FastRPC User Guide 80 N7039 2 DEBUG
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 33
- 1 Introduction
- 2 FastRPC overview
- 3 FastRPC operations
- 4 FastRPC debugging
- 4.1 Common debugging steps
- 4.2 Debugging procedures
- A References
Qualcomm Technologies, Inc.
Confidential and Proprietary – Qualcomm Technologies, Inc.
NO PUBLIC DISCLOSURE PERMITTED: Please report postings of this document on public servers or websites to:
DocCtrlAgent@qualcomm.com.
Restricted Distribution: Not to be distributed to anyone who is not an employee of either Qualcomm Technologies, Inc. or its
affiliated companies without the express approval of Qualcomm Configuration Management.
Not to be used, copied, reproduced, or modified in whole or in part, nor its contents revealed in any manner to others without the
express written permission of Qualcomm Technologies, Inc.
Qualcomm Hexagon and QXDM Professional are products of Qualcomm Technologies, Inc. Other Qualcomm products referenced
herein are products of Qualcomm Technologies, Inc. or its subsidiaries.>
Qualcomm, Hexagon, and QXDM Professional are trademarks of Qualcomm Incorporated, registered in the United States and other
countries. Other product and brand names may be trademarks or registered trademarks of their respective owners.
This technical data may be subject to U.S. and international export, re-export, or transfer (“export”) laws. Diversion contrary to U.S.
and international law is strictly prohibited.
Qualcomm Technologies, Inc.
5775 Morehouse Drive
San Diego, CA 92121
U.S.A.
© 2016-2017 Qualcomm Technologies, Inc. All rights reserved.
Qualcomm® FastRPC
User Guide
80-N7039-2 B
March 31, 2017
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 2
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
Revision history
Revision Date Description
A December 2016 Initial release
B March 2017 Numerous changes to support the SDM660 chipset.
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 3
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
Contents
1 Introduction ...................................................................................................... 5
1.1 Purpose.......................................................................................................................... 5
1.2 Conventions .................................................................................................................. 5
1.3 Technical assistance ...................................................................................................... 5
2 FastRPC overview ........................................................................................... 6
2.1 FastRPC framework ...................................................................................................... 6
2.2 FastRPC architecture .................................................................................................... 7
2.2.1 DSP protection domain and DSP user protection domain ................................. 8
2.2.2 Android ION allocator ....................................................................................... 8
2.2.3 IDL compiler ..................................................................................................... 9
2.3 How FastRPC works ................................................................................................... 10
2.4 Memory buffer management ....................................................................................... 11
2.5 Cache operation .......................................................................................................... 13
Threads and processes ...................................................................................................... 13
2.6 Call flows .................................................................................................................... 14
2.7 IO coherency ............................................................................................................... 16
2.8 Code organization ....................................................................................................... 16
3 FastRPC operations ...................................................................................... 17
3.1 Use rpcmem ................................................................................................................ 17
3.2 Call FastRPC functions ............................................................................................... 18
3.3 Push user shared objects ............................................................................................. 18
3.4 Sign shared objects ..................................................................................................... 19
3.5 Mark buffers as uncached ........................................................................................... 19
3.5.1 Mark buffers as non-coherent .......................................................................... 20
3.6 Allocate DSP local buffers on the DSP ...................................................................... 20
3.7 Other examples ........................................................................................................... 20
4 FastRPC debugging ...................................................................................... 21
4.1 Common debugging steps ........................................................................................... 21
4.1.1 Collect logcat logs and kernel logs .................................................................. 21
4.1.2 Collect messages in QXDM Professional™ tool ............................................. 21
4.1.3 Collect messages if QXDM Pro is not available ............................................. 22
4.1.4 Enable crashes on the aDSP ............................................................................ 22
4.1.5 Collect a crash dump ....................................................................................... 24
4.1.6 Load a DSP crash dump .................................................................................. 25
4.1.7 Measure latency in FastRPC calls ................................................................... 25
4.2 Debugging procedures ................................................................................................ 26
Qualcomm® FastRPC User Guide Contents
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 4
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.2.1 FastRPC call fails but there are no crashes ...................................................... 26
4.2.2 Crashes in FastRPC functions ......................................................................... 29
4.2.3 No functional failures in FastRPC functions, but they are slow ...................... 31
A References ..................................................................................................... 33
A.1 Related documents ..................................................................................................... 33
A.2 Acronyms and terms .................................................................................................. 33

80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 5
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
1 Introduction
1.1 Purpose
This document describes how to use the Qualcomm® FastRPC framework and debug certain
issues.
1.2 Conventions
Code variables appear in angle brackets, for example, <number>.
Shading indicates content that has been added or changed in this revision of the document.
1.3 Technical assistance
For assistance or clarification on information in this document, submit a case to Qualcomm
Technologies, Inc. (QTI) at https://createpoint.qti.qualcomm.com/.
If you do not have access to the CDMATech Support website, register for access or send email to
support.cdmatech@qti.qualcomm.com.

80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 6
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2 FastRPC overview
A Remote Procedure Call (RPC) allows a computer program calling a procedure to execute in
another remote processor, while hiding the details of the remote interaction.
FastRPC is the Qualcomm-proprietary RPC mechanism used to enable remote function calls
between the CPU and aDSP. Hexagon Access customers using Hexagon Vector eXtension
(HVX) algorithms can use the FastRPC framework because the HVX functions are called in the
CPU, while the actual execution is on the aDSP.
2.1 FastRPC framework
Use the FastRPC framework for all programs involving customer-written modules that are to be
called by the CPU but are to be executed on the aDSP.
Specifically, all HVX use cases in camera streaming, and computer vision applications employ
the FastRPC framework. Therefore, use FastRPC when working on camera streaming or
computer vision use cases that involve HVX algorithms to be executed on the aDSP.

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 7
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.2 FastRPC architecture
The FastRPC framework exists in the User process domain in both the CPU and aDSP.
NOTE: The following graphic has been updated.
Application
FastRPC Stub
FastRPC User
HLOS aDSP
FastRPC Kernel Driver
aDSP Implementation
FastRPC Skel
FastRPC User
FastRPC Kernel Driver
Shared Memory
Driver
Kernel Space
Generated by IDL compiler FastRPC software
Figure 2-1 FastRPC framework among other software components
For information on the other components in the diagram, refer to the documents listed in
Section A.1.

