Microhard Systems 00P4 2.4 GHz Spread Spectrum OEM Module User Manual MHX2400MANUA
Microhard Systems Inc 2.4 GHz Spread Spectrum OEM Module MHX2400MANUA
Contents
- 1. manual
- 2. Manual Rev
Manual Rev
iv MHX-910 Operating Manual
Operating Manual
MHX-2400
2.4 GHz Spread Spectrum OEM Transceiver
Revision 1.20, January 31, 2001
Microhard Systems Inc.
#110, 1144 - 29th Ave. N.E.
Calgary, Alberta T2E 7P1
Phone: (403) 248-0028
Fax: (403) 248-2762
www.microhardcorp.com
iii MHX-910 Operating Manual
MHX-2400
2.4 GHz
Spread-Spectrum
Embedded Modem
WARNING
In order to comply with the FCC/IC
adopted RF exposure requirements, this
transmitter system will be installed by the
manufacturer's reseller professional.
Installation of all antennas must be
performed in a manner that will provide at
least 20 cm clearance from the front
radiating aperture, to any user or member
of the public.
This manual contains information of proprietary interest to
Microhard Systems Inc. It has been supplied in confidence to
purchasers and users of the MHX-2400, and by accepting this
material the recipient agrees that the contents will not be copied
or reproduced, in whole or in part, without prior written consent
of Microhard Systems Inc.
Microhard Systems Inc. has made every effort to assure that this
document is accurate and complete. However, the company
reserves the right to make changes or enhancements to the
manual and/or the product described herein at any time and
without notice. Furthermore, Microhard Systems Inc. assumes
no liability resulting from any omissions in this document, or
out of the application or use of the device described herein.
Microhard Systems’ products are appropriate for home, office,
or industrial use, but are not authorized for utilization in
applications where failure could result in damage to property or
human injury or loss of life.
The electronic equipment described in this manual generates,
uses, and radiates radio frequency energy. Operation of this
equipment in a residential area may cause radio interference, in
which case the user, at his own expense, will be required to take
whatever measures necessary to correct the interference.
FCC Declaration of Conformity
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions: (1) this
device may not cause harmful interference, and (2) this
device must accept any interference received including
interference that may caused undesired operation.
Microhard Systems Inc.’s products are warranted against all
failures which occur as a result of defective material or
workmanship within 12 months of purchase by the user. This
warranty does not extend to products that, in the opinion of
Microhard Systems Inc., have been subject to misuse, accidents,
lightning strikes, improper installation or application, nor shall
it extend to units which have, in Microhard Systems Inc.’s
opinion, been opened, tampered with or repaired by an
unauthorized facility.
Microhard Systems Inc.
Leaders in Wireless Telecom
#110, 1144 - 29th Ave. N.E.
Calgary, Alberta T2E 7P1
Phone: (403) 248-0028
Fax: (403) 248-2762
www.microhardcorp.com
© 2001 by Microhard Systems Inc., All Rights Reserved.
HyperTerminal is copyrighted by Hilgraeve Inc, and developed for Microsoft.
Microsoft and Windows are registered trademarks of Microsoft Corporation.
pcANYWHERE and Symantec are registered trademarks of Symantec Corp.
All other products mentioned in this document are trademarks or registered
trademarks of their respective holders.
Manual Revision 1.20, January 31, 2001.

iv MHX-910 Operating Manual
Contents
1. Introduction
1.0 Product Overview .............................................................................................................................................................................. 1
1.1 Features.............................................................................................................................................................................................. 1
1.2 About this Manual ............................................................................................................................................................................. 2
2. Electrical/Physical
2.0 Functional Block Diagram................................................................................................................................................................. 3
2.1 Pinout................................................................................................................................................................................................. 4
2.2 LED Operation................................................................................................................................................................................... 6
2.3 DC Characteristics............................................................................................................................................................................. 8
2.4 AC Characteristics.............................................................................................................................................................................. 9
3. Modes of Operation ..................................................................................................................................................................................... 11
3.1 Data Mode ........................................................................................................................................................................................ 11
3.2 Command Mode ............................................................................................................................................................................... 12
3.2.1 AT Command Interface ....................................................................................................................................................... 13
3.3 Switching Between Command and Data Modes............................................................................................................................... 13
4. Configuration
4.1 Quick Start Approach ...................................................................................................................................................................... 15
4.2 AT Commands................................................................................................................................................................................. 16
A - Answer........................................................................................................................................................................................ 17
E - Command Echo.......................................................................................................................................................................... 17
I - Identification ............................................................................................................................................................................... 17
O - Online Mode.............................................................................................................................................................................. 17
Q - Quiet Mode................................................................................................................................................................................ 17
V - Result Codes Display................................................................................................................................................................. 17
W - Connection Result..................................................................................................................................................................... 18
Z - Reset Modem and load stored configuration.............................................................................................................................. 18
&C - DCD (Data Carrier Detect) ..................................................................................................................................................... 18
&D - DTR (Data Terminal Ready)................................................................................................................................................... 18
&F - Load Factory default configuration ......................................................................................................................................... 18
&K - Handshaking............................................................................................................................................................................ 18
&S - DSR (Data Set Ready)............................................................................................................................................................. 19
&V - View Configuration ................................................................................................................................................................. 19
&E - Framing Error Check................................................................................................................................................................ 19
&W - Write Configuration to memory............................................................................................................................................. 19
Sxxx? - Read S register value........................................................................................................................................................... 19
Sxxx=yyy - Set S register value ....................................................................................................................................................... 19
Command Result Codes................................................................................................................................................................... 20
4.3 S Registers ....................................................................................................................................................................................... 21
S Register 2 - Escape Code............................................................................................................................................................... 21
S Register 3 - CR Control Code....................................................................................................................................................... 21
S Register 4 - Linefeed Control Code .............................................................................................................................................. 21
S Register 5 - Backspace Control Code ........................................................................................................................................... 21
S Register 101 - Operating Mode..................................................................................................................................................... 22
S Register 102 - Serial Baud Rate.................................................................................................................................................... 24
S Register 103 - Wireless Link Rate ................................................................................................................................................ 24
S Register 104 - Network Address................................................................................................................................................... 25
S Register 105 - Unit Address.......................................................................................................................................................... 25
S Register 106 - Primary Hopping Pattern....................................................................................................................................... 25
S Register 206 - Secondary Hopping Pattern.................................................................................................................................... 25
S Register 107 - Encryption Key...................................................................................................................................................... 27
S Register 108 - Output Power Level............................................................................................................................................... 27
S Register 109 - Hopping Interval.................................................................................................................................................... 28
S Register 110 - Data Format............................................................................................................................................................ 29
S Register 111 - Packet Minimum Size ............................................................................................................................................ 29
S Register 112 - Packet Maximum Size............................................................................................................................................ 29
S Register 114 - Packet Size Control ................................................................................................................................................ 29
S Register 116 - Packet Character Timeout ...................................................................................................................................... 29
S Register 113 - Packet Retransmissions.......................................................................................................................................... 30
S Register 213 - Packet Retry Limit.................................................................................................................................................. 31
S Register 115 - Packet Repeat Interval........................................................................................................................................... 31
S Register 117 - Modbus Mode ........................................................................................................................................................ 32
S Register 118 - Roaming................................................................................................................................................................. 33
S Register 119 - Quick Enter to Command....................................................................................................................................... 33

iii MHX-910 Operating Manual
S Register 120 - RTS/DCD Framing................................................................................................................................................. 33
S Register 121 - DCD Timeout......................................................................................................................................................... 33
S Register 122 - Remote Control ...................................................................................................................................................... 34
S Register 123 - RSSI Reading......................................................................................................................................................... 34
4.4 Diagnostics, Statistics and Remote Control...................................................................................................................................... 35
4.4.1 Spectrum Analyzer Feature............................................................................................................................................................... 35
4.4.2 Statistics............................................................................................................................................................................................ 35
4.4.3 Remote Control and Diagnostics ...................................................................................................................................................... 36
5. Installation ................................................................................................................................................................................................... 39
5.1 Estimating the Gain Margin.............................................................................................................................................................. 39
5.2 Antennas and Cabling....................................................................................................................................................................... 41
5.2.1 Internal Cabling ................................................................................................................................................................................ 41
5.2.2 Installing External Cables, Antennas and Lightning Arrestors.......................................................................................................... 42
A. Modem Command Summary...................................................................................................................................................................... 45
B. Serial Interface............................................................................................................................................................................................ 47
C. Sample Schematic Diagram........................................................................................................................................................................ 49
D. Factory Default Settings.............................................................................................................................................................................. 51
EPerformance Tables...................................................................................................................................................................................... 53
F. Hopping Tables............................................................................................................................................................................................ 55
G. Technical Specifications............................................................................................................................................................................. 57
H. Glossary ...................................................................................................................................................................................................... 61
IFCC RF Exposure....................................................................................................................................................................................... 63

