NVIDIA E1162 Wi-Fi and Bluetooth Developer Kit User Manual tegra 250 hw setupx
NVIDIA Corporation Wi-Fi and Bluetooth Developer Kit tegra 250 hw setupx
UserManual.wiki
>
NVIDIA
>
E1162 User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
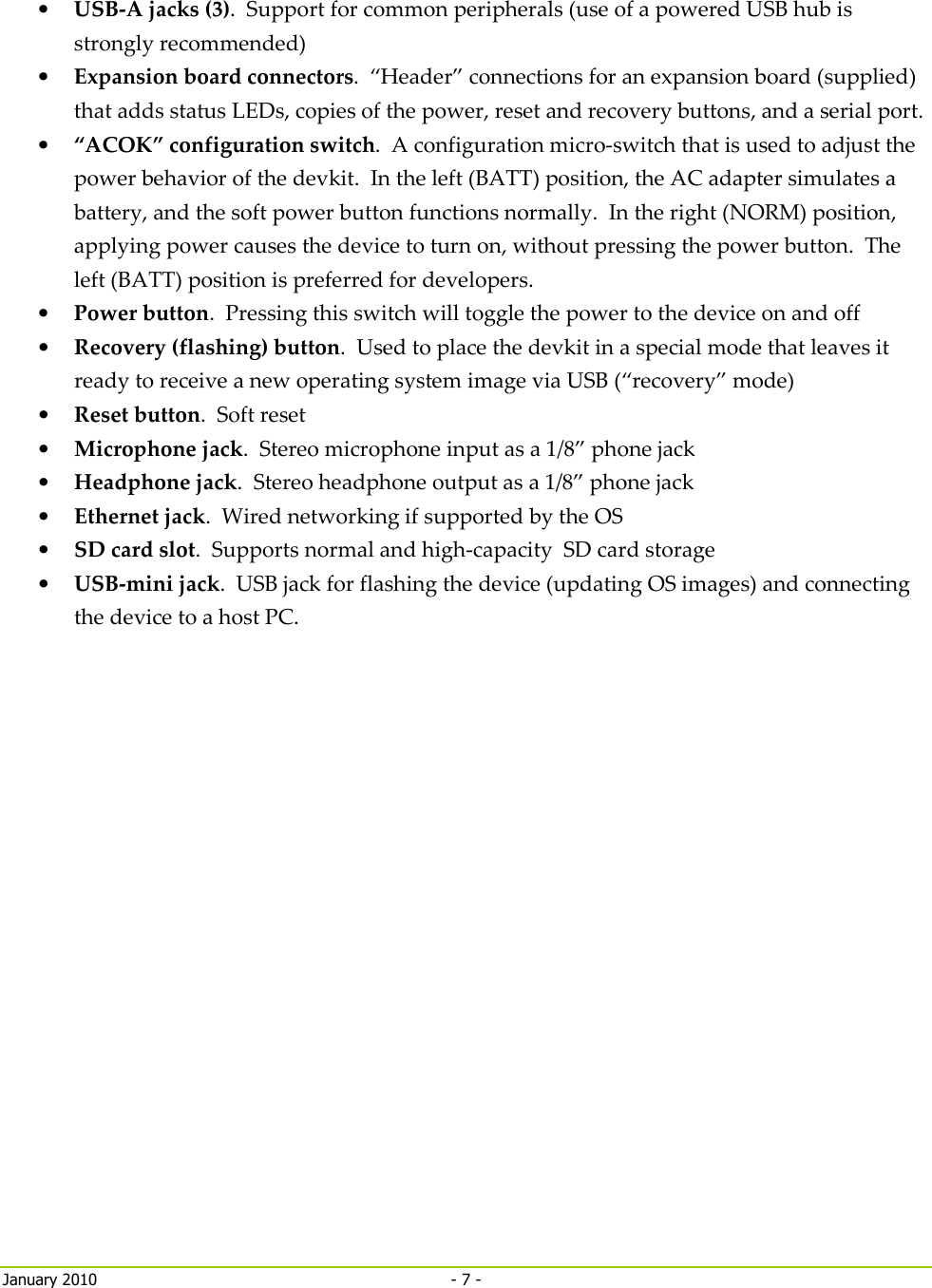
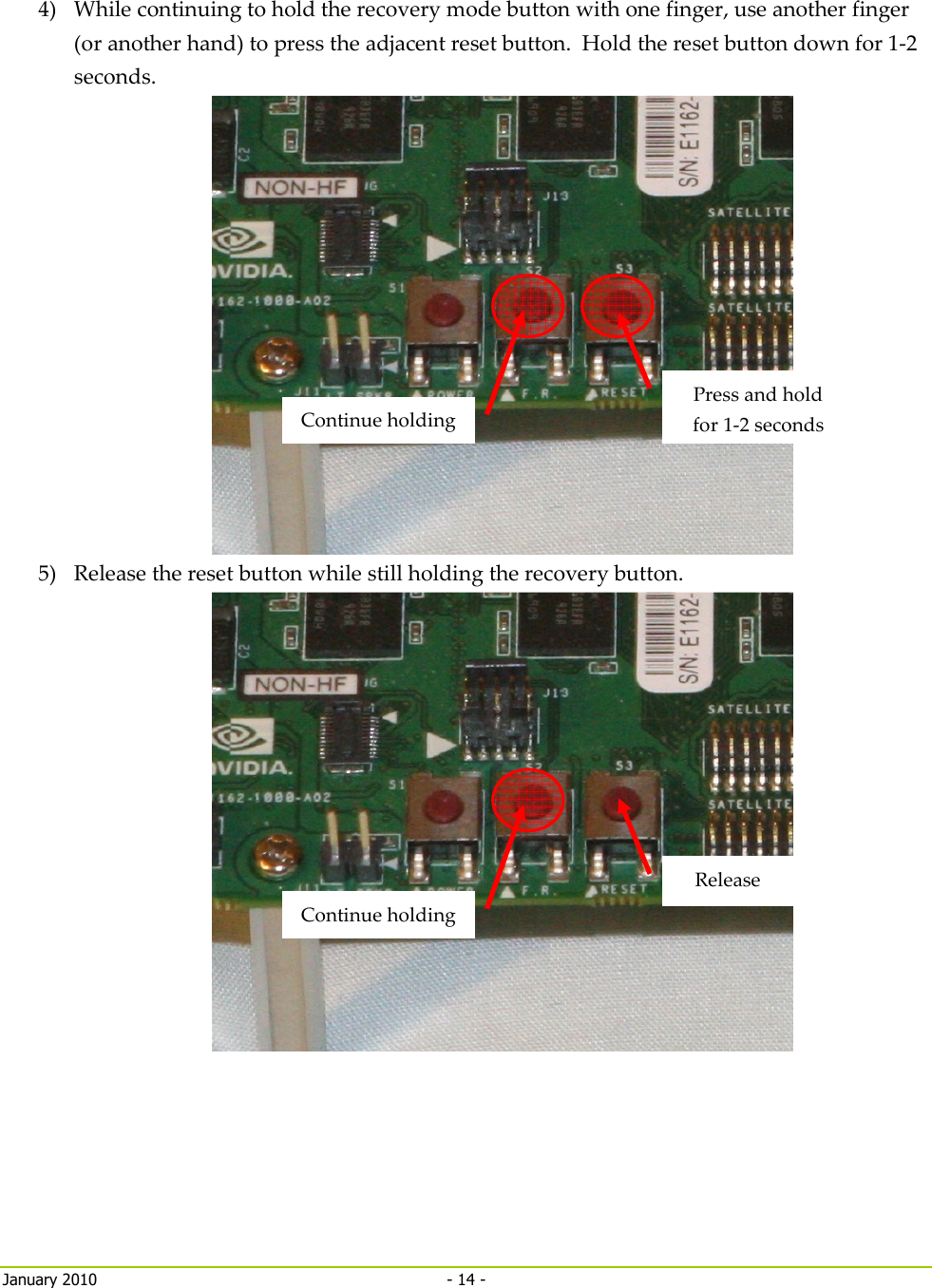
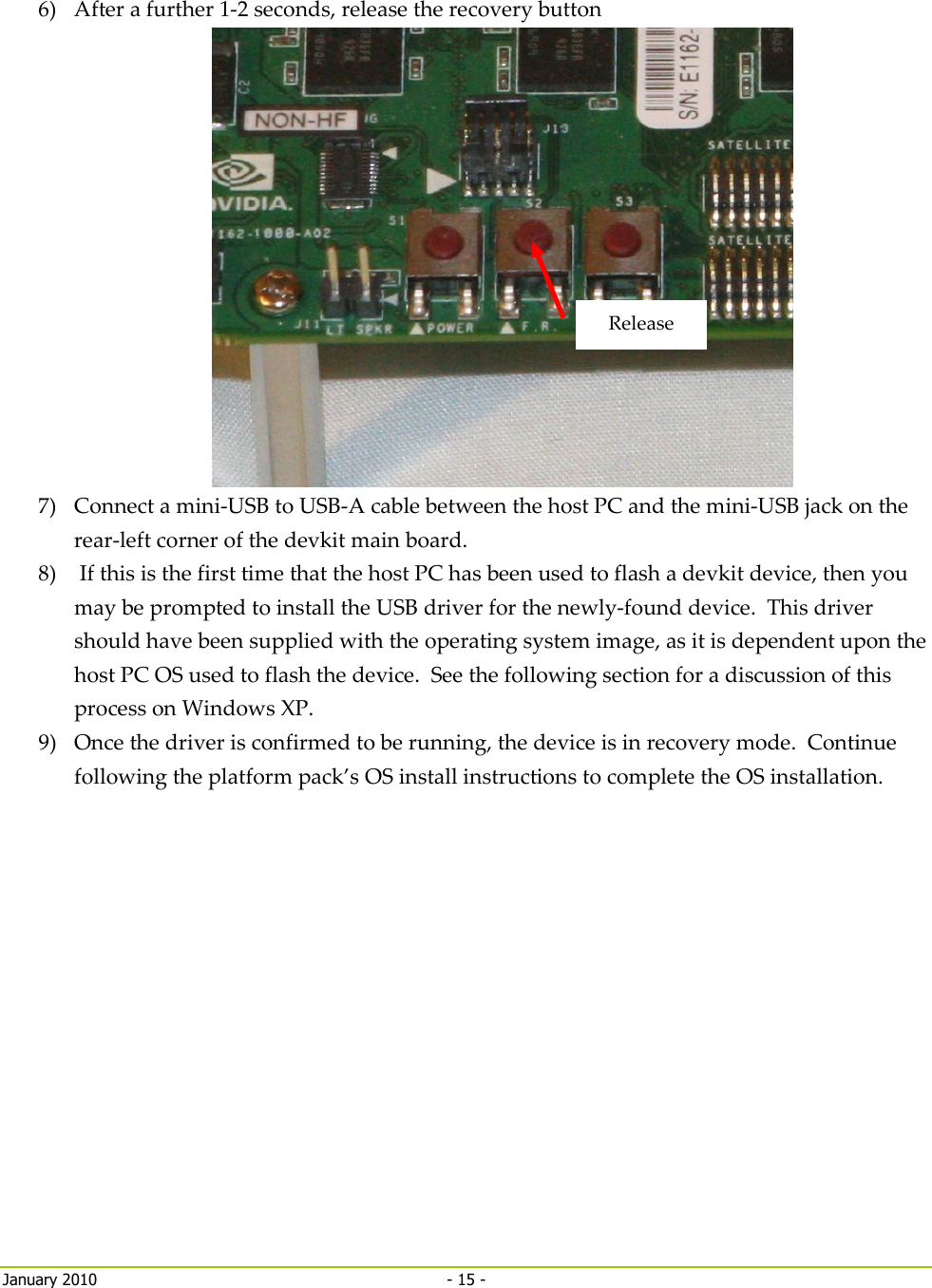
