Deep Stream User Guide
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 29

DU-08633-001_v04
|
December 2017
User Guide
DEEPSTREAM SDK
DeepStream SDK DU-08633-001_v04| ii
DOCUMENT CHANGE HISTORY
DU-08633-001_v04
Version Date Authors Description of Change
01 05/26/2017 RX Add workflow and instructions for two samples
02 06/09/2017 XL Added feature descriptions
03 06/23/2017 BP Added building and running instructions for the
third sample
04 12/21/2017 BP Added Section 4.4 nvSmartDecInfer
DeepStream SDK DU-08633-001_v04| iii
TABLE OF CONTENTS
Chapter 1. Introduction ................................................................................ 1
Chapter 2. Installation ................................................................................. 3
2.1 System Requirements ................................................................................ 3
2.2 Directory Layout ...................................................................................... 3
Chapter 3. Workflow .................................................................................... 5
3.1 Decoding and Inference Workflow ................................................................. 6
3.2 Plug-in Mechanism .................................................................................... 7
3.2.1 IStreamTensor ................................................................................ 7
3.2.2 Module ......................................................................................... 8
Chapter 4. Samples ..................................................................................... 9
4.1 decPerf ............................................................................................... 10
4.1.1 DeviceWorker ............................................................................... 10
4.1.2 Profiler ....................................................................................... 12
4.1.3 Callback ...................................................................................... 12
4.1.4 Running script ............................................................................... 13
4.1.5 Running log .................................................................................. 14
4.2 nvDecInfer ........................................................................................... 15
4.2.1 nvDecInfer_classification .................................................................. 15
4.2.2 Profiler ....................................................................................... 18
4.2.3 Callback ...................................................................................... 18
4.2.4 Running the sample ........................................................................ 18
4.2.5 Running log .................................................................................. 19
4.3 nvDecInfer_detection .............................................................................. 21
4.3.1 Building the sample ........................................................................ 21
4.3.2 Running the sample ........................................................................ 22
4.4 nvSmartDecInfer_detection ....................................................................... 23
4.4.1 Running the sample ........................................................................ 23
―
DeepStream SDK DU-08633-001_v04| iv
LIST OF FIGURES
Figure 3-1: DeepStream Workflow ............................................................... 6
LIST OF CODE
Code 3-1: Tensor Type Definitions ............................................................... 7
Code 3-2: Memory Type Definitions .............................................................. 7
Code 3-3: IStreamTensor Member Functions ................................................... 7
Code 3-4: createStreamTensor Global Function ................................................ 8
Code 4-1: dataProvider Interface ................................................................ 10
Code 4-2: Creating DeviceWorker ............................................................... 10
Code 4-3: Add decoding task ..................................................................... 11
Code 4-4: DeviceWorker (decoding and analysis pipeline) start and stop ................. 11
Code 4-5: Pushing Video Packets to DeviceWorker ........................................... 11
Code 4-6: Setting Decoding Profiler ............................................................. 12
Code 4-7: Callback of Decoding .................................................................. 12
Code 4-8: Setting Decode callback Function in Deviceworker ............................... 13
Code 4-9: Color Space Converter ................................................................ 15
Code 4-10: Adding Inference Task for Caffe models ......................................... 16
Code 4-11: Adding Inference Task for UFF models ........................................... 17
Code 4-12: Defining and Adding User-defined Module into Pipeline ........................ 17
Code 4-13: Defining and Setting Module Profiler .............................................. 18
Code 4-14: Module Callback Function ........................................................... 18

DeepStream SDK DU-08633-001_v04| 1
Chapter 1.
INTRODUCTION
One of the biggest challenges of AI is understanding video content. Applications with
video content are endless: live stream content filtering, face detection and recognition,
traffic surveillance, etc. Use of deep-learning based techniques in conjunction with GPU
architectures have made tackling several of these use cases feasible and realistic. Even
so, use of deep learning for video is computationally expensive. The requirements are
even more stringent for live steaming video use cases since they often involve real time
analysis requiring custom logic that customers can deploy using flexible workflows.
DeepStream provides an easy-to-use and high-performance SDK for video content
analysis, which simplifies development of high-performance video analytics
applications powered by deep learning. DeepStream enables customer to make
optimum use of underlying GPU architectures, including hardware decoding support,
thereby achieving high levels of efficiency, performance, and scale. Furthermore,
DeepStream provides a flexible plug-in mechanism for the user to incorporate their
custom functionality to video analytics applications to meet their unique needs.
DeepStream provides a high-level C++ API for GPU-accelerated video decoding,
inference. DeepStream is built on the top of NVCODEC and NVIDIA® TensorRT™,
which are responsible for video decoding and deep learning inference, respectively.
The following are the key features of DeepStream:
Deploys widely-used neural network models such as GoogleNet, AlexNet, etc. for
real-time image classification and object detection.
Supports neural networks implemented using Caffe and TensorFlow frameworks.

Introduction
DeepStream SDK DU-08633-001_v04| 2
Supports common video formats: H.264, HEVC/H.265, MPEG-2, MPEG-4, VP9, and
VC11.
Takes inference with full precision float type (FP32) or optimized precision2 (FP16
and INT8).
Provides flexible analytics workflow which allows users to implement a plug-in to
define their inference workflow.
