Microduino MIXC104E KIT-mCookie-Education User Manual Part 1
Microduino Inc. KIT-mCookie-Education Part 1
UserManual.wiki
>
Microduino
>
MIXC104E User Manual
>
User Manual Part 1
Contents
1.
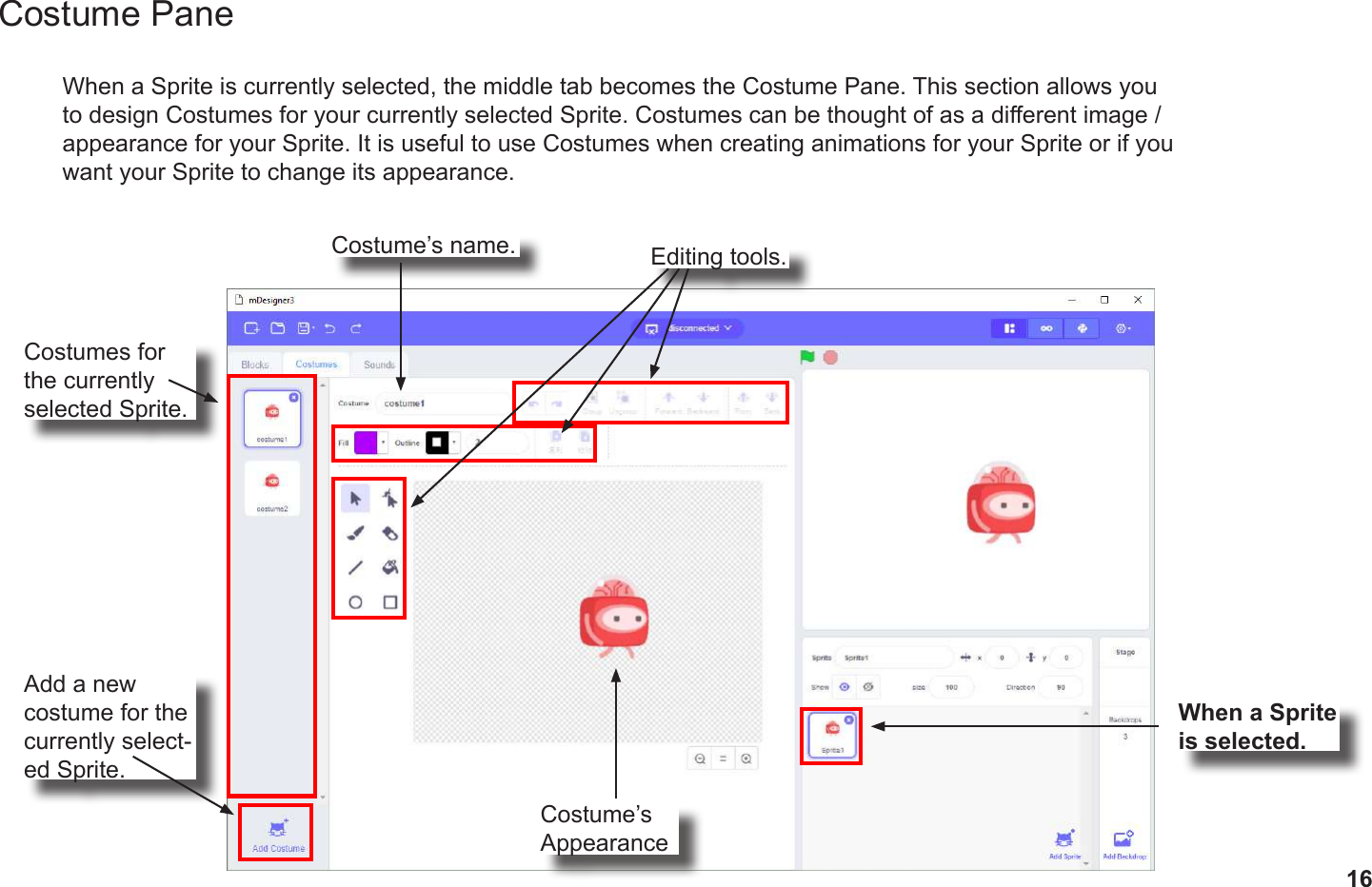
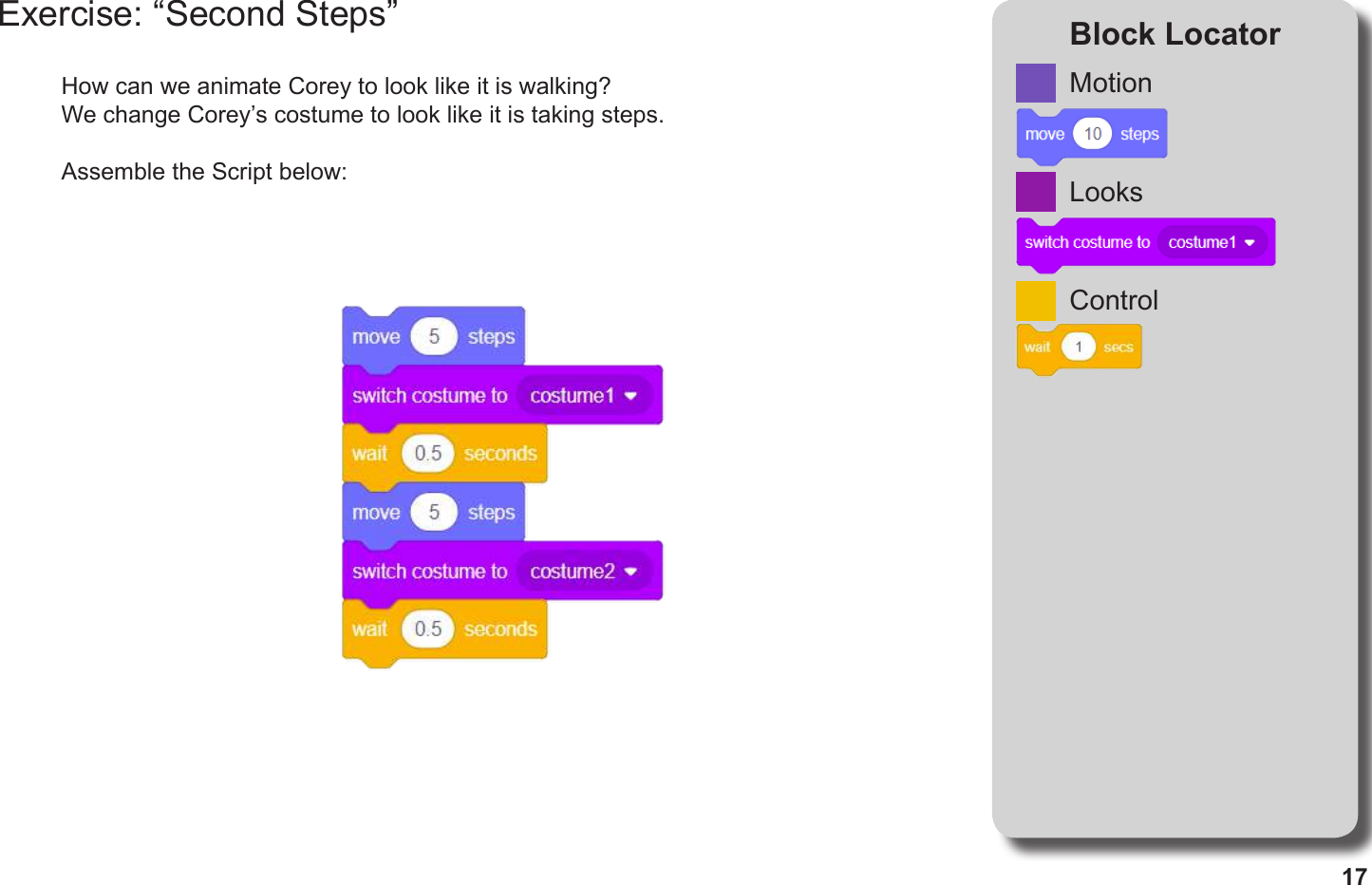
