161204 Mastering The Free RTOS Real Time Kernel A Hands On Tutorial Guide
161204_Mastering_the_FreeRTOS_Real_Time_Kernel-A_Hands-On_Tutorial_Guide
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 398 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Contents
- List of Figures
- List of Code Listings
- List of Tables
- List of Notation
- Preface
- SECTION 1.
- Chapter 1 The FreeRTOS Distribution
- Chapter 2 Heap Memory Management
- Chapter 3 Task Management
- 3.1 Chapter Introduction and Scope
- 3.2 Task Functions
- 3.3 Top Level Task States
- 3.4 Creating Tasks
- 3.5 Task Priorities
- 3.6 Time Measurement and the Tick Interrupt
- 3.7 Expanding the ‘Not Running’ State
- 3.8 The Idle Task and the Idle Task Hook
- 3.9 Changing the Priority of a Task
- 3.10 Deleting a Task
- 3.11 Thread Local Storage
- 3.12 Scheduling Algorithms
- Chapter 4 Queue Management
- Chapter 5 Software Timer Management
- Chapter 6 Interrupt Management
- Chapter 7 Resource Management
- Chapter 8 Event Groups
- Chapter 9 Task Notifications
- 9.1 Chapter Introduction and Scope
- 9.2 Task Notifications; Benefits and Limitations
- 9.3 Using Task Notifications
- Task Notification API Options
- The xTaskNotifyGive() API Function
- The vTaskNotifyGiveFromISR() API Function
- The ulTaskNotifyTake() API Function
- Example 24. Using a task notification in place of a semaphore, method 1
- Example 25. Using a task notification in place of a semaphore, method 2
- The xTaskNotify() and xTaskNotifyFromISR() API Functions
- The xTaskNotifyWait() API Function
- Task Notifications Used in Peripheral Device Drivers: UART Example
- Task Notifications Used in Peripheral Device Drivers: ADC Example
- Task Notifications Used Directly Within an Application
- Chapter 10 Low Power Support
- Chapter 11 Developer Support
- Chapter 12 Trouble Shooting
- 12.1 Chapter Introduction and Scope
- 12.2 Interrupt Priorities
- 12.3 Stack Overflow
- 12.4 Inappropriate Use of printf() and sprintf()
- 12.5 Other Common Sources of Error
- Symptom: Adding a simple task to a demo causes the demo to crash
- Symptom: Using an API function within an interrupt causes the application to crash
- Symptom: Sometimes the application crashes within an interrupt service routine
- Symptom: The scheduler crashes when attempting to start the first task
- Symptom: Interrupts are unexpectedly left disabled, or critical sections do not nest correctly
- Symptom: The application crashes even before the scheduler is started
- Symptom: Calling API functions while the scheduler is suspended, or from inside a critical section, causes the application to crash
- INDEX
i
Mastering the FreeRTOS™
Real Time Kernel
This is the 161204 copy which does not yet cover FreeRTOS V9.0.0 or low power tick-less
operation. Check http://www.FreeRTOS.org regularly for additional documentation and
updates to this book, and see http://www.FreeRTOS.org/FreeRTOS-V9.html for information on
FreeRTOS V9.x.x. Applications created using FreeRTOS V9.x.x can allocate all kernel objects
statically at compile time, removing the need to include a heap memory manager.
This text is being provided for free. In return we ask that you use the business contact
email link on http://www.FreeRTOS.org/contact to provide feedback, comments and
corrections. Thank you.
ii
iii
iv
Mastering the FreeRTOS™
Real Time Kernel
A Hands-On Tutorial Guide
Richard Barry

v
Pre-release 161204 Edition.
All text, source code, and diagrams are the exclusive property of Real Time Engineers Ltd.
unless otherwise noted inline.
© Real Time Engineers Ltd. 2016. All rights reserved.
http://www.FreeRTOS.org
http://www.FreeRTOS.org/plus
http://www.FreeRTOS.org/labs
FreeRTOS™, FreeRTOS.org™ and the FreeRTOS logo are trademarks of Real Time Engineers Ltd. OPENRTOS® and
SAFERTOS® are trademarks of WITTENSTEIN Aerospace and Simulation Ltd. All other brands or product names are the
property of their respective holders.
vi
vii
To Caroline, India and Max.
viii

ix
Contents
Contents .................................................................................................................................. ix
List of Figures ......................................................................................................................... xvi
List of Code Listings ............................................................................................................... xix
List of Tables ........................................................................................................................ xxiii
List of Notation ...................................................................................................................... xxvi
Preface .................................................................................................................................. 1
Multitasking in Small Embedded Systems ............................................................................ 2
About FreeRTOS ............................................................................................................. 2
Value Proposition ............................................................................................................. 3
A Note About Terminology ............................................................................................... 3
Why Use a Real-time Kernel? .......................................................................................... 3
FreeRTOS Features ........................................................................................................ 5
Licensing, and The FreeRTOS, OpenRTOS, and SafeRTOS Family ............................... 6
Included Source Files and Projects ...................................................................................... 7
Obtaining the Examples that Accompany this Book ......................................................... 7
Chapter 1 The FreeRTOS Distribution ............................................................................... 9
1.1 Chapter Introduction and Scope ................................................................................ 10
Scope ............................................................................................................................ 10
1.2 Understanding the FreeRTOS Distribution ................................................................ 11
Definition: FreeRTOS Port ............................................................................................. 11
Building FreeRTOS ........................................................................................................ 11
FreeRTOSConfig.h ........................................................................................................ 11
The Official FreeRTOS Distribution ................................................................................ 12
The Top Directories in the FreeRTOS Distribution ......................................................... 12
FreeRTOS Source Files Common to All Ports ............................................................... 12
FreeRTOS Source Files Specific to a Port ..................................................................... 14
Header Files .................................................................................................................. 15
1.3 Demo Applications .................................................................................................... 16
1.4 Creating a FreeRTOS Project ................................................................................... 18
Adapting One of the Supplied Demo Projects ................................................................ 18
Creating a New Project from Scratch ............................................................................. 19
1.5 Data Types and Coding Style Guide ......................................................................... 21
Data Types .................................................................................................................... 21
Variable Names ............................................................................................................. 22
Function Names ............................................................................................................. 22
Formatting...................................................................................................................... 23

x
Macro Names ................................................................................................................. 23
Rationale for Excessive Type Casting ............................................................................ 24
Chapter 2 Heap Memory Management ............................................................................. 25
2.1 Chapter Introduction and Scope ................................................................................ 26
Prerequisites .................................................................................................................. 26
Dynamic Memory Allocation and its Relevance to FreeRTOS ........................................ 26
Options for Dynamic Memory Allocation ......................................................................... 27
Scope ............................................................................................................................. 28
2.2 Example Memory Allocation Schemes ...................................................................... 29
From FreeRTOS V9.0.0 FreeRTOS applications can be completely statically
allocated, removing the need to include a heap memory manager ................................. 29
Heap_1 .......................................................................................................................... 29
Heap_2 .......................................................................................................................... 30
Heap_3 .......................................................................................................................... 32
Heap_4 .......................................................................................................................... 32
Setting a Start Address for the Array Used By Heap_4 .................................................. 34
Heap_5 .......................................................................................................................... 35
The vPortDefineHeapRegions() API Function ................................................................ 36
2.3 Heap Related Utility Functions .................................................................................. 41
The xPortGetFreeHeapSize() API Function .................................................................... 41
The xPortGetMinimumEverFreeHeapSize() API Function .............................................. 41
Malloc Failed Hook Functions ........................................................................................ 42
Chapter 3 Task Management ........................................................................................... 44
3.1 Chapter Introduction and Scope ................................................................................ 45
Scope ............................................................................................................................. 45
3.2 Task Functions .......................................................................................................... 46
3.3 Top Level Task States ............................................................................................... 47
3.4 Creating Tasks .......................................................................................................... 48
The xTaskCreate() API Function .................................................................................... 48
Example 1. Creating tasks ............................................................................................. 51
Example 2. Using the task parameter ............................................................................. 55
3.5 Task Priorities ........................................................................................................... 58
3.6 Time Measurement and the Tick Interrupt ................................................................. 60
Example 3. Experimenting with priorities ........................................................................ 62
3.7 Expanding the ‘Not Running’ State ............................................................................ 64
The Blocked State .......................................................................................................... 64
The Suspended State..................................................................................................... 65
The Ready State ............................................................................................................ 65
Completing the State Transition Diagram ....................................................................... 65
Example 4. Using the Blocked state to create a delay .................................................... 66
The vTaskDelayUntil() API Function ............................................................................... 70
Example 5. Converting the example tasks to use vTaskDelayUntil() .............................. 71
xi
Example 6. Combining blocking and non-blocking tasks ................................................ 72
3.8 The Idle Task and the Idle Task Hook ....................................................................... 75
Idle Task Hook Functions ............................................................................................... 75
Limitations on the Implementation of Idle Task Hook Functions ..................................... 76
Example 7. Defining an idle task hook function .............................................................. 76
3.9 Changing the Priority of a Task ................................................................................. 79
The vTaskPrioritySet() API Function .............................................................................. 79
The uxTaskPriorityGet() API Function ............................................................................ 79
Example 8. Changing task priorities ............................................................................... 80
3.10 Deleting a Task ......................................................................................................... 85
The vTaskDelete() API Function .................................................................................... 85
Example 9. Deleting tasks .............................................................................................. 86
3.11 Thread Local Storage ................................................................................................ 89
3.12 Scheduling Algorithms .............................................................................................. 90
A Recap of Task States and Events ............................................................................... 90
Configuring the Scheduling Algorithm ............................................................................ 90
Prioritized Pre-emptive Scheduling with Time Slicing ..................................................... 91
Prioritized Pre-emptive Scheduling (without Time Slicing) .............................................. 95
Co-operative Scheduling ................................................................................................ 97
Chapter 4 Queue Management ...................................................................................... 101
4.1 Chapter Introduction and Scope .............................................................................. 102
Scope .......................................................................................................................... 102
4.2 Characteristics of a Queue ...................................................................................... 103
Data Storage ................................................................................................................ 103
Access by Multiple Tasks ............................................................................................. 106
Blocking on Queue Reads ........................................................................................... 106
Blocking on Queue Writes ............................................................................................ 106
Blocking on Multiple Queues ........................................................................................ 107
4.3 Using a Queue ........................................................................................................ 108
The xQueueCreate() API Function ............................................................................... 108
The xQueueSendToBack() and xQueueSendToFront() API Functions ........................ 109
The xQueueReceive() API Function ............................................................................. 111
The uxQueueMessagesWaiting() API Function ............................................................ 113
Example 10. Blocking when receiving from a queue .................................................... 114
4.4 Receiving Data From Multiple Sources ................................................................... 119
Example 11. Blocking when sending to a queue, and sending structures on a queue .. 120
4.5 Working with Large or Variable Sized Data ............................................................. 126
Queuing Pointers ......................................................................................................... 126
Using a Queue to Send Different Types and Lengths of Data ...................................... 128
4.6 Receiving From Multiple Queues ............................................................................ 131
Queue Sets .................................................................................................................. 131
The xQueueCreateSet() API Function .......................................................................... 132
The xQueueAddToSet() API Function .......................................................................... 134
xii
The xQueueSelectFromSet() API Function .................................................................. 135
Example 12. Using a Queue Set .................................................................................. 137
More Realistic Queue Set Use Cases .......................................................................... 141
4.7 Using a Queue to Create a Mailbox ......................................................................... 143
The xQueueOverwrite() API Function ........................................................................... 144
The xQueuePeek() API Function .................................................................................. 145
Chapter 5 Software Timer Management ......................................................................... 147
5.1 Chapter Introduction and Scope .............................................................................. 148
Scope ........................................................................................................................... 148
5.2 Software Timer Callback Functions ......................................................................... 149
5.3 Attributes and States of a Software Timer ............................................................... 150
Period of a Software Timer ........................................................................................... 150
One-shot and Auto-reload Timers ................................................................................ 150
Software Timer States .................................................................................................. 151
5.4 The Context of a Software Timer ............................................................................. 153
The RTOS Daemon (Timer Service) Task .................................................................... 153
The Timer Command Queue ........................................................................................ 153
Daemon Task Scheduling ............................................................................................ 154
5.5 Creating and Starting a Software Timer ................................................................... 158
The xTimerCreate() API Function ................................................................................. 158
The xTimerStart() API Function .................................................................................... 159
Example 13. Creating one-shot and auto-reload timers ................................................ 163
5.6 The Timer ID ........................................................................................................... 166
The vTimerSetTimerID() API Function ......................................................................... 166
The pvTimerGetTimerID() API Function ....................................................................... 166
Example 14. Using the callback function parameter and the software timer ID ............. 167
5.7 Changing the Period of a Timer ............................................................................... 170
The xTimerChangePeriod() API Function ..................................................................... 170
5.8 Resetting a Software Timer ..................................................................................... 174
The xTimerReset() API Function .................................................................................. 174
Example 15. Resetting a software timer ....................................................................... 176
Chapter 6 Interrupt Management .................................................................................... 181
6.1 Chapter Introduction and Scope .............................................................................. 182
Events .......................................................................................................................... 182
Scope ........................................................................................................................... 183
6.2 Using the FreeRTOS API from an ISR .................................................................... 184
The Interrupt Safe API .................................................................................................. 184
The Benefits of Using a Separate Interrupt Safe API .................................................... 184
The Disadvantages of Using a Separate Interrupt Safe API ......................................... 185
The xHigherPriorityTaskWoken Parameter .................................................................. 185
The portYIELD_FROM_ISR() and portEND_SWITCHING_ISR() Macros ..................... 187
6.3 Deferred Interrupt Processing .................................................................................. 189
xiii
6.4 Binary Semaphores Used for Synchronization ........................................................ 191
The xSemaphoreCreateBinary() API Function ............................................................. 194
The xSemaphoreTake() API Function .......................................................................... 194
The xSemaphoreGiveFromISR() API Function ............................................................ 196
Example 16. Using a binary semaphore to synchronize a task with an interrupt .......... 198
Improving the Implementation of the Task Used in Example 16 ................................... 202
6.5 Counting Semaphores ............................................................................................ 208
The xSemaphoreCreateCounting() API Function ......................................................... 210
Example 17. Using a counting semaphore to synchronize a task with an interrupt ....... 211
6.6 Deferring Work to the RTOS Daemon Task ............................................................ 213
The xTimerPendFunctionCallFromISR() API Function ................................................. 214
Example 18. Centralized deferred interrupt processing ................................................ 216
6.7 Using Queues within an Interrupt Service Routine .................................................. 220
The xQueueSendToFrontFromISR() and xQueueSendToBackFromISR() API
Functions ..................................................................................................................... 220
Considerations When Using a Queue From an ISR ..................................................... 222
Example 19. Sending and receiving on a queue from within an interrupt ..................... 222
6.8 Interrupt Nesting ..................................................................................................... 228
A Note to ARM Cortex-M and ARM GIC Users ............................................................ 230
Chapter 7 Resource Management ................................................................................. 233
7.1 Chapter Introduction and Scope .............................................................................. 234
Mutual Exclusion .......................................................................................................... 236
Scope .......................................................................................................................... 237
7.2 Critical Sections and Suspending the Scheduler ..................................................... 238
Basic Critical Sections ................................................................................................. 238
Suspending (or Locking) the Scheduler ....................................................................... 240
The vTaskSuspendAll() API Function ........................................................................... 241
The xTaskResumeAll() API Function ........................................................................... 241
7.3 Mutexes (and Binary Semaphores) ......................................................................... 243
The xSemaphoreCreateMutex() API Function .............................................................. 245
Example 20. Rewriting vPrintString() to use a semaphore ........................................... 245
Priority Inversion .......................................................................................................... 249
Priority Inheritance ....................................................................................................... 250
Deadlock (or Deadly Embrace) .................................................................................... 251
Recursive Mutexes ...................................................................................................... 252
Mutexes and Task Scheduling ..................................................................................... 255
7.4 Gatekeeper Tasks ................................................................................................... 259
Example 21. Re-writing vPrintString() to use a gatekeeper task ................................... 259
Chapter 8 Event Groups................................................................................................. 265
8.1 Chapter Introduction and Scope .............................................................................. 266
Scope .......................................................................................................................... 266
8.2 Characteristics of an Event Group ........................................................................... 268
xiv
Event Groups, Event Flags and Event Bits ................................................................... 268
More About the EventBits_t Data Type ........................................................................ 269
Access by Multiple Tasks ............................................................................................. 269
A Practical Example of Using an Event Group ............................................................. 269
8.3 Event Management Using Event Groups ................................................................. 271
The xEventGroupCreate() API Function ....................................................................... 271
The xEventGroupSetBits() API Function ...................................................................... 271
The xEventGroupSetBitsFromISR() API Function ........................................................ 272
The xEventGroupWaitBits() API Function ..................................................................... 275
Example 22. Experimenting with event groups ............................................................. 279
8.4 Task Synchronization Using an Event Group .......................................................... 285
The xEventGroupSync() API Function .......................................................................... 287
Example 23. Synchronizing tasks ................................................................................. 289
Chapter 9 Task Notifications ........................................................................................... 293
9.1 Chapter Introduction and Scope .............................................................................. 294
Communicating Through Intermediary Objects............................................................. 294
Task Notifications—Direct to Task Communication ...................................................... 294
Scope ........................................................................................................................... 295
9.2 Task Notifications; Benefits and Limitations ............................................................. 296
Performance Benefits of Task Notifications .................................................................. 296
RAM Footprint Benefits of Task Notifications ............................................................... 296
Limitations of Task Notifications ................................................................................... 296
9.3 Using Task Notifications .......................................................................................... 298
Task Notification API Options ....................................................................................... 298
The xTaskNotifyGive() API Function ............................................................................ 298
The vTaskNotifyGiveFromISR() API Function .............................................................. 299
The ulTaskNotifyTake() API Function ........................................................................... 300
Example 24. Using a task notification in place of a semaphore, method 1 .................... 302
Example 25. Using a task notification in place of a semaphore, method 2 .................... 305
The xTaskNotify() and xTaskNotifyFromISR() API Functions ....................................... 307
The xTaskNotifyWait() API Function ............................................................................. 310
Task Notifications Used in Peripheral Device Drivers: UART Example ........................ 313
Task Notifications Used in Peripheral Device Drivers: ADC Example ........................... 320
Task Notifications Used Directly Within an Application ................................................. 322
Chapter 10 Low Power Support .................................................................................... 327
Chapter 11 Developer Support ..................................................................................... 328
11.1 Chapter Introduction and Scope .............................................................................. 329
11.2 configASSERT() ...................................................................................................... 330
Example configASSERT() definitions ........................................................................... 330
11.3 FreeRTOS+Trace .................................................................................................... 332
11.4 Debug Related Hook (Callback) Functions .............................................................. 336
xv
Malloc failed hook ........................................................................................................ 336
11.5 Viewing Run-time and Task State Information ......................................................... 337
Task Run-Time Statistics ............................................................................................. 337
The Run-Time Statistics Clock ..................................................................................... 337
Configuring an Application to Collect Run-Time Statistics ............................................ 338
The uxTaskGetSystemState() API Function ................................................................. 339
The vTaskList() Helper Function .................................................................................. 342
The vTaskGetRunTimeStats() Helper Function ............................................................ 344
Generating and Displaying Run-Time Statistics, a Worked Example ............................ 345
11.6 Trace Hook Macros ................................................................................................. 348
Available Trace Hook Macros ...................................................................................... 348
Defining Trace Hook Macros ........................................................................................ 352
FreeRTOS Aware Debugger Plug-ins .......................................................................... 353
Chapter 12 Trouble Shooting ....................................................................................... 355
12.1 Chapter Introduction and Scope .............................................................................. 356
12.2 Interrupt Priorities .................................................................................................... 357
12.3 Stack Overflow ........................................................................................................ 359
The uxTaskGetStackHighWaterMark() API Function ................................................... 359
Run Time Stack Checking—Overview ......................................................................... 360
Run Time Stack Checking—Method 1 ......................................................................... 360
Run Time Stack Checking—Method 2 ......................................................................... 361
12.4 Inappropriate Use of printf() and sprintf() ................................................................. 362
Printf-stdarg.c .............................................................................................................. 362
12.5 Other Common Sources of Error ............................................................................. 364
Symptom: Adding a simple task to a demo causes the demo to crash ......................... 364
Symptom: Using an API function within an interrupt causes the application to crash ... 364
Symptom: Sometimes the application crashes within an interrupt service routine ........ 364
Symptom: The scheduler crashes when attempting to start the first task ..................... 365
Symptom: Interrupts are unexpectedly left disabled, or critical sections do not nest
correctly ....................................................................................................................... 365
Symptom: The application crashes even before the scheduler is started ..................... 365
Symptom: Calling API functions while the scheduler is suspended, or from inside a
critical section, causes the application to crash ............................................................ 366
INDEX .................................................................................................................................. 368

xvi
List of Figures
Figure 1. Top level directories within the FreeRTOS distribution ............................................ 12
Figure 2. Core FreeRTOS source files within the FreeRTOS directory tree ............................ 13
Figure 3. Port specific source files within the FreeRTOS directory tree .................................. 14
Figure 4. The demo directory hierarchy .................................................................................. 17
Figure 5. RAM being allocated from the heap_1 array each time a task is created ................ 30
Figure 6. RAM being allocated and freed from the heap_2 array as tasks are created
and deleted ........................................................................................................... 31
Figure 7. RAM being allocated and freed from the heap_4 array ........................................... 33
Figure 8 Memory Map ............................................................................................................. 37
Figure 9. Top level task states and transitions........................................................................ 47
Figure 10. The output produced when Example 1 is executed ............................................... 53
Figure 11. The actual execution pattern of the two Example 1 tasks ...................................... 54
Figure 12. The execution sequence expanded to show the tick interrupt executing ............... 61
Figure 13. Running both tasks at different priorities ............................................................... 63
Figure 14. The execution pattern when one task has a higher priority than the other ............. 63
Figure 15. Full task state machine .......................................................................................... 66
Figure 16. The output produced when Example 4 is executed ............................................... 68
Figure 17. The execution sequence when the tasks use vTaskDelay() in place of the
NULL loop ............................................................................................................. 69
Figure 18. Bold lines indicate the state transitions performed by the tasks in Example 4 ...... 70
Figure 19. The output produced when Example 6 is executed ............................................... 74
Figure 20. The execution pattern of Example 6 ...................................................................... 74
Figure 21. The output produced when Example 7 is executed ............................................... 78
Figure 22. The sequence of task execution when running Example 8 .................................... 83
Figure 23. The output produced when Example 8 is executed ............................................... 84
Figure 24. The output produced when Example 9 is executed ............................................... 87
Figure 25. The execution sequence for example 9 ................................................................. 88
Figure 26. Execution pattern highlighting task prioritization and pre-emption in a
hypothetical application in which each task has been assigned a unique
priority ................................................................................................................... 92
Figure 27 Execution pattern highlighting task prioritization and time slicing in a
hypothetical application in which two tasks run at the same priority ...................... 94
Figure 28 The execution pattern for the same scenario as shown in Figure 27, but this
time with configIDLE_SHOULD_YIELD set to 1 .................................................... 95
Figure 29 Execution pattern that demonstrates how tasks of equal priority can receive
hugely different amounts of processing time when time slicing is not used ........... 96
Figure 30 Execution pattern demonstrating the behavior of the co-operative scheduler .......... 98
Figure 31. An example sequence of writes to, and reads from a queue ............................... 104
Figure 32. The output produced when Example 10 is executed ........................................... 118
Figure 33. The sequence of execution produced by Example 10 ......................................... 118
Figure 34. An example scenario where structures are sent on a queue ............................... 119
Figure 35 The output produced by Example 11 ..................................................................... 123
xvii
Figure 36. The sequence of execution produced by Example 11 ......................................... 124
Figure 37 The output produced when Example 12 is executed ............................................. 141
Figure 38 The difference in behavior between one-shot and auto-reload software timers ..... 150
Figure 39 Auto-reload software timer states and transitions .................................................. 152
Figure 40 One-shot software timer states and transitions ..................................................... 152
Figure 41 The timer command queue being used by a software timer API function to
communicate with the RTOS daemon task ......................................................... 154
Figure 42 The execution pattern when the priority of a task calling xTimerStart() is above
the priority of the daemon task ............................................................................ 154
Figure 43 The execution pattern when the priority of a task calling xTimerStart() is below
the priority of the daemon task ............................................................................ 156
Figure 44 The output produced when Example 13 is executed ............................................. 165
Figure 45 The output produced when Example 14 is executed ............................................. 169
Figure 46 Starting and resetting a software timer that has a period of 6 ticks ........................ 174
Figure 47 The output produced when Example 15 is executed ............................................. 179
Figure 48 Completing interrupt processing in a high priority task .......................................... 190
Figure 49. Using a binary semaphore to implement deferred interrupt processing ............... 191
Figure 50. Using a binary semaphore to synchronize a task with an interrupt ...................... 193
Figure 51. The output produced when Example 16 is executed ........................................... 201
Figure 52. The sequence of execution when Example 16 is executed ................................. 202
Figure 53. The scenario when one interrupt occurs before the task has finished
processing the first event .................................................................................... 204
Figure 54 The scenario when two interrupts occur before the task has finished
processing the first event .................................................................................... 205
Figure 55. Using a counting semaphore to ‘count’ events .................................................... 209
Figure 56. The output produced when Example 17 is executed ........................................... 212
Figure 57. The output produced when Example 18 is executed ........................................... 218
Figure 58 The sequence of execution when Example 18 is executed ................................... 219
Figure 59. The output produced when Example 19 is executed ........................................... 226
Figure 60. The sequence of execution produced by Example 19 ......................................... 227
Figure 61. Constants affecting interrupt nesting behavior .................................................... 230
Figure 62 How a priority of binary 101 is stored by a Cortex-M microcontroller that
implements four priority bits ................................................................................ 231
Figure 63. Mutual exclusion implemented using a mutex ..................................................... 244
Figure 64. The output produced when Example 20 is executed ........................................... 248
Figure 65. A possible sequence of execution for Example 20 .............................................. 249
Figure 66. A worst case priority inversion scenario .............................................................. 250
Figure 67. Priority inheritance minimizing the effect of priority inversion .............................. 251
Figure 68 A possible sequence of execution when tasks that have the same priority use
the same mutex .................................................................................................. 255
Figure 69 A sequence of execution that could occur if two instances of the task shown by
Listing 125 are created at the same priority ........................................................ 257
Figure 70. The output produced when Example 21 is executed ........................................... 264
Figure 71 Event flag to bit number mapping in a variable of type EventBits_t ....................... 268
xviii
Figure 72 An event group in which only bits 1, 4 and 7 are set, and all the other event
flags are clear, making the event group’s value 0x92 .......................................... 268
Figure 73 The output produced when Example 22 is executed with xWaitForAllBits set to
pdFALSE ............................................................................................................ 283
Figure 74 The output produced when Example 22 is executed with xWaitForAllBits set to
pdTRUE .............................................................................................................. 284
Figure 75 The output produced when Example 23 is executed ............................................. 292
Figure 76 A communication object being used to send an event from one task to another .... 294
Figure 77 A task notification used to send an event directly from one task to another ........... 295
Figure 78. The output produced when Example 16 is executed ........................................... 304
Figure 79. The sequence of execution when Example 24 is executed ................................. 305
Figure 80. The output produced when Example 25 is executed ........................................... 307
Figure 81 The communication paths from the application tasks to the cloud server, and
back again .......................................................................................................... 323
Figure 82 FreeRTOS+Trace includes more than 20 interconnected views ............................ 332
Figure 83 FreeRTOS+Trace main trace view - one of more than 20 interconnected trace
views .................................................................................................................. 333
Figure 84 FreeRTOS+Trace CPU load view - one of more than 20 interconnected trace
views .................................................................................................................. 334
Figure 85 FreeRTOS+Trace response time view - one of more than 20 interconnected
trace views .......................................................................................................... 334
Figure 86 FreeRTOS+Trace user event plot view - one of more than 20 interconnected
trace views .......................................................................................................... 335
Figure 87 FreeRTOS+Trace kernel object history view - one of more than 20
interconnected trace views .................................................................................. 335
Figure 88 Example output generated by vTaskList() ............................................................. 344
Figure 89 Example output generated by vTaskGetRunTimeStats() ....................................... 345
Figure 90 FreeRTOS ThreadSpy Eclipse plug-in from Code Confidence Ltd. ....................... 353

xix
List of Code Listings
Listing 1. The template for a new main() function ................................................................... 18
Listing 2. Using GCC syntax to declare the array that will be used by heap_4, and place
the array in a memory section named .my_heap .................................................. 35
Listing 3. Using IAR syntax to declare the array that will be used by heap_4, and place
the array at the absolute address 0x20000000 ..................................................... 35
Listing 4. The vPortDefineHeapRegions() API function prototype .......................................... 36
Listing 5. The HeapRegion_t structure ................................................................................... 36
Listing 6. An array of HeapRegion_t structures that together describe the 3 regions of
RAM in their entirety ............................................................................................. 38
Listing 7. An array of HeapRegion_t structures that describe all of RAM2, all of RAM3,
but only part of RAM1 ........................................................................................... 39
Listing 8. The xPortGetFreeHeapSize() API function prototype .............................................. 41
Listing 9. The xPortGetMinimumEverFreeHeapSize() API function prototype ........................ 41
Listing 10. The malloc failed hook function name and prototype. ........................................... 42
Listing 11. The task function prototype ................................................................................... 46
Listing 12. The structure of a typical task function .................................................................. 46
Listing 13. The xTaskCreate() API function prototype ............................................................ 48
Listing 14. Implementation of the first task used in Example 1 ............................................... 52
Listing 15. Implementation of the second task used in Example 1 ......................................... 52
Listing 16. Starting the Example 1 tasks ................................................................................ 53
Listing 17. Creating a task from within another task after the scheduler has started .............. 55
Listing 18. The single task function used to create two tasks in Example 2 ............................ 56
Listing 19. The main() function for Example 2. ....................................................................... 57
Listing 20. Using the pdMS_TO_TICKS() macro to convert 200 milliseconds into an
equivalent time in tick periods ............................................................................... 61
Listing 21. Creating two tasks at different priorities ................................................................ 62
Listing 22. The vTaskDelay() API function prototype .............................................................. 67
Listing 23. The source code for the example task after the null loop delay has been
replaced by a call to vTaskDelay() ........................................................................ 68
Listing 24. vTaskDelayUntil() API function prototype .............................................................. 71
Listing 25. The implementation of the example task using vTaskDelayUntil() ........................ 72
Listing 26. The continuous processing task used in Example 6 .............................................. 73
Listing 27. The periodic task used in Example 6 .................................................................... 73
Listing 28. The idle task hook function name and prototype ................................................... 76
Listing 29. A very simple Idle hook function ........................................................................... 77
Listing 30. The source code for the example task now prints out the ulIdleCycleCount
value ..................................................................................................................... 77
Listing 31. The vTaskPrioritySet() API function prototype ...................................................... 79
Listing 32. The uxTaskPriorityGet() API function prototype .................................................... 79
Listing 33. The implementation of Task 1 in Example 8 ......................................................... 81
Listing 34. The implementation of Task 2 in Example 8 ......................................................... 82
Listing 35. The implementation of main() for Example 8 ......................................................... 83
xx
Listing 36. The vTaskDelete() API function prototype ............................................................. 85
Listing 37. The implementation of main() for Example 9 ......................................................... 86
Listing 38. The implementation of Task 1 for Example 9 ........................................................ 87
Listing 39. The implementation of Task 2 for Example 9 ........................................................ 87
Listing 40. The xQueueCreate() API function prototype ....................................................... 108
Listing 41. The xQueueSendToFront() API function prototype ............................................. 109
Listing 42. The xQueueSendToBack() API function prototype .............................................. 109
Listing 43. The xQueueReceive() API function prototype ..................................................... 112
Listing 44. The uxQueueMessagesWaiting() API function prototype .................................... 113
Listing 45. Implementation of the sending task used in Example 10. .................................... 115
Listing 46. Implementation of the receiver task for Example 10 ............................................ 116
Listing 47. The implementation of main() in Example 10 ...................................................... 117
Listing 48. The definition of the structure that is to be passed on a queue, plus the
declaration of two variables for use by the example ............................................ 120
Listing 49. The implementation of the sending task for Example 11 ..................................... 121
Listing 50. The definition of the receiving task for Example 11 ............................................. 122
Listing 51. The implementation of main() for Example 11 ..................................................... 123
Listing 52. Creating a queue that holds pointers ................................................................... 127
Listing 53. Using a queue to send a pointer to a buffer ......................................................... 127
Listing 54. Using a queue to receive a pointer to a buffer ..................................................... 127
Listing 55. The structure used to send events to the TCP/IP stack task in
FreeRTOS+TCP ................................................................................................. 128
Listing 56. Pseudo code showing how an IPStackEvent_t structure is used to send data
received from the network to the TCP/IP task ..................................................... 129
Listing 57. Pseudo code showing how an IPStackEvent_t structure is used to send the
handle of a socket that is accepting a connection to the TCP/IP task .................. 129
Listing 58. Pseudo code showing how an IPStackEvent_t structure is used to send a
network down event to the TCP/IP task .............................................................. 130
Listing 59. Pseudo code showing how an IPStackEvent_t structure is used to send a
network down to the TCP/IP task ........................................................................ 130
Listing 60. The xQueueCreateSet() API function prototype .................................................. 132
Listing 61. The xQueueAddToSet() API function prototype .................................................. 134
Listing 62. The xQueueSelectFromSet() API function prototype ........................................... 135
Listing 63. Implementation of main() for Example 12 ............................................................ 138
Listing 64. The sending tasks used in Example 12 ............................................................... 139
Listing 65. The receive task used in Example 12 .................................................................. 140
Listing 66. Using a queue set that contains queues and semaphores .................................. 142
Listing 67. A queue being created for use as a mailbox ....................................................... 144
Listing 68. The xQueueOverwrite() API function prototype ................................................... 144
Listing 69. Using the xQueueOverwrite() API function .......................................................... 145
Listing 70. The xQueuePeek() API function prototype .......................................................... 146
Listing 71. Using the xQueuePeek() API function ................................................................. 146
Listing 72. The software timer callback function prototype ................................................... 149
Listing 73. The xTimerCreate() API function prototype ......................................................... 158
xxi
Listing 74. The xTimerStart() API function prototype ............................................................ 160
Listing 75. Creating and starting the timers used in Example 13 .......................................... 163
Listing 76. The callback function used by the one-shot timer in Example 13 ........................ 164
Listing 77. The callback function used by the auto-reload timer in Example 13 .................... 164
Listing 78. The vTimerSetTimerID() API function prototype ................................................. 166
Listing 79. The pvTimerGetTimerID() API function prototype ............................................... 166
Listing 80. Creating the timers used in Example 14 ............................................................. 167
Listing 81. The timer callback function used in Example 14 ................................................. 168
Listing 82. The xTimerChangePeriod() API function prototype ............................................. 170
Listing 83. Using xTimerChangePeriod() ............................................................................. 173
Listing 84. The xTimerReset() API function prototype .......................................................... 175
Listing 85. The callback function for the one-shot timer used in Example 15 ........................ 177
Listing 86. The task used to reset the software timer in Example 15 .................................... 178
Listing 87. The portEND_SWITCHING_ISR() macros .......................................................... 188
Listing 88. The portYIELD_FROM_ISR() macros ................................................................. 188
Listing 89. The xSemaphoreCreateBinary() API function prototype ..................................... 194
Listing 90. The xSemaphoreTake() API function prototype .................................................. 195
Listing 91. The xSemaphoreGiveFromISR() API function prototype ..................................... 196
Listing 92. Implementation of the task that periodically generates a software interrupt in
Example 16 ........................................................................................................ 198
Listing 93. The implementation of the task to which the interrupt processing is deferred
(the task that synchronizes with the interrupt) in Example 16.............................. 199
Listing 94. The ISR for the software interrupt used in Example 16 ....................................... 200
Listing 95. The implementation of main() for Example 16 ..................................................... 201
Listing 96. The recommended structure of a deferred interrupt processing task, using a
UART receive handler as an example ................................................................ 207
Listing 97. The xSemaphoreCreateCounting() API function prototype ................................. 210
Listing 98. The call to xSemaphoreCreateCounting() used to create the counting
semaphore in Example 17 .................................................................................. 211
Listing 99. The implementation of the interrupt service routine used by Example 17 ............ 212
Listing 100. The xTimerPendFunctionCallFromISR() API function prototype ....................... 214
Listing 101. The prototype to which a function passed in the xFunctionToPend
parameter of xTimerPendFunctionCallFromISR() must conform ......................... 214
Listing 102. The software interrupt handler used in Example 18 .......................................... 217
Listing 103. The function that performs the processing necessitated by the interrupt in
Example 18. ....................................................................................................... 217
Listing 104. The implementation of main() for Example 18 ................................................... 218
Listing 105. The xQueueSendToFrontFromISR() API function prototype ............................. 220
Listing 106. The xQueueSendToBackFromISR() API function prototype ............................. 220
Listing 107. The implementation of the task that writes to the queue in Example 19 ............ 223
Listing 108. The implementation of the interrupt service routine used by Example 19 .......... 224
Listing 109. The task that prints out the strings received from the interrupt service
routine in Example 19 ......................................................................................... 225
Listing 110. The main() function for Example 19 .................................................................. 226
Listing 111. An example read, modify, write sequence ........................................................ 234
xxii
Listing 112. An example of a reentrant function .................................................................... 236
Listing 113. An example of a function that is not reentrant ................................................... 236
Listing 114. Using a critical section to guard access to a register ......................................... 238
Listing 115. A possible implementation of vPrintString() ....................................................... 239
Listing 116. Using a critical section in an interrupt service routine ........................................ 240
Listing 117. The vTaskSuspendAll() API function prototype ................................................. 241
Listing 118. The xTaskResumeAll() API function prototype .................................................. 241
Listing 119. The implementation of vPrintString() ................................................................. 242
Listing 120. The xSemaphoreCreateMutex() API function prototype .................................... 245
Listing 121. The implementation of prvNewPrintString() ....................................................... 246
Listing 122. The implementation of prvPrintTask() for Example 20 ....................................... 247
Listing 123. The implementation of main() for Example 20 ................................................... 248
Listing 124. Creating and using a recursive mutex ............................................................... 254
Listing 125. A task that uses a mutex in a tight loop ............................................................. 256
Listing 126. Ensuring tasks that use a mutex in a loop receive a more equal amount of
processing time, while also ensuring processing time is not wasted by
switching between tasks too rapidly .................................................................... 258
Listing 127. The name and prototype for a tick hook function ............................................... 260
Listing 128. The gatekeeper task ......................................................................................... 260
Listing 129. The print task implementation for Example 21 .................................................. 261
Listing 130. The tick hook implementation ............................................................................ 262
Listing 131. The implementation of main() for Example 21 ................................................... 263
Listing 132. The xEventGroupCreate() API function prototype ............................................. 271
Listing 133. The xEventGroupSetBits() API function prototype ............................................. 272
Listing 134. The xEventGroupSetBitsFromISR() API function prototype............................... 273
Listing 135. The xEventGroupWaitBits() API function prototype ........................................... 275
Listing 136. Event bit definitions used in Example 22 ........................................................... 279
Listing 137. The task that sets two bits in the event group in Example 22 ............................ 280
Listing 138. The ISR that sets bit 2 in the event group in Example 22 .................................. 281
Listing 139. The task that blocks to wait for event bits to become set in Example 22 ........... 282
Listing 140. Creating the event group and tasks in Example 22 ........................................... 283
Listing 141. Pseudo code for two tasks that synchronize with each other to ensure a
shared TCP socket is no longer in use by either task before the socket is
closed ................................................................................................................. 286
Listing 142. The xEventGroupSync() API function prototype ................................................ 288
Listing 143. The implementation of the task used in Example 23 ......................................... 290
Listing 144. The main() function used in Example 23 ........................................................... 291
Listing 145. The xTaskNotifyGive() API function prototype ................................................... 298
Listing 146. The vTaskNotifyGiveFromISR() API function prototype ..................................... 299
Listing 147. The ulTaskNotifyTake() API function prototype ................................................. 300
Listing 148. The implementation of the task to which the interrupt processing is deferred
(the task that synchronizes with the interrupt) in Example 24 .............................. 303
Listing 149. The implementation of the interrupt service routine used in Example 24 ........... 304

xxiii
Listing 150. The implementation of the task to which the interrupt processing is deferred
(the task that synchronizes with the interrupt) in Example 25.............................. 306
Listing 151. The implementation of the interrupt service routine used in Example 25 ........... 306
Listing 152. Prototypes for the xTaskNotify() and xTaskNotifyFromISR() API functions ....... 308
Listing 153. The xTaskNotifyWait() API function prototype ................................................... 310
Listing 154. Pseudo code demonstrating how a binary semaphore can be used in a
driver library transmit function ............................................................................. 315
Listing 155. Pseudo code demonstrating how a task notification can be used in a driver
library transmit function ....................................................................................... 317
Listing 156. Pseudo code demonstrating how a task notification can be used in a driver
library receive function ........................................................................................ 319
Listing 157. Pseudo code demonstrating how a task notification can be used to pass a
value to a task .................................................................................................... 321
Listing 158. The structure and data type sent on a queue to the server task ........................ 323
Listing 159. The Implementation of the Cloud Read API Function ....................................... 324
Listing 160. The Server Task Processing a Read Request .................................................. 324
Listing 161. The Implementation of the Cloud Write API Function ........................................ 325
Listing 162. The Server Task Processing a Send Request .................................................. 326
Listing 163 Using the standard C assert() macro to check pxMyPointer is not NULL ............ 330
Listing 164 A simple configASSERT() definition useful when executing under the control
of a debugger ..................................................................................................... 331
Listing 165 A configASSERT() definition that records the source code line that failed an
assertion ............................................................................................................. 331
Listing 166. The uxTaskGetSystemState() API function prototype ....................................... 339
Listing 167. The TaskStatus_t structure ............................................................................... 341
Listing 168. The vTaskList() API function prototype ............................................................. 343
Listing 169. The vTaskGetRunTimeStats() API function prototype ....................................... 344
Listing 170. 16-bit timer overflow interrupt handler used to count timer overflows ................ 346
Listing 171. Macros added to FreeRTOSConfig.h to enable the collection of run-time
statistics.............................................................................................................. 346
Listing 172. The task that prints out the collected run-time statistics .................................... 347
Listing 173. The uxTaskGetStackHighWaterMark() API function prototype .......................... 359
Listing 174. The stack overflow hook function prototype ...................................................... 360
List of Tables
Table 1. FreeRTOS source files to include in the project ....................................................... 20
Table 2. Port specific data types used by FreeRTOS ............................................................. 21
Table 3. Macro prefixes ......................................................................................................... 23
Table 4. Common macro definitions ....................................................................................... 23
Table 5. vPortDefineHeapRegions() parameters .................................................................... 37
Table 6. xPortGetFreeHeapSize() return value ...................................................................... 41
Table 7. xPortGetMinimumEverFreeHeapSize() return value................................................. 42
Table 8. xTaskCreate() parameters and return value ............................................................. 48
Table 9. vTaskDelay() parameters ......................................................................................... 67
xxiv
Table 10. vTaskDelayUntil() parameters ................................................................................ 71
Table 11. vTaskPrioritySet() parameters ................................................................................ 79
Table 12. uxTaskPriorityGet() parameters and return value ................................................... 80
Table 13. vTaskDelete() parameters ...................................................................................... 85
Table 14. The FreeRTOSConfig.h settings that configure the kernel to use Prioritized
Pre-emptive Scheduling with Time Slicing ............................................................ 91
Table 15. An explanation of the terms used to describe the scheduling policy ....................... 92
Table 16. The FreeRTOSConfig.h settings that configure the kernel to use Prioritized
Pre-emptive Scheduling without Time Slicing........................................................ 96
Table 17. The FreeRTOSConfig.h settings that configure the kernel to use co-operative
scheduling ............................................................................................................ 98
Table 18. xQueueCreate() parameters and return value ...................................................... 108
Table 19. xQueueSendToFront() and xQueueSendToBack() function parameters and
return value ......................................................................................................... 109
Table 20. xQueueReceive() function parameters and return values ..................................... 112
Table 21. uxQueueMessagesWaiting() function parameters and return value ...................... 114
Table 22. Key to Figure 36 ................................................................................................... 124
Table 23. xQueueCreateSet() parameters and return value ................................................. 133
Table 24. xQueueAddToSet() parameters and return value ................................................. 134
Table 25. xQueueSelectFromSet() parameters and return value ......................................... 136
Table 26. xQueueOverwrite() parameters and return value .................................................. 145
Table 27. xTimerCreate() parameters and return value ........................................................ 158
Table 28. xTimerStart() parameters and return value ........................................................... 160
Table 29. vTimerSetTimerID() parameters ........................................................................... 166
Table 30. pvTimerGetTimerID() parameters and return value .............................................. 167
Table 31. xTimerChangePeriod() parameters and return value ............................................ 171
Table 32. xTimerReset() parameters and return value ......................................................... 175
Table 33. xSemaphoreCreateBinary() Return Value ............................................................ 194
Table 34. xSemaphoreTake() parameters and return value ................................................. 195
Table 35. xSemaphoreGiveFromISR() parameters and return value .................................... 197
Table 36. xSemaphoreCreateCounting() parameters and return value ................................ 210
Table 37. xTimerPendFunctionCallFromISR() parameters and return value ........................ 214
Table 38. xQueueSendToFrontFromISR() and xQueueSendToBackFromISR()
parameters and return values ............................................................................. 220
Table 39. Constants that control interrupt nesting ................................................................ 228
Table 40. xTaskResumeAll() return value ............................................................................ 241
Table 41. xSemaphoreCreateMutex() return value ............................................................... 245
Table 42, xEventGroupCreate() return value ........................................................................ 271
Table 43, xEventGroupSetBits() parameters and return value ............................................. 272
Table 44, xEventGroupSetBitsFromISR() parameters and return value ............................... 273
Table 45, The Effect of the uxBitsToWaitFor and xWaitForAllBits Parameters ..................... 275
Table 46, xEventGroupWaitBits() parameters and return value ............................................ 277
Table 47, xEventGroupSync() parameters and return value ................................................. 288
Table 48. xTaskNotifyGive() parameters and return value ................................................... 299
xxv
Table 49. vTaskNotifyGiveFromISR() parameters and return value ..................................... 299
Table 50. ulTaskNotifyTake() parameters and return value .................................................. 301
Table 51. xTaskNotify() parameters and return value .......................................................... 308
Table 52. Valid xTaskNotify() eNotifyAction Parameter Values, and Their Resultant
Effect on the Receiving Task’s Notification Value ............................................... 309
Table 53. xTaskNotifyWait() parameters and return value ................................................... 310
Table 54. Macros used in the collection of run-time statistics ............................................... 338
Table 55, uxTaskGetSystemState() parameters and return value ........................................ 340
Table 56. TaskStatus_t structure members .......................................................................... 341
Table 57. vTaskList() parameters ........................................................................................ 343
Table 58. vTaskGetRunTimeStats() parameters .................................................................. 344
Table 59. A selection of the most commonly used trace hook macros ................................. 348
Table 60. uxTaskGetStackHighWaterMark() parameters and return value ........................... 359

xxvi
List of Notation
ADC
Analog to Digital Converter
API
Application Programming Interface
DMA
Direct Memory Access
FAQ
Frequently Asked Question
FIFO
First In First Out
HMI
Human Machine Interface
IDE
Integrated Development Environment
IRQ
Interrupt Request
ISR
Interrupt Service Routine
LCD
Liquid Crystal Display
MCU
Microcontroller
RMS
Rate Monotonic Scheduling
RTOS
Real-time Operating System
SIL
Safety Integrity Level
SPI
Serial Peripheral Interface
TCB
Task Control Block
UART
Universal Asynchronous Receiver/Transmitter

1
Preface

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
2
Multitasking in Small Embedded Systems
About FreeRTOS
FreeRTOS is solely owned, developed and maintained by Real Time Engineers Ltd. Real
Time Engineers Ltd. have been working in close partnership with the world’s leading chip
companies for well over a decade to provide you award winning, commercial grade, and
completely free high quality software.
FreeRTOS is ideally suited to deeply embedded real-time applications that use
microcontrollers or small microprocessors. This type of application normally includes a mix of
both hard and soft real-time requirements.
Soft real-time requirements are those that state a time deadline—but breaching the deadline
would not render the system useless. For example, responding to keystrokes too slowly might
make a system seem annoyingly unresponsive without actually making it unusable.
Hard real-time requirements are those that state a time deadline—and breaching the deadline
would result in absolute failure of the system. For example, a driver’s airbag has the potential
to do more harm than good if it responded to crash sensor inputs too slowly.
FreeRTOS is a real-time kernel (or real-time scheduler) on top of which embedded
applications can be built to meet their hard real-time requirements. It allows applications to be
organized as a collection of independent threads of execution. On a processor that has only
one core, only a single thread can be executing at any one time. The kernel decides which
thread should be executing by examining the priority assigned to each thread by the
application designer. In the simplest case, the application designer could assign higher
priorities to threads that implement hard real-time requirements, and lower priorities to threads
that implement soft real-time requirements. This would ensure that hard real-time threads are
always executed ahead of soft real-time threads, but priority assignment decisions are not
always that simplistic.
Do not be concerned if you do not fully understand the concepts in the previous paragraph yet.
The following chapters provide a detailed explanation, with many examples, to help you
understand how to use a real-time kernel, and how to use FreeRTOS, in particular.
3
Value Proposition
The unprecedented global success of FreeRTOS comes from its compelling value proposition;
FreeRTOS is professionally developed, strictly quality controlled, robust, supported, does not
contain any intellectual property ownership ambiguity, and is truly free to use in commercial
applications without any requirement to expose your proprietary source code. You can take a
product to market using FreeRTOS without even talking to Real Time Engineers ltd., let alone
paying any fees, and thousands of people do just that. If, at any time, you would like to
receive additional backup, or if your legal team require additional written guarantees or
indemnification, then there is a simple low cost commercial upgrade path. Peace of mind
comes with the knowledge that you can opt to take the commercial route at any time you
choose.
A Note About Terminology
In FreeRTOS, each thread of execution is called a ‘task’. There is no consensus on
terminology within the embedded community, but I prefer ‘task’ to ‘thread,’ as thread can have
a more specific meaning in some fields of application.
Why Use a Real-time Kernel?
There are many well established techniques for writing good embedded software without the
use of a kernel, and, if the system being developed is simple, then these techniques might
provide the most appropriate solution. In more complex cases, it is likely that using a kernel
would be preferable, but where the crossover point occurs will always be subjective.
As already described, task prioritization can help ensure an application meets its processing
deadlines, but a kernel can bring other less obvious benefits, too. Some of these are listed
very briefly below.
Abstracting away timing information
The kernel is responsible for execution timing and provides a time-related API to the
application. This allows the structure of the application code to be simpler, and the overall
code size to be smaller.
Maintainability/Extensibility

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
4
Abstracting away timing details results in fewer interdependencies between modules, and
allows the software to evolve in a controlled and predictable way. Also, the kernel is
responsible for timing, so application performance is less susceptible to changes in the
underlying hardware.
Modularity
Tasks are independent modules, each of which should have a well-defined purpose.
Team development
Tasks should also have well-defined interfaces, allowing easier development by teams.
Easier testing
If tasks are well-defined independent modules with clean interfaces, they can be tested in
isolation.
Code reuse
Greater modularity and fewer interdependencies results in code that can be reused with
less effort.
Improved efficiency
Using a kernel allows software to be completely event-driven, so no processing time is
wasted by polling for events that have not occurred. Code executes only when there is
something that must be done.
Counter to the efficiency saving is the need to process the RTOS tick interrupt, and to
switch execution from one task to another. However, applications that don’t make use of an
RTOS normally include some form of tick interrupt anyway.
Idle time
The Idle task is created automatically when the scheduler is started. It executes whenever
there are no application tasks wishing to execute. The idle task can be used to measure
spare processing capacity, to perform background checks, or simply to place the processor
into a low-power mode.
Power Management
5
The efficiency gains that are obtained by using an RTOS allow the processor to spend
more time in a low power mode.
Power consumption can be decreased significantly by placing the processor into a low
power state each time the Idle task runs. FreeRTOS also has a special tick-less mode.
Using the tick-less mode allows the processor to enter a lower power mode than would
otherwise be possible, and remain in the low power mode for longer.
Flexible interrupt handling
Interrupt handlers can be kept very short by deferring processing to either a task created by
the application writer, or the FreeRTOS daemon task.
Mixed processing requirements
Simple design patterns can achieve a mix of periodic, continuous and event-driven
processing within an application. In addition, hard and soft real-time requirements can be
met by selecting appropriate task and interrupt priorities.
FreeRTOS Features
FreeRTOS has the following standard features:
Pre-emptive or co-operative operation
Very flexible task priority assignment
Flexible, fast and light weight task notification mechanism
Queues
Binary semaphores
Counting semaphores
Mutexes
Recursive Mutexes
Software timers
Event groups
Tick hook functions
Idle hook functions
Stack overflow checking
Trace recording
Task run-time statistics gathering

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
6
Optional commercial licensing and support
Full interrupt nesting model (for some architectures)
A tick-less capability for extreme low power applications
Software managed interrupt stack when appropriate (this can help save RAM)
Licensing, and The FreeRTOS, OpenRTOS, and SafeRTOS Family
The FreeRTOS open source license is designed to ensure:
1. FreeRTOS can be used in commercial applications.
2. FreeRTOS itself remains freely available to everybody.
3. FreeRTOS users retain ownership of their intellectual property.
See http://www.FreeRTOS.org/license for the latest open source license information.
OpenRTOS is a commercially licensed version of FreeRTOS provided under license from Real
Time Engineers Ltd. by a third party.
SafeRTOS shares the same usage model as FreeRTOS, but has been developed in
accordance with the practices, procedures, and processes necessary to claim compliance with
various internationally recognized safety related standards.

7
Included Source Files and Projects
Obtaining the Examples that Accompany this Book
Source code, pre-configured project files, and full build instructions for all the examples
presented in this book are provided in an accompanying zip file. You can download the zip file
from http://www.FreeRTOS.org/Documentation/code if you did not receive a copy with the
book. The zip file may not include the latest version of FreeRTOS.
The screen shots included in this book were taken while the examples were executing in a
Microsoft Windows environment, using the FreeRTOS Windows port. The project that uses
the FreeRTOS Windows port is pre-configured to build using the free Express edition of Visual
Studio, which can be downloaded from http://www.microsoft.com/express. Note that, while the
FreeRTOS Windows port provides a convenient evaluation, test and development platform, it
does not provide true real-time behavior.


9
Chapter 1
The FreeRTOS Distribution

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
10
1.1 Chapter Introduction and Scope
FreeRTOS is distributed as a single zip file archive that contains all the official FreeRTOS
ports, and a large number of pre-configured demo applications.
Scope
This chapter aims to help users orientate themselves with the FreeRTOS files and directories
by:
Providing a top level view of the FreeRTOS directory structure.
Describing which files are actually required by any particular FreeRTOS project.
Introducing the demo applications.
Providing information on how a new project can be created.
The description here relates only to the official FreeRTOS distribution. The examples that
come with this book use a slightly different organization.

11
1.2 Understanding the FreeRTOS Distribution
Definition: FreeRTOS Port
FreeRTOS can be built with approximately twenty different compilers, and can run on more
than thirty different processor architectures. Each supported combination of compiler and
processor is considered to be a separate FreeRTOS port.
Building FreeRTOS
FreeRTOS can be thought of as a library that provides multi-tasking capabilities to what would
otherwise be a bare metal application.
FreeRTOS is supplied as a set of C source files. Some of the source files are common to all
ports, while others are specific to a port. Build the source files as part of your project to make
the FreeRTOS API available to your application. To make this easy for you, each official
FreeRTOS port is provided with a demo application. The demo application is pre-configured
to build the correct source files, and include the correct header files.
Demo applications should build ‘out of the box’, although some demos are older than others,
and sometimes a change in the build tools made since the demo was released can cause an
issue. Section 1.3 describes the demo applications.
FreeRTOSConfig.h
FreeRTOS is configured by a header file called FreeRTOSConfig.h.
FreeRTOSConfig.h is used to tailor FreeRTOS for use in a specific application. For example,
FreeRTOSConfig.h contains constants such as configUSE_PREEMPTION, the setting of
which defines whether the co-operative or pre-emptive scheduling algorithm will be used
1
. As
FreeRTOSConfig.h contains application specific definitions, it should be located in a directory
that is part of the application being built, not in a directory that contains the FreeRTOS source
code.
A demo application is provided for every FreeRTOS port, and every demo application contains
a FreeRTOSConfig.h file. It is therefore never necessary to create a FreeRTOSConfig.h file
1
Scheduling algorithms are described in section 3.12.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
12
from scratch. Instead, it is recommended to start with, then adapt, the FreeRTOSConfig.h
used by the demo application provided for the FreeRTOS port in use.
The Official FreeRTOS Distribution
FreeRTOS is distributed in a single zip file. The zip file contains source code for all the
FreeRTOS ports, and project files for all the FreeRTOS demo applications. It also contains a
selection of FreeRTOS+ ecosystem components, and a selection of FreeRTOS+ ecosystem
demo applications.
Do not be put off by the number of files in the FreeRTOS distribution! Only a very small
number of files are required in any one application.
The Top Directories in the FreeRTOS Distribution
The first and second level directories of the FreeRTOS distribution are shown and described in
Figure 1.
FreeRTOS
│ │
│ ├─Source Directory containing the FreeRTOS source files
│ │
│ └─Demo Directory containing pre-configured and port specific FreeRTOS demo projects
│
FreeRTOS-Plus
│
├─Source Directory containing source code for some FreeRTOS+ ecosystem components
│
└─Demo Directory containing demo projects for FreeRTOS+ ecosystem components
Figure 1. Top level directories within the FreeRTOS distribution
The zip file only contains one copy of the FreeRTOS source files; all the FreeRTOS demo
projects, and all the FreeRTOS+ demo projects, expect to find the FreeRTOS source files in
the FreeRTOS/Source directory, and may not build if the directory structure is changed.
FreeRTOS Source Files Common to All Ports
The core FreeRTOS source code is contained in just two C files that are common to all the
FreeRTOS ports. These are called tasks.c, and list.c, and they are located directly in the
FreeRTOS/Source directory, as shown in Figure 2. In addition to these two files, the following
source files are located in the same directory:
queue.c

13
queue.c provides both queue and semaphore services, as described later in this book.
queue.c is nearly always required.
timers.c
timers.c provides software timer functionality, as described later in this book. It need only
be included in the build if software timers are actually going to be used.
event_groups.c
event_groups.c provides event group functionality, as described later in this book. It need
only be included in the build if event groups are actually going to be used.
croutine.c
croutine.c implements the FreeRTOS co-routine functionality. It need only be included in
the build if co-routines are actually going to be used. Co-routines were intended for use on
very small microcontrollers, are rarely used now, and are therefore not maintained to the
same level as other FreeRTOS features. Co-routines are not described in this book.
FreeRTOS
│
└─Source
│
├─tasks.c FreeRTOS source file - always required
├─list.c FreeRTOS source file - always required
├─queue.c FreeRTOS source file - nearly always required
├─timers.c FreeRTOS source file - optional
├─event_groups.c FreeRTOS source file - optional
└─croutine.c FreeRTOS source file - optional
Figure 2. Core FreeRTOS source files within the FreeRTOS directory tree
It is recognized that the file names may result in name space clashes, as many projects will
already include files that have the same names. It is however considered that changing the
names of the files now would be problematic, as to do so would break compatibility with the
many thousands of projects that use FreeRTOS, as well as automation tools, and IDE plug-
ins.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
14
FreeRTOS Source Files Specific to a Port
Source files specific to a FreeRTOS port are contained within the FreeRTOS/Source/portable
directory. The portable directory is arranged as a hierarchy, first by compiler, then by
processor architecture. This is shown in Figure 3.
If you are running FreeRTOS on a processor with architecture ‘architecture’ using compiler
‘compiler’ then, in addition to the core FreeRTOS source files, you must also build the files
located in FreeRTOS/Source/portable/[compiler]/[architecture] directory.
From FreeRTOS V9.0.0 FreeRTOS applications can be completely statically allocated, removing the need to
include a heap memory manager: As will be described in Chapter 2, Heap Memory Management,
FreeRTOS also considers heap memory allocation to be part of the portable layer. FreeRTOS
provides five example heap allocation schemes. The five schemes are named heap_1 to
heap_5, and are implemented by the source files heap_1.c to heap_5.c respectively. The
example heap allocation schemes are contained in the FreeRTOS/Source/portable/MemMang
directory. It is necessary to build one of these five source files in your project, unless your
application provides an alternative implementation.
FreeRTOS
│
└─Source
│
└─portable Directory containing all port specific source files
│
├─MemMang Directory containing the 5 alternative heap allocation source files
│
├─[compiler 1] Directory containing port files specific to compiler 1
│ │
│ ├─[architecture 1] Contains files for the compiler 1 architecture 1 port
│ ├─[architecture 2] Contains files for the compiler 1 architecture 2 port
│ └─[architecture 3] Contains files for the compiler 1 architecture 3 port
│
└─[compiler 2] Directory containing port files specific to compiler 2
│
├─[architecture 1] Contains files for the compiler 2 architecture 1 port
├─[architecture 2] Contains files for the compiler 2 architecture 2 port
└─[etc.]
Figure 3. Port specific source files within the FreeRTOS directory tree
Include Paths
FreeRTOS requires three directories to be included in the compiler’s include path. These are:
1. The path to the core FreeRTOS header files, which is always
FreeRTOS/Source/include.
2. The path to the source files that are specific to the FreeRTOS port in use. As
described above, this is FreeRTOS/Source/portable/[compiler]/[architecture].
15
3. A path to the FreeRTOSConfig.h header file.
Header Files
A source file that uses the FreeRTOS API must include ‘FreeRTOS.h’, followed by the header
file that contains the prototype for the API function being used—either ‘task.h’, ‘queue.h’,
‘semphr.h’, ‘timers.h’ or ‘event_groups.h’.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
16
1.3 Demo Applications
Each FreeRTOS port comes with at least one demo application that should build with no errors
or warnings being generated, although some demos are older than others, and sometimes a
change in the build tools made since the demo was released can cause an issue.
A note to Linux users: FreeRTOS is developed and tested on a Windows host. Occasionally
this results in build errors when demo projects are built on a Linux host. Build errors are
almost always related to the case of letters used when referencing file names, or the direction
of slash characters used in file paths. Please use the FreeRTOS contact form
(http://www.FreeRTOS.org/contact) to alert us to any such errors.
The demo application has several purposes:
To provide an example of a working and pre-configured project, with the correct files
included, and the correct compiler options set.
To allow ‘out of the box’ experimentation with minimal setup or prior knowledge.
As a demonstration of how the FreeRTOS API can be used.
As a base from which real applications can be created.
Each demo project is located in a unique sub-directory under the FreeRTOS/Demo directory.
The name of the sub-directory indicates the port to which the demo project relates.
Every demo application is also described by a web page on the FreeRTOS.org web site. The
web page includes information on:
How to locate the project file for the demo within the FreeRTOS directory structure.
Which hardware the project is configured to use.
How to set up the hardware for running the demo.
How to build the demo.
How the demo is expected to behave.
17
All the demo projects create a subset of the common demo tasks, the implementations of
which are contained in the FreeRTOS/Demo/Common/Minimal directory. The common demo
tasks exist purely to demonstrate how the FreeRTOS API can be used—they do not
implement any particular useful functionality.
More recent demo projects can also build a beginners ‘blinky’ project. Blinky projects are very
basic. Typically they will create just two tasks and one queue.
Every demo project includes a file called main.c. This contains the main() function, from where
all the demo application tasks are created. See the comments within the individual main.c files
for information specific to that demo.
The FreeRTOS/Demo directory hierarchy is shown in Figure 4.
FreeRTOS
│
└─Demo Directory containing all the demo projects
│
├─[Demo x] Contains the project file that builds demo ‘x’
│
├─[Demo y] Contains the project file that builds demo ‘y’
│
├─[Demo z] Contains the project file that builds demo ‘z’
│
└─Common Contains files that are built by all the demo applications
Figure 4. The demo directory hierarchy

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
18
1.4 Creating a FreeRTOS Project
Adapting One of the Supplied Demo Projects
Every FreeRTOS port comes with at least one pre-configured demo application that should
build with no errors or warnings. It is recommended that new projects are created by adapting
one of these existing projects; this will allow the project to have the correct files included, the
correct interrupt handlers installed, and the correct compiler options set.
To start a new application from an existing demo project:
1. Open the supplied demo project and ensure that it builds and executes as expected.
2. Remove the source files that define the demo tasks. Any file that is located within the
Demo/Common directory can be removed from the project.
3. Delete all the function calls within main(), except prvSetupHardware() and
vTaskStartScheduler(), as shown in Listing 1.
4. Check the project still builds.
Following these steps will create a project that includes the correct FreeRTOS source files, but
does not define any functionality.
int main( void )
{
/* Perform any hardware setup necessary. */
prvSetupHardware();
/* --- APPLICATION TASKS CAN BE CREATED HERE --- */
/* Start the created tasks running. */
vTaskStartScheduler();
/* Execution will only reach here if there was insufficient heap to
start the scheduler. */
for( ;; );
return 0;
}
Listing 1. The template for a new main() function
19
Creating a New Project from Scratch
As already mentioned, it is recommended that new projects are created from an existing demo
project. If this is not desirable, then a new project can be created using the following
procedure:
1. Using your chosen tool chain, create a new project that does not yet include any
FreeRTOS source files.
2. Ensure the new project can be built, downloaded to your target hardware, and
executed.
3. Only when you are sure you already have a working project, add to the project the
FreeRTOS source files detailed in Table 1.
4. Copy the FreeRTOSConfig.h header file used by the demo project provided for the port
in use into the project directory.
5. Add the following directories to the path the project will search to locate header files:
FreeRTOS/Source/include
FreeRTOS/Source/portable/[compiler]/[architecture] (where [compiler] and
[architecture] are correct for your chosen port)
The directory containing the FreeRTOSConfig.h header file
6. Copy the compiler settings from the relevant demo project.
7. Install any FreeRTOS interrupt handlers that might be necessary. Use the web page
that describes the port in use, and the demo project provided for the port in use, as a
reference.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
20
Table 1. FreeRTOS source files to include in the project
File
Location
tasks.c
FreeRTOS/Source
queue.c
FreeRTOS/Source
list.c
FreeRTOS/Source
timers.c
FreeRTOS/Source
event_groups.c
FreeRTOS/Source
All C and assembler files
FreeRTOS/Source/portable/[compiler]/[architecture]
heap_n.c
From FreeRTOS V9.0.0 FreeRTOS applications can be completely
statically allocated, removing the need to include a heap memory manager:
FreeRTOS/Source/portable/MemMang, where n is either 1, 2,
3, 4 or 5. Refer to Chapter 2, Heap Memory Management,
for more information.
21
1.5 Data Types and Coding Style Guide
Data Types
Each port of FreeRTOS has a unique portmacro.h header file that contains (amongst other
things) definitions for two port specific data types: TickType_t and BaseType_t. These data
types are described in Table 2.
Table 2. Port specific data types used by FreeRTOS
Macro or typedef
used
Actual type
TickType_t
FreeRTOS configures a periodic interrupt called the tick interrupt.
The number of tick interrupts that have occurred since the FreeRTOS
application started is called the tick count. The tick count is used as a
measure of time.
The time between two tick interrupts is called the tick period. Times are
specified as multiples of tick periods.
TickType_t is the data type used to hold the tick count value, and to
specify times.
TickType_t can be either an unsigned 16-bit type, or an unsigned 32-bit
type, depending on the setting of configUSE_16_BIT_TICKS within
FreeRTOSConfig.h. If configUSE_16_BIT_TICKS is set to 1, then
TickType_t is defined as uint16_t. If configUSE_16_BIT_TICKS is set to
0 then TickType_t is defined as uint32_t.
Using a 16-bit type can greatly improve efficiency on 8-bit and 16-bit
architectures, but severely limits the maximum block period that can be
specified. There is no reason to use a 16-bit type on a 32-bit
architecture.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
22
Table 2. Port specific data types used by FreeRTOS
Macro or typedef
used
Actual type
BaseType_t
This is always defined as the most efficient data type for the architecture.
Typically, this is a 32-bit type on a 32-bit architecture, a 16-bit type on a
16-bit architecture, and an 8-bit type on an 8-bit architecture.
BaseType_t is generally used for return types that can take only a very
limited range of values, and for pdTRUE/pdFALSE type Booleans.
Some compilers make all unqualified char variables unsigned, while others make them signed.
For this reason, the FreeRTOS source code explicitly qualifies every use of char with either
‘signed’ or ‘unsigned’, unless the char is used to hold an ASCII character, or a pointer to char
is used to point to a string.
Plain int types are never used.
Variable Names
Variables are prefixed with their type: ‘c’ for char, ‘s’ for int16_t (short), ‘l’ int32_t (long), and ‘x’
for BaseType_t and any other non-standard types (structures, task handles, queue handles,
etc.).
If a variable is unsigned, it is also prefixed with a ‘u’. If a variable is a pointer, it is also prefixed
with a ‘p’. For example, a variable of type uint8_t will be prefixed with ‘uc’, and a variable of
type pointer to char will be prefixed with ‘pc’.
Function Names
Functions are prefixed with both the type they return, and the file they are defined within. For
example:
vTaskPrioritySet() returns a void and is defined within task.c.
xQueueReceive() returns a variable of type BaseType_t and is defined within queue.c.
pvTimerGetTimerID() returns a pointer to void and is defined within timers.c.
File scope (private) functions are prefixed with ‘prv’.

23
Formatting
One tab is always set to equal four spaces.
Macro Names
Most macros are written in upper case, and prefixed with lower case letters that indicate where
the macro is defined. Table 3 provides a list of prefixes.
Table 3. Macro prefixes
Prefix
Location of macro definition
port (for example, portMAX_DELAY)
portable.h or
portmacro.h
task (for example, taskENTER_CRITICAL())
task.h
pd (for example, pdTRUE)
projdefs.h
config (for example, configUSE_PREEMPTION)
FreeRTOSConfig.h
err (for example, errQUEUE_FULL)
projdefs.h
Note that the semaphore API is written almost entirely as a set of macros, but follows the
function naming convention, rather than the macro naming convention.
The macros defined in Table 4 are used throughout the FreeRTOS source code.
Table 4. Common macro definitions
Macro
Value
pdTRUE
1
pdFALSE
0
pdPASS
1
pdFAIL
0

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
24
Rationale for Excessive Type Casting
The FreeRTOS source code can be compiled with many different compilers, all of which differ
in how and when they generate warnings. In particular, different compilers want casting to be
used in different ways. As a result, the FreeRTOS source code contains more type casting
than would normally be warranted.

25
Chapter 2
Heap Memory Management
From FreeRTOS V9.0.0 FreeRTOS applications can be completely statically allocated,
removing the need to include a heap memory manager

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
26
2.1 Chapter Introduction and Scope
Prerequisites
FreeRTOS is provided as a set of C source files, so being a competent C programmer is a
prerequisite for using FreeRTOS, and therefore this chapter assumes the reader is familiar
with concepts such as:
How a C project is built, including the different compiling and linking phases.
What the stack and heap are.
The standard C library malloc() and free() functions.
Dynamic Memory Allocation and its Relevance to FreeRTOS
From FreeRTOS V9.0.0 kernel objects can be allocated statically at compile time, or dynamically at run time:
Following chapters of this book will introduce kernel objects such as tasks, queues,
semaphores and event groups. To make FreeRTOS as easy to use as possible, these kernel
objects are not statically allocated at compile-time, but dynamically allocated at run-time;
FreeRTOS allocates RAM each time a kernel object is created, and frees RAM each time a
kernel object is deleted. This policy reduces design and planning effort, simplifies the API, and
minimizes the RAM footprint.
This chapter discusses dynamic memory allocation. Dynamic memory allocation is a C
programming concept, and not a concept that is specific to either FreeRTOS or multitasking. It
is relevant to FreeRTOS because kernel objects are allocated dynamically, and the dynamic
memory allocation schemes provided by general purpose compilers are not always suitable for
real-time applications.
Memory can be allocated using the standard C library malloc() and free() functions, but they
may not be suitable, or appropriate, for one or more of the following reasons:
They are not always available on small embedded systems.
Their implementation can be relatively large, taking up valuable code space.
They are rarely thread-safe.

27
They are not deterministic; the amount of time taken to execute the functions will differ
from call to call.
They can suffer from fragmentation
1
.
They can complicate the linker configuration.
They can be the source of difficult to debug errors if the heap space is allowed to grow
into memory used by other variables.
Options for Dynamic Memory Allocation
From FreeRTOS V9.0.0 kernel objects can be allocated statically at compile time, or dynamically at run time:
Early versions of FreeRTOS used a memory pools allocation scheme, whereby pools of
different size memory blocks were pre-allocated at compile time, then returned by the memory
allocation functions. Although this is a common scheme to use in real-time systems, it proved
to be the source of many support requests, predominantly because it could not use RAM
efficiently enough to make it viable for really small embedded systems—so the scheme was
dropped.
FreeRTOS now treats memory allocation as part of the portable layer (as opposed to part of
the core code base). This is in recognition of the fact that different embedded systems have
varying dynamic memory allocation and timing requirements, so a single dynamic memory
allocation algorithm will only ever be appropriate for a subset of applications. Also, removing
dynamic memory allocation from the core code base enables application writer’s to provide
their own specific implementations, when appropriate.
When FreeRTOS requires RAM, instead of calling malloc(), it calls pvPortMalloc(). When
RAM is being freed, instead of calling free(), the kernel calls vPortFree(). pvPortMalloc() has
the same prototype as the standard C library malloc() function, and vPortFree() has the same
prototype as the standard C library free() function.
pvPortMalloc() and vPortFree() are public functions, so can also be called from application
code.
1
The heap is considered to be fragmented if the free RAM within the heap is broken up into small
blocks that are separated from each other. If the heap is fragmented, then an attempt to allocate a
block will fail if no single free block in the heap is large enough to contain the block, even if the total size
of all the separate free blocks in the heap is many times greater than the size of the block that cannot be
allocated.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
28
From FreeRTOS V9.0.0 kernel objects can be allocated statically at compile time, or dynamically at run time:
FreeRTOS comes with five example implementations of both pvPortMalloc() and vPortFree(),
all of which are documented in this chapter. FreeRTOS applications can use one of the
example implementations, or provide their own.
The five examples are defined in the heap_1.c, heap_2.c, heap_3.c, heap_4.c and heap_5.c
source files respectively, all of which are located in the FreeRTOS/Source/portable/MemMang
directory.
Scope
This chapter aims to give readers a good understanding of:
When FreeRTOS allocates RAM.
The five example memory allocation schemes supplied with FreeRTOS.
Which memory allocation scheme to select.