1 Supported format is dependent on specific GPU model. The support matrix can be found at
https://developer.nvidia.com/nvidia-video-codec-sdk.
2 Optimized precision inference requires hardware support, the support device can be found in the
TensorRT manual.
DeepStream SDK DU-08633-001_v04| 3
Chapter 2. INSTALLATION
2.1 SYSTEM REQUIREMENTS
DeepStream has the following software dependencies:
Ubuntu 16.04 LTS (with GCC 5.4)
NVIDIA Display Driver R384
NVIDIA VideoSDK 8.0
NVIDIA CUDA® 9.0
cuDNN 7 & TensorRT 3.0
NVIDIA recommends that DeepStream be run on a hardware platform with an NVIDIA
Tesla® P4 or P40 graphics card. While the processor and memory requirements would
be application dependent, the hardware platform used for execution of the samples
shipped as part of the DeepStream SDK was an Intel Broadwell E5-2690 v4@2.60GHz
3.5GHz Turbo, with 128 GB System RAM.
2.2 DIRECTORY LAYOUT
The DeepStream SDK consists of two main parts: the library and the workflow
demonstration samples. The installed DeepStream package includes the directories /lib,
/include, /doc, and /samples.
The dynamic library libdeepstream.so is in the /lib directory.
There are two header files: deepStream.h and module.h.
● deepStream.h includes the definition of decoded output, supported data type,
inference parameters, profiler class, and DeepStream worker, as well as the
declaration of functions.

Installation
DeepStream SDK DU-08633-001_v04| 4
● module.h is the header file for plug-in implementation. This file is not mandatory
for applications without plug-ins.
The /samples folder includes examples of decoding, decoding and inference, and
plug-in implementations. More information can be found in the Samples chapter.

DeepStream SDK DU-08633-001_v04| 5
Chapter 3. WORKFLOW
Live video stream analysis requires real-time decoding and neural network inference.
For the decoding work, multiple threads execute in parallel, and feed various input
streams to the GPU hardware decoder. For the inference part, one main thread handles
all batched inference tasks by calling the TensorRT inference engine. The user can
configure the maximum batch size, up to the number of decoded frames that may be fed
to the rest of the pipeline. The plug-in system allows users to add more complex
workflows into the pipeline.
Workflow
DeepStream SDK DU-08633-001_v04| 6
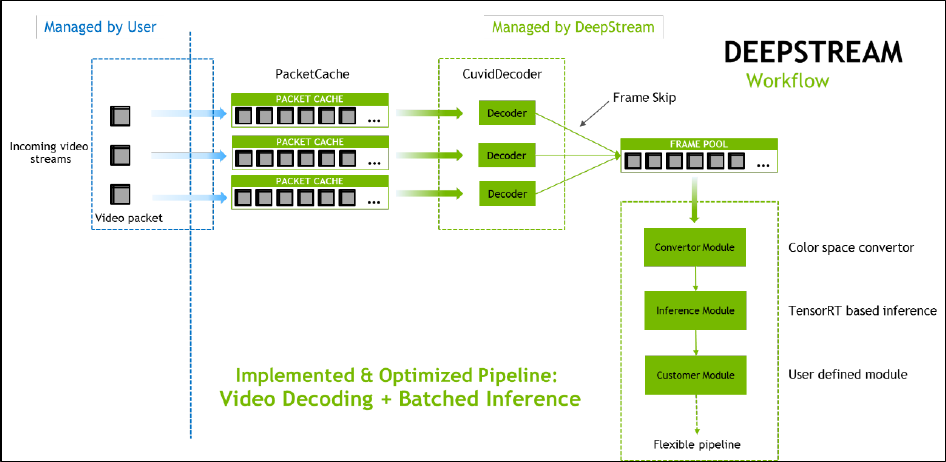
3.1 DECODING AND INFERENCE WORKFLOW
The input to DeepStream consists of multiple video channels from local video files
(H.264, HEVC, etc.) or online streaming videos. The DeepStream workflow is
straightforward, and includes the steps shown below.
Figure 3-1: DeepStream Workflow
1. A DeviceWorker should be created specifying the number of input video channels,
the GPU device ID to be used for executing the pipeline, and using an optional
parameter to specify the maximum batch size of decoded frames passed to inference
module.
2. Videos are parsed and the resulting packets are fed into appropriate channels within
the packet cache maintained by the DeviceWorker.
3. DeviceWorker begins to decode once it gets the input packets and analyzes the
decoded frame.
● A frame pool in DeviceWorker is used for gathering the decoded frames from all
decoders. The analysis pipeline in DeviceWorker fetches a batch of frames for the
next process.
● Typically, the analysis pipeline in DeviceWorker consists of a pair of pre-defined
modules, for “color space conversion” and inference.
● All the decoders share the same CUDA context (primary context) within multiple
host threads. The analysis pipeline is in one host thread.
From a programming viewpoint, the user should build the pipeline by defining and
configuring the DeviceWorker, and then executing the workflow by calling
DeviceWorker->start(). The pipeline will be stopped by DeviceWorker->stop().
Workflow
DeepStream SDK DU-08633-001_v04| 7
3.2 PLUG-IN MECHANISM
In DeepStream, the workflow that follows decoding is called the “analysis pipeline”.