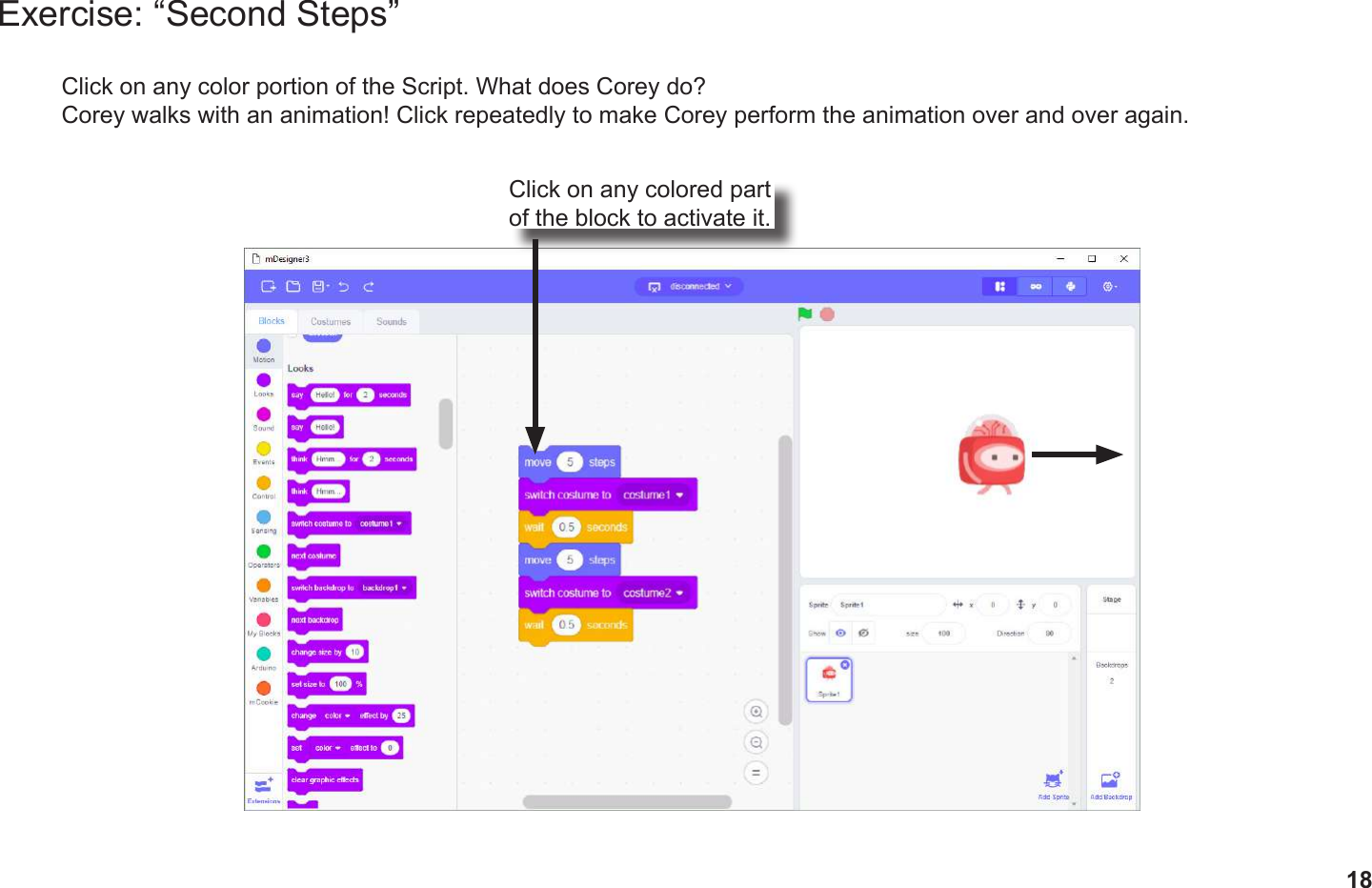
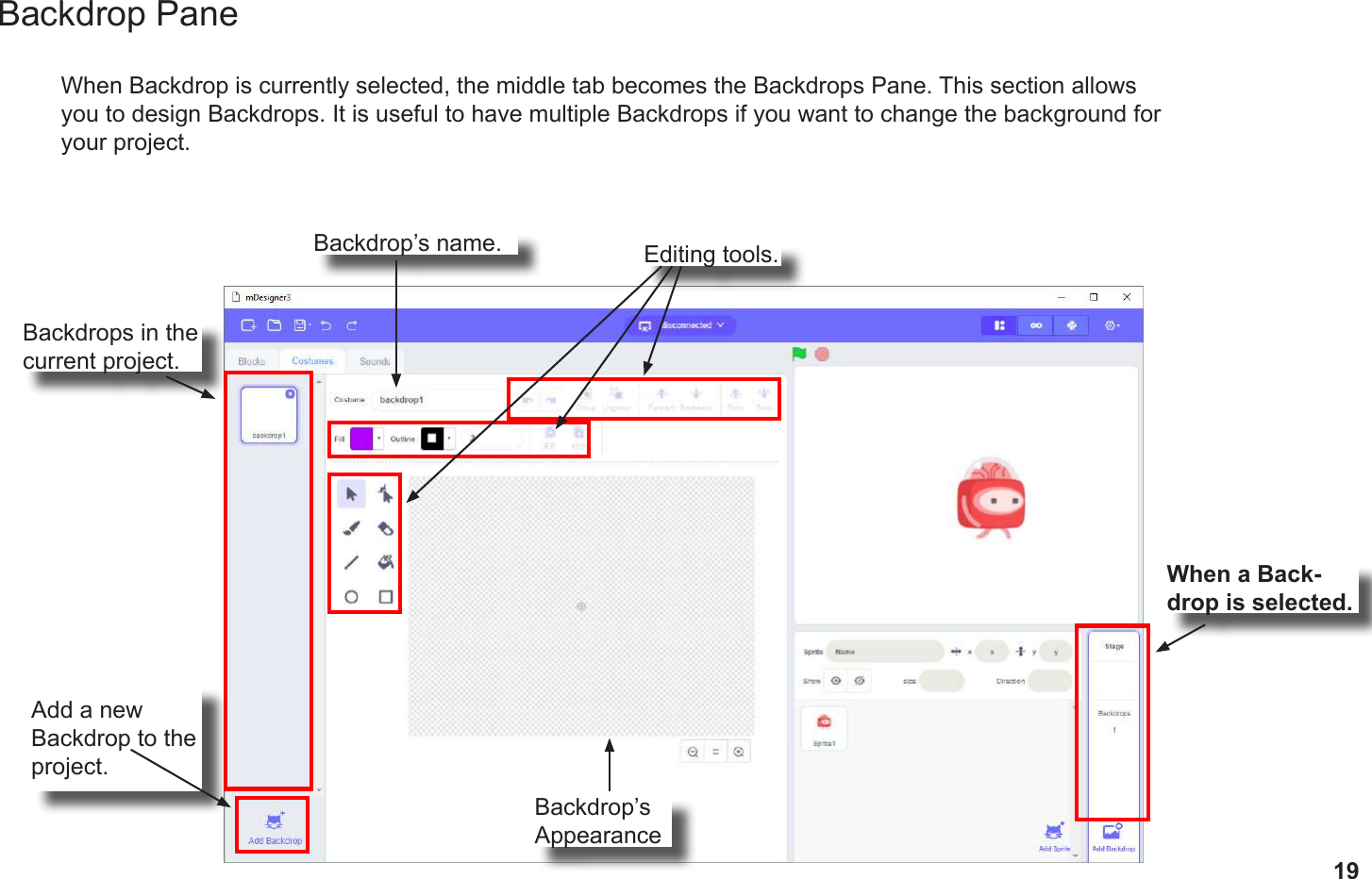
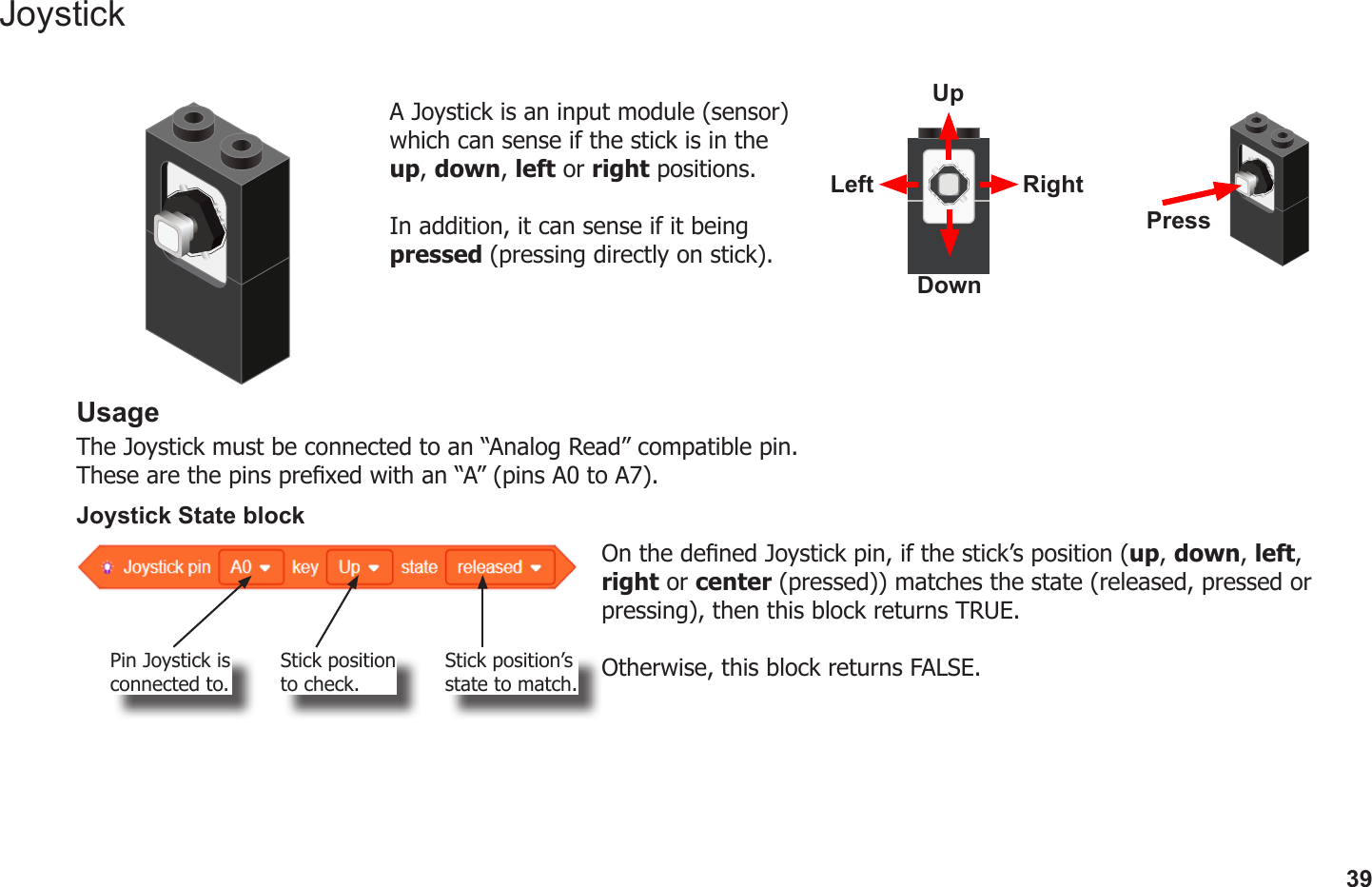
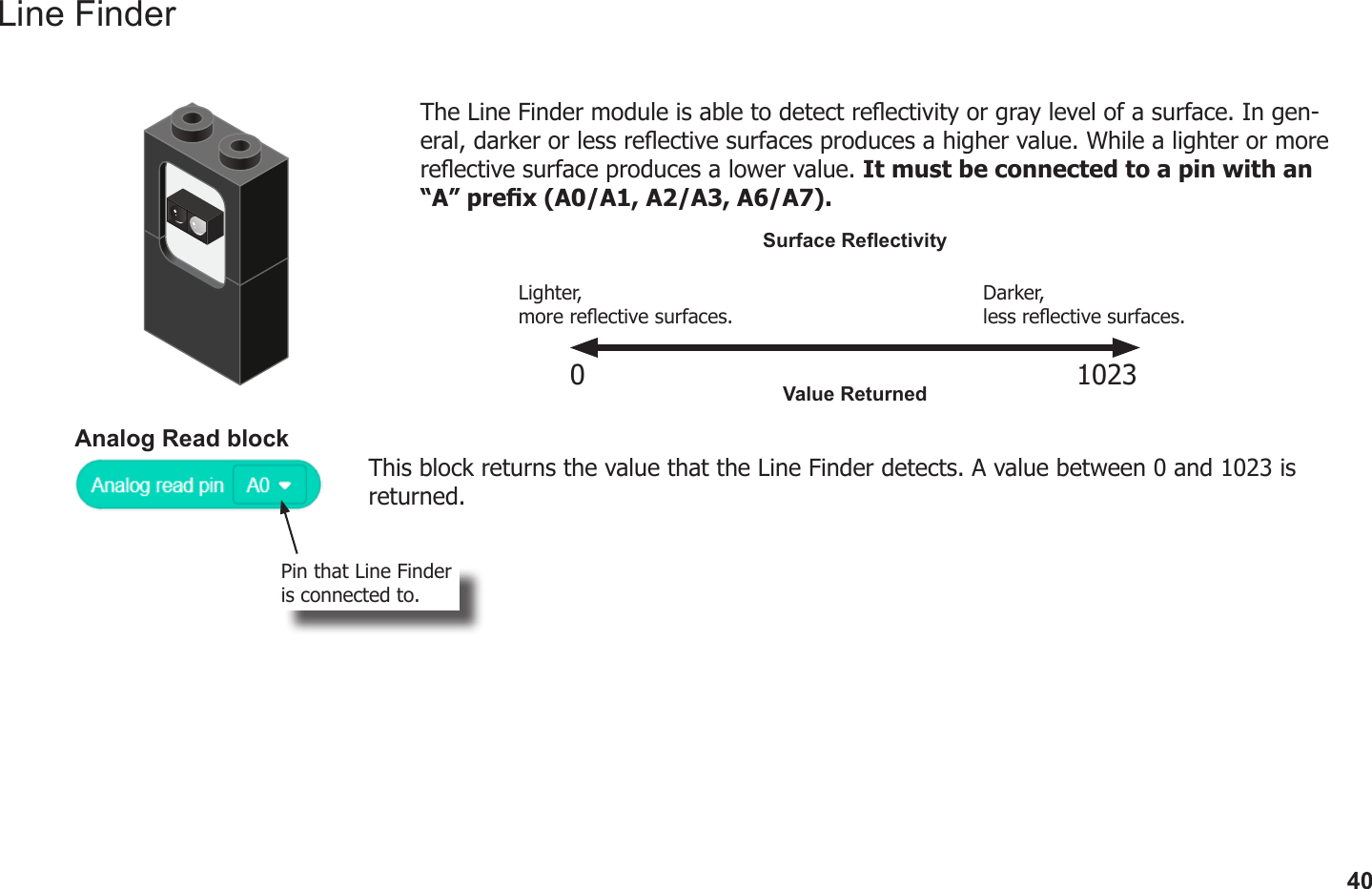
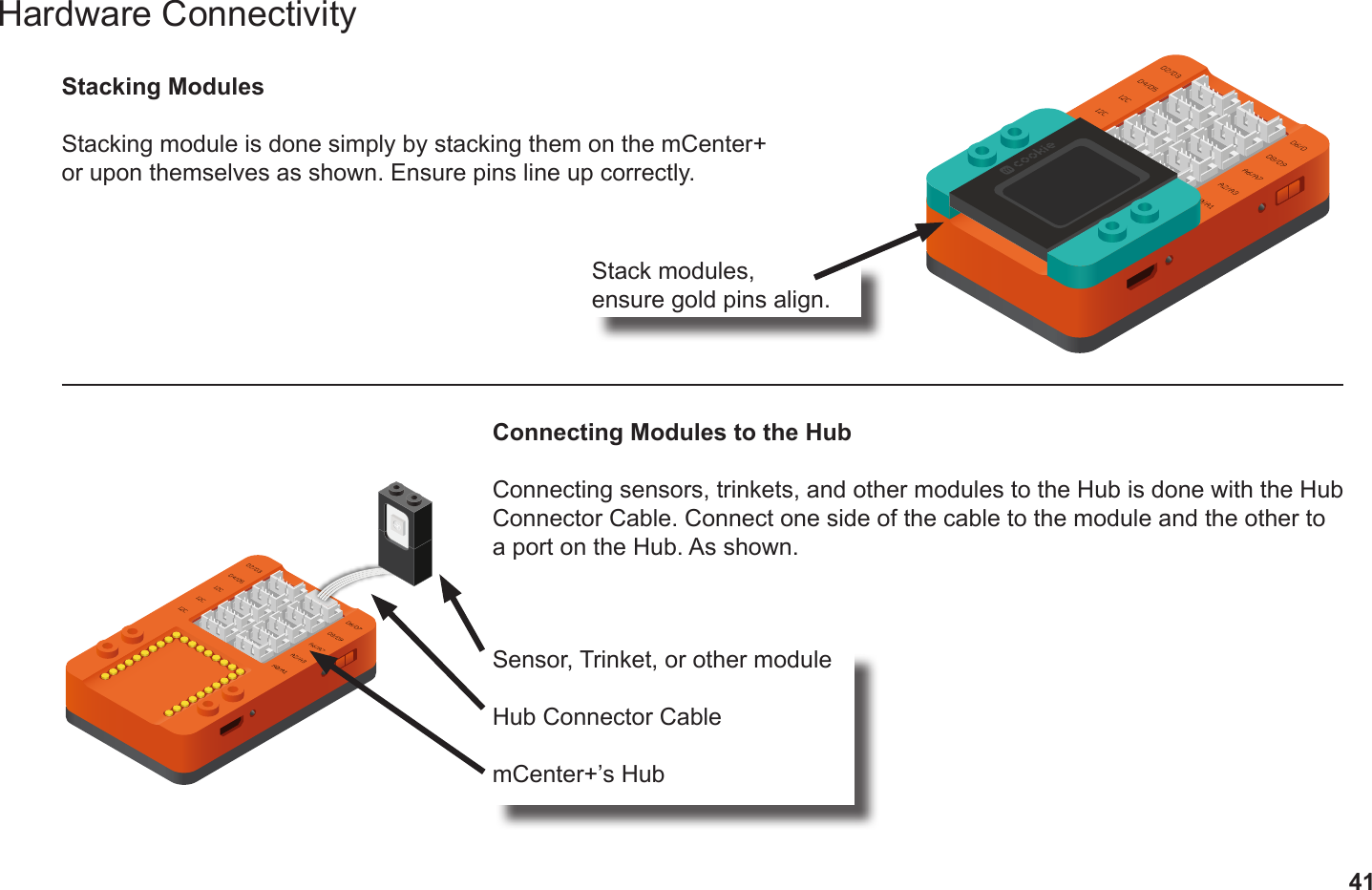
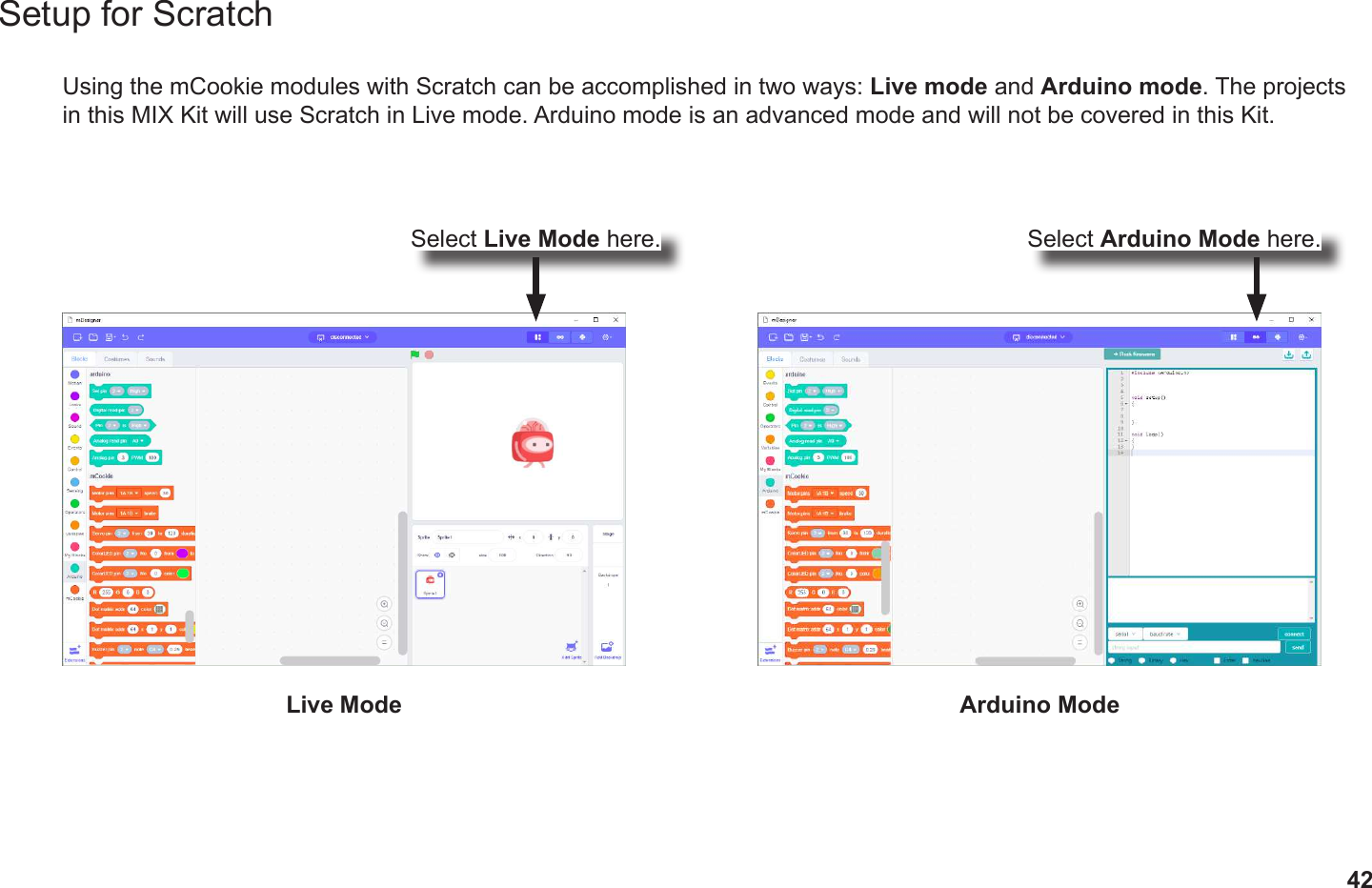
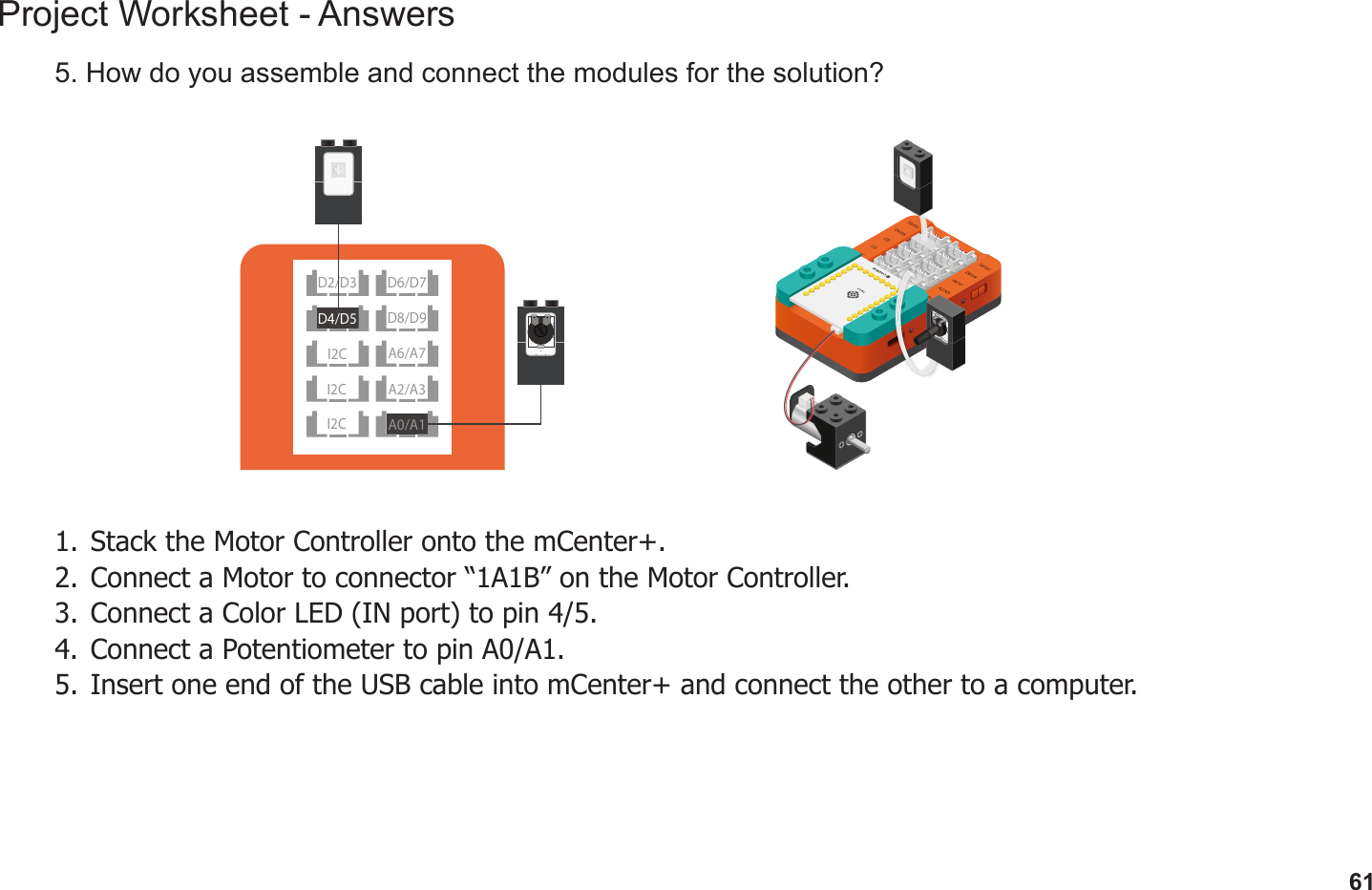