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 8
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.2.1 DSP protection domain and DSP user protection domain
Because the aDSP is a real-time processor whose stability critically affects the overall user
experience, different protection domains (PDs) exist in the aDSP software architecture. These
PDs ensure the stability of the kernel software and the safety of Qualcomm proprietary hardware
information.
There are three protection domains in the aDSP.
Kernel – Access to all memory of all PDs. The memory footprint of this PD must be the
smallest footprint of all PDs.
Guest OS – Access to the memory of its own PD, the memory of the User PD, and some
system registers. Many Qualcomm drivers use this PD.
User – Access only to the memory of its own PD.
The aDSP system firmware automatically makes system calls to the Guest OS or Kernel PD, if
necessary. Customer FastRPC programs run in the User PD.
2.2.2 Android ION allocator
The ION allocator is a contiguous memory allocator provided by the Android platform. It can
allocate a contiguous memory region that both the CPU and aDSP can share.
Use the ION allocator to configure the memory size, alignment, heap ID where memory will be
allocated, and special configuration flags.
For information on memory management, see Section 2.4. For more information on the ION
allocator, refer to the Hexagon SDK1 document page:
<HEXAGON_SDK_ROOT>/docs/Technologies_FastRPC.html#Using%20the%20ION%20al
locator
1 In this document, Hexagon SDK refers to versions 3.0 and later, unless indicated otherwise.

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 9
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.2.3 IDL compiler
Interfaces for the aDSP platform and all FastRPC programs are described in a language called
IDL. IDL allows interface authors to expose only what that object does, but not where it resides
or the programming language in which it is implemented. IDL provides flexibility of software
implementation while maintaining a consistent interface for the software module.
Following is a typical IDL header file.
When using the function parameters:
Indicate input parameters as in.
Indicated parameters to be modified as output as rout.
For more information on the concept and use of the IDL compiler, refer to the Hexagon SDK
document page:
<HEXAGON_SDK_ROOT>/docs/Tools_IDL%20Compiler.html

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 10
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.3 How FastRPC works
The FastRPC framework is a typical proxy pattern. The interface object stub and the
implementation skeleton objects are on different processors. FastRPC clients are directly exposed
to the stub object, and the skeleton object is called internally to the FastRPC framework.
The FastRPC framework consists of the following components.
Component Description
Client User mode process that initiates the remote invocation, typically the customer
process.
Stub Autogenerated code linked with the User mode process that marshals
parameters
ADSPRPC driver
aDSP RPC kernel driver that receives the remote message invocations,
queues the messages, and then waits for the response after signaling the
remote side.
ADSPRPC framework aDSP RPC framework dequeues the messages from the queue and
dispatches them for processing.
Skel Autogenerated code that unmarshaling parameters
Object Method implementation.
Figure 2-2 Interaction of the FastRPC components
1. The User mode process calls the stub version of the function.
The stub code converts the function call to an RPC message.
2. The stub code internally invokes the ADSPRPC driver on the applications processor to queue
the converted message.
3. The ADSPRPC driver on the applications processor sends the queued message to the
ADSPRPC framework on the aDSP.
4. The ADSPRPC framework on the aDSP dispatches the relevant skeleton code.
5. The skeleton code unmarshals the parameter and calls the method implementation.
6. The skeleton code waits for implementation to finish processing, and, in turn, marshals the
return value into the return message.
7. The skeleton code calls the ADSPRPC framework to queue the return message to be
transmitted to the applications processor.