29
2.2 Example Memory Allocation Schemes
From FreeRTOS V9.0.0 FreeRTOS applications can be completely statically allocated, removing the
need to include a heap memory manager
Heap_1
It is common for small dedicated embedded systems to only create tasks and other kernel
objects before the scheduler has been started. When this is the case, memory only gets
dynamically allocated by the kernel before the application starts to perform any real-time
functionality, and the memory remains allocated for the lifetime of the application. This means
the chosen allocation scheme does not have to consider any of the more complex memory
allocation issues, such as determinism and fragmentation, and can instead just consider
attributes such as code size and simplicity.
Heap_1.c implements a very basic version of pvPortMalloc(), and does not implement
vPortFree(). Applications that never delete a task, or other kernel object, have the potential to
use heap_1.
Some commercially critical and safety critical systems that would otherwise prohibit the use of
dynamic memory allocation also have the potential to use heap_1. Critical systems often
prohibit dynamic memory allocation because of the uncertainties associated with non-
determinism, memory fragmentation, and failed allocations—but Heap_1 is always
deterministic, and cannot fragment memory.
The heap_1 allocation scheme subdivides a simple array into smaller blocks, as calls to
pvPortMalloc() are made. The array is called the FreeRTOS heap.
The total size (in bytes) of the array is set by the definition configTOTAL_HEAP_SIZE within
FreeRTOSConfig.h. Defining a large array in this manner can make the application appear to
consume a lot of RAM—even before any memory has been allocated from the array.
Each created task requires a task control block (TCB) and a stack to be allocated from the
heap. Figure 5 demonstrates how heap_1 subdivides the simple array as tasks are created.
Referring to Figure 5:
A shows the array before any tasks have been created—the entire array is free.
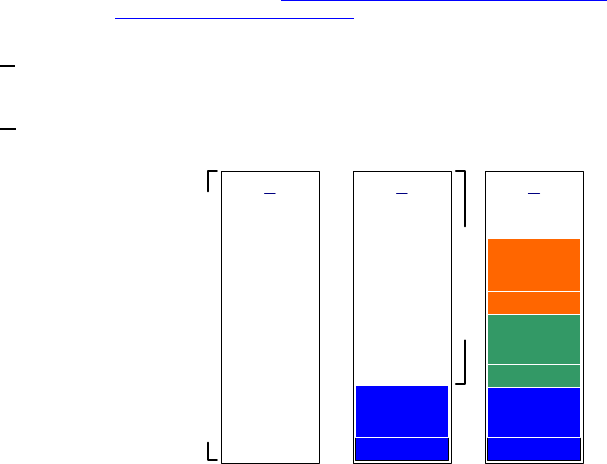
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
30
B shows the array after one task has been created.
C shows the array after three tasks have been created.
A B
TCB
Stack
C
TCB
Stack
TCB
Stack
TCB
Stack
configTOTAL_HEAP_SIZE
Free space
Figure 5. RAM being allocated from the heap_1 array each time a task is created
Heap_2
Heap_2 is retained in the FreeRTOS distribution for backward compatibility, but its use is not
recommended for new designs. Consider using heap_4 instead of heap_2, as heap_4
provides enhanced functionality.
Heap_2.c also works by subdividing an array that is dimensioned by
configTOTAL_HEAP_SIZE. It uses a best fit algorithm to allocate memory and, unlike
heap_1, it does allow memory to be freed. Again, the array is statically declared, so will make
the application appear to consume a lot of RAM, even before any memory from the array has
been assigned.
The best fit algorithm ensures that pvPortMalloc() uses the free block of memory that is closest
in size to the number of bytes requested. For example, consider the scenario where:
The heap contains three blocks of free memory that are 5 bytes, 25 bytes, and 100
bytes, respectively.
pvPortMalloc() is called to request 20 bytes of RAM.
The smallest free block of RAM into which the requested number of bytes will fit is the 25-byte
block, so pvPortMalloc() splits the 25-byte block into one block of 20 bytes and one block of 5

31
bytes
1
, before returning a pointer to the 20-byte block. The new 5-byte block remains
available to future calls to pvPortMalloc().
Unlike heap_4, Heap_2 does not combine adjacent free blocks into a single larger block, so it
is more susceptible to fragmentation. However, fragmentation is not an issue if the blocks
being allocated and subsequently freed are always the same size. Heap_2 is suitable for an
application that creates and deletes tasks repeatedly, provided the size of the stack allocated
to the created tasks does not change.
A B C
TCB
Stack
TCB
Stack
TCB
Stack
configTOTAL_HEAP_SIZE
TCB
Stack
TCB
Stack
TCB
Stack
Free space
TCB
Stack
TCB
Stack
Free space Free
space
Free space
Figure 6. RAM being allocated and freed from the heap_2 array as tasks are created
and deleted
Figure 6 demonstrates how the best fit algorithm works when a task is created, deleted, and
then created again. Referring to Figure 6:
1. A shows the array after three tasks have been created. A large free block remains at
the top of the array.
2. B shows the array after one of the tasks has been deleted. The large free block at the
top of the array remains. There are now also two smaller free blocks that were
previously allocated to the TCB and stack of the deleted task.
3. C shows the situation after another task has been created. Creating the task has
resulted in two calls to pvPortMalloc(), one to allocate a new TCB, and one to allocate
the task stack. Tasks are created using the xTaskCreate() API function, which is
1
This is an oversimplification, because heap_2 stores information on the block sizes within the heap
area, so the sum of the two split blocks will actually be less than 25.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
32
described in section 3.4. The calls to pvPortMalloc() occur internally within
xTaskCreate().
Every TCB is exactly the same size, so the best fit algorithm ensures that the block of
RAM previously allocated to the TCB of the deleted task is reused to allocate the TCB
of the new task.
The size of the stack allocated to the newly created task is identical to that allocated to
the previously deleted task, so the best fit algorithm ensures that the block of RAM
previously allocated to the stack of the deleted task is reused to allocate the stack of
the new task.
The larger unallocated block at the top of the array remains untouched.
Heap_2 is not deterministic, but is faster than most standard library implementations of
malloc() and free().
Heap_3
Heap_3.c uses the standard library malloc() and free() functions, so the size of the heap is
defined by the linker configuration, and the configTOTAL_HEAP_SIZE setting has no affect.
Heap_3 makes malloc() and free() thread-safe by temporarily suspending the FreeRTOS
scheduler. Thread safety, and scheduler suspension, are both topics that are covered in
Chapter 7, Resource Management.
Heap_4
Like heap_1 and heap_2, heap_4 works by subdividing an array into smaller blocks. As
before, the array is statically declared, and dimensioned by configTOTAL_HEAP_SIZE, so will
make the application appear to consume a lot of RAM, even before any memory has actually
been allocated from the array.
Heap_4 uses a first fit algorithm to allocate memory. Unlike heap_2, heap_4 combines
(coalescences) adjacent free blocks of memory into a single larger block, which minimizes the
risk of memory fragmentation.
The first fit algorithm ensures pvPortMalloc() uses the first free block of memory that is large
enough to hold the number of bytes requested. For example, consider the scenario where:
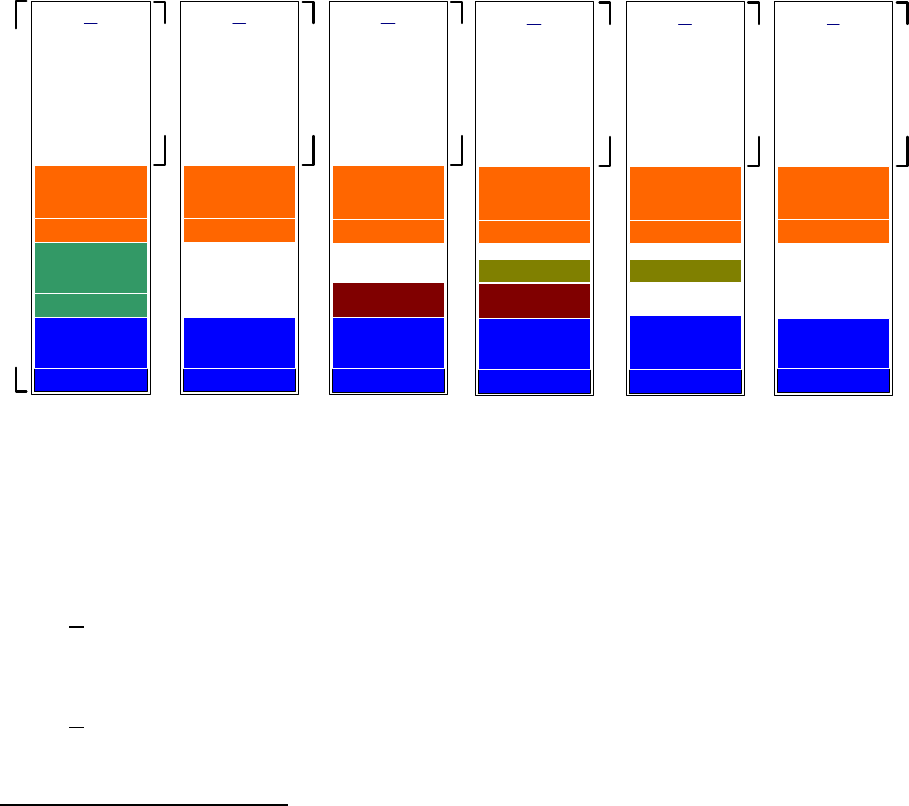
33
The heap contains three blocks of free memory that, in the order in which they appear
in the array, are 5 bytes, 200 bytes, and 100 bytes, respectively.
pvPortMalloc() is called to request 20 bytes of RAM.
The first free block of RAM into which the requested number of bytes will fit is the 200-byte
block, so pvPortMalloc() splits the 200-byte block into one block of 20 bytes, and one block of
180 bytes
1
, before returning a pointer to the 20-byte block. The new 180-byte block remains
available to future calls to pvPortMalloc().
Heap_4 combines (coalescences) adjacent free blocks into a single larger block, minimizing
the risk of fragmentation, and making it suitable for applications that repeatedly allocate and
free different sized blocks of RAM.
configTOTAL_HEAP_SIZE
B
TCB
Stack
TCB
Stack
Free space
Free Space
C
TCB
Stack
Queue
TCB
Stack
Free space
Free Space
D
TCB
Stack
Queue
TCB
Stack
Free space
User
Free Space
E
TCB
Stack
TCB
Stack
Free space
User
Free Space
Free Space
F
TCB
Stack
TCB
Stack
Free space
Free Space
A
TCB
Stack
TCB
Stack
TCB
Stack
Free space
Figure 7. RAM being allocated and freed from the heap_4 array
Figure 7 demonstrates how the heap_4 first fit algorithm with memory coalescence works, as
memory is allocated and freed. Referring to Figure 7:
1. A shows the array after three tasks have been created. A large free block remains at
the top of the array.
2. B shows the array after one of the tasks has been deleted. The large free block at the
top of the array remains. There is also a free block where the TCB and stack of the
1
This is an oversimplification, because heap_4 stores information on the block sizes within the heap
area, so the sum of the two split blocks will actually be less than 200 bytes.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
34
task that has been deleted were previously allocated. Note that, unlike when heap_2
was demonstrated, the memory freed when the TCB was deleted, and the memory
freed when the stack was deleted, does not remain as two separate free blocks, but is
instead combined to create a larger single free block.
3. C shows the situation after a FreeRTOS queue has been created. Queues are created
using the xQueueCreate() API function, which is described in section 4.3.
xQueueCreate() calls pvPortMalloc() to allocate the RAM used by the queue. As
heap_4 uses a first fit algorithm, pvPortMalloc() will allocate RAM from the first free
RAM block that is large enough to hold the queue, which in Figure 7, was the RAM
freed when the task was deleted. The queue does not consume all the RAM in the free
block however, so the block is split into two, and the unused portion remains available
to future calls to pvPortMalloc().
4. D shows the situation after pvPortMalloc() has been called directly from application
code, rather than indirectly by calling a FreeRTOS API function. The user allocated
block was small enough to fit in the first free block, which was the block between the
memory allocated to the queue, and the memory allocated to the following TCB.
The memory freed when the task was deleted has now been split into three separate
blocks; the first block holds the queue, the second block holds the user allocated
memory, and the third block remains free.
5. E show the situation after the queue has been deleted, which automatically frees the
memory that had been allocated to the deleted queue. There is now free memory on
either side of the user allocated block.
6. F shows the situation after the user allocated memory has also been freed. The
memory that had been used by the user allocated block has been combined with the
free memory on either side to create a larger single free block.
Heap_4 is not deterministic, but is faster than most standard library implementations of
malloc() and free().
Setting a Start Address for the Array Used By Heap_4
This section contains advanced level information. It is not necessary to read or understand
this section in order to use Heap_4.
35
Sometimes it is necessary for an application writer to place the array used by heap_4 at a
specific memory address. For example, the stack used by a FreeRTOS task is allocated from
the heap, so it might be necessary to ensure the heap is located in fast internal memory,
rather than slow external memory.
By default, the array used by heap_4 is declared inside the heap_4.c source file, and its start
address is set automatically by the linker. However, if the
configAPPLICATION_ALLOCATED_HEAP compile time configuration constant is set to 1 in
FreeRTOSConfig.h, then the array must instead be declared by the application that is using
FreeRTOS. If the array is declared as part of the application, then the application’s writer can
set its start address.
If configAPPLICATION_ALLOCATED_HEAP is set to 1 in FreeRTOSConfig.h, then a uint8_t
array called ucHeap, and dimensioned by the configTOTAL_HEAP_SIZE setting, must be
declared in one of the application’s source files.
The syntax required to place a variable at a specific memory address is dependent on the
compiler in use, so refer to your compiler’s documentation. Examples for two compilers follow:
Listing 2 shows the syntax required by the GCC compiler to declare the array, and
place the array in a memory section called .my_heap.
Listing 3 shows the syntax required by the IAR compiler to declare the array, and place
the array at the absolute memory address 0x20000000.
uint8_t ucHeap[ configTOTAL_HEAP_SIZE ] __attribute__ ( ( section( ".my_heap" ) ) );
Listing 2. Using GCC syntax to declare the array that will be used by heap_4, and
place the array in a memory section named .my_heap
uint8_t ucHeap[ configTOTAL_HEAP_SIZE ] @ 0x20000000;
Listing 3. Using IAR syntax to declare the array that will be used by heap_4, and
place the array at the absolute address 0x20000000
Heap_5
The algorithm used by heap_5 to allocate and free memory is identical to that used by heap_4.
Unlike heap_4, heap_5 is not limited to allocating memory from a single statically declared
array; heap_5 can allocate memory from multiple and separated memory spaces. Heap_5 is
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
36
useful when the RAM provided by the system on which FreeRTOS is running does not appear
as a single contiguous (without space) block in the system’s memory map.
At the time of writing, heap_5 is the only provided memory allocation scheme that must be
explicitly initialized before pvPortMalloc() can be called. Heap_5 is initialized using the
vPortDefineHeapRegions() API function. When heap_5 is used, vPortDefineHeapRegions()
must be called before any kernel objects (tasks, queues, semaphores, etc.) can be created.
The vPortDefineHeapRegions() API Function
vPortDefineHeapRegions() is used to specify the start address and size of each separate
memory area that together makes up the total memory used by heap_5.
void vPortDefineHeapRegions( const HeapRegion_t * const pxHeapRegions );
Listing 4. The vPortDefineHeapRegions() API function prototype
Each separate memory areas is described by a structure of type HeapRegion_t. A description
of all the available memory areas is passed into vPortDefineHeapRegions() as an array of
HeapRegion_t structures.
typedef struct HeapRegion
{
/* The start address of a block of memory that will be part of the heap.*/
uint8_t *pucStartAddress;
/* The size of the block of memory in bytes. */
size_t xSizeInBytes;
} HeapRegion_t;
Listing 5. The HeapRegion_t structure
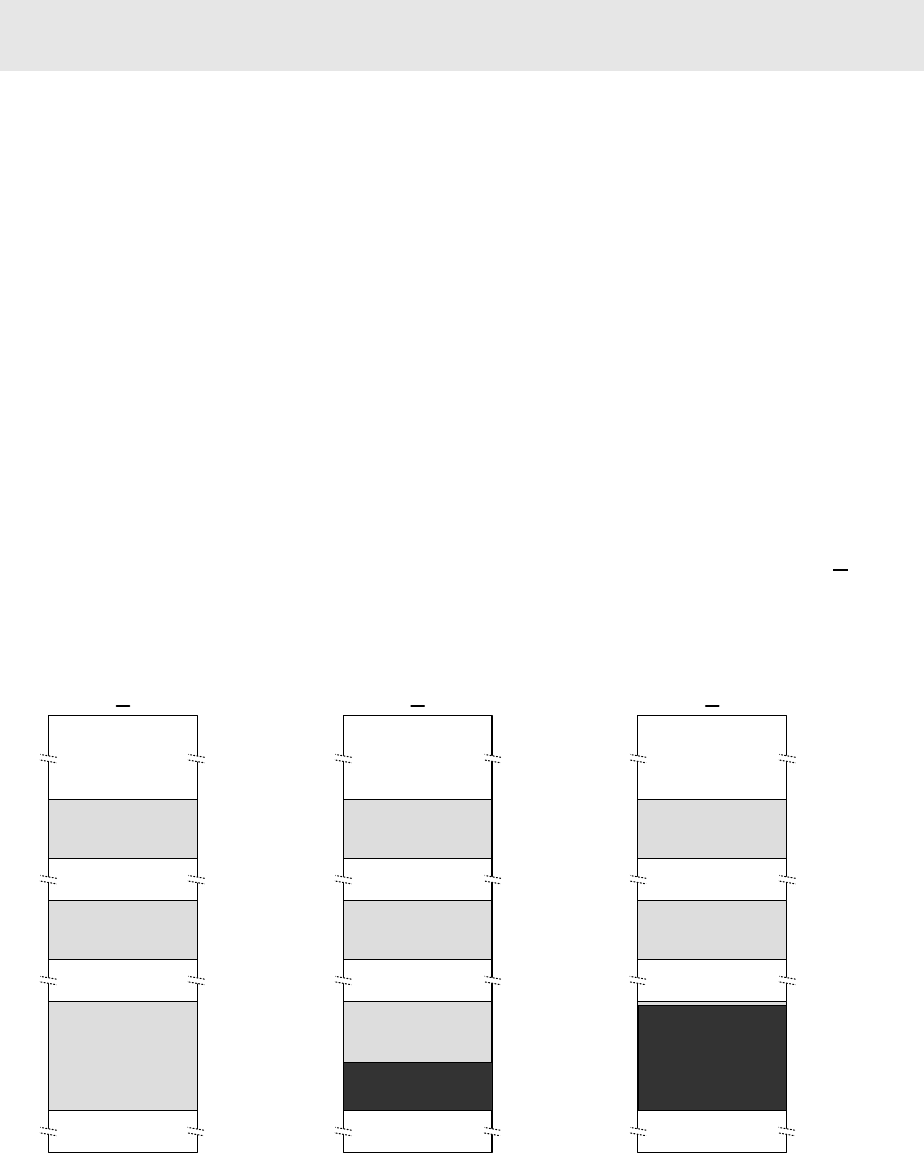
37
Table 5. vPortDefineHeapRegions() parameters
Parameter Name/
Returned Value
Description
pxHeapRegions
A pointer to the start of an array of HeapRegion_t structures. Each
structure in the array describes the start address and length of a memory
area that will be part of the heap when heap_5 is used.
The HeapRegion_t structures in the array must be ordered by start
address; the HeapRegion_t structure that describes the memory area
with the lowest start address must be the first structure in the array, and
the HeapRegion_t structure that describes the memory area with the
highest start address must be the last structure in the array.
The end of the array is marked by a HeapRegion_t structure that has its
pucStartAddress member set to NULL.
By way of example, consider the hypothetical memory map shown in Figure 8 A, which
contains three separate blocks of RAM: RAM1, RAM2 and RAM3. It is assumed executable
code is placed in read only memory, which is not shown.
0x00000000
0x010000
0x01FFFF
RAM1 Remaining
Free
0x020000
0x027FFF
RAM2
32K bytes
0x030000
0x037FFF
RAM3
32K bytes
0xFFFFFFFF
RAM1 Containing
Variables
0x01nnnn
0x00000000
0x010000
0x01FFFF
RAM1
65K bytes
0x020000
0x027FFF
RAM2
32K bytes
0x030000
0x037FFF
RAM3
32K bytes
0xFFFFFFFF
0x00000000
0x010000
0x01FFFF
0x020000
0x027FFF
RAM2
32K bytes
0x030000
0x037FFF
RAM3
32K bytes
0xFFFFFFFF
RAM1 Containing
Variables, inc.
ucHeap[]
A B C
Figure 8 Memory Map

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
38
Listing 6 shows an array of HeapRegion_t structures that together describe the three blocks of
RAM in their entirety.
/* Define the start address and size of the three RAM regions. */
#define RAM1_START_ADDRESS ( ( uint8_t * ) 0x00010000 )
#define RAM1_SIZE ( 65 * 1024 )
#define RAM2_START_ADDRESS ( ( uint8_t * ) 0x00020000 )
#define RAM2_SIZE ( 32 * 1024 )
#define RAM3_START_ADDRESS ( ( uint8_t * ) 0x00030000 )
#define RAM3_SIZE ( 32 * 1024 )
/* Create an array of HeapRegion_t definitions, with an index for each of the three
RAM regions, and terminating the array with a NULL address. The HeapRegion_t
structures must appear in start address order, with the structure that contains the
lowest start address appearing first. */
const HeapRegion_t xHeapRegions[] =
{
{ RAM1_START_ADDRESS, RAM1_SIZE },
{ RAM2_START_ADDRESS, RAM2_SIZE },
{ RAM3_START_ADDRESS, RAM3_SIZE },
{ NULL, 0 } /* Marks the end of the array. */
};
int main( void )
{
/* Initialize heap_5. */
vPortDefineHeapRegions( xHeapRegions );
/* Add application code here. */
}
Listing 6. An array of HeapRegion_t structures that together describe the 3 regions
of RAM in their entirety
While Listing 6 correctly describes the RAM, it does not demonstrate a usable example,
because it allocates all the RAM to the heap, leaving no RAM free for use by other variables.
When a project is built, the linking phase of the build process allocates a RAM address to each
variable. The RAM available for use by the linker is normally described by a linker
configuration file, such as a linker script. In Figure 8 B it is assumed the linker script included
information on RAM1, but did not include information on RAM2 or RAM3. The linker has
therefore placed variables in RAM1, leaving only the portion of RAM1 above address
0x0001nnnn available for use by heap_5. The actual value of 0x0001nnnn will depend on the
combined size of all the variables included in the application being linked. The linker has left
all of RAM2 and all of RAM3 unused, leaving the whole of RAM2 and the whole of RAM3
available for use by heap_5.

39
If the code shown in Listing 6 was used, the RAM allocated to heap_5 below address
0x0001nnnn would overlap the RAM used to hold variables. To avoid that, the first
HeapRegion_t structure within the xHeapRegions[] array could use a start address of
0x0001nnnn, rather than a start address of 0x00010000. However, that is not a recommended
solution because:
1. The start address might not be easy to determine.
2. The amount of RAM used by the linker might change in future builds, necessitating an
update to the start address used in the HeapRegion_t structure.
3. The build tools will not know, and therefore cannot warn the application writer, if the
RAM used by the linker and the RAM used by heap_5 overlap.
Listing 7 demonstrates a more convenient and maintainable example. It declares an array
called ucHeap. ucHeap is a normal variable, so it becomes part of the data allocated to RAM1
by the linker. The first HeapRegion_t structure in the xHeapRegions array describes the start
address and size of ucHeap, so ucHeap becomes part of the memory managed by heap_5.
The size of ucHeap can be increased until the RAM used by the linker consumes all of RAM1,
as shown in Figure 8 C.
/* Define the start address and size of the two RAM regions not used by the
linker. */
#define RAM2_START_ADDRESS ( ( uint8_t * ) 0x00020000 )
#define RAM2_SIZE ( 32 * 1024 )
#define RAM3_START_ADDRESS ( ( uint8_t * ) 0x00030000 )
#define RAM3_SIZE ( 32 * 1024 )
/* Declare an array that will be part of the heap used by heap_5. The array will be
placed in RAM1 by the linker. */
#define RAM1_HEAP_SIZE ( 30 * 1024 )
static uint8_t ucHeap[ RAM1_HEAP_SIZE ];
/* Create an array of HeapRegion_t definitions. Whereas in Listing 6 the first entry
described all of RAM1, so heap_5 will have used all of RAM1, this time the first
entry only describes the ucHeap array, so heap_5 will only use the part of RAM1 that
contains the ucHeap array. The HeapRegion_t structures must still appear in start
address order, with the structure that contains the lowest start address appearing
first. */
const HeapRegion_t xHeapRegions[] =
{
{ ucHeap, RAM1_HEAP_SIZE },
{ RAM2_START_ADDRESS, RAM2_SIZE },
{ RAM3_START_ADDRESS, RAM3_SIZE },
{ NULL, 0 } /* Marks the end of the array. */
};
Listing 7. An array of HeapRegion_t structures that describe all of RAM2, all of
RAM3, but only part of RAM1

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
40
The advantages of the technique demonstrated in Listing 7 include:
1. It is not necessary to use a hard coded start address.
2. The address used in the HeapRegion_t structure will be set automatically, by the
linker, so will always be correct, even if the amount of RAM used by the linker changes
in future builds.
3. It is not possible for RAM allocated to heap_5 to overlap data placed into RAM1 by the
linker.
4. The application will not link if ucHeap is too big.

41
2.3 Heap Related Utility Functions
The xPortGetFreeHeapSize() API Function
The xPortGetFreeHeapSize() API function returns the number of free bytes in the heap at the
time the function is called. It can be used to optimize the heap size. For example, if
xPortGetFreeHeapSize() returns 2000 after all the kernel objects have been created, then the
value of configTOTAL_HEAP_SIZE can be reduced by 2000.
xPortGetFreeHeapSize() is not available when heap_3 is used.
size_t xPortGetFreeHeapSize( void );
Listing 8. The xPortGetFreeHeapSize() API function prototype
Table 6. xPortGetFreeHeapSize() return value
Parameter Name/
Returned Value
Description
Returned value
The number of bytes that remain unallocated in the heap at the time
xPortGetFreeHeapSize() is called.
The xPortGetMinimumEverFreeHeapSize() API Function
The xPortGetMinimumEverFreeHeapSize() API function returns the minimum number of
unallocated bytes that have ever existed in the heap since the FreeRTOS application started
executing.
The value returned by xPortGetMinimumEverFreeHeapSize() is an indication of how close the
application has ever come to running out of heap space. For example, if
xPortGetMinimumEverFreeHeapSize() returns 200, then, at some time since the application
started executing, it came within 200 bytes of running out of heap space.
xPortGetMinimumEverFreeHeapSize() is only available when heap_4 or heap_5 is used.
size_t xPortGetMinimumEverFreeHeapSize( void );
Listing 9. The xPortGetMinimumEverFreeHeapSize() API function prototype

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
42
Table 7. xPortGetMinimumEverFreeHeapSize() return value
Parameter Name/
Returned Value
Description
Returned value
The minimum number of unallocated bytes that have existed in the
heap since the FreeRTOS application started executing.
Malloc Failed Hook Functions
pvPortMalloc() can be called directly from application code. It is also called within FreeRTOS
source files each time an kernel object is created. Examples of kernel objects include tasks,
queues, semaphores, and event groups—all of which are described in later chapters of this
book.
Just like the standard library malloc() function, if pvPortMalloc() cannot return a block of RAM
because a block of the requested size does not exist, then it will return NULL. If
pvPortMalloc() is executed because the application writer is creating a kernel object, and the
call to pvPortMalloc() returns NULL, then the kernel object will not be created.
All the example heap allocation schemes can be configured to call a hook (or callback)
function if a call to pvPortMalloc() returns NULL.
If configUSE_MALLOC_FAILED_HOOK is set to 1 in FreeRTOSConfig.h, then the application
must provide a malloc failed hook function that has the name and prototype shown by Listing
10. The function can be implemented in any way that is appropriate for the application.
void vApplicationMallocFailedHook( void );
Listing 10. The malloc failed hook function name and prototype.
43

45
3.1 Chapter Introduction and Scope
Scope
This chapter aims to give readers a good understanding of:
How FreeRTOS allocates processing time to each task within an application.
How FreeRTOS chooses which task should execute at any given time.
How the relative priority of each task affects system behavior.
The states that a task can exist in.
Readers should also gain a good understanding of:
How to implement tasks.
How to create one or more instances of a task.
How to use the task parameter.
How to change the priority of a task that has already been created.
How to delete a task.
How to implement periodic processing using a task (software timers are discussed in a
later chapter).
When the idle task will execute and how it can be used.
The concepts presented in this chapter are fundamental to understanding how to use
FreeRTOS, and how FreeRTOS applications behave. This is, therefore, the most detailed
chapter in the book.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
46
3.2 Task Functions
Tasks are implemented as C functions. The only thing special about them is their prototype,
which must return void and take a void pointer parameter. The prototype is demonstrated by
Listing 11.
void ATaskFunction( void *pvParameters );
Listing 11. The task function prototype
Each task is a small program in its own right. It has an entry point, will normally run forever
within an infinite loop, and will not exit. The structure of a typical task is shown in Listing 12.
FreeRTOS tasks must not be allowed to return from their implementing function in any way—
they must not contain a ‘return’ statement and must not be allowed to execute past the end of
the function. If a task is no longer required, it should instead be explicitly deleted. This is also
demonstrated in Listing 12.
A single task function definition can be used to create any number of tasks—each created task
being a separate execution instance, with its own stack and its own copy of any automatic
(stack) variables defined within the task itself.
void ATaskFunction( void *pvParameters )
{
/* Variables can be declared just as per a normal function. Each instance of a task
created using this example function will have its own copy of the lVariableExample
variable. This would not be true if the variable was declared static – in which case
only one copy of the variable would exist, and this copy would be shared by each
created instance of the task. (The prefixes added to variable names are described in
section 1.5, Data Types and Coding Style Guide.) */
int32_t lVariableExample = 0;
/* A task will normally be implemented as an infinite loop. */
for( ;; )
{
/* The code to implement the task functionality will go here. */
}
/* Should the task implementation ever break out of the above loop, then the task
must be deleted before reaching the end of its implementing function. The NULL
parameter passed to the vTaskDelete() API function indicates that the task to be
deleted is the calling (this) task. The convention used to name API functions is
described in section 1.5, Data Types and Coding Style Guide. */
vTaskDelete( NULL );
}
Listing 12. The structure of a typical task function
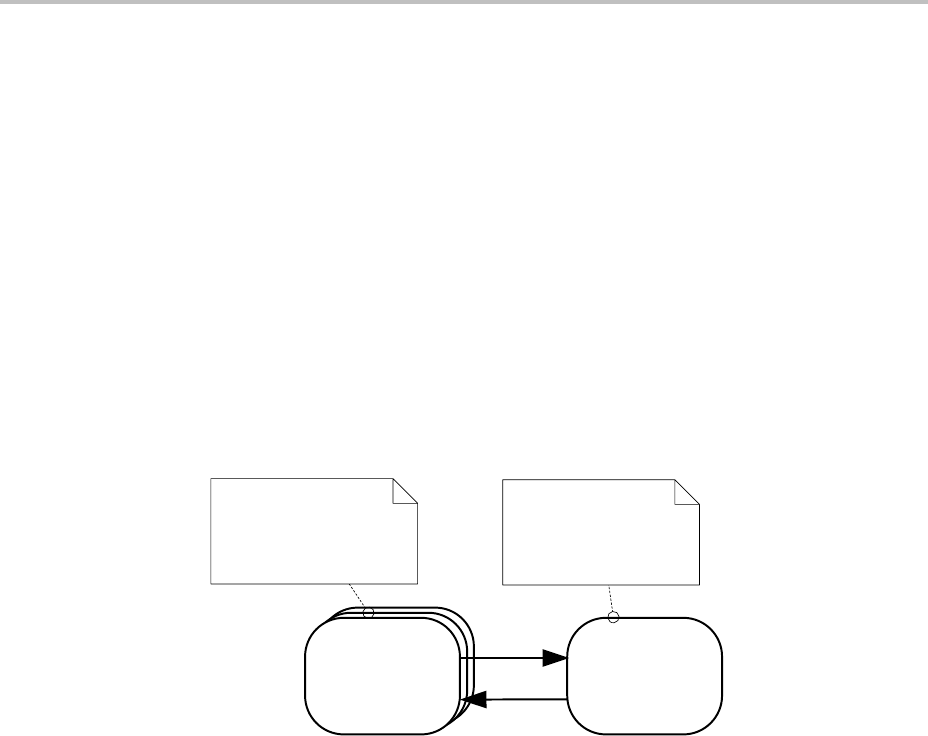
47
3.3 Top Level Task States
An application can consist of many tasks. If the processor running the application contains a
single core, then only one task can be executing at any given time. This implies that a task
can exist in one of two states, Running and Not Running. This simplistic model is considered
first—but keep in mind that it is an over simplification. Later in the chapter it is shown that the
Not Running state actually contains a number of sub-states.
When a task is in the Running state the processor is executing the task’s code. When a task
is in the Not Running state, the task is dormant, its status having been saved ready for it to
resume execution the next time the scheduler decides it should enter the Running state.
When a task resumes execution, it does so from the instruction it was about to execute before
it last left the Running state.
Not Running
Not Running
Not Running Running
All tasks that are
not currently
Running are in the
Not Running state
Only one task
can be in the
Running state at
any one time
Figure 9. Top level task states and transitions
A task transitioned from the Not Running state to the Running state is said to have been
‘switched in’ or ‘swapped in’. Conversely, a task transitioned from the Running state to the Not
Running state is said to have been ‘switched out’ or ‘swapped out’. The FreeRTOS scheduler
is the only entity that can switch a task in and out.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
48
3.4 Creating Tasks
The xTaskCreate() API Function
FreeRTOS V9.0.0 also includes the xTaskCreateStatic() function, which allocates the memory required to create a
task statically at compile time: Tasks are created using the FreeRTOS xTaskCreate() API function.
This is probably the most complex of all the API functions, so it is unfortunate that it is the first
encountered, but tasks must be mastered first as they are the most fundamental component of
a multitasking system. All the examples that accompany this book make use of the
xTaskCreate() function, so there are plenty of examples to reference.
Section 1.5, Data Types and Coding Style Guide, describes the data types and naming
conventions used.
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
const char * const pcName,
uint16_t usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pxCreatedTask );
Listing 13. The xTaskCreate() API function prototype
Table 8. xTaskCreate() parameters and return value
Parameter Name/
Returned Value
Description
pvTaskCode
Tasks are simply C functions that never exit and, as such, are normally
implemented as an infinite loop. The pvTaskCode parameter is simply a
pointer to the function that implements the task (in effect, just the name
of the function).

49
Table 8. xTaskCreate() parameters and return value
Parameter Name/
Returned Value
Description
pcName
A descriptive name for the task. This is not used by FreeRTOS in any
way. It is included purely as a debugging aid. Identifying a task by a
human readable name is much simpler than attempting to identify it by
its handle.
The application-defined constant configMAX_TASK_NAME_LEN
defines the maximum length a task name can take—including the NULL
terminator. Supplying a string longer than this maximum will result in
the string being silently truncated.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
50
Table 8. xTaskCreate() parameters and return value
Parameter Name/
Returned Value
Description
usStackDepth
Each task has its own unique stack that is allocated by the kernel to the
task when the task is created. The usStackDepth value tells the kernel
how large to make the stack.
The value specifies the number of words the stack can hold, not the
number of bytes. For example, if the stack is 32-bits wide and
usStackDepth is passed in as 100, then 400 bytes of stack space will be
allocated (100 * 4 bytes). The stack depth multiplied by the stack width
must not exceed the maximum value that can be contained in a variable
of type uint16_t.
The size of the stack used by the Idle task is defined by the application-
defined constant configMINIMAL_STACK_SIZE1. The value assigned
to this constant in the FreeRTOS demo application for the processor
architecture being used is the minimum recommended for any task. If
your task uses a lot of stack space, then you must assign a larger value.
There is no easy way to determine the stack space required by a task.
It is possible to calculate, but most users will simply assign what they
think is a reasonable value, then use the features provided by
FreeRTOS to ensure that the space allocated is indeed adequate, and
that RAM is not being wasted unnecessarily. Section 12.3, Stack
Overflow, contains information on how to query the maximum stack
space that has actually been used by a task.
pvParameters
Task functions accept a parameter of type pointer to void ( void* ). The
value assigned to pvParameters is the value passed into the task.
Some examples in this book demonstrate how the parameter can be
used.
1
This is the only way the FreeRTOS source code uses the configMINIMAL_STACK_SIZE setting,
although the constant is also used inside demo applications to help make the demos portable across
multiple processor architectures.

51
Table 8. xTaskCreate() parameters and return value
Parameter Name/
Returned Value
Description
uxPriority
Defines the priority at which the task will execute. Priorities can be
assigned from 0, which is the lowest priority, to
(configMAX_PRIORITIES – 1), which is the highest priority.
configMAX_PRIORITIES is a user defined constant that is described in
section 3.5.
Passing a uxPriority value above (configMAX_PRIORITIES – 1) will
result in the priority assigned to the task being capped silently to the
maximum legitimate value.
pxCreatedTask
pxCreatedTask can be used to pass out a handle to the task being
created. This handle can then be used to reference the task in API calls
that, for example, change the task priority or delete the task.
If your application has no use for the task handle, then pxCreatedTask
can be set to NULL.
Returned value
There are two possible return values:
1. pdPASS
This indicates that the task has been created successfully.
2. pdFAIL
This indicates that the task has not been created because there is
insufficient heap memory available for FreeRTOS to allocate enough
RAM to hold the task data structures and stack.
Chapter 2 provides more information on heap memory
management.
Example 1. Creating tasks
This example demonstrates the steps needed to create two simple tasks, then start the tasks
executing. The tasks simply print out a string periodically, using a crude null loop to create the
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
52
period delay. Both tasks are created at the same priority, and are identical except for the
string they print out—see Listing 14 and Listing 15 for their respective implementations.
void vTask1( void *pvParameters )
{
const char *pcTaskName = "Task 1 is running\r\n";
volatile uint32_t ul; /* volatile to ensure ul is not optimized away. */
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* Delay for a period. */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
/* This loop is just a very crude delay implementation. There is
nothing to do in here. Later examples will replace this crude
loop with a proper delay/sleep function. */
}
}
}
Listing 14. Implementation of the first task used in Example 1
void vTask2( void *pvParameters )
{
const char *pcTaskName = "Task 2 is running\r\n";
volatile uint32_t ul; /* volatile to ensure ul is not optimized away. */
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* Delay for a period. */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
/* This loop is just a very crude delay implementation. There is
nothing to do in here. Later examples will replace this crude
loop with a proper delay/sleep function. */
}
}
}
Listing 15. Implementation of the second task used in Example 1
The main() function creates the tasks before starting the scheduler—see Listing 16 for its
implementation.
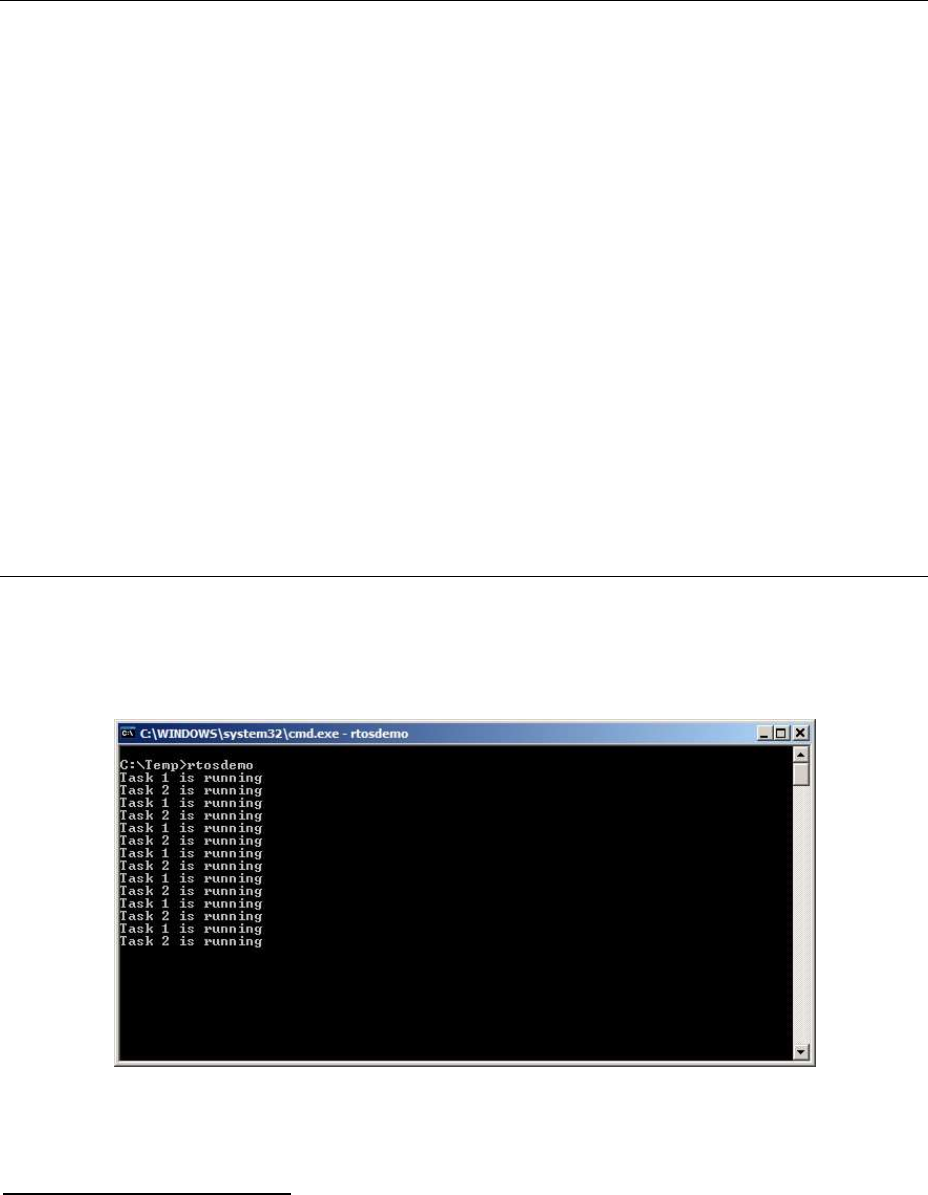
53
int main( void )
{
/* Create one of the two tasks. Note that a real application should check
the return value of the xTaskCreate() call to ensure the task was created
successfully. */
xTaskCreate( vTask1, /* Pointer to the function that implements the task. */
"Task 1",/* Text name for the task. This is to facilitate
debugging only. */
1000, /* Stack depth - small microcontrollers will use much
less stack than this. */
NULL, /* This example does not use the task parameter. */
1, /* This task will run at priority 1. */
NULL ); /* This example does not use the task handle. */
/* Create the other task in exactly the same way and at the same priority. */
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, NULL );
/* Start the scheduler so the tasks start executing. */
vTaskStartScheduler();
/* If all is well then main() will never reach here as the scheduler will
now be running the tasks. If main() does reach here then it is likely that
there was insufficient heap memory available for the idle task to be created.
Chapter 2 provides more information on heap memory management. */
for( ;; );
}
Listing 16. Starting the Example 1 tasks
Executing the example produces the output shown in Figure 10.
Figure 10. The output produced when Example 1 is executed
1
1
The screen shot shows each task printing out its message exactly once before the next task executes.
This is an artificial scenario that results from using the FreeRTOS Windows simulator. The Windows
simulator is not truly real time. Also writing to the Windows console takes a relatively long time and
results in a chain of Windows system calls. Executing the same code on a genuine embedded target
with a fast and non-blocking print function may result in each task printing its string many times before
being switched out to allow the other task to run.
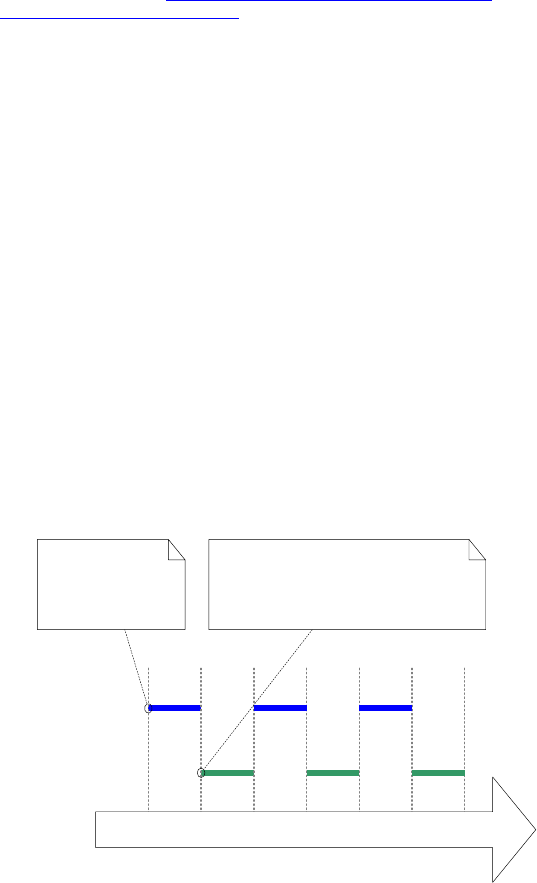
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
54
Figure 10 shows the two tasks appearing to execute simultaneously; however, as both tasks
are executing on the same processor core, this cannot be the case. In reality, both tasks are
rapidly entering and exiting the Running state. Both tasks are running at the same priority,
and so share time on the same processor core. Their actual execution pattern is shown in
Figure 11.
The arrow along the bottom of Figure 11 shows the passing of time from time t1 onwards. The
colored lines show which task is executing at each point in time—for example, Task 1 is
executing between time t1 and time t2.
Only one task can exist in the Running state at any one time. So, as one task enters the
Running state (the task is switched in), the other enters the Not Running state (the task is
switched out).
Time
Task 1
Task 2
t1 t2
At time t1, Task 1
enters the Running
state and executes
until time t2
t3
At time t2 Task 2 enters the Running
state and executes until time t3 - at
which point Task1 re-enters the
Running state
Figure 11. The actual execution pattern of the two Example 1 tasks
Example 1 created both tasks from within main(), prior to starting the scheduler. It is also
possible to create a task from within another task. For example, Task 2 could have been
created from within Task 1, as shown by Listing 17.

55
void vTask1( void *pvParameters )
{
const char *pcTaskName = "Task 1 is running\r\n";
volatile uint32_t ul; /* volatile to ensure ul is not optimized away. */
/* If this task code is executing then the scheduler must already have
been started. Create the other task before entering the infinite loop. */
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, NULL );
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* Delay for a period. */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
/* This loop is just a very crude delay implementation. There is
nothing to do in here. Later examples will replace this crude
loop with a proper delay/sleep function. */
}
}
}
Listing 17. Creating a task from within another task after the scheduler has started
Example 2. Using the task parameter
The two tasks created in Example 1 are almost identical, the only difference between them
being the text string they print out. This duplication can be removed by, instead, creating two
instances of a single task implementation. The task parameter can then be used to pass into
each task the string that it should print out.
Listing 18 contains the code of the single task function (vTaskFunction) used by Example 2.
This single function replaces the two task functions (vTask1 and vTask2) used in Example 1.
Note how the task parameter is cast to a char * to obtain the string the task should print out.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
56
void vTaskFunction( void *pvParameters )
{
char *pcTaskName;
volatile uint32_t ul; /* volatile to ensure ul is not optimized away. */
/* The string to print out is passed in via the parameter. Cast this to a
character pointer. */
pcTaskName = ( char * ) pvParameters;
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* Delay for a period. */
for( ul = 0; ul < mainDELAY_LOOP_COUNT; ul++ )
{
/* This loop is just a very crude delay implementation. There is
nothing to do in here. Later exercises will replace this crude
loop with a proper delay/sleep function. */
}
}
}
Listing 18. The single task function used to create two tasks in Example 2
Even though there is now only one task implementation (vTaskFunction), more than one
instance of the defined task can be created. Each created instance will execute independently
under the control of the FreeRTOS scheduler.
Listing 19 shows how the pvParameters parameter to the xTaskCreate() function is used to
pass the text string into the task.

57
/* Define the strings that will be passed in as the task parameters. These are
defined const and not on the stack to ensure they remain valid when the tasks are
executing. */
static const char *pcTextForTask1 = "Task 1 is running\r\n";
static const char *pcTextForTask2 = "Task 2 is running\r\n";
int main( void )
{
/* Create one of the two tasks. */
xTaskCreate( vTaskFunction, /* Pointer to the function that
implements the task. */
"Task 1", /* Text name for the task. This is to
facilitate debugging only. */
1000, /* Stack depth - small microcontrollers
will use much less stack than this. */
(void*)pcTextForTask1, /* Pass the text to be printed into the
task using the task parameter. */
1, /* This task will run at priority 1. */
NULL ); /* The task handle is not used in this
example. */
/* Create the other task in exactly the same way. Note this time that multiple
tasks are being created from the SAME task implementation (vTaskFunction). Only
the value passed in the parameter is different. Two instances of the same
task are being created. */
xTaskCreate( vTaskFunction, "Task 2", 1000, (void*)pcTextForTask2, 1, NULL );
/* Start the scheduler so the tasks start executing. */
vTaskStartScheduler();
/* If all is well then main() will never reach here as the scheduler will
now be running the tasks. If main() does reach here then it is likely that
there was insufficient heap memory available for the idle task to be created.
Chapter 2 provides more information on heap memory management. */
for( ;; );
}
Listing 19. The main() function for Example 2.
The output from Example 2 is exactly as per that shown for example 1 in Figure 10.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
58
3.5 Task Priorities
The uxPriority parameter of the xTaskCreate() API function assigns an initial priority to the task
being created. The priority can be changed after the scheduler has been started by using the
vTaskPrioritySet() API function.
The maximum number of priorities available is set by the application-defined
configMAX_PRIORITIES compile time configuration constant within FreeRTOSConfig.h. Low
numeric priority values denote low-priority tasks, with priority 0 being the lowest priority
possible. Therefore, the range of available priorities is 0 to (configMAX_PRIORITIES – 1).
Any number of tasks can share the same priority—ensuring maximum design flexibility.
The FreeRTOS scheduler can use one of two methods to decide which task will be in the
Running state. The maximum value to which configMAX_PRIORITIES can be set depends on
the method used:
1. Generic Method
The generic method is implemented in C, and can be used with all the FreeRTOS
architecture ports.
When the generic method is used, FreeRTOS does not limit the maximum value to
which configMAX_PRIORITIES can be set. However, it is always advisable to keep
the configMAX_PRIORITIES value at the minimum necessary, because the higher its
value, the more RAM will be consumed, and the longer the worst case execution time
will be.
The generic method will be used if
configUSE_PORT_OPTIMISED_TASK_SELECTION is set to 0 in FreeRTOSConfig.h,
or if configUSE_PORT_OPTIMISED_TASK_SELECTION is left undefined, or if the
generic method is the only method provided for the FreeRTOS port in use.
2. Architecture Optimized Method
The architecture optimized method uses a small amount of assembler code, and is
faster than the generic method. The configMAX_PRIORITIES setting does not affect
the worst case execution time.
59
If the architecture optimized method is used then configMAX_PRIORITIES cannot be
greater than 32. As with the generic method, it is advisable to keep
configMAX_PRIORITIES at the minimum necessary, as the higher its value, the more
RAM will be consumed.
The architecture optimized method will be used if
configUSE_PORT_OPTIMISED_TASK_SELECTION is set to 1 in FreeRTOSConfig.h.
Not all FreeRTOS ports provide an architecture optimized method.
The FreeRTOS scheduler will always ensure that the highest priority task that is able to run is
the task selected to enter the Running state. Where more than one task of the same priority is
able to run, the scheduler will transition each task into and out of the Running state, in turn.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
60
3.6 Time Measurement and the Tick Interrupt
Section 3.12, Scheduling Algorithms, describes an optional feature called ‘time slicing’. Time
slicing was used in the examples presented so far, and is the behavior observed in the output
they produced. In the examples, both tasks were created at the same priority, and both tasks
were always able to run. Therefore, each task executed for a ‘time slice’, entering the Running
state at the start of a time slice, and exiting the Running state at the end of a time slice. In
Figure 11, the time between t1 and t2 equals a single time slice.
To be able to select the next task to run, the scheduler itself must execute at the end of each
time slice
1
. A periodic interrupt, called the ‘tick interrupt’, is used for this purpose. The length
of the time slice is effectively set by the tick interrupt frequency, which is configured by the
application-defined configTICK_RATE_HZ compile time configuration constant within
FreeRTOSConfig.h. For example, if configTICK_RATE_HZ is set to 100 (Hz), then the time
slice will be 10 milliseconds. The time between two tick interrupts is called the ‘tick period’.
One time slice equals one tick period.
Figure 11 can be expanded to show the execution of the scheduler itself in the sequence of
execution. This is shown in Figure 12, in which the top line shows when the scheduler is
executing, and the thin arrows show the sequence of execution from a task to the tick
interrupt, then from the tick interrupt back to a different task.
The optimal value for configTICK_RATE_HZ is dependent on the application being developed,
although a value of 100 is typical.
1
It is important to note that the end of a time slice is not the only place that the scheduler can select a
new task to run; as will be demonstrated throughout this book, the scheduler will also select a new task
to run immediately after the currently executing task enters the Blocked state, or when an interrupt
moves a higher priority task into the Ready state.

61
Task 1
Task 2
t1 t2 t3
Kernel
Tick
interrupt
occurs
Kernel runs in tick
interrupt to select
next task
Newly selected task runs when
the tick interrupt completes
Figure 12. The execution sequence expanded to show the tick interrupt executing
FreeRTOS API calls always specify time in multiples of tick periods, which are often referred to
simply as ‘ticks’. The pdMS_TO_TICKS() macro converts a time specified in milliseconds into
a time specified in ticks. The resolution available depends on the defined tick frequency, and
pdMS_TO_TICKS() cannot be used if the tick frequency is above 1KHz (if
configTICK_RATE_HZ is greater than 1000). Listing 20 shows how to use pdMS_TO_TICKS()
to convert a time specified as 200 milliseconds into an equivalent time specified in ticks.
/* pdMS_TO_TICKS() takes a time in milliseconds as its only parameter, and evaluates
to the equivalent time in tick periods. This example shows xTimeInTicks being set to
the number of tick periods that are equivalent to 200 milliseconds. */
TickType_t xTimeInTicks = pdMS_TO_TICKS( 200 );
Listing 20. Using the pdMS_TO_TICKS() macro to convert 200 milliseconds into an
equivalent time in tick periods
Note: It is not recommended to specify times in ticks directly within the application, but instead
to use the pdMS_TO_TICKS() macro to specify times in milliseconds, and in so doing,
ensuring times specified within the application do not change if the tick frequency is changed.
The ‘tick count’ value is the total number of tick interrupts that have occurred since the
scheduler was started, assuming the tick count has not overflowed. User applications do not
have to consider overflows when specifying delay periods, as time consistency is managed
internally by FreeRTOS.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
62
Section 3.12, Scheduling Algorithms, describes configuration constants that affect when the
scheduler will select a new task to run, and when a tick interrupt will execute.
Example 3. Experimenting with priorities
The scheduler will always ensure that the highest priority task that is able to run is the task
selected to enter the Running state. In our examples so far, two tasks have been created at
the same priority, so both entered and exited the Running state in turn. This example looks at
what happens when the priority of one of the two tasks created in Example 2 is changed. This
time, the first task will be created at priority 1, and the second at priority 2. The code to create
the tasks is shown in Listing 21. The single function that implements both tasks has not
changed; it still simply prints out a string periodically, using a null loop to create a delay.
/* Define the strings that will be passed in as the task parameters. These are
defined const and not on the stack to ensure they remain valid when the tasks are
executing. */
static const char *pcTextForTask1 = "Task 1 is running\r\n";
static const char *pcTextForTask2 = "Task 2 is running\r\n";
int main( void )
{
/* Create the first task at priority 1. The priority is the second to last
parameter. */
xTaskCreate( vTaskFunction, "Task 1", 1000, (void*)pcTextForTask1, 1, NULL );
/* Create the second task at priority 2, which is higher than a priority of 1.
The priority is the second to last parameter. */
xTaskCreate( vTaskFunction, "Task 2", 1000, (void*)pcTextForTask2, 2, NULL );
/* Start the scheduler so the tasks start executing. */
vTaskStartScheduler();
/* Will not reach here. */
return 0;
}
Listing 21. Creating two tasks at different priorities
The output produced by Example 3 is shown in Figure 13.
The scheduler will always select the highest priority task that is able to run. Task 2 has a
higher priority than Task 1 and is always able to run; therefore, Task 2 is the only task to ever
enter the Running state. As Task 1 never enters the Running state, it never prints out its
string. Task 1 is said to be ‘starved’ of processing time by Task 2.
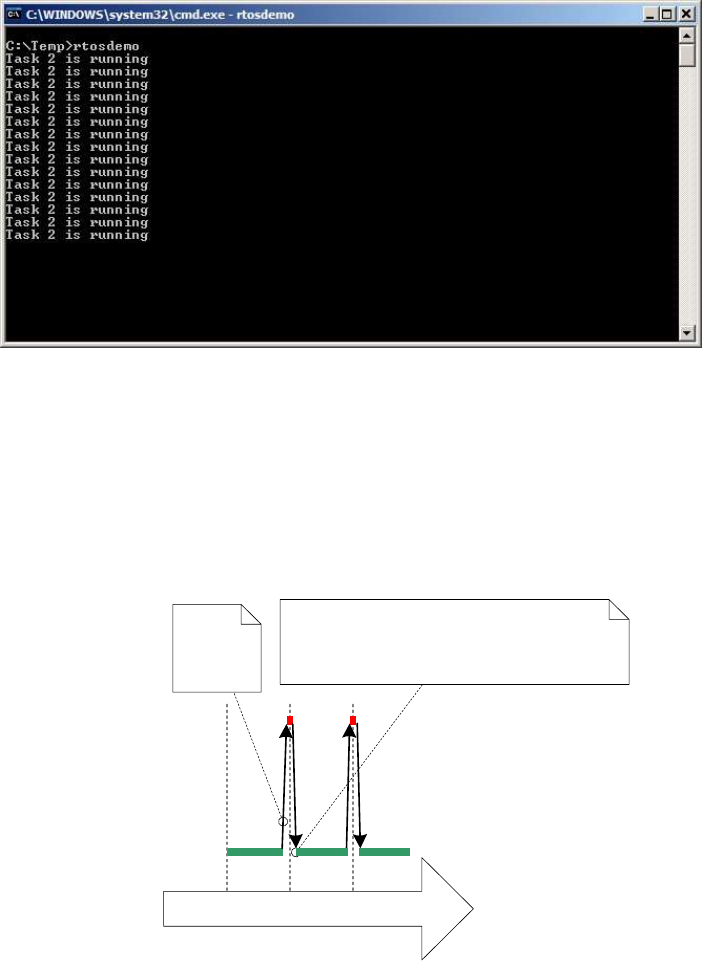
63
Figure 13. Running both tasks at different priorities
Task 2 is always able to run because it never has to wait for anything—it is either cycling
around a null loop, or printing to the terminal.
Figure 14 shows the execution sequence for Example 3.
Task 1
Task 2
t1 t2 t3
Kernel
Tick
interrupt
occurs
The scheduler runs in the tick interrupt
but selects the same task. Task 2 is
always in the Running state and Task 1 is
always in the Not Running state
Figure 14. The execution pattern when one task has a higher priority than the other

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
64
3.7 Expanding the ‘Not Running’ State
So far, the created tasks have always had processing to perform and have never had to wait
for anything—as they never have to wait for anything, they are always able to enter the
Running state. This type of ‘continuous processing’ task has limited usefulness, because they
can only be created at the very lowest priority. If they run at any other priority, they will prevent
tasks of lower priority ever running at all.
To make the tasks useful they must be re-written to be event-driven. An event-driven task has
work (processing) to perform only after the occurrence of the event that triggers it, and is not
able to enter the Running state before that event has occurred. The scheduler always selects
the highest priority task that is able to run. High priority tasks not being able to run means that
the scheduler cannot select them and must, instead, select a lower priority task that is able to
run. Therefore, using event-driven tasks means that tasks can be created at different priorities
without the highest priority tasks starving all the lower priority tasks of processing time.
The Blocked State
A task that is waiting for an event is said to be in the ‘Blocked’ state, which is a sub-state of the
Not Running state.
Tasks can enter the Blocked state to wait for two different types of event:
1. Temporal (time-related) events—the event being either a delay period expiring, or an
absolute time being reached. For example, a task may enter the Blocked state to wait
for 10 milliseconds to pass.
2. Synchronization events—where the events originate from another task or interrupt. For
example, a task may enter the Blocked state to wait for data to arrive on a queue.
Synchronization events cover a broad range of event types.
FreeRTOS queues, binary semaphores, counting semaphores, mutexes, recursive mutexes,
event groups and direct to task notifications can all be used to create synchronization events.
All these features are covered in future chapters of this book.
It is possible for a task to block on a synchronization event with a timeout, effectively blocking
on both types of event simultaneously. For example, a task may choose to wait for a
65
maximum of 10 milliseconds for data to arrive on a queue. The task will leave the Blocked
state if either data arrives within 10 milliseconds, or 10 milliseconds pass with no data arriving.
The Suspended State
‘Suspended’ is also a sub-state of Not Running. Tasks in the Suspended state are not
available to the scheduler. The only way into the Suspended state is through a call to the
vTaskSuspend() API function, the only way out being through a call to the vTaskResume() or
xTaskResumeFromISR() API functions. Most applications do not use the Suspended state.
The Ready State
Tasks that are in the Not Running state but are not Blocked or Suspended are said to be in the
Ready state. They are able to run, and therefore ‘ready’ to run, but are not currently in the
Running state.
Completing the State Transition Diagram
Figure 15 expands on the previous over-simplified state diagram to include all the Not Running
sub-states described in this section. The tasks created in the examples so far have not used
the Blocked or Suspended states; they have only transitioned between the Ready state and
the Running state—highlighted by the bold lines in Figure 15.
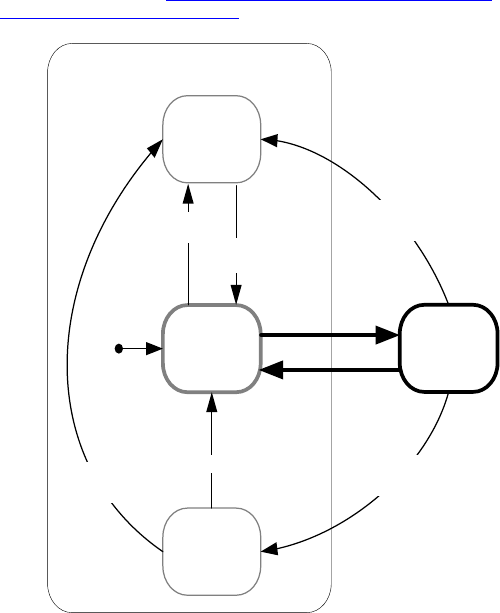
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
66
Not Running
(super state)
Ready
Blocked
Suspended
Running
Event Blocking API
function called
vTaskSuspend()
called
vTaskSuspend()
called vTaskResume()
called
vTaskSuspend()
called
Figure 15. Full task state machine
Example 4. Using the Blocked state to create a delay
All the tasks created in the examples presented so far have been ‘periodic’—they have
delayed for a period and printed out their string, before delaying once more, and so on. The
delay has been generated very crudely using a null loop—the task effectively polled an
incrementing loop counter until it reached a fixed value. Example 3 clearly demonstrated the
disadvantage of this method. The higher priority task remained in the Running state while it
executed the null loop, ‘starving’ the lower priority task of any processing time.
There are several other disadvantages to any form of polling, not least of which is its
inefficiency. During polling, the task does not really have any work to do, but it still uses
maximum processing time, and so wastes processor cycles. Example 4 corrects this behavior
by replacing the polling null loop with a call to the vTaskDelay() API function, the prototype for
which is shown in Listing 22. The new task definition is shown in Listing 23. Note that the
vTaskDelay() API function is available only when INCLUDE_vTaskDelay is set to 1 in
FreeRTOSConfig.h.
vTaskDelay() places the calling task into the Blocked state for a fixed number of tick interrupts.
The task does not use any processing time while it is in the Blocked state, so the task only
uses processing time when there is actually work to be done.
67
void vTaskDelay( TickType_t xTicksToDelay );
Listing 22. The vTaskDelay() API function prototype
Table 9. vTaskDelay() parameters
Parameter
Name
Description
xTicksToDelay
The number of tick interrupts that the calling task will remain in the Blocked
state before being transitioned back into the Ready state.
For example, if a task called vTaskDelay( 100 ) when the tick count was
10,000, then it would immediately enter the Blocked state, and remain in
the Blocked state until the tick count reached 10,100.
The macro pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks. For example, calling
vTaskDelay( pdMS_TO_TICKS( 100 ) ) will result in the calling task
remaining in the Blocked state for 100 milliseconds.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
68
void vTaskFunction( void *pvParameters )
{
char *pcTaskName;
const TickType_t xDelay250ms = pdMS_TO_TICKS( 250 );
/* The string to print out is passed in via the parameter. Cast this to a
character pointer. */
pcTaskName = ( char * ) pvParameters;
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* Delay for a period. This time a call to vTaskDelay() is used which places
the task into the Blocked state until the delay period has expired. The
parameter takes a time specified in ‘ticks’, and the pdMS_TO_TICKS() macro
is used (where the xDelay250ms constant is declared) to convert 250
milliseconds into an equivalent time in ticks. */
vTaskDelay( xDelay250ms );
}
}
Listing 23. The source code for the example task after the null loop delay has been
replaced by a call to vTaskDelay()
Even though the two tasks are still being created at different priorities, both will now run. The
output of Example 4, which is shown in Figure 16, confirms the expected behavior.
Figure 16. The output produced when Example 4 is executed
The execution sequence shown in Figure 17 explains why both tasks run, even though they
are created at different priorities. The execution of the scheduler itself is omitted for simplicity.
The idle task is created automatically when the scheduler is started, to ensure there is always
at least one task that is able to run (at least one task in the Ready state). Section 3.8, The Idle
Task and the Idle Task Hook, describes the Idle task in more detail.

69
Time
Task 1
Task 2
t1 t2 t3
Idle
tn
1 - Task 2 has the highest priority so runs first. It
prints out its string then calls vTaskDelay() - and in so
doing enters the Blocked state, permitting the lower
priority Task 1 to execute.
2 - Task 1 prints out its string, then it too
enters the Blocked state by calling
vTaskDelay().
3 - At this point both application tasks are in
the Blocked state - so the Idle task runs.
4 - When the delay expires the scheduler moves the
tasks back into the ready state, where both execute
again before once again calling vTaskDelay() causing
them to re-enter the Blocked state. Task 2 executes
first as it has the higher priority.
Figure 17. The execution sequence when the tasks use vTaskDelay() in place of the
NULL loop
Only the implementation of the two tasks has changed, not their functionality. Comparing
Figure 17 with Figure 12 demonstrates clearly that this functionality is being achieved in a
much more efficient manner.
Figure 12 shows the execution pattern when the tasks use a null loop to create a delay—so
are always able to run, and as a result use one hundred percent of the available processor
time between them. Figure 17 shows the execution pattern when the tasks enter the Blocked
state for the entirety of their delay period, so use processor time only when they actually have
work that needs to be performed (in this case simply a message to be printed out), and as a
result only use a tiny fraction of the available processing time.
In the Figure 17 scenario, each time the tasks leave the Blocked state they execute for a
fraction of a tick period before re-entering the Blocked state. Most of the time there are no
application tasks that are able to run (no application tasks in the Ready state) and, therefore,
no application tasks that can be selected to enter the Running state. While this is the case,
the idle task will run. The amount of processing time allocated to the idle is a measure of the
spare processing capacity in the system. Using an RTOS can significantly increase the spare
processing capacity simply by allowing an application to be completely event driven.
The bold lines in Figure 18 show the transitions performed by the tasks in Example 4, with
each now transitioning through the Blocked state before being returned to the Ready state.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
70
Not Running
(super state)
Ready
Blocked
Suspended
Running
Event Blocking API
function called
vTaskSuspend()
called
vTaskSuspend()
called vTaskResume()
called
vTaskSuspend()
called
Figure 18. Bold lines indicate the state transitions performed
by the tasks in Example 4
The vTaskDelayUntil() API Function
vTaskDelayUntil() is similar to vTaskDelay(). As just demonstrated, the vTaskDelay()
parameter specifies the number of tick interrupts that should occur between a task calling
vTaskDelay(), and the same task once again transitioning out of the Blocked state. The length
of time the task remains in the blocked state is specified by the vTaskDelay() parameter, but
the time at which the task leaves the blocked state is relative to the time at which vTaskDelay()
was called.
The parameters to vTaskDelayUntil() specify, instead, the exact tick count value at which the
calling task should be moved from the Blocked state into the Ready state. vTaskDelayUntil()
is the API function that should be used when a fixed execution period is required (where you
want your task to execute periodically with a fixed frequency), as the time at which the calling
task is unblocked is absolute, rather than relative to when the function was called (as is the
case with vTaskDelay()).

71
void vTaskDelayUntil( TickType_t * pxPreviousWakeTime, TickType_t xTimeIncrement );
Listing 24. vTaskDelayUntil() API function prototype
Table 10. vTaskDelayUntil() parameters
Parameter Name
Description
pxPreviousWakeTime
This parameter is named on the assumption that vTaskDelayUntil()
is being used to implement a task that executes periodically and
with a fixed frequency. In this case, pxPreviousWakeTime holds
the time at which the task last left the Blocked state (was ‘woken’
up). This time is used as a reference point to calculate the time at
which the task should next leave the Blocked state.
The variable pointed to by pxPreviousWakeTime is updated
automatically within the vTaskDelayUntil() function; it would not
normally be modified by the application code, but must be initialized
to the current tick count before it is used for the first time. Listing 25
demonstrates how the initialization is performed.
xTimeIncrement
This parameter is also named on the assumption that
vTaskDelayUntil() is being used to implement a task that executes
periodically and with a fixed frequency—the frequency being set by
the xTimeIncrement value.
xTimeIncrement is specified in ‘ticks’. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
Example 5. Converting the example tasks to use vTaskDelayUntil()
The two tasks created in Example 4 are periodic tasks, but using vTaskDelay() does not
guarantee that the frequency at which they run is fixed, as the time at which the tasks leave
the Blocked state is relative to when they call vTaskDelay(). Converting the tasks to use
vTaskDelayUntil() instead of vTaskDelay() solves this potential problem.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
72
void vTaskFunction( void *pvParameters )
{
char *pcTaskName;
TickType_t xLastWakeTime;
/* The string to print out is passed in via the parameter. Cast this to a
character pointer. */
pcTaskName = ( char * ) pvParameters;
/* The xLastWakeTime variable needs to be initialized with the current tick
count. Note that this is the only time the variable is written to explicitly.
After this xLastWakeTime is automatically updated within vTaskDelayUntil(). */
xLastWakeTime = xTaskGetTickCount();
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( pcTaskName );
/* This task should execute every 250 milliseconds exactly. As per
the vTaskDelay() function, time is measured in ticks, and the
pdMS_TO_TICKS() macro is used to convert milliseconds into ticks.
xLastWakeTime is automatically updated within vTaskDelayUntil(), so is not
explicitly updated by the task. */
vTaskDelayUntil( &xLastWakeTime, pdMS_TO_TICKS( 250 ) );
}
}
Listing 25. The implementation of the example task using vTaskDelayUntil()
The output produced by Example 5 is exactly as per that shown for Example 4 in Figure 16.
Example 6. Combining blocking and non-blocking tasks
Previous examples have examined the behavior of both polling and blocking tasks in isolation.
This example re-enforces the stated expected system behavior by demonstrating an execution
sequence when the two schemes are combined, as follows.
1. Two tasks are created at priority 1. These do nothing other than continuously print out
a string.
These tasks never make any API function calls that could cause them to enter the
Blocked state, so are always in either the Ready or the Running state. Tasks of this
nature are called ‘continuous processing’ tasks, as they always have work to do (albeit
rather trivial work, in this case). The source for the continuous processing tasks is
shown in Listing 26.
2. A third task is then created at priority 2, so above the priority of the other two tasks.
The third task also just prints out a string, but this time periodically, so uses the

73
vTaskDelayUntil() API function to place itself into the Blocked state between each print
iteration.
The source for the periodic task is shown in Listing 27.
void vContinuousProcessingTask( void *pvParameters )
{
char *pcTaskName;
/* The string to print out is passed in via the parameter. Cast this to a
character pointer. */
pcTaskName = ( char * ) pvParameters;
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. This task just does this repeatedly
without ever blocking or delaying. */
vPrintString( pcTaskName );
}
}
Listing 26. The continuous processing task used in Example 6
void vPeriodicTask( void *pvParameters )
{
TickType_t xLastWakeTime;
const TickType_t xDelay3ms = pdMS_TO_TICKS( 3 );
/* The xLastWakeTime variable needs to be initialized with the current tick
count. Note that this is the only time the variable is explicitly written to.
After this xLastWakeTime is managed automatically by the vTaskDelayUntil()
API function. */
xLastWakeTime = xTaskGetTickCount();
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task. */
vPrintString( "Periodic task is running\r\n" );
/* The task should execute every 3 milliseconds exactly – see the
declaration of xDelay3ms in this function. */
vTaskDelayUntil( &xLastWakeTime, xDelay3ms );
}
}
Listing 27. The periodic task used in Example 6
Figure 19 shows the output produced by Example 6, with an explanation of the observed
behavior given by the execution sequence shown in Figure 20.
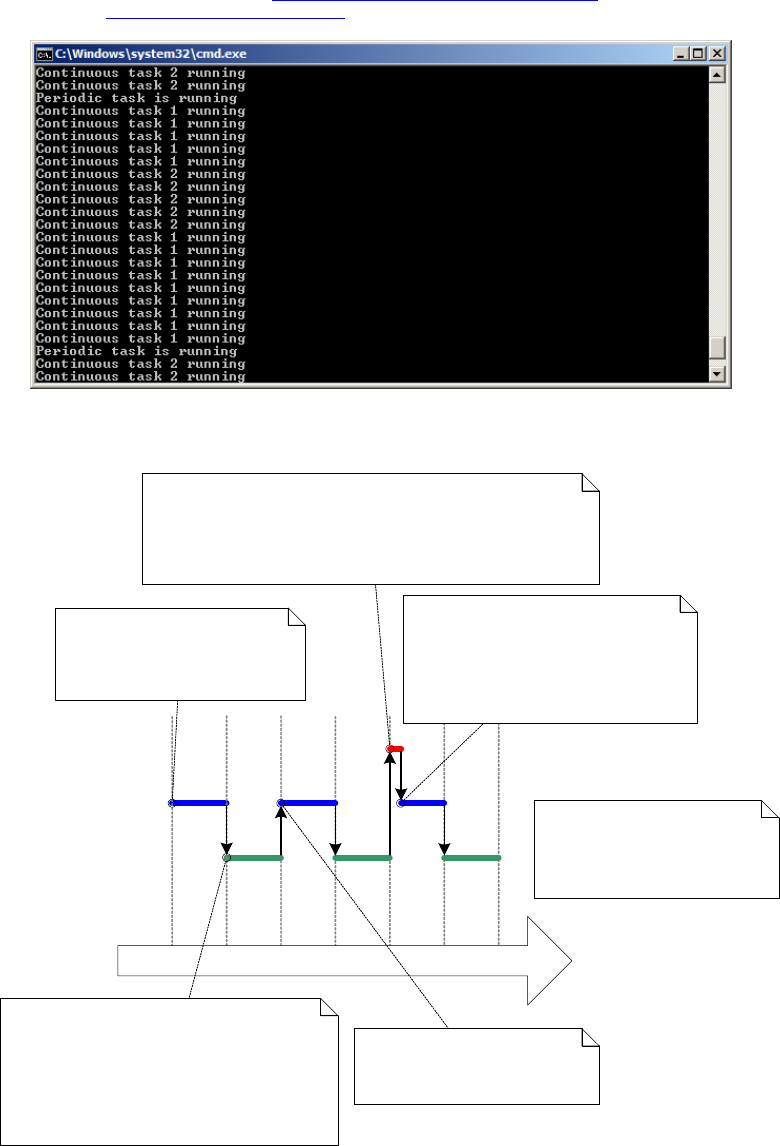
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
74
Figure 19. The output produced when Example 6 is executed
Time
Continuous 2
Idle
t1 t2
1 - Continuous task 1 runs for a
complete tick period (time slice
between times t1 and t2) - during
which time it could print out its
string many times.
t3
2 - The tick interrupt occurs during which the
scheduler selects a new task to run. As both
Continuous tasks have the same priority and
both are always able to run the scheduler
shares processing time between the two - so
Continuous 2 enters the Running state where it
remains for the entire tick period - during which
time it could print out its string many times.
Continuous 1
Periodic
3 - At time t3 the tick interrupt
runs again, causing a switch back
to Continuous 1, and so it goes
on.
t5
4 - At time t5 the tick interrupt finds that the Periodic task block
period has expired so moved the Periodic task into the Ready
state. The Periodic task is the highest priority task so
immediately then enters the Running state where it prints out its
string exactly once before calling vTaskDelayUntil() to return to
the Blocked state.
The Idle task never enters the
Running state as there are
always higher priority task that
are able to do so.
5 - The Periodic task entering the
Blocked state means the scheduler has
again to choose a task to enter the
Running state - in this case Continuous
1 is chosen and it runs up to the next tick
interrupt - during which time it could print
out its string many times.
Figure 20. The execution pattern of Example 6

75
3.8 The Idle Task and the Idle Task Hook
The tasks created in Example 4 spend most of their time in the Blocked state. While in this
state, they are not able to run, so cannot be selected by the scheduler.
There must always be at least one task that can enter the Running state
1
. To ensure this is
the case, an Idle task is automatically created by the scheduler when vTaskStartScheduler() is
called. The idle task does very little more than sit in a loop—so, like the tasks in the original
first examples, it is always able to run.
The idle task has the lowest possible priority (priority zero), to ensure it never prevents a
higher priority application task from entering the Running state—although there is nothing to
prevent application designers creating tasks at, and therefore sharing, the idle task priority, if
desired. The configIDLE_SHOULD_YIELD compile time configuration constant in
FreeRTOSConfig.h can be used to prevent the Idle task from consuming processing time that
would be more productively allocated to applications tasks. configIDLE_SHOULD_YIELD is
described in section 3.12, Scheduling Algorithms.
Running at the lowest priority ensures the Idle task is transitioned out of the Running state as
soon as a higher priority task enters the Ready state. This can be seen at time tn in Figure 17,
where the Idle task is immediately swapped out to allow Task 2 to execute at the instant Task
2 leaves the Blocked state. Task 2 is said to have pre-empted the idle task. Pre-emption
occurs automatically, and without the knowledge of the task being pre-empted.
Note: If an application uses the vTaskDelete() API function then it is essential that the Idle task
is not starved of processing time. This is because the Idle task is responsible for cleaning up
kernel resources after a task has been deleted.
Idle Task Hook Functions
It is possible to add application specific functionality directly into the idle task through the use
of an idle hook (or idle callback) function—a function that is called automatically by the idle
task once per iteration of the idle task loop.
1
This is the case even when the special low power features of FreeRTOS are being used, in which
case the microcontroller on which FreeRTOS is executing will be placed into a low power mode if none
of the tasks created by the application are able to execute.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
76
Common uses for the Idle task hook include:
Executing low priority, background, or continuous processing functionality.
Measuring the amount of spare processing capacity. (The idle task will run only when
all higher priority application tasks have no work to perform; so measuring the amount
of processing time allocated to the idle task provides a clear indication of how much
processing time is spare.)
Placing the processor into a low power mode, providing an easy and automatic method
of saving power whenever there is no application processing to be performed (although
the power saving that can be achieved using this method is less than can be achieved
by using the tick-less idle mode described in Chapter 10, Low Power Support).
Limitations on the Implementation of Idle Task Hook Functions
Idle task hook functions must adhere to the following rules.
1. An Idle task hook function must never attempt to block or suspend.
Note: Blocking the idle task in any way could cause a scenario where no tasks are
available to enter the Running state.
2. If the application makes use of the vTaskDelete() API function, then the Idle task hook
must always return to its caller within a reasonable time period. This is because the
Idle task is responsible for cleaning up kernel resources after a task has been deleted.
If the idle task remains permanently in the Idle hook function, then this clean-up cannot
occur.
Idle task hook functions must have the name and prototype shown by Listing 28.
void vApplicationIdleHook( void );
Listing 28. The idle task hook function name and prototype
Example 7. Defining an idle task hook function
The use of blocking vTaskDelay() API calls in Example 4 created a lot of idle time—time when
the Idle task is executing because both application tasks are in the Blocked state. Example 7

77
makes use of this idle time through the addition of an Idle hook function, the source for which
is shown in Listing 29.
/* Declare a variable that will be incremented by the hook function. */
volatile uint32_t ulIdleCycleCount = 0UL;
/* Idle hook functions MUST be called vApplicationIdleHook(), take no parameters,
and return void. */
void vApplicationIdleHook( void )
{
/* This hook function does nothing but increment a counter. */
ulIdleCycleCount++;
}
Listing 29. A very simple Idle hook function
configUSE_IDLE_HOOK must be set to 1 in FreeRTOSConfig.h for the idle hook function to
get called.
The function that implements the created tasks is modified slightly to print out the
ulIdleCycleCount value, as shown in Listing 30.
void vTaskFunction( void *pvParameters )
{
char *pcTaskName;
const TickType_t xDelay250ms = pdMS_TO_TICKS( 250 );
/* The string to print out is passed in via the parameter. Cast this to a
character pointer. */
pcTaskName = ( char * ) pvParameters;
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Print out the name of this task AND the number of times ulIdleCycleCount
has been incremented. */
vPrintStringAndNumber( pcTaskName, ulIdleCycleCount );
/* Delay for a period of 250 milliseconds. */
vTaskDelay( xDelay250ms );
}
}
Listing 30. The source code for the example task now prints out the
ulIdleCycleCount value
The output produced by Example 7 is shown in Figure 21. It shows the idle task hook function
is called approximately 4 million times between each iteration of the application tasks (the
number of iterations is dependent on the speed of the hardware on which the demo is
executed).
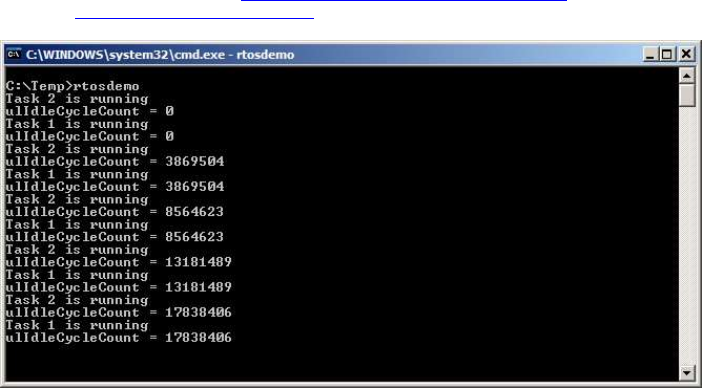
79
3.9 Changing the Priority of a Task
The vTaskPrioritySet() API Function
The vTaskPrioritySet() API function can be used to change the priority of any task after the
scheduler has been started. Note that the vTaskPrioritySet() API function is available only
when INCLUDE_vTaskPrioritySet is set to 1 in FreeRTOSConfig.h.
void vTaskPrioritySet( TaskHandle_t pxTask, UBaseType_t uxNewPriority );
Listing 31. The vTaskPrioritySet() API function prototype
Table 11. vTaskPrioritySet() parameters
Parameter Name
Description
pxTask
The handle of the task whose priority is being modified (the subject
task)—see the pxCreatedTask parameter of the xTaskCreate() API
function for information on obtaining handles to tasks.
A task can change its own priority by passing NULL in place of a valid
task handle.
uxNewPriority
The priority to which the subject task is to be set. This is capped
automatically to the maximum available priority of
(configMAX_PRIORITIES – 1), where configMAX_PRIORITIES is a
compile time constant set in the FreeRTOSConfig.h header file.
The uxTaskPriorityGet() API Function
The uxTaskPriorityGet() API function can be used to query the priority of a task. Note that the
uxTaskPriorityGet() API function is available only when INCLUDE_uxTaskPriorityGet is set to
1 in FreeRTOSConfig.h.
UBaseType_t uxTaskPriorityGet( TaskHandle_t pxTask );
Listing 32. The uxTaskPriorityGet() API function prototype

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
80
Table 12. uxTaskPriorityGet() parameters and return value
Parameter Name/
Return Value
Description
pxTask
The handle of the task whose priority is being queried (the subject
task)—see the pxCreatedTask parameter of the xTaskCreate() API
function for information on obtaining handles to tasks.
A task can query its own priority by passing NULL in place of a valid
task handle.
Returned value
The priority currently assigned to the task being queried.
Example 8. Changing task priorities
The scheduler will always select the highest Ready state task as the task to enter the Running
state. Example 8 demonstrates this by using the vTaskPrioritySet() API function to change the
priority of two tasks relative to each other.
Example 8 creates two tasks at two different priorities. Neither task makes any API function
calls that could cause it to enter the Blocked state, so both are always in either the Ready
state or the Running state. Therefore, the task with the highest relative priority will always be
the task selected by the scheduler to be in the Running state.
Example 8 behaves as follows:
1. Task 1 (Listing 33) is created with the highest priority, so is guaranteed to run first.
Task 1 prints out a couple of strings before raising the priority of Task 2 (Listing 34) to
above its own priority.
2. Task 2 starts to run (enters the Running state) as soon as it has the highest relative
priority. Only one task can be in the Running state at any one time, so when Task 2 is
in the Running state, Task 1 is in the Ready state.
3. Task 2 prints out a message before setting its own priority back down to below that of
Task 1.
4. Task 2 setting its priority back down means Task 1 is once again the highest priority
task, so Task 1 re-enters the Running state, forcing Task 2 back into the Ready state.