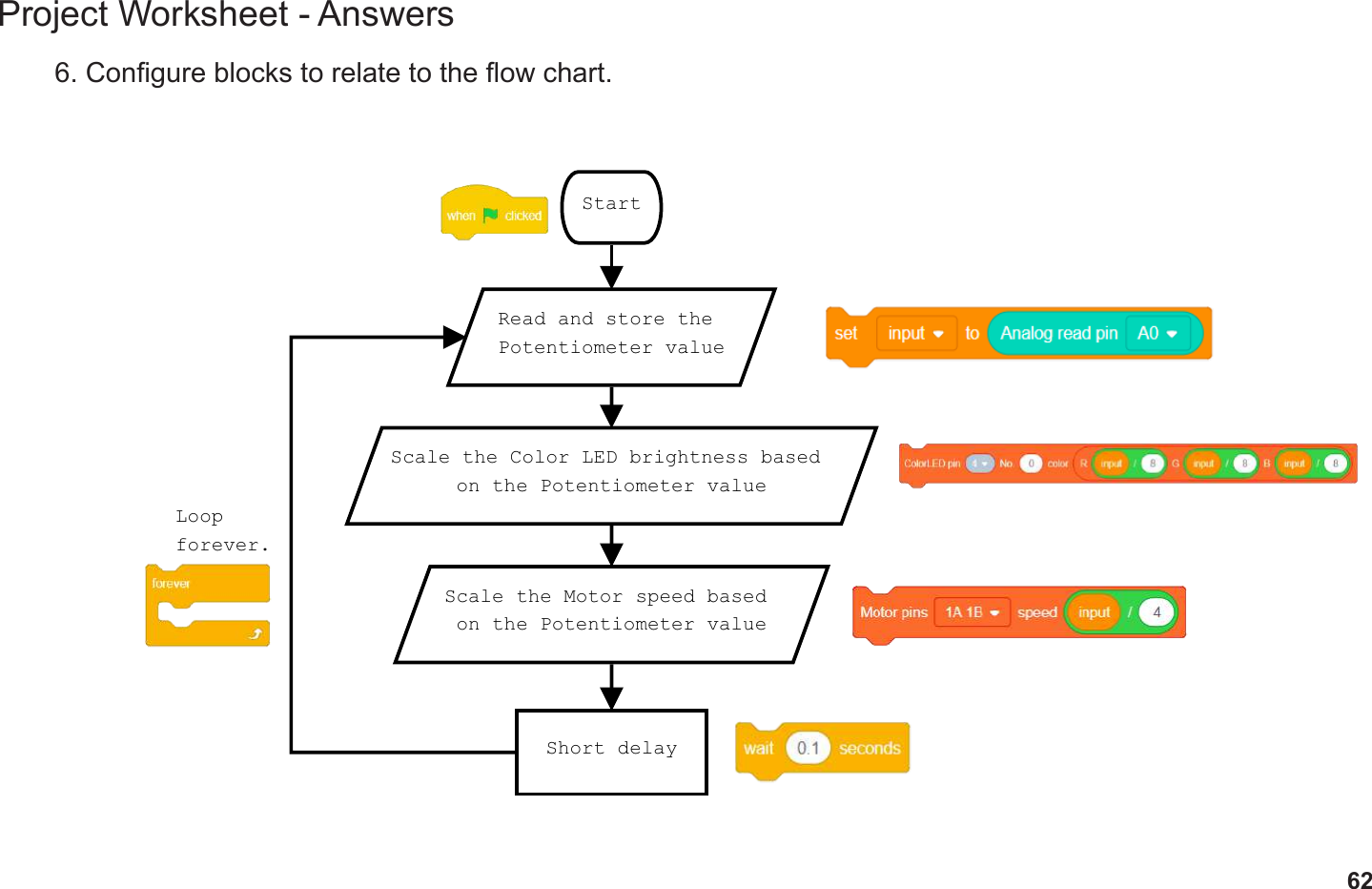
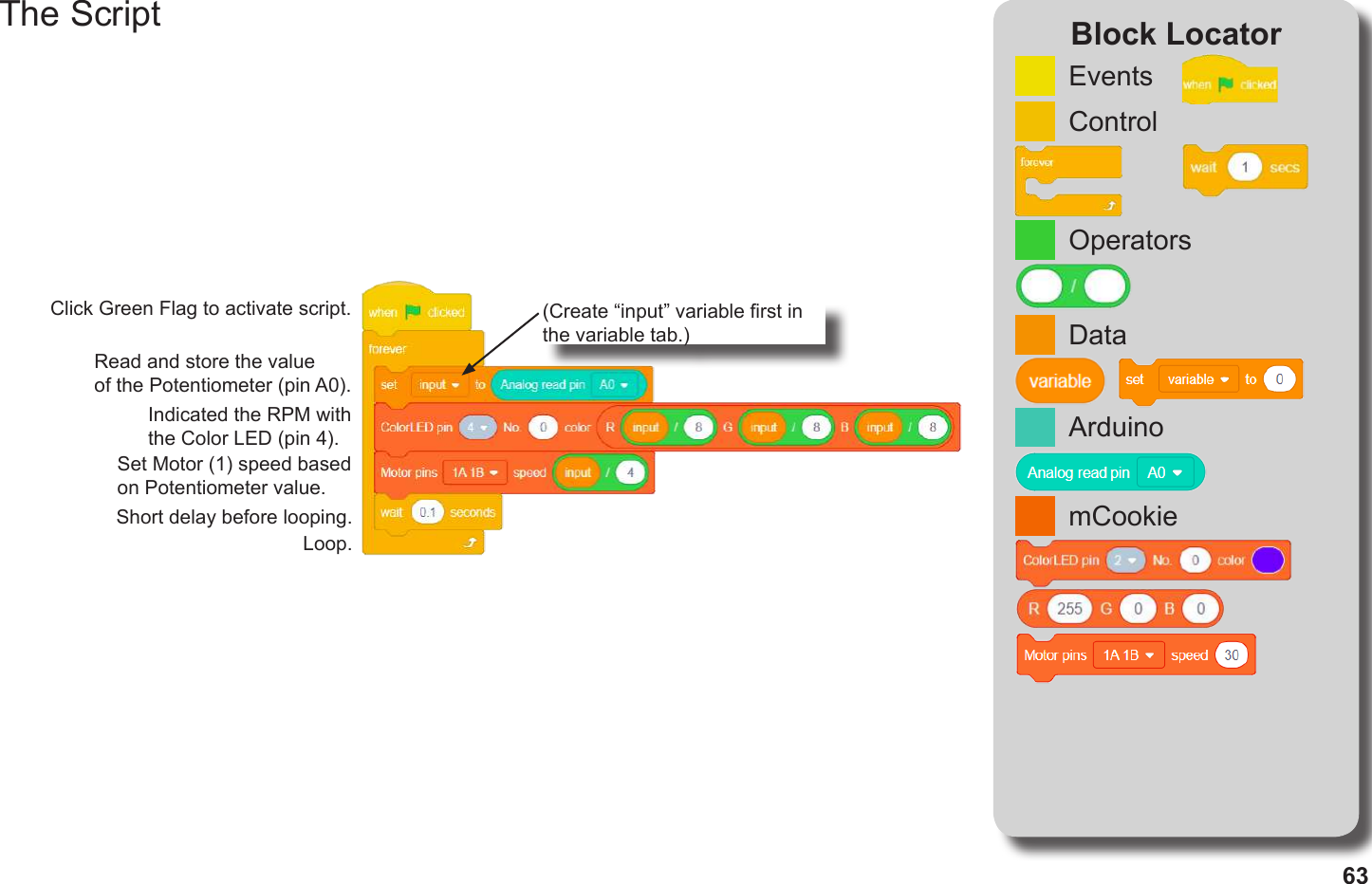
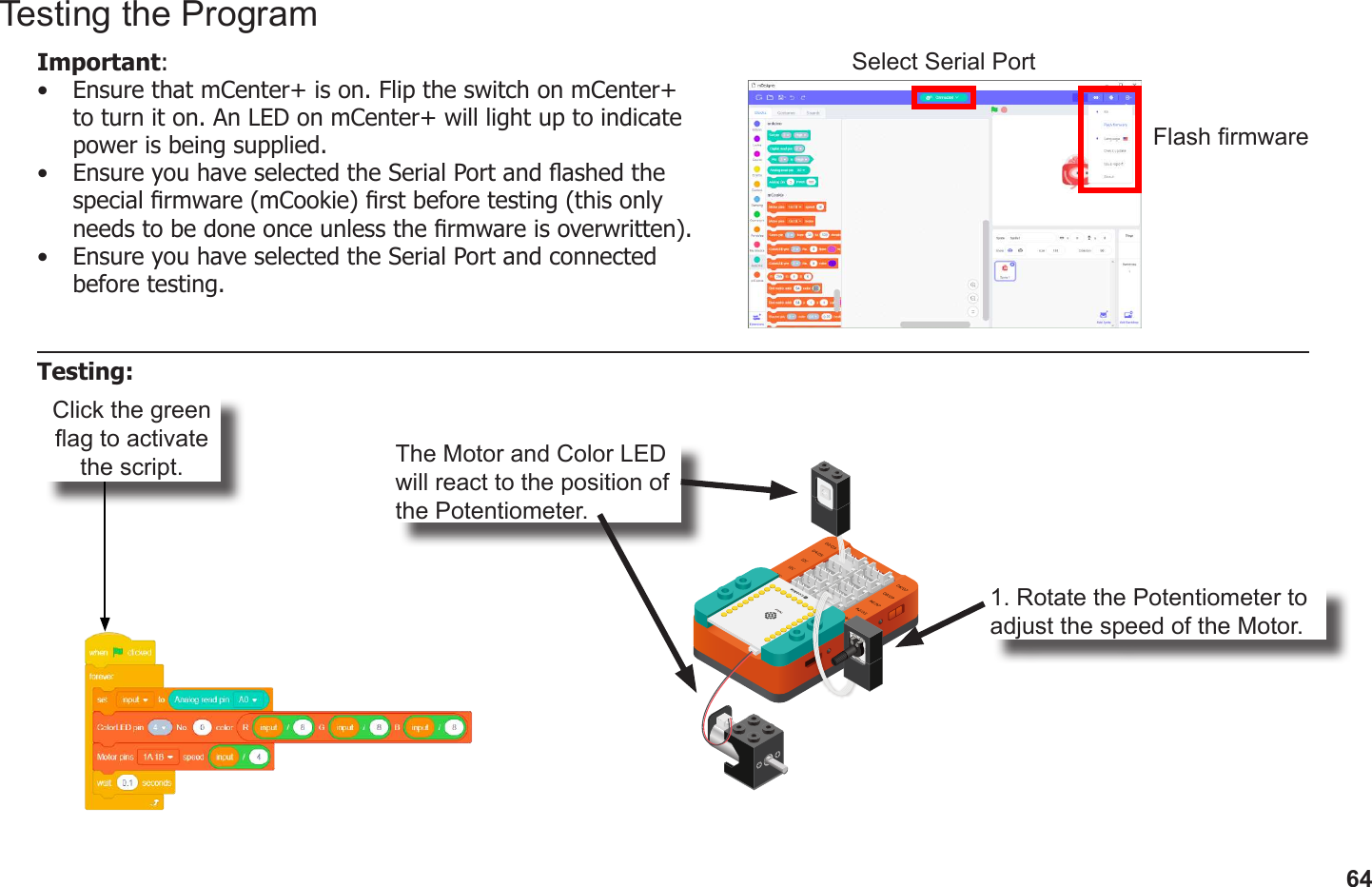
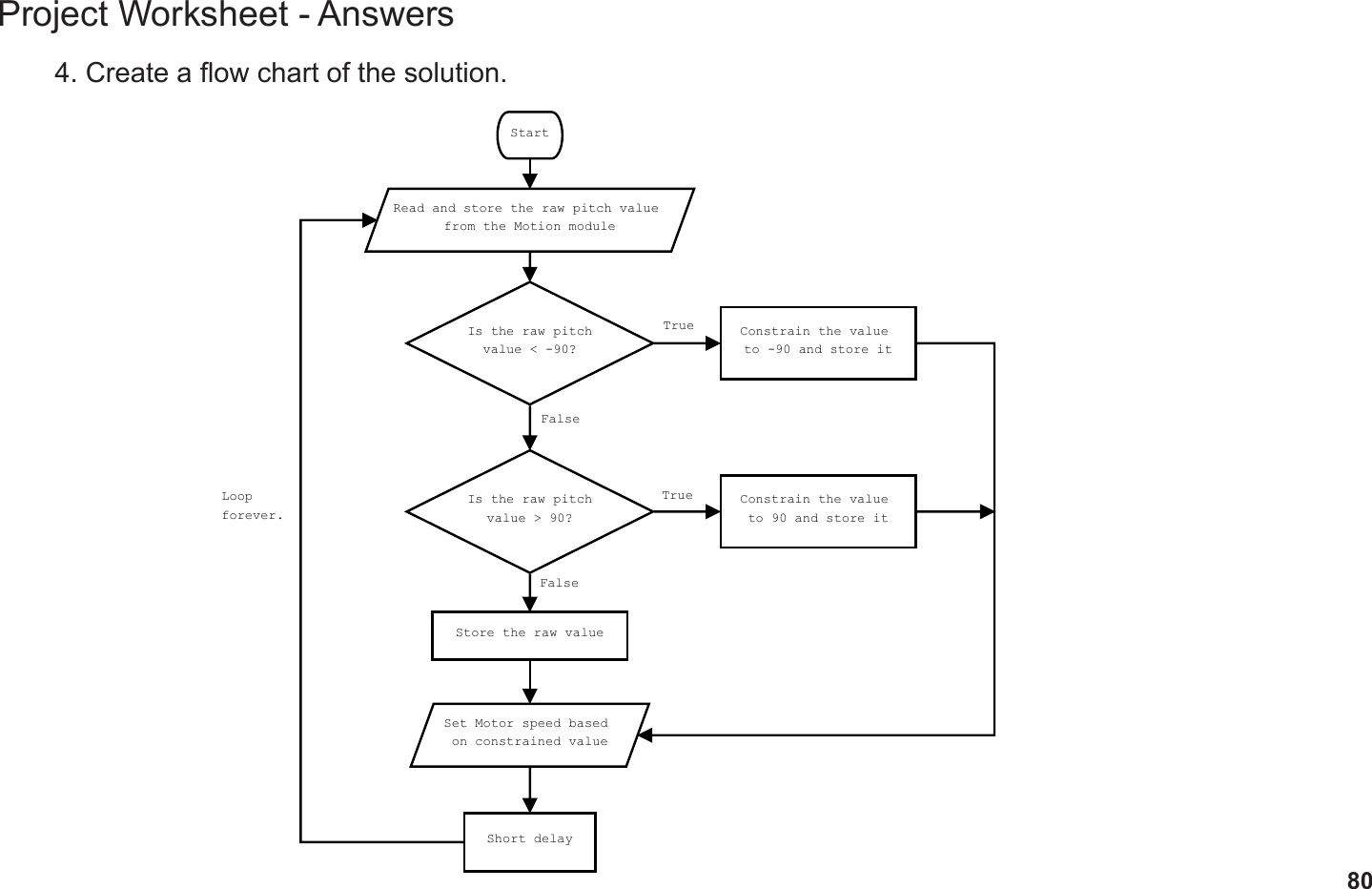
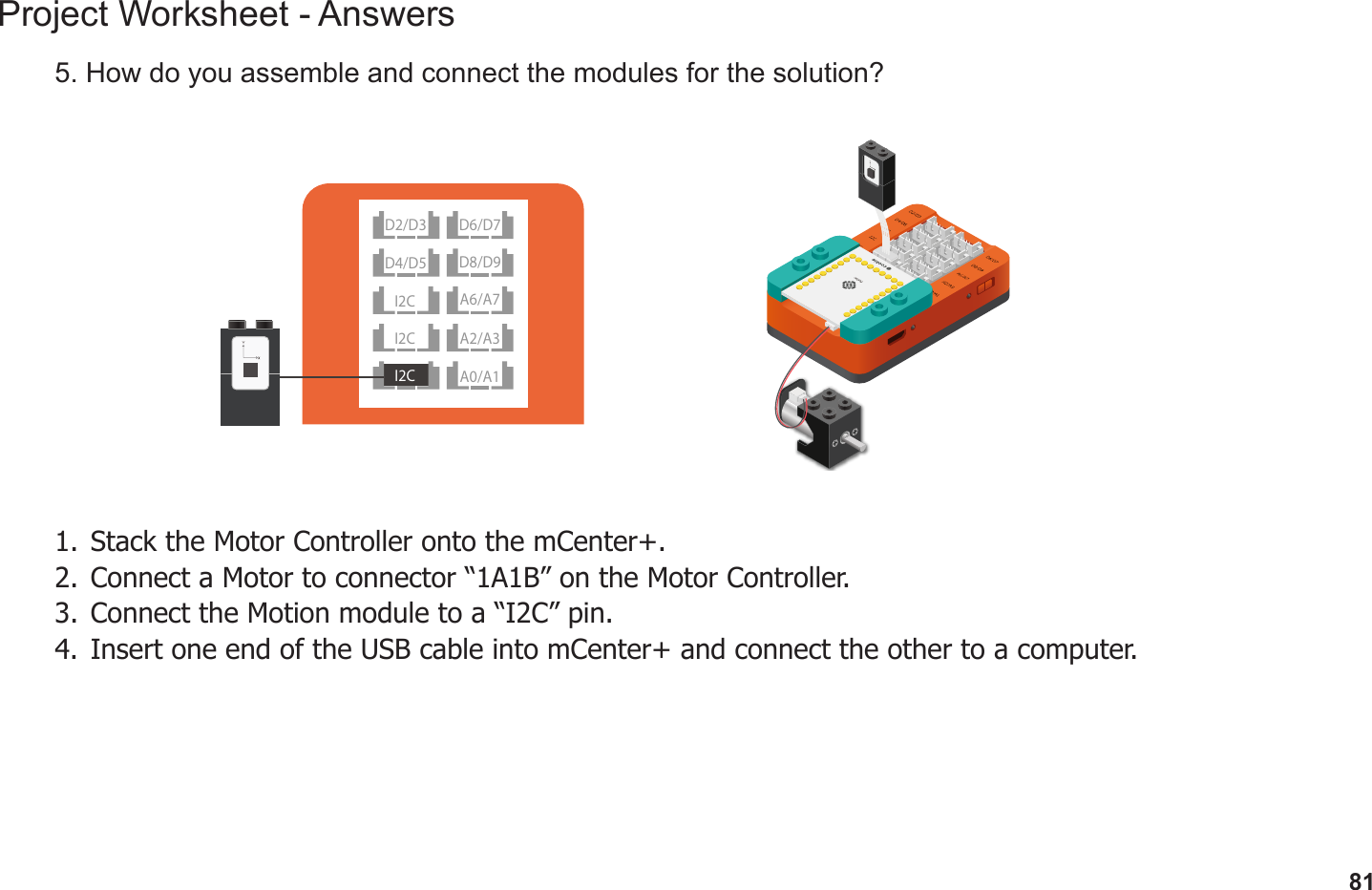
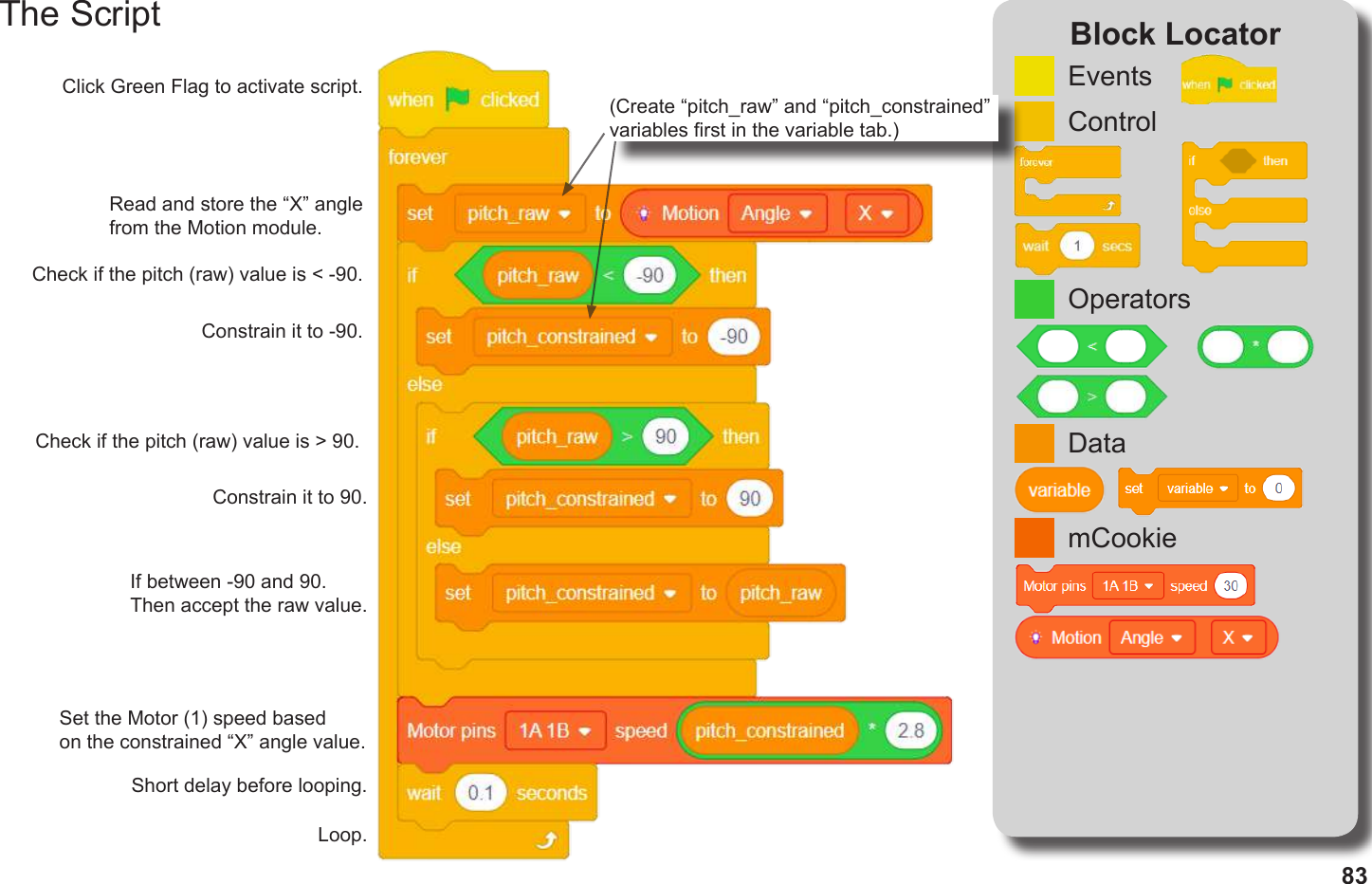
