Novatel 01018518 Smart-MR10 BlueTooth Intergration User Manual OM 20000130SMARTMR10
Novatel Inc Smart-MR10 BlueTooth Intergration OM 20000130SMARTMR10
UserManual.wiki
>
Novatel
>
01018518 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

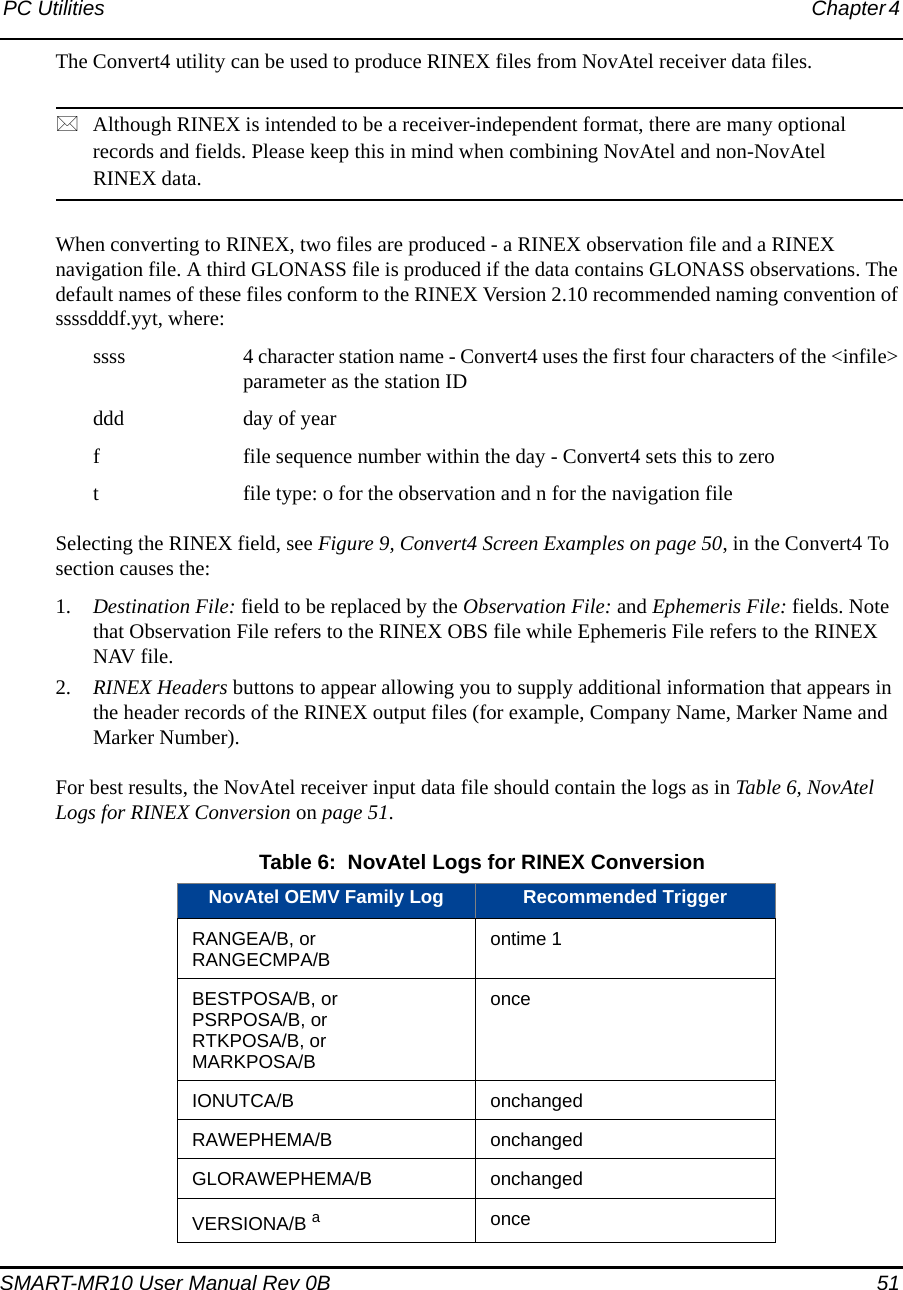
![SMART-MR10 User Manual Rev 0B 13NoticesNoticeThe following notices apply to the SMART-MR10. For more information on emissions testing, please refer to the regulatory body in your geographic area; for example, in the US, the Federal Communications Commission (FCC) and in Europe, the Conformité Européenne (CE).FCCThis device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.SMART-MR10 has been tested and found to comply with the emission limits for a Class B digital device. The Class B limits are designed to provide reasonable protection against harmful interference in a residential installation. SMART-MR10 has been certified by FCC for use in the 2400 MHz - 2483.5 MHz band (FCC ID # TBD).This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Re-orient or relocate the SMART-MR10• Increase the separation between the equipment and the SMART-MR10• Connect the equipment to an outlet on a circuit different from that to which the SMART-MR10 is connected• Consult the dealer or an experienced radio/TV technician for helpIMPORTANT: In order to maintain compliance as a Class “A” or Class “B” digital device, shielded cables should be used for the RS-232 serial data ports (Belden 1036A or equivalent) and twisted pair cable should be used for the CAN port (shielded twisted pair will improve CAN performance in electrically harsh environments). I/O signals should be referred to one of the two signal grounds (connector pin 9 or connector pin 15) and not power ground (connector pin 2). If I/O signals route to different areas of the vehicle, dedicated signal grounds for I/O should be spliced into a common connection to one of the two signal grounds (pin 9 or pin 15).] at a point close to the SMART-MR10. WARNING: Changes or modifications to this equipment not expressly approved by NovAtel Inc. could result in violation of Part 15 of the FCC rules and void the user’sauthority to operate this equipment.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-13.png)
![14 SMART-MR10 User Manual Rev 0BNoticeIndustry CanadaSMART-MR10 Class B digital apparatus complies with Canadian ICES-003.SMART-MR10 appareils numérique de la classe B est conforme à la norme NMB-003 du Canada.SMART-MR10 has been certified for use in the 2400 MHz - 2483 MHz band by Industry Canada (RSS-210) [IC ID # TBD].CEThe SMART-MR10 enclosures carry the CE mark."Hereby, NovAtel Inc. declares that this SMART-MR10 is in compliance with the essential requirements and other relevant provisions of the R&TTE Directive 1999/5/EC and of the EMC Directive 2004/108/EC."WEEEIf you purchased your OEMV® family product in Europe, please return it to your dealer or supplier at the end of its life. The objectives of the European Community's environment policy are, in particular, to preserve, protect and improve the quality of the environment, protect human health and utilise natural resources prudently and rationally. Sustainable development advocates the reduction of wasteful consumption of natural resources and the prevention of pollution. Waste electrical and electronic equipment (WEEE) is a regulated area. Where the generation of waste cannot be avoided, it should be reused or recovered for its material or energy. WEEE products may be recognized by their wheeled bin label ( ). 1RoHSThe SMART-MR10 is compliant with the European Union (EU) Restriction of Hazardous Substances (RoHS) Directive 2002/95/EC. 11. Please visit the NovAtel Web site at http://www.novatel.com/support/weee.htm for more information on WEEE and RoHS.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-14.png)