81
void vTask1( void *pvParameters )
{
UBaseType_t uxPriority;
/* This task will always run before Task 2 as it is created with the higher
priority. Neither Task 1 nor Task 2 ever block so both will always be in
either the Running or the Ready state.
Query the priority at which this task is running - passing in NULL means
"return the calling task’s priority". */
uxPriority = uxTaskPriorityGet( NULL );
for( ;; )
{
/* Print out the name of this task. */
vPrintString( "Task 1 is running\r\n" );
/* Setting the Task 2 priority above the Task 1 priority will cause
Task 2 to immediately start running (as then Task 2 will have the higher
priority of the two created tasks). Note the use of the handle to task
2 (xTask2Handle) in the call to vTaskPrioritySet(). Listing 35 shows how
the handle was obtained. */
vPrintString( "About to raise the Task 2 priority\r\n" );
vTaskPrioritySet( xTask2Handle, ( uxPriority + 1 ) );
/* Task 1 will only run when it has a priority higher than Task 2.
Therefore, for this task to reach this point, Task 2 must already have
executed and set its priority back down to below the priority of this
task. */
}
}
Listing 33. The implementation of Task 1 in Example 8

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
82
void vTask2( void *pvParameters )
{
UBaseType_t uxPriority;
/* Task 1 will always run before this task as Task 1 is created with the
higher priority. Neither Task 1 nor Task 2 ever block so will always be
in either the Running or the Ready state.
Query the priority at which this task is running - passing in NULL means
"return the calling task’s priority". */
uxPriority = uxTaskPriorityGet( NULL );
for( ;; )
{
/* For this task to reach this point Task 1 must have already run and
set the priority of this task higher than its own.
Print out the name of this task. */
vPrintString( "Task 2 is running\r\n" );
/* Set the priority of this task back down to its original value.
Passing in NULL as the task handle means "change the priority of the
calling task". Setting the priority below that of Task 1 will cause
Task 1 to immediately start running again – pre-empting this task. */
vPrintString( "About to lower the Task 2 priority\r\n" );
vTaskPrioritySet( NULL, ( uxPriority - 2 ) );
}
}
Listing 34. The implementation of Task 2 in Example 8
Each task can both query and set its own priority without the use of a valid task handle, by
simply using NULL, instead. A task handle is required only when a task wishes to reference a
task other than itself, such as when Task 1 changes the priority of Task 2. To allow Task 1 to
do this, the Task 2 handle is obtained and saved when Task 2 is created, as highlighted in the
comments in Listing 35.
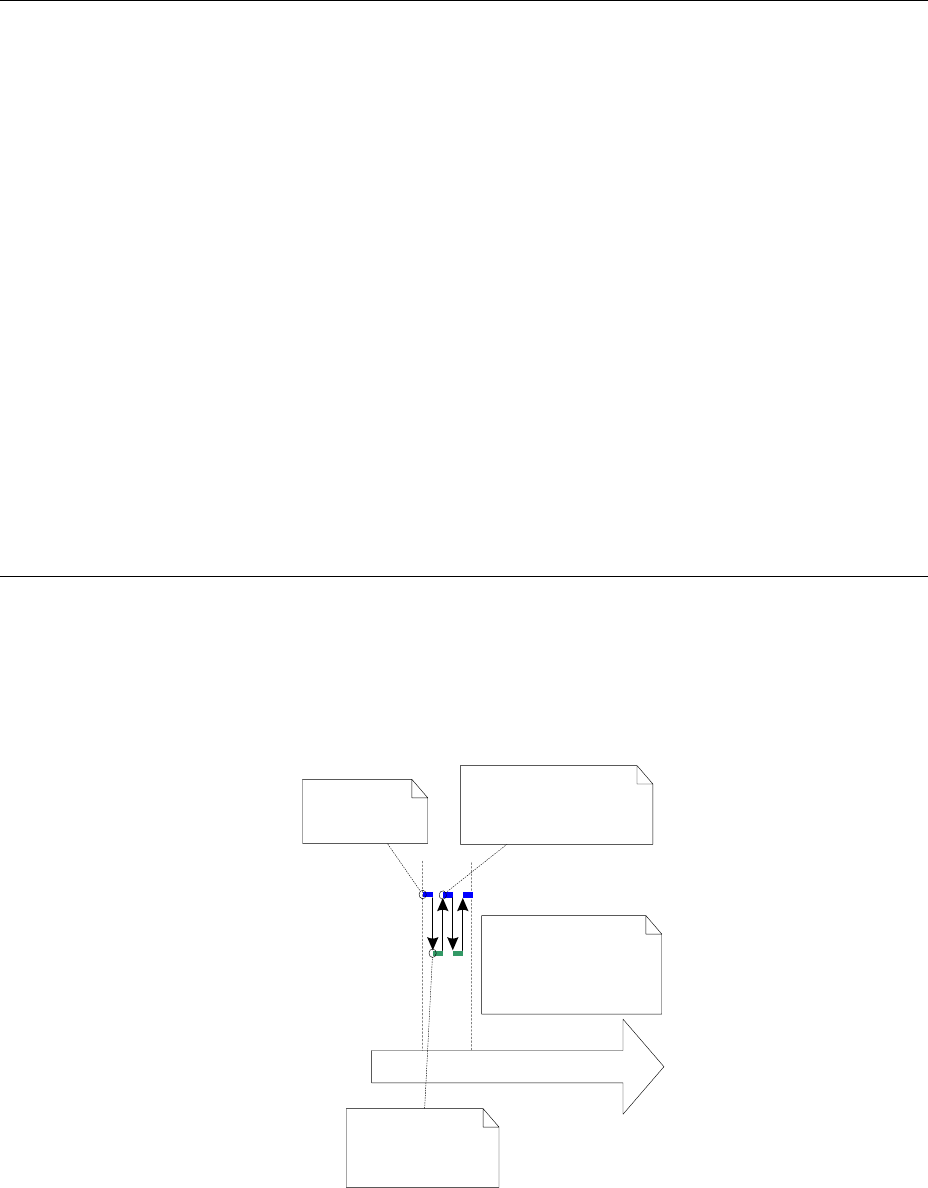
83
/* Declare a variable that is used to hold the handle of Task 2. */
TaskHandle_t xTask2Handle = NULL;
int main( void )
{
/* Create the first task at priority 2. The task parameter is not used
and set to NULL. The task handle is also not used so is also set to NULL. */
xTaskCreate( vTask1, "Task 1", 1000, NULL, 2, NULL );
/* The task is created at priority 2 ______^. */
/* Create the second task at priority 1 - which is lower than the priority
given to Task 1. Again the task parameter is not used so is set to NULL -
BUT this time the task handle is required so the address of xTask2Handle
is passed in the last parameter. */
xTaskCreate( vTask2, "Task 2", 1000, NULL, 1, &xTask2Handle );
/* The task handle is the last parameter _____^^^^^^^^^^^^^ */
/* Start the scheduler so the tasks start executing. */
vTaskStartScheduler();
/* If all is well then main() will never reach here as the scheduler will
now be running the tasks. If main() does reach here then it is likely there
was insufficient heap memory available for the idle task to be created.
Chapter 2 provides more information on heap memory management. */
for( ;; );
}
Listing 35. The implementation of main() for Example 8
Figure 22 demonstrates the sequence in which the Example 8 tasks execute, with the
resultant output shown in Figure 23.
Time
Task 1
Task 2
t1 t2
Idle
1 - Task1 runs
first as it has the
highest priority
2 - Task2 runs each
time Task1 sets the
Task2 priority to be
the highest
3 - Task1 runs again when
Task2 lowers its own priority
back to being below the
Task1 priority, and so on
The Idle task never runs
as both application tasks
are always able to run and
always have a priority
above the idle priority
Figure 22. The sequence of task execution when running Example 8
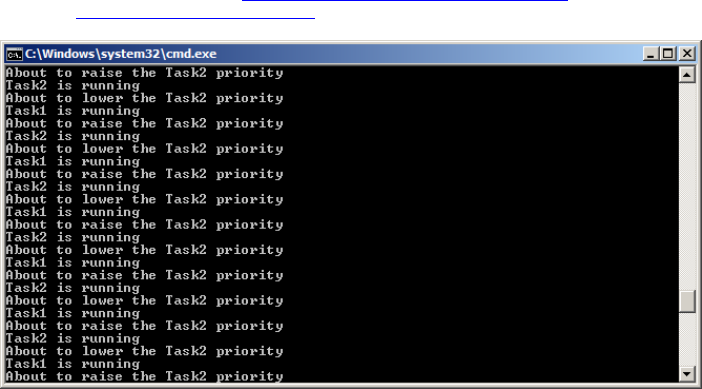
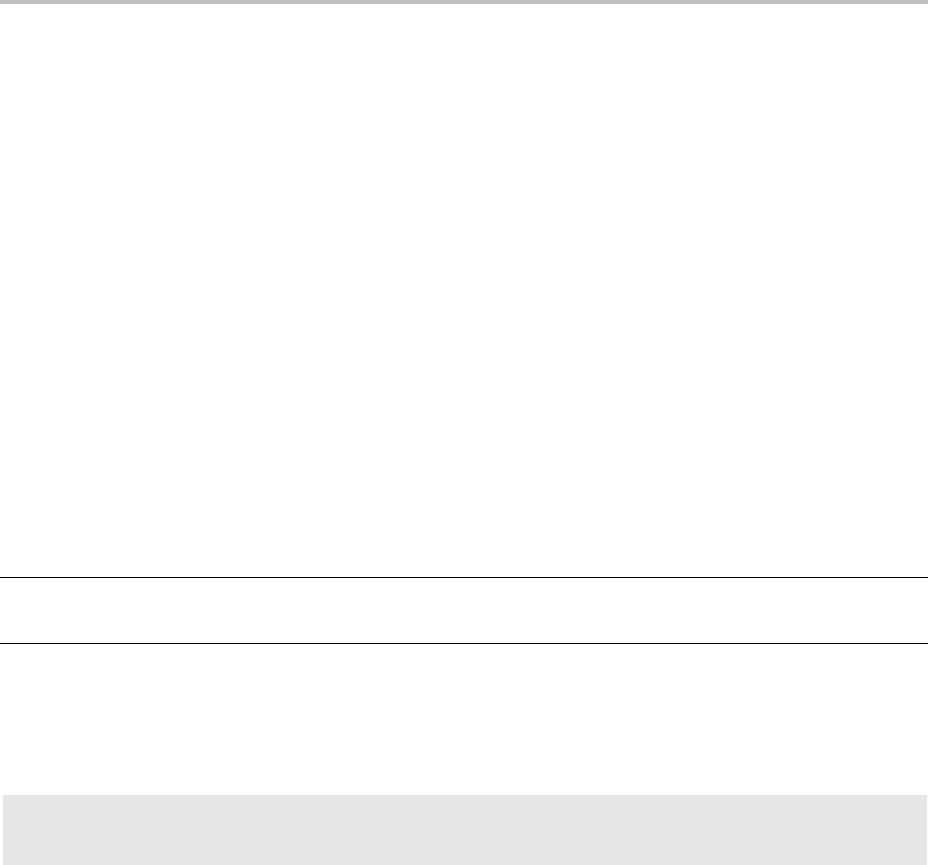
85
3.10 Deleting a Task
The vTaskDelete() API Function
A task can use the vTaskDelete() API function to delete itself, or any other task. Note that the
vTaskDelete() API function is available only when INCLUDE_vTaskDelete is set to 1 in
FreeRTOSConfig.h.
Deleted tasks no longer exist and cannot enter the Running state again.
It is the responsibility of the idle task to free memory allocated to tasks that have since been
deleted. Therefore, it is important that applications using the vTaskDelete() API function do
not completely starve the idle task of all processing time.
Note: Only memory allocated to a task by the kernel itself will be freed automatically when the
task is deleted. Any memory or other resource that the implementation of the task allocated
must be freed explicitly.
void vTaskDelete( TaskHandle_t pxTaskToDelete );
Listing 36. The vTaskDelete() API function prototype
Table 13. vTaskDelete() parameters
Parameter Name/
Return Value
Description
pxTaskToDelete
The handle of the task that is to be deleted (the subject task)—see the
pxCreatedTask parameter of the xTaskCreate() API function for
information on obtaining handles to tasks.
A task can delete itself by passing NULL in place of a valid task handle.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
86
Example 9. Deleting tasks
This is a very simple example that behaves as follows.
1. Task 1 is created by main() with priority 1. When it runs, it creates Task 2 at priority 2.
Task 2 is now the highest priority task, so it starts to execute immediately. The source
for main() is shown in Listing 37, and the source for Task 1 is shown in Listing 38.
2. Task 2 does nothing other than delete itself. It could delete itself by passing NULL to
vTaskDelete() but instead, for demonstration purposes, it uses its own task handle.
The source for Task 2 is shown in Listing 39.
3. When Task 2 has been deleted, Task 1 is again the highest priority task, so continues
executing—at which point it calls vTaskDelay() to block for a short period.
4. The Idle task executes while Task 1 is in the blocked state and frees the memory that
was allocated to the now deleted Task 2.
5. When Task 1 leaves the blocked state it again becomes the highest priority Ready
state task and so pre-empts the Idle task. When it enters the Running state it creates
Task 2 again, and so it goes on.
int main( void )
{
/* Create the first task at priority 1. The task parameter is not used
so is set to NULL. The task handle is also not used so likewise is set
to NULL. */
xTaskCreate( vTask1, "Task 1", 1000, NULL, 1, NULL );
/* The task is created at priority 1 ______^. */
/* Start the scheduler so the task starts executing. */
vTaskStartScheduler();
/* main() should never reach here as the scheduler has been started. */
for( ;; );
}
Listing 37. The implementation of main() for Example 9

87
TaskHandle_t xTask2Handle = NULL;
void vTask1( void *pvParameters )
{
const TickType_t xDelay100ms = pdMS_TO_TICKS( 100UL );
for( ;; )
{
/* Print out the name of this task. */
vPrintString( "Task 1 is running\r\n" );
/* Create task 2 at a higher priority. Again the task parameter is not
used so is set to NULL - BUT this time the task handle is required so
the address of xTask2Handle is passed as the last parameter. */
xTaskCreate( vTask2, "Task 2", 1000, NULL, 2, &xTask2Handle );
/* The task handle is the last parameter _____^^^^^^^^^^^^^ */
/* Task 2 has/had the higher priority, so for Task 1 to reach here Task 2
must have already executed and deleted itself. Delay for 100
milliseconds. */
vTaskDelay( xDelay100ms );
}
}
Listing 38. The implementation of Task 1 for Example 9
void vTask2( void *pvParameters )
{
/* Task 2 does nothing but delete itself. To do this it could call vTaskDelete()
using NULL as the parameter, but instead, and purely for demonstration purposes,
it calls vTaskDelete() passing its own task handle. */
vPrintString( "Task 2 is running and about to delete itself\r\n" );
vTaskDelete( xTask2Handle );
}
Listing 39. The implementation of Task 2 for Example 9
Figure 24. The output produced when Example 9 is executed

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
88
Time
Task 2
Task 1
t1 t2
Idle
1 - Task 1 runs and creates Task 2.
Task 2 starts to run immediately as it
has the higher priority.
2 - Task 2 does nothing other than delete
itself, allowing execution to return to Task 1.
tn
3 - Task 1 calls vTaskDelay(), allowing
the idle task to run until the delay time
expires, and the whole sequence repeats.
Figure 25. The execution sequence for example 9

89
3.11 Thread Local Storage
TBD. This section will be written prior to final publication.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
90
3.12 Scheduling Algorithms
A Recap of Task States and Events
The task that is actually running (using processing time) is in the Running state. On a single
core processor there can only be one task in the Running state at any given time.
Tasks that are not actually running, but are not in either the Blocked state or the Suspended
state, are in the Ready state. Tasks that are in the Ready state are available to be selected by
the scheduler as the task to enter the Running state. The scheduler will always choose the
highest priority Ready state task to enter the Running state.
Tasks can wait in the Blocked state for an event and are automatically moved back to the
Ready state when the event occurs. Temporal events occur at a particular time, for example,
when a block time expires, and are normally used to implement periodic or timeout behavior.
Synchronization events occur when a task or interrupt service routine sends information using
a task notification, queue, event group, or one of the many types of semaphore. They are
generally used to signal asynchronous activity, such as data arriving at a peripheral.
Configuring the Scheduling Algorithm
The scheduling algorithm is the software routine that decides which Ready state task to
transition into the Running state.
All the examples so far have used the same scheduling algorithm, but the algorithm can be
changed using the configUSE_PREEMPTION and configUSE_TIME_SLICING configuration
constants. Both constants are defined in FreeRTOSConfig.h.
A third configuration constant, configUSE_TICKLESS_IDLE, also affects the scheduling
algorithm, as its use can result in the tick interrupt being turned off completely for extended
periods. configUSE_TICKLESS_IDLE is an advanced option provided specifically for use in
applications that must minimize their power consumption. configUSE_TICKLESS_IDLE is
described in Chapter 10, Low Power Support. The descriptions provided in this section
assume configUSE_TICKLESS_IDLE is set to 0, which is the default setting if the constant is
left undefined.
In all possible configurations the FreeRTOS scheduler will ensure tasks that share a priority
are selected to enter the Running state in turn. This ‘take it in turn’ policy is often referred to

91
as ‘Round Robin Scheduling’. A Round Robin scheduling algorithm does not guarantee time
is shared equally between tasks of equal priority, only that Ready state tasks of equal priority
will enter the Running state in turn.
Prioritized Pre-emptive Scheduling with Time Slicing
The configuration shown in Table 14 sets the FreeRTOS scheduler to use a scheduling
algorithm called ‘Fixed Priority Pre-emptive Scheduling with Time Slicing’, which is the
scheduling algorithm used by most small RTOS applications, and the algorithm used by all the
examples presented in this book so far. A description of the terminology used in the
algorithm’s name is provided in Table 15.
Table 14. The FreeRTOSConfig.h settings that configure the kernel to use
Prioritized Pre-emptive Scheduling with Time Slicing
Constant
Value
configUSE_PREEMPTION
1
configUSE_TIME_SLICING
1
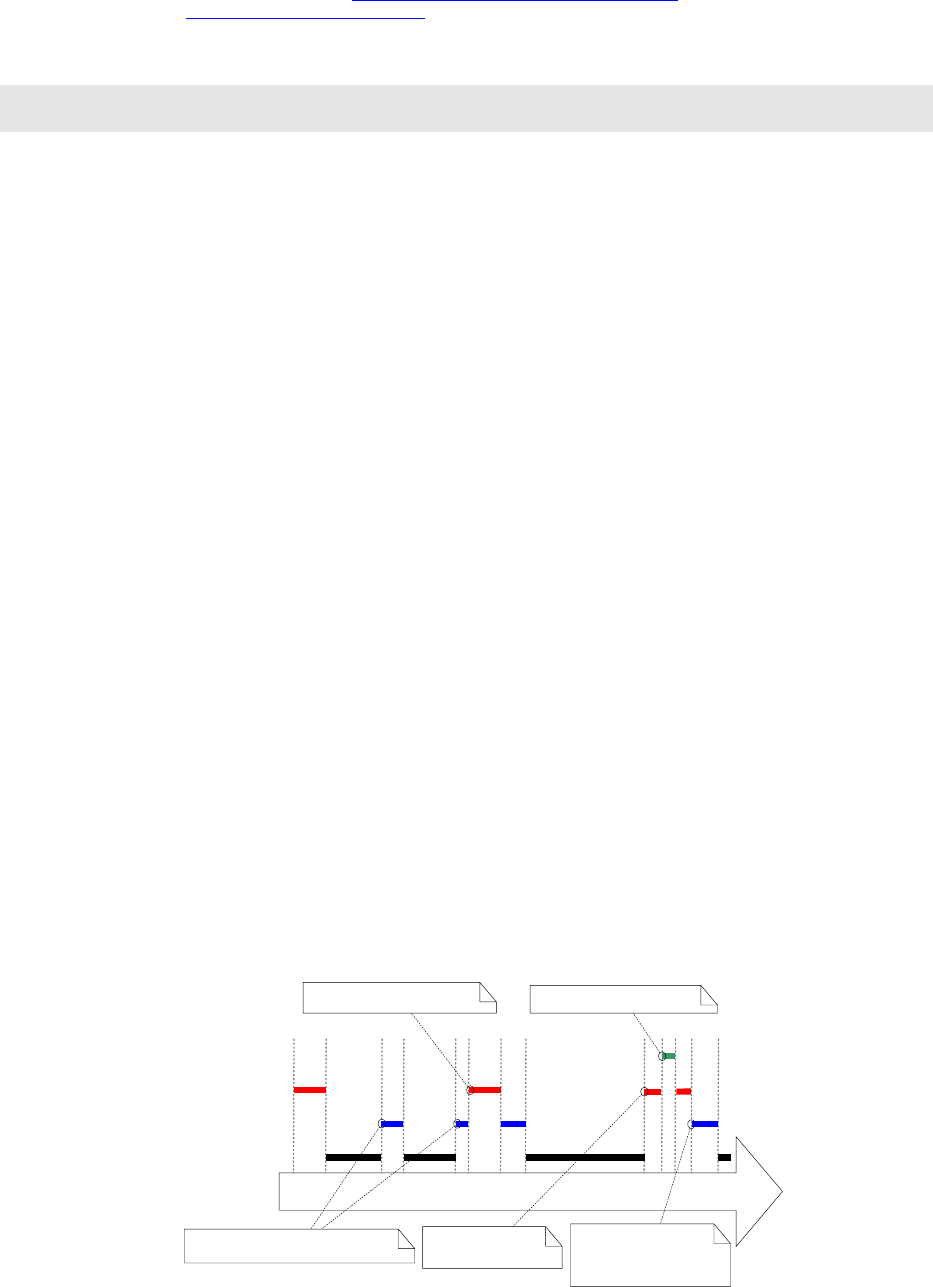
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
92
Table 15. An explanation of the terms used to describe the scheduling policy
Term
Definition
Fixed Priority
Scheduling algorithms described as ‘Fixed Priority’ do not change the priority
assigned to the tasks being scheduled, but also do not prevent the tasks
themselves from changing their own priority, or that of other tasks.
Pre-emptive
Pre-emptive scheduling algorithms will immediately ‘pre-empt’ the Running
state task if a task that has a priority higher than the Running state task
enters the Ready state. Being pre-empted means being involuntarily (without
explicitly yielding or blocking) moved out of the Running state and into the
Ready state to allow a different task to enter the Running state.
Time Slicing
Time slicing is used to share processing time between tasks of equal priority,
even when the tasks do not explicitly yield or enter the Blocked state.
Scheduling algorithms described as using ‘Time Slicing’ will select a new task
to enter the Running state at the end of each time slice if there are other
Ready state tasks that have the same priority as the Running task. A time
slice is equal to the time between two RTOS tick interrupts.
Figure 26 and Figure 27 demonstrate how tasks are scheduled when a fixed priority
preemptive scheduling with time slicing algorithm is used. Figure 26 shows the sequence in
which tasks are selected to enter the Running state when all the tasks in an application have a
unique priority. Figure 27 shows the sequence in which tasks are selected to enter the
Running state when two tasks in an application share a priority.
Task2 (med, periodic)
Task3 (low, event)
Task1 (high, event)
Idle task (continuous)
t1 t3t2 t4 t5t6 t7 t8
t10
t11
t12
t13t9
Task 3 pre-empts the idle task.
Task 2 pre-empts Task 3
Task 2 pre-empts
the Idle task
Task 1 pre-empts Task 2
Event processing is
delayed until higher
priority tasks block
Figure 26. Execution pattern highlighting task prioritization and pre-emption in a
hypothetical application in which each task has been assigned a unique
priority
93
Referring to Figure 26:
1. Idle Task
The idle task is running at the lowest priority, so gets pre-empted every time a higher
priority task enters the Ready state—for example, at times t3, t5 and t9.
2. Task 3
Task 3 is an event-driven task that executes with a relatively low priority, but above the
Idle priority. It spends most of its time in the Blocked state waiting for its event of
interest, transitioning from the Blocked state to the Ready state each time the event
occurs. All FreeRTOS inter-task communication mechanisms (task notifications,
queues, semaphores, event groups, etc.) can be used to signal events and unblock
tasks in this way.
Events occur at times t3 and t5, and also somewhere between t9 and t12. The events
occurring at times t3 and t5 are processed immediately as, at these times, Task 3 is the
highest priority task that is able to run. The event that occurs somewhere between
times t9 and t12 is not processed until t12 because, until then, the higher priority tasks
Task 1 and Task 2 are still executing. It is only at time t12 that both Task 1 and Task 2
are in the Blocked state, making Task 3 the highest priority Ready state task.
3. Task 2
Task 2 is a periodic task that executes at a priority above the priority of Task 3, but
below the priority of Task 1. The task’s period interval means Task 2 wants to execute
at times t1, t6, and t9.
At time t6, Task 3 is in the Running state, but Task 2 has the higher relative priority so
pre-empts Task 3 and starts executing immediately. Task 2 completes its processing
and re-enters the Blocked state at time t7, at which point Task 3 can re-enter the
Running state to complete its processing. Task 3 itself Blocks at time t8.
4. Task 1
Task 1 is also an event-driven task. It executes with the highest priority of all, so can
pre-empt any other task in the system. The only Task 1 event shown occurs at time
t10, at which time Task 1 pre-empts Task 2. Task 2 can complete its processing only
after Task 1 has re-entered the Blocked state at time t11.
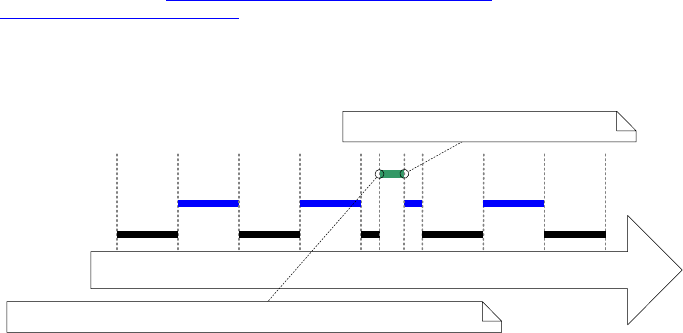
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
94
Task2 (Idle priority, continuous)
Task1 (high, event)
Idle task (continuous)
t1 t2 t3 t4 t5 t8 t9 t10 t11
t6 t7
Task 1 leaves the Blocked state and pre-empts the Idle Task
Task 1 re-enters the Blocked state
Figure 27 Execution pattern highlighting task prioritization and time slicing in a
hypothetical application in which two tasks run at the same priority
Referring to Figure 27:
1. The Idle Task and Task 2
The Idle task and Task 2 are both continuous processing tasks, and both have a priority
of 0 (the lowest possible priority). The scheduler only allocates processing time to the
priority 0 tasks when there are no higher priority tasks that are able to run, and shares
the time that is allocated to the priority 0 tasks by time slicing. A new time slice starts
on each tick interrupt, which in Figure 27 is at times t1, t2, t3, t4, t5, t8, t9, t10 and t11.
The Idle task and Task 2 enter the Running state in turn, which can results in both
tasks being in the Running state for part of the same time slice, as happens between
time t5 and time t8.
2. Task 1
The priority of Task 1 is higher than the Idle priority. Task 1 is an event driven task that
spends most of its time in the Blocked state waiting for its event of interest, transitioning
from the Blocked state to the Ready state each time the event occurs.
The event of interest occurs at time t6, so at t6 Task 1 becomes the highest priority task
that is able to run, and therefore Task 1 pre-empts the Idle task part way through a time
slice. Processing of the event completes at time t7, at which point Task 1 re-enters the
Blocked state.
Figure 27 shows the Idle task sharing processing time with a task created by the application
writer. Allocating that much processing time to the Idle task might not be desirable if the Idle

95
priority tasks created by the application writer have work to do, but the Idle task does not. The
configIDLE_SHOULD_YIELD compile time configuration constant can be used to change how
the Idle task is scheduled:
If configIDLE_SHOULD_YIELD is set to 0 then the Idle task will remain in the Running
state for the entirety of its time slice, unless it is preempted by a higher priority task.
If configIDLE_SHOULD_YIELD is set to 1 then the Idle task will yield (voluntarily give
up whatever remains of its allocated time slice) on each iteration of its loop if there are
other Idle priority tasks in the Ready state.
The execution pattern shown in Figure 27 is what would be observed when
configIDLE_SHOULD_YIELD is set to 0. The execution pattern shown in Figure 28 is what
would be observed in the same scenario when configIDLE_SHOULD_YIELD is set to 1.
Task2 (Idle priority, continuous)
Task1 (high, event)
Idle task (continuous)
t1 t2 t3 t4 t5 t8 t9 t10 t11
t6 t7
Task 1 leaves the Blocked
state and pre-empts Task 2
Task 1 re-enters the Blocked state,
allowing Task 2 to continue running
The Idle task runs for one iteration of its
implementing loop, then yields to allow the
scheduler to select another task
Task 2 runs for the remainder
of the time slice
Figure 28 The execution pattern for the same scenario as shown in Figure 27, but
this time with configIDLE_SHOULD_YIELD set to 1
Figure 28 also shows that, when configIDLE_SHOULD_YIELD is set to 0, the task selected to
enter the Running state after the Idle task does not execute for an entire time slice, but instead
executes for whatever remains of the time slice during which the Idle task yielded.
Prioritized Pre-emptive Scheduling (without Time Slicing)
Prioritized Preemptive Scheduling without time slicing maintains the same task selection and
pre-emption algorithms as described in the previous section, but does not use time slicing to
share processing time between tasks of equal priority.
The FreeRTOSConfig.h settings that configure the FreeRTOS scheduler to use prioritized
preemptive scheduling without time slicing are shown in Table 16.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
96
Table 16. The FreeRTOSConfig.h settings that configure the kernel to use
Prioritized Pre-emptive Scheduling without Time Slicing
Constant
Value
configUSE_PREEMPTION
1
configUSE_TIME_SLICING
0
As was demonstrated in Figure 27, if time slicing is used, and there is more than one ready
state task at the highest priority that is able to run, then the scheduler will select a new task to
enter the Running state during each RTOS tick interrupt (a tick interrupt marking the end of a
time slice). If time slicing is not used, then the scheduler will only select a new task to enter
the Running state when either:
A higher priority task enters the Ready state.
The task in the Running state enters the Blocked or Suspended state.
There are fewer task context switches when time slicing is not used than when time slicing is
used. Therefore, turning time slicing off results in a reduction in the scheduler’s processing
overhead. However, turning time slicing off can also result in tasks of equal priority receiving
greatly different amounts of processing time, a scenario demonstrated by Figure 29. For this
reason, running the scheduler without time slicing is considered an advanced technique that
should only be used by experienced users.
Task2 (Idle priority, continuous)
Task1 (high, event)
Idle task (continuous)
t1 t2 t3 t4 t5 t8 t11 t12 t13
t6 t7
Task 1 leaves the Blocked state
and pre-empts the Idle task
Task 1 re-enters the
Blocked state
t9 t10
Task 1 leaves the Blocked
state and pre-empts Task 2
Task 1 re-enters the
Blocked state
Figure 29 Execution pattern that demonstrates how tasks of equal priority can
receive hugely different amounts of processing time when time slicing is not
used
Referring to Figure 29, which assumes configIDLE_SHOULD_YIELD is set to 0:
97
1. Tick Interrupts
Tick interrupts occur at times t1, t2, t3, t4, t5, t8, t11, t12 and t13.
2. Task 1
Task 1 is a high priority event driven task that spends most of its time in the Blocked
state waiting for its event of interest. Task 1 transitions from the Blocked state to the
Ready state (and subsequently, as it is the highest priority Ready state task, on into the
Running state) each time the event occurs. Figure 29 shows Task 1 processing an
event between times t6 and t7, then again between times t9 and t10.
3. The Idle Task and Task 2
The Idle task and Task 2 are both continuous processing tasks, and both have a priority
of 0 (the idle priority). Continuous processing tasks do not enter the Blocked state.
Time slicing is not being used, so an idle priority task that is in the Running state will
remain in the Running state until it is pre-empted by the higher priority Task 1.
In Figure 29 the Idle task starts running at time t1, and remains in the Running state
until it is pre-empted by Task 1 at time t6—which is more than four complete tick
periods after it entered the Running state.
Task 2 starts running at time t7, which is when Task 1 re-enters the Blocked state to
wait for another event. Task 2 remains in the Running state until it too is pre-empted by
Task 1 at time t9—which is less than one tick period after it entered the Running state.
At time t10 the Idle task re-enters the Running state, despite having already received
more than four times more processing time than the Task 2.
Co-operative Scheduling
This book focuses on pre-emptive scheduling, but FreeRTOS can also use co-operative
scheduling. The FreeRTOSConfig.h settings that configure the FreeRTOS scheduler to use
co-operative scheduling are shown in Table 17.
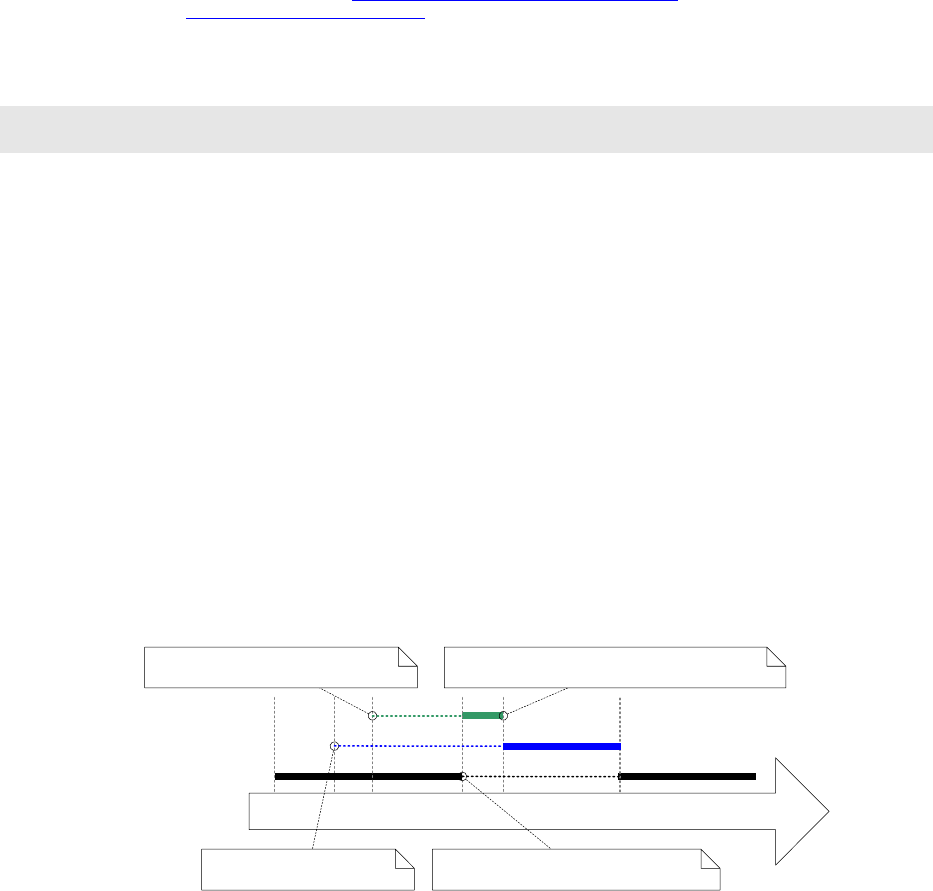
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
98
Table 17. The FreeRTOSConfig.h settings that configure the kernel to use co -
operative scheduling
Constant
Value
configUSE_PREEMPTION
0
configUSE_TIME_SLICING
Any value
When the co-operative scheduler is used, a context switch will only occur when the Running
state task enters the Blocked state, or the Running state task explicitly yields (manually
requests a re-schedule) by calling taskYIELD(). Tasks are never pre-empted, so time slicing
cannot be used.
Figure 30 demonstrates the behavior of the co-operative scheduler. The horizontal dashed
lines in Figure 30 show when a task is in the Ready state.
Task2 (medium priority)
Task1 (high priority)
Task3 (low priority)
t1 t2 t3 t4 t5 t6
Task 2 unblocks when
Task 3 writes to a queue
Task 1 unblocks when an
interrupt writes to a semaphore
Task 3 calls taskYIELD(), allowing
Task 1 to enter the Running state
Task 1 enters the Blocked state, allowing
Task 2 to enter the Running state
Figure 30 Execution pattern demonstrating the behavior of the co-operative
scheduler
Referring to Figure 30:
1. Task 1
Task 1 has the highest priority. It starts in the Blocked state, waiting for a semaphore.
At time t3 an interrupt gives the semaphore, causing Task 1 to leave the Blocked state
and enter the Ready state (giving semaphores from interrupts is covered in Chapter 6).
At time t3 Task 1 is the highest priority Ready state task, and if the pre-emptive
scheduler had been used Task 1 would become the Running state task. However, as
99
the co-operative scheduler is being used, Task 1 remains in the Ready state until time
t4—which is when the Running state task calls taskYIELD().
2. Task 2
The priority of Task 2 is between that of Task 1 and Task 3. It starts in the Blocked
state, waiting for a message that is sent to it by Task 3 at time t2.
At time t2 Task 2 is the highest priority Ready state task, and if the pre-emptive
scheduler had been used Task 2 would become the Running state task. However, as
the co-operative scheduler is being used, Task 2 remains in the Ready state until the
Running state task either enters the Blocked state of calls taskYIELD().
The running state task calls taskYIELD() at time t4, but by then Task 1 is the highest
priority Ready state task, so Task 2 does not actually become the Running state task
until Task 1 re-enters the Blocked state at time t5.
At time t6 Task 2 re-enters the Blocked state to wait for the next message, at which
point Task 3 is once again the highest priority Ready state task.
In a multi-tasking application the application writer must take care that a resource is not
accessed by more than one task simultaneously, as simultaneous access could corrupt the
resource. As an example, consider the following scenario in which the resource being
accessed is a UART (serial port). Two tasks are writing strings to the UART; Task 1 is writing
“abcdefghijklmnop”, and Task 2 is writing “123456789”:
1. Task 1 is in the Running state and starts to write its string. It writes “abcdefg” to the
UART, but leaves the Running state before writing any further characters.
2. Task 2 enters the Running state and writes “123456789” to the UART, before leaving
the Running state.
3. Task 1 re-enters the Running state and writes the remaining characters of its string to
the UART.
In that scenario what is actually written to the UART is “abcdefg123456789hijklmnop”. The
string written by Task 1 has not been written to the UART in an unbroken sequence as
intended, but instead it has been corrupted, because the string written to the UART by Task 2
appears within it.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
100
It is normally easier to avoid problems caused by simultaneous access when the co-operative
scheduler is used than when the pre-emptive scheduler is used
1
:
When the pre-emptive scheduler is used the Running state task can be pre-empted at
any time, including when a resource it is sharing with another task is in an inconsistent
state. As just demonstrated by the UART example, leaving a resource in an
inconsistent state can result in data corruption.
When the co-operative scheduler is used the application writer controls when a switch
to another task can occur. The application writer can therefore ensure a switch to
another task does not occur while a resource is in an inconsistent state.
In the above UART example, the application writer can ensure Task 1 does not leave
the Running state until its entire string has been written to the UART, and in doing so,
removing the possibility of the string being corrupted by the activates of another task.
As demonstrated in Figure 30, systems will be less responsive when the co-operative
scheduler is used than when the pre-emptive scheduler is used:
When the pre-emptive scheduler is used the scheduler will start running a task
immediately that the task becomes the highest priority Ready state task. This is often
essential in real-time systems that must respond to high priority events within a defined
time period.
When the co-operative scheduler is used a switch to a task that has become the
highest priority Ready state task is not performed until the Running state task enters
the Blocked state or calls taskYIELD().
1
Methods of safely sharing resources between tasks are covered later in this book. Resources
provided by FreeRTOS itself, such as queues and semaphores, are always safe to share between
tasks.

101
Chapter 4
Queue Management

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
102
4.1 Chapter Introduction and Scope
‘Queues’ provide a task-to-task, task-to-interrupt, and interrupt-to-task communication
mechanism.
Scope
This chapter aims to give readers a good understanding of:
How to create a queue.
How a queue manages the data it contains.
How to send data to a queue.
How to receive data from a queue.
What it means to block on a queue.
How to block on multiple queues.
How to overwrite data in a queue.
How to clear a queue.
The effect of task priorities when writing to and reading from a queue.
Only task-to-task communication is covered in this chapter. Task-to-interrupt and interrupt-to-
task communication is covered in Chapter 6.

103
4.2 Characteristics of a Queue
Data Storage
A queue can hold a finite number of fixed size data items. The maximum number of items a
queue can hold is called its ‘length’. Both the length and the size of each data item are set
when the queue is created.
Queues are normally used as First In First Out (FIFO) buffers, where data is written to the end
(tail) of the queue and removed from the front (head) of the queue. Figure 31 demonstrates
data being written to and read from a queue that is being used as a FIFO. It is also possible to
write to the front of a queue, and to overwrite data that is already at the front of a queue.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
104
Queue
Task A
int x;
Task B
int y;
A queue is created to allow Task A and Task B to communicate. The queue can hold a maximum of 5
integers. When the queue is created it does not contain any values so is empty.
Queue
10
Task A
int x;
x = 10;
Task B
int y;
Task A writes (sends) the value of a local variable to the back of the queue. As the queue was previously
empty the value written is now the only item in the queue, and is therefore both the value at the back of the
queue and the value at the front of the queue.
Queue
20 10
Task A
int x;
x = 20;
Task B
int y;
Task A changes the value of its local variable before writing it to the queue again. The queue now
contains copies of both values written to the queue. The first value written remains at the front of the
queue, the new value is inserted at the end of the queue. The queue has three empty spaces remaining.
Queue
20 10
Task A
int x;
x = 20;
Task B
int y;
// y now equals 10
Task B reads (receives) from the queue into a different variable. The value received by Task B is the
value from the head of the queue, which is the first value Task A wrote to the queue (10 in this illustration).
Send
Send
Receive
Queue
20
Task A
int x;
x = 20;
Task B
int y;
// y now equals 10
Task B has removed one item, leaving only the second value written by Task A remaining in the queue.
This is the value Task B would receive next if it read from the queue again. The queue now has four
empty spaces remaining.
Figure 31. An example sequence of writes to, and reads from a queue
105
There are two ways in which queue behavior could have been implemented:
1. Queue by copy
Queuing by copy means the data sent to the queue is copied byte for byte into the
queue.
2. Queue by reference
Queuing by reference means the queue only holds pointers to the data sent to the
queue, not the data itself.
FreeRTOS uses the queue by copy method. Queuing by copy is considered to be
simultaneously more powerful and simpler to use than queueing by reference because:
Stack variable can be sent directly to a queue, even though the variable will not exist
after the function in which it is declared has exited.
Data can be sent to a queue without first allocating a buffer to hold the data, and then
copying the data into the allocated buffer.
The sending task can immediately re-use the variable or buffer that was sent to the
queue.
The sending task and the receiving task are completely de-coupled—the application
designer does not need to concern themselves with which task ‘owns’ the data, or
which task is responsible for releasing the data.
Queuing by copy does not prevent the queue from also being used to queue by
reference. For example, when the size of the data being queued makes it impractical
to copy the data into the queue, then a pointer to the data can be copied into the queue
instead.
The RTOS takes complete responsibility for allocating the memory used to store data.
In a memory protected system, the RAM that a task can access will be restricted. In
that case queueing by reference could only be used if the sending and receiving task
could both access the RAM in which the data was stored. Queuing by copy does not
impose that restriction; the kernel always runs with full privileges, allowing a queue to
be used to pass data across memory protection boundaries.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
106
Access by Multiple Tasks
Queues are objects in their own right that can be accessed by any task or ISR that knows of
their existence. Any number of tasks can write to the same queue, and any number of tasks
can read from the same queue. In practice it is very common for a queue to have multiple
writers, but much less common for a queue to have multiple readers.
Blocking on Queue Reads
When a task attempts to read from a queue, it can optionally specify a ‘block’ time. This is the
time the task will be kept in the Blocked state to wait for data to be available from the queue,
should the queue already be empty. A task that is in the Blocked state, waiting for data to
become available from a queue, is automatically moved to the Ready state when another task
or interrupt places data into the queue. The task will also be moved automatically from the
Blocked state to the Ready state if the specified block time expires before data becomes
available.
Queues can have multiple readers, so it is possible for a single queue to have more than one
task blocked on it waiting for data. When this is the case, only one task will be unblocked
when data becomes available. The task that is unblocked will always be the highest priority
task that is waiting for data. If the blocked tasks have equal priority, then the task that has
been waiting for data the longest will be unblocked.
Blocking on Queue Writes
Just as when reading from a queue, a task can optionally specify a block time when writing to
a queue. In this case, the block time is the maximum time the task should be held in the
Blocked state to wait for space to become available on the queue, should the queue already
be full.
Queues can have multiple writers, so it is possible for a full queue to have more than one task
blocked on it waiting to complete a send operation. When this is the case, only one task will
be unblocked when space on the queue becomes available. The task that is unblocked will
always be the highest priority task that is waiting for space. If the blocked tasks have equal
priority, then the task that has been waiting for space the longest will be unblocked.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
108
4.3 Using a Queue
The xQueueCreate() API Function
A queue must be explicitly created before it can be used.
Queues are referenced by handles, which are variables of type QueueHandle_t. The
xQueueCreate() API function creates a queue and returns a QueueHandle_t that references
the queue it created.
FreeRTOS V9.0.0 also includes the xQueueCreateStatic() function, which allocates the memory required to create
a queue statically at compile time: FreeRTOS allocates RAM from the FreeRTOS heap when a
queue is created. The RAM is used to hold both the queue data structures and the items that
are contained in the queue. xQueueCreate() will return NULL if there is insufficient heap RAM
available for the queue to be created. Chapter 2 provides more information on the FreeRTOS
heap.
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize );
Listing 40. The xQueueCreate() API function prototype
Table 18. xQueueCreate() parameters and return value
Parameter Name
Description
uxQueueLength
The maximum number of items that the queue being created can hold
at any one time.
uxItemSize
The size in bytes of each data item that can be stored in the queue.
Return Value
If NULL is returned, then the queue cannot be created because there
is insufficient heap memory available for FreeRTOS to allocate the
queue data structures and storage area.
A non-NULL value being returned indicates that the queue has been
created successfully. The returned value should be stored as the
handle to the created queue.
After a queue has been created the xQueueReset() API function can be used to return the
queue to its original empty state.

109
The xQueueSendToBack() and xQueueSendToFront() API Functions
As might be expected, xQueueSendToBack() is used to send data to the back (tail) of a
queue, and xQueueSendToFront() is used to send data to the front (head) of a queue.
xQueueSend() is equivalent to, and exactly the same as, xQueueSendToBack().
Note: Never call xQueueSendToFront() or xQueueSendToBack() from an interrupt service
routine. The interrupt-safe versions xQueueSendToFrontFromISR() and
xQueueSendToBackFromISR() should be used in their place. These are described in Chapter
6.
BaseType_t xQueueSendToFront( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait );
Listing 41. The xQueueSendToFront() API function prototype
BaseType_t xQueueSendToBack( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait );
Listing 42. The xQueueSendToBack() API function prototype
Table 19. xQueueSendToFront() and xQueueSendToBack() function parameters
and return value
Parameter Name/
Returned Value
Description
xQueue
The handle of the queue to which the data is being sent (written). The
queue handle will have been returned from the call to xQueueCreate()
used to create the queue.
pvItemToQueue
A pointer to the data to be copied into the queue.
The size of each item that the queue can hold is set when the queue is
created, so this many bytes will be copied from pvItemToQueue into
the queue storage area.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
110
Table 19. xQueueSendToFront() and xQueueSendToBack() function parameters
and return value
Parameter Name/
Returned Value
Description
xTicksToWait
The maximum amount of time the task should remain in the Blocked
state to wait for space to become available on the queue, should the
queue already be full.
Both xQueueSendToFront() and xQueueSendToBack() will return
immediately if xTicksToWait is zero and the queue is already full.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without timing out), provided INCLUDE_vTaskSuspend is
set to 1 in FreeRTOSConfig.h.

111
Table 19. xQueueSendToFront() and xQueueSendToBack() function parameters
and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if data was successfully sent to the
queue.
If a block time was specified (xTicksToWait was not zero), then it is
possible the calling task was placed into the Blocked state, to wait
for space to become available in the queue, before the function
returned, but data was successfully written to the queue before the
block time expired.
2. errQUEUE_FULL
errQUEUE_FULL will be returned if data could not be written to the
queue because the queue was already full.
If a block time was specified (xTicksToWait was not zero) then the
calling task will have been placed into the Blocked state to wait for
another task or interrupt to make space in the queue, but the
specified block time expired before that happened.
The xQueueReceive() API Function
xQueueReceive() is used to receive (read) an item from a queue. The item that is received is
removed from the queue.
Note: Never call xQueueReceive() from an interrupt service routine. The interrupt-safe
xQueueReceiveFromISR() API function is described in Chapter 6.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
112
BaseType_t xQueueReceive( QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait );
Listing 43. The xQueueReceive() API function prototype
Table 20. xQueueReceive() function parameters and return values
Parameter Name/
Returned value
Description
xQueue
The handle of the queue from which the data is being received (read).
The queue handle will have been returned from the call to
xQueueCreate() used to create the queue.
pvBuffer
A pointer to the memory into which the received data will be copied.
The size of each data item that the queue holds is set when the queue
is created. The memory pointed to by pvBuffer must be at least large
enough to hold that many bytes.
xTicksToWait
The maximum amount of time the task should remain in the Blocked
state to wait for data to become available on the queue, should the
queue already be empty.
If xTicksToWait is zero, then xQueueReceive() will return immediately if
the queue is already empty.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without timing out) provided INCLUDE_vTaskSuspend is set
to 1 in FreeRTOSConfig.h.

113
Table 20. xQueueReceive() function parameters and return values
Parameter Name/
Returned value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if data was successfully read from the
queue.
If a block time was specified (xTicksToWait was not zero), then it is
possible the calling task was placed into the Blocked state, to wait for
data to become available on the queue, but data was successfully
read from the queue before the block time expired.
2. errQUEUE_EMPTY
errQUEUE_EMPTY will be returned if data cannot be read from the
queue because the queue is already empty.
If a block time was specified (xTicksToWait was not zero,) then the
calling task will have been placed into the Blocked state to wait for
another task or interrupt to send data to the queue, but the block time
expired before that happened.
The uxQueueMessagesWaiting() API Function
uxQueueMessagesWaiting() is used to query the number of items that are currently in a
queue.
Note: Never call uxQueueMessagesWaiting() from an interrupt service routine. The interrupt-
safe uxQueueMessagesWaitingFromISR() should be used in its place.
UBaseType_t uxQueueMessagesWaiting( QueueHandle_t xQueue );
Listing 44. The uxQueueMessagesWaiting() API function prototype

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
114
Table 21. uxQueueMessagesWaiting() function parameters and return value
Parameter Name/
Returned Value
Description
xQueue
The handle of the queue being queried. The queue handle will have
been returned from the call to xQueueCreate() used to create the
queue.
Returned value
The number of items that the queue being queried is currently holding.
If zero is returned, then the queue is empty.
Example 10. Blocking when receiving from a queue
This example demonstrates a queue being created, data being sent to the queue from multiple
tasks, and data being received from the queue. The queue is created to hold data items of
type int32_t. The tasks that send to the queue do not specify a block time, whereas the task
that receives from the queue does.
The priority of the tasks that send to the queue are lower than the priority of the task that
receives from the queue. This means the queue should never contain more than one item
because, as soon as data is sent to the queue the receiving task will unblock, pre-empt the
sending task, and remove the data—leaving the queue empty once again.
Listing 45 shows the implementation of the task that writes to the queue. Two instances of this
task are created, one that writes continuously the value 100 to the queue, and another that
writes continuously the value 200 to the same queue. The task parameter is used to pass
these values into each task instance.

115
static void vSenderTask( void *pvParameters )
{
int32_t lValueToSend;
BaseType_t xStatus;
/* Two instances of this task are created so the value that is sent to the
queue is passed in via the task parameter - this way each instance can use
a different value. The queue was created to hold values of type int32_t,
so cast the parameter to the required type. */
lValueToSend = ( int32_t ) pvParameters;
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Send the value to the queue.
The first parameter is the queue to which data is being sent. The
queue was created before the scheduler was started, so before this task
started to execute.
The second parameter is the address of the data to be sent, in this case
the address of lValueToSend.
The third parameter is the Block time – the time the task should be kept
in the Blocked state to wait for space to become available on the queue
should the queue already be full. In this case a block time is not
specified because the queue should never contain more than one item, and
therefore never be full. */
xStatus = xQueueSendToBack( xQueue, &lValueToSend, 0 );
if( xStatus != pdPASS )
{
/* The send operation could not complete because the queue was full -
this must be an error as the queue should never contain more than
one item! */
vPrintString( "Could not send to the queue.\r\n" );
}
}
}
Listing 45. Implementation of the sending task used in Example 10.
Listing 46 shows the implementation of the task that receives data from the queue. The
receiving task specifies a block time of 100 milliseconds, so will enter the Blocked state to wait
for data to become available. It will leave the Blocked state when either data is available on
the queue, or 100 milliseconds passes without data becoming available. In this example, the
100 milliseconds timeout should never expire, as there are two tasks continuously writing to
the queue.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
116
static void vReceiverTask( void *pvParameters )
{
/* Declare the variable that will hold the values received from the queue. */
int32_t lReceivedValue;
BaseType_t xStatus;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100 );
/* This task is also defined within an infinite loop. */
for( ;; )
{
/* This call should always find the queue empty because this task will
immediately remove any data that is written to the queue. */
if( uxQueueMessagesWaiting( xQueue ) != 0 )
{
vPrintString( "Queue should have been empty!\r\n" );
}
/* Receive data from the queue.
The first parameter is the queue from which data is to be received. The
queue is created before the scheduler is started, and therefore before this
task runs for the first time.
The second parameter is the buffer into which the received data will be
placed. In this case the buffer is simply the address of a variable that
has the required size to hold the received data.
The last parameter is the block time – the maximum amount of time that the
task will remain in the Blocked state to wait for data to be available
should the queue already be empty. */
xStatus = xQueueReceive( xQueue, &lReceivedValue, xTicksToWait );
if( xStatus == pdPASS )
{
/* Data was successfully received from the queue, print out the received
value. */
vPrintStringAndNumber( "Received = ", lReceivedValue );
}
else
{
/* Data was not received from the queue even after waiting for 100ms.
This must be an error as the sending tasks are free running and will be
continuously writing to the queue. */
vPrintString( "Could not receive from the queue.\r\n" );
}
}
}
Listing 46. Implementation of the receiver task for Example 10
Listing 47 contains the definition of the main() function. This simply creates the queue and the
three tasks before starting the scheduler. The queue is created to hold a maximum of five
int32_t values, even though the priorities of the tasks are set such that the queue will never
contain more than one item at a time.

117
/* Declare a variable of type QueueHandle_t. This is used to store the handle
to the queue that is accessed by all three tasks. */
QueueHandle_t xQueue;
int main( void )
{
/* The queue is created to hold a maximum of 5 values, each of which is
large enough to hold a variable of type int32_t. */
xQueue = xQueueCreate( 5, sizeof( int32_t ) );
if( xQueue != NULL )
{
/* Create two instances of the task that will send to the queue. The task
parameter is used to pass the value that the task will write to the queue,
so one task will continuously write 100 to the queue while the other task
will continuously write 200 to the queue. Both tasks are created at
priority 1. */
xTaskCreate( vSenderTask, "Sender1", 1000, ( void * ) 100, 1, NULL );
xTaskCreate( vSenderTask, "Sender2", 1000, ( void * ) 200, 1, NULL );
/* Create the task that will read from the queue. The task is created with
priority 2, so above the priority of the sender tasks. */
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 2, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}
else
{
/* The queue could not be created. */
}
/* If all is well then main() will never reach here as the scheduler will
now be running the tasks. If main() does reach here then it is likely that
there was insufficient FreeRTOS heap memory available for the idle task to be
created. Chapter 2 provides more information on heap memory management. */
for( ;; );
}
Listing 47. The implementation of main() in Example 10
Both tasks that send to the queue have an identical priority. This causes the two sending
tasks to send data to the queue in turn. The output produced by Example 10 is shown in
Figure 32.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
118
Figure 32. The output produced when Example 10 is executed
Figure 33 demonstrate the sequence of execution.
Time
Receiver
Sender 2
t1
Sender 1
1 - The Receiver task runs first because it has the
highest priority. It attempts to read from the queue. The
queue is empty so the Receiver enters the Blocked state
to wait for data to become available. Sender 2 runs after
the Receiver has blocked.
2 - Sender 2 writes to the queue, causing the
Receiver to exit the Blocked state. The
Receiver has the highest priority so pre-empts
Sender 2.
3 - The Receiver task empties the queue
then enters the Blocked state again. This
time Sender 1 runs after the Receiver has
blocked.
4 - Sender 1 writes to the queue, causing
the Receiver to exit the Blocked state and
pre-empt Sender 1 - and so it goes on ……..
Figure 33. The sequence of execution produced by Example 10

119
4.4 Receiving Data From Multiple Sources
It is common in FreeRTOS designs for a task to receive data from more than one source. The
receiving task needs to know where the data came from to determine how the data should be
processed. An easy design solution is to use a single queue to transfer structures with both
the value of the data and the source of the data contained in the structure’s fields. This
scheme is demonstrated in Figure 34.
Controller
CAN bus
Task
eDataID = eMotorSpeed
lDataValue = 10
Another Task
HMI Task
eDataID = eSpeedSetPoint
lDataValue = 5
Queue
typedef struct
{
ID_t eDataID;
int32_t lDataValue;
} Data_t;
Figure 34. An example scenario where structures are sent on a queue
Referring to Figure 34:
A queue is created that holds structures of type Data_t. The structure members allow
both a data value and an enumerated type indicating what the data means to be sent to
the queue in one message.
A central Controller task is used to perform the primary system function. This has to
react to inputs and changes to the system state communicated to it on the queue.
A CAN bus task is used to encapsulate the CAN bus interfacing functionality. When
the CAN bus task has received and decoded a message, it sends the already decoded
message to the Controller task in a Data_t structure. The eDataID member of the
transferred structure is used to let the Controller task know what the data is—in the
depicted case it is a motor speed value. The lDataValue member of the transferred
structure is used to let the Controller task know the actual motor speed value.
A Human Machine Interface (HMI) task is used to encapsulate all the HMI functionality.
The machine operator can probably input commands and query values in a number of

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
120
ways that have to be detected and interpreted within the HMI task. When a new
command is input, the HMI task sends the command to the Controller task in a Data_t
structure. The eDataID member of the transferred structure is used to let the Controller
task know what the data is—in the depicted case it is a new set point value. The
lDataValue member of the transferred structure is used to let the Controller task know
the actual set point value.
Example 11. Blocking when sending to a queue, and sending structures on a
queue
Example 11 is similar to Example 10, but the task priorities are reversed, so the receiving task
has a lower priority than the sending tasks. Also, the queue is used to pass structures, rather
than integers.
Listing 48 shows the definition of the structure used by Example 11.
/* Define an enumerated type used to identify the source of the data. */
typedef enum
{
eSender1,
eSender2
} DataSource_t;
/* Define the structure type that will be passed on the queue. */
typedef struct
{
uint8_t ucValue;
DataSource_t eDataSource;
} Data_t;
/* Declare two variables of type Data_t that will be passed on the queue. */
static const Data_t xStructsToSend[ 2 ] =
{
{ 100, eSender1 }, /* Used by Sender1. */
{ 200, eSender2 } /* Used by Sender2. */
};
Listing 48. The definition of the structure that is to be passed on a queue, plus the
declaration of two variables for use by the example
In Example 10, the receiving task has the highest priority, so the queue never contains more
than one item. This results from the receiving task pre-empting the sending tasks as soon as
data is placed into the queue. In Example 11, the sending tasks have the higher priority, so
the queue will normally be full. This is because, as soon as the receiving task removes an
item from the queue, it is pre-empted by one of the sending tasks which then immediately re-
fills the queue. The sending task then re-enters the Blocked state to wait for space to become
available on the queue again.

121
Listing 49 shows the implementation of the sending task. The sending task specifies a block
time of 100 milliseconds, so it enters the Blocked state to wait for space to become available
each time the queue becomes full. It leaves the Blocked state when either space is available
on the queue, or 100 milliseconds passes without space becoming available. In this example,
the 100 milliseconds timeout should never expire, as the receiving task is continuously making
space by removing items from the queue.
static void vSenderTask( void *pvParameters )
{
BaseType_t xStatus;
const TickType_t xTicksToWait = pdMS_TO_TICKS( 100 );
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Send to the queue.
The second parameter is the address of the structure being sent. The
address is passed in as the task parameter so pvParameters is used
directly.
The third parameter is the Block time - the time the task should be kept
in the Blocked state to wait for space to become available on the queue
if the queue is already full. A block time is specified because the
sending tasks have a higher priority than the receiving task so the queue
is expected to become full. The receiving task will remove items from
the queue when both sending tasks are in the Blocked state. */
xStatus = xQueueSendToBack( xQueue, pvParameters, xTicksToWait );
if( xStatus != pdPASS )
{
/* The send operation could not complete, even after waiting for 100ms.
This must be an error as the receiving task should make space in the
queue as soon as both sending tasks are in the Blocked state. */
vPrintString( "Could not send to the queue.\r\n" );
}
}
}
Listing 49. The implementation of the sending task for Example 11
The receiving task has the lowest priority, so it will run only when both sending tasks are in the
Blocked state. The sending tasks will enter the Blocked state only when the queue is full, so
the receiving task will execute only when the queue is already full. Therefore, it always
expects to receive data even when it does not specify a block time.
The implementation of the receiving task is shown in Listing 50.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
122
static void vReceiverTask( void *pvParameters )
{
/* Declare the structure that will hold the values received from the queue. */
Data_t xReceivedStructure;
BaseType_t xStatus;
/* This task is also defined within an infinite loop. */
for( ;; )
{
/* Because it has the lowest priority this task will only run when the
sending tasks are in the Blocked state. The sending tasks will only enter
the Blocked state when the queue is full so this task always expects the
number of items in the queue to be equal to the queue length, which is 3 in
this case. */
if( uxQueueMessagesWaiting( xQueue ) != 3 )
{
vPrintString( "Queue should have been full!\r\n" );
}
/* Receive from the queue.
The second parameter is the buffer into which the received data will be
placed. In this case the buffer is simply the address of a variable that
has the required size to hold the received structure.
The last parameter is the block time - the maximum amount of time that the
task will remain in the Blocked state to wait for data to be available
if the queue is already empty. In this case a block time is not necessary
because this task will only run when the queue is full. */
xStatus = xQueueReceive( xQueue, &xReceivedStructure, 0 );
if( xStatus == pdPASS )
{
/* Data was successfully received from the queue, print out the received
value and the source of the value. */
if( xReceivedStructure.eDataSource == eSender1 )
{
vPrintStringAndNumber( "From Sender 1 = ", xReceivedStructure.ucValue );
}
else
{
vPrintStringAndNumber( "From Sender 2 = ", xReceivedStructure.ucValue );
}
}
else
{
/* Nothing was received from the queue. This must be an error as this
task should only run when the queue is full. */
vPrintString( "Could not receive from the queue.\r\n" );
}
}
}
Listing 50. The definition of the receiving task for Example 11
main() changes only slightly from the previous example. The queue is created to hold three
Data_t structures, and the priorities of the sending and receiving tasks are reversed. The
implementation of main() is shown in Listing 51.
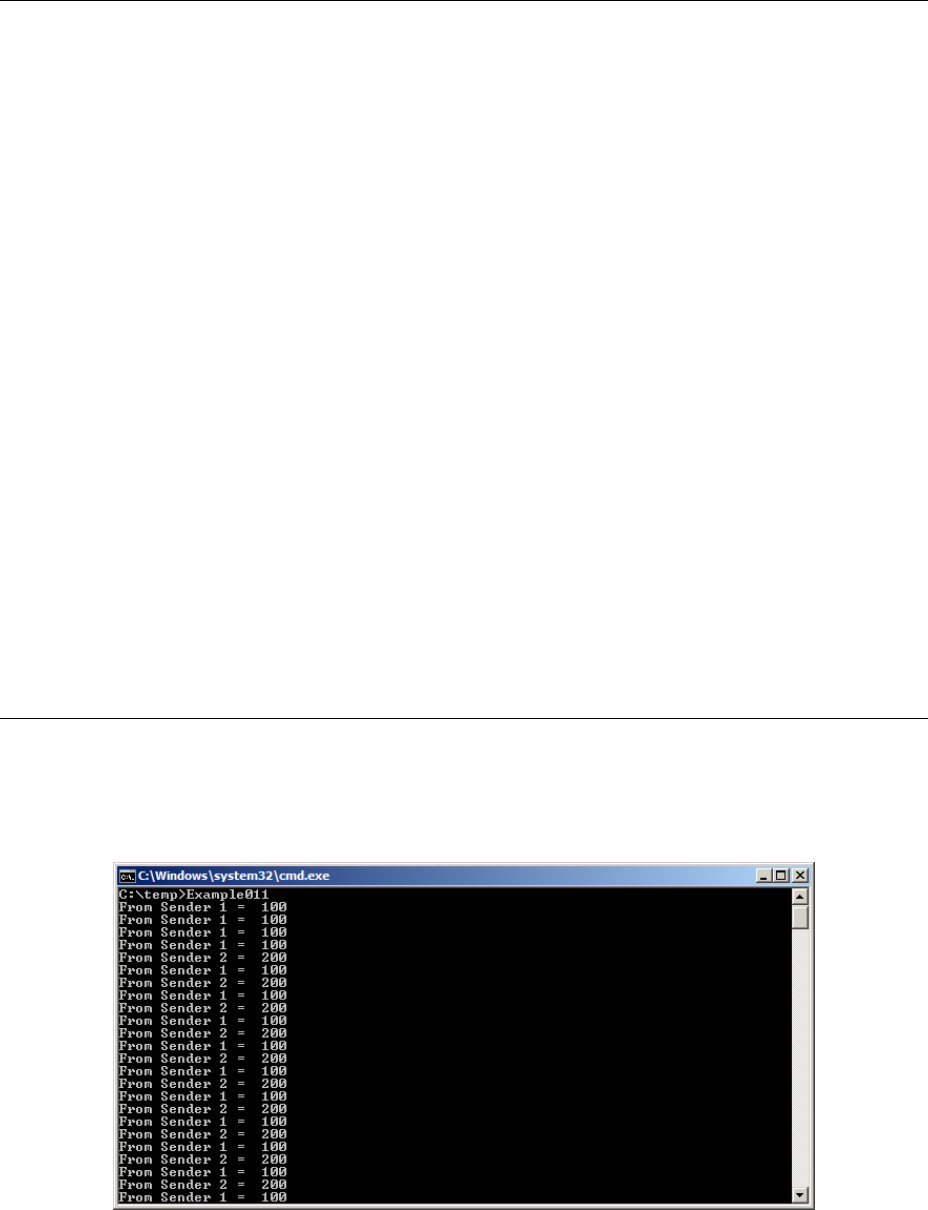
123
int main( void )
{
/* The queue is created to hold a maximum of 3 structures of type Data_t. */
xQueue = xQueueCreate( 3, sizeof( Data_t ) );
if( xQueue != NULL )
{
/* Create two instances of the task that will write to the queue. The
parameter is used to pass the structure that the task will write to the
queue, so one task will continuously send xStructsToSend[ 0 ] to the queue
while the other task will continuously send xStructsToSend[ 1 ]. Both
tasks are created at priority 2, which is above the priority of the receiver. */
xTaskCreate( vSenderTask, "Sender1", 1000, &( xStructsToSend[ 0 ] ), 2, NULL );
xTaskCreate( vSenderTask, "Sender2", 1000, &( xStructsToSend[ 1 ] ), 2, NULL );
/* Create the task that will read from the queue. The task is created with
priority 1, so below the priority of the sender tasks. */
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 1, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}
else
{
/* The queue could not be created. */
}
/* If all is well then main() will never reach here as the scheduler will
now be running the tasks. If main() does reach here then it is likely that
there was insufficient heap memory available for the idle task to be created.
Chapter 2 provides more information on heap memory management. */
for( ;; );
}
Listing 51. The implementation of main() for Example 11
The output produced by Example 11 is shown in Figure 35.
Figure 35 The output produced by Example 11

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
124
Figure 36 demonstrates the sequence of execution that results from having the priority of the
sending tasks above the priority of the receiving task. Table 22 provides further explanation of
Figure 36, and describes why the first four message originate from the same task.
Receiver
Sender 2
t1 t2
Sender 1
t3
t5 t6 t7
t4
Figure 36. The sequence of execution produced by Example 11
Table 22. Key to Figure 36
Time
Description
t1
Task Sender 1 executes and sends 3 data items to the queue.
t2
The queue is full so Sender 1 enters the Blocked state to wait for its next send to
complete. Task Sender 2 is now the highest priority task that is able to run, so enters
the Running state.
t3
Task Sender 2 finds the queue is already full, so enters the Blocked state to wait for
its first send to complete. Task Receiver is now the highest priority task that is able to
run, so enters the Running state.
t4
Two tasks that have a priority higher than the receiving task’s priority are waiting for
space to become available on the queue, resulting in task Receiver being pre-empted
as soon as it has removed one item from the queue. Tasks Sender 1 and Sender 2
have the same priority, so the scheduler selects the task that has been waiting the
longest as the task that will enter the Running state—in this case that is task Sender
1.

125
Table 22. Key to Figure 36
Time
Description
t5
Task Sender 1 sends another data item to the queue. There was only one space in
the queue, so task Sender 1 enters the Blocked state to wait for its next send to
complete. Task Receiver is again the highest priority task that is able to run so enters
the Running state.
Task Sender 1 has now sent four items to the queue, and task Sender 2 is still
waiting to send its first item to the queue.
t6
Two tasks that have a priority higher than the receiving task’s priority are waiting for
space to become available on the queue, so task Receiver is pre-empted as soon as
it has removed one item from the queue. This time Sender 2 has been waiting longer
than Sender 1, so Sender 2 enters the Running state.
t7
Task Sender 2 sends a data item to the queue. There was only one space in the
queue so Sender 2 enters the Blocked state to wait for its next send to complete.
Both tasks Sender 1 and Sender 2 are waiting for space to become available on the
queue, so task Receiver is the only task that can enter the Running state.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
126
4.5 Working with Large or Variable Sized Data
Queuing Pointers
If the size of the data being stored in the queue is large, then it is preferable to use the queue
to transfer pointers to the data, rather than copy the data itself into and out of the queue byte
by byte. Transferring pointers is more efficient in both processing time and the amount of
RAM required to create the queue. However, when queuing pointers, extreme care must be
taken to ensure that:
1. The owner of the RAM being pointed to is clearly defined.
When sharing memory between tasks via a pointer, it is essential to ensure that both
tasks do not modify the memory contents simultaneously, or take any other action that
could cause the memory contents to be invalid or inconsistent. Ideally, only the
sending task should be permitted to access the memory until a pointer to the memory
has been queued, and only the receiving task should be permitted to access the
memory after the pointer has been received from the queue.
2. The RAM being pointed to remains valid.
If the memory being pointed to was allocated dynamically, or obtained from a pool of
pre-allocated buffers, then exactly one task should be responsible for freeing the
memory. No tasks should attempt to access the memory after it has been freed.
A pointer should never be used to access data that has been allocated on a task stack.
The data will not be valid after the stack frame has changed.
By way of example, Listing 52, Listing 53 and Listing 54 demonstrate how to use a queue to
send a pointer to a buffer from one task to another:
Listing 52 creates a queue that can hold up to 5 pointers.
Listing 53 allocates a buffer, writes a string to the buffer, then sends a pointer to the
buffer to the queue.
Listing 54 receives a pointer to a buffer from the queue, then prints the string contained
in the buffer.

127
/* Declare a variable of type QueueHandle_t to hold the handle of the queue being created. */
QueueHandle_t xPointerQueue;
/* Create a queue that can hold a maximum of 5 pointers, in this case character pointers. */
xPointerQueue = xQueueCreate( 5, sizeof( char * ) );
Listing 52. Creating a queue that holds pointers
/* A task that obtains a buffer, writes a string to the buffer, then sends the address of the
buffer to the queue created in Listing 52. */
void vStringSendingTask( void *pvParameters )
{
char *pcStringToSend;
const size_t xMaxStringLength = 50;
BaseType_t xStringNumber = 0;
for( ;; )
{
/* Obtain a buffer that is at least xMaxStringLength characters big. The implementation
of prvGetBuffer() is not shown – it might obtain the buffer from a pool of pre-allocated
buffers, or just allocate the buffer dynamically. */
pcStringToSend = ( char * ) prvGetBuffer( xMaxStringLength );
/* Write a string into the buffer. */
snprintf( pcStringToSend, xMaxStringLength, "String number %d\r\n", xStringNumber );
/* Increment the counter so the string is different on each iteration of this task. */
xStringNumber++;
/* Send the address of the buffer to the queue that was created in Listing 52. The
address of the buffer is stored in the pcStringToSend variable.*/
xQueueSend( xPointerQueue, /* The handle of the queue. */
&pcStringToSend, /* The address of the pointer that points to the buffer. */
portMAX_DELAY );
}
}
Listing 53. Using a queue to send a pointer to a buffer
/* A task that receives the address of a buffer from the queue created in Listing 52, and
written to in Listing 53. The buffer contains a string, which is printed out. */
void vStringReceivingTask( void *pvParameters )
{
char *pcReceivedString;
for( ;; )
{
/* Receive the address of a buffer. */
xQueueReceive( xPointerQueue, /* The handle of the queue. */
&pcReceivedString, /* Store the buffer’s address in pcReceivedString. */
portMAX_DELAY );
/* The buffer holds a string, print it out. */
vPrintString( pcReceivedString );
/* The buffer is not required any more - release it so it can be freed, or re-used. */
prvReleaseBuffer( pcReceivedString );
}
}
Listing 54. Using a queue to receive a pointer to a buffer
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
128
Using a Queue to Send Different Types and Lengths of Data
Previous sections have demonstrated two powerful design patterns; sending structures to a
queue, and sending pointers to a queue. Combining those techniques allows a task to use a
single queue to receive any data type from any data source. The implementation of the
FreeRTOS+TCP TCP/IP stack provides a practical example of how this is achieved.
The TCP/IP stack, which runs in its own task, must process events from many different
sources. Different event types are associated with different types and lengths of data. All
events that occur outside of the TCP/IP task are described by a structure of type
IPStackEvent_t, and sent to the TCP/IP task on a queue. The IPStackEvent_t structure is
shown in Listing 55. The pvData member of the IPStackEvent_t structure is a pointer that can
be used to hold a value directly, or point to a buffer.
/* A subset of the enumerated types used in the TCP/IP stack to identify events. */
typedef enum
{
eNetworkDownEvent = 0, /* The network interface has been lost, or needs (re)connecting. */
eNetworkRxEvent, /* A packet has been received from the network. */
eTCPAcceptEvent, /* FreeRTOS_accept() called to accept or wait for a new client. */
/* Other event types appear here but are not shown in this listing. */
} eIPEvent_t;
/* The structure that describes events, and is sent on a queue to the TCP/IP task. */
typedef struct IP_TASK_COMMANDS
{
/* An enumerated type that identifies the event. See the eIPEvent_t definition above. */
eIPEvent_t eEventType;
/* A generic pointer that can hold a value, or point to a buffer. */
void *pvData;
} IPStackEvent_t;
Listing 55. The structure used to send events to the TCP/IP stack task in
FreeRTOS+TCP
Example TCP/IP events, and their associated data, include:
eNetworkRxEvent: A packet of data has been received from the network.
Data received from the network is sent to the TCP/IP task using a structure of type
IPStackEvent_t. The structure’s eEventType member is set to eNetworkRxEvent, and the
structure’s pvData member is used to point to the buffer that contains the received data. A
pseudo code example is shown in Listing 56.

