Delft3D FLOW User Manual FLOW_User_Manual
User Manual: Pdf Delft3D-FLOW_User_Manual
Open the PDF directly: View PDF ![]() .
.
Page Count: 710 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- List of Figures
- List of Tables
- 1 A guide to this manual
- 2 Introduction to Delft3D-FLOW
- 3 Getting started
- 4 Graphical User Interface
- 4.1 Introduction
- 4.2 MDF-file and attribute files
- 4.3 Filenames and conventions
- 4.4 Working with the FLOW-GUI
- 4.5 Input parameters of MDF-file
- 4.6 Save the MDF and attribute files and exit
- 4.7 Importing, removing and exporting of data
- 5 Tutorial
- 5.1 Introduction – MDF-file and attribute files
- 5.2 Filenames and conventions
- 5.3 FLOW Graphical User Interface
- 5.4 Description
- 5.5 Domain
- 5.6 Time frame
- 5.7 Processes
- 5.8 Initial conditions
- 5.9 Boundaries
- 5.10 Physical parameters
- 5.11 Numerical parameters
- 5.12 Operations
- 5.13 Monitoring
- 5.14 Additional parameters
- 5.15 Output
- 5.16 Save MDF-file
- 5.17 Additional exercises
- 5.18 Execute the scenario
- 5.19 Inspect the results
- 6 Execute a scenario
- 7 Visualise results
- 8 Manage projects and files
- 9 Conceptual description
- 9.1 Introduction
- 9.2 General background
- 9.3 Governing equations
- 9.4 Boundary conditions
- 9.5 Turbulence
- 9.6 Secondary flow; sigma-model only
- 9.7 Wave-current interaction
- 9.8 Heat flux models
- 9.9 Tide generating forces
- 9.10 Hydraulic structures
- 9.11 Flow resistance: bedforms and vegetation
- 10 Numerical aspects of Delft3D-FLOW
- 10.1 Staggered grid
- 10.2 sigma-grid and Z-grid
- 10.3 Definition of model boundaries
- 10.4 Time integration of the 3D shallow water equations
- 10.5 Spatial discretizations of 3D shallow water equations
- 10.6 Solution method for the transport equation
- 10.7 Numerical implementation of the turbulence models
- 10.8 Drying and flooding
- 10.9 Hydraulic structures
- 10.10 Artificial vertical mixing due to sigma co-ordinates
- 10.11 Smoothing parameter boundary conditions
- 10.12 Assumptions and restrictions
- 11 Sediment transport and morphology
- 11.1 General formulations
- 11.2 Cohesive sediment
- 11.2.1 Cohesive sediment settling velocity
- 11.2.2 Cohesive sediment dispersion
- 11.2.3 Cohesive sediment erosion and deposition
- 11.2.4 Interaction of sediment fractions
- 11.2.5 Influence of waves on cohesive sediment transport
- 11.2.6 Inclusion of a fixed layer
- 11.2.7 Inflow boundary conditions cohesive sediment
- 11.3 Non-cohesive sediment
- 11.4 Bedload sediment transport of non-cohesive sediment
- 11.4.1 Basic formulation
- 11.4.2 Suspended sediment correction vector
- 11.4.3 Interaction of sediment fractions
- 11.4.4 Inclusion of a fixed layer
- 11.4.5 Calculation of bedload transport at open boundaries
- 11.4.6 Bedload transport at U and V velocity points
- 11.4.7 Adjustment of bedload transport for bed-slope effects
- 11.5 Transport formulations for non-cohesive sediment
- 11.5.1 Van Rijn (1993)
- 11.5.2 Engelund-Hansen (1967)
- 11.5.3 Meyer-Peter-Muller (1948)
- 11.5.4 General formula
- 11.5.5 Bijker (1971)
- 11.5.6 Van Rijn (1984)
- 11.5.7 Soulsby/Van Rijn
- 11.5.8 Soulsby
- 11.5.9 Ashida–Michiue (1974)
- 11.5.10 Wilcock–Crowe (2003)
- 11.5.11 Gaeuman et al. (2009) laboratory calibration
- 11.5.12 Gaeuman et al. (2009) Trinity River calibration
- 11.6 Morphological updating
- 11.7 Specific implementation aspects
- 11.8 Validation
- 12 Fixed layers in Z-model
- 12.1 Background
- 12.2 Time integration of the 3D shallow water equations
- 12.3 Bed stress term
- 12.4 Horizontal viscosity terms
- 12.5 Spatial discretisations of 3D shallow water equations
- 12.6 Solution method for the transport equation
- 12.7 Baroclinic pressure term
- 12.8 Numerical implementation of the turbulence models
- 12.9 Drying and flooding
- 12.10 Cut-cell and 45 degrees closed boundaries
- 12.11 Hydraulic structures
- 12.12 Assumptions and restrictions
- References
- Glossary of terms
- A Files of Delft3D-FLOW
- A.1 MDF-file
- A.2 Attribute files
- A.2.1 Introduction
- A.2.2 Orthogonal curvilinear grid
- A.2.3 Computational grid enclosure
- A.2.4 Bathymetry
- A.2.5 Thin dams
- A.2.6 Dry points
- A.2.7 Time-series uniform wind
- A.2.8 Space varying wind and pressure
- A.2.9 Initial conditions
- A.2.10 Open boundaries
- A.2.11 Astronomic flow boundary conditions
- A.2.12 Astronomic correction factors
- A.2.13 Harmonic flow boundary conditions
- A.2.14 QH-relation flow boundary conditions
- A.2.15 Time-series flow boundary conditions
- A.2.16 Time-series correction of flow boundary conditions
- A.2.17 Time-series transport boundary conditions
- A.2.18 Time-series for the heat model parameters
- A.2.19 Bottom roughness coefficients
- A.2.20 Horizontal eddy viscosity and diffusivity
- A.2.21 Discharge locations
- A.2.22 Flow rate and concentrations at discharges
- A.2.23 Dredge and dump characteristics
- A.2.24 Dredge and nourishment time-series
- A.2.25 Polygon file
- A.2.26 Observation points
- A.2.27 Moving observation points
- A.2.28 Drogues
- A.2.29 Cross-sections
- A.2.30 Fourier analysis
- A.2.31 (Rigid) 3D vegetation model
- A.2.32 Space varying subsidence uplift definition
- B Special features of Delft3D-FLOW
- B.1 Introduction
- B.2 Decay rate constituents
- B.3 Hydraulic structures
- B.3.1 3D gates
- B.3.2 Quadratic friction
- B.3.3 Porous plate
- B.3.4 Culvert
- B.3.4.1 Definition of culvert in the discharge input file (<.src>)
- B.3.4.2 Properties for culverts defined in INI file (<name.cul>)
- B.3.4.3 Additional key-value pairs for culvert of type `c'
- B.3.4.4 Additional key-value pairs for culvert of type `d' or `e'
- B.3.4.5 Additional key-value pairs for culvert of type `f'
- B.3.4.6 Additional key-value pairs for culvert of type `u'
- B.3.4.7 More culverts
- B.3.5 Linear friction
- B.3.6 Floating structure
- B.3.7 Upwind at Discharges
- B.3.8 User defined discharge through a structure
- B.4 Space varying Coriolis coefficients
- B.5 Temperature modelling
- B.6 Evaporation and precipitation
- B.7 Space varying wind and pressure
- B.8 Horizontal large eddy simulation
- B.9 Sediment transport and morphology
- B.9.1 Sediment input file
- B.9.2 Morphology input file
- B.9.3 Sediment transport input file
- B.9.4 User defined transport routine for sand or bedload fractions
- B.9.5 User defined transport routine for mud fractions
- B.9.6 User defined routine for the settling velocity
- B.9.7 Sediment transport and morphology boundary condition file
- B.9.8 Morphological factor file
- B.9.9 Initial bed composition file
- B.10 Fluid mud (2-layer approach)
- B.11 Z-model
- B.12 Non-hydrostatic solver
- B.13 User defined functions
- B.14 Domain decomposition
- B.15 Surfbeat/roller model
- B.16 Bedform heights
- B.17 Trachytopes
- B.18 Creating D-Water Quality input files
- B.19 Dry run
- B.20 Reuse temporary files
- B.21 Change the update frequency of the nodal factors
- B.22 Bubble screen
- B.23 1D–3D Coupling
- B.24 Output of Courant number messages
- B.25 Initialisation of water depth in dry points
- B.26 Remapping of near-bottom layers for accurate and smooth bottom shear stress in Z-layers
- B.27 Slope Limiter
- B.28 Real-time control
- C Astronomical constituents
- D Some modelling guidelines
- E Computational grid
- F Delft3D-NESTHD
Delft3D
3D/2D modelling suite for integral water solutions
User Manual
Hydro-Morphodynamics
DRAFT
DRAFT
DRAFT
Delft3D-FLOW
Simulation of multi-dimensional hydrodynamic flows
and transport phenomena, including sediments
User Manual
Hydro-Morphodynamics
Version: 3.15
SVN Revision: 54749
April 18, 2018
DRAFT
Delft3D-FLOW, User Manual
Published and printed by:
Deltares
Boussinesqweg 1
2629 HV Delft
P.O. 177
2600 MH Delft
The Netherlands
telephone: +31 88 335 82 73
fax: +31 88 335 85 82
e-mail: info@deltares.nl
www: https://www.deltares.nl
For sales contact:
telephone: +31 88 335 81 88
fax: +31 88 335 81 11
e-mail: software@deltares.nl
www: https://www.deltares.nl/software
For support contact:
telephone: +31 88 335 81 00
fax: +31 88 335 81 11
e-mail: software.support@deltares.nl
www: https://www.deltares.nl/software
Copyright © 2018 Deltares
All rights reserved. No part of this document may be reproduced in any form by print, photo
print, photo copy, microfilm or any other means, without written permission from the publisher:
Deltares.

DRAFT
Contents
Contents
List of Figures xiii
List of Tables xix
1 A guide to this manual 1
1.1 Introduction .................................. 1
1.2 Manual version and revisions ......................... 2
1.3 Typographical conventions .......................... 2
1.4 Changes with respect to previous versions .................. 3
2 Introduction to Delft3D-FLOW 7
2.1 Areas of application .............................. 7
2.2 Standard features ............................... 7
2.3 Special features ................................ 8
2.4 Coupling to other modules .......................... 8
2.5 Utilities .................................... 9
2.6 Installation and computer configuration .................... 9
3 Getting started 11
3.1 Overview of Delft3D .............................. 11
3.2 Starting Delft3D ................................ 11
3.3 Getting into Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Exploring some menu options ......................... 15
3.5 Exiting the FLOW-GUI . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 Graphical User Interface 19
4.1 Introduction .................................. 19
4.2 MDF-file and attribute files . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3 Filenames and conventions . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4 Working with the FLOW-GUI ......................... 22
4.4.1 Starting the FLOW-GUI . . . . . . . . . . . . . . . . . . . . . . . . 22
4.4.2 Visualisation Area window . . . . . . . . . . . . . . . . . . . . . . 23
4.5 Input parameters of MDF-file ......................... 25
4.5.1 Description .............................. 26
4.5.2 Domain ................................ 26
4.5.2.1 Grid parameters . . . . . . . . . . . . . . . . . . . . . . 26
4.5.2.2 Bathymetry ......................... 32
4.5.2.3 Dry points ......................... 34
4.5.2.4 Thin dams ......................... 36
4.5.3 Time frame .............................. 38
4.5.4 Processes .............................. 41
4.5.5 Initial conditions ........................... 43
4.5.6 Boundaries .............................. 46
4.5.6.1 Flow boundary conditions . . . . . . . . . . . . . . . . . 53
4.5.6.2 Transport boundary conditions . . . . . . . . . . . . . . . 61
4.5.7 Physical parameters ......................... 63
4.5.7.1 Constants ......................... 64
4.5.7.2 Viscosity . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.5.7.3 Heat flux model . . . . . . . . . . . . . . . . . . . . . . 72
4.5.7.4 Sediment . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.5.7.5 Morphology . . . . . . . . . . . . . . . . . . . . . . . . 79
4.5.7.6 Wind . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.5.7.7 Tidal forces ......................... 85
Deltares iii

DRAFT
Delft3D-FLOW, User Manual
4.5.8 Numerical parameters . . . . . . . . . . . . . . . . . . . . . . . . 86
4.5.9 Operations .............................. 90
4.5.9.1 Discharge ......................... 90
4.5.9.2 Dredging and dumping . . . . . . . . . . . . . . . . . . . 95
4.5.10 Monitoring .............................. 95
4.5.10.1 Observations . . . . . . . . . . . . . . . . . . . . . . . . 95
4.5.10.2 Drogues . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.5.10.3 Cross-sections ....................... 98
4.5.11 Additional parameters . . . . . . . . . . . . . . . . . . . . . . . . 99
4.5.12 Output ................................100
4.5.12.1 Storage . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.5.12.2 Print . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.5.12.3 Details . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.6 Save the MDF and attribute files and exit . . . . . . . . . . . . . . . . . . . 108
4.7 Importing, removing and exporting of data . . . . . . . . . . . . . . . . . . 109
5 Tutorial 111
5.1 Introduction – MDF-file and attribute files . . . . . . . . . . . . . . . . . . . 111
5.2 Filenames and conventions . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.3 FLOW Graphical User Interface . . . . . . . . . . . . . . . . . . . . . . . . 114
5.3.1 Introduction ..............................114
5.3.2 Saving the input data . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.4 Description ..................................115
5.5 Domain ....................................115
5.5.1 Grid parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.5.2 Bathymetry ..............................119
5.5.3 Dry points ..............................119
5.5.4 Thin dams ..............................122
5.6 Time frame ..................................124
5.7 Processes ..................................125
5.8 Initial conditions ................................126
5.9 Boundaries ..................................127
5.10 Physical parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.10.1 Constants ..............................133
5.10.2 Roughness ..............................134
5.10.3 Viscosity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.10.4 Wind . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.11 Numerical parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.12 Operations ..................................138
5.13 Monitoring ..................................140
5.13.1 Observation points . . . . . . . . . . . . . . . . . . . . . . . . . . 140
5.13.2 Drogues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.13.3 Cross-sections . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.14 Additional parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5.15 Output ....................................144
5.16 Save MDF-file ................................147
5.17 Additional exercises ..............................148
5.18 Execute the scenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.19 Inspect the results ..............................149
6 Execute a scenario 155
6.1 Running a scenario ..............................155
6.1.1 Parallel calculations . . . . . . . . . . . . . . . . . . . . . . . . . . 155
6.1.1.1 DomainDecomposition . . . . . . . . . . . . . . . . . . . 155
iv Deltares

DRAFT
Contents
6.1.1.2 MPI-based parallel . . . . . . . . . . . . . . . . . . . . . 155
6.1.1.3 Fluid mud . . . . . . . . . . . . . . . . . . . . . . . . . 156
6.1.1.4 Mormerge . . . . . . . . . . . . . . . . . . . . . . . . . 156
6.1.2 Running a scenario using Delft3D-MENU . . . . . . . . . . . . . . . 156
6.1.3 Running a scenario using a batch script . . . . . . . . . . . . . . . 158
6.2 Run time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.3 Files and file sizes ..............................160
6.3.1 History file ..............................160
6.3.2 Map file ................................161
6.3.3 Print file . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
6.3.4 Communication file . . . . . . . . . . . . . . . . . . . . . . . . . . 162
6.4 Command-line arguments . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
6.5 Frequently asked questions . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7 Visualise results 165
7.1 Introduction ..................................165
7.2 Working with GPP ..............................165
7.2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
7.2.2 Launching GPP . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.3 Working with Delft3D-QUICKPLOT . . . . . . . . . . . . . . . . . . . . . . 169
7.4 GISVIEW interface ..............................169
8 Manage projects and files 171
8.1 Introduction ..................................171
8.1.1 Managing projects . . . . . . . . . . . . . . . . . . . . . . . . . . 172
8.1.2 Managing files . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
9 Conceptual description 173
9.1 Introduction ..................................173
9.2 General background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
9.2.1 Range of applications of Delft3D-FLOW . . . . . . . . . . . . . . . . 173
9.2.2 Physical processes . . . . . . . . . . . . . . . . . . . . . . . . . . 174
9.2.3 Assumptions underlying Delft3D-FLOW . . . . . . . . . . . . . . . . 175
9.3 Governing equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
9.3.1 Hydrodynamic equations . . . . . . . . . . . . . . . . . . . . . . . 182
9.3.2 Transport equation (for sigma-grid) . . . . . . . . . . . . . . . . . . 190
9.3.3 Coupling between intake and outfall . . . . . . . . . . . . . . . . . . 193
9.3.4 Equation of state . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
9.4 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
9.4.1 Flow boundary conditions . . . . . . . . . . . . . . . . . . . . . . . 196
9.4.1.1 Vertical boundary conditions . . . . . . . . . . . . . . . . 196
9.4.1.2 Open boundary conditions . . . . . . . . . . . . . . . . . 200
9.4.1.3 Shear-stresses at closed boundaries . . . . . . . . . . . . 207
9.4.2 Transport boundary conditions . . . . . . . . . . . . . . . . . . . . 207
9.4.2.1 Open boundary conditions for the transport equation . . . . 207
9.4.2.2 Thatcher-Harleman boundary conditions . . . . . . . . . . 208
9.4.2.3 Vertical boundary conditions transport equation . . . . . . 210
9.5 Turbulence ..................................210
9.5.1 Algebraic turbulence model (AEM) . . . . . . . . . . . . . . . . . . 214
9.5.1.1 Algebraic closure model (ALG) . . . . . . . . . . . . . . . 214
9.5.1.2 Prandtl’s Mixing Length model (PML) . . . . . . . . . . . . 215
9.5.2 k-L turbulence model . . . . . . . . . . . . . . . . . . . . . . . . . 216
9.5.3 k-eps turbulence model . . . . . . . . . . . . . . . . . . . . . . . . 218
9.5.4 Low Reynolds effect . . . . . . . . . . . . . . . . . . . . . . . . . 220
Deltares v

DRAFT
Delft3D-FLOW, User Manual
9.6 Secondary flow; sigma-model only . . . . . . . . . . . . . . . . . . . . . . 221
9.7 Wave-current interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
9.7.1 Forcing by radiation stress gradients . . . . . . . . . . . . . . . . . 227
9.7.2 Stokes drift and mass flux . . . . . . . . . . . . . . . . . . . . . . 228
9.7.3 Streaming ..............................229
9.7.4 Wave induced turbulence . . . . . . . . . . . . . . . . . . . . . . . 230
9.7.5 Enhancement of the bed shear-stress by waves . . . . . . . . . . . 231
9.8 Heat flux models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
9.8.1 Heat balance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
9.8.2 Solar radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
9.8.3 Atmospheric radiation (long wave radiation) . . . . . . . . . . . . . . 241
9.8.4 Back radiation (long wave radiation) . . . . . . . . . . . . . . . . . 242
9.8.5 Effective back radiation . . . . . . . . . . . . . . . . . . . . . . . . 242
9.8.6 Evaporative heat flux . . . . . . . . . . . . . . . . . . . . . . . . . 243
9.8.7 Convective heat flux . . . . . . . . . . . . . . . . . . . . . . . . . 245
9.8.8 Overview of heat flux models . . . . . . . . . . . . . . . . . . . . . 246
9.9 Tide generating forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
9.9.1 Tidal potential of Equilibrium tide . . . . . . . . . . . . . . . . . . . 249
9.9.2 Tidal potential of Earth tide . . . . . . . . . . . . . . . . . . . . . . 252
9.10 Hydraulic structures ..............................252
9.10.1 3D gate ................................253
9.10.2 Quadratic friction . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
9.10.3 Linear friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
9.11 Flow resistance: bedforms and vegetation . . . . . . . . . . . . . . . . . . 254
9.11.1 Bedform heights . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
9.11.1.1 Dune height predictor . . . . . . . . . . . . . . . . . . . 254
9.11.1.2 Van Rijn (2007) bedform roughness height predictor . . . . 256
9.11.2 Trachytopes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
9.11.2.1 Trachytope classes . . . . . . . . . . . . . . . . . . . . . 258
9.11.2.2 Averaging and accumulation of trachytopes . . . . . . . . . 265
9.11.3 (Rigid) 3D Vegetation model . . . . . . . . . . . . . . . . . . . . . 267
10 Numerical aspects of Delft3D-FLOW 269
10.1 Staggered grid ................................269
10.2 sigma-grid and Z-grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
10.3 Definition of model boundaries . . . . . . . . . . . . . . . . . . . . . . . . 271
10.4 Time integration of the 3D shallow water equations . . . . . . . . . . . . . . 272
10.4.1 ADI time integration method . . . . . . . . . . . . . . . . . . . . . 274
10.4.2 Accuracy of wave propagation . . . . . . . . . . . . . . . . . . . . 276
10.4.3 Iterative procedure continuity equation . . . . . . . . . . . . . . . . 277
10.4.4 Horizontal viscosity terms . . . . . . . . . . . . . . . . . . . . . . . 277
10.4.5 Overview time step limitations . . . . . . . . . . . . . . . . . . . . 278
10.5 Spatial discretizations of 3D shallow water equations . . . . . . . . . . . . . 278
10.5.1 Horizontal advection terms . . . . . . . . . . . . . . . . . . . . . . 278
10.5.2 Vertical advection term . . . . . . . . . . . . . . . . . . . . . . . . 283
10.5.3 Viscosity terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
10.6 Solution method for the transport equation . . . . . . . . . . . . . . . . . . 283
10.6.1 Cyclic method . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
10.6.2 Van Leer-2 scheme . . . . . . . . . . . . . . . . . . . . . . . . . . 286
10.6.3 Vertical advection . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
10.6.4 Forester filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
10.7 Numerical implementation of the turbulence models . . . . . . . . . . . . . . 289
10.8 Drying and flooding ..............................289
10.8.1 Bottom depth at water level points . . . . . . . . . . . . . . . . . . 290
vi Deltares

DRAFT
Contents
10.8.2 Total water depth at velocity points . . . . . . . . . . . . . . . . . . 292
10.8.3 Drying and flooding criteria . . . . . . . . . . . . . . . . . . . . . . 295
10.9 Hydraulic structures ..............................297
10.9.1 3D Gate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
10.9.2 Quadratic friction . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
10.9.2.1 Barrier . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
10.9.2.2 Bridge . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
10.9.2.3 Current Deflection Wall . . . . . . . . . . . . . . . . . . . 301
10.9.2.4 Weir . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
10.9.2.5 Porous plate . . . . . . . . . . . . . . . . . . . . . . . . 304
10.9.2.6 Culvert . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
10.9.3 Linear friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
10.9.4 Floating structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
10.10 Artificial vertical mixing due to sigma co-ordinates . . . . . . . . . . . . . . . 307
10.11 Smoothing parameter boundary conditions . . . . . . . . . . . . . . . . . . 311
10.12 Assumptions and restrictions . . . . . . . . . . . . . . . . . . . . . . . . . 312
11 Sediment transport and morphology 315
11.1 General formulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
11.1.1 Introduction ..............................315
11.1.2 Suspended transport . . . . . . . . . . . . . . . . . . . . . . . . . 315
11.1.3 Effect of sediment on fluid density . . . . . . . . . . . . . . . . . . 316
11.1.4 Sediment settling velocity . . . . . . . . . . . . . . . . . . . . . . . 317
11.1.5 Dispersive transport . . . . . . . . . . . . . . . . . . . . . . . . . 317
11.1.6 Three-dimensional wave effects . . . . . . . . . . . . . . . . . . . . 318
11.1.7 Initial and boundary conditions . . . . . . . . . . . . . . . . . . . . 318
11.1.7.1 Initial condition . . . . . . . . . . . . . . . . . . . . . . . 319
11.1.7.2 Boundary conditions . . . . . . . . . . . . . . . . . . . . 319
11.2 Cohesive sediment ..............................320
11.2.1 Cohesive sediment settling velocity . . . . . . . . . . . . . . . . . . 320
11.2.2 Cohesive sediment dispersion . . . . . . . . . . . . . . . . . . . . 321
11.2.3 Cohesive sediment erosion and deposition . . . . . . . . . . . . . . 321
11.2.4 Interaction of sediment fractions . . . . . . . . . . . . . . . . . . . 322
11.2.5 Influence of waves on cohesive sediment transport . . . . . . . . . . 322
11.2.6 Inclusion of a fixed layer . . . . . . . . . . . . . . . . . . . . . . . 322
11.2.7 Inflow boundary conditions cohesive sediment . . . . . . . . . . . . 323
11.3 Non-cohesive sediment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
11.3.1 Non-cohesive sediment settling velocity . . . . . . . . . . . . . . . . 323
11.3.2 Non-cohesive sediment dispersion . . . . . . . . . . . . . . . . . . 324
11.3.2.1 Using the algebraic or k-Lturbulence model . . . . . . . . 324
11.3.2.2 Using the k-εturbulence model . . . . . . . . . . . . . . 326
11.3.3 Reference concentration . . . . . . . . . . . . . . . . . . . . . . . 326
11.3.4 Non-cohesive sediment erosion and deposition . . . . . . . . . . . . 328
11.3.5 Inclusion of a fixed layer . . . . . . . . . . . . . . . . . . . . . . . 331
11.3.6 Inflow boundary conditions non-cohesive sediment . . . . . . . . . . 331
11.4 Bedload sediment transport of non-cohesive sediment . . . . . . . . . . . . 331
11.4.1 Basic formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
11.4.2 Suspended sediment correction vector . . . . . . . . . . . . . . . . 332
11.4.3 Interaction of sediment fractions . . . . . . . . . . . . . . . . . . . 333
11.4.4 Inclusion of a fixed layer . . . . . . . . . . . . . . . . . . . . . . . 333
11.4.5 Calculation of bedload transport at open boundaries . . . . . . . . . 334
11.4.6 Bedload transport at U and V velocity points . . . . . . . . . . . . . 334
11.4.7 Adjustment of bedload transport for bed-slope effects . . . . . . . . . 335
11.5 Transport formulations for non-cohesive sediment . . . . . . . . . . . . . . . 338
Deltares vii

DRAFT
Delft3D-FLOW, User Manual
11.5.1 Van Rijn (1993) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
11.5.2 Engelund-Hansen (1967) . . . . . . . . . . . . . . . . . . . . . . . 343
11.5.3 Meyer-Peter-Muller (1948) . . . . . . . . . . . . . . . . . . . . . . 343
11.5.4 General formula . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
11.5.5 Bijker (1971) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
11.5.5.1 Basic formulation . . . . . . . . . . . . . . . . . . . . . . 345
11.5.5.2 Transport in wave propagation direction (Bailard-approach) . 346
11.5.6 Van Rijn (1984) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
11.5.7 Soulsby/Van Rijn . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
11.5.8 Soulsby ................................351
11.5.9 Ashida–Michiue (1974) . . . . . . . . . . . . . . . . . . . . . . . . 354
11.5.10 Wilcock–Crowe (2003) . . . . . . . . . . . . . . . . . . . . . . . . 354
11.5.11 Gaeuman et al. (2009) laboratory calibration . . . . . . . . . . . . . 355
11.5.12 Gaeuman et al. (2009) Trinity River calibration . . . . . . . . . . . . 355
11.6 Morphological updating . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
11.6.1 Bathymetry updating including bedload transport . . . . . . . . . . . 358
11.6.2 Erosion of (temporarily) dry points . . . . . . . . . . . . . . . . . . 359
11.6.3 Dredging and dumping . . . . . . . . . . . . . . . . . . . . . . . . 359
11.6.4 Bed composition models and sediment availability . . . . . . . . . . 360
11.7 Specific implementation aspects . . . . . . . . . . . . . . . . . . . . . . . 361
11.8 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
12 Fixed layers in Z-model 365
12.1 Background ..................................365
12.2 Time integration of the 3D shallow water equations . . . . . . . . . . . . . . 368
12.2.1 ADI time integration method . . . . . . . . . . . . . . . . . . . . . 368
12.2.2 Linearisation of the continuity equation . . . . . . . . . . . . . . . . 370
12.3 Bed stress term ................................370
12.4 Horizontal viscosity terms . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
12.4.1 Overview time step limitations . . . . . . . . . . . . . . . . . . . . 371
12.5 Spatial discretisations of 3D shallow water equations . . . . . . . . . . . . . 371
12.5.1 Horizontal advection terms . . . . . . . . . . . . . . . . . . . . . . 371
12.5.2 Vertical advection term . . . . . . . . . . . . . . . . . . . . . . . . 373
12.5.3 Viscosity terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
12.6 Solution method for the transport equation . . . . . . . . . . . . . . . . . . 373
12.6.1 Horizontal advection . . . . . . . . . . . . . . . . . . . . . . . . . 376
12.6.1.1 Van Leer-2 scheme . . . . . . . . . . . . . . . . . . . . . 376
12.6.1.2 Implicit upwind scheme . . . . . . . . . . . . . . . . . . . 376
12.6.2 Vertical advection . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
12.6.3 Forester filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
12.7 Baroclinic pressure term . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
12.8 Numerical implementation of the turbulence models . . . . . . . . . . . . . . 379
12.9 Drying and flooding ..............................379
12.9.1 Bottom depth at water level points . . . . . . . . . . . . . . . . . . 379
12.9.2 Bottom depth at velocity points . . . . . . . . . . . . . . . . . . . . 380
12.9.3 Upwinding of the water level in defining the total water depth . . . . . 381
12.9.4 Drying and flooding criteria . . . . . . . . . . . . . . . . . . . . . . 381
12.10 Cut-cell and 45 degrees closed boundaries . . . . . . . . . . . . . . . . . . 383
12.10.1 Introduction ..............................383
12.10.2 Cut Cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
12.10.3 45 degrees closed boundary . . . . . . . . . . . . . . . . . . . . . 384
12.11 Hydraulic structures ..............................385
12.11.1 3D Gate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
12.11.2 Quadratic friction . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
viii Deltares

DRAFT
Contents
12.11.3 Linear friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
12.11.4 Floating structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
12.12 Assumptions and restrictions . . . . . . . . . . . . . . . . . . . . . . . . . 386
References 389
Glossary of terms 399
A Files of Delft3D-FLOW 403
A.1 MDF-file . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
A.1.1 Introduction ..............................403
A.1.2 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
A.1.3 Physical parameters . . . . . . . . . . . . . . . . . . . . . . . . . 406
A.1.3.1 Tide Generating Forces . . . . . . . . . . . . . . . . . . 407
A.1.3.2 Thatcher-Harleman Conditions . . . . . . . . . . . . . . . 407
A.1.4 Output options . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
A.1.4.1 Momentum terms output . . . . . . . . . . . . . . . . . . 413
A.2 Attribute files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414
A.2.1 Introduction ..............................414
A.2.2 Orthogonal curvilinear grid . . . . . . . . . . . . . . . . . . . . . . 415
A.2.3 Computational grid enclosure . . . . . . . . . . . . . . . . . . . . . 416
A.2.4 Bathymetry ..............................417
A.2.5 Thin dams ..............................418
A.2.6 Dry points ..............................419
A.2.7 Time-series uniform wind . . . . . . . . . . . . . . . . . . . . . . . 420
A.2.8 Space varying wind and pressure . . . . . . . . . . . . . . . . . . . 421
A.2.8.1 Defined on the computational grid . . . . . . . . . . . . . 422
A.2.8.2 Defined on an equidistant grid . . . . . . . . . . . . . . . 425
A.2.8.3 Defined on a curvilinear grid . . . . . . . . . . . . . . . . 425
A.2.8.4 Defined on a Spiderweb grid . . . . . . . . . . . . . . . . 426
A.2.9 Initial conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . 426
A.2.10 Open boundaries . . . . . . . . . . . . . . . . . . . . . . . . . . . 428
A.2.11 Astronomic flow boundary conditions . . . . . . . . . . . . . . . . . 429
A.2.12 Astronomic correction factors . . . . . . . . . . . . . . . . . . . . . 430
A.2.13 Harmonic flow boundary conditions . . . . . . . . . . . . . . . . . . 432
A.2.14 QH-relation flow boundary conditions . . . . . . . . . . . . . . . . . 433
A.2.15 Time-series flow boundary conditions . . . . . . . . . . . . . . . . . 434
A.2.16 Time-series correction of flow boundary conditions . . . . . . . . . . 438
A.2.17 Time-series transport boundary conditions . . . . . . . . . . . . . . 440
A.2.18 Time-series for the heat model parameters . . . . . . . . . . . . . . 445
A.2.19 Bottom roughness coefficients . . . . . . . . . . . . . . . . . . . . 448
A.2.20 Horizontal eddy viscosity and diffusivity . . . . . . . . . . . . . . . . 449
A.2.21 Discharge locations . . . . . . . . . . . . . . . . . . . . . . . . . . 451
A.2.22 Flow rate and concentrations at discharges . . . . . . . . . . . . . . 452
A.2.23 Dredge and dump characteristics . . . . . . . . . . . . . . . . . . . 454
A.2.24 Dredge and nourishment time-series . . . . . . . . . . . . . . . . . 462
A.2.25 Polygon file ..............................463
A.2.26 Observation points . . . . . . . . . . . . . . . . . . . . . . . . . . 464
A.2.27 Moving observation points . . . . . . . . . . . . . . . . . . . . . . 465
A.2.28 Drogues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467
A.2.29 Cross-sections . . . . . . . . . . . . . . . . . . . . . . . . . . . . 468
A.2.30 Fourier analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 469
A.2.31 (Rigid) 3D vegetation model . . . . . . . . . . . . . . . . . . . . . 470
A.2.32 Space varying subsidence uplift definition . . . . . . . . . . . . . . . 474
Deltares ix

DRAFT
Delft3D-FLOW, User Manual
B Special features of Delft3D-FLOW 477
B.1 Introduction ..................................477
B.2 Decay rate constituents . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479
B.3 Hydraulic structures ..............................479
B.3.1 3D gates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479
B.3.2 Quadratic friction . . . . . . . . . . . . . . . . . . . . . . . . . . . 480
B.3.2.1 Barrier . . . . . . . . . . . . . . . . . . . . . . . . . . . 480
B.3.2.2 Bridge . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
B.3.2.3 Current deflection wall (CDW) . . . . . . . . . . . . . . . 482
B.3.2.4 Weirs (2D model) . . . . . . . . . . . . . . . . . . . . . . 483
B.3.2.5 Local weir . . . . . . . . . . . . . . . . . . . . . . . . . 485
B.3.3 Porous plate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487
B.3.4 Culvert ................................489
B.3.4.1 Definition of culvert in the discharge input file (<∗.src>). . 489
B.3.4.2 Properties for culverts defined in INI file (<name.cul>). . . 490
B.3.4.3 Additional key-value pairs for culvert of type ‘c’ . . . . . . . 491
B.3.4.4 Additional key-value pairs for culvert of type ‘d’ or ‘e’ . . . . 491
B.3.4.5 Additional key-value pairs for culvert of type ‘f’ . . . . . . . 492
B.3.4.6 Additional key-value pairs for culvert of type ‘u’ . . . . . . . 493
B.3.4.7 More culverts . . . . . . . . . . . . . . . . . . . . . . . . 493
B.3.5 Linear friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494
B.3.5.1 Rigid sheet . . . . . . . . . . . . . . . . . . . . . . . . . 494
B.3.6 Floating structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 495
B.3.7 Upwind at Discharges . . . . . . . . . . . . . . . . . . . . . . . . 497
B.3.8 User defined discharge through a structure . . . . . . . . . . . . . . 497
B.4 Space varying Coriolis coefficients . . . . . . . . . . . . . . . . . . . . . . 507
B.5 Temperature modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
B.5.1 Direct specification of net solar radiation . . . . . . . . . . . . . . . 508
B.5.2 Specification of the coefficient of free convection . . . . . . . . . . . 509
B.5.3 Output of computed heat fluxes . . . . . . . . . . . . . . . . . . . . 509
B.6 Evaporation and precipitation . . . . . . . . . . . . . . . . . . . . . . . . . 510
B.7 Space varying wind and pressure . . . . . . . . . . . . . . . . . . . . . . . 511
B.7.1 Space varying wind and pressure on an equidistant grid . . . . . . . 512
B.7.2 Space varying wind and pressure on a separate curvilinear grid . . . . 517
B.7.3 Space varying wind and pressure on a Spiderweb grid . . . . . . . . 520
B.8 Horizontal large eddy simulation . . . . . . . . . . . . . . . . . . . . . . . 525
B.9 Sediment transport and morphology . . . . . . . . . . . . . . . . . . . . . 529
B.9.1 Sediment input file . . . . . . . . . . . . . . . . . . . . . . . . . . 530
B.9.2 Morphology input file . . . . . . . . . . . . . . . . . . . . . . . . . 537
B.9.3 Sediment transport input file . . . . . . . . . . . . . . . . . . . . . 548
B.9.4 User defined transport routine for sand or bedload fractions . . . . . . 552
B.9.5 User defined transport routine for mud fractions . . . . . . . . . . . . 556
B.9.6 User defined routine for the settling velocity . . . . . . . . . . . . . . 560
B.9.7 Sediment transport and morphology boundary condition file . . . . . . 563
B.9.8 Morphological factor file . . . . . . . . . . . . . . . . . . . . . . . 565
B.9.9 Initial bed composition file . . . . . . . . . . . . . . . . . . . . . . 567
B.10 Fluid mud (2-layer approach) . . . . . . . . . . . . . . . . . . . . . . . . . 568
B.10.1 Two layer system . . . . . . . . . . . . . . . . . . . . . . . . . . . 570
B.10.1.1 Suspension layer . . . . . . . . . . . . . . . . . . . . . . 570
B.10.1.2 Fluid mud layer . . . . . . . . . . . . . . . . . . . . . . . 571
B.10.1.3 Mathematical modelling of fluid mud layer . . . . . . . . . 571
B.10.2 Applying fluid mud . . . . . . . . . . . . . . . . . . . . . . . . . . 573
B.10.2.1 DelftIO library . . . . . . . . . . . . . . . . . . . . . . . 574
B.10.2.2 Running a simulation in foreground . . . . . . . . . . . . . 575
x Deltares

DRAFT
Contents
B.10.2.3 Running a simulation in background . . . . . . . . . . . . 575
B.10.2.4 Pitt falls . . . . . . . . . . . . . . . . . . . . . . . . . . 575
B.10.3 Post-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . 575
B.11 Z-model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576
B.11.1 Grid definition and construction . . . . . . . . . . . . . . . . . . . . 576
B.11.2 Defining the keywords in the FLOW-GUI . . . . . . . . . . . . . . . 577
B.11.3 Restrictions and limitations . . . . . . . . . . . . . . . . . . . . . . 577
B.11.3.1 Defining Cut-cells and 45 degrees closed boundaries . . . . 579
B.11.4 45 degrees staircase closed boundary points (Z-model only) . . . . . 580
B.11.5 Cut-cell closed boundary points (Z-model only) . . . . . . . . . . . . 581
B.12 Non-hydrostatic solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582
B.12.1 The use of hydrostatic and non-hydrostatic models . . . . . . . . . . 582
B.12.2 Governing equations . . . . . . . . . . . . . . . . . . . . . . . . . 582
B.12.3 A pressure correction technique for computing the non-hydrostatic
pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583
B.12.4 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . 586
B.12.5 Conjugate gradient method (CG) . . . . . . . . . . . . . . . . . . . 587
B.12.6 Practical aspects of using the non-hydrostatic flow module . . . . . . 588
B.12.6.1 Switches in MDF-file . . . . . . . . . . . . . . . . . . . . 588
B.12.6.2 Grid spacing . . . . . . . . . . . . . . . . . . . . . . . . 590
B.12.6.3 Vertical mixing . . . . . . . . . . . . . . . . . . . . . . . 590
B.12.6.4 Convergence criterion CG solver . . . . . . . . . . . . . . 590
B.12.6.5 Defining the input (keywords) for the non-hydrostatic pres-
sure approach . . . . . . . . . . . . . . . . . . . . . . . 591
B.13 User defined functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592
B.13.1 Boundary conditions for turbulence models . . . . . . . . . . . . . . 592
B.13.2 Diagnostic mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 594
B.13.3 Particle wind factor . . . . . . . . . . . . . . . . . . . . . . . . . . 594
B.14 Domain decomposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595
B.14.1 Introduction ..............................595
B.14.2 Motivations for domain decomposition . . . . . . . . . . . . . . . . 595
B.14.3 Local refinement horizontal and vertical . . . . . . . . . . . . . . . . 599
B.14.4 Pre-processing, processing and post-processing . . . . . . . . . . . 600
B.14.5 Restrictions ..............................602
B.14.6 How to set-up a domain decomposition model . . . . . . . . . . . . 603
B.15 Surfbeat/roller model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604
B.15.1 Domain ................................604
B.15.2 Formulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605
B.15.3 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . 607
B.15.4 Coupling with other modules . . . . . . . . . . . . . . . . . . . . . 608
B.15.5 Modes of operation . . . . . . . . . . . . . . . . . . . . . . . . . . 608
B.15.6 Input description . . . . . . . . . . . . . . . . . . . . . . . . . . . 608
B.16 Bedform heights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613
B.17 Trachytopes ..................................616
B.17.1 Trachytope definition file . . . . . . . . . . . . . . . . . . . . . . . 617
B.17.2 Area files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618
B.18 Creating D-Water Quality input files . . . . . . . . . . . . . . . . . . . . . . 619
B.19 Dry run ....................................620
B.20 Reuse temporary files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 621
B.21 Change the update frequency of the nodal factors . . . . . . . . . . . . . . . 621
B.22 Bubble screen ................................621
B.22.1 Entrained water as function of the air injection . . . . . . . . . . . . 622
B.22.1.1 Single nozzle bubble plume . . . . . . . . . . . . . . . . 623
B.22.1.2 Bubble screen or line bubble plume . . . . . . . . . . . . . 623
Deltares xi

DRAFT
Delft3D-FLOW, User Manual
B.22.1.3 Bubble plume in stagnant stratified water . . . . . . . . . . 624
B.22.2 Theory ................................625
B.22.3 Numerical implementation . . . . . . . . . . . . . . . . . . . . . . 628
B.22.4 Input description . . . . . . . . . . . . . . . . . . . . . . . . . . . 630
B.22.4.1 Generating a file with bubble screen locations . . . . . . . 630
B.22.4.2 Extending the discharge locations file with bubble screens . 631
B.22.4.3 Extending the time-series file (<∗.dis>) with amount of en-
trained water . . . . . . . . . . . . . . . . . . . . . . . . 631
B.22.5 Coupling with other models . . . . . . . . . . . . . . . . . . . . . 632
B.22.6 Model results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632
B.23 1D–3D Coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633
B.23.1 Motivation for online Delft3D-SOBEK coupling . . . . . . . . . . . . 633
B.23.2 Implementation of Delft3D-SOBEK coupling . . . . . . . . . . . . . 634
B.23.3 Model setup and input (including best practise) . . . . . . . . . . . . 635
B.23.3.1 Preparation of the Delft3D-FLOW and SOBEK models . . . 636
B.23.3.2 Setup of the communication file used by coupling . . . . . . 637
B.23.3.3 Running of the coupled model system . . . . . . . . . . . 639
B.23.3.4 Best practice with regard to running coupled Delft3D-SOBEK
simulations . . . . . . . . . . . . . . . . . . . . . . . . . 639
B.23.4 Versions and limitations . . . . . . . . . . . . . . . . . . . . . . . . 640
B.24 Output of Courant number messages . . . . . . . . . . . . . . . . . . . . . 640
B.25 Initialisation of water depth in dry points . . . . . . . . . . . . . . . . . . . . 640
B.26 Remapping of near-bottom layers for accurate and smooth bottom shear stress
in Z-layers ..................................641
B.27 Slope Limiter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642
B.28 Real-time control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642
B.28.1 Run procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643
B.28.2 Time-series forcing of controlled structures . . . . . . . . . . . . . . 643
B.28.3 Data Locations layer . . . . . . . . . . . . . . . . . . . . . . . . . 646
B.28.4 Decision layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646
B.28.5 Measures layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 659
C Astronomical constituents 663
C.1 Introduction ..................................663
C.2 List of astronomical constituents . . . . . . . . . . . . . . . . . . . . . . . 663
D Some modelling guidelines 669
D.1 Introduction ..................................669
D.2 Depth-averaged or 3D model . . . . . . . . . . . . . . . . . . . . . . . . . 669
D.3 Selection of the vertical turbulence model . . . . . . . . . . . . . . . . . . . 670
D.3.1 Well-mixed ..............................671
D.3.2 Partly mixed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671
D.3.3 Strongly stratified . . . . . . . . . . . . . . . . . . . . . . . . . . . 671
E Computational grid 673
F Delft3D-NESTHD 679
F.1 Introduction ..................................679
F.2 How to use NESTHD1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679
F.3 How to use NESTHD2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 681
F.4 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683
xii Deltares

DRAFT
List of Figures
List of Figures
2.1 System architecture of Delft3D ........................ 8
3.1 Title window of Delft3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Main window Delft3D-MENU ......................... 12
3.3 Selection window for Hydrodynamics . . . . . . . . . . . . . . . . . . . . . 13
3.4 Select working directory window . . . . . . . . . . . . . . . . . . . . . . 13
3.5 Select working directory window to set the working directory to <flow\friesian_tidal_inlet>13
3.6 The current working directory is not shown in the title bar due to its length . . . 14
3.7 Main window of the FLOW Graphical User Interface . . . . . . . . . . . . . . 14
3.8 Menu bar of the FLOW-GUI . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.9 File drop down menu ............................. 15
3.10 Data Group Domain selection and input fields . . . . . . . . . . . . . . . . . 16
3.11 Save changes window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.1 Main window of the FLOW-GUI . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 Visualisation Area Window . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3 Possible selections of View →Attributes . . . . . . . . . . . . . . . . . . . 24
4.4 Display symbols of all grid related quantities . . . . . . . . . . . . . . . . . 25
4.5 Data Group Description ............................ 26
4.6 Staggered grid of Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . . . . 27
4.7 Sub-data group Grid parameters ....................... 29
4.8 Definition sketch grid system to North orientation . . . . . . . . . . . . . . . 30
4.9 Specifying the layers thickness . . . . . . . . . . . . . . . . . . . . . . . . 30
4.10 Sub-data group Domain →Bathymetry . . . . . . . . . . . . . . . . . . . . 32
4.11 Dry point at grid location (m, n)....................... 34
4.12 Sub-data group Dry points . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.13 Equivalence of v-type thin dams (left) and u-type thin dams (right) with the
same grid indices, (M−1 to M+1, N) ..................... 36
4.14 Sub-data group Thin dams . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.15 Data Group Time frame ............................ 38
4.16 Data Group Processes ............................ 40
4.17 Sediment definition window . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.18 Data group Initial conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.19 Sketch of cross-section with 8 grid cells . . . . . . . . . . . . . . . . . . . . 48
4.20 Main window for defining open boundaries . . . . . . . . . . . . . . . . . . 49
4.21 Open and save window for boundary locations and conditions . . . . . . . . . 50
4.22 Straight channel; location of open and closed boundaries . . . . . . . . . . . 51
4.23 Specifying astronomical boundary conditions . . . . . . . . . . . . . . . . . 54
4.24 Contents of a Component set with two tidal constituents having corrections . . 56
4.25 Specifying harmonic boundary conditions . . . . . . . . . . . . . . . . . . . 57
4.26 Specifying QH-relation boundary conditions . . . . . . . . . . . . . . . . . . 59
4.27 Specifying time-series boundary conditions . . . . . . . . . . . . . . . . . . 60
4.28 Transport conditions; Thatcher Harleman time lags . . . . . . . . . . . . . . 61
4.29 Specifying transport boundary conditions . . . . . . . . . . . . . . . . . . . 62
4.30 Specifying the physical constants . . . . . . . . . . . . . . . . . . . . . . . 64
4.31 Examples of the wind drag coefficient . . . . . . . . . . . . . . . . . . . . . 65
4.32 Sub-data group Roughness . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.33 Defining the eddy viscosity and eddy diffusivity . . . . . . . . . . . . . . . . 69
4.34 Window with HLES parameters . . . . . . . . . . . . . . . . . . . . . . . . 70
4.35 Sub-data group Heat flux model . . . . . . . . . . . . . . . . . . . . . . . . 73
4.36 Sub-data group Sediment, overall and cohesive sediment parameters . . . . . 76
4.37 Sub-data group Sediment, cohesive sediment parameters (continued) . . . . 77
Deltares xiii

DRAFT
Delft3D-FLOW, User Manual
4.38 Sub-data group Sediment, cohesive sediment parameters (continued) . . . . 78
4.39 Sub-data group Sediment, non-cohesive sediment parameters . . . . . . . . 79
4.40 Sub-data group Morphology ......................... 80
4.41 Wind definition window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.42 Nautical definition of the wind direction . . . . . . . . . . . . . . . . . . . . 85
4.43 Sub-window Tidal forces ........................... 86
4.44 Data Group Numerical parameters ..................... 87
4.45 Data Group Discharges ............................ 91
4.46 Sub-window to define the discharge rate and substance concentrations . . . . 93
4.47 Decomposition of momentum released by a discharge station in (m, n). . . . 93
4.48 Sub-data group Dredging and dumping . . . . . . . . . . . . . . . . . . . . 95
4.49 Sub-window for Monitoring locations . . . . . . . . . . . . . . . . . . . . . 95
4.50 Sub-window for Observation points . . . . . . . . . . . . . . . . . . . . . . 96
4.51 Sub-data group Monitoring →Drogues . . . . . . . . . . . . . . . . . . . . 97
4.52 Sub-data group Monitoring →Cross-Sections . . . . . . . . . . . . . . . . 98
4.53 Data Group Additional parameters . . . . . . . . . . . . . . . . . . . . . . 100
4.54 Sub-data group Output storage . . . . . . . . . . . . . . . . . . . . . . . . 101
4.55 Sub-data group Output →Storage →Edit WAQ input . . . . . . . . . . . . 104
4.56 Sub-data group Output →Print . . . . . . . . . . . . . . . . . . . . . . . 106
4.57 Output Specifications window . . . . . . . . . . . . . . . . . . . . . . . . 107
4.58 File drop down menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.59 Save changes window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.1 Starting window of the FLOW Graphical User Interface . . . . . . . . . . . . 114
5.2 Data Group Description sub-window . . . . . . . . . . . . . . . . . . . . . 115
5.3 Sub-data group Grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5.4 Sub-data group Grid; filenames, type of co-ordinate system and grid dimensions116
5.5 Visualisation Area window . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.6 Staggered grid used in Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . 118
5.7 Sub-data group Bathymetry . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.8 Location of a dry point at grid indices (m, n). . . . . . . . . . . . . . . . . 120
5.9 Sub-data group Dry Points . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.10 Sets of thin dams blocking v-velocities (left) and blocking u-velocities (right) . . 122
5.11 Sub-data group Thin dams . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.12 Equivalence of v-type thin dams (left) and u-type thin dams (right) with the
same grid indices, (m−1to m+ 1, n). . . . . . . . . . . . . . . . . . . 123
5.13 Window Time frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.14 Processes window ..............................125
5.15 Processes: Pollutants and tracers sub-window . . . . . . . . . . . . . . . 126
5.16 Initial conditions sub-window . . . . . . . . . . . . . . . . . . . . . . . . 127
5.17 Boundaries sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5.18 Open/Save Boundaries sub-window . . . . . . . . . . . . . . . . . . . . . 129
5.19 Harmonic boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . 131
5.20 Boundaries: Transport Conditions window . . . . . . . . . . . . . . . . . 131
5.21 Physical parameters sub-data groups . . . . . . . . . . . . . . . . . . . . 133
5.22 Physical parameters - Constants sub-window . . . . . . . . . . . . . . . . 134
5.23 Roughness sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.24 Viscosity sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.25 Wind sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.26 Filled time table in the Wind sub-window . . . . . . . . . . . . . . . . . . . 136
5.27 Numerical parameters sub-window . . . . . . . . . . . . . . . . . . . . . 137
5.28 Data Group Operations;Discharges sub-window . . . . . . . . . . . . . . 138
5.29 Representation of a discharge in the Visualisation Area window . . . . . . . 139
5.30 Discharge Data sub-window . . . . . . . . . . . . . . . . . . . . . . . . . 139
xiv Deltares

DRAFT
List of Figures
5.31 Observation points sub-window . . . . . . . . . . . . . . . . . . . . . . . 141
5.32 Representation of an observation point in the Visualisation area window . . . 141
5.33 Drogues sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.34 Representation of a drogue in the Visualisation Area window . . . . . . . . 143
5.35 Cross-sections sub-window . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.36 Representation of a v-cross-section in the Visualisation Area window . . . . 144
5.37 Output sub-window ..............................145
5.38 Output details sub-window . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.39 Select scenario to be executed . . . . . . . . . . . . . . . . . . . . . . . . 148
5.40 Part of the <tri-diag>report file . . . . . . . . . . . . . . . . . . . . . . . 149
5.41 Computed time-series of the water level, current and salinity in observation
point Obs4 ..................................151
5.42 Computational grid with drogue Dr4, and contours of water level on 6 August
1990 01:00 hr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
5.43 Vector velocities and contours of salinity on 6 August 1990 01:00 hr . . . . . . 153
6.1 MENU-window for Hydrodynamics . . . . . . . . . . . . . . . . . . . . . . 156
6.2 Select the MDF-file to be verified . . . . . . . . . . . . . . . . . . . . . . . 157
6.3 Part of the report to the output window . . . . . . . . . . . . . . . . . . . . 157
6.4 Select a report file for inspection . . . . . . . . . . . . . . . . . . . . . . . 158
7.1 Hierarchy of GPP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
7.2 Main window of GPP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.3 Parameters and locations in the <trih-tut_fti.dat>file . . . . . . . . . . . . . 168
7.4 Some options to change the plot attributes . . . . . . . . . . . . . . . . . . 169
7.5 Delft3D-QUICKPLOT interface to Delft3D result . . . . . . . . . . . . . . . . 170
9.1 Definition of water level (ζ), depth (h) and total depth (H). . . . . . . . . . . 183
9.2 Example of σ- and Z-grid . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
9.3 Examples wind drag coefficient depending on wind speed. . . . . . . . . . . 200
9.4 Hydrodynamic model of coastal area with three open boundaries with offshore
boundary (A–B at deep water) and two cross shore boundaries (A–A’, and B–B’)205
9.5 Illustration of memory effect for open boundary . . . . . . . . . . . . . . . . 209
9.6 Spiral motion in river bend (from Van Rijn (1990)) . . . . . . . . . . . . . . . 221
9.7 Vertical profile secondary flow (V) in river bend and direction bed stress . . . 222
9.8 Vertical distribution of turbulent kinetic energy production . . . . . . . . . . . 230
9.9 Schematic view of non-linear interaction of wave and current bed shear-stresses
(from Soulsby et al. (1993b, Figure 16, p. 89)) . . . . . . . . . . . . . . . . . 232
9.10 Inter-comparison of eight models for prediction of mean and maximum bed
shear-stress due to waves and currents (from Soulsby et al. (1993b, Figure 17,
p. 90)) ....................................234
9.11 Overview of the heat exchange mechanisms at the surface . . . . . . . . . . 236
9.12 Co-ordinate system position Sun
δ: declination; θ: latitude; ωt: angular speed . . . . . . . . . . . . . . . . . 240
9.13 Effect of tide generating force on the computed water elevation at Venice . . . 250
9.14 Earth ocean tidal interaction (after Schwiderski (1980)) . . . . . . . . . . . . 251
10.1 Example of a grid in Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . . 270
10.2 Mapping of physical space to computational space . . . . . . . . . . . . . . 270
10.3 Grid staggering, 3D view (left) and top view (right) . . . . . . . . . . . . . . 270
10.4 Example of Delft3D-FLOW model area . . . . . . . . . . . . . . . . . . . . 272
10.5 Example of Delft3D-FLOW grid . . . . . . . . . . . . . . . . . . . . . . . . 273
10.6 Numerical region of influence for one time step, “Zig-zag channel” . . . . . . . 276
Deltares xv

DRAFT
Delft3D-FLOW, User Manual
10.7 (a) Control Volume for mass for the Flooding scheme,
(b) Control Volume for momentum in horizontal and
(c) vertical direction for the Flooding scheme . . . . . . . . . . . . . . . . . 280
10.8 Layer numbering in σ-model . . . . . . . . . . . . . . . . . . . . . . . . . 283
10.9 Illustration of wiggles in vertical direction . . . . . . . . . . . . . . . . . . . 288
10.10 Definition bottom depth on FLOW grid . . . . . . . . . . . . . . . . . . . . . 291
10.11 Negative control volume with two positive flow-through heights, MEAN-option . 292
10.12 Drying of a tidal flat; averaging approach. The flow-through height is based on
the average water level, see Equation (10.63), the velocity point is set dry. . . 293
10.13 Overtopping of a river bank (weir); averaging approach. The flow-through
height is based on the average water level, see Equation (10.63), the velocity
point is set dry. ................................293
10.14 Drying of a tidal flat; upwind approach. The flow-through height is determined
by flow direction, see Equation (10.64), the velocity point remains wet. . . . . 294
10.15 Overtopping of a river bank; upwind approach. The flow-through height is
based on the maximum water level, see Equation (10.64), the velocity point
remains wet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
10.16 Special limiter for critical flow due to a sudden contraction (Flooding scheme
and increase in bottom larger than DGCUNI). . . . . . . . . . . . . . . . . 295
10.17 Example of a 3D Gate (vertical cross-section) . . . . . . . . . . . . . . . . . 298
10.18 Computational layer partially blocked at bottom of gate . . . . . . . . . . . . 299
10.19 Example of a hydrostatic consistent and inconsistent grid;
(a) Hδσ > σ ∂H
∂x δx,(b) Hδσ < σ ∂H
∂x δx . . . . . . . . . . . . . . . . . . . 308
10.20 Finite Volume for diffusive fluxes and pressure gradients . . . . . . . . . . . 309
10.21 Left and right approximation of a strict horizontal gradient . . . . . . . . . . . 310
10.22 Cold start with damping of eigen oscillations due to bottom friction . . . . . . 312
11.1 Sediment mixing coefficient in non-breaking waves (Source: Van Rijn (1993)) . 325
11.2 Selection of the kmx layer; where ais Van Rijn’s reference height . . . . . . . 327
11.3 Schematic arrangement of flux bottom boundary condition . . . . . . . . . . 328
11.4 Approximation of concentration and concentration gradient at bottom of kmx
layer .....................................329
11.5 Setting of bedload transport components at velocity points . . . . . . . . . . 335
11.6 Morphological control volume and bedload transport components . . . . . . . 358
12.1 Irregular representation of bottom boundary layer in the Z-model . . . . . . . 366
12.2 Vertical computational grid Z-model (left) and σ-model (right) . . . . . . . . . 367
12.3 discretisation along streamlines. Grid points in difference stencil dependent
on flow direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
12.4 Aggregation of Control volumes in the vertical due to variation position free
surface ....................................375
12.5 Horizontal fluxes between neighbouring cells with variation in position free sur-
face ......................................375
12.6 Definition bottom depth on Delft3D-FLOW grid . . . . . . . . . . . . . . . . 380
12.7 The flow-through height is determined by the flow direction. The bottom is
represented as a staircase around the depth in water level points. . . . . . . . 381
12.8 left: Cut Cell (definition) and right: defined by shifting (exaggerated) the corner
point to boundary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
12.9 Flow along staircase boundary. . . . . . . . . . . . . . . . . . . . . . . . . 384
12.10 Reflection of velocities . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
12.11 Example of a 3D Gate (vertical cross-section) . . . . . . . . . . . . . . . . . 385
12.12 Computational layer partially blocked at the bottom of the 3D gate . . . . . . . 385
A.1 Example of computational grid enclosures . . . . . . . . . . . . . . . . . . 417
xvi Deltares

DRAFT
List of Figures
A.2 Example of thin dams in a model area . . . . . . . . . . . . . . . . . . . . 419
A.3 Dry points in model area . . . . . . . . . . . . . . . . . . . . . . . . . . . 420
A.4 Definition sketch of wind direction according to Nautical convention . . . . . . 421
A.5 Definition wind components for space varying wind . . . . . . . . . . . . . . 424
A.6 Cross-sections in model area . . . . . . . . . . . . . . . . . . . . . . . . . 469
A.7 Example of the plant input file (<name.pla>) where the areas are defined with
a polygon file, see section A.2.25 . . . . . . . . . . . . . . . . . . . . . . . 473
A.8 Example of the plant input file (<name.pla>) where the area is defined with
files according the depth-format, see section A.2.4 . . . . . . . . . . . . . . 473
A.9 Example of the plant input file (<name.pla>) where two different vegetation
types are defined. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474
B.1 Example of 3D gates in perspective view (left) and top view (right) . . . . . . 481
B.2 Barriers in model area . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
B.3 Example of CDW in perspective view (left) and top view (right) . . . . . . . . 484
B.4 Top view of 2D weirs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486
B.5 Local weir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487
B.6 Top view of rigid sheets . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495
B.7 Cross-sectional view floating structure
The vertical lines are drawn through the velocity points . . . . . . . . . . . . 497
B.8 Illustration of the data to grid conversion for meteo input on a separate curvi-
linear grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 519
B.9 Wind definition according to Nautical convention . . . . . . . . . . . . . . . 522
B.10 Spiderweb grid definition . . . . . . . . . . . . . . . . . . . . . . . . . . . 522
B.11 Definition of truncation wave numbers due to resolution and numerical damping 528
B.12 Schematic representation of the governing processes between suspension
layer and fluid mud layer Winterwerp et al. (1999). . . . . . . . . . . . . . . 570
B.13 A schematic representation of two Delft3D-FLOW modules running simultane-
ously simulating a fluid mud problem . . . . . . . . . . . . . . . . . . . . . 573
B.14 Vertical grid construction, Z-model ......................578
B.15 Inserting appropriate keywords to switch on the Z-grid-model . . . . . . . . . 578
B.16 Defining cut-cell and 45 degree closed boundaries . . . . . . . . . . . . . . 579
B.17 45 degrees staircase closed boundary . . . . . . . . . . . . . . . . . . . . 580
B.18 Cut-cell closed boundary (not related to the data specified in the example above)581
B.19 Schematic representation of the free surface boundary condition for the pres-
sure correction. ................................587
B.20 Area where a non-hydrostatic pressure is taken into account . . . . . . . . . 589
B.21 Defining the Non-hydrostatic solver using the Z-model in the FLOW-GUI . . . 591
B.22 Example of grid refinement . . . . . . . . . . . . . . . . . . . . . . . . . . 596
B.23 Example of coupling of models with a different dimension . . . . . . . . . . . 597
B.24 Schematised island without domain decomposition . . . . . . . . . . . . . . 597
B.25 Schematised island with domain decomposition . . . . . . . . . . . . . . . . 598
B.26 Example of grid refinement in the horizontal direction . . . . . . . . . . . . . 600
B.27 Problem layout sketch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605
B.28 Schematic axisymmetric bubble plume with entrainment of water by the rising
bubbles ....................................622
B.29 Definition of near-, mid- and far-field of the circulation induced by a bubble
screen and the vertical profile of the vertical (downward) velocity in the mid-
field circulation cell ..............................623
B.30 Flux of entrained water as function or air flow under atmospheric conditions
and height above the nozzle in stagnant non-stratified water based on experi-
ments in (Milgram, 1983) The injected air flux is given in [Nm3/s] where N
stands for normal atmospheric conditions. . . . . . . . . . . . . . . . . 624
Deltares xvii

DRAFT
Delft3D-FLOW, User Manual
B.31 Schematic overview of the introduction of cold hypolimnion water into the lower
part of the warmer epilimnion by a bubble plume. Above the first plunge point
the second plunge point creates an intrusion and recirculation inside the epil-
imnion. ....................................625
B.32 The mid field averaged heat equation with vertical distribution of sources/sinks
and vertical (downward) velocity profile and the model equation applied to a
single grid box. ................................630
B.33 Initial temperature profile (blue) and after application of a bubble screen at
z=−16 m (red line). On horizontal axis the temperature (in ◦C) and on the
vertical axis the vertical position in the water column (in m). . . . . . . . . . . 632
B.34 Explicit exchange of water levels and discharges between Delft3D-FLOW and
SOBEK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634
B.35 Coupling of the Delft3D-FLOW and SOBEK grids. . . . . . . . . . . . . . . . 634
B.36 Enable Delft3D-FLOW in SOBEK settings and select MDF-file and communication-
file. ......................................637
B.37 Remapping of two near-bed layers to an equidistant layering. Figure from
Platzek et al. (2012). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 641
D.1 Steps to determine if a 3D model is required . . . . . . . . . . . . . . . . . 670
E.1 Left: items with the same (array) number. Right: a computational control volume674
E.2 Lower-left (left) and lower right (right) computational grid cell . . . . . . . . . 674
E.3 Definition sketch of a (12 ∗7) staggered grid with grid enclosure (thick line)
and numerical grid ..............................675
E.4 Location and combination of water level and velocity controlled open boundaries676
E.5 Straight channel with 10 ∗5computational grid cells . . . . . . . . . . . . . 677
F.1 Hydrodynamics selection window with the Tools option . . . . . . . . . . . 680
F.2 Additional tools window with the NESTHD1 and NESTHD2 options . . . . . 680
F.3 Specification of input and output files for NESTHD1 . . . . . . . . . . . . . . 681
F.4 Specification of input and output files for NESTHD2 . . . . . . . . . . . . . . 682
F.5 Overview grids overall and nested models . . . . . . . . . . . . . . . . . . . 682
xviii Deltares

DRAFT
List of Tables
List of Tables
4.1 Overview of the main attribute files . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Time step limitations shallow water solver Delft3D-FLOW . . . . . . . . . . . 39
4.3 Definition of open and closed boundaries. . . . . . . . . . . . . . . . . . . . 51
5.1 Overview of attribute files. . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.1 Simulation performance on different operating systems . . . . . . . . . . . . 159
9.2 Overview of eddy viscosity options in Delft3D-FLOW . . . . . . . . . . . . . 188
9.3 Overview of eddy diffusivity options in Delft3D-FLOW . . . . . . . . . . . . . 192
9.4 Frequencies, phases and amplitude on alongshore waterlevel boundary and
corresponding frequenties, phases and amplitudes for the cross-shore Neu-
mann boundaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
9.5 Fitting coefficients for wave/current boundary layer model . . . . . . . . . . . 234
9.6 Albedo coefficient and cloud function . . . . . . . . . . . . . . . . . . . . . 241
9.7 Terms of the heat balance used in heat model 1 . . . . . . . . . . . . . . . . 247
9.8 Terms of the heat balance used in heat model 2 . . . . . . . . . . . . . . . . 247
9.9 Terms of the heat balance used in heat model 4 . . . . . . . . . . . . . . . . 248
9.10 Terms of the heat balance used in heat model 5 . . . . . . . . . . . . . . . . 248
9.11 Summary of time dependent input data of the heat flux models . . . . . . . . 249
9.12 Constants of major tidal modes . . . . . . . . . . . . . . . . . . . . . . . . 251
10.1 Time step limitations shallow water solver Delft3D-FLOW . . . . . . . . . . . 278
11.1 Additional transport relations . . . . . . . . . . . . . . . . . . . . . . . . . 338
11.2 Overview of the coefficients used in the various regression models (Soulsby
et al., 1993a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
11.3 Overview of the coefficients used in the various regression models, continued
(Soulsby et al., 1993a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
12.1 Available advection and diffusion schemes in the Z-layer model (for compari-
son also the options available in the σ-model have been included). . . . . . . 368
12.2 Time step limitations shallow water solver Delft3D-FLOW . . . . . . . . . . . 371
A.2 Print flags for map-data . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408
A.3 Print flags for history-data . . . . . . . . . . . . . . . . . . . . . . . . . . . 408
A.3 Print flags for history-data . . . . . . . . . . . . . . . . . . . . . . . . . . . 409
A.4 Storage flags for map-data . . . . . . . . . . . . . . . . . . . . . . . . . . 409
A.5 Storage flags for history-data . . . . . . . . . . . . . . . . . . . . . . . . . 409
A.5 Storage flags for history-data . . . . . . . . . . . . . . . . . . . . . . . . . 410
A.6 Optional output flags under Additional parameters . . . . . . . . . . . . . . 410
A.7 Dredge and dump input file with keywords . . . . . . . . . . . . . . . . . . . 454
A.8 Vegetation input file with keywords . . . . . . . . . . . . . . . . . . . . . . 471
B.1 Special features of Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . . . 477
B.1 Special features of Delft3D-FLOW . . . . . . . . . . . . . . . . . . . . . . 478
B.2 Default parameter settings for the SGS model . . . . . . . . . . . . . . . . . 528
B.3 Sediment input file with keywords . . . . . . . . . . . . . . . . . . . . . . . 530
B.4 Options for sediment diameter characteristics . . . . . . . . . . . . . . . . . 533
B.5 Sediment input file without keywords . . . . . . . . . . . . . . . . . . . . . 534
B.5 Sediment input file without keywords . . . . . . . . . . . . . . . . . . . . . 535
B.6 Morphological input file with keywords . . . . . . . . . . . . . . . . . . . . . 537
B.7 Morphological input file without keywords . . . . . . . . . . . . . . . . . . . 545
B.7 Morphological input file without keywords . . . . . . . . . . . . . . . . . . . 546
Deltares xix

DRAFT
Delft3D-FLOW, User Manual
B.8 Additional transport relations . . . . . . . . . . . . . . . . . . . . . . . . . 548
B.9 Transport formula parameters . . . . . . . . . . . . . . . . . . . . . . . . . 548
B.10 Sediment transport formula input file with keywords . . . . . . . . . . . . . . 551
B.11 Initial bed composition file keywords . . . . . . . . . . . . . . . . . . . . . 567
B.12 Example of vertical grid refinement . . . . . . . . . . . . . . . . . . . . . . 601
B.13 Example of a <name.ddb>file . . . . . . . . . . . . . . . . . . . . . . . . 603
B.14 Bedform keywords in mdf file . . . . . . . . . . . . . . . . . . . . . . . . . 613
C.1 Astronomical constituents . . . . . . . . . . . . . . . . . . . . . . . . . . . 663
xx Deltares

DRAFT
1 A guide to this manual
1.1 Introduction
This User Manual concerns the hydrodynamic module, Delft3D-FLOW, of the Delft3D software
suite. To make this manual more accessible we will briefly describe the contents of each
chapter and appendix.
If this is your first time to start working with Delft3D-FLOW we suggest you to read and practice
the getting started of chapter 3 and the tutorial of chapter 5. These chapters explain the user
interface options and guide you through the definition of your first simulation.
Chapter 2:Introduction to Delft3D-FLOW, provides specifications of Delft3D-FLOW, such
as the areas of applications, the standard and specific features provided, the required com-
puter configuration and how to install the software.
Chapter 3:Getting started, explains the use of the overall menu program, which gives
access to all Delft3D modules and to the pre- and post-processing tools. Last but not least
you will get a first introduction into the FLOW Graphical User Interface (GUI), used to define
the input required for a flow simulation.
Chapter 4:Graphical User Interface, provides practical information on the selection of all
parameters and the tuning of the model.
Chapter 5:Tutorial, emphasis at giving you some first hands-on experience in using the
FLOW-GUI to define the input of a simple problem, in verifying this input, in executing the
simulation and in inspecting the results.
Chapter 6:Execute a scenario, discusses how to verify and execute a scenario and provides
information on run times and file sizes.
Chapter 7:Visualise results, explains in short the visualisation of results. It introduces the
post processing program GPP to visualise or animate the simulation results.
Chapter 8:Manage projects and files, provides a detailed insight into the managing of
projects and scenarios.
Chapter 9:Conceptual description, describes the theoretical physics modelled in Delft3D-
FLOW.
Chapter 10:Numerical aspects of Delft3D-FLOW, discusses the various grids, grid-numbering
etc., as well as all practical matters about the implications of parameter selections.
Chapter 11:Sediment transport and morphology, describes the three-dimensional trans-
port of suspended sediment, bedload transport and morphological updating of the bottom.
Chapter 12:Fixed layers in Z-model, the concept of fixed, horizontal layers in the vertical
grid are given.
References, provides a list of publications and related material on the Delft3D-FLOW module.
Glossary of terms, contains a list and explanations of the terms and abbreviations used in
this manual.
Deltares 1 of 688

DRAFT
Delft3D-FLOW, User Manual
Appendix A:Files of Delft3D-FLOW, gives a description of the files that can be used in the
input of Delft3D-FLOW. Generally, these files are generated by the FLOW-GUI and you need
not to be concerned about their internal details. However, in certain cases it can be useful to
know these details, for instance to generate them by means of other utility programs.
Appendix B:Special features of Delft3D-FLOW, gives an overview and description of the
additional functions provided by Delft3D-FLOW. An additional function provides specific func-
tionalities which are not yet supported by the user interface, but which are recognised by a
keyword in the MDF-file with one or more values. This value can be a string of characters
referring to a file that contains additional input parameters for this function.
The available features are listed in Table B.1. They include e.g. decay rate for constituents,
hydraulic structures, space varying Coriolis coefficients, evaporation and precipitation, space
varying wind and pressure, horizontal large eddy simulation, 3D sediment and morphology,
fluid mud, Z-model, a non-hydrostatic module, user-defined functions, domain decomposi-
tion, surfbeat or roller model and trachytopes.
Appendix C:Astronomical constituents, this appendix gives a complete overview of the
astronomical components supported by Delft3D-FLOW. For each component is given: its
name, angular frequency, amplitude in the equilibrium tide and the relation if an amplitude
coupling exists with other components.
Appendix D:Some modelling guidelines, this appendix discusses some guidelines to de-
termine when you need a 3D computation and which vertical turbulence model you need,
given the type of modelling application.
Appendix E:Computational grid, discusses the location of open and closed boundaries
on the staggered grid used in Delft3D-FLOW. The definition and use of the grid enclosure is
discussed in detail. Reading this appendix is suggested when you want to know all the details
of the staggered grid and specific implementation aspects and consequences. For normal
use of Delft3D-FLOW you can skip this appendix.
Appendix F:Delft3D-NESTHD, discusses the steps to generate boundary conditions for a
nested Delft3D-FLOW model. In case the hydrodynamic and transport boundary conditions
of a Delft3D-FLOW model are generated by a larger (overall) model we speak of a nested
model. Nesting in Delft3D-FLOW is executed in three steps, using two separate utilities and
the Delft3D-FLOW program.
1.2 Manual version and revisions
This manual applies to Delft3D-FLOW version 6.00.00, and FLOW-GUI version 3.43.05.
1.3 Typographical conventions
Throughout this manual, the following conventions help you to distinguish between different
elements of text to help you learn about the FLOW-GUI.
2 of 688 Deltares
DRAFT
A guide to this manual
Example Description
Module
Project
Title of a window or a sub-window are in given in bold.
Sub-windows are displayed in the Module window and
cannot be moved.
Windows can be moved independently from the Mod-
ule window, such as the Visualisation Area window.
Save Item from a menu, title of a push button or the name of
a user interface input field.
Upon selecting this item (click or in some cases double
click with the left mouse button on it) a related action
will be executed; in most cases it will result in displaying
some other (sub-)window.
In case of an input field you are supposed to enter input
data of the required format and in the required domain.
<\tutorial\wave\swan-curvi>
<siu.mdw>
Directory names, filenames, and path names are ex-
pressed between angle brackets, <>. For the Linux
and UNIX environment a forward slash (/) is used in-
stead of the backward slash (\) for PCs.
“27 08 1999” Data to be typed by you into the input fields are dis-
played between double quotes.
Selections of menu items, option boxes etc. are de-
scribed as such: for instance ‘select Save and go to
the next window’.
delft3d-menu Commands to be typed by you are given in the font
Courier New, 10 points.
In this User manual, user actions are indicated with this
arrow.
[m s−1] [−] Units are given between square brackets when used
next to the formulae. Leaving them out might result in
misinterpretation.
1.4 Changes with respect to previous versions
Version Description
3.15 Meteo input (wind, pressure, etc.) modified (FLOW v3.60.01.02 and higher),
see Appendices A.2.8 and B.7.
Bubble screen added.
1D–3D Coupling added.
Deltares 3 of 688
DRAFT
Delft3D-FLOW, User Manual
Version Description
3.14 Section 9.3.3: UNESCO formulation added.
Chapter 12.12,References: References on UNESCO formulation added.
Equation (9.173) corrected.
Equation (11.94): −before max changed to +.
Equation (11.97): Vreplaced by q.
Section A.2.15, example <∗.bct>file: time function should be time-function.
Section A.2.21, example <∗.dis>file: time function should be time-function.
Section B.8.4, example <∗.bcc>file: time function should be time-function.
Section B.8.5, example <∗.mft>file: time function should be time-function.
Section B.9.1.3, description of ηand ηadded.
Section B13.4, runprocedure adjusted to use arguments for tdatom.exe and
trisim.exe.
Section 9.3.1: description horizontal viscosity extended taking
into account Subgrid scale viscosity and HLES viscosity. Momentum equation
adapted.
Section 9.3.2: description horizontal diffusivity extended taking
into account Subgrid scale viscosity and HLES diffusivity. Transport equation
adapted.
3.13 New keyword (IniSedThick) for Initial sediment layer thickness at the bed.
Unit is metre. GUI reads old keyword and converts data to new keyword.
New functionality: Neumann boundaries described.
New functionality: Time-varying morphological scale factor, see B.8.5.
New functionality: Maximum number of constituents (pollutants and/or sedi-
ments) increased to 99.
New functionality: if FLOW runs online with WAVE, and wind is active in the
FLOW simulation, this wind can be used in the WAVE simulation.
New functionality: Section 6.5 (Command-line arguments) added.
New functionality: Initial conditions from a map-file described.
Online Delft3D-WAVE and Online coupling is now possible.
GUI output file <attribute_files.runid>changed in <runid.fil>with runid not
truncated.
Limitation of 4 Gb for NEFIS files added.
Maximum number of discharges increased to 500.
Units for reflection parameter at open boundaries added.
New functionality: reflection parameter for discharge boundaries implemented.
MENU screens updated.
Astronomical component A0 cannot be corrected by a <∗.cor>file.
New functionality: The name of the MDF-file may be up to 256 characters, i.e.
the runid is not limited anymore to 3 characters.
In Data Group Numerical parameters,Depth specified at cell corners or cell
centres introduced. Text adjusted accordingly.
Chapter 11 updated.
Appendix B.8 updated.
Appendix B.13: Before using <model_id.ddb>you have to replace the grid
filenames by the MDF-filenames.
Appendix F.1: Restriction added: The boundaries of the nested model may not
consist of a single grid cell.
4 of 688 Deltares

DRAFT
A guide to this manual
Version Description
3.12 Chapter 4: the contribution from the HLES sub-grid model will be added to the
background values (FLOW v3.50.09.02 and higher).
Chapter 4 updated with online coupling, online Delft3D-WAVE.
Chapter 4 updated with latest GUI developments (Cartesian or spherical grids,
sediment and morphology, dredging and dumping, specification of astronom-
ical flow boundary conditions changed, no slip condition added, Horizontal
Large Eddy Simulations, heat flux model parameters added, specification of
wind moved to Physical parameters, specification of tide generating forces
moved to Physical parameters, additional drying and flooding options, momen-
tum solver options).
In chapter 4 emphasized that the stop time may not be too far ahead of the
Reference date.
Also in chapter 4 the description of In-out discharges improved.
In chapter 7 Delft3D-GIS updated to GISVIEW.
Theoretical background of Sediment and morphology updated and moved from
Appendix B.8 to a new chapter 11.
Inclusion of Z-model (horizontal layers) and Non-hydrostatic approach; Chap-
ters 9and 10 are amended. New Chapter, 12, is dedicated for specifics of the
Z-model.
C(urrent)D(eflection)W(all)-features added (for σ- and Z-model).
Special treatment for ‘staircase’ closed boundary added for Z-model.
Reference and Glossary updated and renamed to chapter 12.12 and 12.12 re-
spectively.
Appendix B.10: Input description for Z-model.
3.11 Update of MENU windows with second postprocessing tool Delft3D-
QUICKPLOT.
Operation of Change working directory updated in chapter 3.
In chapter 10: description of the Flooding Scheme.
Section 10.4.3: Description of AOI method removed.
Section 10.6.2: Equation (10.35) 0 and 1 interchanged.
Appendix B.8: Update of Sediment and Morphology latest developments.
Appendix B.14 added: Surfbeat/roller model.
3.10 Reference version for these change notes.
Deltares 5 of 688

DRAFT
Delft3D-FLOW, User Manual
6 of 688 Deltares

DRAFT
2 Introduction to Delft3D-FLOW
Deltares has developed a unique, fully integrated computer software suite for a multi-disciplinary
approach and 3D computations for coastal, river and estuarine areas. It can carry out simu-
lations of flows, sediment transports, waves, water quality, morphological developments and
ecology. It has been designed for experts and non-experts alike. The Delft3D suite is com-
posed of several modules, grouped around a mutual interface, while being capable to interact
with one another. Delft3D-FLOW, which this manual is about, is one of these modules.
Delft3D-FLOW is a multi-dimensional (2D or 3D) hydrodynamic (and transport) simulation
program which calculates non-steady flow and transport phenomena that result from tidal and
meteorological forcing on a rectilinear or a curvilinear, boundary fitted grid. In 3D simulations,
the vertical grid is defined following the σco-ordinate approach.
2.1 Areas of application
Tide and wind-driven flows (i.e. storm surges).
Stratified and density driven flows.
River flow simulations.
Simulations in deep lakes and reservoirs.
Simulation of Tsunamis, hydraulic jumps, bores and flood waves.
Fresh-water river discharges in bays.
Salt intrusion.
Thermal stratification in lakes, seas and reservoirs.
Cooling water intakes and waste water outlets.
Transport of dissolved material and pollutants.
Online sediment transport and morphology.
Wave-driven currents.
Non-hydrostatic flows.
2.2 Standard features
Tidal forcing.
The effect of the Earth’s rotation (Coriolis force).
Density driven flows (pressure gradients terms in the momentum equations).
Advection-diffusion solver included to compute density gradients with an optional facility
to treat very sharp gradients in the vertical.
Space and time varying wind and atmospheric pressure.
Advanced turbulence models to account for the vertical turbulent viscosity and diffusivity
based on the eddy viscosity concept. Four options are provided: k-ε, k-L, algebraic and
constant model.
Time varying sources and sinks (e.g. river discharges).
Simulation of the thermal discharge, effluent discharge and the intake of cooling water at
any location and any depth.
Drogue tracks.
Robust simulation of drying and flooding of inter-tidal flats.
Deltares 7 of 688
DRAFT
Delft3D-FLOW, User Manual
Flow/Mor Wave Water Quality Ecology Particles/Oil
Overall Menu
Tools
Figure 2.1: System architecture of Delft3D
2.3 Special features
Various options for the co-ordinate system (rectilinear, curvilinear or spherical).
Built-in automatic switch converting 2D bottom-stress coefficient to 3D coefficient.
Built-in anti-creep correction to suppress artificial vertical diffusion and artificial flow due
to σ-grids.
Built-in switch to run the model in either σ-model or in Z-model.
Various options to model the heat exchange through the free water surface.
Wave induced stresses and mass fluxes.
Influence of waves on the bed shear stress.
Optional facility to calculate the intensity of the spiral motion phenomenon in the flow (e.g.
in river bends) which is especially important in sedimentation and erosion studies (for
depth averaged — 2DH — computations only).
Optional facility for tidal analysis of output parameters.
Optional facility for special points such as 3D gates, Current Deflecting Wall (CDW) floating
structures, bridges, culverts, porous plates and weirs.
Optional facility to switch between a number of advection solvers.
Optional facility for user-defined functions.
Domain decomposition.
2.4 Coupling to other modules
The hydrodynamic conditions (velocities, water elevations, density, salinity, vertical eddy vis-
cosity and vertical eddy diffusivity) calculated in the Delft3D-FLOW module are used as input
to the other modules of Delft3D, which are (see Figure 2.1):
module description
Delft3D-WAVE short wave propagation
D-Water Quality far-field water quality
D-Waq PART mid-field water quality and particle tracking
Delft3D-ECO ecological modelling
Delft3D-SED cohesive and non-cohesive sediment transport
8 of 688 Deltares
DRAFT
Introduction to Delft3D-FLOW
2.5 Utilities
For using Delft3D-FLOW the following utilities are important:
module description
RGFGRID for generating curvilinear grids
QUICKIN for preparing and manipulating grid oriented data, such as
bathymetry or initial conditions for water levels, salinity or con-
centrations of constituents.
Delft3D-TRIANA for performing off-line tidal analysis of time series generated
by Delft3D-FLOW
Delft3D-TIDE for performing tidal analysis on time-series of measured water
levels or velocities
Delft3D-NESTHD for generating (offline) boundary conditions from an overall
model for a nested model
GPP for visualisation and animation of simulation results
Delft3D-QUICKPLOT a second tool for visualisation and animation of simulation
results
For details on using these utility programs you are referred to the respective User Manual.
2.6 Installation and computer configuration
See the Delft3D Installation Manual.
Deltares 9 of 688

DRAFT
Delft3D-FLOW, User Manual
10 of 688 Deltares

DRAFT
3 Getting started
3.1 Overview of Delft3D
The Delft3D program suite is composed of a set of modules (components) each of which
covers a certain range of aspects of a research or engineering problem. Each module can be
executed independently or in combination with one or more other modules. The information
exchange between modules is provided automatically by means of a so-called communication
file; each module writes results required by another module to this communication file and
reads from the file the information required from other modules. Other, module-specific, files
contain results of a computation and are used for visualisation and animation of results.
Delft3D is provided with a menu shell through which you can access the various modules. In
this chapter we will guide you through some of the input screens to get the look-and-feel of
the program. In chapter 5, Tutorial, you will learn to define and run a simple scenario.
3.2 Starting Delft3D
To start Delft3D:
On an MS Windows platform: select Delft3D in the Programs menu or click on the Delft3D
icon on the desktop.
On Linux machines: type delft3d-menu on the command line.
Next the title window of Delft3D is displayed, Figure 3.1:
Figure 3.1: Title window of Delft3D
After a short while the main window of the Delft3D-MENU appears, Figure 3.2.
Several menu options are shown. In Figure 3.2 all options are sensitive.
For now, only concentrate on exiting Delft3D-MENU, hence:
Click on the Exit push button.
The window will be closed and you are back in the Windows Desktop screen for PCs or on
the command line for Linux workstations.
Deltares 11 of 688
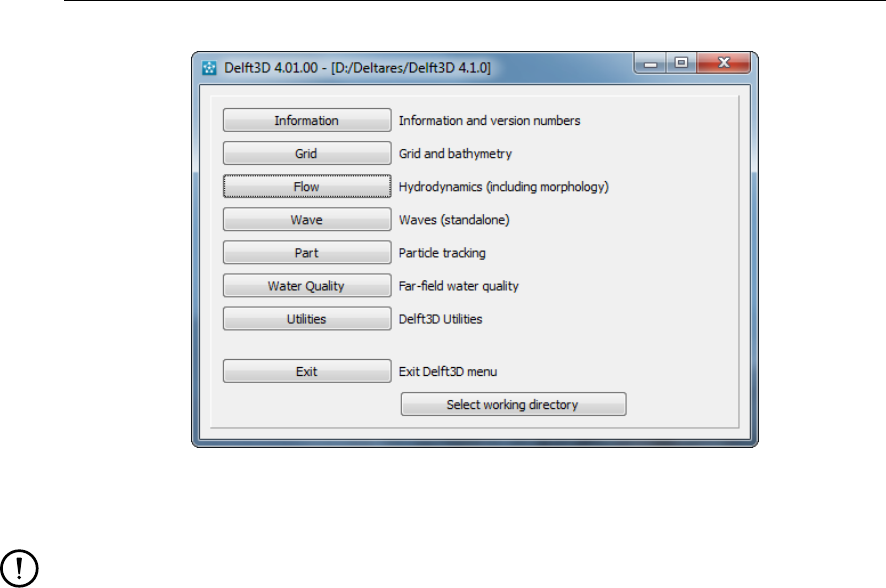
DRAFT
Delft3D-FLOW, User Manual
Figure 3.2: Main window Delft3D-MENU
Remark:
In this and the following chapters several windows are shown to illustrate the presen-
tation of Delft3D-MENU and Delft3D-FLOW. These windows are grabbed from the PC-
platform. For Linux workstations the content of the windows is the same, but the colours
may be different. On the PC-platform you can set your preferred colours by using the
Display Properties.
3.3 Getting into Delft3D-FLOW
To continue restart the menu program as indicated above.
Click the Flow button.
Next the selection window for Hydrodynamics is displayed for preparing a flow input (MDF-)file
or wave input (MDW-)file, to execute a computation in foreground (including online WAVE or
online coupling), to inspect the report files with information on the execution and to visualise
the results: Figure 3.3.
Before continuing with any of the selections of this Hydrodynamics (including morphology)
window, you must select the directory in which you are going to prepare scenarios and execute
computations:
Click the Select working directory button.
Next the Select working directory window, Figure 3.4, is displayed (your current directory
may differ, depending on the location of your Delft3D installation).
Browse to and open the <Tutorial>sub-directory of your Delft3D Home-directory.
Open the <flow>directory.
Enter the <friesian_tidal_inlet>sub-directory and close the Select working directory
window by clicking OK, see Figure 3.5.
Next the Hydrodynamics (including morphology) window is re-displayed, but now the
12 of 688 Deltares
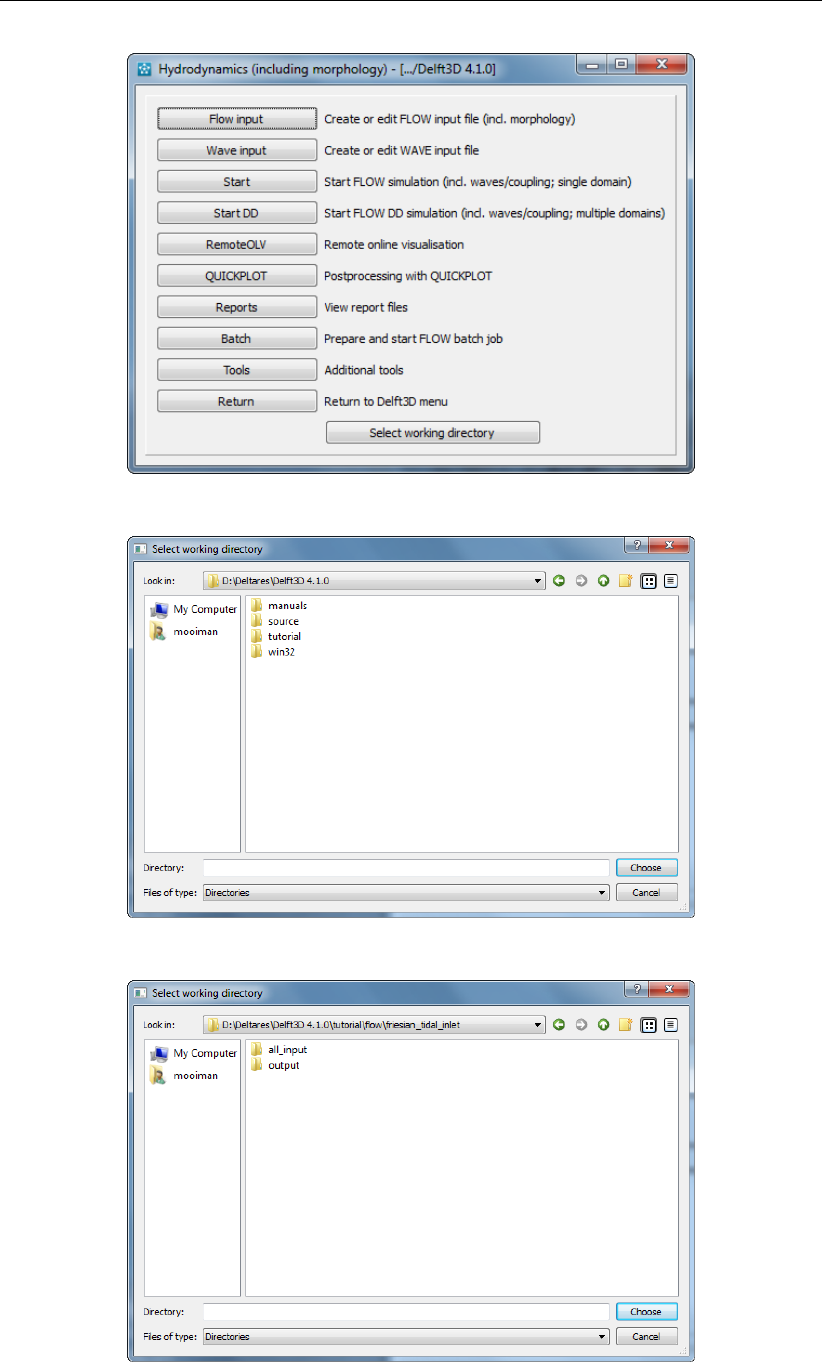
DRAFT
Getting started
Figure 3.3: Selection window for Hydrodynamics
Figure 3.4: Select working directory window
Figure 3.5: Select working directory window to set the working directory to
<flow\friesian_tidal_inlet>
Deltares 13 of 688
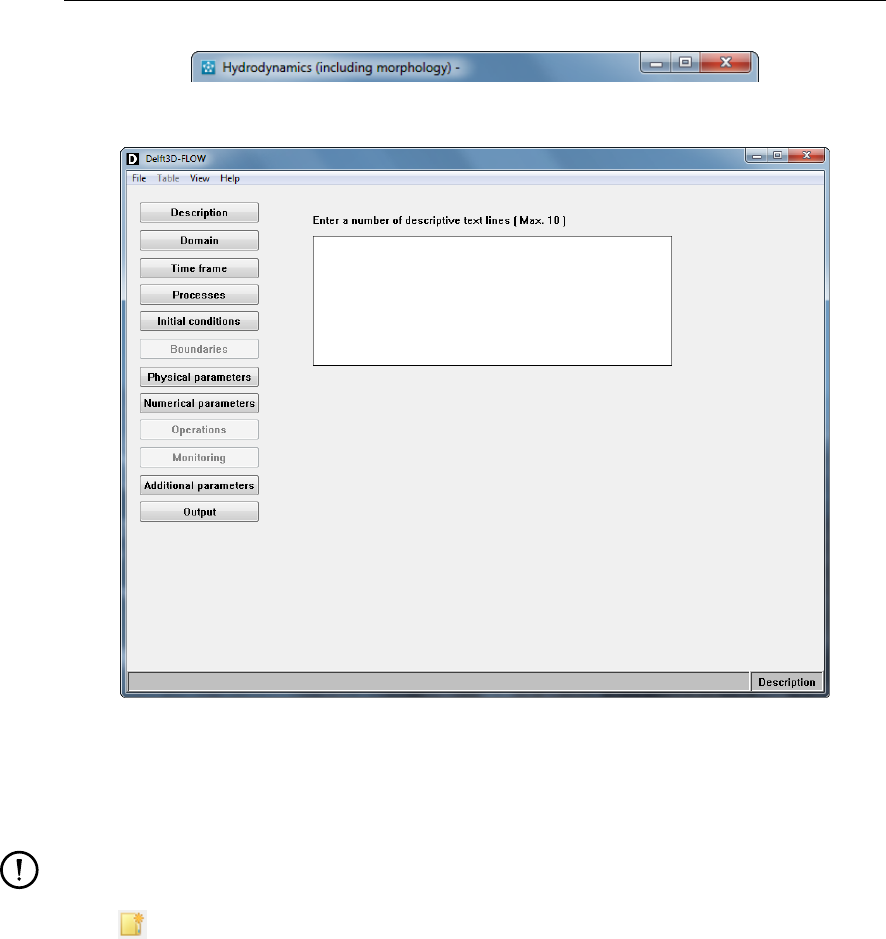
DRAFT
Delft3D-FLOW, User Manual
Figure 3.6: The current working directory is not shown in the title bar due to its length
Figure 3.7: Main window of the FLOW Graphical User Interface
changed current working directory is displayed in the title bar (if the name is not too long),
see Figure 3.6.
Remark:
In case you want to start a new project for which no directory exists yet, you can select
in the Select working directory window to create a new folder.
In the main Hydrodynamics (including morphology) menu, Figure 3.3, you can define,
execute and visualise a scenario. In this guided tour through Delft3D-FLOW we limit ourselves
to inspecting some windows of the FLOW Graphical User Interface (GUI).
Hence:
Click on Flow input.
The FLOW-GUI is loaded and the primary input screen is opened, Figure 3.7.
The purpose of this FLOW-GUI is to create the input file of Delft3D-FLOW, also called the
“Master Definition Flow” file (MDF-file) which contains all information to execute a flow simu-
lation.
14 of 688 Deltares
DRAFT
Getting started
Figure 3.8: Menu bar of the FLOW-GUI
Figure 3.9: File drop down menu
3.4 Exploring some menu options
The menu bar of the FLOW-GUI displays four options:
File select and open an MDF-file, save an MDF-file, save an MDF-file
under a different name, save attribute files or ‘exit’ the FLOW-GUI.
Table tool to change table oriented data by adding or deleting rows or val-
ues.
View visualisation area or list of attribute files.
About About information.
Each option provides one or more selections; for instance, clicking on File enables the selec-
tions:
New to clean-up the internal data structure and start with a new scenario.
Open to open an existing MDF-file.
Save MDF to save the MDF-data under its current name.
Save MDF As to save the MDF-data under a new name.
Save All to save all attribute data in the current attribute files + MDF-file.
Save All As to save all attribute data under a new name + MDF-file.
Exit to exit the FLOW-GUI and return to the Hydrodynamics (including
morphology) window.
The input parameters that define a hydrodynamic scenario are grouped into Data Groups.
These Data Groups are represented by the large grey buttons at the left of the main win-
dow. Upon starting the FLOW-GUI, Figure 3.7 is displayed with the Data Group Description
selected and displayed. The area to the right of the Data Groups is called the canvas area.
This canvas area will be dynamically filled with input fields, tables, or list boxes to define the
various kinds of input data required for a simulation. In Figure 3.7 the Description text box is
displayed in the canvas area.
Click on a Data Group and see what happens. For example, clicking the Domain button and
next the sub Data Group Grid parameters, will result in the window shown in Figure 3.10. The
Tutorial in chapter 5 will make you become fully acquainted with the various input windows
that result from this main window.
You are encouraged to explore the various Data Groups and sub-windows to get a first im-
pression on the items the Data Groups are composed of. Though several input items are
Deltares 15 of 688
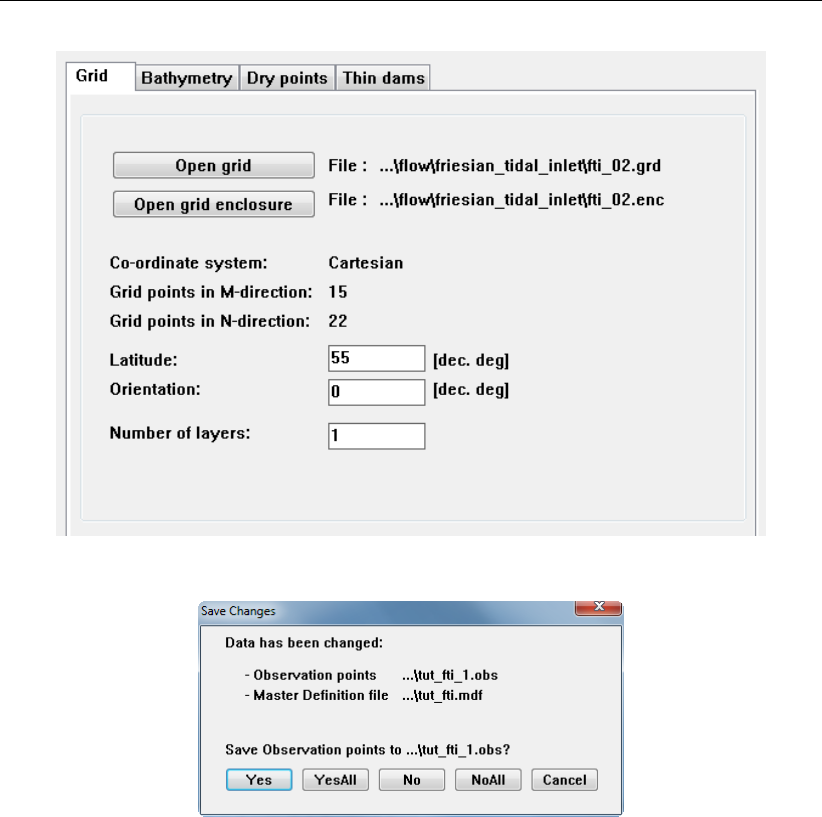
DRAFT
Delft3D-FLOW, User Manual
Figure 3.10: Data Group Domain selection and input fields
Figure 3.11: Save changes window
related there is no fixed or prescribed order in defining the input data. Occasionally you might
get a warning or error message that some data is not saved or not consistent with earlier
defined data; during this introduction you can neglect these messages and press the Ignore
button if requested. No harm will be done on existing input files as you are not going to save
the input data of this exercise.
3.5 Exiting the FLOW-GUI
To exit the FLOW-GUI:
From the File menu, select Exit.
If you have made any change to any input field and have not explicitly saved both the attribute
data and/or the MDF-data Figure 3.11 is displayed.
In this case only the MDF-data was not saved; if you have changed data that must be saved
into a so-called attribute file, the unsaved attribute files will be listed.
Select one of the options displayed:
Yes save the first unsaved data item, request for a file name if not yet
16 of 688 Deltares

DRAFT
Getting started
defined and proceed to the next unsaved data item.
YesAll save all unsaved data items and request a file name if not yet de-
fined.
No don’t save the first unsaved data item; proceed to the next unsaved
data.
NoAll exit without saving any unsaved data item.
Cancel abort this Exit action and return to the FLOW-GUI.
Neglect any unsaved data and exit:
Click NoAll.
You will be back in the Hydrodynamics (including morphology) window of the Delft3D-
MENU program, Figure 3.3.
Ignore all other options and just:
Click Return to return to the main window of Delft3D-MENU, Figure 3.2.
Click Exit.
The window is closed and the control is returned to the desktop or the command line.
In this Getting Started session you have learned to access the FLOW-GUI and to load and
inspect an existing input (MDF-)file.
We encourage new users next to run the tutorial described in chapter 5.
Deltares 17 of 688

DRAFT
Delft3D-FLOW, User Manual
18 of 688 Deltares

DRAFT
4 Graphical User Interface
4.1 Introduction
In order to set up a hydrodynamic model you must prepare an input file. All parameters to
be used originate from the physical phenomena being modelled. Also from the numerical
techniques being used to solve the equations that describe these phenomena, and finally,
from decisions being made to control the simulation and to store its results. Within the range
of realistic values, it is likely that the solution is sensitive to the selected parameter values, so
a concise description of all parameters is required. The input data defined is stored into an
input file which, as you may recall, is called the Master Definition Flow file or MDF-file.
If you have not used Delft3D-FLOW before, or if you are not familiar with the FLOW Graphical
User Interface (GUI) we suggest you to execute the tutorial given in chapter 5 first and then
return to this chapter.
In section 4.2 we discuss some general aspects of the MDF-file and its attribute files. In
section 4.3 we discuss shortly the filenames and their extension. In section 4.4 we discuss
working with the FLOW-GUI and the Visualisation Area window. In section 4.5 we discuss all
input parameters, including their restrictions and their valid ranges or domain. In many cases
we give a short discussion on the criteria to determine a parameter or to select a certain
formulation, such as the turbulence closure model for the vertical turbulent eddy viscosity and
turbulent eddy diffusivity. In section 4.6 we discuss saving the MDF-file and exiting the FLOW-
GUI. Finally, we discuss in section 4.7 the aspect of importing, removing and exporting of data
and their references in the MDF-file.
4.2 MDF-file and attribute files
The Master Definition Flow file (MDF-file) is the input file for the hydrodynamic simulation
program. It contains all the necessary data required for defining a model and running the
simulation program. In the MDF-file you can define attribute files in which relevant data (for
some parameters) is stored. This will be particularly the case when parameters contain a large
number of data (e.g. time-dependent or space varying data). The MDF-file and all possible
user-definable attribute files are listed and described in Appendix A.
Although you are not supposed to work directly on the MDF-file it is useful to have some ideas
on it as it reflects the idea of the designer on how to handle large amounts of input data and
it might help you to gain a better idea on how to work with this file.
The basic characteristics of an MDF-file are:
It is an ASCII file.
Each line contains a maximum of 300 characters.
Each (set of) input parameter(s) is preceded by a (set of) keyword(s).
The MDF-file is an intermediate file between the FLOW-GUI and the hydrodynamic simula-
tion program. Being an ASCII-file, it can be transported to an arbitrary hardware platform.
Consequently, the hydrodynamic simulation program and the FLOW-GUI do not necessarily
have to reside on the same hardware platform. Currently, Delft3D does not support remote
or distributed processing, but you can easily write a couple of scripts to run your pre- and
postprocessing on one hardware platform and run the computational intensive simulation at
an other hardware platform. The results of all modules are written to platform independent
binary files, so also these result files you can transfer across hardware platforms without any
conversion. Contact our support manager if you need remote or distributed computational
Deltares 19 of 688

DRAFT
Delft3D-FLOW, User Manual
functionalities.
The MDF-file is self contained, i.e. it contains all the necessary information about the model
concerned. It can therefore be used as model archive. To maintain a good overview of the
file, its length is restricted to 300 columns.
As you will see in chapter 5, after having specified certain types of input parameters you can
store them in attribute files. The MDF-file only contains permanent input parameters and
references to these attribute files. An overview of the attribute files is given in Section 4.3.
If you wish to create attribute files in advance, since supplying long time-series manually is
not very practical, you must make sure that the correct input formats are used. The formats
of all attribute files (and of the MDF-file itself) are described in detail in Appendix A.
4.3 Filenames and conventions
The names of the MDF-file and its attribute files have a specific structure, some aspects are
mandatory while others are only advised or preferred.
MDF-file
The name of an MDF-file must have the following structure: <runid.mdf>.
The runid may consist of up to 256 alpha-numeric characters and may not contain blanks.
The runid part of the filename is used as a run-id in the names of the result files to safeguard
the link between an MDF-file and the result files. When you have many computations we
suggest to use a combination of one alpha- and two numeric-characters followed by a useful
name of your project.
Example: <r01-calibration.mdf>.
This file could indicate the flow-input file of the first calibration run of a project.
Result files
The results of a Delft3D-FLOW computation are stored in several types of files:
communication file: <com-runid.def>and <com-runid.dat>.
history file: <trih-runid.def>and <trih-runid.dat>.
map file: <trim-runid.def>and <trim-runid.dat>.
drogue file: <trid-runid.def>and <trid-runid.dat>.
restart files <tri-rst.runid.date.time>.
The result files are stored in the working or project directory.
Restrictions:
Each scenario must have a unique run-id; when you have many computations we sug-
gest to use a character followed by a two digit number.
Avoid spaces in a filename, use an underscore instead, i.e. <r01_test.mdf>instead of
<r01 test.mdf>.
The extension mdf is mandatory.
The communication file contains results that are required by other modules, such as the water
quality module. The history file contains results of all computed quantities in a number of
20 of 688 Deltares
DRAFT
Graphical User Interface
Table 4.1: Overview of the main attribute files
Quantity Filename and mandatory extension
Astronomic correction factors <name.cor>
Bathymetry or depth <name.dep>
Bottom roughness <name.rgh>
Constituents boundary conditions <name.bcc>
Cross-sections <name.crs>
Curvilinear grid <name.grd>
Discharge locations <name.src>
Discharges rates <name.dis>
Dredge and dump characteristics <name.dad>
Drogues or floating particles <name.par>
Dry points <name.dry>
Flow boundary conditions (astronomic) <name.bca>
Flow boundary conditions (harmonic) <name.bch>
Flow boundary conditions (QH-relation) <name.bcq>
Flow boundary conditions (time-series) <name.bct>
Fourier analysis input file <name.fou>
Grid enclosure <name.enc>
Horizontal eddy viscosity and diffusivity <name.edy>
Initial conditions <name.ini>
Morphology characteristics <name.mor>
Observation points <name.obs>
Open boundaries <name.bnd>
Sediment characteristics <name.sed>
Temperature model parameters <name.tem>
Thin dams <name.thd>
Wind <name.wnd>
user-defined grid points at a user-defined time interval. The map file contains results of all
quantities in all grid points at a user-specified time interval.
Attribute files
Attribute files contain certain input quantities, such as monitoring points or time dependent
input data such as wind. The names of the main attribute files are basically free, but their
extension is mandatory as indicated in Table 4.1.
The name of an attribute file must have the following structure: <name.extension>.
Where:
<name.extension>may consist of up to 256 alpha-numeric characters and may contain
(sub-) directories, i.e. the full path.
There is no limitation other than the platform dependent limitations; you are referred to
your hardware platform manual for details. We suggest to add some continuation charac-
ter, for instance -number to the name to distinguish between various updates or modifica-
tions of the file, i.e. <name-number.extension>.
The extension is mandatory as indicated in Table 4.1.
Deltares 21 of 688
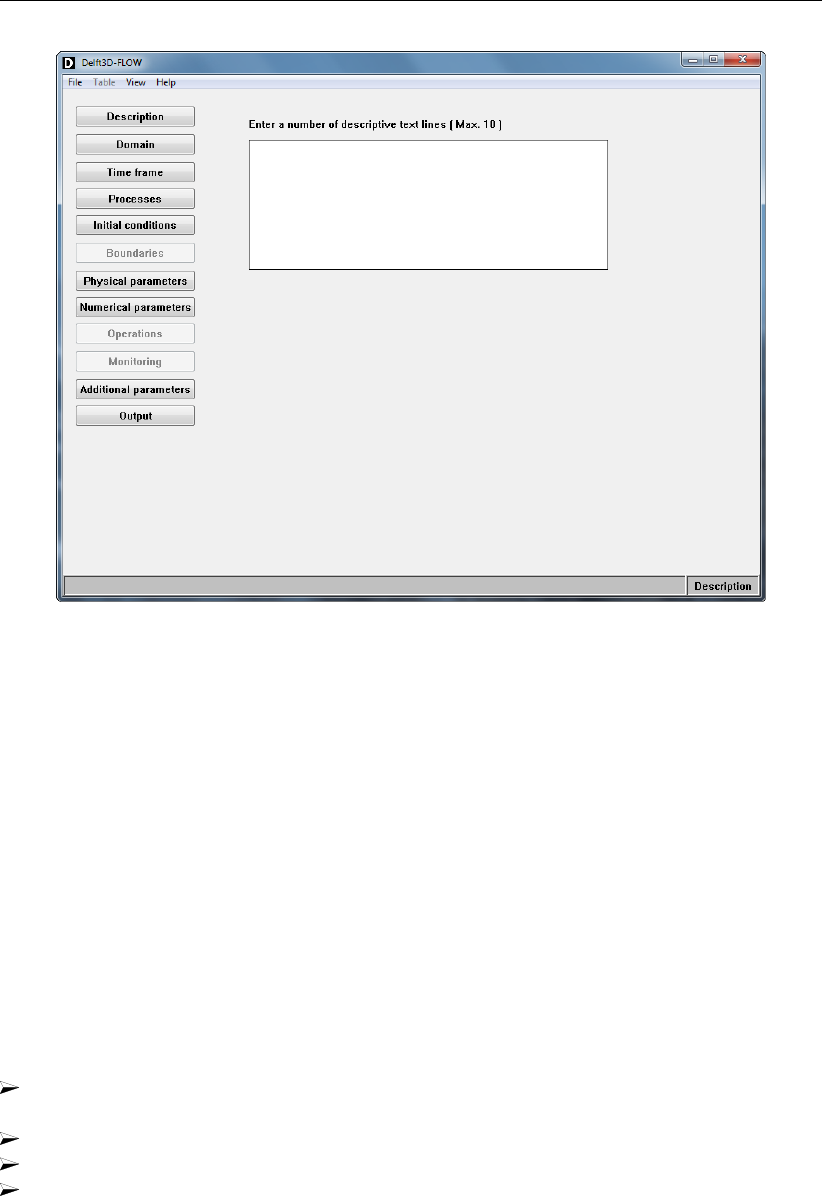
DRAFT
Delft3D-FLOW, User Manual
Figure 4.1: Main window of the FLOW-GUI
4.4 Working with the FLOW-GUI
4.4.1 Starting the FLOW-GUI
The purpose of the FLOW-GUI is to provide a graphical user interface which simplifies the
preparation of an MDF-file. For your convenience, in this section we briefly recapitulate how
to work with the FLOW-GUI (alternatively, consult Chapters 3and 5). With respect to the
parameters in the MDF-file, the FLOW-GUI follows either one of the following options:
A single parameter is updated and included in the MDF-file.
A reference to an attribute file is updated and included in the MDF-file. An attribute file
can be created by the FLOW-GUI if the required data was specified.
To start the FLOW-GUI you must in short execute the following commands, see chapter 3 for
details:
Click the Delft3D-MENU icon on the desktop (PC) or execute the command delft3d-menu
on the command line (Linux and UNIX).
Click the menu item FLOW.
Change to your project or working directory.
Click the menu item Flow input; the FLOW-GUI will be started and the main window will
be opened, see Figure 4.1.
You are now ready to start defining or modifying all input parameters grouped into so-called
data groups. In the menu bar you can choose from the following options:
File For opening and saving an MDF-file, or saving an MDF-file with an-
other name, for saving attribute files under the same name or under
a new name, for cleaning up the internal data structure and for ex-
iting the FLOW-GUI. Sub-menus are: New,Open,Save MDF,Save
22 of 688 Deltares
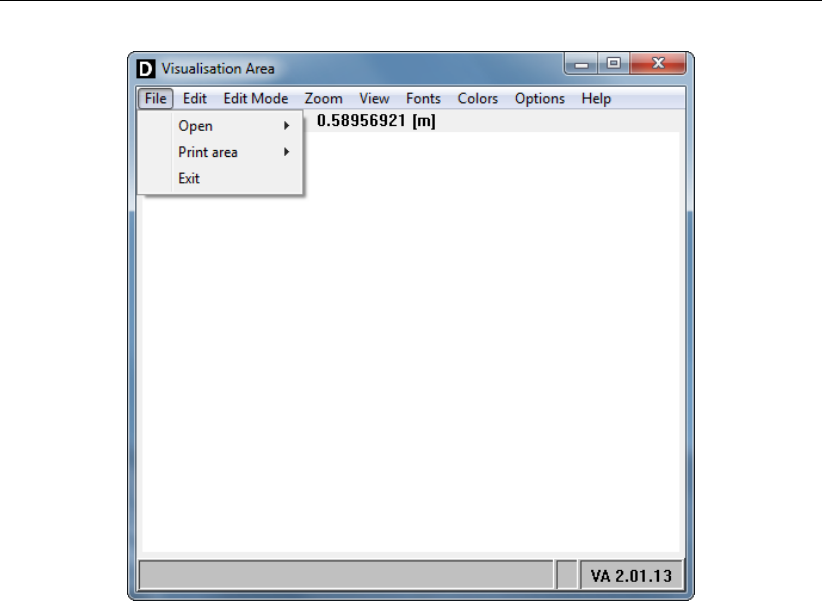
DRAFT
Graphical User Interface
Figure 4.2: Visualisation Area Window
MDF As,Save All,Save All As and Exit.
Table To change attribute files by adding or deleting rows or values in ta-
ble quantities. Sub-menus are: Insert row above,Copy row above,
Delete rowand Copy value to all rows.
View For viewing the grid related parameters or for listing the attribute files
used (only their referenced name, not their contents). Sub-menus
are: Visualisation Area and Attribute files.
Help For getting online and context sensitive help. Sub-menus are: Con-
tents and About. The first is not implemented yet.
4.4.2 Visualisation Area window
Most grid related data specified in the MDF-file can be visualised and defined in the Visuali-
sation Area window. These grid related data are: dry points, thin dams, observation points,
drogues, discharges, cross-sections and open boundaries.
Upon selecting View →Visualisation Area the Visualisation Area window will pop up, Fig-
ure 4.2.
The visualisation area is still blank, but after you have defined or selected a grid it will display
the grid and several grid related quantities.
The main and sub-menus of the Visualisation Area window are:
File To Open some of the grid defining files, to print (Print area) the Visu-
alisation Area window or Exit (close) the Visualisation Area win-
dow.
Edit To select one of the grid related quantities that can be visualised.
Edit Mode To Add,Delete,Modify (move) and View the quantities selected in
Deltares 23 of 688
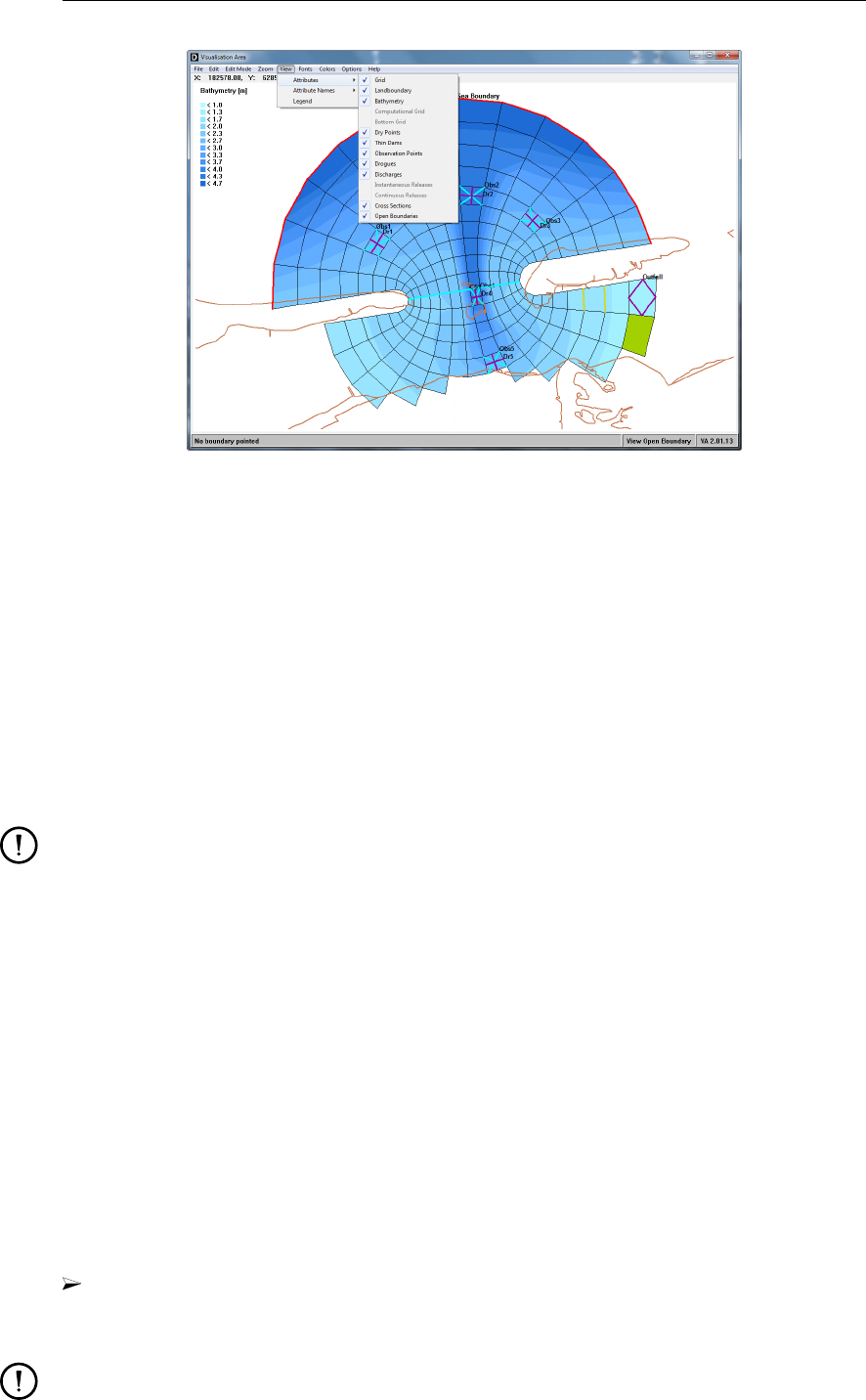
DRAFT
Delft3D-FLOW, User Manual
Figure 4.3: Possible selections of View →Attributes
Edit.
Zoom To Zoom In and Zoom Out the whole visualisation area, Zoom Box in
a user-defined area and Zoom Reset to return to the initial situation.
View To switch on or off viewing attributes and/or attribute names. The
various selections of View →Attributes are displayed in Figure 4.3.
You can activate (display) or de-activate (hide) the various attributes.
Fonts To set the font, size, etc. of the attribute names.
Colors To set the colours for visualising the bathymetry.
Options To select which quantities will be displayed in the visualisation area
and to refresh the display.
Help For online information of using the Visualisation Area window.
Remarks:
The Edit and Edit Mode options make it possible to graphically define, delete, modify
(move) or just view quantities of a certain type, without having to type locations manu-
ally.
If a quantity can have a user-defined name you can fill that in after having defined its
location graphically.
You can save the data in an attribute file before you change the quantity to be worked
on, but you can also postpone this until the end of your input session.
The Edit Mode remains in its selected mode as long as you are working in the Visu-
alisation Area window. This allows you to define (Add) or delete (Delete) all kind of
quantities without having to set and reset the Edit Mode. The Edit Mode shifts back to
View mode as soon as you leave the Visualisation Area window, to prevent unintended
modifications of your grid related quantities.
Make sure the Edit Mode is selected properly, if not you might accidentally move a
quantity without notice!
To see how each quantity is represented in the Visualisation Area display the legend:
Select View →Legend
and next Figure 4.4 is displayed.
Remark:
24 of 688 Deltares
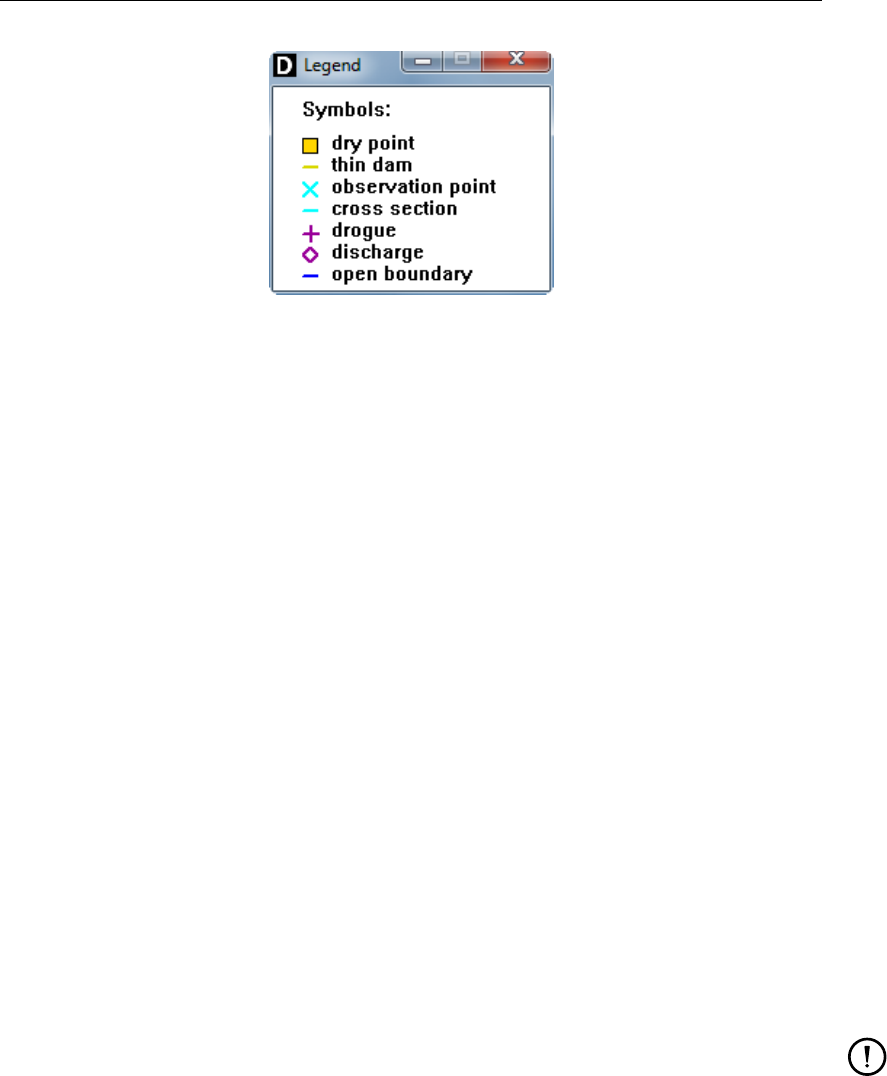
DRAFT
Graphical User Interface
Figure 4.4: Display symbols of all grid related quantities
Symbols are grouped in colours, but with different representation to support easy recog-
nition.
4.5 Input parameters of MDF-file
In this section all input parameters of the MDF-file will be described in the order as they appear
in the FLOW-GUI. After starting the FLOW-GUI data groups become available for defining or
changing the input parameters in the MDF-file.
A data group is a coherent set of input parameters that together define a certain type of input
data. For instance, in the Data Group Operations you can define all aspects related to a
discharge, such as its name, its location, its discharge rate, if the momentum of the discharge
is to be taken into account and if so in which direction and last but not least the concentration
of all substances released. Several of these items can be specified as a function of time,
where the time-series can be specified manually or read from a file.
Some data groups are organised in sub-data groups, such as the Data Group Domain, that
consists of four sub-data groups: Grid parameters,Bathymetry,Dry points and Thin dams.
We will now describe all data groups in consecutive order. For each input quantity we give:
A short description of its meaning. In many cases we add a more comprehensive discus-
sion to put the quantity and its use in perspective.
The restrictions on its use.
The range of allowed values, called its domain, and its default value (if applicable).
Remark:
Before you can define grid related quantities, you must define or select the grid struc-
ture. When editing an existing input file there is no preferred or mandatory order in
which to address the various data groups.
Deltares 25 of 688
DRAFT
Delft3D-FLOW, User Manual
Figure 4.5: Data Group Description
4.5.1 Description
The Data Group Description is a text box of up to 10 lines of text, which you can use to
describe the purpose of the present model and for discriminating the present run from the
(possibly) other runs with the same model. The description is only used for reference. Upon
selecting the data group Figure 4.5 is displayed.
If you started from an existing MDF-file its name is displayed above in the title bar.
Domain:
Parameter Lower limit Upper limit Default Unit
Descriptive text Any printable character Empty lines none
Restriction:
10 lines of text each containing a maximum of 30 characters.
4.5.2 Domain
The Data Group Domain contains the following sub-data groups: Grid parameters,Bathy-
metry,Dry points and Thin dams.
4.5.2.1 Grid parameters
In the sub-data group Grid parameters you specify the grid used, the latitude of the model
area and the number of (vertical) layers.
Before continuing with discussing the Grid parameters you should familiarise yourself with the
concept of the staggered grid applied in Delft3D-FLOW.
In a staggered grid not all quantities, such as the water level, the depth, the velocity compo-
nents or concentration of substances, are defined at the same location in the numerical grid
(and thus in the physical space).
The staggered grid applied in Delft3D is given in Figure 4.6.
Closed boundaries are defined through u- or v-points; open boundaries through either u-,
v- or water level (ζ-) points depending on the type of boundary condition such as velocity or
water level.
26 of 688 Deltares
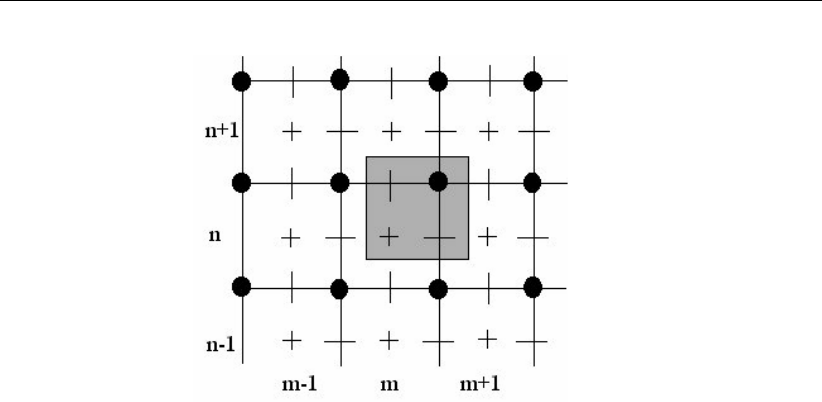
DRAFT
Graphical User Interface
Legend:
full lines the numerical grid
grey area items with the same grid indices (m, n)
+water level, concentration of constituents, salinity, tem-
perature
−horizontal velocity component in ξ-direction (also
called u- and m-direction)
|horizontal velocity component in η-direction (also
called v- and n-direction)
•depth below mean (still) water level (reference level)
Figure 4.6: Staggered grid of Delft3D-FLOW
The location of other grid related quantities, such as discharges and observation points are
given when appropriate.
In Delft3D-FLOW we support two types of co-ordinate systems in the horizontal:
Cartesian: the co-ordinates are in metres
Spherical: the co-ordinates are in decimal degrees
For a Cartesian grid you have to specify the latitude of the model area; this will be used
to calculate a fixed Coriolis force for the entire area. For a spherical grid the Coriolis force is
calculated from the latitude co-ordinates in the grid file and thus varies in the latitude direction.
Typically, you use spherical co-ordinates for large areas, such as a regional model.
The type of co-ordinate system is stored in the grid file, together with the number of grid points
in both directions, and the co-ordinates of the grid points.
The construction of a suitable curvilinear grid is not a simple task, because the grid must fulfill
the following criteria:
It must fit as closely as possible to the land-water boundaries (in short land boundaries)
of the area to be modelled.
It must be orthogonal, i.e. grid lines must intersect perpendicularly.
The grid spacing must vary smoothly over the computational region to minimise inaccuracy
errors in the finite difference operators.
The Delft3D modelling suite contains the grid generator program RGFGRID that allows you to
generate a curvilinear grid (in Cartesian or spherical co-ordinates) with the required resolution
and properties. The actual construction of a grid is realised in an iterative procedure allowing
Deltares 27 of 688
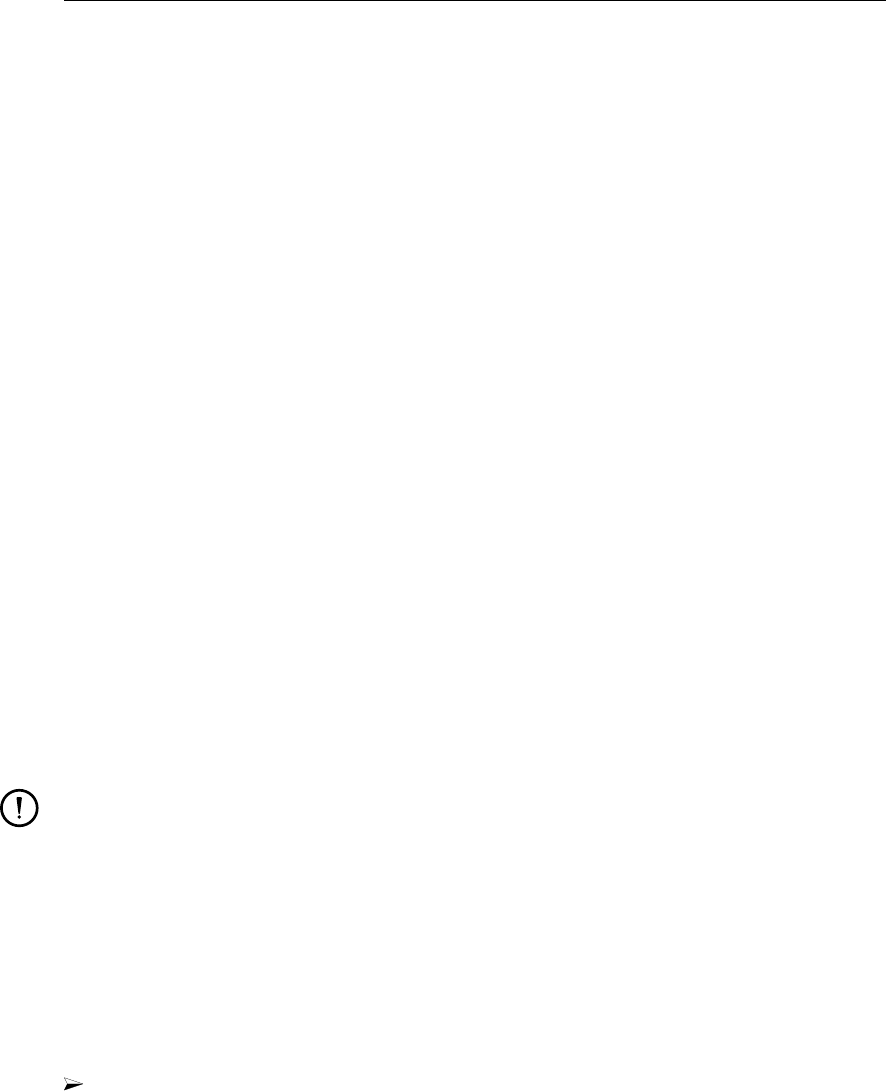
DRAFT
Delft3D-FLOW, User Manual
for a stepwise generation of the model grid, working from a coarse version of the grid to finer
versions until the required resolution is achieved. RGFGRID provides all kind of features to
develop a grid, such as refine or de-refine the grid globally or locally, delete or add locally
individual grid cells, define separately a grid in a sub-area and glue it to the overall grid and
orthogonalise the grid. RGFGRID provides features to inspect the quality of the grid.
The quality of a grid is to a large extent determined by its orthogonality and the rate with
which certain properties change over the area to be modelled (smoothness). A measure for
the orthogonality is the angle, or the cosine of the angle, between the grid lines in ξ- and
η-direction. A measure for the grid smoothness is the aspect ratio of grid cells (ratio of the
grid cell dimension in ξ- and η-direction) and the ratio of neighbouring grid cell dimensions.
As a guideline we suggest the following overall quality criteria:
Orthogonality: cos(ϕ)<0.02, where ϕis the angle between the grid lines.
Aspect ratio: must be in the range [1 to 2], unless the flow is predominantly along one of
the grid lines.
Ratio of neighbouring grid cells: should be less than 1.2 in the area of interest up to 1.4
far away.
You can use RGFGRID to inspect these and other properties graphically. For details see the
RGFGRID User Manual.
The horizontal resolution of the grid depends on the characteristic length scale of the bathy-
metry and the land-water boundary and of flow patterns you want to resolve. To resolve an
important geometrical or hydrodynamic phenomenon you will need at least 5 grid cells; to
resolve a horizontal circulation the grid size should be 1/10th or less of the size of the circula-
tion.
Remark:
Flooding and drying is less accurate if the grid size increases.
Opening a grid and enclosure file
Select Grid parameters →Open grid, see Figure 4.7. A file window opens in which you
can browse to the required directory, and open a <∗.grd>file.
After the grid file has been opened, the co-ordinate system used is displayed, as well as the
number of grid points in both directions. Next
Select Grid parameters →Open grid enclosure, see Figure 4.7. A file window opens in
which you can browse to the required directory, and open the <∗.enc>file that belongs
to your grid file.
A grid enclosure is a closed polygon specified on a grid through the water level points. Its
purpose is to define the active or potentially active (i.e. wet) computational cells in the com-
putational domain and the location of the open and closed boundaries. The grid enclosure is
generated by the grid generator RGFGRID; its use is under all practical conditions completely
transparent to you and you do not need to be aware of the definition and implementation
details.
However, if you want to inspect certain files, such as the grid file or the bathymetry file and
want to check all details in relation to values and locations, you must be aware of certain
details related to definition and implementation. You can find these details in chapter 10 as far
28 of 688 Deltares
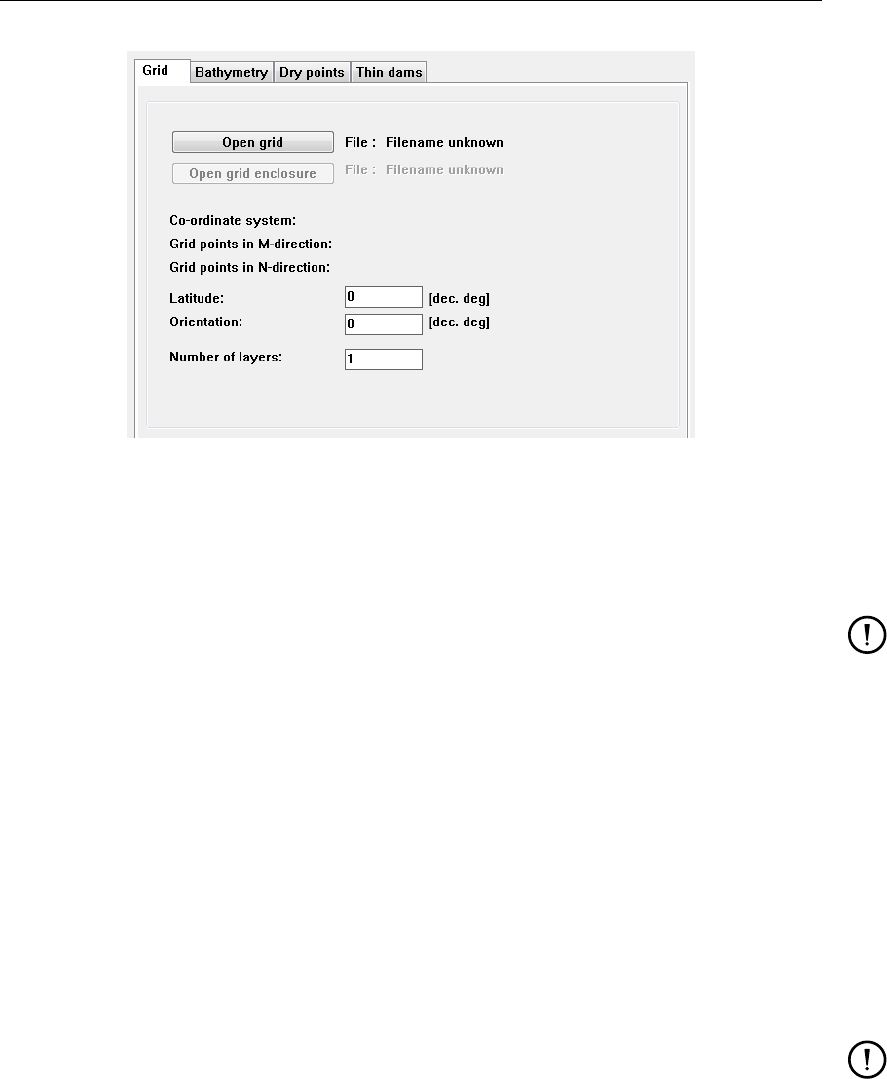
DRAFT
Graphical User Interface
Figure 4.7: Sub-data group Grid parameters
as related to the numerical scheme, in section A.2.3 related to the file structure and content
and in Appendix E for a detailed discussion of the grid enclosure and the location of open and
closed boundaries.
Remarks:
We strongly suggest generating the grid and the grid enclosure in all cases with the
grid generator program RGFGRID.
If no grid enclosure is specified a default polygon is generated through the four corner
points of the numerical grid.
Latitude and orientation of the model area
If the grid is defined in Cartesian co-ordinates you have to specify the latitude and orientation
of the model:
Latitude Latitude location of the model on Earth.
The Coriolis force is determined by the location of the model area on the Earth’s globe, i.e.
the angle of latitude (in degrees North). In the northern hemisphere you must enter a positive
value; in the southern hemisphere you must enter a negative value.
Remark:
The Coriolis force in a spherical model varies in the North-South direction and is deter-
mined by the actual latitude.
Orientation The model orientation is defined as the angle between the true North
and the y-axis of the Cartesian co-ordinate system. The angle is
positive if the rotation is clockwise, see Figure 4.8.
Deltares 29 of 688
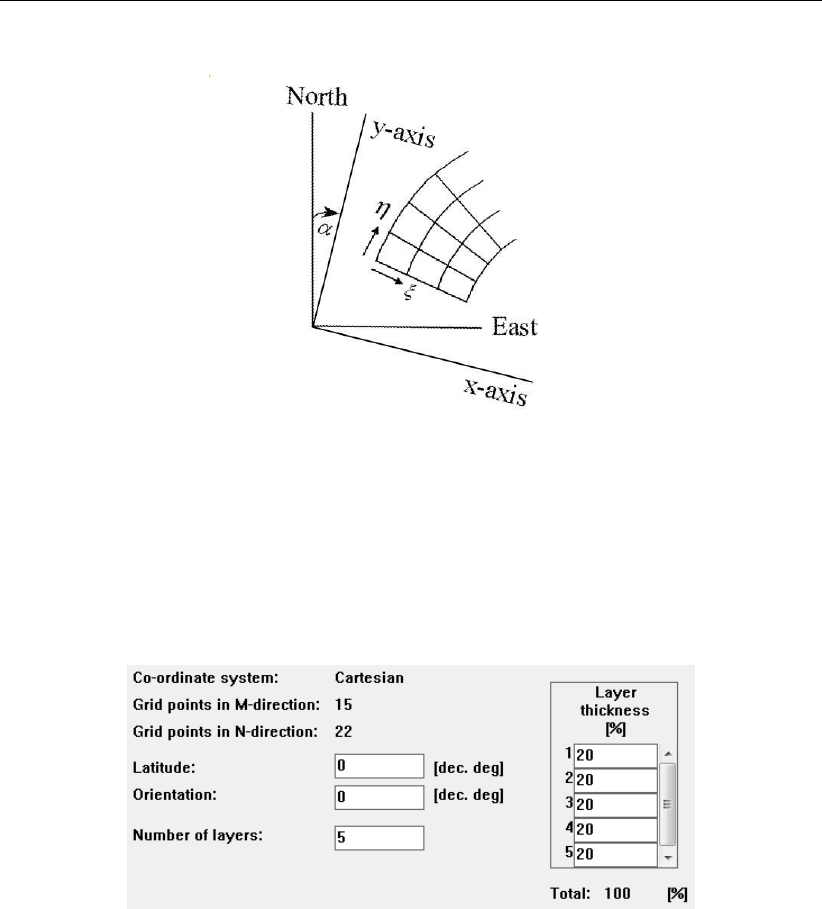
DRAFT
Delft3D-FLOW, User Manual
Figure 4.8: Definition sketch grid system to North orientation
Number of layers
For a depth-averaged computation you must set the Number of layers to 1. For a 3D compu-
tation, the Number of layers is larger than 1. Furthermore, you must specify the thickness of
the layers in the vertical. Upon setting the Number of layers larger than 1, an additional input
field Layer thickness is displayed, see Figure 4.9.
Figure 4.9: Specifying the layers thickness
In the vertical direction, two types of vertical grid with distinctive layer thickness characteristics
are supported:
With the σ-grid in the vertical the layer thickness varies with the depth, and the number of
active layers is constant (denoted in this manual as the σ-model) and
Z-grid; here the layer thickness is fixed and the number of active layers varies with the
depth. The layer thickness at the top is however determined by the actual water level
and at the bottom by the local topography. The model using this grid is referred to as the
Z-model.
To achieve a constant number of layers in the σ-model, a σco-ordinate transformation in the
vertical is used. You can specify an arbitrary number or distribution as long as the total sum
of the layers is 100 %.
The thickness of a layer is defined as:
a percentage of the initial water depth for the Z-model and
30 of 688 Deltares
DRAFT
Graphical User Interface
a percentage of the, time varying, water depth for the σ-model.
You can specify an arbitrary number or distribution as long as the total sum of the layers is
100 %. See Chapters 9,10 and 12 for more details of the vertical co-ordinate system.
Remark:
In the σ-model layer 1 corresponds to the surface layer while in the Z-model layer 1
refers to the bottom layer.
To resolve the logarithmic profile of the horizontal velocity components in the vertical the
thickness of the bottom layer should be small. It is recommended to choose the bed layer
thickness to be about 2 % of the water depth. The variation in the layer thickness should not
be large, i.e. the layer thickness must have a smooth distribution. An indicative value for the
variation-factor for each layer is 0.7 to 1.4. Going from bottom to surface the suggested layer
thickness should not exceed 3 %, 4.5 %, 6.75 %, etc. of the water depth. For a ten σ-layers
example the suggested layer thickness is {2, 3, 4, 6, 8, 10, 12, 15, 20, 20} %.
If wind is one of the important driving forces also the layer thickness near the surface should
not exceed 2 % of the water depth. Thus, going down from the surface the layer thickness
should not exceed 3 %, 4.5 %, 6.75 % etc. of the water depth.
A similar argument holds when you want to resolve sharp density gradients in the vertical:
you must have a sufficiently fine grid to resolve the vertical profile.
Domain:
Parameter Lower limit Upper limit Default Unit
Latitude -90.0 90.0 0.0 degrees
North
Orientation 0.0 360.0 0.0 degrees
Number of layers 1 100 1 -
Thickness 0.01 100.0 100.0 % total
depth
Restrictions:
The direction of the line segments in the polygon of the grid enclosure must form a
multiple of a 45 degree angle with the numerical grid axis.
A line segment may not intersect or touch another line segment.
The grid enclosure (polygon) must be closed.
The sum of the layer thickness must be equal to 100 %.
The maximum number of layers is 100.
Deltares 31 of 688
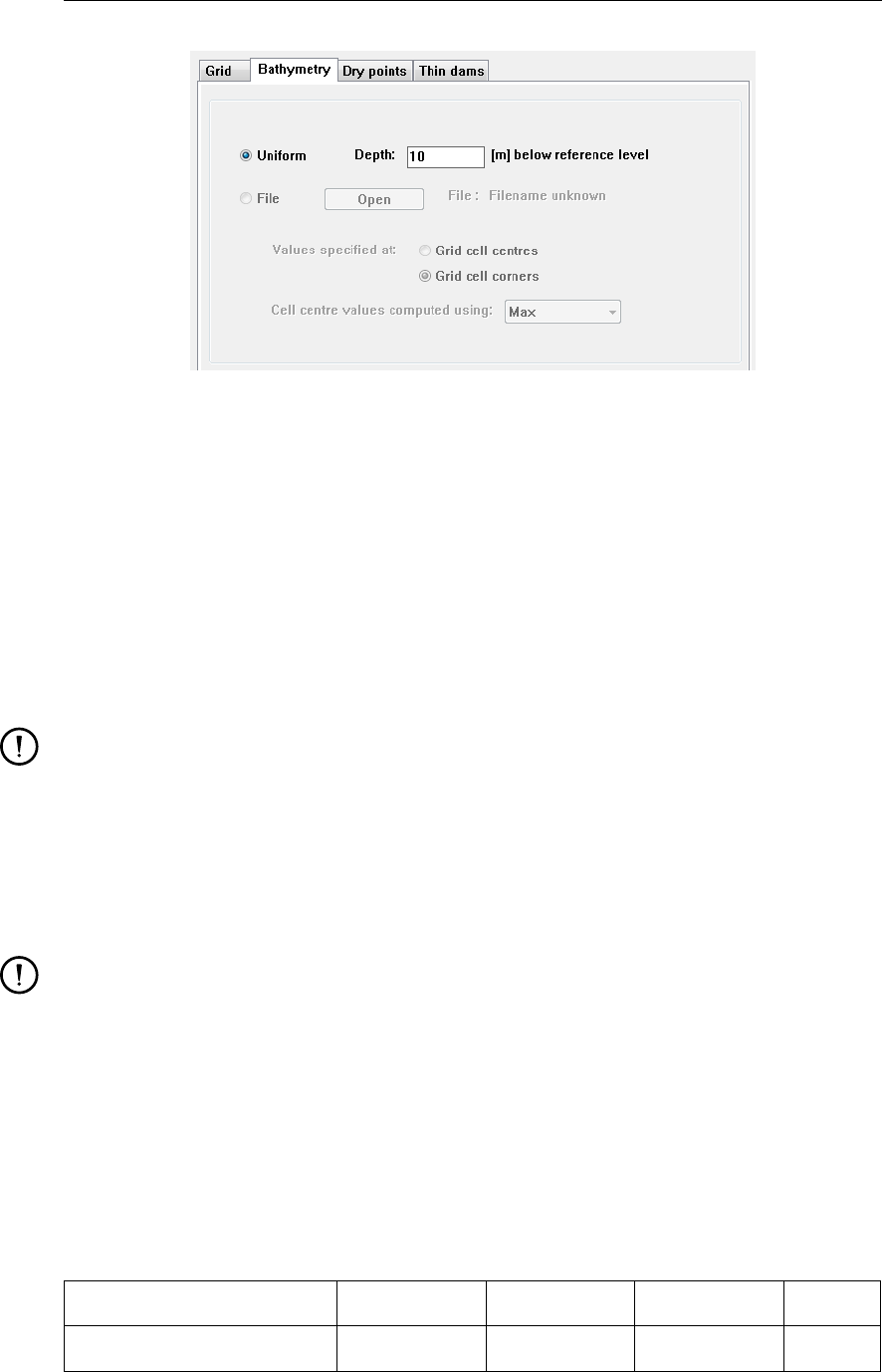
DRAFT
Delft3D-FLOW, User Manual
Figure 4.10: Sub-data group Domain →Bathymetry
4.5.2.2 Bathymetry
The depth schematisation may be uniform or non-uniform across the model area. A non-
uniform (space-varying) bathymetry is given in an attribute file with the extension <dep>. For
a uniform bathymetry the sub-window is given in Figure 4.10.
You can either select:
Uniform To enter a uniform depth value for the whole model area. Upon se-
lecting Uniform an input field Depth is displayed.
Depth To enter a uniform depth (positive downward).
Remark:
The reference level of the depth is a horizontal plane. A nega-
tive value defines a depth above the reference plane.
File To specify a file with bathymetry data. Upon selecting File an Open
button is displayed.
Open To open and read the bathymetry file with extension <dep>; see
Appendix A for its file format.
Values specified at Select if the depth values have been generated at cell centres (Grid
cell centres) or at cell corners (Grid cell corners).
Remark:
Default QUICKIN generates data at the grid cell corners, but
you can also choose to generate data at cell centres.
Cell centre value
computed using
You can either select (see also section 10.8.1):
Max The depth at the cell centre is the maximum of the 4 sur-
rounding depths at the cell corners.
Mean The depth at the cell centre is the mean of the 4 surround-
ing depths at the cell corners.
Min The depth at the cell centre is the minimum of the 4 sur-
rounding depths at the cell corners.
Domain:
Parameter Lower limit Upper limit Default Unit
Depth -1,000 20,000 10.0 m
The task of assigning depth values to grid points can be split in two main components. The
32 of 688 Deltares

DRAFT
Graphical User Interface
first one is the gathering of the raw bathymetric data, the second one is the actual interpolation
of these raw data on the structured grid.
You can obtain the bathymetric data by:
Digitising bathymetric charts (Admiralty Charts, Fair Sheets).
Extracting the bottom schematisation of the area to be modelled from the bottom schema-
tisation of an overall coarser hydrodynamic model.
Using available measurements (echo-soundings).
Remark:
Do pay special attention to the reference levels of different raw bathymetric data sources.
These options can be combined to obtain the most elaborate depth data. However, you
must be careful when combining depth data originating from different sources (different chart
datums). Corrections might be required to ensure that all depth values refer to only one
reference level. The combined bathymetric data may not all be of the same resolution, neither
of the same quality with respect to accuracy, nor may they cover the complete area of the
grid. If all data are simply stacked into one file, there will be the problem that high quality data
becomes contaminated with low quality data, thus spoiling interpolation results that might
have been good if properly dealt with. Hence, you must carefully evaluate the quality of the
various bathymetric data sets, before deciding to either include or discard it.
The interpolation of these data to the depth points of the grid should result in a bathymetry that
resembles the natural bathymetry as closely as possible. However, this does not mean that
the best bathymetry is obtained by always assigning the actual depths to all grid points. Since
the FLOW module calculates averaged flow velocities and water levels, equality of averaged
bathymetric features is more important than equality of bathymetric features at discrete grid
points. Therefore, you should adopt a volume-preserving interpolation method that uses all
data points if there is redundancy of data in a given grid cell.
In this way, the integral bathymetric features are best accounted for. In the opposite situation,
when there are less data points than grid points in a given area, you will apply some kind of
interpolation method on a triangulation network.
You can apply the utility program QUICKIN that enables you to select a sequence of data
files and to control the interpolation areas and the interpolation method. The triangulation
network is designed in such a way, that minimum triangle side lengths are achieved. Thus, a
maximum correlation between the numerical bathymetry and known bathymetric data points
is then obtained. The resulting bathymetry on the numerical grid is shown by way of iso-lines.
You can correct interactively depth values of individual samples or grid points.
Deltares 33 of 688
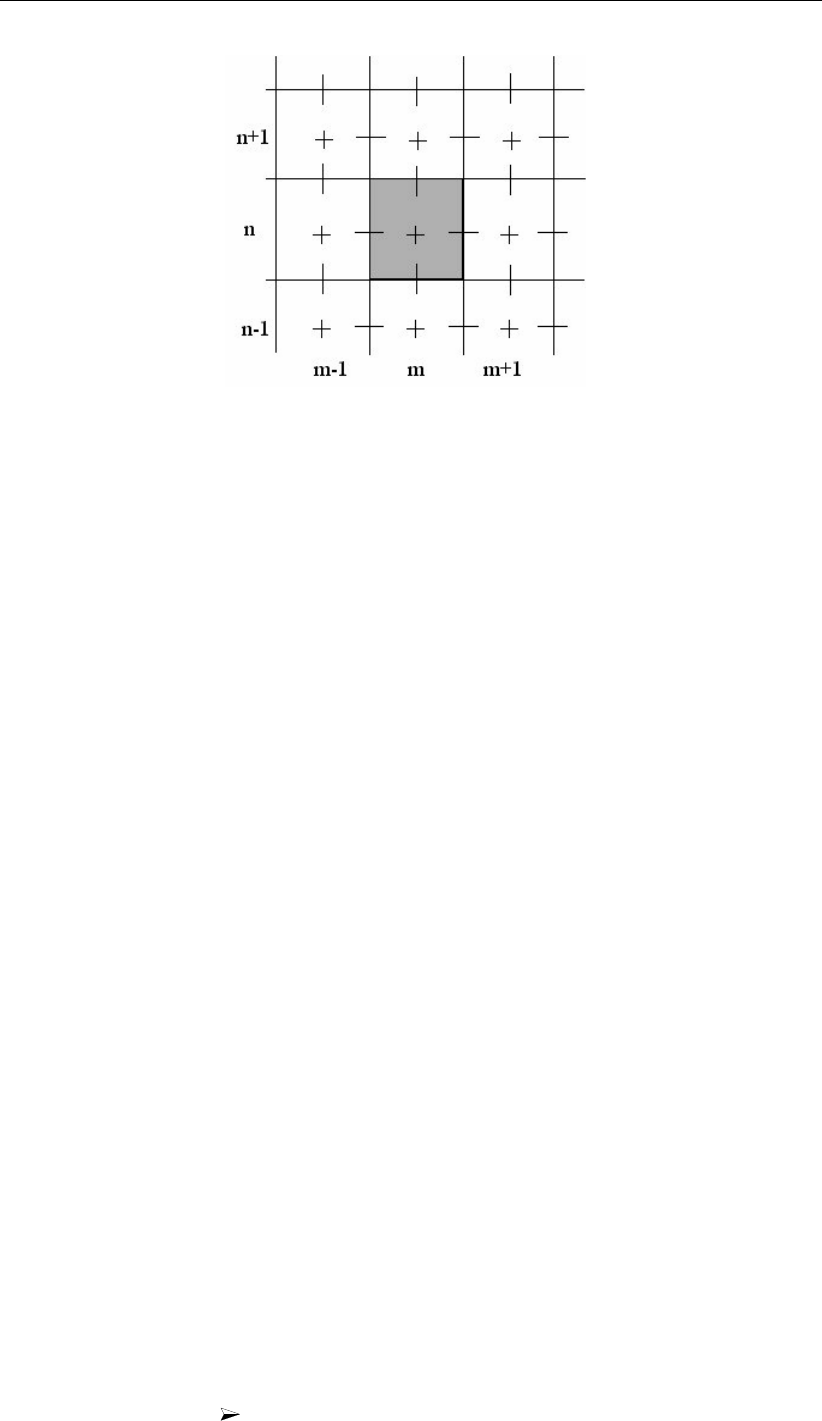
DRAFT
Delft3D-FLOW, User Manual
Figure 4.11: Dry point at grid location (m, n)
Bathymetry in relation to drying and flooding
Drying and flooding is a discontinuous process. It may generate high frequency disturbances
in the results. In general, the magnitude of the disturbance will depend on the grid size and
the bottom topography. The disturbances are small if the grid size is small and the bottom
has smooth gradients. If the bottom has steep gradients across a large area on a tidal flat,
a large area may be taken out of the flow domain in just one half integration time step. This
can produce many (short wave length or wave period) disturbances (noise) in the simulation
results. You can avoid this by smoothing the bottom gradients. You should also pay attention
to the fact that depth values at points near closed boundaries are used in the drying and
flooding procedure. Finally, you must ensure that the topography for points near tidal flats in
general, and for discharge points near tidal flats in particular, are appropriately schematised
to prevent the cells to be set wet and dry at each integration time step. For details of the
numerical aspects of drying and flooding see chapter 10. Finally, you must avoid drying and
flooding at open boundaries.
4.5.2.3 Dry points
Dry points are grid cells centred around a water level point that are permanently dry during
a computation, irrespective of the local water depth and without changing the water depth as
seen from the wet points. Dry points are specified as a line of dry points; a single dry point is
specified as a line of unit length.
In Figure 4.11 a single dry point is defined at location (m, n). The depth at the corner points,
i.e. at (m, n),(m, n −1),(m−1, n −1) and (m−1, n)remain unchanged, i.e. as defined
by the bathymetry. As a result the water depth in the surrounding water level points (+) are
not influenced by the presence of the dry point.
You can specify dry points either manually, graphically in the Visualisation Area window or
by reading from an attribute file (file extension <dry>).
Upon selecting the Data Group Dry points the sub-window of Figure 4.12 is displayed.
Dry points are characterised by their (m, n)grid indices. You can apply one or more of the
following options:
Add To add one or a line of dry points either:
Click Add.
34 of 688 Deltares
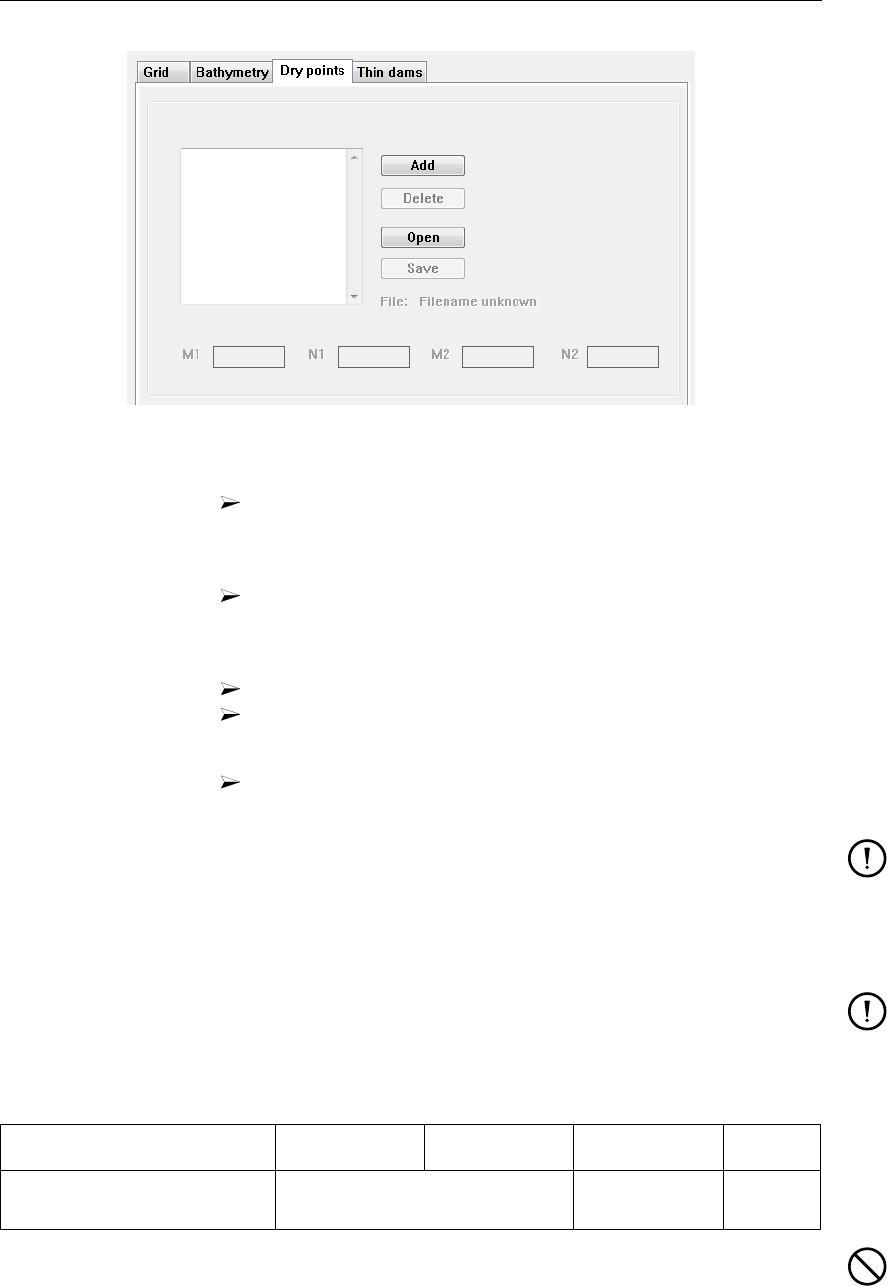
DRAFT
Graphical User Interface
Figure 4.12: Sub-data group Dry points
Specify the grid indices of the begin and end points, i.e. (m1, n1)
and (m2, n2).
or
Use the Visualisation Area window (see section 4.4.2 on how
to use the Visualisation Area window).
Delete To delete a single dry point or a line of dry points either:
Select the dry points to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open To read dry points from an attribute file with extension <dry>.
Remark:
If you want to combine dry points read from a file and inserted
manually you must read the file first and then add the manually
defined dry points. In reverse order the manually defined dry
points are overwritten by those of the file.
Save To save all dry points in the same or a new attribute file.
Remark:
You can save the dry points here or postpone it to the end of
the input definition when you save the MDF-file.
Domain:
Parameter Lower limit Upper limit Default Unit
Indices (m, n)Anywhere in the computa-
tional domain
none none
Restrictions:
Dry points may only be specified along line segments which form a 45 degrees angle,
or the multiple of it, with the computational grid axis.
If dry points are read from file and defined manually, the file must be read first. Upon
saving all dry points are stored in the (new) attribute file.
Deltares 35 of 688
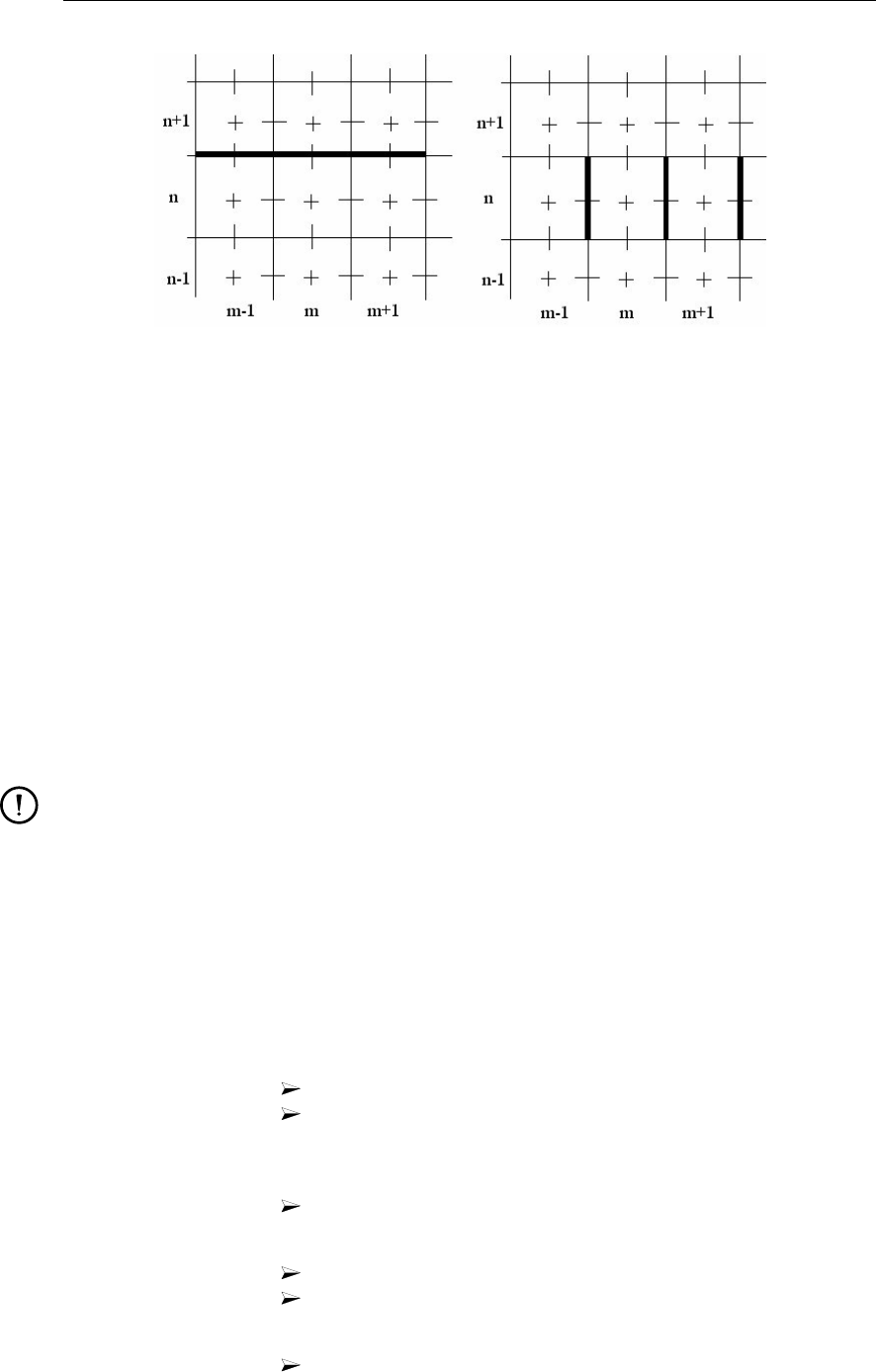
DRAFT
Delft3D-FLOW, User Manual
Figure 4.13: Equivalence of v-type thin dams (left) and u-type thin dams (right) with the
same grid indices, (M−1 to M+1, N)
4.5.2.4 Thin dams
Thin dams are infinitely thin objects defined at the velocity points which prohibit flow exchange
between the two adjacent computational cells without reducing the total wet surface and the
volume of the model. The purpose of a thin dam is to represent small obstacles (e.g. break-
waters, dams) in the model which have sub-grid dimensions, but large enough to influence the
local flow pattern. Thin dams are specified as a line of thin dams; a single thin dam is spec-
ified as a line of unit length. The line of thin dams is defined by its indices of begin and end
point, (m1, n1) and (m2, n2), respectively, and the direction of thin dam (u- or v-direction).
Thin dams can be specified either manually or via an imported file with mask <thd>.
In Figure 4.13 the location is shown for three single u-thin dams (left) and a line of three v-
thin dams (right). Note that these thin dams have the same grid indices; they only differ in the
direction.
Remark:
Thin dams separate the flow on both side, but they do not separate the bathymetry on
both sides. Depth points are located at the thin dam and so this depth is used on both
sides of the thin dam. If you need to apply a different depth on both sides you cannot
apply a thin dam, but you should use a line of dry points instead.
Upon selecting Thin dams the sub-window of Figure 4.14 is displayed.
You can apply one or more of the following selections:
Add To add a single or a line of thin dams either:
Click Add.
Specify the grid indices of the begin and end point, i.e. (m1, n1)
and (m2, n2).
or
Use the Visualisation Area window, see section 4.4.2.
Delete To delete a single or a line of thin dams either:
Select the thin dam to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window, see section 4.4.2.
Open To read thin dams from an attribute file with extension <thd>.
36 of 688 Deltares
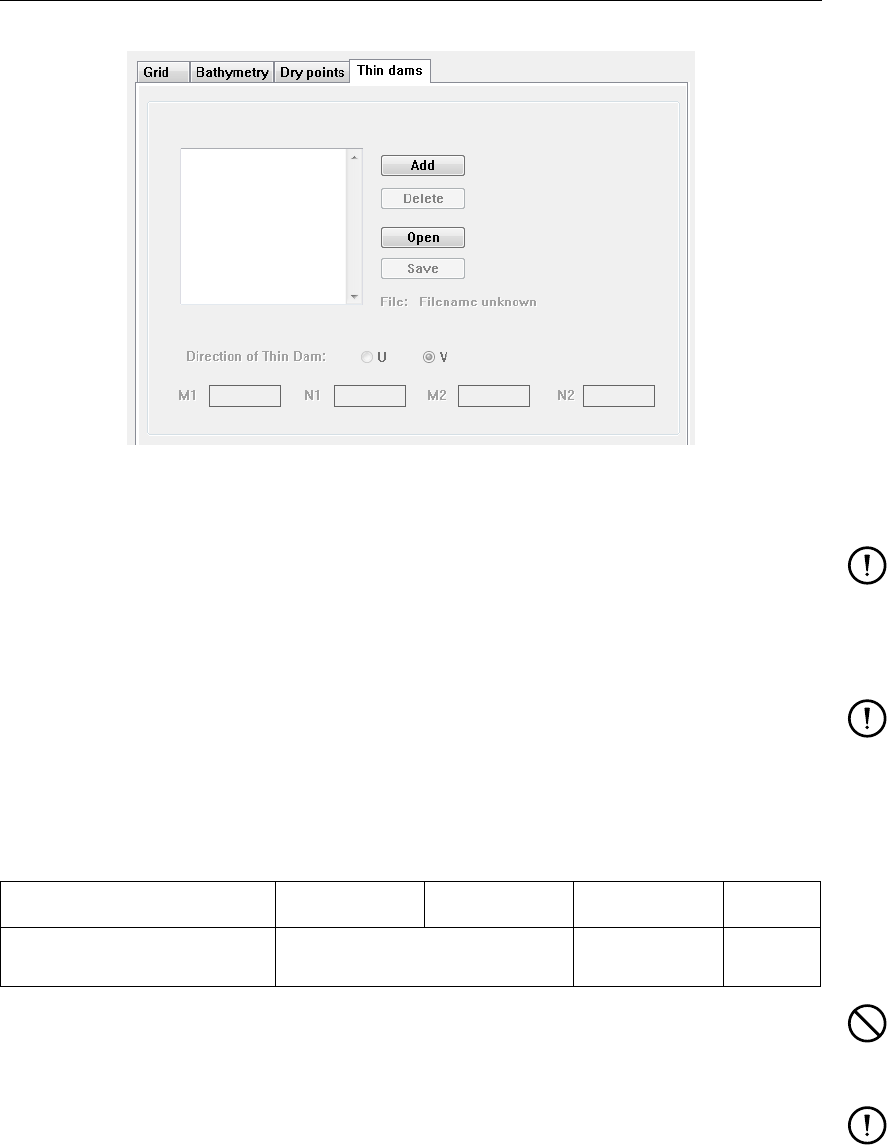
DRAFT
Graphical User Interface
Figure 4.14: Sub-data group Thin dams
Remark:
If you want to combine thin dams read from a file and inserted
manually you must read the file first and then add the manually
defined thin dams. In reverse order the manually defined thin
dams are overwritten by those of the file.
Save To save the thin dams to the same or a new attribute file.
Remark:
You can save the thin dams here or postpone it to the end of
the input definition when you save the MDF-file.
Direction of Thin Dam A thin dam can either be defined as blocking the flow in u- or v-
direction; select either direction.
Domain:
Parameter Lower limit Upper limit Default Unit
Indices (m, n)Anywhere in the computa-
tional domain
none none
Restriction:
Thin dams can only be specified along lines parallel to one of the numerical grid axes
or along lines which form a 45 degrees angle with the numerical grid axis.
Remarks:
Defining thin dams at the grid boundaries (other then open boundaries) does not make
sense since these boundaries are already closed per definition.
Thin dams perpendicular to open boundaries are allowed.
Thin dams aligned along an open boundary section are strongly discouraged. You can
better subdivide such a section in sub-sections excluding the thin dams. If done so
these thin dams do not make sense anymore, see the first remark.
Deltares 37 of 688
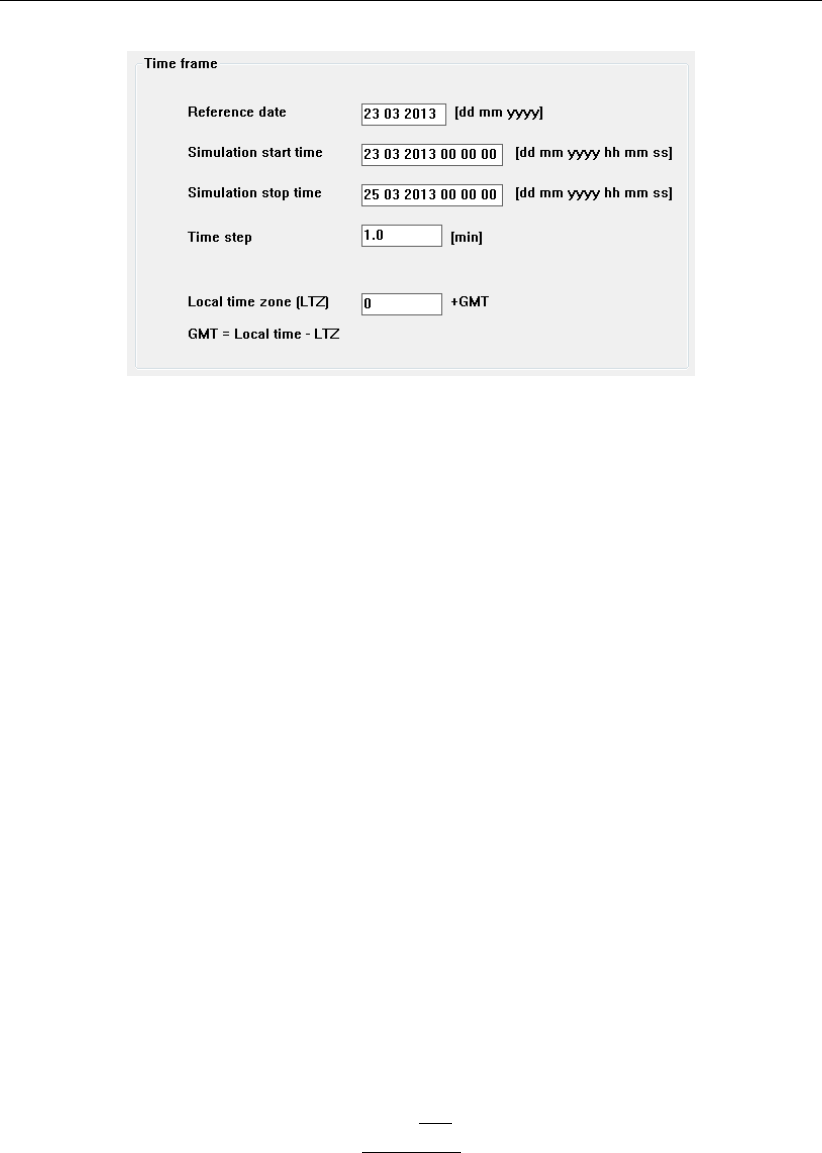
DRAFT
Delft3D-FLOW, User Manual
Figure 4.15: Data Group Time frame
4.5.3 Time frame
In the Data Group Time frame you define the relation between the time axis of the real world
and that of the simulation. All time dependent input is defined by the date and time as [dd mm
yyyy hh mm ss], but in the simulation a time is determined by its number of time steps after
the simulation reference date at time [00 00 00]. Upon selecting the Data Group Time frame
the sub-window given in Figure 4.15 is displayed.
You must specify the following input data:
Reference date The reference date of the simulation.
The reference date defines the (arbitrary) t = 0 point for all time-
series as used in the simulation. All time-series are specified in min-
utes after this t = 0 point. This reference date is also given in the
header of files containing time-series, such as boundary conditions
of type Time-Series,section A.2.15, or flow rate and concentrations
of discharges, section A.2.22. By default the reference date is set
equal to the current date.
Simulation start time The start date and time of the simulation.
Simulation stop time The stop date and time of the simulation.
Time step The time step used in the simulation in minutes.
Generally, you can choose the time step based on accuracy argu-
ments only, in most cases stability is not an issue. The accuracy
is, among several other parameters, such as the reproduction of the
important spatial length scales by the numerical grid, dependent on
the Courant-Friedrichs-Lewy number (CFL), defined by:
CF L =∆t√gH
{∆x, ∆y}(4.1)
where ∆tis the time step (in seconds), gis the acceleration of grav-
ity, His the (total) water depth, and {∆x, ∆y}is a characteristic
value (in many cases the minimal value) of the grid spacing in either
direction.
Generally, the Courant number should not exceed a value of ten, but
for problems with rather small variations in both space and time the
Courant number can be taken substantially larger. See section 10.4
for a discussion on the numerical scheme used in Delft3D-FLOW in
relation to stability and accuracy. For your convenience we repeat
38 of 688 Deltares
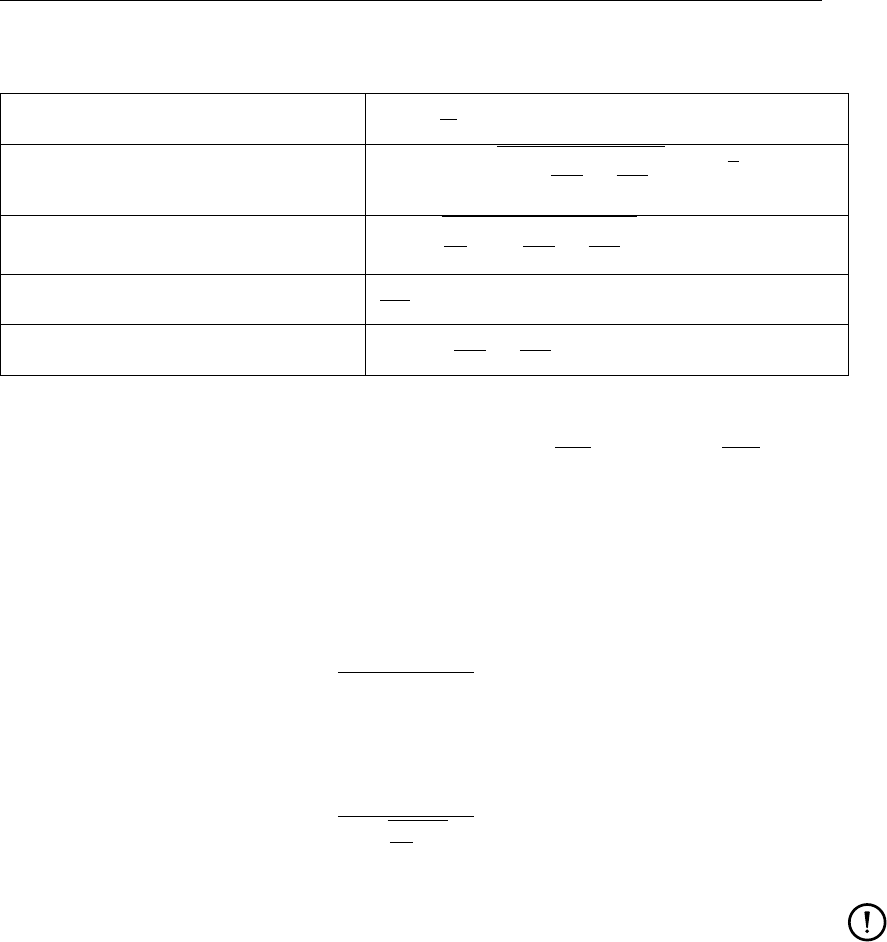
DRAFT
Graphical User Interface
Table 4.2: Time step limitations shallow water solver Delft3D-FLOW
Points per wave period T ∆t≤1
40 T
Accuracy ADI for barotropic mode for
complex geometries
Ct= 2∆trgH 1
∆x2+1
∆y2<4√2
Stability baroclinic mode 2∆tr∆ρ
ρgH 1
∆x2+1
∆y2<1
Explicit algorithm flooding u∆t
∆x<2
Stability horizontal viscosity term ∆tνH1
∆x2+1
∆y2<1
the summary of that section. Let ∆xand ∆ybe horizontal grid
sizes. For a curvilinear grid ∆x=pGξξ and ∆y=pGηη. In the
time step limitations are given for the shallow water code Delft3D-
FLOW. Which of the limitations is most restrictive is dependent on
the kind of application: length scale, velocity scale, with or without
density-coupling etc.
For the Z-model the following additional limitations apply:
∆t≤min (∆x, ∆y)
max (|u|,|v|)(4.2)
and
∆t≤min (∆x, ∆y)
q∆ρ
ρgH
(4.3)
Remark:
You should check the influence of the time step on your results
at least once.
Local time zone The time difference between local time and UTC.
The time zone is defined as the time difference (in hours) between
the local time (normally used as the time frame for Delft3D-FLOW)
and Coordinated universal time (UTC). The local Time Zone is used
for for two processes:
To determine the phases in local time of the tidal components
when tide generating forces are included in the simulation, see
Data Group Processes.
To compare the local time of the simulation with the times at
which meteo input is specified, e.g. wind velocities and atmo-
spheric pressure. These can be specified in a different time zone.
If the Local Time Zone = 0.0 then the simulation time frame will refer
to UTC.
Deltares 39 of 688
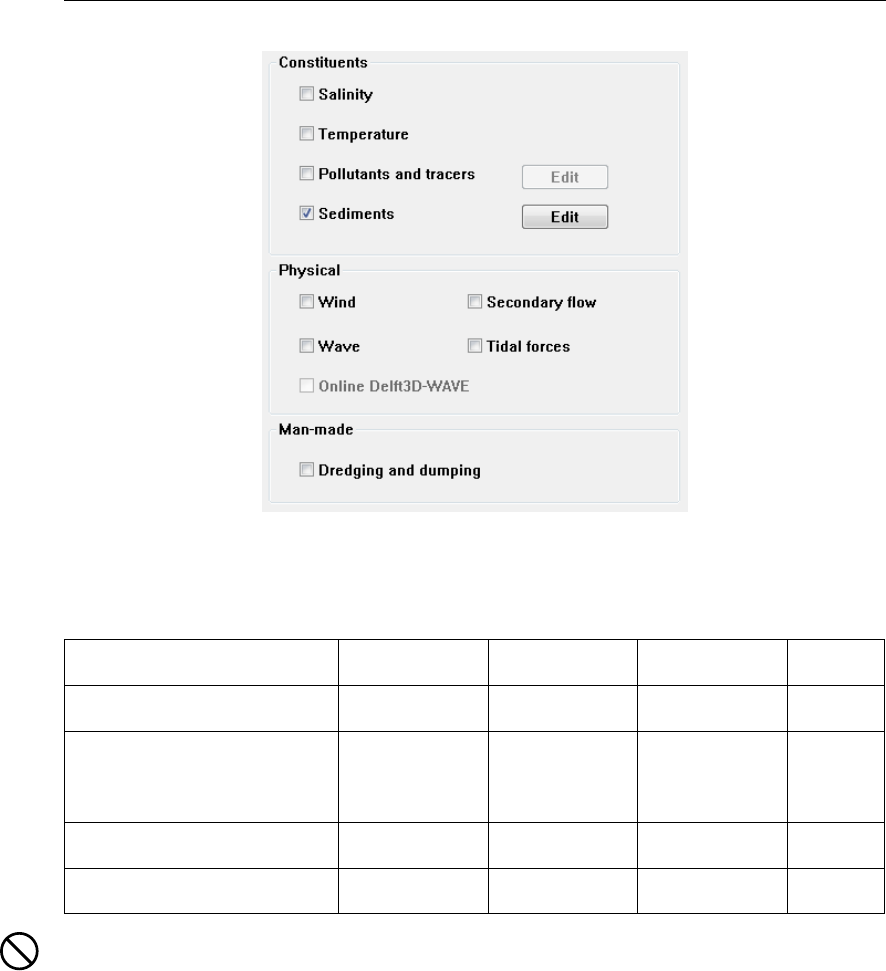
DRAFT
Delft3D-FLOW, User Manual
Figure 4.16: Data Group Processes
Domain:
Parameter Lower limit Upper limit Default Unit
Date Current date none
Time 00 00 00 23 59 59 00 00 00 hours
minutes
seconds
Time step 0.0 999.0 1.0 minutes
Local Time Zone -12.0 12.0 0.0 hours
Restrictions:
If open boundaries are used with forcing type Astronomic then dates may not be before
1 January 1900.
The start and stop date must be equal to or larger than the reference date.
The start and stop time must be integer multiples of the time-step.
The simulation stop time must be equal to or larger than the simulation start time.
The time step must be positive.
40 of 688 Deltares
DRAFT
Graphical User Interface
4.5.4 Processes
In the Data Group Processes you specify which processes or quantities that might influence
the hydrodynamic simulation are taken into account. Here you only define which processes
you are going to apply; the parameters required for these processes are defined in other Data
Groups, such as Initial conditions or Boundaries.
Click the Data Group Processes, upon which Figure 4.16 is displayed.
In Figure 4.16 the process Sediments has been selected; this enables the process Dredging
and dumping.
Remarks:
To include Waves (offline) you need a communication file with wave data.
To run FLOW Online with WAVE you have to write the communication file, and you have
to prepare an MDW-file prior to execute these simulations
Secondary flow is only displayed for depth averaged computations using the σ-model,
but not for the Z-model
Tidal forces is only displayed if the grid is in spherical co-ordinates.
You can select any combination of the processes by:
Ticking off its check box and specifying names if required.
Salinity The salinity concentration will be taken into account including its in-
fluence on the water density and other processes.
Temperature The temperature is computed and the influence of the temperature
on the water density is taken into account. Several heat flux models
are available; see the sub-data group Physical parameters →Heat
flux model.
Salinity and temperature affect the density of the water. As a consequence, a horizontal
and vertical density gradient may occur which induces density driven flows. The density is
calculated at cell centres.
Pollutants and tracers The spreading of up to 99 constituents (pollutants and/or sediments)
can be simulated simultaneously. If Pollutants are selected a window
appears to let you specify the names of the constituents applied. The
names of the constituents can be up to 20 characters long.
Remark:
You can specify a first order decay rate for each of the con-
stituents. See section B.2 for a description on how to use this
option.
Sediments This functionality includes the transport of suspended sediments (co-
hesive and non-cohesive), bedloads and optionally updating the bathy-
metry. If Sediments are selected a window appears to let you specify
the names of the cohesive and/or non-cohesive sediments applied,
see Figure 4.17.
The names of sediment substances have to start with “Sediment”.
Furthermore, the tabs Sediment and Morphology are available in the
Data Group Physical parameters where you can define the sediment
and morphology characteristics.
Remark:
See chapter 11 and section B.9 for details on how to use the
Sediment and morphology functionality.
Wind To include a wind field and its influence on the flow and spreading of
Deltares 41 of 688
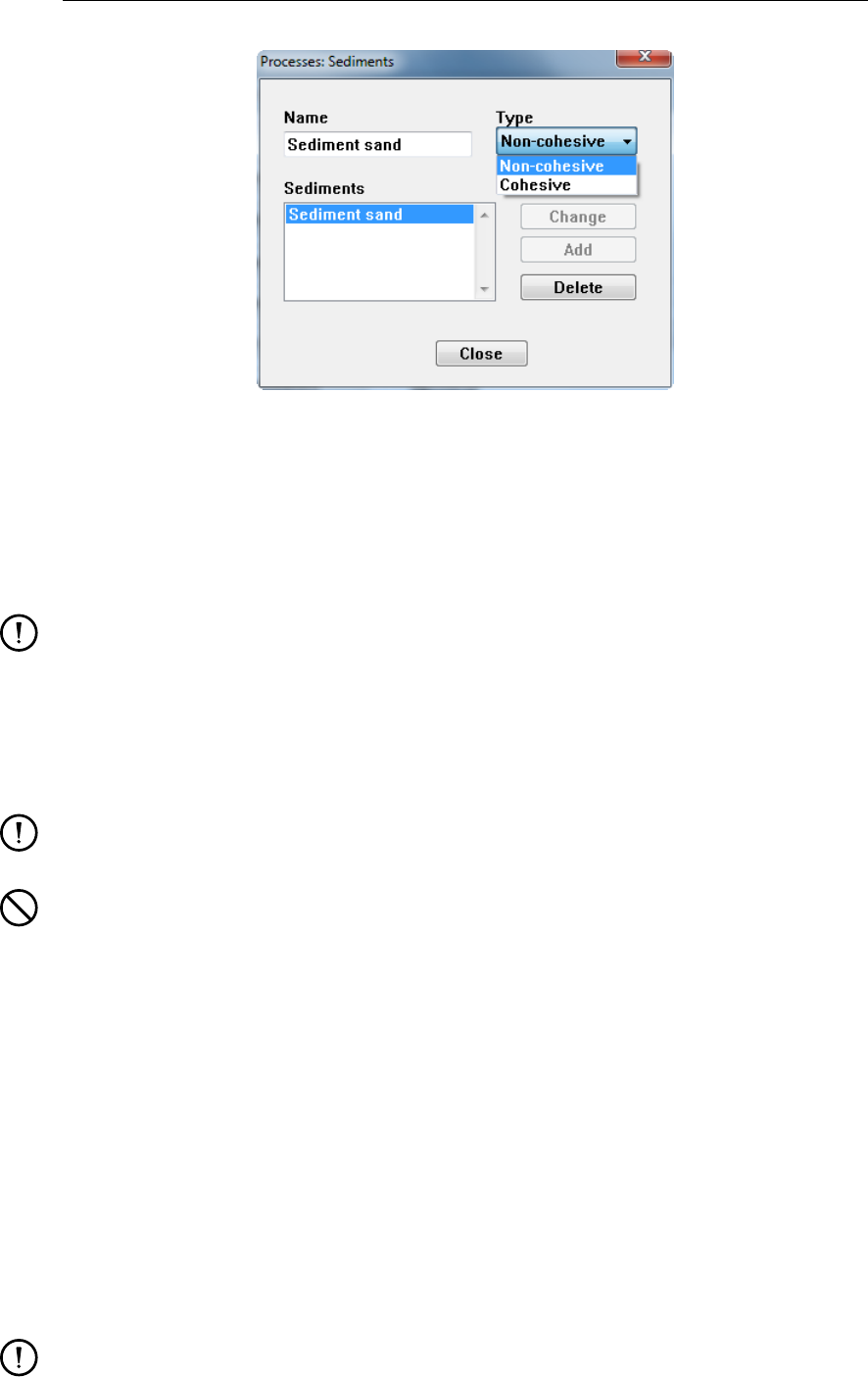
DRAFT
Delft3D-FLOW, User Manual
Figure 4.17: Sediment definition window
substances. If wind is selected a Wind tab is available in the Data
Group Physical parameters. There you can specify a global time
varying wind field, or read a time and space varying wind field and
pressure from a file. The latter is useful for the simulation of storm
surges or typhoons in a regional model.
Remark:
If FLOW runs online with WAVE, the wind specified in FLOW
can be used in WAVE.
Wave To take into account the influence of short waves on the bed-stress
and the radiation stress on the overall momentum transport. See
section 9.7 for details on how to take the wave-current interaction
into account. For details of modelling waves you are referred to the
User Manual of Delft3D-WAVE.
Remark:
You first have to run the WAVE module to create a communica-
tion file with the required wave information.
Restriction:
The Wave process is only available for the σ-model.
You select the formulation for the influence of short waves on the
bottom roughness in the Data Group Physical parameters →Rough-
ness.
Online Delft3D-WAVE An extension to the previous process is Online Delft3D-WAVE. In
this case there is a direct coupling with Delft3D-WAVE. Every time
the communication file is written, subsequently a WAVE simulation
is performed. Then FLOW resumes, using the latest WAVE results.
Prior to starting the FLOW simulation with online Delft3D-WAVE you
also have to prepare a WAVE input file. For details of modelling
waves you are referred to the User Manual of Delft3D-WAVE.
Secondary flow The process Secondary flow adds the influence of helical flow, such
as in river bends, to the momentum transport, see section 9.6 for
details of the formulations.
The influence of spiralling flow can either be taken into account through
an equilibrium formulation or as an evolutionary process by solving
an advection-diffusion equation.
Remark:
In 3D simulations the check box of Secondary flow is invisible,
i.e. cannot (and need not) be selected. The influence of helical
42 of 688 Deltares
DRAFT
Graphical User Interface
flow is resolved in the 3D formulation itself.
Restriction:
Secondary flow is only available for the σ-model.
Tidal forces To specify the parameters for tide generating forces. If tidal forces
is selected a tab Tidal forces is available in Data Group Physical
parameters. For details see section 9.9. Tidal forces can only be
specified for spherical co-ordinates.
Dredging and dumping When the process Sediments is switched on, you can use the func-
tionality to dredge and dump sediments. This feature can also be
used for sand mining (only dredging, no associated dumping within
the model domain) and sediment nourishment (only dumping, no as-
sociated dredging within the model domain). The file with dredg-
ing and dumping sites and dredge characteristics must be opened
in the Data Group Operations →Dredging and dumping, see sec-
tion 4.5.9.2.
Restrictions:
The process Wave is not available for the Z-model.
Secondary flow is not available for the Z-model.
Tidal forces can only be applied for spherical grids.
4.5.5 Initial conditions
In the Data Group Initial conditions you can specify the initial values the computation will start
with.1Initial conditions are required for all dependent variables, such as water level, flow ve-
locity components, salinity and/or temperature in the case of an inhomogeneous computation,
and for the secondary flow and constituents if included in the simulation. The processes salin-
ity, temperature, secondary flow and constituents are selected in the Data Group Processes.
Initial conditions can be very simple, such as a uniform value in the whole area, or more
complex as a space varying value obtained from ‘somewhere’ or taken from a previous run.
You can select the initial conditions arbitrarily within the domain specified below. The optimum
values depend on a combination of the values of the boundary conditions at the start time of
the simulation, the values of the variables in the (dynamic) equilibrium of the model and to
some extent the topography.
A large discrepancy between the initial condition and the boundary conditions at the simula-
tion start time can result in short wave disturbances that propagate into the model area. If
the discrepancy is so large that the flow velocity becomes close to or above the critical flow
velocity the simulation might even become unstable. The time to reduce these short wave dis-
turbances by internal dissipation such as bottom friction might be quite large, in tidal situations
one or even several tidal cycles.
The effects of a discrepancy between the initial condition and the boundary conditions at the
start time of the simulation can be substantially reduced by applying a transition period from
the initial condition to the actual boundary conditions and determine the intermediate values
by a smooth interpolation; see the Data Group Numerical parameters.
For complicated topographies with large drying and flooding areas we suggest to start at high
water and define an initial condition to this situation. Mismatches between the initial condition
and the boundary condition are washed out of the system instead of propagating inward.
1Initial condition file is not yet available for the Z-model
Deltares 43 of 688
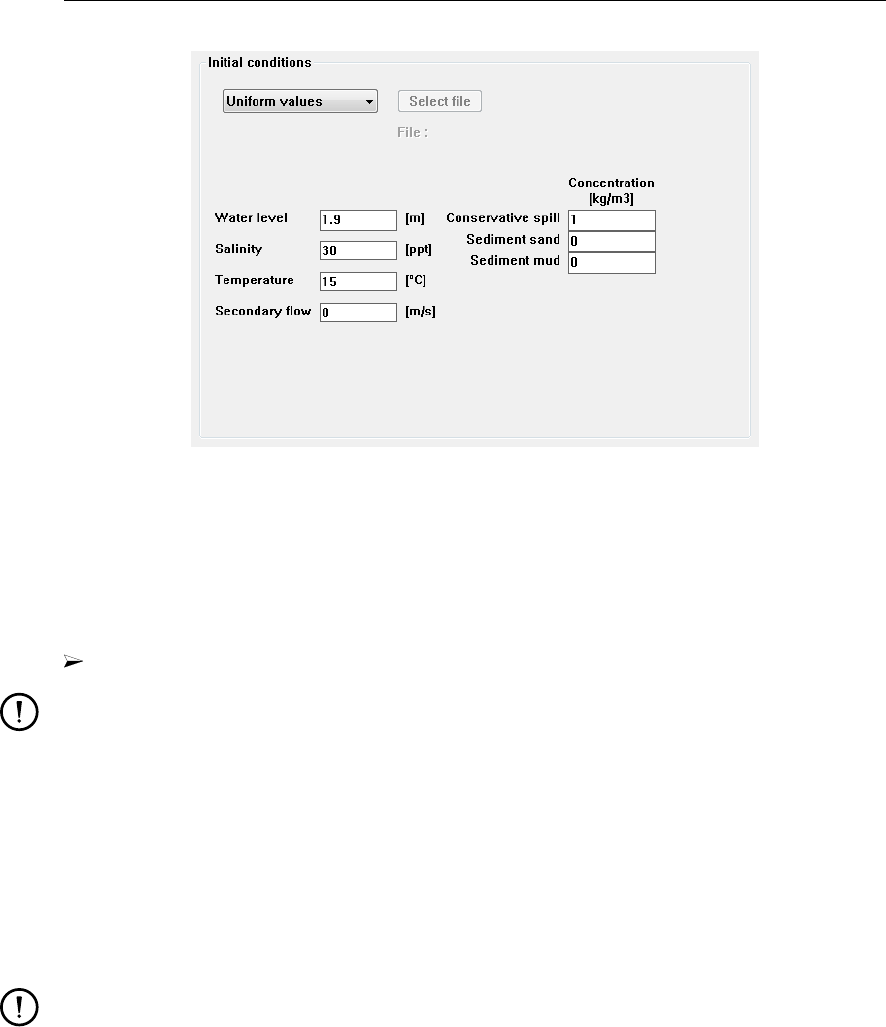
DRAFT
Delft3D-FLOW, User Manual
Figure 4.18: Data group Initial conditions
If you do not use optimum initial conditions, the final results will be the same, but the transient
period to reach the (dynamic) equilibrium will increase.
To display the Initial conditions window:
Click the Data Group Initial conditions. Next, Figure 4.18 is displayed.
Remark:
For the layout to appear as displayed in Figure 4.18 we have selected a depth averaged
computation (Number of layers = 1 in the Data Group Domain →Grid parameters), se-
lected all processes in the Data Group Processes, defined one pollutant, two sediments
and set the option in Figure 4.18 to Uniform. If you specify less processes less data
fields will be displayed.
You can select one of the following options:
Uniform To specify a uniform initial condition for the water level and each of
the constituents defined in the Data Group Processes.
Remark:
The uniform initial condition for the velocity components is by
default set to zero.
For uniform initial conditions you must specify one or more of the following quantities, depend-
ing on the processes you have selected in the Data Group Processes:
Water level Specify the initial condition above the reference plane (i.e. the still
water level) in [m]. Above the reference plane is positive.
Salinity Specify the initial (sea)water salinity in [ppt].
Temperature Specify the initial water temperature in [◦C].
Secondary flow Specify the initial secondary flow in [m/s]. This option can only be
applied when you have selected a depth averaged simulation (Num-
ber of layers = 1 in Data Group Domain →Grid parameters) and the
σ-model.
Constituents Specify the initial constituent (pollutant, sediment) concentrations in
[kg/m3].
44 of 688 Deltares
DRAFT
Graphical User Interface
When you select either of the following options the input fields of the uniform values, displayed
in the lower half of Figure 4.18 are not displayed.
Initial conditions file The initial conditions are read from an attribute file that you some
how obtained, for instance from a previous run, created by a sep-
arate program or constructed from measurements. Upon selecting
this option you must specify the file.
Restart file The initial conditions are read from a restart file from a previous run.
To identify this file you must select either a <tri-rst.runid>or a <tri-
rst.runid.date.time>file.
Map file The initial conditions are read from a map file from a previous run.
To identify this file you must select a <trim-runid>file.
Domain:
Parameter Lower limit Upper limit Default Unit
Water level -1,000 1,000 0.0 m
Salinity 0.0 100.0 31.0 ppt
Temperature 0.0 60.0 15.0 ◦C
Secondary flow -10.0 10.0 0.0 m/s
Constituent 0.0 1,000 0.0 kg/m3
Restrictions:
The uniform initial conditions for the flow velocity components in both horizontal direc-
tions are zero by default and cannot be changed.
The initial conditions for salinity, temperature, secondary flow and constituents need
only be specified if the corresponding process is selected in the Data Group Processes.
For the Restart file and Map file options to work properly:
the restart-runid must differ from the current runid
the restart file <tri-rst.∗>or map file <trim-∗>must reside in the current working
directory.
the simulation start time of the current scenario must coincide with the time instance
at which the restart file is written in the selected scenario; see Data Group Output
→Storage; or, when using a map-file: the start time of the current simulation must
occur on the map file.
the same processes must be used in both computations.
in case of a 3D-application both computations must have the same number of layers
and layer thickness.
Remark:
Delft3D-FLOW does not check for all these requirements.
Deltares 45 of 688

DRAFT
Delft3D-FLOW, User Manual
4.5.6 Boundaries
In the Data Group Boundaries you can define the open boundaries, their location, type and
all input data related to driving the simulation. At an open boundary the flow and transport
boundary conditions are required. These conditions represent the influence of the outer world,
i.e. the area beyond the model area which is not modelled. The flow may be forced using wa-
ter levels, currents, water level gradients, discharges (total or per grid cell) and the Riemann
invariant which is a combination of water level and current. The hydrodynamic forcing can be
prescribed using harmonic or astronomical components or as time-series. For water level forc-
ing the boundary conditions can also be specified in terms of QH-relations. The transport of
salinity, temperature and/or constituents is prescribed by specifying the inflow concentrations.
You can specify the boundary conditions for these parameters as time-series only.
Depending upon the variability of the parameters along the open boundary, you can divide an
open boundary into sections. A boundary section is characterised by a name, indices of the
begin and end point of the boundary section, the type of boundary forcing and last but not
least the data itself.
The following types of boundary conditions are available:
Water level
Velocity
Neumann (water level gradient)
Discharge or flux (total or per grid cell)
Riemann or weakly reflective boundaries2
The choice of the type of boundary condition used depends on the phenomena to be studied.
For instance, when you are modelling water levels at the inland side of an estuary, you will
prescribe the known water levels at the entrance of the estuary. However, the same internal
solution may be achieved by prescribing flow velocities, fluxes or weakly reflective conditions.
But, the latter three yield a much weaker control over the water level, since velocities are
only weakly coupled to water levels, especially for the more complex flow situations. Other
examples are:
When modelling river flow, the upstream flux is prescribed in combination with the down-
stream water level.
When modelling cross flow in front of a harbour, velocity components are prescribed.
The Neumann type of boundary is used to impose the alongshore water level gradient. Neu-
mann boundaries can only be applied on cross-shore boundaries in combination with a water
level boundary at the seaward boundary, which is needed to make the solution of the mathe-
matical boundary value problem well-posed.
The Riemann type of boundary is used to simulate a weakly reflective boundary. The main
characteristic of a weakly reflective boundary condition is that the boundary up to a certain
level is transparent for outgoing waves, such as short wave disturbances. Outgoing waves
can cross the open boundary without being reflected back into the computational domain as
happens for the other types of boundaries.
A weakly reflective form of the other boundary types is obtained by specifying a reflection
coefficient. This coefficient Alfa must be ≥0(recommended value for tidal computations is
50 or 100). For more details about the weakly reflective boundary condition see Verboom and
2This feature has only been tested for the σ-model
46 of 688 Deltares