MHX-2400 Operating Manual: Chapter 1 Introduction. 1
1. Introduction
1.0 Product Overview
The MHX-2400 is a high-performance embedded wireless data transceiver.
Operating in the 2.4000-2.4835 GHz ISM band, this frequency-hopping
spread-spectrum module is capable of providing reliable wireless data
transfer between almost any type of equipment which uses an asynchronous
serial interface. The small-size and superior RF performance of this module
make it ideal for many applications. Typical uses for this module include:
n SCADA
n Traffic Control
n Remote Monitoring
n Fleet Management;
n Telemetry;
n Remote Camera/Robot Control;
n Security Systems; and,
n Display Signs.
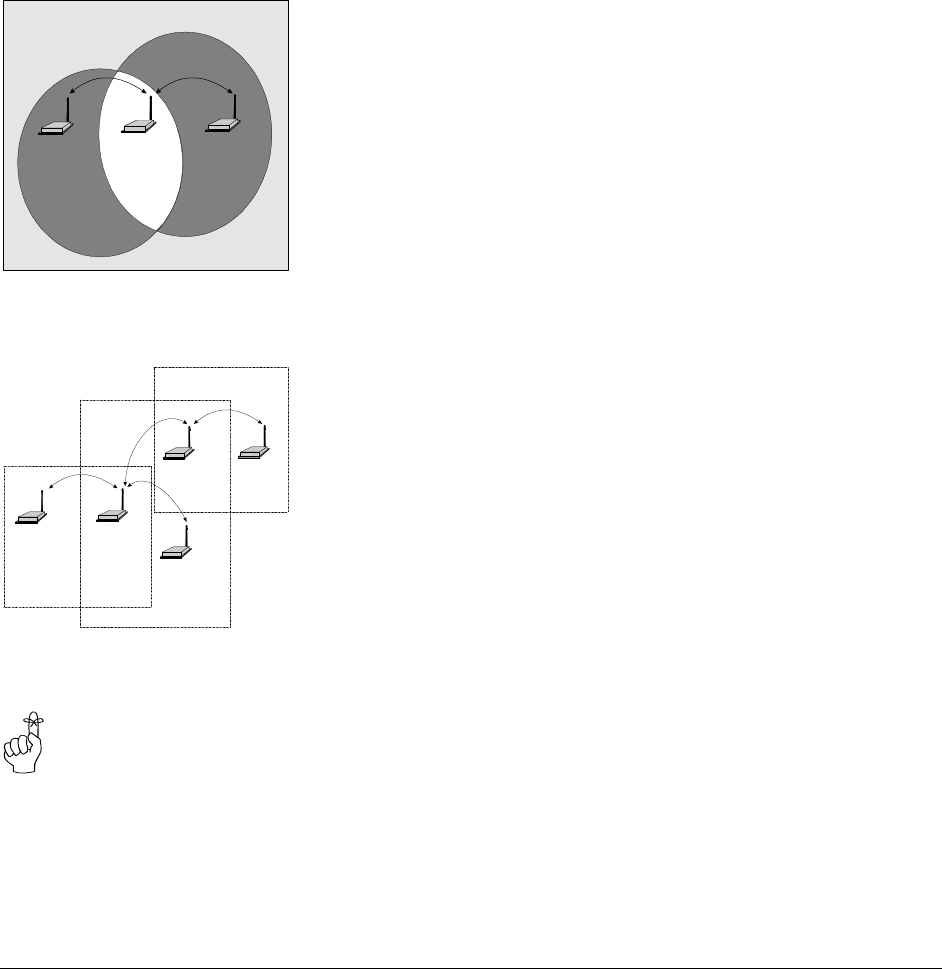
While a pair of MHX-2400 modules can link two terminal devices (“point-to-
point” operation), multiple modules can be used together to create a network
of various topologies, including “point-to-multipoint” and “repeater”
operation. Multiple independent networks can operate concurrently, so it is
possible for unrelated communications to take place in the same or a nearby
area without sacrificing privacy or reliability.
1.1 Features
Key features of the MHX-2400 include:
ntransmission within a public, license-exempt band of the radio
spectrum1 – this means that it can be used without access fees
(such as those incurred by cellular airtime);
na serial I/O data port with handshaking and hardware flow
control, allowing the MHX-2400 to interface directly to any
equipment with an asynchronous serial interface.
1
2MHX-2400 Operating Manual: Chapter 1 Introduction
n49 sets of user-selectable pseudo-random hopping patterns,
intelligently designed to offer the possibility of separately
operating multiple networks while providing security, reliability
and high tolerance to interference;
nencryption key with 65536 user-selectable values to maximize
security and privacy of communications;
nbuilt-in CRC-16 error detection and auto re-transmit to provide
100% accuracy and reliability of data;
nease of installation and use – the MHX-2400 module uses a
subset of standard AT style commands, very similar to those
used by traditional telephone line modems.
While the typical application for the MHX-2400 is to provide a short- to mid-
range wireless communications link between DTEs, it can be adapted to
almost any situation where an asynchronous serial interface is used and data
intercommunication is required.
1.2 About this Manual
This manual has been provided as a guide and reference for installing and
using MHX-2400 wireless modem modules. The manual contains
instructions, suggestions, and information which will help you set up and
achieve optimal performance from your equipment using the MHX-2400
module.
It is assumed that users of the MHX-2400 module have either system
integration or system design experience. Chapter 2 details the requirements
and connections of the MHX-2400 module. Chapter 3 describes the AT
command register setup and configuration. The Appendices, including the
Glossary of Terms, are provided as informational references which you may
find useful throughout the use of this manual as well as during the operation
of the wireless modem.
Throughout the manual, you will encounter not only illustrations that further
elaborate on the accompanying text, but also several symbols which you
should be attentive to:
Caution or Warning: Usually advises against some action which could
result in undesired or detrimental consequences.
Point to Remember: Highlights a key feature, point, or step which is worth
noting, Keeping these in mind will make using the MHX-2400 more
useful or easier to use.
Tip: An idea or suggestion is provided to improve efficiency or to make
something more useful.
With that in mind, enjoy extending the boundaries of your communications
with the MHX-2400 module.
MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration 3
2. Electrical/Physical
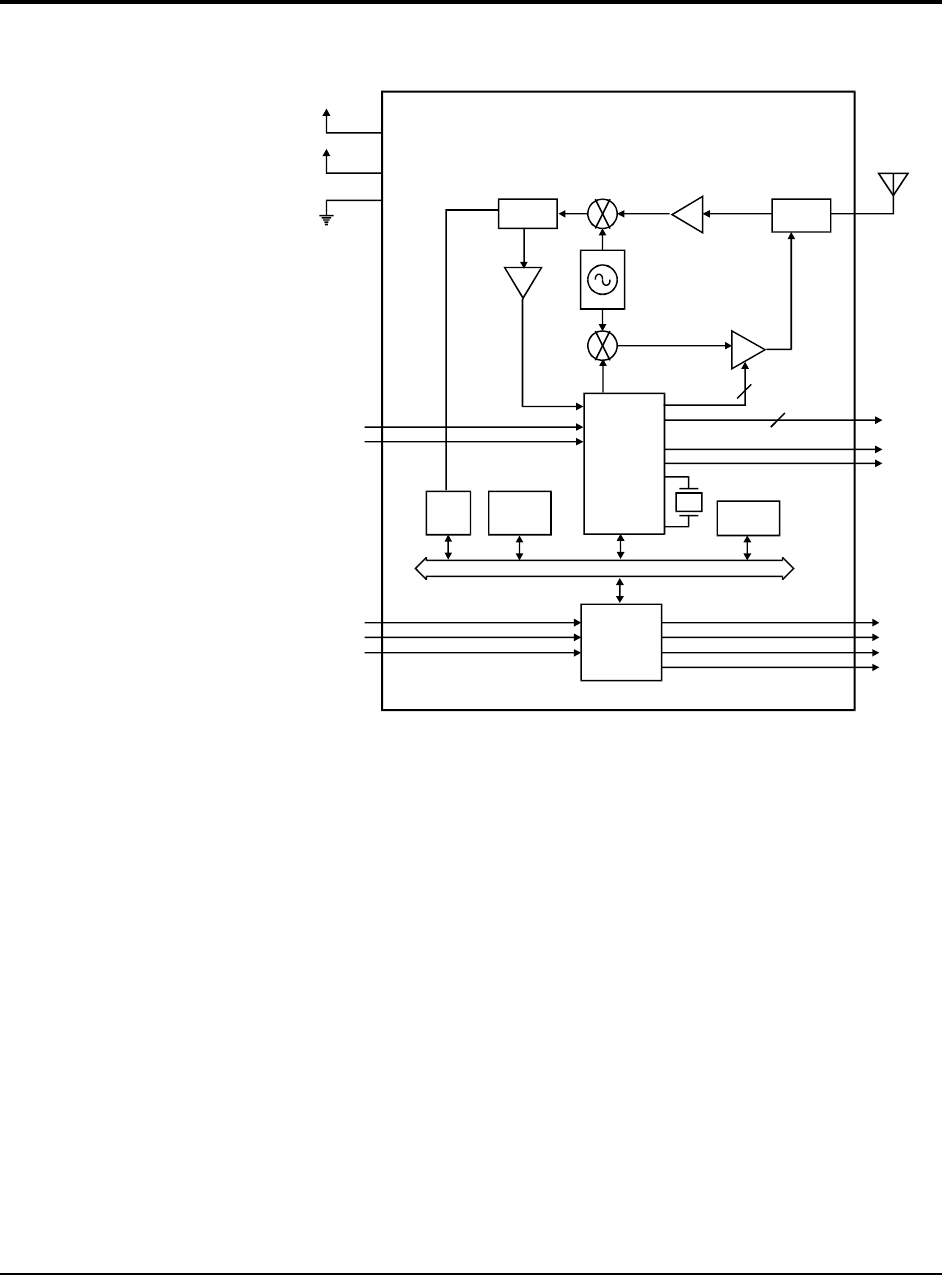
2.0 Functional Block Diagram
Antenna
Switch
Mixer
LNAMixer
IF Demod
Frequency
Synthesizer
PA
Comparator
+
-
uC
8 bit data bus
UART
(DCE)
GAIN
A/D SRAM EEPROM
SRAM
CTS
DCD
DSR
RxD
DTR
TxD
RTS
\Config
\Reset
RSSI1-3
RXMODE
TXMODE
DVcc
AVcc
GND
4MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration
2.1 Pinout
Figure 1 provides a top-view pinout drawing of the MHX-2400 module. The
corner pins (1,20,21,40) are labeled directly on the module.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
AVcc
AVcc
DVcc
DVcc
DVcc
DVcc
DVcc
NC
\Config
\Reset
GND
GND
GND
GND
GND
GND
GND
NC
NC
NC
NC
NC
NC
NC
NC
RxMODE
TxMODE
RSSI3
RSSI2
RSSI1
CTS
RTS
DSR
NC
DTR
TxD
MHX-2400
19
20
NC
NC
RxD
DCD
37
38
39
40
Figure 1 - Pinout (Top View)
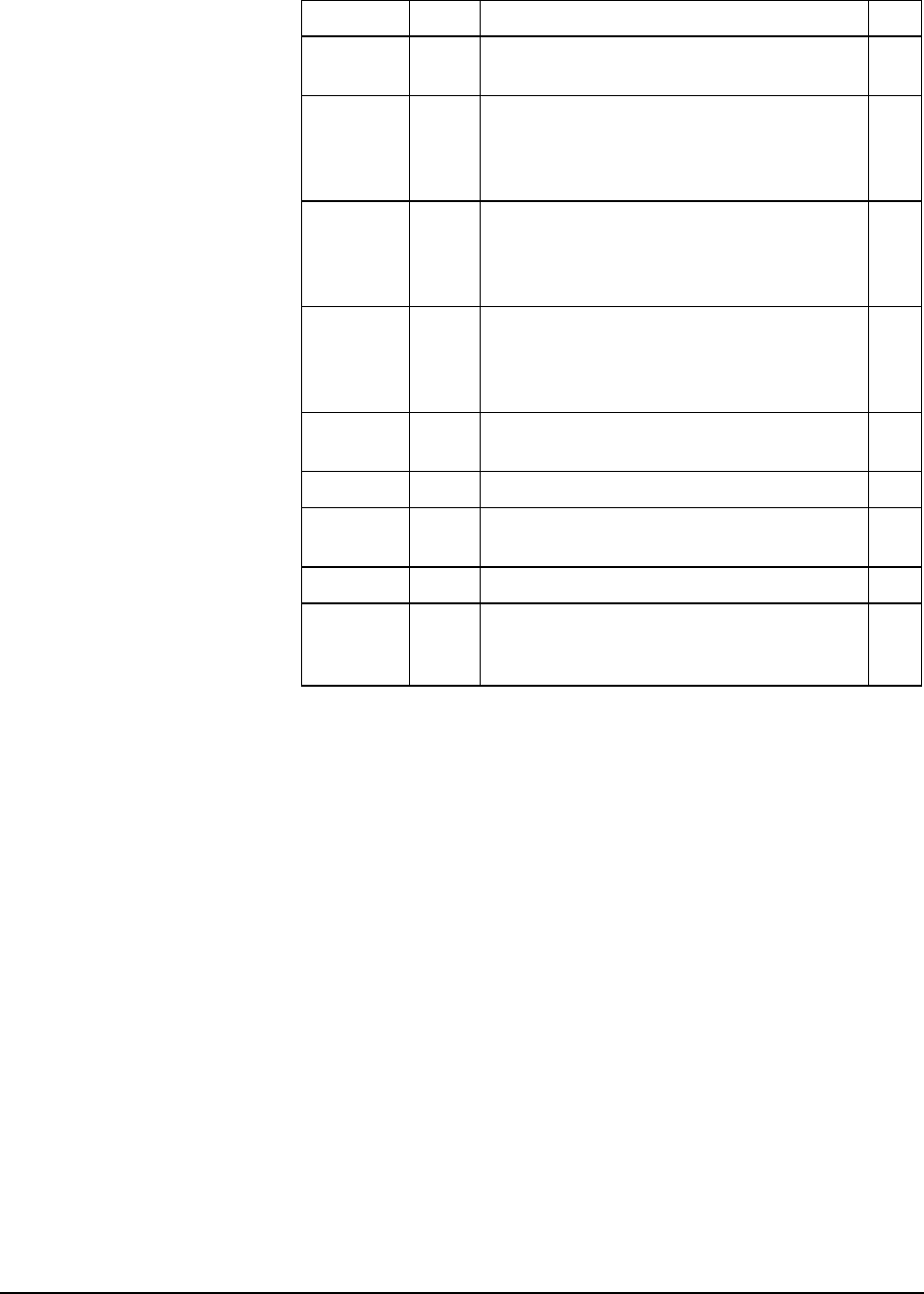
Pin Name No. Description I/O
AVcc 1,2 Positive Supply for Radio Circuitry. See Section
2.3 for DC Characteristics I
\Config 9Leave unconnected. For factory use only. Do
not ground
CTS 28 RS-232 Clear to Send. Active low (TTL level)
output. See Appendix B for a complete description
of all RS-232 signals.
O
DCD 21 RS-232 Data Carrier Detect. Active low (TTL
level) output. O
DSR 26 RS-232 Data Set Ready. Active low (TTL level)
output. O
DTR 24 RS-232 Data Terminal Ready. Active low
(TTL level) input.
I
DVcc 3-7 Positive Supply for Logic circuitry and I/O
pins. See Section 2.3 for DC Characteristics
I
MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration 5
GND 11-17 Ground reference for logic, radio and I/O pins.
\Reset 10 Active low reset input to the module. See
Section 2.4 for timing information.
I
RSSI1 29 Receive Signal Strength Indicator 1. This
output is the first of the three RSSI indicators
to become active high as the signal strength
increases. See Section 2.2 for details
O
RSSI2 30 Receive Signal Strength Indicator 2. This
output is the second RSSI indicator to become
active high as the signal strength increases.
See Section 2.2 for details.
O
RSSI3 31 Receive Signal Strength Indicator 3. This
output is the last RSSI indicator to become
active high as the signal strength increases.
See Section 2.2 for details.
O
RTS 27 RS-232 Request to Send. Active low (TTL
level) input.
I
RxD 22 RS-232 Receive Data. TTL level output. O
RX/SYNC 33 Active high output indicates receive and
synchronization status. See Section 2.2.
O
TxD 23 RS-232 Transmit Data. TTL level input. I
TXMODE 32 Active high output indicates module is
transmitting data over the RF channel. See
Section 2.2.
O
6MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration
2.2 LED OPERATION
LED functionality is dependent on the mode of operation. Lines RX/SYNC,
TXMODE, and RSSI1,2 and 3 are designed to drive LED’s (active high).
LED
MODE RX/Sync TXMode RSSI1,2,3
Power Up (S0=1, S119=1) off off blink 500ms
on/500ms off
Power Up (S0=1, S119=0) off off off
Power Up (S0=0) off off off
Command Mode off off off
Data Mode - Master on while receiving
valid data packets
from slaves and
repeaters in the
network
on for the first
portion of each
hop interval.
RSSI mode
based on all
received packets
See Table 3
Data Mode - Repeater
During Sync. Acquisition off off alternating
300ms on
Data Mode - Repeater
When Synchronized on for first portion
of hop interval on for second
portion of hop
interval
RSSI mode
based on packets
received from
Slaves*
See Table 3
Data Mode - Slave During
Sync. Acquisition off off alternating
300ms on
Data Mode - Slave
When Synchronized on on when
transmitting a
packet.
RSSI mode
based on packets
received from the
Repeater or
Master with
which it
communicates
See Table 3
*If Slaves have been silent for 2 seconds, repeater will base its RSSI on
packets received from the Master.
MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration 7
Signal strength, which is also reported in Register S123, is calculated based
on the last four valid received packets with correct CRC, and represented by
RSSI1, 2 and 3.
For slaves, packets are received on every single hop either from a repeater, or
the master.
When calculating RSSI, the master takes into consideration all packets
received from slaves and repeaters. Repeaters and slaves only transmit back
to the master when they have information to send. Therefore, if no data is
coming back to the master then RSSI will never get updated at the master,
and the LED’s will be off.
Table 3 - RSSI mode operation
Signal Strength
(dBm) RSSI1 RSSI2 RSSI3
-108 50% duty cycle off off
-101 on solid off off
-93 on solid 50% duty cycle off
-86 on solid on solid off
-79 on solid on solid 50% duty cycle
-71 on solid on solid on solid
8MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration
IMPORTANT:
For best performance, it is
strongly recommended to use
a separate, linearly regulated
supply for Vcc Radio. Do
not directly feed a switching
power supply into Vcc
Radio.
For OEM design simplicity,
connect both the radio and
logic Vcc connections
together.
Caution: Using any other power
supply which does not provide the
proper voltage or current could
damage the MHX-2400 module.
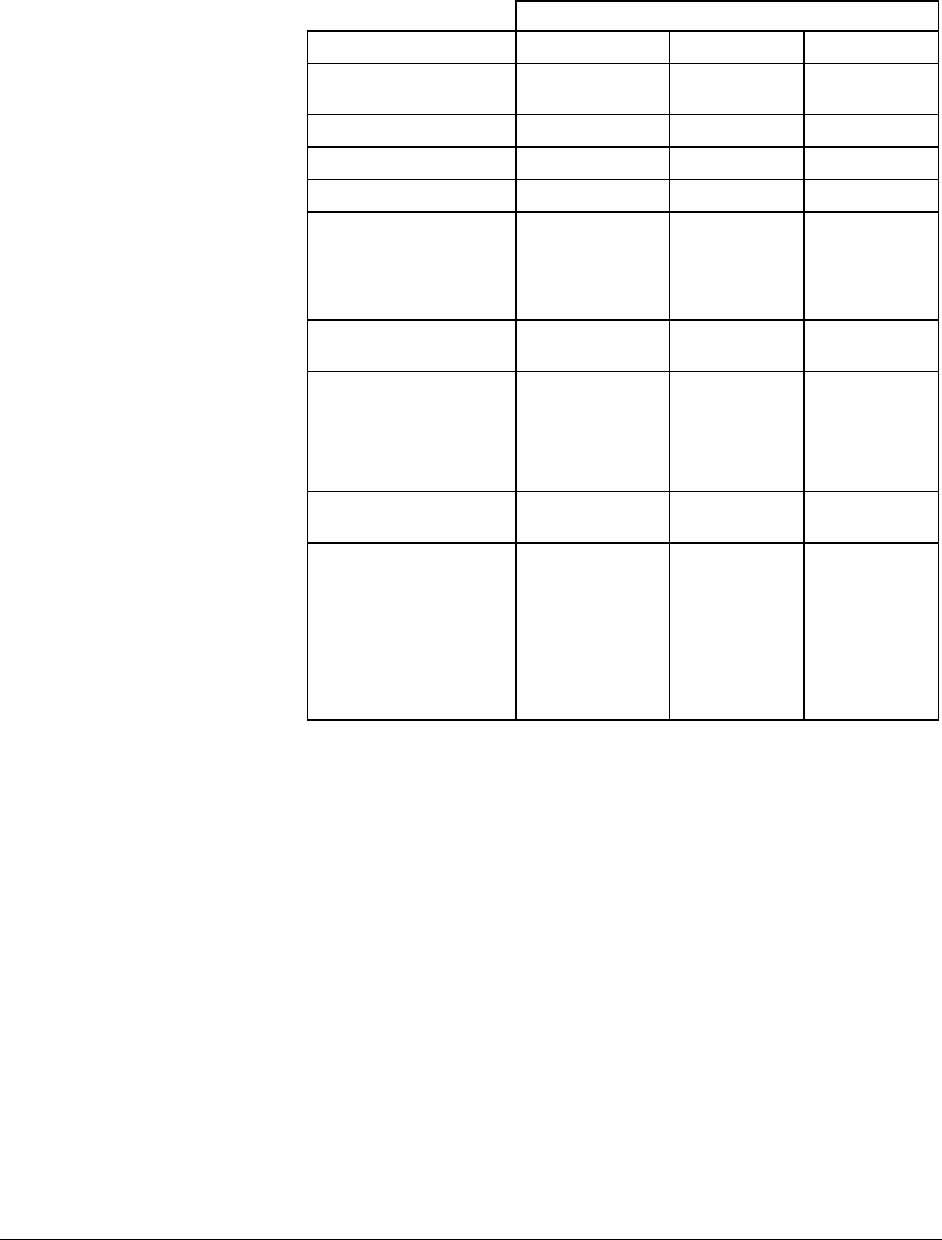
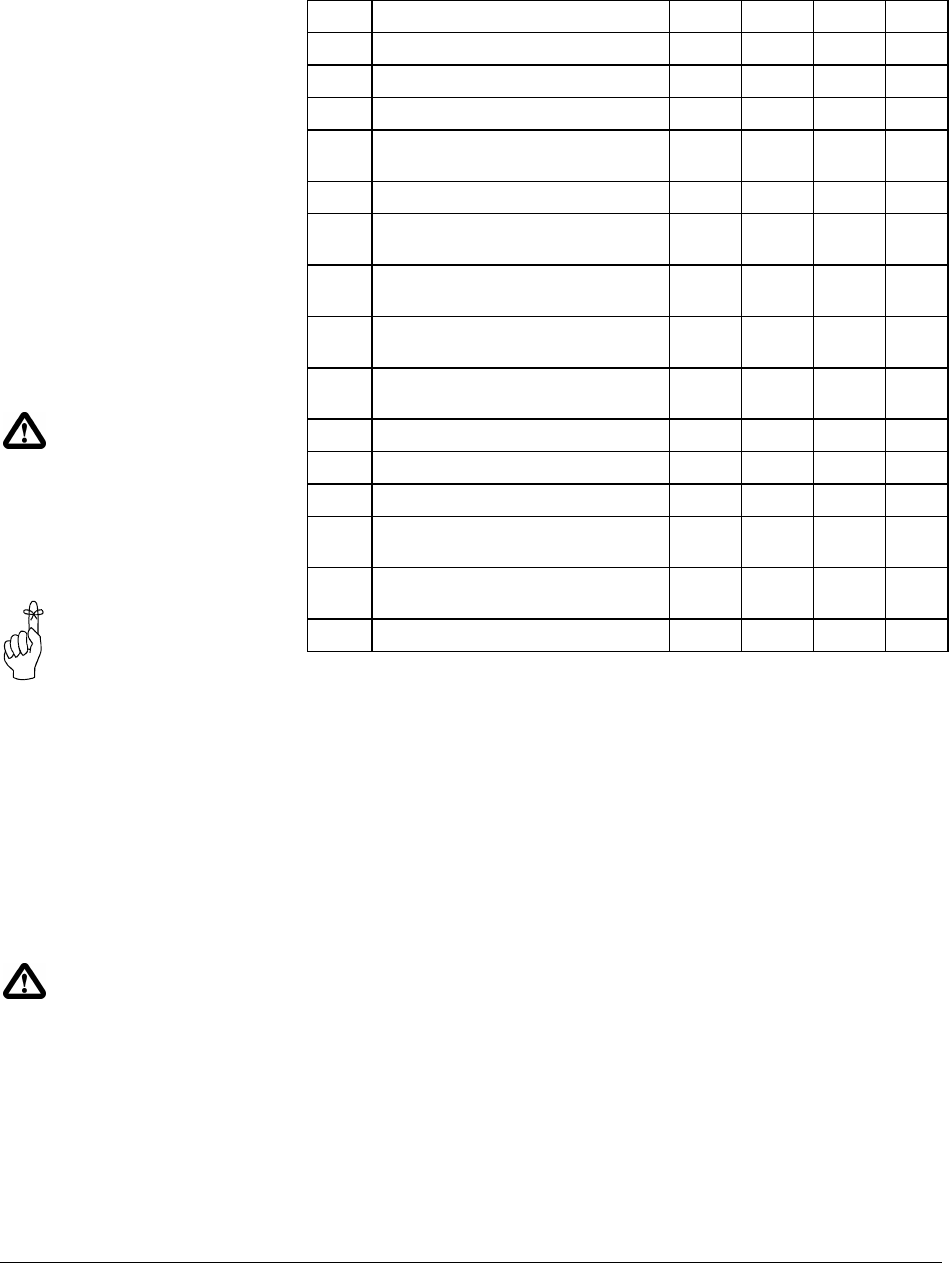
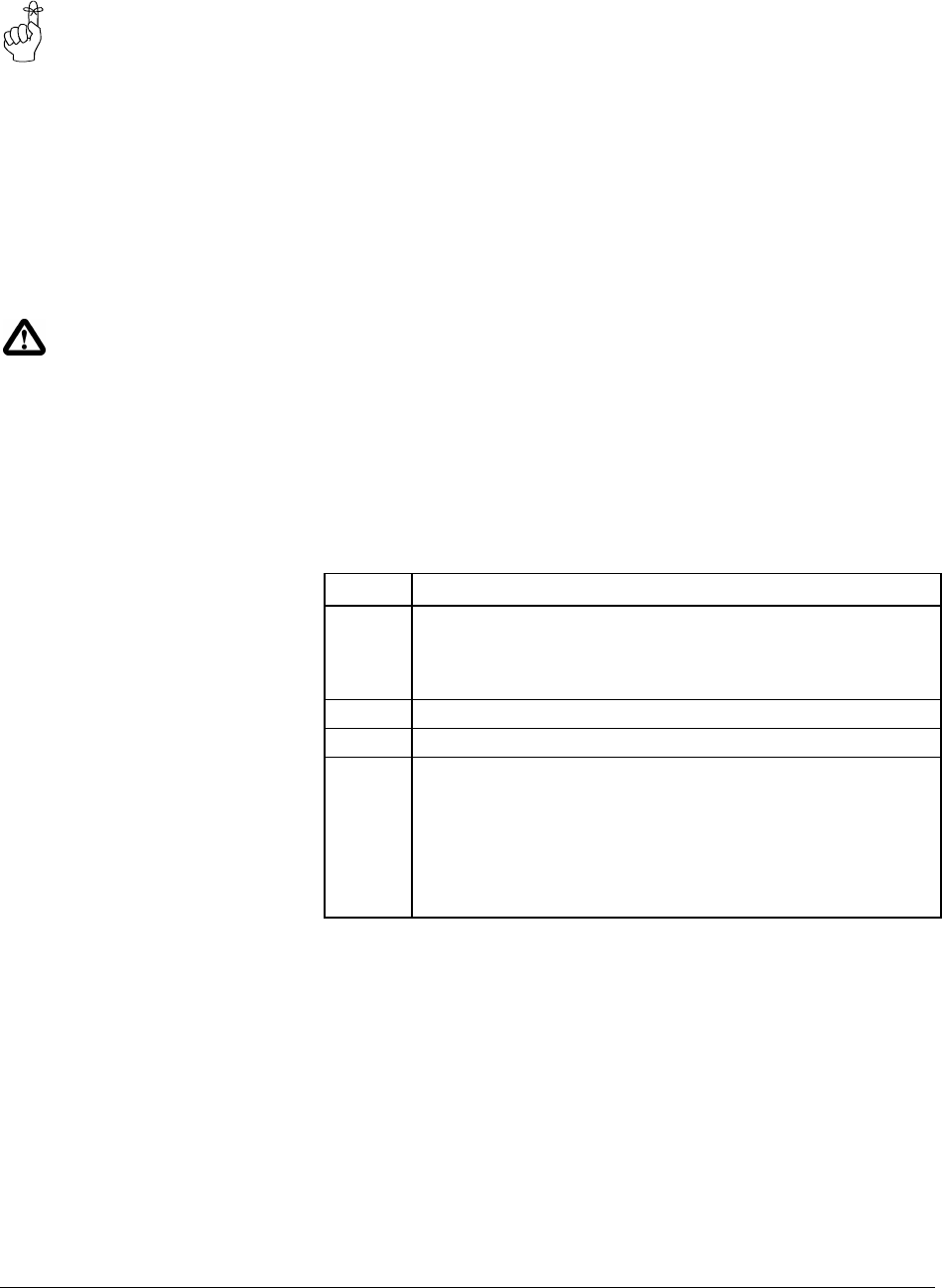
2.3 DC Characteristics
Sym Characteristic Min Typ Max Units
AVCC Radio Supply Voltage 4.9 5.0 5.5 V
DVCC Logic Supply Voltage 4.75 5.0 5.5 V
VPOT Power On Reset Threshold Voltage 1.8 22.2 V
VRST Reset Pin Threshold Voltage DVCC/
2V
AICCR Radio Supply Current in Receive Mode 96 107 117 mA
AICCT
0
Radio Supply Current at 1mW Transmit 68 108 119 mA
AICCT
1
Radio Supply Current at 10mW Transmit 111 123 135 mA
AICCT
2
Radio Supply Current at 100mW Transmit 157 174 191 mA
AICCT
3
Radio Supply Current at 1W Transmit 398 442 486 mA
DICC Logic Supply Current 95 105 115 mA
VIL Input Low Voltage (Pins 23,24,27) -0.5 .3DVCC V
VIH Input High Voltage (Pins 23,24,27) 0.6VCC VCC+.5 V
VOL Output Low Voltage (Pins 21,22,26,28-
33) 0.6 V
VOH Output High Voltage (Pins 21,22,26,28-
33) 4.2 V
ISRCE Sourcing Current (Pins 21,22,26,28-33) 10 mA
MHX-2400 Operating Manual: Chapter 2 Initial Setup and Configuration 9
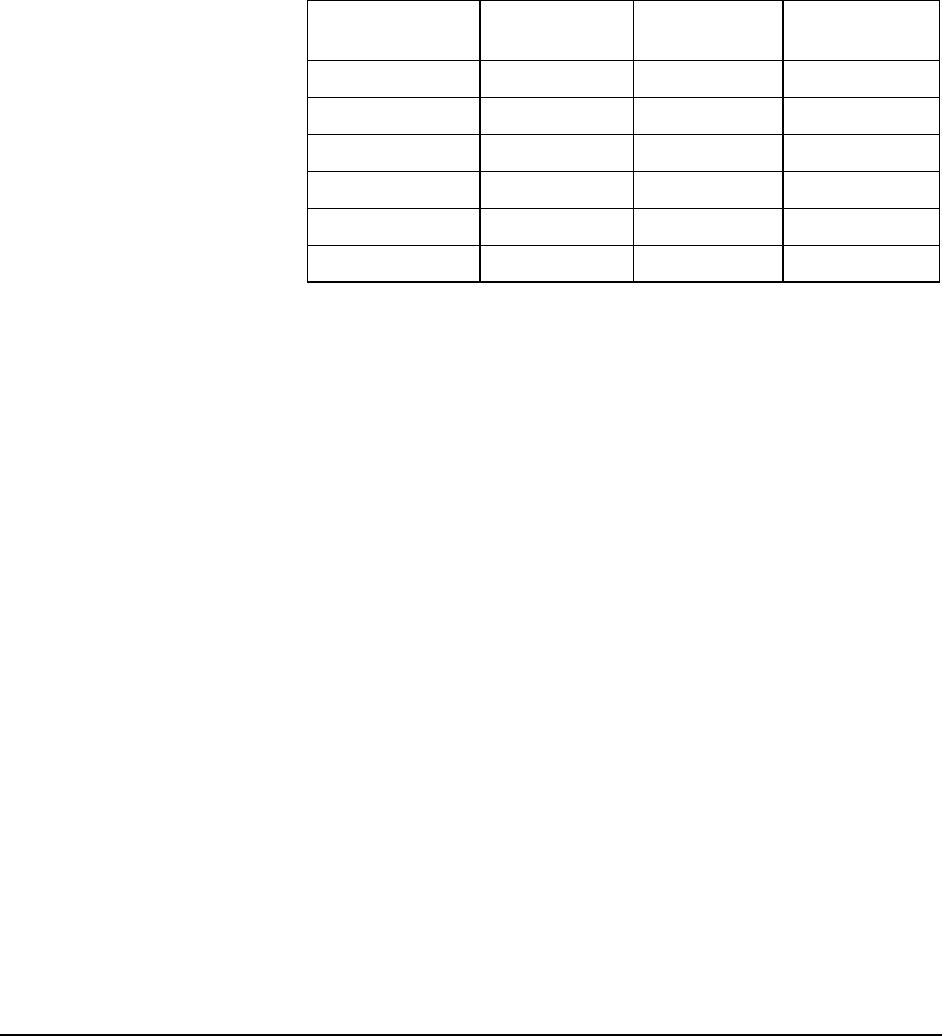
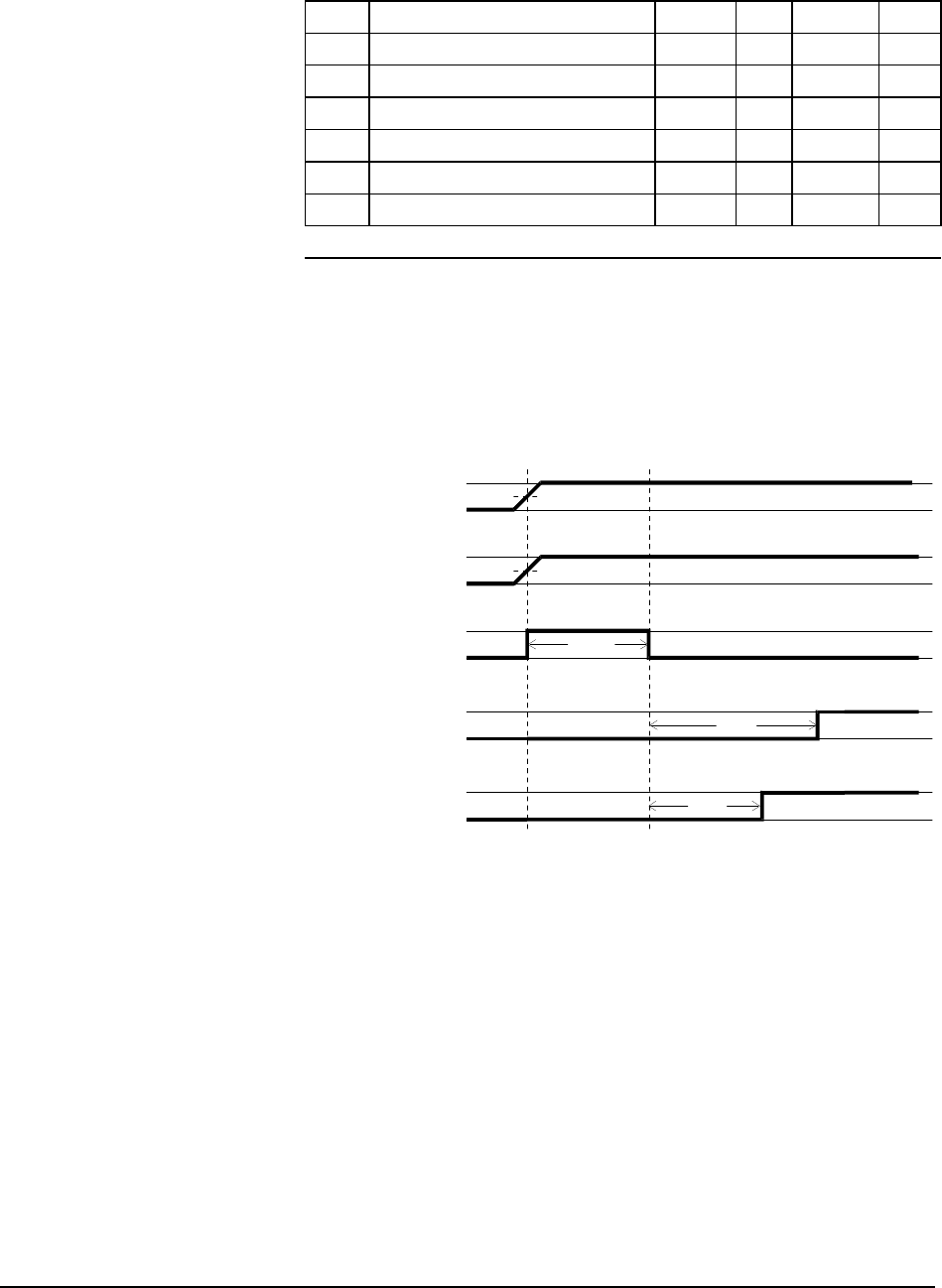
2.4 AC Characteristics
Sym Characteristic Min Typ Max Units
TTOUT Reset Delay Time-Out Period 500 ms
TR2D Internal Reset to Data Mode* 0 5 s
TR2C Internal Reset to Command Mode 0ms
*Unit will enter into Command Mode upon power up if register S0=0. Unit will enter into Data
Mode upon power-up if register S0=1. When powering up into Data Mode, an additional delay
of 5 seconds is added if Register S119=1. See page 20 for details.
Figure 2 provides timing information for both power-up reset and the \Reset
line operation. A fixed internal reset delay timer of roughly 500ms is
triggered as the VPOT or VRST threshold is reached.
T
V
VDV
\Reset
Internal Reset
CC
TOUT
RST
POT
T
Data Mode
R2D
T
Command Mode
R2C
(Valid when S0=1)
(Valid when S0=0)
Figure 2. Reset Timing