![ForewordSMART-MR10 User Manual Rev 0B 17• The letter H in the Offset columns of the commands and logs tables represents the header length for that command or log. Refer to the OEMV Family Firmware Reference Manual for ASCII and binary header details.• The number following 0x is a hexadecimal number.• Command descriptions’ brackets, [ ], represent the optionality of parameters.• In tables where values are missing, they are assumed to be reserved for future use.• Status words are output as hexadecimal numbers and must be converted to binary format (and in some cases then also to decimal). For an example of this type of conversion, please refer to the RANGE log in the OEMV Family Firmware Reference Manual.Conversions and their binary or decimal results are always read from right to left. For a complete list of hexadecimal, binary and decimal equivalents, please refer to the Unit Conversion section of the GNSS Reference Book available on our Web site at http://www.novatel.com/support/docupdates.htm.This symbol indicates an important statement, caution or warning.See also Section B.1, Syntax Conventions on Page 73 for additional conventions.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-17.png)

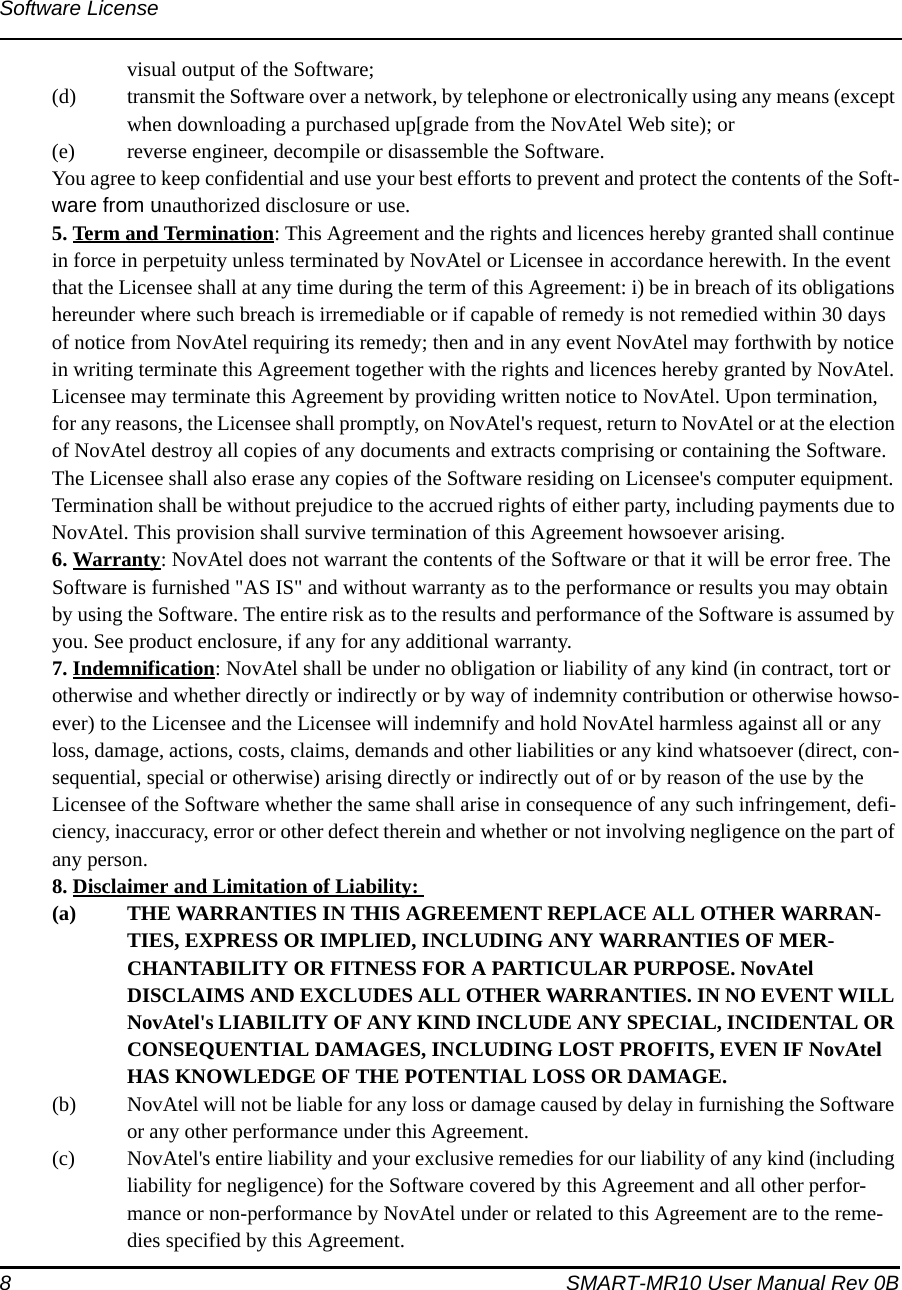
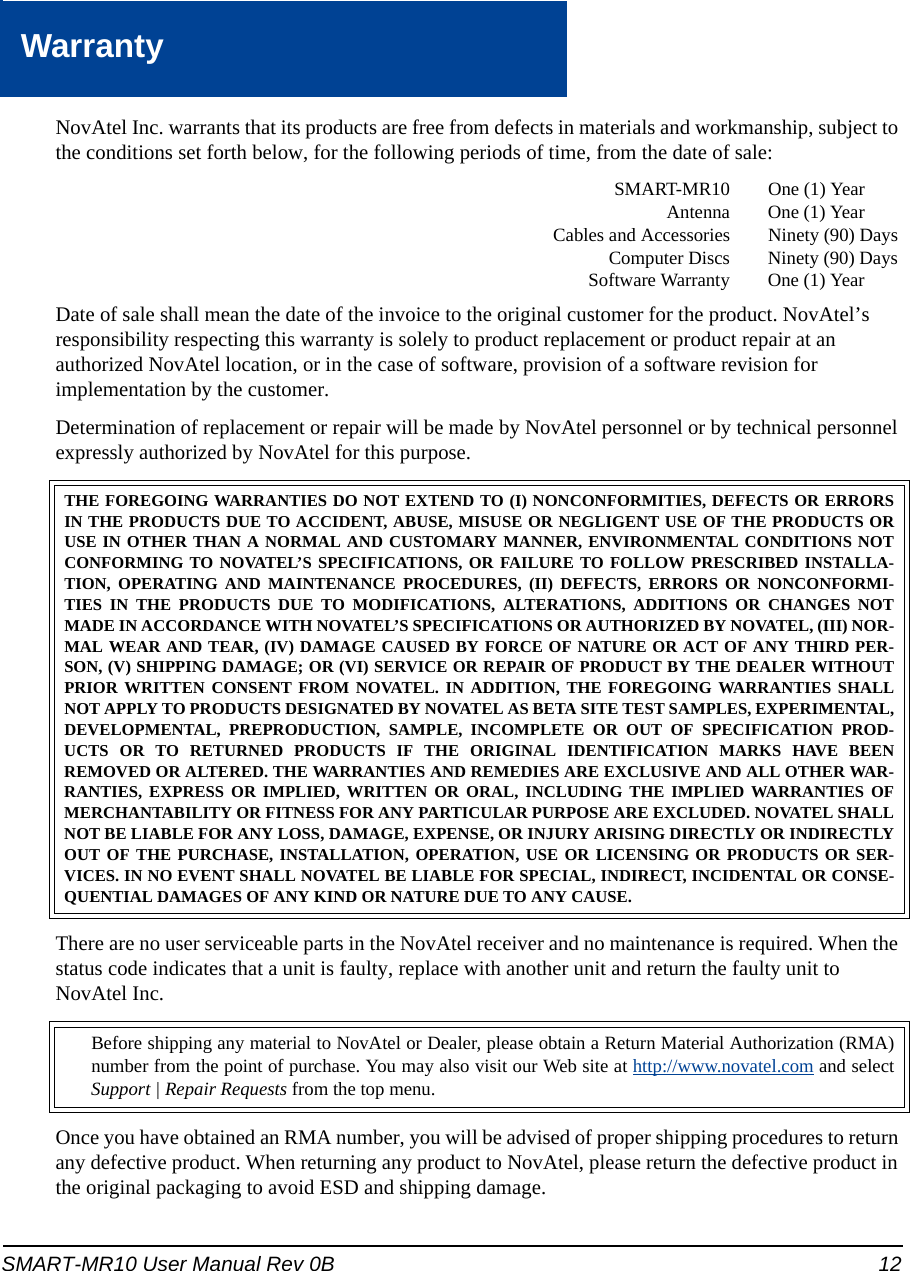
![Installation and Setup Chapter 2 SMART-MR10 User Manual Rev 0B 29Table 4 shows the meaning of the LED states in the expected sequence after power is applied. Flashing means that the LED is turning on and off at a 1 Hz rate - 0.5 seconds on and 0.5 seconds off.Debugging Guidelines:• If the power is on but the yellow LED doe not flash within one minute, then no satellites are tracking. There may be excessive blockage or the unit may be defective. Make sure the unit has an unobstructed view of the sky. Try power cycling the unit.• If the yellow LED does not flash within one minute and power cycling the unit does not fix the problem, request a VERSION log to ensure that the auth code is correct.Example of a receiver loaded with an incorrect auth code:<ok[com1]<version com1 0 72.0 unknown 0 12.387 004c0001 3681 5053< 3< gpscard "invalid authcode" "dhc09401009" "mcagtp-1.00-22b" "3.710" "3.002" "2009/dec/30" "11:20:58"< db_userappauto "smartag" "0" "" "1.100" "" "2010/jan/25" "17:32:44"< userinfo "no bt" "" "" "" "" "" ""[com1]• If the yellow LED is flashing but does not progress to solid yellow within one minute, then insufficient satellites are tracking or the signal quality is poor and ephemeris data can’t be received. Normally, four satellites are sufficient for a valid position as long as they are widely Table 4: SMART-MR10 LED Status IndicatorsRed Yellow GreenConditionOff Off Off Power is not available. (Red indicator may also not be lit if a boot failure has occurred.)On Off Off Power available but no satellites are being trackedOn Flashing Off Tracking at least one satellite but not a valid positionOn On Off Position valid in basic autonomous modeOn On Flashing SBAS tracking, but not enough data for enhanced solution.On On On Position valid in an enhanced accuracy modea (WAAS/EGNOS/MSAS/DGPS, OmniSTAR VBS/XP/HP, or RTK)a. When acting as a reference receiver, all lights on solid indicates a good fixed position.On Flashing Flashing Fixed position with bad integrity](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-29.png)
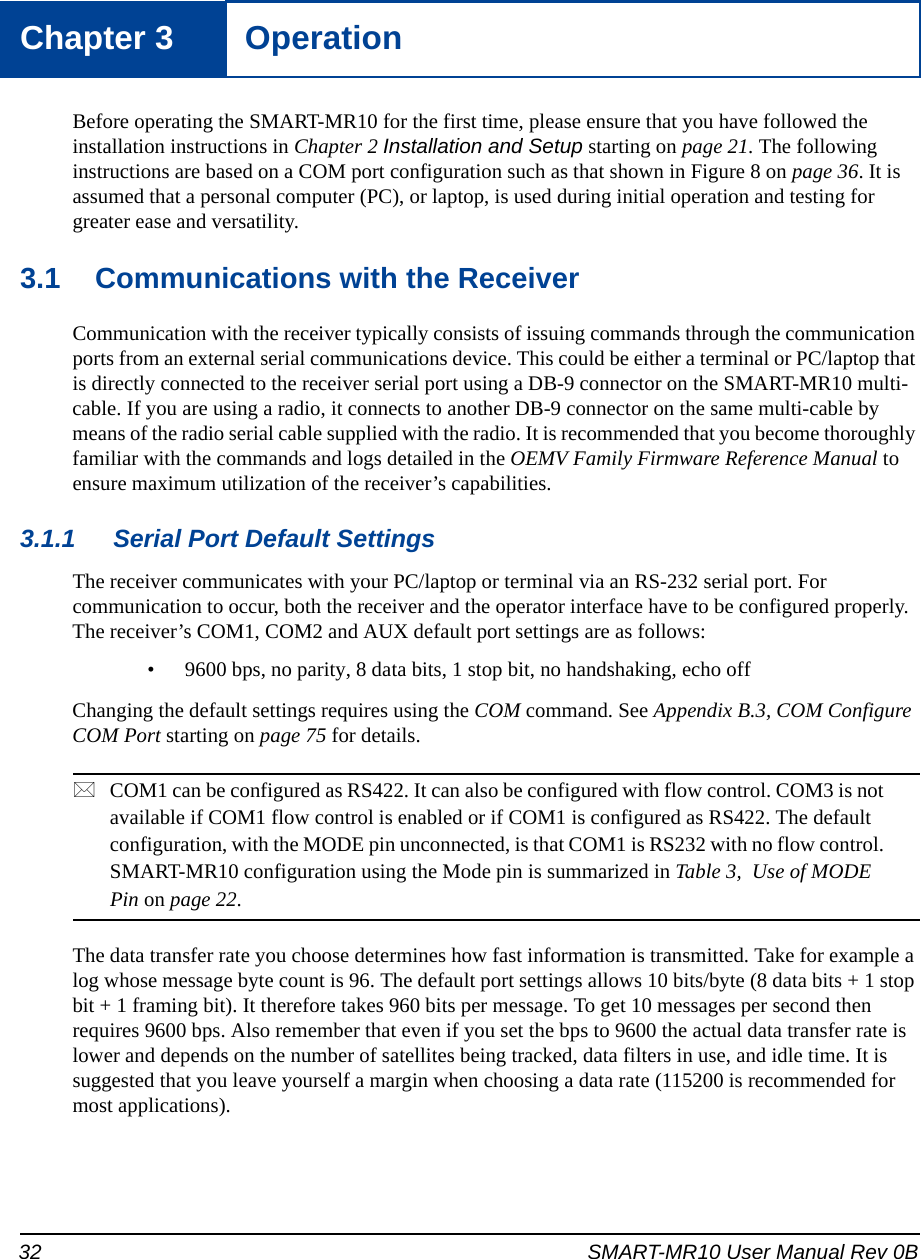
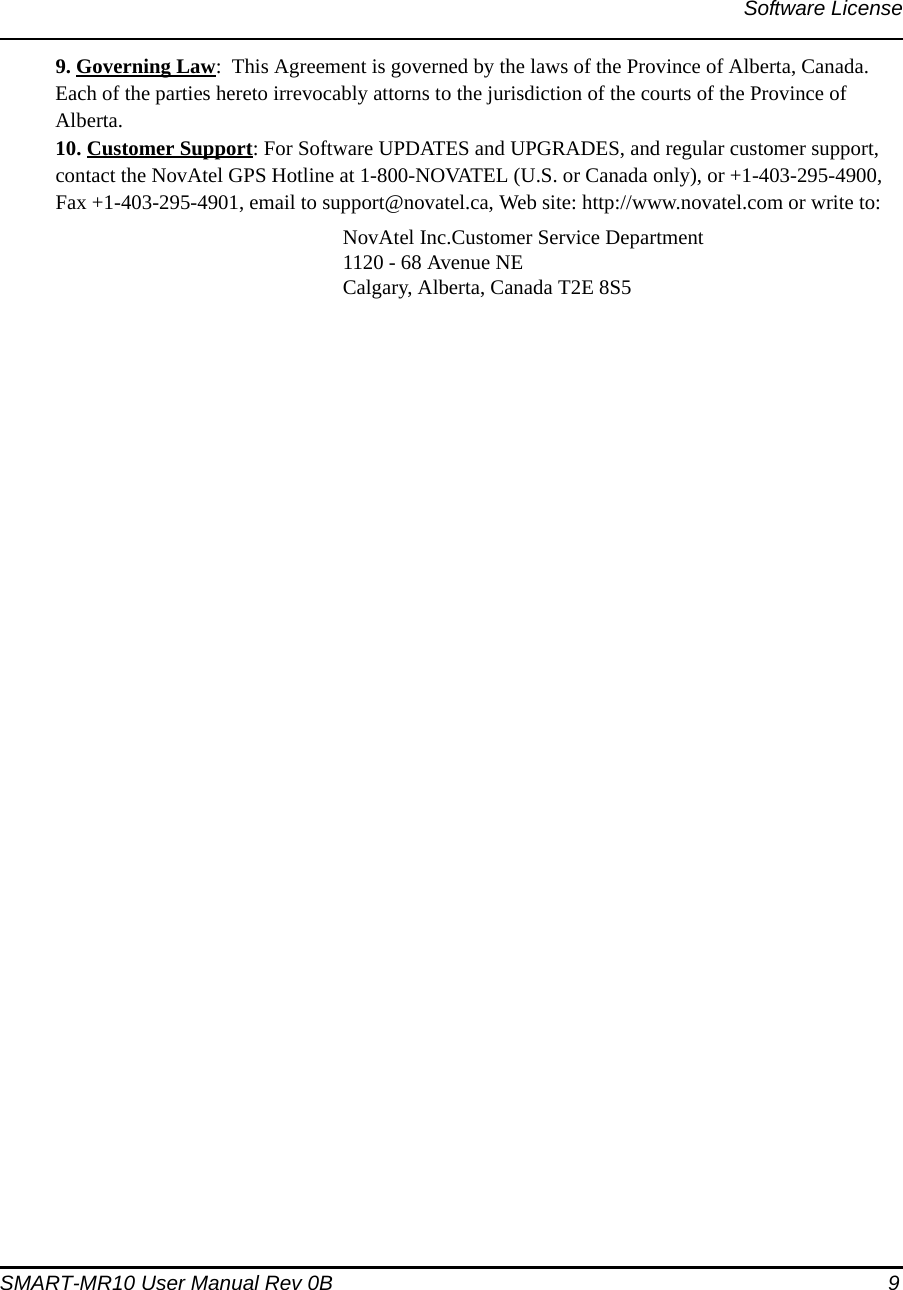
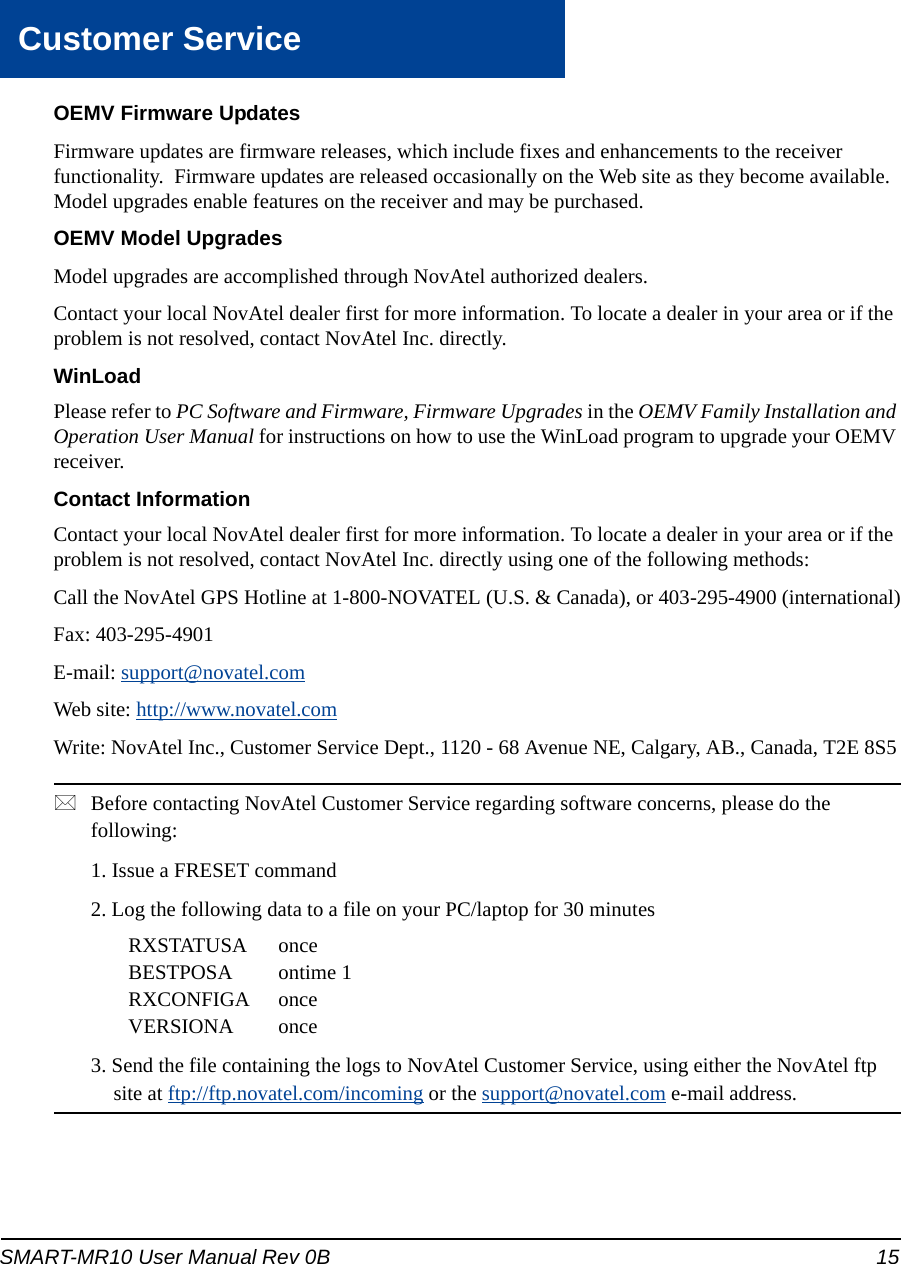
![34 SMART-MR10 User Manual Rev 0BChapter 3 Operation 3.2.2 Communicating with the Receiver Using CDULaunch the CDU program and select Device | Open from its main menu. The Open Configuration window appears. Figure 7, below, shows an Open Configuration window with three possible configurations already set up. Your configurations may be different or you may have none at all, in which case, the Open Configuration window is empty. Figure 7: Open Configuration WindowRefer to CDU’s help file by selecting the Help | Contents menu. Ensure you can see the Console and ASCII Messages windows by selecting them from the View menu.When the receiver is first turned on, no data is transmitted from the COM ports except for the port prompt. The console window displays a port name:[COM1] if connected to COM1 port,or[COM2] if connected to COM2 port,Any of the above prompts indicate that the receiver is ready and waiting for command input. 1. You may also have to wait for output from receiver self tests. For example, on start-up, the OEMV family receiver is set to log the RXSTATUSEVENTA log ONNEW on all ports. Refer to the OEMV Family Firmware Reference Manual for more details.2. If you find that CDU is unable to locate your OEMV family receiver, it may be that you have previously used the SAVECONFIG command. In this case, try using a different COM port to communicate to the receiver. Once communication has been established, issue the command FRESET STANDARD. You should now be able to use your original communication port again.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-34.png)