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 11
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
8. The ADSPRPC framework on the aDSP sends the return message back to the ADSPRPC
driver on the applications processor.
9. ADSPRPC driver identifies the waiting stub code and dispatches the return value.
10. The stub code unmarshals the return message and sends it to the calling User mode process.
2.4 Memory buffer management
The aDSP is part of the SoC package. Therefore, various processor units (in this case, the aDSP
and CPU) have access to the same hardware memory unit (such as DDR3).
For better memory control, there are multiple logical divisions of the memory. Each processing
unit has exclusive and shared access to various memory areas. Memory protection units (MPUs)
implement the access control.
Applications
Processor
Hexagon
Processor
DDR HLOS Memory aDSP
Memory
Shared
Memory
Memory Protection Units
Figure 2-3 Relationship of MPUs and memory buffers
The shared memory is used separately in the CPU and aDSP via different memory translation.
The same region or regions of physical memory are translated into different virtual addresses in
each processing unit via different translation lookahead buffers (TLBs).
As with all standard computers, there is a limited number of TLB entries. If the entries are all
filled, each new memory mapping causes eviction of an existing TLB entry. Adding and evicting
TLB entries eventually slows the entire program, especially when it is avoidable. Therefore, we
strongly recommend allocating large physically contiguous chunks of buffers to be mapped to the
corresponding large virtual address range. Do not map several physically non-contiguous chunks
to represent a virtual contiguous range.
In the latest high-end Qualcomm products, a System Memory Management Unit (SMMU)
introduces another translation layer:
It optimizes the need to allocate small chunks of memory when larger chunks are not
available
It optimizes the need to allocate contiguous physical addresses to minimize the number of
TLB entries
With the SMMU layer, the actual non-contiguous memory chunks are presented in a contiguous
view to each processing unit. However, the SMMU records and gathers the scattered data in its
own records.
Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 12
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
NOTE: Nothing is required from the software side to configure SMMU functionality.
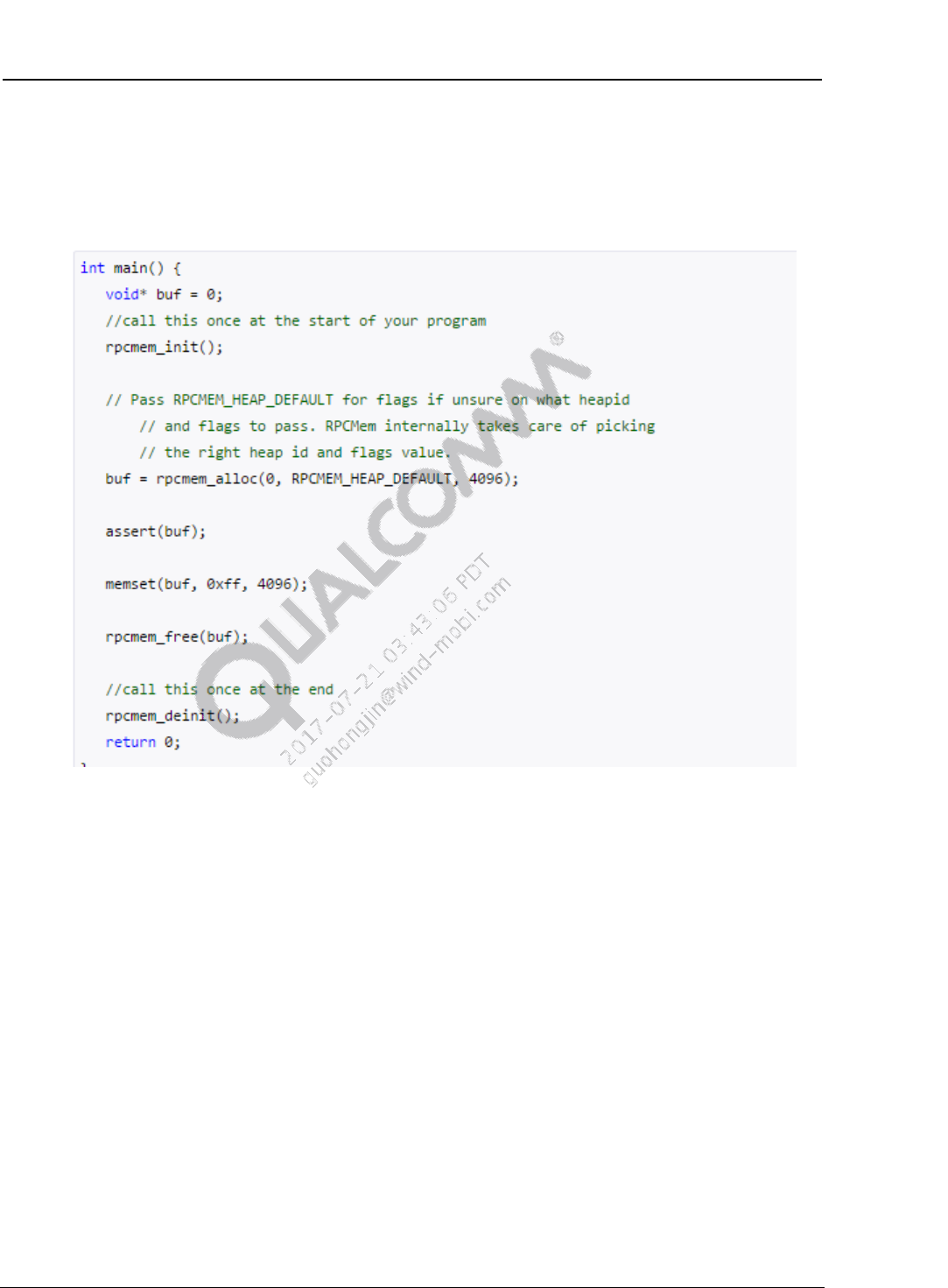
To ensure contiguous physical memory, use the ION allocator (Section 2.2.2). Following is an
example of rpcmem usage.
For more information on memory management in the FastRPC framework, refer to the Hexagon
SDK document:
<HEXAGON_SDK_ROOT>/docs/Technologies_FastRPC.html#RPCMem
Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 13
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.5 Cache operation
In all multiprocessor computer systems, cache coherency (or cache synchronization) means the
local cache of the shared resources must be up-to-date when accessed, thus ensuring the correct
functionality. The FastRPC framework provides the following methods to ensure cache
coherency, which is related to the IDL compiler (Section 2.2.3):
If a parameter is designated as in in the IDL builder, the CPU flushes the cache for the buffer
corresponding to the parameter. Then it makes an RPC call, where the DSP invalidates the
cache for the buffer before reading it.
If a parameter is designated as rout in the IDL builder, the CPU makes an RPC call. The DSP
flushes the cache after writing to the buffer that corresponds to the parameter. Then the CPU
invalidates the cache for the buffer after the RPC call returns and before reading the buffer.
If a parameter is designated as inrout in the IDL builder, the cache operations for both in and
rout are executed.
Threads and processes
Both the CPU and aDSP employ multithreaded operating systems, so it is important to understand
the thread and process operations related in each FastRPC call.
A separate process is created on the DSP for each process on high-level operating system
(HLOS), which is the OS running on the CPU.
Each process or thread on the HLOS has a corresponding process or thread on the DSP.
This process is created when the device is opened on the HLOS, and it is destroyed when
the device is closed on the HLOS.
The shell process called fastrpc_shell_0 is loaded on the DSP when a user process is
spawned. The object of this shell must be compiled together with the DSP build.
When an RPC message is invoked and no corresponding thread exists on the DSP, the
required thread is created on the DSP.
The threads are destroyed when the corresponding HLOS thread exits.
More details are provided with debugging examples in Chapter 4.
Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 14
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
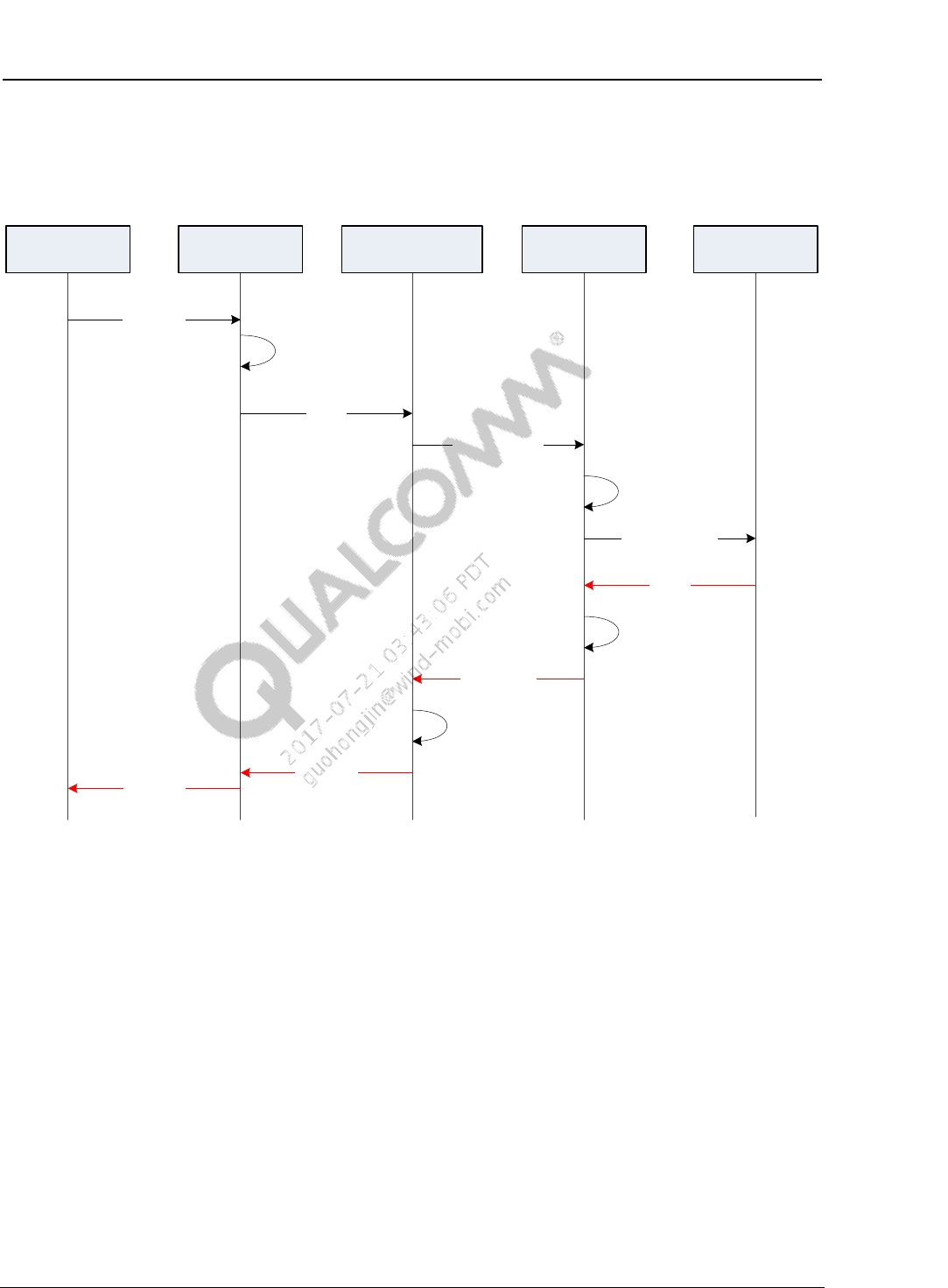
2.6 Call flows
Marking a parameter as in incurs a different call flow from rout.
Invocation
IOCTL
Return SMD
Invoke skel and
implementation
Invoke
Application and
Stub
HLOS
FastRPC User
HLOS FastRPC
Kernel
DSP FastRPC
Library
Skel and
Implementation
SMD message
Invoke queue
FLUSH cache
Response
Response
Return
Invalidate cache
Figure 2-4 Call flow: a parameter is designated as in
NOTE: In the call flow diagrams, IOCTL is the same as the IOCTL in all Linux kernel drivers.
Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 15
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
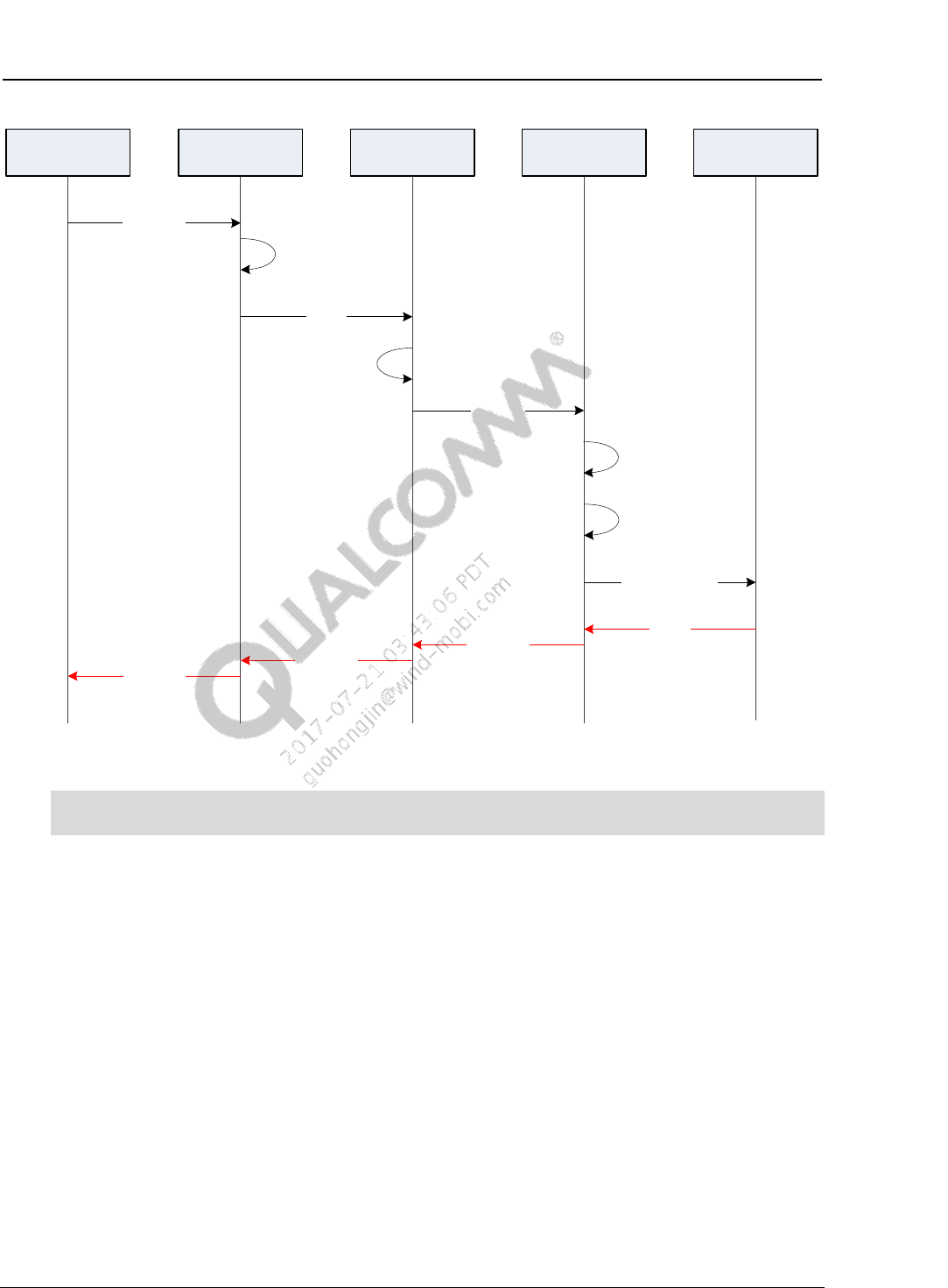
Invocation
IOCTL
Return
Invoke skel and
method
Invoke
Application and
Skel HLOS User Kernel DSP Library Implementation
FLUSH cache
RPC call
Invoke queue
Invalidate cache
Response
Response
Response
Figure 2-5 Call flow: a parameter is designated as rout
NOTE: A parameter designated as inrout will invoke cache coherency operations applied to both in and
rout. Thus, for inrout, add extra cache operations in both the in and rout call flows.

