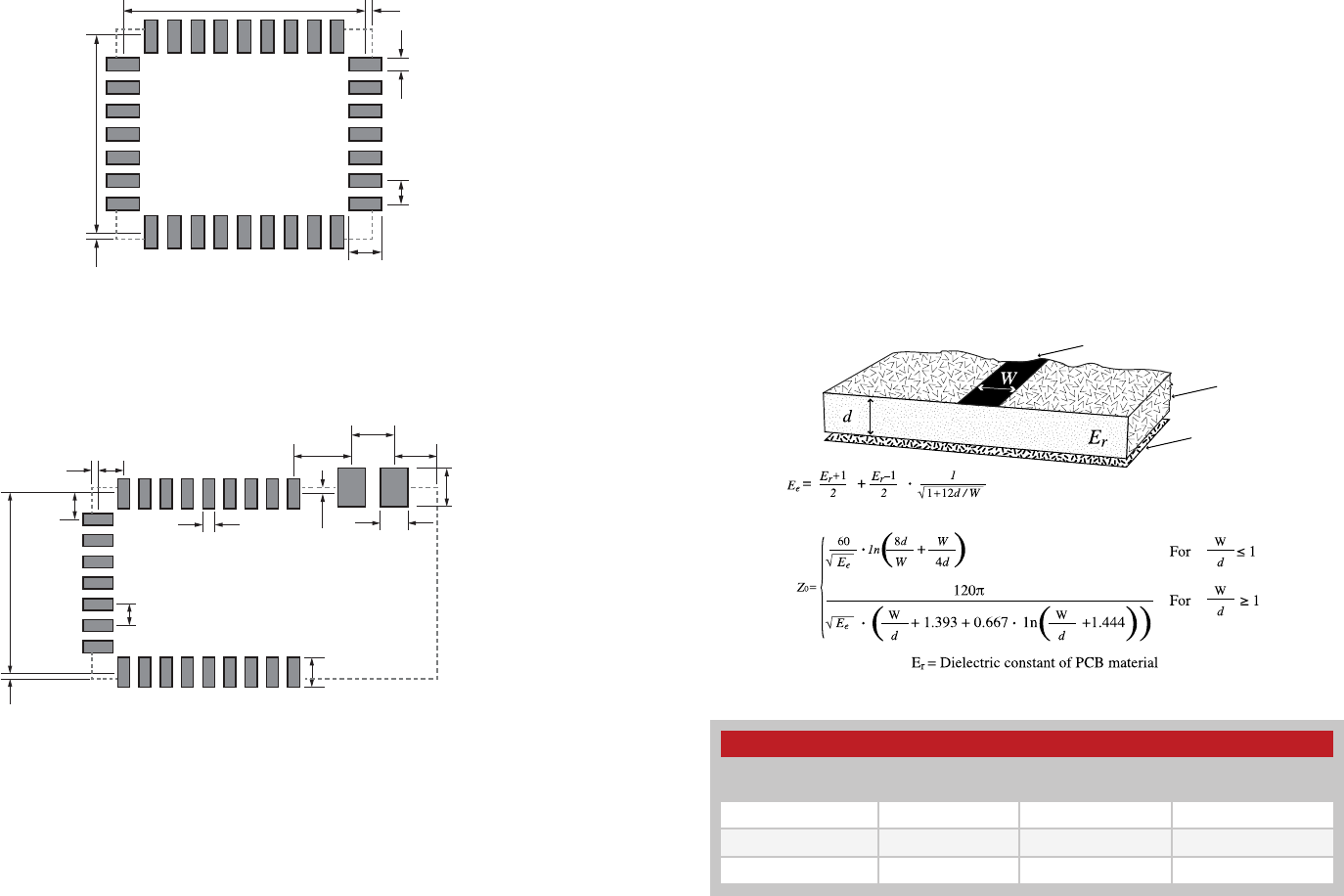
– – – –
52 53
Pad Layout
The pad layout diagrams below are designed to facilitate both hand and
automated assembly. Figure 49 shows the footprint for the smaller version
and Figure 50 shows the footprint for the pre-certified version.