DRAFT
Graphical User Interface
Slob (1984), Verboom and Segal (1986) and chapter 9.
If there is more than one open boundary in the model area, you should avoid applying the
same type of boundary condition at all boundaries. For instance, two velocity boundaries at
both ends of a straight channel may lead to continuity problems, i.e. the channel will eventually
dry up or will overflow, if the fluxes that are a result of these velocity components and their
respective water levels are not compatible. In this case it is better to prescribe the normal
velocity component at one end of the channel and the water level at the other. A physically
stable result is then obtained. When modelling tidal flow in a large basin, forcing by prescribing
water levels only is generally a sound procedure.
In practice, the type of boundary condition applied often depends mainly on the available data.
For example, most of the larger sea models are likely driven by water level boundaries only
since these are the only quantities known with some accuracy.
When prescribing water level boundaries, you should keep in mind that water level is a globally
varying quantity. There is a substantial correlation between water levels in locations being
not too far apart, meaning that a small error in the prescription of water levels can only be
compensated by a large response in the velocity components. The area of influence of this
phenomenon is not limited to a certain number of grid points near the boundary, but rather
to the entire physical area. Since we do not want small errors in the boundary conditions to
significantly influence the model results, we locate boundaries as far away from the areas of
interest as possible.
The boundary condition is prescribed at two so-called boundary support points (Begin or A,
and End or B), which divide a complete boundary into several segments. Points that lie in
between these two support points are calculated by linear interpolation of the forcing at both
ends. The actual signal at the support points may either be presented to the program as a
harmonic type of signal (frequencies, amplitudes and phases) or directly as a time-series.
Often, the signal itself will be a tidal signal composed of amplitudes and phases at astronomic
frequencies. For large area models (horizontal dimensions of the order of the tidal wave
length or larger), the amplitudes and phases can be interpolated from nearby ports. However,
the small relative error introduced by the interpolation procedure becomes more and more
significant and important when the method is applied for smaller area models (e.g. coastal
models). For these models, the boundary condition should be obtained by nesting the model
into a calibrated larger area model.
Remark:
The interpolation between the begin and end point of a boundary section are obtained
by linear interpolation of the values at these (support) points. For boundary conditions
expressed in amplitudes and phases the interpolation is executed on these quantities
(and not on the computed time dependent boundary values).
Deltares 47 of 688
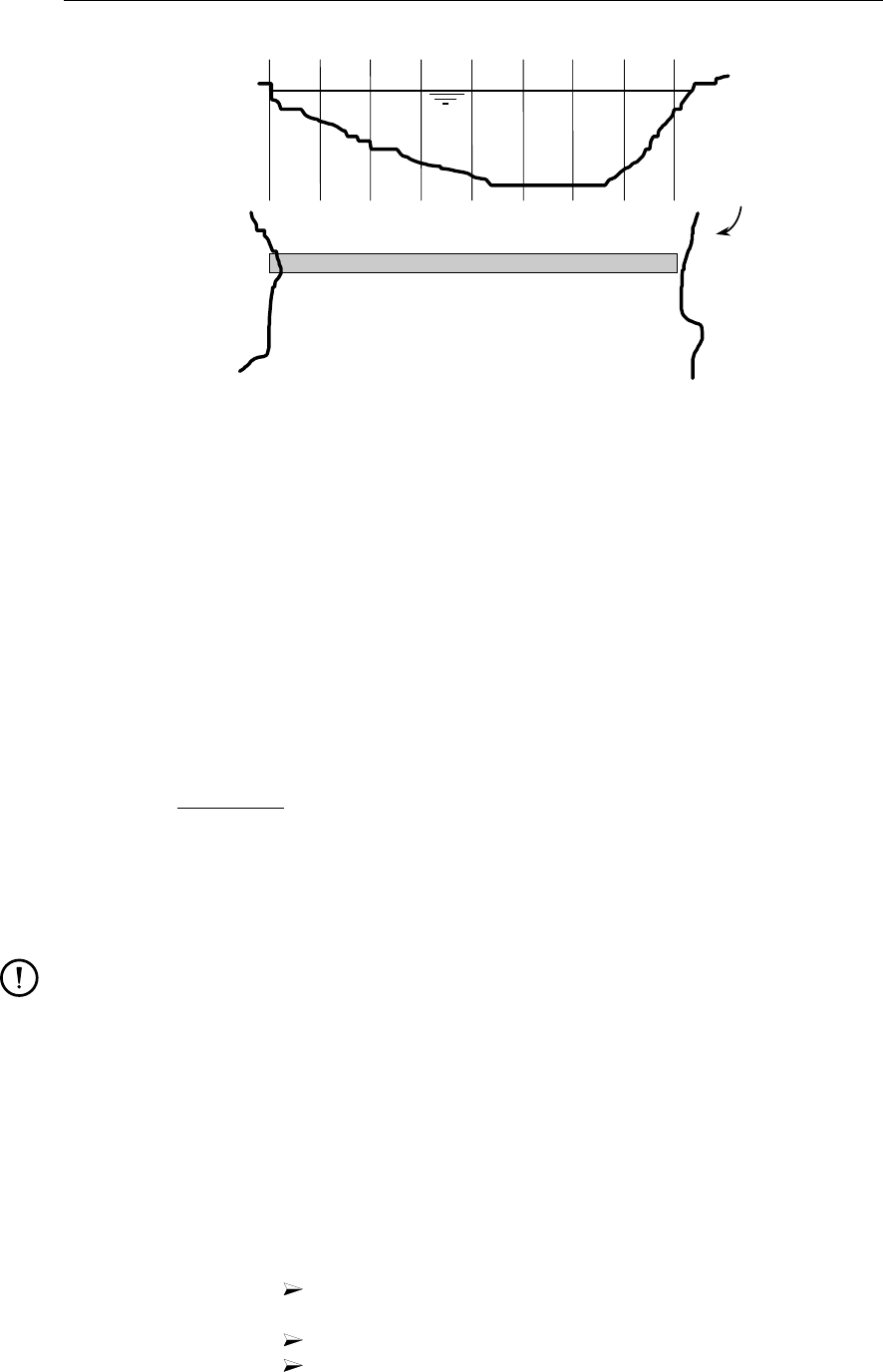
DRAFT
Delft3D-FLOW, User Manual
-
-
+-
-
+
+
+
+
+
+ + +
+ + +
+
+ +
+ +
+ + + +
+ +
+ +
+ +
- - ---
- - --- -
- - -
--
-
--
--
---
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Top view
Cross-section
1 2 3 4 5 6 78
Virtual line of grid points
Discharge
boundary
Figure 4.19: Sketch of cross-section with 8 grid cells
Discharge per grid cell and total discharge
To specify boundary conditions of type Discharge per cell you must apply a similar procedure
as for the other boundary types, i.e. the discharge is prescribed at both ends of a boundary
section and intermediate values are determined by linear interpolation. However, the dis-
charge prescribed in an end point is the discharge through the grid cell related to that specific
end point. If you want to prescribe a certain discharge through the total cross-section you
must translate this total discharge into discharges at the end points. This is a rather difficult
task if the bathymetry changes appreciably over the cross-section. A better approach is to
define boundary sections of just one grid cell and to determine the boundary conditions per
grid cell (still given at its end points A and B, which now are the same) using the following
approach:
Qi=H3/2
i
PN
j=1 H3/2
j
Q(4.4)
where Qi,Hi,Qand Nare the discharge through section i, the average depth in section
i, the total discharge through the cross-section and the total number of sections in the cross-
section, respectively.
Remark:
The depth is defined at the grid lines between the velocity, or discharge points, see
Figure 4.19 details.
In the present release of Delft3D-FLOW the procedure mentioned above is incorporated in
the FLOW-GUI, so you can prescribe the discharge through a cross-section using the type of
boundary Total discharge.
Upon selecting the Data Group Boundaries the following sub-window is displayed, see Fig-
ure 4.20. You can select one or more of the following options:
Add To Add an open boundary section either:
Click Add. The section is given the default name “-Unnamed-”,
displayed in the Section name field.
Replace the name “-Unnamed-” by a useful name.
Specify the grid indices of the begin and end point given by (M1,
N1) and (M2, N2).
or
48 of 688 Deltares
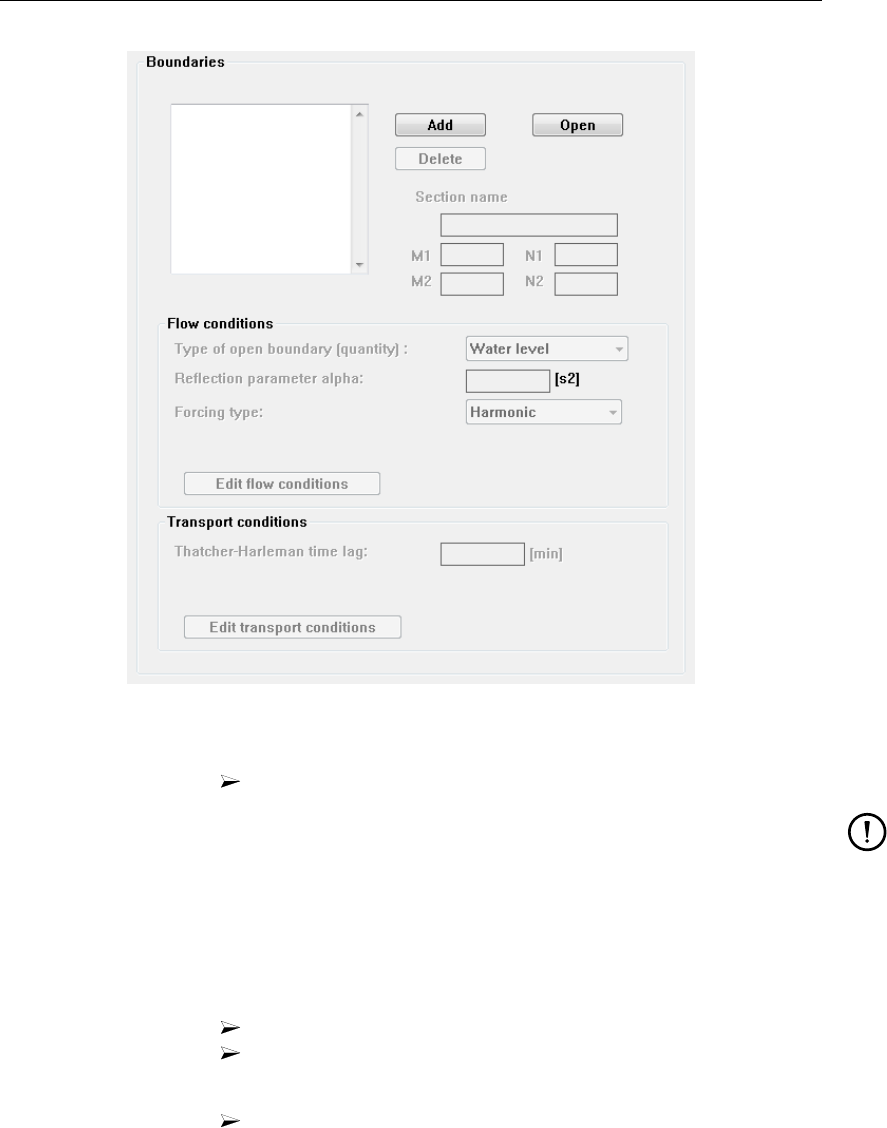
DRAFT
Graphical User Interface
Figure 4.20: Main window for defining open boundaries
Use the Visualisation Area window.
Remarks:
Open boundary sections typically extend over more than just
one grid cell, so you have to specify their begin and end point.
There is no preferred direction in the definition of a boundary
section.
Only an open boundary of the type Water level may be defined
along a diagonal grid line.
Delete To Delete an open boundary section either:
Select the boundary section to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open/Save Open or Save the definitions (location, type of open boundary, re-
flection parameter, forcing type) of the open boundary sections in
an attribute file with extension bnd in the working directory. Upon
selecting Open / Save Figure 4.21 is displayed.
Deltares 49 of 688
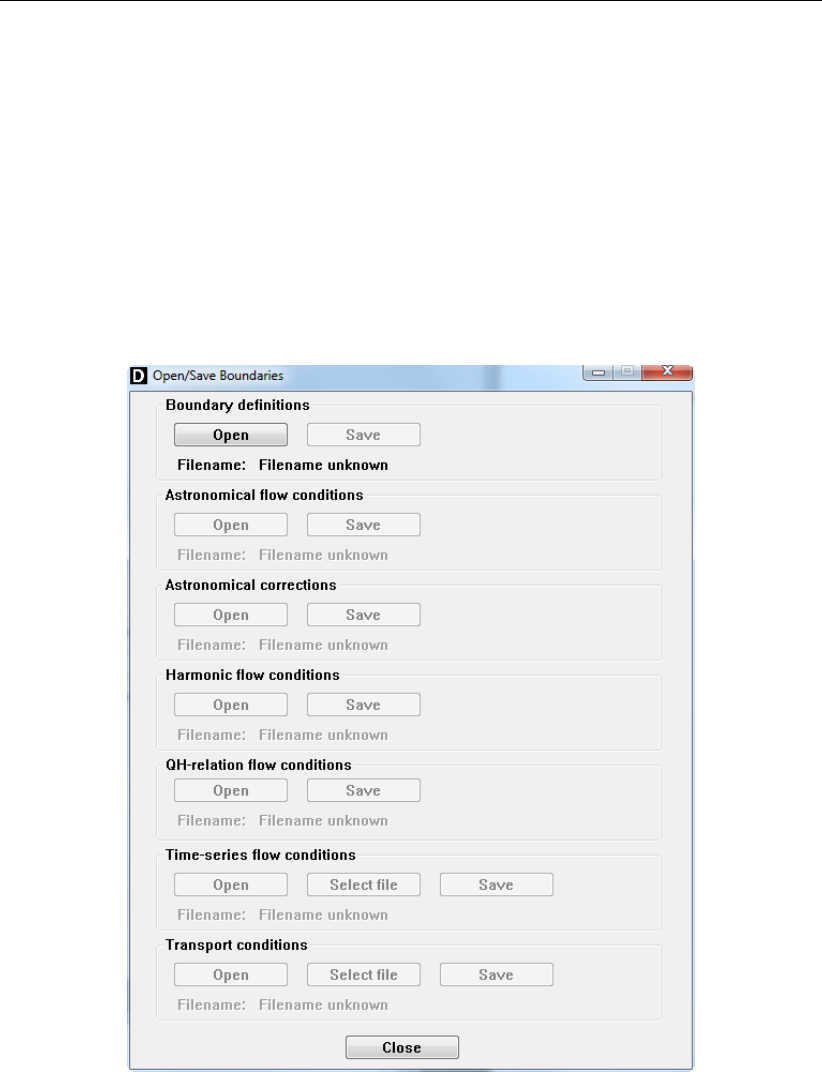
DRAFT
Delft3D-FLOW, User Manual
Figure 4.21: Open and save window for boundary locations and conditions
50 of 688 Deltares
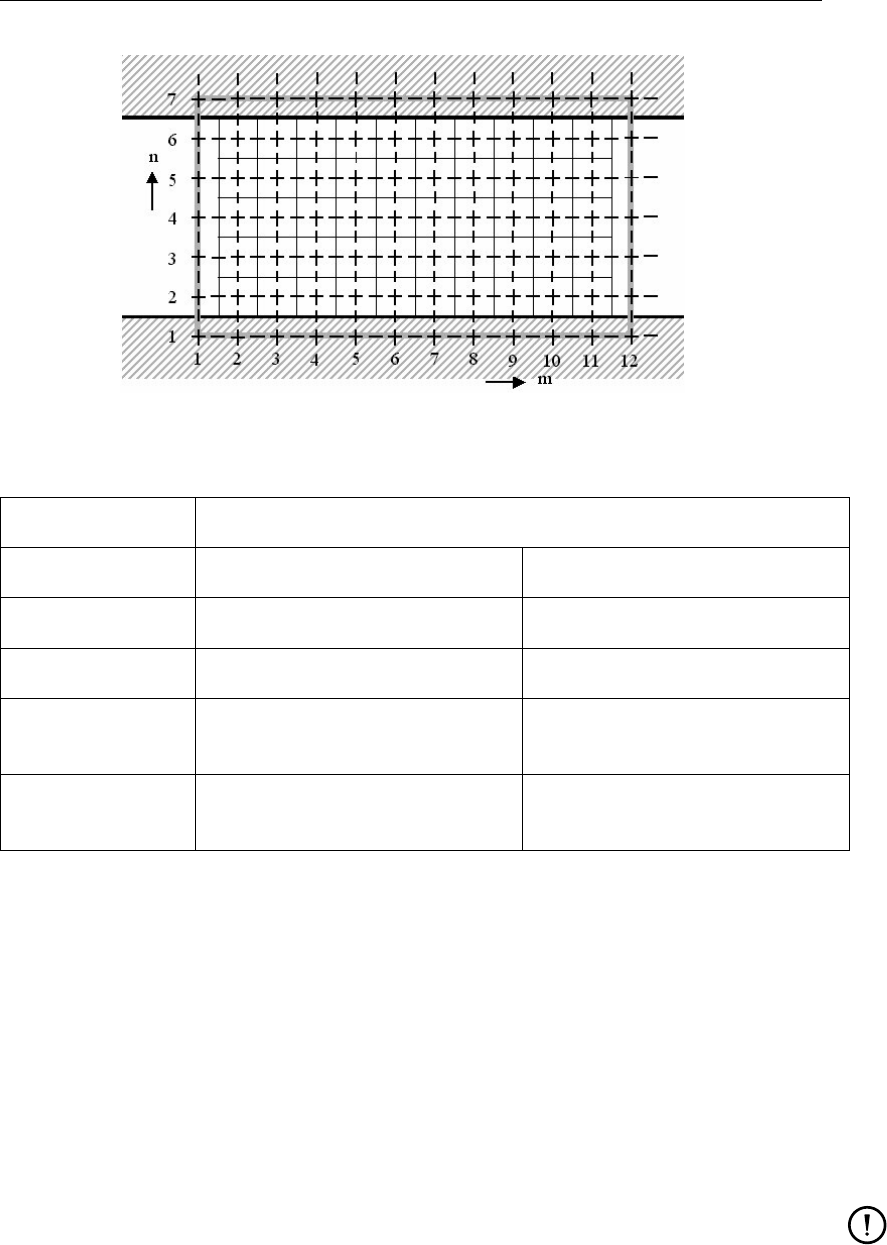
DRAFT
Graphical User Interface
Figure 4.22: Straight channel; location of open and closed boundaries
Table 4.3: Definition of open and closed boundaries.
Boundary Indices of begin and end point
Displayed in FLOW-GUI Used in computation
West boundary (1, 2) and (1, 6) (1, 2) and (1, 6)
South boundary (2, 1) and (11, 1) (2, 1) and (11, 1)
East boundary (12, 2) and (12, 6) (12, 2) and (12, 6) ζ-boundary
(11, 2) and (11, 6) u-boundary
North boundary (2, 7) and (11, 7) (2, 7) and (11, 7) ζ-boundary
(2, 6) and (12, 6) v-boundary
Discussion:
The location and numbering of open boundaries need some clarification and illustration. Both
open and closed boundaries are defined at the grid enclosure (through the water level points).
However, physically closed and open velocity controlled open boundaries are located at the
nearest velocity point inside the grid enclosure.
To illustrate this we take the example given in Appendix E for a straight rectilinear channel of
10 ∗5grid cells or 11 ∗6grid points, see Figure 4.22.
The definition of the boundary sections, both as displayed in the FLOW-GUI and as used in
the computation, are given in Table 4.3.
Remark:
Much confusion on the location and numbering of open and closed boundaries can be
avoided by thinking in terms of computational grid cells. Water level boundaries are
located just outside the first or last computational grid cell and velocity boundaries are
located at the edge of the first or last computation cell. See Appendix E for a discussion
and illustration.
Deltares 51 of 688
DRAFT
Delft3D-FLOW, User Manual
Domain:
Parameter Lower limit Upper limit Default Unit
Name boundary Any printable character -Unnamed- none
(m, n)At the grid enclosure 0 none
Alfa 0.0 10,000.0 0.0 none
Restrictions:
A boundary section name must be non-blank, and can contain up to 20 characters.
A boundary section must be located on the grid enclosure.
The number of boundary sections is limited to 300.
Next you must specify for each boundary section the type of forcing and the forcing itself.
Type of open boundary Select either one of the options:
Water level
Current
Neumann
Discharge per cell
Total discharge
Riemann
Remarks:
Riemann type of boundary has only been tested for the σ-
model.
Only an open boundary of the type Water level may be defined
along a diagonal grid line.
Reflection parameter
Alfa
Specify the amount by which you to want to make the open boundary
less reflective for short wave disturbances that propagate towards
the boundary from inside the model.
Remark:
The reflection parameter does not apply for Neumann or Rie-
mann controlled boundary sections.
Forcing type Select either one of the options:
Astronomic, the flow conditions are specified using tidal con-
stituents, amplitudes and phases. The nodal amplitude and phase
factors are determined at the start of the simulation and updated
after each NodalT time interval.
Harmonic, the flow conditions are specified using user-defined
frequencies, amplitudes and phases.
QH-relation, (only in combination with water level boundary type)
the water level is derived from the computed discharge leaving
the domain through the boundary.
Time-series, the flow conditions are specified as time-series.
Vertical profile for
hydrodynamics
The vertical profile does not apply for Water level or Neumann con-
trolled boundary sections, neither for a 2D simulation. The profile
can be:
Uniform The velocity profile is uniform over the water depth.
Logarithmic The velocity profile is a logarithmic function over the
52 of 688 Deltares

DRAFT
Graphical User Interface
water depth.
Per layer The velocity profile is embedded in the boundary con-
dition file taken from a larger area model by nesting.
Remark:
This option is activated if you open a boundary location <bnd>-
file with boundary type ‘3-d profile’. In the current implemen-
tation you must add this type manually in the <bnd>-file;
see section A.2.10 and A.2.15 for details.
Remark:
The Vertical profile for hydrodynamics forms also part of the
definition and it will be saved in the <bnd>file as well.
Edit flow conditions To specify the boundary data for the hydrodynamic simulation. De-
tails are specified in a separate window, see section 4.5.6.1.
Edit transport
conditions
To specify the boundary data for the constituents transported with
the flow and only for those constituents specified in the Data Group
Processes. Details are specified in a separate window, see sec-
tion 4.5.6.2.
To define the boundary condition data press the Edit flow conditions button. The sub-window
displayed depends on the Type of open boundary selected.
4.5.6.1 Flow boundary conditions
For flow boundary conditions you can either select:
Astronomic
Harmonic
QH-relation (for water levels only)
Time-series
The window to specify the boundary data depends on the forcing type selected.
Astronomic boundary conditions
You can specify the boundary conditions in terms of astronomical components. Specifying
astronomical components in a manner similar as harmonic components is a laborious activity,
as tens of components can be prescribed. These astronomical components are mostly ob-
tained from some type of tidal analysis program, such as Delft3D-TIDE or Delft3D-TRIANA.
The boundary conditions are stored in an attribute file with extension <bca>.
The observed tidal motion can be described in terms of a series of simple harmonic con-
stituent motions, each with its own characteristic frequency ω(angular velocity). The ampli-
tudes Aand phases Gof the constituents vary with the positions where the tide is observed.
In this representation by means of the primary constituents, compound and higher harmonic
constituents may have to be added. This is the case in shallow water areas for example,
where advection, large amplitude to depth ratio, and bottom friction give rise to non-linear
interactions. For a list of primary and compound constituents, see Appendix C.
The general formula for the astronomical tide is:
H(t) = A0+
k
X
i=1
AiFicos (ωit+ (V0+u)i−Gi)(4.5)
Deltares 53 of 688
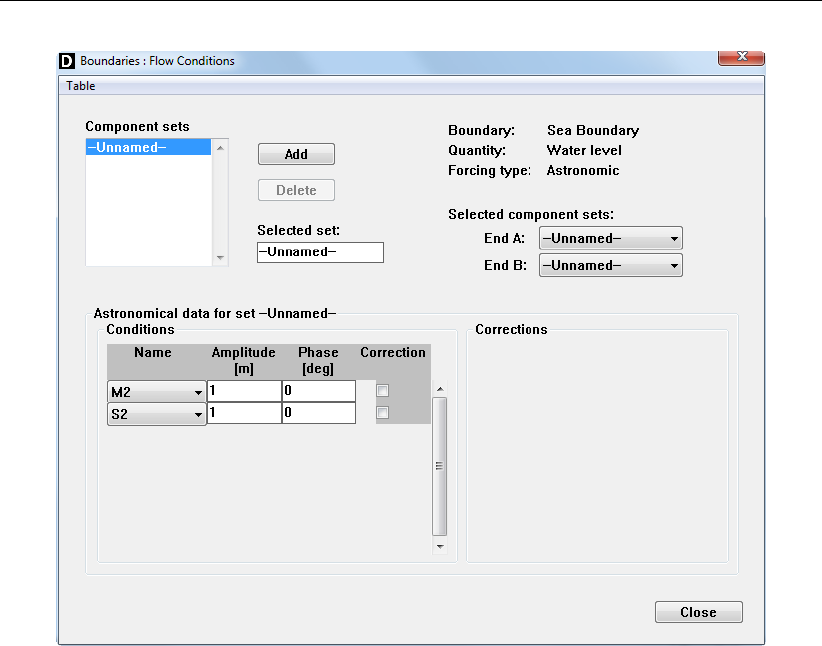
DRAFT
Delft3D-FLOW, User Manual
Figure 4.23: Specifying astronomical boundary conditions
in which:
H(t)water level at time t
A0mean water level over a certain period
knumber of relevant constituents
iindex of a constituent
Ailocal tidal amplitude of a constituent
Finodal amplitude factor
ωiangular velocity
(V0+u)iastronomical argument
Giimproved kappa number (= local phase lag)
Fiand (V0+u)iare time-dependent factors which, together with ω, can easily be calculated
and are generally tabulated in the various tidal year books. V0is the phase correction factor
which relates the local time frame of the observations to an internationally agreed celestial
time frame. V0is frequency dependent. Fiand uiare slowly varying amplitude and phase
corrections and are also frequency dependent. For most frequencies they have a cyclic period
of 18.6 years. A0,Aiand Giare position-dependent: they represent the local character
of the tide. You only have to provide the amplitudes, phases and frequencies (in terms of
constituent names). By default, Delft3D-FLOW re-calculates the nodal amplitude factors and
astronomical arguments every 6 hours. See section B.21 for changing this default.
Upon selecting Astronomic and next Edit flow conditions Figure 4.23 is displayed.
Each open boundary section has a begin (A) and an end (B) point. At each end you have
to assign a Component set. A Component set consists of a number of tidal constituents with
their Name,Amplitude and Phase.
54 of 688 Deltares
DRAFT
Graphical User Interface
To add a Component set:
Click Add. The set is given the default name ‘-Unnamed-’.
Replace the name ‘-Unnamed-’ in the Selected set field by a useful name, reflecting the
boundary and the end point (A or B) for which this set will be used.
Remark:
When adding a Component set, this set will have the same tidal constituents as the first
set. The amplitudes will be 1 and the phases 0.
To add a tidal constituent to a Component set:
First select the required set from the list of available Component sets.
Click in the Amplitude or Phase field.
Use the menu item Table in the menu bar to insert, copy or delete a row, or to copy a
value.
In the Name field: select from the dropdown list the required tidal constituent.
Specify the Amplitude and Phase.
Remark:
The mean value (A0) has no phase.
To assign a Component set to a boundary:
First select the required open boundary.
Click Edit flow conditions.
Under Selected component sets, select from the dropdown list the required set for End A.
Under Selected component sets, select from the dropdown list the required set for End B.
You can apply corrections to the defined astronomic components. These corrections can be
applied to a sub-set of the boundary sections and to a sub-set of the astronomic components
applied. These corrections are typically applied during the calibration phase of a model. Both
the amplitude (multiplicative) and the phase (additive) can be corrected, see Figure 4.24. This
attribute file has extension <cor>.
Remarks:
The correction does not apply for the A0 astronomic component.
If the type of open boundary is Total discharge, only one Component set is needed for
this open boundary. Specify the same set for End A and End B.
Be aware that amplitudes and phases for intermediate points at the open boundary are
linearly interpolated from the values at the end points. For instance, if you have a phase
of 1 degree at End A, and a phase of 359 degrees at End B, an intermediate point will
have a phase of 180 degrees. If you do not want this, you can specify 361 degrees at
End A.
To save the component sets, the corrections and the specification of the sets to boundary end
points:
Use Open / Save in Figure 4.20 to enter the Open/Save Boundaries window of Fig-
ure 4.21.
Remarks:
The components sets are stored in a file with extension <bca>.
The information about which set is assigned to which boundary end point is stored in
the <bnd>file.
Deltares 55 of 688
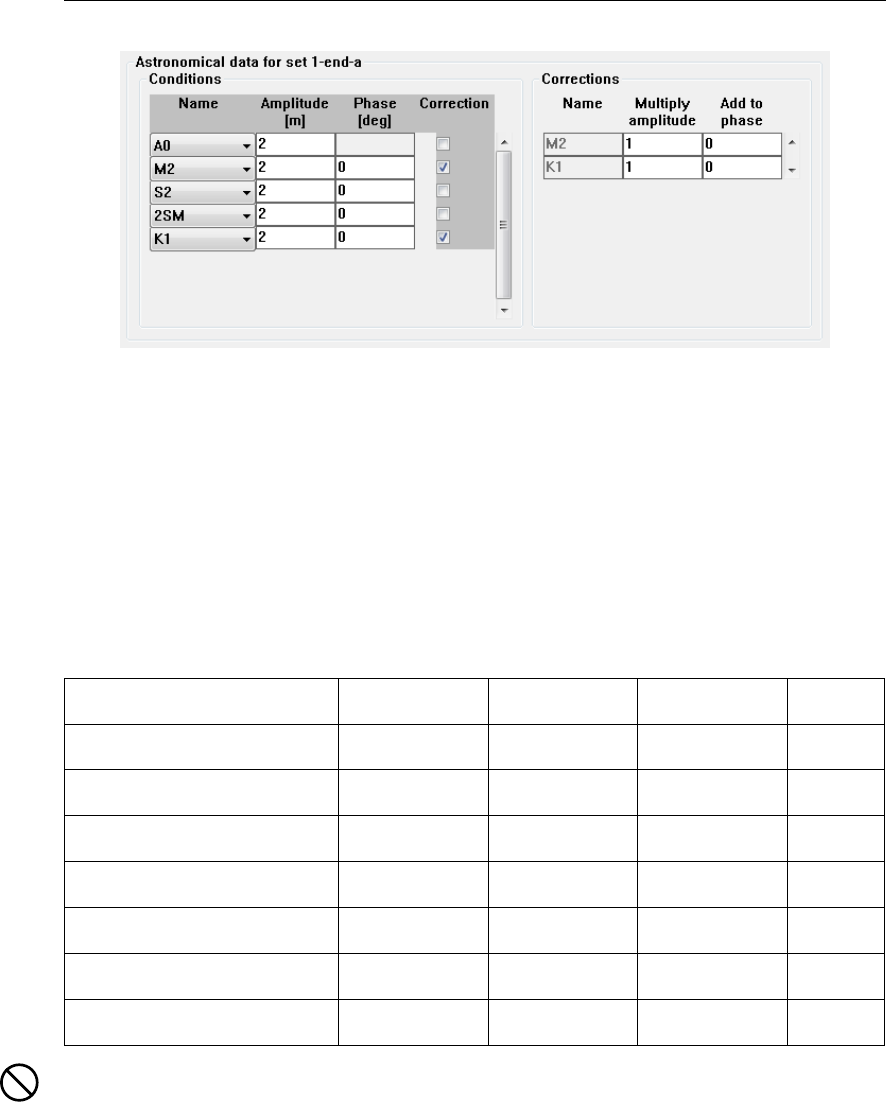
DRAFT
Delft3D-FLOW, User Manual
Figure 4.24: Contents of a Component set with two tidal constituents having corrections
You can import astronomic boundary conditions by selecting Open/Save in Figure 4.20 and
Open Astronomical flow conditions in Figure 4.21. In the window of Figure 4.23 the component
sets from the imported file are listed under Component sets. You can extend, delete or modify
them at will.
To assign a Component set to an end point of an open boundary section, follow the procedure
above.
Domain:
Parameter Lower limit Upper limit Default Unit
Water level 0.0 100.0 0.0 m
Neumann 0.0 100.0 0.0 -
Current 0.0 10.0 0.0 m/s
Discharge 0.0 1.0E+06 0.0 m3/s
Riemann 0.0 100.0 0.0 m/s
Phase -360.0 360.0 0.0 degrees
Alpha 0.0 10,000 0.0 none
Restrictions:
Astronomical forcing can not be mixed with harmonic forcing.
Boundary conditions of type Astronomic must precede boundary conditions of type QH-
table and Time-series.
The maximum number of frequencies is 234.
56 of 688 Deltares
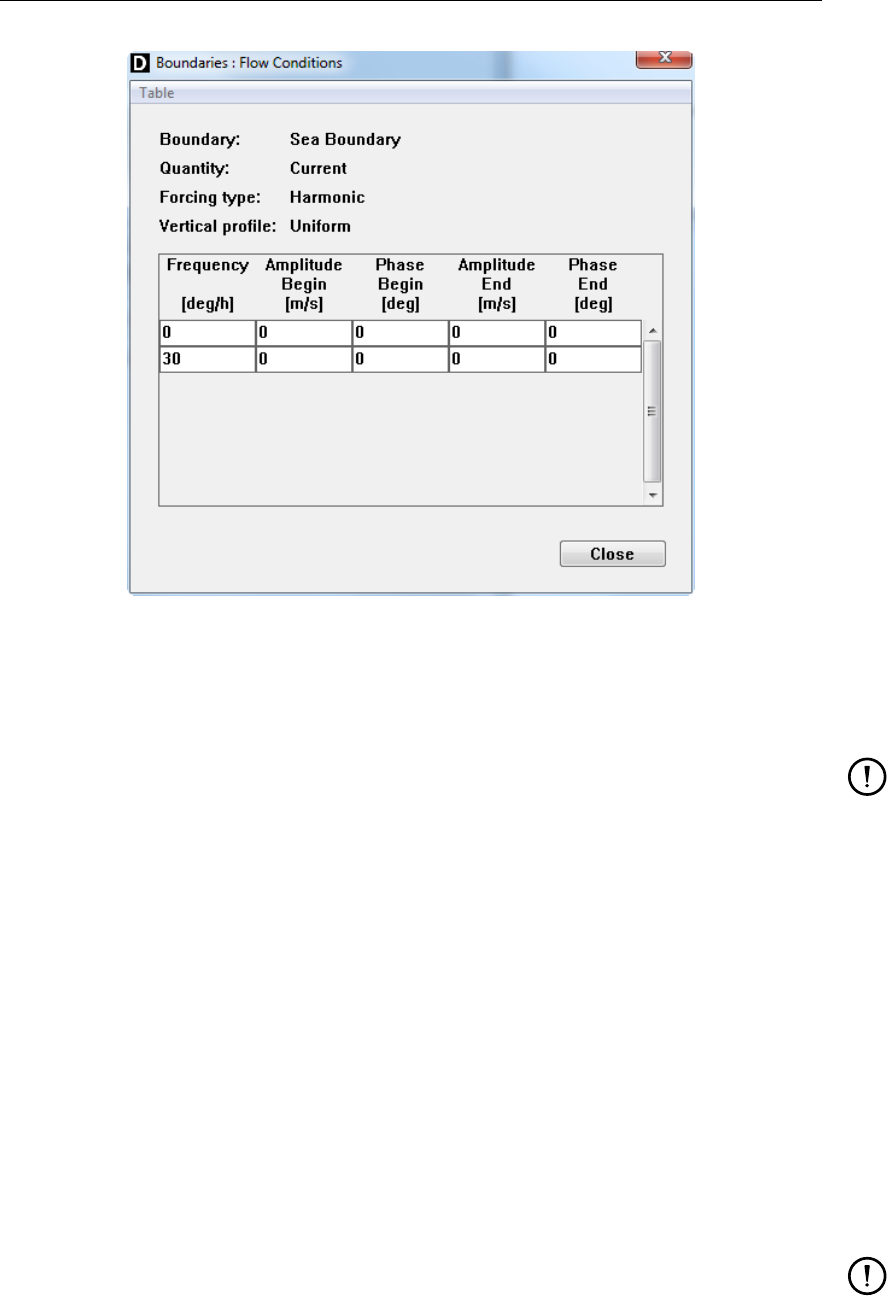
DRAFT
Graphical User Interface
Figure 4.25: Specifying harmonic boundary conditions
Harmonic boundary conditions
Upon selecting Harmonic and next Edit flow conditions Figure 4.25 is displayed.
Remark:
If the type of open boundary is Total discharge, the amplitudes and phases for the whole
section are required.
The boundary signal F(t)is constructed by super-imposing the following individual compo-
nents:
F(t) =
N
X
i=1
Aicos (ωit−ϕ)(4.6)
where Nis the number of frequency components. The unit of the amplitudes depends on the
quantity prescribed, they are respectively [m] for water elevations, [-] for Neumann, [m/s] for
velocities, [m3/s] for fluxes, and [m/s] for Riemann boundaries.
For each of the boundary sections you can either import the boundary conditions by selecting
Open/Save, or specify the harmonic conditions manually in a table.
Open Import the harmonic boundary conditions from an attribute file with
extension <bch>.
Remark:
The data you import here will be included in the <bch>at-
tribute file when you save the boundary locations and condi-
tions, see Figure 4.21.
In the table you must specify:
Frequency The frequency of the harmonic component in [degrees/hour].
Deltares 57 of 688
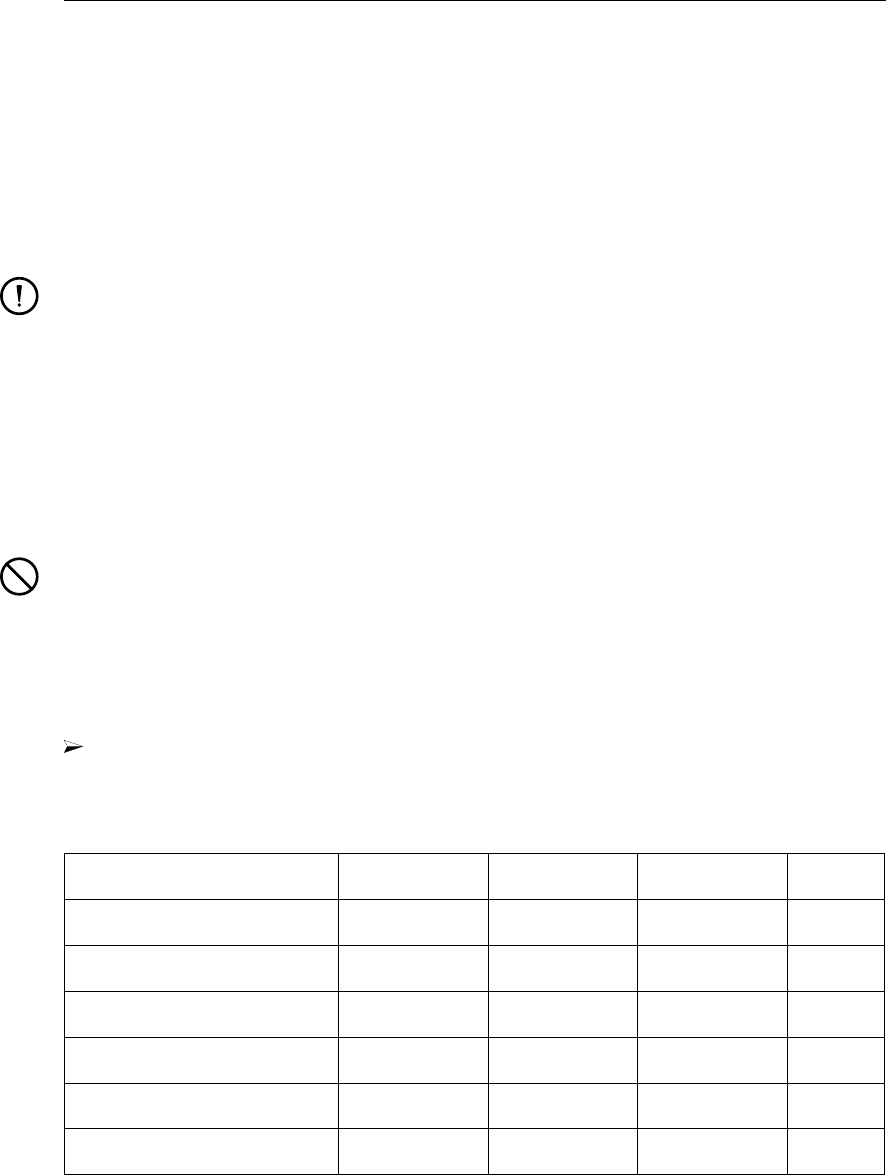
DRAFT
Delft3D-FLOW, User Manual
Amplitude The amplitude of the harmonic component in [m], [-], [m3/s] or [m/s]
at the Begin point A and at the End point B defined at grid indices
(M1, N1) and (M2, N2), respectively.
Phase The phase of the harmonic component in [degrees] at the Begin
point A and at the End point B defined at grid indices (M1, N1) and
(M2, N2), respectively.
Use the menu item Table in the menu bar to insert, copy or delete a row, or to copy a value.
Remarks:
The mean value is specified by zero frequency and zero phase. The mean value must
always be specified.
All boundaries with Harmonic forcing must have the same frequencies. If not taken care
of by you, the GUI will save the frequencies of the last Harmonic boundary.
Be aware that amplitudes and phases for intermediate points at the open boundary are
linearly interpolated from the values at the end points. For instance, if you have a phase
of 1 degree at End A, and a phase of 359 degrees at End B, an intermediate point will
have a phase of 180 degrees. If you do not want this, you can specify 361 degrees at
End A.
Restrictions:
Harmonic forcing may not be mixed with astronomical forcing and must precede QH
and time-series forcing.
The maximum number of frequencies is 234.
If you have defined all data for the currently selected boundary section:
Close the sub-window and select another boundary section to define its boundary condi-
tions.
Domain:
Parameter Lower limit Upper limit Default Unit
Water level 0.0 100.0 0.0 m
Neumann 0.0 100.0 0.0 -
Current 0.0 10.0 0.0 m/s
Discharge 0.0 1.0E+06 0.0 m3/s
Riemann 0.0 100.0 0.0 m/s
Phase -360.0 360.0 0.0 degrees
58 of 688 Deltares
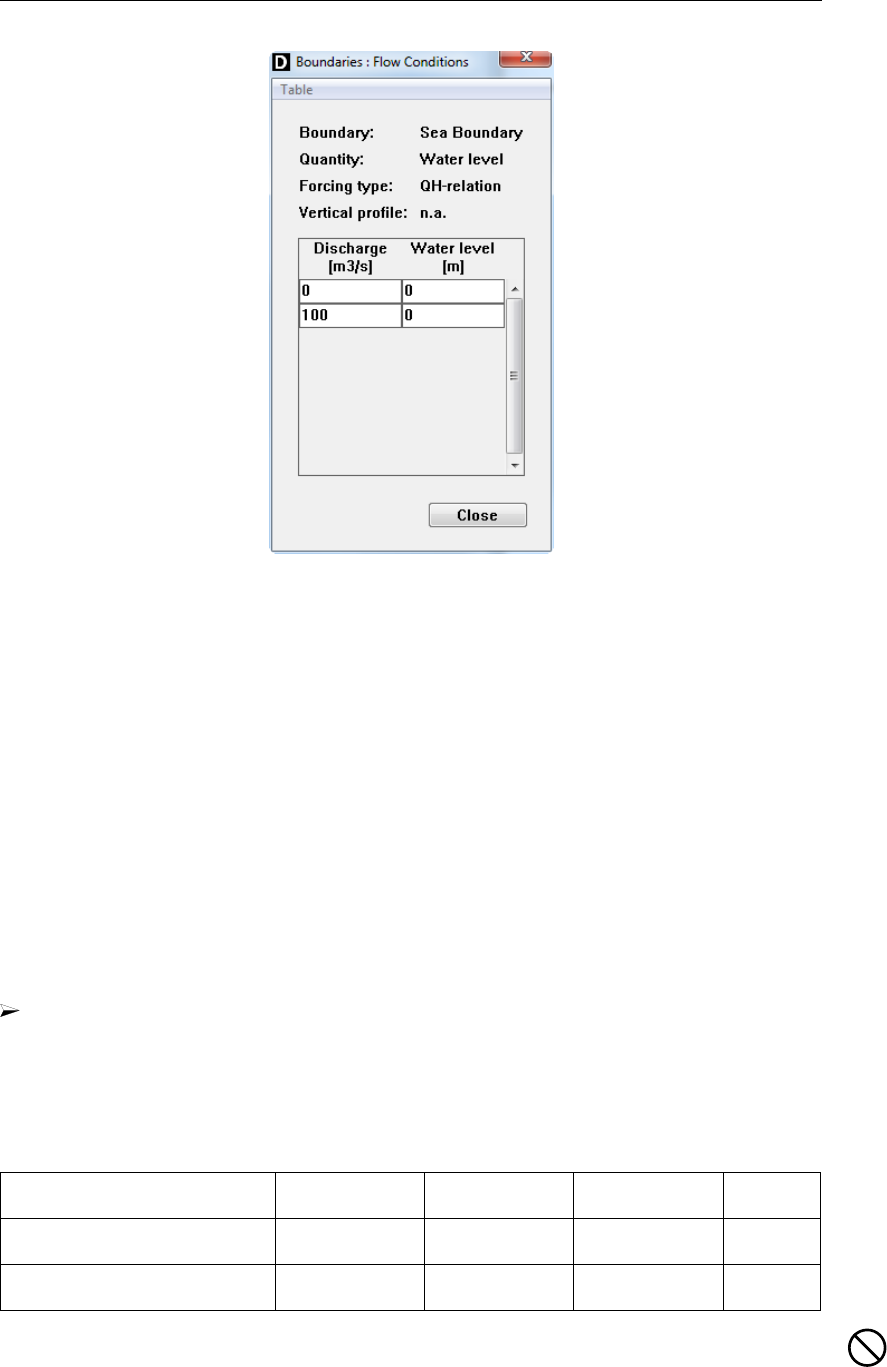
DRAFT
Graphical User Interface
Figure 4.26: Specifying QH-relation boundary conditions
QH-relation boundary conditions (for water level boundaries only)
For QH-relations you must specify the relation between the outflowing discharge and the water
level at the boundary. Intermediate values are determined by linear interpolation. You cannot
change the type of interpolation. Above the highest specified discharge and below the lowest
specified discharge the water level is kept constant.
Upon selecting QH-relation and next Edit flow conditions Figure 4.26 is displayed.
The sub-window displayed has just one column for the discharge and one column for the water
level. Use the menu item Table in the menu bar to insert, copy or delete a row, or to copy a
value. First click in either the Discharge or Water level input field.
If you have defined all data for the currently selected boundary section:
Close the sub-window and select another boundary section to define its boundary condi-
tions.
A relaxation parameter can be specified in the data group Numerical parameters.
Domain:
Parameter Lower limit Upper limit Default Unit
Discharge -1.0E+6 1.0E+06 0.0 m3/s
Water level -100.0 100.0 0.0 m
Restrictions:
The discharges should be specified in increasing order. That is, for positive discharges
from small to large and for negative discharges from large to small.
Deltares 59 of 688
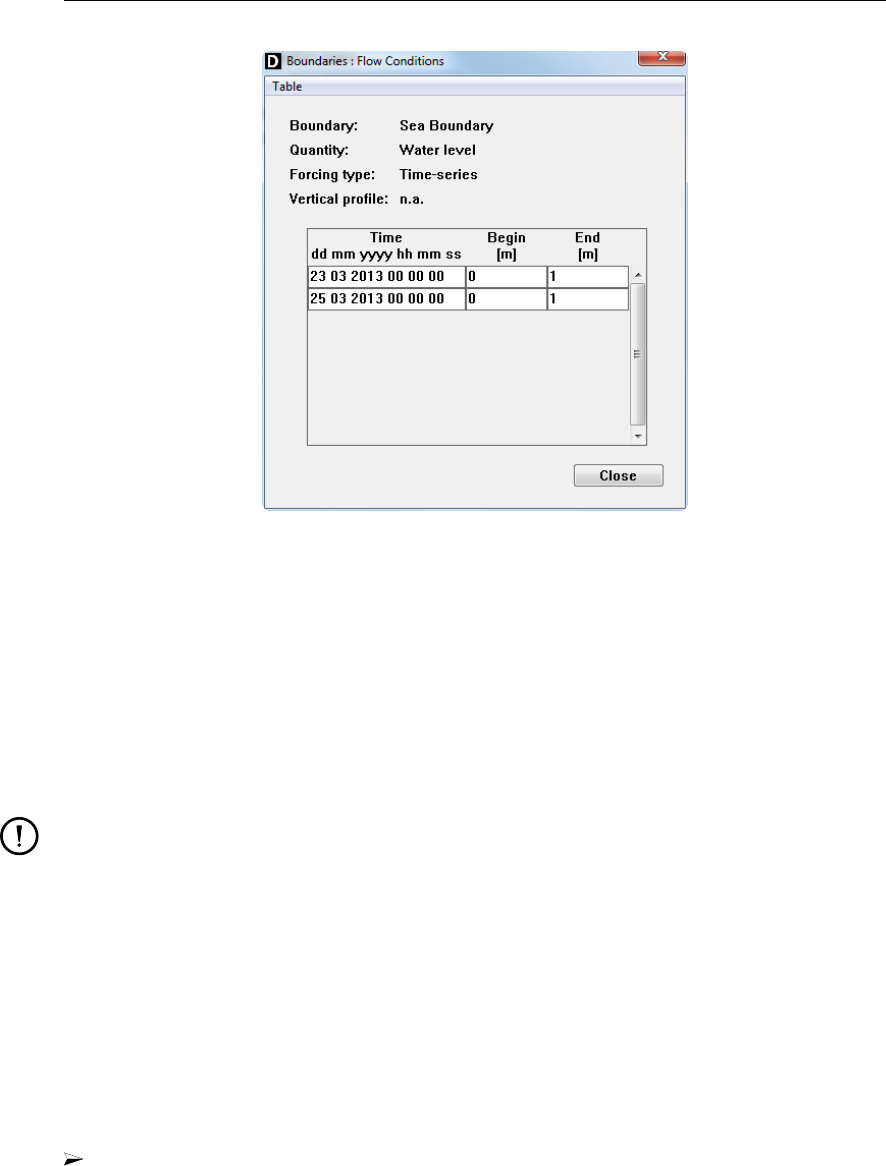
DRAFT
Delft3D-FLOW, User Manual
Figure 4.27: Specifying time-series boundary conditions
Intermediate values are determined by linear interpolation. Above the highest specified
discharge and below the lowest specified discharge the water level is kept constant.
Boundaries with forcing by a QH relation must precede time-series boundaries and they
must follow boundaries with harmonic and astronomical forcing.
Time-series boundary conditions
Upon selecting Time-series and next Edit flow conditions Figure 4.27 is displayed.
Remark:
If the type of open boundary is Total discharge, only one (1) discharge is required for
the whole section.
For time-series conditions you must specify the boundary conditions in terms of values of
the selected kind, i.e. water level, Neumann, current, discharge or Riemann, at time break-
points for both the Begin point A and the End point B, respectively. Intermediate values are
determined by linear interpolation. You cannot change the type of interpolation.
Use the menu item Table in the menu bar to insert, copy or delete a row, or to copy a value.
If you have defined all data for the currently selected boundary section:
Close the sub-window and select another boundary section to define its boundary condi-
tions.
60 of 688 Deltares
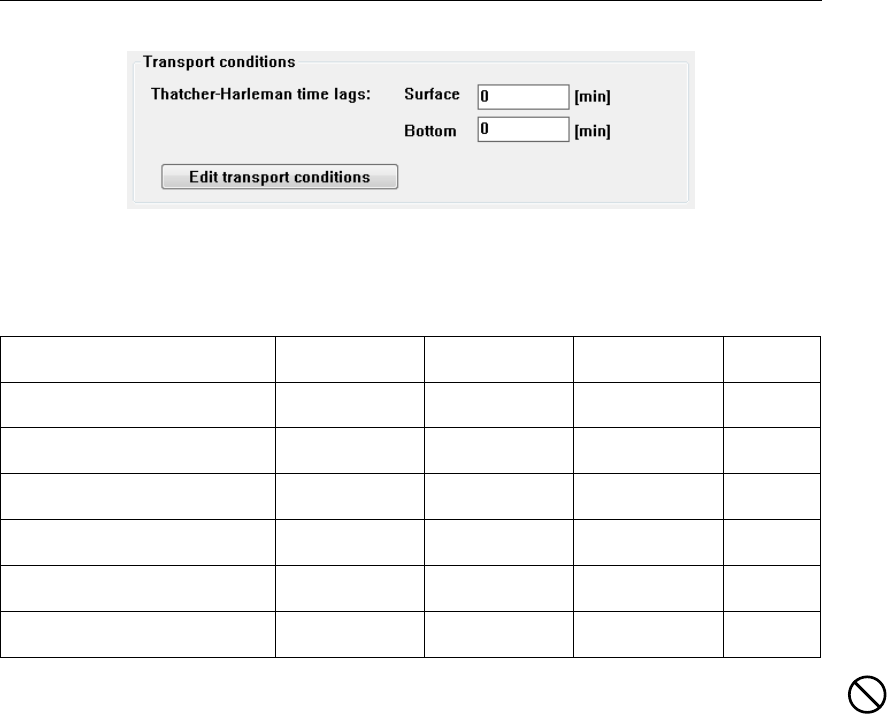
DRAFT
Graphical User Interface
Figure 4.28: Transport conditions; Thatcher Harleman time lags
Domain:
Parameter Lower limit Upper limit Default Unit
Water level -100.0 100.0 0.0 m
Neumann -100.0 100.0 0.0 -
Current -10.0 10.0 0.0 m/s
Discharge -1.0E+6 1.0E+06 0.0 m3/s
Riemann -100.0 100.0 0.0 m/s
Alfa 0.0 10,000 0.0 none
Restrictions:
The time breakpoints must differ from the simulation start time by an integer multiple of
the time-step (Data Group Time frame).
The first time breakpoint must be before or equal to the simulation start time, and the
last time breakpoint must be equal or later than the simulation stop time (see Data
Group Time frame).
Time breakpoints must be given in ascending order.
Intermediate values are determined by linear interpolation.
Time-series forcing must follow astronomic, harmonic or QH forcing when these type of
boundary conditions are applied in the same model area.
4.5.6.2 Transport boundary conditions
To specify the boundary conditions for all quantities defined in the Data Group Processes you
must for each boundary section:
Select the boundary section in the list box, see Figure 4.20.
Specify if required Thatcher Harleman time lags, see Figure 4.28.
Thatcher-Harleman
time lag
The return time for concentrations from their value at outflow to their
value specified by the boundary condition at inflow. For 3D simula-
tions you can specify different values at the surface and at the bottom
to represent the influence of stratification and the different flow con-
ditions above and below the interface.
At the sea-side boundary a common problem for numerical models of estuarine areas is en-
countered when the boundary conditions for a constituent are to be prescribed. In a physical
(unbounded) world, the inflowing water mass immediately after low water slack originates from
the outflowing water mass a moment earlier. Consequently, the concentration of the inflowing
Deltares 61 of 688
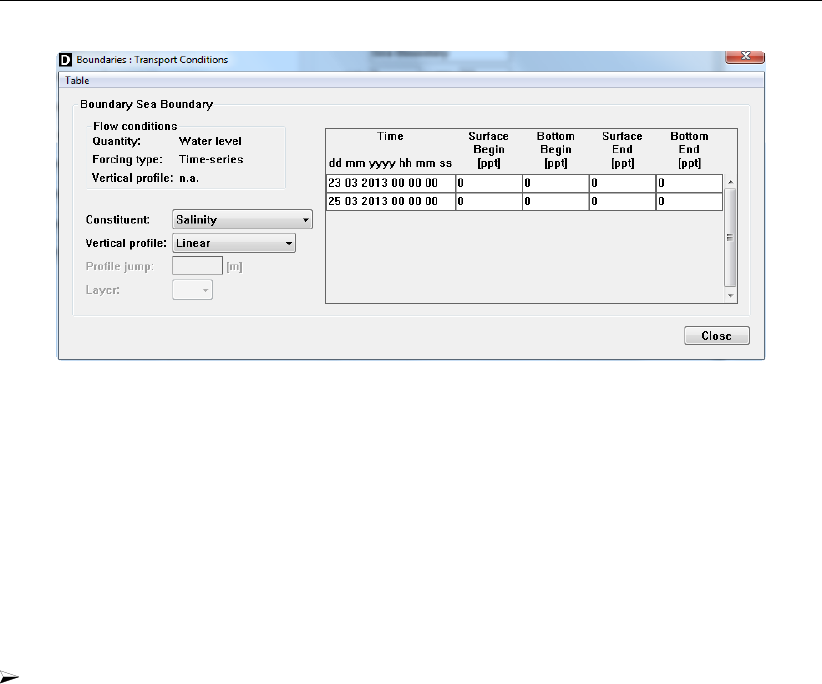
DRAFT
Delft3D-FLOW, User Manual
Figure 4.29: Specifying transport boundary conditions
water is commonly not equal to the concentration Cmax which has been prescribed along
this open boundary. It will take some time before the concentration along this open boundary
reaches the Cmax value. In numerical models, this time lag (return time) is often modelled
by means of a “Thatcher-Harleman” boundary condition (Thatcher and Harleman,1972). The
return time depends on the flow conditions outside the estuary. If there is a strong circulation
the return time is short. The return time must be specified for each open boundary section,
one for the top layer and the other for the bottom layer. The return times for the layers in
between will be determined through a linear interpolation of these two values.
Select Edit transport conditions.
Next the window Boundaries: Transport Conditions is displayed, see Figure 4.29. The
window displayed is for a 3D simulation; for a 2D simulation all input fields related to 3D are
either absent or insensitive. In a 3D simulation you can specify a surface and a bottom value,
in a 2D simulation you need to specify only the surface value (applied over the whole depth).
Transport boundary conditions always are specified as time-series.
You can specify one or more of the following options, depending whether you have a 2D or a
3D simulation; for each of the quantities selected in the Data Group Processes you must:
Constituent Select the quantity to be defined next in the table.
In the table you must specify time breakpoints and concentrations at the Surface and Bottom
layer for the Begin point A and the End point B of the current boundary section, defined at
grid indices (m1, n1) and (m2, n2), respectively. Use the menu item Table in the menu bar
to insert, copy or delete a row, or to copy a value.
Vertical profile To specify the vertical profile of the concentration at the current bound-
ary section. You can either select:
Uniform The value is applied over the whole water depth; only
the surface values need to be specified.
Linear Surface and bottom values are linearly interpolated for
intermediate depth.
Step You can define a jump in the vertical profile.
Upon selecting this option you can specify the depth (Profile
jump) below the free surface at which the profile jump occurs.
The surface value is maintained down to this depth and the bot-
tom value is used from the jump depth down to the bottom.
62 of 688 Deltares
DRAFT
Graphical User Interface
Per layer The vertical profile is embedded in the boundary con-
dition file taken from a larger area model by nesting.
If a constituent (i.e. salinity or temperature, etc) is included in a 3D model then the vertical
profiles for these quantities must be prescribed, besides the usual boundary condition values.
The options for the vertical profile for these quantities are respectively: Uniform,Linear and
Step (discontinuous profile). In the last case the location of the profile jump, measured in me-
tres from the water surface, must be prescribed. During initialisation the jump in the profile will
be translated into a layer number. Once determined, this layer number will be fixed throughout
the simulation; so this layer number depends on the initial water level.
Remark:
When the initial conditions are read from a restart file (hot start), the position of the
jump will be determined using the water elevation read from this file. Consequently,
a mismatch between your boundary condition and the concentration distribution in the
vertical, just inside the open boundary, may occur. This mismatch can produce spurious
oscillations in your result.
If you have defined all data for the currently selected boundary section:
Close the sub-window and select another boundary section to define its transport bound-
ary conditions.
Domain:
Parameter Lower limit Upper limit Default Unit
Salinity 0.0 100.0 0.0 ppt
Temperature 0.0 60.0 0.0 ◦C
Pollutant or sediment 0.0 1,000 0.0 kg/m3
Restrictions:
The time breakpoints must differ from the simulation start time by an integer multiple of
the time-step (Data Group Time frame).
The first time breakpoint must be before or equal to the simulation start time, and the
last time breakpoint must be equal or later than the simulation stop time (see Data
Group Time frame).
Time breakpoints must be given in ascending order.
4.5.7 Physical parameters
In the Data Group Physical parameters you can select or specify a number of parameters
related to the physical condition of the model area. The physical parameters can be split into
several classes; some are always needed and some are related to the processes switched on
or off.
The Data Group Physical parameters contains several tabs. The tabs for Constants,Rough-
ness and Viscosity are always visible. The other tabs are only available if the associated
processes are switched on:
Heat flux model (requires Temperature process activated)
Sediment and Morphology (requires Sediments process activated)
Deltares 63 of 688
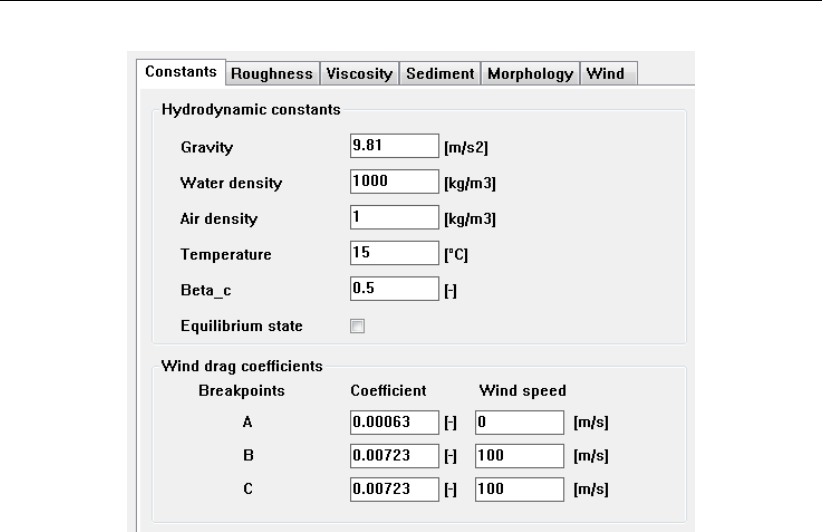
DRAFT
Delft3D-FLOW, User Manual
Figure 4.30: Specifying the physical constants
Wind (requires Wind process activated)
Tidal forces (requires grid in spherical co-ordinates and Tidal forces process activated)
4.5.7.1 Constants
Upon selecting Physical parameters →Constants the sub-window given by Figure 4.30 is
displayed. You can specify one or more of the following constants:
Gravity The gravitational acceleration in [m/s2].
Water density The background water density in [kg/m3].
This value is only required for a homogeneous simulation, i.e. the
processes temperature and salinity are not selected.
Air density The density of air in [kg/m3], used in the wind stress formulation.
Temperature The background water temperature in [◦C], used in the equation of
state. This value is only required if the process Temperature is not
selected, and the process Salinity is.
Salinity The background water salinity in [ppt], used in the equation of state.
This value is only required if the processes Salinity is not selected,
and the process Temperature is.
Beta_c Fraction of the shear stress due to secondary flow taken into account
in the momentum equation.
Equilibrium state Tick off if you want to apply the equilibrium state for the secondary
flow process (only for depth-averaged flow):
Yes Apply the equilibrium state.
No Compute the secondary flow as a dynamical process.
The flow in a river bend is basically three-dimensional. The velocity has a component in the
plane perpendicular to the river axis. This component is directed to the inner bend along the
river bed and directed to the outer bend near the water surface. This so-called ‘secondary
flow’ (spiral motion) is of importance for the calculation of changes of the river bed in mor-
phological models. This spiral motion is automatically taken into account in a 3D simulation,
64 of 688 Deltares
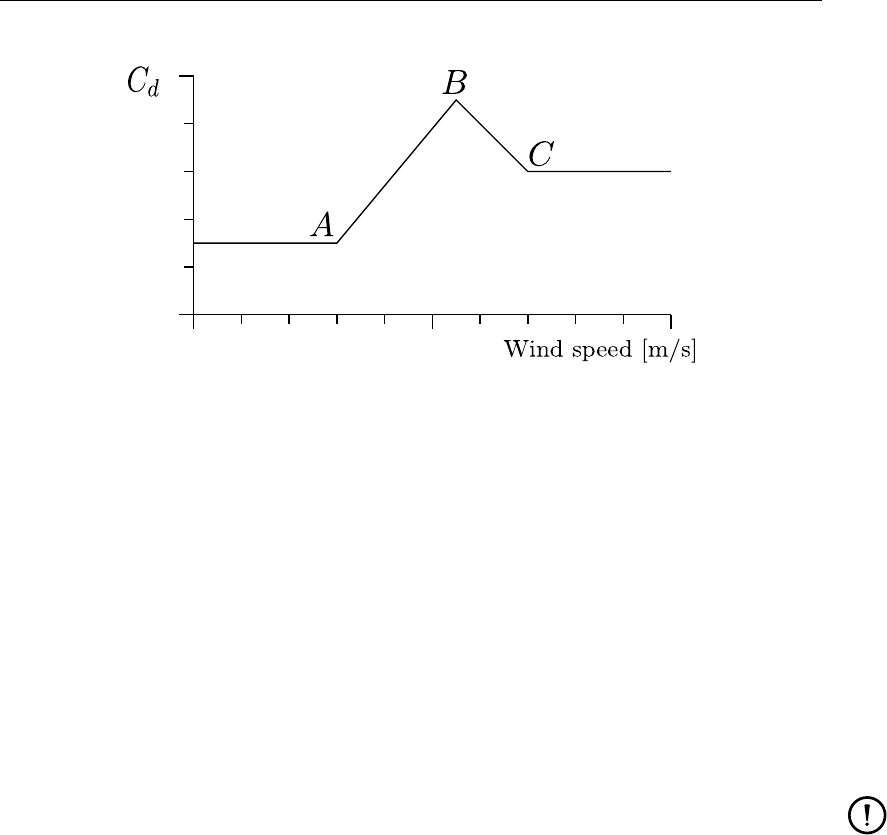
DRAFT
Graphical User Interface
0
Figure 4.31: Examples of the wind drag coefficient
but in 2D simulations the flow equations must be extended to take this effect into account.
The intensity of the secondary flow is a measure for the magnitude of the component of the
secondary flow normal to the depth averaged flow. The vertical distribution of this horizontal
velocity component is assumed to be a universal function of the vertical co-ordinate. The
actual local velocity distribution originates from a multiplication of this function with the spiral
motion intensity. The spiral motion intensity, I, can be used to determine the deviation of the
direction of the bed shear stress from the direction of the depth-averaged flow; this is done in
the morphological module if the secondary flow is included as a process. The βcparameter
described here influences the extent to which the effect of spiral motion in a depth-averaged
model is accounted for. The secondary flow may be computed from a local equilibrium ap-
proach or from an advection/diffusion equation. The parameter Beta_c specifies to which
extent the shear stresses due to the secondary flow are included in the momentum equation
(Beta_c = 0 means no inclusion). See section 9.6 for full details.
Remark:
You do not need (can not) prescribe boundary conditions for the transport equations
that describe the secondary flow. The underlying assumption is that the secondary flow
is locally determined inside the model area and not transported into the model area
through the open boundaries. This assumption might be violated in models that cover
only a very small area.
Wind drag You can specify three Wind drag coefficient values and three Wind
speed values at which these coefficients apply.
The wind drag coefficient may be linearly dependent on the wind speed, reflecting increasing
roughness of the water surface with increasing wind speed. The three wind drag coefficients
determine three breakpoints in the piece-wise linear function of wind drag coefficient and wind
speed, see Figure 4.31. The first two coefficients, Breakpoint (A), determine the constant wind
drag coefficient from zero wind speed up to the wind speed specified. The last two coefficients,
Breakpoint (C), specify the constant wind drag coefficient from the specified wind speed and
higher. Inbetween the breakpoints there is a linear interpolation applied. As a result, you
can specify a constant wind drag coefficient, a linearly increasing wind drag coefficient or a
piece-wise linear function of wind speed, as shown in Figure 4.31.
Deltares 65 of 688
DRAFT
Delft3D-FLOW, User Manual
Domain:
Parameter Lower limit Upper limit Default Unit
Gravity 9.5 12.0 9.81 m/s2
Water density 900.0 1,500 1,000 kg/m3
Air density 0.5 1.5 1.0 kg/m3
Temperature 0.0 60.0 15.0 ◦C
Salinity 0.0 100.0 31.0 ppt
Beta_c 0.0 1.0 0.5 none
Coefficient A 0.0 0.1 0.00063 none
Coefficient B 0.0 0.1 0.00723 none
Coefficient C 0.0 0.1 0.00723 none
Wind speed A 0.0 100.0 0.0 m/s
Wind speed B 0.0 100.0 100.0 m/s
Wind speed C 0.0 100.0 100.0 m/s
Roughness
In the sub-data group Roughness you can specify the bottom roughness and the roughness
of the side walls.
The bottom roughness can be computed with several formulae and you can specify different
coefficients for x- (or ξ-) and y- (or η-) direction; either as a uniform value in each direction,
or space-varying imported from an attribute file.
Upon selecting Physical parameters →Roughness the window given by Figure 4.32 is dis-
played.
Bottom roughness
You can select and define the following options and parameters:
Roughness formula The bottom roughness can be computed according to:
Manning.
White-Colebrook.
Chézy.
Z0(for 3D simulations only).
In the Manning formulation the Manning coefficient, n, must be spec-
ified. The Chézy friction coefficient is calculated from:
C=H1/6
n(4.7)
where His the water depth. A typical Manning value is 0.02 [s/m1/3].
66 of 688 Deltares
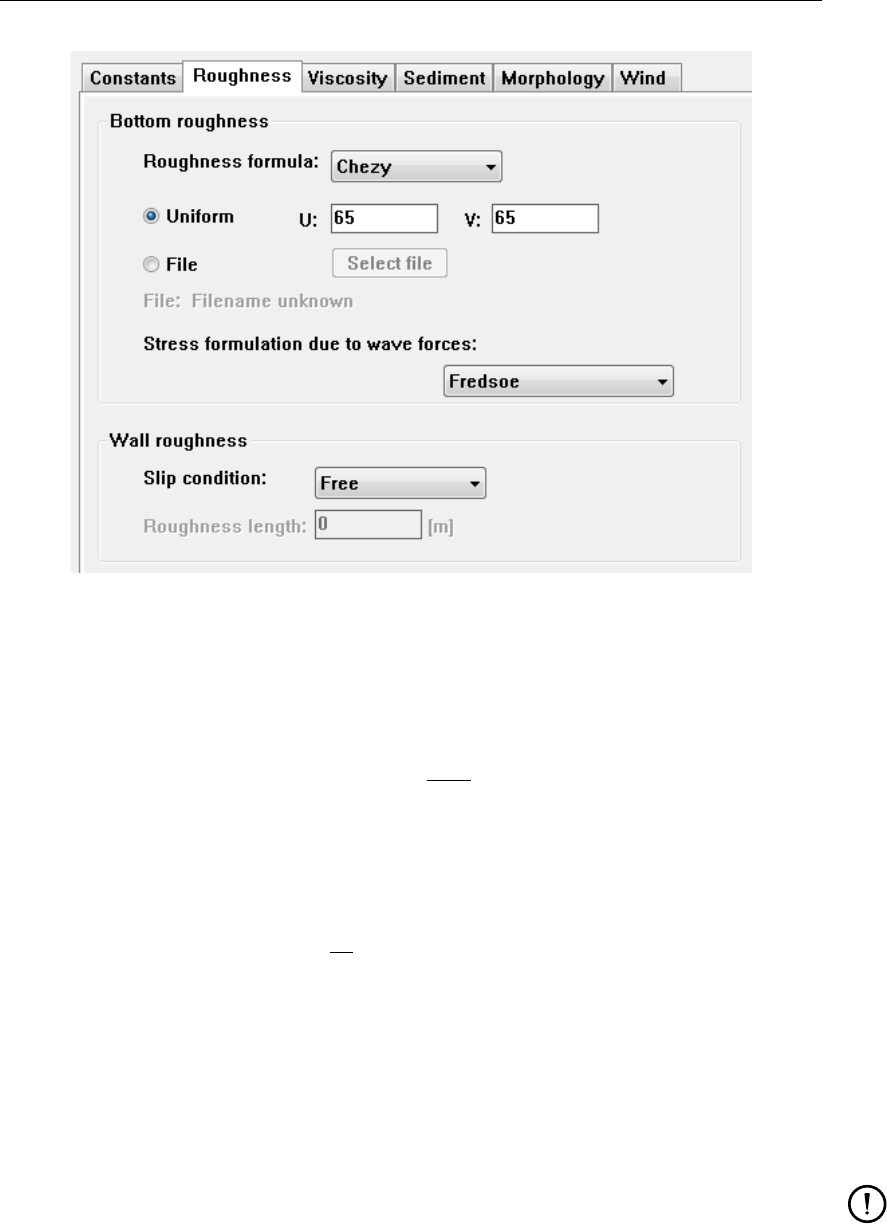
DRAFT
Graphical User Interface
Figure 4.32: Sub-data group Roughness
In the White-Colebrook formulation you must specify the equivalent
geometrical roughness of Nikuradse, ks[m]. The Chézy friction co-
efficient is calculated from:
C= 18 10log 12H
ks(4.8)
A first estimate of the bed roughness length z0[m] in 3D computa-
tions can be derived from the equivalent geometrical roughness of
Nikuradse, ks:
z0=ks
30 (4.9)
Typical values of ksrange from 0.15 [m] for (river) beds with sediment
transport down to 0.01 [m] or less for (very) smooth surfaces; see
section 9.4.1 for more details.
A first estimate of the Chézy friction coefficient is given by:
C= 25 + H(4.10)
Remark:
The Chézy friction coefficient discussed above applies to a
depth averaged computation.
Uniform Specify the values in u- and v-direction in the input fields.
File Select the space varying coefficients in u- and v-direction from an
attribute file (extension <rgh>). See section A.2.19 for a format
description of the roughness file. The file is not read.
Stress formulation due
to wave forces
The bottom stress due to wave forces can be computed with several
formulae. You can select one of the following formulae, see also
section 9.7.5:
Deltares 67 of 688
DRAFT
Delft3D-FLOW, User Manual
Fredsøe (1984)
Myrhaug and Slaattelid (1990)
Grant and Madsen (1979)
Huynh-Thanh and Temperville (1991)
Davies et al. (1988)
Bijker (1967)
Christoffersen and Jonsson (1985)
O’ Connor and Yoo (1988)
Van Rijn et al. (2004)
Wall roughness
The friction of side walls is computed from a ‘law of the wall’ formulation if selected:
Slip condition You can select one of the following:
Free; zero tangential shear stress
Partial; specify the roughness length (m).
No; zero velocity at the wall assumed.
In large-scale hydrodynamic simulations, the tangential shear stress for all lateral boundaries
or vertical walls can be safely neglected (free slip). For simulations of small-scale flow (e.g.
laboratory scale) the influence of the side walls on the flow can be significant and this flag can
be activated. The partial slip only applies to the side walls of permanently dry areas, including
dry points. The tangential shear stress is calculated based on a logarithmic law of the wall
where the roughness length needs to be specified. See chapter 9 for details.
Domain:
Parameter Lower limit Upper limit Default Unit
Manning 0.0 0.04 65.0 m−1/3s
White-Colebrook 0.0 10.0 65.0 m
Chézy 0.0 1,000 65.0 m1/2/s
Z00.0 1.0 65.0 m
Remark:
The default value is set for the Chézy-formulation.
4.5.7.2 Viscosity
The background horizontal eddy viscosity and horizontal eddy diffusivity are user-defined. The
viscosity and diffusivity calculated with the Horizontal Large Eddy Simulation (HLES) sub-grid
model will be added to the background values (for FLOW v3.50.09.02 and higher).
Remark:
If you use an older version of FLOW, or if you re-run an old MDF-file with FLOW
v3.50.09.02 or higher, be aware of this adding operation.
The user-defined parameters can be entered as one uniform value for each quantity (uniform
for both directions) or as non-uniform values read from a user-specified file with file extension
<edy>.
68 of 688 Deltares
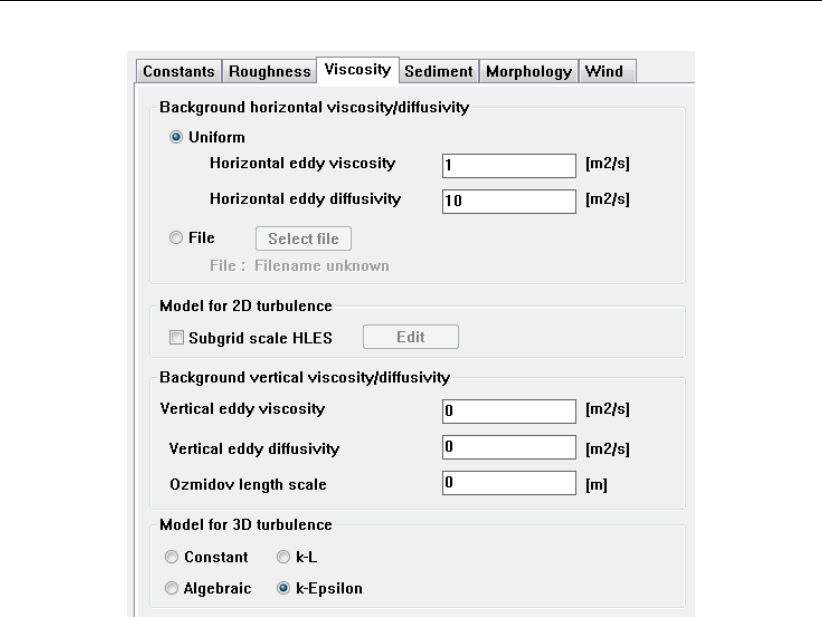
DRAFT
Graphical User Interface
Figure 4.33: Defining the eddy viscosity and eddy diffusivity
If the model is 3D, you may specify constant background values for the turbulent vertical eddy
viscosity. If constituents are modelled you may also specify a constant background value for
the vertical turbulent eddy diffusivity and the Ozmidov length scale.
Finally the model for 3D turbulence can be specified. For details see section 9.5.
Upon selecting Physical parameters →Viscosity Figure 4.33 will be displayed.
Horizontal eddy viscosity and diffusivity
You can select or specify the following parameters:
Background values
Uniform A uniform horizontal eddy viscosity and eddy diffusivity. The values
are defined in the separate input fields.
Horizontal eddy
viscosity
Specify a uniform horizontal eddy viscosity in [m2/s].
Horizontal eddy
diffusivity
Specify a uniform horizontal eddy diffusivity in [m2/s].
File Select the horizontal eddy viscosity and eddy diffusivity from an at-
tribute file with extension <edy>. The data is not read.
Deltares 69 of 688
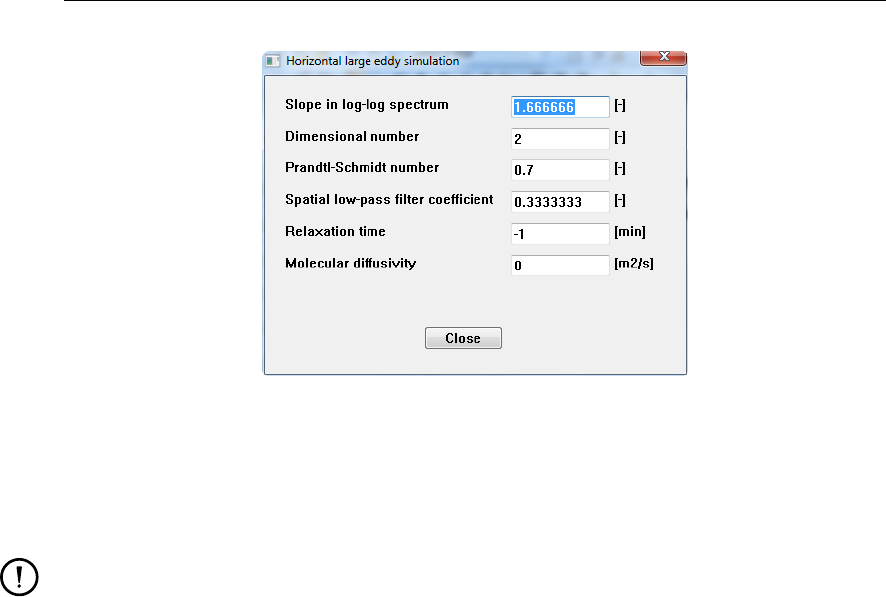
DRAFT
Delft3D-FLOW, User Manual
Figure 4.34: Window with HLES parameters
Model for 2D turbulence
Subgrid scale HLES Upon selecting Figure 4.34 will be displayed. Details about the input
parameters and theory can be found in section B.8.
Remarks:
The contribution from the HLES model will be added to the background values.
If the relaxation time is less than 0.0, the high-pass filtering operation will be cancelled.
Background vertical eddy viscosity and diffusivity
You can select or specify the following parameters:
Vertical eddy viscosity Specify a uniform vertical turbulent eddy viscosity in [m2/s].
Vertical eddy diffusivity Specify a uniform vertical turbulent eddy diffusivity in [m2/s].
The resulting viscosity is the maximum of the user-defined background value and the calcu-
lated value from the turbulence model. Similar for the diffusivity.
Ozmidov length scale The Ozmidov length scale determines the minimal value for the verti-
cal diffusivity from the calculated vertical diffusivity and the equation
using Brunt-Väisälä frequency and Ozmidov length scale; see chap-
ter 9 for details.
Model for 3D turbulence
Turbulence Model For a 3D simulation you can select the type of turbulence formulation
used to determine the vertical turbulent eddy viscosity and the ver-
tical turbulent eddy diffusivity additional to the background values.
You can select from:
Constant Only the background values will be applied.
Algebraic The coefficients are determined by algebraic equations
for the turbulent energy and the mixing length.
k-L The coefficients are determined by a transport equation for
the turbulent kinetic energy kand mixing length L.
k-epsilon The coefficients are determined by transport equations
for both the turbulent kinetic energy and the turbulent kinetic en-
ergy dissipation.
70 of 688 Deltares

DRAFT
Graphical User Interface
Remark:
You do not need (can not) prescribe boundary conditions for the transport equations
used in the selected turbulence model. The underlying assumption is that the turbu-
lence is mainly generated inside the model area and not transported into the model
area through the open boundaries. For very small area models this assumption might
be violated and a special add-on to the flow module can be provided to prescribe the
required boundary conditions.
In 3D-simulations the vertical turbulent eddy viscosity and turbulent diffusivity are computed
using a turbulence closure model. The four models differ in their prescription of the turbulent
kinetic energy, the dissipation of energy and/or the mixing length.
Constant eddy viscosity and diffusivity: you must specify background values that are used
in both (horizontal) directions.
Algebraic model: the first closure model uses an algebraic formula for kand L.
kdepends on the (friction) velocities, whereas for the mixing length La function following
Bakhmetev (1932) is used. In the case of vertical density gradients, the turbulent exchanges
are limited by buoyancy forces and the mixing length Lmust be corrected. This correction
involves a so-called damping function. The approach is sufficiently accurate to be applied in
cases where weakly stratified flow conditions exist. See section 9.5.1 for full details.
k-Lmodel: the second closure model is a first-order turbulence closure model.
In this model an identical approach is applied for the mixing length L. To find the turbulent
kinetic energy ka transport equation is solved. See section 9.5.2 for full details.
k-εmodel: the third model is a k-εmodel which is a second-order turbulence closure model.
Here, both the turbulent kinetic energy kand the turbulent kinetic dissipation εare prescribed
by a transport equation. From kand εthe mixing length and the vertical turbulent eddy
viscosity value are determined. The mixing length is now a property of the flow, and in the
case of stratification no damping functions are needed. The eddy diffusivity is derived from
the eddy viscosity. See section 9.5.3 for full details.
Remark:
Both parameters, the vertical eddy viscosity and eddy diffusivity, are defined at the layer
interfaces. Therefore, when you plot or print these values you will obtain one value more
than the number of layers.
The value for both the horizontal eddy viscosity and the horizontal eddy diffusivity depends
on the flow and the grid size used in the simulation. For detailed models where much of the
details of the flow are resolved by the grid, grid sizes typically tens of metres or less, the values
for the eddy viscosity and the eddy diffusivity are typically in the range of 1 to 10 [m2/s]. For
large (tidal) areas with a coarse grid, grid sizes of hundreds of metres or more, the coefficients
typically range from 10 to 100 [m2/s]. Both coefficients are so-called calibration parameters;
their value must be determined in the calibration process.
The use of the uniform vertical eddy viscosity and eddy diffusivity coefficient depends on the
selected turbulence closure model:
If a constant turbulence closure model is selected the prescribed (constant) background
Deltares 71 of 688
DRAFT
Delft3D-FLOW, User Manual
values are applied.
In all other cases the uniform values are used as a background (minimum) value for the
turbulent contribution. The molecular viscosity and diffusivity are added to the turbulent
part.
In case of strongly stratified flow, a background vertical eddy viscosity may be needed to damp
out short oscillations generated by e.g. drying and flooding, boundary conditions, wind forcing
etc. Without this background eddy viscosity these short oscillations will only be damped in
the bottom layer. The layers behave as if they were de-coupled. The value suggested for the
background eddy viscosity depends on the application. The value must be small compared to
the vertical eddy viscosity calculated by the turbulence closure model. Our experience is that
for stratified estuaries and lakes a value of 10−4to 10−3[m2/s] is suitable.
For the eddy diffusivity similar arguments hold as for the eddy viscosity with one exception.
Actually, a background eddy diffusivity is not necessary and will generate additional vertical
mixing of matter through the pycnocline. However, the access to this value is retained for
reason of compatibility with the eddy viscosity and for experimental purposes.
Domain:
Parameter Lower limit Upper limit Default Unit
Horizontal eddy viscosity 0.0 100.0 10..0 m2/s
Horizontal eddy diffusivity 0.0 1,000 10.0 m2/s
Vertical eddy viscosity 0.0 100.0 1.0E-6 m2/s
Vertical eddy diffusivity 0.0 1,000 1.0E-6 m2/s
Ozmidov length scale 0.0 Max. number 0.0 m
Restriction:
Due to the manner in which the horizontal shear stresses containing cross derivatives
are numerically implemented (explicit integration) the, otherwise unconditionally stable,
numerical scheme for the viscosity term will become conditionally stable. Please check
the stability criterion in chapter 10.
4.5.7.3 Heat flux model
If you have switched on the Temperature process, you can specify how the exchange of heat
through the free surface is modelled.
Upon selecting the tab Heat flux model in the Data Group Physical parameters the window
given by Figure 4.35 is displayed.
In Figure 4.35 the Ocean heat flux model is selected. Depending on the selected heat flux
model parameters are displayed or not.
72 of 688 Deltares
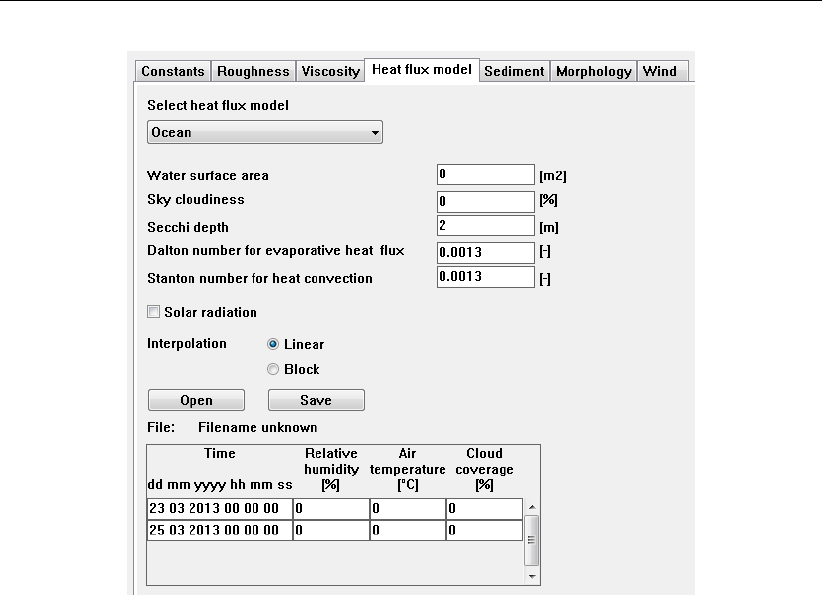
DRAFT
Graphical User Interface
Figure 4.35: Sub-data group Heat flux model
Heat flux model
You can select one of the following options:
No flux The background temperature is used throughout the model area.
Absolute flux, total
solar radiation
The absolute temperature is computed. The relative humidity, air
temperature and the (short wave) solar radiation for a clear sky have
to be prescribed. The net atmospheric (long wave) radiation and the
heat losses due to evaporation and convection are computed by the
model.
Absolute flux, net solar
radiation
The absolute temperature is computed. The relative humidity, air
temperature and the combined net (short wave) solar and net (long
wave) atmospheric radiation have to be prescribed. The terms re-
lated to heat losses due to evaporation and convection are computed
by the model.
Excess temperature The heat exchange flux at the air-water interface is computed; only
the background temperature is required.
Murakami The relative humidity, air temperature and the net (short wave) solar
radiation have to be prescribed. The effective back radiation, and the
heat losses due to evaporation and convection are computed by the
model. The incoming radiation is absorbed as a function of depth.
The evaporative heat flux is calibrated for Japanese waters.
Ocean The relative humidity, air temperature and the fraction of the sky cov-
ered by clouds is prescribed (in %). The effective back radiation and
the heat losses due to evaporation and convection are computed by
the model. Additionally, when air and water conditions are such that
free convection occurs, free convection of latent and sensible heat
is computed by the model and added to the forced convection. This
model formulation typically applies for large water bodies.
Deltares 73 of 688

DRAFT
Delft3D-FLOW, User Manual
The absolute temperature models compute the heat fluxes through the water surface by con-
sidering incoming radiation, back radiation, evaporation and convection. Evaporation and
convection depend on air temperature, water temperature, relative humidity and wind speed.
When modelling the effect of a thermal discharge, it is often enough to compute the excess
temperature distribution and decay. Excess heat is transferred from the water surface to
the atmosphere by evaporation, long-wave radiation and convection. This total heat flux is
proportional to the excess temperature at the surface. The heat transfer coefficient depends
mainly on the water temperature and the wind speed.
Remarks:
If you have selected a heat flux model which includes evaporation, you can specify if
the evaporated water should be taken into account. Specify Maseva = #Y# in Data
Group Additional parameters.
Precipitation and evaporation is an add-on of FLOW independent if you model temper-
ature or not. See section B.6 for how you can use this add-on. If you use this add-on
together with the process Temperature, then the user-defined evaporation overrules the
computed evaporation from the heat flux model. The user-defined evaporated water is
always included in the continuity equation.
Global parameters for the heat flux models
You can define:
Water surface area The water area exposed to wind in [m2]. Required for heat flux mod-
els 1, 2 and 3.
A secondary effect is included in the heat models by taking into account the surface area of
the water body exposed to the wind. Wind strongly affects the evaporation and convection
process. The value for the surface area can differ from the effective water surface in the
model. Its value depends on the model geometry and on the direction of the wind (Sweers,
1976). Effectively, the surface area can be regarded as a calibration parameter.
Sky cloudiness The fractional blocking of the solar radiation by clouds in [%]. Re-
quired by heat flux models 1, 4 and 5.
The incoming solar and atmospheric radiations are affected by clouds. The Sky cloudiness
parameter describes the percentage of the solar radiation blocked by the clouds; 0 % refers
to clear sky condition whereas a value equal to 100 % implies that most of the solar radiation
will be absorbed by the atmosphere. Only 35 % (excluding the reflection) of the specified
solar radiation will reach the water surface. Consequently, due to increased absorption the
atmosphere will ultimately radiate more energy.
Secchi depth Required by heat flux models 4 and 5.
Dalton number for evaporative heat flux. Required by heat flux models 4 and 5.
Stanton number for heat convection. Required by heat flux model 5.
74 of 688 Deltares
DRAFT
Graphical User Interface
Time dependent heat flux model input
Interpolation The type of interpolation used for the time-series at intermediate time
instances. You can select either Linear or Block interpolation.
Open / Save To open and read or save the time-series from or to an attribute file
with extension <tem>.
In the table you must specify time-series for the following parameters:
Incoming solar radiation for a clear sky in J/(m2s) (only for heat flux model 1)
Net (short wave) solar radiation in J/(m2s) (heat flux model 4)
Combined net (short wave) solar and net (long wave) atmospheric radiation in J/(m2s)
(heat flux model 2)
Background temperature in ◦C (Excess heat flux model)
Air temperature in ◦C (all heat flux models except the Excess model)
Relative humidity in % (all heat flux models except the Excess model)
Fraction of the sky covered by clouds (in %) (Ocean heat flux model)
The background temperature used in the excess temperature heat model is already pre-
scribed in Data Group Physical parameters →Constants.
Domain:
Parameter Lower limit Upper limit Default Unit
Water surface 0.0 Max. Number 0.0 m2
Sky cloudiness 0.0 100.0 0.0 %
Secchi depth 0.0 2.00 m
Dalton number 0.0 1.0 0.00130 -
Stanton number 0.0 1.0 0.00130 -
Temperature 0.0 60.0 0.0 ◦C
Humidity 0.0 100.0 0.0 %
Solar radiation 0.0 Max. Number 0.0 W/m2
Restrictions:
The time breakpoints must differ from the simulation start time by an integer multiple of
the time-step (Data Group Time frame).
The first time breakpoint must be before or equal to the simulation start time, and the
last time breakpoint must be equal or later than the simulation stop time (see Data
Group Time frame).
Time breakpoints must be given in ascending order.
Deltares 75 of 688
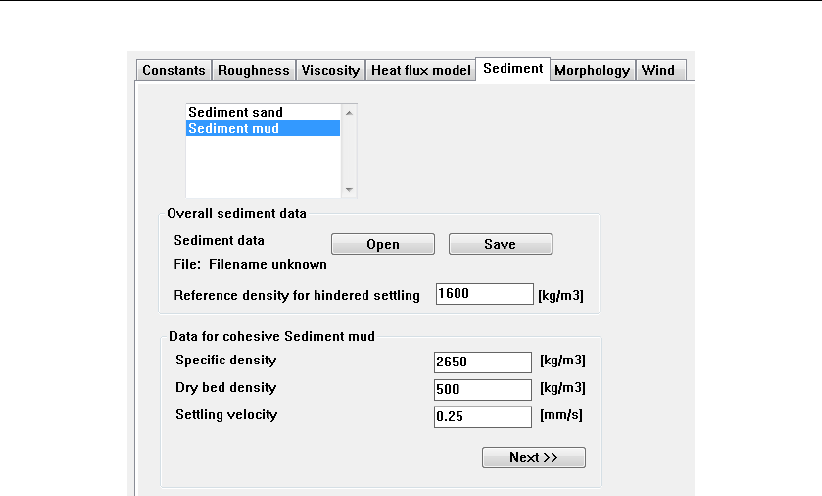
DRAFT
Delft3D-FLOW, User Manual
Figure 4.36: Sub-data group Sediment, overall and cohesive sediment parameters
4.5.7.4 Sediment
Sediment transport offers the following functionalities (for details see chapter 11):
Cohesive sediment transport, including the effect of salinity on flocculation.
Non-cohesive suspended sediment (sand) transport.
Bedload transport, including effect of wave asymmetry.
Influence of waves and hindered settling.
Updating the bed-level and feedback to the hydrodynamics.
Up to 99 fractions of sand or combination of sand and mud.
Numerous sediment transport formulations
If you have switched on the Sediments process, you can specify the characteristics of the
(non-) cohesive sediments, the critical shear stresses for sedimentation and erosion (for co-
hesive sediments) and the initial sediment at the bed.
Upon selecting the tab Sediment in the Data Group Physical parameters the window given
by Figure 4.36 is displayed.
Open / Save The sediment characteristics can be read from or saved to the file
<∗.sed>. See section B.9 for a detailed description.
Overall sediment data
Reference density for
hindered settling
In high concentration mixtures, the settling velocity of a single par-
ticle is reduced due to the presence of other particles. In order to
account for this hindered settling effect Richardson and Zaki (1954)
are followed. The reference density is a parameter in their formula-
tion. See section 11.1.4.
76 of 688 Deltares
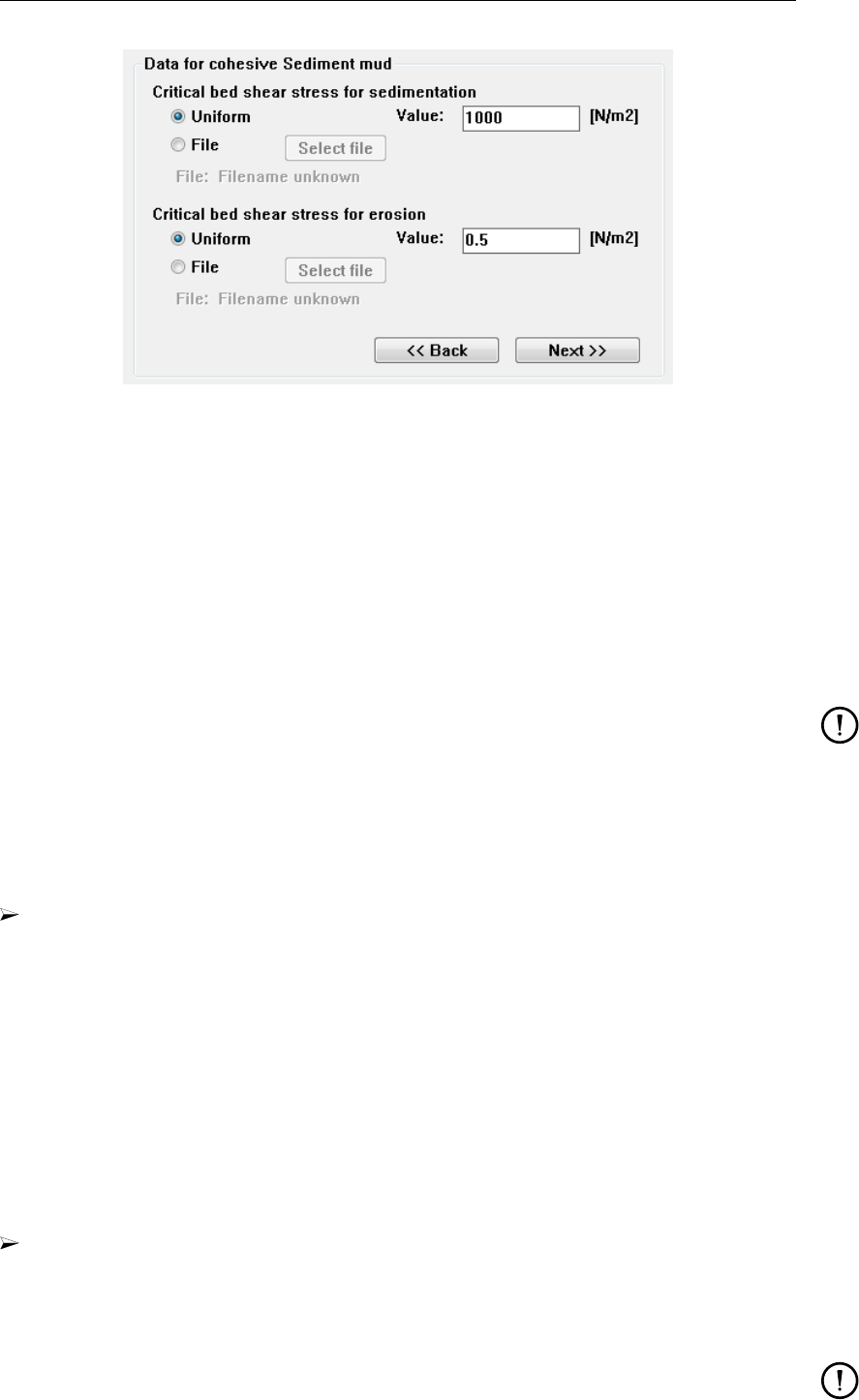
DRAFT
Graphical User Interface
Figure 4.37: Sub-data group Sediment, cohesive sediment parameters (continued)
Cohesive sediment
Specific density For sediment transport the Eckart relation is extended to include the
density effect of sediment fractions in the fluid mixture, see sec-
tion 11.1.3. The specific density of each sediment fraction is part
of this formulation.
Dry bed density The thickness of the sediment above the fixed layer is calculated
by dividing the mass of sediment available at the bed by the user
specified dry bed density.
Settling velocity The settling velocity of the cohesive sediment.
Remarks:
The settling velocity has to be specified in mm/s in the GUI but
is written in [m/s] to the <∗.sed>file
In salt water cohesive sediment tends to flocculate to form sed-
iment “flocs”, with the degree of flocculation depending on the
salinity of the water. This has been implemented, see sec-
tion 11.2.1. Though the GUI does not support this formulation,
you can still edit the <∗.sed>file to use this functionality.
Press Next to browse to the next cohesive input parameters, showing Figure 4.37.
For cohesive sediment fractions the fluxes between the water phase and the bed are calcu-
lated with the well-known Partheniades-Krone formulations (Partheniades,1965):
Critical bed shear
stress for
sedimentation
If the bed shear stress is larger than the critical stress, no sedimen-
tation takes place. If the bed shear stress is smaller than the flux is
calculated following Partheniades-Krone, see section 11.2.3.
Critical bed shear
stress for erosion
If the bed shear stress is smaller than the critical stress, no erosion
takes place. If the bed shear stress is larger than the flux is calcu-
lated following Partheniades-Krone, see section 11.2.3.
Space-varying shear stress files can be made with QUICKIN.
Press Next to browse to the next cohesive input parameters, showing Figure 4.38.
Sediment erosion rate Erosion parameter in the formulation of Partheniades-Krone, see
section 11.2.3.
Initial sediment layer
thickness at bed
The initial sediment layer thickness at the bed in metre.
Remarks:
Deltares 77 of 688
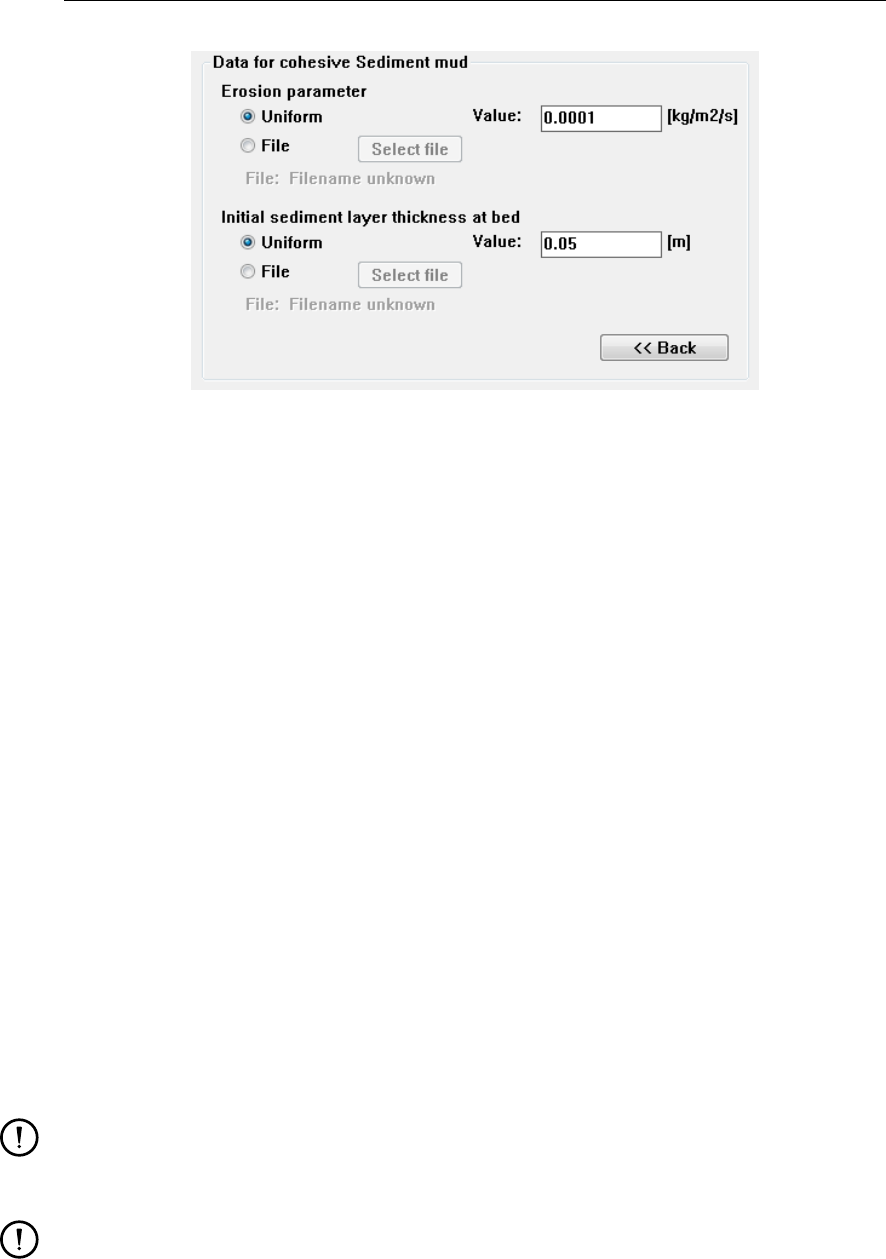
DRAFT
Delft3D-FLOW, User Manual
Figure 4.38: Sub-data group Sediment, cohesive sediment parameters (continued)
The initial bed composition should be specified at the cell cen-
tres. You can use QUICKIN with the Operations →Data in
Cell Centre option on to prepare the file with space-varying ini-
tial sediment layer thickness at the bed.
GUI v3.39.25 and higher writes a new keyword (IniSedThick)
to the <∗.sed>file. The sediment now is in metre, before it
was in kg/m2. Old <∗.sed>files will be converted by the GUI.
Non-cohesive sediment
If you have defined a non-cohesive sediment fraction, you have to specify the following pa-
rameters, see Figure 4.39.
Specific density For sediment transport the Eckart relation is extended to include the
density effect of sediment fractions in the fluid mixture, see sec-
tion 11.1.3. The specific density of each sediment fraction is part
of this formulation.
Dry bed density The thickness of the sediment above the fixed layer is calculated
by dividing the mass of sediment available at the bed by the user
specified dry bed density.
Median sediment
diameter
The settling velocity of a non-cohesive (“sand”) sediment fraction is
computed following the method of Van Rijn (1993). The formulation
used depends on the diameter of the sediment in suspension: See
section 11.3.1.
Remark:
The sediment diameter has to be specified in µm in the GUI
but is written in m to the <∗.sed>file.
Initial sediment layer
thickness at bed
The initial available sediment at the bed.
Remarks:
The initial bed composition should be specified at the cell cen-
tres. You can use QUICKIN with the Operations →Data in
Cell Centre option on to prepare the file with space-varying ini-
tial sediment layer thickness at the bed.
GUI v3.39.25 and higher writes a new keyword (IniSedThick)
to the <∗.sed>file. The sediment now is in metre, before it
was in kg/m2. Old <∗.sed>files will be converted by the GUI.
78 of 688 Deltares
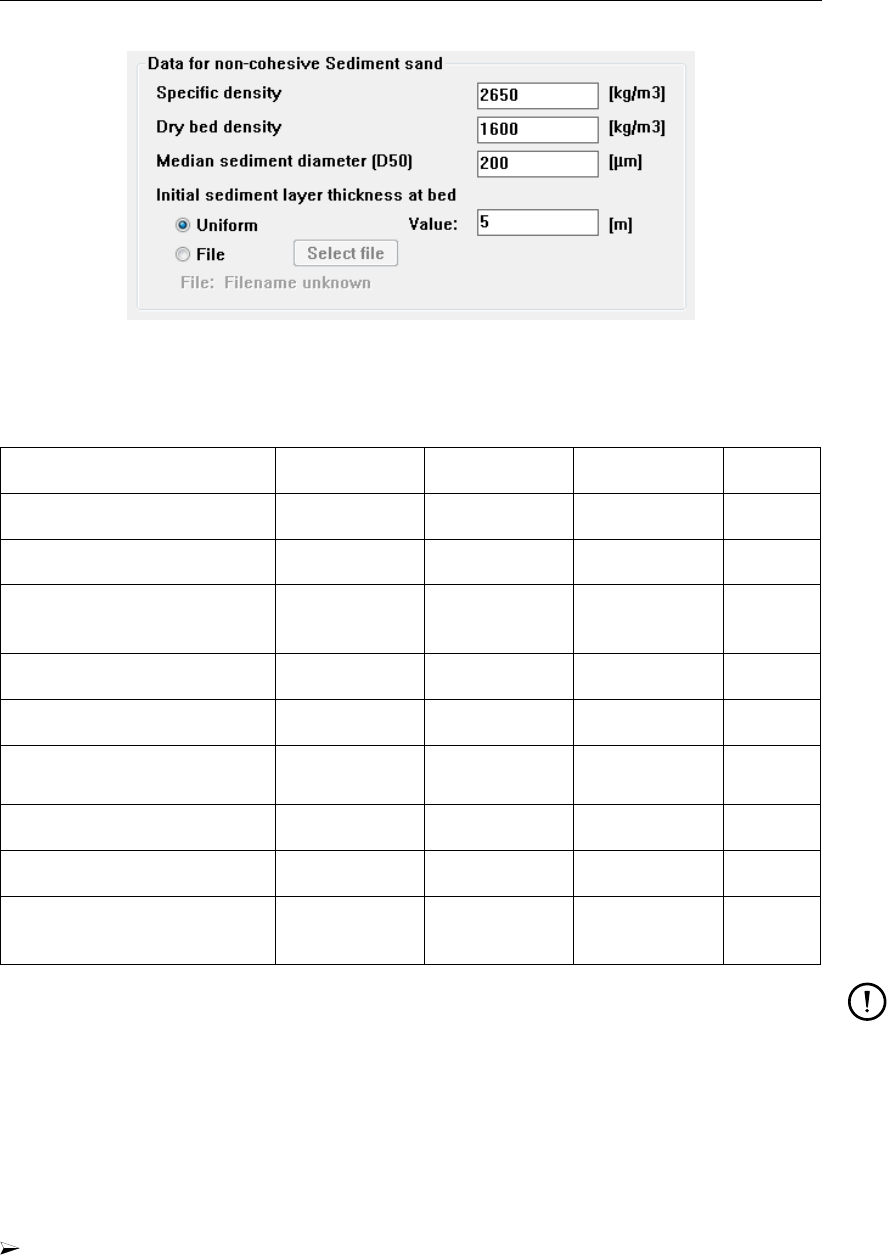
DRAFT
Graphical User Interface
Figure 4.39: Sub-data group Sediment, non-cohesive sediment parameters
Domain:
Parameter Lower limit Upper limit Default Unit
Reference density 100.0 Max. Number 1600.0 kg/m3
Specific density 100.0 4000.0 2650.0 kg/m3
Dry bed density mud: 100.0 3000.0 mud: 500.0 kg/m3
sand: 500.0 3000.0 sand: 1600.0 kg/m3
Settling velocity >0.0 30.0 0.25 mm/s
Median sediment diameter 64.0 2000.0 200 µm
Critical shear stress for sedi-
mentation
0.0 1000.0 1000.0 N/m2
Critical shear stress for erosion 0.001 100.0 0.5 N/m2
Sediment erosion rate 0.0 1.0 0.0001 kg/(m2s)
Initial sediment layer at bed 0.0 mud: 10.0 mud: 0.05 m
sand: 50.0 sand: 5.0
Remarks:
The settling velocity value is written in [m/s] to the file <∗.sed>.
The mean sediment diameter value is written in [m] to the file <∗.sed>.
4.5.7.5 Morphology
With the feedback of bottom changes to the hydrodynamic computation you can execute a full
morphodynamic computation. You can include the influence of waves by running this version
of Delft3D-FLOW in combination with the Delft3D-WAVE module. See section 11.6 for details.
Selecting the tab Morphology in the Data Group Physical parameters opens Figure 4.40.
Open / Save The morphology characteristics can be read from or saved to the file
<∗.mor>. See section B.9 for a detailed description.
General
Deltares 79 of 688
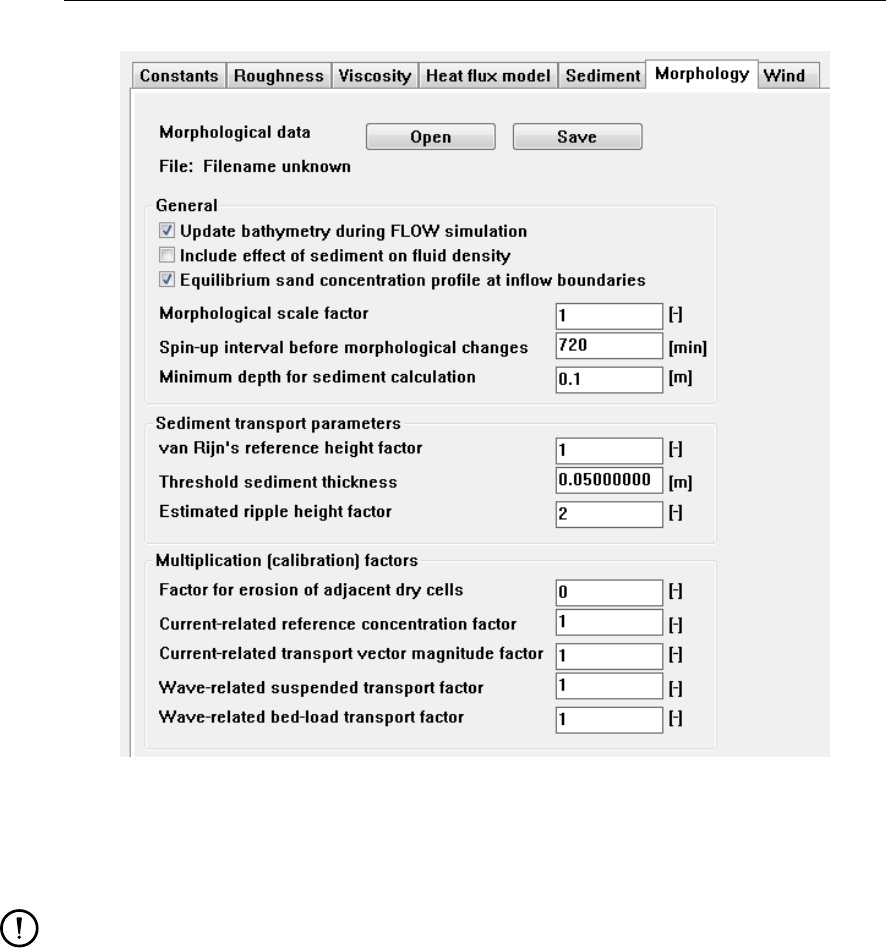
DRAFT
Delft3D-FLOW, User Manual
Figure 4.40: Sub-data group Morphology
Update bathymetry
during FLOW
simulation
If you want to take into account the feedback of bottom changes on
the hydrodynamics, tick off this option.
Remark:
The use of this update option only affects the updating of the depth values (at ζand
velocity points) used by flow calculations at subsequent time-steps; the quantity of sed-
iment available at the bed will still be updated, regardless of the state of this flag.
Include effect of
sediment on fluid
density
You can include or neglect the effect of sediment on the fluid density
by setting this option accordingly.
For coarser non-cohesive material you can specify that, at all open inflow boundaries, the flow
should enter carrying all “sand” sediment fractions at their equilibrium concentration profiles.
This means that the sediment load entering through the boundaries will be near-perfectly
adapted to the local flow conditions, and very little accretion or erosion should be experienced
near the model boundaries.
Equilibrium sand
concentration profile at
inflow boundary
Tick off to use this option. When not activated the inflow concen-
trations specified in Data Group Boundaries →Transport conditions
will be used.
One of the complications inherent in carrying out morphological projections on the basis of
hydrodynamic flows is that morphological developments take place on a time scale several
80 of 688 Deltares

DRAFT
Graphical User Interface
times longer than typical flow changes (for example, tidal flows change significantly in a period
of hours, whereas the morphology of a coastline will usually take weeks, months, or years to
change significantly). One technique for approaching this problem is to use a Morphological
time scale factor whereby the speed of the changes in the morphology is scaled up to a rate
that it begins to have a significant impact on the hydrodynamic flows.
Morphological scale
factor
The above can be achieved by specifying a non-unity value.
Remark:
The Morphological scale factor can also be time-varying, see section B.9.8. This feature
is not yet supported by the GUI. You have to edit the <∗.mor>file manually.
The implementation of the Morphological time scale factor is achieved by simply multiplying
the erosion and deposition fluxes from the bed to the flow and vice-versa by this scale factor, at
each computational time-step. This allows accelerated bed-level changes to be incorporated
dynamically into the hydrodynamic flow calculations.
Frequently, a hydrodynamic simulation will take some time to stabilise after transitioning from
the initial conditions to the (dynamic) boundary conditions. It is likely that during this stabilisa-
tion period the patterns of erosion and accretion that take place do not accurately reflect the
true morphological development and should be ignored.
Spin-up interval before
morphological changes
Specify a time interval (in minutes after the start time) after which the
morphological bottom updating will begin. During this time interval all
other calculations will proceed as normal (sediment will be available
for suspension for example) however the effect of the sediment fluxes
on the available bottom sediments will not be taken into account.
Minimum depth for
sediment calculation
In the case of erosion near dry points a threshold depth for comput-
ing sediment transport can be used, see section 11.6.2.
Sediment transport parameters
The following parameters are only relevant for non-cohesive sediments.
van Rijn’s reference
height factor
For non-cohesive sediment (e.g. sand), we follow the method of Van
Rijn (1993) for the combined effect of waves and currents, see sec-
tion 11.3. The reference height formulation contains a proportionality
factor called van Rijn’s reference height factor.
Because of the more complex, partly explicit — partly implicit, erosive flux terms used for
“sand” type sediments it is not possible to use the simple source limitation technique used for
cohesive sediments. Instead, you must specify a Threshold sediment thickness.
Threshold sediment
thickness
At each time-step the thickness of the bottom sediments is calcu-
lated. If the remaining sediment thickness is less than the user-
specified threshold and erosive conditions are expected then the
source and sink sediment flux terms, see Eq. (??), are reduced in
the following manner:
Estimated ripple height
factor
In case of waves, the wave related roughness is related to the esti-
mated ripple height, see section 11.3.3.
Deltares 81 of 688

DRAFT
Delft3D-FLOW, User Manual
Multiplication (calibration) factors
The following parameters are only relevant for non-cohesive sediments.
In the case of erosion near a dry beach or bank, the standard scheme will not allow erosion
of the adjacent cells, even when a steep scour hole would develop right next to the beach.
Therefore a scheme has been implemented, where for each wet cell, if there are dry points
adjacent to it; the erosion volume is distributed over the wet cell and the adjacent dry cells.
Factor for erosion of
adjacent dry cells
The distribution is governed by a user-specified factor for erosion
of adjacent dry cells, which determines the fraction of the erosion
to assign (evenly) to the adjacent cells; if this factor equals zero,
the standard scheme is used; if this factor equals 1, all erosion that
would occur in the wet cell is assigned to the adjacent dry cells.
Current-related
reference
concentration factor
The reference concentration is calculated in accordance with Van
Rijn et al. (2000), see section 11.3.3.
Only Van Rijn (1993) and Van Rijn et al. (2004) compute explicitly a wave-related transport
component.
Stotal =BED ·Sbedload current +BEDW ·Sbedload waves +SUSW ·Ssuspended waves (4.11)
dDP S
dt =Stotal out −Stotal in +SUS ·(Entrainment −Deposition)(4.12)
where Sbedload current,Sbedload waves,Ssuspended waves, Entrainment, and Deposition depend on
the sediment transport formula used. In most cases it holds Sbedload waves = 0 and Ssuspended waves =
0.
Current-related transport vector magnitude factor : —
Wave-related suspended transport factor: The wave-related suspended sediment trans-
port is modelled using an approximation method proposed by Van Rijn (2001), see sec-
tion 11.5.1.
Wave-related bedload transport factor: —
82 of 688 Deltares
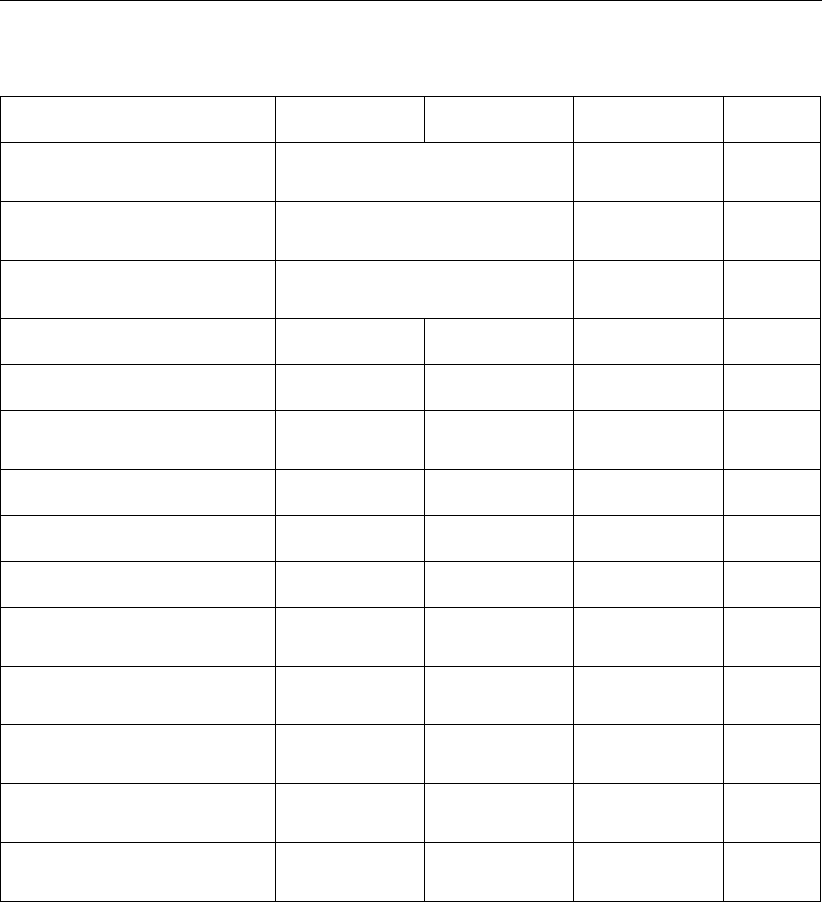
DRAFT
Graphical User Interface
Domain:
Parameter Lower limit Upper limit Default Unit
Update bathymetry during
FLOW simulation
yes or no yes none
Include effect of sediment on
fluid density
yes or no no none
Equilibrium sand concentration
profile at inflow boundary
yes or no yes none
Morphological scale factor 0.0 10000.0 1.0 -
Spin-up interval 0.0 720.0 min
Minimum depth for sediment
calculation
0.1 10.0 0.1 m
Van Rijn’s reference height 0.4 2.0 1.0 -
Threshold sediment thickness 0.005 10.0 0.05 m
Estimated ripple height factor 1.0 5.0 2.0 -
Factor for erosion of adjacent
dry cells
0.0 1.0 0.0 -
Current-related reference con-
centration factor
0.0 100.0 1.0 -
Current-related transport vec-
tor magnitude factor
0.0 100.0 1.0 -
Wave-related suspended
transport factor
0.0 100.0 1.0 -
Wave-related bedload trans-
port factor
0.0 100.0 1.0 -
4.5.7.6 Wind
When the Wind process is activated in Data Group Processes, see Figure 4.16, the tab Wind
is available in the Data Group Physical parameters. Selecting this tab displays Figure 4.41.
Wind fields can be specified as uniform but time dependent or as a space and time varying
wind (and pressure) field. In the Wind tab you can select:
Space varying wind
and pressure
To define a space and time varying wind and pressure field. Open
the file with wind and pressure data.
Uniform To define a wind field that is time dependent but uniform in space.
Upon selecting Uniform you can either specify the wind data or read an attribute file.
Deltares 83 of 688
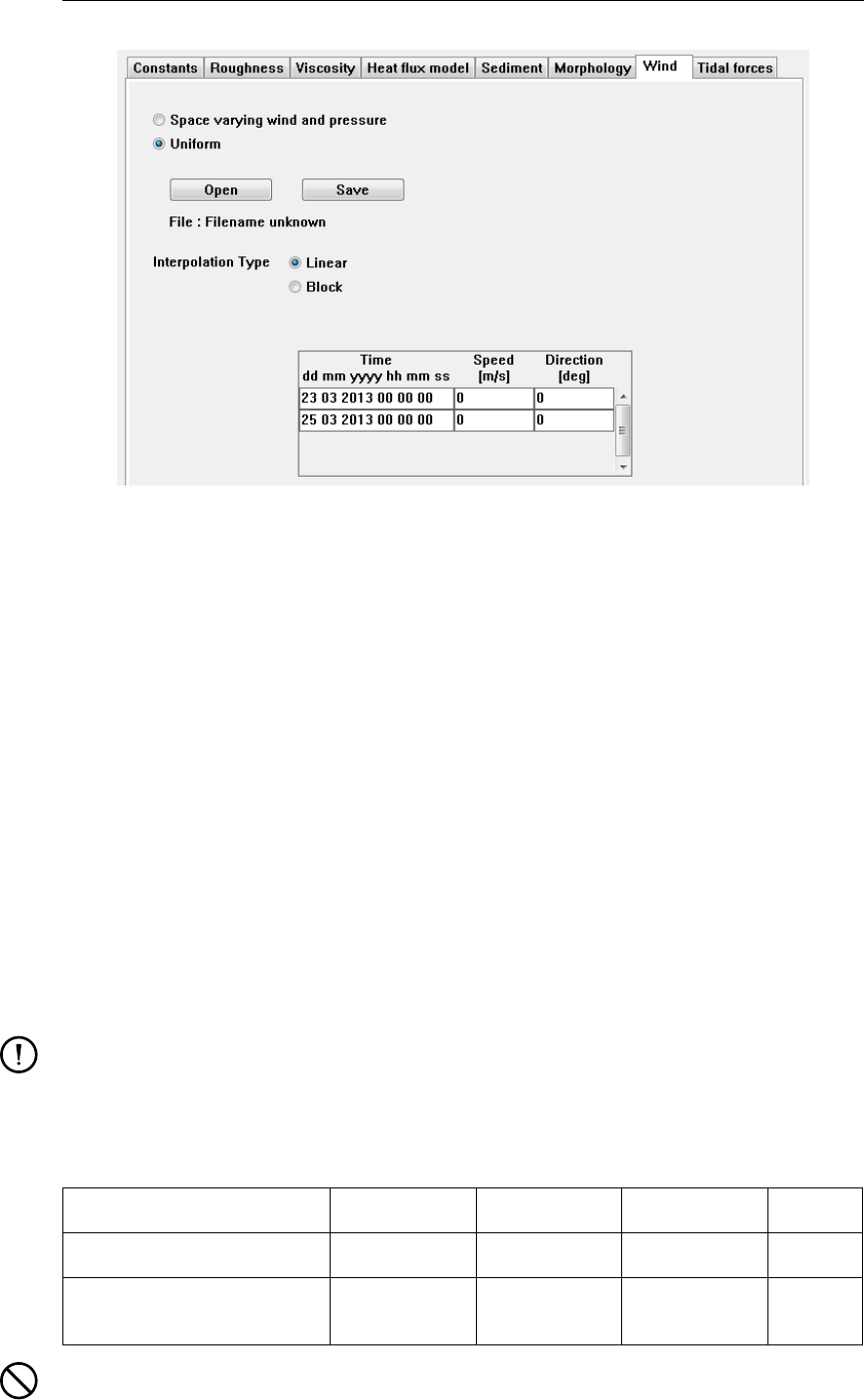
DRAFT
Delft3D-FLOW, User Manual
Figure 4.41: Wind definition window
Uniform wind
For a uniform wind you can specify:
Open To read an attribute file with a uniform but (potentially) time depen-
dent wind field; file extension <wnd>.
Save To save the manually defined or modified wind field to a file. If you
want to combine wind data read from a file and defined manually you
must first import the file and then add, delete or modify the imported
data; reversing this order will overwrite your manually defined data.
Interpolation Type Time dependent data is specified at time instances called break-
points; to determine the value at intermediate times you can apply a
linear or a block type of interpolation.
Time-Series Specify the time breakpoints in [dd mm yyyy hh mm ss], the wind
speed in [m/s] and the wind direction in degrees (nautical definition).
The wind direction is defined according to the nautical definition, i.e. relative to true North and
positive measured clockwise. In Figure 4.42 the wind direction is about +60 degrees, i.e. an
East-North-East wind.
Remark:
The wind direction is measured (clockwise) starting from true North. East-North-East
wind thus has a direction of +67.5 degrees.
Domain:
Parameter Lower limit Upper limit Default Unit
Wind speed 0.0 100.0 0.0 m/s
Wind direction 0.0 360.0 0.0 degrees
North
Restrictions:
84 of 688 Deltares
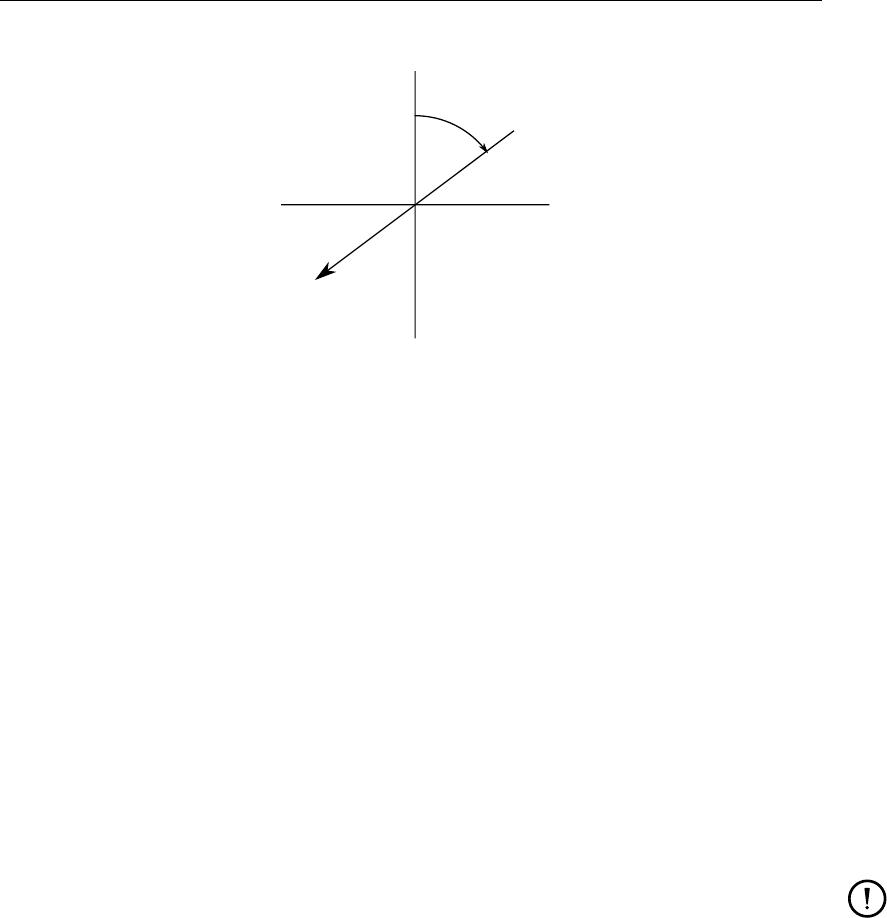
DRAFT
Graphical User Interface
North
East
South
West
Wind direction
Figure 4.42: Nautical definition of the wind direction
The time breakpoints must differ from the simulation start time by an integer multiple of
the time-step (see Data Group Time frame).
The first time breakpoint must be before or equal to the simulation start time, and the
last time breakpoint must be equal or later than the simulation stop time (see Data
Group Time frame).
Time breakpoints must be given in ascending order.
Space varying wind and pressure
For a space varying wind and pressure you can specify:
Select file To select an attribute file with space and time varying wind and pres-
sure data. The file is not read.
Interpolation Type Time dependent data is specified at time instances called break-
points; to determine the value at intermediate times you can apply a
linear or a block type of interpolation.
Remarks:
The space varying wind and pressure selected in this sub-data group must be defined
on the hydrodynamic grid.
It is also possible to use space varying wind and pressure defined on an independent
wind grid. See section A.2.8.2 and section B.7 for details.
When using space varying wind and pressure, the input is applied at the interior of the
domain. On open boundaries this can cause a pressure gradient, which in turn causes
a water level gradient. To reduce this effect, it is possible to apply a pressure correction
on open boundaries. This functionality is described in section B.7.1.
4.5.7.7 Tidal forces
When the process Tidal forces is selected (see Figure 4.16), the tab Tidal forces is available
in Data Group Physical parameters. Selecting this tab Figure 4.43 is displayed.
You can select the components that are taken into account by the tidal force generating routine
by ticking off the check box. See section 9.9 for details of tide generating forces.
Deltares 85 of 688
DRAFT
Delft3D-FLOW, User Manual
Figure 4.43: Sub-window Tidal forces
4.5.8 Numerical parameters
In the Data Group Numerical parameters you can specify parameters related to drying and
flooding and some other advanced options for numerical approximations.
Several drying/flooding procedures are available in Delft3D-FLOW, see chapter 10. By default
the water depth in each of the grid cell faces (velocity points) of a computational grid cell is
determined to decide if the flow should be blocked by a (temporary) thin dam. If the flow at
the four faces of a computational grid cell is blocked this grid cell is set dry. Note that this
does not guarantee the water depth at the grid cell centre (water level point) to be positive
definite. An additional check can be done on the water depth at the centre (water level point).
The bottom depth in the cell centre (water level point) is not uniquely defined, several options
are available. In combination with the water level in the cell centre it is determined if the cell
is being dried or flooded; see section 10.8 for more details on drying and flooding.
Click the Data Group Numerical parameters. This results in Figure 4.44.Note: if your model
is not 3D, or you have not modelled salinity or another constituent, then you will see less input
parameters.
You must select or define one or more of the following parameters:
Drying and flooding
check
Determine if you want to apply an additional check on the water
depth at the cell centres (water level points); or only a check at the
cell faces (velocity points).
Depth at grid cell faces You can either select (see also section 10.8.2):
Mean The depth at the cell face is the mean of the depths at the
cell corners (m,n) and (m,n+1).
Min The depth at the cell face is the minimum of the depths at
the water level points (m,n) and (m+1,n).
Upwind The depth at the u-velocity point is the depth at water
level point (m,n) if the u-velocity is larger than 0, the depth at
water level point (m+1,n) if the u-velocity is less than 0, and the
average if the u-velocity is 0.
Mor The Mor option is the same as Min.
86 of 688 Deltares
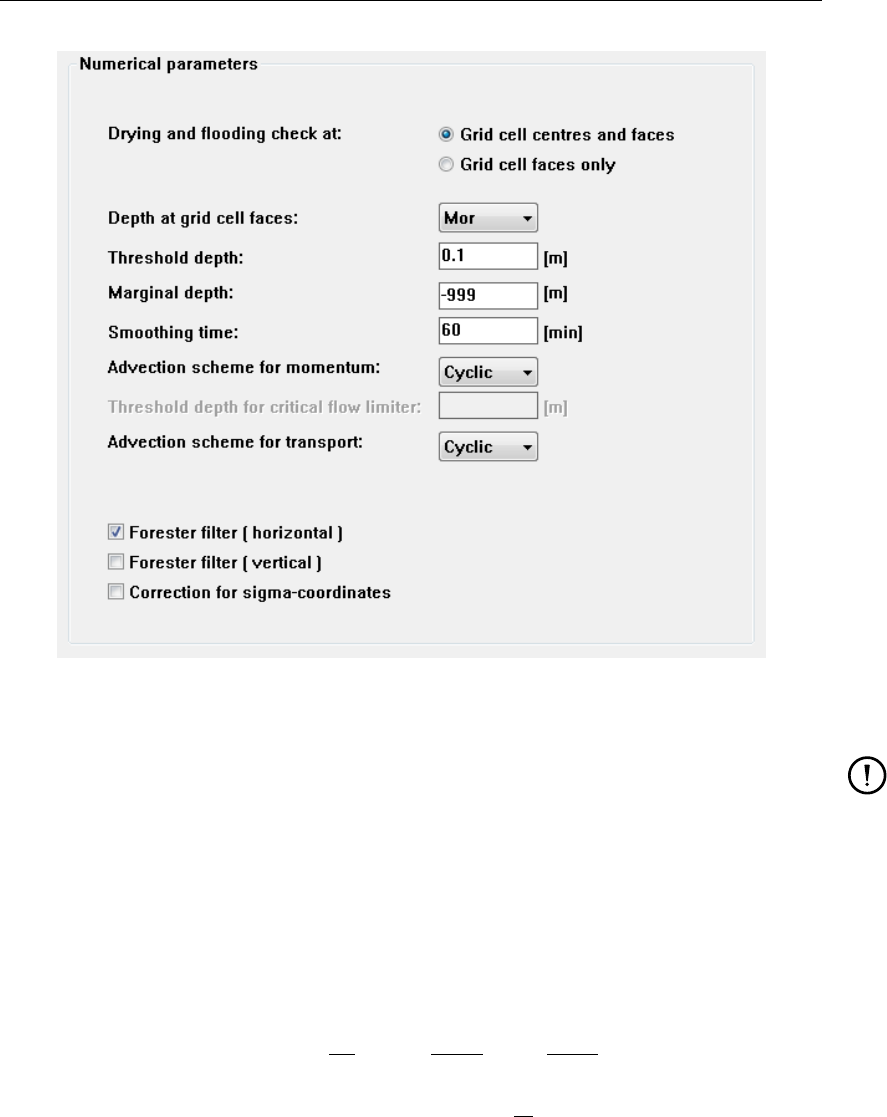
DRAFT
Graphical User Interface
Figure 4.44: Data Group Numerical parameters
Remark:
Depth specified at grid cell centres (section 4.5.2.2) and Depth at grid cell faces is
Mean, can not be used together.
Threshold depth The threshold depth above which a grid cell is considered to be wet.
The threshold depth must be defined in relation to the change of
the water depth per time step in order to prevent the water depth to
become negative in just one time step. This would result in iterations
in the computation and thus a larger computational time.
As a rule of thump you can use:
δ≥
∂ζ
∂t ∆t≈2π|a|
T∆t=2π|a|
N(4.13)
where δis the threshold depth, ∂ζ
∂t is a measure for the change of
the water level as a function of time with aas characteristic ampli-
tude, Tis the tidal period, ∆tis the time step of the computation
and Nis the number of time steps per tidal period.
Example:
With a tidal amplitude of 2 m and time step of 1 minute (N= 720)
we find δ≥0.017 m.
Marginal depth For the water level at the velocity points as default the mean value is
used. It is also possible to determine the water levels at the cell faces
with a so-called upwind approach: initially the water depth is the
bottom depth at the velocity point plus the water level at the velocity
point.
If this water depth is less than the marginal depth then:
Deltares 87 of 688

DRAFT
Delft3D-FLOW, User Manual
The water depth equals the bottom depth plus the water level at
(m,n) if the u-velocity is larger than 0.
The water depth equals the bottom depth plus the water level at
(m+1,n) if the u-velocity is less than 0.
The water depth equals the bottom depth plus the maximum of
the water levels at (m,n) and (m+1,n) if the u-velocity is 0.
Smoothing time The time interval used at the start of a simulation for a smooth tran-
sition between initial and boundary conditions.
In some cases, the prescribed initial condition and the boundary
values at the start time of the simulation do not match. This can
introduce large spurious waves that enter the model area. Subse-
quently, the wave will be reflected at the internal boundaries and
along the open boundaries of the model until the wave energy is
dissipated completely by bottom or internal (eddy viscosity) friction
forces. These reflections can be observed as spurious oscillations
in the solutions and they will enhance the spin-up (warming-up) time
of the model. To reduce this time, a smooth transition period can
be specified, during which the boundary condition will be adapted
gradually starting from the prescribed initial condition value.
For the spatial discretization of the horizontal advection terms, three options are available in
Delft3D-FLOW. The first and second option use higher-order dissipative approximations of
the advection terms. The time integration is based on the ADI-method. The first scheme
is denoted as the Cyclic method; see Stelling and Leendertse (1992). The second scheme
is denoted as the WAQUA-scheme, see Stelling (1984) and Stelling and Leendertse (1992).
The WAQUA-scheme and the Cyclic method do not impose a time step restriction. The third
scheme can be applied for problems that include rapidly varying flows for instance in hydraulic
jumps and bores (Stelling and Duinmeijer,2003). The scheme is denoted as the Flooding
scheme and was developed for 2D simulations with a rectilinear grid of the inundation of dry
land with obstacles such as road banks and dikes. The integration of the advection term is
explicit and the time step is restricted by the Courant number for advection. See section 10.4.1
for more details.
Advection scheme for
momentum
Select the type of numerical method for the advective terms in the
momentum equation.
Currently, the following numerical schemes are supported:
the Cyclic scheme
the Waqua scheme
the Flood scheme
Default the standard Cyclic method is applied; see chapter 10.
For the Flooding scheme the accuracy in the numerical approximation of the critical discharge
rate for flow with steep bed slopes, can be increased by the use of a special approximation
(slope limiter) of the total water depth at a velocity point downstream, see section 10.8 for
details.
Threshold depth for
critical flow limiter
For the Flood scheme you have to specify a threshold depth which
determines how the water depth is calculated.
Advection scheme for
transport
Select the type of numerical method for the advective terms in the
advection-diffusion equation for constituents.
Currently, two numerical schemes are supported:
theCyclic method (accurate, but positive definite results are not
88 of 688 Deltares
DRAFT
Graphical User Interface
guaranteed).
Van Leer-2 method (less accurate, but positive definite results
guaranteed).
Default the standard Cyclic method is applied; see chapter 10. How-
ever, when a monotonous solution (no over- and undershoots) in the
horizontal is required, then the slightly less accurate but monotonous
Van Leer-2 method can be applied (see chapter 10). It might still
be necessary to remove wiggles generated by the central difference
scheme in the vertical.
Remark:
The continuity equation is solved iteratively, see section 10.4.4.
The default number of iterations is 2. With the keyword and
value Iter = #, where # is the required number of iterations,
you can specify the number of iterations. You can add this key-
word and value manually to the MDF-file or specify them under
Additional parameter, see section 4.5.11.
Relaxation factor
QH-forcing
This factor only applies if QH-forcing is used at open boundaries. In
some cases, when discharge fluctuates quickly, under-relaxation is
necessary to stabilise the forcing by a QH-relation. This parameter in
the range between 0 and 1 specifies the amount of under-relaxation.
If no relaxation is required, this parameter should be set to 0.
Forester filter Activate or de-activate a Forester filter in the horizontal or in the ver-
tical direction.
In the horizontal direction numerical diffusion is added in points where
the quantity (concentration) is negative. The diffusion is two-dimensional
along σ-planes. The horizontal Forester filter acts on the salinity, the
temperature and the concentrations of dissolved substances, includ-
ing suspended sediments. The horizontal Forester filter is not ap-
plied to the spiral motion intensity, as this quantity can be negative
by its nature.
In the vertical direction the solution is made monotone for salinity and
temperature only; i.e. the vertical filter is not applied to constituents
or suspended sediments. Wiggles, generated by the central differ-
ences in the vertical, are smoothed.
When the Forester filter is applied in both directions, the horizontal
filter is applied first, followed by the filter in the vertical direction.
Remark:
In 3D sediment transport computations, see section B.9, small
negative sediment concentrations (smaller than 1.10−3kg/m3)
can be found. These negative concentrations can be suppressed
by applying a horizontal Forester filter. However, the penalty
can be a substantially larger computational time.
Correction for sigma
co-ordinates
Activate or de-activate an anti-creep correction. σco-ordinates have
a slight disadvantage in case large bottom gradients exist in the
model. Owing to truncation errors, artificial vertical diffusion and ar-
tificial flow may occur in this case. A counter measure (a so-called
anti-creep approach) can be activated to suppress this phenomenon.
Deltares 89 of 688
DRAFT
Delft3D-FLOW, User Manual
Domain:
Parameter Lower limit Upper limit Default Unit
Drying and flooding check At cell faces always; optional at
cell centres
at both -
Depth specified at grid cell corners or centres cell corners -
Depth at grid cell centres Max, Mean, Min Max -
Depth at grid cell faces Mean, Min, Upwind, Mor Mean -
Threshold depth 0.0 10 0.1 m
Marginal depth - - -999.999 m
Smoothing time 0.0 n.a. 0.0 min
Advection scheme momentum Cyclic, Waqua, Flood Cyclic none
Threshold depth flow limiter 0.0 0.0 m
Advection scheme transport Cyclic, Van Leer-2 Cyclic none
Relaxation factor QH 0.0 1.0 0.0 -
Forester filters on or off off none
Correction for sigma co-
ordinates
on or off off
Remark:
A warning will be issued if the Threshold depth exceeds 1.0 m.
4.5.9 Operations
Upon selecting the Data Group Operations the sub-window of Figure 4.45 is displayed. The
tab Dredging and dumping is only available if the Sediments process has been selected and
the man-made process Dredging and dumping has been switched on.
4.5.9.1 Discharge
In Delft3D-FLOW intake stations and waste-water outfalls can be considered as localised dis-
charges of water and dissolved substances. A discharge (or source) in the model domain is
characterised by a name which serves as identification, and its position in the grid (respec-
tively m, n and k). If the discharged effluent is to take place at one point in the vertical, then
the layer number k has to be specified. However, if the discharged flow is to be distributed
uniformly over all layers (taking into account the layer thickness), then the layer number K
must be set to 0.
In addition to the discharge rate the concentration of the constituents released and the tem-
perature and/or the salinity, depending on the selections made in the Data Group Processes
must be specified.
Upon selecting the tab Discharges the sub-window of Figure 4.45 is displayed.
90 of 688 Deltares
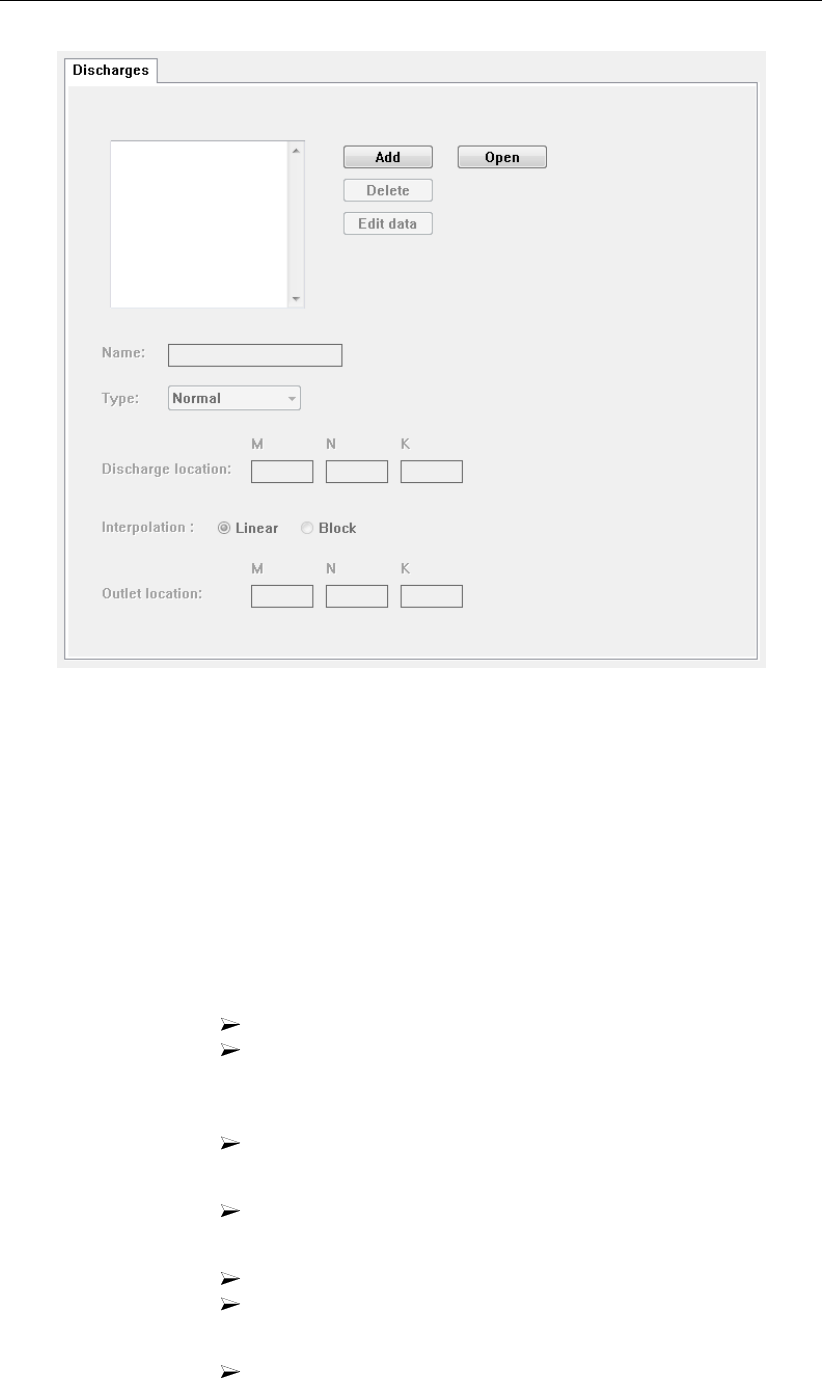
DRAFT
Graphical User Interface
Figure 4.45: Data Group Discharges
Remarks:
You can model a river as an open boundary or as a discharge.
The discharge rate is communicated to the water quality and particle tracking modules
WAQ and PART, respectively, but not the concentrations, temperature or salinity. These
quantities are computed in the WAQ and PART module in combination with the other
water quality processes.
The various input items you can select are discussed below.
Add To Add a discharge either:
Click Add.
Specify the grid indices and the layer of the release point, i.e. (M,
N, K). K only if you have a 3D model.
or
Use the Visualisation Area window.
and
Specify the name of the discharge in the Name input field.
Delete To Delete a discharge either:
Select the discharge to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open/Save Open or save the discharge data to attribute files; the locations to a
Deltares 91 of 688

DRAFT
Delft3D-FLOW, User Manual
file with extension <src>, the discharge rates to a <dis>file.
Remark:
If you want to combine discharges read from an attribute file and inserted manually you
must read the file first and then add the manually defined discharges. In reverse order
the manually defined discharges are overwritten by those of the file.
Type The discharge can be of type:
Normal: the discharge rate is released without taking specific
aspects into account.
Momentum: the momentum of the discharge is taken into ac-
count. When prescribing the data the momentum and its direc-
tion relative to the North must be specified; for more details see
below under specify v-direction.
Walking: the discharge moves to the nearest wet grid cell if the
cell in which the discharge is released becomes dry. It moves
back to its original position when the grid cell is flooded again.
In-out: intake and outlet are on different locations. The intake
and outlet discharge rates are the same; the concentration of
a constituent at the outlet equals the concentrations at the inlet
plus the user-defined concentration (when applicable).
Interpolation The interpolation of time dependent input data can be either
Linear: intermediate values are determined by linear interpola-
tion.
Block: the last value is repeated until the next value is defined.
Outlet location You define the grid indices (M, N, K) of the outlet related to the just
defined inlet. These indices are only required and accessible for the
discharge Type =In-out.
Edit data To specify the discharge rate and the concentration of the discharged
substances. Upon selecting Edit data a sub-window is displayed,
see Figure 4.46.
The time dependent data are defined at time breakpoints and their intermediate value is de-
termined by either linear or block wise interpolation as defined under Interpolation. Depending
on the selections made in the Data Group Processes you must specify more or less quantities.
In the most complete case you must specify:
Time Date and time of the time breakpoints.
Flow The discharge rate in [m3/s].
Remark:
A positive rate indicates discharging into the model, except for
an In-out discharge: a positive rate means withdrawal at the
intake. The same amount of water is discharged into the model
at the outlet.
v-magnitude The speed with which the discharge is released in [m/s]. Only for
discharge Type =Momentum.
v-direction The direction in which the momentum is delivered to the flow. The
direction is defined similar to the wind direction, i.e. measured (clock-
wise) from the North. Only for discharge of Type =Momentum.
The momentum released to the flow due to a discharge is distributed over the velocity points
92 of 688 Deltares
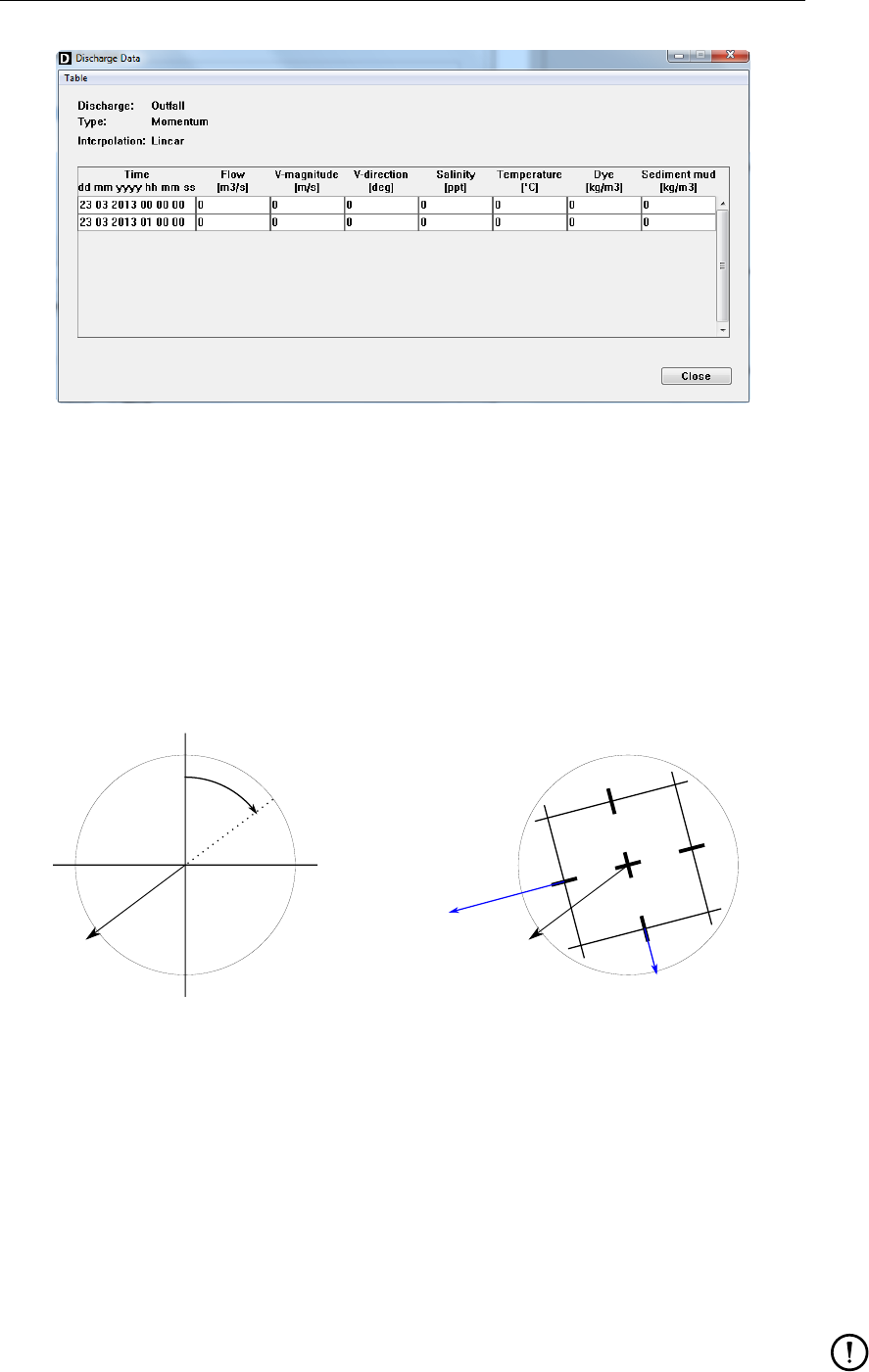
DRAFT
Graphical User Interface
Figure 4.46: Sub-window to define the discharge rate and substance concentrations
that bound the quadrant in which the discharge is released.
Example: the momentum of a discharge released in the first quadrant as seen from the dis-
charge location (water level point), is decomposed over the u- and v-velocity point with grid
indices (m, n). The momentum of a discharge released in the third quadrant is decomposed
over the u- and v-velocity points with grid indices of respectively, (m−1, n)and (m, n −1),
see Figure 4.47. The mass (of water and constituents) is released in the (water level) point
with grid indices (m, n).
North
East
South
West
(a) Direction of the discharge with momentum
vector.
(b) The ξ- and η-components of the discharge
momentum vector are shifted to the down-
stream velocity points.
Figure 4.47: Decomposition of momentum released by a discharge station in (m, n)
Salinity The salinity concentration in [ppt]. Only if Salinity is selected in the
Data Group Processes.
Temperature The temperature of the discharge in [◦C]. Only if Temperature is se-
lected in the Data Group Processes.
Pollutants and
sediments
The concentration of the constituents released in [kg/m3]. Only if Pol-
lutants and/or Sediments are defined in the Data Group Processes.
Remarks:
Layer 1 corresponds to the surface layer.
Deltares 93 of 688
DRAFT
Delft3D-FLOW, User Manual
If the discharge is to be distributed uniformly over the layers, you must enter K = 0.
A positive discharge represents an inflow into the model area; a negative discharge
represents an outflow from the area; for Type =Normal,Walking and Momentum.
For Type =In-out, a positive discharge represents withdrawal at the intake. The same
amount is an inflow at the outlet. Furthermore, the specified concentration is added to
the concentration of the water withdrawn.
A discharge can be located in an area that becomes temporarily dry during the simula-
tion. In such a case there will be no intake, unless you have specified the discharge to
be of Type =Walking.
Walking discharges move to the nearest wet grid cell by looking at the steepest descent
of the surrounding bathymetry.
Domain:
Parameter Lower limit Upper limit Default Unit
Location Anywhere in the grid, within the computational domain
and not at the model boundaries.
Flow -10,000 +10,000 0.0 m3/s
v-magnitude 0.0 100.0 0.0 m/s
v-direction -360.0 360.0 0.0 degree
Salinity 0.0 100.0 0.0 ppt
Temperature 0.0 60.0 0.0 ◦C
Concentration 0.0 10,000 0.0 kg/m3
Restrictions:
The discharge name must be non-blank, and contains up to 20 characters.
The discharge must be located within the grid enclosure.
The number of discharges is limited to 5000, including the automatically generated
discharges when using bubble screens, see section B.22.4.2.
If discharges are specified both through an attribute file and interactively, then the at-
tribute file must be read first. Reversing this order will overwrite the interactively defined
discharges.
The time breakpoints specified for time-series must differ from the simulation start time
by an integer multiple of the time-step (Data Group Time frame).
The first time breakpoint must be before or equal to the simulation start time, and the
last time breakpoint must be equal or later than the simulation stop time (see Data
Group Time frame).
Time breakpoints must be given in ascending order.
94 of 688 Deltares

DRAFT
Graphical User Interface
Figure 4.48: Sub-data group Dredging and dumping
Figure 4.49: Sub-window for Monitoring locations
4.5.9.2 Dredging and dumping
When sediments are modelled and the man-made process Dredging and dumping is switched
on (see Data Group Processes), the tab Dredging and dumping is available, see Fig-
ure 4.48.
Click Select file and specify the file <∗.dad>with dredging and dumping data.
Remark:
See the QUICKIN User Manual on how to define dredging and dumping areas.
4.5.10 Monitoring
Computational results can be monitored as a function of time by using observation points,
drogues or cross-sections. Monitoring points are characterised by a name and the grid indices
of its location in the model area.
4.5.10.1 Observations
Observation points are used to monitor the time-dependent behaviour of one or all computed
quantities as a function of time at a specific location, i.e. water elevations, velocities, fluxes,
salinity, temperature and concentration of the constituents. Observation points represent an
Eulerian viewpoint at the results. Observation points are located at cell centres, i.e. at water
level points. Upon selecting the data and sub-data group Monitoring →Observations the
sub-window of Figure 4.50 is displayed.
You can apply one or more of the following options:
Add To Add an observation point either:
Click Add.
Replace the name “-Unnamed-” by a useful name in the Name
input field.
Specify the grid indices of the observation point, i.e. (m, n).
or
Use the Visualisation Area window.
Delete To Delete an observation point either:
Deltares 95 of 688
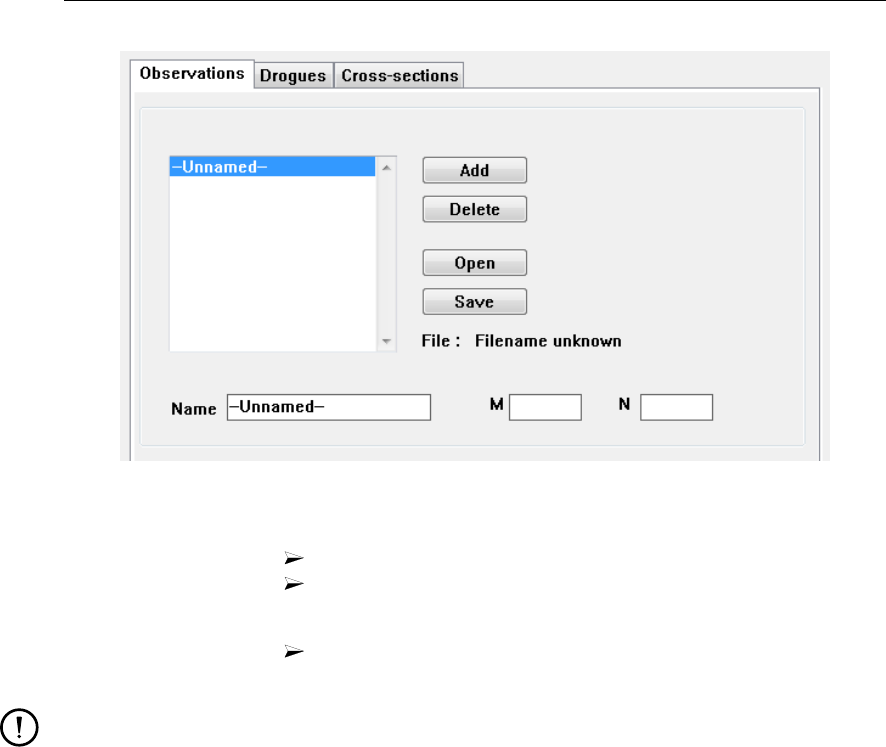
DRAFT
Delft3D-FLOW, User Manual
Figure 4.50: Sub-window for Observation points
Select the observation point to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open Open and read observation points defined in an attribute file.
Remark:
If you want to combine observation points read from an attribute
file and inserted manually you must read the file first and then
add the manually defined observation points. In reverse or-
der the manually defined observation points are overwritten by
those of the file.
Save Save the observation points defined in an attribute file with extension
<obs>.
The domain and restrictions for Observation points, Drogues and Cross-sections are very
similar and are discussed at the end of this section.
4.5.10.2 Drogues
Drogues are used to monitor the path of a particle moving with the flow. In the horizontal:
drogues can be released anywhere in the grid, this means you can release them at fractional
grid cell positions. In the vertical: drogues are released in the surface layer. Drogues are only
transported due to the velocities in the surface layer. There is no diffusion or random process
involved. When wind applies, the wind affects the velocities in the surface and thus the path
of drogues. You can release and recover them at any time during the simulation (provided the
time complies with the restrictions for time instances).
Upon selecting the data and sub-data group Monitoring →Drogues the sub-window of Fig-
ure 4.51 is displayed.
You can apply one or more of the following options:
Add To Add a drogue either:
96 of 688 Deltares
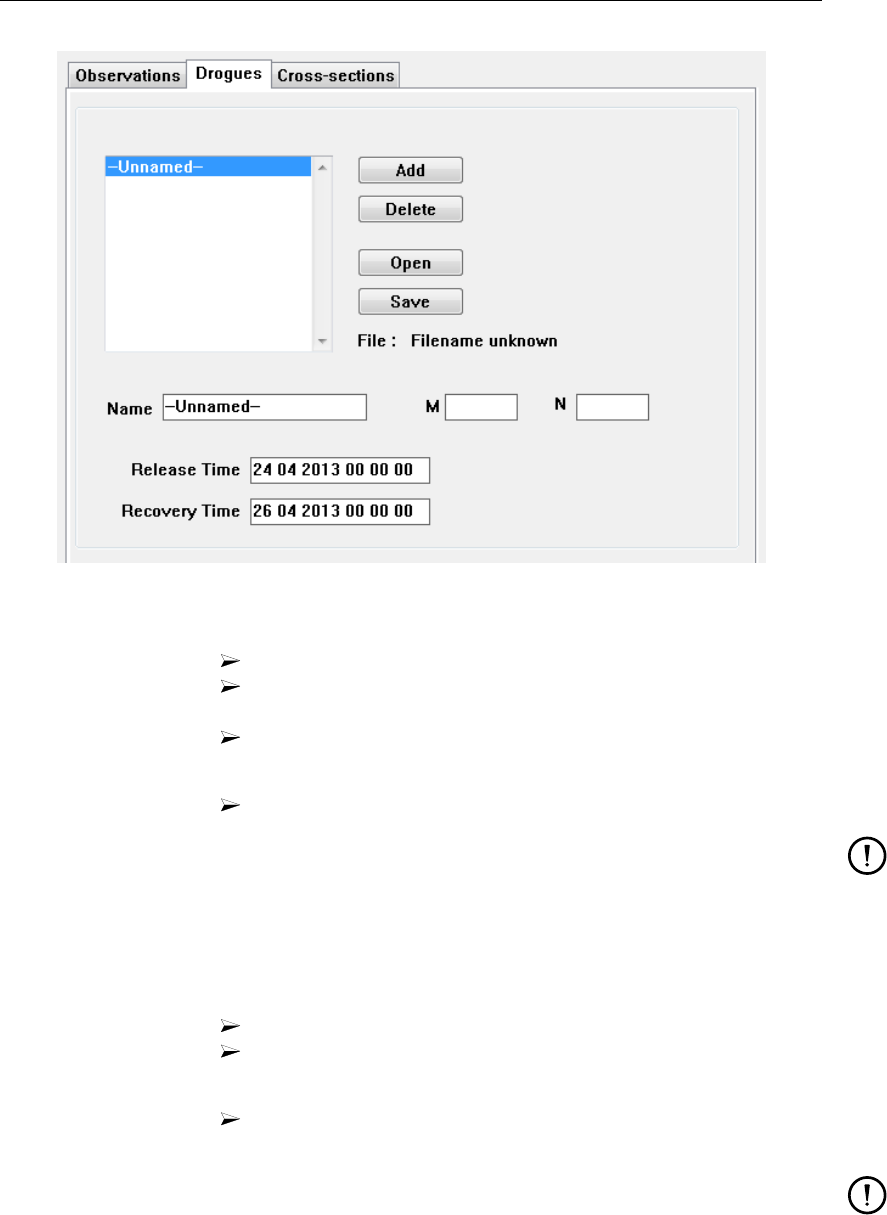
DRAFT
Graphical User Interface
Figure 4.51: Sub-data group Monitoring →Drogues
Click Add.
Replace the name “-Unnamed-” by a useful name in the Name
input field.
Specify the grid indices of the drogue release point, i.e. (m, n).
or
Use the Visualisation Area window.
Remark:
Drogues can be released inside grid cells, i.e. their grid indices
M and N can have fractional values. When using the visualisa-
tion area you can only specify release points at the grid centres;
so if other fractional values are required you have to specify
them manually.
Delete To Delete a drogue point either:
Select the drogue to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open Open and read drogues defined in an attribute file.
Remark:
If you want to combine drogues read from an attribute file and
inserted manually you must read the file first and then add the
manually defined drogues. In reverse order the manually de-
fined drogues are overwritten by those of the file.
Save Save the drogues defined in an attribute file with extension <par>.
The domain and restrictions for Drogues,Observations points and Cross-sections are very
similar and are discussed at the end of this section.
Deltares 97 of 688
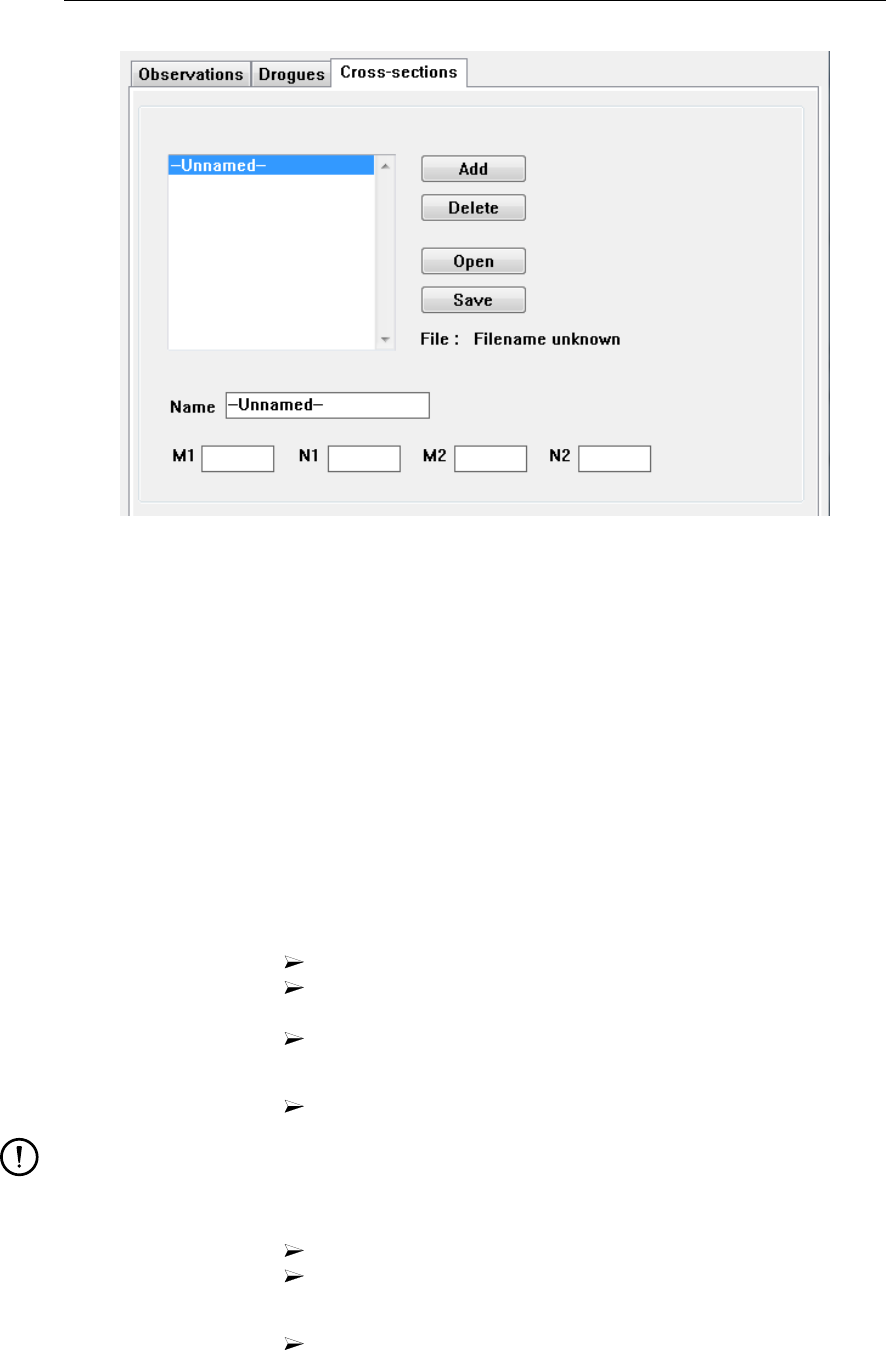
DRAFT
Delft3D-FLOW, User Manual
Figure 4.52: Sub-data group Monitoring →Cross-Sections
4.5.10.3 Cross-sections
Cross-sections are used to store the sum of computed fluxes (hydrodynamic), flux rates (hy-
drodynamic), fluxes of matter (if existing) and transport rates of matter (if existing) sequentially
in time at a prescribed interval. A cross-section is defined along a constant m- or n- grid index
and it must include at least two grid points. To define a cross-section, you must specify an
arbitrary section name, the begin indices (M1, N1) and end (M2, N2) indices of the section.
Upon selecting the data and sub-data group Monitoring →Cross-sections the sub-window of
Figure 4.52 is displayed.
You can apply one or more of the following options:
Add To Add a cross-section either:
Click Add.
Replace the name “-Unnamed-” by a useful name in the Name
input field.
Specify the grid indices (M1, N1) and (M2, N2).
or
Use the Visualisation Area window.
Remark:
Cross-sections typically extent over more than just one grid
cell, so you have to specify their start and end point.
Delete To Delete a cross-section either:
Select the cross-section to be deleted in the list box.
Click Delete.
or
Use the Visualisation Area window.
Open Open and read cross-sections defined in an attribute file.
Save Save the cross-sections in an attribute file with extension <crs>.
98 of 688 Deltares
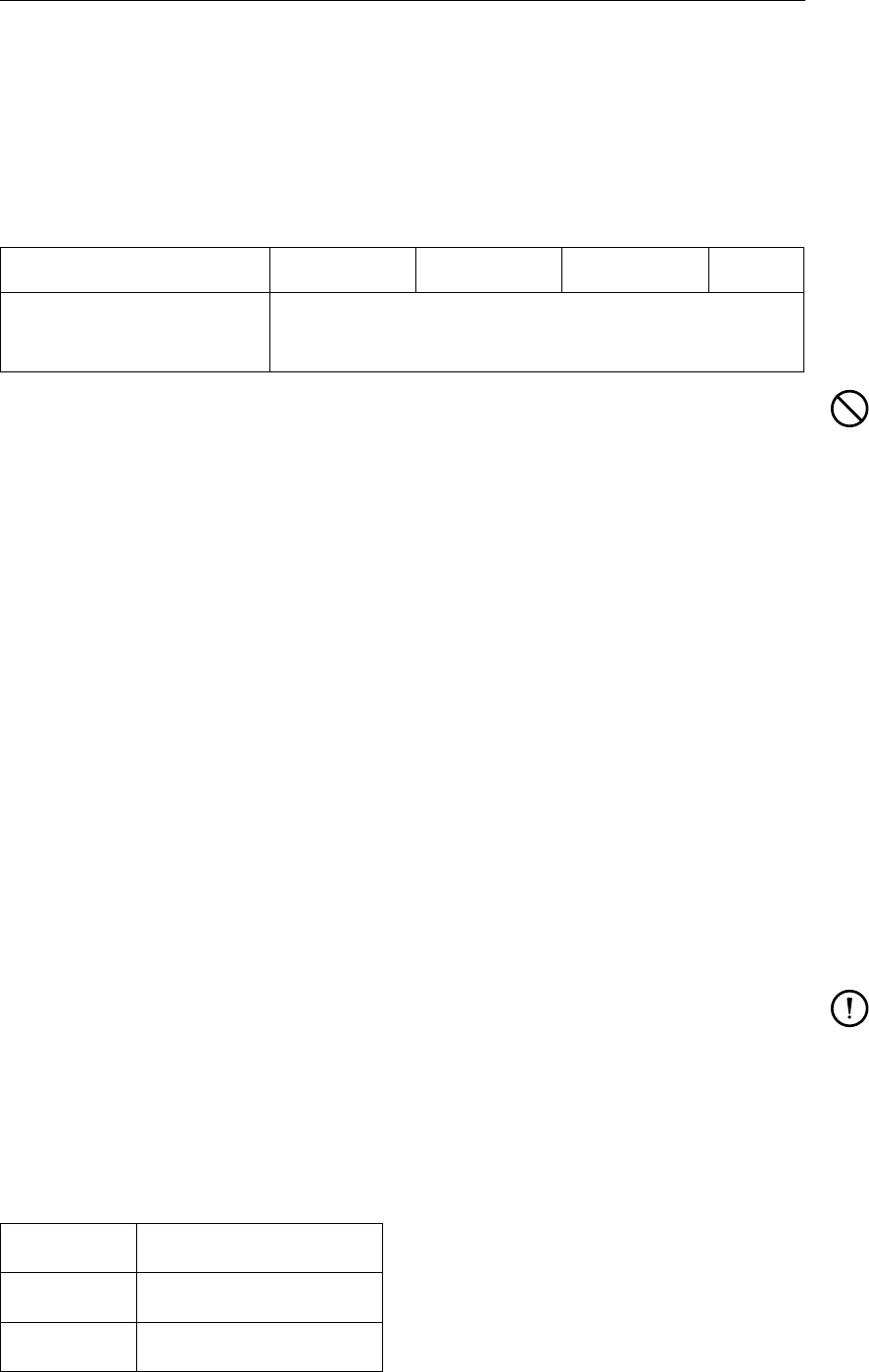
DRAFT
Graphical User Interface
If you want to combine cross-sections read from an attribute file and inserted manually you
must read the file first and then add the manually defined cross-sections. In reverse order the
manually defined cross-sections are overwritten by those of the file.
All cross-sections must be saved in an attribute file upon leaving the sub-data group.
Domain:
Parameter Lower limit Upper limit Default Unit
Location Anywhere in the grid, within the computational domain
and not at the model boundaries, i.e. 2 ≤M≤Mmax−1;
2≤N≤Nmax−1.
Restrictions:
The release time and the recovery time of drogues must comply with the definition of
time parameters.
Drogues must be released in an active grid point; this point may become dry during the
computation.
A cross-section must extend over at least two grid points.
If observation points are read from an attribute file and defined interactively, the file must
be read first; reversing the order will overwrite the manually defined observation points.
When saving the results as time-series, you have to define at least 2 obsservation
points.
When using cross-sections, you should define at least 2 sections.
4.5.11 Additional parameters
Through the use of an Additional parameter you have access to additional functionalities that
are not yet fully supported by the FLOW-GUI. The option of Additional parameters has been
introduced to be more flexible in providing special functionality in the computational code
without changing the FLOW-GUI. After thorough testing it will be released to all users. If you
have access to an option, you can specify the required parameters in a separate input file.
Upon selecting this data group Figure 4.53 is displayed.
Each Additional parameter is characterised by a keyword and a value:
Remarks:
Keywords are CASE-sensitive!
The value is often the name of an attribute file and must be enclosed between #’s.
See Appendix B for full details of the currently available Add-ons, their keywords, values, file
format and file contents.
Example:
Keyword Value
Fillwl #ex-001.lwl#
Iter 4
Deltares 99 of 688
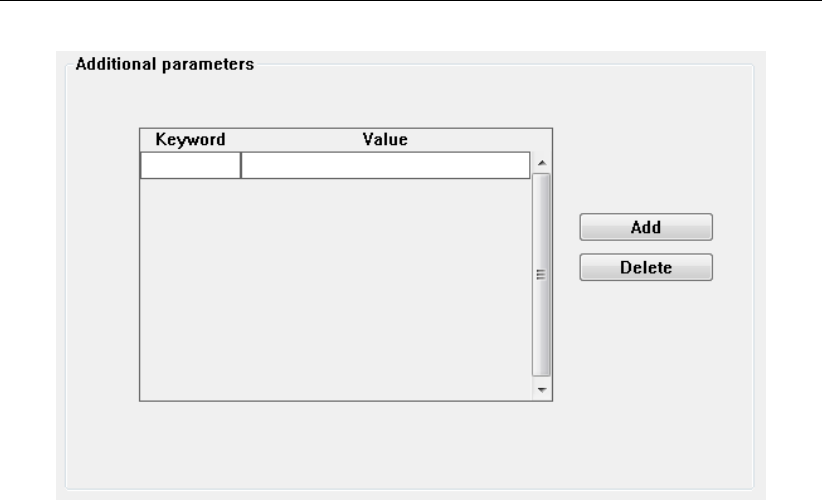
DRAFT
Delft3D-FLOW, User Manual
Figure 4.53: Data Group Additional parameters
The first keyword refers to local weirs and the value is the filename in which the location and
other properties of the local weir(s) are defined; for details see section B.3.
The second keyword redefines the number of iterations used when computing the continuity
equation to be 4 (instead of the default value 2); for details see section A.1.
4.5.12 Output
In the Data Group Output you can specify which computational results will be stored for further
analysis or for other computations and which output shall be printed. Though the printing
option is hardly used it is a useful option when numerical output values are required.
Before defining the various input fields we want to explain in short the use of the various data
files used to store the results.
Delft3D modules use one or more Map, History, Communication and Restart files to store the
simulation results and other information needed to understand and interpret what is on the
files:
Maps are snap shots of the computed quantities of the entire area. As you (can) save all
results in all grid points a typical Map file can be many hundreds of MB large. So typically
Map results are only stored at a small number of instances during the simulation.
In a History file you store all results as function of time, but only in the specified monitoring
points. The amount of data is usually much smaller than for a Map file, and you typically store
history data at a small time interval to have a smooth time function when plotting the results.
In the Communication file you store data required for other modules of Delft3D, such as the
hydrodynamic results for a water quality simulation or the wave forces for a wave-current in-
teraction. As the results must be stored in all grid points a Communication file can typically be
as large as or even larger than a Map file. So, you only store the results in the Communication
file as far as needed for the other simulations. For water quality simulations you typically store
the results of the last day or a (couple of) tidal cycles and use this data cyclic to make a water
100 of 688 Deltares
DRAFT
Graphical User Interface
Figure 4.54: Sub-data group Output storage
quality simulation over many days or weeks.
In order not to waste computing time you can restart a simulation at a predefined time of a
previously executed simulation. For this you specify the restart interval at which all information
required to restart the simulation, are stored in a so-called Restart file. Typically, you select a
large restart interval in order not to waste disk space.
Remark:
The restart file is not platform independent. This means you can not use directly, i.e.
without some kind of conversion, a restart file from a simulation executed on another
hardware platform. You can also restart from a map-file which is platform independent.
Click the Data Group Output.
The data group Output is organised in three sub-data groups:
Storage, to define the time intervals to various file used.
Print, to define if, when and which data will be printed.
Details, to make a selection of all possible data to be stored in the files or to be printed.
Deltares 101 of 688

DRAFT
Delft3D-FLOW, User Manual
4.5.12.1 Storage
The sub-data group Output storage is displayed in Figure 4.55.
In the top of the Output storage sub-window the simulation start and stop time and the time-
step used in the simulation are displayed for your convenience, but they cannot be changed
in this data group (see the Data Group Time frame).
You can apply one or more of the following options:
Store map results
Start time Date and time to start storing the results in the Map file.
Stop time Date and time to stop storing the results in the Map file.
Interval Time interval, in minutes, to write the Map file.
Store history results
History interval Time interval, in minutes, to write the History file for the whole simu-
lation.
Store communication file
Start time Date and time to start storing the results in the Communication file.
Stop time Date and time to stop storing the results in the Communication file.
Interval Time interval, in minutes, to write the Communication file.
Write restart files
Restart interval Time interval, in minutes, to write the Restart file.
Perform Fourier analysis
Fourier Analysis To activate the Fourier analysis on computational results. Upon tick-
ing off this option you can select a file with the time period and the
frequencies you want to apply, see below for a short description and
section A.2.30 for details of the file format.
For large scale tidal flow models, Delft3D-FLOW is equipped with
a facility to perform online Fourier analysis on computational results.
This enables the generation of computed co-tidal maps. These maps
can be compared with co-tidal maps from literature, a very conve-
nient way to check if the tidal wave propagation is simulated cor-
rectly by the model. Upon selecting Fourier analysis you specify
the time period to use, the variable(s) to analyse, the layer number,
the frequencies to use and some other more special items (see Ap-
pendix A). When you specify a zero frequency the minimum, mean
and maximum level of the variable is computed in the model area
over the specified time period. You can select one or more of the
following parameters:
Water level.
Velocity components.
Mass fluxes of water.
Temperature.
Salinity.
Constituent(s).
102 of 688 Deltares

DRAFT
Graphical User Interface
This option creates by default output in ascii format. The output for-
mat can be switched to NetCDF by means of the FlNcdf keyword
under Additional parameters. For spherical models we recommend
the NetCDF format since the latitude and longitude are written to the
ascii file with only three digits behind the decimal point.
View results during the simulation
Online visualisation When selecting this option you can inspect the results during the
computation.
The option of Online visualisation lets you monitor the results during the simulation as an
animation. You can select the type of parameter displayed, the type of view used, such as
iso-lines and vector plots in plain view per layer, or as cross-section, and per layer. You can
store the results to file and run this file afterwards as an animation. During the simulation
you can change your selection of parameter(s) displayed. Online animation is a very powerful
tool to let you inspect the behaviour of your model; this will help you to see anomalies in the
results much better and in a much earlier stage than when using plots and figures.
Built-in coupling with D-Water Quality
Export WAQ input When continuing with the Water Quality modules, you can either cou-
ple the com-file after the FLOW simulation has ended, or do it via the
built-in option.
The D-Water Quality input files can either be generated using a coupling program that runs
concurrently with the Delft3D-FLOW simulation or they can be written by Delft3D-FLOW di-
rectly. The latter approach is the preferred approach (i.e. the built-in option). See section B.18
for details of the file format.
Export WAQ input window
In the top of the Output storage sub-window, frame WAQ simulation times (Figure 4.55), the
start and stop time and the time-step used for hydro-morphodynamic simulation are displayed
for your convenience, but they cannot be changed in this window (see the Data Group Time
frame).
Store results for WAQ
To store results for use in D-Water Quality you can edit the following options:
Start time Date and time to start storing the results in files suitable for D-Water
Quality.
Stop time Date and time to stop storing the results in files suitable for D-Water
Quality.
Time step [min] Time interval, in minutes, to write files suitable for D-Water Quality.
In the frame WAQ aggregation you can specify the horizontal aggregation and the vertical
aggregation.
Deltares 103 of 688
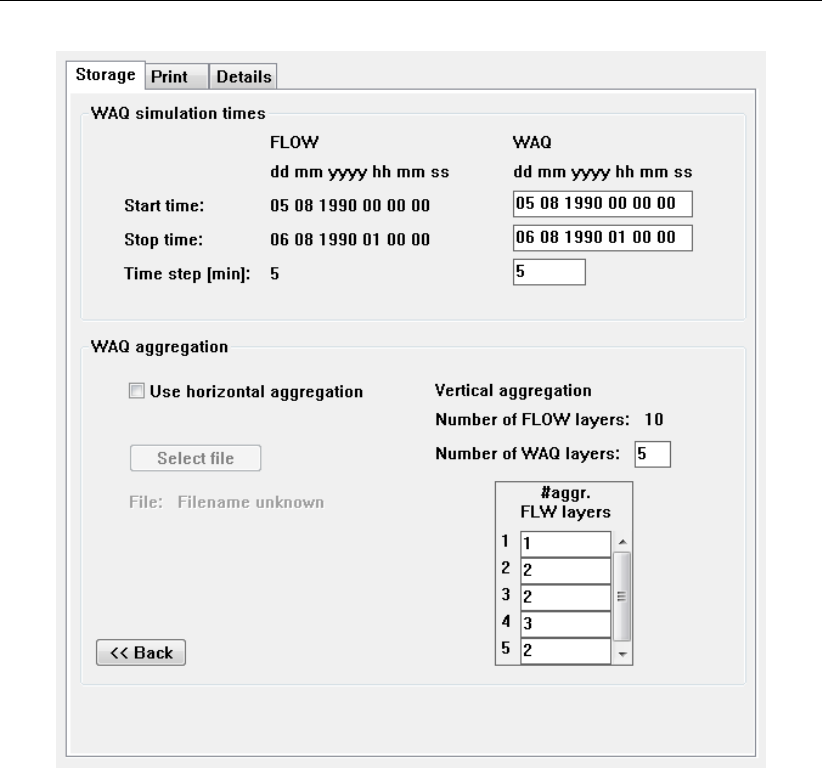
DRAFT
Delft3D-FLOW, User Manual
Figure 4.55: Sub-data group Output →Storage →Edit WAQ input
Horizontal aggregation
Horizontal aggregation When selecting this option you can select a file defining the hori-
zontal aggregation. This file can be made with the program D-Waq
DIDO.
To make a horizontal aggregation with the program D-Waq DIDO, save first the MDF-file with-
out a check on Use horizontal aggregation. Now a hydro-morphodynamic simulation without
horizontal aggregation could be made. Start the program D-Waq DIDO and load the just
saved MDF-file, define your horizontal aggregation (see DIDO UM (2013)). Save the aggre-
gation file in D-Waq DIDO and select this file in the FLOW-GUI. Go to data group Output →
Storage →Edit WAQ input, check mark Use horizontal aggregation and select the just saved
aggregation file.
104 of 688 Deltares
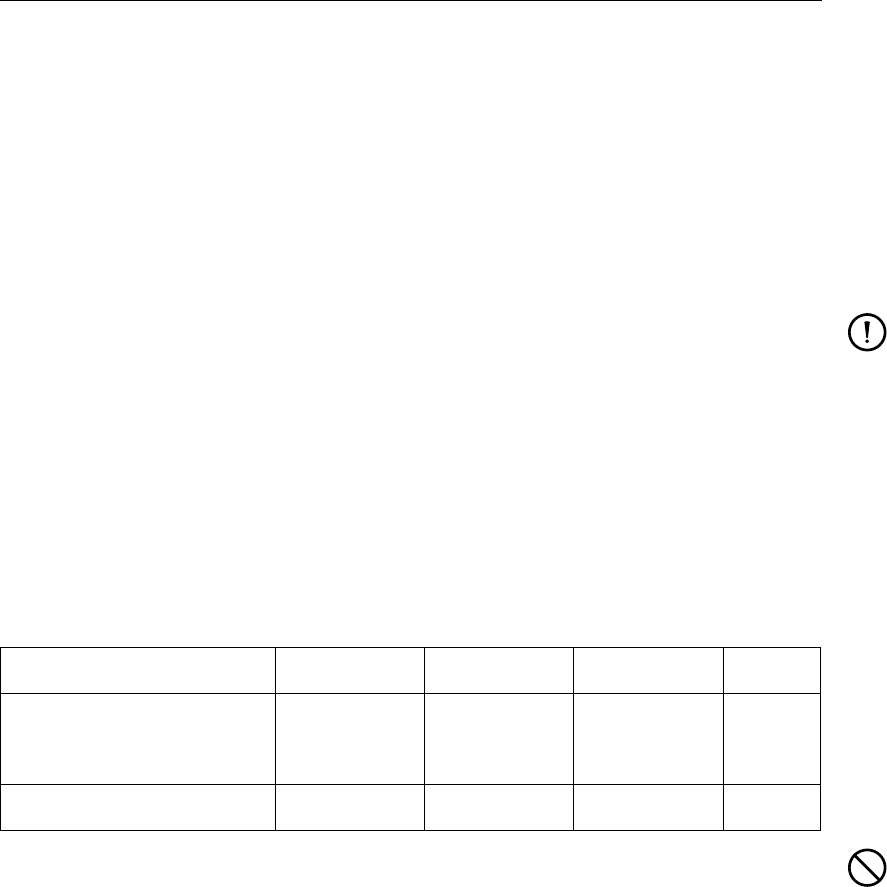
DRAFT
Graphical User Interface
Vertical aggregation
For convenience the number of layers in the hydrodynamic simulation is given. You are able
specify the number of layers needed for the D-Water Quality simulation. If this number is
less then the number of hydrodynamic layers you have to specify which layers should be
aggregated to one WAQ layer.
Example: In the example 5 WAQ layers with aggregation “1 2 2 3 2” in table # aggr. FLW layers
are specified, which means that hydrodynamic layers 2/3, 4/5, 6/7/8 and 9/10 are aggregated
(see Figure 4.55).
Remarks:
No Map, History, Communication or Restart file is written if you set the interval to write
the data equal to zero. When verifying the MDF-file a warning will be issued that the
time definition is not correct and that the corresponding file will not be created. If you
did not want to create this file, you can ignore this warning.
By default the start time to store the hydrodynamic results is used as the simulation
start time of the far- and mid-field water quality scenarios using these hydrodynamic
results.
Drogues are written to a separate drogue-file for each time step between the release
and recovery time. You can not specify the interval to write the drogue-file.
Domain:
Parameter Lower limit Upper limit Default Unit
Date and time Reference date Simulation
date and time
Valid
date and
time
Interval 0.0 0.00 minutes
Restriction:
The start and stop time must differ an integer multiple from the Reference date and
the time interval for storing results must be an integer multiple of the Time step, both
specified in the Data Group Time frame.
4.5.12.2 Print
In the sub-data group Output →Print you can specify which results will be printed. The
selected results are printed to a file; the name of the file is composed using the prefix of the
name of the MDF-file: <tri-prt.runid>.
Upon selecting the sub-data group Output →Print a sub-window is displayed, see Fig-
ure 4.56.
You can apply one or more of the following options:
Print history results
Start time Date and time to start writing the history data to a print file.
Stop time Date and time to stop writing the history data to a print file.
Interval Time interval, in minutes, to write the history data to a print file.
Deltares 105 of 688
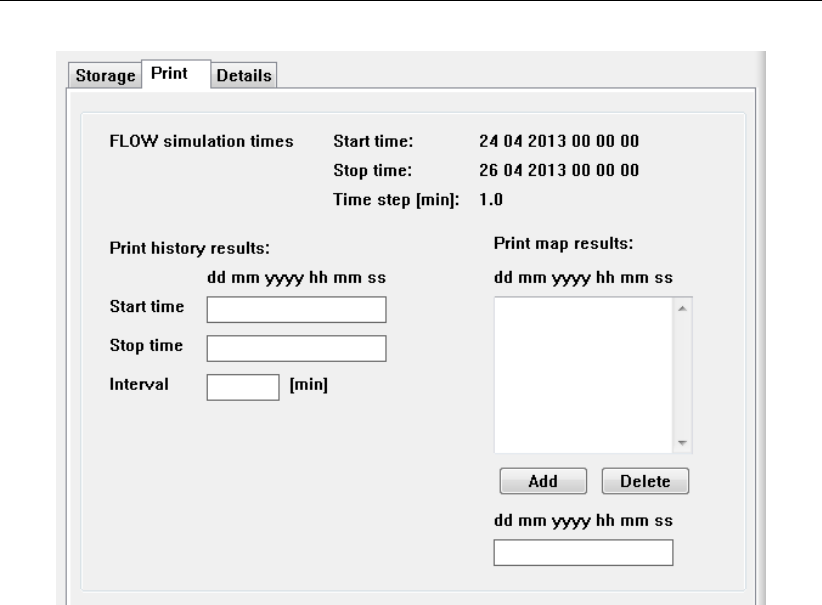
DRAFT
Delft3D-FLOW, User Manual
Figure 4.56: Sub-data group Output →Print
Print Map Results
Add Add the map time, specified in the input field below the list box, to
the list of time instances to be written to the print file.
Delete Select a time instance from the list box and press Delete to remove
a time instance from the list box.
A warning is issued if the maximum number of time instances is reached. The print times
may be specified in ascending order; the computed water elevations, flows and transported
quantities at all points are stored in an ASCII-formatted file for printing.
4.5.12.3 Details
In the sub-data group Output →Details you can make a selection of all possible data to be
stored in the files or selected for printing. Upon selecting the sub-data group Figure 4.57 is
displayed.
By ticking the check boxes you can specify which items you want the program to store on file
or to print and which not.
106 of 688 Deltares
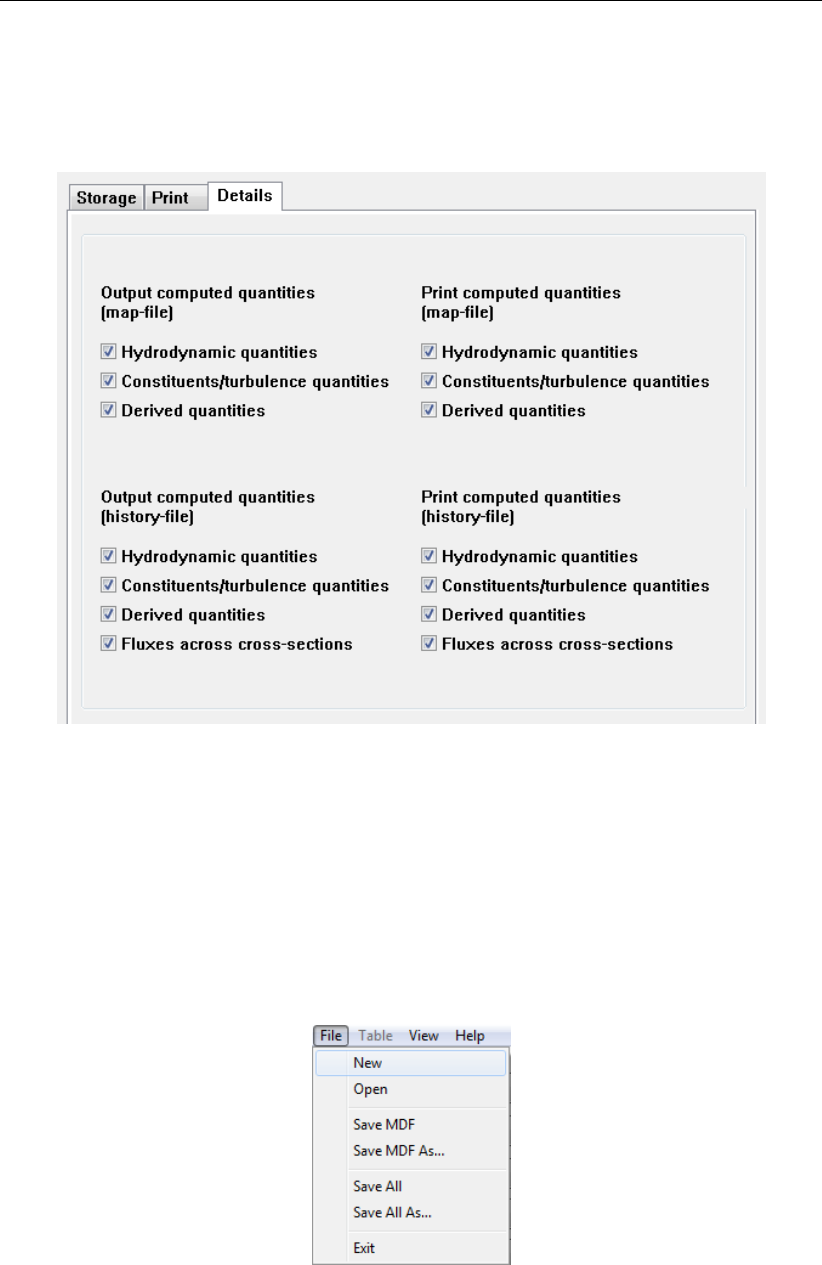
DRAFT
Graphical User Interface
Figure 4.57: Output Specifications window
Figure 4.58: File drop down menu
Deltares 107 of 688
DRAFT
Delft3D-FLOW, User Manual
4.6 Save the MDF and attribute files and exit
To save the MDF-file or any of the attribute files:
Click File in the menu bar of the FLOW-GUI window and select any of the Save or Save
As options, see Figure 4.58.
For saving the files and exiting the FLOW-GUI only the last five options in the file drop down
menu are relevant.
Select:
Save MDF to save the MDF-data under its current name.
Save MDF As to save the MDF-data under a new name.
Save All to save all attribute data in the current attribute files.
Save All As to save all attribute data under a new name.
Exit to exit the FLOW-GUI and return to the Hydrodynamics window.
Upon selecting Save MDF or Save MDF As the MDF-file is save with a reference to the
attribute files as they existed at the time you started the edit session or after the last save
command. Changes to attributes are ignored if you have not explicitly saved them. These
Save MDF and Save MDF As options allows you to ignore some or all of the changes you
have made to some or all attribute data and restore the last saved situation. The non-saved
changes are not lost, as they are still available in the input fields of the FLOW-GUI.
If you want to save the changes to the attribute files as well, you must select Save All or Save
All As. Existing files are overwritten when you select Save All; you are requested to specify
a filename if the attribute file does not yet exist. With Save All As you must specify a (new)
filename for all the files, including the MDF-file, which must be saved.
To exit the FLOW-GUI:
Click File →Exit.
If all data items, including the MDF-file, have been saved, the FLOW-GUI is closed and the
Hydrodynamics (including morphology) window of Delft3D-MENU is redisplayed.
However, if not all data items have been saved yet a list of all non-saved (attribute) data
will be displayed and you can select for each non-saved data item the required action, see
Figure 4.59. In this case none of the data items nor the MDF-file itself has been saved yet.
Select one of the options displayed:
Yes Save the first unsaved data item, request for a filename if not yet
defined and proceed to the next unsaved data item.
YesAll Save all unsaved data items and request a filename if not yet defined.
No Don’t save the first unsaved data item; proceed to the next unsaved
data item.
NoAll Exit without saving any unsaved data.
Cancel Abort this Exit action and return to the FLOW-GUI.
After you have worked through all unsaved data items the FLOW-GUI will be closed and the
Hydrodynamics (including morphology) window of Delft3D-MENU will be displayed.
108 of 688 Deltares
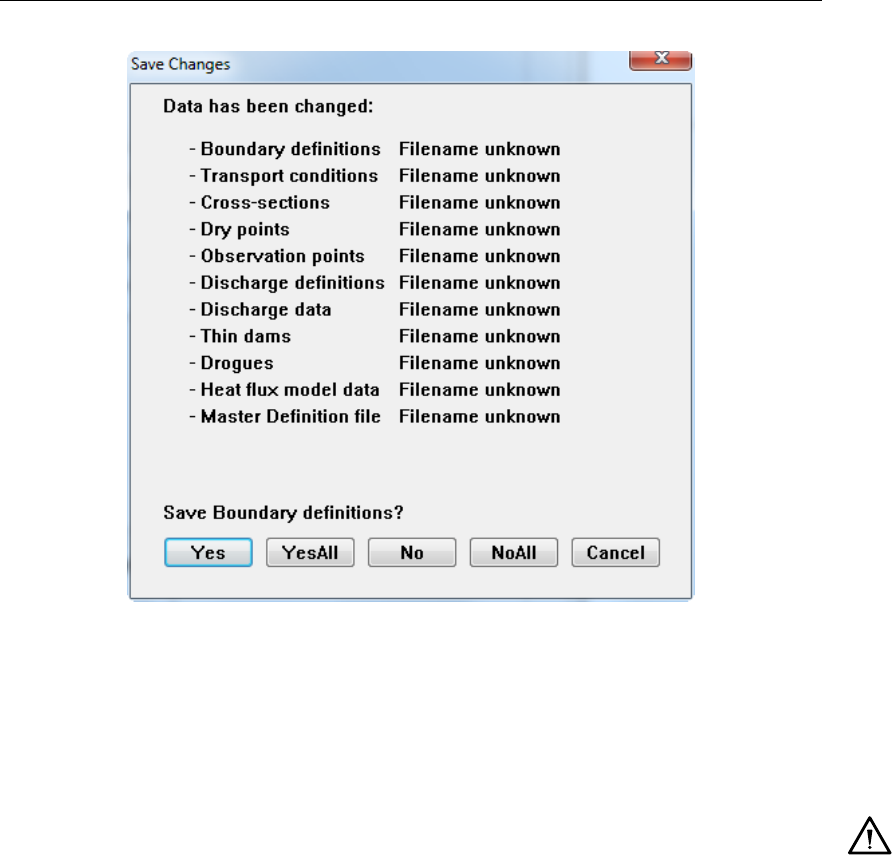
DRAFT
Graphical User Interface
Figure 4.59: Save changes window
4.7 Importing, removing and exporting of data
When starting a scenario definition session from an existing MDF-file, all attribute files are
imported automatically. If the reference to an attribute file does not exist, or if you wish to
apply a different attribute file you can apply the Open or Select file option.
Warnings:
If you want to combine attribute data from an existing file with manually defined data,
you must open the existing data before you add new data items.
If you want to concatenate data items from two files you must do so offline with your
favourable editor.
The reference to an empty attribute file (because you have deleted all data items) is automat-
ically removed from the MDF-file upon saving the MDF-file.
Most attribute files are ASCII-files and free formatted; you are referred to Appendix A for
details on their format and contents.
Deltares 109 of 688

DRAFT
Delft3D-FLOW, User Manual
110 of 688 Deltares

DRAFT
5 Tutorial
5.1 Introduction – MDF-file and attribute files
In this Tutorial we will guide you through the process of creating a simple example of a flow
simulation. All information for a flow simulation, also called scenario, is stored in an input
file, also known as Master Definition Flow file (MDF-file). However, before starting this input
definition process we want to explain in short the basics of a model definition, the structure of
an MDF-file and the basic steps you are supposed to execute.
To execute a flow simulation for a specific area we need various kinds of information, such
as the extent of the model area, (i.e. both the boundary between wet and dry areas and
the location of the open boundaries where water level or flow conditions are prescribed), the
bathymetry, geometrical details of the area such as breakwaters, structures, discharges and
the definition of which and where results of the simulation need to be stored for later inspection
or for other simulations. Finally, a numerical grid must be defined on which all location related
parameters are being defined. So, the basic steps that precede the definition of an input file
can be summarised as:
Selection of the extent of the area to be modelled.
Definition of location and extent of open boundaries and the type of boundary conditions
to be prescribed, i.e. water level, velocities or discharges.
Definition of the land(-water) boundary.
Generation of a numerical grid.
Generation of the bathymetry defined on the numerical grid.
Definition of many different grid related quantities, such as open boundaries, monitoring
points, discharge locations, release points of drogues.
Definition of the time frame of your scenario, i.e. start and stop time and various time
functions, such as the open boundary conditions, wind speed and direction, discharges
and salinity concentrations or other substances transported by the flow.
Most activities, but the last two, must be executed before starting the FLOW Graphical User
Interface (GUI). They result in most cases in one or more files that are to be located in the
project directory to be defined when starting the project (see chapter 8). The project directory
is also referred to as the working directory. The first two steps are based on experience
in solving similar problems and on engineering judgement, no tools are available to support
these steps others than (GIS-based) maps and (digitised) charts.
Delft3D supports the use of a rectilinear, a curvilinear and a spherical grid. Rectilinear and
spherical grids are generated automatically given the grid dimensions and sizes, and no tool
is required. To generate a curvilinear grid you can use the grid generator program RGFGRID,
provided with Delft3D. To generate a curvilinear body fitted grid you need a file with the land
boundary and preferably the bathymetry. The land boundary is obtained from digitising a map
or from GIS and the bathymetry is obtained upon using the tool QUICKIN. For details you
are referred to the User Manuals of RGFGRID and QUICKIN. For the file formats of the land
boundary, the bathymetry and other files, see Appendix A. For this tutorial these files are
provided.
The data of the land boundary, the bathymetry and the numerical grid, but also information
on boundary conditions, discharges and grid related quantities such as monitoring points,
discharges etc. are stored in separate, so-called attribute files. In the MDF-file only a reference
is made to these files instead of including all data in the MDF-file itself. The big advantage of
using attribute files is that the data can be used in many scenarios but is stored only once on
the system disks.
Deltares 111 of 688

DRAFT
Delft3D-FLOW, User Manual
In this tutorial we provide an existing MDF-file with attribute files for a specific example called
‘fti’. The area modelled concerns the entrance between two islands in the northern part of
The Netherlands and is called “Friesian Tidal Inlet”. On the outer side of the area the flow
is driven by a semi-diurnal tide, while the inner side the area enclosed by land. We use this
basic example to guide you through most of the input definition part of a flow simulation.
To create or modify an MDF-file you use the FLOW-GUI you became acquainted with in chap-
ter 3. Furthermore, two attribute files are provided for use in this tutorial, viz. the curvilinear
grid file called <fti_02.grd>and the grid enclosure file <fti_02.enc>. The grid enclosure de-
scribes the extent of the numerical model; points outside the grid enclosure will not take part
in the simulation (are outside the open boundaries or are always on-land). While using the
FLOW-GUI you will create new attribute files which contain data like locations of monitoring
points or time-series needed for the computation. The complete MDF-file and all attribute files
created in this tutorial are also provided in the Tutorial directory, but instead of using them you
will build your own attribute files and MDF-file.
Remarks:
The choices you are going to make are not based on physical relevance or other prac-
tical considerations, but merely to show a number of features of the FLOW-GUI and to
make you familiar with it.
You will start with a new (empty) input file, so all input fields when displayed are empty or
only have default values. But, the screens displayed in this tutorial display the situation
after you have typed in the required data.
5.2 Filenames and conventions
The names of the MDF-file and of attribute files have a specific structure, some aspects are
obliged while others are only advised or preferred.
MDF-file
The name of an MDF-file must have the following structure: <name.mdf>. The name may
consist of up to 252 alpha-numeric characters and may contain (sub-)directories: <path\runid>.
The runid of the filename is used in the names of the result files to safeguard the link between
an MDF-file and the result files. We suggest to use a combination of one alpha- and two
numeric-characters followed by a useful name of your project.
Example: <c:\projects\panama\r01-calibration.mdf>
This file could indicate the flow-input file of the first calibration run of a project named Panama
in the directory <c:\projects>.
The extension <mdf>is mandatory.
112 of 688 Deltares
DRAFT
Tutorial
Table 5.1: Overview of attribute files.
Quantity Filename and mandatory extension
Astronomic correction factors <name.cor>
Bathymetry or depth <name.dep>
Bottom roughness <name.rgh>
Constituents boundary conditions <name.bcc>
Cross-sections <name.crs>
Curvilinear grid <name.grd>
Discharge locations <name.src>
Discharges rates <name.dis>
Dredge and dump characteristics <name.dad>
Drogues or floating particles <name.par>
Dry points <name.dry>
Flow boundary conditions (astronomic) <name.bca>
Flow boundary conditions (harmonic) <name.bch>
Flow boundary conditions (QH-relation) <name.bcq>
Flow boundary conditions (time-series) <name.bct>
Fourier analysis input file <name.fou>
Grid enclosure <name.enc>
Horizontal eddy viscosity and diffusivity <name.edy>
Initial conditions <name.ini>
Morphology characteristics <name.mor>
Observation points <name.obs>
Open boundaries <name.bnd>
Sediment characteristics <name.sed>
Temperature model parameters <name.tem>
Thin dams <name.thd>
Wind <name.wnd>
Result files
The results of a Delft3D-FLOW computation are stored in four types of files:
History file: <trih-runid.def>and <trih-runid.dat>.
Map file: <trim-runid.def>and <trim-runid.dat>.
Drogues file: <trid-runid.def>and <trid-runid.dat>.
Communication file: <com-runid.def>and <com-runid.dat>.
The result files are stored in the working or project directory.
The history file contains results of all computed quantities in a number of user-defined grid
points at a user-defined time interval. The map-file contains results of all quantities in all grid
points at a user-specified time interval. The drogues file contains the positions of all drogues
released as a function of time. The communication file contains results that are required by
other modules, such as the water quality module.
Deltares 113 of 688
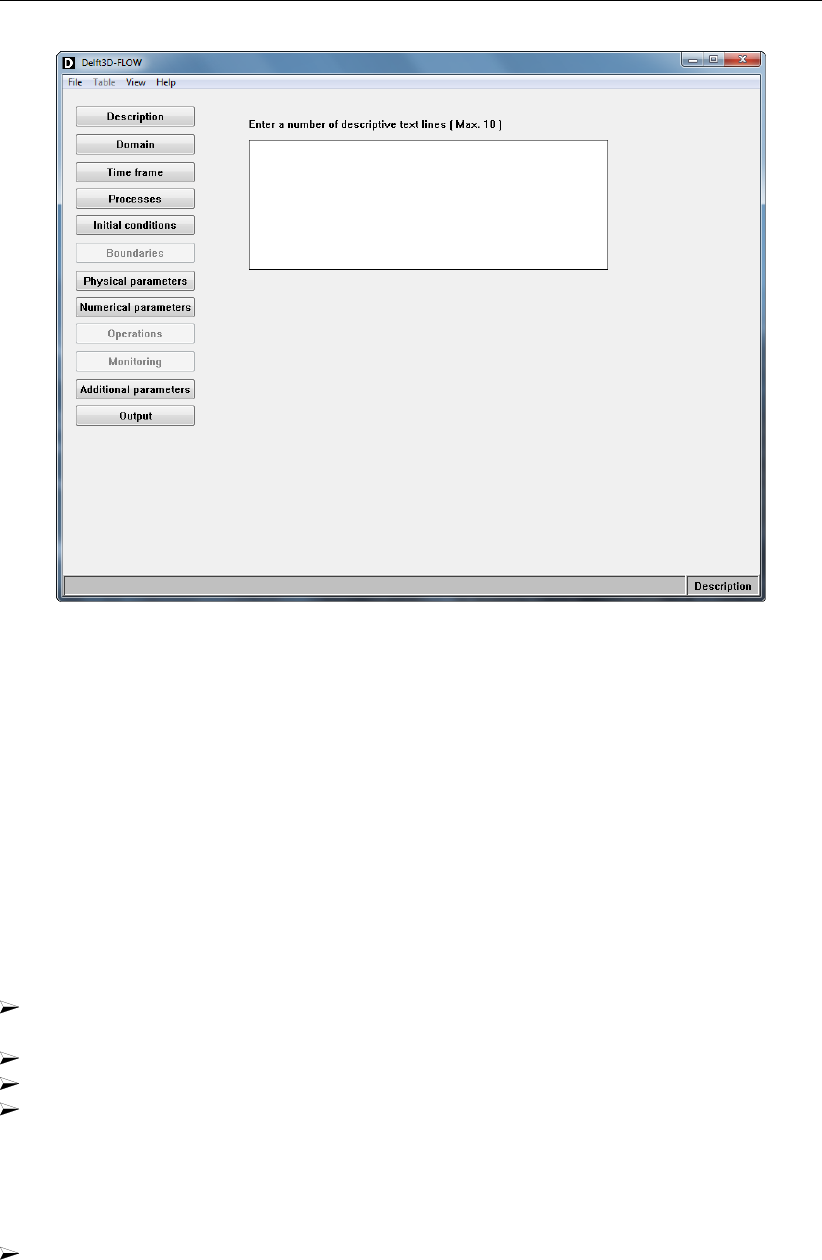
DRAFT
Delft3D-FLOW, User Manual
Figure 5.1: Starting window of the FLOW Graphical User Interface
Attribute files
Attribute files contain certain input quantities, such as monitoring points or time dependent
input data such as wind. The names of attribute files are basically free, but their extension is
mandatory as indicated below.
5.3 FLOW Graphical User Interface
5.3.1 Introduction
To start the FLOW Graphical User Interface (GUI) you must execute the following commands,
see chapter 3 for details:
Click the Delft3D-MENU icon on the desk-top (Windows) or execute the delft3d-menu
command on the command line (Linux).
Select the menu item FLOW, see Figure 3.2.
Change, i.e. go to the working directory <..\tutorial\flow\friesian_tidal_inlet>.
Select the menu item Flow input,Figure 3.3.
Next the main window of the FLOW-GUI is displayed, see Figure 5.1.
To open an existing input file:
Select File →Open.
By selecting an existing MDF-file all attribute files and their related data are loaded into mem-
ory and displayed in the input fields.
Instead, you are going to define all input data from scratch and save your data into an input
file called <tut_fti.mdf>.
114 of 688 Deltares
DRAFT
Tutorial
Figure 5.2: Data Group Description sub-window
If you have selected File →Open you can return to the initial situation right after starting the
FLOW-GUI by selecting File →New. This will reset the internal data structure.
You are now ready to start defining your own scenario, but before doing so you will learn how
to save your input data, even if the input data is incomplete.
5.3.2 Saving the input data
Initially, this tutorial may be somewhat tedious to work with. Rather then going on until the end
you may want to stop somewhere during the exercise. In order to save you from re-entering
again all the data another time up to the moment where you had stopped, you should save
the just entered data, so that later on you can pick up the thread where you left it.
To save your data:
Select File →Save All. This option is enabled when necessary.
For each Data Group with changed data for which you have not yet defined an attribute
filename and for the MDF-data (if you have not yet defined an MDF-filename) a file selec-
tion window will be opened, enabling you to save the unsaved data in an existing or in a
new file.
Next select Exit to close the FLOW-GUI or continue with your data definition.
Neglect the other options of the File drop down menu; they will be discussed later on.
5.4 Description
In the Data Group Description you can identify the scenario you are going to define by giving
a comprehensive description of the project, the application domain and the specific selections
to be made in this scenario. The description is only used for identification and has no influence
on the simulation itself. Type the description as displayed in, Figure 5.2.
5.5 Domain
The Data Group Domain supports four sub-data groups:
Grid, to define the numerical grid.
Bathymetry, to define the bottom topography.
Dry points, to define grid points that are excluded from being flooded during a simulation.
Thin dams, to define dams along grid lines that block the flow but have no influence on the
storage.
Deltares 115 of 688
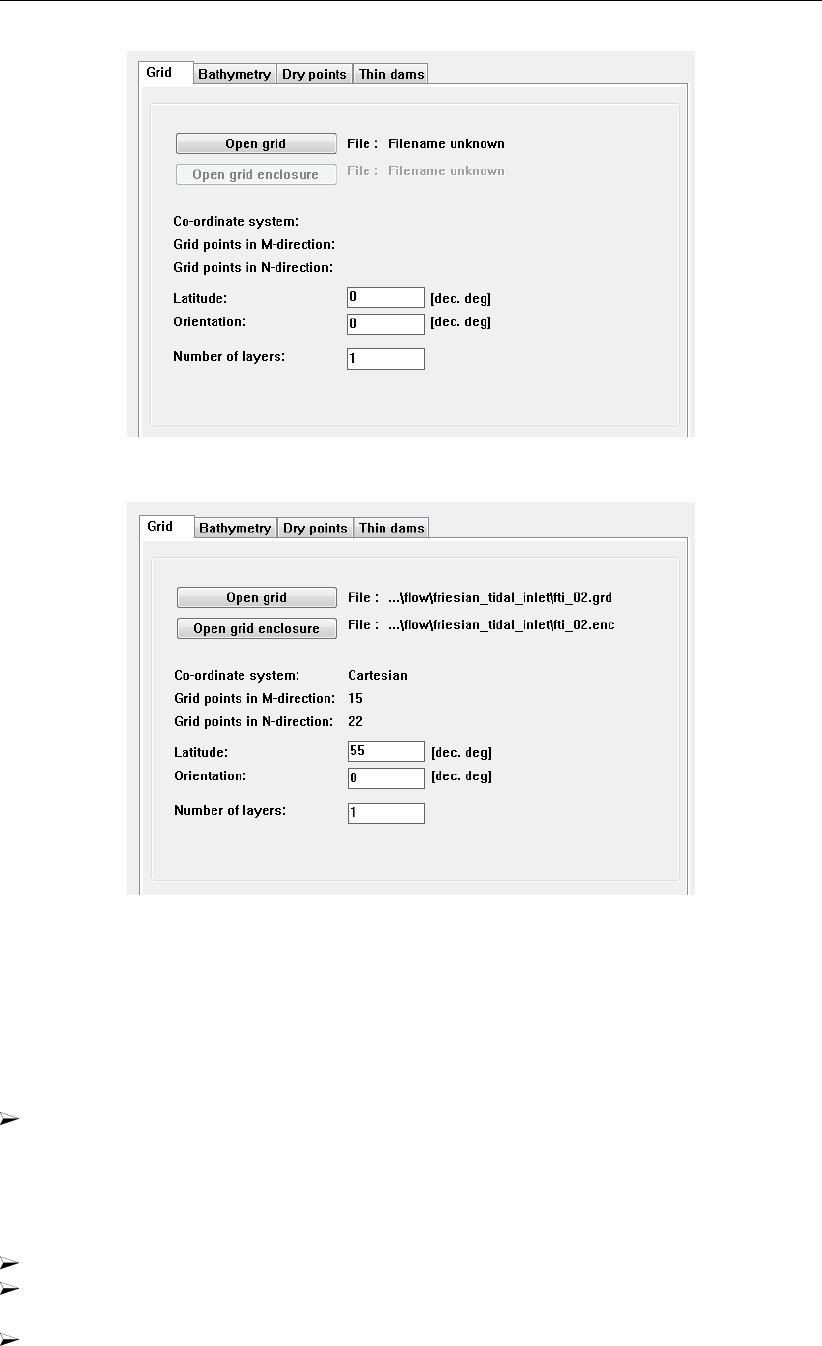
DRAFT
Delft3D-FLOW, User Manual
Figure 5.3: Sub-data group Grid
Figure 5.4: Sub-data group Grid; filenames, type of co-ordinate system and grid dimen-
sions
5.5.1 Grid parameters
In the sub-data group Grid you can open the grid to be used, its location and the number and
thickness of the vertical layers.
Click on Domain and then on Grid.
The resulting window is given in Figure 5.3.
There are two Open buttons, one for the grid and one for the grid enclosure.
Click Open grid. A file selection window is displayed.
Select the folder <..\tutorial\flow\friesian_tidal_inlet>if not already selected at the start of
this tutorial, see section 5.3.1.
Select the file <fti_02.grd>and open it.
The file selection window is closed and the filename <fti_02.grd>appears to the right of the
Open grid button, see Figure 5.4.
116 of 688 Deltares