Qualcomm® FastRPC User Guide FastRPC overview
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 16
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2.7 IO coherency
NOTE: This section was added to this document revision.
For each FastRPC invocation (whether the call type is in, rout, or inrout), both the CPU and
aDSP must flush and invalidate the cache to maintain cache coherency in the system. Results
might be additional latency in the FastRPC call and additional overhead for the entire system
performance.
IO coherency eliminates the cache flush and cache invalidations. In Figure 2-5, for example, the
flush operation is implemented as fast forwarding (snooping) from the DSP cache to the CPU
cache. This implementation replaces the requirement for the cache to be flushed and then
reloaded from the DDR, thus avoiding the otherwise necessary memory read/write operations.
Similar steps are executed for bus invalidation.
IO coherency has the following advantages:
It reduces the time spent on cache cleaning or invalidation.
It is a hardware feature, allowing the aDSP to snoop into the CPU cache.
Section 4.2.3.1 has a table that lists IO coherency enabled for the MSM8998 chipset. This table
shows a significant improvement in FastRPC latency compared to other targets where IO
coherency is not enabled.
2.8 Code organization
NOTE: This section was added to this document revision.
HLOS
Kernel driver – kernel/drivers/char/adsprpc.c
Built as part of the LA kernel image
User space – vendor/qcom/proprietary/adsprpc
Shared object library: libadsprpc.so
Daemon process: adsprpcd
aDSP
adsp_proc/platform/*
ADSPRPC framework library that is linked with the aDSP image
The library acts as the transport that accepts remove invocations originating from applications
processor.