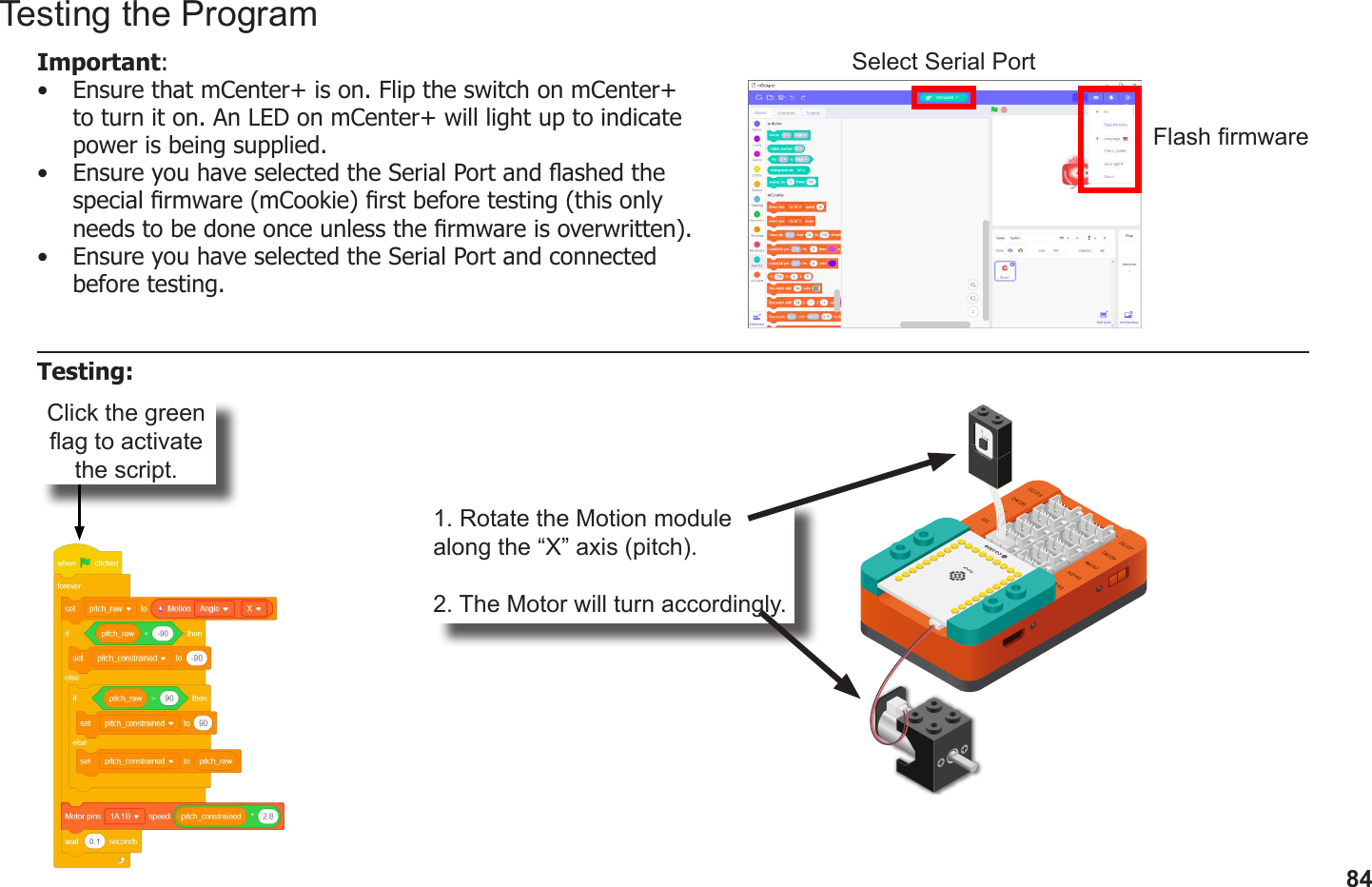
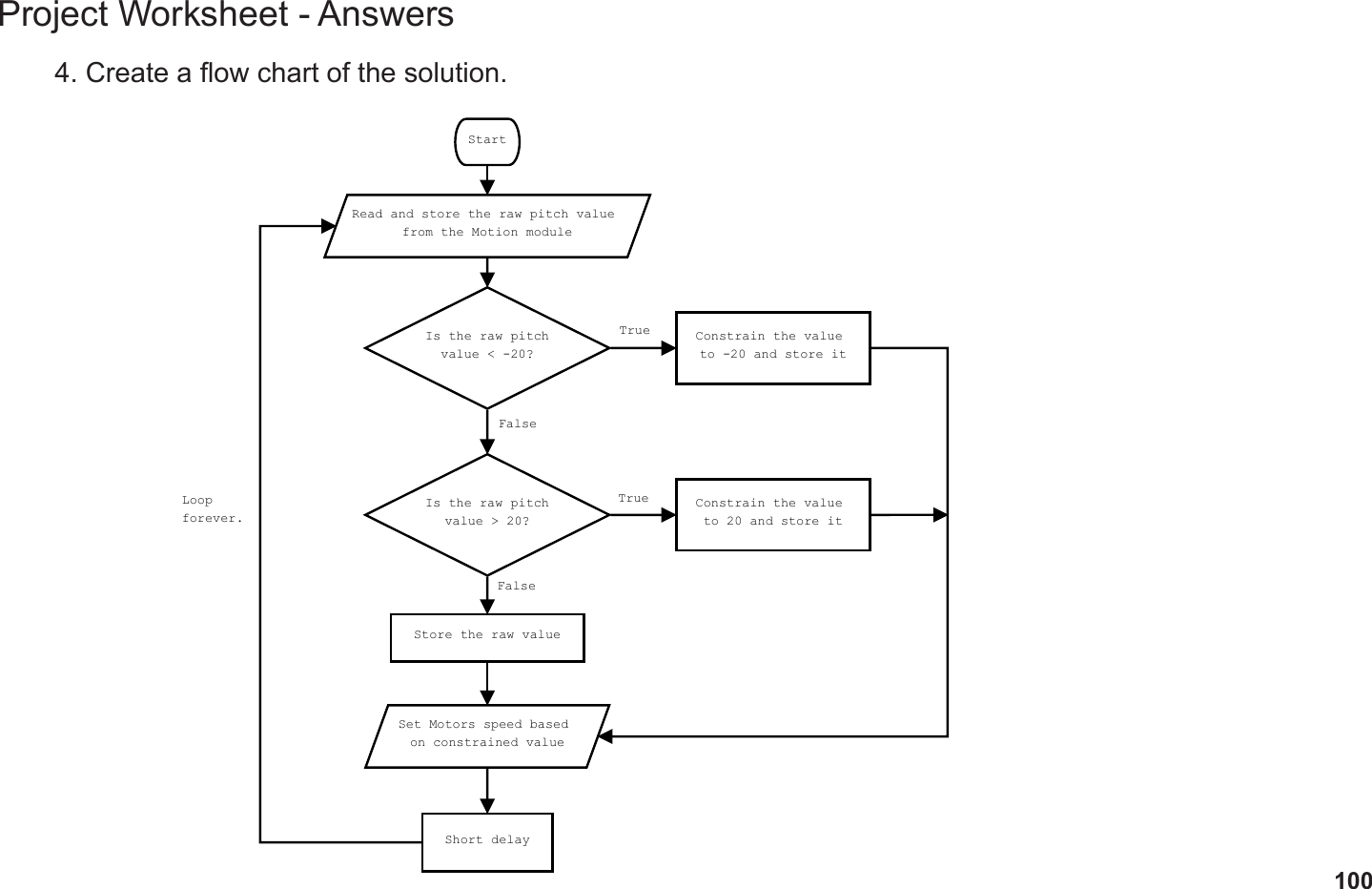
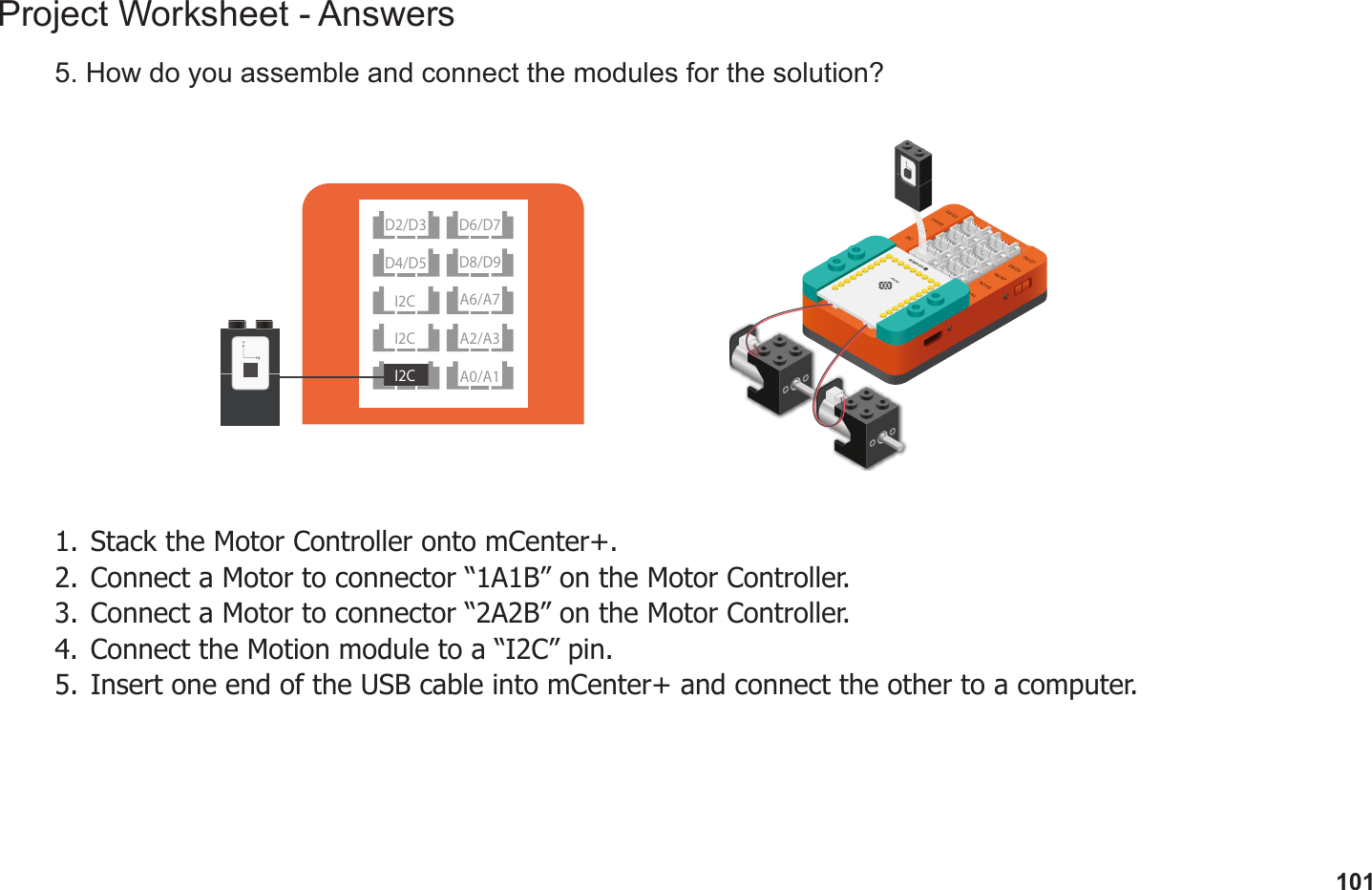
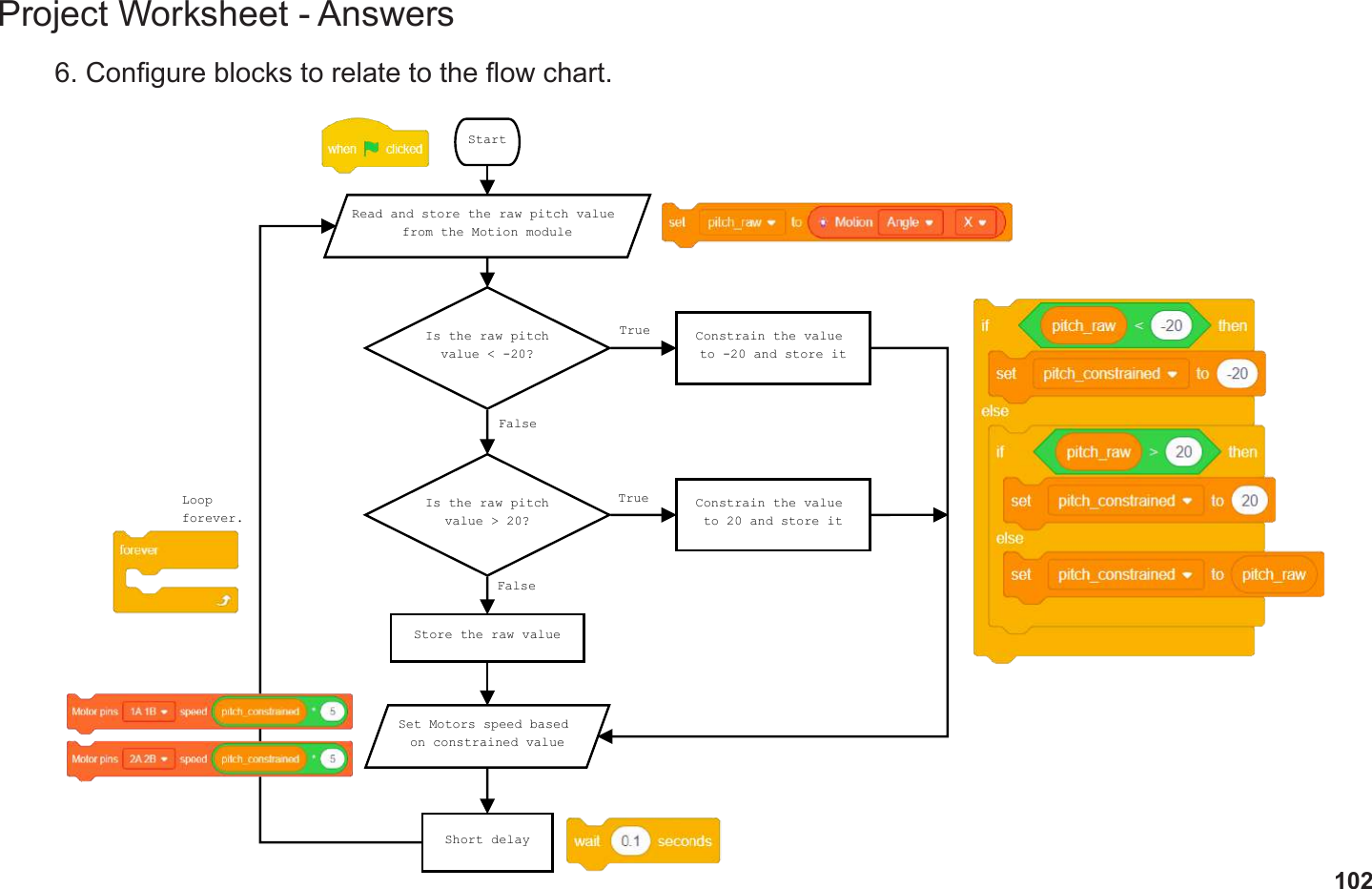
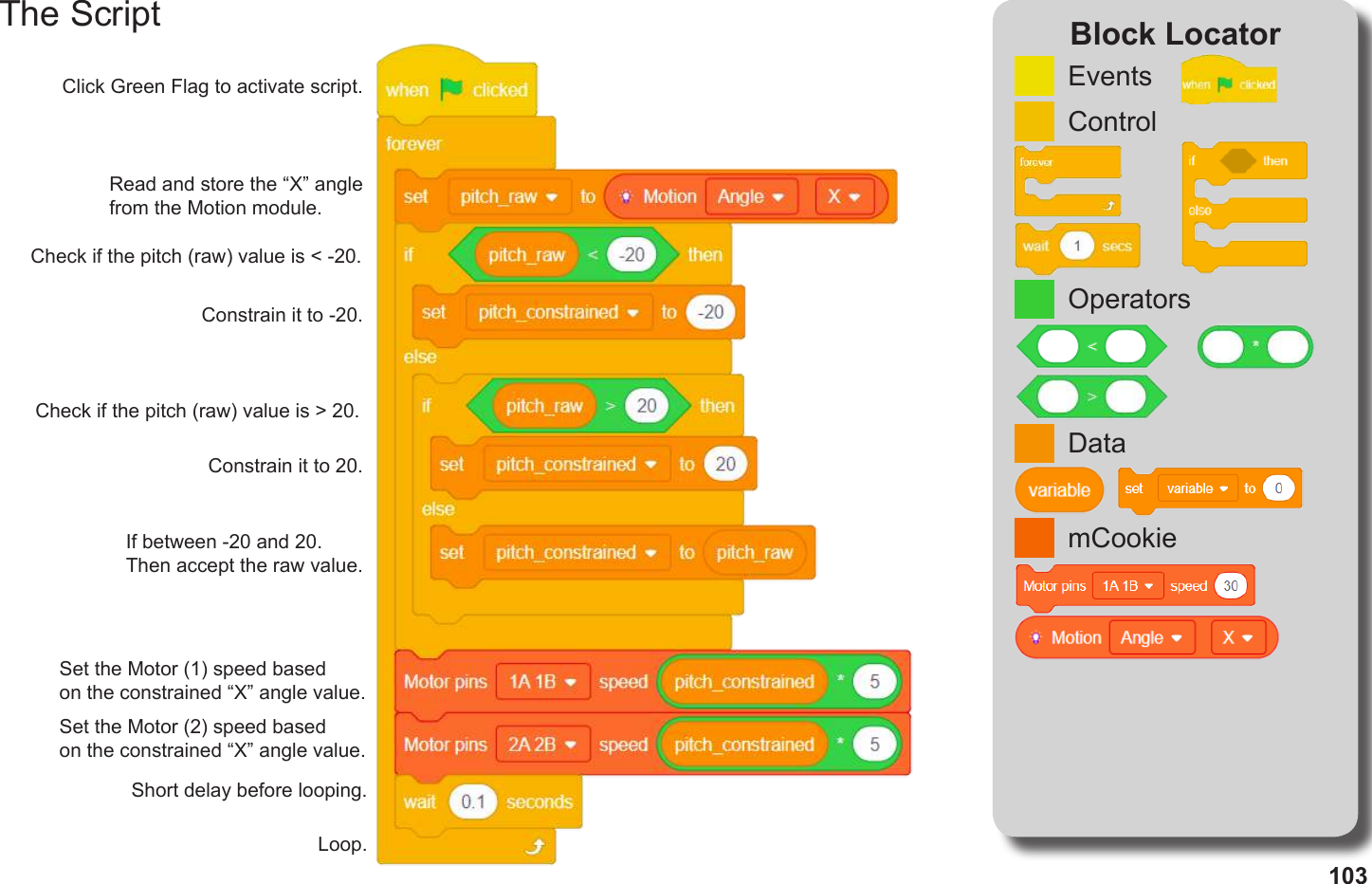
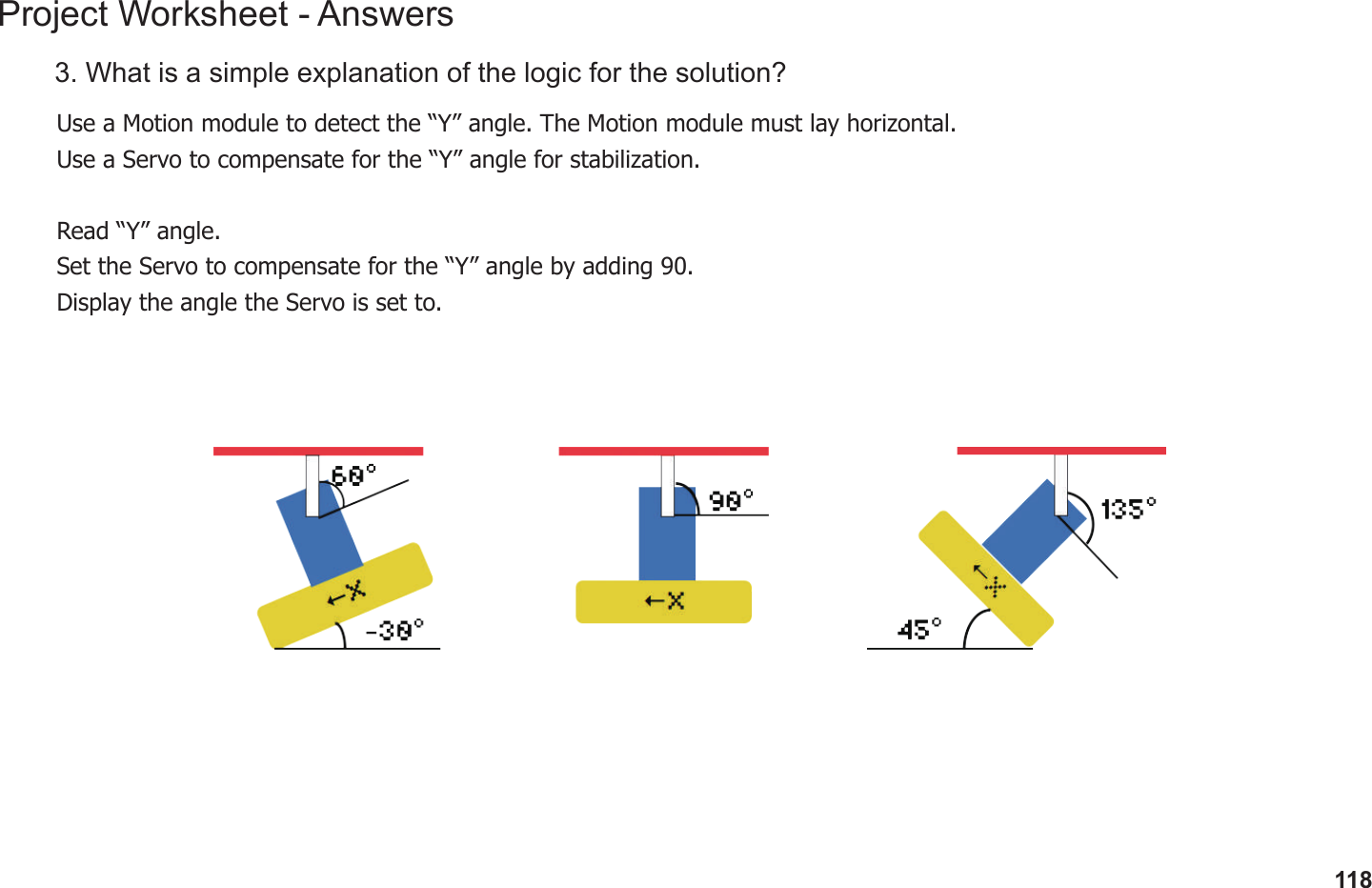
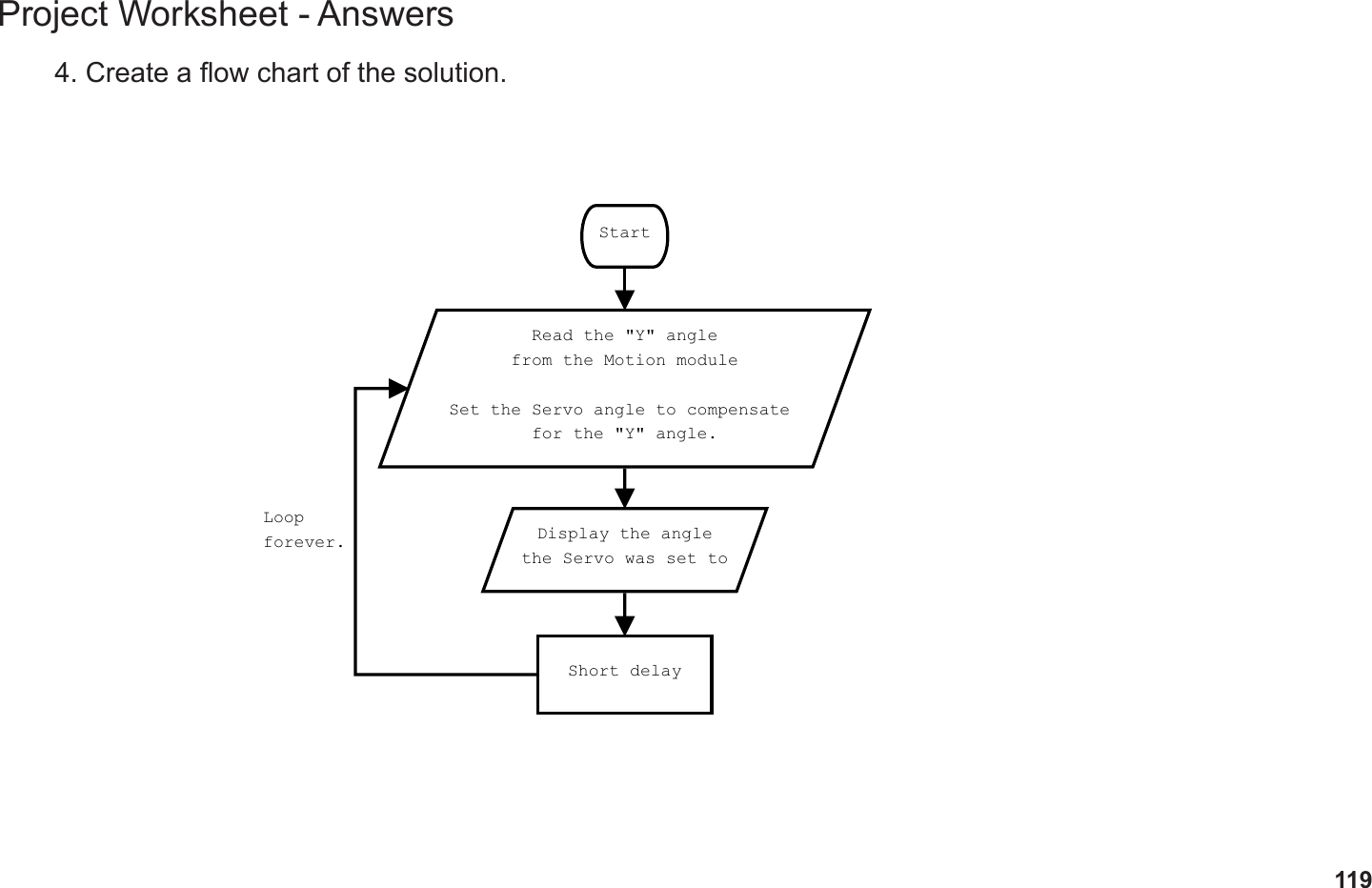