DRAFT
Tutorial
Furthermore, the type of co-ordinate system (Cartesian or Spherical) is displayed together
with the grid dimensions. This information is contained in the grid file.
Repeat the same actions for the grid enclosure file <fti_02.enc>.
Set the Latitude to: “55.00” [degrees N].
Orientation is the angle (clockwise is positive) between true North and the y-direction; its
default value is zero and can be left unchanged. For the current purpose the grid is ready for
use.
Remarks:
You cannot modify the Grid Dimensions after loading a grid file. The dimensions of the
grid Mmax (number of grid points in ξ-direction) and Nmax (the number of grid points
in η-direction) have been set (in this case to 15 and 22) in the grid generation program
and cannot be changed. However, you can still select the number of vertical layers.
Maintain the currently inserted value 1 (for a depth averaged computation).
Many of the data items to be specified in the coming windows are related to and defined
at a numerical grid. It is therefore obvious first to select or define the grid you are going
to use.
A warning will be displayed when you try to define a grid related quantity before you
have defined your grid.
Before you continue with the other sub-data groups, you should visualise and inspect the area
to be modelled and the numerical grid used.
Click the item View in the menu bar and select the item Visualisation Area in the drop
down list. This will result in the window as shown in Figure 5.5.
Move the Visualisation Area window to the right of the screen, to keep it (at least partly)
uncovered.
In Figure 5.5 the numerical grid is shown with the active grid cells enclosed by the grid en-
closure. In the Visualisation Area window all grid related quantities can be viewed, defined,
moved and deleted, but as no quantities are yet defined only the grid is displayed. Select the
menu items in the menu bar of the Visualisation Area window to inspect the various options.
For the tutorial we leave the Visualisation Area window, this window is described in more
details in chapter 4.
Before continuing with the sub-data group Bathymetry you should make yourself acquainted
with the concept of the staggered grid applied in Delft3D.
In Delft3D-FLOW we apply a staggered grid, i.e. not all quantities are defined at the same
location in the numerical grid. When defining grid related quantities it is important you have
familiarised yourself with the concept of staggered grids.
The staggered grid applied in Delft3D is given in Figure 5.6, with the following legend:
full lines the numerical grid
grey area items with the same grid indices (m, n)
+water level, concentration of constituents, salinity, temperature
−horizontal velocity component in x- or ξ-direction (also called u- and m-direction)
| horizontal velocity component in y- or η-direction (also called v- and n-direction)
•depth below mean (still) water level (reference level). Depth is defined positive
downward.
Closed boundaries are defined through u- or v-points; open boundaries through u-, v- or
Deltares 117 of 688
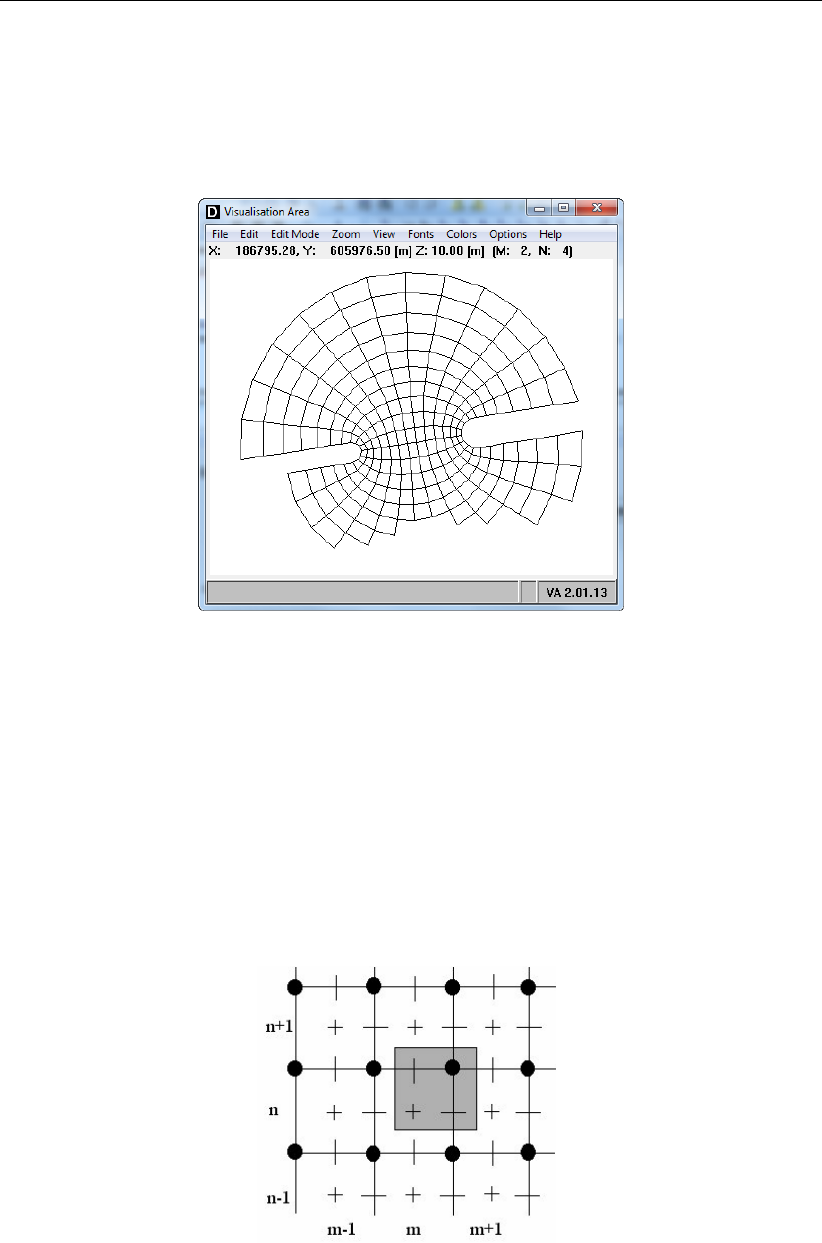
DRAFT
Delft3D-FLOW, User Manual
Figure 5.5: Visualisation Area window
Figure 5.6: Staggered grid used in Delft3D-FLOW
118 of 688 Deltares
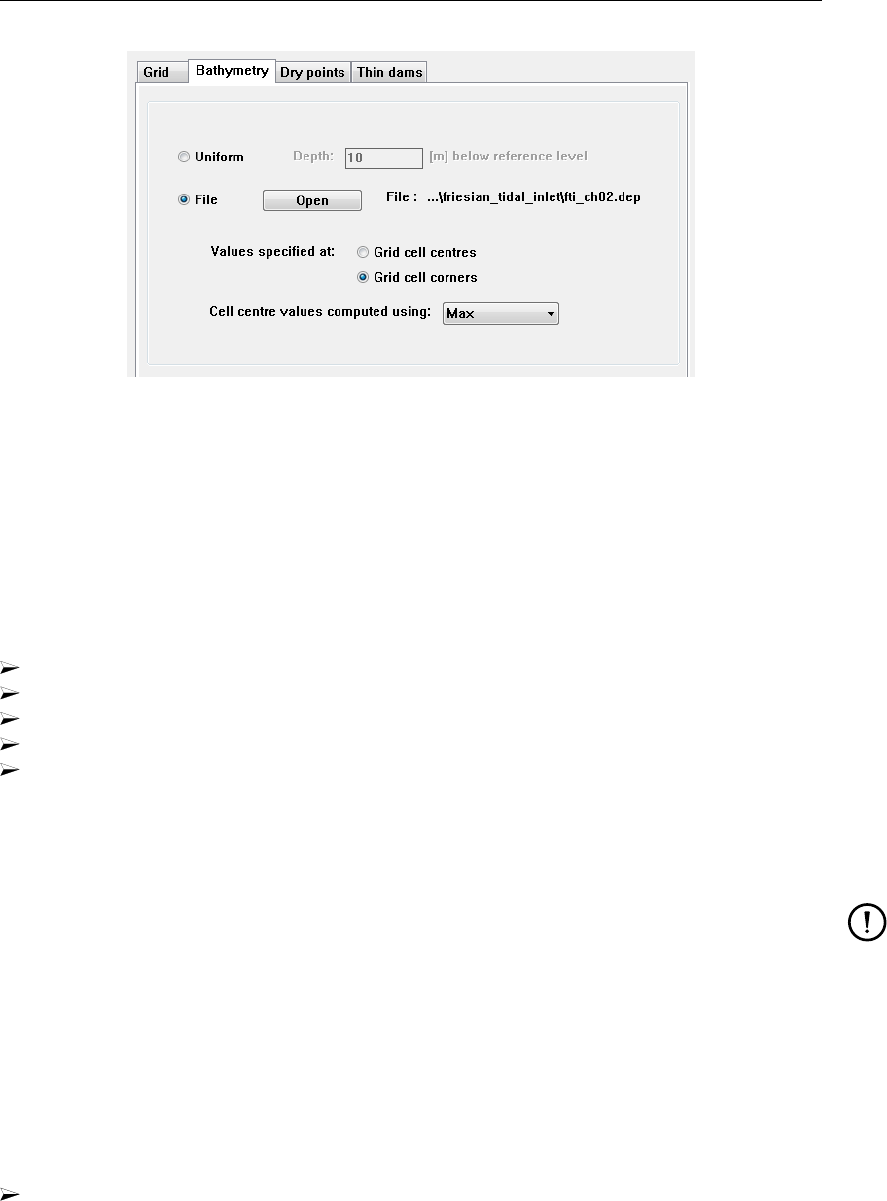
DRAFT
Tutorial
Figure 5.7: Sub-data group Bathymetry
water level (zeta-)points depending on the type of boundary condition such as velocity or
water level. The location of other grid related quantities are given when appropriate.
5.5.2 Bathymetry
The next step in preparing the MDF-file is to set up the bathymetry of the area for which you
just have loaded the grid:
Click the sub-data group Bathymetry.
Activate the File option.
Select the file <fti_ch02.dep>after pressing the Open button.
Behind Values specified at, select radio button Grid cell corners.
The Cell centre values computed using is set to MAX by default.
The sub-window should look like Figure 5.7.
Another option would have been to Open a (free or unformatted) bathymetry file.
Remark:
The bathymetry is defined relative to the reference level and is counted positive down-
ward to the bottom. The tool QUICKIN provides an option to compose a bathymetry
from measured (sampled) data and to reverse the sign of grid related data in case the
data is provided with the opposite sign.
5.5.3 Dry points
Dry points are grid cells that are permanently dry during a computation, irrespective of the
local water depth. Dry points are located at the water level point, Figure 5.8.
Click the sub-data group Dry points.
Next the Dry points sub-window is displayed, Figure 5.9.
You will see the layout of Figure 5.9 in several other sub-data groups, so it is worthwhile to
discuss this window in some more details. In this window you can see the following items:
A list box with the names of the quantities defined so far. The name of a dry point is
composed of its grid indices, but for other quantities (such as discharges) you can specify
a name. You can select an item by clicking on its name in the list box.
Deltares 119 of 688
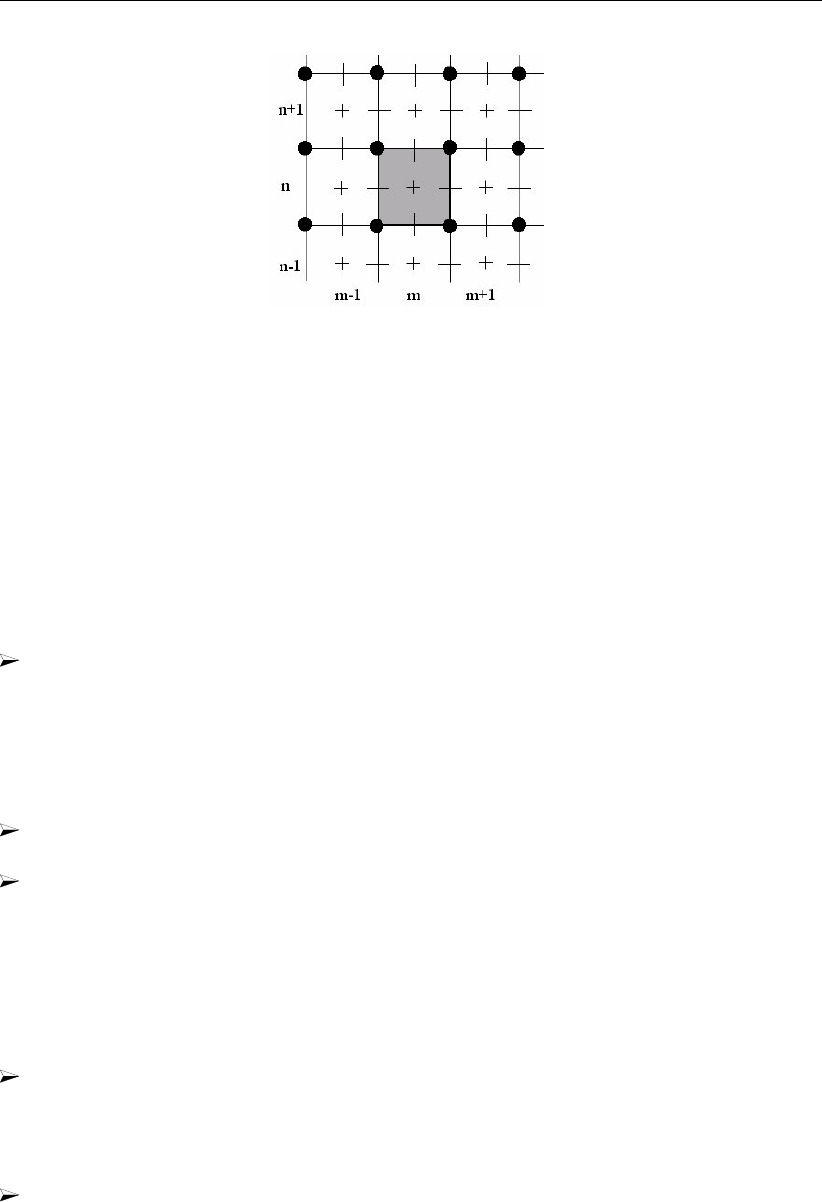
DRAFT
Delft3D-FLOW, User Manual
Figure 5.8: Location of a dry point at grid indices (m, n)
Buttons Add and Delete for adding or deleting items from the list box.
Buttons Open and Save for opening the items from an existing attribute file or saving the
items to an attribute file.
A couple of input fields to specify the location (and for some quantities a name field). For
some quantities you can specify only one item at a time, so only one pair of (m, n)indices
needs to be specified. For other quantities you can specify a line of quantities and then
the indices of the start and end point must be specified.
To add a dry point:
Click Add.
In the list box a dry point with default name –Unnamed– appears.
As dry points can be defined as a line of dry points you must specify the indices of the start
and end point of the line, or set the indices the same for a single dry point.
Select and enter one after the other the following values: M1 = “2”, N1 = “13”, M2 = “7”,
and N2 = “13”.
Click in the list box to confirm the input.
Now, you have defined a line of dry points along the grid line N=13 and extending over several
M-grid points, i.e. M=2, . . . , M=7. In the list box the name of the line of dry points is changed
to (2,13)..(7,13); note the name is composed of the grid indices of start and end point.
To see the just defined dry points:
Select in the GUI menu View →Visualisation Area.
In the Visualisation Area window you can see the indicated fields light up in red; this implies
that dry points have been defined at these locations and are selected.
Remain in the Visualisation Area window and select View →Legend.
A window is displayed with a legend of the symbols that can be displayed in the Visualisation
Area window. Minimise this window after inspection to keep it near by.
You can also define dry points by means of point-and-click in the Visualisation Area window.
Please note that while moving the cursor over the visualisation area the position of the cursor
is displayed just below the menu bar in both world coordinates and grid indices.
120 of 688 Deltares
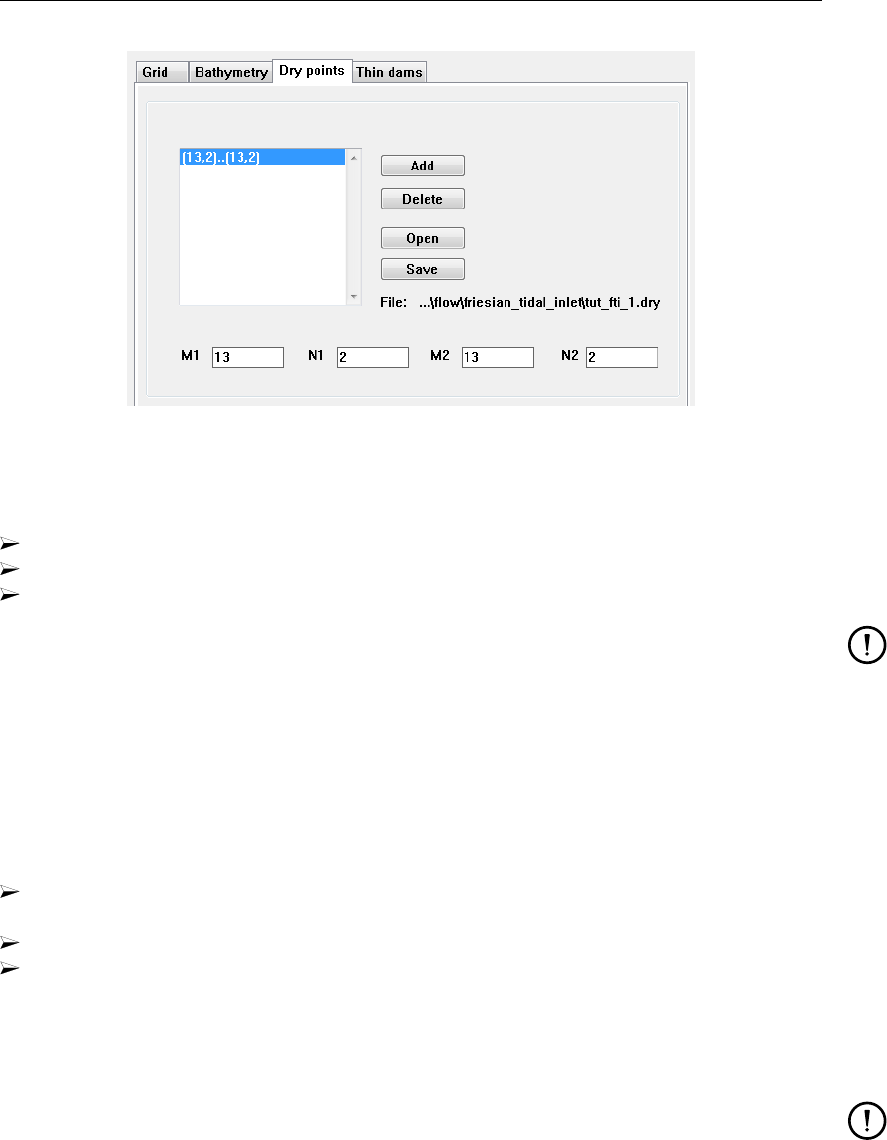
DRAFT
Tutorial
Figure 5.9: Sub-data group Dry Points
To add a dry point by point-and-click in the Visualisation Area window:
Select Edit Mode →Add and select Edit →Dry Point in the menu bar.
Move the mouse pointer to the grid cell with indices M=13 and N=2.
Select this point.
Remark:
Selecting a menu item or a grid related quantity actually consists of two actions: the
first action is to move the cursor to the required item or position and next confirm the
selection with clicking the left mouse. In short this process will be called selecting.
As a result the earlier defined six dry points in the grid have turned yellow, the newly defined
dry point is displayed in red and in the Dry points list box the indices of the newly defined dry
point is given. Now, before you move on to the next item you will delete the six defined dry
points and single dry point, hence:
Select the dry points (2,13)..(7,13) and click Delete; the dry points are removed from the
list (and from the Visualisation Area).
Click Save next to the list box.
Specify the name <tut_fti_1.dry>in the working directory of the opened file selection
window and save the file. If the file already exists the program will ask you whether you
wish to overwrite the old file <tut_fti_1.dry>. Please confirm.
Below Save the filename <tut_fti_1.dry>appears, see Figure 5.9.
Remark:
You don’t need to save the data in each sub-data group. The FLOW-GUI keeps track
of all changed data fields. When selecting File →New, or when exiting the FLOW-GUI
you will be notified that not all data has not been saved and you can either continue and
discard this data or save the data to an existing or new file. However, a preferred way
of working is to save data items when defined.
Deltares 121 of 688
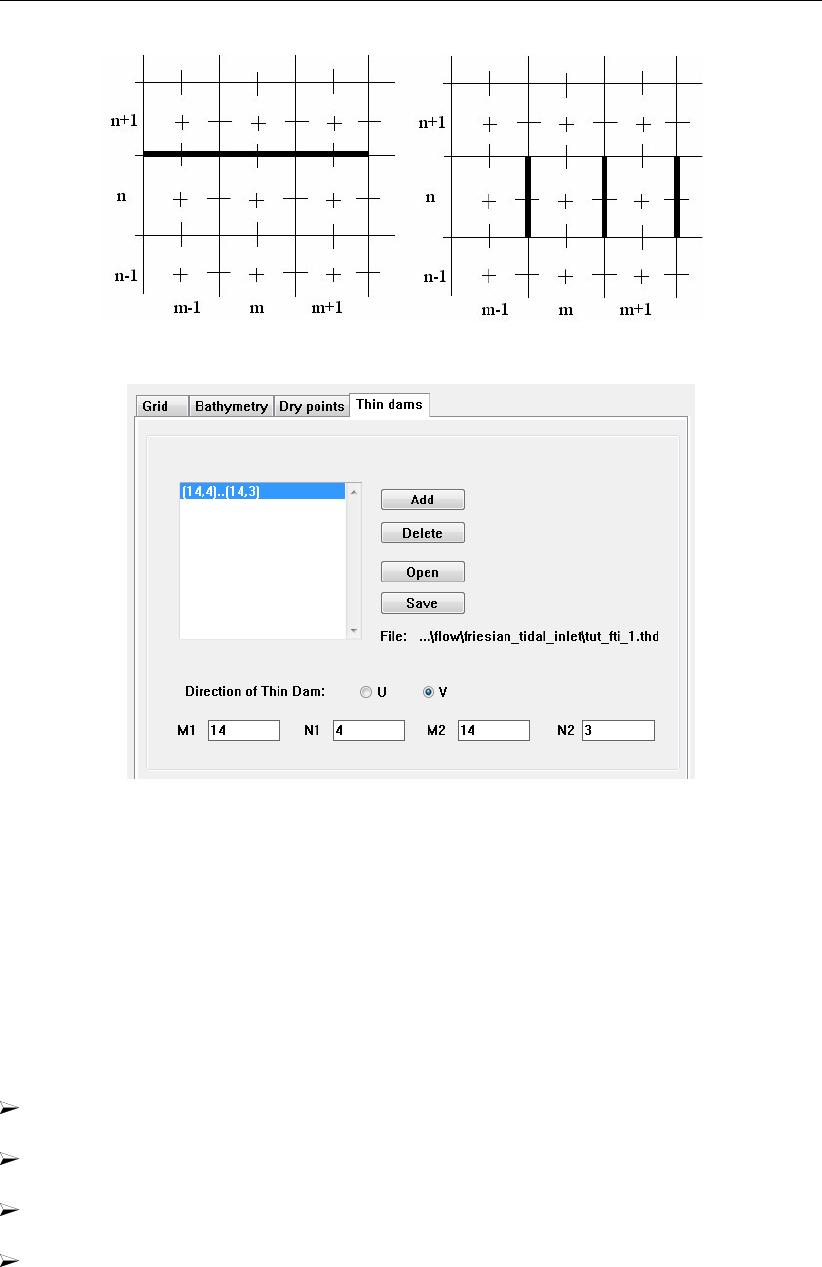
DRAFT
Delft3D-FLOW, User Manual
Figure 5.10: Sets of thin dams blocking v-velocities (left) and blocking u-velocities (right)
Figure 5.11: Sub-data group Thin dams
5.5.4 Thin dams
Next you are going to define a Thin dam. Thin dams are infinitely thin objects defined along
the grid lines, which prohibit flow exchange between two computational cells at the two sides
of the dam without reducing the total wet surface and the volume of the model. The purpose
of a thin dam is to represent small obstacles (e.g. breakwaters or dams). See Figure 5.10 for
the location of u- and v-thin dams.
The Thin dams sub-window is displayed in Figure 5.11.
Click the sub-data group Thin dams in the Domain window. Similar to what happened in
the previous section, there appears a sub-window for Thin dams.
Define a line of thin dam points who block the flow in v-direction by entering the indices
M1 = “14”, N1 = “4”, M2 = “14” and N2 = “3”.
The selected grid section turns red in the visualisation area to indicate thin dams have
been defined and are currently selected.
Save the thin dams in the file <tut_fti_1.thd>.
You have just defined two thin dams with a length of one grid cell each. In the list box a name
composed of the indices of start and end point is displayed. The selected direction of the thin
dam is indicated in the check box of u- or v-direction.
You can also define a single thin dam or a line of thin dams by point-and-click in the Visuali-
122 of 688 Deltares
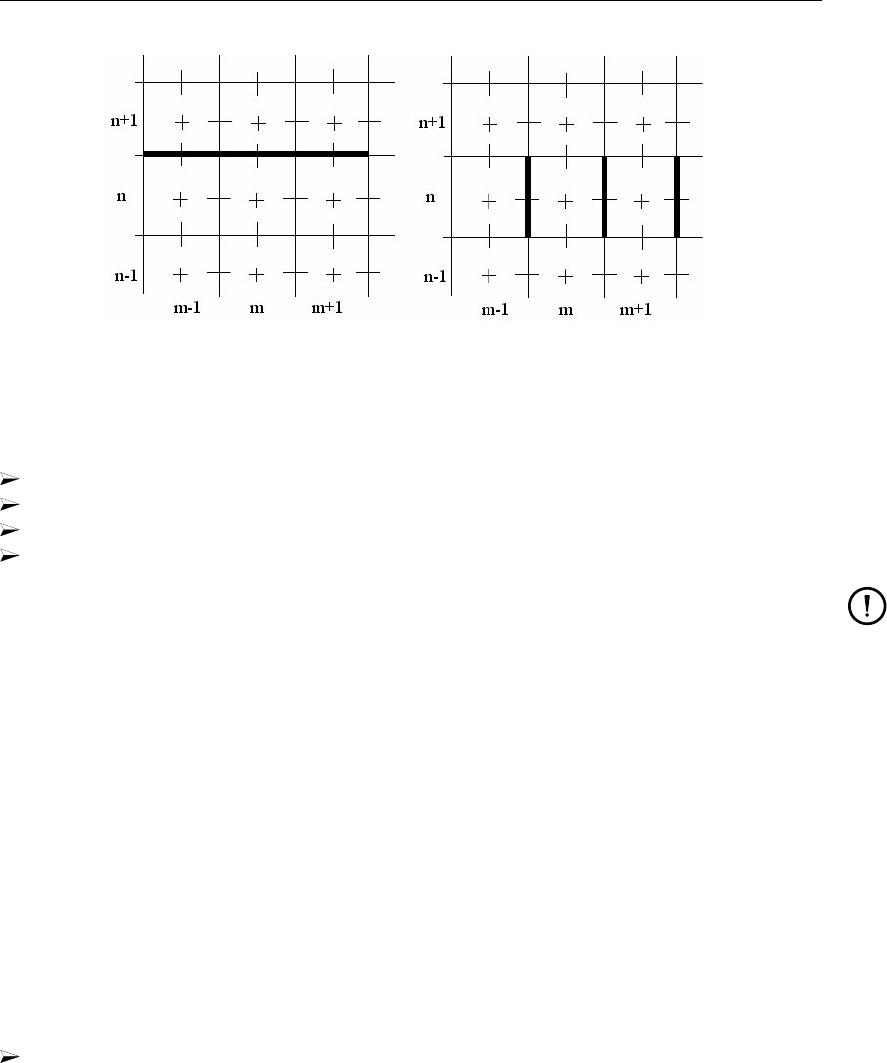
DRAFT
Tutorial
Figure 5.12: Equivalence of v-type thin dams (left) and u-type thin dams (right) with the
same grid indices, (m−1to m+ 1, n)
sation Area window:
Select Edit Mode →Add and Edit →Thin Dams in the Visualisation Area menu bar.
Click a grid location, but keep the mouse button pressed.
Move the mouse pointer to the required length and release the mouse button.
The selected grid line section turns yellow, thus indicating a thin dam has been defined.
Remark:
You can define lines or sets of thin dams along the grid lines but also at angles of a
multiple of 45 degrees with the grid.
Add a couple of more thin dams, change the direction in which the thin dam is defined by click-
ing the u- or v-direction check box and see how the change is visualised in the Visualisation
Area window. Familiarise yourself with this, understand why a line of thin dams along one grid
line changes to a set of single thin dams along the other grid direction when changing from u-
to v-direction and vice versa. See Figure 5.12 for u- and v-types of thin dams with the same
grid indices.
Before you go on to the next data group you should undo the random changes; the easiest
way to do this is to neglect the additional thin dams and go on to the next data group, as
you already have saved the firstly defined thin dams. However, this would stimulate a wrong
working habit and so you are advised to delete all the additional thin dams before you leave
the data group, or to overwrite the currently defined thin dams by the saved thin dams in
<tut_fti_1.thd>. So:
Open the thin dam file <tut_fti_1.thd>.
You have defined all the required items in the Domain window, so you can move on to the
next data group.
Deltares 123 of 688
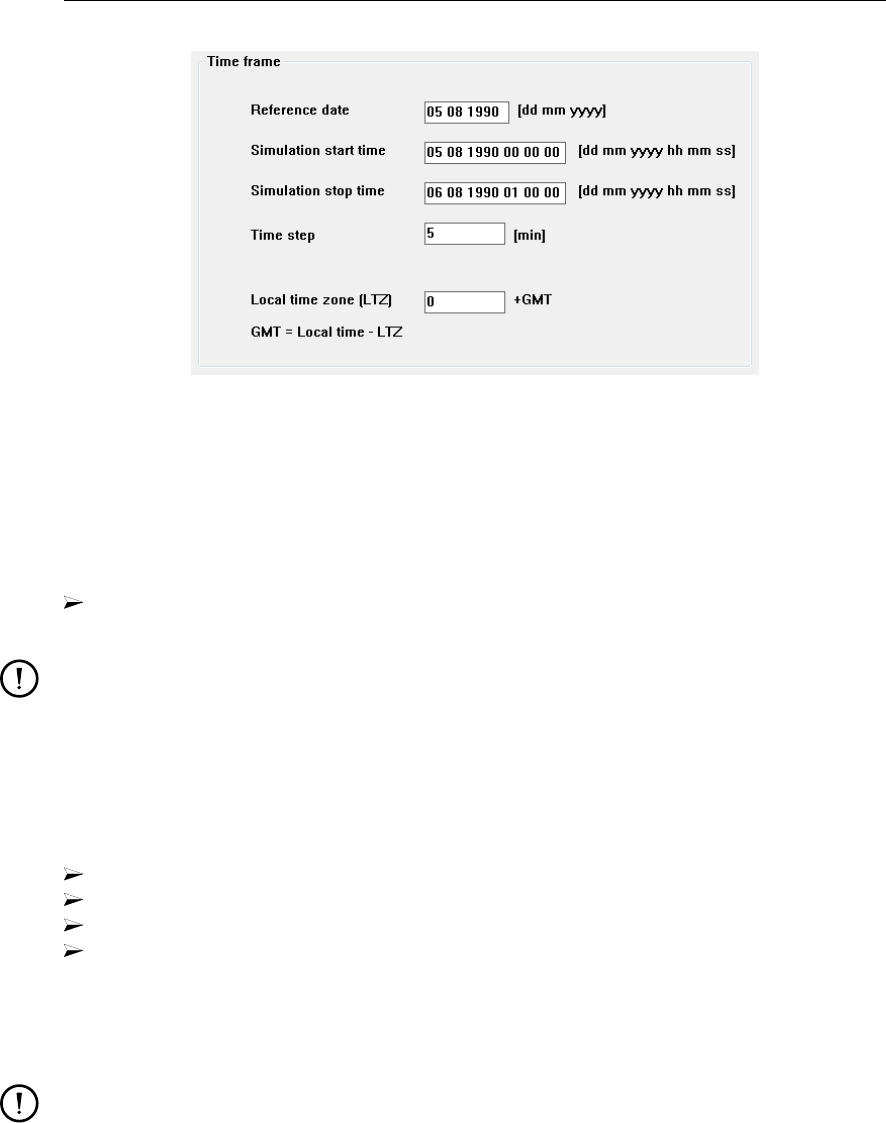
DRAFT
Delft3D-FLOW, User Manual
Figure 5.13: Window Time frame
5.6 Time frame
In the Data Group Time frame you can specify the time frame of your computation composed
of the reference date, the simulation start time, the simulation stop time and the time step
used in the numerical simulation.
Click the Data Group Time frame. In the canvas area the following sub-window is dis-
played, Figure 5.13:
Remark:
When this window is first activated it always shows the current calendar date of your
computer.
The Reference date prescribes the (arbitrary) t = 0 point for all time-series as used in the
simulations. However, in the FLOW-GUI all time related input is specified in a real time format,
i.e. [dd mm yyyy] for the date and [hh mm ss] for the time.
Click the Reference date input field and type the date “05 08 1990”.
Set the Simulation start time to “05 08 1990 00 00 00”.
Set the Simulation stop time to “06 08 1990 01 00 00”.
Set the time step to “5” minutes.
The simulation time thus covers exactly 25 hours, or about two semi-diurnal tidal cycles.
Neglect the other input field.
Remarks:
All data items of the Data Group Time frame are stored in the MDF-file and not in an
attribute file. In fact all single data items are stored in the MDF-file.
The maximum Courant number given the grid, depth and time step is about 11.
124 of 688 Deltares
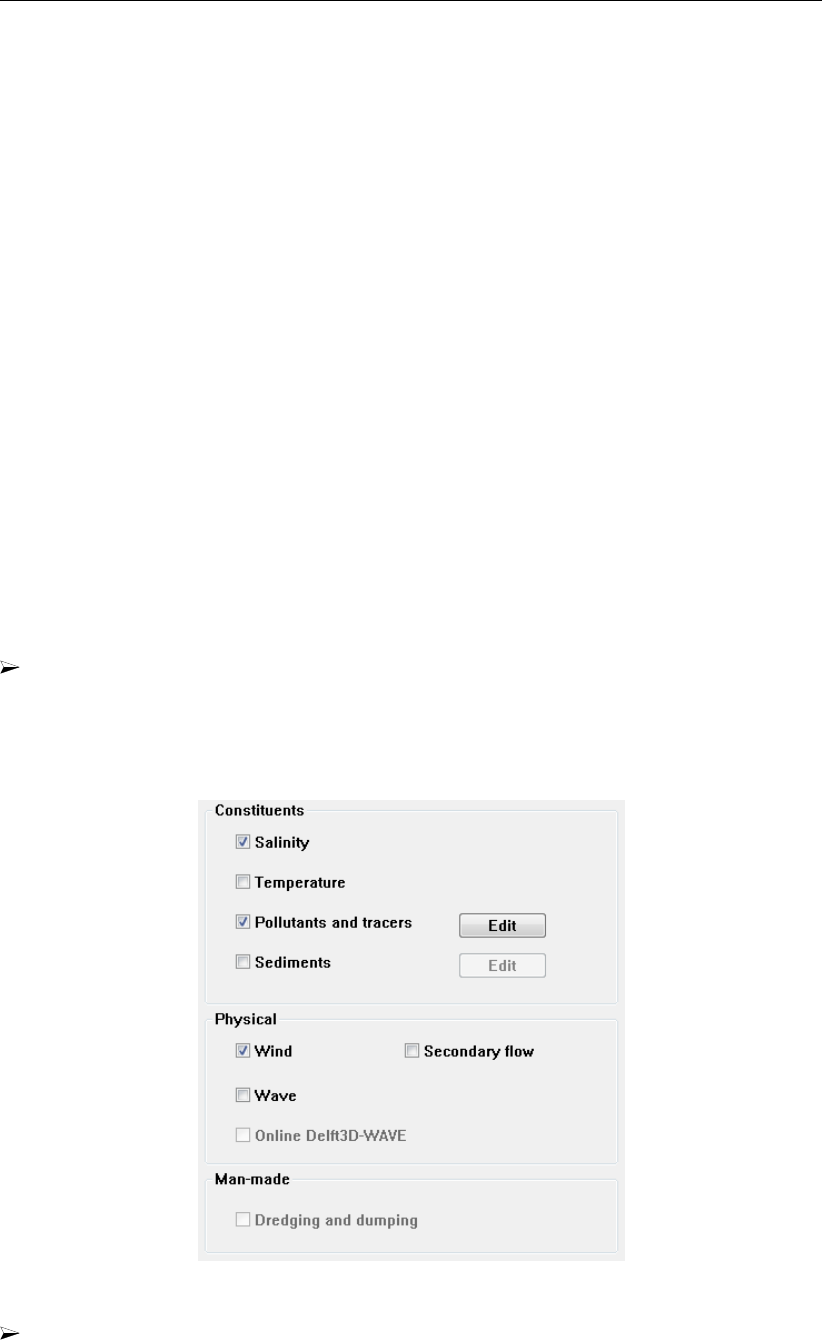
DRAFT
Tutorial
5.7 Processes
In the Data Group Processes you specify which processes or quantities that might influence
the hydrodynamic simulation are taken into account. You can select constituents:
Salinity
Temperature
Pollutants and tracers
Sediments
or physical processes:
Wind
Wave
Secondary flow (2D mode only and no Z-model)
Online Delft3D-WAVE
Tidal Forces (spherical co-ordinates only)
or man-made processes:
Dredging and dumping (only if sediments are selected)
To select the required processes:
Click the Data Group Processes.
The Processes sub-window is displayed with the list of possible constituents and processes,
see Figure 5.14. The buttons Edit are only displayed after you have selected the constituents
Pollutants and tracers or Sediments.
Figure 5.14: Processes window
Activate the required processes by ticking off their check box; in this tutorial we select the
constituents:
Salinity and
Pollutants and tracers,
Deltares 125 of 688
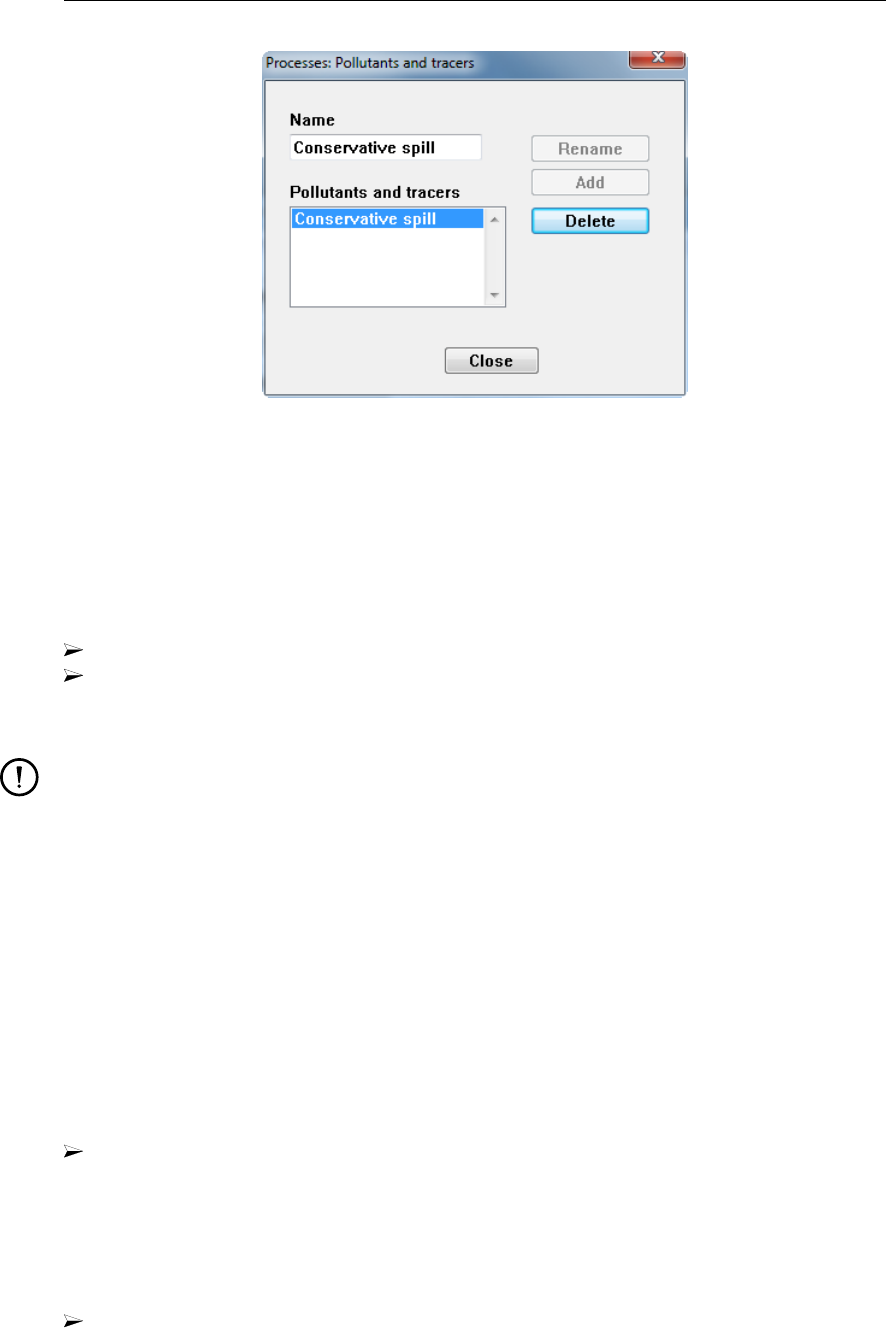
DRAFT
Delft3D-FLOW, User Manual
Figure 5.15: Processes: Pollutants and tracers sub-window
Immediately after ticking off the Pollutants and tracers checkbox or when the Edit is
pressed (if enabled), the Processes: Pollutants and tracers window is displayed, see
Figure 5.15.
And tick off the physical process
Wind.
Now type into the Name input field the words “Conservative Spill” and click Add.
Close the sub-window.
You have just defined one conservative constituent that is transported by the flow.
Remarks:
The first time you select Processes - Pollutants and tracers,Figure 5.14 is automatically
displayed. For changing the constituent names later on you must click the aforemen-
tioned Edit button.
You can specify a simple decay rate for each of the substances. It is currently imple-
mented as a special feature, see section B.2 for details. For interacting constituents you
have to apply the water quality module D-Water Quality.
See chapter 11 for the use of cohesive and non-cohesive sediments.
5.8 Initial conditions
In the Data Group Initial conditions you can specify the initial values used when starting the
computation. The initial conditions can be very simple, such as a uniform value in the whole
area or taken from a previous computation.
Click the Data Group Initial conditions.
The sub-window Initial conditions is displayed, Figure 5.16.
Shown are some option boxes and input fields. In the dropdown list Uniform values has
already been set. If not:
Select Uniform values.
Input fields are shown for the processes selected in the Data Group Processes, so in this case
for the processes water level (by default), salinity and one constituent.
126 of 688 Deltares
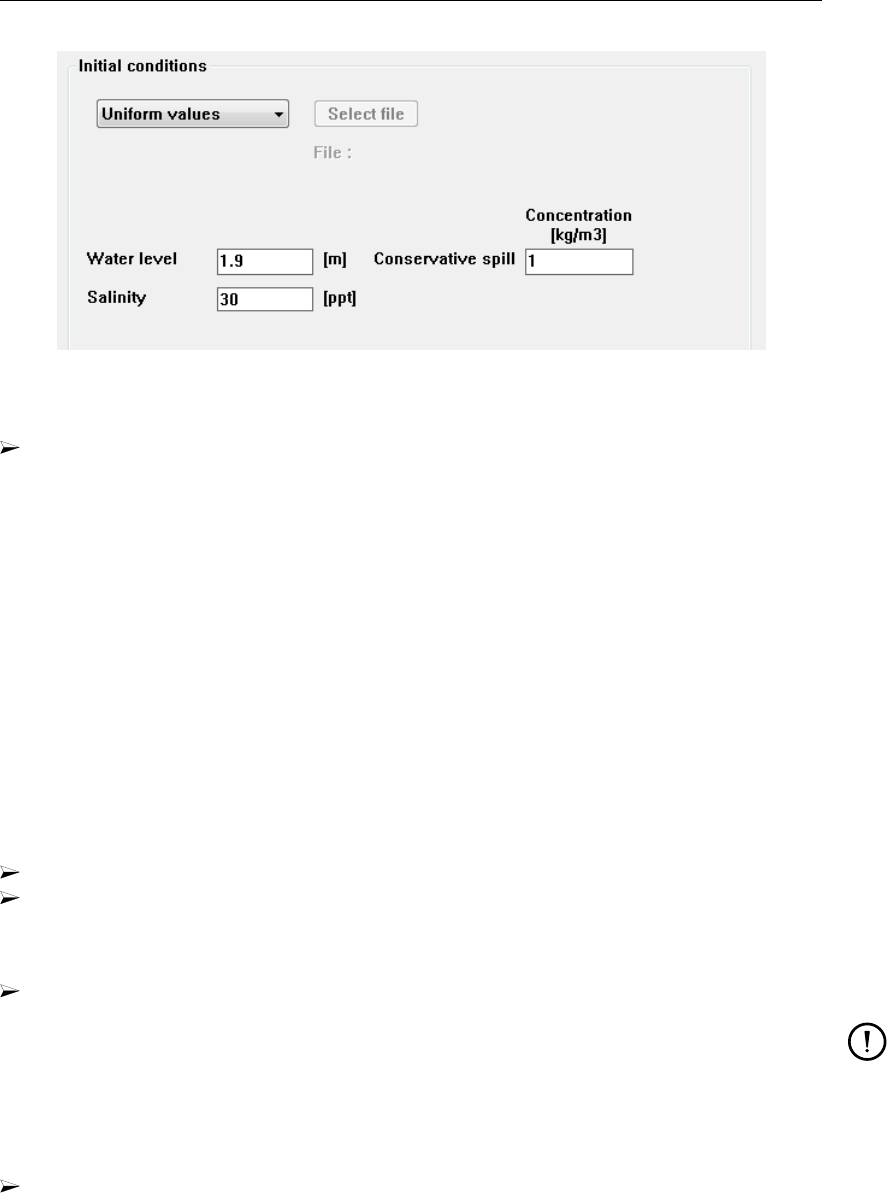
DRAFT
Tutorial
Figure 5.16: Initial conditions sub-window
Enter the values: Water Level: “1.9” m; Salinity: “30.0” ppt and Conservative Spill: “1.0”
kg/m3.
The initial conditions are stored in the MDF-file when saving the input.
5.9 Boundaries
In the Data Group Boundaries you can define the open boundaries, their location, type and all
input data related to forcing the simulation. Open boundaries are defined in sections of one
or more grid cells. Boundary conditions are prescribed at both ends of a section, called begin
and end, or, A and B. Boundary conditions for intermediate points along a boundary section
are determined by linear interpolation. Boundary sections may not be overlapping, so if you
define two boundary sections along an open boundary, end-point B of section one and start
point A of section two are located in consecutive grid cells.
Firstly, you are going to define the location and extent of the open boundaries:
Click the Data Group Boundaries.
Click Add to the right of the list box.
In the input field Section name appears the word –Unnamed–.
Enter instead: “Sea Boundary”.
Remark:
Values are read from the input field upon losing the focus, i.e. when you select another
input field or select a boundary section in the list box.
Now define the begin and end point of the open boundary:
Type the following values of the grid indices in the appropriate input fields: M1 = “2”, N1 =
“22”, M2 = “14” and N2 = “22”.
Retain the value 0.0 in the Reflection parameter alpha input field.
In the Visualisation Area window the open boundary just defined is displayed as a thick red
line.
To save these settings:
Deltares 127 of 688
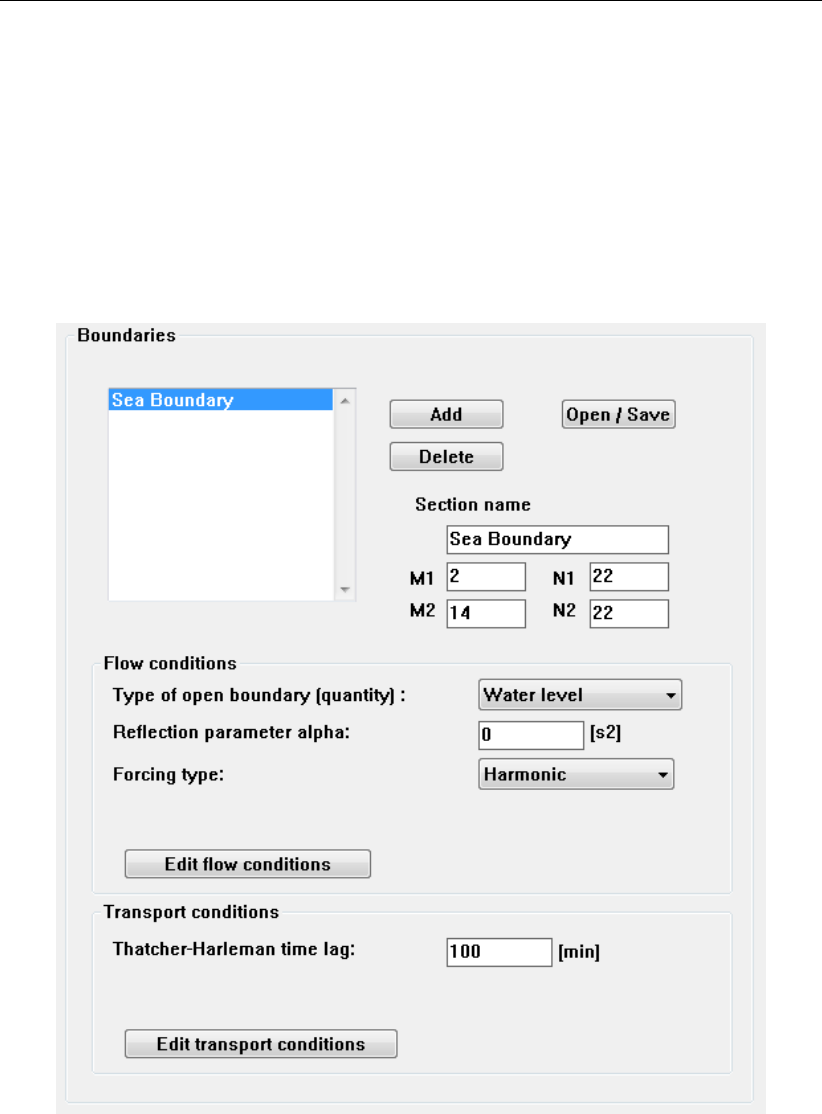
DRAFT
Delft3D-FLOW, User Manual
Figure 5.17: Boundaries sub-window
128 of 688 Deltares
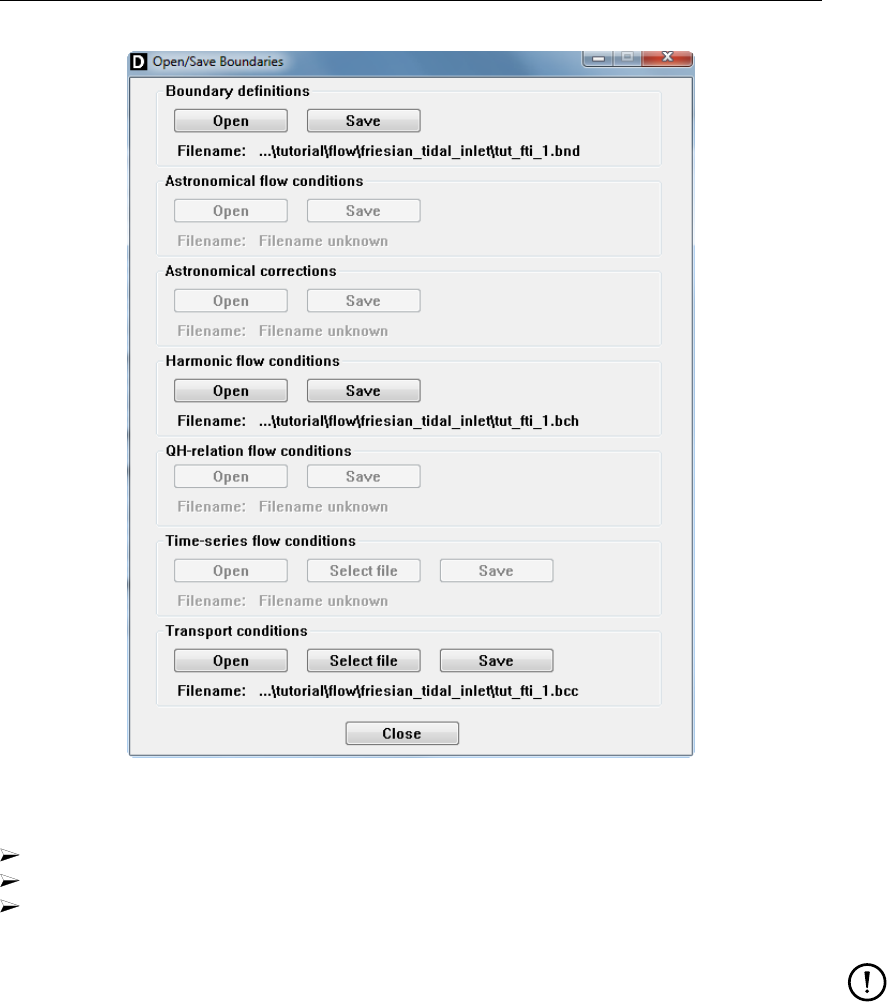
DRAFT
Tutorial
Figure 5.18: Open/Save Boundaries sub-window
Click Open/Save in the Boundaries sub-window.
Click Save (Boundary definitions) in the pop-up sub-window, Figure 5.18.
Enter the filename <tut_fti_1.bnd>in the working directory and close the Open/Save
Boundaries menu window.
Remarks:
After pressing Open/Save a sub-window is displayed with references to all type of at-
tribute files related to open boundaries. Concentrate for the moment on the Boundary
Definitions attribute file and discard the others.
You can define an open boundary in the Visualisation Area window in the same way
as you define a line of thin dams or a line of dry points, i.e. select the begin point, keep
the mouse button pressed, drag the mouse pointer to the end point of the boundary
section along the grid line, and release the mouse button.
For open boundaries there is one additional condition, i.e. the open boundary must be
defined at the edge of the grid as shown in the Visualisation Area. To define an open
boundary by point-and-click: select the Edit Mode →Add and Edit →Open Bound-
aries in the menu bar of the Visualisation Area window and continue as prescribed.
Make sure you undo all changes; the easiest way is to import the previously saved open
boundary locations.
In the visualisation area all open boundaries are visualised at grid lines, i.e. at the edge
of computational grid cells. The (M, N) indices displayed in the Visualisation Area
refers to the computational grid cell. This grid cell number differs by one in M or N
depending on the location of the boundary (left, lower, right or upper) from the grid line.
Deltares 129 of 688
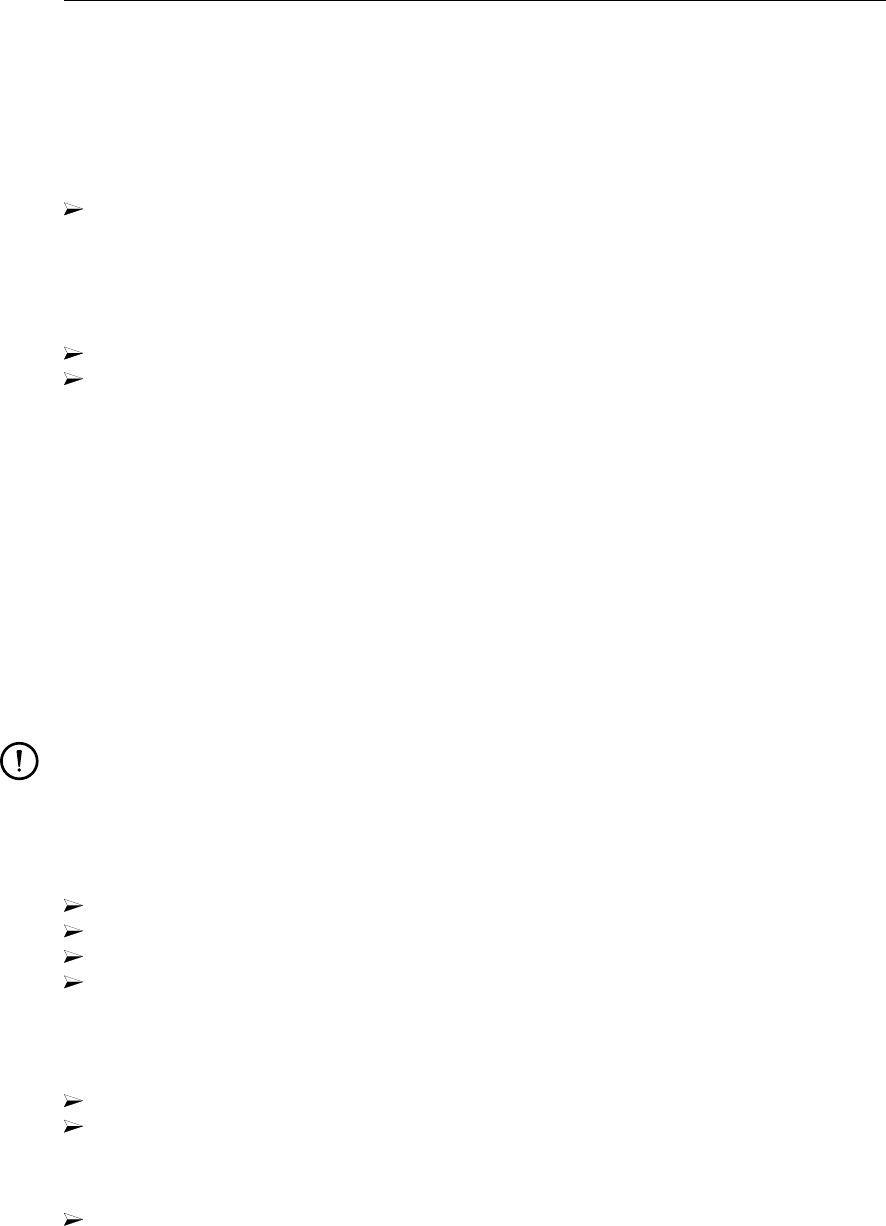
DRAFT
Delft3D-FLOW, User Manual
This rule also applies to open boundaries in side the computational domain. For a detailed
discussion on the computational grid and the location of open and closed boundaries see
Appendix E.
To define an open boundary by point and click you should select and drag inside the first
(or last) grid cell so as to select the first (or last) water level or velocity point.
In this tutorial you will use the default type of open boundary i.e. Water level and the Harmonic
type of forcing (the default is Astronomic).
Set the forcing type to Harmonic.
Click Edit flow conditions.
In this tutorial we are going to specify harmonic boundary conditions for a depth averaged
computation (only one layer in the vertical, see Data Group Domain →Grid), so several
options are either invisible or insensitive.
The harmonic components must be specified for both ends of an open boundary section. The
begin and end point are referred to as ‘Begin’ or ‘point A’ and ‘End’ or ‘point B’. The Begin
point has the indices (M1, N1) and the End point has the indices (M2, N2); see Figure 5.17.
You are going to prescribe a semi-diurnal tide with amplitude of 1.1 m and phase 0 degrees
at the Begin point and amplitude 1.1 m and phase -34.26 degrees in the End point.
After filling the input fields the table should look like Figure 5.19.
Remark:
The frequency is specified in degrees per hour. Hence, 360/12.5 = 28.8 for the semi-
diurnal tide. A mean sea level is defined with a frequency of 0 degrees/hr.
Now save the data to the attribute file:
Close the Boundaries - Flow Conditions sub-window.
Select Open/Save in the Boundaries window.
Save the harmonic flow conditions into file <tut_fti_1.bch>.
Close the Open/Save Boundaries window.
You are back in the Boundaries window. Next you will provide time-series for the concentra-
tions of the constituent and salinity at the open boundary.
Set the Thatcher-Harleman time lag to “100” minutes, see Figure 5.17.
Click Edit transport conditions.
To define the boundary conditions for the process salinity:
Select from the Constituents dropdown list: Salinity.
Next, fill out the table form with the following time breakpoints and parameter values at both
ends (Begin and End):
130 of 688 Deltares
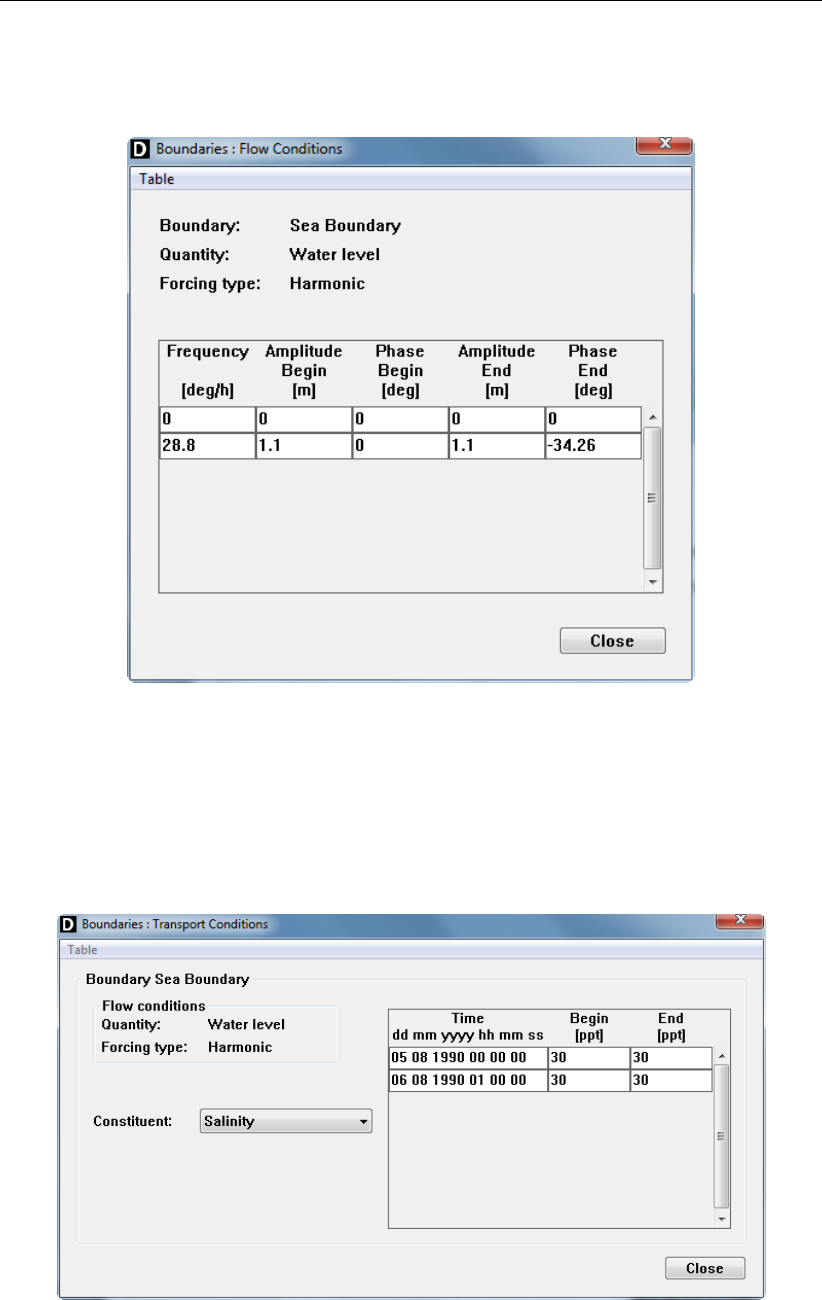
DRAFT
Tutorial
Figure 5.19: Harmonic boundary conditions
Figure 5.20: Boundaries: Transport Conditions window
Deltares 131 of 688
DRAFT
Delft3D-FLOW, User Manual
Date and time Begin End
05 08 1990 00 00 00 30.0 30.0
06 08 1990 01 00 00 30.0 30.0
Next select from the dropdown list the constituent Conservative Spill.
and fill out the table with the following time breakpoints and parameter values at both ends.
Date and time Begin End
05 08 1990 00 00 00 1.0 1.0
06 08 1990 01 00 00 1.0 1.0
For this constituent you set all concentrations to 1.0, representing a tracer that is present in
the inflowing sea water. For a tracer to be washed out of the system you should enter the
sea-background concentration, for instance zero or a small value. Recall you have specified
the initial condition (Data Group Initial conditions) to 1.0 for this constituent.
Remarks:
The time breakpoints for Salinity and the constituent Conservative Spill and for any
other process selected can be different; they do not need to be the same.
In Figure 5.20 only the input data for Salinity is visible; you must use the Constituents
drop down list to select the other selected constituents.
Remark:
In a 3D model you can specify a profile. To inspect this you can go back to the Data
Group Domain →Grid and increase the number of layers to two (with a distribution of
50 % for each layer) and return to the current window (Data Group Boundaries - Edit
transport conditions - Constituents - Salinity). Ignore all warnings and error messages
that might be displayed (remember you might not have specified all kind of data required
for a real 3D simulation). After inspection make sure to return the number of layers to
one.
You have now finished the boundary conditions for all processes and constituents and you are
ready to save the data.
Close this window to return to the Boundaries window.
Select in the Boundaries window Open/Save - Transport conditions - Save and save the
transport boundary conditions in the working directory in the file <tut_fti_1.bcc>.
Close the Open/Save Boundaries window.
132 of 688 Deltares
DRAFT
Tutorial
Figure 5.21: Physical parameters sub-data groups
5.10 Physical parameters
In this Data Group you can define a number of physical parameters, grouped in several sub-
data groups.
Click the Data Group Physical parameters.
Next the sub-data groups Constants, Roughness, Viscosity and Wind are displayed as tabs;
Figure 5.21. As temperature was not selected in the Data Group Processes the sub-data
group Heat flux model is invisible.
In the next sections the other sub-data groups will be treated.
5.10.1 Constants
The sub-data group Constants concerns items such as the acceleration of gravity, the water
and air density and constants that determine the wind drag force. To specify the constants:
Click the tab Constants, see Figure 5.22.
Set the values by entering into their respective input fields:
Gravity: “9.81” m/s2(default value).
Water density : “1024.0” kg/m3.
Air density: “1.00” kg/m3.
Temperature: “10.0” ◦C.
There are three Wind drag coefficients:
Type into the input fields of the first line “0.0025” [-] and “0.00” [m/s].
Type into the input fields of the second line “0.0025” [-] and “100.00” [m/s].
Type into the input fields of the third line “0.0025” [-] and “100.00” [m/s].
The three wind drag coefficients determine breakpoints in the piece-wise linear function of
wind drag and wind speed:
The first two coefficients determine the wind drag value that is used from zero wind speed
up to the wind speed specified by the second constant.
The third two coefficients specify the wind drag used from the specified wind speed and
higher.
As a result you can specify a constant wind drag, a linearly increasing wind drag or a piece-
wise linear function of wind speed.
Deltares 133 of 688
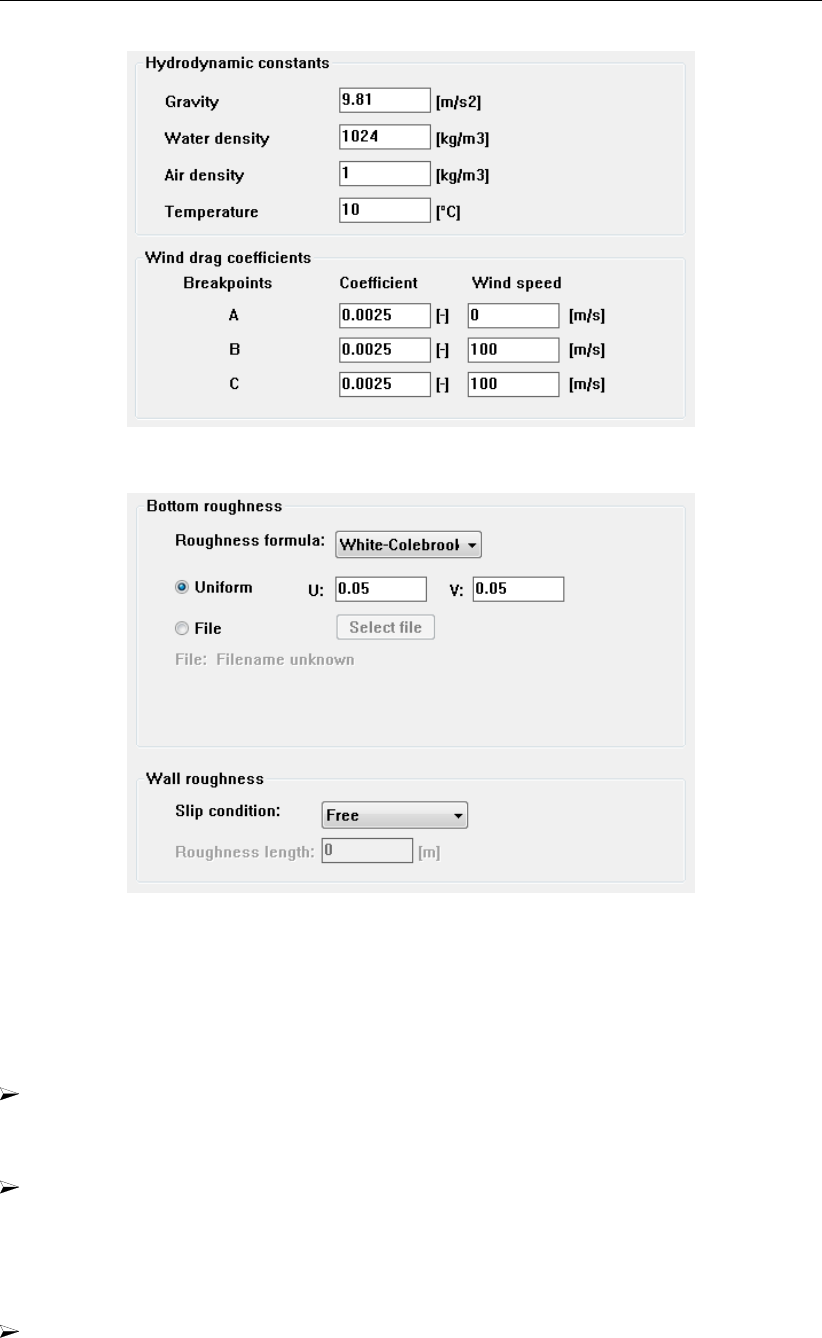
DRAFT
Delft3D-FLOW, User Manual
Figure 5.22: Physical parameters - Constants sub-window
Figure 5.23: Roughness sub-window
5.10.2 Roughness
In the sub-data group Roughness you can specify the bed roughness and for specific situa-
tions the roughness of the side walls.
Click the tab Roughness, next Figure 5.23 is displayed.
Three different friction formulations are given, i.e. Manning,White-Colebrook or Chézy:
Select White-Colebrook.
The bottom roughness can be specified as a constant value over the whole area or as a space
varying value (read from an attribute file). The option Uniform has already been activated by
default, you only have to specify the constant value that is to be used.
Enter the value “0.05” for both U- and V-direction.
Ignore the Slip condition dropdown box (and the roughness value related to it).
134 of 688 Deltares
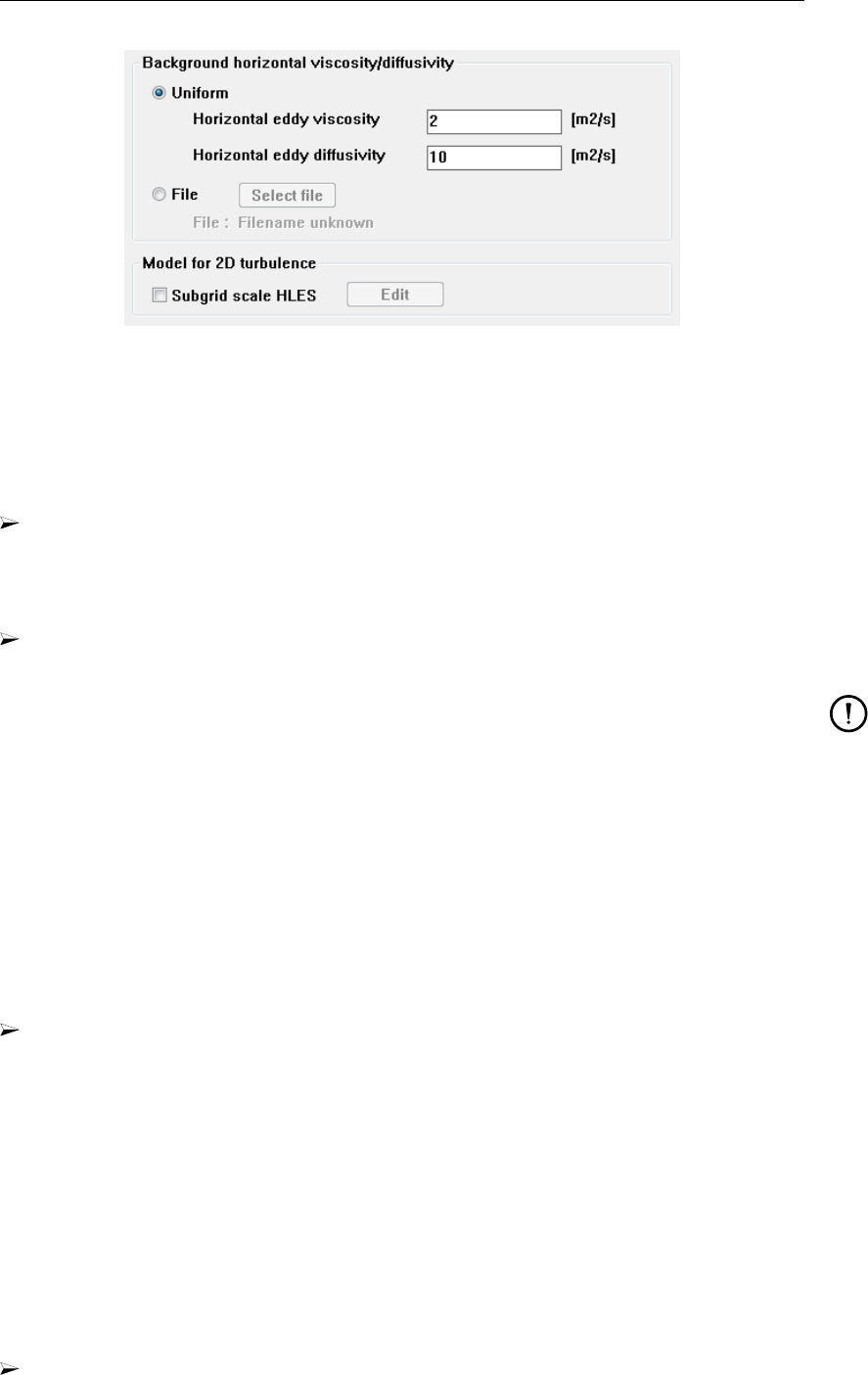
DRAFT
Tutorial
Figure 5.24: Viscosity sub-window
5.10.3 Viscosity
In the sub-data group Viscosity you can specify the eddy viscosity and the eddy diffusivity in
the horizontal and vertical directions.
Click the tab Viscosity, next Figure 5.24 is displayed.
As this is a depth averaged model, only the background Horizontal eddy viscosity and the
background Horizontal eddy diffusivity are displayed and require a value:
Set the horizontal eddy viscosity to “2.0” m2/s. and the horizontal eddy diffusivity to “10.0”
m2/s, respectively.
Remark:
You specify one value for both the Horizontal Eddy Viscosity and the Horizontal Eddy
Diffusivity in U- and V-direction. Space varying values can be read from a file; these
files must be prepared offline using some kind of editor or a program, such as the tool
QUICKIN provided with Delft3D.
The model for 2D turbulence computes viscosities and diffusivities which will be added to the
background values. In this tutorial we will not use this model.
5.10.4 Wind
Next you are going to specify the wind speed and direction:
Click the Wind tab.
Next Figure 5.25 is displayed. The check box Uniform is set, indicating you are specifying a
uniform, but possibly time dependent wind field. Now for the sake of curiosity, select Space
varying wind and pressure, and see what happens next. But then go back by activating again
the Uniform check box.
You are going to define a linearly increasing wind speed from 0 m/s to 10 m/s during the first
12:30 hour of the simulation, the direction changing from 0 to 90 degrees in the same time
interval, and keeping that value for the rest of the computation.
For operations on a table use the menu item Table in the menu bar. To add or insert (before
the current row) a row:
Select Table →Copy row above.
Deltares 135 of 688
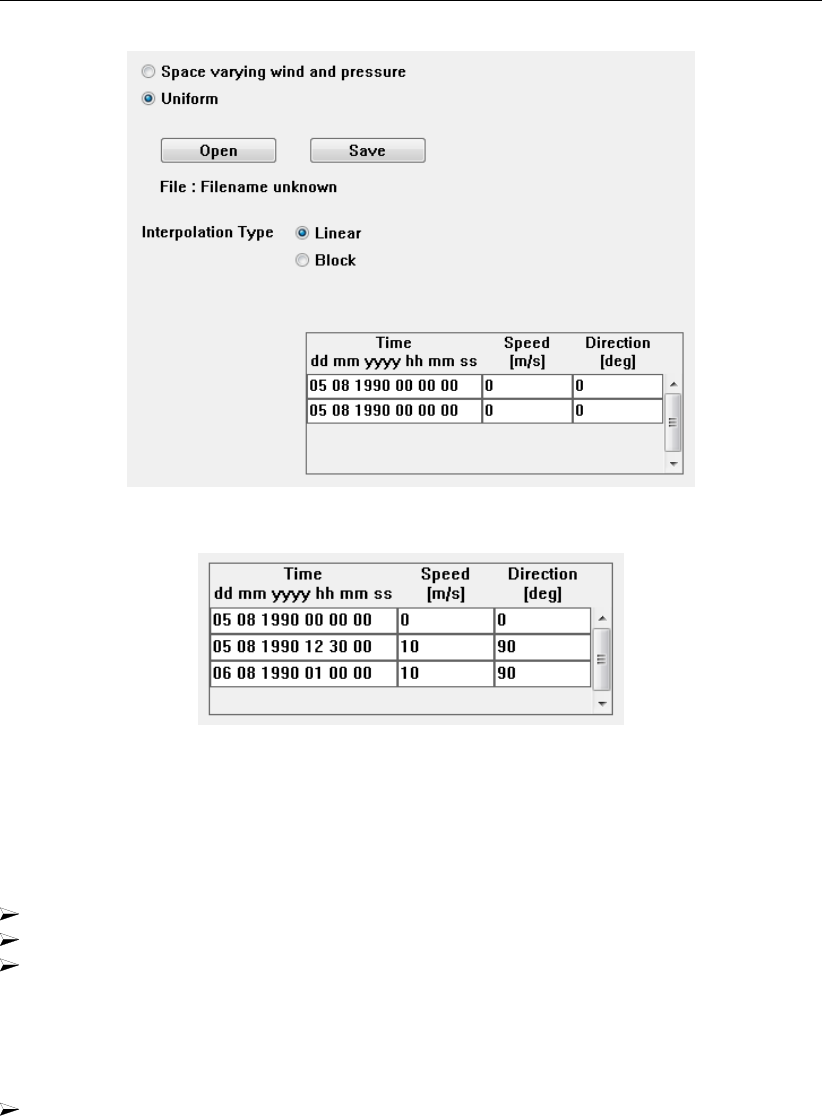
DRAFT
Delft3D-FLOW, User Manual
Figure 5.25: Wind sub-window
Figure 5.26: Filled time table in the Wind sub-window
A new row has been inserted and you can modify the data.
In the time table, fill in the following data:
“05 08 1990 00 00 00”, “0”, “0”
“05 08 1990 12 30 00”, “10”, “90”
“06 08 1990 01 00 00”, “10”, “90”
After editing, the table should look like Figure 5.26.
Now save the wind data:
Save the wind data in the working directory in the file <tut_fti_1.wnd>.
136 of 688 Deltares
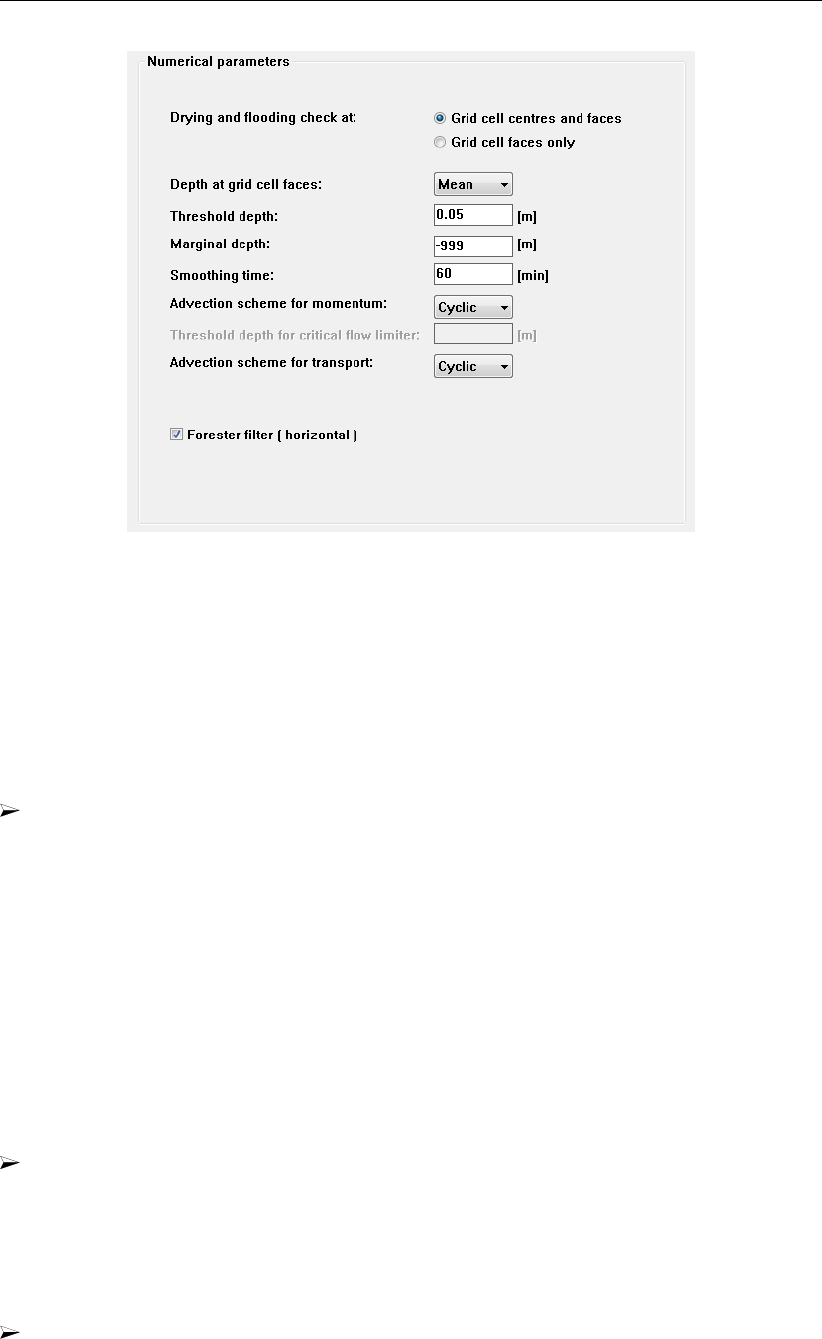
DRAFT
Tutorial
Figure 5.27: Numerical parameters sub-window
5.11 Numerical parameters
In the Data Group Numerical parameters you can specify parameters related to drying and
flooding and some other advanced options for numerical approximations.
Although drying and flooding will not take place in this model, for the sake of getting a good
overview of what is going on, you will include a drying and flooding procedure.
Click the Data Group Numerical parameters, next Figure 5.27 is displayed.
The first selection to be made concerns drying and flooding. The options for Drying and
flooding check at determine where the check should be performed:
at grid cell centres (water level points) and grid cell faces (velocity points),
or at only grid cell faces (velocity points).
A grid cell is flooded if the water depth is larger than the specified Threshold depth and dried
if the water depth is smaller than half this value. See chapter 10 for details of this drying and
flooding procedure. The Marginal depth is used to change the approximation of the convective
terms in the momentum equations to allow for local super-critical flows. Skip for this tutorial
the Marginal depth input field.
Set the Threshold depth to “0.05” m.
The Smoothing time determines the time interval in which the open boundary conditions are
gradually applied, starting at the specified initial condition to the specified open boundary
conditions. This smoothing of the boundary conditions prevents the introduction of short wave
disturbances into the model.
Set the Smoothing time to “60” minutes.
Ignore the other options or input fields.
Deltares 137 of 688
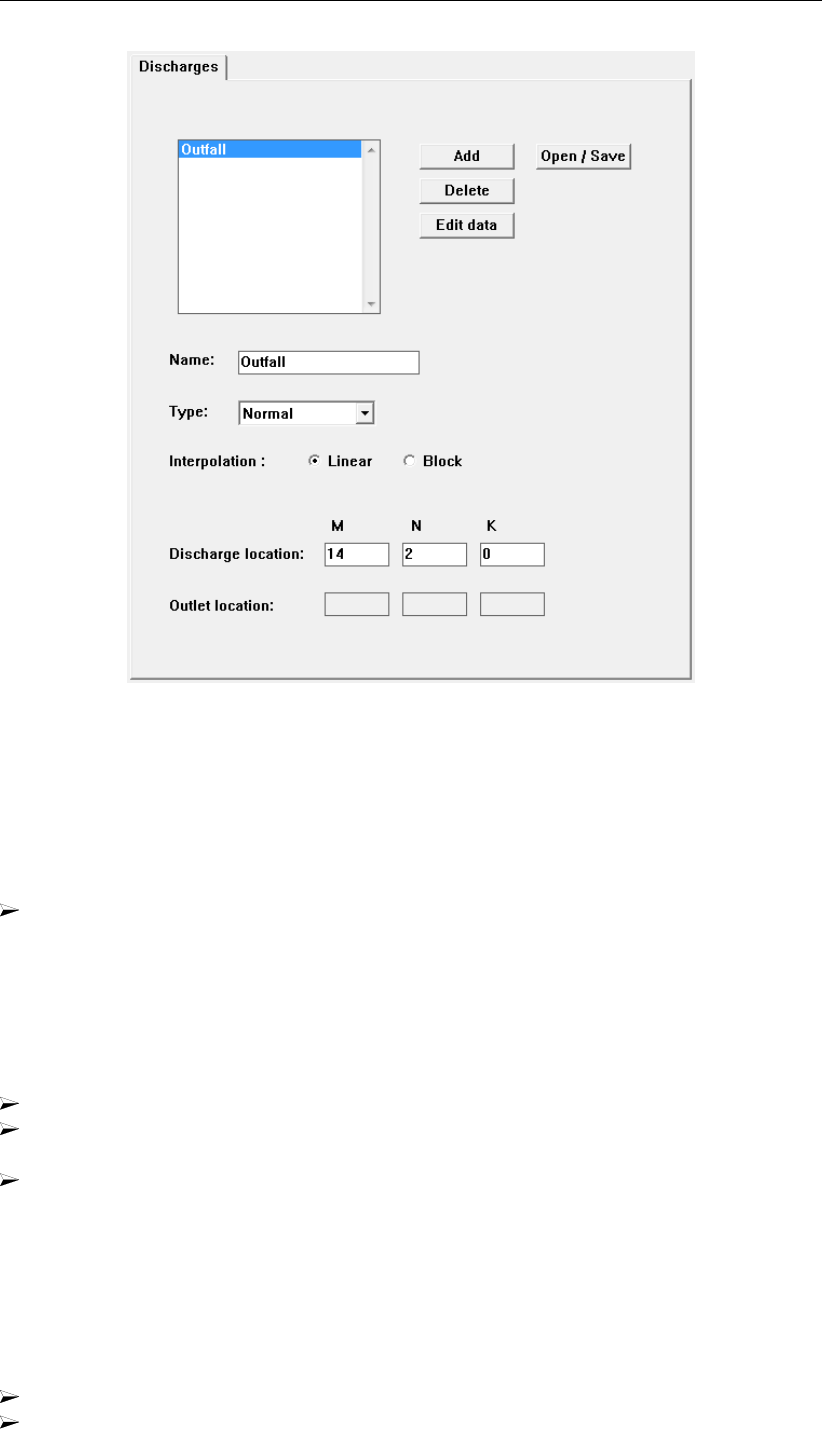
DRAFT
Delft3D-FLOW, User Manual
Figure 5.28: Data Group Operations;Discharges sub-window
5.12 Operations
In the Data Group Operations you can specify the location and all related properties of dis-
charges. For this tutorial we have introduced one constituent (Conservative Spill); its release
rate must be defined.
Click the Data Group Operations.
The Discharges tab, Figure 5.28, has a similar layout as the Dry points or Thin dams sub-
window, but in addition you must specify the rate and concentrations of the discharged sub-
stances.
To add a discharge by point-and-click in the Visualisation Area window:
Select Edit Mode →Add and select Edit →Discharges in the menu bar.
Define the discharge location by point-and-click in the Visualisation Area window at grid
cell M = “14” and N = “2”.
Replace the text (14,2) in the Name input field with “Outfall”.
In the Visualisation Area window discharges are represented by a lozenge at a water level
point, see Figure 5.29.
The discharge is located at the centre of the computational cell (m, n).
To save the discharge location:
Click Open/Save to open the Open/Save Discharges window.
Click Save in group Discharge definitions to save the discharge location in the file <tut_fti_1.src>
138 of 688 Deltares
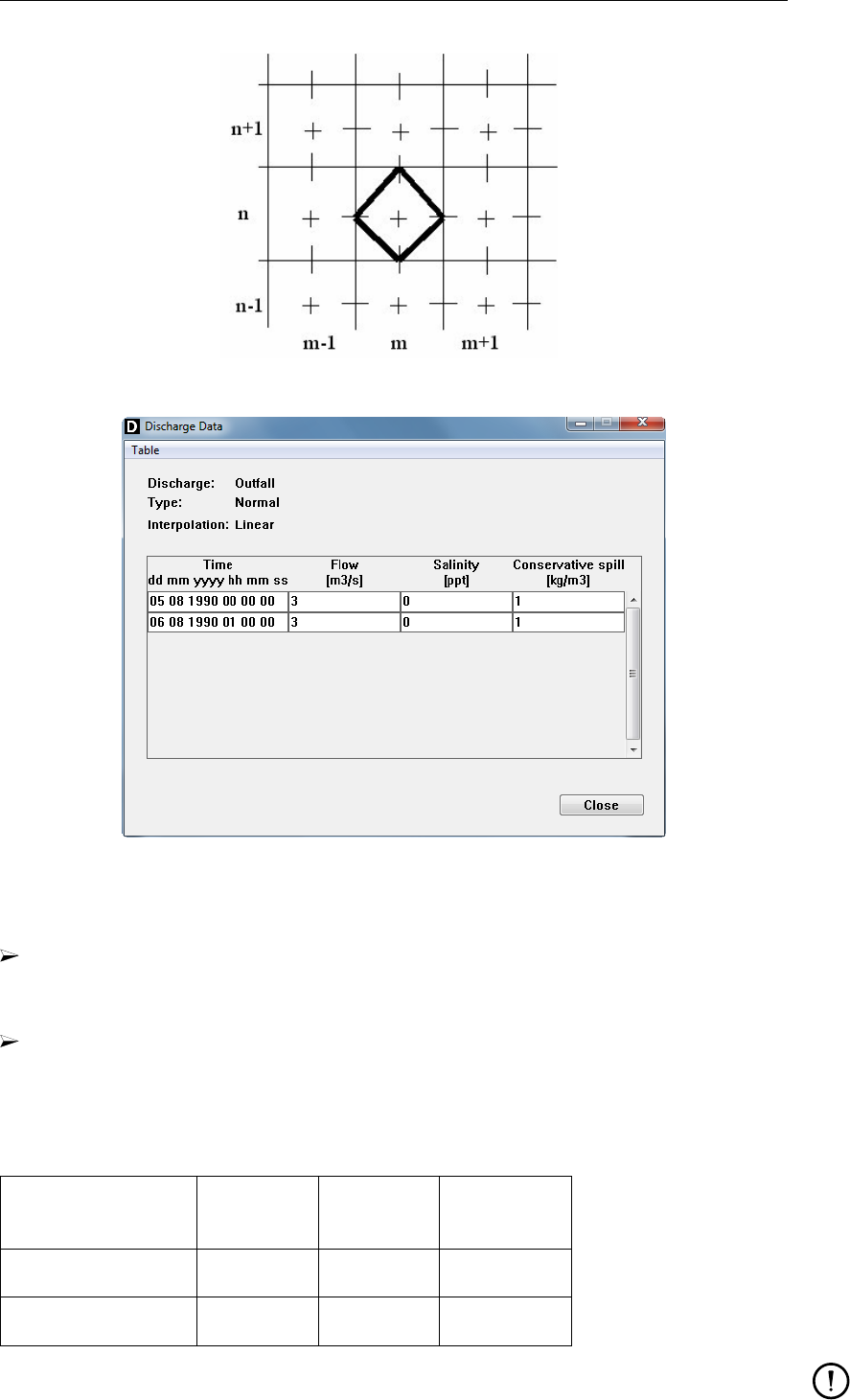
DRAFT
Tutorial
Figure 5.29: Representation of a discharge in the Visualisation Area window
Figure 5.30: Discharge Data sub-window
in the working directory.
Close the Open/Save Discharges window.
Next you must define the time dependent discharge data:
Click Edit data.
The table to define the discharge rate and concentrations is displayed in Figure 5.30.
Specify the following data in this table:
Date and time Flow
m3/s
Salinity
ppt
Cons.Spill
kg/m3
05 08 1990 00 00 00 3.0 0.0 1.0
06 08 1990 01 00 00 3.0 0.0 1.0
Deltares 139 of 688
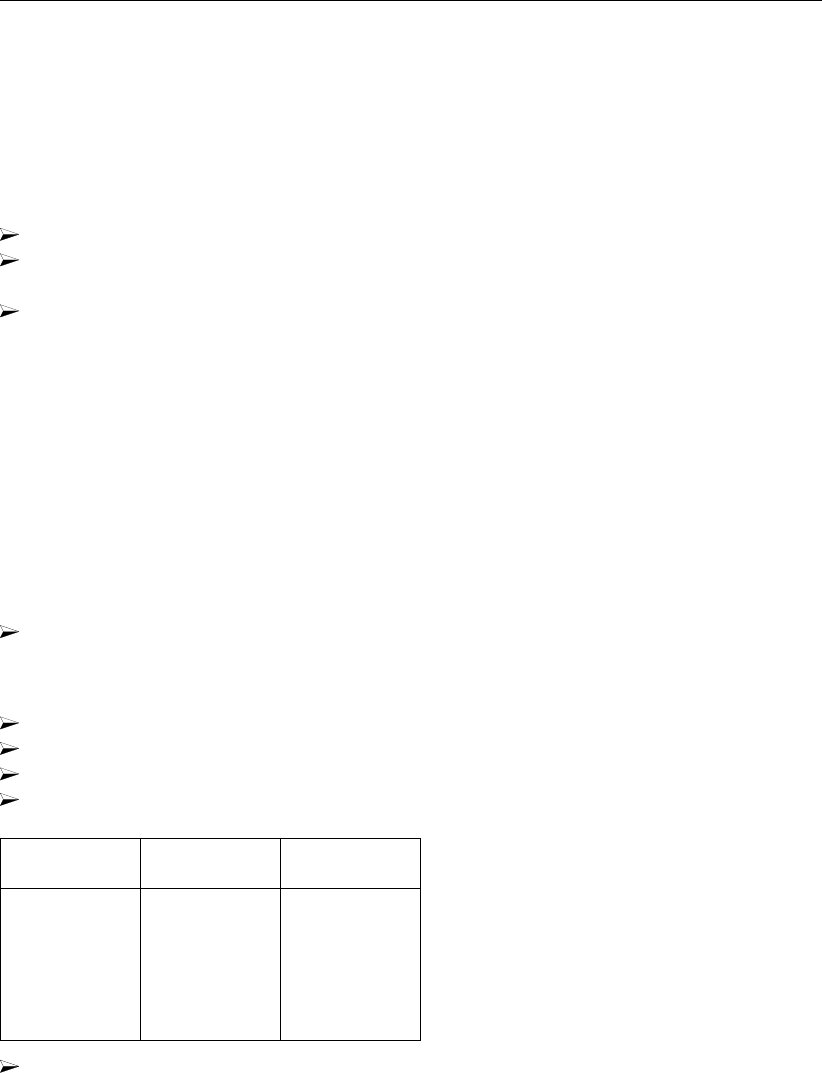
DRAFT
Delft3D-FLOW, User Manual
Remarks:
The data specified represents a fresh water discharge (salinity = 0 ppt) of 3 m3/s.
Obviously, the time breakpoints are the same for all time dependent quantities related
to the discharge.
Scroll the table horizontally, if needed, to display the Conservative Spill data input fields.
Close the window if all input is specified.
Click Open/Save and click on Save in datagoup Discharge data to save the discharge data
in the attribute file <tut_fti_1.dis>in the working directory.
Close the Open/Save Discharges window.
5.13 Monitoring
The Data Group Monitoring consists of three sub-data groups, i.e. Observations, Drogues
and Cross-sections.
5.13.1 Observation points
Observation points are grid locations where all quantities computed during the simulations are
stored at a user-defined time interval (Data Group Output →Storage). Observation points
are located at the computational grid cell centres, i.e. at the water level points.
Click the sub-data group Observations,Figure 5.31 is displayed.
To add an observation point:
Select from the menubar Edit mode →Add and Edit →Observation Point.
Select the location (M = 4, N = 17) in the Visualisation Area window.
Replace the text (4,17) with “Obs1”.
Repeat this for the observation points Obs2 to Obs5 as specified in the table below:
Name M index N index
Obs1 4 17
Obs2 9 17
Obs3 12 17
Obs4 9 11
Obs5 9 7
Save the Observation Points just defined in the file <tut_fti_1.obs>in the working direc-
tory.
In the Visualisation Area window observation points are represented by a cross through the
computational grid cell centre, Figure 5.32.
The observation point is defined at (m, n).
140 of 688 Deltares
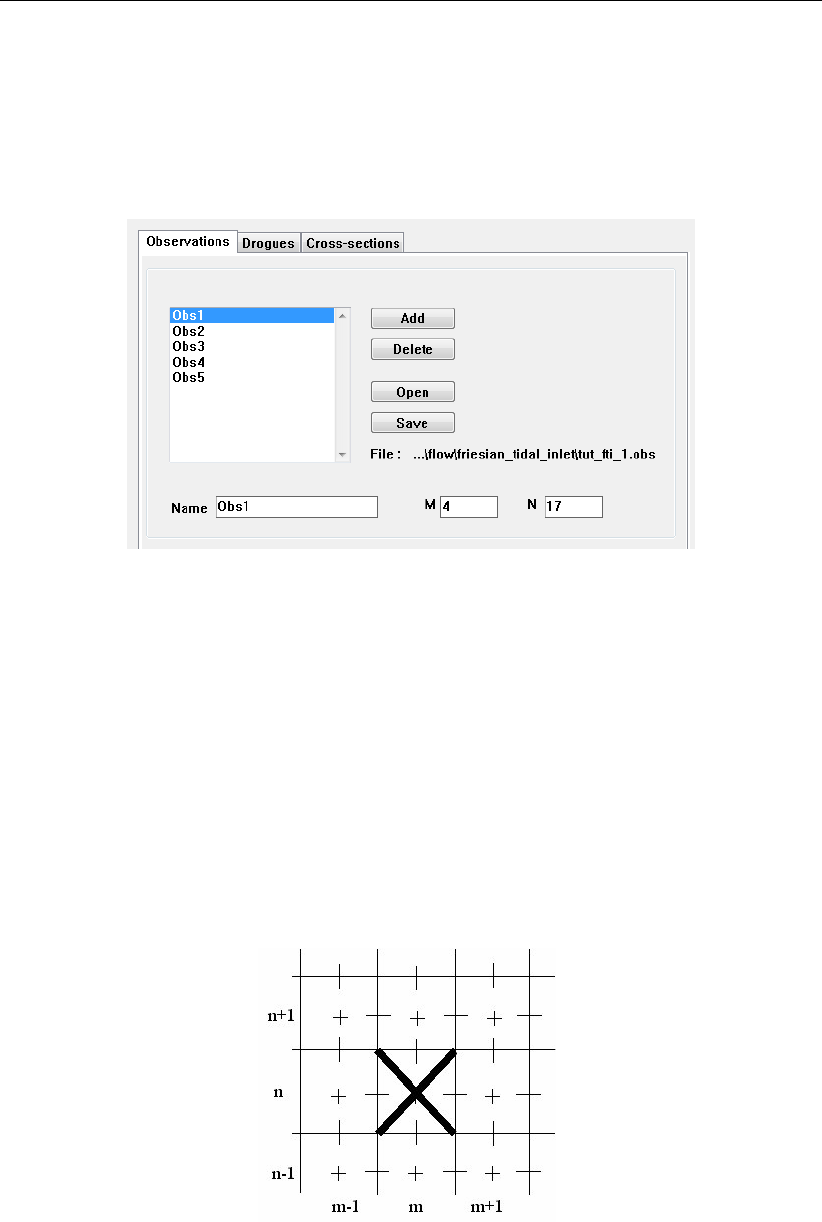
DRAFT
Tutorial
Figure 5.31: Observation points sub-window
Figure 5.32: Representation of an observation point in the Visualisation area window
Deltares 141 of 688
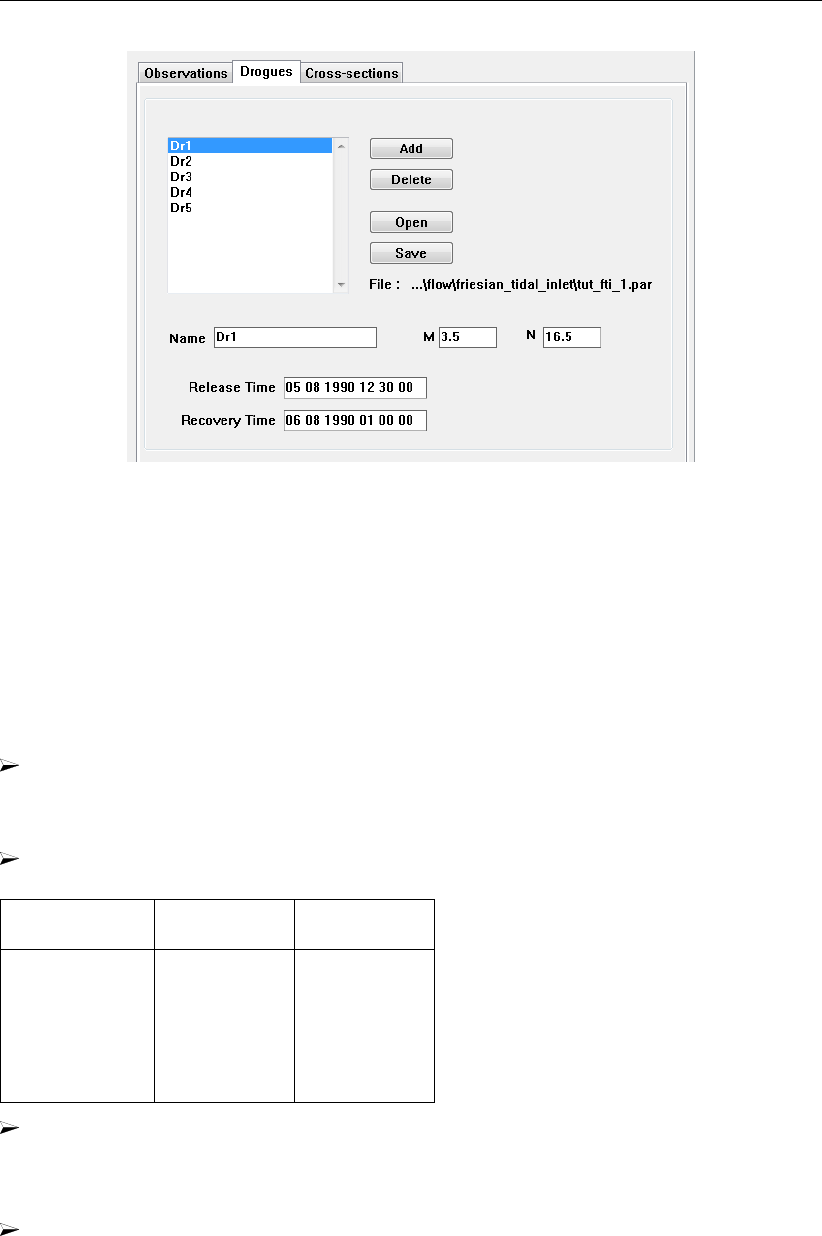
DRAFT
Delft3D-FLOW, User Manual
Figure 5.33: Drogues sub-window
5.13.2 Drogues
Drogues are floats that move with the flow. They are released and recovered at a user-
specified time. Their location is stored at the same time interval as the computational time
step (see Data Group Time frame). Drogues can be located anywhere in a grid cell, i.e. a
drogue can be released at decimal indices. However, in the Visualisation Area window you
can only select grid centre location, so if other decimal values are required you must enter
these indices manually in the FLOW-GUI.
Click the sub-data group Drogues,Figure 5.33 is displayed.
To add drogues:
Click Add and enter the following drogues:
Name M index N index
Dr1 3.50 16.50
Dr2 8.50 16.50
Dr3 11.50 16.50
Dr4 8.50 10.50
Dr5 8.50 6.50
The Release Time and Recovery Time are by default the same as the start and stop times
of the simulation. For all drogues change them to:
Release Time : “05 08 1990 12 30 00”
Recovery Time : “06 08 1990 01 00 00”
Save the drogue data in the file <tut_fti_1.par>in the working directory.
In the Visualisation Area window drogues are represented by a ‘+’ through the computational
grid centre, Figure 5.34.
The drogue is located at (m, n).
142 of 688 Deltares
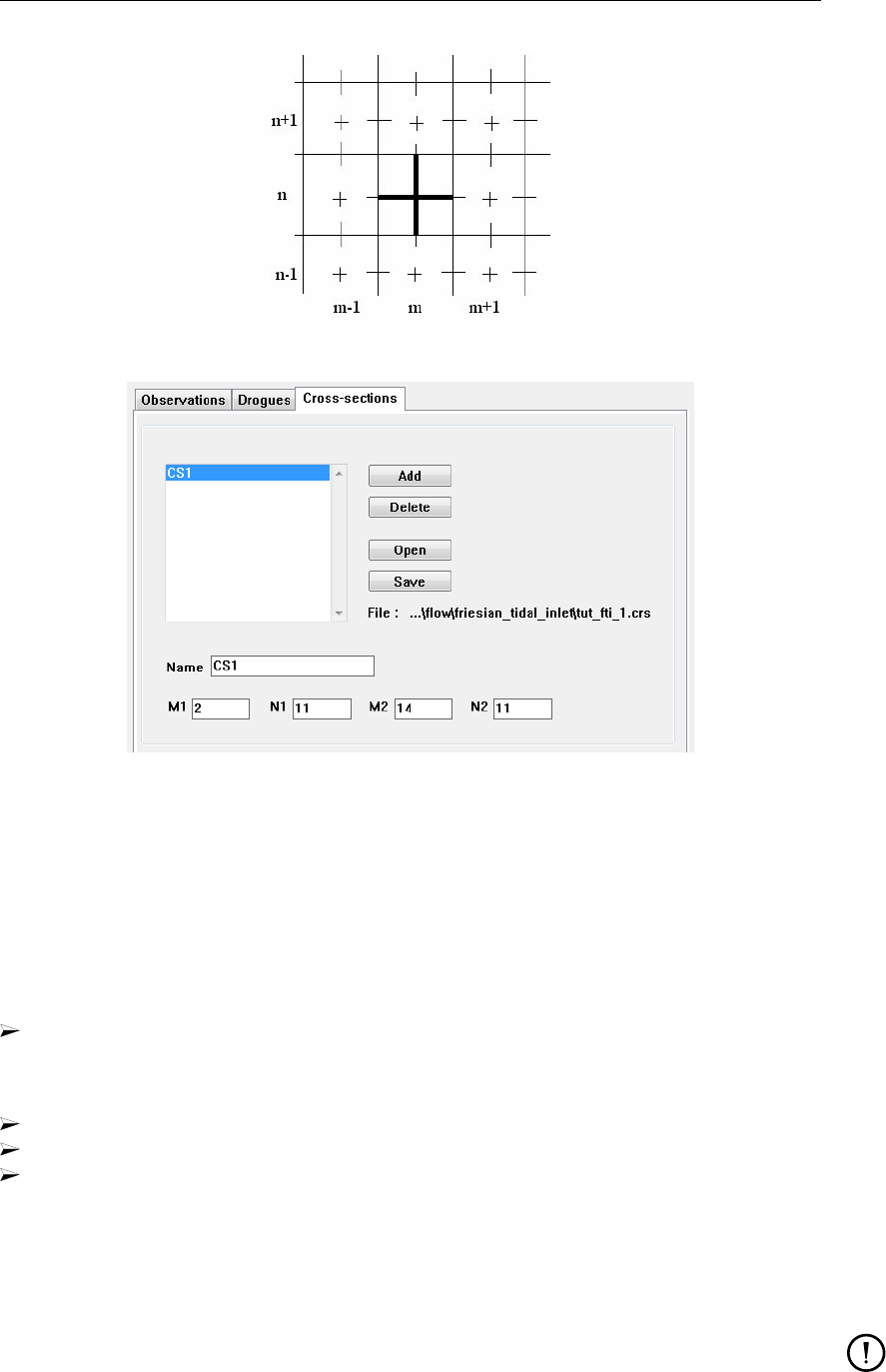
DRAFT
Tutorial
Figure 5.34: Representation of a drogue in the Visualisation Area window
Figure 5.35: Cross-sections sub-window
5.13.3 Cross-sections
Cross-sections are sections along one of the grid directions through which the various kinds of
transport fluxes are determined and stored as a function of time. For defining cross-sections
you can apply the same procedures as for Thin dams or Dry points in the Data Group Domain.
Cross-sections are defined along the grid lines, either as U- or as V-cross-section. To enter
the sub-data group Cross-sections:
Click Cross-sections, next Figure 5.35 is displayed.
To add a cross-section:
Click Add.
Type in the Name field the word “CS1” to replace –Unnamed–.
Enter the indices M1 = “2”, N1 = “11”, M2 = “14” and N2 = “11”.
In the Visualisation Area window a cross-section is represented by a thick line along one of
the grid lines, Figure 5.36.
In Figure 5.36 the V-cross-section runs from (m−1, n) to (m+1, n).
Remark:
Cross-sections must have a minimum length of two grid cells.
Deltares 143 of 688
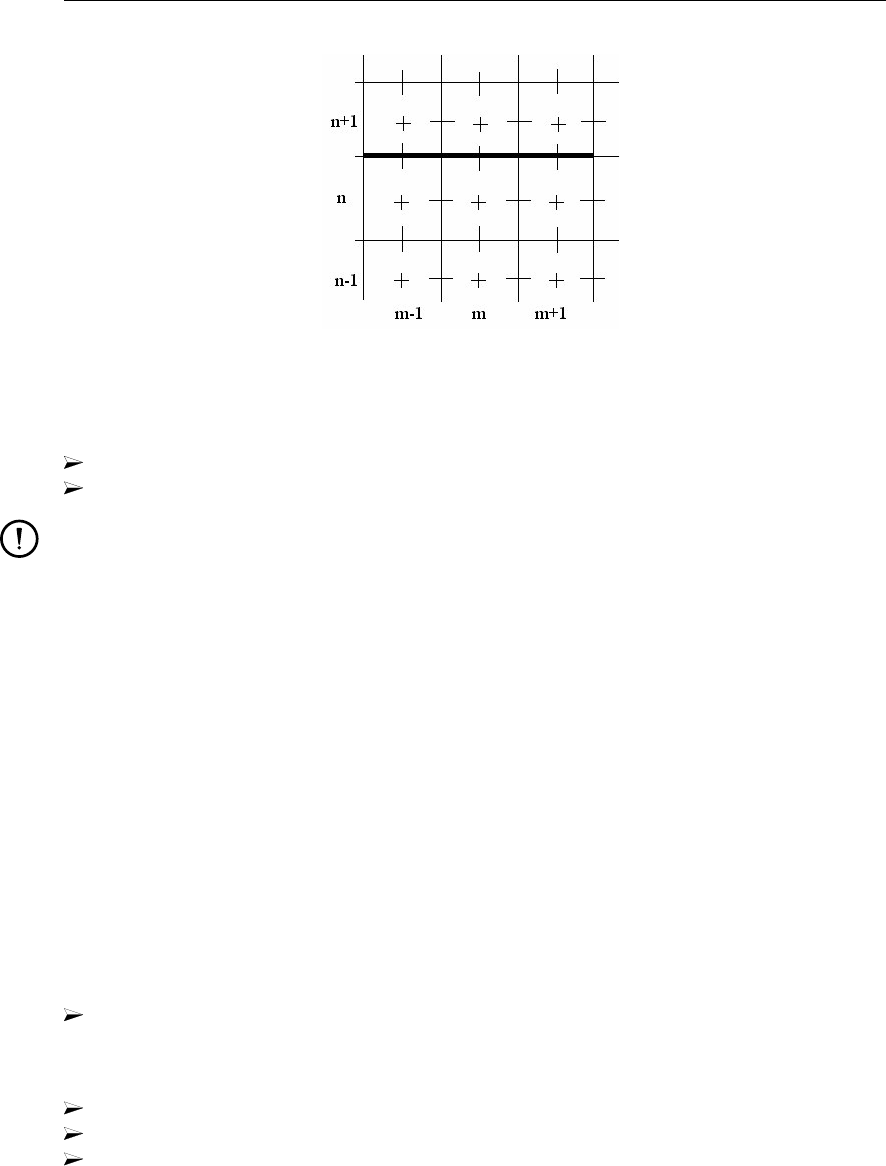
DRAFT
Delft3D-FLOW, User Manual
Figure 5.36: Representation of a v-cross-section in the Visualisation Area window
To save the just defined cross-section:
Click Save.
Save the data in file <tut_fti_1.crs>in the working directory.
Remark:
You are encouraged to define a cross-section along either of the grid lines by point-
drag-and-click. Make sure to undo the additional definitions (for instance by opening
the just saved attribute file) before you move on to the next data group.
5.14 Additional parameters
In the Data Group Additional parameters you can specify keywords and their value, often the
name of an attribute file, which are not yet supported by the FLOW-GUI. For details you are
referred to Appendix B, but for this tutorial we ignore this Data Group.
5.15 Output
In the Data Group Output you can specify which computational results will be stored for further
analysis or other computations and which output shall be printed. Though the printing option
is hardly used it is a useful option when numerical output values are required.
To enter the data group:
Click the Data Group Output.
The Data Group Output supports three sub-data groups:
Storage: to define the time interval to store results to disk.
Print: to define the time interval to store results to a printable file.
Details: to define which quantities will be stored or printed.
Upon selecting Storage the sub-window, Figure 5.37, will be displayed.
Before defining the various input fields we want to explain in short the use of the various files
used to store the results. Basically, Delft3D-FLOW uses four types of files to store results:
History file
The history file contains all quantities as a function of time, but only in the specified Mon-
itoring Points and Cross-Sections. The amount of data is usually much smaller than for
a map file, and you typically store history data at a small interval to have a smooth time
144 of 688 Deltares
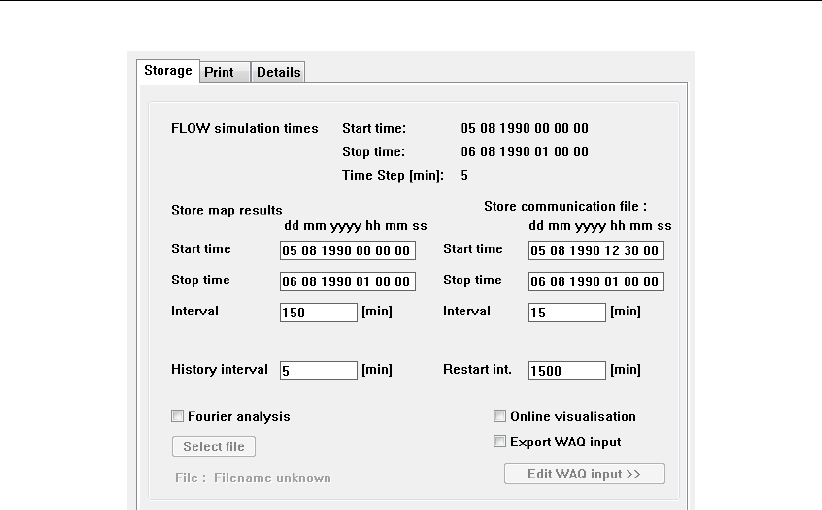
DRAFT
Tutorial
Figure 5.37: Output sub-window
function when plotting the results.
Map file
The map file contains snap shots of the computed quantities of the entire area. As you
save all results in all grid points a typical Map file can be many hundreds of Mbytes large.
So typically map results are only stored at a small number of instances during the simula-
tion.
Drogue file
The drogue file contains the (x, y)-position of all drogues at each computational time step
in the time interval between release and recovery time.
Communication file
The communication file contains results required by other modules of Delft3D, such as the
hydrodynamic results for a water quality simulation or the wave forces for a wave-current
interaction. As the results must be stored in all grid points a communication file can be
as large as or even larger than a Map file. So typically you only store the results in the
Communication file as far as needed for the other simulations; for water quality simulations
you typically store the results of the last day or a (couple of) cyclic tidal cycle and use this
data repeatedly to make a water quality simulation over many days or weeks.
In order not to waste computing time you can restart a simulation at a predefined time of a
previously executed simulation (Data Group Initial conditions). For this you specify the Restart
Interval at which all information required to restart the simulation. Typically you select a large
restart interval in order not to waste disk space.
Now continue to define the various times and time intervals:
Set Store map results to:
Start time: “05 08 1990 00 00 00”
Stop time: “06 08 1990 01 00 00”
Interval time: “150” min.
Set Store communication file to:
Start time: “05 08 1990 12 30 00”
Stop time: “06 08 1990 01 00 00”
Deltares 145 of 688
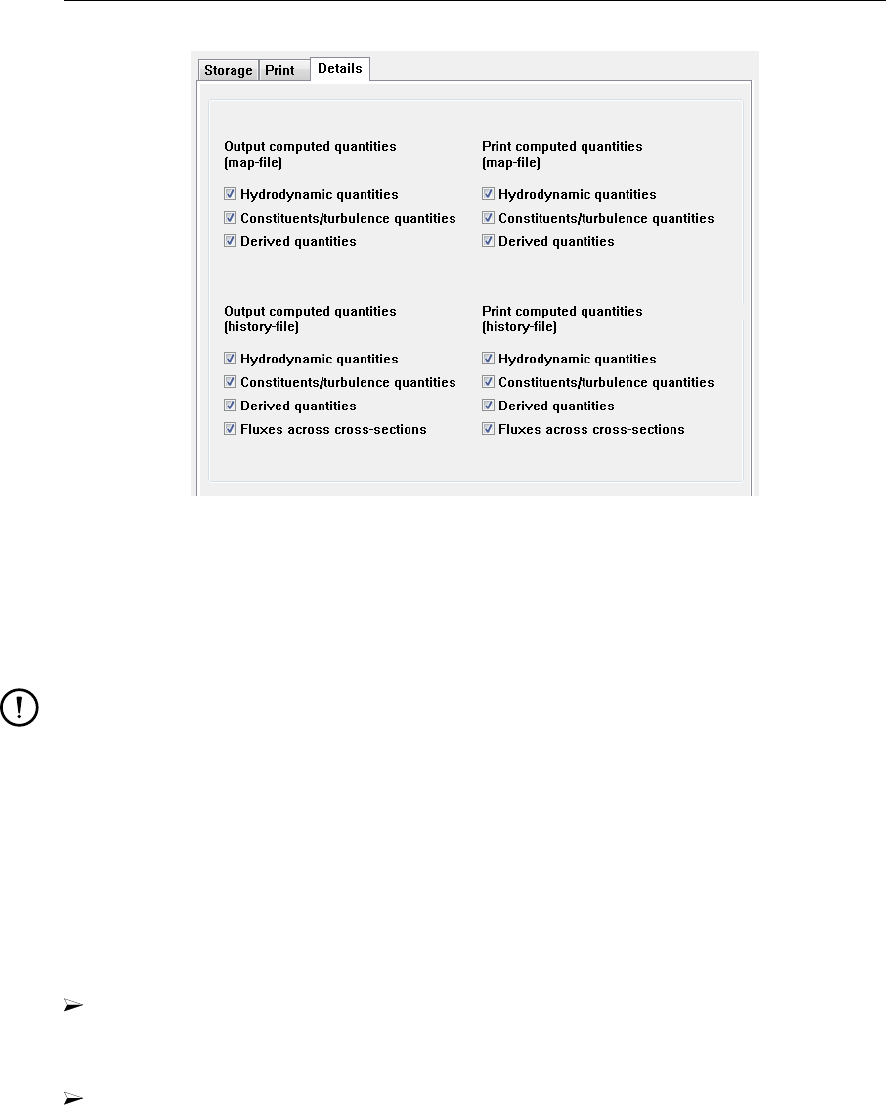
DRAFT
Delft3D-FLOW, User Manual
Figure 5.38: Output details sub-window
Interval time: “15” min
Set History interval to: “5” minutes.
Set Restart int.: “1500” min
Remarks:
The interval to write the various files must be an integral multiple of the computational
time step, defined in the Data Group Time frame.
The history, map, and drogue data is stored by default in binary NEFIS files. This file
format is best suited for further post-processing using Deltares software. For interoper-
ability with other software you may want to use the binary NetCDF file format instead.
The file format can be changed by means of the FlNcdf keyword; see section A.1.4.
The restart interval as set results in a restart file at the end of the simulation.
For this tutorial we ignore the item Fourier analysis, it is discussed in detail in chapter 4.
Tick off Online visualisation, this results in viewing the results during the simulation.
To control the quantities that are actually stored on files or printed:
Click the sub-data group Details, next Figure 5.38 is displayed.
By ticking the check boxes you can specify which items you want the program to store on
file or to print and which not; details of the quantities covered by each group are given in
chapter 4.
For this tutorial we ignore the sub-data group Print.
You have now gone through all Data Groups and you have defined in most of them one or
more data items. Before continuing you should save this data to make sure you can always
return to this status of the FLOW-GUI.
146 of 688 Deltares
DRAFT
Tutorial
5.16 Save MDF-file
In the preceding sections you have entered many data items, some of which are already saved
in attribute files.
To summarise:
1 Dry Points <tut_fti_1.dry>
2 Thin Dams <tut_fti_1.thd>
3 Open Boundaries definitions <tut_fti_1.bnd>
4 Wind <tut_fti_1.wnd>
5 Flow boundary conditions (harmonic) <tut_fti_1.bch>
6 Transport boundary conditions <tut_fti_1.bcc>
7 Discharge locations <tut_fti_1.src>
8 Discharge rates <tut_fti_1.dis>
9 Observation points <tut_fti_1.obs>
10 Drogues <tut_fti_1.par>
11 Cross sections <tut_fti_1.crs>
In addition you have used three predefined attribute file:
1 Curvilinear Grid <fti_02.grd>
2 Grid Enclosure <fti_02.enc>
3 Bathymetry <fti_ch02.dep>
To save the reference to all these attribute files and other (single) input data in the MDF-file:
Click File →Save MDF As in the menu bar of the FLOW-GUI.
Save the MDF-data in the file <tut_fti.mdf>in the working directory.
Remarks:
Do not use blanks in the name of the MDF-file.
All attribute data is saved in attribute files (if they exist) and the references to existing
attribute files are stored in the new MDF-file.
If you have defined all attribute files in their respective Data Group, the MDF-file is
complete.
All unsaved Data Groups are ignored.
Upon selecting File →New,File →Open or Exit you will be notified if some data is not
saved and you can choose to ignore the data, or to save the data.
In previous versions of the FLOW-GUI you were obliged to save the attribute data in
their respective Data Group. A warning was issued on leaving a Data Group without
saving its related attribute file(s). Starting this version of the FLOW-GUI you can save
attribute data in their respective Data Group, but you can postpone it to the moment
when you save the MDF-data. You will be prompted for unsaved data.
To exit the program:
Click File →Exit.
Deltares 147 of 688
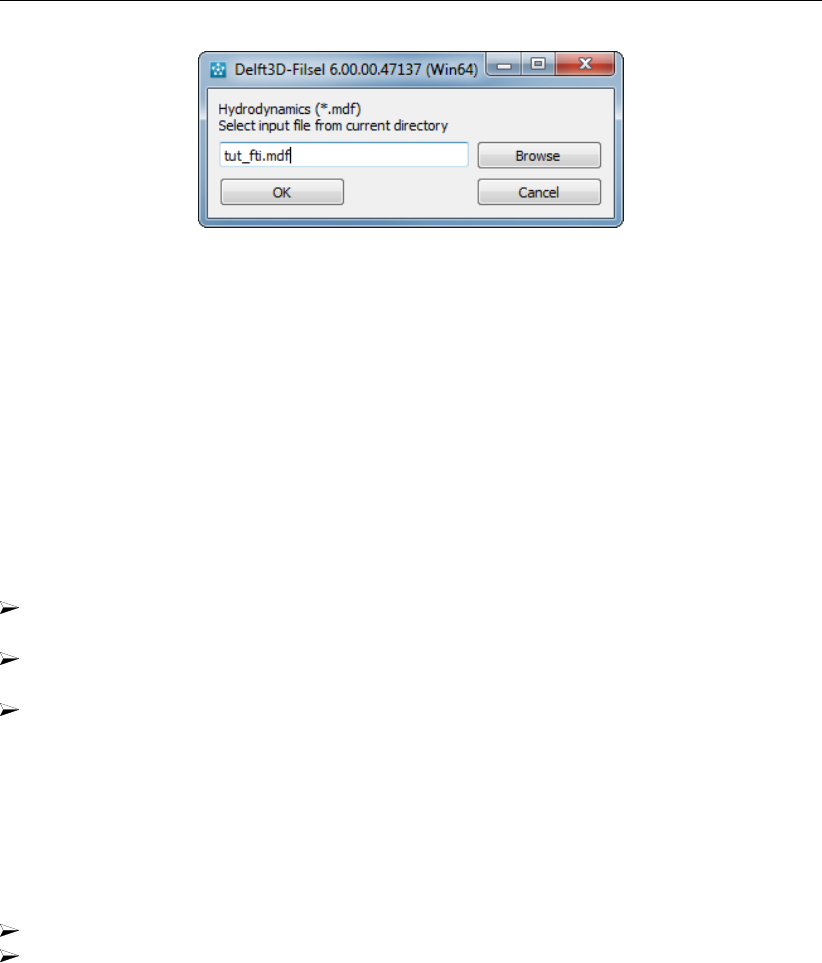
DRAFT
Delft3D-FLOW, User Manual
Figure 5.39: Select scenario to be executed
5.17 Additional exercises
You are encouraged to go back to the start of the tutorial and explore some of the options
not used or discussed in this first example. A very worthwhile exercise is to define, delete or
modify the definition of grid related quantities using the Visualisation Area window only. With
the menu item Edit Mode →Modify you can drag-and-drop (i.e. move) any of the grid related
quantities.
5.18 Execute the scenario
If you have an error free scenario you can start the simulation:
Select Start in the Delft3D-MENU to start the computation in foreground. In Figure 5.39
the selection window is displayed for the scenario to be executed (i.e. MDF-file).
If <tut_fti.mdf>is not selected already, use Select file to navigate to the working directory
and select <tut_fti.mdf>.
Confirm your selection with OK.
In foreground the status of the simulation and possible messages are displayed in the active
window.
After the simulation is finished you are strongly advised to inspect at least some of the report
files generated during the simulation to check if all went according to plan. This concerns
especially the <tri-diag>file (located in the working directory). To see this report:
Select Reports in the Hydrodynamics (including morphology) window.
Select Flow to inspect the report file.
Especially the end of this file is of importance as it summarises errors, warnings and informa-
tion of the simulation, see Figure 5.40.
The simulation is executed without errors or warnings.
148 of 688 Deltares
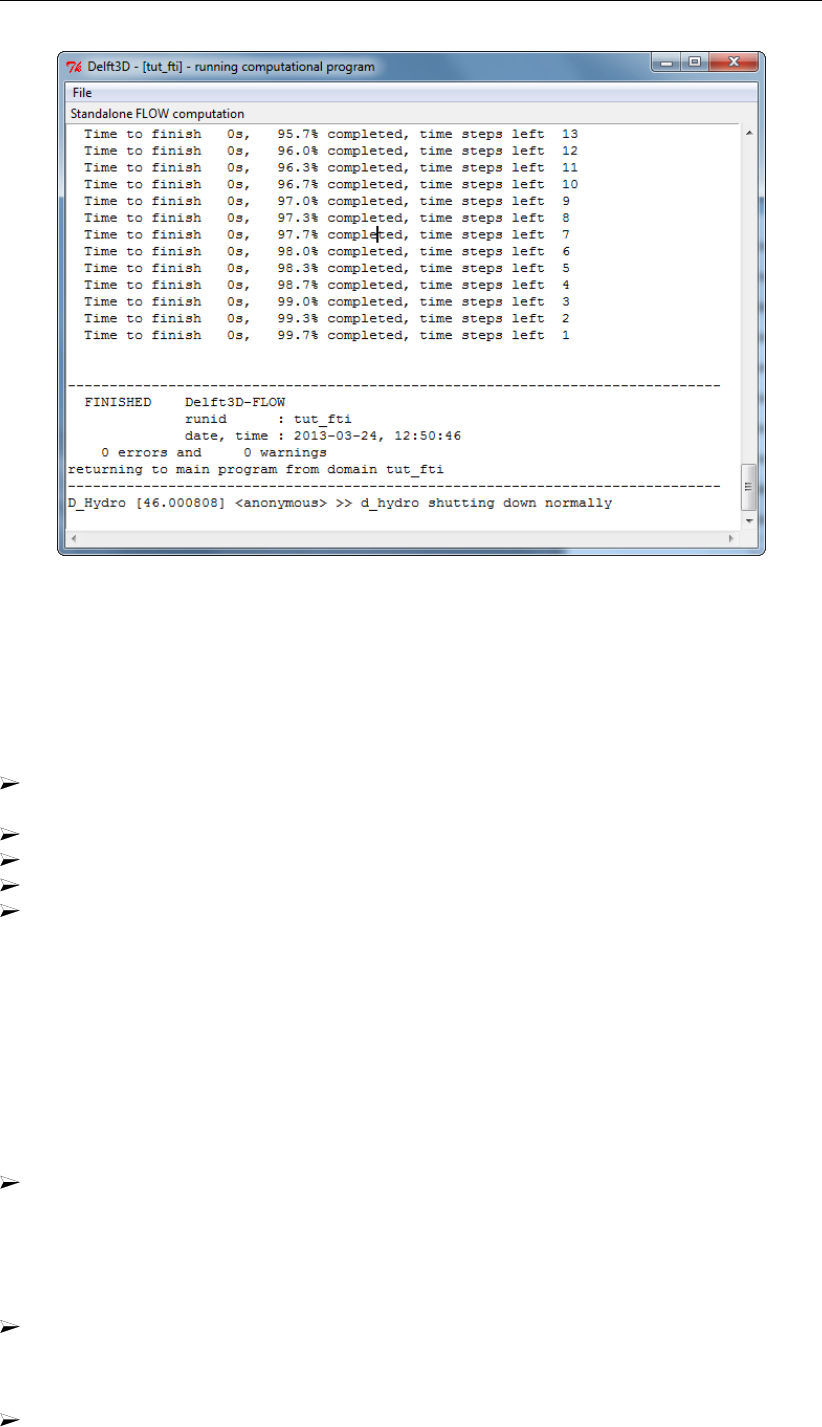
DRAFT
Tutorial
Figure 5.40: Part of the <tri-diag>report file
5.19 Inspect the results
In Figure 5.41 to Figure 5.43 some results are shown of the simulation just finished. To
reproduce these plots you should start the general post processing program GPP (see the
GPP User Manual GPP UM (2013)).
Select GPP in the Hydrodynamics (including morphology) window or Utilities - GPP in
the main Delft3D-MENU.
In the main window of GPP select Session →Open.
Copy the file <all_input\tut_fti.ssn>to the working directory<.\tut_fti.ssn>.
In the file selection menu select and open the file <tut_fti.ssn>.
In the main window of GPP select Plots and select from the list of possible plots the one
you would like to inspect.
In a <∗.ssn>file the references are stored to data sets, in this case the result files of the
tut_fti-scenario, and the definition of earlier defined plots and their layout. By calling this
scenario file you can inspect the same plots after repeating the simulation with (other input
data) of the FLOW scenario tut_fti. For details of using GPP you are referred to the User
Manual of GPP.
To return to the main window of GPP while viewing a plot:
Select Plot →Close.
You can select another plot as described above.
To close GPP and return to Delft3D-MENU:
Select in the main window of GPP Session →Exit.
To close Delft3D-MENU:
Select Return.
Deltares 149 of 688

DRAFT
Delft3D-FLOW, User Manual
Select Exit.
150 of 688 Deltares
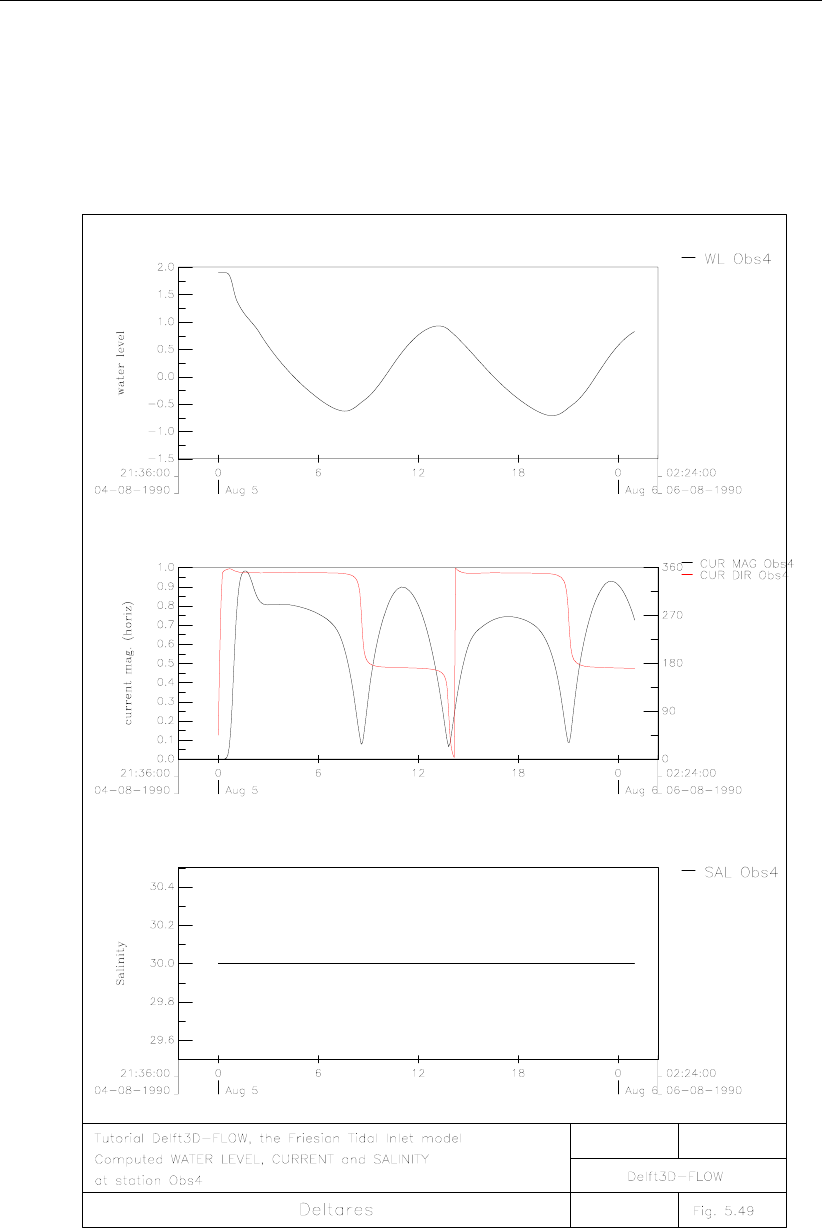
DRAFT
Tutorial
Figure 5.41: Computed time-series of the water level, current and salinity in observation
point Obs4
Deltares 151 of 688
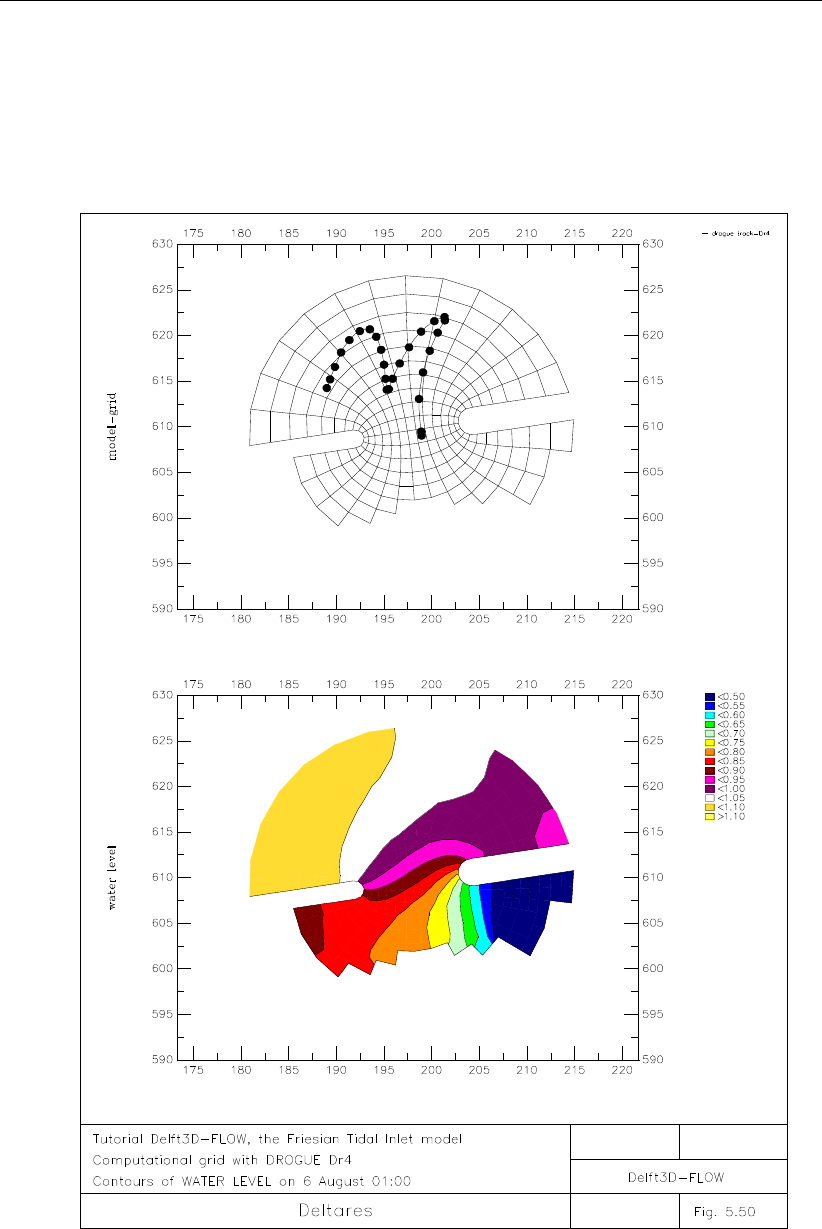
DRAFT
Delft3D-FLOW, User Manual
Figure 5.42: Computational grid with drogue Dr4, and contours of water level on 6 August
1990 01:00 hr
152 of 688 Deltares
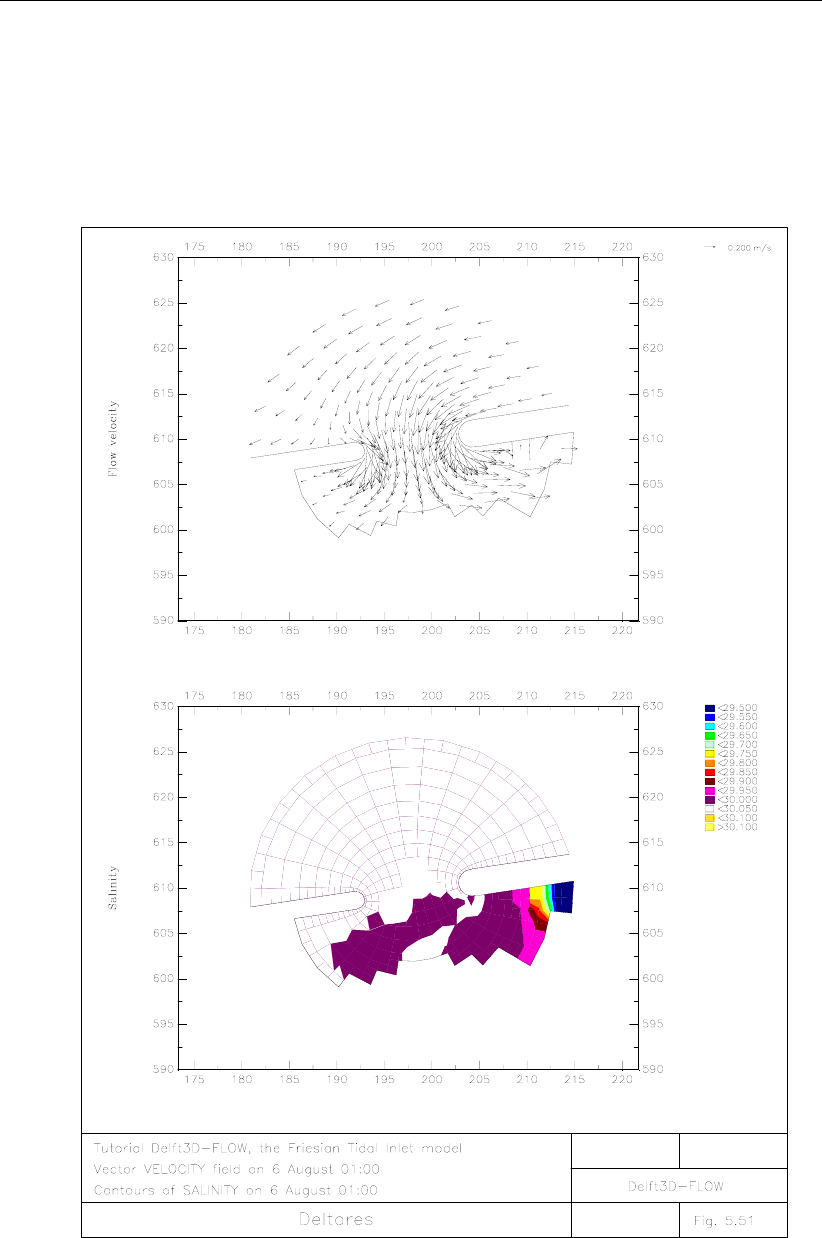
DRAFT
Tutorial
Figure 5.43: Vector velocities and contours of salinity on 6 August 1990 01:00 hr
Deltares 153 of 688

DRAFT
Delft3D-FLOW, User Manual
154 of 688 Deltares

DRAFT
6 Execute a scenario
6.1 Running a scenario
After defining the input for the Delft3D-FLOW hydrodynamic simulation, the computation can
be executed either via Delft3D-MENU or using a batch script. Via Delft3D-MENU, the status
of the computation and possible messages are displayed in a separate window. When using
a batch script, all messages are written to a file and you can continue working in the current
window.
Not all functionality is available when using Delft3D-MENU to start a calculation. Use a batch
script (see section 6.1.3) in the following cases:
Using MPI to run in parallel
Using mormerge
Using fluid mud
Using some queueing mechanism on a cluster
6.1.1 Parallel calculations
This section is an overview of all techniques where parallel calculations are involved.
6.1.1.1 DomainDecomposition
See section B.14. An example is at https://svn.oss.deltares.nl/repos/delft3d/
trunk/examples/02_domaindecomposition. Each subdomain runs in a separate
thread, inside one executable.
Multiple cores will be used automatically when available on the executing machine.
DomainDecomposition calculations can not be executed using multiple machines.
Does not work in combination with MPI-based parallel calculations
6.1.1.2 MPI-based parallel
Example scripts are inside https://svn.oss.deltares.nl/repos/delft3d/trunk/
examples/01_standard. The domain is split automatically in stripwise partitions.
Can not be started via Delft3D-MENU
Does not work in combination with:
DomainDecomposition
Fluid mud
Coup online
Drogues and moving observation points
Culverts
Power stations with inlet and outlet in different partitions
Non-hydrostatic solvers
Walking discharges
2D skewed weirs
max(mmax,nmax)/npart ≤4
Roller model
Mormerge
Mass balance polygons
Deltares 155 of 688
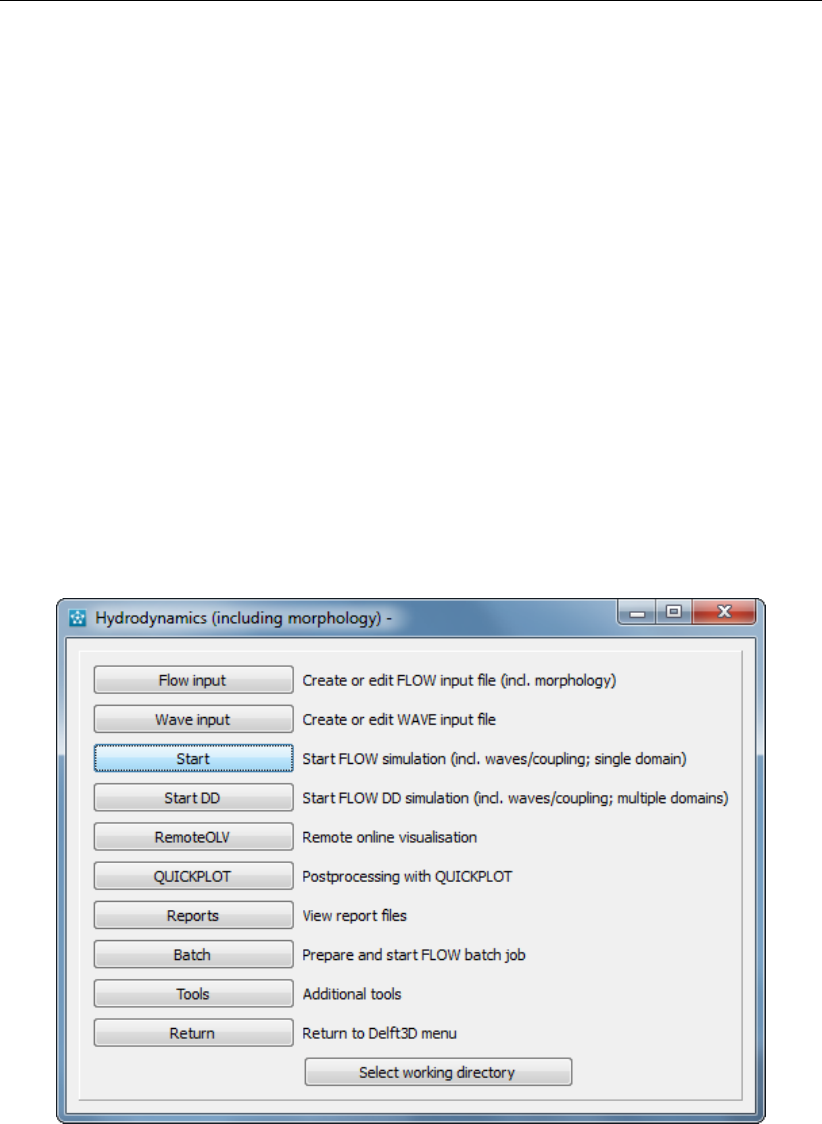
DRAFT
Delft3D-FLOW, User Manual
6.1.1.3 Fluid mud
See section B.10. An example is at https://svn.oss.deltares.nl/repos/delft3d/
trunk/examples/04_fluidmud. The two calculations run in separate executables.
Multiple cores will be used automatically when available on the executing machine.
Fluid mud calculations can not be executed using multiple machines.
Does not work in combination with MPI-based parallel calculations
6.1.1.4 Mormerge
An example is at https://svn.oss.deltares.nl/repos/delft3d/trunk/examples/
05_mormerge. A script, written in the language "Tcl" is used to start all executables:<mormerge.tcl>.
Multiple cores will be used automatically when available on the executing machine.
Does not work in combination with MPI-based parallel calculations
6.1.2 Running a scenario using Delft3D-MENU
To start Delft3D-FLOW:
Select Start, see Figure 6.1.
Figure 6.1: MENU-window for Hydrodynamics
A new window is displayed in which you can select the input file to be used, Figure 6.2.
Apply Select file to select the required MDF-file.
After pressing OK the simulation will start and a window will appear. In foreground the status
of the simulation and possible messages are displayed in the active window, see Figure 6.3
After the simulation is finished you are strongly advised to inspect at least some of the report
files generated during the simulation to check if all went according to plan. To see which
156 of 688 Deltares
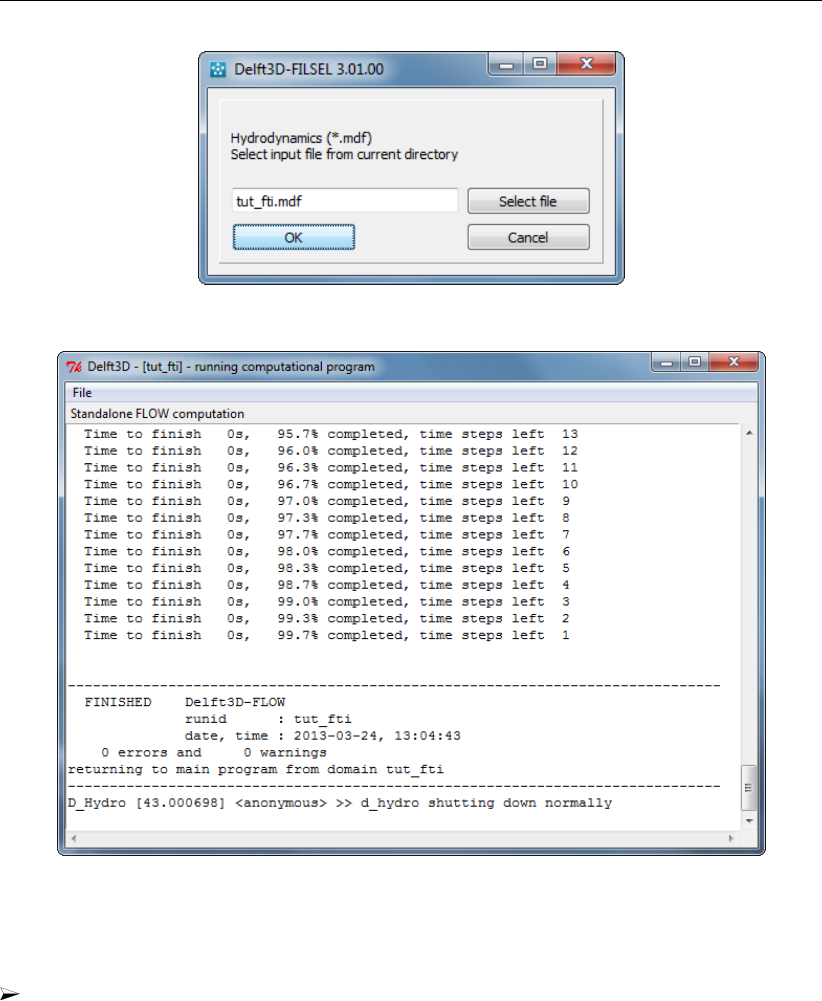
DRAFT
Execute a scenario
Figure 6.2: Select the MDF-file to be verified
Figure 6.3: Part of the report to the output window
reports are generated:
Select Reports in the Hydrodynamics (including morphology) window, upon which Fig-
ure 6.4 is displayed.
Select either one to inspect:
The report file of the simulation: <tri-diag.∗>.
The print file with printed output results: <tri-prt.∗>.
The report file of the WAVE simulation (if applicable): <swn-diag.∗>.
The report file of the Hydrodynamic coupling (if applicable): <couplnef.out>.
A random file, upon selecting this option an editor window is opened that allows you to
inspect or modify a file without having to leave the FLOW-GUI.
The report file <tri-diag.∗>contains information on the total simulation time, the time spent in
certain parts of the simulation and an indication of the performance (seconds processor time
per grid point per time step). In the next section we shall give some guidelines to estimate the
simulation time and the required disk space for the various result files.
Deltares 157 of 688
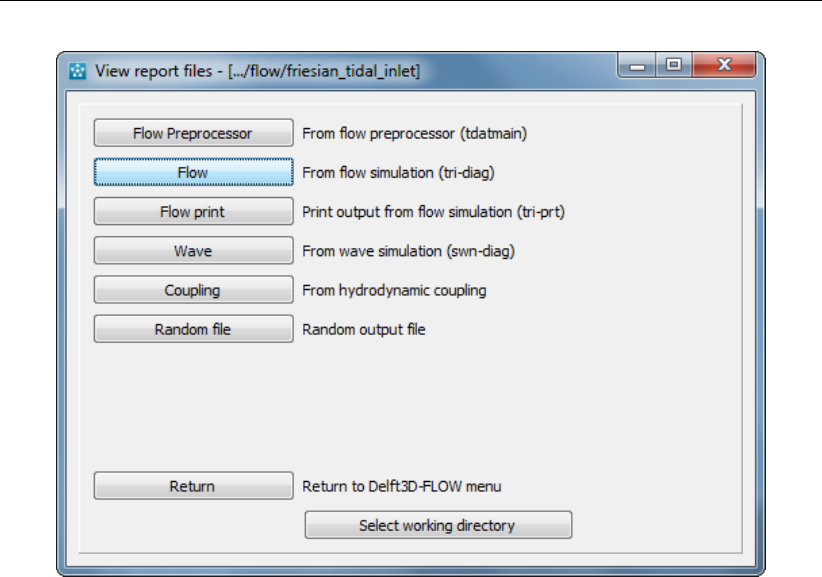
DRAFT
Delft3D-FLOW, User Manual
Figure 6.4: Select a report file for inspection
6.1.3 Running a scenario using a batch script
Batch scripts can be generated in two ways:
Delft3D-MENU can generate batch scripts (not for all functionality)
Copy an existing script and adapt it for your purpose. Examples are available at https:
//svn.oss.deltares.nl/repos/delft3d/trunk/examples
Separate scripts are needed for Windows (with extension "bat") and Linux (with extension
"sh"). See section 6.4 for the command-line arguments.
The easiest Windows script (assuming Delft3D is installed properly, assuming a correct <config_d_hydro.xml>
is available, compare with example "01_standard"):
set PATH=%D3D_HOME%\%ARCH%\flow2d3d\bin;%PATH%
%D3D_HOME%\%ARCH%\flow2d3d\bin\d_hydro.exe config_d_hydro.xml
The easiest Linux script (assuming Delft3D is installed properly, assuming a correct <config_d_hydro.xml>
is available, compare with example "01_standard"):
export LD_LIBRARY_PATH=$D3D_HOME/$ARCH/flow2d3d/bin:$LD_LIBRARY_PATH
$D3D_HOME/$ARCH/flow2d3d/bin/d_hydro.exe config_d_hydro.xml
6.2 Run time
The actual run time of a model can vary considerably depending on a variety of factors such
as:
The problem being solved, characterised by the number of active grid points, the number
of layers in the vertical or the number of processes taken into account.
158 of 688 Deltares
DRAFT
Execute a scenario
Table 6.1: Simulation performance on different operating systems
Computation WIN LINUX
Without Domain decomposition 0.5E-05 0.4E-05
With Domain decomposition 0.5E-04 to 0.1E-03 0.5E-04 to 0.1E-03
The length of the simulation in time and the time step being used.
The hardware configuration that is used and the work load of the processor.
For this reason, only some general considerations are given to determine the run time of a
hydrodynamic simulation. On a PC or a workstation without separate I/O-processors the CPU
time is the sum of the processor time and the I/O time.
The processor time required for a simulation is primarily determined by:
The model definition, i.e. the number of active grid points and the number and type of the
processes taken into account.
The length of the simulated period in terms of the number of time steps executed.
The I/O time is determined by:
The number of times the computed data are written to history, map, print and communica-
tion files.
The number of observation points, cross-sections and the number of output parameters.
The simulation performance is defined as the CPU time per grid point per time step per con-
stituent:
simulation performance =CPU time
N·Mmax ·Nmax ·Kmax ·Lmax[system seconds]
where:
N is the number of time steps executed
Mmax is the number of grid points in x-direction
Nmax is the number of grid points in y-direction
Kmax is the number of layers in the vertical
Lmax is the number of constituents
In Table 6.1 the simulation performance is given for a PC with a Windows and a Linux oper-
ating system respectively. The Windows and Linux PC have similar processors (AMD Athlon
64 X2 Dual Core Processor 4200+, 2.19GHz).
Remarks:
The simulation performance is almost linearly dependent on the processor speed.
The simulation performance can be improved with about 20 % by minimizing the output
written to the result files.
The simulation performance is written to the diagnosis file at the end of a calculation.
Deltares 159 of 688

DRAFT
Delft3D-FLOW, User Manual
When using Domain decomposition, each domain produces its own simulation perfor-
mance index. The difference between these indexes will become very large when the
domain load is unbalanced.
To improve the time estimates we suggest to keep record of the simulation performance
on your hardware environment including all site specific aspects. In case the simulation
performance is very bad on similar hardware and the workload is not excessively high,
you are advised to contact your system manager to check the general settings of your
hardware such as swap and stack space. For system requirements you are referred to
the Installation Manual.
6.3 Files and file sizes
For estimating the required disk space the following files are important:
history file
map file
print file
communication file
drogues file
Remark:
Drogues files are generally small and are not discussed further.
6.3.1 History file
The size of the history file is determined by:
The number of monitoring points (observation points + cross-sections): H1.
The number of quantities stored: H2.
The number of additional process parameters, such as salinity, temperature, constituents
and turbulence quantities, taken into account in the simulation: H3.
The number of time the history data is written to the history file: H4.
You can estimate the size of a history file (in bytes) from the following equation:
size history file = H1 ·(H2 + H3) ·H4 ·4 bytes.
As a first approximation you can use H2 = 15.
Example
For a 2D simulation with density driven currents (salinity and temperature), a simulated period
of 12 hrs 30 min, a time integration step of 5 minutes, 30 monitoring points and each time
step being stored, the size of the history file will be of the order of 360 kBytes. For the same
model but now with 10 layers in the vertical the file size will increase to about 4 MBytes. These
estimates show that history files are rather small. Unless the number of monitoring points is
excessively large the history files are typically much smaller than the map output files.
160 of 688 Deltares

DRAFT
Execute a scenario
6.3.2 Map file
The size of the map file is determined by:
The size of the model, i.e. the number of active grid cells multiplied by the number of layers
(Mmax ·Nmax ·Kmax): M1.
The number of quantities stored: M2.
The number of process parameters taken into account, such as salinity, temperature,
constituents and turbulence quantities: M3.
The number of time steps for which the map file is written: M4.
Remark:
For a more refined estimate you should distinguish between parameters that depend
or not on the number of layers used (such as the water level). For a 3D simulation the
latter quantities can be neglected, for a 2D simulation they must be accounted for. As a
first estimate we double the number of quantities M2 in a 2D simulation.
As a first approximation you can use M2 = 15 for a 3D simulation and M2 = 30 for a 2D
simulation.
You can estimate the size of a map file (in bytes) from the following equation:
size map file = M1 ·(M2 + M3) ·M4 ·4 bytes.
Example
For a 3D simulation with 50 by 50 points and 5 layers, simulated with density driven currents
(salinity and temperature), simulation results stored for a period of 12 hours and 30 minutes,
and the file is written with an interval of 30 minutes the size of the map file will be about 31
MBytes. For larger models the map file can easily become excessively large, as result the
map file is less frequently written, for instance every 2 or 3 hours.
6.3.3 Print file
The print file is a formatted ASCII file with a size that can be large, varying from hundreds of
Kbytes to hundreds of Mbytes. Its size depends on:
The number of grid points: P1.
The number of layers in the vertical: Kmax.
The print flags for the map data requested: P2.
The number of times the map data is written to the file: P3.
The number of monitoring stations: P4.
The print flags for the history data requested: P5.
The number of times the history data is written to the file: P6.
You can estimate the size of a print file (in bytes) from the following equation:
size print file = 2 ·(P1 ·Kmax ·P2 ·P3 + P4 ·P5 ·P6) ·4 bytes
The factor of 2 is applied for all explaining text included in the file.
Deltares 161 of 688
DRAFT
Delft3D-FLOW, User Manual
Example
For a similar simulation as in the former section and all print flags checked, i.e. roughly 15
items, the print file is found to be in the order of 36 MBytes; its size is found to be determined
by the map data.
6.3.4 Communication file
The size of the communication or COM-file (e.g. for the other Delft3D modules, such as the
water quality module WAQ) from the hydrodynamic simulation is determined by:
The number of grid cells in horizontal and vertical direction, i.e. Mmax ·Nmax ·Kmax: C1.
The number of quantities stored: C2.
The number of process parameters taken into account, such as salinity, temperature,
constituents and turbulence quantities: C3.
The number of time steps, for which the communication file is written: C4.
You can estimate the size of a communication file (in bytes) from the following formula:
size communication file = C1 ·(C2 + C3) ·C4 ·4 bytes.
As a first approximation you can use C2 = 15.
Example
A COM-file size of 20 MBytes should be expected for a model containing 50 by 50 points by 5
layers, simulated with density driven currents and simulation results stored for a period of 12
hrs 30 min, and the file is written with an interval of 15 minutes.
For a more refined estimate you should account for parameters that are stored only once and
parameters that are stored for each layer. However, the contribution of the latter to the file size
easily dominates by far the contribution of the other parameters.
Remark:
The file sizes given are indicative and the figures may not be linearly extrapolated to
determine the file size when the number of grid points is enlarged.
6.4 Command-line arguments
When using Delft3D-MENU to start a Delft3D-FLOW calculation, an XML-formatted config-
uration file will be generated automatically named <config_flow2d3d.xml>. The calculation
itself is started by executing:
d_hydro.exe <XML config file>
With:
d_hydro.exe The name of the executable to be started
<XML config file> The (only) command-line argument with default name <config_flow2d3d.xml>
When using a script to start a Delft3D-FLOW calculation, the XML-formatted configuration file
has to be generated manually. There are three ways to do this:
1 Use one of the examples at https://svn.oss.deltares.nl/repos/delft3d/
trunk/examples as a start, both for example configuration files and for run scripts.
162 of 688 Deltares
DRAFT
Execute a scenario
2 Use the tcl script <.../menu/bin/create_config_xml.tcl>inside the Delft3D installation di-
rectory.
3 Use a text editor and write the file from scratch. Use the following (minimum) example as
a start:
<?xml version="1.0" encoding="iso-8859-1"?>
<deltaresHydro xmlns="http://schemas.deltares.nl/deltaresHydro"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="http://schemas.deltares.nl/deltaresHydro
http://content.oss.deltares.nl/schemas/d_hydro-1.00.xsd">
<control>
<sequence>
<start>myNameFlow</start>
</sequence>
</control>
<flow2D3D name="myNameFlow">
<library>flow2d3d</library>
<mdfFile>f34.mdf</mdfFile>
</flow2D3D>
</deltaresHydro>
Remarks:
The automatically generated XML configuration file contains comments about optional
parameters.
The automatically generated XML configuration file itself is generated using the script
<.../menu/bin/create_config_xml.tcl>mentioned above.
The site http://oss.deltares.nl/web/delft3d contains a lot of information
about running a calculation.
6.5 Frequently asked questions
This chapter aims to help you with common questions that may arise while using Delft3D-
FLOW.
1Question
What to do if the message No convergence in UZD appear often in the diagnostic file
Answer
In general this message appear in the beginning of your simulation and it means that the
Red-Black Jacobi iteration is not converged. If this iteration process is not converged the
computed momentum has not reached the desired accuracy, after the maximum number
of iterations (i.e. hard coded on 50 iterations). As no convergence is reported for the
first few time steps (tidal cycles) there is no need to adjust the input parameters of your
simulation.
The simulations of Delft3D-FLOW are boundary driven and the mismatch of momentum
should disappears after a few tidal cycles. But if the message No convergence in UZD still
appears after a few tidal cycles you have to decrease the timestep.
2Question
What to do if the message Water level gradient too high > x m (per 0.5 DT) after nst
timesteps in the following points: m, n appear in the diagnostic file
Answer
In general this message appear in the beginning of your simulation and it means that the
water level changes are too high for the given time step (nst) and at location (m, n).
The simulations of Delft3D-FLOW are boundary driven and the mismatch should disap-
pears after a few tidal cycles. But if the message Water level gradient too high . . . still
appears after a few tidal cycles you have to decrease the timestep.
Deltares 163 of 688

DRAFT
Delft3D-FLOW, User Manual
164 of 688 Deltares

DRAFT
7 Visualise results
7.1 Introduction
Visualisation and animation of results is an essential part of presenting the results of your
project. In Delft3D-FLOW you have several options:
Online Visualisation: to inspect your results during the computation, see section 4.5.12.
GPP: to display and print a large variety of graphs, store the defined sets of figures in a
session file and use the same definitions in a next computation.
Delft3D-QUICKPLOT: to display quickly and print a large variety of graphs, save the de-
fined sets of figures, etc.
Delft3D-MATLAB1interface: to load, process or display your results in the MATLAB envi-
ronment.
GISVIEW interface: to load, process or display your results in the ArcGIS2environment.
The interfaces to MATLAB and ArcGIS are additional utilities in Delft3D and must be acquired
separately.
In the following sections we will briefly discuss each of these options; for full details you are
referred to the respective User Manuals.
7.2 Working with GPP
GPP offers a comprehensive selection and plotting facility to visualise or animate simulation
results, to import and visualise other data such as measurements, or to export selected data
sets of the results for use in other programs. You can define a single figure or a set of figures
and inspect it on screen or make a hardcopy of it on one of the supported hard copy devices.
The figures can be processed in an interactive manner or in the background (batch) mode.
In this section we only give a very concise description of the post-processor. For a detailed
description of its use and functionalities you are referred to the GPP User Manual.
7.2.1 Overview
When executing a project with many simulations the amount of data from which a set will be
visualised can be enormously large; also the files in which the data are stored can be very
large. Therefore it is not optimal to search the original result files over and over again for each
parameter or for each new figure. GPP, instead, provides a mechanism to make a selection of
the various results and parameters before starting the actual visualisation process and makes
a kind of reference list to these sets of data. Next you can define one or more graphs and
fill them with data from these data sets. As GPP knows were to find this data, retrieving the
data is executed very efficiently. This efficiency is further increased by the option to select all
observation points for a certain quantity or to select all time instances at which a quantity is
stored in the map file and let you make the final selection when producing the figure.
GPP has access to the communication file and to the result files of all Delft3D modules and
in fact to many other programs of Deltares, so you can combine almost any kind of data in a
figure.
GPP uses a certain hierarchy in the data and the meta-data, see Figure 7.1.
1MATLAB is software for PC desktop and is a trademark of The MathWorks, Inc, Natick, MA, USA.
2ArcGIS is GIS-software for desktop and is a trademark of ESRI, Inc. Redlands, CA, USA.
Deltares 165 of 688
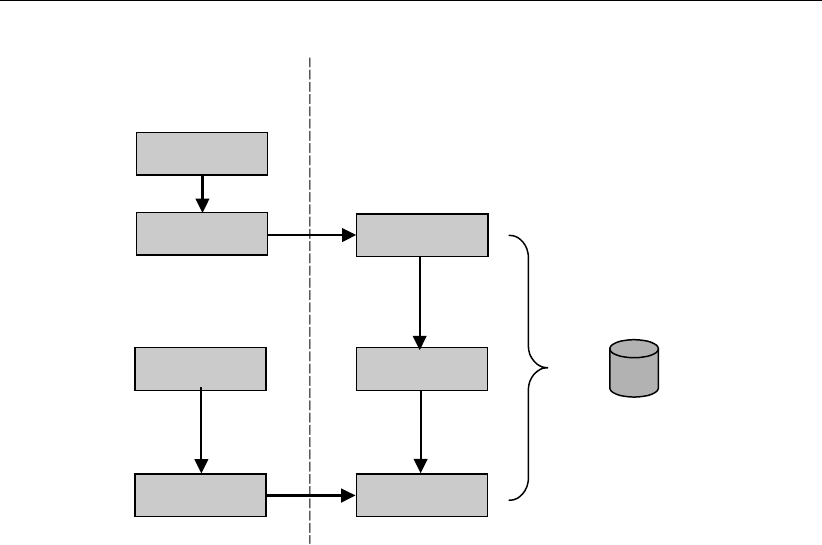
DRAFT
Delft3D-FLOW, User Manual
m odels
file types
presentation
layouts plots
data sets
files
M e ta -d a ta D a ta
S ession file
Figure 7.1: Hierarchy of GPP
We distinguish meta-data to specify the definitions of a figure at a high level of abstraction
(left part of Figure 7.1) and the actual data (right part of Figure 7.1).
Meta-data:
models Defines the set of models the results of which can be visualised.
You can change this set of models to limit the options presented in
GPP menus.
file types Defines the set of file types that can be used.
You can change this set of file types to limit the options presented in
GPP menus.
presentations Defines the set of data-presentation methods, such as contour maps
or xy-graphs.
layouts Defines the set of layouts that can be used in a figure.
You specify the general set-up of a figure by defining the appropriate
layout, the size of the graph, the plot areas, their position, additional
text etc.
Data:
files The actual files to be used in your plot session.
data sets The actual data sets selected from the files and to be used in the
visualisation.
plots The actual figures, including the data, which will be presented on
your monitor or printed on paper.
session file An ASCII file containing all information that defines the figures. For
the data only the references to the data is stored in the session file,
not the data itself.
166 of 688 Deltares
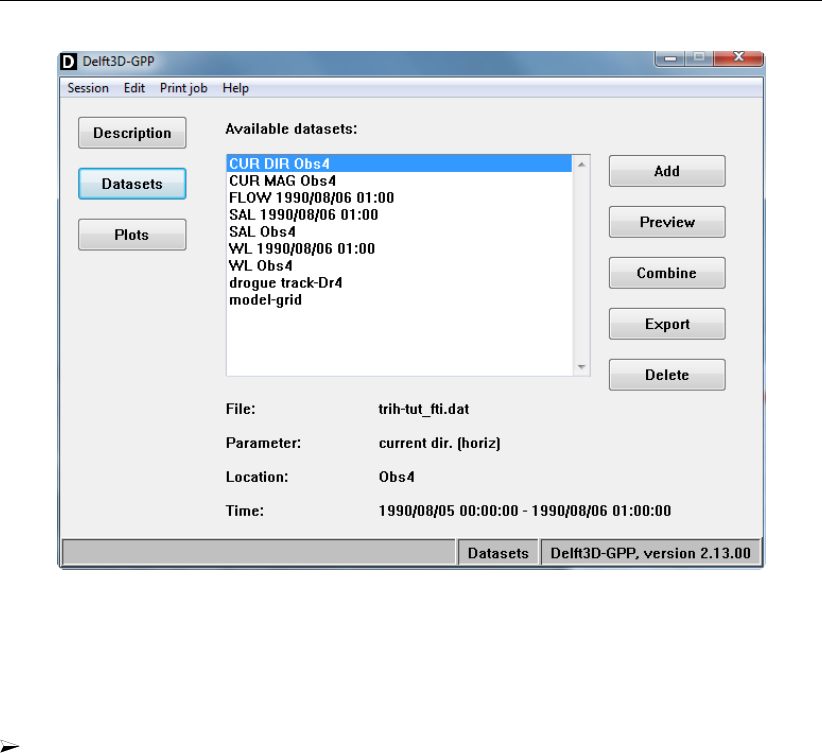
DRAFT
Visualise results
Figure 7.2: Main window of GPP
7.2.2 Launching GPP
To start GPP:
Select from the Delft3D-MENU FLOW -GPP and next Figure 7.2 is displayed.
The basic functions are shortly described below; for full details you are referred to the GPP
User Manual.
Session To load an existing session file or to save the settings and selections
of the current session in a session file for later use.
Description To give a short description of a session file; this information is used
only for reference.
Datasets List of pre-selected data sets to be used in the current plot session.
You can give selected data sets a useful name. At start-up the se-
lections are displayed of the previous plot session in the current di-
rectory.
Plots List of pre-selected plot layouts to be used in the current plot session.
At start-up the selections are displayed of the previous plot session
in the current directory.
Add To add a data set or plot layout, depending which function on the left
side of the list box has been selected.
Preview To preview a selected data set or plot layout from the list displayed
in the list box.
Combine To combine any of the available (single) data sets to a new data set,
such as multiply, divide, take the maximum value etc. and save the
new data set under a unique name.
Export To export the selected single or combined data set to an ASCII file
or GIS-file (for single data sets only).
Delete To delete the selected data set or plot layout.
Deltares 167 of 688
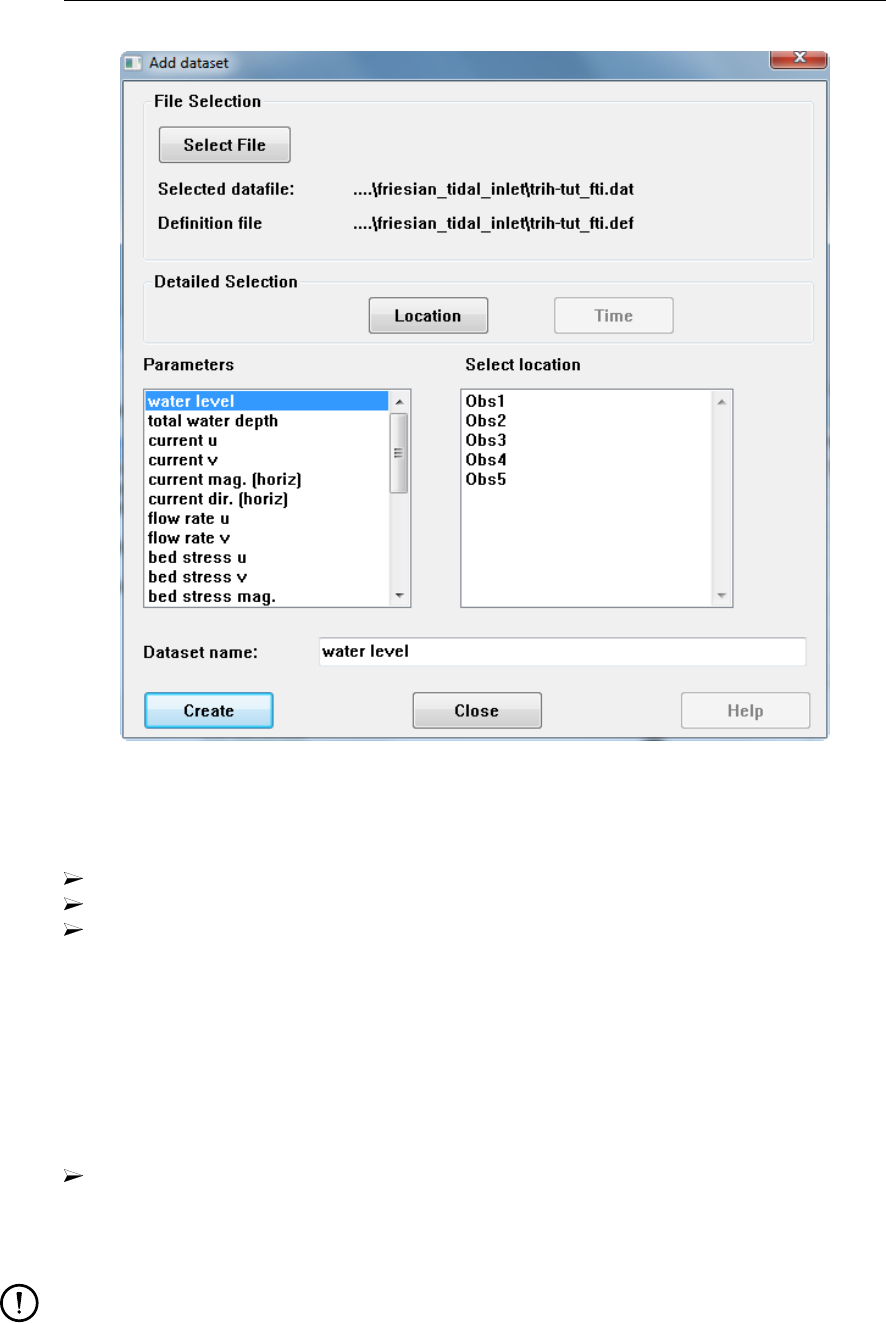
DRAFT
Delft3D-FLOW, User Manual
Figure 7.3: Parameters and locations in the <trih-tut_fti.dat>file
To add a data set of a specific result file to the Available data sets in Figure 7.2:
Select Datasets -Add in Figure 7.2.
Click Select File in the Add dataset window, Figure 7.3.
Select the required data file in the file selection window that is being displayed.
The parameters and locations (or time in case of map-results) available in a selected result
file are displayed in the Add dataset window, see Figure 7.3.
You can make as many selections from a specific result file, or from different results files (to
combine results from different computations or models) as you like.
To have a quick view on a data set:
Select in Figure 7.2 the required data set and click Preview.
The selected data set and a default plot layout will be displayed in the Plot window, see
Figure 7.3.
Remark:
GPP recognises the type of data selected and uses an appropriate default presentation
method to display the results.
In Figure 7.4 some of the options are displayed to change attributes of the figure.
168 of 688 Deltares
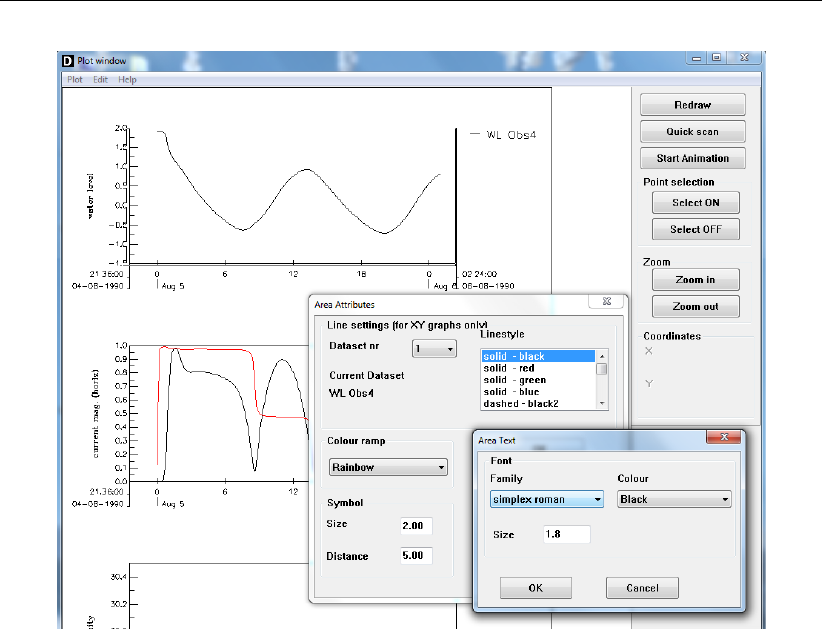
DRAFT
Visualise results
Figure 7.4: Some options to change the plot attributes
You are referred to the User Manual of GPP for full details on how to use GPP.
7.3 Working with Delft3D-QUICKPLOT
A graphical interface, Delft3D-QUICKPLOT, see Figure 7.5, is provided to make a basic graph-
ical representation of the data or make a quick animation. The interface can be started from
the Delft3D-MENU or by typing d3d_qp at the MATLAB command prompt.
The interface allows to open the binary Delft3D output files (both NEFIS and NetCDF) and to
select data fields. After making a selection of time steps, stations and (m, n, k) indices, you
can either load the data (Open a data file button) or plot the data (Quick View button). See the
Delft3D-QUICKPLOT User Manual for full details and a description of the routines and their
use.
7.4 GISVIEW interface
To access, visualise and process Delft3D map-results in a GIS-environment, an interface
between Delft3D and ArcGIS was developed. This interface is provided as an extension to
ArcGIS. From a user point of view three menu-options are added to the standard menu-bar of
ArcGIS.
For full details of the GISVIEW interface you are referred to the GISVIEW User Manual
(Delft3D-GISVIEW UM,2013).
Deltares 169 of 688
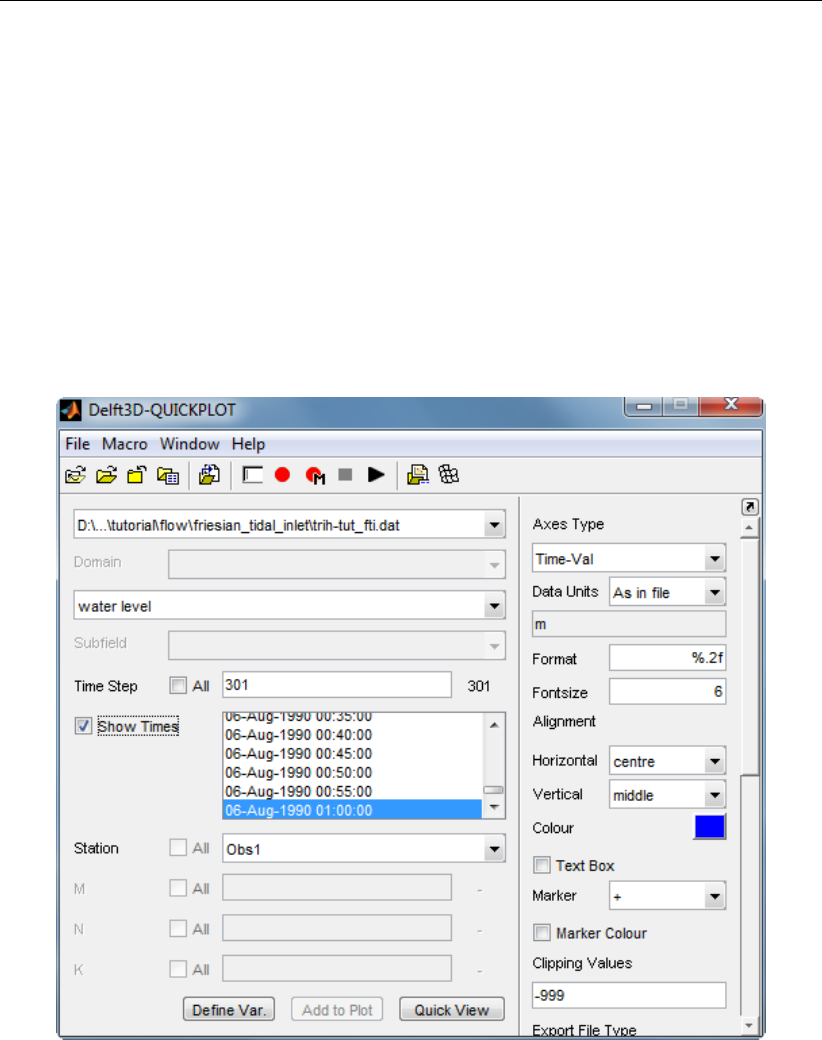
DRAFT
Delft3D-FLOW, User Manual
Figure 7.5: Delft3D-QUICKPLOT interface to Delft3D result
170 of 688 Deltares

DRAFT
8 Manage projects and files
8.1 Introduction
When executing a project generally a large number of files are created. Typically, some of
these files have a rather general use and will not or hardly change during the project, such
as the curvilinear grid, while other files may change appreciably for each simulation, such as
the bed stress or wind field during a calibration phase. Organising the files in your project in a
logical sense is important to keep track of all simulations and changes you have investigated.
We suggest to organise your project directory along the hierarchy of steps typical for your
project.
A typical hierarchy of steps for a hydrodynamic – water quality assessment study might be:
Hydrodynamics:
Inspection and analysis of the problem to be solved, of the available data and information
of the area and of the processes involved.
Setting up of the hydrodynamic model, i.e. definition of the model extent, the grid size, the
number of layers (in case of a 3D simulation), generation of the land boundary outline and
the curvilinear grid.
Collecting and processing the bathymetric data and generating the model bathymetry.
Preparing boundary conditions.
Processing field measurements for calibration and verification data in stations, cross-
sections and verticals, both as time-series and as maps.
Defining a couple of simulations to make a first assessment of the model behaviour.
Defining the calibration runs to be executed.
Accessing the results, performing a (in most cases several) sensitivity analysis and iterat-
ing on the calibration process if necessary.
Determining and executing the verification runs and accessing the final accuracy of the
simulations.
Determining the simulation period to be stored for the water quality study and generating
the hydrodynamic database for the water quality simulations.
Water quality:
A similar set of steps can be defined for the water quality assessment study.
Determining if the same or a coarser grid shall be used for the water quality simulations
and transfer the hydrodynamics defined on the hydrodynamic grid to the water quality grid.
Determining the water quality processes and parameters that must be involved.
Remark:
The number of water quality computations can be very large due to the number of pro-
cesses that must be simulated and the number of parameters that must be investigated
in a sensitivity analysis.
This hierarchy of steps, the related computations each with its specific input, attribute and
results files must be organised in some way to control the large amounts of files. This is
necessary to guarantee the quality of the results and the consistency between input data and
result.
Deltares 171 of 688

DRAFT
Delft3D-FLOW, User Manual
8.1.1 Managing projects
It is of utmost importance to structure your project in a logical way. This will make it easy to
understand its structure by colleagues working on the same project. Furthermore, it helps to
retrieve results when after some time you have to answer additional questions.
There are many ways to structure a project and there is probably not just one best way. The
structure you want to apply may depend on company rules or personal preferences. Below
we give some general ideas to structure your projects.
To manage your projects you might apply the following steps:
Define for each project a separate directory or file system.
Organise the directory in-line with the various steps mentioned in the introduction, i.e. pre-
pare sub-directories for preparing the boundary conditions, the field data, the bathymetry,
the grid, etc. and give them useful names.
Execute each dominant step in the project, such as preliminary assessment, calibration
and verification in separate sub-directories and execute sensitivity studies within these
steps in sub-sub-directories.
Remark:
Never combine the program files with project data; define a project directory.
Currently, the FLOW Graphical User Interface (GUI) only supports short file names in a work-
ing directory, i.e. all files used in a scenario must be in the current working directory. Organis-
ing your project as sketched above means that many unchanged files must be copied to each
(sub-)directory and so will reside many times on your file system, thereby increasing your disk
requirements. However, the alternative of ‘all scenarios in one and the same directory’ is not
attractive either as you easy will have hundreds of files. You are advised to prefer the struc-
turing of your simulations above optimising the amount of disk space used for the attribute
files. This problem is solved to a large extent if the FLOW-GUI can handle long file names and
paths. This option will be available in a next release.
A probably more urgent problem is to handle the large result files; they may easily result in
full file systems. An option in case of a full file system is to move the large result files to a
background storage facility and only load them back on the file system when necessary. The
result files are usually the real big ones so the storage problem is relieved quite a bit by moving
these files. Online compression is only a partial solution as a typical compression factor for
result files is only 2 or 3. Fortunately, the costs or mass storage devices is decreasing at a
rapid rate.
8.1.2 Managing files
The length of the MDF-file name is limited to 256 characters, and has the form <runid.mdf>.
Do not use blanks in the runid.
172 of 688 Deltares

DRAFT
9 Conceptual description
9.1 Introduction
Increasing awareness of environmental issues has focused the attention of scientists and en-
gineers on the problem of predicting the flow and dispersion of contaminants in water systems.
Reliable information on water flow, waves, water quality, sediment transport and morphology
can be obtained from appropriate mathematical models. In general the first step in such mod-
elling activities concerns the simulation of the flow itself. Whether the problem is related, for
example, to the stability of a hydraulic structure, to salt intrusion, to the dispersion of pollu-
tants or to the transport of silt and sediment, flow simulations usually form the basis of the
investigations to be carried out.
Delft3D is the integrated flow and transport modelling system of Deltares for the aquatic en-
vironment. The flow module of this system, viz. Delft3D-FLOW, provides the hydrodynamic
basis for other modules such as water quality, ecology, waves and morphology. For steady and
non-steady modelling of the far-field water quality and ecology, it is coupled with the far-field
water quality module D-Water Quality. Non-steady modelling of the mid-field water quality
is performed by coupling the flow module to the particle tracking simulation module D-Waq
PART. For the interaction between waves and currents the flow module may be coupled with
the short-waves model Delft3D-WAVE.
In the vertical direction Delft3D-FLOW offers two different vertical grid systems: a so-called σ
co-ordinate system (σ-model) introduced by Phillips (1957) for ocean models and the Carte-
sian Zco-ordinate system (Z-model).
This chapter gives some background information on the conceptual model of the Delft3D-
FLOW module. The numerical algorithms are described in chapter 10. Most of the concepts
and algorithms are applicable to both the σ-model and Z-model. However, the specifics of
the Zco-ordinate system will be presented in more detail in chapter 12.
9.2 General background
9.2.1 Range of applications of Delft3D-FLOW
The hydrodynamic module Delft3D-FLOW simulates two-dimensional (2DH, depth-averaged)
or three-dimensional (3D) unsteady flow and transport phenomena resulting from tidal and/or
meteorological forcing, including the effect of density differences due to a non-uniform tem-
perature and salinity distribution (density-driven flow). The flow model can be used to predict
the flow in shallow seas, coastal areas, estuaries, lagoons, rivers and lakes. It aims to model
flow phenomena of which the horizontal length and time scales are significantly larger than
the vertical scales.
If the fluid is vertically homogeneous, a depth-averaged approach is appropriate. Delft3D-
FLOW is able to run in two-dimensional mode (one computational layer), which corresponds
to solving the depth-averaged equations. Examples in which the two-dimensional, depth-
averaged flow equations can be applied are tidal waves, storm surges, tsunamis, harbour
oscillations (seiches) and transport of pollutants in vertically well-mixed flow regimes.
Three-dimensional modelling is of particular interest in transport problems where the hori-
zontal flow field shows significant variation in the vertical direction. This variation may be
generated by wind forcing, bed stress, Coriolis force, bed topography or density differences.
Examples are dispersion of waste or cooling water in lakes and coastal areas, upwelling and
downwelling of nutrients, salt intrusion in estuaries, fresh water river discharges in bays and
Deltares 173 of 688

DRAFT
Delft3D-FLOW, User Manual
thermal stratification in lakes and seas.
9.2.2 Physical processes
The numerical hydrodynamic modelling system Delft3D-FLOW solves the unsteady shallow
water equations in two (depth-averaged) or in three dimensions. The system of equations
consists of the horizontal equations of motion, the continuity equation, and the transport
equations for conservative constituents. The equations are formulated in orthogonal curvi-
linear co-ordinates or in spherical co-ordinates on the globe. In Delft3D-FLOW models with
a rectangular grid (Cartesian frame of reference) are considered as a simplified form of a
curvilinear grid. In curvilinear co-ordinates, the free surface level and bathymetry are related
to a flat horizontal plane of reference, whereas in spherical co-ordinates the reference plane
follows the Earth’s curvature.
The flow is forced by tide at the open boundaries, wind stress at the free surface, pressure
gradients due to free surface gradients (barotropic) or density gradients (baroclinic). Source
and sink terms are included in the equations to model the discharge and withdrawal of water.
The Delft3D-FLOW model includes mathematical formulations that take into account the fol-
lowing physical phenomena:
Free surface gradients (barotropic effects).
The effect of the Earth’s rotation (Coriolis force).
Water with variable density (equation of state).
Horizontal density gradients in the pressure (baroclinic effects).
Turbulence induced mass and momentum fluxes (turbulence closure models).
Transport of salt, heat and other conservative constituents.
Tidal forcing at the open boundaries.
Space and time varying wind shear-stress at the water surface.
Space varying shear-stress at the bottom.
Space and time varying atmospheric pressure on the water surface.
Time varying sources and sinks (e.g. river discharges).
Drying and flooding of tidal flats.
Heat exchange through the free surface.
Evaporation and precipitation.
Tide generating forces.
Effect of secondary flow on depth-averaged momentum equations.
Lateral shear-stress at wall.
Vertical exchange of momentum due to internal waves.
Influence of waves on the bed shear-stress (2D and 3D).
Wave induced stresses (radiation stress) and mass fluxes.
Flow through hydraulic structures.
Wind driven flows including tropical cyclone winds.
174 of 688 Deltares

DRAFT
Conceptual description
9.2.3 Assumptions underlying Delft3D-FLOW
In Delft3D-FLOW the 2D (depth-averaged) or 3D non-linear shallow water equations are
solved. These equations are derived from the three dimensional Navier-Stokes equations for
incompressible free surface flow. The following assumptions and approximations are applied:
In the σco-ordinate system the depth is assumed to be much smaller than the horizontal
length scale. For such a small aspect ratio the shallow water assumption is valid, which
means that the vertical momentum equation is reduced to the hydrostatic pressure rela-
tion. Thus, vertical accelerations are assumed to be small compared to the gravitational
acceleration and are therefore not taken into account. When this assumption is not valid
then Delft3D provides an option to apply the so-called Non-hydrostatic pressure model in
the Z-model. For details, we refer to chapter 12 and section B.12 of this User Manual.
The effect of variable density is only taken into account in the pressure term (Boussinesq
approximation).
In the σco-ordinate system, the immediate effect of buoyancy on the vertical flow is not
considered. In Delft3D-FLOW vertical density differences are taken into account in the
horizontal pressure gradients and in the vertical turbulent exchange coefficients. So the
application of Delft3D-FLOW is restricted to mid-field and far-field dispersion simulations
of discharged water.
For a dynamic online coupling between morphological changes and flow the 3D sediment
and morphology feature is available.
In a Cartesian frame of reference, the effect of the Earth’s curvature is not taken into
account. Furthermore, the Coriolis parameter is assumed to be uniform unless specifically
specified otherwise.
In spherical co-ordinates the inertial frequency depends on the latitude.
At the bottom a slip boundary condition is assumed, a quadratic bottom stress formulation
is applied.
The formulation for the enhanced bed shear-stress due to the combination of waves and
currents is based on a 2D flow field, generated from the velocity near the bed using a
logarithmic approximation.
The equations of Delft3D-FLOW are capable of resolving the turbulent scales (large eddy
simulation), but usually the hydrodynamic grids are too coarse to resolve the fluctuations.
Therefore, the basic equations are Reynolds-averaged introducing so-called Reynolds
stresses. These stresses are related to the Reynolds-averaged flow quantities by a turbu-
lence closure model.
In Delft3D-FLOW the 3D turbulent eddies are bounded by the water depth. Their contri-
bution to the vertical exchange of horizontal momentum and mass is modelled through
a vertical eddy viscosity and eddy diffusivity coefficient (eddy viscosity concept). The
coefficients are assumed to be proportional to a velocity scale and a length scale. The
coefficients may be specified (constant) or computed by means of an algebraic, k-Lor
k-εturbulence model, where kis the turbulent kinetic energy, Lis the mixing length and
εis the dissipation rate of turbulent kinetic energy.
In agreement with the aspect ratio for shallow water flow, the production of turbulence is
based on the vertical (and not the horizontal) gradients of the horizontal flow. In case
of small-scale flow (partial slip along closed boundaries), the horizontal gradients are in-
cluded in the production term.
The boundary conditions for the turbulent kinetic energy and energy dissipation at the free
surface and bottom assume a logarithmic law of the wall (local equilibrium).
The eddy viscosity is an-isotropic. The horizontal eddy viscosity and diffusivity coefficients
should combine both the effect of the 3D turbulent eddies and the horizontal motions that
cannot be resolved by the horizontal grid. The horizontal eddy viscosity is generally much
larger than the vertical eddy viscosity.
For large-scale flow simulations, the tangential shear-stress at lateral closed boundaries
can be neglected (free slip). In case of small-scale flow partial slip is applied along closed
Deltares 175 of 688

DRAFT
Delft3D-FLOW, User Manual
boundaries.
For large-scale flow simulations, the horizontal viscosity terms are reduced to a bi-harmonic
operator along co-ordinate lines. In case of small-scale flow the complete Reynold’s stress
tensor is computed. The shear-stress at the side walls is calculated using a logarithmic
law of the wall.
In the σco-ordinate system, Delft3D-FLOW solves the so-called long wave equation. The
pressure is hydrostatic and the model is not capable of resolving the scales of short waves.
Therefore, the basic equations are averaged in analogy with turbulence introducing so-
called radiation stresses. These stresses are related to the wave quantities of Delft3D-
WAVE by a closure model.
It is assumed that a velocity point is set dry when the actual water depth is below half
of a user-defined threshold. If the point is set dry, then the velocity at that point is set to
zero. The velocity point is set wet again when the local water depth is above the threshold.
The hysteresis between drying and flooding is introduced to prevent drying and flooding in
two consecutive time steps. The drying and flooding procedure leads to a discontinuous
movement of the closed boundaries at tidal flats.
A continuity cell is set dry when the four surrounding velocity points at the grid cell faces
are dry or when the actual water depth at the cell centre is below zero (negative volume).
The flux of matter through a closed wall and through the bed is zero.
Without specification of a temperature model, the heat exchange through the free surface
is zero. The heat loss through the bottom is always zero.
If the total heat flux through the water surface is computed using a temperature excess
model the exchange coefficient is a function of temperature and wind speed and is de-
termined according to Sweers (1976). The natural background temperature is assumed
constant in space and may vary in time. In the other heat flux formulations the fluxes
due to solar radiation, atmospheric and back radiation, convection, and heat loss due to
evaporation are modelled separately.
The effect of precipitation on the water temperature is accounted for.
9.3 Governing equations
In this section, we will present in detail the governing equations. Below an overview of the
symbols that are used in the equations is presented.
List of Symbols
Symbol Units Meaning
A(m,n)m2area of computational cell at location (m, n)
ˆ
Aδm near-bed peak orbital excursion
am reference height as defined by Van Rijn
α- artificial compression coefficient
Bkm2/s3buoyancy flux term in transport equation for turbulent kinetic
energy
Bem2/s4buoyancy flux term in transport equation for the dissipation of
turbulent kinetic energy
C, C2Dm1/2/s 2D Chézy coefficient
C3Dm1/2/s 3D Chézy coefficient
Cd- wind drag coefficient
ckg/m3mass concentration
cakg/m3mass concentration at reference height a
176 of 688 Deltares

DRAFT
Conceptual description
Symbol Units Meaning
cD- constant relating mixing length, turbulent kinetic energy and
dissipation in the k-εmodel
cpJ/(kg◦C) specific heat of sea water
cµ- calibration constant
c0
µ- constant in Kolmogorov-Prandtl’s eddy viscosity formulation
Dkg/s3dissipation rate wave energy
Dkg/(m2s) deposition rate cohesive sediment
DP SED m depth of sediment available at the bed
D∗- non-dimensional particle diameter
dm depth below some horizontal plane of reference (datum)
Dsm representative diameter of suspended sediment
D50 m median diameter of sediment
D90 m sediment diameter
Em/s evaporation
Ekg/(m2s) erosion rate cohesive sediment
eambar vapour pressure at a given air temperature
esmbar saturated vapour pressure at a given temperature
Fc- cloudiness factor
Fxm/s2radiation stress gradient in x-direction
Fym/s2radiation stress gradient in y-direction
Fξm/s2turbulent momentum flux in ξ-direction
Fηm/s2turbulent momentum flux in η-direction
f1/s Coriolis parameter (inertial frequency)
f(Fc)- attenuation function for the solar and atmospheric (long wave)
radiation
fFIXFAC - fixed layer proximity factor
fMORFAC - user-defined morphological acceleration factor
fw- total wave friction factor
f0
w- grain-related wave friction factor
fwind - dependency of λof the wind speed in temperature excess
model
pGξξ m coefficient used to transform curvilinear to rectangular co-
ordinates
pGηη m coefficient used to transform curvilinear to rectangular co-
ordinates
gm/s2acceleration due to gravity
Hm total water depth (H=d+ζ;dpositive downward)
Hrms m root-mean-square wave height
Im/s spiral motion intensity (secondary flow)
Ibe m/s equilibrium intensity of spiral motion due to curvature of stream
lines
Ice m/s equilibrium intensity of spiral motion due to Coriolis
km2/s2turbulent kinetic energy
kam increased (apparent) bed roughness height felt by the current
in the presence of waves
ksm Nikuradse roughness length
ks,c m current related bed roughness height
kx,ky1/m wave number
ks,w m wave related bed roughness height
Lm mixing length
Deltares 177 of 688