80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 17
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
3 FastRPC operations
The calculator example illustrates how to use FastRPC. Only those areas directly related to
FastRPC are highlighted. For more information about the calculator example, refer to the
Hexagon SDK document:
<SDK root>\docs\calculator_android.html
3.1 Use rpcmem
In the calculator example, calculator_test.c is compiled on the CPU, and
calculator_imp.c is compiled on the aDSP. They are the stub-skeleton pair necessary to form
the FastRPC components in the CPU and aDSP.
Following is the recommended usage of rpcmem.
1. In calculator_test.c::45:
rpcmem_init();
For convenience, when trying FastRPC examples, we recommend using rpcmem
functions instead of the ION functions that are provided in the Android source code.
The HLOS code must take care of rpcmem operations, not the DSP code.
Initialize rpcmem before doing anything.
2. In calculator_test.c::49:
printf(“- allocate %d bytes from ION heap\n”, len);
if (0 == (test = (int*)rpcmem_alloc(0, RPCMEM_HEAP_DEFAULT, len))) {
printf(“Error: alloc failed\n”);
nErr = 1;
goto bail;
}
3. In test_calculator.c::95:
if (test) {
rpcmem_free(test);
}
rpcmem_deinit();
4. In android.min:13 and android.min:22, the following code links the RPC library:
calculator_test_DLLS += libcalculator libadsprpc
Qualcomm® FastRPC User Guide FastRPC operations
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 18
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
3.2 Call FastRPC functions
If the function is defined in calculator_imp.c., calling a FastRPC function does not require
anything special.
For example, in calculator_imp.c::10:
int calculator_sum(const int* vec, int vecLen, int64* res)
In calculator_test.c::69:
if (0 != calculator_sum(test, num, &result)) {
printf(“Error: compute on aDSP failed\n”);
nErr = 1;
goto bail;
}
3.3 Push user shared objects
The calculator_walkthrough.py script provides a general understanding of what is required to
compile and run the calculator examples. The following locations show the built executables and
objects on the CPU and aDSP.
1. In calculator_walkthrough.py::58-61:
Push the Android executable for any standalone applications into /data/. Push the Android
libraries, or the stub shared objects, into /system/lib.
os.system(‘adb push ‘+calculator_exe+’ /data’)
os.system(‘adb shell chmod 777 /data/calculator’)
os.system(‘adb push ‘+libcalculator+’ /system/lib’)
Where in libcalculator_walkthrough.py::29-30:
calculator_exe=HEXAGON_SDK_ROOT+’/examples/common/calculator/android_Deb
ug/ship/calculator’
libcalculator=HEXAGON_SDK_ROOT+’/examples/common/calculator/android_Debu
g/ship/libcalculator.so’
2. In calculator_walkthrough.py::65:
Push the DSP libraries, or the skeleton shared objects, into /system/lib/rfsa/adsp:
os.system(‘adb push ‘+libcalculator_skel+’ /system/lib/rfsa/adsp’)
Where in calculator_walkthrough.py::31:
libcalculator_skel=HEXAGON_SDK_ROOT+’/examples/common/calculator/hexagon
_Debug_dynamic/ship/libcalculator_skel.so’

Qualcomm® FastRPC User Guide FastRPC operations
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 19
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
3.4 Sign shared objects
To enhance the security of the shared objects, and to protect the data security of the entire
software system, digitally sign all shared objects that are built.
In calculator_walkthrough.py::34:
android_Debug = ‘make —C’ + HEXAGON_SDK_ROOT +
‘/examples/common/calculator tree V=android_Debug || exit /b’
This example illustrates how to build the calculator Android objects.
1. Comment out calculator_walkthrough.py::49:
os.system(call_test_sig),
2. In calculator_walkthrough.py::46:
call_test_sig=’python ‘+ HEXAGON_SDK_ROOT+’/scripts/testsig.py’
Given steps 1 and 2, the calculator example will run normally.
However, by changing calculator_walkthrough.py::34 as follows:
android_Debug = ‘make —C’ + HEXAGON_SDK_ROOT +
‘/examples/common/calculator tree V=android_Release || exit /b’
In this example, the calculator example will not run unless calculator_walkthrough.py::46
is uncommented.
These examples show the importance of signing the user-generated shared objects. Chapter 4
provides more details on how to detect problems where a shared object is not signed.
3.5 Mark buffers as uncached
To minimize latency, mark the ION buffers to be allocated as uncached if the following condition
is true:
Other than DSP HVX processing, the HLOS does not access the allocated buffer (the HLOS
neither reads from nor writes to the allocated buffer).
Continuing with the calculator example, use the following function and parameters to allocate the
RPC memory buffer:
rpcmem_alloc(0, RPCMEM_HEAP_DEFAULT, len);
The second parameter, RPCMEM_HEAP_DEFAULT, means that the allocated memory will be cached.
To allocate an uncached buffer instead, use the RPCMEM_HEAP_UNCACHED parameter:
rpcmem_alloc(0, RPCMEM_HEAP_UNCACHED, len);
The reason for this optimization is that all cached buffers are shared across multiple processing
units, so the cache coherency mechanism must be in place. Therefore, if you are certain the
HLOS will not modify this allocated buffer other than during HVX processing, mark the memory
buffer as uncached so that all mechanisms and related latencies will be circumvented.

Qualcomm® FastRPC User Guide FastRPC operations
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 20
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
3.5.1 Mark buffers as non-coherent
NOTE: This section was added to this document revision.
For all chipsets where IO coherency is applied, an alternative to marking the ION buffers as
uncached is to register the buffers as non-coherent. The following example shows how to
implement non-coherency:
flags = ION_FLAG_CACHED | RPCMEM_HEAP_NONCOHERENT;
rpcmem_alloc(0, flags, len);
3.6 Allocate DSP local buffers on the DSP
A common pitfall when designing algorithms over the FastRPC framework is to allocate all
memory over rpcmem functions, and then send them all to the aDSP. Instead, allocate only what
must be shared with rpcmem functions, and allocate the rest of the memory locally.
In many aDSP algorithms, an intermediate buffer is required to store the data temporarily.
Typically, those buffers are local to the aDSP, and the HLOS is not required to access those
intermediate buffers. We strongly recommend allocating those data buffers inside the aDSP
implementation, instead of allocating them via the ION allocator and then passing them to the
aDSP.
For example, scratch_buf of size 1024 is accessed only on the aDSP.
Instead of calling rpcmem_alloc() in the HLOS (stub) program and then passing the buffer as
an argument:
scratch_buf = rpcmem_alloc(0, RPCMEM_HEAP_DEFAULT, 1024);
Call malloc in the aDSP (skel) program, and then use scratch_buf in the aDSP program:
scratch_buf = malloc(1024);
Locally allocating the buffers on the aDSP prevents unnecessary FastRPC overhead.
3.7 Other examples
In addition to the calculator_android.html example, the Hexagon SDK has other FastRPC
framework examples:
<SDK root>\docs\FastCV\Image Downscale.html
<SDK root>\docs\Camera Streaming\Examples.html
This document does not discuss these examples. Remember the following recommendations
when using these examples:
..\FastCV\Image Downscale.html – Be familiar with the concept and usage of the DSP
Computer Vision (CV) function.
..\Camera Streaming\Examples.html – Be familiar with the concept and usage of
camera streaming functionalities.