129
void vSendRxDataToTheTCPTask( NetworkBufferDescriptor_t *pxRxedData )
{
IPStackEvent_t xEventStruct;
/* Complete the IPStackEvent_t structure. The received data is stored in
pxRxedData. */
xEventStruct.eEventType = eNetworkRxEvent;
xEventStruct.pvData = ( void * ) pxRxedData;
/* Send the IPStackEvent_t structure to the TCP/IP task. */
xSendEventStructToIPTask( &xEventStruct );
}
Listing 56. Pseudo code showing how an IPStackEvent_t structure is used to
send data received from the network to the TCP/IP task
eTCPAcceptEvent: A socket is to accept, or wait for, a connection from a client.
Accept events are sent from the task that called FreeRTOS_accept() to the TCP/IP task
using a structure of type IPStackEvent_t. The structure’s eEventType member is set to
eTCPAcceptEvent, and the structure’s pvData member is set to the handle of the socket
that is accepting a connection. A pseudo code example is shown in Listing 57.
void vSendAcceptRequestToTheTCPTask( Socket_t xSocket )
{
IPStackEvent_t xEventStruct;
/* Complete the IPStackEvent_t structure. */
xEventStruct.eEventType = eTCPAcceptEvent;
xEventStruct.pvData = ( void * ) xSocket;
/* Send the IPStackEvent_t structure to the TCP/IP task. */
xSendEventStructToIPTask( &xEventStruct );
}
Listing 57. Pseudo code showing how an IPStackEvent_t structure is used to
send the handle of a socket that is accepting a connection to the TCP/IP
task
eNetworkDownEvent: The network needs connecting, or re-connecting.
Network down events are sent from the network interface to the TCP/IP task using a
structure of type IPStackEvent_t. The structure’s eEventType member is set to
eNetworkDownEvent. Network down events are not associated with any data, so the
structure’s pvData member is not used. A pseudo code example is shown in Listing 58.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
130
void vSendNetworkDownEventToTheTCPTask( Socket_t xSocket )
{
IPStackEvent_t xEventStruct;
/* Complete the IPStackEvent_t structure. */
xEventStruct.eEventType = eNetworkDownEvent;
xEventStruct.pvData = NULL; /* Not used, but set to NULL for completeness. */
/* Send the IPStackEvent_t structure to the TCP/IP task. */
xSendEventStructToIPTask( &xEventStruct );
}
Listing 58. Pseudo code showing how an IPStackEvent_t structure is used to
send a network down event to the TCP/IP task
The code that receives and processes these events within the TCP/IP task is shown in Listing
59. It can be seen that the eEventType member of the IPStackEvent_t structures received
from the queue is used to determine how the pvData member is to be interpreted.
IPStackEvent_t xReceivedEvent;
/* Block on the network event queue until either an event is received, or xNextIPSleep ticks
pass without an event being received. eEventType is set to eNoEvent in case the call to
xQueueReceive() returns because it timed out, rather than because an event was received. */
xReceivedEvent.eEventType = eNoEvent;
xQueueReceive( xNetworkEventQueue, &xReceivedEvent, xNextIPSleep );
/* Which event was received, if any? */
switch( xReceivedEvent.eEventType )
{
case eNetworkDownEvent :
/* Attempt to (re)establish a connection. This event is not associated with any
data. */
prvProcessNetworkDownEvent();
break;
case eNetworkRxEvent:
/* The network interface has received a new packet. A pointer to the received data
is stored in the pvData member of the received IPStackEvent_t structure. Process
the received data. */
prvHandleEthernetPacket( ( NetworkBufferDescriptor_t * )( xReceivedEvent.pvData ) );
break;
case eTCPAcceptEvent:
/* The FreeRTOS_accept() API function was called. The handle of the socket that is
accepting a connection is stored in the pvData member of the received IPStackEvent_t
structure. */
xSocket = ( FreeRTOS_Socket_t * ) ( xReceivedEvent.pvData );
xTCPCheckNewClient( pxSocket );
break;
/* Other event types are processed in the same way, but are not shown here. */
}
Listing 59. Pseudo code showing how an IPStackEvent_t structure is used to send a
network down to the TCP/IP task

131
4.6 Receiving From Multiple Queues
Queue Sets
Often application designs require a single task to receive data of different sizes, data of
different meaning, and data from different sources. The previous section demonstrated how
this can be achieved in a neat and efficient way using a single queue that receives structures.
However, sometimes an application’s designer is working with constraints that limit their
design choices, necessitating the use of a separate queue for some data sources. For
example, third party code being integrated into a design might assume the presence of a
dedicated queue. In such cases a ‘queue set’ can be used.
Queue sets allow a task to receive data from more than one queue without the task polling
each queue in turn to determine which, if any, contains data.
A design that uses a queue set to receive data from multiple sources is less neat, and less
efficient, than a design that achieves the same functionality using a single queue that receives
structures. For that reason, it is recommended that queue sets are only used if design
constraints make their use absolutely necessary.
The following sections describe how to use a queue set by:
1. Creating a queue set.
2. Adding queues to the set.
Semaphores can also be added to a queue set. Semaphores are described later in this
book.
3. Reading from the queue set to determine which queues within the set contain data.
When a queue that is a member of a set receives data, the handle of the receiving
queue is sent to the queue set, and returned when a task calls a function that reads
from the queue set. Therefore, if a queue handle is returned from a queue set then the
queue referenced by the handle is known to contain data, and the task can then read
from the queue directly.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
132
Note: If a queue is a member of a queue set then do not read data from the queue
unless the queue’s handle has first been read from the queue set.
Queue set functionality is enabled by setting the configUSE_QUEUE_SETS compile time
configuration constant to 1 in FreeRTOSConfig.h.
The xQueueCreateSet() API Function
A queue set must be explicitly created before it can be used.
Queues sets are referenced by handles, which are variables of type QueueSetHandle_t. The
xQueueCreateSet() API function creates a queue set and returns a QueueSetHandle_t that
references the queue set it created.
QueueSetHandle_t xQueueCreateSet( const UBaseType_t uxEventQueueLength );
Listing 60. The xQueueCreateSet() API function prototype

133
Table 23. xQueueCreateSet() parameters and return value
Parameter Name
Description
uxEventQueueLength
When a queue that is a member of a queue set receives data, the
handle of the receiving queue is sent to the queue set.
uxEventQueueLength defines the maximum number of queue
handles the queue set being created can hold at any one time.
Queue handles are only sent to a queue set when a queue within the
set receives data. A queue cannot receive data if it is full, so no
queue handles can be sent to the queue set if all the queues in the
set are full. Therefore, the maximum number of items the queue set
will ever have to hold at one time is the sum of the lengths of every
queue in the set.
As an example, if there are three empty queues in the set, and each
queue has a length of five, then in total the queues in the set can
receive fifteen items (three queues multiplied by five items each)
before all the queues in the set are full. In that example
uxEventQueueLength must be set to fifteen to guarantee the queue
set can receive every item sent to it.
Semaphores can also be added to a queue set. Binary and counting
semaphores are covered later in this book. For the purposes of
calculating the necessary uxEventQueueLength, the length of a
binary semaphore is one, and the length of a counting semaphore is
given by the semaphore’s maximum count value.
As another example, if a queue set will contain a queue that has a
length of three, and a binary semaphore (which has a length of one),
uxEventQueueLength must be set to four (three plus one).
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
134
Table 23. xQueueCreateSet() parameters and return value
Parameter Name
Description
Return Value
If NULL is returned, then the queue set cannot be created because
there is insufficient heap memory available for FreeRTOS to allocate
the queue set data structures and storage area.
A non-NULL value being returned indicates that the queue set has
been created successfully. The returned value should be stored as
the handle to the created queue set.
The xQueueAddToSet() API Function
xQueueAddToSet() adds a queue or semaphore to a queue set. Semaphores are described
later in this book.
BaseType_t xQueueAddToSet( QueueSetMemberHandle_t xQueueOrSemaphore,
QueueSetHandle_t xQueueSet );
Listing 61. The xQueueAddToSet() API function prototype
Table 24. xQueueAddToSet() parameters and return value
Parameter Name
Description
xQueueOrSemaphore
The handle of the queue or semaphore that is being added to the
queue set.
Queue handles and semaphore handles can both be cast to the
QueueSetMemberHandle_t type.
xQueueSet
The handle of the queue set to which the queue or semaphore is
being added.

135
Table 24. xQueueAddToSet() parameters and return value
Parameter Name
Description
Return Value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if the queue or semaphore was
successfully added to the queue set.
2. pdFAIL
pdFAIL will be returned if the queue or semaphore could not be
added to the queue set.
Queues and binary semaphores can only be added to a set when
they are empty. Counting semaphores can only be added to a set
when their count is zero. Queues and semaphores can only be a
member of one set at a time.
The xQueueSelectFromSet() API Function
xQueueSelectFromSet() reads a queue handle from the queue set.
When a queue or semaphore that is a member of a set receives data, the handle of the
receiving queue or semaphore is sent to the queue set, and returned when a task calls
xQueueSelectFromSet(). If a handle is returned from a call to xQueueSelectFromSet() then
the queue or semaphore referenced by the handle is known to contain data and the calling
task must then read from the queue or semaphore directly.
Note: Do not read data from a queue or semaphore that is a member of a set unless the
handle of the queue or semaphore has first been returned from a call to
xQueueSelectFromSet(). Only read one item from a queue or semaphore each time the
queue handle or semaphore handle is returned from a call to xQueueSelectFromSet().
QueueSetMemberHandle_t xQueueSelectFromSet( QueueSetHandle_t xQueueSet,
const TickType_t xTicksToWait );
Listing 62. The xQueueSelectFromSet() API function prototype

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
136
Table 25. xQueueSelectFromSet() parameters and return value
Parameter Name
Description
xQueueSet
The handle of the queue set from which a queue handle or
semaphore handle is being received (read). The queue set handle
will have been returned from the call to xQueueCreateSet() used to
create the queue set.
xTicksToWait
The maximum amount of time the calling task should remain in the
Blocked state to wait to receive a queue or semaphore handle from
the queue set, if all the queues and semaphore in the set are empty.
If xTicksToWait is zero then xQueueSelectFromSet() will return
immediately if all the queues and semaphores in the set are empty.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds to a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without timing out) provided INCLUDE_vTaskSuspend is
set to 1 in FreeRTOSConfig.h.

137
Table 25. xQueueSelectFromSet() parameters and return value
Parameter Name
Description
Return Value
A return value that is not NULL will be the handle of a queue or
semaphore that is known to contain data. If a block time was
specified (xTicksToWait was not zero), then it is possible that the
calling task was placed into the Blocked state to wait for data to
become available from a queue or semaphore in the set, but a
handle was successfully read from the queue set before the block
time expired. Handles are returned as a QueueSetMemberHandle_t
type, which can be cast to either a QueueHandle_t type or
SemaphoreHandle_t type.
If the return value is NULL then a handle could not be read from the
queue set. If a block time was specified (xTicksToWait was not zero)
then the calling task will have been placed into the Blocked state to
wait for another task or interrupt to send data to a queue or
semaphore in the set, but the block time expired before that
happened.
Example 12. Using a Queue Set
This example creates two sending tasks and one receiving task. The sending tasks send data
to the receiving task on two separate queues, one queue for each task. The two queues are
added to a queue set, and the receiving task reads from the queue set to determine which of
the two queues contain data.
The tasks, queues, and the queue set, are all created in main()—see Listing 63 for its
implementation.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
138
/* Declare two variables of type QueueHandle_t. Both queues are added to the same
queue set. */
static QueueHandle_t xQueue1 = NULL, xQueue2 = NULL;
/* Declare a variable of type QueueSetHandle_t. This is the queue set to which the
two queues are added. */
static QueueSetHandle_t xQueueSet = NULL;
int main( void )
{
/* Create the two queues, both of which send character pointers. The priority
of the receiving task is above the priority of the sending tasks, so the queues
will never have more than one item in them at any one time*/
xQueue1 = xQueueCreate( 1, sizeof( char * ) );
xQueue2 = xQueueCreate( 1, sizeof( char * ) );
/* Create the queue set. Two queues will be added to the set, each of which can
contain 1 item, so the maximum number of queue handles the queue set will ever
have to hold at one time is 2 (2 queues multiplied by 1 item per queue). */
xQueueSet = xQueueCreateSet( 1 * 2 );
/* Add the two queues to the set. */
xQueueAddToSet( xQueue1, xQueueSet );
xQueueAddToSet( xQueue2, xQueueSet );
/* Create the tasks that send to the queues. */
xTaskCreate( vSenderTask1, "Sender1", 1000, NULL, 1, NULL );
xTaskCreate( vSenderTask2, "Sender2", 1000, NULL, 1, NULL );
/* Create the task that reads from the queue set to determine which of the two
queues contain data. */
xTaskCreate( vReceiverTask, "Receiver", 1000, NULL, 2, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
/* As normal, vTaskStartScheduler() should not return, so the following lines
Will never execute. */
for( ;; );
return 0;
}
Listing 63. Implementation of main() for Example 12
The first sending task uses xQueue1 to send a character pointer to the receiving task every
100 milliseconds. The second sending task uses xQueue2 to send a character pointer to the
receiving task every 200 milliseconds. The character pointers are set to point to a string that
identifies the sending task. The implementation of both sending tasks is shown in Listing 64.

139
void vSenderTask1( void *pvParameters )
{
const TickType_t xBlockTime = pdMS_TO_TICKS( 100 );
const char * const pcMessage = "Message from vSenderTask1\r\n";
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Block for 100ms. */
vTaskDelay( xBlockTime );
/* Send this task's string to xQueue1. It is not necessary to use a block
time, even though the queue can only hold one item. This is because the
priority of the task that reads from the queue is higher than the priority of
this task; as soon as this task writes to the queue it will be pre-empted by
the task that reads from the queue, so the queue will already be empty again
by the time the call to xQueueSend() returns. The block time is set to 0. */
xQueueSend( xQueue1, &pcMessage, 0 );
}
}
/*-----------------------------------------------------------*/
void vSenderTask2( void *pvParameters )
{
const TickType_t xBlockTime = pdMS_TO_TICKS( 200 );
const char * const pcMessage = "Message from vSenderTask2\r\n";
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Block for 200ms. */
vTaskDelay( xBlockTime );
/* Send this task's string to xQueue2. It is not necessary to use a block
time, even though the queue can only hold one item. This is because the
priority of the task that reads from the queue is higher than the priority of
this task; as soon as this task writes to the queue it will be pre-empted by
the task that reads from the queue, so the queue will already be empty again
by the time the call to xQueueSend() returns. The block time is set to 0. */
xQueueSend( xQueue2, &pcMessage, 0 );
}
}
Listing 64. The sending tasks used in Example 12
The queues that are written to by the sending tasks are members of the same queue set.
Each time a task sends to one of the queues, the handle of the queue is sent to the queue set.
The receiving task calls xQueueSelectFromSet() to read the queue handles from the queue
set. After the receiving task has received a queue handle from the set, it knows the queue
referenced by the received handle contains data, so reads the data from the queue directly.
The data it reads from the queue is a pointer to a string, which the receiving task prints out.
If a call to xQueueSelectFromSet() times out, then it will return NULL. In Example 12,
xQueueSelectFromSet() is called with an indefinite block time, so will never time out, and can

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
140
only return a valid queue handle. Therefore, the receiving task does not need to check to see
if xQueueSelectFromSet() returned NULL before the return value is used.
xQueueSelectFromSet() will only return a queue handle if the queue referenced by the handle
contains data, so it is not necessary to use a block time when reading from the queue.
The implementation of the receive task is shown in Listing 65.
void vReceiverTask( void *pvParameters )
{
QueueHandle_t xQueueThatContainsData;
char *pcReceivedString;
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Block on the queue set to wait for one of the queues in the set to contain data.
Cast the QueueSetMemberHandle_t value returned from xQueueSelectFromSet() to a
QueueHandle_t, as it is known all the members of the set are queues (the queue set
does not contain any semaphores). */
xQueueThatContainsData = ( QueueHandle_t ) xQueueSelectFromSet( xQueueSet,
portMAX_DELAY );
/* An indefinite block time was used when reading from the queue set, so
xQueueSelectFromSet() will not have returned unless one of the queues in the set
contained data, and xQueueThatContainsData cannot be NULL. Read from the queue. It
is not necessary to specify a block time because it is known the queue contains
data. The block time is set to 0. */
xQueueReceive( xQueueThatContainsData, &pcReceivedString, 0 );
/* Print the string received from the queue. */
vPrintString( pcReceivedString );
}
}
Listing 65. The receive task used in Example 12
Figure 37 shows the output produced by Example 12. It can be seen that the receiving task
receives strings from both sending tasks. The block time used by vSenderTask1() is half of
the block time used by vSenderTask2(), causing the strings sent by vSenderTask1() to be
printed out twice as often as those sent by vSenderTask2().
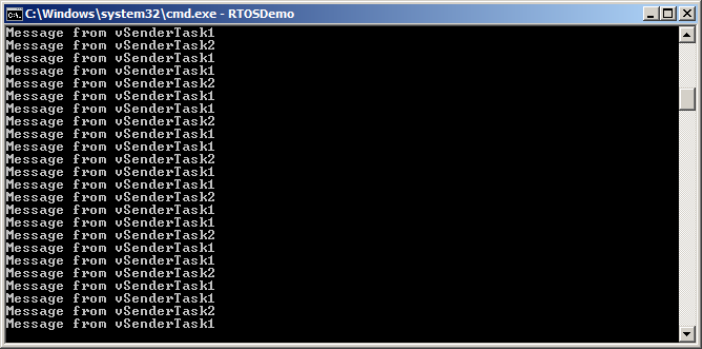
141
Figure 37 The output produced when Example 12 is executed
More Realistic Queue Set Use Cases
Example 12 demonstrated a very simplistic case; the queue set only contained queues, and
the two queues it contained were both used to send a character pointer. In a real application,
a queue set might contain both queues and semaphores, and the queues might not all hold
the same data type. When this is the case, it is necessary to test the value returned by
xQueueSelectFromSet(), before the returned value is used. Listing 66 demonstrates how to
use the value returned from xQueueSelectFromSet() when the set has the following members:
1. A binary semaphore.
2. A queue from which character pointers are read.
3. A queue from which uint32_t values are read.
Listing 66 assumes the queues and semaphore have already been created and added to the
queue set.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
142
/* The handle of the queue from which character pointers are received. */
QueueHandle_t xCharPointerQueue;
/* The handle of the queue from which uint32_t values are received. */
QueueHandle_t xUint32tQueue;
/* The handle of the binary semaphore. */
SemaphoreHandle_t xBinarySemaphore;
/* The queue set to which the two queues and the binary semaphore belong. */
QueueSetHandle_t xQueueSet;
void vAMoreRealisticReceiverTask( void *pvParameters )
{
QueueSetMemberHandle_t xHandle;
char *pcReceivedString;
uint32_t ulRecievedValue;
const TickType_t xDelay100ms = pdMS_TO_TICKS( 100 );
for( ;; )
{
/* Block on the queue set for a maximum of 100ms to wait for one of the members of
the set to contain data. */
xHandle = xQueueSelectFromSet( xQueueSet, xDelay100ms );
/* Test the value returned from xQueueSelectFromSet(). If the returned value is
NULL then the call to xQueueSelectFromSet() timed out. If the returned value is not
NULL then the returned value will be the handle of one of the set’s members. The
QueueSetMemberHandle_t value can be cast to either a QueueHandle_t or a
SemaphoreHandle_t. Whether an explicit cast is required depends on the compiler. */
if( xHandle == NULL )
{
/* The call to xQueueSelectFromSet() timed out. */
}
else if( xHandle == ( QueueSetMemberHandle_t ) xCharPointerQueue )
{
/* The call to xQueueSelectFromSet() returned the handle of the queue that
receives character pointers. Read from the queue. The queue is known to contain
data, so a block time of 0 is used. */
xQueueReceive( xCharPointerQueue, &pcReceivedString, 0 );
/* The received character pointer can be processed here... */
}
else if( xHandle == ( QueueSetMemberHandle_t ) xUint32tQueue )
{
/* The call to xQueueSelectFromSet() returned the handle of the queue that
receives uint32_t types. Read from the queue. The queue is known to contain
data, so a block time of 0 is used. */
xQueueReceive(xUint32tQueue, &ulRecievedValue, 0 );
/* The received value can be processed here... */
}
Else if( xHandle == ( QueueSetMemberHandle_t ) xBinarySemaphore )
{
/* The call to xQueueSelectFromSet() returned the handle of the binary semaphore.
Take the semaphore now. The semaphore is known to be available so a block time
of 0 is used. */
xSemaphoreTake( xBinarySemaphore, 0 );
/* Whatever processing is necessary when the semaphore is taken can be performed
here... */
}
}
}
Listing 66. Using a queue set that contains queues and semaphores

143
4.7 Using a Queue to Create a Mailbox
There is no consensus on terminology within the embedded community, and ‘mailbox’ will
mean different things in different RTOSes. In this book the term mailbox is used to refer to a
queue that has a length of one. A queue may get described as a mailbox because of the way
it is used in the application, rather than because it has a functional difference to a queue:
A queue is used to send data from one task to another task, or from an interrupt
service routine to a task. The sender places an item in the queue, and the receiver
removes the item from the queue. The data passes through the queue from the sender
to the receiver.
A mailbox is used to hold data that can be read by any task, or any interrupt service
routine. The data does not pass through the mailbox, but instead remains in the
mailbox until it is overwritten. The sender overwrites the value in the mailbox. The
receiver reads the value from the mailbox, but does not remove the value from the
mailbox.
This chapter describes two queue API functions that allow a queue to be used as a mailbox.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
144
Listing 67 shows a queue being created for use as a mailbox.
/* A mailbox can hold a fixed size data item. The size of the data item is set
when the mailbox (queue) is created. In this example the mailbox is created to
hold an Example_t structure. Example_t includes a time stamp to allow the data held
in the mailbox to note the time at which the mailbox was last updated. The time
stamp used in this example is for demonstration purposes only - a mailbox can hold
any data the application writer wants, and the data does not need to include a time
stamp. */
typedef struct xExampleStructure
{
TickType_t xTimeStamp;
uint32_t ulValue;
} Example_t;
/* A mailbox is a queue, so its handle is stored in a variable of type
QueueHandle_t. */
QueueHandle_t xMailbox;
void vAFunction( void )
{
/* Create the queue that is going to be used as a mailbox. The queue has a
length of 1 to allow it to be used with the xQueueOverwrite() API function, which
is described below. */
xMailbox = xQueueCreate( 1, sizeof( Example_t ) );
}
Listing 67. A queue being created for use as a mailbox
The xQueueOverwrite() API Function
Like the xQueueSendToBack() API function, the xQueueOverwrite() API function sends data
to a queue. Unlike xQueueSendToBack(), if the queue is already full, then xQueueOverwrite()
will overwrite data that is already in the queue.
xQueueOverwrite() should only be used with queues that have a length of one. That
restriction avoids the need for the function’s implementation to make an arbitrary decision as
to which item in the queue to overwrite, if the queue is full.
Note: Never call xQueueOverwrite() from an interrupt service routine. The interrupt-safe
version xQueueOverwriteFromISR() should be used in its place.
BaseType_t xQueueOverwrite( QueueHandle_t xQueue, const void * pvItemToQueue );
Listing 68. The xQueueOverwrite() API function prototype
145
Table 26. xQueueOverwrite() parameters and return value
Parameter Name/
Returned Value
Description
xQueue
The handle of the queue to which the data is being sent (written). The
queue handle will have been returned from the call to xQueueCreate()
used to create the queue.
pvItemToQueue
A pointer to the data to be copied into the queue.
The size of each item that the queue can hold is set when the queue is
created, so this many bytes will be copied from pvItemToQueue into
the queue storage area.
Returned value
xQueueOverwrite() will write to the queue even when the queue is full,
so pdPASS is the only possible return value.
Listing 69 shows xQueueOverwrite() being used to write to the mailbox (queue) that was
created in Listing 67.
void vUpdateMailbox( uint32_t ulNewValue )
{
/* Example_t was defined in Listing 67. */
Example_t xData;
/* Write the new data into the Example_t structure.*/
xData.ulValue = ulNewValue;
/* Use the RTOS tick count as the time stamp stored in the Example_t structure. */
xData.xTimeStamp = xTaskGetTickCount();
/* Send the structure to the mailbox - overwriting any data that is already in the
mailbox. */
xQueueOverwrite( xMailbox, &xData );
}
Listing 69. Using the xQueueOverwrite() API function
The xQueuePeek() API Function
xQueuePeek() is used to receive (read) an item from a queue without the item being removed
from the queue. xQueuePeek() receives data from the head of the queue, without modifying
the data stored in the queue, or the order in which data is stored in the queue.
Note: Never call xQueuePeek() from an interrupt service routine. The interrupt-safe version
xQueuePeekFromISR() should be used in its place.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
146
xQueuePeek() has the same function parameters and return value as xQueueReceive().
BaseType_t xQueuePeek( QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait );
Listing 70. The xQueuePeek() API function prototype
Listing 71 shows xQueuePeek() being used to receive the item posted to the mailbox (queue)
in Listing 69.
BaseType_t vReadMailbox( Example_t *pxData )
{
TickType_t xPreviousTimeStamp;
BaseType_t xDataUpdated;
/* This function updates an Example_t structure with the latest value received
from the mailbox. Record the time stamp already contained in *pxData before it
gets overwritten by the new data. */
xPreviousTimeStamp = pxData->xTimeStamp;
/* Update the Example_t structure pointed to by pxData with the data contained in
the mailbox. If xQueueReceive() was used here then the mailbox would be left
empty, and the data could not then be read by any other tasks. Using
xQueuePeek() instead of xQueueReceive() ensures the data remains in the mailbox.
A block time is specified, so the calling task will be placed in the Blocked
state to wait for the mailbox to contain data should the mailbox be empty. An
infinite block time is used, so it is not necessary to check the value returned
from xQueuePeek(), as xQueuePeek() will only return when data is available. */
xQueuePeek( xMailbox, pxData, portMAX_DELAY );
/* Return pdTRUE if the value read from the mailbox has been updated since this
function was last called. Otherwise return pdFALSE. */
if( pxData->xTimeStamp > xPreviousTimeStamp )
{
xDataUpdated = pdTRUE;
}
else
{
xDataUpdated = pdFALSE;
}
return xDataUpdated;
}
Listing 71. Using the xQueuePeek() API function

147
Chapter 5
Software Timer Management

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
148
5.1 Chapter Introduction and Scope
Software timers are used to schedule the execution of a function at a set time in the future, or
periodically with a fixed frequency. The function executed by the software timer is called the
software timer’s callback function.
Software timers are implemented by, and are under the control of, the FreeRTOS kernel.
They do not require hardware support, and are not related to hardware timers or hardware
counters.
Note that, in line with the FreeRTOS philosophy of using innovative design to ensure
maximum efficiency, software timers do not use any processing time unless a software timer
callback function is actually executing.
Software timer functionality is optional. To include software timer functionality:
1. Build the FreeRTOS source file FreeRTOS/Source/timers.c as part of your project.
2. Set configUSE_TIMERS to 1 in FreeRTOSConfig.h.
Scope
This chapter aims to give readers a good understanding of:
The characteristics of a software timer compared to the characteristics of a task.
The RTOS daemon task.
The timer command queue.
The difference between a one shot software timer and a periodic software timer.
How to create, start, reset and change the period of a software timer.
149
5.2 Software Timer Callback Functions
Software timer callback functions are implemented as C functions. The only thing special
about them is their prototype, which must return void, and take a handle to a software timer as
its only parameter. The callback function prototype is demonstrated by Listing 72.
void ATimerCallback( TimerHandle_t xTimer );
Listing 72. The software timer callback function prototype
Software timer callback functions execute from start to finish, and exit in the normal way. They
should be kept short, and must not enter the Blocked state.
Note: As will be seen, software timer callback functions execute in the context of a task that is
created automatically when the FreeRTOS scheduler is started. Therefore, it is essential that
software timer callback functions never call FreeRTOS API functions that will result in the
calling task entering the Blocked state. It is ok to call functions such as xQueueReceive(), but
only if the function’s xTicksToWait parameter (which specifies the function’s block time) is set
to 0. It is not ok to call functions such as vTaskDelay(), as calling vTaskDelay() will always
place the calling task into the Blocked state.
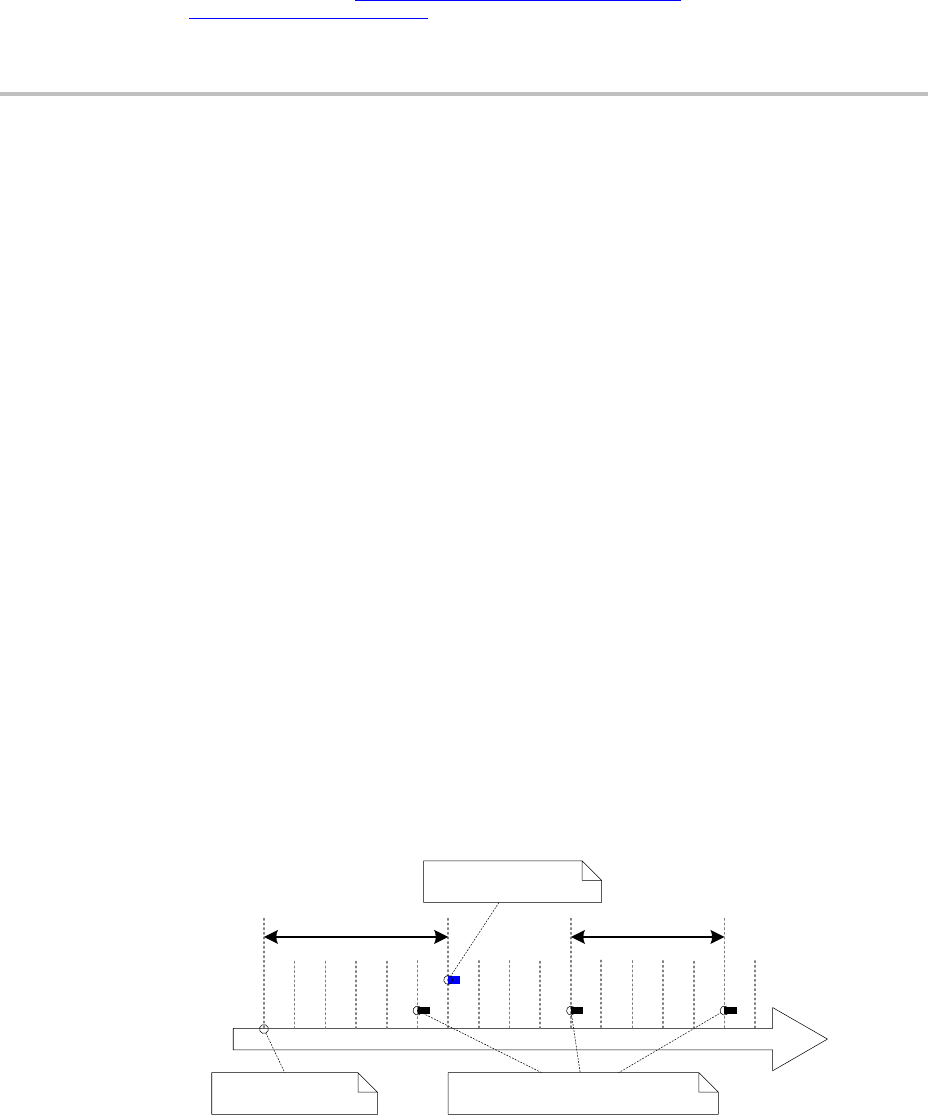
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
150
5.3 Attributes and States of a Software Timer
Period of a Software Timer
A software timer’s ‘period’ is the time between the software timer being started, and the
software timer’s callback function executing.
One-shot and Auto-reload Timers
There are two types of software timer:
1. One-shot timers
Once started, a one-shot timer will execute its callback function once only. A one-shot
timer can be restarted manually, but will not restart itself.
2. Auto-reload timers
Once started, an auto-reload timer will re-start itself each time it expires, resulting in
periodic execution of its callback function.
Figure 38 shows the difference in behavior between a one-shot timer and an auto-reload timer.
The dashed vertical lines mark the times at which a tick interrupt occurs.
Timer2 (auto-reload)
t1 t2 t3 t4 t5 t6 t7 t8 t9 t11 t13 t15 t17
Timer1 (one-shot)
The one shot timer
executes once only
Period of
Timer 1 equals 6
Period of
Timer 2 equals 5
The auto-reload timer executes
repeatedly with fixed period
Both timers are
started at time t1
Figure 38 The difference in behavior between one-shot and auto-reload software
timers
Referring to Figure 38:
Timer 1
151
Timer 1 is a one-shot timer that has a period of 6 ticks. It is started at time t1, so its
callback function executes 6 ticks later, at time t7. As timer 1 is a one-shot timer, its
callback function does not execute again.
Timer 2
Timer 2 is an auto-reload timer that has a period of 5 ticks. It is started at time t1, so its
callback function executes every 5 ticks after time t1. In Figure 38 this is at times t6, t11
and t16.
Software Timer States
A software timer can be in one of the following two states:
Dormant
A Dormant software timer exists, and can be referenced by its handle, but is not
running, so its callback functions will not execute.
Running
A Running software timer will execute its callback function after a time equal to its
period has elapsed since the software timer entered the Running state, or since the
software timer was last reset.
Figure 39 and Figure 40 show the possible transitions between the Dormant and Running
states for an auto-reload timer and a one-shot timer respectively. The key difference between
the two diagrams is the state entered after the timer has expired; the auto-reload timer
executes its callback function then re-enters the Running state, the one-shot timer executes its
callback function then enters the Dormant state.
The xTimerDelete() API function deletes a timer. A timer can be deleted at any time.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
152
Timer expired /
Execute Callback
Dormant
Running
xTimerCreate()
called
xTimerStart(),
xTimerReset() or
xTimerChangePeriod()
called
xTimerStop()
called
Figure 39 Auto-reload software timer states and transitions
Dormant
Running
xTimerStart(),
xTimerReset() or
xTimerChangePeriod()
called
xTimerStop()
called
Timer expired /
Execute Callback
xTimerCreate()
called
Figure 40 One-shot software timer states and transitions

153
5.4 The Context of a Software Timer
The RTOS Daemon (Timer Service) Task
All software timer callback functions execute in the context of the same RTOS daemon (or
‘timer service’) task
1
.
The daemon task is a standard FreeRTOS task that is created automatically when the
scheduler is started. Its priority and stack size are set by the configTIMER_TASK_PRIORITY
and configTIMER_TASK_STACK_DEPTH compile time configuration constants respectively.
Both constants are defined within FreeRTOSConfig.h.
Software timer callback functions must not call FreeRTOS API functions that will result in the
calling task entering the Blocked state, as to do so will result in the daemon task entering the
Blocked state.
The Timer Command Queue
Software timer API functions send commands from the calling task to the daemon task on a
queue called the ‘timer command queue’. This is shown in Figure 41. Examples of
commands include ‘start a timer’, ‘stop a timer’ and ‘reset a timer’.
The timer command queue is a standard FreeRTOS queue that is created automatically when
the scheduler is started. The length of the timer command queue is set by the
configTIMER_QUEUE_LENGTH compile time configuration constant in FreeRTOSConfig.h.
1
The task used to be called the ‘timer service task’, because originally it was only used to execute
software timer callback functions. Now the same task is used for other purposes too, so it is known by
the more generic name of the ‘RTOS daemon task’.
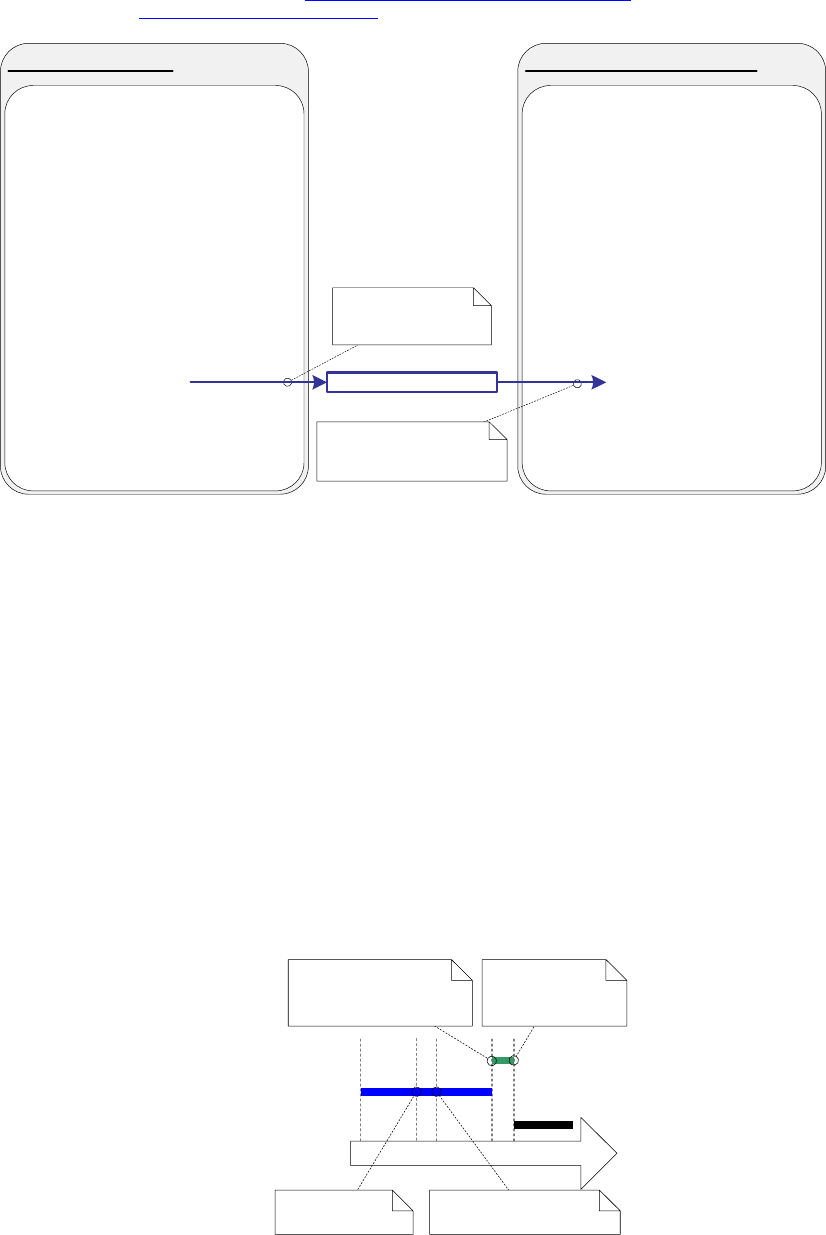
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
154
FreeRTOS (kernel) CodeApplication Code
/* A function implemented in
an application task. */
void vAFunction( void )
{
/* Write function code
here. */
....
/* At some point the
xTimerReset() API
function is called.
The implementation of
xTimerReset() writes to
the timer command queue.
*/
xTimerReset();
/* Write the rest of the
function code here. */
}
/* A pseudo representation
of the FreeRTOS daemon task.
This is not the real
code! */
void prvTimerTask( ... )
{
for( ;; )
{
/* Wait for a
command. */
xQueueReceive();
/* Process the
command. */
}
}
Timer command queue
The API function
writes to the timer
command queue
The RTOS daemon
task reads from the
timer command queue
Figure 41 The timer command queue being used by a software timer API function to
communicate with the RTOS daemon task
Daemon Task Scheduling
The daemon task is scheduled like any other FreeRTOS task; it will only process commands,
or execute timer callback functions, when it is the highest priority task that is able to run.
Figure 42 and Figure 43 demonstrate how the configTIMER_TASK_PRIORITY setting affects
the execution pattern.
Figure 42 shows the execution pattern when the priority of the daemon task is below the
priority of a task that calls the xTimerStart() API function.
Task1
Daemon Task
t1 t4 t5t3
Idle
The Daemon task
processes the “start
timer” command
The Daemon
task enters the
Blocked state
The call to
xTimerStart() returns
Task 1 calls
xTimerStart()
t2
Figure 42 The execution pattern when the priority of a task calling xTimerStart() is
above the priority of the daemon task
155
Referring to Figure 42, in which the priority of Task 1 is higher than the priority of the daemon
task, and the priority of the daemon task is higher than the priority of the Idle task:
1. At time t1
Task 1 is in the Running state, and the daemon task is in the Blocked state.
The daemon task will leave the Blocked state if a command is sent to the timer
command queue, in which case it will process the command, or if a software timer
expires, in which case it will execute the software timer’s callback function.
2. At time t2
Task 1 calls xTimerStart().
xTimerStart() sends a command to the timer command queue, causing the daemon
task to leave the Blocked state. The priority of Task 1 is higher than the priority of the
daemon task, so the daemon task does not pre-empt Task 1.
Task 1 is still in the Running state, and the daemon task has left the Blocked state and
entered the Ready state.
3. At time t3
Task 1 completes executing the xTimerStart() API function. Task 1 executed
xTimerStart() from the start of the function to the end of the function, without leaving the
Running state.
4. At time t4
Task 1 calls an API function that results in it entering the Blocked state. The daemon
task is now the highest priority task in the Ready state, so the scheduler selects the
daemon task as the task to enter the Running state. The daemon task then starts to
process the command sent to the timer command queue by Task 1.
Note: The time at which the software timer being started will expire is calculated from
the time the ‘start a timer’ command was sent to the timer command queue—it is not
calculated from the time the daemon task received the ‘start a timer’ command from the
timer command queue.
5. At time t5
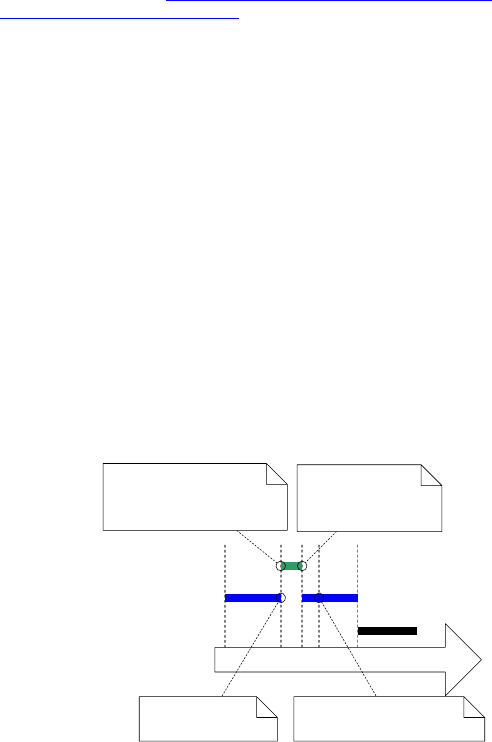
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
156
The daemon task has completed processing the command sent to it by Task 1, and
attempts to receive more data from the timer command queue. The timer command
queue is empty, so the daemon task re-enters the Blocked state. The daemon task will
leave the Blocked state again if a command is sent to the timer command queue, or if a
software timer expires.
The Idle task is now the highest priority task in the Ready state, so the scheduler
selects the Idle task as the task to enter the Running state.
Figure 43 shows a similar scenario to that shown by Figure 42, but this time the priority of the
daemon task is above the priority of the task that calls xTimerStart().
Task1
Daemon Task
t2 t5t3
Idle
The Daemon task
processes the “start
timer” command
The Daemon
task enters the
Blocked state
Task 1 calls
xTimerStart()
t1 t4
The call to
xTimerStart() returns
Figure 43 The execution pattern when the priority of a task calling xTimerS tart() is
below the priority of the daemon task
Referring to Figure 43, in which the priority of the daemon task is higher than the priority of
Task 1, and the priority of the Task 1 is higher than the priority of the Idle task:
1. At time t1
As before, Task 1 is in the Running state, and the daemon task is in the Blocked state.
2. At time t2
Task 1 calls xTimerStart().
xTimerStart() sends a command to the timer command queue, causing the daemon
task to leave the Blocked state. The priority of the daemon task is higher than the
priority of Task 1, so the scheduler selects the daemon task as the task to enter the
Running state.
157
Task 1 was pre-empted by the daemon task before it had completed executing the
xTimerStart() function, and is now in the Ready state.
The daemon task starts to process the command sent to the timer command queue by
Task 1.
3. At time t3
The daemon task has completed processing the command sent to it by Task 1, and
attempts to receive more data from the timer command queue. The timer command
queue is empty, so the daemon task re-enters the Blocked state.
Task 1 is now the highest priority task in the Ready state, so the scheduler selects Task
1 as the task to enter the Running state.
4. At time t4
Task 1 was pre-empted by the daemon task before it had completed executing the
xTimerStart() function, and only exits (returns from) xTimerStart() after it has re-entered
the Running state.
5. At time t5
Task 1 calls an API function that results in it entering the Blocked state. The Idle task is
now the highest priority task in the Ready state, so the scheduler selects the Idle task
as the task to enter the Running state.
In the scenario shown by Figure 42, time passed between Task 1 sending a command to the
timer command queue, and the daemon task receiving and processing the command. In the
scenario shown by Figure 43, the daemon task had received and processed the command
sent to it by Task 1 before Task 1 returned from the function that sent the command.
Commands sent to the timer command queue contain a time stamp. The time stamp is used
to account for any time that passes between a command being sent by an application task,
and the same command being processed by the daemon task. For example, if a ‘start a timer’
command is sent to start a timer that has a period of 10 ticks, the time stamp is used to ensure
the timer being started expires 10 ticks after the command was sent, not 10 ticks after the
command was processed by the daemon task.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
158
5.5 Creating and Starting a Software Timer
The xTimerCreate() API Function
FreeRTOS V9.0.0 also includes the xTimerCreateStatic() function, which allocates the memory required to create a
timer statically at compile time: A software timer must be explicitly created before it can be used.
Software timers are referenced by variables of type TimerHandle_t. xTimerCreate() is used to
create a software timer and returns a TimerHandle_t to reference the software timer it creates.
Software timers are created in the Dormant state.
Software timers can be created before the scheduler is running, or from a task after the
scheduler has been started.
Section 1.5 describes the data types and naming conventions used.
TimerHandle_t xTimerCreate( const char * const pcTimerName,
TickType_t xTimerPeriodInTicks,
UBaseType_t uxAutoReload,
void * pvTimerID,
TimerCallbackFunction_t pxCallbackFunction );
Listing 73. The xTimerCreate() API function prototype
Table 27. xTimerCreate() parameters and return value
Parameter Name/
Returned Value
Description
pcTimerName
A descriptive name for the timer. This is not used by FreeRTOS in
any way. It is included purely as a debugging aid. Identifying a timer
by a human readable name is much simpler than attempting to identify
it by its handle.
xTimerPeriodInTicks
The timer’s period specified in ticks. The pdMS_TO_TICKS() macro
can be used to convert a time specified in milliseconds into a time
specified in ticks.
uxAutoReload
Set uxAutoReload to pdTRUE to create an auto-reload timer. Set
uxAutoReload to pdFALSE to create a one-shot timer.

159
Table 27. xTimerCreate() parameters and return value
Parameter Name/
Returned Value
Description
pvTimerID
Each software timer has an ID value. The ID is a void pointer, and can
be used by the application writer for any purpose. The ID is
particularly useful when the same callback function is used by more
than one software timer, as it can be used to provide timer specific
storage. Use of a timer’s ID is demonstrated in an example within this
chapter.
pvTimerID sets an initial value for the ID of the task being created.
pxCallbackFunction
Software timer callback functions are simply C functions that conform
to the prototype shown in Listing 72. The pxCallbackFunction
parameter is a pointer to the function (in effect, just the function name)
to use as the callback function for the software timer being created.
Returned value
If NULL is returned, then the software timer cannot be created
because there is insufficient heap memory available for FreeRTOS to
allocate the necessary data structure.
A non-NULL value being returned indicates that the software timer has
been created successfully. The returned value is the handle of the
created timer.
Chapter 2 provides more information on heap memory management.
The xTimerStart() API Function
xTimerStart() is used to start a software timer that is in the Dormant state, or reset (re-start) a
software timer that is in the Running state. xTimerStop() is used to stop a software timer that
is in the Running state. Stopping a software timer is the same as transitioning the timer into
the Dormant state.
xTimerStart() can be called before the scheduler is started, but when this is done, the software
timer will not actually start until the time at which the scheduler starts.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
160
Note: Never call xTimerStart() from an interrupt service routine. The interrupt-safe version
xTimerStartFromISR() should be used in its place.
TimerHandle_t xTimerStart( TimerHandle_t xTimer, TickType_t xTicksToWait );
Listing 74. The xTimerStart() API function prototype
Table 28. xTimerStart() parameters and return value
Parameter Name/
Returned Value
Description
xTimer
The handle of the software timer being started or reset. The handle
will have been returned from the call to xTimerCreate() used to create
the software timer.

161
Table 28. xTimerStart() parameters and return value
Parameter Name/
Returned Value
Description
xTicksToWait
xTimerStart() uses the timer command queue to send the ‘start a
timer’ command to the daemon task. xTicksToWait specifies the
maximum amount of time the calling task should remain in the Blocked
state to wait for space to become available on the timer command
queue, should the queue already be full.
xTimerStart() will return immediately if xTicksToWait is zero and the
timer command queue is already full.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
If INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h then
setting xTicksToWait to portMAX_DELAY will result in the calling task
remaining in the Blocked state indefinitely (without a timeout) to wait
for space to become available in the timer command queue.
If xTimerStart() is called before the scheduler has been started then
the value of xTicksToWait is ignored, and xTimerStart() behaves as if
xTicksToWait had been set to zero.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
162
Table 28. xTimerStart() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if the ‘start a timer’ command was
successfully sent to the timer command queue.
If the priority of the daemon task is above the priority of the task
that called xTimerStart(), then the scheduler will ensure the start
command is processed before xTimerStart() returns. This is
because the daemon task will pre-empt the task that called
xTimerStart() as soon as there is data in the timer command
queue.
If a block time was specified (xTicksToWait was not zero), then it is
possible the calling task was placed into the Blocked state to wait
for space to become available in the timer command queue before
the function returned, but data was successfully written to the timer
command queue before the block time expired.
1. pdFALSE
pdFALSE will be returned if the ‘start a timer’ command could not
be written to the timer command queue because the queue was
already full.
If a block time was specified (xTicksToWait was not zero) then the
calling task will have been placed into the Blocked state to wait for
the daemon task to make room in the timer command queue, but
the specified block time expired before that happened.

163
Example 13. Creating one-shot and auto-reload timers
This example creates and starts a one-shot timer and an auto-reload timer—as shown in
Listing 75.
/* The periods assigned to the one-shot and auto-reload timers are 3.333 second and half a
second respectively. */
#define mainONE_SHOT_TIMER_PERIOD pdMS_TO_TICKS( 3333 )
#define mainAUTO_RELOAD_TIMER_PERIOD pdMS_TO_TICKS( 500 )
int main( void )
{
TimerHandle_t xAutoReloadTimer, xOneShotTimer;
BaseType_t xTimer1Started, xTimer2Started;
/* Create the one shot timer, storing the handle to the created timer in xOneShotTimer. */
xOneShotTimer = xTimerCreate(
/* Text name for the software timer - not used by FreeRTOS. */
"OneShot",
/* The software timer's period in ticks. */
mainONE_SHOT_TIMER_PERIOD,
/* Setting uxAutoRealod to pdFALSE creates a one-shot software timer. */
pdFALSE,
/* This example does not use the timer id. */
0,
/* The callback function to be used by the software timer being created. */
prvOneShotTimerCallback );
/* Create the auto-reload timer, storing the handle to the created timer in xAutoReloadTimer. */
xAutoReloadTimer = xTimerCreate(
/* Text name for the software timer - not used by FreeRTOS. */
"AutoReload",
/* The software timer's period in ticks. */
mainAUTO_RELOAD_TIMER_PERIOD,
/* Setting uxAutoRealod to pdTRUE creates an auto-reload timer. */
pdTRUE,
/* This example does not use the timer id. */
0,
/* The callback function to be used by the software timer being created. */
prvAutoReloadTimerCallback );
/* Check the software timers were created. */
if( ( xOneShotTimer != NULL ) && ( xAutoReloadTimer != NULL ) )
{
/* Start the software timers, using a block time of 0 (no block time). The scheduler has
not been started yet so any block time specified here would be ignored anyway. */
xTimer1Started = xTimerStart( xOneShotTimer, 0 );
xTimer2Started = xTimerStart( xAutoReloadTimer, 0 );
/* The implementation of xTimerStart() uses the timer command queue, and xTimerStart()
will fail if the timer command queue gets full. The timer service task does not get
created until the scheduler is started, so all commands sent to the command queue will
stay in the queue until after the scheduler has been started. Check both calls to
xTimerStart() passed. */
if( ( xTimer1Started == pdPASS ) && ( xTimer2Started == pdPASS ) )
{
/* Start the scheduler. */
vTaskStartScheduler();
}
}
/* As always, this line should not be reached. */
for( ;; );
}
Listing 75. Creating and starting the timers used in Example 13
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
164
The timers’ callback functions just print a message each time they are called. The
implementation of the one-shot timer callback function is shown in Listing 76. The
implementation of the auto-reload timer callback function is shown in Listing 77.
static void prvOneShotTimerCallback( TimerHandle_t xTimer )
{
TickType_t xTimeNow;
/* Obtain the current tick count. */
xTimeNow = xTaskGetTickCount();
/* Output a string to show the time at which the callback was executed. */
vPrintStringAndNumber( "One-shot timer callback executing", xTimeNow );
/* File scope variable. */
ulCallCount++;
}
Listing 76. The callback function used by the one-shot timer in Example 13
static void prvAutoReloadTimerCallback( TimerHandle_t xTimer )
{
TickType_t xTimeNow;
/* Obtain the current tick count. */
xTimeNow = uxTaskGetTickCount();
/* Output a string to show the time at which the callback was executed. */
vPrintStringAndNumber( "Auto-reload timer callback executing", xTimeNow );
ulCallCount++;
}
Listing 77. The callback function used by the auto -reload timer in Example 13
Executing this example produces the output shown in Figure 44. Figure 44 shows the auto-
reload timer’s callback function executing with a fixed period of 500 ticks
(mainAUTO_RELOAD_TIMER_PERIOD is set to 500 in Listing 75), and the one-shot timer’s
callback function executing only once, when the tick count is 3333
(mainONE_SHOT_TIMER_PERIOD is set to 3333 in Listing 75).
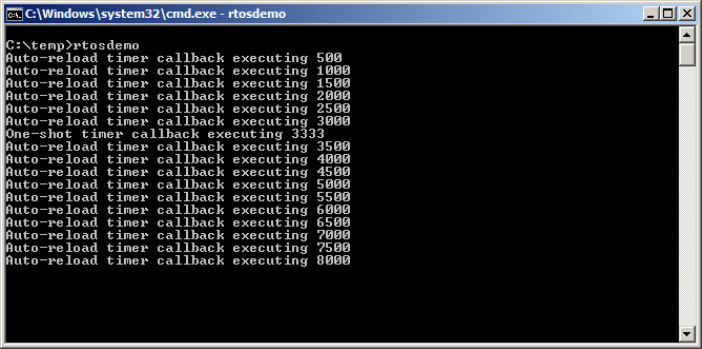
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
166
5.6 The Timer ID
Each software timer has an ID, which is a tag value that can be used by the application writer
for any purpose. The ID is stored in a void pointer (void *), so can store an integer value
directly, point to any other object, or be used as a function pointer.
An initial value is assigned to the ID when the software timer is created—after which the ID
can be updated using the vTimerSetTimerID() API function, and queried using the
pvTimerGetTimerID() API function.
Unlike other software timer API functions, vTimerSetTimerID() and pvTimerGetTimerID()
access the software timer directly—they do not send a command to the timer command
queue.
The vTimerSetTimerID() API Function
void vTimerSetTimerID( const TimerHandle_t xTimer, void *pvNewID );
Listing 78. The vTimerSetTimerID() API function prototype
Table 29. vTimerSetTimerID() parameters
Parameter Name/
Returned Value
Description
xTimer
The handle of the software timer being updated with a new ID value.
The handle will have been returned from the call to xTimerCreate()
used to create the software timer.
pvNewID
The value to which the software timer’s ID will be set.
The pvTimerGetTimerID() API Function
void *pvTimerGetTimerID( TimerHandle_t xTimer );
Listing 79. The pvTimerGetTimerID() API function prototype

167
Table 30. pvTimerGetTimerID() parameters and ret urn value
Parameter Name/
Returned Value
Description
xTimer
The handle of the software timer being queried. The handle will have
been returned from the call to xTimerCreate() used to create the
software timer.
Returned value
The ID of the software timer being queried.
Example 14. Using the callback function parameter and the software timer ID
The same callback function can be assigned to more than one software timer. When that is
done, the callback function parameter is used to determine which software timer expired.
Example 13 used two separate callback functions; one callback function was used by the one-
shot timer, and the other callback function was used by the auto-reload timer. Example 14
creates similar functionality to that created by Example 13, but assigns a single callback
function to both software timers.
The main() function used by Example 14 is almost identical to the main() function used in
Example 13. The only difference is where the software timers are created. This difference is
shown in Listing 80, where prvTimerCallback() is used as the callback function for both timers.
/* Create the one shot timer software timer, storing the handle in xOneShotTimer. */
xOneShotTimer = xTimerCreate( "OneShot",
mainONE_SHOT_TIMER_PERIOD,
pdFALSE,
/* The timer’s ID is initialized to 0. */
0,
/* prvTimerCallback() is used by both timers. */
prvTimerCallback );
/* Create the auto-reload software timer, storing the handle in xAutoReloadTimer */
xAutoReloadTimer = xTimerCreate( "AutoReload",
mainAUTO_RELOAD_TIMER_PERIOD,
pdTRUE,
/* The timer’s ID is initialized to 0. */
0,
/* prvTimerCallback() is used by both timers. */
prvTimerCallback );
Listing 80. Creating the timers used in Example 14

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
168
prvTimerCallback() will execute when either timer expires. The implementation of
prvTimerCallback() uses the function’s parameter to determine if it was called because the
one-shot timer expired, or because the auto-reload timer expired.
prvTimerCallback() also demonstrates how to use the software timer ID as timer specific
storage; each software timer keeps a count of the number of times it has expired in its own ID,
and the auto-reload timer uses the count to stop itself the fifth time it executes.
The implementation of prvTimerCallback() is shown in Listing 79.
static void prvTimerCallback( TimerHandle_t xTimer )
{
TickType_t xTimeNow;
uint32_t ulExecutionCount;
/* A count of the number of times this software timer has expired is stored in the timer's
ID. Obtain the ID, increment it, then save it as the new ID value. The ID is a void
pointer, so is cast to a uint32_t. */
ulExecutionCount = ( uint32_t ) pvTimerGetTimerID( xTimer );
ulExecutionCount++;
vTimerSetTimerID( xTimer, ( void * ) ulExecutionCount );
/* Obtain the current tick count. */
xTimeNow = xTaskGetTickCount();
/* The handle of the one-shot timer was stored in xOneShotTimer when the timer was created.
Compare the handle passed into this function with xOneShotTimer to determine if it was the
one-shot or auto-reload timer that expired, then output a string to show the time at which
the callback was executed. */
if( xTimer == xOneShotTimer )
{
vPrintStringAndNumber( "One-shot timer callback executing", xTimeNow );
}
else
{
/* xTimer did not equal xOneShotTimer, so it must have been the auto-reload timer that
expired. */
vPrintStringAndNumber( "Auto-reload timer callback executing", xTimeNow );
if( ulExecutionCount == 5 )
{
/* Stop the auto-reload timer after it has executed 5 times. This callback function
executes in the context of the RTOS daemon task so must not call any functions that
might place the daemon task into the Blocked state. Therefore a block time of 0 is
used. */
xTimerStop( xTimer, 0 );
}
}
}
Listing 81. The timer callback function used in Example 14
The output produced by Example 14 is shown in Figure 45. It can be seen that the auto-
reload timer only executes five times.
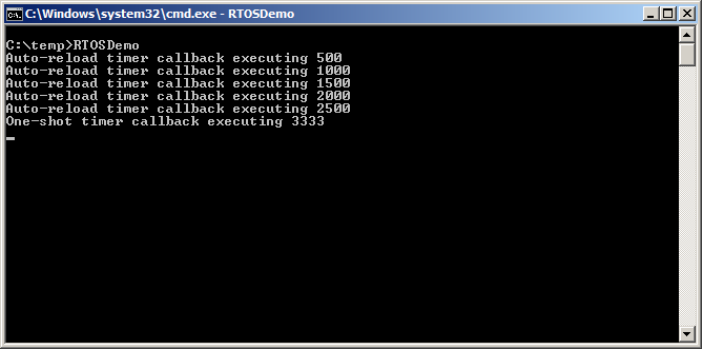
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
170
5.7 Changing the Period of a Timer
Every official FreeRTOS port is provided with one or more example projects. Most example
projects are self-checking, and an LED is used to give visual feedback of the project’s status; if
the self-checks have always passed then the LED is toggled slowly, if a self-check has ever
failed then the LED is toggled quickly.
Some example projects perform the self-checks in a task, and use the vTaskDelay() function
to control the rate at which the LED toggles. Other example projects perform the self-checks
in a software timer callback function, and use the timer’s period to control the rate at which the
LED toggles.
The xTimerChangePeriod() API Function
The period of a software timer is changed using the xTimerChangePeriod() function.
If xTimerChangePeriod() is used to change the period of a timer that is already running, then
the timer will use the new period value to recalculate its expiry time. The recalculated expiry
time is relative to when xTimerChangePeriod() was called, not relative to when the timer was
originally started.
If xTimerChangePeriod() is used to change the period of a timer that is in the Dormant state (a
timer that is not running), then the timer will calculate an expiry time, and transition to the
Running state (the timer will start running).
Note: Never call xTimerChangePeriod() from an interrupt service routine. The interrupt-safe
version xTimerChangePeriodFromISR() should be used in its place.
BaseType_t xTimerChangePeriod( TimerHandle_t xTimer,
TickType_t xNewTimerPeriodInTicks,
TickType_t xTicksToWait );
Listing 82. The xTimerChangePeriod() API function prototype

171
Table 31. xTimerChangePeriod() parameters and return value
Parameter Name/
Returned Value
Description
xTimer
The handle of the software timer being updated with a new period
value. The handle will have been returned from the call to
xTimerCreate() used to create the software timer.
xTimerPeriodInTicks
The new period for the software timer, specified in ticks. The
pdMS_TO_TICKS() macro can be used to convert a time specified in
milliseconds into a time specified in ticks.
xTicksToWait
xTimerChangePeriod() uses the timer command queue to send the
‘change period’ command to the daemon task. xTicksToWait specifies
the maximum amount of time the calling task should remain in the
Blocked state to wait for space to become available on the timer
command queue, should the queue already be full.
xTimerChangePeriod() will return immediately if xTicksToWait is zero
and the timer command queue is already full.
The macro pdMS_TO_TICKS() can be used to convert a time
specified in milliseconds into a time specified in ticks.
If INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h, then
setting xTicksToWait to portMAX_DELAY will result in the calling task
remaining in the Blocked state indefinitely (without a timeout) to wait
for space to become available in the timer command queue.
If xTimerChangePeriod() is called before the scheduler has been
started, then the value of xTicksToWait is ignored, and
xTimerChangePeriod() behaves as if xTicksToWait had been set to
zero.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
172
Table 31. xTimerChangePeriod() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if data was successfully sent to the
timer command queue.
If a block time was specified (xTicksToWait was not zero), then it is
possible the calling task was placed into the Blocked state to wait
for space to become available in the timer command queue before
the function returned, but data was successfully written to the timer
command queue before the block time expired.
2. pdFALSE
pdFALSE will be returned if the ‘change period’ command could
not be written to the timer command queue because the queue
was already full.
If a block time was specified (xTicksToWait was not zero) then the
calling task will have been placed into the Blocked state to wait for
the daemon task to make room in the queue, but the specified
block time expired before that happened.
Listing 83 shows how the FreeRTOS examples that include self-checking functionality in a
software timer callback function use xTimerChangePeriod() to increase the rate at which an
LED toggles if a self-check fails. The software timer that performs the self-checks is referred
to as the ‘check timer’.

173
/* The check timer is created with a period of 3000 milliseconds, resulting in the LED toggling
every 3 seconds. If the self-checking functionality detects an unexpected state, then the check
timer’s period is changed to just 200 milliseconds, resulting in a much faster toggle rate. */
const TickType_t xHealthyTimerPeriod = pdMS_TO_TICKS( 3000 );
const TickType_t xErrorTimerPeriod = pdMS_TO_TICKS( 200 );
/* The callback function used by the check timer. */
static void prvCheckTimerCallbackFunction( TimerHandle_t xTimer )
{
static BaseType_t xErrorDetected = pdFALSE;
if( xErrorDetected == pdFALSE )
{
/* No errors have yet been detected. Run the self-checking function again. The
function asks each task created by the example to report its own status, and also checks
that all the tasks are actually still running (and so able to report their status
correctly). */
if( CheckTasksAreRunningWithoutError() == pdFAIL )
{
/* One or more tasks reported an unexpected status. An error might have occurred.
Reduce the check timer’s period to increase the rate at which this callback function
executes, and in so doing also increase the rate at which the LED is toggled. This
callback function is executing in the context of the RTOS daemon task, so a block
time of 0 is used to ensure the Daemon task never enters the Blocked state. */
xTimerChangePeriod( xTimer, /* The timer being updated. */
xErrorTimerPeriod, /* The new period for the timer. */
0 ); /* Do not block when sending this command. */
}
/* Latch that an error has already been detected. */
xErrorDetected = pdTRUE;
}
/* Toggle the LED. The rate at which the LED toggles will depend on how often this function
is called, which is determined by the period of the check timer. The timer’s period will
have been reduced from 3000ms to just 200ms if CheckTasksAreRunningWithoutError() has ever
returned pdFAIL. */
ToggleLED();
}
Listing 83. Using xTimerChangePeriod()
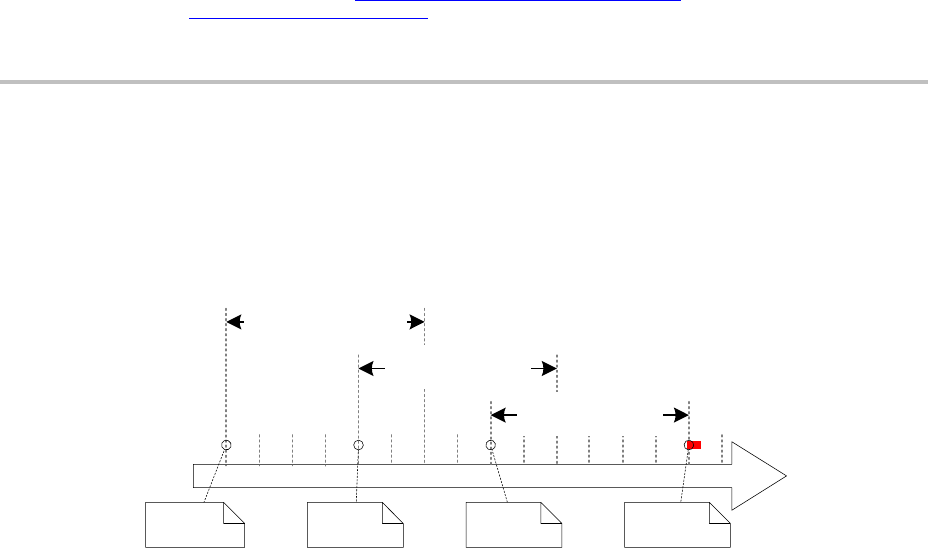
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
174
5.8 Resetting a Software Timer
Resetting a software timer means to re-start the timer; the timer’s expiry time is recalculated to
be relative to when the timer was reset, rather than when the timer was originally started. This
is demonstrated by Figure 46, which shows a timer that has a period of 6 being started, then
reset twice, before eventually expiring and executing its callback function.
Timer1
t1 t2 t3 t4 t5 t6 t7 t8 t9 t11 t13 t15
Expiry time calculated
to be t7 (t1 + 6 = t7)
Timer 1
is started
Expiry time re-
calculated to be t11
Expiry time re-
calculated to be t15
Timer 1
is reset
Timer 1
executes
Timer 1
is reset
Figure 46 Starting and resetting a software timer that has a period of 6 ticks
Referring to Figure 46:
Timer 1 is started at time t1. It has a period of 6, so the time at which it will execute its
callback function is originally calculated to be t7, which is 6 ticks after it was started.
Timer 1 is reset before time t7 is reached, so before it had expired and executed its
callback function. Timer 1 is reset at time t5, so the time at which it will execute its
callback function is re-calculated to be t11, which is 6 ticks after it was reset.
Timer 1 is reset again before time t11, so again before it had expired and executed its
callback function. Timer 1 is reset at time t9, so the time at which it will execute its
callback function is re-calculated to be t15, which is 6 ticks after it was last reset.
Timer 1 is not reset again, so it expires at time t15, and its callback function is executed
accordingly.
The xTimerReset() API Function
A timer is reset using the xTimerReset() API function.
xTimerReset() can also be used to start a timer that is in the Dormant state.
175
Note: Never call xTimerReset() from an interrupt service routine. The interrupt-safe version
xTimerResetFromISR() should be used in its place.
BaseType_t xTimerReset( TimerHandle_t xTimer, TickType_t xTicksToWait );
Listing 84. The xTimerReset() API function prototype
Table 32. xTimerReset() parameters and return value
Parameter Name/
Returned Value
Description
xTimer
The handle of the software timer being reset or started. The handle
will have been returned from the call to xTimerCreate() used to create
the software timer.
xTicksToWait
xTimerChangePeriod() uses the timer command queue to send the
‘reset’ command to the daemon task. xTicksToWait specifies the
maximum amount of time the calling task should remain in the Blocked
state to wait for space to become available on the timer command
queue, should the queue already be full.
xTimerReset() will return immediately if xTicksToWait is zero and the
timer command queue is already full.
If INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h then
setting xTicksToWait to portMAX_DELAY will result in the calling task
remaining in the Blocked state indefinitely (without a timeout) to wait
for space to become available in the timer command queue.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
176
Table 32. xTimerReset() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if data was successfully sent to the
timer command queue.
If a block time was specified (xTicksToWait was not zero), then it is
possible the calling task was placed into the Blocked state to wait
for space to become available in the timer command queue before
the function returned, but data was successfully written to the timer
command queue before the block time expired.
2. pdFALSE
pdFALSE will be returned if the ‘reset’ command could not be
written to the timer command queue because the queue was
already full.
If a block time was specified (xTicksToWait was not zero) then the
calling task will have been placed into the Blocked state to wait for
the daemon task to make room in the queue, but the specified
block time expired before that happened.
Example 15. Resetting a software timer
This example simulates the behavior of the backlight on a cell phone. The backlight:
Turns on when a key is pressed.
Remains on provided further keys are pressed within a certain time period.
Automatically turns off if no key presses are made within a certain time period.
A one-shot software timer is used to implement this behavior:

177
The [simulated] backlight is turned on when a key is pressed, and turned off in the
software timer’s callback function.
The software timer is reset each time a key is pressed.
The time period during which a key must be pressed to prevent the backlight being
turned off is therefore equal to the period of the software timer; if the software timer is
not reset by a key press before the timer expires, then the timer’s callback function
executes, and the backlight is turned off.
The xSimulatedBacklightOn variable holds the backlight state. xSimulatedBacklightOn is set
to pdTRUE to indicate the backlight is on, and pdFALSE to indicate the backlight is off.
The software timer callback function is shown in Listing 85.
static void prvBacklightTimerCallback( TimerHandle_t xTimer )
{
TickType_t xTimeNow = xTaskGetTickCount();
/* The backlight timer expired, turn the backlight off. */
xSimulatedBacklightOn = pdFALSE;
/* Print the time at which the backlight was turned off. */
vPrintStringAndNumber(
"Timer expired, turning backlight OFF at time\t\t", xTimeNow );
}
Listing 85. The callback function for the one-shot timer used in Example 15
Example 15 creates a task to poll the keyboard
1
. The task is shown in Listing 86, but for the
reasons described in the next paragraph, Listing 86 is not intended to be representative of an
optimal design.
Using FreeRTOS allows your application to be event driven. Event driven designs use
processing time very efficiently, because processing time is only used if an event has
occurred, and processing time is not wasted polling for events that have not occurred.
Example 15 could not be made event driven because it is not practical to process keyboard
interrupts when using the FreeRTOS Windows port, so the much less efficient polling
1
Printing to the Windows console, and reading keys from the Windows console, both result in the
execution of Windows system calls. Windows system calls, including use of the Windows console,
disks, or TCP/IP stack, can adversely affect the behavior of the FreeRTOS Windows port, and should
normally be avoided.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
178
technique had to be used instead. If Listing 86 was an interrupt service routine, then
xTimerResetFromISR() would be used in place of xTimerReset().
static void vKeyHitTask( void *pvParameters )
{
const TickType_t xShortDelay = pdMS_TO_TICKS( 50 );
TickType_t xTimeNow;
vPrintString( "Press a key to turn the backlight on.\r\n" );
/* Ideally an application would be event driven, and use an interrupt to process key
presses. It is not practical to use keyboard interrupts when using the FreeRTOS Windows
port, so this task is used to poll for a key press. */
for( ;; )
{
/* Has a key been pressed? */
if( _kbhit() != 0 )
{
/* A key has been pressed. Record the time. */
xTimeNow = xTaskGetTickCount();
if( xSimulatedBacklightOn == pdFALSE )
{
/* The backlight was off, so turn it on and print the time at which it was
turned on. */
xSimulatedBacklightOn = pdTRUE;
vPrintStringAndNumber(
"Key pressed, turning backlight ON at time\t\t", xTimeNow );
}
else
{
/* The backlight was already on, so print a message to say the timer is about to
be reset and the time at which it was reset. */
vPrintStringAndNumber(
"Key pressed, resetting software timer at time\t\t", xTimeNow );
}
/* Reset the software timer. If the backlight was previously off, then this call
will start the timer. If the backlight was previously on, then this call will
restart the timer. A real application may read key presses in an interrupt. If
this function was an interrupt service routine then xTimerResetFromISR() must be
used instead of xTimerReset(). */
xTimerReset( xBacklightTimer, xShortDelay );
/* Read and discard the key that was pressed – it is not required by this simple
example. */
( void ) _getch();
}
}
}
Listing 86. The task used to reset the software timer in Example 15
The output produced when Example 15 is executed is shown in Figure 47. With reference to
Figure 47:
The first key press occurred when the tick count was 812. At that time the backlight
was turned on, and the one-shot timer was started.
Further key presses occurred when the tick count was 1813, 3114, 4015 and 5016. All
of these key presses resulted in the timer being reset before the timer had expired.

179
The timer expired when the tick count was 10016. At that time the backlight was
turned off.
Figure 47 The output produced when Example 15 is executed
It can be seen in Figure 47 that the timer had a period of 5000 ticks; the backlight was turned
off exactly 5000 ticks after a key was last pressed, so 5000 ticks after the timer was last reset.


181
Chapter 6
Interrupt Management

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
182
6.1 Chapter Introduction and Scope
Events
Embedded real-time systems have to take actions in response to events that originate from
the environment. For example, a packet arriving on an Ethernet peripheral (the event) might
require passing to a TCP/IP stack for processing (the action). Non-trivial systems will have to
service events that originate from multiple sources, all of which will have different processing
overhead and response time requirements. In each case, a judgment has to be made as to
the best event processing implementation strategy:
1. How should the event be detected? Interrupts are normally used, but inputs can also
be polled.
2. When interrupts are used, how much processing should be performed inside the
interrupt service routine (ISR), and how much outside? It is normally desirable to keep
each ISR as short as possible.
3. How events are communicated to the main (non-ISR) code, and how can this code be
structured to best accommodate processing of potentially asynchronous occurrences?
FreeRTOS does not impose any specific event processing strategy on the application
designer, but does provide features that allow the chosen strategy to be implemented in a
simple and maintainable way.
It is important to draw a distinction between the priority of a task, and the priority of an
interrupt:
A task is a software feature that is unrelated to the hardware on which FreeRTOS is
running. The priority of a task is assigned in software by the application writer, and a
software algorithm (the scheduler) decides which task will be in the Running state.
Although written in software, an interrupt service routine is a hardware feature because
the hardware controls which interrupt service routine will run, and when it will run.
Tasks will only run when there are no ISRs running, so the lowest priority interrupt will
interrupt the highest priority task, and there is no way for a task to pre-empt an ISR.
183
All architectures on which FreeRTOS will run are capable of processing interrupts, but details
relating to interrupt entry, and interrupt priority assignment, vary between architectures.
Scope
This chapter aims to give readers a good understanding of:
Which FreeRTOS API functions can be used from within an interrupt service routine.
Methods of deferring interrupt processing to a task.
How to create and use binary semaphores and counting semaphores.
The differences between binary and counting semaphores.
How to use a queue to pass data into and out of an interrupt service routine.
The interrupt nesting model available with some FreeRTOS ports.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
184
6.2 Using the FreeRTOS API from an ISR
The Interrupt Safe API
Often it is necessary to use the functionality provided by a FreeRTOS API function from an
interrupt service routine (ISR), but many FreeRTOS API functions perform actions that are not
valid inside an ISR—the most notable of which is placing the task that called the API function
into the Blocked state; if an API function is called from an ISR, then it is not being called from a
task, so there is no calling task that can be placed into the Blocked state. FreeRTOS solves
this problem by providing two versions of some API functions; one version for use from tasks,
and one version for use from ISRs. Functions intended for use from ISRs have “FromISR”
appended to their name.
Note: Never call a FreeRTOS API function that does not have “FromISR” in its name from an
ISR.
The Benefits of Using a Separate Interrupt Safe API
Having a separate API for use in interrupts allows task code to be more efficient, ISR code to
be more efficient, and interrupt entry to be simpler. To see why, consider the alternative
solution, which would have been to provide a single version of each API function that could be
called from both a task and an ISR. If the same version of an API function could be called
from both a task and an ISR then:
The API functions would need additional logic to determine if they had been called from
a task or an ISR. The additional logic would introduce new paths through the function,
making the functions longer, more complex, and harder to test.
Some API function parameters would be obsolete when the function was called from a
task, while others would be obsolete when the function was called from an ISR.
Each FreeRTOS port would need to provide a mechanism for determining the
execution context (task or ISR).
Architectures on which it is not easy to determine the execution context (task or ISR)
would require additional, wasteful, more complex to use, and non-standard interrupt
entry code that allowed the execution context to be provided by software.