DRAFT
Delft3D-FLOW, User Manual
Symbol Units Meaning
`- index number of sediment fraction
MS
xkg m/s depth-averaged mass flux due to Stokes drift in x-direction
MS
ykg m/s depth-averaged mass flux due to Stokes drift in y-direction
Mξm/s2source or sink of momentum in ξ-direction
Mηm/s2source or sink of momentum in η-direction
nm−1/3s Manning’s coefficient
Pkg/(ms2) hydrostatic water pressure
Pm/s precipitation
Pkm2/s3production term in transport equation for turbulent kinetic en-
ergy
Pξkg/(m2s2) gradient hydrostatic pressure in ξ-direction
Pηkg/(m2s2) gradient hydrostatic pressure in η-direction
Pεm2/s4production term in transport equation for the dissipation of tur-
bulent kinetic energy
Qm/s global source or sink per unit area
QaJ/(m2s) atmospheric radiation (long wave radiation)
Qan J/(m2s) net atmospheric radiation
Qbr J/(m2s) back radiation (long wave radiation)
Qco J/(m2s) heat loss due to convection
Qev J/(m2s) heat loss due to evaporation
QsJ/(m2s) solar radiation (short wave radiation)
Qsc J/(m2s) solar radiation with a clear sky
Qsn J/(m2s) net solar insolation
Qtot J/(m2s) heat flux through free surface
qin 1/s local source per unit volume
qout 1/s local sink per unit volume
Rm radius of the Earth
Ri - gradient Richardson’s number
Rsm radius of curvature of a streamline in the secondary flow model
r- reflection coefficient for solar and atmospheric (long wave) ra-
diation
rhum % relative air humidity at a given temperature
Sppt salinity
Sarea m2representative surface area in heat model
Smax ppt maximum salinity for flocculation calculations
Sb,n additional bedload transport vector. The direction of this vector
is normal to the unadjusted bedload transport vector, in the
down slope direction
|S0
b|magnitude of the unadjusted bedload transport vector (ad-
justed for longitudinal bed slope only)
S00
bkg/(ms) mass bedload transport rate
|S00
b|kg/(ms) magnitude of the bedload transport vector
S(m,n)
b,uu kg/(ms) computed bedload sediment transport vector in u-direction,
held at the u-point of the computational cell at location (m, n)
s- relative density of sediment fraction (= ρs/ρw)
Sppt salinity
T◦C temperature (general reference)
¯
TK temperature (general reference)
T- non-dimensional bed-shear stress
178 of 688 Deltares
DRAFT
Conceptual description
Symbol Units Meaning
Ta- non-dimensional bed-shear stress for reference concentration
Ta◦C air temperature
Tback ◦C natural background temperature of water in the model area
Tps peak wave period
TTHbottom s Thatcher Harleman return time for the bed layer
TTHsurface s Thatcher Harleman return time for the surface layer
Ts◦C water temperature at free surface
Tξξ,Tηη ,
Tξη
kg/(ms2) contributions secondary flow to shear stress tensor
ts time
Um/s depth-averaged velocity in ξ-direction
ˆ
Um/s velocity of water discharged in ξ-direction
ˆ
Uδm/s peak orbital velocity at the bed
um/s flow velocity in the x- or ξ-direction
ub,cr m/s critical (threshold) near-bed fluid velocity
ubm/s near-bed fluid velocity vector
u∗m/s friction velocity due to currents or due to current and waves
u0
∗m/s effective bed shear velocity
u∗m/s vertically averaged friction velocity
u∗bm/s friction velocity at the bed
ub
∗m/s modified friction velocity near bed
us
∗m/s friction velocity at the free surface
~
Um/s magnitude of depth-averaged horizontal velocity vector
(U, V )T
U10 m/s averaged wind speed at 10 m above free surface
ˆ
Um/s velocity of water discharged in x- or ξ-direction
ˆ
Uorb m/s amplitude of the near-bottom wave orbital velocity
uSm/s Stokes drift in x- or ξ-direction
˜um/s total velocity due to flow and Stokes drift in x- or ξ-direction
vm/s fluid velocity in the y- or η-direction
vbm/s velocity at bed boundary layer in y- or η-direction
Vm/s depth-averaged velocity in y- or η-direction
ˆ
Vm/s velocity of water discharged in y- or η-direction
vSm/s Stokes drift in y- or η-direction
˜vm/s total velocity due to flow and Stokes drift in y- or η-direction
wm/s fluid velocity in z-direction
ws,0m/s particle settling velocity in clear water (non-hindered)
wsm/s particle (hindered) settling velocity in a mixture
x, y, z m Cartesian co-ordinates
z0m bed roughness length
˜z0m enhanced bed roughness length due to current and waves
z0nm roughness length normal to the boundary
∂zb
∂s - bed slope in the direction of bedload transport
∂z(u)
∂x - bed slope in the positive x-direction evaluated at the downwind
u-point
∂z(v)
∂y - bed slope in the positive y-direction evaluated at the downwind
v-point
∂zb
∂n - bed slope in the direction normal to the bedload transport vec-
tor
Deltares 179 of 688

DRAFT
Delft3D-FLOW, User Manual
Symbol Units Meaning
αbn - user-defined coefficient
β- ratio of sediment and fluid mixing
βc- coefficient to account for secondary flow in momentum equa-
tions
δmm thickness of wave boundary mixing layer
δwm thickness of wave boundary layer
χdeg astronomical argument of a tidal component
∆rm ripple height
∆(m,n)
SED kg/m2change in quantity of bottom sediment at location (m, n)
∆ts computational time-step
∆x(m,n)m cell width in the x-direction, held at the v-point of cell (m, n)
∆y(m,n)m cell width in the y-direction, held at the u-point of cell (m, n)
∆zbm thickness of the bed layer
∆zsm thickness of the surface layer
∆σb- thickness of the bed boundary layer in relative co-ordinates
εεm2/s4dissipation in transport equation for dissipation of turbulent ki-
netic energy
εm2/s3dissipation in transport equation for turbulent kinetic energy
ε- emissivity coefficient of water at air-water interface
εfm2/s fluid diffusion in the z-direction
εf,x,εf,y,
εf,z
m2/s fluid diffusion coefficients in the x, y, z-directions, respectively
εsm2/s sediment diffusion in the z-direction
εs,x,εs,y ,
εs,z
m2/s sediment diffusion coefficients in the x, y, z-directions, respec-
tively
γm−1extinction coefficient (measured)
γmbar/◦C Bowen’s constant
φdeg latitude co-ordinate in spherical co-ordinates
φJ/(sm2◦C) exchange coefficient for the heat flux in excess temperature
model
φdeg internal angle of friction of bed material (assumed to be 30◦)
ϕm equilibrium tide
ϕem perturbation of the equilibrium tide due to earth tide
ϕeo m perturbation of the equilibrium tide due to tidal load
ϕom perturbation of the equilibrium tide due to oceanic tidal load
λdeg longitude co-ordinate in spherical co-ordinates
λd1/s first order decay coefficient
νmol m2/s kinematic viscosity (molecular) coefficient
νback
Hm2/s background horizontal eddy viscosity (ξ- and η-direction)
νback
Vm2/s background vertical eddy viscosity for momentum equations
Dback
Hm2/s background horizontal eddy diffusivity (ξ- and η-direction)
Dback
Vm2/s background vertical eddy diffusivity for transport equation
νVm2/s vertical eddy viscosity
ν2Dm2/s part of eddy viscosity due to horizontal turbulence model
ν3Dm2/s part of eddy viscosity due to turbulence model in vertical direc-
tion
η– relative availability of the sediment fraction in the mixing layer
µc– efficiency factor current
ρkg/m3density of water
180 of 688 Deltares
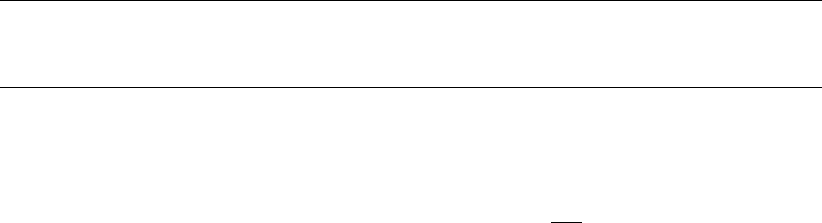
DRAFT
Conceptual description
Symbol Units Meaning
ρakg/m3density of air
ρ0kg/m3reference density of water
σJ/(m2s K4) Stefan-Boltzmann’s constant
σ– scaled vertical co-ordinate; σ=z−ζ
d+ζ;
(surface, σ= 0; bed level, σ=−1)
σc– Prandtl-Schmidt number
σc0– Prandtl-Schmidt number for constituent (0.7 for salinity and
temperature, 1.0 for suspended sediments)
σmol – Prandtl-Schmidt number for molecular mixing
(700 for salinity, 6.7 for temperature)
τbN/m2bed shear stress due to current and waves
τbξ kg/(ms2) bed shear stress in ξ-direction
τbη kg/(ms2) bed shear stress in η-direction
τckg/(ms2) magnitude of the bed shear stress due to current alone
τwkg/(ms2) magnitude of the at bed shear stress due to waves alone
τmkg/(ms2) magnitude of the wave-averaged at bed shear stress for com-
bined waves and current
τb,c N/m2bed shear stress due to current
τb,cr N/m2critical bed shear stress
τb,cw N/m2bed shear stress due to current in the presence of waves
τb,w N/m2bed shear stress due to waves
τcr N/m2critical bed shear stress
τcr,d N/m2user-defined critical deposition shear stress
τcr,e N/m2user-defined critical erosion shear stress
τcw N/m2mean bed shear stress due to current and waves
τmax N/m2maximum bottom shear stress with wave-current interaction
τmean N/m2mean (cycle averaged) bottom shear stress with wave-current
interaction
τsη kg/(ms2) shear stress at surface in ξ-direction
τsη kg/(ms2) shear stress at surface in η-direction
ωm/s velocity in the σ-direction in the σ-co-ordinate system
ω1/s angular frequency waves
ωdeg/hour angular frequency of tide and/or Fourier components
ψJ/(m2s) heat flux through free surface
ξ, η - horizontal, curvilinear co-ordinates
ζm water level above some horizontal plane of reference (datum)
ζbm bottom tide
ζem earth tide
ζeo m tidal loading
Deltares 181 of 688

DRAFT
Delft3D-FLOW, User Manual
9.3.1 Hydrodynamic equations
Delft3D-FLOW solves the Navier Stokes equations for an incompressible fluid, under the shal-
low water and the Boussinesq assumptions. In the vertical momentum equation the vertical
accelerations are neglected, which leads to the hydrostatic pressure equation. In 3D models
the vertical velocities are computed from the continuity equation. The set of partial differential
equations in combination with an appropriate set of initial and boundary conditions is solved
on a finite difference grid, see chapter 10 for the numerical aspects.
In the horizontal direction Delft3D-FLOW uses orthogonal curvilinear co-ordinates. Two co-
ordinate systems are supported:
Cartesian co-ordinates (ξ, η)
Spherical co-ordinates (λ, φ)
The boundaries of a river, an estuary or a coastal sea are in general curved and are not
smoothly represented on a rectangular grid. The boundary becomes irregular and may in-
troduce significant discretization errors. To reduce these errors boundary fitted orthogonal
curvilinear co-ordinates are used. Curvilinear co-ordinates also allow local grid refinement in
areas with large horizontal gradients.
Spherical co-ordinates are a special case of orthogonal curvilinear co-ordinates with:
ξ=λ,
η=φ,
pGξξ =Rcos φ,
pGηη =R,
(9.1)
in which λis the longitude, φis the latitude and Ris the radius of the Earth (6 378.137 km,
WGS84).
In Delft3D-FLOW the equations are formulated in orthogonal curvilinear co-ordinates. The
velocity scale is in physical space, but the components are perpendicular to the cell faces of
the curvilinear grid. The grid transformation introduces curvature terms in the equations of
motion.
In the vertical direction Delft3D-FLOW offers two different vertical grid systems: the σco-
ordinate system (σ-model) and the Cartesian Zco-ordinate system (Z-model). The hydrody-
namic equations described in this section are valid for the σco-ordinate system. The equa-
tions for the Zco-ordinate system are similar. Equations or relations that are fundamentally
different will be discussed separately and in detail in chapter 12.
The σco-ordinate system
The σ-grid was introduced by Phillips (1957) for atmospheric models. The vertical grid con-
sists of layers bounded by two σ-planes, which are not strictly horizontal but follow the bottom
topography and the free surface. Because the σ-grid is boundary fitted both to the bottom and
to the moving free surface, a smooth representation of the topography is obtained.
The number of layers over the entire horizontal computational area is constant, irrespective of
the local water depth (see Figure 9.2). The distribution of the relative layer thickness is usually
non-uniform. This allows for more resolution in the zones of interest such as the near surface
area (important for e.g. wind-driven flows, heat exchange with the atmosphere) and the near
bed area (sediment transport).
182 of 688 Deltares
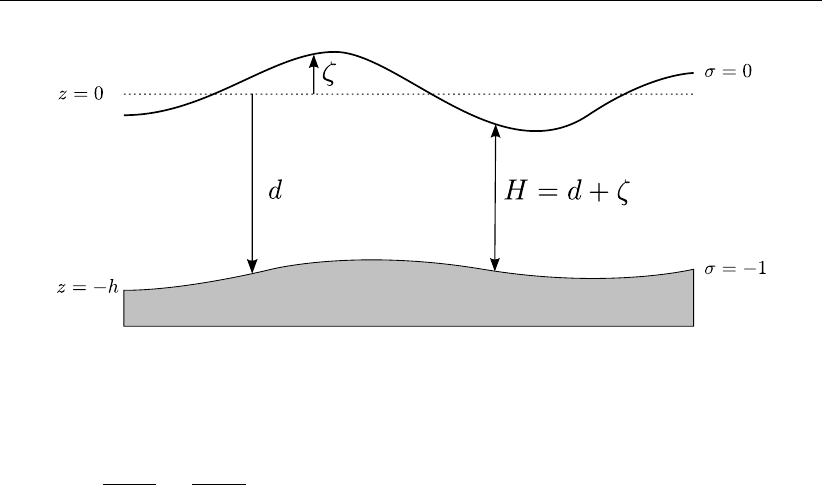
DRAFT
Conceptual description
Figure 9.1: Definition of water level (ζ), depth (h) and total depth (H).
The σco-ordinate system is defined as:
σ=z−ζ
d+ζ=z−ζ
H,(9.2)
with:
zthe vertical co-ordinate in physical space.
ζthe free surface elevation above the reference plane (at z= 0).
dthe depth below the reference plane.
Hthe total water depth, given by d+ζ.
At the bottom σ=−1and at the free surface σ= 0 (see Figure 9.1). The partial derivatives
in the original Cartesian co-ordinate system are expressed in σco-ordinates by the chain rule
introducing additional terms (Stelling and Van Kester,1994). The flow domain of a 3D shallow
water model consists in the horizontal plane of a restricted (limited) area composed of open
and closed (land) boundaries and in the vertical of a number of layers. In a σco-ordinate
system the number of layers is the same at every location in the horizontal plane, i.e. the layer
interfaces are chosen following planes of constant σ, see Figure 9.2. For each layer a set of
coupled conservation equations is solved.
Cartesian co-ordinate system in the vertical (Z-model)
In coastal seas, estuaries and lakes, stratified flow can occur in combination with steep topog-
raphy. Although the σ-grid is boundary fitted (in the vertical), it will not always have enough
resolution around the pycnocline. The co-ordinate lines intersect the density interfaces that
may give significant errors in the approximation of strictly horizontal density gradients (Leen-
dertse,1990;Stelling and Van Kester,1994). Therefore, recently a second vertical grid co-
ordinate system based on Cartesian co-ordinates (Z-grid) was introduced in Delft3D-FLOW
for 3D simulations of weakly forced stratified water systems.
The Z-grid model has horizontal co-ordinate lines that are (nearly) parallel with density inter-
faces (isopycnals) in regions with steep bottom slopes. This is important to reduce artificial
mixing of scalar properties such as salinity and temperature. The Z-grid is not boundary-
fitted in the vertical. The bottom (and free surface) is usually not a co-ordinate line and is
represented as a staircase (zig-zag boundary; see Figure 9.2).
Continuity equation
The depth-averaged continuity equation is derived by integration the continuity equation for
incompressible fluids (∇•~u = 0) over the total depth, taken into account the kinematic
Deltares 183 of 688
DRAFT
Delft3D-FLOW, User Manual
Figure 9.2: Example of σ- and Z-grid
boundary conditions at water surface and bed level, and is given by:
∂ζ
∂t +1
pGξξpGηη
∂(d+ζ)UpGηη
∂ξ +1
pGξξpGηη
∂(d+ζ)VpGξξ
∂η = (d+ζ)Q,
(9.3)
with Uand Vthe depth averaged velocities
U=1
d+ζZζ
d
u dz =Z0
−1
u dσ (9.4)
V=1
d+ζZζ
d
v dz =Z0
−1
v dσ (9.5)
and Qrepresenting the contributions per unit area due to the discharge or withdrawal of water,
precipitation and evaporation:
Q=Z0
−1
(qin −qout)dσ +P−E, (9.6)
with qin and qout the local sources and sinks of water per unit of volume [1/s], respectively, P
the non-local source term of precipitation and Enon-local sink term due to evaporation. We
remark that the intake of, for example, a power plant is a withdrawal of water and should be
modelled as a sink. At the free surface there may be a source due to precipitation or a sink
due to evaporation.
Momentum equations in horizontal direction
The momentum equations in ξ- and η-direction are given by:
∂u
∂t +u
pGξξ
∂u
∂ξ +v
pGηη
∂u
∂η +ω
d+ζ
∂u
∂σ −v2
pGξξpGηη
∂pGηη
∂ξ +
+uv
pGξξpGηη
∂pGξξ
∂η −fv =−1
ρ0pGξξ
Pξ+Fξ+
+1
(d+ζ)2
∂
∂σ νV
∂u
∂σ +Mξ,(9.7)
184 of 688 Deltares
DRAFT
Conceptual description
and
∂v
∂t +u
pGξξ
∂v
∂ξ +v
pGηη
∂v
∂η +ω
d+ζ
∂v
∂σ +uv
pGξξpGηη
∂pGηη
∂ξ +
−u2
pGξξpGηη
∂pGξξ
∂η +fu =−1
ρ0pGηη
Pη+Fη+
+1
(d+ζ)2
∂
∂σ νV
∂v
∂σ +Mη.(9.8)
The vertical eddy viscosity coefficient νVis defined in Equation (9.20). Density variations are
neglected, except in the baroclinic pressure terms, Pξand Pηrepresent the pressure gradi-
ents. The forces Fξand Fηin the momentum equations represent the unbalance of horizontal
Reynold’s stresses. Mξand Mηrepresent the contributions due to external sources or sinks
of momentum (external forces by hydraulic structures, discharge or withdrawal of water, wave
stresses, etc.). The effects of surface waves on the flow as modelled in Delft3D-FLOW are
described in section 9.7.
Vertical velocities
The vertical velocity ωin the adapting σ-co-ordinate system is computed from the continuity
equation:
∂ζ
∂t +1
pGξξpGηη
∂(d+ζ)upGηη
∂ξ +1
pGξξpGηη
∂(d+ζ)vpGξξ
∂η +
+∂ω
∂σ = (d+ζ) (qin −qout).(9.9)
At the surface the effect of precipitation and evaporation is taken into account. The vertical
velocity ωis defined at the iso σ-surfaces. ωis the vertical velocity relative to the moving
σ-plane. It may be interpreted as the velocity associated with up- or downwelling motions.
The “physical” vertical velocities win the Cartesian co-ordinate system are not involved in
the model equations. Computation of the physical vertical velocities is only required for post-
processing purposes. These velocities can be expressed in the horizontal velocities, water
depths, water levels and vertical ω-velocity according to:
w=ω+1
pGξξpGηη upGηη σ∂H
∂ξ +∂ζ
∂ξ +vpGξξ σ∂H
∂η +∂ζ
∂η +
+σ∂H
∂t +∂ζ
∂t .(9.10)
Hydrostatic pressure assumption (for σ-grid)
Under the shallow water assumption, the vertical momentum equation is reduced to a hydro-
static pressure equation. Vertical accelerations due to buoyancy effects and due to sudden
variations in the bottom topography are not taken into account. So:
∂P
∂σ =−gρH. (9.11)
Deltares 185 of 688
DRAFT
Delft3D-FLOW, User Manual
After integration, the hydrostatic pressure is given by:
P=Patm +gH Z0
σ
ρ(ξ, η, σ0, t)dσ0.(9.12)
Firstly, we consider water with a constant density and next with a non-uniform density.
For water of constant density and taking into account the atmospheric pressure, the pressure
gradients read:
1
ρ0pGξξ
Pξ=g
pGξξ
∂ζ
∂ξ +1
ρ0pGξξ
∂Patm
∂ξ ,(9.13)
1
ρ0pGηη
Pη=g
pGηη
∂ζ
∂η +1
ρ0pGηη
∂Patm
∂η .(9.14)
The gradients of the free surface level are the so-called barotropic pressure gradients. The
atmospheric pressure is included in the system for storm surge simulations. The atmospheric
pressure gradients dominate the external forcing at peak winds during storm events. Space
and time varying wind and pressure fields are especially important when simulating storm
surges.
In case of a non-uniform density, the local density is related to the values of temperature and
salinity by the equation of state, see section 9.3.4. Leibniz rule is used to obtain the following
expressions for the horizontal pressure gradients:
1
ρ0pGξξ
Pξ=g
pGξξ
∂ζ
∂ξ +gd+ζ
ρ0pGξξ Z0
σ∂ρ
∂ξ +∂ρ
∂σ
∂σ
∂ξ dσ0(9.15)
1
ρ0pGηη
Pη=g
pGηη
∂ζ
∂η +gd+ζ
ρ0pGηη Z0
σ∂ρ
∂η +∂ρ
∂σ
∂σ
∂η dσ0(9.16)
The first term in Eqs. (9.15) and (9.16) represents the barotropic pressure gradient (without
atmospheric pressure gradients) and the second term the baroclinic pressure gradient. In the
horizontal gradient a vertical derivative is introduced by the σco-ordinate transformation. In
estuaries and coastal seas the vertical grid may deteriorate strongly in case of steep bottom
slopes. In order to avoid artificial flow the numerical approximation of the baroclinic pres-
sure terms requires a special numerical approach. The discretisations of Delft3D-FLOW are
discussed in Section 10.10, see also Stelling and Van Kester (1994).
Floating structures
To simulate the influence of floating structures, such as ships or pontoons, both the pressure
term in the momentum equations and the continuity equation are modified.
The pressure of a floating structure at the free surface is dependent on the draft of the struc-
ture, generically called ’ship’ (dship ):
Patm =gρ0dship (9.17)
186 of 688 Deltares

DRAFT
Conceptual description
If the free surface is covered by a floating structure, the free surface cannot move freely. The
water level should be fixed, using a “rigid lid” boundary condition. This boundary condition
is implemented by reducing the storage area of the grid cell with a factor α(the parameter
Riglid in section B.3.6):
α∂ζ
∂t (9.18)
with 0< α ≤1. The wave speed below the floating structure increases to pgH/α. To
prevent numerical inaccuracy for wave propagation αmust be larger than zero. We suggest
α≈0.1.
Coriolis force
The Coriolis parameter fdepends on the geographic latitude and the angular speed of ro-
tation of the earth, Ω:f= 2Ω sin φ. For a curvilinear grid you should specify the space
varying Coriolis parameter, using a suitable projection.
Reynold’s stresses
The forces Fξand Fηin the horizontal momentum equations represent the unbalance of
horizontal Reynolds stresses. The Reynolds stresses are modelled using the eddy viscosity
concept, (for details e.g. Rodi (1984)). This concept expresses the Reynolds stress compo-
nent as the product between a flow as well as grid-dependent eddy viscosity coefficient and
the corresponding components of the mean rate-of-deformation tensor. The meaning and the
order of the eddy viscosity coefficients differ for 2D and 3D, for different horizontal and vertical
turbulence length scales and fine or coarse grids. In general the eddy viscosity is a function
of space and time.
For 3D shallow water flow the stress tensor is an-isotropic. The horizontal eddy viscosity
coefficient, νH, is much larger than the vertical eddy viscosity νV(νHνV). The horizontal
viscosity coefficient may be a superposition of three parts:
1 a part due to “sub-grid scale turbulence”,
2 a part due to “3D-turbulence” see Uittenbogaard et al. (1992) and
3 a part due to dispersion for depth-averaged simulations.
In simulations with the depth-averaged momentum and transport equations, the redistribution
of momentum and matter due to the vertical variation of the horizontal velocity is denoted
as dispersion. In 2D simulations this dispersion is not simulated as the vertical profile of the
horizontal velocity is not resolved. Then this dispersive effect may be modelled as the product
of a viscosity coefficient and a velocity gradient. The dispersion term may be estimated by the
Elder formulation.
If the vertical profile of the horizontal velocity is not close to a logarithmic profile (e.g. due to
stratification or due to forcing by wind) then a 3D-model for the transport of matter is recom-
mended.
The horizontal eddy viscosity is mostly associated with the contribution of horizontal turbulent
motions and forcing that are not resolved by the horizontal grid (“sub-grid scale turbulence”) or
by (a priori) the Reynolds-averaged shallow-water equations. For the former we introduce the
sub-grid scale (SGS) horizontal eddy viscosity νSGS and for the latter the horizontal eddy vis-
cosity νback
H. Delft3D-FLOW simulates the larger scale horizontal turbulent motions through a
methodology called Horizontal Large Eddy Simulation (HLES). The associated horizontal vis-
Deltares 187 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 9.2: Overview of eddy viscosity options in Delft3D-FLOW
model description νSGS νback
H(represents) ν3Dνback
V
2D, no HLES - 2D-turbulence +
dispersion coefficient
- -
2D, with HLES computed
by HLES
3D-turbulence +
dispersion coefficient
- -
3D, no HLES - 2D-turbulence computed by ver-
tical turbulence
model.
background
vertical
viscosity
3D, with HLES computed
by HLES
- computed by ver-
tical turbulence
model.
background
vertical
viscosity
cosity coefficient νSGS will then be computed by a dedicated SGS-turbulence model, including
the Elder contribution if requested. For details of this approach, see section B.8.
The background horizontal viscosity, user-defined through the input file is represented by
νback
H. Consequently, in Delft3D-FLOW the horizontal eddy viscosity coefficient is defined by
νH=νSGS +νV+νback
H.(9.19)
The 3D part νVis referred to as the three-dimensional turbulence and in 3D simulations it is
computed following a 3D-turbulence closure model.
For turbulence closure models responding to shear production only, it may be convenient to
specify a background or “ambient” vertical mixing coefficient in order to account for all other
forms of unresolved mixing, νback
V. Therefore, in addition to all turbulence closure models in
Delft3D-FLOW a constant (space and time) background mixing coefficient may be specified
by you, which is a background value for the vertical eddy viscosity in the momentum Eqs. (9.7)
and (9.8). Consequently, the vertical eddy viscosity coefficient is defined by:
νV=νmol + max(ν3D, νback
V),(9.20)
with νmol the kinematic viscosity of water. The 3D part ν3Dis computed by a 3D-turbulence
closure model, see section 9.5. Summarizing, since in Delft3D-FLOW several combinations
of horizontal and vertical eddy viscosity are optional, Table 9.2 presents an overview of these
combinations.
Remarks:
We note that the “background horizontal eddy viscosity” represents a series of compli-
cated hydrodynamic phenomena. Table 9.2 shows that this background horizontal eddy
viscosity νback
Heither contains zero, one or two contributions.
The background horizontal eddy viscosity νback
Hhas to be specified by you in the GUI in
addition to the Elder formulation for 3D-turbulence and dispersion in 2D simulations.
For the description of the (vertical) turbulence models for 3D simulations, we refer to
section 9.5.
It is important to emphasize that the lower limit of vertical eddy viscosity νback
Vis only
used in the momentum equations (see Eqs. (9.7) and (9.8)) and is not used in the
vertical turbulence models (see for example Eqs. (9.115),(9.127) and (9.128)). For the
transport equation there is similar lower limit.
188 of 688 Deltares
DRAFT
Conceptual description
For the sake of completeness; to model secondary flow in river bends in depth-averaged sim-
ulations, Delft3D-FLOW contains a formulation to account for the effect of this spiral motion.
Then, the horizontal stress tensor is extended with additional shear stresses, see section 9.6.
The σco-ordinate system rotates the Cartesian stress tensor and introduces additional deriva-
tives (Stelling and Van Kester,1994). In Delft3D-FLOW, the stress tensor is redefined in the
σco-ordinate system assuming that the horizontal length scale is much larger than the water
depth (Blumberg and Mellor,1985) and that the flow is of boundary-layer type. The horizontal
gradients are taken along σ-planes. This approach guarantees a positive definite operator,
also on the numerical grid (Beckers et al.,1998). Thus, the forces Fξand Fηare of the form:
Fξ=1
pGξξ
∂τξξ
∂ξ +1
pGηη
∂τξη
∂η ,(9.21)
Fη=1
pGξξ
∂τηξ
∂ξ +1
pGηη
∂τηη
∂η .(9.22)
For small-scale flow, i.e. when the shear stresses at the closed boundaries must be taken into
account, the shear stresses τξξ,τξη ,τηξ and τηη are determined according to:
τξξ =2νH
pGξξ ∂u
∂ξ +∂u
∂σ
∂σ
∂ξ ,(9.23)
τξη =τηξ =νH(1
pGηη ∂u
∂η +∂u
∂σ
∂σ
∂η +1
pGξξ ∂v
∂ξ +∂v
∂σ
∂σ
∂ξ ),(9.24)
τηη =2νH
pGηη ∂v
∂η +∂v
∂σ
∂σ
∂η .(9.25)
For large-scale flow simulated with coarse horizontal grids, i.e. when the shear stresses along
the closed boundaries may be neglected, the forces Fξand Fηare simplified. The horizontal
viscosity terms in Delft3D-FLOW are then reduced to the Laplace operator along grid lines:
Fξ=νH 1
pGξξpGξξ
∂2u
∂ξ2+1
pGηηpGηη
∂2u
∂η2!,(9.26)
Fη=νH 1
pGξξpGξξ
∂2v
∂ ξ2+1
pGηηpGηη
∂2v
∂η2!,(9.27)
where the eddy viscosity has been assumed to be a constant.
The choice between the formulations represented by Eqs. (9.21) to (9.25), or Eqs. (9.26) and
(9.27) depends on the application (velocity scales) and can be specified by you. Eqs. (9.21)
to (9.25) are used in combination with rough side walls (partial slip). Their numerical imple-
mentation is explicit and this introduces a stability condition, see chapter 10.
Deltares 189 of 688
DRAFT
Delft3D-FLOW, User Manual
In the expressions for the horizontal viscosity terms, the curvature of the grid in the horizontal
and vertical plane has been neglected.
In strongly stratified flows, the turbulent eddy viscosity at the interface reduces to zero and
the vertical mixing reduces to molecular diffusion (laminar flow). This is physically not realis-
tic because in strongly stratified flow random internal waves exist. These internal waves are
generated continuously by various sources; they increase the production of turbulence and
generate vertical mixing of momentum. Because the effect of internal waves is not explicitly
taken into account in the present implementation of the turbulence models, the effect of inter-
nal waves may be assigned to a constant (in space and time) background eddy viscosity at
input, which is added to the momentum equations only.
Discharge or withdrawal of momentum
The discharge of water, when momentum is taken into account, gives an additional term in
the Uand Vmomentum equation:
Mξ=qin(ˆ
U−u)(9.28)
Mη=qin(ˆ
V−v)(9.29)
with ˆ
Uand ˆ
Vthe velocity components of the momentum discharged in ξ- and η-direction,
respectively. If ˆ
Uand ˆ
Vare set to zero, then the flow is decelerated.
9.3.2 Transport equation (for σ-grid)
The flows in rivers, estuaries, and coastal seas often transport dissolved substances, salinity
and/or heat. In Delft3D-FLOW, the transport of matter and heat is modelled by an advection-
diffusion equation in three co-ordinate directions. Source and sink terms are included to
simulate discharges and withdrawals. Also first-order decay processes may be taken into
account. A first-order decay process corresponds to a numerical solution which is exponen-
tially decreasing. For more complex processes e.g. eutrophication, biological and/or chemical
processes the water quality module D-Water Quality should be used.
The transport equation here is formulated in a conservative form in orthogonal curvilinear
co-ordinates in the horizontal direction and σco-ordinates in the vertical direction:
∂(d+ζ)c
∂t +1
pGξξpGηη (∂pGηη (d+ζ)uc
∂ξ +∂pGξξ (d+ζ)vc
∂η )+∂ωc
∂σ =
d+ζ
pGξξpGηη (∂
∂ξ DHpGηη
pGξξ
∂c
∂ξ !+∂
∂η DHpGξξ
pGηη
∂c
∂η !)+
+1
d+ζ
∂
∂σ DV
∂c
∂σ −λd(d+ζ)c+S, (9.30)
with DHthe horizontal diffusion coefficient, DVthe horizontal diffusion coefficient, λdrepre-
senting the first order decay process and Sthe source and sink terms per unit area due to
the discharge qin or withdrawal qout of water and/or the exchange of heat through the free
surface Qtot:
S= (d+ζ) (qincin −qoutc) + Qtot.(9.31)
The total horizontal diffusion coefficient DHis defined by
DH=DSGS +DV+Dback
H(9.32)
190 of 688 Deltares
DRAFT
Conceptual description
with DSGS the diffusion due to the sub-grid scale turbulence model (Equation (B.4)). We
remark that in Equation (9.32) a user defined diffusion coefficient for the horizontal is used
Dback
H. The reason is that you may use this horizontal diffusion coefficient for calibration
independent of the horizontal eddy viscosity. This eddy diffusivity depends on the constituent.
The vertical diffusion coefficient DVis defined by
DV=νmol
σmol
+ max D3D, Dback
V,(9.33)
with D3Dthe diffusion due to turbulence model in vertical direction (Equation (9.103)) and
with νmol the kinematic viscosity of water and σmol is either the (molecular) Prandtl number
for heat diffusion or the Schmidt number for diffusion of dissolved matter.
For vertical mixing, the eddy viscosity νVis defined by you at input via the GUI (e.g. in
case of a constant vertical eddy viscosity) or computed by a 3D-turbulence model, see Equa-
tion (9.20). Delft3D-FLOW will also compute the vertical diffusion coefficients by taking into
account the turbulence Prandtl-Schmidt number.
For shallow-water flow, the diffusion tensor is an-isotropic. Typically, the horizontal eddy dif-
fusivity DHexceeds the vertical eddy diffusivity DV. The horizontal diffusion coefficient is
assumed to be a superposition of three parts:
1 The 2D part DSGS (sub-grid scale turbulence), due to motions and mixing that are not
resolved by the horizontal grid.
2 The contribution due to 3D turbulence, D3D, which is related to the turbulent eddy viscos-
ity and is computed by a 3D turbulence closure model, see Uittenbogaard et al. (1992).
3Dback
Hrepresenting the Reynolds-averaged equations and/or accounting for other unre-
solved horizontal mixing.
For depth-averaged simulations, the horizontal eddy diffusivity should also include dispersion
by the vertical variation of the horizontal flow (so-called Taylor-shear dispersion). Delft3D-
FLOW has an option (so-called HLES approach) solving explicitly the larger scale horizontal
turbulent motions. Then the 2D part DSGS is associated with mixing by horizontal motions and
forcing that cannot be resolved on the grid. For details of the HLES-approach, see section B.8.
The horizontal background diffusion coefficient is represented by Dback
Hand it is specified by
you at input and it should account for all other forms of unresolved mixing (in most cases it is
a calibration parameter).
Remark:
We remark that for small scale applications the default value set by the GUI of 10 m2/s
is too large.
In addition to the vertical eddy diffusivity estimated by a 3D turbulence model you may specify
a background or “ambient” vertical mixing coefficient accounting for all other forms of unre-
solved mixing. In strongly stratified flows, breaking internal waves may be generated which are
not modelled by the available 3D turbulence models of Delft3D-FLOW. Instead, you can spec-
ify the so-called Ozmidov length scale Loz, see section 9.5 for a more detailed description.
Then, the 3D-turbulence part D3Dis defined as the maximum of the vertical eddy diffusivity
computed by the turbulence model and the Ozmidov length scale (see also Equation (9.101)):
D3D= max D3D,0.2L2
ozs−g
ρ
∂ρ
∂z !.(9.34)
Deltares 191 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 9.3: Overview of eddy diffusivity options in Delft3D-FLOW
model description DSGS Dback
H(represents) D3DDback
V
2D, no HLES 0 2D-turbulence +
dispersion coefficient
- -
2D, with HLES computed
by HLES
3D-turbulence +
dispersion coefficient
- -
3D, no HLES 0 2D-turbulence maximum of
value of turbu-
lence model and
the Ozmidov
length scale.
background
eddy
diffusivity
3D, with HLES computed
by HLES
- maximum of
value of turbu-
lence model and
the Ozmidov
length scale.
background
eddy
diffusivity
For all turbulence closure models in Delft3D-FLOW a vertical background mixing coefficient
Dback
Vhas to be specified by you via the GUI, Equation (9.33)
For two-dimensional depth-averaged simulations, the horizontal eddy diffusivity Dback
Hshould
also contain a contribution due to the vertical variation of the horizontal flow (Taylor shear
dispersion). This part is discarded by depth averaging the 3D advection diffusion equation.
For the application of a depth-averaged transport model, the water column should be well-
mixed and the Taylor shear dispersion should be of secondary importance, otherwise a 3D
model should be used for the simulation of the transport of matter.
Summarizing, in Delft3D-FLOW many options are available for the eddy diffusivity; Table 9.3
presents an overview of these options. We note that this is rather similar to the eddy viscosity
options (see Table 9.2).
Remarks:
The horizontal background diffusion-type coefficient is represented by Dback
Hand pre-
scribed by you in the GUI. The default value of 10 m2/s is too large for small scale
applications.
The vertical eddy diffusivity D3Dis the maximum value of the Ozmidov length scale and
the vertical eddy viscosity computed by the turbulence model. If you have not switched
on the Ozmidov length scale, which is the case in most of the simulations, then the
Ozmidov length scale is equal to zero.
192 of 688 Deltares
DRAFT
Conceptual description
Artificial vertical diffusion
The σco-ordinate system rotates the Cartesian stress tensor and introduces additional deriva-
tives (Stelling and Van Kester,1994). In Delft3D-FLOW the diffusion tensor is redefined in the
σco-ordinate system assuming that the horizontal length scale is much larger than the water
depth (Blumberg and Mellor,1985) and that the flow is of boundary-layer type. The horizontal
gradients are taken along σ-planes. This approach guarantees a positive definite operator,
also on the numerical grid (Beckers et al.,1998).
For steep bottom slopes in combination with vertical stratification, the horizontal diffusion
along σ-planes introduces artificial vertical diffusion (Huang and Spaulding,1996). Strict
horizontal diffusion along Z-planes gives a more realistic description of the physical transport
process. Numerical implementation of the complete transformation behaved poorly (Blumberg
and Mellor,1985). Stelling and Van Kester (1994) developed an algorithm to approximate the
horizontal diffusion along Z-planes in a σ-co-ordinate framework, see Section 10.10.
9.3.3 Coupling between intake and outfall
For a power plant, the discharge at the outfall is set equal to the inflow at the intake, i.e.:
qout =qin.(9.35)
The temperature, salinity and concentrations of substances prescribed as a function of time
for the Intake - Outfall combination are added to the values at the intake, i.e. they represent
the influence of the power plant on their value or concentration:
Tout =Tin + ∆Tdischarge,(9.36)
Sout =Sin + ∆Sdischarge,(9.37)
Cout =Cin + ∆Cdischarge,(9.38)
where the increase in temperature, salinity or concentration due to the power plant can be
negative.
Remark:
The temperature, salinity, or concentration at the outfall is set to zero when its value
would become negative. The computation is continued, but a warning is written to the
diagnostic file.
9.3.4 Equation of state
The density of water ρis a function of salinity (s) and temperature (t). In Delft3D-FLOW you
can choose between two different formulations for the equation of state (Eckart or UNESCO).
The first empirical relation derived by Eckart (1958) is based on a limited number of measure-
ments dating from 1910 (only two salinities at 5 temperatures). In the original equation the
pressure is present, but at low pressures the effect on density can be neglected.
Eckart formulation
The Eckart formulation is given by (Eckart,1958):
Range: 0< t < 40 ◦C, 0<s<40 ppt
ρ=1,000P0
λ+α0P0
,(9.39)
Deltares 193 of 688
DRAFT
Delft3D-FLOW, User Manual
where:
λ= 1779.5 + 11.25t−0.0745t2−(3.80 + 0.01t)s, (9.40)
α0= 0.6980,(9.41)
P0= 5890 + 38t−0.375t2+ 3s. (9.42)
with the salinity sin ppt and the water temperature tin ◦C.
For fresh water the Eckart formulation does not give the maximum density at the temperature
of 4 degrees Celsius. This is an important physical aspect when simulating the thermocline
formation in lakes or stagnant basins. Therefore also the so-called UNESCO formulation is
implemented in Delft3D-FLOW.
UNESCO formulation
The UNESCO formulation is given by (UNESCO,1981a):
Range: 0< t < 40 ◦C, 0.5<s<43 ppt
ρ=ρ0+As +Bs3/2+Cs2(9.43)
where
ρ0= 999.842594 + 6.793952 ·10−2t−9.095290 ·10−3t2+
+ 1.001685 ·10−4t3−1.120083 ·10−6t4+ 6.536332 ·10−9t5(9.44)
A= 8.24493 ·10−1−4.0899 ·10−3t+ 7.6438 ·10−5t2+
−8.2467 ·10−7t3+ 5.3875 ·10−9t4(9.45)
B=−5.72466 ·10−3+ 1.0227 ·10−4t−1.6546 ·10−6t2(9.46)
C= 4.8314 ·10−4(9.47)
Remarks:
Equation (9.45) is known as the International Equation of State for Seawater (EOS80)
and is based on 467 data points. The standard error of the equation is 3.6·10−3kg/m3
(Millero and Poisson,1981).
The Practical Salinity Scale (UNESCO,1981b, Par. 3.2) and the International Equation
of State are meant for use in all oceanic waters. However, these equations should be
used with caution in waters that have a chemical composition different from standard
seawater. In such waters, densities derived with the methods based on practical salinity
measurements and the International Equation of State may deviate measurably from
the true densities. However, in water masses different in composition from standard
seawater the differences in densities derived by the new equations involve only very
small errors.
Recommendation
The UNESCO formulae serve as an international standard. Further, the UNESCO formulae
show the correct temperature of 4 degrees Celsius where fresh water has its maximum den-
sity. The latter is of importance for thermal stratification in deep lakes in moderate climate
zones. Therefore we recommend the application of the UNESCO formulae and to select the
Eckart formulation only for consistence with previous projects in which it has been used. At
this moment the default is UNESCO.
194 of 688 Deltares

DRAFT
Conceptual description
Nevertheless, the UNESCO formulae have their limitations as they are based on the general
properties of seawater mixed with fresh water. Particularly in cases where marginal density
differences play a role, typically lakes, a variable mineral content of the water may create den-
sity differences not detected by just temperature and salinity. For such dedicated cases, you
are warranted to check the accuracy of the UNESCO formulae against experimental density-
relations derived from the (lake) water. In case of deviations or other constituents determining
the water density, we then recommend to contact the Helpdesk for further assistance such as
the implementation of a more dedicated density formulation.
How to specify the equation of state
The equation of state cannot yet be specified from the FLOW-GUI. You have to edit the MDF-
file yourself:
If you want to apply the Eckart formulation, add DenFrm = #Eckart#.
If you want to apply the UNESCO formulation you do not need to change the MDF-file, since
the default formulation is UNESCO. However, you may add DenFrm = #UNESCO# if you
want to.
9.4 Boundary conditions
The 3D and 2D depth-averaged shallow water or long-wave equations applied in Delft3D-
FLOW represent a hyperbolic (inviscid case) or parabolic (viscid case) set of partial differential
equations. To get a well-posed mathematical problem with a unique solution, a set of initial and
boundary conditions for water levels and horizontal velocities must be specified. The contour
of the model domain consists of parts along “land-water” lines (river banks, coast lines) which
are called closed boundaries and parts across the flow field which are called open boundaries.
Closed boundaries are natural boundaries. The velocities normal to a closed boundary are set
to zero. Open boundaries are always artificial “water-water” boundaries. In a numerical model
open boundaries are introduced to restrict the computational area and so the computational
effort. They are situated as far away as possible from the area of interest. Long waves
propagating out of the model area should not be hampered by the open boundaries. The
reflection should be minimal.
The solution of the shallow water equations can be split in a steady state solution and a tran-
sient solution. The steady state solution depends on the boundary conditions and the forcing
terms while the transient solution follows from the deviation between the initial condition and
the steady state solution at the start of the simulation, the reflection at the open boundaries
and the amount of dissipation.
Usually it is assumed that initially the model is at rest (“cold start”). The start of the simulation
will generate short progressive waves with a wavelength coupled with the length of the model
area (eigen oscillations). When disturbances are reflected at the open boundaries and are
trapped in the model area, a standing wave may be generated. A water level boundary acts
as a nodal point and a velocity or closed boundary acts as an anti-nodal point. The tran-
sient solution may propagate out of the model area through the open boundaries (Riemann
boundary condition) or be reduced at the open boundaries (low pass filter) by use of the α-
coefficient, Eqs. (9.74) and (9.75), or die out due to bottom friction and viscosity. The spin-up
time of a model is dependent on the time-scale with which the transient solution dies out.
The steady state solution is completely dependent on the boundary conditions. It is reached
after the transient solution died out. The number of boundary conditions specified at any
particular point of the boundary should be equal to the number of characteristics entering the
Deltares 195 of 688
DRAFT
Delft3D-FLOW, User Manual
region at that point, see Courant and Hilbert (1962) or Vreugdenhil (1989). Delft3D-FLOW
assumes that the flow at the open boundaries is sub-critical, which means that the magnitude
of the flow is smaller than the velocity of wave propagation. Sub-critical flow means that the
Froude number, which is defined by:
F r =|U|
√gH ,(9.48)
is smaller than one. For sub-critical flow we distinguish two situations, viz. inflow and outflow.
At inflow, we have to specify two boundary conditions and at outflow we have to specify one
boundary condition. For tidal flow the number of required boundary conditions varies between
ebb and flood. The first boundary condition is an external forcing by the water level, the normal
velocity, the discharge rate or the Riemann invariant specified by you. The second boundary
condition is a built-in boundary condition. At inflow the velocity component along the open
boundary is set to zero. The influence of this built-in boundary condition is in most cases
restricted to only a few grid cells near the open boundary. It would be better to specify the tan-
gential velocity component. The tangential velocity may be determined from measurements
or from model results of a larger domain (nesting of models). In the present implementation
of the open boundary conditions in Delft3D-FLOW it is not possible yet to specify the tangen-
tial velocity component at input. To get a realistic flow pattern near the open boundary, it is
suggested to define the model boundaries at locations where the grid lines of the boundary
are perpendicular to the flow.
For modelling the region outside the computational domain, incident waves should be known
and are prescribed at the open boundaries. To reduce the reflections at the open boundaries
a so-called weakly reflecting boundary condition may be applied. This boundary condition is
derived using the Riemann invariants of the linearised shallow water equations without Cori-
olis and bottom friction (Verboom and Slob,1984). The boundary condition is non-reflective
for waves, which pass normal to the boundary (wave front parallel with open boundary). If we
do not prescribe exactly the incoming Riemann invariants at an open boundary, the outgoing
wave will reflect at the boundary and propagate back as a disturbance into the model area.
Usually information on both water level and velocity is not available and consequently we can-
not specify the Riemann invariant. A water level or velocity boundary condition can be made
weakly reflective for short wave components originating from the initial conditions or the eigen
frequencies by adding the time derivative of the Riemann invariant see Eqs. (9.74) and (9.75).
If these Riemann invariants are not used then these short wave components may disturb the
solution for a long time.
In the vertical direction the momentum equations are parabolic. The vertical velocity profile is
determined by the vertical eddy viscosity and the boundary conditions at the bed (bed stress)
and at the free surface (wind stress). The spin-up time of the vertical profiles is dependent on
the vertical eddy viscosity.
When the grid size near the boundaries is larger than the thickness of the boundary layers
occurring in the flow, the shear-stresses along the lateral boundaries can be neglected. A
so-called free slip boundary condition is applied at all lateral boundaries. For the simulation
of laboratory flumes the effect of side wall friction can be added to the system of equations in
Delft3D-FLOW by a so-called partial slip boundary condition.
9.4.1 Flow boundary conditions
9.4.1.1 Vertical boundary conditions
196 of 688 Deltares
DRAFT
Conceptual description
Kinematic boundary conditions
In the σco-ordinate system, the free surface (σ= 0, or z=ζ) and the bottom (σ=−1,
or z=−d) are σco-ordinate surfaces. ωis the vertical velocity relative to the σ-plane. The
impermeability of the surface and the bottom is taken into account by prescribing the following
kinematic conditions:
ω|σ=−1= 0 and ω|σ=0 = 0 (9.49)
For the Z-grid the kinematic conditions read:
w|z=−d= 0 and w|z=ς= 0 (9.50)
Bed boundary condition
At the seabed, the boundary conditions for the momentum equations are:
νV
H
∂u
∂σ σ=−1
=1
ρ0
τbξ,(9.51)
νV
H
∂v
∂σ σ=−1
=1
ρ0
τbη,(9.52)
with τbξ and τbη the components of the bed stress in ξ- and η-direction, respectively. The bed
stress may be the combined effect of flow and waves. In this section we restrict ourselves
to the resistance due to flow only. For the parameterisations for the combination of flow and
waves, see section 9.7. At first we discuss the formulations for 2D depth-averaged flow,
followed by the formulations for 3D flow.
Depth-averaged flow
For 2D depth-averaged flow the shear-stress at the bed induced by a turbulent flow is assumed
to be given by a quadratic friction law:
~τb=
ρ0g~
U~
U
C2
2D
,(9.53)
where ~
Uis the magnitude of the depth-averaged horizontal velocity.
The 2D-Chézy coefficient C2Dcan be determined according to one of the following three
formulations:
Chézy formulation:
C2D=Chézy coefficient [m1/2/s]. (9.54)
Manning’s formulation:
C2D=
6
√H
n(9.55)
where:
Deltares 197 of 688

DRAFT
Delft3D-FLOW, User Manual
His the total water depth [m].
nis the Manning coefficient [m−1/3s].
White-Colebrook’s formulation:
C2D= 18 10log 12H
ks(9.56)
where:
His the total water depth
ksis the Nikuradse roughness length.
Alluvial bed properties and land use data can be used to determine the roughness and flow
resistance. Specific functionality has been implemented to make the translation of bed and
land use properties into roughness and flow resistance characteristics. See section 9.11.2 for
details.
Three-dimensional flow
For 3D models, a quadratic bed stress formulation is used that is quite similar to the one for
depth-averaged computations. The bed shear stress in 3D is related to the current just above
the bed:
~τb3D=gρ0~ub|~ub|
C2
3D
,(9.57)
with |~ub|the magnitude of the horizontal velocity in the first layer just above the bed. The con-
tribution of the vertical velocity component to the magnitude of the velocity vector is neglected.
The first grid point above the bed is assumed to be situated in the logarithmic boundary layer.
Let ∆zbbe the distance to the computational grid point closest to the bed, so:
~ub=~u∗
κln 1 + ∆zb
2z0,(9.58)
where z0is user-defined. In the numerical implementation of the logarithmic law of the wall for
a rough bottom, the bottom is positioned at z0. The magnitude of the bottom stress is defined
as:
|~τb|=ρ0~u∗|~u∗|.(9.59)
Using Eqs. (9.57) to (9.59),C3Dcan be expressed in the roughness height z0of the bed:
C3D=√g
κln 1 + ∆zb
2z0.(9.60)
The parameter z0can be linked to the actual geometric roughness as a fraction of the RMS-
value of the sub-grid bottom fluctuations. For rough walls Nikuradse (1933) found:
z0=ks
30,(9.61)
where ksis known as the Nikuradse roughness length scale and has been determined exper-
imentally.
198 of 688 Deltares
DRAFT
Conceptual description
Often a 3D-calculations are preceded by depth-averaged calculations. Then, the Chézy-
coefficients C2Dmay be used for calibration of the 3D model. Under the assumption of
a logarithmic velocity profile Equation (9.54), equality of bottom stress and the assumption
z0H, the magnitude of the depth-averaged velocity is given by:
~
U=|~u∗|
κln 1 + H
ez0.(9.62)
The Chézy coefficient C2Dcan be converted into the bed roughness height z0using the
relation:
z0=H
e1+ κC2D
√g−e
.(9.63)
The depth Hin Eqs. (9.62) and (9.63) denotes the actual water depth. As a result the rough-
ness height z0depends on the horizontal co-ordinates ξ,ηand time t. Equality of the bed
stress in 2D leads to the relation:
C2D=√g
κln 1 + H
ez0.(9.64)
Note: that the difference between the 2D- and the 3D-Chézy coefficient (9.64) and (9.60)
depends on the relative thickness of the computational bed layer. Using a 2D simulation for
the calibration of waterlevels is only accurate if the vertical velocity profile of the horizontal
velocity is almost logarithmic. Examples are discharge waves in rivers, tidal flows in estuaries
and seas. The method is not accurate for stratified flows and wind driven flows, because in
these cases the vertical profile will deviate a lot from the logarithmic profile Equation (9.54),
so also Equation (9.58) is not correct.
Surface boundary condition
At the free surface the boundary conditions for the momentum equations are:
νV
H
∂u
∂σ σ=0
=1
ρ0|~τs|cos (θ),(9.65)
νV
H
∂v
∂σ σ=0
=1
ρ0|~τs|sin (θ),(9.66)
where θis the angle between the wind stress vector and the local direction of the grid-line η
is constant. Without wind, the stress at the free surface is zero. The magnitude of the wind
shear-stress is defined as:
|~τs|=ρ0~u∗s|~u∗s|.(9.67)
The magnitude is determined by the following widely used quadratic expression:
|~τs|=ρaCdU2
10 (9.68)
where:
Deltares 199 of 688
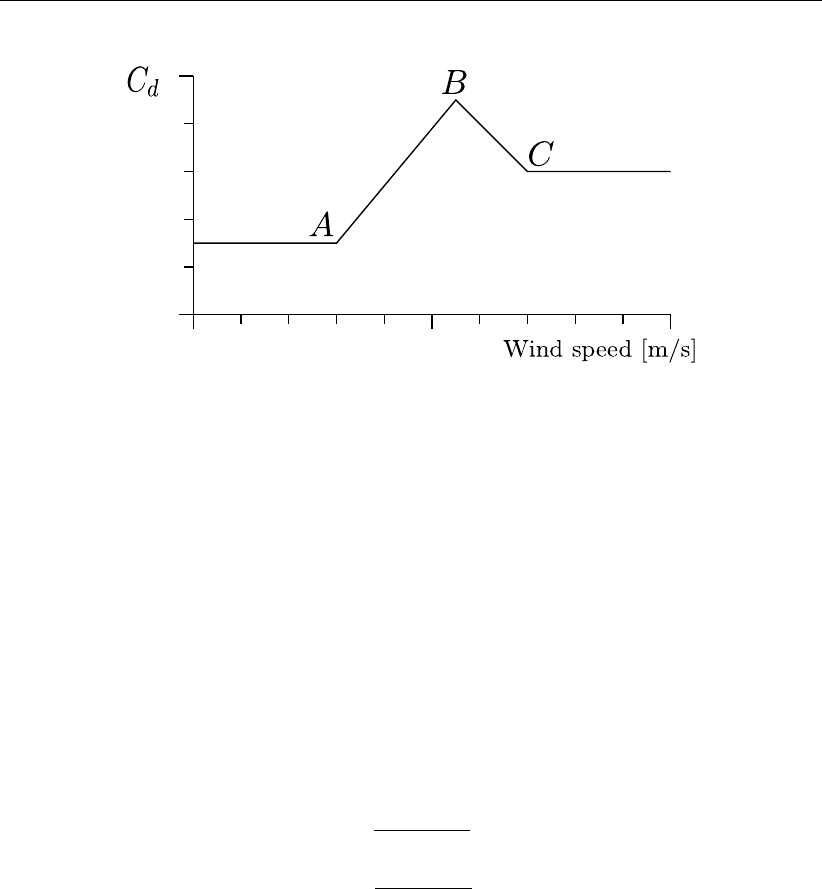
DRAFT
Delft3D-FLOW, User Manual
0
Figure 9.3: Examples wind drag coefficient depending on wind speed.
ρathe density of air.
U10 the wind speed 10 meter above the free surface (time and space
dependent).
Cdthe wind drag coefficient, dependent on U10.
Delft3D-FLOW offers the possibility to prescribe either global or local wind. Global wind cor-
responds to uniform in space and varying in time. Local winds vary both in space and time.
Local wind is applied in combination with space and time varying atmospheric pressure.
The wind drag coefficient may be dependent on the wind velocity, reflecting increasing rough-
ness of the sea surface with increasing wind speed, see Smith and Banke (1975). You may
specify an empirical relation following:
Cd(U10) =
CA
d, U10 ≤UA
10,
CA
d+CB
d−CA
dU10 −UA
10
UB
10 −UA
10
, UA
10 ≤U10 ≤UB
10,
CB
d+CC
d−CB
dU10 −UB
10
UC
10 −UB
10
, UB
10 ≤U10 ≤UC
10,
CC
d, UC
10 ≤U10,
(9.69)
where:
Ci
dare the user-defined wind drag coefficients at respectively the wind
speed Ui
10 (i=A, B, C).
Ui
10 are user-defined wind speeds (i=A, B, C).
With Equation (9.69) several relations for the wind drag coefficient are possible, see Fig-
ure 9.3.
9.4.1.2 Open boundary conditions
Open boundaries are virtual “water-water” boundaries. They are introduced to obtain a lim-
ited computational area and so to reduce the computational effort. In nature, waves can cross
these boundaries unhampered and without reflections. At an open boundary the water level,
the normal velocity component or a combination should be prescribed to get a well-posed
mathematical initial-boundary value problem. For an inflow boundary, also the tangential ve-
locity component should be specified. In the present implementation, the tangential velocity
component is set to zero. It is assumed that the flow is normal to the open boundary. The data
needed for the boundary conditions can be obtained from measurements, tide tables or from
200 of 688 Deltares
DRAFT
Conceptual description
a larger model, which encloses the model at hand (nesting). If we do not prescribe exactly
the incoming waves at an open boundary, the outgoing waves will reflect at the boundary and
propagate as a disturbance into the area.
To reduce the reflections at the open boundary (Verboom and Slob,1984;Verboom and Segal,
1986) derived a so-called zero and first order weakly reflecting boundary condition based on
the work of Engquist and Majda (1977,1979). Assuming zero flow along the boundary, the
zero order boundary condition may also be obtained using the so-called Riemann invariants
for the linearised 1D equation normal to the open boundary:
R=U±2pgH. (9.70)
The two Riemann invariants are two waves moving in opposite direction with propagation
speed R=U±√gH. The sign is dependent on the direction of propagation. At the open
boundary, the incoming wave should be specified. We restrict ourselves to the positive sign
(left boundary). The linearised Riemann invariant is given by:
U+ 2pgH =U+ 2pg(d+ζ)≈U+ 2pgd +ζrg
d,|ζ|
d1.(9.71)
The boundary condition which should be specified by you is: f(t) = U+ζpg
d, the term
2√gd is computed from the known depth-field and added in the computational part. It is
assumed that the reference plane is chosen such that the mean water level is zero.
The boundary condition based on the Riemann invariant is weakly reflective in 1D. But in 2D
this boundary condition is only weakly reflective for waves which pass normal to the boundary
and if the Coriolis force and the bottom friction are negligible. Nevertheless, in practice it
reduces the reflection also for waves, which have an oblique incidence. Usually we do not
have information on both water level and velocity so we do not know the incoming Riemann
invariant and another type of boundary should be chosen. A water level or velocity boundary
condition can be made weakly reflective for short wave components originating from the initial
conditions or the eigen frequencies by adding the time derivative of the Riemann invariant see
Eqs. (9.74) and (9.75).
In the computational part the following type of boundary conditions are distinguished (for the
sake of simplicity only a description for the U-direction is given here):
Water level: ζ=Fζ(t) + δatm,
Velocity (in normal direction): U=FU(t),
Discharge (total and per cell): Q=FQ(t),
Neumann ∂ζ
∂~n =f(t),
Riemann invariant U±ζpg
d=FR(t).
If measured elevation data is not available, the barotropic forcing at the open boundaries is
approximated by a linear superposition of:
Free surface gradient for long-term circulation (geostrophic currents).
Tidal fluctuations.
Meteorological forcing (wind set-up).
Waves (wave set-up).
In general, the boundary conditions are specified in a limited number of boundary points.
Linear interpolation is used to generate the boundary conditions at the intermediate points
along the boundary. This interpolation can generate physical unrealistic flows in the region
Deltares 201 of 688

DRAFT
Delft3D-FLOW, User Manual
close to the open boundary. The boundary conditions should allow these disturbances to
propagate out of the area or the number of points where the boundary condition is specified
should be extended.
On water level boundaries, an input signal is prescribed that is consistent with some average
pressure. Usually the signal corresponds to Mean Sea Level. One actually wants to prescribe
an input signal corresponding to the local pressure prescribed by the space varying meteo
input. To this end, it is possible to specify an average pressure (paverage) — which should
correspond to your input signal on the open boundaries — which is then used to determine
local pressure gradients that need to be applied along the open boundaries to obtain an input
signal that is consistent with the local atmospheric pressure. This functionality need to be
specified in the Data Group Additional parameters, using PavBnd:Average Pressure on
Boundaries. Using this keyword one can specify an average pressure that is used on all water
level open boundaries, independent of the type of wind input. The pressure must be specified
in N/m2.
δatm =paverage −patm
ρg (9.72)
where
paverage average pressure prescribed with the keyword PavBnd,
patm the local atmospheric pressure, given by the meteo module (see section B.7).
ρdensity of water
gacceleration due to gravity
The same correction can also be used on Riemann boundaries, and is calculated as follows:
FR(t) = FR(t)±paverage −patm
ρg rg
d(9.73)
with dthe local water depth, and the sign depends on the orientation of the open boundary
related to the grid.
For the transport equation, concentrations should be specified at inflow, see section 9.4.2.1,
and the concentration should be free at outflow. For salinity and heat the concentration bound-
ary conditions influence the flow by the baroclinic pressure term. At slack water, when the
barotropic pressure gradients are small, this may lead to strange circulation cells along a long
open boundary. Therefore an additional flag (keyword) has been implemented to switch off
the baroclinic pressure term at the open boundary BarocP = #NO#. This is a global flag.
The baroclinic pressure is switched off for all open boundaries. The default value is #YES#.
For the velocity, discharge and Riemann type of boundary condition, the flow is assumed to
be perpendicular to the open boundary. Substitution of the Riemann boundary condition in
the 1D linearised continuity equation leads to the well-known radiation boundary condition.
Stelling (1984) added the time-derivative of the Riemann invariant to the water level and ve-
locity boundary conditions, to make the boundaries less reflective for disturbances with the
eigen frequency of the model area. This reduces the spin-up time of a model from a cold
start:
Water level boundary: ζ+α∂
∂t nU±2pgHo=Fζ(t),(9.74)
Velocity boundary: U+α∂
∂t nU±2pgHo=FU(t).(9.75)
202 of 688 Deltares
DRAFT
Conceptual description
The reflection coefficient αshould be chosen sufficiently large to damp the short waves intro-
duced at the start of the simulation. The following values are advised:
Water level boundary: α=TdsH
g,[s2] (9.76)
Velocity boundary: α=Td[s] (9.77)
where Tdis the time it takes for a free surface wave to travel from the left boundary to the right
boundary of the model area. In ocean and sea models, the period Tdis of the same order
as the period of the tidal forcing. In that case αmust be set to zero, otherwise effectively the
amplitude of one of the components in the boundary condition is reduced. These values can
be derived with Fourier analysis for the 1D linear long wave equation without advection by
substituting a wave with period Td.
For the velocity and discharge type of boundary condition, the flow is assumed to be perpen-
dicular to the open boundary. In 3D models you can prescribe:
auniform profile
alogarithmic profile
or
a so-called 3D profile
in the vertical. A 3D-profile means that the velocity at each σ-layer is specified as any of
the forcing types, i.e. as harmonic components, time-series or astronomical components; see
section 4.5.6 for details.
Remark:
A 3D-profile can only be prescribed by importing a file containing the boundary condition
at each layer. This file can be generated with the utility program Delft3D-NESTHD.
A logarithmic profile may be applied for velocity, discharge, or Riemann boundaries. The
logarithmic profile depends on the local roughness height z0and the local water depth H. This
profile is described for a velocity boundary condition in direction perpendicular to the open
boundary. The vertical co-ordinate zis measured relative to the bed. The depth-averaged
velocity Uis used to determine the friction velocity:
~u∗=~
U
1
κH RH
0ln z+z0
z0dz
=~
U
1
κH h(H+z0) ln H+z0
z0−Hi(9.78)
The velocity of layer k,uk, is specified as:
~uk=~u∗
κ(zk−1−zk)Zzk−1
zk
ln z+z0
z0dz,
=~u∗
κ(zk−1−zk)(zk−1+z0)ln zk−1+z0
z0−1−(zk+z0)ln zk+z0
z0−1,
(9.79)
Deltares 203 of 688
DRAFT
Delft3D-FLOW, User Manual
with (for σ-grid):
zk= (1 + σk−1)H. (9.80)
After substitution of u∗in this equation the layer velocity ukis expressed in terms of U,H
and z0.
The discharge is, in case of a total discharge boundary condition, at each time step distributed
over the active points of the open boundary in the following manner derived from the Chézy
equation:
qi=Bih1.5
iCi
PN
j=1 Bjh1.5
jCj
Q. (9.81)
where Bi,hiand Ciare the width, water depth and roughness of grid cell irespectively, N
is the number of boundary points, and Qis the total discharge imposed.
In case a QH-relation is used at a water level boundary the total discharge is computed from
the discharges per grid cell
Q=
N
X
j=1 Bi
K
X
k=1
ui,k∆zi,k!=
N
X
j=1
Bi¯uihi(9.82)
where Bi,¯uiand hiare the width, depth averaged velocity and water depth of grid cell i,ui,
kand ∆zi,k are the velocity and thickness of layer kat grid cell iin case of a 3D simulation,
Nis the number of boundary points and Kis the number of layers. The total discharge Qis
used to derive a water level from the QH-relation specified by you, which is imposed uniformly
at the boundary.
Neumann boundary conditions
Application of 2D and 3D hydrodynamic models to study the impact of engineering solutions
such as the design of nourishments, groynes, offshore breakwaters on approximately uniform
coasts is often hampered by the fact that they are considered to be difficult to set up and
difficult to calibrate. One of the main problems is the specification of suitable boundary condi-
tions at the open boundaries. This is due to a combination of processes acting on the model
domain, a certain water level or velocity distribution will develop in cross-shore direction. For
the boundary conditions to match this distribution the solution has to be known beforehand; if
not, boundary disturbances will develop.
There are two ways to overcome this problem. The first is to try and predict the water level
setup or the current velocity along the lateral boundary by solving a 1DH or 2DV problem
along the boundary and to impose this. For simple cases this is possible but for more complex
combinations of forcing conditions it is cumbersome. A better solution suggested by Roelvink
and Walstra (2004) in the paper ‘Keeping it simple by using complex models’ is to let the
model determine the correct solution at the boundaries by imposing the alongshore water
level gradient (a so-called Neumann boundary condition) instead of a fixed water level or
velocity. In many cases the gradient can be assumed to be zero; only in tidal cases or in
cases where a storm surge travels along a coast the alongshore gradient varies in time, but
in model with a limited cross-shore extent, the alongshore gradient of the water level does not
vary much in cross-shore direction.
The alongshore water level gradient can be assumed to be zero in case of a steady wind/wave
field, or vary periodically for a tidal wave travelling along the coast. In the latter case, the along-
shore gradient varies in time at the boundary. A constant periodical water level gradient for a
204 of 688 Deltares
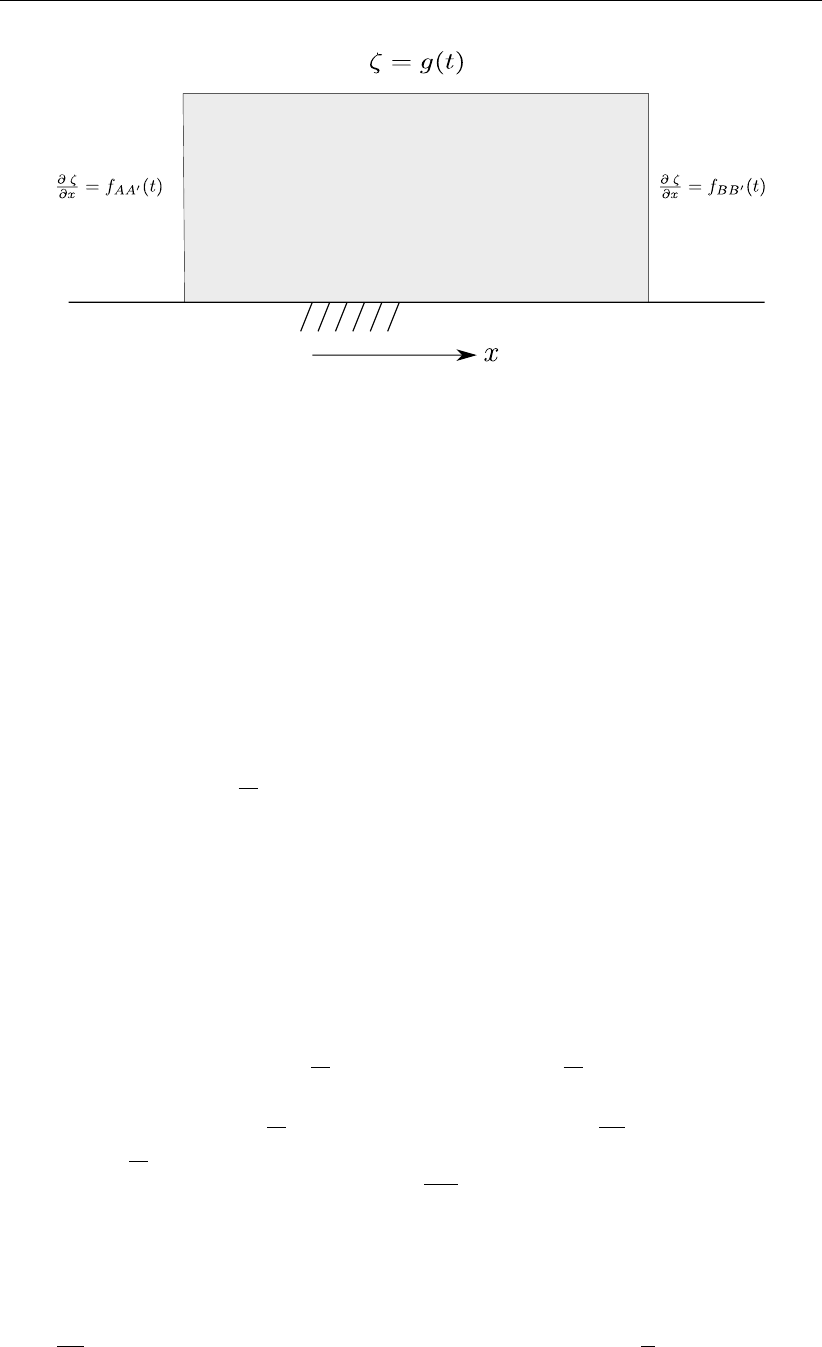
DRAFT
Conceptual description
A
A' B'
B
Figure 9.4: Hydrodynamic model of coastal area with three open boundaries with offshore
boundary (A–B at deep water) and two cross shore boundaries (A–A’, and B–
B’)
boundary can be applied to models with a limited cross-shore extent, under the assumption
that the alongshore gradient of the water level does not vary much in cross-shore direction.
Neumann boundaries can only be applied on cross-shore boundaries in combination with a
water level boundary at the offshore boundary, which is needed to make the solution of the
mathematical boundary value problem well-posed (see Figure 9.4).
Defining boundary conditions with Neumann boundaries
Consider the example below; describing a small coastal region with a tidal wave travelling
along the coast in eastward direction. On the cross-shore boundaries (sections A–A’, B–B’
in Figure 9.4), the water level gradient as a function of time, denoted as Neumann Boundary
condition will be imposed: ∂ζ
∂x =f(t). At the offshore boundary (A–B), the water level has to
be prescribed to make the solution fully determined. At the water level boundary we set the
reflection coefficient αto zero.
The offshore boundary is forced by a harmonic/astronomic water level according to a progres-
sive wave given by:
ζ=
N
X
j=1
ˆ
ζjcos(ωjt−kjx) =
N
X
j=1
ˆ
ζjcos(ωjt−ϕj)(9.83)
where: ˆ
ζj= amplitude [m]; ωj=2π
Tjfrequency [rad/h]; kj=2π
Ljwave number [rad/m]; Let
dAB be the distance between point A and B. The phase difference (ϕj) between points A and
B is then given by kjdAB =2π
LjdAB (to get degrees multiply it by 180
π); Ljis the tidal wave
length Lj=2π
ωjcj, with cjthe velocity of the tidal wave. For shallow water the velocity is
independent of the frequency and is given by √gH with Ha characteristic water depth.
For the forcing of the two cross-shore boundaries a gradient (Neumann) type of boundary
condition is used. The forcing term f(t)is related to the offshore forcing by the relation:
∂ζ
∂x =
N
X
j=1
kjˆ
ζjsin (ωjt−kjx) =
N
X
j=1
kjˆ
ζjcos ωjt−ϕj+π
2 (9.84)
Deltares 205 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 9.4: Frequencies, phases and amplitude on alongshore waterlevel boundary and
corresponding frequenties, phases and amplitudes for the cross-shore Neu-
mann boundaries
WL–boundary
A–B
Neumann boundaries
A–A’, B–B’
Frequency [◦/h] ωj(A) = ωj(B)ωj(A) = ωj(A0) =
ωj(B) = ωj(B0)
Phase [◦]ϕj(A)=0◦
ϕj(B) = ϕj
ϕj(A) = ϕj(A0) = ±90◦
ϕj(B) = ϕj(B0) = ±90◦+ϕj
Amplitude
A–B: [m]
A–A0, B–B0: [−]
ˆ
ζj(A) = ˆ
ζj(B)∂ζ
∂x j(A) = ∂ζ
∂x j(A0) = 2π
Lj
ˆ
ζj
∂ζ
∂x j(B) = ∂ζ
∂x j(B0) = 2π
Lj
ˆ
ζj
In Table 9.4 we specify the relation between the tidal forcing at the offshore boundary (water
level type) and the forcing at the cross-shore boundaries (Neumann type) for the coastal
model of Figure 9.4.
General remarks on open boundaries
At the start of the simulation, the boundary conditions often do not match with the initial
conditions. Therefore, in Delft3D-FLOW at the open boundaries a linear interpolation is
applied between the actual field value and the boundary condition, to reduce the spin up
time of the model. The smoothing time is the last moment at which interpolation takes
place.
To define the phase difference in Delft3D-FLOW the unity degrees is used. To determine
the amplitude of the water level gradient, radians should be used.
The tidal wave length Ljmay be estimated from the phase difference ∆ϕAB =2π
LjdAB
between tidal stations along the boundary, Roelvink and Walstra (2004) or be approxi-
mated using Lj=2π
ωj√gH with Ha characteristic depth along the offshore boundary.
If the tidal wave component is travelling in positive x-direction, the phase difference be-
tween the water level and Neumann boundary is π/2(≡+90◦). If the tidal wave compo-
nent is travelling in negative x-direction, the phase difference is −π/2(≡ −90◦).
For each tidal component, the corresponding component of water level gradient can be
determined on the basis of its frequency, phase difference between boundaries A and B
and amplitude, see Table 9.4.
The Neumann boundaries are interpreted as gradient type of boundaries for water level.
Advection terms at the offshore boundary may generate an artificial boundary layer along
the boundary. The advection terms containing normal gradients have to be switched off.
This is done by adding an additional keyword to the MDF-file:
Cstbnd =#YES#
When modelling salinity and/or heat transport, the boundary condition of these quantities
should match their initial value. Otherwise the baroclinic pressure gradient can causes
severe water level gradients, especially on deep water. These larger water level gradients
generates waves which will propagate into the domain and enlarging the spin-up time of
the model.
206 of 688 Deltares

DRAFT
Conceptual description
9.4.1.3 Shear-stresses at closed boundaries
A closed boundary is situated at the transition between land and water. At a closed boundary,
two boundary conditions have to be prescribed. One boundary condition has to do with the
flow normal to the boundary and the other one with the shear-stress along the boundary.
The boundary condition for flow normal to the boundary is:
No flow through the boundary.
For the shear stress along the boundary one of the following conditions can be prescribed:
1 Zero tangential shear-stress (free slip).
2 Partial slip.
For large-scale simulations, the influence of the shear-stresses along closed boundaries can
be neglected. Free slip is then applied for all closed boundaries. For simulations of small-
scale flow (e.g. laboratory scale), the influence of the side walls on the flow may no longer be
neglected. This option has been implemented for closed boundaries and dry points but not for
thin dams. The reason is that the shear stress at a thin dam is dependent on the side (double
valued).
Along the side walls, the tangential shear stress is calculated based on a logarithmic law of
the wall:
τξη =τηξ =ρu2
∗.(9.85)
The friction velocity u∗is determined by the logarithmic-law for a rough wall, with side wall
roughness length z0nand the velocity in the first grid point near the side wall. Let ∆xsbe the
grid size normal to the sidewall. Then:
|~usidewall|=u∗
κln 1 + ∆xs
2z0n.(9.86)
9.4.2 Transport boundary conditions
9.4.2.1 Open boundary conditions for the transport equation
The horizontal transport of dissolved substances in rivers, estuaries, and coastal seas is
dominated by advection. The horizontal diffusion in flow direction is of secondary importance.
The consequence is that the transport equation is advection dominated, has a wave character,
and from a mathematical point of view is of hyperbolic type. The equation has only one
characteristic, which is parallel to the flow. Without diffusion, an observer moving with the
flow, experiences a constant concentration. As described before, open boundaries have to
limit the computational area. At an open boundary during inflow (flood) a boundary condition
is needed. During outflow (ebb) the concentration must be free. At inflow we have to specify
the concentration which may be determined by the concentration at outflow of the former ebb
period. Because usually only the background concentration is known from measurements
or from a larger model area, a special boundary condition based on the concentration in the
interior area in combination with a return time is used, which does not completely fix the
concentration at the background value. This is the so-called Thatcher-Harleman boundary
condition (Thatcher and Harleman,1972), which is discussed in the next section.
In Delft3D-FLOW, one of the following four vertical profiles may be specified at open bound-
aries:
Deltares 207 of 688
DRAFT
Delft3D-FLOW, User Manual
1Uniform profile
The concentration value specified is applied uniformly over the vertical.
2Linear profile
The concentration value must be specified at the surface and near the bed. The interme-
diate values are then determined using linear interpolation:
ck=cbottom + (1 + σk) (csurface −cbottom)(9.87)
or similarly for the Z-grid:
ck=cbottom +d+zk
d+ζ(csurface −cbottom)(9.88)
3Step profile
The concentration value must be specified both for the surface layer and the bed layer,
together with the initial vertical position of the discontinuity. The concentration for an
intermediate layer is determined following:
ck=csurface, zk> zd,
cbottom, zk≤zd.(9.89)
The zdco-ordinate specifying the position of the discontinuity is used only initially to de-
termine the index kof the related layer. The layer index of the discontinuity is kept fixed
during the simulation. In case of σ-grid, the discontinuity is moving with the free surface,
following the position of the corresponding σ-plane.
Remark:
If the initial conditions are read from a restart file (hot start), then the position of the
jump will be determined using the water elevation read from this file. Consequently,
a mismatch between your boundary condition and the concentration distribution in
the vertical, just inside the open boundary, may occur. This mismatch can produce
oscillations in the simulation results.
43D profile
For a nested model Delft3D-FLOW offers the possibility to prescribe the concentration at
every σ- or Z-layer using a time-series:
ck=Fc(t).(9.90)
9.4.2.2 Thatcher-Harleman boundary conditions
The transport of dissolved substances such as salt, sediment, and heat is described by the
advection-diffusion equation. The horizontal transport is advection dominated and the equa-
tion is of hyperbolic type. At inflow, one boundary condition is needed and the concentration
is specified. At outflow, no boundary condition is allowed. The concentration is determined by
pure advection from the interior area:
∂C
∂t +U
pGξξ
∂C
∂ξ = 0.(9.91)
In Delft3D-FLOW the dispersive fluxes through the open boundaries at both inflow and outflow
are zero:
DH
pGξξ
∂C
∂ξ = 0.(9.92)
208 of 688 Deltares
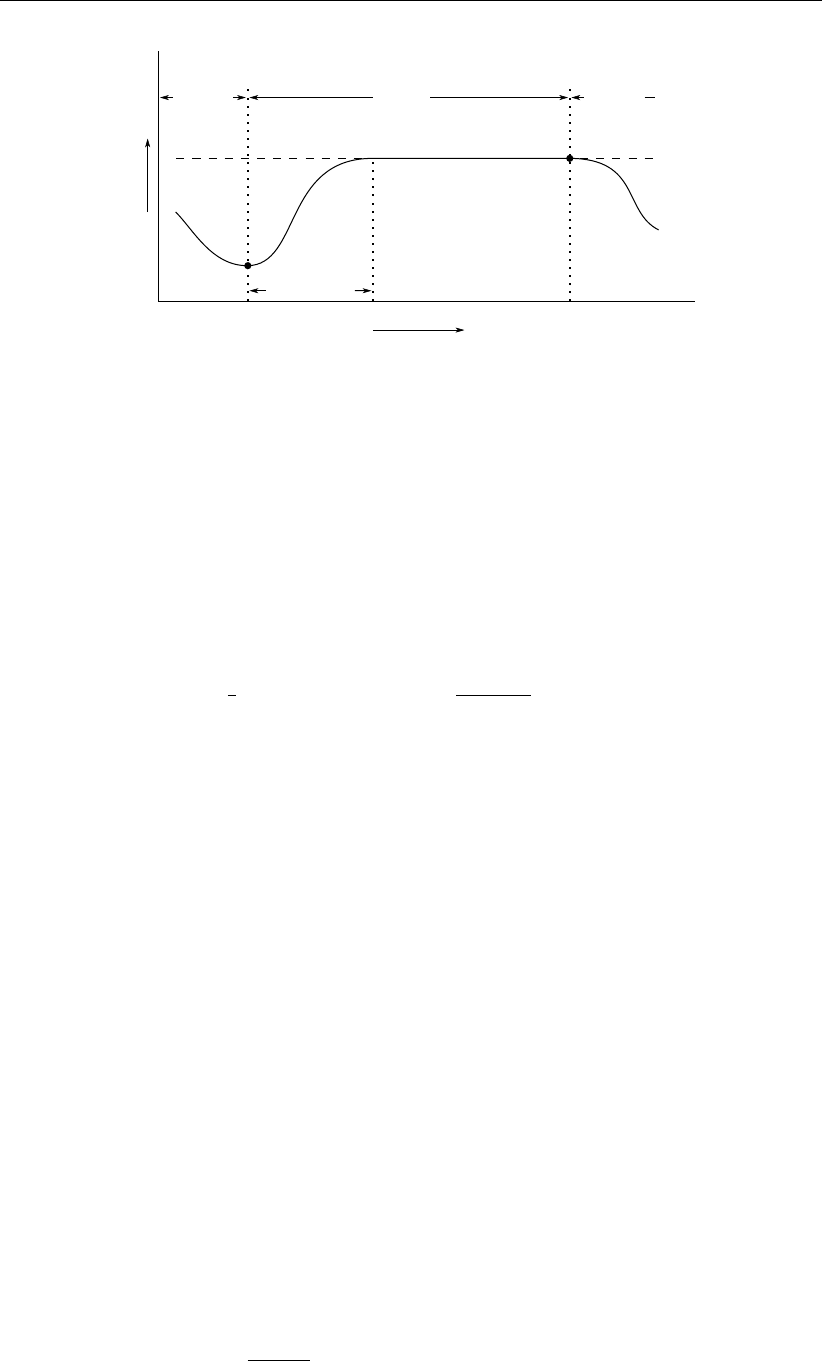
DRAFT
Conceptual description
Outflow Inflow
Background concentration
Concentration at boundary
Return time
Time
Outflow
Figure 9.5: Illustration of memory effect for open boundary
If the concentration at outflow differs from the boundary condition at inflow, there is a discon-
tinuity in the concentration at the turn of the flow. The transition of the concentration at the
boundary from the outflow value to the inflow value may take some time. This depends on the
refreshment of the water in the boundary region. The transition time is called the return time.
The functional relationship describing the variation in concentration from the slack-water value
to the present value is arbitrary. In Delft3D-FLOW, a half-cosine variation is used. After the
return time, the boundary value remains constant until outward flow begins (Leendertse and
Gritton,1971;Thatcher and Harleman,1972). The mathematical formulation of this memory
effect is given as follows:
C(t) = (Cout +1
2(Cbnd −Cout)cos πTret−τout
Tret + 1,0≤τout ≤Tret
Cbnd , τout > Tret
(9.93)
where
Cout is the computed concentration at the open boundary at the last time of outward
flow,
Cbnd is the boundary concentration described by you,
τout is the elapsed time since the last outflow τout =t−tout
tout the last time of outward flow, and
Tret is the constituent return period.
When the flow turns inward (τout = 0), the concentration is set equal to Cout. During the inter-
val 0≤τout ≤Tret the concentration will return to the background concentration Cbnd. After
that period, the concentration will remain Cbnd. The mechanism is illustrated in Figure 9.5.
For a stratified flow the return time of the upper layer will be longer than for the bottom layer.
Delft3D-FLOW offers the opportunity to prescribe return times for the surface layer and the
bed layer. For the intermediate layers the return time is determined using linear interpolation:
TTHk=TTHbottom + (1 + σk) (TTHsurface −TTHbottom ),(9.94)
or similarly for the Z-grid:
TTHk=TTHbottom +d+zk
d+ζ(TTHsurface −TTHbottom )(9.95)
with:
Deltares 209 of 688
DRAFT
Delft3D-FLOW, User Manual
TTHbottom return time bed layer.
TTHsurface return time surface layer.
zk,σkvertical position, respectively in Z- and σco-ordinate system.
dlocal depth value
Therefore an additional flag (key word) has been implemented to switch off the baroclinic
pressure term at open boundaries: BarocP = #NO#. This is a global flag. The baroclinic
pressure is switched off for all open boundaries. The default value is #YES#.
Remark:
When you specify a negative value for the time lag the boundary treatment for con-
stituents, salinity and temperature will be the same as at outflow, but now for all times.
Thus, the solution for these parameters will be fully determined by the processes inside
the model area. This negative value has no physical meaning or background; it only
offers the option to fully exclude the influence of the outer world on the inner solution.
9.4.2.3 Vertical boundary conditions transport equation
The vertical diffusive flux through the free surface and bed is zero with exception of the heat
flux through the free surface. The mathematical formulations for the heat exchange at the free
surface are given in section 9.8:
DV
H
∂c
∂σ σ=0
= 0,(9.96)
DV
H
∂c
∂σ σ=−1
= 0.(9.97)
9.5 Turbulence
Delft3D-FLOW solves the Navier-Stokes equations for an incompressible fluid. Usually the
grid (horizontal and/or vertical) is too coarse and the time step too large to resolve the turbulent
scales of motion. The turbulent processes are “sub-grid”. The primitive variables are space-
and time-averaged quantities. Filtering the equations leads to the need for appropriate closure
assumptions.
For 3D shallow water flow the stress and diffusion tensor are an-isotropic. The horizontal eddy
viscosity coefficient νHand eddy diffusivity coefficient DHare much larger than the vertical
coefficients νVand DV, i.e. νHνVand DHDV. The horizontal coefficients are
assumed to be a superposition of three parts:
1 a part due to molecular viscosity.
2 a part due to “2D-turbulence”,
3 a part due to “3D-turbulence” see Uittenbogaard et al. (1992) and
The 2D part is associated with the contribution of horizontal motions and forcings that cannot
be resolved (“sub-grid scale turbulence”) by the horizontal grid (Reynolds averaged or eddy
resolving computations). The 3D part is referred to as the three-dimensional turbulence and
is computed following one of the turbulence closure models, described in this section. For
2D depth-averaged simulations, the horizontal eddy viscosity and eddy diffusivity coefficient
should also contain a contribution due to the vertical variation of the horizontal flow (Taylor
shear dispersion).
210 of 688 Deltares

DRAFT
Conceptual description
The background horizontal viscosity coefficient νback
Hand eddy diffusivity coefficient Dback
H
(constant or space-varying) must be specified by you via the Delft3D-FLOW GUI. Delft3D-
FLOW additionally has a sub-grid scale model, HLES for 2D-turbulence (see section B.8).
These coefficients can also be used to damp small-scale noise introduced by the advection
terms. They must be chosen dependent on the grid size. Furthermore the horizontal co-
efficients are an order of magnitude larger than the vertical coefficients determined by the
turbulence closure model specified by you.
In Delft3D-FLOW, four turbulence closure models have been implemented to determine νV
and DV:
1 Constant coefficient.
2 Algebraic Eddy viscosity closure Model (AEM).
3k-Lturbulence closure model.
4k-εturbulence closure model.
The turbulence closure models differ in their prescription of the turbulent kinetic energy k, the
dissipation rate of turbulent kinetic energy ε, and/or the mixing length L.
The first turbulence closure model is the simplest closure based on a constant value which
has to be specified by you. We remark that a constant eddy viscosity will lead to parabolic
vertical velocity profiles (laminar flow). The other three turbulence closure models are based
on the so-called eddy viscosity concept of Kolmogorov (1942) and Prandtl (1945). The eddy
viscosity is related to a characteristic length scale and velocity scale. The eddy viscosity has
the following form:
ν3D=c0
µL√k, (9.98)
where:
c0
µa constant determined by calibration, derived from the empirical constant cµin
the k-εmodel; c0
µ=c1/4
µ,cµ= 0.09 (Rodi,1984),
Lis the mixing length, and
kis the turbulent kinetic energy.
The algebraic eddy viscosity model (AEM) does not involve transport equations for the turbu-
lent quantities. This so-called zero order closure scheme is a combination of two algebraic
formulations. This model uses analytical (algebraic) formulas to determine kand L. The
turbulent kinetic energy kdepends on the (friction) velocities or velocity gradients and for the
mixing length, L, the following function of the depth is taken (Bakhmetev,1932):
L=κ(z+d)r1−z+d
H,(9.99)
with κthe Von Kármán constant, κ≈0.41. For a homogeneous flow this leads to a logarith-
mic velocity profile.
In case of vertical density gradients, the turbulent exchanges are limited by buoyancy forces
and the mixing length Lof Equation (9.99) must be corrected. On the other hand high ve-
locity gradients, increase turbulent mixing and can weaken the stratification. Stratification
stability can be described in the interaction between gravitational forces (bouyancy flux Bk,
Equation (9.120)) and turbulent shear production (Pk,Equation (9.117)). The stratification is
Deltares 211 of 688
DRAFT
Delft3D-FLOW, User Manual
characterised by the gradient Richardson number, Ri, defined by:
Ri =−g∂ρ
∂z
ρh∂u
∂z 2+∂v
∂z 2i,(9.100)
see e.g. Richardson (1920); Taylor (1931); Miles (1987). For Ri ≥0the stratification is
stable whereby for Ri < 0the stratification is unstable. Stable stratification leads to damping
of turbulent mixing while unstable stratification leads to higher mixing. Mathematically this is
described by a so-called damping function FL(Ri)that depends on the gradient Richardson
number Ri (Simonin et al.,1989):
L=κ(z+d)r1−z+d
HFL(Ri).(9.101)
These damping functions have been determined by fitting mathematical functions which fulfil
the limiting conditions to laboratory data sets. Different formulations have been suggested. In
Delft3D-FLOW the algebraic eddy viscosity model (AEM) is extended to stratified flows by the
formulation of Busch (1972):
FL(Ri) = e−2.3Ri, Ri ≥0,
(1 −14Ri)0.25 , Ri < 0.(9.102)
The third closure model for the eddy viscosity involves one transport equation for kand is
called a first order turbulence closure scheme. The mixing length Lis prescribed analytically
and the same formulation, including damping functions, is used as for the AEM turbulence
model. However, to find the kinetic energy k, a transport equation is solved. This turbulence
closure model is known as the k-Lmodel.
The fourth model is the k-εmodel that is a second order turbulence closure model. In this
model both the turbulence energy kand dissipation rate of turbulent kinetic energy εare
calculated by a transport equation. From kand εthe mixing length Land viscosity are
determined. The mixing length is now a property of the flow, and in the case of stratification
no damping functions are needed.
A brief description of each of these turbulence closure model will be given further on in this
section, for more details we refer to Uittenbogaard et al. (1992). The k-εmodel has been
used in tidal simulations by Baumert and Radach (1992) and Davies and Gerritsen (1994), for
stratified flow of a river plume by Postma et al. (1999) and for the evolution of a thermocline
by Burchard and Baumert (1995).
For the combination of flow and waves, the effect of the orbital velocities on the production of
turbulence is modelled indirectly by the enhancement of the bed roughness; see section 9.7.
The shear production is determined only from the wave-averaged velocities.
The turbulence closure models do not take into account the vertical mixing induced by shear-
ing and breaking of short and random internal gravity waves. This internal-wave-induced
mixing can be determined using an additional transport equation for Internal Wave Energy
(IWE-model) (Uittenbogaard and Baron,1989;Uittenbogaard,1995). The IWE model de-
scribes the energy transfer from internal waves to turbulence as well as the excitation of
internal waves by turbulence. The simplest approximation of the effect of internal waves is the
introduction of constant vertical ambient mixing coefficients of momentum ν, and/or heat and
matter D.
212 of 688 Deltares
DRAFT
Conceptual description
For strongly stratified flows it is important to introduce suitably chosen constant ambient (back-
ground) mixing coefficients, because the mixing coefficients computed by turbulence models
with shear production only, reduce to zero. In the latter situation the vertical layers are com-
pletely de-coupled (frictionless). Disturbances are hardly damped and also the erosion of the
vertical stratification is reduced to molecular diffusion.
Based on our experience with highly stratified flows we suggest applying an ambient or back-
ground vertical eddy viscosity in the order of 10−4m2/s for the vertical exchange of mo-
mentum. This value corresponds with field measurements in the Rotterdam Waterway, The
Netherlands.
Eddy diffusivity
The vertical eddy diffusivity is a scaled form of the eddy viscosity according to:
D3D=ν3D
σc
.(9.103)
Parameter σcis the Prandtl-Schmidt number. Its numerical value depends on the substance
C. Moreover, for zero order models (for example, the algebraic turbulence closure model),
it is affected by the stratification. It slightly widens the applicability of an algebraic model for
weakly stratified flows. In general the expression for the Prandtl-Schmidt number reads:
σc=σc0Fσ(Ri).(9.104)
The σc0in this expression depends on the substance. It is a constant. Fσ(Ri)is a so-called
damping function that depends on the density stratification via the gradient Richardson’s num-
ber Ri defined in Equation (9.100), see ?.
In Delft3D-FLOW the following settings of σc0and Fσ(Ri)are used:
In all cases, regardless the turbulence closure model, σc0= 0.7for the transport of
heat, salinity, and tracer concentrations. For suspended sediment concentrations in online
sediment transport computations, σc0= 1.0.
For the transport of turbulent kinetic energy kin the k-Lmodel and k-εmodel σc0= 1.0,
and for the transport of turbulent kinetic energy dissipation εin the k-εmodel σc0= 1.3.
In case the algebraic turbulence closure model is applied, the damping function Fσ(Ri)
is the following Munk-Anderson formula (Munk and Anderson,1948):
Fσ(Ri) =
(1 + 3.33Ri)1.5
√1 + 10Ri , Ri ≥0
1, Ri < 0.
(9.105)
The damping functions Eqs. (9.102) and (9.105) were obtained by measurements of steady-
state stable stratified turbulent shear flows. In the mathematical formulation, the fluxes are
instantaneously influenced by changes in the vertical gradients of velocity and density. A
physical adjustment time of the turbulence to the variations of the vertical gradients, is not
taken into account. The fluxes are not a monotone function of the gradients. For the transport
equation of heat, for small temperature gradients the heat flux increases when the tempera-
ture gradient increases but for large temperature gradients the heat flux decreases because
the vertical eddy diffusivity is damped. For large values of the density gradients and small val-
ues of the velocity gradients, the vertical diffusion equation becomes mathematically ill-posed
Deltares 213 of 688

DRAFT
Delft3D-FLOW, User Manual
Barenblatt et al. (1993), and the computed vertical profiles may become discontinuous (step-
wise). The number of “steps” is dependent on the vertical grid. For strongly stratified flows
(Ri > 1), the k-εmodel is advised.
In the k-εturbulence model no damping function is used since the influence of stratification
on the mixing length is taken into account by the buoyancy terms in the transport equations
for kand ε. Thus: Fσ(Ri) = 1 for all Ri. This is one of the main advantages of the k-ε
turbulence model. Damping functions, as used in the standard Level 2.5 turbulence closure
model of Mellor and Yamada (1974,1982), may generate unphysical “stepwise” profiles as
observed by Deleersnijder and Luyten (1994).
The numerical scheme for the vertical advection of heat and salt (central differences) may
introduce small vertical oscillations. This computational noise may enhance the turbulent
mixing. Delft3D-FLOW has a vertical filtering technique to remove this noise and to reduce
the undesirable mixing. For more details, see chapter 10.
In strongly-stratified flows, the turbulent eddy viscosity at the interface reduces to zero and
the vertical mixing reduces to molecular diffusion. To account for the vertical mixing induced
by shearing and breaking of short and random internal gravity waves, we suggest to apply an
ambient eddy diffusivity in the order of 10−4to 10−5m2/s dependent on the Prandtl-Schmidt
number. In Delft3D-FLOW for stable stratified flows, the minimal eddy diffusivity may be based
on the Ozmidov length scale Loz, specified by you and the Brunt-Väisälä frequency of internal
waves:
DV= max D3D,0.2L2
ozs−g
ρ
∂ρ
∂z !.(9.106)
For a detailed description of the turbulence closure models of Delft3D-FLOW we refer to Rodi
(1984) and Uittenbogaard et al. (1992).
9.5.1 Algebraic turbulence model (AEM)
The Algebraic Eddy viscosity Model (AEM) in Delft3D-FLOW is a combination of two zero
order closure schemes. These models will be denoted by ALG (Algebraic closure model) and
PML (Prandtl’s Mixing Length model). Both models will be briefly described. The combination
of the two models was made to broaden the applicability of the algebraic turbulence closure.
9.5.1.1 Algebraic closure model (ALG)
In the algebraic closure model, ALG, a logarithmic velocity profile is assumed. This leads to a
linear relation between the turbulent kinetic energy at the bed and the turbulent kinetic energy
at the free surface:
k=1
√cµub
∗21−z+d
H+u2
∗s
z+d
H,(9.107)
with:
cµA constant, cµ≈0.09, calibrated for local-equilibrium shear layers (Rodi,
1984).
u∗sThe friction velocity at the free surface, see Equation (9.67).
ub
∗A modified form of the bed friction velocity u∗b.
The turbulent kinetic energy kat the bed and at the free surface is determined basing on the
shear stresses. The bed friction velocity u∗bis determined from the magnitude of the velocity
214 of 688 Deltares

DRAFT
Conceptual description
in the first grid point above the bed, under the assumption of a logarithmic velocity profile:
~u∗b=κ
ln 1 + ∆zb
2z0~ub.(9.108)
In tidal flows, at slack water the velocities are almost zero near the bed. Higher in the water
column, the turbulence intensity may still be large. To avoid a zero eddy viscosity, velocities
higher in the water column have to be used in the determination of the bed friction velocity.
Under the assumption that the velocity profile is logarithmic in the discrete model for layer with
index k:
~u∗k=κ
ln 1 + zk+d
z0~uk,(9.109)
and the average value is defined as:
~u∗=1
K
K
X
k=1
~u∗k.(9.110)
In the linear profile for the turbulence energy, Equation (9.107),
~ub
∗= max (~u∗, ~u∗b)(9.111)
is used. The friction velocity at the free surface is dependent on the wind velocity at 10 m
above the free surface Eqs. (9.67) to (9.69).
In this algebraic turbulence closure model the wind stress and the bed stress affect the eddy
viscosity over the total water depth instantaneously. In deep areas, this is physically not
correct; the turbulent kinetic energy generated at the free surface and at the bed must be
transported along the water column by vertical diffusion. This will lead to phase differences
in the time-series of the turbulent energy for the different layers, see Baumert and Radach
(1992).
Given kof Equation (9.107) and Lof Equation (9.101) the eddy viscosity νALG is prescribed
by Equation (9.98). The eddy viscosity is parabolic and gives in the case of wind-driven
circulation, a double logarithmic vertical velocity profile.
9.5.1.2 Prandtl’s Mixing Length model (PML)
A second algebraic expression for the eddy viscosity is obtained by assuming instantaneous
local equilibrium between production and dissipation in the k-Lmodel. This closure scheme
is known as Prandtl’s Mixing Length model (PML). In the production term the horizontal deriva-
tives are left out, they are small compared to the vertical derivatives, leading to:
k=1
√cµL2"∂u
∂z 2
+∂v
∂z 2#.(9.112)
The mixing length Lis again prescribed by Equation (9.101). Given kof Equation (9.112)
and Lof Equation (9.101) the eddy viscosity νPML is prescribed by Equation (9.98). Note that
for a logarithmic velocity profile, without wind, Eqs. (9.107) and (9.112) give the same linear
distribution of k.
Deltares 215 of 688

DRAFT
Delft3D-FLOW, User Manual
For the turbulence closure scheme ALG, the turbulent kinetic energy over the whole water
column is in phase with the bed stress. For the PML model there is a phase difference in k,
introduced by phase differences in the vertical gradient of the horizontal velocities. The phase
differences depend on the total water depth and the eddy viscosity:
T≈H2
νV
,(9.113)
see e.g. Baumert and Radach (1992).
The PML-model leads to a zero eddy viscosity and eddy diffusivity at the position in the ver-
tical where the vertical gradients of the velocity are zero (e.g. in wind-driven flows). This is
physically incorrect.
For robustness, in Delft3D-FLOW the turbulence closure models PML and ALG are combined
to one algebraic model, denoted as the AEM model. The eddy viscosity is calculated following:
ν3D= max (νALG, νPML)(9.114)
The eddy diffusivity is derived from the eddy viscosity, using the Prandtl-Schmidt number.
Tidal simulations using this parameterisation have been performed for the Irish Sea (Davies
and Gerritsen,1994).
9.5.2 k-Lturbulence model
A so-called first order turbulence closure scheme implemented in Delft3D-FLOW is the k-L
model. In this model the mixing length Lis prescribed analytically, Equation (9.101). The
velocity scale is based on the kinetic energy of turbulent motion. The turbulent kinetic energy
kfollows from a transport equation that includes an energy dissipation term, a buoyancy term
and a production term. The following two assumptions are made:
The production, buoyancy and dissipation terms are the dominating terms.
The horizontal length scales are much larger than the vertical ones (shallow water, bound-
ary layer type of flows).
The conservation of the turbulent quantities is less important and the transport equation is
implemented in a non-conservative form. The second assumption leads to simplification of
the production term. The transport equation for kis as follows:
∂k
∂t +u
pGξξ
∂k
∂ξ +v
pGηη
∂k
∂η +ω
d+ζ
∂k
∂σ =
+1
(d+ζ)2
∂
∂σ Dk
∂k
∂σ +Pk+Pkw +Bk−ε. (9.115)
with
Dk=νmol
σmol
+ν3D
σk
(9.116)
In the production term Pkof turbulent kinetic energy, the horizontal gradients of the horizontal
velocity and all the gradients of the vertical velocities are neglected. The production term is
216 of 688 Deltares

DRAFT
Conceptual description
given by:
Pk=ν3D
1
(d+ζ)2"∂u
∂σ 2
+∂v
∂σ 2#.(9.117)
For small-scale applications (e.g. simulation of laboratory flume), you can switch on a more
extended production term Pkof turbulent kinetic energy (option “partial slip”, rough side wall)
given by:
Pk= 2ν3D
1
2 (d+ζ)2(∂u
∂σ 2
+∂v
∂σ 2)+ 1
pGξξ
∂u
∂ξ !2
+
+ 2ν3D
1
2 1
pGηη
∂u
∂η +1
pGξξ
∂v
∂ξ !2
+ 1
pGηη
∂v
∂η !2
.(9.118)
In this expression, ν3Dis the vertical eddy viscosity, prescribed by Equation (9.98). In
Eqs. (9.117) and (9.118) it has been assumed that the gradients of the vertical velocity w
can be neglected with respect to the gradients of the horizontal velocity components uand v.
The horizontal and vertical (σ-grid) curvature of the grid has also been neglected.
The turbulent energy production due to wave action is given by Pkw; the exact formulation is
in section 9.7.4.
Near the closed walls the normal derivative of the tangential velocity is determined with the
law of the wall:
∂u
∂y =u∗
κy .(9.119)
In stratified flows, turbulent kinetic energy is converted into potential energy. This is repre-
sented by a buoyancy flux Bkdefined by:
Bk=ν3D
ρσρ
g
H
∂ρ
∂σ (9.120)
with the Prandtl-Schmidt number σρ= 0.7for salinity and temperature and σρ= 1.0for
suspended sediments.
In the k-Lmodel, it is assumed that the dissipation εdepends on the mixing length Land
kinetic turbulent energy kaccording to:
ε=cD
k√k
L,(9.121)
where cDis a constant determined by calibration, derived from the constant cµin the k-ε
model:
cD=c3/4
µ≈0.1925.(9.122)
Deltares 217 of 688
DRAFT
Delft3D-FLOW, User Manual
To solve the transport equation, boundary conditions must be specified. A local equilibrium of
production and dissipation of kinetic energy is assumed at the bed which leads to the following
Dirichlet boundary condition:
k|σ=−1=u2
∗b
√cµ
.(9.123)
The friction velocity u∗bat the bed is determined from the magnitude of the velocity in the
grid point nearest to the bed, under the assumption of a logarithmic velocity profile, see Equa-
tion (9.58). The bed roughness (roughness length) may be enhanced by the presence of wind
generated short crested waves, see section 9.7.
In case of wind forcing, a similar Dirichlet boundary condition is prescribed for the turbulent
kinetic energy kat the free surface:
k|σ=0 =u2
∗s
√cµ
.(9.124)
In the absence of wind, the turbulent kinetic energy kat the surface is set to zero.
At open boundaries, the turbulent energy kis computed using the equation for kEqua-
tion (9.107) without horizontal advection. For a logarithmic velocity profile this will approxi-
mately lead to the following linear distribution based on the shear-stress at the bed and at the
free surface:
k(z) = 1
√cµu2
∗b1−z+d
H+u2
∗s
z+d
H.(9.125)
9.5.3 k-εturbulence model
In the k-εturbulence model, transport equations must be solved for both the turbulent kinetic
energy kand for the energy dissipation ε. The mixing length Lis then determined from εand
kaccording to:
L=cD
k√k
ε.(9.126)
In the transport equations, the following two assumptions are made:
The production, buoyancy, and dissipation terms are the dominating terms.
The horizontal length scales are larger than the vertical ones (shallow water, boundary
layer type of flows).
Because of the first assumption, the conservation of the turbulent quantities is less important
and the transport equation is implemented in a non-conservation form.
The transport equations for kand εare non-linearly coupled by means of their eddy diffusivity
Dk, Dεand the dissipation terms. The transport equations for kand εare given by:
∂k
∂t +u
pGξξ
∂k
∂ξ +v
pGηη
∂k
∂η +ω
d+ζ
∂k
∂σ = +
+1
(d+ζ)2
∂
∂σ Dk
∂k
∂σ +Pk+Pkw +Bk−ε, (9.127)
218 of 688 Deltares

DRAFT
Conceptual description
∂ε
∂t +u
pGξξ
∂ε
∂ξ +v
pGηη
∂ε
∂η +ω
d+ζ
∂ε
∂σ =
1
(d+ζ)2
∂
∂σ Dε
∂ε
∂σ +Pε+Pεw +Bε−c2ε
ε2
k.(9.128)
with
Dk=νmol
σmol
+ν3D
σk
and Dε=ν3D
σε
(9.129)
The production term Pkis defined in Eqs. (9.117) and (9.118), and the buoyancy term Bkis
defined in Equation (9.120). The production term Pεand the buoyancy flux Bεare defined
by:
Pε=c1ε
ε
kPk,(9.130)
Bε=c1ε
ε
k(1 −c3ε)Bk,(9.131)
with Lprescribed by Equation (9.126) and the calibration constants by (Rodi,1984):
c1ε= 1.44,(9.132)
c2ε= 1.92,(9.133)
c3ε=0.0unstable stratification
1.0stable stratification (9.134)
In Delft3D-FLOW in the ε-equation for stable stratification the buoyancy flux is switched off,
so c3ε= 1.0and for unstable stratification the buoyancy flux is switched on c3ε= 0.0.
The energy production and energy dissipation due to waves, the terms Pkw and Pεw in
Eqs. (9.127) and (9.128), are given in section 9.7.4.
The coefficients of the 3D k-εturbulence closure model as implemented in Delft3D-FLOW are
not the same as in the depth-averaged k-εturbulence closure model (Rodi,1984), therefore
for depth-averaged simulations, the k-εturbulence closure model is not available for you.
The vertical eddy viscosity ν3Dis determined by:
ν3D=c0
µL√k=cµ
k2
ε,(9.135)
with:
cµ=cDc0
µ.(9.136)
For the transport equation of the turbulent kinetic energy kthe same Dirichlet boundary con-
ditions are used as for the k-Lmodel described earlier, see Equation (9.123) and (9.124).
For the transport equation of the dissipation ε, the following boundary condition is used at the
bed:
ε|σ=−1=u3
∗b
κz0
,(9.137)
Deltares 219 of 688
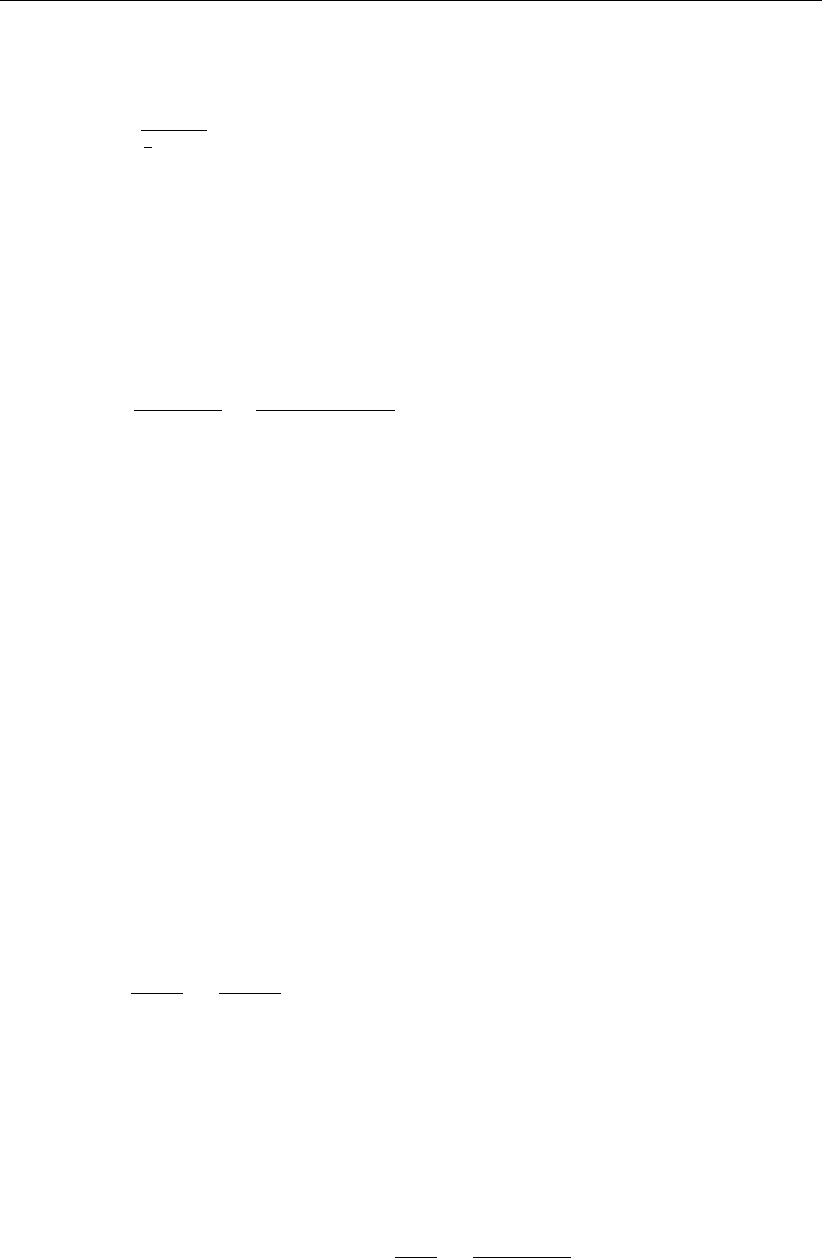
DRAFT
Delft3D-FLOW, User Manual
and at the surface the dissipation εis prescribed by:
ε|σ=0 =u3
∗s
1
2κ∆zs
.(9.138)
In case of no wind, the dissipation εis set to zero at the free surface.
At open boundaries, the energy dissipation εis computed using Equation (9.128) without hor-
izontal advection. For a logarithmic velocity profile this will approximately lead to a hyperbolic
distribution which is the superposition of two hyperbola, corresponding to a double logarithmic
velocity profile, on the basis of the shear-stresses at the bed and at the free surface:
ε(z) = u3
∗b
κ(z+d)+u3
∗s
κ(H−z−d),(9.139)
where zdenotes the vertical co-ordinate.
The k-εturbulence model was successfully applied for the simulation of stratified flow in the
Hong Kong waters (Postma et al.,1999) and verified for the seasonal evolution of the thermo-
cline (Burchard and Baumert,1995).
9.5.4 Low Reynolds effect
In laboratory flumes or highly stratified flows e.g. by mud, the flow is nearly laminar. Then the
vertical eddy viscosity computed by the standard k-epsilon model is over-estimated because
this model lacks viscous damping terms. Therefore, in literature so-called low-Re k-εmodels
are proposed. Our experience (Uittenbogaard, pers. comm.), however, is that these models
require large resolution and switch from laminar to turbulent flow conditions at too large Re-
numbers. Instead, we extended the k-εturbulence model in Delft3D-FLOW by a continuous
damping function reducing its eddy viscosity, see below. In Delft3D-FLOW it is possible to
switch on this so-called Low Reynolds turbulence model by adding the keyword LRdamp in
the MDF-file. The formulation implemented is given below.
The turbulence Reynolds number is defined as
ReT=k2
νmolε=ν3D
cµνmol
,(9.140)
If the turbulence Reynolds number is low, then the eddy viscosity and the eddy diffusivity
computed from the k-εmodel are corrected by the damping function
ν3D(Relow) = f(ReT)ν3D(k−ε;Rehigh)(9.141)
in which
f(ReT)=1−e−p2where p=ReT
100 =ν3D
100cµνmol
(9.142)
No critical value for the Reynolds number needs to be specified, because a value of ReT=
300 (f= 0.999877) is applied. We remark that function frapidly converges to 1 for large
values of ReT.
220 of 688 Deltares
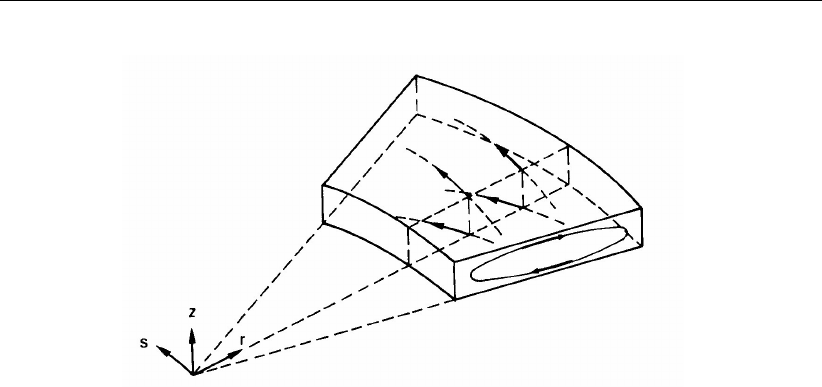
DRAFT
Conceptual description
Figure 9.6: Spiral motion in river bend (from Van Rijn (1990))
9.6 Secondary flow; σ-model only
This feature is only available in the σ-model.
The flow in a river bend is basically three-dimensional. The velocity has a component in the
plane perpendicular to the river axis. This component is directed to the inner bend near the
riverbed and directed to the outer bend near the water surface, see Figure 9.6.
This so-called ’secondary flow’ (spiral motion) is of importance for the calculation of changes
of the riverbed in morphological models and the dispersion of matter. In a 3D model the
secondary flow is resolved on the vertical grid, but in 2D depth-averaged simulations the
secondary flow has to be determined indirectly using a secondary flow model. It strongly
varies over the vertical but its magnitude is small compared to the characteristic horizontal
flow velocity.
The secondary flow will be defined here as the velocity component v(σ)normal to the depth-
averaged main flow. The spiral motion intensity of the secondary flow Iis a measure for the
magnitude of this velocity component along the vertical:
I=Z0
−1|v(σ)|dσ. (9.143)
The vertical distribution of the secondary flow is assumed to be a universal function of the
vertical co-ordinate f(σ). The actual local velocity distribution originates from a multiplication
of this universal function with the spiral motion intensity, see Kalkwijk and Booij (1986):
ν(σ) = f(σ)I. (9.144)
A vertical distribution for a river bend is given in Figure 9.7. The spiral motion intensity Ileads
to a deviation of the direction of the bed shear stress from the direction of the depth-averaged
flow and thus affects the bedload transport direction. This effect can be taken into account in
morphological simulations.
Deltares 221 of 688
DRAFT
Delft3D-FLOW, User Manual
+sτbs
τb
τbn
+r
M
δ
uv
Figure 9.7: Vertical profile secondary flow (V) in river bend and direction bed stress
The component of the bed shear stress normal to the depth-averaged flow direction τbr reads:
τbr =−2ρα2(1 −α)~
UI, (9.145)
where αis defined in Equation (9.156) and ~
Uis the magnitude of the depth-averaged ve-
locity. To take into account the effect of the secondary flow on the depth-averaged flow, the
depth-averaged shallow water equations have to be extended with:
An additional advection-diffusion equation to account for the generation and adaptation of
the spiral motion intensity.
Additional terms in the momentum equations to account for the horizontal effective shear-
stresses originating from the secondary flow.
Depth-averaged continuity equation
The depth-averaged continuity equation is given by:
∂ζ
∂t +1
pGξξpGηη
∂(d+ζ)UpGηη
∂ξ +1
pGξξpGηη
∂(d+ζ)VpGξξ
∂η =Q
(9.146)
where Uand Vindicate the depth-averaged velocities on an orthogonal curvilinear grid.
Momentum equations in horizontal direction
The momentum equations in ξ- and η-direction are given by:
∂U
∂t +U
pGξξ
∂U
∂ξ +V
pGηη
∂U
∂η +UV
pGξξpGηη
∂pGξξ
∂η −V2
pGξξpGηη
∂pGηη
∂ξ +
−fV =−1
ρ0pGξξ
Pξ−gU√U2+V2
C2
2D(d+ζ)+Fξ+Fsξ +Mξ,(9.147)
222 of 688 Deltares
DRAFT
Conceptual description
and
∂V
∂t +U
pGξξ
∂V
∂ξ +V
pGηη
∂V
∂η +UV
pGξξpGηη
∂pGηη
∂ξ −U2
pGξξpGηη
∂pGξξ
∂η +
+fU =−1
ρ0pGηη
Pη−gV √U2+V2
C2
2D(d+ζ)+Fη+Fsη +Mη.(9.148)
The fourth term in the right-hand side represents the effect of the secondary flow on the depth-
averaged velocities (shear stresses by depth-averaging the non-linear acceleration terms).
Effect of secondary flow on depth-averaged momentum equations
To account for the effect of the secondary flow on the depth-averaged flow, the momentum
equations have to be extended with additional shear stresses. To close the equations these
stresses are coupled to parameters of the depth-averaged flow field. The main flow is as-
sumed to have a logarithmic velocity profile and the secondary flow originates from a multipli-
cation of a universal function with the spiral motion intensity, see Kalkwijk and Booij (1986).
Depth averaging of the 3D equations leads to correction terms in the depth-averaged momen-
tum equations for the effect of spiral motion:
Fsξ =1
d+ζ(1
pGξξ
∂[(d+ζ)Tξξ]
∂ξ +1
pGηη
∂[(d+ζ)Tξη]
∂η )+
+(2Tξη
pGξξpGηη
∂pGξξ
∂η +2Tξξ
pGξξpGηη
∂pGηη
∂ξ ),(9.149)
and:
Fsη =1
d+ζ(1
pGξξ
∂[(d+ζ)Tηξ]
∂ξ +1
pGηη
∂[(d+ζ)Tηη]
∂η )+
+(2Tηη
pGξξpGηη
∂pGξξ
∂η +2Tηξ
pGξξpGηη
∂pGηη
∂ξ ),(9.150)
with the shear-stresses, resulting from the secondary flow, modelled as:
Tξξ =−2βUV, (9.151)
Tξη =Tηξ =βU2−V2,(9.152)
Tηη = 2βUV, (9.153)
and:
β=β∗(d+ζ)
R∗
s
,(9.154)
β∗=βc5α−15.6α2+ 37.5α3,(9.155)
βc∈[0,1] , correction coefficient specified by you,
α=√g
κC2D
<1
2,(9.156)
Deltares 223 of 688
DRAFT
Delft3D-FLOW, User Manual
with R∗
sthe effective radius of curvature of a 2D streamline to be derived from the intensity
of the spiral motion and κthe Von Kármán constant. The spiral motion intensity is computed
by Equation (9.157). The limitation on α,Equation (9.156), is set to ensure that the length
scale Lain Equation (9.164) is always positive. For βc= 0, the depth-averaged flow is not
influenced by the secondary flow.
Remark:
Equation (9.156) effectively means a lower limit on C2D.
The depth averaged transport equation for the spiral motion intensity
The variation of the spiral motion intensity Iin space and time, is described by a depth-
averaged advection-diffusion equation:
∂[(d+ζ)I]
∂t +1
pGξξpGηη (∂(d+ζ)UpGηη I
∂ξ +∂(d+ζ)VpGξξI
∂η )=
+d+ζ
pGξξpGηη (∂
∂ξ "DHpGηη
pGξξ
∂I
∂ξ #+∂
∂η "DHpGξξ
pGηη
∂I
∂η #)+ (d+ζ)S,
(9.157)
with:
S=−I−Ie
Ta
,(9.158)
Ie=Ibe −Ice,(9.159)
Ibe =d+ζ
Rs~
U,(9.160)
Ice =fd+ζ
2,(9.161)
~
U=pU2+V2,(9.162)
Ta=La
~
U
,(9.163)
La=(1 −2α) (d+ζ)
2κ2α,(9.164)
and Rsthe radius of curvature of the stream-line defined by:
Us
Rs
=−∂Ur
∂s ,(9.165)
with Usand Urthe components along and perpendicular to the streamline. The effective
radius of curvature to be used for the evaluation of the coefficient β,Equation (9.155), reads:
R∗
s=
(d+ζ)~
U
I.(9.166)
To guarantee stability the effective radius of curvature is bounded by the following empirical
relation:
R∗
s≥10 (d+ζ).(9.167)
224 of 688 Deltares

DRAFT
Conceptual description
The above formulas account for two sources of secondary flow:
The centrifugal force in case of curved streamlines, Ibe.
The effect of the Coriolis force, Ice.
The solution of the advection-diffusion equation will take some computer time. For steady
state simulations, Delft3D-FLOW has an option to compute the spiral intensity Ibased on an
algebraic expression assuming local equilibrium:
I=Ibe −Ice.(9.168)
Boundary conditions for spiral motion
At open boundaries, during inflow the spiral motion intensity must be prescribed. The local
equilibrium value Equation (9.168) is used. For perpendicular inflow the radius of curvature
goes to infinity and the spiral intensity reduces to zero.
9.7 Wave-current interaction
In relatively shallow areas (coastal seas) wave action becomes important because of several
processes:
The vertical mixing processes are enhanced due to turbulence generated near the surface
by whitecapping and wave breaking, and near the bottom due to energy dissipation in the
bottom layer.
A net mass flux is generated which has some effect on the current profile, especially in
cross-shore direction.
In the surf zone long-shore currents and a cross-shore set-up is generated due to varia-
tions in the wave-induced momentum flux (radiation stress). In case of an irregular surf
zone, bathymetry strong circulations may be generated (rip currents).
The bed shear stress is enhanced; this affects the stirring up of sediments and increases
the bed friction.
These processes are accounted for in a wave-averaged manner. Some processes basically
act at a specific location or interface, such as the enhanced bed shear-stress or wave breaking
at the surface, while others have a (certain) distribution over the vertical, such as the energy
dissipation due to bottom friction in the wave boundary layer. A vertical distribution can, of
course, only be accounted for in a 3D computation; in a 2D computation such a process is
accounted for in a depth averaged form.
The computation of waves and wave-induced effects is the domain of wave models. Delft3D-
WAVE supports currently one wave model: SWAN, a third generation wave model (Ris,1997).
SWAN computes the full (directional and frequency) spectrum on a rectilinear or curvilinear
grid with many processes formulated in detail. For details and background you are referred to
the Delft3D-WAVE User Manual (WAVE UM,2013) and the references cited above.
For the sake of simplicity, we will describe in this section all wave-induced effects on a rect-
angular grid. In Delft3D-FLOW, however, these terms have been implemented in a curvilinear
co-ordinate system. For a full wave-current interaction the currents from Delft3D-FLOW are
used in Delft3D-WAVE (current refraction). The numerical grids used in the flow and wave
computation often differ. Delft3D-FLOW and SWAN can both apply a rectilinear or curvilinear
grid. To use the required grid resolution in the area of interest you can use nested grids. The
transformation of results between the nested grids and the grids used in the flow and in the
wave computations is executed automatically and is fully transparent to you. In SWAN, you
Deltares 225 of 688
DRAFT
Delft3D-FLOW, User Manual
can use the same curvilinear grid as used in Delft3D-FLOW and obtain in one computation
the required resolution in the area of interest.
The general procedure to derive the wave-induced forces is:
Average the continuity equation and the momentum equations over the wave period.
Express the residual terms that remain compared to the case without waves in terms of
the wave properties, such as the wave energy, the phase and group velocity, and wave
length or wave period.
Obviously, there are various averaging procedures. A straightforward approach is to define the
mean motion by time averaging the equations over a wave period. The momentum equation in
x-direction, averaged over the wave motion and expressed in Cartesian co-ordinates is given
by:
∂¯uj
∂t + ¯ui
∂¯uj
∂xj
+... +g∂¯
ζ
∂xj−1
ρ
∂¯τij
∂xi
=Fj,(9.169)
where for iand jthe summation rule applies, i, j ={1,2,3}, the wave averaged quantity is
indicated by an overhead bar, ¯ujis the wave-mean velocity component, ¯
ζis the wave-mean
free surface elevation, ¯τij are the components of the wave-averaged normal stress tensor,
and Fjis the wave-induced force that remains after averaging the momentum equation over
the wave period. This wave induced force can generally be written as the gradient of the
radiation-stress tensor S:
Fi=−∂Sij
∂xj
.(9.170)
Using wave propagation models we can express Sij in terms of the wave parameters, such
as the wave energy, the phase and group velocity, the wave length and the wave period. The
wave-induced force is computed as the gradient of the radiation stress terms.
The above given procedure can only be applied when the mean motion is uniform with depth.
In most practical cases this does not apply. Then the only way to split the mean and oscillating
motion is through the Generalised Lagrangian Mean, GLM method of Andrews and McIntyre
(1978). As shown by Andrews and McIntyre (1978), Groeneweg and Klopman (1998) and
Groeneweg (1999) the (depth averaged and 3D) flow equations written in a co-ordinate sys-
tem moving with the Stokes drift are very similar to the ordinary Eulerian formulation. However,
the wave-induced driving force due to averaging over the wave motion is more accurately ex-
pressed in wave properties. The relation between the GLM velocity and the Eulerian velocity
is given by:
~uL=~uE+~uS,(9.171)
where ~uLis the GLM-velocity vector, ~uEis the ordinary Eulerian-velocity vector and ~uSis the
Stokes-drift vector.
The momentum equation in x-direction, averaged over the wave motion and expressed in
GLM co-ordinates is given by:
∂¯uL
j
∂t + ¯uL
i
∂¯uL
j
∂xj
+... +g∂¯
ζ
∂xj−1
ρ
∂¯τL
ij
∂xi
=FL
j,(9.172)
where for iand jthe summation rule applies, i, j ={1,2,3}, and the quantities have the
same meaning as in Equation (9.169), but now in GLM co-ordinates. As shown by Groeneweg
226 of 688 Deltares
DRAFT
Conceptual description
(1999) the right-hand side of Equation (9.172) contains a term related to a Stokes correction
of the shear stresses. In the current implementation this term is neglected.
So in short:
In Delft3D-FLOW, the hydrodynamic equations are written and solved in GLM-formulation,
including the wave-current interactions.
The GLM velocities are written to the communication file and are used in all (sediment)
transport computations. Quantities moving with the flow are transported by the total, i.e.
the GLM, velocity and not the Eulerian velocity.
The Eulerian velocities are written to the Delft3D-FLOW result files to be used in compar-
isons of computational results with measurements.
The only difference in the computational procedure as compared to the ordinary Eulerian
formulation occurs at the boundaries. The velocity at the bottom is not the total velocity but
the Eulerian velocity; so the bed-shear-stress is corrected for the Stokes drift. At lateral
velocity boundaries, the total velocity must be prescribed; the implementation is such that
the Eulerian velocity is prescribed in the boundary conditions (by you) and the Stokes drift
is added by Delft3D-FLOW. At water level boundaries, just the wave-mean water level
must be prescribed.
In the following sections, we discuss the wave-current interaction terms and their possible
profile in the vertical. Where applicable we distinguish between the depth-averaged and the
3D formulations.
Remarks:
For brevity, we suppress the index Lfor GLM quantities. So, in this section a velocity
without super-script refers to the GLM velocity, unless explicitly mentioned differently.
A super-script Sis used to indicate the Stokes drift.
9.7.1 Forcing by radiation stress gradients
The wave-induced force, i.e. the right-hand side of Equation (9.172), can be expressed in the
wave parameters of the wave model that is being applied. For linear current refraction the
expression can be derived analytically. To account for wave dissipation due to for instance
bottom friction, wave breaking and whitecapping and wave growth due to wind one can rely
on mild slope formulations with dissipation terms.
As shown by Dingemans et al. (1987), using the gradients of the radiation stresses in numer-
ical models can result in spurious currents. Dingemans et al. (1987) showed that the diver-
gence free part of the radiation stress is not capable of driving currents and can therefore
be neglected if one is primarily interested in wave-driven currents. The remaining part of the
radiation stress gradients is closely related to the wave energy dissipation, i.e. the right-hand
side of Equation (9.172) can be written as:
Fi=Dki
ω,(9.173)
where Dis the total energy dissipation due to waves, kiis the wave number in i-direction
and ωis the wave frequency; see Dingemans (1997) for many details and discussions on this
subject.
Deltares 227 of 688
DRAFT
Delft3D-FLOW, User Manual
2D implementation
For a depth averaged model the momentum equations in x- and y-direction, leaving out most
of the terms, can be written as:
∂U
∂t +. . . +gU√U2+V2
C2
2D(d+ζ)+. . . =. . . +Fx,(9.174)
∂V
∂t +. . . +gV √U2+V2
C2
2D(d+ζ)+. . . =. . . +Fy,(9.175)
where Fxand Fyare the depth averaged wave-induced forcings and given by the gradients
of the radiation stress tensor S, or following Dingemans et al. (1987) approximated by wave
energy dissipation:
Fx=−∂Sxx
∂x −∂Syx
∂y =Dkx
ω,(9.176)
Fy=−∂Sxy
∂x −∂Syy
∂y =Dky
ω.(9.177)
The dissipation rate D(a negative quantity) is computed by the wave model and read from the
communication file. In SWAN, the dissipation rate may be computed from the bottom friction
(orbital motion), depth-induced breaking and whitecapping.
You can choose to apply the radiation stress or the dissipation rate to determine the wave-
induced forces.
3D implementation
In version 5.01 (and higher) of Delft3D-FLOW the 3 different dissipation rates, calculated by
SWAN, are handled separately: dissipation due to depth-induced breaking and whitecapping
at the top layer and dissipation due to bottom friction at the bed layer. The effect of the
divergence free part of the radiation stresses is (the remaining part of the radiation stress gra-
dients, after the wave dissipation has been subtracted) is added to the momentum equations
in Delft3D-FLOW (effect spread over the water column). This provides most adequate results,
e.g. in situations with undertow.
9.7.2 Stokes drift and mass flux
In surface waves, fluid particles describe an orbital motion. The net horizontal displacement
for a fluid particle is not zero. This wave induced drift velocity, the so-called Stokes-drift,
is always in the direction of wave propagation. A particle at the top of the orbit beneath a
wave crest moves slightly faster in the forward direction than it does in the backward direction
beneath a wave trough. The mean drift velocity is a second order quantity in the wave height.
The drift leads to additional fluxes in the wave averaged mass continuity equation.
The wave-induced mass fluxes MS
xand MS
yare found by integration of the components of
the Stokes drift uSand vSover the wave-averaged total water depth:
MS
x=Zζ
−d
ρouSdz =E
ωkx(9.178)
MS
y=Zζ
−d
ρ0vSdz =E
ωky(9.179)
228 of 688 Deltares
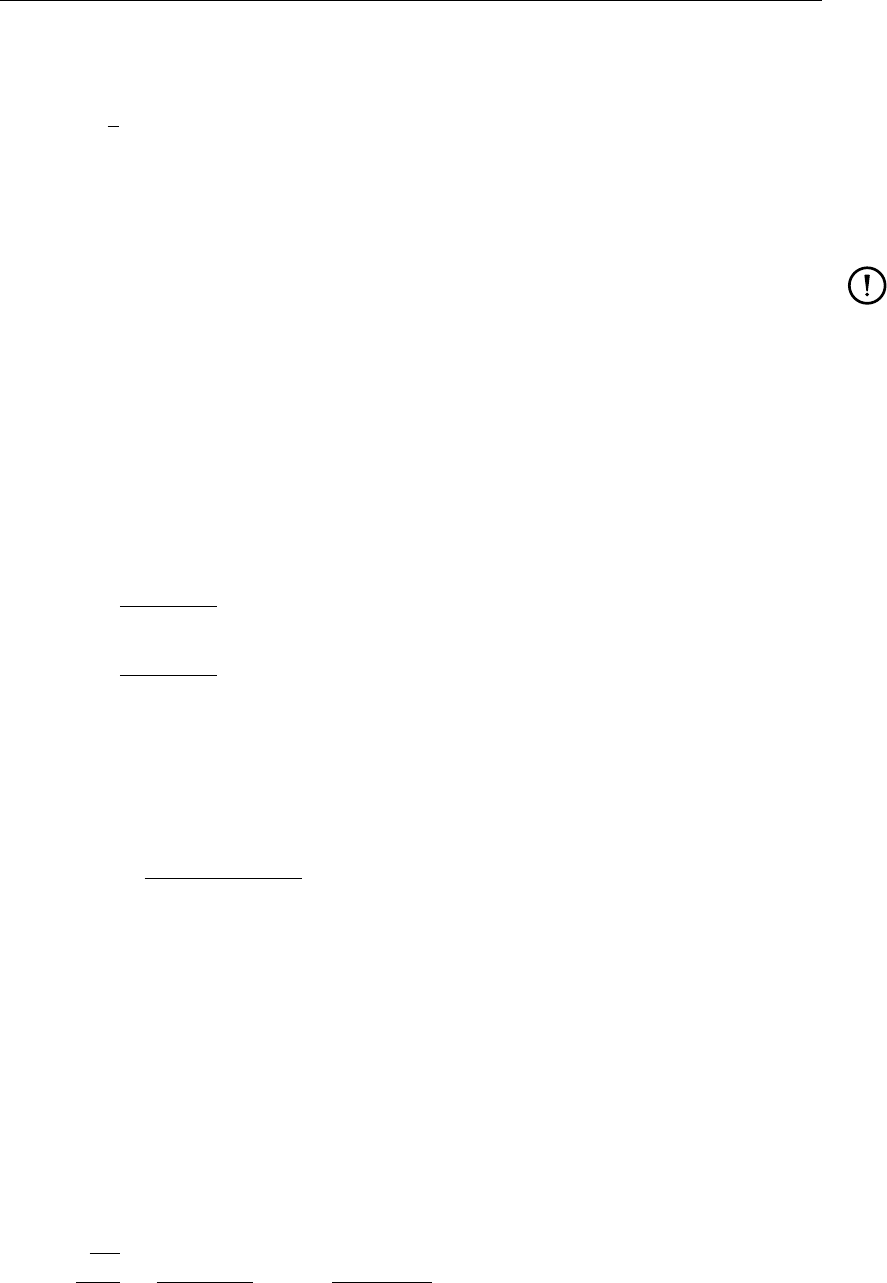
DRAFT
Conceptual description
with Ethe wave energy defined as:
E=1
8ρ0gH2
rms.(9.180)
The mass fluxes MS
xand MS
yare computed by an interface program and are written to the
communication file.
Remarks:
The mass flux effect is only taken into account when Delft3D-FLOW is used from within
Delft3D-MOR.
The velocities written to the communication file for use in Delft3D-MOR, Delft3D-WAVE,
and D-Water Quality are based on the total flux velocities.
The Eulerian velocities, which may be used in comparisons with measurements at a
fixed location, are written to the hydrodynamic map and history files.
2D implementation
The depth-averaged Stokes drift is given by:
US=MS
x
ρ0(d+ζ),(9.181)
VS=MS
y
ρ0(d+ζ).(9.182)
3D implementation
The Stokes drift is computed from the wave theory, see Dean and Dalrymple (1991, pg. 287,
eq. 10.8):
~uS(z) = ωka2cosh (2kz)
2 sinh2(kH)(cos φ, sin φ)T.(9.183)
The wave is computed from the mass fluxes which are read from the communication file:
φ= tan−1MS
x/MS
y.(9.184)
9.7.3 Streaming
Streaming (a wave-induced current in the wave boundary layer directed in the wave propa-
gation direction) is modelled as a time-averaged shear-stress which results from the fact that
the horizontal and vertical orbital velocities are not exactly 90◦out of phase. It is based on
the wave bottom dissipation and is assumed to decrease linearly to zero across the wave
boundary layer (Fredsøe and Deigaard,1992):
−∂˜u˜w
∂z =Dfkcos φ
ρ0ωδ 1−d+ζ−z0
δfor d+ζ−δ≤z0≤d+ζ(9.185)
For the definition of z0see Figure 9.8.
The left-hand side of Equation (9.185) is the residual term after averaging a vertical derivative
of the advection terms over the wave period. The dissipation due to bottom friction Dfis
Deltares 229 of 688
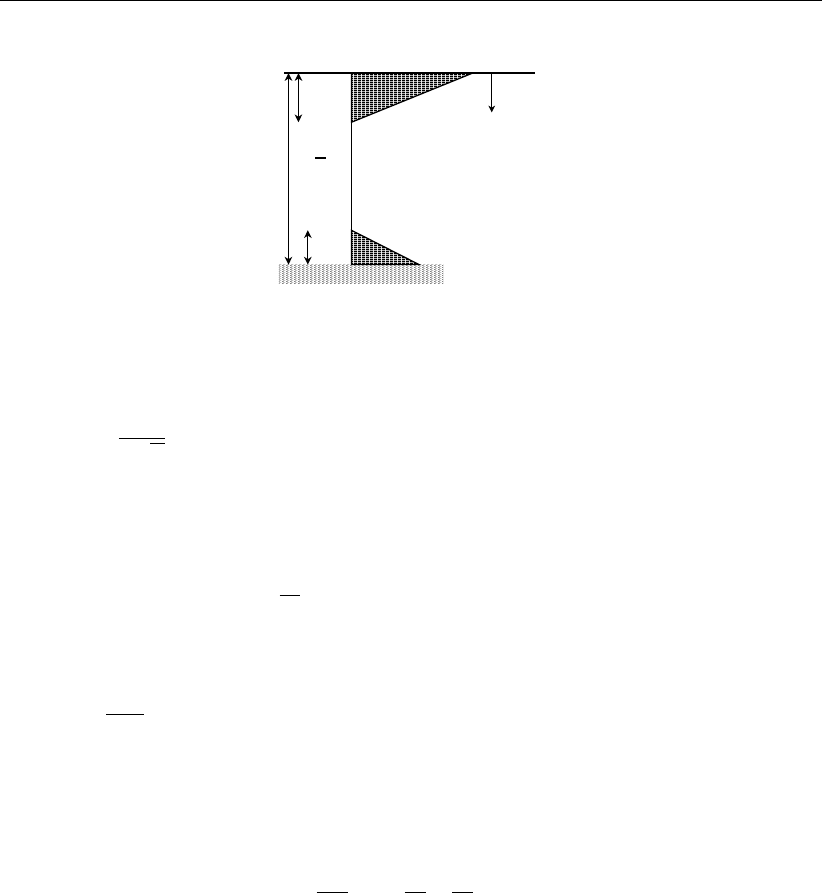
DRAFT
Delft3D-FLOW, User Manual
½ H rm s
δ
d +
ζ
Z ’
M W L
Figure 9.8: Vertical distribution of turbulent kinetic energy production
given by:
Df=1
2√πρ0fwu3
orb,(9.186)
where uorb is the orbital velocity near the bed, given by Equation (9.204). The friction factor
fwis according to Soulsby et al. (1993b) given by:
fw= min (0.3,1.39 A
z0−0.52),(9.187)
with:
A=uorb
ω,(9.188)
and φis given by Equation (9.184).
The thickness of the wave boundary layer δis given by:
δ=Hmin "0.5,20 max (ez0
H,0.09ks
HA
ks0.82)#.(9.189)
9.7.4 Wave induced turbulence
The vertical mixing processes are enhanced by the wave actions. This can best be accounted
for by adding the wave energy production and dissipation terms in the turbulence model. The
two main sources of wave energy decay that are included are wave breaking and bottom
friction due to the oscillatory wave motion in the bottom boundary layer.
In the case of breaking waves, there is a production of turbulent energy directly associated
with the energy dissipation due to breaking (Deigaard,1986). The total depth-averaged con-
tribution of wave breaking is given by Dw[W/m2], which is computed in the wave model (e.g.
SWAN). Wave energy dissipation due to bottom friction is also considered to produce tur-
bulent kinetic energy. These processes are incorporated by introducing source terms in the
turbulent kinetic energy (for both the k-Land the k-εturbulence model) and in the turbulent
kinetic energy dissipation equation (k-εturbulence model).
230 of 688 Deltares

DRAFT
Conceptual description
Breaking waves
In a 3D-model the contribution due to wave breaking is linearly distributed over a half wave
height below the mean water surface, Hrms/2. This is described by the following expression
for the turbulent kinetic energy distribution:
Pkw (z0) = 4Dw
ρwHrms 1−2z0
Hrms for 0≤z0≤1
2Hrms.(9.190)
The source term Pεw in the ε-equation is coupled to Pkw according to:
Pεw (z0) = c1ε
ε
kPkw (z0),(9.191)
where c1εis a calibration constant (c1ε= 1.44).
Due to the breaking of waves the boundary conditions of kand εhave to be changed. The
boundary conditions at the free surface of kand εare given by:
k|free surface =kwind +kwaves =kwind +2Dwκ
ρwcD2
3
(9.192)
ε|free surface =εwind +εwaves =εwind +4Dw
ρwHrms
(9.193)
Bottom friction
The contribution due to bottom friction is linearly distributed over the thickness of the wave
boundary layer, see Figure 9.8.
Pkw (z0) = 2Df
ρ0δ1−d+ζ−z0
δfor d+ζ−δ≤z0≤d+ζ, (9.194)
due to wave energy decay in the bottom boundary layer. Here z0is the vertical co-ordinate
with its origin at the (wave averaged) water level and so z0is positive downward, Dfrepresent
wave energy dissipation due to bottom friction, Dfis given by Equation (9.186).
The boundary conditions at the bottom, due to the non-linear interaction of the current and
wave boundary layer is directly taken into account, by the adaptation of the bottom roughness
height, see Equation (9.212).
9.7.5 Enhancement of the bed shear-stress by waves
The boundary layers at the bed associated with the waves and the current interact non-linearly.
This has the effect of enhancing both the mean and oscillatory bed shear-stresses. In addition
the current profile is modified, because the extra turbulence generated close to the bed by the
waves appears to the current as being equivalent to an enhanced bottom roughness. The
bed shear-stress due to the combination of waves and current is enhanced beyond the value
which would result from a linear addition of the bed shear-stress due to waves, ~τw, and the
bed shear-stress due to current ~τc. For sediment transport modelling it is important to predict
the maximum bed shear-stress, ~τmax, while the current velocity and the turbulent diffusion are
determined by the combined wave-current bed shear-stress ~τm.
Various, often very complex, methods exist to describe the bottom boundary layer under com-
bined current and wave action and the resulting virtual roughness. Soulsby et al. (1993a)
Deltares 231 of 688
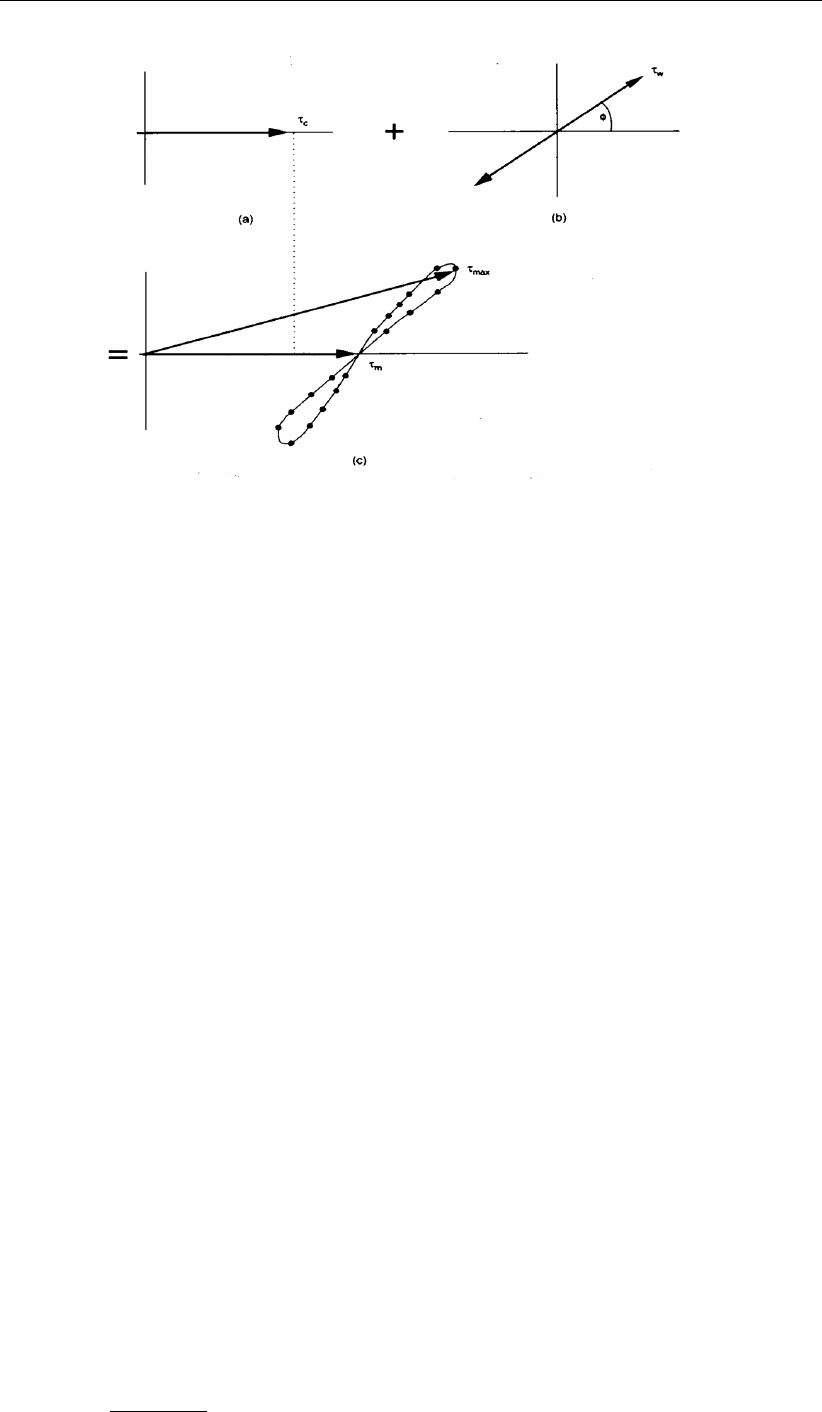
DRAFT
Delft3D-FLOW, User Manual
Figure 9.9: Schematic view of non-linear interaction of wave and current bed shear-
stresses (from Soulsby et al. (1993b, Figure 16, p. 89))
developed a parameterisation of these methods allowing a simple implementation and com-
parison of various wave-current interaction models: Fredsøe (1984); Myrhaug and Slaattelid
(1990); Grant and Madsen (1979); Huynh-Thanh and Temperville (1991); Davies et al. (1988);
Bijker (1967); Christoffersen and Jonsson (1985); O’ Connor and Yoo (1988); Van Rijn et al.
(2004). All these methods have all been implemented in Delft3D-FLOW and can be applied
in 2D and 3D modelling. However, as there are minor, but specific differences in determining
certain quantities, such as determining the shear-stress at the bottom, we prefer to discuss
the 2D and 3D implementation separately.
2D implementation
Following Soulsby et al. (1993b), Figure 9.9 gives a schematic overview of the bed shear-
stresses for wave current interaction.
Soulsby et al. (1993b) fitted one standard formula to all of the models, each model having its
own fitting coefficients. The parameterisation of Soulsby for the time-mean bed shear-stress
is of the form:
|~τm|=Y(|~τc|+|~τw|),(9.195)
with
Y=X{1 + bXp(1 −X)q},(9.196)
and for the maximum bed shear-stress:
|~τmax|=Z(|~τc|+|~τw|),(9.197)
with
Z= 1 + aXm(1 −X)n.(9.198)
and:
X=|~τc|
|~τc|+|~τw|,(9.199)
232 of 688 Deltares

DRAFT
Conceptual description
The value of the parameters a,b,p,q,mand ndepends on the friction model which is
parameterised, and:
|~τc|magnitude of the bed stress due to current alone
|~τw|magnitude of the bed stress for waves alone
|~τm|magnitude of the mean bed stress for combined waves and current
|~τmax|magnitude of the maximum bed stress for combined waves and current.
Remark:
The stresses ~τmand ~τmax are assumed to have the same direction as ~τc.
Following Soulsby et al. (1993b) the expressions for the parameters χ(=a, b, p, q, m, n)
and J(=I, J; also depending on the friction model) have the form:
χ=χ1+χ2|cos φ|J+χ3+χ4|cos φ|J10log fw
C2D,(9.200)
in which:
C2Ddrag coefficient due to current
fwwave friction factor
φthe angle between the current direction and the direction of wave propagation.
As the radiation stress is always in the wave direction, we can derive φfrom:
|cos φ|=|UFx+V Fy|
~
U~
F
.(9.201)
Values of the parameters a,b,p,qand Jin Equation (9.200) have been optimised by Soulsby
et al. (1993b), see Table 9.5 and Figure 9.10.
The bed shear-stress due to flow alone may be computed using various types of formulations
like Chézy, Manning or White-Colebrook, see Eqs. (9.54) to (9.56). The bed shear-stress due
to current alone can be written in the form:
~τc=
gρ0~
U~
U
C2
2D
.(9.202)
The magnitude of the wave-averaged bed shear-stress due to waves alone is related to the
wave orbital velocity near the bottom ~uorb and the friction coefficient fw:
|~τw|=1
2ρ0fwu2
orb.(9.203)
The orbital velocity is computed from the linear wave theory and is given by:
uorb =1
4√πHrmsω
sinh (kH),(9.204)
where the root-mean-square wave height Hrms and the wave period T(= 2π/ω)are read
from the communication file. The variation of the wave friction factor with relative orbital excur-
sion at the bed under purely oscillatory flow is given by Swart (1974) (≡Equations (11.77),
Deltares 233 of 688
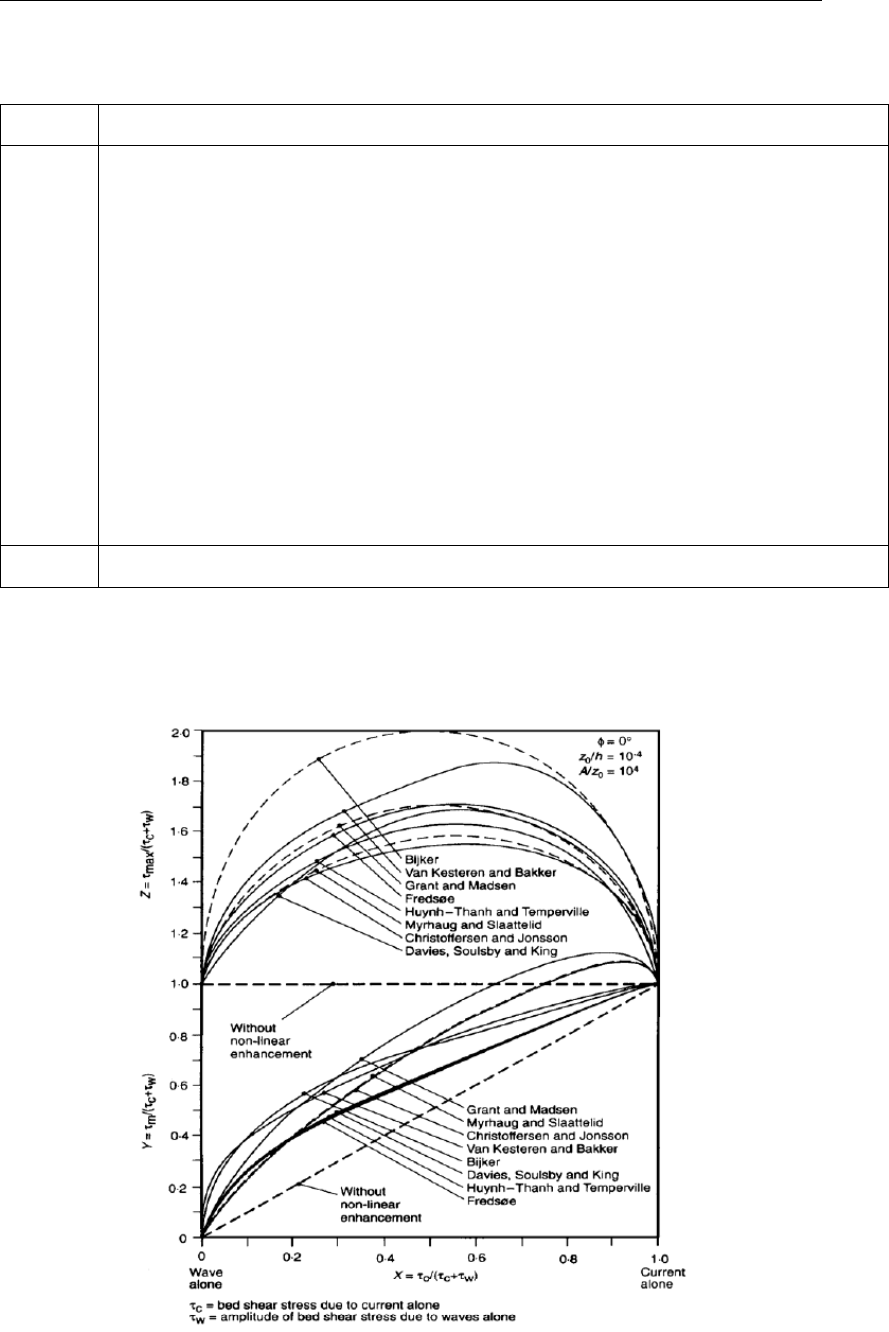
DRAFT
Delft3D-FLOW, User Manual
Table 9.5: Fitting coefficients for wave/current boundary layer model
Model1a1a2a3a4m1m2m3m4n1n2n3n4I
FR84 -0.06 1.70 -0.29 0.29 0.67 -0.29 0.09 0.42 0.75 -0.27 0.11 -0.02 0.80
MS90 -0.01 1.84 -0.58 -0.22 0.63 -0.09 0.23 -0.02 0.82 -0.30 0.19 -0.21 0.67
HT91 -0.07 1.87 -0.34 -0.12 0.72 -0.33 0.08 0.34 0.78 -0.23 0.12 -0.12 0.82
GM79 0.11 1.95 -0.49 -0.28 0.65 -0.22 0.15 0.06 0.71 -0.19 0.17 -0.15 0.67
DS88 0.05 1.62 -0.38 0.25 1.05 -0.75 -0.08 0.59 0.66 -0.25 0.19 -0.03 0.82
BK67 0.00 2.00 0.00 0.00 0.00 0.50 0.00 0.00 0.00 0.50 0.00 0.00 1.00
CJ85 -0.01 1.58 -0.52 0.09 0.65 -0.17 0.18 0.05 0.47 -0.03 0.59 -0.50 0.64
OY88 -0.45 2.24 0.16 -0.09 0.71 0.27 -0.15 0.03 1.19 -0.66 -0.13 0.12 0.77
b1b2b3b4p1p2p3p4q1q2q3q4J
FR84 0.29 0.55 -0.10 -0.14 -0.77 0.10 0.27 0.14 0.91 0.25 0.50 0.45 3.00
MS90 0.65 0.29 -0.30 -0.21 -0.60 0.10 0.27 -0.06 1.19 -0.68 0.22 -0.21 0.50
HT91 0.27 0.51 -0.10 -0.24 -0.75 0.13 0.12 0.02 0.89 0.40 0.50 -0.28 2.70
GM79 0.73 0.40 -0.23 -0.24 -0.68 0.13 0.24 -0.07 1.04 -0.56 0.34 -0.27 0.50
DS88 0.22 0.73 -0.05 -0.35 -0.86 0.26 0.34 -0.07 -0.89 2.33 2.60 -2.50 2.70
BK67 0.32 0.55 0.00 0.00 -0.63 0.05 0.00 0.00 1.14 0.18 0.00 0.00 3.00
CJ85 0.47 0.29 -0.09 -0.12 -0.70 0.13 0.28 -0.04 1.65 -1.19 -0.42 0.49 0.60
OY88 -0.06 0.26 0.08 -0.03 -1.00 0.31 0.25 -0.26 0.38 1.19 0.25 -0.66 1.50
VR04 Y= 0.0and Z= 1.0
1FR84=Fredsøe (1984), MS90=Myrhaug and Slaattelid (1990),
HT91=Huynh-Thanh and Temperville (1991), GM79=Grant and Madsen (1979), DS88=Davies et al. (1988),
BK67=Bijker (1967), CJ85=Christoffersen and Jonsson (1985), OY88=O’ Connor and Yoo (1988),
VR04=Van Rijn et al. (2004)
Figure 9.10: Inter-comparison of eight models for prediction of mean and maximum bed
shear-stress due to waves and currents (from Soulsby et al. (1993b, Fig-
ure 17, p. 90))
234 of 688 Deltares

DRAFT
Conceptual description
(11.116) and (11.157)):
fw=
0.00251 exp 5.21 A
ks−0.19,A
ks>π
2,
0.3,A
ks≤π
2,
(9.205)
with:
A=uorb
ω,(9.206)
ksis the Nikuradse roughness length-scale and ωis the wave angular frequency.
As the bed is in rest and the equations are formulated in GLM co-ordinates, we must cor-
rect the bed shear-stress used in the momentum equations for the Stokes drift. The total or
effective bed shear stress is given by:
~τb=|~τm|
~
U~
U−~
US,(9.207)
where the components of the depth-averaged Stokes drift ~
USare given by Eqs. (9.181) and
(9.182).
3D implementation
For 3D simulations the enhanced bed shear-stress is computed along the same lines, but
remark that the bed shear-stress is now a boundary condition. The magnitude of the depth-
averaged velocity in Equation (9.202) is determined from the velocity near the bed, assuming
a logarithmic velocity profile.
The bed shear-stress corrected for the Stokes drift is given by:
~τb=|~τm|
~
U2D~u −~uS,(9.208)
with:
~
U2D=1
d+ζZζ
−d
~udz. (9.209)
The Stokes drift and the angle between near bed current and the waves are given by Eqs. (9.183)
and (9.184).
Matching the velocity profile corresponding with the increased mean bed stress ~τmfor waves
and current, with a logarithmic profile for the mean flow outside the wave boundary layer:
~τm=ρ0~
˜u∗~
˜u∗(9.210)
with ~
˜u∗the shear-stress velocity for waves and current and following Equation (9.58):
~ub=~
˜u∗
κln 1 + ∆zb
2z0,(9.211)
Deltares 235 of 688
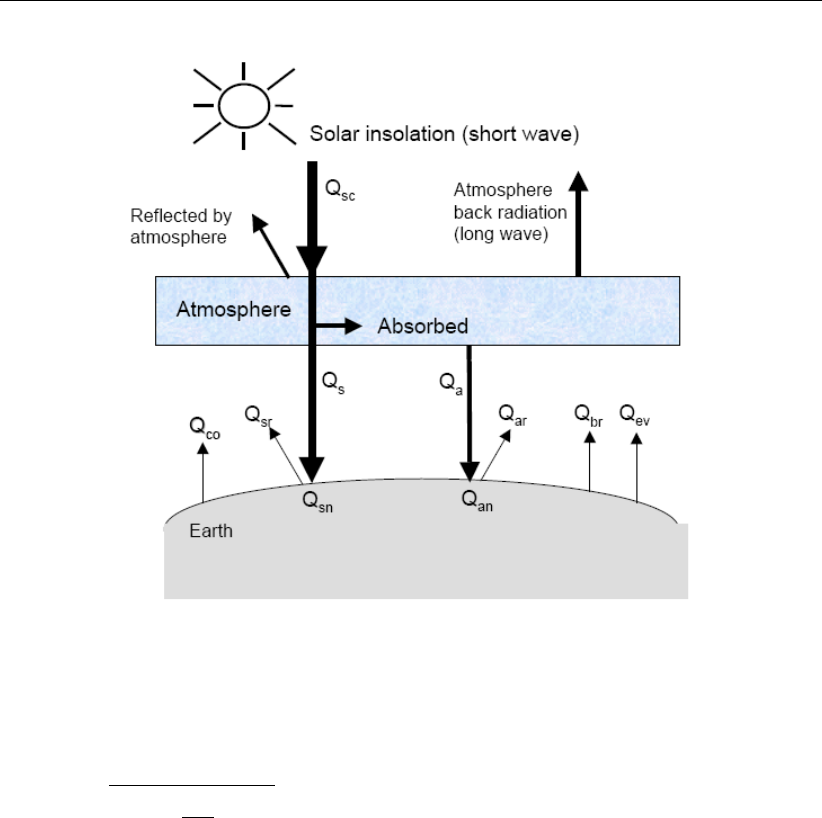
DRAFT
Delft3D-FLOW, User Manual
Figure 9.11: Overview of the heat exchange mechanisms at the surface
with ~ubthe horizontal velocity in the first layer just above the bed. The increased roughness
length for waves and current ˜z0satisfies:
˜z0=∆zb
exp κ|~ub|
|~
˜u∗|−1
.(9.212)
This increased roughness length is used in the turbulence closure schemes.
9.8 Heat flux models
The heat radiation emitted by the sun reaches the earth in the form of electromagnetic waves
with wavelengths in the range of 0.15 to 4 µm. In the atmosphere the radiation undergoes
scattering, reflection and absorption by air, cloud, dust and particles. On average neither the
atmosphere nor the earth accumulates heat, which implies that the absorbed heat is emitted
back again. The wavelengths of these emitted radiations are longer (between 4 and 50 µm)
due to the lower prevailing temperature in the atmosphere and on Earth. Schematically the
radiation process, along with the heat flux mechanisms at the water surface, is shown in
Figure 9.11.
Legend for Figure 9.11:
Qsc radiation (flux) for clear sky condition in [J/m2s]
Qco heat loss due to convection (sensible) in [J/m2s]
Qsr reflected solar radiation in [J/m2s]
Qssolar radiation (short wave radiation) in [J/m2s]
Qsn net incident solar radiation (short wave), =Qs−Qsr
Qaatmospheric radiation (long wave radiation) in [J/m2s]
Qan net incident atmospheric radiation (long wave)
236 of 688 Deltares

DRAFT
Conceptual description
Qar reflected atmospheric radiation in [J/m2s]
Qbr back radiation (long wave radiation) in [J/m2s]
Qev heat loss due to evaporation (latent) in [J/m2s]
In Delft3D-FLOW the heat exchange at the free surface is modelled by taking into account the
separate effects of solar (short wave) and atmospheric (long wave) radiation, and heat loss
due to back radiation, evaporation and convection. In literature there is a great variability of
empirical formulations to calculate these heat fluxes across the sea surface. Most formulations
differ in the dependency of the exchange on the meteorological parameters such as wind
speed, cloudiness and humidity. Some formulations were calibrated for coastal seas others
for lakes.
In Delft3D-FLOW five heat flux models have been implemented:
1Heat flux model 1
The incoming (short wave) solar radiation for a clear sky is prescribed. The net atmo-
spheric (long wave) radiation and the heat losses due to evaporation, back radiation and
convection are computed by the model.
2Heat flux model 2
The combined net (short wave) solar and net (long wave) atmospheric radiation is pre-
scribed. The terms related to heat losses due to evaporation, back radiation and convec-
tion are computed by the model.
3Excess temperature model
The heat exchange flux at the air-water interface is computed; only the background tem-
perature is required.
4Murakami heat flux model
The net (short wave) solar radiation is prescribed. The effective back radiation and the
heat losses due to evaporation and convection are computed by the model. The incoming
radiation is absorbed as a function of depth. The evaporative heat flux is calibrated for
Japanese waters.
5Ocean heat flux model
The fraction of the sky covered by clouds is prescribed (in %). The effective back radiation
and the heat losses due to evaporation and convection are computed by the model. Ad-
ditionally, when air and water densities and/or temperatures are such that free convection
occurs, free convection of latent and sensible heat is computed by the model. This model
formulation typically applies for large water bodies.
For the physical background of the heat exchange at the air-water interface and the definitions,
we refer to Octavio et al. (1977) for model 1 and 2, to Sweers (1976) for model 3, to Murakami
et al. (1985) for model 4 and to Gill (1982) and Lane (1989) for model 5.
With the exception of model 3 the excess temperature model, the heat fluxes through the
water surface by incoming radiation, back radiation, evaporation and convection are computed
separately. Evaporation and convection depend on the air temperature, the water temperature
near the free surface, relative humidity, and wind speed. The excess temperature model
computes the heat fluxes through the water surface in such a way that the temperature of
the surface layer relaxates to the natural background temperature specified by you. The heat
transfer coefficient mainly depends on the water temperature and the wind speed.
9.8.1 Heat balance
The total heat flux through the free surface reads:
Qtot =Qsn +Qan −Qbr −Qev −Qco,(9.213)
Deltares 237 of 688

DRAFT
Delft3D-FLOW, User Manual
with:
Qsn net incident solar radiation (short wave)
Qan net incident atmospheric radiation (long wave)
Qbr back radiation (long wave)
Qev evaporative heat flux (latent heat)
Qco convective heat flux (sensible heat).
The subscript nrefers to a net contribution. Each of the heat fluxes in Equation (9.213) will
be discussed in detail.
The change in temperature in the top layer Ts(in ◦C) is given by:
∂Ts
∂t =Qtot
ρwcp∆zs
,(9.214)
where
Qtot is the total heat flux through the air-water surface, [J/m2s],
cpis the specific heat capacity of sea water (= 3930 J kg−1 K),
ρwis the specific density of water,[kg/m3] and
∆zsis the thickness of the top layer, [m].
In Delft3D-FLOW, the heat exchange at the bed is assumed to be zero. This may lead to
over-prediction of the water temperature in shallow areas. Also the effect of precipitation on
the water temperature is not taken into account.
Remarks:
The temperature Tis by default expressed in ◦C. However, in some formulas the abso-
lute temperature ¯
Tin K is used. They are related by:
¯
T=T+ 273.15.(9.215)
In Equation (9.214) the total incoming heat flux is assumed to be absorbed in the top
layer. This may result in an unrealistically high surface temperature when the top layer is
thin. This can be prevented by absorbing the incoming radiation as a function of depth.
Currently, this is only implemented in heat flux models 4 and 5.
The input parameters for the heat flux models are model dependent. For example, the
input for the solar radiation has to be specified (measured data) as incoming (short-
wave) solar radiation for a clear sky (Qsc) for heat flux model 1, as combined net solar
radiation and net atmospheric radiation (sum of Qsn and Qan) for heat flux model 2,
as net solar radiation for heat flux model 4, or is computed by the heat flux model itself
(heat flux models 3 and 5).
When using heat flux model 5, the free convection of latent and sensible heat is also
determined. This can be switched off when needed, by setting the coefficient of free
convection cfrcon to zero.
9.8.2 Solar radiation
The short-wave radiation emitted by the sun that reaches the earth surface under a clear sky
condition can be evaluated by means of:
Direct measurements.
Applying Stefan-Boltzmann’s law for radiation from a black-body:
Q=σ¯
T4(9.216)
238 of 688 Deltares

DRAFT
Conceptual description
with σ= Stefan-Boltzmann’s constant = 5.67 ·10−8J/(m2s K4) and ¯
Tthe (absolute)
temperature in K.
Empirical formulae.
In the heat flux models 1, 2 and 4 the solar radiation has to be specified by the user. In the
excess temperature model (model 3) the solar radiation does not play an explicit role, but is
part of the background temperature. In the heat flux model 5 the solar radiation is computed
by Delft3D-FLOW and is dependent on the geographical position at the earth and the local
time.
Not all of the radiation is absorbed at the water surface. A part is transmitted to deeper water.
Short waves can penetrate over a distance of 3 to 30 meters, depending on the clarity of the
water, while the relatively longer waves are absorbed at the surface. Therefore, it is convenient
to separate the incoming solar insolation into two portions:
1βQsn, the longer wave portion, which is absorbed at the surface and
2(1 −β)Qsn, the remainder part, which is absorbed in deeper water.
The absorption of heat in the water column is an exponential function of the distance Hfrom
the water surface:
(1 −β)Qsn =ZH
0
e−γz dz ⇒(9.217)
Qsn (h) = γe−γh
1−e−γH (1 −β)Qsn,(9.218)
with:
βpart of Qsn absorbed at the water surface which is a function of the wavelength.
The default value of βin Delft3D-FLOW is 0.06.
γextinction coefficient (measured) in m−1, also related to the so-called Secchi-
depth γ=1.7
HSecchi
hdistance to the water surface in meters.
Htotal water depth.
Remark:
The exponential decay function, Equation (9.218) has only been implemented in the
heat flux models 4 and 5. In the other heat flux models the incoming radiation is ex-
pected to be absorbed in the top layer.
In heat flux model 5 the flux is computed dependent on the geographical position and the
local time. The incoming energy flux at the water surface depends on the angle (declination)
between the incoming radiation and the Earth’s surface. This declination depends on the
geographical position on the Earth and the local time. The Earth axis is not perpendicular
to the line connecting the Sun with Earth. This tilting (angle δ) varies with the time of the
year and it leads to a seasonal variation of the radiation flux. At June 21, the declination is
maximal, 23.5 degrees. Of course, by the rotation of the Earth the solar radiation also varies
during the day. Near twelve o’clock local time, the sun elevation above the horizon is maximal.
For an overview of the angles used to determine the solar elevation angle γ, see Figure 9.12.
The temporal and latitude-dependent solar elevation angle γis estimated by:
sin (γ) = sin (δ) sin πφ
180−cos (δ) cos πφ
180cos (ω1t)(9.219)
Deltares 239 of 688
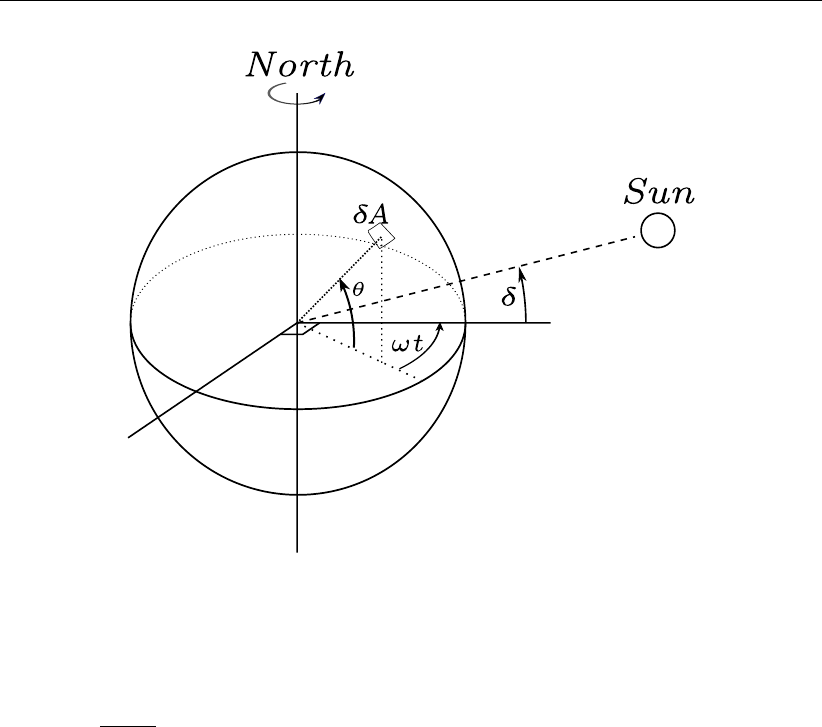
DRAFT
Delft3D-FLOW, User Manual
Figure 9.12: Co-ordinate system position Sun
δ: declination; θ: latitude; ωt: angular speed
with:
δ=23.5π
180 cos(ω0t−2.95),(9.220)
where ω0is the frequency of the annual variation and ω1the frequency of the diurnal variation;
φis the latitude.
The incoming short-wave solar radiation through a clear sky at ground level Qsc is about 0.76
of the flux incident at the top of the atmosphere (Gill,1982):
Qsc =0.76Ssin(γ),sin(γ)≥0,
0.0,sin(γ)<0.(9.221)
The solar constant S= 1 368 J/(m2s) or W/m2. This is the average energy flux at the mean
radius of the Earth.
A part of the radiation that reaches the water surface is reflected. The fraction reflected or
scattered (surface albedo) is dependent on latitude and season. Cloud cover will reduce the
magnitude of the radiation flux that reaches the sea surface. The cloudiness is expressed by
a cloud cover fraction Fc, the fraction of the sky covered by clouds. The correction factor for
cloud cover is an empirical formula. The absorption of solar radiation is calculated (Gill,1982)
as the product of the net downward flux of short wave-radiation in cloudless conditions and
factors correcting for reflection and cloud cover:
Qsn =Qs−Qsr = (1 −α)Qscf(Fc),(9.222)
with:
Qsn net heat radiation (flux) from the Sun
Qssolar radiation (short wave radiation) in [J/m2s]
240 of 688 Deltares
DRAFT
Conceptual description
Table 9.6: Albedo coefficient and cloud function
Heat flux model albedo (α)f(Fc)
1 0.06 1.0−0.65F2
c
2 - -
3 - -
4 0.09 -
5 0.06 1.0−0.4Fc−0.38F2
c
Qsr reflected solar radiation in [J/m2s]
Qsc radiation (flux) for clear sky condition
αalbedo (reflection) coefficient
Fcfraction of sky covered by clouds (user-defined input)
f(Fc)function of Fc
The cloud function f(Fc)and the albedo coefficient αused in Delft3D-FLOW are given in
Table 9.6. For the Ocean heat flux model the net solar radiation can also be specified directly
by the user instead of letting the model determine it from the cloud coverage. Details on this
functionality can be found in section B.5.
9.8.3 Atmospheric radiation (long wave radiation)
Atmospheric radiation is primarily due to emission of absorbed solar radiation by water vapour,
carbon dioxide and ozone in the atmosphere. The emission spectrum of the atmosphere is
highly irregular. The amount of atmospheric radiation that reaches the earth is determined by
applying the Stefan-Boltzmann’s law that includes the emissivity coefficient of the atmosphere
ε. Taking into account the effect of reflection by the surface and reflection and absorption by
clouds, the relation for the net atmospheric radiation Qan reads (Octavio et al.,1977):
Qan = (1 −r)εσ ¯
T4
ag(Fc),(9.223)
where ¯
Tais the air temperature (in K) and the reflection coefficient r= 0.03. The emissivity
factor of the atmosphere εmay depend both on vapour pressure and air temperature. The
emissivity of the atmosphere varies between 0.7 for clear sky and low temperature and 1.0.
The presence of clouds increases the atmospheric radiation. This is expressed in the cloud
function g(Fc).
In heat flux model 1 a simple linear formula for the net atmospheric radiation is used (Octavio
et al.,1977):
Qan = (218.0+6.3Ta)g(Fc),(9.224)
with Tathe air temperature (in ◦C). The cloud function g(Fc)in Eqs. (9.223) and (9.224) is
given by:
g(Fc)=1.0+0.17F2
c.(9.225)
The linearisation of Equation (9.223) is carried out around Ta= 15 ◦C.
Remarks:
In heat flux model 1 the atmospheric radiation is computed.
Deltares 241 of 688
DRAFT
Delft3D-FLOW, User Manual
In heat flux model 2 the atmospheric radiation is part of the (measured) net solar radia-
tion flux specified by you.
In heat flux models 4 and 5 the atmospheric radiation is part of the total long-wave
radiation flux, the so-called effective back radiation, see section 9.8.5.
The fraction of the sky covered by clouds Fcis fixed for the whole simulation period in
the heat flux models 1 and 4. Fcis not used in heat flux models 2 and 3 and can be
prescribed as a function of time in heat flux model 5.
9.8.4 Back radiation (long wave radiation)
Water radiates as a near black body, so the heat radiated back by the water can be described
by Stefan-Boltzmann’s law of radiation, corrected by an emissivity factor ε= 0.985 of water
(Sweers,1976;Octavio et al.,1977) and the reflection coefficient for the air-water interface
r= 0.03:
Qbr = (1 −r)εσ ¯
T4
s,(9.226)
with ¯
Tsthe (absolute) water surface temperature in K.
For heat flux models 1 and 2 Equation (9.226) has been linearised around Ts= 15 ◦C:
Qbr = 303 + 5.2Ts.(9.227)
Remark:
In heat flux models 1 and 2 the back radiation from the water surface is computed
explicitly. In heat flux models 4 and 5 the back radiation is part of the total long-wave
radiation flux, the so-called effective back radiation, see section 9.8.5. In heat model 3
the back radiation is part of the heat exchange coefficient (Sweers,1976).
9.8.5 Effective back radiation
In heat flux models 4 and 5 the total net long wave radiation flux is computed. This is called
the effective back radiation:
Qeb =Qbr −Qan.(9.228)
The atmospheric radiation depends on the vapour pressure ea, see section 9.8.6, the air tem-
perature Taand the cloud cover Fc. The back radiation depends on the surface temperature
Ts.
In heat flux model 4 the effective back radiation is computed using Berliand’s formula:
Qeb =εσ ¯
T4
a(0.39 −0.058√ea)1.0−0.65F2
c+ 4εσ ¯
T3
a¯
Ts−¯
Ta,(9.229)
with the actual vapour pressure eagiven by Equation (9.235).
In heat flux model 5 the effective back radiation Qeb is computed following:
Qeb =εσ ¯
T4
s(0.39 −0.05√ea)1.0−0.6F2
c,(9.230)
with the actual vapour pressure eagiven by Equation (9.237).
242 of 688 Deltares

DRAFT
Conceptual description
9.8.6 Evaporative heat flux
Evaporation is an exchange process that takes place at the interface between water and air
and depends on the conditions both in the water near the surface and the air above it. The
evaporation depends on meteorological factors (wind-driven convection) and vapour pres-
sures.
In heat flux models the evaporative heat flux Qev is defined by:
Qev =LvE, (9.231)
with Lvthe latent heat of vaporisation in J/kg water:
Lv= 2.5·106−2.3·103Ts.(9.232)
The evaporation rate Eis defined as the mass of water evaporated per unit area per unit time
[kg/(m2s)]. It is computed differently for different heat flux models. Most heat flux models use
some form of Dalton’s law of mass transfer:
E=f(U10) (es−ea),(9.233)
where the actual vapour pressure eaand the saturated vapour pressure es, can be given by
different relations. Heat flux models 1, 2 and 4 use vapour pressures defined as:
es= 23.38 exp 18.1−5 303.3
¯
Ts,(9.234)
ea=rhum23.38 exp 18.1−5 303.3
¯
Ta,(9.235)
for the actual and remote vapour pressure, respectively. Heat flux model 5 uses definitions for
the vapour pressures as:
es= 100.7859+0.03477Ts
1.0+0.00412Ts,(9.236)
ea=rhum100.7859+0.03477Ta
1.0+0.00412Ta.(9.237)
Here rhum is the relative humidity in [-].
Remarks:
The relative humidity rhum is specified as a function of time in all heat flux models but
the excess temperature model (model 3). In heat flux model 5 it can also be specified
varying in space. It should be specified in the input in percentages.
For heat flux model 5, the vapour pressures are calculated using air and water surface
temperatures in ◦C, while for the other models the vapour pressures are computed
using temperatures in K.
The evaporation rate Ecomputed from a heat flux model can be added as a source
term to the right hand side of the continuity equation Equation (9.3). The keyword
required is Maseva = #Y#.
By default Eis computed from the heat flux model formulation selected, but Ecan
also be prescribed as a function of time. In the latter case this user-defined evaporation
overrules the computed evaporation both in the heat flux model and in the continuity
equation; see section B.6 on how to prescribe a time dependent evaporation.
When the computed Eis negative, it is replaced by zero, assuming that it is caused by
modelling misfit and not by the actual physical process of water condensation out ot the
air into the water.
Deltares 243 of 688

DRAFT
Delft3D-FLOW, User Manual
For models 1, 2 and 3 the wind speed function f(U10)following Sweers (1976) is used:
f(U10) = (3.5+2.0U10)5.0×106
Sarea 0.05
,(9.238)
where
Sarea is the exposed water surface in m2, defined in the input and fixed for the whole
simulation.
The coefficients calibrated by Sweers were based on the wind speed at 3 meter above the
free surface; the coefficients in Equation (9.238) are based on the wind speed 10 meter above
the water level.
In heat flux model 4 the wind speed function following Murakami et al. (1985) is used:
f(U10) = cmurU10,(9.239)
with cmur a constant. This was calibrated for Japanese waters (Murakami et al.,1985) to be
1.2×10−9, without the influence of free convection. It corresponds to a so-called Dalton
number ceof 0.0016.
Evaporative heat flux for model 5
In heat flux model 5 the evaporation rate is computed from the difference in relative humidity,
rather than from the difference in vapour pressure. Another difference between heat flux
model 5 and the others is that, for heat flux model 5, the contribution to the evaporative heat
flux is split in a contribution by forced convection and a contribution by free convection.
The total heat flux due to evaporation then results from adding the forced convection of latent
heat in Equation (9.241) and the free convection of latent heat in Equation (9.245):
Qev =Qev,forced +Qev,free.(9.240)
Both kinds of evaporations are discussed separately.
Forced convection of latent heat
The latent heat flux due to forced convection for heat flux model 5 reads:
Qev,forced =LVρaf(U10){qs(Ts)−qa(Ta)},(9.241)
with qsand qathe specific humidity of respectively saturated air and remote air (10 m above
water level):
qs(Ts) = 0.62es
Patm −0.38es
,(9.242)
qa(Ta) = 0.62ea
Patm −0.38ea
.(9.243)
The saturated and remote vapour pressures esand eaare given by Eqs. (9.236) and (9.237).
The wind function in Equation (9.241) is defined as:
f(U10) = ceU10,(9.244)
244 of 688 Deltares
DRAFT
Conceptual description
Without the influence of free convection, the Dalton number cein model 5 was calibrated for
the North Sea to be ce= 0.0015.
Free convection of latent heat
Loss of heat due to evaporation occurs not only by forced convection, wind driven, but also
by free convection. Free convection is driven by buoyant forces due to density differences
(by temperature and/or water vapour content) creating unstable conditions in the atmospheric
boundary layer (ABL). Evaporation due to free convection is important in circumstances where
inverse temperature/density gradients are present and wind speeds are almost negligible so
that the amount of forced convection is small. Neglecting free convection in this situation will
lead to underestimating the heat loss. (Ryan et al.,1974) developed a correction to the wind
function, accounting for free convection. The derivation of evaporation by just free convection
is based on the analogy of heat and mass transfer.
Free convection is only included in temperature model 5 and the latent heat flux due to free
convection reads:
Qev,free =ksLVρa(qs−qa),(9.245)
with the average air density:
ρa=ρa0+ρa10
2,(9.246)
and with the heat transfer coefficient defined as:
ks=(0if ρa10 −ρa0≤0
cfr.conv ngα2
νair ρa(ρa10 −ρa0)o1/3if ρa10 −ρa0>0(9.247)
where the coefficient of free convection cf r.conv was calibrated to be 0.14, see (Ryan et al.,
1974). The viscosity of air νair is assumed to have the constant value 16.0×10−6m2/s. The
molecular diffusivity of air αm2/s is defined as
α=νair
σ,(9.248)
with σ= 0.7(for air) the Prandtl number. In Equation (9.245), the saturated air density is
given by:
ρa0=
100Patm−100es
Rdry +100es
Rvap
Ts+ 273.15 ,(9.249)
the remote air density (10 m above the water level):
ρa10 =
100Patm−100ea
Rdry +100ea
Rvap
Tair + 273.15 ,(9.250)
where Rdry is the gas constant for dry air: 287.05 J/(kg K) and Rvap is the gas constant
for water vapour: 461.495 J/(kg K). The specific humidity of respectively saturated air and
remote air (10 m above the water level), qsand qaare given by Eqs. (9.242) and (9.243). The
saturated and remote vapour pressure esand eaare defined in Eqs. (9.236) and (9.237).
9.8.7 Convective heat flux
Deltares 245 of 688

DRAFT
Delft3D-FLOW, User Manual
Convective heat flux for model 1, 2 and 4
Assuming that the turbulent exchange of heat at the air-water interface equals the turbulent
exchange of mass, the convective heat flux can be related to the evaporative mass flux by the
Bowen ratio:
Qco =RbQev,(9.251)
Rb=γTs−Ta
es−ea
,(9.252)
with γthe so-called Bowen’s constant:
γ= 0.61 for heat flux models 1 and 2
γ= 0.66 for heat flux model 4.
The saturated and actual vapour pressures are calculated by Eqs. (9.234) and (9.235) for heat
flux models 1, 2 and 4 and by Eqs. (9.236) and (9.237) for heat flux model 5.
Convective heat flux for model 5
In heat flux model 5 the convective heat flux is split into two parts, just as the evaporative
heat flux. The convective heat flux is divided into a contribution by forced convection and a
contribution by free convection.
The total heat flux due to convection then results from adding the forced convection of sensible
heat in Equation (9.254) and the free convection of sensible heat in Equation (9.256):
Qco =Qco,forced +Qco,free.(9.253)
Forced convection of sensible heat
The sensible heat flux due to forced convection is computed by:
Qco,forced =ρacpg(U10) (Ts−Ta),(9.254)
with cpthe specific heat of air. It is considered constant and taken to be 1 004.0J/(kg K). The
wind-speed function g(U10)is defined following Gill (1982):
g(U10) = cHU10,(9.255)
with cHthe so-called Stanton number. Without the influence of free convection, the Stanton
number was calibrated for the North Sea to be cH= 0.00145.
Free convection of sensible heat
The heat transfer for free convection is defined as:
Qco,free =ksρacp(Ts−Ta),(9.256)
with the heat transfer coefficient ksgiven by Equation (9.247).
9.8.8 Overview of heat flux models
Heat flux model 1
For heat flux model 1 the relations used for the computation of the heat balance, Equa-
tion (9.213), are given in Table 9.7.
246 of 688 Deltares
DRAFT
Conceptual description
Table 9.7: Terms of the heat balance used in heat model 1
Quantity Description According to
Qsc short wave solar radiation for clear sky measured
Qsn net solar radiation Equation (9.222)
Qan net atmospheric radiation Eqs. (9.224) and (9.225)
Qbr back radiation Equation (9.227)
Qev heat loss due to evaporation Eqs. (9.231) to (9.238)
Qco heat loss due to convection Eqs. (9.251) and (9.252)
Heat flux model 2
Heat flux model 2 is based on formulations given by Octavio et al. (1977). The source of
data for the combined net incoming radiation terms (Qsn +Qan)must come from direct
measurements. The remaining terms (back radiation, evaporation, convection) are computed
similarly as for heat flux model option 1, Table 9.8.
Table 9.8: Terms of the heat balance used in heat model 2
Quantity Description According to
Qsn +Qan net solar and net atmospheric radiation measured
Qbr back radiation Equation (9.227)
Qev heat loss due to evaporation Eqs. (9.231) to (9.238)
Qco heat loss due to convection Eqs. (9.251) and (9.252)
Excess temperature model - heat flux model 3
The excess temperature model 3 is based on Sweers (1976), the heat exchange flux is rep-
resented by a bulk exchange formula:
Qtot =−λ(Ts−Tback),(9.257)
with
Tsthe water temperature at the free surface, [◦C], and
Tback the natural background temperature, [◦C].
The heat exchange coefficient λis a function of the surface temperature Tsand the wind
speed U10. It is derived by linearization of the exchange fluxes for back radiation, evaporation
and convection. The following relation was derived by Sweers (1976):
λ= 4.48 + 0.049Ts+f(U10)1.12 + 0.018Ts+ 0.00158T2
s.(9.258)
For the wind function f(U10)Equation (9.238) is applied.
Deltares 247 of 688
DRAFT
Delft3D-FLOW, User Manual
Murakami model - heat flux model 4
The heat flux model 4 was calibrated for the Japanese waters (Murakami et al.,1985). The
following relations are used for the computation of the heat terms, Table 9.9.
Table 9.9: Terms of the heat balance used in heat model 4
Quantity Description According to
Qsn net solar radiation measured
Qeb effective back radiation Equation (9.229)
Qev heat loss due to evaporation Eqs. (9.231) to (9.235)
Qco heat loss due to convection Eqs. (9.251) and (9.252)
Ocean model - heat flux model 5
The heat flux model 5 following Gill (1982) and Lane (1989) was calibrated for the North Sea
and successfully applied for great lakes. The following relations are used for the computation
of the heat terms,Table 9.10.
Table 9.10: Terms of the heat balance used in heat model 5
Quantity Description According to
Qsn net solar radiation Eqs. (9.219) and (9.222)
Qeb effective back radiation Equation (9.230)
Qev heat loss due to evaporation Eqs. (9.241) to (9.240)
Qco heat loss due to convection Eqs. (9.254) to (9.253)
Summary of required input data for the heat flux models
The required time dependent input data for each of the heat flux models is summarised in
Table 9.11.
248 of 688 Deltares
DRAFT
Conceptual description
Table 9.11: Summary of time dependent input data of the heat flux models
Quantity model 1 model 2 Excess
temperature
Murakami Ocean
Qsc X
Qsn X X(optional)
Qsn +Qan X X(optional)
Tback X
TaX X X X
rhum X X X X
FcX
9.9 Tide generating forces
Numerical models of tidal motion in coastal seas generally do not account for the direct local
influence of the tide generating forces. The amount of water mass in these models is relatively
small and the effect of these forces on the flow can be neglected. For coastal areas, the
prescription of tidal forcing along open boundaries is sufficient in generating the appropriate
and accurate tidal motion.
The need to model larger seashore areas with sections of the deep ocean or large closed
basins has increased. In the numerical models of these areas the contribution of the gravita-
tional forces on the water motion increases considerably and can no longer be neglected, see
Figure 9.13, to generate an accurate tidal motion.
The tide generating forces originate from the Newtonian gravitational forces of the terrestrial
system (Sun, Moon and Earth) on the water mass. Based on their origins the tide generated
by these forces can be distinguished into:
Equilibrium tide.
Assuming that the earth is covered entirely with water and neglecting any secondary ef-
fects (see next section), then the ocean response is called the equilibrium tide, ζ(idealised
situation).
Earth Tide.
Displacement the earth’s crust due to the elasticity of the earth.
9.9.1 Tidal potential of Equilibrium tide
The equilibrium tide is modelled by including the tide generating potential terms for equilibrium
tide in the momentum equations. The following terms are added to the right-hand side of the
momentum equations Eqs. (9.7) and (9.8), respectively:
g
pGξξ
∂ϕ
∂ξ ,and g
pGηη
∂ϕ
∂η .(9.259)
Following Schwiderski (1980), the tidal potential ϕfor equilibrium tide is decomposed into the
Deltares 249 of 688
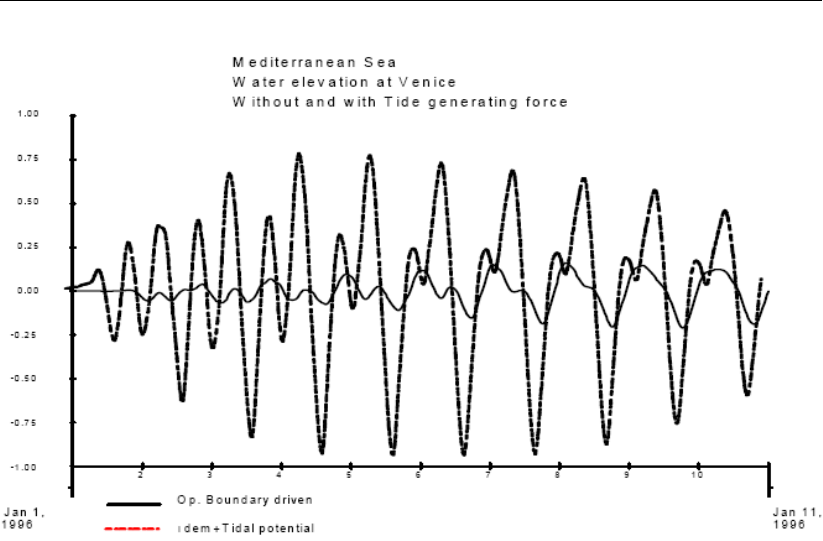
DRAFT
Delft3D-FLOW, User Manual
Figure 9.13: Effect of tide generating force on the computed water elevation at Venice
series:
ϕ=X
ν=0,1,2
ϕν(λ, φ, t),(9.260)
consisting of the following major tidal species:
Long-Period species ν= 0 : ϕ0=Ki1.5 cos2φ−1cos (ωit+ 2λ+χi),
(9.261)
Diurnal species ν= 1 : ϕ1=Kisin (2φ) cos (ωit+λ+χi),(9.262)
Semi-diurnal species ν= 2 : ϕ2=Kicos2(φ) cos (ωit+ 2λ+χi),(9.263)
with:
λ, φ geographical co-ordinates
Kiamplitude of equilibrium tide (component dependent)
ωifrequency of equilibrium tide (component dependent)
χiastronomical argument of equilibrium tide (component dependent) relative to
UTC midnight
tuniversal standard time - UTC
Table 9.12 provides an overview of frequencies ωiand constants Kifor each of the 11 tidal
constituents considered in the species Eqs. (9.261) to (9.263).
Following Schwiderski (1980), all other constituents fall below 4% of the dominating semi-
diurnal principal moon (M2) tide and need not be considered in global ocean tide models.
Since tidal models can be used in predictive mode (predicting the actual water elevations and
currents) the long term variations (18.6 years cycle) in the tidal components are accounted
for by including nodal corrections (see Delft3D-TIDE, User Manual; TIDE UM (2013)). In
Delft3D-FLOW the correction is carried out only once at the initialisation of the simulation.
Consequently, with regard to the accuracy of the generated tide, this imposes a restriction on
the simulation period to approximately one year.
250 of 688 Deltares
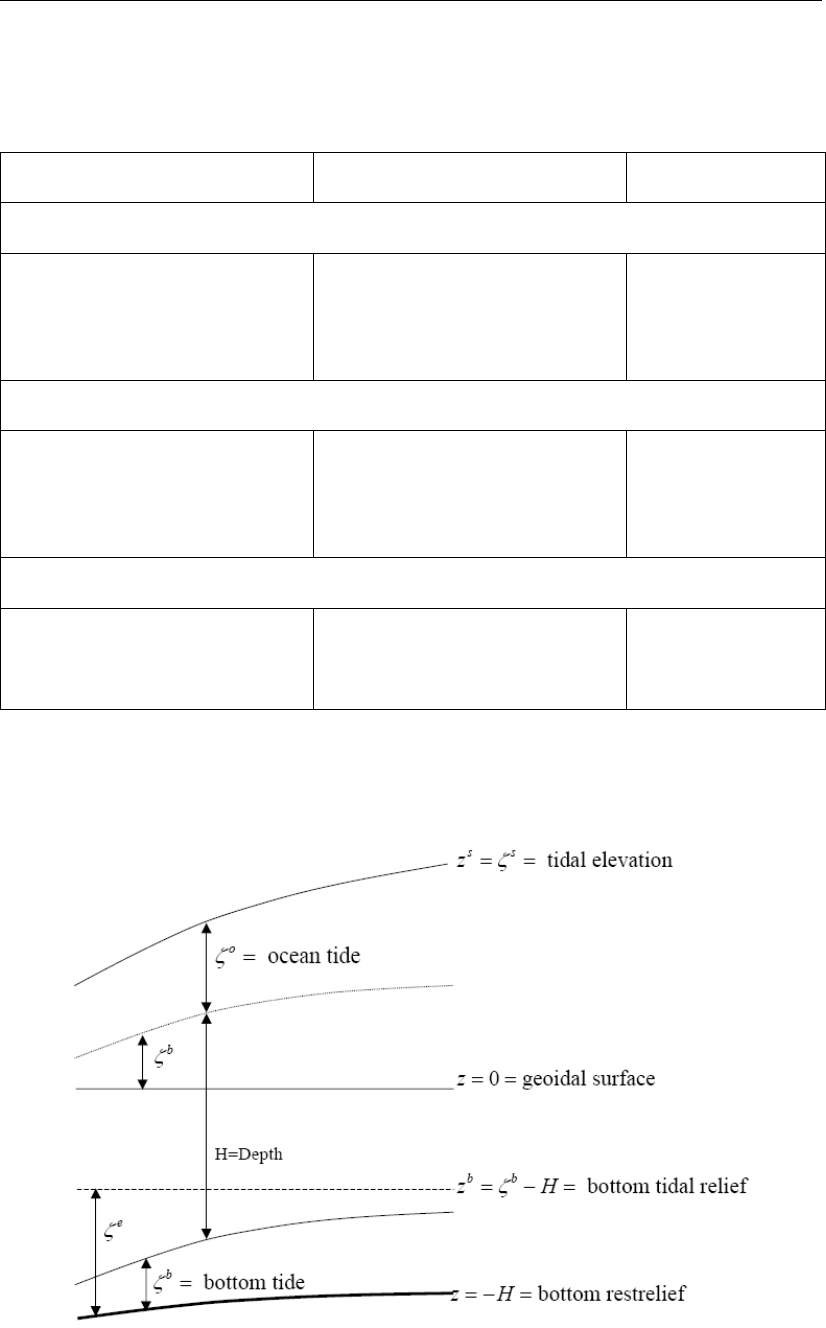
DRAFT
Conceptual description
Table 9.12: Constants of major tidal modes
Tidal constituent Frequency ωi(degrees/hr) Constant Ki
Semi-diurnal Species
M2 principal lunar 28.984104237 0.242334
S2 principal solar 30.000000000 0.113033
N2 elliptical lunar 28.439729554 0.046398
K2 declination lunar-solar 30.082137278 0.030704
Diurnal Species
K1 declination lunar-solar 15.041068639 0.141565
O1 principal lunar 13.943035598 0.100514
P1 principal solar 14.958931361 0.046843
Q1 elliptical solar 13.398660914 0.019256
Long-period Species
Mf fortnightly lunar 1.098033041 0.041742
Mm monthly lunar 0.544374684 0.022026
Ssa semi-annual solar 0.082137278 0.019446
Figure 9.14: Earth ocean tidal interaction (after Schwiderski (1980))
Deltares 251 of 688

DRAFT
Delft3D-FLOW, User Manual
For the determination of the astronomical arguments χin Eqs. (9.261) to (9.263) a module of
Delft3D-TIDE is applied. If the computations are to be carried out in local time, then the time
difference between the local time and UTC must be specified. This difference is referred to as
the local time zone (LTZ) in the input.
9.9.2 Tidal potential of Earth tide
The equilibrium tide approach concentrates on the influence of gravitational forces on ocean
tides. It neglects the effect of these forces on terrestrial tide (i.e. it assumes that earth is a
stiff body) and/or the interaction between the two. Following Schwiderski, the following two
interaction effects should be considered:
1 Earth tide (ζe) and tidal loading (ζeo =ζe−ζb), are the earth tidal responses to the
equilibrium tide ϕand oceanic tidal load ζ.
2ϕe,ϕeo and ϕoare perturbations of the equilibrium tide ϕin response to ζe,ζeo and ζ,
respectively.
These perturbations are subsequently regrouped in the final equations according to their
causes and are approximated as follows:
ϕe−ζe= 0.31ϕ, (9.264)
and:
ϕo+ζeo −ϕeo = 0.10ζ. (9.265)
However the improvement due to the second correction term is considerably less significant
(10% improvement in the difference between observed and simulated phases), than the in-
clusion of proper eddy viscosity and bottom friction coefficients for the hydrodynamics of an
ocean basin, see Schwiderski (1980). Therefore, in Delft3D-FLOW only the first correction
term has been included.
Consequently, in the momentum equations, Eqs. (9.7) and (9.8), the following net tidal po-
tential terms are applied, yielding a 31 % reduction of the originally derived equilibrium tide
potential terms):
0.69 g
pGξξ
∂ϕ
∂ξ ,and 0.69 g
pGηη
∂ϕ
∂η .(9.266)
9.10 Hydraulic structures
Obstacles in the flow may generate sudden transitions from flow contraction to flow expansion.
The grid resolution is often low compared to the gradients of the water level, the velocity and
the bathymetry. The hydrostatic pressure assumption may locally be invalid. Examples of
these obstacles in civil engineering are: gates, barriers, sluices, groynes, weirs, bridge piers
and porous plates. The obstacles generate energy losses and may change the direction of
the flow.
The forces due to obstacles in the flow which are not resolved (sub-grid) on the horizon-
tal grid, should be parameterised. The obstacles are denoted in Delft3D-FLOW as hydraulic
structures. In the numerical model the hydraulic structures should be located at velocity points
of the staggered grid, see section 10.1. The direction of the forces: Uor Vshould be spec-
ified at input. To model the force on the flow generated by a hydraulic structure, the flow in a
252 of 688 Deltares

DRAFT
Conceptual description
computational layer is blocked or a quadratic energy or linear loss term is added to the mo-
mentum equation. The mathematical formulations are given in this section. For the numerical
implementation we refer to Section 10.9.
9.10.1 3D gate
In 3D simulations, constructions which partially block the horizontal flow can be modelled as
so-called “gates”. Its horizontal and vertical position can be specified. The horizontal velocities
of the computational layers at position of the gate are set to zero. This generates a vertical
structure of the horizontal flow around a hydraulic structure which is more realistic. There is
no transport of salt or sediment through the computational layers of a gate. The width of a
gate is assumed to be zero, so it has no influence on the water volume. Upstream of the
gate the flow is accelerated due to contraction and downstream the flow is decelerated due to
expansion.
Furthermore, a free slip boundary conditions has been implemented at the transition from an
open layer to a closed layer (representing a gate):
νV
∂U
∂z z=a
= 0,(9.267)
with z=athe top or the bottom of the gate.
9.10.2 Quadratic friction
The flow rate Qthrough a hydraulic structure can often be described by a so-called Q-H
relation. They relate the flow rate to the difference between the upstream and downstream
water levels:
Q=µAp2g|ζu−ζd|,(9.268)
with µthe contraction coefficient (0< µ ≤1), the wet flow-through area and and the
upstream and downstream water level, respectively. The contraction coefficient in the so-
called Q-H relation is dependent on the kind of hydraulic structure. The contraction coefficient
µcan be used to determine the additional quadratic friction term in the momentum equation.
Mξ=−closs−u
∆xu√u2+v2,(9.269)
Mη=−closs−v
∆yv√u2+v2,(9.270)
with closs the energy loss coefficient. For the following types of hydraulic structures, a quadratic
formulation for the energy loss is implemented in Delft3D-FLOW:
barrier
bridge pier
Current Deflecting Wall (CDW)
local weir or 2D weir
porous plate
culvert
Deltares 253 of 688

DRAFT
Delft3D-FLOW, User Manual
9.10.3 Linear friction
To reduce the flow rate through a certain cross-section Delft3D-FLOW offers also the func-
tionality of a linear friction term. This kind of hydraulic structure is denoted as a rigid sheet:
Mξ=−closs−uu
∆x,(9.271)
Mη=−closs−vv
∆y,(9.272)
with closs the energy loss coefficient, which should be specified by you at input.
9.11 Flow resistance: bedforms and vegetation
The terrain and vegetation excert shear stresses on the passing flow. The magnitude of
the shear stress of the bed is often characterised by means of roughness coefficient of type
Chézy, Manning or White-Colebrook as discussed in section 9.4.1. Within the main stream
flow the shear stresses are largely determined by the local conditions of the alluvial bed (bed
composition and bedform characteristics). In other areas, such the floodplains of rivers and
in the intertidal areas of estuaries, the flow resistance is determined by a combination of veg-
etation and an alluvial bedforms or even a non-alluvial bed. To accurately represent such
conditions in the numerical model, Delft3D-FLOW has been extended with a couple features,
this includes bedform roughness predictors and vegetation models. These types of flow re-
sistance may be resolved in a 2D numerical model using the trachytope approach (see sec-
tion 9.11.2) and in a 3D model by a combination of bed resistance formulations. First, we start
with a description of the bedform roughness height predictor.
9.11.1 Bedform heights
There are various types of bedforms; each type influences the hydro- and morphodynam-
ics in its own way. Following Van Rijn (2007) we distinguish between roughness heights for
ripples, mega-ripples and dunes. Delft3D contains a module to predict dune characteris-
tics (height/length) which may be used in determining the threshold level for dredging (see
keyword UseDunes in section A.2.23) or to compute a dune roughness height which can
be used as the bed roughness in the flow computation via trachytope formulae 105 (Equa-
tion (9.312)) or 106 (Equation (9.313)) as described in section 9.11.2. One can also deter-
mine the dune, mega-ripple, and ripple roughness heights directly according Van Rijn (2007).
Both approaches are described in the two sections below. The corresponding keywords are
described in Appendix B.16.
9.11.1.1 Dune height predictor
Four dune height predictors have been implemented: Van Rijn (1984c), Fredsøe (1982) based
on Meyer-Peter and Müller (1948) or Engelund and Hansen (1967), and a power relation. One
of these predictors can be selected using the keyword BdfH. In case of Van Rijn (1984c) the
dune height hdis computed as
hd= 0.11εH D50
H0.3
(1 −e−T/2)(25 −T)(9.273)
where εis a calibration coefficient and Tis the dimensionless bed shear parameter. Fredsøe
(1982) formulated an approach to obtain a dune height predictor for a general sediment trans-
port formula s=f(U, H, k)depending on depth-averaged flow magnitude U, water depth
Hand Nikuradse bed roughness kas
hd=εsH/U∂s
∂U −H∂s
∂H −k∂s
∂k (9.274)
254 of 688 Deltares
DRAFT
Conceptual description
If one applies this approach to the transport formula by Meyer-Peter and Müller (1948) one
obtains
hd=24
63εH max(1 −θcr
µθ ,0) (9.275)
where µis the efficiency factor (C/Cg,90)1.5based on a grain related bed roughness of
3D90 and θcr is the critical mobility parameter based on the Shields curve or given by the
user. If one applies the formulation of Fredsøe (1982) to the transport formula by Engelund
and Hansen (1967) one obtains
hd=1
5εH (9.276)
The latter two formulations have been implemented in Delft3D. Finally, the power relation dune
height predictor reads
hd=aHHbH(9.277)
The dune height formulations given by equations (9.273)–(9.277) are approximations for the
dune height under equilibrium conditions. Under time and spatially varying conditions, the
dune height will need time to adjust; this effect has been implemented by means of an advec-
tion relaxation equation.
∂hd
∂t +uH
∂hd
∂x +vH
∂hd
∂y =hd,eq −hd
TH
(9.278)
By default these effects are neglected, such that hd=hd,eq. By means of the keyword
BdfRlx one can select four options for computing the variables uH,vHand TH: (i) constant
relaxation time scale TH, (ii) constant relaxation distance LH, (iii) relaxation distance propor-
tional to dune length Ld, and (iv) relaxation distance dependent on dune length Ldand water
depth H. In the first three advection cases, the direction of the bedform migration is assumed
to be equal to the direction of the depth averaged velocity in all cases, i.e.
uH=cH
u
U(9.279)
vH=cH
v
U(9.280)
where uand vare the xand ycomponents of the depth averaged velocity, Uthe flow velocity
magnitude √u2+v2, and cHis the bedform celerity (magnitude) given by a power relation
derived for a generic transport formula approximation s=asUbsas
cH=bss
H=asbsUbs
H=aCUbC
H(9.281)
while the relaxation time scale THis either given, or computed from TH=LH/cHwhere
the relaxation distance LHis either given or proportional to the dune length LH=fLH Ld.
In the fourth advection case THis computed again using TH=LH/cHbut in that case the
relaxation distance LHis given by
LH= min "Hmax
HbLH
, φmax#Ld(9.282)
Deltares 255 of 688