80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 21
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4 FastRPC debugging
The following procedures assume that debugging is performed on Windows 7 setups. While most
steps in this section apply to Linux setup as well, some steps do not apply to Linux.
CAUTION: Some Qualcomm utility applications do not yet work reliably on Windows 10 setups. This
document will be updated when support for Windows 10 is complete.
4.1 Common debugging steps
The following steps are common in many debugging procedures described in Section 4.2.
4.1.1 Collect logcat logs and kernel logs
To collect adb logcat logs:
adb logcat
To collect adb logcat while printing it to a file:
adb logcat |tee <filename>.txt
To collect Android kernel messages while printing them to a file:
adb shell cat /proc/kmsg/ (|tee kernel_msg.txt)
4.1.2 Collect messages in QXDM Professional™ tool
If you have QXDM Professional (QXDM Pro)2, use the QXDM Pro help document for
information on collecting the messages. For your convenience, following are common keyboard
shortcuts:
Shortcut Description
F3: Message View Displays all collected messages
Alt+I Clear all messages and logs
Ctrl+I Save all messages and logs to a file
Alt+A Save all messages (but not logs) to a text file
Alt+S (When the slide bar is at the bottom of the screen)
Toggle automatic scrolling of messages
2 Obtained from CreatePoint

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 22
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.1.3 Collect messages if QXDM Pro is not available
The Hexagon SDK provides other options for collection messages:
mini-dm
Refer to the documentation in:
<HEXAGON_SDK_ROOT>\docs\Debugging_Message%20Logs.html#mini-dm
NOTE: mini-dm works reliably only on Qualcomm MTPs. It is not guaranteed to work on any
other customer devices.
HLOS kernel
To enable kernel driver error logs:
adb shell dmesg
In kernel/drivers/char/adsprpc_shared.h:
ifndef VERIFY_PRINT_ERROR
#define VERIFY_EPRINTF(format, args) pr_err(format, args)
#endif
HLOS user space
To capture logcat messages:
adb logcat –s adsprpc
4.1.4 Enable crashes on the aDSP
A common problem for many customer devices is being unable to trigger or induce crashes on the
aDSP. You must enable crashes if you want to trigger them.
The reason why crashes are sometimes not enabled is because Qualcomm enables crash-isolation
protection. Enabling crashes is equivalent to disabling crash-isolation.
4.1.4.1 Restart the aDSP subsystem
The first crash isolation is the aDSP subsystem restart (SSR). With this isolation, crashing in the
aDSP does not cause the crash in the entire system, but causes only the aDSP to restart locally.
1. Find out which subsystem is the aDSP by checking the name of each subsystem:
adb shell cat /sys/bus/msm_subsys/devices/subsys<i>/name
Where i is 0, 1, 2, …
The number of i might be different for different customer devices:
/sys/bus/msm_subsys/devices/subsys2 # cat name
adsp
/sys/bus/msm_subsys/devices/subsys3 # cat name
slpi
In this example, subsys2 is the aDSP.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 23
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
2. Disable SSR for the aDSP subsystem using the following command:
adb shell “echo SYSTEM >
/sys/bus/msm_subsys/devices/subsys2/restart_level”
4.1.4.2 Set the debug mode for the aDSP User PD
The aDSP User PD has two modes:
Default mode – A crash in the User PD does not trigger a crash in the aDSP.
Debug mode – A crash in the User PD triggers a crash in the aDSP.
Set the Debug mode for the User PD by calling HAP_set_userpd_mode() in the
algorithm/skeleton implementation on the aDSP. For example, use a function such as an
initialization routine.
1. To disable the aDSP SSR from the CPU (per Section 4.1.4.1), set the Debug mode:
adb shell setprop fastrpc.process
This property treats all User PDs as critical on the remote processor (aDSP).
2. Alternatively, treat only the User PD being debugged as critical by setting the
ADSP_PROCESS_ATTRS environment variable to the program that is running:
adb shell ADSP_PROCESS_ATTRS=1 /data/calculator 0 0 4
4.1.4.3 Induce crashes
Occasionally, you might want to induce a crash to gather logs and other system states at a certain
point. If you do not want to modify the code, the following method allows you to induce a crash
in adb:
>adb root
>adb wait-for-device
>adb shell “echo c > /proc/sysrq-trigger”
NOTE: There are many other ways to induce crashes. For simplicity, this document provides only this
method.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 24
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.1.5 Collect a crash dump
Ensure that the Qualcomm Product Support Tool (QPST) is enabled.
If the QPST is enabled, the device automatically goes into Download mode, loads the crash
dump onto the device, and reboots.
If the QPST is not enabled, the device is stuck in Download mode while seeking the
handshake signal to be sent from QPST. Loading will start as soon as QPST is enabled.
To enable the QPST, go to start menu and search for QPST Configuration.
After the crash dump is loaded, check C:\ProgramData\Qualcomm\QPST\Sahara\ for the
folders containing the loaded crash dumps.
As shown in this example, there might be more than one subfolder at that location. To determine
which dump was loaded, either search by the COM port number from the device manager or
determine the timestamps of the dumps. In this example, Port_COM33 is the recently loaded
crash dump.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 25
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.1.6 Load a DSP crash dump
When a crash occurs in the aDSP, refer to Hexagon Multimedia: Android aDSP Crash Analysis
(80-NF768-29).
4.1.7 Measure latency in FastRPC calls
The major difficulty in measuring FastRPC latency is that the CPU and aDSP have different
clock domains: 00:00:01.234 in the CPU clock does not equal to 00:00:01.234 in the aDSP clock.
We recommend measuring the overall latency of FastRPC as:
<CPU execution time> minus the <DSP execution time>
The following sections use the calculator example in the Hexagon SDK. You can further enhance
the measurement by optimizing the functions to decrease the latency of the measurements
themselves. You can also repeatedly execute the same FastRPC call many times, and print only
the total timing values in the last iteration.
4.1.7.1 Profile the CPU execution time
On the CPU side, following these steps in calculator_test.c:
1. Add the following line to the file inclusion list:
#include <sys/time.h>
2. Add the following utility function:
unsigned long long get_time_msec()
{
struct timeval tv;
gettimeofday(&tv, NULL);
return ((tv.tv_sec * 1000) + (tv.tv_usec / 1000));
}
//Note: It’s easy to convert the above function to measure in
microseconds.
3. Use the utility function after the call to the FastRPC functions, and subtract the timestamps to
get the time elapsed:
uint64 timestamp = get_time_msec();
calculator_sum(test, num, &result)
timestamp = get_time_msec() — timestamp;
printf(“- sum = %lld within %lld milliseconds\n”, result,timestamp);