10 CompactRFTM Operating Manual: Chapter 3 Configuration Options

CompactRFTM Operating Manual: Chapter 3 Modes of Operation 11
3. Modes of Operation
The MHX-2400 modem can be easily configured to meet a wide range of
needs and applications. The module is designed such that all communication
is through one serial port (Pins 21 to 28 on the module). This port has two
functions:
1. It provides the asynchronous interface with the host equipment for data
that is sent/received on the RF channel. When operating in this fashion,
the module is said to be in data mode.
2. It is also used for configuring and programming the module. When
operating in this fashion, the module is said to be in command mode.
In addition to data mode and command mode, there is a third mode of
operation called diagnostics mode. The module will always be in one of
these three modes.
3.1 Data Mode
Data mode is the normal operating mode of the MHX-2400. When in data
mode, the MHX-2400 is communicating with other MHX-2400 modules, and
facilitating wireless asynchronous serial communication amongst two or more
terminal devices. There are three basic elements to any MHX-2400
communications network:
• One module configured as the Master
• Zero or more modules configured as Repeaters
• One or more modules configured as Slaves
The function of the Master is to provide synchronization for the entire
network, and to control the flow of data. There is always one Master per
network. The Master is the ultimate destination for all data collected at the
various Repeater’s and Slave’s serial ports. With the network set up for
Point-to-Multipoint communication, all data received at the Master’s serial
port is transmitted to every Repeater and Slave in the network. The MHX-
2400 is a frequency hopping transceiver, meaning that it “hops” to a new
frequency after a predetermined time interval. This time interval is a fixed
time set by the user, and can range from 14ms to 180ms. The MHX-2400
hops according to a pseudorandom pattern of 50 different channels.
When configured as a Slave, the MHX-2400 searches for synchronization
with a Master. Network topologies consisting of a single Master and
virtually any combination of Slaves and Repeaters may be deployed. The
functionality of any particular MHX-2400 can be configured as follows:
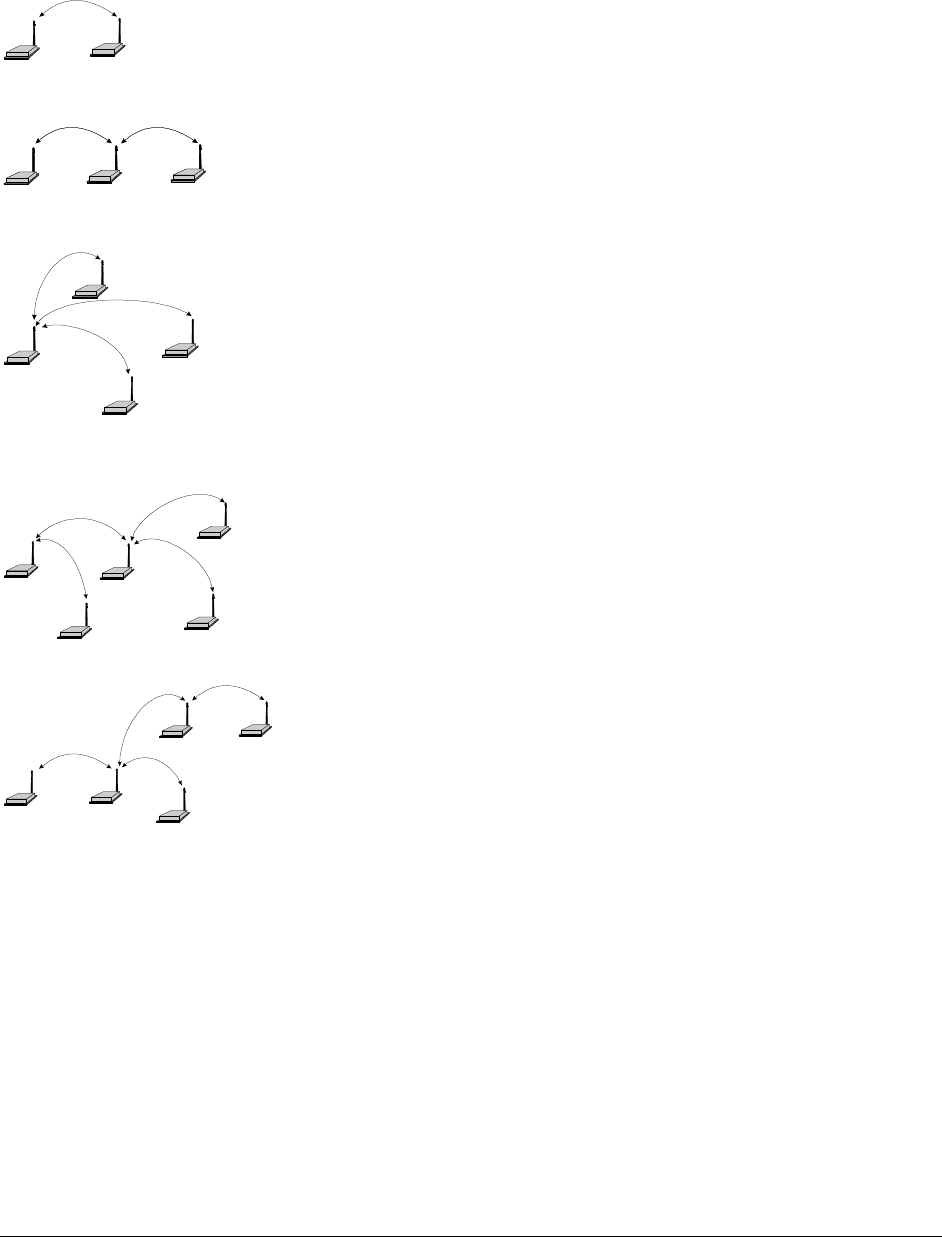
12 CompactRFTM Operating Manual: Chapter 3 Configuration Options
MS
Network 1
MSR
MSR
Network 2
M
S
S
S
Network 3
MR
S
S
S
Network 4
MR
SR
S
Network 5
Figure 2 - Sample Network
Topologies. Virtually any
Combination of Slaves and
Repeaters May be Used.
nMaster Point-to-Point: The modem is configured to
communicate with a single Slave, either directly, or through one
or more Repeaters.
nMaster Point-to-Multipoint: The modem is configured to
communicate with one or more Slaves and/or Repeaters.
nSlave: The modem is configured to communicate with one
Master either directly or through one or more Repeaters..
nRepeater: The modem is configured to pass information from
either a Master or another Repeater onto subsequent Repeaters
and/or Slaves and vice versa. The Repeater also acts as a Slave
in the sense that, like a Slave, it passes information to/from its
serial port.
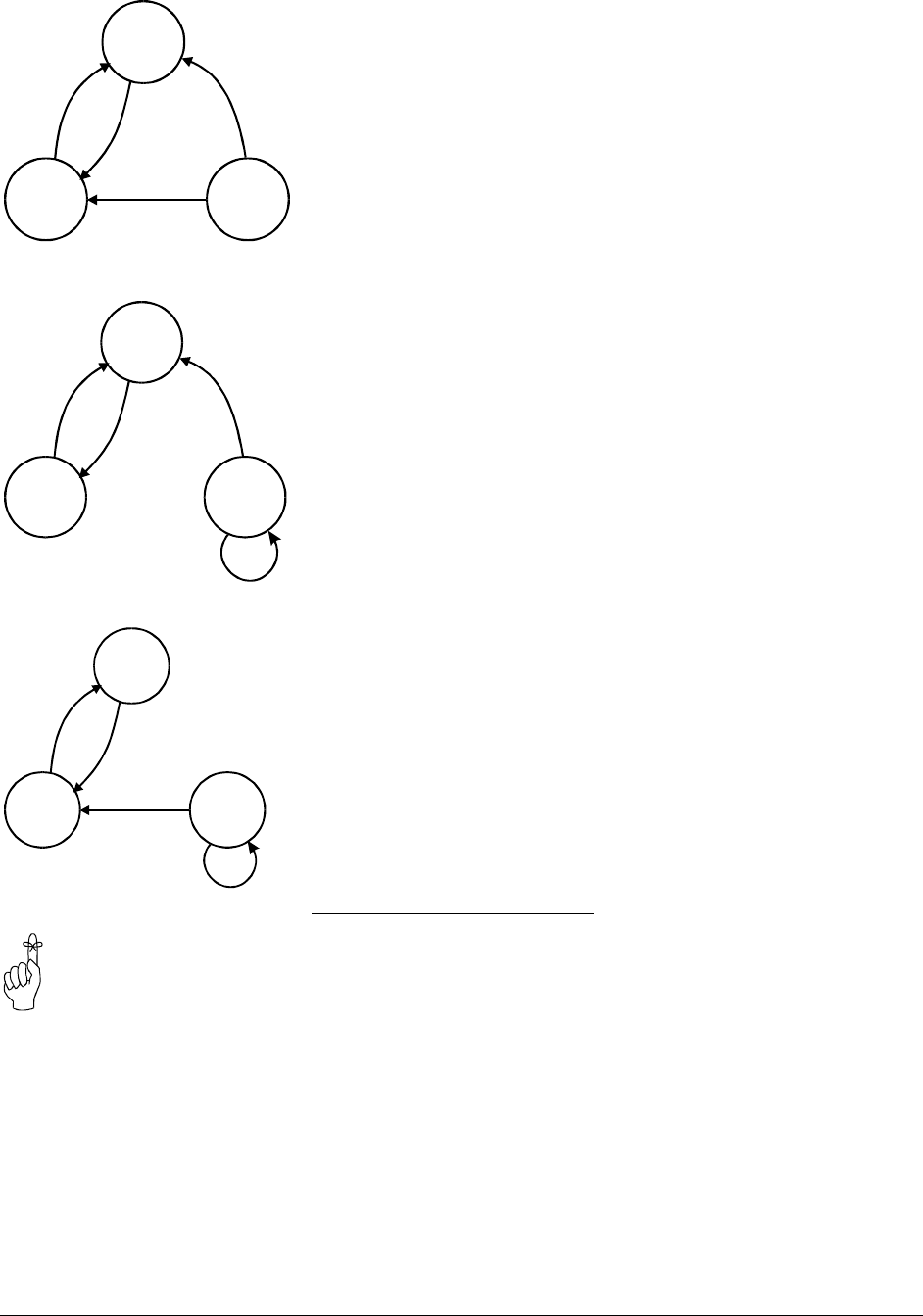
Examples of different network topologies are shown in Figure 4. Network 1
shows Point-to-Point communication between a Master and Slave. Network
2 makes use of a Repeater to communicate with the Slave. Network 3
illustrates a simple Point-to-Multipoint network with no Repeaters. Networks
4 and 5 gives examples of Point-to-Multipoint networks consisting of both
Repeaters and Slaves. There is effectively no restriction to the number of
Repeaters and Slaves that can be added to a network. As seen in Network 4,
a Master can communicate directly with both Slaves and Repeaters.
3.2 Command Mode
The MHX-2400 firmware has been designed to allow the user to customize
the operation of the modem through an AT Command Interface. This
interface is ideal for direct interface with another microcontroller or for
higher level Windows-based software applications, but also contains user-
friendly built-in register descriptions. These descriptions make it easy for the
user to configure the unit by manually inputting AT Commands and
modifying S-Register parameters, using any standard terminal program. The
MHX-series development board is a useful tool for familiarizing yourself
with the various operating parameters and user interface. Reference
schematics for the development board can be found in Appendix G. To
access the MHX-2400’s command mode using the development board:
1. Insert the module into the socket with the antenna connector towards the
edge of the board.
2. Attach the supplied antenna.
3. Connect a straight through serial cable between the DB9 connector and
the serial port on your PC
4. Run any terminal application program such as Hyperterminal
5. Set the serial port to 9600 baud, 8N1
6. Apply power to the development board
7. While the three RSSI LED’s are blinking, type ‘MHX’ (you have about
5 seconds to do this). The modem should respond with ‘OK’.
8. Type ‘AT&V <ENTER>’
CompactRFTM Operating Manual: Chapter 3 Modes of Operation 13
3.2.1 AT Command Interface
At this point you should see a menu similar to the following appear:
BAUD = 9600
E1 Q0 V1 W0
DCD &C1 DTR &D0 Framing &E0 Handshaking &K3 DSR &S1
S0=1 S2=43 S3=13 S4=10 S5=8
Operating Mode S101=1 Serial Baud Rate S102=7
Wireless Link Rate S103=2 Network Address S104=1
Unit Address S105=1 Hop Pattern S106=0
Encryption Key S107=1 Output Power S108=2
Hop Interval S109=4 Data Format S110=1
Packet Min Size S111=1 Packet Max Size S112=43
Packet Retransmissions S113=1 Quick enter to command S119=1
Packet Repeat Interval S115=1 Character Timeout, ms S116=8
RTS/DCD Framing, ms S120=0 DCD Timeout, ms S121=0
Secondary Hop Pattern S206=2 Packet Retry Limit S213=2
Average RSSI value S123= -0 dBm Modbus Mode S117=0
Roaming S118=0 Packet Size Control S114=0
Remote Control S122=0
OK
The MHX-2400 is controlled through an AT Command line interface, using a
command set which is very similar to a traditional Hayes telephone modem
command set.
All line entries must be preceded by the characters ‘AT’. The characters
‘AT’ are known as the attention characters and must be typed at the
beginning of each command line. For example, to change the operating
mode, type:
ATS101=2 <ENTER>
The modem should respond with ’OK.’ The above command will set the
operating mode to Master Point-to-Point.
Register settings are not immediately stored to non-volatile memory,
therefore if the modem is powered down at this point, the Operating Mode
would revert to its previous value. To store any recently updated command
registers, the following “write” command must be entered.
AT&W <ENTER>
3.3 Switching Between Command and Data Modes
Your modem must be in command mode for it to execute a command. If
you send characters when the modem is in data mode, the modem transmits
the characters over the air.
Depending on its settings, the modem will either power up in command mode
or data mode. Normally, when first received from the factory, the unit will
power up into data mode. During the first five seconds after power-up, the
user is given the opportunity to avoid entering into data mode but instead
enter into command mode by typing ‘MHX’.
14 CompactRFTM Operating Manual: Chapter 3 Configuration Options
DATA
MODE
POWER-UP
SEQUENCE
COMMAND
MODE
USER TYPES 'MHX'
5 sec elapses
or
characters
other than
'MHX'
entered by
the user
(ATA or ATO Command)
DTR or
Escape Sequence
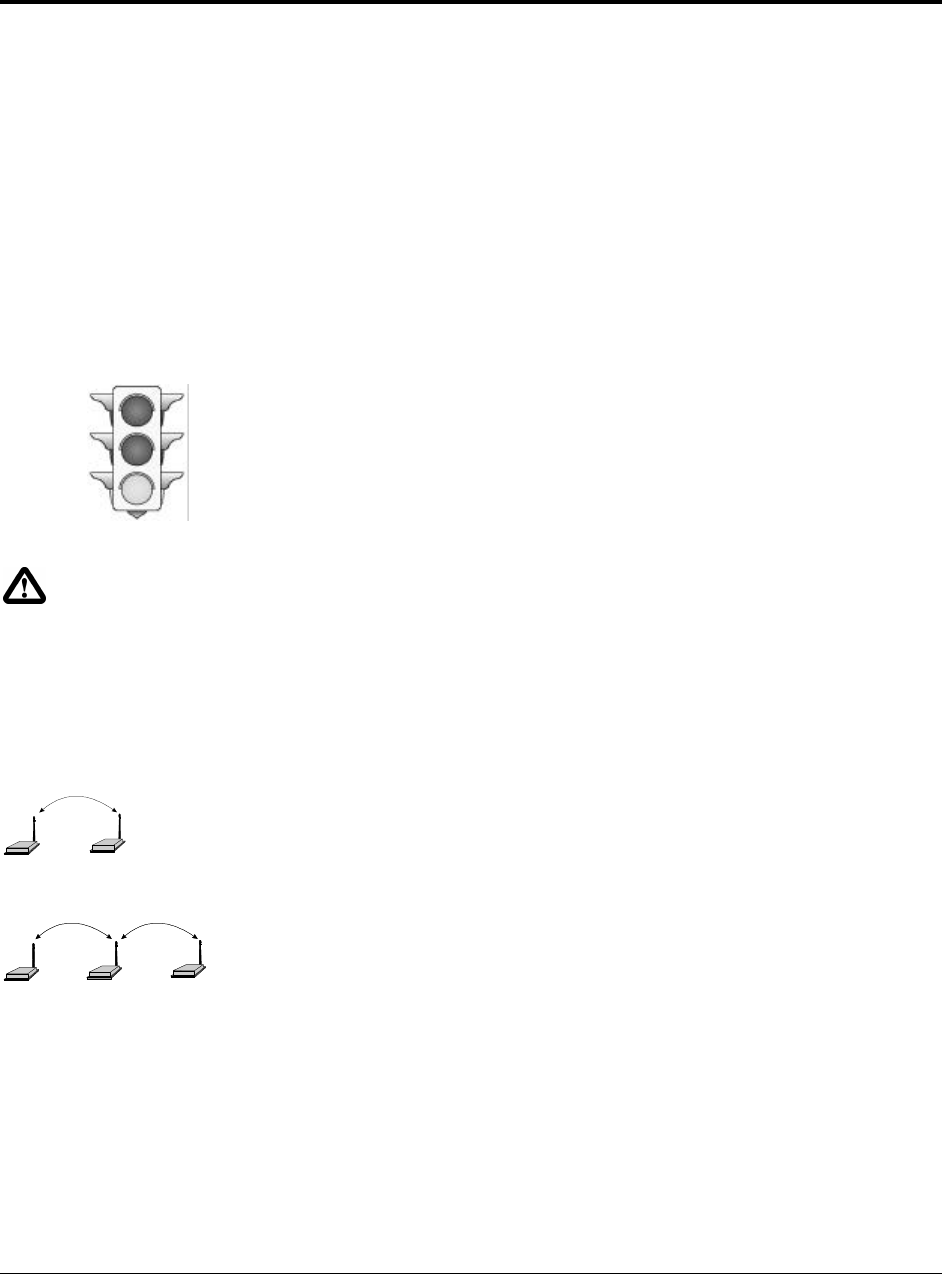
Figure 4A. S0=1, S119=1
(factory default)
DATA
MODE
POWER-UP
SEQUENCE
COMMAND
MODE
500 msec
(ATA or ATO Command)
DTR or
Escape Sequence
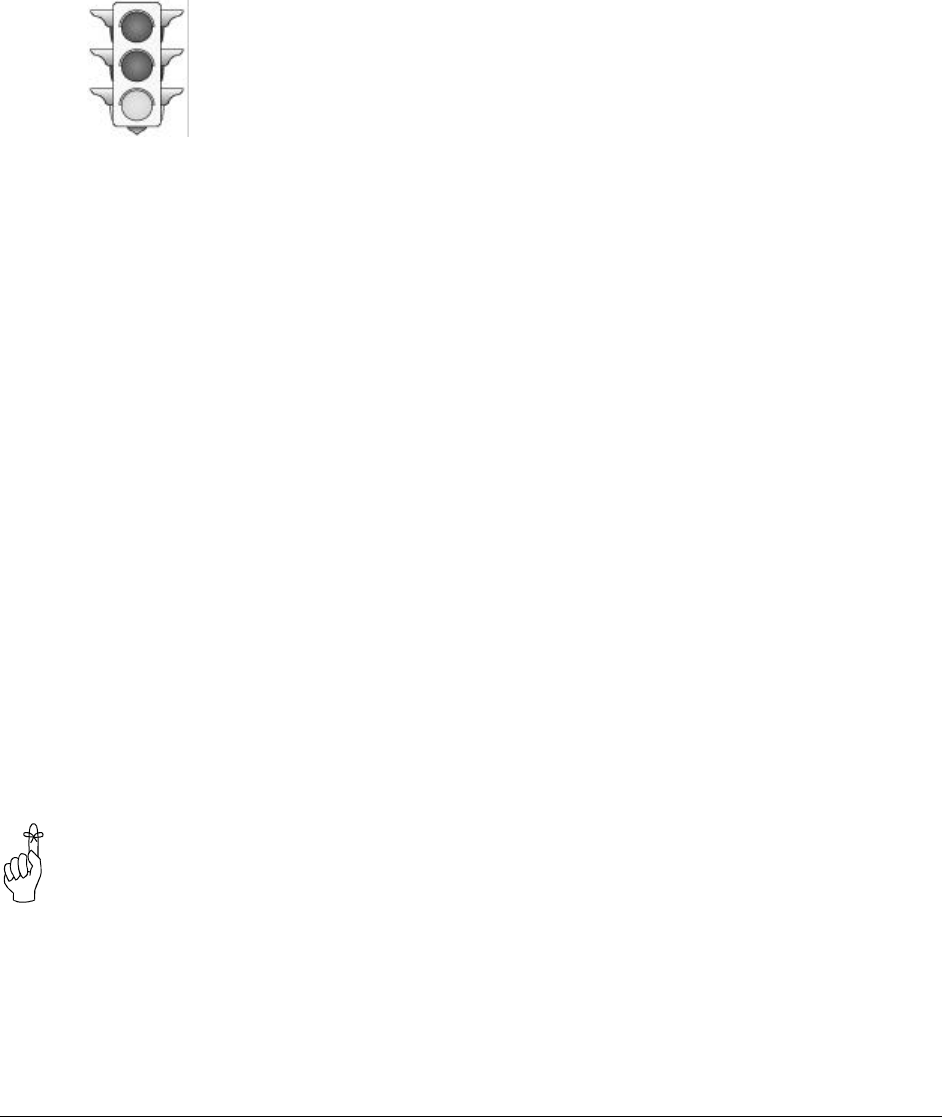
Figure 4B. S0=1, S119=0
DATA
MODE
POWER-UP
SEQUENCE
COMMAND
MODE
500 msec
(ATA or ATO Command)
DTR or
Escape Sequence
Figure 4C. S0=0
The escape sequence will not
be accepted unless both the
MHX-2400 and the terminal
are set to the same baud rate
The terminal must be set for 9600 baud 8N1 in order for the modem to accept
these characters. If ‘MHX’ is typed incorrectly, the modem will immediately
enter into data mode. If the five seconds elapses without any response from
the user, the modem will go into data mode.
In command mode, the module “autobauds,” meaning that it will adapt to the
baud rate of the DTE equipment to which it is connected. Therefore, when in
command mode, you may change the baud rate of your equipment, and the
MHX-2400 will automatically adjust to this baud rate once an AT string is
issued. The new baud rate is stored in register S102. Several baud rates
ranging from 2400 to 115200 may be selected.
You can place the modem into Data Mode from Command Mode either by:
• Issuing the answer command (ATA <ENTER>); or,
• Issuing the online command (ATO <ENTER>).
The modem will now attempt to communicate with other MHX-2400
modules. While in Data Mode, the modem will communicate through the
serial port at the same baud rate as was last used in Command Mode2.
To return to Command Mode, you can either:
• Send the escape sequence. (The escape sequence consists of 1 second of
inactivity, followed by the characters ‘+++’ followed by another second
of inactivity.); or,
• Toggle the DTR line (depending on the &D parameter see pg 11).
The escape sequence must be issued at the baud rate that the modem has been
set to. If the modem is set to 19200 baud, and the escape sequence is issued
at 9600 baud, for example, the modem will not recognize it, and will not go
into Command Mode.
Figure 4 provides a state diagram for power-up, command mode, and data
mode. Note that there are three different variants of the state diagram which
depend on the values of registers S0 and S119. See the appropriate sections
for more details about these registers. The factory defaults are S0=1 and
S119=1.
2 It is possible to enter into Data Mode at a different baud rate from what is
currently being used in Command Mode by issuing the command ATS102=x,
where x is one of the valid baud rates. Care must be taken when setting the
baud rate in this manner. If you issue another AT string after attempting to
set the baud rate using ATS102 <ENTER>, the modem will again autobaud
and automatically revert to the baud rate of the host equipment. For example,
if your equipment is running at 9600 baud and you wish to set up the modem
to run at 19200 baud, the following command line entry would be suitable:
ATS102=5&WA <ENTER>
The first part (S102=5) sets the baud rate to 19200. The next characters
(&W) write this baud rate to memory. The last character (A) puts the modem
into Data Mode. Once in Data Mode, the modem is unable to autobaud, and
is fixed at 19200 baud. By combining several commands into one command
line entry, and then immediately putting the modem online, the modem is not
given a chance to autobaud back to 9600.
CompactRFTM Operating Manual: Chapter 4 Configuration 15
4. Configuration
Warning: After testing the units
for correct operation using the
quick-start approach, be sure to
modify some of the security
parameters such as Network
Address and Encryption Key, to
avoid unintentional
communication with other users of
MHX-2400 products..
MS
Network 1
MSR
MSR
Network 2
Figure 6. Basic Networks
This chapter provides a detailed description of the various operating
parameters of the MHX-2400. Section 4.1 provides a quick-start approach
which outlines the minimum requirements for establishing communication
between two MHX-2400 modules. The settings will not necessarily provide
optimal performance for your application, but will verify that the modules are
functioning correctly.
Section 4.2 describes the AT Command interface, and the various AT
Commands. Section 4.3 covers all S-Register parameters which affect the
operation of the modem while in data mode, and Section 4.4 provides a
description of all diagnostic features of the modem.
4.1 Quick Start Approach
There are several parameters that must be set in order to establish
communication between a pair of MHX-2400 modules.
The MHX-2400 is equipped with four standard factory default settings.
Instead of manually configuring each individual operating parameter, a global
command may be used to quickly configure the modem for a particular type
of operation. For example, to quickly implement Network 1, Factory default
1 would be applied to the Master, and Factory default 2 would be applied to
the Slave. To quickly set up Network 2, apply Factory 1 to the Master,
Factory 3 to the Repeater, and Factory 4 to the Slave. These defaults will get
you started and only ensure that a link can be established, but do not
necessarily provide the best performance. Optimization of the
communications link is discussed in later sections.
To implement the basic network illustrated in Figure 6, Network 1,
1. Insert the module into the development board socket with the antenna
connector towards the edge of the board.
2. Attach the supplied antenna.
3. Connect a straight through serial cable between the DB9 connector and
the serial port on your PC
4. Run any terminal application program such as Hyperterminal and set the
terminal application’s serial port settings to 9600 baud, 8N1
5. Apply power to the development board
6. While the three RSSI LED’s are blinking, type ‘MHX’ (you have about
5 seconds to do this). The modem should respond with ‘OK’.
7. Configure the unit to Factory Setting 1 by typing AT&F1 <return>. This puts
the unit into Master Point-to-point mode.
8. Store these settings to memory by typing AT&W <return>.
9. Put the modem into Data Mode by typing ATA (or ATO) <return>
10. Perform above steps for the second unit, using Factory Setting 2 instead of
Factory Setting 1. This will configure the second unit as a Slave.
16 CompactRFTM Operating Manual: Chapter 3 Configuration Options
The escape sequence will not
be accepted unless both the
MHX-2400 and the terminal
are set to the same baud rate
The units should now be communicating. Remember, the parameters defined
by Factory Settings 1 and 2 will likely not be the most ideal for your
application, but will quickly allow you to test the units. A complete summary
of the settings defined by all four factory settings can be found in Appendix
C. Factory Default Settings.
Settings are not immediately stored in non-volatile memory, therefore, the
command &W is issued to store the current configuration into non-volatile
memory. Settings are retained even after powering down. All user selectable
parameters for the MHX-2400 are described in detail in Sections 4.3 and 4.4:
Checking the Link
To check if the units are communicating, observe the LED indicators on the
development board which houses the Slave unit. If the link is good, up to
three RSSI LED’s Slave modem should be active along with the RX/Sync
LED, and if the link is absent (due to a fault at one end or another, such as
misconfiguration), the LED’s will be in either “scanning mode” or inactive.
See Section 2.2 for complete LED operation.
Characters typed at the Master terminal should appear at the Slave’s terminal,
and vice versa. Also, verify that the RX LED blinks as packets of data are
received at the Master modem. As data is sent from Slave to Master, the RX
indicator should blink on as correct packets of data are received. At this
point, the Master’s RSSI LED’s should become active. It is recommended
that if the MHX-2400 will be deployed in the field where large distances
separate the units, the modems should be configured and tested in close
proximity (e.g., in the same room) first to ensure a good link can be
established and settings are correct. This will facilitate troubleshooting,
should problems arise.
4.2 AT Commands
Several AT Commands are supported by the MHX-2400. These commands
affect the operation of the modem in command mode and the transition
between data and command modes. More commands and S-Register settings
are discussed in Sections 4.3 and 4.4.
To make the command line more readable, you can insert as many spaces as
desired. The command line holds up to 16 characters, not including the AT
prefix. If you want to send more than one command line, wait for a response
before entering the AT prefix at the start of the next command line.
To re-execute the previous command, enter A/. The modem will execute the
previous command line.
When in Command Mode, the modem “autobauds”, meaning that it will
automatically adjust to the baud rate of the terminal. You may change the
terminal baud rate while in Command Mode without losing communication
with the modem.
For the AT command protocol, an escape sequence consists of three
consecutive escape codes preceded and followed by at least 1 second of
inactivity. Typically, the ‘+’ character is used as the escape code.
+++ preceded and followed by 1 second of inactivity