DRAFT
Delft3D-FLOW, User Manual
and the bedform celerity is given by
cH=acH max "H
Hmax bcH
, γmin#sb
H(1 −Fr2)(9.283)
where sbis the total bedload transport rate, Fr2is the squared Froude number U2/gH and
Hmax,bLH ,φmax,acH ,bcH and γmin are constants that can be set. In this case the bedform
migration direction is assumed to be equal to the direction of the bedload transport vector ~sb.
For the dune length Ldused in some of the formulations above, you can choose either one
of the following two options using keyword BdfL. If you choose to compute the dune height
according Van Rijn (1984c) then it will be computed as
Ld= 7.3H(9.284)
otherwise it will be computed using the power relation
Ld=aLHbL(9.285)
Note that only the dune height is subject to the advective and relaxation behaviour formulated
in Equation (9.278); for the dune length always these equilibrium formulations are used.
Finally, you may select one of three methods for computing the bedform roughness height by
means of the keyword BdfRou; these methods are based on the formulations of Van Rijn
(1984c), Van Rijn (2007) or a power relation. This value will only be used if you use the
trachytope option for specifying bed roughness and include either one of alluvial roughness
formulae 105 and 106. In case of Van Rijn (1984c) the roughness height related to dunes is
computed as
ks,d = 1.1hd1−e−25hd/Ld(9.286)
and in case of the power relation this quantity is computed as
ks,d =aRHbR
d(9.287)
The roughness height related to ripples is set in both cases equal to 3D90. In case of Van
Rijn (2007) the roughness heights neither depend on the computed dune height nor on the
dune length; in that case the equations given in the following section are used.
9.11.1.2 Van Rijn (2007) bedform roughness height predictor
As proposed by Eq. (5a)–(5d) in Van Rijn (2007) the roughness height predictor for ripples is
given by
ks,r =αr20Dsilt if D50 < Dsilt
k∗
s,r otherwise (9.288)
where αris a calibration factor, Dsilt = 32 µm and k∗
s,r is given by
k∗
s,r =
150fcsD50 if ψ≤50
(182.5−0.65ψ)fcsD50 if 50 < ψ ≤250
20fcsD50 if ψ > 250
(9.289)
in which ψis the current-wave mobility parameter defined as U2
wc/[(s−1)gD50]using
U2
wc =U2
w+u2
cand relative density s=ρs/ρw, peak orbital velocity near bed Uw=
256 of 688 Deltares

DRAFT
Conceptual description
πHs/[Trsinh(2kh)], depth-averaged current velocity uc, significant wave height Hs, wave
number k= 2π/L, wave length Lderived from (L/Tp±uc)2=gL tanh(2πh/L)/(2π),
relative wave period Tr, peak wave period Tp, water depth Hand factor fcs = (0.25Dgravel/D50)1.5
in which Dgravel = 0.002 m. The value of ks,r is limited to values ranging from D90 to 2% of
the water depth.
Following Eq. (6a)–(6d) by Van Rijn (2007) the roughness height predictor for mega-ripples is
given by
ks,mr =αmr 0if D50 < Dsilt
k∗
s,mr otherwise (9.290)
where αmr is a calibration factor and k∗
s,mr is given by
k∗
s,mr =
0.0002ffsψH if ψ≤50
(0.011 −0.00002ψ)ffsHif 50 < ψ ≤550
0.02 if ψ > 550 and D50 ≥Dsand
200D50 if ψ > 550 and Dsilt ≤D50 < Dsand
(9.291)
in which ffs = (D50/1.5Dsand)and Dsand = 0.000062 m. The value of ks,mr is limited to
values smaller than 0.2 m.
Following Eq. (7a)–(7d) by Van Rijn (2007) the roughness height predictor for dunes is given
by
ks,d =αd0if D50 < Dsilt
k∗
s,d otherwise (9.292)
where αdis a calibration factor and k∗
s,d is given by
k∗
s,d =
0.0004ffsψH if ψ≤100
(0.048 −0.00008ψ)ffsHif 100 < ψ ≤600
0if ψ > 600
(9.293)
Since these formulations do not depend on the equations for the dune characteristics given
in the previous section, the advection and relaxation effects represented by Equation (9.278)
cannot be included these Van Rijn (2007) formulations. Therefore, a separate relaxation
option has been implemented for all three bedform roughness heights according Van Rijn
(2007) formulations as given by
ks,r = (1 −αr)ks,r,new +αrks,r,old where αr=e−∆t/Tr
ks,mr = (1 −αmr)ks,mr,new +αmrks,mr,old where αmr =e−∆t/Tmr
ks,d = (1 −αd)ks,d,new +αdks,d,old where αd=e−∆t/Td
(9.294)
where ∆tis the hydrodynamic time step of bed roughness updating, and Tr,Tmr and Tdare
different relaxation time scales for the three bedform types. Note that if a relaxation time scale
T∗becomes zero, the corresponding relaxation factor α∗will be zero and the relaxation effect
disappears.
Warning:
Until Delft3D release 3.28.10, the relaxation factors α∗are not defined as indicated
above but as max[1 −(5∆t/T∗),0].
Deltares 257 of 688
DRAFT
Delft3D-FLOW, User Manual
Remarks:
In case of a simulation with multiple sediment fractions, the D50 of the grain mixture in
the surface layer is used.
Non-erodible layers and partial transport effects are not taken into account to reduce
the roughness height.
9.11.2 Trachytopes
This functionality allows you to specify the bed roughness and flow resistance on a sub-grid
level by defining and using various land use or roughness/resistance classes, further referred
to as trachytopes after the Greek word τραχ´υτ ης for roughness. The input parameters and
files to use the trachytopes functionality are described in section B.17.
At every time step (or less frequent as requested by the user) the trachytopes are converted
into a representative bed roughness C,kor n(as described in section 9.4.1) and optional
linear flow resistance coefficient λm,n per velocity point.
Mξ=−1
2λm,nu√u2+v2(9.295)
Mη=−1
2λm,nv√u2+v2(9.296)
To save computational time the user may choose to update the computed bed roughness and
resistance coefficients less frequently than every time step. See section B.17 for a description
of the keywords and input files associated with this feature.
The following two sections describe the various classes of trachytopes distinguished and the
way in which they are combined, respectively.
9.11.2.1 Trachytope classes
Three base classes of trachytopes are distinguished: area classes, line classes and point
classes. The area classes (type range 51–200) basically cover the whole area, therefore,
they are generally the dominant roughness factor. The line classes (type range 201–250)
may be used to represent hedges and similar flow resistance elements; it will add anisotropy
to the roughness field. The point class (type range 251–300) represents a set of point flow
resistance elements. The next six sections provide an overview of the various trachytope
formulae implemented.
258 of 688 Deltares
DRAFT
Conceptual description
Special classes (1–50)
In addition to the three base classes two special trachytope classes have been defined: a flood
protected area and a composite trachytope class. The first class represents a sub-grid area
that is protected from flooding and thus does not contribute to the bed roughness; however,
the effect on the flow resistance should be taken into account. The second class can be used
to make derived trachytope classes that are a combination of two other trachytopes: an area
fraction αof trachytope type T1and an area fraction β(often equal to 1−α) of trachytope
type T2.
FormNr Name Formula
Special classes (1–50)
1 flood protected area area fraction shows up as fbin Eqs. (9.348)
and (9.351)
2 composite trachytope fraction αof type T1and fraction β(generally
β= 1 −α) of type T2
Area trachytope classes (51–200)
The class of area trachytopes is subdivided into three types: simple (51–100), alluvial (101–
150) and vegetation (151–200). Four simple area trachytopes have been implemented repre-
senting the four standard roughness types of flow module.
FormNr Name Formula
51 White-Colebrook value k
52 Chézy value C
53 Manning value C=6
√h/n
54 z0value k= 30z0
Six alluvial trachytopes have been implemented.
FormNr Name Formula
101 simplified Van Rijn Equation (9.297)
102 power relation Equation (9.298)
103 Van Rijn (1984c) Equations (9.299) to (9.307)
104 Struiksma Equations (9.308) to (9.311)
105 bedforms quadratic Equation (9.312)
106 bedforms linear Equation (9.313)
The first alluvial roughness formula is a simplified version of the Van Rijn (1984c) alluvial
roughness predictor
k=Ah0.7h1−e−Bh−0.3i(9.297)
it is obtained from Equation (9.299) by noting that hb∝h0.7and Lb∝hand ignoring the
grain related roughness. The parameters Aand Bcan be calibrated by the user. The second
Deltares 259 of 688

DRAFT
Delft3D-FLOW, User Manual
formula implemented is a straightforward general power law
C=AhB(9.298)
where Aand Bare calibration coefficients. The Van Rijn (1984c) alluvial roughness predictor
reads
k=k90 + 1.1hb1−e−25hb/Lb(9.299)
where the bedform height hband length Lbare given by
hb= 0.11hD50
h0.31−e−T/2(25 −T)(9.300)
Lb= 7.3h(9.301)
where his the local water depth and the transport stage parameter Tis given by
T=u02
∗−u2
∗,cr
u2
∗,cr
(9.302)
where u0∗is the bed shear velocity given by
u02
∗=gu2/C2
g,90 (9.303)
where
Cg,90 = 18 10log(12h/k90)and k90 = 3D90 (9.304)
and u∗,cr is the critical bed shear velocity according Shields given by
u2
∗,cr =g∆D50θc(9.305)
given
θc=
0.24/D∗if D∗≤4
0.14D−0.64
∗if 4< D∗≤10
0.04D−0.10
∗if 10 < D∗≤20
0.013D0.29
∗if 20 < D∗≤150
0.055 if 150 < D∗
(9.306)
where
D∗=D50 g∆
ν21/3
(9.307)
This predictor does not contain any calibration coefficients but requires D50 and D90 data
from the morphology module. It does not include the advective and relaxation behaviour that
is available by explicitly simulating the dune height as described in Section 9.11.1 combined
with trachytope number 106.
The second alluvial roughness predictor proposed by (Struiksma, pers. comm.) allows for a
lot of adjustments, it reads
1
C2= (1 −ξ)1
C2
90
+ξ1
C2
min
(9.308)
260 of 688 Deltares

DRAFT
Conceptual description
where
C90 =A110log(A2h/D90)(9.309)
and
ξ=max(0, θg−θc)
θm−θc
θ2
m−θcθg
(θm−θc)θg
(9.310)
which varies from 0at θg≤θcto 1at θg=θmwhere
θg=u2
C2
90∆D50
(9.311)
and A1,A2,θc,θm,Cmin are coefficients that the user needs to specify. This formula requires
also D50 and D90 data from the morphology module. The fifth formula is based on Van Rijn
(2007) and reads
k= min(qk2
s,r +k2
s,mr +k2
s,d,h
2)(9.312)
It uses the roughness heights of ripples kr, mega-ripples kmr and dunes kd. These rough-
ness heights are based on Van Rijn (2007) formulae as described in section 9.11.1; these
formulae depend on D50 and D90 data which may be either specified as part of the rough-
ness type or obtained from the morphology module. The sixth formula is similar, but uses a
linear addition
k= min(ks,r +ks,mr +ks,d,h
2)(9.313)
Four vegetation based area trachytopes have been implemented. Two formulae (referred to
as ‘Barneveld’) are based on the work by Klopstra et al. (1996,1997) and two on the work by
Baptist (2005).
FormNr Name Formula
151 Barneveld 1 Eqs. (9.314) –(9.323),CD= 1.65
152 Barneveld 2 Eqs. (9.314) –(9.320),(9.324) –(9.326)
153 Baptist 1 Eqs. (9.327) and (9.328)
154 Baptist 2 Eqs. (9.329),(9.331) and (9.332)
The formula by Klopstra et al. (1997) reads
C=1
h3/2
2
√2AqC3ehv√2A+u2
v0−pC3+u2
v0+
uv0
√2Aln (√C3ehv√2A+u2
v0−uv0)(√C3+u2
v0+uv0)
(√C3ehv√2A+u2
v0+uv0)(√C3+u2
v0−uv0)+
√g(h−(hv−a))
κ(h−(hv−a)) ln h−(hv−a)
z0−aln a
z0−(h−hv)
(9.314)
where
A=nCD
2α(9.315)
Deltares 261 of 688
DRAFT
Delft3D-FLOW, User Manual
C3=2g(h−hv)
α√2A(ehv√2A+e−hv√2A)(9.316)
a=1 + q1 + 4E2
1κ2(h−hv)
g
2E2
1κ2
g
(9.317)
and
z0=ae−F(9.318)
where
E1=√2AC3ehv√2A
2qC3ehv√2A+u2
v0
(9.319)
and
F=κqC3ehv√2A+u2
v0
pg(h−(hv−a)) (9.320)
Here, his the water depth, hvis the vegetation height, and n=mD where mis the number
of stems per square metre and Dis the stem diameter. For the first implementation the
parameter αin Equation (9.316) is given by
α= max(0.001,0.01phhv)(9.321)
and the velocity within the vegetation is approximated by uv0√iwhere
u2
v0=2g
CDn(9.322)
and iis the water level gradient. For emerged vegetation the first implementation reads
1
C2=CDnh
2g(9.323)
The second implementation of Klopstra et al. (1996) is based on a modification by Van Velzen
et al. (2003); it is identical except for the following modifications to Eqs. (9.321) –(9.323). The
main difference between the two implementations is the inclusion of the roughness Cbof the
bed itself (without vegetation). The parameter αin Equation (9.316) is now given by
α= 0.0227h0.7
v(9.324)
and the velocity within the vegetation is approximated by uv0√iwhere
u2
v0=hv
CDhvn
2g+1
C2
b
(9.325)
262 of 688 Deltares
DRAFT
Conceptual description
and iis the water level gradient. For emerged vegetation the second implementation reads
1
C2=CDnh
2g+1
C2
b
(9.326)
For large values of Cbthe latter two equations simplify to the corresponding equations of the
first implementation. The first implementation requires vegetation height hvand density n
as input parameters (the drag coefficient CDis equal to 1.65); for second implementation
you’ll also need to specify the drag coefficient CDand the alluvial bed roughness kb(Cbin
Equation (9.326) is computed as 18 10log(12h/kb)).
The first implementation of the roughness predictor by Baptist (Baptist,2005) reads for the
case of submerged vegetation
C=1
q1
C2
b+CDnhv
2g
+√g
κln( h
hv
)(9.327)
where nis the vegetation density (n=mD where mis the number of stems per square
metre and Dis the stem diameter). The second term goes to zero at the transition from
submerged to emerged vegetation. At that transition the formula changes into the formula for
non-submerged vegetation which reads
C=1
q1
C2
b+CDnh
2g
(9.328)
which is identical to the non-submerged case of the second implementation of the work by
Klopstra et al. (1996) (see Equation (9.326)).
The drawback of the three vegetation based formulations above is that they parameterize the
flow resistance by means of the bed roughness. Consequently, the presence of vegetation
will lead to a higher bed roughness and thus to a higher bed shear stress and larger sediment
transport rates in case of morphological computations. Therefore, we have included a −λ
2u2
term in the momentum equation where λrepresents the flow resistance of the vegetation. For
the case of non-submerged vegetation h<hvthe flow resistance and bed roughness are
strictly separated
C=Cband λ=CDn(9.329)
In the case of submerged vegetation h>hvthe two terms can’t be split in an equally clean
manner. However, we can split the terms such that the bed shear stress computed using
the depth averaged velocity uand the net bed roughness Cequals the bed shear stress
computed using the velocity uvwithin the vegetation layer and the real bed roughness Cb.
u2
C2=u2
v
C2
b
(9.330)
With this additional requirement we can rewrite Equation (9.327) as
C=Cb+√g
κln( h
hv
)s1 + CDnhvC2
b
2g(9.331)
Deltares 263 of 688
DRAFT
Delft3D-FLOW, User Manual
and
λ=CDnhv
h
C2
b
C2(9.332)
which simplify to Equation (9.329) for h=hv. Both formulae by Baptist require vegetation
height hv, density n, drag coefficient CDand alluvial bed roughness Cbas input parameters.
Linear trachytope classes (201–250)
Two formulae have been implemented for linear trachytopes such as hedges or bridge piers.
FormNr Name Formula
201 hedges 1 Eqs. (9.333) to (9.335)
202 hedges 2 Eqs. (9.336) to (9.338)
The first implementation reads
1
C2=h
2g
Lhedge
Wcell Lcell
1−µ2
µ2(9.333)
where Lhedge is the projected length of the hedge, Wcell and Lcell are the width and length
of the grid cell. The ratio Lhedge /Wcell may be interpreted as the number of hedges that the
flow encounters per unit width. The second ratio is thus the inverse of the average distance
between these hedges within the grid cell. The last term may be loosely referred to as the
drag of the hedge, which is determined by the hedge pass factor µgiven by
µ= 1 + 0.175nh
hv−2(9.334)
if the hedge extends above the water level (hv> h) and is given by
µ= 1 −0.175nh
hv(9.335)
if the hedge is fully submerged (h>hv) where nis a dimensionless hedge density. The
second implementation reads
1
C2=CDnLhedge h
2gLcell Wcell
(9.336)
or equivalently
C=s2gLcell Wcell
hLhedge r1
CDn(9.337)
for non-submerged conditions and
C=s2gLcell Wcell
hLhedge
hv
hr1
CDn+m0v
u
u
th−hv
h2
1−h−hv
h2
(9.338)
for submerged conditions. We recognize the same ratio Lcell Wcell /Lhedge that represents
the average distance between hedges. Equation (9.336) can be directly compared to similar
equations for area trachytopes (Equation (9.323)), point trachytopes (Equation (9.339)) and
bridge resistance (Equation (10.76)). Note that the formula for computing the loss coefficient
for a bridge explicitly includes the reduction in the flow area and the resulting increase in the
effective flow velocity, whereas the above mentioned trachytope formulae don’t.
264 of 688 Deltares
DRAFT
Conceptual description
Point trachytope classes: various (251–300)
One formula for point trachytopes has been implemented. It may be used to represent groups
of individual trees or on a smaller scale plants.
FormNr Name Formula
251 trees Eqn. (9.339)
The implemented formula reads
C=s2g
CDnmin(hv, h)(9.339)
where n=mD with mthe number of trees per unit area and Dthe characteristic tree
diameter, hvis the vegetation height and his the local water depth. The formula is identical
to Equation (9.328) except for the fact that the point trachytope formula has no bed roughness
and area associated with it. The generalization of Equation (9.339) to the submerged case
(h > hv) lacks the extra term in Equation (9.327).
9.11.2.2 Averaging and accumulation of trachytopes
Point and linear roughnesses are accumulated by summing the inverse of the squared Chézy
values Ci.
1
C2
pnt
=X
i
1
C2
pnt,i
(9.340)
1
C2
lin
=X
i
1
C2
lin,i
(9.341)
The area roughnesses are accumulated weighted by the surface area fraction fi. These
roughnesses are accumulated as White-Colebrook roughness values and as Chézy values;
for the latter values both the linear sum (“parallel”) and the sum of inverse of squared values
(“serial”) are computed. Roughness values are converted into each other as needed based
on the local water depth using Eqs. (9.54)–(9.56).
karea =X
i
fiki(9.342)
1
C2
area,s
=X
i
fi
1
C2
i
(9.343)
Carea,p=X
i
fiCi(9.344)
For the fraction of the grid cell area for which no roughness class is specified the default
roughness is used.
The flow resistance coefficients are also accumulated proportionally to the surface area frac-
tion fiassociated with the trachytope considered. For the fraction of the grid cell area for
which no flow resistance is specified, obviously none is used.
λ=X
i
fiλi(9.345)
Deltares 265 of 688
DRAFT
Delft3D-FLOW, User Manual
The final effective bed roughness of the grid cell may be computed by either one of the follow-
ing two methods.
Method 1
The total mean roughness is computed by summing the White-Colebrook values for the areas
and line and point resistance features.
km=karea +klin +kpnt (9.346)
where klin = 12h10−Clin /18 and kpnt = 12h10−Cpnt /18. The effect of the water free
area fraction fbis taken into account by means of the following empirical relation in which
Cm= 18 10log(12h/km)is the mean Chézy value corresponding to the total mean White-
Colebrook roughness value obtained from Equation (9.346).
fb= max(min(0.843, fb),0.014) (9.347)
Ctotal =Cm1.12 −0.25fb−0.99pfb(9.348)
The resulting Ctotal value is used in the computation. This method together with trachytope
classes 1, 51, 101, 151 and 201 corresponds to the NIKURADSE option of the WAQUA/TRIWAQ
flow solver.
Method 2
The total roughness is computed by first averaging over the serial and parallel averages of the
Chézy values according
Carea =αsCarea,s+ (1 −αs)Carea,p(9.349)
where αs= 0.6by default. Subsequenty the effect of the water free area fraction fbis
taken into account by means of the following empirical relation (identical to Equation (9.348)
of method 1).
fb= max(min(0.843, fb),0.014) (9.350)
Carea,corr =Carea 1.12 −0.25fb−0.99pfb(9.351)
Finally the Chézy value representing the total bed roughness is computed by accumulating
the inverses of the squared Chézy values.
1
C2
total
=1
C2
area,corr
+1
C2
lin
+1
C2
pnt
(9.352)
The resulting Ctotal value is used in the computation. This method together with trachytope
classes 1, 51, 52, 53, 101, 152, 202 and 251 corresponds to the ROUGHCOMBINATION
option of the WAQUA/TRIWAQ flow solver.
266 of 688 Deltares
DRAFT
Conceptual description
9.11.3 (Rigid) 3D Vegetation model
In a detailed numerical model one may want to represent the vertical variations in the vegeta-
tion characteristics and study the effect of vegetation on the 3D flow and turbulence.
The interaction of submersed vegetation upon hydrodynamics and fysical processes has re-
ceived increasing attention because of its influence on water quality in lakes and on morpho-
logical developments in salt marshes (Houwing et al.,2000;WL | Delft Hydraulics,1998).
Uittenbogaard (dec. 2000) formulated theory for incorporating the effects of vegetation upon
momentum and turbulence equations and implemented this in the so called ‘(Rigid) 3D Veg-
etation model’, see Winterwerp and Uittenbogaard (1997), that has extensively been tested
and compared to experiments (Meijer,1998)byOberez (2001).
The main input parameter for this formulation is the plant geometry, see section A.2.31. The
implementation of vegetation resistance can also be applied for 2DH computations.
Theoretical background
The basic input parameters are the number of stems per unit area as function of height n(z),
and the stem width as function of height φ(z).
The influence of the vegetation upon the momentum equations is given by the vertical distri-
bution of the friction force as caused by cylindrical elements in oblique flow:
F(z) = 1
2ρ0CDφ(z)n(z)|u(z)|u(z) [N/m3](9.353)
with u(z)the horizontal flow velocity profile and CDthe cylindrical resistance coefficient (de-
fault value 1.0).
The horizontal cross sectional plant area is given by:
Ap(z) = π
4φ2(z)n(z)(9.354)
The influence of the vegetation upon vertical mixing is reflected in an extra source term Tin
the kinetic turbulent energy equation:
∂k
∂t =1
1−Ap
∂
∂z (1 −Ap)ν+νt
σk∂k
∂z +T+Pk−Bk−ε(9.355)
with T(z)the work spent by upon the fluid:
T(z) = F(z)u(z)(9.356)
and an extra source term T τ −1in the epsilon equation,
∂ε
∂t =1
1−Ap
∂
∂z (1 −Ap)ν+νt
σk∂ε
∂z +T τ−1+Pε−Bε−εε(9.357)
with τthe minimum of:
τ= min(τfree, τveg)(9.358)
Deltares 267 of 688
DRAFT
Delft3D-FLOW, User Manual
with the dissipation time scale of free turbulence
τfree =1
c2ε
k
ε(9.359)
and the dissipation time scale of eddies in between the plants
τveg =1
c2ε√cµ
3
rL2
T(9.360)
that have a typical size limited by the smallest distance in between the stems:
L(z) = Cls1−Ap(z)
n(z)(9.361)
Clis a coefficient reducing the geometrical length scale to the typical volume averaged tur-
bulence length scale. Uittenbogaard presents a closure and finds that a Clvalue of 0.07 is
applicable for grid generated turbulence. For vegetation this coefficient may be tuned, values
of 0.8 are found applicable, see Uittenbogaard (dec. 2000).
268 of 688 Deltares
DRAFT
10 Numerical aspects of Delft3D-FLOW
The mathematical formulations of the 3D shallow water flow and transport model Delft3D-
FLOW were presented in chapter 9. To solve the partial differential equations the equations
should be transformed to the discrete space. In this chapter the space discretisation, time
integration and numerical solution methods applied in Delft3D-FLOW will be described.
The description provided here applies in most cases for both the vertical σco-ordinate sys-
tem (σ-model) and the vertical zco-ordinate system (Z-model). Numerical aspects that are
specifically valid only for the Z-model system will be described separately in chapter 12.
Delft3D-FLOW is applied for modelling a wide range of different flow conditions: e.g. turbulent
flows in laboratory flumes, tidal flow in estuaries and seas, rapidly varying flows in rivers,
density driven flows by thermal discharges, wind driven flows in lakes and ocean dynamics.
For all these applications (with complete different length scales) Delft3D-FLOW should give a
solution. For the choice of the numerical methods, robustness had high priority.
10.1 Staggered grid
The numerical method of Delft3D-FLOW is based on finite differences. To discretise the 3D
shallow water equations in space, the model area is covered by a curvilinear grid. It is as-
sumed that the grid is orthogonal and well-structured, see Figure 10.1.
The grid co-ordinates can be defined either in a Cartesian or in a spherical co-ordinate system.
In both cases a curvilinear grid, a file with curvilinear grid co-ordinates in the physical space,
has to be provided. Such a file may be generated by a grid generator, see the User Manual
of RGFGRID.
The numerical grid transformation is implicitly known by the mapping of the co-ordinates of
the grid vertices from the physical to the computational space. The geometrical quantities
pGξξ and pGηη introduced in the transformed equations, see Eqs. (9.3) to (9.8), have to
be discretised on the computational grid, see Figure 10.2.
The primitive variables water level and velocity (u,v,w) describe the flow. To discretise the
3D shallow water equations, the variables are arranged in a special way on the grid, see Fig-
ure 10.2 and Figure 10.3. The pattern is called a staggered grid. This particular arrangement
of the variables is called the Arakawa C-grid. The water level points (pressure points) are
defined in the centre of a (continuity) cell. The velocity components are perpendicular to the
grid cell faces where they are situated.
Staggered grids have several advantages such as:
Boundary conditions can be implemented in a rather simple way.
It is possible to use a smaller number of discrete state variables in comparison with dis-
cretizations on non-staggered grids, to obtain the same accuracy.
Staggered grids for shallow water solvers prevent spatial oscillations in the water levels;
see e.g. Stelling (1984).
Deltares 269 of 688
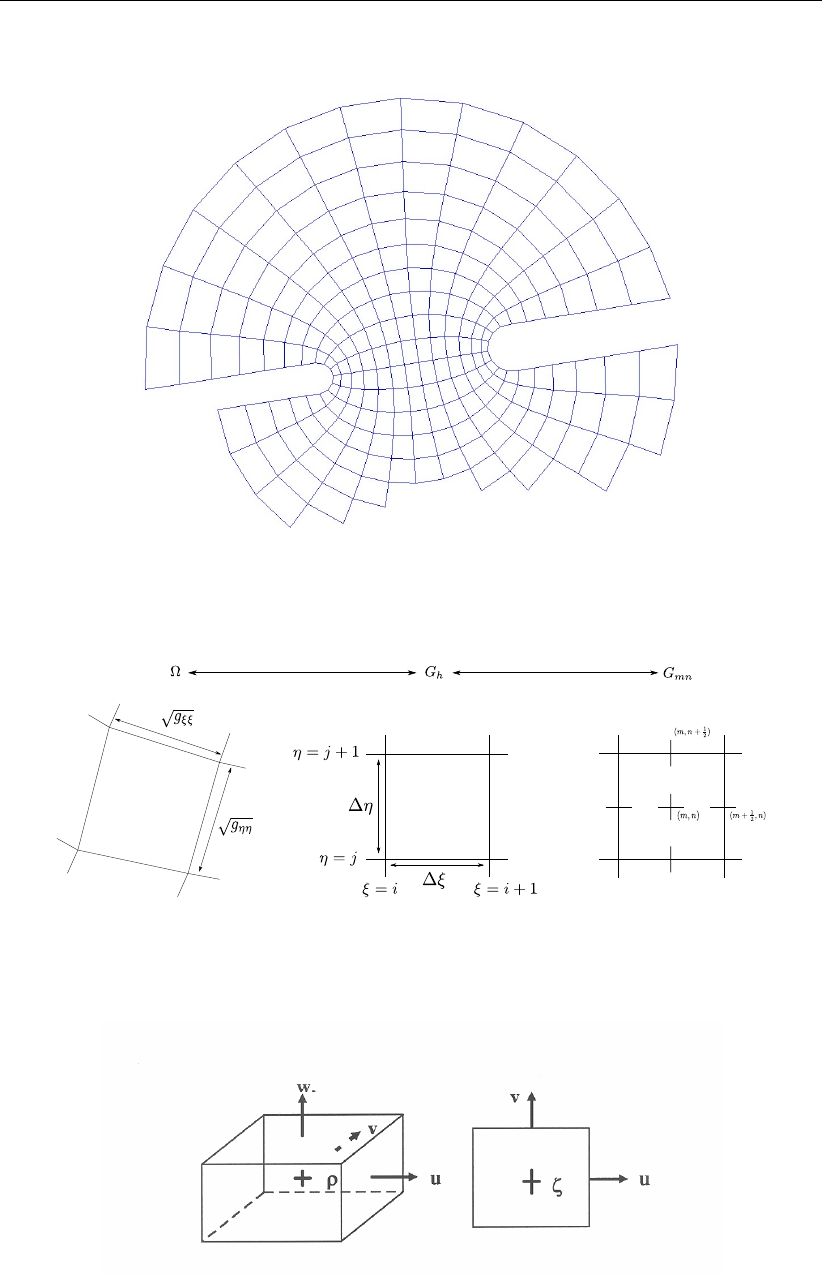
DRAFT
Delft3D-FLOW, User Manual
Figure 10.1: Example of a grid in Delft3D-FLOW
Figure 10.2: Mapping of physical space to computational space
Legend:
+water level (ζ) / density (ρ) point
→velocity point (u,vor w)
Figure 10.3: Grid staggering, 3D view (left) and top view (right)
270 of 688 Deltares

DRAFT
Numerical aspects of Delft3D-FLOW
10.2 σ-grid and Z-grid
In the vertical direction, two types of grid are available:
a boundary-fitted σco-ordinates and
a grid that is strictly horizontal also called the Z-grid.
For the σco-ordinate grid, the number of layers over the entire horizontal computational area
is constant, irrespective of the local water depth. The distribution of the relative layer thickness
is usually non-uniform. This allows for more resolution in the zones of interest such as the
near surface area (important for e.g. wind-driven flows, heat exchange with the atmosphere)
and the near bed area (sediment transport).
The σ-grid is commonly used in Delft3D-FLOW. However, occasionally this grid may not be
sufficient to solve problems where stratified flow can occur in combination with steep topog-
raphy. The σ-grid, though boundary fitted, will generally not have enough resolution around
the pycnocline which is strictly horizontal in the physical space. High resolution around py-
cnocline is in this situation preferred. Therefore, recently a second vertical grid co-ordinate
system based on Cartesian co-ordinates (Z-grid) was introduced in Delft3D-FLOW for 3D
simulations of weakly forced stratified water systems.
The Z-grid has horizontal co-ordinate lines that are (nearly) parallel with density interfaces
(isopycnals) in regions with steep bottom slopes. This is important to reduce artificial mixing
of scalar properties such as salinity and temperature. The Z-grid is not boundary-fitted in the
vertical. The bottom (and free surface) is usually not a co-ordinate line and is represented as
a staircase (see previous chapter).
10.3 Definition of model boundaries
The horizontal model area is defined by specifying the so-called computational grid enclosure
(automaticly enerated by RGFGRID). The computational grid enclosure consists of one or
more closed polygons that specify the boundaries of the model area. There are two types
of boundaries: closed boundaries along “land-water” lines (coastlines, riverbanks) and open
boundaries across the flow field. The open boundaries are artificial and chosen to limit the
computational area. The polygons consist of line pieces connecting water level points on the
numerical grid, with a direction parallel to the grid lines or diagonal (45 degrees) through the
grid. The computational cells on the grid enclosure are land points (permanent dry) or open
boundary points. An island may be removed from the computational domain by specifying
a closed polygon (“land-water line”) as part of the grid enclosure. If a computational grid
enclosure is not specified, then a default rectangular computational grid is assumed. A default
enclosure is spanned by the lines connecting the water level points (1, 1), (Mmax, 1), (Mmax,
Nmax) and (1, Nmax).
Figure 10.4 shows for a horizontal model area the grid staggering, the grid enclosure and the
position of open and closed boundaries. Figure 10.5 shows the corresponding grid of control
volumes which may be generated by the grid generator RGFGRID. This example will now be
explained in detail.
The computational grid enclosure for the grid of control volumes shown in Figure 10.4 is
defined by the following polygon of line pieces:
(1,1) - (5,1)
(5,1) - (7,3)
(7,3) - (8,3)
Deltares 271 of 688
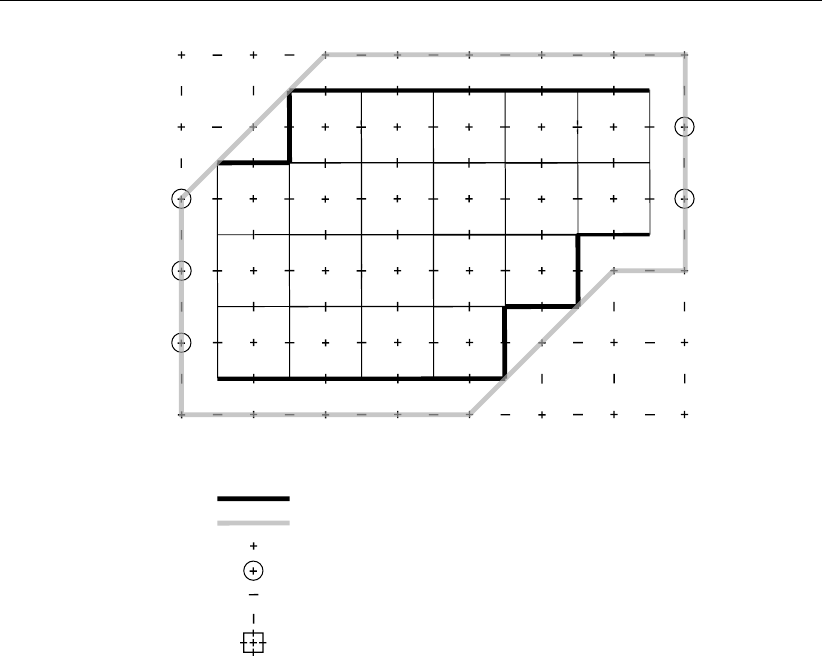
DRAFT
Delft3D-FLOW, User Manual
2
3
4
5
123
6
4 5 6 7 8
1
Closed boundary
Grid enclosure
Water level point
Open boundary point
u-velocity point
v-velocity point
Grid cell/Computational cell/Control volume
Figure 10.4: Example of Delft3D-FLOW model area
(8,3) - (8,6)
(8,6) - (3,6)
(3,6) - (1,4)
(1,4) - (1,1)
The array dimensions Mmax=8 and Nmax=6, with Mmax-2 and Nmax-2 the number of grid
cells in ξ- and η-direction, respectively. Open boundaries are located at the line pieces
(m,n)=(1,2) to (1,3) and at (m,n)=(8,4) to (8,5). For this example, the grid lines and corre-
sponding control volumes drawn by the grid generator RGFGRID are shown in Figure 10.5.
We remark that the dimensions of the grid in RGFGRID are Mmax-1 and Nmax-1, counting
the grid corners. Thus, in both directions the dimension of the grid in RGFGRID is one less
than the dimension specified for the model area in the MDF-file. This has to do with the stag-
gered grid and is often a source of misunderstanding. We remark that the depth files (files
with extension <dep>) should have entries for all Mmax by Nmax values, see <∗.dep>files
and section A.2.4. For a detailed discussion of the grid, the grid enclosure and the location of
boundary points see Appendix E.
After generating a curvilinear grid with the grid generator RGFGRID , as output file there is
also a computational grid enclosure file, which can be used by Delft3D-FLOW.
10.4 Time integration of the 3D shallow water equations
Following Stelling (1984), a robust solver for the shallow water equations has to satisfy the
following demands:
Robustness (unconditionally stable).
Accuracy (at least second order consistency).
272 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.5: Example of Delft3D-FLOW grid
Suitable for both time-dependent and steady state problems.
Computationally efficient.
An explicit time integration of the shallow water equations on a rectangular grid is subject to a
time step condition based on the Courant number for wave propagation:
CFLwave = 2∆tpgHr1
∆x2+1
∆y2<1,(10.1)
where ∆tis the time step, gis the acceleration of gravity, His the total water depth and
∆x=pGξξ and ∆y=pGηη are the smallest grid spaces in ξ- and η-direction of
the physical space. For many practical applications, this requires a time step of only a few
seconds to simulate tidal propagation. Exceeding the time step would generate instability and
from the view of robustness, this is not acceptable. Therefore, an implicit method is needed.
However, an implicit scheme can be uneconomic in computer time and storage if the inversion
of a large matrix is required. A straightforward implicit finite difference approximation is the
Crank-Nicholson method. For the linearised depth-averaged shallow water equations without
advection and bottom friction, the Crank Nicholson method in vector form reads:
~
U`+1 −~
U`
∆t+1
2A~
U`+1
2A~
U`+1 =~
0,(10.2)
with:
~
U= (u, v, ζ)T,(10.3)
A=
0−f g ∂
∂x
f0g∂
∂y
H∂
∂x H∂
∂y 0
,(10.4)
and:
H=d+ζ. (10.5)
The solution after one time step is given by
~
U`+1 =I+1
2∆tA−1
×I−1
2∆tA~
U`.(10.6)
Deltares 273 of 688

DRAFT
Delft3D-FLOW, User Manual
After discretization, the spatial differential operators in both grid directions generate a system
of difference equations with a band matrix. In each row there are at least five non-zero entries,
corresponding to the grid cells surrounding the water level point. The band width is relatively
large and all grid points are implicitly coupled. Solving the equations would require a large
computational effort. In the next section a computationally efficient time integration method
will be described, which is applied for the σ-grid in Delft3D-FLOW.
10.4.1 ADI time integration method
Leendertse (1967); Leendertse and Gritton (1971); Leendertse et al. (1973) introduced an
Alternating Direction Implicit (ADI) method for the shallow water equations. The ADI-method
splits one time step into two stages. Each stage consists of half a time step. In both stages,
all the terms of the model equations are solved in a consistent way with at least second order
accuracy in space.
For the spatial discretization of the horizontal advection terms, three options are available in
Delft3D-FLOW. The first and second option use higher-order dissipative approximations of
the advection terms. The time integration is based on the ADI-method. The first scheme
is denoted as the WAQUA-scheme, see Stelling (1984) and Stelling and Leendertse (1992).
The second scheme is denoted as the Cyclic method; see Stelling and Leendertse (1992).
The WAQUA-scheme and the Cyclic method do not impose a time step restriction. The third
scheme can be applied for problems that include rapidly varying flows for instance in hydraulic
jumps and bores (Stelling and Duinmeijer,2003). The scheme is denoted as the Flooding
scheme and was developed for 2D simulation with a rectilinear grid of the inundation of dry
land with obstacles such as road banks and dikes. The integration of the advection term
is explicit and the time step is restricted by the Courant number for advection. We discuss
the time integration for scheme WAQUA and method Cyclic. For the Flooding scheme, the
advection term is taken at the previous time level and moved to the right-hand side.
For the water level gradient and the advection terms, the time levels are alternating; if in
one stage a term is taken implicitly in time, this term will be taken explicitly in time in the
other stage. For the complete time step, each separate term is still integrated second-order
accurate in time. The advantage of the ADI-method is that the implicitly integrated water
levels and velocities are coupled along grid lines leading to systems of equations with a small
bandwidth. Substitution of the discrete momentum equations in the continuity equation leads
to a tri-diagonal system of equations for the water levels. After computing the water levels,
back substitution of the water levels in the discrete momentum equations gives the velocities;
see Stelling (1984) for full details.
In vector form (for the 2D case) the ADI-method is given by:
Step 1:
~
U`+1
2−~
U`
1
2∆t+1
2Ax~
U`+1
2+1
2Ay~
U`+B~
U`+1
2=~
d, (10.7)
Step 2:
~
U`+1 −~
U`+1
2
1
2∆t+1
2Ax~
U`+1
2+1
2Ay~
U`+1 +B~
U`+1 =~
d, (10.8)
274 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
with:
Ax=
0−f g ∂
∂x
0u∂
∂x +v∂
∂y 0
H∂
∂x 0u∂
∂x
,(10.9)
Ay=
u∂
∂x +v∂
∂y 0 0
f0g∂
∂y
0H∂
∂y v∂
∂y
,(10.10)
and:
B= λ0 0
0λ0
0 0 0 !,(10.11)
with λthe linearized bottom friction coefficient. To improve stability the bottom friction is inte-
grated implicitly for each stage. ~
dis the right-hand side containing external forcings like wind
and atmospheric pressure. The time integration of the horizontal viscosity terms is discussed
in section 10.4.4 and is dependent on the formulation.
In the first stage the time level proceeds from `to `+1
2and the simulation time from t=`∆t
to t=`+1
2∆t. In this stage first the V-momentum equation, Equation (9.8), is solved,
followed by the U-momentum equation, Equation (9.7), which is implicitly coupled with the
continuity equation, Equation (9.3), by the free surface gradient. In the second stage the time
level proceeds from `+1
2to `+ 1. In this stage first the U-momentum equation is solved,
followed by the V-momentum equation which is implicitly coupled with the continuity equation
by the free surface gradient. In the stage, in which the barotropic pressure term (i.e. water
level gradient) is integrated implicitly, the advection terms and viscosity terms are integrated
explicitly. Similarly in the stage, in which the barotropic pressure term (i.e. water level gradient)
is integrated explicitly, the advection terms and viscosity terms are integrated implicitly.
The second stage in the ADI-method is almost similar to the first stage. The grid coeffi-
cients, direction dependent roughness coefficients and the u-velocity and v-velocity are inter-
changed. The only principal difference between the u- and v-momentum equations is the sign
of the Coriolis term. In Delft3D-FLOW the similarity of the difference equations is used in the
implementation. The same subroutine is used for the momentum equation in both directions,
only the sign of the Coriolis term is dependent on the computational direction.
For the 3D shallow water equations the horizontal velocity components are coupled in the
vertical direction by the vertical advection and viscosity term. An explicit time integration of
the vertical exchange terms on a σ-co-ordinate or a Z-co-ordinate grid would in shallow areas
lead to very severe time step limitations:
∆t≤(∆σH)2
2νV
or ∆t≤(∆z)2
2νV
,(10.12)
∆t≤∆σH
ωor ∆t≤∆z
w,(10.13)
where ∆σH and ∆Zare the vertical grid size and ωis the transformed vertical velocity
and w the vertical velocity. Therefore, in the vertical direction a fully implicit time integration
method is applied, which is first-order accurate in time and leads to tri-diagonal systems of
equations. The vertical coupling of the discretized momentum equations is eliminated by a
double sweep algorithm.
Deltares 275 of 688
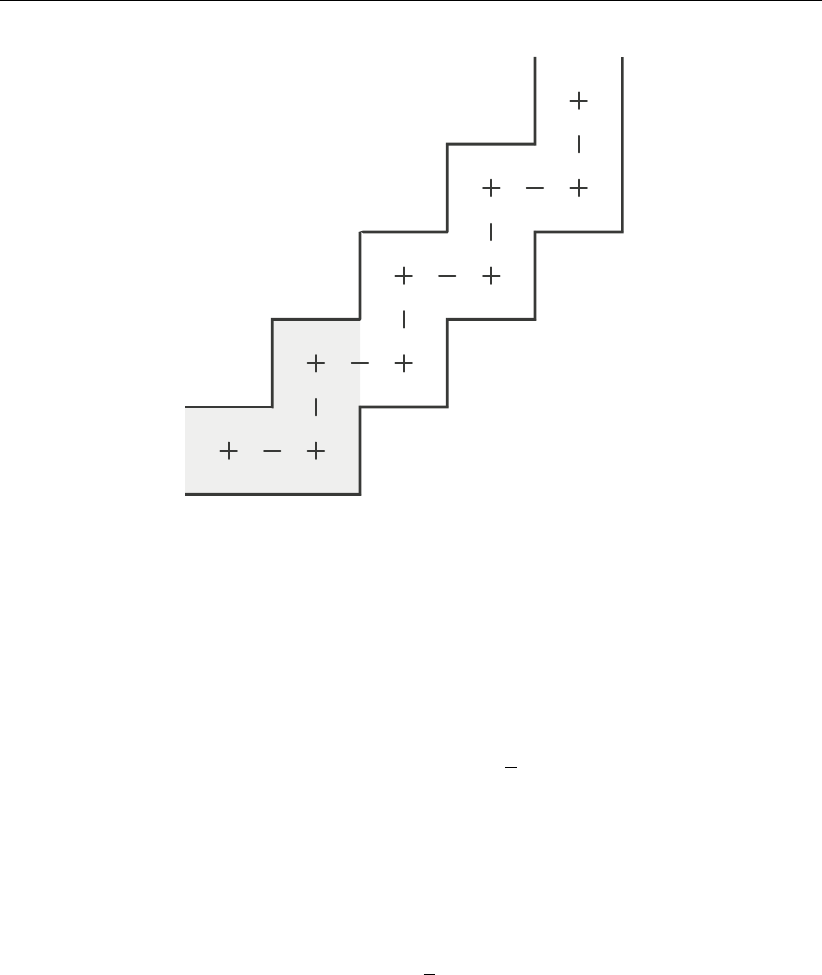
DRAFT
Delft3D-FLOW, User Manual
P
Figure 10.6: Numerical region of influence for one time step, “Zig-zag channel”
10.4.2 Accuracy of wave propagation
The standard time integration method in Delft3D-FLOW for the σ-model is the ADI-method
described in the previous section. Water levels and velocities are implicitly solved along grid
lines. The wave propagation is related to the Courant number, see Equation (10.1). It is
known, see e.g. Benqué et al. (1982) and Weare (1979), that for flow along irregular (stair-
case) closed boundaries, flow around islands, flow over tidal flats, and through “zig-zag”,
see Figure 10.6, channels where the grid lines do not smoothly follow the geometry, the ADI-
method is inaccurate for Courant numbers larger than 4√2. The numerical region of influence
does not correspond to the mathematical region of influence following the theory of character-
istics for hyperbolic systems of equations. The ADI-method may lead to inaccurately predicted
flow patterns, see e.g. Stelling (1984). This inaccuracy is called the ADI-effect and is intro-
duced by the splitting of the spatial operator in two directions. A free surface wave cannot
travel through more than two bends of 90 degrees in one complete ADI time step (Stelling,
1984), see Figure 10.6.
The upper bound for the Courant number of 4√2occurs in the most critical situation, namely
in case of a narrow channel (width of few grid sizes) that makes an angle of 45 degrees with
the computational grid. In practical situations the Courant number should not exceed a value
of 10. However, this is a rough estimate. You are advised to carry out sensitivity tests in order
to determine the largest time step for which the ADI-method still yields accurate results.
276 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
10.4.3 Iterative procedure continuity equation
The non-linearity in the coupled continuity equation, Equation (9.3), and momentum equation,
Eqs. (9.7) and (9.8) requires an iterative procedure. For the U-momentum equation:
∂
∂ξ pGηηHU`+1
2≈pGηη
ξHU`+1
2
m+1
2,n −pGηη
ξHU`+1
2
m−1
2,n
∆ξ(10.14)
≈pGηη
ξH[q]
m+1
2,nU[q]
m+1
2,n−pGηη
ξH[q]
m−1
2,nU[q]
m−1
2,n
∆ξ.
(10.15)
The iterative procedure in Delft3D-FLOW removes the non-linear term by multiplying the free
surface gradient in the discretized momentum equation by the factor:
r[q]=H[q−1]
m,n
H[q]
m,n
.(10.16)
This factor converges to one. The iterative procedure in Delft3D-FLOW is mass conservative
after each iteration. Two iterations are enough both for accuracy and stability. The number of
iterations is set in the MDF-file by the keyword Iter.
For rapidly varying flows, the water depth at velocity points may be discontinuous. To obtain
accurate approximations of the local water depth at discontinuities slope limiters are used,
see section 10.5.1. In this way positive water depths are guaranteed. This requires local
linearization of the continuity equation. The same approach is used for the Z-model:
∂
∂ξ pGηηHU`+1
2≈pGηη
ξH`
m+1
2,nU`+1
2
m+1
2,n−pGηη
ξH`
m−1
2,nU`+1
2
m−1
2,n
∆ξ
(10.17)
This linearization of the continuity equation is used in combination with the Flooding scheme
for advection and the Z-model. This approach is less stable in shallow areas.
10.4.4 Horizontal viscosity terms
In section 9.3.1 the horizontal turbulent fluxes of momentum are described. If the horizontal
viscosity terms are simplified, Eqs. (9.26) and (9.27), there results a Laplace operator along
grid lines. The u-momentum equation involves only second-order derivatives of the u-velocity.
In this case, this term is integrated fully implicitly by using operator splitting. This procedure is
unconditionally stable.
In the momentum equations, the complete Reynolds stress tensor is used, Eqs. (9.23)–(9.25),
for the following cases:
partial slip at closed boundaries,
no slip at the closed boundaries,
HLES-model for sub-grid viscosity.
Deltares 277 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 10.1: Time step limitations shallow water solver Delft3D-FLOW
Points per wave period T∆t≤T
40
Accuracy ADI for barotropic mode for
complex geometries
Cf= 2∆trgH 1
∆x2+1
∆y2<4√2
Explicit advection scheme “Flooding
scheme” and for the Z-model.
∆t|u|
∆x<2
Stability baroclinic mode internal wave
propagation (Z-model only)
∆tr(ρbottom−ρtop )
ρtop gH
41
∆x2+1
∆y2<1
Stability horizontal viscosity term (HLES,
partial slip, no slip)
2∆tνH1
∆x2+1
∆y2<1
Secondary flow (with βdefined in Equa-
tion (9.155))
2∆tβ|u|
min(∆x,∆y)≤1
For the complete Reynolds stress tensor the shear stress τξη in the u-momentum equation
contains derivatives of the v-velocity. The Reynolds stresses are integrated explicitly, which
leads to the following additional stability condition:
∆t≤1
2νH1
∆x2+1
∆y2−1
.(10.18)
In case of a curvilinear grid ∆x=pGξξ and ∆y=pGηη.
The stresses due to secondary flow Tξξ,Tξη in the depth averaged U-momentum equation
Equation (9.147) contain the depth averaged U- and V-velocity components. These stresses
are integrated explicitly, which leads to the following stability condition:
2∆tβ |u|
min (∆x, ∆y)≤1(10.19)
with βdefined in Equation (9.155).
10.4.5 Overview time step limitations
In this section we give an overview of the time step limitations due to stability and accuracy
for the time integration of the shallow water equations in Delft3D-FLOW. Let ∆xand ∆y
be horizontal grid sizes. In case of a curvilinear grid ∆x=pGξξ and ∆y=pGηη.
In Table 10.1 the time step limitations are given for the shallow water code Delft3D-FLOW.
Which of the limitations is most restrictive is dependent on the kind of application: length
scale, velocity scale, with or without density-coupling etc.
10.5 Spatial discretizations of 3D shallow water equations
10.5.1 Horizontal advection terms
The choice of the spatial discretization of the advective terms has great influence on the
accuracy, monotony and efficiency of the computational method. Central differences are often
second order accurate, but may give rise to non-physical spurious oscillations, the so-called
278 of 688 Deltares
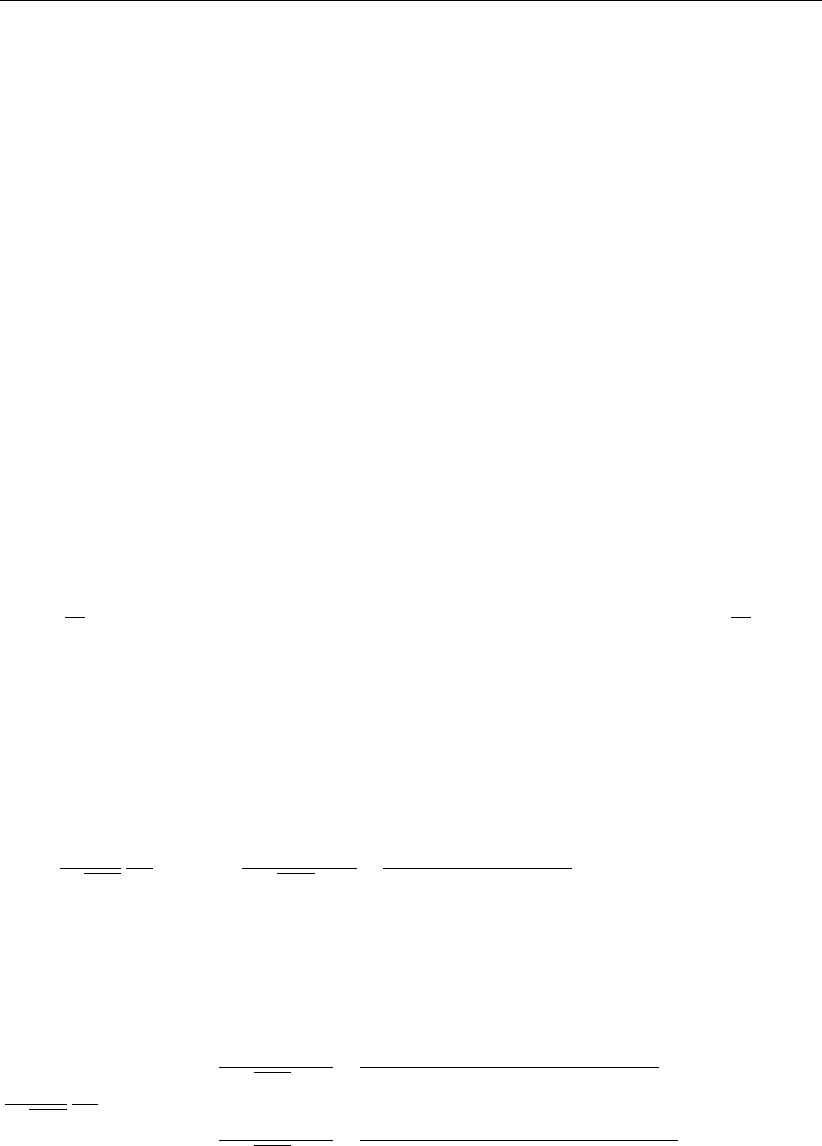
DRAFT
Numerical aspects of Delft3D-FLOW
“wiggles” (Gresho and Lee,1981) in the solution. These wiggles arise in the vicinity of steep
gradients of the quantity to be resolved. In shallow water flow these wiggles may also be
introduced near closed boundaries and thin dams. On the other hand, first order upwinding is
unconditionally wiggle-free or monotone, thus promoting the stability of the solution process,
but introduces a truncation error, which has the form of a second-order artificial viscosity
term (Vreugdenhil,1994). In advection-dominated flows, this artificial viscosity dominates the
physical viscosity and the computed solution is much smoother than the correct one. Higher
order upwinding is not free from numerical oscillations and introduces fourth-order artificial
viscosity. This higher order viscosity suppresses the wiggles without smoothing the solution
too much.
In Delft3D-FLOW the following advection schemes are implemented:
1 WAQUA-scheme
2 Cyclic method
3 Flooding-scheme
4 Multi directional upwind (Z-model only)
WAQUA-scheme
The first scheme (WAQUA) based on Stelling (1984) is an extension of the ADI-method of
Leendertse with a special approach for the horizontal advection terms. The normal advection
term u∂u
∂ξ is discretised with central differences and the cross advection term v∂u
∂η , based
on the dissipative reduced phase error scheme. It is a splitting of a third order upwind finite
difference scheme for the first derivative into two second order consistent discretizations: a
central discretization Equation (10.20) and Equation (10.21), which are successively used in
both stages of the ADI-scheme. For the cross advection term the spatial discretization is given
by:
Stage 1:
v
pGηη
∂u
∂η m,n,k
=¯vξη
m,n,k
pGηηm,n um,n+1,k −um,n−1,k
2∆η,(10.20)
and
Stage 2:
v
pGηη
∂u
∂η m,n,k
=
¯vξη
m,n,k
pGηηm,n 3um,n,k −4um,n−1,k +um,n−2,k
2∆η,¯vξη
m,n,k ≥0
¯vξη
m,n,k
pGηηm,n −3um,n,k + 4um,n+1,k −um,n+2,k
2∆η,¯vξη
m,n,k <0
(10.21)
The advective terms for the v-momentum equation are discretized in a similar way. Spatial
oscillations in the velocities are suppressed by means of fourth-order dissipation, (Stelling,
1984;Stelling and Leendertse,1992). The WAQUA scheme has little dissipation and is used
for the accurate prediction of water levels along the Dutch rivers.
Deltares 279 of 688
DRAFT
Delft3D-FLOW, User Manual
(a) (b) (c)
Figure 10.7: (a)Control Volume for mass for the Flooding scheme,
(b)Control Volume for momentum in horizontal and
(c)vertical direction for the Flooding scheme
Cyclic-scheme
The second method, (Cyclic), which is the default method, is based on the dissipative reduced
phase error scheme Eqs. (10.20) and (10.21) for both the normal advection term u∂u
∂ξ and the
cross advection term v∂u
∂η (Stelling and Leendertse,1992).
For WAQUA and the Cyclic method, the advection terms are integrated implicitly in the stage
of the ADI-method in which the free surface gradient is at the old time level. In the stage
in which the free surface gradient is integrated implicitly the advection terms are at the old
time level. For stability the vertical terms are integrated implicitly in both stages. The upwind
discretization is used in the stage in which both the horizontal advection and vertical viscosity
term are integrated implicitly. The resulting linear system of equations has eleven diagonals.
The system is solved efficiently by a Red Black Jacobi iterative scheme in the horizontal
direction and a double sweep in the vertical direction. For the Cyclic method the matrix is
diagonally dominant and the iterative scheme converges well. For the WAQUA scheme, due to
the central difference scheme for the normal advection, the matrix is not diagonally dominant
for large time steps (Courant number advection more than one) and this may lead to bad
convergence behaviour.
Flooding-scheme
The third scheme, based on Stelling and Duinmeijer (2003) can be applied to rapidly varying
depth-averaged flows for instance the inundation of dry land or flow transitions due to large
gradients of the bathymetry (obstacles). The scheme can also be used in combination with
obstacles represented by only one point on coarse grids. In the Flooding scheme the bottom
is approximated by a staircase of tiles (DPUOPT=MIN), centred around the water level points,
see Figure 10.7a. In combination with the local invalidity of the hydrostatic pressure assump-
tion, conservation properties become crucial. In flow expansions a numerical approximation is
applied that is consistent with conservation of momentum and in flow contractions a numerical
approximation is applied that is consistent with the Bernoulli equation. For sufficiently smooth
conditions, and a fine grid size, both approximations converge to the same solution. The lo-
cal order of consistency depends on the solution. The approximations are second-order, but
the accuracy reduces to first order near extreme values by the use of the so-called Minmod
slope limiter (Stelling and Duinmeijer,2003). The limiter prevents the generation of wiggles.
The conservation of momentum in the present implementation has been derived only for a
Cartesian rectangular grid and depth averaged velocities.
280 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
We describe the discretizations for positive flow direction. For negative flow direction the
discretizations are defined accordingly. The momentum conservative approximation for the
normal advection term u∂u
∂ξ derived for a Control Volume around a velocity point is given by
(using q=Hu):
u
pGξξ
∂u
∂ξ m+1
2,n
=1
HpGξξ ∂qu
∂ξ −u∂q
∂ξ m+1
2,n
(10.22)
=2
(Hm,n +Hm+1,n)pGξξm+1
2,n ×
( ¯qξ
m+1,n ˜um+1,n −¯qξ
m,n ˜um,n
∆ξ!−um+1
2,n ¯qξ
m+1,n −¯qξ
m,n
∆ξ!)
(10.23)
¯qξ
m,n =qm+1
2,n +qm−1
2,n
2(10.24)
˜um,n =
um−1
2,n +1
2ψ(ru)um−1
2,n −um−3
2,n¯qξ
m,n ≥0
um+1
2,n +1
2ψ(ru)um+1
2,n −um+3
2,n¯qξ
m,n <0(10.25)
ψ(ru) = max(0,min(ru,1)) (10.26)
ru=um+1
2,n −um−1
2,n
um−1
2,n −um−3
2,n
For negative flow direction, the limiter is defined accordingly. (10.27)
q|m+1
2,n =u|m+1
2,n
Hm,n +Hm+1,n
2(10.28)
The momentum conservative approximation for the cross advection term v∂u
∂η is given by
(using p=Hv):
v
pGηη
∂u
∂η m+1
2,n
=1
HpGηη ∂pu
∂η −u∂p
∂η m+1
2,n
(10.29)
=2
(Hm,n +Hm+1,n)pGηηm+1
2,n ×
¯pξ
m+1
2,n+1
2
˜um+1
2,n+1
2−¯pξ
m+1
2,n−1
2
˜um+1
2,n−1
2
∆η
−
um+1
2,n
¯pξ
m+1
2,n+1
2−¯pξ
m+1
2,n−1
2
∆η
(10.30)
Deltares 281 of 688
DRAFT
Delft3D-FLOW, User Manual
¯pξ
m+1
2,n−1
2
=pm,n−1
2+pm+1,n−1
2
2(10.31)
˜um+1
2,n−1
2=
um+1
2,n−1+1
2ψ(ru)um+1
2,n−1−um+1
2,n−2¯pξ
m+1
2,n−1
2≥0
um+1
2,n+1 +1
2ψ(ru)um+1
2,n+1 −um+1
2,n+2¯pξ
m+1
2,n−1
2
<0
(10.32)
ψ(ru) = max(0,min(ru,1)) (10.33)
ru=um+1
2,n −um+1
2,n−1
um+1
2,n−1−um+1
2,n−2
(10.34)
For negative flow direction, the limiter is defined accordingly.
p|m+1
2,n = ¯vξηm+1
2,n
Hm,n +Hm+1,n
2(10.35)
From the momentum conservative formulation a so-called energy head conservative dis-
cretization for the same Control Volume, see Figures 10.7b and 10.7c, can be derived under
steady state conditions (constant discharge q) in 1D (along a streamline in 2D), see Equa-
tion (10.36).
q2
2pGξξ "1
(Hm+1,n)2−1
(Hm,n)2#Energy Head Conservation
=
λ2q2
(Hm,n +Hm+1,n)pGξξ 1
Hm+1,n −1
Hm,n Momentum Conservation
(10.36)
λ=(1q > 0∧Hm,n < Hm+1,n
(Hm,n+Hm+1,n )2
4Hm,nHm+1,n q > 0∧Hm,n > Hm+1,n
(10.37)
The energy conservative discretization is applied for contractions in both directions. For 2D
flow the direction of the grid lines do not always coincide with streamlines and this will generate
small head losses.
Near the boundaries the higher order discretization stencils for the advection terms contain
grid points on or across the boundary. To avoid an artificial boundary layer or instabilities, the
discretizations are reduced to lower order discretizations with smaller stencils. Stelling (1984)
developed the numerical boundary treatment implemented in Delft3D-FLOW.
Multi directional upwind (Z-model only)
The fourth scheme, which is only available in the Z-model is a multi-directional upwind
scheme. It is an extension to two dimensions of the first-order upwind method. Both an explicit
and an implicit variant of the scheme is available. It is a positive and monotone scheme. For
the explicit variant there is the Courant number stability constraint. The method is described
by Bijvelds (2001).
282 of 688 Deltares
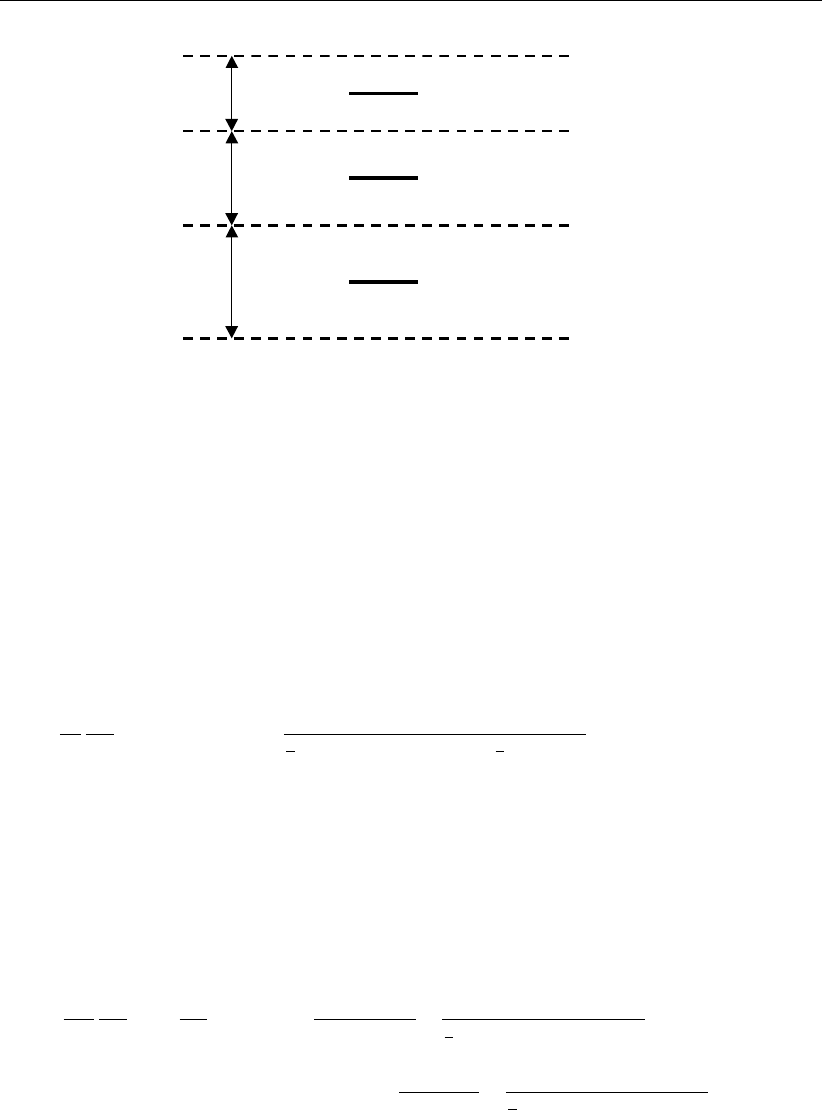
DRAFT
Numerical aspects of Delft3D-FLOW
u
k-1
u
k
u
k+1
h
k-1
h
k
h
k+1
layer k-1
layer k
layer k+1
Figure 10.8: Layer numbering in σ-model
10.5.2 Vertical advection term
The horizontal velocities of adjacent vertical layers are coupled by the vertical advection and
the vertical viscosity term. The σco-ordinate system can lead to very thin layers in shallow
areas. To prevent instabilities, a fully implicit time integration is used for the vertical exchange
terms. This results in tridiagonal systems of equations in the vertical.
In a shallow water model the horizontal length scale is much larger than the vertical length
scale. In the vertical direction the eddy viscosity term dominates the advection term. Only for
stratified flows where the turbulent exchange is reduced, advection may be dominant. For the
space discretization of the vertical advection term, a second order central difference is used:
ω
H
∂u
∂σ m,n,k
= ¯ωξσ
m,n,k um,n,k−1−um,n,k+1
1
2hm,n,k−1+hm,n,k +1
2hm,n,k+1 ,(10.38)
where hm,n,k denotes the thickness of the computational layer with index kdefined by hm,n,k =
∆σkHm,n and Hthe total water depth or hm,n,k = ∆zm,n,k in the Z-model.
10.5.3 Viscosity terms
The approximation of the vertical viscosity terms are based on central differences. The vertical
viscosity term in the u-equations is discretized as:
1
H2
∂
∂σ νV
∂u
∂σ m,n,k
=νV|m,n,k−1
hm,n,k um,n,k−1−um,n,k
1
2(hm,n,k−1+hm,n,k)+
−νV|m,n,k
hm,n,k um,n,k −um,nk+1
1
2(hm,n,k +hm,n,k+1).(10.39)
The vertical eddy viscosity is computed at the layer interface, with hm,n,k = ∆σkHm,n or
hm,n,k = ∆zm,n,k in the Z-model.
10.6 Solution method for the transport equation
A robust and accurate solver for scalar transport has to satisfy the following demands:
Mass conservation.
Monotony (positive solution).
Accuracy (at least second order consistency).
Suitable for both time-dependent and steady state problems.
Deltares 283 of 688

DRAFT
Delft3D-FLOW, User Manual
Computationally efficient.
An explicit time integration of the scalar advection-diffusion equation on a rectangular grid has
a time step limitation based on the Courant number for advection:
Cadv = max u∆t
∆x,v∆t
∆y≤1,(10.40)
with ∆xand ∆ythe grid spaces in the physical space.
Explicit integration of the horizontal diffusion term yields an upper limit of:
∆t≤1
DH1
∆x2+1
∆y2−1
.(10.41)
For the 3D transport equation the scalar concentrations are coupled in the vertical direction by
the vertical advection and diffusion term. An explicit time integration of the vertical exchange
terms on the σ-co-ordinate grid would lead to very severe time step limitations:
∆t≤(∆σH)2
2DV
,(10.42)
∆t≤∆σH
ω.(10.43)
Therefore in the vertical direction a fully implicit time integration method is applied, which is
first order in time and leads to tridiagonal systems of equations. The vertical coupling of the
discretized transport equations is removed by a double sweep algorithm.
To ensure that the total mass is conserved the transport equation in Delft3D-FLOW is dis-
cretized with a mass conserving Finite Volume approach (flux form). For the spatial dis-
cretization of the horizontal advection terms, two options are available in Delft3D-FLOW. The
first (and default) option is a finite difference scheme that conserves large gradients without
generating spurious oscillations and is based on the ADI-method. This scheme is denoted as
the Cyclic method, see Stelling and Leendertse (1992). The Cyclic method of Stelling and
Leendertse is based on an implicit time integration of both advection and diffusion and does
not impose a time step restriction.
The second option is an explicit scheme that belongs to the class of monotonic schemes: the
so-called Van Leer-2 scheme (Van Leer,1974). The Van Leer-2 scheme is slightly less accu-
rate than the scheme of Stelling and Leendertse. It combines two numerical schemes, namely
a first order upwind scheme and the second order upwind scheme developed by Fromm. In
case of a local minimum or maximum the first order upwind scheme is applied, whereas the
upwind scheme of Fromm is used in case of a smooth numerical solution. The time integration
of the Van Leer-2 scheme is explicit and therefore a CFL condition for advection and diffusion
must be fulfilled. Owing to the explicit time integration the Van Leer-2 scheme requires per
time step less computation time than the Cyclic method of Stelling and Leendertse. However,
the Van Leer-2 scheme produces a more diffusive numerical solution, because of the fact that
a first order upwind discretization is applied in case of a local maximum or minimum. The
transport scheme for the Z-model is described by Bijvelds (2001).
The transport equation is coupled with the momentum equations by the baroclinic pressure
term, see Eqs. (9.15) and (9.16) and section 9.3.4. The temporal variations in salinity are
284 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
slow compared to the variations in the flow and therefore the baroclinic term in the momen-
tum equations is treated explicitly, introducing a stability condition for internal gravity waves
(baroclinic mode), see section 10.4.5. The coupling with the flow is weak and in Delft3D-
FLOW the transport equation is solved independently of the flow for each half time step.
For the time integration of the horizontal diffusion term along σ-planes the Crank-Nicholson
method is applied. If the spatial discretization of the horizontal diffusion term is based on
a Cartesian grid using the Finite Volume approach of Stelling and Van Kester (1994) the
integration is explicit.
Source terms are integrated explicitly. In order to avoid negative concentrations and instabili-
ties, sink terms are integrated fully implicit.
10.6.1 Cyclic method
To keep the numerical diffusion as small as possible the horizontal advection terms in the
scalar transport equation are approximated by the sum of a third-order upwind scheme and a
second-order central scheme. A second order central scheme is applied for the approximation
of the vertical advection term.
For the Cyclic method the time integration follows the ADI-method for the continuity equation.
In the first stage all space derivatives with respect to ξare taken implicitly and all derivatives
in the η-direction are taken explicitly. In the second stage the directions for explicit and implicit
integration are interchanged. If the upwind discretization is used in the stage in which both
the horizontal advection and vertical viscosity term are integrated implicitly, the resulting linear
system of equations has thirteen diagonals but the matrix is diagonally dominant. Thus, the
system can be solved effectively by a Red Black Jacobi iterative scheme in the horizontal
direction and a double sweep in the vertical direction.
For the Cyclic method the upwind discretization of the horizontal advective fluxes in ξ-direction
is described by:
1
pGξξ
∂hucpGηη
∂ξ m,n,k
=1
pGξξm,n
ξη Fm+1
2,n,k −Fm−1
2,n,k
∆ξ!.(10.44)
For the scalar flux Fm+1
2,n,k at the U-velocity point the interpolation is given by:
Fm+1
2,n,k =um+1
2,n,khm+1
2,n,k pGηηm+1
2,n (10cm,n,k−5cm−1,n,k+cm−2,n,k
6∆ξ, um+1
2,n,k ≥0
10cm+1,n,k−5cm+2,n,k+cm+3,n,k
6∆ξ, um+1
2,n,k <0
(10.45)
In the first stage in η-direction a central scheme is applied:
1
pGηη
∂hvcpGξξ
∂η m,n,k
=1
pGηηm,n
ξη Gm,n+1
2,k −Gm,n−1
2,k
∆η!,(10.46)
with the scalar flux Gm+1
2,n,k at the V-velocity point determined by:
Gm+1
2,n,k =vm+1
2,n,khm+1
2,n,k pGξξm,n+1
2
cm,n,k +cm,n+1,k
2.(10.47)
Deltares 285 of 688
DRAFT
Delft3D-FLOW, User Manual
Near open and closed boundaries the approximations for the fluxes are reduced to lower
order.
10.6.2 Van Leer-2 scheme
For the second option in Delft3D-FLOW, namely the Van Leer-2 scheme, the interpolation
formula for the horizontal fluxes is given by:
Fm+1
2,n,k =um+1
2,n,khm+1
2,n,k pGηηm+1
2,n ×
cm,n,k +α(1 −CF Ladv−u) (cm,n,k −cm−1,n,k)cm+1,n,k−cm,n,k
cm+1,n,k−cm−1,n,k ,
when um+1
2,n,k ≥0,
cm+1,n,k +α(1 + CF Ladv−u) (cm+1,n,k −cm+2,n,k)cm,n,k−cm+1,n,k
cm,n,k−cm+2,n,k ,
when um+1
2,n,k <0,
(10.48)
with:
CFLadv−u=∆t|u|
∆x(10.49)
and:
α=
0,cm+1,n,k−2cm,n,k+cm−1,n,k
cm+1,n,k−cm−1,n,k >1,(local max. or min.),
1,cm+1,n,k−2cm,n,k+cm−1,n,k
cm+1,n,k−cm−1,n,k ≤1,(monotone). (10.50)
In η-direction a similar discretization is applied. Eqs. (10.48) to (10.50) consist of a diffusive
first-order upwind term and a higher order anti-diffusive term.
The time integration of the Van Leer-2 scheme is explicit. The Courant number for advection
should be smaller than 1.
10.6.3 Vertical advection
In the vertical direction the fluxes are discretized with a central scheme:
1
H
∂ωc
∂σ m,n,k
=1
Hm,n Fm,n,k−1−Fm,n,k
∆σ,(10.51)
with the flux Fm,n,k determined by:
Fm,n,k =ωm,n,k
cm,n,k +cm,n,k−1
2.(10.52)
The time integration in the vertical direction is fully implicit. The vertical advection leads to
a tridiagonal system in the vertical. If the flow in the vertical is advection dominated, due to
vertical stratification in combination with upwelling or downwelling near a closed boundary or
a sill, a discharge of buoyant water, the central differences in the vertical may give rise to non-
physical spurious oscillations. The solution has an unphysical maximum or minimum scalar
concentration (overshoot or undershoot).
286 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
10.6.4 Forester filter
It is well-known that second or higher order advective difference methods (such as the Cyclic
method) on coarse grids may exhibit non-physical oscillations near regions of steep gradi-
ents. The difference operators do not guarantee positive solutions and consequently negative
concentrations may occur. For depth-averaged simulations the Van Leer-2 scheme is strictly
positive. In 3D, for both transport schemes, the central differences in the vertical may give
rise to non-physical spurious oscillations, so-called “wiggles” (Gresho and Lee,1981) in the
solution when the vertical grid Péclet number Pe∆z=|w|∆z
DV≤2. These wiggles may arise in
the vicinity of steep gradients of the quantity to be resolved. In shallow water scalar transport
these wiggles may be introduced in stratified areas near closed boundaries and steep bottom
slopes. Positive solutions are not guaranteed. In case of negative concentrations an iterative
filter procedure based on local diffusion along σ-lines followed by a vertical filter is started in
order to remove the negative values. The filtering technique in this procedure is the so-called
Forester filter (Forester,1979), a non-linear approach which removes the computational noise
without inflicting significant amplitude losses in sharply peaked solutions.
If concentration cm,n,k is negative, then the iterative, mass conservative filtering process is
described (for the sake of simplicity only in one direction, namely the ξ-direction) by:
cp+1
m,n,k =cp
m,n,k +cp
m+1,n,k −cp
m,n,k
4min 1,Vm+1,n,k
Vm,n,k +
+cp
m−1,n,k −cp
m,n,k
4min 1,Vm−1,nk
Vm,n,k ,(10.53)
with Vm,n,k denoting the volume of cell (m, n, k).
This filter is applied only in grid cells with a negative concentration. The superscript pdenotes
the iteration number. The filter smoothes the solution and reduces the local minima (negative
concentrations). Equation (10.53), can be interpreted as an approximation of the following
advection-diffusion equation:
∂c
∂t =α−β
4
∆x
∆t
∂c
∂x +α+β
4
∆x2
∆t
∂2c
∂x2+(higher order terms),(10.54)
with:
α= min 1,Vm+1,n,k
Vm,n,k ,(10.55)
and:
β= min 1,Vm−1,n,k
Vm,n,k .(10.56)
The Forester filter introduces an artificial advection and diffusion. The numerical diffusion
coefficient of the horizontal filter is:
Dnum =α+β
4
∆x2
∆t≤∆x2
2∆t.(10.57)
Thus the filter introduces numerical diffusion but only locally. Maximal 100 iterations are car-
ried out. If there is still a grid cell with a negative concentration after 100 iterations, then a
Deltares 287 of 688

DRAFT
Delft3D-FLOW, User Manual
Figure 10.9: Illustration of wiggles in vertical direction
warning is generated. To further understand the influence of the Forester filter, we rewrite
Equation (10.53) as:
cp+1
m,n,k =1−α+β
4cp
m,n,k +α
4cp
m+1,n,k +β
4cp
m−1,n,k.(10.58)
As both α≤1and β≤1, all coefficients of Equation (10.58) are positive. Consequently, a
positive concentration will remain positive, i.e. it will not introduce negative concentrations ir-
respective the steepness of the concentration gradients. A negative concentration surrounded
by positive concentrations, usually the result of ill represented steep gradients (wiggles), will
be less negative after one iteration and is effectively removed after several iterations by adding
enough (local) diffusion to force the concentration to become positive.
In the vertical, these wiggles may lead to unrealistic vertical profiles of temperature and/or
salinity, see Figure 10.9.
Local maxima and minima in temperature or salinity in the vertical direction, generated by the
computational method may give physically unstable density profiles and can also better be
removed by a numerical filter then by turbulent vertical mixing. We should be sure that it is
a wiggle generated by the numerical method and not by physical processes like heating or
cooling through the free surface or the discharge of water somewhere in the vertical. A similar
filtering technique as in the horizontal direction is applied for points with a local maximum or
minimum in the vertical:
local maximum:
cm,n,k >max (cm,n,k+1, cm,n,k−1) + ε, and Pe∆z=|w|∆z
DV≤2
local minimum:
cm,n,k <min (cm,n,k+1, cm,n,k−1) + ε, and Pe∆z=|w|∆z
DV≤2
the filter is applied, with ε= 10−3. The numerical diffusion coefficient of the vertical filter is:
Dnum =∆z2
2∆t.(10.59)
Smooth but unstable vertical density profiles of salinity and temperature in the vertical direc-
tion, can sometimes also better be vertically mixed by a numerical filter technique then by the
288 of 688 Deltares
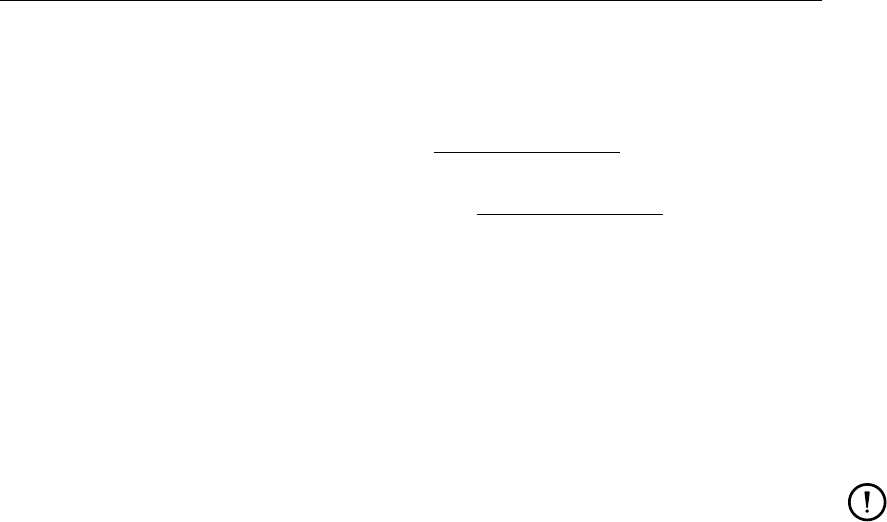
DRAFT
Numerical aspects of Delft3D-FLOW
turbulence model. E.g. for temperature, the algorithm is given by:
If Tm,n,k > Tm,n,k−1+εThen
Tm,n,k =Tm,n,k −min (∆zk,∆zk−1)(Tm,n,k −Tm,n,k−1)
2∆zk
Tm,n,k−1=Tm,n,k−1+ min (∆zk,∆zk−1)(Tm,n,k −Tm,n,k−1)
2∆zk−1
Endif (10.60)
with ε= 10−6.
If both the horizontal and vertical filter are switched on, then first the filter in the horizontal
direction is carried out. The maximum number of filter steps in the horizontal direction is
100. This is followed by applying the filter in the vertical direction and hereby minimising the
additional vertical mixing. The maximum number of filter steps in the vertical direction is 1000.
If the maximum number of filter steps is exceeded, a warning is written in the diagnostic file.
Remark:
The vertical Forester filter does not affect sediments and other constituents. When
activated, the filter only smooths salinity and temperature.
10.7 Numerical implementation of the turbulence models
The turbulence closure models in Delft3D-FLOW are all based on the eddy viscosity concept;
see section 9.5. The eddy viscosity is always based on information of the previous half time
step. The transport equations of turbulent kinetic energy k,Equation (9.127), and dissipation
rate ε,Equation (9.128) are solved in a non-conservative form. For turbulent boundary flows
local production, dissipation, and vertical diffusion are the dominant processes. On the stag-
gered grid, the turbulent quantities k,εand the eddy viscosity νVare positioned at the layer
interfaces in the centre of the computational cell. This choice makes it possible to discretize
the vertical gradients in the production term and buoyancy term accurately and to implement
the vertical boundary conditions at the bed and the free surface. First order upwind differenc-
ing for the advection provides positive solutions. For more details we refer to Uittenbogaard
et al. (1992) and Van Kester (1994).
10.8 Drying and flooding
Estuaries and coastal embayments contain large, shallow, and relatively flat areas separated
and interleaved by deeper channels and creeks. When water levels are high, the entire area
is water covered but as tide falls, the shallow areas are exposed, and ultimately the flow is
confined only to the deeper channels. The dry tidal flats may occupy a substantial fraction of
the total surface area. The accurate reproduction of covering or uncovering of the tidal flats is
an important feature of numerical flow models based on the shallow water equations.
Many rivers have compound channels, consisting of a main channel which always carries
flow (the summer-bed) and one or two flood plains which only carry flow during extreme river
discharges (the winter-bed). The summer bed is surrounded by low dikes, which will overtop
when the river discharge increases. The winter-bed is surrounded by much higher dikes,
which are designed to protect the polders against extreme river discharges. The flooding of
the flood plains increases the drainage capacity of the river and reduces the local water level
gradients.
In a numerical model, the process of drying and flooding is represented by removing grid
points from the flow domain that become “dry” when the tide falls and by adding grid points
Deltares 289 of 688

DRAFT
Delft3D-FLOW, User Manual
that become “wet” when the tide rises. Drying and flooding is constrained to follow the sides
of grid cells. In this section, we specify the algorithms which have been used to determine the
moment when a grid cell (water level point) or cell boundary (velocity point) becomes dry or
wet. Drying and flooding gives a discontinuous movement of the closed boundaries and may
generate small oscillations in water levels and velocities. The oscillations introduced by the
drying and flooding algorithm are small if the grid sizes are small and the bottom has smooth
gradients.
The crucial items in a wetting and drying algorithm are:
The way in which the bottom depth is defined at a water level point.
The way in which the water level is defined at velocity points.
Criteria for setting a velocity and/or water level points wet or dry.
In the following subsections, these three items will be discussed.
The standard drying and flooding algorithm in Delft3D-FLOW is efficient and accurate for
coastal regions, tidal inlets, estuaries, and rivers. In combination with the Flooding scheme for
advection in the momentum equation, the algorithm is also effective and accurate for rapidly
varying flows with large water level gradients because of the presence of hydraulic jumps or
the occurrence of bores as a result of dam breaks.
10.8.1 Bottom depth at water level points
Delft3D-FLOW uses a staggered grid; see Figure 10.4. At input the bottom depth can be
specified by you at the vertices of a computational cell, the so-called depth points, or in the
cell centre, the so-called water level point (DPSOPT=DP). The DPSOPT=DP-option implies
that the position of the depth points is shifted to the water level points. You should consider
this interpretation when generating the depth values with e.g. QUICKIN.
To determine the total water depth at water level points, a bottom depth in the cell centre of
the Control Volume is required. The bottom depth in a water level point dζ
m,n is not uniquely
defined; see Figure 10.10. The algorithm used to determine this depth value from the four
surrounding depth points depends on the choice made by you. In older versions of Delft3D-
FLOW, three options were available: MEAN,MAX and MIN (through the value of the parameter
DRYFLP). Recently a new flag DPSOPT has been introduced with the following extended
options: MEAN,MAX,MIN and DP. It replaces partly the function of the old input parameter
DRYFLP.
The algorithms to determine the depth in a water level point from the four surrounding depth
points are given by:
MAX-option: dζ
m,n = max(dm,n, dm−1,n, dm,n−1, dm−1,n−1)
MEAN-option: dζ
m,n = 0.25(dm,n +dm−1,n +dm,n−1+dm−1,n−1)
MIN-option: dζ
m,n = min(dm,n, dm−1,n, dm,n−1, dm−1,n−1)
DP-option: dζ
m,n =dm,n
With the introduction of DPSOPT the value of the keyword in the input file that is related to the
selection of additional drying and flooding procedure at a water level point, DRYFLP, is now
restricted to YES or NO.YES implies that an additional drying and flooding check is required
290 of 688 Deltares
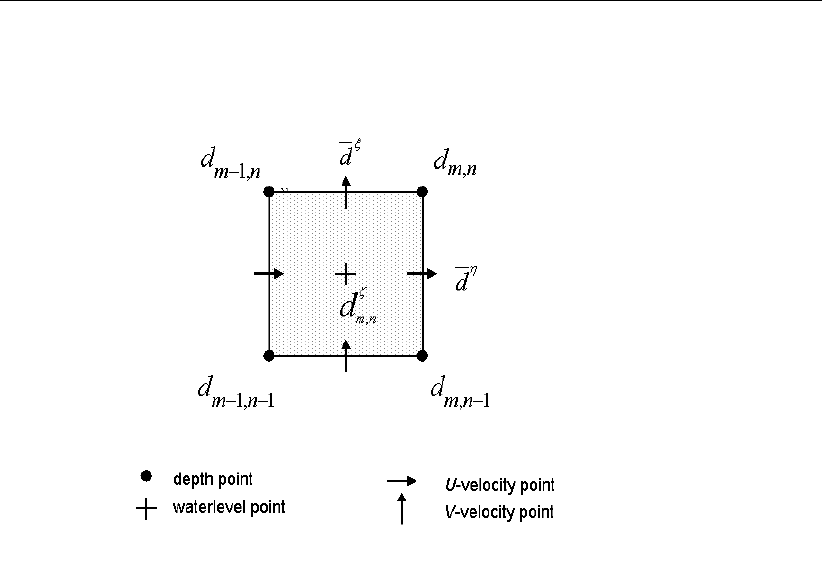
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.10: Definition bottom depth on FLOW grid
based on the evaluation of the value of the total water depth. If its value drops below the user
specified threshold than all four cell interfaces are set to dry (velocities are set to zeroes).
DRYFLP=NO implies that the drying and flooding check is only to be based on the individual
test of the depth values at the cell interfaces.
For the time being, if unspecified, DPSOPT value is determined automatically from DRYFLP
by the program (default value of DPSOPT is equal to DRYFLP and subsequently DRYFLP is
then set according to its original value).
The retention volume of a dry cell is the cell area times the difference between the water
level and the bottom depth at the cell centre. For the combination of flow computations with
transport of dissolved substances, the control volume/retention volume should be positive. In
Figure 10.11 an example is shown in which the water level is below the bottom in the cell
centre (dζ
m,n), determined on basis of the average depth, is below the bottom, while some of
the adjacent velocity points still have a positive flow through height.
Therefore after solving the coupled system of continuity equation and momentum equation
there is a drying check applied to the water level points, see section 10.8.3. If the total water
depth in a water level point is negative:
Hζ
m,n =dζ
m,n +ζm,n ≤0,(10.61)
the continuity cell is taken out of the computation and the half time step is repeated. In case of
steep bottom slopes, the MEAN option may lead to flooding of velocity points and afterwards
drying due to a negative control volume, increasing the computational time. The use of MAX
(default) is recommended. The algorithms for flooding and drying of tidal flats have been
extensively described by Stelling et al. (1986). However, that article does not include the MAX
option. It has been found that the MAX procedure is more favourable and will produce a more
smooth solution than the options described by Stelling et al. (1986).
Deltares 291 of 688
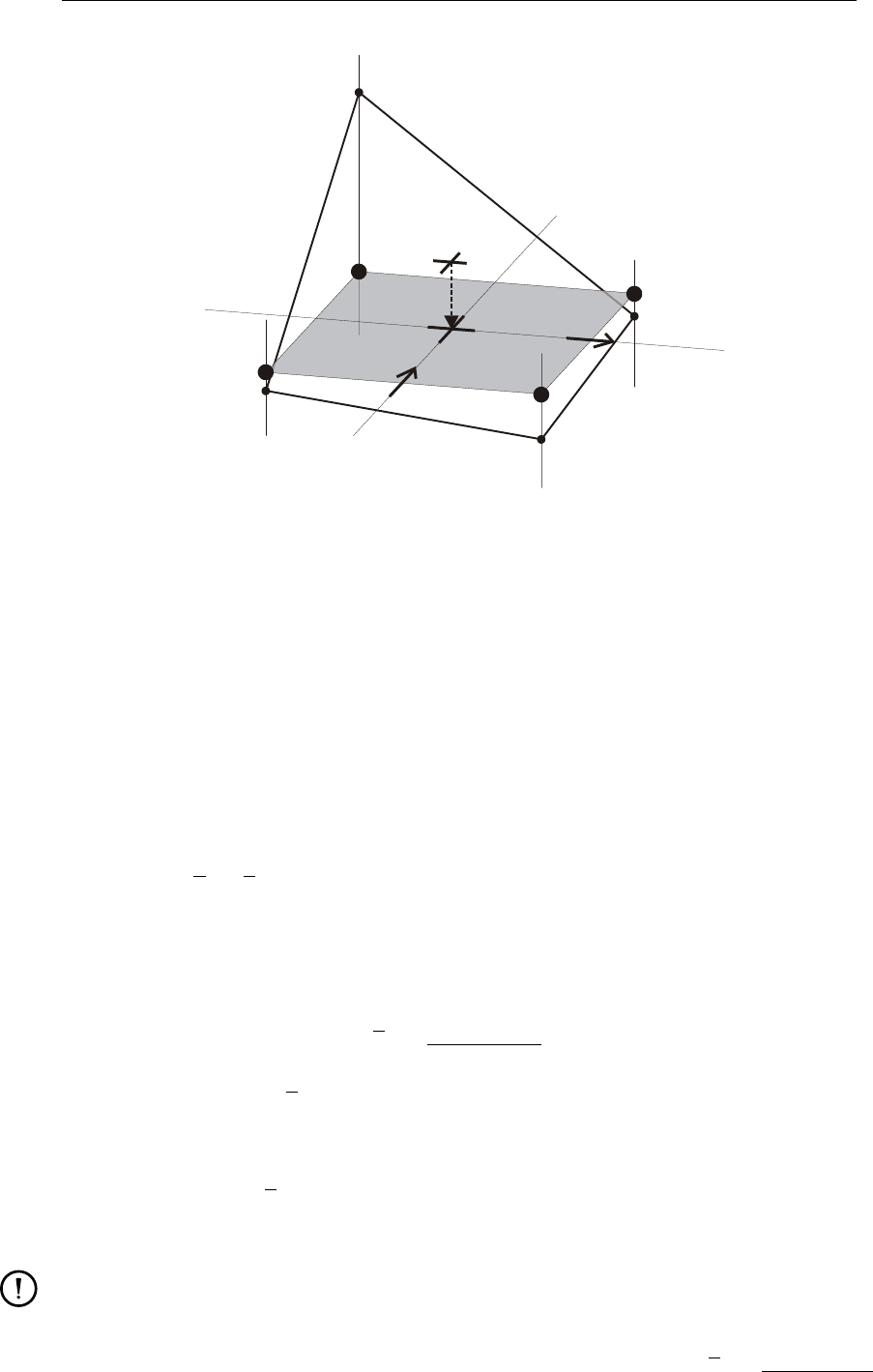
DRAFT
Delft3D-FLOW, User Manual
d(m-1,n-1)
d(m,n-1)
d(m,n)
d(m-1,n)
d
ζ
m,n
ζ
m,n
H
ζ
m,n
Figure 10.11: Negative control volume with two positive flow-through heights, MEAN-
option
The initial water level at a dry cell is determined by the depth at a water level point:
ζm,n =−dζ
m,n.(10.62)
10.8.2 Total water depth at velocity points
Due to the staggered grid applied in Delft3D-FLOW, the total water depth at a velocity point for
the computation of the discharge through a cell face is not uniquely defined. Usually (default
option, marginal depth DCO=-999) it is determined by the arithmetic average of the depth
specified in the vertices of the cell face (side) plus the average of the water levels computed
in the cell centres at each side of that cell face:
HU
m,n =dη+ζξ,(10.63)
For the depth values at the cell interfaces, ¯
dη, you can now choose from the following three
options by setting an appropriate value for the input parameter DPUOPT:
DPUOPT = MEAN (default option): dη=(dm,n+dm,n−1)
2,
DPUOPT = MIN(imum): dη= min dζ
m,n, dζ
m+1,n,
DPUOPT = UPW(ind): dη=
dζ
m,n if Um,n >0
dζ
m+1,n if Um,n <0
min dζ
m,n, dζ
m+1,nif Um,n = 0
Remark:
DPSOPT is DP and DPUOPT is MEAN should not be used together.
For the water level at the cell interfaces ¯
ζξas default the mean value is used: ζξ=(ζm,n +ζm+1,n)
2.
292 of 688 Deltares
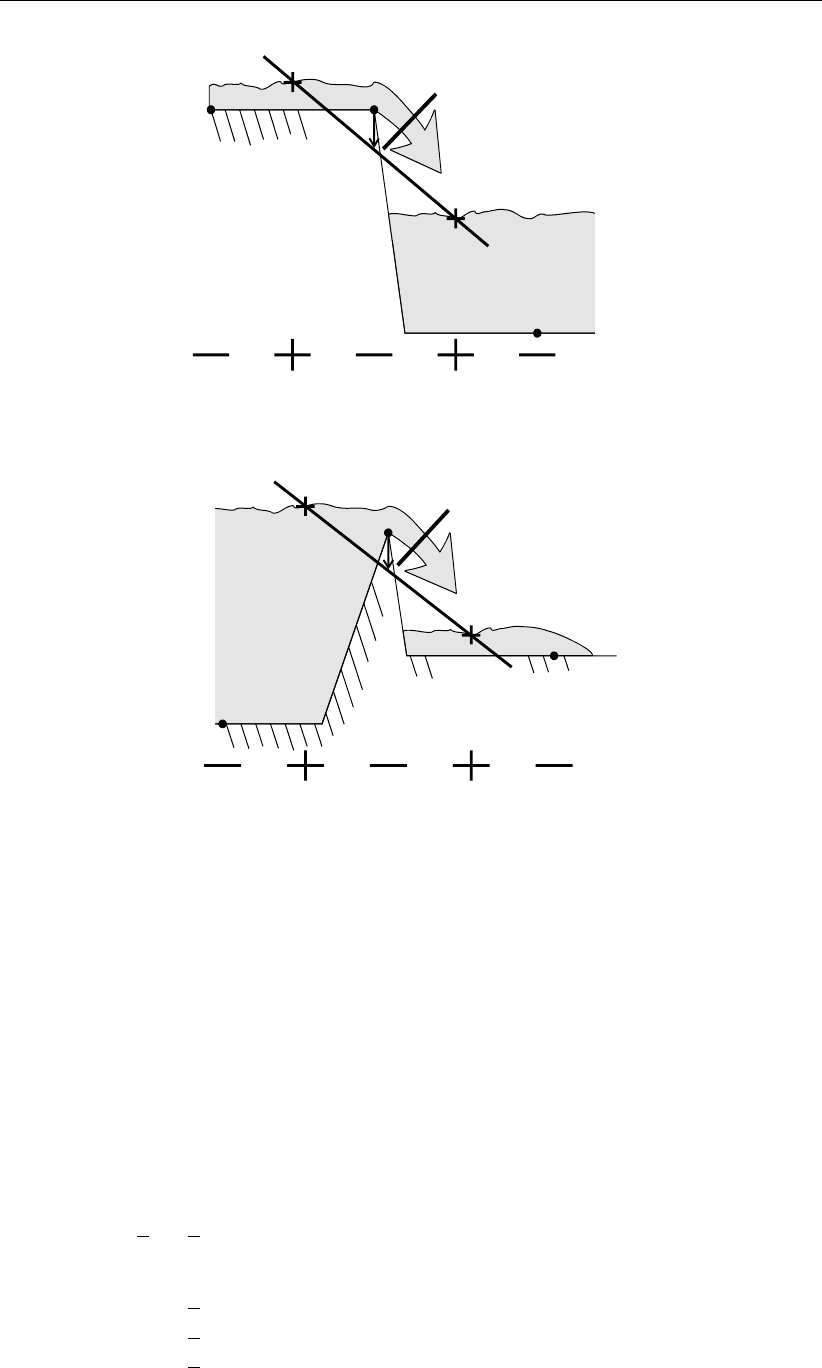
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.12: Drying of a tidal flat; averaging approach. The flow-through height is based
on the average water level, see Equation (10.63), the velocity point is set
dry.
Figure 10.13: Overtopping of a river bank (weir); averaging approach. The flow-through
height is based on the average water level, see Equation (10.63), the ve-
locity point is set dry.
In the neighbourhood of steep bottom gradients, use of the average water level to compute
the total water depth at a velocity point, may lead to an inaccurate determination of the flow-
through height. The velocity point is set dry too early, see Figure 10.12 and Figure 10.13. A
large volume of water is left on the tidal flat, increasing artificially the storage capacity of the
wet area.
It is also possible to determine the water levels at the cell faces with a so-called upwind
approach. This approach was already suggested by Stelling (1984) for shallow regions. In
Delft3D-FLOW the choice between upwind and the average approach for the water level in a
U-point is controlled by flag DPUOPT. In the Z-model always upwind water levels and depth
are used in velocity points (Bijvelds,2001). The upwind flow through height in a U-velocity
point based on an upwind water level is given by:
HU
m,n =dη+ζξ,
If (DPUOPT = UPW ∨hydraulic structure ∨Z-model)Then
HU
m,n =
dη+ζm,n, Um,n >0,
dη+ζm+1,n, Um,n <0,
dη+ max (ζm,n, ζm+1,n), Um,n = 0,
Endif (10.64)
Deltares 293 of 688
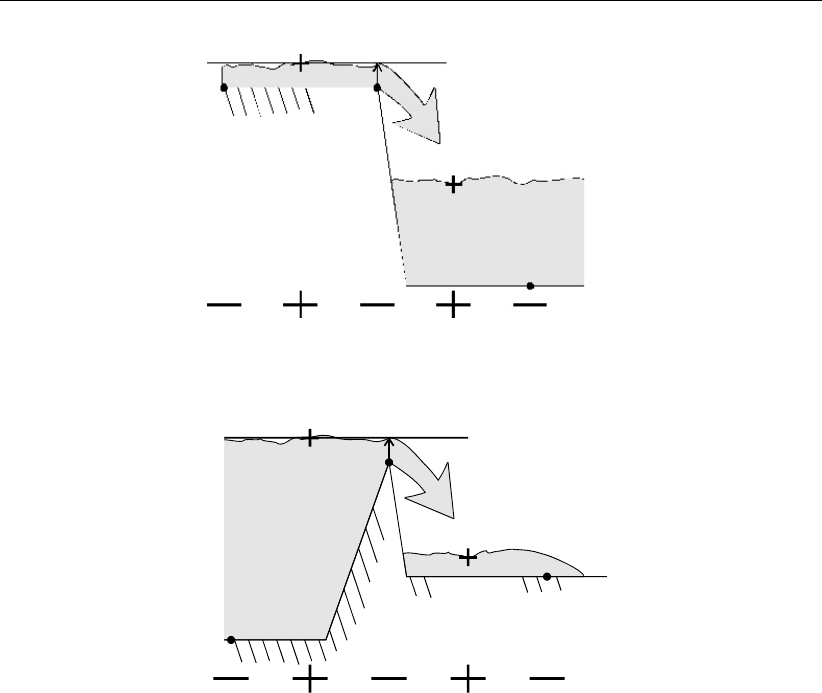
DRAFT
Delft3D-FLOW, User Manual
Figure 10.14: Drying of a tidal flat; upwind approach. The flow-through height is deter-
mined by flow direction, see Equation (10.64), the velocity point remains
wet.
Figure 10.15: Overtopping of a river bank; upwind approach. The flow-through height is
based on the maximum water level, see Equation (10.64), the velocity point
remains wet.
with Um,n representing the depth averaged velocity both for 2D and 3D. The computation of
the upwind total water depth HV
m,n in a V-velocity point is similar. The upwind approach is
physically more realistic for velocity points between cells with different bottom depth at low
water and falling tide (Figure 10.14) or for weir like situations (Figure 10.15). Upwinding the
water level in the determination of the total water depth (flow through height) enhances the
discharge because the upwind water level is generally higher than the average water level,
resulting in a larger flow area, which allows the water level gradient to drive a larger amount
of water into the neighbouring cell during the next time step. Taking the maximum of the two
surrounding water levels at a dry cell face prevents that a velocity point is artificially kept dry.
The upwind approach is physically less realistic if the flow has the opposite direction as the
water level gradient (wind driven flow).
Figure 10.15 shows the situation of a river which overtops its bank. If we take the average
water level to determine the total water depth at the crest, the velocity point remains dry. The
water level will rise too much in the main channel of the river, leading to unrealistic water levels
downstream. When the river run off increases, suddenly the flood plains are filled with water,
generating a shock wave.
The Flooding scheme, see section 10.4.4, is accurate for the approximation of the advec-
tion in rapidly varied flows due to sudden expansions or sudden contractions (Stelling and
Duinmeijer,2003). An example of such a flow problem is the simulation of the inundation
of dry land with obstacles such as road banks and dikes. Due to a sudden contraction, the
flow speed can become critical. The accuracy in the approximation of the critical discharge
rate is dependent on the approximation (limiter) of the total water depth at a velocity point
294 of 688 Deltares
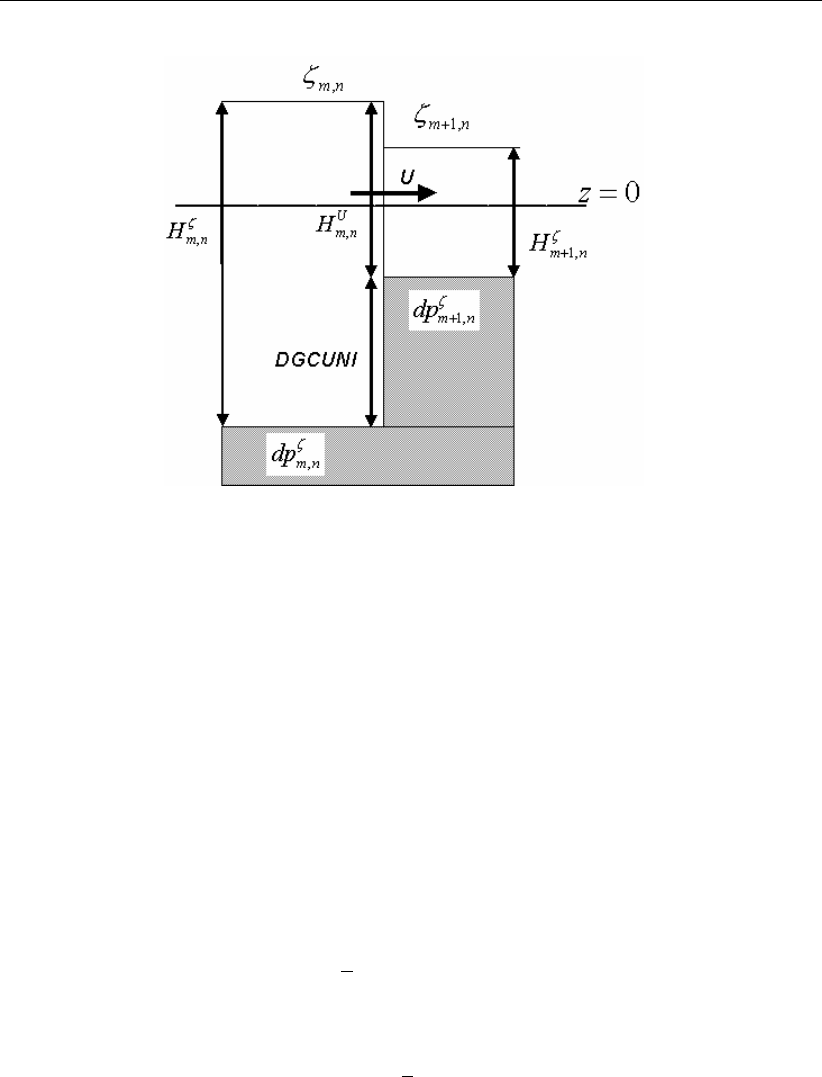
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.16: Special limiter for critical flow due to a sudden contraction (Flooding
scheme and increase in bottom larger than DGCUNI)
downstream.
For the Flooding scheme the bottom is assumed to be represented as a staircase (DPUOPT=MIN)
of tiles, centred around the water level points, see Figure 10.7b and Figure 10.16. The flow
through height in a U-velocity point is always based on an upwind water level, the user-defined
marginal depth DCO is set at +999.
For the Flooding scheme the accuracy in the numerical approximation of the critical discharge
rate for flow with steep bed slopes, can be increased by the use of a special approximation
(slope limiter) of the total water depth at a velocity point downstream. The limiter function
is controlled by the user-defined threshold depth for critical flow limiter DGCUNI, see Fig-
ure 10.16 and:
If (Um,n >0∧dζ
m,n > dζ
m+1,n +DGCUNI)Then
HU
m,n = min HU
m,n,max 2
3Hζ
m,n, Hζ
m+1,n
Elseif (Um,n <0∧dζ
m,n +DGCUNI < dζ
m+1,n)Then
HU
m,n = min HU
m,n,max Hζ
m,n,2
3Hζ
m+1,n
Endif (10.65)
By the introduction of the user-defined threshold DGCUNI, see Figure 10.16, the points for
this special approach, are recognised automatically during the simulation, without having to
specify all the points at input.
10.8.3 Drying and flooding criteria
As described in section 10.4 an Alternating Direction Implicit (ADI) time integration method is
used in Delft3D-FLOW. This method consists of two stages (half time steps). At both stages
the same drying and flooding algorithm is applied. Therefore, we will only describe the drying
and flooding algorithm for the first half time step.
Deltares 295 of 688

DRAFT
Delft3D-FLOW, User Manual
The total water depth HU
m,n at a velocity point should at least be positive to guarantee a
realistic discharge across a cell face. If the total water level drops below half of a user-
specified threshold, then the velocity point is set dry. In 3D simulations the velocities are
set to zero for all the computational layers. The computational cell is closed for the side
normal to the velocity point. If the water level rises and the total water depth is larger than
the threshold, the velocity point is set wet again. The drying threshold is given half the value
of the wetting threshold (hysteresis) to inhibit changes of state in two consecutive time steps
(“flip-flop”), due to oscillations introduced by the algorithm itself. When all four velocity points
of a computational cell surrounding a water level point are dry then this computational cell will
be set dry.
The total water depth Hζ
m,n at a water level point should at least be positive to guarantee a
positive control volume. If the total water level becomes negative, the four velocity points at the
cell sides are set dry. In 3D simulations the velocities are set to zero for all the computational
layers. If a negative control volume occurs, the half time step should be completely repeated
and the computational time increases. Flooding is restricted to velocity points.
The thickness of the water layer of a dry cell (retention volume) is dependent on the threshold
dspecified by you. Therefore, the threshold value dmust fulfil the following condition:
δ≥∂ζ
∂t
∆t
2.(10.66)
In general, the magnitude of the disturbances generated by the drying and flooding algorithm
will depend on the grid size, the bottom topography and the time step. The disturbances are
small if the grid size is small and the bottom has smooth gradients. If the bottom has steep
gradients across a large area on a tidal flat, a large area may be taken out of the flow domain
in just one half integration time step. This will produce short oscillations. You can avoid this
by smoothing the bottom gradients.
Flooding is an explicit process. The boundary of the wet area can only move one grid cell
per time step. If the time step is too large an unphysical water level gradient at the wet-dry
interface is built up, which will generate oscillations after flooding.
Attention should also be paid to the fact that depth values at points at closed boundaries are
used in the total water depth of a velocity point parallel to the boundary and for the depth at
a water level point for the MEAN-option. The depth at closed boundaries should be a bottom
value near the coastline and not a land height.
In the first stage of the ADI-method, the drying and flooding algorithm in Delft3D-FLOW con-
sists of the following four checks:
1 Drying check for velocity points in y-direction (HV
m,n <0.5δ).
2 Drying check for velocity points in x-direction (HU
m,n <0.5δ) and flooding check for
velocity points in x-direction (HU
m,n > δ). These checks are based on the water level of
the previous half time step.
3 Drying check for velocity points in x-direction (HU
m,n <0.5δ) during iterative solution for
new water level.
4 Drying check (negative volumes) for water level points (Hζ
m,n <0.0).
In the second stage of the ADI-method, the directions are interchanged.
The threshold δis specified by you at input. The total water depth at velocity points is com-
296 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
puted according to either Equation (10.63) or Equation (10.64), corresponding to the average
and the upwind approach, respectively. Default the average approximation is used in the
σ-model and the upwind approach is always used in the Z-model.
Remark:
Near hydraulic structures: (discharge points, weirs and barriers) always upwinding
Equation (10.64) is applied, independent of the marginal depth DCO.
The total water depth in water level points depends on the way in which the bottom depth is
computed. Four options are available (see section 10.8.1).
In step four of the drying and flooding algorithm in Delft3D-FLOW, a check at each water level
point is carried out to avoid negative volumes.
A smooth flooding behaviour is obtained if the simulation is initialised at high water, with
the initial water level at the expected maximum level. In that case the water layer (retention
volume) at dry points is initialised by the drying flooding algorithm. If a simulation is not
started at high water, the water levels at dry points are initially set at the bottom depth. The
thickness of the water layer is zero. If the computational cell is flooded, the water layer may be
very thin and cause problems in combination with online salt transport or off-line water quality
simulations. In Delft3D-FLOW the computational part is protected against “dividing by zero”
by assuming that the total water depth is at least 1 centimetre.
You may define in velocity points so-called weirs or spillways. Weirs are hydraulic structures
causing energy losses, see section 10.9. For a 2D weir the height of the crest, HKRU, is taken
into account in the drying and flooding algorithm.
The drying check for a 2D weir point at a U-point is given by:
HU
m,n <1
2δ∧max(ζm−1,n, ζm,n) + HKRUm,n <1
2δ, (10.67)
and flooding the flooding check:
HU
m,n > δ ∧max(ζm−1,n, ζm,n) + HKRUm,n > δ. (10.68)
The weir acts as a thin dam for water levels lower than the crest height.
10.9 Hydraulic structures
In a Delft3D-FLOW model, so-called hydraulic structures can be defined to model the effect of
obstructions in the flow which can not be resolved on the horizontal grid (sub-grid) or where
the flow is locally non-hydrostatic. Examples of hydraulic structures in civil engineering are:
gates, sills, sluices, barriers, porous plates, bridges, groynes, weirs. A hydraulic structure
generates a loss of energy apart from the loss by bottom friction. At hydraulic structure points,
an additional force term is added to the momentum equation, to parameterise the extra loss
of energy. The term has the form of a friction term with a contraction or discharge coefficient.
In this section, the mathematical formulations and implementation of the hydraulic structures
available in Delft3D-FLOW will be described in more detail. The hydraulic structures are
divided into three basic types:
hydraulic structures with quadratic friction,
hydraulic structures with linear friction and
floating structure.
Deltares 297 of 688
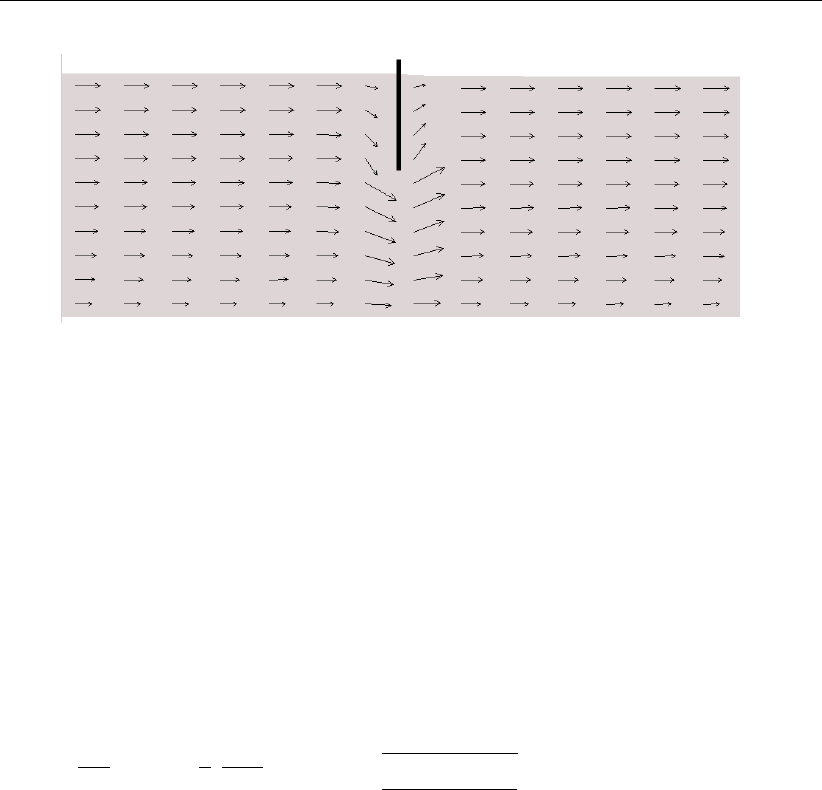
DRAFT
Delft3D-FLOW, User Manual
Figure 10.17: Example of a 3D Gate (vertical cross-section)
The flow condition at hydraulic structures may be supercritical. For supercritical flow, the
downstream water level has no influence on the flow rate. The energy loss formulations
presently available in Delft3D-FLOW assume subcritical flow. Only for the hydraulic structures
of the types 2D weir and culvert also the supercritical flow rate is computed accurately.
All hydraulic structures except for culverts are located on the interface between two computa-
tional cells. Around a hydraulic structure, there will be large horizontal gradients in the water
level, the velocity field and in the concentrations. In order to prevent unphysical oscillations in
the velocities and concentrations upstream of hydraulic structure points the user can switch
(option) the discretisation of the advective terms at such points to an upwind approximation.
For the momentum equations, the following energy preserving upwind discretization of advec-
tion is applied:
U∂U
∂x m,n,k
=1
2
∂U2
∂x m,n,k
=(U2
m,n,k−U2
m−1,n,k
2∆x, Um,n,k >0,
U2
m+1,n,k−U2
m,n,k
2∆x, Um,n,k <0.
(10.69)
For the transport equation, locally a first order upwind scheme is used by default.
Culverts have been implemented as two coupled discharge locations (one inlet and one out-
let) which may be located in different parts of the computational grid. Culverts with a user
defined discharge relation (type ‘u’) can be used to implement (non-local) discharge formula-
tions representative of other kinds of structures, see section B.3.4.6.
10.9.1 3D Gate
A 3D gate is in fact a thin dam with a limited height/depth (and positioned in the vertical).
A gate may be used to model a vertical constriction of the horizontal flow such as barriers,
sluices and Current deflection walls. The vertical constriction of the flow may vary in time by
the lowering or raising of the gate.
A 3D gate is located at a velocity point and its width is assumed to be zero, so it has no
influence on the water volume in the model area. The flow at all intermediate layers of the
gate is set to zero. The layer near the top and the layer near the bottom of the gate may be
partially blocked. Upstream of the structure the flow is accelerated due to contraction and
downstream the flow is decelerated due to expansion.
For 3D gates not only the begin and end co-ordinates of its horizontal position, but also its
vertical position can be specified. This means that some of the layers can be represented as
vertical thin dams. In the σ-model the position of the 3D-gate can be:
298 of 688 Deltares
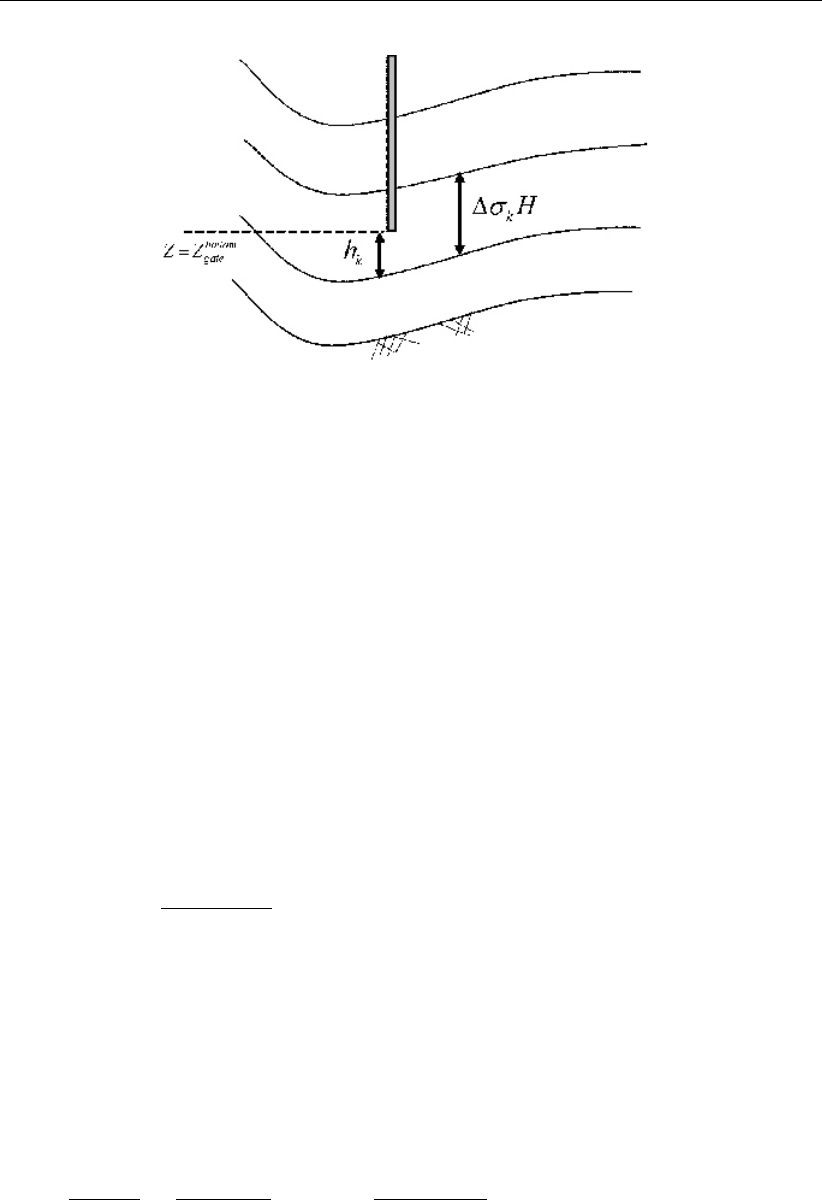
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.18: Computational layer partially blocked at bottom of gate
“fixed” in the computational grid (and moving with the water level in the Cartesian co-
ordinate system),
“fixed” in the Cartesian co-ordinate system (and moving through the σ-grid),
moving in the Cartesian co-ordinate system by lowering or raising of the gate (3D barrier).
For the latter two cases, a layer may be partially blocked near the top or the bottom of the gate,
see Figure 10.18. The wet cross section of that computational layer is reduced. The reduction
factors are computed on basis of the vertical position of the gate and the time-dependent
vertical σ-grid.
For more details on the data input requirements for the different type of 3D gates we refer to
section B.3.1.
10.9.2 Quadratic friction
The steady-state subcritical flow rate Qthrough a hydraulic structure is related to the differ-
ence between the upstream and downstream water levels:
Q=µAp2g|ζu−ζd|,(10.70)
with µthe contraction coefficient (0< µ ≤1), the wet flow-through area and and the
upstream and downstream water level, respectively. The contraction coefficient in the so-
called Q-H relation is dependent on the kind of hydraulic structure. We assume that the
hydraulic structure is “sub-grid”, and that there is a local equilibrium between the force on the
flow due to the obstruction and the local water level gradient. The Q-H relation may be used
to determine the coefficient closs−Uin the quadratic friction term of the momentum equation,
to model the effect of the hydraulic structure. For a Q-H relation at a U-velocity point:
gζu−ζd
∆x=Q2
2µ2A2∆x=closs−U
Um,n ~
Um,n
∆x,(10.71)
The resistance coefficient closs−Uneed to be specified by the user at input.
For the following types of hydraulic structures, a quadratic formulation for the energy loss is
implemented in Delft3D-FLOW:
barrier
bridge
Deltares 299 of 688

DRAFT
Delft3D-FLOW, User Manual
Current Deflection Wall
2D weir
local weir
porous plate
culvert
10.9.2.1 Barrier
In Delft3D-FLOW, the hydraulic structure barrier is the combination of a movable gate and a
quadratic friction term. It can be used in 2D and 3D models. In 3D models the model depth
at the barrier point should be decreased to the sill depth for appropriate modelling of salt
transport.
A barrier is located at a velocity point. For a 3D barrier, some of the layers are closed depen-
dent on the gate height. The barrier is “sub-grid” and has no influence on the water volume in
the model area. Upstream of a barrier the flow is accelerated due to contraction and down-
stream the flow is decelerated due to expansion. The expansion introduces a water level jump
between the upstream and downstream water level, which is independent of the grid size. The
energy loss for a barrier is taken into account by adding an extra quadratic friction term to the
momentum equations Equation (10.71). The appropriate energy loss coefficient should be
specified for each barrier by the user, dependent on the local discharge relation, see Equa-
tion (10.71). The quadratic friction is added to the momentum equations for all layers which
are open.
The discharge relation presently available at barrier points in Delft3D-FLOW assumes sub-
critical free surface flow. The depth-averaged flow-rate through a barrier is given by:
Q=µAp2g|ζu−ζd|,(10.72)
with µthe barrier contraction coefficient (0< µ ≤1). The contraction coefficient should
be obtained from laboratory or field measurements. The contraction coefficient is used to
determine the equivalent energy loss coefficient closs−uin Equation (9.269) or closs−vin
Equation (9.270) depending on the U/V-direction of the barrier. Based on a depth-averaged
analysis, the energy loss coefficient closs is related to the barrier contraction coefficient µas:
closs =1
2µ2.(10.73)
The user specifies either the energy loss coefficient closs directly (barrier loss type ‘a’) or the
coefficients αand β(barrier loss type ‘b’) with which the energy loss coefficient is computed
using:
closs =1
21
α+βp −p2
(10.74)
where pis the ratio of barrier opening height over total water depth at barrier (p= 0 if barrier
is fully closed, p= 1 if barrier is completely open). The value of βis typically equal to 1−α
such that energy loss coefficient closs becomes zero for a completely open gate. Energy
losses due to barrier constrictions under fully open conditions may be schematised by means
of a pair of porous plates immediately upstream and downstream of the barrier.
For a 3D barrier, part of the energy loss is computed directly by the discretisation of the con-
vection terms in the momentum equations and the bottom friction term. The loss coefficient
closs should be used for calibration. Between the gate and the sill we assume a uniform ve-
locity profile. For a partial open layer k, see Figure 10.18, with reduced thickness hkthe loss
coefficient is increased proportionally to the square of the layer blockage factor.
300 of 688 Deltares
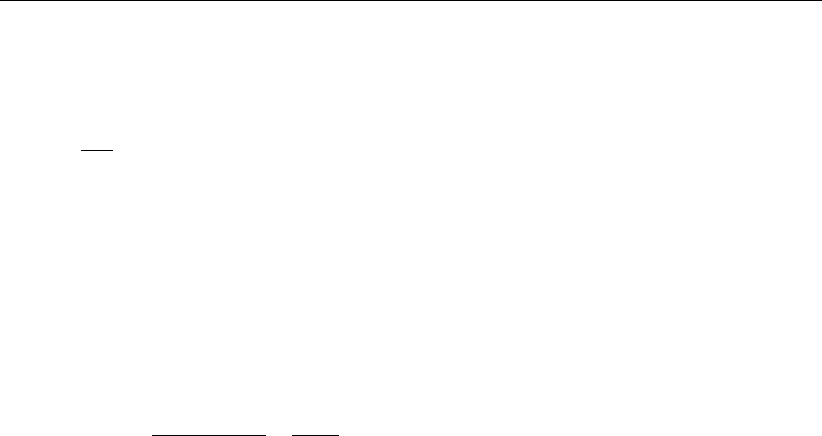
DRAFT
Numerical aspects of Delft3D-FLOW
Furthermore, free slip boundary conditions has been implemented at the transition from an
open layer to a closed layer (representing the bottom side of the gate):
vv
∂U
∂z z=Zgate
bottom
= 0 (10.75)
with Zgate
bottom the vertical position of the bottom of the gate.
10.9.2.2 Bridge
The flow resistance due to a jetty or a bridge is dependent on the blocking of the flow by the
piers (Farraday and Charlton,1983). For a row of piles perpendicular to the U-direction the
energy loss coefficient closs−uperpendicular to the flow is given by (and has to be specified):
closs−u=NCdragdpile
2∆yAtot
Aeff 2
,(10.76)
with:
Atot total cross sectional area (Atot =ζ∆y).
Aeff effective wet cross sectional area (Atot minus the area blocked by piles: Aeff =
Atot −ζNdpile).
Cdrag the drag coefficient of a pier (pile) (1.0 for a smooth cylindrical pile).
dpile the diameter of a pile.
Nthe number of piles in the grid cell.
At a bridge point the quadratic friction term is added to the momentum equation for all layers
which are open. Currently, you should derive the value of the loss coefficient and specify at
input (see the structure Porous plate).
10.9.2.3 Current Deflection Wall
In Delft3D-FLOW, the hydraulic structure CDW is the combination of a fixed gate and a
quadratic friction term. It can be used in 2D and 3D models.
ACDW is located at a velocity point. In 3D some of the computational layers are closed
dependent on the gate height and the upstream water level. The CDW is “sub-grid” and
has no influence on the water volume in the model area. Upstream of a CDW the flow is
accelerated due to contraction and downstream the flow is decelerated due to expansion.
The expansion introduces a water level jump between the upstream and downstream water
level, which is independent of the grid size. The energy loss for a CDW is taken into account
by adding an extra quadratic friction term to the momentum equations Equation (10.71). The
appropriate energy loss coefficient should be specified by the user, dependent on the local
discharge relation, see Equation (10.71)) or dependent on the flow resistance that you want
to induce; see Equation (10.76). The quadratic friction is added to the momentum equations
for all layers which are open.
10.9.2.4 Weir
In Delft3D-FLOW, the hydraulic structure weir is a fixed non-movable construction generating
energy losses due to constriction of the flow. They are commonly used to model sudden
changes in depth (roads, summer dikes) and groynes in simulation models of rivers.
2D Weir
The mathematical concept was developed by Wijbenga (1990). For a 2D weir the crest height
Deltares 301 of 688
DRAFT
Delft3D-FLOW, User Manual
(HKRU) is taken into account only in the drying and flooding algorithm, to determine if a
velocity point is wet or dry, see section 10.8.3.
A 2D weir is assumed to be “sub-grid”, and the total water depth in the wet cross section to
compute the discharge is still based on the bottom without crest. So the energy loss generated
by the weir is not computed directly by the convective terms in the momentum equations. The
energy loss is parameterised and added in the momentum equation as follows:
Mξ=−gH∆Eweir
∆x(10.77)
The flow condition at a local weir may be sub- or supercritical. For supercritical flow the dis-
charge at the weir is completely determined by the energy head upstream and the discharge
is limited by:
Qsuper = ∆y2
3Eupr2
3gEup (10.78)
with
Eup =ζup +HKRUi+1
2,j +(Uup)2
2g=ζweir +HKRUi+1
2,j +(Uweir)2
2g=(10.79)
The flow condition depends on the water level downstream and the discharge rate.
The flow at the weir crest is supercritical if:
ζdown +HKRU ≤2
3Eup or Q≥Qsuper (10.80)
For supercritical flow, the difference between the energy head upstream and downstream of
the weir should be equal to the energy loss caused by the weir.
∆Eweir =Eup −Edown (10.81)
302 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
with
Edown =ζdown +(Udown)2
2g(10.82)
In the momentum equation, the energy loss term is used to control the discharge at the
theoretical supercritical discharge rate Equation (10.78).
For sub-critical flow conditions, the energy loss ∆Eweir is based on experimental data “Tabel-
lenboek van Rijkswaterstaat” (Vermaas,1987)∆Etable and/or the formula of Carnot ∆ECar.
This depends on the flow velocity Uweir at the weir crest, This velocity is derived from the
discharge upstream and the crest height, assuming conservation of energy for the flow con-
traction.
Uweir =Qweir
∆y(ζup +HKRU)(10.83)
The energy loss following Carnot is given by:
∆ECar =(Uweir −Udown)2
2g(10.84)
with
Udown =Qweir
∆y(ζdown +HKRU +dsill)(10.85)
If the flow velocity at the weir crest is less than 0.25 m/s the energy loss is calculated according
to ∆ECar, when the velocity is between 0.25 m/s and 0.5 m/s, a weighted average is used
between ∆ECar and ∆Etable, if the velocity is more than 0.5 m/s, ∆Etable is used.
The energy loss is assumed to be normal to the obstruction and for a U-weir it is added to the
momentum equation as follows
∂U
∂t +. . . =. . . −g∆EnUn+1/2
i+1/2,j
∆xUn
i+1/2,j
(10.86)
∆En= (1 −θ) ∆En+θ∆En−1/2(10.87)
where the velocity in the denominator of the first term is replaced by the critical flow velocity
over the weir in case of a perfect weir. To prevent oscillations when the flow over the weir is
just below supercritical a relaxation parameter θhas been introduced which can be set to a
value between 0 and 1 by means of the ThetaW keyword. The default value is 0 meaning
no under-relaxation used for the energy loss ∆E. See section B.3.2.4 for details on the
user-input.
Local weir
In 3D models, the model depth at a weir point should be decreased for appropriate modelling
of salt transport. The crest height of a local weir is not derived from the bottom but specified at
input. The crest height (HKRU) is taken into account only in the drying and flooding algorithm,
to determine if a velocity point is wet or dry, see section 10.8.3. The total water depth in the
Deltares 303 of 688
DRAFT
Delft3D-FLOW, User Manual
wet cross-section at a local weir point is based on the crest height. For a local weir, part
of the energy loss is computed directly by the discretisation of the convection terms in the
momentum equations and the bottom friction term. The loss coefficient closs−Ushould be
used for calibration.
10.9.2.5 Porous plate
For a so-called porous plate the energy loss coefficient should be specified by the user at
input.
Mξ=−closs−U
Um,n ~
Um,n
∆x(10.88)
10.9.2.6 Culvert
In Delft3D-FLOW intake/outlet couplings have been implemented. A culvert is a special in-
take/outlet coupling in which the discharge rate depends on the flow regime. In case of a
normal intake/outlet coupling, which is called a “power station”, the discharge rate is specified
on input.
Definition of a culvert
In Delft3D-FLOW four types of culverts are distinguished:
Type Description
‘c’ One-way culvert with a “simple” discharge formulation
‘d’ Two-way culvert with a “more generalized” discharge formulation
‘e’ One-way culvert with a “more generalized” discharge formulation
‘u’ Two-way culvert/structure with user-defined discharge formulation
Culvert of type ‘c’
For a culvert of type ‘c’, which corresponds to a completely submerged culvert, the discharge
rate through the culvert (in [m3/s]) is computed by the Delft3D-FLOW program, according to
Q=µAp2gmax(0, ζintake −ζoutlet)(10.89)
with µthe culvert loss coefficient (dimensionless), Athe area (in m2) of the culvert opening
and ζintake and ζoutlet the water levels at the intake and outlet, respectively.
Culvert of type ‘d’ or ‘e’
It is known that Equation (10.89) does not perform satisfactorily in all flow conditions. In
particular, this is the case when the downstream water level is below the so-called critical
depth. Therefore, a more general formulation for the computation of the discharge through
the culvert is available. Six flow classifications are distinguished, with different discharge
relations for each type. The classification was taken from French et al. (1987), (page 368).
However, more generalized formulations were proposed by WL Borgerhout for the culvert loss
coefficient and have been encorporated.
Let us first introduce some notation:
ζu= max(0, ζintake −zculvert)and ζd= max(0, ζoutlet −zculvert)(10.90)
304 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
in which zculvert is the vertical position of the bottom of the culvert relative to the reference
level (positive upwards). Furthermore, the critical depth is defined by
Hc=3
sQ2
gW 2(10.91)
with Wthe width (in [m]) of the culvert.
To consider six flow classifications and their discharge charateristics some variables are de-
fined. Lis the length of the culvert, nthe Manning’s coefficient (in [m1/3/s]) representing
the energy loss due to the culvert and a discharge coefficient that is prescribed by the user
(c1
D, c2
Dand c3
D), in which the superscript represents the type(s) of flow condition. Further-
more, S0is the slope of the culvert, Scis the so-called critical slope, uis the velocity through
the culvert and αis the so-called energy loss correction coefficient, which has to be specified
by the user as well. This coefficient represents all energy losses due to a culvert that are not
part of the other terms in the discharge relations.
The six flow classifications and their discharge characteristics read:
Type 1 (supercritical flow with critical depth at intake; steep culvert slope)
Q=µHcWp2g(ζu−Hc)with µ=c1
D(10.92)
Type 2 (supercritical flow with critical depth at outfall; mild culvert slope)
Q=µ(H∗)HcWp2g(ζu−Hc)with H∗= 0.5Hc+ 0.5ζu
µ(H∗) = c1
D/s1 + 2gLn2
(R∗)4/3+α(c1
D)2Hc
H∗2
and R∗=H∗W
2H∗+W
(10.93)
Type 3 (tranquil flow):
Q=µ(H∗)ζdWp2g(ζintake −ζoutlet)with H∗= 0.5ζu+ 0.5ζd
µ(H∗) = c1
D/s1 + 2gLn2
(R∗)4/3+α(c1
D)2ζd
H∗2
and R∗=H∗W
2H∗+W
(10.94)
Type 4 (submerged flow)
Q=µ(H∗)HW p2g(ζintake −ζoutlet)with H∗=H
µ(H∗) = c2
D/s1 + 2gLn2
(R∗)4/3+α(c2
D)2and R∗=H∗W
2H∗+ 2W(10.95)
Type 5 (rapid flow at inlet)
Q=µ(H∗)HW p2gζuwith µ(H∗) = c3
Dand H∗=H(10.96)
Deltares 305 of 688
DRAFT
Delft3D-FLOW, User Manual
Type 6 (full flow free outlet)
Q=µ(H∗)HW p2g(ζu−H)with H∗=H
µ(H∗) = c2
D/s1 + 2gLn2
(R∗)4/3+α(c2
D)2and R∗=HW
2H+ 2W(10.97)
From Eqs. (10.92) to (10.97) it can be seen that three different discharge coefficients are used,
namely
c1
D: flow classification type 1, 2 and 3
c2
D: flow classification types 4 and 6
c3
D: flow classification type 5
In the table below the conditions are listed for these six flow regimes.
Type Conditions
Flow regime ζuζdζdother
1 supercritical flow with critical depth at
intake
<1.5H≤H≤HcSo> Sc
2 supercritical flow with critical depth at
outlet
<1.5H≤H≤HcSo≤Sc
3 tranquil flow <1.5H≤H > Hc
4 submerged flow > H > H
5 rapid flow at inlet ≥1.5H≤H≤Hc
6 full flow free outlet ≥1.5H≤H≥Hc
Remarks:
From this table it can be verified that all possible flow conditions can occur. Either,
(types 5 or 6), or (types 1, 2 or 3). If none of these flow conditions are satisfied, then
(type 4).
Flow type 1 corresponds to culverts with a steep slope, whereas flow type 2 represents a
mild culvert slope. Since the culvert implementation applied in Delft3D-FLOW is based
on strict horizontal culverts, only flow type 2 can occur and not flow type 1.
The formulations are more or less identical to the ones applied in SOBEK-RURAL of
Deltares. The differences are in the computation of the culvert loss coefficient µ.
Difference between culvert type ‘d’ and ‘e’
In the previous text it is described how the discharge through a culvert is computed. For a
one-way culvert (type ‘e’) the discharge is always from the intake location to the outlet location.
If the water level at the outlet location is higher than at the intake, then there is no flow through
the culvert. In case of a two-way culvert (type ‘d’) the location with the highest water level
(thus, either intake or outlet location) is considered as the intake location. This means that for
a two-way culvert flow through the culvert in two-directions is possible.
We note that culvert types ‘c’ and ‘e’ are comparable. Only the computation of the discharge
through the culvert differs, see Equation (10.89) versus Eqs. (10.92) to (10.97).
306 of 688 Deltares

DRAFT
Numerical aspects of Delft3D-FLOW
Culvert of type ‘u’
The discharge Qthrough a culvert of type ‘u’ is determined by a subroutine that you provide
yourself. The discharge can be based on the water levels at both ends of the culvert. You can
use this routine to reproduce the formulations for culverts of types ‘c’, ‘d’ and ‘e’ and variations
thereof, or you can implement a discharge functions that is valid for some completely different
structure. This culvert type can be used to implement a variety of structures resulting in point-
to-point fluxes (either uniform over the water depth or at specific heights). An example routine
is given in section B.3.8.
10.9.3 Linear friction
Rigid sheet
For a so-called rigid sheet, the resistance force is assumed to be linearly dependent on the
flow. The resistance coefficient, closs−U, can be specified by the user at input.
Mξ=−closs−U
Um,n
∆x(10.98)
10.9.4 Floating structure
Floating structures can be modelled. Via an external file the depth of the floating structure has
to be specified. A floating structure is simulated by assuming a local pressure that pushes the
water to a depth specified by the key word Filfls. See section B.3.6 for details of the data
input requirements.
In combination with a floating structure, an artificial compression coefficient may be specified.
Then, the time derivative in the continuity equation Equation (9.9) is multiplied by the artificial
compression coefficient α, (keyword Riglid in the input) yielding:
α∂ζ
∂t +1
pGξξpGηη
∂(d+ζ)upGηη
∂ξ +1
pGξξpGηη
∂(d+ζ)vpGξξ
∂η +
+∂ω
∂σ =H(qin −qout).(10.99)
10.10 Artificial vertical mixing due to σco-ordinates
The σ-transformation is boundary-fitted in the vertical. The bottom boundary and free surface
are represented smoothly. The water column is divided into the same number of layers inde-
pendent of the water depth. In a σ-model, the vertical resolution increases automatically in
shallow areas.
For steep bottom slopes combined with vertical stratification, σ-transformed grids introduce
numerical problems for the accurate approximation of horizontal gradients both in the baro-
clinic pressure term and in the horizontal diffusion term. Due to truncation errors artificial
vertical mixing and artificial flow may occur, Leendertse (1990) and Stelling and Van Kester
(1994). This artificial vertical transport is sometimes called “creep”.
Let ζbe the position of the free surface, dthe depth measured downward positive and H
the total water depth. If we consider the transformation from Cartesian co-ordinates to σ
co-ordinates, defined by:
x=x∗, y =y∗, σ =z−ζ
H,(10.100)
Deltares 307 of 688
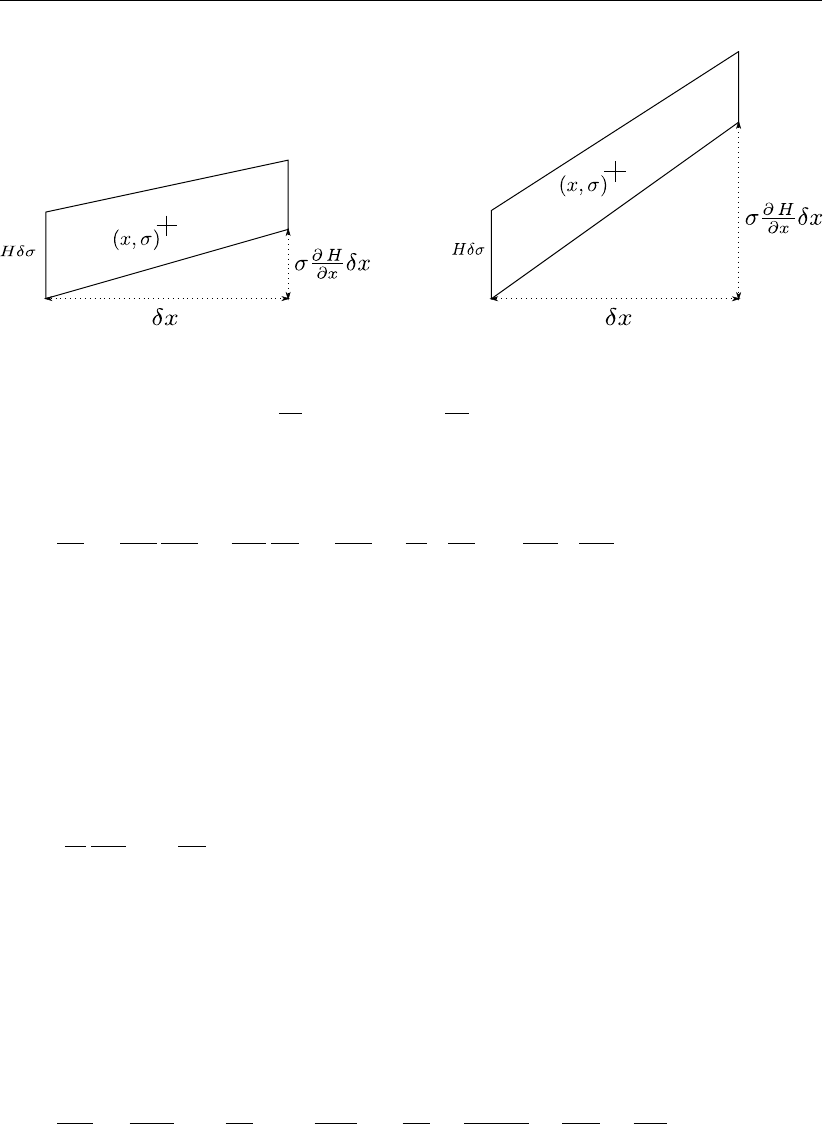
DRAFT
Delft3D-FLOW, User Manual
(a) Hydrostatic consistent grid cell (b) Hydrostatic inconsistent grid cell
Figure 10.19: Example of a hydrostatic consistent and inconsistent grid;
(a)Hδσ > σ ∂H
∂x δx,(b)Hδσ < σ ∂H
∂x δx
the horizontal pressure gradient reads:
∂p
∂x =∂p∗
∂x∗
∂x∗
∂x +∂p∗
∂σ
∂σ
∂x =∂p∗
∂x∗−1
H∂ζ
∂x +σ∂H
∂x ∂p∗
∂σ .(10.101)
In case of vertical stratification near steep bottom slopes, small pressure gradients at the
left-hand side may be the sum of relatively large terms with opposite sign at the right-hand
side. Small truncation errors in the approximation of both terms result in a relatively large
error in the pressure gradient. This artificial forcing produces artificial flow. The truncation
errors depend on the grid sizes ∆xand ∆z. Observations of this kind has led to the notion
of “hydrostatic consistency”, see also Figure 10.19. In the notation used by Haney (1991) this
consistency relation is given by:
σ
H
∂H
∂x <
∂σ
∂x.(10.102)
From this equation, it can be seen that by increasing the number of σ-levels the consistency
condition will eventually be violated.
Similarly, for the horizontal diffusion term, the transformation from Cartesian co-ordinates to
σco-ordinates leads to various cross derivatives. For example, the transformation of a simple
second order derivative leads to:
∂2c
∂x2=∂2c∗
∂x∗2+∂σ
∂x2
−∂2c∗
∂σ2+ 2∂σ
∂x −∂2c∗
∂x∗∂σ +∂2σ
∂x2−∂c∗
∂σ .(10.103)
For such a combination of terms it is difficult to find a numerical approximation that is stable
and positive, see Huang and Spaulding (1996). Near steep bottom slopes or near tidal flats
where the total depth becomes very small, truncations errors in the approximation of the
horizontal diffusive fluxes in σ-co-ordinates are likely to become very large, similar to the
horizontal pressure gradient.
In Delft3D-FLOW the stress tensor is redefined in the σco-ordinate system assuming that the
horizontal length scale is much larger than the water depth (Blumberg and Mellor,1985) and
that the flow is of boundary-layer type. The horizontal gradients are taken along σ-planes.
308 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
Figure 10.20: Finite Volume for diffusive fluxes and pressure gradients
This approach guarantees a positive definite operator, also on the numerical grid (Beckers
et al.,1998). For a detailed description we refer to chapter 9.
If the same approach is used for the horizontal diffusion operator in the transport equation:
∂2c
∂x2≈∂2c∗
∂x∗2,(10.104)
Horizontal diffusion will lead to vertical transport of matter through vertical stratification in-
terfaces (pycnocline) which is unphysical. A more accurate, strict horizontal discretization is
needed.
In Delft3D-FLOW an option is available that minimises artificial vertical diffusion and artificial
flow due to truncation errors; see section 4.5.8 option Correction for sigma-co-ordinates. A
method has been implemented which gives a consistent, stable and monotonic approximation
of both the horizontal pressure gradient and the horizontal diffusion term, even when the
hydrostatic consistency condition Eq. is not fulfilled. This “anti-creep” option is based upon
a Finite Volume approach; see Figure 10.20. The horizontal diffusive fluxes and baroclinic
pressure gradients are approximated in Cartesian co-ordinates by defining rectangular finite
volumes around the σ-co-ordinate grid points. Since these boxes are not nicely connected
to each other, see Figure 10.21, an interpolation in zco-ordinates is required to compute the
fluxes at the interfaces.
Since the centres of the finite volumes on the left-hand side and right-hand side of a vertical
interval are not at the same vertical level, a z-interpolation of the scalar concentration cis
needed to compute strictly horizontal derivatives. The values obtained from this interpolation
are indicated by c∗
1and c∗
2respectively in Figure 10.21.Stelling and Van Kester (1994) apply
a non-linear filter to combine the two consistent approximations of the horizontal gradient,
Deltares 309 of 688
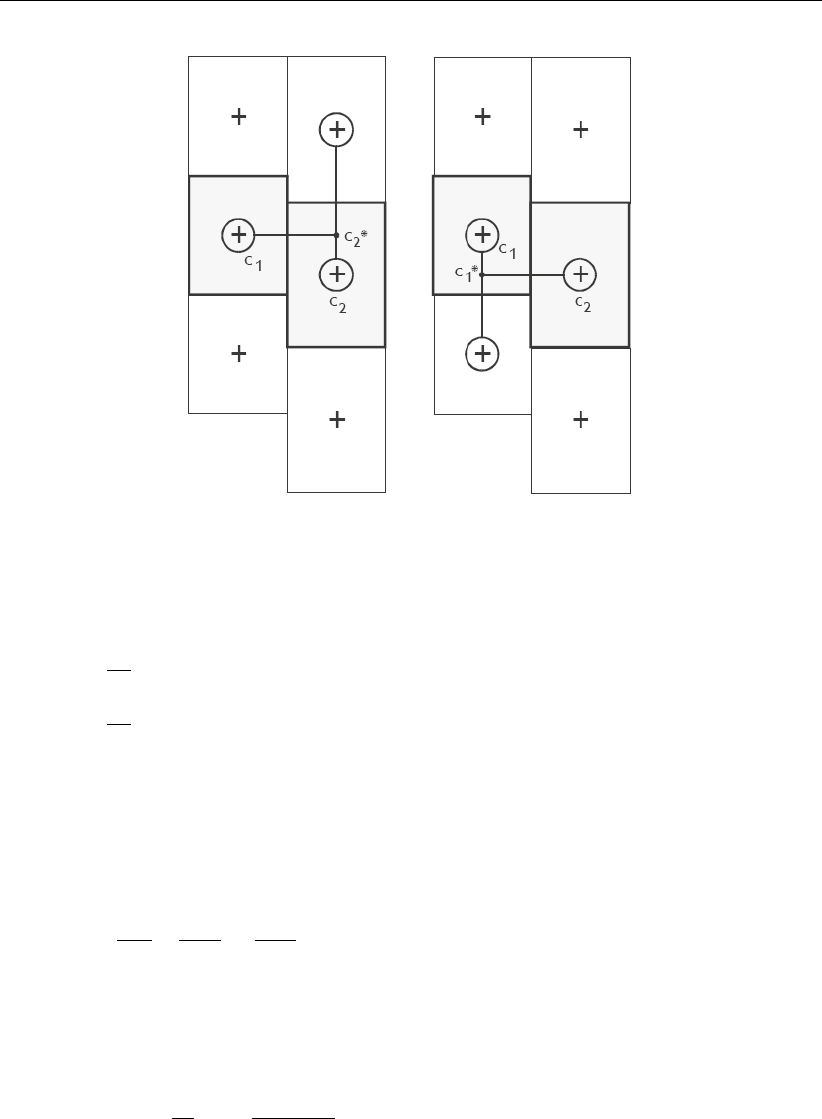
DRAFT
Delft3D-FLOW, User Manual
Figure 10.21: Left and right approximation of a strict horizontal gradient
s1= (c∗
2−c1)/∆xand s2= (c2−c∗
1)/∆x:
If s1×s2<0Then
∆c
∆x= 0
Else
∆c
∆x=sign (s1)×min (|s1|,|s2|)
Endif
(10.105)
If an interval has only grid boxes at one side, the derivative is directly set to zero. The hor-
izontal fluxes are summed for each control volume to compute the diffusive transport. The
integration of the horizontal diffusion term is explicit with time step limitation:
∆t≤1
DH1
∆x2+1
∆y2−1
.(10.106)
The derivatives are used in the integral for the baroclinic pressure force in the momentum
equation:
Px(x, z) = 1
ρ0Zζ
z
g∂ρ (x, s)
∂x ds. (10.107)
Originally, this approach was implemented in Delft3D-FLOW. Slørdal (1997) stated that the
above approximation may sometimes produce errors of the same sign which leads to a sys-
tematic underestimation of the baroclinic pressure term. This underestimation can be ascribed
to the non-linear filter, which selects the minimum of the two gradients under consideration.
This limiter is fully analogous to the min-mod limiter used for the construction of monotone
advection schemes (Hirsch,1990). Since the same approximation of the horizontal gradient
is used for the horizontal diffusion flux, it is important to ensure that the difference operator
is positive definite in order to get physically realistic solutions. The maximum and minimum
of a variable being transported by diffusion do not increase or decrease (min-max principle).
310 of 688 Deltares
DRAFT
Numerical aspects of Delft3D-FLOW
By taking the minimum of the gradients, Stelling and Van Kester (1994) show that, the min-
max principle is fulfilled. Beckers et al. (1998) show that any nine-point consistent linear dis-
cretization of the horizontal diffusion on the σ-grid does not fulfil the min-max principle. From
numerical tests Slørdal (1997) concluded that the underestimation is reduced by increasing
the vertical resolution, but is sometimes enhanced by increasing the horizontal resolution.
Let s4be a consistent approximation of the horizontal gradient s4= (s1+s2)/2.Slørdal
(1997) suggested to take s4as approximation of the horizontal gradient. He calls his approach
the “modified Stelling and Van Kester scheme”. It is equivalent to linear interpolation at a
certain z-level before taking the gradient. It is more accurate than taking the minimum of
the absolute value of the two slopes s1and s2but it does not fulfil the min-max principle
for the diffusion operator. It may introduce wiggles and a small persistent artificial vertical
diffusion (except for linear vertical density distributions). Due to the related artificial mixing,
stratification may disappear entirely for long term simulations, unless the flow is dominated by
the open boundary conditions.
By introducing an additional approximation of the horizontal gradient in the filter algorithm
defined by s3= (c2−c1)/∆x, the stringent conditions of the minimum operator can be re-
laxed somewhat. The drawback of underestimation of the baroclinic pressure force reported
by Slørdal (1997) can be minimised without loosing that the method fulfils the min-max princi-
ple. This third gradient s3, which is consistent for min (|s1|,|s2|)< s3<max (|s1|,|s2|),
has point-to-point transfer properties and therefore leads to a positive scheme for sufficiently
small time steps. The following non-linear approach presently available in Delft3D-FLOW is
both consistent and assures the min-max principle:
If s1×s2<0Then
∆c
∆x= 0
Elseif |s4|<|s3|Then
∆c
∆x=s4
Elseif min (|s1|,|s2|)<|s3|<max (|s1|,|s2|)Then
∆c
∆x=s3
Else
∆c
∆x=sign (s1) min (|s1|,|s2|)
Endif
(10.108)
The method requires a binary search to find the indices of neighbouring grid boxes, which is
time consuming. The increase in computation time is about 30%.
If the streamlines are strictly horizontal, transport of matter discretised on a σco-ordinate
grid may still generate some numerical vertical diffusion by the discretisation of the advection
terms.
10.11 Smoothing parameter boundary conditions
The solution of the shallow water equations is uniquely determined by a set of initial and
boundary conditions. The boundary conditions represent the external forcing and determine
the steady state solution. The deviation between the initial condition and the steady state
solution generates a transient (mass spring system analogy).
In Delft3D-FLOW the initial conditions for the water level and velocities are obtained from:
The results of a previous run (warm start).
User-prescribed (space varying or uniform) input fields (cold start).
Deltares 311 of 688
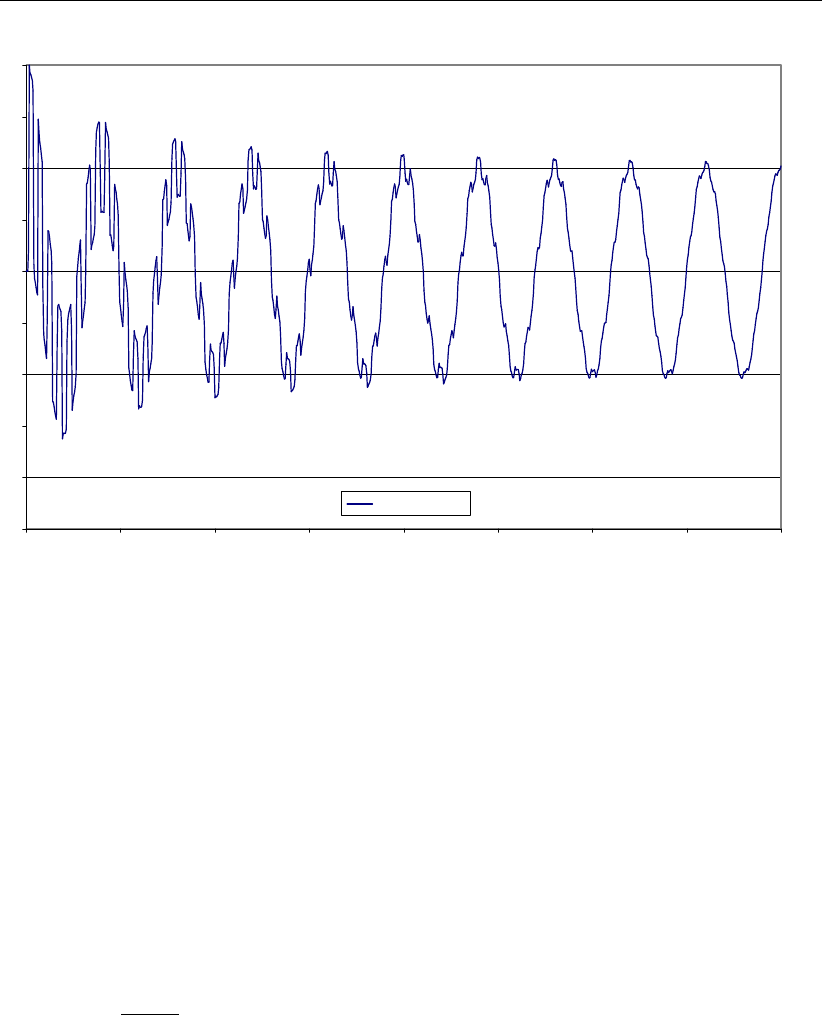
DRAFT
Delft3D-FLOW, User Manual
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0
50000
100000
150000
200000
250000
300000
350000
400000
water levels
Figure 10.22: Cold start with damping of eigen oscillations due to bottom friction
The initial values are usually inconsistent with the boundary conditions at the start time of the
simulation. This will generate a transient solution consisting of waves with eigen frequencies
of the model domain. These waves may be reflected at the boundaries and generate a stand-
ing wave system. The waves should be dissipated completely by bottom friction and viscosity
terms or leave the domain through the open boundaries, see Figure 10.22. The damping of
the transient solution determines the spin-up time of the numerical model.
To reduce the amplitude of the transient wave and the spin-up time of a model, Delft3D-
FLOW has an option to switch on the boundary forcing gradually by use of a smoothing period
(parameter Tsmo). The boundary forcing is given by:
Fsmo
b(t) = (1 −α)Fb(t) + αFi(t),(10.109)
with:
α=Tsmo−t
Tsmo , t < Tsmo,
0, t ≥Tsmo,(10.110)
and:
Fi(t)The initial value at the boundary.
Fb(t)The boundary condition.
Fsmo
b(t)The boundary condition after smoothing.
Smoothing is possible both for a warm and a cold start. If the initial conditions are consistent
with the boundary conditions at the start time of the simulation then the smoothing time should
be set to zero.
10.12 Assumptions and restrictions
The solution of the discretized equations is just an approximation of the exact solution. The
accuracy of the solution depends not only on the numerical scheme, but also on the way in
312 of 688 Deltares

DRAFT
Numerical aspects of Delft3D-FLOW
which the bottom topography, the geographical area, and the physical processes (turbulence,
wave-current interaction) are modelled.
The time integration method strongly influences the wave propagation when applying a large
time step. The assumption is made that, by restricting the computational time step, the free
surface waves can be propagated correctly.
The open boundaries in a numerical flow model are artificial in the sense that they are intro-
duced to limit the computational area that is modelled. The free surface waves should pass
these boundaries completely unhindered. In the numerical model, wave reflections may occur
at the open boundaries. These reflections will be observed as spurious oscillations superim-
posed on the physical results. In Delft3D-FLOW, weakly reflective boundaries are available
which diminish these effects.
The open boundary can be divided into segments (sections). The boundary conditions in
Delft3D-FLOW are specified for these segments, two values per segment are required, one for
each segment end. The boundary condition at internal points within this segment is obtained
by linearly interpolation between the end points. Therefore, if the phase variation of the tidal
forcing along an open boundary segment is non-linear then the number of open boundary
segments should be increased so that the phases at all the segments can be specified. Phase
errors may generate an artificial re-circulation flow (eddy) near the open boundary. For steady-
state simulations, a similar effect may be observed near the open boundaries if the effect of
the Coriolis force on the water level gradient along the open boundary is not taken into account
in the boundary conditions.
Care must be taken when time-series of measurements are directly prescribed as forcing
functions at the open boundaries. Measurements often contain a lot of undesired noise, due
to meteorological or other effects. For tidal flow computations, calibration on processed field
data obtained from a tidal analysis or Fourier analysis, avoids this problem.
Deltares 313 of 688

DRAFT
Delft3D-FLOW, User Manual
314 of 688 Deltares

DRAFT
11 Sediment transport and morphology
11.1 General formulations
11.1.1 Introduction
The sediment transport and morphology module supports both bedload and suspended load
transport of non-cohesive sediments and suspended load of cohesive sediments. For schema-
tisation we distinguish “mud” (cohesive suspended load transport), “sand” (non-cohesive bed-
load and suspended load transport) and “bedload” (non-cohesive bedload only or total load
transport) fractions. A model may contain a mixture of up to 99 suspended (i.e. “sand” and
“mud”) fraction and an arbitrary amount of “bedload” fractions if computer memory and simu-
lation time allows. The only difference between “bedload” and “sand” fractions lies in the fact
that the suspended load advection-diffusion equation is not solved for the “bedload” fraction.
If the suspended load is known to be negligible (either due to sediment diameter or sediment
transport formula chosen), the “bedload” approach is more efficient. Sediment interactions
are taken into account although especially in the field of sand-mud interactions still a couple
of processes are lacking.
11.1.2 Suspended transport
Three-dimensional transport of suspended sediment is calculated by solving the three-dimensional
advection-diffusion (mass-balance) equation for the suspended sediment:
∂c(`)
∂t +∂uc(`)
∂x +∂vc(`)
∂y +
∂w−w(`)
sc(`)
∂z +
−∂
∂x ε(`)
s,x
∂c(`)
∂x −∂
∂y ε(`)
s,y
∂c(`)
∂y −∂
∂z ε(`)
s,z
∂c(`)
∂z = 0,(11.1)
where:
c(`)mass concentration of sediment fraction (`)[kg/m3]
u,vand wflow velocity components [m/s]
ε(`)
s,x,ε(`)
s,y and ε(`)
s,z eddy diffusivities of sediment fraction (`)[m2/s]
w(`)
s(hindered) sediment settling velocity of sediment fraction (`)[m/s]
The local flow velocities and eddy diffusivities are based on the results of the hydrodynamic
computations. Computationally, the three-dimensional transport of sediment is computed in
exactly the same way as the transport of any other conservative constituent, such as salinity,
heat, and constituents. There are, however, a number of important differences between sed-
iment and other constituents, for example, the exchange of sediment between the bed and
the flow, and the settling velocity of sediment under the action of gravity. These additional
processes for sediment are obviously of critical importance. Other processes such as the
effect that sediment has on the local mixture density, and hence on turbulence damping, can
also be taken into account. In addition, if a net flux of sediment from the bed to the flow, or
vice versa, occurs then the resulting change in the bathymetry should influence subsequent
hydrodynamic calculations. The formulation of several of these processes (such as, settling
velocity, sediment deposition and pickup) are sediment-type specific, this especially applies
for sand and mud. Furthermore, the interaction of sediment fractions is important for many
processes, for instance the simultaneous presence of multiple suspended sediment fractions
has implications for the calculation of the local hindered settling velocity of any one sediment
fraction as well as for the resulting mixture density.
Deltares 315 of 688
DRAFT
Delft3D-FLOW, User Manual
The following sections describe, at a conceptual level, the differences between the suspended
transport of sediments and the transport of other conservative constituents. At the same
time we discuss some of the differences in general terms and refer for the details of the
mathematical formulations to Sections 11.2 and 11.3.
Remarks:
The presence of multiple sediment fractions considerably complicates the calculation
of the density of the bed and the availability of a particular class of sediment at the
bed. See the sections on sediment interaction (Sections 11.2.4 and 11.4.3) and bed
composition models (section 11.6.4).
Small negative sediment concentrations (−1·10−3kg/m3) can be found in a com-
putation. These negative concentrations can be suppressed by applying a horizontal
Forester filter, Sections 4.5.8 and 10.6.4. However, this can result in a substantially
larger computing time. It is suggested to accept small negative concentrations and
to apply a Forester filter only when the negative concentrations become unacceptably
large.
Avertical Forester filter applied in a sediment transport computation will not affect the
sediments. Since this filter smoothes the vertical profile and thus can have a strong
influence on the vertical mixing processes, this vertical filter has been de-activated for
sediments.
11.1.3 Effect of sediment on fluid density
By default Delft3D-FLOW uses the empirical relation formulated by UNESCO (1981a) to ad-
just the density of water in order to take into account varying temperature and salinity. For
sediment transport this relation is extended to include the density effect of sediment fractions
in the fluid mixture. This is achieved by adding (per unit volume) the mass of all sediment
fractions, and subtracting the mass of the displaced water. As a mathematical statement this
translates as:
ρmix S, c(`)=ρw(S) +
lsed
X
`=1
c(`) 1−ρw(S)
ρ(`)
s!(11.2)
where:
ρw(S)specific density of water with salinity concentration S[kg/m3]
Ssalinity concentration [ppt]
ρ(`)
sspecific density of sediment fraction (`)[kg/m3]
lsed number of sediment fractions
Horizontal density gradients (now also due to differences in sediment concentrations) can
create density currents. Vertical density gradients can also have a significant effect on the
amount of vertical turbulent mixing present, as discussed below.
You can include or neglect the effect of sediment on the fluid density by setting the DENSIN
flag in the morphology input file.
Remark:
This option is included as it has been found that a secondary effect of including sediment
in the density calculations is a reduction of the flow velocity in the lower computational
layers (when compared with a standard logarithmic velocity profile) and a consequent
reduction in the computed bed shear stress. This reduction in bed shear stress is
particularly pronounced when the k-εturbulence closure model is used, and leads to
an increase in overall flow velocity and a consequent lowering of the free surface. Our
316 of 688 Deltares
DRAFT
Sediment transport and morphology
experience shows that this change in the free surface level (even if very slight) can lead
to calibration problems when converting an existing 2DH model to 3D if the model is
driven using water level boundary conditions. A simple method of circumventing these
problems can be achieved by setting DENSIN = .false. which has the effect of
preventing the sediment from having any effect on the density of the water/sediment
mixture.
11.1.4 Sediment settling velocity
The settling velocity w(`)
sfor sand and mud are strongly different in formulation; see Sections
11.2.1 and 11.3.1 for details. In high concentration mixtures, the settling velocity of a single
particle is reduced due to the presence of other particles. In order to account for this hindered
settling effect we follow Richardson and Zaki (1954) and determine the settling velocity in
a fluid-sediment mixture as a function of the sediment concentration and the non-hindered
settling fall velocity:
w(`)
s=1−ctot
s
Csoil 5
w(`)
s,0.(11.3)
where Csoil is the reference density (input parameter), ws,0is the ‘basic’ sediment fraction
specific settling velocity. The total mass concentration ctot
mis the sum of the mass concentra-
tions of the sediment fractions:
ctot
m=
lsed
X
`=1
c(`)
s.(11.4)
As the fall velocity is now a function of the sediment fractions concentration, this implies that
each sediment fraction has a fall velocity which is a function of location and time.
Remark:
The process of sediment settling is computed with a first-order upwind numerical scheme.
While use of the upwind settling formulation does slightly under-predict the mass of sed-
iment settling, the magnitude of this error has been shown to be rather small (Lesser
et al.,2000).
11.1.5 Dispersive transport
The eddy diffusivities ε(`)
s,x,ε(`)
s,y and ε(`)
s,z depend on the flow characteristics (turbulence level,
taking into account the effect of high sediment concentrations on damping turbulent exchange
processes) and the influence of waves (due to wave induced currents and enhanced bottom
shear stresses). Delft3D-FLOW supports four so-called “turbulence closure models”:
Constant coefficient.
Algebraic eddy viscosity closure model.
k-Lturbulence closure model.
k-εturbulence closure model.
The first is a simple constant value which is specified by you. A constant eddy viscosity will
lead to parabolic vertical velocity profiles (laminar flow). The other three turbulence closure
models are based on the eddy viscosity concept of Kolmogorov (1942) and Prandtl (1945)
and offer zero, first, and second order closures for the turbulent kinetic energy (k) and for the
mixing length (L). All three of the more advanced turbulence closure models take into account
Deltares 317 of 688
DRAFT
Delft3D-FLOW, User Manual
the effect that a vertical density gradient has on damping the amount of vertical turbulent
mixing. See section 9.5 for a full description of the available turbulence closure models.
The output of a turbulence closure model is the eddy viscosity at each layer interface; from
this the vertical sediment mixing coefficient is calculated:
ε(`)
s=βεf,(11.5)
where:
ε(`)
svertical sediment mixing coefficient for the sediment fraction (`)
βnon-cohesive sediment: Van Rijn’s ‘beta’ factor or effective ‘beta’ factor.
cohesive sediment fractions and fine sand (<150 µm): 1.0.
εfvertical fluid mixing coefficient calculated by the selected turbulence model.
Remarks:
For cohesive sediment fractions the extra turbulent mixing due to waves is not yet in-
cluded in the eddy diffusivity. This is a limitation of the present implementation. See
also section 11.2.2.
For non-cohesive sediment the effect of waves is accounted for by using a modified or
effective ‘beta’ factor of Van Rijn (k-εmodel) or by using a separate formula to compute
εf(algebraic or k-L) model. See also section 11.3.2.
11.1.6 Three-dimensional wave effects
Traditionally wave effects were only incorporated in a depth-averaged manner via a (breaking)
wave induced shear stress at the surface, a wave induced mass flux and an increased bed
shear stress. Important wave effects such as streaming in the wave boundary layer and wave
induced turbulence were not accounted for. The problem of three dimensional wave effects
has been studied by Walstra and Roelvink (2000); their main suggestions for improvement
are:
1 The wave induced mass flux is corrected with the second order Stokes drift.
2 The production of turbulent energy associated with wave breaking is incorporated by in-
troducing an extra source term in the kinetic energy and dissipation equations of the k-ε
turbulence model.
3 The production of turbulent energy associated with dissipation in the near-bed wave bound-
ary layer is incorporated by introducing an extra source term in the kinetic energy and
dissipation equations of the k-εturbulence model.
4 Streaming (a wave induced current in the wave boundary layer directed in the wave prop-
agation direction) is modelled as a time averaged shear stress.
These improvements have been implemented in Delft3D-FLOW; for full details you are re-
ferred to section 9.7. These effects are important when computing the transport of sediment
in wave and current situations; see Sections 11.2.5 and 11.3.4 for full details regarding their
effect on cohesive and non-cohesive sediments respectively.
11.1.7 Initial and boundary conditions
To solve Equation (11.1) you need to prescribe initial and boundary conditions for each sus-
pended sediment fraction.
318 of 688 Deltares

DRAFT
Sediment transport and morphology
11.1.7.1 Initial condition
The initial conditions for the sediment fractions are handled in exactly the same manner as
those for any other conservative constituent, i.e. you can specify:
One global initial concentration for each sediment fraction.
Space-varying initial concentrations read from a restart file generated by a previous run.
Space-varying initial concentrations read from a user-defined input file.
In these options cohesive and non-cohesive sediment fractions are treated in the same way.
In many practical applications the non-cohesive sediment concentrations adapt very rapidly to
equilibrium conditions, so in the case of a cold start where the hydrodynamic model also takes
some time to stabilise, a uniform zero concentration for the non-cohesive sediment fractions
is usually adequate.
11.1.7.2 Boundary conditions
For each of the model boundaries you must prescribe the boundary condition for each sedi-
ment fraction. We discuss in short the general type of conditions and refer for the details to
the sections to follow.
Water surface boundary
The vertical diffusive flux through the free surface is set to zero for all conservative constituents
(except heat, which can cross this boundary). This is left unchanged for suspended sediment.
−w(`)
sc(`)−ε(`)
s,z
∂c(`)
∂z = 0,at z=ζ(11.6)
where z=ζis the location of the free surface.
Bed boundary condition
The exchange of material in suspension and the bed is modelled by calculating the sediment
fluxes from the bottom computational layer to the bed, and vice versa. These fluxes are then
applied to the bottom computational layer by means of a sediment source and/or sink term in
each computational cell. The calculated fluxes are also applied to the bed in order to update
the bed level. The boundary condition at the bed is given by:
−w(`)
sc(`)−ε(`)
s,z
∂c(`)
∂z =D(`)−E(`),at z=zb(11.7)
where:
D(`)sediment deposition rate of sediment fraction (`).
E(`)sediment erosion rate of sediment fraction (`).
The formulations of D(`)and E(`)strongly differ for cohesive and non-cohesive sediment; for
the details you are referred to Sections 11.2.3 and 11.3.4 respectively.
Deltares 319 of 688

DRAFT
Delft3D-FLOW, User Manual
Open inflow boundaries
Delft3D-FLOW requires you to specify boundary conditions for all conservative constituents at
all open inflow boundaries. When modelling in three dimensions you may choose to specify
boundary concentrations that have a uniform, linear, or step distribution over the vertical. You
may also choose to specify a “Thatcher-Harleman” return time to simulate the re-entry of
material that flowed out of the model after the flow reverses direction.
All of these options are also available for sediment constituents, although they are probably
more appropriate for fine, cohesive sediment than for sand-sized particles. To assist with
modelling coarser material an additional option has been included. This option allows you to
specify that, at all open inflow boundaries, the flow should enter carrying all “sand” sediment
fractions at their “equilibrium” concentration profiles. This feature has been implemented as
a Neumann boundary condition, that is, zero concentration gradient at the boundary. By set-
ting the sediment concentrations at the boundary equal to those just inside model domain, a
near-perfectly adapted flow will enter the domain and very little accretion or erosion should
be experienced near the model boundaries. This will generally be the desired situation if the
model boundaries are well chosen. This feature can be activated for sand and mud frac-
tion separately by setting NeuBcSand (previously, EqmBc) and/or NeuBcMud to true in the
morphology input file.
Open outflow boundaries
No boundary condition is prescribed at outflow boundaries; effectively this means that the dis-
persive transport of sediment at the outflow boundary is neglected compared to the advective
transport.
11.2 Cohesive sediment
11.2.1 Cohesive sediment settling velocity
In salt water cohesive sediment tends to flocculate to form sediment “flocs”, with the degree
of flocculation depending on the salinity of the water. These flocs are much larger than the
individual sediment particles and settle at a faster rate. In order to model this salinity depen-
dency you must supply two settling velocities and a maximum salinity. The first velocity, WS0,
is taken to be the settling velocity of the sediment fraction in fresh water (salinity = 0). The
second velocity, WSM, is the settling velocity of the fraction in water having a salinity equal to
SALMAX. The settling velocity of the sediment flocs is calculated as follows:
w(`)
s,0=
w(`)
s,max
21−cos( πS
Smax )+w(`)
s,f
21 + cos( πS
Smax ),when S≤Smax
w(`)
s,max,when S > Smax
(11.8)
where:
w(`)
s,0the (non-hindered) settling velocity of sediment fraction (`)
w(`)
s,max WSM, settling velocity of sediment fraction (`)at salinity concentration SALMAX
w(`)
s,f WS0, fresh water settling velocity of sediment fraction (`)
Ssalinity
Smax SALMAX, maximal salinity at which WSM is specified
Remarks:
Modelling turbulence induced flocculation or the break-up of sediment flocs is not yet
implemented.
The influence of flocculation is disregarded by setting WSM = WS0.
320 of 688 Deltares

DRAFT
Sediment transport and morphology
11.2.2 Cohesive sediment dispersion
The vertical mixing coefficient for sediment is equal to the vertical fluid mixing coefficient
calculated by the selected turbulence closure model, i.e.:
ε(`)
s=εf,(11.9)
where:
ε(`)
svertical sediment mixing coefficient for sediment fraction (`)
εfvertical fluid mixing coefficient calculated by the selected turbulence closure
model
11.2.3 Cohesive sediment erosion and deposition
For cohesive sediment fractions the fluxes between the water phase and the bed are calcu-
lated with the well-known Partheniades-Krone formulations (Partheniades,1965):
E(`)=M(`)Sτcw, τ(`)
cr,e,(11.10)
D(`)=w(`)
sc`
bSτcw, τ(`)
cr,d,(11.11)
c(`)
b=c(`)z=∆zb
2, t,(11.12)
where:
E(`)erosion flux [kg m−2s−1]
M(`)user-defined erosion parameter EROUNI [kg m−2s−1]
Sτcw, τ(`)
cr,eerosion step function:
Sτcw, τ(`)
cr,e=
τcw
τ(`)
cr,e −1!,when τcw > τ(`)
cr,e,
0,when τcw ≤τ(`)
cr,e.
(11.13)
D(`)deposition flux [kg m−2s−1]
w(`)
sfall velocity (hindered) [m/s]
c(`)
baverage sediment concentration in the near bottom computational
layer
Sτcw, τ(`)
cr,ddeposition step function:
Sτcw, τ(`)
cr,d=
1−τcw
τ(`)
cr,d !,when τcw < τ(`)
cr,d,
0,when τcw ≥τ(`)
cr,d.
(11.14)
τcw maximum bed shear stress due to current and waves as calculated
by the wave-current interaction model selected by the user; see sec-
tion 9.7 for full details
τ(`)
cr,e user-defined critical erosion shear stress TCEUNI [N/m2]
τ(`)
cr,d user-defined critical deposition shear stress TCDUNI [N/m2]
Remark:
Superscript (`)implies that this quantity applies to sediment fraction (`).
Deltares 321 of 688

DRAFT
Delft3D-FLOW, User Manual
The calculated erosion or deposition flux is applied to the near bottom computational cell by
setting the appropriate sink and source terms for that cell. Advection, particle settling, and
diffusion through the bottom of the near bottom computational cell are all set to zero to prevent
double counting these fluxes.
11.2.4 Interaction of sediment fractions
The following notes hold only in case of multiple sediment fractions. The formulations given
in the previous section have been formulated for uniform cohesive sediment beds. However,
often the bed will be made up of a range of sediment types and sizes. In such cases the
erosion rate will be affected. If the bed stratigraphy is modelled in detail, it may be assumed
that the erosion rate is proportional to the availability of the sediment fraction considered
in the top-most layer of the bed stratigraphy. On the other hand if the bed stratigraphy is not
explicitly included in the model and only the overall characteristics of the local bed composition
is known, one must assume either that the bed composition is almost uniform (in which case
the erosion rate can again be assumed to be proportional to the bed composition) or that the
cohesive sediment fraction considered forms a layer that covers the other sediment fractions
(in this case the erosion rate of the cohesive sediment will not be reduced). The former
approach is nowadays the default approach for the online-morphology module, but the latter
behaviour may be activated by setting the OldMudFrac keyword tot true in the morphology
input file.
Remarks:
Assuming an erosion rate proportional to the availability of the sediment fraction consid-
ered may result in a significant underestimation of the erosion rate if the bed is modelled
as a single uniformly mixed layer (default setting) and the mud contents is low.
Assuming that the erosion rate is independent of the availability of the sediment fraction
considered will lead to an overestimation of the erosion rate. For instance, if the model
includes two equal cohesive sediment fractions their total transport rate will be double
that of the rate observed in an identical simulation carried out using the total amount of
the two sediment fractions in the former simulation.
11.2.5 Influence of waves on cohesive sediment transport
For cohesive sediment fractions the sediment mixing coefficient will still be set following Equa-
tion (11.9). This implies that the extra turbulent mixing due to waves will not be included in the
suspended sediment transport calculations (for these sediment fractions) except by way of
the enhancement of the bed shear stress caused by wave-current interaction, see section 9.7
for details. This is a limitation of the present implementation.
11.2.6 Inclusion of a fixed layer
If the thickness of the sediment layer becomes small then the erosion flux is reduced by a
factor fFIXFAC as defined in section 11.4.4. This reduction factor is related to the formula-
tions implemented for non cohesive sediment transport (see Sections 11.3.5 and 11.4.4 for
suspended and bedload transport respectively).
322 of 688 Deltares

DRAFT
Sediment transport and morphology
11.2.7 Inflow boundary conditions cohesive sediment
Although it is general good advice to locate the open boundaries sufficiently far away from
the area of interest, this is not always possible in long-term simulations. In such cases it is
desirable to impose some kind of equilibrium boundary conditions. The mud concentrations
are in general more loosely coupled to local morphology than the concentrations of coarser
non-cohesive sediment fractions; a unique “equilibrium” concentration (profile) does often not
exist due to differences in critical shear stresses for erosion and sedimentation. So, Delft3D-
FLOW allows for a different approach. For cohesive material you can specify that, at all open
inflow boundaries, the flow should enter carrying the same mud concentration as computed
in the interior of the model. This feature is enabled by setting NeuBcMud in the morphology
input file to true (Neumann boundary condition: concentration gradient perpendicular to open
boundary equal to zero). Although this option may sometimes be very useful, one must be
careful when applying it: the sediment concentration of the incoming flow may take on any
value that does not lead to significant deposition in the first grid cell.
By setting NeuBcMud = false, the concentrations to be applied at the inflow boundaries
are read from the <∗.bcc>file, which has to be created with the FLOW User Interface. If the
parameter is set to true, the values specified in the <∗.bcc>file are overruled.
11.3 Non-cohesive sediment
For the transport of non-cohesive sediment, Van Rijn et al. (2000) approach is followed by
default. You can also specify a number of other transport formulations (see section 11.5)
11.3.1 Non-cohesive sediment settling velocity
The settling velocity of a non-cohesive (“sand”) sediment fraction is computed following the
method of Van Rijn (1993). The formulation used depends on the diameter of the sediment in
suspension:
w(`)
s,0=
(s(`)−1)gD(`)2
s
18ν,65 µm< Ds≤100 µm
10ν
Ds
s1 + 0.01(s(`)−1)gD(`)3
s
ν2−1
,100 µm< Ds≤1000 µm
1.1q(s(`)−1)gD(`)
s,1000 µm< Ds
(11.15)
where:
s(`)relative density ρ(`)
s/ρwof sediment fraction(`)
D(`)
srepresentative diameter of sediment fraction (`)
νkinematic viscosity coefficient of water [m2/s]
D(`)
sis the representative diameter of the suspended sediment given by the user-defined sed-
iment diameter SEDDIA (D50 of bed material) multiplied by the user-defined factor FACDSS
(see also remarks). This value of D(`)
swill be overruled if IOPSUS=1 and the transport for-
mula of Van Rijn (1993) has been selected, see section 11.5.1 for details.
Remark:
In the case of non-uniform bed material Van Rijn (1993) concluded that, on the basis of
measurements, D(`)
sshould be in the range of 60 to 100 % of D50 of the bed material.
Deltares 323 of 688

DRAFT
Delft3D-FLOW, User Manual
If the bed material is very widely graded (well sorted) consideration should be given to
using several sediment fractions to model its behaviour more accurately.
11.3.2 Non-cohesive sediment dispersion
The output of a turbulence closure model is the eddy viscosity at each layer interface; from
this the vertical sediment mixing coefficient is calculated using the following expressions:
11.3.2.1 Using the algebraic or k-Lturbulence model
Without waves
If the algebraic or k-Lturbulence model is selected and waves are inactive then the vertical
mixing coefficient for sediment is computed from the vertical fluid mixing coefficient calcu-
lated by the selected turbulence closure model. For non-cohesive sediment the fluid mixing
coefficient is multiplied by Van Rijn’s ‘beta factor’ which is intended to describe the different
diffusivity of a fluid ‘particle’ and a sand grain. Expressed mathematically:
ε(`)
s=βε(`)
f,(11.16)
where:
ε(`)
svertical sediment mixing coefficient for sediment fraction (`)
βVan Rijn’s ‘beta’ factor for the sediment fraction (see Equation (11.24))
ε(`)
fvertical fluid mixing coefficient calculated by the selected turbulence closure
model
Including waves
If waves are included in a simulation using the algebraic or k-Lturbulence closure model
then the sediment mixing coefficient for non-cohesive sediment fractions is calculated entirely
separately from the turbulence closure model, using expressions given by Van Rijn (1993) for
both the current-related and wave-related vertical turbulent mixing of sediment.
The current-related mixing is calculated using the ‘parabolic-constant’ distribution recom-
mended by Van Rijn:
ε(`)
s,c =κβu∗,cz(1 −z/h),when z < 0.5h,
0.25κβu∗,ch, when z≥0.5h, (11.17)
where:
ε(`)
s,c vertical sediment mixing coefficient due to currents (for this sediment fraction)
u∗,c current-related bed shear velocity
In the lower half of the water column this expression should produce similar turbulent mixing
values to those produced by the algebraic turbulence closure model. The turbulent mixing in
the upper half of the water column is generally of little importance to the transport of ‘sand’
sediment fractions as sediment concentrations in the upper half of the water column are low.
The wave-related mixing is also calculated following Van Rijn (1993). In this case Van Rijn rec-
ommends a smoothed step type distribution over the vertical, with a linear transition between
the two hinge points, see Figure 11.1.
324 of 688 Deltares
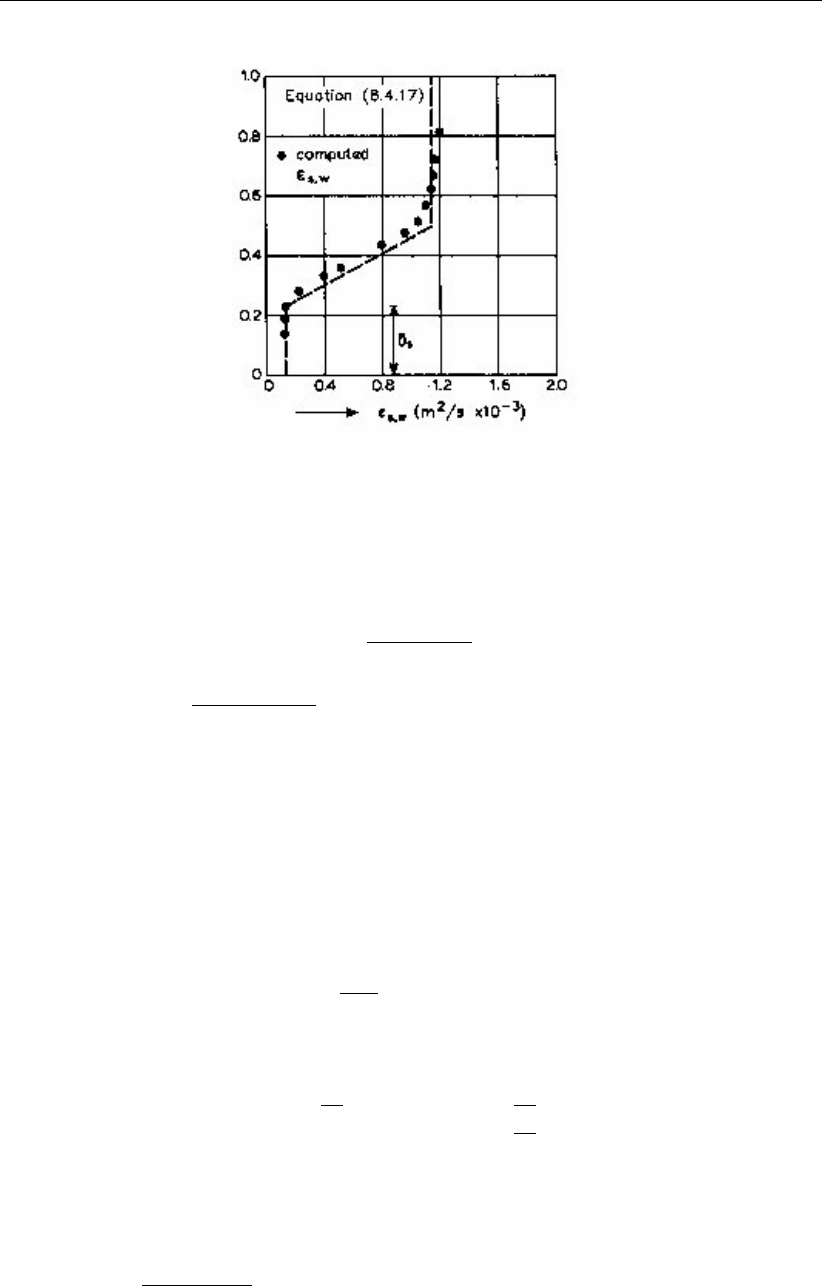
DRAFT
Sediment transport and morphology
Figure 11.1: Sediment mixing coefficient in non-breaking waves (Source: Van Rijn
(1993))
The expressions used to set this distribution are:
ε(`)
s,w =
ε(`)
s,bed = 0.004D∗δ(`)
sˆ
Uδ,when z≤δ(`)
s,
ε(`)
s,bed +ε(`)
s,max −ε(`)
s,bed z−δ(`)
s
0.5h−δ(`)
s!,when δ(`)
s< z < 0.5h,
ε(`)
s,max =0.035γbrhHs
Tp
,when z≥0.5h,
(11.18)
where δ(`)
s(the thickness of the near-bed sediment mixing layer) is estimated using Van Rijn’s
formulation, given by:
δ(`)
s= min [0.5,max {0.1,max (5γbrδw,10γbrks,w)}](11.19)
where:
δwthickness of the wave boundary layer:
δw= 0.072 ˆ
Aδ ˆ
Aδ
ks,w !−0.25
(11.20)
γbr empirical coefficient related to wave breaking:
γbr =1 + Hs
h−0.40.5when Hs
h>0.4
1when Hs
h≤0.4(11.21)
ks,w wave-related bed roughness (as calculated for suspended sediment transport)
We calculate the total vertical sediment mixing coefficient by following Van Rijn and taking the
sum of the squares:
ε(`)
s=qε(`)2
s,c +ε(`)2
s,w ,(11.22)
where εsis the vertical sediment diffusion coefficient used in the suspended sediment trans-
port calculations for this sediment fraction.
Deltares 325 of 688
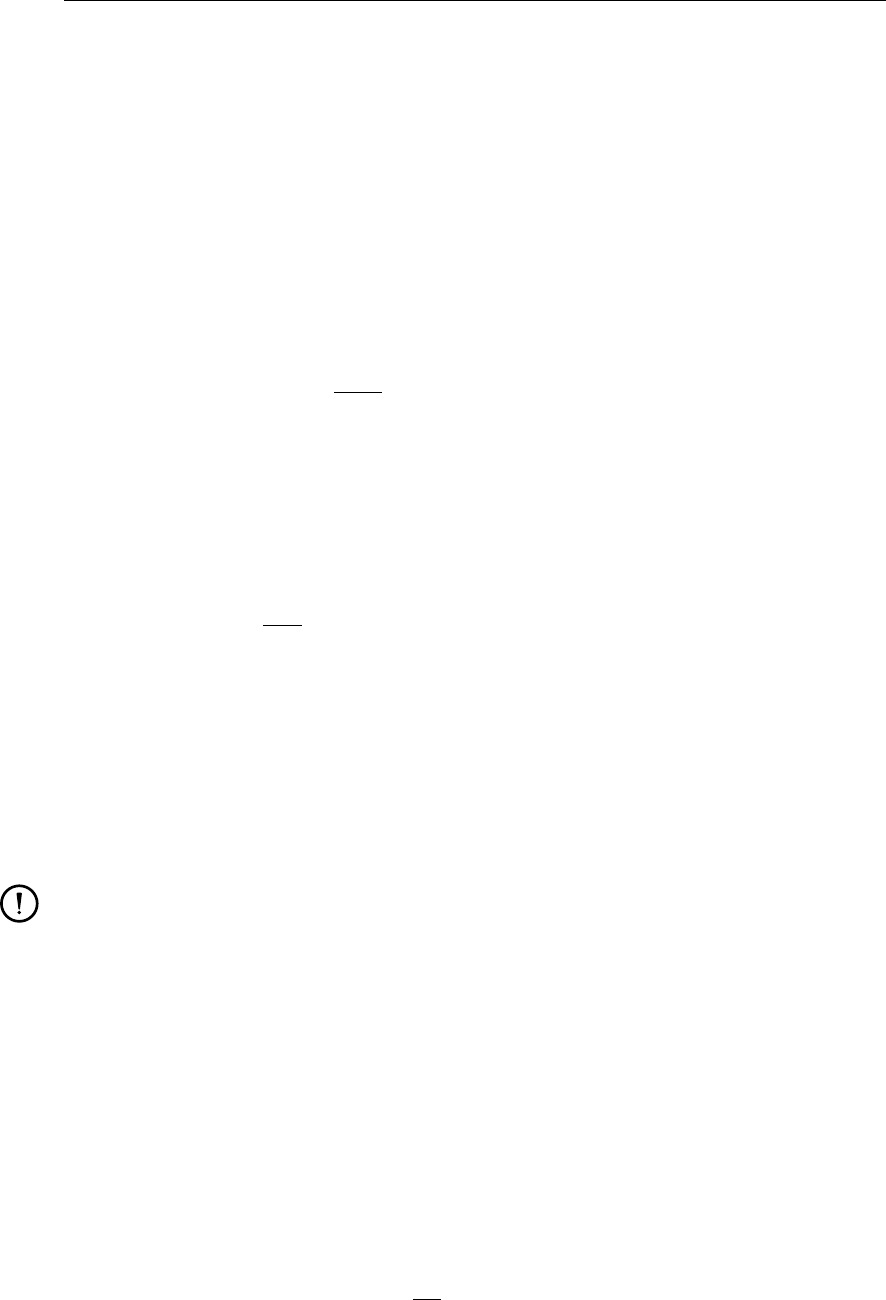
DRAFT
Delft3D-FLOW, User Manual
11.3.2.2 Using the k-εturbulence model
In the case of the k-εturbulence closure model the vertical sediment mixing coefficient can
be calculated directly from the vertical fluid mixing coefficient calculated by the turbulence
closure model, using the following expression:
ε(`)
s=β(`)
eff εf,(11.23)
where:
ε(`)
svertical sediment mixing coefficient of sediment fraction (`)
β(`)
eff the effective Van Rijn’s ‘beta’ factor of sediment fraction (`)As the beta factor
should only be applied to the current-related mixing this is estimated as: β(`)
eff =
1 + β(`)−1τc
τw+τc,for non-cohesive sediment fractions
β(`)Van Rijn’s ‘beta’ factor of the sediment fraction (`),Equation (11.24)
τcbed shear stress due to currents
τwbed shear stress due to waves
εfvertical fluid mixing coefficient calculated by the k-εturbulence closure model
Van Rijn’s ’beta’ factor is calculated from (Van Rijn,1984b):
β(`)= 1 + 2 w(`)
s
u∗,c !2
.(11.24)
Where w(`)
sis the settling velocity of the non-cohesive sediment fraction, and u∗,c is the local
bed shear stress due to currents.
This implies that the value of β(`)is space (and time) varying, however it is constant over the
depth of the flow. In addition, due to the limited knowledge of the physical processes involved,
we follow Van Rijn (1993) and limit β(`)to the range 1< β(`)<1.5.
Remarks:
In a wave and current situation Van Rijn (1993) applies the β-factor to only the current-
related turbulent mixing, whereas we apply it to the total turbulent mixing calculated by
the selected turbulence closure model. However, little is known about the dependence
of the β-factor on flow conditions; this discrepancy is expected to be of little importance
in practical situations.
The k-εturbulence closure model has been extended by Walstra et al. (2000) to include
the three-dimensional effects of waves. However the effect of wave asymmetry on the
bedload transport is not yet included.
11.3.3 Reference concentration
For non-cohesive sediment (e.g. sand), we follow the method of Van Rijn (1993) for the com-
bined effect of waves and currents. The reference height is given by:
a= min max AKSFAC ·ks,∆r
2,0.01h,0.20h,(11.25)
where:
aVan Rijn’s reference height
AksFac user-defined proportionality factor (morphology input file)
326 of 688 Deltares
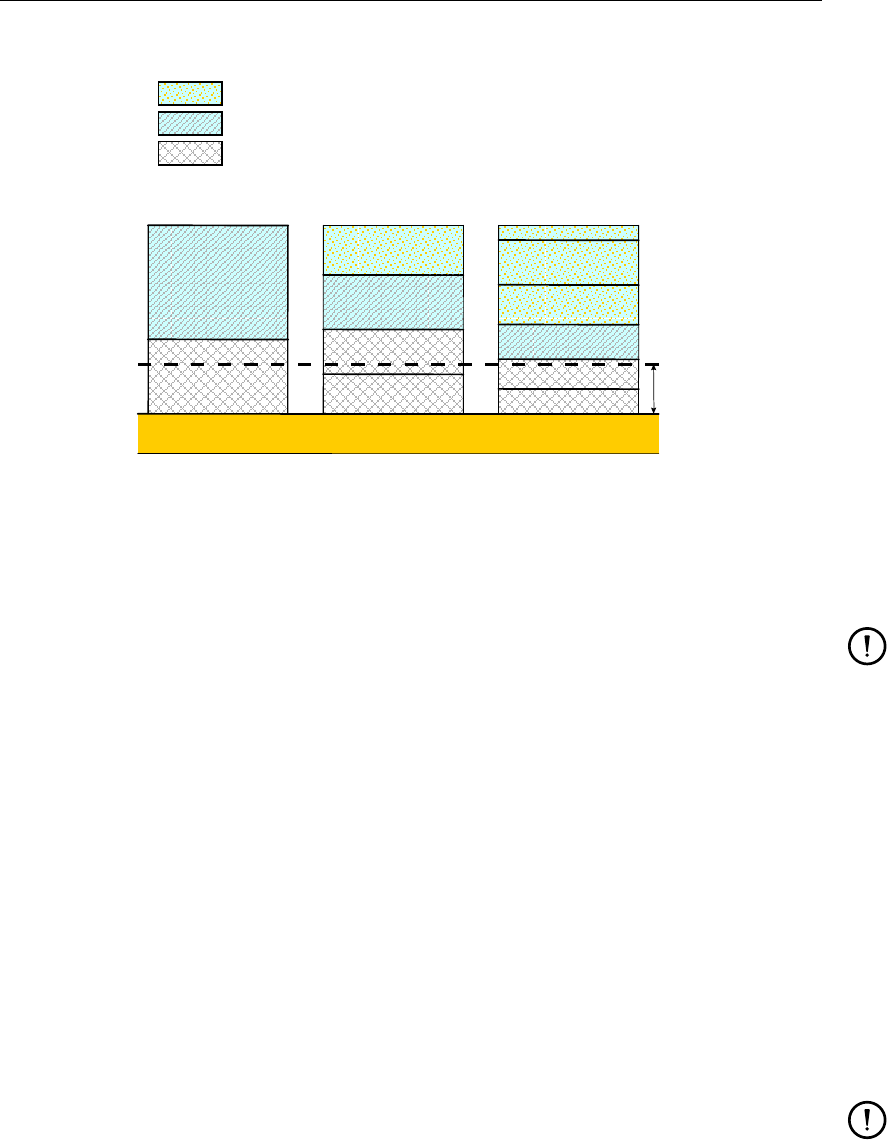
DRAFT
Sediment transport and morphology
BED
a
BED
Layer
kmx
BED
kmx
kmx
kmx
Coarse Grid Medium Grid Fine Grid
Standard computational cell
Reference cell for “sand” sediment
Concentration set equal to concentration of reference layer for
‘sand’ sediment calculations
KEY
Figure 11.2: Selection of the kmx layer; where ais Van Rijn’s reference height
ksuser-defined current-related effective roughness height (see options below)
∆rwave-induced ripple height, set to a constant value of 0.025 m
hwater depth
Remark:
Van Rijn’s reference height ais limited to a maximum of 20% of the water depth. This
precaution is only likely to come into effect in very shallow areas.
With the keyword IOPKCW you have two options to calculate ks(and kw):
ksand kwspecified by you (constant in space).
ksderived from current-related effective roughness height as determined in the Delft3D-
FLOW module (spatially varying) and kw=RWAVE ·∆r.
Calculation of the reference concentration
The reference concentration cais calculated directly by the sediment transport formula or
it is derived from the suspended sediment transport rate given by the sediment transport
formula as ca=Ss/Hu. The default transport formula (Van Rijn,1993) includes a formula
for the reference concentration (see section 11.5.1). The reference concentration is adjusted
proportional to the relative availability of the sediment fraction in the top-layer of the bed (see
section 11.6.4 on bed composition models).
Remark:
The reference concentration and therefore the suspended load can be calibrated using
the keyword Sus in the morphology input file.
Deltares 327 of 688
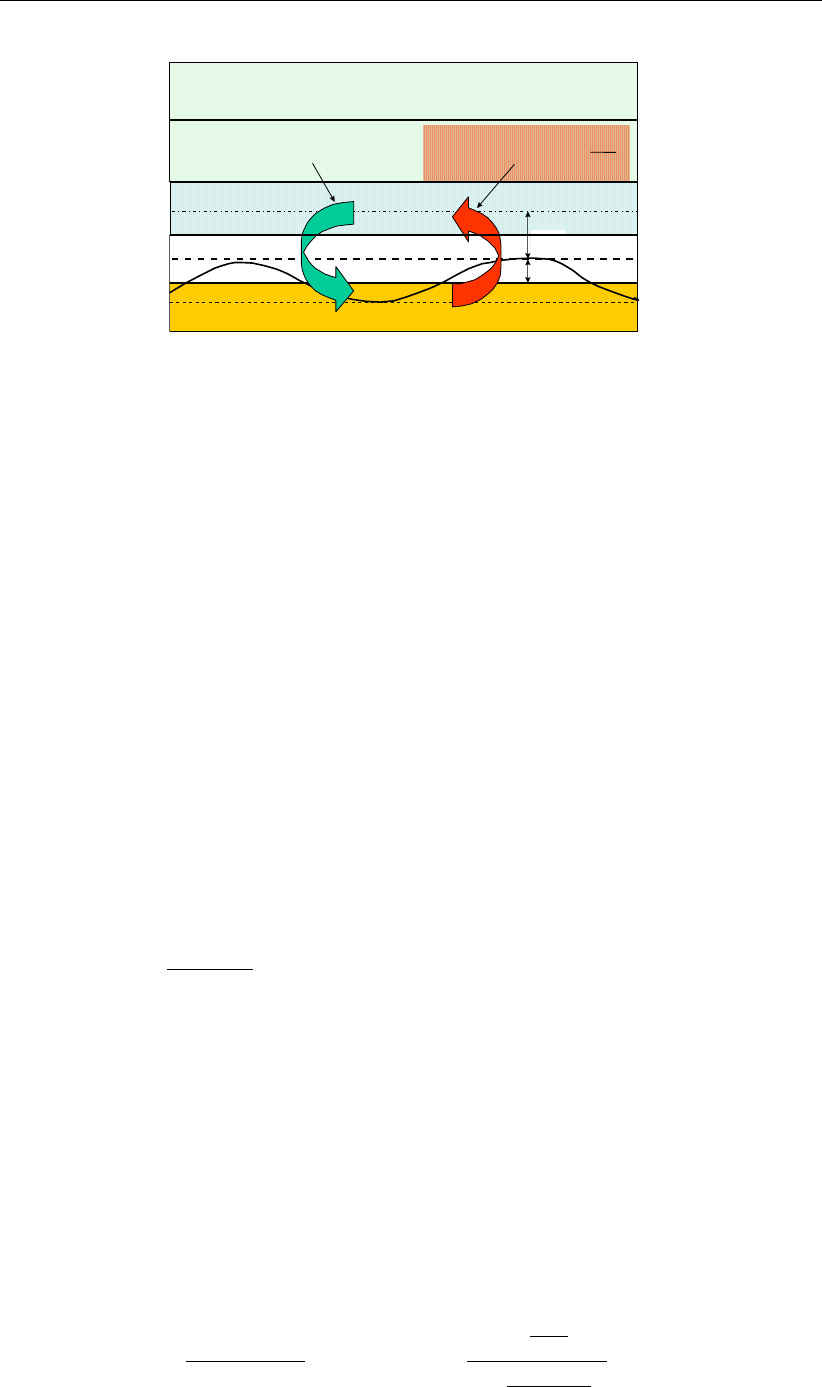
DRAFT
Delft3D-FLOW, User Manual
cwFluxDeposition
s
=
a
z
∆
dz
dc
FluxErosion
s
ε
=
kmx
layer
BED
Figure 11.3: Schematic arrangement of flux bottom boundary condition
11.3.4 Non-cohesive sediment erosion and deposition
The transfer of sediment between the bed and the flow is modelled using sink and source
terms acting on the near-bottom layer that is entirely above Van Rijn’s reference height. This
layer is identified as the reference layer and for brevity is referred to as the kmx-layer; see
Figure 11.2.
The sediment concentrations in the layer(s) that lie below the kmx layer are assumed to rapidly
adjust to the same concentration as the reference layer.
Each half time-step the source and sink terms model the quantity of sediment entering the flow
due to upward diffusion from the reference level and the quantity of sediment dropping out of
the flow due to sediment settling. A sink term is solved implicitly in the advection-diffusion
equation, whereas a source term is solved explicitly. The required sink and source terms for
the kmx layer are calculated as follows.
In order to determine the required sink and source terms for the kmx layer, the concentration
and concentration gradient at the bottom of the kmx layer need to be approximated. We
assume a standard Rouse profile between the reference level aand the centre of the kmx
layer (see Figure 11.4).
c(`)=c(`)
aa(h−z)
z(h−a)A(`)
,(11.26)
where:
c(`)concentration of sediment fraction (`)
c(`)
areference concentration of sediment fraction (`)
aVan Rijn’s reference height
hwater depth
zelevation above the bed
A(`)Rouse number
As the reference concentration and the concentration in the centre of the kmx layer ckmx are
known, the exponent A(`)can be determined.
c(`)
kmx =c(`)
aa(h−zkmx)
zkmx(h−a)A(`)
⇒A(`)=
ln ckmx
ca
ln a(h−zkmx)
zkmx(h−a)(11.27)
328 of 688 Deltares
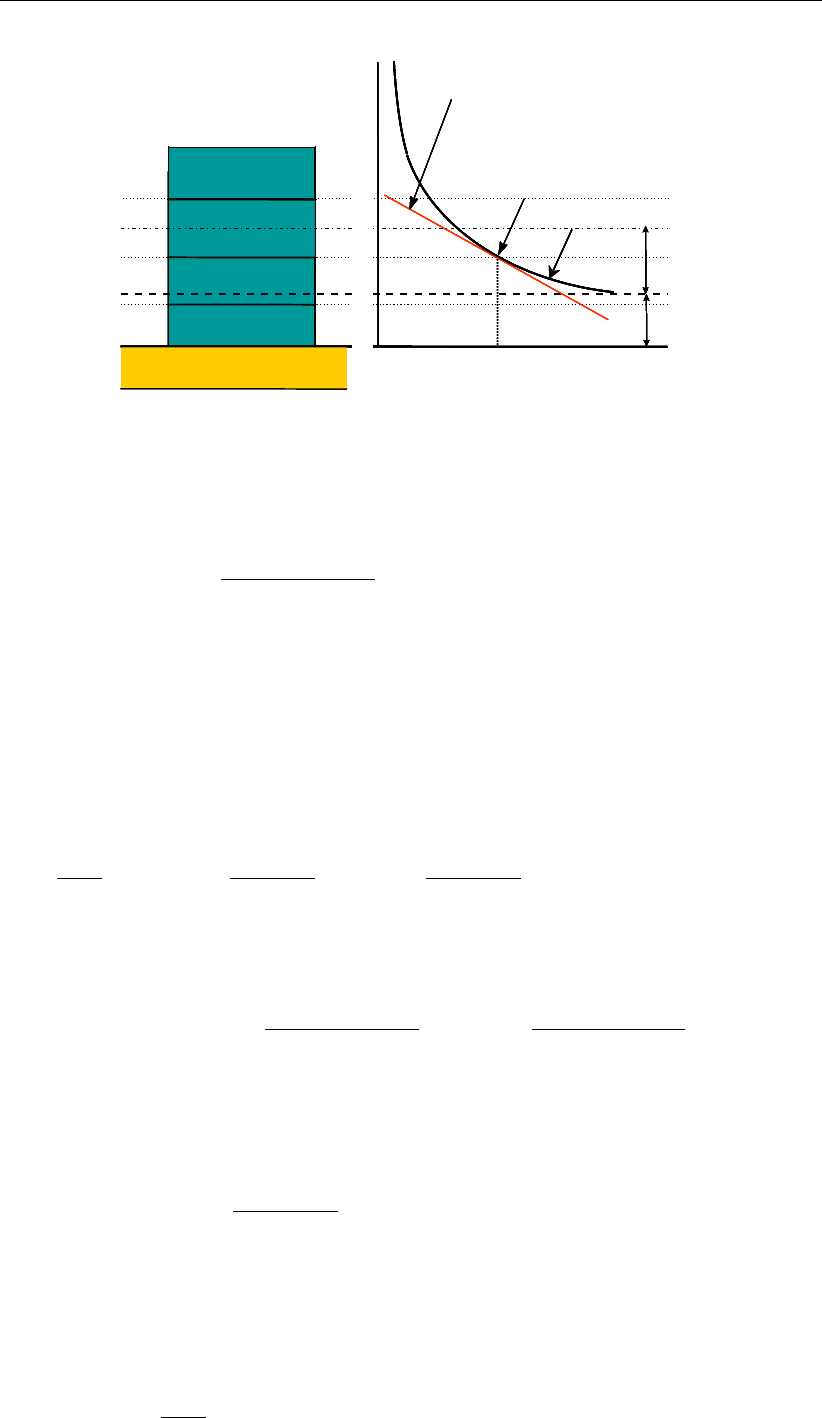
DRAFT
Sediment transport and morphology
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
c
kmxbot
Rouse profile
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
c
kmxbot
Rouse profile
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
c
kmxbot
Rouse profile
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
a
BED
kmx
a
BED
kmx +
+
∆z
c
kmx
c
a
Concentration
Approximation to concentration
gradient at bottom of kmx layer
Approximation to
concentration at
bottom of kmx layer
H e i g h t a b o v e b e d
c
kmxbot
Rouse profile
Figure 11.4: Approximation of concentration and concentration gradient at bottom of kmx
layer
The concentration at the bottom of the kmx layer is:
c(`)
kmx(bot)=c(`)
aa(h−zkmx(bot))
zkmx(bot)(h−a)A(`)
(11.28)
We express this concentration as a function of the known concentration ckmx by introducing
a correction factor α1:
c(`)
kmx(bot)=α(`)
1c(`)
kmx (11.29)
The concentration gradient of the Rouse profile is given by:
∂c(`)
∂z =A(`)c(`)
aa(h−z)
z(h−a)A(`)−1
·−ah
z2(h−a)(11.30)
The concentration gradient at the bottom of the kmx layer is:
c0(`)
kmx(bot)=A(`)c(`)
aa(h−zkmx(bot))
zkmx(bot)(h−a)A(`)−1
· −ah
z2
kmx(bot)(h−a)!(11.31)
We express this gradient as a function of the known concentrations caand ckmx by introducing
another correction factor α2:
c0(`)
kmx(bot)=α(`)
2 c(`)
kmx −c(`)
a
∆z!(11.32)
Erosive flux due to upward diffusion
The upward diffusion of sediment through the bottom of the kmx layer is given by the expres-
sion:
E(`)=ε(`)
s
∂c(`)
∂z ,(11.33)
Deltares 329 of 688

