Presentation Automate Integration Of Miniature Smart Cameras Into Robotic Applications
2017-04-24
: Microscan Automate Presentation Integration Of Miniature Smart Cameras Into Robotic Applications Automate Presentation_Integration of Miniature Smart Cameras into Robotic Applications
Open the PDF directly: View PDF ![]() .
.
Page Count: 35

Integration of Miniature
Smart Cameras into
Robotic Applications
Steven J. King
Product Manager - Machine Vision and Lighting
Microscan Systems

Many Definitions of a Robot
•Multi-Axis Motion Systems
•Traditional Industrial Robots
•Collaborative Robots
•Mobile Robots
•Warehouse Robots
•Self Driving Cars
Source: Schneider Elec, Unimation, UR, TRC, Tech Xplore (Fetch), Google

Robot Markets
•Automotive
•Electronics
•Clinical
•Food and Beverage
•Packaging
•Warehousing
•General Manufacturing
Source: UR Robots, Fanuc, Montclaire.edu, Motoman, ABB (Electronic Design)

Robot Applications
•Pick and Place
•Assembly
•Quality Inspection
•Packaging and Palletizing
•Lab Analysis and Testing
•Screw Driving
•Labeling
•Gluing, Dispensing and Welding
•Polishing
•Injection Molding
AutoID -
Reading 1D and 2D
codes is integral to
many applications

Robot Applications –(Vision and AutoID Apps)
•Pick and Place –(Locate, Read, Guide)
•Assembly –(Locate, Read, Guide, Check)
•Quality Inspection - (Check, Measure, Read)
•Packaging and Palletizing - (Locate, Read, Guide, Check)
•Lab Analysis and Testing - (Locate, Measure, Read, Guide, Check)
•Screw Driving - (Locate, Guide, Check)
•Labeling - (Locate, Read/Verify)
•Gluing, Dispensing and Welding - (Guide, Check)
•Polishing - (Check)
•Injection Molding - (Check, Measure)
AutoID -
Reading 1D and 2D
codes are integral to
many applications

Challenges Integrating Vision with Robots
•Robot Applications need AutoID and Machine Vision to Achieve:
•Fuller autonomy
•Greater speeds
•Greater accuracy
•Ability to perform high value operations
•Robot Applications Face Challenges in Many Areas:
•Physical Installation –Mounting, Size, Optics, Lighting
•Cabling –High Flex cables capable of millions of cycles
•Programming –Simplicity, Flexibility, UI integration with Robot Controller
•Calibration –2D and 3D, Multiple coordinate systems
•Integration of Results –Data formatting, Protocol support, Image display

Miniature Smart Cameras
•Miniature Smart Cameras Use Cases
•General Use
•Fully Integrated Camera –Lighting to communications
•Powerful toolset, simple programming and deployment software
•Highly configurable to achieve best price
•Light weight on the end of a robot arm
•Low mass
•Integral to robot gripper
•Dense pack many cameras together over a single part
•Multiple cameras needed for high resolution inspection
•Avoids parallax issue with single camera looking at all features
•Embedded –One/multiple cameras in very small spaces
•SMT Pick and Place machines as one example
•Desk top clinical analyzer as another
Source: UR, Microscan

Miniaturization –Camera Examples
•Lighting
•Optics
•AutoFocus
•Processing
•Comm
MV-40MV-30
MV-20
MV-Engine
Ethernet, Serial,
Digital IO
Serial,
Digital IO
Ethernet
over USB
Ethernet,
Serial,
Digital IO
Source: Microscan

General Use Example –Food and Beverage
•Mounting –Over the Work Space
•Lighting –General Large Area Lighting
•Optics –Wide Angle
•Calibration –Vision to Robot Pick Area
•Tools
•Morphology/Blob
•Custom Scripts for Pick Ordering
•Output
•Serial, TCP/IP Socket
•Pick Order, X, Y, Size, Defects
Source: Motoman
General Use Example –Calibration
•Calibration is
performed
using robot
placed
target/targets
•Vision gets
calibrated to
robot pick
space

General Use Example –The Task
•Product fills
lanes
•Vision
Computes
Count, X, Y,
Size, Pick
Order
•Reports data
to robot
•Robot picks
up product