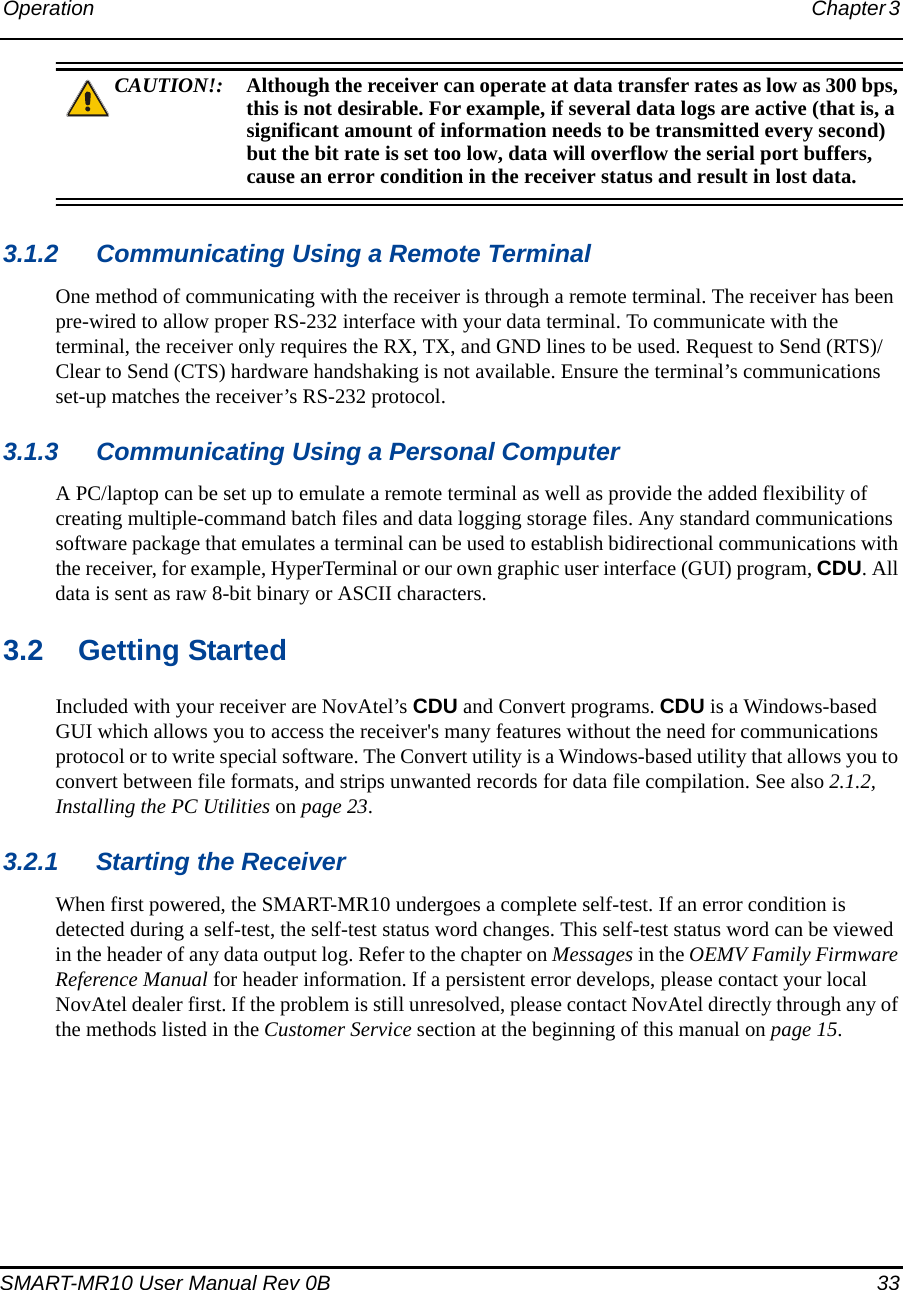
![Operation Chapter 3 SMART-MR10 User Manual Rev 0B 35Commands are typed at the interfacing computing device’s keypad or keyboard, and executed after issuing a carriage return command which is usually the same as pressing the <Enter> key.An example of a response to an input command is the FIX POSITION command, as shown in the following example:[COM2] fix position 51.11635 -114.0383 1048.2 [carriage return]<OKwhere [COM2] is the port prompt, followed by the command you enter from your keypad or keyboard and [carriage return] indicates that you should press the <Enter> key.The example above illustrates the command input to the base receiver’s COM2 port, which sets the position of the base station receiver for differential operation. Confirmation that the command was actually accepted is the appearance of <OK.If a command is entered incorrectly, the receiver responds with:<INVALID MESSAGE ID (or a more detailed message)WARNING!: Ensure the Control Panel’s Power Settings on your PC/laptop are not set to go into Hibernate or Standby modes. Data will be lost if one of these modes occurs during a logging session.3.3 Transmitting and Receiving CorrectionsRTK or DGPS corrections can be transmitted from a base station to a rover station to improve position accuracy. The base station is the GNSS receiver, which is acting as the stationary reference. It has a known position and transmits correction messages to the rover station. The rover station is the GNSS receiver which does not know its exact position and can be sent correction messages from a base station to calculate differential GNSS positions. The SMART-MR10 can be used as a base receiver to transmit RTK or DGPS corrections or a rover to receive the same corrections. An example of differential setup is given in Figure 8 on page 36.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-35.png)
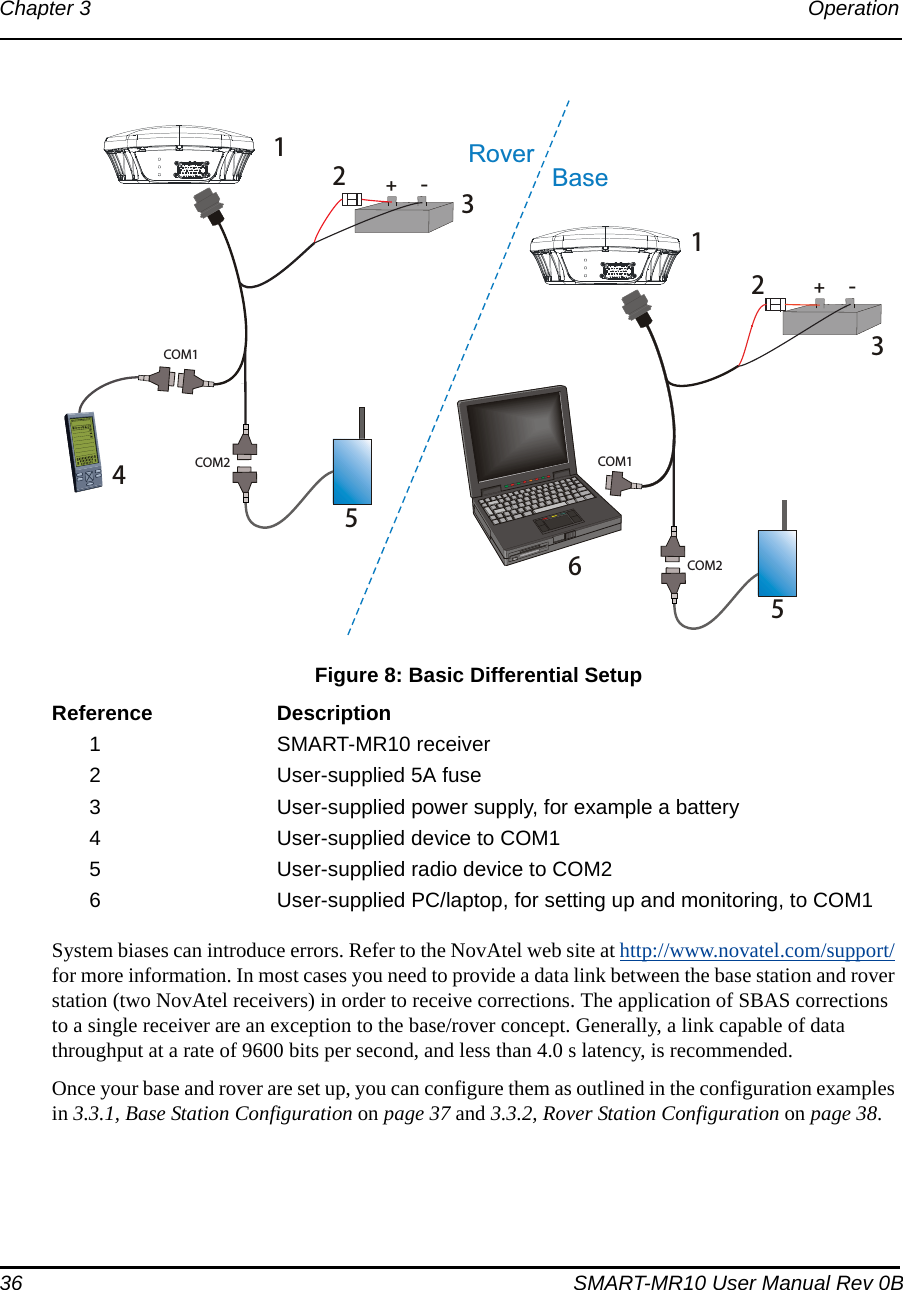
![Operation Chapter 3 SMART-MR10 User Manual Rev 0B 373.3.1 Base Station ConfigurationAt the base station, enter the following commands:interfacemode port rx_type tx_type [responses]fix position latitude longitude heightlog port message [trigger [period]]Examples of these commands include the following:RTCA interfacemode com2 none rtca offfix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 rtcaobs ontime 1log com2 rtcaref ontime 10log com2 rtca1 ontime 5 (optional, enable code-dgps coverage)log com2 rtcaephem ontime 10 1 (optional)RTCAOBS2 interfacemode com2 none rtca off(recommended) fix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 rtcaobs2 ontime 1log com2 rtcaref ontime 10RTCM V2.3 interfacemode com2 none rtcm offfix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 rtcm3 ontime 10log com2 rtcm22 ontime 10 1log com2 rtcm1819 ontime 1log com2 rtcm1 ontime 5 (optional)RTCM V3 interfacemode com2 none rtcmv3 offfix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 rtcm1002 ontime 1 (for L1 only models or cards OEMV1 and OEMV1G)log com2 rtcm1004 ontime 1 (for L1/L2 models or cards OEMV1DF, OEMV2G, and OEMV3G)log com2 rtcm1006 ontime 10log com2 rtcm1019 ontime 120RTCM V3 with GLONASS interfacemode com2 none rtcmv3 off(recommended) fix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 rtcm1002 ontime 1 (for L1 only models or cards OEMV1 and OEMV1G)log com2 rtcm1004 ontime 1(for L1/L2 models or cards OEMV1DF, OEMV2G, and OEMV3G)log com2 rtcm1010 ontime 1 (for L1 only models or cards OEMV1 and OEMV1G)log com2 rtcm1012 ontime 1](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-37.png)