Besides the pre-defined color space converter and TensorRT-based inference modules, the
user can define their own modules. There are two main classes: IStreamTensor, which
defines input and output format of this module, and IModule, which is the
implementation of the module mechanism.
3.2.1 IStreamTensor
All modules use the IStreamTensor format, which allows the data to have a shape
consisting of up to four dimensions. The tensor type can be float, nv12_frame, object
coordination, or a user-defined type.
Code 3-1: Tensor Type Definitions
typedef enum {
FLOAT_TENSOR = 0, //!< float tensor
NV12_FRAME = 1, //!< nv12 frames
OBJ_COORD = 2, //!< coords of object
CUSTOMER_TYPE = 3 //!< user-defined type
} TENSOR_TYPE;
The data can be stored in the GPU or CPU, as specified by MEMORY_TYPE.
Code 3-2: Memory Type Definitions
typedef enum {
GPU_DATA = 0, //!< gpu data
CPU_DATA = 1 //!< cpu data
} MEMORY_TYPE;
Data and information are fetched from the previous module as IStreamTensor. The
functions in IStreamTensor are listed in Code 3-3.
Code 3-3: IStreamTensor Member Functions
virtual void *getGpuData() = 0;
virtual const void *getConstGpuData() = 0;
virtual void *getCpuData() = 0;
virtual const void *getConstCpuData() = 0;
virtual size_t getElemSize() const = 0;
virtual MEMORY_TYPE getMemoryType() const = 0;
virtual TENSOR_TYPE getTensorType() const = 0;
virtual std::vector<int>& getShape() = 0;
Workflow
DeepStream SDK DU-08633-001_v04| 8
virtual std::vector<TRACE_INFO > getTraceInfos() = 0;
virtual int getMaxBatch() const = 0;
virtual void setShape(const std::vector<int>& shape) = 0;
virtual void setShape(const int n, const int c, const int h, const
int w) = 0;
virtual void setTraceInfo(std::vector<TRACE_INFO >& vTraceInfos) = 0;
virtual void destroy() = 0;
For the input of module, you can use functions with the “get” prefix to acquire the
information and data. For the output of the module, the “set” prefix function helps to set
the information. IStreamTensor should be created with createStreamTensor.
Code 3-4: createStreamTensor Global Function
inline IStreamTensor *createStreamTensor(const int nMaxLen, const
size_t nElemSize, const TENSOR_TYPE Ttype, const MEMORY_TYPE Mtype,
const int deviceId) {
return reinterpret_cast<IStreamTensor
*>(createStreamTensorInternal(nMaxLen, nElemSize, Ttype, Mtype,
deviceId));
}
Be sure to pass or update the Trace information, which includes information about the
frames index, video index, etc. This can be used for tracing attributes of detected objects.
3.2.2 Module
Each module should include initialize(), execute(), and destroy(). The module can be
added into DeviceWorker by IDeviceWorker->addCustomerTask (defined in
deepStream.h). The DeepStream system executes “initialize” when adding a task, and
calls the “execute” function of each module serially when executing DeviceWorker-
>start(). The “destroy” function is executed when calling DeviceWorker->destroy().

DeepStream SDK DU-08633-001_v04| 9
Chapter 4. SAMPLES
DeepStream provides four samples (located in the /samples directory):
decPerf
Uses DeepStream to test the performance of video decoding.
nvDecInfer_classification
Uses DeepStream to test the video decoding and inference for classification.
nvDecInfer_detection
Uses DeepStream to test the video decoding and inference for detection.
nvSmartDecInfer_detection
Illustrates the “smart decoding” feature whereby only I-frames in the input video are
retrieved for decoding and inference.
The /samples directory includes the following subdirectories:
/common
Contains header files shared by all samples
/data/model
Contains GoogleNet and Resnet10 pre-trained models for classification and
detection use cases respectively
/data/video
Contains videos to use with the samples
Samples
DeepStream SDK DU-08633-001_v04| 10
4.1 DECPERF
The decPerf sample is used to test the performance of GPU hardware decoding and
shows the following pre-analysis workflow:
feeding packets into the pipeline
adding the decoding task
profiling the decoding performance
4.1.1 DeviceWorker
DataProvider and FileDataProvider Class Definitions
The definition of these two classes is in the header file dataProvider.h.
FileDataProvider is used to load a packet from a video file. The dataProvider
interface is shown in Code 4-1.
Code 4-1: dataProvider Interface
// get data from the data provider. If return false, it means no
more data can be load.
bool getData(uint8_t **ppBuf, int *pnBuf);
// reset the dataProvider to reload from the video file from the
beginning.
void reload();
Creating a DeviceWorker
DeviceWorker is responsible for the entire DeepStream workflow. It includes multi-
channel decoding and maintains the analysis pipeline. DeviceWorker is created by
the createDeviceWorker function with the number of channels (g_nChannels) and
GPU ID (g_devID) as parameters. There is an optional third parameter (maximum
batch size) that specifies the maximum number of frames that DeepStream shall
attempt to batch together for processing in the pipeline. The implementation uses
this option to set the size of the “frame pool” (shown in Figure 3-1), so that the
decoder copies up to as many decoded frames into the pool before they are
processed by the analysis thread. Batching is particularly useful in use cases
involving low channel count where processing one frame from each input video at a
time can be inefficient. If the parameter is left out, it shall default to the number of
channels.