General Use Example –Tools
•Morphology
•Separate and
Segment
•Blob
•Centroid
•Angle
•Size
•Custom
Scripting tool
sorts results
and sends
“pick” order to
robot
General Use Example –Outputs
•Sends all data
to Robot via:
•RS-232
•Socket
•PLC Links
•Display image
on HMI
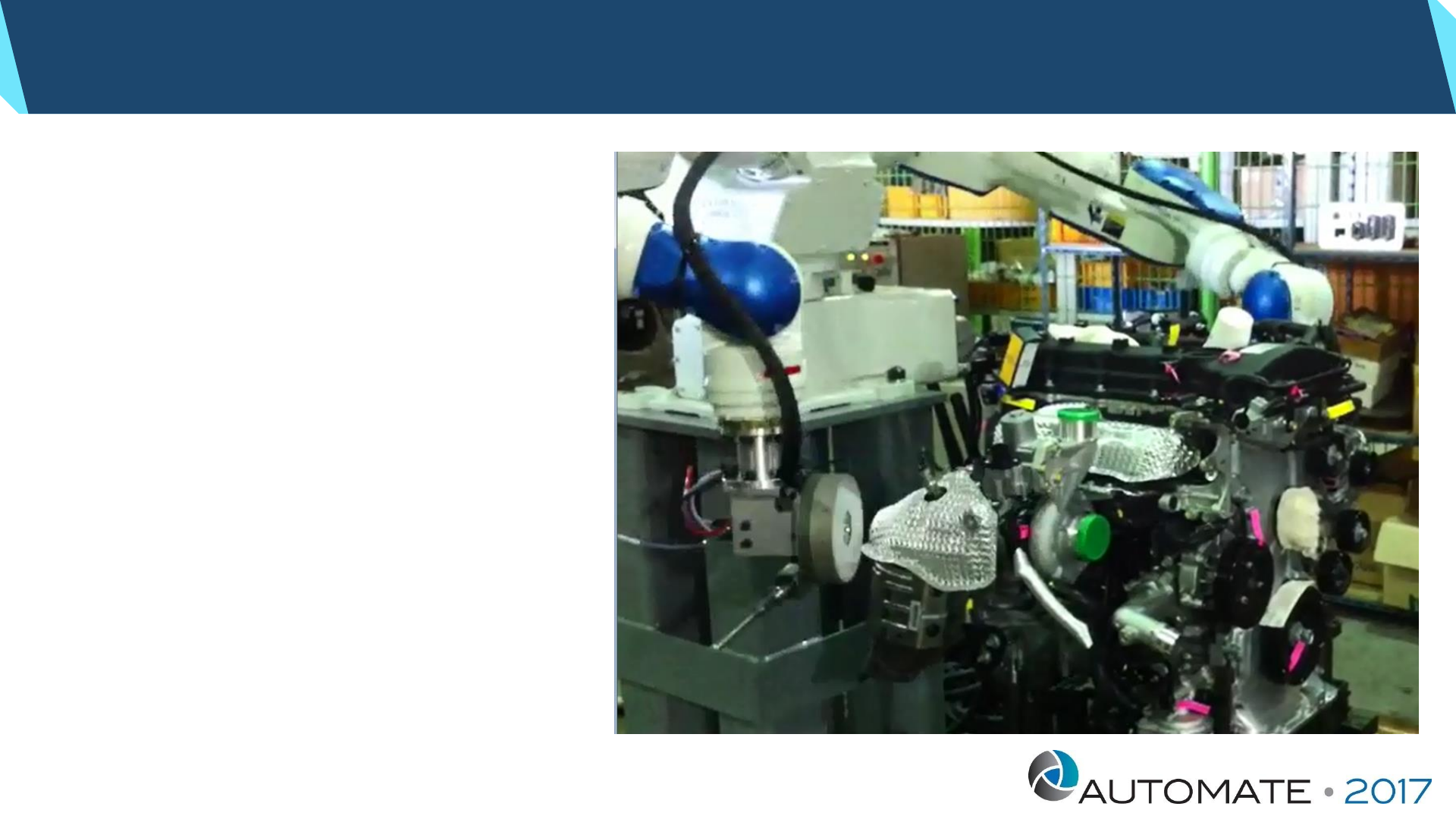
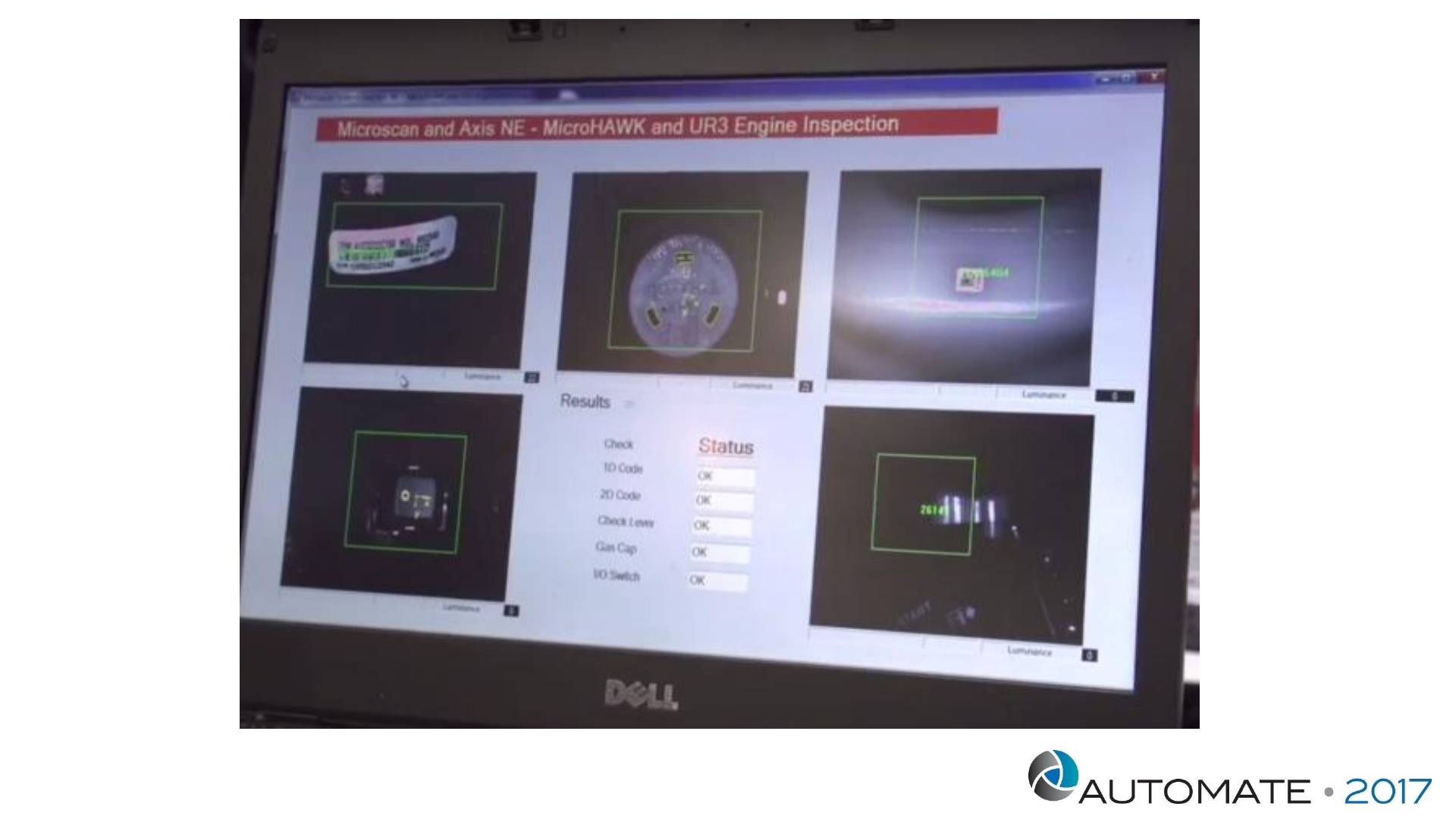
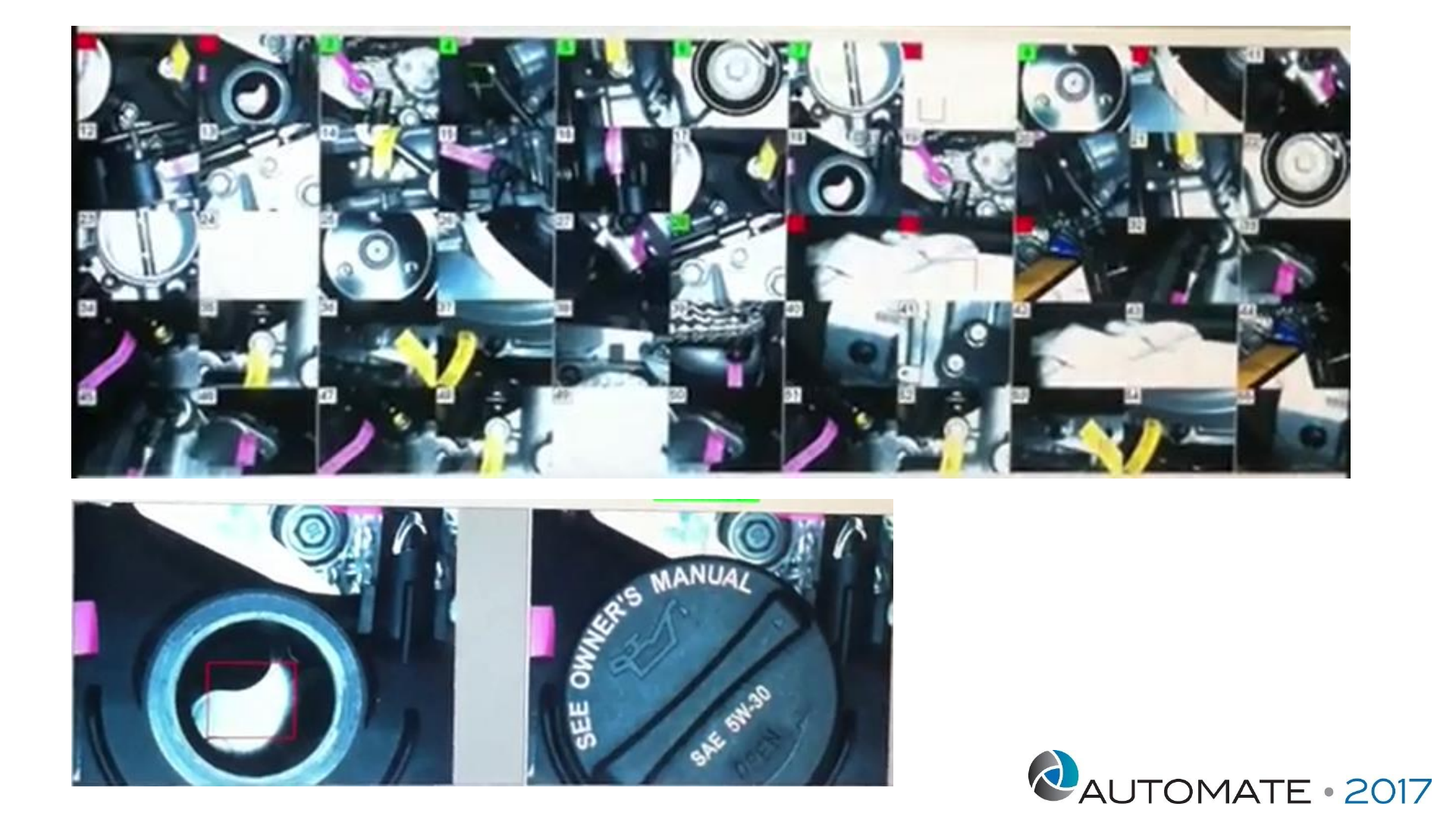
End of Arm Example –Automotive, Engine Check
•Mounting –End of Arm
•Lighting - Integrated
•Optics - Auto Focus
•Calibration - Simple
•Programming
•Multiple Inspections
•Asynch Triggering
•Tools
•Presence/Absence
•Reading
• Measure …
•Output
•P/F or Data per Inspection