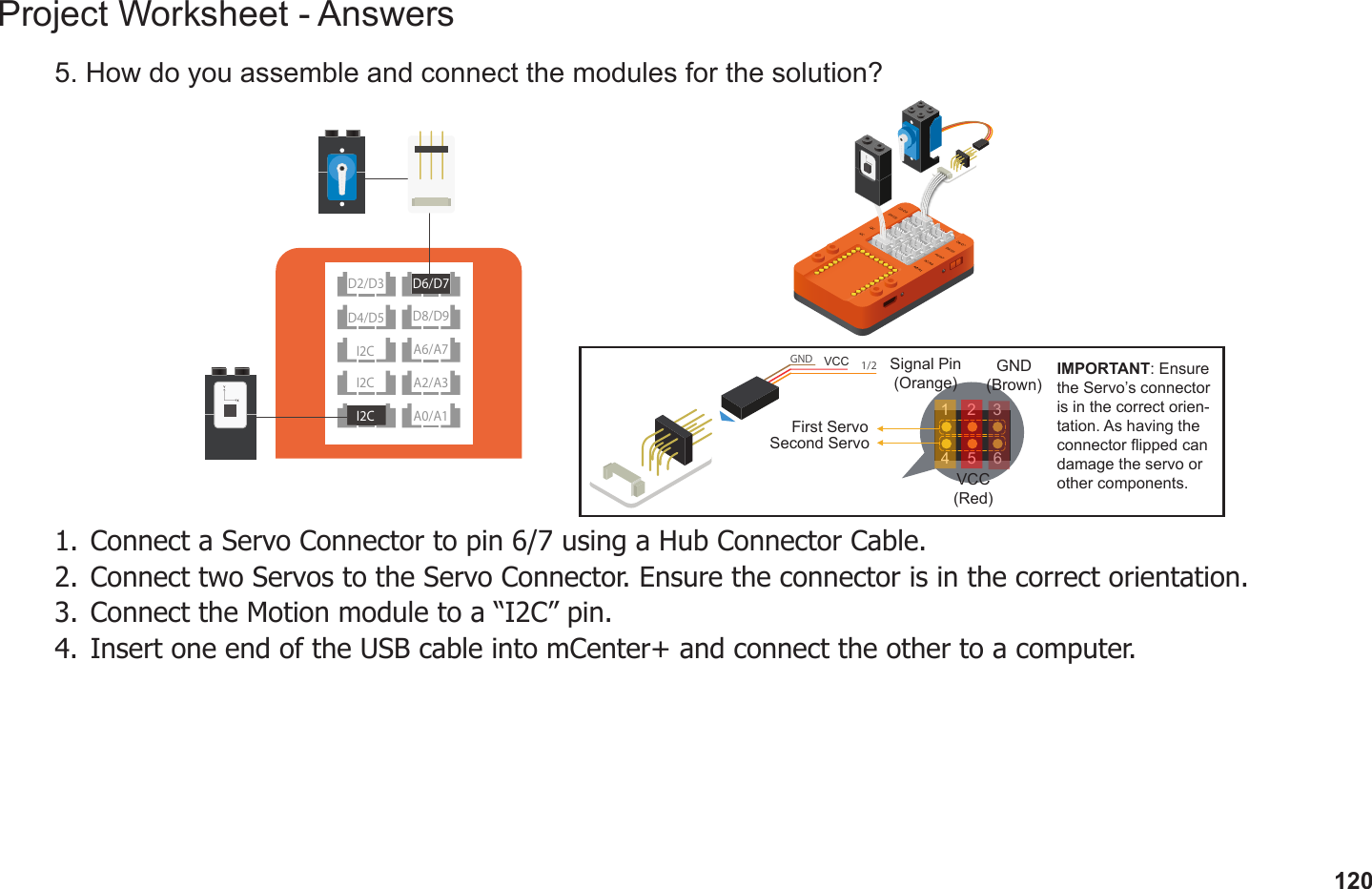
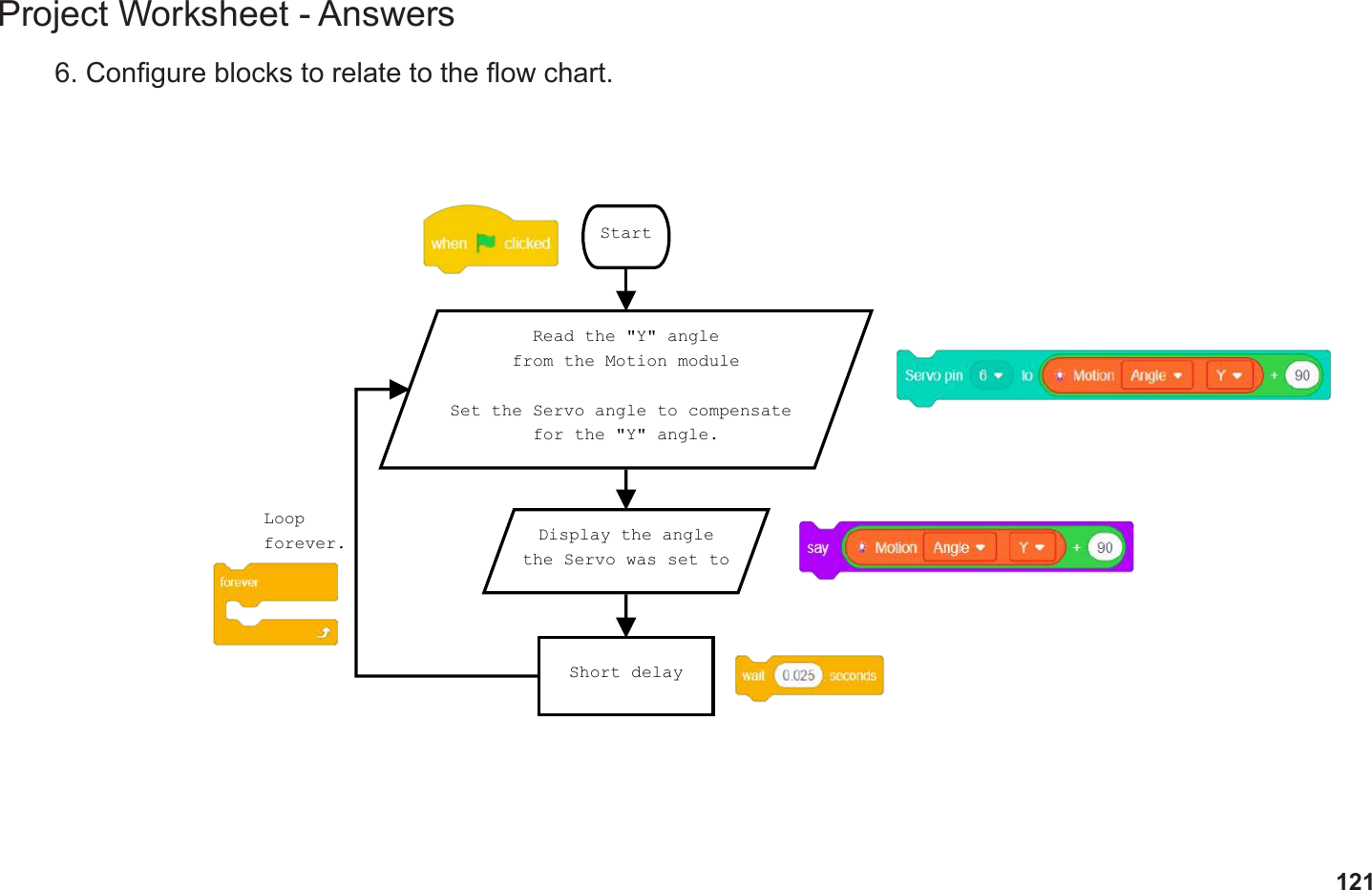
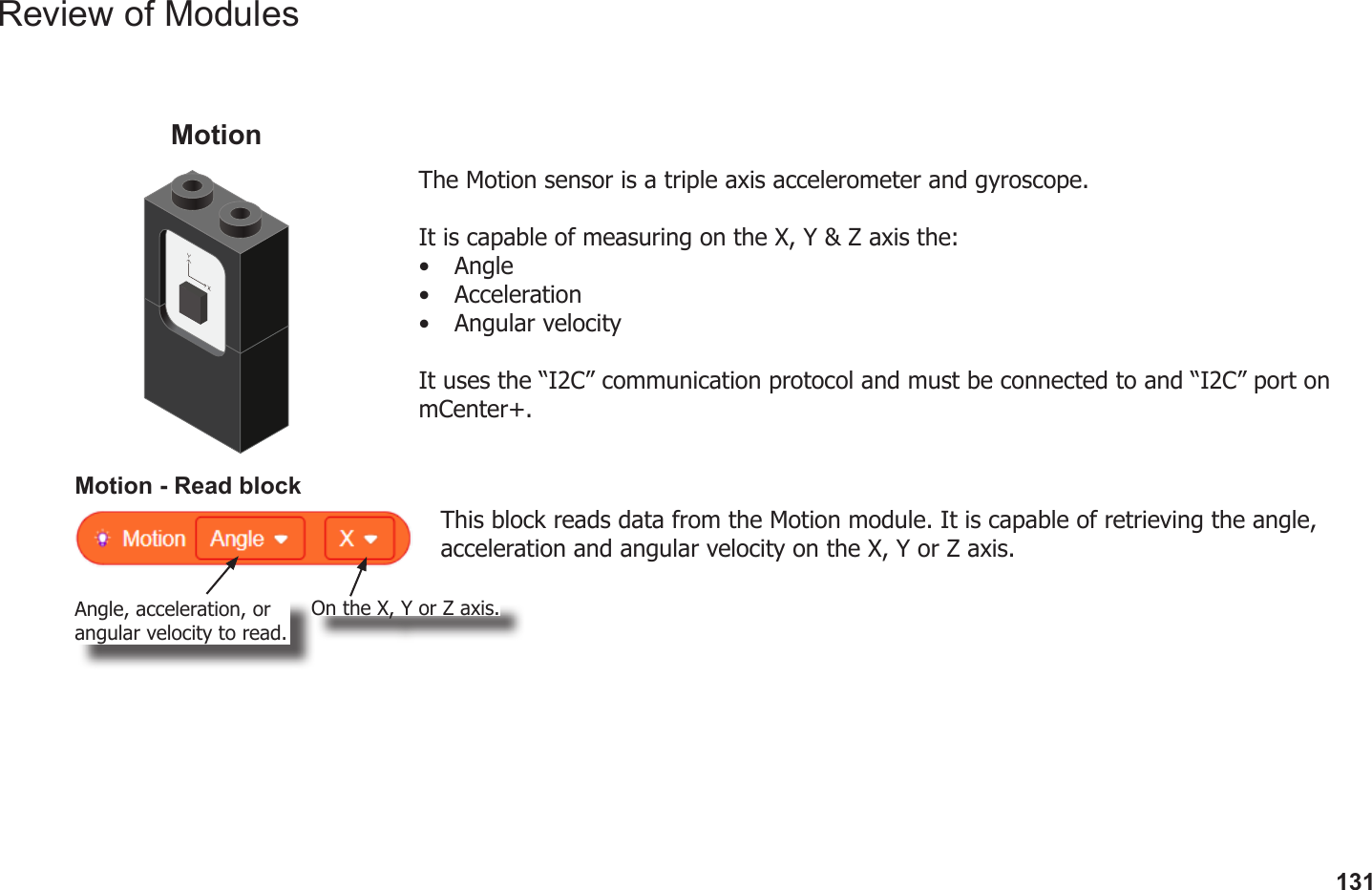
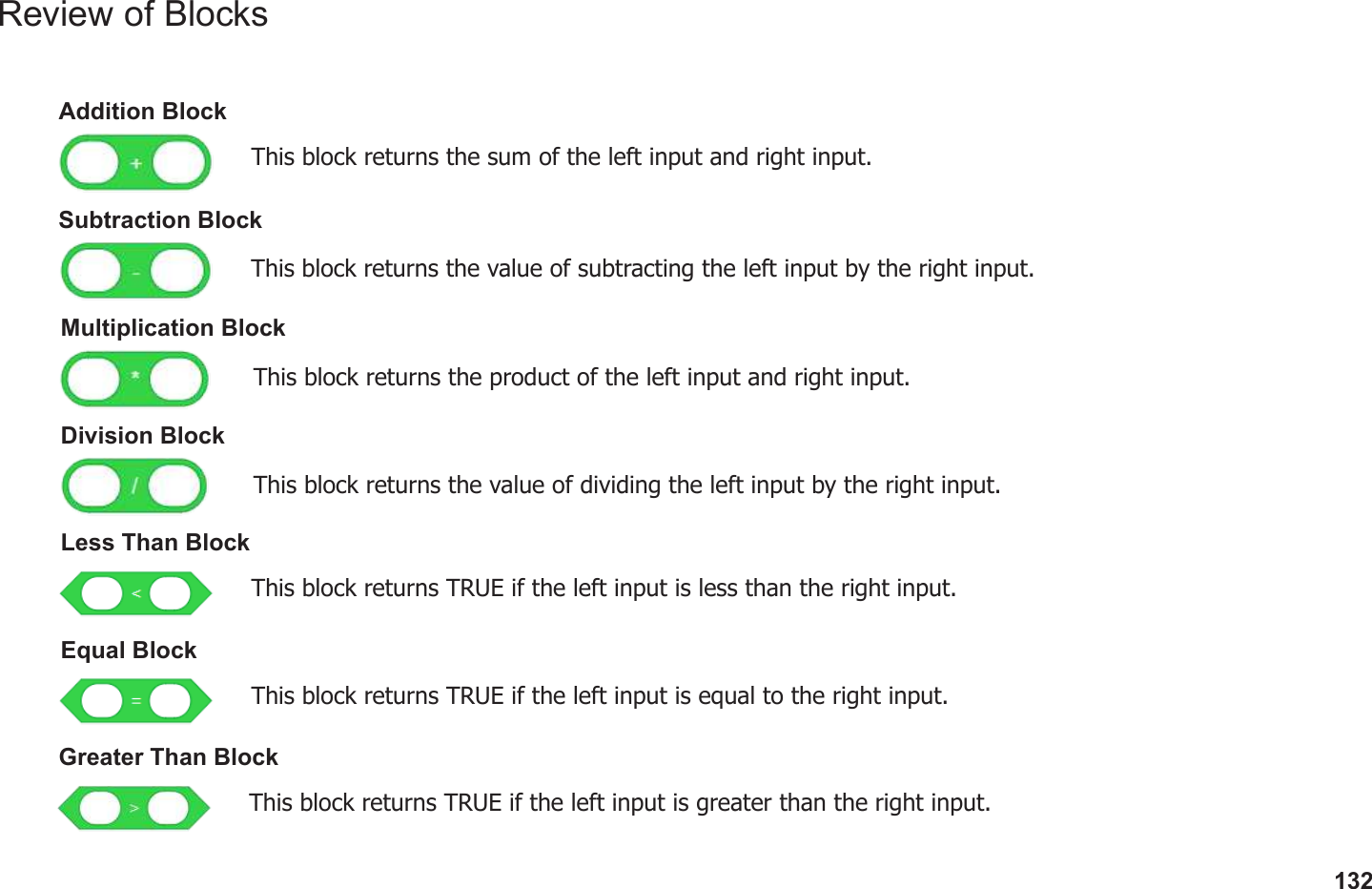
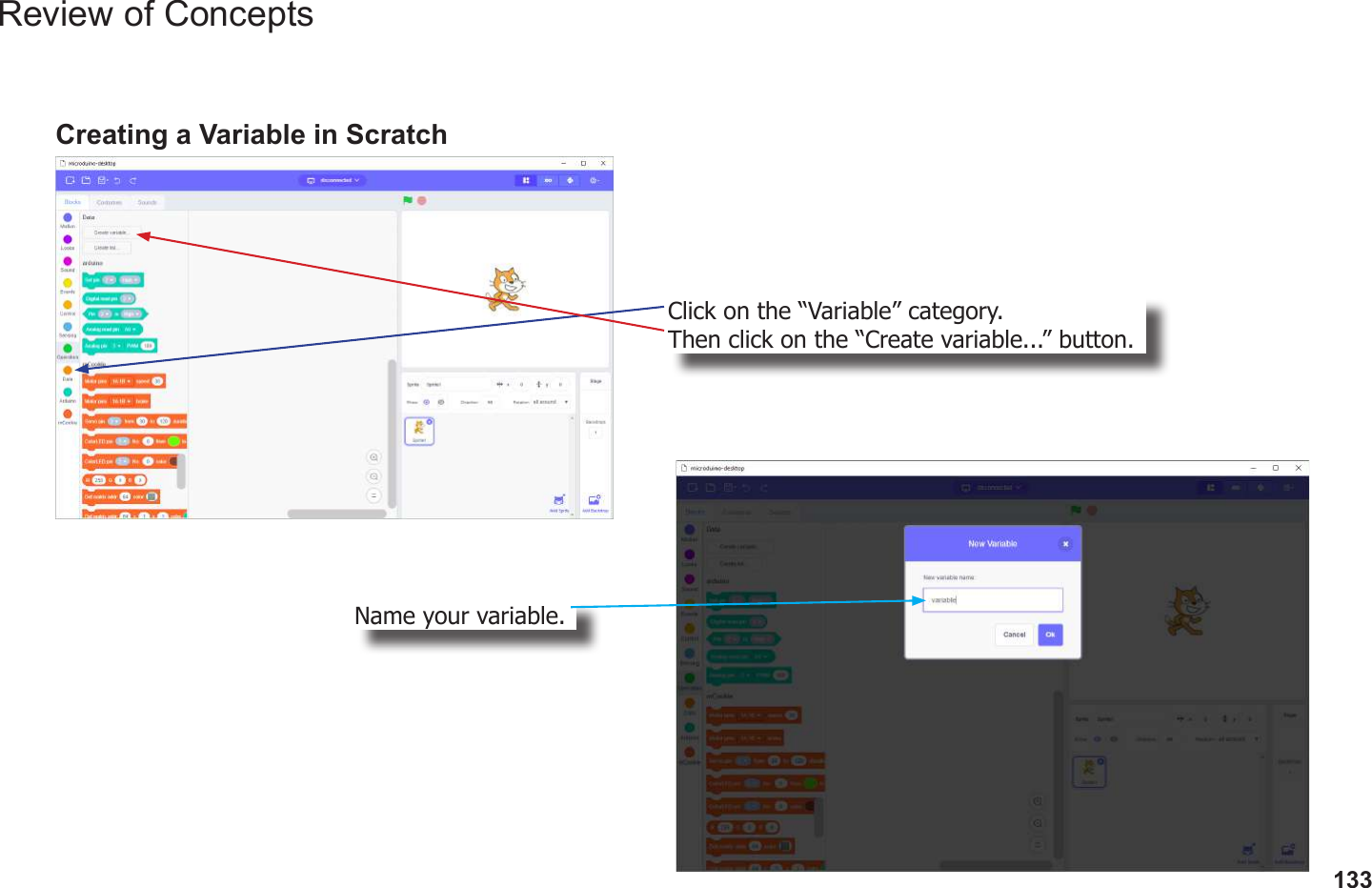
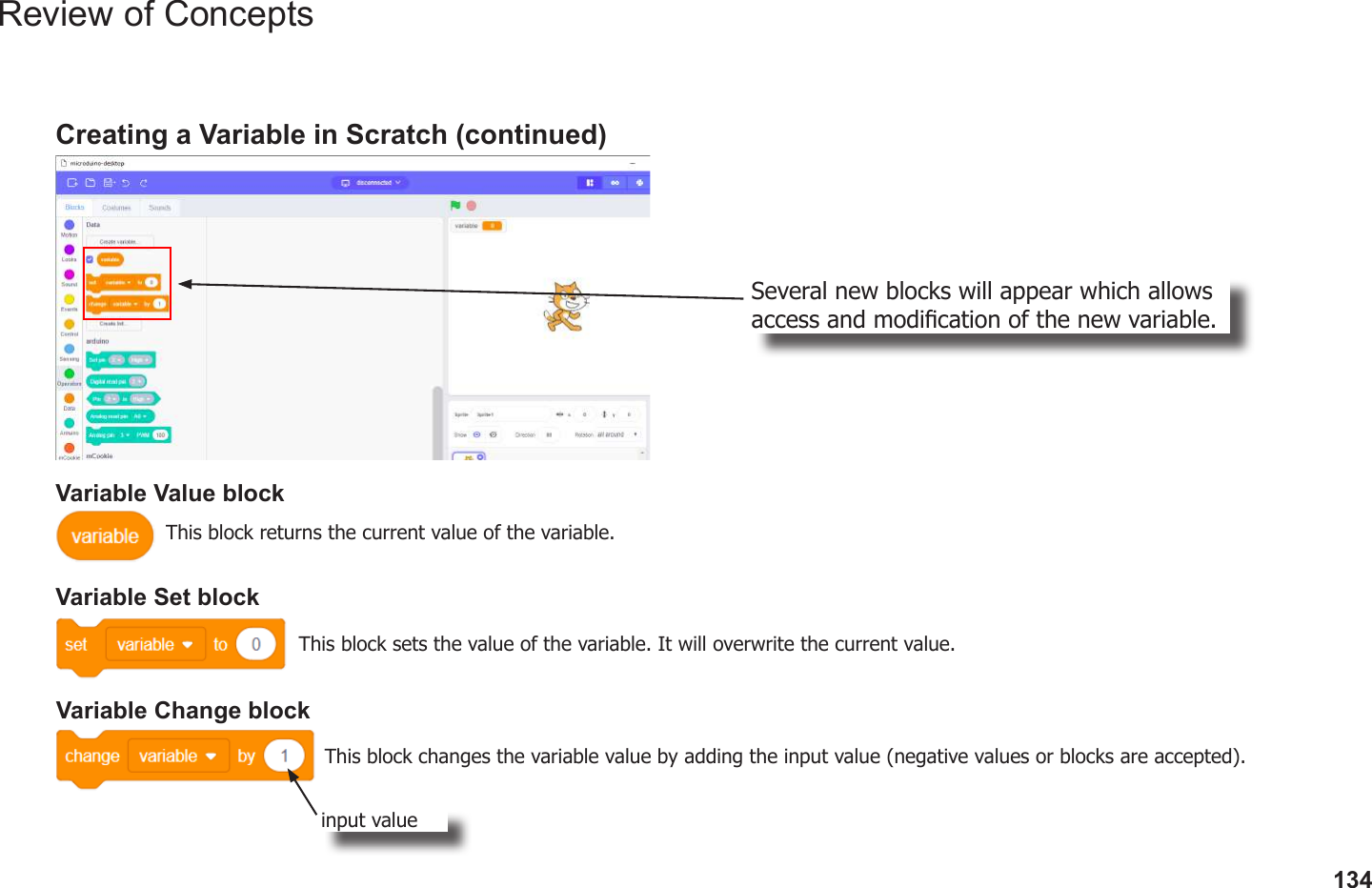
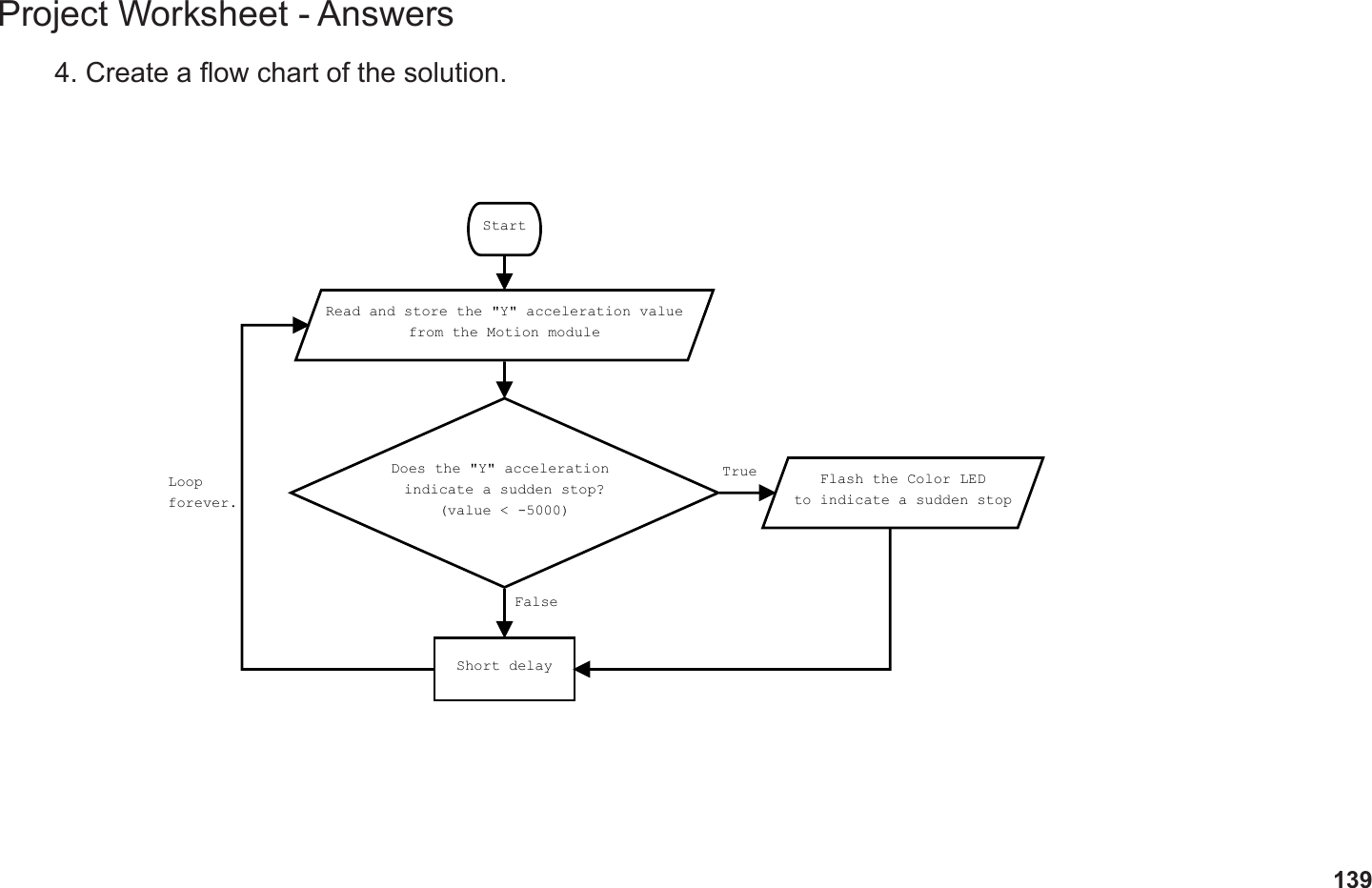