0.420"
0.015"
0.028"
0.050"
0.060"
0.070"
0.015"
0.136"
0.100"
0.101"
0.060"
0.065"
0.090"
0.015"
0.420"
0.015"
0.028"
0.050"
0.520"
0.070"
0.015"
Figure 49: HUM-***-RC Recommended PCB Layout
Figure 50: HUM-***-RC-UFL/CAS Recommended PCB Layout
Microstrip Details
A transmission line is a medium whereby RF energy is transferred from
one place to another with minimal loss. This is a critical factor, especially in
high-frequency products like Linx RF modules, because the trace leading
to the module’s antenna can effectively contribute to the length of the
antenna, changing its resonant bandwidth. In order to minimize loss and
detuning, some form of transmission line between the antenna and the
module should be used unless the antenna can be placed very close (<1⁄8in)
to the module. One common form of transmission line is a coax cable and
another is the microstrip. This term refers to a PCB trace running over a
ground plane that is designed to serve as a transmission line between the
module and the antenna. The width is based on the desired characteristic
impedance of the line, the thickness of the PCB and the dielectric constant
of the board material. For standard 0.062in thick FR-4 board material, the
trace width would be 111 mils. The correct trace width can be calculated
for other widths and materials using the information in Figure 51 and
examples are provided in Figure 52. Software for calculating microstrip lines
is also available on the Linx website.
Trace
Board
Ground plane
Figure 51: Microstrip Formulas
Example Microstrip Calculations
Dielectric Constant Width / Height
Ratio (W / d)
Effective Dielectric
Constant
Characteristic
Impedance (Ω)
4.80 1.8 3.59 50.0
4.00 2.0 3.07 51.0
2.55 3.0 2.12 48.8
Figure 52: Example Microstrip Calculations
– – – –
54 55
Each of the module’s ground pins should have short traces tying
immediately to the ground plane through a via.
Bypass caps should be low ESR ceramic types and located directly
adjacent to the pin they are serving.
A 50-ohm coax should be used for connection to an external antenna.
A 50-ohm transmission line, such as a microstrip, stripline or coplanar
waveguide should be used for routing RF on the PCB. The Microstrip
Details section provides additional information.
In some instances, a designer may wish to encapsulate or “pot” the
product. There are a wide variety of potting compounds with varying
dielectric properties. Since such compounds can considerably impact
RF performance and the ability to rework or service the product, it is
the responsibility of the designer to evaluate and qualify the impact and
suitability of such materials.
Helpful Application Notes from Linx
It is not the intention of this manual to address in depth many of the issues
that should be considered to ensure that the modules function correctly
and deliver the maximum possible performance. We recommend reading
the application notes listed in Figure 53 which address in depth key areas
of RF design and application of Linx products. These applications notes
are available online at www.linxtechnologies.com or by contacting the Linx
literature department.
Board Layout Guidelines
The module’s design makes integration straightforward; however, it
is still critical to exercise care in PCB layout. Failure to observe good
layout techniques can result in a significant degradation of the module’s
performance. A primary layout goal is to maintain a characteristic
50-ohm impedance throughout the path from the antenna to the module.
Grounding, filtering, decoupling, routing and PCB stack-up are also
important considerations for any RF design. The following section provides
some basic design guidelines.
During prototyping, the module should be soldered to a properly laid-out
circuit board. The use of prototyping or “perf” boards results in poor
performance and is strongly discouraged. Likewise, the use of sockets
can have a negative impact on the performance of the module and is
discouraged.
The module should, as much as reasonably possible, be isolated from
other components on your PCB, especially high-frequency circuitry such as
crystal oscillators, switching power supplies, and high-speed bus lines.
When possible, separate RF and digital circuits into different PCB regions.
Make sure internal wiring is routed away from the module and antenna and
is secured to prevent displacement.
Do not route PCB traces directly under the module. There should not be
any copper or traces under the module on the same layer as the module,
just bare PCB. The underside of the module has traces and vias that could
short or couple to traces on the product’s circuit board.
The Pad Layout section shows a typical PCB footprint for the module. A
ground plane (as large and uninterrupted as possible) should be placed on
a lower layer of your PC board opposite the module. This plane is essential
for creating a low impedance return for ground and consistent stripline
performance.
Use care in routing the RF trace between the module and the antenna
or connector. Keep the trace as short as possible. Do not pass it under
the module or any other component. Do not route the antenna trace on
multiple PCB layers as vias add inductance. Vias are acceptable for tying
together ground layers and component grounds and should be used in
multiples. The -CAS version must follow the layout in Figure 46.