Code 4-2: Creating DeviceWorker
// Create a deviceWorker on a GPU device, the user needs to set the
channel number.
Samples
DeepStream SDK DU-08633-001_v04| 11
IDeviceWorker *pDeviceWorker = createDeviceWorker(g_nChannels,
g_devID, g_maxBatchSize);
Adding Decoding Task in the DeviceWorker
There is only one parameter for DeviceWorker->addDecodeTask,
Code 4-3: Add decoding task
// Add decode task, the parameter is the format of codec.
pDeviceWorker->addDecodeTask(cudaVideoCodec_H264);
Running the DeviceWorker
After adding the decode task, DeviceWorker will create N decoders (N ==
g_nChannels). The decoding works will be submitted in parallel to the GPU decoder
through multiple host threads.
Code 4-4: DeviceWorker (decoding and analysis pipeline) start and stop
// Start and stop the DeviceWorker.
pDeviceWorker->start();
pDeviceWorker->stop();
Pushing Packets into DeviceWorker
DeviceWorker will be in a suspended state until the user pushes video packets into
it. DecPerf provides an example by using userPushPacket() defined in the sample.
Code 4-5: Pushing Video Packets to DeviceWorker
// User push video packets into a packet cache
std::vector<std::thread > vUserThreads;
for (int i = 0; i < g_nChannels; ++i) {
vUserThreads.push_back( std::thread(userPushPacket,
vpDataProviders[i],
pDeviceWorker,
i
) );
}
// wait for user push threads
for (auto& th : vUserThreads) {
th.join();
}
Samples
DeepStream SDK DU-08633-001_v04| 12
4.1.2 Profiler
The decPerf sample illustrates profiling decode operations being performed during
execution using the IDecodeProfiler interface.
The DecodeProfiler class implements the IDecodeProfiler interface and implements the
necessary reportDecodeTime method for profiling decode operations. One instance of
this class is created and registered for each instance of the decoder associated per
channel.
Code 4-6: Setting Decoding Profiler
pDeviceWorker->setDecodeProfiler(g_vpDecProfilers[i], i);
For each decoding channel, the callback function reportDecodeTime() will be called once
each frame is decoded. The information of frame index, video channel, device ID and the
time of decoding this frame will be recorded.
4.1.3 Callback
Besides the plug-in mechanism introduced in Section 3.2, DeepStream provides a
callback mechanism to get data from the decoder for a simple case where a plug-in is
unnecessary. The callback function is defined by the user. The callback function should
be passed to DeviceWorker by the setDecCallback function.
Callback of Decoding
Code 4-7: Callback of Decoding
typedef struct {
int frameIndex_; //!< Frame index
int videoIndex_; //!< Video index
int nWidthPixels_; //!< Frame width
int nHeightPixels_; //!< Frame height
uint8_t *dpFrame_; //!< Frame data (nv12
format)
size_t frameSize_; //!< Frame size in bytes
cudaStream_t stream_; //!< CUDA stream
} DEC_OUTPUT
typedef void (*DECODER_CALLBACK)(void *pUserData, DEC_OUTPUT
*decOutput);
Samples
DeepStream SDK DU-08633-001_v04| 13
Set Decode callback function in DeviceWorker
Code 4-8: Setting Decode callback Function in Deviceworker
/** \brief Set Decode callback function
*
* User can define his/her own callback function to get the NV12
frame.
* \param pUserData The data defined by user.
* \param callback The callback function defined by user.
* \param channel The channel index of video.
*/
virtual void setDecCallback(void *pUserData, DECODER_CALLBACK
callback, const int channel) = 0;
4.1.4 Running script
Build the sample by running make in the /decPerf directory.
The dependencies listed in the System Requirements need to be installed before running
the build.
To run the sample, execute the run.sh script within the /decPerf directory. The various
configuration options in the script are shown below:
----------------------------------------------------------------------
-devID: The device ID of GPU
-channels: The number of video channels
-fileList: The file path list, format: file1,file2,file3,…
-endlessLoop: If value equals 1, the application will reload the video at the end of
video.
../bin/sample_decPerf -devID=${DEV_ID} -channels=${CHANNELS} \
-fileList=${FILE_LIST} -endlessLoop=1;
-----------------------------------------------------------------------
Samples
DeepStream SDK DU-08633-001_v04| 14
4.1.5 Running log
Results from a sample execution is shown in the log below. Highlights in the log are
annotated in red.