185
The Disadvantages of Using a Separate Interrupt Safe API
Having two versions of some API functions allows both tasks and ISRs to be more efficient,
but introduces a new problem; sometimes it is necessary to call a function that is not part of
the FreeRTOS API, but makes use of the FreeRTOS API, from both a task and an ISR.
This is normally only a problem when integrating third party code, as that is the only time when
the software’s design is out of the control of the application writer. If this does become an
issue then the problem can be overcome using one of the following techniques:
1. Defer interrupt processing to a task
1
, so the API function is only ever called from the
context of a task.
2. If you are using a FreeRTOS port that supports interrupt nesting, then use the version
of the API function that ends in “FromISR”, as that version can be called from tasks and
ISRs (the reverse is not true, API functions that do not end in “FromISR” must not be
called from an ISR).
3. Third party code normally includes an RTOS abstraction layer that can be implemented
to test the context from which the function is being called (task or interrupt), and then
call the API function that is appropriate for the context.
The xHigherPriorityTaskWoken Parameter
This section introduces the concept of the xHigherPriorityTaskWoken parameter. Do not be
concerned if you do not fully understand this section yet, as practical examples are provided in
following sections.
If a context switch is performed by an interrupt, then the task running when the interrupt exits
might be different to the task that was running when the interrupt was entered—the interrupt
will have interrupted one task, but returned to a different task.
Some FreeRTOS API functions can move a task from the Blocked state to the Ready state.
This has already been seen with functions such as xQueueSendToBack(), which will unblock a
task if there was a task waiting in the Blocked state for data to become available on the
subject queue.
1
Deferred interrupt processing is covered in the next section of this book.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
186
If the priority of a task that is unblocked by a FreeRTOS API function is higher than the priority
of the task in the Running state then, in accordance with the FreeRTOS scheduling policy, a
switch to the higher priority task should occur. When the switch to the higher priority task
actually occurs is dependent on the context from which the API function is called:
If the API function was called from a task
If configUSE_PREEMPTION is set to 1 in FreeRTOSConfig.h then the switch to the higher
priority task occurs automatically within the API function—so before the API function has
exited. This has already been seen in Figure 43, where writing to the timer command
queue resulted in a switch to the RTOS daemon task before the function that wrote to the
command queue had exited.
If the API function was called from an interrupt
A switch to a higher priority task will not occur automatically inside an interrupt. Instead, a
variable is set to inform the application writer that a context switch should be performed.
Interrupt safe API functions (those that end in “FromISR”) have a pointer parameter called
pxHigherPriorityTaskWoken that is used for this purpose.
If a context switch should be performed, then the interrupt safe API function will set
*pxHigherPriorityTaskWoken to pdTRUE. To be able to detect this has happened, the
variable pointed to by pxHigherPriorityTaskWoken must be initialized to pdFALSE before it
is used for the first time.
If the application writer opts not to request a context switch from the ISR, then the higher
priority task will remain in the Ready state until the next time the scheduler runs—which in
the worst case will be during the next tick interrupt.
FreeRTOS API functions can only set *pxHighPriorityTaskWoken to pdTRUE. If an ISR
calls more than one FreeRTOS API function, then the same variable can be passed as the
pxHigherPriorityTaskWoken parameter in each API function call, and the variable only
needs to be initialized to pdFALSE before it is used for the first time.
There are several reasons why context switches do not occur automatically inside the interrupt
safe version of an API function:
1. Avoiding unnecessary context switches
187
An interrupt may execute more than once before it is necessary for a task to perform any
processing. For example, consider a scenario where a task processes a string that was
received by an interrupt driven UART; it would be wasteful for the UART ISR to switch to
the task each time a character was received because the task would only have processing
to perform after the complete string had been received.
2. Control over the execution sequence
Interrupts can occur sporadically, and at unpredictable times. Expert FreeRTOS users may
want to temporarily avoid an unpredictable switch to a different task at specific points in
their application—although this can also be achieved using the FreeRTOS scheduler
locking mechanism.
3. Portability
It is the simplest mechanism that can be used across all FreeRTOS ports.
4. Efficiency
Ports that target smaller processor architectures only allow a context switch to be
requested at the very end of an ISR, and removing that restriction would require additional
and more complex code. It also allows more than one call to a FreeRTOS API function
within the same ISR without generating more than one request for a context switch within
the same ISR.
5. Execution in the RTOS tick interrupt
As will be seen later in this book, it is possible to add application code into the RTOS tick
interrupt. The result of attempting a context switch inside the tick interrupt is dependent on
the FreeRTOS port in use. At best, it will result in an unnecessary call to the scheduler.
Use of the pxHigherPriorityTaskWoken parameter is optional. If it is not required, then set
pxHigherPriorityTaskWoken to NULL.
The portYIELD_FROM_ISR() and portEND_SWITCHING_ISR() Macros
This section introduces the macros that are used to request a context switch from an ISR. Do
not be concerned if you do not fully understand this section yet, as practical examples are
provided in following sections.
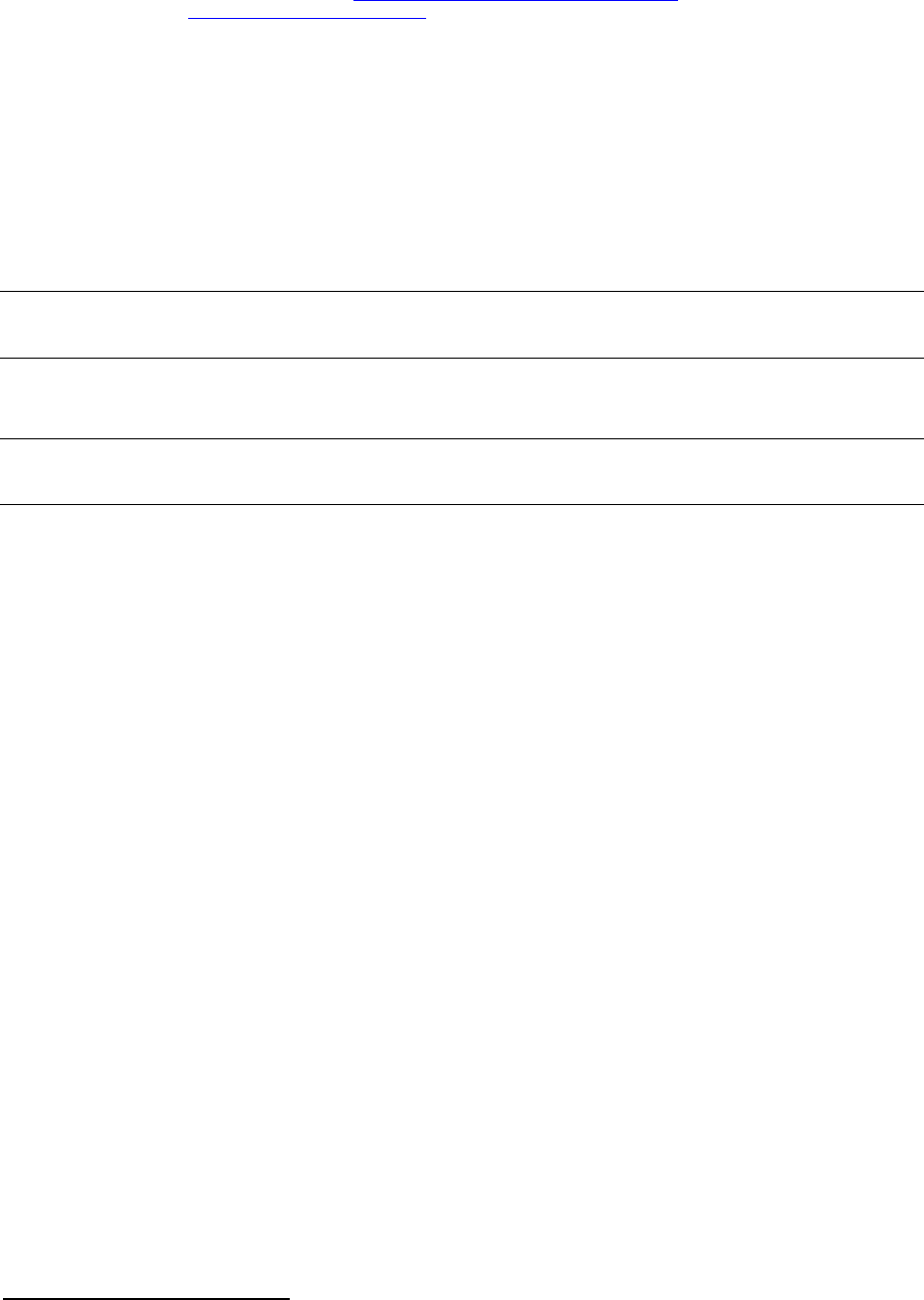
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
188
taskYIELD() is a macro that can be called in a task to request a context switch.
portYIELD_FROM_ISR() and portEND_SWITCHING_ISR() are both interrupt safe versions of
taskYIELD(). portYIELD_FROM_ISR() and portEND_SWITCHING_ISR() are both used in the
same way, and do the same thing
1
. Some FreeRTOS ports only provide one of the two
macros. Newer FreeRTOS ports provide both macros. The examples in this book use
portYIELD_FROM_ISR().
portEND_SWITCHING_ISR( xHigherPriorityTaskWoken );
Listing 87. The portEND_SWITCHING_ISR() macros
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
Listing 88. The portYIELD_FROM_ISR() macros
The xHigherPriorityTaskWoken parameter passed out of an interrupt safe API function can be
used directly as the parameter in a call to portYIELD_FROM_ISR().
If the portYIELD_FROM_ISR() xHigherPriorityTaskWoken parameter is pdFALSE (zero), then
a context switch is not requested, and the macro has no effect. If the portYIELD_FROM_ISR()
xHigherPriorityTaskWoken parameter is not pdFALSE, then a context switch is requested, and
the task in the Running state might change. The interrupt will always return to the task in the
Running state, even if the task in the Running state changed while the interrupt was executing.
Most FreeRTOS ports allow portYIELD_FROM_ISR() to be called anywhere within an ISR. A
few FreeRTOS ports (predominantly those for smaller architectures), only allow
portYIELD_FROM_ISR() to be called at the very end of an ISR.
1
Historically, portEND_SWITCHING_ISR() was the name used in FreeRTOS ports that required
interrupt handlers to use an assembly code wrapper, and portYIELD_FROM_ISR() was the name used
in FreeRTOS ports that allowed the entire interrupt handler to be written in C.

189
6.3 Deferred Interrupt Processing
It is normally considered best practice to keep ISRs as short as possible. Reasons for this
include:
Even if tasks have been assigned a very high priority, they will only run if no interrupts
are being serviced by the hardware.
ISRs can disrupt (add ‘jitter’ to) both the start time, and the execution time, of a task.
Depending on the architecture on which FreeRTOS is running, it might not be possible
to accept any new interrupts, or at least a subset of new interrupts, while an ISR is
executing.
The application writer needs to consider the consequences of, and guard against,
resources such as variables, peripherals, and memory buffers being accessed by a
task and an ISR at the same time.
Some FreeRTOS ports allow interrupts to nest, but interrupt nesting can increase
complexity and reduce predictability. The shorter an interrupt is, the less likely it is to
nest.
An interrupt service routine must record the cause of the interrupt, and clear the interrupt.
Any other processing necessitated by the interrupt can often be performed in a task, allowing
the interrupt service routine to exit as quickly as is practical. This is called ‘deferred interrupt
processing’, because the processing necessitated by the interrupt is ‘deferred’ from the ISR to
a task.
Deferring interrupt processing to a task also allows the application writer to prioritize the
processing relative to other tasks in the application, and use all the FreeRTOS API functions.
If the priority of the task to which interrupt processing is deferred is above the priority of any
other task, then the processing will be performed immediately, just as if the processing had
been performed in the ISR itself. This scenario is shown in Figure 48, in which Task 1 is a
normal application task, and Task 2 is the task to which interrupt processing is deferred.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
190
ISR
Task2
(deferred processing task)
Task1
t1 t3t2 t4
1 - Task1 is Running when an
interrupt occurs.
2 - The ISR executes, handles
the interrupting peripheral,
clears the interrupt, then
unblocks Task 2.
3 - The priority of Task 2 is higher than
the priority of Task 1, so the ISR returns
directly to Task 2, in which the interrupt
processing is completed.
4 - Task 2 enters the
Blocked state to wait for
the next interrupt, allowing
Task 1 to re-enter the
Running state.
Figure 48 Completing interrupt processing in a high priority task
In Figure 48, interrupt processing starts at time t2, and effectively ends at time t4, but only the
period between times t2 and t3 is spent in the ISR. If deferred interrupt processing had not
been used then the entire period between times t2 and t4 would have been spent in the ISR.
There is no absolute rule as to when it is best to perform all processing necessitated by an
interrupt in the ISR, and when it is best to defer part of the processing to a task. Deferring
processing to a task is most useful when:
The processing necessitated by the interrupt is not trivial. For example, if the interrupt
is just storing the result of an analog to digital conversion, then it is almost certain this
is best performed inside the ISR, but if result of the conversion must also be passed
through a software filter, then it may be best to execute the filter in a task.
It is convenient for the interrupt processing to perform an action that cannot be
performed inside an ISR, such as write to a console, or allocate memory.
The interrupt processing is not deterministic—meaning it is not known in advance how
long the processing will take.
The following sections describe and demonstrate the concepts introduced in this chapter so
far, including FreeRTOS features that can be used to implement deferred interrupt processing.
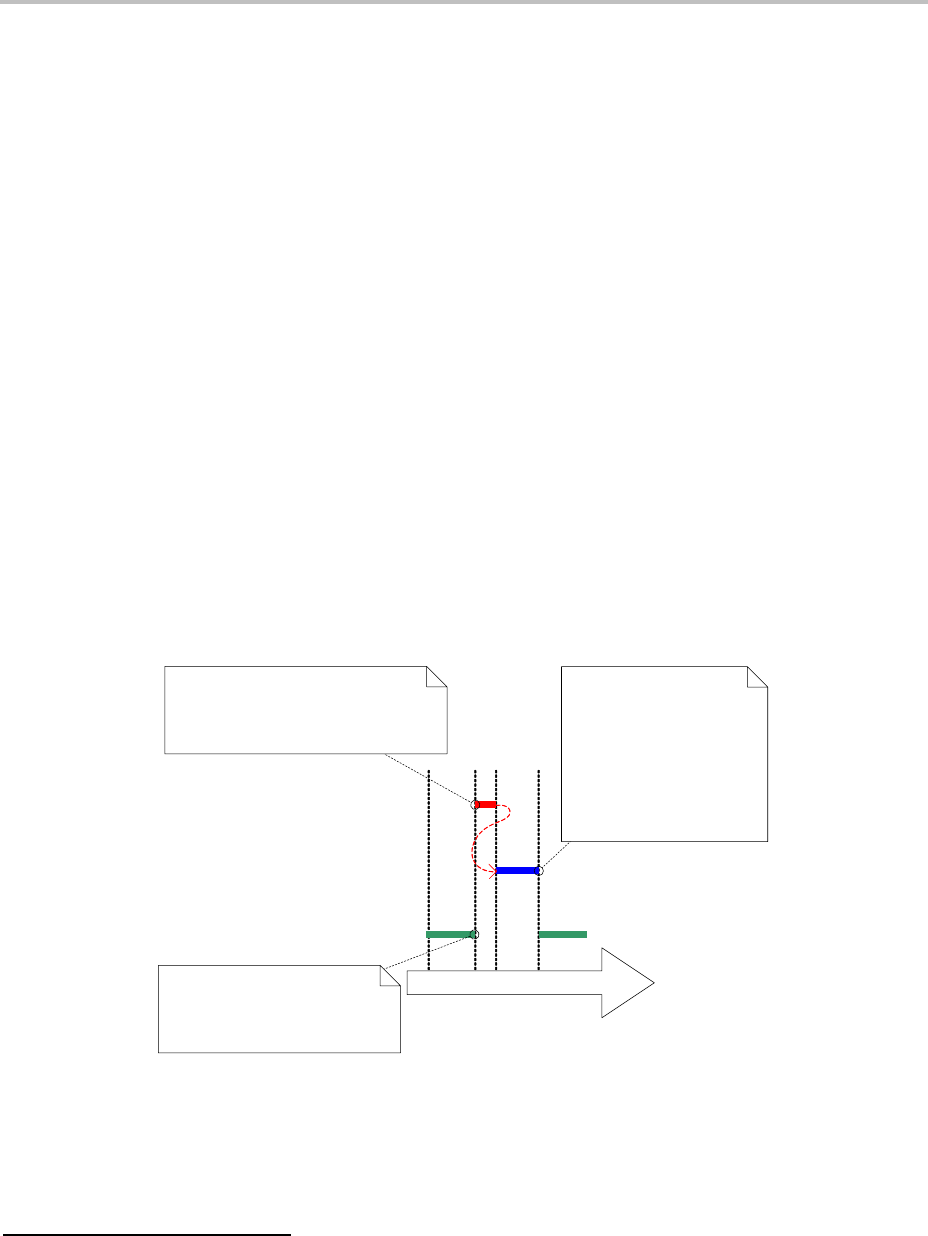
191
6.4 Binary Semaphores Used for Synchronization
The interrupt safe version of the Binary Semaphore API can be used to unblock a task each
time a particular interrupt occurs, effectively synchronizing the task with the interrupt. This
allows the majority of the interrupt event processing to be implemented within the
synchronized task, with only a very fast and short portion remaining directly in the ISR. As
described in the previous section, the binary semaphore is used to ‘defer’ interrupt processing
to a task
1
.
As previously demonstrated in Figure 48, if the interrupt processing is particularly time critical,
then the priority of the deferred processing task can be set to ensure the task always pre-
empts the other tasks in the system. The ISR can then be implemented to include a call to
portYIELD_FROM_ISR(), ensuring the ISR returns directly to the task to which interrupt
processing is being deferred. This has the effect of ensuring the entire event processing
executes contiguously (without a break) in time, just as if it had all been implemented within
the ISR itself. Figure 49 repeats the scenario shown in Figure 48, but with the text updated to
describe how the execution of the deferred processing task can be controlled using a
semaphore.
ISR
Task2
(deferred processing task)
Task1
t1 t3t2 t4
2 - The ISR executes, handles
the interrupting peripheral,
clears the interrupt, then ‘gives’
a semaphore to unblock Task 2.
3 - Task 2 completes
any further processing
necessitated by the
interrupt, then blocks
on the semaphore to
wait to be unblocked
again by the next
interrupt.
1 - When the interrupt
occurs, Task1 is Running,
and Task2 is Blocked
waiting for a semaphore.
Figure 49. Using a binary semaphore to implement deferred interrupt processing
The deferred processing task uses a blocking ‘take’ call to a semaphore as a means of
entering the Blocked state to wait for the event to occur. When the event occurs, the ISR uses
1
It is more efficient to unblock a task from an interrupt using a direct to task notification than it is using a
binary semaphore. Direct to task notifications are not covered until Chapter 9, Task Notifications.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
192
a ‘give’ operation on the same semaphore to unblock the task so that the required event
processing can proceed.
‘Taking a semaphore’ and ‘giving a semaphore’ are concepts that have different meanings
depending on their usage scenario. In this interrupt synchronization scenario, the binary
semaphore can be considered conceptually as a queue with a length of one. The queue can
contain a maximum of one item at any time, so is always either empty or full (hence, binary).
By calling xSemaphoreTake(), the task to which interrupt processing is deferred effectively
attempts to read from the queue with a block time, causing the task to enter the Blocked state
if the queue is empty. When the event occurs, the ISR uses the xSemaphoreGiveFromISR()
function to place a token (the semaphore) into the queue, making the queue full. This causes
the task to exit the Blocked state and remove the token, leaving the queue empty once more.
When the task has completed its processing, it once more attempts to read from the queue
and, finding the queue empty, re-enters the Blocked state to wait for the next event. This
sequence is demonstrated in Figure 50.
Figure 50 shows the interrupt ‘giving’ the semaphore, even though it has not first ‘taken’ it, and
the task ‘taking’ the semaphore, but never giving it back. This is why the scenario is described
as being conceptually similar to writing to and reading from a queue. It often causes confusion
as it does not follow the same rules as other semaphore usage scenarios, where a task that
takes a semaphore must always give it back—such as the scenarios described in Chapter 7,
Resource Management.
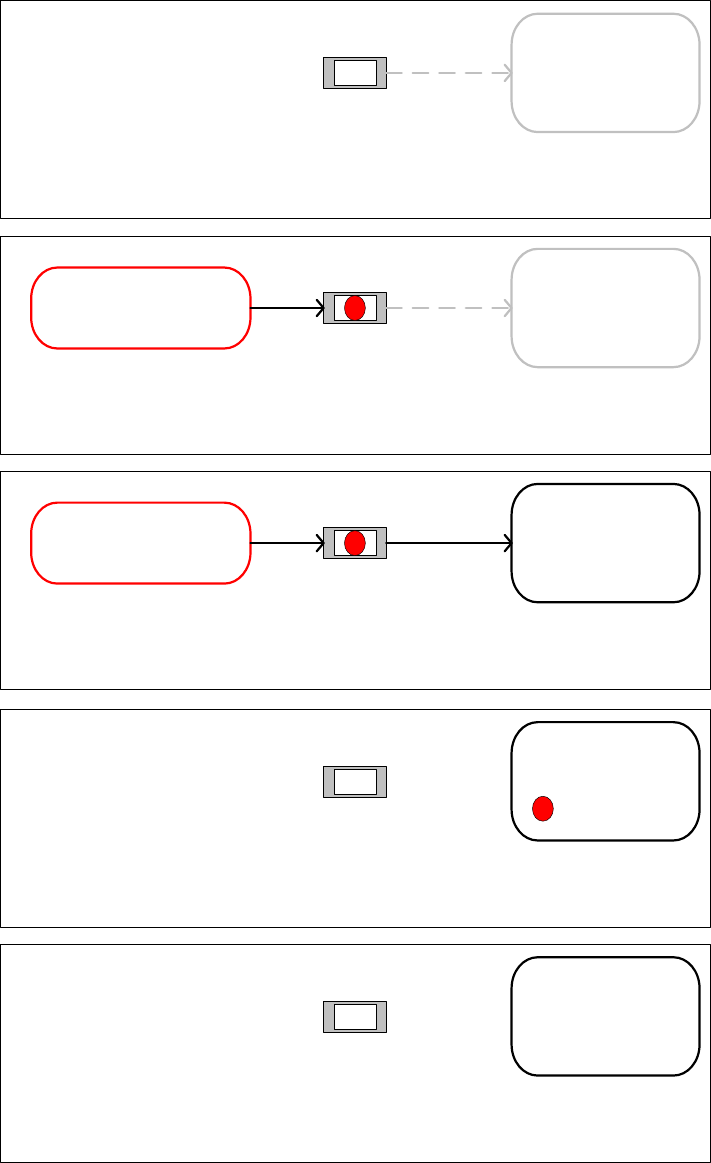
193
Task
xSemaphoreTake()
...that now successfully
‘takes’ the semaphore, so it
is unavailable once more.
Task
The task can now perform its action, when complete
it will once again attempt to ‘take’ the semaphore
which will cause it to re-enter the Blocked state.
Task
The semaphore is not
available...
...so the task is blocked
waiting for the semaphore
xSemaphoreTake()
Task
xSemaphoreTake()
Interrupt!
An interrupt occurs...that
‘gives’ the semaphore….
xSemaphoreGiveFromISR()
Task
xSemaphoreTake()
Interrupt!
xSemaphoreGiveFromISR()
...which unblocks the task
(the semaphore is now
available)...
Figure 50. Using a binary semaphore to synchronize a task with an interrupt
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
194
The xSemaphoreCreateBinary() API Function
FreeRTOS V9.0.0 also includes the xSemaphoreCreateBinaryStatic() function, which allocates the memory
required to create a binary semaphore statically at compile time: Handles to all the various types of
FreeRTOS semaphore are stored in a variable of type SemaphoreHandle_t.
Before a semaphore can be used, it must be created. To create a binary semaphore, use the
xSemaphoreCreateBinary() API function
1
.
SemaphoreHandle_t xSemaphoreCreateBinary( void );
Listing 89. The xSemaphoreCreateBinary() API function prototype
Table 33. xSemaphoreCreateBinary() Return Value
Parameter Name
Description
Returned value
If NULL is returned, then the semaphore cannot be created because
there is insufficient heap memory available for FreeRTOS to allocate the
semaphore data structures.
A non-NULL value being returned indicates that the semaphore has been
created successfully. The returned value should be stored as the handle
to the created semaphore.
The xSemaphoreTake() API Function
‘Taking’ a semaphore means to ‘obtain’ or ‘receive’ the semaphore. The semaphore can be
taken only if it is available.
All the various types of FreeRTOS semaphore, except recursive mutexes, can be ‘taken’ using
the xSemaphoreTake() function.
xSemaphoreTake() must not be used from an interrupt service routine.
1
Some Semaphore API functions are actually macros, not functions. For simplicity, they are all referred
to as functions throughout this book.

195
BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore, TickType_t xTicksToWait );
Listing 90. The xSemaphoreTake() API function prototype
Table 34. xSemaphoreTake() parameters and return value
Parameter Name/
Returned Value
Description
xSemaphore
The semaphore being ‘taken’.
A semaphore is referenced by a variable of type SemaphoreHandle_t. It
must be explicitly created before it can be used.
xTicksToWait
The maximum amount of time the task should remain in the Blocked
state to wait for the semaphore if it is not already available.
If xTicksToWait is zero, then xSemaphoreTake() will return immediately if
the semaphore is not available.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds to a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without a timeout) if INCLUDE_vTaskSuspend is set to 1 in
FreeRTOSConfig.h.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
196
Table 34. xSemaphoreTake() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS is returned only if the call to xSemaphoreTake() was
successful in obtaining the semaphore.
If a block time was specified (xTicksToWait was not zero), then it is
possible that the calling task was placed into the Blocked state to wait
for the semaphore if it was not immediately available, but the
semaphore became available before the block time expired.
2. pdFALSE
The semaphore is not available.
If a block time was specified (xTicksToWait was not zero), then the
calling task will have been placed into the Blocked state to wait for the
semaphore to become available, but the block time expired before this
happened.
The xSemaphoreGiveFromISR() API Function
Binary and counting semaphores
1
can be ‘given’ using the xSemaphoreGiveFromISR()
function.
xSemaphoreGiveFromISR() is the interrupt safe version of xSemaphoreGive(), so has the
pxHigherPriorityTaskWoken parameter that was described at the start of this chapter.
BaseType_t xSemaphoreGiveFromISR( SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken );
Listing 91. The xSemaphoreGiveFromISR() API function prototype
1
Counting semaphores are described in a later section of this book.

197
Table 35. xSemaphoreGiveFromISR() parameters and return value
Parameter Name/
Returned Value
Description
xSemaphore
The semaphore being ‘given’.
A semaphore is referenced by a variable of type
SemaphoreHandle_t, and must be explicitly created before
being used.
pxHigherPriorityTaskWoken
It is possible that a single semaphore will have one or more
tasks blocked on it waiting for the semaphore to become
available. Calling xSemaphoreGiveFromISR() can make the
semaphore available, and so cause a task that was waiting
for the semaphore to leave the Blocked state. If calling
xSemaphoreGiveFromISR() causes a task to leave the
Blocked state, and the unblocked task has a priority higher
than the currently executing task (the task that was
interrupted), then, internally, xSemaphoreGiveFromISR() will
set *pxHigherPriorityTaskWoken to pdTRUE.
If xSemaphoreGiveFromISR() sets this value to pdTRUE,
then normally a context switch should be performed before
the interrupt is exited. This will ensure that the interrupt
returns directly to the highest priority Ready state task.
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if the call to
xSemaphoreGiveFromISR() is successful.
2. pdFAIL
If a semaphore is already available, it cannot be given,
and xSemaphoreGiveFromISR() will return pdFAIL.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
198
Example 16. Using a binary semaphore to synchronize a task with an interrupt
This example uses a binary semaphore to unblock a task from an interrupt service routine—
effectively synchronizing the task with the interrupt.
A simple periodic task is used to generate a software interrupt every 500 milliseconds. A
software interrupt is used for convenience because of the complexity of hooking into a real
interrupt in some target environments. Listing 92 shows the implementation of the periodic
task. Note that the task prints out a string both before and after the interrupt is generated.
This allows the sequence of execution to be observed in the output produced when the
example is executed.
/* The number of the software interrupt used in this example. The code shown is from
the Windows project, where numbers 0 to 2 are used by the FreeRTOS Windows port
itself, so 3 is the first number available to the application. */
#define mainINTERRUPT_NUMBER 3
static void vPeriodicTask( void *pvParameters )
{
const TickType_t xDelay500ms = pdMS_TO_TICKS( 500UL );
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Block until it is time to generate the software interrupt again. */
vTaskDelay( xDelay500ms );
/* Generate the interrupt, printing a message both before and after
the interrupt has been generated, so the sequence of execution is evident
from the output.
The syntax used to generate a software interrupt is dependent on the
FreeRTOS port being used. The syntax used below can only be used with
the FreeRTOS Windows port, in which such interrupts are only simulated. */
vPrintString( "Periodic task - About to generate an interrupt.\r\n" );
vPortGenerateSimulatedInterrupt( mainINTERRUPT_NUMBER );
vPrintString( "Periodic task - Interrupt generated.\r\n\r\n\r\n" );
}
}
Listing 92. Implementation of the task that periodically generates a software
interrupt in Example 16
Listing 93 shows the implementation of the task to which the interrupt processing is deferred—
the task that is synchronized with the software interrupt through the use of a binary
semaphore. Again, a string is printed out on each iteration of the task, so the sequence in
which the task and the interrupt execute is evident from the output produced when the
example is executed.

199
It should be noted that, while the code shown in Listing 93 is adequate for Example 16, where
interrupts are generated by software, it is not adequate for scenarios where interrupts are
generated by hardware peripherals. A following sub-section describes how the structure of the
code needs to be changed to make it suitable for use with hardware generated interrupts.
static void vHandlerTask( void *pvParameters )
{
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Use the semaphore to wait for the event. The semaphore was created
before the scheduler was started, so before this task ran for the first
time. The task blocks indefinitely, meaning this function call will only
return once the semaphore has been successfully obtained - so there is
no need to check the value returned by xSemaphoreTake(). */
xSemaphoreTake( xBinarySemaphore, portMAX_DELAY );
/* To get here the event must have occurred. Process the event (in this
Case, just print out a message). */
vPrintString( "Handler task - Processing event.\r\n" );
}
}
Listing 93. The implementation of the task to which the interrupt processing is
deferred (the task that synchronizes with the interrupt) in Example 16
Listing 94 shows the ISR. This does very little other than ‘give’ the semaphore to unblock the
task to which interrupt processing is deferred.
Note how the xHigherPriorityTaskWoken variable is used. It is set to pdFALSE before calling
xSemaphoreGiveFromISR(), then used as the parameter when portYIELD_FROM_ISR() is
called. A context switch will be requested inside the portYIELD_FROM_ISR() macro if
xHigherPriorityTaskWoken equals pdTRUE.
The prototype of the ISR, and the macro called to force a context switch, are both correct for
the FreeRTOS Windows port, and may be different for other FreeRTOS ports. Refer to the
port specific documentation pages on the FreeRTOS.org website, and the examples provided
in the FreeRTOS download, to find the syntax required for the port you are using.
Unlike most architectures on which FreeRTOS runs, the FreeRTOS Windows port requires an
ISR to return a value. The implementation of the portYIELD_FROM_ISR() macro provided
with the Windows port includes the return statement, so Listing 94 does not show a value
being returned explicitly.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
200
static uint32_t ulExampleInterruptHandler( void )
{
BaseType_t xHigherPriorityTaskWoken;
/* The xHigherPriorityTaskWoken parameter must be initialized to pdFALSE as
it will get set to pdTRUE inside the interrupt safe API function if a
context switch is required. */
xHigherPriorityTaskWoken = pdFALSE;
/* 'Give' the semaphore to unblock the task, passing in the address of
xHigherPriorityTaskWoken as the interrupt safe API function's
pxHigherPriorityTaskWoken parameter. */
xSemaphoreGiveFromISR( xBinarySemaphore, &xHigherPriorityTaskWoken );
/* Pass the xHigherPriorityTaskWoken value into portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken was set to pdTRUE inside xSemaphoreGiveFromISR()
then calling portYIELD_FROM_ISR() will request a context switch. If
xHigherPriorityTaskWoken is still pdFALSE then calling
portYIELD_FROM_ISR() will have no effect. Unlike most FreeRTOS ports, the
Windows port requires the ISR to return a value - the return statement
is inside the Windows version of portYIELD_FROM_ISR(). */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 94. The ISR for the software interrupt used in Example 16
The main() function creates the binary semaphore, creates the tasks, installs the interrupt
handler, and starts the scheduler. The implementation is shown in Listing 95.
The syntax of the function called to install an interrupt handler is specific to the FreeRTOS
Windows port, and may be different for other FreeRTOS ports. Refer to the port specific
documentation pages on the FreeRTOS.org website, and the examples provided in the
FreeRTOS download, to find the syntax required for the port you are using.
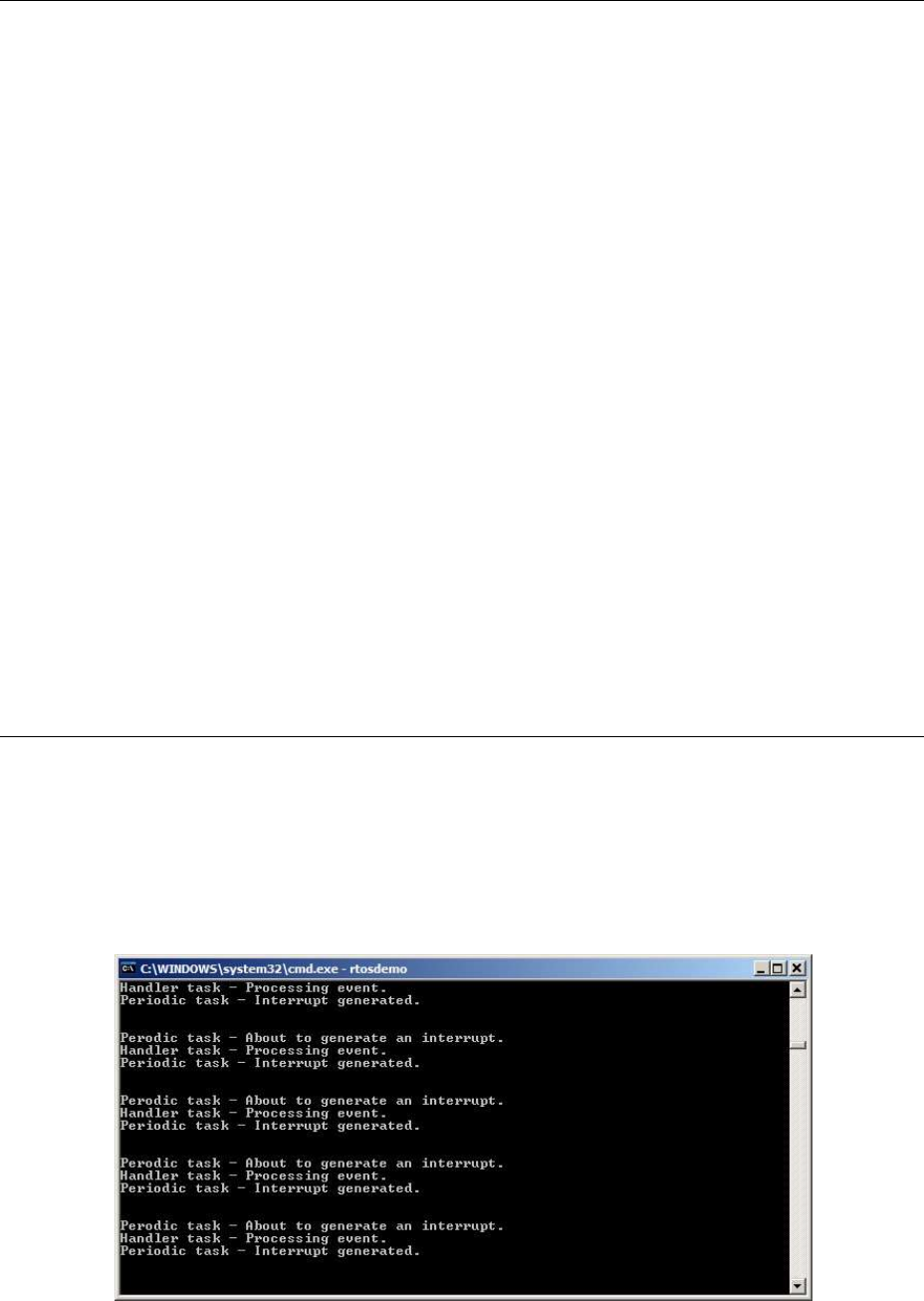
201
int main( void )
{
/* Before a semaphore is used it must be explicitly created. In this example
a binary semaphore is created. */
xBinarySemaphore = xSemaphoreCreateBinary();
/* Check the semaphore was created successfully. */
if( xBinarySemaphore != NULL )
{
/* Create the 'handler' task, which is the task to which interrupt
processing is deferred. This is the task that will be synchronized with
the interrupt. The handler task is created with a high priority to ensure
it runs immediately after the interrupt exits. In this case a priority of
3 is chosen. */
xTaskCreate( vHandlerTask, "Handler", 1000, NULL, 3, NULL );
/* Create the task that will periodically generate a software interrupt.
This is created with a priority below the handler task to ensure it will
get preempted each time the handler task exits the Blocked state. */
xTaskCreate( vPeriodicTask, "Periodic", 1000, NULL, 1, NULL );
/* Install the handler for the software interrupt. The syntax necessary
to do this is dependent on the FreeRTOS port being used. The syntax
shown here can only be used with the FreeRTOS windows port, where such
interrupts are only simulated. */
vPortSetInterruptHandler( mainINTERRUPT_NUMBER, ulExampleInterruptHandler );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}
/* As normal, the following line should never be reached. */
for( ;; );
}
Listing 95. The implementation of main() for Example 16
Example 16 produces the output shown in Figure 51. As expected, vHandlerTask() enters the
Running state as soon as the interrupt is generated, so the output from the task splits the
output produced by the periodic task. Further explanation is provided in Figure 52.
Figure 51. The output produced when Example 16 is executed
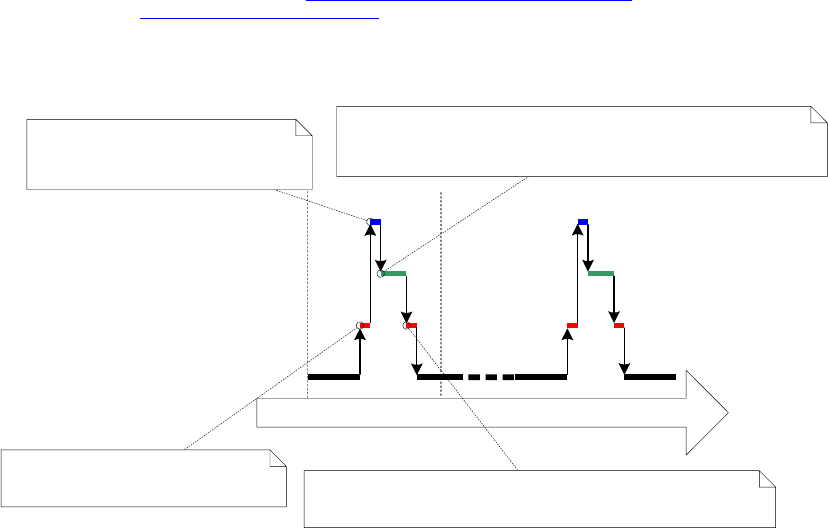
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
202
Interrupt
Handler
t1 t2
Periodic
1 - The Idle task is running most of the
time. Every 500ms it gets pre-empted by
the Periodic task.
Idle
Time
2 - The Periodic task prints its first
message then forces an interrupt. The
interrupt service routine (ISR) executes
immediately.
3 - The ISR ‘gives’ the semaphore, causing vHandlerTask() to unblock.
The ISR then returns directly to vHandlerTask() because the task is the
highest priority Ready state task. vHandlerTask() prints out its message
before returning to the Blocked state to wait for the next interrupt.
4 - The Periodic task is once again the highest priority task - it prints
out its second message before entering the Blocked state again to wait
for the next time period. This leaves just the Idle task able to run.
Figure 52. The sequence of execution when Example 16 is executed
Improving the Implementation of the Task Used in Example 16
Example 16 used a binary semaphore to synchronize a task with an interrupt. The execution
sequence was as follows:
1. The interrupt occurred.
2. The ISR executed and ‘gave’ the semaphore to unblock the task.
3. The task executed immediately after the ISR, and ‘took’ the semaphore.
4. The task processed the event, then attempted to ‘take’ the semaphore again—entering
the Blocked state because the semaphore was not yet available (another interrupt had
not yet occurred).
The structure of the task used in Example 16 is adequate only if interrupts occur at a relatively
low frequency. To understand why, consider what would happen if a second, and then a third,
interrupt had occurred before the task had completed its processing of the first interrupt:
When the second ISR executed the semaphore would be empty, so the ISR would give
the semaphore, and the task would process the second event immediately after it had
completed processing the first event. That scenario is shown in Figure 53.
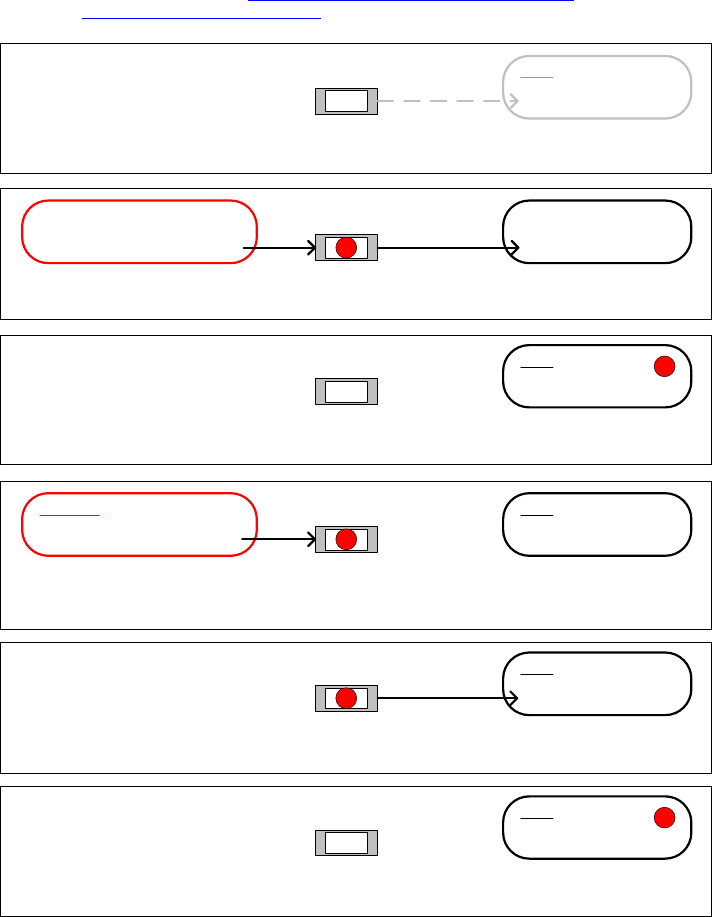
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
204
Task
vProcessEvent()
The task takes the semaphore (without entering the
Blocked state), then processes the second event.
Task
xSemaphoreTake()
When the task has finished processing the first event it calls xSemaphoreTake() again.
Another interrupt has already occurred, so the semaphore is already available.
TaskInterrupt!
xSemaphoreGiveFromISR()
The task is still processing
the first event.
Another interrupt occurs while the task is still processing the
first event. The ISR ‘gives’ the semaphore again, effectively
latching the event so the event is not lost.
vProcessEvent()
Task
vProcessEvent()
The task ‘takes’ the semaphore, so the semaphore is no longer
available. The task then starts to process the first event.
Task
xSemaphoreTake()
Interrupt!
An interrupt ‘gives’ the
semaphore….
xSemaphoreGiveFromISR()
… which unblocks the task.
Task
The semaphore is not
available...
...the task is blocked
waiting for the semaphore.
xSemaphoreTake()
Figure 53. The scenario when one interrupt occurs before the task has finished
processing the first event
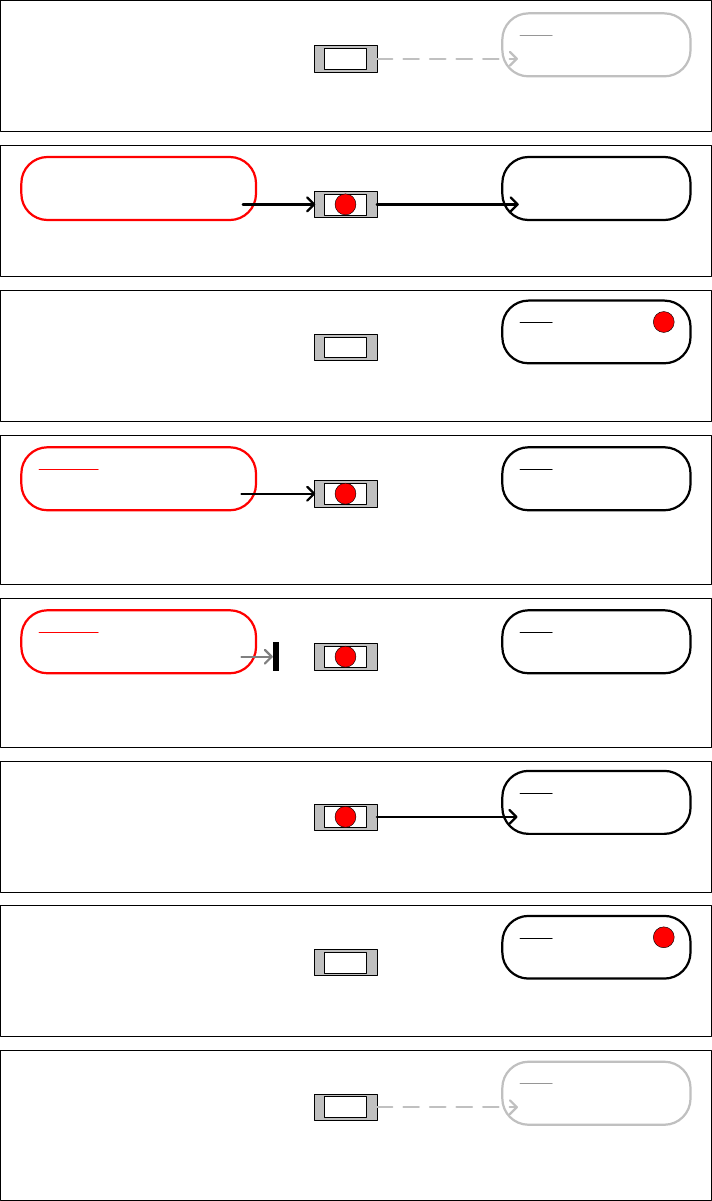
205
Task
The semaphore is not
available...
...the task is blocked
waiting for the semaphore.
xSemaphoreTake()
Task
xSemaphoreTake()
Interrupt!
An interrupt ‘gives’ the
semaphore….
xSemaphoreGiveFromISR()
… which unblocks the task.
Task
vProcessEvent()
The task ‘takes’ the semaphore, so the semaphore is no longer
available. The task then starts to process the first event.
TaskInterrupt!
xSemaphoreGiveFromISR()
The task is still processing
the first event.
A second interrupt occurs while the task is still processing
the first event. The ISR ‘gives’ the semaphore again,
effectively latching the event so the event is not lost.
vProcessEvent()
TaskInterrupt!
xSemaphoreGiveFromISR()
The task is still processing
the first event.
A third interrupt occurs while the task is still processing the first
event. The ISR cannot give the semaphore again, because
the semaphore is already available, and the event is lost.
vProcessEvent()
Task
xSemaphoreTake()
When the task has finished processing the first event it calls xSemaphoreTake() again. A
second and third interrupt have already occurred, so the semaphore is already available.
Task
vProcessEvent()
The task takes the semaphore (without entering the Blocked state), so the semaphore
is no longer available. The task then processes the second event.
Task
When the task has finished processing the second event it calls xSemaphoreTake() again,
but the semaphore is not available, and the task enters the Blocked state to wait for the
next interrupt - even though the third event has not been processed.
xSemaphoreTake()
Figure 54 The scenario when two interrupts occur before the task has finished
processing the first event

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
206
The deferred interrupt handling task used in Example 16, and shown in Listing 93, is
structured so that it only processes one event between each call to xSemaphoreTake(). That
was adequate for Example 16, because the interrupts that generated the events were
triggered by software, and occurred at a predictable time. In real applications, interrupts are
generated by hardware, and occur at unpredictable times. Therefore, to minimize the chance
of an interrupt being missed, the deferred interrupt handling task must be structured so that it
processes all the events that are already available between each call to xSemaphoreTake()
1
.
This is demonstrated by Listing 96, which shows how a deferred interrupt handler for a UART
could be structured. In Listing 96, it is assumed the UART generates a receive interrupt each
time a character is received, and that the UART places received characters into a hardware
FIFO (a hardware buffer).
The deferred interrupt handling task used in Example 16 had one other weakness; it did not
use a time out when it called xSemaphoreTake(). Instead, the task passed portMAX_DELAY
as the xSemaphoreTake() xTicksToWait parameter, which results in the task waiting
indefinitely (without a time out) for the semaphore to be available. Indefinite timeouts are often
used in example code because their use simplifies the structure of the example, and therefore
makes the example easier to understand. However, indefinite timeouts are normally bad
practice in real applications, because they make it difficult to recover from an error. As an
example, consider the scenario where a task is waiting for an interrupt to give a semaphore,
but an error state in the hardware is preventing the interrupt from being generated:
If the task is waiting without a time out, it will not know about the error state, and will
wait forever.
If the task is waiting with a time out, then xSemaphoreTake() will return pdFAIL when
the time out expires, and the task can then detect and clear the error the next time it
executes. This scenario is also demonstrated in Listing 96.
1
Alternatively, a counting semaphore, or a direct to task notification, can be used to count events.
Counting semaphores are described in the next section. Direct to task notifications are described in
Chapter 9, Task Notifications. Direct to task notifications are the preferred method as they are the most
efficient in both run time and RAM usage.

207
static void vUARTReceiveHandlerTask( void *pvParameters )
{
/* xMaxExpectedBlockTime holds the maximum time expected between two interrupts. */
const TickType_t xMaxExpectedBlockTime = pdMS_TO_TICKS( 500 );
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* The semaphore is 'given' by the UART's receive (Rx) interrupt. Wait a
maximum of xMaxExpectedBlockTime ticks for the next interrupt. */
if( xSemaphoreTake( xBinarySemaphore, xMaxExpectedBlockTime ) == pdPASS )
{
/* The semaphore was obtained. Process ALL pending Rx events before
calling xSemaphoreTake() again. Each Rx event will have placed a
character in the UART’s receive FIFO, and UART_RxCount() is assumed to
return the number of characters in the FIFO. */
while( UART_RxCount() > 0 )
{
/* UART_ProcessNextRxEvent() is assumed to process one Rx character,
reducing the number of characters in the FIFO by 1. */
UART_ProcessNextRxEvent();
}
/* No more Rx events are pending (there are no more characters in the
FIFO), so loop back and call xSemaphoreTake() to wait for the next
interrupt. Any interrupts occurring between this point in the code and
the call to xSemaphoreTake() will be latched in the semaphore, so will
not be lost. */
}
else
{
/* An event was not received within the expected time. Check for, and if
necessary clear, any error conditions in the UART that might be
preventing the UART from generating any more interrupts. */
UART_ClearErrors();
}
}
}
Listing 96. The recommended structure of a deferred interrupt processing task ,
using a UART receive handler as an example

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
208
6.5 Counting Semaphores
Just as binary semaphores can be thought of as queues that have a length of one, counting
semaphores can be thought of as queues that have a length of more than one. Tasks are not
interested in the data that is stored in the queue—just the number of items in the queue.
configUSE_COUNTING_SEMAPHORES must be set to 1 in FreeRTOSConfig.h for counting
semaphores to be available.
Each time a counting semaphore is ‘given’, another space in its queue is used. The number of
items in the queue is the semaphore’s ‘count’ value.
Counting semaphores are typically used for two things:
1. Counting events
1
In this scenario, an event handler will ‘give’ a semaphore each time an event occurs—
causing the semaphore’s count value to be incremented on each ‘give’. A task will ‘take’ a
semaphore each time it processes an event—causing the semaphore’s count value to be
decremented on each ‘take’. The count value is the difference between the number of
events that have occurred and the number that have been processed. This mechanism is
shown in Figure 55.
Counting semaphores that are used to count events are created with an initial count value
of zero.
2. Resource management.
In this scenario, the count value indicates the number of resources available. To obtain
control of a resource, a task must first obtain a semaphore—decrementing the
semaphore’s count value. When the count value reaches zero, there are no free
resources. When a task finishes with the resource, it ‘gives’ the semaphore back—
incrementing the semaphore’s count value.
1
It is more efficient to count events using a direct to task notification than it is using a counting
semaphore. Direct to task notifications are not covered until Chapter 9.
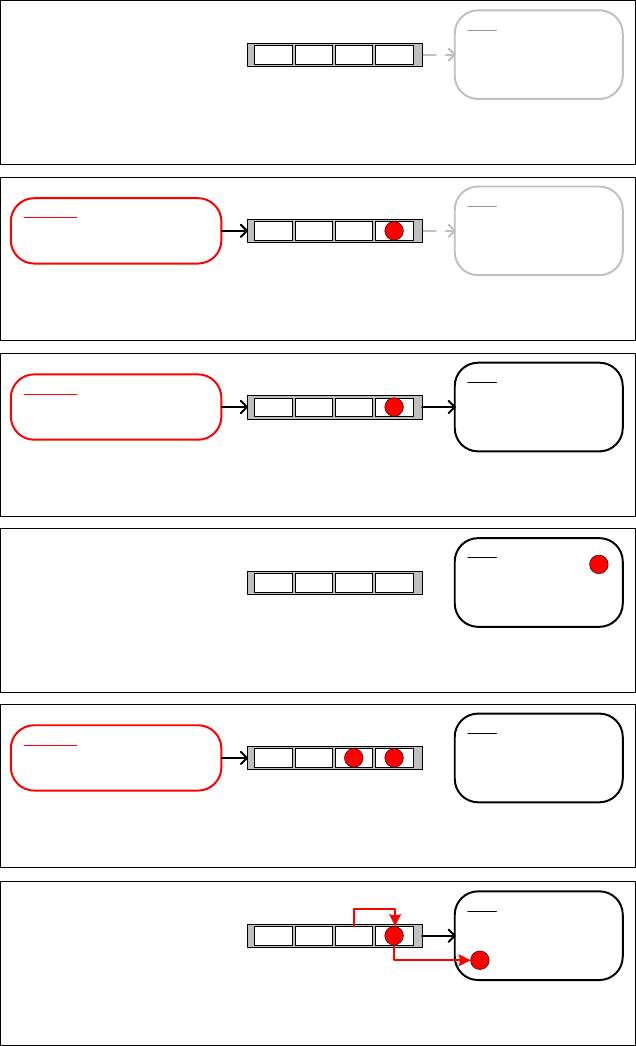
209
Counting semaphores that are used to manage resources are created so that their initial
count value equals the number of resources that are available. Chapter 7 covers using
semaphores to manage resources.
Task
[The semaphore count is 0]
The task is blocked waiting
for a semaphore
xSemaphoreTake()
Task
xSemaphoreTake()
Interrupt!
An interrupt occurs...that
‘gives’ the semaphore….
xSemaphoreGiveFromISR()
Task
xSemaphoreTake()
Interrupt!
xSemaphoreGiveFromISR()
...which unblocks the task (the
semaphore is now available)...
Task
xSemaphoreTake()
When the task has finished processing the first event it calls xSemaphoreTake()
again. Another two semaphores are already ‘available’, one is taken without the task
ever entering the Blocked state, leaving one ‘latched’ semaphore still available.
Task
Interrupt!
xSemaphoreGiveFromISR()
The task is still processing
the first event.
Another two interrupts occur while the task is still
processing the first event. Both ISRs ‘give’ the semaphore,
effectively latching both events, so neither event is lost.
Task
vProcessEvent()
...that now successfully ‘takes’ the
semaphore, so it is unavailable once more.
The task now starts to process the event.
[The semaphore count is 1]
[The semaphore count is 1]
[The semaphore count is 0]
[The semaphore count is 2]
[The semaphore count is 1]
vProcessEvent()
Figure 55. Using a counting semaphore to ‘count’ events
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
210
The xSemaphoreCreateCounting() API Function
FreeRTOS V9.0.0 also includes the xSemaphoreCreateCountingStatic() function, which allocates the memory
required to create a counting semaphore statically at compile time: Handles to all the various types of
FreeRTOS semaphore are stored in a variable of type SemaphoreHandle_t.
Before a semaphore can be used, it must be created. To create a counting semaphore, use
the xSemaphoreCreateCounting() API function.
SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount,
UBaseType_t uxInitialCount );
Listing 97. The xSemaphoreCreateCounting() API function prototype
Table 36. xSemaphoreCreateCounting() parameters and return value
Parameter Name/
Returned Value
Description
uxMaxCount
The maximum value to which the semaphore will count. To continue the
queue analogy, the uxMaxCount value is effectively the length of the
queue.
When the semaphore is to be used to count or latch events, uxMaxCount
is the maximum number of events that can be latched.
When the semaphore is to be used to manage access to a collection of
resources, uxMaxCount should be set to the total number of resources
that are available.
uxInitialCount
The initial count value of the semaphore after it has been created.
When the semaphore is to be used to count or latch events,
uxInitialCount should be set to zero—as, presumably, when the
semaphore is created, no events have yet occurred.
When the semaphore is to be used to manage access to a collection of
resources, uxInitialCount should be set to equal uxMaxCount—as,
presumably, when the semaphore is created, all the resources are
available.
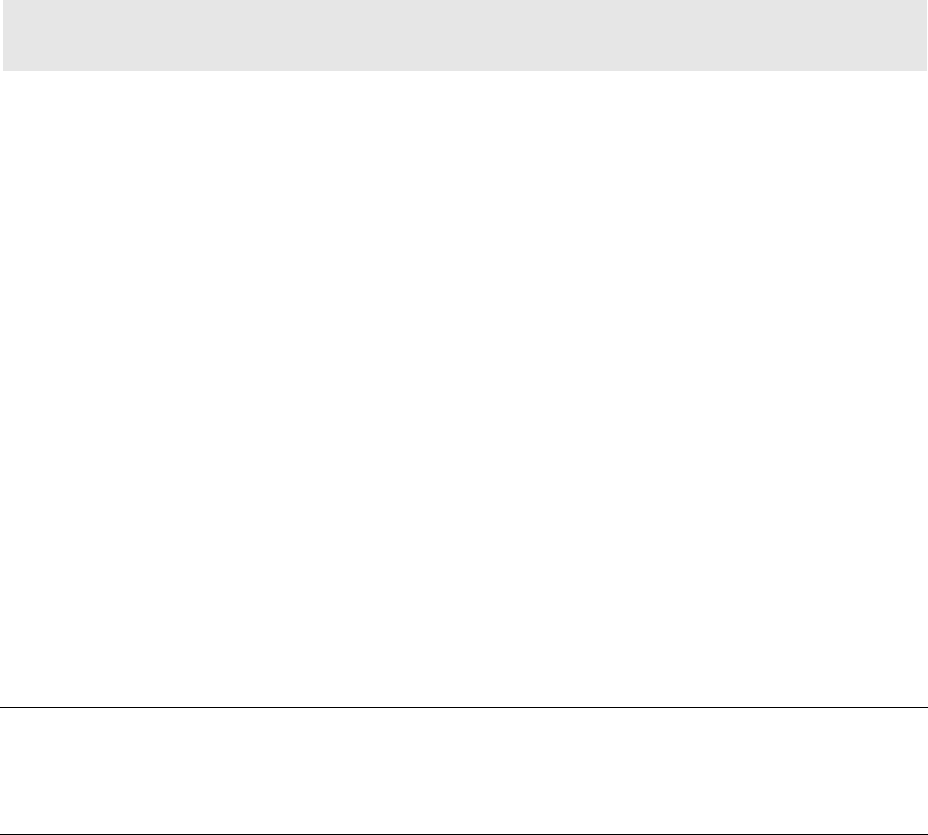
211
Table 36. xSemaphoreCreateCounting() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
If NULL is returned, the semaphore cannot be created because there is
insufficient heap memory available for FreeRTOS to allocate the
semaphore data structures. Chapter 2 provides more information on
heap memory management.
A non-NULL value being returned indicates that the semaphore has been
created successfully. The returned value should be stored as the handle
to the created semaphore.
Example 17. Using a counting semaphore to synchronize a task with an interrupt
Example 17 improves on the Example 16 implementation by using a counting semaphore in
place of the binary semaphore. main() is changed to include a call to
xSemaphoreCreateCounting() in place of the call to xSemaphoreCreateBinary(). The new API
call is shown in Listing 98.
/* Before a semaphore is used it must be explicitly created. In this example a
counting semaphore is created. The semaphore is created to have a maximum count
value of 10, and an initial count value of 0. */
xCountingSemaphore = xSemaphoreCreateCounting( 10, 0 );
Listing 98. The call to xSemaphoreCreateCounting() used to create the counting
semaphore in Example 17
To simulate multiple events occurring at high frequency, the interrupt service routine is
changed to ‘give’ the semaphore more than once per interrupt. Each event is latched in the
semaphore’s count value. The modified interrupt service routine is shown in Listing 99.
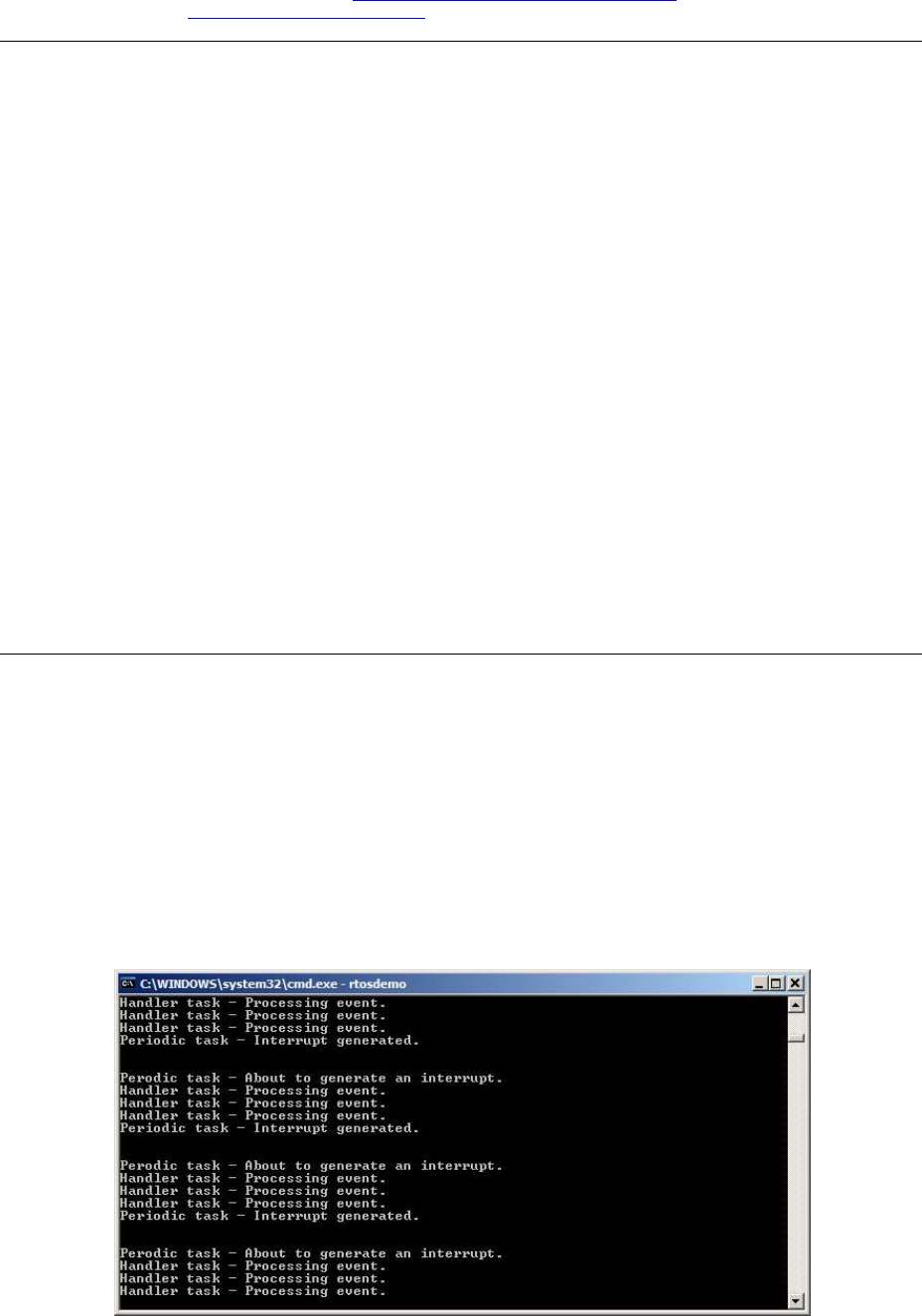
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
212
static uint32_t ulExampleInterruptHandler( void )
{
BaseType_t xHigherPriorityTaskWoken;
/* The xHigherPriorityTaskWoken parameter must be initialized to pdFALSE as it
will get set to pdTRUE inside the interrupt safe API function if a context switch
is required. */
xHigherPriorityTaskWoken = pdFALSE;
/* 'Give' the semaphore multiple times. The first will unblock the deferred
interrupt handling task, the following 'gives' are to demonstrate that the
semaphore latches the events to allow the task to which interrupts are deferred
to process them in turn, without events getting lost. This simulates multiple
interrupts being received by the processor, even though in this case the events
are simulated within a single interrupt occurrence. */
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
/* Pass the xHigherPriorityTaskWoken value into portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken was set to pdTRUE inside xSemaphoreGiveFromISR() then
calling portYIELD_FROM_ISR() will request a context switch. If
xHigherPriorityTaskWoken is still pdFALSE then calling portYIELD_FROM_ISR() will
have no effect. Unlike most FreeRTOS ports, the Windows port requires the ISR to
return a value - the return statement is inside the Windows version of
portYIELD_FROM_ISR(). */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 99. The implementation of the interrupt service routine used by Example 17
All the other functions remain unmodified from those used in Example 16.
The output produced when Example 17 is executed is shown in Figure 56. As can be seen,
the task to which interrupt handling is deferred processes all three [simulated] events each
time an interrupt is generated. The events are latched into the count value of the semaphore,
allowing the task to process them in turn.
Figure 56. The output produced when Example 17 is executed

213
6.6 Deferring Work to the RTOS Daemon Task
The deferred interrupt handling examples presented so far have required the application writer
to create a task for each interrupt that uses the deferred processing technique. It is also
possible to use the xTimerPendFunctionCallFromISR()
1
API function to defer interrupt
processing to the RTOS daemon task—removing the need to create a separate task for each
interrupt. Deferring interrupt processing to the daemon task is called ‘centralized deferred
interrupt processing’.
Chapter 5 described how software timer related FreeRTOS API functions send commands to
the daemon task on the timer command queue. The xTimerPendFunctionCall() and
xTimerPendFunctionCallFromISR() API functions use the same timer command queue to send
an ‘execute function’ command to the daemon task. The function sent to the daemon task is
then executed in the context of the daemon task.
Advantages of centralized deferred interrupt processing include:
Lower resource usage
It removes the need to create a separate task for each deferred interrupt.
Simplified user model
The deferred interrupt handling function is a standard C function.
Disadvantages of centralized deferred interrupt processing include:
Less flexibility
It is not possible to set the priority of each deferred interrupt handling task separately.
Each deferred interrupt handling function executes at the priority of the daemon task. As
described in Chapter 5, the priority of the daemon task is set by the
configTIMER_TASK_PRIORITY compile time configuration constant within
FreeRTOSConfig.h.
Less determinism
1
It was noted in Chapter 5 that the daemon task was originally called the timer service task because it
was originally only used to execute software timer callback functions. Hence, xTimerPendFunctionCall()
is implemented in timers.c, and, in accordance with the convention of prefixing a function’s name with
the name of the file in which the function is implemented, the function’s name is prefixed with ‘Timer’.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
214
xTimerPendFunctionCallFromISR() sends a command to the back of the timer command
queue. Commands that were already in the timer command queue will be processed by
the daemon task before the ‘execute function’ command sent to the queue by
xTimerPendFunctionCallFromISR().
Different interrupts have different timing constraints, so it is common to use both methods of
deferring interrupt processing within the same application.
The xTimerPendFunctionCallFromISR() API Function
xTimerPendFunctionCallFromISR() is the interrupt safe version of xTimerPendFunctionCall().
Both API functions allow a function provided by the application writer to be executed by, and
therefore in the context of, the RTOS daemon task. Both the function to be executed, and the
value of the function’s input parameters, are sent to the daemon task on the timer command
queue. When the function actually executes is therefore dependent on the priority of the
daemon task relative to other tasks in the application.
BaseType_t xTimerPendFunctionCallFromISR( PendedFunction_t xFunctionToPend,
void *pvParameter1,
uint32_t ulParameter2,
BaseType_t *pxHigherPriorityTaskWoken );
Listing 100. The xTimerPendFunctionCallFromISR() API function prototype
void vPendableFunction( void *pvParameter1, uint32_t ulParameter2 );
Listing 101. The prototype to which a function passed in the xFunctionToPend
parameter of xTimerPendFunctionCallFromISR() must conform
Table 37. xTimerPendFunctionCallFromISR() parameters and return value
Parameter Name/
Returned Value
Description
xFunctionToPend
A pointer to the function that will be executed in the daemon
task (in effect, just the function name). The prototype of the
function must be the same as that shown in Listing 101.

215
Table 37. xTimerPendFunctionCallFromISR() parameters and return value
Parameter Name/
Returned Value
Description
pvParameter1
The value that will be passed into the function that is executed
by the daemon task as the function’s pvParameter1 parameter.
The parameter has a void * type to allow it to be used to pass
any data type. For example, integer types can be directly cast
to a void *, alternatively the void * can be used to point to a
structure.
ulParameter2
The value that will be passed into the function that is executed
by the daemon task as the function’s ulParameter2 parameter.
pxHigherPriorityTaskWoken
xTimerPendFunctionCallFromISR() writes to the timer
command queue. If the RTOS daemon task was in the
Blocked state to wait for data to become available on the timer
command queue, then writing to the timer command queue will
cause the daemon task to leave the Blocked state. If the
priority of the daemon task is higher than the priority of the
currently executing task (the task that was interrupted), then,
internally, xTimerPendFunctionCallFromISR() will set
*pxHigherPriorityTaskWoken to pdTRUE.
If xTimerPendFunctionCallFromISR() sets this value to
pdTRUE, then a context switch must be performed before the
interrupt is exited. This will ensure that the interrupt returns
directly to the daemon task, as the daemon task will be the
highest priority Ready state task.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
216
Table 37. xTimerPendFunctionCallFromISR() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdPASS
pdPASS will be returned if the ‘execute function’ command
was written to the timer command queue.
2. pdFAIL
pdFAIL will be returned if the ‘execute function’ command
could not be written to the timer command queue because
the timer command queue was already full. Chapter 5
describes how to set the length of the timer command
queue.
Example 18. Centralized deferred interrupt processing
Example 18 provides similar functionality to Example 16, but without using a semaphore, and
without creating a task specifically to perform the processing necessitated by the interrupt.
Instead, the processing is performed by the RTOS daemon task.
The interrupt service routine used by Example 18 is shown in Listing 102. It calls
xTimerPendFunctionCallFromISR() to pass a pointer to a function called
vDeferredHandlingFunction() to the daemon task. The deferred interrupt processing is
performed by the vDeferredHandlingFunction() function.
The interrupt service routine increments a variable called ulParameterValue each time it
executes. ulParameterValue is used as the value of ulParameter2 in the call to
xTimerPendFunctionCallFromISR(), so will also be used as the value of ulParameter2 in the
call to vDeferredHandlingFunction() when vDeferredHandlingFunction() is executed by the
daemon task. The function’s other parameter, pvParameter1, is not used in this example.

217
static uint32_t ulExampleInterruptHandler( void )
{
static uint32_t ulParameterValue = 0;
BaseType_t xHigherPriorityTaskWoken;
/* The xHigherPriorityTaskWoken parameter must be initialized to pdFALSE as it will
get set to pdTRUE inside the interrupt safe API function if a context switch is
required. */
xHigherPriorityTaskWoken = pdFALSE;
/* Send a pointer to the interrupt's deferred handling function to the daemon task.
The deferred handling function's pvParameter1 parameter is not used so just set to
NULL. The deferred handling function's ulParameter2 parameter is used to pass a
number that is incremented by one each time this interrupt handler executes. */
xTimerPendFunctionCallFromISR( vDeferredHandlingFunction, /* Function to execute. */
NULL, /* Not used. */
ulParameterValue, /* Incrementing value. */
&xHigherPriorityTaskWoken );
ulParameterValue++;
/* Pass the xHigherPriorityTaskWoken value into portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken was set to pdTRUE inside xTimerPendFunctionCallFromISR() then
calling portYIELD_FROM_ISR() will request a context switch. If
xHigherPriorityTaskWoken is still pdFALSE then calling portYIELD_FROM_ISR() will have
no effect. Unlike most FreeRTOS ports, the Windows port requires the ISR to return a
value - the return statement is inside the Windows version of portYIELD_FROM_ISR(). */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 102. The software interrupt handler used in Example 18
The implementation of vDeferredHandlingFunction() is shown in Listing 103. It prints out a
fixed string, and the value of its ulParameter2 parameter.
vDeferredHandlingFunction() must have the prototype shown in Listing 101, even though, in
this example, only one of its parameters is actually used.
static void vDeferredHandlingFunction( void *pvParameter1, uint32_t ulParameter2 )
{
/* Process the event - in this case just print out a message and the value of
ulParameter2. pvParameter1 is not used in this example. */
vPrintStringAndNumber( "Handler function - Processing event ", ulParameter2 );
}
Listing 103. The function that performs the processing necessitated by the interrupt
in Example 18.
The main() function used by Example 18 is shown in Listing 104. It is simpler than the main()
function used by Example 16 because it does not create either a semaphore or a task to
perform the deferred interrupt processing.
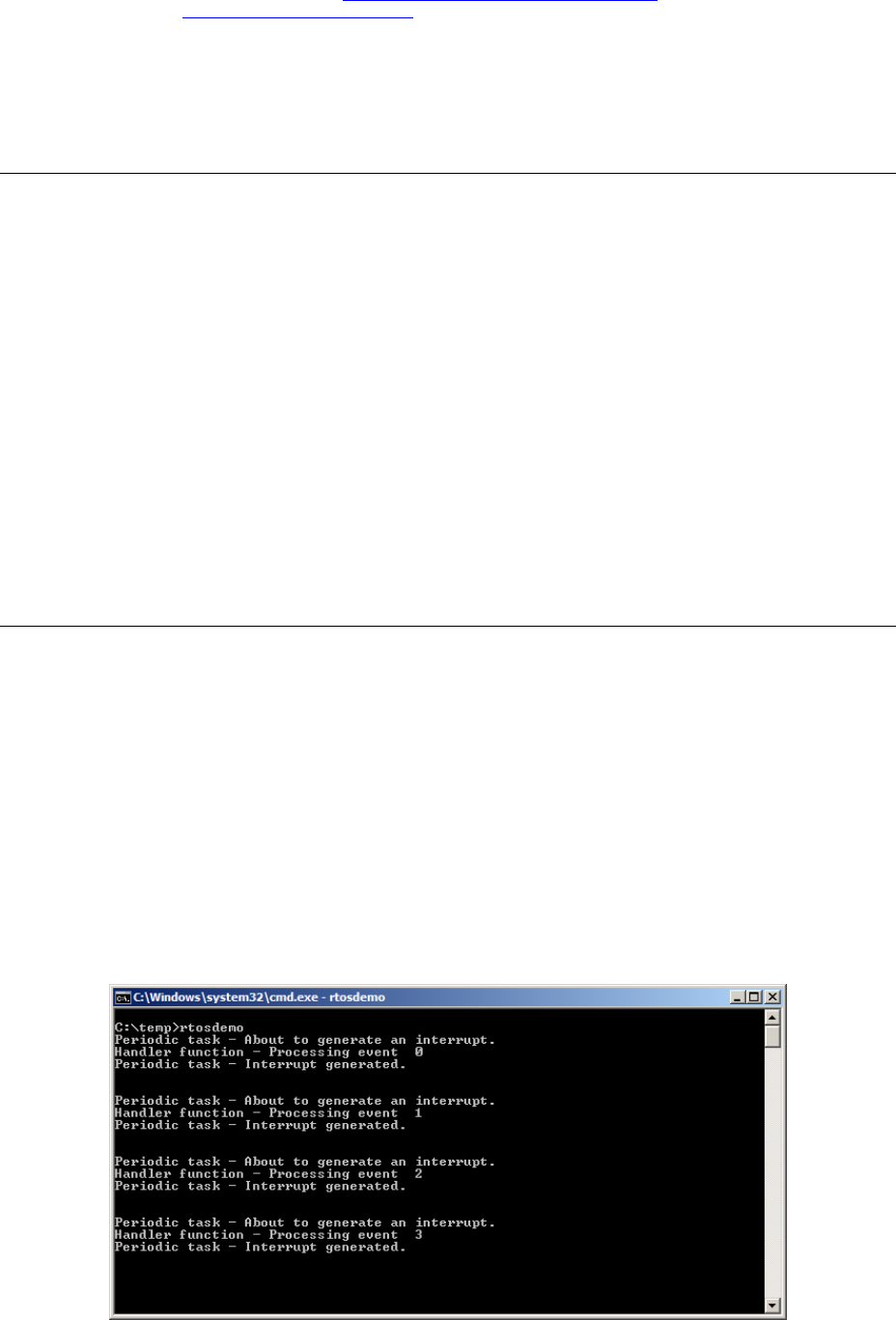
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
218
vPeriodicTask() is the task that periodically generates software interrupts. It is created with a
priority below the priority of the daemon task to ensure it is pre-empted by the daemon task as
soon as the daemon task leaves the Blocked state.
int main( void )
{
/* The task that generates the software interrupt is created at a priority below the
priority of the daemon task. The priority of the daemon task is set by the
configTIMER_TASK_PRIORITY compile time configuration constant in FreeRTOSConfig.h. */
const UBaseType_t ulPeriodicTaskPriority = configTIMER_TASK_PRIORITY - 1;
/* Create the task that will periodically generate a software interrupt. */
xTaskCreate( vPeriodicTask, "Periodic", 1000, NULL, ulPeriodicTaskPriority, NULL );
/* Install the handler for the software interrupt. The syntax necessary to do
this is dependent on the FreeRTOS port being used. The syntax shown here can
only be used with the FreeRTOS windows port, where such interrupts are only
simulated. */
vPortSetInterruptHandler( mainINTERRUPT_NUMBER, ulExampleInterruptHandler );
/* Start the scheduler so the created task starts executing. */
vTaskStartScheduler();
/* As normal, the following line should never be reached. */
for( ;; );
}
Listing 104. The implementation of main() for Example 18
Example 18 produces the output shown in Figure 57. The priority of the daemon task is higher
than the priority of the task that generates the software interrupt, so
vDeferredHandlingFunction() is executed by the daemon task as soon as the interrupt is
generated. That results in the message output by vDeferredHandlingFunction() appearing in
between the two messages output by the periodic task, just as it did when a semaphore was
used to unblock a dedicated deferred interrupt processing task. Further explanation is
provided in Figure 58.
Figure 57. The output produced when Example 18 is executed
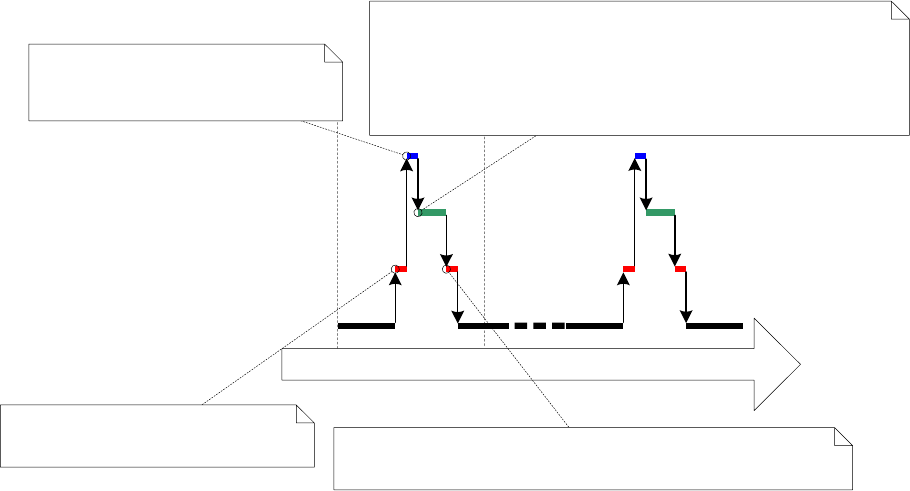
219
Interrupt
Daemon Task
t1 t2
Periodic
1 - The Idle task is running most of the
time. Every 500ms it gets pre-empted by
the Periodic task.
Idle
Time
2 - The Periodic task prints its first
message then forces an interrupt. The
interrupt service routine executes
immediately.
3 - The interrupt calls xTimerPendFunctionCallFromISR(), which writes
to the timer command queue, causing the daemon task to unblock. The
interrupt service routine then returns directly to the daemon task because
the daemon task is the highest priority Ready state task. The daemon
task prints out its message, including the incrementing parameter value,
before returning to the Blocked state to wait for either another message to
arrive on the timer command queue, or a software timer to expire.
4 - The Periodic task is once again the highest priority task - it prints
out its second message before entering the Blocked state again to wait
for the next time period. This leaves just the Idle task able to run.
Figure 58 The sequence of execution when Example 18 is executed

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
220
6.7 Using Queues within an Interrupt Service Routine
Binary and counting semaphores are used to communicate events. Queues are used to
communicate events, and to transfer data.
xQueueSendToFrontFromISR() is the version of xQueueSendToFront() that is safe to use in
an interrupt service routine, xQueueSendToBackFromISR() is the version of
xQueueSendToBack() that is safe to use in an interrupt service routine, and
xQueueReceiveFromISR() is the version of xQueueReceive() that is safe to use in an interrupt
service routine.
The xQueueSendToFrontFromISR() and xQueueSendToBackFromISR() API
Functions
BaseType_t xQueueSendToFrontFromISR( QueueHandle_t xQueue,
void *pvItemToQueue
BaseType_t *pxHigherPriorityTaskWoken
);
Listing 105. The xQueueSendToFrontFromISR() API function prototype
BaseType_t xQueueSendToBackFromISR( QueueHandle_t xQueue,
void *pvItemToQueue
BaseType_t *pxHigherPriorityTaskWoken
);
Listing 106. The xQueueSendToBackFromISR() API function prototype
xQueueSendFromISR() and xQueueSendToBackFromISR() are functionally equivalent.
Table 38. xQueueSendToFrontFromISR() and xQueueSendToBackFromISR()
parameters and return values
Parameter Name/
Returned Value
Description
xQueue
The handle of the queue to which the data is being sent
(written). The queue handle will have been returned from the
call to xQueueCreate() used to create the queue.