Helpful Application Note Titles
Note Number Note Title
AN-00100 RF 101: Information for the RF Challenged
AN-00126 Considerations for Operation Within the 902–928MHz Band
AN-00130 Modulation Techniques for Low-Cost RF Data Links
AN-00140 The FCC Road: Part 15 from Concept to Approval
AN-00500 Antennas: Design, Application, Performance
AN-00501 Understanding Antenna Specifications and Operation
RG-00104 RC Series Transceiver Command Data Interface Reference Guide
Figure 53: Helpful Application Note Titles
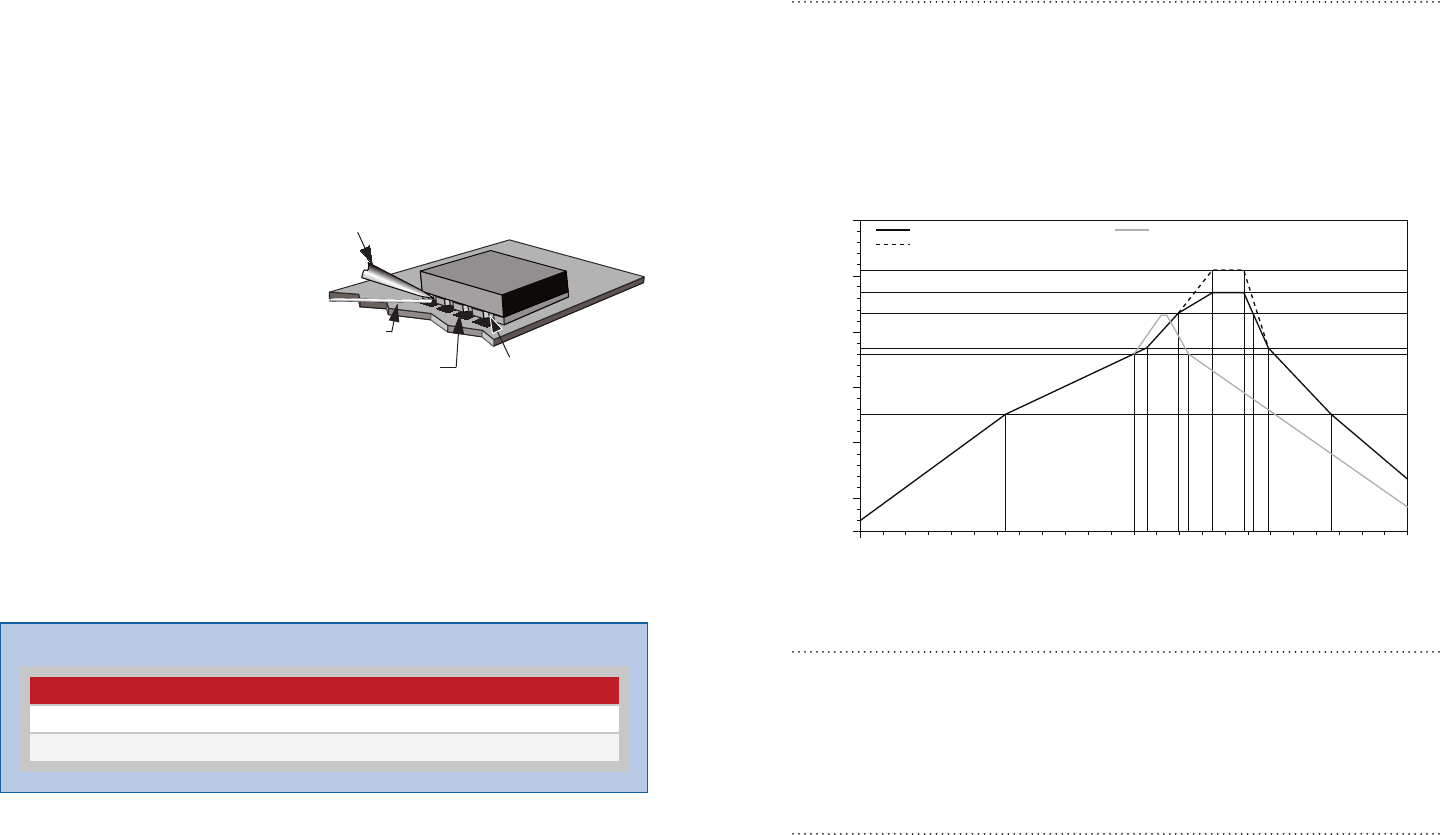
– – – –
56 57
Production Guidelines
The module is housed in a hybrid SMD package that supports hand and
automated assembly techniques. Since the modules contain discrete
components internally, the assembly procedures are critical to ensuring
the reliable function of the modules. The following procedures should be
reviewed with and practiced by all assembly personnel.