End of Arm Example - Challenges
•High Speed Robot Motion
•Requires Low Camera Mass
•Very High Cycle Counts
•Requires high flex Power and EtherNet cables
•Multiple Inspections
•Requires multiple inspections within a single job
•Unique Triggers
•Unique Sets of Tools
•Unique Vision Results
•Requires fast AutoFocus lens to inspect at different distances
•Requires active control over gain, exposure and lighting for optimum images
•Processes in Parallel With Robot Motion to Next Inspection Point
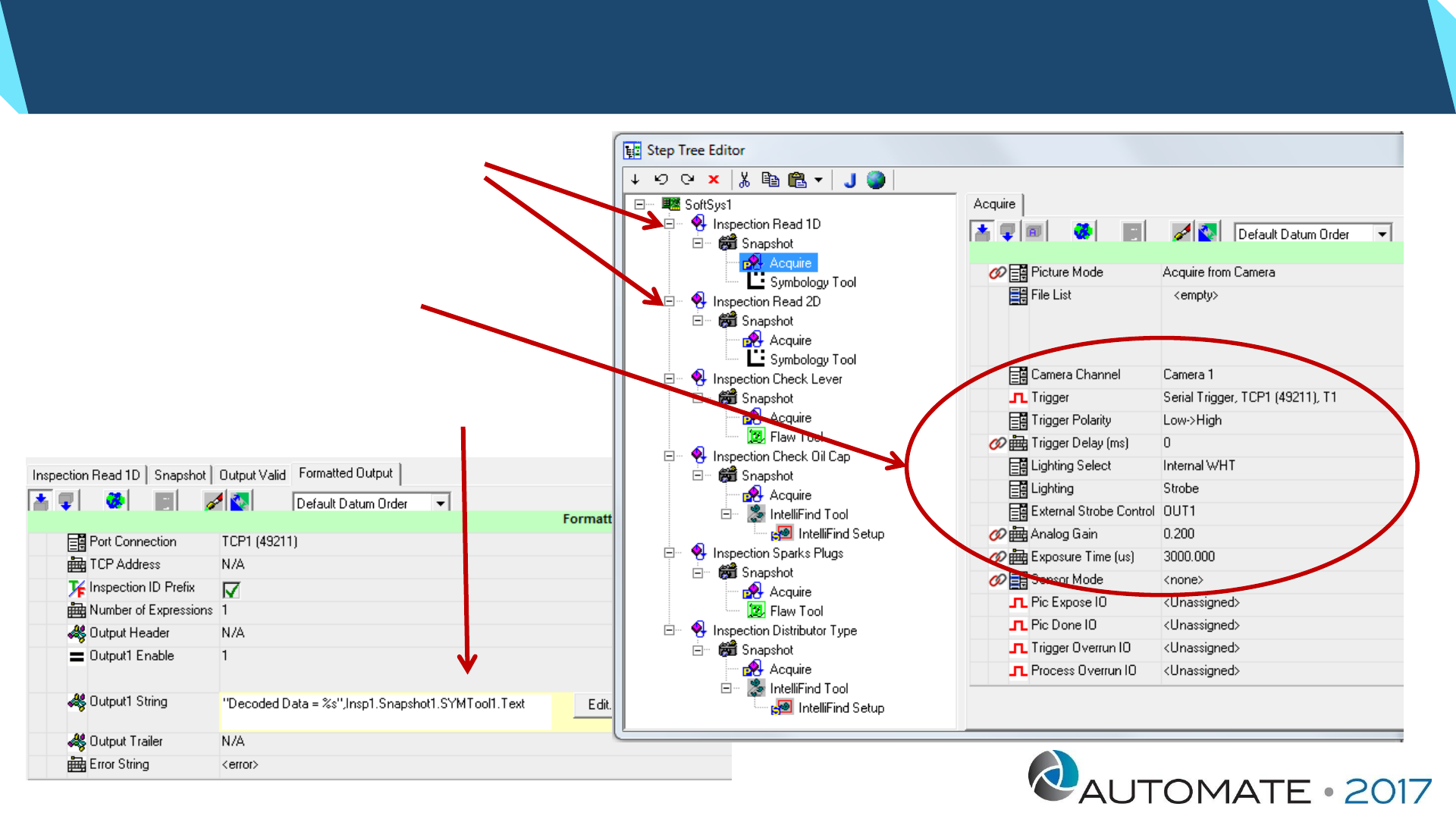
End of Arm Example - Programming
•Multiple Inspections
•Unique Triggers
•Focus Distance
•Exposure/Gain
•Lighting
•Custom Output Result