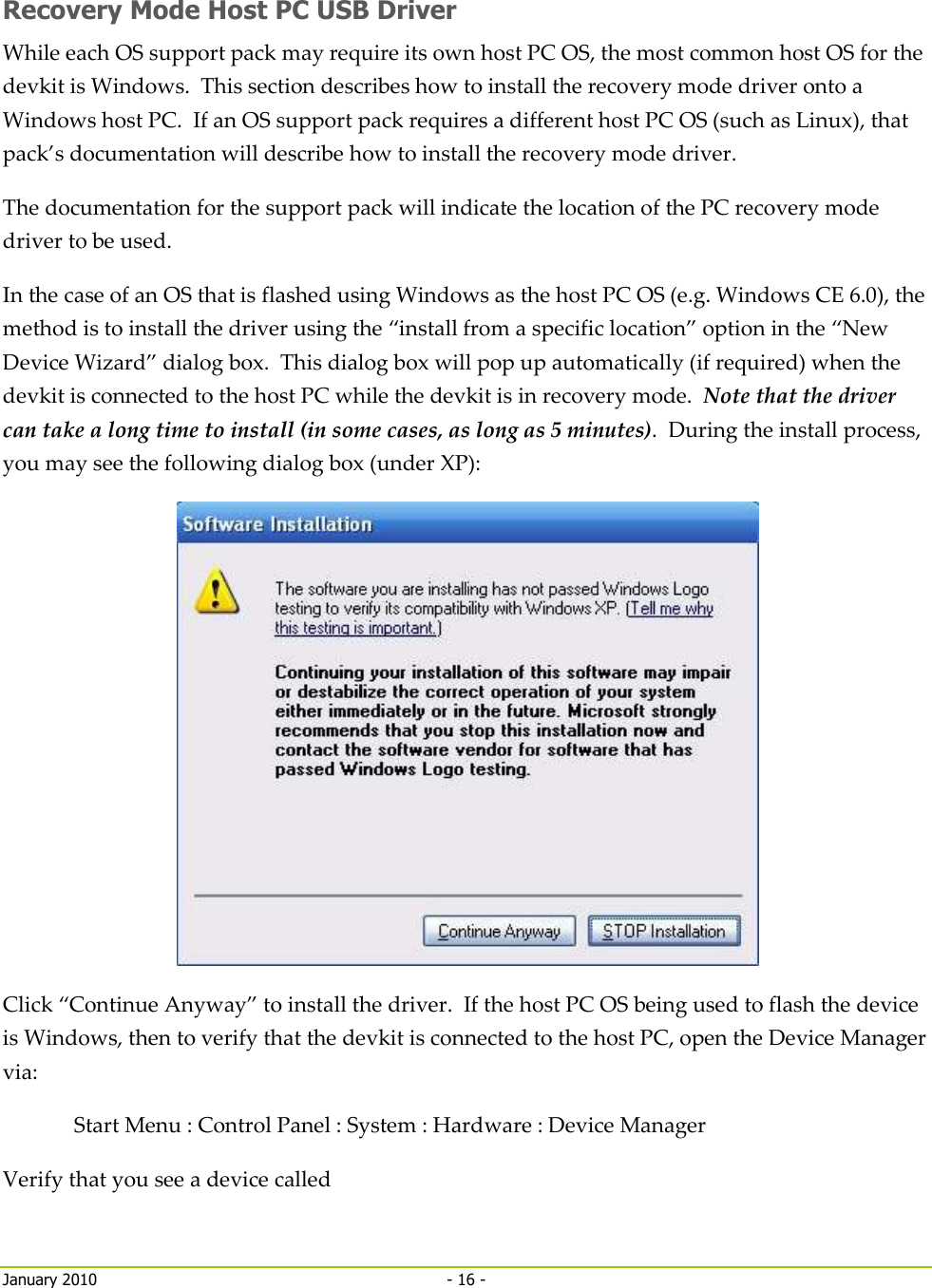
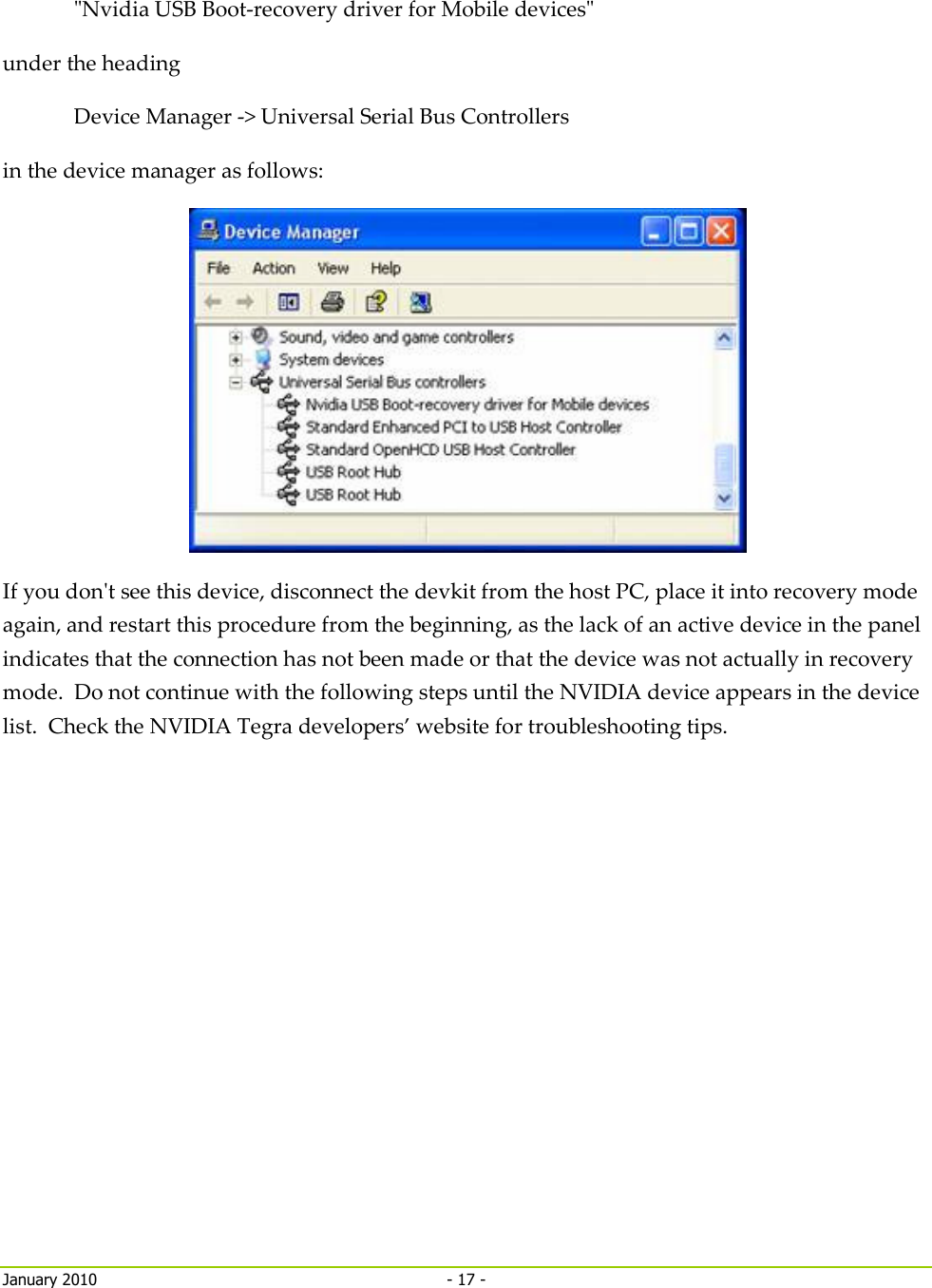
![January 2010 - 8 - Mini Satellite Board In addition, most Tegra 250 devkits include the “mini satellite board”, which replicates the main power, reset and recovery buttons, adds a UART serial port for low-level debugging on some OSes, and switches and LEDs for common “smartbook” features like lid close, wifi on/off, etc. An appendix at the end of this document provides connection instructions. The board is pictured below: • UART serial port. Standard serial port for use with some OS images for low-level logging and debugging • Power, reset, recovery buttons. Replicated from the main board so that all controls may be found on the satellite board. Useful if the main board is somehow packaged • Simulated lid switch. On some OS images, setting this switch causes the device to sleep • Dual ribbon cables. Connection to the main board • Wifi, BT, etc status LEDs. Provides activity status of major peripherals • WiFi switch. Enables/disables WiFi radio Simulated lid switch WiFi switch Power, reset, recovery buttons Wifi, BT, etc status LEDs Dual ribbon cables to main board UART serial port [Add the following notice on the mini satellite board (as well as the main board: Property of NVIDIA Corporation. Not for resale. Return to NVIDIA upon completion of use.]](https://usermanual.wiki/NVIDIA/E1162/User-Guide-1383647-Page-8.png)