CompactRFTM Operating Manual: Chapter 4 Configuration 17
Note that the terminal must be
configured to the same baud rate
as the modem in order for the
modem to recognize the escape
sequence. The modem is unable
to “autobaud” while in Data
Mode.
The following is a description of
all available commands. ‘*’
denotes standard factory settings.
All of the following commands
must be preceded by “AT”.
AAnswer
The A command puts the modem
into data mode, where the
modem attempts to communicate
with other compatibly configured
modems (Type ATA <return>).
ECommand Echo
Your modem is preset to return
(or echo) commands to the host
microprocessor when in
Command Mode.
E0 No Command
Echo
*E1 Command
Echo
IIdentification
The I command returns various
modem information settings.
I1 Product Code
(MHX-910)
I2 Issue ROM
Check (OK or ERROR)
I3 Product
Identification (Firmware
Version)
I4 Firmware Date
I5 Firmware
Copyright
I6 Firmware Time
I7 Serial Number
OOn-line Mode
The O command puts the modem
into data mode. This command
is identical to the A command.
QQuiet Mode
Your modem is preset to send responses when it executes commands, and
there after to keep the host informed of its status.
*Q0 Enable modem responses
Q1 Disable modem responses
VResult Codes display
Your modem can either display result codes as words or numbers.
V0 Display Result Codes as numbers
*V1 Display Result Codes as words
WConnection Result
This parameter determines the modem response at the transition from Data
Mode to Command Mode
*W0 Reports computer (DTE) baud rate as CONNECT xxxx
W1 Reports wireless rate between modems as CARRIER
xxxx.
W2 Reports modem (DCE) baud rate as CONNECT xxxx
18 CompactRFTM Operating Manual: Chapter 3 Configuration Options
Refer to Appendix A (page
19) for a summary of the
modem commands
&F1 &F2
Master Slave
&F1 &F4
&F3
Master Repeater Slave
ZReset and load stored configuration
The Z command resets the modem and loads the stored configuration.
&C DCD (Data Carrier Detect)
The &C command controls the modem’s DCD output signal to the host
microprocessor. This command determines when the DCD is active.
&C0 DCD is always ON
*&C1 DCD on when modems are synchronized. DCD is always
on when unit is configured as Master.
&C2 DCD used for output data framing and Modbus mode. See
page 25 for details.
&D DTR (Data Terminal Ready)
The &D command controls what action the modem performs when the DTR
input line is toggled. The DTR input is controlled by the host
microprocessor.
*&D0 DTR line is ignored
&D1 Not Supported
&D2 DTR disconnects and switches to Command Mode
&D3 DTR disconnects and resets modem. Modem will remain
in this state until DTR again goes active.
&F Load Factory Default Configuration
The &F command resets the modem and loads the default factory
configuration.
&F1 Master Point-to-Multipoint. Designed to communicate
with modems configured as &F2 or &F3.
&F2 Slave. Designed to communicate with another modem
configured as &F1.
&F3 Repeater. Designed to communicate with modems
configured as &F1 and &F4.
&F4 Slave working with factory default Repeater and factory
default Master. Communicates directly with Repeater
configured as &F3.
&K Handshaking
The &K command controls the handshaking between the modem and host
microprocessor.
&K0 Disable handshaking
&K2 RTS/CTS input data framing. See page 25 for details.
*&K3 Enable hardware handshaking (RTS/CTS)

CompactRFTM Operating Manual: Chapter 4 Configuration 19
Configuration options are
not stored in non-volatile
memory until the WRITE
command (&W) is executed
&S DSR (Data Set Ready)
The &S command controls the DSR line for the modem, and determines
when it is active
&S0 DSR is always ON
*&S1 DSR is ON in Data Mode, OFF in Command Mode
&S2 DTR/DSR signaling. With &S2, Slaves and repeaters
output the state of the master’s DTR on their local DSR line. Master
outputs the state of a slave’s DTR on its local DSR line only in
point-to-point mode (i.e., DTR is a two-way signal transfer in point-
to-point mode, and a one-way signal transfer in point-to-multipoint
mode).
&V View Configuration
The &V command displays all S registers and their current values.
&E Framing Error Check
This command enables or disables Framing Error Check. When enabled, the
modem looks for the stop bit. If the stop bit is absent, the byte is thrown out.
When enabled, the modem also does a parity check. Note that the data
format (number of data bits, parity type, and number of stop bits) is defined
by S register 110.
*&E0 Disable Framing Error Check
&E1 Enable Framing Error Check
&W Write Configuration to Memory
The &W command stores the active configuration into the modem’s non-
volatile memory.
Sxxx? Read S register value
This command causes the modem to display the current setting of S register
xxx.
Sxxx=yyy Set S register value (see section 3.3 S-Registers)
This command sets the specified S register to a value specified by yyy.

20 CompactRFTM Operating Manual: Chapter 3 Configuration Options
AT Command Result Codes
The MHX-2400 module can display the results of a command as either text
strings or numerical data. The following chart shows resulting text string and
corresponding numeric result.
0OK
3NO CARRIER
4ERROR
7CONNECT 2400
8CONNECT 3600
9CONNECT 4800
10 CONNECT 7200
12 CONNECT 9600
13 CONNECT 14400
14 CONNECT 19200
15 CONNECT 28800
17 CONNECT 38400
18 CONNECT 57600
33 CONNECT 115200
62 CARRIER 45000
64 CARRIER 20000

CompactRFTM Operating Manual: Chapter 4 Configuration 21
Refer to Appendix A (page
19) for a summary of the
S-Registers.
S Registers 2 through 5
cannot be stored to non-
volatile memory.
4.3 S Registers
The S Registers described in this section affect the operating characteristics
of the modem.
S Register 0 - Auto Answer
If this register is set to zero, the modem will power up in command mode. If
this register is set to one, the modem will power up in data mode.
S Register 2 - Escape Code
This register contains the ASCII value of the escape character.
The default value (decimal 43) is equivalent to the ASCII character ‘+’.
Values greater than 127 disable the escape feature and prevent you from
returning to the Command Mode. This register cannot be stored to non-
volatile memory. If the modem is reset, or powered down, the default value
is restored.
Default is ‘+’ (decimal 43).
S Register 3 - CR Control Code
This register contains the ASCII value of the carriage return character.
This is the character that is used to end the command line and is also the
character that appears after the modem sends a response. This register cannot
be stored to non-volatile memory. If the modem is reset, or powered down,
the default value is restored.
Default is ‘CR’ (decimal 13).
S Register 4 - Linefeed Control Code
Register S4 sets the ASCII value of the linefeed character.
The modem sends the linefeed character after sending a carriage return
character when sending text responses. This register cannot be stored to non-
volatile memory. If the modem is reset, or powered down, the default value
is restored.
Default is ‘LF’ (decimal 10).
S Register 5 - Backspace Control Code
Register S5 sets the ASCII value of the backspace character.
This character is both the character created by entering BACKSPACE and
the character echoed to move the cursor to the left. This register cannot be
stored to non-volatile memory. If the modem is reset, or powered down, the
default value is restored.
Default is ‘BS’ (decimal 8).