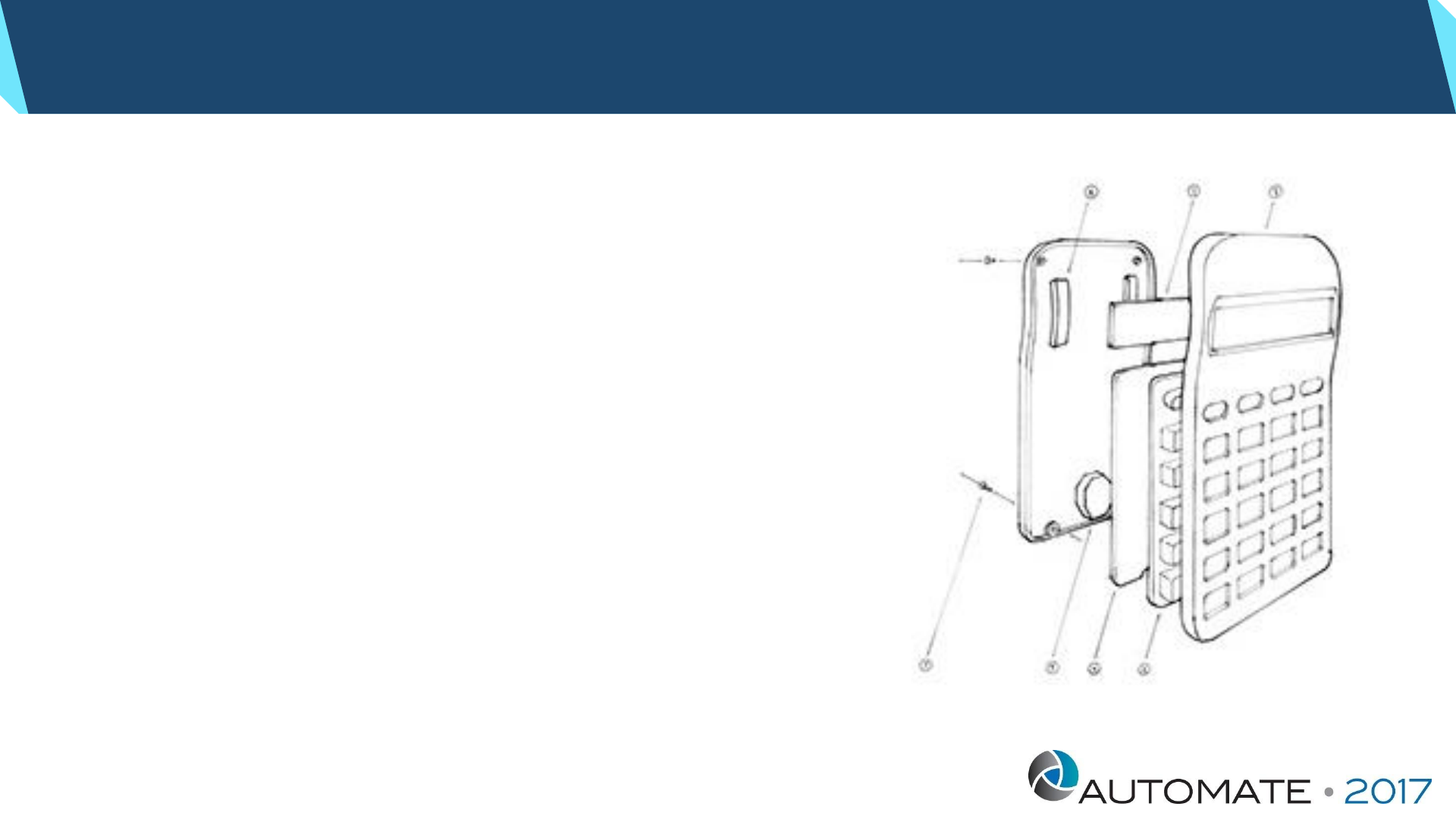
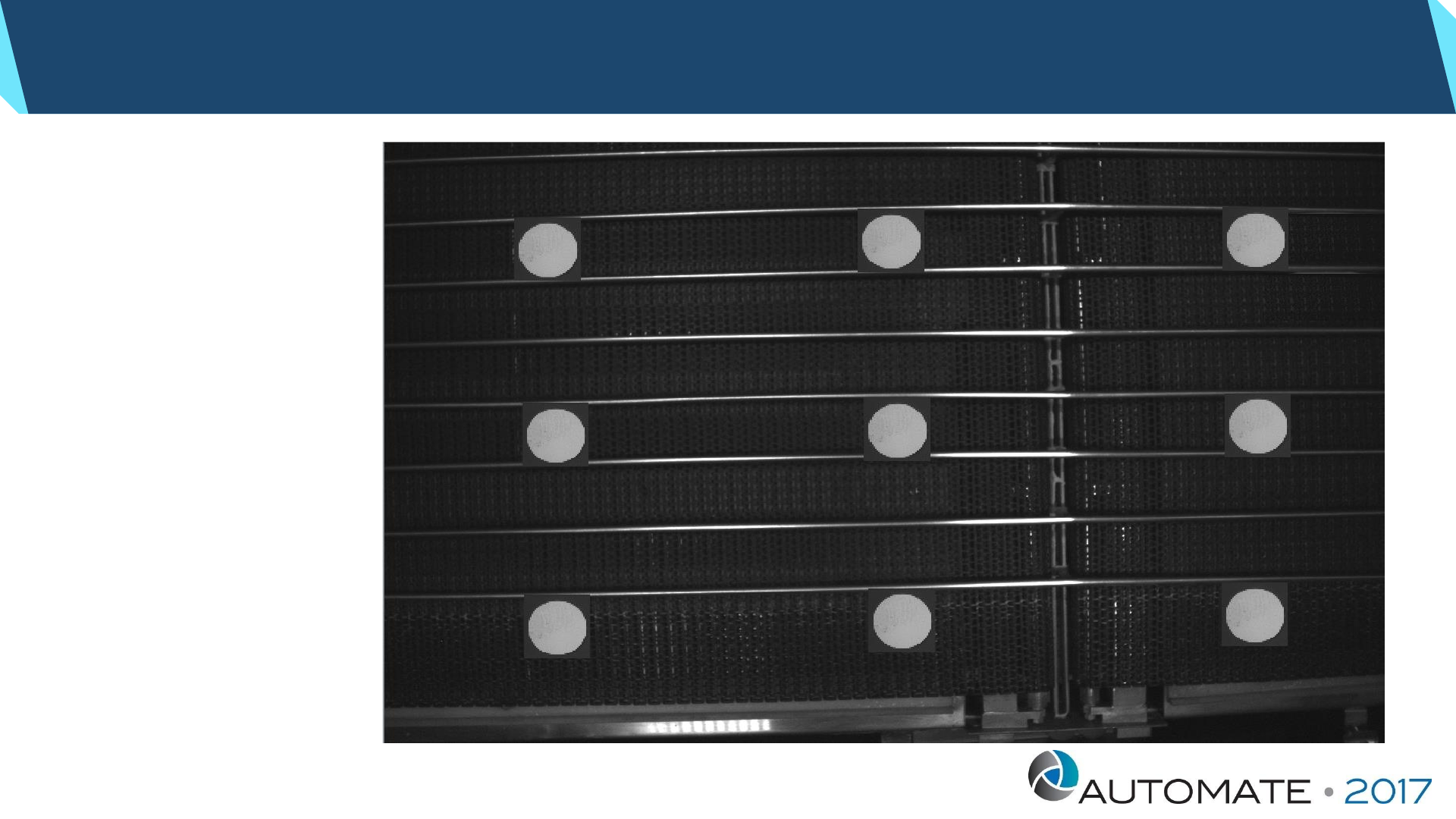
Dense Pack Example –Consumer Electronics
•Assembly of Consumer Electronics
•Locate Critical Features on Each Part
•Computer Overall Location of Each Part
•Compute Offset of One Part to Other
•Robot Assembles Parts Together
Source: Joe Hu, AD 146 Rasche
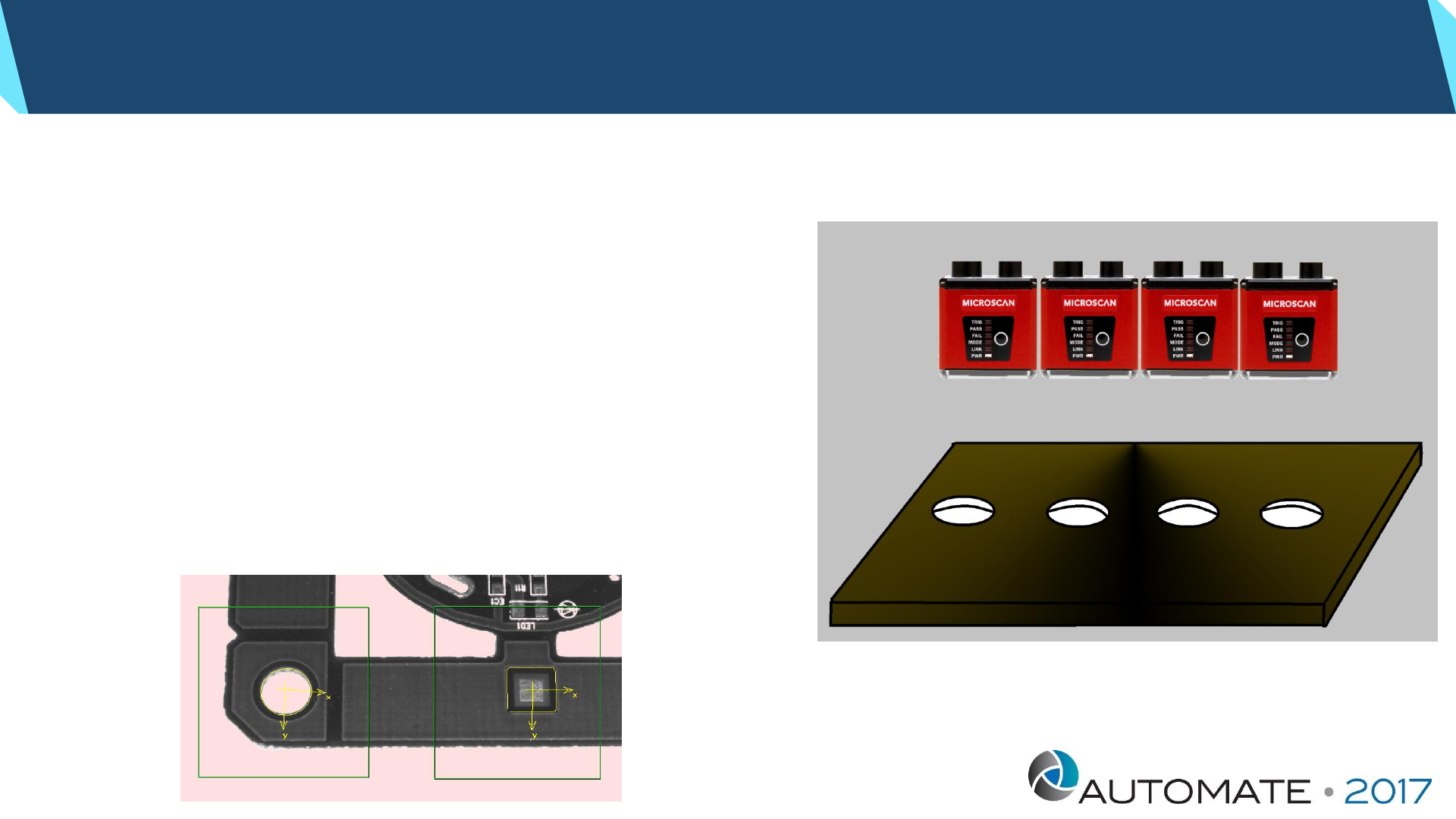
Dense Pack Example –Challenges
•Very High Accuracy Required
•One to Two Features Per Camera
•Features Very Close Together
•Cameras Close Together
•All Cameras Look Through One Light
•Combine all Camera Results
•Calibrate Vision to Robot
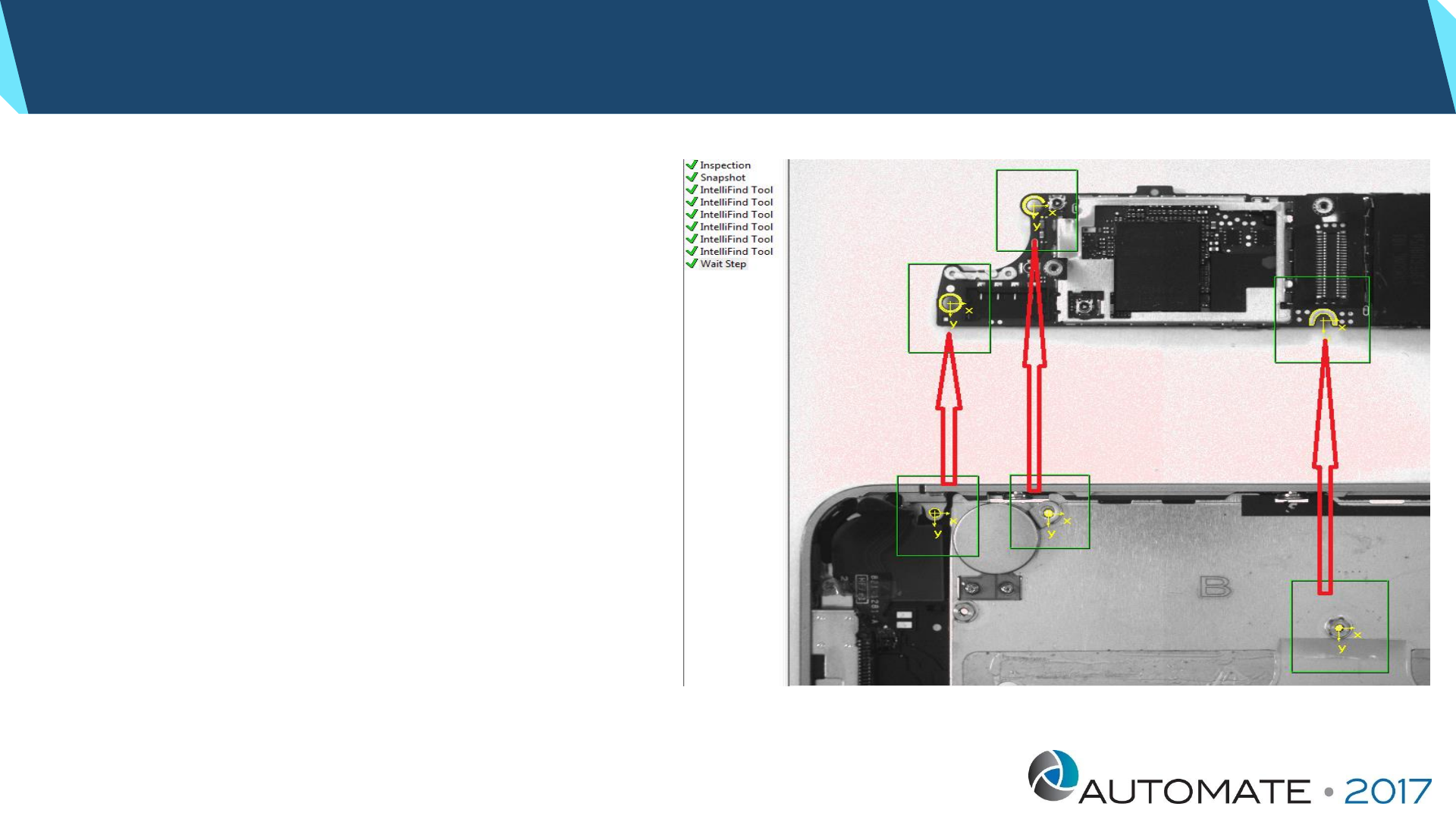