![38 SMART-MR10 User Manual Rev 0BChapter 3 Operation (for L1/L2 models or cards OEMV1DF, OEMV2G, and OEMV3G)log com2 rtcm1006 ontime 10log com2 rtcm1033 ontime 10log com2 rtcm1019 ontime 120log com2 rtcm1020 ontime 120CMRPLUS (CMR+) interfacemode com2 none cmr offfix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 cmrobs ontime 1log com2 cmrgloobs ontime 1 log com2 cmrplus ontime 1 (important to use ontime 1 with cmrplus)CMR interfacemode com2 none cmr offfix position 51.11358042 -114.04358013 1059.4105 (enter your own lat, lon, hgt)log com2 cmrobs ontime 1log com2 cmrgloobs ontime 1 log com2 cmrref ontime 10log com2 cmrdesc ontime 10 1 (optional)3.3.2 Rover Station ConfigurationAt the rover station, enter:interfacemode port rx_type tx_type [responses]For example:RTCA interfacemode com2 rtca none offRTCAOBS2 interfacemode com2 rtca none offRTCM V2.3 interfacemode com2 rtcm none offRTCM V3 interfacemode com2 rtcmv3 none offRTCM V3 with GLONASSinterfacemode com2 rtcmv3 none offCMR+ interfacemode com2 cmr none offCMR interfacemode com2 cmr none off (same as CMR+)](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-38.png)
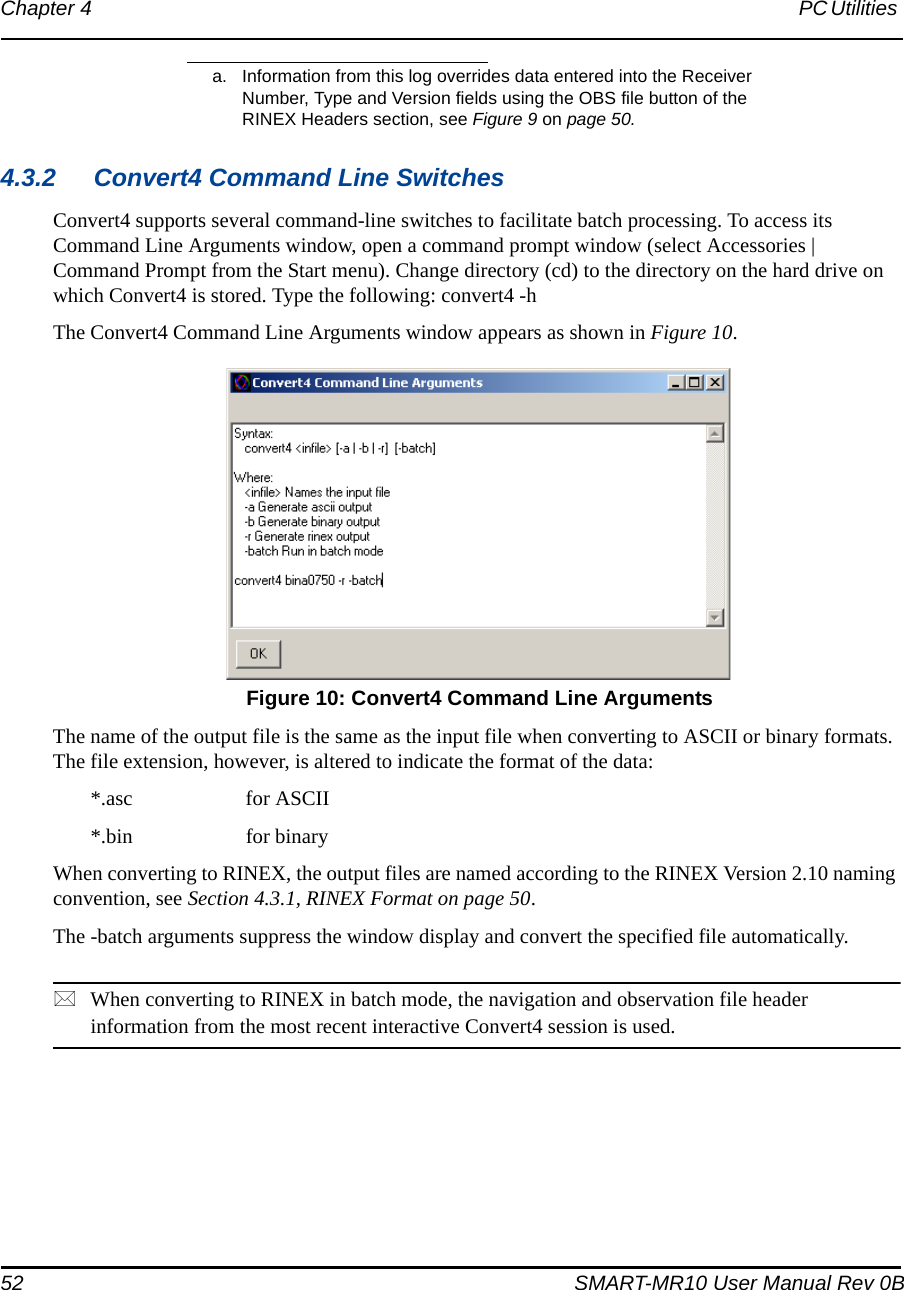
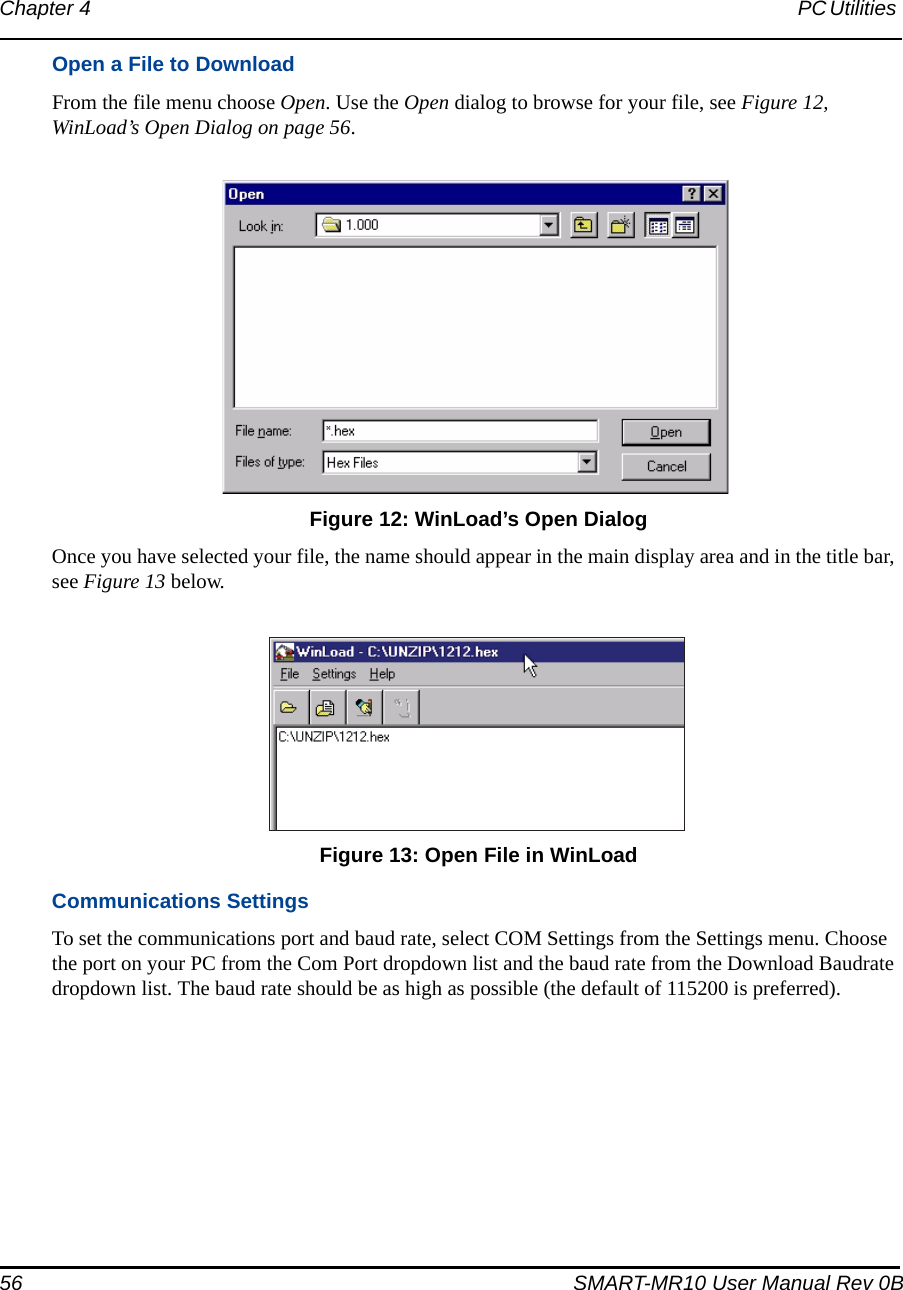
![54 SMART-MR10 User Manual Rev 0BChapter 4 PC Utilities auth-code is the upgrade authorization code, expressed as hhhh,hhhh,hhhh,hhhh,hhhh,model# where the h characters are an ASCII hexadecimal code, and the model# would be ASCII textExample:auth 17cb,29af,3d74,01ec,fd34,l1smrterOnce the AUTH command has been executed, the OEMV family receiver will reboot itself. Issuing the LOG VERSION command will confirm the new upgrade model type and version number.If communicating using CDU, the communication path needs to be closed and re-opened using the Device menu.4.4.2 Updating Using the WinLoad UtilityWinLoad is required (instead of the AUTH command) when upgrading previously released firmware with a newer version of program and model firmware. WinLoad is a Windows utility program designed to facilitate program and model upgrades. Once WinLoad is installed and running, it will allow you to select a host PC serial port, bit rate, directory path, and file name of the new program firmware to be transferred to the OEMV family receiver via its COM1 or COM2 port. The port chosen must have an RS-232 interface to the PC.Transferring Firmware FilesTo proceed with your program upgrade, you must first acquire the latest firmware revision. You will need a file with a name such as OEMXXXX.EXE (where XXXX is the firmware revision level). This file is available from NovAtel's FTP site (http://www.novatel.com), or via e-mail (support@novatel.ca). If transferring is not possible, the file can be mailed to you on CD. For more information on how to contact NovAtel Customer Service please see page 15 at the beginning of this manual.You will need at least 1 MB of available space on your hard drive. For convenience, you may wish to copy this file to a GPS sub-directory (for example, C:\GPS\LOADER).The file is available in a compressed format with password protection; Customer Service will provide you with the required password. After copying the file to your computer, it must be decompressed. The syntax for decompression is as follows:Syntax:[filename] [password]where filename is the name of the compressed file (but not including the .EXE extension) and password is the password required to allow decompressionExample:oem1001 12345678A Windows-based dialog box is provided for password entry.The self-extracting archive will then generate the following files:WinLoad.exe WinLoad utility programHowTo.txt Instructions on how to use the WinLoad utility](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-54.png)
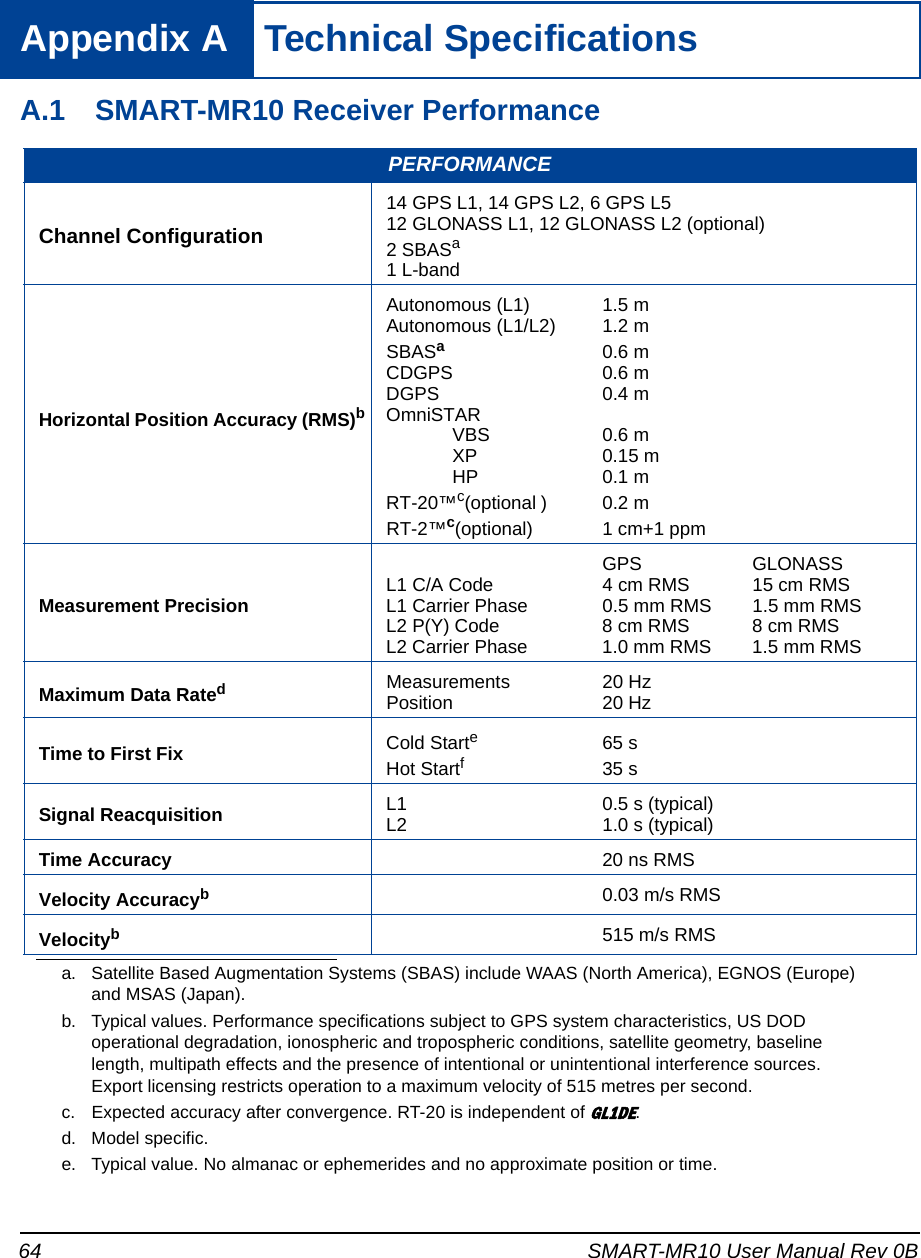
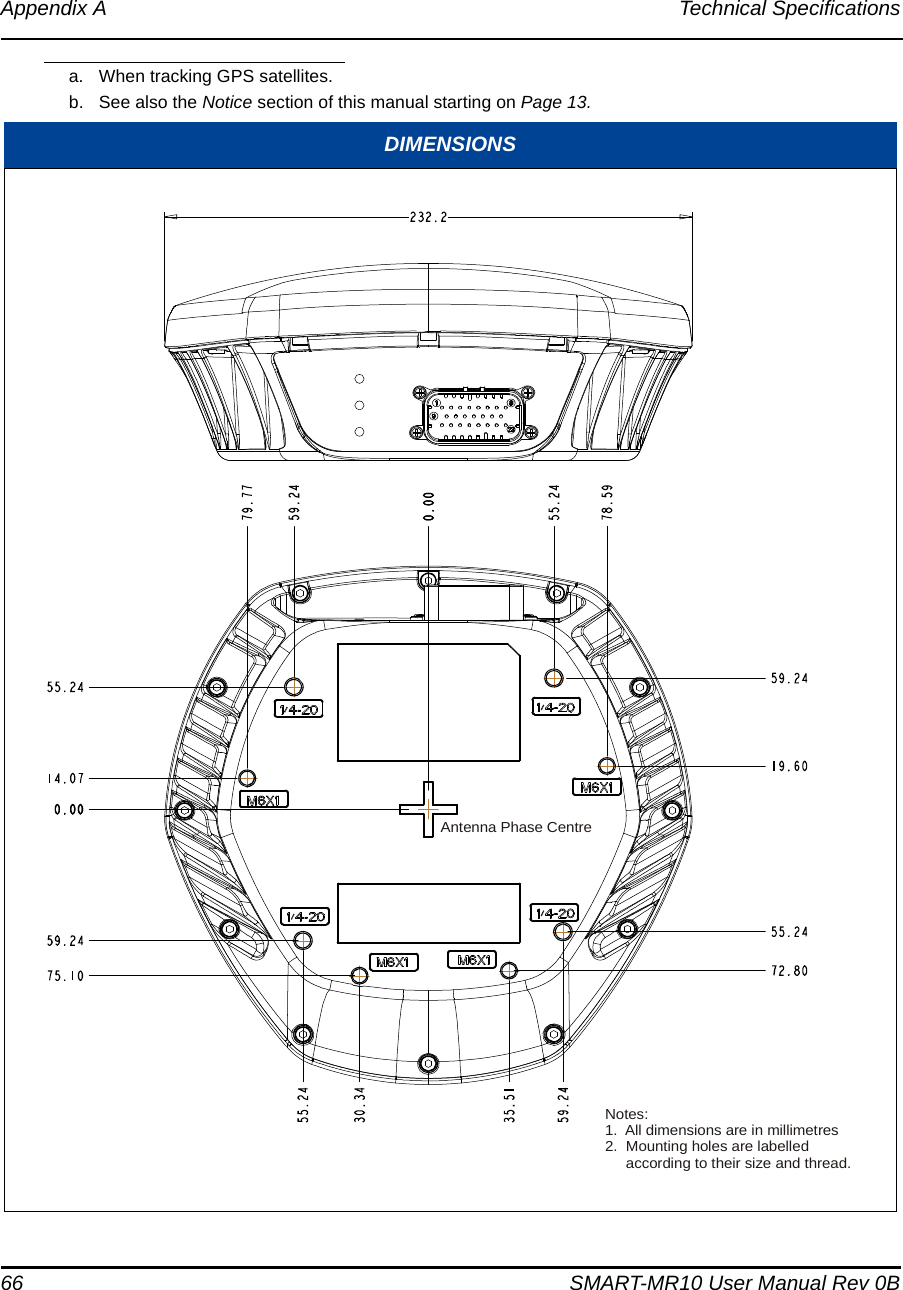
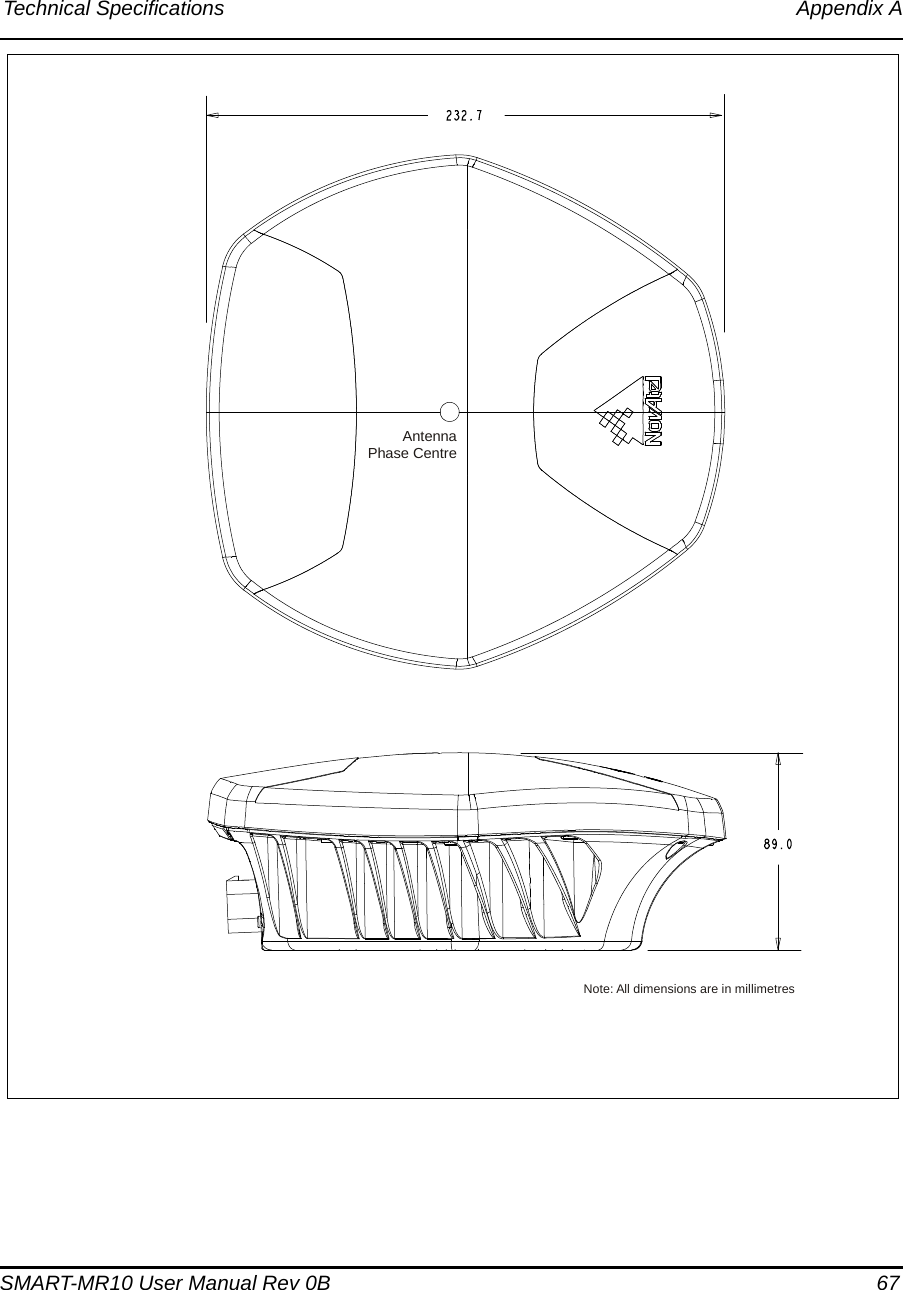
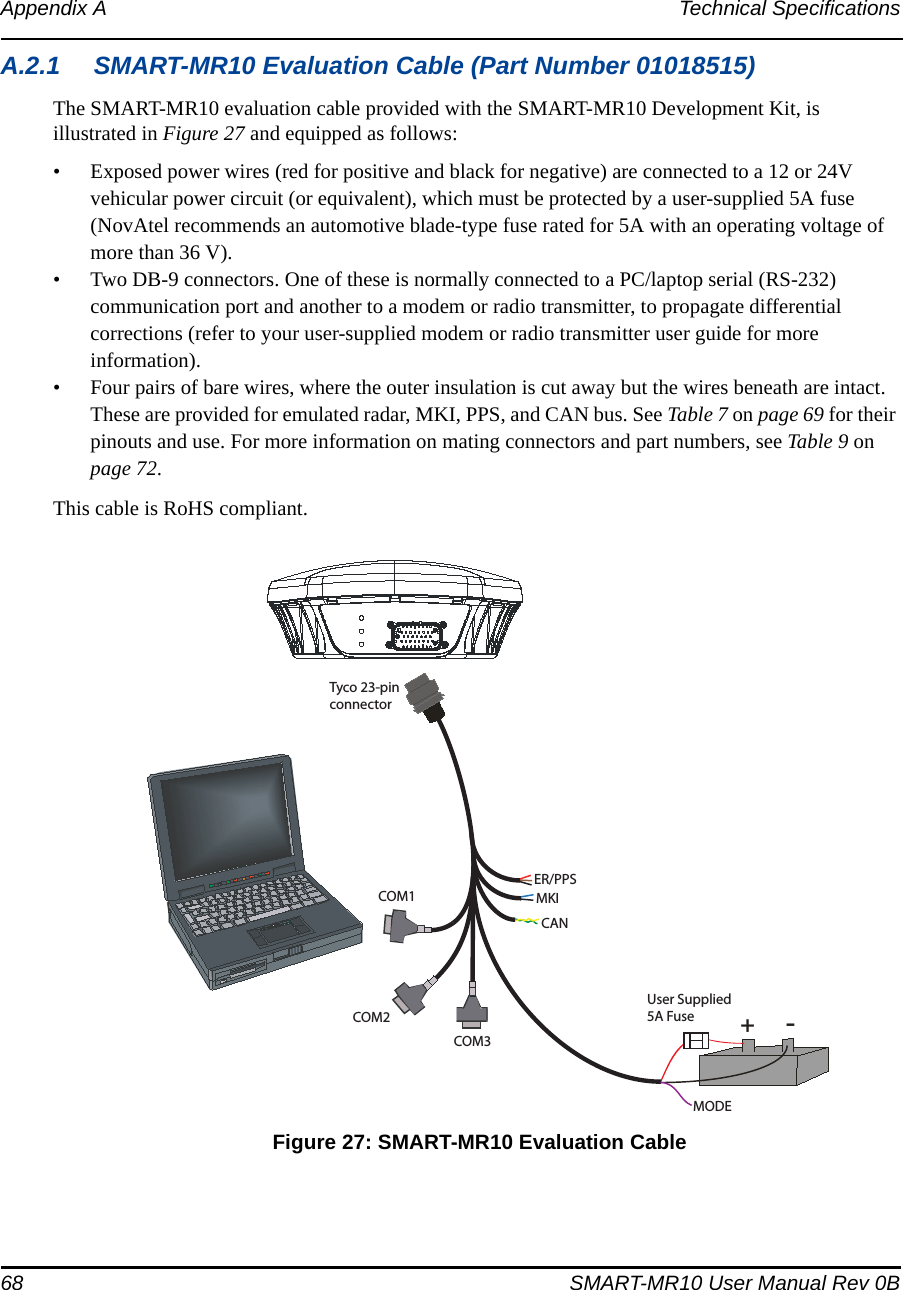