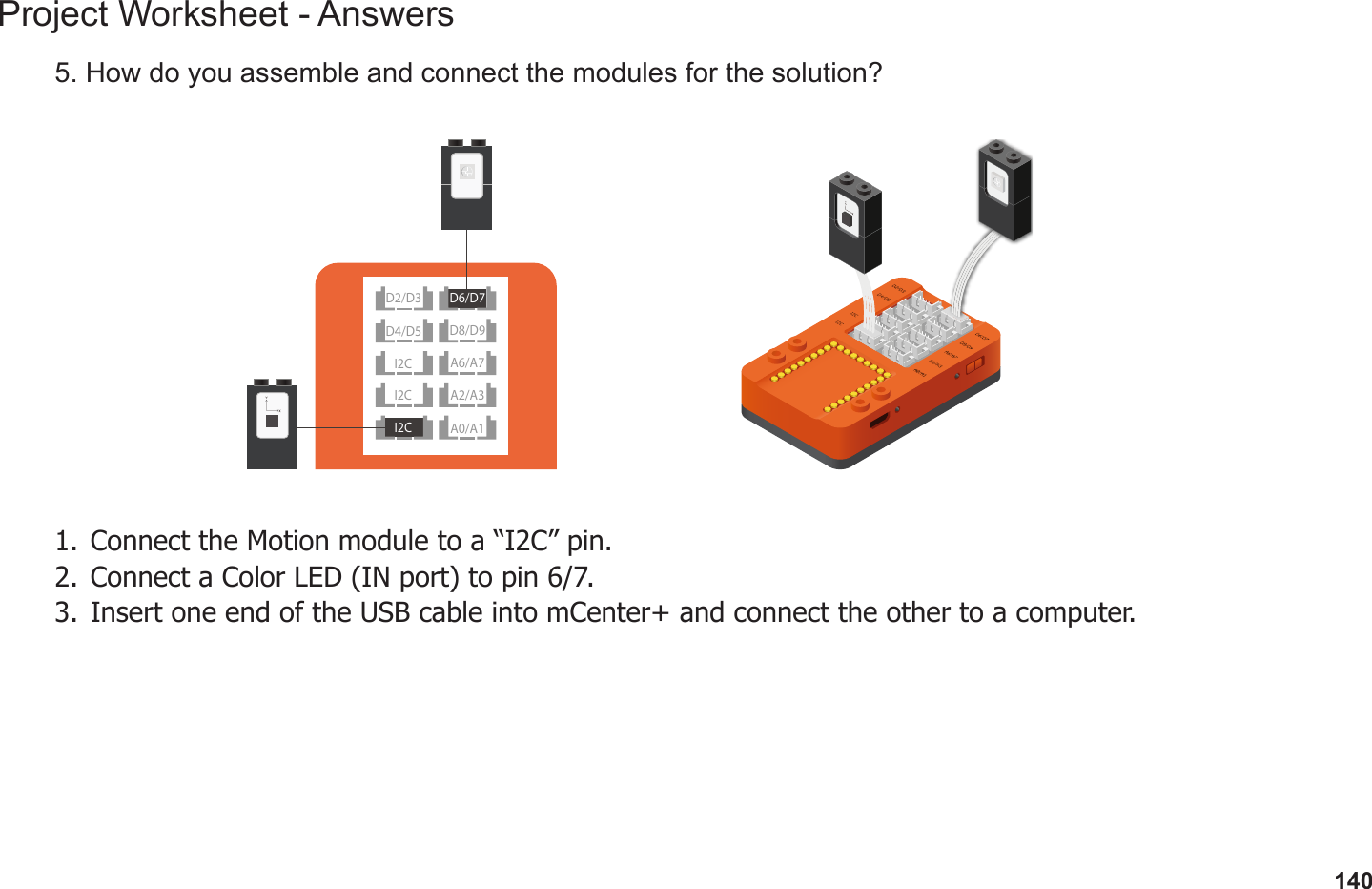
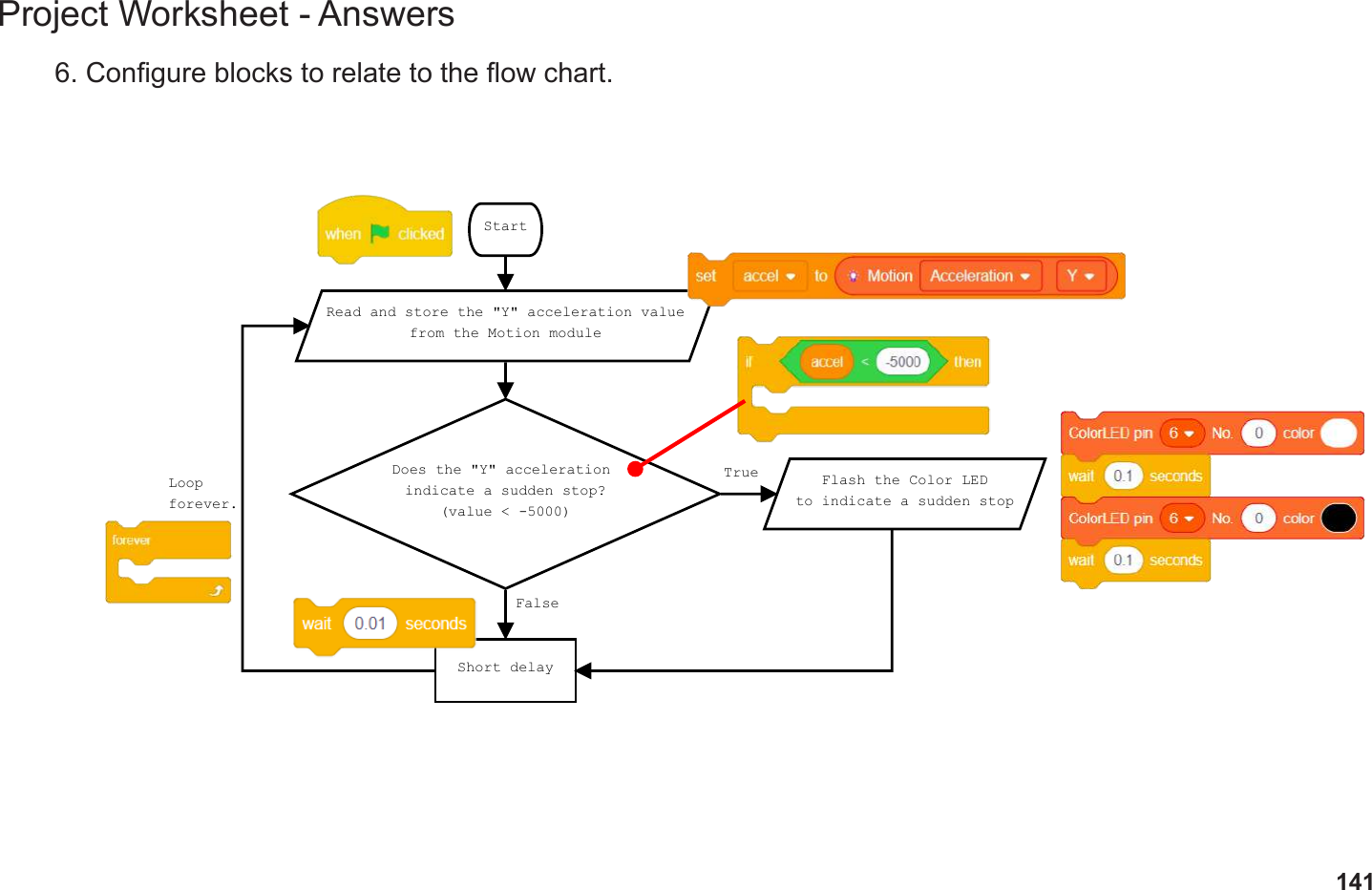
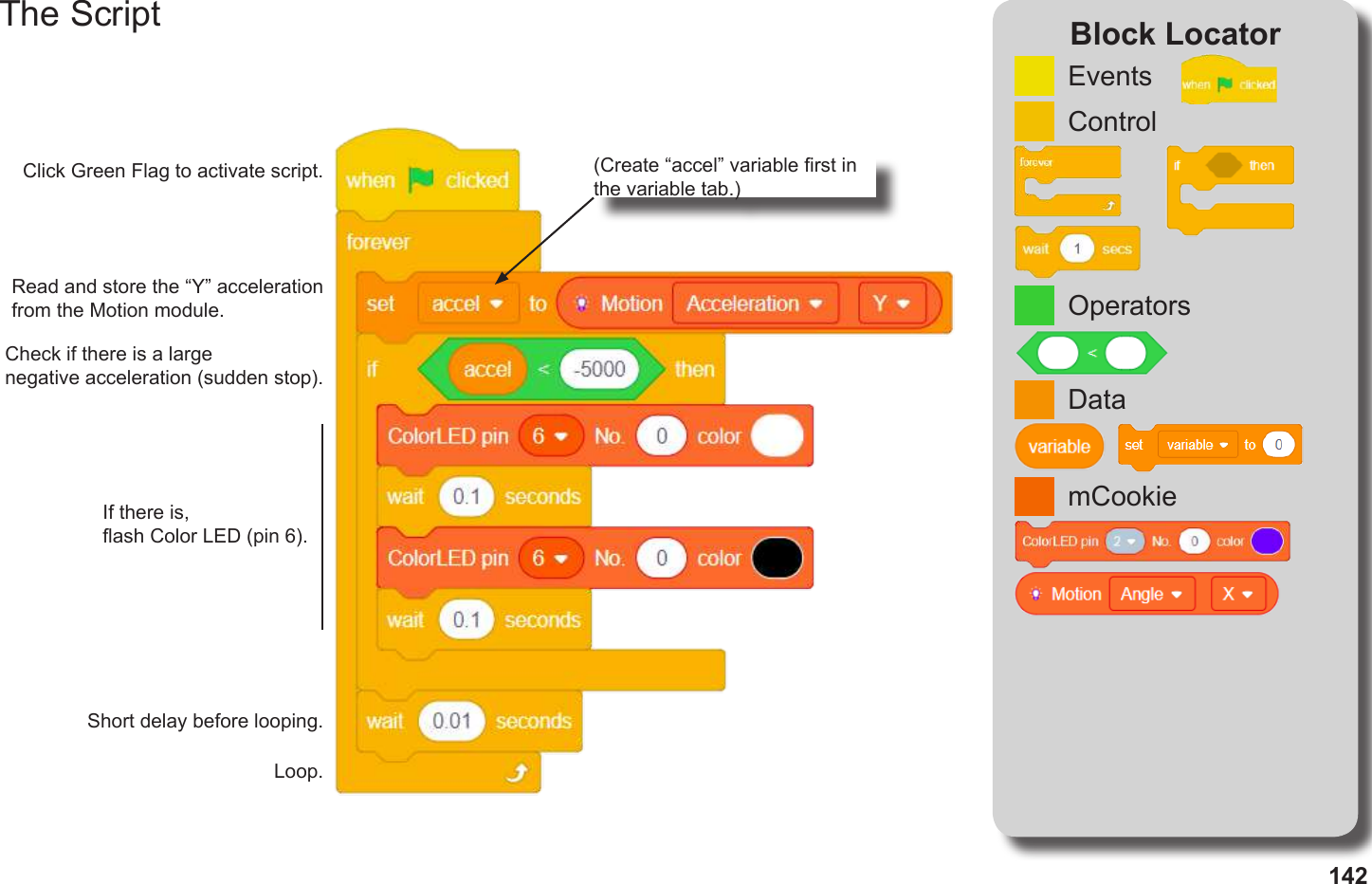
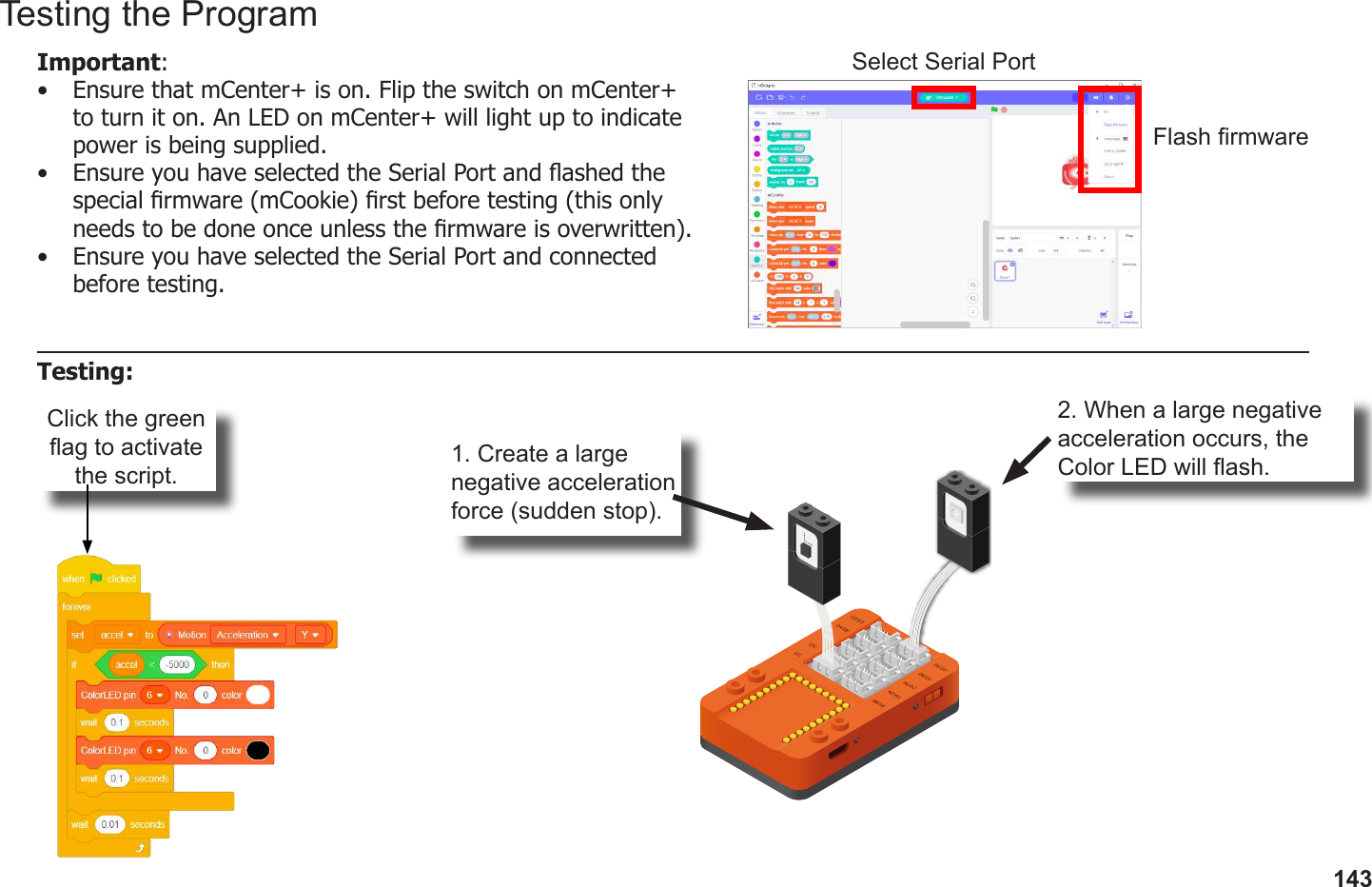
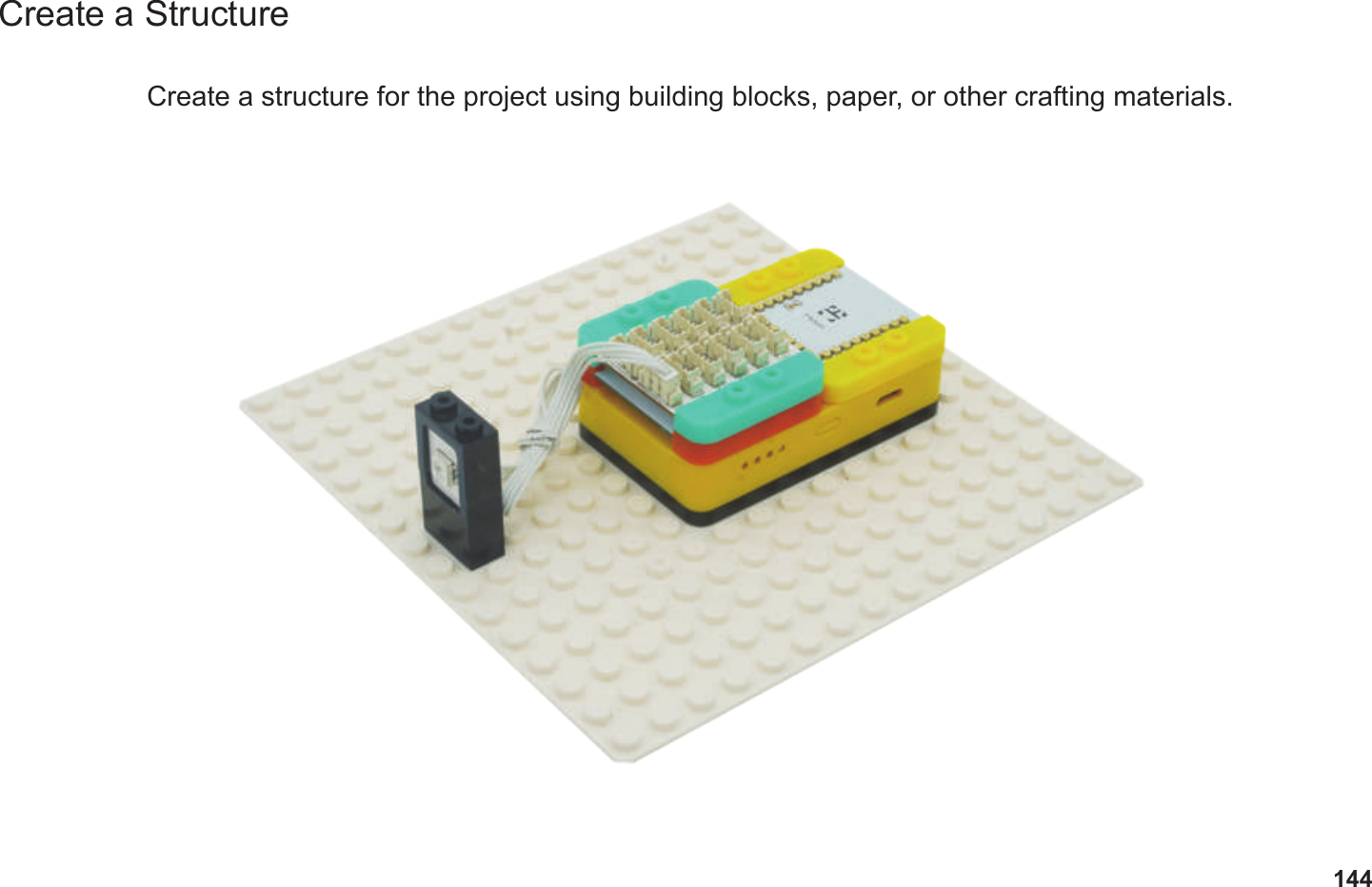
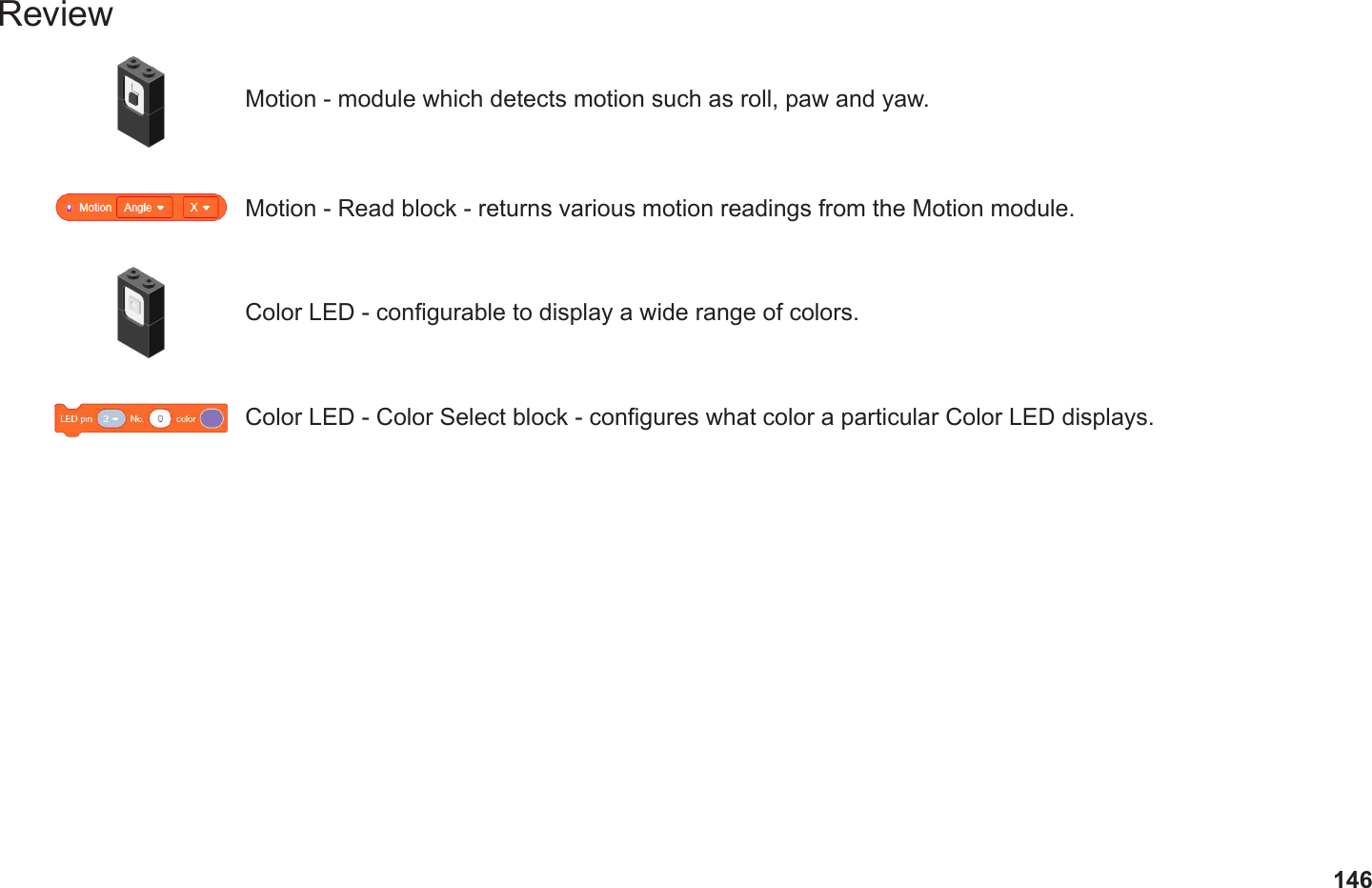