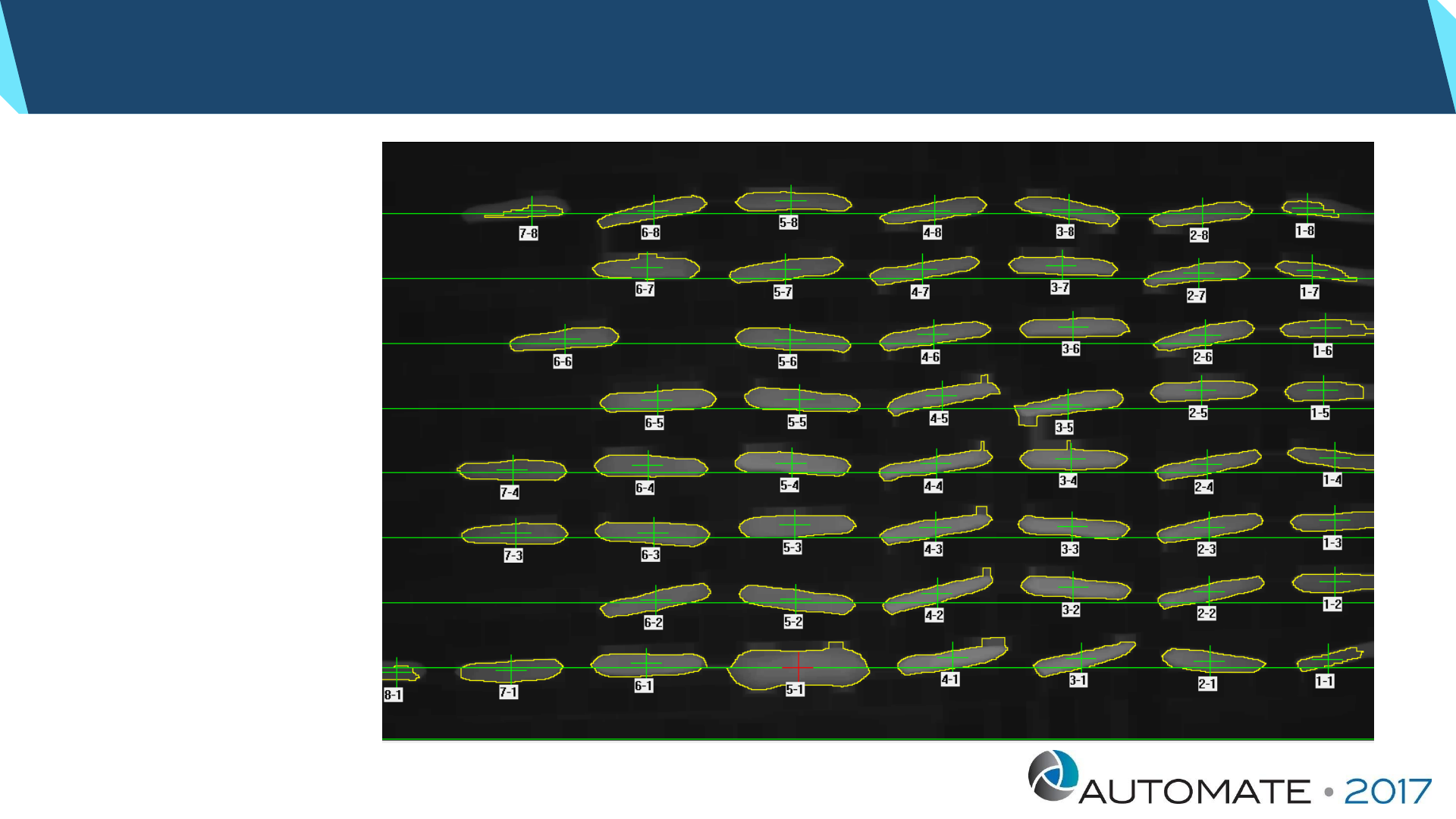
Dense Pack Example –Assembly
•Lighting –Very Large DOAL
•Optics –Gauging Quality
•Calibration
•Vision to Robot
•Robot Moves Calibration Dot in
Grid Pattern under all cameras
•Tools
•Edge Based Pattern Match
•Rigid Body Fit - Part 1 to Ideal
•Rigid Body Fit - Part 2 to Ideal
•Compute Offset Part 1 to Part 2
•Output
•Offset for aligning Part1 to Part 2
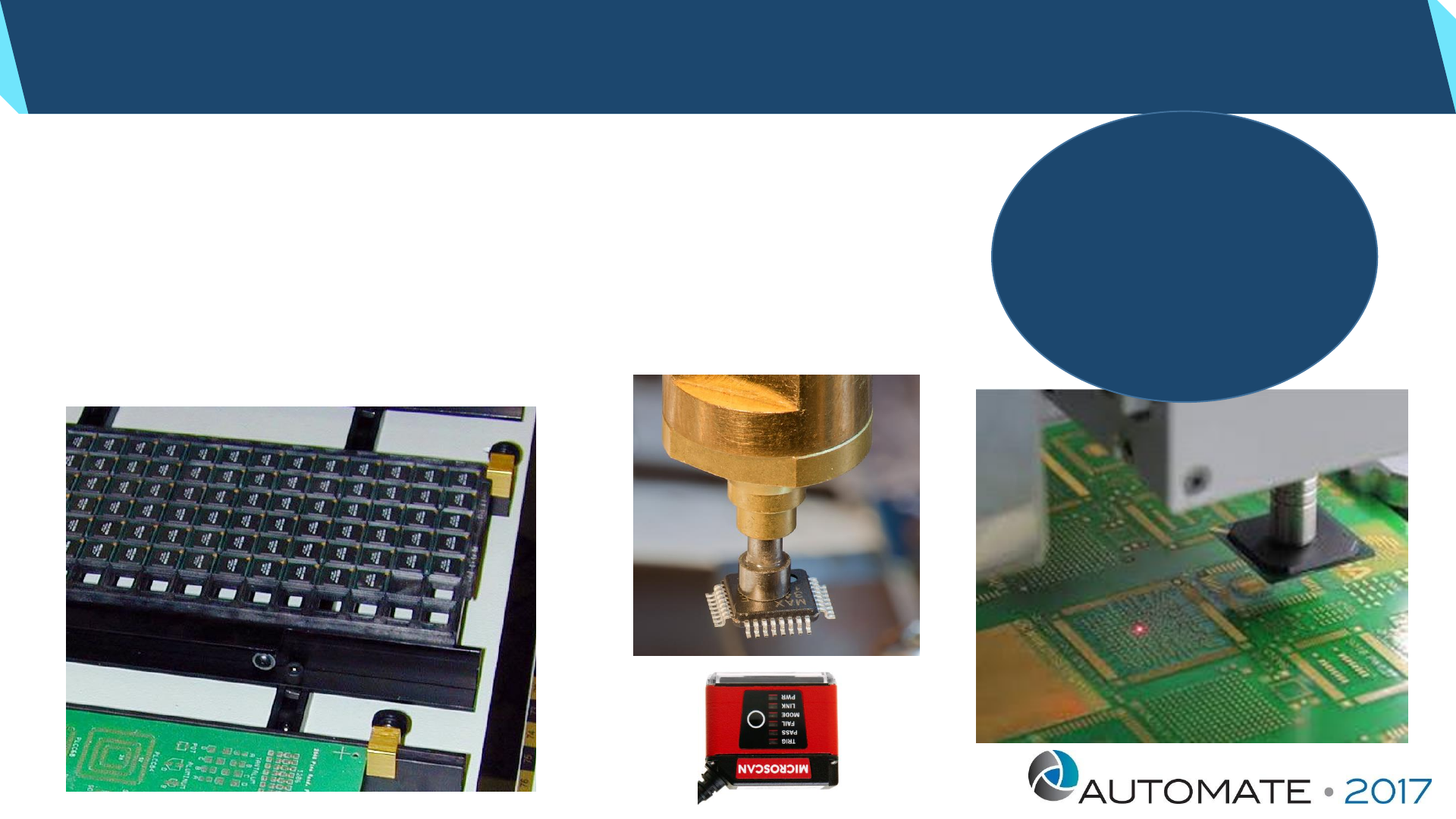
Embedded Example –Electronics
•Robot Picks Multiple Part Types from Trays
•Pick Head Flies Part over Camera
•Vision Computes X, Y, Theta of Part
•Robot Places Part on Board
Single or Multiple
Cameras. Very small
envelope for cameras
and lighting.