Hand Assembly
Pads located on the bottom
of the module are the primary
mounting surface (Figure 54).
Since these pads are inaccessible
during mounting, castellations
that run up the side of the module
have been provided to facilitate
solder wicking to the module’s
underside. This allows for very
quick hand soldering for prototyping and small volume production. If the
recommended pad guidelines have been followed, the pads will protrude
slightly past the edge of the module. Use a fine soldering tip to heat the
board pad and the castellation, then introduce solder to the pad at the
module’s edge. The solder will wick underneath the module, providing
reliable attachment. Tack one module corner first and then work around the
device, taking care not to exceed the times in Figure 55.
Automated Assembly
For high-volume assembly, the modules are generally auto-placed.
The modules have been designed to maintain compatibility with reflow
processing techniques; however, due to their hybrid nature, certain aspects
of the assembly process are far more critical than for other component
types. Following are brief discussions of the three primary areas where
caution must be observed.
Castellations
PCB Pads
Soldering Iron
Tip
Solder
Figure 54: Soldering Technique
Reflow Temperature Profile
The single most critical stage in the automated assembly process is the
reflow stage. The reflow profile in Figure 56 should not be exceeded
because excessive temperatures or transport times during reflow will
irreparably damage the modules. Assembly personnel need to pay careful
attention to the oven’s profile to ensure that it meets the requirements
necessary to successfully reflow all components while still remaining
within the limits mandated by the modules. The figure below shows the
recommended reflow oven profile for the modules.
Shock During Reflow Transport
Since some internal module components may reflow along with the
components placed on the board being assembled, it is imperative that
the modules not be subjected to shock or vibration during the time solder
is liquid. Should a shock be applied, some internal components could be
lifted from their pads, causing the module to not function properly.
Washability
The modules are wash-resistant, but are not hermetically sealed. Linx
recommends wash-free manufacturing; however, the modules can be
subjected to a wash cycle provided that a drying time is allowed prior
to applying electrical power to the modules. The drying time should be
sufficient to allow any moisture that may have migrated into the module
to evaporate, thus eliminating the potential for shorting damage during
power-up or testing. If the wash contains contaminants, the performance
may be adversely affected, even after drying.
125°C
185°C
217°C
255°C
235°C
60 12030 150180 210240 270300 330360090
50
100
150
200
250
300
Recommended RoHS Profile
Max RoHS Profile
Recommended Non-RoHS Profile
180°C
Temperature (oC)
Time (Seconds)
Figure 56: Maximum Reflow Temperature Profile
Warning: Pay attention to the absolute maximum solder times.