22 MHX-2400 Operating Manual: Chapter 3 Configuration Options

MHX-2400 Operating Manual: Chapter 3 Configuration Options 23
Only one Master can exist
for each network.
S Register 101 - Operating Mode
The Operating Mode (register S101) partly defines the “personality” of the
MHX-2400 module. Allowable settings for this register are 1 through 5 as
follows:.
• S101=1 Master Point to Multipoint
• S101=2 Master Point to Point
• S101=3 Slave
• S101=4 Repeater
• S101=5 Master - Diagnostics (see Section 4.4)
The default for this register depends on which factory default is selected as
shown below:
• Default for Factory Setting &F1 is 1 (Master Point-to-Multipoint)
• Default for Factory Setting &F2 is 3 (Slave)
• Default for Factory Setting &F3 is 4 (Repeater)
• Default for Factory Setting &F4 is 3 (Slave)
1)Master - Point to Multipoint. In any given network, there
is always only one Master. All other units should be configured as either
Slaves or Repeaters. When defined as a Point-to-Multipoint Master, the
modem broadcasts data to all Slaves and Repeaters in the network, and is
also the ultimate destination for data transmitted by all Slaves and
Repeaters. In addition, the Master defines the following network parameters
to be utilized by all other modems in the network (See the appropriate
sections for a complete description of these parameters):
nMaximum Packet Size (S112)
nMinimum Packet Size (S111)
nWireless Link Rate (S103)
nHop Interval (S109)
2)Master - Point to Point. This mode of operation is identical
to Master Point-to-Multipoint, with the exception that the Master only
broadcasts to one particular Slave or Repeater. The modem with which
communication occurs is defined by the Unit Address (S105). For example,
if a Slave has been assigned Unit Address 100, and the Master wishes to
communicate with that Slave, the Master must also be assigned a Unit
Address of 100. If there are Repeaters in the network, they will pass the
packet through to the Slave, and vice versa. Because Repeaters also have
Slave functionality (i.e., a Repeater can be connected to a terminal), the
Master can choose to communicate solely with a Repeater. This would be
accomplished by assigning the same Unit Address to both the Master and
the Repeater.
24 MHX-2400 Operating Manual: Chapter 3 Configuration Options
PHP=1 PHP=2
PHP=1
SHP=2
Master
Repeater
Slave
Network 50
Hop Pattern 1
Hop Pattern 2
Figure 3 - Repeater
Operation
Master Repeater
Slave
Repeater
Slave
PHP=1 PHP=1
SHP=2
PHP=2
PHP=2
SHP=3 PHP=3
Hop-
Pattern 1
Hop Pattern 2
Hop Pattern 3
Figure 4 - A Network
Utilizing Three Hopping
Patterns
If there is no DTE connected
to the Repeater, turn off
handshaking (&K0) and set
the baud rate to 115K.
3)Slave. Up to 65534 Slaves may exist in a network, all of which
communicate with the common Master (either directly or via Repeater(s)).
Slaves cannot directly communicate with other. Slaves only provide
acknowledgement for packets of data sent by the Master when the Master is
in Point-to-Point mode. In multipoint mode, multiple slaves would conflict
with one another if they were all trying to acknowledge the Master at the
same time. The Master does, however, send acknowledgements to all
messages it receives from Slaves. The Master initiates communications by
sending a broadcast message to all Slaves. All Slaves are free to respond in
a “Slotted ALOHA” fashion, meaning that each Slave can choose one of
several windows in which to transmit. If there happens to be two Slaves
attempting to talk at the same time, the Master may not receive the data, and
the Slaves therefore would not get an acknowledgement. At this point, the
Slaves would attempt to get the information through at random time
intervals, thus attempting to avoid any more conflicts. Special parameters
which control the Slave’s response characteristics can be modified with S
Registers S115 and S213.
4) Repeater. A more precise title would be Repeater/Slave, because a
Repeater also has much of the same functionality as a Slave. A terminal can
be connected at the Repeater location and communicate with the Master
terminal. There is no restriction to the number of Repeaters in a network,
allowing for communication over virtually limitless distances. The presence
of one Repeater in a network automatically degrades system throughput by
half. Additional Repeaters, regardless of the quantity, do not diminish
system throughput any further. To understand Repeater operation, consider
the module as belonging to two hopping patterns at the same time: The
Primary Hopping Pattern and the Secondary Hopping Pattern. In Figure 3,
the Master belongs to Hopping Pattern 1, and communicates with the
Repeater on this hopping pattern. The Slave belongs to Hopping Pattern 2,
and communicates with the Repeater on this hopping pattern. The whole
system belongs to Network 50 (i.e., all units must be assigned the same
Network Address (S104), which in this case was selected to be 50. Note
that Slaves and Master only communicate on their respective Primary
Hopping Pattern. Repeaters communicate on the Primary Hopping Pattern
when communicating with the Master (or with another Repeater between
itself and the Master). Repeaters communicate on their Secondary Hopping
Pattern when communicating with Slaves (or with another Repeater between
itself and the Slaves). Figure 4 shows another example.
If the Repeater is not also being used as a Slave (there is no DTE connected
to the serial port), it is recommended that the Repeater’s baud rate be set to
115K, and that handshaking be disabled (&K0). This will help ensure a
smooth flow of data through the network.
MHX-2400 Operating Manual: Chapter 3 Configuration Options 25
The Master determines the
Wireless Link Rate. This
setting on all other modems
is ignored..
S Register 102 - Serial Baud Rate
The Serial Baud Rate is the current speed that the modem is using to
communicate with the DTE. In command mode, the module “autobauds,”
meaning that it will adapt to the baud rate of the DTE equipment to which it
is connected. Therefore, when in command mode, you may change the baud
rate of your equipment, and the MHX-2400 will automatically adjust to this
baud rate once an AT string is issued. The new baud rate is stored in
register S102. If you issue a command to change the value of S102, the
instant you issue another command, the baud rate will revert back to that of
the DTE equipment. Therefore, it is advisable to operate in Command Mode
at the desired baud rate for Data Mode.
See page 14 for additional information.
The possible values are:
1 115200
2 57600
3 38400
4 28800
5 19200
6 14400
7 9600
8 7200
9 4800
10 3600
11 2400
It is generally advisable to choose the highest rate that your terminal
equipment will handle to maximize performance, unless a limitation on the
available bandwidth is desired. If the DTE is a personal computer, the port
can usually be used reliably at 115200. Issuing the &Fx command (factory
default) does not affect the current setting of S102.
S Register 103 - Wireless Link Rate
The Wireless Link Rate is the speed and optimization method for which
modems will communicate over the RF link. It is only necessary to set this
parameter on the Master unit. Units configured as Repeaters and Slaves will
ignore this setting, and adjust automatically to the rate of the Master.
The allowable settings are:
2Fast without Forward Error Correction
*4Fast with Forward Error Correction
Depending on the application requirements, each mode will provide
different throughput and performance. Appendix E. Performance Tables
give some indication of the performance to be expected in each mode.
In general, Forward Error Correction (FEC) reduces throughput, but in some
environments will actually increase throughput. FEC can reduce the number
of bad data packets, and hence reduce the need to retransmit.
26 MHX-2400 Operating Manual: Chapter 3 Configuration Options
Select a Network Address
and assign it to all units
which will be included in the
network.
Use the same Unit Address
on both units for point-to-
point mode. In multipoint
mode, set each Slave and
Repeater to a different Unit
Address.
Valid Unit Addresses are 1
to 65535.
S Register 104 - Network Address
The Network Address defines the membership to which individual units can
be a part of. By establishing a network under a common Network Address,
the network can be isolated from any other concurrently operating network.
As well, the Network Address provides a measure of privacy and security.
Only those units which are members of the network will participate in the
communications interchange. Valid values for the Network Address range
from 0 to 65535, inclusive.
To enhance privacy and reliability of communications where multiple
networks may operate concurrently in close proximity, it is suggested that an
atypical value be chosen – perhaps something meaningful yet not easily
selected by chance or coincidence.
Default is 1.
S Register 105 - Unit Address
In point-to-point operation, the Unit Address on both the Master and Slave
(or Repeater) units must be the same. In a multipoint system, the Unit
Address uniquely identifies each Slave and Repeater from one another.
Each unit in a multipoint system must have a unique Unit Address ranging
from 1 to 65535. Do not use 0 as a Unit Address, and do not use a Unit
Address more than once within the same Network. This is required because
the Master must be able to acknowledge each unit individually, based on the
Unit Address.
S Register 106 - Primary Hopping Pattern
S Register 206 - Secondary Hopping Pattern
Since the MHX-2400 is a frequency-hopping modem, the carrier frequency
changes periodically according to one of 64 pseudo-random patterns,
defined by the Primary and Secondary Hopping Patterns. Valid entries for
each are 0 through 63. Patterns 0 through 57 are pre-programmed, with
details provided in Appendix F. Patterns 58 through 63 are user-editable
patterns. See Appendix F for details.
The concept of Primary and Secondary Hopping Patterns was introduced in
the discussion of S Register 101 (Operating Mode).
Using the designations M[a,] Rx[a,b] and Sx[a] where:
- M indicates Master;
- R indicates Repeater;
- S indicates Slave;
- x is the Unit Address;
- a is the primary hopping pattern; and,
- b is the secondary hopping pattern;
MHX-2400 Operating Manual: Chapter 3 Configuration Options 27
Master Slave
Master Repeater Slave
Master Repeater1 Repeater2 Slave
Slaves and Masters do not
use Secondary Hopping
Patterns
Remember to assign a
unique Unit Address (1 to
65535) to each unit in the
system
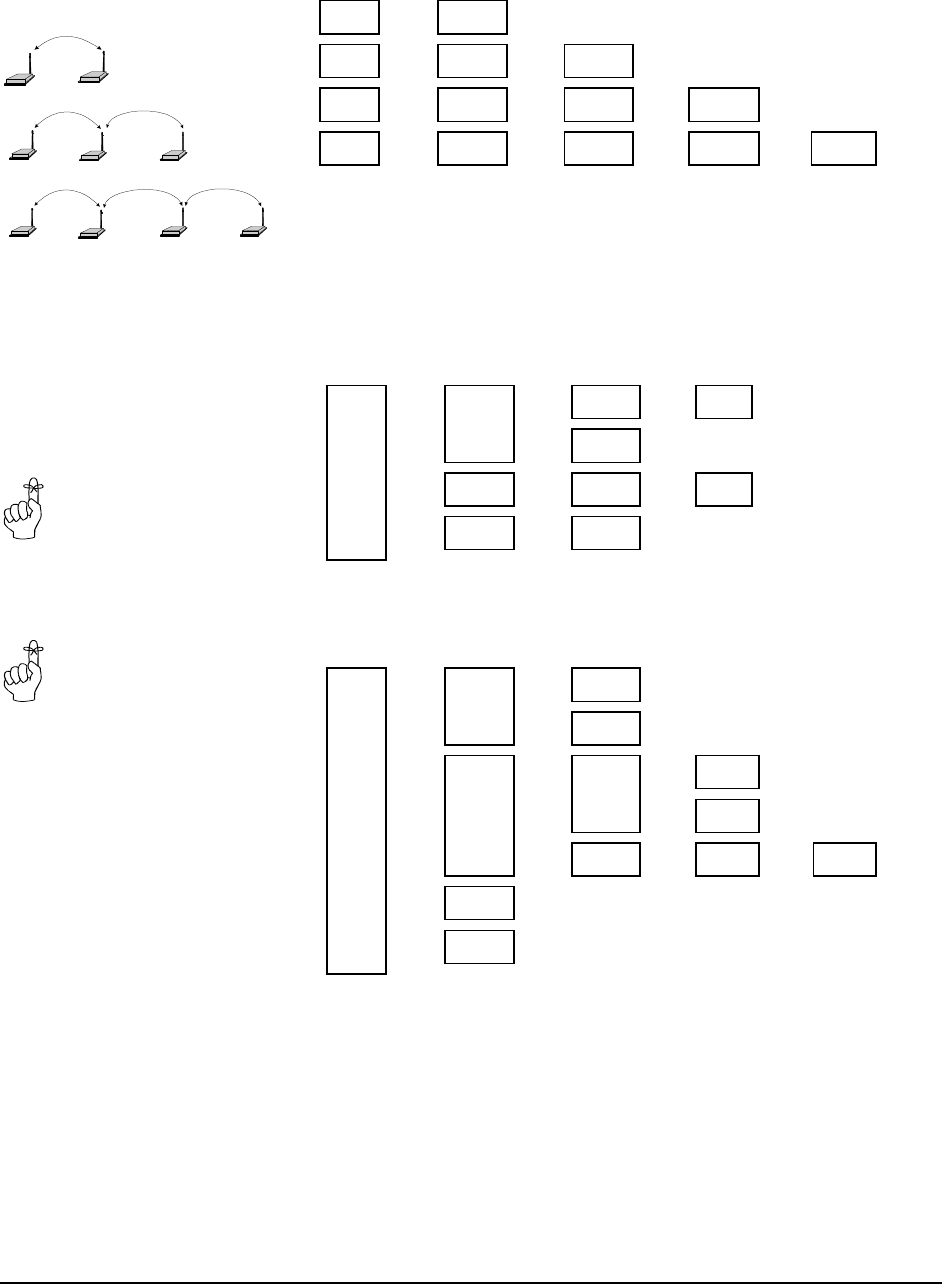
the following diagrams illustrate the methodology for deploying simple to
complicated networks:
M[1] ←→ S1[1]
M[1] ←→ R1[1,2] ←→ S2[2]
M[1] ←→ R1[1,2] ←→ R2[2,3] ←→ S3[3]
M[1] ←→ R1[1,2] ←→ R2[2,3] ←→ R3[3,4] ←→ S4[4]
It is reasonable to consider a Repeater as being both a Slave and a Master,
alternating between Primary and Secondary Hopping Patterns as the unit
changes channel. Consider R1 in the illustration below. When
communicating with the Master, R1 is acting like a Slave on Primary
Hopping Pattern 1. When communicating with R2 and S4, R1 is acting like
a Master on Secondary Hopping Pattern 2. If multiple Repeaters are used,
they should have different Secondary Hopping Patterns:
←→ R1[1,2] ←→ R2[2,5] ←→ S3[5]
M[1] ←→ S4[2]
←→ R5[1,3] ←→ R6[3,6] ←→ S7[6]
←→ R8[1,4] ←→ S9[4]
Note that all units have a unique Unit Address.
Networks of any complexity can be created by linking multiple Repeaters
and Slaves:
←→ R1[1,2] ←→ S2[2]
←→ S3[2]
←→ ←→ R5[3,6] ←→ S6[6]
M[1] R4[1,3] ←→ S7[6]
←→ R8[3,7] ←→ R9[7,8] ←→ S10[8]
←→ S11[1]
←→ S12[1]
With a limitation of 49 hopping patterns, one might suspect that there is a
limitation to the number of repeaters in a system. However, if the units are
far enough away from one another, hopping patterns may be reused in
different sections of the network, without causing interference.
28 MHX-2400 Operating Manual: Chapter 3 Configuration Options
All units within a network
must use the same
encryption key.
*The MHX-2400, when sold
with antennas with gain
higher than 6dBi, shall be
factory limited to no more
than 100 mW. Only settings
0, 1 and 2 are available.
S Register 107 - Encryption Key
The Encryption Key provides a measure of security and privacy of
communications by rendering the transmitted data useless without the
correct key on the receiver. Valid Encryption Keys range from 0 to 65535.
Keep in mind that all units within the network must use the same key for
communications to succeed.
S Register 108 - Output Power Level
The Output Power Level determines at what power the MHX-2400
transmits. The MHX-2400’s sensitive receiver can operate with very low
power levels, so it is recommended that the lowest power necessary is used;
using excessive power contributes to unnecessary “RF pollution”.
The allowable settings are:
010 mW *4 500 mW
150 mW *5 750 mW
2100 mW *6 1 W
*3 250 mW
Ideally, you should test the communications performance between units
starting from a low power level and working upward until the RSSI is
sufficiently high and a reliable link is established. Although the conditions
will vary widely between applications, typical uses for some of the settings
are described below:
Power Use
10 mW For in-building use, typically provides a link up to 300 feet on the
same floor or up/down a level. Outdoors, distances of 10 km can be
achieved if high-gain (directional) antennas are placed high above
ground level and are in direct line-of-sight.
50 mW 200-500 ft indoors, 8-15 km* outdoors.
100 mW 400-800 ft indoors, 15-25 km* outdoors.
1000 mW
(1 W)
Typically provides communications up to a distance of 1000 feet or
more in-building on the same floor or up/down a few levels,
depending on building construction (wood, concrete, steel, etc.). In
ideal line-of-sight conditions, up to 30 km* or more can be
achieved. Note that only an antenna with a gain of no more than 6
dBi may be used. Any higher is a violation of FCC rules. See
IMPORTANT warning below.
* These outdoor distances assume antennas are mounted at least 100 ft
above ground level
MHX-2400 Operating Manual: Chapter 3 Configuration Options 29
FCC Regulations
The hopping interval is
controlled by the master.
The slave and repeater units
will use the hopping interval
setting from the master.
Warning: Communication will
fail if the hopping interval is not
set according to the guidelines of
Appendix E.;..
IMPORTANT:
FCC Regulations allow up to 36 dBi effective radiated power (ERP).
Therefore, the sum of the transmitted power (in dBm), the cabling loss
and the antenna gain cannot exceed 36 dBi.
1 mW = 0 dBm
10 mW = 10 dBm
100 mW = 20 dBm
1000 mW = 30 dBm
For example, when transmitting 1 Watt (30 dBm), the antenna gain
cannot exceed 36 - 30 = 6 dBi.
Microhard Systems Inc. limits the MHX-2400’s transmitted power to
100mW for all units purchased with antennas with gain above 6dBi.
S Register 109 - Hopping Interval
This option determines the frequency at which the modems change channel.
Note that the Master controls this parameter for the entire network. This
setting is ignored in units configured as Slaves or Repeaters.
The allowable settings are:
18 msec
212 msec
316 msec
420 msec
530 msec
645 msec
780 msec
*8 120 msec
Some of the shorter hop intervals are incompatible in combination with:
• repeaters in the system;
• the value set for link rate (S103); and,
• larger maximum packet sizes (S112).
See Appendix E for optimal Hopping Interval settings in relation to packet
size and link rate.

30 MHX-2400 Operating Manual: Chapter 3 Configuration Options
When S114=0, the
Minimum and Maximum
Packet Size is controlled by
the Master , therefore, the
Slave and Repeater units will
use the Minimum and
Maximum Packet Size
setting from the Master.
When S114=1, Slave and
Repeater units will use their
local S111 and S112 settings
for packet size control
S Register 110 - Data Format
This register determines the format of the data on the serial port. Allowable
settings are:
*1 8 bits, No Parity, 1 Stop
28 bits, No Parity, 2 Stop
38 bits, Even Parity, 1 Stop
48 bits, Odd Parity, 1 Stop
57 bits, No Parity, 1 Stop
67 bits, No Parity, 2 Stop
77 bits, Even Parity, 1 Stop
87 bits, Odd Parity, 1 Stop
97 bits, Even Parity, 2 Stop
10 7 bits, Odd Parity, 2 Stop
11 9 bits, No Parity, 1 Stop
S Register 111 - Packet Minimum Size
S Register 112 - Packet Maximum Size
S Register 114 - Packet Size Control
S Register 116 - Packet Character Timeout
These settings determine the conditions under which the modem will
transmit accumulated data over the air.
S Register 111 - Minimum Size
Valid entries for this register are 1 to 255 bytes, which defines the minimum
number of bytes to receive from the DTE before encapsulating them in a
packet and transmitting over the air.
Note that if register S114=0 at any particular Repeater or Slave, that
Repeater or Slave will ignore its own S111 register and abide by the
Master’s S111 setting. If S114=1 at any particular Repeater or Slave, that
Repeater or Slave will use its own local S111 setting. The default for S111
is 1 byte.
S Register 112 - Maximum Size
This setting has a range of 2 to 255, and defines the maximum number of
bytes from the DTE which should be encapsulated in a packet. This value
should be greater than the minimum packet size, but not smaller than is
necessary for reliable communications. If the wireless link is consistently
good and solid, a maximum size of 255 will yield the best throughput
(depending on the higher level protocols of the connected equipment).
However, if the link is poor (e.g., experiencing excessive interference) and
data is frequently retransmitted, the maximum packet size should be
reduced. This decreases the probability of errors within packets, and
reduces the amount of traffic in the event that retransmissions are required.
Note that if register S114=0 at any particular Repeater or Slave, that
Repeater or Slave will ignore its own S112 register and abide by the
Master’s S112 setting. If S114=1 at any particular Repeater or Slave, that
Repeater or Slave will use its own local S112 setting. The default for S112
is 255 bytes.

MHX-2400 Operating Manual: Chapter 3 Configuration Options 31
S Register 114 - Packet Size Control
This register, when set to 1, allows for Repeater and Slaves’ local S111 and
S112 to override those of the Master. This may be useful for controlled
asymmetrical data flow. The master always transmits in the first portion of
the hop interval, with slaves and repeaters responding back to the master on
the second portion of the hop interval. Setting the master’s max packet size
smaller than that of the slave would ensure that the master uses less of the
available time within the hop interval for transmitting data, thereby
allocating more time for the slave.
S Register 116 - Packet Character Timeout
This register has valid entries of 0 to 254 milliseconds. The Packet
Character Timeout timer looks for gaps in the data being received from the
DTE. The timer is only activated after the Minimum Packet Size has been
accumulated in the modem. After which, if the timer detects a gap in the
data exceeding the Packet Character Timeout value, the modem will
transmit the data.
The MHX-2400 will accumulate data in its buffers from the DTE until one
of the following requirements is met (whichever occurs first):
• The Maximum Packet Size (in bytes) has been accumulated;
• The Minimum Packet Size has been accumulated AND the Packet
Character Timeout interval has elapsed.
The default for the Packet Character Timeout is 9 ms. If set to 0 ms, the
unit will buffer exactly the minimum packet size before transmitting.
S Register 113 - Packet Retransmissions
This register applies to both Master Point-to-Multipoint and Repeater
operation. It does not apply to Slave or to Master Point-to-Point operation.
The Master will retransmit each data packet exactly the number of times
defined by the Packet Retransmissions parameter. The Master retransmits
once at the beginning of each hopping interval until the limit is reached.
This parameter is not necessary in Slave units since all Slaves receive
acknowledgement from the Master, and needn’t blindly retransmit if it has
knowledge that the Master has received the packet. Similarly, this
parameter is not used by the Master during Point-to-Point communication
since the Master only would be required to retransmit if no
acknowledgement were received from the Slave. As discussed previously,
the Repeater effectively behaves as both a Master and a Slave. When the
Repeater is tuned to its Secondary Hopping Pattern (acting as a Master), the
Packet Retransmissions Parameter comes into play. The Repeater will re-
send packets of data on to Slaves or other Repeaters exactly the number of
times defined by the Packet Retransmissions parameter.
Recipients of the packet will discard any duplicates The valid settings for
this parameter are 0 to 255 retransmissions. The default is 2.

32 MHX-2400 Operating Manual: Chapter 3 Configuration Options
S Register 213 - Packet Retry Limit
Packet Retry Limit is analogous to Packet Retransmissions, but specifically
applies to Slaves, Repeaters and Point-to-Point Masters. This parameter is
not used by the Master in Point-to-Multipoint networks. Because the Slave
has the advantage of receiving acknowledgements from the Master, it is not
necessary to blindly retransmit each packet. If the Slave does not get an
acknowledgement on the next hop, it will retransmit its packet. This will
continue until the Packet Retry Limit is reached or an acknowledgement is
received. If the limit is reached, the modem will give up and discard the
data. Valid settings are 0 to 255 retries. The default value is 2.
The Repeater makes use of this parameter when it is tuned to its Primary
Hopping Pattern and is acting like a Slave. Likewise, the Master in a Point-
to-Point network uses this parameter because it is expecting to receive
acknowledgement from a Slave. Acknowledgements from Slaves cannot be
carried through repeaters back to the Master. Therefore in point-to-point
networks that make use of repeaters, care must be taken not to set the Packet
Retry Limit too high.
S Register 115 - Packet Repeat Interval
A parameter that is specific to Slaves and Repeaters is the Packet Repeat
Interval.
The allowable settings are 1 through 255. The default is 1.
This parameter defines a range of random numbers that the Slave will use as
the next slot in which it will attempt to send the packet. For example, if this
register is set to 7, the Slave will choose a number between one and seven as
the next slot in which to transmit. Suppose the random number generator
picks 5, then the Slave will transmit in the fifth time slot. A Slave will
transmit a maximum of once per hopping interval, however, depending on
the duration of the hopping interval and the maximum packet size, more
than one slot per hop is potentially available. The Slave will transmit more
frequently when a Repeat Interval with a smaller range is selected. Choose
1 to have the Slave transmit in the first available slot. Choose higher
intervals for less frequent transmission, or to avoid collisions between many
Slaves in the system.
This register is always disregarded and taken as S115=1 in Point-to-Point
mode.
MHX-2400 Operating Manual: Chapter 3 Configuration Options 33
S Register 117 - Modbus Mode
Modbus Mode allows for the MHX-2400 to be fully Modbus compatible.
For Modbus operation, the general requirement is to get the packet of data
to the receiving serial port with no gaps in the data. The MHX-2400
incorporates a “Modbus Mode” which implements a delay at the receiving
modem to ensure that no gaps are introduced. For most applications, the
following settings are suitable for Modbus operation:
1. Set Modbus Mode parameter S117 = 1
2. Set the minimum packet size (S111) to 1 byte
3. Set the character timeout S116 (rounded to the nearest ms) to roughly
2.5 byte lengths. For example, at 9600 baud,
S116 = 1/9600 x 10 x 2.5 x 1000 = 2.6ms
Rounded up, S116 = 3ms
4. Set parameter S121 = 3 byte lengths. For example, at 19200 baud
S121 = 1/19200 x 10 x 3 x 1000 = 1.56ms.
Rounded up, S121 = 2ms
5. Set S120 as follows:
Slave Side
S120 = (Hop Interval in ms) x (1 + # of Master retransmissions) x (1 +
# of Repeaters over 1)
eg. Hop Interval S109=4 (20 ms),
Master Retransmissions S113=1
Number of Repeaters in system = 2; then,
S120 = 20 x (1 + 1) x (1 + 1) = 80 ms
Master Side
S120 = (Hop Interval in ms) x (1 + # of Repeaters over 1)
6. Try to set the hop interval as short as possible while still ensuring
adequate throughput. It is recommended to set the Hop Interval and
Maximum Packet Size as specified in Appendix E. Performance
Tables. For example, for Master to Slave communication with no FEC,
If a throughput of 60kbps is required, set the Hop Interval S109=3, and
set the Maximum Packet Size S112=110.
The allowable settings for this register are:
*0 Disabled
1Enabled
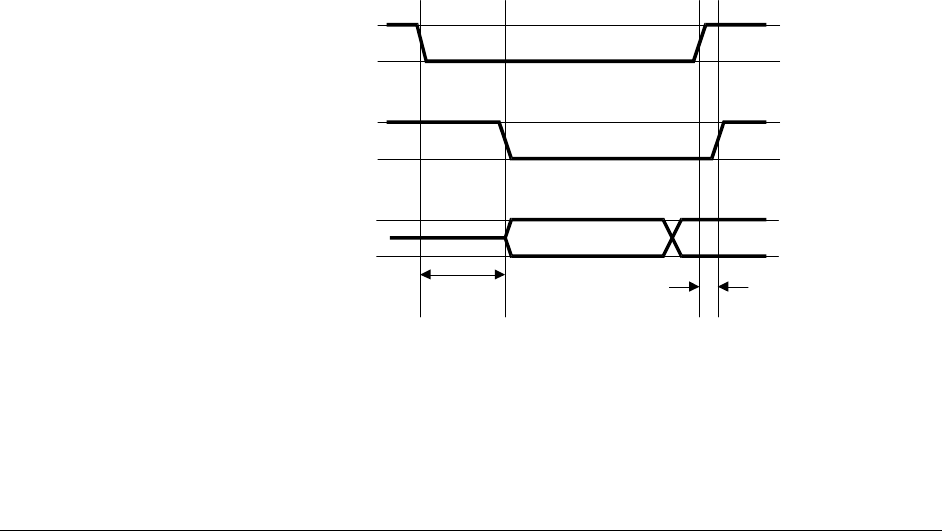
34 MHX-2400 Operating Manual: Chapter 3 Configuration Options
S Register 118 - Roaming
This mode is activated on slaves and repeaters by setting register S118=1.
In this mode, a slave/repeater looks for synchronization with a Master
having the same network address and encryption key, but without regard for
the hopping pattern S106. Once the slave/repeater finds such a master, it
tunes to that master’s hopping pattern. If synchronization is lost, the
slave/repeater will again begin searching for a new master. Using this
algorithm, a mobile unit can ‘roam’ and automatically synchronize with a
new master once it loses communication with the previous one.
The allowable settings for this register are:
*0 Disabled
1Enabled
S Register 119 - Quick Enter to Command
By setting this register to 1, a delay of 5 seconds is introduced at power-up
before the modem goes into data mode. If, during these 5 seconds, the user
enters ‘MHX’ the modem will instead go into Command Mode, and reply
with ‘OK’. The terminal baud rate must be set to 9600 baud. If an incorrect
character is entered, the modem will immediately go into Data Mode. The
default setting is 1 - Enabled.
S Register 120 - RTS/DCD Framing
S Register 121 - DCD Timeout
The MHX-2400 supports two special types of data framing:
• Input (or RTS/CTS) Data Framing; and,
• Output (or DCD) Data Framing
Input Data Framing is enabled by configuring the Handshaking Parameter as
&K2. This type of framing makes use of the S120 parameter as illustrated
in Figure 5. Parameter S120 can be set to any value between 0 and 254 ms.
RTS
CTS
TXD
S120 (ms)
Data going into MHX-910
0 to 1 ms
Figure 5 - Input Data Framing
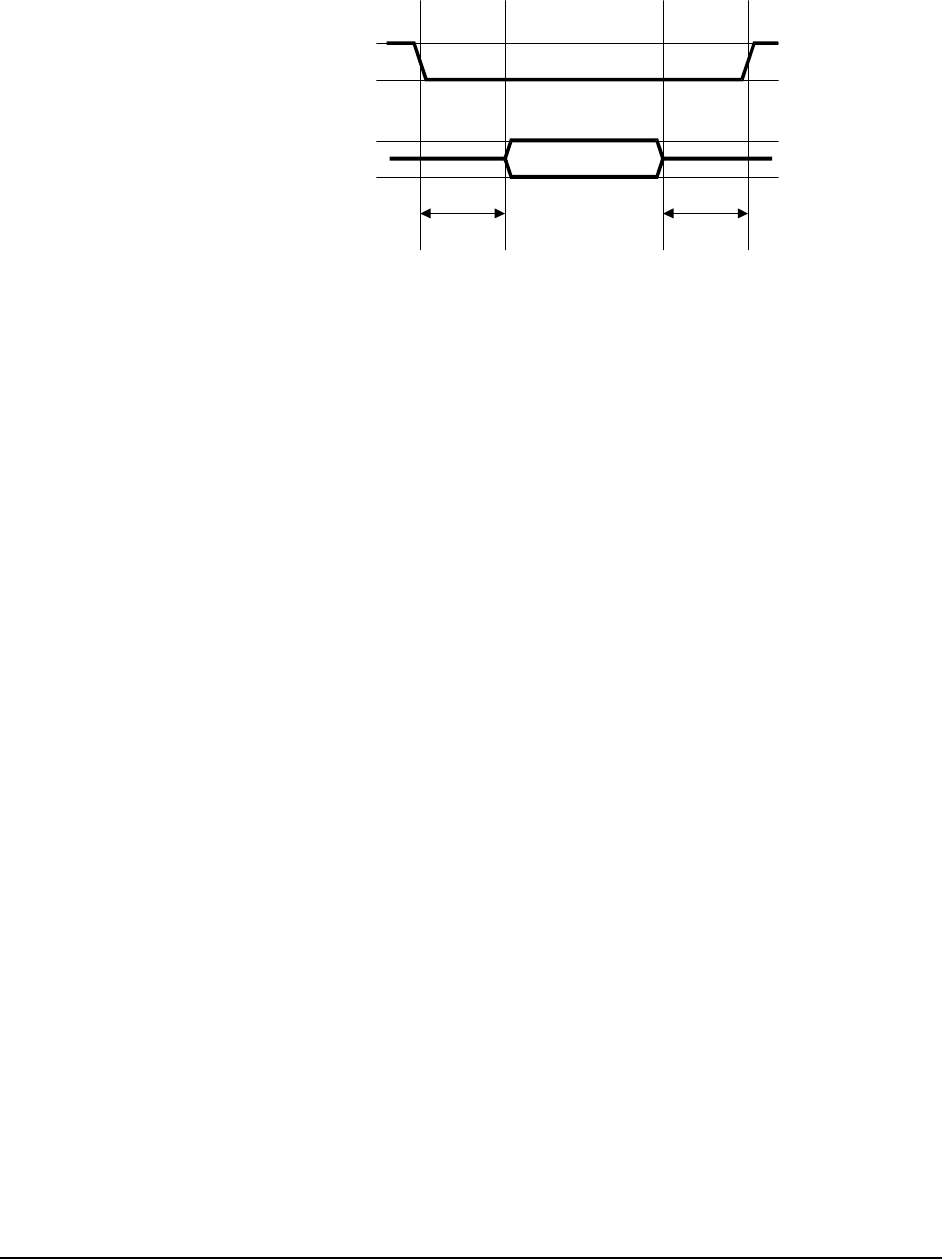
MHX-2400 Operating Manual: Chapter 3 Configuration Options 35
To enable output (DCD) data framing, set the Data Carrier Detect parameter
as &C2. This type of framing uses both S120 and S121 registers as shownin
Figure 6. Valid ranges for each parameter are 0 to 254 ms
DCD
RXD Data leaving MHX-910
S120 (ms) S121 (ms)
Figure 6 - Output Data Framing
S Register 122 - Remote Control
This register either disables or enables remote control at a repeater or slave
unit. When disabled, a slave/repeater’s settings may be remotely read by the
master, but may not be remotely modified. When enabled, the
slave/repeater allows the network master full remote control access. See
Section 4.4.3 for details. The default is 0 - disabled.
S Register 123 - RSSI Reading
This register displays the average signal strength in dBm over the previous
four hop intervals. The value in this register is also reflected in status lines
RSSI1,2 and 3. See Section 2.2 for a description of RSSI, and how it is
derived.