221
Table 38. xQueueSendToFrontFromISR() and xQueueSendToBackFromISR()
parameters and return values
Parameter Name/
Returned Value
Description
pvItemToQueue
A pointer to the data that will be copied into the queue.
The size of each item the queue can hold is set when the
queue is created, so this many bytes will be copied from
pvItemToQueue into the queue storage area.
pxHigherPriorityTaskWoken
It is possible that a single queue will have one or more tasks
blocked on it, waiting for data to become available. Calling
xQueueSendToFrontFromISR() or
xQueueSendToBackFromISR() can make data available, and
so cause such a task to leave the Blocked state. If calling the
API function causes a task to leave the Blocked state, and the
unblocked task has a priority higher than the currently
executing task (the task that was interrupted), then, internally,
the API function will set *pxHigherPriorityTaskWoken to
pdTRUE.
If xQueueSendToFrontFromISR() or
xQueueSendToBackFromISR() sets this value to pdTRUE,
then a context switch should be performed before the interrupt
is exited. This will ensure that the interrupt returns directly to
the highest priority Ready state task.
Returned value
There are two possible return values:
1. pdPASS
pdPASS is returned only if data has been sent successfully
to the queue.
2. errQUEUE_FULL
errQUEUE_FULL is returned if data cannot be sent to the
queue because the queue is already full.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
222
Considerations When Using a Queue From an ISR
Queues provide an easy and convenient way of passing data from an interrupt to a task, but it
is not efficient to use a queue if data is arriving at a high frequency.
Many of the demo applications in the FreeRTOS download include a simple UART driver that
uses a queue to pass characters out of the UART’s receive ISR. In those demos a queue is
used for two reasons: to demonstrate queues being used from an ISR, and to deliberately load
the system in order to test the FreeRTOS port. The ISRs that use a queue in this manner are
definitely not intended to represent an efficient design, and unless the data is arriving slowing,
it is recommended that production code does not copy the technique. More efficient
techniques, that are suitable for production code, include:
Using Direct Memory Access (DMA) hardware to receive and buffer characters. This
method has practically no software overhead. A direct to task notification
1
can then be
used to unblock the task that will process the buffer only after a break in transmission
has been detected.
Copying each received character into a thread safe RAM buffer
2
. Again, a direct to
task notification can be used to unblock the task that will process the buffer after a
complete message has been received, or after a break in transmission has been
detected.
Processing the received characters directly within the ISR, then using a queue to send
just the result of processing the data (rather than the raw data) to a task. This was
previously demonstrated by Figure 34.
Example 19. Sending and receiving on a queue from within an interrupt
This example demonstrates xQueueSendToBackFromISR() and xQueueReceiveFromISR()
being used within the same interrupt. As before, for convenience the interrupt is generated by
software.
1
Direct to task notifications provide the most efficient method of unblocking a task from an ISR. Direct
to task notifications are covered in Chapter 9, Task Notifications.
2
The ‘Stream Buffer’, provided as part of FreeRTOS+TCP (http://www.FreeRTOS.org/tcp), can be used
for this purpose.

223
A periodic task is created that sends five numbers to a queue every 200 milliseconds. It
generates a software interrupt only after all five values have been sent. The task
implementation is shown in Listing 107.
static void vIntegerGenerator( void *pvParameters )
{
TickType_t xLastExecutionTime;
uint32_t ulValueToSend = 0;
int i;
/* Initialize the variable used by the call to vTaskDelayUntil(). */
xLastExecutionTime = xTaskGetTickCount();
for( ;; )
{
/* This is a periodic task. Block until it is time to run again. The task
will execute every 200ms. */
vTaskDelayUntil( &xLastExecutionTime, pdMS_TO_TICKS( 200 ) );
/* Send five numbers to the queue, each value one higher than the previous
value. The numbers are read from the queue by the interrupt service routine.
The interrupt service routine always empties the queue, so this task is
guaranteed to be able to write all five values without needing to specify a
block time. */
for( i = 0; i < 5; i++ )
{
xQueueSendToBack( xIntegerQueue, &ulValueToSend, 0 );
ulValueToSend++;
}
/* Generate the interrupt so the interrupt service routine can read the
values from the queue. The syntax used to generate a software interrupt is
dependent on the FreeRTOS port being used. The syntax used below can only be
used with the FreeRTOS Windows port, in which such interrupts are only
simulated.*/
vPrintString( "Generator task - About to generate an interrupt.\r\n" );
vPortGenerateSimulatedInterrupt( mainINTERRUPT_NUMBER );
vPrintString( "Generator task - Interrupt generated.\r\n\r\n\r\n" );
}
}
Listing 107. The implementation of the task that writes to the queue in Example 19
The interrupt service routine calls xQueueReceiveFromISR() repeatedly until all the values
written to the queue by the periodic task have been read out, and the queue is left empty. The
last two bits of each received value are used as an index into an array of strings. A pointer to
the string at the corresponding index position is then sent to a different queue using a call to
xQueueSendFromISR(). The implementation of the interrupt service routine is shown in
Listing 108.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
224
static uint32_t ulExampleInterruptHandler( void )
{
BaseType_t xHigherPriorityTaskWoken;
uint32_t ulReceivedNumber;
/* The strings are declared static const to ensure they are not allocated on the
interrupt service routine's stack, and so exist even when the interrupt service
routine is not executing. */
static const char *pcStrings[] =
{
"String 0\r\n",
"String 1\r\n",
"String 2\r\n",
"String 3\r\n"
};
/* As always, xHigherPriorityTaskWoken is initialized to pdFALSE to be able to
detect it getting set to pdTRUE inside an interrupt safe API function. Note that
as an interrupt safe API function can only set xHigherPriorityTaskWoken to
pdTRUE, it is safe to use the same xHigherPriorityTaskWoken variable in both
the call to xQueueReceiveFromISR() and the call to xQueueSendToBackFromISR(). */
xHigherPriorityTaskWoken = pdFALSE;
/* Read from the queue until the queue is empty. */
while( xQueueReceiveFromISR( xIntegerQueue,
&ulReceivedNumber,
&xHigherPriorityTaskWoken ) != errQUEUE_EMPTY )
{
/* Truncate the received value to the last two bits (values 0 to 3
inclusive), then use the truncated value as an index into the pcStrings[]
array to select a string (char *) to send on the other queue. */
ulReceivedNumber &= 0x03;
xQueueSendToBackFromISR( xStringQueue,
&pcStrings[ ulReceivedNumber ],
&xHigherPriorityTaskWoken );
}
/* If receiving from xIntegerQueue caused a task to leave the Blocked state, and
if the priority of the task that left the Blocked state is higher than the
priority of the task in the Running state, then xHigherPriorityTaskWoken will
have been set to pdTRUE inside xQueueReceiveFromISR().
If sending to xStringQueue caused a task to leave the Blocked state, and if the
priority of the task that left the Blocked state is higher than the priority of
the task in the Running state, then xHigherPriorityTaskWoken will have been set
to pdTRUE inside xQueueSendToBackFromISR().
xHigherPriorityTaskWoken is used as the parameter to portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken equals pdTRUE then calling portYIELD_FROM_ISR() will
request a context switch. If xHigherPriorityTaskWoken is still pdFALSE then
calling portYIELD_FROM_ISR() will have no effect.
The implementation of portYIELD_FROM_ISR() used by the Windows port includes a
return statement, which is why this function does not explicitly return a
value. */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 108. The implementation of the interrupt service routine used by Example 19

225
The task that receives the character pointers from the interrupt service routine blocks on the
queue until a message arrives, printing out each string as it is received. Its implementation is
shown in Listing 109.
static void vStringPrinter( void *pvParameters )
{
char *pcString;
for( ;; )
{
/* Block on the queue to wait for data to arrive. */
xQueueReceive( xStringQueue, &pcString, portMAX_DELAY );
/* Print out the string received. */
vPrintString( pcString );
}
}
Listing 109. The task that prints out the strings received from the interrupt service
routine in Example 19
As normal, main() creates the required queues and tasks before starting the scheduler. Its
implementation is shown in Listing 110.
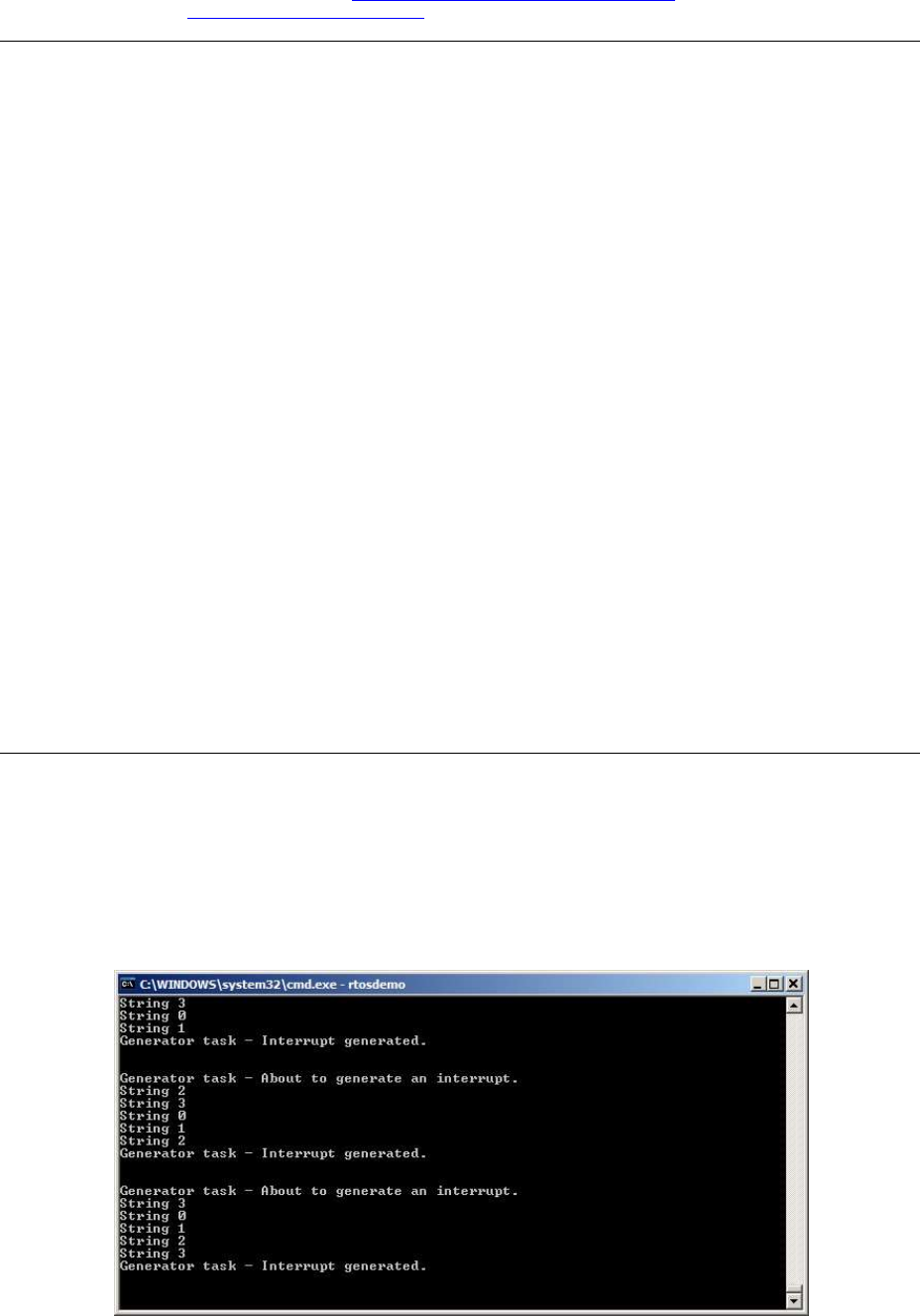
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
226
int main( void )
{
/* Before a queue can be used it must first be created. Create both queues used
by this example. One queue can hold variables of type uint32_t, the other queue
can hold variables of type char*. Both queues can hold a maximum of 10 items. A
real application should check the return values to ensure the queues have been
successfully created. */
xIntegerQueue = xQueueCreate( 10, sizeof( uint32_t ) );
xStringQueue = xQueueCreate( 10, sizeof( char * ) );
/* Create the task that uses a queue to pass integers to the interrupt service
routine. The task is created at priority 1. */
xTaskCreate( vIntegerGenerator, "IntGen", 1000, NULL, 1, NULL );
/* Create the task that prints out the strings sent to it from the interrupt
service routine. This task is created at the higher priority of 2. */
xTaskCreate( vStringPrinter, "String", 1000, NULL, 2, NULL );
/* Install the handler for the software interrupt. The syntax necessary to do
this is dependent on the FreeRTOS port being used. The syntax shown here can
only be used with the FreeRTOS Windows port, where such interrupts are only
simulated. */
vPortSetInterruptHandler( mainINTERRUPT_NUMBER, ulExampleInterruptHandler );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
/* If all is well then main() will never reach here as the scheduler will now be
running the tasks. If main() does reach here then it is likely that there was
insufficient heap memory available for the idle task to be created. Chapter 2
provides more information on heap memory management. */
for( ;; );
}
Listing 110. The main() function for Example 19
The output produced when Example 19 is executed is shown in Figure 59. As can be seen,
the interrupt receives all five integers, and produces five strings in response. More
explanation is given in Figure 60.
Figure 59. The output produced when Example 19 is executed
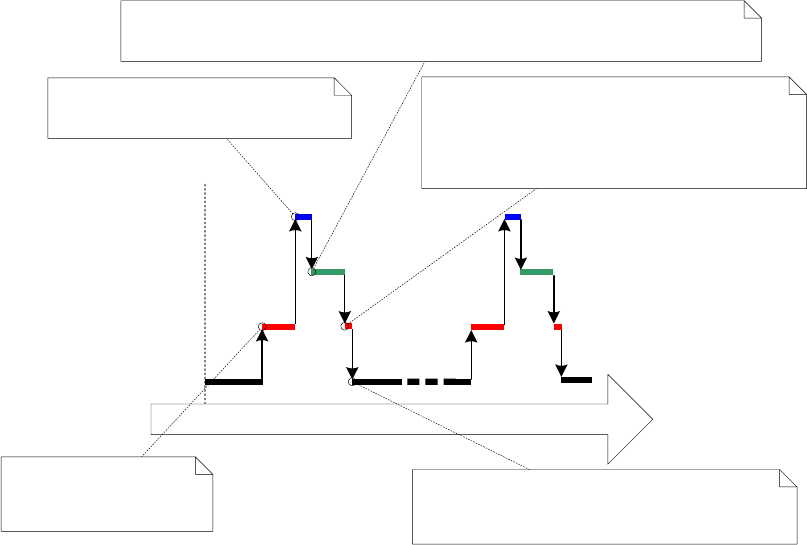
227
Interrupt
StringPrinter
t1
IntegerGenerator
Idle
Time
1 - The Idle task runs most
of the time. Every 200ms it
gets preempted by the
IntegerGenerator task.
2 - The IntegerGenerator writes 5 values
to a queue, then forces an interrupt.
3 - The interrupt service routine both reads from a queue and writes to a queue, writing a
string to one queue for every integer received from another. Writing strings to a queue
unblocks the StringPrinter task.
4 - The StringPrinter task is the highest priority task
so runs immediately after the interrupt service
routine. It prints out each string it receives on a
queue - when the queue is empty it enters the
Blocked state, allowing the lower priority
IntegerGenerator task to run again.
5 - The IntegerGenerator task is a periodic task so
blocks to wait for the next time period - once again
the idle task is the only task able to run. 200ms after
it last started to execute the whole sequence repeats.
Figure 60. The sequence of execution produced by Example 19
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
228
6.8 Interrupt Nesting
It is common for confusion to arise between task priorities and interrupt priorities. This section
discusses interrupt priorities, which are the priorities at which interrupt service routines (ISRs)
execute relative to each other. The priority assigned to a task is in no way related to the
priority assigned to an interrupt. Hardware decides when an ISR will execute, whereas
software decides when a task will execute. An ISR executed in response to a hardware
interrupt will interrupt a task, but a task cannot pre-empt an ISR.
Ports that support interrupt nesting require one or both of the constants detailed in Table 39 to
be defined in FreeRTOSConfig.h. configMAX_SYSCALL_INTERRUPT_PRIORITY and
configMAX_API_CALL_INTERRUPT_PRIORITY both define the same property. Older
FreeRTOS ports use configMAX_SYSCALL_INTERRUPT_PRIORITY, and newer FreeRTOS
port use configMAX_API_CALL_INTERRUPT_PRIORITY.
Table 39. Constants that control interrupt nesting
Constant
Description
configMAX_SYSCALL_INTERRUPT_PRIORITY or
configMAX_API_CALL_INTERRUPT_PRIORITY
Sets the highest interrupt priority from which
interrupt-safe FreeRTOS API functions can
be called.
configKERNEL_INTERRUPT_PRIORITY
Sets the interrupt priority used by the tick
interrupt, and must always be set to the
lowest possible interrupt priority.
If the FreeRTOS port in use does not also
use the
configMAX_SYSCALL_INTERRUPT_PRIORITY
constant, then any interrupt that uses
interrupt-safe FreeRTOS API functions
must also execute at the priority defined by
configKERNEL_INTERRUPT_PRIORITY.
Each interrupt source has a numeric priority, and a logical priority:
229
Numeric priority
The numeric priority is simply the number assigned to the interrupt priority. For example, if
an interrupt is assigned a priority of 7, then its numeric priority is 7. Likewise, if an interrupt
is assigned a priority of 200, then its numeric priority is 200.
Logical priority
An interrupt’s logical priority describes that interrupt’s precedence over other interrupts.
If two interrupts of differing priority occur at the same time, then the processor will execute
the ISR for whichever of the two interrupts has the higher logical priority before it executes
the ISR for whichever of the two interrupts has the lower logical priority.
An interrupt can interrupt (nest with) any interrupt that has a lower logical priority, but an
interrupt cannot interrupt (nest with) any interrupt that has an equal or higher logical
priority.
The relationship between an interrupt’s numeric priority and logical priority is dependent on the
processor architecture; on some processors, the higher the numeric priority assigned to an
interrupt the higher that interrupt’s logical priority will be, while on other processor architectures
the higher the numeric priority assigned to an interrupt the lower that interrupt’s logical priority
will be.
A full interrupt nesting model is created by setting
configMAX_SYSCALL_INTERRUPT_PRIORITY to a higher logical interrupt priority than
configKERNEL_INTERRUPT_PRIORITY. This is demonstrated in Figure 61, which shows a
scenario where:
The processor has seven unique interrupt priorities.
Interrupts assigned a numeric priority of 7 have a higher logical priority than interrupts
assigned a numeric priority of 1.
configKERNEL_INTERRUPT_PRIORITY is set to one.
configMAX_SYSCALL_INTERRUPT_PRIORITY is set to three.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
230
configMAX_SYSCALL_INTERRUPT_PRIORITY = 3
configKERNEL_INTERRUPT_PRIORITY = 1
Interrupts using these priorities
will never be delayed by anything
the kernel is doing, can nest, but
cannot use any FreeRTOS API
functions.
Interrupts that make API calls
can only use these priorities,
can nest, but will be masked
by critical sections.
Interrupts that
don’t call any API
functions can use
any priority and
will nest
Priority 1
Priority 2
Priority 3
Priority 4
Priority 5
Priority 6
Priority 7
Figure 61. Constants affecting interrupt nesting behavior
Referring to Figure 61:
Interrupts that use priorities 1 to 3, inclusive, are prevented from executing while the
kernel or the application is inside a critical section. ISRs running at these priorities can
use interrupt-safe FreeRTOS API functions. Critical sections are described in Chapter
7.
Interrupts that use priority 4, or above, are not affected by critical sections, so nothing
the scheduler does will prevent these interrupts from executing immediately—within the
limitations of the hardware itself. ISRs executing at these priorities cannot use any
FreeRTOS API functions.
Typically, functionality that requires very strict timing accuracy (motor control, for
example) would use a priority above configMAX_SYSCALL_INTERRUPT_PRIORITY
to ensure the scheduler does not introduce jitter into the interrupt response time.
A Note to ARM Cortex-M
1
and ARM GIC Users
Interrupt configuration on Cortex-M processors is confusing, and prone to error. To assist your
development, the FreeRTOS Cortex-M ports automatically check the interrupt configuration,
but only if configASSERT() is defined. configASSERT() is described in section 11.2.
1
This section only partially applies to Cortex-M0 and Cortex-M0+ cores.

231
The ARM Cortex cores, and ARM Generic Interrupt Controllers (GICs), use numerically low
priority numbers to represent logically high priority interrupts. This can seem counter-intuitive,
and is easy to forget. If you wish to assign an interrupt a logically low priority, then it must be
assigned a numerically high value. If you wish to assign an interrupt a logically high priority,
then it must be assigned a numerically low value.
The Cortex-M interrupt controller allows a maximum of eight bits to be used to specify each
interrupt priority, making 255 the lowest possible priority. Zero is the highest priority.
However, Cortex-M microcontrollers normally only implement a subset of the eight possible
bits. The number of bits actually implemented is dependent on the microcontroller family.
When only a subset of the eight possible bits has been implemented, it is only the most
significant bits of the byte that can be used—leaving the least significant bits unimplemented.
Unimplemented bits can take any value, but it is normal to set them to 1. This is demonstrated
by Figure 62, which shows how a priority of binary 101 is stored in a Cortex-M microcontroller
that implements four priority bits.
Figure 62 How a priority of binary 101 is stored by a Cortex-M microcontroller that
implements four priority bits
In Figure 62 the binary value 101 has been shifted into the most significant four bits because
the least significant four bits are not implemented. The unimplemented bits have been set to
1.
Some library functions expect priority values to be specified after they have been shifted up
into the implemented (most significant) bits. When using such a function the priority shown in
Figure 62 can be specified as decimal 95. Decimal 95 is binary 101 shifted up by four to make
binary 101nnnn (where ‘n’ is an unimplemented bit), and with the unimplemented bits set to 1
to make binary 1011111.
Some library functions expect priority values to be specified before they have been shifted up
into the implemented (most significant) bits. When using such a function the priority shown in
Figure 62 must be specified as decimal 5. Decimal 5 is binary 101 without any shift.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
232
configMAX_SYSCALL_INTERRUPT_PRIORITY and configKERNEL_INTERRUPT_PRIORITY
must be specified in a way that allows them to be written directly to the Cortex-M registers, so
after the priority values have been shifted up into the implemented bits.
configKERNEL_INTERRUPT_PRIORITY must always be set to the lowest possible interrupt
priority. Unimplemented priority bits can be set to 1, so the constant can always be set to 255,
no matter how many priority bits are actually implemented.
Cortex-M interrupts will default to a priority of zero—the highest possible priority. The
implementation of the Cortex-M hardware does not permit
configMAX_SYSCALL_INTERRUPT_PRIORITY to be set to 0, so the priority of an interrupt
that uses the FreeRTOS API must never be left at its default value.

233
Chapter 7
Resource Management

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
234
7.1 Chapter Introduction and Scope
In a multitasking system there is potential for error if one task starts to access a resource, but
does not complete its access before being transitioned out of the Running state. If the task
leaves the resource in an inconsistent state, then access to the same resource by any other
task or interrupt could result in data corruption, or other similar issue.
Following are some examples:
1. Accessing Peripherals
Consider the following scenario where two tasks attempt to write to an Liquid Crystal
Display (LCD).
1. Task A executes and starts to write the string “Hello world” to the LCD.
2. Task A is pre-empted by Task B after outputting just the beginning of the string—
“Hello w”.
3. Task B writes “Abort, Retry, Fail?” to the LCD before entering the Blocked state.
4. Task A continues from the point at which it was pre-empted, and completes
outputting the remaining characters of its string—“orld”.
The LCD now displays the corrupted string “Hello wAbort, Retry, Fail?orld”.
2. Read, Modify, Write Operations
Listing 111 shows a line of C code, and an example of how the C code would typically be
translated into assembly code. It can be seen that the value of PORTA is first read from
memory into a register, modified within the register, and then written back to memory. This
is called a read, modify, write operation.
/* The C code being compiled. */
PORTA |= 0x01;
/* The assembly code produced when the C code is compiled. */
LOAD R1,[#PORTA] ; Read a value from PORTA into R1
MOVE R2,#0x01 ; Move the absolute constant 1 into R2
OR R1,R2 ; Bitwise OR R1 (PORTA) with R2 (constant 1)
STORE R1,[#PORTA] ; Store the new value back to PORTA
Listing 111. An example read, modify, write sequence
235
This is a ‘non-atomic’ operation because it takes more than one instruction to complete, and
can be interrupted. Consider the following scenario where two tasks attempt to update a
memory mapped register called PORTA.
1. Task A loads the value of PORTA into a register—the read portion of the operation.
2. Task A is pre-empted by Task B before it completes the modify and write portions of
the same operation.
3. Task B updates the value of PORTA, then enters the Blocked state.
4. Task A continues from the point at which it was pre-empted. It modifies the copy of
the PORTA value that it already holds in a register, before writing the updated value
back to PORTA.
In this scenario, Task A updates and writes back an out of date value for PORTA. Task B
modifies PORTA after Task A takes a copy of the PORTA value, and before Task A writes
its modified value back to the PORTA register. When Task A writes to PORTA, it
overwrites the modification that has already been performed by Task B, effectively
corrupting the PORTA register value.
This example uses a peripheral register, but the same principle applies when performing
read, modify, write operations on variables.
3. Non-atomic Access to Variables
Updating multiple members of a structure, or updating a variable that is larger than the
natural word size of the architecture (for example, updating a 32-bit variable on a 16-bit
machine), are examples of non-atomic operations. If they are interrupted, they can result in
data loss or corruption.
4. Function Reentrancy
A function is ‘reentrant’ if it is safe to call the function from more than one task, or from both
tasks and interrupts. Reentrant functions are said to be ‘thread safe’ because they can be
accessed from more than one thread of execution without the risk of data or logical
operations becoming corrupted.
Each task maintains its own stack and its own set of processor (hardware) register values.
If a function does not access any data other than data stored on the stack or held in a

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
236
register, then the function is reentrant, and thread safe. Listing 112 is an example of a
reentrant function. Listing 113 is an example of a function that is not reentrant.
/* A parameter is passed into the function. This will either be passed on the stack,
or in a processor register. Either way is safe as each task or interrupt that calls
the function maintains its own stack and its own set of register values, so each task
or interrupt that calls the function will have its own copy of lVar1. */
long lAddOneHundred( long lVar1 )
{
/* This function scope variable will also be allocated to the stack or a register,
depending on the compiler and optimization level. Each task or interrupt that calls
this function will have its own copy of lVar2. */
long lVar2;
lVar2 = lVar1 + 100;
return lVar2;
}
Listing 112. An example of a reentrant function
/* In this case lVar1 is a global variable, so every task that calls
lNonsenseFunction will access the same single copy of the variable. */
long lVar1;
long lNonsenseFunction( void )
{
/* lState is static, so is not allocated on the stack. Each task that calls this
function will access the same single copy of the variable. */
static long lState = 0;
long lReturn;
switch( lState )
{
case 0 : lReturn = lVar1 + 10;
lState = 1;
break;
case 1 : lReturn = lVar1 + 20;
lState = 0;
break;
}
}
Listing 113. An example of a function that is not reentrant
Mutual Exclusion
To ensure data consistency is maintained at all times access to a resource that is shared
between tasks, or between tasks and interrupts, must be managed using a ‘mutual exclusion’
technique. The goal is to ensure that, once a task starts to access a shared resource that is
not re-entrant and not thread-safe, the same task has exclusive access to the resource until
the resource has been returned to a consistent state.
237
FreeRTOS provides several features that can be used to implement mutual exclusion, but the
best mutual exclusion method is to (whenever possible, as it is often not practical) design the
application in such a way that resources are not shared, and each resource is accessed only
from a single task.
Scope
This chapter aims to give readers a good understanding of:
When and why resource management and control is necessary.
What a critical section is.
What mutual exclusion means.
What it means to suspend the scheduler.
How to use a mutex.
How to create and use a gatekeeper task.
What priority inversion is, and how priority inheritance can reduce (but not remove) its
impact.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
238
7.2 Critical Sections and Suspending the Scheduler
Basic Critical Sections
Basic critical sections are regions of code that are surrounded by calls to the macros
taskENTER_CRITICAL() and taskEXIT_CRITICAL(), respectively. Critical sections are also
known as critical regions.
taskENTER_CRITICAL() and taskEXIT_CRITICAL() do not take any parameters, or return a
value
1
. Their use is demonstrated in Listing 114.
/* Ensure access to the PORTA register cannot be interrupted by placing it within a
critical section. Enter the critical section. */
taskENTER_CRITICAL();
/* A switch to another task cannot occur between the call to taskENTER_CRITICAL() and
the call to taskEXIT_CRITICAL(). Interrupts may still execute on FreeRTOS ports that
allow interrupt nesting, but only interrupts whose logical priority is above the
value assigned to the configMAX_SYSCALL_INTERRUPT_PRIORITY constant – and those
interrupts are not permitted to call FreeRTOS API functions. */
PORTA |= 0x01;
/* Access to PORTA has finished, so it is safe to exit the critical section. */
taskEXIT_CRITICAL();
Listing 114. Using a critical section to guard access to a register
The example projects that accompany this book use a function called vPrintString() to write
strings to standard out—which is the terminal window when the FreeRTOS Windows port is
used. vPrintString() is called from many different tasks; so, in theory, its implementation could
protect access to standard out using a critical section, as shown in Listing 115.
1
A function like macro does not really ‘return a value’ in the same way that a real function does. This
book applies the term ‘return a value’ to macros when it is simplest to think of the macro as if it were a
function.
239
void vPrintString( const char *pcString )
{
/* Write the string to stdout, using a critical section as a crude method of
mutual exclusion. */
taskENTER_CRITICAL();
{
printf( "%s", pcString );
fflush( stdout );
}
taskEXIT_CRITICAL();
}
Listing 115. A possible implementation of vPrintString()
Critical sections implemented in this way are a very crude method of providing mutual
exclusion. They work by disabling interrupts, either completely, or up to the interrupt priority
set by configMAX_SYSCALL_INTERRUPT_PRIORITY—depending on the FreeRTOS port
being used. Pre-emptive context switches can occur only from within an interrupt, so, as long
as interrupts remain disabled, the task that called taskENTER_CRITICAL() is guaranteed to
remain in the Running state until the critical section is exited.
Basic critical sections must be kept very short, otherwise they will adversely affect interrupt
response times. Every call to taskENTER_CRITICAL() must be closely paired with a call to
taskEXIT_CRITICAL(). For this reason, standard out (stdout, or the stream where a computer
writes its output data) should not be protected using a critical section (as shown in Listing
115), because writing to the terminal can be a relatively long operation. The examples in this
chapter explore alternative solutions.
It is safe for critical sections to become nested, because the kernel keeps a count of the
nesting depth. The critical section will be exited only when the nesting depth returns to zero—
which is when one call to taskEXIT_CRITICAL() has been executed for every preceding call to
taskENTER_CRITICAL().
Calling taskENTER_CRITICAL() and taskEXIT_CRITICAL() is the only legitimate way for a
task to alter the interrupt enable state of the processor on which FreeRTOS is running.
Altering the interrupt enable state by any other means will invalidate the macro’s nesting
count.
taskENTER_CRITICAL() and taskEXIT_CRITICAL() do not end in ‘FromISR’, so must not be
called from an interrupt service routine. taskENTER_CRITICAL_FROM_ISR() is an interrupt
safe version of taskENTER_CRITICAL(), and taskEXIT_CRITICAL_FROM_ISR() is an
interrupt safe version of taskEXIT_CRITICAL(). The interrupt safe versions are only provided

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
240
for FreeRTOS ports that allow interrupts to nest—they would be obsolete in ports that do not
allow interrupts to nest.
taskENTER_CRITICAL_FROM_ISR() returns a value that must be passed into the matching
call to taskEXIT_CRITICAL_FROM_ISR(). This is demonstrated in Listing 116.
void vAnInterruptServiceRoutine( void )
{
/* Declare a variable in which the return value from taskENTER_CRITICAL_FROM_ISR()
will be saved. */
UBaseType_t uxSavedInterruptStatus;
/* This part of the ISR can be interrupted by any higher priority interrupt. */
/* Use taskENTER_CRITICAL_FROM_ISR() to protect a region of this ISR. Save the
value returned from taskENTER_CRITICAL_FROM_ISR() so it can be passed into the
matching call to taskEXIT_CRITICAL_FROM_ISR(). */
uxSavedInterruptStatus = taskENTER_CRITICAL_FROM_ISR();
/* This part of the ISR is between the call to taskENTER_CRITICAL_FROM_ISR() and
taskEXIT_CRITICAL_FROM_ISR(), so can only be interrupted by interrupts that have
a priority above that set by the configMAX_SYSCALL_INTERRUPT_PRIORITY constant. */
/* Exit the critical section again by calling taskEXIT_CRITICAL_FROM_ISR(),
passing in the value returned by the matching call to
taskENTER_CRITICAL_FROM_ISR(). */
taskEXIT_CRITICAL_FROM_ISR( uxSavedInterruptStatus );
/* This part of the ISR can be interrupted by any higher priority interrupt. */
}
Listing 116. Using a critical section in an interrupt service routine
It is wasteful to use more processing time executing the code that enters and then
subsequently exits a critical section, than executing the code actually being protected by the
critical section. Basic critical sections are very fast to enter, very fast to exit, and always
deterministic, making their use ideal when the region of code being protected is very short.
Suspending (or Locking) the Scheduler
Critical sections can also be created by suspending the scheduler. Suspending the scheduler
is sometimes also known as ‘locking’ the scheduler.
Basic critical sections protect a region of code from access by other tasks and by interrupts. A
critical section implemented by suspending the scheduler only protects a region of code from
access by other tasks, because interrupts remain enabled.
241
A critical section that is too long to be implemented by simply disabling interrupts can, instead,
be implemented by suspending the scheduler. However, interrupt activity while the scheduler
is suspended can make resuming (or ‘un-suspending’) the scheduler a relatively long
operation, so consideration must be given to which is the best method to use in each case.
The vTaskSuspendAll() API Function
void vTaskSuspendAll( void );
Listing 117. The vTaskSuspendAll() API function prototype
The scheduler is suspended by calling vTaskSuspendAll(). Suspending the scheduler
prevents a context switch from occurring, but leaves interrupts enabled. If an interrupt
requests a context switch while the scheduler is suspended, then the request is held pending,
and is performed only when the scheduler is resumed (un-suspended).
FreeRTOS API functions must not be called while the scheduler is suspended.
The xTaskResumeAll() API Function
BaseType_t xTaskResumeAll( void );
Listing 118. The xTaskResumeAll() API function prototype
The scheduler is resumed (un-suspended) by calling xTaskResumeAll().
Table 40. xTaskResumeAll() return value
Returned Value
Description
Returned value
Context switches that are requested while the scheduler is suspended
are held pending and performed only as the scheduler is being resumed.
If a pending context switch is performed before xTaskResumeAll()
returns then pdTRUE is returned. Otherwise pdFALSE is returned.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
242
It is safe for calls to vTaskSuspendAll() and xTaskResumeAll() to become nested, because the
kernel keeps a count of the nesting depth. The scheduler will be resumed only when the
nesting depth returns to zero—which is when one call to xTaskResumeAll() has been
executed for every preceding call to vTaskSuspendAll().
Listing 119 shows the actual implementation of vPrintString(), which suspends the scheduler
to protect access to the terminal output.
void vPrintString( const char *pcString )
{
/* Write the string to stdout, suspending the scheduler as a method of mutual
exclusion. */
vTaskSuspendScheduler();
{
printf( "%s", pcString );
fflush( stdout );
}
xTaskResumeScheduler();
}
Listing 119. The implementation of vPrintString()

243
7.3 Mutexes (and Binary Semaphores)
A Mutex is a special type of binary semaphore that is used to control access to a resource that
is shared between two or more tasks. The word MUTEX originates from ‘MUTual EXclusion’.
configUSE_MUTEXES must be set to 1 in FreeRTOSConfig.h for mutexes to be available.
When used in a mutual exclusion scenario, the mutex can be thought of as a token that is
associated with the resource being shared. For a task to access the resource legitimately, it
must first successfully ‘take’ the token (be the token holder). When the token holder has
finished with the resource, it must ‘give’ the token back. Only when the token has been
returned can another task successfully take the token, and then safely access the same
shared resource. A task is not permitted to access the shared resource unless it holds the
token. This mechanism is shown in Figure 63.
Even though mutexes and binary semaphores share many characteristics, the scenario shown
in Figure 63 (where a mutex is used for mutual exclusion) is completely different to that shown
in Figure 53 (where a binary semaphore is used for synchronization). The primary difference
is what happens to the semaphore after it has been obtained:
A semaphore that is used for mutual exclusion must always be returned.
A semaphore that is used for synchronization is normally discarded and not returned.
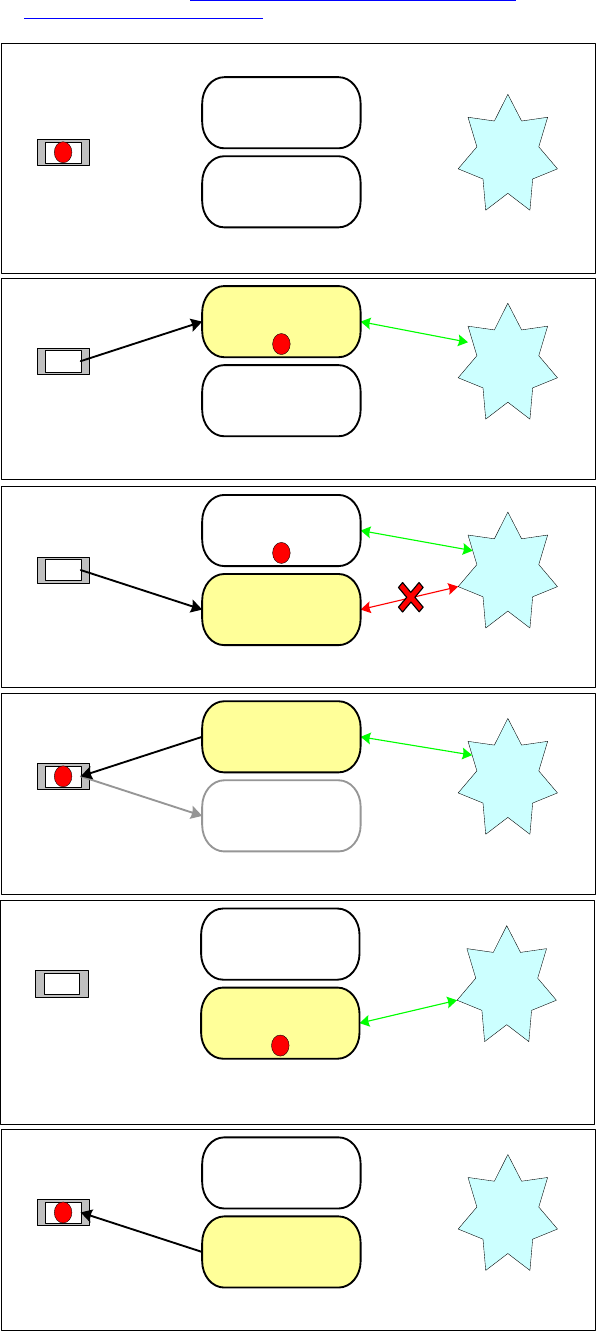
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
244
Guarded
resource
When Task B finishes accessing the resource it too gives the mutex back. The mutex is now
once again available to both tasks.
Task A
Task B
xSemaphoreGive()
Guarded
resource
Task A giving the mutex back causes Task B to exit the Blocked state (the mutex is now
available). Task B can now successfully obtain the mutex, and having done so is permitted to
access the resource.
Task A
Task B
xSemaphoreTake()
Guarded
resource
Task B opts to enter the Blocked state to wait for the mutex - allowing Task A to run again.
Task A finishes with the resource so ‘gives’ the mutex back.
Task B
Task A
xSemaphoreGive()
xSemaphoreTake()
Guarded
resource
Task B executes and attempts to take the same mutex. Task A still has the mutex so the
attempt fails and Task B is not permitted to access the guarded resource.
Task A
Task B
xSemaphoreTake()
Guarded
resource
Task A attempts to take the mutex. Because the mutex is available Task A successfully
becomes the mutex holder so is permitted to access the resource.
Task B
Task A
xSemaphoreTake()
The mutex used to
guard the resource
Guarded
resource
The resource being
guarded by the mutex
Two tasks each want to access the resource, but a task is not permitted to access the
resource unless it is the mutex (token) holder.
Task A
Task B
Figure 63. Mutual exclusion implemented using a mutex
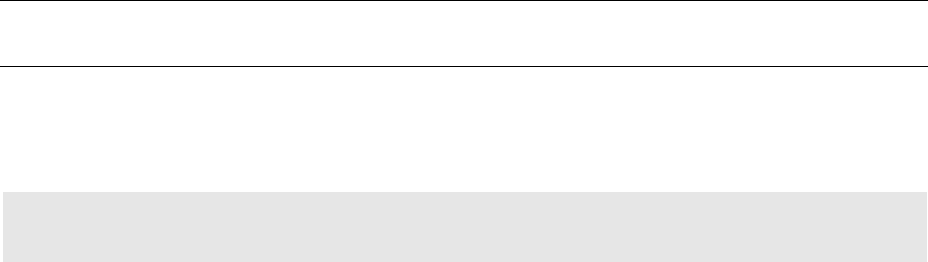
245
The mechanism works purely through the discipline of the application writer. There is no
reason why a task cannot access the resource at any time, but each task ‘agrees’ not to do so,
unless it is able to become the mutex holder.
The xSemaphoreCreateMutex() API Function
FreeRTOS V9.0.0 also includes the xSemaphoreCreateMutexStatic() function, which allocates the memory required
to create a mutex statically at compile time: A mutex is a type of semaphore. Handles to all the
various types of FreeRTOS semaphore are stored in a variable of type SemaphoreHandle_t.
Before a mutex can be used, it must be created. To create a mutex type semaphore, use the
xSemaphoreCreateMutex() API function.
SemaphoreHandle_t xSemaphoreCreateMutex( void );
Listing 120. The xSemaphoreCreateMutex() API function prototype
Table 41. xSemaphoreCreateMutex() return value
Parameter Name/
Returned Value
Description
Returned value
If NULL is returned then the mutex could not be created because there is
insufficient heap memory available for FreeRTOS to allocate the mutex
data structures. Chapter 2 provides more information on heap memory
management.
A non-NULL return value indicates that the mutex has been created
successfully. The returned value should be stored as the handle to the
created mutex.
Example 20. Rewriting vPrintString() to use a semaphore
This example creates a new version of vPrintString() called prvNewPrintString(), then calls the
new function from multiple tasks. prvNewPrintString() is functionally identical to vPrintString(),
but controls access to standard out using a mutex, rather than by locking the scheduler. The
implementation of prvNewPrintString() is shown in Listing 121.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
246
static void prvNewPrintString( const char *pcString )
{
/* The mutex is created before the scheduler is started, so already exists by the
time this task executes.
Attempt to take the mutex, blocking indefinitely to wait for the mutex if it is
not available straight away. The call to xSemaphoreTake() will only return when
the mutex has been successfully obtained, so there is no need to check the
function return value. If any other delay period was used then the code must
check that xSemaphoreTake() returns pdTRUE before accessing the shared resource
(which in this case is standard out). As noted earlier in this book, indefinite
time outs are not recommended for production code. */
xSemaphoreTake( xMutex, portMAX_DELAY );
{
/* The following line will only execute once the mutex has been successfully
obtained. Standard out can be accessed freely now as only one task can have
the mutex at any one time. */
printf( "%s", pcString );
fflush( stdout );
/* The mutex MUST be given back! */
}
xSemaphoreGive( xMutex );
}
Listing 121. The implementation of prvNewPrintString()
prvNewPrintString() is called repeatedly by two instances of a task implemented by
prvPrintTask(). A random delay time is used between each call. The task parameter is used
to pass a unique string into each instance of the task. The implementation of prvPrintTask() is
shown in Listing 122.

247
static void prvPrintTask( void *pvParameters )
{
char *pcStringToPrint;
const TickType_t xMaxBlockTimeTicks = 0x20;
/* Two instances of this task are created. The string printed by the task is
passed into the task using the task’s parameter. The parameter is cast to the
required type. */
pcStringToPrint = ( char * ) pvParameters;
for( ;; )
{
/* Print out the string using the newly defined function. */
prvNewPrintString( pcStringToPrint );
/* Wait a pseudo random time. Note that rand() is not necessarily reentrant,
but in this case it does not really matter as the code does not care what
value is returned. In a more secure application a version of rand() that is
known to be reentrant should be used - or calls to rand() should be protected
using a critical section. */
vTaskDelay( ( rand() % xMaxBlockTimeTicks ) );
}
}
Listing 122. The implementation of prvPrintTask() for Example 20
As normal, main() simply creates the mutex, creates the tasks, then starts the scheduler. The
implementation is shown in Listing 123.
The two instances of prvPrintTask() are created at different priorities, so the lower priority task
will sometimes be pre-empted by the higher priority task. As a mutex is used to ensure each
task gets mutually exclusive access to the terminal, even when pre-emption occurs, the strings
that are displayed will be correct and in no way corrupted. The frequency of pre-emption can
be increased by reducing the maximum time the tasks spend in the Blocked state, which is set
by the xMaxBlockTimeTicks constant.
Notes specific to using Example 20 with the FreeRTOS Windows port:
Calling printf() generates a Windows system call. Windows system calls are outside
the control of FreeRTOS, and can introduce instability.
The way in which Windows system calls execute mean it is rare to see a corrupted
string, even when the mutex is not used.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
248
int main( void )
{
/* Before a semaphore is used it must be explicitly created. In this example a
mutex type semaphore is created. */
xMutex = xSemaphoreCreateMutex();
/* Check the semaphore was created successfully before creating the tasks. */
if( xMutex != NULL )
{
/* Create two instances of the tasks that write to stdout. The string they
write is passed in to the task as the task’s parameter. The tasks are
created at different priorities so some pre-emption will occur. */
xTaskCreate( prvPrintTask, "Print1", 1000,
"Task 1 ***************************************\r\n", 1, NULL );
xTaskCreate( prvPrintTask, "Print2", 1000,
"Task 2 ---------------------------------------\r\n", 2, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}
/* If all is well then main() will never reach here as the scheduler will now be
running the tasks. If main() does reach here then it is likely that there was
insufficient heap memory available for the idle task to be created. Chapter 2
provides more information on heap memory management. */
for( ;; );
}
Listing 123. The implementation of main() for Example 20
The output produced when Example 20 is executed is shown in Figure 64. A possible
execution sequence is described in Figure 65.
Figure 64. The output produced when Example 20 is executed
Figure 64 shows that, as expected, there is no corruption in the strings that are displayed on
the terminal. The random ordering is a result of the random delay periods used by the tasks.

249
Task 2
t1
Task 1
Idle
Time
1 - The delay period for Task 1 expires so
Task 1 pre-empts the idle task.
2 - Task 1 takes the mutex and starts to
write out its string. Before the entire string
has been output Task 1 is preempted by the
higher priority Task 2.
3 - Task 2 attempts to take the mutex, but the mutex is still held by
Task 1 so Task 2 enters the Blocked state, allowing Task 1 to
execute again.
4 - Task 1 completes writing out its string, and gives
back the mutex - causing Task 2 to exit the Blocked
state. Task 2 preempts Task 1 again
5 - Task 2 writes out its string, gives back the
semaphore, then enters the Blocked state to wait
for the next execution time. This allows Task 1 to
run again - Task 1 also enters the Blocked state to
wait for its next execution time leaving only the Idle
task to run.
Figure 65. A possible sequence of execution for Example 20
Priority Inversion
Figure 65 demonstrates one of the potential pitfalls of using a mutex to provide mutual
exclusion. The sequence of execution depicted shows the higher priority Task 2 having to wait
for the lower priority Task 1 to give up control of the mutex. A higher priority task being
delayed by a lower priority task in this manner is called ‘priority inversion’. This undesirable
behavior would be exaggerated further if a medium priority task started to execute while the
high priority task was waiting for the semaphore—the result would be a high priority task
waiting for a low priority task—without the low priority task even being able to execute. This
worst case scenario is shown in Figure 66.
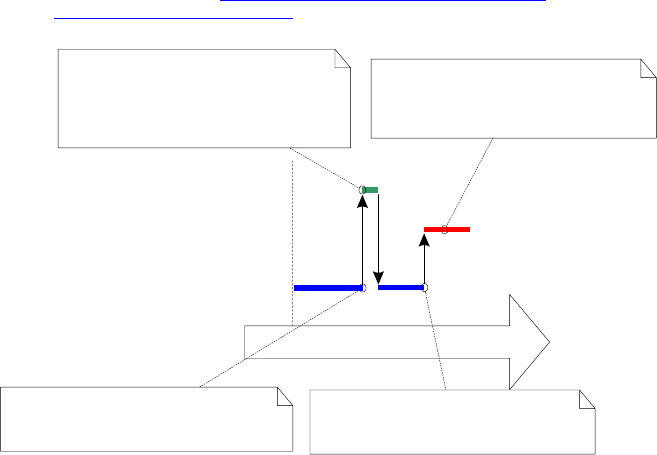
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
250
High priority task [HP]
t1
Medium priority task [MP]
Time
1 - The LP task takes a mutex before being
preempted by the HP task.
Low priority task [LP]
2 - The HP task attempts to take the mutex
but can’t because it is still being held by the
LP task. The HP task enters the Blocked
state to wait for the mutex to become
available.
3 - The LP task continues to execute, but
gets preempted by the MP task before it
gives the mutex back.
4 - The MP task is now running. The HP
task is still waiting for the LP task to return
the mutex, but the LP task is not even
executing!
Figure 66. A worst case priority inversion scenario
Priority inversion can be a significant problem, but in small embedded systems it can often be
avoided at system design time, by considering how resources are accessed.
Priority Inheritance
FreeRTOS mutexes and binary semaphores are very similar—the difference being that
mutexes include a basic ‘priority inheritance’ mechanism, whereas binary semaphores do not.
Priority inheritance is a scheme that minimizes the negative effects of priority inversion. It
does not ‘fix’ priority inversion, but merely lessens its impact by ensuring that the inversion is
always time bounded. However, priority inheritance complicates system timing analysis, and it
is not good practice to rely on it for correct system operation.
Priority inheritance works by temporarily raising the priority of the mutex holder to the priority of
the highest priority task that is attempting to obtain the same mutex. The low priority task that
holds the mutex ‘inherits’ the priority of the task waiting for the mutex. This is demonstrated by
Figure 67. The priority of the mutex holder is reset automatically to its original value when it
gives the mutex back.
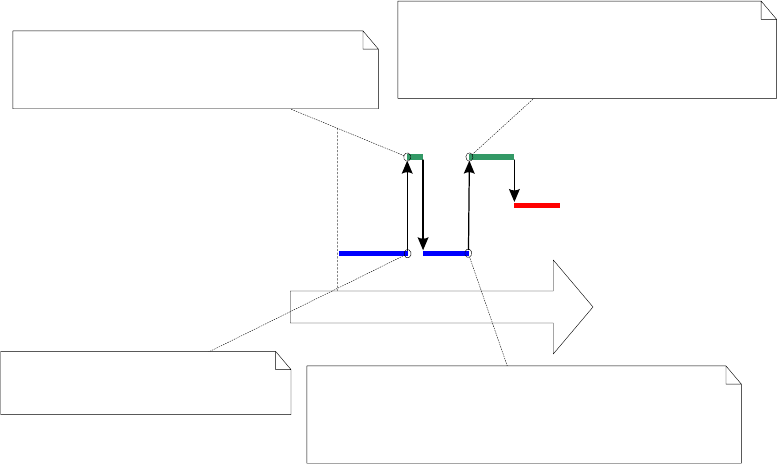
251
High priority task [HP]
t1
Medium priority task [MP]
Time
1 - The LP task takes a mutex before being
preempted by the HP task.
Low priority task [LP]
2 - The HP task attempts to take the mutex but can’t
because it is still being held by the LP task. The HP task
enters the Blocked state to wait for the mutex to become
available.
3 - The LP task is preventing the HP task from executing so inherits
the priority of the HP task. The LP task cannot now be preempted by
the MP task, so the amount of time that priority inversion exists is
minimized. When the LP task gives the mutex back it returns to its
original priority.
4 - The LP task returning the mutex causes the HP task to
exit the Blocked state as the mutex holder. When the HP
task has finished with the mutex it gives it back. The MP
task only executes when the HP task returns to the Blocked
state so the MP task never holds up the HP task.
Figure 67. Priority inheritance minimizing the effect of priority inversion
As just seen, priority inheritance functionality effects the priority of tasks that are using the
mutex. For that reason, mutexes must not be used from an interrupt service routines.
Deadlock (or Deadly Embrace)
‘Deadlock’ is another potential pitfall of using mutexes for mutual exclusion. Deadlock is
sometimes also known by the more dramatic name ‘deadly embrace’.
Deadlock occurs when two tasks cannot proceed because they are both waiting for a resource
that is held by the other. Consider the following scenario where Task A and Task B both need
to acquire mutex X and mutex Y in order to perform an action:
1. Task A executes and successfully takes mutex X.
2. Task A is pre-empted by Task B.
3. Task B successfully takes mutex Y before attempting to also take mutex X—but mutex
X is held by Task A so is not available to Task B. Task B opts to enter the Blocked
state to wait for mutex X to be released.
4. Task A continues executing. It attempts to take mutex Y—but mutex Y is held by Task
B, so is not available to Task A. Task A opts to enter the Blocked state to wait for
mutex Y to be released.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
252
At the end of this scenario, Task A is waiting for a mutex held by Task B, and Task B is waiting
for a mutex held by Task A. Deadlock has occurred because neither task can proceed.
As with priority inversion, the best method of avoiding deadlock is to consider its potential at
design time, and design the system to ensure that deadlock cannot occur. In particular, and
as previously stated in this book, it is normally bad practice for a task to wait indefinitely
(without a time out) to obtain a mutex. Instead, use a time out that is a little longer than the
maximum time it is expected to have to wait for the mutex—then failure to obtain the mutex
within that time will be a symptom of a design error, which might be a deadlock.
In practice, deadlock is not a big problem in small embedded systems, because the system
designers can have a good understanding of the entire application, and so can identify and
remove the areas where it could occur.
Recursive Mutexes
It is also possible for a task to deadlock with itself. This will happen if a task attempts to take
the same mutex more than once, without first returning the mutex. Consider the following
scenario:
1. A task successfully obtains a mutex.
2. While holding the mutex, the task calls a library function.
3. The implementation of the library function attempts to take the same mutex, and enters
the Blocked state to wait for the mutex to become available.
At the end of this scenario the task is in the Blocked state to wait for the mutex to be returned,
but the task is already the mutex holder. A deadlock has occurred because the task is in the
Blocked state to wait for itself.
This type of deadlock can be avoided by using a recursive mutex in place of a standard mutex.
A recursive mutex can be ‘taken’ more than once by the same task, and will be returned only
after one call to ‘give’ the recursive mutex has been executed for every preceding call to ‘take’
the recursive mutex.
Standard mutexes and recursive mutexes are created and used in a similar way:
253
Standard mutexes are created using xSemaphoreCreateMutex(). Recursive mutexes
are created using xSemaphoreCreateRecursiveMutex(). The two API functions have
the same prototype.
Standard mutexes are ‘taken’ using xSemaphoreTake(). Recursive mutexes are
‘taken’ using xSemaphoreTakeRecursive(). The two API functions have the same
prototype.
Standard mutexes are ‘given’ using xSemaphoreGive(). Recursive mutexes are ‘given’
using xSemaphoreGiveRecursive(). The two API functions have the same prototype.
Listing 124 demonstrates how to create and use a recursive mutex.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
254
/* Recursive mutexes are variables of type SemaphoreHandle_t. */
SemaphoreHandle_t xRecursiveMutex;
/* The implementation of a task that creates and uses a recursive mutex. */
void vTaskFunction( void *pvParameters )
{
const TickType_t xMaxBlock20ms = pdMS_TO_TICKS( 20 );
/* Before a recursive mutex is used it must be explicitly created. */
xRecursiveMutex = xSemaphoreCreateRecursiveMutex();
/* Check the semaphore was created successfully. configASSERT() is described in
section 11.2. */
configASSERT( xRecursiveMutex );
/* As per most tasks, this task is implemented as an infinite loop. */
for( ;; )
{
/* ... */
/* Take the recursive mutex. */
if( xSemaphoreTakeRecursive( xRecursiveMutex, xMaxBlock20ms ) == pdPASS )
{
/* The recursive mutex was successfully obtained. The task can now access
the resource the mutex is protecting. At this point the recursive call
count (which is the number of nested calls to xSemaphoreTakeRecursive())
is 1, as the recursive mutex has only been taken once. */
/* While it already holds the recursive mutex, the task takes the mutex
again. In a real application, this is only likely to occur inside a sub-
function called by this task, as there is no practical reason to knowingly
take the same mutex more than once. The calling task is already the mutex
holder, so the second call to xSemaphoreTakeRecursive() does nothing more
than increment the recursive call count to 2. */
xSemaphoreTakeRecursive( xRecursiveMutex, xMaxBlock20ms );
/* ... */
/* The task returns the mutex after it has finished accessing the resource
the mutex is protecting. At this point the recursive call count is 2, so
the first call to xSemaphoreGiveRecursive() does not return the mutex.
Instead, it simply decrements the recursive call count back to 1. */
xSemaphoreGiveRecursive( xRecursiveMutex );
/* The next call to xSemaphoreGiveRecursive() decrements the recursive call
count to 0, so this time the recursive mutex is returned.*/
xSemaphoreGiveRecursive( xRecursiveMutex );
/* Now one call to xSemaphoreGiveRecursive() has been executed for every
proceeding call to xSemaphoreTakeRecursive(), so the task is no longer the
mutex holder.
}
}
}
Listing 124. Creating and using a recursive mutex
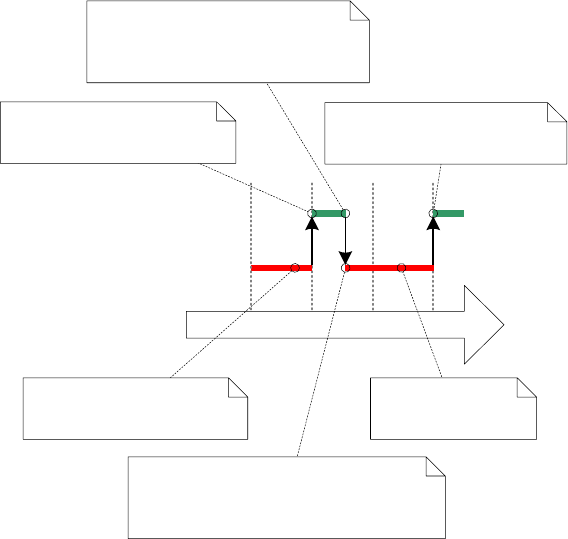
255
Mutexes and Task Scheduling
If two tasks of different priority use the same mutex, then the FreeRTOS scheduling policy
makes the order in which the tasks will execute clear; the highest priority task that is able to
run will be selected as the task that enters the Running state. For example, if a high priority
task is in the Blocked state to wait for a mutex that is held by a low priority task, then the high
priority task will pre-empt the low priority task as soon as the low priority task returns the
mutex. The high priority task will then become the mutex holder. This scenario has already
been seen in Figure 67.
It is however common to make an incorrect assumption as to the order in which the tasks will
execute when the tasks have the same priority. If Task 1 and Task 2 have the same priority,
and Task 1 is in the Blocked state to wait for a mutex that is held by Task 2, then Task 1 will
not pre-empt Task 2 when Task 2 ‘gives’ the mutex. Instead, Task 2 will remain in the
Running state, and Task 1 will simply move from the Blocked state to the Ready state. This
scenario is shown in Figure 68, in which the vertical lines mark the times at which a tick
interrupt occurs.
Task 1 (priority 1)
t1
Task 2 (priority 1)
1 - Task 2 executes for a
time slice, during which it
‘takes’ the mutex
3 - Task 1 attempts to ‘take’ the
mutex that is held by Task 2 and
enters the Blocked state to wait for
the mutex to become available
4 - Task 2 executes for the remainder
of the time slice and, because Task 1
is blocked, remains in the Running
state into the following time slice
t2 t3 t4
6 - Task 1 does not re-enter
the Running state until the
start of the next time slice
2 - Task 1 starts to execute
at the beginning of the next
time slice
5 - Task 2 ‘gives’
the mutex,
unblocking Task 1
Figure 68 A possible sequence of execution when tasks that have the same priority
use the same mutex

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
256
In the scenario shown in Figure 68, the FreeRTOS scheduler does not make Task 1 the
Running state task as soon as the mutex is available because:
1. Task 1 and Task 2 have the same priority, so unless Task 2 enters the Blocked state, a
switch to Task 1 should not occur until the next tick interrupt (assuming
configUSE_TIME_SLICING is set to 1 in FreeRTOSConfig.h).
2. If a task uses a mutex in a tight loop, and a context switch occurred each time the task
‘gave’ the mutex, then the task would only ever remain in the Running state for a short
time. If two or more tasks used the same mutex in a tight loop, then processing time
would be wasted by rapidly switching between the tasks.
If a mutex is used in a tight loop by more than one task, and the tasks that use the mutex have
the same priority, then care must be taken to ensure the tasks receive an approximately equal
amount of processing time. The reason the tasks might not receive an equal amount of
processing time is demonstrated by Figure 69, which shows a sequence of execution that
could occur if two instances of the task shown by Listing 125 are created at the same priority.
/* The implementation of a task that uses a mutex in a tight loop. The task creates
a text string in a local buffer, then writes the string to a display. Access to the
display is protected by a mutex. */
void vATask( void *pvParameter )
{
extern SemaphoreHandle_t xMutex;
char cTextBuffer[ 128 ];
for( ;; )
{
/* Generate the text string – this is a fast operation. */
vGenerateTextInALocalBuffer( cTextBuffer );
/* Obtain the mutex that is protecting access to the display. */
xSemaphoreTake( xMutex, portMAX_DELAY );
/* Write the generated text to the display – this is a slow operation. */
vCopyTextToFrameBuffer( cTextBuffer );
/* The text has been written to the display, so return the mutex. */
xSemaphoreGive( xMutex );
}
}
Listing 125. A task that uses a mutex in a tight loop
The comments in Listing 125 note that creating the string is a fast operation, and updating the
display is a slow operation. Therefore, as the mutex is held while the display is being updated,
the task will hold the mutex for the majority of its run time.
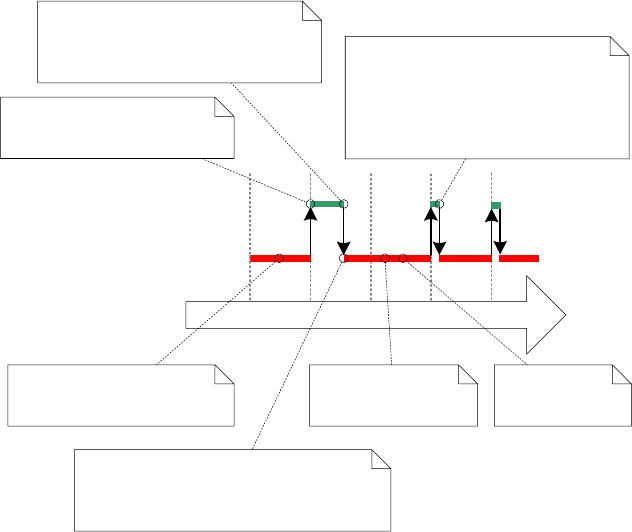
257
In Figure 69, the vertical lines mark the times at which a tick interrupt occurs.
Task 1 (priority 1)
t1
Task 2 (priority 1)
t2 t3 t4
6 - Task 2
‘takes’ the
mutex again
t5
1 - Task 2 executes for a
time slice, during which it
‘takes’ the mutex
3 - Task 1 attempts to ‘take’ the
mutex that is held by Task 2 and
enters the Blocked state to wait for
the mutex to become available
2 - Task 1 starts to execute
at the beginning of the next
time slice
4 - Task 2 executes for the remainder
of the time slice and, because Task 1 is
blocked, remains in the Running state
into the following time slice
5 - Task 2 ‘gives’
the mutex,
unblocking Task 1
7 - Task 1 starts to execute at the
beginning of the next time slice,
attempts to ‘take’ the mutex that is
held by Task 2, and enters the
Blocked state again to wait for the
mutex to become available
Figure 69 A sequence of execution that could occur if two instances of the task
shown by Listing 125 are created at the same priority
Step 7 in Figure 69 shows Task 1 re-entering the Blocked state—that happens inside the
xSemaphoreTake() API function.
Figure 69 demonstrates that Task 1 will be prevented from obtaining the mutex until the start
of a time slice coincides with one of the short periods during which Task 2 is not the mutex
holder.
The scenario shown in Figure 69 can be avoided by adding a call to taskYIELD() after the call
to xSemaphoreGive(). This is demonstrated in Listing 126, where taskYIELD() is called if the
tick count changed while the task held the mutex.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
258
void vFunction( void *pvParameter )
{
extern SemaphoreHandle_t xMutex;
char cTextBuffer[ 128 ];
TickType_t xTimeAtWhichMutexWasTaken;
for( ;; )
{
/* Generate the text string – this is a fast operation. */
vGenerateTextInALocalBuffer( cTextBuffer );
/* Obtain the mutex that is protecting access to the display. */
xSemaphoreTake( xMutex, portMAX_DELAY );
/* Record the time at which the mutex was taken. */
xTimeAtWhichMutexWasTaken = xTaskGetTickCount();
/* Write the generated text to the display – this is a slow operation. */
vCopyTextToFrameBuffer( cTextBuffer );
/* The text has been written to the display, so return the mutex. */
xSemaphoreGive( xMutex );
/* If taskYIELD() was called on each iteration then this task would only ever
remain in the Running state for a short period of time, and processing time
would be wasted by rapidly switching between tasks. Therefore, only call
taskYIELD() if the tick count changed while the mutex was held. */
if( xTaskGetTickCount() != xTimeAtWhichMutexWasTaken )
{
taskYIELD();
}
}
}
Listing 126. Ensuring tasks that use a mutex in a loop receive a more equal amount
of processing time, while also ensuring processing time is not wasted by
switching between tasks too rapidly

259
7.4 Gatekeeper Tasks
Gatekeeper tasks provide a clean method of implementing mutual exclusion without the risk of
priority inversion or deadlock.
A gatekeeper task is a task that has sole ownership of a resource. Only the gatekeeper task is
allowed to access the resource directly—any other task needing to access the resource can
do so only indirectly by using the services of the gatekeeper.
Example 21. Re-writing vPrintString() to use a gatekeeper task
Example 21 provides another alternative implementation for vPrintString(). This time, a
gatekeeper task is used to manage access to standard out. When a task wants to write a
message to standard out, it does not call a print function directly but, instead, sends the
message to the gatekeeper.
The gatekeeper task uses a FreeRTOS queue to serialize access to standard out. The
internal implementation of the task does not have to consider mutual exclusion because it is
the only task permitted to access standard out directly.
The gatekeeper task spends most of its time in the Blocked state, waiting for messages to
arrive on the queue. When a message arrives, the gatekeeper simply writes the message to
standard out, before returning to the Blocked state to wait for the next message. The
implementation of the gatekeeper task is shown by Listing 128.
Interrupts can send to queues, so interrupt service routines can also safely use the services of
the gatekeeper to write messages to the terminal. In this example, a tick hook function is used
to write out a message every 200 ticks.
A tick hook (or tick callback) is a function that is called by the kernel during each tick interrupt.
To use a tick hook function:
1. Set configUSE_TICK_HOOK to 1 in FreeRTOSConfig.h.
2. Provide the implementation of the hook function, using the exact function name and
prototype shown in Listing 127.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
260
void vApplicationTickHook( void );
Listing 127. The name and prototype for a tick hook function
Tick hook functions execute within the context of the tick interrupt, and so must be kept very
short, must use only a moderate amount of stack space, and must not call any FreeRTOS API
functions that do not end with ‘FromISR()’.
The scheduler will always execute immediately after the tick hook function, so interrupt safe
FreeRTOS API functions called from the tick hook do not need to use their
pxHigherPriorityTaskWoken parameter, and the parameter can be set to NULL.
static void prvStdioGatekeeperTask( void *pvParameters )
{
char *pcMessageToPrint;
/* This is the only task that is allowed to write to standard out. Any other
task wanting to write a string to the output does not access standard out
directly, but instead sends the string to this task. As only this task accesses
standard out there are no mutual exclusion or serialization issues to consider
within the implementation of the task itself. */
for( ;; )
{
/* Wait for a message to arrive. An indefinite block time is specified so
there is no need to check the return value – the function will only return
when a message has been successfully received. */
xQueueReceive( xPrintQueue, &pcMessageToPrint, portMAX_DELAY );
/* Output the received string. */
printf( "%s", pcMessageToPrint );
fflush( stdout );
/* Loop back to wait for the next message. */
}
}
Listing 128. The gatekeeper task
The task that writes to the queue is shown in Listing 129. As before, two separate instances of
the task are created, and the string the task writes to the queue is passed into the task using
the task parameter.

261
static void prvPrintTask( void *pvParameters )
{
int iIndexToString;
const TickType_t xMaxBlockTimeTicks = 0x20;
/* Two instances of this task are created. The task parameter is used to pass
an index into an array of strings into the task. Cast this to the required
type. */
iIndexToString = ( int ) pvParameters;
for( ;; )
{
/* Print out the string, not directly, but instead by passing a pointer to
the string to the gatekeeper task via a queue. The queue is created before
the scheduler is started so will already exist by the time this task executes
for the first time. A block time is not specified because there should
always be space in the queue. */
xQueueSendToBack( xPrintQueue, &( pcStringsToPrint[ iIndexToString ] ), 0 );
/* Wait a pseudo random time. Note that rand() is not necessarily reentrant,
but in this case it does not really matter as the code does not care what
value is returned. In a more secure application a version of rand() that is
known to be reentrant should be used - or calls to rand() should be protected
using a critical section. */
vTaskDelay( ( rand() % xMaxBlockTimeTicks ) );
}
}
Listing 129. The print task implementation for Example 21
The tick hook function counts the number of times it is called, sending its message to the
gatekeeper task each time the count reaches 200. For demonstration purposes only, the tick
hook writes to the front of the queue, and the tasks write to the back of the queue. The tick
hook implementation is shown in Listing 130.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
262
void vApplicationTickHook( void )
{
static int iCount = 0;
/* Print out a message every 200 ticks. The message is not written out directly,
but sent to the gatekeeper task. */
iCount++;
if( iCount >= 200 )
{
/* As xQueueSendToFrontFromISR() is being called from the tick hook, it is
not necessary to use the xHigherPriorityTaskWoken parameter (the third
parameter), and the parameter is set to NULL. */
xQueueSendToFrontFromISR( xPrintQueue,
&( pcStringsToPrint[ 2 ] ),
NULL );
/* Reset the count ready to print out the string again in 200 ticks time. */
iCount = 0;
}
}
Listing 130. The tick hook implementation
As normal, main() creates the queues and tasks necessary to run the example, then starts the
scheduler. The implementation of main() is shown in Listing 131.

263
/* Define the strings that the tasks and interrupt will print out via the
gatekeeper. */
static char *pcStringsToPrint[] =
{
"Task 1 ****************************************************\r\n",
"Task 2 ----------------------------------------------------\r\n",
"Message printed from the tick hook interrupt ##############\r\n"
};
/*-----------------------------------------------------------*/
/* Declare a variable of type QueueHandle_t. The queue is used to send messages
from the print tasks and the tick interrupt to the gatekeeper task. */
QueueHandle_t xPrintQueue;
/*-----------------------------------------------------------*/
int main( void )
{
/* Before a queue is used it must be explicitly created. The queue is created
to hold a maximum of 5 character pointers. */
xPrintQueue = xQueueCreate( 5, sizeof( char * ) );
/* Check the queue was created successfully. */
if( xPrintQueue != NULL )
{
/* Create two instances of the tasks that send messages to the gatekeeper.
The index to the string the task uses is passed to the task via the task
parameter (the 4th parameter to xTaskCreate()). The tasks are created at
different priorities so the higher priority task will occasionally preempt
the lower priority task. */
xTaskCreate( prvPrintTask, "Print1", 1000, ( void * ) 0, 1, NULL );
xTaskCreate( prvPrintTask, "Print2", 1000, ( void * ) 1, 2, NULL );
/* Create the gatekeeper task. This is the only task that is permitted
to directly access standard out. */
xTaskCreate( prvStdioGatekeeperTask, "Gatekeeper", 1000, NULL, 0, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
}
/* If all is well then main() will never reach here as the scheduler will now be
running the tasks. If main() does reach here then it is likely that there was
insufficient heap memory available for the idle task to be created. Chapter 2
provides more information on heap memory management. */
for( ;; );
}
Listing 131. The implementation of main() for Example 21
The output produced when Example 21 is executed is shown in Figure 70. As can be seen,
the strings originating from the tasks, and the strings originating from the interrupt, all print out
correctly with no corruption.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
264
Figure 70. The output produced when Example 21 is executed
The gatekeeper task is assigned a lower priority than the print tasks—so messages sent to the
gatekeeper remain in the queue until both print tasks are in the Blocked state. In some
situations, it would be appropriate to assign the gatekeeper a higher priority, so messages get
processed immediately—but doing so would be at the cost of the gatekeeper delaying lower
priority tasks until it has completed accessing the protected resource.

265
Chapter 8
Event Groups

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
266
8.1 Chapter Introduction and Scope
It has already been noted that real-time embedded systems have to take actions in response
to events. Previous chapters have described features of FreeRTOS that allow events to be
communicated to tasks. Examples of such features include semaphores and queues, both of
which have the following properties:
They allow a task to wait in the Blocked state for a single event to occur.
They unblock a single task when the event occurs—the task that is unblocked is the
highest priority task that was waiting for the event.
Event groups are another feature of FreeRTOS that allow events to be communicated to
tasks. Unlike queues and semaphores:
Event groups allow a task to wait in the Blocked state for a combination of one of more
events to occur.
Event groups unblock all the tasks that were waiting for the same event, or combination
of events, when the event occurs.
These unique properties of event groups make them useful for synchronizing multiple tasks,
broadcasting events to more than one task, allowing a task to wait in the Blocked state for any
one of a set of events to occur, and allowing a task to wait in the Blocked state for multiple
actions to complete.
Event groups also provide the opportunity to reduce the RAM used by an application, as often
it is possible to replace many binary semaphores with a single event group.
Event group functionality is optional. To include event group functionality, build the FreeRTOS
source file event_groups.c as part of your project.
Scope
This chapter aims to give readers a good understanding of:
Practical uses for event groups.
267
The advantages and disadvantages of event groups relative to other FreeRTOS
features.
How to set bits in an event group.
How to wait in the Blocked state for bits to become set in an event group.
How to use an event group to synchronize a set of tasks.
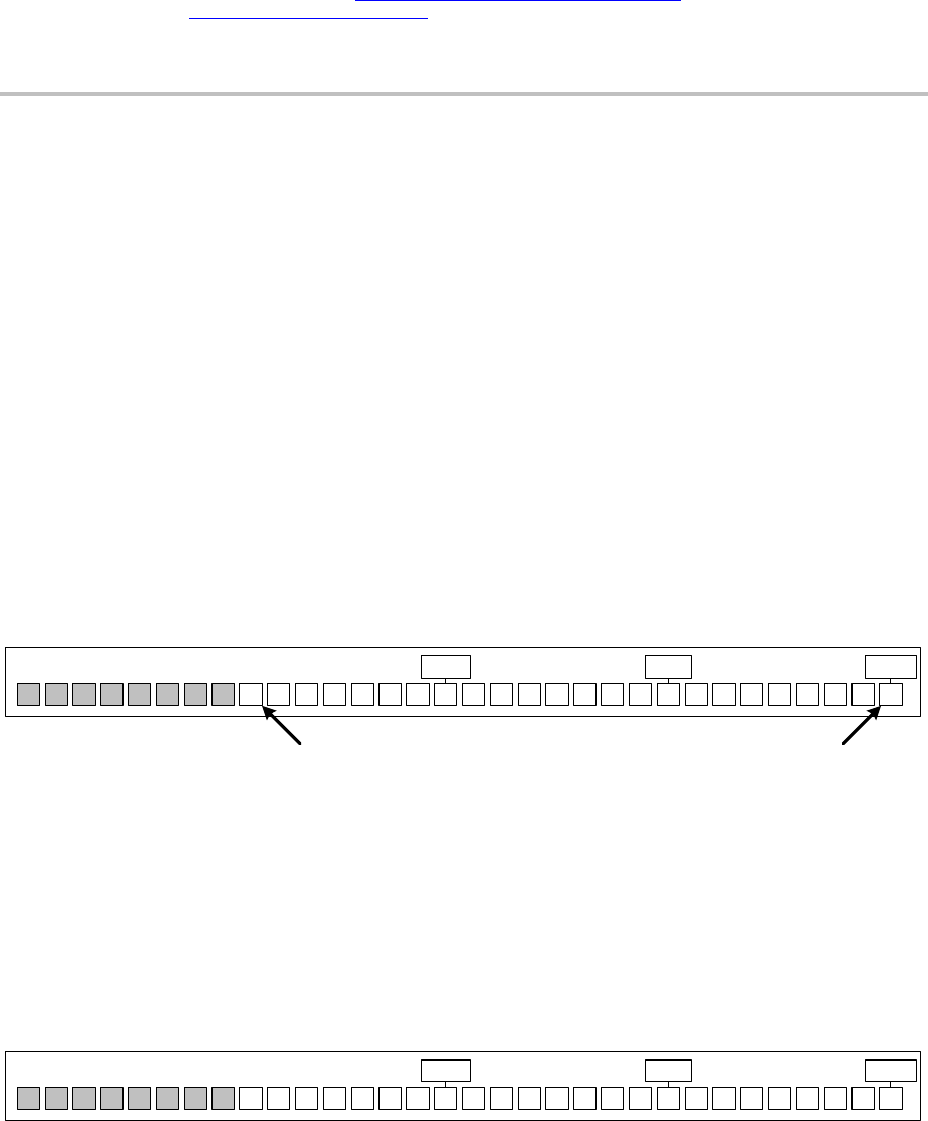
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
268
8.2 Characteristics of an Event Group
Event Groups, Event Flags and Event Bits
An event ‘flag’ is a Boolean (1 or 0) value used to indicate if an event has occurred or not. An
event ‘group’ is a set of event flags.
An event flag can only be 1 or 0, allowing the state of an event flag to be stored in a single bit,
and the state of all the event flags in an event group to be stored in a single variable; the state
of each event flag in an event group is represented by a single bit in a variable of type
EventBits_t. For that reason, event flags are also known as event ‘bits’. If a bit is set to 1 in
the EventBits_t variable, then the event represented by that bit has occurred. If a bit is set to 0
in the EventBits_t variable, then the event represented by that bit has not occurred.
Figure 71 shows how individual event flags are mapped to individual bits in a variable of type
EventBits_t.
Bit 0 is Flag 0
Event flags in a variable of type EventBits_t
01234567891011121314151617181920212223XXXXXXXX
Bit 23 is Flag 23
Bit 0Bit 8Bit 16
Figure 71 Event flag to bit number mapping in a variable of type EventBits_t
As an example, if the value of an event group is 0x92 (binary 1001 0010) then only event bits
1, 4 and 7 are set, so only the events represented by bits 1, 4 and 7 have occurred. Figure 72
shows a variable of type EventBits_t that has event bits 1, 4 and 7 set, and all the other event
bits clear, giving the event group a value of 0x92.
Event Group Value
XXXXXXXX 010010010000000000000000
Bit 0Bit 8Bit 16
Figure 72 An event group in which only bits 1, 4 and 7 are set, and all the other
event flags are clear, making the event group’s value 0x92
It is up to the application writer to assign a meaning to individual bits within an event group.
For example, the application writer might create an event group, then:

269
Define bit 0 within the event group to mean “a message has been received from the
network”.
Define bit 1 within the event group to mean “a message is ready to be sent onto the
network”.
Define bit 2 within the event group to mean “abort the current network connection”.
More About the EventBits_t Data Type
The number of event bits in an event group is dependent on the configUSE_16_BIT_TICKS
compile time configuration constant within FreeRTOSConfig.h
1
:
If configUSE_16_BIT_TICKS is 1, then each event group contains 8 usable event bits.
If configUSE_16_BIT_TICKS is 0, then each event group contains 24 usable event bits.
Access by Multiple Tasks
Event groups are objects in their own right that can be accessed by any task or ISR that
knows of their existence. Any number of tasks can set bits in the same event group, and any
number of tasks can read bits from the same event group.
A Practical Example of Using an Event Group
The implementation of the FreeRTOS+TCP TCP/IP stack provides a practical example of how
an event group can be used to simultaneously simplify a design, and minimize resource
usage.
A TCP socket must respond to many different events. Examples of events include accept
events, bind events, read events and close events. The events a socket can expect at any
given time is dependent on the state of the socket. For example, if a socket has been created,
but not yet bound to an address, then it can expect to receive a bind event, but would not
expect to receive a read event (it cannot read data if it does not have an address).
1
configUSE_16_BIT_TICKS configures the type used to hold the RTOS tick count, so would seem
unrelated to the event groups feature. Its effect on the EventBits_t type is a consequence of
FreeRTOS’s internal implementation, and desirable as configUSE_16_BIT_TICKS should only be set to
1 when FreeRTOS is executing on an architecture that can handle 16-bit types more efficiently than 32-
bit types.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
270
The state of a FreeRTOS+TCP socket is held in a structure called FreeRTOS_Socket_t. The
structure contains an event group that has an event bit defined for each event the socket must
process. FreeRTOS+TCP API calls that block to wait for an event, or group of events, simple
block on the event group.
The event group also contains an ‘abort’ bit, allowing a TCP connection to be aborted, no
matter which event the socket is waiting for at the time.