![Technical Specifications Appendix ASMART-MR10 User Manual Rev 0B 65A.2 SMART-MR10 Specificationsf. Typical value. Almanac and recent ephemerides saved and approximate time entered. For more information, Please refer to the “SETAPPROXTIME” command in the OEMV Family Firmware Reference Manual found on our Web site at http://www.novatel.com/support/docupdates.htm.INPUT/OUTPUT CONNECTORSSMART-MR10 COM/PWR +8 to +36 V DC at 2.5 W (typical while logging) aFor the cable pinouts and drawings, see SMART-MR10 Evaluation Cable (Part Number 01018515) starting on page 68 and SMART-MR10 Streamlined Cable (Part Number 01018526) starting on page 70.Serial Com Ports 3 RS-232 serial ports (1 port configurable to RS422) [230,400 bps maximum]CAN SAE J1939/ ISO 11783/ ISO 11898 CompliantEmulated Radar Output High = Supply Voltage -0.5V MinimumLow = 0.5 V MaximumLoad = 3K Ohm MinimumPPS Output 3.3 V CMOS Logic CompatibleMKI Input 3.3 V CMOS Logic/ 5 V TolerantMode Pin 0 to 36 V DC (depending on the desired configuration, the Mode pin can be left open, connected to ground, or connected to the supply voltage)INPUT/ OUTPUT CONNECTOR PROTECTIONElectrical Conducted/ Coupled disturbance toleranceISO 7637-2:2004 (Survives all pulse types)ISO 15003 (TBD)LED INDICATORSMore details can also be found in Section 2.2.2, Status Indicators starting on Page 28PHYSICALSize 223 mm x 223 mm x 90 mm heightWeight 2.2 kg maximumENVIRONMENTALOperating Temperature -40°C to +75°CStorage Temperature -55°C to +90°CHumidity Not to exceed 95% non-condensingImmersion MIL-STD-810F Method 512.4 Procedure 1Vibration bRandom MIL-STD-810F Method 514.5 C17Sinusoidal IEC 68-2-6 ASAE EP455, 5.15.2 Level 1 (TBD)Shock MIL-STD-810 F Method 516.5](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-65.png)
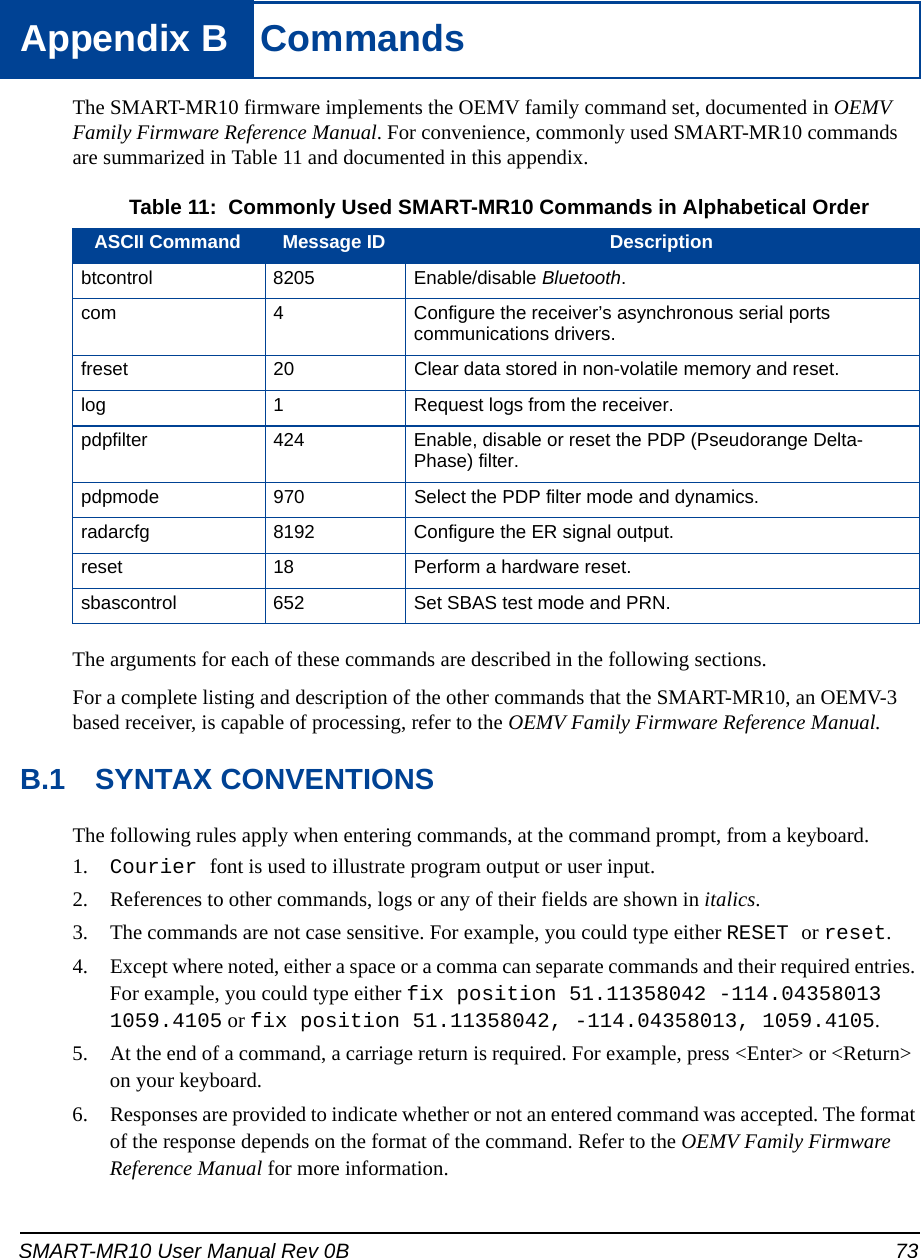
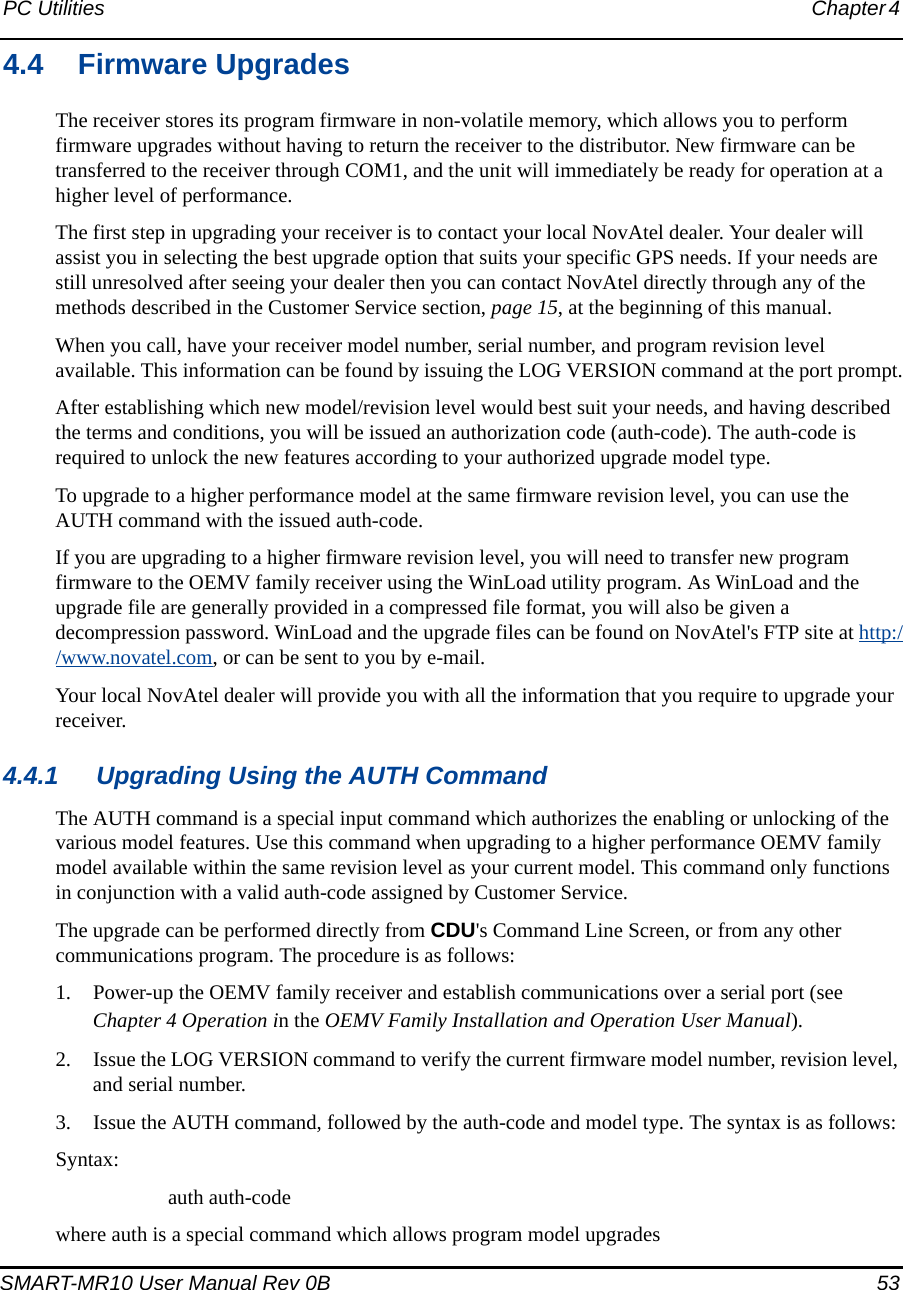
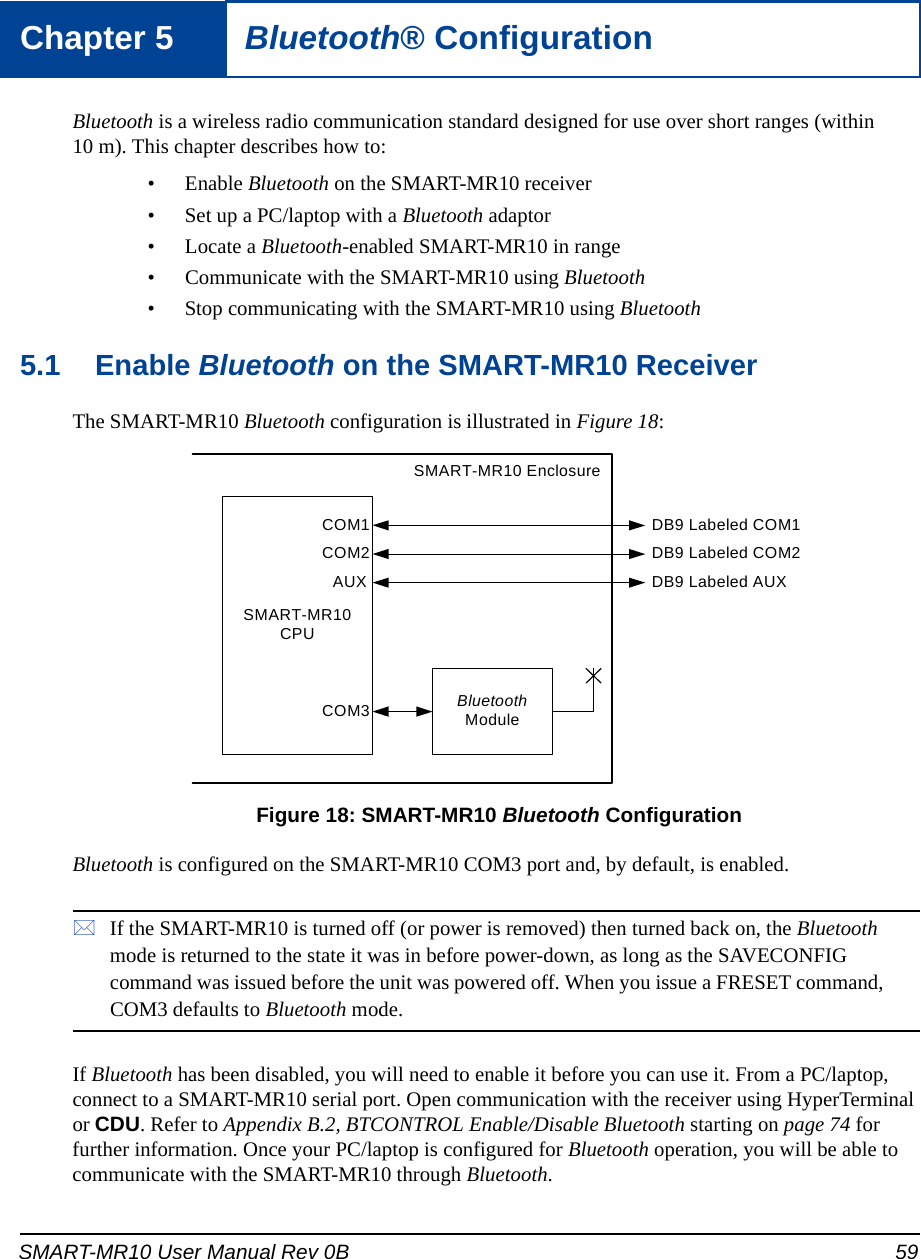
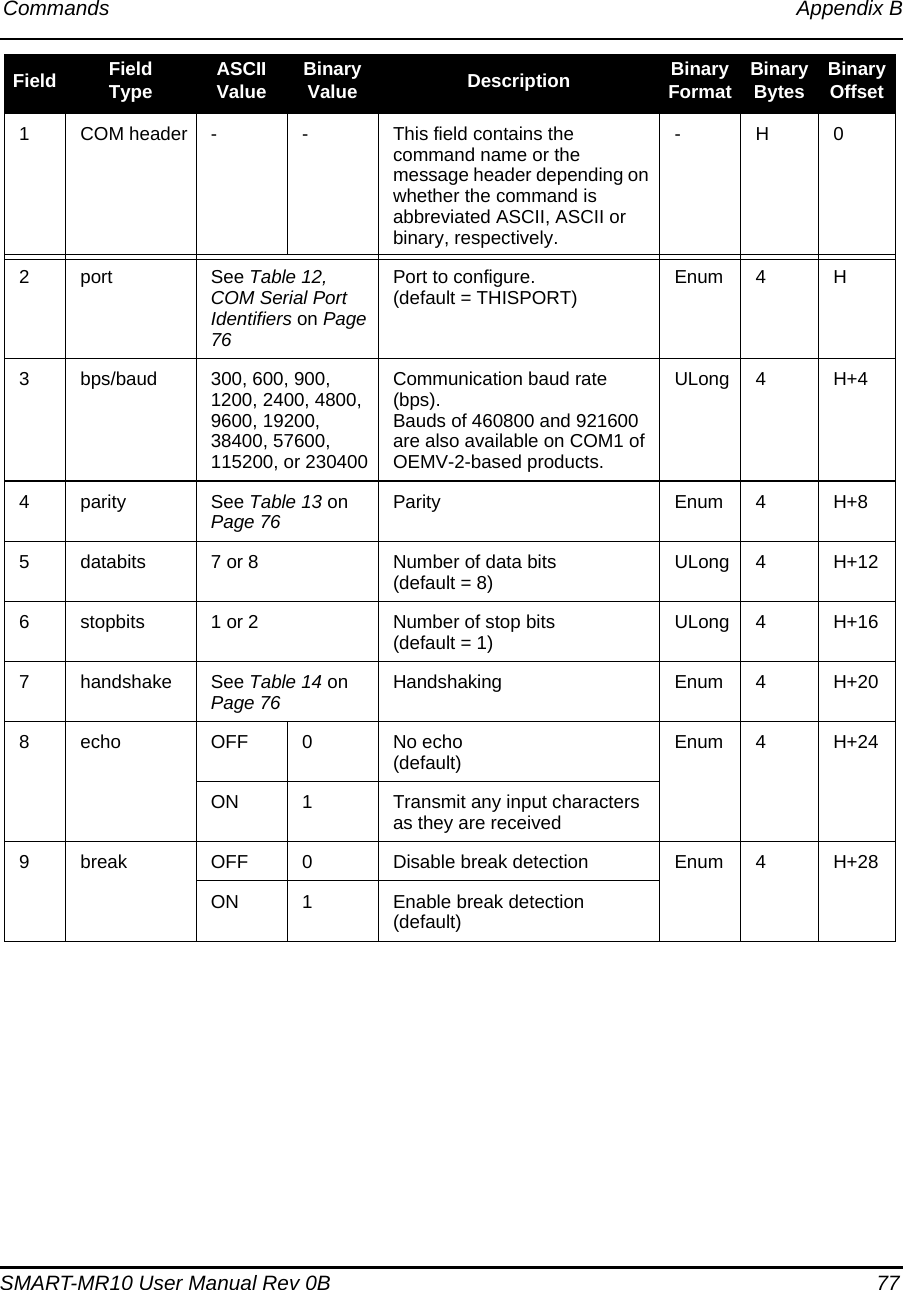
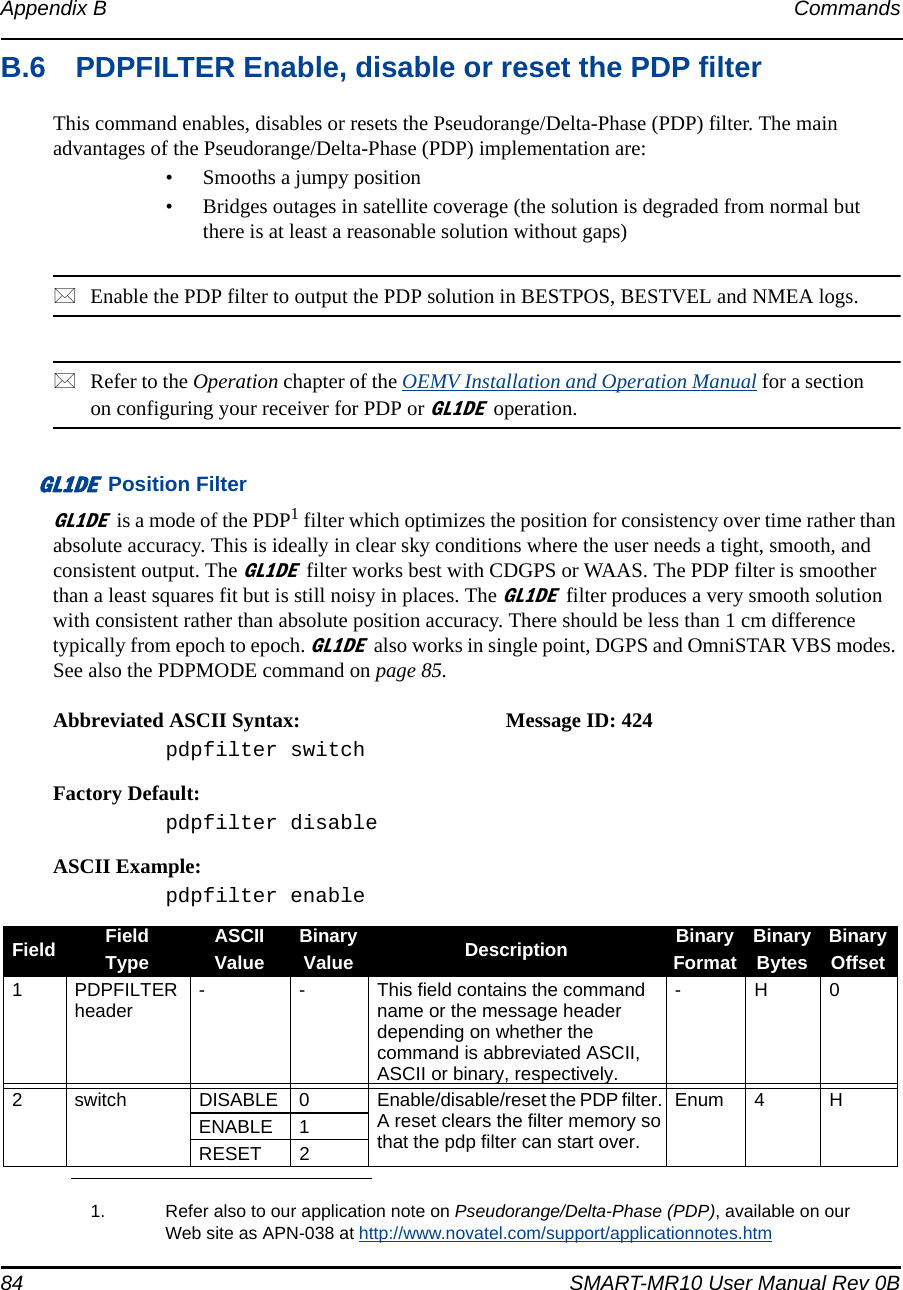
![74 SMART-MR10 User Manual Rev 0BAppendix B Commands7. Optional parameters are indicated by square brackets ([ ]). For commands that contain optional parameters, the value used if the optional parameter is not specified is given in the syntax table for the command.8. Data format definitions, as specified in the “Format” field, are detailed in the OEMV Family Firmware Reference Manual. Note that all binary data is little-endian byte-ordered.B.2 BTCONTROL Enable/Disable BluetoothThe BTCONTROL command enables or disables the Bluetooth module. To ensure no possibility of interference, when the module is disabled it is completely powered down.Abbreviated ASCII Syntax: Message ID: 8205BTCONTROL switchFactory Default:The Bluetooth module is enabled by default.Example 1 to disable Bluetooth:btcontrol disableExample 2 to enable Bluetooth:btcontrol enable1. If users want the current state of the Bluetooth module to persist across receiver resets and power-ups, they should issue a saveconfig command.2. Changing the Bluetooth from disabled to enabled takes several seconds to execute. This means that, even though the user will get an immediate “OK>” response followed by the COM prompt, the Bluetooth module may not be ready for communication.Field Data Description Binary Bytes Binary Format Binary Offset1header This field contains the command name or the message header depending on whether the command is abbreviated ASCII, ASCII or binary, respectively.- - 02switch Enable or disable Bluetooth0 = ENABLE1 = DISABLE(default = ENABLE)4Enum H](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-74.png)
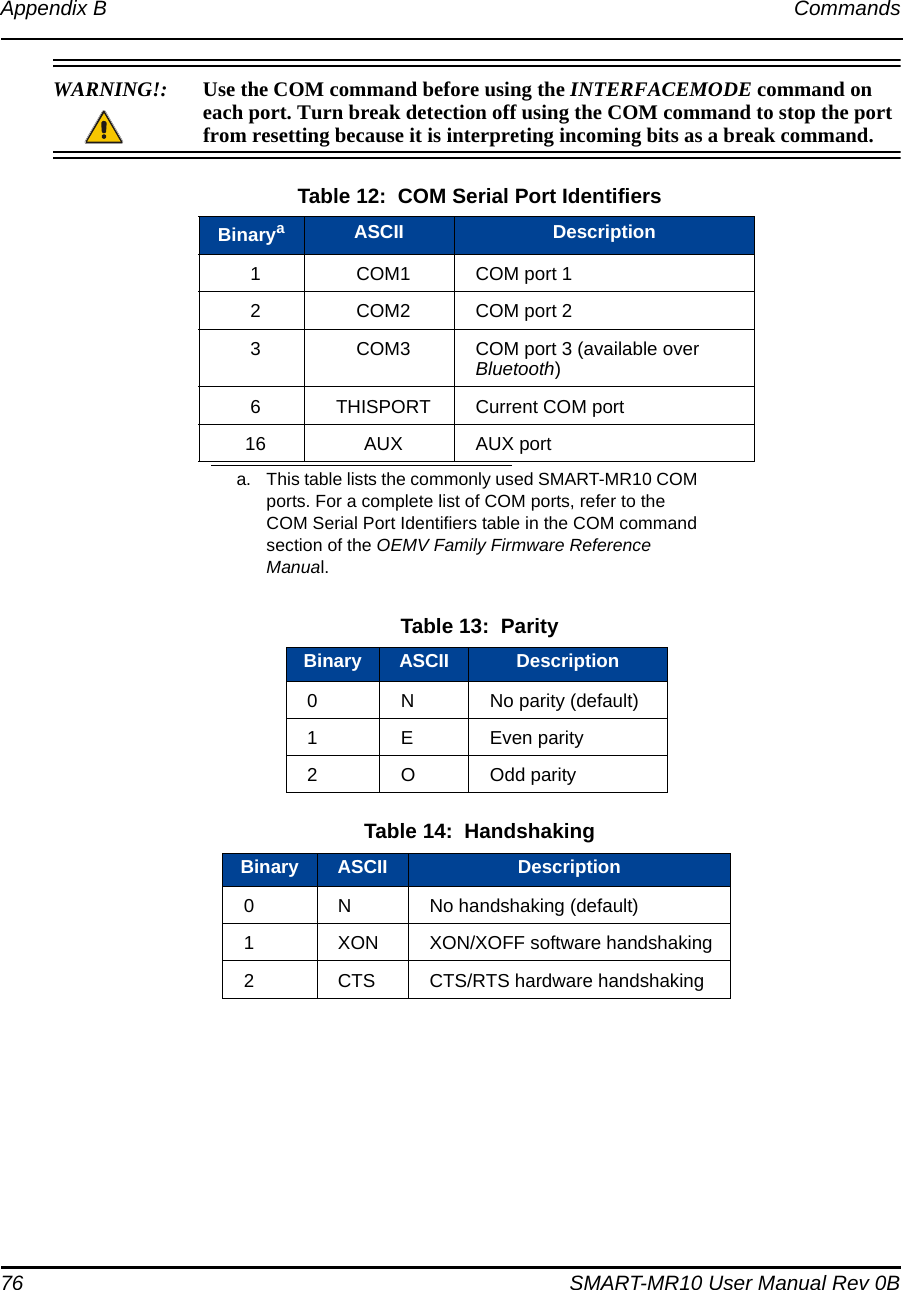
![Commands Appendix BSMART-MR10 User Manual Rev 0B 75B.3 COM Configure COM PortThis command permits you to configure the receiver’s asynchronous serial port communications drivers.The current COM port configuration can be reset to its default state at any time by sending it two hardware break signals of 250 milliseconds each, spaced by fifteen hundred milliseconds (1.5 seconds) with a pause of at least 250 milliseconds following the second break. This will:• Stop the logging of data on the current port (see UNLOGALL command in the OEMV Family Firmware Reference Manual).• Clear the transmit and receive buffers on the current port.• Return the current port to its default settings (see Factory Defaults section in Chapter 2 Commands of the OEMV Family Firmware Reference Manual).