DRAFT
Delft3D-FLOW, User Manual
where ε(`)
sand ∂c(`)
∂z are evaluated at the bottom of the kmx layer.
We approximate this expression by:
E(`)≈α(`)
2ε(`)
s c(`)
a−c(`)
kmx
∆z!,(11.34)
where:
α(`)
2correction factor for sediment concentration
ε(`)
ssediment diffusion coefficient evaluated at the bottom of the kmx cell of sedi-
ment fraction(`)
c(`)
areference concentration of sediment fraction(`)
c(`)
kmx average concentration of the kmx cell of sediment fraction(`)
∆zdifference in elevation between the centre of the kmx cell and Van Rijn’s refer-
ence height: ∆z=zkmx −a
The erosion flux is split in a source and sink term:
E(`)≈α(`)
2ε(`)
sc(`)
a
∆z−α(`)
2ε(`)
sc(`)
kmx
∆z.(11.35)
The first of these terms can be evaluated explicitly and is implemented as a sediment source
term. The second can only be evaluated implicitly and is implemented as a (positive) sink
term. Thus:
Source(`)
erosion =α(`)
2ε(`)
sc(`)
a
∆z(11.36)
Sink(`)
erosion =α(`)
2ε(`)
sc(`)
kmx
∆z(11.37)
Deposition flux due to sediment settling
The settling of sediment through the bottom of the kmx cell is given by the expression:
D(`)=w(`)
sc(`)
kmx(bot),(11.38)
where w(`)
sand c(`)
kmx(bot)are evaluated at the bottom of the kmx layer.
We set:
c(`)
kmx(bot)=α(`)
1c(`)
kmx.(11.39)
The deposition flux is approximated by:
D(`)≈α(`)
1c(`)
kmxw(`)
s.(11.40)
This results in a simple deposition sink term:
Sink(`)
deposition =α(`)
1c(`)
kmxw(`)
s.(11.41)
330 of 688 Deltares
DRAFT
Sediment transport and morphology
The total source and sink terms is given by:
Source(`)=α(`)
2c(`)
a ε(`)
s
∆z!,(11.42)
Sink(`)="α(`)
2 ε(`)
s
∆z!+α(`)
1w(`)
s#c(`)
kmx.(11.43)
These source and sink terms are both guaranteed to be positive.
11.3.5 Inclusion of a fixed layer
The bedload transport is reduced if the thickness of the sediment layer becomes small (see
section 11.4.4). The same effect has been implemented as a reduction for the entrainment
and deposition terms as well as the equilibrium concentration by a factor fFIXFAC if erosion is
expected to occur.
11.3.6 Inflow boundary conditions non-cohesive sediment
Although it is general good advice to locate the open boundaries sufficiently far away from
the area of interest, this is not always possible in long-term simulations. In such cases it
is desirable to impose some kind of equilibrium boundary conditions. Although equilibrium
boundary conditions may be better defined for non-cohesive sediments than for cohesive
sediments, we have implemented the open boundary condition in a consistent manner. For
non-cohesive suspended material you can specify that, at all open inflow boundaries, the
flow should enter carrying the same concentration of sediment as computed in the interior
of the model. This feature is enabled by setting NeuBcSand in the morphology input file to
true (Neumann boundary condition: concentration gradient perpendicular to open boundary
equal to zero). This means that the sediment load entering through the boundaries will be
near-perfectly adapted to the local flow conditions and very little accretion or erosion should
be experienced near the model boundaries. This will generally be the desired situation if
the model boundaries are well chosen. This method gives the correct results even when the
turbulent mixing profile is clearly non-parabolic.
By setting NeuBcSand = false, the concentrations to be applied at the inflow boundaries
are read from the <∗.bcc>file, which has to be created with the FLOW User Interface. If the
parameter is set to true, the values specified in the <∗.bcc>file are overruled. This parameter
used to be called EqmBc.
11.4 Bedload sediment transport of non-cohesive sediment
Bedload (or, for the simpler transport formulae, total load) transport is calculated for all “sand”
and “bedload” sediment fractions by broadly according to the following approach: first, the
magnitude and direction of the bedload transport at the cell centres is computed using the
transport formula selected (See section 11.5), subsequently the transport rates at the cell
interfaces are determined, corrected for bed-slope effect and upwind bed composition and
sediment availability.
11.4.1 Basic formulation
For simulations including waves the magnitude and direction of the bedload transport on a
horizontal bed are calculated using the transport formula selected assuming sufficient sedi-
ment and ignoring bed composition except for e.g. hiding and exposure effects on the critical
Deltares 331 of 688
DRAFT
Delft3D-FLOW, User Manual
shear stresses. The default sediment transport formula is Van Rijn (1993) as documented in
section 11.5.1.
Some of the sediment transport formulae prescribe the bedload transport direction whereas
others predict just the magnitude of the sediment transport. In the latter case the initial trans-
port direction will be assumed to be equal to the direction of the characteristic (near-bed) flow
direction. In the case of a depth-averaged simulation, the secondary flow/spiral flow intensity
Isoptionally computed by the flow module may be taken into account; the bedload transport
direction ϕτ is given by the following formula:
tan(ϕτ) = v−αIu
UIs
u+αIv
UIs
(11.44)
in which
αI=2
κ2Es1−√g
κC (11.45)
where:
ggravitational acceleration
κVon Kármán constant
CChézy roughness
Uthe depth-averaged velocity
Escoefficient to be specified by you as Espir keyword in the morphology input
file
The default value of Esis 0, which implies that the spiral flow effect on the bedload transport
direction is not included. The spiral flow effect is of crucial importance in a depth-averaged
simulation to get pointbar formation in river bends. This effect is only included for transport
formulae that return the bedload transport rate but not its direction, i.e. Engelund & Hansen,
Meyer-Peter & Muller, General formula, Van Rijn (1984), Ashida & Michiue and optionally the
user-defined formula.
The Van Rijn (1993) formula distinguishes the following transport components that are all
treated like bed or total load, i.e. without relaxation effects of an advection diffusion equation:
bedload due to currents, Sbc
bedload due to waves, Sbw
suspended load due to waves, Ssw.
These three transport components can be calibrated independently by using the respective
keywords Bed,BedW and SusW in the morphology input file.
11.4.2 Suspended sediment correction vector
The transport of suspended sediment is computed over the entire water column (from σ=−1
to σ= 0). However, for “sand” sediment fractions, Van Rijn regards sediment transported
below the reference height aas belonging to “bedload sediment transport” which is computed
separately as it responds almost instantaneously to changing flow conditions and feels the
effects of bed slopes. In order to prevent double counting, the suspended sediment fluxes be-
low the reference height aare derived by means of numerical integration from the suspended
transport rates. The opposite of these fluxes are scaled with the upwind sediment availability
and subsequently imposed as corrective transport. This suspended load correction is included
in the depth-averaged suspended load written to the output files of the program.
332 of 688 Deltares
DRAFT
Sediment transport and morphology
11.4.3 Interaction of sediment fractions
The following notes hold only in case of multiple sediment fractions. Sediment fractions may
interacted in several ways:
reference concentrations, erosion rates and sediment transport rates will be reduced pro-
portional to the availability of sediment fraction considered in the bed (less of the fraction
available for transport)
sediment fractions of different sizes influence each other by means of hiding and exposure:
fine sediments hide among coarse sediments and are thereby partly shielded from the
main flow while the coarser sediments are more exposed than they would be among
other sediments of the same size. This effect is taken into account by increasing the
effective critical shear stress for fine sediments while lowering it for coarse sediments.
This adjustment is carried out using a multiplicative factor ξ. The following formulations
have been implemented:
No hiding and exposure correction (ξ= 1)
Egiazaroff formulation
ξ=10log 19
10log 19 + 10log (Di/Dm)2
.(11.46)
Ashida & Michiue formulation
ξ=
0.8429Dm
Diif Di/Dm<0.38889
10log 19
10log 19 + 10log (Di/Dm)2
otherwise .(11.47)
Parker, Klingeman & McLean or Soehngen, Kellermann & Loy formulation
ξ=Dm
Diα
.(11.48)
where αis given by the ASKLHE keyword in the morphology input file.
Wu, Wang & Jia formulation
ϕ(`)=X
i
η(i)D(i)
D(`)−D(i)(11.49)
ξ(`)=1−ϕ(`)
ϕ(`)m
(11.50)
where mis given by the MWWJHE keyword in the morphology input file.
The hiding and exposure effect has been implemented for the following transport formulae
containing a critical shear stress: Meyer-Peter & Muller, general formula, Ashida-Michiue and
optionally the user-defined formula.
11.4.4 Inclusion of a fixed layer
Inclusion of a fixed layer implies that the quantity of sediment at the bed is finite and may, if
excessive erosion occurs, become exhausted and be unavailable to supply sediment to sus-
pended and bedload transport modes. In case the bed is covered by bedforms, the troughs of
the bedforms will start to expose the non-erodible layer before sediment runs out completely.
Deltares 333 of 688
DRAFT
Delft3D-FLOW, User Manual
This results in a gradual reduction of the transport capacity over a certain sediment thickness
indicated by THRESH. This effect is taken into account in the bedload formulations by com-
paring the thickness of the sediment layer available at the bed with a user-defined threshold
value. If the quantity of sediment available is less than the threshold then the magnitude of
the calculated bedload transport vector is reduced as follows:
S00
b=fFIXFACS00
b,(11.51)
where:
S00
bmagnitude of the bedload transport vector (before correction for bed slope ef-
fects)
fFIXFAC upwind fixed layer proximity factor: fFIXFAC =DPSED
THRESH , limited to the range
0≤fFIXFAC ≤1.
DPSED depth of sediment available at the bed
THRESH user-defined erosion threshold
The equilibrium suspended load concentration in the sediment pickup term is reduced by the
same fixed layer proximity factor (in this case of course the local value and not some upwind
value is used since suspended sediment pickup has no associated horizontal direction).
In effect, because of the upwind approach used to transfer the bedload transport components
to the U and V velocity points, this method limits the sediment that can leave a computational
cell, if the quantity of the sediment at the bed is limited. One implication of the use of this
rather simple approach is that a finite (although always less than the user-defined threshold)
thickness of sediment is required at the bed if a non-zero magnitude of the bedload transport
vector is required.
Remarks:
Areas may be initially specified as containing zero bottom sediment if non-erodible ar-
eas are required. It is likely that these areas will accrete a little sediment in order to
allow an equilibrium bedload transport pattern to develop.
This effect has also been included for cohesive and non cohesive suspended sediment
as indicated in Sections 11.2.6 and 11.3.5.
11.4.5 Calculation of bedload transport at open boundaries
At open boundaries the user may either prescribe the bed level development or the bedload
transport rates. In the latter case the bedload transport rates are known from the model
input, whereas in the former case the effective bedload transport rates at the boundary could
be derived from the mass balance at the open boundary point. The bed level boundary
condition is imposed at the same location where a water level boundary condition is imposed,
that is at the grid cell just outside the model domain. A consequence of this approach is
that the bed level at the first grid cell inside the model domain will not exactly behave as
you imposed, but in general it will follow the imposed behaviour closely. In case of multiple
sediment fractions, a boundary condition for the bed composition is also needed at inflow
boundaries. See Appendices B.9.2 and B.9 for imposing various morphological boundary
conditions.
11.4.6 Bedload transport at U and V velocity points
As the control volume for bed level change calculations is centred on the water level points,
see Figure 11.5, the bedload transport vector components are actually required at the U and
V velocity points, rather than at the water level points where Sb,x and Sb,y are calculated. By
default, we use a simple “upwind” numerical scheme to set the bedload transport components
334 of 688 Deltares
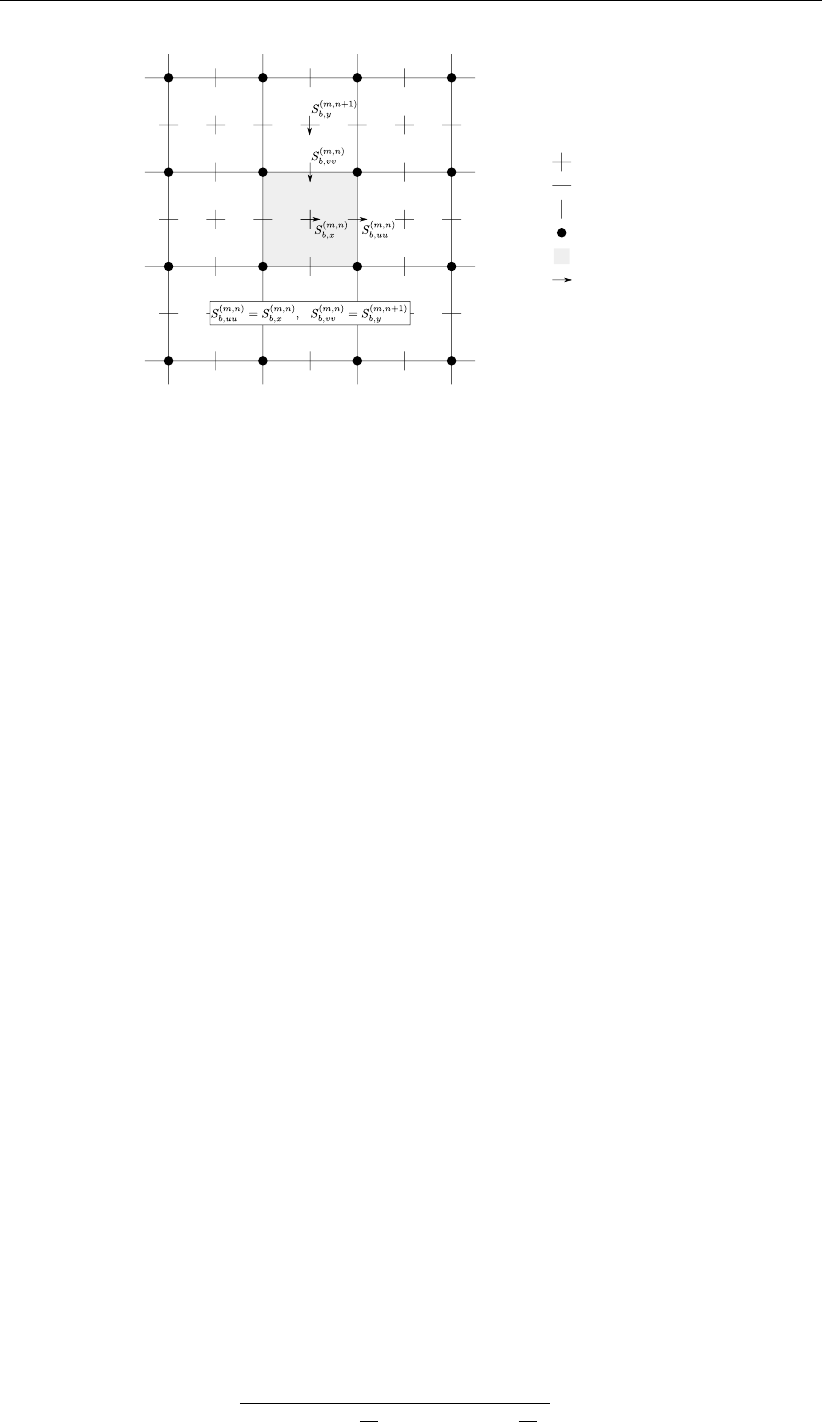
DRAFT
Sediment transport and morphology
water level point
u-velocity point
v-velocity point
depth point
control volume
mm-1 m+1
n
n+1
n-1
bedload transport
Figure 11.5: Setting of bedload transport components at velocity points
at the Uand Vpoints as this ensures that the bed will remain stable. For each active velocity
point the upwind direction is determined by summing the bedload transport components at the
water level points on either side of the velocity point and taking the upwind direction relative to
the resulting net transport direction. The bedload transport component at the velocity point is
then set equal to the component computed at the water level point immediately “upwind” (see
Figure 11.5). In the example shown in Figure 11.5 the bedload transport component S(m,n)
b,uu
is set equal to S(m,n)
b,x and the component S(m,n)
b,vv is set equal to S(m,n+1)
b,y . It is possible
to switch from upwind to central approach by setting the UpwindBedload keyword in the
morphology input file to false; although the central approach is more accurate, it is less stable
(less damping).
11.4.7 Adjustment of bedload transport for bed-slope effects
Bedload transport is affected by bed level gradients. Two bed slope directions are distin-
guished: the slope in the initial direction of the transport (referred to as the longitudinal bed
slope) and the slope in the direction perpendicular to that (referred to as the transverse bed
slope). The longitudinal bed slope results in a change in the sediment transport rate as given
by:
~
S0b=αs~
S00,(11.52)
or, in vector component form:
S0
b,x =αsS00
b,x,(11.53)
S0
b,y =αsS00
b,y,(11.54)
whereas the primary effect of the transverse bed slope is a change in transport towards the
downslope direction (this may be accomplished by either a pure rotation of the transport vec-
tor or by adding a transverse transport component). You may choose one of the following
formulations for these effects.
1 no effect of bed slope on bedload transport
2Bagnold (1966) for longitudinal slope and Ikeda (1982,1988) as presented by Van Rijn
(1993) for transverse slope. This is the default option for the bedload transport of all
sediment transport formulae. In this case αsis given by
αs= 1 + αbs tan (φ)
cos tan−1∂z
∂s tan (φ) + ∂z
∂s −1!,(11.55)
Deltares 335 of 688
DRAFT
Delft3D-FLOW, User Manual
where αbs is a user-defined tuning parameter, ALFABS keyword in the morphology in-
put file (default = 1.0). An additional bedload transport vector is subsequently calculated,
perpendicular to the main bedload transport vector. The magnitude of this vector is calcu-
lated using a formulation based on the work of Ikeda (1982,1988) as presented by Van
Rijn (1993). Van Rijn’s equation (7.2.52) is modified to Equation (11.56) by setting the ref-
erence co-ordinates sand naligned with and perpendicular to the local characteristic flow
direction respectively. This implies that there is no flow in the ndirection: i.e. ub,n = 0:
Sb,n =|S0
b|αbn
ub,cr
|~ub|
∂zb
∂n ,(11.56)
where:
Sb,n additional bedload transport vector. The direction of this vector is normal to
the unadjusted bedload transport vector, in the down slope direction
|S0
b|magnitude of the unadjusted bedload transport vector (adjusted for longitu-
dinal bed slope only): |S0
b|=qS0
b,x2+S0
b,y2.
αbn user-defined coefficient, ALFABN (default = 1.5)
ub,cr critical (threshold) near-bed fluid velocity
~ubnear-bed fluid velocity vector
∂zb
∂n bed slope in the direction normal to the unadjusted bedload transport vector
To evaluate Equation (11.56) we substitute:
ub,cr
|~ub|=rτb,cr
|~τb|,(11.57)
where:
τb,cr critical bed shear stress
~τbbed shear stress due to current and waves: ~τb=µc~τb,cw +µw~τb,w.
resulting in:
Sb,n =|S0
b|fnorm,(11.58)
where:
fnorm =αbnrτb,cr
|~τb|
∂zb
∂n .(11.59)
The two components of this vector are then added to the two components of the bedload
transport vector as follows:
Sb,x =S0
b,x −S0
b,yfnorm
Sb,y =S0
b,y +S0
b,xfnorm (11.60)
where Sb,x and Sb,y are the components of the required bedload transport vector, calcu-
lated at the water level points
3Koch and Flokstra (1980) as extended by Talmon et al. (1995). In this case αsis given by
αs= 1 −αbs
∂z
∂s,(11.61)
where αbs is a user-defined tuning parameter, ALFABS keyword in the morphology input
file (default = 1.0). The direction of the bedload is adjusted according to the following
formulation:
tan(ϕs) = sin(ϕτ) + 1
f(θ)
∂zb
∂y
cos(ϕτ) + 1
f(θ)
∂zb
∂x
,(11.62)
336 of 688 Deltares
DRAFT
Sediment transport and morphology
in which ϕτis the original direction of the sediment transport and ϕsis the final direction
and where f(θ)equals:
f(θ) = AshθBsh
iDi
HCsh Di
DmDsh
,(11.63)
where Ash,Bsh,Csh and Dsh are tuning coefficients specified by you in the morphology
input file as keywords Ashld,Bshld,Cshld and Dshld.
4Parker and Andrews (1985). The same formulae for αsand ϕshold as in the previous
case except for f(θ)which now equals:
f(θ) = cL
1 + µcLsθ
max 1
10 θ, ξθcr,(11.64)
where Coulomb friction parameter cL, lift-drag ratio µand critical shields parameter θcr
should be specified by you in the morphology input file as keywords CoulFri,FlFdRat
and ThetaCr. Note that this formula includes the hiding and exposure factor ξ.
This completes the calculation of the bedload transport field. The transports at the Uand V
velocity points are then stored for use in the computation of bed level changes, as described
in the section 11.6. In all cases the bed slope has been defined as follows.
Longitudinal bed slope
This bed slope is calculated as:
∂zb
∂s =∂z(u)
∂x
S00
b,x
|S00
b|+∂z(v)
∂y
S00
b,y
|S00
b|,(11.65)
∂zb
∂s max
= 0.9 tan (φ),(11.66)
where:
∂zb
∂s bed slope in the direction of bedload transport
∂z(u)
∂x bed slope in the positive x-direction evaluated at the U-point
∂z(v)
∂y bed slope in the positive y-direction evaluated at the V-point
φinternal angle of friction of bed material (assumed to be 30◦)
Remarks:
zbis the depth down to the bed from a reference height (positive down), a downward
bed slope returns a positive value).
The bed slope is calculated at the Uand Vpoints as these are the locations at which
the bedload transport vector components will finally be applied.
Transverse bed slope
This bed slope is calculated as:
∂zb
∂n =−∂z(u)
∂x
S00
b,y
|S00
b|+∂z(v)
∂y
S00
b,x
|S00
b|.(11.67)
Deltares 337 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 11.1: Additional transport relations
Formula Bedload Waves
11.5.1,Van Rijn (1993) Bedload + suspended Yes
11.5.2,Engelund-Hansen (1967) Total transport No
11.5.3,Meyer-Peter-Muller (1948) Total transport No
11.5.4,General formula Total transport No
11.5.5,Bijker (1971) Bedload + suspended Yes
11.5.6,Van Rijn (1984) Bedload + suspended No
11.5.7,Soulsby/Van Rijn Bedload + suspended Yes
11.5.8,Soulsby Bedload + suspended Yes
11.5.9,Ashida–Michiue (1974) Total transport No
11.5.10,Wilcock–Crowe (2003) Bedload No
11.5.11,Gaeuman et al. (2009) laboratory calibration Bedload No
11.5.12,Gaeuman et al. (2009) Trinity River calibration Bedload No
11.5 Transport formulations for non-cohesive sediment
This special feature offers a number of standard sediment transport formulations for non-
cohesive sediment. Table 11.1 gives a summary of the available additional formulae.
Additionally, you can implement your own sediment transport formula in a shared library
(<dll>or <so>) and call it from Delft3D-FLOW. See section B.9.3 for this option. Now, let
us continue with a general description of the sediment transport formulae included by default.
11.5.1 Van Rijn (1993)
Van Rijn (1993) distinguishes between sediment transport below the reference height a which
is treated as bedload transport and that above the reference height which is treated as
suspended-load. Sediment is entrained in the water column by imposing a reference con-
centration at the reference height.
Reference concentration
The reference concentration is calculated in accordance with Van Rijn et al. (2000) as:
c(`)
a= 0.015ρ(`)
s
D(`)
50 T(`)
a1.5
aD(`)
∗0.3(11.68)
where:
c(`)
amass concentration at reference height a
In order to evaluate this expression the following quantities must be calculated:
D(`)
∗non-dimensional particle diameter:
D(`)
∗=D(`)
50 (s(`)−1)g
ν21/3
(11.69)
T(`)
anon-dimensional bed-shear stress:
T(`)
a=(µ(`)
cτb,cw +µ(`)
wτb,w)−τ(`)
cr
τ(`)
cr
(11.70)
338 of 688 Deltares

DRAFT
Sediment transport and morphology
µ(`)
cefficiency factor current:
µ(`)
c=f0(`)
c
fc
(11.71)
f0(`)
cgain related friction factor:
f0(`)
c= 0.24 "10log 12h
3D(`)
90 !#−2
(11.72)
f(`)
ctotal current-related friction factor:
f(`)
c= 0.24 10log 12h
ks−2
(11.73)
τb,cw bed shear stress due to current in the presence of waves. Note that the bed
shear velocity u∗is calculated in such a way that Van Rijn’s wave-current inter-
action factor αcw is not required.
τb,cw =ρwu2
∗(11.74)
µ(`)
wefficiency factor waves:
µ(`)
w= max 0.063,1
81.5−Hs
h2!(11.75)
τb,w bed shear stress due to waves:
τb,w =1
4ρwfwb
Uδ2(11.76)
fwtotal wave-related friction factor (≡Equations (9.205),(11.116) and (11.157)):
fw= exp
−6+5.2 ˆ
Aδ
ks,w !−0.19
(11.77)
To avoid the need for excessive user input, the wave related roughness ks,w is related to the
estimated ripple height, using the relationship:
ks,w =RW AV E ·∆r, with ∆r= 0.025 and 0.01 m≤ks,w ≤0.1m (11.78)
where:
RWAVE the user-defined wave roughness adjustment factor. Recommended to be in
the range 1–3, default = 2.
τ(`)
cr critical bed shear stress:
τ(`)
cr = (ρ(`)
s−ρw)gD(`)
50 θ(`)
cr (11.79)
θ(`)
cr threshold parameter θ(`)
cr is calculated according to the classical Shields curve
as modelled by Van Rijn (1993) as a function of the non-dimensional grain size
D∗. This avoids the need for iteration.
Deltares 339 of 688

DRAFT
Delft3D-FLOW, User Manual
Note: for clarity, in this expression the symbol D∗has been used where D(`)
∗
would be more correct:
θ(`)
cr =
0.24D−1
∗,1< D∗≤4
0.14D−0.64
∗,4< D∗≤10
0.04D−0.1
∗,10 < D∗≤20
0.013D0.29
∗,20 < D∗≤150
0.055,150 < D∗
(11.80)
aVan Rijn’s reference height
ˆ
Aδpeak orbital excursion at the bed: ˆ
Aδ=Tpˆ
Uδ
2π.
D(`)
50 median sediment diameter
D(`)
90 90 % sediment passing size: D(`)
90 = 1.5D(`)
50
hwater depth
kaapparent bed roughness felt by the flow when waves are present. Calculated
by Delft3D-FLOW using the wave-current interaction formulation selected; see
section 9.7 for details: ka≤10ks
ksuser-defined current-related effective roughness height (space varying)
ks,w wave-related roughness, calculated from ripple height, see Equation (11.78)
uzvelocity magnitude taken from a near-bed computational layer. In a current-only
situation the velocity in the bottom computational layer is used. Otherwise, if
waves are active, the velocity is taken from the layer closest to the height of the
top of the wave mixing layer δ.
b
Uδpeak orbital velocity at the bed: √2×RMS orbital velocity at bed, taken from the
wave module.
zuheight above bed of the near-bed velocity (uz)used in the calculation of bottom
shear stress due to current
∆restimated ripple height, see Equation (11.78)
δmthickness of wave boundary mixing layer following Van Rijn (1993): 3δw(and
δm≥ka)
δwwave boundary layer thickness:
δw= 0.072 ˆ
Aδˆ
Aδ
ks,w −0.25.
We emphasise the following points regarding this implementation:
The bottom shear stress due to currents is based on a near-bed velocity taken from the
hydrodynamic calculations, rather than the depth-averaged velocity used by Van Rijn.
All sediment calculations are based on hydrodynamic calculations from the previous half
time-step. We find that this is necessary to prevent unstable oscillations developing.
The apparent roughness felt by the flow (ka) is dependent on the hydrodynamic wave-current
interaction model applied. At this time, Van Rijn’s wave-current interaction model is not avail-
able in Delft3D-FLOW. This means that it is not possible for a user to exactly reproduce results
obtained using Van Rijn’s full formulations for waves and currents.
340 of 688 Deltares

DRAFT
Sediment transport and morphology
Adjustment of the representative diameter of suspended sediment
The representative diameter of the suspended sediment D(`)
sgenerally given by the user-
defined sediment diameter SEDDIA (D50 of bed material) multiplied by the user-defined factor
FACDSS (see also remarks) can be overruled in case the Van Rijn (1993) transport formula is
selected. This achieved by setting IOPSUS=1 the representative diameter of the suspended
sediment will then be set to:
D(`)
s=
0.64D(`)
50 for T(`)
A≤1
D(`)
50 1+0.015 T(`)
A−25 for 1< T (`)
A≤25
D(`)
50 for 25 < T (`)
A
(11.81)
where T(`)
ais given by equation (11.70).
Bedload transport rate
For simulations including waves the magnitude and direction of the bedload transport on a
horizontal bed are calculated using an approximation method developed by Van Rijn et al.
(2003). The method computes the magnitude of the bedload transport as:
|Sb|= 0.006ρswsD(`)
50 M0.5M0.7
e(11.82)
where:
Sbbedload transport [kg m-1 s-1]
Msediment mobility number due to waves and currents [-]
Meexcess sediment mobility number [-]
M=v2
eff
(s−1) gD50
(11.83)
Me=(veff −vcr)2
(s−1) gD50
(11.84)
veff =qv2
R+U2
on (11.85)
in which:
vcr critical depth averaged velocity for initiation of motion (based on a parameteri-
sation of the Shields curve) [m/s]
vRmagnitude of an equivalent depth-averaged velocity computed from the velocity
in the bottom computational layer, assuming a logarithmic velocity profile [m/s]
Uon near-bed peak orbital velocity [m/s] in onshore direction (in the direction on
wave propagation) based on the significant wave height
Uon (and Uoff used below) are the high frequency near-bed orbital velocities due to short
waves and are computed using a modification of the method of Isobe and Horikawa (1982).
This method is a parameterisation of fifth-order Stokes wave theory and third-order cnoidal
wave theory which can be used over a wide range of wave conditions and takes into ac-
count the non-linear effects that occur as waves propagate in shallow water (Grasmeijer and
Van Rijn,1998).
The direction of the bedload transport vector is determined by assuming that it is composed
of two parts: part due to current (Sb,c) which acts in the direction of the near-bed current, and
Deltares 341 of 688

DRAFT
Delft3D-FLOW, User Manual
part due to waves (Sb,w) which acts in the direction of wave propagation. These components
are determined as follows:
Sb,c =Sb
p1 + r2+ 2 |r|cos ϕ(11.86)
|Sb,w|=r|Sb,c|(11.87)
where:
r=(|Uon| − vcr)3
(|vR| − vcr)3(11.88)
Sb,w = 0 if r < 0.01,Sb,c = 0 if r > 100, and ϕ= angle between current and wave
direction for which Van Rijn (2003) suggests a constant value of 90◦.
Also included in the “bedload” transport vector is an estimation of the suspended sediment
transport due to wave asymmetry effects. This is intended to model the effect of asymmetric
wave orbital velocities on the transport of suspended material within about 0.5 m of the bed
(the bulk of the suspended transport affected by high frequency wave oscillations).
This wave-related suspended sediment transport is again modelled using an approximation
method proposed by Van Rijn (2001):
Ss,w =fSUSWγUALT(11.89)
where:
Ss,w wave-related suspended transport [kg/(ms)]
fSUSW user-defined tuning parameter
γphase lag coefficient (= 0.2)
UAvelocity asymmetry value [m/s] = U4
on−U4
off
U3
on+U3
off
LTsuspended sediment load [kg/m2] = 0.007ρsD50Me
The three separate transport modes are imposed separately. The direction of the bedload
due to currents Sb,c is assumed to be equal to the direction of the current, whereas the two
wave related transport components Sb,w and Ss,w take on the wave propagation direction.
This results in the following transport components:
Sbc,u =ub,u
|ub||Sb,c|(11.90)
Sbc,v =ub,v
|ub||Sb,c|(11.91)
Sbw,u =Sb,w cos φ(11.92)
Sbw,v =Sb,w sin φ(11.93)
Ssw,u =Ss,w cos φ(11.94)
Ssw,v =Ss,w sin φ(11.95)
where φis the local angle between the direction of wave propagation and the computational
grid. The different transport components can be calibrated independently by using the Bed,
BedW and SusW keywords in the morphology input file.
342 of 688 Deltares
DRAFT
Sediment transport and morphology
11.5.2 Engelund-Hansen (1967)
The Engelund-Hansen sediment transport relation has frequently been used in rivers and
estuaries. It reads:
S=Sb+Ss,eq =0.05αq5
√gC3∆2D50
(11.96)
where:
qmagnitude of flow velocity
∆the relative density (ρs−ρw)/ρw
CChézy friction coefficient
αcalibration coefficient (O(1))
The transport rate is imposed as bedload transport due to currents Sbc. The following for-
mula specific parameters have to be specified in the input files of the Transport module (See
section B.9.3): calibration coefficient αand roughness height rk.
Remarks:
The D50 grain size diameter is based on the sediment fraction considered.
A second formula specific input parameter (rk) is required for the Engelund-Hansen
formula. This parameter, which represents the roughness height for currents alone in
[m], is only used to determine the Cvalue when the Chézy friction in the flow has not
been defined. Generally, this parameter can thus be treated as a dummy parameter.
11.5.3 Meyer-Peter-Muller (1948)
The Meyer-Peter-Muller sediment transport relation is slightly more advanced than the Engelund-
Hansen formula, as it includes a critical shear stress for transport. It reads:
S= 8αD50p∆gD50(µθ −ξθcr)3/2(11.97)
where:
αcalibration coefficient (O(1))
∆the relative density (ρs−ρw)/ρw
µripple factor or efficiency factor
θcr critical Shields’ mobility parameter (= 0.047)
ξhiding and exposure factor for the sediment fraction considered
and the Shields’ mobility parameter θgiven by
θ=q
C21
∆D50
(11.98)
in which qis the magnitude of the flow velocity [m/s]. The ripple factor µreads:
µ= min C
Cg,90 1.5
,1.0!(11.99)
where Cg,90 is the Chézy coefficient related to grains, given by:
Cg,90 = 18 10log 12(d+ζ)
D90 (11.100)
Deltares 343 of 688

DRAFT
Delft3D-FLOW, User Manual
with D90 specified in [m]. The transport rate is imposed as bedload transport due to currents
Sbc. The following formula specific parameters have to be specified in the input files of the
Transport module (See section B.9.3): calibration coefficient αand a dummy value.
Remark:
The D50 is based on the sediment fraction considered, the D90 grain size diameters is
based on the composition of the local sediment mixture.
11.5.4 General formula
The general sediment transport relation has the structure of the Meyer-Peter-Muller formula,
but all coefficients and powers can be adjusted to fit your requirements. This formula is aimed
at experienced users that want to investigate certain parameters settings. In general this
formula should not be used. It reads:
S=αD50p∆gD50θb(µθ −ξθcr)c(11.101)
where ξis the hiding and exposure factor for the sediment fraction considered and
θ=q
C21
∆D50
(11.102)
in which qis the magnitude of the flow velocity.
The transport rate is imposed as bedload transport due to currents Sbc. The following pa-
rameters have to be specified in the input files of the Transport module (See section B.9.3):
calibration coefficient α, powers band c, ripple factor or efficiency factor µ, critical Shields’
mobility parameter θcr.
11.5.5 Bijker (1971)
The Bijker formula sediment transport relation is a popular formula which is often used in
coastal areas. It is robust and generally produces sediment transport of the right order of
magnitude under the combined action of currents and waves. Bedload and suspended load
are treated separately. The near-bed sediment transport (Sb) and the suspended sediment
transport (Ss) are given by the formulations in the first sub-section. It is possible to include
sediment transport in the wave direction due to wave asymmetry and bed slope following
the Bailard approach, see Bailard (1981), Stive (1986). Separate expressions for the wave
asymmetry and bed slope components are included:
~
Sb=~
Sb0+~
Sb,asymm +~
Ss,asymm +~
Sb,slope +~
Ss,slope (11.103)
~
Ss=~
Ss0(11.104)
where Sb0and Ss0are the sediment transport in flow direction as computed according to the
formulations of Bijker in the first sub-section, and the asymmetry and bed slope components
for bedload and suspended transport are defined in the second sub-section. Both bedload and
suspended load terms are incorporated in the bedload transport for further processing. The
transport vectors are imposed as bedload transport vector due to currents Sbc and suspended
load transport magnitude Ss, from which the equilibrium concentration is derived, respectively.
344 of 688 Deltares
DRAFT
Sediment transport and morphology
11.5.5.1 Basic formulation
The basic formulation of the sediment transport formula according to Bijker is given by:
Sb=bD50
q
C√g(1 −φ) exp (Ar)(11.105)
Ss= 1.83SbI1ln 33.0h
rc+I2(11.106)
where
CChézy coefficient (as specified in input of Delft3D-FLOW module)
hwater depth
qflow velocity magnitude
φporosity
and
Ar= max (−50,min (100, Ara)) (11.107)
b=BD + max 0,min 1,(hw/h)−Cd
Cs−Cd(BS −BD)(11.108)
I1= 0.216 rc
hz∗−1
1−rc
hz∗
1
Z
rc/h 1−y
yz∗dy (11.109)
I2= 0.216 rc
hz∗−1
1−rc
hz∗
1
Z
rc/h
ln y1−y
yz∗dy (11.110)
where
BS Coefficient bfor shallow water (default value 5)
BD Coefficient bfor deep water (default value 2)
CsShallow water criterion (Hs/h) (default value 0.05)
CdDeep water criterion (default value 0.4)
rcRoughness height for currents [m]
and
Ara =−0.27∆D50C2
µq21+0.5ψUb
q2(11.111)
µ=C
18 10log(12h/D90)1.5
(11.112)
z∗=w
κq√g
Cr1+0.5ψUb
q2(11.113)
Deltares 345 of 688

DRAFT
Delft3D-FLOW, User Manual
Ub=ωhw
2 sinh (kwh)(11.114)
ω=2π
T(11.115)
fw= exp −5.977 + 5.123
a0.194
0(11.116)
(≡Equations (9.205),(11.77) and (11.157)):
a0= max 2,Ub
ωrc(11.117)
ψ=(Cqfw
2gif wave effects are included (T > 0)
0otherwise (11.118)
where
CChézy coefficient (as specified in input of Delft3D-FLOW module)
hwwave height (Hrms)
kwwave number
Twave period computed by the waves model or specified by you as Tuser.
Ubwave velocity
wsediment fall velocity [m/s]
∆relative density (ρs−ρw)/ρw
κVon Kármán constant (0.41)
The following formula specific parameters have to be specified in the input files of the Trans-
port module (See section B.9.3): BS,BD,Cs,Cd, dummy argument, rc,w,εand Tuser.
11.5.5.2 Transport in wave propagation direction (Bailard-approach)
If the Bijker formula is selected it is possible to include sediment transport in the wave direction
due to wave asymmetry following the Bailard approach, see Bailard (1981) and Stive (1986).
For a detailed description of the implementation you are referred to Nipius (1998).
Separate expressions for the wave asymmetry and bed slope components are included for
both bedload and suspended load. Both extra bedload and suspended load transport vectors
are added to the bedload transport as computed in the previous sub-section:
~
Sb=~
Sb0+~
Sb,asymm +~
Ss,asymm +~
Sb,slope +~
Ss,slope (11.119)
where the asymmetry components for respectively the bedload and suspended transport in
wave direction are written as:
Sb;asymm(t) = ρcfεb
(ρs−ρ)g(1 −φ) tan ϕ|u(t)|2u(t)(11.120)
Ss;asymm(t) = ρcfεs
(ρs−ρ)g(1 −φ)w|u(t)|3u(t)(11.121)
346 of 688 Deltares

DRAFT
Sediment transport and morphology
from which the components in ξand ηdirection are obtained by multiplying with the cosine
and sine of the wave angle θwand the bed slope components as:
Sb;slope,ξ (t) = ρcfεb
(ρs−ρ)g(1 −φ) tan ϕ
1
tan ϕ|u(t)|3∂zb
∂ξ (11.122)
Ss;slope,ξ (t) = ρcfεs
(ρs−ρ)g(1 −φ)w
εs
w|u(t)|5∂zb
∂ξ (11.123)
and similar for the ηdirection, where:
u(t)near bed velocity signal [m/s]
ρdensity of water [kg/m3]
ρsdensity of the sediment [kg/m3]
cfcoefficient of the bottom shear stress [-] (constant value of 0.005)
φporosity [-] (constant value of 0.4)
ϕnatural angle of repose [-] (constant value of tan ϕ= 0.63)
wsediment fall velocity [m/s]
εbefficiency factor of bedload transport [-] (constant value of 0.10)
εsefficiency factor of suspended transport [-] (constant value of 0.02, but in imple-
mented expression for suspended bed slope transport the second εsis replaced
by a user-defined calibration factor; see Equation (11.126)).
These transports are determined by generating velocity signals of the orbital velocities near
the bed by using the Rienecker and Fenton (1981) method, see also Roelvink and Stive
(1989).
The (short wave) averaged sediment transport due to wave asymmetry, Equations (11.120)
and (11.121), is determined by using the following averaging expressions of the near bed
velocity signal (calibration coefficients included):
u|u|2=F acA ˜u|˜u|2+ 3F acU ¯u|˜u|2(11.124)
u|u|3=F acA ˜u|˜u|3+ 4F acU ¯u|˜u|3(11.125)
in which:
˜uorbital velocity signal
¯uaveraged flow velocity (due to tide, undertow, wind, etc.)
F acA user-defined calibration coefficient for the wave asymmetry
F acU user-defined calibration coefficient for the averaged flow
The suspended transport relation due to the bed slope according to Equation (11.123) is
implemented as:
Ss;slope,ξ(t) = ρcfεs
(ρs−ρ)g(1 −φ)w
εsl
w|u(t)|5∂zb
∂ξ (11.126)
where:
εsl user-defined calibration coefficient EpsSL
To activate this transport option, you have to create a separate file named <coef.inp>which
contains on three separate lines the calibration coefficients: FacA,FacU and EpsSL. The
Deltares 347 of 688

DRAFT
Delft3D-FLOW, User Manual
other parameters are read from the transport input file or are specified as general sediment
characteristics.
Note: the user-defined FacU value is currently treated as a dummy value, FacU = 0.0 will
always be used.
A validation study (Nipius,1998) showed that the following coefficient settings yielded the best
results for the Dutch coast:
FacA = 0.4
FacU = 0.0
EpsSL = 0.11
If a relatively straight coast is considered the effect of the parameters is:
The wave asymmetry causes onshore directed sediment transport (i.e. in the wave propa-
gation direction). An increased FacA results in an increased onshore transport and hence
steepening of the cross-shore bottom profile.
The bed slope transport is in general offshore directed. By increasing EpsSL an in-
creased flattening of the bottom profile occurs (i.e. increased offshore transports).
The ratio between these parameters determines the balance between onshore and off-
shore transport and hence the shape and slope of the cross-shore bottom profile. The
associated response time of the cross-shore morphology can be influenced by modifying
the values of the two parameters, but maintaining a constant ratio. Increased values result
in increased gross transports and consequently a reduced morphological response time
(and vice versa).
11.5.6 Van Rijn (1984)
The Van Rijn (1984a,b,c) sediment transport relation is a transport formula commonly used for
fine sediments in situations without waves. Separate expressions for bedload and suspended
load are given. The bedload transport rate is given by:
Sb=
0.053q∆gD3
50D−0.3
∗T2.1for T < 3.0
0.1q∆gD3
50D−0.3
∗T1.5for T≥3.0
(11.127)
where Tis a dimensionless bed shear parameter, written as:
T=µcτbc −τbcr
τbcr
(11.128)
It is normalised with the critical bed shear stress according to Shields (τbcr), the term µcτbc is
the effective shear stress. The formulas of the shear stresses are
τbc =1
8ρwfcbq2(11.129)
fcb =0.24
(10log (12h/ξc))2(11.130)
µc=18 10log (12h/ξc)
Cg,90 2
(11.131)
where Cg,90 is the grain related Chézy coefficient
Cg,90 = 18 10log 12h
3D90 (11.132)
348 of 688 Deltares
DRAFT
Sediment transport and morphology
The critical shear stress is written according to Shields:
τbcr =ρw∆gD50θcr (11.133)
in which θcr is the Shields parameter which is a function of the dimensionless particle param-
eter D∗:
D∗=D50 ∆g
ν21
3
(11.134)
The suspended transport formulation reads:
Ss=fcsqhCa(11.135)
In which Cais the reference concentration, qdepth averaged velocity, hthe water depth and
fcs is a shape factor of which only an approximate solution exists:
fcs =f0(zc)if zc6= 1.2
f1(zc)if zc= 1.2(11.136)
f0(zc) = (ξc/h)zc−(ξc/h)1.2
(1 −ξc/h)zc(1.2−zc)(11.137)
f1(zc) = ξc/h
1−ξc/h1.2
ln (ξc/h)(11.138)
where ξcis the reference level or roughness height (can be interpreted as the bedload layer
thickness) and zcthe suspension number:
zc= min 20,ws
βκu∗
+φ(11.139)
u∗=qrfcb
8(11.140)
β= min 1.5,1+2ws
u∗2!(11.141)
φ= 2.5ws
u∗0.8Ca
0.650.4
(11.142)
The reference concentration is written as:
Ca= 0.015α1
D50
ξc
T1.5
D0.3
∗
(11.143)
The bedload transport rate is imposed as bedload transport due to currents Sbc,while the
computed suspended load transport rate is converted into a reference concentration equal to
fcsCa. The following formula specific parameters have to be specified in the input files of the
Transport module (See section B.9.3): calibration coefficient α1, dummy argument, reference
level (bedload layer thickness) or roughness height ξc[m] and settling velocity ws[m/s].
Deltares 349 of 688

DRAFT
Delft3D-FLOW, User Manual
11.5.7 Soulsby/Van Rijn
The sediment transport relation has been implemented based on the formulations provided in
Soulsby (1997). References in the following text refer to this book.
If the wave period Tpis smaller than 10−6s, the wave period Tpis set to 5 s and the root-
mean-square wave height is set to 1 cm. Furthermore, the wave period is limited to values
larger than 1 s. The root-mean-square wave height is limited to values smaller than 0.4 H,
where His the water depth.
The sediment transport is set to zero in case of velocities smaller than 10−6m/s, water depth
larger than 200 m or smaller than 1 cm.
The root-mean-square orbital velocity is computed as:
Urms =√2πHrms
Tpsinh (kH)(11.144)
Furthermore, D∗is defined as (Soulsby,1997, p.104):
D∗=g∆
ν21/3
D50 (11.145)
Using the critical bed shear velocity according to Van Rijn (Soulsby,1997, p.176):
Ucr =0.19D0.1
50 10log (4H/D90)if D50 ≤0.5mm
8.5D0.6
50 10log (4H/D90)if 0.5mm < D50 ≤2mm (11.146)
larger values of D50 lead to an error and to the halting of the program.
The sediment transport is split into a bedload and suspended load fraction. The direction of
the bedload transport is assumed to be equal to the direction of the depth-averaged velocity
in a 2D simulation and equal to the direction of the velocity at the reference height a(see
section 11.3.3) in a 3D simulation (Soulsby,1997, p.183):
Sbx =AcalAsbuξ (11.147)
Sby =AcalAsbvξ (11.148)
and the suspended transport magnitude is given by the following formula (this quantity is
lateron converted to a reference concentration to feed the advection-diffusion equation for the
suspended sediment transport as indicated in section 11.3.3):
Ss=AcalAssξ√u2+v2(11.149)
where
Acal a user-defined calibration factor
Asb bedload multiplication factor
Asb = 0.005HD50/H
∆gD50 1.2
(11.150)
Ass suspended load multiplication factor
Ass = 0.012D50
D−0.6
∗
(∆gD50)1.2(11.151)
350 of 688 Deltares
DRAFT
Sediment transport and morphology
ξa general multiplication factor
ξ=rU2+0.018
CD
U2
rms −Ucr2.4
(11.152)
where Uis the total depth-averaged velocity and CDis the drag coefficient due
to currents, defined by:
CD=κ
ln (H/z0)−12
(11.153)
where z0equals 6 mm and the Von Kármán constant κis set to 0.4.
The bedslope correction factor is not explicitly included in this formula as it is a standard
correction factor available in the online morphology module. The method is intended for con-
ditions in which the bed is rippled.
The following formula specific parameters have to be specified in the input files of the Trans-
port module (See section B.9.3): the calibration factor Acal, the ratio of the two characteristic
grain sizes D90/D50 and the z0roughness height.
11.5.8 Soulsby
The sediment transport relation has been implemented based on the formulations provided in
Soulsby (1997). References in the following text refer to this book.
If the wave period Tpis smaller than 10−6s, the wave period Tpis set to 5 s and the root-
mean-square wave height is set to 1 cm. Furthermore, the wave period is limited to values
larger than 1 s. The root-mean-square wave height is limited to values smaller than 0.4 H,
where His the water depth.
The sediment transport is set to zero in case of velocities smaller than 10−6m/s, water depth
larger than 200 m or smaller than 1 cm.
The root-mean-square orbital velocity Urms and the orbital velocity Uorb are computed as
Urms =√2Uorb =√2πHrms
Tpsinh (kH)(11.154)
For a flat, non-rippled bed of sand the z0roughness length is related to the grain size as
(Soulsby,1997, eq.25, p.48) where χis a user-defined constant:
z0=D50
χ(11.155)
The relative roughness is characterised using a∗:
a∗=UorbTp
z0
(11.156)
which is subsequently used to determine the friction factor of the rough bed according to
Swart (1974) (≡Equations (9.205),(11.77) and (11.116)):
fw=0.3if a∗≤30π2
0.00251 exp (14.1a−0.19
∗)if a∗>30π2(11.157)
Deltares 351 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 11.2: Overview of the coefficients used in the various regression models (Soulsby
et al.,1993a)
Model b1 b2 b3 b4 p1 p2 p3 p4
1 (FR84) 0.29 0.55 -0.10 -0.14 -0.77 0.10 0.27 0.14
2 (MS90) 0.65 0.29 -0.30 -0.21 -0.60 0.10 0.27 -0.06
3 (HT91) 0.27 0.51 -0.10 -0.24 -0.75 0.13 0.12 0.02
4 (GM79) 0.73 0.40 -0.23 -0.24 -0.68 0.13 0.24 -0.07
5 (DS88) 0.22 0.73 -0.05 -0.35 -0.86 0.26 0.34 -0.07
6 (BK67) 0.32 0.55 0.00 0.00 -0.63 0.05 0.00 0.00
7 (CJ85) 0.47 0.29 -0.09 -0.12 -0.70 0.13 0.28 -0.04
8 (OY88) -0.06 0.26 0.08 -0.03 -1.00 0.31 0.25 -0.26
which corresponds to formulae 60a/b of Soulsby (p.77) using r=a∗/(60π)where ris the
relative roughness used by Soulsby. The friction factor is used to compute the amplitude of
the bed shear-stress due to waves as:
τw= 0.5ρfwU2
orb (11.158)
Furthermore, the shear stress due to currents is computed as:
τc=ρCDU2(11.159)
where
CD=κ
1 + ln (z0/H)2
(11.160)
as defined on Soulsby (1997, p.53–55). The interaction of the currents and waves is taken
into account using the factor Y in the following formula for mean bed shear stress during a
wave cycle under combined waves and currents (Soulsby,1997, p.94):
τm=Y(τw+τc)(11.161)
The formula for Yis given by:
Y=X[1 + bXp(1 −X)q](11.162)
where:
X=τc
τc+τw
(11.163)
and bis computed using:
b=b1+b2|cos φ|J+b3+b4|cos φ|J10log (fw/CD)(11.164)
and pand qare determined using similar equations. In this formula φequals the angle
between the wave angle and the current angle, and the coefficients are determined by the
model index modind and tables 11.2 and 11.3 (related to Soulsby (1997, Table 9, p.91)):
352 of 688 Deltares
DRAFT
Sediment transport and morphology
Table 11.3: Overview of the coefficients used in the various regression models, continued
(Soulsby et al.,1993a)
Model q1 q2 q3 q4 J
1 (FR84) 0.91 0.25 0.50 0.45 3.0
2 (MS90) 1.19 -0.68 0.22 -0.21 0.50
3 (HT91) 0.89 0.40 0.50 -0.28 2.7
4 (GM79) 1.04 -0.56 0.34 -0.27 0.50
5 (DS88) -0.89 2.33 2.60 -2.50 2.7
6 (BK67) 1.14 0.18 0.00 0.00 3.0
7 (CJ85) 1.65 -1.19 -0.42 0.49 0.60
8 (OY88) 0.38 1.19 0.25 -0.66 1.50
Using the shear stresses given above, the following two Shields parameters are computed:
θm=τm
ρg∆D50
and θw=τw
ρg∆D50
(11.165)
Furthermore, D∗is defined as (Soulsby,1997, p.104):
D∗=g∆
ν21/3
D50 (11.166)
with which a critical Shields parameter is computed (Soulsby,1997, eq.77, p.106):
θcr =0.30
1+1.2D∗
+ 0.055 (1 −exp (−0.02D∗)) (11.167)
The sediment transport rates are computed using the following formulations for normalised
transport in current direction and normal direction (Soulsby,1997, eq.129, p.166/167):
Φx1= 12 (θm−θcr)pθm+ε(11.168)
Φx2= 12 (0.95 + 0.19 cos (2φ)) θmpθw+ε(11.169)
Φx= max (Φx1,Φx2)(11.170)
Φy=12 (0.19θmθ2
wsin (2φ))
(θw+ε)1.5+ 1.5 (θm+ε)1.5(11.171)
where εis a small constant (10−4) to prevent numerical complications. From these expression
are finally the actual bedload transport rates obtained:
Sb,x =pg∆D3
50
U(Φxu−Φyv)(11.172)
Sb,y =pg∆D3
50
U(Φxv−Φyu)(11.173)
The transport vector is imposed as bedload transport due to currents. The following formula
specific parameters have to be specified in the input files of the Transport module (See sec-
tion B.9.3): calibration coefficient Acal, the model index for the interaction of wave and current
forces modind (integer number 1 to 8) and the D50/z0ratio χ(about 12).
Deltares 353 of 688
DRAFT
Delft3D-FLOW, User Manual
11.5.9 Ashida–Michiue (1974)
The transport rate is given by a generalised version of the Ashida-Michiue formulation:
Sbc =αq∆gD3
50θm1−ξθc
θp 1−rξθc
θ!q
(11.174)
where ξis the hiding and exposure factor for the sediment fraction considered and:
θ=q
C21
∆D50
(11.175)
in which qis the magnitude of the flow velocity. The transport rate is imposed as bedload
transport due to currents Sbc. The following formula specific parameters have to be specified
in the input files of the Transport module (See section B.9.3): α,θc,m,pand q(Ashida and
Michiue recommend α=17, θc=0.05, m=1.5, p=1 and q=1).
11.5.10 Wilcock–Crowe (2003)
The Wilcock-Crowe transport model is a fractional surface based transport model for calcu-
lating bedload transport of mixed sand and gravel sediment. The equations and their devel-
opment are described in Wilcock and Crowe (2003). The bedload transport rate of each size
fraction is given by:
Sbi =W∗
iFiU3
∗
∆g(11.176)
W∗
i=(0.002φ7.5for φ < 1.35
14 1−0.894
φ0.54.5for φ≥1.35 (11.177)
φ=τ
τri
(11.178)
τri
τrm
=Di
Dmb
(11.179)
τrm = (0.021 + 0.015 exp (−20Fs)) (ρs−ρw)gDg(11.180)
b=0.67
1 + exp 1.5−Di
Dg(11.181)
where:
DiD50 of size fraction i
Dggeometric mean grain size of whole grain size distribution
Fiproportion of size fraction ion the bed surface
Fsproportion of sand on the bed surface
Sbi bedload transort rate of size fraction i
W∗
idimensionless bedload transport rate of size fraction i
∆the relative density of the sediment (ρs−ρw)/ρw
τri reference shear stress of grains of size Di
τrm reference shear stress of grains of size Dg
Remarks:
The Wilcock-Crowe model incorporates its own hiding function so no external formula-
tion should be applied.
354 of 688 Deltares
DRAFT
Sediment transport and morphology
The roughness height used for the calculation of grain shear stress during the develop-
ment of the Wilcock-Crowe transport model was ks= 2D65.
This sediment transport formula does not have any input parameters that can be, or
need to be, tuned.
11.5.11 Gaeuman et al. (2009) laboratory calibration
The Gaeuman et al. sediment transport model is a modified form of the Wilcock-Crowe model
which uses the variance of grain size distribution on the phi scale (σ2
φ) rather than the frac-
tion of sand on the bed surface (Fs) as a measure of the bed surface condition for use in
the calculation of reference shear stress. The ’laboratory calibration’ implementation of the
Gaeuman et al. transport model is calibrated to the experimental data used in the derivation
of the Wilcock-Crowe transport model. The model, it’s derivation and calibration is described
in Gaeuman et al. (2009).
The formulae for the calculation of Sbi,W∗
i,φand τri are the same as for the Wilcock-Crowe
transport model (Equations (11.176),(11.177),(11.178) and (11.179)) but the calculation of
τrm and bdiffers.
τrm = θc0+0.015
1 + exp 10.1σ2
φ−14.14!(ρs−ρw)gDg(11.182)
b=1−α0
1 + exp 1.5−Di
Dg(11.183)
σ2
φ=
n
X
i=1 2log Di
Dg2
Fi(11.184)
where θc0and α0are user specified parameters (See section B.9.3). If the values θc0=
0.021 and α0= 0.33 are specified the original relation calibrated to the Wilcock-Crowe
laboratory data is recovered.
Remark:
The Gaeuman et al. model incorporates its own hiding function so no external formula-
tion should be applied.
11.5.12 Gaeuman et al. (2009) Trinity River calibration
The ’Trinity River calibration’ implementation of the Gaeuman et al. transport model is cali-
brated to observed bedload transport rates in the Trinity River, USA and is described in Gaeu-
man et al. (2009). It differs from the ’laboratory calibration’ implementation in the calculation
of τrm and b.
τrm = θc0+0.022
1 + exp 7.1σ2
φ−11.786!(ρs−ρw)gDg(11.185)
b=1−α0
1 + exp 1.9−Di
3Dg(11.186)
where θc0and α0are user specified parameters (See section B.9.3). If the values θc0= 0.03
and α0= 0.3are specified the original Gaeuman et al. formulation calibrated to the Trinity
River is recovered.
Remark:
Deltares 355 of 688
DRAFT
Delft3D-FLOW, User Manual
The Gaeuman et al. model incorporates its own hiding function so no external formula-
tion should be applied.
11.6 Morphological updating
The elevation of the bed is dynamically updated at each computational time-step. This is
one of the distinct advantages over an offline morphological computation as it means that the
hydrodynamic flow calculations are always carried out using the correct bathymetry.
At each time-step, the change in the mass of bed material that has occurred as a result of the
sediment sink and source terms and transport gradients is calculated. This change in mass is
then translated into a bed level change based on the dry bed densities of the various sediment
fractions. Both the bed levels at the cell centres and cell interfaces are updated.
Remark:
The depths stored at the depth points (which are read directly from the bathymetry
specified as input) are only updated for writing to the communication file and the result
files.
A number of additional features have been included in the morphological updating routine in
order to increase the flexibility. These are discussed below.
Morphological “switch”
You can specify whether or not to update the calculated depths to the bed by setting the
MorUpd (or equivalently BedUpd) flag in the morphology input file. It may be useful to turn
bottom updating off if only the initial patterns of erosion and deposition are required, or an
investigation of sediment transport patterns with a constant bathymetry is required.
Remark:
The use of MorUpd or BedUpd only affects the updating of the depth values (at ζand
velocity points); the amount of sediment available in the bed will still be updated. Use
the CmpUpd flag to switch off the updating of the bed composition. If you wish to prevent
any change in both the bottom sediments and flow depths from the initial condition then
this may also be achieved by either setting the morphological delay interval MorStt to
a value larger than the simulation period, or by setting the morphological factor MorFac
to 0. See below for a description of these two user variables.
Morphological delay
Frequently, a hydrodynamic simulation will take some time to stabilise after transitioning from
the initial conditions to the (dynamic) boundary conditions. It is likely that during this stabil-
isation period the patterns of erosion and accretion that take place do not accurately reflect
the true morphological development and should be ignored. This is made possible by use of
MorStt whereby you can specify a time interval (in minutes after the start time) after which
the morphological bottom updating will begin. During the MorStt time interval all other
calculations will proceed as normal (sediment will be available for suspension for example)
however the effect of the sediment fluxes on the available bottom sediments will not be taken
into account.
356 of 688 Deltares

DRAFT
Sediment transport and morphology
Morphological time scale factor
One of the complications inherent in carrying out morphological projections on the basis of
hydrodynamic flows is that morphological developments take place on a time scale several
times longer than typical flow changes (for example, tidal flows change significantly in a period
of hours, whereas the morphology of a coastline will usually take weeks, months, or years to
change significantly). One technique for approaching this problem is to use a “morphological
time scale factor” whereby the speed of the changes in the morphology is scaled up to a rate
that it begins to have a significant impact on the hydrodynamic flows. This can be achieved
by specifying a non-unity value for the variable MorFac in the morphology input file.
Remark:
The Morphological scale factor can also be time-varying, see section B.9.8. This feature
is not yet supported by the GUI. You have to edit the <∗.mor>file manually.
The implementation of the morphological time scale factor is achieved by simply multiplying
the erosion and deposition fluxes from the bed to the flow and vice-versa by the MorFac-
factor, at each computational time-step. This allows accelerated bed-level changes to be
incorporated dynamically into the hydrodynamic flow calculations.
While the maximum morphological time scale factor that can be included in a morphodynamic
model without affecting the accuracy of the model will depend on the particular situation being
modelled, and will remain a matter of judgement, tests have shown that the computations
remain stable in moderately morphologically active situations even with MorFac-factors in
excess of 1 000. We also note that setting MorFac=0 is often a convenient method of pre-
venting both the flow depth and the quantity of sediment available at the bottom from updating,
if an investigation of a steady state solution is required.
Remarks:
Verify that the morphological factor that you use in your simulation is appropriate by
varying it (e.g. reducing it by a factor of 2) and verify that such changes do not affect
the overall simulation results.
The interpretation of the morphological factor differs for coastal and river applications.
For coastal applications with tidal motion, the morphological variations during a tidal cy-
cle are often small and the hydrodynamics is not significantly affected by the bed level
changes. By increasing the morphological factor to for instance 10, the morphological
changes during one simulated tidal cycle are increased by this factor. From a hydrody-
namical point of view this increase in morphological development rate is allowed if the
hydrodynamics is not significantly influenced. In that case the morphological develop-
ment after one tidal cycle can be assumed to represent the morphological development
that would in real life only have occurred after 10 tidal cycles. In this example the num-
ber of hydrodynamic time steps required to simulate a certain period is reduced by a
factor of 10 compared to a full 1:1 simulation. This leads to a significant reduction in
simulation time. However, one should note that by following this approach the order
of events is changed, possible conflicts may arise in combination with limited sediment
availability and bed stratigraphy simulations. In river applications there is no such pe-
riodicity as a tidal cycle. For such applications, the morphological factor should be
interpreted as a speed-up factor for morphological development without changing the
order of events. Effectively, it means that the morphological development is simulated
using a, for instance 10 times, larger time step than the hydrodynamics, or phrased
more correctly the hydrodynamics is simulated at a 10 times faster rate. This means
that in case of time-varying boundary conditions (e.g. river hydrograph) the time-scale
of these forcings should be sped up: a 20 day flood peak will be compressed in 2 days.
However, one should take care that by speeding up the hydrodynamic forcings one
Deltares 357 of 688
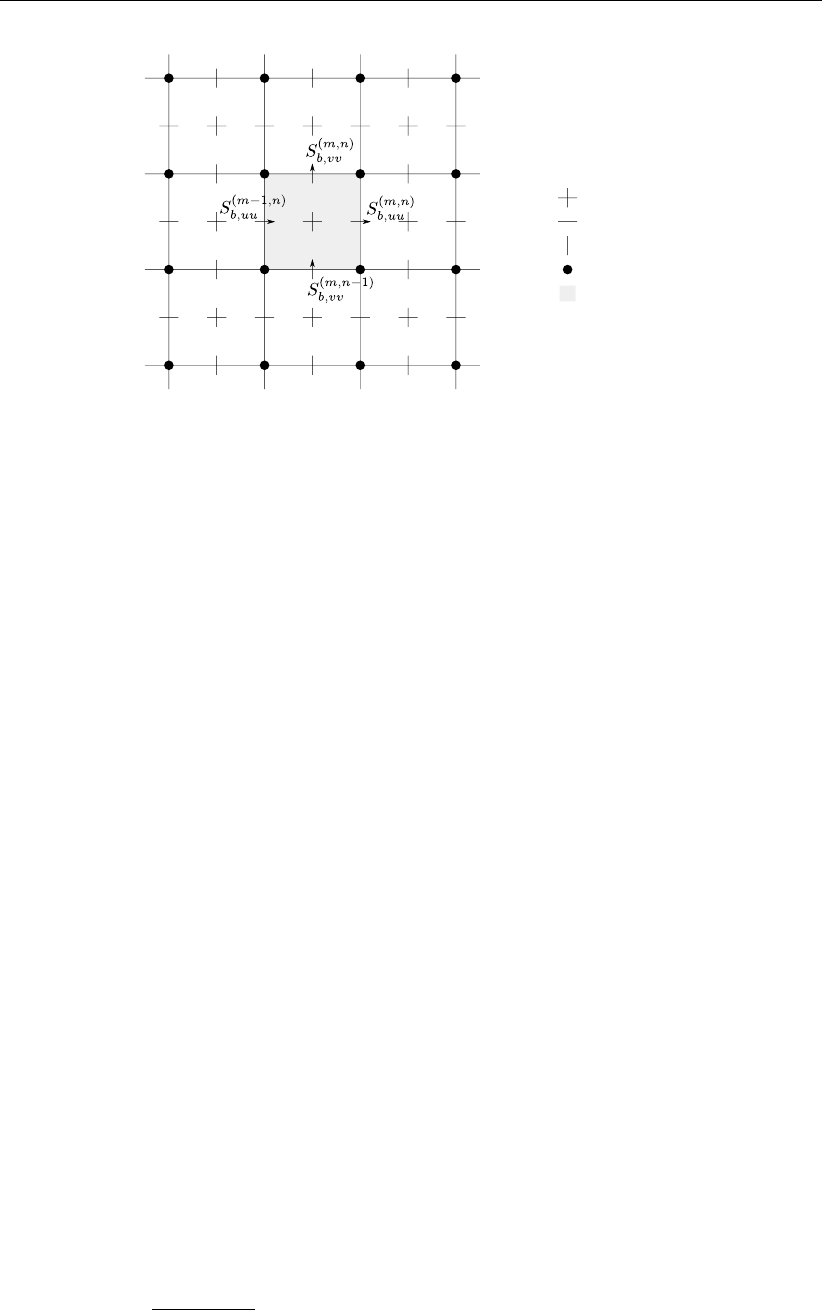
DRAFT
Delft3D-FLOW, User Manual
water level point
u-velocity point
v-velocity point
depth point
control volume
mm-1 m+1
n
n+1
n-1
Figure 11.6: Morphological control volume and bedload transport components
does not substantially change the nature of the overall hydrodynamic and morphologi-
cal development: a quasi-steady flood period should not become a short, dynamic flash
flood. For river applications, changing the morphological factor must be associated with
changing all external time-varying forcings. For coastal applications only the overall
simulation time should be adjusted. Note that the combination of a river-like flood peak
and a tidal motion will cause problems when interpreting morphological factor not equal
to 1.
The effect of the morphological factor is different for bed and suspended load. At each
time step bedload is picked-up from the bed and deposited on the bed: only the trans-
ports are increased by the morphological factor used for the time step considered. How-
ever, in case of suspended load there is a time-delay between the time of erosion and
the time of deposition. The erosion and deposition fluxes are increased by the morpho-
logical factor, but the suspended concentrations are not (since that would influence the
density effects). It is possible to vary the morphological factor during a simulation to
speed up relatively quiet periods more than relatively active periods. Such changes in
the morphological factor will not influence the mass balance of a bed or total load sim-
ulation since pickup and deposition are combined into one time step. However, in case
of suspended load the entrainment and deposition may occur at time-steps governed
by different morphological factors. In such cases the entrainment flux that generated a
certain suspended sediment concentration will differ from the deposition flux that was
caused by the settling of the same suspended sediment. A change in morphological
factor during a period of non-zero suspended sediment concentrations, will thus lead to
a mass-balance error in the order of the suspended sediment volume times the change
in morphological factor. The error may kept to a minimum by appropriately choosing the
transition times.
11.6.1 Bathymetry updating including bedload transport
The change in the quantity of bottom sediments caused by the bedload transport is calculated
using the expression:
∆(m,n)
SED =∆tfMORFAC
A(m,n) S(m−1,n)
b,uu ∆y(m−1,n)−S(m,n)
b,uu ∆y(m,n)+
S(m,n−1)
b,vv ∆x(m,n−1) −S(m,n)
b,vv ∆x(m,n)!,(11.187)
where:
∆(m,n)
SED change in quantity of bottom sediment at location (m, n)[kg/m2]
358 of 688 Deltares

DRAFT
Sediment transport and morphology
∆tcomputational time-step [s]
fMORFAC user-defined morphological acceleration factor, MORFAC
A(m,n)area of computational cell at location (m, n)[m2]
S(m,n)
b,uu computed bedload sediment transport vector in udirection, held at
the upoint of the computational cell at location (m, n)[kg/(m s)]
∆x(m,n)cell width in the xdirection, held at the Vpoint of cell (m, n)[m]
∆y(m,n)cell width in the ydirection, held at the Upoint of cell (m, n)[m]
This calculation is repeated for all ‘sand’ and ‘bedload’ sediment fractions, if more than one is
present, and the resulting change in the bottom sediment mass is added to the change due
to the suspended sediment sources and sinks and included in the bed composition and bed
level updating scheme.
11.6.2 Erosion of (temporarily) dry points
In the case of erosion near a dry beach or bank, the standard scheme will not allow erosion
of the adjacent cells, even when a steep scour hole would develop right next to the beach.
Therefore a scheme has been implemented that allows the (partial) redistribution of an erosion
flux from a wet cell to the adjacent dry cells. The distribution is governed by a user-defined
factor ThetSD, which determines the fraction of the erosion to assign (evenly) to the adjacent
cells. If ThetSD equals zero the standard scheme is used, i.e. all erosion occurs at the wet
cell. If ThetSD equals 1 all erosion that would occur in the wet cell is assigned to the adjacent
dry cells. The ‘wet’ and ‘dry’ cells in the paragraph above are defined as cells at which the
water depths are, respectively, above and below the threshold depth SedThr for computing
sediment transport.
A modification to this method may be activated by specifying a parameter HMaxTH larger
than the threshold depth SedThr for computing sediment transport. In this case, the factor
ThetSD is used as upper limit for the fraction of the erosion to be transferred to adjacent dry
cells. The actual factor to be transferred is equal to Thet , which is computed as:
Thet = (h1−SedThr )/(HMaxTH −SedThr )×ThetSD
where Thet = min(Thet ,ThetSD )(11.188)
Here, h1is the local water depth. The purpose of this formulation is to allow erosion of parts
that are inactive in terms of transport but still wet, while limiting the erosion of the dry beach.
If erosion of the dry beach is desired, this option is not recommended, so HMaxTH should be
set less than SedThr.
Remark:
The overall erosion flux is redistributed to the adjacent cells. Depending on the avail-
ability of individual sediment fractions at the central ‘wet’ cell and the surrounding ‘dry’
cells, the erosion from the adjacent cells will replenish the eroded cell with different
sediment fractions than those that were eroded.
11.6.3 Dredging and dumping
If the bed levels are updated, you may also include some dredging and dumping activities at
the end of each half time step. This feature can also be used for sand mining (only dredging,
no associated dumping within the model domain) and sediment nourishment (only dumping,
no associated dredging within the model domain). Dredging and dumping is performed at this
stage in the following order:
Deltares 359 of 688

DRAFT
Delft3D-FLOW, User Manual
For each dredge area: if the bed level exceeds a threshold level (or the water depth drops
below a certain level) then the bed level is lowered based on the dredging option and the
corresponding volume of sediment is removed. If the dredging capacity is less than the
volume to be dredged, the sequence of dredging (e.g. top first or uniform) determines
which grid cells are dredging at the current point in time.
The volume of dredged material is summed over all cells in a dredge area and distributed
over the dump areas, using the link percentages or the link order (up to the dump capacity).
In simulations with multiple sediment fractions the sediment composition is tracked.
For each dump area: the bed level is raised and the bed composition is adjusted based on
the volume and characteristics of material to be dumped. The sediment may be distributed
equally or non-uniformly (e.g. deepest points first) over the grid cells in the dump area.
Remark:
Dredging and dumping may also performed during initialization, before the first time-
step.
Warning:
Dredging large amounts of material may harm the stability of the calculation.
The dredging and dumping feature allows you to specify dredging and dumping areas as
x,ypolygons. Within each dredging polygon the bed levels are lowered to a user-defined
depth; by default grid cells are considered to lie within a polygon if their centre lies within
the polygon. It is possible to distribute the dredged material over multiple dumping locations.
You may also decide to not dump the sediment back into the model (feature referred to as
sand mining); this can be implemented by defining a dump polygon outside the grid, or by not
specifying any dump polygon at all. This option cannot be combined with the option to dredge
only as much as dump capacity is available. For sediment nourishment one should use a
[nourishment] block specifying the amount (and, if applicable, the composition) of the
nourished sediment. The dredging and dumping activities should be specified in a <∗.dad>
file; for a description of this attribute file see section A.2.23. The <mdf>file should contain a
keyword Fildad referring to the file used. The <∗.dad>file refers to the file containing the
polygons.
11.6.4 Bed composition models and sediment availability
The morphology module currently implements two bed composition models:
A uniformly mixed bed (one sediment layer). There is no bookkeeping of the order in which
sediments are deposited and all sediments are available for erosion.
A layered bed stratigraphy (multiple sediment layers). A user-defined number of bed com-
position bookkeeping layers may be included to keep track of sediment deposits. When
sediments are deposited, they are initially added to the top-most layer. After mixing in
the top layer, sediments are pushed towards the bookkeeping layers beneath it. The
bookkeeping layers are filled up to a user-defined maximum thickness, if this threshold is
exceeded a new layer is created. If the creation of a new layer would exceed the maxi-
mum number of layers specified by you, layers at the bottom of the stratigraphy stack will
be merged. Only sediments in the top-most layer are available for erosion. After erosion,
the top-most layer is replenished from below.
The default bed composition model is the uniformly mixed one. Currently only the default bed
composition model is supported by the user interface. See section B.9.2 on how to select the
other bed composition model.
360 of 688 Deltares

DRAFT
Sediment transport and morphology
At input you must specify the amount of sediment available at the bed as the total (dry) mass
of all sediment fractions in [kg/m2]. This may be a constant value for the entire model or,
alternatively, a space-varying initial sediment file (values to be specified at cell centres). The
initial bed composition is assumed to be uniformly mixed.1The thickness of the total sediment
layer is calculated from the sediment mass by dividing by the user-defined dry bed density
CDryB. Currently, CDryB is constant in time and space for each individual sediment fraction.
The top of these sediment deposits will coincide with the initial bed level. Below the bottom
of these deposits the model assumes a non-erodible bed (sometimes referred to as a fixed
layer).
When the model almost runs out of sediment at a particular location, the sediment flux terms
will be reduced. The reduction starts when the available sediment thickness drops below a
user-defined threshold Thresh. The flux terms affected are slightly different for cohesive and
non-cohesive sediments, as described below.
Cohesive sediment fractions
In the case of cohesive sediment, the erosive sediment source term is reduced proportion-
ally to the ratio of available sediment thickness over Thresh. The deposition term is never
reduced.
Non-cohesive sediment fractions
In the case of non-cohesive sediments all bedload transport rates out of a grid cell are reduced
by the upwind ratio of available sediment thickness over Thresh. The source and sink terms
of the advection-diffusion equation are not reduced unless the erosive sediment source term
is predicted to be larger than the deposition (sink) term, in that case both terms are reduced by
the ratio of available sediment thickness over Thresh as shown by the following equations:
Sourcetotal =Sourcetotal ∗fr,(11.189)
Sinktotal =Sinktotal ∗fr,(11.190)
where fris a reduction factor determined by:
fr= min ∆sed
Thresh,1,(11.191)
where ∆sed is the thickness of sediment at the bed.
The likelihood of erosive conditions occurring is assessed by calculating the total sediment
source and sink terms using the concentration from the previous time-step to evaluate the
implicit sink term. If the sink term is greater than the source term, then deposition is expected,
and fris set to 1.0 so that deposition close to the fixed layer is not hindered.
11.7 Specific implementation aspects
Negative water depth check
In rare situations (with high morphological acceleration factors) it is possible that, in one time-
step, the bed accretes more than the water depth. If this occurs the water depth will become
negative (water surface level is below the bed level). This situation is checked for and, if it
1The uniformly mixed bed can be used as input for both bed composition models. If you have more detailed
information on the bed stratigraphy, you may use the bed stratigraphy model and specify an initial layering of the
bed composition by means of the IniComp keyword (see section B.9.2) and associated initial bed composition
file (see section B.9.9). In that case the bed composition given in the <∗.sed>file will overruled, you have to
specify dummy values though.
Deltares 361 of 688
DRAFT
Delft3D-FLOW, User Manual
occurs, the water surface level for the cell is set equal to the new bed level. The cell will then
be set dry.
Threshold depth for sediment calculations introduced
If the water depth in a cell is less than SedThr, specified in the morphology input file, then
the sediment source and sink terms for the suspended sediment fractions (‘sand’ and ‘mud’)
will be set to zero (such that neither erosion nor resuspension will occur there). Note that
the advection diffusion equation may bring suspended sediment into such cells but it will not
interact with the bed; the only way for this sediment to leave the water column is by an increase
in water depth (such that interaction is allowed) or by advective/diffusive transport out of the
shallow cell. Furthermore, the bedload transport into (and out of) these cells for ‘sand’ and
‘bedload’ sediment fractions will be set to zero (bed load transport for ‘mud’ fractions is zero
always). This restriction has been included in order to prevent numerical problems during the
computation of the reference concentration, e.g. to prevent sudden bursts of sediment from
occurring when computational cells are flooded.
Remark:
In areas with very shallow water depths and sediment sources and sinks, you must
ensure that the user-defined threshold depth for drying and flooding, see section 4.5.8,
is not set too large.
Calculation of bed shear in wave and current situations altered
The calculation of the bed shear velocity u∗has been simplified in situations with waves and
currents. The bed shear is always calculated using the velocities computed in the bottom
computational layer, rather than using the computational layer closest to the top of the sedi-
ment mixing layer. The reference velocity in the bottom computational layer is adjusted to the
top of the sediment mixing layer using the apparent bed roughness kabefore being used to
compute the bed shear velocity using the physical bed roughness ks.
Depth at grid cell faces (velocity points)
During a morphological simulation the depth stored at the Uand Vvelocity points must be
updated to reflect the bed level changes calculated in the water level points. This used to be
performed by setting the new depth for the velocity point by copying the new depth held at the
water level point, using a simple upwind numerical scheme. As this may introduce instabili-
ties in the flow computation, especially near drying and flooding and in tidal simulations, this
method has been replaced by setting the depth at Uand Vpoints equal to the minimum of
the adjacent depths in water level points. This change significantly improves the smoothness
of flooding dry cells.
Remarks:
The setting of depths at velocity points as the minimum of the adjacent water level
points only comes into effect if sediment is present and the user-defined flag MORUPD
is .true. (i.e. bathymetrical changes are expected to occur at some point during the
simulation period). If this condition is not met then the depths at the velocity points do
not need to be updated during the course of the simulation.
The program still requires the depth at velocity points to be set to MOR for morphological
simulations. This anticipated that this restriction is lifted in a coming release.
Since the MOR and MIN procedures for computing the depth at cell interfaces are equiv-
alent, we advise you to use the MIN procedure during the calibration of a hydronamic
model that will later on be converted into a morphological model.
362 of 688 Deltares

DRAFT
Sediment transport and morphology
11.8 Validation
To test and validate the formulations and implementation of the 3D sediment transport feature
many simulations have been executed. These are reported in Lesser et al. (2000); Lesser
(2003); Ruessink and Roelvink (2000); Lesser et al. (2004); Roelvink (2003).
Remarks:
Small negative sediment concentrations (−1·10−3kg/m3) can be found in a com-
putation. These negative concentrations can be suppressed by applying a horizontal
Forester filter, Sections 4.5.8 and 10.6.4. However, this can result in a substantially
larger computing time. It is suggested to accept small negative concentrations and
to apply a Forester filter only when the negative concentrations become unacceptably
large.
A vertical Forester filter applied in a sediment transport computation will not affect the
sediments. Since it smoothes the vertical profile and thus can have a strong influence
on the vertical mixing processes, the vertical Forester filter is always de-activated for
sediment.
Deltares 363 of 688

DRAFT
Delft3D-FLOW, User Manual
364 of 688 Deltares

DRAFT
12 Fixed layers in Z-model
12.1 Background
In coastal seas, estuaries and lakes, stratified flow occurs in combination with steep topogra-
phy. 3D numerical modelling of the hydrodynamics and water quality in these areas requires
accurate treatment of the vertical exchange processes. The existence of vertical stratification
influences the turbulent exchange of heat, salinity and passive contaminants. The accuracy of
the discretisation of the vertical exchange processes is determined by the vertical grid system.
The vertical grid should:
resolve the boundary layer near the bottom to allow an accurate evaluation of the bed
stress
be fine around pycnocline
avoid large truncation errors in the approximation of strict horizontal gradients.
The commonly used σco-ordinate system does not meet all the requirements. The σco-
ordinate system is boundary fitted but will not always have enough resolution around the pycn-
ocline. The grid co-ordinate lines intersect the density interfaces. The σco-ordinate gives sig-
nificant errors in the approximation of strictly horizontal density gradients (Leendertse,1990;
Stelling and Van Kester,1994) in areas with steep bottom topography. Therefore, in 2003 a
second vertical grid co-ordinate system based on Cartesian co-ordinates (Z-grid) was intro-
duced in Delft3D-FLOW for 3D simulations of weakly forced stratified water systems, referred
as Z-model in this manual.
The Cartesian Zco-ordinate system has horizontal co-ordinate lines, which are (nearly) par-
allel with density interfaces (isopycnals) in regions with steep bottom slopes. This is important
to reduce artificial mixing of scalar properties such as salinity and temperature. The Z-model
is not boundary-fitted in the vertical. The bottom (and free surface) is usually not a co-ordinate
line and is represented as a staircase (zig-zag boundary). The number of grid cells in the ver-
tical varies for each horizontal grid point. In the Zco-ordinate system, the vertical index of the
free surface cell is “kmax” and the vertical index of the bottom layer is “kmin”. These indices
are dependent on the horizontal index. The vertical layer index in the Z-model decreases
from top to bottom. In the σ-model of Delft3D-FLOW the vertical index of the free surface
cell is always “1” and the vertical index of the bottom layer is “kmax”, which is independent
of the horizontal index. In other words, the vertical index increases from top to bottom. The
difference between the numbering in both grid systems has a historical background.
The staircase representation of the bottom, see Figure 12.1 leads to inaccuracies in the ap-
proximation of the bed stress and the horizontal advection near the bed (Bijvelds,2001). A
transport flux along the bed is split into a horizontal and vertical part, which leads to numerical
cross-wind diffusion in the transport equation for matter. The inaccuracies related to the stair-
case boundary representation of the bed in the Z-model are reduced by simple adjustments
of the determination of the bed shear stress and the advection near solid vertical walls.
Grid spacing in the σco-ordinate model is constructed by lines of constant σ. In a finite-
difference model, due to the σ-transformation, the number of control volumes in the vertical
direction is constant over the entire computational domain. The relative layer thickness ∆σ
does not depend on the horizontal co-ordinates xand y. This makes it impossible to locally
refine the grid around pycnocline in regions with steep bed topography. Moreover, the σ-
transformation gives rise to, not always required, high grid resolution in shallow areas (tidal
flats) and possibly insufficient grid resolution in deeper parts (holes) of the computational
domain. At tidal flats at low tide, the mapping may even become singular. The numerical
scheme may become non-convergent in these areas due to hydrostatic inconsistency (Haney,
Deltares 365 of 688
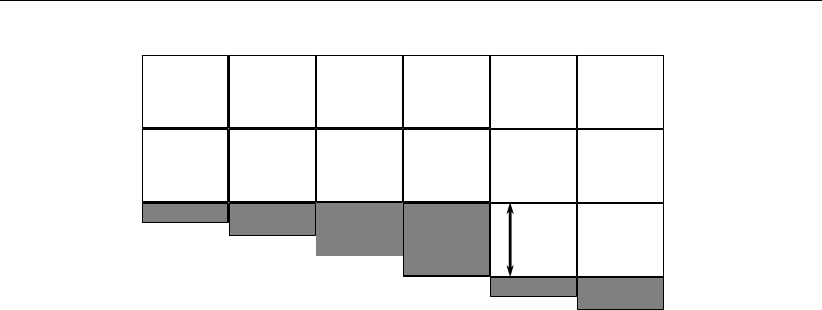
DRAFT
Delft3D-FLOW, User Manual
∆z
k
Figure 12.1: Irregular representation of bottom boundary layer in the Z-model
1991).
The vertical grid system of a Zco-ordinate model is based on horizontal surfaces with con-
stant zco-ordinate value intersecting the water column; see Figure 12.1. The concept of
layers used here should not be confused with layers of constant density in stratified flows.
The layer thickness here is defined as the distance between two consecutive grid surfaces
and is independent of space and time for an intermediate layer. The layer thickness of the
top layer ∆zkmax is defined as the distance between the free surface and the first horizontal
surface. The layer thickness may vary in space and time. The free surface moves through the
vertical grid (Casulli and Cheng,1992). The vertical index kof the top layer of neighbouring
horizontal grid cells may vary. In that case, fluxes may be defined at cell faces that do not
necessarily have a “wet” neighbouring grid cell. The thickness of the bottom layer is the dis-
tance between the bottom z=−d(x, y)and the first horizontal surface above the bed. The
layer thickness of the top and bottom cells can be very small, even approaching zero as the
top cell becomes dry.
Let z=zkbe strict horizontal surfaces, where kis an integer indicating the layer index. In
the present model, the vertical grid spacing ∆zkis defined by:
∆zk(x, y, t) = min [ζ(x, y, t), zk]−max [−d(x, y), zk−1](12.1)
Taking into account variable grid sizes near the bed and allowing the free surface to move
through the vertical grid introduces a lot of book keeping and makes the free surface boundary
elaborate to treat in the numerical method. The grid points that are “wet” are determined every
half time step. A computational cell is set “wet” when ever ∆zi,j,k >0. Since the grid spacing
near the bed and free surface may vary as a function of space and time, velocity points on
the staggered grid of two adjacent grid cells may be situated at different vertical positions.
Formally, this leads to additional terms in the discretized equations but these terms are not
taken into account. The variation of the free surface and bed topography is smooth in most
areas, which justifies the neglect of the cross terms involved.
The 3D shallow-water models in Delft3D-FLOW using σco-ordinates and zco-ordinates re-
spectively, are based on almost the same numerical methods.
The 3D shallow-water equations are discretized on a staggered grid (Arakawa C-grid). The
shallow-water equations (SWE) are solved by an ADI-type of factorization for the barotropic
pressure (Stelling,1984). Both the horizontal components of the velocity vector, uand v,
are computed once in a full time step ∆t. The vertical grid space may vanish due to dry-
ing and flooding of shallow areas. The vertical viscosity terms are integrated fully implicitly
in order to avoid an excessive small time step imposed by the relatively small vertical grid
366 of 688 Deltares
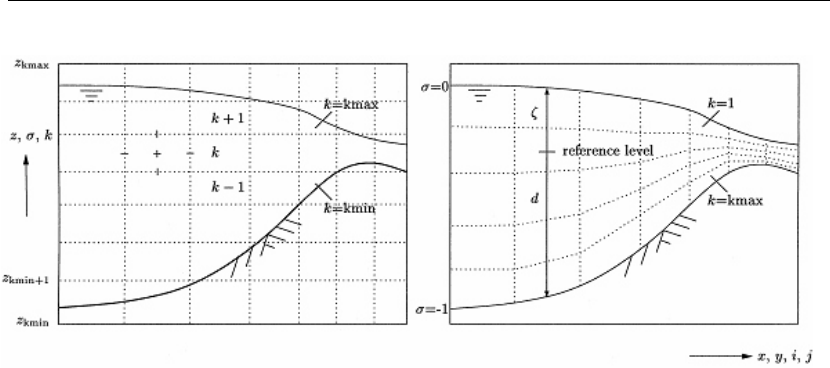
DRAFT
Fixed layers in Z-model
Figure 12.2: Vertical computational grid Z-model (left) and σ-model (right)
spaces. The vertical advection terms can be integrated using either an implicit scheme (cen-
tral differences), or an explicit upwind (finite volume scheme), depending on the application.
The explicit scheme introduced a time step criterium for stability. The horizontal viscosity
terms are integrated explicitly. For the integration of the horizontal advection terms, different
schemes are available:
Explicit Multi-Directional Upwind scheme (MOMSOL =MDUE, default option)
Implicit Multi-Directional Upwind scheme (MOMSOL =MDUI)
Implicit (first-order) Upwind scheme (MOMSOL =IUPW )
Explicit Flooding scheme (MOMSOL =FLOOD)
Explicit Upwind Finite-Volume scheme (MOMSOL =FINVOL)
The characteristics of these different schemes are explained in section 12.5.1.
For the explicit integration schemes (or when flooding of dry cells is involved), the time step is
restricted by the Courant-Friedrichs-Lewy condition for horizontal advection.
For the computation of the vertical eddy viscosity and eddy diffusivity several methods are
available, just as for the σ-model. The standard k-εturbulence closure model (Rodi,1984) is
commonly recommended. It uses two partial differential equations to compute the transport
of turbulent kinetic energy and energy dissipation rate. The production term only depends
on the vertical gradients of the horizontal velocity. The presence of stratification is taken into
account by the buoyancy flux.
A finite volume approach is used for the discretisation of the scalar transport equation, which
ensures mass conservation. To circumvent time step restrictions imposed by the small verti-
cal grid size in drying areas, implicit time integration is used for the vertical derivatives in the
transport equation. In horizontal and vertical direction, diffusion is discretized using central
differences. For horizontal derivatives, either explicit or implicit approximations can be used,
depending on the application. The horizontal advective terms can be computed by either the
Van Leer-2 TVD scheme or the Implicit Upwind scheme (first order accurate) and vertical ad-
vection is computed using an implicit central difference method to avoid time step limitations.
Apart from the free surface, the vertical grid spacing is not a function of time.
An overview of all available schemes for horizontal and vertical advection and diffusion for
both the momentum equation and the transport equation in the Z-layer model is given in
Table 12.1. For comparison also the options available in the σ-model have been included.
Deltares 367 of 688
DRAFT
Delft3D-FLOW, User Manual
Table 12.1: Available advection and diffusion schemes in the Z-layer model (for compari-
son also the options available in the σ-model have been included).
Method Process Options Remarks
σ-model
Time integration ADI section 10.4
Hor. advection
(momentum)
- CYCLIC
- WAQUA
- FLOOD
section 10.5.1
Vert. advection
(momentum)
Central implicit section 10.5.2
Hor. advection
and diffusion
(transport)
- Cyclic
- Van Leer-2
section 10.6
Z-model
Time integration ADI section 12.2
Hor. advection
(momentum)
- MDUE
- MDUI
- IUPW
- FLOOD
- FINVOL
section 12.5.1
Vert. advection
(momentum)
- Central implicit
- Upwind explicit
(finite volume)
section 12.5.2
Hor. advection
(transport)
- Van Leer-2
- IUPW
section 12.6
Hor. diffusion
(transport)
- Central explicit
- Central implicit
section 12.6
12.2 Time integration of the 3D shallow water equations
12.2.1 ADI time integration method
The 3D shallow-water equations are discretized on a staggered grid (Arakawa C-grid). The
shallow-water equations (SWE) are solved by an ADI-type of factorization for the barotropic
pressure (Stelling,1984). Both the horizontal components of the velocity vector, uand v, are
computed once in a full time step ∆t. The vertical advection and viscosity term are integrated
fully implicitly in order to avoid an excessive small time step imposed by the relatively small
vertical grid spaces near the bottom and the free surface. The vertical grid space may vanish
due to drying and flooding of the top layer. The horizontal advection and viscosity terms are
integrated explicitly. The time step is restricted by the Courant-Friedrichs-Lewy condition for
horizontal advection.
In vector form (for the 2D case), the ADI-method is given by:
368 of 688 Deltares
DRAFT
Fixed layers in Z-model
Step 1:
~
U`+1
2−~
U`
1
2∆t+1
2Ax~
U`+1
2+1
2Ay~
U`+B~
U`+1
2=~
d, (12.2)
Step 2:
~
U`+1 −~
U`+1
2
1
2∆t+1
2Ax~
U`+1
2+1
2Ay~
U`+1 +B~
U`+1 =~
d, (12.3)
with:
Ax=
0−f g ∂
∂x
0 0 0
H∂
∂x 0u∂
∂x
,(12.4)
Ay=
0 0 0
f0g∂
∂y
0H∂
∂y v∂
∂y
,(12.5)
and:
B= λ0 0
0λ0
0 0 0 !,(12.6)
with λthe linearised bottom friction coefficient.
To improve stability the bottom friction is integrated implicitly for each stage. ~
dis the right-hand
side containing the horizontal advection terms, external forcing like wind and atmospheric
pressure. The time integration of the horizontal viscosity terms is discussed in section 10.5.1
and is dependent on the formulation.
In the first stage, the time level proceeds from `to `+1
2and the simulation time from t=`∆t
to t=`+1
2∆t. In this stage the U-momentum equation is solved, which is implicitly
coupled with the continuity equation, Equation (9.3), by the free surface gradient. In the
second stage, the time level proceeds from `+1
2to `+ 1. The V-momentum equation is
solved, which is implicitly coupled with the continuity equation by the free surface gradient.
For the 3D shallow water equations, the horizontal velocity components are coupled in the
vertical direction by the vertical advection and viscosity term. In the vertical direction a fully
implicit time integration method is applied, which is first-order accurate in time and leads to tri-
diagonal systems of equations. The vertical coupling of the discretised momentum equations
is eliminated by a double sweep algorithm.
Deltares 369 of 688
DRAFT
Delft3D-FLOW, User Manual
12.2.2 Linearisation of the continuity equation
The non-linear terms in the coupled continuity equation and momentum equations, given by
Eqs. (9.3),(9.7) and (9.8), are removed by linearisation of the fluxes in time. For the terms
containing Uvelocity in the continuity equation, the linearisation leads to1:
∂
∂ξ pGηηHU`+1
2≈∂
∂ξ pGηηH`U`+1
2≈
≈pGηηH`U`+1
2m+1
2,n −pGηηH`U`+1
2m−1
2,n
∆ξ
(12.7)
12.3 Bed stress term
The bed stress term is computed using the logarithmic boundary layer relation expressed by
Equation (9.58). In this expression the grid distance of the first grid point above the bed, ∆zb
is used to determine the bed stress. When the distribution of the layer thickness at the bottom
shows large variation then large errors in the water level gradient may be introduced. This
is caused by local maxima of the turbulent energy level computed by the turbulence closure
model that affects the vertical viscosity term and vertical velocity.
In the Z-model this situation is more likely to occur than in the σ-model because the grid
distance of the first grid point above the bed, ∆zbcan vary strongly in the x-, y-space and its
value can locally be quite small; see Figure 12.1. This will result in a bed stress term that is
inaccurate and discontinuous.
To reduce this effect, the bed stress term is computed using the velocity at one grid point
above the bed (unless the number of active layers equals one):
u∗=ubottom+1κ
ln 1 +
∆zbottom+1
2+∆zbottom
z0(12.8)
An additional option is added to Delft3D-FLOW to improve the accuracy and smoothness of
the computed bottom shear stress significantly. This option involves the local remapping of
the near-bed layering to an equidistant layering, as described in Platzek et al. (2012), see
section B.26.
12.4 Horizontal viscosity terms
The horizontal viscosity term is simplified (see Eqs. (9.26) and (9.27)). The simplification
yields a Laplace operator along grid lines. The u-momentum equation involves only second-
order derivatives of the u-velocity.
In the momentum equations, the complete Reynolds stress tensor, given by Eqs. (9.23) to
(9.25), is used in the following cases:
partial slip at closed boundaries,
no slip at the closed boundaries,
HLES-model for sub-grid viscosity.
1This linearisation of the continuity equation is also used in the σ-model in combination with the Flooding
scheme for advection
370 of 688 Deltares
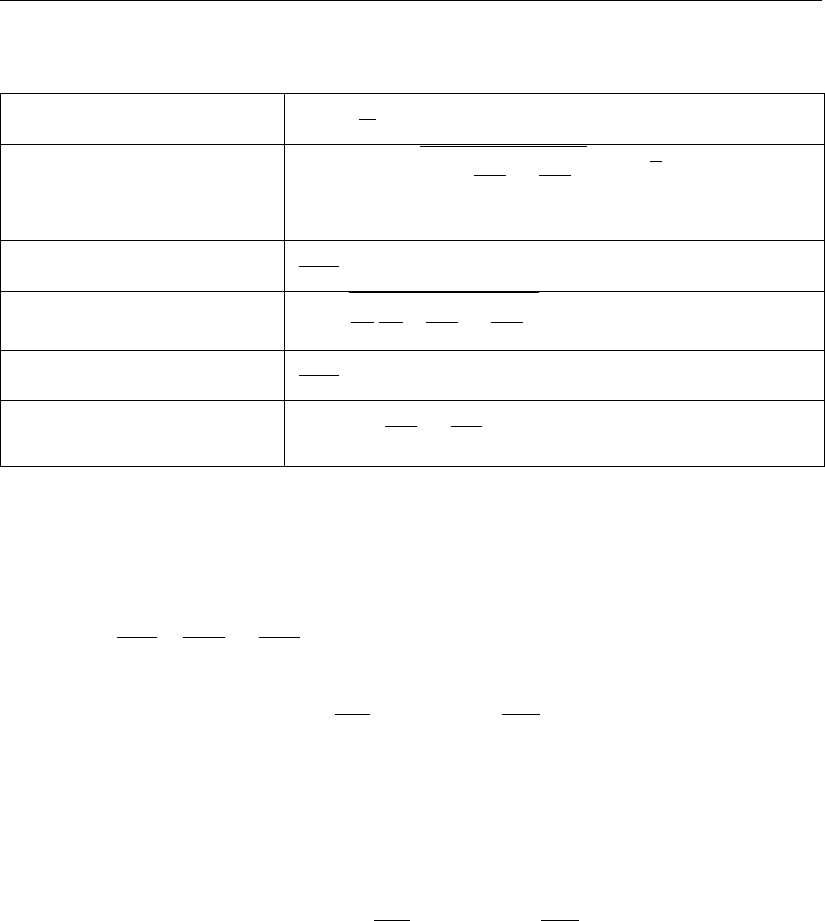
DRAFT
Fixed layers in Z-model
Table 12.2: Time step limitations shallow water solver Delft3D-FLOW
Points per wave period T ∆t≤T
40
Accuracy ADI for barotropic
mode for complex geome-
tries
Cf= 2∆trgH 1
∆x2+1
∆y2<4√2
Explicit advection scheme ∆t|u|
∆x<2
Stability baroclinic mode ∆tr∆ρ
ρ
gH
41
∆x2+1
∆y2<1
Explicit algorithm flooding ∆t|u|
∆x<2
Stability horizontal viscosity
term
∆t2νH1
∆x2+1
∆y2<1
For the complete Reynolds stress tensor, the shear stress τξη in the u-momentum equation
contains derivatives of the v-velocity. The horizontal viscosity term is integrated explicitly,
which leads to the following additional stability condition:
∆t≤1
2νH1
∆x2+1
∆y2−1
.(12.9)
In case of a curvilinear grid ∆x=pGξξ and ∆y=pGηη.
12.4.1 Overview time step limitations
In Table 12.2 an overview of the time step limitations due to stability and accuracy for the
time integration limitations are given for the shallow water code Delft3D-FLOW. Which of the
limitations is most restrictive is dependent on the kind of application: length scale, velocity
scale, with or without density-coupling, etc. In the relations below ∆xand ∆yare horizontal
grid sizes. For a curvilinear grid ∆x=pGξξ and ∆y=pGηη.
12.5 Spatial discretisations of 3D shallow water equations
12.5.1 Horizontal advection terms
The horizontal advective terms in the Z-model can be approximated by a number of different
schemes:
Explicit Multi-Directional Upwind scheme (MOMSOL =MDUE, default option)
Implicit Multi-Directional Upwind scheme (MOMSOL =MDUI)
Implicit (first-order) Upwind scheme (MOMSOL =IUPW )
Explicit Flooding scheme (MOMSOL =FLOOD)
Explicit Upwind Finite-Volume scheme (MOMSOL =FINVOL)
The Multi-Directional Upwind MDUE (explicit) and MDUI (Implicit) discretisations approximate
the advection terms along streamlines (Van Eijkeren et al.,1993). Although this method is
formally of first order accuracy, it was found to be much less diffusive than the standard first
order upwind method (Bijvelds,1997). The discretisation stencil is dependent on the direction
of the flow; see Figure 12.3. The discretisation for flow with a positive Uand V-component is
Deltares 371 of 688
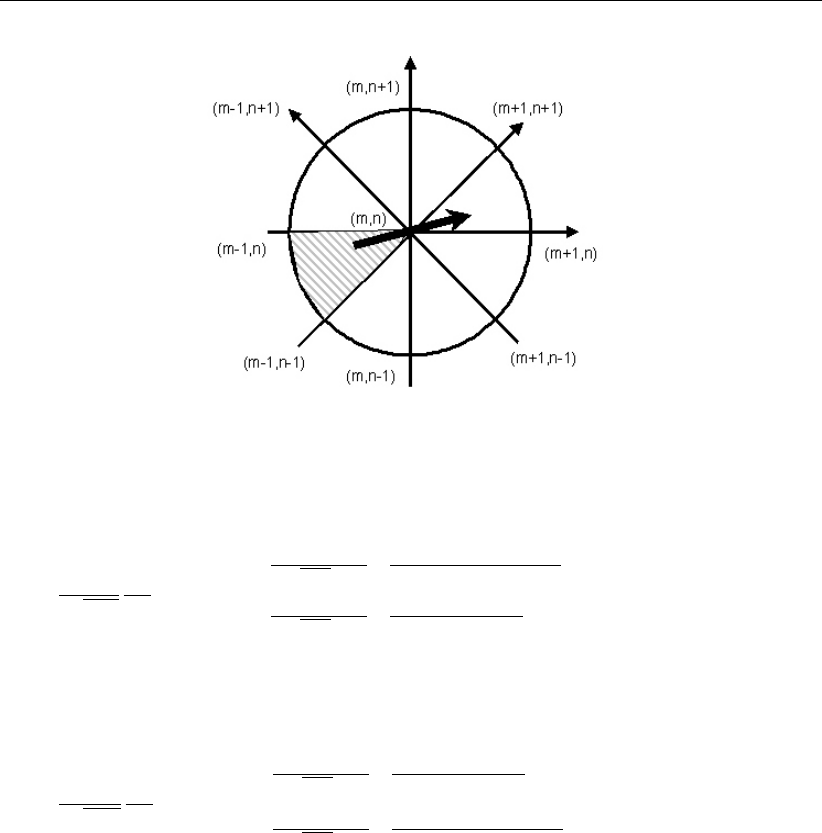
DRAFT
Delft3D-FLOW, User Manual
Figure 12.3: discretisation along streamlines. Grid points in difference stencil dependent
on flow direction
given by the following two equations.
u
pGξξ
∂u
∂ξ m,n,k
=
um,n,k
(√Gηη )m,n um,n−1,k −um−1,n−1,k
∆ξ¯vξη
m,n,k > um,n,k >0
um,n,k
(√Gηη )m,n um,n,k −um−1,n,k
∆ξum,n,k >¯vξη
m,n,k >0,
(12.10)
and:
v
pGηη
∂u
∂η m,n,k
=
¯vξη
m,n,k
(√Gηη )m,n um,n,k −um,n−1,k
∆η¯vξη
m,n,k > um,n,k >0
¯vξη
m,n,k
(√Gηη )m,n um−1,n,k −um−1,n−1,k
∆ηum,n,k >¯vξη
m,n,k >0
,
(12.11)
The implicit first order upwind IUPW method can be employed when stability is most important
and accuracy is of less interest. This method provides most damping or numerical diffusion
of the available options.
The flooding solver FLOOD is the same as for the σ-model (see section 10.5.1. It switches be-
tween conservation of momentum and conservation of energy based on local flow expansions
and contractions due to bottom gradients.
The finite-volume FINVOL scheme is momentum-conservative and can also be applied in
flooding simulations where conservation of momentum is required.
The FLOOD and FINVOL scheme are both fully explicit and thus require the time step to fullfil
the Courant-Friedrichs-Lewy stability condition.
Near the boundaries, the discretisation stencils for the advection terms may contain grid points
on or across the boundary. To avoid an artificial boundary layer or instabilities, the discretisa-
tions are reduced to smaller stencils.
372 of 688 Deltares

DRAFT
Fixed layers in Z-model
12.5.2 Vertical advection term
The horizontal velocities of adjacent vertical layers are coupled by the vertical advection and
the vertical viscosity term. The Z-model can have a very thin layer near the bottom or near
the free surface. To prevent instabilities, we recommend the use of the fully implicit time
integration for the vertical exchange terms (default). This results in tridiagonal systems of
equations in the vertical.
In a shallow water model the horizontal length scale is much larger than the vertical length
scale. In the vertical direction the eddy viscosity term dominates the advection term, except
in stratified flows where the turbulent exchange is reduced and advection may be dominant.
For the space discretisation of the vertical advection term, a second order central difference
is used:
w∂u
∂z m,n,k
= ¯wξz
m,n,k um,n,k+1 −um,n,k−1
1
2hm,n,k−1+hm,n,k +1
2hm,n,k+1 ,(12.12)
where hm,n,k denotes the thickness of layer with index kdefined by hm,n,k =zk−zk−1.
An explicit, momentum-conservative, upwind finite volume scheme is also available if momen-
tum conservation is considered to be more crucial than stability for a certain application. At
present, this scheme for vertical advection can only be used in combination with the finite
volume FINVOL scheme for horizontal advection. The vertical advection scheme is automat-
ically switched to this explicit upwind approach when the horizontal advection scheme is set
to MOMSOL =FINVOL. The user should note that this scheme is fully explicit and thus re-
quires the time step to fullfil the Courant-Friedrichs-Lewy stability condition, also for vertical
advection, i.e. depending on the vertical grid spacing ∆zand the vertical velocity w.
12.5.3 Viscosity terms
The approximation of the viscosity terms are based on central differences. The vertical vis-
cosity term is discretised as:
∂
∂z νV
∂u
∂z m,n,k
=νV|m,n,k+1
hm,n,k um,n,k+1 −um,n,k
1
2(hm,n,k+1 +hm,n,k)+
−νV|m,n,k
hm,n,k um,n,k −um,n,k−1
1
2(hm,n,k +hm,n,k−1).(12.13)
The vertical eddy viscosity is computed at the layer interface.
We note that near the bottom, the grid layering may be highly non-uniform due to the fact
that the bottom introduces thin layers. In such situations, the approximation given in Equa-
tion (12.13), is very inaccurate due to the linear approximations of the (often) near-logarithmic
velocity profiles near the bottom, see e.g. Platzek et al. (2012). To avoid these problems, a
near-bed, layer-remapping approach was implemented as proposed by Platzek et al. (2012).
This option can be switched on using an additional keyword, described in section B.26.
12.6 Solution method for the transport equation
A robust and accurate solver for scalar transport has to satisfy the following demands:
mass conservation by consistency with the discrete continuity equation,
Deltares 373 of 688
DRAFT
Delft3D-FLOW, User Manual
monotonicity (positive solution),
accuracy,
suitable for both time-dependent and steady state problems and
computationally efficient.
To ensure that the total mass is conserved, the transport equation is discretised with a mass
conserving Finite Volume approach (flux form). The transport equation formulated in a con-
servative form in Cartesian co-ordinates is given by:
∂(∆zm,n,kc)
∂t +1
∆x∆y{∂x(uc∆y∆zm,n,k) + ∂y(vc∆x∆zm,n,k)}
+ (wc)m,n,k −(wc)m,n,k−1=
+1
∆x∆y∂xDH∆y∆zm,n,k
∂c
∂x+∂yDH∆x∆zm,n,k
∂c
∂y +
+DV
∂c
∂z m,n,k −DV
∂c
∂z m,n,k−1−λd∆zm,n,kc+S, (12.14)
with λdrepresenting the first order decay process and Sthe source and sink terms per unit
area. ∆xand ∆yare the grid spaces in the physical space. The index of the computational
layer kincreases in the positive Z-direction. kmin and kmax are the indices of the bottom
and top cells respectively. The range of vertical index varies over the horizontal grid. The
vertical grid spacing of the top layer ∆zkmax changes in time as the free surface moves.
There is no scalar flux through the free surface and the bottom.
Two methods have been implemented in the Delft3D-FLOW transport solver in Z-model to
approximate the horizontal advective fluxes. The default option is the so-called Van Leer-2
scheme (Van Leer,1974), which guarantees monotonicity of the solution. The time integration
of the Van Leer-2 scheme is explicit and therefore the CFL condition for advection gives a
stability condition:
Cadv = max u∆t
∆x,v∆t
∆y≤1,(12.15)
The second available method is an implicit first-order upwind scheme IUPW, which does not
have the CFL stability condition, but which is less accrate than the Van Leer-2 scheme.
The horizontal diffusive terms are discretized conform the choice made for the horizontal
advective terms, i.e. when the Van Leer-2 scheme is chosen, the diffusive terms are approxi-
mated explicitly, whereas when the IUPW scheme is chosen, they are modelled implicitly. In
the case the explicit integration of the horizontal diffusive fluxes is used (i.e. for the Van Leer-2
scheme) an upper limit for the time step is given by:
∆t≤1
2DH1
∆x2+1
∆y2−1
.(12.16)
The scalar concentrations are coupled in the vertical direction by the vertical advection and
diffusion term. The vertical transport is computed at the layer interfaces which are situated
entirely under the free surface layer both at the old and the new time level. An explicit time
integration of the vertical exchange terms near the bottom and free surface would lead to very
374 of 688 Deltares
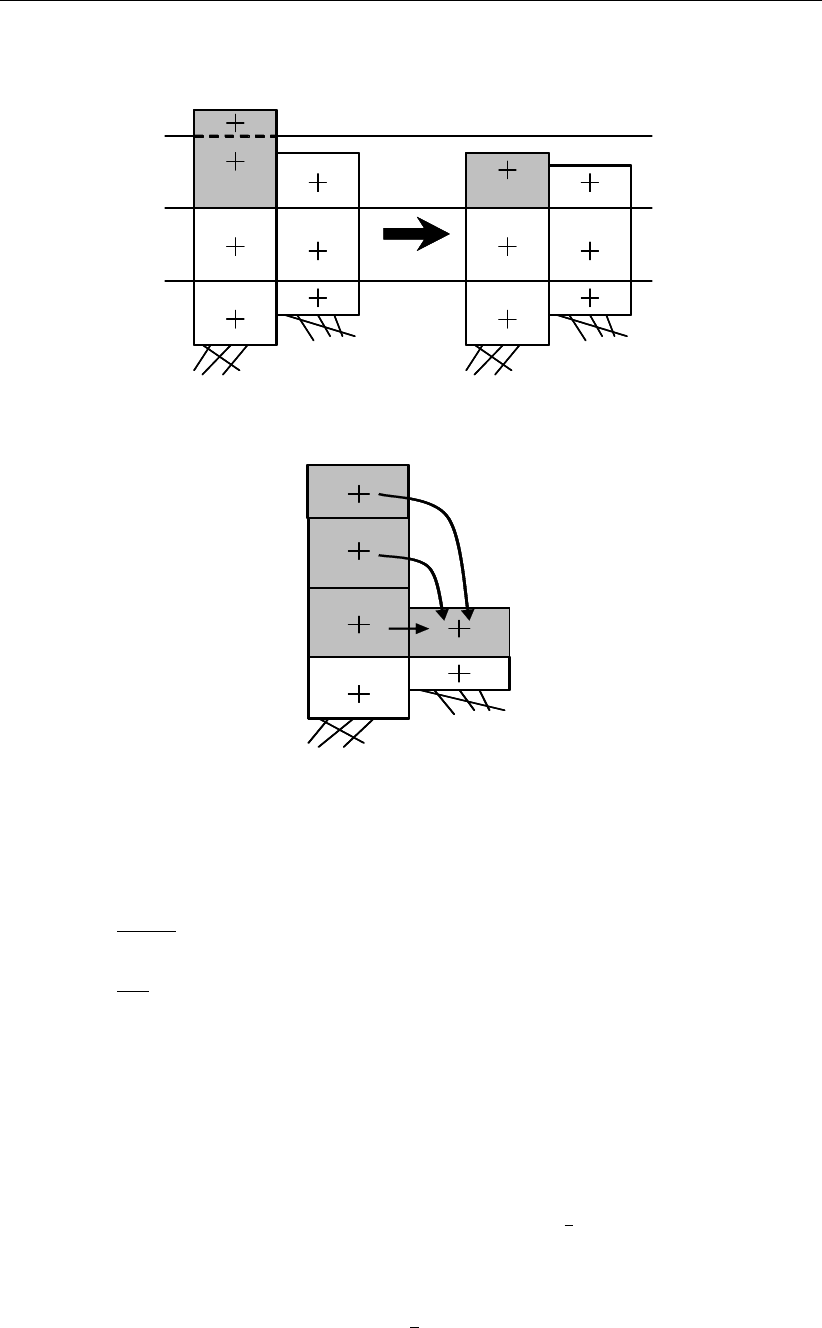
DRAFT
Fixed layers in Z-model
(m,k) (m,k)
(m,kmax)
(m,kmax)
z
k
zk-1
(m,kmax)
tt+∆t/2
(m,k) (m,k)
(m,kmax)
(m,kmax)
z
k
zk-1
(m,kmax)
tt+∆t/2
Figure 12.4: Aggregation of Control volumes in the vertical due to variation position free
surface
( m , k m a x ( m ) )
(m , k m a x ( m - 1 ) )
( m , k m a x ( m ) )
(m , k m a x ( m - 1 ) )
Figure 12.5: Horizontal fluxes between neighbouring cells with variation in position free
surface
severe time step limitations:
∆t≤(∆z)2
2DV
,(12.17)
∆t≤∆z
w.(12.18)
Therefore in the vertical direction a fully implicit time integration method is applied, which is
first order in time and leads to tri-diagonal systems of equations. The vertical coupling of the
discretised transport equations is removed by a double sweep algorithm.
To combine the horizontal and vertical transport, we introduce an approach based on a frac-
tional step method. The water column is divided into two parts; see Figure 12.4. In this case,
the free surface at the old time level tand the new time level t+1
2∆tare in a different compu-
tational layer. The 3D part of the water column consists of the cells (finite volumes) which are
situated entirely under the free surface layer at both time levels. The remaining “wet” cells are
aggregated to one Control Volume and the horizontal fluxes are summed, see Figure 12.5.
The concentrations at the new time level, t+1
2∆tare computed. If the index of free surface
the cell has increased, the concentration at the new time level is assumed to be constant over
all the computational layers in the free surface cell.
Deltares 375 of 688
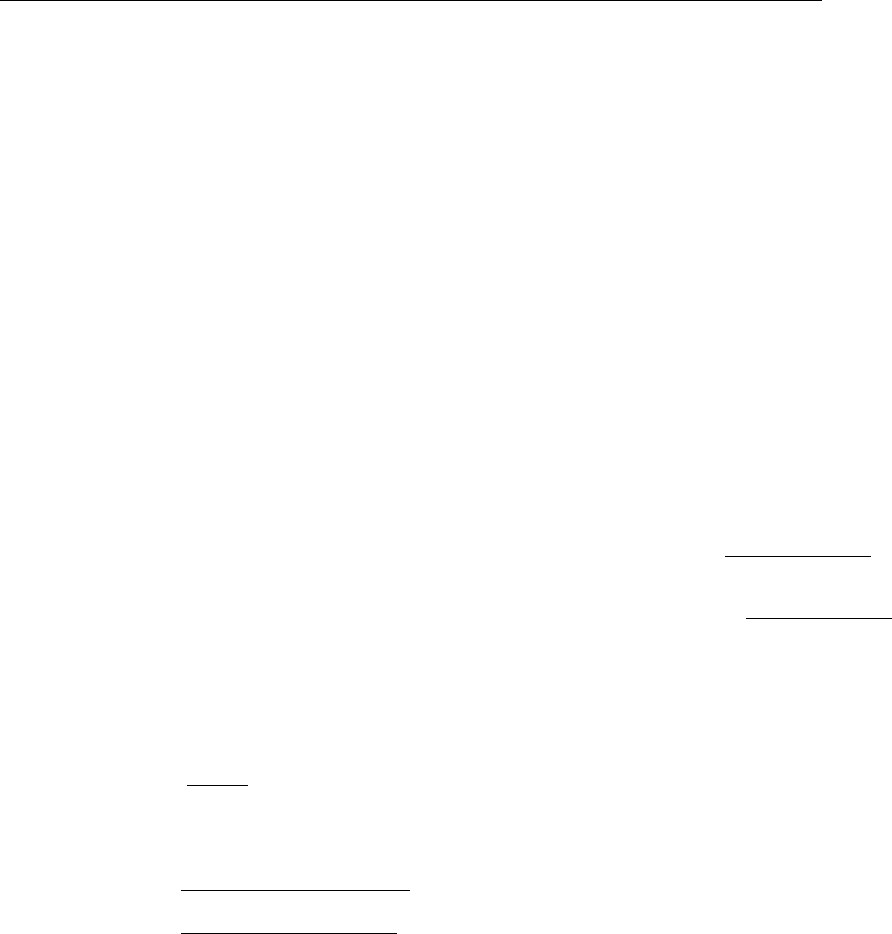
DRAFT
Delft3D-FLOW, User Manual
Source terms are integrated explicitly. In order to avoid negative concentrations and instabili-
ties, sink terms are integrated fully implicitly.
12.6.1 Horizontal advection
Two methods have been implemented in the Delft3D-FLOW transport solver to approximate
the horizontal advective fluxes. The default option is the so-called Van Leer-2 scheme (Van
Leer,1974), the second option is an implicit first-order upwind scheme IUPW.
12.6.1.1 Van Leer-2 scheme
The Van Leer-2 scheme (Van Leer,1974) is used for the approximation of the horizontal
transport terms. It combines two numerical schemes, namely a first order upwind scheme
and the second order upwind scheme developed by Fromm. In case of a local minimum or
maximum the first order upwind scheme is applied, whereas the upwind scheme of Fromm is
used in case of a smooth numerical solution.
The interpolation formula for the horizontal fluxes is given by:
Fm,n,k =um,n,khm,n,k∆y
cm,n,k +α(1 −CFLadv−u) (cm,n,k −cm−1,n,k)cm+1,n,k −cm,n,k
cm+1,n,k−cm−1,n,k ,
when um,n,k ≥0,
cm+1,n,k +α(1 + CFLadv−u) (cm,n,k −cm−1,n,k)cm+1,n,k −cm+2,n,k
cm,n,k−cm+2,n,k ,
when um,n,k <0,
(12.19)
with:
CFLadv−u=∆t |u|
∆x (12.20)
and:
α=
0,cmm+1,n,k−2cm,n,k+cm−1,n,k
cm+1,n,k−cm−1,n,k >1,(local max. or min.),
1,cm+1,n,k−2cm,n,k+cm−1,n,k
cm+1,n,k−cm−1,n,k ≤1,(monotone). (12.21)
In y-direction, a similar discretisation is applied. The time integration of the Van Leer-2
scheme is explicit. The Courant number for advection should be smaller than 1.
12.6.1.2 Implicit upwind scheme
The interpolation formula for the horizontal fluxes in x-direction is given by:
F`+1
m,n,k =u`
m,n,kh`
m,n,k∆y
c`+1
m,n,k,
when u`
m,n,k ≥0,
c`+1
m+1,n,k,
when u`
m,n,k <0,
(12.22)
It is a first order upwind scheme. Note that we now added the time level superscript `to
indicate the implicit treatment of the concentrations cin the fluxes. In y-direction the fluxes
are discretized similarly.
376 of 688 Deltares
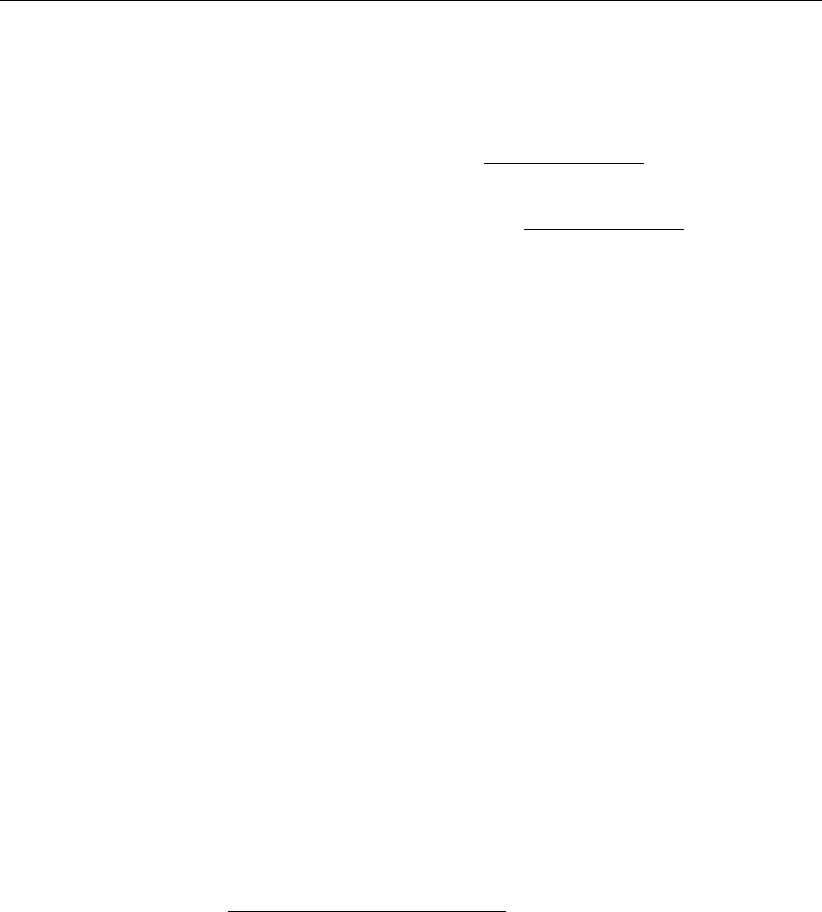
DRAFT
Fixed layers in Z-model
12.6.2 Vertical advection
In the vertical direction, the fluxes are discretised with a central scheme:
(wc)m,n,k −(wc)m,n,k−1=wm,n,k cm,n,k +cm,n,k+1
2
−wm,n,k−1cm,n,k +cm,n,k−1
2.(12.23)
The time integration in the vertical direction is fully implicit. The vertical advection leads to
a tri-diagonal system in the vertical. If the flow in the vertical is advection dominated due to
vertical stratification in combination with up welling or down welling near a closed boundary, a
sill or a discharge of buoyant water, the central differences in the vertical may give rise to non-
physical spurious oscillations. The scalar concentration then computed has an unphysical
maximum or minimum (overshoot or undershoot).
12.6.3 Forester filter
In 3D, the central differences in the vertical may give rise to non-physical spurious oscillations,
so-called “wiggles” (Gresho and Lee,1981) in the solution. These wiggles arise in the vicinity
of steep gradients of the quantity to be resolved. The wiggles in the concentration may be
introduced in stratified areas near closed boundaries and steep bottom slopes. Positive so-
lutions are not guaranteed, because there the vertical transport is large. In case of negative
concentrations, an iterative filter procedure based on local diffusion along Z-lines followed by
a vertical filter is started in order to remove the negative values. These filters can be switched
on by the user (see section 4.5.8). The filtering technique in this procedure is the so-called
Forester filter (Forester,1979), a non-linear approach which removes the computational noise
without inflicting significant amplitude losses in sharply peaked solutions.
If concentration cm,n,k is negative, then the iterative filtering process in the x-direction is given
by:
cp+1
m,n,k =cp
m,n,k +cp
m+1,n,k −2cp
m,n,k +cp
m−1,n,k
4,(12.24)
This filter is applied only in grid cells where a negative concentration occurs.
The superscript pdenotes the iteration number. The filter smooths the solution and reduces
the local minima (negative concentrations). Consequently, a positive concentration will remain
positive, i.e. it will not introduce negative concentrations irrespective the steepness of the con-
centration gradients. A negative concentration surrounded by positive concentrations, usually
the result of ill-represented steep gradients (wiggles), will be less negative after one iteration
and is effectively removed after several iterations by adding enough (local) diffusion to force
the concentration to become positive. Maximally 100 iterations are carried out. If there is still
a grid cell with a negative concentration after 100 iterations, then a warning is generated.
Local maxima and minima in temperature or salinity in the vertical direction, generated by the
computational method may give physically unstable density profiles and can also better be
removed by a numerical filter then by turbulent vertical mixing. A similar filtering technique
as in the horizontal direction is applied for points with a local maximum or minimum in the
vertical:
local maximum: cm,n,k >max (cm,n,k+1, cm,n,k−1) + ε,
Deltares 377 of 688

DRAFT
Delft3D-FLOW, User Manual
local minimum: cm,n,k <min (cm,n,k+1, cm,n,k−1) + ε,
the filter is applied, with ε= 10−3. The numerical diffusion coefficient of the vertical filter is:
Dnum =∆z2
2∆t.(12.25)
Smooth but unstable vertical density profiles of salinity and temperature in the vertical direc-
tion, can sometimes also better be vertically mixed by a numerical filter then by the turbulence
model. For salinity, the algorithm is given by:
If sm,n,k > sm,n,k−1+εThen
sm,n,k =sm,n,k −min (∆zk,∆zk−1)(sm,n,k −sm,n,k−1)
2∆zk
sm,n,k−1=sm,n,k−1+ min (∆zk,∆zk−1)(sm,n,k −sm,n,k−1)
2∆zk−1
(12.26)
Endif
with ε= 10−3.
If both the horizontal and vertical filters are switched on, then first the filter in the horizontal
direction is carried out. It is followed by the filter in the vertical direction, thereby minimising
the additional vertical mixing.
Remark:
The vertical Forester filter does not affect other constituents. When activated it only
smooths salinity and temperature.
12.7 Baroclinic pressure term
The transport equation is coupled with the momentum equations by the baroclinic pressure
term; see Eqs. (9.15) and (9.16) and section 9.3.4. The baroclinic pressure term reads:
Px(x, z) = 1
ρ0Zζ
z
g∂ρ (x, z)
∂x dz. (12.27)
In the Z-model, the horizontal derivatives of the density can be discretised straightforwardly
on the computational grid:
Px|m,n,k =g
ρ0(1
2∆zm,n,k
ρm+1,n,k −ρm,n,k
∆x+
kmax
X
j=k+1 ∆zm,n,j
ρm+1,n,j −ρm,n,j
∆x)
(12.28)
The temporal variations in salinity and temperature are slow compared to the variations in
the flow and therefore the baroclinic term in the momentum equations is treated explicitly,
introducing a stability condition for internal gravity waves (baroclinic mode), see Table 12.2.
The coupling with the flow is weak and in Delft3D-FLOW, the transport equation is solved
independently of the flow for each half time step.
378 of 688 Deltares

DRAFT
Fixed layers in Z-model
12.8 Numerical implementation of the turbulence models
The turbulence closure models in Delft3D-FLOW are all based on the eddy viscosity concept;
see section 9.5. The eddy viscosity is always based on information of the previous half time
step. The transport equations of turbulent kinetic energy k,Equation (9.127), and dissipation
rate ε,Equation (9.128) are solved in a non-conservative form. For turbulent boundary flows
local production, dissipation, and vertical diffusion are the dominant processes. On the stag-
gered grid, the turbulent quantities k,εand the eddy viscosity νVare positioned at the layer
interfaces in the centre of the computational cell. This choice makes it possible to discretise
the vertical gradients in the production term and buoyancy term accurately and to implement
the vertical boundary conditions at the bed and the free surface. First order upwind differenc-
ing for the advection provides positive solutions. For more details we refer to Uittenbogaard
et al. (1992) and Bijvelds (2001).
12.9 Drying and flooding
Just as in the σ-model, in the Z-model shallow parts of estuaries and coastal seas are subject
to drying and flooding during the tidal cycle. The drying and flooding procedure in the Z-model
is almost identical to the procedure applied in the σ-model. Due to different representation of
the bottom depth (see following section) the procedure is somewhat simplified.
Furthermore, a technical difference is introduced due to the nature of the grid definition in
the vertical. In a σ-model, when a point is set to dry, then all the layers are deactivated
simultaneously. In a Z-model however, the free surface can move freely through the vertical
grid, resulting in the fact that . The top layer can vanish due to ’wetting and drying’ in the
vertical.
The crucial issues in a wetting and drying algorithm are:
The way in which the bottom depth is defined at a water level point.
The way in which the water level is defined at velocity points.
The way in which the total water depth is defined.
Criteria for setting a velocity and/or water level point wet or dry.
These items will be discussed below.
12.9.1 Bottom depth at water level points
The main difference between the σ-model and the Z-model is the representation of the bottom
in the model. In the Z-model it is represented as a staircase around the depth in the water
level points; see Figure 12.1. However, due to grid staggering, the bottom depth in a water
level point dζ
m,n is not uniquely defined; see Figure 12.6.
The manner in which this depth value can be determined from the four surrounding depth
points may be influenced by the user. In both the σ- and the Z-model, four options are avail-
able: MEAN,MAX,DP, and MIN. The option is specified through the value of the parameter
DPSOPT. For the definition and a detailed discussion on this topic we refer you to Chapter 10.
Deltares 379 of 688
DRAFT
Delft3D-FLOW, User Manual
Figure 12.6: Definition bottom depth on Delft3D-FLOW grid
Drying and flooding switch
The drying and flooding switch, DRYFLP, works exactly the same as in the σ-model; see
section 10.8.3. To activate the additional drying and flooding procedure at a water level point,
based on the evaluation of the value of the total water depth, the value of DRYFLP must be
set to YES.DRYFLP =NO implies that the drying and flooding check is only to be based on
the individual test of the depth values at the cell interfaces.
If the total water depth in a water level point is negative:
Hζ
m,n =dζ
m,n +ζm,n ≤0,(12.29)
the horizontal cell is taken out of the computation and the half time step is repeated. The initial
water level at a dry cell is determined by the depth at a water level point:
ζm,n =−dζ
m,n.(12.30)
The surface layer thickness
The vertical grid size near the free surface depends on the spatial location and on time. Once
the new free surface location has been computed, the following equation is used to determine
the vertical grid size:
∆zk(x, y, t) = min [ζ(x, y, t), zk]−max [−d(x, y), zk−1],(12.31)
except for the situation where the water level exceeds the maximum grid layer interface Ztop.
In that case the vertical grid size of the top layer is increased to include the free surface:
∆zk(x, y, t) = ζ(x, y, t)−max [−d(x, y), zk−1].(12.32)
12.9.2 Bottom depth at velocity points
Due to the staggered grid applied in Delft3D-FLOW, see Figure 12.6, the bottom and total
water depth at velocity points are not uniquely defined. For the Z-model the bottom is rep-
resented as a staircase (DPUOPT=MIN) of tiles, centred around the water level points, see
Figure 12.7. The bottom depth at a velocity point is thus the minimum depth of the two sur-
rounding bottom depths in the ζ-points:
DPUOPT =MIN :dη= min dζ
m,n, dζ
m+1,n,(12.33)
In contrast to the σ-model, this value for DPUOPT is fixed. So any other value will not be
accepted by the program.
380 of 688 Deltares
DRAFT
Fixed layers in Z-model
1,m n
H
ζ
+
,m n
ζ
1,m n
dp
ζ
+
1k
z z
−
=
,m n
H
ζ
1,m n
ζ
+
,
U
m n
H
U
,m n
dp
ζ
1k
z z
+
=
k
z z=
max( , )
k m n
z z=
Figure 12.7: The flow-through height is determined by the flow direction. The bottom is
represented as a staircase around the depth in water level points.
12.9.3 Upwinding of the water level in defining the total water depth
The total water depth in a U-velocity point is computed using the upwind water level:
HU
m,n =
dη+ζm,n, Um,n >0,
dη+ζm+1,n, Um,n <0,
dη+ max (ζm,n, ζm+1,n), Um,n = 0,
(12.34)
with Um,n representing the depth averaged velocity both for 2D and 3D. The computation of
the upwind total water depth HV
m,n in a V-velocity point is similar. The upwind approach is
physically more realistic for velocity points between cells with different bottom depth at low
water and falling tide (Figure 12.12) or for weir like situations.
Upwinding the water level in the determination of the total water depth at the velocity points as
specified above enhances the discharge. The computed water level is generally higher than
the average water level, resulting in a larger flow area, which allows the water level gradient to
drive a larger amount of water into the neighbouring cell during the next time step. Taking the
maximum of the two surrounding water levels at a dry cell face prevents that a velocity point
is artificially kept dry.
The method above is physically less realistic if the flow has the opposite direction as the water
level gradient (wind driven flow). This may result into flip-flop behaviour of the computational
cell where it is alternately set to dry and wet during the computation.
12.9.4 Drying and flooding criteria
As described in section 10.4 an Alternating Direction Implicit (ADI) time integration method is
used in Delft3D-FLOW. This method consists of two stages (half-time steps). At both stages
the same drying and flooding algorithm is applied. Therefore, we will only describe the drying
and flooding algorithm for the first half time step. If a new water level is computed, both the
horizontal geometry (wet versus dry) and the vertical geometry (number of vertical layers) are
updated.
The total water depth HU
m,n at a velocity point should at least be positive to guarantee a
realistic discharge across a cell face. If the total water level drops below half of a user-specified
threshold, then the velocity point is set dry. In 3D simulations, the velocity of a computational
Deltares 381 of 688

DRAFT
Delft3D-FLOW, User Manual
layer is set to zero if the vertical grid space ∆zU
kvanishes. The computational cell is closed
for the side normal to that velocity point. If the water level rises and the total water depth is
larger than the threshold, the velocity point is set wet again. The drying threshold is given half
the value of the wetting threshold (hysteresis) to inhibit changes of state in two consecutive
time steps (“flip-flop”), due to oscillations introduced by the algorithm itself. If the vertical grid
space ∆zU
kis larger than a threshold ∆zmin the computational layer is taken into account.
The initial velocity of the layer is the same as the velocity of the top layer of the previous half
time level.
In Delft3D-FLOW it is also possible to initiate the bottom friction term in velocity points that
have just become active in case of flooding. This makes sure that the flow through such a
cell interface, directly experiences some bottom friction, which would not be the case if the
cell face would be initialised with zero velocity. This algorithm is automatically switched on
when using the bottom depth option DPSOPT=DP. Otherwise, it can be switched on using the
additional parameter (see Appendix B):
SlpLim=#Y#,
(a slope limiter), which also makes sure that the flow along steep bottom slopes occurs with a
limited water level gradient (see section B.27).
In 2D, the total water depth Hζ
m,n at a water level point should at least be positive to guarantee
a positive control volume. If the total water depth becomes negative, the four velocity points
at the cell sides are set dry. In 3D simulations, the vertical grid space ∆zζ
kshould be positive.
The thickness of the water layer of a dry cell (retention volume) is dependent on the threshold
dspecified by you. Therefore, the threshold value dmust fulfil the following condition:
δ≥∂ζ
∂t
∆t
2.(12.35)
In general, the magnitude of the disturbances generated by the drying and flooding algorithm
will depend on the grid size, the bottom topography and the time step. The disturbances are
small if the grid size is small and the bottom has smooth gradients. If the bottom has steep
gradients across a large area on a tidal flat, a large area may be taken out of the flow domain
in just one half integration time step. This will produce short oscillations. You can avoid this
by smoothing the bottom gradients. Flooding is an explicit process. The boundary of the wet
area can only move one grid cell per time step. If the time step is too large an unphysical
water level gradient at the wet-dry interface is built up, which will generate a shock wave after
flooding.
In the first stage of the ADI-method the drying and flooding algorithm in Delft3D-FLOW con-
sists of the following checks:
1 Drying check for velocity points in x-direction (HU
m,n <0.5δand ∆zU
m,n,k < zmin) and
flooding check for velocity points in x-direction (HU
m,n > δ and ∆zU
m,n,k > zmin). These
checks are based on the water level of the previous half time step.
2 Drying check for velocity points in x-direction (HU
m,n <0.5δ) during iterative solution for
new water level.
3 Drying check (negative volumes) for water level points (Hζ
m,n <0.0).
In the second stage of the ADI-method, the directions are interchanged.
382 of 688 Deltares

DRAFT
Fixed layers in Z-model
The threshold δis specified at input. The total water depth at velocity points is computed by
the upwind approach.
When a computational cell is dry, the thickness of the water layer is below the drying threshold.
If the computational cell is flooded, the water layer may be very thin and may cause problems
in combination with online salt transport or off-line water quality simulations. In Delft3D-FLOW
the computational part is protected against “dividing by zero” by assuming that the total water
depth is at least 10% of the drying and flooding threshold Dryflc, which is also the minimum
layer thickness ∆zmin.
You may define in velocity points so-called weirs or spillways. Weirs are hydraulic structures
causing energy losses, see section 10.9. For a 2D weir the height of the crest, HKRU, is taken
into account in the drying and flooding algorithm.
The drying check for a 2D weir point at a U-point is given by:
HU
m,n <1
2δor max(ζm−1,n, ζm,n) + HKRUm,n <1
2δ, (12.36)
and the flooding check:
HU
m,n > δ or max(ζm−1,n, ζm,n) + HKRUm,n > δ. (12.37)
The weir acts as a thin dam for water levels lower than the crest height.
12.10 Cut-cell and 45 degrees closed boundaries
This feature applies for the Z-model only.
12.10.1 Introduction
A staircase closed boundary is sometimes unavoidable when schematising the land-water
interface, even in curvilinear co-ordinates. To avoid inaccuracies introduced by the staircase
closed boundaries in the Z-model, two methods for removal of such inaccuracies are im-
plemented in Delft3D-FLOW. One is derived from the so-called Cut Cell method, for general
curved closed boundaries which do not coincide with a gridline. The second one is derived
for 45 degrees boundaries (1 to 1).
12.10.2 Cut Cells
The Cut Cell approach involves truncating the Control Volumes at the boundary surface to
create new cells which conform to the shape of the boundary, see Figure 12.8 (left). In the
grid generator corner points are shifted, Figure 12.8 (right) to remove the staircase. This
approach is called a “Cut Cell” method; see Kirkpatrick et al. (2003).
We discuss the approximation of the fluxes through the boundary cells and the pressure
gradients. It is necessary to relocate the velocity nodes associated with the cut boundary
cells. The velocity nodes are placed at the centre of the cut face of the Control Volume. It
allows the mass conservation to be discretised in the same manner as for a standard cell. The
only difference is that the horizontal area (volume) is recalculated for the truncated cells. In 3D
the horizontal area is the same for all layers. The pressure (water level) points are left in the
original position, even though this may mean that they are physically outside the boundaries
of the associated Control Volume. In the present implementation, the advection terms and the
wall shear stresses are not corrected for the cut cells.
Deltares 383 of 688
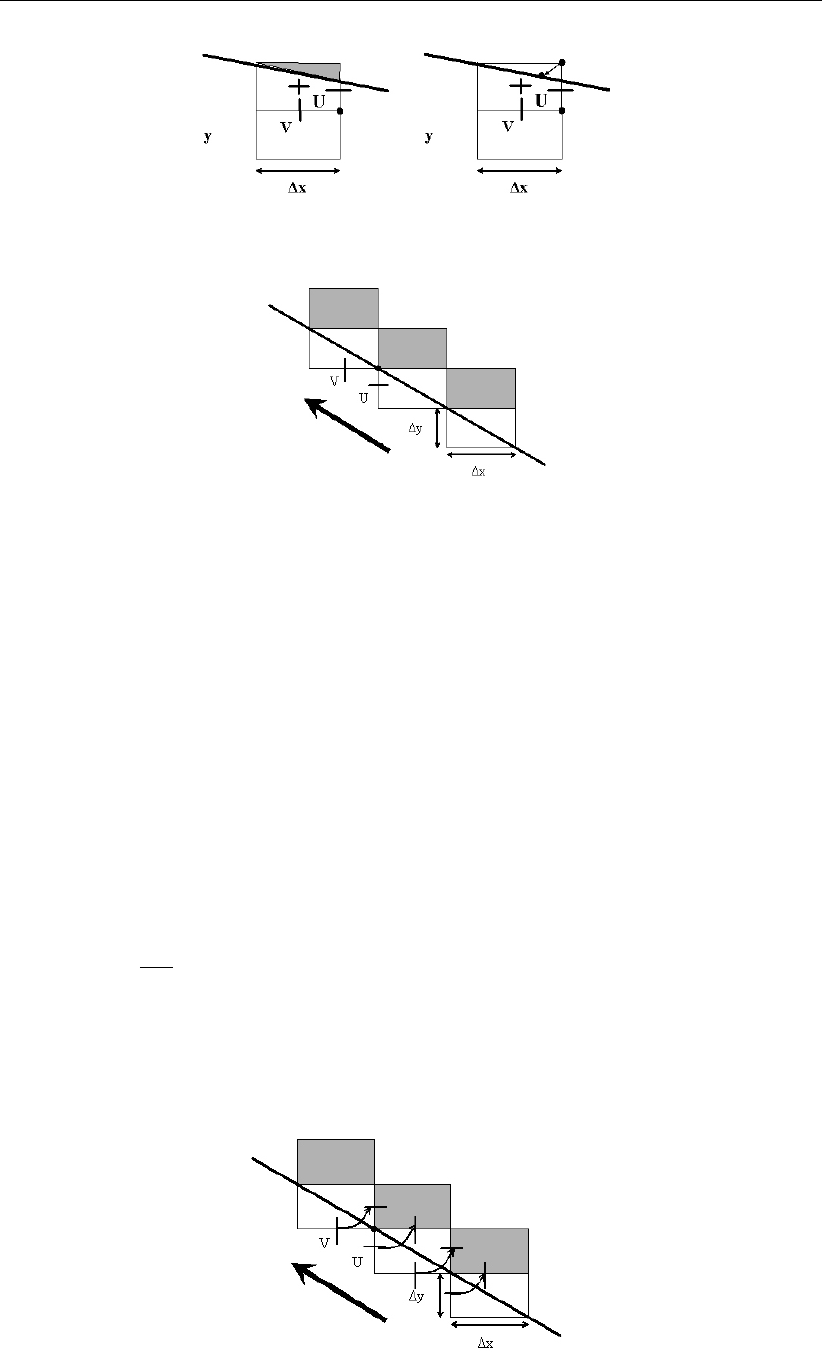
DRAFT
Delft3D-FLOW, User Manual
Figure 12.8: left: Cut Cell (definition) and right: defined by shifting (exaggerated) the
corner point to boundary.
Figure 12.9: Flow along staircase boundary.
The spatial approximation of the advection terms was not adapted. Only for Cut Cells the
curvature term was removed because the grid cells are no longer orthogonal.
On the staggered grid you need averaging to determine the V-velocity in a U-velocity point.
For Cut cells we changed the averaging procedure, to reduce the effect of the zero velocities
at the closed boundaries on the bottom stress. In the averaging procedure only velocity points
which are not at closed boundaries are taken into account. This reduces the artificial boundary
layer along closed “staircase” boundaries.
12.10.3 45 degrees closed boundary
For a staircase boundary of 45 degrees (1-1), a special approach is implemented for the
advection terms. The velocities are reflected in the boundary line, taking into account the
aspect ratio of the grid cells.
Vi,j =−∆y
∆xUi,j (12.38)
The advection terms for these 45 degree boundary cells are discretised with an explicit first
order upwind scheme using the velocities at the boundaries.
Figure 12.10: Reflection of velocities
384 of 688 Deltares
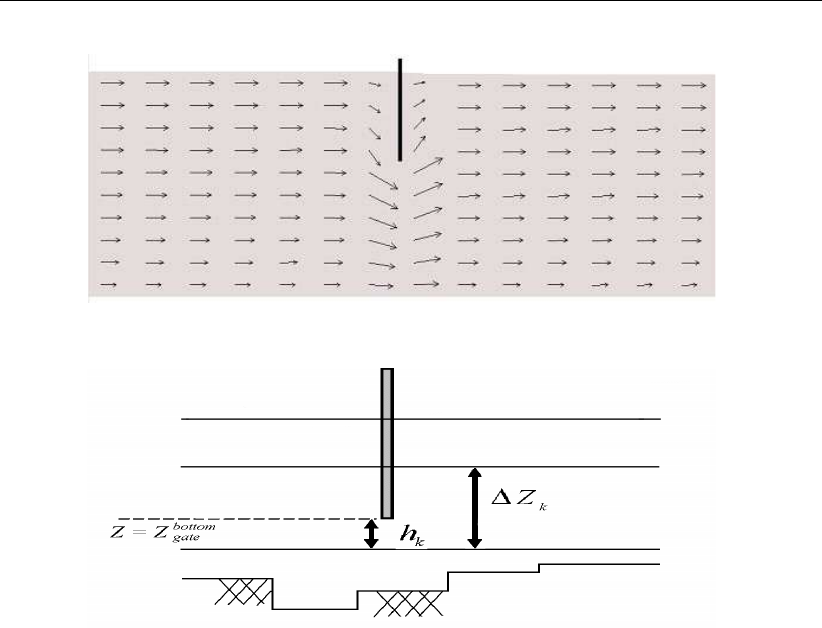
DRAFT
Fixed layers in Z-model
Figure 12.11: Example of a 3D Gate (vertical cross-section)
Figure 12.12: Computational layer partially blocked at the bottom of the 3D gate
12.11 Hydraulic structures
Also in the Z-model, the so-called hydraulic structures can be defined to model the effect of
obstructions in the flow that cannot be resolved on the horizontal grid (sub-grid) or where the
flow is locally non-hydrostatic. Examples of hydraulic structures in civil engineering are gates,
sills, sluices, barriers, porous plates, bridges, groynes, weirs. A hydraulic structure generates
a loss of energy apart from the loss by bottom friction. At these points an additional force term
is added to the momentum equation, to parameterise the extra loss of energy. The term has
the form of a friction term with a contraction or discharge coefficient.
In section 10.9, the mathematical formulations and implementation of the hydraulic structures
available in Delft3D-FLOW has been described thoroughly. In this section only the parts that
deviate will be discussed.
12.11.1 3D Gate
A 3D gate is in fact a thin dam with a limited height/depth (and position in the vertical). It is
located at a velocity point and its width is assumed to be zero, so it has no influence on the
water volume in the model area. The flow at all intermediate layers of the gate is set to zero.
The layer near the top and the layer near the bottom of the gate may be partially blocked.
Upstream of the structure the flow is accelerated due to contraction and downstream the flow
is decelerated due to expansion.
A 3D gate may be used to model a vertical constriction of the horizontal flow such as near
barriers, sluices and Current deflection walls. The vertical constriction of the flow may vary
in time by the lowering or raising of the gate. The implementation of the 3D gate has been
described in section 10.9.1. In this section, the figures showing the 3D gate as defined in the
Z-model will be shown.
Deltares 385 of 688

DRAFT
Delft3D-FLOW, User Manual
For more details on the data input requirements for the different type of 3D gates, we refer to
Appendix B.3.1.
12.11.2 Quadratic friction
The only hydraulic structure where quadratic friction is applied that is not available within the
Z-model is the so-called 2D Weir. The remaining structure may be defined in the Z-model in
a similar manner as the σ-model; see Eqs. (10.70) to (10.76).
12.11.3 Linear friction
The resistance force that is assumed to be linearly dependent on the flow is applied for the
rigid sheet. Rigid sheet in the Z-model is treated in a similar manner as in the σ-model; see
Equation (10.98).
12.11.4 Floating structure
Floating structures can also be modelled in the Z-model. It is treated in a similar manner as
in the σ-model; see Equation (10.99).
12.12 Assumptions and restrictions
The solution of the discretised equations is just an approximation of the exact solution. The
accuracy of the solution depends not only on the numerical scheme, but also on the way in
which the bottom topography, the geographical area, and the physical processes (turbulence,
wave-current interaction) are modelled.
The time integration method strongly influences the wave propagation when applying a large
time step. The assumption is made that, by restricting the computational time step, the free
surface waves can be propagated correctly.
The open boundaries in a numerical flow model are artificial in the sense that they are intro-
duced to limit the computational area that is modelled. The free surface waves should pass
these boundaries completely unhindered. In the numerical model, wave reflections may occur
at the open boundaries. These reflections will be observed as spurious oscillations superim-
posed on the physical results. In Delft3D-FLOW weakly-reflective boundaries are available
which diminish these effects.
The open boundary can be divided into segments (sections). The boundary conditions in
Delft3D-FLOW are specified for these segments, two values per segment are required, one for
each segment end. The boundary condition at internal points within this segment is obtained
by linearly interpolation between the end points. Therefore, if the phase variation of the tidal
forcing along an open boundary segment is non-linear then the number of open boundary
segments should be increased so that the phases at all the segments can be specified. Phase
errors may generate an artificial re-circulation flow (eddy) near the open boundary. For steady-
state simulations, a similar effect may be observed near the open boundaries if the effect of
the Coriolis force on the water level gradient along the open boundary is not taken into account
in the boundary conditions.
Care must be taken when time-series of measurements are directly prescribed as forcing
functions at the open boundaries. Measurements often contain a lot of undesired noise, due
to meteorological or other effects. For tidal flow computations, calibration on processed field
data obtained from a tidal analysis or Fourier analysis, avoids this problem.
386 of 688 Deltares

DRAFT
Fixed layers in Z-model
The following functionalities can not be used in combination with the Z-model:
Parallel calculation
Roller model
Real Time Control
Morphology
Secondary flow
Internal waves
Fluid mud
Gauss Seidel solver
Q2E 2D turbulence model
The following functionalities are not fully tested in combination with the Z-model:
Heat model other than option 5
Evaporation model
Tide generating forces
Q-H boundary
Drogues
Spherical coordinates
HLES
Structures
Domain decomposition
Wall friction
Deltares 387 of 688

DRAFT
Delft3D-FLOW, User Manual
388 of 688 Deltares

DRAFT
References
Adcroft, A., C. Hill and J. Marshall, 1997. “Representation of topography by shaved cells in a
height coordinate ocean model.” Monthly Weather Review 125 (9): 2293–2315.
Andrews, D. G. and M. E. McIntyre, 1978. “An exact theory of nonlinear waves on a
Lagrangian-mean flow.” Journal of Fluid Mechanics 89 (4): 609–646.
Asaeda, T. and J. Imberger, 1992. “Structure of bubble plumes in leinearly stratified medium.”
Journal of Fluid Mechanics 249: 35–37.
Bagnold, R. A., 1966. An approach to the sediment transport problem from general physics.
US government Print Office.
Bailard, J. A., 1981. “An Energetics Total Load Sediment Transport Model for Plane Sloping
Beaches.” Journal of Geophysical Research 86 (C11): 10938–10954.
Bakhmetev, B. A., 1932. Hydraulics of open channels,. Eng. Soc. Monograph. McGraw-Hill.
Baptist, M. J., 2005. Modelling floodplain biogeomorphology. Ph.D. thesis, Delft University of
Technology.
Barenblatt, G. I., M. Bertsch, R. Dal Passo, V. M. Prostokishen and M. Ughi, 1993. “A mathe-
matical model of turbulent heat and mass transfer in stably stratified shear flow.” Journal of
Fluid Mechanics 253: 341–358.
Baumert, H. and G. Radach, 1992. “Hysteresis of Turbulent Kinetic Energy in Non-rotational
Tidal Flows: A Model Study.” Journal of Geophysical Research 97 (C3): 3669–3677.
Beckers, J. M., H. Burchard, J. M. Campin, E. Deleersnijder and P. P. Mathieu, 1998. “Another
reason why simple discretizations of rotated diffusion operators cause problems in ocean
models: comments on “isoneutral diffusion in a z co-ordinate ocean model”.” American
Meteorological Society 28: 1552–1559.
Bendat, J. S. and A. G. Piersol, 1971. Random data: analysis and measurement procedures.
John Wiley & Sons, Inc. New York.
Benqué, J. P., J. A. Cunge, J. Feuillet, A. Hauguel and F. M. Holly, 1982. “New method for tidal
current computation.” Journal of the Waterway, Port, Coastal and Ocean Division, ASCE
108: 396–417.
Bijker, E. W., 1967. Some considerations about scales for coastal models with moveable bed.
Tech. Rep. 50, WL | Delft Hydraulics, Delft, The Netherlands.
Bijvelds, M. D. J. P., 1997. Recirculating steady flows in harbours: comparison of numerical
computations to laboratory experiments. Tech. Rep. 1-97, Delft University of Technology,
Delft, The Netherlands.
Bijvelds, M. D. J. P., 2001. Numerical modelling of estuarine flow over steep topography. Ph.D.
thesis, Delft University of Technology.
Blumberg, A. F. and G. L. Mellor, 1985. “Modelling vertical and horizontal diffusivities with the
sigma co-ordinate system.” Monthly Weather Review 113 (8): 1379.
Bulson, P., 1961. “Currents produced by an air curtain in deep water.” Dock and Harbour
Authority 42: 15–22.
Burchard, H. and H. Baumert, 1995. “On the performance of a mixed-large model based on
the k-epsilon turbulence closure.” Journal of Geophysical Research 100 (C5): 8523–8540.
Deltares 389 of 688

DRAFT
Delft3D-FLOW, User Manual
Busch, N. E., 1972. “On the mechanics of atmospheric turbulence.” In Workshop on Microm-
eteorology, pages 1–65. American Meteorological Society.
Busnelli, M. M., 2001. Numerical simulation of free surface flows with steep gradients. WL |
Delft Hydraulics, Delft, The Netherlands. Ph.D. thesis.
Casulli, V., 1999. “A semi-implicit finite difference mehod for non-hydrostatic, free surface
flows.” International Journal Numerical Methods In Fluids 30: 425–440.
Casulli, V. and R. T. Cheng, 1992. “Semi-implicit finite difference methods for three-
dimensional shallow water flow.” International Journal Numerical Methods In Fluids 15 (6):
629–648.
Christoffersen, J. B. and I. G. Jonsson, 1985. “Bed friction and dissipation in a combined
current and wave motion.” Ocean Engineering 12 (5): 387–423.
Courant, R. and D. Hilbert, 1962. Methods of mathematical physics. Interscience, New York.
Davies, A. G., R. L. Soulsby and H. L. King, 1988. “A numerical model of the combined wave
and current bottom boundary layer.” Journal of Geophysical Research 93 (C1): 491–508.
Davies, A. M. and H. Gerritsen, 1994. “An intercomparison of three-dimensional tidal hydro-
dynamic models of the Irish Sea.” Tellus 46A: 200–221.
Dean, R. G. and R. A. Dalrymple, 1991. Water wave mechanics for enginieers and scientists,
vol. 2 of Advanced series on ocean engineering. World Scientific Publishing Company.
Deigaard, 1986. Not yet known.
Deleersnijder, E. and P. Luyten, 1994. “On the practical advantages of the quasi-equilibrium
version of the Mellor and Yamada level 2.5 turbulence closure applied to marine modelling.”
Appl. Math. Modelling 18: 281–287.
Delft3D-GISVIEW UM, 2013. Delft3D-GISVIEW User Manual. Deltares, 1.04 ed.
DIDO UM, 2013. Delft3D-DIDO User Manual. Deltares, Delft, 4.00 ed.
Dingemans, M. W., 1997. Water Wave Propagation over Uneven Bottoms, Vol. 1 and 2.
Advanced Series on Ocean Engineering, Vol. 13. World Scientific, London.
Dingemans, M. W., A. C. Radder and H. J. de Vriend, 1987. “Computation of the driving forces
of wave-induced currents.” Coastal Engineering 11: 539–563.
Dongeren, A. R. van and I. A. Svendsen, 1997. “Absorbing-generating boundary conditions
for shallow water models.” Journal of the Waterway, Port, Coastal and Ocean Division,
ASCE 123 (6): 303–313.
Eckart, C., 1958. “Properties of water, Part II. The equation of state of water and sea water at
low temperatures and pressures.” American Journal of Science 256: 225–240.
Eijkeren, J. C. H. van, B. J. de Haan, G. S. Stelling and T. L. van Stijn, 1993. “Notes on
Numerical Fluid Mechanics, Linear upwind biased methods.” In C. B. Vreugdenhil and
B. Koren, eds., Numerical Methods for Advection-Diffusion Problems,, vol. 45, chap. 3,
pages 55–91. Vieweg Verlag, Braunschweig. ISSN 0179-9614, ISBN 3-528-07645-3.
Engelund, F. and E. Hansen, 1967. A monograph on Sediment Transport in Alluvial Streams.
Teknisk Forlag, Copenhagen.
Engquist, B. and A. Majda, 1977. “Absorbing boundary conditions for the numerical simulation
of waves.” Mathematics of Computation 31 (139): 629–651.
390 of 688 Deltares

DRAFT
References
Engquist, B. and A. Majda, 1979. “Radiation boundary conditions for acoustic and elastic
wave calculations.” Communications on Pure & Applied Mathematics 32: 313–357.
Fannelop, T. and K. Sjoen, 1980. “Hydrodynamics of air-bubble plumes.” In Proc. AIAA 18-th
Aerospace Sci. Meeting.
Farraday, R. V. and F. G. Charlton, 1983. Hydraulic factors in bridge design. Tech. rep.,
Hydraulics Research Station Ltd. Wallingford, Oxfordshire, England.
Forester, C. K., 1979. “Higher Order Monotonic Convective Difference Schemes.” Journal of
Computational Physics 23: 1–22.
Fredsøe, J., 1982. “Shape and dimensions of stationary dunes in rivers.” Journal of the
Hydraulics Division, ASCE 108: 932–947.
Fredsøe, J., 1984. “Turbulent boundary layer in wave-current interaction.” Journal of Hydraulic
Engineering 110: 1103–1120.
Fredsøe, J. and R. Deigaard, 1992. Mechanics of Coastal Sediment Transport. No. 3 in
Advanced series on ocean engineering. World Scientific Publishing.
French, R. H., J. Zseleczky and R. Margolies, eds., 1987. Open-Channel Hydraulics. McGraw-
Hill, New York. 2nd edition.
Gaeuman, D., E. Andrews, A. Krause and W. Smith, 2009. “Predicting fractional bed load
transport rates: Application of the Wilcock-Crowe equations to a regulated gravel bed river.”
Water Resources Research 45.
Galappatti, R., 1983. A depth integrated model for suspended transport. Tech. rep., Delft
University of Technology, Delft, The Netherlands.
Germano, M., U. Piomelli, P. Moin and W. H. Cabot, 1991. “A dynamic subgrid-scale eddy
viscosity model.” Physics of Fluids A 3 (7): 1760–1765.
Gill, A. E., 1982. Atmosphere-Ocean dynamics, vol. 30 of International Geophysics Series.
Academic Press.
Golub, G. H. and C. F. Van Loan, 1989. Matrix computations. Baltimore: John Hopkins
University Press.
GPP UM, 2013. Delft3D-GPP User Manual. Deltares, 2.14 ed.
Grant, W. D. and O. S. Madsen, 1979. “Combined wave and current interaction with a rough
bottom.” Journal of Geophysical Research 84 (C1): 1797–1808.
Grasmeijer, B. and L. Van Rijn, 1998. “Breaker bar formation and migration.” Coastal Engi-
neering pages 2750–2758. Virginia, USA.
Gresho, P. M. and R. L. Lee, 1981. “Don’t suppress the wiggles, they’re telling you something.”
Computer and Fluids 9: 223–253.
Groeneweg, J., 1999. Wave-current interactions in a generalized Lagrangian mean formula-
tion. Delft University of Technology, Delft, The Netherlands. Ph.D. thesis.
Groeneweg, J. and G. Klopman, 1998. “Changes of the mean velocity profiles in the combined
wave-current motion in a GLM formulation.” Journal of Fluid Mechanics 370: 271–296.
Haney, R. L., 1991. “On the pressure gradient force over steep topography in sigma co-
ordinate models.” Journal of Physical Oceanography 21: 610–619.
Deltares 391 of 688

DRAFT
Delft3D-FLOW, User Manual
Hirsch, C., 1990. Numerical computation of internal and external flows. John Wiley & Sons,
New York.
Houwing, E. J., I. C. Tánczos, A. Kroon and M. B. de Vries, 2000. “Interaction of submerged
vegetation, hydrodynamics and turbidity; analysis of field and laboratory studies.” Confer-
ence INTERCOH2000 .
Huang, W. and M. Spaulding, 1996. “Modelling horizontal diffusion with sigma coordinate
system.” Journal of Hydraulic Engineering 122 (6): 349–352.
Huynh-Thanh, S. and A. Temperville, 1991. “A numerical model of the rough turbulent bound-
ary layer in combined wave and current interaction.” In R. L. Soulsby and R. Bettes, eds.,
Sand transport in rivers, estuaries and the sea, pages 93–100. Balkema Rotterdam.
Ikeda, S., 1982. “Incipient Motion of Sand Particles on Side Slopes.” Journal of the Hydraulics
Division, ASCE 108 (1): 95–114.
Ikeda, S., 1988. Not yet known.
Isobe, M. and K. Horikawa, 1982. “Study on water particle velocities of shoaling and breaking
waves.” Coastal Engineering in Japan 25: 109–123.
Jagers, H. R. A. and S. A. H. van Schijndel, 2000. 3D computations around structures. Tech.
Rep. Q2487, WL | Delft Hydraulics, Delft, The Netherlands. In Dutch (3D rekenen rondom
constructies).
Kalkwijk, J. P. T. and R. Booij, 1986. “Adaptation of secondary flow in nearly horizontal flow.”
Journal of Hydraulic Research 24 (1): 19–37.
Kester, J. A. T. M. van, 1994. Validatie DELFT3D voor menglaag proef. Fase 1: Verbeterde
implmentatie k-εmodel. Tech. Rep. Z810, WL | Delft Hydraulics, Delft, The Netherlands.
Kirkpatrick, M. P., S. W. Armfield and J. H. Kent, 2003. “A representation of curved boundaries
for the solution of the Navier-Stokes equations on a staggered three-dimensional Cartesian
grid.” Journal of Computational Physics 184: 1–36.
Klopstra, D., H. J. Barneveld and J. M. Van Noortwijk, 1996. Analytisch model hydraulis-
che ruwheid van overstroomde moerasvegetatie. Tech. Rep. PR051, HKV consultants,
Lelystad, The Netherlands. Commissioned by Rijkswaterstaat/RIZA, The Netherlands.
Klopstra, D., H. J. Barneveld, J. M. Van Noortwijk and E. H. van Velzen, 1997. “Analytical
model for hydraulic roughness of submerged vegetation.” In The 27th IAHR Congress, San
Francisco, 1997; Proceedings of Theme A, Managing Water: Coping with Scarcity and
Abundance, pages 775–780. American Society of Civil Engineers (ASCE), New York.
Koch, F. G. and C. Flokstra, 1980. “Bed level computations for curved alluvial channels.” In
Proceedings of the XIXth congress of the International Association for Hydraulic Research,
2-7 Feb. 1981, New Delhi, India, vol. 2, pages 357–364.
Kolmogorov, A. N., 1942. “Equations of turbulent motion in incompressible fluid.” Izv. Akad.
Nauk. SSR, Seria fizicheska Vi No.1 2 (1-2): 56–58. English translation: 1968 Imperial
College, Mech. Eng. Dept. Rept. ON/6.
Lane, A., 1989. The heat balance of the North Sea. Tech. Rep. 8, Proudman Oceanographic
Laboratory.
Leendertse, J. J., 1967. Aspects of a computational model for long-period water-wave propa-
gation. RM-5294-RR. Rand Corporation, Santa Monica. Ph.D. thesis.
392 of 688 Deltares

DRAFT
References
Leendertse, J. J., 1990. “Turbulence modelling of surface water flow and transport: part IVa.”
Journal of Hydraulic Engineering 114 (4): 603–606.
Leendertse, J. J., R. C. Alexander and S.-K. Liu, 1973. A three-dimensional model for estu-
aries and coastal seas. Volume I: Principles of Computations Report R-1417-OWRT, Rand
Corporation, Santa Monica, CA. Volume II: Aspects of computation, R-1764-OWRT, Vol-
ume III: The interim program, R-1884-OWRT, Volume IV: Turbulent energy computation,
R-2187-OWRT.
Leendertse, J. J. and E. C. Gritton, 1971. A water quality simulation model for well mixed
estuaries and coastal seas: Vol. II, Computation Procedures. Tech. Rep. R-708-NYC, Rand
Corporation.
Leer, B. van, 1974. “Towards the ultimate conservative difference scheme II. Monotonicity and
conservation combined in a second order scheme.” Journal of Computational Physics 32:
101–136.
Lesser, 2003. Not yet known.
Lesser, G., J. van Kester and J. A. Roelvink, 2000. On-line sediment transport within Delft3D-
FLOW. Tech. Rep. Z2899, wl.
Lesser, G. R., J. A. Roelvink, J. A. T. M. van Kester and G. S. Stelling, 2004. “Development and
validation of a three-dimensional morphological model.” Coastal Engineering 51: 883–915.
McDougall, T., 1978. “Bubble plumes in stratified environments.” Journal of Fluid Mechanics
85: 655–672.
Meijer, D., 1998. Modelproeven overstroomde vegetatie. Tech. rep., HKV Lijn in water. In
Dutch.
Mellor, G. L. and T. Yamada, 1974. “A hierarchy of turbulence closure models for planetary
boundary layers.” Journal of Atmospheric Science 31: 1791–1896.
Mellor, G. L. and T. Yamada, 1982. “Development of a turbulence closure model for geophys-
ical fluid problems.” Review of Geophysics and Space Physics 20 (4): 851–875.
Meyer-Peter, E. and R. Müller, 1948. “Formulas for bed load transport.” In Proceedings of the
2nd Congress IAHR, Stockholm, vol. 2, pages 39–64.
Miles, J., 1987. “Richardson’s number revisited.” In E. J. List and G. H. Jirka, eds., 3rd
International Symp. Stratified Flows, February 3-5, Pasadena, California, pages 1–7. asce.
Milgram, J., 1983. “Mean flow in round bubble plumes.” Journal of Fluid Mechanics 133:
345–376.
Millero, F. J. and A. Poisson, 1981. “International one-atmosphere equation of state of sea
water.” Deep-Sea Research 28A (6): 625–629.
Munk, W. H. and E. R. Anderson, 1948. “Notes on the theory of the thermocline.” Journal of
Marine Research 7 (3): 276–295.
Murakami, M., Y. Oonisishi and H. Kunishi, 1985. “A numerical simulation of the distribution
of water temperature and salinity in the Seto Inland Sea.” Journal of the Oceanographical
Society of Japan 41: 221–224.
Myrhaug, D. and O. H. Slaattelid, 1990. “A rational approach to wave-current friction coeffi-
cients for rough, smooth and transitional turbulent flow.” Coastal Engineering 14: 265–293.
Deltares 393 of 688

DRAFT
Delft3D-FLOW, User Manual
Nikuradse, J., 1933. Laws of flow in rough pipes. Tech. Rep. Forschungsheft 361, Forschung
auf dem Gebiete des Ingenieurwesens, VDI Verlag, Berlin, Germany. In German (Strö-
mungsgesetze in rauhren rohren) English translation: Laws of flow in rough pipes, NACA
TM 1292, 1950.
Nipius, K. G., 1998. Transverse transport modelling using Bailard applied to Grevelingen-
mouth delta. Delft University of Technology, Delft, The Netherlands. M.Sc. thesis, in
Dutch (Dwarstransportmodellering m.b.v. Bailard toegepast op de Voordelta Grevelingen-
monding).
O’ Connor, B. A. and D. Yoo, 1988. “Mean bed friction of combined wave-current flow.” Coastal
Engineering 12: 1–21.
Oberez, A., 2001. Turbulence modeling of hydraulic roughness of submerged vegetation.
Master’s thesis, UNESCO IHE, Delft. H.E.100.
Octavio, K. A. H., G. H. Jirka and D. R. F. Harleman, 1977. Vertical Heat Transport Mecha-
nisms in Lakes and Reservoirs. Tech. Rep. 22, Massachusetts Institute of Technology.
Pacanowski, R. C. and A. Gnanadesikan, 1998. “Transient response in a Z-level ocean model
that resolves topography with partial cells.” Monthly Weather Review 126: 3248–3270.
Parker, G. and E. D. Andrews, 1985. “Sorting of bed load sediment by flow in meander bends.”
Water Resources Research 21: 1361–1373.
Partheniades, E., 1965. “Erosion and Deposition of Cohesive Soils.” Journal of the Hydraulics
Division, ASCE 91 (HY 1): 105–139. January.
Phillips, N. A., 1957. “A co-ordinate system having some special advantages for numerical
forecasting.” Journal of Meteorology 14: 184–185.
Platzek, F. W., G. S. Stelling, J. A. Jankowski and R. Patzwahl, 2012. “On the representation
of bottom shear stress in z-layer models.” In Hydroinformatics 2012. Hamburg, Germany.
Postma, L., G. S. Stelling and J. Boon, 1999. “Three-dimensional water quality and hydro-
dynamic modelling in Hong Kong. Stratification and water quality.” In Proceedings of the
2nd International Symp. on Environmental Hydraulics, Hong Kong, December 1998, pages
43–49. Balkema, Rotterdam.
Prandtl, L., 1945. “Über ein neues Formelsystem für die ausgebildete Turbulenz.” Nachrichten
von der Akademie der Wissenschaften in Gottingen. Mathematisch-Physikalische Klasse
pages 6–19.
RGFGRID UM, 2016. Delft3D-RGFGRID User Manual. Deltares, 5.00 ed.
Richardson, J. F. and W. N. Zaki, 1954. “Sedimentation and fluidization: Part I.” I. Trans.
Institution of Chemical Engineers 32: 35–53.
Richardson, L. F., 1920. “The supply of energy from and to atmospheric eddies.” Proceedings
of the Royal Society London A97: 345–373.
Rienecker, M. M. and J. D. Fenton, 1981. “A Fourier approximation method for steady water
waves.” Journal of Fluid Mechanics 104: 119–137.
Rijn, L. C. van, 1984a. “Sediment transport, Part I: bed load transport.” Journal of Hydraulic
Engineering 110 (10): 1431–1456.
Rijn, L. C. van, 1984b. “Sediment transport, Part II: suspended load transport.” Journal of
Hydraulic Engineering 110 (11): 1613–1640.
394 of 688 Deltares

DRAFT
References
Rijn, L. C. van, 1984c. “Sediment transport, Part III: bed form and alluvial roughness.” Journal
of Hydraulic Engineering 110 (12): 1733–1754.
Rijn, L. C. van, 1990. Principles of fluid flow and surface waves in rivers, estuaries, seas and
oceans. Aqua Publications, The Netherlands.
Rijn, L. C. van, 1993. Principles of Sediment Transport in Rivers, Estuaries and Coastal Seas.
Aqua Publications, The Netherlands.
Rijn, L. C. van, 2001. General view on sand transport by currents and waves : data analysis
and engineering modelling for uniform and graded sand (TRANSPOR 2000 and CROS-
MOR 2000 models). Z2899.20 / Z2099.30 / Z2824.30. WL | Delft Hydraulics, Delft, The
Netherlands.
Rijn, L. C. van, 2003. “Sediment transport by currents and waves; general approximation
formulae Coastal Sediments.” In Corpus Christi, USA.
Rijn, L. C. van, 2007. “Unified View of Sediment Transport by Currents and Waves. I: Initiation
of Motion, Bed Roughness, and Bed-Load Transport.” Journal of Hydraulic Engineering
133 (6): 649–667.
Rijn, L. C. van, J. A. Roelvink and W. T. Horst, 2000. Approximation formulae for sand transport
by currents and waves and implementation in DELFT-MOR. Tech. Rep. Z3054.40, WL |
Delft Hydraulics, Delft, The Netherlands.
Rijn, L. C. van, D. R. Walstra and M. v. Ormondt, 2004. Description of TRANSPOR2004 and
implementation in Delft3D-ONLINE. Tech. Rep. Z3748.10, WL | Delft Hydraulics, Delft, The
Netherlands.
Rijn, L. van, D. Walstra, B. Grasmeijer, J. Sutherland, S. Pan and J. Sierra, 2003. “The
predictability of cross-shore bed evolution of sandy beaches at the time scale of storms
and seasons using process-based profile models.” Coastal Engineering 47: 295–327.
Ris, R. C., 1997. Spectral Modelling of Wind Waves in Coastal Areas. Communications on
Hydraulic and Geotechnical Engineering, report 97-4. Delft University of Technology, Delft,
The Netherlands. Ph.D. thesis.
Rodi, W., 1984. “Turbulence models and their application in Hydraulics, State-of-the-art paper
article sur l’etat de connaissance.” IAHR Paper presented by the IAHR-Section on Funda-
mentals of Division II: Experimental and Mathematical Fluid Dynamics, The Netherlands.
Roelvink, J. A., 1993. “Dissipation in random wave groups incident on a beach.” Coastal
Engineering 19: 127–150.
Roelvink, J. A., 2003. Not yet known.
Roelvink, J. A. and M. J. F. Stive, 1989. “Bar-generating cross-shore flow mechanisms on a
beach.” Journal of Geophysical Research 94 (C4): 4785–4800.
Roelvink, J. A. and D. J. R. Walstra, 2004. “Keeping it simple by using complex models.”
In Proceedings of the 6th International Conference on Hydro-Science and Engineering.
Advances in Hydro-Science and Engineering, vol. VI, page p. 12. Brisbane, Australia.
Ruessink, G. and J. A. Roelvink, 2000. Validation of On-line Mud Transport within Delft3D-
FLOW. Tech. rep., WL | Delft Hydraulics, Delft, The Netherlands.
Ryan, P. J., D. R. F. Harleman and K. D. Stolzenbach, 1974. “Surface Heat Loss From Cooling
Ponds.” Water Resources Research 10 (5): 930–938.
Deltares 395 of 688

DRAFT
Delft3D-FLOW, User Manual
Schwiderski, E. W., 1980. “On Charting Global Ocean Tides.” Review of Geophysics and
Space Physics 18 (10): 243–268.
Simonin, O., R. E. Uittenbogaard, F. Baron and P. L. Viollet, 1989. “Possibilities and limita-
tions to simulate turbulence fluxes of mass and momentum, measured in a steady stratified
mixing layer.” In Proc. XXIII IAHR Congress, pages A55–A62. National Research Council,
Canada, Ottawa.
Slørdal, L. H., 1997. “The pressure gradient force in sigma-co-ordinate ocean models.” Inter-
national Journal Numerical Methods In Fluids 24: 987–1017.
Smith, S. D. and E. G. Banke, 1975. “Variation of the sea surface drag coefficient with wind
speed.” Quarterly Joournal of the Royal Meteorological Society 101: 665–673.
Soulsby, R., 1997. Dynamics of marine sands, a manual for practical applications. Thomas
Telford, London.
Soulsby, R. L., A. G. Davies, J. Fredsøe, D. A. Huntley, I. G. Jonnson, D. Myrhaug, R. R.
Simons, A. Temperville and T. J. Zitman, 1993a. “Bed shear stresses due to combined
waves and currents.” In Abstracts-in-depth of the Marine Science and Technology G8-M
overall workshop, Grenoble., pages 2.1-1/2.1–4.
Soulsby, R. L., L. Hamm, G. Klopman, D. Myrhaug, R. R. Simons and G. P. Thomas, 1993b.
“Wave-current interaction within and outside the bottom boundary layer.” Coastal Engineer-
ing 21: 41–69.
Stelling, G. S., 1984. On the construction of computational methods for shallow water flow
problems. Tech. Rep. 35, Rijkswaterstaat.
Stelling, G. S. and S. P. A. Duinmeijer, 2003. “A staggered conservative scheme for ev-
ery Froude number in rapidly varied shallow water flows.” International Journal Numerical
Methods In Fluids 43: 1329–1354.
Stelling, G. S. and J. A. T. M. van Kester, 1994. “On the approximation of horizontal gradi-
ents in sigma co-ordinates for bathymetry with steep bottom slopes.” International Journal
Numerical Methods In Fluids 18: 915–955.
Stelling, G. S. and J. J. Leendertse, 1992. “Approximation of Convective Processes by Cyclic
AOI methods.” In M. L. Spaulding, K. Bedford and A. Blumberg, eds., Estuarine and coastal
modeling, Proceedings 2nd Conference on Estuarine and Coastal Modelling, ASCE, pages
771–782. Tampa.
Stelling, G. S., A. K. Wiersma and J. B. T. M. Willemse, 1986. “Practical aspects of accurate
tidal computations.” Journal of Hydraulic Engineering 112 (9): 802–817.
Stive, M. J. F., 1986. “A model for cross-shore sediment transport.” In Proceedings 20th
International Coastal Engineering Conference, pages 1550–1564. American Society of Civil
Engineers, New York.
Swart, 1974. Offshore sediment transport and equilibrium beach profiles. Ph.D. thesis, Delft
University of Technology, Delft, The Netherlands. Delft Hydraulics Publ. 131.
Sweers, H. E., 1976. “A nomogram to estimate the heat exchange coefficient at the air-water
interface as a function of windspeed and temperature; a critical survey of some literature.”
Journal of Hydrology 30: –.
Talmon, A. M., N. Struiksma and M. C. L. M. van Mierlo, 1995. “Laboratory measurements of
the direction of sediment transport on transverse alluvial-bed slopes.” Journal of Hydraulic
Research 33 (4): 495–517.
396 of 688 Deltares

DRAFT
References
Taylor, G. I., 1931. “Effect of variation in density on the stability of superposed streams of
fluid.” Proceedings Camb. Phil. Soc. 23: 730–731.
Thatcher, M. L., 1981. Not yet known.
Thatcher, M. L. and D. R. F. Harleman, 1972. A mathematical model for the prediction of
unsteady salinity intrusion in estuaries. Report no. 144, MIT School of Engineering Mas-
sachusetts Institute of Technologie, Department of Civil Engineering.
TIDE UM, 2013. Delft3D-TIDE User Manual. Deltares, 3.00 ed.
Uittenbogaard, R. E., 1995. The importance of internal waves for mixing in a stratified estuar-
ine tidal flow. Ph.D. thesis, Delft University of Technology, Delft, The Netherlands.
Uittenbogaard, R. E., 1998. Model for eddy diffusivity and viscosity related to sub-grid velocity
and bed topography. Tech. rep., WL | Delft Hydraulics, Delft, The Netherlands.
Uittenbogaard, R. E., dec. 2000. Hydrodynamics of flow over plants, internal communication.
Tech. rep., WL | Delft Hydraulics, Delft, The Netherlands.
Uittenbogaard, R. E. and F. Baron, 1989. “A proposal: extension of the q2e-eps model for
stably stratified flows with transport of Internal Wave Energy.” In 7th Turbulent Shear Flows
Symp., Stanford, August, pages 21–23. Sanford University.
Uittenbogaard, R. E., J. A. T. M. van Kester and G. S. Stelling, 1992. Implementation of
three turbulence models in 3D-TRISULA for rectangular grids. Tech. Rep. Z81, WL | Delft
Hydraulics, Delft, The Netherlands.
Uittenbogaard, R. E. and B. Van Vossen, 2003. “Subgrid-scale model for Quasi-2D turbulence
in shallow water.” In In: Shallow flows: proceedings of the international symposium, pages
575–582.
UNESCO, 1981a. Background papers and supporting data on the international equation of
state 1980. Tech. Rep. 38, UNESCO.
UNESCO, 1981b. The practical salinity scale 1978 and the international equation of state of
seawater 1980. Tech. Rep. 36, UNESCO. Tenth report of the Joint Panel on Oceanographic
Tables and Standards (1981), (JPOTS), Sidney, B.C., Canada.
Velzen, E. H. van, P. Jesse, P. Cornelissen and H. Coops, 2003. Stromingsweerstand vege-
tatie in uiterwaarden. Tech. Rep. 2003.029, Rijkswaterstaat/RIZA.
Verboom, G. K. and A. Segal, 1986. “Weakly reflective boundary conditions for shallow water
equations.” In 25th Meeting Dutch Working group on Numerical Flow Simulations, Delft.
Delft University of Technology, Delft, The Netherlands.
Verboom, G. K. and A. Slob, 1984. “Weakly-reflective boundary conditions for two-dimensional
water flow problems.” Advances in water resources 7 (4): 192–197. Also presented at
“5th International Conference on Finite Elements in Water Resources, Burlington, Vermont,
June 1984”.
Vermaas, H., 1987. Energylosses due to weirs. Tech. Rep. Q92, WL | Delft Hydraulics, Delft,
The Netherlands. In Dutch (Energieverliezen door overlaten: Een gewijzigde berekenings-
procedure voor WAQUA-rivieren versie).
Vossen, B. van, 2000. Horizontal Large Eddy simulations; evaluation of flow computations
with Delft3D-FLOW. Tech. Rep. MEAH-197, WL | Delft Hydraulics, Delft, The Netherlands.
Vreugdenhil, C. B., 1989. Computational Hydraulics: an Introduction. Springer-Verlag.
Deltares 397 of 688

DRAFT
Delft3D-FLOW, User Manual
Vreugdenhil, C. B., 1994. Numerical methods for shallow-water flow. Water Science and
technology library. Kluwer Academic Publishers.
Walstra, D. J. R. and J. A. Roelvink, 2000. “3D Calculation of Wave Driven Cross-shore
Currents.” In Proceedings 27th International Conference on Coastal Engineering, Sydney,
Australia, July 16-21, 2000, pages 1050–1063.
Walstra, D. J. R., J. A. Roelvink and J. Groeneweg, 2000. “Calculation of Wave-Driven Cur-
rents in a 3D Mean Flow Model.” In Proceedings 27th International Conference on Coastal
Engineering, Sydney, Australia, July 16-21, 2000.
Wang, Z. B. and J. C. Winterwerp, 1992. A model to simulate the transport of fluid mud. Tech.
Rep. Z163, WL | Delft Hydraulics, Delft, The Netherlands.
WAVE UM, 2013. Delft3D-WAVE User Manual. Deltares, 3.03 ed.
Weare, T. J., 1979. “Errors arising from irregular boundaries in ADI solutions of the shallow
water equations.” International Journal Numerical Methods Engineering 14: 921–931.
Wijbenga, J. H. A., 1990. Representation of extra energy losses in RIVCUR. Tech. Rep. Q910,
WL | Delft Hydraulics, Delft, The Netherlands. In Dutch (Weergave van extra energieverlies
in RIVCUR), research for Rijkswaterstaat, Dienst Binnenwateren/RIZA.
Wilcock, P. and J. Crowe, 2003. “Surface-based transport model for mixed-size sediment.”
Journal of Hydraulic Engineering 129 (2): 120–128.
Winterwerp, J. C. and R. E. Uittenbogaard, 1997. Sediment transport and fluid mud flow.
Tech. Rep. Z2005, WL | Delft Hydraulics, Delft, The Netherlands.
Winterwerp, J. C., Z. B. Wang, J. A. T. M. van Kester and F. J. Verweij, 1999. “On the far-field
impact of Water Injection Dredging.” J. Waterway, Port, Coastal and Ocean Engineering
submitted: –.
WL | Delft Hydraulics, 1998. Interaction of submerged vegetation and physical processes;
Delft, The Netherlands. Research report, WL | Delft Hydraulics, Delft, The Netherlands. (in
Dutch).
398 of 688 Deltares

DRAFT
Glossary of terms
area Geometric domain for the models.
astronomical tidal
constituent
Amplitude and phase of the tidal constituents which represent the
tide. See also Delft3D-TIDE.
bathymetry The measurement of depths of the model area. Represented in
Delft3D-FLOW by a matrix of depth values; each value is defined
in the right upper corner of the corresponding grid cell. Prepared
as an attribute file for Delft3D-FLOW or entered in the MDF-file as a
uniform value for the whole grid. Default: 0.0. Unit: meter.
bottom roughness
coefficient
Measure of the resistance of the flow to the bottom. Physical param-
eter for Delft3D-FLOW. Defined in the middle of grid sides. Prepared
as an input file for Delft3D-FLOW (containing non-uniform values in
Uand Vdirection) or entered in the MDF-file as a uniform value;
Presentation: table or single value. Given according to: Manning,
Chézy [m1/2/s], White Colebrook.
boundary section Boundaries are separation lines between the model area and the
outside world. Boundaries can be divided in open boundaries, lo-
cated in open water, and closed boundaries representing the land-
water interface. A boundary section is a part of a boundary on which
boundary conditions are prescribed.
boundary conditions Boundary conditions describe the influence of the outside world on
the inside of the model area.
calibration Tuning of model parameters such that the simulation results match
an observed data set within a prescribed accuracy interval.
coupling program Program which performs some operations on Delft3D-FLOW output
files in order to create input files for D-Water Quality or D-Waq PART.
With the coupling program, aggregation in time and/or space is pos-
sible. Delft3D-FLOW itself can now also perform these actions (See
B.18).
cross-section A line defined along a fixed ξ- or η-co-ordinate, where the sum of
computed fluxes, flux rates, fluxes of matter (if exist) and transport
rates of matter (if exists) are stored sequentially in time at a pre-
scribed interval.
current In case of 2D computation: Speed and direction of the hydrodynamic
depth-averaged flow. In case of 3D computation: Speed and direc-
tion of the hydrodynamic flow in a layer.
cyclic tide Tidal condition in which the tide repeats itself (e.g. cyclic semi-diurnal
tide which repeats itself after it’s period of approximately 24 hours
and 50 minutes).
default Initial value for a parameter, to be used in the FLOW Input Processor
at simulation start time if no MDF-file has been opened.
GPP Program for the visualisation and animation of results of Delft3D
modules.
QUICKIN Program for the generation and manipulation of grid related data,
such as bathymetry, or initial conditions.
Delft3D-QUICKPLOT A second program for the visualisation and animation of results of
Delft3D modules.
RGFGRID Program for the generation of orthogonal curvilinear grids.
Delft3D-TRIANA Program for the analysis of observed and simulated tide, used during
calibration.
Delft3D-FLOW Simulation program for tidal and wind driven flow, including the effect
of density differences due to a non-uniform heat and salt concentra-
tion distribution. Previously known as TRISULA.
Deltares 399 of 688
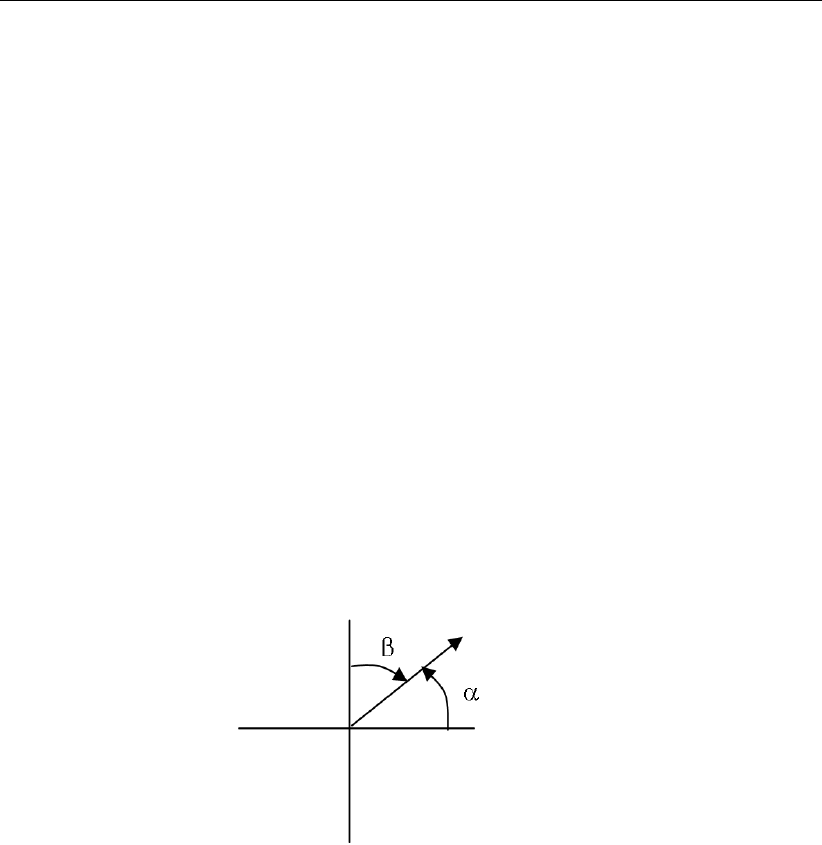
DRAFT
Delft3D-FLOW, User Manual
depth averaged speed Hydrodynamic speed, averaged over the depth.
depth contours Presentation of the bathymetry by iso-lines of depth values.
discharge Location where water and possibly constituents dissolved in the wa-
ter are released into or subtracted from the model area.
discharge rate The amount of water and possibly constituents dissolved in the water
released into or subtracted from the model area per unit of time.
domain Range of values a parameter can have for meaningful results. A
domain is represented by its lower and upper limit.
drogues Floating objects moving with the flow.
dry area/dry point Part of the model area that is not flooded. Represented by a collec-
tion of cells in the grid (dry points) which are either temporarily or
permanently dry.
drying and flooding A process in which points or sub-areas of the model area are be-
coming dry or wet depending on the local water depth.
flow rate Volume of fluid passing a cross-section per unit of time.
flow velocity Speed and direction of a water particle. In the staggered grid the
speed is computed at the water level point using only the velocity
components with the same grid co-ordinates as the water level point,
i.e. the velocity components are not averaged over the velocity points
on both sides of the water level point before being used.
flow direction Direction in which the flow of a water particle is moving. North = 0◦;
East = 90◦; South = 180◦and West = 270◦. The convention is:
flow direction β= 90◦−α
with:
αmathematical angle
βangle according Nautical convention
grid (horizontal) Structured set of virtual points covering the model area in the hor-
izontal direction on which the simulation results are obtained. In
Delft3D-FLOW two types of horizontal grid co-ordinate systems can
be applied: a Cartesian or a spherical co-ordinate system. In both
systems the grid is curvilinear and orthogonal.
grid (vertical) Structured set of virtual points covering the model area in the vertical
direction on which the simulation results are obtained. In Delft3D-
FLOW two types of vertical grids can be distinguished: a σ-grid and
aZ-grid.
harmonic components Amplitudes and phases that constitute a time dependent signal, such
as a tide. Generally these components are obtained as a result of
Fourier analysis. Fourier components are often prescribed as model
forcing when a cyclic tidal movement is required.
high water Time of the tide with maximum water level.
hydrostatic pressure Pressure exerted by a fluid due to its weight. When the vertical mo-
tion of fluid is small compared to the motion in the horizontal direction
we may still apply this principle in the computation.
history file File that contains the results of a simulation in monitoring stations as
400 of 688 Deltares

DRAFT
Glossary of terms
a function of time.
horizontal velocity In case of 2D computation: Speed and direction of the hydrodynamic
depth-averaged flow. In case of 3D computation: Speed and direc-
tion of the hydrodynamic flow in a layer.
Remark:
the velocity in a layer is in a σ-layer and is not in a horizontal
plane.
hydrodynamic
conditions
Set of data which determines the input for Delft3D-FLOW.
integrity check Verification of input and output data on both its domain and its inter-
nal consistency.
logarithmic
speed/velocity profile
An expression for the velocity distribution over the depth. The veloc-
ity is assumed to be a logarithmic function of the water depth and
depends on the depth averaged speed.
lon/lat Longitudinal and latitudinal co-ordinates in degrees, minutes and
seconds.
map file File that contains the results of a simulation in all grid points at spe-
cific instances of time.
model area A part of the physical space (the world) that is (schematically) repre-
sented in the simulation. The model area is connected to the outer
world through closed and open boundaries. The forcing of the outer
world on the model area is described by boundary conditions and
external forces such as wind.
monitoring station Virtual point in the model area, where computational results, such as
the current, the water level and/or the concentration of constituents
are monitored as a function of time. Also called observation point.
morphological
dynamics
Change of bathymetry due to sedimentation and erosion. Computed
with the module 3DMOR feature of FLOW.
neap tide Tide with a small tidal range.
non-hydrostatic
pressure
Pressure exerted by the fluid due to its (relatively large) vertical mo-
tion. The vertical motion, that may be in the order of magnitude of
(or greater than) the horizontal motion, may be induced by buoyancy
or by obstacles or a hydraulic jump.
observation station Monitoring point for current, water level and/or temperature and salin-
ity. Observation points are defined at the centre of grid cells. Delft3D-
FLOW writes the results of the simulation in this point to a history file.
print file File that contains a sub-set of the results in ASCII format that can be
listed on a printer.
restart Start of a simulation using the results of a previous run as initial
conditions.
restart file File with the simulation results at the last time step of a previous
simulation, to be used as initial conditions in a restart run.
river outflow/run-off Amount of water flowing from the river into the model area.
roughness Equivalent to ‘bottom roughness’. Recommended term is bottom
roughness.
salinity Constituent of (sea) water. Salinity causes a density induced flow
additional to the hydrodynamic flow.
scenario Set of conditions which determine the hydrodynamic simulation com-
pletely. A scenario is defined (stored) in an MDF-file and its attribute
files.
simulation time Time period between simulation start and stop time, expressed as
real time or in the number of time steps.
spin-up time Time required by the model to adjust itself to match the prescribed
boundary and initial conditions. Also known as initial period, tran-
Deltares 401 of 688