271
8.3 Event Management Using Event Groups
The xEventGroupCreate() API Function
FreeRTOS V9.0.0 also includes the xEventGroupCreateStatic() function, which allocates the memory required to
create an event group statically at compile time: An event group must be explicitly created before it
can be used.
Event groups are referenced using variables of type EventGroupHandle_t. The
xEventGroupCreate() API function is used to create an event group, and returns an
EventGroupHandle_t to reference the event group it creates.
EventGroupHandle_t xEventGroupCreate( void );
Listing 132. The xEventGroupCreate() API function prototype
Table 42, xEventGroupCreate() return value
Parameter
Name
Description
Return Value
If NULL is returned, then the event group cannot be created because
there is insufficient heap memory available for FreeRTOS to allocate the
event group data structures. Chapter 2 provides more information on
heap memory management.
A non-NULL value being returned indicates that the event group has been
created successfully. The returned value should be stored as the handle
to the created event group.
The xEventGroupSetBits() API Function
The xEventGroupSetBits() API function sets one or more bits in an event group, and is
typically used to notify a task that the events represented by the bit, or bits, being set has
occurred.
Note: Never call xEventGroupSetBits() from an interrupt service routine. The interrupt-safe
version xEventGroupSetBitsFromISR() should be used in its place.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
272
EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet );
Listing 133. The xEventGroupSetBits() API function prototype
Table 43, xEventGroupSetBits() parameters and return value
Parameter
Name
Description
xEventGroup
The handle of the event group in which bits are being set. The event
group handle will have been returned from the call to
xEventGroupCreate() used to create the event group.
uxBitsToSet
A bit mask that specifies the event bit, or event bits, to set to 1 in the event
group. The value of the event group is updated by bitwise ORing the
event group’s existing value with the value passed in uxBitsToSet.
As an example, setting uxBitsToSet to 0x04 (binary 0100) will result in
event bit 3 in the event group becoming set (if it was not already set),
while leaving all the other event bits in the event group unchanged.
Returned Value
The value of the event group at the time the call to xEventGroupSetBits()
returned. Note that the value returned will not necessarily have the bits
specified by uxBitsToSet set, because the bits may have been cleared
again by a different task.
The xEventGroupSetBitsFromISR() API Function
xEventGroupSetBitsFromISR() is the interrupt safe version of xEventGroupSetBits().
Giving a semaphore is a deterministic operation because it is known in advance that giving a
semaphore can result in at most one task leaving the Blocked state. When bits are set in an
event group it is not known in advance how many tasks will leave the Blocked state, so setting
bits in an event group is not a deterministic operation.
The FreeRTOS design and implementation standard does not permit non-deterministic
operations to be performed inside an interrupt service routine, or when interrupts are disabled.
For that reason, xEventGroupSetBitsFromISR() does not set event bits directly inside the
interrupt service routine, but instead defers the action to the RTOS daemon task.

273
BaseType_t xEventGroupSetBitsFromISR( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
BaseType_t *pxHigherPriorityTaskWoken );
Listing 134. The xEventGroupSetBitsFromISR() API function prototype
Table 44, xEventGroupSetBitsFromISR() parameters and return value
Parameter Name
Description
xEventGroup
The handle of the event group in which bits are being set. The
event group handle will have been returned from the call to
xEventGroupCreate() used to create the event group.
uxBitsToSet
A bit mask that specifies the event bit, or event bits, to set to 1
in the event group. The value of the event group is updated by
bitwise ORing the event group’s existing value with the value
passed in uxBitsToSet.
As an example, setting uxBitsToSet to 0x05 (binary 0101) will
result in event bit 3 and event bit 0 in the event group
becoming set (if they were not already set), while leaving all
the other event bits in the event group unchanged.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
274
Table 44, xEventGroupSetBitsFromISR() parameters and return value
Parameter Name
Description
pxHigherPriorityTaskWoken
xEventGroupSetBitsFromISR() does not set the event bits
directly inside the interrupt service routine, but instead defers
the action to the RTOS daemon task by sending a command
on the timer command queue. If the daemon task was in the
Blocked state to wait for data to become available on the timer
command queue, then writing to the timer command queue will
cause the daemon task to leave the Blocked state. If the
priority of the daemon task is higher than the priority of the
currently executing task (the task that was interrupted), then,
internally, xEventGroupSetBitsFromISR() will set
*pxHigherPriorityTaskWoken to pdTRUE.
If xEventGroupSetBitsFromISR() sets this value to pdTRUE,
then a context switch should be performed before the interrupt
is exited. This will ensure that the interrupt returns directly to
the daemon task, as the daemon task will be the highest
priority Ready state task.
Returned Value
There are two possible return values:
1. pdPASS
pdPASS will be returned only if data was successfully sent
to the timer command queue.
2. pdFALSE
pdFALSE will be returned if the ‘set bits’ command could
not be written to the timer command queue because the
queue was already full.
275
The xEventGroupWaitBits() API Function
The xEventGroupWaitBits() API function allows a task to read the value of an event group, and
optionally wait in the Blocked state for one or more event bits in the event group to become
set, if the event bits are not already set.
EventBits_t xEventGroupWaitBits( const EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait );
Listing 135. The xEventGroupWaitBits() API function prototype
The condition used by the scheduler to determine if a task will enter the Blocked state, and
when a task will leave the Blocked state, is called the ‘unblock condition’. The unblock
condition is specified by a combination of the uxBitsToWaitFor and the xWaitForAllBits
parameter values:
uxBitsToWaitFor specifies which event bits in the event group to test
xWaitForAllBits specifies whether to use a bitwise OR test, or a bitwise AND test
A task will not enter the Blocked state if its unblock condition is met at the time
xEventGroupWaitBits() is called.
Examples of conditions that will result in a task either entering the Blocked state, or exiting the
Blocked state, are provided in Table 45. Table 45 only shows the least significant four binary
bits of the event group and uxBitsToWaitFor values—the other bits of those two values are
assumed to be zero.
Table 45, The Effect of the uxBitsToWaitFor and xWaitForAllBits Parameters
Existing Event
Group Value
uxBitsToWaitFor
value
xWaitForAllBits
value
Resultant Behavior
0000
0101
pdFALSE
The calling task will enter the Blocked
state because neither of bit 0 or bit 2
are set in the event group, and will
leave the Blocked state when either bit
0 OR bit 2 are set in the event group.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
276
Table 45, The Effect of the uxBitsToWaitFor and xWaitForAllBits Parameters
Existing Event
Group Value
uxBitsToWaitFor
value
xWaitForAllBits
value
Resultant Behavior
0100
0101
pdTRUE
The calling task will enter the Blocked
state because bit 0 and bit 2 are not
both set in the event group, and will
leave the Blocked state when both bit 0
AND bit 2 are set in the event group.
0100
0110
pdFALSE
The calling task will not enter the
Blocked state because xWaitForAllBits
is pdFALSE, and one of the two bits
specified by uxBitsToWaitFor is already
set in the event group.
0100
0110
pdTRUE
The calling task will enter the Blocked
state because xWaitForAllBits is
pdTRUE, and only one of the two bits
specified by uxBitsToWaitFor is already
set in the event group. The task will
leave the Blocked state when both bit 2
and bit 3 are set in the event group.
The calling task specifies bits to test using the uxBitsToWaitFor parameter, and it is likely the
calling task will need to clear these bits back to zero after its unblock condition has been met.
Event bits can be cleared using the xEventGroupClearBits() API function, but using that
function to manually clear event bits will lead to race conditions in the application code if:
There is more than one task using the same event group.
Bits are set in the event group by a different task, or by an interrupt service routine.
The xClearOnExit parameter is provided to avoid these potential race conditions. If
xClearOnExit is set to pdTRUE, then the testing and clearing of event bits appears to the
calling task to be an atomic operation (uninterruptable by other tasks or interrupts).

277
Table 46, xEventGroupWaitBits() parameters and return value
Parameter Name
Description
xEventGroup
The handle of the event group that contains the event bits being read.
The event group handle will have been returned from the call to
xEventGroupCreate() used to create the event group.
uxBitsToWaitFor
A bit mask that specifies the event bit, or event bits, to test in the event
group.
For example, if the calling task wants to wait for event bit 0 and/or event
bit 2 to become set in the event group, then set uxBitsToWaitFor to 0x05
(binary 0101). Refer to Table 45 for further examples.
xClearOnExit
If the calling task’s unblock condition has been met, and xClearOnExit is
set to pdTRUE, then the event bits specified by uxBitsToWaitFor will be
cleared back to 0 in the event group before the calling task exits the
xEventGroupWaitBits() API function.
If xClearOnExit is set to pdFALSE, then the state of the event bits in the
event group are not modified by the xEventGroupWaitBits() API function.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
278
Table 46, xEventGroupWaitBits() parameters and return value
Parameter Name
Description
xWaitForAllBits
The uxBitsToWaitFor parameter specifies the event bits to test in the
event group. xWaitForAllBits specifies if the calling task should be
removed from the Blocked state when one or more of the events bits
specified by the uxBitsToWaitFor parameter are set, or only when all of
the event bits specified by the uxBitsToWaitFor parameter are set.
If xWaitForAllBits is set to pdFALSE, then a task that entered the Blocked
state to wait for its unblock condition to be met will leave the Blocked state
when any of the bits specified by uxBitsToWaitFor become set (or the time
out specified by the xTicksToWait parameter expires).
If xWaitForAllBits is set to pdTRUE, then a task that entered the Blocked
state to wait for its unblock condition to be met will only leave the Blocked
state when all of the bits specified by uxBitsToWaitFor are set (or the time
out specified by the xTicksToWait parameter expires).
Refer to Table 45 for examples.
xTicksToWait
The maximum amount of time the task should remain in the Blocked state
to wait for its unblock condition to be met.
xEventGroupWaitBits() will return immediately if xTicksToWait is zero, or
the unblock condition is met at the time xEventGroupWaitBits() is called.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without timing out), provided INCLUDE_vTaskSuspend is set
to 1 in FreeRTOSConfig.h.

279
Table 46, xEventGroupWaitBits() parameters and return value
Parameter Name
Description
Returned Value
If xEventGroupWaitBits() returned because the calling task’s unblock
condition was met, then the returned value is the value of the event group
at the time the calling task’s unblock condition was met (before any bits
were automatically cleared if xClearOnExit was pdTRUE). In this case the
returned value will also meet the unblock condition.
If xEventGroupWaitBits() returned because the block time specified by the
xTicksToWait parameter expired, then the returned value is the value of
the event group at the time the block time expired. In this case the
returned value will not meet the unblock condition.
Example 22. Experimenting with event groups
This example demonstrates how to:
Create an event group.
Set bits in an event group from an interrupt service routine.
Set bits in an event group from a task.
Block on an event group.
The effect of the xEventGroupWaitBits() xWaitForAllBits parameter is demonstrated by first
executing the example with xWaitForAllBits set to pdFALSE, and then executing the example
with xWaitForAllBits set to pdTRUE.
Event bit 0 and event bit 1 are set from a task. Event bit 2 is set from an interrupt service
routine. These three bits are given descriptive names using the #define statements shown in
Listing 136.
/* Definitions for the event bits in the event group. */
#define mainFIRST_TASK_BIT ( 1UL << 0UL ) /* Event bit 0, which is set by a task. */
#define mainSECOND_TASK_BIT ( 1UL << 1UL ) /* Event bit 1, which is set by a task. */
#define mainISR_BIT ( 1UL << 2UL ) /* Event bit 2, which is set by an ISR. */
Listing 136. Event bit definitions used in Example 22

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
280
Listing 137 shows the implementation of the task that sets event bit 0 and event bit 1. It sits in
a loop, repeatedly setting one bit, then the other, with a delay of 200 milliseconds between
each call to xEventGroupSetBits(). A string is printed out before each bit is set to allow the
sequence of execution to be seen in the console.
static void vEventBitSettingTask( void *pvParameters )
{
const TickType_t xDelay200ms = pdMS_TO_TICKS( 200UL ), xDontBlock = 0;
for( ;; )
{
/* Delay for a short while before starting the next loop. */
vTaskDelay( xDelay200ms );
/* Print out a message to say event bit 0 is about to be set by the task,
then set event bit 0. */
vPrintString( "Bit setting task -\t about to set bit 0.\r\n" );
xEventGroupSetBits( xEventGroup, mainFIRST_TASK_BIT );
/* Delay for a short while before setting the other bit. */
vTaskDelay( xDelay200ms );
/* Print out a message to say event bit 1 is about to be set by the task,
then set event bit 1. */
vPrintString( "Bit setting task -\t about to set bit 1.\r\n" );
xEventGroupSetBits( xEventGroup, mainSECOND_TASK_BIT );
}
}
Listing 137. The task that sets two bits in the event group in Example 22
Listing 138 shows the implementation of the interrupt service routine that sets bit 2 in the event
group. Again, a string is printed out before the bit is set to allow the sequence of execution to
be seen in the console. In this case however, because console output should not be
performed directly in an interrupt service routine, xTimerPendFunctionCallFromISR() is used to
perform the output in the context of the RTOS daemon task.
As in previous examples, the interrupt service routine is triggered by a simple periodic task that
forces a software interrupt. In this example, the interrupt is generated every 500 milliseconds.

281
static uint32_t ulEventBitSettingISR( void )
{
/* The string is not printed within the interrupt service routine, but is instead
sent to the RTOS daemon task for printing. It is therefore declared static to ensure
the compiler does not allocate the string on the stack of the ISR, as the ISR's stack
frame will not exist when the string is printed from the daemon task. */
static const char *pcString = "Bit setting ISR -\t about to set bit 2.\r\n";
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
/* Print out a message to say bit 2 is about to be set. Messages cannot be
printed from an ISR, so defer the actual output to the RTOS daemon task by
pending a function call to run in the context of the RTOS daemon task. */
xTimerPendFunctionCallFromISR( vPrintStringFromDaemonTask,
( void * ) pcString,
0,
&xHigherPriorityTaskWoken );
/* Set bit 2 in the event group. */
xEventGroupSetBitsFromISR( xEventGroup, mainISR_BIT, &xHigherPriorityTaskWoken );
/* xTimerPendFunctionCallFromISR() and xEventGroupSetBitsFromISR() both write to
the timer command queue, and both used the same xHigherPriorityTaskWoken
variable. If writing to the timer command queue resulted in the RTOS daemon task
leaving the Blocked state, and if the priority of the RTOS daemon task is higher
than the priority of the currently executing task (the task this interrupt
interrupted) then xHigherPriorityTaskWoken will have been set to pdTRUE.
.
xHigherPriorityTaskWoken is used as the parameter to portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken equals pdTRUE, then calling portYIELD_FROM_ISR() will
request a context switch. If xHigherPriorityTaskWoken is still pdFALSE, then
calling portYIELD_FROM_ISR() will have no effect.
The implementation of portYIELD_FROM_ISR() used by the Windows port includes a
return statement, which is why this function does not explicitly return a
value. */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 138. The ISR that sets bit 2 in the event group in Example 22
Listing 139 show the implementation of the task that calls xEventGroupWaitBits() to block on
the event group. The task prints out a string for each bit that is set in the event group.
The xEventGroupWaitBits() xClearOnExit parameter is set to pdTRUE, so the event bit, or bits,
that caused the call to xEventGroupWaitBits() to return will be cleared automatically before
xEventGroupWaitBits() returns.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
282
static void vEventBitReadingTask( void *pvParameters )
{
EventBits_t xEventGroupValue;
const EventBits_t xBitsToWaitFor = ( mainFIRST_TASK_BIT |
mainSECOND_TASK_BIT |
mainISR_BIT );
for( ;; )
{
/* Block to wait for event bits to become set within the event group. */
xEventGroupValue = xEventGroupWaitBits( /* The event group to read. */
xEventGroup,
/* Bits to test. */
xBitsToWaitFor,
/* Clear bits on exit if the
unblock condition is met. */
pdTRUE,
/* Don't wait for all bits. This
parameter is set to pdTRUE for the
second execution. */
pdFALSE,
/* Don't time out. */
portMAX_DELAY );
/* Print a message for each bit that was set. */
if( ( xEventGroupValue & mainFIRST_TASK_BIT ) != 0 )
{
vPrintString( "Bit reading task -\t Event bit 0 was set\r\n" );
}
if( ( xEventGroupValue & mainSECOND_TASK_BIT ) != 0 )
{
vPrintString( "Bit reading task -\t Event bit 1 was set\r\n" );
}
if( ( xEventGroupValue & mainISR_BIT ) != 0 )
{
vPrintString( "Bit reading task -\t Event bit 2 was set\r\n" );
}
}
}
Listing 139. The task that blocks to wait for event bits to become set in Example 22
The main() function creates the event group, and the tasks, before starting the scheduler. See
Listing 140 for its implementation. The priority of the task that reads from the event group is
higher than the priority of the task that writes to the event group, ensuring the reading task will
pre-empt the writing task each time the reading task’s unblock condition is met.
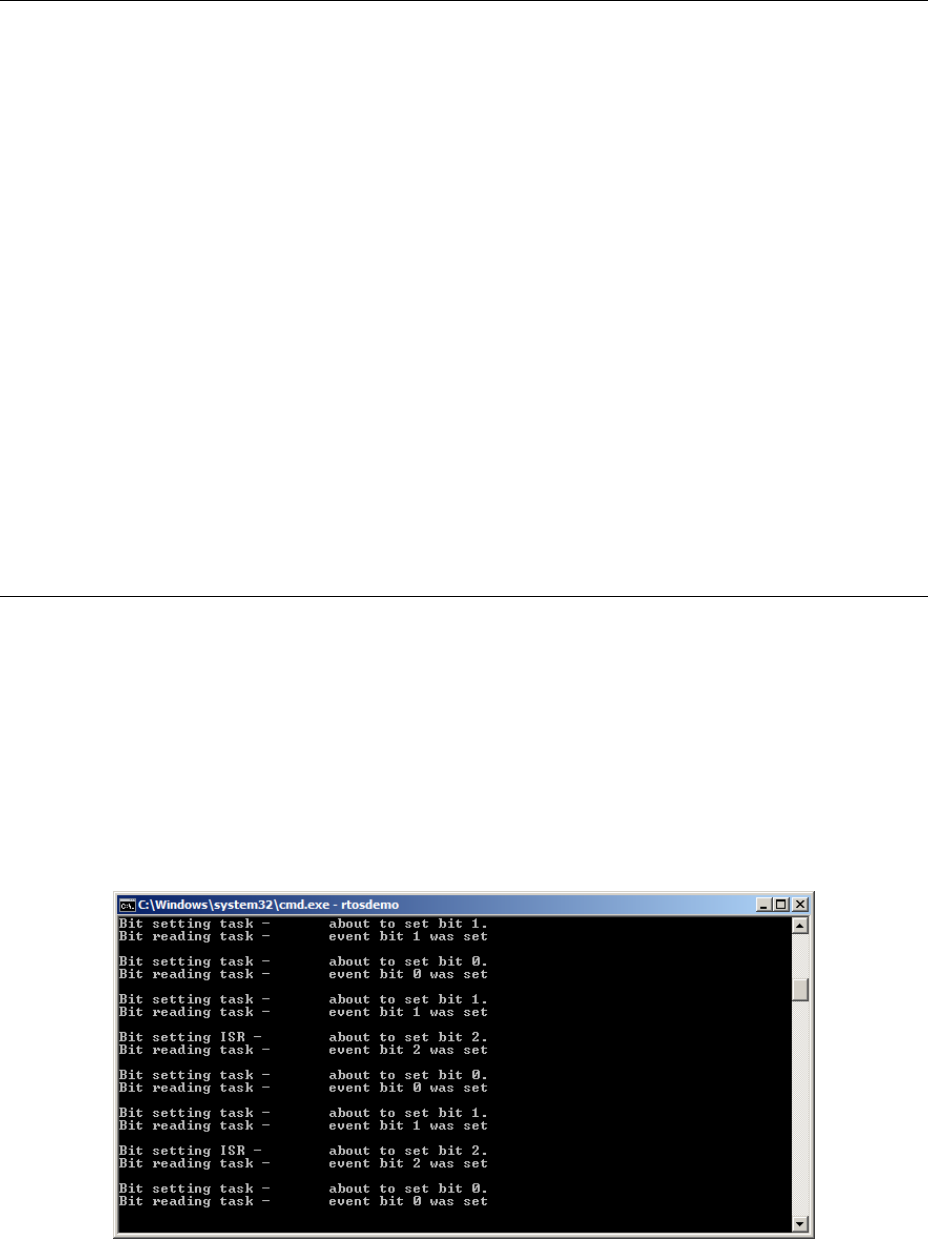
283
int main( void )
{
/* Before an event group can be used it must first be created. */
xEventGroup = xEventGroupCreate();
/* Create the task that sets event bits in the event group. */
xTaskCreate( vEventBitSettingTask, "Bit Setter", 1000, NULL, 1, NULL );
/* Create the task that waits for event bits to get set in the event group. */
xTaskCreate( vEventBitReadingTask, "Bit Reader", 1000, NULL, 2, NULL );
/* Create the task that is used to periodically generate a software interrupt. */
xTaskCreate( vInterruptGenerator, "Int Gen", 1000, NULL, 3, NULL );
/* Install the handler for the software interrupt. The syntax necessary to do
this is dependent on the FreeRTOS port being used. The syntax shown here can
only be used with the FreeRTOS Windows port, where such interrupts are only
simulated. */
vPortSetInterruptHandler( mainINTERRUPT_NUMBER, ulEventBitSettingISR );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
/* The following line should never be reached. */
for( ;; );
return 0;
}
Listing 140. Creating the event group and tasks in Example 22
The output produced when Example 22 is executed with the xEventGroupWaitBits()
xWaitForAllBits parameter set to pdFALSE is shown in Figure 73. In Figure 73, it can be seen
that, because the xWaitForAllBits parameter in the call to xEventGroupWaitBits() was set to
pdFALSE, the task that reads from the event group leaves the Blocked state and executes
immediately every time any of the event bits are set.
Figure 73 The output produced when Example 22 is executed with xWaitForAllBits
set to pdFALSE
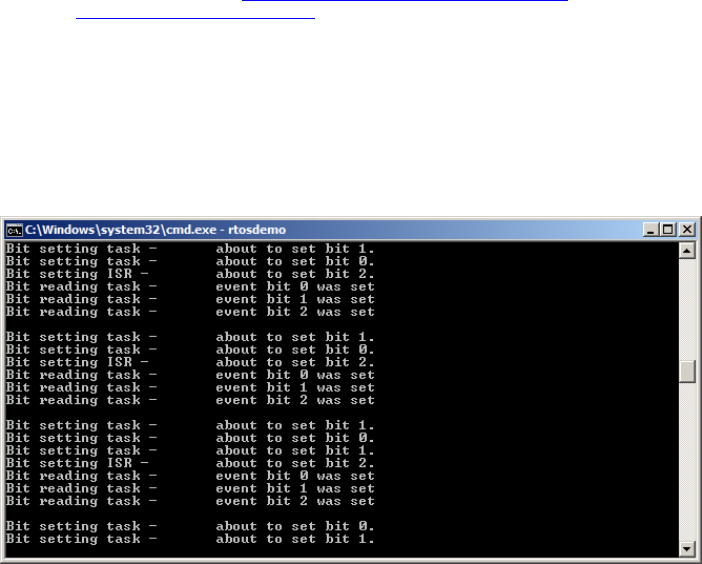
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
284
The output produced when Example 22 is executed with the xEventGroupWaitBits()
xWaitForAllBits parameter set to pdTRUE is shown in Figure 74. In Figure 74 it can be seen
that, because the xWaitForAllBits parameter was set to pdTRUE, the task that reads from the
event group only leaves the Blocked state after all three of the event bits are set.
Figure 74 The output produced when Example 22 is executed with xWaitForAllBits
set to pdTRUE

285
8.4 Task Synchronization Using an Event Group
Sometimes the design of an application requires two or more tasks to synchronize with each
other. For example, consider a design where Task A receives an event, then delegates some
of the processing necessitated by the event to three other tasks: Task B, Task C and Task D.
If Task A cannot receive another event until tasks B, C and D have all completed processing
the previous event, then all four tasks will need to synchronize with each other. Each task’s
synchronization point will be after that task has completed its processing, and cannot proceed
further until each of the other tasks have done the same. Task A can only receive another
event after all four tasks have reached their synchronization point.
A less abstract example of the need for this type of task synchronization is found in one of the
FreeRTOS+TCP demonstration projects. The demonstration shares a TCP socket between
two tasks; one task sends data to the socket, and a different task receives data from the same
socket
1
. It is not safe for either task to close the TCP socket until it is sure the other task will
not attempt to access the socket again. If either of the two tasks wishes to close the socket,
then it must inform the other task of its intent, and then wait for the other task to stop using the
socket before proceeding. The scenario where it is the task that sends data to the socket that
wishes to close the socket is demonstrated by the pseudo code shown in Listing 140.
The scenario demonstrated by Listing 140 is trivial, as there are only two tasks that need to
synchronize with each other, but it is easy to see how the scenario would become more
complex, and require more tasks to join the synchronization, if other tasks were performing
processing that was dependent on the socket being open.
1
At the time of writing, this is the only way a single FreeRTOS+TCP socket can be shared between
tasks.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
286
void SocketTxTask( void *pvParameters )
{
xSocket_t xSocket;
uint32_t ulTxCount = 0UL;
for( ;; )
{
/* Create a new socket. This task will send to this socket, and another task will receive
from this socket. */
xSocket = FreeRTOS_socket( ... );
/* Connect the socket. */
FreeRTOS_connect( xSocket, ... );
/* Use a queue to send the socket to the task that receives data. */
xQueueSend( xSocketPassingQueue, &xSocket, portMAX_DELAY );
/* Send 1000 messages to the socket before closing the socket. */
for( ulTxCount = 0; ulTxCount < 1000; ulTxCount++ )
{
if( FreeRTOS_send( xSocket, ... ) < 0 )
{
/* Unexpected error - exit the loop, after which the socket will be closed. */
break;
}
}
/* Let the Rx task know the Tx task wants to close the socket. */
TxTaskWantsToCloseSocket();
/* This is the Tx task’s synchronization point. The Tx task waits here for the Rx task to
reach its synchronization point. The Rx task will only reach its synchronization point
when it is no longer using the socket, and the socket can be closed safely. */
xEventGroupSync( ... );
/* Neither task is using the socket. Shut down the connection, then close the socket. */
FreeRTOS_shutdown( xSocket, ... );
WaitForSocketToDisconnect();
FreeRTOS_closesocket( xSocket );
}
}
/*-----------------------------------------------------------*/
void SocketRxTask( void *pvParameters )
{
xSocket_t xSocket;
for( ;; )
{
/* Wait to receive a socket that was created and connected by the Tx task. */
xQueueReceive( xSocketPassingQueue, &xSocket, portMAX_DELAY );
/* Keep receiving from the socket until the Tx task wants to close the socket. */
while( TxTaskWantsToCloseSocket() == pdFALSE )
{
/* Receive then process data. */
FreeRTOS_recv( xSocket, ... );
ProcessReceivedData();
}
/* This is the Rx task’s synchronization point - it only reaches here when it is no longer
using the socket, and it is therefore safe for the Tx task to close the socket. */
xEventGroupSync( ... );
}
}
Listing 141. Pseudo code for two tasks that synchronize with each other to ensure a
shared TCP socket is no longer in use by either task before the socket is
closed
287
An event group can be used to create a synchronization point:
Each task that must participate in the synchronization is assigned a unique event bit
within the event group.
Each task sets its own event bit when it reaches the synchronization point.
Having set its own event bit, each task blocks on the event group to wait for the event
bits that represent all the other synchronizing tasks to also become set.
However, the xEventGroupSetBits() and xEventGroupWaitBits() API functions cannot be used
in this scenario. If they were used, then the setting of a bit (to indicate a task had reached its
synchronization point) and the testing of bits (to determine if the other synchronizing tasks had
reached their synchronization point) would be performed as two separate operations. To see
why that would be a problem, consider a scenario where Task A, Task B and Task C attempt
to synchronize using an event group:
1. Task A and Task B have already reached the synchronization point, so their event bits
are set in the event group, and they are in the Blocked state to wait for task C’s event
bit to also become set.
2. Task C reaches the synchronization point, and uses xEventGroupSetBits() to set its bit
in the event group. As soon as Task C’s bit is set, Task A and Task B leave the
Blocked state, and clear all three event bits.
3. Task C then calls xEventGroupWaitBits() to wait for all three event bits to become set,
but by that time, all three event bits have already been cleared, Task A and Task B
have left their respective synchronization points, and so the synchronization has failed.
To successfully use an event group to create a synchronization point, the setting of an event
bit, and the subsequent testing of event bits, must be performed as a single uninterruptable
operation. The xEventGroupSync() API function is provided for that purpose.
The xEventGroupSync() API Function
xEventGroupSync() is provided to allow two or more tasks to use an event group to
synchronize with each other. The function allows a task to set one or more event bits in an
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
288
event group, then wait for a combination of event bits to become set in the same event group,
as a single uninterruptable operation.
The xEventGroupSync() uxBitsToWaitFor parameter specifies the calling task’s unblock
condition. The event bits specified by uxBitsToWaitFor will be cleared back to zero before
xEventGroupSync() returns, if xEventGroupSync() returned because the unblock condition had
been met.
EventBits_t xEventGroupSync( EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
const EventBits_t uxBitsToWaitFor,
TickType_t xTicksToWait );
Listing 142. The xEventGroupSync() API function prototype
Table 47, xEventGroupSync() parameters and return value
Parameter Name
Description
xEventGroup
The handle of the event group in which event bits are to be set, and then
tested. The event group handle will have been returned from the call to
xEventGroupCreate() used to create the event group.
uxBitsToSet
A bit mask that specifies the event bit, or event bits, to set to 1 in the event
group. The value of the event group is updated by bitwise ORing the
event group’s existing value with the value passed in uxBitsToSet.
As an example, setting uxBitsToSet to 0x04 (binary 0100) will result in
event bit 3 becoming set (if it was not already set), while leaving all the
other event bits in the event group unchanged.
uxBitsToWaitFor
A bit mask that specifies the event bit, or event bits, to test in the event
group.
For example, if the calling task wants to wait for event bits 0, 1 and 2 to
become set in the event group, then set uxBitsToWaitFor to 0x07 (binary
111).

289
Table 47, xEventGroupSync() parameters and return value
Parameter Name
Description
xTicksToWait
The maximum amount of time the task should remain in the Blocked state
to wait for its unblock condition to be met.
xEventGroupSync() will return immediately if xTicksToWait is zero, or the
unblock condition is met at the time xEventGroupSync() is called.
The block time is specified in tick periods, so the absolute time it
represents is dependent on the tick frequency. The macro
pdMS_TO_TICKS() can be used to convert a time specified in
milliseconds into a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task to wait
indefinitely (without timing out), provided INCLUDE_vTaskSuspend is set
to 1 in FreeRTOSConfig.h.
Returned Value
If xEventGroupSync() returned because the calling task’s unblock
condition was met, then the returned value is the value of the event group
at the time the calling task’s unblock condition was met (before any bits
were automatically cleared back to zero). In this case the returned value
will also meet the calling task’s unblock condition.
If xEventGroupSync() returned because the block time specified by the
xTicksToWait parameter expired, then the returned value is the value of
the event group at the time the block time expired. In this case the
returned value will not meet the calling task’s unblock condition.
Example 23. Synchronizing tasks
Example 23 uses xEventGroupSync() to synchronize three instances of a single task
implementation. The task parameter is used to pass into each instance the event bit the task
will set when it calls xEventGroupSync().
The task prints a message before calling xEventGroupSync(), and again after the call to
xEventGroupSync() has returned. Each message includes a time stamp. This allows the

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
290
sequence of execution to be observed in the output produced. A pseudo random delay is
used to prevent all the tasks reaching the synchronization point at the same time.
See Listing 143 for the task’s implementation.
static void vSyncingTask( void *pvParameters )
{
const TickType_t xMaxDelay = pdMS_TO_TICKS( 4000UL );
const TickType_t xMinDelay = pdMS_TO_TICKS( 200UL );
TickType_t xDelayTime;
EventBits_t uxThisTasksSyncBit;
const EventBits_t uxAllSyncBits = ( mainFIRST_TASK_BIT |
mainSECOND_TASK_BIT |
mainTHIRD_TASK_BIT );
/* Three instances of this task are created - each task uses a different event
bit in the synchronization. The event bit to use is passed into each task
instance using the task parameter. Store it in the uxThisTasksSyncBit
variable. */
uxThisTasksSyncBit = ( EventBits_t ) pvParameters;
for( ;; )
{
/* Simulate this task taking some time to perform an action by delaying for a
pseudo random time. This prevents all three instances of this task reaching
the synchronization point at the same time, and so allows the example’s
behavior to be observed more easily. */
xDelayTime = ( rand() % xMaxDelay ) + xMinDelay;
vTaskDelay( xDelayTime );
/* Print out a message to show this task has reached its synchronization
point. pcTaskGetTaskName() is an API function that returns the name assigned
to the task when the task was created. */
vPrintTwoStrings( pcTaskGetTaskName( NULL ), "reached sync point" );
/* Wait for all the tasks to have reached their respective synchronization
points. */
xEventGroupSync( /* The event group used to synchronize. */
xEventGroup,
/* The bit set by this task to indicate it has reached the
synchronization point. */
uxThisTasksSyncBit,
/* The bits to wait for, one bit for each task taking part
in the synchronization. */
uxAllSyncBits,
/* Wait indefinitely for all three tasks to reach the
synchronization point. */
portMAX_DELAY );
/* Print out a message to show this task has passed its synchronization
point. As an indefinite delay was used the following line will only be
executed after all the tasks reached their respective synchronization
points. */
vPrintTwoStrings( pcTaskGetTaskName( NULL ), "exited sync point" );
}
}
Listing 143. The implementation of the task used in Example 23

291
The main() function creates the event group, creates all three tasks, and then starts the
scheduler. See Listing 144 for its implementation.
/* Definitions for the event bits in the event group. */
#define mainFIRST_TASK_BIT ( 1UL << 0UL ) /* Event bit 0, set by the first task. */
#define mainSECOND_TASK_BIT( 1UL << 1UL ) /* Event bit 1, set by the second task. */
#define mainTHIRD_TASK_BIT ( 1UL << 2UL ) /* Event bit 2, set by the third task. */
/* Declare the event group used to synchronize the three tasks. */
EventGroupHandle_t xEventGroup;
int main( void )
{
/* Before an event group can be used it must first be created. */
xEventGroup = xEventGroupCreate();
/* Create three instances of the task. Each task is given a different name,
which is later printed out to give a visual indication of which task is
executing. The event bit to use when the task reaches its synchronization point
is passed into the task using the task parameter. */
xTaskCreate( vSyncingTask, "Task 1", 1000, mainFIRST_TASK_BIT, 1, NULL );
xTaskCreate( vSyncingTask, "Task 2", 1000, mainSECOND_TASK_BIT, 1, NULL );
xTaskCreate( vSyncingTask, "Task 3", 1000, mainTHIRD_TASK_BIT, 1, NULL );
/* Start the scheduler so the created tasks start executing. */
vTaskStartScheduler();
/* As always, the following line should never be reached. */
for( ;; );
return 0;
}
Listing 144. The main() function used in Example 23
The output produced when Example 23 is executed is shown in Figure 75. It can be seen that,
even though each task reaches the synchronization point at a different (pseudo random) time,
each task exits the synchronization point at the same time
1
(which is the time at which the last
task reached the synchronization point).
1
Figure 75 shows the example running in the FreeRTOS Windows port, which does not provide true
real time behavior (especially when using Windows system calls to print to the console), and will
therefore show some timing variation.
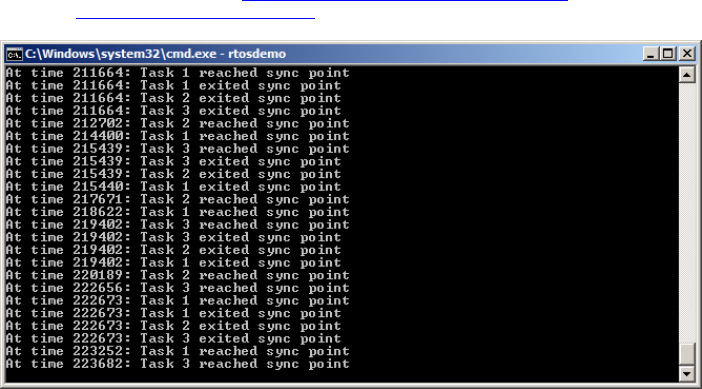

293
Chapter 9
Task Notifications
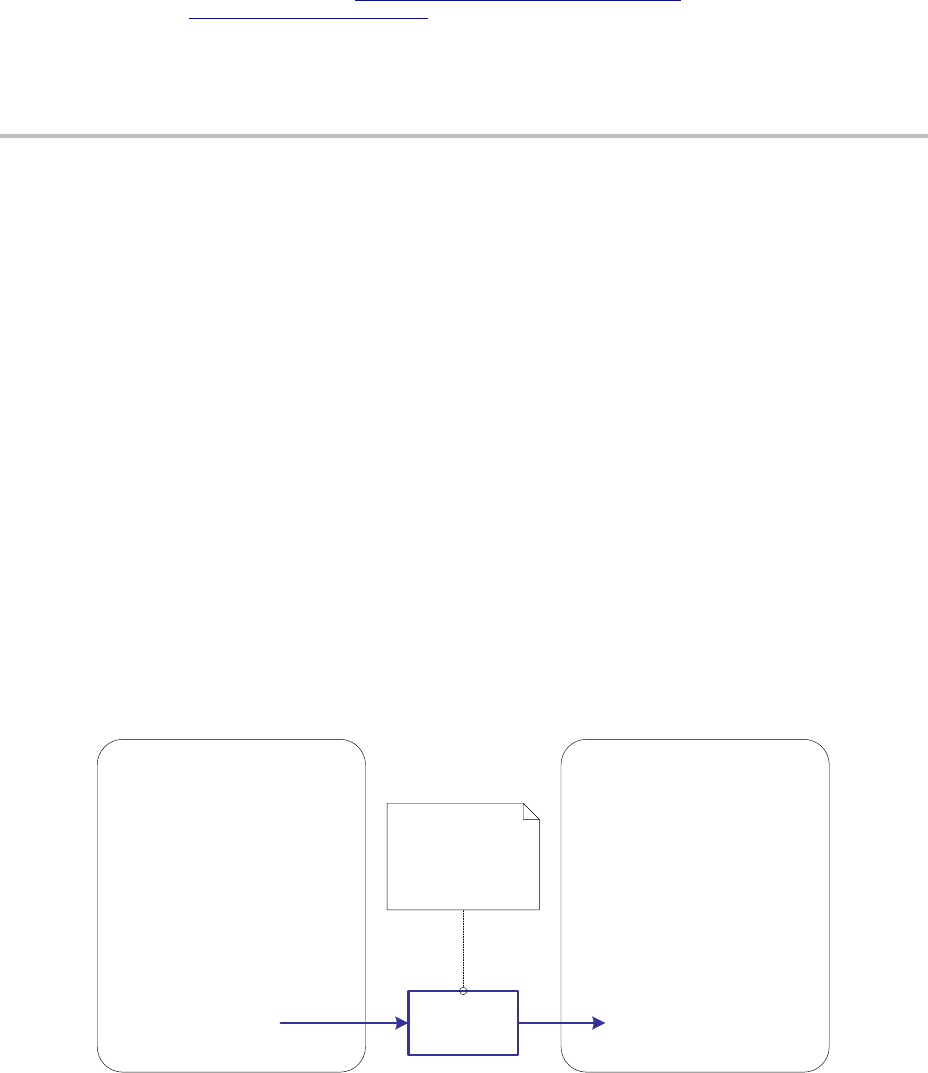
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
294
9.1 Chapter Introduction and Scope
It has been seen that applications that use FreeRTOS are structured as a set of independent
tasks, and that it is likely that these autonomous tasks will have to communicate with each
other so that, collectively, they can provide useful system functionality.
Communicating Through Intermediary Objects
This book has already described various ways in which tasks can communicate with each
other. The methods described so far have required the creation of a communication object.
Examples of communication objects include queues, event groups, and various different types
of semaphore.
When a communication object is used, events and data are not sent directly to a receiving
task, or a receiving ISR, but are instead sent to the communication object. Likewise, tasks
and ISRs receive events and data from the communication object, rather than directly from the
task or ISR that sent the event or data. This is depicted in Figure 76.
void vTask1( void *pvParam )
{
for( ;; )
{
/* Write function code
here. */
....
/* At some point vTask1
sends an event to
vTask2. The event is
not sent directly to
vTask2, but instead to
a communication object.
*/
ASendFunction();
}
}
void vTask2( void *pvParam )
{
for( ;; )
{
/* Write function code
here. */
....
/* At some point vTask2
receives an event from
vTask1. The event is
not received directly
from vTask1, but instead
from the communication
object. */
AReceiveFunction();
}
}
Communication
object
The communication
object could be a
queue, event group,
or one of the many
types of semaphore
Figure 76 A communication object being used to send an event from one task to
another
Task Notifications—Direct to Task Communication
‘Task Notifications’ allow tasks to interact with other tasks, and to synchronize with ISRs,
without the need for a separate communication object. By using a task notification, a task or
ISR can send an event directly to the receiving task. This is depicted in Figure 77.
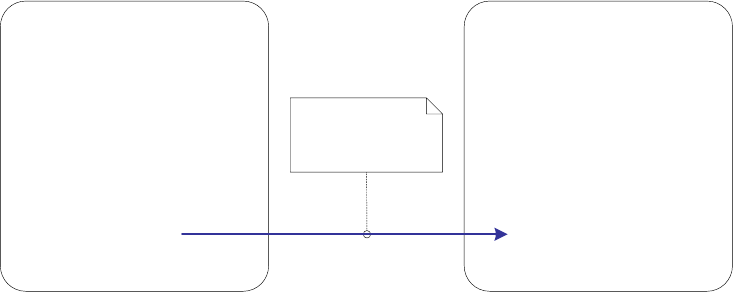
295
void vTask1( void *pvParam )
{
for( ;; )
{
/* Write function code
here. */
....
/* At some point vTask1
sends an event to
vTask2 using a direct to
task notification.*/
ASendFunction();
}
}
void vTask2( void *pvParam )
{
for( ;; )
{
/* Write function code
here. */
....
/* At some point vTask2
receives a direct
notification from vTask1
*/
AReceiveFunction();
}
}
This time there is no
communication
object in the middle
Figure 77 A task notification used to send an event directly from one task to another
Task notification functionality is optional. To include task notification functionality set
configUSE_TASK_NOTIFICATIONS to 1 in FreeRTOSConfig.h.
When configUSE_TASK_NOTIFICATIONS is set to 1, each task has a ‘Notification State’,
which can be either ‘Pending’ or ‘Not-Pending’, and a ‘Notification Value’, which is a 32-bit
unsigned integer. When a task receives a notification, its notification state is set to pending.
When a task reads its notification value, its notification state is set to not-pending.
A task can wait in the Blocked state, with an optional time out, for its notification state to
become pending.
Scope
This chapter aims to give readers a good understanding of:
A task’s notification state and notification value.
How and when a task notification can be used in place of a communication object, such
as a semaphore.
The advantages of using a task notification in place of a communication object.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
296
9.2 Task Notifications; Benefits and Limitations
Performance Benefits of Task Notifications
Using a task notification to send an event or data to a task is significantly faster than using a
queue, semaphore or event group to perform an equivalent operation.
RAM Footprint Benefits of Task Notifications
Likewise, using a task notification to send an event or data to a task requires significantly less
RAM than using a queue, semaphore or event group to perform an equivalent operation. This
is because each communication object (queue, semaphore or event group) must be created
before it can be used, whereas enabling task notification functionality has a fixed overhead of
just eight bytes of RAM per task.
Limitations of Task Notifications
Task notifications are faster and use less RAM than communication objects, but task
notifications cannot be used in all scenarios. This section documents the scenarios in which a
task notification cannot be used:
Sending an event or data to an ISR
Communication objects can be used to send events and data from an ISR to a task, and
from a task to an ISR.
Task notifications can be used to send events and data from an ISR to a task, but they
cannot be used to send events or data from a task to an ISR.
Enabling more than one receiving task
A communication object can be accessed by any task or ISR that knows its handle (which
might be a queue handle, semaphore handle, or event group handle). Any number of
tasks and ISRs can process events or data sent to any given communication object.
Task notifications are sent directly to the receiving task, so can only be processed by the
task to which the notification is sent. However, this is rarely a limitation in practical cases
because, while it is common to have multiple tasks and ISRs sending to the same
297
communication object, it is rare to have multiple tasks and ISRs receiving from the same
communication object.
Buffering multiple data items
A queue is a communication object that can hold more than one data item at a time. Data
that has been sent to the queue, but not yet received from the queue, is buffered inside the
queue object.
Task notifications send data to a task by updating the receiving task’s notification value. A
task’s notification value can only hold one value at a time.
Broadcasting to more than one task
An event group is a communication object that can be used to send an event to more than
one task at a time.
Task notifications are sent directly to the receiving task, so can only be processed by the
receiving task.
Waiting in the blocked state for a send to complete
If a communication object is temporarily in a state that means no more data or events can
be written to it (for example, when a queue is full no more data can be sent to the queue),
then tasks attempting to write to the object can optionally enter the Blocked state to wait for
their write operation to complete.
If a task attempts to send a task notification to a task that already has a notification
pending, then it is not possible for the sending task to wait in the Blocked state for the
receiving task to reset its notification state. As will be seen, this is rarely a limitation in
practical cases in which a task notification is used.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
298
9.3 Using Task Notifications
Task Notification API Options
Task notifications are a very powerful feature that can often be used in place of a binary
semaphore, a counting semaphore, an event group, and sometimes even a queue. This wide
range of usage scenarios can be achieved by using the xTaskNotify() API function to send a
task notification, and the xTaskNotifyWait() API function to receive a task notification.
However, in the majority of cases, the full flexibility provided by the xTaskNotify() and
xTaskNotifyWait() API functions is not required, and simpler functions would suffice.
Therefore, the xTaskNotifyGive() API function is provided as a simpler but less flexible
alternative to xTaskNotify(), and the ulTaskNotifyTake() API function is provided as a simpler
but less flexible alternative to xTaskNotifyWait().
The xTaskNotifyGive() API Function
xTaskNotifyGive() sends a notification directly to a task, and increments (adds one to) the
receiving task’s notification value. Calling xTaskNotifyGive() will set the receiving task’s
notification state to pending, if it was not already pending.
The xTaskNotifyGive()
1
API function is provided to allow a task notification to be used as a
lighter weight and faster alternative to a binary or counting semaphore.
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
Listing 145. The xTaskNotifyGive() API function prototype
1
xTaskNotifyGive() is actually implemented as macro, not a function. For simplicity it is referred to as a
function throughout this book.
299
Table 48. xTaskNotifyGive() parameters and return value
Parameter Name/
Returned Value
Description
xTaskToNotify
The handle of the task to which the notification is being
sent—see the pxCreatedTask parameter of the
xTaskCreate() API function for information on obtaining
handles to tasks.
Returned value
xTaskNotifyGive() is a macro that calls xTaskNotify(). The
parameters passed into xTaskNotify() by the macro are set
such that pdPASS is the only possible return value.
xTaskNotify() is described later in this book.
The vTaskNotifyGiveFromISR() API Function
vTaskNotifyGiveFromISR() is a version of xTaskNotifyGive() that can be used in an interrupt
service routine.
void vTaskNotifyGiveFromISR( TaskHandle_t xTaskToNotify,
BaseType_t *pxHigherPriorityTaskWoken );
Listing 146. The vTaskNotifyGiveFromISR() API function prototype
Table 49. vTaskNotifyGiveFromISR() parameters and return value
Parameter Name/
Returned Value
Description
xTaskToNotify
The handle of the task to which the notification is being
sent—see the pxCreatedTask parameter of the
xTaskCreate() API function for information on obtaining
handles to tasks.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
300
Table 49. vTaskNotifyGiveFromISR() parameters and return value
Parameter Name/
Returned Value
Description
pxHigherPriorityTaskWoken
If the task to which the notification is being sent is waiting in
the Blocked state to receive a notification, then sending the
notification will cause the task to leave the Blocked state.
If calling vTaskNotifyGiveFromISR() causes a task to leave
the Blocked state, and the unblocked task has a priority
higher than the priority of the currently executing task (the
task that was interrupted), then, internally,
vTaskNotifyGiveFromISR() will set
*pxHigherPriorityTaskWoken to pdTRUE.
If vTaskNotifyGiveFromISR() sets this value to pdTRUE, then
a context switch should be performed before the interrupt is
exited. This will ensure that the interrupt returns directly to
the highest priority Ready state task.
As with all interrupt safe API functions, the
pxHigherPriorityTaskWoken parameter must be set to
pdFALSE before it is used.
The ulTaskNotifyTake() API Function
ulTaskNotifyTake() allows a task to wait in the Blocked state for its notification value to be
greater than zero, and either decrements (subtracts one from) or clears the task’s notification
value before it returns.
The ulTaskNotifyTake() API function is provided to allow a task notification to be used as a
lighter weight and faster alternative to a binary or counting semaphore.
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
Listing 147. The ulTaskNotifyTake() API function prototype

301
Table 50. ulTaskNotifyTake() parameters and return value
Parameter Name/
Returned Value
Description
xClearCountOnExit
If xClearCountOnExit is set to pdTRUE, then the calling
task’s notification value will be cleared to zero before the call
to ulTaskNotifyTake() returns.
If xClearCountOnExit is set to pdFALSE, and the calling
task’s notification value is greater than zero, then the calling
task’s notification value will be decremented before the call to
ulTaskNotifyTake() returns.
xTicksToWait
The maximum amount of time the calling task should remain
in the Blocked state to wait for its notification value to be
greater than zero.
The block time is specified in tick periods, so the absolute
time it represents is dependent on the tick frequency. The
macro pdMS_TO_TICKS() can be used to convert a time
specified in milliseconds to a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task
to wait indefinitely (without timing out), provided
INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
302
Table 50. ulTaskNotifyTake() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
The returned value is the calling task’s notification value
before it was either cleared to zero or decremented, as
specified by the value of the xClearCountOnExit parameter.
If a block time was specified (xTicksToWait was not zero),
and the return value is not zero, then it is possible the calling
task was placed into the Blocked state, to wait for its
notification value to be greater than zero, and its notification
value was updated before the block time expired.
If a block time was specified (xTicksToWait was not zero),
and the return value is zero, then the calling task was placed
into the Blocked state, to wait for its notification value to be
greater than zero, but the specified block time expired before
that happened.
Example 24. Using a task notification in place of a semaphore, method 1
Example 16 used a binary semaphore to unblock a task from within an interrupt service
routine—effectively synchronizing the task with the interrupt. This example replicates the
functionality of Example 16, but uses a direct to task notification in place of the binary
semaphore.
Listing 148 shows the implementation of the task that is synchronized with the interrupt. The
call to xSemaphoreTake() that was used in Example 16 has been replaced by a call to
ulTaskNotifyTake().
The ulTaskNotifyTake() xClearCountOnExit parameter is set to pdTRUE, which results in the
receiving task’s notification value being cleared to zero before ulTaskNotifyTake() returns. It is
therefore necessary to process all the events that are already available between each call to
ulTaskNotifyTake(). In Example 16, because a binary semaphore was used, the number of
pending events had to be determined from the hardware, which is not always practical. In
Example 24, the number of pending events is returned from ulTaskNotifyTake().

303
Interrupt events that occur between calls to ulTaskNotifyTake are latched in the task’s
notification value, and calls to ulTaskNotifyTake() will return immediately if the calling task
already has notifications pending.
/* The rate at which the periodic task generates software interrupts. */
const TickType_t xInterruptFrequency = pdMS_TO_TICKS( 500UL );
static void vHandlerTask( void *pvParameters )
{
/* xMaxExpectedBlockTime is set to be a little longer than the maximum expected time
between events. */
const TickType_t xMaxExpectedBlockTime = xInterruptFrequency + pdMS_TO_TICKS( 10 );
uint32_t ulEventsToProcess;
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Wait to receive a notification sent directly to this task from the
interrupt service routine. */
ulEventsToProcess = ulTaskNotifyTake( pdTRUE, xMaxExpectedBlockTime );
if( ulEventsToProcess != 0 )
{
/* To get here at least one event must have occurred. Loop here until
all the pending events have been processed (in this case, just print out
a message for each event). */
while( ulEventsToProcess > 0 )
{
vPrintString( "Handler task - Processing event.\r\n" );
ulEventsToProcess--;
}
}
else
{
/* If this part of the function is reached then an interrupt did not
arrive within the expected time, and (in a real application) it may be
necessary to perform some error recovery operations. */
}
}
}
Listing 148. The implementation of the task to which the interrupt processing is
deferred (the task that synchronizes with the interrupt) in Example 24
The periodic task used to generate software interrupts prints a message before the interrupt is
generated, and again after the interrupt has been generated. This allows the sequence of
execution to be observed in the output produced.
Listing 149 shows the interrupt handler. This does very little other than send a notification
directly to the task to which interrupt handling is deferred.
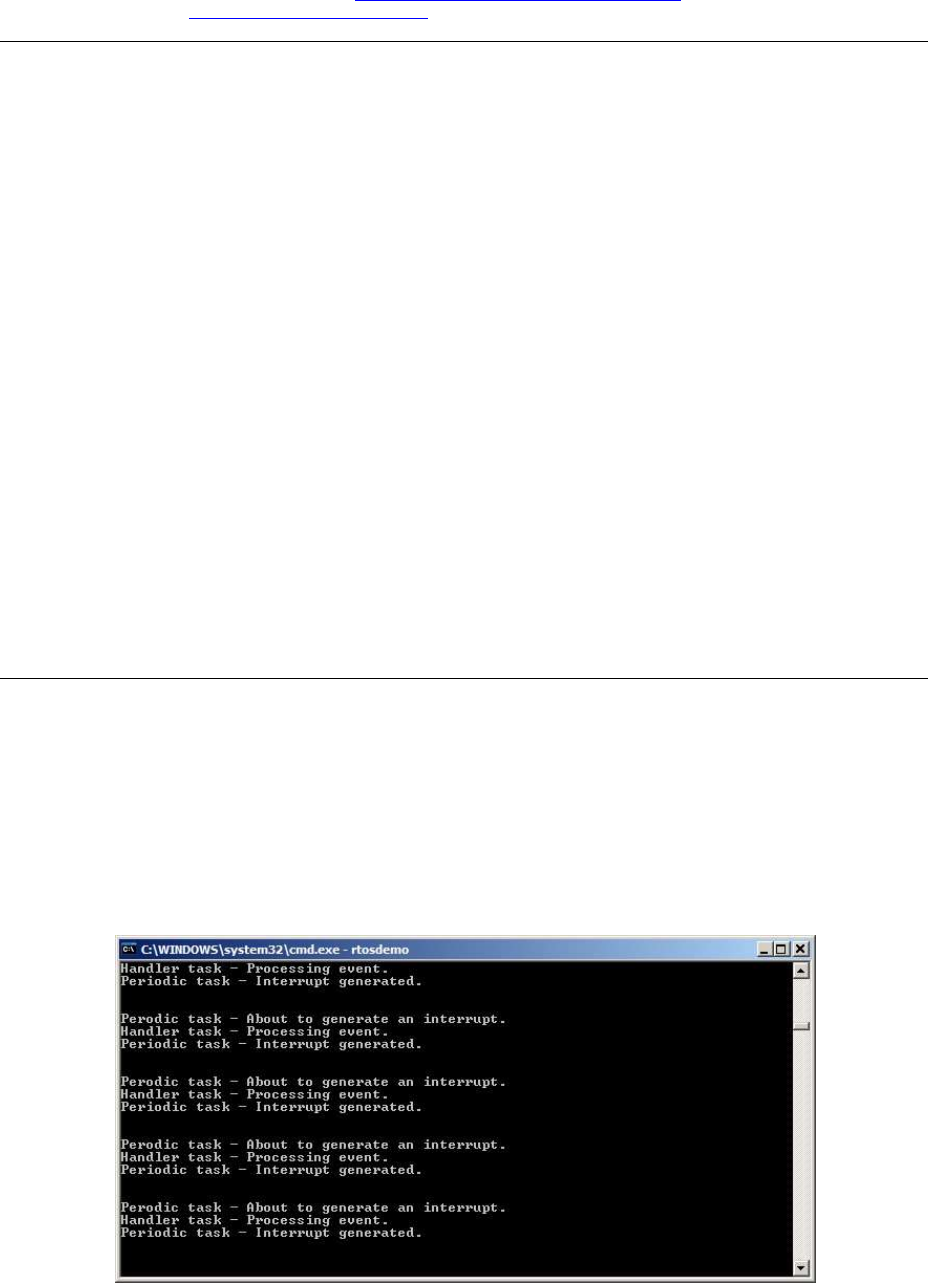
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
304
static uint32_t ulExampleInterruptHandler( void )
{
BaseType_t xHigherPriorityTaskWoken;
/* The xHigherPriorityTaskWoken parameter must be initialized to pdFALSE as
it will get set to pdTRUE inside the interrupt safe API function if a
context switch is required. */
xHigherPriorityTaskWoken = pdFALSE;
/* Send a notification directly to the task to which interrupt processing is
being deferred. */
vTaskNotifyGiveFromISR( /* The handle of the task to which the notification
is being sent. The handle was saved when the task
was created. */
xHandlerTask,
/* xHigherPriorityTaskWoken is used in the usual
way. */
&xHigherPriorityTaskWoken );
/* Pass the xHigherPriorityTaskWoken value into portYIELD_FROM_ISR(). If
xHigherPriorityTaskWoken was set to pdTRUE inside vTaskNotifyGiveFromISR()
then calling portYIELD_FROM_ISR() will request a context switch. If
xHigherPriorityTaskWoken is still pdFALSE then calling
portYIELD_FROM_ISR() will have no effect. The implementation of
portYIELD_FROM_ISR() used by the Windows port includes a return statement,
which is why this function does not explicitly return a value. */
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 149. The implementation of the interrupt service routine used in Example 24
The output produced when Example 24 is executed is shown in Figure 78. As expected, it is
identical to that produced when Example 16 is executed. vHandlerTask() enters the Running
state as soon as the interrupt is generated, so the output from the task splits the output
produced by the periodic task. Further explanation is provided in Figure 79.
Figure 78. The output produced when Example 16 is executed
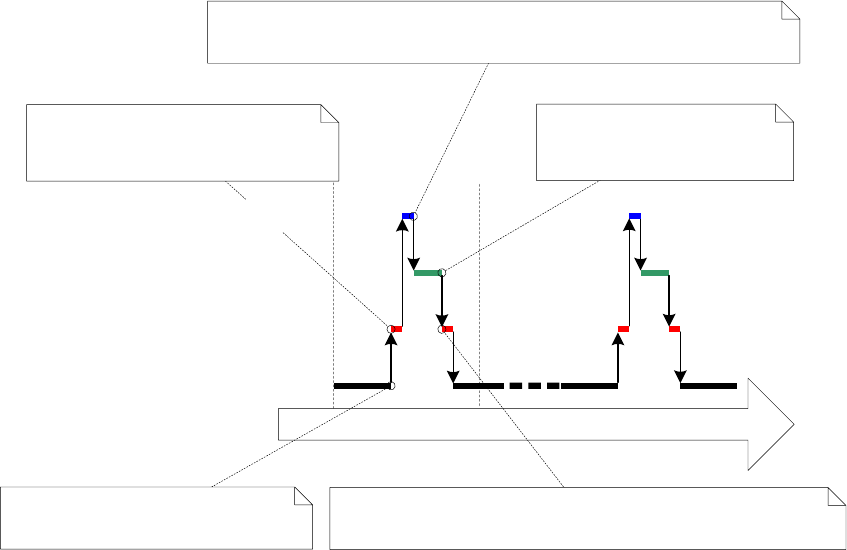
305
Handler
t1 t2
Periodic
1 - The Idle task is running most of the
time. Every 500ms its gets pre-empted
by the Periodic task.
Idle
Time
2 - The Periodic task prints its first
message then forces an interrupt. The
interrupt service routine (ISR) executes
immediately.
4 - vHandlerTask() prints out its
message before returning to the
Blocked state to wait for the next
notification.
5 - The Periodic task is once again the highest priority task - it prints
out its second message before entering the Blocked state again to wait
for the next time period. This leaves just the Idle task able to run.
3 - The ISR sends a notification directly to vHandlerTask(), causing the task to
unblock. The ISR then returns directly to vHandlerTask() because the task is
then the highest priority Ready state task.
Interrupt
Figure 79. The sequence of execution when Example 24 is executed
Example 25. Using a task notification in place of a semaphore, method 2
In Example 24, the ulTaskNotifyTake() xClearOnExit parameter was set to pdTRUE. Example
25 modifies Example 24 slightly to demonstrate the behavior when the ulTaskNotifyTake()
xClearOnExit parameter is instead set to pdFALSE.
When xClearOnExit is pdFALSE, calling ulTaskNotifyTake() will only decrement (reduce by
one) the calling task’s notification value, instead of clearing it to zero. The notification count is
therefore the difference between the number of events that have occurred, and the number of
events that have been processed. That allows the structure of vHandlerTask() to be simplified
in two ways:
1. The number of events waiting to be processed is held in the notification value, so it
does not need to be held in a local variable.
2. It is only necessary to process one event between each call to ulTaskNotifyTake().
The implementation of vHandlerTask() used in Example 25 is shown in Listing 150.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
306
static void vHandlerTask( void *pvParameters )
{
/* xMaxExpectedBlockTime is set to be a little longer than the maximum expected time
between events. */
const TickType_t xMaxExpectedBlockTime = xInterruptFrequency + pdMS_TO_TICKS( 10 );
/* As per most tasks, this task is implemented within an infinite loop. */
for( ;; )
{
/* Wait to receive a notification sent directly to this task from the
interrupt service routine. The xClearCountOnExit parameter is now pdFALSE,
so the task's notification value will be decremented by ulTaskNotifyTake(),
and not cleared to zero. */
if( ulTaskNotifyTake( pdFALSE, xMaxExpectedBlockTime ) != 0 )
{
/* To get here an event must have occurred. Process the event (in this
case just print out a message). */
vPrintString( "Handler task - Processing event.\r\n" );
}
else
{
/* If this part of the function is reached then an interrupt did not
arrive within the expected time, and (in a real application) it may be
necessary to perform some error recovery operations. */
}
}
}
Listing 150. The implementation of the task to which the interrupt processing is
deferred (the task that synchronizes with the interrupt) in Example 25
For demonstration purposes, the interrupt service routine has also been modified to send more
than one task notification per interrupt, and in so doing, simulate multiple interrupts occurring
at high frequency. The implementation of the interrupt service routine used in Example 25 is
shown in Listing 151.
static uint32_t ulExampleInterruptHandler( void )
{
BaseType_t xHigherPriorityTaskWoken;
xHigherPriorityTaskWoken = pdFALSE;
/* Send a notification to the handler task multiple times. The first ‘give’ will
unblock the task, the following 'gives' are to demonstrate that the receiving
task's notification value is being used to count (latch) events - allowing the
task to process each event in turn. */
vTaskNotifyGiveFromISR( xHandlerTask, &xHigherPriorityTaskWoken );
vTaskNotifyGiveFromISR( xHandlerTask, &xHigherPriorityTaskWoken );
vTaskNotifyGiveFromISR( xHandlerTask, &xHigherPriorityTaskWoken );
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 151. The implementation of the interrupt service routine used in Example 25
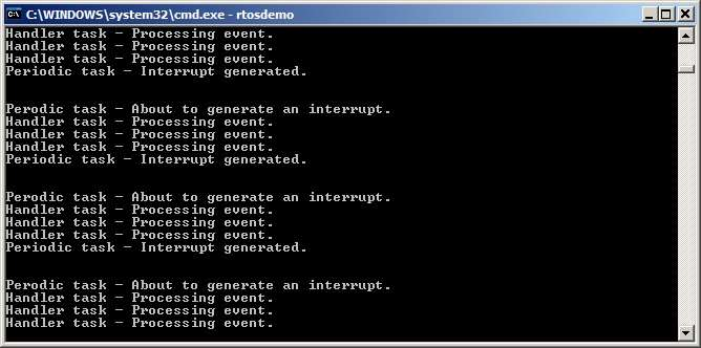
307
The output produced when Example 25 is executed is shown in Figure 80. As can be seen,
vHandlerTask() processes all three events each time an interrupt is generated.
Figure 80. The output produced when Example 25 is executed
The xTaskNotify() and xTaskNotifyFromISR() API Functions
xTaskNotify() is a more capable version of xTaskNotifyGive() that can be used to update the
receiving task’s notification value in any of the following ways:
Increment (add one to) the receiving task’s notification value, in which case
xTaskNotify() is equivalent to xTaskNotifyGive().
Set one or more bits in the receiving task’s notification value. This allows a task’s
notification value to be used as a lighter weight and faster alternative to an event
group.
Write a completely new number into the receiving task’s notification value, but only if
the receiving task has read its notification value since it was last updated. This allows
a task’s notification value to provide similar functionality to that provided by a queue
that has a length of one.
Write a completely new number into the receiving task’s notification value, even if the
receiving task has not read its notification value since it was last updated. This allows
a task’s notification value to provide similar functionality to that provided by the
xQueueOverwrite() API function. The resultant behavior is sometimes referred to as a
‘mailbox’.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
308
xTaskNotify() is more flexible and powerful than xTaskNotifyGive(), and because of that extra
flexibility and power, it is also a little more complex to use.
xTaskNotifyFromISR() is a version of xTaskNotify() that can be used in an interrupt service
routine, and therefore has an additional pxHigherPriorityTaskWoken parameter.
Calling xTaskNotify() will always set the receiving task’s notification state to pending, if it was
not already pending.
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction );
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction,
BaseType_t *pxHigherPriorityTaskWoken );
Listing 152. Prototypes for the xTaskNotify() and xTaskNotifyFromISR() API
functions
Table 51. xTaskNotify() parameters and return value
Parameter Name/
Returned Value
Description
xTaskToNotify
The handle of the task to which the notification is being
sent—see the pxCreatedTask parameter of the
xTaskCreate() API function for information on obtaining
handles to tasks.
ulValue
How ulValue is used is dependent on the eNotifyAction value.
See Table 52.
eNotifyAction
An enumerated type that specifies how to update the
receiving task’s notification value. See Table 52.
Returned value
xTaskNotify() will return pdPASS except in the one case
noted in Table 52.

309
Table 52. Valid xTaskNotify() eNotifyAction Parameter Values, and Their Resultant
Effect on the Receiving Task’s Notification Value
eNotifyAction Value
Resultant Effect on Receiving Task
eNoAction
The receiving task’s notification state is set to pending
without it’s notification value being updated. The
xTaskNotify() ulValue parameter is not used.
The eNoAction action allows a task notification to be used as
a faster and lighter weight alternative to a binary semaphore.
eSetBits
The receiving task’s notification value is bitwise OR’ed with
the value passed in the xTaskNotify() ulValue parameter. For
example, if ulValue is set to 0x01, then bit 0 will be set in the
receiving task's notification value. As another example, if
ulValue is 0x06 (binary 0110) then bit 1 and bit 2 will be set in
the receiving task's notification value.
The eSetBits action allows a task notification to be used as a
faster and lighter weight alternative to an event group.
eIncrement
The receiving task’s notification value is incremented. The
xTaskNotify() ulValue parameter is not used.
The eIncrement action allows a task notification to be used
as a faster and lighter weight alternative to a binary or
counting semaphore, and is equivalent to the simpler
xTaskNotifyGive() API function.
eSetValueWithoutOverwrite
If the receiving task had a notification pending before
xTaskNotify() was called, then no action is taken and
xTaskNotify() will return pdFAIL.
If the receiving task did not have a notification pending before
xTaskNotify() was called, then the receiving task’s notification
value is set to the value passed in the xTaskNotify() ulValue
parameter.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
310
Table 51. xTaskNotify() parameters and return value
Parameter Name/
Returned Value
Description
eSetValueWithOverwrite
The receiving task’s notification value is set to the value
passed in the xTaskNotify() ulValue parameter, regardless of
whether the receiving task had a notification pending before
xTaskNotify() was called or not.
The xTaskNotifyWait() API Function
xTaskNotifyWait() is a more capable version of ulTaskNotifyTake(). It allows a task to wait,
with an optional timeout, for the calling task’s notification state to become pending, should it
not already be pending. xTaskNotifyWait() provides options for bits to be cleared in the calling
task’s notification value both on entry to the function, and on exit from the function.
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait );
Listing 153. The xTaskNotifyWait() API function prototype
Table 53. xTaskNotifyWait() parameters and return value
Parameter Name/
Returned Value
Description
ulBitsToClearOnEntry
If the calling task did not have a notification pending before it
called xTaskNotifyWait(), then any bits set in
ulBitsToClearOnEntry will be cleared in the task’s notification
value on entry to the function.
For example, if ulBitsToClearOnEntry is 0x01, then bit 0 of
the task's notification value will be cleared. As another
example, setting ulBitsToClearOnEntry to 0xffffffff
(ULONG_MAX) will clear all the bits in the task's notification
value, effectively clearing the value to 0.

311
Table 53. xTaskNotifyWait() parameters and return value
Parameter Name/
Returned Value
Description
ulBitsToClearOnExit
If the calling task exits xTaskNotifyWait() because it received
a notification, or because it already had a notification pending
when xTaskNotifyWait() was called, then any bits set in
ulBitsToClearOnExit will be cleared in the task’s notification
value before the task exits the xTaskNotifyWait() function.
The bits are cleared after the task's notification value has
been saved in *pulNotificationValue (see the description of
pulNotificationValue below).
For example, if ulBitsToClearOnExit is 0x03, then bit 0 and
bit 1 of the task's notification value will be cleared before the
function exits.
Setting ulBitsToClearOnExit to 0xffffffff (ULONG_MAX) will
clear all the bits in the task's notification value, effectively
clearing the value to 0.
pulNotificationValue
Used to pass out the task's notification value. The value
copied to *pulNotificationValue is the task's notification value
as it was before any bits were cleared due to the
ulBitsToClearOnExit setting.
pulNotificationValue is an optional parameter and can be set
to NULL if it is not required.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
312
Table 53. xTaskNotifyWait() parameters and return value
Parameter Name/
Returned Value
Description
xTicksToWait
The maximum amount of time the calling task should remain
in the Blocked state to wait for its notification state to become
pending.
The block time is specified in tick periods, so the absolute
time it represents is dependent on the tick frequency. The
macro pdMS_TO_TICKS() can be used to convert a time
specified in milliseconds to a time specified in ticks.
Setting xTicksToWait to portMAX_DELAY will cause the task
to wait indefinitely (without timing out), provided
INCLUDE_vTaskSuspend is set to 1 in FreeRTOSConfig.h.

313
Table 53. xTaskNotifyWait() parameters and return value
Parameter Name/
Returned Value
Description
Returned value
There are two possible return values:
1. pdTRUE
This indicates xTaskNotifyWait() returned because a
notification was received, or because the calling task already
had a notification pending when xTaskNotifyWait() was
called.
If a block time was specified (xTicksToWait was not zero),
then it is possible that the calling task was placed into the
Blocked state, to wait for its notification state to become
pending, but its notification state was set to pending before
the block time expired.
2. pdFALSE
This indicates that xTaskNotifyWait() returned without the
calling task receiving a task notification.
If xTicksToWait was not zero then the calling task will have
been held in the Blocked state to wait for its notification state
to become pending, but the specified block time expired
before that happened.
Task Notifications Used in Peripheral Device Drivers: UART Example
Peripheral driver libraries provide functions that perform common operations on hardware
interfaces. Examples of peripherals for which such libraries are often provided include
Universal Asynchronous Receivers and Transmitters (UARTs), Serial Peripheral Interface
(SPI) ports, analog to digital converters (ADCs), and Ethernet ports. Examples of functions
typically provided by such libraries include functions to initialize a peripheral, send data to a
peripheral, and receive data from a peripheral.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
314
Some operations on peripherals take a relatively long time to complete. Examples of such
operations include a high precision ADC conversion, and the transmission of a large data
packet on a UART. In these cases the driver library function could be implemented to poll
(repeatedly read) the peripheral’s status registers to determine when the operation has
completed. However, polling in this manner is nearly always wasteful as it utilizes 100% of the
processor’s time while no productive processing is being performed. The waste is particularly
expensive in a multi-tasking system, where a task that is polling a peripheral might be
preventing the execution of a lower priority task that does have productive processing to
perform.
To avoid the potential for wasted processing time, an efficient RTOS aware device driver
should be interrupt driven, and give a task that initiates a lengthy operation the option of
waiting in the Blocked state for the operation to complete. That way, lower priority tasks can
execute while the task performing the lengthy operation is in the Blocked state, and no tasks
use processing time unless they can use it productively.
It is common practice for RTOS aware driver libraries to use a binary semaphore to place
tasks into the Blocked state. The technique is demonstrated by the pseudo code shown in
Listing 154, which provides the outline of an RTOS aware library function that transmits data
on a UART port. In Listing 154:
xUART is a structure that describes the UART peripheral, and holds state information.
The xTxSemaphore member of the structure is a variable of type SemaphoreHandle_t.
It is assumed the semaphore has already been created.
The xUART_Send() function does not include any mutual exclusion logic. If more than
one task is going to use the xUART_Send() function, then the application writer will
have to manage mutual exclusion within the application itself. For example, a task may
be required to obtain a mutex before calling xUART_Send().
The xSemaphoreTake() API function is used to place the calling task into the Blocked
state after the UART transmission has been initiated.
The xSemaphoreGiveFromISR() API function is used to remove the task from the
Blocked state after the transmission has completed, which is when the UART
peripheral’s transmit end interrupt service routine executes.