36 MHX-2400 Operating Manual: Chapter 3 Configuration Options
4.4 Diagnostics, Statistics and Remote Control
The MHX-2400 provides several commands which are very useful for
troubleshooting and analyzing the performance of the radio system.
4.4.1 Spectrum Analyzer Feature (ATG)
Issuing the command ATG <return>,causes the MHX-2400 to perform a
sweep of the entire operating spectrum, giving a signal strength read-out in
dBm for each channel as shown below:
Noise level, '*'- mean value, '.'- max value
ch 1 -138dBm *
ch 2 -139dBm *
ch 3 -139dBm *
ch 4 -139dBm *
ch 5 -139dBm *
ch 6 -139dBm *
ch 7 -130dBm *
ch 8 -116dBm *
ch 9 -135dBm *
...
ch 127 -135dBm *
Paging -135dBm *
Channel 1 is at frequency 902.4 MHz, with all subsequent channels in 200
kHz increments. This feature also displays average received signal strength
for 12 channels above the 902-928 MHz ISM band. This area of the
spectrum is used by paging networks.
When deploying a network, the spectrum analyzer feature is useful for
determining which parts of the ISM band may be noisy. This knowledge
can be used to select an appropriate hopping pattern, or for creating a
custom hopping pattern which avoids those frequencies.
In addition, the presence of extremely high paging noise (> -25dBm) may
indicate a need to install Microhard’s external cavity filter in line with the
antenna. See Chapter 5 for details.
4.4.2 Statistics (ATP)
The ATP <return> command provides a list of several statistics as follows:
# of data packets sent = 0
# of data packets received = 0
# of Slave's retries = 0
# of Slave's packets dropped = 0
# of Slave's sync errors = 0
# of CRC errors = 0
OK
The MHX-2400 starts the statistics count at zero each time the unit is
powered up, or after the ATP command has been issued. By entering the
ATP command, all statistics are cleared back to zero. The maximum limit
for each statistic is 65535.
MHX-2400 Operating Manual: Chapter 3 Configuration Options 37
4.4.3 Remote Control and Diagnostics (S101=5)
This is a very powerful tool which allows user to remotely configure and
interrogate all units in a multipoint system from the Master unit. Simply by
having knowledge of the unit address of each slave/repeater in the system,
users can set the unit address of the master to match that of the
slave/repeater of interest, set S101=5, go online, and interrogate/modify
virtually all parameters of the remote repeater/slave unit. It should be noted
that when the master goes online, all other units belonging to the network
will synchronize with the master, but only the unit whose unit address
matches the master’s will respond to the master’s diagnostic commands.
In addition, in diagnostics mode, the master can change its unit address ‘on-
the-fly,’ avoiding the delays of going into command mode, modifying the
unit address, going back online and re-synchronizing with the entire
network, before interrogating a new slave/repeater. The master’s unit
address can be changed while still maintaining synchronization with the
entire network, allowing for quick and efficient diagnostic sessions with all
remote units. Ensure that register S122=1 on any slave/repeater that you
wish to remotely modify.
Table 4 provides a diagnostics command summary. The first column is a
list of commands that may be issued at the master. The second column is
the corresponding remote register. In general, any command issued without
any additional parameters is a read command. For example, if you type:
0 <return>
The remote slave/repeater will send back the value if its S101 register. On
the Master terminal screen, you would see:
0 (this is the 0 that you typed, echoed back locally)
3 (this indicates that the remote’s S101=3)
If you type:
04 <return>
This command would change the remote’s operating mode to S101=4
(repeater). The remote unit should return ‘OK’. Remember, if the remote’s
S122=0 (remote control disabled), the remote will respond with ‘ERROR’.
In Table 6, Column 1, the meanings of the format is as follows:
COMMAND A command without (x) indicates that you may not add any
additional parameters. i.e., you may only read back the value
of the remote’s register. You may not modify that register.
The only exception to this is the WRITE command ‘e’. Type
‘e’ to force the write command (&W) at the remote modem.
COMMAND(x) Indicates this command may be sent with or without a
parameter. Issuing this command without a parameter reads
the corresponding remote’s register. Issuing this command
with the additional parameter ‘x’ changes the corresponding
remote’s register to ‘x’. Remember, any changes you wish to
retain in the event of a powerdown or reset should be stored to
non-volatile memory by issuing the write command ‘e’.
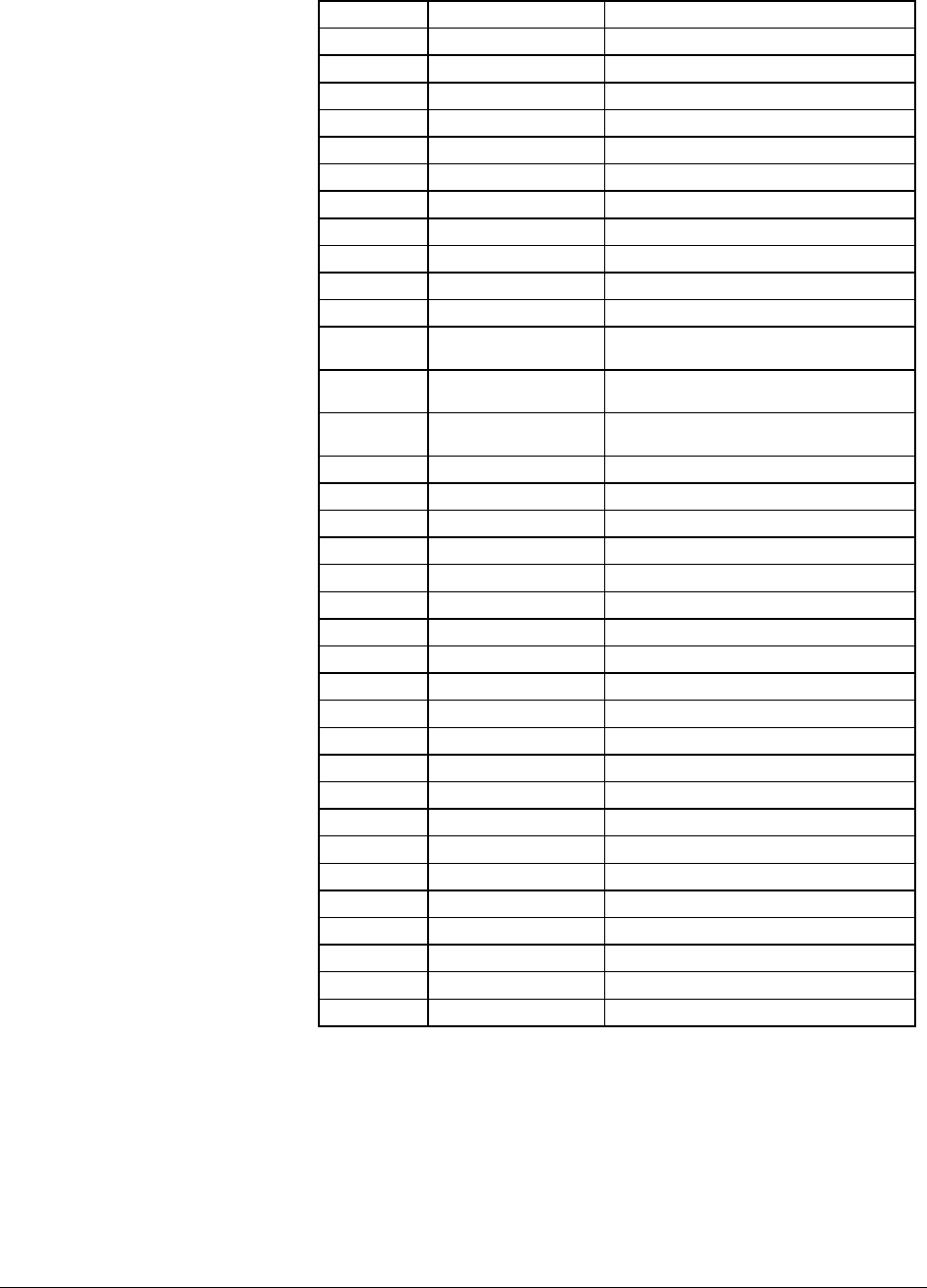
38 MHX-2400 Operating Manual: Chapter 3 Configuration Options
Table 6 - Remote Control and Diagnostics
Command Remote Register Description
0(x) S101 Operating Mode
1S102 Baud Rate
2(x) S108 Output Power
3(x) S110 Data Format
4(x) S115 Repeat Interval
5(x) S116 Character Timeout
6(x) S120 RTS/DCD Framing
7(x) S121 DCD Timeout
8(x) S117 Modbus Mode
9(x) S213 Retry Limit
atest string Read back 'OK' from remote
a1 test string Read back 'Microhard Systems, Inc.' from
remote
a2 test string Read back 64 character test string from
remote
a3 test string Read back 255 character test string from
remote
b(x) &E Framing
c(x) &C DCD
d(x) &K Handshaking
e&W Write
fS123 RSSI
g(x) S104 Network Address
h(x) S106 Hopping Pattern
I(x) S206 Secondary Hopping Pattern
j(x) S113 Retransmissions
k1 statistics Read # of data packets sent
k2 statistics Read # of data packets received
k3 statistics Read # of Slave's retries
k4 statistics Read # of Slave's packets dropped
k5 statistics Read # of Slave's sync errors
k6 statistics Read # of CRC errors
k255 statistics Clear statistics
l(x) S119 Quick Enter to Command Mode
m(x) S118 Roaming
n(x) S114 Packet Size Control
o(x) S111 Min Packet Size
p(x) S112 Max Packet Size

MHX-2400 Operating Manual: Chapter 3 Configuration Options 39
40 MHX-2400 Operating Manual: Chapter 3 Configuration Options
5. Installation
The installation, removal
or maintenance of all
antenna components must
be carried out by
qualified and experienced
professionals.
The installation, removal or maintenance of all antenna
components must be carried out by qualified and
experienced professionals.
The MHX-2400 complies with FCC part 15 at the modular level for
operation in the license-free 902-928 MHz ISM band. This chapter
provides guidelines for installing and deploying equipment which
incorporates the MHX-2400 module.
5.1 Estimating the Gain Margin
Successful communication between CompactRF modules is dependent on
three main factors:
• System Gain
• Path Loss
• Interference
System gain is a calculation in dB describing the performance to be
expected between a transmitter-receiver pair. The number can be calculated
based on knowledge of the equipment being deployed. The following four
factors make up a system gain calculation:
1. Transmitter power (user selectable 0, 10, 20 or 30 dBm)
2. Transmitter gain (transmitting antenna gain minus cabling loss between
the transmitting antenna and the MHX-2400 module)
3. Receiver gain (Receiving antenna gain minus cabling loss between the
receiving antenna and the module)
4. Receiver sensitivity (Specified as -105 dBm on the MHX-2400 module)
In the following illustration, the transmitting antenna has a gain of 6 dB, and
the receiving antenna has a gain of 3 dB. The cable loss between the
module and the antenna is 2 dB on both the transmitting and receiving side.
Transmitter
30 dBm
Output Power
Receiver
Sensitivity =
-105 dBm
Cable Loss = 2 dBCable Loss = 2 dB
Antenna Gain = 6 dB Antenna Gain = 3 dB
The power level has been set to 30 dBm (1W) on the transmitter, and the
receiver sensitivity for the MHX-2400 is -105 dBm.
System gain would be calculated to be:
30 - 2 + 6 + 3 - 2 + 105 = 140 dB.
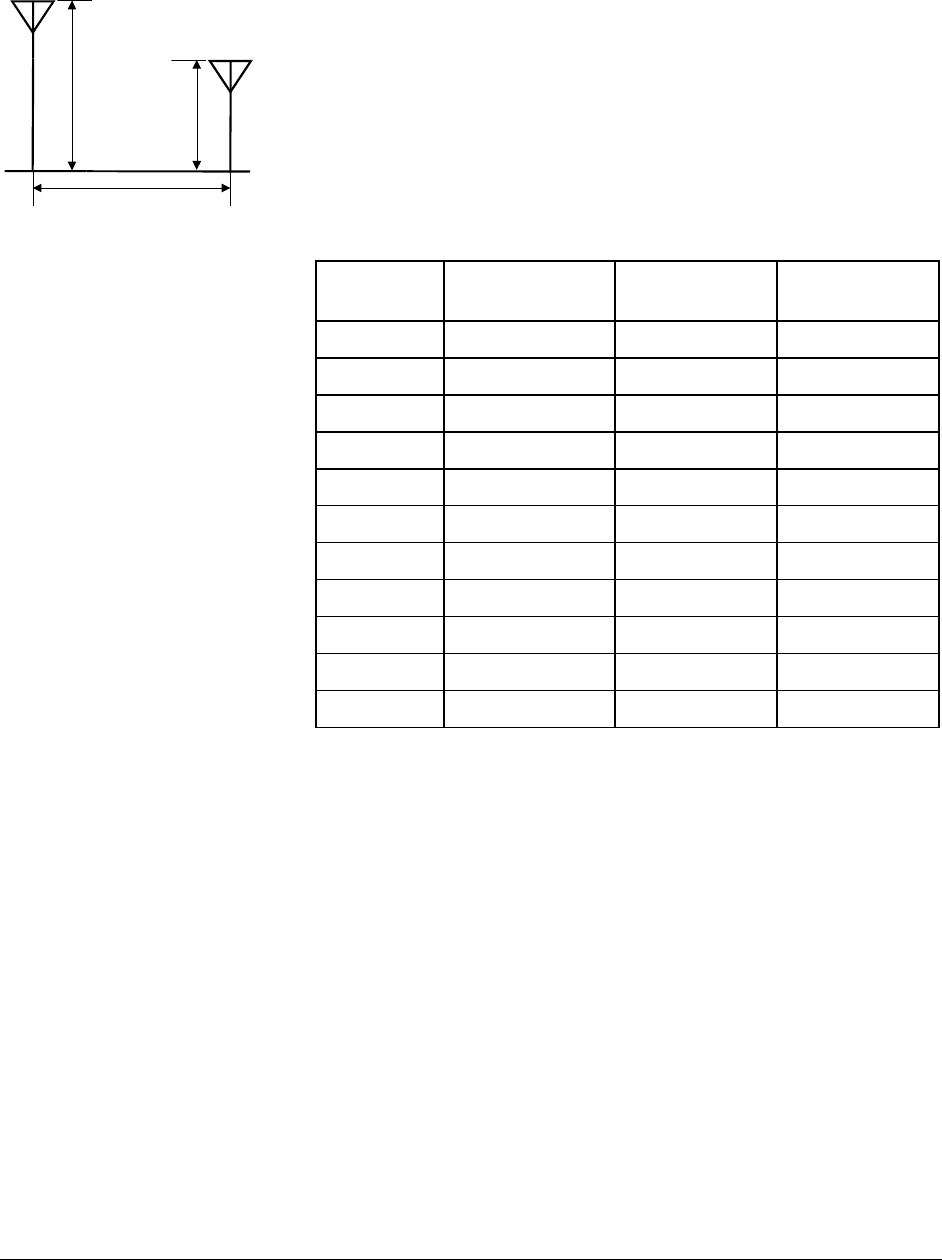
CompactRFTM Operating Manual: Chapter 5 Installation 41
Base Height (m)
Mobile
Height
(m)
Distance (km)
When deploying your system, care must be taken to ensure the path loss
(reduction of signal strength from transmitter to receiver in dB) between
equipment does not exceed the system gain (140 dB in the above example).
It is recommended to design for a gain margin of at least 10 dB to ensure
reliable communication. Gain margin is the difference between system gain
and path loss. Referring to the same example, suppose the path loss is 100
dB, the gain margin would be 40 dB, which is more than adequate for
reliable communication.
Path loss is a very complicated calculation which mainly depends on the
terrain profile, and the height of the antennas off the ground.
The following table provides path loss numbers for varying antenna heights
and antenna separation: These numbers are real averages taken from rural
environments. They do not apply to urban, non-line-of-sight environments.
Distance
(km)
Base Height
(m)
Mobile Height
(m)
Path Loss
(dB)
5 15 2.5 116.5
5 30 2.5 110.9
8 15 2.5 124.1
8 15 5 117.7
8 15 10 105
16 15 2.5 135.3
16 15 5 128.9
16 15 10 116.2
16 30 10 109.6
16 30 5 122.4
16 30 2.5 128.8
Once the equipment is deployed, you can verify the signal strength by
entering into Command Mode and reading Register S123. This register
provides the average signal strength in dBm. The minimum strength for
communication is roughly -105 dBm. For consistent reliable
communication, you should try to deploy the equipment such that signal
strength exceeds -95 dBm.
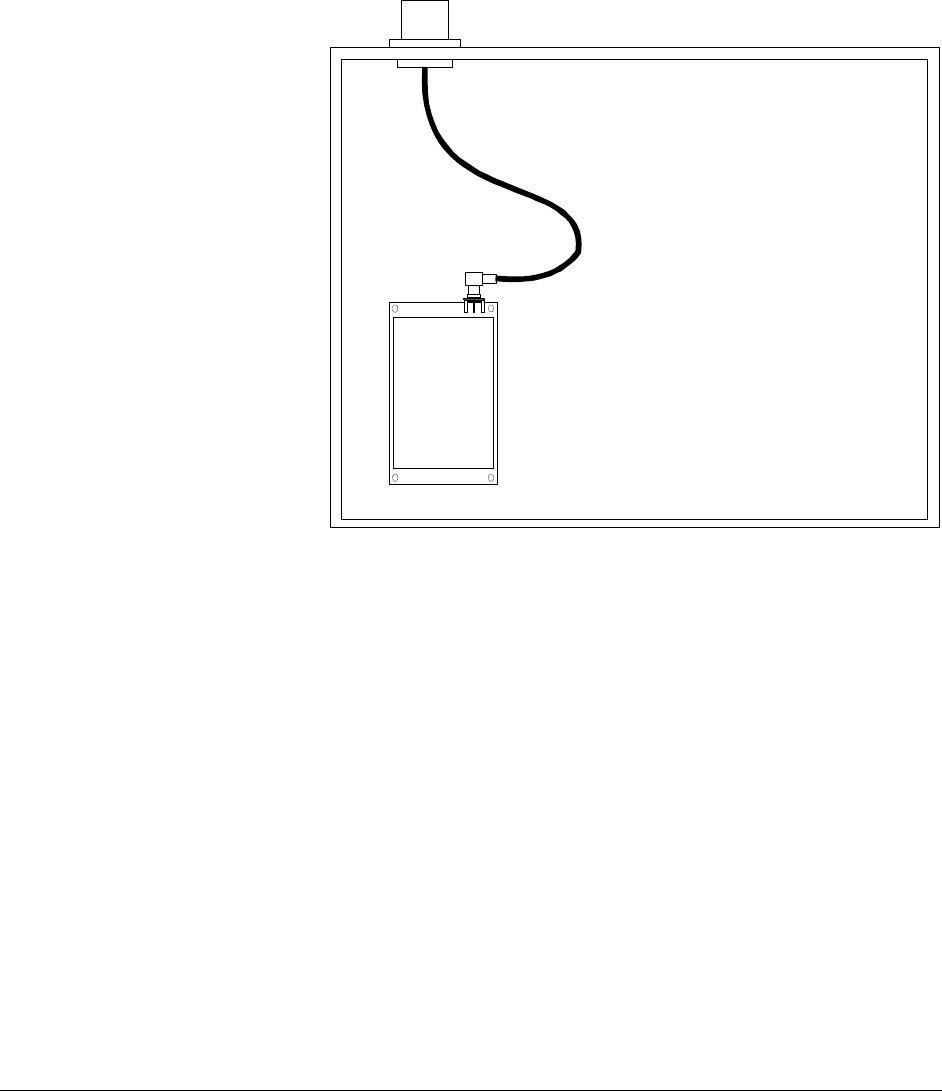
42 MHX-2400 Operating Manual: Chapter 3 Configuration Options
5.2 Antennas and Cabling
This section describes the recommended procedure for installing cabling
and antennas for use with the MHX-2400 module.
5.2.1 Internal Cabling
The most common method for installing the module is to run a cable from
the module’s MCX connector to a reverse TNC bulkhead connector on the
chassis of the equipment as shown in Figure 11. This cable can be
purchased from Microhard Systems.
RG316 Cable
with MCX male
connector
and Reverse TNC
bulkhead
connector
Reverse TNC Connector
MCX female connector
MHX-910
Figure 11. Suggested Internal Cabling
Cable losses are negligible for the short piece used within the chassis.
Additional losses up to 0.5 dB may be present in the MCX and Reverse
TNC connections.
CompactRFTM Operating Manual: Chapter 5 Installation 43
The installation, removal or
maintenance of all antenna
components must be carried out
by qualified and experienced
professionals.
Never work on an antenna system
when there is lightning in the
area.
Direct human contact with the
antenna is potentially unhealthy
when the MHX-2400 is generating
RF energy. Always ensure that
the MHX-2400 equipment is
powered down during installation.
5.2.2 Installing External Cables, Antennas and Lightning
Arrestors
The installation, removal or maintenance of all antenna components must be
carried out by qualified and experienced professionals.
Never work on an antenna system when there is lightning in the area.
Direct human contact with the antenna is potentially unhealthy when the
MHX-2400 is generating RF energy. Always ensure that the MHX-2400
equipment is powered down during installation.
Surge Arrestors
The most effective protection against lightning is to install two lightning
(surge) arrestors. One at the antenna, and the other at the interface with the
equipment. The surge arrestor grounding system should be fully
interconnected with the transmission tower and power grounding systems to
form a single, fully integrated ground circuit. Typically, both ports on surge
arrestors are N-female.
Cabling
The following coax cables are recommended:
Cable Loss (dB/100ft)
LMR 195 10.7
LMR 400 3.9
LMR 600 2.5
Factors to take into consideration when choosing a cable are:
• price;
• bend radius limitations (the lower performance cables generally can
bend more sharply)
• performance requirements; and,
• distance between the equipment and the antenna.
When installing the cable, always begin fastening at the top near the antenna
connector/surge arrestor. The cable must be supported at the top with a
hose clamp or wrap lock, and at 5 ft intervals down the length of the tower.
Over-tightening the fasteners will dent the cable and reduce performance. If
properly grounded surge arrestors are not installed at both the top and the
bottom of the cable, then the cable should be grounded to the tower at these
locations using a cable grounding kit. If the tower is non-conductive, then a
separate conductor, physically separate from the cable, should be run down
the tower.
44 MHX-2400 Operating Manual: Chapter 3 Configuration Options
To comply with FCC regulations,
.you must limit ERP to 36 dBm or
less.
Antenna
Before choosing an antenna, you should have some knowledge of the path
loss and the topology of the equipment. If the equipment is in a fixed
location and is to communicate with only one other unit also in a fixed
location, then a Yagi antenna is suitable. Choose a Yagi with enough gain
to ensure adequate gain margin. When deploying the Yagi, point the
antenna towards the intended target, ensuring the antenna elements are
perpendicular to the ground.
If the equipment must communicate with multiple or mobile transceivers,
then select an Omni-directional antenna with appropriate gain.
The Effective Radiated Power (ERP) emitted from
the antenna cannot exceed +36 dBm ERP.
With the MHX-2400 set to full power, ERP is calculated as follows:
ERP = 30 - (Cabling and Connector Losses) + (Antenna Gain) < 36
Use the guidelines in the previous section for calculating cable and
connector losses. If cabling and connector losses are 2 dB, then the
maximum allowable gain of the antenna will be 8 dB.
External Filter
Although the MHX-2400 is capable of filtering out RF noise in most
environments, there are circumstances that require external filtering. Paging
towers, and cellular base stations in close proximity to the MHX-2400
antenna can desensitize the receiver. Microhard Systems’ external cavity
filter eliminates this problem. The filter has two N-female ports and should
be connected in line at the interface to the RF equipment.
Weatherproofing
Type N and RTNC connectors are not weatherproof. All connectors should
be taped with rubber splicing tape (weatherproofing tape), and then coated
with a sealant.