DRAFT
Delft3D-FLOW, User Manual
sient time or warming-up time.
spring tide Tide with a large tidal range.
staggered grid Grid in which the water level, velocity components and depth points
are defined at different locations.
steady state Equilibrium situation; all time variations are absent.
temperature Thermodynamic condition of the material concerned. In Delft3D-
FLOW the temperature is treated as a constituent. Temperature
causes a density induced flow additional to the hydrodynamic flow.
test run Simulation run to check the hydrodynamic behaviour of the model as
described by the scenario.
thin dam A virtual dam along the side of a grid cell across which no flow ex-
change is possible. Thin dams are defined in the middle of the grid
sides.
threshold Water depth above which a dry grid cell is becoming wet.
tidal constants Amplitude and phase of the tidal constituents which represent the
tide. See also Delft3D-TIDE.
tidal cycle Time period of the dominant tidal component; about 12 hours and 25
minutes for a semi-diurnal tide and about 24 hours and 50 minutes
for a diurnal tide.
TIDE Program for the analysis of observed or simulated water levels or
flows in terms of astronomical tidal components, in order to calculate
a geometric series to represent the tide.
time frame Start and stop time of the simulation and the forcing of all (sub-
)processes in the simulation, including writing the results to file.
time history Sequence of numbers giving the value of one or more parameters in
an observation point at sequential moments.
time-series Sequence of numbers giving the value of one or more parameters
used in the model input, or of the simulation results in an observation
point at sequential moments.
time step Time interval at which the results of the simulation are computed.
vector field Flow data in all grid cells expressed as arrows at a certain instance
in time. The arrow represents the speed and direction of the flow.
verification Evaluation of the quality of simulated results by comparison with ob-
served data. Also called validation.
viscosity Measure of the resistance of the fluid to the flow.
Defined as a uniform value in the MDF-file or as non-uniform values
in every grid point in an attribute file.
water level Elevation of the free water surface above some reference level.
wind velocity Magnitude and direction of wind; usually defined relative to true North,
positive angle measured clock wise.
Z-grid Vertical grid in a 3D model that is strictly horizontal. Index k= 1
in the Z-grid refers to the bottom layer and index k=kmax to the
surface layer.
Z-model A 3D model that has been defined with a vertical grid that is strictly
horizontal.
σ-grid Vertical grid in a 3D model that follows the depth profile, i.e. the so-
called σ-plane. Index k= 1 in the σ-grid refers to the surface layer
and index k=kmax to the bottom layer.
σ-model A 3D model that has been defined with a vertical grid using σ-planes.
402 of 688 Deltares
DRAFT
A Files of Delft3D-FLOW
A.1 MDF-file
A.1.1 Introduction
File contents The Master Definition FLOW file (MDF-file) is the input file for the
hydrodynamic simulation program.
Filetype ASCII
File format Free formatted
Filename <name.mdf>
Generated FLOW-GUI or manually offline
The Master Definition FLOW file (MDF-file) is the input file for the hydrodynamic simulation
program. It contains all the necessary data required for defining a model and running the
simulation program. In the MDF-file you can define attribute files in which relevant data (for
some parameters) are stored. This is especially useful when parameters contain a large
number of data (e.g. time-dependent or space varying data). The user-definable attribute files
are listed and described in section A.2.
The MDF-file has the following general characteristics:
Each line contains a maximum of 300 characters.
Each (set of) input parameter(s) is preceded by a Keyword.
AKeyword is at most 6 characters long (a combination of numerical and alpha-numerical
characters, but starting with an alpha-numeric character), followed by an equal sign “=”.
The MDF-file is an intermediate file between the FLOW-GUI and the hydrodynamic simulation
program. As it is an ASCII-file, it can be transported to an arbitrary hardware platform. Con-
sequently, the hydrodynamic simulation program and the FLOW-GUI do not necessarily have
to reside on the same hardware platform.
Generally, you need not to bother about the internal layout or content of the MDF-file. It is,
however, sometimes useful to be able to inspect the file and/or make small changes manually.
Therefore the MDF-file is an ordinary ASCII-file which you can inspect and change with your
favourite ASCII-editor.
The MDF-file is self contained, i.e. it contains all the necessary information about the model
concerned. It can therefore be used as model archive by printing the file.
A.1.2 Example
In this section an example MDF-file is listed and described. The same area is used as in
Chapter 5, but the scenario applies to a 3D computation. The left column contains the keyword
and its value(s); the central column contains the dimension (if useful) and the right column
contains a short description.
Record description:
Keyword and value Format Description
Ident = #Delft3D-FLOW .03.02 3.39.12# C*28 Identification string FLOW-GUI
Commnt= Comment line (not used)
Runtxt= #Demonstration model Delft3D # C*20 Up to ten lines of free text to
continued on next page
Deltares 403 of 688
DRAFT
Delft3D-FLOW, User Manual
continued from previous page
Keyword and value Format Description
#Friesian Tidal Inlet model # clarify the purpose of the simulation
#3 layers # and to indicate specific parameter selections.
Filcco= #fti_02.grd# C*256 Name of the grid file <∗.grd>
Fmtcco= #FR# C*2 Format of grid file
Anglat= 5.5000000e+001 1 R Latitude of model centre
Grdang= 0.0000000e+000 1 R Angle between true North and y-axis
Filgrd= #fti_02.enc# C*256 Grid enclosure file <∗.enc>
Fmtgrd= #FR# C*2 Format of grid enclosure file
MNKmax= 15 22 3 3 I Number of grid points 3D simulation
Thick = 50.0000 1 R Layer thickness from top to bottom
35.0000 1 R in percentage of total water depth
15.0000 1 R
Fildep= #fti_ch02.dep# C*256 File with depth values <∗.dep>
Fmtdep= #FR# C*2 Format of depth file
Commnt=
Fildry= #tut_fti_1.dry# C*256 File with indices of dry points <∗.dry>
Fmtdry= #FR# C*2 Format of dry points file
Filtd = #tut_fti_1.thd# C*256 File with indices of thin dams <∗.thd>
Fmttd = #FR# C*2 Format of thin dam file
Commnt=
Itdate= #1990-08-05# C*10 Reference date for all time functions
Tunit = #M# C*1 Time unit of time dependent data
Tstart= 0.000000 1 R Start time after Itdate in Tunits
Tstop = 1.5000000e+003 1 R Stop time after Itdate in Tunits
Dt = 5.00000 1 R Time step in Tunits
Tzone = 0 1 R Local time zone
Commnt=
Sub1 = #S W # C*4 Flags to activate the processes in two
Sub2 = #PC # C*3 groups of four and three characters
Namc1 = #Conservative Spill # C*20 Name of first constituents
Wnsvwp= #N# C*1 Flag for space varying wind and pressure
Filwnd= #tut_fti_1.wnd# C*256 File with wind data <∗.wnd>
Fmtwnd= #FR# C*2 Format of wind data file
Wndint= #Y# C*1 Wind data interpolation flag
Commnt=
Zeta0 = 1.90000 1 R Initial condition water level
U0 = [.] 1 R Initial condition x-velocity
V0 = [.] 1 R Initial condition y-velocity
S0 = 3.0000000e+001 1 R Initial condition salinity, one value for each layer
C01 = 1.0000000e+000 1 R Initial concentration constituent 1
Commnt=
Filbnd= #tut_fti_1.bnd# C*256 File with boundary locations <∗.bnd>
Fmtbnd= #FR# C*2 Format of boundary file
FilbcH= #tut_fti_1.bch# C*256 File with harmonic flow boundary conditions <∗.bch>
FmtbcH= #FR# C*2 Format of harmonic conditions file
FilbcC= #tut_fti_1.bcc# C*256 File with transport boundary conditions <∗.bcc>
FmtbcC= #FR# C*2 Format of transport conditions file
Rettis= 1.0000000e+002 x R Thatcher-Harleman return time at surface
1.0000000e+002 (for x open boundaries)
Rettib= 1.0000000e+002 x R Thatcher-Harleman return time at bed level
1.0000000e+002 (for x open boundaries)
continued on next page
404 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
continued from previous page
Keyword and value Format Description
Commnt=
Ag = 9.81300 1 R Gravitational acceleration
Rhow = 1030.00 1 R Density of water at background temperature and salinity
Alph0 = [.] Reflection coefficient
Tempw = 15.0000 1 R Background water temperature
Salw = 3.1000000e+001 1 R Background salinity
Rouwav= # # C*4 Bottom stress formulation due to wave action
Wstres= 0.00250000 0.000000 0.00250000
100.000 0.00250000 0.000000
6 R Wind stress and wind speed coefficients
Rhoa = 1.00000 1 R Air density
Betac = 0.500000 1 R Parameter spiral motion
Equili= #N# C*1 Flag for computation spiral motion
Tkemod= #Algebraic # C*12 Type of turbulence closure model
Ktemp = 0 1 I Selection flag for heat model
Fclou = 0.000000 1 R Percentage sky cloudiness
Sarea = 0.000000 1 R Surface area in heat model
Ivapop = 0 1 I Vapour pressure user specified. Only for heat model 4.
Temint= #Y# C*1 Interpolation flag for temperature data
Commnt=
Roumet= #C# C*1 Type of bottom friction formulation
Ccofu = 45.0000 1 R Uniform bottom roughness in u-dir.
Ccofv = 45.0000 1 R Uniform bottom roughness in v-dir.
Xlo = 0.000000 1 R Ozmidov length scale
Htur2d= #N# C*2 Flag for HLES sub-grid model
Vicouv= 2.00000 1 R Uniform horizontal eddy viscosity
Dicouv= 10.0000 1 R Uniform horizontal eddy diffusivity
Vicoww= 1.00000e-006 1 R Uniform vertical eddy viscosity
Dicoww= 1.00000e-006 1 R Uniform vertical eddy diffusivity
Irov = 0 1 I Flag to activate partial slip conditions
Z0v = [.] 1 R Roughness length vertical side walls
Commnt=
Iter = 2 1 I Number of iterations in cont.eq.
Dryflp= #YES# C*3 Flag for extra drying and flooding
Dpsopt= #MAX# C*3 Option for check at water level points
Dpuopt= #MEAN# C*4 Option for check at velocity points
Dryflc= 0.0500000 1 R Threshold depth drying and flooding
Dco = -999.999 1 R Marginal depth in shallow area’s
Tlfsmo= 0.000000 1 R Time interval to smooth the hydrodynamic boundary conditions
ThetQH= 0.0000000e+000 1 R Relaxation parameter for QH relation (0 = no relaxation)
ThetQT= 0.0000000e+000 1 R Relaxation parameter for total discharge boundary (0 = no relaxation)
Forfuv= #Y# C*1 Flag horizontal Forester filter
Forfww= #Y# C*1 Flag vertical Forester filter
Sigcor= #N# C*1 Flag to activate anti-creep
Trasol= #Cyclic-method# C*13 Numerical method for advective terms
Momsol= #Cyclic# C*6 Numerical method for momentum terms
Commnt=
Filsrc= #tut_fti_1.src# C*256 File with discharge locations <∗.src>
Fmtsrc= #FR# C*2 Format of discharge locations file
Fildis= #tut_fti_1.dis# C*256 File with discharge data <∗.dis>
Fmtdis= #FR# C*2 Format of discharge data file
Commnt= no. observation points: 5
continued on next page
Deltares 405 of 688
DRAFT
Delft3D-FLOW , User Manual
continued from previous page
Keyword and value Format Description
Filsta= #tut_fti_1.obs# C*256 File with observation points <∗.obs>
Fmtsta= #FR# C*2 Format of observation points file
Filpar= #tut_fti_1.par# C*256 File with drogues <∗.par>
Fmtpar= #FR# C*2 Format of drogues file
Commnt=
Eps = [.]
Commnt=
Commnt= no. cross sections: 4
Filcrs= #tut_fti_1.crs# C*256 File with cross-sections <∗.crs>
Fmtcrs= #FR# C*2 Format of cross-sections file
Commnt=
Filpla= #name.pla# C*256 File with vegetation description <*.pla>
Commnt=
PMhydr= #YYYYYY# C*6 Flags print map output hydrodynamic quantities
PMproc= #YYYYYYYYYY# C*10 Flags print map output constituents and turbulence
PMderv= #YYY# C*3 Flags print map output derived quantities
PHhydr= #YYYYYY# C*6 Flags print time history hydrodynamic quantities
PHproc= #YYYYYYYYYY# C*10 Flags print time history constituents and turbulence
PHderv= #YYY# C*3 Flags print time history derived quantities
PHflux= #YYYY# C*4 Print flags time history fluxes through cross-sections
SMhydr= #YYYYY# C*5 Flags store map output hydrodynamic quantities
SMproc= #YYYYYYYYYY# C*10 Flags store map output constituents and turbulence
SMderv= #YYYYY# C*6 Flags store map output derived quantities
SHhydr= #YYYY# C*4 Flags store time history output hydrodynamic quantities
SHproc= #YYYYYYYYYY# C*10 Flags store time history output constituents and turbulence
SHderv= #YYYYY# C*5 Flags store time history output derived quantities
SHflux= #YYYY# C*4 Flags store time history output fluxes through cross-sections
Commnt= attribute file Fourier analysis
Filfou= # # C*256 File with quantities to be Fourier analysed <∗.fou>
Online= #YES# C*3 Flag for online visualisation
Prmap = [.] 1 R Time instances to print map output
Prhis = 750.000 0.000000 60.0000 3 R Time information to print history output
Flmap = 2190.00 120.000 2940.00 3 R Time information to store map output
Flhis = 0.000000 5.00000 2940.00 3 R Time information to store history output
Flpp = 2190.00 10.0000 2940.00 3 R Time information to write to the communication file
Flrst = -999.999 1 R Time interval to write restart file
Commnt=
BarocP = #Y# C*1 Flag for activating barocline pressure term at open boundaries. Default = #Y#
A.1.3 Physical parameters
For Tide Generating forces and Thatcher-Harleman return times there is an extra explanation
on the use of the keywords in the following sections
406 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
A.1.3.1 Tide Generating Forces
For tide generating forces you can specify the tidal components that are taken into account.
The layout of Tidfor is defined as follows:
Tidfor = #M2 S2 N2 K2#
#K1 O1 P1 Q1#
#Mf Mm Ssa #
A.1.3.2 Thatcher-Harleman Conditions
The Thatcher-Harleman conditions are by default specified by a return time (in minutes) for
the surface and the bed level for each open boundary. Example with 3 open boundaries:
Rettis = 1.0000000e+002
0.0000000e+000
5.0000000e+001
Rettib = 1.0000000e+002
0.0000000e+000
5.0000000e+001
It is also possible to specify return times for individual constituents, using the following key-
words:
RetsS Return time for Salinity at surface
RetbS Return time for Salinity at bed level
RetsT Return time for Temperature at surface
RetbT Return time for Temperature at bed level
Rets01 Return time for Constituent number 1 at surface
Retb01 Return time for Constituent number 1 at bed level
Idem for constituents with other numbers.
Remarks:
Rettis and Rettib can be combined with the additional keywords to specify return
times for all constituents, with varying values for specific constituents. Here is an exam-
ple specifying a return time of 100 minutes for all constituents, except for temperature,
having a return time of 200 minutes:
Rettis = 1.0000000e+002
1.0000000e+002
Rettib = 1.0000000e+002
1.0000000e+002
RetsT = 2.0000000e+002
2.0000000e+002
RetbT = 2.0000000e+002
2.0000000e+002
Rettis and Rettib are supported by FLOW-GUI; the constituent specific variants
are not; you have to add them with a text editor to the mdf-file.
A.1.4 Output options
The MDF-file contains a number of keywords for selecting output options to print (ascii) files
and binary map-, his-, dro-, and com-files.
The keywords related to 2D/3D ascii output are PMhydr,PMproc,PMderv to select which
quantities to write and Prmap to indicate the time steps at which to write these fields. The
Deltares 407 of 688
DRAFT
Delft3D-FLOW, User Manual
keywords related to history station and cross-section ascii output are PHhydr,PHproc,
PHderv,PHflux to select the quantities and Prhis to select the output times. The ascii
output options are generally not used except for debugging purposes.
The keywords related to 2D/3D binary map-file output are SMhydr,SMproc,SMderv to
select the quantities and Flmap to select the output times. The keywords related to history
station and cross-section binary output are SHhydr,SHproc,SHderv,SHflux to select
the quantities again and Flhis to select the times. The format used for the binary map-,
his-, dro-files is by default NEFIS; this can be switched to NetCDF by means of the keyword
FlNcdf. The keyword Flpp specifies the output times for the com-file; the quantities written
to the com-file and the file format of the com-file cannot be changed.
The values to be specified for the PM*,PH*,SM*and SH*keywords are strings of Y and N
characters representing flags for output of different quantities. These quantities differ slightly
for storing results to file and for printing, so the flags for each option are described in the tables
below. Finally Table A.6 lists a couple of options for additional output to map- and his-files and
the tri-diag file which can be switched on in the Additional parameters section of the user
interface.
Table A.2: Print flags for map-data
Keyword and value Number/Description
PMhydr = #YYYYYY# 1 Water level
2–5 U and V-velocities, magnitude and direction
6ω-velocities relative to σ-plane and w-
velocities
PMproc =
#YYYYYYYYYY#
1 Concentration salinity
2 Temperature
3–7 Concentration constituents
8 Intensity spiral motion
9 and 10 Turbulent energy and dissipation
PMderv=#YYY# 1 and 2 Vertical eddy viscosity and vertical eddy dif-
fusivity. Richardson number if either or both
are selected
3 Density
Table A.3: Print flags for history-data
Keyword and value Number/Description
PHhydr = #YYYYYY# 1 Water level
2–5 U- and V-velocities, magnitude and direction
6ω-velocities relative to σ-plane and w-
velocities
PHproc =
#YYYYYYYYYY#
1 Concentration salinity
2 Temperature
3–7 Concentration constituents
8 Intensity spiral motion
9 and 10 Turbulent energy and dissipation
408 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.3: Print flags for history-data
Keyword and value Number/Description
PHderv=#YYY# 1 and 2 Vertical eddy viscosity and vertical eddy dif-
fusivity. Richardson number if either or both
are selected
3 Density
PHflux = #YYYY# 1 Total flux through cross-setions
2 Momentary flux through cross-sections
3 Advective transport through cross-sections
4 Dispersive transport through cross-sections
Table A.4: Storage flags for map-data
Keyword and value Number/Description
SMhydr = #YYYYY# 1 Water level
2 and 3 U- and V-velocities
4 and 5 ω-velocities relative to σ-plane and w-
velocities
SMproc =
#YYYYYYYYYY#
1 Concentration salinity
2 Temperature
3–7 Concentration constituents
8 Intensity spiral motion
9 and 10 Turbulent energy and dissipation
SMderv=#YYYYYY# 1 and 2 U- and V- bed stress components
3 and 4 Vertical eddy viscosity and vertical eddy dif-
fusivity. Richardson number if either or both
are selected
5 Density
6 Filtered U- and V-velocities of HLES model
and horizontal eddy viscosity
Table A.5: Storage flags for history-data
Keyword and value Number/Description
SHhydr = #YYYY# 1 water level
2 and 3 U- and V-velocities
4 W-velocities
SHproc =
#YYYYYYYYYY#
1 Concentration salinity
2 Temperature
3–7 Concentration constituents
8 Intensity spiral motion
9 Turbulent kinetic energy
10 Turbulent dissipation
Deltares 409 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.5: Storage flags for history-data
Keyword and value Number/Description
SHderv=#YYYYY# 1 and 2 U- and V- bed stress components
3 and 4 Vertical eddy viscosity and vertical eddy dif-
fusivity. Richardson number if either or both
are selected
5 Density
SHflux=#YYYY# 1 Flux in U- and V-direction in ζ-point Total
flux through cross-sections1)
2 Momentary flux through cross-sections1)
3 Advective flux through cross-sections1)
4 Dispersive flux through cross-sections1)
1) if cross-sections are defined.
The layout of the time information to store results, such as Prhis and Flmap, is defined as:
Item Description
First real number Start time in Tunit after the computation start time
Second real number Time interval in Tunit
Third real number Stop time in Tunit after the computation start time
Table A.6: Optional output flags under Additional parameters
Keyword Value Description Default
AddTim #Y# or #N# Flag for additional performance timing output to
<tri-diag>file.
#N#
AdvFlx #Y# or #N# Flag for output of instaneous horizontal fluxes
of the advection diffusion equation per sub-
stance.
Note: anticreep and Forester filter fluxes are
not included in these fluxes.
#N#
AirOut #Y# or #N# Write meteo input to map- and his-file. This
can be used to check the meteorological model
forcing. The following quantities will be written
to the map-file: wind velocity vector, pressure,
cloud coverage (if space varying), air humid-
ity (if space varying), air temperature (if space
varying), precipitation rate (if space varying),
and evaporation rate (if computed). The follow-
ing quantities will be written for the station loca-
tions to the his-file: wind velocity vector, pres-
sure, precipitation rate, and evaporation rate.
#N#
continued on next page
410 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.6 – continued from previous page
Keyword Value Description Default
CflMsg #Y# or #N# Write warnings for too high advective Courant
numbers during whole simulation (instead of a
maximum of 100 warnings).
#N#
Chezy #Y# or #N# Write roughness as Chézy values to map-file. #N#
CumAFl #Y# or #N# Flag for output of cumulative horizontal fluxes
of the advection diffusion equation per sub-
stance.
Note 1: anticreep and Forester filter fluxes are
not included in these fluxes.
Note 2: AdvFlx will be automatically switched
on if CumAFl is activated.
#N#
Filbal #filename# Triggers mass balance output for the polygons
on the history-file: volume, area, average con-
centration and average bed level data as well
as total water, constituent and sediment flux
data. The polygon file should match the file
format described in section A.2.25. The values
will be accumulated over grid cells for which the
centre point is located within the polygon. If
the centre point is located in multiple polygons,
the grid cell will be assigned to the first polygon
only.
-
FlNcdf #string# The value string lists the binary file types that
should use NetCDF instead of NEFIS (or ascii
in case of the Fourier file) as file format. The
program will check whether the following sub-
strings occur in the value string: map, his,
dro, and fou for map-, history-, drogue-, and
Fourier-files respectively.
-
HisBar #Y# or #N# Flag for output of barrier height data to history
file
#N#
HisDis #Y# or #N# Flag for output of flow rate data of discharges
and culverts to history file
#N# (#Y#
in case of
culverts)
HdtOut #Y# or #N# Flag for output at every half time step to inves-
tigate fluctuations in the results due to the two
steps of the ADI solution. Both time steps will
be labelled with the same (end of full time step)
time.
#N#
HeaOut #Y# or #N# Flag for output of heat fluxes determined by
temperature models.
#N#
continued on next page
Deltares 411 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.6 – continued from previous page
Keyword Value Description Default
KfMnMx #Y# or #N# Flag for output of kfumin, kfumax, kfvmin, kfv-
max, kfsmin, and kfsmax arrays to the map-file.
These administrative arrays indicate which lay-
ers of a Z-model are active at velocity (U, V)
and water level points.
#N#
LayOut #Y# or #N# Flag for output of vertical coordinates of layer
interfaces to the map-file.
#N#
MapWav #Y# or #N# Write wave data to map-file. This can be used
to check that the wave parameters have been
passed correctly to the flow computation.
#N#
MergeMap #Y# or #N# Flag for merging the results of a parallel simu-
lation when writing the map and Fourier files. If
MergeMap equals #Y# the simulation will cre-
ate one map file and one Fourier file for the
whole domain (if output of these files is re-
quested). If MergeMap equals #N# the sim-
ulation will create one map file and one Fourier
file per partition (if output of these files is re-
quested). Please note that a split (non-merged)
map-file cannot be used for restarting.
#Y#
MomTrm #Y# or #N# Flag for output of momentum terms to the map-
file (see details in Section A.1.4.1).
#N#
PrecOut 4 or 8 Precision of the data written to the output (his-
tory, map, drogue, Fourier) files: single (4) or
double (8) precision. If the simulation runs in
single precision, then PrecOut can only be
set to 4.
4
Rough #Y# or #N# Write roughness in input unit (as specified
Roumet keyword) to map-file. This is particu-
larly useful when using the water depth depen-
dent roughness formulations offered by trachy-
topes.
#N#
SgrThr 10−3to 103Threshold value in [m] for reporting water level
change messages to <tri-diag>file.
25 m
SHlay 1 3 6 Specification of the layers for which the out-
put parameters are written to history-file. By
default all layers are written. This specifica-
tion may be useful when output reduction is
needed. Postprocessing (e.g. with Delft3D-
QUICKPLOT) may be unable/awkward when
necessary information is missing, (e.g. depth
averaged velocity, vertical profiles).
-
continued on next page
412 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.6 – continued from previous page
Keyword Value Description Default
SMlay 2 5 7 8 Specification of the layers for which the out-
put parameters are written to map-file. By
default all layers are written. This specifica-
tion may be useful when output reduction is
needed. Postprocessing (e.g. with Delft3D-
QUICKPLOT) may be unable/awkward when
necessary information is missing, (e.g. depth
averaged velocity, vertical profiles).
-
SMVelo #glm# or
#euler#
Flag for velocity output to his- and map-files. #euler#
UgrThr 10−3to 103Threshold value in [m/s] for reporting veloc-
ity component change messages to <tri-diag>
file.
5 m/s
Vortic #Y# or #N# Flag for output of vorticity and enstrophy. #N#
A.1.4.1 Momentum terms output
The momentum Eqs. (9.7) and (9.8) in section 9.3.1 can be combined to the following vec-
torized form in which everything except for the partial velocity derivatives in time has been
moved to the right hand side:
∂u
∂t
∂v
∂t
|{z}
A
=
−u
√Gξξ
∂u
∂ξ −uv
√Gξξ √Gηη
∂√Gξξ
∂η
−v
√Gηη
∂v
∂η −uv
√Gξξ √Gηη
∂√Gηη
∂ξ
| {z }
B
+
−v
√Gηη
∂u
∂η +v2
√Gξξ √Gηη
∂√Gηη
∂ξ
−u
√Gξξ
∂v
∂ξ +u2
√Gξξ √Gηη
∂√Gξξ
∂η
| {z }
C
+−ω
d+ζ
∂u
∂σ
−ω
d+ζ
∂v
∂σ
| {z }
D
+fv
−fu
| {z }
E
+
−1
ρ0√Gξξ
Pξ
−1
ρ0√Gηη
Pη
| {z }
F
+Fξ
Fη
|{z}
G
+"1
(d+ζ)2∂
∂σ νV∂u
∂σ
1
(d+ζ)2∂
∂σ νV∂v
∂σ #
| {z }
H
+Mξ
Mη
|{z}
I
(A.1)
When the keyword MomTrm is activated, then most of the marked terms will be written to the
map-file. This feature is available as of DelftD-FLOW version 6.01.01 for sigma-layer models
only. The variables are added as elements to the map-series group. The field contains the
terms valid for the last whole time step (i.e. averaged over the two half time steps of the ADI
solver) for regular output, and terms valid for each half time step in case of half time step
output (HdtOut active). The element names for the M- and N-components respectively, as
well as a textual description of the meaning of the terms is given in the list below.
A elements MOM_DUDT and MOM_DVDT: acceleration (in GLM coordinates)
Deltares 413 of 688
DRAFT
Delft3D-FLOW, User Manual
B elements MOM_UDUDX and MOM_VDVDY: acceleration due to streamwise momentum
transport
C elements MOM_VDUDY and MOM_UDVDX: acceleration due to lateral momentum trans-
port
D vertical advection of momentum (not yet included in output file)
E elements MOM_UCORIOLIS and MOM_VCORIOLIS: acceleration due to Coriolis force
F the pressure term is split into acceleration due to barotropic pressure gradients as given
by the first term in Eqs. (9.15) and (9.16) including the atmospheric pressure gradient (el-
ements MOM_UPRESSURE and MOM_VPRESSURE) and the baroclinic pressure gra-
dient (elements MOM_UDENSITY and MOM_VDENSITY) as given by the second term in
the aforementioned equations
G elements MOM_UVISCO and MOM_VVISCO: acceleration due to viscosity as given by
Eqs. (9.26) and (9.27)
H vertical diffusion of momentum (not yetincluded in the output file)
I all other terms are further subdivided into flow resistance for instance due to vegeta-
tion (elements MOM_URESISTANCE and MOM_VRESISTANCE), tide generating forces
(elements MOM_UTIDEGEN and MOM_VTIDEGEN), wind force in top layer (elements
MOM_UWINDFORCE and MOM_VWINDFORCE), bed shear in bottom layer (elements
MOM_UBEDSHEAR and MOM_VBEDSHEAR), and waves forces (elements MOM_UWAVES
and MOM_VWAVES).
A.2 Attribute files
A.2.1 Introduction
In the following sections we describe the attribute files used in the input file (MDF-file) of
Delft3D-FLOW. Most of these files contain the quantities that describe one specific item, such
as the location of open boundaries, or time dependent data of fluxes discharged in the model
area by discharge stations.
Most of the attribute files can be generated by the FLOW-GUI after defining an input scenario.
Some files can almost only be generated by utility programs such as the curvilinear grid gen-
erated by RGFGRID. Still, we describe both type of files as it might be useful to know how
the input data is structured to be able to generate (large) files, such as astronomic boundary
conditions, or time-series for wind speed and direction by client specific tools.
For each file we give the following information:
File contents.
Filetype (free formatted, fix formatted or unformatted).
Filename and extension.
Generated by (i.e. how to generate the file).
Restrictions on the file contents.
Example(s).
Remarks:
The access mode of all attribute files is sequential.
In the examples the file content is printed in font Courier and comment (not included in
the file) between curly brackets font, unless explicitly stated differently.
414 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
A.2.2 Orthogonal curvilinear grid
The orthogonal curvilinear grid file can be specified in the FLOW-GUI in Data group Domain
- Grid parameters.
File contents The co-ordinates of the orthogonal curvilinear grid at the depth points.
Filetype ASCII
File format Free formatted
Filename <name.grd>
Generated RGFGRID
Record description:
Record Record description
Preceding description records, starting with an asterisk (∗), will be
ignored.
1 Record with Co-ordinate System = Cartesian or value
Spherical
2 Record with
Missing Value = -9.99999000000000024E+02.
If this record is not given 0.0will be assumed as missing value.
3 The number of grid points in m- and n-direction (2 integers).
4 Three real values (not used).
5 to K+5 A label and record number, the x-component of the world co-
ordinates of all points in m-direction, starting with row 1 to row
nmax, with as many continuation records as required by mmax
and the number of co-ordinates per record. The label and record
number are suppressed on the continuation lines. This set of records
is repeated for each row until n=nmax.
K+5 to 2K+4 A similar set of records for the y-component of the world co-
ordinates.
K is the number of records to specify for all grid points a set of x- and y-co-ordinates.
Restrictions:
The grid must be orthogonal.
Input items in a record are separated by one or more blanks.
Example:
*
*Deltares, Delft3D-RGFGRID Version 4.16.01.4531, Sep 30 2008, 23:32:27
*File creation date: 2008-10-01, 23:19:22
*
Coordinate System = Cartesian
9 7
000
Eta= 1 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Deltares 415 of 688
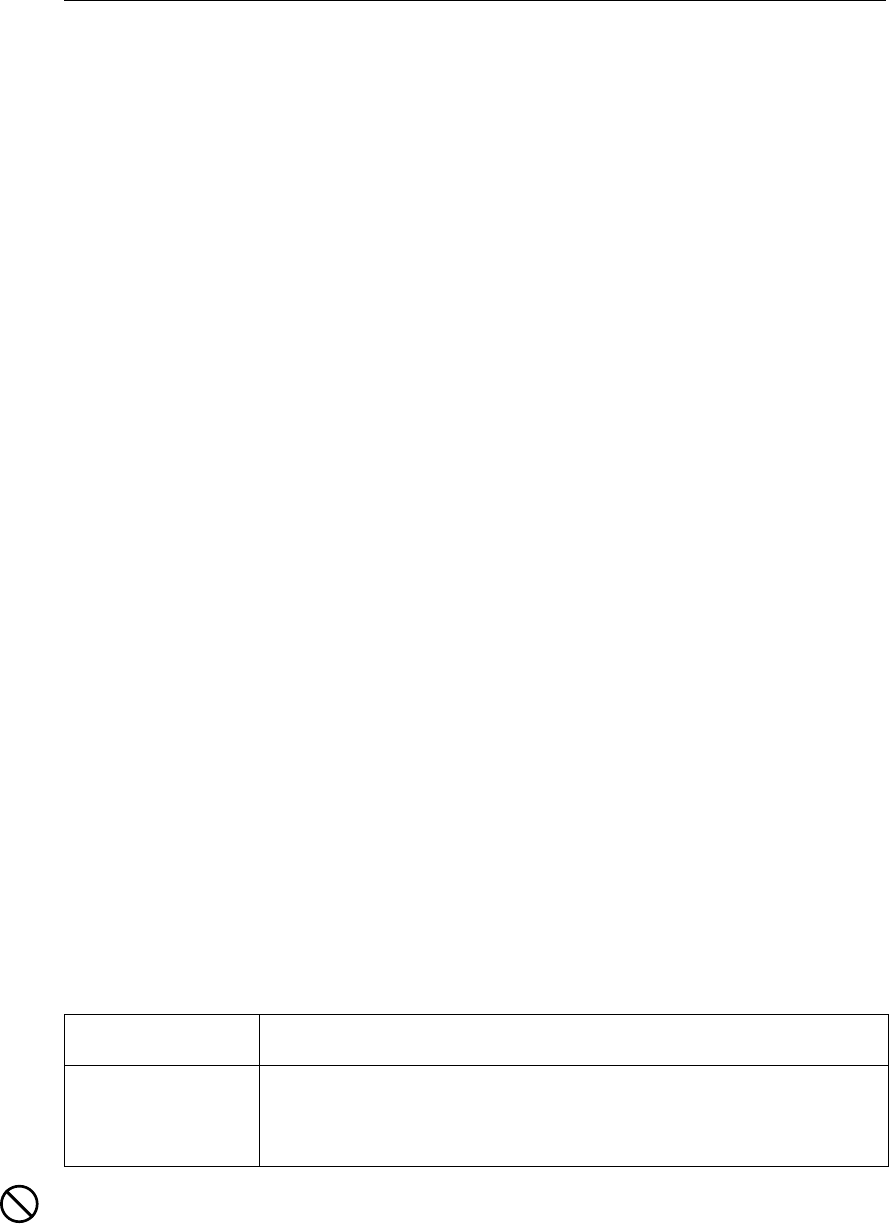
DRAFT
Delft3D-FLOW, User Manual
Eta= 2 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 3 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 4 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 5 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 6 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 7 0.00000000000000000E+00 1.00000000000000000E+02 2.000000...
5.00000000000000000E+02 6.00000000000000000E+02 7.000000...
Eta= 1 1.00000000000000000E+02 1.00000000000000000E+02 1.000000...
1.00000000000000000E+02 1.00000000000000000E+02 1.000000...
Eta= 2 2.00000000000000000E+02 2.00000000000000000E+02 2.000000...
2.00000000000000000E+02 2.00000000000000000E+02 2.000000...
Eta= 3 3.00000000000000000E+02 3.00000000000000000E+02 3.000000...
3.00000000000000000E+02 3.00000000000000000E+02 3.000000...
Eta= 4 4.00000000000000000E+02 4.00000000000000000E+02 4.000000...
4.00000000000000000E+02 4.00000000000000000E+02 4.000000...
Eta= 5 5.00000000000000000E+02 5.00000000000000000E+02 5.000000...
5.00000000000000000E+02 5.00000000000000000E+02 5.000000...
Eta= 6 6.00000000000000000E+02 6.00000000000000000E+02 6.000000...
6.00000000000000000E+02 6.00000000000000000E+02 6.000000...
Eta= 7 7.00000000000000000E+02 7.00000000000000000E+02 7.000000...
7.00000000000000000E+02 7.00000000000000000E+02 7.000000...
A.2.3 Computational grid enclosure
The computational grid enclosure file need to be specified in the FLOW-GUI in Data Group
Domain - Grid parameters, the file itself is generated by RGFGRID, see RGFGRID UM (2016).
File contents The indices of the external computational grid enclosure(s) and op-
tionally one or more internal computational grid enclosures that out-
lines the active computational points in a Delft3D-FLOW computa-
tion. The file is strongly related to the curvilinear grid file.
Filetype ASCII
File format Free formatted
Filename <name.enc>
Generated RGFGRID
Record description:
Record Record description
All One pair of M and N indices representing the grid co-ordinates
where a line segment of the computational grid enclosure (polygon)
changes direction.
Restrictions:
A polygon must be closed. The first point of the polygon is repeated as last point.
A line segment may not intersect or touch any other line segment.
The angle formed by consecutive line segments (measured counter clock-wise) can
have a value of: 45, 90, 135, 225, 270 or 315 degrees, but not 0, 180 and 360 degrees.
In a row or column there should be at least two active computational grid cells.
Input items in a record are separated by one or more blanks.
Example:
416 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
-+ +
++
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+ +
++
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+ +
++
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+ +
++
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
- -
+
+
-
-
- -
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
- -
+
+
-
-
- -
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
- -
+
+
-
-
- -
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
- -
+
+
-
-
- -
12 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
1
2
3
4
5
6
7
8
M - direction
N - direction
Legend:
+water level point
|v-velocity point
−u-velocity point
Full thick line grid enclosure and (for the external polygon only) loca-
tion of water level open boundaries.
Full thin line location for velocity or discharge open boundaries.
Figure A.1: Example of computational grid enclosures
Model area with (one) external and one internal polygon, see Figure A.1.
1 1 begin external polygon
6 1
8 3
9 3
9 1
16 1
19 4
19 6
17 8
4 8
1 5
1 1 end external polygon
13 4 begin internal polygon
14 4
14 5
13 5
13 4 end internal polygon
A.2.4 Bathymetry
The bathymetry file can be specified in the FLOW-GUI in Data Group Domain - Bathymetry.
File contents The bathymetry in the model area, represented by depth values (in
metres) for all grid points.
Filetype ASCII
File format Free formatted or unformatted
Filename <name.dep>
Generated FLOW-GUI (only for uniform depth values).
Offline with QUICKIN and data from digitised charts or GIS-database.
Deltares 417 of 688
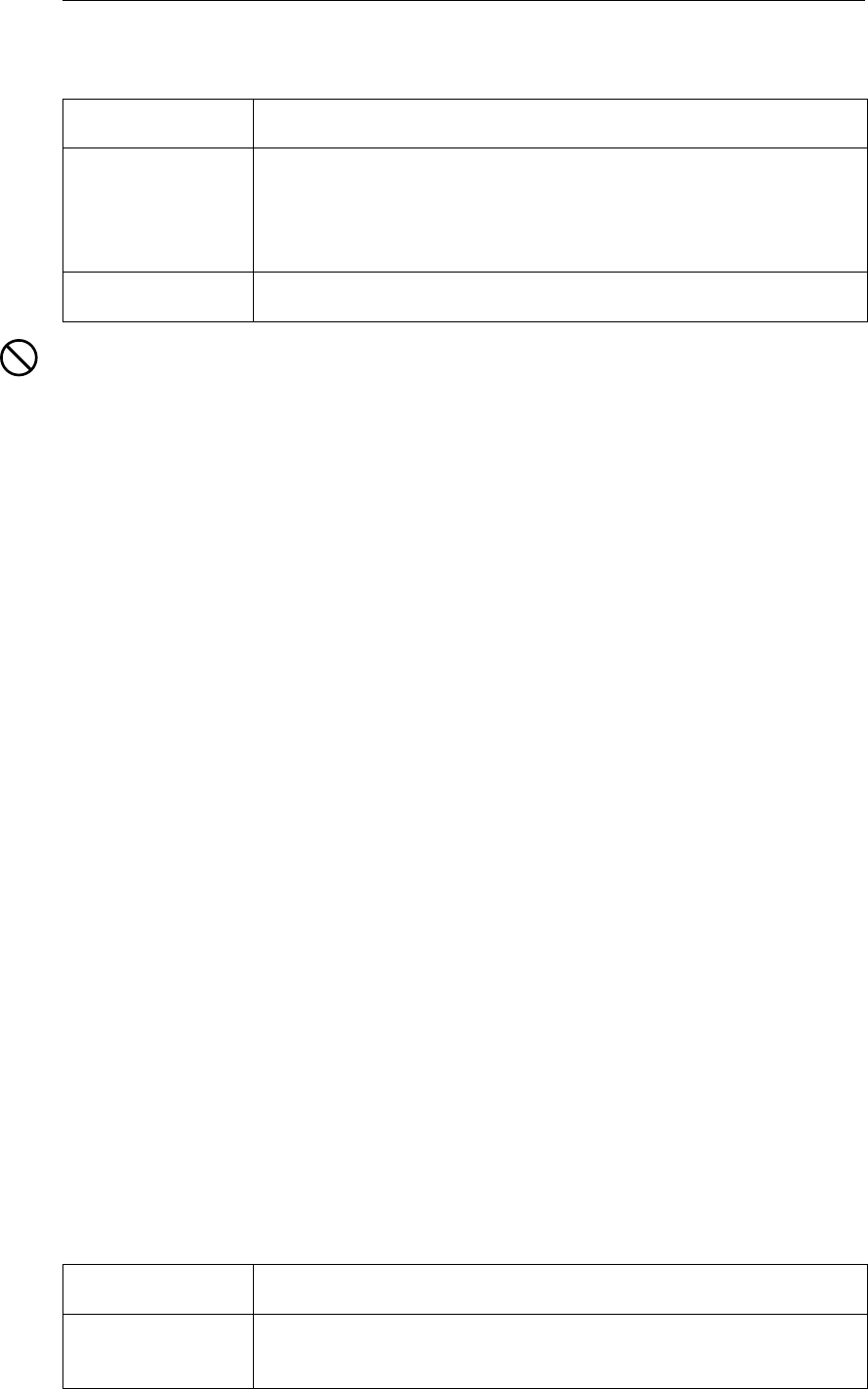
DRAFT
Delft3D-FLOW, User Manual
Record description:
Filetype Record description
Free formatted Depth values per row, starting at N = 1 to N = Nmax, separated
by one or more blanks. The number of continuation lines is deter-
mined by the number of grid points per row (Mmax) and the maxi-
mum record size of 132.
Unformatted Mmax depth values per row for N = 1 to N = Nmax.
Restrictions:
The file contains one M and N line more than the grid dimension.
The maximum record length in the free formatted file is 132.
Depth values from the file will not be checked against their domain.
The input items are separated by one or more blanks (free formatted file only).
The default missing value is: −999.0
Example:
File containing 16 ∗8data values for a model area with 15 ∗7grid points (free formatted file).
1.0 2.0 3.0 4.0 -5.0 -5.0 -5.0 8.0 9.0 10.0 11.0
12.0 13.0 14.0 -5.0 -999.0
3.0 4.0 5.0 6.0 7.0 -6.0 -6.0 10.0 11.0 12.0 13.0
14.0 15.0 16.0 17.0 -999.0
5.0 6.0 7.0 8.0 9.0 10.0 -7.0 12.0 13.0 14.0 15.0
16.0 17.0 18.0 19.0 -999.0
7.0 8.0 9.0 10.0 11.0 12.0 13.0 14.0 15.0 16.0 17.0
18.0 19.0 -7.0 19.0 -999.0
9.0 10.0 11.0 12.0 13.0 14.0 15.0 16.0 17.0 18.0 19.0
20.0 19.0 18.0 17.0 -999.0
-7.0 12.0 13.0 14.0 15.0 16.0 17.0 18.0 19.0 20.0 19.0
18.0 17.0 16.0 15.0 -999.0
-8.0 -8.0 15.0 16.0 17.0 18.0 19.0 20.0 19.0 18.0 17.0
16.0 15.0 14.0 13.0 -999.0
-999.0 -999.0 -999.0 -999.0 -999.0 -999.0 -999.0 -999.0 -999.0 -999.0 -999.0
-999.0 -999.0 -999.0 -999.0 -999.0
A.2.5 Thin dams
The thin dams file can be specified in the FLOW-GUI in Data Group Domain - Thin dams.
File contents Location and type of thin dams.
Filetype ASCII
File format Free formatted
Filename <name.thd>
Generated QUICKIN or FLOW-GUI
Record description:
Record Record description
each record The grid indices of the begin and end point of a line of thin dams (4
integers). A character indicating the type of thin dams (U or V).
418 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Figure A.2: Example of thin dams in a model area
Restrictions:
The angle of the line segment and the horizontal numerical grid axis may be an integer
multiple of 45 degrees.
Thin dams can not be defined along the model boundaries (which by default lie along
the lines M = 1, N = 1, M = Mmax or N = Nmax). Therefore, the indices of thin dams
must lie between M = 2 and Mmax-1 and N = 2 and Nmax-1 respectively.
Input items are separated by one or more blanks.
The direction of the dam is perpendicular to the velocity direction over which the dams
are superimposed!
Example:
Three (sets of) thin dams in model area of 19 ∗8grid points, see Figure A.2.
6264V
7 4 10 7 U
12 3 12 7 U
A.2.6 Dry points
The dry points file can be specified in the FLOW-GUI in Data Group Domain - Dry points.
File contents Index location of (permanently) dry points.
Filetype ASCII
File format Free formatted
Filename <name.dry>
Generated QUICKIN or FLOW-GUI
Record description:
Record Record description
each record The grid indices of the begin and end point of a dry section (4
integers).
Deltares 419 of 688
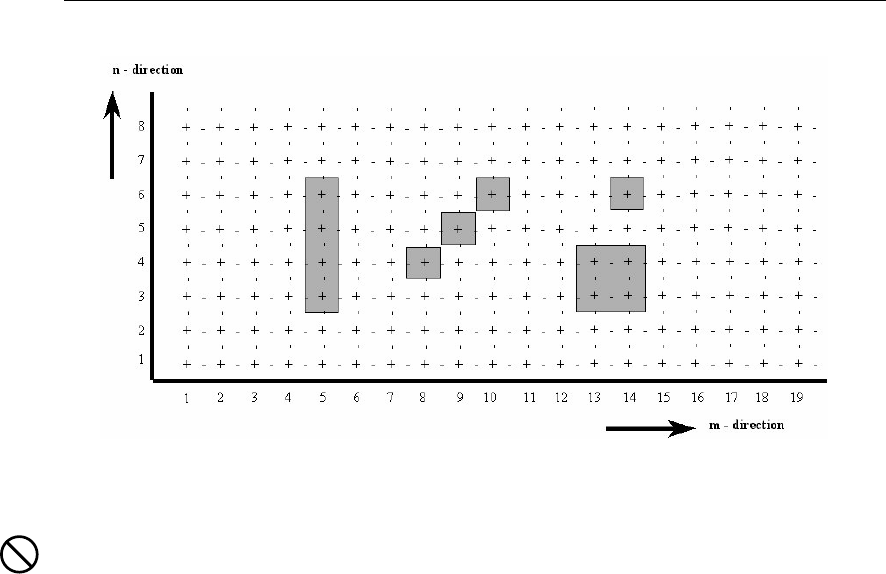
DRAFT
Delft3D-FLOW, User Manual
Figure A.3: Dry points in model area
Restrictions:
The angle of a line of dry points and the horizontal numerical grid axis can be an integer
multiple of 45 degrees.
Dry points may not be defined along the model boundaries (which by default lie along
the lines M = 1, N = 1, M = Mmax or N = Nmax). Therefore, the indices of these points
must lie between M = 2 and Mmax-1 and N = 2 and Nmax-1, respectively.
The input items are separated by one or more blanks.
The most lower-left dry point has indices (2, 2).
Example:
Five sets of dry points in a model area of 19 ∗8grid points, see Figure A.3.
5356
8 4 10 6
13 3 14 3
13 4 14 4
14 6 14 6
A.2.7 Time-series uniform wind
Time-series for wind speed and direction for a uniform wind can be specified in the FLOW-GUI
in Data Group Physical parameters - Wind.
File contents Time-series for wind speed and direction for a uniform wind. The
wind direction is defined according to the nautical convention, i.e.
relative to north and positive in clock-wise direction, see Figure A.4.
Filetype ASCII or binary
File format Free formatted or unformatted
Filename <name.wnd>
Generated FLOW-GUI, WAVE-GUI, or manually offline
420 of 688 Deltares
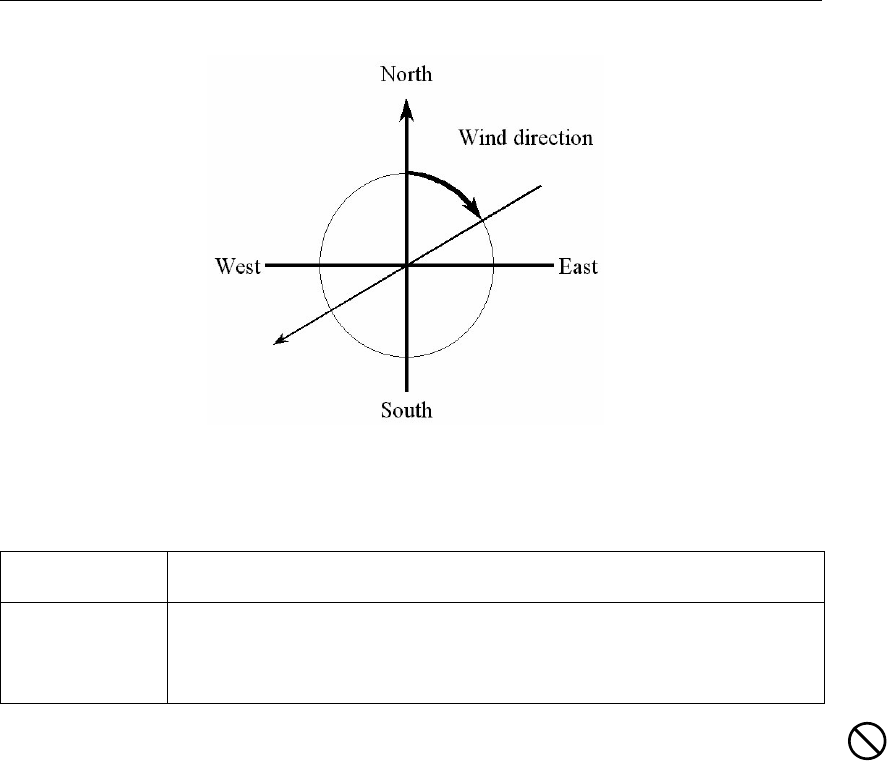
DRAFT
Files of Delft3D-FLOW
Figure A.4: Definition sketch of wind direction according to Nautical convention
Record description:
Record Record description
each record The time in minutes after the Reference date 00:00:00 hr (1 real). The
wind speed in m/s and the wind direction relative to north, positive clock
wise (2 reals).
Restrictions:
Times must be an integer multiple of the simulation time step.
The contents of the file will not be checked on its domain.
The input items are separated by one or more blanks.
Example:
Time-series for uniform wind field, starting as a north wind, turning to south-west and back to
north, see Figure A.4. The wind direction in Figure A.4 is about +60 degrees.
0. 0.0 0.
10. 1.2 315.
30. 3.7 270.
150. 4.2 225.
600. 5.7 225.
610. 4.0 235.
900. 0.0 0.
A.2.8 Space varying wind and pressure
In this section the different options are described for specifying space varying meteo data
(wind, atmospheric pressure, etc.) as input for your simulation. The descriptions in this section
are applicable to meteo input files of a certain version. More details on the compatibility
of the meteo input files and the conversion from one version to another can be found in
Appendix B.7.
Deltares 421 of 688
DRAFT
Delft3D-FLOW, User Manual
A.2.8.1 Defined on the computational grid
Time-series for space varying wind velocity components (east-west and south-north) and at-
mospheric pressure can be specified in the FLOW-GUI in Data Group Physical parameters -
Wind.
File contents Time-series for space varying wind velocity components (east-west
and south-north) and atmospheric pressure, defined on the compu-
tational grid. The file consists of a header, followed by datablocks
containing the wind and pressure fields at times specified using a
standardised time definition above each datablock. The header spec-
ifies the type of file and the input it contains using a number of key-
words. The keywords are case insensitive and the order of the key-
words is not fixed.
Filetype ASCII or binary.
File format Free formatted or unformatted, keyword based.
Filename <name.wnd>
Generated Some offline program.
Header description:
Keywords Value Description
FileVersion 1.03 version of file format
Filetype meteo_on_computational_grid meteo input on computa-
tional grid
NODATA_value free value used for input that is
to be neglected
n_quantity 3 number of quantities speci-
fied in the file
quantity1 x_wind wind in x-direction
quantity2 y_wind wind in y-direction
quantity3 air_pressure air pressure
unit1 m s-1 unit of quantity1,
meters/second
unit2 m s-1 unit of quantity2,
meter/second
unit3 Pa or unit of quantity3, Pa or
mbar millibar
422 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Time definition and data block description
Keywords Value Description
Time fixed format described below time definition string
The time definition string has a fixed format, used to completely determine the time at which
a dataset is valid. The time definition string has the following format:
TIME minutes/hours since YYYY-MM-DD HH:MM:SS TIME ZONE, e.g.
360 minutes since 2008-07-28 10:55:00 +01:00
The format of the string is completely fixed. No extra spaces or tabs can be added between
the different parts of the definition. The time definition is followed by the datablock of input
values corresponding to the specified time. The data block consists of three subsequent
blocks containing the velocity component in M-direction, the velocity component in N-direction
and the atmospheric pressure, respectively. All three quantities are given for Nmax by Mmax
points, where the first value in the dataset corresponds to cell (1,1) on the grid. Every next
line in the dataset then corresponds to a row on the grid. The time definition and the data
block — for all three quantities — are repeated for each time instance of the time-series.
File version and conversion
The current description holds for FileVersion 1.03. The table below shows the latest
modifications in the file format (and version number).
FileVersion Modifications
1.03 No changes for this meteo input type, but for the meteo types me-
teo_on_equidistant_grid and meteo_on_curvilinear_grid
1.02 No changes for this meteo input type, but for the meteo type me-
teo_on_spider_web_grid
1.01 Changed keyword MeteoType to FileType
Changed fixed value of input type (Keyword Filetype) from Svwp to
meteo_on_computational_grid (meteo_on_flow_grid is also allowed)
Restrictions:
Keywords are followed by an equal sign ’=’ and the value of the keyword.
When a keyword has value free the value of this keyword is free to choose by the user.
When only one value is given for a keyword, this keyword has a fixed value and when 2
or more options are shown, the user can choose between those values.
Times must be specified exactly according to the time definition. See the examples
shown in this section.
The contents of the file will not be checked on its domain.
The wind components are specified at the cell centres (water level points) of the com-
putational grid.
Input items in a data block are separated by one or more blanks (free formatted file
only).
Deltares 423 of 688
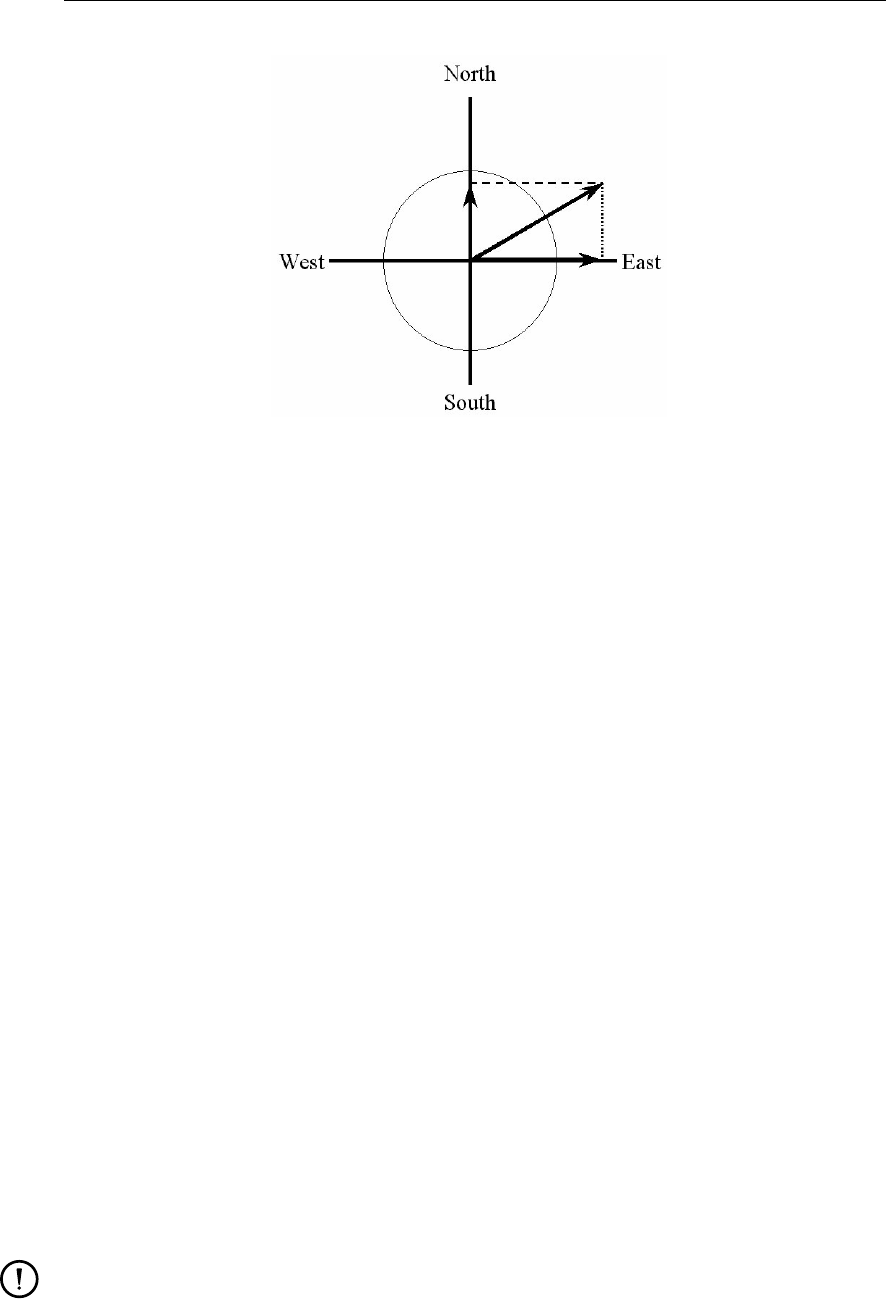
DRAFT
Delft3D-FLOW, User Manual
Figure A.5: Definition wind components for space varying wind
Remarks:
The time definition in the meteorological file contains the number of minutes or hours
since a reference data and time in a certain time zone. The reference time and time
zone may differ from those of the simulation. The computational engine will search
in the meteo file for the simulation time and interpolate between neighbouring times if
necessary. Possible differences in time zone will be accounted for by shifting the meteo
input data with the difference. The reference times within the time definition string may
vary in a meteo file, i.e. it is possible to attach new input with a different reference time,
behind the last data block.
Comments can be added after #’s.
Example
Model area of 25 ∗33 grid points (Mmax = 25; Nmax = 33). The input data is printed in
Courier, comments are printed behind #’s.
Time = 0.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 25 values each} # Wind component west to east
{33 records with 25 values each} # Wind component south to north
{33 records with 25 values each} # Atmospheric pressure
Time = 340.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 25 values each} # Wind component west to east
{33 records with 25 values each} # Wind component south to north
{33 records with 25 values each} # Atmospheric pressure
Time = 600.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 25 values each} # Wind component west to east
{33 records with 25 values each} # Wind component south to north
{33 records with 25 values each} # Atmospheric pressure
Time = 1240.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 25 values each} # Wind component west to east
{33 records with 25 values each} # Wind component south to north
{33 records with 25 values each} # Atmospheric pressure
Remarks:
To obtain the wind direction according to the nautical convention, the wind direction is
reversed.
The wind is specified in terms of its components along the west-east (x_wind) and
south-north (y_wind) co-ordinate system, see Figure A.5. These definitions differ
from the nautical convention (used for uniform wind), which is specified relative to true
424 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
North, see Figure A.4.
Remark:
On open boundaries, an input signal is prescribed that is consistent with some average
pressure. Usually the signal corresponds to Mean Sea Level. One actually wants to
prescribe an input signal corresponding to the local pressure prescribed by the space
varying meteo input. To this end, it is possible to specify an average pressure - which
should correspond to your input signal on the open boundaries - which is then used to
determine local pressure gradients that need to be applied along the open boundaries
to obtain an input signal that is consistent with the local atmospheric pressure. This
functionality used to be specified in the wind file but it should now be specified in the
Master Definition File in the Data Group Additional parameters, using PavBnd:Aver-
age Pressure on Boundaries. Using this keyword one can specify an average pressure
that is used on all open boundaries, independent of the type of wind input. The pressure
must be specified in N/m2. An example:
PavBnd= 101300.0
A.2.8.2 Defined on an equidistant grid
Time-series for space varying wind velocity components (east-west and south-north) and at-
mospheric pressure on an equidistant grid (other than the computational grid) can be specified
in the FLOW-GUI in Data Group Additional parameters.
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on an equidistant rectilinear or spherical grid (other than the
computational grid).
Filetype ASCII.
File format Free formatted, keyword based.
Filename <name.amp>for atmospheric pressure in [Pa] or [millibar],
<name.amu>for the wind speed component in east-west-direction
in [m/s],
<name.amv>for the wind speed component in north-south direc-
tion in [m/s].
Generated Some offline program.
Remark:
Space varying wind and pressure on an equidistant grid is implemented as a special
feature. You must specify some additional keywords and values in Data Group Addi-
tional parameters or in the MDF-file; see section B.7.1 for details.
A.2.8.3 Defined on a curvilinear grid
Time-series for space varying wind velocity components (east-west and south-north) and at-
mospheric pressure on a separate curvilinear grid (other than the computational grid) can be
specified in the FLOW-GUI in Data Group Additional parameters.
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on a curvilinear (Cartesian or spherical) grid (other than the
computational grid).
Filetype ASCII.
File format Free formatted, keyword based.
Filename <name.amp>for atmospheric pressure in [Pa] or [millibar],
<name.amu>for the wind speed component in east-west-direction
in [m/s],
Deltares 425 of 688
DRAFT
Delft3D-FLOW, User Manual
<name.amv>for the wind speed component in north-south direc-
tion in [m/s],
<name.grd>for the curvilinear grid on which the wind and pressure
are specified.
Generated Some offline program.
Remark:
Space varying wind and pressure on a curvilinear grid is implemented as a special fea-
ture. You must specify some additional keywords and values in Data Group Additional
parameters or in the MDF-file; see section B.7.2 for details.
A.2.8.4 Defined on a Spiderweb grid
Time-series for space varying wind velocity components (east-west and south-north) and at-
mospheric pressure on a Spiderweb grid can be specified in the FLOW-GUI in Data Group
Additional parameters.
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on a Spiderweb grid. The grid can be rectilinear or spherical.
This type of wind input is used to describe (rotating) cyclone winds.
Filetype ASCII.
File format Free formatted, keyword based.
Filename <name.web>containing the wind speed in [m/s], wind (from) direc-
tion in [degree] and atmospheric pressure in [Pa] or [millibar].
Generated Some offline program.
Remark:
Space varying wind and pressure on a Spiderweb grid is implemented as a special fea-
ture. You must specify some additional keywords and values in Data Group Additional
parameters or in the MDF-file; see section B.7.3 for details.
A.2.9 Initial conditions
File contents Initial conditions for the hydrodynamics, the transported constituents
(if any) and the secondary flow intensity (if any) at all points (Data
Group Initial conditions).
File format Free formatted or unformatted.
Filename <name.ini>
Generated Offline by some external program.
Initial conditions for separate quantities can be generated with the program QUICKIN.
Record description:
Record Record description
each record A record contains a row of Mmax values (Mmax reals).
The file contains a matrix of dimensions (Mmax∗Nmax) for each quantity and if relevant for
each layer for which an initial condition is required.
The matrices are given in the following order:
1 Water elevation (one matrix).
426 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
2 U-velocities (Kmax matrices).
3 V-velocities (Kmax matrices).
4 Salinity, only if selected as an active process (Kmax matrices).
5 Temperature, only if selected as an active process (Kmax matrices).
6 Constituent number 1, 2, 3 to the last constituent chosen, only if selected (Kmax matrices).
7 Secondary flow (for 2D simulations only), only if selected as an active process (one ma-
trix).
In total there will be (Cmax+2)∗Kmax + 1 matrices of Mmax∗Nmax where:
Mmax number of grid points in M (U or ξ) direction.
Nmax number of grid points in N (V or η) direction.
Kmax number of layers.
Cmax number of constituents (including temperature, salinity, secondary flow).
Restrictions:
The maximum record length in the free formatted file is 132
The contents of the file will not be checked on its domain.
Input items in a record are separated by one or more blanks (free formatted file only).
Example 1:
A model of 1 layer, Mmax = 25 and Nmax = 33, with two constituents, TEST1 and TEST2,
and secondary flow.
The input data is printed in Courier; comment (not in the file) is printed between brackets.
{33 records with 25 values each} {Water elevation}
{33 records with 25 values each} {U-velocity component}
{33 records with 25 values each} {V-velocity component}
{33 records with 25 values each} {Concentrations constituent TEST1}
{33 records with 25 values each} {Concentrations constituent TEST2}
{33 records with 25 values each} {Secondary flow intensity}
Example 2:
A model with 2 layers, Mmax = 25 and Nmax = 33, with salinity, temperature and one con-
stituent, denoted by TEST.
The input data is printed in Courier; comment (not in the file) is printed between brackets.
{33 records with 25 values each} {Water elevation}
{33 records with 25 values each} {U-velocity component in layer 1}
{33 records with 25 values each} {U-velocity component in layer 2}
{33 records with 25 values each} {V-velocity component in layer 1}
{33 records with 25 values each} {V-velocity component in layer 2}
{33 records with 25 values each} {Salinity in layer 1}
{33 records with 25 values each} {Salinity in layer 2}
{33 records with 25 values each} {Temperature in layer 1}
{33 records with 25 values each} {Temperature in layer 2}
{33 records with 25 values each} {Concentrations constituent TEST in layer 1}
{33 records with 25 values each} {Concentrations constituent TEST in layer 2}
Remarks:
A record for the free formatted file is to be interpreted as a logical record. The length
of a physical record is limited to 132, so a logical record consists of as many physical
records as required by Mmax and the number of values per (physical) record.
Deltares 427 of 688
DRAFT
Delft3D-FLOW, User Manual
The velocity components are the computational U and V components, not the east and
north components.
A.2.10 Open boundaries
The open boundaries file(s) can be specified in the FLOW-GUI in Data Group Boundaries.
File contents The location and description of open boundaries.
Filetype ASCII
File format Fix formatted for text variables; free formatted for real and integer
values.
Filename <name.bnd>
Generated FLOW-GUI
Record description:
Record Record description
each record Name of the open boundary section (20 characters).
Type of boundary (1 character).
Z water level
C current
N Neumann
Q discharge per grid cell
T total discharge for boundary section
R Riemann
Type of data (1 character).
A astronomic
H harmonic
Q QH tables (only for water level boundaries)
T time-series
Grid indices of the begin and end point of the boundary section (4
integers).
Reflection coefficient (1 real), not for Neumann or Riemann.
Vertical profile (three strings); only for 3D simulations and velocity
type boundaries (C, Q, T and R).
Uniform
Logarithmic
3D profile
Two labels (each 12 characters, no blanks in the label name) refer-
encing to the blocks in the amplitude and phase file <∗.bca>;only
if the type of data is A.
Restrictions:
Maximum record length in the free formatted file is 132.
The boundary section name must start at position one in a record.
The value of the reflection coefficient will not be checked on its domain.
All input items in a record must be separated by one or more blanks.
428 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Astronomic and harmonic forced boundaries must be specified before QH-relation forced
boundaries, which in turn should be specified before time-series forced boundaries.
Astronomic and harmonic forced boundaries cannot be combined.
Example:
Two boundary sections with data type A(stronomic) and one with type T(ime series).
Paradise Bay 1 Q A 1 1 1 5 0.0 Uniform Paradise_1A Paradisee_lB
Paradise Bay 2 C A 16 3 16 6 0.0 Logarithmic Paradise_2A Paradisee_2B
Sea Entrance Z T 4 8 14 8 0.0
Remarks:
A label may not contain blanks between non-blank characters.
For the labels 12 characters are read. Be sure the second label starts at least 13
positions after the start of the first.
A.2.11 Astronomic flow boundary conditions
File contents Boundary conditions for open boundary sections of type Astronomic
(Data Group Boundaries - Flow conditions) in terms of amplitudes
and phases for the astronomic components.
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.bca>
Generated FLOW-GUI or offline by program Delft3D-TRIANA.
Record description:
Record Record description
1 Label for end point A of open boundary section (12 characters, no
blanks)
2 to 2+NCOM-1 For each component its name (8 characters), amplitude and phases (2
reals).
2+NCOM Label for end point B of open boundary section (12 characters, no
blanks).
2+NCOM+1 to
2+2∗NCOM
For each component its name (8 characters), amplitude and phases (2
reals).
where:
NCOM number of tidal components.
These records are repeated for each open boundary section.
Restrictions:
The labels for the end points of an open boundary section are defined in the <name.bnd>
file.
The name of the label may not contain blanks between non-blnak characters.
Deltares 429 of 688

DRAFT
Delft3D-FLOW, User Manual
All component names are written in upper case.
The label and component name must start in position one.
The number of components and the components used may differ between boundary
sections.
At both ends of a section the same set of components must be defined. Between
sections these sets may differ.
Example:
A model with 3 open boundary sections (with astronomical boundary conditions).
The input data is printed in Courier; comment (not in the file) is printed between brackets.
East_bound_A {section name, end point A}
A0 0.02 0.0 {mean value}
M2 1.87 314.3 {component name, amplitude and phase}
S2 0.32 276.4
O1 0.21 14.3
East_bound_B {section name, end point B}
A0 0.03 0.0 {mean value}
M2 1.89 264.7 {component name, amplitude and phase}
S2 0.29 220.9
O1 0.19 38.3
West_bound_A {section name, end point A}
A0 0.06 0.0 {mean value}
M2 1.71 122.5 {component name, amplitude and phase}
S2 0.18 46.4
West_bound_B {section name, end point B}
A0 0.06 0.0 {mean value}
M2 1.69 110.3 {component name, amplitude and phase}
S2 0.19 22.4
Sea_bound_A {section name, end point A}
A0 0.07 0.0 {mean value}
M2 1.67 300.9 {component name, amplitude and phase}
S2 0.32 76.2
K1 0.05 33.1
Sea_bound_B {section name, end point B}
A0 0.07 0.0 {mean value}
M2 1.69 324.1 {component name, amplitude and phase}
S2 0.29 110.1
K1 0.09 6.1
A.2.12 Astronomic correction factors
File contents The file contains corrections to the astronomical components of the
open boundary sections with data type astronomic. These correc-
tions may be applied during calibration. This file avoids a large pro-
cessing effort of your tidal data. Just specify the appropriate bound-
ary section and the component(s) that you wish to alter and how
much it needs be changed (Data Group Boundaries - Flow condi-
tions). The amplitude factor is a multiplicative factor and the phase
factor is an additive factor.
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.cor>
Generated FLOW-GUI
430 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record description:
Record Record description
1 Label for begin point (12 characters).
2 to 1+NCOMR Component name (8 characters), amplitude and phase correction fac-
tors (2 reals).
2+NCOMR Label for end point (12 characters).
3+NCOMR to
2+2∗NCOMR
Component name (8 characters), amplitude and phase correction fac-
tors (2 reals).
where:
NCOMR the number of tidal components that requires corrections.
The records (1 to 2+2∗NCOMR) may be repeated for the number of open boundary sections.
Restrictions:
The name of the label may not contain blanks between non-blnak characters.
Label names for the begin and end points are defined in the <name.bnd>file.
All component names are written in upper case.
The label and component name must start in record position one.
The number of components and the components used may differ per boundary section.
The astronomical component A0 cannot be corrected.
Example:
Model for which two open boundary sections, with astronomical boundary conditions, need
corrections.
The input data is printed in Courier; comment (not in the file) is printed between brackets.
East_bound_A {section name, end point A}
M2 0.90 10.0 {component name, amplitude and phase}
S2 0.95 -7.5
East_bound_B {section name, end point B}
M2 0.90 10.0 {component name, amplitude and phase}
S2 0.95 -7.5
Sea_bound_A {section name, end point A}
M2 0.95 7.0 {component name, amplitude and phase}
S2 0.90 -3.0
Q1 1.10 15.0
K1 1.10 10.0
Sea_bound_B {section name, end point B}
M2 0.95 7.0 {component name, amplitude and phase}
S2 0.90 -3.0
Q1 1.10 15.0
K1 1.10 10.0
Remark:
In the example the correction factors are the same for both end points; but this is not
mandatory.
Deltares 431 of 688
DRAFT
Delft3D-FLOW, User Manual
A.2.13 Harmonic flow boundary conditions
File contents The frequencies, amplitudes and phases for all open boundary sec-
tions with data type equal to H(armonic) (Data Group Boundaries -
Flow conditions).
Filetype ASCII
File format Free formatted
Filename <name.bch>
Generated FLOW-GUI or manually offline
Record description:
Record Record description
1 Frequencies (including 0.0 for the the mean value) (reals).
2 Blank
3 to NTOH+2 Amplitudes at the begin of each boundary section for all frequencies
(reals).
NTOH+3 to
2∗NTOH+2
Amplitudes at the end of each boundary section for all frequencies
(reals).
2∗NTOH+3 Blank
2∗NTOH+4 to
3∗NTOH+3
Phases at the begin of each boundary section for all frequencies (blanks
for mean value) (reals).
3∗NTOH+4 to
4∗NTOH+3
Phases at the end of each boundary section for all frequencies (blanks
for mean value) (reals).
where:
NTOH number of open boundary sections driven with harmonic frequencies.
Restrictions:
Maximum record length is 132.
The input items will not be checked on their domain.
Input items in a record are separated by one or more blanks.
Remark:
The phase values at intermediate points are interpolated from the values specified at the
begin and end of the opening section. You should take care for a good representation
of phases at transition points (e.g. an interpolation between 356 and 13 degrees).
Example:
Model area with 3 open boundary sections (NTOH = 3) with H data type and two harmonic
frequencies including the mean value (which has frequency 0.0).
The input data is printed in Courier; comment (not in the file) is printed between brackets.
432 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
0.0 30.0000 {KC = 2, including zero frequency for the mean value}
{blank record}
-1.6 2.1 {amplitudes at end A, section 1}
-1.5 2.3 {amplitudes at end A, section 2}
1.6 2.2 {amplitudes at end A, section 3}
-1.7 2.2 {amplitudes at end B, section 1}
-1.7 2.1 {amplitudes at end B, section 2}
1.8 2.2 {amplitudes at end B, section 3}
{blank record}
120.5 {phase at end A, 1-st component, section 1}
79.6 {phase at end A, 1-st component, section 2}
245.8 {phase at end A, 1-st component, section 3}
125.6 {phase at end B, 1-st component, section 1}
88.9 {phase at end B, 1-st component, section 2}
283.7 {phase at end B, 1-st component, section 3}
A.2.14 QH-relation flow boundary conditions
File contents QH relations at water level boundaries for boundary sections with the
data type Q (Data Group Boundaries - Flow conditions).
File format Fix format for header information; free format for time series data.
Filename <name.bcq>
Generated FLOW-GUI or manually offline
Record description:
For each water level boundary segment with data type Q a data block must be prescribed
consisting of:
Header records containing a number of compulsory and optional keywords accompanied
by their values.
A set of records containing the discharge/water level data.
Each record contains a discharge in [m3/s] and a water level in [m].
Restrictions:
Maximum record length is 5000.
Position, format of the keywords and the format of keyword-values in the header are
fixed (see example).
All keywords have a length of 20 characters.
Header in each block must be ended with the (compulsory) keyword: ‘records in table’
accompanied by the number of data records to follow.
Positive discharges indicate flow in positive M/N direction. If the model flows in negative
M/N direction negative discharges must be specified.
Discharges must be specified in increasing order. That is, Q= 100.0should be
specified before Q= 200.0. For negative discharges Q=−200.0must be specified
before Q=−100.0.
QH boundaries should only be specified as outflow boundaries.
The sequence of blocks must be consistent with the sequence of water level boundary
sections with data type Q.
Example:
Model with open boundary sections with data type Q. Flow in negative M or N direction.
Deltares 433 of 688

DRAFT
Delft3D-FLOW, User Manual
table-name Boundary Section : 2 a20,1x,a40
contents uniform a20,1x,a20
location1open boundary number 2 a20,1x,a20
xy-function ’equidistant’
interpolation2linear a20,1x,free
parameter ’total discharge (t) ’ unit ’[m**3/s]’ a20,1x,a20,1x,a20,free
parameter ’water elevation (z) ’ unit ’[m]’ a20,1x,a20,1x,a20,free
records in table 5 a20,1x,i6
-2000.0000 2.1455
-1500.0000 1.7711
-1000.0000 1.3516
-500.0000 0.8514
-300.0000 0.6057
A.2.15 Time-series flow boundary conditions
File contents Time-series for flow boundary conditions of all open boundary sec-
tions with data type T (Data Group Boundaries - Flow conditions).
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.bct>
Generated FLOW-GUI, program Delft3D-NESTHD or manually offline
Record description:
For each open boundary segment with boundary data of type T (time-series) the data is given
in two related blocks:
1 A header block containing a number of compulsory and optional keywords accompanied
by their values.
2 A data block containing the time dependent data.
Description header block:
1sequence must follow sequential order of open boundaries in pre-processor
2Optional Keywords and values
434 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record Text Format Value Format
1 table-name a20, 1x ’Boundary Section: ##’ a
2 contents a20,1x ’Logarithmic ’
’Uniform ’
’3d-profile ’
a
3 location a20, 1x ’name boundary section’ (see
<name.bnd>file)
a
4 time-function a20, 1x ’non-equidistant’ a
5 reference-time a20, 1x yyyymmdd (must be equal to it-
date)
i8
6 time-unit a20, 1x ’minutes’ a
7 interpolation a20, 1x ’linear’ a
8 to 8+NPAR+1 parameter a20, 1x ’parameter name and location’,
’layer and location’, units ’[ccc]’
a,
’units’,
a
10+NPAR records-in-table a20, 1x number of records in the data
block
integer
Remark:
NPAR is the number of parameters for which a time varying boundary condition is being
specified.
Description data block:
Record Record description
each record Time in minutes after the Reference Date and NPAR∗{2 of Kmax} values
representing the parameter for which a time varying boundary condition
is being specified (all reals). The number of values to be specified for
each end point of a boundary section depends on the type of profile in
the vertical:
2 real values for either a uniform or logarithmic profile
Kmax∗2 real values for 3D-profile where the end points for each layer
are prescribed.
Restrictions:
Maximum record length is 5000.
Position, format of the keywords and the format of keyword-values in the header are
fixed (see example).
All keywords have a length of 20 characters.
Header in each block must be ended with the (compulsory) keyword: ‘records in table’
accompanied by the number of data records to follow.
Times must be multiples of the integration time step; the times specified will be checked
on their domain.
The sequence of blocks must be consistent with the sequence of open boundary sec-
Deltares 435 of 688

DRAFT
Delft3D-FLOW , User Manual
tions with data type T(ime).
All open boundaries that have ‘3D-profile’ must precede other open boundaries.
Example 1:
Model with 2 open boundary sections with time-series as boundary conditions.
The first boundary section concerns a discharge boundary for which the boundary condition
is given at two time breakpoints, i.e. at 0.0 and 8 000.0 minutes after the Reference Date. The
vertical profile is logarithmic, the interpolation method linear, the time-series is assumed to be
non-equidistant and the time is given in minutes. The second boundary section concerns a
current boundary for which the boundary condition is given at two time breakpoints, i.e. at 0.0
and 8 000.0 minutes after the Reference Date. The vertical profile is uniform, the interpolation
method linear, the time series is assumed to be non-equidistant and the time is given in
minutes.
table-name ’Boundary Section : 1’
contents ’logarithmic ’
location ’East Boundary ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’ ’
parameter ’flux/discharge (q) end A’ unit ’ ’
parameter ’flux/discharge (q) end B’ unit ’ ’
records in table 2
0.0000 50000.0 100000.
8000.0000 75000.0 133000.
table-name ’Boundary Section : 2’
contents ’uniform ’
location ’West boundary ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’current (c) end A’ unit ’[m/s]’
parameter ’current (c) end B’ unit ’[m/s]’
records in table 2
0.0000 1.50000 1.60000
8000.0000 1.75000 1.80000
Example 2:
The second example concerns an open sea boundary consisting of three sections, one sec-
tion is velocity controlled, one section is Riemann controlled and one section is water level
controlled. The computation is depth averaged. See section A.2.17 for the corresponding
bcc-file.
table-name ’Boundary Section : 1’
contents ’Uniform ’
location ’west-vel-1 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’current (c) end A’ unit ’[m/s]’
parameter ’current (c) end B’ unit ’[m/s]’
436 of 688 Deltares

DRAFT
Files of Delft3D-FLOW
records-in-table 185
840.0 0.000 0.000
855.0 0.120 0.116
...................
...................
3555.0 -0.651 -0.845
3570.0 -0.589 -0.783
table-name ’Boundary Section : 2’
contents ’Uniform ’
location ’west-vel-2 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’riemann (r) end A’ unit ’[m/s]’
parameter ’riemann (r) end B’ unit ’[m/s]’
records-in-table 185
840.0 0.000 0.000
855.0 0.113 0.104
...................
3555.0 -0.815 -0.341
3570.0 -0.756 -0.301
table-name ’Boundary Section : 3’
contents ’Uniform ’
location ’west-wl ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’water elevation (z) end A’ unit ’[m]’
parameter ’water elevation (z) end B’ unit ’[m]’
records-in-table 185
840.0 1.899 1.858
855.0 1.848 1.808
...................
3585.0 2.197 2.192
3600.0 2.186 2.183
Example 3:
The third example concerns the same open boundary of the second example, but now for a
3D computation with 5 layers in the vertical. See section A.2.17 for the bcc-file.
table-name ’Nested flow BC west-vel-1 ’
contents ’3d-profile ’
location ’west-vel-1 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’current (c) end A layer: 1’ unit ’[m/s]’
parameter ’current (c) end A layer: 2’ unit ’[m/s]’
parameter ’current (c) end A layer: 3’ unit ’[m/s]’
parameter ’current (c) end A layer: 4’ unit ’[m/s]’
parameter ’current (c) end A layer: 5’ unit ’[m/s]’
parameter ’current (c) end B layer: 1’ unit ’[m/s]’
parameter ’current (c) end B layer: 2’ unit ’[m/s]’
parameter ’current (c) end B layer: 3’ unit ’[m/s]’
parameter ’current (c) end B layer: 4’ unit ’[m/s]’
parameter ’current (c) end B layer: 5’ unit ’[m/s]’
records-in-table 185
Deltares 437 of 688

DRAFT
Delft3D-FLOW, User Manual
840.0 .000 .000 .000 .000 .000 .000 .000 .000 .000 .000
855.0 .124 .118 .109 .109 .106 .126 .119 .115 .112 .107
.................................................................
3585.0 -.583 -.641 -.736 -.788 -.776 -.444 -.529 -.651 -.766 -.841
3600.0 -.499 -.549 -.636 -.691 -.682 -.374 -.447 -.557 -.668 -.741
table-name ’Nested flow BC west-vel-2 ’
contents ’3d-profile ’
location ’west-vel-2 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’current (c) end A layer: 1’ unit ’[m/s]’
parameter ’current (c) end A layer: 2’ unit ’[m/s]’
parameter ’current (c) end A layer: 3’ unit ’[m/s]’
parameter ’current (c) end A layer: 4’ unit ’[m/s]’
parameter ’current (c) end A layer: 5’ unit ’[m/s]’
parameter ’current (c) end B layer: 1’ unit ’[m/s]’
parameter ’current (c) end B layer: 2’ unit ’[m/s]’
parameter ’current (c) end B layer: 3’ unit ’[m/s]’
parameter ’current (c) end B layer: 4’ unit ’[m/s]’
parameter ’current (c) end B layer: 5’ unit ’[m/s]’
records-in-table 185
840.0 .000 .000 .000 .000 .000 .000 .000 .000 .000 .000
855.0 .119 .113 .109 .106 .103 .104 .104 .101 .999 .102
.................................................................
3585.0 -.403 -.491 -.612 -.728 -.804 -.450 -.454 -.454 -.422 -.365
3600.0 -.339 -.415 -.524 -.634 -.705 -.409 -.407 -.390 -.349 -.286
table-name ’Nested flow BC west-wl ’
contents ’uniform ’
location ’west-wl ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’water elevation (z) end A ’ unit ’[m]’
parameter ’Water elevation (z) end B ’ unit ’[m]’
records-in-table 185
840.0 1.899 1.856
855.0 1.883 1.857
...................
3585.0 2.186 2.181
3600.0 2.185 2.177
A.2.16 Time-series correction of flow boundary conditions
File contents Time-series corrections for flow boundary conditions of all open bound-
ary sections with data type T (Data Group Boundaries - Flow condi-
tions in GUI).
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Same format as .bct file described above.
Filename <name.bc0>
MDF file example line Filbc0 = # name.bc0 #
Generated program Delft3D-NESTHD or manually offline
438 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record description:
For each open boundary segment with boundary data of type T (time-series) the data is given
in two related blocks:
1 A header block containing a number of compulsory and optional keywords accompanied
by their values.
2 A data block containing the time dependent data.
Description header block:
Record Text Format Value Format
1 table-name a20, 1x ’Boundary Section: ##’ a
2 contents a20,1x ’Logarithmic ’
’Uniform ’
’3d-profile ’
a
3 location a20, 1x ’name boundary section’ (see
<name.bnd>file)
a
4 time-function a20, 1x ’non-equidistant’ a
5 reference-time a20, 1x yyyymmdd (must be equal to it-
date)
i8
6 time-unit a20, 1x ’minutes’ a
7 interpolation a20, 1x ’linear’ a
8 to 8+NPAR+1 parameter a20, 1x ’parameter name and location’,
’layer and location’, units ’[ccc]’
a,
’units’,
a
10+NPAR records-in-table a20, 1x number of records in the data
block
integer
Remark:
NPAR is the number of parameters for which a time varying boundary condition is being
specified.
Description data block:
Record Record description
each record Time in minutes after the Reference Date and NPAR∗{2 of Kmax} values
representing the parameter for which a time varying boundary condition
is being specified (all reals). The number of values to be specified for
each end point of a boundary section depends on the type of profile in
the vertical:
2 real values for either a uniform or logarithmic profile
Kmax∗2 real values for 3D-profile where the end points for each layer
are prescribed.
Deltares 439 of 688

DRAFT
Delft3D-FLOW, User Manual
Restrictions:
Maximum record length is 5000.
Position, format of the keywords and the format of keyword-values in the header are
fixed (see example).
All keywords have a length of 20 characters. The keywords are case-sensitive.
Header in each block must be ended with the (compulsory) keyword: ‘records in table’
accompanied by the number of data records to follow.
Times must be multiples of the integration time step; the times specified will be checked
on their domain.
The sequence of blocks must be consistent with the sequence of open boundary sec-
tions with data type T(ime).
All open boundaries that have ‘3D-profile’ must precede other open boundaries.
Example 1:
One of the open boundary sections with time-varying boundary correction in additional to the
boundary condition.
A water level correction at the east boundary for which the boundary condition is given at two
time breakpoints, i.e. at 40.0 and 50.0 minutes after the Reference Date. The vertical profile is
logarithmic, the interpolation method linear, the time-series is assumed to be non-equidistant
and the time is given in minutes.
table-name ’Boundary Section : 1’
contents ’logarithmic ’
location ’East Boundary ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’ ’
parameter ’water elevation (z) end A’ unit ’[m]’
parameter ’water elevation (z) end B’ unit ’[m]’
records in table 2
4.0000000e+001 -9.0207780e-005 1.0587220e-004
5.0000000e+001 -1.9945080e-004 7.0667030e-005
...
A.2.17 Time-series transport boundary conditions
File contents Time-series for transport boundary conditions of all open boundary
sections (Data Group Boundaries - Transport conditions).
Filetype ASCII
File format Fix format for header information; free format for time-series data
Filename <name.bcc>
Generated FLOW-GUI, program Delft3D-NESTHD or manually offline
440 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record description:
For each open boundary segment the data is given in two related blocks:
1 A header block containing a number of compulsory and optional keywords accompanied
by their values.
2 A data block containing the time dependent data.
Description header block:
Record Text Format Value Format
1 table-name a20, 1x ’Boundary Section : ##’ a
2 contents a20,1x ’Logarithmic ’
’Uniform ’
’Step ’
’3d-profile ’
a
3 location a20, 1x ’name boundary section’ (see
<name.bnd>file
a
4 time-function a20, 1x ’non-equidistant’ a
5 reference-time a20, 1x yyyymmdd (must be equal to it-
date)
i8
6 time-unit a20, 1x ’minutes’ a
7 interpolation a20, 1x ’linear’ a
8 to 8+NPAR+1 parameter a20, 1x ’parameter name and location’,
’layer and location’,
units ’[ccc]’
a,
’units’,
a
10+NPAR records in table a20, 1x number of records in the data
block
integer
Remark:
NPAR is the number of parameters for which a time-varying boundary condition is being
specified.
Description data block:
Deltares 441 of 688
DRAFT
Delft3D-FLOW , User Manual
Record Record description
each record Time in minutes after the Reference Date and NPAR values represent-
ing the parameter for which a time varying boundary condition is being
specified (all reals). The number of values to be specified for each end
point of a boundary section depends on the type of profile in the vertical:
uniform: 2 real values for each parameter specified
linear: 4 real values for each parameter specifying the parameter in the
surface and in the bottom layer for both section end points.
step: 5 real values; 4 reals for each parameter specifying the parameter
in the surface and in the bottom layer for both section end points and
the location of the discontinuity/jump in the vertical in metres below the
surface
3D-profile: Kmax∗2 real values for each layer in both end points of the
boundary section being prescribed.
Restrictions:
Maximum record length is 5000.
Position, format of the keywords and the format of keyword-values in the header are
fixed (format in example).
All keywords have a length of 20 characters.
Header in each block must be ended with the (compulsory) keyword: ‘records in table’
accompanied by the number of data records to follow.
Times must be multiples of the integration time step; the times specified will be checked
on their domain.
Not all values of other parameters from the file will be checked on their domain.
The sequence of blocks must be consistent with the sequence of open boundary sec-
tions and the sequence of constituents.
All open boundaries that have ‘3D-profile’ must precede other open boundaries.
Example 1:
Model area with two open boundary sections. A 3D simulation (KMAX >1) has been speci-
fied; the profiles in the vertical are prescribed as functions. Salinity and one constituent are
included in the simulation. The boundary condition is specified as follows:
For a boundary section called West BOUNDARY, the salinity has a ‘Step’ profile with
the discontinuity occurring at 2.5 metres below the surface and a constituent called ’test
constituent’ has a Uniform profile in the vertical. The boundary conditions are given for
two time breakpoints, i.e. at 0.0 and 8000.0 minutes after the Reference Date 00:00:00 hr.
For a boundary section called East BOUNDARY, the salinity has a linear profile in the
vertical and a constituent called ’test constituent’ has a Uniform profile in the vertical. The
boundary conditions are given for two time breakpoints, i.e. at 0.0 and 8000.0 minutes
after midnight on the Reference Date.
table-name ’T-series BC for process run: 123’
contents ’step’
location ’West BOUNDARY’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
parameter ’time ’ unit ’[min]’
parameter ’salinity end A surface’ unit ’[ppt]’
parameter ’salinity end A bed ’ unit ’[ppt]’
parameter ’salinity end B surface’ unit ’[ppt]’
442 of 688 Deltares

DRAFT
Files of Delft3D-FLOW
parameter ’salinity end B bed ’ unit ’[ppt]’
parameter ’discontinuity ’ unit ’[m]’
records in table 2
0.0000 33.0000 35.000 34.0000 36.0000 2.5000
8000.0000 32.7000 34.000 35.0000 36.2000 2.5000
table-name ’T-series BC for flow run: 123’
contents ’uniform’
location ’West BOUNDARY’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’test constituent end A ’ unit ’[-]’
parameter ’test constituent end B ’ unit ’[-]’
records in table 2
0.0000 1.50000 1.60000
8000.0000 1.75000 1.80000
table-name ’T-series BC for process run: 123’
contents ’linear’
location ’East BOUNDARY’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’salinity end A surface’ unit ’[ppt]’
parameter ’salinity end A bed ’ unit ’[ppt]’
parameter ’salinity end B surface’ unit ’[ppt]’
parameter ’salinity end B bed ’ unit ’[ppt]’
records in table 2
0.0000 33.0000 35.000 34.0000 36.0000
8000.0000 32.7000 34.000 35.0000 36.2000
table-name ’T-series BC for flow run: 123’
contents ’uniform’
location ’East BOUNDARY’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’test constituent end A ’ unit ’[-]’
parameter ’test constituent end B ’ unit ’[-]’
records in table 2
0.0000 1.50000 1.60000
8000.0000 1.75000 1.80000
Example 2:
The second example concerns an open sea boundary consisting of three sections for which
the salinity concentrations are prescribed. The computation is depth averaged; see sec-
tion A.2.15 for the corresponding bct-file.
table-name ’Boundary Section : 1’
contents ’Uniform ’
location ’west-vel-1 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’Salinity end A uniform’ unit ’[ppt]’
parameter ’Salinity end B uniform’ unit ’[ppt]’
records-in-table 185
Deltares 443 of 688

DRAFT
Delft3D-FLOW , User Manual
840.0 20.9 23.2
855.0 20.9 23.2
870.0 20.9 23.0
885.0 20.9 22.8
900.0 20.9 22.5
..................
3555.0 20.2 21.2
3570.0 20.5 21.2
3585.0 20.7 21.3
3600.0 20.9 21.4
table-name ’Boundary Section : 2’
contents ’Uniform ’
location ’west-vel-2 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’Salinity end A uniform’ unit ’[ppt]’
parameter ’Salinity end B uniform’ unit ’[ppt]’
records-in-table 185
840.0 23.2 21.9
855.0 23.1 21.9
870.0 23.0 21.8
885.0 22.8 21.6
900.0 22.5 21.4
..................
3555.0 21.1 17.8
3570.0 21.1 17.8
3585.0 21.2 17.8
3600.0 21.3 17.9
table-name ’Boundary Section : 3’
contents ’Uniform ’
location ’west-vel-3 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’Salinity end A uniform’ unit ’[ppt]’
parameter ’Salinity end B uniform’ unit ’[ppt]’
records-in-table 185
840.0 20.6 22.2
855.0 20.6 22.1
870.0 20.5 21.8
885.0 20.4 21.4
900.0 20.3 20.8
..................
3555.0 16.7 12.4
3570.0 16.7 13.0
3585.0 16.7 13.5
3600.0 16.8 13.9
Example 3:
The third example concerns the same open boundary of the second example, i.e. consisting
of three sections for which the salinity concentrations are prescribed. The computation is a
3D computation with 5 layers in the vertical; see section A.2.15 for the corresponding bct-file.
table-name ’Nested transport bc salinity west-vel-1 ’
contents ’3d-profile’ # at ends A&B of open boundary segment
location ’west-vel-1 ’
time-function ’non-equidistant’
reference-time 19960718
444 of 688 Deltares

DRAFT
Files of Delft3D-FLOW
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’salinity end A layer: 1’ unit ’[ppt]’
parameter ’salinity end A layer: 2’ unit ’[ppt]’
parameter ’salinity end A layer: 3’ unit ’[ppt]’
parameter ’salinity end A layer: 4’ unit ’[ppt]’
parameter ’salinity end A layer: 5’ unit ’[ppt]’
parameter ’salinity end B layer: 1’ unit ’[ppt]’
parameter ’salinity end B layer: 2’ unit ’[ppt]’
parameter ’salinity end B layer: 3’ unit ’[ppt]’
parameter ’salinity end B layer: 4’ unit ’[ppt]’
parameter ’salinity end B layer: 5’ unit ’[ppt]’
records-in-table 185
840.0 15.6 16.5 19.3 19.3 20.3 17.1 18.4 21.1 23.0 24.1
855.0 15.6 16.7 19.4 19.5 20.6 16.9 17.9 20.6 22.6 23.8
.................................................................
3585.0 11.7 13.1 15.2 16.7 17.8 10.7 13.1 18.1 19.3 20.6
3600.0 11.8 13.1 15.2 16.7 17.6 11.1 13.1 18.0 19.1 20.4
table-name ’Nested transport bc salinity west-vel-2 ’
contents ’3d-profile’ # at ends A&B of open boundary segment
location ’west-vel-2 ’
time-function ’non-equidistant’
reference-time 19960718
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’salinity end A layer: 1’ unit ’[ppt]’
parameter ’salinity end A layer: 2’ unit ’[ppt]’
parameter ’salinity end A layer: 3’ unit ’[ppt]’
parameter ’salinity end A layer: 4’ unit ’[ppt]’
parameter ’salinity end A layer: 5’ unit ’[ppt]’
parameter ’salinity end B layer: 1’ unit ’[ppt]’
parameter ’salinity end B layer: 2’ unit ’[ppt]’
parameter ’salinity end B layer: 3’ unit ’[ppt]’
parameter ’salinity end B layer: 4’ unit ’[ppt]’
parameter ’salinity end B layer: 5’ unit ’[ppt]’
records-in-table 185
840.0 17.3 18.4 20.6 22.9 24.2 16.5 16.5 17.9 20.2 23.3
855.0 17.2 18.0 20.2 22.6 23.9 16.4 16.5 17.8 20.0 23.1
.................................................................
.................................................................
3585.0 10.7 13.1 18.3 19.5 20.8 11.2 12.3 15.0 17.4 19.2
3600.0 11.1 13.2 18.2 19.4 20.7 11.9 12.8 15.4 17.8 19.5
A.2.18 Time-series for the heat model parameters
File contents Time dependent data for heat model (Data Group Physical parame-
ters - Heat flux model).
Filetype ASCII
File format Free formatted
Filename <name.tem>
Generated FLOW-GUI, or manually offline
Deltares 445 of 688
DRAFT
Delft3D-FLOW, User Manual
Record description:
The record description depends on the heat flux model selected.
Option 1: Absolute temperature model, total incoming solar radiation
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Incoming solar radiation for a cloudless sky [J/m2s] [4 reals].
Option 2: Absolute temperature model, net solar radiation
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Net (sum of short and long wave radiation, reflection accounted for) solar
radiation [J/m2s], [4 reals].
Option 3: Excess temperature model
Record Record description
each record Time after midnight on the Reference Date [minutes].
Background temperature [◦C], [2 reals].
Option 4A: Murakami heat flux model
In this option the vapour pressure will be computed (IVAPOP = 0).
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Net (short wave) solar radiation [J/m2s], [4 reals].
Option 4B: Murakami heat flux model
In this option the vapour pressure is user-defined (IVAPOP = 1).
446 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Net (short wave) solar radiation [J/m2s].
Vapour pressure [mbar], [5 reals].
Option 5A: Ocean model
In this option the solar radiation will be computed from the cloud coverage (SolRad = #N#)
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Fraction cloud coverage [percentage], [4 reals].
Option 5B: Ocean model
In this option the solar radiation is specified directly, additional to the cloud coverage (SolRad
= #Y#)
Record Record description
each record Time after midnight on the Reference Date [minutes].
Relative humidity [percentage].
Air temperature [◦C].
Fraction cloud coverage [percentage]
Net (short wave) solar radiation [J/m2s], [5 reals].
Remark:
The parameter IVAPOP is specified in the MDF-file.
Restrictions:
Times must be multiples of the integration time step.
Relative humidity must be a percentage (0–100).
The other parameters will not be checked against their domain.
Input items in a record must be separated by one or more blanks.
Only for the Ocean model: Using SolRad as described for option 5B, one can specify
the measured net solar radiation directly as a time series. The specified solar radiation
is then only reduced using the Albedo coefficient.
Example 1:
Heat flux model option 3 is selected.
0. 0.
10. 15.
20. 17.
Deltares 447 of 688

DRAFT
Delft3D-FLOW, User Manual
30. 17.
150. 16.
600. 16.
610. 15.
900. 0.
Example 2:
Heat flux model option 2 is selected.
0. 40. 18. 0.
10. 45. 21. 50.
20. 47. 24. 200.
30. 47. 22. 200.
150. 46. 25. 250.
600. 46. 23. 200.
610. 45. 18. 50.
900. 40. 17. 0.
Example 3:
Heat flux model option 4B is selected. You have to add IVAPOP = 1 in the Data Group
Additional parameters.
0. 40.0 18.0 0. 8.3412
10. 45.0 21.0 50. 11.2994
20. 47.0 24.0 200. 14.1575
30. 47.0 22.0 200. 12.5449
150. 46.0 25.0 250. 14.7110
600. 46.0 23.0 200. 13.0460
610. 45.0 18.0 50. 9.3838
900. 40.0 17.0 0. 7.8337
A.2.19 Bottom roughness coefficients
File contents Bottom roughness coefficients in U- and V-direction for all grid points
(Data Group Physical parameters - Roughness).
Filetype ASCII
File format Free formatted or unformatted
Filename <name.rgh>
Generated Free formatted: FLOW-GUI (only for uniform depth values), QUICKIN
or manually offline.
Unformatted: by some external program.
Record description:
Two blocks with data are needed: one for U- and one for V-direction.
Filetype Record description
Free formatted The bottom roughness is given per row, starting at N = 1 to N = Nmax,
separated by one or more blanks. The number of continuation lines
is determined by the number of grid points per row (Mmax) and the
maximum record size of 132.
Unformatted Mmax bottom roughness values per row for N = 1 to N = Nmax.
448 of 688 Deltares

DRAFT
Files of Delft3D-FLOW
Restrictions:
The maximum record length in the free formatted file is 132.
The value of these parameters will not be checked against their domain.
Input items in a record must be separated by one or more blanks (free formatted file
only).
Example:
Bottom roughness coefficients (Chézy formulation) for a model containing 11∗7 points.
The records are filled with (maximal) 8 reals.
The input data is printed in Courier; comment (not in the file) is printed between brackets.
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0 {start U-roughness coefficient}
65.0 65.0 65.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
60.0 60.0 60.0 60.0 60.0 60.0 60.0 60.0
60.0 60.0 60.0
60.0 60.0 60.0 60.0 60.0 60.0 60.0 60.0
60.0 60.0 60.0
55.0 55.0 55.0 55.0 55.0 55.0 55.0 55.0
55.0 55.0 55.0
55.0 55.0 55.0 55.0 55.0 55.0 55.0 55.0
55.0 55.0 55.0
55.0 55.0 55.0 55.0 55.0 55.0 55.0 55.0
55.0 55.0 55.0
60.0 60.0 60.0 60.0 60.0 60.0 60.0 60.0 {start V-roughness coefficient)
60.0 60.0 60.0
60.0 60.0 60.0 60.0 60.0 60.0 60.0 60.0
60.0 60.0 60.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
65.0 65.0 65.0 65.0 65.0 65.0 65.0 65.0
65.0 65.0 65.0
A.2.20 Horizontal eddy viscosity and diffusivity
File contents Horizontal eddy viscosity and eddy diffusivity for all grid points (Data
Group Physical parameters - Viscosity).
Filetype ASCII or binary
File format Free formatted or unformatted
Filename <name.edy>
Generated Free formatted: FLOW-GUI, QUICKIN or manually offline.
Unformatted: by some external program.
Remark:
Horizontal eddy diffusivity is only needed in case of salinity, temperature or constituents.
Deltares 449 of 688
DRAFT
Delft3D-FLOW, User Manual
Record description:
Filetype Record description
Free formatted The eddy viscosity is given per row, starting at N = 1 to N = Nmax,
separated by one or more blanks. The number of continuation lines
is determined by the number of grid points per row (Mmax) and the
maximum record size of 132.
The eddy diffusivity is given per row in a similar fashion as the eddy
viscosity is given.
Unformatted Mmax eddy viscosity values per row for N = 1 to N = Nmax.
First the eddy viscosity is given followed by the eddy diffusivity.
Restrictions:
The maximum record length in the free formatted file is 132.
The value of the input parameters will not be checked against their domain.
Items in a record must be separated by one or more blanks (free formatted file only).
Example:
Eddy viscosity and eddy diffusivity for a model with (one layer and) m=8, n=12 grid points. A
constituent is included in the model.
The input data is printed in Courier; comment (not in the file) is printed between brackets.
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 {start eddy viscosity}
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0 {start eddy diffusivity}
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 25.0 25.0 25.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 25.0 25.0 25.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 25.0 25.0 25.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 10.0
450 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
A.2.21 Discharge locations
File contents Description (name, grid indices and interpolation method for dis-
charge rate) for discharge stations (Data Group Operations - Dis-
charges).
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.src>
Generated FLOW-GUI or manually offline
Record description:
Record Record description
each record Name of discharge (20 characters),
Type of interpolation (1 character):
y linear,
n block,
Grid indices of discharge location (3 integers),
Character to indicate the type of discharge:
blank | n normal discharge,
b bubble screen, see section B.22,
c | d | e| u culvert, see section 10.9.2.6,
m discharge with momentum,
p power station,
w walking discharge,
Grid indices of power station outlet (3 integers).
Restrictions:
One record per discharge
Maximum record length is 132.
The discharge name is read as string of length 20 and must start in position one.
If K = 0, the discharge will be distributed over the vertical proportional to the relative
layer thickness.
A discharge must be located inside the computational grid enclosure.
Items in a record must be separated by one or more blanks.
Example:
The application requires 5 discharges. The first two discharges are ‘normal’ discharges, the
first discharge is only in layer 5, the second discharge is distributed over the vertical. The third
discharge is a walking discharge; the release point moves with drying and flooding. The last
two discharges are so-called power stations. The intake of the first power station is distributed
over the vertical and its outlet is in layer 1, while the second power station has its intake in
layer 5 and its outlet distributed over the vertical.
Discharge Station A Y 10 11 5
Discharge Station B Y 15 5 0
Discharge Station C Y 114 88 3 w
Discharge Station D N 115 93 0 p 110 90 1
Discharge Station E Y 88 119 5 p 80 115 0
Deltares 451 of 688
DRAFT
Delft3D-FLOW, User Manual
A.2.22 Flow rate and concentrations at discharges
File contents Discharge rate and concentrations as a function of time for each
discharge location (Data Group Operations - Discharges).
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.dis>
Generated FLOW-GUI, or manually offline
Record description:
For each discharge the data is given in two related blocks:
1 A header block containing a number of compulsory and optional keywords with their val-
ues.
2 A data block containing the time dependent data.
Description header block:
Record Text Value
1 table-name ’T-series for discharges run: runid’
2 contents regular, momentum, walking, power
3 location name of the discharge
4 time-function equidistant or non-equidistant
5 reference-time yyyymmdd
6 time-unit minutes
7 interpolation linear or block
8 to 8+NPAR+1 parameter name of parameter, ’unit’, units of parameter
10+NPAR records in table the number of records in the data block
where:
NPAR is the number of parameters for which a time discharge is being specified.
Description data block:
Record Record description
each record Time in minutes after 00:00:00 on the Reference Date (1 real),
NPAR values representing the parameters for which a time varying dis-
charge is being specified (all reals).
Restrictions:
452 of 688 Deltares

DRAFT
Files of Delft3D-FLOW
The parameters must be given in the following mandatory sequence: discharge flux,
salinity, temperature, constituents, velocity and direction relative to the ξ-axis (positive
counter-clock wise). Only those constituents are specified in the time dependent data
that are specified in the header.
The maximum record length in the file is 132.
The format of keywords and keyword-values in the header are fixed.
All keywords have a length of 20 characters.
Header records must start in position one.
Header in each block must be ended with the (compulsory) keyword: ‘records in table’
accompanied by its appropriate value.
Times must be a multiple of the integration time step; times will be checked.
Not all other parameters will be checked against their domain.
The order of the blocks must be consistent with the sequence of discharge locations as
specified in the FLOW-GUI.
Input items in the data records must be separated by one or more blanks.
Example:
The number of discharges is 3. Each discharge releases salinity and one constituent in addi-
tion to the water released.
table-name ’T-series for discharges run: 1’
contents ’momentum’
location ’Ara River’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’flux/discharge rate ’ unit ’[m**3/s]’
parameter ’salinity ’ unit ’[ppt]’
parameter ’test ’ unit ’[kg/m**3]’
parameter ’flow magnitude [m/s]’ unit ’[m/s]’
parameter ’flow direction [deg]’ unit ’[deg]’
records in table 2
0.0 90.0 5.0 0.0 45.0 18.0
1440.0 90.0 0.0 0.0 50.0 20.0
table-name ’T-series for discharges run: 123’
contents ’regular’
location ’Sumida River’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’flux/discharge rate ’ unit ’[m**3/s]’
parameter ’salinity ’ unit ’[ppt]’
parameter ’test ’ unit ’[kg/m**3]’
records in table 2
0.0 65.0 0.0 1.0
1440.0 65.0 0.0 1.0
table-name ’T-series for discharges run: 123’
contents ’regular’
location ’Tama River’
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’flux/discharge rate’ unit ’[m**3/s]’
parameter ’salinity ’ unit ’[ppt]’
parameter ’test ’ unit ’[kg/m**3]’
records in table 2
0.0 40.0 3.0 0.0
Deltares 453 of 688
DRAFT
Delft3D-FLOW, User Manual
1440.0 40.0 3.0 0.0
Remark:
The flow rate specified in this file may be overruled during the computation by means of
the real-time control module. See B.28
A.2.23 Dredge and dump characteristics
File contents Characteristics of all dredging, dumping and sediment nourishment
activities in the simulation (Data Group Operations - Dredge and
dump).
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.dad>
Generated QUICKIN, or manually offline
Record description:
The file consists of a header block (containing information about versions) followed by an
optional general block with global settings for all dredge/dump blocks and all domains, one
(or more) optional domain blocks with settings for the specified domain, a dredge block for
each dredge area, a nourishment block for each sediment nourishment measure and an op-
tional dump block for each dump area. Table A.8 gives an overview of all supported key-
words and their purpose. The name of the dredge and dump polygon file should be specified
in the general block, but for reasons of backward compatibility it is also accepted that the
PolygonFile is located in the header block.
Table A.7: Dredge and dump input file with keywords
Keyword Format Record description
DredgeFileInformation
FileCreatedBy string program name and version
FileCreationDate string creation date and time of the <∗.dad>file
FileVersion string version number of the <∗.dad>file (‘01.02’)
General
PolygonFile string name of polygon file with polylines defining dump and
dredge areas
continued on next page
R = Real; I = Integer; L = Logical; C = Character
454 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.7 – continued from previous page
Keyword Format Record description
InPolygon 1 I default flag to indicate how to check whether a grid
cell is inside or outside a dredge or dump polygon (1–
3, default: 2). This option can be used to study the
sensitivity of the simulation for changes in polygon
sizes. A grid cell is inside the polygon if
1 all corners of the grid cell lie within the poly-
gon (minimum area)
2 the centre of the grid cell lies within the poly-
gon (default)
3 one of the corners of the grid cell lies within
the polygon (maximum area)
RefPlane 1 R or
string
elevation of reference plane above reference level of
the simulation for dredging and dumping for this do-
main: constant value or file name (default: 0 m) Over-
ruled by value for current domain.
DepthDef 1 I default flag to indicate meaning of depth definitions
(1–4; default: 1) ) See description in dredge block.
DredgeDepth 1 R default depth to be maintained by dredging (default:
-999.) Set to -999. if dredging is not limited by depth.
MaxVolRate 1 R default maximum dredging or sediment nourish-
ment rate in m3/morphological year (volume includ-
ing pores) (default: -999.) Set to -999. if dredging
rate is unlimited.
DredgeDistr 1 I default distribution of dredging activities when limited
by rate (1–8, default: 3) See description in dredge
block.
Clearance 1 R default additional depth to dredge when dredging oc-
curs (default: 0 m).
TriggerAll 1 L default flag to indicate that if one point in the dredge
area exceeds the dredging threshold, all points
should be dredged to clearance level irrespective
whether they exceed the trigger level (default: false)
DredgeWhenDry 1 L default flag to indicate whether dredging should con-
tinue at dry points (default: false).
continued on next page
R = Real; I = Integer; L = Logical; C = Character
Deltares 455 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.7 – continued from previous page
Keyword Format Record description
DredgeWhileMorfac01 L default flag to indicate whether dredging activities
should occur during morphological startup period or
periods with morfac=0 (default: true). This flag af-
fects only dredging activities not limited by dredging
rate; activities that are limited by a maximum dredg-
ing rate are always inactive during startup and other
periods with morfac=0 as the effective morphological
time is zero.
ObeyCmp 1 L default flag to indicate whether dredging should be
limited to the amount of sediment available (default:
true). If false: excess dredged volume is recorded
but cannot be dumped as composition is unknown
and considered to be irrelevant for the simulation.
TimeSeries string,
optional
name of file containing time-dependent dredging
activities
TS_MorTimeScale 1 L flag to indicate whether times in TimeSeries file
are specified on hydrodynamical or morphological
time scale (true = morphological time scale; default:
false = hydrodynamical time scale)
DistrOverDump 1 I default method of distributing sediment over dump
areas. (1–3; default: 1) See description in dredge
block.
DumpDistr 1 I default method of distributing sediment within a dump
area. (1–4; default: 1) See description in dump block.
MinimumDumpDepth 1 R default minimum remaining depth after dumping:
when specified, dumping continues until the specified
level is reached. Any surplus of sediment is removed
from the model (default: -999.) Set to -999. if dump-
ing should not be restricted.
DumpWhenDry 1 L default flag to indicate whether dumping should con-
tinue at dry points (default: false)
UseDunes 1 L flag to indicate whether simulated dune heights
should be included in volume computations when
dredging and dumping; if included, dune height will
be set to 0 after dredging and dumping (default: false)
AlphaDuneHeight [0 0.5] if UseDunes is true, then the effective bed level is
increased by this fraction of the dune height when
checking whether dredging threshold is exceeded
(default: 0.5)
continued on next page
R = Real; I = Integer; L = Logical; C = Character
456 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.7 – continued from previous page
Keyword Format Record description
Domain
Name string name of the domain
RefPlane 1 R or
string
elevation of reference plane above reference level of
the simulation for dredging and dumping for this do-
main: constant value or file name (default: constant
as specified in General block) The format of the file is
a QUICKIN compatible file with data at cell centres.
Dredge
Name string name of the dredge area: should correspond to a
blockname in the polygon file
InPolygon 1 I flag to indicate how to check whether a grid cell is in-
side or outside the dredge polygon (1–3, default: as
indicated in General block). See description in Gen-
eral block.
DepthDef 1 I flag to indicate meaning of depth definitions (1–4; de-
fault: as specified in General block)
1 relative to reference plane
2 relative to water level
3 relative to maximum of reference plane and
water level
4 relative to minimum of reference plane and
water level
DredgeDepth 1 R depth to be maintained by dredging relative (default:
as specified in General block) Set to -999. if dredging
is not limited by depth.
MaxVolRate 1 R maximum dredging rate in m3/morphological year
(volume including pores) (default: as specified in
General block) Set to -999. if dredging rate is un-
limited. This maximum volume per year will only be
reached if dredging takes place year-round and never
runs out of available dredging material, i.e. it doesn’t
increase the dredging rate per time step if the dredg-
ing strategy isn’t active for a while.
continued on next page
R = Real; I = Integer; L = Logical; C = Character
Deltares 457 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.7 – continued from previous page
Keyword Format Record description
DredgeDistr 1 I in case the maximum dredging rate is reached in a
certain timestep, the model has to decide what sedi-
ment to remove (1–8; default: as specified in General
block). Eight rules have been implemented
1 remove same sediment thickness from every
grid cell
2 remove highest sediment deposits first
3 remove sediment proportionally to the amount
of sediment available for dredging (default)
4 remove sediment from highest point first
(gives more or less same results as 2 for small
time steps, but may give erratic behavior when
large time steps are used)
5 remove sediment from lowest point first
6 remove sediment from shallowest areas first
7 remove sediment from shallowest point first
(gives more or less same results as 6 for small
time steps, but may give erratic behavior when
large time steps are used)
8 remove sediment from deepest point first
Clearance 1 R additional depth to dredge when dredging occurs (de-
fault: as specified in General block)
TriggerAll 1 L flag to indicate that if one point in the dredge area
exceeds the dredging threshold, all points should be
dredged to clearance level irrespective whether they
exceed the trigger level (default: as specified in Gen-
eral block)
DredgeWhenDry 1 L flag to indicate whether dredging should continue at
dry points (default: as specified in General block)
DredgeWhileMorfac01 L flag to indicate whether dredging activities should
occur during morphological startup period or peri-
ods with morfac=0 (default: as specified in General
block). This flag affects only dredging activities not
limited by dredging rate.
ObeyCmp 1 L flag to indicate whether dredging should be limited to
the amount of sediment available (default: as speci-
fied in General block). If false: excess dredged vol-
ume is recorded but cannot be dumped as compo-
sition is unknown and considered to be irrelevant for
the simulation.
continued on next page
R = Real; I = Integer; L = Logical; C = Character
458 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.7 – continued from previous page
Keyword Format Record description
DumpLimited 1 L flag to indicate that dredging is limited by dump ca-
pacity (default: false)
DistrOverDump 1 I method of distributing sediment over dump areas (old
keyword DumpDistr still supported). Three meth-
ods have been implemented (1–3, default: 1)
1 based on user specified percentages
2 fill dump areas in specified order
3 distribute sediment based on dump capacity
Dump string name of the dump area: should correspond to a
blockname in the polygon file
Sediment string,
optional
name of sediment fraction
Percentage 1 R percentage of dredged material of the indicated sed-
iment fraction to be dumped in the indicated dump
area; if no sediment fraction is indicated: uniform
value for all fractions.
Nourishment
Name string,
optional
name of the nourishment source. Contrary to the
Name in the dredge and dump blocks, this name is
not associated with a specific polygon.
Volume 1 R total sediment volume (including pores) to be
supplied
MaxVolRate 1 R maximum sediment nourishment rate in
m3/morphological year (volume including pores)
(default: as specified in General block) This rate will
be converted into a rate per time step assuming that
nourishment occurs at a constant rate year-round,
i.e. it does not try to compensate for periods of
limited dumping capacity or periods of inactivity as
optionally specified in TimeSeries file.
Sediment string name of sediment fraction
SedPercentage 1 R composition of supplied sediment: volumetric per-
centage of the indicated sediment fraction
continued on next page
R = Real; I = Integer; L = Logical; C = Character
Deltares 459 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.7 – continued from previous page
Keyword Format Record description
DistrOverDump 1 I method of distributing sediment over dump areas (old
keyword DumpDistr still supported). Three meth-
ods have been implemented (1–3, default: 1)
1 based on user specified percentages
2 fill dump areas in specified order
3 distribute sediment based on dump capacity
Dump string name of the dump area: should correspond to a
blockname in the polygon file
Sediment string,
optional
name of sediment fraction
Percentage 1 R percentage of dredged material of the indicated sed-
iment fraction to be dumped in the indicated dump
area; if no sediment fraction is indicated: uniform
value for all fractions.
Dump
Name string name of the dump area: should correspond to a
blockname in the polygon file
InPolygon 1 I flag to indicate how to check whether a grid cell is
inside or outside the dump polygon (1–3, default: as
indicated in General block). See description in Gen-
eral block.
DepthDef 1 I flag to indicate meaning of depth definitions (1–4; de-
fault: as specified in General block)
1 relative to reference plane
2 relative to water level
3 relative to maximum of reference plane and
water level
4 relative to minimum of reference plane and
water level
MinimumDumpDepth 1 R minimum remaining depth after dumping: when spec-
ified, dumping continues until the specified level is
reached. Any surplus of sediment is removed from
the model (default: as specified in General block) Set
to -999. if dumping should not be restricted.
continued on next page
R = Real; I = Integer; L = Logical; C = Character
460 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Table A.7 – continued from previous page
Keyword Format Record description
DumpDistr 1 I determines how the sediment is dumped within the
dump area. Four options have been implemented (1–
4; default as specified in General block)
1 dump with uniform thickness
2 fill in lowest parts first (horizontal reference
plane)
3 fill in deepest parts first
4 dump proportional to capacity (only for dump-
ing areas with limited capacity)
DumpWhenDry 1 L flag to indicate whether dumping should continue at
dry points (default: as specified in General block)
R = Real; I = Integer; L = Logical; C = Character
Warning:
QUICKIN does not yet recognize all keywords and will remove all keywords it does
not recognize when you attempt to edit a manually edited dredge and dump file with
QUICKIN. Backup old <∗.dad>files before you try to do so!
Restrictions:
The maximum record length in the file is 256 characters.
Dredge and dump activities may be combined with domain decomposition simulations.
However, please note that in such cases one should select the same <∗.dad>for all
domains and use the domain block if there are differences between the domains.
Dumping conditions (to a certain minimum depth or to flooded points only) may not
exactly be satisfied if multiple dredging and dumping overlap. In case of dredging limited
by dumping capacity similar interactions may also cause deviations from requested
behaviour.
Remarks:
The order of the data blocks is arbitrary.
To remove sediment from the model, specify one (or more) dump areas outside the grid.
Dredging measures are processed in the order in which the dredge blocks are specified
in the input file.
Dumping measures are processed in the order in which they are specified in the dredge
and nourishment blocks of the input file.
Example:
The number of dredge areas is 3. ‘dredge 1’ and ‘dredge 2’ will be dredged to a depth of 10
m. All dredged material is dumped in area ‘dump 1’. Area ‘dredge 3’ is dredged to a depth of
20 m and the material removed from that area is dumped in ‘dump 2’.
[DredgeFileInformation]
FileCreatedBy = Deltares, QUICKIN Version 4.20.00.30984, Nov 12 2013, 09:50:44
FileCreationDate = 2013-11-28, 16:01:21
FileVersion = 01.03
[General]
PolygonFile = dad_areas.pol
Deltares 461 of 688
DRAFT
Delft3D-FLOW, User Manual
[Dredge]
Name = dredge 1
DredgeDepth = 10.00
Dump = dump 1
Percentage = 100.0
[Dredge]
Name = dredge 2
DredgeDepth = 10.00
Dump = dump 1
Percentage = 100.0
[Dredge]
Name = dredge 3
DredgeDepth = 20.00
Dump = dump 2
Percentage = 100.0
A.2.24 Dredge and nourishment time-series
File contents Time-series for dredge and nourishment activities; filename speci-
fied in dredge and dump characteristics file.
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.ddt>
Generated manually offline
Record description:
The file may contain one or more time-series for dredging and sediment nourishment activ-
ities. A time-series will be used for all dredging and sediment nourishment activities if the
location equals ‘General’. It will be used only for a single dredging or sediment nourish-
ment activity if the location equals the name of the dredging or sediment nourishment
activity. The order of the paired header/data blocks is arbitrary.
Description header block:
Keyword Record description
location ‘General’ or name of dredging or sediment nourishment activity (1
quoted string)
time-function time function type (quoted string: ‘non-equidistant’)
reference-time reference time (integer formatted as yyyymmdd or quoted string
‘from model’)
time-unit time unit (quoted string: ‘decades’, ‘years’, ‘days’, ‘hours’, ‘min-
utes’, ‘seconds’, ‘ddhhmmss’, ‘absolute’)
interpolation interpolation type (quoted string: ‘block’)
parameter parameter name (quoted string: ‘time’ or ‘active’) followed by key-
word unit and dummy unit specification (quoted string: time-unit
or ‘-’)
Description data block:
462 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record Record description
each record time specified in time-unit since reference-time or ab-
solute time specified as an integer formatted as yyyymmddhh-
mmss
value indicating whether dredging (or sediment nourishment) is
active from the specified time onwards (0=inactive, 1=active).
Example:
Model with multiple dredging and nourishment activities. All specified activities will be active
during the first two days except for the dredging activity called ‘dredge 3’ which is active during
days two till four.
location ’General ’
time-function ’non-equidistant ’
reference-time ’from model’
time-unit ’days’
interpolation ’block’
parameter ’time ’ unit ’ ’
parameter ’active ’ unit ’-’
0.0000 1.0
2.0000 0.0
location ’dredge 3 ’
time-function ’non-equidistant ’
reference-time ’from model’
time-unit ’days’
interpolation ’block’
parameter ’time ’ unit ’ ’
parameter ’active ’ unit ’-’
0.0000 0.0
2.0000 1.0
4.0000 0.0
A.2.25 Polygon file
File contents The co-ordinates of one or more polygons. Each polygon is written
in a single block of data
Filetype ASCII
File format Free formatted
Filename <name.pol>
Generated RGFGRID, QUICKIN, D-Waq DIDO, etc
Record description:
The file may contain one or more polygons. For every polygon the file should contain a line
indicating the name of the polygon, followed by a line indicating the number of points making
up the polygon and the number of coordinates, i.e. 2, finally followed by the coordinate data.
Deltares 463 of 688
DRAFT
Delft3D-FLOW, User Manual
Record Record description
Preceding description records, starting with an asterisk (∗), and will
be ignored.
1 A non blank character string, starting in column one
2 Two integers representing the numbers of rows and number of
columns for this block of data
Two reals representing the x, y or λ, φ-coordinate
Restriction:
The first record and the last record in the block should be the same
Example:
*
*Deltares, Delft3D-DIDO Version 3.39.01.4423:4459, Sep 25 2008, 20:10:54
*2008-09-25, 22:11:08
*
Observation Area 001
5 2
1.8768018E+05 6.1708738E+05
1.8996981E+05 6.1001035E+05
1.9746314E+05 6.1266423E+05
1.9480925E+05 6.1838830E+05
1.8768018E+05 6.1708738E+05
Observation Area 002
5 2
2.0011703E+05 6.1818015E+05
1.9819166E+05 6.1063479E+05
2.0568498E+05 6.0870942E+05
2.0797461E+05 6.1599460E+05
2.0011703E+05 6.1818015E+05
Observation Area 003
5 2
1.9340425E+05 6.1396516E+05
2.0183425E+05 6.1365294E+05
1.9944054E+05 6.0558720E+05
1.9522555E+05 6.0595146E+05
1.9340425E+05 6.1396516E+05
A.2.26 Observation points
The observation points file can be specified in the FLOW-GUI in Data Group Monitoring -
Observations.
File contents Description of observation points characterised by their name and
grid indices.
Filetype ASCII
File format Fix formatted for text variables, free formatted for integer values.
Filename <name.obs>
Generated FLOW-GUI or manually offline
464 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Record description:
Record Record description
each record Name of observation point (20 characters),
Location of the observation point in grid indices (2 integers).
Restrictions:
One record per observation point.
The name of the observation point must start in position one.
The maximum record length is 132.
Input items in a record must be separated by one or more blanks.
Example:
File containing 5 observation points:
Paradise Bay 1 10 11
Paradise Bay 2 11 11
Sea Entrance 4 8
Port Arthur 18 85
Deep Channel 22 44
Remarks:
The observation points are stationary by default. A moving observation point can be
specified by defining a stationary observation point in the above-mentioned observation
points file and by subsequently specifying its path via a moving observation point file
(keyword Filmst) or by linking it to a drogue.
The position of an observation point is automatically linked to that of a drogue if the
same name is used for both the observation point and the drogue. If an observation
point is linked to a drogue, the position of that observation point specified in the obser-
vation file described above is overruled.
If the path of an observation point is specified via a moving observation point file, the
position of that observation point specified in the observation file described above is
overruled. For a description of the moving observation point file see Section A.2.27.
If an observation point moves out of the simulation domain, a missing value of -999.0
will be returned for all quantities.
If the name of an observation point matches both a record in the moving observation
point file and the name of a drogue, then the path of the drogue will be used.
A.2.27 Moving observation points
The <name.mst>-file specifies the path of a moving observation point. Its file format resem-
bles closely the file format of time series conditions at open boundaries. The moving obser-
vation points file can be specified in the Additional Parameters section of the FLOW-GUI by
means of the keyword Filmst:
Filmst = #name.mst#
File contents Time-series of the paths of moving observation points
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.mst>
Generated manually offline
Deltares 465 of 688
DRAFT
Delft3D-FLOW, User Manual
Record description:
For each observation point that should be moving along a pre-defined path, the path is speci-
fied by means of two related blocks:
A header block containing a number of compulsory and optional keywords accompanied
by their values.
A data block containing the time dependent data.
Description header block:
Text Required Value
table-name no arbitrary string
location yes ’name observation point’ (see <name.obs>file)
time-function no {’non-equidistant’} or ’equidistant’
time-step yes time step only in case of time-function ’equidistant’
reference-time yes yyyymmdd, yyymmdd hhmmss or ’from model’
time-unit no ’years’, ’decades’, ’days’, ’hours’, {’minutes’}, ’sec-
onds’, ’ddhhmmss’ or ’date’
interpolation no {’linear’} or ’block’
extrapolation no ’periodic’, ’constant’ or {’none’}
parameter yes ’time’ unit ’[min]’
parameter yes ’x-coordinate’ units ’[m]’ (or ’[deg]’)
parameter yes ’y-coordinate’ units ’[m]’ (or ’[deg]’)
records-in-table no number of times/lines in the data block
Remarks:
Default parameter values are indicated in braces.
Reference-time not required if time-unit equals ’date’.
Unit strings are currently not interpreted by Delft3D-FLOW.
Only tables for which the location name matches the name of an observation point
specified in the <name.obs>file will be used.
Description data block:
Record Record description
each record Time in time-units after the reference-time and followed by x- and
y-coordinates (all reals). In case of time-function ‘equidistant’,
the first (time) column should be dropped. In case of time-unit
‘date’ the date and time should be specified as one string using
the format: yyyymmddhhmmss.
466 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Remark:
Maximum record length is 512.
Example:
The example file specifies the tracks of two moving observation points named ’Steamer 1’ and
’Raft 2’ respectively. The actual model may include zero, one or two moving observation points
depending on the number of location names that match observation point names specified in
the <∗.obs>file.
location ’Steamer 1’
time-function ’non-equidistant’
reference-time 20100118
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’x-coordinate ’ unit ’[m]’
parameter ’y-coordinate ’ unit ’[m]’
records-in-table 3
0 1750 1450
1440 2250 1950
2880 1750 2450
location ’Raft 2’
time-function ’non-equidistant’
reference-time 20100118
time-unit ’minutes’
interpolation ’linear’
parameter ’time ’ unit ’[min]’
parameter ’x-coordinate ’ unit ’[m]’
parameter ’y-coordinate ’ unit ’[m]’
records-in-table 2
0 2050 1550
2880 3050 1550
A.2.28 Drogues
File contents Description of drogues characterised by their name, release indices,
release and recovery time (Data Group Monitoring - Drogues).
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.par>
Generated FLOW-GUI or manually offline
Record description:
Record Record description
each record Name of the drogue (20 characters),
Release time in minutes relative to 00:00:00 on the Reference Date (1
real),
Recovery time in minutes relative to 00:00:00 on the Reference Date (1
real),
Grid indices of the release point of the drogue (2 reals).
Remark:
Drogues can be released anywhere inside a grid cell, i.e. at fractional grid indices. The
Deltares 467 of 688
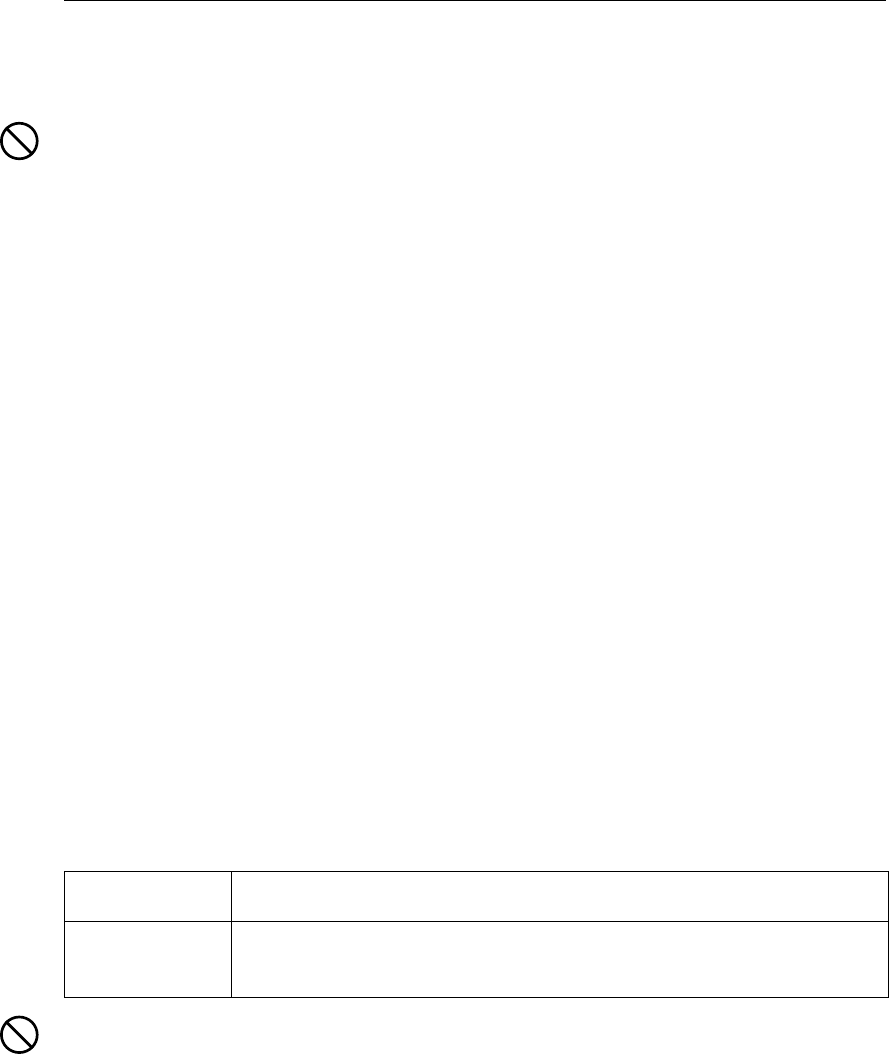
DRAFT
Delft3D-FLOW, User Manual
default value, when using the Visualisation Area window, is the grid centre; fractional
indices must be defined manually.
Restrictions:
One record per drogue.
The drogue’s name must start in position one.
Maximum record length is 132.
Input items in a record must be separated by one or more blanks.
Example:
File contains 5 drogues. All drogues are released and recovered at the same time: released at
1200 minutes after the midnight on the simulation Reference Date and recovered 300 minutes
later. All drogues are released in the grid cells surrounding depth point with grid indices
(10,11).
Drogue at Station: A 1200.00 1500.00 10.0 11.0
Drogue at Station: B 1200.00 1500.00 10.5 11.0
Drogue at Station: C 1200.00 1500.00 10.0 11.5
Drogue at Station: D 1200.00 1500.00 9.5 11.0
Drogue at Station: E 1200.00 1500.00 10.0 10.5
A.2.29 Cross-sections
File contents The description of cross-sections characterised by their name and
grid indices (Data Group Monitoring - Cross-sections).
Filetype ASCII
File format Fix formatted for text variables, free formatted for integer values.
Filename <name.crs>
Generated FLOW-GUI or manually offline
Record description:
Record Record description
each record Name of the cross-section (20 characters), Grid indices of the begin and
end point of the cross-section (4 integers).
Restrictions:
One record per cross-section
The cross-section’s name must start in position one.
Maximum record length is 132.
A cross-section must contain at least two consecutive grid cells.
Name and indices are separated by one or more blanks.
Example:
File containing 3 cross-sections, two ‘V-cross-sections’ and one ‘U-cross-section’, see Fig-
ure A.6.
Bridge 5 6 8 6
River Edo - Entrance 16 3 16 7
Sea Entrance 4 2 12 2
468 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Figure A.6: Cross-sections in model area
A.2.30 Fourier analysis
File contents All parameters required to execute an online Fourier analysis for
specified quantities, a specified period and for specified frequencies
(Data Group Output - Storage).
Filetype ASCII
File format Fix formatted for text variables, free formatted for real and integer
values.
Filename <name.fou>
Generated Manually offline
Record description:
Record Record description
each record Variable on which the Fourier analysis is to be performed (2 characters):
wl water levels
uv velocities
qf mass fluxes of water
ct temperature
cs salinity
cn n-th constituent in the MDF-file
bs bed stress
Analysis start time in minutes after 00:00:00 on the Reference Date,
Analysis stop time in minutes after 00:00:00 on the Reference Date,
Number of cycles within the analysis time frame,
Nodal amplification factor,
Astronomical argument,
Layer number for the Fourier analysis,
Flag for the computation of elliptic parameters:
y/n (default no) if number of cycles >0,
min/max if number of cycles = 0.
Remarks:
If the number of cycles is set equal to 0, the mean level of the variable over the interval
specified by the start and stop time is determined.
If, in addition, the flag for the computation of elliptic parameters is set to “max” or “min”
Deltares 469 of 688
DRAFT
Delft3D-FLOW, User Manual
the maximal or minimal value is determined of the selected variable as it occured during
the simulation.
Computed Fourier amplitudes slightly differ from the amplitude of the corresponding
tidal component. When comparisons with co-tidal maps have to be made, this factor
can be determined using the subsystem ASCON of Delft3D-TIDE, the tidal analysis
package of Deltares.
Computed Fourier phases are related to the reference date of the FLOW computation.
For comparisons with co-tidal maps a phase shift equal to the astronomical argument
has to be applied.
The layer number is not relevant for water levels.
Restrictions:
Times specified must be a multiple of the computational time step.
Times specified must be a valid time, i.e. must fit in the simulation time frame of the
FLOW computation.
Items in a record must be separated by one or more blanks.
The variable’s name must start in position one.
Example:
A Fourier analysis is requested for:
Water level: mean value and the first two harmonics.
U- and V-velocity: first harmonic, in the top layer (1).
Mass fluxes of water: first harmonic, in the top layer (1).
Temperature: first harmonic, in the third layer.
Salinity: mean value of the third layer.
Four constituents: mean value for a slightly shifted time period in the top layer for 3 con-
stituents; and the maximum for the fourth constituent.
wl 720. 1440. 2 1.000 0.000
wl 720. 1440. 1 1.000 0.000
wl 720 1440. 0 1.000 0.000
uv 720. 1440. 1 1.000 0.000 1
qf 720. 1440. 1 1.000 0.000 1
ct 720. 1440. 1 1.000 0.000 3
cs 720. 1440. 0 1.000 0.000 3
c1 710. 1430. 0 1.000 0.000 1
c2 710. 1430. 0 1.000 0.000 1
c3 710. 1430. 0 1.000 0.000 1
c4 710. 1430. 0 1.000 0.000 1 max
Remark:
A layer value of 0 in a 3D model is not allowed; i.e. this will NOT result in a depth-
averaged value.
A.2.31 (Rigid) 3D vegetation model
To include vegetation in Delft3D-FLOW, the keyword Filpla may be included in the FLOW
input file <∗.mdf>, e.g.:
Filpla=#example.pla#
In the FLOW-GUI this keyword-value pair can be specified in Data Group Additional Parame-
ters.
470 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
File contents Characteristics of vegetation.
Filetype ASCII
File format Ini formatted.
Filename <name.pla>
Generated manually offline
Record description:
Table A.8: Vegetation input file with keywords
Keyword Format Record description
VegetationFileInformation
FileCreatedBy string program name and version
FileCreationDate string creation date and time of the <∗.pla>file
FileVersion string version number of the <∗.pla>file (‘01.00’)
General
PolygonFile string name of polygon file with polylines defining vegeta-
tion areas
ClPlant 1 R The overall turbulence length scale Clbetween
stems (Equation (9.361)).
ItPlant 1 I Number of time steps between updates of plant
arrays
Vegetation
type string Type of the vegetation
Vps 2 R,
1 I,
1 R
Specification of the vertical plant structure (Vps). For
each specified plant type, there should be a block in
the file containing four columns:
1 height [m]
2 stem diameter [m]
3 number of stems [-]
4Cdcoefficient [-]
Area
VegetationType string name between # must match a vegetation group in
this file.
Polygon string name between # as specified the polygon file defined
by the keyword PolygonFile
continued on next page
R = Real; I = Integer; L = Logical; C = Character
Deltares 471 of 688
DRAFT
Delft3D-FLOW, User Manual
Table A.8 – continued from previous page
Keyword Format Record description
NPlants or I Number of stems per square metre [m2]
NPlantsFile string name between # must match an existing file in dep-
format (see section A.2.4)
R = Real; I = Integer; L = Logical; C = Character
In the plant input file, the overall turbulence length scale Clcan be specified (Equation (9.361)),
using the keyword ClPlant.
If more types of plants are specified in the same grid cell, the average stem diameter and
the average number of stems per unit area are combined such that the combination gives the
total resistance and total occupied plant areas. The number of stems per unit area may vary
over time if a sigma layer passes a plant top. Then, the number of stems and their diameters
will be redistributed over the vertical. The update may not be necessary every time step if the
water level varies slowly. The update interval may be increased to save some computational
effort, using the keyword ItPlant.
In the (Rigid) 3D vegetation model input file many different plant types may be specified, each
type with its own vertical plant structure and horizontal spatial distribution.
The Vertical Plant Structure (VPS) describes the number of stems and their widths per plant
as a function of the vertical co-ordinate. For each specified plant type, there should be a block
in the file containing four columns:
1 the height of the plants,
2 number of stems,
3 stem diameter and
4 the friction coefficient
The horizontal distribution of the number of plants per m2can be specified for each plant type
separated in two ways.
1 by means of a constant value (NPlants)
2 by means of reference to a file (NPlantsFile). The file format is according the dep-file
format, see section A.2.4
Some example input files are given in Figures A.7 to A.9
472 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
[VegetationFileInformation]
FileCreatedBy = Delft3D Support
FileCreationDate = 29-11-2013
FileVersion = 01.00
[General]
PolygonFile = plants.pol
ClPlant = 0.80 [ - ] Turbulence length scale coefficient between stems
ItPlant = 50 [ - ] Number of time steps between updates of plant arrays
[Vegetation]
Type = reed
*
*height [m] stem diameter [m] nr of stems [-] cd-coefficient [-]
*
Vps = 0.0 0.008 1 1.0
Vps = 0.90 0.008 1 1.0
Vps = 0.91 0.001 1 1.0
[Area]
VegetationType = #reed# [ - ] must match a vegetation group in this file
Polygon = #reed# [ - ] must match a polygon in the PolygonFile
NPlants = 256 [ 1/m2 ]
Figure A.7: Example of the plant input file (<name.pla>) where the areas are defined
with a polygon file, see section A.2.25
[VegetationFileInformation]
FileCreatedBy = Delft3D Support
FileCreationDate = 02-07-2004
FileVersion = 01.00
[General]
ClPlant = 0.80 [ - ] Turbulence length scale coefficient between stems
ItPlant = 50 [ - ] Number of time steps between updates of plant arrays
[Vegetation]
Type = reed
*
*height [m] stem diameter [m] nr of stems [-] cd-coefficient [-]
*
Vps = 0.0 0.008 1 1.0
Vps = 0.90 0.008 1 1.0
Vps = 0.91 0.001 1 1.0
[Area]
VegetationType = #reed # [ - ] must match a vegetation group in this file
NPlantsFile = #reed.dep# [ - ] must match an existing file in dep-format
Figure A.8: Example of the plant input file (<name.pla>) where the area is defined with
files according the depth-format, see section A.2.4
Deltares 473 of 688
DRAFT
Delft3D-FLOW, User Manual
[VegetationFileInformation]
FileCreatedBy = Delft3D Support
FileCreationDate = 29-11-2013
FileVersion = 01.00
[General]
ClPlant = 0.80 [ - ] Turbulence length scale coefficient between stems
ItPlant = 50 [ - ] Number of time steps between updates of plant arrays
[Vegetation]
Type = wier1
*
*height [m] stem diameter [m] nr of stems [-] cd coefficient [-]
*
Vps = 0 0.003 1000 1.0
Vps = 0.5 0.003 1000 1.0
[Vegetation]
Type = wier2
*
*height [m] stem diameter [m] nr of stems [-] cd coefficient [-]
*
Vps = 0 0.003 1000 1.0
Vps = 0.8 0.003 1000 1.0
[Area]
VegetationType = #wier1 #
NPlantsFile = #vegetatiedichtheid_gemaaid_wier.dep#
[Area]
VegetationType = #wier2 #
NPlantsFile = #vegetatiedichtheid_niet_gemaaid_wier.dep#
Figure A.9: Example of the plant input file (<name.pla>) where two different vegetation
types are defined.
A.2.32 Space varying subsidence uplift definition
To include subsidence/uplift in Delft3D-FLOW, the keyword Filsdu may be included in the
FLOW input file <∗.mdf>, e.g.:
Filsdu=#example.sdu#
SduS1 =#N#
The value of the keyword SduS1 determines whether or not the water level is adjusted as
well (default: no). In the FLOW-GUI these keyword-value pairs can be specified in Data
Group Additional Parameters.
In this section a description of the space-varying subsidence/uplift is given.
File contents Time-series for space varying uplift (or subsidence), defined on the
computational grid. The file consists of a header, followed by dat-
ablocks containing the uplift field at times specified using a stan-
dardised time definition above each datablock. The header specifies
the type of file and the input it contains using a number of keywords.
The keywords are case insensitive and the order of the keywords is
not fixed.
Filetype ASCII or binary.
File format Free formatted or unformatted, keyword based.
Filename <name.sdu>
Generated Some offline program.
474 of 688 Deltares
DRAFT
Files of Delft3D-FLOW
Header description:
Keywords Value Description
FileVersion 1.03 version of file format
Filetype field_on_computational_grid field input on computational
grid
NODATA_value free value used for input that is
to be neglected
n_quantity 1 number of quantities speci-
fied in the file
quantity1 bedrock_surface_elevation bed rock surface elevation
unit1 m unit of quantity1, me-
ters w.r.t. to arbirtrary
datum
Time definition and data block description
Keywords Value Description
Time fixed format described below time definition string
The time definition string has a fixed format, used to completely determine the time at which
a dataset is valid. The time definition string has the following format:
TIME minutes/hours since YYYY-MM-DD HH:MM:SS TIME ZONE, e.g.
360 minutes since 2008-07-28 10:55:00 +01:00
The format of the string is completely fixed. No extra spaces or tabs can be added between the
different parts of the definition. The time definition is followed by the datablock of input values
corresponding to the specified time. The data block consists of a single block containing the
bedrock surface elevation in the Nmax by Mmax water level points, where the first value in the
dataset corresponds to cell (1,1) on the grid. Every next line in the dataset then corresponds
to a row on the grid. The time definition and the data block are repeated for each time instance
of the time-series.
Deltares 475 of 688
DRAFT
Delft3D-FLOW, User Manual
File version and conversion
The current description holds for FileVersion 1.03.
Restrictions:
Keywords are followed by an equal sign ’=’ and the value of the keyword.
When a keyword has value free the value of this keyword is free to choose by the user.
When only one value is given for a keyword, this keyword has a fixed value and when 2
or more options are shown, the user can choose between those values.
Times must be specified exactly according to the time definition. See the examples
shown in this section.
The contents of the file will not be checked on its domain.
Input items in a data block are separated by one or more blanks (free formatted file
only).
Remarks:
The time definition in the subsidence/uplift (sdu) file is handled similarly to space varying
wind and pressure defined on the computational grid (Section ).
Comments can be added after #’s.
Example
Model area of 250 ∗33 grid points (Mmax = 250; Nmax = 33). The input data is printed in
Courier, comments are printed behind #’s.
Time = 0.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 250 values each} # Bedrock surface elevation w.r.t. to arbitrary datum
Time = 340.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 250 values each} # Bedrock surface elevation w.r.t. to arbitrary datum
Time = 600.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 250 values each} # Bedrock surface elevation w.r.t. to arbitrary datum
Time = 1240.0 minutes since 2008-09-20 10:30:00 +01:00 # Time definition
{33 records with 250 values each} # Bedrock surface elevation w.r.t. to arbitrary datum
Remark:
The subsidence/uplift file (.sdu) is attached to the master definition file (.mdf) using the
FilSdu keyword. To include the effect of change in the bedrock surface elevation upon
the water level, the SduS1 keyword should be set to #Y# or #N# ( = default).
476 of 688 Deltares
DRAFT
B Special features of Delft3D-FLOW
B.1 Introduction
In the FLOW-GUI in Data Group Additional parameters you can specify certain parameters
and values that initiate a special feature to Delft3D-FLOW.
When you want to use such a special feature you must specify its keyword and value in
the Data Group Additional parameters. The keyword is used in the MDF-file to recognise the
special feature and the value is in most cases the name of the file that provides additional input
data for that feature. In this section we describe the keywords and files related to the special
features that are currently available. Details of the formulations of most special features are
given in Chapters 9,10,11 and 12. For some special features the details of the formulations
are given in this appendix, such as:
Horizontal Large Eddy Simulations (HLES) and
Domain decomposition.
The currently available special features are:
Table B.1: Special features of Delft3D-FLOW
Functionality Description
B.2 Decay rate constituents Define a linear decay rate for each constituent
B.3 Hydraulic structures Hydraulic structures that influence the flow
rigid sheets Impermeable sheets in (part of) the vertical
Floating structures Floating structure at the free surface
3D gates Gate structures in (part of) the vertical
local weir Weirs
porous plate Porous plate in (part of) the vertical
bridge pier Sub-grid piers extending over full vertical
2D weir Spillways, weirs and summer dikes (2D)
Upwinding at discharges Upwind advection scheme near discharge locations
current deflection wall Current deflecting wall
B.4 Space varying Coriolis coefficients Coriolis coefficient for each grid point
B.5 Temperature modelling Temperature modelling
B.6 Evaporation and precipitation User-defined evaporation and rainfall
B.7 Space varying wind and pressure Space varying wind and pressure input
B.8 Horizontal large eddy simulation Sub-grid scale HLES model
B.9 Sediment transport and morphology see also chapter 11
B.10 Fluid mud (2-layer approach) see section B.10
B.11 Z-model see also chapter 12 and section B.11
B.12 Non-hydrostatic solver see also chapter 12 and section B.12
B.14 Domain decomposition see section B.14
Deltares 477 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.1: Special features of Delft3D-FLOW
Functionality Description
B.15 Surfbeat/roller model see section B.15
B.19 Dry run see section B.19
B.20 Reuse temporary files see section B.20
B.21 Change the update frequency of the
nodal factors
see section B.21
B.22 Bubble screen Injection of air to enhance vertical mixing
B.23 1D–3D Coupling See section B.23
B.24 Output of Courant number messages See section B.24
B.25 Initialisation of water depth in dry
points
See section B.25
B.26 Remapping of near-bottom layers for
accurate and smooth bottom shear stress
in Z-layers
See section B.26
B.27 Slope Limiter See section B.27
Remark:
An important restriction of the current implementation of structures in Delft3D-FLOW is
that only one type of structure is accepted at a grid, (m, n), location. This means you
cannot combine a local weir and a porous plate or 3D gate at the same grid location.
However, you can combine two 3D gates, one extending over layer 1 and another 3D
gate extending over layer 3to 5, at the same grid, (m, n), location.
A specific type of special feature is the User Defined Function. It is a more powerfull definition
of a special feature but its definition is more complex. These User Defined Functions are
described in section B.13.
The currently available User Defined Functions are:
Functionality Description
BC turbulence model Boundary conditions for the turbulence model
Diagnostic mode Specify to use the diagnostic mode
Particle wind factor An additional wind speed working on particles
478 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.2 Decay rate constituents
Keyword Value Description Default
Decay# real number Linear decay rate of constituent #
where # = {1 to 9}
0.0 [1/day]
Dcay## real number Linear decay rate of constituent
## where ## = {10 to 99}
0.0 [1/day]
For the (conservative) constituents defined in the Data Group Processes →Pollutants and
tracers you can define a linear decay rate. Decay rates cannot be specified for salinity, temper-
ature and suspended sediment fractions. The number of the constituent following the Decay
or Dcay keyword should match the number of the corresponding Namc keyword indicating
the name of the constituent. The decay rate is defined per day.
The decay rate is implemented as a sink term on the right hand side of the transport equation,
i.e.
∂c
∂t + (advection) = (dispersion)−K·c, (B.1)
where Kis the decay rate.
Remark:
The keyword is case sensitive!
B.3 Hydraulic structures
B.3.1 3D gates
Keyword Value Description Default
Filgat #name.gat# Filename for 3D gate data none
A 3D gate is represented by a vertical plate in the flow along one of the grid directions and
that covers some or all layers in the vertical, Figure B.1.
There is no momentum exchange across the gate and friction exerted on the flow is not taken
into account. The purpose of 3D gates is to represent small objects, e.g. floating or submerged
dams or structures. 3D gates can be defined at multiples of 45 degree angles with the grid
directions and they must be defined inside the grid enclosure.
File contents Definition of impermeable sheets blocking the flow in N- or M-direction
and extending over one or more layers in the vertical.
File format Free formatted.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Value must be enclosed between two number signs (#).
Deltares 479 of 688
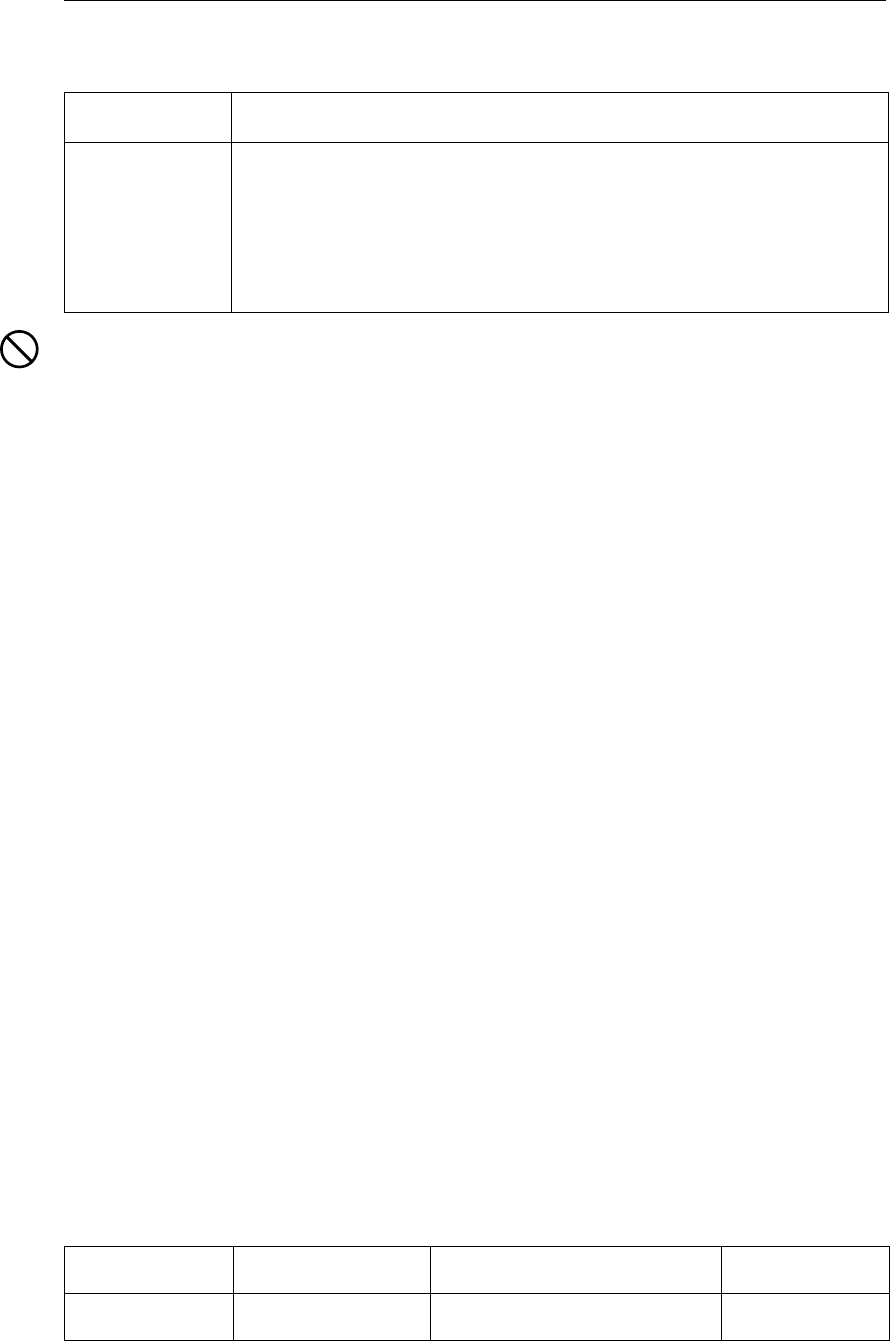
DRAFT
Delft3D-FLOW, User Manual
Record description:
Record Record description
each record Direction in which the flow is blocked (1 character):
U U-gate
V V-gate
Begin and end indices of the gate, i.e. m1, n1, m2, n2 (4 integers)
Layer numbers over which the gate extends, i.e. k1 and k2 (2 integers).
Restrictions:
The 3D gate type must be given in position one.
A multiple gate can be defined along a line segment. The angle of the line segment and
the M-direction must be an integer multiple of 45 degrees.
Gates may not be defined along the model boundaries (which by default lie along the
lines m = 1, n = 1, m = Mmax or n = Nmax). Therefore, the indices of these points must
lie between m = 2 and Mmax-1 and n = 2 and Nmax-1, respectively.
Input items in a record must be separated by one or more blanks.
You cannot combine 3D gates with other structures, such as rigid sheets, porous plates
or local weirs at the same grid location (m, n).
However, gates defined at the same location but extending over different layers can be
combined (you can have a gate at the same location in layer 1 and in layers 3 to 5).
Example:
Four 3D gates are defined, see Figure B.1.
Three V-gates extending from:
(5, 3) to (7, 3) over layer 4,
(5, 4) to (7, 4) over layer 4 and 5,
(5, 5) to (7, 5) over layer 4 and 5.
One U-gate extending from:
(4, 4) to (5, 4) over layer 4 and 5.
V537344
V547445
V557545
U444545
B.3.2 Quadratic friction
B.3.2.1 Barrier
Keyword Value Description Default
Filbar #name.bar# Filename for barrier data none
A barrier is represented by a vertical gate from the water level down to a certain level in the
flow along one of the grid directions. The gate blocks the flow in the top grid cells. The number
480 of 688 Deltares
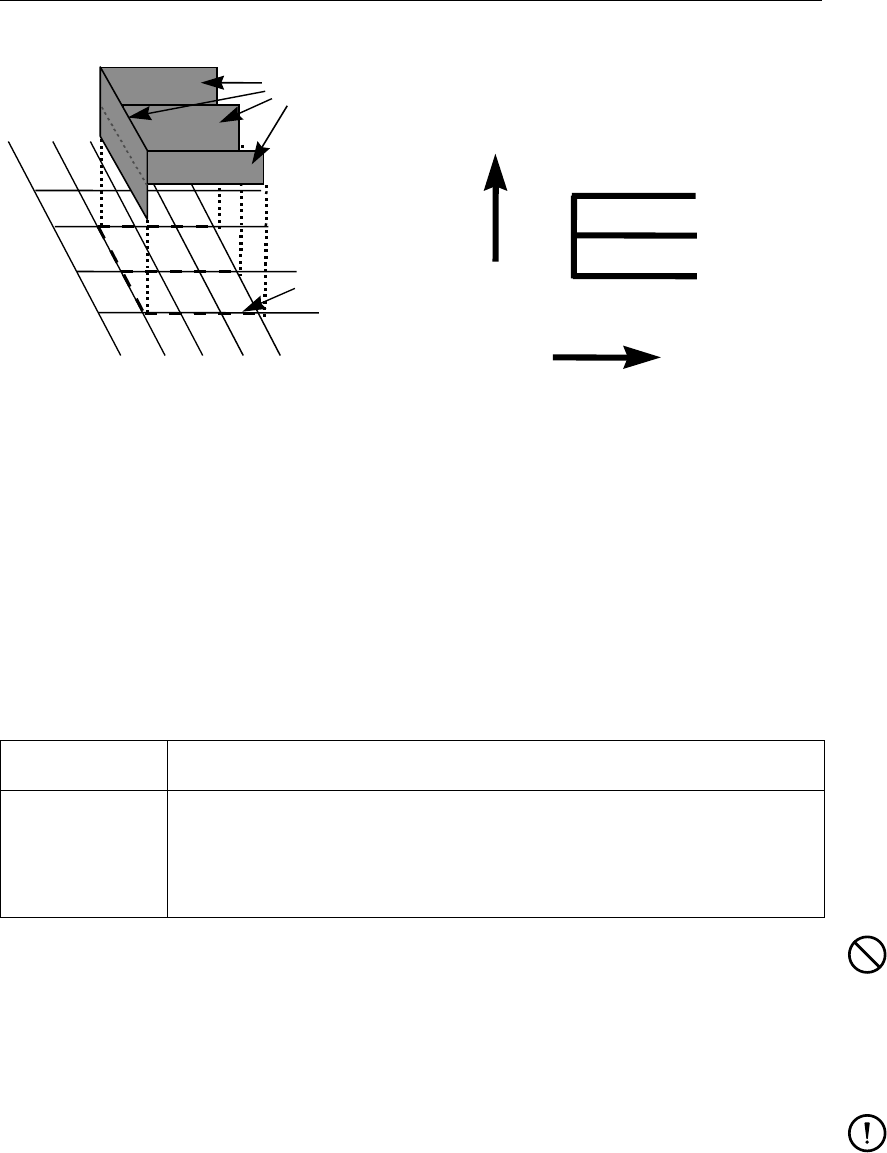
DRAFT
Special features of Delft3D-FLOW
M=4 M=6
N=3
N=4
N=5
K=4
K=5
Gates
Projection of the
gates on the bed
N=6
+
+
-
-
--
+
+
-
-
-
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
--
-+
+
+ +
++
--
- -
-
-
-
-
-
-
-
+
+
-
-
--
-
4 5 6 7 8
M - direction
3
4
5
6
N - direction
Figure B.1: Example of 3D gates in perspective view (left) and top view (right)
of layers that are blocked will vary with water elevation and the gate level. Partial blocking is
accounted for.
File contents The description of barrier locations and characteristics.
Filetype ASCII
File format Fixed formatted for text variables, free formatted for integer values.
Filename <name.bar>
Generated manually offline
Record description:
Record Record description
each record Name of the barrier (20 characters), barrier orientation (U or V), grid
indices of the begin and end point (4 integers), bottom level of gate
(1 real, positive up), barrier loss type (a or b), energy loss coefficients
(1 or 2 reals).
Restrictions:
One record per barrier.
The barrier’s name must start in position one.
Maximum record length is 132.
Name, barrier orientation and other parameters must be separated by one or more
blanks.
Remarks:
The bottom level of the gate specified in this file may be overruled during the computa-
tion by means of the real-time control module. See B.28
For barrier loss type ‘a’, you have to specify one energy loss coefficient, namely closs.
For barrier loss type ‘b’, you have to specify two energy loss coefficients, namely αand
β.
Old barrier records imply the use of barrier loss type ‘a’. Such old records contain the
coefficients in the following order: name of the barrier (20 characters), barrier orienta-
tion (U or V), grid indices of the begin and end point (4 integers), energy loss coefficient
closs (1 real), bottom level of gate (1 real, positive up).
Deltares 481 of 688
DRAFT
Delft3D-FLOW, User Manual
Figure B.2: Barriers in model area
Example:
File containing 3 barriers for the configuration shown in Figure B.2. The bottom levels of the
gates vary between 2.0 and 4.0. All three barriers use barrier loss type ‘a’. The first barrier
has an energy loss coefficient closs of 0.9, while the other two have been assigned a loss
coefficient of 0.8.
Barrier North V 5 6 8 6 4.0 a 0.9
Barrier East U 16 3 16 7 2.0 a 0.8
Barrier South V 4 2 12 2 3.0 a 0.8
B.3.2.2 Bridge
The effect of a bridge can be schematized using porous plates. See section B.3.3.
B.3.2.3 Current deflection wall (CDW)
Keyword Value Description Default
Filcdw #name.cdw# Filename for CDW data none
A CDW is represented by a vertical plate in the flow along one of the grid directions with fixed
dimensions in the vertical. The flow across the plate is blocked. In σgrid the number of layers
that are blocked will vary with water elevation. Partial blocking is accounted for. The plate is
supported by pylons, Figure B.3.
There is no momentum exchange across the plate and friction exerted on the flow by the
supportive pylons is taken into account. Current Deflecting Wall is used to deflect some of the
flow that enters into a harbour to enhance flow exchange and thereby to reduce siltation in the
harbour. CDW must be defined inside the grid enclosure.
File contents Definition of impermeable sheet blocking the flow in N- or M-direction
and its co-ordinates in the vertical. This information is followed by
friction coefficient for the supportive pylons.
File format Free formatted.
Generated Manually offline.
Remarks:
482 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
The keyword Filcdw is case sensitive!
Value of Filcdw must be enclosed between two number signs (#).
Record description:
Record Record description
each record Direction in which the flow is blocked (1 character):
U U-gate
V V-gate
Begin and end indices of the gate, i.e. m1, n1, m2, n2 (4 integers)
Friction coefficient to account for the effect of the supportive pylons
(1 real)
z-co-ordinates over which the gate extends, i.e. zbot and ztop (2 reals).
Restrictions:
The CDW structure blocking the velocity must be given in position one.
A single CDW structure is allowed along a line segment. The angle of the line segment
and the M-direction must be an integer multiple of 45 degrees.
Gates may not be defined along the model boundaries (which by default lie along the lines
m = 1, n = 1, m = Mmax or n = Nmax). Therefore, the indices of these points must lie
between m = 2 and Mmax-1 and n = 2 and Nmax-1, respectively.
Input items in a record must be separated by one or more blanks.
You can not combine CDW with other structures, such as rigid sheets, porous plates or
local weirs at the same grid location (m, n).
The friction coefficient must be larger than 0.
Vertical position of the CDW plates (bottom and top) are specified in the Cartesian co-
ordinate in the z-direction (positive up relative to reference plane).
zco-ordinate at the top must be > z co-ordinate at the bottom.
zco-ordinate at the top may be arbitrarily high (e.g. 999.99 to ensure that the plate is
always above water).
Example:
This example defines a CDW structure blocking the V-velocity (i.e. structure aligned with flow
in U-direction):
(5, 3) to (7, 3) at the vertical position between z=−1.5m and z= 999.99 m.
CDW is supported by pylons introducing friction with friction coefficient of 0.116
V 5 3 7 3 0.116 -1.5 999.99
B.3.2.4 Weirs (2D model)
Keyword Value Description Default
Fil2dw #name.2dw# Filename for data spillways,
weirs and summer dikes
none
ThetaW [0,1] Relaxation parameter 0
Deltares 483 of 688
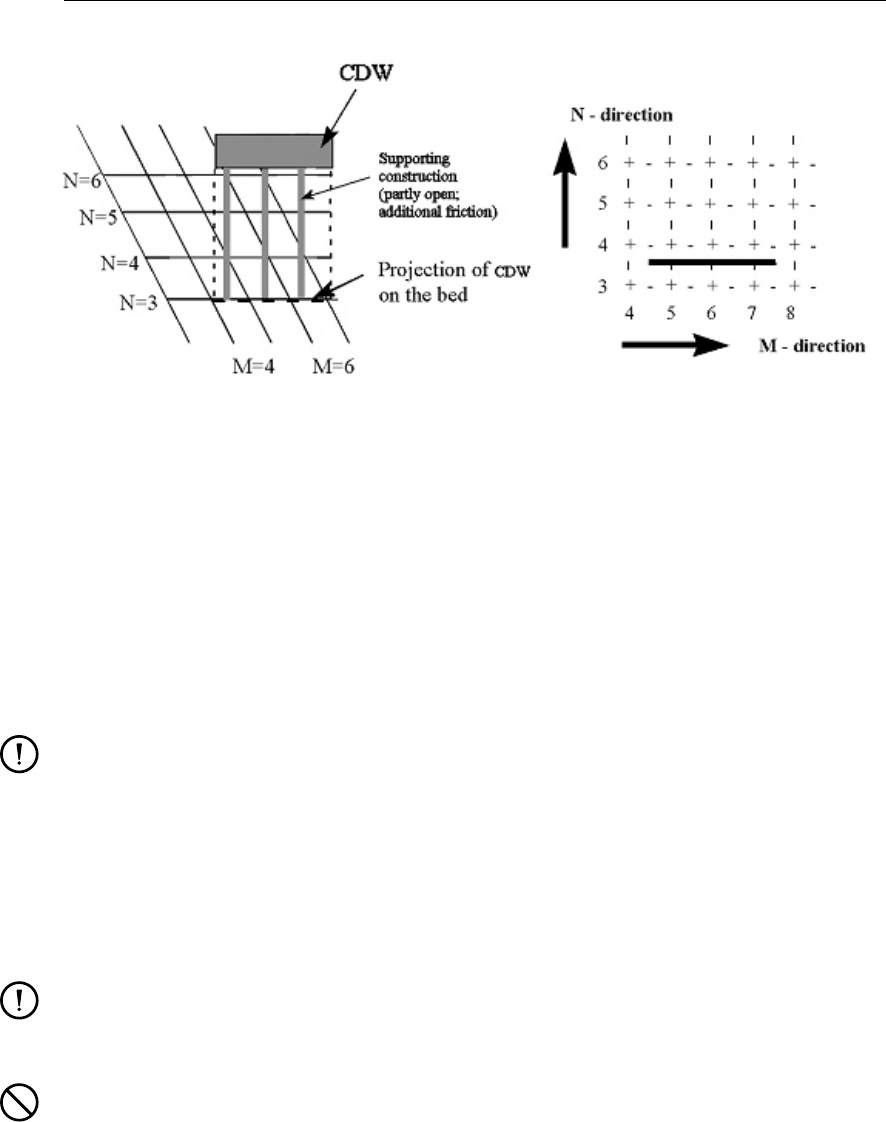
DRAFT
Delft3D-FLOW, User Manual
Figure B.3: Example of CDW in perspective view (left) and top view (right)
A 2D weir can only be used in a 2D model. (not yet implemented for the Z-model).
A 2D weir is modelled as a sub-grid phenomenon, i.e. its dimensions are (assumed to be)
much smaller than the grid size and only its overall influence on the flow is taken into account.
A 2D weir is characterised by its location and its crest height. Contrary to local weirs, the 2D
weirs are based on an empirical estimation of the energy loss over the weir in both the case
of a perfect weir and an imperfect weir. This energy loss is converted into an effective friction
coefficient, which may be adapted using a calibration coefficient; see section 10.9.2 for full
details. For a perfect weir the energy term controls the discharge to the theoretical discharge
for supercritical flow given the the energy head upstream of the weir.
Remark:
The option Waqopt=#Y# to change the discretisation has been replaced by Momsol
= #WAQUA#.
File contents Location, dimensions and energy losses of spillways, weirs and sum-
mer dikes.
File format Free formatted.
Filename User-defined.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Values of character-type must be enclosed between two number signs (#).
Restrictions:
One 2D weir per record.
The 2D weir type must be given in position one of each record.
2D weirs may not be defined along the model boundaries (which by default lie along the
lines M = 1, N = 1, M = Mmax or N = Nmax). Therefore, the indices of these points must
lie between M = 2 and Mmax-1 and N = 2 and Nmax-1, respectively.
The friction calibration coefficient must have a positive value.
Input items in a record must be separated by one or more blanks.
484 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Record description:
Record Record description
each record Direction of the 2D weir normal to the flow (1 character):
U U-weir
V V-weir
Begin and end indices of the 2D weir, i.e. m1, n1, m2, n2 (4 integers),
Friction calibration coefficient normally equal to 1.0 [-] (1 real),
Crest height [m] measured positive downward (1 real),
Real number; not yet used (1 real).
Remark:
The definition of the weir crest is the same as for the bottom depth: the depth below the
horizontal plane of reference (positive downward).
Example:
The file contains three 2D weirs:
The first weir is a ‘U-weir’, i.e. influencing the flow in U-direction at m = 6, from n = 4 to n =
6. The calibration coefficient is 1.0 and the crest height is 12.0 metres below the reference
plane.
The second weir is a ‘V-weir’, at m = 14 to m = 16 at n = 3. The calibration coefficient is
1.0 and the crest height is 11.0 metres below the reference plane.
The third weir is defined along a 45 degrees line and consists of four small ‘U-weirs’ each.
The calibration coefficient is 1.0 and the crest height is 9.0 metres below the reference
plane.
See Figure B.4 for a top view of the location in the grid.
U 6 4 6 6 1. 12. 0.
V 14 3 16 3 1. 11. 0.
U 7 4 10 7 1. 9. 0.
B.3.2.5 Local weir
Keyword Value Description Default
Fillwl #name.lwl# Filename for local weir data none
Upwlwl #Y# or #N# Upwind advection scheme
near structure
#Y#
A local weir may be used in a 3D model. It is assumed that the friction coefficient is the same
for all the computational layers.
A local weir is modelled as a sub-grid phenomenon, i.e. its dimensions are (assumed to
be) much smaller than the grid size and only its overall influence on the flow is taken into
account. This overall influence is modelled by the energy losses due to the weir. These energy
losses are described as an additional quadratic friction term in the momentum equations; see
Sections 9.10.2 and 10.9.2 for full details. A local weir can be defined at multiples of 45 degree
angles with the grid directions and they must be defined inside the grid enclosure, Figure B.5.
Deltares 485 of 688
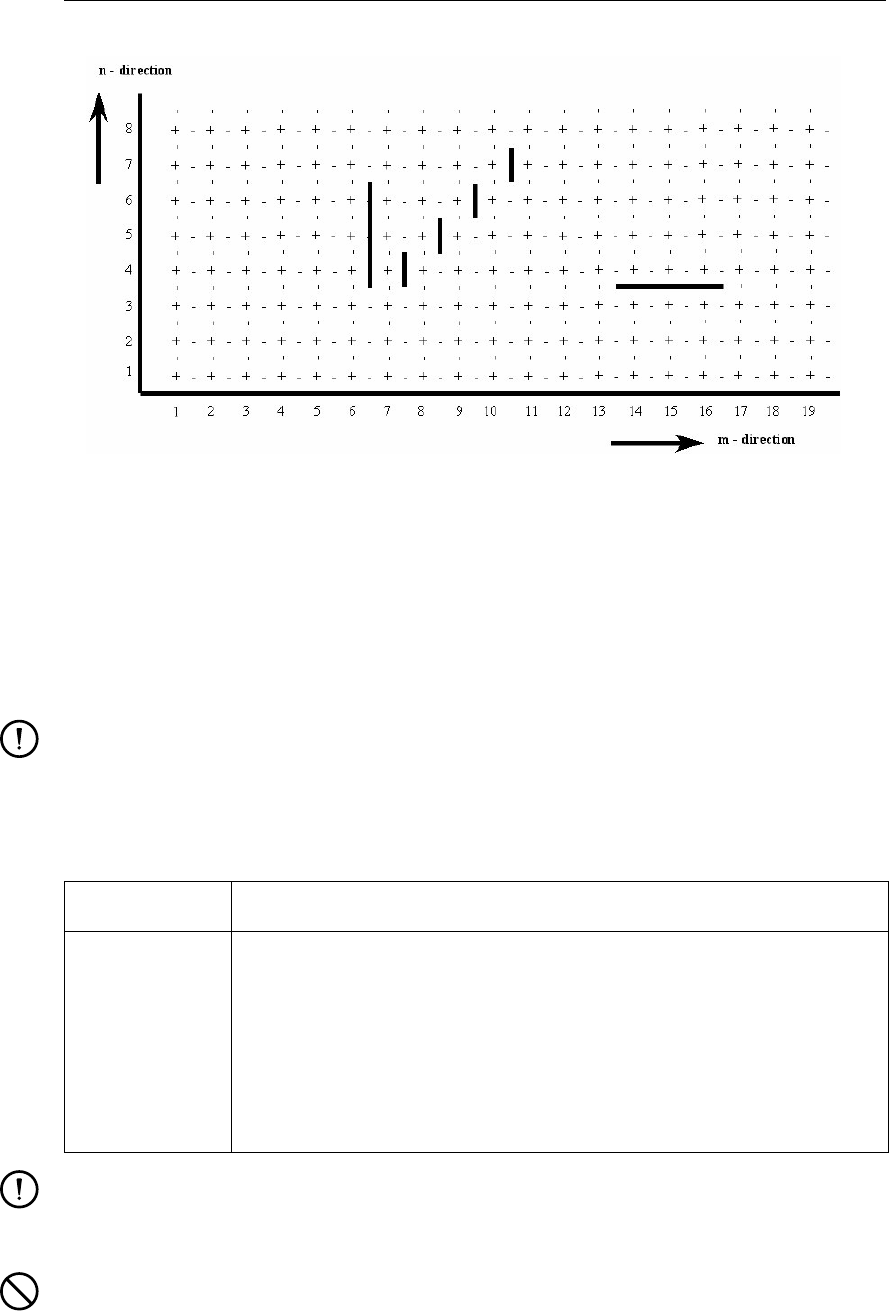
DRAFT
Delft3D-FLOW, User Manual
Figure B.4: Top view of 2D weirs
With the keyword Upwlwl you can specify to use an upwind approximation in the advective
terms of the momentum equations at the location of the structure. You can use this option to
prevent (damp) oscillations that may occur due to large gradients.
File contents Location, dimensions and energy losses of local weirs.
File format Free formatted.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Values of character-type must be enclosed between two number signs (#).
Record description:
Record Record description
each record Direction of the local weir normal to the flow (1 character):
U U-weir
V V-weir
Begin and end indices of the local weir, i.e. m1, n1, m2, n2 (4 integers),
Friction coefficient of the quadratic friction [-] (1 real),
Crest height [m] measured positive downward (1 real),
Real number; not yet used (1 real).
Remark:
The definition (reference system) of the weir crest is the same as for the bottom depth,
so below the horizontal plane of reference (positive downward).
Restrictions:
The crest height is ignored when the local water depth at the local weir (averaged water
depth on both sides of the local weir) is smaller than the crest height specified.
One local weir per record.
The local weir type must be given in position one of each record.
Local weirs can be defined along a line segment at an angle with the M-direction of an
486 of 688 Deltares
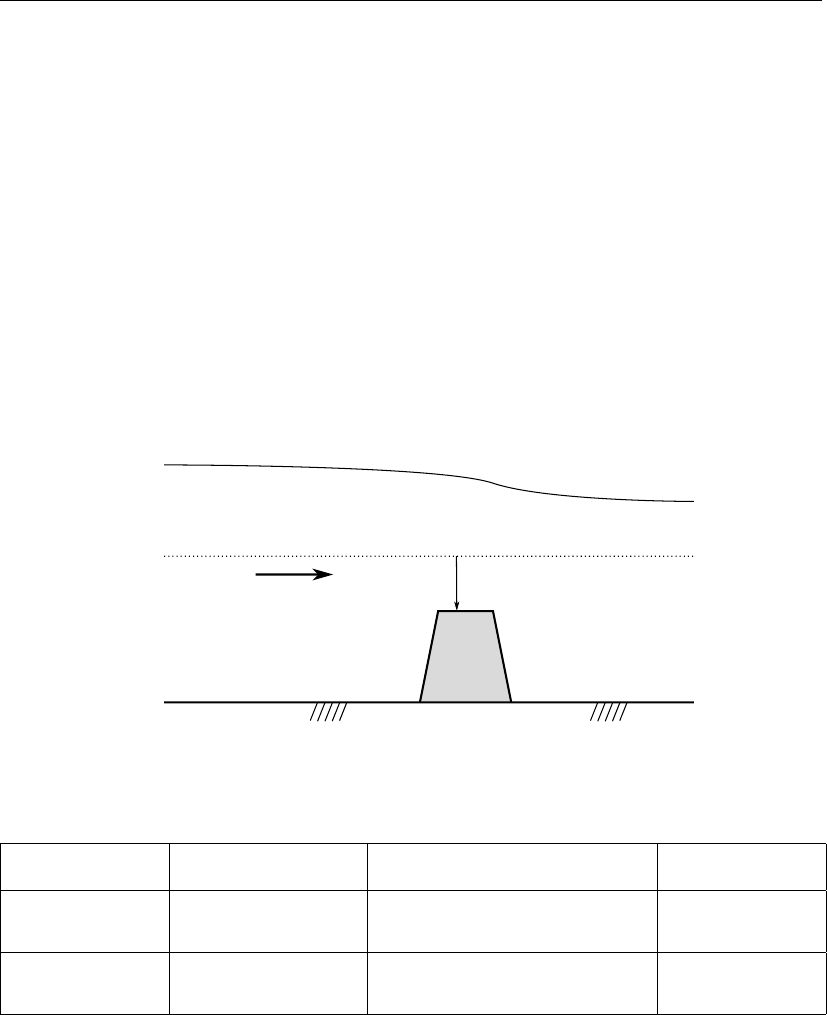
DRAFT
Special features of Delft3D-FLOW
integer multiple of 45 degrees.
Local weirs may not be defined along the model boundaries (which by default lie along
the lines m = 1, n = 1, m = Mmax or n = Nmax). Therefore, the indices of these points
must lie between m = 2 and Mmax-1 and n = 2 and Nmax-1, respectively.
The friction coefficient must have a positive value.
Input items in a record must be separated by one or more blanks.
You can not combine weirs with other structures, such as 3D gates, porous plates or
rigid sheets at the same grid location (m, n).
Example:
A local weir is defined at m = 5, n = 2. The quadratic friction coefficient is 0.5 and the crest
height is 12.0 metres below the reference plane, see Figure B.5.
U 5 2 5 2 .5 12. 1.
z=0
Crest height [m]
u
Figure B.5: Local weir
B.3.3 Porous plate
Keyword Value Description Default
Filppl #name.ppl# Filename for porous plate
data
none
Upwppl #Y# or #N# Upwind advection scheme
near structure
#Y#
A porous plate is a partially transparent structure that extends into the flow along one of the
grid directions, that covers some or all layers in the vertical, but who’s thickness is much
smaller than the grid size in the direction normal to the porous plate. Due to its partial trans-
parency mass and momentum is exchanged across the porous plate. A porous plate can be
used to represent objects that are not totally oblique to the flow and are thin relative to the
grid size such as partly transparent breakwaters. The porosity of the plate is controlled by a
quadratic friction term; the friction is an input parameter, see Sections 9.10.2 and 10.9.2 for
full details. Porous plates can only be defined at multiples of 45 degree angles with the grid
directions and they must be defined inside the grid enclosure.
With the keyword Upwppl you can specify to use an upwind approximation in the advective
terms of the momentum equations at the location of the structure. You can use this option to
prevent (damp) oscillations that may occur due to large gradients.
File contents Definition of the location of a porous plate extending over one or
more layers of the water column with a quadratic friction to simulate
Deltares 487 of 688
DRAFT
Delft3D-FLOW, User Manual
the energy losses.
File format Free formatted.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Values of character-type must be enclosed between two number signs (#).
Record description:
Record Record description
each record Direction of the porous plate normal to the flow (1 character):
U U-porous plate
V V-porous plate
Begin and end indices, i.e. m1, n1, m, n2 (4 integers),
Layers over which the porous plate extend, i.e. k1 and k2 (2 integers),
Friction coefficient of the quadratic friction [-] (1 real).
Restrictions:
One record per porous plate.
A porous plate can be defined along a line segment at an angle of an integer multiple
of 45 degrees with the M-direction.
A porous plate may not be defined along the model boundaries (which by default lie
along the lines m = 1, n = 1, m = Mmax or n = Nmax). Therefore, the indices of
these points must lie between m = 2 and m = Mmax - 1 and n = 2 and n = Nmax - 1,
respectively.
The friction coefficient must be positive.
Input items in a record must be separated by one or more blanks.
You can not combine porous plates with other structures, such as 3D gates, rigid sheets
or local weirs at the same grid location (m, n).
Example:
Porous plates are defined at the following points:
A U-direction porous plate from (16, 2) to (16, 4) extending over seven layers,
A V-direction porous plate from (4, 1) to (4, 6) extending over five layers,
A U-direction porous plate from (7, 14) to (7, 20) extending over three layers.
U 16 2 16 4 1 7 1000.
V 4 1 4 6 1 5 1000.
U 7 14 7 20 3 5 800.
488 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
B.3.4 Culvert
Presently there are 4 types of discharges:
Normal
Momentum
Walking
In-out
A culvert is a special intake/outlet coupling in which the discharge rate depends on the flow
regime. The location of the culvert are defined in the <∗.src>file. The characteristics of
the culverts are defined in the new file <∗.cul>. The keyword Filcul = #name.cul# has to be
added to the MDF-file. A dummy discharge (series) has to be specified in the discharge data
<∗.dis>file for culverts, but such value(s) will not be used in the computation. For a culvert
the discharge is computed by Delft3D-FLOW itself, this means that the discharge values in
the <∗.dis>file have no meaning. You are advised to prescribe dummy values in this file
(e.g. -999.99).
The other two files are described now.
B.3.4.1 Definition of culvert in the discharge input file (<∗.src>)
The attribute file for discharges, the so-called <∗.src>file, has been extended with an iden-
tification mark and the locations of the intake/outlet of the culvert. Culverts are identified by
‘c’, ‘d’, ‘e’ , ‘f’ or ‘u’ (case insensitive) and the M, N, K indices of the coupled locations. For
a one-way culvert (types ‘c’ and ‘e’) the flow is always from the intake location to the outlet
location. For a two-way culvert (type ‘d’ and ‘f’ ) flow in both directions is possible; for type
‘d’, the direction is from high to low water level, for type ‘f’, the direction is from high to low
pressure, taking density differences into account. For the user-defined culvert/structure (type
‘u’) the flow may be either one or both directions depending on the requirements of the user.
In case of a one-way culvert, the first (M, N, K) pair in the <∗.src>file defines the intake
location and the second (M, N, K) pair defines the outlet location. Flow through the culvert is
only possible from the intake to the outlet, which is the case if the water elevation at the intake
is higher than at the outlet location. If the water elevation at the outlet location is higher than
at the intake, then there is no flow. Furthermore, if the intake location is set dry, then there is
no flow through the culvert.
Below an example is given of a <∗.src>file. The first discharge represents a normal dis-
charge, the second one a walking discharge and the third one a so-called power station (or
intake/outlet combination). The latter four correspond to four types of culverts, respectively. A
line for culverts of type ‘u’ is the same except for the type character.
Example of <∗.src>file
Discharge 1 Y 2 2 1
Discharge 2 Y 2 11 5 w
Power station 1 Y 8 5 3 p 2 4 9
Culvert 1 Y 2 4 2 c 2 7 2
Culvert 2 Y 5 4 0 D 6 7 0
Culvert 3 Y 7 7 0 e 6 6 0
Culvert 4 Y 3 3 0 f 4 4 0
The first 20 positions of each record are reserved for the name of the culvert.
Deltares 489 of 688

DRAFT
Delft3D-FLOW, User Manual
Remarks:
In case of a domain decomposition simulation, the intake and outlet locations of a power
station and of culverts should be in the same domain.
For a culvert of type ‘d’, ‘e’, ‘f’, the layer numbers (fourth and seventh entry in the
<∗.src>file) have no meaning. For type ‘c’ the layer number must be specified. 0 is
interpreted as equally devided over the full water column. For a culvert of type ‘d’, ‘e’, ‘f’
also the vertical position has to be specified (see description of file <name.cul>) and
the layer numbers of the intake and outlet are determined by Delft3D-FLOW. Note that
in case of a power station the layer numbers should be specified on input.
Restriction:
The locations of the intake and outlet must be different, otherwise an error will be gen-
erated by the program.
B.3.4.2 Properties for culverts defined in INI file (<name.cul>)
The following line has to be added to the MDF-file
Filcul= #name.cul#
With <name.cul>the file with the culverts characteristics.
Depending on the type ‘c’, ‘d’, ‘e’, ‘f’ or ‘u’ additional properties of the culvert need to be
specified. These properties are specified by a file with name <name.cul>in the directory of
the corresponding MDF-file.
This file is of the INI file format. It starts with one so-called chapter [CulvertFileInformation]
with three so-called key-value pairs (i.e. a key with a specification of its value). From these
key-value pairs only the specification of the key FileVersion and its value are necessary.
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 26-04-2004
FileVersion = 01.02
After the chapter [CulvertFileInformation] and its key-values pairs, for each culvert
there should be one separate chapter [Culvert]. For each culvert this chapter needs a
key Name for which the corresponding value specifies the name of the culvert. This name
must match exactly the name in the <∗.src>file.
Example
[Culvert]
Name = Culvert 1
Depending on the type ‘c’, ‘d’, ‘e’, ‘f’ or ‘u’, each chapter [Culvert] contains additional
key-value pairs. These key-values are described separately for culverts of type ‘c’, for culverts
of type ‘d’ or ‘e’, for culverts of type ‘f’ and for culverts of type ‘u’.
490 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
B.3.4.3 Additional key-value pairs for culvert of type ‘c’
For a culvert of type ‘c’ the area of the culvert opening A(in m2) and the culvert loss coefficient
(µ, dimensionless) should be specified, see Eq. (10.89).
These properties Aand µof the culvert are specified by the keys WetArea and LossCoefficient
respectively.
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 26-04-2004
FileVersion = 01.02
[Culvert]
Name = Culvert 1
LossCoefficient = 0.9
WetArea = 4.0
B.3.4.4 Additional key-value pairs for culvert of type ‘d’ or ‘e’
Since for culverts of type ‘d’ or ‘e’ the culvert loss coefficient is now dependent on the wet
section of the culvert, a table has to be specified that relates the culvert loss coefficient and
the wet section of the culvert. Furthermore, for each culvert of type ‘d’ or ‘e’, three coefficients
have to be specified, for flow types (1/2/3), (4/6) and 5, respectively.
Because of this, for culvert of type ‘d’ or ‘e’ the following key-value pairs need to be specified:
Height with the value of H, the height of the culvert [m],
Width with the value of W, the width of the culvert [m],
VerticalPosition with the value of zculvert, the vertical position of the bottom of the
culvert relative to the reference level (positive upwards) [m],
Length with the value of L, the length of the culvert [m],
FrictionCoefficient with the value of n, the energy loss coefficient of the culvert
(Manning’s coefficient [s/m1/3]),
CorrectionCoefficient with the value of a, the energy loss correction coefficient
of the culvert [-],
NumberOfRelations1,NumberOfRelations2, and NumberOfRelations3 with
the number of relations as an integer value (i.e. the number of entries of the table) between
the culvert loss coefficient and the wet section of the culvert for flow types (1/2/3), (4/6)
and 5, respectively, and
Corresponding to the keys NumberOfRelations1,NumberOfRelations2, and
NumberOfRelations3 the keys LossCoefficient1,LossCoefficient2, and
LossCoefficient3, respectively, for the culvert loss coefficient and the keys WetArea1,
WetArea2, and WetArea3, respectively, for the wet section of the culvert. The values
of these keys define the table that relates the culvert loss coefficient and the wet section
of the culvert. Note that the number of relations as specified by the value of the key, say
NumberOfRelations1, should correspond with the number of values (all values on
one line, each value separated by a space) of the key LossCoefficient1 and the key
WetArea1.
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 26-04-2004
Deltares 491 of 688
DRAFT
Delft3D-FLOW, User Manual
FileVersion = 01.02
[Culvert]
Name = Culvert 2
Height = 1.0
Width = 1.0
VerticalPosition = -4.0
Length = 20.0
FrictionCoefficient = 0.015
CorrectionCoefficient = 0.03
NumberOfRelations1 = 2
LossCoefficient1 = 0.6 0.7
WetArea1 = 10.0 13.0
NumberOfRelations2 = 2
LossCoefficient2 = 0.6 0.7
WetArea2 = 10.0 13.0
NumberOfRelations3 = 2
LossCoefficient3 = 0.6 0.7
WetArea3 = 10.0 13.0
Remarks:
For each culvert c1
D,c2
Dand c3
Dhave to be specified, respectively.
The energy loss correction coefficient αmay be different for each culvert, but is inde-
pendent of the flow condition.
It is assumed that the wet areas are specified in ascending order.
If the actual wet is smaller than the first value specified in the table, then the first loss
coefficient in the table is used.
Similarly, if the actual wet area is larger than the last value specified in the table, then
the last loss coefficient in the table is used.
In between linear interpolation is applied.
Maximally ten pairs of culvert loss coefficients and wet areas can be specified.
B.3.4.5 Additional key-value pairs for culvert of type ‘f’
For a culvert of type ‘f’ the following key-value pairs need to be specified:
Height with the value of H, the height of the culvert [m],
Width with the value of W, the width of the culvert [m],
VerticalPosition with the value of zculvert, the vertical position of the bottom of the
culvert relative to the reference level (positive upwards) [m],
LossCoefficient with the value of µ[-].
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 05-04-2013
FileVersion = 01.02
[Culvert]
Name = Culvert 4
LossCoefficient = 0.9
Height = 0.25
Width = 0.25
VerticalPosition = -4.0
492 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
B.3.4.6 Additional key-value pairs for culvert of type ‘u’
The discharge through a culvert of type ‘u’ is not computed using a predefined formula, but it
is determined by a routine that you provide yourself in a shared library. Hence the keywords
required for culverts of type ‘u’ differ significantly from those required for the culverts of type ‘c’,
‘d’ and ‘e’ mentioned above. The interface for the routine is described in detail in section B.3.8.
The following key-value pairs need to be specified:
CulvertLib Name of the shared object (.dll on Windows, or .so on Linux) without file
extension that contains the routine CulvertFunction,
CulvertFunction Name of the routine that should be used to compute the discharge
through the culvert/structure,
CulvertFile This key can optionally be used to point to an input file with parameter
settings for the user routine CulvertFunction. See section B.3.8 for a description of
the subroutine interface.
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 26-04-2004
FileVersion = 01.02
[Culvert]
Name = Culvert 4
CulvertLib = plugin_culvert
CulvertFunction = TABLE
CulvertFile = culvert_params.txt
B.3.4.7 More culverts
In case of more culverts, which can be of different type, the additional properties are specified
in one INI file (<name.cul>).
Example
[CulvertFileInformation]
FileCreatedBy = Delft3D user
FileCreationDate = 12:32:06, 26-04-2004
FileVersion = 01.02
[Culvert]
Name = Culvert 2
Height = 1.0
Width = 1.0
VerticalPosition = -4.0
Length = 20.0
FrictionCoefficient = 0.015
CorrectionCoefficient = 0.03
NumberOfRelations1 = 3
LossCoefficient1 = 0.6 0.65 0.7
WetArea1 = 0.0 0.4 1.0
NumberOfRelations2 = 3
LossCoefficient2 = 0.7 0.75 0.8
WetArea2 = 0.0 0.6 1.0
NumberOfRelations3 = 3
LossCoefficient3 = 0.8 0.85 0.9
WetArea3 = 0.0 0.5 1.0
[Culvert]
Name = Culvert 1
LossCoefficient = 0.9
WetArea = 4.0
Deltares 493 of 688
DRAFT
Delft3D-FLOW, User Manual
B.3.5 Linear friction
B.3.5.1 Rigid sheet
Keyword Value Description Default
Filrgs #name.rgs# Filename for rigid sheet data none
Upwrgs #Y# or #N# Upwind advection scheme
near structure
#Y#
A rigid sheet is a plate that extends into the flow along one of the grid lines and that covers
one or more layers in the vertical. The (linear) friction, see Sections 9.10.3 and 10.9.3 for
details, exerted by the plate on the flow can be taken into account. You can specify a line of
rigid sheets along grid lines or along lines at multiples of 45 degrees.
With the keyword Upwrgs you can specify to use an upwind approximation in the advective
terms of the momentum equations at the location of the rigid sheet. You can use this option
to prevent (damp) oscillations that may occur due to large gradients.
File contents The location and extent of rigid sheets and the additional (linear)
friction coefficient.
File format Free formatted, but starting in position one of each record.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Character values must be enclosed between two number signs (#).
There is no other limitation to Value.
A rigid sheet can also be used in a 2DH model.
File description:
Record Record description
each record Direction of the flow blocked by the rigid sheets (1 character):
U U-weir
V V-weir
Begin and end indices of the rigid sheet in m- and n-direction, i.e. m1,
n1, m2, n2 (4 integers),
Extension in the vertical, i.e. k1 and k2 (2 integers).
Friction coefficient of the rigid sheet [m/s] (1 real).
Restrictions:
One (set of) rigid sheet(s) per record.
The angle of the line of rigid sheets and the m-direction must be an integer multiple of
45 degrees (in the computational space).
Rigid sheets can not be defined along the model boundaries and should not cross the
grid enclosure.
The friction coefficient must be positive.
Input items on a record must be separated by one or more blanks.
You can not combine rigid sheets with other structures, such as 3D gates, porous plates
or local weirs at the same grid (m, n) location.
494 of 688 Deltares
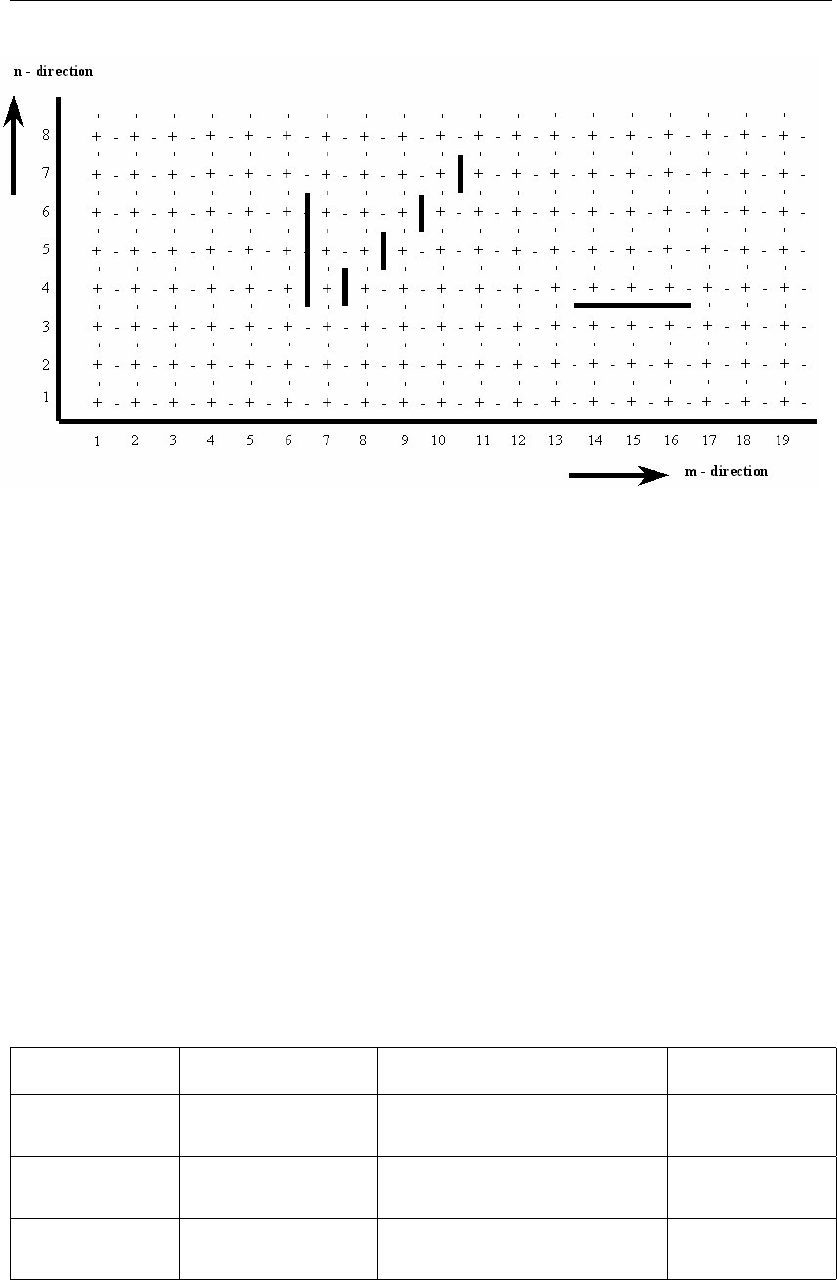
DRAFT
Special features of Delft3D-FLOW
Figure B.6: Top view of rigid sheets
Example:
The file contains three rigid sheets:
The first sheet is a ‘U-sheet’, i.e. blocking the flow in U-direction at m = 6, from n = 4 to n
= 6, over the first 7 layers.
The second rigid sheet is a ‘V-sheet’, at m = 14 to m = 16 at n = 3, extending over 3 grid
cells, and extending over the first 5 layers in the vertical.
The third rigid sheet is defined along a 45 degrees line and consists of four small sheets
each covering one grid cell and layers 2 to 6.
See Figure B.6 for a top view of the location in the grid.
U6466171000.
V 14 3 16 3 1 5 1000.
U 7 4 10 7 2 6 800.
B.3.6 Floating structure
Keyword Value Description Default
Filfls #name.fls# Filename for a floating struc-
ture data
none
Riglid 1 real number Compressibility of the flow be-
neath the structure
1.0
Upwfls #Y# or #N# Upwind advection scheme
near structure
#Y#
Floating structures are characterised by their horizontal extent, the depth they penetrate the
surface and their ability to react on the local upward pressure, Figure B.7. The floating struc-
ture is modelled as a locally applied surface pressure. The friction exerted by the structure
on the flow is not taken into account. With the keyword Riglid you can specify the flow
beneath the flow structure to be treated as incompressible, see section 9.3.1 for details.
Deltares 495 of 688
DRAFT
Delft3D-FLOW, User Manual
With the keyword Upwfls you can specify to use an upwind approximation in the advective
terms of the momentum equations at the location of the floating structure. You can use this
option to prevent (damp) oscillations that may occur due to large gradients.
In Delft3D-FLOW version 3.07.00 and higher the following processes are switched off at the
locations of a floating structure:
Evaporation.
Wind (both the wind stress and the wind speed itself, used in the Internal Wave Energy
model, are set to zero).
Wave influences (wave stresses, wave period, wave angle, mass fluxes due to waves,
dissipation due to waves and the orbital velocity in the bottom layer).
Unchanged are the following processes:
Precipitation (is drained through the floating structure).
Turbulence formulation in the vertical.
No friction on the flow by the floating structure.
File contents Thickness of the floating structure (in metres) defined in water level
points for all grid points in the top layers.
File format Free formatted.
Generated QUICKIN or manually offline.
Remarks:
The keyword is case sensitive!
Value must be enclosed between two number signs (#).
Floating structures are located at water level points (centre of a grid cell).
Record description:
Record Record description
1 to p Thickness of the floating structure in metres for all grid points in the
top layer starting for n = 1 and m = 1 to Mmax, with as many values
per record as allowed by the maximal record length (132) and as many
continuation records (p) as necessary to specify all Mmax points.
p+1 to p ·Nmax Repeating the set of p-records for N = 2 to Nmax.
Restrictions:
Maximum record length is 132.
Values from the file will not be checked against their domain.
Where no floating structure is present the thickness is specified as zero.
Input items in a record must be separated by one or more blanks.
You can not combine floating structures with other structures, such as 3D gates, porous
plates or local weirs at the same grid (m, n) location.
Floating structures cannot be defined at M = 1, M = Mmax or N = 1, N = Nmax.
496 of 688 Deltares
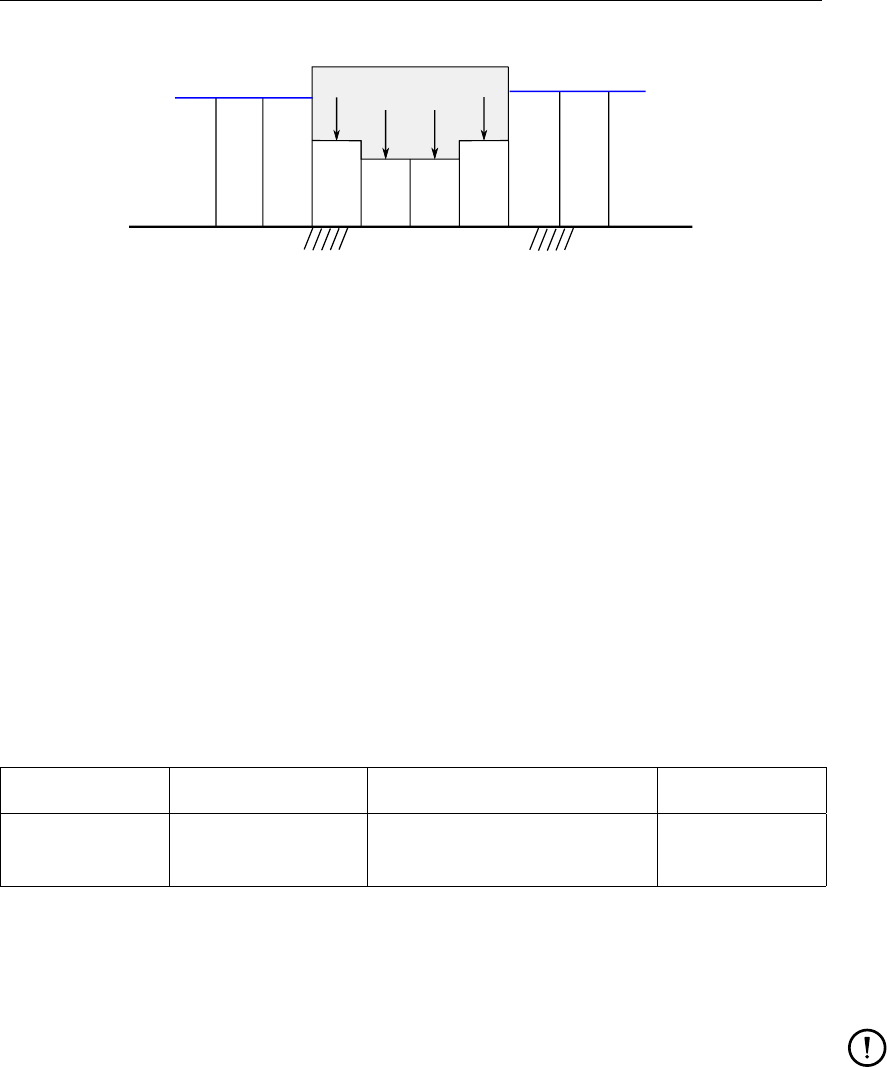
DRAFT
Special features of Delft3D-FLOW
Floating structure
Figure B.7: Cross-sectional view floating structure
The vertical lines are drawn through the velocity points
Example:
For a model area of 14 ∗7grid points. The structure has a rectangular shape and extends
over three grid cells in N-direction (n = 3 to 5) and 5 grid cells in M-direction (n = 7 to 11)
with a varying depth ranging from 1 to 3 m. An example of a cross-sectional view is given in
Figure B.7.
-999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 {N=1}
-999 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -999 {N=2}
-999 0.0 0.0 0.0 0.0 0.0 2.0 3.0 3.0 2.5 1.0 0.0 0.0 -999 {N=3}
-999 0.0 0.0 0.0 0.0 0.0 2.0 3.0 3.0 2.5 1.0 0.0 0.0 -999 {N=4}
-999 0.0 0.0 0.0 0.0 0.0 2.0 3.0 3.0 2.5 1.0 0.0 0.0 -999 {N=5}
-999 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -999 {N=6}
-999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 -999 {N=7}
B.3.7 Upwind at Discharges
Keyword Value Description Default
Upwsrc #Y#, #N# or #Mo-
mentum only#
Upwind advection scheme
near discharge locations
#Momentum
only#
With the keyword Upwsrc you can specify to use an upwind approximation in the advective
terms of the momentum equations at the location of discharges. The upwind approximation
can be used either for all discharges, no discharges at all, or only momentum discharges. You
can use this option to prevent (damp) oscillations that may occur due to large gradients.
Remarks:
The keyword is case sensitive!
Values of character-type must be enclosed between two number signs (#).
B.3.8 User defined discharge through a structure
This section gives an example code for a user-defined routine that computes the discharge
through a structure (the feature can be enabled by using a culvert of type ‘u’, see sec-
tion B.3.4). This particular example implements two routines: the formula for a culvert of
type ‘d’ and a simple table specifying discharge as a function of the water level difference.
The order and way in which arguments are passed to external functions differs among FOR-
TRAN compilers. Most compilers allow you to change these settings, however, if these set-
tings do not match the settings of the calling program the program will crash when trying to
call the subroutine in the supplied library. It is, therefore, important to make sure that the
Deltares 497 of 688

DRAFT
Delft3D-FLOW , User Manual
settings that you use to compile the library match the settings used when compiling delftflow.
It therefore recommended to generate the library using the same compiler as delftflow; at
this moment this is the Intel Fortran 11 compiler1using default settings for a multithreaded
program.
Most of the code is straightforward and standard Fortran, so it should be fairly easy to under-
stand. Some statements may, however, require some explanation. The !DEC$ statement is
read by the compiler and makes sure the subroutine name is visible to the outside world. The
real type “hp” is defined as a double precision quantity: even if the simulation runs in single
precision, the communication with the library occurs in double precision hence all input and
output arguments of the subroutine should be defined to be of the type “real(hp)”.
The input quantities are provided using three linear arrays, namely a real array, an integer
array and a character array. Each element of these arrays represents a different quantity;
see the example for a description of the various input items. Input parameters for the routine
are the water levels and bed levels at both ends of the culvert/structure, the discharge at
the previous time step and the gravitational acceleration used in the computation. You may
either use the various elements directly in your formulae or define local variables as done
in the example; the latter approach keeps your own code more readable and separate from
the Delft3D interface. The array approach for the input items allows us to add extra input
parameters to the end of the arrays without breaking compatibility with older routines.
The following module implements two formulations for culverts. The routine CULVERT imple-
ments the equations for culvert of type ‘d’ and the routine externtable (externally known at
TABLE) implements a simple tabular approach to determine the discharge as function of the
water level difference. The output variables of the routine are
discharge If positive, the discharge from intake to outlet, and if negative, the discharge
from outlet to intake. The discharge should be specified in [m3/s].
zpos1 If set, it specifies the height in [m] above the reference level of the culvert at the
intake side. If not set, it defaults to a discharge uniform over the water depth.
zpos2 If set, it specifies the height in [m] above the reference level of the culvert at the
outlet side. If not set, it defaults to a discharge uniform over the water depth.
module plugin_culvert
!
! Local constants
! Interface is in high precision
!
implicit none
integer , parameter :: hp = kind(1.0d0)
contains
subroutine culvert(dll_integers, max_integers, &
dll_reals , max_reals , &
dll_strings , max_strings , &
discharge, zpos1, zpos2, &
error_message )
!DEC$ ATTRIBUTES DLLEXPORT, ALIAS: ’CULVERT’ :: CULVERT
!!--description-----------------------------------------------------------------
!
! Computes culvert discharge
!
!!--pseudo code and references--------------------------------------------------
! NONE
1If you can’t use this compiler then make sure that the following minimum conditions are met: multi-threaded
library with calling convention “C, by reference” and “string length arguments after all arguments”.
498 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
!!--declarations----------------------------------------------------------------
implicit none
!
! Subroutine arguments: input
!
integer , intent(in) :: max_integers
integer , intent(in) :: max_reals
integer , intent(in) :: max_strings
integer , dimension(max_integers), intent(in) :: dll_integers
real(hp) , dimension(max_reals) , intent(in) :: dll_reals
character(len=256), dimension(max_strings) , intent(in) :: dll_strings
!
! Subroutine arguments: output
!
real(hp) , intent(out) :: discharge ! discharge from 1 to 2 [m3/s]
character(len=256), intent(out) :: error_message ! not empty: echo and stop run
!
! Subroutine arguments: optional output arguments
!
real(hp) :: zpos1 ! vertical position at 1 [m]
real(hp) :: zpos2 ! vertical position at 2 [m]
!
! Local variables for input parameters
!
integer :: kfs1, kfs2
integer :: m1, m2
integer :: n1, n2, nm1, nm2
real(hp) :: ag
real(hp) :: olddis
real(hp) :: timsec
real(hp) :: zb1, zb2, zw1, zw2
character(len=256) :: filenm
character(len=256) :: runid
!
! Local variables
!
integer :: numrel1, numrel2, numrel3
real(hp) :: htcul, wtcul, poscul, calfa, cleng, cmann
real(hp), dimension(2) :: wetar1, wetar2, wetar3, closs1, closs2, closs3
!
integer :: i, iflow
real(hp) :: area
real(hp) :: cc1, cd1, cd2, cd3, coefl
real(hp) :: hin, hout, height
real(hp) :: zz1, zz2
!
!! extract array variables -----------------------------------------------------
!
if (max_integers < 8) then
error_message = ’Insufficient integer values provided by delftflow’
return
endif
nm1 = dll_integers( 1) ! nm index of point 1
m1 = dll_integers( 2) ! m index of point 1
n1 = dll_integers( 3) ! n index of point 1
kfs1 = dll_integers( 4) ! dry flag of point 1 (0 = dry, 1 = wet)
nm2 = dll_integers( 5) ! nm index of point 2
m2 = dll_integers( 6) ! m index of point 2
n2 = dll_integers( 7) ! n index of point 2
kfs2 = dll_integers( 8) ! dry flag of point 2 (0 = dry, 1 = wet)
!
if (max_reals < 7) then
error_message = ’Insufficient real values provided by delftflow’
return
endif
timsec = dll_reals( 1) ! current time since reference time [s]
Deltares 499 of 688

DRAFT
Delft3D-FLOW , User Manual
zw1 = dll_reals( 2) ! water level at point 1 [m]
zw2 = dll_reals( 3) ! water level at point 2 [m]
zb1 = dll_reals( 4) ! bed level at point 1 [m]
zb2 = dll_reals( 5) ! bed level at point 2 [m]
olddis = dll_reals( 6) ! discharge at previous time step [m3/s]
ag = dll_reals( 7) ! gravitational acceleration [m/s2]
!
if (max_strings < 2) then
error_message = ’Insufficient strings provided by delftflow’
return
endif
runid = dll_strings( 1) ! user-specified run-identification
filenm = dll_strings( 2) ! user-specified file name (keyword: CulvertFile)
!
!! executable statements -------------------------------------------------------
write(*,*) ’plugin_culvert.dll : culvert : called’
!
! The output argument error_message MUST have value ’ ’ to continue the calculation.
!
error_message = ’ ’
!
! If you want to indicate that this subroutine has encountered some invalid input or
! encountered some unexpected situation, you can set the error_message to a non-empty
! string. This error_message will then be shown in the log file of the calling program
! and the simulation will abort. This is shown by the next line, remove it to enable
! this subroutine.
!
! error_message = ’Use culvert formula ’’D’’ inside \DFLOW’
!
! Set some parameters and compute derivative quantities.
!
!-------------------------------------------------------
!
poscul = -4.0_hp
htcul = 1.0_hp
wtcul = 1.0_hp
numrel1 = 2
wetar1(1) = 10.0_hp
closs1(1) = 0.6_hp
wetar1(2) = 13.0_hp
closs1(2) = 0.7_hp
numrel2 = 2
wetar2(1) = 10.0_hp
closs2(1) = 0.6_hp
wetar2(2) = 13.0_hp
closs2(2) = 0.7_hp
numrel3 = 2
wetar3(1) = 10.0_hp
closs3(1) = 0.6_hp
wetar3(2) = 13.0_hp
closs3(2) = 0.7_hp
calfa = 0.03_hp
cleng = 20.0_hp
cmann =0.015_hp
!
! compute loss coefficient:
!
area = 0.0
coefl = 0.0
if (kfs1 == 1 .or. kfs2 == 1) then
hin = max (0.0_hp,zw1-poscul)
hout = max (0.0_hp,zw2-poscul)
height = 0.5 *( hin + hout)
height = min ( height , htcul )
area = height *wtcul
!
500 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
! compute cd1:
!
if ( area < wetar1(1) ) cd1 = closs1(1)
if ( area >= wetar1(numrel1) ) cd1 = closs1(numrel1)
do i = 2,numrel1
if ( area > wetar1(i-1) .and. area <= wetar1(i) ) then
zz1 = area - wetar1(i-1)
zz2 = wetar1(i) - wetar1(i-1)
cc1 = closs1(i) - closs1(i-1)
cd1 = closs1(i-1) + zz1 / zz2 *cc1
endif
enddo
!
! compute cd2:
!
if ( area <= wetar2(1) ) cd2 = closs2(1)
if ( area >= wetar2(numrel2) ) cd2 = closs2(numrel2)
do i = 2,numrel2
if ( area > wetar2(i-1) .and. area <= wetar2(i) ) then
zz1 = area - wetar2(i-1)
zz2 = wetar2(i) - wetar2(i-1)
cc1 = closs2(i) - closs2(i-1)
cd2 = closs2(i-1) + zz1 / zz2 *cc1
endif
enddo
!
! compute cd3:
!
if ( area <= wetar3(1) ) cd3 = closs3(1)
if ( area >= wetar3(numrel3) ) cd3 = closs3(numrel3)
do i = 2,numrel3
if ( area > wetar3(i-1) .and. area <= wetar3(i) ) then
zz1 = area - wetar3(i-1)
zz2 = wetar3(i) - wetar3(i-1)
cc1 = closs3(i) - closs3(i-1)
cd3 = closs3(i-1) + zz1 / zz2 *cc1
endif
enddo
endif
!
!-------------------------------------------------------
!
! Compute discharge
!
discharge = 0.0_hp ! discharge (positive = from 1 to 2, negative = from 2 to 1)
if (zw1 >= zw2) then
if (kfs1 .eq. 1) then
call cptdis(ag ,area ,calfa ,cd1 , &
& cd2 ,cd3 ,cleng ,cmann , &
& coefl ,olddis ,htcul ,iflow , &
& poscul ,discharge ,zw1 ,zw2 , &
& wtcul )
endif
else
!
! intake and outfall exchange; recompute area and energy loss
!
if (kfs2 .eq. 1) then
call cptdis(ag ,area ,calfa ,cd1 , &
& cd2 ,cd3 ,cleng ,cmann , &
& coefl ,olddis ,htcul ,iflow , &
& poscul ,discharge ,zw2 ,zw1 , &
& wtcul )
discharge = -discharge
endif
endif
Deltares 501 of 688

DRAFT
Delft3D-FLOW , User Manual
!
! Optionally set vertical position of culvert
!
zpos1 = poscul
zpos2 = poscul
end subroutine culvert
subroutine cptdis(ag ,area ,alfa ,cd1 , &
& cd2 ,cd3 ,leng ,mann , &
& coefl ,olddis ,htculv ,itype , &
& positc ,rdis ,s0in ,s0out , &
& width )
!!--description-----------------------------------------------------------------
!
! Computes the discharge relation through a culverts for five flow regimes
!
!!--pseudo code and references--------------------------------------------------
! NONE
!!--declarations----------------------------------------------------------------
!
implicit none
!
!
! Local parameters
!
! minimum depth voor H*or R*(see documentation) of 0.001 m
real(hp), parameter :: hmin = 0.001
!
! Global variables
!
integer :: itype ! flow regime (2 to 6)
real(hp), intent(in) :: ag ! acceleration due to gravity
real(hp), intent(in) :: alfa ! energy loss correction coefficient of culvert
real(hp) :: area ! effective area (=htculv *width)
real(hp), intent(in) :: cd1 ! energy loss coefficients for the three types
real(hp), intent(in) :: cd2 ! energy loss coefficients for the three types
real(hp), intent(in) :: cd3 ! energy loss coefficients for the three types
real(hp) :: coefl ! culvert loss coefficient (cd1, cd2 or cd3)
real(hp), intent(in) :: htculv ! effective height of culvert
real(hp), intent(in) :: leng ! length of culvert
real(hp), intent(in) :: mann ! Manning’s friction coefficient of culvert
real(hp), intent(in) :: olddis ! discharge at previous time step
real(hp), intent(in) :: positc ! vertical position of culvert
real(hp) :: rdis ! discharge through culvert
real(hp), intent(in) :: s0in ! water elevation at intake
real(hp), intent(in) :: s0out ! water elevation at outfall
real(hp), intent(in) :: width ! width of culvert
!
! Local variables:
!
integer :: iexit
integer :: iter
real(hp) :: eps
real(hp) :: hc ! critical depth
real(hp) :: hhh
real(hp) :: hster ! value for wet cross section area
real(hp) :: locdis
real(hp) :: muster ! auxiliary value
real(hp) :: rster
real(hp) :: value
real(hp) :: ztin ! water level at intake
real(hp) :: ztout ! water level at outfall
!
!! executable statements -------------------------------------------------------
!
502 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
eps = 0.001
ztin = max(0.0_hp, s0in - positc)
ztout = max(0.0_hp, s0out- positc)
!
! compute h_critical (based on averaged waterlevel):
!
locdis = olddis
do iter=1,10
hhh = locdis**2.0 / (ag *width**2.0)
hc = hhh**(1.0 / 3.0)
hster = min(htculv, 0.5 *ztin + 0.5 *ztout )
hster = max(hster, hmin)
rster = (hster *width ) / max(hmin, 2.0 *hster + width)
value = 1.0 + (2.0 *ag *leng *(mann**2.0) / rster**(4.0 / 3.0) &
& + alfa) *(cd2**2.0)
muster = cd2 / max(hmin, sqrt(value) )
locdis = muster *hster *width *&
& sqrt(2.0 *ag *max(0.0_hp, ztin - ztout))
enddo
itype = -999
if (ztin/htculv > 1.0 .and. ztout/htculv > 1.0) then
!
! type 4 (submerged flow):
!
itype = 4
rster = (htculv *width ) / max(hmin, 2.0 *htculv + 2.0 *width)
value = 1.0 + (2.0 *ag *leng *(mann**2.0) / rster**(4.0 / 3.0) + &
& alfa) *(cd2**2.0)
muster = cd2 / max(hmin, sqrt(value) )
rdis = muster *htculv *width *sqrt(2*ag*(ztin - ztout))
!coefl = muster
!area = htculv *width
elseif (ztin/htculv < 1.5 .and. ztout/htculv <= 1.0) then
if (ztout <= hc) then
!
! type 2 (supercritical flow):
!
itype = 2
do iter=1,10
hhh = locdis**2.0 / (ag *width**2.0)
hc = hhh**(1.0 / 3.0)
hster = min(htculv, 0.5 *hc + 0.5 *ztin )
hster = max(hster, hmin)
rster = (hster *width ) / max(hmin, 2.0 *hster + width)
value = 1 + (2.0 *ag *leng *(mann**2.0) / rster**(4.0 / 3.0) + &
& alfa) *(cd1**2.0) *(hc / max(hmin, hster))**2
muster = cd1 / max(hmin, sqrt(value) )
rdis = muster *hc *width *sqrt(2.0 *ag *(max(hmin, ztin - hc)))
locdis = rdis
enddo
!coefl = muster
!area = hc *width
elseif (ztout > hc) then
!
! type 3 (tranquil flow):
!
itype = 3
hster = min(htculv, 0.5 *ztin + 0.5 *ztout )
hster = max(hster, hmin)
rster = (hster *width ) / max(hmin, 2.0 *hster + width)
value = 1.0 + (2.0 *ag *leng *(mann**2.0) / rster**(4.0/3.0) + &
& alfa) *(cd1**2.0) *(ztout / max(hmin,hster))**2.0
muster = cd1 / max(hmin, sqrt(value) )
rdis = muster *ztout *width *&
& sqrt(2.0 *ag *(max(hmin, ztin - ztout)))
!coefl = muster
Deltares 503 of 688