Figure 55: Absolute Maximum Solder Times
Absolute Maximum Solder Times
Hand Solder Temperature: +427ºC for 10 seconds for lead-free alloys
Reflow Oven: +255ºC max (see Figure 56)
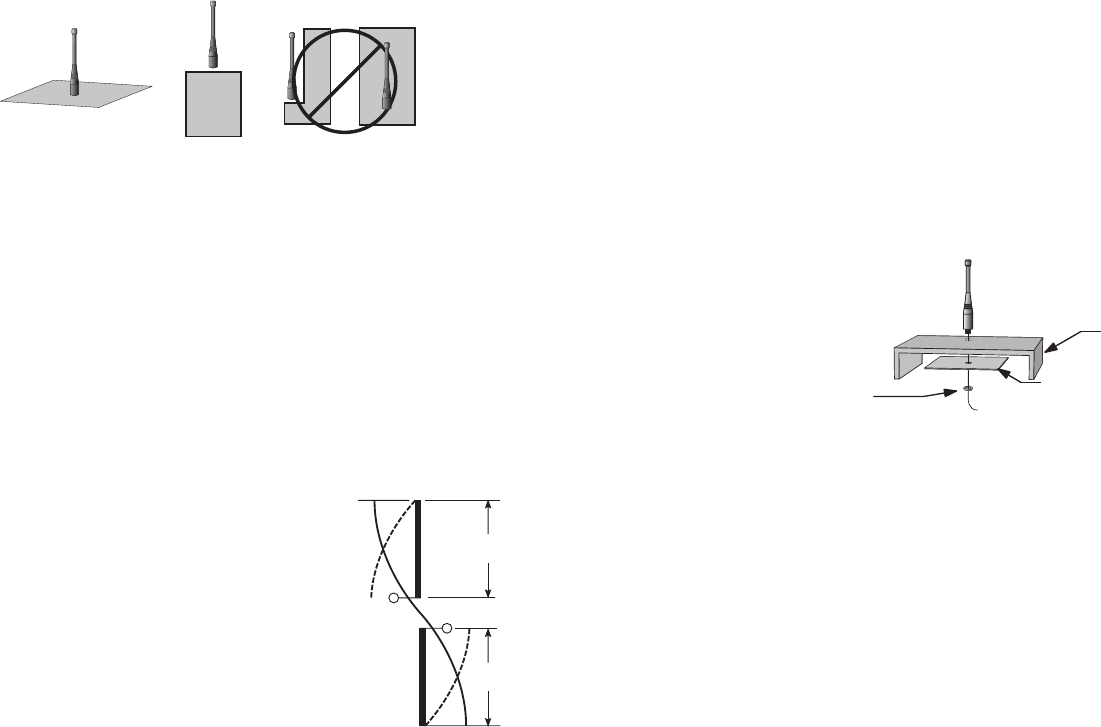
– – – –
58 59
General Antenna Rules
The following general rules should help in maximizing antenna performance.
1. Proximity to objects such as a user’s hand, body or metal objects will
cause an antenna to detune. For this reason, the antenna shaft and tip
should be positioned as far away from such objects as possible.
2. Optimum performance is obtained from a ¼- or ½-wave straight whip
mounted at a right angle to the ground plane (Figure 57). In many
cases, this isn’t desirable for practical or ergonomic reasons, thus,
an alternative antenna style such as a helical, loop or patch may be
utilized and the corresponding sacrifice in performance accepted.
3. If an internal antenna is to be used, keep it away from other metal
components, particularly large items like transformers, batteries,
PCB tracks and ground planes. In many cases, the space around the
antenna is as important as the antenna itself. Objects in close proximity
to the antenna can cause direct detuning, while those farther away will
alter the antenna’s symmetry.
4. In many antenna designs, particularly ¼-wave whips, the ground plane
acts as a counterpoise, forming, in essence,
a ½-wave dipole (Figure 58). For this reason,
adequate ground plane area is essential.
The ground plane can be a metal case or
ground-fill areas on a circuit board. Ideally, it
should have a surface area less than or equal
to the overall length of the ¼-wave radiating
element. This is often not practical due to
size and configuration constraints. In these
instances, a designer must make the best use
of the area available to create as much ground
OPTIMUM
USABLE NOT RECOMMENDED
NUT GROUND PLANE
(MAY BE NEEDED)
CASE
Figure 57: Ground Plane Orientation
plane as possible in proximity to the base of the antenna. In cases
where the antenna is remotely located or the antenna is not in close
proximity to a circuit board, ground plane or grounded metal case, a
metal plate may be used to maximize the antenna’s performance.
5. Remove the antenna as far as possible from potential interference
sources. Any frequency of sufficient amplitude to enter the receiver’s
front end will reduce system range and can even prevent reception
entirely. Switching power supplies, oscillators or even relays can also
be significant sources of potential interference. The single best weapon
against such problems is attention to placement and layout. Filter the
module’s power supply with a high-frequency bypass capacitor. Place
adequate ground plane under potential sources of noise to shunt noise
to ground and prevent it from coupling to the RF stage. Shield noisy
board areas whenever practical.
6. In some applications, it is advantageous to place the module and
antenna away from the main equipment (Figure 59). This can avoid
interference problems and allows the antenna to be oriented for
optimum performance. Always use 50Ω coax, like RG-174, for the
remote feed.