• Set the interface mode to NovAtel for both input and output (see INTERFACEMODE command in the OEMV Family Firmware Reference Manual).Baud rates higher than 115,200 bps are not supported by standard PC hardware. Special PC hardware may be required for higher rates, including 230400 bps, 460800 bps and 921600 bps. Also, some PC's have trouble with baud rates beyond 57600 bps.Abbreviated ASCII Syntax: Message ID: 4COM [port] bps [parity[databits[stopbits[handshake[echo[break]]]]]]Factory Default:com com1 9600 n 8 1 n off oncom com2 9600 n 8 1 n off oncom aux 9600 n 8 1 n off onDo not alter the COM3 port configuration, since COM3 is reserved for Bluetooth.ASCII Example:com com1,57600,n,8,1,n,off,onWatch for situations where the COM ports of two receivers are connected together and the baud rates do not match. Data transmitted through a port operating at a slower baud rate may be misinterpreted as break signals by the receiving port if it is operating at a higher baud rate. This is because data transmitted at the lower baud rate is stretched relative to the higher baud rate. In this case, configure the receiving port to have break detection disabled using the COM command.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-75.png)
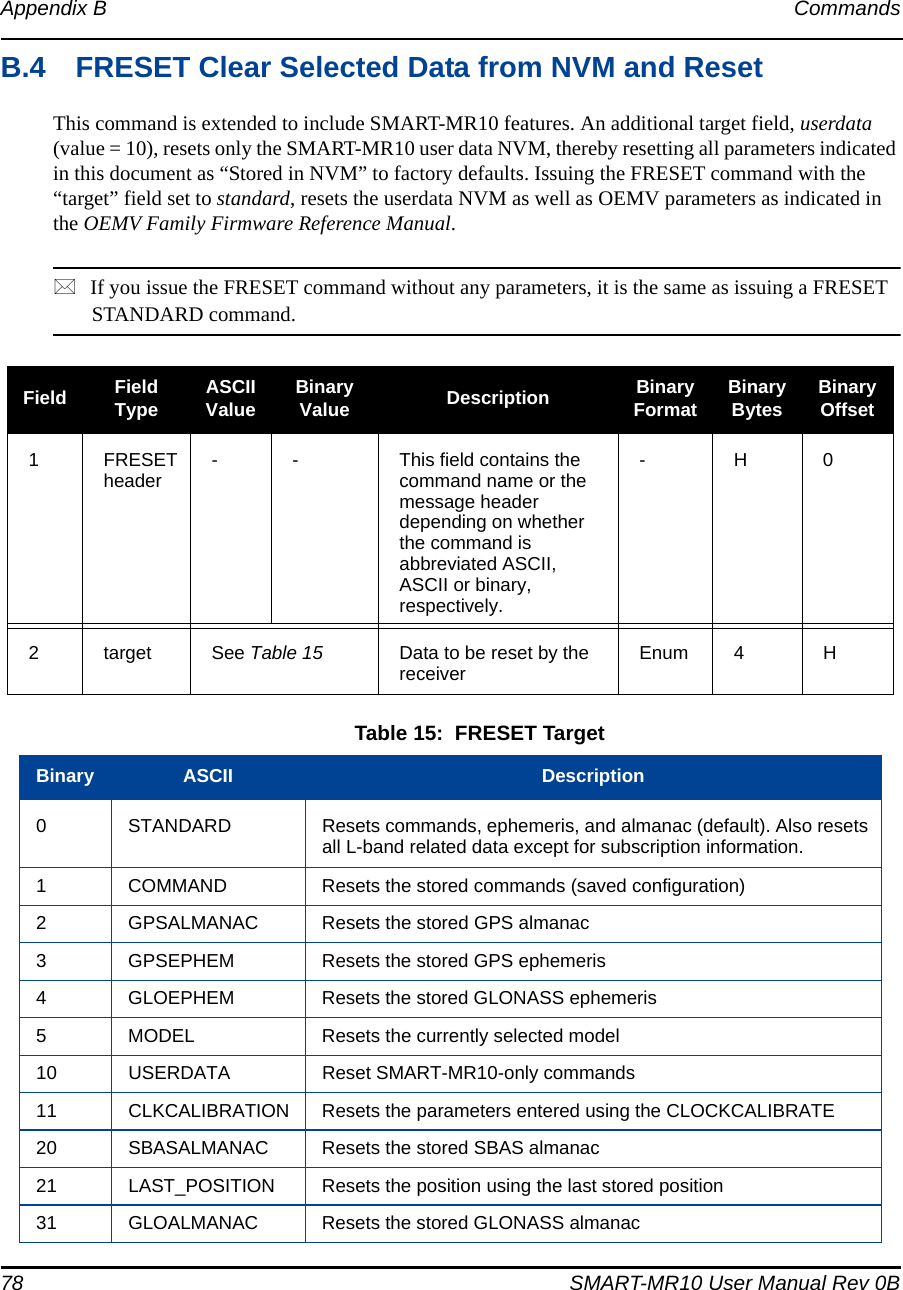
![Commands Appendix BSMART-MR10 User Manual Rev 0B 79B.5 LOG Request Logs from the ReceiverMany different types of data can be logged using several different methods of triggering the logevents. Every log element can be directed to any combination of the three COM ports and three USBports. The ONTIME trigger option requires the addition of the period parameter. See the OEMVFamily Firmware Reference Manual for further information and a complete list of data log structures.The LOG command tables in this section show the ASCII command format.The optional parameter [hold] prevents a log from being removed when the UNLOGALL command,with its defaults, is issued. To remove a log which was invoked using the [hold] parameter requires thespecific use of the UNLOG command. To remove all logs that have the [hold] parameter, use theUNLOGALL command with the held field set to 1.The [port] parameter is optional. If [port] is not specified, [port] is defaulted to the port that the com-mand was received on.1. The OEMV family of receivers can handle 30 logs at a time. If you attempt to log more than 30 logs at a time, the receiver responds with an Insufficient Resources error. Each COM port (serial and USB) already has RXSTATUSEVENT log associated with it. This means that with 3 serial ports and no USB ports, 7 logs are already accounted for, as shown below:• RXSTATUSEVENT on COM1, COM2, and COM3• TRACKSTAT, BESTVEL, and PSRXYZ on XCOM1See the example on the next page. 2. Maximum flexibility for logging data is provided to the user by these logs. The user is cautioned, however, to recognize that each log requested requires additional CPU time and memory buffer space. Too many logs may result in lost data and degraded CPU performance. Receiver overload can be monitored using the idle-time field and buffer overload bits of the Receiver Status in any log header.3. Polled log types do not allow fractional offsets or ONTIME rates faster than 1Hz.4. Use the ONNEW trigger with the MARKTIME, MARK2TIME, MARKPOS or MARK2POS logs. 5. Only the MARKPOS, MARK2POS, MARKTIME or MARK2TIME logs, and ‘polled’ log types are generated ‘on the fly’ at the exact time of the mark. Synchronous and asynchronous logs output the most recently available data.6. If you do use the ONTIME trigger with asynchronous logs, the time stamp in the log does not necessarily represent the time the data was generated, but rather the time when the log is being transmitted.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-79.png)