-----------------------------------------------------------------------
./run.sh
[DEBUG][11:51:32] Device ID: 0
[DEBUG][11:51:32] Video channels: 2
[DEBUG][11:51:32] Endless Loop: 1
[DEBUG][11:51:32] Device name: Tesla P4
[DEBUG][11:51:32] =========== Video Parameters Begin =============
[DEBUG][11:51:32] Video codec : AVC/H.264
[DEBUG][11:51:32] Frame rate : 30/1 = 30 fps
[DEBUG][11:51:32] Sequence format : Progressive
[DEBUG][11:51:32] Coded frame size: [1280, 720]
[DEBUG][11:51:32] Display area : [0, 0, 1280, 720]
[DEBUG][11:51:32] Chroma format : YUV 420
[DEBUG][11:51:32] =========== Video Parameters End =============
[DEBUG][11:51:32] =========== Video Parameters Begin =============
[DEBUG][11:51:32] Video codec : AVC/H.264
[DEBUG][11:51:32] Frame rate : 30/1 = 30 fps
[DEBUG][11:51:32] Sequence format : Progressive
[DEBUG][11:51:32] Coded frame size: [1280, 720]
[DEBUG][11:51:32] Display area : [0, 0, 1280, 720]
[DEBUG][11:51:32] Chroma format : YUV 420
[DEBUG][11:51:32] =========== Video Parameters End =============
[DEBUG][11:51:33] Video [0]: Decode Performance: 718.89 frames/second || Decoded Frames:
500
[DEBUG][11:51:33] Video [1]: Decode Performance: 711.68 frames/second || Decoded Frames:
500 - decode performance for each channel
[DEBUG][11:51:33] Video [0]: Decode Performance: 762.77 frames/second || Decoded Frames:
1000
[DEBUG][11:51:33] Video [1]: Decode Performance: 748.20 frames/second || Decoded Frames:
1000
[DEBUG][11:51:34] Video [0]: Decode Performance: 770.27 frames/second || Decoded Frames:
1500
[DEBUG][11:51:34] Video [1]: Decode Performance: 738.86 frames/second || Decoded Frames:
1500
[DEBUG][11:51:35] Video [0]: Decode Performance: 758.35 frames/second || Decoded Frames:
2000
[DEBUG][11:51:35] Video [1]: Decode Performance: 766.09 frames/second || Decoded Frames:
2000
-----------------------------------------------------------------------

Samples
DeepStream SDK DU-08633-001_v04| 15
4.2 NVDECINFER
Two versions of nvDecInfer samples are provided that illustrate use of the SDK to build
decode+inference workflows. These are named nvDecInfer_classification and
nvDecInfer_detection, representing classification and detection use cases. The
underlying design and architecture for both of these samples is largely common. We
describe the nvDecInfer_classification sample in detail, with the understanding that the
detection sample implementation is largely analogous.
4.2.1 nvDecInfer_classification
The nvDecInfer_classification samples demonstrate typical usage of video decode and
inference. Decoded frames are converted into BGR planar format, and use TensorRT
with GoogleNet to implement inferencing. There is a user-defined plug-in to print
probabilities of top-5 results into a log file.
4.2.1.1 Initializing the DeepStream library
All samples need to first initialize the DeepStream library before it can be used, by
calling the deepStreamInit() function declared in deepStream.h.
4.2.1.2 Adding a module into the analysis pipeline
Module: color space convertor
The format of decoded frame is NV12 (YUV420), which is converted to RGB planar
for the inference model.
Code 4-9: Color Space Converter
// Add frame paser
IModule* pConvertor = pDeviceWorker-
>addColorSpaceConvertorTask(BGR_PLANAR);
Module: inference
The inference module can accept Caffe and UFF (Universal Framework Format)
models, as supported in TensorRT 3.0. Note that UFF models provide a means by
which to run TensorFlow-trained models through a TensorFlow-to-UFF conversion
process as outlined in the TensorRT 3.0 documentation.
Samples
DeepStream SDK DU-08633-001_v04| 16
● Caffe Model
For executing Caffe models, the inference module needs a network description file
(prototxt), a trained weight file (caffemodel), the input and output names, and a
batch size as parameters. Note that this is the batch size used for inference in
TensorRT. While typically this batch size would be the same as the maxBatchSize
parameter specified while creating the DeviceWorker object as part of the
createDeviceWorker() call, the library allows these to be different with the only
requirement being that the inference batch size cannot be smaller than the number of
input channels.
This part is also an example of connecting modules. The first parameter of
addInferenceTask is a previous module (the color space converter module in this
case) and the output index of its associated tensor to be used as input for inference.
Code 4-10: Adding Inference Task for Caffe models
// Add inference task
std::string inputLayerName = "data";
std::vector<std::string > outputLayerNames(1, "prob");
IModule*pInferModule=pDeviceWorker->addInferenceTask(
std::make_pair(pConvertor, 0),
g_deployFile,
g_modelFile,
g_meanFile,
inputLayerName,
outputLayerNames,
g_nChannels
);
● UFF models
For executing UFF models, the inference module needs the following parameters:
UFF model description file (with .uff extension), the input and output layer names,
the inference batch size, and the dimensionality of the input tensor specified based
on the number of color channels in pixel format, and the height and width of the
input video.
The function to be called for adding a uff-based inference layer is
addInferenceTask_uff. As with the Caffe interface, the first parameter of
addInferenceTask_uff is a previous module along with index of its output tensor to
be used as input of inference.
Samples
DeepStream SDK DU-08633-001_v04| 17
Code 4-11: Adding Inference Task for UFF models
// Add inference task
std::string inputLayerName("input");
std::vector<std::string > outputLayerNames{"spatial_avg"};
IModule *pInferModule = pDeviceWorker->addInferenceTask_uff(
std::make_pair(pConvertor, 0),
g_uffFile,
g_meanFile,
g_nC, g_nH, g_nW, /* dimensions of input tensor */
inputLayerName,
outputLayerNames,
g_nChannels);
● User-defined accuracy checking module
This module is an example of a user-defined module. The probability of top 5 results
will be recorded into a log file. The user defined module inherits from the IModule
class in the module.h file. The previous module should be specified when adding a
module into the pipeline by DeviceWorker->addCustomerTask.