I
EDIPOLE
ELEMENT
GROUND
PLANE
VIRTUAL λ/4
DIPOLE
λ/4
λ/4
VERTICAL λ/4 GROUNDED
ANTENNA (MARCONI)
Figure 58: Dipole Antenna
OPTIMUM
USABLE NOT RECOMMENDED
NUT GROUND PLANE
(MAY BE NEEDED)
CASE
Figure 59: Remote Ground Plane
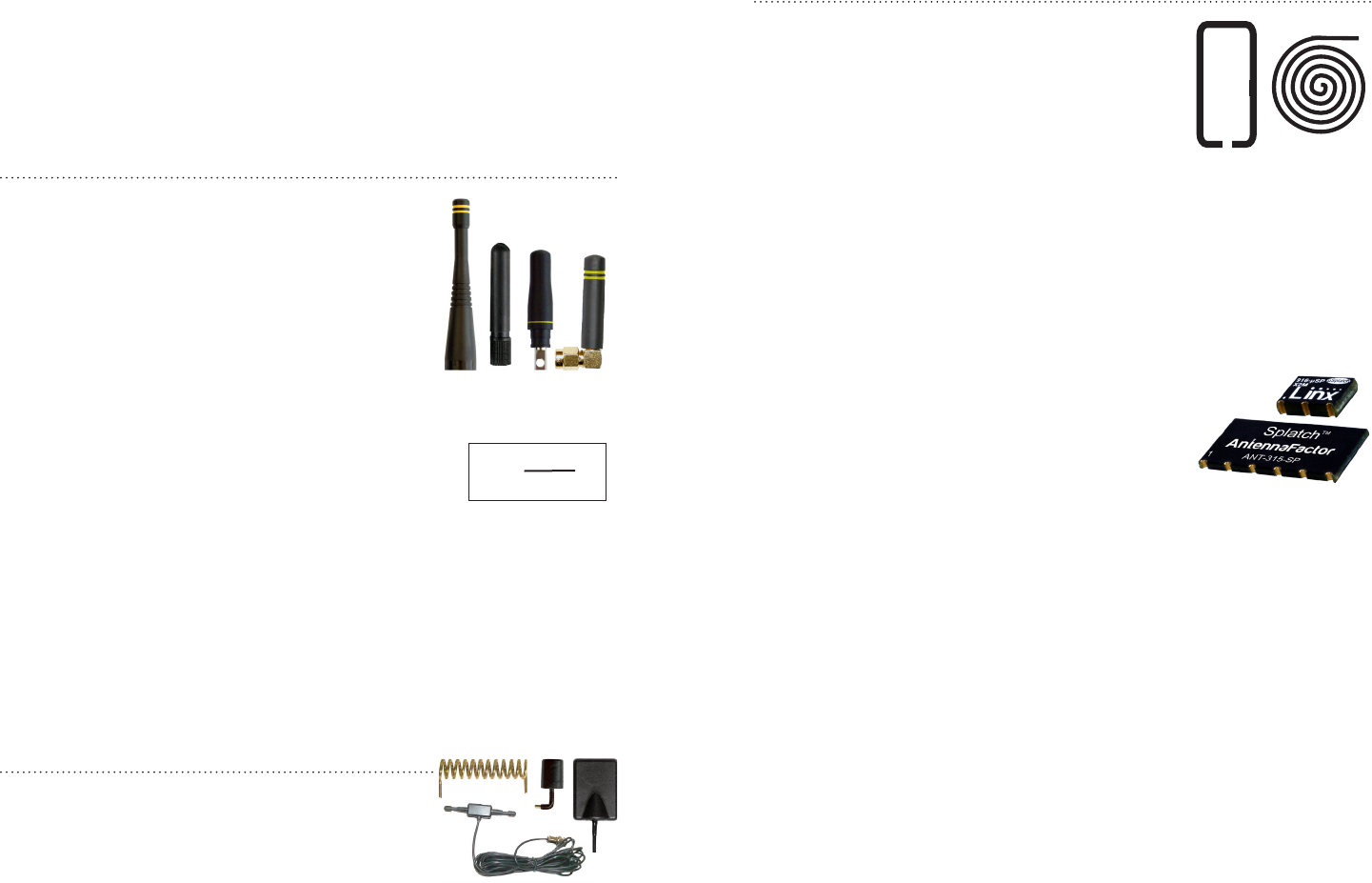
– – – –
60 61
Common Antenna Styles
There are hundreds of antenna styles and variations that can be employed
with Linx RF modules. Following is a brief discussion of the styles most
commonly utilized. Additional antenna information can be found in Linx
Application Notes AN-00100, AN-00140, AN-00500 and AN-00501. Linx
antennas and connectors offer outstanding performance at a low price.