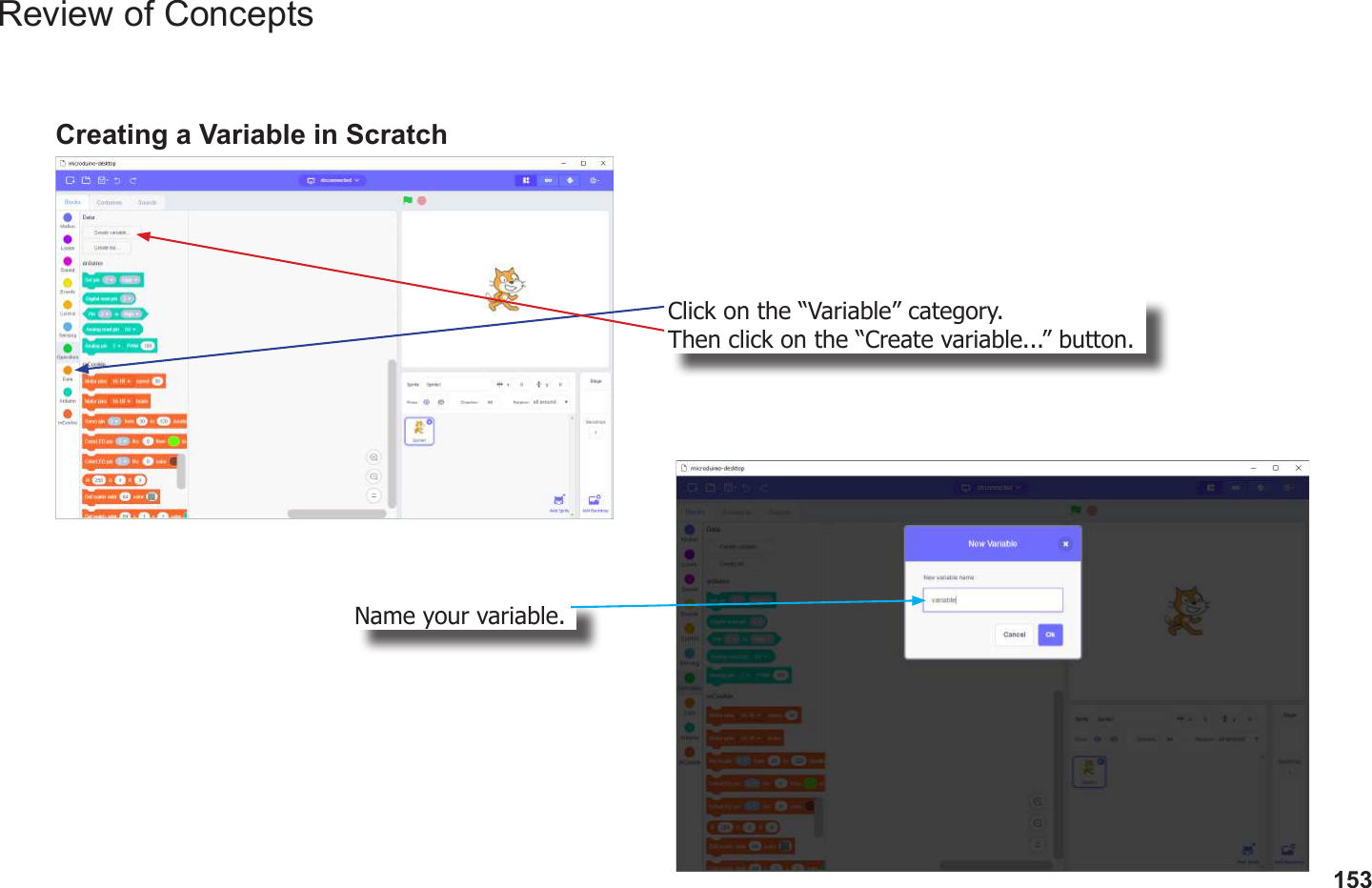
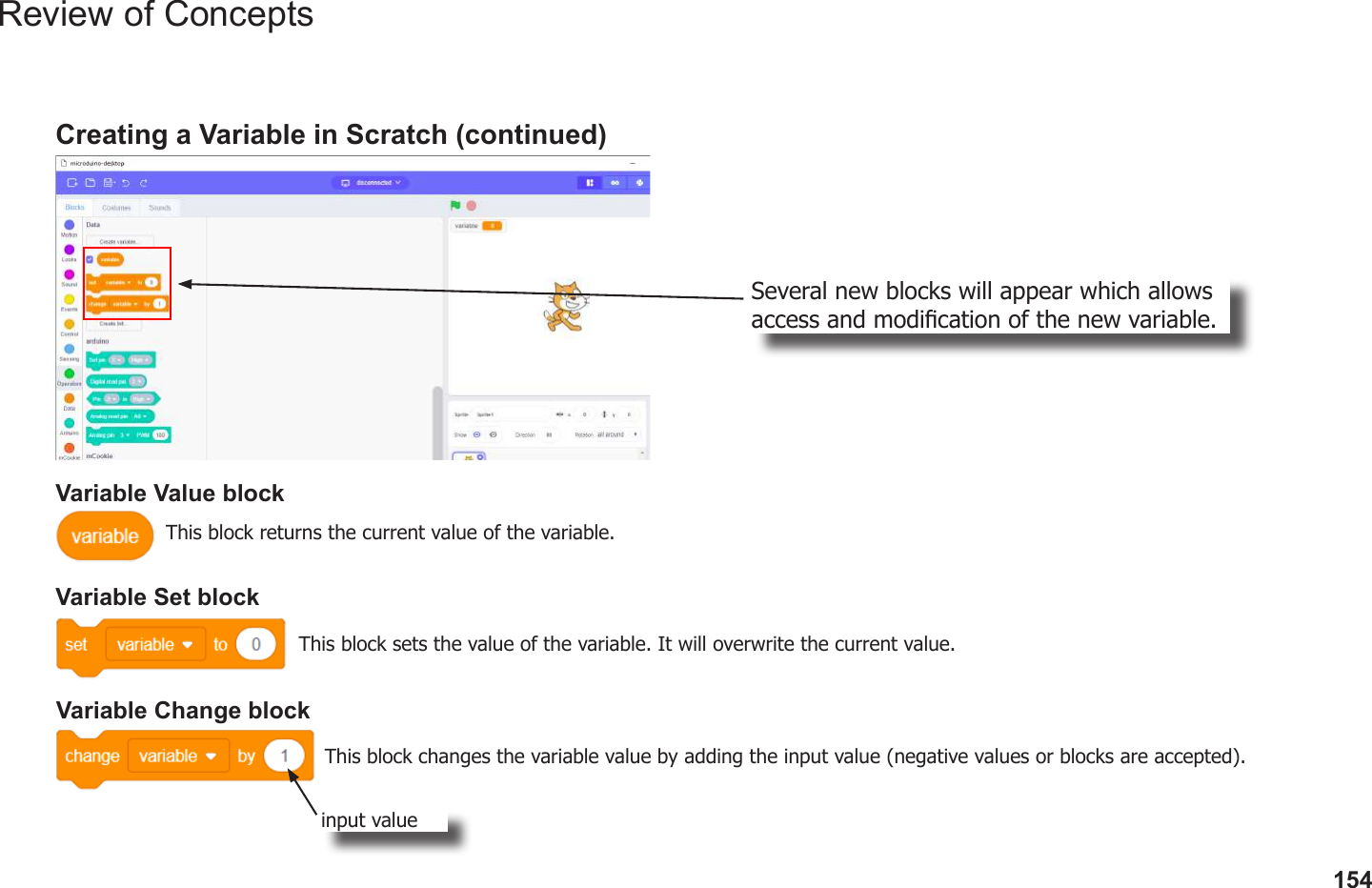
User Manual Part 1
2.
User manual Part 2
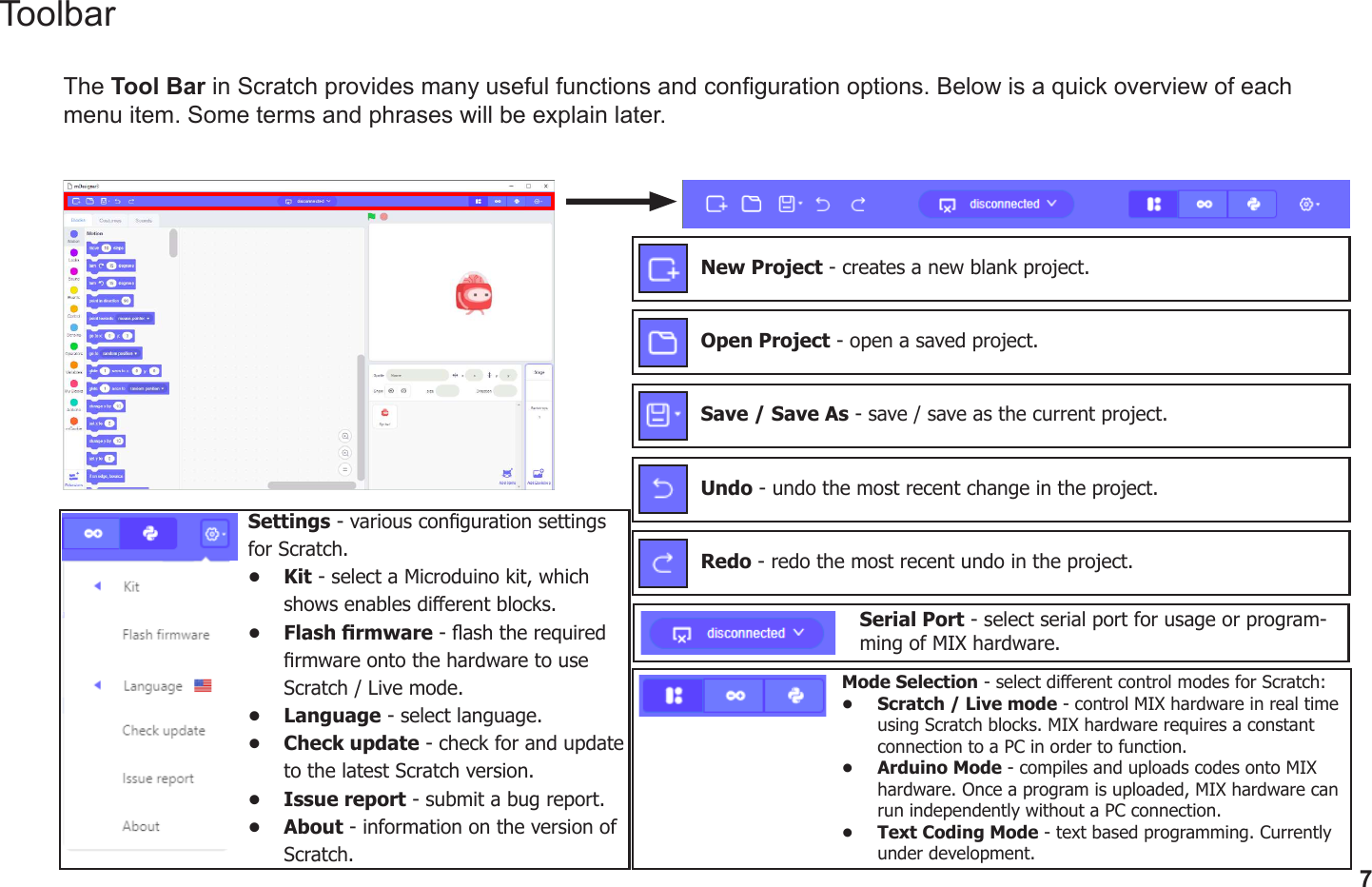
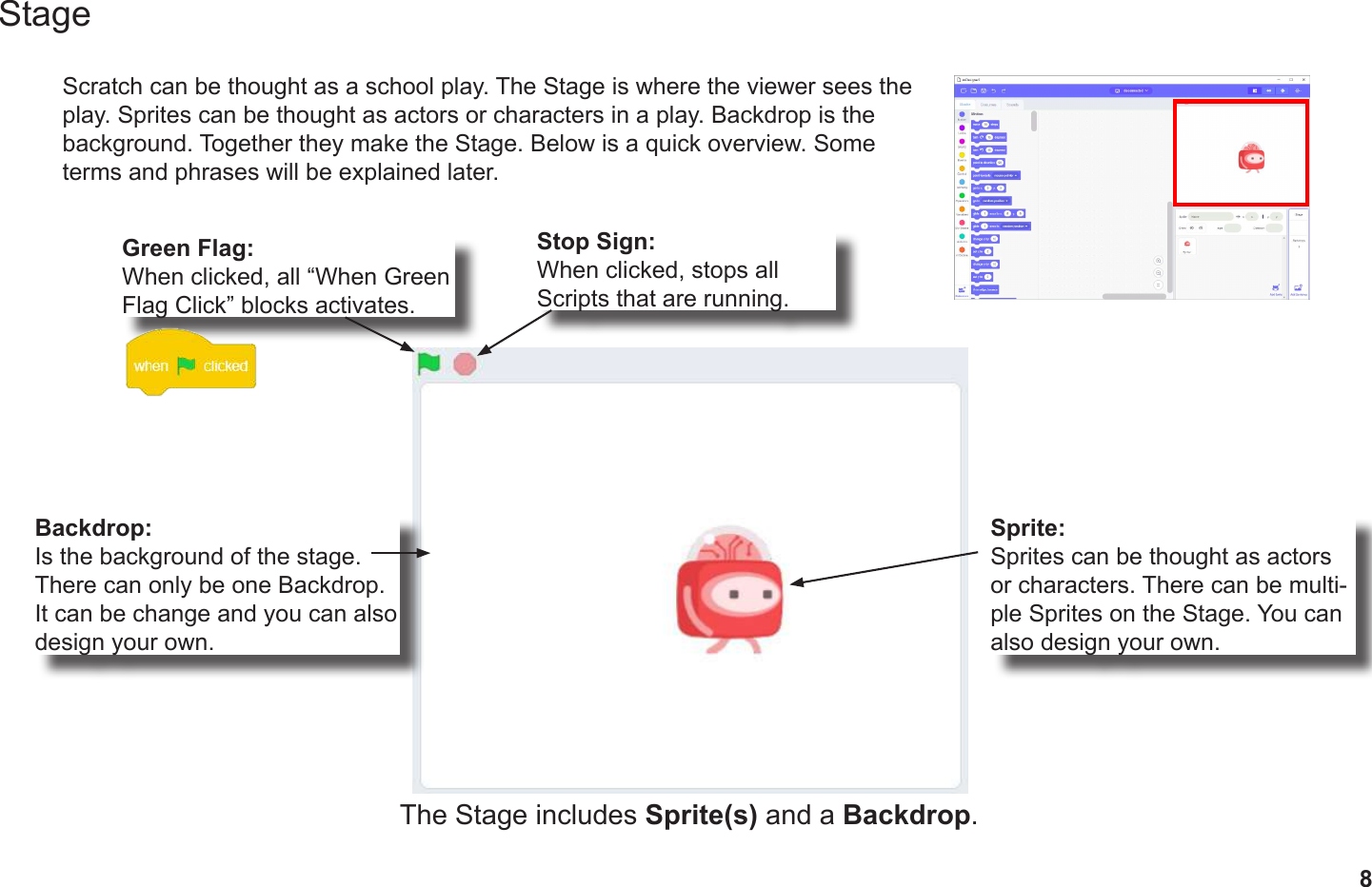
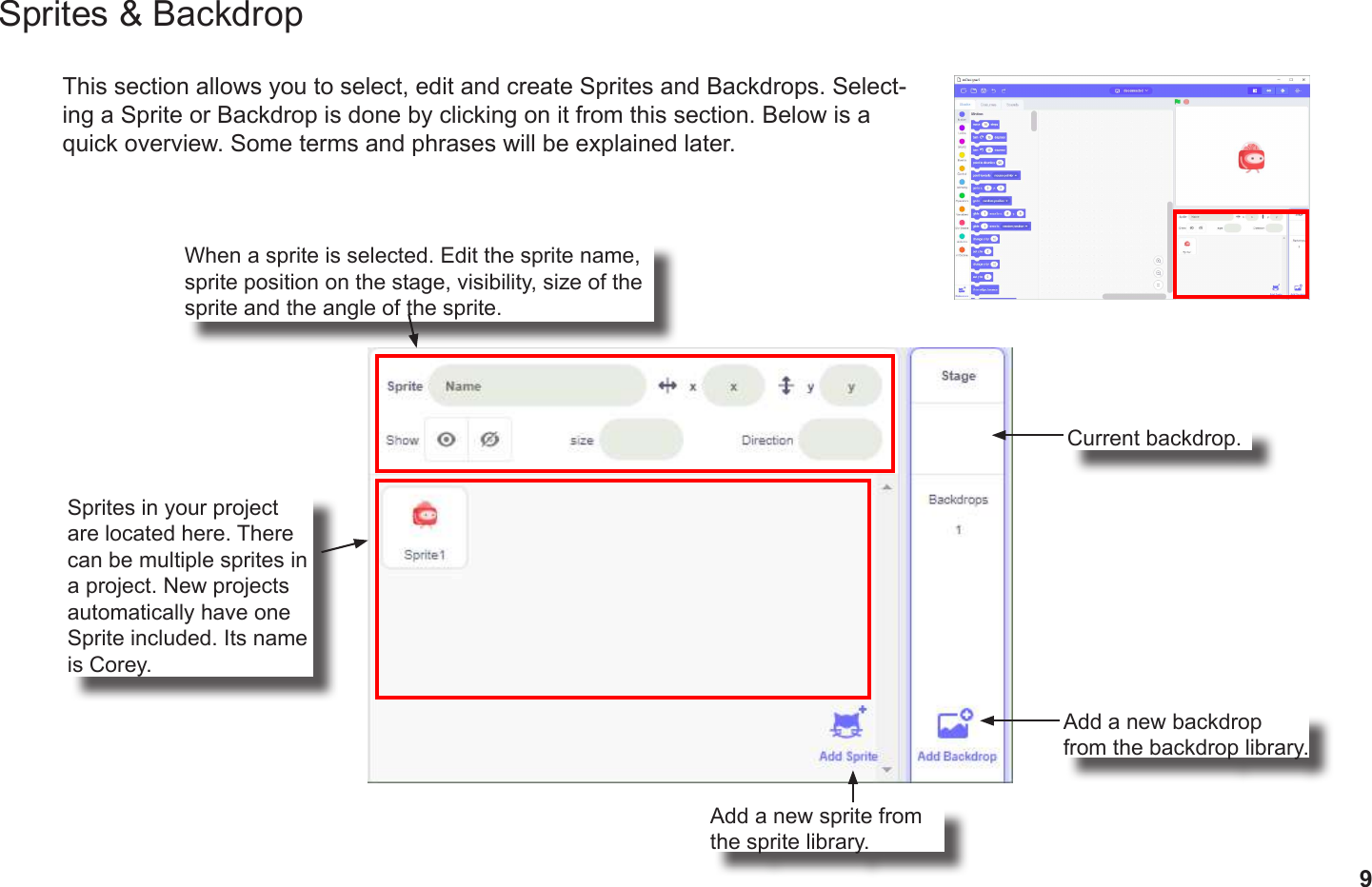
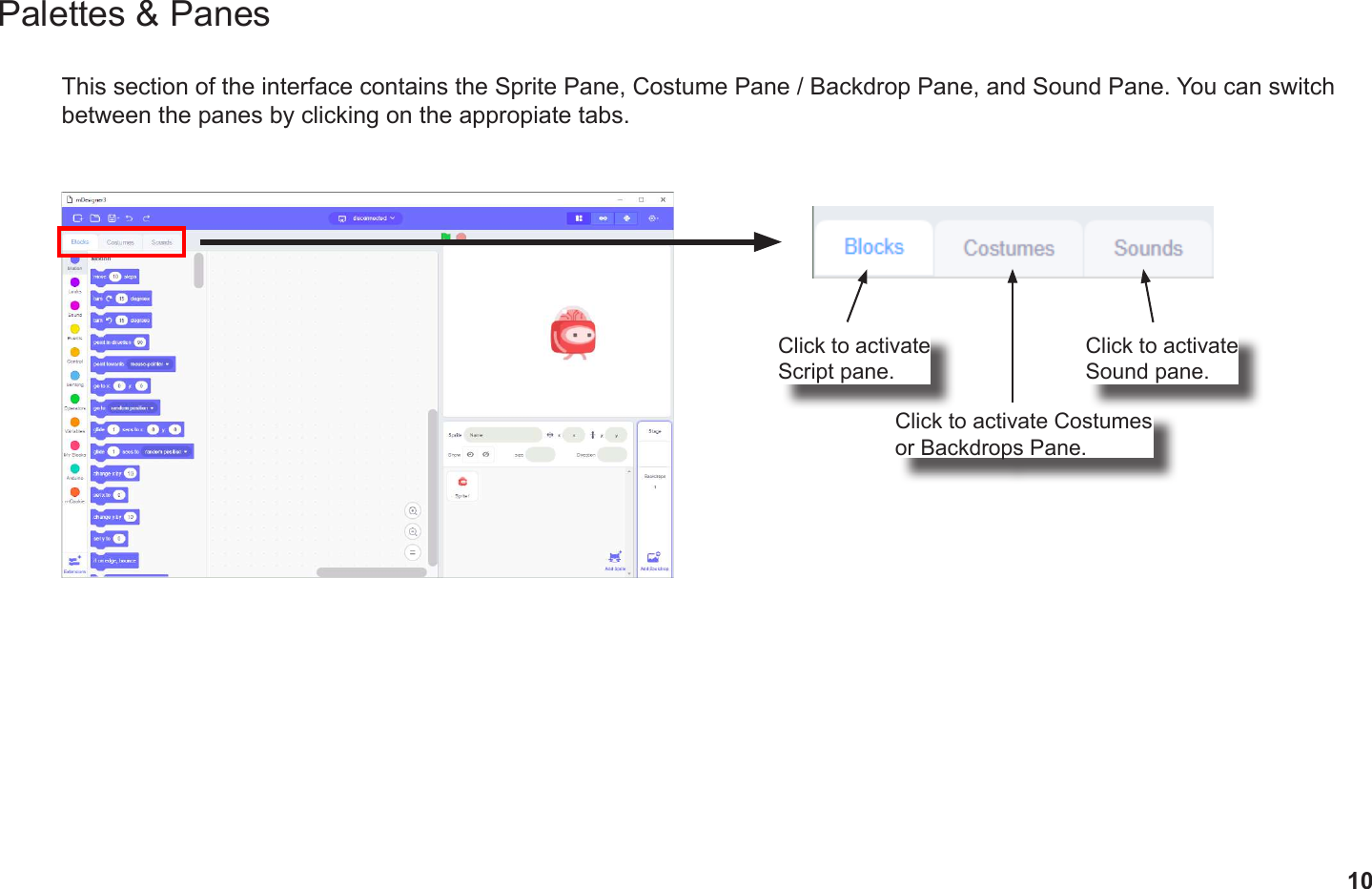