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 26
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.1.7.2 Profile the DSP execution time
On the aDSP side, use the HAP_perf_get_time_us() function to get the execution time. In
calculator_imp.c, follow these steps:
1. Add the following lines to the file inclusion list:
// profile DSP execution time (without RPC overhead) via HAP_perf api’s.
#include “HAP_perf.h”
2. Inside the calculator_sum() function, add the following lines:
Uint64 timestamp = HAP_perf_get_time_us();
FARF(HIGH, “execution time %lld”,HAP_perf_get_time_us() — timestamp);
Take the first timestamp as the first line inside the function, and take the second timestamp as
the last line before returning.
4.2 Debugging procedures
Following are debugging procedures for the common problems listed in Section 4.1. When new
problems are introduced, Qualcomm will expand or renew these sections as necessary.
NOTE: Complete steps are provided for simpler problems. For more complicated problems, only the
steps for loading the crash dump or generating more information are provided. More steps are
required to find the root cause and resolve the problem.
4.2.1 FastRPC call fails but there are no crashes
When a FastRPC call fails without any crashes, verify that crashes are enabled as described in
Section 4.1.4. If they are not enabled, perform the procedures in Section 4.1.4. to enable crashes,
and then check for a crash.
If a crash still does not occur, collect logcat, kernel, and QXDM Pro logs to see what failed in the
call. Following are typical failures.
4.2.1.1 Failures during FastRPC initialization
Kernel logs
Check whether the kernel logs have the following error, which indicates permission was denied
when trying to open an adsprpc-smd device node:
01-01 07:04:48.150 4289 4289 W FastCVTest : type=1400 audit(0.0:77): avc:
denied { read } for name="adsprpc-smd" dev="tmpfs" ino=16418
scontext=u:r:untrusted_app:s0:c512,c768
tcontext=u:object_r:adsprpcd_device:s0 tclass=chr_file permissive=0
Add the name of the customer application in the sepolicy file to use this device. The existing
content in the sepolicy file is a good example.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 27
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
logcat
Check whether the logcat has following error, which indicates that an operation was not permitted
and apps_dev_init failed:
01-01 00:06:56.645 2276 2315 E /system/vendor/bin/hbtp_daemon:
vendor/qcom/proprietary/adsprpc/src/fastrpc_apps_user.c:802:Error 57:
apps_dev_init failed. domain 2, errno "Operation not permitted"
Typically, this error occurs because the GLINK/SMD channel was not opened for the channel
(aDSP/cDSP/mDSP). Check whether the DSP is up and running without any issues.
4.2.1.2 Signature failures
For signature failures, the QXDM Pro logs contain error messages that are like this example.
MSG [08500/03] QDSP6/Error 00:03:59.021
sigverify.c 00553 209a::error: -1: -1 != (*num_segments =
GetProp_uint32(pHandle, “num_segments”,-1))
MSG [08500/03] QDSP6/Error 00:03:59.022
sigverify.c 00623 209a::error: -1: 0 == Read_Hash_From_Devcfg(so_name, (const
byte**) &p_elf->pHashes, &p_elf->cbHashes, &num_segments)
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00568 209a:OEM ID --------------------- 0x0
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00569 209a:Debug Fuse Enabled --------- Yes
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00570 209a:Testsig Enabled ------------ No
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00571 209a:Testsig file found --------- No
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00576 209a:module: Module is signed --- No
MSG [08500/02] QDSP6/High 00:03:59.022
sigverify.c 00581 209a:module: Static hash found -- No
MSG [08500/03] QDSP6/Error 00:03:59.022
map_object.c 00491 96:signature verify start failed for libcalculator_skel.so
MSG [08500/03] QDSP6/Error 00:03:59.025
rtld.c 00727 3099:dlopen failed, libcalculator_skel.so
Android has different versions, so there are two possible locations for the shared objects. If you
are not sure of your version, use the first command to see if your version is newer. Use the second
command to see if your version is older.
1. adb shell ls /system/vendor/lib/rfsa/adsp
2. adb shell ls /system/lib/rfsa/adsp
For example, when using the second command to check for libadsp_hvx_add_constant.so,
you see the following results:
adb shell ls /system/vendor/lib/rfsa/adsp
libAMF_hexagon_skel.so
libadsp_hvx_add_constant.so
libadsp_hvx_skel.so
libadsp_hvx_stats.so
...
us-syncproximity.so
Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 28
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
These results mean libadsp_hvx_add_constant.so was pushed into
/system/vendor/lib/rfsa/adsp.
Check whether the signatures are generated and whether they are pushed into the right location:
1. Check whether the timestamp is correct. In this example, it is correct.
adb shell ls /system/vendor/lib/rfsa/adsp —al
-rw-r—r—root root 28256 2016-07-16 09:04
libAMF_hexagon_skel.so
-rw-r—r—root root 14736 2016-08-07 13:40
libadsp_hvx_add_constant.so
-rw-r—r—root root 158136 2016-08-07 13:40 libadsp_hvx_skel.so
...
-rw-r—r—root root 78136 2016-07-16 09:04 us-syncproximity.so
2. To check whether the objects are built as debug, run the build command to build your shared
objects. This example shows that you are building the binaries as the debug version:
make tree V=hexagon_debug_dynamic_toolv72_v60
In contrast, the following command builds the binaries as the release version, and you must
sign the shared objects:
make tree V=hexagon_Release_dynamic_toolv72_v60
3. To verify whether the signatures are present in the build, use the following command and
search for the keyword, testsig.
adb shell ls /system/vendor/lib/rfsa/adsp |grep testsig
testsig-0x8fea24ce.so
NOTE: With Hexagon SDK 3.0 installed, the test signature automatic loading script is located
at <sdk root>\scripts\testsig.py.
4. Edit the Python file to modify the location where test signatures are pushed:
cat ..\..\..\scripts\testsig.py |grep “/system”
os.system(‘adb shell mkdir /system/lib/rfsa’)
os.system(‘adb shell mkdir /system/lib/rfsa/adsp’)
os.system(‘adb push ‘+testsig+’ /system/lib/rfsa/adsp/’)
4.2.1.3 User PD crashes
If there are crashes from the User PD, the QXMD Pro log contains messages like this example:
MSG [08500/03] QDSP6/Error 00:02:26.278
fastrpc_port.c 00079 failed to enqueue msg 3840 3840 9310d530 1020100 A800A8000
4096
MSG [08500/03] QDSP6/Error 00:02:26.280
fastrpc_port.c 00079 failed to enqueue msg 3840 3842 3 4020200 A80004000 8192
Because the User PD has already crashed, there is no skeleton function to which the call in the
stub function will map. Therefore, the immediate symptom of a crash in User PD is a failure to
enqueue FastRPC call messages.
The log messages are retrieved by removing the skeleton function implementation in the
calculator examples (calculator_sum function in calculator_imp.c). If a FastRPC function only
has a stub implementation but not a skel, User PD crashes occur.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 29
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
If User PD crash messages are in the log, the crash was not enabled; otherwise, the crash in User
PD brings down the entire system. To ensure that the crash is enabled, follow the steps in
Section 4.1.4. Then you will have more information about the actual point of crash from the crash
dump.
4.2.1.4 Calling functions on a crashed User PD
When calling functions and the User PD crashes, the QXDM Pro log lists the FastRPC error
code 39:
MSG [08500/03] QDSP6/Error 03:55:41.735
fastrpc_thread_queue.c 00771 012b::error: 39: !(nErr =
ftq_enqueue_on_group(procs, msg))
MSG [08500/03] QDSP6/Error 03:55:41.735
fastrpc_port.c 00088 012b:failed to enqueue msg 1029 12441 e69095e0 0 00000000
4096
This message indicates two things:
The FastRPC session was previously established, and it has crashed by the time we call this
function.
This error typically occurs when the applications processor repeatedly calls the same
FastRPC function across many iterations, and User PD crashes occurred before the latest
iteration calling the same function.
The User PD crash did not bring down the entire system.
Enable crashes (per Section 4.1.4) to find the actual point of the crash. Gather the logs and
crash dumps accordingly.
Important FastRPC error codes:
#define AEE_ENOSUCH 39 // no such name/port/socket/service
exists or valid name/port/socket/service exists or valid
#define AEE_EOUTOFHANDLES 45 // out of handles
#define AEE_ECONNRESET 104 // Connection reset by peer
4.2.2 Crashes in FastRPC functions
Following are some common problems when crashes occurred in FastRPC functions. When
calling FastRPC functions, crashes can occur whether a User PD crash is enabled or not.
4.2.2.1 Crashes occur without enabling a User PD crash
When crashes are not enabled, but there are still crashes when calling FastRPC functions, load the
dump to check whether the FastRPC threads were running at the time of the crash. Then
determine whether the crash is immediately caused by FastRPC functions in the rootPD.
To determine if a thread is from rootPD, follow these steps:
1. Load the crash dump.
2. In the Trace32 window, click the QT button.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 30
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
3. Find the ASID number for the thread.
If the ASID number is 0, the thread is from rootPD.
Otherwise, the thread is from User PD.
As shown in this example, the mbserver thread is on rootPD, and the running mbclient
thread is on User PD.
4.2.2.2 Crashes occur after enabling a User PD Crash
To load the crash dump and analyze the call stacks, internal states, and other information in the
crash dumps, follow the steps in Section 4.1.5.
Check and resolve the following questions:
1. Was the customer thread running when the crash happened?
If yes, typically something is wrong inside the user algorithm.
If not, there might be system issues.
2. Is more than one User PD program running at the time of the crash, implying possible
concurrency problems?
3. Are there many threads in the READY state, implying possible deadlocks or thread
starvation?