Whip Style
A whip style antenna (Figure 60) provides
outstanding overall performance and stability.
A low-cost whip can be easily fabricated from
a wire or rod, but most designers opt for the
consistent performance and cosmetic appeal of
a professionally-made model. To meet this need,
Linx offers a wide variety of straight and reduced
height whip style antennas in permanent and
connectorized mounting styles.
The wavelength of the operational frequency determines
an antenna’s overall length. Since a full wavelength
is often quite long, a partial ½- or ¼-wave antenna
is normally employed. Its size and natural radiation
resistance make it well matched to Linx modules.
The proper length for a straight ¼-wave can be easily
determined using the formula in Figure 61. It is also
possible to reduce the overall height of the antenna by
using a helical winding. This reduces the antenna’s bandwidth but is a great
way to minimize the antenna’s physical size for compact applications. This
also means that the physical appearance is not always an indicator of the
antenna’s frequency.
Specialty Styles
Linx offers a wide variety of specialized antenna
styles (Figure 62). Many of these styles utilize helical
elements to reduce the overall antenna size while
maintaining reasonable performance. A helical
antenna’s bandwidth is often quite narrow and the
antenna can detune in proximity to other objects, so
care must be exercised in layout and placement.
L =
234
F
MHz
Figure 60: Whip Style Antennas
Figure 61:
L = length in feet of
quarter-wave length
F = operating frequency
in megahertz
Figure 62: Specialty Style
Antennas
Loop Style
A loop or trace style antenna is normally printed
directly on a product’s PCB (Figure 63). This
makes it the most cost-effective of antenna
styles. The element can be made self-resonant or
externally resonated with discrete components,
but its actual layout is usually product specific.
Despite the cost advantages, loop style antennas
are generally inefficient and useful only for short
range applications. They are also very sensitive to changes in layout and
PCB dielectric, which can cause consistency issues during production.
In addition, printed styles are difficult to engineer, requiring the use of
expensive equipment including a network analyzer. An improperly designed
loop will have a high VSWR at the desired frequency which can cause
instability in the RF stage.
Linx offers low-cost planar (Figure 64) and chip
antennas that mount directly to a product’s PCB.
These tiny antennas do not require testing and
provide excellent performance despite their small
size. They offer a preferable alternative to the often
problematic “printed” antenna.
Figure 63: Loop or Trace Antenna
Figure 64: SP Series
“Splatch” and uSP
“MicroSplatch” Antennas
– – – –
62 63
Regulatory Considerations
When working with RF, a clear distinction must be made between what
is technically possible and what is legally acceptable in the country where
operation is intended. Many manufacturers have avoided incorporating RF
into their products as a result of uncertainty and even fear of the approval
and certification process. Here at Linx, our desire is not only to expedite the
design process, but also to assist you in achieving a clear idea of what is
involved in obtaining the necessary approvals to legally market a completed
product.
For information about regulatory approval, read AN-00142 on the Linx
website or call Linx. Linx designs products with worldwide regulatory
approval in mind.
In the United States, the approval process is actually quite straightforward.
The regulations governing RF devices and the enforcement of them are
the responsibility of the Federal Communications Commission (FCC). The
regulations are contained in Title 47 of the United States Code of Federal
Regulations (CFR). Title 47 is made up of numerous volumes; however,
all regulations applicable to this module are contained in Volume 0-19.
It is strongly recommended that a copy be obtained from the FCC’s
website, the Government Printing Office in Washington or from your local
government bookstore. Excerpts of applicable sections are included
with Linx evaluation kits or may be obtained from the Linx Technologies
website, www.linxtechnologies.com. In brief, these rules require that any
device that intentionally radiates RF energy be approved, that is, tested for
compliance and issued a unique identification number. This is a relatively
painless process. Final compliance testing is performed by one of the many
independent testing laboratories across the country. Many labs can also
provide other certifications that the product may require at the same time,
such as UL, CLASS A / B, etc. Once the completed product has passed,
an ID number is issued that is to be clearly placed on each product
manufactured.