Code 4-12: Defining and Adding User-defined Module into Pipeline
// user-defined module inherits from IModule
class UserDefinedModule : public IModule {
…
};
// adding module into pipeline
PRE_MODULE_LIST preModules;
preModules.push_back(std::make_pair(pInferModule, 0));
UserDefinedModule *pAccurancyModule = new
UserDefinedModule(preModules, g_validationFile, g_synsetFile,
g_nChannels, logger);
assert(nullptr != pAccurancyModule);
pDeviceWorker->addCustomerTask(pAccurancyModule);
Samples
DeepStream SDK DU-08633-001_v04| 18
4.2.2 Profiler
Each module (pre-defined or user-defined) can define their profiler, and is called
during DeepStream execution.
Code 4-13: Defining and Setting Module Profiler
// define module profiler
class ModuleProfiler : public IModuleProfiler {…}
// setup module profiler
pConvertor->setProfiler(g_pConvertorProfiler);
pInferModule->setProfiler(g_pInferProfiler);
pAccuracyModule->setProfiler(g_pAccuracyProfiler);
4.2.3 Callback
Each module can have their own callback function to get the result.
Code 4-14: Module Callback Function
typedef void (*MODULE_CALLBACK)(void *pUserData,
std::vector<IStreamTensor *>& out);
virtual void setCallback(void *pUserData, MODULE_CALLBACK callback)
= 0;
4.2.4 Running the sample
Build the sample by running make in the /nvDecInfer_classification directory.
Dependencies listed in the System Requirements need to be installed before running the
build.
In order to execute the sample, the user needs to put together a sample video. NVIDIA
provides a script (generate_video.sh) within the directory that generates a video
that consists of images from the ImageNet dataset stitched together. Refer to http://image-
net.org/download-faq for terms of use of the video and these images.
Run the sample as follows:
1. It not already installed, install ffmpeg.
sudo apt-get update
sudo apt-get install ffmpeg
Samples
DeepStream SDK DU-08633-001_v04| 19
2. Execute the generate_video.sh script to auto-generate a sample video (named
sample_224x224.h264).
3. Execute the run.sh script.
The salient configuration options that the user can configure in the script are shown
below.
-----------------------------------------------------------------------
-channels: The number of video channels
-fileList: The file path list, format: file1,file2,file3,…
-deployFile: The path to the deploy file
-moduleFile: The path to the model file
-meanFile: The path to the mean file
-synsetFile: The synset file
-validationFile: The label file
-endlessLoop: If value equals 1, the application will reload the video at the end of
video.
../bin/sample_classification -nChannels=${CHANNELS} \
-fileList=${FILE_LIST} \
-deployFile=${DEPLOY} \
-modelFile=${MODEL} \
-meanFile=${MEAN} \
-synsetFile=${SYNSET} \
-validationFile=${VAL} \
-endlessLoop=0
---------------------------------------------------------------------
4.2.5 Running log
Results from the sample execution are shown in the log below. Highlights in the log are
denoted in red.
-----------------------------------------------------------------------
./run.sh
[DEBUG][12:03:58] Video channels: 2
[DEBUG][12:03:58] Endless Loop: 0
[DEBUG][12:03:58] Device name: Tesla P4
[DEBUG][12:03:59] Use FP32 data type.
[DEBUG][12:04:01] =========== Network Parameters Begin ===========
[DEBUG][12:04:01] Network Input:
[DEBUG][12:04:01] >Batch :2
[DEBUG][12:04:01] >Channel :3
[DEBUG][12:04:01] >Height :224
[DEBUG][12:04:01] >Width :224
[DEBUG][12:04:01] Network Output [0]
[DEBUG][12:04:01] >Channel :1000
Samples
DeepStream SDK DU-08633-001_v04| 20
[DEBUG][12:04:01] >Height :1
[DEBUG][12:04:01] >Width :1
[DEBUG][12:04:01] Mean values = [103.907, 116.572,122.602]
[DEBUG][12:04:01] =========== Network Parameters End ===========
[DEBUG][12:04:01] =========== Video Parameters Begin =============
[DEBUG][12:04:01] Video codec : AVC/H.264
[DEBUG][12:04:01] Frame rate : 25/1 = 25 fps
[DEBUG][12:04:01] Sequence format : Progressive
[DEBUG][12:04:01] Coded frame size: [224, 224]
[DEBUG][12:04:01] Display area : [0, 0, 224, 224]
[DEBUG][12:04:01] Chroma format : YUV 420
[DEBUG][12:04:01] =========== Video Parameters End =============
[DEBUG][12:04:01] =========== Video Parameters Begin =============
[DEBUG][12:04:01] Video codec : AVC/H.264
[DEBUG][12:04:01] Frame rate : 25/1 = 25 fps
[DEBUG][12:04:01] Sequence format : Progressive
[DEBUG][12:04:01] Coded frame size: [224, 224]
[DEBUG][12:04:01] Display area : [0, 0, 224, 224]
[DEBUG][12:04:01] Chroma format : YUV 420
[DEBUG][12:04:01] =========== Video Parameters End =============
[DEBUG][12:04:05] Video[1] Decoding Performance: 31.03 frames/second || Total Frames: 100
- Decode performance for each channel
[DEBUG][12:04:05] Video[0] Decoding Performance: 31.04 frames/second || Total Frames: 100
[DEBUG][12:04:05] Analysis Pipeline Performance: 62.02 frames/second || Total Frames: 200
- Combined end to end decode+inference performance across all channels
[DEBUG][12:04:08] Video[0] Decoding Performance: 30.69 frames/second || Total Frames: 200
[DEBUG][12:04:08] Video[1] Decoding Performance: 30.69 frames/second || Total Frames: 200
[DEBUG][12:04:08] Analysis Pipeline Performance: 61.39 frames/second || Total Frames: 400