CompactRFTM Operating Manual: Chapter 5 Installation 45

46 MHX-2400 Operating Manual: Appendix A. Modem Command Summary
A. Modem Command Summary
The following provides a command summary for the MHX-2400 module. Factory settings are denoted with a ‘*’.
AT Commands
AAnswer
ECommand Echo
E0 No Echo
* E1 Command Echo
IIdentification
I0 Product Code
I2 ROM Checksum test
I3 Firmware Version
I4 Firmware Date
I5 Copyright
I6 Firmware Time
OOn-line Mode
QQuiet Mode
* Q0 Enables Result Codes
Q1 Disables Result Codes
VResult Codes Display
V0 Display as Numbers
* V1 Display as Words
WConnection Result
* W0 Reports DTE as CONNECT xxxx
W1 Reports computer (DTE) rate and wireless rate
between modems as CARRIER xxxx.
W2 Reports DCE as CONNECT xxxx
ZReset and load stored configuration
&C DCD (Data Carrier Detect)
&C0 DCD is always on
* &C1 DCD is on when modems are synchronized
&C2 DCD used for output data framing
&D DTR (Data Terminal Ready)
&D0 DTR ignored
* &D2 DTR disconnects and switches to command
&D3 DTR disconnects and resets modem
&F Load Factory Default
&F1 Master
&F2 Slave
&F3 Repeater
&F4 Slave through Repeater
&K Handshaking
&K0 Disable Handshaking
&K2 RTS/CTS Input Framing
* &K3 Enable Handshaking
&S DSR (Data Set Ready)
&S0 DSR is always on
* &S1 DSR on in data, off in command mode
&V View Configuration
&W Write configuration to memory
Sxx? Read S register value
Sxx=yy Set S register value
Result Codes
0OK 12 CONNECT 9600
3NO CARRIER 13 CONNECT 14400
4ERROR 14 CONNECT 19200
7CONNECT 2400 15 CONNECT 28800
8CONNECT 3600 17 CONNECT 38400
9CONNECT 4800 18 CONNECT 57600
10 CONNECT 7200 33 CONNECT 115200
64 CARRIER 20000 62 CARRIER 45000
S Registers
S0 Auto Answer [0...255]
0 = power up in Command Mode,
non-zero = power up in Data Mode
S2 Escape code [0...255] default ‘+’
S3 CR character [0...255] default <cr>
S4 Line Feed [0...255] default <lf>
S5 Backspace [0...255] default <bs>
S101 Operating Mode
1 - Master Point to Multipoint
2 - Master Point to Point
3 - Slave
4 - Repeater
S102 Serial Baud Rate
*1 = 115200, 2 = 57600, 3 = 38400
4 = 28800, 5 = 19200, 6 = 14400
7 = 9600, 8 = 7200, 9 = 4800,
10 = 3600, 11 = 2400
S103 Wireless Link Rate
2 = Fast w/o FEC
*4 = Fast with FEC
S104 Network Address [0...65535]
S105 Unit Address [1...65535]
S106 Primary Hopping Pattern [0...50]
S206 Secondary Hopping Pattern [0...50]
S107 Encryption Key [0...65535]
S108 Output Power Level
0 = 10 mW, 1 = 50 mW, *2 = 100 mW, 3 = 250 mW
4 = 500 mW, 5 = 750 mW, 6 = 1W
S109 Hopping Interval
1 = 8 msec, 2 = 12 msec, 3 = 16 msec,
4 = 20 msec, 5 = 30 msec, 6 = 45 msec,
7 = 80 msec, *8 = 120 msec
S110 Data Format
* 1 = 8N1, 2 = 8N2, 3 = 8E1, 4 = 8O1
5 = 7N1, 6 = 7N2, 7 = 7E1, 8 = 7O1
9 = 7E2, 10 = 7O2, 11 = 9N1
S111 Packet Minimum Size [1...Maximum Size]
S112 Packet Maximum Size [2...255]
S113 Packet Retransmissions [0...255]
S213 Packet Retry Limit [0...255]
S115 Packet Repeat Interval [1..255]
Default = 1
S116 Packet Character Timeout [0...254 ms]
S117 Modbus Mode
*0 = Disabled, 1 = Enabled
S120 RTS/DCD Framing Interval [0...254 ms]
S121 DCD Timeout [0...254 ms]

MHX-2400 Operating Manual: RS-232 Interface and Cables 47

MHX-2400 Operating Manual: Appendix B Serial Interface 49
B. Serial Interface
Modem
(DCE)
Signal
Host
Microprocessor
(DTE)
1 DCD →IN
2 RX →IN
3← TX OUT
4← DTR OUT
5 SG →IN
6 DSR →IN
7← RTS OUT
8 CTS →IN
Arrows denote the direction that
signals are asserted (e.g., DCD
originates at the DCE and tells the
DTE that a carrier is present).
The MHX-2400 module uses 8 pins on the header connector for
asynchronous serial I/O. The interface conforms to standard RS-232 signals
without level shifting, so direct connection to a host microprocessor is
possible.
The signals in the asynchronous serial interface are described below:
DCD Data Carrier Detect - Output from Modem - When asserted (TTL low),
DCD informs the DTE that a communications link has been established with
another MHX-2400.
RX Receive Data - Output from Modem - Signals transferred from the MHX-
2400 are received by the DTE via RX.
TX Transmit Data - Input to Modem - Signals are transmitted from the DTE via
TX to the MHX-2400.
DTR Data Terminal Ready - Input to Modem - Asserted (TTL low) by the DTE to
inform the modem that it is alive and ready for communications.
SG Signal Ground - Provides a ground reference for all signals transmitted by
both DTE and DCE.
DSR Data Set Ready - Output from Modem - Asserted (TTL low) by the DCE to
inform the DTE that it is alive and ready for communications. DSR is the
modem’s equivalent of the DTR signal.
RTS Request to Send - Input to Modem - A “handshaking” signal which is
asserted by the DTE (TTL low) when it is ready. When hardware
handshaking is used, the RTS signal indicates to the DCE that the host can
receive data.
CTS Clear to Send - Output from Modem - A “handshaking” signal which is
asserted by the DCE (TTL low) when it has enabled communications and
transmission from the DTE can commence. When hardware handshaking is
used, the CTS signal indicates to the host that the DCE can receive data.
Notes: It is typical to refer to RX and TX from the perspective of the DTE. This should be
kept in mind when looking at signals relative to the modem (DCE); the modem
transmits data on the RX line, and receives on TX.
“DCE” and “modem” are often synonymous since a modem is typically a DCE device.
“DTE” is, in most applications, a device such as a host microprocessor.

50 MHX-2400 Operating Manual: Appendix B Serial Interface
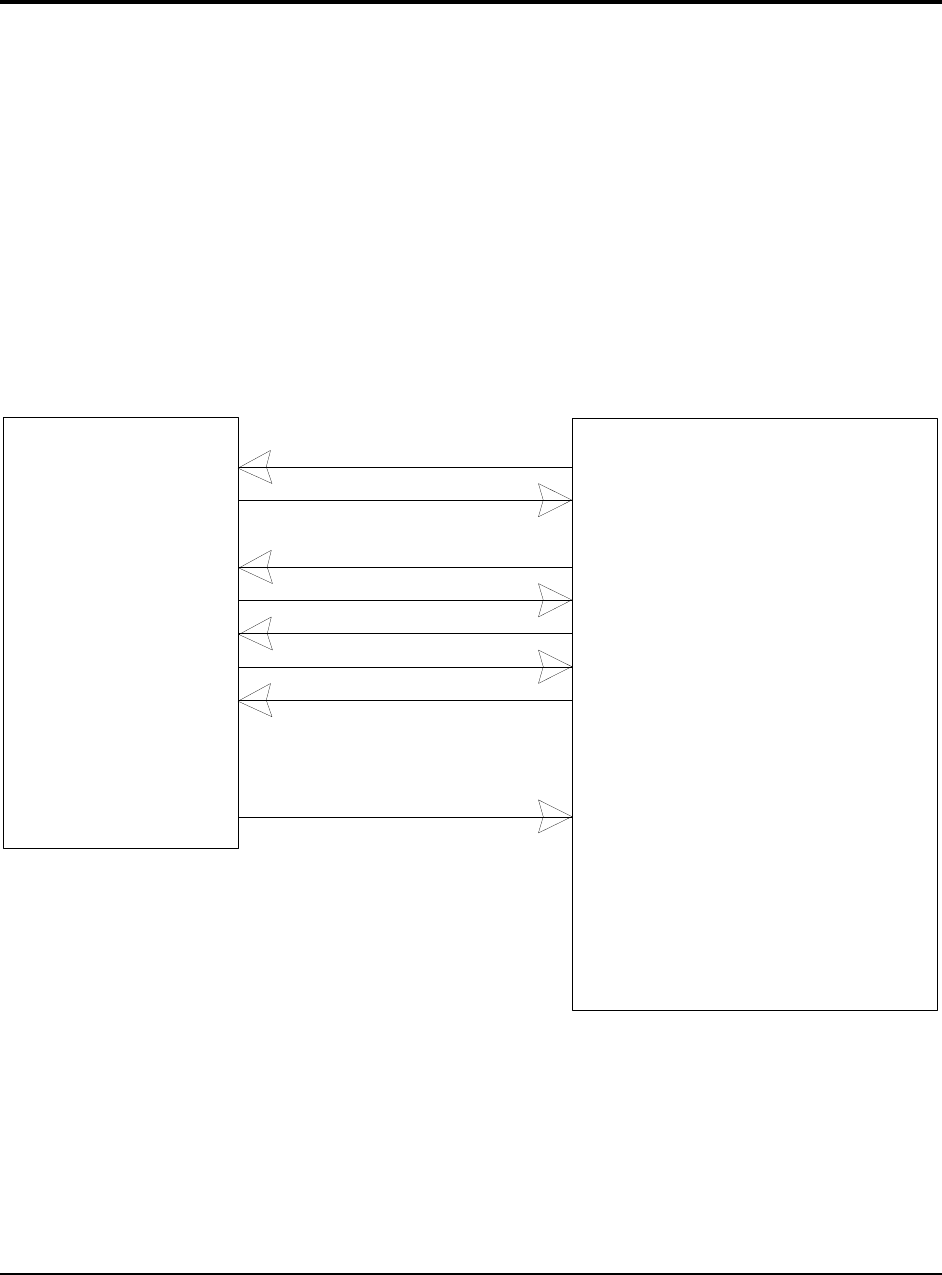
MHX-2400 Operating Manual: Appendix C Sample Schematic Diagram 51
C. Sample Schematic Diagram
The following is a sample microprocessor implementation with a MICROCHIP PIC 16C74 and the MHX-2400. The MHX-
2400 performs no level shifting on the serial port, so direct connection to the host microprocessor is possible.
DO NOT CONNECT THE MHX-2400 TO RS 232 DRIVER OUTPUTS. DAMAGE TO THE UNIT MAY RESULT.
On this implementation, the onboard SCI of the PIC 16C74 is directly connected pins 2 and 3 of the MHX-2400. The bi-
directional Port D is used for asserting or monitoring control signals from the MHX-2400.
The RESET signal is momentary active low signal asserted by the host microprocessor.
RESET initializes the MHX-2400 and places the system in a known state. This signal should be set high after the host
microprocessor has been reset.
The CONFIG line is reserved for factory use. This signal should be set high.
RXD
TXD
DCD
DTR
DSR
RTS
CTS
RESET
PIC16C74
MHX-
series
2
3
1
4
6
7
8
31
Power Connections not shown
RC7
RC6
RD0
RD1
RD2
RD3
RD4
RD6

52 MHX-2400 Operating Manual: Appendix C Sample Schematic Diagram
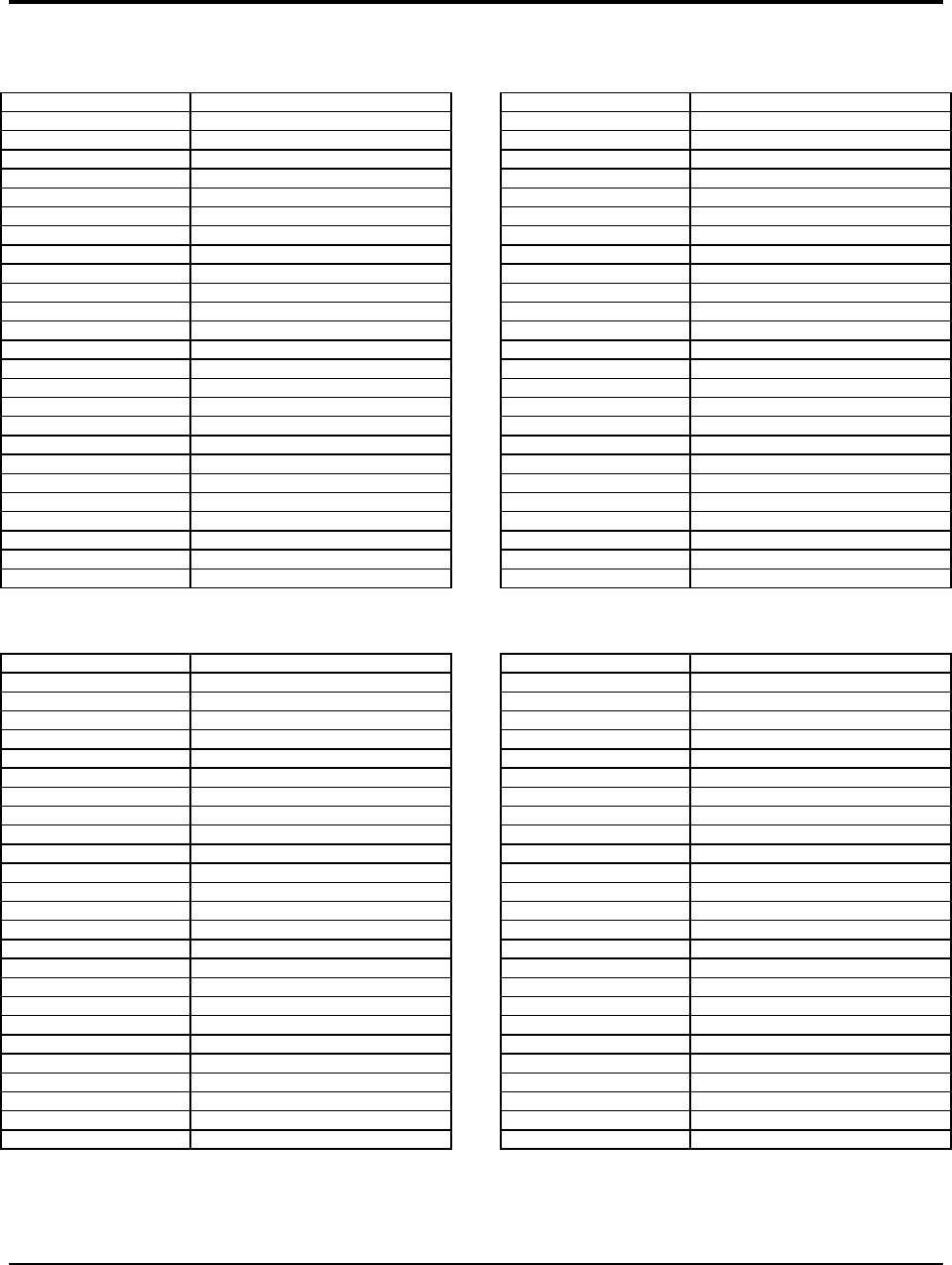
MHX-2400 Operating Manual: Appendix D. Factory Default Settings 53
D. Factory Default Settings
AT&F1 - Master Default Settings
E1, Q0, V1, W0, S0=0, S2=43, S3=13, S4=10, S5=8
DCD &C1 (On)
DTR &D0 (DTR is ignored)
Framing &E0 (Disabled)
Handshaking &K3 (Enabled)
DSR &S1 (On in Data, Off in Command)
Operating Mode S101=1 (Master P-MP)
Serial Baud Rate S102=1 (115kbaud)
Wireless Link Rate S103=4 (Fast, FEC)
Network Address S104=1
Unit Address S105=1
Primary Hop Pattern S106=0
Encryption Key S107=1
Output Power S108=2 (100mW)
Hop Interval S109=8
Data Format S110=1 (8N1)
Packet Minimum Size S111=1
Packet Maximum Size S112=255
Packet Retransmissions S113=2
Packet Repeat Interval S115=1 (Don’t Care)
Character Timeout (ms) S116=8
Modbus Mode S117=0
RTS/DCD Framing (ms) S120=0
DCD Timeout (ms) S121=0
Secondary Hop Pattern S206=2 (Don’t Care)
Packet Retry Limit S213=2 (Don’t Care)
AT&F2 - Slave Default Settings
E1, Q0, V1, W0, S0=1, S2=43, S3=13, S4=10, S5=8
DCD &C1 (On when modems are synced)
DTR &D0 (DTR is ignored)
Framing &E0 (Disabled)
Handshaking &K3 (Enabled)
DSR &S1 (On in Data, Off in Command)
Operating Mode S101=3 (Slave)
Serial Baud Rate S102=1 (115kbaud)
Wireless Link Rate S103=4 (Fast, FEC) (Set by Master)
Network Address S104=1
Unit Address S105=2
Primary Hop Pattern S106=0
Encryption Key S107=1
Output Power S108=2 (100mW)
Hop Interval S109=8 (Set by Master)
Data Format S110=1 (8N1)
Packet Minimum Size S111=1 (Set by Master)
Packet Maximum Size S112=255 (Set by Master)
Packet Retransmissions S113=2 (Don’t Care)
Packet Repeat Interval S115=1
Character Timeout (ms) S116=9
Modbus Mode S117=0
RTS/DCD Framing (ms) S120=0
DCD Timeout (ms) S121=0
Secondary Hop Pattern S206=2 (Don’t Care)
Packet Retry Limit S213=2
AT&F3 - Repeater Default Settings
E1, Q0, V1, W0, S0=1, S2=43, S3=13, S4=10, S5=8
DCD &C1 (On when modems are synced)
DTR &D0 (DTR is ignored)
Framing &E0 (Disabled)
Handshaking &K3 (Enabled)
DSR &S1 (On in Data, Off in Command)
Operating Mode S101=4 (Repeater)
Serial Baud Rate S102=1 (115kbaud)
Wireless Link Rate S103=4 (Fast, FEC) (Set by Master)
Network Address S104=1
Unit Address S105=3
Primary Hop Pattern S106=0
Encryption Key S107=1
Output Power S108=2 (100mW)
Hop Interval S109=8 (Set by Master)
Data Format S110=1 (8N1)
Packet Minimum Size S111=1 (Set by Master)
Packet Maximum Size S112=255 (Set by Master)
Packet Retransmissions S113=2
Packet Repeat Interval S115=1
Character Timeout (ms) S116=8
Modbus Mode S117=0
RTS/DCD Framing (ms) S120=0
DCD Timeout (ms) S121=0
Secondary Hop Pattern S206=2
Packet Retry Limit S213=2
AT&F4 -Slave Through Repeater Default Settings
E1, Q0, V1, W0, S0=1, S2=43, S3=13, S4=10, S5=8
DCD &C1 (On when modems are synced)
DTR &D0 (DTR is ignored)
Framing &E0 (Disabled)
Handshaking &K3 (Enabled)
DSR &S1 (On in Data, Off in Command)
Operating Mode S101=3 (Slave)
Serial Baud Rate S102=1 (115kbaud)
Wireless Link Rate S103=4 (Fast, FEC) (Set by Master)
Network Address S104=1
Unit Address S105=4
Primary Hop Pattern S106=2
Encryption Key S107=1
Output Power S108=2 (100mW)
Hop Interval S109=8 (Set by Master)
Data Format S110=1 (8N1)
Packet Minimum Size S111=1 (Set by Master)
Packet Maximum Size S112=255 (Set by Master)
Packet Retransmissions S113=2 (Don’t Care)
Packet Repeat Interval S115=1
Character Timeout (ms) S116=8
Modbus Mode S117=0
RTS/DCD Framing (ms) S120=0
DCD Timeout (ms) S121=0
Secondary Hop Pattern S206=2 (Don’t Care)
Packet Retry Limit S213=2