315
/* Driver library function to send data to a UART. */
BaseType_t xUART_Send( xUART *pxUARTInstance, uint8_t *pucDataSource, size_t uxLength )
{
BaseType_t xReturn;
/* Ensure the UART's transmit semaphore is not already available by attempting to take
the semaphore without a timeout. */
xSemaphoreTake( pxUARTInstance->xTxSemaphore, 0 );
/* Start the transmission. */
UART_low_level_send( pxUARTInstance, pucDataSource, uxLength );
/* Block on the semaphore to wait for the transmission to complete. If the semaphore
is obtained then xReturn will get set to pdPASS. If the semaphore take operation times
out then xReturn will get set to pdFAIL. Note that, if the interrupt occurs between
UART_low_level_send() being called, and xSemaphoreTake() being called, then the event
will be latched in the binary semaphore, and the call to xSemaphoreTake() will return
immediately. */
xReturn = xSemaphoreTake( pxUARTInstance->xTxSemaphore, pxUARTInstance->xTxTimeout );
return xReturn;
}
/*-----------------------------------------------------------*/
/* The service routine for the UART's transmit end interrupt, which executes after the
last byte has been sent to the UART. */
void xUART_TransmitEndISR( xUART *pxUARTInstance )
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
/* Clear the interrupt. */
UART_low_level_interrupt_clear( pxUARTInstance );
/* Give the Tx semaphore to signal the end of the transmission. If a task is Blocked
waiting for the semaphore then the task will be removed from the Blocked state. */
xSemaphoreGiveFromISR( pxUARTInstance->xTxSemaphore, &xHigherPriorityTaskWoken );
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 154. Pseudo code demonstrating how a binary semaphore can be used in a
driver library transmit function
The technique demonstrated in Listing 154 is perfectly workable, and indeed common
practice, but it has some drawbacks:
The library uses multiple semaphores, which increases its RAM footprint.
Semaphores cannot be used until they have been created, so a library that uses
semaphores cannot be used until it has been explicitly initialized.
Semaphores are generic objects that are applicable to a wide range of use cases; they
include logic to allow any number of tasks to wait in the Blocked state for the
semaphore to become available, and to select (in a deterministic manner) which task to
remove from the Blocked state when the semaphore does become available.
Executing that logic takes a finite time, and that processing overhead is unnecessary in

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
316
the scenario shown is Listing 154, in which there cannot be more than one task waiting
for the semaphore at any given time.
Listing 155 demonstrates how to avoid these drawbacks by using a task notification in place of
a binary semaphore.
Note: If a library uses task notifications, then the library’s documentation must clearly state
that calling a library function can change the calling task’s notification state and notification
value.
In Listing 155:
The xTxSemaphore member of the xUART structure has been replaced by the
xTaskToNotify member. xTaskToNotify is a variable of type TaskHandle_t, and is used
to hold the handle of the task that is waiting for the UART operation to complete.
The xTaskGetCurrentTaskHandle() FreeRTOS API function is used to obtain the
handle of the task that is in the Running state.
The library does not create any FreeRTOS objects, so does not incur a RAM overhead,
and does not need to be explicitly initialized.
The task notification is sent directly to the task that is waiting for the UART operation to
complete, so no unnecessary logic is executed.
The xTaskToNotify member of the xUART structure is accessed from both a task and an
interrupt service routine, requiring that consideration be given as to how the processor will
update its value:
If xTaskToNotify is updated by a single memory write operation, then it can be updated
outside of a critical section, exactly as shown in Listing 155. This would be the case if
xTaskToNotify is a 32-bit variable (TaskHandle_t was a 32-bit type), and the processor
on which FreeRTOS is running is a 32-bit processor.
If more than one memory write operation is required to update xTaskToNotify, then
xTaskToNotify must only be updated from within a critical section—otherwise the
interrupt service routine might access xTaskToNotify while it is in an inconsistent state.
This would be the case if xTaskToNotify is a 32-bit variable, and the processor on
317
which FreeRTOS is running is a 16-bit processor, as it would require two 16-bit
memory write operations to update all 32-bits.
Internally, within the FreeRTOS implementation, TaskHandle_t is a pointer, so sizeof(
TaskHandle_t ) always equals sizeof( void * ).
/* Driver library function to send data to a UART. */
BaseType_t xUART_Send( xUART *pxUARTInstance, uint8_t *pucDataSource, size_t uxLength )
{
BaseType_t xReturn;
/* Save the handle of the task that called this function. The book text contains notes as to
whether the following line needs to be protected by a critical section or not. */
pxUARTInstance->xTaskToNotify = xTaskGetCurrentTaskHandle();
/* Ensure the calling task does not already have a notification pending by calling
ulTaskNotifyTake() with the xClearCountOnExit parameter set to pdTRUE, and a block time of 0
(don't block). */
ulTaskNotifyTake( pdTRUE, 0 );
/* Start the transmission. */
UART_low_level_send( pxUARTInstance, pucDataSource, uxLength );
/* Block until notified that the transmission is complete. If the notification is received
then xReturn will be set to 1 because the ISR will have incremented this task's notification
value to 1 (pdTRUE). If the operation times out then xReturn will be 0 (pdFALSE) because
this task's notification value will not have been changed since it was cleared to 0 above.
Note that, if the ISR executes between the calls to UART_low_level_send() and the call to
ulTaskNotifyTake(), then the event will be latched in the task’s notification value, and the
call to ulTaskNotifyTake() will return immediately.*/
xReturn = ( BaseType_t ) ulTaskNotifyTake( pdTRUE, pxUARTInstance->xTxTimeout );
return xReturn;
}
/*-----------------------------------------------------------*/
/* The ISR that executes after the last byte has been sent to the UART. */
void xUART_TransmitEndISR( xUART *pxUARTInstance )
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
/* This function should not execute unless there is a task waiting to be notified. Test this
condition with an assert. This step is not strictly necessary, but will aid debugging.
configASSERT() is described in section 11.2.*/
configASSERT( pxUARTInstance->xTaskToNotify != NULL );
/* Clear the interrupt. */
UART_low_level_interrupt_clear( pxUARTInstance );
/* Send a notification directly to the task that called xUART_Send(). If the task is Blocked
waiting for the notification then the task will be removed from the Blocked state. */
vTaskNotifyGiveFromISR( pxUARTInstance->xTaskToNotify, &xHigherPriorityTaskWoken );
/* Now there are no tasks waiting to be notified. Set the xTaskToNotify member of the xUART
structure back to NULL. This step is not strictly necessary but will aid debugging. */
pxUARTInstance->xTaskToNotify = NULL;
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 155. Pseudo code demonstrating how a task notification can be used in a
driver library transmit function

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
318
Task notifications can also replace semaphores in receive functions, as demonstrated in
pseudo code Listing 156, which provides the outline of an RTOS aware library function that
receives data on a UART port. Referring to Listing 156:
The xUART_Receive() function does not include any mutual exclusion logic. If more
than one task is going to use the xUART_Receive() function, then the application writer
will have to manage mutual exclusion within the application itself. For example, a task
may be required to obtain a mutex before calling xUART_Receive().
The UART’s receive interrupt service routine places the characters that are received by
the UART into a RAM buffer. The xUART_Receive() function returns characters from
the RAM buffer.
The xUART_Receive() uxWantedBytes parameter is used to specify the number of
characters to receive. If the RAM buffer does not already contain the requested
number characters, then the calling task is placed into the Blocked state to wait to be
notified that the number of characters in the buffer has increased. The while() loop is
used to repeat this sequence until either the receive buffer contains the requested
number of characters, or a timeout occurs.
The calling task may enter the Blocked state more than once. The block time is
therefore adjusted to take into account the amount of time that has already passed
since xUART_Receive() was called. The adjustments ensure the total time spent
inside xUART_Receive() does not exceed the block time specified by the xRxTimeout
member of the xUART structure. The block time is adjusted using the FreeRTOS
vTaskSetTimeOutState() and xTaskCheckForTimeOut() helper functions.

319
/* Driver library function to receive data from a UART. */
size_t xUART_Receive( xUART *pxUARTInstance, uint8_t *pucBuffer, size_t uxWantedBytes )
{
size_t uxReceived = 0;
TickType_t xTicksToWait;
TimeOut_t xTimeOut;
/* Record the time at which this function was entered. */
vTaskSetTimeOutState( &xTimeOut );
/* xTicksToWait is the timeout value - it is initially set to the maximum receive
timeout for this UART instance. */
xTicksToWait = pxUARTInstance->xRxTimeout;
/* Save the handle of the task that called this function. The book text contains notes
as to whether the following line needs to be protected by a critical section or not. */
pxUARTInstance->xTaskToNotify = xTaskGetCurrentTaskHandle();
/* Loop until the buffer contains the wanted number of bytes, or a timeout occurs. */
while( UART_bytes_in_rx_buffer( pxUARTInstance ) < uxWantedBytes )
{
/* Look for a timeout, adjusting xTicksToWait to account for the time spent in this
function so far. */
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) != pdFALSE )
{
/* Timed out before the wanted number of bytes were available, exit the loop. */
break;
}
/* The receive buffer does not yet contain the required amount of bytes. Wait for a
maximum of xTicksToWait ticks to be notified that the receive interrupt service
routine has placed more data into the buffer. It does not matter if the calling
task already had a notification pending when it called this function, if it did, it
would just iteration around this while loop one extra time. */
ulTaskNotifyTake( pdTRUE, xTicksToWait );
}
/* No tasks are waiting for receive notifications, so set xTaskToNotify back to NULL.
The book text contains notes as to whether the following line needs to be protected by
a critical section or not. */
pxUARTInstance->xTaskToNotify = NULL;
/* Attempt to read uxWantedBytes from the receive buffer into pucBuffer. The actual
number of bytes read (which might be less than uxWantedBytes) is returned. */
uxReceived = UART_read_from_receive_buffer( pxUARTInstance, pucBuffer, uxWantedBytes );
return uxReceived;
}
/*-----------------------------------------------------------*/
/* The interrupt service routine for the UART's receive interrupt */
void xUART_ReceiveISR( xUART *pxUARTInstance )
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
/* Copy received data into this UART's receive buffer and clear the interrupt. */
UART_low_level_receive( pxUARTInstance );
/* If a task is waiting to be notified of the new data then notify it now. */
if( pxUARTInstance->xTaskToNotify != NULL )
{
vTaskNotifyGiveFromISR( pxUARTInstance->xTaskToNotify, &xHigherPriorityTaskWoken );
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 156. Pseudo code demonstrating how a task notification can be used in a
driver library receive function

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
320
Task Notifications Used in Peripheral Device Drivers: ADC Example
The previous section demonstrated how to use vTaskNotifyGiveFromISR() to send a task
notification from an interrupt to a task. vTaskNotifyGiveFromISR() is a simple function to use,
but its capabilities are limited; it can only send a task notification as a valueless event, it
cannot send data. This section demonstrates how to use xTaskNotifyFromISR() to send data
with a task notification event. The technique is demonstrated by the pseudo code shown in
Listing 157, which provides the outline of an RTOS aware interrupt service routine for an
Analog to Digital Converter (ADC). In Listing 157:
It is assumed an ADC conversion is started at least every 50 milliseconds.
ADC_ConversionEndISR() is the interrupt service routine for the ADC’s conversion end
interrupt, which is the interrupt that executes each time a new ADC value is available.
The task implemented by vADCTask() processes each value generated by the ADC. It
is assumed the task’s handle was stored in xADCTaskToNotify when the task was
created.
ADC_ConversionEndISR() uses xTaskNotifyFromISR() with the eAction parameter set
to eSetValueWithoutOverwrite to send a task notification to the vADCTask() task, and
write the result of the ADC conversion into the task’s notification value.
The vADCTask() task uses xTaskNotifyWait() to wait to be notified that a new ADC
value is available, and to retrieve the result of the ADC conversion from its notification
value.

321
/* A task that uses an ADC. */
void vADCTask( void *pvParameters )
{
uint32_t ulADCValue;
BaseType_t xResult;
/* The rate at which ADC conversions are triggered. */
const TickType_t xADCConversionFrequency = pdMS_TO_TICKS( 50 );
for( ;; )
{
/* Wait for the next ADC conversion result. */
xResult = xTaskNotifyWait(
/* The new ADC value will overwrite the old value, so there is no need
to clear any bits before waiting for the new notification value. */
0,
/* Future ADC values will overwrite the existing value, so there is no
need to clear any bits before exiting xTaskNotifyWait(). */
0,
/* The address of the variable into which the task's notification value
(which holds the latest ADC conversion result) will be copied. */
&ulADCValue,
/* A new ADC value should be received every xADCConversionFrequency
ticks. */
xADCConversionFrequency * 2 );
if( xResult == pdPASS )
{
/* A new ADC value was received. Process it now. */
ProcessADCResult( ulADCValue );
}
else
{
/* The call to xTaskNotifyWait() did not return within the expected time,
something must be wrong with the input that triggers the ADC conversion, or with
the ADC itself. Handle the error here. */
}
}
}
/*-----------------------------------------------------------*/
/* The interrupt service routine that executes each time an ADC conversion completes. */
void ADC_ConversionEndISR( xADC *pxADCInstance )
{
uint32_t ulConversionResult;
BaseType_t xHigherPriorityTaskWoken = pdFALSE, xResult;
/* Read the new ADC value and clear the interrupt. */
ulConversionResult = ADC_low_level_read( pxADCInstance );
/* Send a notification, and the ADC conversion result, directly to vADCTask(). */
xResult = xTaskNotifyFromISR( xADCTaskToNotify, /* xTaskToNotify parameter. */
ulConversionResult, /* ulValue parameter. */
eSetValueWithoutOverwrite, /* eAction parameter. */
&xHigherPriorityTaskWoken );
/* If the call to xTaskNotifyFromISR() returns pdFAIL then the task is not keeping up
with the rate at which ADC values are being generated. configASSERT() is described
in section 11.2.*/
configASSERT( xResult == pdPASS );
portYIELD_FROM_ISR( xHigherPriorityTaskWoken );
}
Listing 157. Pseudo code demonstrating how a task notification can be used to
pass a value to a task

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
322
Task Notifications Used Directly Within an Application
This section reinforces the power of task notifications by demonstrating their use in a
hypothetical application that includes the following functionality:
1. The application communicates across a slow internet connection to send data to, and
request data from, a remote data server. From here on, the remote data server is
referred to as the cloud server.
2. After requesting data from the cloud server, the requesting task must wait in the
Blocked state for the requested data to be received.
3. After sending data to the cloud server, the sending task must wait in the Blocked state
for an acknowledgement that the cloud server received the data correctly.
A schematic of the software design is shown in Figure 81. In Figure 81:
The complexity of handling multiple internet connections to the cloud server is
encapsulated within a single FreeRTOS task. The task acts as a proxy server within
the FreeRTOS application, and is referred to as the server task.
Application tasks read data from the cloud server by calling CloudRead(). CloudRead()
does not communicate with the cloud server directly, but instead sends the read
request to the server task on a queue, and receives the requested data from the server
task as a task notification.
Application tasks write date to the cloud server by calling CloudWrite(). CloudWrite()
does not communicate with the cloud server directly, but instead sends the write
request to the server task on a queue, and receives the result of the write operation
from the server task as a task notification.
The structure sent to the server task by the CloudRead() and CloudWrite() functions is shown
in Listing 158.
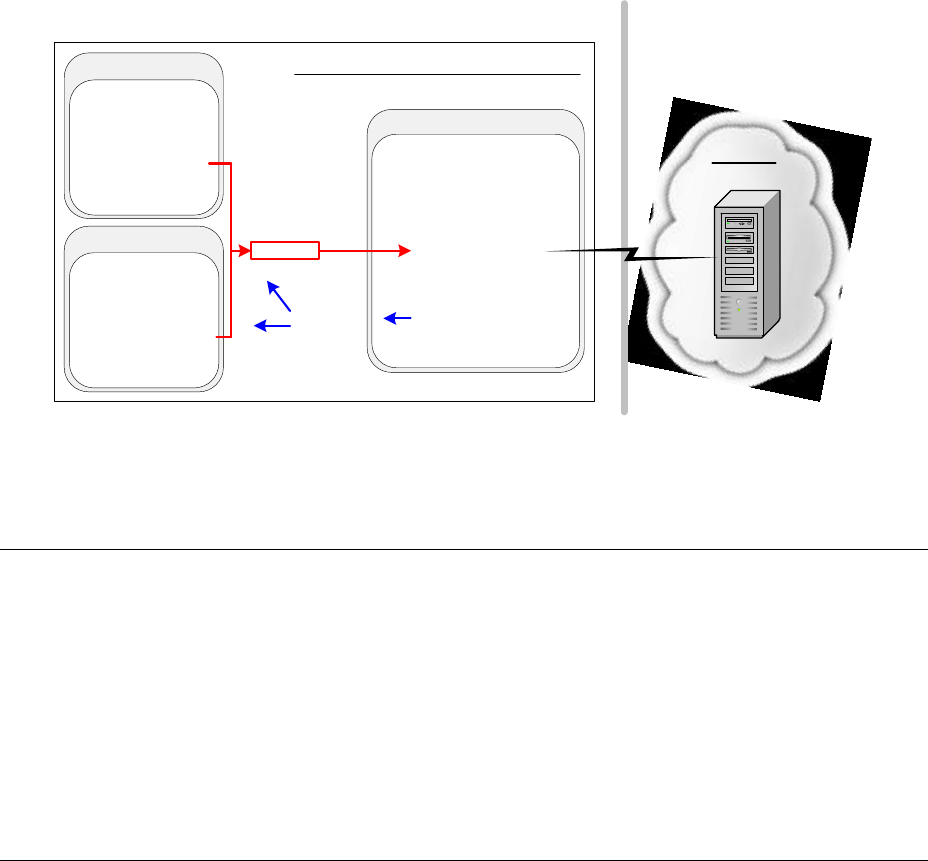
323
Server Task
void ServerTask( ... )
{
for( ;; )
{
/* Wait for
command or event. */
xQueueReceive();
/* Process command
or event. */
ProcessMessage();
}
}Cloud Server
Application Task 2 Queue
Application Task 1
void Task1( ... )
{
for( ;; )
{
CloudRead();
}
}
void Task2( ... )
{
for( ;; )
{
CloudWrite();
}
}
Internet
Client Device (Running FreeRTOS)
Task
Notifications
Figure 81 The communication paths from the application tasks to the cloud server,
and back again
typedef enum CloudOperations
{
eRead, /* Send data to the cloud server. */
eWrite /* Receive data from the cloud server. */
} Operation_t;
typedef struct CloudCommand
{
Operation_t eOperation; /* The operation to perform (read or write). */
uint32_t ulDataID; /* Identifies the data being read or written. */
uint32_t ulDataValue; /* Only used when writing data to the cloud server. */
TaskHandle_t xTaskToNotify;/* The handle of the task performing the operation. */
} CloudCommand_t;
Listing 158. The structure and data type sent on a queue to the server task
Pseudo code for CloudRead() is shown in Listing 159. The function sends its request to the
server task, then calls xTaskNotifyWait() to wait in the Blocked state until it is notified that the
requested data is available.
Pseudo code showing how the server task manages a read request is shown in Listing 160.
When the data has been received from the cloud server, the server task unblocks the
application task, and sends the received data to the application task, by calling xTaskNotify()
with the eAction parameter set to eSetValueWithOverwrite.
Listing 160 shows a simplified scenario, as it assumes GetCloudData() does not have to wait
to obtain a value from the cloud server.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
324
/* ulDataID identifies the data to read. pulValue holds the address of the variable into
which the data received from the cloud server is to be written. */
BaseType_t CloudRead( uint32_t ulDataID, uint32_t *pulValue )
{
CloudCommand_t xRequest;
BaseType_t xReturn;
/* Set the CloudCommand_t structure members to be correct for this read request. */
xRequest.eOperation = eRead; /* This is a request to read data. */
xRequest.ulDataID = ulDataID; /* A code that identifies the data to read. */
xRequest.xTaskToNotify = xTaskGetCurrentTaskHandle(); /* Handle of the calling task. */
/* Ensure there are no notifications already pending by reading the notification value
with a block time of 0, then send the structure to the server task. */
xTaskNotifyWait( 0, 0, NULL, 0 );
xQueueSend( xServerTaskQueue, &xRequest, portMAX_DELAY );
/* Wait for a notification from the server task. The server task writes the value
received from the cloud server directly into this task’s notification value, so there is
no need to clear any bits in the notification value on entry to or exit from the
xTaskNotifyWait() function. The received value is written to *pulValue, so pulValue is
passed as the address to which the notification value is written. */
xReturn = xTaskNotifyWait( 0, /* No bits cleared on entry. */
0, /* No bits to clear on exit. */
pulValue, /* Notification value into *pulValue. */
pdMS_TO_TICKS( 250 ) ); /* Wait a maximum of 250ms. */
/* If xReturn is pdPASS, then the value was obtained. If xReturn is pdFAIL, then the
request timed out. */
return xReturn;
}
Listing 159. The Implementation of the Cloud Read API Function
void ServerTask( void *pvParameters )
{
CloudCommand_t xCommand;
uint32_t ulReceivedValue;
for( ;; )
{
/* Wait for the next CloudCommand_t structure to be received from a task. */
xQueueReceive( xServerTaskQueue, &xCommand, portMAX_DELAY );
switch( xCommand.eOperation ) /* Was it a read or write request? */
{
case eRead:
/* Obtain the requested data item from the remote cloud server. */
ulReceivedValue = GetCloudData( xCommand.ulDataID );
/* Call xTaskNotify() to send both a notification and the value received from the
cloud server to the task that made the request. The handle of the task is
obtained from the CloudCommand_t structure. */
xTaskNotify( xCommand.xTaskToNotify, /* The task’s handle is in the structure. */
ulReceivedValue, /* Cloud data sent as notification value. */
eSetValueWithOverwrite );
break;
/* Other switch cases go here. */
}
}
}
Listing 160. The Server Task Processing a Read Request

325
Pseudo code for CloudWrite() is shown in Listing 161. For the purpose of demonstration,
CloudWrite() returns a bitwise status code, where each bit in the status code is assigned a
unique meaning. Four example status bits are shown by the #define statements at the top of
Listing 161.
The task clears the four status bits, sends its request to the server task, then calls
xTaskNotifyWait() to wait in the Blocked state for the status notification.
/* Status bits used by the cloud write operation. */
#define SEND_SUCCESSFUL_BIT ( 0x01 << 0 )
#define OPERATION_TIMED_OUT_BIT ( 0x01 << 1
#define NO_INTERNET_CONNECTION_BIT ( 0x01 << 2 )
#define CANNOT_LOCATE_CLOUD_SERVER_BIT ( 0x01 << 3 )
/* A mask that has the four status bits set. */
#define CLOUD_WRITE_STATUS_BIT_MASK ( SEND_SUCCESSFUL_BIT |
OPERATION_TIMED_OUT_BIT |
NO_INTERNET_CONNECTION_BIT |
CANNOT_LOCATE_CLOUD_SERVER_BIT )
uint32_t CloudWrite( uint32_t ulDataID, uint32_t ulDataValue )
{
CloudCommand_t xRequest;
uint32_t ulNotificationValue;
/* Set the CloudCommand_t structure members to be correct for this write request. */
xRequest.eOperation = eWrite; /* This is a request to write data. */
xRequest.ulDataID = ulDataID; /* A code that identifies the data being written. */
xRequest.ulDataValue = ulDataValue; /* Value of the data written to the cloud server. */
xRequest.xTaskToNotify = xTaskGetCurrentTaskHandle(); /* Handle of the calling task. */
/* Clear the three status bits relevant to the write operation by calling
xTaskNotifyWait() with the ulBitsToClearOnExit parameter set to
CLOUD_WRITE_STATUS_BIT_MASK, and a block time of 0. The current notification value is
not required, so the pulNotificationValue parameter is set to NULL. */
xTaskNotifyWait( 0, CLOUD_WRITE_STATUS_BIT_MASK, NULL, 0 );
/* Send the request to the server task. */
xQueueSend( xServerTaskQueue, &xRequest, portMAX_DELAY );
/* Wait for a notification from the server task. The server task writes a bitwise status
code into this task’s notification value, which is written to ulNotificationValue. */
xTaskNotifyWait( 0, /* No bits cleared on entry. */
CLOUD_WRITE_STATUS_BIT_MASK, /* Clear relevant bits to 0 on exit. */
&ulNotificationValue, /* Notified value. */
pdMS_TO_TICKS( 250 ) ); /* Wait a maximum of 250ms. */
/* Return the status code to the calling task. */
return ( ulNotificationValue & CLOUD_WRITE_STATUS_BIT_MASK );
Listing 161. The Implementation of the Cloud Write API Function
Pseudo code demonstrating how the server task manages a write request is shown in Listing
162. When the data has been sent to the cloud server, the server task unblocks the
application task, and sends the bitwise status code to the application task, by calling
xTaskNotify() with the eAction parameter set to eSetBits. Only the bits defined by the

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
326
CLOUD_WRITE_STATUS_BIT_MASK constant can get altered in the receiving task’s
notification value, so the receiving task can use other bits in its notification value for other
purposes.
Listing 162 shows a simplified scenario, as it assumes SetCloudData() does not have to wait
to obtain an acknowledgement from the remote cloud server.
void ServerTask( void *pvParameters )
{
CloudCommand_t xCommand;
uint32_t ulBitwiseStatusCode;
for( ;; )
{
/* Wait for the next message. */
xQueueReceive( xServerTaskQueue, &xCommand, portMAX_DELAY );
/* Was it a read or write request? */
switch( xCommand.eOperation )
{
case eWrite:
/* Send the data to the remote cloud server. SetCloudData() returns a bitwise
status code that only uses the bits defined by the CLOUD_WRITE_STATUS_BIT_MASK
definition (shown in Listing 161). */
ulBitwiseStatusCode = SetCloudData( xCommand.ulDataID, xCommand.ulDataValue );
/* Send a notification to the task that made the write request. The eSetBits
action is used so any status bits set in ulBitwiseStatusCode will be set in the
notification value of the task being notified. All the other bits remain
unchanged. The handle of the task is obtained from the CloudCommand_t
structure. */
xTaskNotify( xCommand.xTaskToNotify, /* The task’s handle is in the structure. */
ulBitwiseStatusCode, /* Cloud data sent as notification value. */
eSetBits );
break;
/* Other switch cases go here. */
}
}
}
Listing 162. The Server Task Processing a Send Request

327
Chapter 10
Low Power Support
TBD. This chapter will be written prior to final publication.

329
11.1 Chapter Introduction and Scope
This chapter highlights a set of features that are included to maximize productivity by:
Providing insight into how an application is behaving.
Highlighting opportunities for optimization.
Trapping errors at the point at which they occur.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
330
11.2 configASSERT()
In C, the macro assert() is used to verify an assertion (an assumption) made by the program.
The assertion is written as a C expression, and if the expression evaluates to false (0), then
the assertion has deemed to have failed. For example, Listing 163 tests the assertion that the
pointer pxMyPointer is not NULL.
/* Test the assertion that pxMyPointer is not NULL */
assert( pxMyPointer != NULL );
Listing 163 Using the standard C assert() macro to check pxMyPointer is not NULL
The application writer specifies the action to take if an assertion fails by providing an
implementation of the assert() macro.
The FreeRTOS source code does not call assert(), because assert() is not available with all
the compilers with which FreeRTOS is compiled. Instead, the FreeRTOS source code
contains lots of calls to a macro called configASSERT(), which can be defined by the
application writer in FreeRTOSConfig.h, and behaves exactly like the standard C assert().
A failed assertion must be treated as a fatal error. Do not attempt to execute past a line that
has failed an assertion.
Using configASSERT() improves productivity by immediately trapping and identifying many of
the most common sources of error. It is strongly advised to have configASSERT() defined
while developing or debugging a FreeRTOS application.
Defining configASSERT() will greatly assist in run-time debugging, but will also increase the
application code size, and therefore slow down its execution. If a definition of configASSERT()
is not provided, then the default empty definition will be used, and all the calls to
configASSERT() will be completely removed by the C pre-processor.
Example configASSERT() definitions
The definition of configASSERT() shown in Listing 164 is useful when an application is being
executed under the control of a debugger. It will halt execution on any line that fails an
assertion, so the line that failed the assertion will be the line displayed by the debugger when
the debug session is paused.

331
/* Disable interrupts so the tick interrupt stops executing, then sit in a loop so
execution does not move past the line that failed the assertion. If the hardware
supports a debug break instruction, then the debug break instruction can be used in
place of the for() loop. */
#define configASSERT( x ) if( ( x ) == 0 ) { taskDISABLE_INTERRUPTS(); for(;;); }
Listing 164 A simple configASSERT() definition useful w hen executing under the
control of a debugger
The definition of configASSERT() shown in Listing 165 is useful when an application is not
being executed under the control of a debugger. It prints out, or otherwise records, the source
code line that failed an assertion. The line that failed the assertion is identified using the
standard C __FILE__ macro to obtain the name of the source file, and the standard C
__LINE__ macro to obtain the line number within the source file.
/* This function must be defined in a C source file, not the FreeRTOSConfig.h header
file. */
void vAssertCalled( const char *pcFile, uint32_t ulLine )
{
/* Inside this function, pcFile holds the name of the source file that contains
the line that detected the error, and ulLine holds the line number in the source
file. The pcFile and ulLine values can be printed out, or otherwise recorded,
before the following infinite loop is entered. */
RecordErrorInformationHere( pcFile, ulLine );
/* Disable interrupts so the tick interrupt stops executing, then sit in a loop
so execution does not move past the line that failed the assertion. */
taskDISABLE_INTERRUPTS();
for( ;; );
}
/*-----------------------------------------------------------*/
/* These following two lines must be placed in FreeRTOSConfig.h. */
extern void vAssertCalled( const char *pcFile, uint32_t ulLine );
#define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
Listing 165 A configASSERT() definition that records the source code line that failed
an assertion
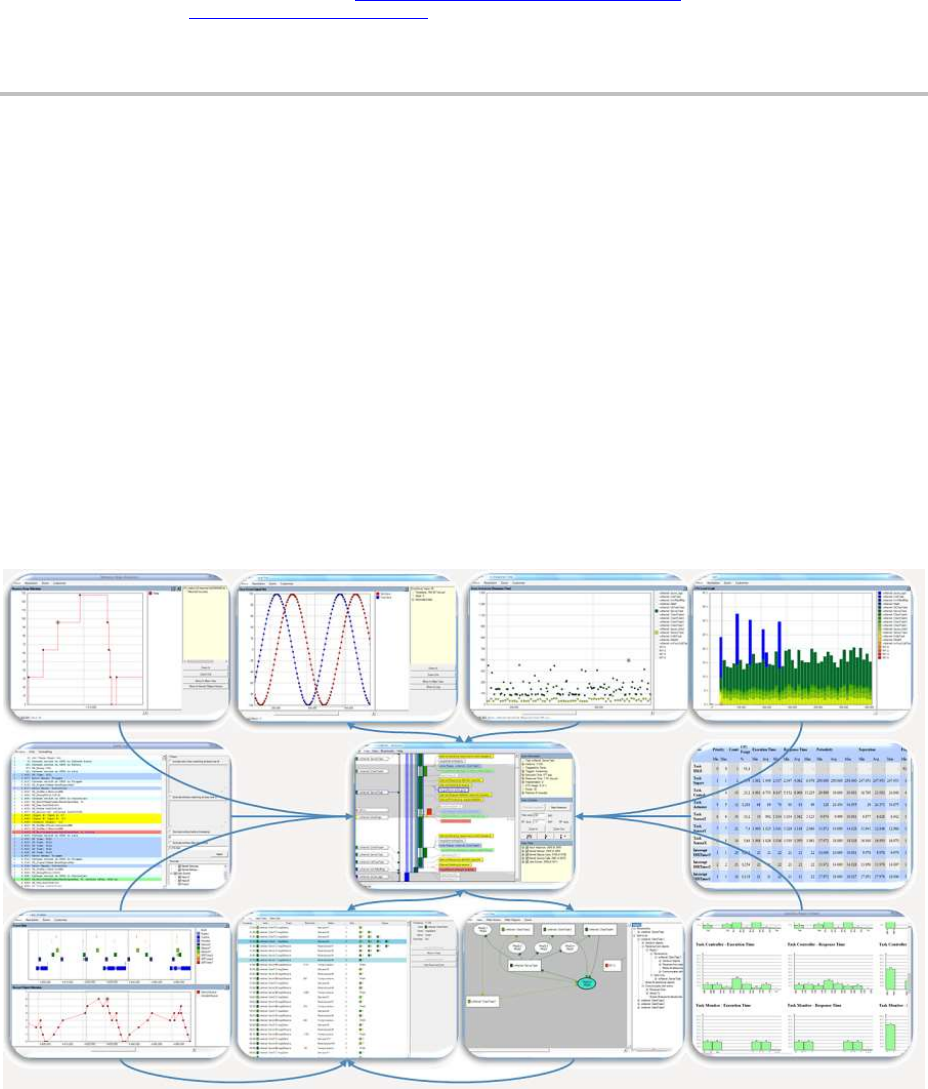
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
332
11.3 FreeRTOS+Trace
FreeRTOS+Trace is a run-time diagnostic and optimization tool provided by our partner
company, Percepio.
FreeRTOS+Trace captures valuable dynamic behavior information, then presents the captured
information in interconnected graphical views. The tool is also capable of displaying multiple
synchronized views.
The captured information is invaluable when analyzing, troubleshooting, or simply optimizing a
FreeRTOS application.
FreeRTOS+Trace can be used side-by-side with a traditional debugger, and complements the
debugger's view with a higher level time based perspective.
Figure 82 FreeRTOS+Trace includes more than 20 interconnected views

333
Figure 83 FreeRTOS+Trace main trace view - one of more than 20 interconnected
trace views
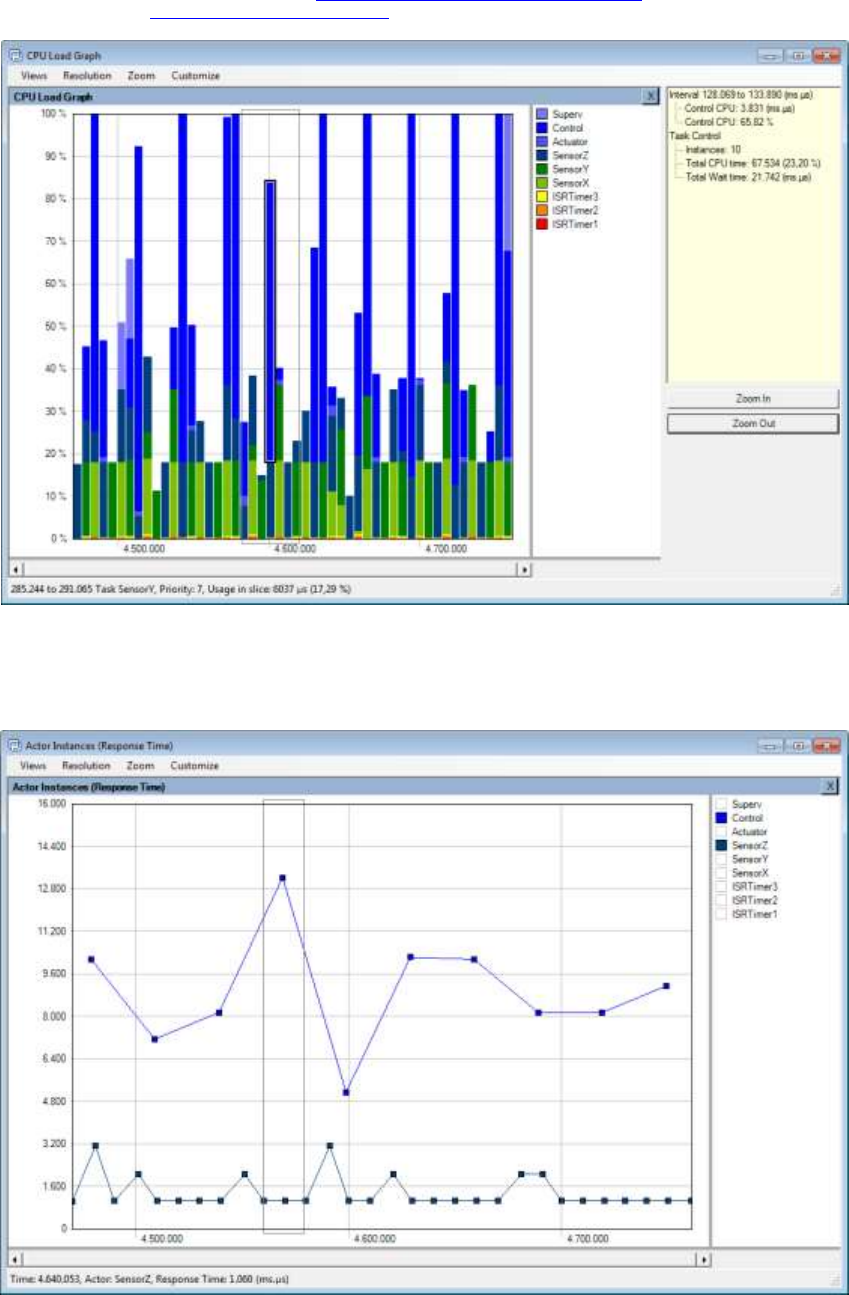
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
334
Figure 84 FreeRTOS+Trace CPU load view - one of more than 20 interconnected
trace views
Figure 85 FreeRTOS+Trace response time view - one of more than 20 interconnected
trace views

335
Figure 86 FreeRTOS+Trace user event plot view - one of more than 20
interconnected trace views
Figure 87 FreeRTOS+Trace kernel object history view - one of more than 20
interconnected trace views

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
336
11.4 Debug Related Hook (Callback) Functions
Malloc failed hook
The malloc failed hook (or callback) was described in Chapter 2, Heap Memory Management.
Defining a malloc failed hook ensures the application developer is notified immediately if an
attempt to create a task, queue, semaphore or event group fails.
Stack overflow hook
Details of the stack overflow hook are provided in section 12.3, Stack Overflow.
Defining a stack overflow hook ensures the application developer is notified if the amount of
stack used by a task exceeds the stack space allocated to the task.

337
11.5 Viewing Run-time and Task State Information
Task Run-Time Statistics
Task run-time statistics provide information on the amount of processing time each task has
received. A task’s run time is the total time the task has been in the Running state since the
application booted.
Run-time statistics are intended to be used as a profiling and debugging aid during the
development phase of a project. The information they provide is only valid until the counter
used as the run-time statistics clock overflows. Collecting run-time statistics will increase the
task context switch time.
To obtain binary run-time statistics information, call the uxTaskGetSystemState() API function.
To obtain run-time statistics information as a human readable ASCII table, call the
vTaskGetRunTimeStats() helper function.
The Run-Time Statistics Clock
Run-time statistics need to measure fractions of a tick period. Therefore, the RTOS tick count
is not used as the run-time statistics clock, and the clock is instead provided by the application
code. It is recommended to make the frequency of the run-time statistics clock between 10
and 100 times faster than the frequency of the tick interrupt. The faster the run-time statistics
clock, the more accurate the statistics will be, but also the sooner the time value will overflow.
Ideally, the time value will be generated by a free-running 32-bit peripheral timer/counter, the
value of which can be read with no other processing overhead. If the available peripherals
and clock speeds do not make that technique possible, then alternative but less efficient
techniques include:
1. Configuring a peripheral to generate a periodic interrupt at the desired run-time
statistics clock frequency, and then using a count of the number of interrupts generated
as the run-time statistics clock.
This method is very inefficient if the periodic interrupt is only used for the purpose of
providing a run-time statistics clock. However, if the application already uses a periodic
interrupt with a suitable frequency, then it is simple and efficient to add a count of the
number of interrupts generated into the existing interrupt service routine.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
338
2. Generate a 32-bit value by using the current value of a free running 16-bit peripheral
timer as the 32-bit value’s least significant 16-bits, and the number of times the timer
has overflowed as the 32-bit value’s most significant 16-bits.
It is possible, with appropriate and somewhat complex manipulation, to generate a run-time
statistics clock by combining the RTOS tick count with the current value of an ARM Cortex-M
SysTick timer. Some of the demo projects in the FreeRTOS download demonstrate how this
is achieved.
Configuring an Application to Collect Run-Time Statistics
Table 54 details the macros necessary to collect task run-time statistics. It was originally
intended for the macros to be included in the RTOS port layer, which is why the macros are
prefixed ‘port’, but it has proven more practical to define them in FreeRTOSConfig.h.
Table 54. Macros used in the collection of run-time statistics
Macro
Description
configGENERATE_RUN_TIME_STATS
This macro must be set to 1 in
FreeRTOSConfig.h. When this
macro is set to 1 the scheduler will
call the other macros detailed in this
table at the appropriate times.
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()
This macro must be provided to
initialize whichever peripheral is
used to provide the run-time
statistics clock.
339
Table 54. Macros used in the collection of run-time statistics
Macro
Description
portGET_RUN_TIME_COUNTER_VALUE(), or
portALT_GET_RUN_TIME_COUNTER_VALUE(Time)
One of these two macros must be
provided to return the current run-
time statistics clock value. This is
the total time the application has
been running, in run-time statistics
clock units, since the application first
booted.
If the first macro is used it must be
defined to evaluate to the current
clock value. If the second macro is
used it must be defined to set its
‘Time’ parameter to the current clock
value.
The uxTaskGetSystemState() API Function
uxTaskGetSystemState() provides a snapshot of status information for each task under the
control of the FreeRTOS scheduler. The information is provided as an array of TaskStatus_t
structures, with one index in the array for each task. TaskStatus_t is described by Listing 167
and Table 56.
UBaseType_t uxTaskGetSystemState( TaskStatus_t * const pxTaskStatusArray,
const UBaseType_t uxArraySize,
uint32_t * const pulTotalRunTime );
Listing 166. The uxTaskGetSystemState() API function prototype

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
340
Table 55, uxTaskGetSystemState() parameters and return value
Parameter Name
Description
pxTaskStatusArray
A pointer to an array of TaskStatus_t structures.
The array must contain at least one TaskStatus_t structure for each
task. The number of tasks can be determined using the
uxTaskGetNumberOfTasks() API function.
The TaskStatus_t structure is shown in Listing 167, and the
TaskStatus_t structure members are described in Table 56.
uxArraySize
The size of the array pointed to by the pxTaskStatusArray parameter.
The size is specified as the number of indexes in the array (the number
of TaskStatus_t structures contained in the array), not by the number of
bytes in the array.
pulTotalRunTime
If configGENERATE_RUN_TIME_STATS is set to 1 in
FreeRTOSConfig.h, then *pulTotalRunTime is set by
uxTaskGetSystemState() to the total run time (as defined by the run-
time statistics clock provided by the application) since the target booted.
pulTotalRunTime is optional, and can be set to NULL if the total run time
is not required.
Returned value
The number of TaskStatus_t structures that were populated by
uxTaskGetSystemState() is returned.
The returned value should equal the number returned by the
uxTaskGetNumberOfTasks() API function, but will be zero if the value
passed in the uxArraySize parameter was too small.

341
typedef struct xTASK_STATUS
{
TaskHandle_t xHandle;
const char *pcTaskName;
UBaseType_t xTaskNumber;
eTaskState eCurrentState;
UBaseType_t uxCurrentPriority;
UBaseType_t uxBasePriority;
uint32_t ulRunTimeCounter;
uint16_t usStackHighWaterMark;
} TaskStatus_t;
Listing 167. The TaskStatus_t structure
Table 56. TaskStatus_t structure members
Parameter Name/
Returned Value
Description
xHandle
The handle of the task to which the information in the structure
relates.
pcTaskName
The human readable text name of the task.
xTaskNumber
Each task has a unique xTaskNumber value.
If an application creates and deletes tasks at run time then it is
possible that a task will have the same handle as a task that was
previously deleted. xTaskNumber is provided to allow application
code, and kernel aware debuggers, to distinguish between a task
that is still valid, and a deleted task that had the same handle as
the valid task.
eCurrentState
An enumerated type that holds the state of the task.
eCurrentState can be one of the following values: eRunning,
eReady, eBlocked, eSuspended, eDeleted.
A task will only be reported as being in the eDeleted state for the
short period between the time the task was deleted by a call to
vTaskDelete(), and the time the Idle task frees the memory that
was allocated to the deleted task’s internal data structures and
stack. After that time, the task will no longer exist in any way, and
it is invalid to attempt to use its handle.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
342
Table 56. TaskStatus_t structure members
Parameter Name/
Returned Value
Description
uxCurrentPriority
The priority at which the task was running at the time
uxTaskGetSystemState() was called. uxCurrentPriority will only be
higher than the priority assigned to the task by the application
writer if the task has temporarily been assigned a higher priority in
accordance with the priority inheritance mechanism described in
section 7.3, Mutexes (and Binary Semaphores).
uxBasePriority
The priority assigned to the task by the application writer.
uxBasePriority is only valid if configUSE_MUTEXES is set to 1 in
FreeRTOSConfig.h.
ulRunTimeCounter
The total run time used by the task since the task was created.
The total run time is provided as an absolute time that uses the
clock provided by the application writer for the collection of run-
time statistics. ulRunTimeCounter is only valid if
configGENERATE_RUN_TIME_STATS is set to 1 in
FreeRTOSConfig.h.
usStackHighWaterMark
The task’s stack high water mark. This is the minimum amount of
stack space that has remained for the task since the task was
created. It is an indication of how close the task has come to
overflowing its stack; the closer this value is to zero, the closer the
task has come to overflowing its stack. usStackHighWaterMark is
specified in bytes.
The vTaskList() Helper Function
vTaskList() provides similar task status information to that provided by
uxTaskGetSystemState(), but it presents the information as a human readable ASCII table,
rather than an array of binary values.
vTaskList() is a very processor intensive function, and leaves the scheduler suspended for an
extended period. Therefore, it is recommended the function is used for debug purposes only,
and not in a production real-time system.

343
vTaskList() is available if configUSE_TRACE_FACILITY and
configUSE_STATS_FORMATTING_FUNCTIONS are both set to 1 in FreeRTOSConfig.h.
void vTaskList( signed char *pcWriteBuffer );
Listing 168. The vTaskList() API function prototype
Table 57. vTaskList() parameters
Parameter
Name
Description
pcWriteBuffer
A pointer to a character buffer into which the formatted and human
readable table is written. The buffer must be large enough to hold the
entire table, as no boundary checking is performed.
An example of the output generated by vTaskList() is shown in Figure 88. In the output:
Each row provides information on a single task.
The first column is the task’s name.
The second column is the task’s state, where ‘R’ means Ready, ‘B’ means Blocked, ‘S’
means Suspended, and ‘D’ means the task has been deleted. A task will only be
reported as being in the deleted state for the short period between the time the task
was deleted by a call to vTaskDelete(), and the time the Idle task frees the memory that
was allocated to the deleted task’s internal data structures and stack. After that time,
the task will no longer exist in any way, and it is invalid to attempt to use its handle.
The third column is the task’s priority.
The fourth column is the task’s stack high water mark. See the description of
usStackHighWaterMark in Table 56.
The fifth column is the unique number allocated to the task. See the description of
xTaskNumber in Table 56
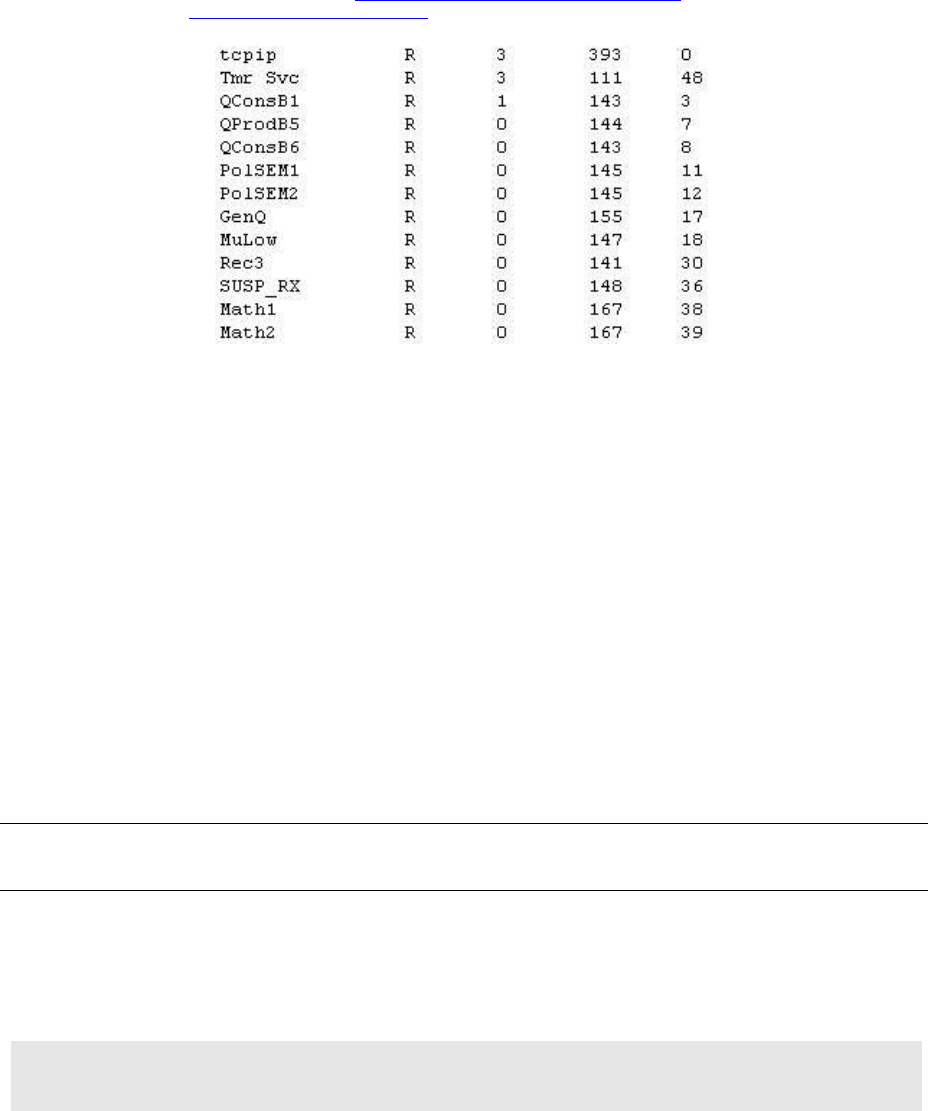
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
344
Figure 88 Example output generated by vTaskList()
The vTaskGetRunTimeStats() Helper Function
vTaskGetRunTimeStats() formats collected run-time statistics into a human readable ASCII
table.
vTaskGetRunTimeStats() is a very processor intensive function and leaves the scheduler
suspended for an extended period. Therefore, it is recommended the function is used for
debug purposes only, and not in a production real-time system.
vTaskGetRunTimeStats() is available when configGENERATE_RUN_TIME_STATS and
configUSE_STATS_FORMATTING_FUNCTIONS are both set to 1 in FreeRTOSConfig.h.
void vTaskGetRunTimeStats( signed char *pcWriteBuffer );
Listing 169. The vTaskGetRunTimeStats() API function prototype
Table 58. vTaskGetRunTimeStats() parameters
Parameter
Name
Description
pcWriteBuffer
A pointer to a character buffer into which the formatted and human
readable table is written. The buffer must be large enough to hold the
entire table, as no boundary checking is performed.
An example of the output generated by vTaskGetRunTimeStats() is shown in Figure 89. In the
output:
Each row provides information on a single task.
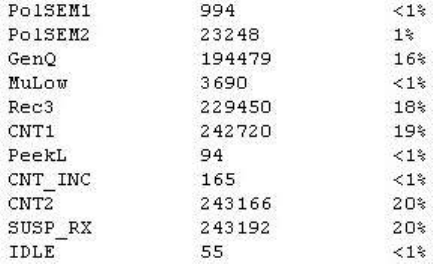
345
The first column is the task name.
The second column is the amount of time the task has spent in the Running state as an
absolute value. See the description of ulRunTimeCounter in Table 56.
The third column is the amount of time the task has spent in the Running state as a
percentage of the total time since the target was booted. The total of the displayed
percentage times will normally be less than the expected 100% because statistics are
collected and calculated using integer calculations that round down to the nearest
integer value.
Figure 89 Example output generated by vTaskGetRunTimeStats()
Generating and Displaying Run-Time Statistics, a Worked Example
This example uses a hypothetical 16-bit timer to generate a 32-bit run-time statistics clock.
The counter is configured to generate an interrupt each time the 16-bit value reaches its
maximum value—effectively creating an overflow interrupt. The interrupt service routine
counts the number of overflow occurrences.
The 32-bit value is created by using the count of overflow occurrences as the two most
significant bytes of the 32-bit value, and the current 16-bit counter value as the least significant
two bytes of the 32-bit value. Pseudo code for the interrupt service routine is shown in Listing
170.
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
346
void TimerOverflowInterruptHandler( void )
{
/* Just count the number of interrupts. */
ulOverflowCount++;
/* Clear the interrupt. */
ClearTimerInterrupt();
}
Listing 170. 16-bit timer overflow interrupt handler used to count timer overflow s
Listing 171 shows the lines added to FreeRTOSConfig.h to enable the collection of run-time
statistics.
/* Set configGENERATE_RUN_TIME_STATS to 1 to enable collection of run-time
statistics. When this is done, both portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() and
portGET_RUN_TIME_COUNTER_VALUE() or portALT_GET_RUN_TIME_COUNTER_VALUE(x) must also
be defined. */
#define configGENERATE_RUN_TIME_STATS 1
/* portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() is defined to call the function that sets
up the hypothetical 16-bit timer (the function’s implementation is not shown). */
void vSetupTimerForRunTimeStats( void );
#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() vSetupTimerForRunTimeStats()
/* portALT_GET_RUN_TIME_COUNTER_VALUE() is defined to set its parameter to the
current run-time counter/time value. The returned time value is 32-bits long, and is
formed by shifting the count of 16-bit timer overflows into the top two bytes of a
32-bit number, then bitwise ORing the result with the current 16-bit counter
value. */
#define portALT_GET_RUN_TIME_COUNTER_VALUE( ulCountValue ) \
{ \
extern volatile unsigned long ulOverflowCount; \
\
/* Disconnect the clock from the counter so it does not change \
while its value is being used. */ \
PauseTimer(); \
\
/* The number of overflows is shifted into the most significant \
two bytes of the returned 32-bit value. */ \
ulCountValue = ( ulOverflowCount << 16UL ); \
\
/* The current counter value is used as the least significant \
two bytes of the returned 32-bit value. */ \
ulCountValue |= ( unsigned long ) ReadTimerCount(); \
\
/* Reconnect the clock to the counter. */ \
ResumeTimer(); \
}
Listing 171. Macros added to FreeRTOSConfig.h to enable the collection of run-time
statistics
The task shown in Listing 172 prints out the collected run-time statistics every 5 seconds.

347
/* For clarity, calls to fflush() have been omitted from this code listing. */
static void prvStatsTask( void *pvParameters )
{
TickType_t xLastExecutionTime;
/* The buffer used to hold the formatted run-time statistics text needs to be quite
large. It is therefore declared static to ensure it is not allocated on the task
stack. This makes this function non re-entrant. */
static signed char cStringBuffer[ 512 ];
/* The task will run every 5 seconds. */
const TickType_t xBlockPeriod = pdMS_TO_TICKS( 5000 );
/* Initialize xLastExecutionTime to the current time. This is the only time this
variable needs to be written to explicitly. Afterwards it is updated internally
within the vTaskDelayUntil() API function. */
xLastExecutionTime = xTaskGetTickCount();
/* As per most tasks, this task is implemented in an infinite loop. */
for( ;; )
{
/* Wait until it is time to run this task again. */
vTaskDelayUntil( &xLastExecutionTime, xBlockPeriod );
/* Generate a text table from the run-time stats. This must fit into the
cStringBuffer array. */
vTaskGetRunTimeStats( cStringBuffer );
/* Print out column headings for the run-time stats table. */
printf( "\nTask\t\tAbs\t\t\t%%\n" );
printf( "-------------------------------------------------------------\n" );
/* Print out the run-time stats themselves. The table of data contains
multiple lines, so the vPrintMultipleLines() function is called instead of
calling printf() directly. vPrintMultipleLines() simply calls printf() on
each line individually, to ensure the line buffering works as expected. */
vPrintMultipleLines( cStringBuffer );
}
}
Listing 172. The task that prints out the collected run-time statistics
161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
348
11.6 Trace Hook Macros
Trace macros are macros that have been placed at key points within the FreeRTOS source
code. By default, the macros are empty, and so do not generate any code, and have no run
time overhead. By overriding the default empty implementations, an application writer can:
Insert code into FreeRTOS without modifying the FreeRTOS source files.
Output detailed execution sequencing information by any means available on the target
hardware. Trace macros appear in enough places in the FreeRTOS source code to
allow them to be used to create a full and detailed scheduler activity trace and profiling
log.
Available Trace Hook Macros
It would take too much space to detail every macro here. Table 59 details the subset of
macros deemed to be most useful to an application writer.
Many of the descriptions in Table 59 refer to a variable called pxCurrentTCB. pxCurrentTCB is
a FreeRTOS private variable that holds the handle of the task in the Running state, and is
available to any macro that is called from the FreeRTOS/Source/tasks.c source file.
Table 59. A selection of the most commonly used trace hook macros
Macro
Description
traceTASK_INCREMENT_TICK(xTickCount)
Called during the tick interrupt, after
the tick count is incremented. The
xTickCount parameter passes the
new tick count value into the macro.
traceTASK_SWITCHED_OUT()
Called before a new task is
selected to run. At this point,
pxCurrentTCB contains the handle
of the task about to leave the
Running state.

349
Table 59. A selection of the most commonly used trace hook macros
Macro
Description
traceTASK_SWITCHED_IN()
Called after a task is selected to
run. At this point, pxCurrentTCB
contains the handle of the task
about to enter the Running state.
traceBLOCKING_ON_QUEUE_RECEIVE(pxQueue)
Called immediately before the
currently executing task enters the
Blocked state following an attempt
to read from an empty queue, or an
attempt to 'take' an empty
semaphore or mutex. The
pxQueue parameter passes the
handle of the target queue or
semaphore into the macro.
traceBLOCKING_ON_QUEUE_SEND(pxQueue)
Called immediately before the
currently executing task enters the
Blocked state following an attempt
to write to a queue that is full. The
pxQueue parameter passes the
handle of the target queue into the
macro.
traceQUEUE_SEND(pxQueue)
Called from within xQueueSend(),
xQueueSendToFront(),
xQueueSendToBack(), or any of
the semaphore ‘give’ functions,
when the queue send or
semaphore ‘give’ is successful.
The pxQueue parameter passes
the handle of the target queue or
semaphore into the macro.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
350
Table 59. A selection of the most commonly used trace hook macros
Macro
Description
traceQUEUE_SEND_FAILED(pxQueue)
Called from within xQueueSend(),
xQueueSendToFront(),
xQueueSendToBack(), or any of
the semaphore ‘give’ functions,
when the queue send or
semaphore ‘give’ operation fails. A
queue send or semaphore ‘give’ will
fail if the queue is full and remains
full for the duration of any block
time specified. The pxQueue
parameter passes the handle of the
target queue or semaphore into the
macro.
traceQUEUE_RECEIVE(pxQueue)
Called from within
xQueueReceive() or any of the
semaphore ‘take’ functions, when
the queue receive or semaphore
‘take’ is successful. The pxQueue
parameter passes the handle of the
target queue or semaphore into the
macro.

351
Table 59. A selection of the most commonly used trace hook macros
Macro
Description
traceQUEUE_RECEIVE_FAILED(pxQueue)
Called from within
xQueueReceive() or any of the
semaphore ‘take’ functions, when
the queue or semaphore receive
operation fails. A queue receive or
semaphore ‘take’ operation will fail
if the queue or semaphore is empty
and remains empty for the duration
of any block time specified. The
pxQueue parameter passes the
handle of the target queue or
semaphore into the macro.
traceQUEUE_SEND_FROM_ISR(pxQueue)
Called from within
xQueueSendFromISR() when the
send operation is successful. The
pxQueue parameter passes the
handle of the target queue into the
macro.
traceQUEUE_SEND_FROM_ISR_FAILED(pxQueue)
Called from within
xQueueSendFromISR() when the
send operation fails. A send
operation will fail if the queue is
already full. The pxQueue
parameter passes the handle of the
target queue into the macro.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
352
Table 59. A selection of the most commonly used trace hook macros
Macro
Description
traceQUEUE_RECEIVE_FROM_ISR(pxQueue)
Called from within
xQueueReceiveFromISR() when
the receive operation is successful.
The pxQueue parameter passes
the handle of the target queue into
the macro.
traceQUEUE_RECEIVE_FROM_ISR_FAILED(pxQueue)
Called from within
xQueueReceiveFromISR() when
the receive operation fails due to
the queue already being empty.
The pxQueue parameter passes
the handle of the target queue into
the macro.
traceTASK_DELAY_UNTIL()
Called from within
vTaskDelayUntil() immediately
before the calling task enters the
Blocked state.
traceTASK_DELAY()
Called from within vTaskDelay()
immediately before the calling task
enters the Blocked state.
Defining Trace Hook Macros
Each trace macro has a default empty definition. The default definition can be overridden by
providing a new macro definition in FreeRTOSConfig.h. If trace macro definitions become
long or complex, then they can be implemented in a new header file that is then itself included
from FreeRTOSConfig.h.

353
In accordance with software engineering best practice, FreeRTOS maintains a strict data
hiding policy. Trace macros allow user code to be added to the FreeRTOS source files, so the
data types visible to the trace macros will be different to those visible to application code:
Inside the FreeRTOS/Source/tasks.c source file, a task handle is a pointer to the data
structure that describes a task (the task’s Task Control Block, or TCB). Outside of the
FreeRTOS/Source/tasks.c source file a task handle is a pointer to void.
Inside the FreeRTOS/Source/queue.c source file, a queue handle is a pointer to the
data structure that describes a queue. Outside of the FreeRTOS/Source/queue.c
source file a queue handle is a pointer to void.
Extreme caution is required if a normally private FreeRTOS data structure is accessed directly
by a trace macro, as private data structures might change between FreeRTOS versions.
FreeRTOS Aware Debugger Plug-ins
Plug-ins that provide some FreeRTOS awareness are available for the following IDEs. This
list may not be an exhaustive:
Eclipse (StateViewer)
Eclipse (ThreadSpy)
IAR
ARM DS-5
Atollic TrueStudio
Microchip MPLAB
iSYSTEM WinIDEA
Figure 90 FreeRTOS ThreadSpy Eclipse
plug-in from Code Confidence Ltd.


355
Chapter 12
Trouble Shooting

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
356
12.1 Chapter Introduction and Scope
This chapter highlights the most common issues encountered by users who are new to
FreeRTOS. First it focuses on three issues that have proven to be the most frequent source of
support requests over the years; incorrect interrupt priority assignment, stack overflow, and
inappropriate use of printf(). It then briefly, and in an FAQ style, touches on other common
errors, their possible cause, and their solutions.
Using configASSERT() improves productivity by immediately trapping and identifying many of
the most common sources of error. It is strongly advised to have configASSERT() defined
while developing or debugging a FreeRTOS application. configASSERT() is described in
section 11.2.

357
12.2 Interrupt Priorities
Note: This is the number one cause of support requests, and in most ports defining
configASSERT() will trap the error immediately!
If the FreeRTOS port in use supports interrupt nesting, and the service routine for an interrupt
makes use of the FreeRTOS API, then it is essential the interrupt’s priority is set at or below
configMAX_SYSCALL_INTERRUPT_PRIORITY, as described in section 6.8, Interrupt
Nesting. Failure to do this will result in ineffective critical sections, which in turn will result in
intermittent failures.
Take particular care if running FreeRTOS on a processor where:
Interrupt priorities default to having the highest possible priority, which is the case on
some ARM Cortex processors, and possibly others. On such processors, the priority of
an interrupt that uses the FreeRTOS API cannot be left uninitialized.
Numerically high priority numbers represent logically low interrupt priorities, which may
seem counterintuitive, and therefore cause confusion. Again this is the case on ARM
Cortex processors, and possibly others.
For example, on such a processor an interrupt that is executing at priority 5 can itself
be interrupted by an interrupt that has a priority of 4. Therefore, if
configMAX_SYSCALL_INTERRUPT_PRIORITY is set to 5, any interrupt that uses the
FreeRTOS API can only be assigned a priority numerically higher than or equal to 5. In
that case, interrupt priorities of 5 or 6 would be valid, but an interrupt priority of 3 is
definitely invalid.
Different library implementations expect the priority of an interrupt to be specified in a
different way. Again, particularly relevant to libraries that target ARM Cortex
processors, where interrupt priorities are bit shifted before being written to the
hardware registers. Some libraries will perform the bit shift themselves, whereas
others expect the bit shift to be performed before the priority is passed into the library
function.
Different implementations of the same architecture implement a different number of
interrupt priority bits. For example, a Cortex-M processor from one manufacturer may

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
358
implement 3 priority bits, while a Cortex-M processor from another manufacturers may
implement 4 priority bits.
The bits that define the priority of an interrupt can be split between bits that define a
pre-emption priority, and bits that define a sub-priority. Ensure all the bits are assigned
to specifying a pre-emption priority, so sub-priorities are not used.
In some FreeRTOS ports, configMAX_SYSCALL_INTERRUPT_PRIORITY has the alternative
name configMAX_API_CALL_INTERRUPT_PRIORITY.

359
12.3 Stack Overflow
Stack overflow is the second most common source of support requests. FreeRTOS provides
several features to assist trapping and debugging stack related issues
1
.
The uxTaskGetStackHighWaterMark() API Function
Each task maintains its own stack, the total size of which is specified when the task is created.
uxTaskGetStackHighWaterMark() is used to query how close a task has come to overflowing
the stack space allocated to it. This value is called the stack ‘high water mark’.
UBaseType_t uxTaskGetStackHighWaterMark( TaskHandle_t xTask );
Listing 173. The uxTaskGetStackHighWaterMark() API function prototype
Table 60. uxTaskGetStackHighWaterMark() parameters and return value
Parameter Name/
Returned Value
Description
xTask
The handle of the task whose stack high water mark is being queried (the
subject task)—see the pxCreatedTask parameter of the xTaskCreate()
API function for information on obtaining handles to tasks.
A task can query its own stack high water mark by passing NULL in place
of a valid task handle.
Returned value
The amount of stack used by the task grows and shrinks as the task
executes and interrupts are processed.
uxTaskGetStackHighWaterMark() returns the minimum amount of
remaining stack space that has been available since the task started
executing. This is the amount of stack that remains unused when stack
usage is at its greatest (or deepest) value. The closer the high water
mark is to zero, the closer the task has come to overflowing its stack.
1
These features are not available in the FreeRTOS Windows port.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
360
Run Time Stack Checking—Overview
FreeRTOS includes two optional run time stack checking mechanisms. These are controlled
by the configCHECK_FOR_STACK_OVERFLOW compile time configuration constant within
FreeRTOSConfig.h. Both methods increase the time it takes to perform a context switch.
The stack overflow hook (or stack overflow callback) is a function that is called by the kernel
when it detects a stack overflow. To use a stack overflow hook function:
1. Set configCHECK_FOR_STACK_OVERFLOW to either 1 or 2 in FreeRTOSConfig.h,
as described in the following sub-sections.
2. Provide the implementation of the hook function, using the exact function name and
prototype shown in Listing 174.
void vApplicationStackOverflowHook( TaskHandle_t *pxTask, signed char *pcTaskName );
Listing 174. The stack overflow hook function prototype
The stack overflow hook is provided to make trapping and debugging stack errors easier, but
there is no real way to recover from a stack overflow when it occurs. The function’s
parameters pass the handle and name of the task that has overflowed its stack into the hook
function.
The stack overflow hook gets called from the context of an interrupt.
Some microcontrollers generate a fault exception when they detect an incorrect memory
access, and it is possible for a fault to be triggered before the kernel has a chance to call the
stack overflow hook function.
Run Time Stack Checking—Method 1
Method 1 is selected when configCHECK_FOR_STACK_OVERFLOW is set to 1.
A task’s entire execution context is saved onto its stack each time it gets swapped out. It is
likely that this will be the time at which stack usage reaches its peak. When
configCHECK_FOR_STACK_OVERFLOW is set to 1, the kernel checks that the stack pointer
remains within the valid stack space after the context has been saved. The stack overflow
hook is called if the stack pointer is found to be outside its valid range.
361
Method 1 is quick to execute, but can miss stack overflows that occur between context
switches.
Run Time Stack Checking—Method 2
Method 2 performs additional checks to those already described for method 1. It is selected
when configCHECK_FOR_STACK_OVERFLOW is set to 2.
When a task is created, its stack is filled with a known pattern. Method 2 tests the last valid 20
bytes of the task stack space to verify that this pattern has not been overwritten. The stack
overflow hook function is called if any of the 20 bytes have changed from their expected
values.
Method 2 is not as quick to execute as method 1, but is still relatively fast, as only 20 bytes are
tested. Most likely, it will catch all stack overflows; however, it is possible (but highly
improbable) that some overflows will be missed.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
362
12.4 Inappropriate Use of printf() and sprintf()
Inappropriate use of printf() is a common source of error, and, unaware of this, it is common
for application developers to then add further calls to printf() to aid debugging, and in-so-doing,
exasperate the problem.
Many cross compiler vendors will provide a printf() implementation that is suitable for use in
small embedded systems. Even when that is the case, the implementation may not be thread
safe, probably won’t be suitable for use inside an interrupt service routine, and depending on
where the output is directed, take a relatively long time to execute.
Particular care must be taken if a printf() implementation that is specifically designed for small
embedded systems is not available, and a generic printf() implementation is used instead, as:
Just including a call to printf() or sprintf() can massively increase the size of the
application’s executable.
printf() and sprintf() may call malloc(), which might be invalid if a memory allocation
scheme other than heap_3 is in use. See section 2.2, Example Memory Allocation
Schemes, for more information.
printf() and sprintf() may require a stack that is many times bigger than would otherwise
be required.
Printf-stdarg.c
Many of the FreeRTOS demonstration projects use a file called printf-stdarg.c, which provides
a minimal and stack-efficient implementation of sprintf() that can be used in place of the
standard library version. In most cases, this will permit a much smaller stack to be allocated to
each task that calls sprintf() and related functions.
printf-stdarg.c also provides a mechanism for directing the printf() output to a port character by
character, which while slow, allows stack usage to be decreased even further.
Note that not all copies of printf-stdarg.c included in the FreeRTOS download implement
snprintf(). Copies that do not implement snprintf() simply ignore the buffer size parameter, as
they map directly to sprintf().
363
Printf-stdarg.c is open source, but is owned by a third party, and therefore licensed separately
from FreeRTOS. The license terms are contained at the top of the source file.

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
364
12.5 Other Common Sources of Error
Symptom: Adding a simple task to a demo causes the demo to crash
Creating a task requires memory to be obtained from the heap. Many of the demo application
projects dimension the heap to be exactly big enough to create the demo tasks—so, after the
tasks are created, there will be insufficient heap remaining for any further tasks, queues, event
groups, or semaphores to be added.
The idle task, and possible also the RTOS daemon task, are created automatically when
vTaskStartScheduler() is called. vTaskStartScheduler() will return only if there is not enough
heap memory remaining for these tasks to be created. Including a null loop [ for(;;); ] after the
call to vTaskStartScheduler() can make this error easier to debug.
To be able to add more tasks, either increase the heap size, or remove some of the existing
demo tasks. See section 2.2, Example Memory Allocation Schemes, for more information.
Symptom: Using an API function within an interrupt causes the application to
crash
Do not use API functions within interrupt service routines, unless the name of the API function
ends with ‘...FromISR()’. In particular, do not create a critical section within an interrupt unless
using the interrupt safe macros. See section 6.2, Using the FreeRTOS API from an ISR, for
more information.
In FreeRTOS ports that support interrupt nesting, do not use any API functions in an interrupt
that has been assigned an interrupt priority above
configMAX_SYSCALL_INTERRUPT_PRIORITY. See section 6.8, Interrupt Nesting, for more
information.
Symptom: Sometimes the application crashes within an interrupt service routine
The first thing to check is that the interrupt is not causing a stack overflow. Some ports only
check for stack overflow within tasks, and not within interrupts.
The way interrupts are defined and used differs between ports and between compilers.
Therefore, the second thing to check is that the syntax, macros, and calling conventions used
in the interrupt service routine are exactly as described on the documentation page provided
365
for the port being used, and exactly as demonstrated in the demo application provided with the
port.
If the application is running on a processor that uses numerically low priority numbers to
represent logically high priorities, then ensure the priority assigned to each interrupt takes that
into account, as it can seem counter-intuitive. If the application is running on a processor that
defaults the priority of each interrupt to the maximum possible priority, then ensure the priority
of each interrupt is not left at its default value. See section 6.8, Interrupt Nesting, and section
12.2, Interrupt Priorities, for more information.
Symptom: The scheduler crashes when attempting to start the first task
Ensure the FreeRTOS interrupt handlers have been installed. Refer to the documentation
page for the FreeRTOS port in use for information, and the demo application provided for the
port for an example.
Some processors must be in a privileged mode before the scheduler can be started. The
easiest way to achieve this is to place the processor into a privileged mode within the C
startup code, before main() is called.
Symptom: Interrupts are unexpectedly left disabled, or critical sections do not
nest correctly
If a FreeRTOS API function is called before the scheduler has been started then interrupts will
deliberately be left disabled, and not re-enable again until the first task starts to execute. This
is done to protect the system from crashes caused by interrupts attempting to use FreeRTOS
API functions during system initialization, before the scheduler has been started, and while the
scheduler may be in an inconsistent state.
Do not alter the microcontroller interrupt enable bits or priority flags using any method other
than calls to taskENTER_CRITICAL() and taskEXIT_CRITICAL(). These macros keep a count
of their call nesting depth to ensure interrupts become enabled again only when the call
nesting has unwound completely to zero. Be aware that some library functions may
themselves enable and disable interrupts.
Symptom: The application crashes even before the scheduler is started
An interrupt service routine that could potentially cause a context switch must not be permitted
to execute before the scheduler has been started. The same applies to any interrupt service

161204 Pre-release for FreeRTOS V8.x.x. See http://www.FreeRTOS.org/FreeRTOS-V9.html for information about FreeRTOS
V9.x.x. Use http://www.FreeRTOS.org/contact to provide feedback, corrections, and check for updates.
366
routine that attempts to send to or receive from a FreeRTOS object, such as a queue or
semaphore. A context switch cannot occur until after the scheduler has started.
Many API functions cannot be called until after the scheduler has been started. It is best to
restrict API usage to the creation of objects such as tasks, queues, and semaphores, rather
than the use of these objects, until after vTaskStartScheduler() has been called.
Symptom: Calling API functions while the scheduler is suspended, or from
inside a critical section, causes the application to crash
The scheduler is suspended by calling vTaskSuspendAll() and resumed (unsuspended) by
calling xTaskResumeAll(). A critical section is entered by calling taskENTER_CRITICAL(),
and exited by calling taskEXIT_CRITICAL().
Do not call API functions while the scheduler is suspended, or from inside a critical section.
367

368
INDEX
A
atomic, 235
B
background
background processing, 76
BaseType_t, 22
best fit, 30, 32
Binary Semaphore, 191
Blocked State, 64
Blocking on Queue Reads, 106
Blocking on Queue Writes, 106
Building FreeRTOS, 11
C
configAPPLICATION_ALLOCATED_HEAP, 35
configCHECK_FOR_STACK_OVERFLOW, 360
configGENERATE_RUN_TIME_STATS, 338
configIDLE_SHOULD_YIELD, 75, 95
configKERNEL_INTERRUPT_PRIORITY, 228
configMAX_PRIORITIES, 58
configMAX_SYSCALL_INTERRUPT_PRIORITY, 228
configMINIMAL_STACK_DEPTH, 50
configTICK_RATE_HZ, 60
configTOTAL_HEAP_SIZE, 29
configUSE_IDLE_HOOK, 77
configUSE_PORT_OPTIMISED_TASK_SELECTION,
58
configUSE_PREEMPTION, 90
configUSE_TASK_NOTIFICATIONS, 295
configUSE_TICKLESS_IDLE, 90
configUSE_TIME_SLICING, 90
continuous processing, 72
continuous processing task, 64
co-operative scheduling, 97
Counting Semaphores, 208
Creating a FreeRTOS Project, 18
Creating Tasks, 48
critical regions, 238
critical section, 230
Critical sections, 238
D
Data Types, 21
Deadlock, 251
Deadly Embrace, 251
deferred interrupts, 191
Deleting a Task, 85
Demo Applications, 16
E
eNoAction, 309
eNotifyAction, 308
errQUEUE_FULL, 111
eSetBits, 309
eSetValueWithoutOverwrite, 309
eSetValueWithOverwrite, 310
Event Bits, 268
event driven, 64
Event Flags, 268
Event Groups, 265
EventBits_t, 269
EventGroupHandle_t, 271
Events, 182
F
fixed execution period, 70
Fixed Priority, 92
Formatting, 23
free(), 26
FreeRTOSConfig.h, 11
Function Names, 22
Function Reentrancy, 235
G
Gatekeeper tasks, 259
H
Header Files, 15
Heap_1, 29
Heap_2, 30
Heap_3, 32
Heap_4, 32
heap_5, 35
HeapRegion_t, 36
high water mark, 359
highest priority, 51
I
Idle Task, 68, 75
Idle Task Hook, 75
Include Paths, 14
Interrupt Nesting, 228
L
locking the scheduler, 240
low power mode, 76
lowest priority, 51, 58
M
Macro Names, 23
Malloc Failed Hook, 42
malloc(), 26
Measuring the amount of spare processing capacity, 76
Mutex, 243
mutual exclusion, 236
369
N
non-atomic, 235
Not Running state, 47
O
OpenRTOS, 6
P
pdMS_TO_TICKS, 61
periodic
periodic tasks, 66
periodic interrupt, 60
Port, 11
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS,
338
portGET_RUN_TIME_COUNTER_VALUE, 339
portMAX_DELAY, 110, 112, 161, 171, 175, 278, 289,
301
pre-empted
pre-emption, 75
Pre-emptive, 92
Priorities, 58
Prioritized Pre-emptive Scheduling, 95
priority, 51, 58
priority inheritance, 250
priority inversion, 249
pvParameters, 50, 159, 215, 341
pvPortMalloc(), 27
Q
queue access by Multiple Tasks, 106
queue block time, 106
queue item size, 103
queue length, 103
QueueHandle_t, 108
Queues, 101
QueueSetHandle_t, 132
R
RAM allocation, 27
Read, Modify, Write Operations, 234
Ready state, 65
reentrant, 235
Round Robin, 91
Run Time Stack Checking, 360
Run Time Statistics, 337
Running state, 47, 64
S
SafeRTOS, 6
Scheduling Algorithms, 90
SemaphoreHandle_t, 194, 210, 245
Software Timers, 147
Source Files, 12
spare processing capacity
measuring spare processing capacity, 69
Stack Overflow, 359
stack overflow hook, 360
starvation, 62
starving
starvation, 64
state diagram, 65
Suspended State, 65
suspending the scheduler, 240
swapped in, 47
swapped out, 47
switched in, 47
switched out, 47
Synchronization, 191
Synchronization events, 64
T
tabs, 23
Task Functions, 46
task handle, 51, 82
Task Notifications, 293
Task Parameter, 55
Task Synchronization, 285
taskYIELD(), 98
Temporal
temporal events, 64
the xSemaphoreCreateMutex(), 245
tick count, 61
tick hook function, 259
tick interrupt, 60
Tick Interrupt, 60
ticks, 61
TickType_t, 21
Time Measurement, 60
time slice, 60
Time Slicing, 92
Trace Hook Macros, 348
Trace macros, 348
traceBLOCKING_ON_QUEUE_RECEIVE, 349
traceBLOCKING_ON_QUEUE_SEND, 349
traceQUEUE_RECEIVE, 350
traceQUEUE_RECEIVE_FAILED, 351
traceQUEUE_RECEIVE_FROM_ISR, 352
traceQUEUE_RECEIVE_FROM_ISR_FAILED, 352
traceQUEUE_SEND, 349
traceQUEUE_SEND_FAILED, 350
traceQUEUE_SEND_FROM_ISR, 351
traceQUEUE_SEND_FROM_ISR_FAILED, 351
traceTASK_DELAY, 352
traceTASK_DELAY_UNTIL, 352
traceTASK_INCREMENT_TICK, 348
traceTASK_SWITCHED_IN, 349
traceTASK_SWITCHED_OUT, 348
Type Casting, 24
U
ulBitsToClearOnEntry, 310
ulBitsToClearOnExit, 311
ulTaskNotifyTake(), 300
uxQueueMessagesWaiting(), 113
uxTaskGetStackHighWaterMark(), 359
uxTaskPriorityGet(), 79
V
vApplicationStackOverflowHook, 360

370
Variable Names, 22
vPortDefineHeapRegions(), 36
vPortFree(), 27
vSemaphoreCreateBinary(), 194, 210
vTaskDelay(), 66
vTaskDelayUntil(), 70
vTaskDelete(), 85
vTaskGetRunTimeStats(), 344
vTaskNotifyGiveFromISR(), 299
vTaskPrioritySet(), 79
vTaskResume(), 65
vTaskSuspend(), 65
vTaskSuspendAll(), 241
X
xClearCountOnExit, 301
xEventGroupCreate(), 271
xEventGroupSetBits(), 271
xEventGroupSetBitsFromISR(), 272
xEventGroupSync(), 287
xEventGroupWaitBits(), 275
xPortGetFreeHeapSize(), 41
xPortGetMinimumEverFreeHeapSize(), 41
xQueueCreate(), 108, 132, 271
xQueuePeek(), 145
xQueueReceive(), 111
xQueueSend(), 109
xQueueSendFromISR(), 220
xQueueSendToBack(), 109, 144
xQueueSendToFront(), 109, 144
xSemaphoreCreateCounting(), 210
xSemaphoreCreateRecursiveMutex(), 253
xSemaphoreGiveFromISR(), 196
xSemaphoreGiveRecursive(), 253
xSemaphoreTakeRecursive()., 253
xTaskCreate(), 48
xTaskGetTickCount(), 72
xTaskNotify(), 307
xTaskNotifyFromISR(), 308
xTaskNotifyGive(), 298
xTaskNotifyWait(), 310
xTaskResumeAll(), 241
xTaskResumeFromISR(), 65