![80 SMART-MR10 User Manual Rev 0BAppendix B CommandsAbbreviated ASCII Syntax: Message ID: 1LOG [port] message [trigger [period [offset [hold]]]]Factory Default:log com1 rxstatuseventa onnew 0 0 holdlog com2 rxstatuseventa onnew 0 0 holdlog com3 rxstatuseventa onnew 0 0 holdlog aux rxstatuseventa onnew 0 0 holdlog usb1 rxstatuseventa onnew 0 0 holdlog usb2 rxstatuseventa onnew 0 0 holdlog usb3 rxstatuseventa onnew 0 0 holdAbbreviated ASCII Example 1:log com1 bestpos ontime 7 0.5 holdThe above example shows BESTPOS logging to COM port 1 at 7 second intervals and offset by 0.5 seconds (output at 0.5, 7.5, 14.5 seconds and so on). The [hold] parameter is set so that logging is not disrupted by the UNLOGALL command.To send a log only one time, the trigger option can be ignored. Abbreviated ASCII Example 2:log com1 bestpos once 0.000000 0.000000 noholdRefer to the Command Formats section of the OEMV Family Firmware Reference Manual for additional examples.1. In CDU there are two ways to initiate data logging to the receiver's serial ports. You can either enter the LOG command in the Console window, or use the interface provided in the Logging Control window. Ensure the Power Settings on your PC are not set to go into Hibernate or Standby modes. Data is lost if one of these modes occurs during a logging session.2. Only the ASCII/Abbreviated ASCII log table is included in this manual. Please refer to the LOG command in the OEMV Family Firmware Reference Manual for binary log details.](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-80.png)
![Commands Appendix BSMART-MR10 User Manual Rev 0B 81Field FieldName ASCIIValue Description Field Type1LOG (ASCII) header- This field contains the command name or the message header depending on whether the command is abbreviated ASCII or ASCII respectively.-2 port See Table 16, Detailed Serial Port Identifiers on Page 82Output port(default = THISPORT) Enum3 message Any valid message name, with an optional A or B suffix.Message name of log to output Char [ ]4 trigger ONNEW Output when the message is updated (not necessarily changed) EnumONCHANGED Output when the message is changedONTIME Output on a time intervalONNEXT Output only the next messageONCE Output only the current message. (default)ONMARK Output when a pulse is detected on the mark 1 input, MKI5 period Any positive double value larger than the receiver’s minimum raw measurement periodLog period (for ONTIME trigger) in seconds(default = 0) Double6 offset Any positive double value smaller than the period.Offset for period (ONTIME trigger) in seconds. If you wished to log data at 1 second after every minute you would set the period to 60 and the offset to 1 (default = 0)Double7 hold NOHOLD Allow log to be removed by the UNLOGALL command (default) EnumHOLD Prevent log from being removed by the UNLOGALL command](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-81.png)
![88 SMART-MR10 User Manual Rev 0BAppendix B CommandsB.9 RESET Performs a hardware resetThis command performs a hardware reset. Following a RESET command, the receiver initiates a cold-start boot up. Therefore, the receiver configuration reverts either to the factory default, if no user configuration was saved, or the last SAVECONFIG settings.The optional delay field is used to set the number of seconds the receiver is to wait before resetting.Abbreviated ASCII Syntax: Message ID: 18reset [delay]Examplereset 120The RESET command can be used to erase any unsaved changes to the receiver configuration.Field FieldType ASCIIValue BinaryValue Description BinaryFormat BinaryBytes BinaryOffset1RESET header - - This field contains the command name or the message header depending on whether the command is abbreviated ASCII, ASCII or binary, respectively.- H 02delay Seconds to wait before resetting. (default = 0) Ulong 4 H](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-88.png)
![Commands Appendix BSMART-MR10 User Manual Rev 0B 89B.10 SBASCONTROL Set SBAS test mode and PRNThis command allows you to dictate how the receiver handles Satellite Based Augmentation System (SBAS) corrections. The receiver automatically switches to Pseudorange Differential (RTCM or RTCA) or RTK if the appropriate corrections are received, regardless of the current setting.To enable the position solution corrections, you must issue the SBASCONTROL ENABLE command. The GPS receiver does not attempt to track any GEO satellites until you use the SBASCONTROL command to tell it to use either WAAS, EGNOS, or MSAS corrections.When in AUTO mode, if the receiver is outside the defined satellite system’s corrections grid, it reverts to ANY mode and chooses a system based on other criteria.Once tracking satellites from one system in ANY or AUTO mode, it does not track satellites