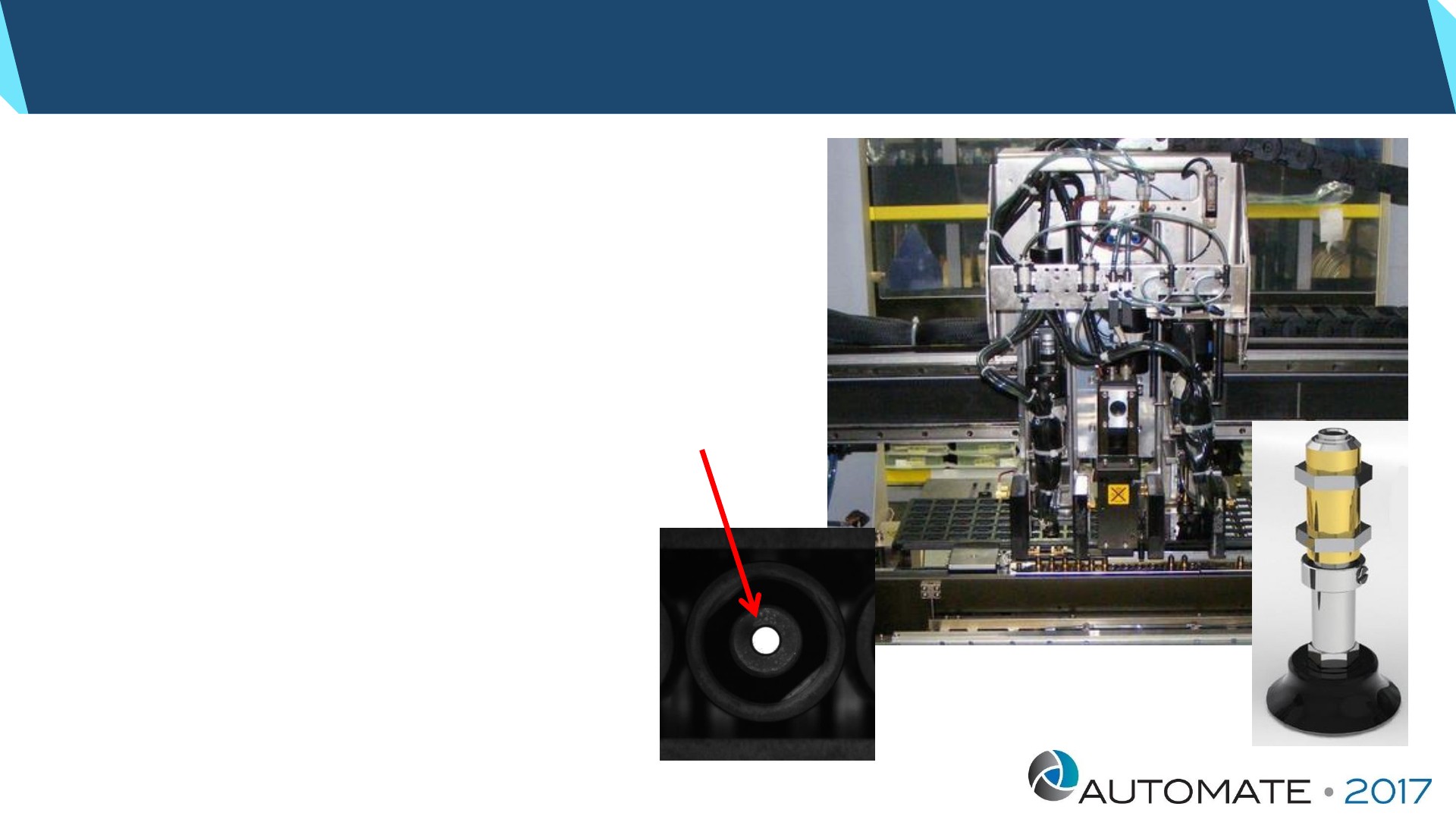
Embedded Example - Challenges
•One or Multiple Cameras Buried in Very Small Spaces
•Very High Resolution Required - Micron Tolerances
•Very High Accuracy Achieved by Calibrating Vision to Pick Head
•Pick Head Needs Previously Calibrated to the PC Board (Fiducials)
•Handle Multiple Part Types –BGA, QFN, TSOP, etc.
•Requires unique inspection and trigger per part type
•Requires unique lighting, exposure and gain per part type
• Employ Strobe lighting to freeze motion as robot “flies” part over camera
•Requires automatic part training to locate features
•Match features to cad model of part
•Used to compute Rigid Body Fit of Part to ideal location on PCB
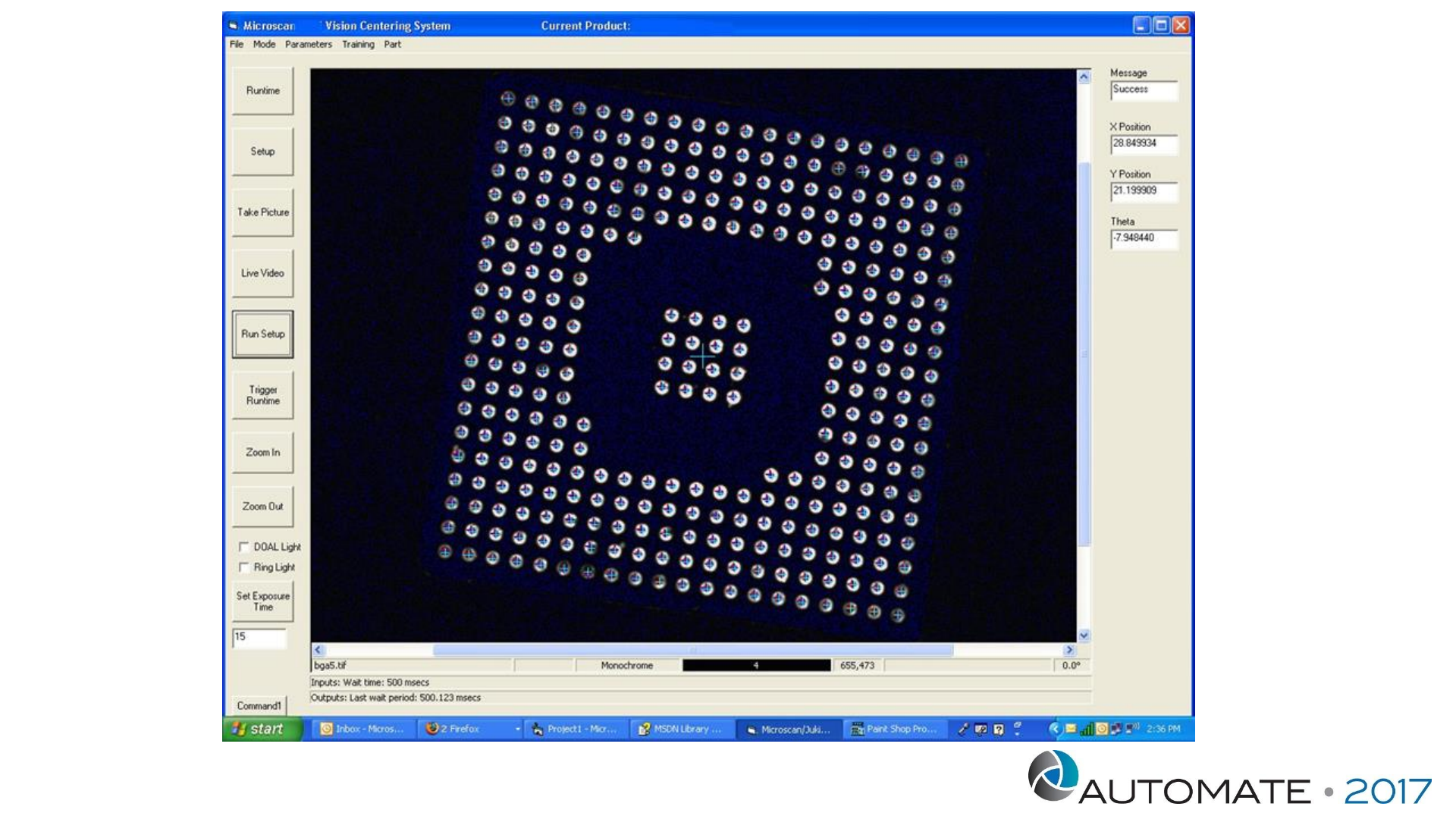
Embedded Example –Pick and Place Vision
•Lighting –Part Specific.
•Low Angle Ring, Diffuse On Axis.
•Optics –Gauging Quality
•Calibration –Vision to Robot Gripper
•Gripper is moved in a grid pattern
•Vision locates gripper at all positions
•Calibrate to robot coordinates
•Tools
•Various for lead/pin/ball locate
•Rigid Body Fit to Model Part
•Output
•X, Y and Theta of Part
Source: Juki Automation Systems
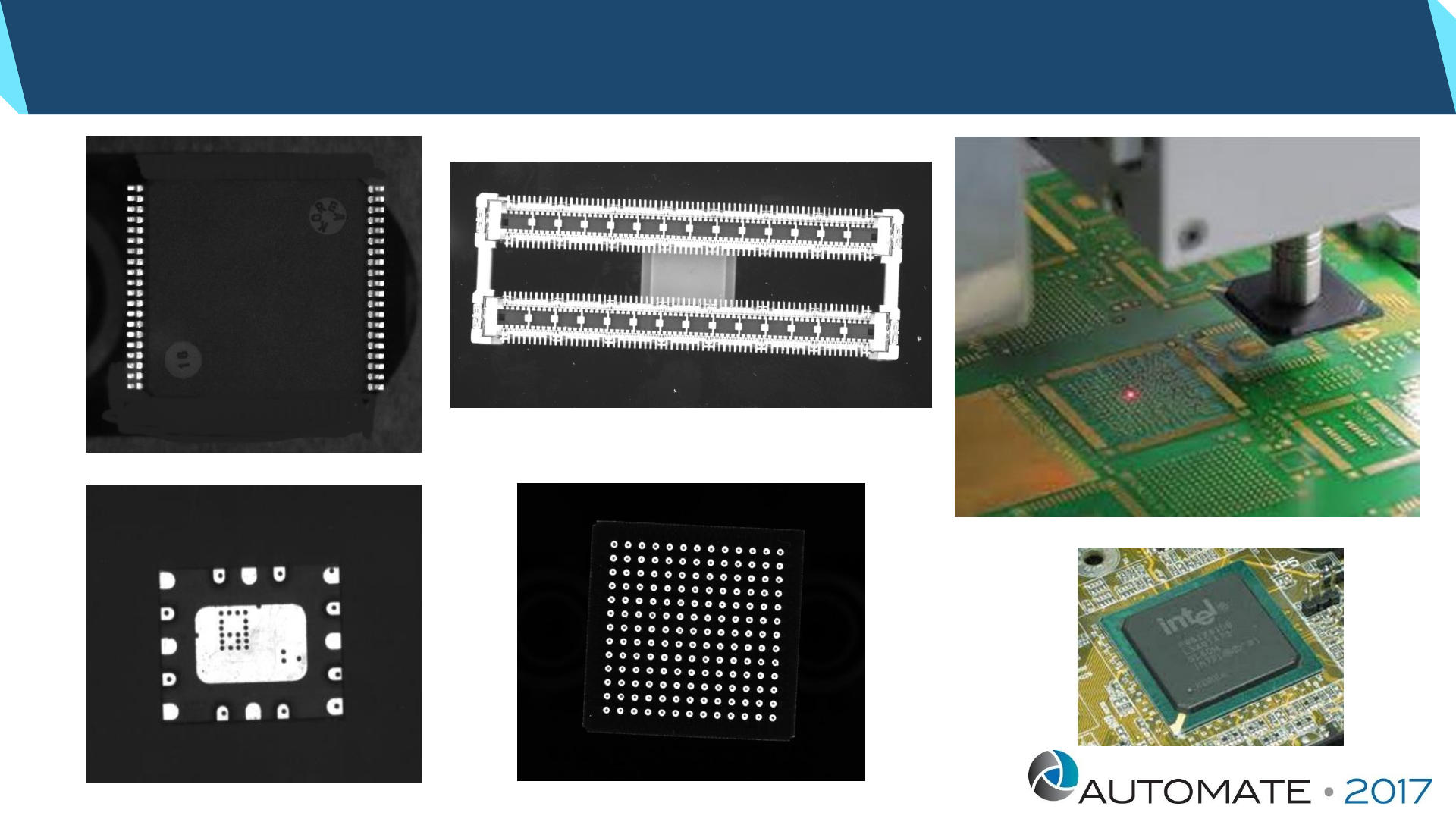
Embedded Example –Part Types