[DEBUG][12:04:11] Video[1] Decoding Performance: 30.13 frames/second || Total Frames: 300
[DEBUG][12:04:11] Video[0] Decoding Performance: 30.08 frames/second || Total Frames: 300
[DEBUG][12:04:11] Analysis Pipeline Performance: 60.15 frames/second || Total Frames: 600
-----------------------------------------------------------------------
Samples
DeepStream SDK DU-08633-001_v04| 21
4.3 NVDECINFER_DETECTION
The nvDecInfer_detection sample demonstrates use of a ResNet-10 network to
implement detection use case using DeepStream. The network supports detection of
four classes of objects: cars, people, road signs, and two-wheelers. It leverages support
within TensorRT for optimizing trained networks to reduced INT8 precision that can
then be deployed on NVIDIA Tesla® P4 GPUs, leading to efficiency gains. Note that the
network is unpruned and is provided for illustrative purposes only while offering no
guarantees for accuracy or performance. The sample can be executed by running the
run.sh script, which uses the sample_720p.h264 video in the samples/data/video
directory for input. The sample video as well as other input parameters can be
configured as required in the run.sh script.
4.3.1 Building the sample
Build the sample by running make in the /nvDecInfer_detection directory.
Besides the dependencies listed in the System Requirements, the detection samples
require other software to be installed as explained below.
The detection sample can potentially render the bounding boxes of objects being
detected as part of the GUI. To support this, the user is required to install a few
dependent software packages that are necessary, as listed below:
Mesa-dev packages
sudo apt-get install build-essential
sudo apt-get install libgl1-mesa-dev
libglu
sudo apt-get install libglu1-mesa-dev
freeglut
sudo apt-get install freeglut3-dev
openCV
sudo apt-get install libopencv-dev python-opencv
glew
Install from project webpage: http://glew.sourceforge.net/index.html
Samples
DeepStream SDK DU-08633-001_v04| 22
4.3.2 Running the sample
By default, information about detected objects is sent to per-channel log files in KITTI
format under the /logs directory. Only the type of object and bounding box coordinate
fields are populated in the log.
GUI visualization of the results is disabled by default. It can be enabled using the “-gui
1” option. Note that a window manager needs to be running to support this use case.
The salient options in the script that the user can configure are shown below.
-----------------------------------------------------------------------
-channels: The number of video channels
-fileList: The file path list, format: file1,file2,file3,…
-deployFile: The path to the deploy file
-moduleFile: The path to the model file
-meanFile: The path to the mean file
-synsetFile: The synset file
-validationFile: The label file
-gui: enable gui (outputs kitti logs by default)
-endlessLoop: If value equals 1, the application will reload the video at the end of
video.
../bin/sample_detection -nChannels=${CHANNELS} \
-fileList=${FILE_LIST} \
-deployFile=${DEPLOY} \
-modelFile=${MODEL} \
-meanFile=${MEAN} \
-synsetFile=${SYNSET} \
-validationFile=${VAL} \
-endlessLoop=0
---------------------------------------------------------------------
Samples
DeepStream SDK DU-08633-001_v04| 23
4.4 NVSMARTDECINFER_DETECTION
The detection and classification samples described previously decode and infer on every
frame, which may not be necessary for certain inference workloads. The
nvSmartDecInfer_detection sample implements an optimization of this model whereby
only I-frames in the input video are injected into the DeepStream pipeline and
subsequently decoded and inferred. This reduces the per stream workload on the GPU,
which may allow more streams to be processed as part of the pipeline.
The nvSmartDecInfer_detection sample illustrates application of the smart decode
capability to the nvDecInfer_detection sample described previously. The crux of the
functionality is in the FileDataProvider::getData() function, which now parses the input
video for the next I-frame rather than retrieving every frame. The functionality for
parsing of the video file to detect I-frames is performed by the findIFrame() function that
maintains a state machine as it progressively parses bytes from the file to identify the
next I-frame.
4.4.1 Running the sample
Build the sample using the same procedure as outline for the detection sample as
outlined in section 4.3.1.
As with the other samples, the smart decode sample can be executed by running the
run.sh script. Its parameters are identical to the nvDecInfer_detection sample, except
that on-screen display (enabled using the -gui option) is not supported since it is only
the I-frames that flow through the pipeline making continuous rendering of video not
possible. The logs output by the sample show the number of I-frames that are analyzed
by the DeepStream pipeline, indicating a frequency of one I-frame every 250 frames for
the provided video.
$ ./run.sh
[DEBUG][11:16:23] Video channels: 1
[ERROR][11:16:23] Warning: No mean files.