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 31
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
4.2.3 No functional failures in FastRPC functions, but they are slow
The following sections describe how to measure latency for FastRPC calls (FastRPC overhead)
accurately.
4.2.3.1 Confirm FastRPC function latency
Hexagon SDK 3.1 and later versions have a FastRPC test function called rpcperf. This utility
allows you to compare the latency vs. the following Qualcomm-measured table.
For more information on using the rpcperf tool, refer to Hexagon SDK documentation in:
<Hexagon_DSK_ROOT>\docs\Examples_Performance.html
Follow the steps in Section 4.1.7 to profile the total FastRPC latency, and then compare your
results with this table.
NOTE: The values in the table are for ideal situations with minimum processing. We expect the actual
values expected to be slightly higher.
4.2.3.2 Analyze FastRPC latency
If the latency is higher than expected, analyze the FastRPC latency:
1. Identify the possible reasons for latency (see the list of reasons).
2. Make the changes for each reason.
3. Profile FastRPC latency again to see if performance improves. If not, start over from step 1.
Common reasons for higher FastRPC latency
If rpcperf numbers do not agree with the table in Section 4.2.3.1:
The boot image might not be in the performance kernel.
NOTE: For some Qualcomm builds, the default kernel is the debug kernel with extra code for
debugging.

Qualcomm® FastRPC User Guide FastRPC debugging
80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 32
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
To check for the image flavors, load boot.img and system.img from
android\out\target\product\msm8996\secondary-boot\.
Clock voting might not be correct.
Refer to the rpcperf documentation for information on how to vote for maximum clocks.
If rpcperf numbers agree with the table in Section 4.2.3.1, but the latency of the actual user
program is too high:
The total number of buffers being allocated via rpcmem operations is too high (more than
dozens of MBs).
The total amount of memory passed via the FastRPC call is too high.
The user program unnecessarily uses cached buffers (Section 3.5).
The user program unnecessary uses intermediate buffers (Section 3.6).

80-N7039-2 B Confidential and Proprietary – Qualcomm Technologies, Inc. 33
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
A References
A.1 Related documents
Title Number
Qualcomm Technologies, Inc.
Hexagon Multimedia: Fast RPC and Dynamic Loading User Guide for
ADSP.BF.2.2 and 2.4
80-NF769-32
Hexagon Access Elite CAPIv2 API Interface Specification 80-N8098-1
Hexagon Multimedia: aDSP Firmware Overview for ADSP.BF.2.x 80-NF768-21
Sectools: Elfsigner/SecImage Tool User Guide 80-NM248-4
Enabling Secure Boot in MSM8996 Chipsets 80-NV396-81
QACT v6.x.x User Guide 80-VM407-9
Shared Memory Driver API Reference Guide 80-N1924-1
Hexagon Multimedia: Android aDSP Crash Analysis 80-NF768-29
Hexagon SDK 3.0 or later
Hexagon600_SDK.WIN.3.0 Installer or the installer for a later version
A.2 Acronyms and terms
Acronym or term Definition
aDSP Audio DSP
cDSP Compute DSP
CV Computer Vision
HLOS High-level operating system
mDSP Modem DSP
MPU Memory protection unit
PD Protection domain
QPST Qualcomm Product Support Tool
RPC Remote Procedure Call
sDSP Sensors DSP
SMD Shared Memory Driver
SMMU System Memory Management Unit
SoC System-on-chip
SSR Subsystem restart
TCB Task control block
TLB Translation lookahead buffer