from other systems. This is because systems such as WAAS, EGNOS and MSAS do not share broadcast information and have no way of knowing each other are there.The “testmode” parameter in the example is to get around the test mode of these systems. EGNOS at one time used the IGNOREZERO test mode. At the time of printing, ZEROTOTWO is the correct setting for all SBAS, including EGNOS, running in test mode. On a simulator, you may want to leave this parameter off or specify NONE explicitly.When you use the SBASCONTROL command to direct the GPS receiver to use a specific correction type, the GPS receiver begins to search for and track the relevant GEO PRNs for that correction type only.You can force the GPS receiver to track a specific PRN using the ASSIGN command. You can force the GPS receiver to use the corrections from a specific SBAS PRN using the SBASCONTROL command.Disable stops the corrections from being used.Abbreviated ASCII Syntax: Message ID: 652sbascontrol keyword [system] [prn] [testmode]](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-89.png)
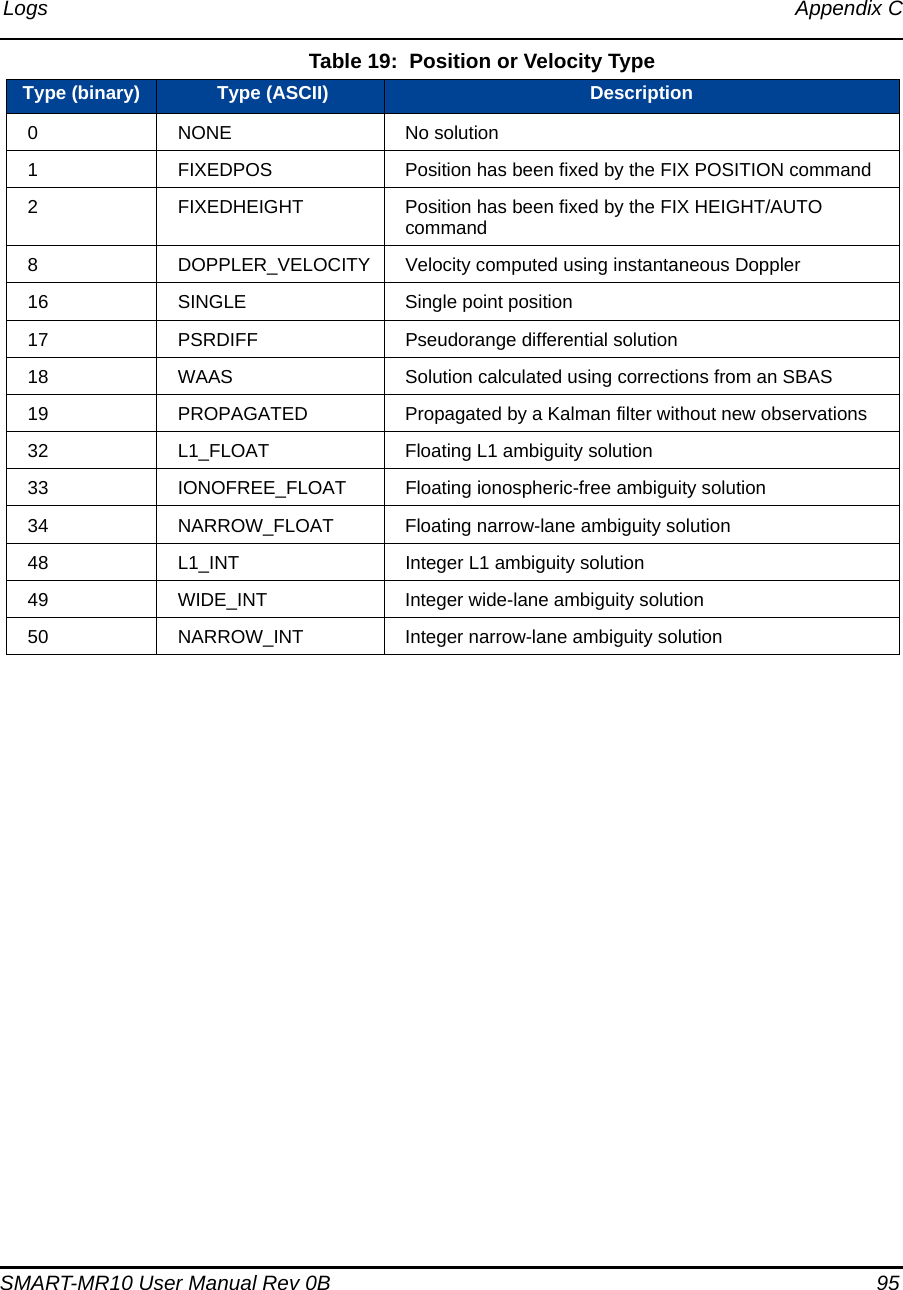
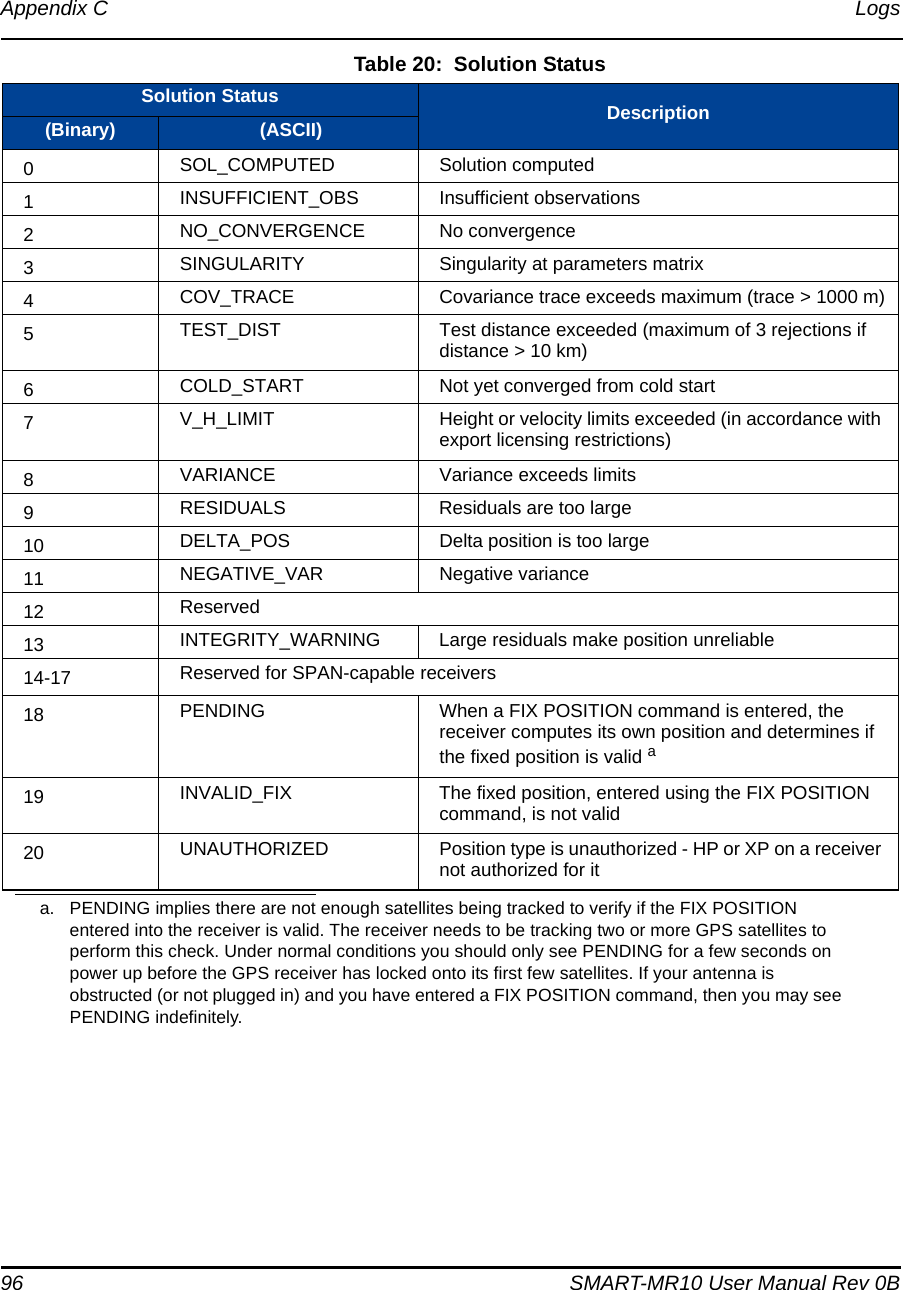
![94 SMART-MR10 User Manual Rev 0BAppendix C LogsField # Field type Data Description Format BinaryBytes BinaryOffset1RADAR-SIGNAL headerLog header H 02sol status Solution status, see Table 20, Solution Status on Page 96 Enum 4 H3vel type Velocity type, see Table 19, Position or Velocity Type on Page 95 Enum 4H+44speed Speed over ground (m/s) Double 8H+84varf freq External VARF output frequency (Hz) Double 8H+165radar freq Radar signal frequency (Hz) as output by the Emulated Radar Out signal. See SMART-MR10 Evaluation Cable starting on Page 68.Double 8H+246 xxxx 32-bit CRC (ASCII and Binary only) Hex 4H+327[CR][LF] Sentence terminator (ASCII only) - - -](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-94.png)
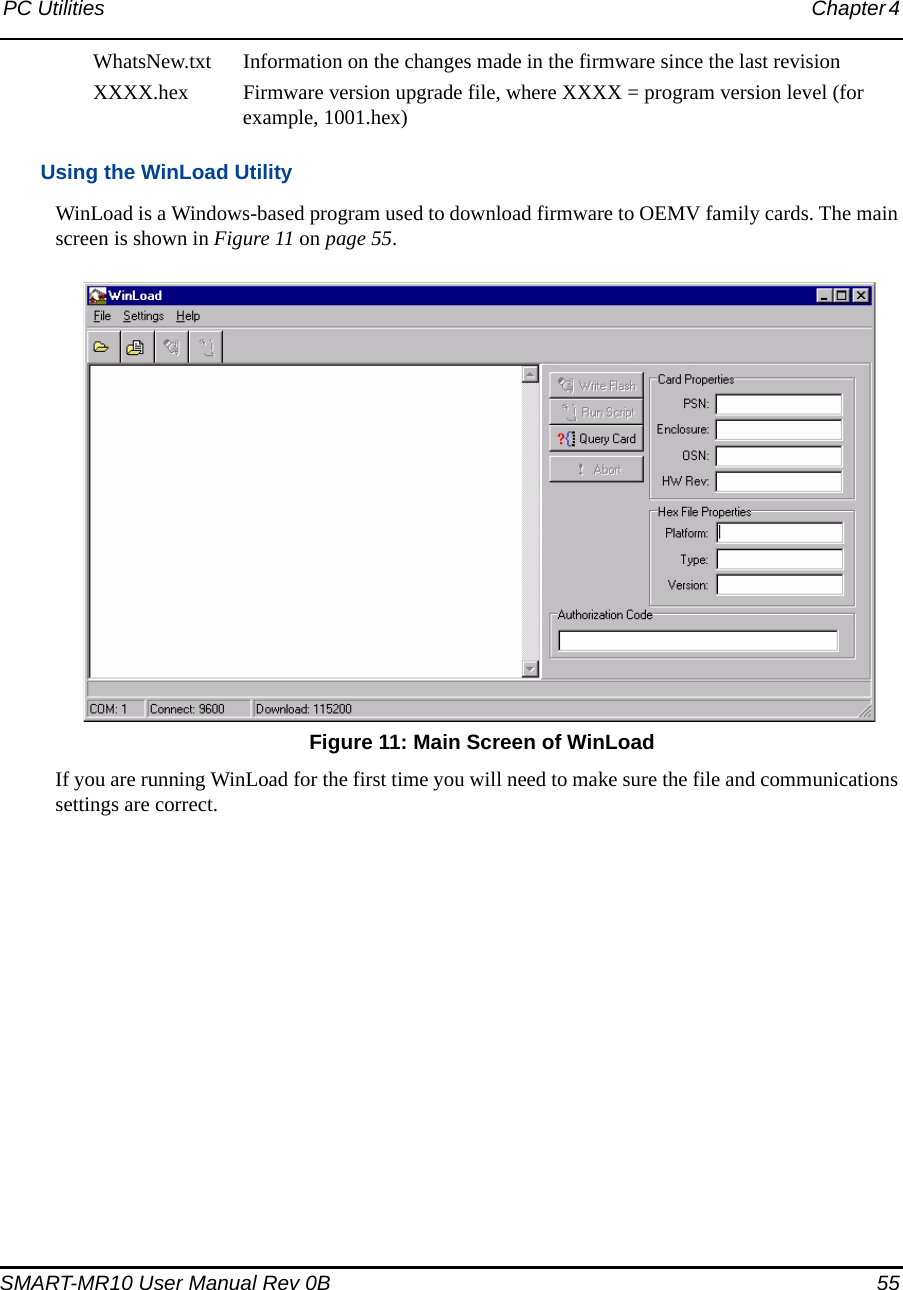
![Logs Appendix CSMART-MR10 User Manual Rev 0B 97C.2.2 VERSION HW & SW Versions and Serial NumbersThe Component Type of the VERSION log, refer to the OEMV Family Firmware Reference Manual, is extended to include SMART-MR10 information as in Table . Table 21: Component TypeFor the SMART-MR10, the BT MAC address field has been added, in hexadecimal format, to the USERINFO block, “002166000001” in the following example.[COM1]<VERSION COM1 0 94.5 UNKNOWN 0 156.357 004c0001 3681 5010< 3< GPSCARD "N1GA" "DHC09401037" "MCAGTP-1.00-22B""3.710" "3.002" "2009/Nov/30" "11:08:19"< DB_USERAPPAUTO "SmartAg" "0" "" "1.100" "" "2009/Nov/27" "13:22:29"< USERINFO "LMX9830" "0212" "002166000001" "" "" "" ""[COM1]In the above example, the firmware is shown as 3.710 and the SMART-MR10 application is shown as 1.100.Binary Valueaa. Unused numbers are reserved for future use.ASCII Value Description0 UNKNOWN Unknown Component1 GPSCARD OEMV GPSCard Component3 ENCLOSURE SMART-MR10 Receiver8 USERINFO User-application information component981073925 (0x3A7A0005) DB_USERAPPAUTO Auto-starting user-application firmware](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-97.png)
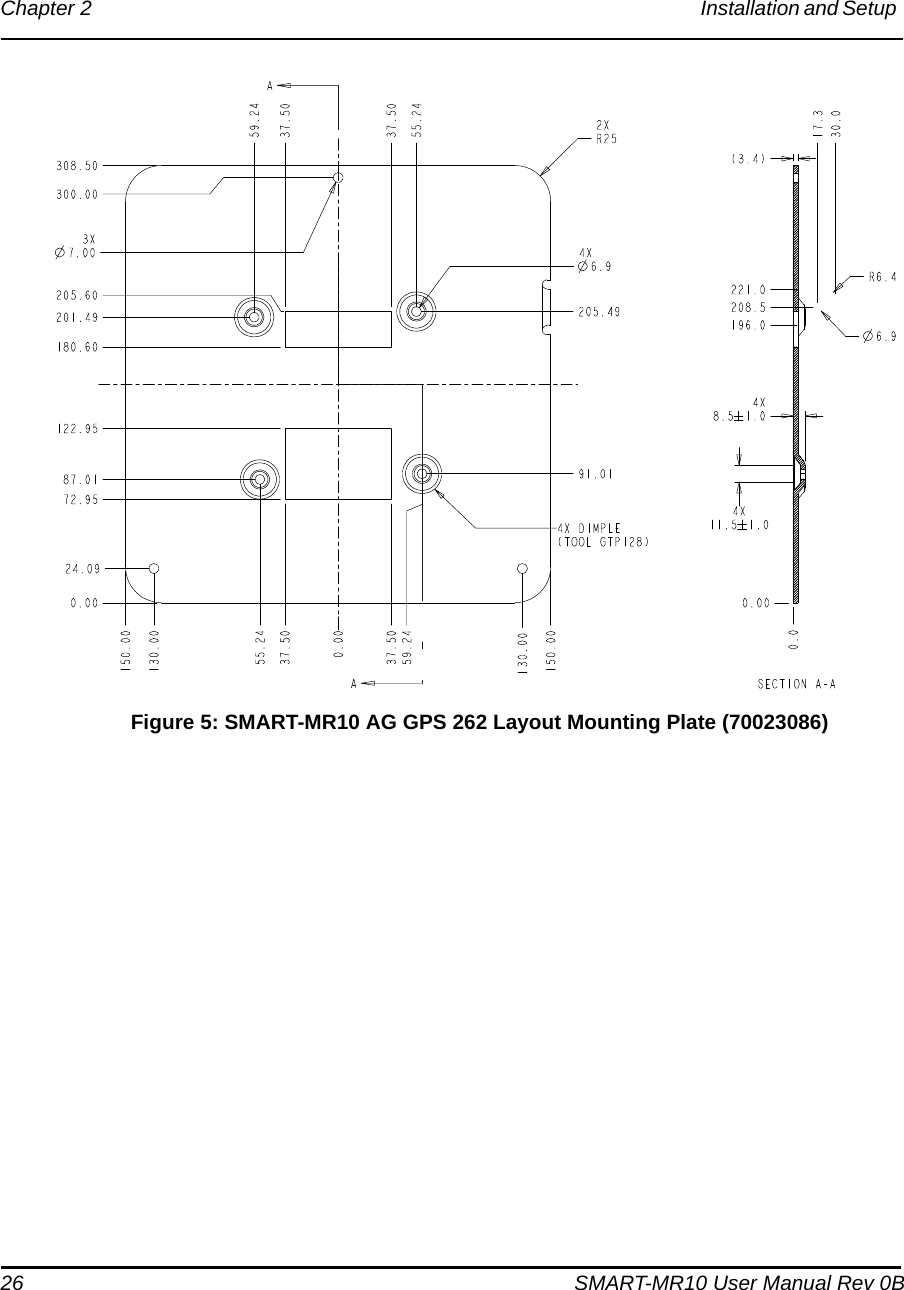
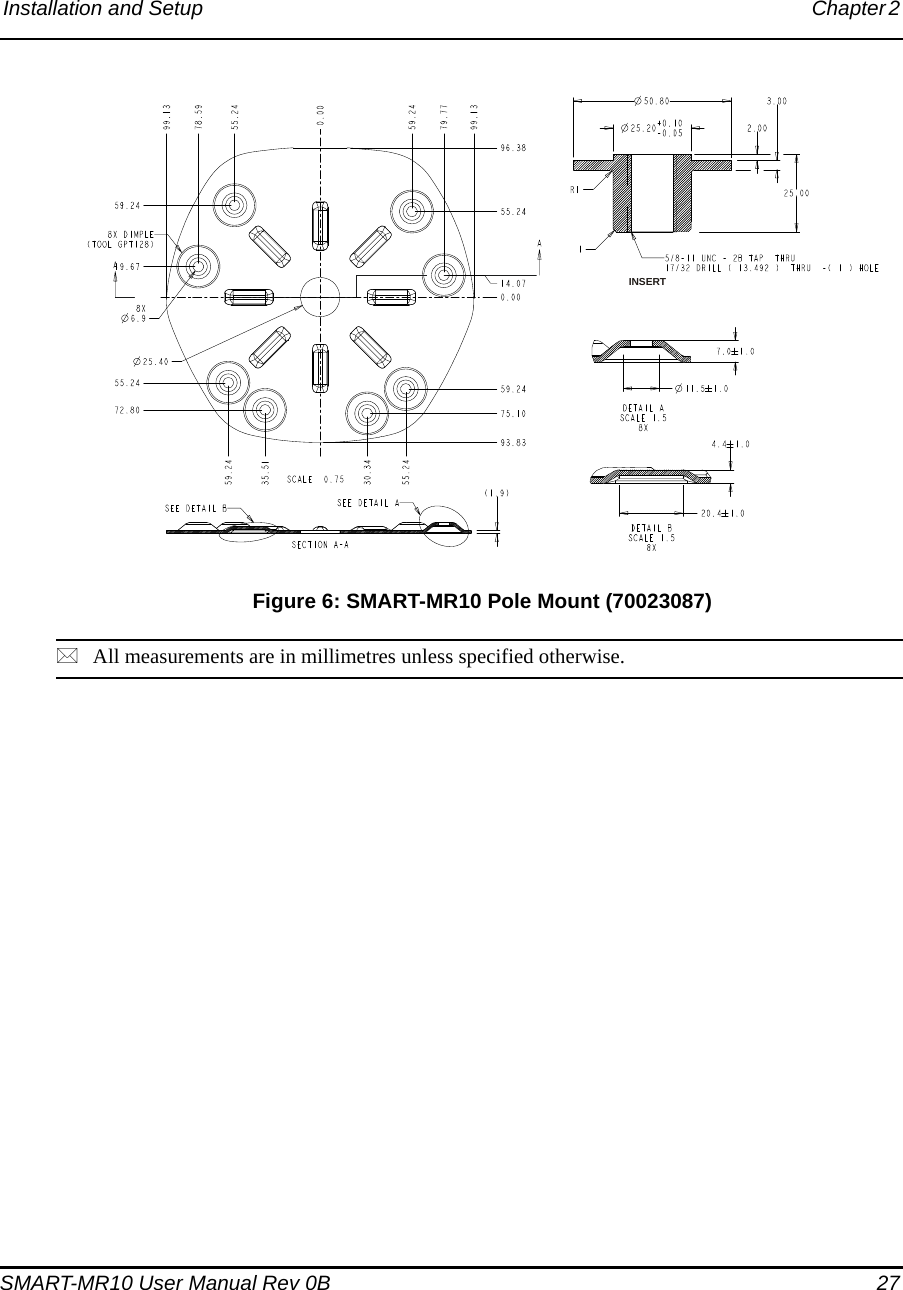
![98 SMART-MR10 User Manual Rev 0BAppendix D Replacement PartsThe following are a list of the replacement parts available for your NovAtel SMART-MR10 receiver. Should you require assistance, or need to order additional components, please contact your local NovAtel dealer or Customer Service representative.D.1 SMART-MR10D.2 AccessoriesThe accessories above are also available from www.novatel.comPart Description NovAtel Part SMART-MR10 01018518Full connectivity cable [23-pin socket to 3 DB-9 connectors, twisted CAN I/O pair, and other bare wire connectors (see SMART-MR10 Evaluation Cable (Part Number 01018515) starting on Page 68)]01018515Streamlined cable 01018526Universal Mounting Plate 70023085AG GPS 262 Mounting Plate 70023086Pole Mount 70023087Part Description NovAtel Part OEMV Family Compact Disc with PC utilities including CDU 01018235OEMV Family Installation and Operation User Manual OM-20000093OEMV Family Firmware Reference Manual OM-20000094](https://usermanual.wiki/Novatel/01018518/User-Guide-1307064-Page-98.png)