•Clinical Diagnostics Instrumentation
•Point-of-Care Instrumentation
•Pathology Instrumentation
•Laboratory Automation
27
Embedded Example –Automation in Life Sciences

Embedded Example –Automation in Life Sciences
•Identification
•Inspection
•Measurement
•Guidance

Common Automated Identification Applications
(1D/2D Code Reading)
•Identification of
•Specimen Tubes
•Reagents
•Tube carriers
•Specimen slides/cassettes
•Microwell plates
•Pre-coded vials
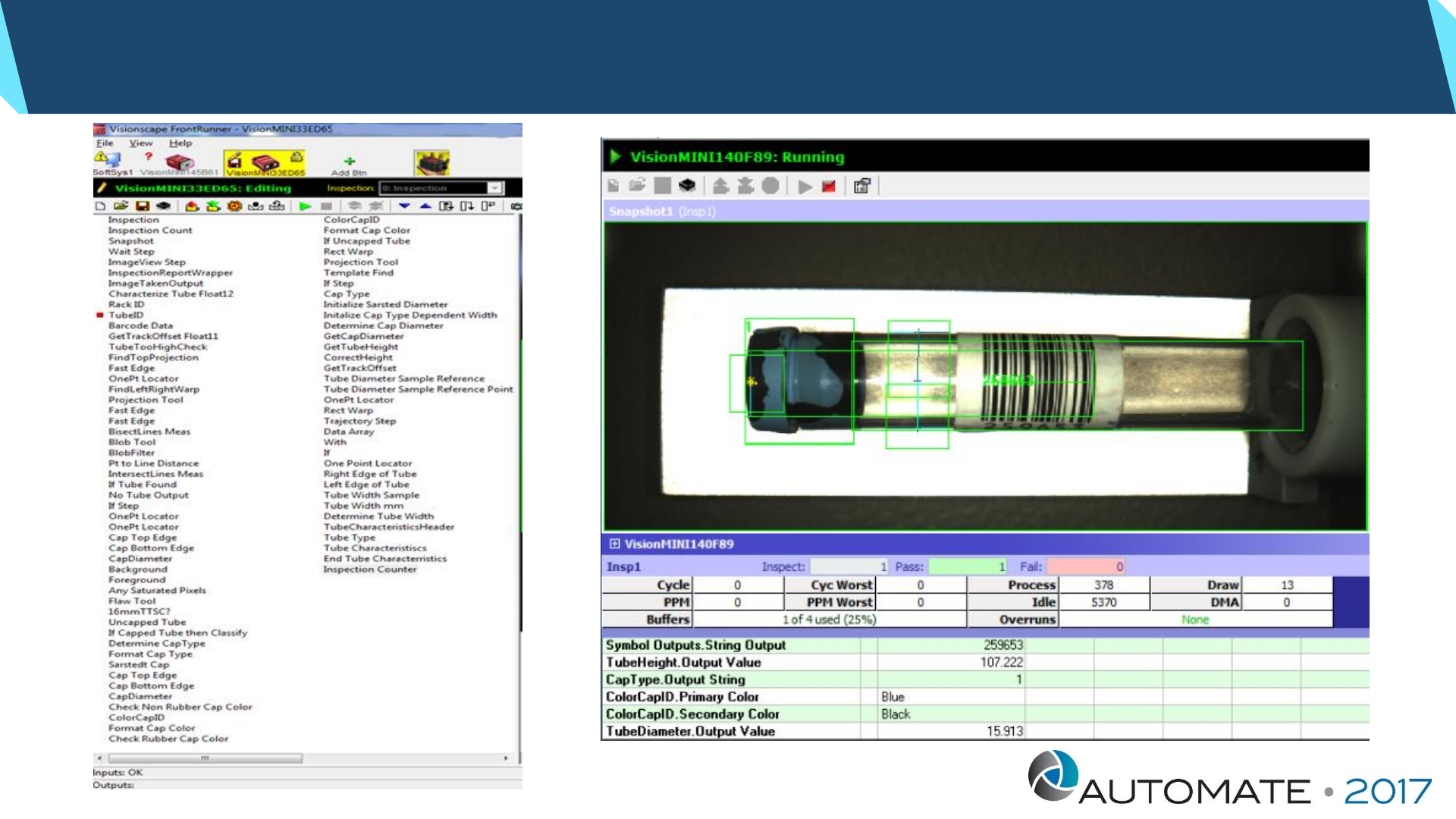
Embedded Example –Automation in Life Sciences