Questions regarding interpretations of the Part 2 and Part 15 rules or the
measurement procedures used to test intentional radiators such as Linx RF
modules for compliance with the technical standards of Part 15 should be
addressed to:
Federal Communications Commission
Equipment Authorization Division
Customer Service Branch, MS 1300F2
7435 Oakland Mills Road
Columbia, MD, US 21046
Phone: + 1 301 725 585 | Fax: + 1 301 344 2050
Email: labinfo@fcc.gov
ETSI Secretaria
650, Route des Lucioles
06921 Sophia-Antipolis Cedex
FRANCE
Phone: +33 (0)4 92 94 42 00
Fax: +33 (0)4 93 65 47 16
International approvals are slightly more complex, although Linx modules
are designed to allow all international standards to be met. If the end
product is to be exported to other countries, contact Linx to determine the
specific suitability of the module to the application.
All Linx modules are designed with the approval process in mind and thus
much of the frustration that is typically experienced with a discrete design is
eliminated. Approval is still dependent on many factors, such as the choice
of antennas, correct use of the frequency selected and physical packaging.
While some extra cost and design effort are required to address these
issues, the additional usefulness and profitability added to a product by RF
makes the effort more than worthwhile.
Note: Linx RF modules are designed as component devices that require
external components to function. The purchaser understands that
additional approvals may be required prior to the sale or operation of
the device, and agrees to utilize the component in keeping with all laws
governing its use in the country of operation.

Disclaimer
Linx Technologies is continually striving to improve the quality and function of its products. For this reason, we
reserve the right to make changes to our products without notice. The information contained in this Data Guide
is believed to be accurate as of the time of publication. Specifications are based on representative lot samples.
Values may vary from lot-to-lot and are not guaranteed. “Typical” parameters can and do vary over lots and
application. Linx Technologies makes no guarantee, warranty, or representation regarding the suitability of any
product for use in any specific application. It is the customer’s responsibility to verify the suitability of the part for
the intended application. NO LINX PRODUCT IS INTENDED FOR USE IN ANY APPLICATION WHERE THE SAFETY
OF LIFE OR PROPERTY IS AT RISK.
Linx Technologies DISCLAIMS ALL WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
PURPOSE. IN NO EVENT SHALL LINX TECHNOLOGIES BE LIABLE FOR ANY OF CUSTOMER’S INCIDENTAL OR
CONSEQUENTIAL DAMAGES ARISING IN ANY WAY FROM ANY DEFECTIVE OR NON-CONFORMING PRODUCTS
OR FOR ANY OTHER BREACH OF CONTRACT BY LINX TECHNOLOGIES. The limitations on Linx Technologies’
liability are applicable to any and all claims or theories of recovery asserted by Customer, including, without
limitation, breach of contract, breach of warranty, strict liability, or negligence. Customer assumes all liability
(including, without limitation, liability for injury to person or property, economic loss, or business interruption) for
all claims, including claims from third parties, arising from the use of the Products. The Customer will indemnify,
defend, protect, and hold harmless Linx Technologies and its officers, employees, subsidiaries, affiliates,
distributors, and representatives from and against all claims, damages, actions, suits, proceedings, demands,
assessments, adjustments, costs, and expenses incurred by Linx Technologies as a result of or arising from any
Products sold by Linx Technologies to Customer. Under no conditions will Linx Technologies be responsible for
losses arising from the use or failure of the device in any application, other than the repair, replacement, or refund
limited to the original product purchase price. Devices described in this publication may contain proprietary,
patented, or copyrighted techniques, components, or materials. Under no circumstances shall any user be
conveyed any license or right to the use or ownership of such items.
©2015 Linx Technologies. All rights reserved.
The stylized Linx logo, Wireless Made Simple, WiSE, CipherLinx and the stylized CL logo are trademarks of Linx Technologies.
Linx Technologies
159 Ort Lane
Merlin, OR, US 97532
Phone: +1 541 471 6256
Fax: +1 541 471 6251
www.linxtechnologies.com