54 MHX-2400 Operating Manual: Appendix D Factory Default Settings
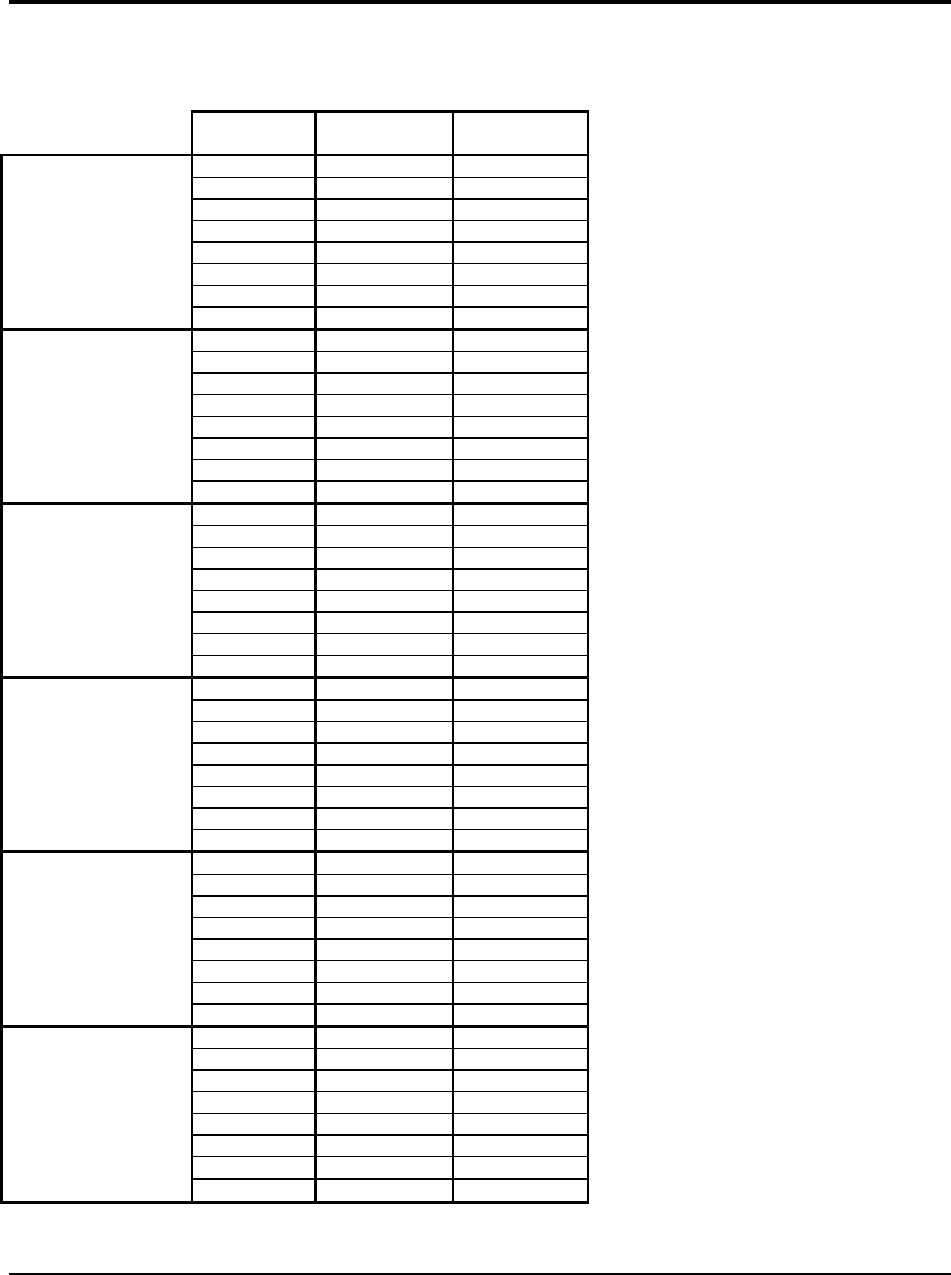
MHX-2400 Operating Manual: Appendix E. Performance Tables 55
E. Performance Tables
The scope of this appendix is to find the best possible performance and maximum packet size at different modes of
operation. The setup assumes a baud rate of 115k, no retries and no retransmissions..
Hop
Interval
Optimal Packet
Size (bytes)
Throughput
(kbps)*
1 (8 ms) 14 20
Slave to Master 2 (12 ms) 66 52
Communication. 3 (16 ms) 110 66
(No Repeater) 4 (20 ms) 154 74
5 (30 ms) 255 83
Link Rate = Fast 6 (45 ms) 255 56
NO FEC 7 (80 ms) 255 31
8 (120 ms) 255 21
1 (8 ms) 5 4
Slave to Master 2 (12 ms) 34 22
Communication. 3 (16 ms) 54 28
(No Repeater) 4 (20 ms) 76 32
5 (30 ms) 130 38
Link Rate = Fast 6 (45 ms) 210 43
WITH FEC 7 (80 ms) 255 30
8 (120 ms) 255 20
1 (8 ms) N/A N/A
Repeater to 2 (12 ms) 3 1
Master Direct 3 (16 ms) 22 13
Communication. 4 (20 ms) 44 21
5 (30 ms) 101 32
Link Rate = Fast 6 (45 ms) 178 39
NO FEC 7 (80 ms) 255 31
8 (120 ms) 255 21
1 (8 ms) N/A N/A
Repeater to 2 (12 ms) N/A N/A
Master Direct 3 (16 ms) 5 2
Communication. 4 (20 ms) 16 6
5 (30 ms) 43 12
Link Rate = Fast 6 (45 ms) 80 16
WITH FEC 7 (80 ms) 174 20
8 (120 ms) 255 20
1 (8 ms) N/A N/A
Slave to Master 2 (12 ms) 3 1
Through One or 3 (16 ms) 22 13
More Repeaters. 4 (20 ms) 43 21
5 (30 ms) 93 31
Link Rate = Fast 6 (45 ms) 174 38
NO FEC 7 (80 ms) 255 31
8 (120 ms) 255 21
1 (8 ms) N/A N/A
Slave to Master 2 (12 ms) N/A N/A
Through One or 3 (16 ms) N/A N/A
More Repeaters. 4 (20 ms) 14 6
5 (30 ms) 40 12
Link Rate = Fast 6 (45 ms) 80 16
WITH FEC 7 (80 ms) 174 19
8 (120 ms) 255 20

56 MHX-2400 Operating Manual: Appendix E. Performance Tables
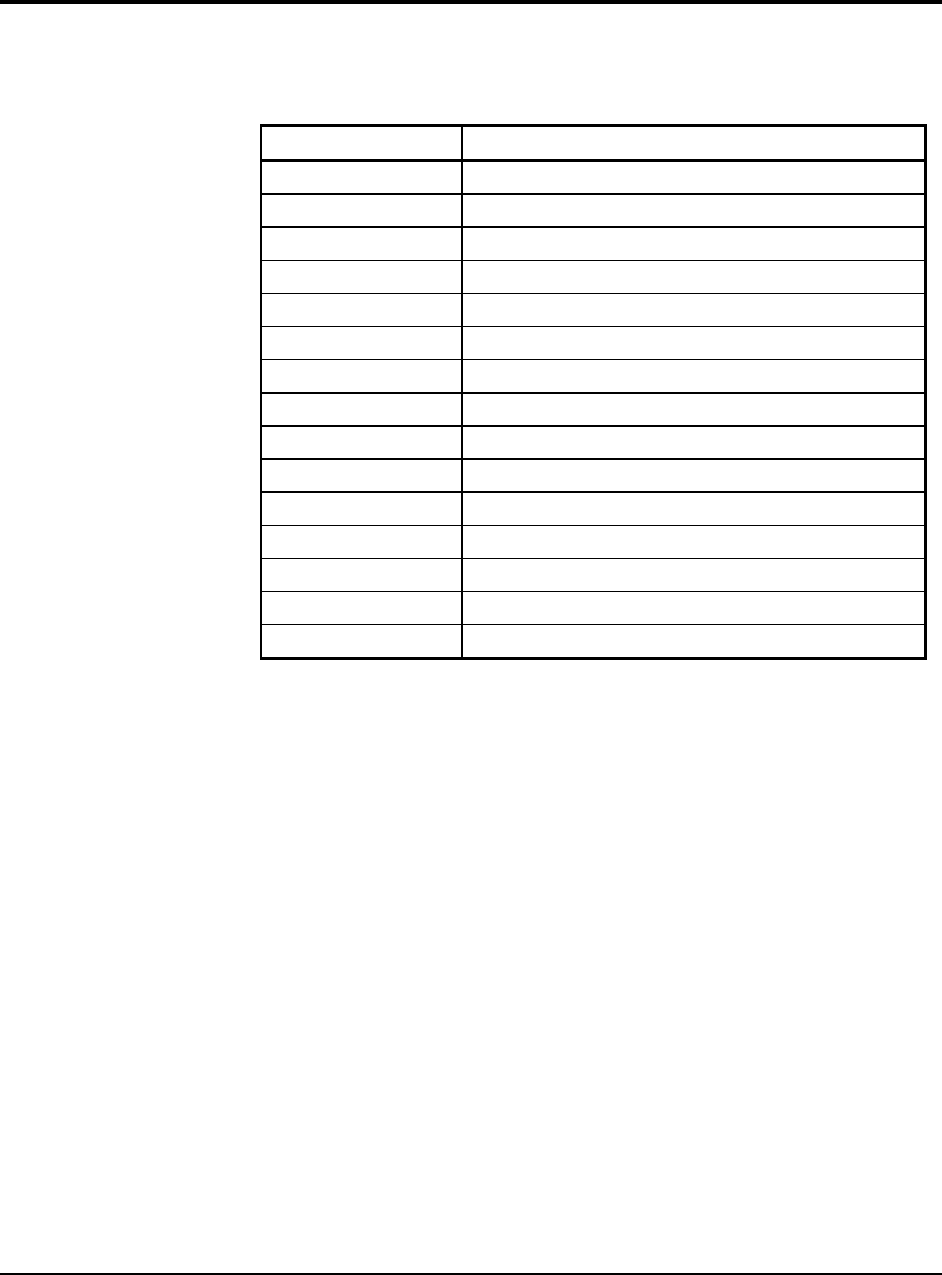
MHX-2400 Operating Manual: Appendix F. Hopping Patterns 57
F. Hopping Patterns
This Appendix provides a guide for selecting appropriate hopping patterns (S106,S206). There
are 49 hopping patterns: Patterns have been designed to notch out certain segments of the ISM
band.
Pattern Number Spectrum Used
0 - 7 2.4012 - 2.4824 GHz
8 - 10 2.4012 - 2.4312 GHz
11 - 13 2.4052 - 2.4352 GHz
14 - 16 2.4092 - 2.4392 GHz
17 - 19 2.4132 - 2.4432 GHz
20 - 22 2.4172 - 2.4472 GHz
23 - 25 2.4212 - 2.4512 GHz
26 - 28 2.4252 - 2.4552 GHz
29 - 31 2.4292 - 2.4592 GHz
32 - 34 2.4332 - 2.4632 GHz
35 - 37 2.4372 - 2.4672 GHz
38 - 40 2.4412 - 2.4712 GHz
41 - 43 2.4452 - 2.4752 GHz
44 - 46 2.4492 - 2.4792 GHz
47 - 48 2.4520 - 2.4820 GHz
Patterns 44 to 48 may be manually edited by entering AT&H at the Command Line. Each pattern must use a channel
only once, and must consist of exactly 76 channels. There are 202 channels available ranging from Channel 1 at
2.4016 GHz up to Channel 202 at 2.4820 GHz

58 MHX-2400 Operating Manual: Appendix F. Hopping Patterns
MHX-2400 Operating Manual: Appendix G. Technical Specifications 59
G. Technical Specifications
Electrical/Physical
Data Interface Asynchronous Serial Port, TTL Levels
Signals Sig. Gnd, TX, RX, DCD, DSR, DTR, RTS, CTS
Bandwidth / Data Rate 2,400 - 115,200 bps, uncompressed half-duplex,
Approx. 100 kbps sustained in intelligent asymmetrical full-duplex
transmission mode
Communications Range130 kilometres (19 miles)
Power Requirements 5 VDC, 1.0 Amp
Power Consumption 700 mA max, 450 mA typical at 1W transmit; 200 mA receive
Operating Frequency 2.4000 GHz to 2.4835 GHz
System Gain 135 dB
Sensitivity -105 dBm
Output Power 10, 50, 100, 250, 500, 750, 1000mW (user-selectable)
Spreading Code Frequency Hopping
Hopping Patterns 20 pseudo-random, user-selectable
Error Detection CRC-16 with auto re-transmit
Error Correction User-selectable Forward Error Correction (FEC)
Dimensions (LxWxH) Encl: 3.5” x 2.1” x 1.” (90 mm x 53 mm x 25 mm)
Weight 75 grams
Operating Environment Temperature: -40 to +70°C
Humidity: 5 to 95%, non-condensing
Storage Temperature -40 to 90°C
1. Clear line-of-sight, elevated high-gain antennas.

60 MHX-2400 Operating Manual: Appendix G. Technical Specifications

MHX-2400 Operating Manual: Appendix H. Glossary 61
H. Glossary
Terminology Used in the MHX-2400 Operating Manual
Asynchronous communications A method of
telecommunications in which units of single bytes
of data are sent separately and at an arbitrary time
(not periodically or referenced to a clock). Bytes
are “padded” with start and stop bits to distinguish
each as a unit for the receiving end, which need
not be synchronized with the sending terminal.
Attenuation The loss of signal power through
equipment, lines/cables, or other transmission
devices. Measured in decibels (dB).
Bandwidth The information-carrying capacity of a
data transmission medium or device, usually
expressed in bits/second (bps).
Baud Unit of signaling speed equivalent to the
number of discrete conditions or events per
second. If each signal event represents only one
bit condition, then baud rate equals bits per
second (bps) – this is generally true of the serial
data port, so baud and bps have been used
interchangeably in this manual when referring to
the serial port; this is not always the case during
the DCE-to-DCE communications, where a
number of modulation techniques are used to
increase the bps rate over the baud rate.
Bit The smallest unit of information in a binary
system, represented by either a 1 or 0.
Abbreviated “b”.
Bits per second (b/s or bps) A measure of data
transmission rate in serial communications. Also
see baud.
Byte A group of bits, generally 8 bits in length. A
byte typically represents a character of data.
Abbreviated “B”.
Characters per second (cps) A measure of data
transmission rate for common exchanges of data.
A character is usually represented by 10 bits: an 8-
bit byte plus two additional bits for marking the
start and stop. Thus, in most cases (but not
always), cps is related to bits per second (bps) by
a 1:10 ratio.
CRC (Cyclic Redundancy Check) An error-detection
scheme for transmitted data. Performed by using
a polynomial algorithm on data, and appending a
checksum to the end of the packet. At the
receiving end, a similar algorithm is performed
and checked against the transmitted checksum.
Crossover cable (Also known as rollover, null-
modem, or modem-eliminator cable) A cable
which allows direct DTE-to-DTE connection
without intermediate DCEs typically used to
bridge the two communicating devices. Can also
be used to make cabled DCE-to-DCE connections.
The name is derived from “crossing” or “rolling”
several lines, including the TX and RX lines so
that transmitted data from one DTE is received on
the RX pin of the other DTE and vice-versa.
Data Communications Equipment (DCE, also
referred to as Data Circuit-Terminating
Equipment, Data Set) A device which facilitates a
communications connection between Data
Terminal Equipment (DTEs). Often, two or more
compatible DCE devices are used to “bridge”
DTEs which need to exchange data. A DCE
performs signal encoding, decoding, and
conversion of data sent/received by the DTE, and
transmits/receives data with another DCE.
Common example is a modem.
Data Terminal Equipment (DTE) An end-
device which sends/receives data to/from a DCE,
often providing a user-interface for information
exchange. Common examples are computers,
terminals, and printers.
dBm Stands for “Decibels referenced to one
milliwatt (1 mW)”. A standard unit of power
level commonly used in RF and communications
work. n dBm is equal to 10(n/10) milliwatt, so
0dBm = 1mW, -10dBm = 0.1mW, -20dBm =
0.01mW, etc.
DCE See Data Communications Equipment.
DTE See Data Terminal Equipment.
Flow Control A method of moderating the
transmission of data so that all devices within the
communications link (DTEs and DCEs) transmit
and receive only as much data as they can handle
at once. This prevents devices from sending data
which cannot be received at the other end due to
conditions such as a full buffer or hardware not in
a ready state. This is ideally handled by hardware
using flow-control and handshaking signals, but

62 MHX-2400 Operating Manual: Appendix H . Glossary
can be controlled also by software using X-ON/X-
OFF (transmitter on/off) commands.
Frequency-hopping A type of spread spectrum
communication whereby the carrier frequency
used between transmitter and receiver changes
repeatedly in a synchronized fashion according to
a specified algorithm or table. This minimizes
unauthorized jamming (interference) and
interception of telecommunications.
Full-duplex Where data can be transmitted,
simultaneously and independently, bi-
directionally.
Half duplex Exists when the communications
medium supports bi-directional transmission, but
data can only travel in one direction at the same
time.
Handshaking A flow-control procedure for
establishing data communications whereby
devices indicate that data is to be sent and await
appropriate signals that allow them to proceed.
Line-of-sight Condition in which a transmitted
signal can reach its destination by travelling a
straight path, without being absorbed and/or
bounced by objects in its path.
Master The station which controls and/or polls one
or more Slave stations in a point-to-point or point-
to-multipoint network. Often functions as a server
or hub for the network.
Non-volatile memory Memory which retains
information which is written to it.
Null modem cable See Crossover cable.
Point-to-point A simple communications network
in which only two DTEs are participants.
Point-to-multipoint A communications network
in which a Master DTE communicates with two or
more Slave DTEs.
Repeater A device which automatically amplifies
or restores signals to compensate for distortion
and/or attenuation prior to retransmission. A
repeater is typically used to extend the distance
for which data can be reliably transmitted using a
particular medium or communications device.
RS-232 (Recommended Standard 232; more
accurately, RS-232C or EIA/TIA-232E) Defined
by the EIA, a widely known standard electrical
and physical interface for linking DCEs and DTEs
for serial data communications. Traditionally
specifies a 25-pin D-sub connector, although
many newer devices use a compact 9-pin
connector with only the essential signaling lines
used in asynchronous serial communications.
Lines have two possible states: “high” (on, active,
asserted, carrying +3 to +25 V) or “low” (off,
inactive, disasserted, carrying -3 to -25 V).
RTU (Remote Terminal Unit) A common term
describing a DTE device which is part of a wide-
area network. Often a RTU performs data I/O and
transmits the data to a centralized station.
Serial communications A common mode of
data transmission whereby character bits are sent
sequentially, one at a time, using the same
signaling line. Contrast with parallel
communications where all bits of a byte are
transmitted at once, usually requiring a signal line
for each bit.
Shielded cable Interface medium which is
internally shrouded by a protective sheath to
minimize external electromagnetic interference
(“noise”).
Slave A station which is controlled and/or polled by
the Master station for communications. Typically
represents one end of a point-to-point connection,
or one of the terminal nodes in a point-to-
multipoint network. Often a RTU is linked by a
Slave DCE.
Spread spectrum A method of transmitting a
signal over a wider bandwidth (using several
frequencies) than the minimum necessary for the
originally narrowband signal. A number of
techniques are used to achieve spread spectrum
telecommunications, including frequency hopping.
Spread spectrum provides the possibility of
sharing the same band amongst many users while
increasing the tolerance to interference and noise,
and enhancing privacy of communications.
Throughput A measure of the rate of data trans-
mission passing through a data communication
system, often expressed as bits or characters per
second (bps or cps).

CompactRFTM Operating Manual: Appendix J. FCC RF Exposure 63
I. FCC RF Exposure
FCC RF Exposure Warning
In order to comply with the FCC/IC adopted RF exposure requirements, this transmitter system
will be installed by the manufacturer’s reseller professional. Installation of all antennas must be
performed in a manner that will provide at least 20 cm clearance from the front radiating
aperture, to any user or member of the public.