Common Automated Inspection/Measurement Application Examples
•Test Tube Check for
•Tube presence
•Cap presence
•Tube height
•Tube diameter
•Cap type
•Cap color
•Label presence
•Label location
•Fluid level detection
Embedded Example –Automation in Life Sciences

Embedded Example - Challenges
•Small Footprint Machines
•One or Multiple Cameras On Miniature Robots
•Very Low Cost
•Large Number and Variety of Inspections
•Very Short Working Distances
•Very Wide Fields of View
•Difficult Lighting Situations
•Calibrated and Un-calibrated Inspections
•Proof Testing on 10,000+ Samples

Embedded Example –Life Sciences
•Lighting
•Embedded on Camera
•Single LEDs at Critical Locations in Workspace
•Retroflective surfaces for Backlight
•Optics –2.8 mm to 6 mm, 60-80 degree fields of view
•Calibration –Done on Model Tubes
•Inspections –10 to 30. Up to 300 tools per job.
•Tools
•Read
•Inspect
•Locate, Measure
•Custom
Embedded Example –Life Sciences

Summary
•Robot Applications Face Challenges in Many Areas:
•Physical Installation –Mounting, Size, Optics, Lighting
•Cabling –High Flex, capable of millions of cycles
•Programming –Simple yet Flexible, UI integration with robot controller
•Calibration –2D and 3D, marrying multiple coordinate systems
•Integration of Results –Data formatting/output, Protocol support, Image display
•Miniature Smart Cameras Solve Many of These Challenges
•General Use - Fully Integrated, Simple Programming, Configurable to Achieve Best Price
•End of the robot arm - Low mass, Built into robot gripper, High number of inspections
•Dense packed - Many cameras fit together over a single part for high accuracy results
•Embedded applications - Fit multiple cameras into small spaces

Contact
Steven J. King
Vision and Lighting Product Manager
Microscan Systems
486 Amherst Street
Nashua, NH
USA
Telephone: (603)-320-5085
Email: sking@microscan.com
www.microscan.com