[DEBUG][11:16:23] GUI disabled. KITTI log files will be generated.
[DEBUG][11:16:23] Endless Loop: 0
[DEBUG][11:16:23] Device name: Tesla P4
[DEBUG][11:16:23] Use INT8 data type.
[DEBUG][11:16:25] =========== Network Parameters Begin ===========
[DEBUG][11:16:25] Network Input:
[DEBUG][11:16:25] >Batch :1
[DEBUG][11:16:25] >Channel :3
[DEBUG][11:16:25] >Height :368
[DEBUG][11:16:25] >Width :640
[DEBUG][11:16:25] Network Output [0]
[DEBUG][11:16:25] >Channel :4
[DEBUG][11:16:25] >Height :23
Samples
DeepStream SDK DU-08633-001_v04| 24
[DEBUG][11:16:25] >Width :40
[DEBUG][11:16:25] Network Output [1]
[DEBUG][11:16:25] >Channel :16
[DEBUG][11:16:25] >Height :23
[DEBUG][11:16:25] >Width :40
[DEBUG][11:16:25] =========== Network Parameters End ===========
[DEBUG][11:16:25] Set SPS for smart decoding
[DEBUG][11:16:25] Set PPS for smart decoding
[DEBUG][11:16:25] the index of 1 I Frame in the video is 0
[DEBUG][11:16:25] =========== Video Parameters Begin =============
[DEBUG][11:16:25] Video codec : AVC/H.264
[DEBUG][11:16:25] Frame rate : 30/1 = 30 fps
[DEBUG][11:16:25] Sequence format : Progressive
[DEBUG][11:16:25] Coded frame size: [1280, 720]
[DEBUG][11:16:25] Display area : [0, 0, 1280, 720]
[DEBUG][11:16:25] Chroma format : YUV 420
[DEBUG][11:16:25] =========== Video Parameters End =============
[DEBUG][11:16:25] the index of 2 I Frame in the video is 250
[DEBUG][11:16:25] the index of 3 I Frame in the video is 500
[DEBUG][11:16:25] the index of 4 I Frame in the video is 750
[DEBUG][11:16:25] the index of 5 I Frame in the video is 1000
[DEBUG][11:16:25] the index of 6 I Frame in the video is 1250
[DEBUG][11:16:25] User: Ending...
www.nvidia.com
Notice
THE INFORMATION IN THIS DOCUMENT AND ALL OTHER INFORMATION CONTAINED IN NVIDIA DOCUMENTATION
REFERENCED IN THIS DOCUMENT IS PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED,
STATUTORY, OR OTHERWISE WITH RESPECT TO THE INFORMATION FOR THE PRODUCT, AND EXPRESSLY
DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A
PARTICULAR PURPOSE. Notwithstanding any damages that customer might incur for any reason whatsoever,
NVIDIA’s aggregate and cumulative liability towards customer for the product described in this document shall
be limited in accordance with the NVIDIA terms and conditions of sale for the product.
THE NVIDIA PRODUCT DESCRIBED IN THIS DOCUMENT IS NOT FAULT TOLERANT AND IS NOT DESIGNED,
MANUFACTURED OR INTENDED FOR USE IN CONNECTION WITH THE DESIGN, CONSTRUCTION, MAINTENANCE,
AND/OR OPERATION OF ANY SYSTEM WHERE THE USE OR A FAILURE OF SUCH SYSTEM COULD RESULT IN A
SITUATION THAT THREATENS THE SAFETY OF HUMAN LIFE OR SEVERE PHYSICAL HARM OR PROPERTY DAMAGE
(INCLUDING, FOR EXAMPLE, USE IN CONNECTION WITH ANY NUCLEAR, AVIONICS, LIFE SUPPORT OR OTHER LIFE
CRITICAL APPLICATION). NVIDIA EXPRESSLY DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY OF FITNESS FOR
SUCH HIGH RISK USES. NVIDIA SHALL NOT BE LIABLE TO CUSTOMER OR ANY THIRD PARTY, IN WHOLE OR IN
PART, FOR ANY CLAIMS OR DAMAGES ARISING FROM SUCH HIGH RISK USES.
NVIDIA makes no representation or warranty that the product described in this document will be suitable for
any specified use without further testing or modification. Testing of all parameters of each product is not
necessarily performed by NVIDIA. It is customer’s sole responsibility to ensure the product is suitable and fit
for the application planned by customer and to do the necessary testing for the application in order to avoid a
default of the application or the product. Weaknesses in customer’s product designs may affect the quality
and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements
beyond those contained in this document. NVIDIA does not accept any liability related to any default, damage,
costs or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner
that is contrary to this document, or (ii) customer product designs.
Other than the right for customer to use the information in this document with the product, no other license,
either expressed or implied, is hereby granted by NVIDIA under this document. Reproduction of information in
this document is permissible only if reproduction is approved by NVIDIA in writing, is reproduced without
alteration, and is accompanied by all associated conditions, limitations, and notices.
Trademarks
NVIDIA, the NVIDIA logo, TensorRT, NVIDIA Tesla, and CUDA are trademarks and/or registered trademarks of
NVIDIA Corporation in the Unites States and other countries. Other company and product names may be
trademarks of the respective companies with which they are associated.
Copyright
© 2017 NVIDIA Corporation. All rights reserved.