User Manual Part 1
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
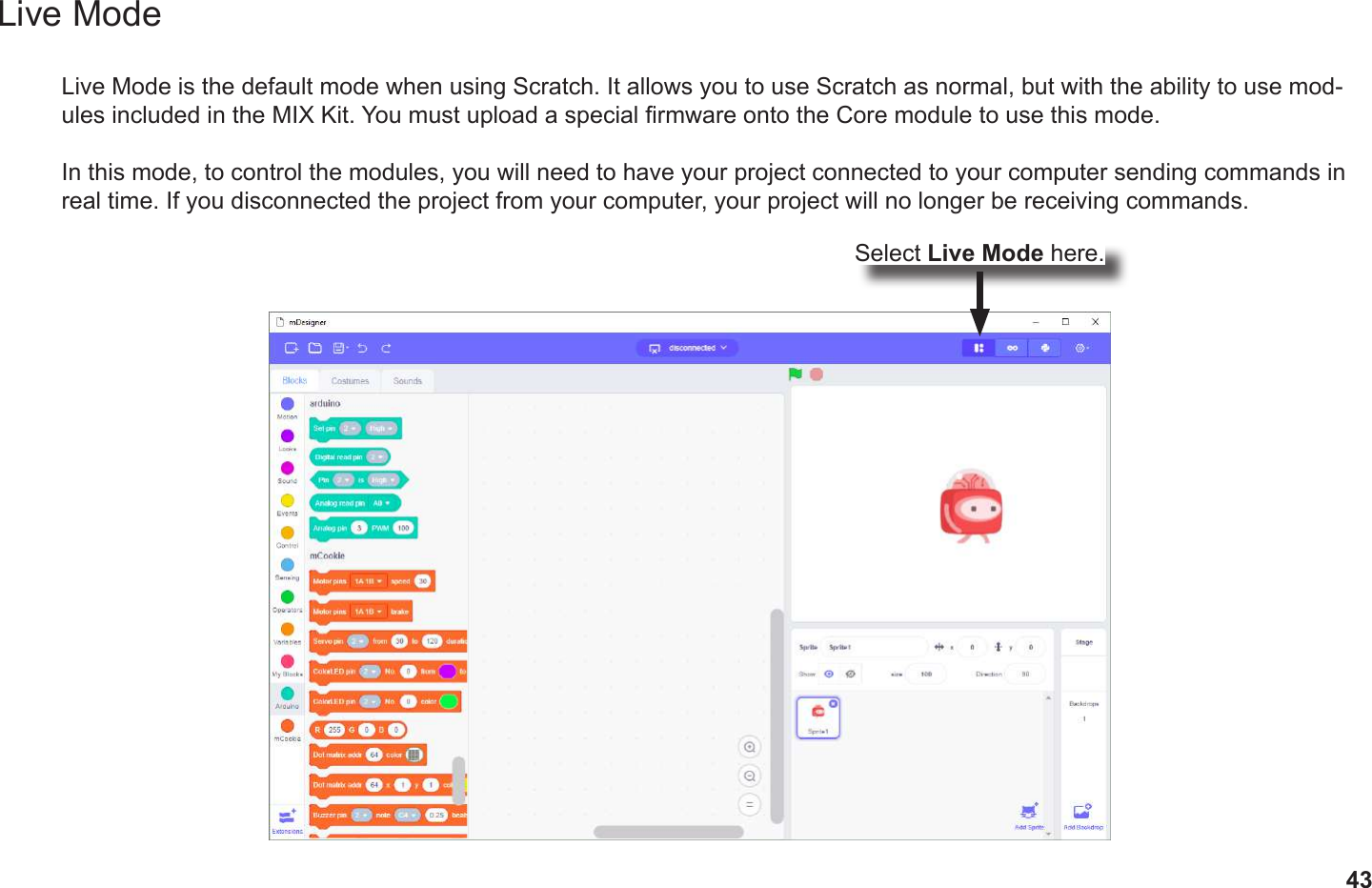
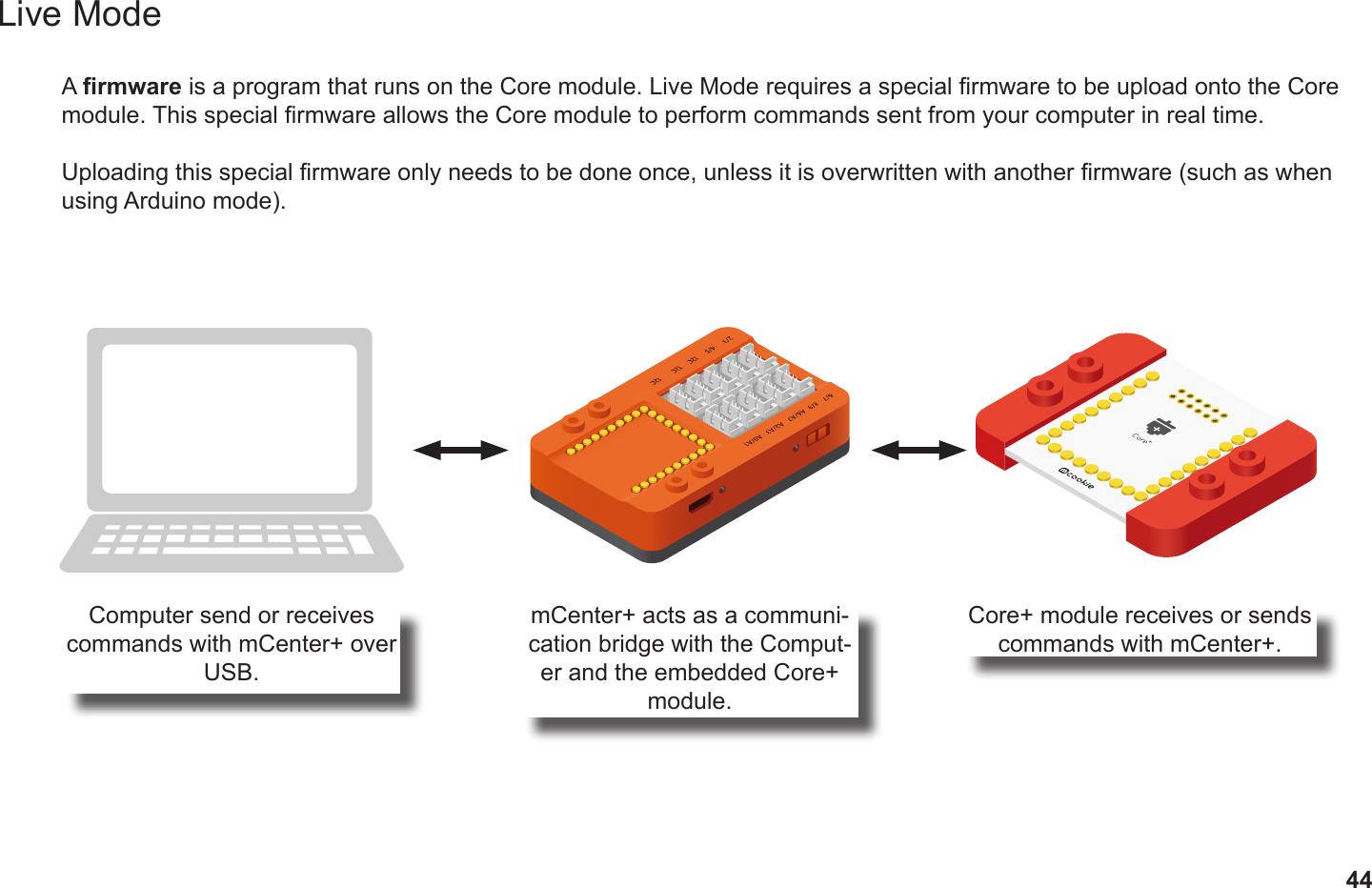
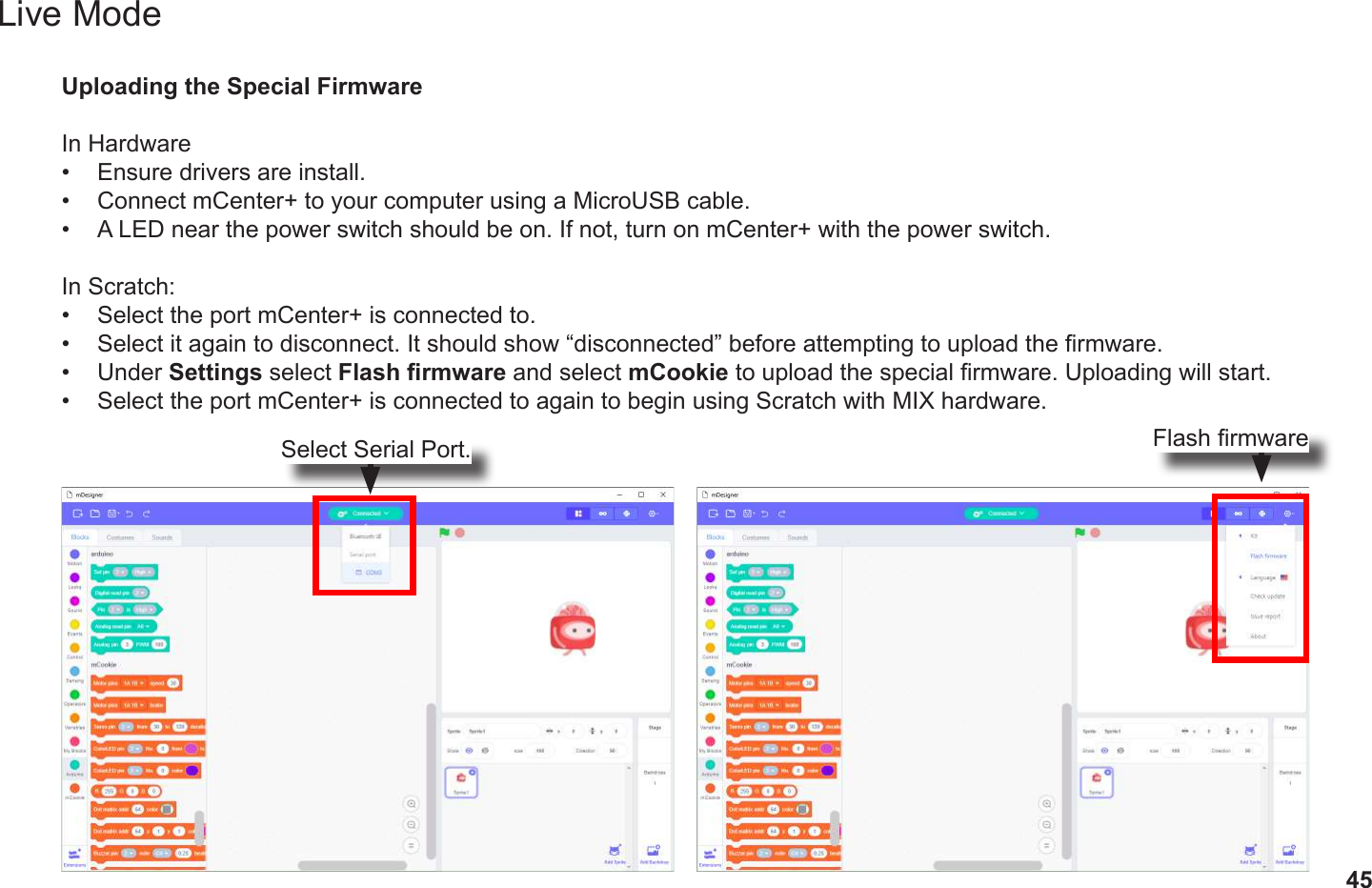
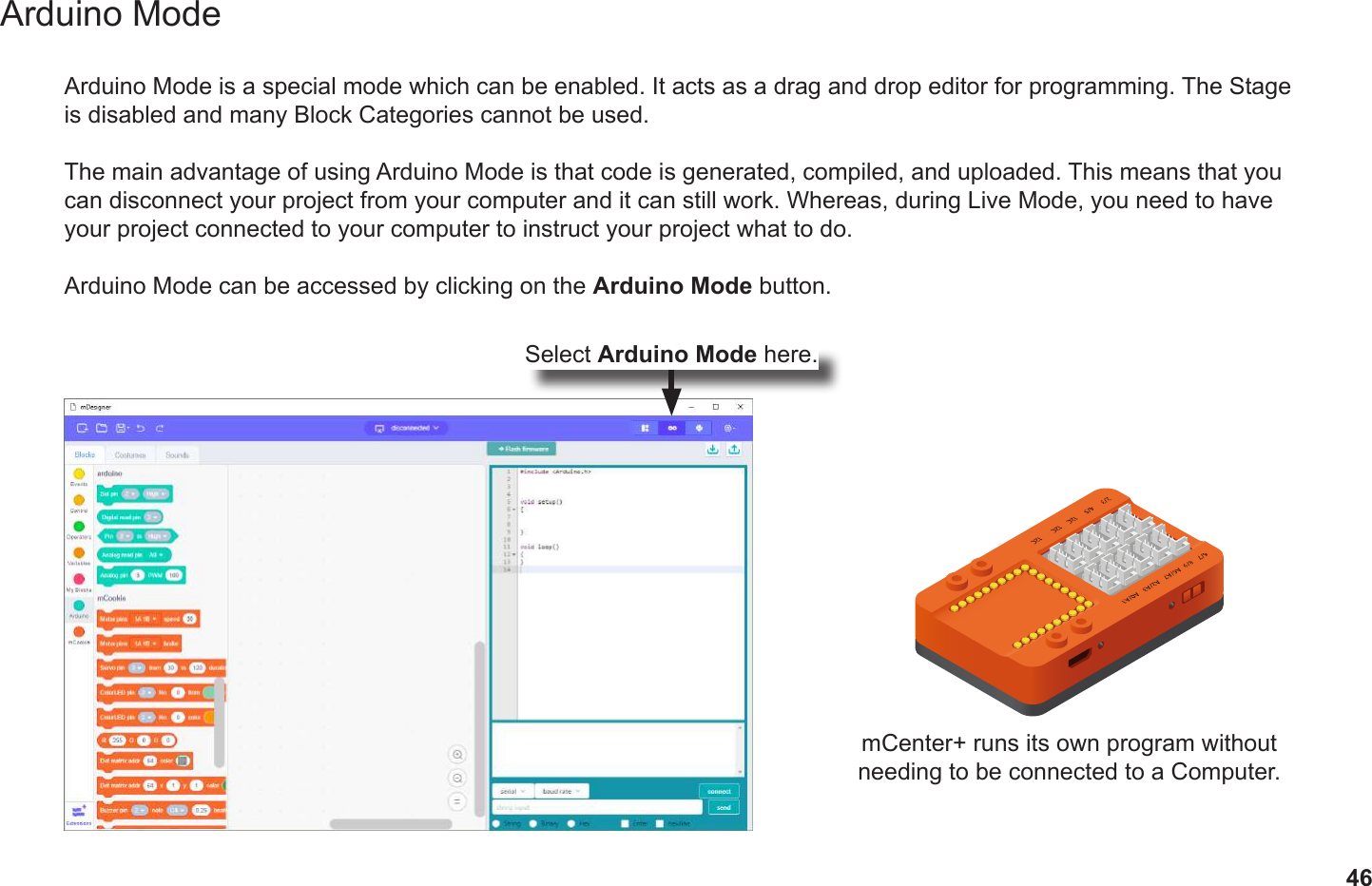
User Manual
Discussion / Help
Navigation