DRAFT
Delft3D-FLOW , User Manual
!area = ztout *width
endif
elseif ((ztin / htculv >= 1.5) .and. (ztout / htculv <= 1.0)) then
if (ztout <= hc) then
!
! type 5 (rapid flow at inlet):
!
itype = 5
rdis = cd3 *htculv *width *sqrt(2.0 *ag *ztin)
!coefl = cd3
!area = htculv *width
elseif (ztout > hc) then
!
! type 6 (full flow free outlet):
!
itype = 6
rster = (htculv *width ) / max(hmin, 2.0 *htculv + 2.0 *width)
value = 1 + (2.0 *ag *leng *(mann**2.0) / rster**(4.0 / 3.0) + &
& alfa) *(cd2**2.0)
muster = cd2 / max(hmin, sqrt(value) )
rdis = muster *htculv *width *sqrt(2.0 *ag *(ztin - htculv))
!coefl = cd2
!area = htculv *width
endif
else
!write (*,*) ’none of the conditions is satisfied’
!write (*,*) ’ERROR’
endif
end subroutine cptdis
subroutine externtable(dll_integers, max_integers, &
dll_reals , max_reals , &
dll_strings , max_strings , &
discharge, zpos1, zpos2, &
error_message )
!DEC$ ATTRIBUTES DLLEXPORT, ALIAS: ’TABLE’ :: EXTERNTABLE
!!--description-----------------------------------------------------------------
!
! Computes discharge based on table
!
!!--pseudo code and references--------------------------------------------------
! NONE
!!--declarations----------------------------------------------------------------
implicit none
!
! Subroutine arguments: input
!
integer , intent(in) :: max_integers
integer , intent(in) :: max_reals
integer , intent(in) :: max_strings
integer , dimension(max_integers), intent(in) :: dll_integers
real(hp) , dimension(max_reals) , intent(in) :: dll_reals
character(len=256), dimension(max_strings) , intent(in) :: dll_strings
!
! Subroutine arguments: output
!
real(hp) , intent(out) :: discharge ! discharge from 1 to 2 [m3/s]
character(len=256), intent(out) :: error_message ! not empty: echo and stop run
!
! Subroutine arguments: optional output arguments
!
real(hp) :: zpos1 ! vertical position at 1 [m]
real(hp) :: zpos2 ! vertical position at 2 [m]
!
! Local variables for input parameters
504 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
!
integer :: kfs1, kfs2
integer :: m1, m2
integer :: n1, n2, nm1, nm2
real(hp) :: ag
real(hp) :: olddis
real(hp) :: timsec
real(hp) :: zb1, zb2, zw1, zw2
character(len=256) :: filenm
character(len=256) :: runid
!
! Local variables
!
integer :: istat
integer :: n
real(hp) :: a
real(hp) :: dz
!
logical, save :: first = .true.
integer, save :: npairs
real(hp), dimension(:), allocatable, save :: dzw
real(hp), dimension(:), allocatable, save :: disch
!
!! extract array variables -----------------------------------------------------
!
if (max_integers < 8) then
error_message = ’Insufficient integer values provided’
return
endif
nm1 = dll_integers( 1) ! nm index of point 1
m1 = dll_integers( 2) ! m index of point 1
n1 = dll_integers( 3) ! n index of point 1
kfs1 = dll_integers( 4) ! dry flag of point 1 (0 = dry, 1 = wet)
nm2 = dll_integers( 5) ! nm index of point 2
m2 = dll_integers( 6) ! m index of point 2
n2 = dll_integers( 7) ! n index of point 2
kfs2 = dll_integers( 8) ! dry flag of point 2 (0 = dry, 1 = wet)
!
if (max_reals < 7) then
error_message = ’Insufficient real values provided’
return
endif
timsec = dll_reals( 1) ! current time since reference time [s]
zw1 = dll_reals( 2) ! water level at point 1 [m]
zw2 = dll_reals( 3) ! water level at point 2 [m]
zb1 = dll_reals( 4) ! bed level at point 1 [m]
zb2 = dll_reals( 5) ! bed level at point 2 [m]
olddis = dll_reals( 6) ! discharge at previous time step [m3/s]
ag = dll_reals( 7) ! gravitational acceleration [m/s2]
!
if (max_strings < 2) then
error_message = ’Insufficient strings provided’
return
endif
runid = dll_strings( 1) ! user-specified run-identification
filenm = dll_strings( 2) ! user-specified file name
!
!! executable statements -------------------------------------------------------
!
write(*,*) ’plugin_culvert.dll : externtable : called’
! The output argument error_message MUST have value ’ ’ to continue the calculation.
!
error_message = ’ ’
!
! Set some parameters and compute derivative quantities.
!
Deltares 505 of 688

DRAFT
Delft3D-FLOW , User Manual
!-------------------------------------------------------
!
if (first) then
!
! Read parameters from filenm
!
open(717, file=filenm, status=’OLD’, action=’READ’, iostat=istat)
if (istat/=0) then
write(error_message,*) ’Error ’,istat,’ while reading input file’
return
endif
!
read(717,*, iostat=istat) npairs
if (istat/=0) then
write(error_message,*) ’Error reading dimension of discharge table’
return
elseif (npairs<=0) then
write(error_message,*) ’Number of values should be at least 1’
return
endif
!
allocate(dzw(npairs) , stat=istat)
if (istat==0) allocate(disch(npairs), stat=istat)
if (istat/=0) then
write(error_message,*) ’Memory allocation error’
return
endif
!
do n = 1,npairs
read(717,*, iostat=istat) dzw(n), disch(n)
if (istat/=0) then
write(error_message,*) ’Error reading value pair ’,n,’ of discharge table’
return
elseif (n==1) then
if (dzw(n)<=0.0_hp) then
write(error_message,*) ’First water level difference should be positive’
return
endif
elseif (n>1) then
if (dzw(n)<=dzw(n-1)) then
write(error_message,*) ’Water level differences should be increasing’
return
endif
endif
enddo
close(717)
!
first = .false.
endif
!
!-------------------------------------------------------
!
! Compute discharge (positive = from 1 to 2, negative = from 2 to 1)
!
dz = abs(zw1-zw2)
if (dz<=dzw(1)) discharge = (dz/dzw(1))*disch(1)
if (dz>dzw(npairs)) discharge = disch(npairs)
do n = 2,npairs
if (dz>dzw(n-1) .and. dz<=dzw(n)) then
a = (dz-dzw(n-1))/(dzw(n)-dzw(n-1))
discharge = (1.0_hp-a)*disch(n-1) + a*disch(n)
endif
enddo
if (zw1<zw2) discharge = -discharge
!
! Optionally set vertical position
506 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
!
!zpos1 = poscul
!zpos2 = poscul
end subroutine externtable
end module plugin_culvert
The last routine would require an input file containing
1
1.0 5.0
in which the first line indicates the number of lines in the table and the second and following
lines indicate pivotal values for the water level difference and the associated discharge. In this
particular example the discharge would vary linearly from −5m3/s to 5m3/s from a water level
difference of −1to 1m and would be constant beyond these limits. Note that the variables
zpos1 and zpos2 have been set by the CULVERT routine but not by the TABLE routine,
hence the latter discharge will be imposed uniformly over the water depth whereas the culvert
discharges will be imposed as point source/sink at the specified elevation.
B.4 Space varying Coriolis coefficients
Keyword Value Description Default
Filcio #name.ext# Filename for spacy varying
Coriolis coefficients
none
A space varying Coriolis force is useful in large area models that are not using a spherical
grid (in a spherical grid formulation the Coriolis force is by definition space varying). You must
specify the Coriolis force in each grid cell. The domain is −1.4544 ·10−4to 1.4544 ·10−4.
File contents A space varying Coriolis coefficient.
File format Free formatted.
Generated QUICKIN or manually offline.
Remarks:
The keyword is case sensitive!
Value must be enclosed between two number signs (#).
There is no other limitation to Value.
Record description:
Record Record description
1 to p Coriolis coefficient for all grid points in a layer starting for n = 1 and m =
1 to Mmax, with as many values per record as allowed by the maximal
record length (132) and as many continuation records (p) as necessary
to specify all Mmax points.
p+1 to p ·Nmax Repeating the set of p-records for N = 2 to Nmax.
Restrictions:
Maximum record length is 132.
Deltares 507 of 688
DRAFT
Delft3D-FLOW, User Manual
Values from the file will not be checked against their domain.
The input items on a record must be separated by one or more blanks.
Example:
For a model area of 8∗8points with its x-axis in west-east direction.
.1177E-3 .1177E-3 .1177E-3 .1177E-3 .1177E-3 .1177E-3 .1177E-3
.1178E-3 .1178E-3 .1178E-3 .1178E-3 .1178E-3 .1178E-3 .1178E-3
.1179E-3 .1179E-3 .1179E-3 .1179E-3 .1179E-3 .1179E-3 .1179E-3
.1180E-3 .1180E-3 .1180E-3 .1180E-3 .1180E-3 .1180E-3 .1180E-3
.1182E-3 .1182E-3 .1182E-3 .1182E-3 .1182E-3 .1182E-3 .1182E-3
.1183E-3 .1183E-3 .1183E-3 .1183E-3 .1183E-3 .1183E-3 .1183E-3
.1184E-3 .1184E-3 .1184E-3 .1184E-3 .1184E-3 .1184E-3 .1184E-3
.1185E-3 .1185E-3 .1185E-3 .1185E-3 .1185E-3 .1185E-3 .1185E-3
B.5 Temperature modelling
This feature concerns the elaboration of some of the available heat models that are available
in Delft3D-FLOW. The extra features are:
Direct specification of net solar radiation. This option is only available for the Ocean heat
model (ktemp=5). An extra time series can be added to the temperature file #name.tem#.
Used keyword: SolRad.
Specification of the coefficient of free convection. This option is only available for the
Ocean heat model (ktemp=5). Used keyword: cFrCon.
Output of computed heat fluxes. For all computational points the heat fluxes (solar radia-
tion, back radiation, evaporation, convection and the total heat flux) are written to the Map
file. Used keyword: HeaOut.
Output of computed evaporation rate. For all computational points the evaporation rate
can be written to the Map file, as well as for all stations to the His file. The His file includes
the precipitation rates; this quantity will be written to the Map file only if it varies spatially.
Used keyword: AirOut.
B.5.1 Direct specification of net solar radiation
Keyword Value Description Default
SolRad #Y# or #N# Specify net solar radiation di-
rectly in the temperature file
#name.tem#
#N#
For the Ocean heat model (ktemp=5), the option is available to directly specify a time series
of net (short wave) solar radiation in the temperature file #name.tem#, e.g. a time series of
measured solar radiation. The specified solar radiation is then used directly in the heat model,
instead of determining it from the specified cloud coverage. The cloud coverage must still be
provided by the user, as it is used in other parts of the heat model, e.g. in the determination
of the back radiation. For details on the specification of the input in the temperature file, see
section A.2.18.
Remark:
Values of character-type must be enclosed between two number signs (#).
508 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.5.2 Specification of the coefficient of free convection
Keyword Value Description Default
cFrCon 1 real number Coefficient of free convection 0.14
In the Ocean heat model (ktemp=5), the contribution of free convection is incorporated in the
computation of the heat fluxes. The coefficient for free convection has a default value of 0.14
[-]. The contribution of free convection can be switched off by giving the coefficient a value
0.0:
cFrCon= 0.0
For more details on the contribution of free convection and its conceptual description, see
Sections 9.8.6 and 9.8.7.
B.5.3 Output of computed heat fluxes
Keyword Value Description Default
HeaOut #Y# or #N# Write the computed heat fluxes to
the Map file for all computational
points
#N#
Using keyword HeaOut the computed heat fluxes are written to the Map file. Which heat
fluxes are written to the Map file, depends on the heat model that is used.
For heat models 1, 2, 4 and 5:
Evaporation heat flux
Heat flux of forced convection
Nett back radiation
Nett solar radiation
Total nett heat flux
Computed minus derived heat flux (when relevant, see section B.6)
Additionaly for heat model 5 - Ocean model (if free convection is included):
Free convection of sensible heat
Free convection of latent heat
For heat model 3 - Excess temperature model:
Exchange coefficient in Excess temperature model
Total nett heat flux
Remarks:
Values of character-type must be enclosed between two number signs (#).
The heat fluxes are not (yet) written to the History file. Therefore one can not yet inspect
time series of heat fluxes at monitoring stations.
More details on the incorporation of free convection can be found in Sections 9.8.6 and
9.8.7. Free convection is only included in the Ocean heat model (ktemp=5).
Deltares 509 of 688
DRAFT
Delft3D-FLOW, User Manual
B.6 Evaporation and precipitation
In certain simulations, e.g. in tropical areas, the evaporation and precipitation can not be
neglected. Upon using the Fileva keyword, you can specify the time-series for evaporation
and precipitation (and its temperature) in a separate ASCII file. The interpolation method
(Block or Linear) can be set via the keyword Evaint.
When Fileva IS NOT specified, the evaporation will be calculated internally when needed
for the heat balance (heat model 1, 2, 4 or 5, see section 9.8.8). In the heat balance, the
calculated evaporation heat flux is used. In the mass balance, the calculated evaporation
mass flux is not used, by default. When adding Maseva = #Y# to the MDF-file, the mass
flux of the calculated evaporation will be used in the mass balance.
When Fileva IS specified with the value -999.0 for the evaporation in the complete input file,
the evaporation will be calculated internally when needed for the heat balance (heat model 1,
2, 4 or 5, see section 9.8.8). In the heat balance, the calculated evaporation heat flux and
the specified precipitative heat flux are used. In the mass balance, the calculated evapora-
tion mass flux and the specified precipitative mass flux are used, by default. When adding
Maseva = #N# to the MDF-file, the mass flux of the calculated evaporation and the speci-
fied precipitation will not be used in the mass balance.
When Fileva IS specified with realistic values for the evaporation in the complete input file,
the evaporation will be calculated internally when needed for the heat balance (heat model 1,
2, 4 or 5, see section 9.8.8). In the heat balance, the calculated evaporation heat flux and
the specified precipitative heat flux are used, by default. In the mass balance, the specified
evaporation mass flux and the specified precipitative mass flux are used, by default. When
adding Maseva = #N# to the MDF-file, the mass flux of the specified precipitation and
the calculated evaporation will not be used in the mass balance. When adding QEvap =
#derived# to the MDF-file, the heat flux of the specified precipitation and the specified
evaporation will be used in the heat balance.
Remark:
By using the keyword AirOut, the evaporation rate for all computational points can be
written to the Map file, as well as for all stations to the His file. The His file includes the
precipitation rates; this quantity will be written to the Map file only if it varies spatially.
Keyword Value Description Default
Fileva #name.eva# Filename none
Evaint #Y# or #N# Linear (Y) or block (N) interpolation #Y#
Maseva #Y# or #N# Add evaporation and precipitation
to the continuity equation
#Y# (with Fileva)
#N# (without Fileva)
QEvap # derived # or
# computed #
Evaporation heat flux:
is derived from the prescribed
evaporation mass flux (de-
rived)
is calculated internally, in-
dependent of the prescribed
mass flux (computed)
# computed #
510 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
File contents Time dependent data for evaporation and precipitation.
File format Free formatted.
Filename <name.eva>
Generated Manually offline.
Remarks:
Evaporation and precipitation can not be combined with the Excess temperature model
(model 3 in section 9.8.8).
When using an evaporation value of -999.0 in the complete input file, Delft3D-FLOW
will calculate internally both the evaporation mass flux and heat flux.
When adding HeaOut = #Y# to the MDF-file, additional output will be written to the
map-file, including the mismatch between the calculated and the derived evaporation
heat flux (when relevant), see section B.5.3.
The keyword is case sensitive!
Non-numerical values must be enclosed between two number signs (#).
Record description:
Record Record description
each record Time in [minutes] after 00:00 on the Reference Date (1 real),
Precipitation in [mm/hour] (1 real),
Evaporation in [mm/hour] (1 real),
Rain temperature in [◦C] (1 real).
Restrictions:
Time must be integer multiples of the integration time step.
The value of the parameters is not checked against its domain.
Input items in a record must be separated by one or more blanks.
Example:
0. 1. 1. 10.
10. 1. 1. 10.
20. 2. 1. 11.
30. 2. 10. 12.
150. 1. 15. 15.
600. 1. 23. 21.
B.7 Space varying wind and pressure
In many cases the space varying wind data is provided by a meteorological station. This
data is often defined on a different grid than the computational grid used in Delft3D-FLOW.
Translating these files into files defined on the (curvilinear) grid of the computational engine
is often a lengthy process and can result in huge files. This feature facilitates the reading
of the meteorological data on its own grid and interpolates the data internally to the grid of
Delft3D-FLOW. Delft3D-FLOW can handle three types of meteorological input:
1 Time- and space-varying wind on an equistant grid
2 Time- and space-varying wind on a curvilinear grid
3 Time- and space-varying wind on a Spiderweb grid
The descriptions in this section are conform the current file format for meteorological in-
Deltares 511 of 688
DRAFT
Delft3D-FLOW, User Manual
put. A large update of the meteo input file formats was introduced in Delft3D-FLOW version
3.55.05.823. Since then, several smaller modifications have been made. Details on these
modifications in the file formats can be found in the sections below describing the different
meteo input types.
Convert file format
To convert a meteo file from before Delft3D-FLOW version 3.55.05.823 (not keyword based)
into the new format, a script is available, written in Matlab, named <meteo_old2new.m>.
The Delft3D distribution contains this script. Instructions for conversion of files with versions
later than Delft3D-FLOW version 3.55.05.823 to newer versions can be found in the sections
below.
B.7.1 Space varying wind and pressure on an equidistant grid
Keywords Value Description Default
Filwp #name.amp# file for atmospheric pressure none
Filwu #name.amu# file for wind speed in East-direction none
Filwv #name.amv# file for wind speed in North-
direction
none
Additional keywords for relative air humidity, air temperature and air cloudiness are also (op-
tionally) available:
Keywords Value Description Default
Filwr #name.amr# file for relative air humidity none
Filwt #name.amt# file for air temperature none
Filwc #name.amc# file for air cloudiness none
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on an equidistant (Cartesian or spherical) grid.
File format Free formatted or unformatted, keyword based.
Generated Some offline program.
Remark:
The keywords are case insensitive.
Header description for the wind velocity files:
Keywords Value Description
FileVersion 1.03 version of file format
Filetype meteo_on_equidistant_grid meteo input on equidistant grid
NODATA_value free value used for input that is to be
neglected
512 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Keywords Value Description
n_cols free number of columns used for wind
datafield
n_rows free number of rows used for wind
datafield
grid_unit mor unit of distances on the grid
degree in both x- and y-direction
x_llcorner free x-coordinate of lower left corner
of lower left grid cell (in units
specified in grid_unit
y_llcorner free y-coordinate of lower left corner
of lower left grid cell (in units
specified in grid_unit
x_llcenter free x-coordinate of centre of lower
left grid cell (in units specified in
grid_unit
y_llcenter free y-coordinate of centre of lower
left grid cell (in units specified in
grid_unit
dx free gridsize in x-direction in units
specified in grid_unit
dy free gridsize in y-direction in units
specified in grid_unit
n_quantity 1 number of quantities specified in
the file
quantity1 x_wind or the velocity component given in
y_wind unit unit1
unit1 m s-1 unit of quantity1:
metre/second
The user must specify the location of the equidistant grid on which the meteorological data
is specified. If one has the location of the lower left corner of the lower left grid cell, one can
specify the starting point of the grid using keywords x_llcorner and y_llcorner. If
one has the location of the cell centre of the lower left grid cell, one should use the keywords
x_llcenter and y_llcenter. Using the first option, the first data value is placed at
(x_llcorner+1
2dx, y_llcorner+1
2dy), which is the cell centre of cell (1,1). Using the latter
option, the first data value is placed at (x_llcenter, y_llcenter), which is again the cell centre of
cell (1,1), i.e. the data values are always placed at the cell centres of the meteorological grid.
Note that the lower left grid cell is defined to be the grid cell with index (1,1). When using the
option of meteorological data on a separate curvilinear grid, the origin and orientation of the
data set can be chosen freely with respect to the grid on which it is specified, see section B.7.2
for details.
Deltares 513 of 688
DRAFT
Delft3D-FLOW, User Manual
Time definition and data block description for the wind velocity files
Keywords Value Description
Time fixed format described below time definition string
The time definition string has a fixed format, used to completely determine the time at which
a dataset is valid. The time definition string has the following format:
TIME minutes/hours since YYYY-MM-DD HH:MM:SS TIME ZONE, e.g.
360 minutes since 2008-07-28 10:55:00 +01:00
The format of the string is completely fixed. No extra spaces or tabs can be added between the
different parts of the definition. The time definition is followed by the datablock of input values
corresponding to the specified time. The data block contains values for the wind velocity in
x- or y-direction for n_cols by n_rows points, starting at the top left point. The time definition
and the data block are repeated for each time instance of the time-series.
The atmospheric pressure file
The header for the atmospheric pressure is similar to that of the wind velocity files, except for
the following differences.
Keywords Value Description
quantity1 air_pressure air pressure
unit1 Pa or mbar unit of quantity1: Pascal or
millibar
The specification of the time definition and the data block is fully conform the wind velocity
files.
File version and conversion
The current description holds for FileVersion 1.03. The table below shows the latest
modifications in the file format (and version number).
514 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
FileVersion Modifications
1.03 Use of keyword Value_pos to indicate the position of the lower left
corner of the grid replaced by use of the combination of keywords:
x_llcorner and y_llcorner or
x_llcenter and y_llcenter
1.02 No changes for this meteo input type, but for the meteo type me-
teo_on_spiderweb_grid
1.01 Changed keyword MeteoType to FileType
Changed fixed value of input type (Keyword Filetype) from ArcInfo
to meteo_on_equidistant_grid
Restrictions:
The contents of the file will not be checked on its domain.
Keywords are followed by an equal sign ’=’ and the value of the keyword.
When a keyword has value free, the value of this keyword is free to choose by the user.
When only one value is given for a keyword, this keyword has a fixed value and when 2
or more options are shown, the user can choose between those values.
Times must be specified exactly according to the time definition. See the examples
shown in this section.
The atmospheric pressure file must use the same grid definition and time frame as the
files for the wind velocity components.
The unit of the meteo grid must be the same as the computational grid, i.e. both with
grid_unit = [m] or both with grid_unit = [degree].
Input items in a data block are separated by one or more blanks.
The wind components are specified at the cell centres (water level points) of the numer-
ical grid.
The wind components are specified in the west-east (x_wind) and south-north direc-
tions (y_wind).
Remarks:
The time definition in the meteo files contains the number of minutes or hours since
a reference date and time in a certain time zone. The reference time and time zone
may differ from those of the simulation. During a simulation the computational engine
will search in the meteo file for the current simulation time and interpolate between
neighbouring times if necessary. Possible differences in time zone will be accounted for
by shifting the meteo input data. The reference times within the time definition string
may vary in a meteo file, i.e. it is possible to attach new input with a different reference
time, behind the last data block. Consecutive times must always be increasing in the
input file.
Comments can be added after pound signs (#). These are not read.
Example of a file containing wind in x-direction (west-east)
The data blocks in this example are the result of the following FORTRAN statements:
do j = nrows,1,-1
write(out,*) (xwind(i,j),i=1,ncols)
enddo
The x-wind velocity file for a 3 (n_cols) by 4 (n_rows) grid has the following layout:
Deltares 515 of 688

DRAFT
Delft3D-FLOW, User Manual
FileVersion = 1.03
filetype = meteo_on_equidistant_grid
NODATA_value = -999.000
n_cols = 3
n_rows = 4
grid_unit = degree
x_llcenter = -12.000
y_llcenter = 48.000
dx = 0.12500
dy = 0.083333333
n_quantity = 1
quantity1 = x_wind
unit1 = m s-1
TIME = 0.0 hours since 2008-01-15 04:35:00 +00:00
2 3.0 3.6
3 4.5 2
2.2 1 2.3
1.2 0.7 -0.4
TIME = 6.0 hours since 2008-01-15 04:35:00 +00:00
-1.1 -2.3 -3.6
-3.2 0.8 1.1
2.2 -1 -1.6
1.2 -0.7 -0.4
This results in an x-component of wind velocity given - in [m/s] - on a spherical, 3 by 4,
equidistant grid, with grid sizes given by dx and dy (in degrees) and where the centre point
of the lower left cell of the grid lies in (longitude, latitude) (-12.0, 48.0) on the globe. Data is
given at two times: 0 and 6 hours since January 15th, 2008, 4:35 AM, in UTC+0.
Remarks:
The wind file specified in the Data Group Physical parameters - Wind is overruled when
the keywords for wind on an equidistant grid (see section B.7.1) are specified in the
Data Group Additional parameters.
The layout of the data blocks is from north to south (whereas most of the other files in
Delft3D-FLOW, such as the curvilinear grid file, are ordered from south to north).
On open boundaries, an input signal is prescribed that is consistent with some average
pressure. Usually the signal corresponds to Mean Sea Level. One actually wants to
prescribe an input signal corresponding to the local pressure prescribed by the space
varying meteo input. To this end, it is possible to specify an average pressure - which
should correspond to your input signal on the open boundaries - which is then used to
determine local pressure gradients that need to be applied along the open boundaries
to obtain an input signal that is consistent with the local atmospheric pressure. This
functionality used to be specified in the wind file but it should now be specified in the
Master Definition File in the Data Group Additional parameters, using PavBnd:Aver-
age Pressure on Boundaries. Using this keyword one can specify an average pressure
that is used on all open boundaries, independent of the type of wind input. The pressure
must be specified in N/m2. An example:
PavBnd= 101300.0
516 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.7.2 Space varying wind and pressure on a separate curvilinear grid
Keywords Value Description Default
Fwndgp #name.amp# file for atmospheric pressure none
Fwndgu #name.amu# file for wind speed in East-direction none
Fwndgv #name.amv# file for wind speed in North-
direction
none
Optionally additional keywords for relative air humidity, air temperature and air cloudiness:
Keywords Value Description Default
Fwndgr #name.amr# file for relative air humidity none
Fwndgt #name.amt# file for air temperature none
Fwndgc #name.amc# file for air cloudiness none
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on a curvilinear (Cartesian or spherical) grid.
File format Free formatted or unformatted, keyword based.
Generated Some offline program.
Remark:
The keywords are case insensitive.
Header description for the wind velocity files:
Keywords Value Description
FileVersion 1.03 version of file format
Filetype meteo_on_curvilinear_grid meteo input on curvilinear grid
NODATA_value free value used for input that is to be
neglected
grid_file free.grd name of the curvilinear grid file on
which the data is specified
first_data_value grid_llcorner or see example below
grid_ulcorner or
grid_lrcorner or
grid_urcorner
data_row grid_row or see example below
grid_column
n_quantity 1 number of quantities specified in
the file
quantity1 x_wind or the velocity component given in
Deltares 517 of 688
DRAFT
Delft3D-FLOW, User Manual
Keywords Value Description
y_wind unit unit1
unit1 m s-1 unit of quantity1:
metres/second
Time definition and data block description for the wind velocity files
For a description of the time definition and data block see section B.7.1.
The atmospheric pressure file
For a description of the atmospheric file see section B.7.1.
File version and conversion
The current description holds for FileVersion 1.03. The table below shows the latest
modifications in the file format (and version number).
FileVersion Modifications
1.03 Fixed bug in interpolation of data from meteo grid to computational grid:
Conversion script mirrored data set erroneously. This was treated cor-
rectly by meteo module. Fixed both the conversion script and the meteo
module together: Required modification in meteo input file:
Change first_data_value = grid_llcorner into grid_ulcorner or
vice versa
or
Change first_data_value = grid_lrcorner into grid_urcorner or
vice versa
1.02 No changes for this meteo input type, but for the meteo type me-
teo_on_spiderweb_grid
1.01 Changed keyword MeteoType to FileType
Changed keyword Curvi_grid_file to Grid_file
Changed fixed value of input type (Keyword Filetype) from Curvi to
meteo_on_curvilinear_grid
Restrictions:
The restrictions for space varying wind and pressure on a separate curvilinear grid are
the same as for space varying wind and pressure on an equidistant grid, described
in section B.7.1. A differerence is that the data values on the curvilinear grid are not
specified in the cell centres, but in the grid points (cell corners).
The unit of the meteo grid must be the same as the computational grid, i.e. both with
grid_unit = [m] or both with grid_unit = [degree].
Remark:
The remarks for space varying wind and pressure on a separate curvilinear grid are
the same as for space varying wind and pressure on an equidistant grid, described in
518 of 688 Deltares
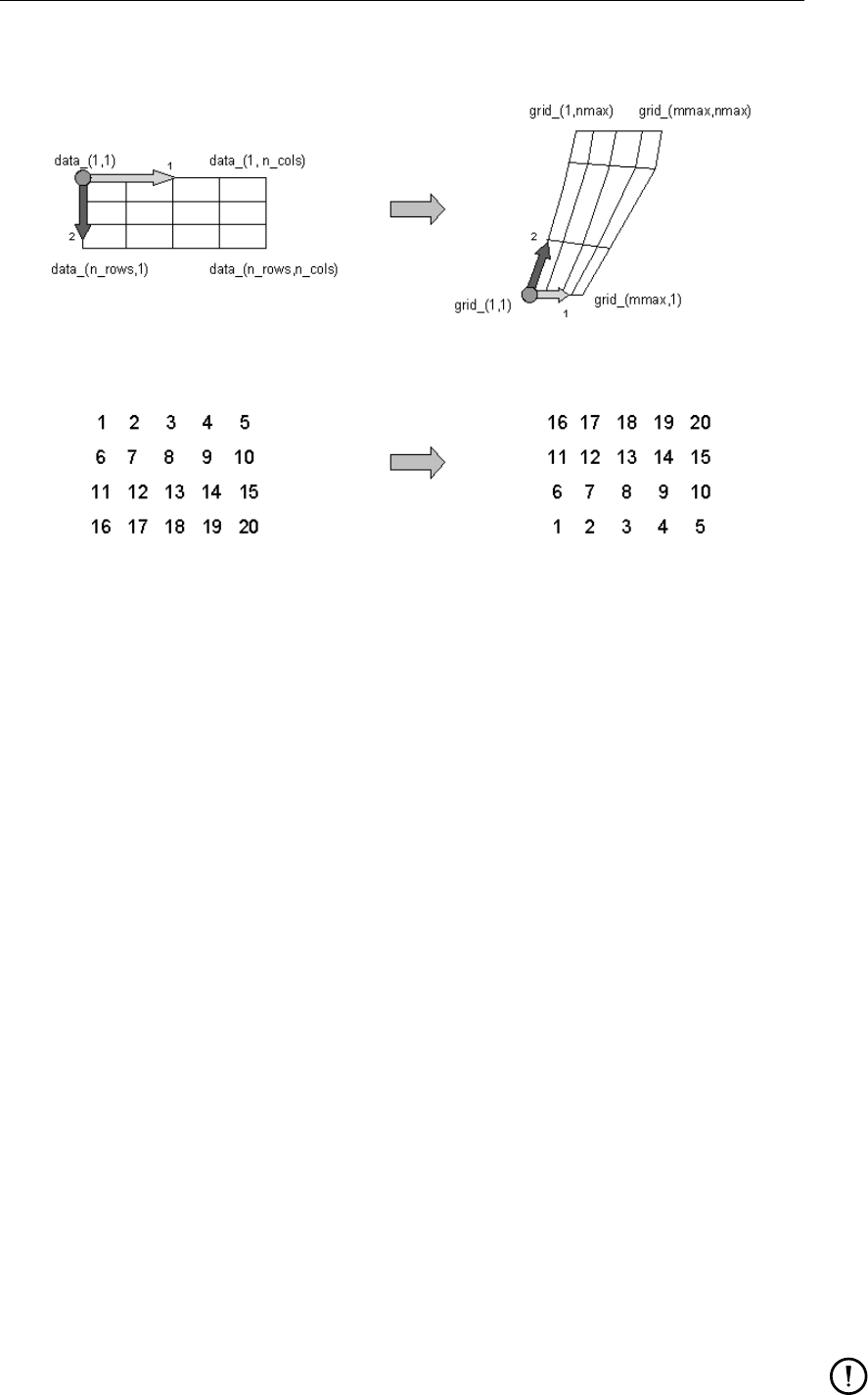
DRAFT
Special features of Delft3D-FLOW
section B.7.1.
Figure B.8: Illustration of the data to grid conversion for meteo input on a separate curvi-
linear grid
Example:
A file for input of x-velocity (in west-east direction) on a 4 (n_rows) by 5 (n_cols) curvilin-
ear grid, where the meteorogical data is mirrored vertically with respect to the grid, has the
following layout:
FileVersion = 1.03
filetype = meteo_on_curvilinear_grid
NODATA_value = -999.000
grid_file = curviwind.grd
first_data_value = grid_llcorner
data_row = grid_row
n_quantity = 1
quantity1 = x_wind
unit1 = m s-1
TIME = 0.0 minutes since 1993-06-28 14:50:00 -02:00
12345
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
TIME = 600.0 minutes since 1993-06-28 14:50:00 -02:00
12345
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
This results in an x-component of velocity given - in [m/s] - on the curvilinear grid specified in
file <curviwind.grd>. The data set will be mirrored such that the first value of the data (upper
left corner, in the example ’1’) corresponds to the lower left corner of the grid (point (1,1)) and
a row of data corresponds to a row on the grid, see Figure B.8. Data is given at two times: 0
and 600 minutes since June 28th, 1993, 14:50 PM, in UTC-2.
Remark:
Deltares 519 of 688
DRAFT
Delft3D-FLOW, User Manual
The wind file specified in the Data Group Physical parameters - Wind is overruled when
the keywords for wind on a separate curvilinear grid (see section B.7.2) are specified in
the Data Group Additional parameters.
B.7.3 Space varying wind and pressure on a Spiderweb grid
Keywords Value Description Default
Filweb #name.web# file containing wind speed, wind di-
rection and atmospheric pressure
drop
none
Cyclone winds are governed by a circular motion, combined with a cyclone track. This type
of wind is generally very difficult to implement on a curvilinear grid. This feature facilitates the
reading of the so-called Spiderweb files and interpolates the wind and pressure data internally
to the computational grid. A special feature of the space varying wind and pressure on the
Spiderweb grid is that it can be combined with one of the other meteorological input options
described in this manual, i.e. to either uniform wind and pressure, or to one of the space
varying wind and pressure options, see section A.2.8.
File contents Time-series of a space varying wind and atmospheric pressure de-
fined on a Spiderweb grid. This grid may be specified in Cartesian
or spherical coordinates.
File format Free formatted or unformatted, keyword based.
Generated Some offline program.
Remarks:
The keywords are case insensitive.
Space varying wind and pressure on a Spiderweb grid is added to other wind input and
the wind fields are interpolated and combined in and around the cyclone.
Header description of the Spiderweb wind and pressure file:
Keywords Value Description
FileVersion 1.03 version of file format
Filetype meteo_on_spiderweb_grid meteo input on Spiderweb grid
NODATA_value free value used for input that is to be
neglected
n_cols free number of gridpoints in angular
direction
n_rows free number of gridpoints in radial
direction
grid_unit mor unit of the Spiderweb grid
degree
spw_radius free radius of the spiderweb given in
units given by spw_rad_unit
520 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Keywords Value Description
spw_rad_unit m unit of the Spiderweb radius
spw_merge_frac [0.0,1.0] fraction of the Spiderweb radius
where merging starts of the back-
ground wind with the Spiderweb
wind. Default is 0.5
air_pressure air_pressure_default_from Both keyword and value are too
_reference _computational_engine long to fit on one line.
Reference value related to
p_drop is the default air pressure
of the computional engine
or free or the value specified.
If missing, p_drop is extracted
from the actual atmospheric
pressure.
n_quantity 3 number of quantities specified in
the file
quantity1 wind_speed wind speed given in unit unit1
quantity2 wind_from_direction direction where the wind is com-
ing from given in unit unit2
quantity3 p_drop drop in atmospheric pressure
given in unit unit3
unit1 m s-1 unit of quantity1:
metres/second
unit2 degree unit of quantity2: degrees
unit3 Pa or unit of quantity3: Pascal or
mbar millibar
Time definition and data block description
For a description of the time definition see section B.7.1.
Cyclone track information:
For each time in the time series of space varying wind and pressure on a Spiderweb grid, the
position of the cyclone eye (and thus also the spiderweb grid) must be given, as well as the
drop of atmospheric pressure in the cyclone eye.
Deltares 521 of 688
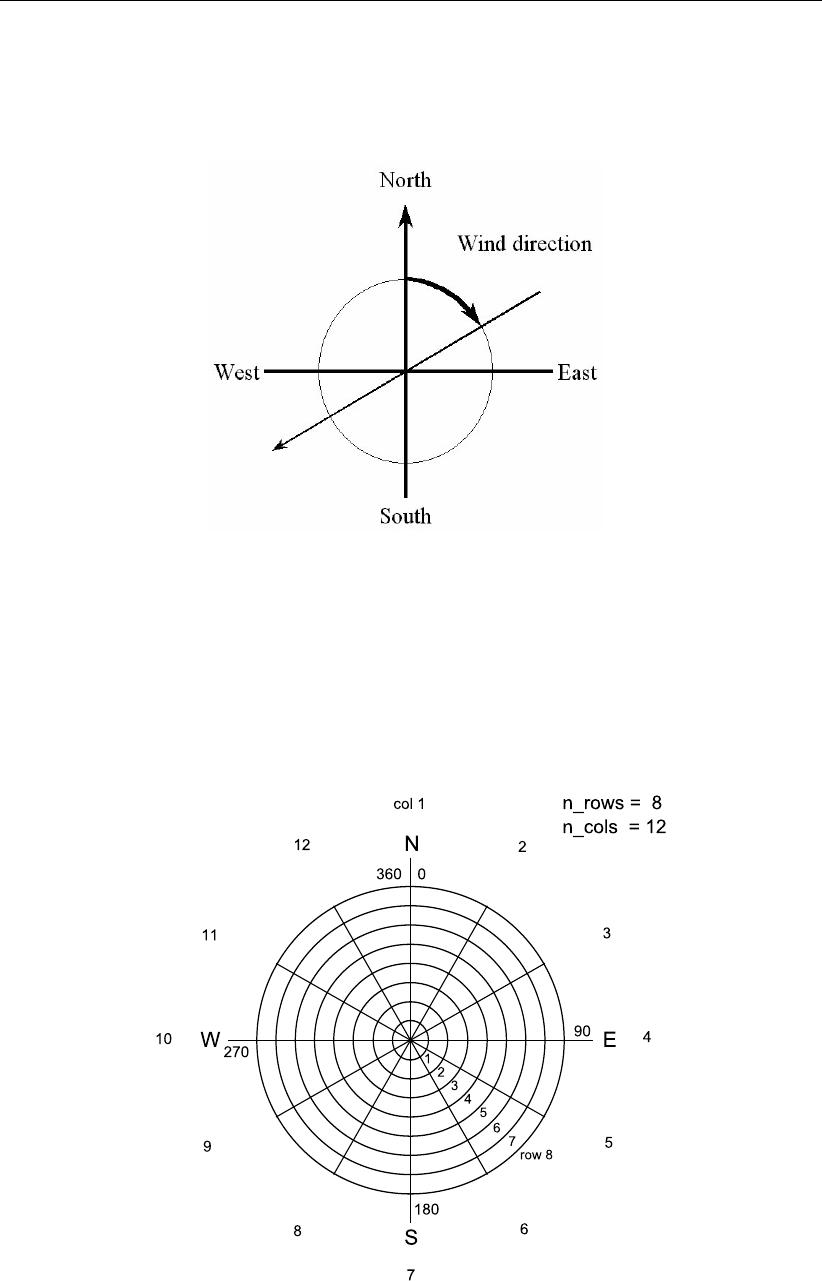
DRAFT
Delft3D-FLOW, User Manual
Figure B.9: Wind definition according to Nautical convention
Figure B.10: Spiderweb grid definition
522 of 688 Deltares
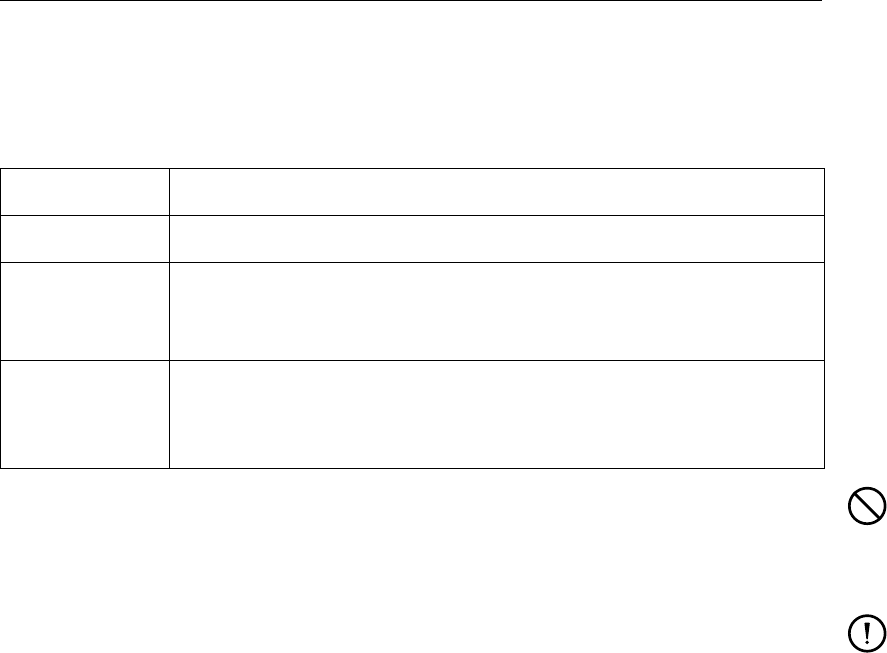
DRAFT
Special features of Delft3D-FLOW
File version and conversion
The current description holds for FileVersion 1.03. The table below shows the latest
modifications in the file format (and version number).
FileVersion Modifications
1.03 No changes for this meteo input type
1.02 Changed the use of keyword n_rows and n_cols. The radius of the
cyclone is divided in n_rows rings of width: spw_radius/n_rows [m]
and the circle is divided in n_cols parts of 2π/n_cols [rad].
1.01 Changed keyword MeteoType to FileType
Changed fixed value of input type (Keyword Filetype) from Spider-
web to meteo_on_spiderweb_grid
Restriction:
The restrictions for space varying wind and pressure on a Spiderweb grid are the
same as for space varying wind and pressure on an equidistant grid, described in sec-
tion B.7.1.
Remarks:
The remarks for space varying wind and pressure on a separate curvilinear grid are
the same as for space varying wind and pressure on an equidistant grid, described in
section B.7.1.
The Spiderweb grid is circular and the definitions of the number of rows n_rows and
the number of columns n_cols is therefore different then for the other meteo input
formats. For the Spiderweb grid, the number of rows determines the grid size in ra-
dial direction. The number of columns defines the grid size in angular direction. See
Figure B.10.
The wind is specified according to the nautical convention, i.e. wind from the true North
has direction zero and the wind turns clockwise with an increasing angle. See Fig-
ure B.9.
Example:
A file for input of space varying wind and pressure on a 5x3 Spiderweb grid, has the following
layout:
FileVersion = 1.03
filetype = meteo_on_spiderweb_grid
NODATA_value = -999.000
n_cols = 3
n_rows = 5
grid_unit = degree
spw_radius = 600000.0
spw_rad_unit = m
air_pressure_reference = air_pressure_default_from_computational_engine
n_quantity = 3
quantity1 = wind_speed
quantity2 = wind_from_direction
quantity3 = p_drop
unit1 = m s-1
unit2 = degree
unit3 = Pa
Deltares 523 of 688

DRAFT
Delft3D-FLOW, User Manual
TIME = 0.0 hours since 1997-07-14 03:00:00 -06:00
x_spw_eye = 115.1
y_spw_eye = 18.9
p_drop_spw_eye = 5300.0
1.38999 1.38261 1.38315
1.28251 1.34931 1.22571
1.27215 1.31214 1.32451
1.38999 1.86592 2.87732
1.43899 1.24912 2.21519
60.0000 180.0000 270.0000
28.7500 20.0000 31.2500
42.5000 53.7500 65.0000
49.3400 60.2400 81.5200
51.4100 62.0000 43.1200
5301.280 5294.490 5156.240
5043.460 5112.040 5264.020
5140.020 5202.520 5411.210
5294.730 5285.760 5235.250
5242.530 5156.190 5124.240
TIME = 1.0 hours since 1997-07-14 03:00:00 -06:00
x_spw_eye = 114.8
y_spw_eye = 18.8
p_drop_spw_eye = 5250.0
1.35763 1.35763 1.35763
1.35763 1.87273 2.24784
1.92214 2.47836 2.17266
1.87662 2.72116 2.82375
1.26585 2.24146 2.38722
159.0000 346.5200 290.6400
342.3200 282.1400 20.2400
10.7500 25.5300 36.4500
61.8400 81.6200 45.5100
49.5250 56.7500 75.1300
5314.520 5104.490 5287.240
5124.240 5285.760 5252.420
5152.460 5247.040 5222.020
5242.020 5223.520 5475.210
5244.270 5211.210 4998.110
This results in the following set of meteo data. Velocities given in [m/s] and pressure drops in
[Pa] on a Spiderweb grid which is given in spherical coordinates (grid_unit = degree). The
cyclone and spiderweb grid have a radius of 600 km. The grid is 5x3, which means the radius
is divided in five parts of 120 km and the 360 degrees are divided in 3 parts of 120 degrees
each. Wind speeds, wind directions and pressure drops are given at two times: 0 and 1.0
hour since July 14th, 1997, 03:00 AM, in UTC-6. Between these two times the cyclone eye
moves from (longitude, latitude) (115.1, 18.9) to (114.8, 18.8) on the globe and the pressure
drop in the cylcone eye decreases from 5300.0 [Pa] to 5250.0 [Pa].
524 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.8 Horizontal large eddy simulation
HLES is supported by the FLOW-GUI, see Data Group Physical parameters - Viscosity.
Keywords Value and
unit
Description Default Range
Htur2d #YES# Enable the use of HLES #N#
Htural 1.666666 [-] Slope in log-log spectrum 1.666666 [1,3]
Hturnd 2 [-] Dimensional number 2 2 or 3
Hturst 0.7 [-] Prandtl-Schmidt number 0.7 [0.5,1]
Hturlp 0.3333333 [-] Spatial low-pass filter coeffi-
cient
0.3333333 [0.2,1]
Hturrt 1.0 [min] Relaxation time -1.0 >0.0(or
−1.0)
Hturdm 0.0 [m2/s] Molecular diffusivity 0.0 = 0.0
Hturel #YES# Switch to add Elder’s term #YES#
In addition the Slip condition for Wall roughness can be changed to “no”.
Remark:
The possible values for the Slip condition are:
- free slip condition at the side walls (Irov = 0),
- partial slip with user-defined wall roughness length (Irov = 1),
- no-slip condition at the side walls (Irov = 2).
The choice of the slip condition depends on the grid size versus the boundary layer thick-
ness. It is of no use to apply a partial or no-slip condition when the grid size cannot resolve
the boundary layer.
No-slip and partial slip conditions along smoothly curved boundaries can support the sep-
aration of the boundary layer and the wall, whereas a free slip condition cannot.
Elder’s term is only applicable for 2DH models.
The relaxation time τshould be assigned a positive value in agreement with the time
scale to be used in Eq. (B.7). If τis set to −1.0then the ψt
n+1 term in Eq. (B.6) is ignored
such that in Eq. (B.5) the gradients of the full instantaneous velocities are used instead
of those of the high-pass filtered velocities. This means that if τis set to −1.0also a
(near-)steady velocity gradient will contribute to the sub-grid eddy viscosity. For practical
applications a positive value of τshould be used; its value may determined as 2 to 6 times
the (largest) time scale of the eddies, however, one should take care not to filter out the
higher harmonics (e.g. M4 or M6) of the flow forcing. It advised to verify model sensitivity
for the chosen value of τ.
Htural,Hturnd,Hturst,Hturlp,Hturrt and Hturdm correspond with α,nD,σT,
flp,τ, and Dmol.Hturel corresponds with Elder: a switch to enable the addition of the
Elder’s term to the depth-averaged parabolic diffusivity profile to take into account the effect
of a 3D velocity profile (so-called Taylor-shear dispersion) in a depth-averaged model.
Deltares 525 of 688
DRAFT
Delft3D-FLOW, User Manual
Detailed description:
Below we summarise the essential aspects of the sub-grid scale model for Horizontal Large
Eddy Simulation (HLES) of shallow water flows subjected to bed friction. The result of this
HLES model is a formulation of the horizontal component of the sub-grid eddy viscosity and
the sub-grid eddy diffusivity.
The model is based on theoretical considerations presented by Uittenbogaard (1998); Uitten-
bogaard and Van Vossen (2003) and summarised by Van Vossen (2000). This model for the
sub-grid eddy viscosity νSGS includes the damping of sub-grid eddies by bed friction reads:
νSGS =1
k2
sq(γσTS∗)2+B2−B,(B.2)
with:
B=
3g~
U
4H C2,(B.3)
where Cis the Chézy coefficient and His the water depth.
Correspondingly, the sub-grid eddy diffusivity DSGS for horizontal mixing of heat, salt, mud
and dissolved constituents reads:
DSGS =νSGS
σT
.(B.4)
The definition of all symbols in Eqs. (B.2) to (B.4) are presented hereafter.
In Eq. (B.2) the sum of strain rates squared (i.e. double contraction of horizontal component
of the strain rate tensor) reads:
(S∗)2= 2 ∂u∗
∂x 2
+ 2 ∂v∗
∂y 2
+∂u∗
∂y 2
+∂v∗
∂x 2
+ 2∂u∗
∂y
∂v∗
∂x .(B.5)
In Eq. (B.5), the superscript (. . .)∗denotes fluctuating flow variables and these are defined
through the following recursive high-pass filter operator (Bendat and Piersol,1971, p. 297–
298):
ψ∗=ψn+1 −ψt
n+1,(B.6)
with:
ψt
n+1 = (1 −a)ψn+1 +aψt
n,ψt
0= 0 and a= exp (−∆t/τ),(B.7)
with ∆tis the time step, nis the time step number, (n+1) denotes the present time step and
τis the relaxation time. In Eq. (B.6),ψrepresents any of the velocity components (u,v).
If the relaxation time τis specified as −1.0then ψt
n+1 is set to zero which means that,
effectively, the high-pass filtering operation is thereby cancelled. A positive value τis strongly
recommended; see also remarks above.
When you apply the HLES-model, the following considerations are of importance:
526 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
According to the theory just the spatially and temporarily varying fluctuations should enter
Eq. (B.2).
The application of a high-pass filter just for temporal fluctuations and not (also) in space
is a pragmatic choice. Spatial filtering on non-equidistant curvilinear grids with thin dams
or structures is computationally tedious whereas temporal variations on sufficiently short
time scales are due to turbulent eddies only and hence just temporal filtering is the optimal
choice.
Not only the total velocity vector (u,v) is on output but also the high-pass filtered hori-
zontal velocity components (ut
n, vt
n)are internally stored as well as written to standard
output thereby enabling plotting or animating the spatial vector field (u∗
n, v∗
n)that visually
presents vortex structures superimposed on the (mean) current.
For steady flows (u, v)∗= 0 holds so that S∗= 0 and consequently the sub-grid scale
(SGS) eddy viscosity νSGS = 0.
For νSGS = 0 the simulated (mean) flow subjected to some horizontal shearing can be
become unstable, in agreement with the Orr-Sommerfeld hydrodynamic stability equation,
provided (physical and numerical) internal friction and bed friction are sufficiently small.
The SGS model’s property νSGS = 0 for time independent flow is similar to the essential
property of the well-known dynamic SGS model that applies spatial filtering on equidistant
Cartesian grids, see Germano et al. (1991).
When the unstable flow creates temporal velocity variations then the SGS eddy viscosity
Eq. (B.2) develops.
Towards drying conditions, the local water depth Hdecreases to nearly zero which then
reduces νSGS to zero, see Eq. (B.2).
At drying, the time filtered velocity components (ψt
n+1 in Eq. (B.6)) are set to zero.
After flooding, the water depth Hincreases from nearly zero and then νSGS increases
gradually for increasing water depth but constant high-pass filtered strain rates, see Eq. (B.2).
In principle, turbulence fluctuations with appropriate time and length scales should be
superimposed on the mean open boundaries conditions on inflow. Presently, this is not
the case in Delft3D-FLOW, although its open boundary conditions allow for time series
or harmonics. In most cases, the internal topography or geometry (breakwaters etc.) is
such that hydrodynamic instabilities develop inside the flow domain but relevant exceptions
exist such as the flow in a straight channel with constant depth. The latter flow case is
marginally unstable i.e. wavy velocity perturbations superimposed on the mean flow create
secondary instabilities. This type of flow needs the upstream turbulence perturbations as
open boundary conditions on inflow. To that purpose, a generator of synthetic time series
of spatially correlated (coherent eddy structures) turbulence fluctuations is recommended.
The high-pass filter Eq. (B.6) is designed for stationary flows only but it is also applicable
to weakly non-stationary flows with eddy turnover times significantly smaller than the time
scale of the base flow’s boundary conditions. For tidal flows, with turbulent horizontal eddies
superimposed, the high-pass filter can be improved e.g. through linear regression based on
the flow’s history. The fluctuations (. . .)∗then fall into the category of so-called turbulence
with stationary first increments for which much of the same theory as for stationary turbulence
applies. Experience on typical time scales and sensitivity of the eddies for τmust determine
whether improvements on the high-pass filter are advisable.
In Equation (B.2),kis the wave number magnitude of the truncating wave length below which
Equation (B.2) is designed to represent the net effect of sub-grid turbulence and its relation to
a horizontally isotropic grid size reads:
ks=πflp
∆;flp ≤1.(B.8)
where flp is the spatial low-pass filter coefficient that depends on the spatial filtering properties
Deltares 527 of 688
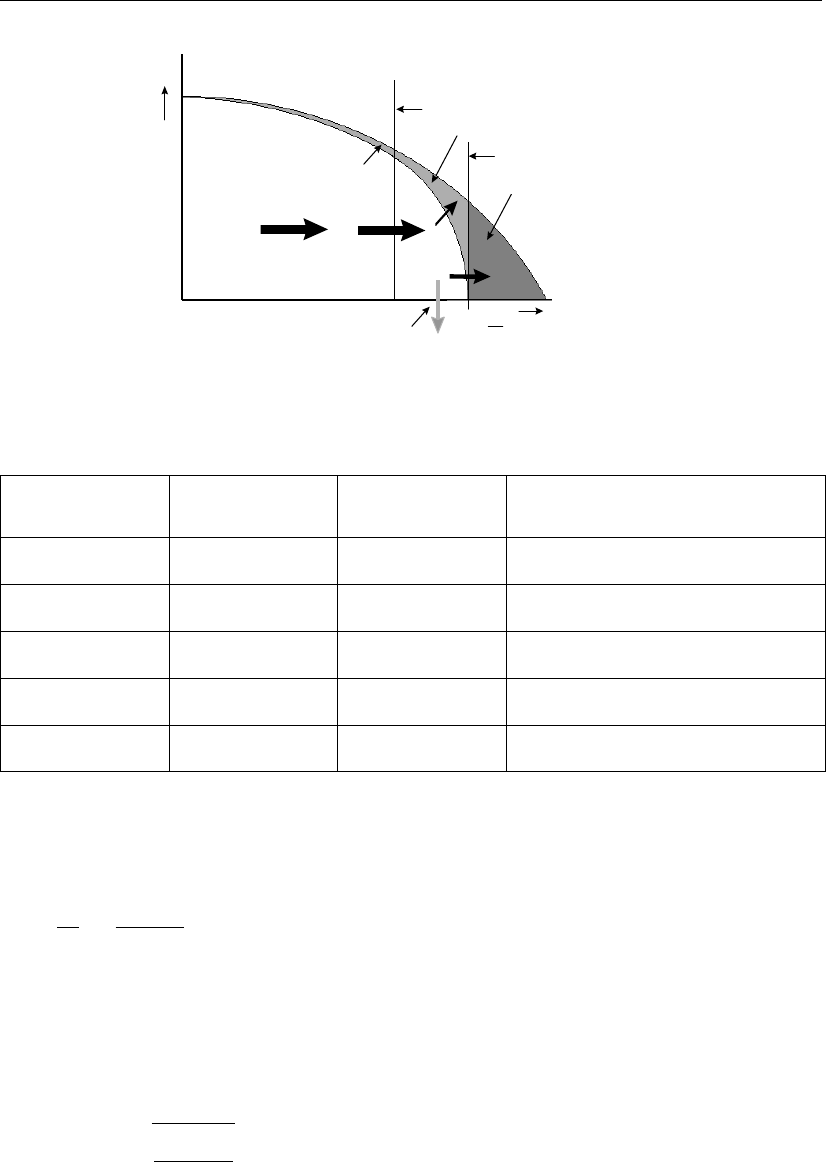
DRAFT
Delft3D-FLOW, User Manual
resolved scales
numerical cut-off
(numerical) sub-grid scales
E(k)
(theoretical) sub-grid scales
theoretical cut-off
k
numerical
dissipation
Energy flow
kx
s=
π
∆
Figure B.11: Definition of truncation wave numbers due to resolution and numerical
damping
Table B.2: Default parameter settings for the SGS model
Parameter Value Input parame-
ter
Description
α5/3 Htural Slope in log-log spectrum
nD 2 Hturnd Dimensional number
σT0.7 Hturst Prandtl-Schmidt number
flp 0.3 Hturlp Spatial low-pass filter coefficient
τ()∗Hturrt Relaxation time
of the advection scheme. For the ideal scheme, flp = 1 holds without any damping up to the
shortest resolvable wave length (2∆), see Figure B.11. For anisotropic grids we propose, in
agreement with others, to consider the cell area i.e.
1
k2
s
=∆x∆y
(πflp)2,(B.9)
Moreover, the derivation of Eq. (B.2) is generally applicable for 2D as well as 3D turbulence
(nD= 2 or 3) with slope αin the log-log spectrum of energy density E(k)(usually α= 3
or 5/3 holds) as a function of wave number magnitude kand these properties are introduced
through γin Equation (B.2) that yields:
γ=I∞s1−α−2
2nD
, I∞= 0.844.(B.10)
The parameters to the SGS model that are user-defined input are shown in Table B.2 together
with their recommended values.
Where ()∗is typically twice the largest time scale of the eddies.
The value for flp is determined semi-empirically i.e. it is obtained by previous HLES experi-
ments (Jagers and Van Schijndel,2000) but it is partially founded on theoretical considerations
of the 2nd order ADI central-upwind advection scheme of Delft3D-FLOW (Stelling,1984).
528 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
For a proper use of HLES with Delft3D-FLOW, the following three time step limitations hold:
1 Courant number CFLBT for surface waves (barotropic mode) less than 4√2:
CFLBT = 2√2∆t√gH
∆x≤4√2.(B.11)
2 Courant number CF Lconv for convection less than unity:
CF Lconv =U∆t
∆x≤1.(B.12)
3 Explicit integration of SGS stresses:
∆t≤(∆x)2
2νSGS
.(B.13)
Usually, the most restrictive time step limitation is due to the barotropic Courant number
CFLBT . This restriction is based on accuracy and near-conservation of energy rather than
stability because the non-viscous part of the entire solution procedure is unconditionally sta-
ble. Note that the advection scheme of Delft3D-FLOW does not strictly conserve kinetic en-
ergy. However, it approximates this property quite well for CF LBT <4√2, as demonstrated
by Van Vossen (2000, Chapter 6).
In view of a usually small Froude number, the second convection/advection condition is usually
satisfied when CFLBT <4√2. In view of HLES, we call the second limitation a space-time
consistence condition stating that the spatial increments (time step ×velocity) in transporting
eddies should be in agreement or consistent with their minimal resolvable size. If space-time
consistence condition is violated then the large time step destroys the proper simulation of the
deformation of the transported eddy by shearing of other eddies or the mean flow.
Finally, the third limitation is rarely violated and it is the single one referring to pure numerical
stability rather than to accuracy.
B.9 Sediment transport and morphology
Sediment transport and morphology is supported by the FLOW-GUI, see Data Groups Pro-
cesses and Physical parameters - Sediment, Morphology.
Keywords Value Description Default
Filsed #name.sed# Sediment input file; define sediment frac-
tions and other input quantities
none
Filmor #name.mor# Morphological input file; define parameters
for the morphodynamic computation
none
TraFrm #name.tra# Sediment transport input file; define the
default sediment transport formula for
sand and bedload fractions and its coef-
ficients. By default the sediment transport
formula for sand and bedload fractions is
formula -1: Van Rijn (1993). This use of
the keyword TraFrm is considered obso-
lete; please specify the sediment transport
formula per sediment fraction in the sedi-
ment input file.
none
Deltares 529 of 688
DRAFT
Delft3D-FLOW, User Manual
This feature concerns the use of sediment transport in Delft3D-FLOW. With the feedback of
bed level changes to the hydrodynamic computation you can execute a full morphodynamic
computation. You can include the influence of waves by running this version of Delft3D-FLOW
in combination with the Delft3D-WAVE module. This sediment transport feature offers the
following functionalities:
Cohesive sediment transport, including the effect of salinity on flocculation.
Non-cohesive suspended sediment (sand) transport.
Bedload transport, including effect of wave asymmetry.
Influence of waves and hindered settling.
Updating the bed-level and feedback to the hydrodynamics.
Up to 99 suspended fractions (combinations of sand or mud) and arbitrary number of
bedload fractions.
Numerous sediment transport formulations
File contents See the following sections.
Filetype ASCII
File format Free format.
Generated FLOW-GUI.
Remarks:
Sediment names are case sensitive!
The files should not contain tabs.
All suspended sediment fractions must have been defined as a constituent with special
names that begin with “Sediment” (e.g. “Sediment 1”).
For these constituents, boundary conditions should be prescribed which can be over-
written by equilibrium concentrations using one of the options described in the morpho-
dynamic input file.
For these constituents initial conditions and concentrations at sources should be speci-
fied.
B.9.1 Sediment input file
The sediment input file contains the characteristics of all sediment fractions. In the record
description the name of the quantities are given to simplify their reference in the formulas
given in chapter 11.
Remarks:
There are several versions of the <∗.sed>file. The keyword based file is described
in Table B.3. FLOW-GUI v3.39.14 and higher reads and saves the keyword based file.
The file with no keywords can also be read by this GUI. FLOW can handle both types
of files.
FLOW-GUI v3.39.25 and higher writes keyword SdbUni not anymore. In stead a new
keyword, IniSedThick is written.
Table B.3: Sediment input file with keywords
Keyword Record description
SedimentFileInformation
FileCreatedBy contains version number of FLOW-GUI
continued on next page
530 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.3 – continued from previous page
Keyword Record description
FileCreationDate creation date and time of the <∗.sed>file
FileVersion version number
SedimentOverall
IopSus option for determining suspended sediment diameter (see
section 11.3.1) (integer)
Cref reference density (CSOIL) for hindered settling calculations
(not active when ≥1·106) [kg/m3] (1 real)
MudCnt mud fraction (only if none of the sediment fractions is of type
mud)
uniform value (1 real)
or file <∗.mdc>with spatially varying values at cell centres
(1 string)
Sediment
Name name between # as specified in NamC in mdf-file
SedTyp type of sediment; must be “sand”, “mud” or “bedload”: (1
string) “sand” and “mud” fractions need to be specified be-
fore “bedload” fractions.
RhoSol specific density of sediment fraction [kg/m3] (1 real)
SedDxx xx percentile sediment diameter (for sand or bedload)
where xx can take on values from 01 to 99 [m] (1 real)
SedMinDia minimum sediment diameter (for sand or bedload) [m]
(1 real)
SedDia median sediment diameter (for sand or bedload) equivalent
to SedD50 [m]
uniform value (1 real)
or file <∗.d50>with spatially varying values at cell centres
(1 string)
SedSg geometric standard deviation of sediment diameter (for
sand or bedload) [m] (1 real)
SedMaxDia maximum sediment diameter (for sand or bedload) [m]
(1 real)
SalMax salinity for saline settling velocity (for mud) [ppt] (1 real)
WS0 settling velocity fresh water (for mud) [m/s] (1 real)
continued on next page
Deltares 531 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.3 – continued from previous page
Keyword Record description
WSM settling velocity saline water (for mud) [m/s] (1 real)
TcrSed critical stress for sedimentation [N/m2]
uniform value (1 real)
or file <∗.tcd>with spatially varying values at cell centres
(1 string)
TcrEro critical stress for erosion [N/m2]
uniform value (1 real)
or file <∗.tce>with spatially varying values at cell centres
(1 string)
EroPar erosion parameter [kg/m2s]
uniform value (1 real)
or file <∗.ero>with spatially varying values at cell centres
(1 string)
CDryB dry bed density [kg/m3] (1 real)
SdBUni or
IniSedThick
initial sediment mass at bed per unit area [kg/m2]
initial sediment layer thickness at bed [m]
uniform value (1 real)
or filename <∗.sdb>with non-uniform values at cell cen-
tres (1 string)
FacDSS factor for determining suspended sediment diameter
Dsus = FACDSS ∗SEDDIA (for sand) [-] (1 real)
TraFrm Name of file containing the fraction specific sediment trans-
port formula (1 string)
or number of the fraction specific sediment transport formula
IFORM (1 integer).
See Section B.9.3. This formula overrules the default
formula.
*If TraFrm specifies the number of the sediment transport
formula IFORM then the keywords associated with the sed-
iment transport formula should be listed in this Sediment
block. See Section B.9.3 for a listing of the transport for-
mula specific keywords.
SettleLib Name of the shared object (.dll on Windows, or .so on Linux)
without file extension in which the user-defined settling ve-
locity routine is located (1 string). Only to be specified in
combination with SettleFunction.
continued on next page
532 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.3 – continued from previous page
Keyword Record description
SettleFunction Name of the user-defined subroutine which provides the
settling velocity (1 string). Only to be specified in combina-
tion with SettleLib. See section B.9.6 for a description
of the subroutine interface.
SettleInput Optional file name to be passed to SettleFunction (1
string). Only to be specified in combination with
SettleFunction.
The Sediment block can be repeated for other fractions
Remarks:
The SedDia parameter may only be specified as a file if the simulation includes only
one sediment fraction.
There are a couple of options to specify the characteristic diameter(s) for sand or bed-
load fractions. Table B.4 gives an overview of the various options, the associated sedi-
ment distribution types and the implicit assumptions.
Table B.4: Options for sediment diameter characteristics
Specified quantities Assumptions
SedDia (uniform value) or
SedD50 (uniform value)
Piecewise log-uniform distribution
SedD10 = 0.75 SedD50
SedD90 = 1.5 SedD50
SedDia (filename) or
SedD50 (filename)
Lognormal distribution (spatially varying grain size)
SedSg = 1.34
SedDia (filename) or
SedD50 (filename), SedSg
Lognormal distribution (spatially varying grain size)
SedDxx (any xx), SedSg Lognormal distribution
Two SedDxx values Lognormal distribution
SedSg computed from xx and SedDxx
SedMinDia, SedMaxDia Loguniform distribution
SedMinDia or SedMaxDia,
One SedDxx value
Loguniform distribution
More than two SedDxx,
SedMinDia, SedMaxDia val-
ues
Piecewise loguniform distribution
Other combinations not allowed
Deltares 533 of 688
DRAFT
Delft3D-FLOW, User Manual
Example of a version 2 file, with keywords:
[SedimentFileInformation]
FileCreatedBy = Delft3D-FLOW-GUI, Version: 3.39.14.03
FileCreationDate = Thu Dec 08 2005, 14:47:46
FileVersion = 02.00
[SedimentOverall]
IopSus = 0 Suspended sediment size is Y/N
calculated dependent on d50
Cref = 1.60e+03 [kg/m3] CSoil Reference density for hindered
settling
[Sediment]
Name = #Sediment sand# Name as specified in NamC in mdf-file
SedTyp = sand Must be "sand", "mud" or "bedload"
RhoSol = 2.6500000e+003 [kg/m3] Specific density
SedDia = 2.0000000e-004 [m] Median sediment diameter (D50)
CDryB = 1.6000000e+003 [kg/m3] Dry bed density
IniSedThick = 0.50e+000 [m] Initial sediment layer thickness at bed
(uniform value or file name)
FacDSS = 1.0e+0 [-] FacDss*SedDia = Initial suspended
sediment diameter.
[Sediment]
Name = #Sediment mud# Name as specified in NamC in mdf-file
SedTyp = mud Must be "sand", "mud" or "bedload"
RhoSol = 2.6500000e+003 [kg/m3] Specific density
SalMax = 0.0000000e+000 [ppt] Salinity for saline settling velocity
WS0 = 2.5000001e-004 [m/s] Settling velocity fresh water
WSM = 2.5000001e-004 [m/s] Settling velocity saline water
TcrSed = 1.0000000e+003 [N/m2] Critical stress for sedimentation
TcrEro = 5.0000000e-001 [N/m2] Critical stress for erosion
EroPar = 9.9999997e-005 [kg/m2s] Erosion parameter
CDryB = 5.0000000e+002 [kg/m3] Dry bed density
IniSedThick = 0.05e+000 [m] Initial sediment layer thickness at bed
(uniform value or file name)
FacDSS = 1.00e+0 [-] FacDss*SedDia = Initial suspended
sediment diameter
Table B.5: Sediment input file without keywords
Record Record description
1 VERSION: version number (in the present Delft3D Release, this line
should read “∗Version 01”)
2 LSED: number of sediment fractions
CSOIL: reference density for hindered settling calculations (not active
when ≥1·106) [kg/m3]
IOPSUS: option for determining suspended sediment diameter (see sec-
tion 11.3.1) (1 integer, 1 real, 1 integer)
3 SEDTYP: type of sediment: “sand” or “mud” (1 string)
4 RHOSOL: specific density of sediment fraction [kg/m3] (1 real)
5 SEDDIA: median sediment diameter (for sand) [m] (1 real)
6 SALMAX: salinity for saline settling velocity (for mud) [ppt] (1 real)
7 WS0: settling velocity fresh water (for mud) [m/s] (1 real)
534 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.5: Sediment input file without keywords
Record Record description
8 WSM: settling velocity saline water (for mud) [m/s] (1 real)
9 TCDUNI: critical stress for sedimentation (uniform value) [N/m2] (1 real) or
FILTCD: file with spatially varying values of TCDUNI <∗.tcd>at cell cen-
tres (1 string)
10 TCEUNI: critical stress for erosion (uniform value) [N/m2] (1 real) or
FILTCE: file with spatially varying values of TCEUNI <∗.tce>at cell cen-
tres (1 string)
11 EROUNI: erosion parameter (uniform value) [kg/m2s] (1 real) or
FILERO: file with spatially varying values of EROUNI <∗.ero>at cell cen-
tres (1 string)
12 CDRYB: dry bed density [kg/m3] (1 real)
13 SDBUNI: initial sediment mass at bed per unit area [kg/m2] (1 real) or
FILSDB: filename with non-uniform values of SDBUNI <∗.sdb>at cell
centres (1 string)
14 FACDSS: factor for determining suspended sediment diameter
Dsus = FACDSS∗SEDDIA (for sand) [-] (1 real)
15 to 27 repeat records 3 to 14 for a second sediment fraction;
repeat this block as many times as there are sediment fractions (max.
LSED)
Remarks:
If no version number is specified, the program will read records 2 to 13 from the input
file, and set FACDSS = 1. This has been done to ensure backward compatibility.
The filenames for non-uniform parameters have a mandatory extension as indicated in
Table B.5.
Records 6–11 only have meaning for mud fractions (but have to be included for sand as
well).
Record 5 only has meaning for sand fractions (but has to be included in case of mud).
Deltares 535 of 688
DRAFT
Delft3D-FLOW, User Manual
Example of a version 1 file, with no keywords:
This example concerns the transport of two sediment fractions one sand (with a D50 = 140
micron) and one mud (with a spatially-varying critical stress for erosion, defined in the file
<critstr.tce>). Comments are printed between brackets.
*Version 01
2 1600. 2 {LSED : no. of sediment, CSOIL, IOPSUS }
sand {SEDTYP : type of sediment}
2650.0 {RHOSOL : density sediment [kg/m3]}
0.00014 {SEDDIA : median sediment diameter [m]}
0.0000 {SALMAX : salinity saline water [ppt]}
0.0000 {WS0 : settling velocity fresh water [m/s]}
0.0000 {WSM : settling velocity saline water [m/s]}
0.0000 {TCDUNI : critical stress for sedimentation [N/m2]}
0.0000 {TCEUNI : critical stress for erosion [N/m2]}
0.0000 {EROUNI : Erosion parameter [kg/m2/s]}
1600.0 {CDRYB : dry bed density [kg/m3]}
800.0 {SDBUNI : Uniform value of init. mass on bed [kg/m2]}
0.8 {FACDSS : factor for suspended sediment diameter [-]}
mud {SEDTYP : type of sediment}
2650.0 {RHOSOL : density sediment [kg/m3]}
0.0000 {SEDDIA : median sediment diameter [m]}
10.000 {SALMAX : salinity saline water [ppt]}
0.0005 {WS0 : settling velocity fresh water [m/s]}
0.0020 {WSM : settling velocity saline water [m/s]}
0.1000 {TCDUNI : critical stress for sedimentation [N/m2]}
critstr.tce
0.0001 {EROUNI : Erosion parameter [kg/m2/s]}
300.0 {CDRYB : dry bed density [kg/m3]}
800.0 {SDBUNI : Uniform value of init. mass on bed [kg/m2]}
1.0 {FACDSS : factor for suspended sediment diameter [-]}
Remark:
Additional comments in the input file are not mandatory.
Restrictions:
Records specifying an attribute filename should not contain additional comment text.
The values of the parameters are not checked against their domains.
Attribute files in the sediment input file
In the sediment input file 4 optional attribute files can be defined for spatially varying data:
FILTCD critical stress for sedimentation [N/m2].
FILTCE critical stress for erosion [N/m2].
FILERO erosion parameter [kg/m2s].
FILSDB initial sediment mass at the bed per unit area [kg/m2].
These (ASCII) files have the same format as the depth file. See section A.2.4:
Record description:
File type Record description
Free
formatted
Parameter values per row, starting at N = 1 to N = Nmax, separated by
one or more blanks. The number of continuation lines is determined by
the number of grid points per row (Mmax) and the maximum record size
of 132.
536 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Restrictions:
The maximum record length in the free formatted file is 132.
Parameter values from the file will not be checked against their domain.
The input items are separated by one or more blanks.
B.9.2 Morphology input file
The morphological input file contains additional information necessary for a morphodynamic
run. Like the <∗.sed>file there is the (old) version without keywords and a newer version
with keywords.
Table B.6: Morphological input file with keywords
Keyword Record description
MorphologyFileInformation
FileCreatedBy contains version number of FLOW-GUI
FileCreationDate creation date and time of the <∗.mor>file
FileVersion version number
Morphology
MorFac morphological scale factor
constant (1 real) or
file with time-dependent values (string)
in case of a file: no text may be used after the
filename
MorStt time interval in Tunit after the start of the simula-
tion after which morphological changes will be calcu-
lated (1 real)
Thresh threshold sediment thickness for reducing sediment
exchange [m] (1 real)
MorUpd update bed level during flow run (1 logical: false or
true) Keyword to be replaced by BedUpd.
BedUpd update bed level during flow run (1 logical: false or
true)
CmpUpd update bed composition during flow run (1 logical:
false or true)
NeglectEntrainment compute bed level changes from suspended sed-
iment transport rates instead of from the entrain-
ment and deposition terms; neglect the entrainment
of suspended sediment in the mass balance (1 logi-
cal: false or true)
continued on next page
Deltares 537 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.6 – continued from previous page
Keyword Record description
EqmBc Neumann boundary condition for non-cohesive sus-
pended sediment concentrations at inflow bound-
aries (1 logical: false or true) Keyword to be replaced
by NeuBcSand
NeuBcSand Neumann boundary condition for non-cohesive sus-
pended sediment concentrations at inflow bound-
aries (1 logical: false or true)
NeuBcMud Neumann boundary condition for cohesive sus-
pended sediment concentrations at inflow bound-
aries (1 logical: false or true)
DensIn include effect of sediment on density gradient (1 log-
ical: false or true)
AksFac Van Rijn’s reference height = AKSFAC ∗KS (1 real)
RWave multiplication factor estimated ripple height; wave re-
lated roughness = RWAVE ∗estimated ripple height
(1 real ) NOTE: estimated ripple height now fixed at
0.025 m.
Sus current-related suspended sediment transport factor
(1 real)
Bed current-related bedload transport factor (1 real)
SusW wave-related suspended sediment transport factor
(1 real)
BedW wave-related bedload sediment transport factor
(1 real)
SedThr minimum depth for sediment calculations (1 real)
ThetSD global / maximum dry cell erosion factor (1 real)
HMaxTH maximum depth for variable THETSD (1 real)
FWFac tuning parameter for wave streaming (1 real)
EpsPar Only for waves in combination with k-epsilon turbu-
lence model; Van Rijn’s parabolic mixing coefficient
(1 logical)
IopKCW option for ks and kw (1 real)
RDC current related roughness ks (1 real)
continued on next page
538 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.6 – continued from previous page
Keyword Record description
RDW wave related roughness kw (1 real)
UpdInf update bed levels at inflow boundaries (1 logical:
false or true)
Multi "Mormerge": run multiple morphological simulations
in parallel and continuously merge the morpholog-
ical developments (1 logical: false or true). See
https://svn.oss.deltares.nl/repos/
delft3d/trunk/examples/05_mormerge
DzMax maximum bed level change per time step expressed
as percentage of water depth (1 real)
CaMax maximum equilibrium sediment concentration in Van
Rijn formula (1 real)
OldMudFrac if true, do not include the fractional reduction factor
in the mud entrainment term (1 logical: false or true)
IHidExp hiding and exposure formulation number (1 integer
in the range 1 to 5) If the simulation includes a mud
fraction, only 1 is allowed.
1 no hiding and exposure
2 Egiazaroff formulation
3 Ashida & Michiue formulation
4 Parker et al. formulation
5 Wu, Wang & Jia formulation
ASKLHE hiding and exposure parameter for formulation 4
(1 real)
MWWJHE hiding and exposure parameter for formulation 5
(1 real)
Espir effect of spiral flow on bedload transport (1 real)
ISlope bed slope formulation (1 integer in the range 1 to 4)
1 no bed slope
2 Bagnold formulation
3 Koch & Flokstra formulation
4 Parker & Andrews formulation
AlfaBs longitudinal bed gradient factor for bedload transport
(1 real) used by all formulations except formulation 1
AlfaBn transverse bed gradient factor for bedload transport
for formulation 2 (1 real)
continued on next page
Deltares 539 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.6 – continued from previous page
Keyword Record description
Ashld multiplicative factor Ash for bed slope formulation 3
(1 real)
Bshld power Bsh for bed slope formulation 3 (1 real)
Cshld power Csh for bed slope formulation 3 (1 real)
Dshld power Dsh for bed slope formulation 3 (1 real)
CoulFri Coulomb friction for bed slope formulation 4 (1 real)
FlFdRat Lift/drag force ratio for bed slope formulation 4
(1 real)
ThetaCr Critical shear stress for bed slope formulation 4
(1 real)
BcFil file containing morphological boundary conditions (1
string)
Boundary
Name name of boundary as specified in BND file (1 string)
IBedCond bedload or bed level boundary condition (1 integer in
the range 0 to 5)
0 no bed level constraint
1 bed level fixed
2 depth specified as function of time
3 depth change specified as function of
time
4 bedload transport rate prescribed (vol-
ume rate of bed material)
5 bedload transport rate prescribed (vol-
ume rate of stone)
ICmpCond bed composition boundary condition (1 integer in the
range 0 to 3)
0 no bed composition constraint
1 composition constant
2 mass fractions specified as function of
time
3 volume fractions specified as function
of time
the Boundary block can be repeated for other boundaries
Numerics
continued on next page
540 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.6 – continued from previous page
Keyword Record description
UpwindBedload use upwind bedload (true, default) or central bedload
(false)
LaterallyAveragedBedload smoothed bedload transport rates (1 logical: false or
true). Default false.
MaximumWaterdepth use locally maximum water depth to compute char-
acteristic velocity for sediment transport at cell centre
(1 logical: false or true). Default false.
Output
All keywords in this block determine whether the
named quantity is to be written to the map-file. Un-
less indicated otherwise, the value should be 1 logi-
cal and the default is false.
VelocAtZeta characteristic velocity vector at cell centres
VelocMagAtZeta velocity magnitude at cell centres
VelocZAtZeta height of characteristic velocity at cell centres
ShearVeloc shear velocity u∗
BedTranspAtFlux bedload transport (due to currents and waves) plus
suspended transport due to waves at staggered cell
faces. Default true.
BedTranspDueToCurrentsAtZetabedload transport due to currents at cell centres
BedTranspDueToCurrentsAtFluxbedload transport due to currents at staggered cell
faces
BedTranspDueToWavesAtZeta bedload transport due to waves at cell centres
BedTranspDueToWavesAtFlux bedload transport due to waves at staggered cell
faces
SuspTranspAtFlux depth integrated suspended load transport minus
near bed corrective transport at staggered cell faces.
Default true.
SuspTranspDueToWavesAtZetasuspended load transport due to waves at cell
centres
SuspTranspDueToWavesAtFluxsuspended load transport due to waves at staggered
cell faces
NearBedTranspCorrAtFlux near bed corrective transport at staggered cell faces
continued on next page
Deltares 541 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.6 – continued from previous page
Keyword Record description
EquilibriumConcentration equilibrium concentration at which entrainment
equals deposition. Only for 2D simulations. Default
true.
NearBedRefConcentration near bed reference concentration. Default true.
SettlingVelocity settling velocity. Default true.
SourceSinkTerms source and sink terms
Bedslope bed slope vector
Taurat shear stress ratio
Bedforms bed form roughnesses
Dm arithmetic mean sediment diameter
Dg geometric mean sediment diameter
Frac sediment fraction in top layer
MudFrac mud fraction in top layer
FixFac non-erodible layer reduction factor
HidExp hiding and exposure factor
Percentiles percentiles of characteric sediment diameter to be
written to the map-file (default: 10, 50 and 90)
CumNetSedimentationFlux accumulated net sedimentation over the period be-
tween two map-file output times
BedLayerSedimentMass mass of each sediment fraction per unit area per bed
layer. Default: true.
BedLayerDepth depth of bed layer interfaces. Default: true.
BedLayerVolumeFractions volume fraction of each sediment fraction per bed
layer. Default: true.
BedLayerPorosity porosity per bed layer. Only if IPorosity>0. Default:
true.
continued on next page
542 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.6 – continued from previous page
Keyword Record description
StatWaterDepth The value lists the statistics to be computed and
stored for the water depth over the period between
two output times (1 string). The program will check
whether the following substrings occur in the value
string: min, max, mean, and std for minimum, max-
imum, mean, and standard deviation respectively.
Default: none.
StatVelocity The value lists the statistics to be computed and
stored for the depth averaged velocity over the pe-
riod between two output times (1 string). The pro-
gram will check whether the following substrings oc-
cur in the value string: min, max, mean, and std for
minimum, maximum, mean, and standard deviation
respectively. Default: none.
StatBedload The value lists the statistics to be computed and
stored for the total bed load (accumulated over all
sediment fractions) over the period between two out-
put times (1 string). The program will check whether
the following substrings occur in the value string:
min, max, mean, and std for minimum, maximum,
mean, and standard deviation respectively. Default:
none.
StatSuspload The value lists the statistics to be computed and
stored for the total suspended load (accumulated
over all sediment fractions) over the period between
two output times (1 string). The program will check
whether the following substrings occur in the value
string: min, max, mean, and std for minimum, max-
imum, mean, and standard deviation respectively.
Default: none.
TranspType sediment transport unit (1 integer in the range 0 to
2):
0 kg/(s m)
1 m3bed material/(s m)
2 m3stone/(s m) (default option)
AverageAtEachOutputTime cumulative average of sediment transport rates at
each map output time step instead of only at end of
simulation
Underlayer
continued on next page
Deltares 543 of 688
DRAFT
Delft3D-FLOW , User Manual
Table B.6 – continued from previous page
Keyword Record description
IUnderLyr stratigraphy schematisation model (1 integer, either
1 or 2)
1 one well mixed layer
2 multiple layers
MxNULyr maximum number of underlayers (excluding trans-
port and base layers) in case IUnderLyr=2 (1 integer)
TTLForm transport layer thickness formulation in case IUnder-
Lyr=2 (1 integer in the range 1 to 3)
1 constant user-defined
2 proportional to water depth
3 proportional to bedform height
ThTrLyr thickness of transport layer in case of TTLForm=1
uniform or (1 real) or
file <∗.ttl>with spatially varying values at cell cen-
tres (1 string)
TTLAlpha proportionality constant in case of TTLForm=2 or 3
TTLMin minimum thickness in case of TTLForm=2 or 3
ThUnLyr characteristic maximum thickness of stratigraphy lay-
ers in case IUnderLyr=2 (1 real)
UpdBaseLyr update option for composition and thickness of base
layer (1 integer in the range 1 to 4)
1 composition and thickness computed
2 composition constant, thickness com-
puted
3 composition copied from layer above,
thickness computed
4 composition and thickness constant
IniComp file containing initial bed composition (1 string) us-
age of this keyword overrules the IniSedThick
(or older SdBUni) values given in the sed file (see
section B.9.9)
For these boundary conditions you need to specify the imposed time-series in the file referred
to using the BcFil keyword. File format described in section B.9.7.
Example of a version 2 file, with keywords:
[MorphologyFileInformation]
FileCreatedBy = Delft3D-FLOW-GUI, Version: 3.39.14.03
FileCreationDate = Thu Dec 08 2005, 14:47:50
FileVersion = 02.00
[Morphology]
EpsPar = false Only for waves in combination with k-eps
IopKCW = 1 Flag for determining Rc and Rw
544 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
RDC = 0.01 [m] Current related roughness (IopKCW = 0)
RDW = 0.02 [m] Wave related roughness (IopKCW = 0)
MorFac = 1.0000000e+000 [-] Morphological scale factor
MorStt = 7.20e+02 [min] Spin-up interval from TStart till start of morph changes
Thresh = 5.0e-002 [m] Threshold sed thickness for reducing sed
exchange
MorUpd = true Update bathymetry during flow run
EqmBc = true Equilibrium concentration at inflow
boundaries
DensIn = false Include effect of sediment on density
gradient
AksFac = 1.00000e+000 [-] Van Rijn’s reference height = AKSFAC *KS
RWave = 2.0e+0 [-] Wave related roughness = RWAVE *estimated
ripple height. Van Rijn Recommends range 1-3
AlfaBs = 1.00e+00 [-] Longitudinal bed gradient factor for bedload transport
AlfaBn = 1.50e+0 [-] Transverse bed gradient factor for bedload transport
Sus = 1.0e+0 [-] Multipl fac for suspended sed reference concentration
Bed = 1.0e+00 [-] Multipl factor for bedload transport vector magnitude
SusW = 1.0e+000 [-] Wave-related suspended sed. transport factor
BedW = 1.00e+000 [-] Wave-related bedload sed. transport factor
SedThr = 1.00e-001 [m] Minimum threshold depth for sediment computations
ThetSD = 0.00e+000 [-] Fraction of erosion to assign to adjacent dry cells
HMaxTH = 1.50e+00 [m] Max depth for var THETSD. Set < SEDTHR to use global
value only
FWFac = 1.0e+00 [-] Only for waves in combination with k-eps model
Table B.7: Morphological input file without keywords
Record Record description
1 VERSION: version number (in the present Delft3D Release, this line
should read “∗Version 01”)
2 MORFAC: morphological scale factor (1 real)
3 MORSTT: time interval in minutes after the start of the simulation after
which morphological changes will be calculated (1 real)
4 THRESH: threshold sediment thickness for reducing sediment exchange
[m] (1 real)
5 MORUPD: update bathymetry during flow run (1 logical: .false. or .true.)
6 EQMBC: equilibrium sediment concentration profile at inflow boundaries
(1 logical: .false. or .true.)
7 DENSIN: include effect of sediment on density gradient (1 logical: .false.
or .true.)
8 AKSFAC: Van Rijn’s reference height = AKSFAC ∗KS (1 real)
9 RWAVE: multiplication factor estimated ripple height; wave related rough-
ness = RWAVE ∗estimated ripple height (1 real ) NOTE: estimated ripple
height now fixed at 0.025 m.
10 ALFABS: longitudinal bed gradient factor for bedload transport (1 real)
11 ALFABN: transverse bed gradient factor for bedload transport (1 real)
Deltares 545 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.7: Morphological input file without keywords
Record Record description
12 SUS: current-related suspended sediment transport factor (1 real)
13 BED: current-related bedload transport factor (1 real)
14 SUSW: wave-related suspended sediment transport factor (1 real)
15 BEDW: wave-related bedload sediment transport factor (1 real)
16 SEDTHR: minimum depth for sediment calculations (1 real)
17 THETSD: global / maximum dry cell erosion factor (1 real)
18 HMAXTH: maximum depth for variable THETSD (1 real)
19 FWFAC: tuning parameter for wave streaming (1 real)
20 EPSPAR: Van Rijn’s parabolic mixing coefficient (1 logical)
21 IOPKCW: option for ks and kw, RC: current related roughness ks, RW:
wave related roughness kw
Example version 1 file with no keywords:
This example concerns a morphological simulation in which the bed-level updating com-
mences 6250 minutes after the start of the simulation. Comments are printed between brack-
ets.
*Version 01
180. {MORFAC : morphological scale factor}
6250. {MORSTT : time interval in min after start, for bed updating}
0.2 {THRESH : threshold sed. thickness for reducing sed. exchange}
.true. {MORUPD : update bathymetry during flow run}
.true. {EQMBC : equilibrium concentration at inflow boundaries}
.true. {DENSIN : include effect of sediment on density gradient}
1.0 {AKSFAC : Van Rijn’s reference height = AKSFAC * KS}
2.0 {RWAVE : multiplication factor estimated ripple height}
1.0 {ALFABS : long. bed gradient factor for bedload transport}
1.5 {ALFABN : tran. bed gradient factor for bedload transport}
1.0 {SUS : multiplication factor sus. sed. ref. concentration}
1.0 {BED : multiplication factor bedload transp. vector magn.}
1.0 {SUSW : wave-related suspended sediment transport factor}
1.0 {BEDW : wave-related bedload sediment transport factor}
0.25 {SEDTHR : minimum depth for sediment calculations}
1.0 {THETSD : global / maximum dry cell erosion factor}
0.01 {HMAXTH : maximum depth for variable THETSD}
0.1 {FWFAC : tuning parameter for wave streaming}
.false. {EPSPAR : Van Rijn’s parabolic-linear mixing distribution}
1 0.01 0.02 {IOPKCW, RDC, RDW : parameters for determining morphological roughness}
Remarks:
If no version number is specified, the program will read records 2 to 19 from the input file,
and set EPSPAR = FALSE and IOPKCW = 1. This has been done to ensure backward
compatibility.
546 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
If EPSPAR is set to TRUE, Van Rijn’s parametric mixing distribution is also used if the
k-εmodel is selected in FLOW. If it is set to FALSE, the mixing is set equal to the εof
the k-εmodel.
IOPKCW is a switch to determine ks and kw:
IOPKCW = 0 : ks = RDC and kw = RDW
IOPKCW = 1 : ks is taken from current-related effective roughness height as deter-
mined in the FLOW (spatially varying) and kw=RW AV E ·∆r(see
section 11.3.3).
The file for specifying bedload, bed level and/or bed composition boundary conditions
is described in section B.9.7.
Restriction:
The values of the parameters are not checked against their domains.
Output enhancements:
The following parameters or (time dependent) data have been added to the result files:
Result file Data
History file Sediment concentrations, bedload transport, suspended transport, cumu-
lative bedload and suspended transports in monitoring points and inte-
grated over cross-sections, near-bed reference concentrations
Map file Sediment concentrations per layer, bedload and suspended transport, in-
stantaneous and averaged, time-varying bathymetry, available sediment
per fraction, cumulative erosion/sedimentation, near-bed reference con-
centrations, as well as any additional quantity selected in the output block
of the morphology input file (as indicated in Table B.6)
Remarks:
Use the MATLAB interface or Delft3D-QUICKPLOT to plot all these parameters.
Use the parameter DENSIN to switch on or off the effect of the sediment concentration
on the density and thereby its influence on the turbulence (hindered settling).
You can use the utility DATSEL to read these values from file. This requires the following
modifications to the <files.def>-file in directory <$D3D_HOME\$ARCH\flow\default>.
For PC this directory is usually located at: <c:\delft3d\w32\flow\default>. The section
about the ‘trim’-file should read:
’trim-’
’XCOR’,’YCOR’,’ALFAS’,’map-const’
10
’initial bottom depth’, ’DP0’ ,’ ’ ,’map-const’ ,’CODB’, ’TEMPOUT’,’d’
’depth water level points’, ’DP0’ ,’ ’ ,’map-const’ ,’KCS’,’map-const’,’s’
’water level’, ’S1’ ,’ ’ ,’map-series’,’KCS’,’map-const’,’c’
’velocity’, ’U1’, ’V1’, ’map-series’,’KCS’,’map-const’,’u’
’bottom stress’, ’TAUKSI’,’TAUETA’,’map-series’,’KCS’,’map-const’,’u’
’thickness of bed layer’, ’DPSED’,’ ’ ,’map-sed-series’,’KCS’,’map-const’,’c’
’time-varying depth’, ’DPS’,’ ’ ,’map-sed-series’,’KCS’,’map-const’,’c’
’bottom sediment kg/m2’, ’BODSED’,’ ’ ,’map-sed-series’,’KCS’,’map-const’,’c’
’bedload transport’, ’SBUU’ ,’SBVV’ ,’map-sed-series’,’KCS’,’map-const’,’u’
’susp. load transport’, ’SSUU’ ,’SSVV’ ,’map-sed-series’,’KCS’,’map-const’,’u’
Deltares 547 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.8: Additional transport relations
Formula Bedload Affected
by Waves
IFORM
for cohesive fractions
11.2.3, Partheniades-Krone Suspended Yes -3
B.9.5, User-defined Suspended Yes —
for non-cohesive fractions
—, Van Rijn (2007) Bedload + suspended Yes -2
11.5.1,Van Rijn (1993) Bedload + suspended Yes -1
11.5.2,Engelund-Hansen (1967) Total transport No 1
11.5.3,Meyer-Peter-Muller (1948) Total transport No 2
11.5.4,General formula Total transport No 4
11.5.5,Bijker (1971) Bedload + suspended Yes 5
11.5.6,Van Rijn (1984) Bedload + suspended No 7
11.5.7,Soulsby/Van Rijn Bedload + suspended Yes 11
11.5.8,Soulsby Bedload + suspended Yes 12
11.5.9,Ashida–Michiue (1974) Total transport Yes 14
11.5.10,Wilcock–Crowe (2003) Bedload No 16
11.5.11,Gaeuman et al. (2009) labo-
ratory calibration
Bedload No 17
11.5.12,Gaeuman et al. (2009) Trinity
River calibration
Bedload No 18
B.9.4, User-defined Bedload + suspended Yes —
B.9.3 Sediment transport input file
By default, the formulations of Van Rijn et al. (2000) are applied for the suspended and bed-
load transport of non-cohesive sediment (IFORM=-1), while the formulations of Partheniades
and Krone are used for cohesive sediment (IFORM=-3). This is just one of the sediment
transport formulae implemented; Table B.8 gives an overview of all transport formulae avail-
able. You can also supply a library with your own favourite sediment transport formula and use
one of those, but more about that in Section B.9.4. Let’s focus now on the set of predefined
formulations.
If you want to use one of these formulae, you have to specify the IFORM number listed in
Table B.8 as value for the keyword TraFrm in the Sediment block of the sediment transport
input file (see Table B.3) and specify the keywords relevant for the selected transport formula.
The following table lists the parameters to be specified in the sediment transport input file for
each separate transport formula.
Table B.9: Transport formula parameters
Keyword Parameter Unit
—, Partheniades-Krone
EroPar erosion parameter kg/m2s
TcrSed critical stress for sedimentation N/m2
TcrEro critical stress for erosion of bed N/m2
TcrFluff critical stress for erosion of fluff layer N/m2
ParFluff0 maximum erosion flux from fluff layer
ParFluff1 erosion parameter for fluff layer
548 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Keyword Parameter Unit
DepEff reduction factor for deposition/sedimentation rate
(value between 0 = no sedimentation and 1 = refer-
ence sedimentation, or equal to -1 = reduction based
on critical stress for sedimentation) [default: -1]
-
—, Van Rijn (2007)
IopSus option for determining suspended sediment diameter
(see section 11.3.1)
integer
Pangle phase lead for bed shear stress of Nielsen (1992)
Fpco phase lag effects in wave-induced suspended trans-
port
Subiw wave period subdivision integer
[De-
fault:
50]
EpsPar Only for waves in combination with k-epsilon turbu-
lence model; Van Rijn’s parabolic mixing coefficient
logical
GamTcr TODO(??): TODOto be described
SalMax salinity for saline settling velocity ppt
11.5.1,Van Rijn (1993)
IopSus option for determining suspended sediment diameter
(see section 11.3.1)
integer
AksFac Van Rijn’s reference height = AKSFAC ∗KS -
RWave multiplication factor estimated ripple height; wave re-
lated roughness = RWAVE ∗estimated ripple height
(1 real ) NOTE: estimated ripple height now fixed at
0.025 m.
-
RDC current related roughness ks m
RDW wave related roughness kw m
IopKCW option for ks and kw
EpsPar Only for waves in combination with k-epsilon turbu-
lence model; Van Rijn’s parabolic mixing coefficient
logical
11.5.2,Engelund-Hansen (1967)
ACal calibration coefficient α-
RouKs bed roughness height rk(dummy) m
SusFac suspended sediment fraction -
11.5.3,Meyer-Peter-Muller (1948)
ACal calibration coefficient α-
11.5.4,General formula
ACal calibration coefficient α-
PowerB power b-
PowerC power c-
RipFac ripple factor or efficiency factor µ-
ThetaC critical Shields’ mobility parameter θc-
11.5.5,Bijker (1971)
CalBs calibration coefficient bfor shallow water BS -
CalBd calibration coefficient bfor deep water BD -
CritCs shallow water (hw/h) criterion Cs-
CritCd deep water (hw/h) criterion Cd-
– dummy argument NA
Deltares 549 of 688

DRAFT
Delft3D-FLOW, User Manual
Keyword Parameter Unit
RouKs bed roughness height rcm
WSettle settling velocity wm/s
Porosity porosity ε-
TWave wave period Tuser (used if computed wave period <
10−6)
s
11.5.6,Van Rijn (1984)
ACal calibration coefficient α1-
– dummy argument NA
Aks reference level ξcm
WSettle settling velocty wsm/s
11.5.7,Soulsby/Van Rijn
ACal calibration coefficient Acal -
RatioD90D50 D90/D50 ratio -
RouZ0 z0roughness height m
11.5.8,Soulsby
ACal calibration coefficient Acal -
ModInd model index modind -
RatioD50Z0 D50/z0ratio χ-
–, Wang/Fredsoe
VicMol kinematic (molecular) viscosity coefficient νmol m2/s
ACal calibration coefficient Acal -
11.5.9,Ashida–Michiue (1974)
ACal calibration coefficient α-
ThetaC critical Shields’ mobility parameter θc-
PowerM power m-
PowerP power p-
PowerQ power q-
11.5.10,Wilcock–Crowe (2003)
ACal alibration coefficient -
11.5.11,Gaeuman et al. (2009) laboratory calibration
ThetaC0 calibration coefficient θc0-
Alpha0 calibration coefficient α0-
11.5.12,Gaeuman et al. (2009) Trinity River calibration
ThetaC0 calibration coefficient θc0-
Alpha0 calibration coefficient α0-
User-defined
none -
The kernel also supports old files in which the value of TraFrm is not the integer of the
sediment transport formula, but the name of a sediment transport input file <∗.tra>. This
option is not supported by the user interface. These sediment transport input files exist in two
flavours: keyword-based and not keyword-based.
The file may start with an arbitrary number of lines not containing the text IFORM.
Then a line starting with sediment transport formula number IFORM and containing text
IFORM.
Then an arbitrary number of lines starting with an asterisk (∗) may follow.
550 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.10: Sediment transport formula input file with keywords
Keyword Record description
TransportFormulaFileInformation
FileCreatedBy contains version number of FLOW-GUI
FileCreationDate creation date and time of the <∗.tra>file
FileVersion version number, currently 01.00
TransportFormula
Name name of transport formula (string)
DLL library name without <.dll>or <.so>extension (string)
Function function name within library to call
InputFile optional file name to be passed to library
Then a line starting with the number sign (#) followed by a transport formula number
optionally followed by text identifying the transport formula for the user. The next lines
should contain the parameter values of the transport formula coefficients: one parameter
value per line optionally followed by text identifying the parameter. There may be an
arbitrary number of blocks starting with # in the file, but exactly one should correspond to
the transport formula number IFORM specified above.
An example file for transport formula 5 referred to as “Bijker (1971)” is provided below.
Remarks:
Van Rijn (1993) does not require any additional parameters. Only the transport formula
number (-1) followed by the string IFORM is required.
The user-defined transport formula requires a keyword based transport input file as
described below.
The keyword IFORM must be present in the same line as the formula number.
The file should not contain tabs.
If you want to use your own sediment transport formula, the transport input file should use a
new keyword based file format described by Table B.10. This file points to a shared library
(on Windows commonly referred to as a DLL) and the subroutine in that library that should
be called to get the transport rates. The library may contain one or more sediment transport
formulae. The interface of the subroutine depends on the type of sediment (“sand”, “bedload”
or “mud”) for which the formula is to be used. For sand fractions the routine should return
sbc_total,sbc,sbcu,sbcv,equi_conc,cesus,ssus,sbwu,sbwv,sswu,sswv
and t_relax. Even though bedload fractions don’t have a suspended load component,
the subroutine for such sediment fractions should return the same list of quantities as for the
case of sand fractions. For mud fractions the routine should return source and sink. The
meaning of these output arguments is described in the Sections B.9.4 and B.9.5 for sand and
mud fractions, respectively.
Deltares 551 of 688

DRAFT
Delft3D-FLOW, User Manual
Example for Bijker formula:
This is an example of a sediment transport input file to be used with the Bijker formulation.
5 Number of transport formula IFORM
*--------------------------------------------------------
#5 BIJKER with wave effect
5 -Par 1- Coefficient shallow water BS
2 -Par 2- Coefficient deep water BD
.4 -Par 3- Shallow water limit CRITS
.05 -Par 4- Deep water limit CRITD
.000300 -Par 5- D90 grain size D90
.05 -Par 6- Bottom roughness height RK
.016 -Par 7- Particle fall velocity W
.4 -Par 8- Porosity POR
7.0 -Par 9- Wave Period T
# End of specification of transport relation
Note that only the number 5, the marker #5 and the values on the next lines are required. All
the other text is optional.
Example for Van Rijn 1993 formula:
This is an example of a sediment transport input file to be used with the Van Rijn (1993)
formulations in which case there is no need for additional parameters. The file could simply
read:
-1 IFORM
Example for user-defined transport formula:
This is an example of the Engelund Hansen transport formula implemented as a subroutine
EngHan in a libary <MyTransportLibrary.dll>or <MyTransportLibrary.so>depending on the
operating system. The DLL points to the appropriate library file (which should be located in
the work directory or somewhere on the Windows search path). The Function points to the
appropriate subroutine in the library file.
[TransportFormulaFileInformation]
FileCreationDate = Thu Dec 08 2005, 14:47:50
FileVersion = 01.00
[TransportFormula]
Name = My Engelund Hansen implementation
DLL = MyTransportLibrary
Function = EngHan
B.9.4 User defined transport routine for sand or bedload fractions
This section gives an example code for a user-defined transport routine for sand or bedload
fractions. The interface of the routine for mud fractions is slightly different; it is described in
section B.9.5. This particular example implements the Engelund and Hansen (1967) formula
as a total load transport formula; the code can be found in the source directory of the Delft3D
installation on your computer.
The order and way in which arguments are passed to external functions differs among FOR-
TRAN compilers. Most compilers allow you to change these settings, however, if these set-
tings do not match the settings of the calling program the program will crash when trying to
call the subroutine in the supplied library. It is, therefore, important to make sure that the
settings that you use to compile the library match the settings used when compiling delftflow.
552 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
It therefore recommended to generate the library using the same compiler as delftflow; at
this moment this is the Intel Fortran 11 compiler2using default settings for a multithreaded
program.
Most of the code is straightforward and standard Fortran, so it should be fairly easy to under-
stand. Some statements may, however, require some explanation. The !DEC$ statement is
read by the compiler and makes sure the subroutine name is visible to the outside world. The
real type “hp” is defined as a double precision quantity: even if the simulation runs in single
precision, the communication with the library occurs in double precision hence all input and
output arguments of the subroutine should be defined to be of the type “real(hp)”.
The input quantities are provided using three linear arrays, namely a real array, an integer
array and a character array. Each element of these arrays represents a different quantity;
see the example for a description of the various input items. You may either use the various
elements directly in your formulae or define local variables as done in the example; the latter
approach keeps your own code more readable and separate from the Delft3D interface. The
array approach for the input items allows us to add extra input parameters to the end of the
arrays without breaking compatibility with older routines.
subroutine enghan(dll_integers, max_integers, &
dll_reals , max_reals , &
dll_strings , max_strings , &
sbc_total, sbc , sbcu, sbcv, sbwu, sbwv , &
equi_conc, cesus, ssus, sswu, sswv, t_relax , &
error_message )
!DEC$ ATTRIBUTES DLLEXPORT, ALIAS: ’ENGHAN’ :: ENGHAN
!!--description-----------------------------------------------------------------
!
! Computes sediment transport according to
! Engelund and Hansen (1967)
!
!!--pseudo code and references--------------------------------------------------
! NONE
!!--declarations----------------------------------------------------------------
implicit none
!
! Local constants
! Interface is in high precision
!
integer , parameter :: hp = kind(1.0d0)
!
! Subroutine arguments: input
!
integer , intent(in) :: max_integers
integer , intent(in) :: max_reals
integer , intent(in) :: max_strings
integer , dimension(max_integers), intent(in) :: dll_integers
real(hp) , dimension(max_reals) , intent(in) :: dll_reals
character(len=256), dimension(max_strings) , intent(in) :: dll_strings
!
! Subroutine arguments: output
!
real(hp) , intent(out) :: sbc ! bedload due to currents, magnitude [m3/m/s]
real(hp) , intent(out) :: sbcu ! bedload due to currents, m component [m3/m/s]
real(hp) , intent(out) :: sbcv ! bedload due to currents, n component [m3/m/s]
real(hp) , intent(out) :: sbwu ! bedload due to waves, m component [m3/m/s]
real(hp) , intent(out) :: sbwv ! bedload due to waves, n component [m3/m/s]
real(hp) , intent(out) :: cesus ! susp load concentration [m3/m3]
real(hp) , intent(out) :: ssus ! susp load due to currents, magnitude [m3/m/s]
2If you can’t use this compiler then make sure that the following minimum conditions are met: multi-threaded
library with calling convention “C, by reference” and “string length arguments after all arguments”.
Deltares 553 of 688

DRAFT
Delft3D-FLOW , User Manual
real(hp) , intent(out) :: sswu ! susp load due to waves, m component [m3/m/s]
real(hp) , intent(out) :: sswv ! susp load due to waves, n component [m3/m/s]
real(hp) , intent(out) :: t_relax ! relaxation time in 2D mode [s]
character(len=256), intent(out) :: error_message ! not empty: echo and stop run
logical , intent(out) :: equi_conc ! true: contration cesus returned by formula
! false: susp load ssus returned by formula
logical , intent(out) :: sbc_total ! true: bedload magnitude returned by formula
! false: bedload components returned
!
! Local variables for input parameters
!
integer :: l
integer :: m
integer :: n, nm
real(hp) :: ag
real(hp) :: chezy
real(hp) :: d10, d50, d90, dss, dstar
real(hp) :: h, hidexp, hrms
real(hp) :: mudfrac
real(hp) :: rhosol, rhowat, rlabda
real(hp) :: sal
real(hp) :: taub, tem, teta, timsec, tp
real(hp) :: u, umod, uorb, utot, uuu
real(hp) :: v, vicmol, vvv
real(hp) :: ws
real(hp) :: zumod
character(len=256) :: runid
!
! Local variables
!
real(hp) :: acal
real(hp) :: cf
real(hp) :: delta
real(hp) :: ustar
!
!! extract array variables -----------------------------------------------------
!
if (max_integers < 4) then
error_message = ’Insufficient integer values provided by delftflow’
return
endif
nm = dll_integers( 1) ! nm index of the grid cell
m = dll_integers( 2) ! m index of the grid cell
n = dll_integers( 3) ! n index of the grid cell
l = dll_integers( 4) ! number of the sediment fraction in the computation
!
if (max_reals < 30) then
error_message = ’Insufficient real values provided by delftflow’
return
endif
timsec = dll_reals( 1) ! current time since reference time [s]
u = dll_reals( 2) ! m component of effective depth-averaged velocity [m/s]
v = dll_reals( 3) ! n component of effective depth-averaged velocity [m/s]
utot = dll_reals( 4) ! magnitude of effective depth-averaged velocity [m/s]
uuu = dll_reals( 5) ! m component of characteristic velocity [m/s]
vvv = dll_reals( 6) ! n component of characteristic velocity [m/s]
umod = dll_reals( 7) ! magnitude of characteristic velocity [m/s]
zumod = dll_reals( 8) ! height above bed of characteristic velocity [m]
h = dll_reals( 9) ! water depth [m]
chezy = dll_reals(10) ! local Chezy value [m1/2/s]
hrms = dll_reals(11) ! wave height [m]
tp = dll_reals(12) ! wave period [s]
teta = dll_reals(13) ! angle between wave dir and local grid orientation [deg]
rlabda = dll_reals(14) ! wave length [m]
uorb = dll_reals(15) ! orbital velocity at the bed [m/s]
d50 = dll_reals(16) ! sediment diameter of fraction [m]
554 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
dss = dll_reals(17) ! sediment diameter of fraction when in suspension [m]
dstar = dll_reals(18) ! critical dimensionless grain size parameter [-]
d10 = dll_reals(19) ! 10-percentile diameter of local sediment mixture [m]
d90 = dll_reals(20) ! 90-percentile diameter of local sediment mixture [m]
mudfrac = dll_reals(21) ! mud fraction [-]
hidexp = dll_reals(22) ! hiding & exposure factor [-]
ws = dll_reals(23) ! settling velocity [m/s]
rhosol = dll_reals(24) ! solid sediment density [kg/m3]
rhowat = dll_reals(25) ! local water density [kg/m3]
sal = dll_reals(26) ! local salinity [ppt]
tem = dll_reals(27) ! local water temperature [degC]
ag = dll_reals(28) ! gravitational acceleration [m/s2]
vicmol = dll_reals(29) ! molecular viscosity of water [m2/s]
taub = dll_reals(30) ! bed shear stress [N/m2]
!
if (max_strings < 2) then
error_message = ’Insufficient strings provided by delftflow’
return
endif
runid = dll_strings( 1) ! user-specified run-identification
filenm = dll_strings( 2) ! user-specified file name (keyword: InputFile)
!
!! executable statements -------------------------------------------------------
!
write(*,*) ’plugin_delftflow_traform.dll : enghan : called’
! The output argument error_message MUST have value ’ ’ to continue the calculation.
!
error_message = ’ ’
!
! If you want to indicate that this subroutine has encountered some invalid input or
! encountered some unexpected situation, you can set the error_message to a non-empty
! string. This error_message will then be shown in the log file of the calling program
! and the simulation will abort. This is shown by the next line, remove it to enable
! this subroutine.
!
! error_message = ’Use the Engelund Hansen formula inside \DFLOW’
!
! Set some parameters and compute derivative quantities.
!
delta = (rhosol - rhowat) / rhowat ! relative density of sediment particle
acal = 0.6_hp
cf = ag/chezy/chezy
ustar = sqrt(cf)*utot
!
! Set the transport rates and concentrations.
! Note: all transport quantities should be given in m3 solid material per s.
! i.e. rate (or concentration) in kg/s =
! rhosol *specified rate (or concentration)
!
sbc_total = .true. ! set flag to indicate that bedload magnitude is given
sbc = acal*0.05_hp*utot*ustar**4/ag**2/sqrt(cf)/delta**2/d50
! bedload magnitude is non-zero
sbcu = 0.0_hp ! bedload component, m direction (here dummy since sbc_total is true)
sbcv = 0.0_hp ! bedload component, n direction (here dummy since sbc_total is true)
!
! There should be no suspended load.
!
equi_conc = .false. ! set flag to indicate that susp load magnitude is given
cesus = 0.0_hp ! suspended load concentration (here dummy since equi_conc is false)
ssus = 0.0_hp ! zero suspended load transport
!
! This formula does not include wave driven transport.
!
sbwu = 0.0_hp ! bedload transport, m direction due to waves is zero
sbwv = 0.0_hp ! bedload transport, n direction due to waves is zero
sswu = 0.0_hp ! suspended load transport, m direction due to waves is zero
Deltares 555 of 688
DRAFT
Delft3D-FLOW, User Manual
sswv = 0.0_hp ! suspended load transport, n direction due to waves is zero
!
! Since there is no suspended load, also the relaxation time for depth-averaged models can be
! set to zero.
!
t_relax = 0.0_hp ! relaxation time is zero
end subroutine enghan
!$
For the bedload (due to currents) the routine may either return the total transport rate (sbc)
or the two transport components (sbcu and sbcv) in the two grid directions mand n. The
logical flag sbc_total indicates which values the routine has set (obviously true for the
former choice and false for the latter choice). In the former case the sediment transport
direction is automatically set equal to the near bed velocity direction in a 3D model and equal
to the depth-averaged velocity direction corrected for secondary flow (see Equation (11.44))
in a 2D model.
For the suspended load (due to currents) there are again two options: the routine may either
return the (equilibrium) suspended sediment concentration (cesus) or the (equilibrium) sus-
pended transport rate (ssus). The logical flag equi_conc indicates which value the routine
has set (obviously true for the former choice and false for the latter choice). For sand frac-
tions the (equilibrium) suspended sediment concentration will be computed in the latter case
as Ssus/uH where uis the depth-averaged velocity and His the water depth. For bedload
fractions the reverse is done: if cesus is given then the suspended sediment transport rate
is computed by multiplying it with uH.
If you want to distinguish between flow and wave driven transports, you may set the wave
driven bedload and suspended load rate components separately using sbwu,sbwv,sswu
and sswv. It should be noted that the suspended load due to currents (specified as either
cesus or ssus) will be used to force the advection-diffusion equation for the suspended
load. The suspended load due to waves (specified using sswu and sswv) is treated as a
regular explicit sediment flux.
Remark:
All transport quantities should be given in [m3] solid material, i.e. excluding any pore
volumes.
In 3D simulations the advection and diffusion of sediment in the vertical direction results in
a relaxation behaviour; the concentrations are imposed near the bed and it takes time for
the model to reach the equilibrium concentration. In 2D simulations the processes in the
vertical direction are lacking; for such applications a relaxation time is needed to reproduce
this behaviour. You can specify it here as t_relax; if t_relax is equal to zero or if it is
negative then the program will use the Galappatti (1983) formula.
B.9.5 User defined transport routine for mud fractions
This section gives an example code for a user-defined transport routine for mud fractions. The
interface of the routine for sand and bedload fractions is slightly different; it is described in
section B.9.4. This particular example implements the source and sink terms of Partheniades
(1965) formulae; the code can be found in the source directory of the Delft3D installation on
your computer.
The order and way in which arguments are passed to external functions differs among FOR-
TRAN compilers. Most compilers allow you to change these settings, however, if these set-
tings do not match the settings of the calling program the program will crash when trying to
556 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
call the subroutine in the supplied library. It is, therefore, important to make sure that the
settings that you use to compile the library match the settings used when compiling delftflow.
It therefore recommended to generate the library using the same compiler as delftflow; at
this moment this is the Intel Fortran 11 compiler3using default settings for a multithreaded
program.
Most of the code is straightforward and standard Fortran, so it should be fairly easy to under-
stand. Some statements may, however, require some explanation. The !DEC$ statement is
read by the compiler and makes sure the subroutine name is visible to the outside world. The
real type “hp” is defined as a double precision quantity: even if the simulation runs in single
precision, the communication with the library occurs in double precision hence all input and
output arguments of the subroutine should be defined to be of the type “real(hp)”.
The input quantities are provided using three linear arrays, namely a real array, an integer
array and a character array. Each element of these arrays represents a different quantity;
see the example for a description of the various input items. The input parameters for the
mud transport formula are the same as those for the sand and bedload fractions, however, a
number of input parameters are not defined in case of mud, namely the characteristic grain
diameters D10,D50,D90,Ds,D∗, the mud fraction and the hiding and exposure factor ξ.
You may either use the various elements directly in your formulae or define local variables as
done in the example; the latter approach keeps your own code more readable and separate
from the Delft3D interface. The array approach for the input items allows us to add extra input
parameters to the end of the arrays without breaking compatibility with older routines.
subroutine parkro(dll_integers, max_integers, &
dll_reals , max_reals , &
dll_strings , max_strings , &
sink , source , &
error_message )
!DEC$ ATTRIBUTES DLLEXPORT, ALIAS: ’PARKRO’ :: PARKRO
!!--description-----------------------------------------------------------------
!
! Computes source and sink terms according to
! Partheniades and Krone (1965)
!
!!--pseudo code and references--------------------------------------------------
! NONE
!!--declarations----------------------------------------------------------------
implicit none
!
! Local constants
! Interface is in high precision
!
integer , parameter :: hp = kind(1.0d0)
!
! Subroutine arguments: input
!
integer , intent(in) :: max_integers
integer , intent(in) :: max_reals
integer , intent(in) :: max_strings
integer , dimension(max_integers), intent(in) :: dll_integers
real(hp) , dimension(max_reals) , intent(in) :: dll_reals
character(len=256), dimension(max_strings) , intent(in) :: dll_strings
!
! Subroutine arguments: output
!
real(hp) , intent(out) :: source ! source term [kg/m2/s]
real(hp) , intent(out) :: sink ! sink term [-] (to be multiplied with concentration and settling velocity)
3If you can’t use this compiler then make sure that the following minimum conditions are met: multi-threaded
library with calling convention “C, by reference” and “string length arguments after all arguments”.
Deltares 557 of 688

DRAFT
Delft3D-FLOW , User Manual
character(len=256), intent(out) :: error_message ! not empty: echo and stop run
!
! Local variables for input parameters
!
integer :: l
integer :: m
integer :: n, nm
real(hp) :: ag
real(hp) :: chezy
real(hp) :: d10, d50, d90, dss, dstar
real(hp) :: h, hidexp, hrms
real(hp) :: mudfrac
real(hp) :: rhosol, rhowat, rlabda
real(hp) :: sal
real(hp) :: taub, tem, teta, timsec, tp
real(hp) :: u, umod, uorb, utot, uuu
real(hp) :: v, vicmol, vvv
real(hp) :: ws
real(hp) :: zumod
character(len=256) :: runid
!
! Local variables
!
real(hp) :: eropar
real(hp) :: taum, tcrero, tcrdep
!
!! extract array variables -----------------------------------------------------
!
if (max_integers < 4) then
error_message = ’Insufficient integer values provided by delftflow’
return
endif
nm = dll_integers( 1) ! nm index of the grid cell
m = dll_integers( 2) ! m index of the grid cell
n = dll_integers( 3) ! n index of the grid cell
l = dll_integers( 4) ! number of the sediment fraction in the computation
!
if (max_reals < 30) then
error_message = ’Insufficient real values provided by delftflow’
return
endif
timsec = dll_reals( 1) ! current time since reference time [s]
u = dll_reals( 2) ! m component of effective depth-averaged velocity [m/s]
v = dll_reals( 3) ! n component of effective depth-averaged velocity [m/s]
utot = dll_reals( 4) ! magnitude of effective depth-averaged velocity [m/s]
uuu = dll_reals( 5) ! m component of characteristic velocity [m/s]
vvv = dll_reals( 6) ! n component of characteristic velocity [m/s]
umod = dll_reals( 7) ! magnitude of characteristic velocity [m/s]
zumod = dll_reals( 8) ! height above bed of characteristic velocity [m]
h = dll_reals( 9) ! water depth [m]
chezy = dll_reals(10) ! local Chezy value [m1/2/s]
hrms = dll_reals(11) ! wave height [m]
tp = dll_reals(12) ! wave period [s]
teta = dll_reals(13) ! angle between wave dir and local grid orientation [deg]
rlabda = dll_reals(14) ! wave length [m]
uorb = dll_reals(15) ! orbital velocity at the bed [m/s]
!
!---- the following parameters are undefined for mud fractions -----------------
d50 = dll_reals(16) ! sediment diameter of fraction [m]
dss = dll_reals(17) ! sediment diameter of fraction when in suspension [m]
dstar = dll_reals(18) ! critical dimensionless grain size parameter [-]
d10 = dll_reals(19) ! 10-percentile diameter of local sediment mixture [m]
d90 = dll_reals(20) ! 90-percentile diameter of local sediment mixture [m]
mudfrac = dll_reals(21) ! mud fraction [-]
hidexp = dll_reals(22) ! hiding & exposure factor [-]
!---- the parameters above are undefined for mud fractions ---------------------
558 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
!
ws = dll_reals(23) ! settling velocity [m/s]
rhosol = dll_reals(24) ! solid sediment density [kg/m3]
rhowat = dll_reals(25) ! local water density [kg/m3]
sal = dll_reals(26) ! local salinity [ppt]
tem = dll_reals(27) ! local water temperature [degC]
ag = dll_reals(28) ! gravitational acceleration [m/s2]
vicmol = dll_reals(29) ! molecular viscosity of water [m2/s]
taub = dll_reals(30) ! bed shear stress [N/m2]
!
if (max_strings < 2) then
error_message = ’Insufficient strings provided by delftflow’
return
endif
runid = dll_strings( 1) ! user-specified run-identification
filenm = dll_strings( 2) ! user-specified file name (keyword: InputFile)
!
!! executable statements -------------------------------------------------------
!
write(*,*) ’plugin_delftflow_traform.dll : parkro : called’
! The output argument error_message MUST have value ’ ’ to continue the calculation.
!
error_message = ’ ’
!
! If you want to indicate that this subroutine has encountered some invalid input or
! encountered some unexpected situation, you can set the error_message to a non-empty
! string. This error_message will then be shown in the log file of the calling program
! and the simulation will abort. This is shown by the next line, remove it to enable
! this subroutine.
!
! error_message = ’Use the Partheniades Krone formula inside \DFLOW’
!
! Set some parameters and compute derivative quantities.
!
tcrero = 0.1_hp
tcrdep = 0.1_hp
eropar = 2.5e-6_hp
!
! Compute source and sink terms
!
taum = max(0.0_hp, taub/tcrero - 1.0_hp)
source = eropar *taum
if (tcrdep > 0.0_hp) then
sink = max(0.0_hp , 1.0_hp-taub/tcrdep)
else
sink = 0.0_hp
endif
end subroutine parkro
Compared to the subroutine for sand and bedload fractions (described in section B.9.4) this
routine has very few output arguments, namely only source and sink. The source term
will be used explicitly and should be specified in kg (mud) per unit area (m2) per unit of
time (s). The sink term is treated implicitly and reads sink times ct+1wswhere ct+1 is the
concentration at the new time level in [kg/m3] and wsis the local settling velocity in [m/s];
hence the quantity sink to be returned by the routine is dimensionless.
Remarks:
The unit for the source term is [kg/m3/s].
The sink quantity is dimensionless since it will be multiplied with the concentration in
[kg/m3] and the settling velocity in [m/s] to give the actual sink term in the equation.
Deltares 559 of 688

DRAFT
Delft3D-FLOW , User Manual
B.9.6 User defined routine for the settling velocity
This section gives an example code for a user-defined routine that computes the settling
velocity. This particular example implements a simple salinity dependent settling formula for
mud, but the same routine interface can also be used for sand fractions.
The order and way in which arguments are passed to external functions differs among FOR-
TRAN compilers. Most compilers allow you to change these settings, however, if these set-
tings do not match the settings of the calling program the program will crash when trying to
call the subroutine in the supplied library. It is, therefore, important to make sure that the
settings that you use to compile the library match the settings used when compiling delftflow.
It therefore recommended to generate the library using the same compiler as delftflow; at
this moment this is the Intel Fortran 11 compiler4using default settings for a multithreaded
program.
Most of the code is straightforward and standard Fortran, so it should be fairly easy to under-
stand. Some statements may, however, require some explanation. The !DEC$ statement is
read by the compiler and makes sure the subroutine name is visible to the outside world. The
real type “hp” is defined as a double precision quantity: even if the simulation runs in single
precision, the communication with the library occurs in double precision hence all input and
output arguments of the subroutine should be defined to be of the type “real(hp)”.
The input quantities are provided using three linear arrays, namely a real array, an integer
array and a character array. Each element of these arrays represents a different quantity; see
the example for a description of the various input items. The input parameters for the mud
transport formula are the same as those for the sand and bedload fractions, however, two
input parameters are not defined in case of mud, namely D50 and Ds. You may either use the
various elements directly in your formulae or define local variables as done in the example; the
latter approach keeps your own code more readable and separate from the Delft3D interface.
The array approach for the input items allows us to add extra input parameters to the end of
the arrays without breaking compatibility with older routines.
subroutine settle(dll_integers, max_integers, &
dll_reals , max_reals , &
dll_strings , max_strings , &
ws , &
error_message )
!DEC$ ATTRIBUTES DLLEXPORT, ALIAS: ’SETTLE’ :: SETTLE
!!--description-----------------------------------------------------------------
!
! Computes simple salinity dependent settling velocity.
!
!!--pseudo code and references--------------------------------------------------
! NONE
!!--declarations----------------------------------------------------------------
implicit none
!
! Local constants
! Interface is in high precision
!
integer , parameter :: hp = kind(1.0d0)
!
! Subroutine arguments: input
!
integer , intent(in) :: max_integers
integer , intent(in) :: max_reals
4If you can’t use this compiler then make sure that the following minimum conditions are met: multi-threaded
library with calling convention “C, by reference” and “string length arguments after all arguments”.
560 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
integer , intent(in) :: max_strings
integer , dimension(max_integers), intent(in) :: dll_integers
real(hp) , dimension(max_reals) , intent(in) :: dll_reals
character(len=256), dimension(max_strings) , intent(in) :: dll_strings
!
! Subroutine arguments: output
!
real(hp) , intent(out) :: ws ! settling velocity [m/s]
character(len=256), intent(out) :: error_message ! not empty: echo and stop run
!
! Local variables for input parameters
!
integer :: k
integer :: l
integer :: m
integer :: n, nm
real(hp) :: ag
real(hp) :: cconc, chezy, conc, csoil
real(hp) :: d50, dss
real(hp) :: epstur
real(hp) :: h
real(hp) :: ktur
real(hp) :: rhosol, rhowat
real(hp) :: sal
real(hp) :: tem, timsec
real(hp) :: u, um
real(hp) :: v, vicmol, vm
real(hp) :: w
character(len=256) :: runid
!
! Local variables
!
real(hp) :: f
real(hp) :: pi
real(hp) :: salmax
real(hp) :: ws0, ws1
!
!! extract array variables -----------------------------------------------------
!
if (max_integers < 5) then
error_message = ’Insufficient integer values provided by delftflow’
return
endif
nm = dll_integers( 1) ! nm index of the grid cell
m = dll_integers( 2) ! m index of the grid cell
n = dll_integers( 3) ! n index of the grid cell
k = dll_integers( 4) ! layer number of the grid cell
l = dll_integers( 5) ! number of the sediment fraction in the computation
!
if (max_reals < 21) then
error_message = ’Insufficient real values provided by delftflow’
return
endif
timsec = dll_reals( 1) ! current time since reference time [s]
u = dll_reals( 2) ! m component of the local velocity [m/s]
v = dll_reals( 3) ! n component of the local velocity [m/s]
w = dll_reals( 4) ! vertical component of the local velocity [m/s]
sal = dll_reals( 5) ! local salinity [ppt]
tem = dll_reals( 6) ! local water temperature [degC]
rhowat = dll_reals( 7) ! local water density [kg/m3]
conc = dll_reals( 8) ! sediment concentration [kg/m3] of considered fraction
cconc = dll_reals( 9) ! total sediment concentration [kg/m3] over all fractions
ktur = dll_reals(10) ! turbulent kinetic energy [m2/s2]
epstur = dll_reals(11) ! turbulent dissipation [m2/s3]
!
!---- the following parameters are undefined for mud fractions -----------------
Deltares 561 of 688

DRAFT
Delft3D-FLOW, User Manual
d50 = dll_reals(12) ! sediment diameter of fraction [m]
dss = dll_reals(13) ! sediment diameter of fraction when in suspension [m]
!---- the parameters above are undefined for mud fractions ---------------------
!
rhosol = dll_reals(14) ! solid sediment density [kg/m3]
csoil = dll_reals(15) ! reference density for hindered settling calculations [kg/m3]
ag = dll_reals(16) ! gravitational acceleration [m/s2]
vicmol = dll_reals(17) ! molecular viscosity of water [m2/s]
h = dll_reals(18) ! water depth [m]
um = dll_reals(19) ! m component of effective depth-averaged velocity [m/s]
vm = dll_reals(20) ! n component of effective depth-averaged velocity [m/s]
chezy = dll_reals(21) ! local Chezy value [m1/2/s]
!
if (max_strings < 2) then
error_message = ’Insufficient strings provided by delftflow’
return
endif
runid = dll_strings( 1) ! user-specified run-identification
filenm = dll_strings( 2) ! user-specified file name (keyword: SettleInput)
!
!! executable statements -------------------------------------------------------
!
write(*,*) ’plugin_delftflow_traform.dll : settle : called’
! The output argument error_message MUST have value ’ ’ to continue the calculation.
!
error_message = ’ ’
!
! If you want to indicate that this subroutine has encountered some invalid input or
! encountered some unexpected situation, you can set the error_message to a non-empty
! string. This error_message will then be shown in the log file of the calling program
! and the simulation will abort. This is shown by the next line, remove it to enable
! this subroutine.
!
! error_message = ’Use the settling velocity routine inside \DFLOW’
!
! Set some parameters and compute derivative quantities.
!
ws1 = 5.0e-4_hp ! settling velocity at S >= S_max
ws0 = 5.0e-4_hp ! settling velocity at S = 0
salmax = 30.0_hp
!
pi = 4.0_hp *atan(1.0_hp)
!
! Compute settling velocity
!
if (sal > salmax) then
f = 1.0_hp
else
f = 0.5_hp *(1 - cos(pi*sal/salmax))
endif
ws = ws0 + (ws1 - ws0) *f
end subroutine settle
Compared to the subroutine for sand and bedload fractions (described in section B.9.4) this
routine has very few output arguments, namely only source and sink. The source term
will be used explicitly and should be specified in kg (mud) per unit area (m2) per unit of
time (s). The sink term is treated implicitly and reads sink times ct+1wswhere ct+1 is the
concentration at the new time level in [kg/m3] and wsis the local settling velocity in [m/s];
hence the quantity sink to be returned by the routine is dimensionless.
Remarks:
The unit for the source term is [kg/m3/s].
The sink quantity is dimensionless since it will be multiplied with the concentration in
562 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
[kg/m3] and the settling velocity in [m/s] to give the actual sink term in the equation.
B.9.7 Sediment transport and morphology boundary condition file
File contents Time-series for sediment transport and morphology boundary con-
ditions
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.bcm>
Generated manually offline
Record description:
For each open boundary segment that according to the boundary characteristics given in the
<∗.mor>file requires boundary data, the data is given in two related blocks:
A header block containing a number of compulsory and optional keywords accompanied
by their values.
A data block containing the time dependent data.
Description header block:
Text Required Value
table-name no arbitrary string
location yes ’name boundary section’ (see <name.bnd>file)
time-function no {’non-equidistant’} or ’equidistant’
time-step yes time step only in case of time-function ’equidistant’
reference-time yes yyyymmdd, yyymmdd hhmmss or ’from model’
time-unit no ’years’, ’decades’, ’days’, ’hours’, {’minutes’}, ’sec-
onds’, ’ddhhmmss’ or ’date’
interpolation no {’linear’} or ’block’
extrapolation no ’periodic’, ’constant’ or {’none’}
parameter yes ’parameter name and location’ units ’[ccc]’
records-in-table no number of times/lines in the data block
Remarks:
Default parameter values are indicated in braces.
Reference-time not required if time-unit equals ’date’.
Unit strings are currently not interpreted by Delft3D-FLOW.
The ‘parameter name and location’ strings depend on the boundary type chosen, i.e. quantity
type to be specified. The following table lists the base parameter names. The full ‘parameter
name and location’ string is a concatenation of the indicated base parameter name, optionally
followed by a single space character and the user-defined sediment name, optionally followed
by ‘end A’ and ‘end B’ location strings. Bedload transport should be specified for only the
Deltares 563 of 688
DRAFT
Delft3D-FLOW , User Manual
non-mud fractions (i.e. sand and bedload fractions only) whereas bed composition should
be specified for all fractions. The parameters for multiple sediment fractions must occur in
the same order as in which the sediment fractions have been defined. The location strings
‘end A’ and ‘end B’ can be used to indicate that the specified quantity linearly varies along
the boundary; in case of a parameter for multiple sediment fractions, all parameter-sediment
pairs must be specified for both ‘end A’ and ‘end B’ and all ‘end A’ conditions should precede
the ‘end B’ conditions.
Boundary type Base parameter
name
Unit Multiplicity
sediment transport and bed level
0: free none - -
1: fixed none - -
2: time series depth m 1
3: depth change prescribed depth change m/s 1
4: transport incl pores prescribed transport incl pores m3/s/m #nonmud
5: transport excl pores prescribed transport excl pores m3/s/m #nonmud
bed composition
0: free none - -
1: fixed none - -
2: mass fraction prescribed mass fraction - #sediment
3: volume fraction prescribed volume fraction - #sediment
Description data block:
Record Record description
each record Time in time-units after the reference-time and followed by as many val-
ues as parameters have been defined in the description block (all reals).
In case of time-function ‘equidistant’, the first (time) column should be
dropped. In case of time-unit ‘date’ the date and time should be speci-
fied as one string using the format: yyyymmddhhmmss.
Remarks:
Maximum record length is 512.
The morphological boundary conditions will only be used at inflow boundaries.
Bed composition boundary conditions are only relevant if you do not impose incoming
bedload transport.
The parameter name of the column should read ‘time’.
Example:
Model with morphological boundary conditions imposed at two boundaries. At both bound-
aries the depth and mass fractions for two sediment fractions ‘Sediment fine’ and ‘Sediment
coarse’ respectively are prescribed. The file structure allows you to either combine boundary
conditions in one table, or to use individual tables. The example shows both approaches.
location ’East Boundary’
time-function ’non-equidistant’
564 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time’ unit ’[min]’
parameter ’depth’ unit ’[m]’
parameter ’mass fraction Sediment fine’ unit ’[-]’
parameter ’mass fraction Sediment coarse’ unit ’[-]’
0.0000 5.0 0.3 0.7
2880.0000 6.0 0.4 0.6
location ’West boundary’
time-function ’non-equidistant’
time-unit ’date’
interpolation ’linear’
parameter ’time’ unit ’[]’
parameter ’depth end A’ unit ’[m]’
parameter ’depth end B’ unit ’[m]’
19941001000000 5.0 5.5
19941003000000 6.0 6.5
location ’West boundary’
time-function ’equidistant’
reference-time 19941001
time-unit ’days’
time-step 2
interpolation ’linear’
parameter ’mass fraction Sediment fine end A’ unit ’[-]’
parameter ’mass fraction Sediment coarse end A’ unit ’[-]’
parameter ’mass fraction Sediment fine end B’ unit ’[-]’
parameter ’mass fraction Sediment coarse end B’ unit ’[-]’
0.3 0.7 0.35 0.75
0.4 0.6 0.45 0.65
B.9.8 Morphological factor file
File contents Time-series for morphological factor
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.mft>
Generated manually offline
Record description:
The data is given in two related blocks:
A header block containing a number of compulsory and optional keywords accompanied
by their values.
A data block containing the time dependent data.
Description header block:
Deltares 565 of 688
DRAFT
Delft3D-FLOW, User Manual
Text Required Value
table-name no arbitrary string
hline location no should be blank if specified
time-function no {‘non-equidistant’} or ‘equidistant’
time-step yes time step only in case of time-function ‘equidistant’
reference-time yes yyyymmdd, yyymmdd hhmmss or ‘from model’
time-unit no ‘years’, ‘decades’, ‘days’, ‘hours’, {‘minutes’}, ‘sec-
onds’, ‘ddhhmmss’ or ‘date’
interpolation yes ‘block’ (default value ‘linear’ should not be used)
extrapolation no ‘periodic’, ‘constant’ or {‘none’}
parameter yes ‘parameter name and location’ units ‘[ccc]’
records-in-table no number of times/lines in the data block
Remarks:
Maximum record length is 512.
The parameter name of the column should read ‘time’.
The ‘parameter name and location’ string should read ‘MorFac’.
Default parameter values are indicated in braces.
Interpolation method should be ‘block’ for MorFac!
Reference-time not required if time-unit equals ‘date’.
Unit strings are currently not interpreted by Delft3D-FLOW.
Description data block:
Record Record description
each record Time in time-units after the reference-time and followed by as many val-
ues as parameters have been defined in the description block (all reals).
In case of time-function ‘equidistant’, the first (time) column should be
dropped. In case of time-unit ‘date’ the date and time should be speci-
fied as one string using the format: yyyymmddhhmmss.
Example:
The following file prescribes a morphological factor of 5 until Jan 2, 1994 0:00 and a factor of
10 thereafter.
time-function ’non-equidistant’
reference-time 19941001
time-unit ’minutes’
interpolation ’block’
extrapolation ’constant’
parameter ’time’ unit ’[min]’
parameter ’MorFac’ unit ’[-]’
0.0000 5.0
1440.0000 10.0
566 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.9.9 Initial bed composition file
The initial bed composition file allows you to specify the initial composition of multiple layers
in the bed. If the bed is intially vertically homogeneous, you can use the IniSedThick (or
older SdBUni) keywords in the <∗.sed>file. If the bed is initially not completely homoge-
neous in the vertical direction, you should use this initial bed composition file. This <∗.inb>
file is keywords based.
Table B.11: Initial bed composition file keywords
Keyword Record description
BedCompositionFileInformation
FileCreatedBy contains version number of FLOW-GUI
FileCreationDatecreation date and time of the <∗.inb>file
FileVersion version number, currently 01.00
Layer
Type Layer type (1 string) options:
mass fraction: requires Thick and Fractionxkeywords
volume fraction: requires Thick and Fractionxkeywords
sediment mass: requires SedBedxkeywords
sediment thickness: requires SedBedxkeywords
Thick thickness of sediment layer [m] in case of either ‘mass fraction’ or
‘volume fraction’ type layer
uniform value (1 real)
or filename <∗.thk>with non-uniform values at cell centres (1 string)
Fraction1,
Fraction2,
...
mass or volume fraction in case of ‘mass fraction’ and ‘volume frac-
tion’ type layer respectively
uniform value (1 real)
or filename <∗.frc>with non-uniform values at cell centres (1 string)
SedBed1,
SedBed2, ...
mass or thickness in case of ‘sediment mass’ and ‘sediment thick-
ness’ type layer respectively
uniform value (1 real)
or filename <∗.sdb>with non-uniform values at cell centres (1
string)
The Layer block can be repeated as often as needed.
Example of an initial bed composition file:
The example file contains two layers. The first (top) layer has a spatially varying thickness as
given by the QUICKIN file <layer1.thk>while the composition is uniform 30 % of sediment
fraction 1 and 70 % of sediment fraction 2. The characteristics of the second layer are given as
sediment mass [kg/m2]: a constant 1600 kg m−2 of sediment fraction 2 and a spatially varying
amount of sediment fraction 1 (as specified in the QUICKIN file <layer2fraction1mass.sdb>).
[BedCompositionFileInformation]
Deltares 567 of 688
DRAFT
Delft3D-FLOW, User Manual
FileCreationDate = Thu Dec 08 2005, 14:47:50
FileVersion = 01.00
[Layer]
Type = mass fraction
Thick = layer1.thk
Fraction1 = 0.3
Fraction2 = 0.7
[Layer]
Type = sediment mass
SedBed1 = layer2fraction1mass.sdb
SedBed2 = 1600
B.10 Fluid mud (2-layer approach)
This feature (beta functionality) concerns the simulation of a fluid mud layer together with an
overlying suspension layer using the 3D sediment transport, see the previous section. The
modelling of fluid mud requires two separate MDF files, both with different additional keywords.
Suspension layer
Keywords Value Description
Filsed #name.sed# Sediment input file; defines sediment fractions and other
input quanities
Flumud #YES# Indicates that 3D sediment simulation is run parallel to
a fluid mud simulation
Restrictions:
Only one sediment type can be specified (most logically “mud”)
Morphological changes cannot be computed.
Details about the sediment input file can be found in Appendix B.9.1.
Fluid mud layer
Keywords Value Description
Filmud #name.mud# Mud input file; defines properties of fluid mud
File contents See the table below
Filetype ASCII
File format Free Format
Generated Manually offline
Remark:
The keywords are case sensitive.
568 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Record description:
Record Record description
1 CBED: sediment concentration of the bed [g/l]
2 CMUD: sediment concentration of the fluid mud layer [g/l]
3 FMUD: friction coefficient between consolidated bed and fluid mud layer [-]
4 FWAT: friction coefficient between fluid mud layer and suspension layer [-]
5 MERS: bulk erosion coefficient [kg/m2/s]
6 RHOSUS: density of the suspension layer [kg/m3]
7 RHOMUD: density of the mud layer [kg/m3]
8 TAUBNG: Bingham yield stress [Pa]
9 TAUERS: critical shear stress for erosion [Pa]
10 TAUSET: critical shear stress for settling [Pa]
11 VDEW: dewatering velocity [m/s]
Example:
400.0 cbed =
75.0 cmud =
0.05 fmud =
0.032 fwat =
0.000 mers =
1020 rhosus =
1065 rhomud =
0.2 taubng =
0.5 tauers =
0.1 tauset =
0.000 vdew =
Restrictions:
The values of the parameters are not checked against their domains.
The fluid mud simulation is carried out using the same schematisation as the suspen-
sion layer simulation is carried out.
The fluid mud layer must be modelled as a 2DH problem.
The modelling of a fluid mud layer requires a non-standard method of using the Delft3D
software. This aspect is discussed in detail further on in this appendix.
Detailed description:
In some (consultancy) projects (one of) the question(s) to be answered is the generation and
fate of fluid mud layers in estuaries. These questions may be related to optimising dredging
strategies or environmental problems concerning the transport of contaminated mud. Fluid
mud layers may be formed from deposition of sediment from the water column. Once formed,
the fluid mud layer may be forced to flow by gravity or shear stresses induced by the overlying
Deltares 569 of 688
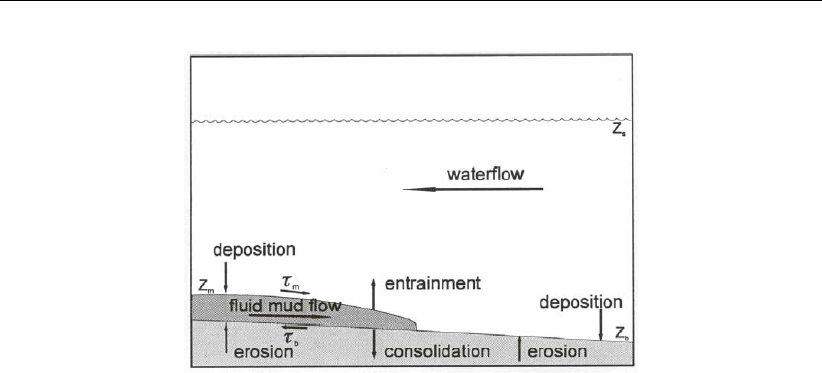
DRAFT
Delft3D-FLOW, User Manual
Figure B.12: Schematic representation of the governing processes between suspension
layer and fluid mud layer Winterwerp et al. (1999).
water. If shear stresses are high enough, material from the mud layer may be entrained into
the water column. When the flow in the mud layer is sufficiently high, the mud layer may
erode the consolidated bed. Material thus eroded contributes to the fluid mud layer. When
the fluid mud layer is at rest, the fluid mud layer is subjected to consolidation. The processes
described above, are depicted in Figure B.12.
B.10.1 Two layer system
The system of a suspension layer and a fluid mud layer is considered as a two layer system.
A suspension layer is driven by tidal forces and possibly by wind shear stresses. Sediment
may be transferred from the bottom to the fluid mud layer by erosion and the other way around
by consolidation, and sediment may be transferred from the fluid mud layer to the suspension
layer by means of entrainment and the other way around by deposition.
B.10.1.1 Suspension layer
The water motion in the fluid mud layer is assumed to be governed by tidal forces, wind shear
stresses, bottom shear stresses and sediment concentration. Since the sediment concentra-
tion is assumed to have a significant effect the 3D sediment version of Delft3D-FLOW is used
for the simulation of the suspension layer.
It is assumed that the velocities in the suspension layer are much larger than the velocities
in the fluid mud layer. In addition it is assumed that the thickness of the fluid mud layer is
negligible compared to the thickness of the water layer. Consequently, the fluid mud layer is
therefore assumed not to influence the suspension layer hydrodynamically. For the present
system, the bed roughness is also independent of the presence of the fluid mud layer. The
fluid mud layer, however, acts as a sediment source or sink for the suspension layer.
570 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
B.10.1.2 Fluid mud layer
The fluid mud flow is assumed to be driven by the shear stresses acting in the interface of
suspension layer and fluid mud. The non-Newtonian rheological properties of the fluid mud
layer are accounted for by the formulation of the shear stresses in the interfaces of suspension
and fluid mud layer, and of fluid mud layer and the consolidated bed, if the fluid mud layer is
modelled as 2DH problem.
The shear stresses in the fluid mud - water interface depend on the velocity difference between
the two layers using a material specific friction coefficient. The shear stresses in the bed - fluid
mud layer depend on the speed of the fluid mud flow, again using a material specific friction
coeffient and a Bingham yield stress. Sediment is transported from the bed to the fluid mud
layer, to the suspension layer and vice versa. The density of the fluid mud layer is assumed
to be constant, as is the density of the consolidated bed. In the present formulations, the
thickness of the consolidated bed is assumed not to change with time. Furthermore, the mud
bed is assumed to be an infinite source of mud.
B.10.1.3 Mathematical modelling of fluid mud layer
The mathematical model for the fluid mud layer is given by Wang and Winterwerp (1992).
Herein only a concise description is provided. The mass balance reads:
∂dm
∂t +∂umdm
∂x +∂vmdm
∂y =1
cm
dm
dt ,(B.14)
where tis time, xand yare spatial co-ordinates, dmis the thickness of the fluid mud layer,
umis the flow speed of the fluid mud layer in x-direction, umis the flow speed of the fluid
mud layer in y-direction and cmthe (constant) sediment concentration in the mud layer. The
right-hand term in Eq. (B.14) represents the source term in the mass balance.
The equations of motion for both directions read:
∂um
∂t +um
∂um
∂x +vm
∂um
∂y +gρm−ρ
ρm
∂ηm
∂x −Ωvm+1
ρmdm
(τbx −τsx) = −1
ρm
ρg ∂η
∂x
(B.15)
and
∂vm
∂t +um
∂vm
∂x +vm
∂vm
∂y +gρm−ρ
ρm
∂ηm
∂y −Ωum+1
ρmdm
(τby −τsy) = −1
ρm
ρg ∂η
∂y
(B.16)
where ρmis the density of the fluid mud layer, ρthe density of the suspension layer, Ωthe
coefficient of the Coriolis acceleration, τbx the shear stress between the fluid mud layer and
the underlying bed in x-direction, τby the shear stress between the fluid mud layer and the
underlying bed in y-direction, τsx the shear stress between the suspension layer and the fluid
mud layer in x-direction, τsy the shear stress between the suspension layer and the fluid mud
layer in y-direction, ηthe elevation of the surface (of the suspension layer), ηmthe elevation
of the mud-suspension interface and gthe acceleration due to gravity.
The shear stresses are given by:
τbx
τby=um
vmτm
pu2
m+v2
m
(B.17)
Deltares 571 of 688

DRAFT
Delft3D-FLOW, User Manual
where
τm=τB+fmρm
8u2
m+v2
m,(B.18)
and τsx
τsy=∆u
∆vfsρ√∆u2+ ∆v2
8.(B.19)
Herein is:
fmfriction coefficient between the bed and the fluid mud layer,
fsfriction coefficient between the suspension layer and the fluid mud layer,
τBBingham yield strength,
∆u u −um,
∆v v −vm,
u x-component of the flow velocity in the suspension layer (k=kmax)
v y-component of the flow velocity in the suspension layer (k=kmax).
The sediment exchange rate between the suspension layer and the fluid mud layer includes:
settling
entrainment
and between the fluid mud layer and the (consolidated) bed:
erosion
consolidation, when the fluid mud layer is at rest (um=vm= 0).
The source term in the mass balance equation (B.14) is given by:
dm
dt =Settling −Entrainment +Erosion −Dewatering (B.20)
The settling term is given by:
Settling =Hτdm −τs
τdm wsCτdm −τs
τdm (B.21)
Herein H() is the Heaviside function, and τdm is the critical shear stress for settling.
The entrainment term is given by Winterwerp et al. (1999)
Entrainment =2Csh|~u∗,m|2−τB
ρmi|~u −~um|+Cσh|~u∗,s|2−τB
ρmi|~u∗,s|
gh∆ρ
ρ+Cs|~u −~um|2cm(B.22)
in which the terms between the angular brackets are relevant only if their values are positive.
Furthermore, u3
∗,s =u3
∗+u3
∗,m,u∗is shear velocity of the flow of the suspension layer, and
u2
∗,m =fs(u−um)2. The empirical coefficients are Cs= 0.25 and Cσ= 0.42.
The erosion term is given by:
Erosion =Hτb−τe
τeMeτb−τe
τe(B.23)
572 of 688 Deltares
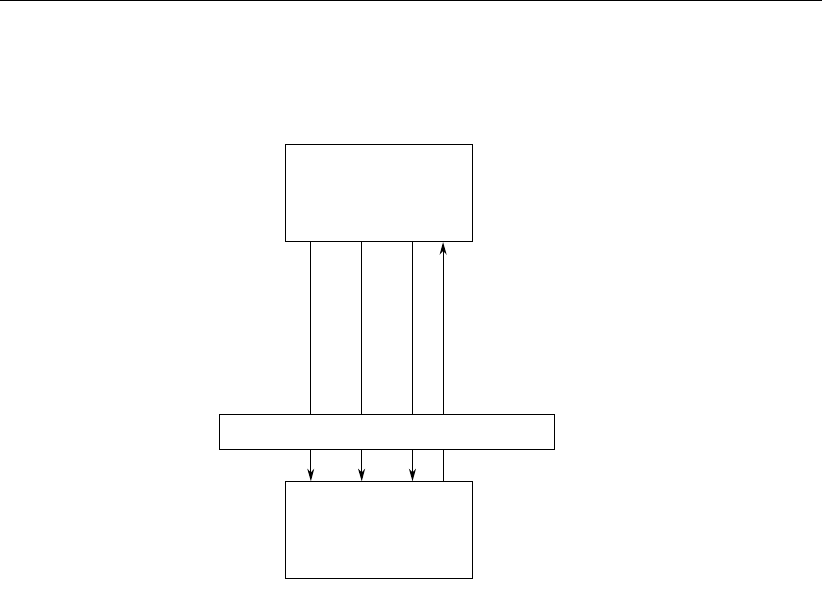
DRAFT
Special features of Delft3D-FLOW
On-line Sediment
Fluid mud
Delft IO Library
e n t r a i n m e n t
u , v v e l o c i t y f i e l d
k = k m a x
s e d i m e n t c o n c e n t r a t i o n
k = k m a x
s e t t l i n g v e l o c i t y f i e l d
k = k m a x
Figure B.13: A schematic representation of two Delft3D-FLOW modules running simulta-
neously simulating a fluid mud problem
where Meis the bulk erosion coefficient and τeis the critical shear stress for erosion.
The dewatering term is given by:
Dewatering =V0c0(B.24)
where V0is the consolidation speed and c0is the sediment concentration in the fluid mud
layer.
In (Wang and Winterwerp,1992) it is shown that the governing equations for the fluid mud
layer are quite similar to the governing equations for the water phase in the 2DH case, so that
only minor modifications to the standard Delft3D-FLOW code are required to apply this code
to fluid mud simulations.
B.10.2 Applying fluid mud
In practice, the standard code for Delft3D-FLOW with 3D sediment is modified such that the
same code can be applied to both the suspension layer (possibly in 3D) and the fluid mud
layer (only 2DH). A simulation of a fluid mud problem requires the execution of two Delft3D-
FLOW modules, one for the suspension layer and one for the fluid mud layer. The data transfer
between the two modules is handled by DelftIO library calls. These library calls also take care
of a proper synchronisation of both Delft3D-FLOW modules. A schematic representation of a
fluid mud simulation is shown in Figure B.13.
The procedure followed is that two MDF-files are created: one for the suspension layer and
one for the fluid mud layer. The FLOW module determines from the MDF file whether the
FLOW module is run for the suspension layer or the fluid mud layer. Both modules are exe-
cuted simultaneously and communicate the following parameters:
velocity field of the bottom layer of the suspension layer.
Deltares 573 of 688

DRAFT
Delft3D-FLOW , User Manual
Direction: suspension layer →fluid mud layer
Purpose: calculating shear stresses between suspension layer and fluid mud layer
sediment concentration and settling velocity in the bottom layer of the suspension phase
Direction: suspension layer →fluid mud layer
Purpose: calculating the settling flux from the suspension layer to the fluid mud layer
entrainment flux
Direction: fluid mud layer →suspension layer suspension layer to the fluid mud layer
The parameters described above are communicated each half time step.
B.10.2.1 DelftIO library
The communication between two delftflow executables is handled by DelftIO library calls. The
behaviour of these communication lines are to some extent user configurable. This can be
done by editing the file <dioconifg.ini>, which follows the syntax of common Windows <.ini>
files. A <dioconfig.ini>file may contain a Defaults section in which the global settings for all
streams can be specified.
The option StreamType defines the type of the data stream. This can be “ASCII”: a human
readable format (useful for debugging), “BINARY”: a fast binary stream, human unreadable
format and platform dependent format, “NEFIS”: a fast binary stream, human unreadable and
platform independent format.
The option OnLine may take the values True or False. If True, then the data streams are
synchronised. This means that a data stream may contain only one block of data of a prede-
fined size, such as a flow field. When putting data onto the stream, the program waits until
the data are taken up by the receiving program. Similarly, when receiving data, the program
only continues when all data are received. The offline mode (OnLine=False) may be useful
for calibrating the fluid mud module for large modules. In this way, the suspension layer needs
to be simulated only once. The draw back is that there is no interaction between suspension
layer and fluid mud layer.
The option Active can be used to exclude a data stream to be used during a simulation
(Active=False). This is useful if a fluid mud simulation is run offline. For both the 3D sediment
FLOW module and the fluid mud module the incoming data streams should be neglected.
The global settings may be altered for particular data streams. If this is required the Defaults
section contains a line NumberOfDatasets = x where xrepresents the number of data
sets with different settings. For each data set the options above can be altered. A data stream
is identified with the keyword Name=. . .
Below follows an example of the <dioconfig.ini>file.
[Defaults]
StreamType=ASCII
OnLine=True
NumberOfDatasets=2
[Dataset1]
Name=Dataset_A
Desc=description of dataset A
StreamType=Binary
[Dataset2]
Name=Dataset_B
574 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Active=False
If no <dioconfig.ini>file exists, the default values are used:
StreamType=BINARY
OnLine=False
Active=True
B.10.2.2 Running a simulation in foreground
The procedure to run a fluid mud simulation in the foreground is straight forward: two flow
models are executed directly after another by using the FLOW Selection menu.
B.10.2.3 Running a simulation in background
For a fluid mud simulation it is essential that two delftflow executables are run simultaneously.
The batch file prepare options in the FLOW Selection window currently do not provide in
launching executables simultaneously. However, the Selection menu generated scripts can
easily be adapted to be applied to fluid mud simulations. If more than one fluid mud simulation
is to be run, it is essential that the batch file is generated such that the delftflow.exe’s that
should be run simultaneously are added to the batch file one after another.
Unix shell scripts: The unix shell scripts run delftflow.exe, and repeat this sequence for all
models specified. In order to execute delftflow.exes simultaneously you need to add an
“&” sign to the command line executing only the first delftflow program:
${D3D_HOME}/${ARCH}/flow/bin/delftflow.exe >> flow-inp.scr 2>&1 &
Windows batch files: The Windows batch files are similar to the Unix shell scripts except
for the syntax. The command line executing the first delftflow.exe should be such that the
delftflow.exe is executed by the start command
start %D3D_HOME%\%ARCH%\flow\bin\delftflow.exe >> flow-mud.scr
B.10.2.4 Pitt falls
The present version of the program does not check for possible inconsistencies between the
problem definition of the suspension layer and the fluid mud layer. You are considered to be
responsible for preserving the consistency. Some mistakes are easily made and may result
in incomprehensible error messages. The following checklist may be used to track down the
problem in case.
consistent grid definition;
consistent depth schematisation;
consistent time frame (including time spacing);
consistent water density suspension phase and suspension density in fluid mud attribute
file;
only one delftflow simulation can be run with online visualisation checked on;
the fluid mud problem must be modelled 2DH (i.e. Kmax=1);
DelftIO communication stream <dio-∗>files have to be removed before running a fluid
mud simulation. These files may exist if a previous run did not terminate normally.
B.10.3 Post-processing
As a result of the similarity in solving the equations pertaining to the suspension layer and
those pertaining to the fluid mud layer, the standard post-processing can be used to visualise
the computational results of the fluid mud layer. It is remarked that the nomenclature of some
Deltares 575 of 688
DRAFT
Delft3D-FLOW, User Manual
parameters may be somewhat confusing, for example water level should be read as mud
level.
B.11 Z-model
B.11.1 Grid definition and construction
The vertical grid in the Z-model is based on horizontal layers with constant zco-ordinate
intersecting the water column. The (maximum) layer thickness is defined as the distance
between two consecutive surfaces and is independent of space and time.
Near the free surface and the bed the computational grids may be partially filled depending
on the local depth and the free surface elevation. Furthermore, the free surface in the Z-
grid-ordinate model is not restricted to the upper most grid cell. Consequently, the number of
active grid cells may vary in space and time. The values kmin and kmax, indicating the index
of the lower and upper most active grid cell, are not constant. Note that the Z-model indexes
its layer number, is in contrast to the σ-grid, from bottom to surface; k=kmin is the bottom
layer, k=kmax is the surface layer.
The vertical grid is constructed upon the specification of the following input parameters (see
Figure B.14):
Keywords Value Description
Zmodel #Y# a (character) flag denoting that a Z-model is defined instead
of a σ-model
Zbot ZBOT A real value representing the maximum depth in the model
(relative to the reference level; unit: metres; positive up-
wards). It marks the lower boundary of the grid.
Ztop ZTOP A real value representing the ‘imaginary’ maximum water
level in the model (relative to the reference level; unit: me-
tres; positive upwards). This imaginary level is used only to
determine the grid distribution. It does not mark the maxi-
mum surface level.
Record description:
The distance d(Ztop, Zbot)is used to determine the thickness of each layer with the
help of the layer distribution specified by you (array THICK). The thickness of layer kis
referred to as ∆Zk.
The thickness of the top layer is determined every half time step using the fixed layering
and the newly computed surface level. The top of the top layer is set equal to the surface
level. If the surface level exceeds Ztop by a (relatively) large distance, this can lead to a
thick top layer, reducing the local accuracy. If this happens during a simulation, a warning
is issued (to the <tri-diag>file) of the following form:
*** WARNING Maximum water level 0.146E-03 (m) exceeds ZTOP specified in input;
changing ZTOP to above this value is strongly advised
This top layer will always be sufficiently large to contain the computed water level, but the
vertical resolution at the top level may be reduced when these warnings occur.
Near the bed, the layer thickness is not uniform as it depends on the actual depth. Layers
may also be situated (partly) under the bed level.
576 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Remarks:
Ztop must be greater than Zbot.
Zbot must be at least equal (in absolute term) to the maximum depth value specified,
otherwise an error message will be generated of the form:
*** ERROR Depth value -0.350E+01 (m) exceeds ZBOT specified in input;
change ZBOT to this value
Ztop must be at least equal (in absolute term) to the initial water level specified, other-
wise an error message will be generated.
If a bottom level is specified above Ztop (dry points with depth set to e.g. -100.0 m) an
error is given at the start of the simulation, with the message to change the concerned
cells to permanently dry points. This message has the following form:
*** ERROR One or more depth values exceed ZTOP specified in input
Options:
1: Change ZTOP to above the heighest value: 0.100E+02
2: Copy the following lines into the .dry file to make these points permanently dry:
3, 2, 3, 2
10, 39, 10, 39
End of data-block for dry points file.
The sequence of layer number is reversed in comparison to the σ-co-ordinate model
Example - input parameters:
This example concerns a simulation where some layers become partly or completely dry. It
is a 5-layered model with a non-uniform vertical grid. The reference level is at 0.0 m. The
parameter values that have been specified in the input file are:
Zmodel= #Y#
Zbot = -4.0
Ztop = 1.0
Thick = 12.0
23.0
35.0
20.0
10.0
For an arbitrary time instant where the maximum water level is approximately 1.8 m — ex-
ceeding Ztop — the resulting vertical grid is shown in Figure B.14.
B.11.2 Defining the keywords in the FLOW-GUI
Thick corresponds to the layer array in the window Datagroup Domain, subgroup Grid param-
eters. Keywords Zmodel,Zbot and Ztop and their respective values can be added/edited
via the Data Group Additional parameters (see Figure B.15):
B.11.3 Restrictions and limitations
The following functions are not allowed when used in combination with the Z-model:
3D Morphology (on line SED), incl. Roller model
Coupled FLOW-WAQ simulations
Internal Wave option (IWE)
Wave effect (Wave induced flow)
Fluid Mud
Q2E 2D Turbulence closure model
Deltares 577 of 688
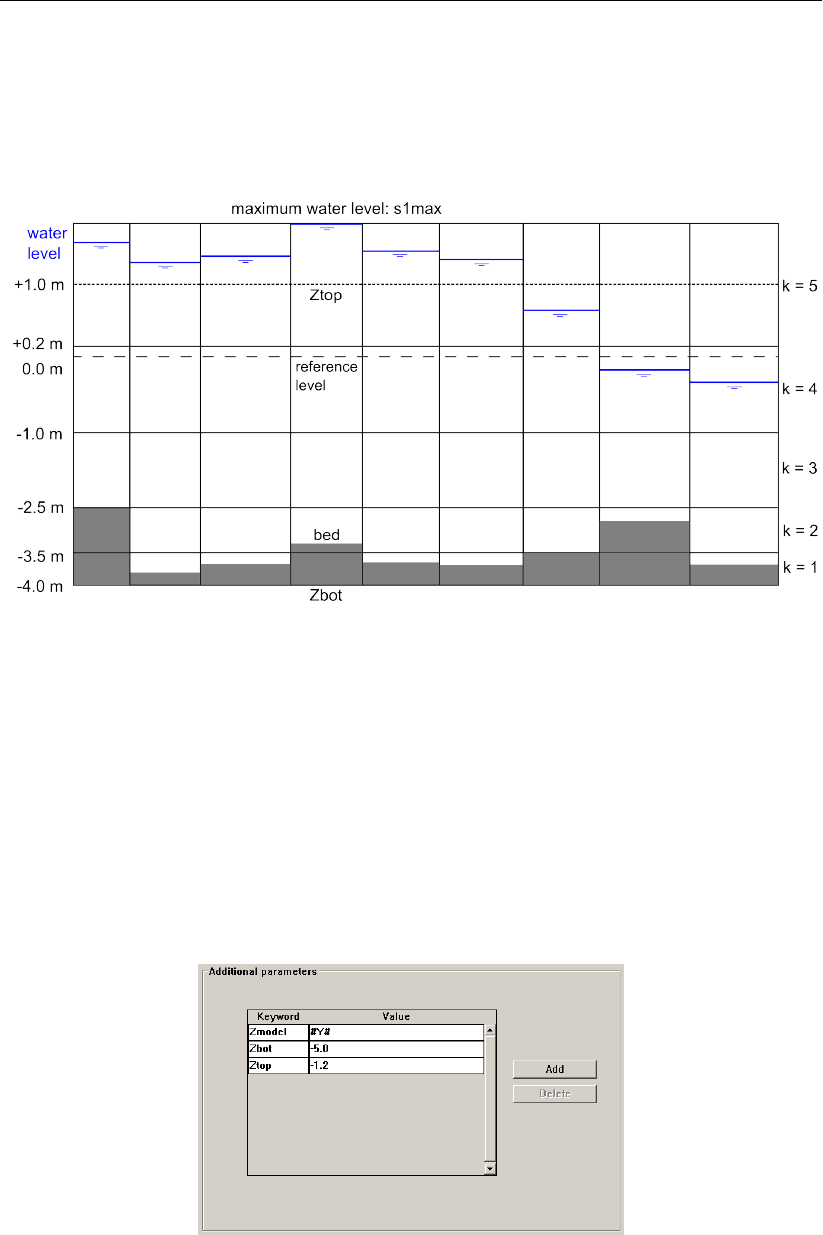
DRAFT
Delft3D-FLOW, User Manual
Figure B.14: Vertical grid construction, Z-model
Figure B.15: Inserting appropriate keywords to switch on the Z-grid-model
578 of 688 Deltares
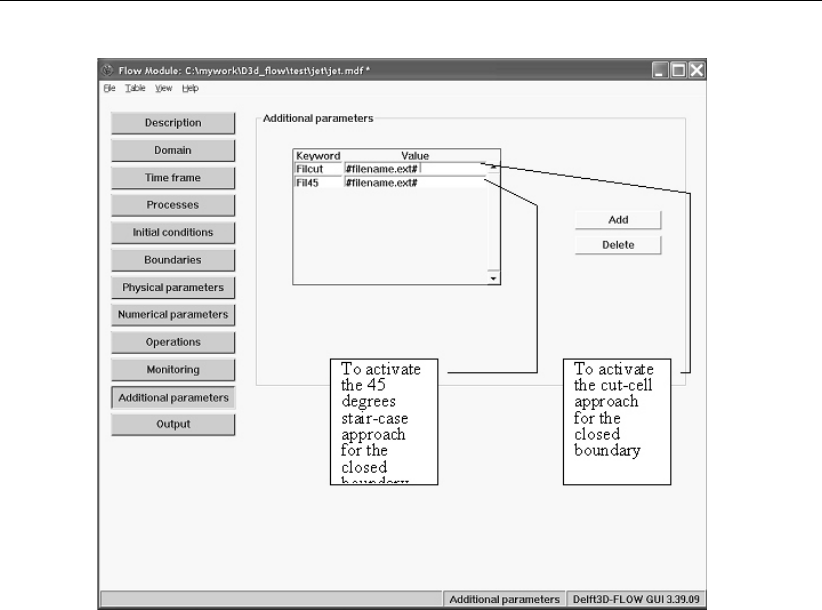
DRAFT
Special features of Delft3D-FLOW
Figure B.16: Defining cut-cell and 45 degree closed boundaries
Secondary Flow
Waqua option - structure
2D Weir
Momentum solver other than Multi Direction Upwind Explicit (default)
Cyclic Transport solver - will be overridden Van Leer 2 method (default)
DPUOPT other than MIN (minimum) which is the default or UPW (upwind)
The following (combinations) of functions have not been (fully) tested (WARNINGS will be
issued, but computation will continue):
Spherical co-ordinate
Tide generating forces
Drogues
Structures
B.11.3.1 Defining Cut-cells and 45 degrees closed boundaries
To activate the cut-cell approach or the removal of 45 degrees staircase effect along the closed
boundaries the following case sensitive keywords may be added/edited in the MDF-file via the
Data Group Additional parameters respectively as follows:
The format of a 45 degree closed boundary file is identical to that of the dry points file. Similar
rules for defining these points are applicable.
The format of a Cut-cell closed boundary file is identical to that of the thin dams file. Similar
rules for defining these points are applicable.
Deltares 579 of 688
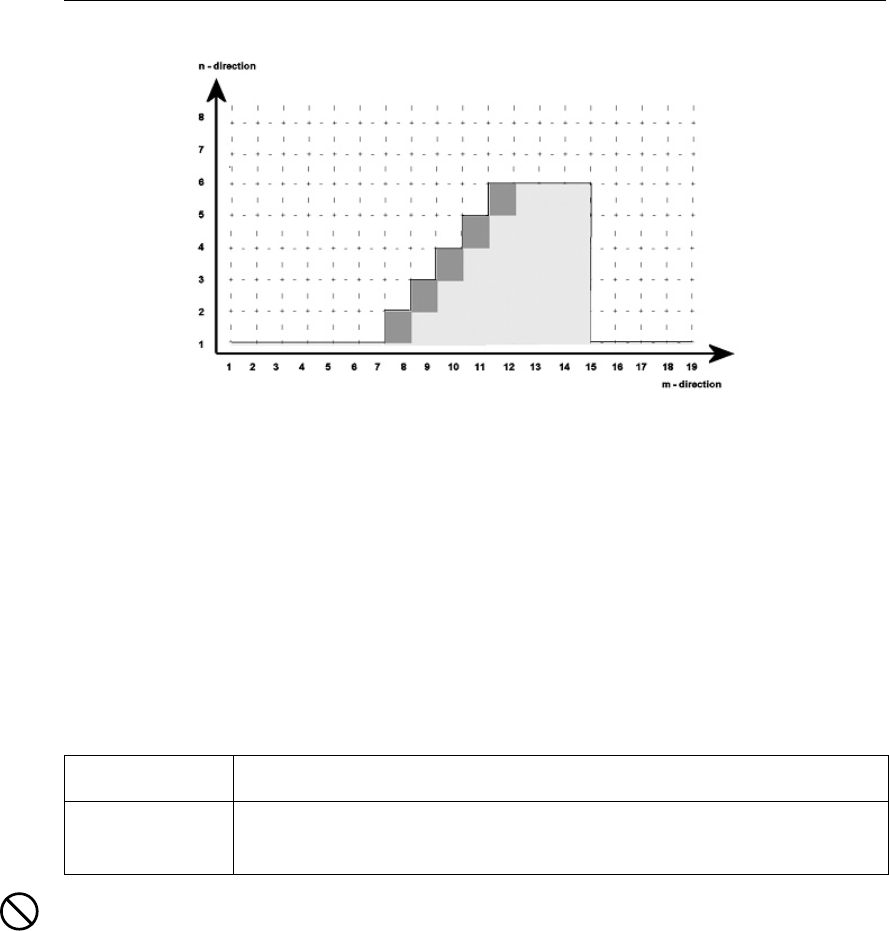
DRAFT
Delft3D-FLOW, User Manual
Figure B.17: 45 degrees staircase closed boundary
B.11.4 45 degrees staircase closed boundary points (Z-model only)
File contents Location of (permanently) 45 degrees staircase closed boundary
points with the purpose of removing the staircase effect (Z-model
only)
Filetype ASCII
File format Free formatted.
Filename <name.cut>
Generated FLOW-GUI (treat it as dummy dry point) or manually offline.
Record description:
Record Record description
each record The grid indices of the begin and end point of a 45 degrees closed
boundary point section (4 integers).
Restrictions:
The angle of a line of dry points and the horizontal numerical grid axis can be an integer
multiple of 45 degrees.
Points forming 45 degrees closed boundary must be defined on active internal points.
The input items are separated by one or more blanks.
45 degrees staircase point may not be Cut-cell as well
Example:
Five sets of 45 degrees closed boundary points in a model area of 19 ∗8grid points, see
Figure B.17.
8 1 8 1
9 2 9 2
10 3 10 3
11 4 11 4
12 5 12 5
580 of 688 Deltares
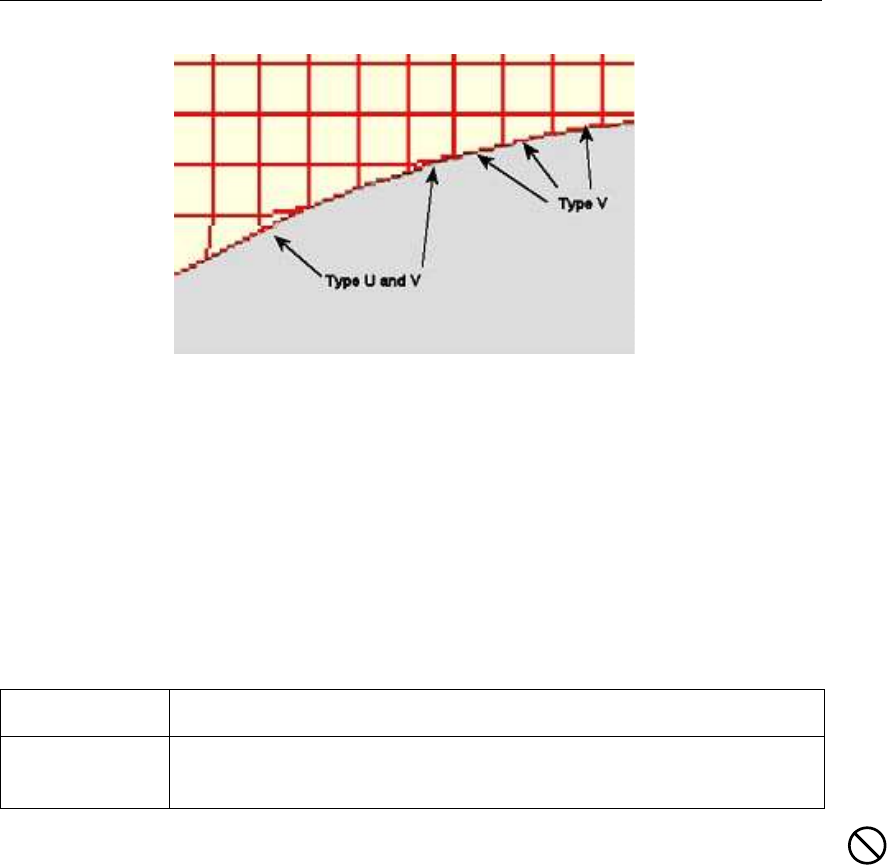
DRAFT
Special features of Delft3D-FLOW
Figure B.18: Cut-cell closed boundary (not related to the data specified in the example
above)
B.11.5 Cut-cell closed boundary points (Z-model only)
File contents Location and type of cut-cell closed boundary points (Z-model only)
Filetype ASCII
File format Free formatted.
Filename <name.cut>
Generated manually offline.
Record description:
Record Record description
each record The grid indices of the begin and end point of a line of thin dams (4
integers). A character indicating the type of thin dams (U or V).
Restrictions:
Cut-cell closed boundary must be an active internal point but adjacent to closed bound-
ary.
Cut-cell closed boundary point must have an area that is >0.
Cut-cell point in a corner is not allowed.
Cut-cell point may not be 45 degrees staircase cell as well.
Example:
Twelve points in a model are marked as cut-cell points, see Figure B.18.
4 15 4 15 V
3 15 3 15 U
3 13 3 13 V
2 13 2 13 U
1919U
2929V
11 7 11 7 U
11 6 11 6 V
12 11 12 11 U
12 10 12 10 V
13 13 13 13 U
13 12 13 12 V
Deltares 581 of 688

DRAFT
Delft3D-FLOW, User Manual
B.12 Non-hydrostatic solver
B.12.1 The use of hydrostatic and non-hydrostatic models
The application of three-dimensional numerical models for understanding and assessing free
surface flows has become widely used in the past decades. In most of these cases the flows
are of boundary layer type, which means that the vertical acceleration component is relatively
small. Under these circumstances, the pressure distribution in the vertical may be assumed
to be hydrostatic, and hence the hydrodynamic pressure may be neglected.
Within the Delft3D-FLOW model, this hydrostatic pressure assumption has been adopted,
which implies that the numerical model is based on the shallow-water equation. The approx-
imation of hydrostatic pressure or, equivalently, shallow water simplifies the coupled set of
three-dimensional equations to be solved and therefore allows the development of a compu-
tationally efficient three-dimensional numerical hydrodynamic model.
Delft3D-FLOW has been used successfully in many practical test cases in describing horizon-
tal velocity profiles in vertical direction or stratified currents in predominantly horizontal flows.
However, there are situations where the vertical acceleration, and thereby the non-hydrostatic
pressure component, can not be neglected. This, for example, is the case when flows over
abruptly changing bottom topography, orbital movements in short wave motions, or intensive
vertical circulations are considered. Generally, the application of hydrostatic approximation is
disputable, when the vertical scales of the flow (i.e. velocities and distances) are of the same
order of magnitude as the horizontal scales of the flow. When the requirements for shallow-
water flow are no longer met, the hydrodynamic component of the pressure has to be resolved
in order to get physically realistic flow patterns.
In order to capture non-hydrostatic flow phenomena, the hydrostatic version of the Cartesian
grid (Z-model), which is part of the Delft3D modelling suite, is extended with a non-hydrostatic
module. The numerical method employed in this model is presented in the following.
B.12.2 Governing equations
Before discussing the numerical method used for computing the non-hydrostatic pressure, the
underlying equations are given.
For small density differences (∆ρ/ρ01, where ρ0is a reference density), the Reynolds-
averaged Navier-Stokes equation may be written as:
∂ui
∂t +ui
∂uj
∂xi
+1
ρ0
∂p
∂xi−1
ρ0
∂τij
∂xj
+εijk2Ωjuk=ρ
ρ0
gδi3(B.25)
where δij is the Kronecker delta, εijk is the permutation symbol, Ωjis the planetary vorticity
and τij are the turbulent stresses. The pressure pcan be split into a hydrostatic (ρgz) and
hydrodynamic (q) part:
p=patm +gZζ
z
ρdz0+q(B.26)
582 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Using this expression, the momentum equations in the x,y, and z-direction read respectively:
∂u
∂t +1
ρ0
∂
∂x Zζ
z
ρgdz0+1
ρ0
∂q
∂x =RHSx(B.27)
∂v
∂t +1
ρ0
∂
∂y Zζ
z
ρgdz0+1
ρ0
∂q
∂y =RHSy(B.28)
∂w
∂t +1
ρ0
∂q
∂z =RHSz(B.29)
where the right-hand-side, RHSi, contains the acceleration due to advection, turbulent stresses
and Coriolis. The shallow-water equations are obtained by reducing the vertical momentum
equation to the hydrostatic pressure assumption, which implies q= 0.
The continuity equation is given by:
∂ui
∂xi
= 0 (B.30)
By integrating the continuity equation over the depth, and applying the kinematical boundary
condition
Dζ
Dt ≡∂ζ
∂t +u∂ζ
∂x +v∂ζ
∂y =w(B.31)
this equation may be written as:
∂ζ
∂t +∂
∂x Zζ
−d
udz +∂
∂y Zζ
−d
vdz = 0 (B.32)
B.12.3 A pressure correction technique for computing the non-hydrostatic pressure
The hydrodynamic pressure is computed by using a pressure correction technique that is
similar to the method presented by Casulli (1999) and Busnelli (2001). The pressure correc-
tion method is employed in combination with an ADI-technique which differs slightly from the
Delft3D σ-model (Bijvelds,2001).
The provisional horizontal velocities, un+1∗,vn+1∗and wn+1∗are computed from the ADI-
steps:
First step ADI
un+1/2−un
∆t=gζn+1/2
i+1 −ζn+1/2
i
∆x+1
ρ0
qn
i+1 −qn
i
∆x+RHSx(B.33)
vn+1/2=vn(B.34)
ζn+1/2−ζn
∆t+
K
P
k=1 ∆zn
kun+1/2
ki−
K
P
k=1 ∆zn
kun+1/2
ki−1
∆x+
K
P
k=1 ∆zn
kvn+1/2
kj−
K
P
k=1 ∆zn
kvn+1/2
kj−1
∆y= 0 (B.35)
Deltares 583 of 688
DRAFT
Delft3D-FLOW, User Manual
Second step ADI
un+1∗=un+1/2(B.36)
vn+1∗−vn+1/2
∆t=gζn+1∗
j+1 −ζn+1∗
j
∆y+1
ρ0
qn
j+1 −qn
j
∆y+RHSy(B.37)
ζn+1∗−ζn+1/2
∆t+
K
P
k=1 ∆zn
kun+1∗
ki−
K
P
k=1 ∆zn
kun+1∗
ki−1
∆x+
K
P
k=1 ∆zn
kvn+1∗
kj−
K
P
k=1 ∆zn
kvn+1∗
kj−1
∆y= 0 (B.38)
The provisional vertical velocity is computed from
wn+1∗−wn
∆t=1
ρ0
qn
k+1 −qkn
∆z+RHSz(B.39)
The hydrodynamic pressure qis located in the cell-centre of the staggered C-grid. It is noted
that in the implementation of the above equations the acceleration due to Coriolis is omitted
in the vertical momentum equation.
The barotropic pressure gradient is computed implicitly in order to avoid time step restrictions
due to stability conditions. This yields a tri-diagonal set of equations which can be solved
efficiently by using a double sweep technique. For computational efficiency, the remainder of
the terms are treated explicitly. Further details on the spatial discretisation of the differential
equations can be found in (Bijvelds,2001). Recently it was found out that the discretisation of
the advection terms in the Z-model was not robust enough in combination with the pressure
correction method. The discretisation was changed to first order upwind instead of the multi-
directional upwind method of the original implementation (Bijvelds,2001).
It is noted that at this point of the computation the velocity field is no longer free of divergence,
hence ∇•~u 6= 0. By applying a pressure correction in the next step of the computation, the
requirement ∇•~u = 0 is met at all computational cells.
Hydrodynamic pressure correction
The momentum equations in the pressure correction step read:
un+1 −un+1∗
∆t=1
ρ0
˜qn+1
i+1 −˜qn+1
i
∆x(B.40)
vn+1 −vn+1∗
∆t=1
ρ0
˜qn+1
j+1 −˜qn+1
j
∆y(B.41)
wn+1 −wn+1∗
∆t=1
ρ0
˜qn+1
k+1 −˜qn+1
k
∆z(B.42)
Where ˜q=qn+1 −qn
584 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
It may be verified that the pressure correction applied in the above discretisation is a consistent
approximation of the underlying differential equation, by substituting the following expression
in the momentum equation in x-direction:
∂u
∂t −1
ρ0
∂q
∂x ≈un+1 −u∗+u∗−un
∆t−1
ρ0qn+1
i+1 −qn+1
i
∆x+qn
i+1 −qn
i
∆x−qn
i+1 −qn
i
∆x
(B.43)
For the sake of convenience the horizontal grid spacing, ∆xand ∆y, are assumed to be con-
stant. The discretised continuity equation below the free surface (i.e. k=kfsmin, . . . , kfsmax−
1) reads
un+1
i+1/2,j,k −un+1
i−1/2,j,k
∆x+vn+1
i,j+1/2,k −vn+1
i,j−1/2,k
∆y+wn+1
i,j,k+1/2−wn+1
i,j,k−1/2
∆z= 0 (B.44)
At the free surface, the finite difference approximation of Eq. (B.32) is
ζn+1
i,j −ζn
i,j
∆t+
K
P
k=1
(∆zn¯un+1)i+1/2,j,k −
K
P
k=1
(∆zn¯un+1)i−1/2,j,k
∆x+
K
P
k=1
(∆zn¯vn+1)i,j+1/2,k −
K
P
k=1
(∆zn¯vn+1)i,j−1/2,k
∆y= 0 (B.45)
Using Eq. (B.44) this may be written as:
ζn+1
i,j −ζn
i,j
∆t+(∆zn¯un+1)i+1/2,j,k −(∆zn¯un+1)i−1/2,j,k
∆x+
(∆zn¯vn+1)i,j+1/2,k −(∆zn¯vn+1)i,j−1/2,k
∆y+wn+1
K−1= 0 (B.46)
Note that for consistency with the approximation of the continuity equation in the ADI-steps,
the vertical grid spacing ∆zshould be taken at the time level n.
By inserting the momentum Equations (B.40) to (B.42) in the continuity equation for the in-
ner field (k=kfsmin, . . . , kfsmax −1), we arrive at a system of equations where the
pressure correction q∗is the only unknown:
1
ρ0"qn+1
i+1,j,k −qn+1
i,j,k ∆n
i+1/2,j,k −qn+1
i,j,k −qn+1
i−1,j,k∆n
i−1/2,j,k
∆x2#+
1
ρ0"qn+1
i,j+1,k −qn+1
i,j,k ∆n
i,j+1/2,k −qn+1
i,j,k −qn+1
i,j−1,k∆n
i,j−1/2,k
∆y2#+
1
ρ0"qn+1
i,j,k+1 −qn+1
i,j,k
∆zn
i,j,k+1/2−qn+1
i,j,k −qn+1
i,j,k−1
∆zn
i,j,k−1/2#=un+1∗
i+1/2,j,k∆zn
i+1/2,j,k −un+1∗
i−1/2,j,k∆zn
i−1/2,j,k
∆x+
vn+1∗
i,j+1/2,k∆zn
i,j+1/2,k −vn+1∗
i,j−1/2,k∆zn
i,j−1/2,k
∆y+wn+1∗
i,j,k+1/2−wn+1∗
i,j,k−1/2(B.47)
Deltares 585 of 688
DRAFT
Delft3D-FLOW, User Manual
At the top layer K, both q∗and ζn+1 need to be determined:
ζn+1
i,j −ζn
i,j
∆t+1
ρ0"qn+1
i+1,j,K −qn+1
i,j,K ∆n
i+1/2,j,K −qn+1
i,j,K −qn+1
i−1,j,K ∆n
i−1/2,j,K
∆x2#+
1
ρ0"qn+1
i,j+1,K −qn+1
i,j,K ∆n
i,j+1/2,K −qn+1
i,j,K −qn+1
i,j−1,K ∆n
i,j−1/2,K
∆y2#+
1
ρ0"qn+1
i,j,K+1 −qn+1
i,j,K
∆zn
i,j,K+1/2−qn+1
i,j,K −qn+1
i,j,K−1
∆zn
i,j,K−1/2#=un+1∗
i+1/2,j,K ∆zn
i+1/2,j,K −un+1∗
i−1/2,j,K ∆zn
i−1/2,j,K
∆x+
vn+1∗
i,j+1/2,K ∆zn
i,j+1/2,K −un+1∗
i,j−1/2,K ∆zn
i,j−1/2,K
∆y−wn+1∗
i,j,K−1/2(B.48)
In order to close the system of equations, the transient (ζn+1 −ζn)/∆tneeds to be approx-
imated. By assuming a excursion of the water level ζn+1 −ζn+1∗as a result of the pressure
correction step, the total pressure in the top cell may be written as
qn+1
i,j,K =ρg ζn+1
i,j −ζn+1∗
i,j +qn+1∗
i,j,K (B.49)
Hence, the hydrodynamic pressure at the top cell now contains a hydrostatic pressure com-
ponent equal to ρg(ζn+1 −ζn+1). Assuming the pressure to be hydrostatic in the upper
most grid cell, which implies qn+1
K= 0, the pressure correction at the old geometry (based
on ζn+1∗), may be written as:
qn+1
i,j,K =ρg ζn+1
i,j −ζn+1∗
i,j +qn+1∗
i,j,K (B.50)
Using this equation ζcan be eliminated from Eq. (B.48) and the pressure correction is the
only unknown variable. Substituting Equation (B.50) in Equation (B.48) yields a symmetric
and positive definite system of equations, which is solved by using the standard conjugate
gradients (CG) method.
The computed pressure correction field qn+1∗
i,j,k contains a hydrostatic pressure component
(proportional to ζn+1 −ζn+1∗) which originates from the change of water level. The barotropic
pressure gradient hereby introduced is accounted for in the following ADI step. Therefore the
total pressure field needs to be corrected for by a constant value equal to ζn+1 −ζn+1∗,
according to Equation (B.50).
For the upper most grid cells this yields
qn+1
i,j,K = 0 (B.51)
which leads to the hydrostatic pressure assumption in the top layer. The new free surface
elevation can readily be determined from Eq. (B.50). The free surface boundary condition is
shown graphically in Figure B.19.
B.12.4 Boundary conditions
In order to get a closed system of equations, boundary conditions for the pressure correction
and the free surface elevation need to be imposed.
586 of 688 Deltares
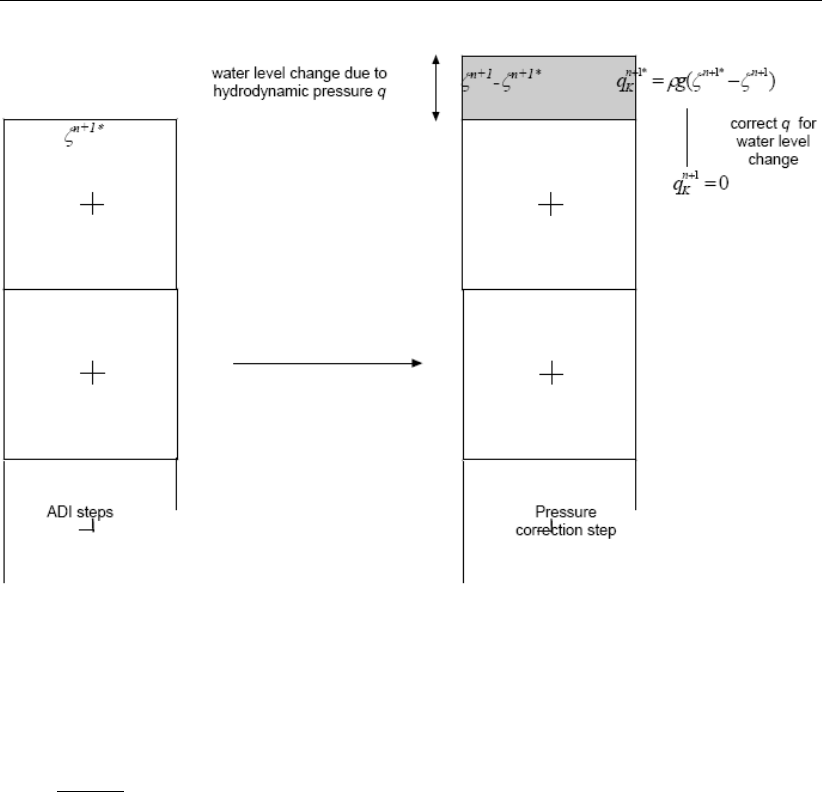
DRAFT
Special features of Delft3D-FLOW
Figure B.19: Schematic representation of the free surface boundary condition for the
pressure correction.
Near closed walls and at the boundaries of the non-hydrostatic area we assume homoge-
neous Neumann boundary conditions for the pressure correction:
∂qn+1∗
∂n = 0 (B.52)
where nis the direction normal to the closed boundary. Physically this means there is no
flow through closed boundaries due to hydrodynamic pressure gradients. At open boundaries
where a water level is imposed the hydrodynamic pressure (correction) is assumed to be zero:
qn+1∗= 0 (B.53)
B.12.5 Conjugate gradient method (CG)
In the non-hydrostatic model, the pressure correction is solved by means of the conjugate
gradient method (CG). The CG method is an effective method for symmetric positive definite
systems. It is the oldest and best known of the non-stationary methods. The method proceeds
by generating vector sequences of iterates (i.e. successive approximations to the solution),
residuals corresponding to the iterates, and search directions used in updating the iterates and
residuals. Although the length of these sequences can become large, only a small number of
vectors need to be kept in memory. At each iteration stage two inner products are performed
in order to compute update scalars that are defined to make the sequences satisfy certain
orthogonality conditions. On a symmetric positive definite linear system these conditions
imply that the distance to the true solution is minimized in some norm.
The convergence rate of the CG method (and iterative methods in general) depends on the
spectral properties of the coefficient matrix. Therefore one may attempt to transform the linear
system into one that is equivalent in the sense that it has the same solution, but that has more
favourable spectral properties. A pre-conditioner is a matrix that effects such a transformation.
Deltares 587 of 688

DRAFT
Delft3D-FLOW, User Manual
In the present implementation, local scaling of the system of equations is used to improve the
matrix properties, being one of the simplest pre-conditioners.
For further details on the CG method, the reader is referred to Golub and Van Loan (1989).
B.12.6 Practical aspects of using the non-hydrostatic flow module
The non-hydrostatic module provides you with a tool that is capable of simulating small-scale
flow phenomena that cannot be captured with a ordinary hydrostatic model. In order to model
these non-hydrostatic phenomena properly, some requirements regarding the model set-up
and the model parameters that are used need to be met. These requirements stem from the
physical nature of the flow, and are partly due to the fact that the original Delft3D-FLOW model
was developed for stably-stratified shallow-water flow. In the following some practical aspects
on the use of the non-hydrostatic model will be discussed.
B.12.6.1 Switches in MDF-file
The non-hydrostatic model can be switched on by you by including the key-word Nonhyd
= #YES# in the MDF-file. It is noted that the non-hydrostatic option is available within the
Z-model only. Therefore, the keywords of the Z-model need to be set, Zbot,Ztop and the
keyword Zmodel must be also set to “#YES#” to activate the non-hydrostatic module (see
section B.11.1).
Compared to hydrostatic simulations, including the non-hydrostatic pressure in the simula-
tions increases the computational effort typically by a factor 4–10, depending on the type of
problem and on the stopping criterion of the CG solver. In order to restrict the computational
effort, the computation of the non-hydrostatic pressure can be limited to a part of the compu-
tational domain. In many practical applications non-hydrostatic phenomena are only locally of
importance. As a consequence, the non-hydrostatic pressure may be neglected in the largest
part of the computational domain. The neglect of the non-hydrostatic pressure may either
ensue from the local physical nature of the flow, or may be due to the fact that the specific
area lies outside the region of interest. Insight in the physics is therefore required when using
this model feature.
To limit the region where the non-hydrostatic pressure is computed, the key-word Nharea
must be included in the MDF-file, followed by two sets of indices that define a square region
(in terms of grid administration). For example the statement
Nharea = 128 1 176 26
creates the following area (with indices (128,1)–(176,26)) within the curvilinear grid in which
the non-hydrostatic pressure is taken into account, see Figure B.20.
588 of 688 Deltares
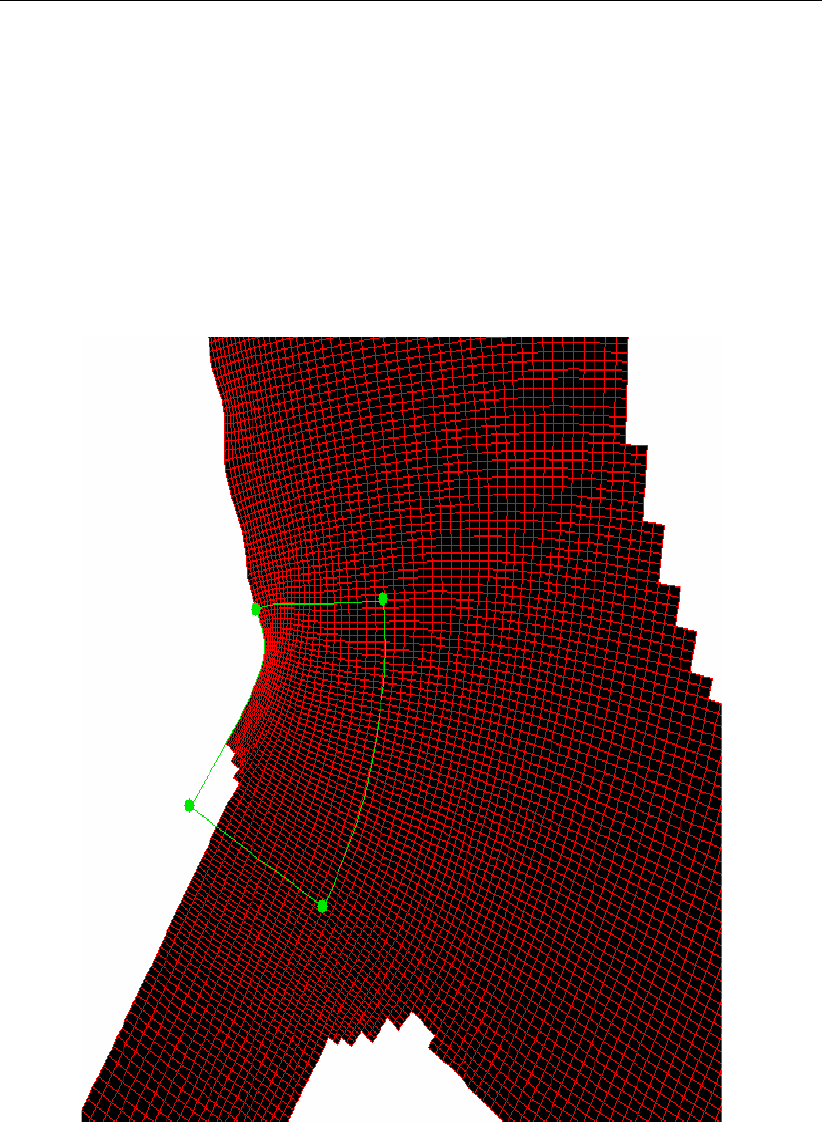
DRAFT
Special features of Delft3D-FLOW
Figure B.20: Area where a non-hydrostatic pressure is taken into account
Deltares 589 of 688

DRAFT
Delft3D-FLOW, User Manual
B.12.6.2 Grid spacing
The grids used for modelling shallow water flow are usually characterised by the fact that the
horizontal grid spacing is much larger that the vertical grid spacing. Hence, the shallowness
of the flow, characterised by Lhor Lvert, is reflected by the grid’s aspect ratio ∆x, ∆y
∆z. For non-hydrostatic flows, the typical length scales of the flow or of the same order
of magnitude in both the horizontal and vertical direction. This means that the horizontal
grid spacing has to be reduced significantly if non-hydrostatic flow phenomena need to be
resolved.
If, for example, we consider the flow computed near a vertical wall in a hydrostatic and non-
hydrostatic model, differences are only significant if we meet the above mentioned require-
ment, despite the fact that we apply an appropriate model for the physical phenomenon we
are studying. In a hydrostatic model the vertical flow will typically be concentrated in the first
grid cell from the wall, which is due to the fact that the vertical flow is determined by con-
tinuity only. (the wall is not “felt” in the model because there is no pressure built-up in the
vertical direction). This means that the vertical velocities that are computed in the model are
directly related to the horizontal grid spacing since w=Q/(∆x∆y). In a low-resolution
non-hydrostatic model, these low velocities lead to an under estimation of the non-hydrostatic
pressure, and hence, the flow computed resembles the hydrostatic flow.
B.12.6.3 Vertical mixing
The hydrostatic version of Delft3D-FLOW is developed for stably stratified shallow-water flow.
The presence of unstable stratification gives rise to strong vertical circulation, which, by def-
inition, cannot be captured by the hydrostatic model, and results in flow patterns that are
physically unrealistic. Since the model is not suited to model these types of flow, measures
can be taken to suppress the presence of unstable stratification.
Among these measures, the so-called Forester filter may have a large impact on the results
that are obtained with the non-hydrostatic Z-model. This filter, that may be switched on by
you in the MDF-file, smears out the computed scalar variable (e.g. salinity, temperature), in
such a way that a stably stratified monotonous solution is obtained for this quantity.
This filter is available in both the horizontal (Forfuv) and vertical direction (Forfww). When
modelling stratified flows with the non-hydrostatic model in which unstable stratification may
be expected, the filter in the vertical direction must be switched off (value field “no”). It is
noted that wiggles which are due to numerical treatment of the differential equations, may
arise when the Forester filter is not activated.
B.12.6.4 Convergence criterion CG solver
The system of equations is solved by using the CG algorithm. The number of iterations
performed by the CG algorithm depends on the stopping criterion and on the type of norm
that is used for the determination of the residual.
The value for the stopping criterion can be set by you by specifying a value for the key-
word Nheps in the MDF-file. The default value for this parameter is set equal to 10−2. If
the criterion is set too small, the number of iterations may exceed the maximum number of
iterations in CG, which may be defined by you by means of the key word Nhiter. The default
value for this parameter is set equal to 50.
In that case a warning will be written to the diagnostic file, together with the maximum of the
residual at the end of the last CG iteration. The way in which the residual of the CG-algorithm
590 of 688 Deltares
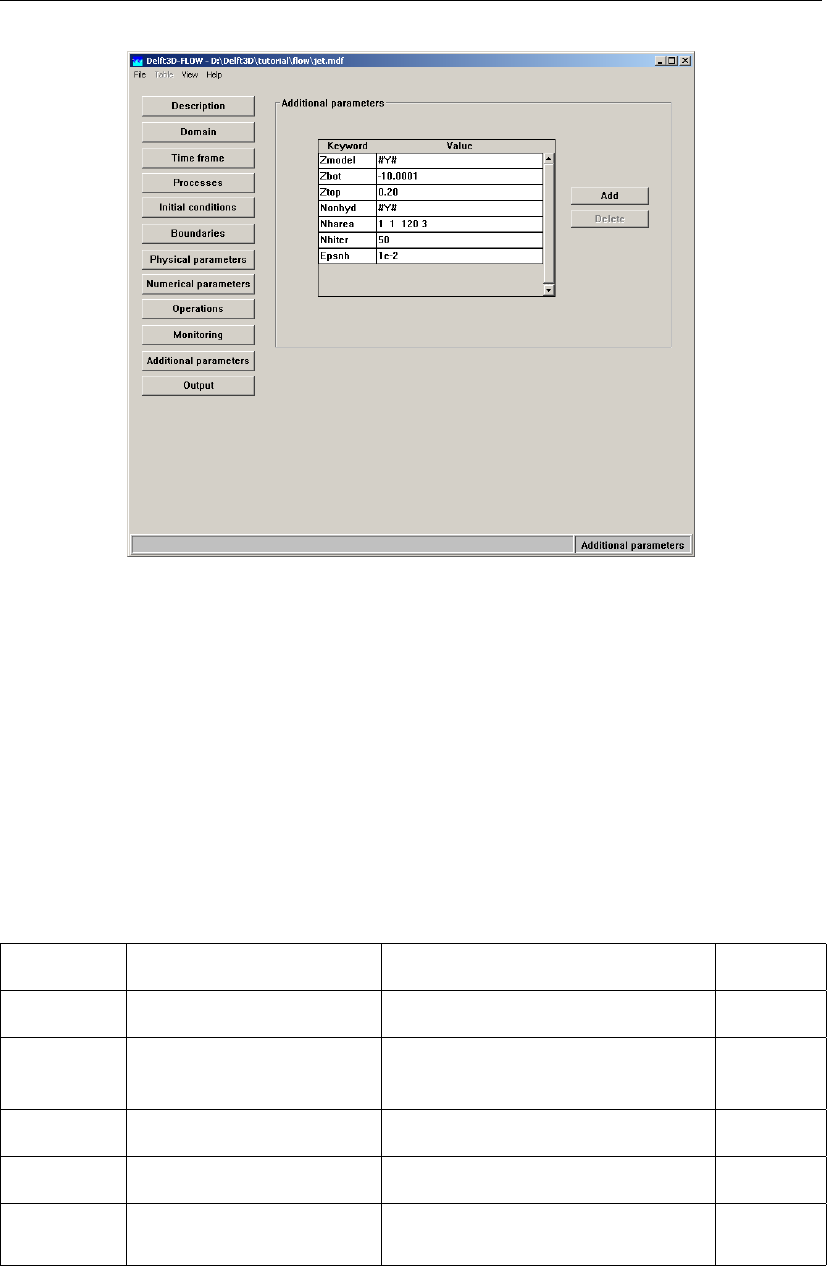
DRAFT
Special features of Delft3D-FLOW
Figure B.21: Defining the Non-hydrostatic solver using the Z-model in the FLOW-GUI
is determined can be specified by you as well. This residual determines the measure of
divergence of the computed velocity field. The default value for this parameter is the L∞-
norm. For non-hydrostatic phenomena that have a strong local character it is advised to use
the L∞-norm. In other cases the L2-norm will be sufficiently accurate. The L2-norm is used
when the keyword L2norm in the MDF-file is set equal to #YES#.
B.12.6.5 Defining the input (keywords) for the non-hydrostatic pressure approach
To run the Z-model in the non-hydrostatic mode the following case sensitive keywords need
to be added in the MDF-file via the window Additional parameters, for Z-model keywords see
section B.11:
Keyword Value Description Default
Nonhyd #YES# Activate non-hydrostatic module –
Nharea 1≤M1< M2≤Mmax Define non-hydrostatic area –
1≤N1< N2≤Nmax
Nhiter 5≤N≤500 Maximum number of iterations 50
Epsnh 0.0< ε < 0.1Stop criterion CG-method 10−2
L2norm #Y# yields L2-norm
#N# yields L∞-norm
Type of norm used for determina-
tion residual
#Y#
Deltares 591 of 688
DRAFT
Delft3D-FLOW, User Manual
B.13 User defined functions
Keyword Value Description Default
Nprcus {1 to 4} Number of User Defined Functions
used
0
To use one or more User Defined Functions (UDF) you must specify the number of UDFs
with the keyword Nprcus and its value. Next you must specify for each UDF a UDF-specific
number of keywords and values; this input data is defined with the UDF sections. For each
UDF you must define the keyword Prcusr which defines the UDF to be used.
The currently available User Defined Functions are:
Functionality Description
bc turbulence model Boundary conditions for the turbulence model
diagnostic mode Specify to use the diagnostic mode
particle wind
factor
An additional wind speed working on particles
Finally you must specify the keyword Nprinp; its value consits of 4 integers which defines:
the number of files to be used (first integer)
the number of reals to be used (second integer)
the number of integers to be used (third integer)
the number of string variables to be used (fourth integer)
B.13.1 Boundary conditions for turbulence models
Keyword Value Description Default
Prcusr #bc turbulence model # Boundary conditions for the k-L
and k-εturbulence models
none
Nprinp 1 0 0 0 One filename will be specified
No reals
No integers
No strings
1000
Filusr #name.ext# Filename with boundary condi-
tions
none
In most cases the generation and dissipation turbulence is dominated by the processes in-
side the model area. The boundary conditions for both the turbulent kinetic energy and the
turbulent energy dissipation rate are set to zero by default. However, in small area models
the boundary conditions might be important. You can specify a vertical profile but other wise
uniform value for each boundary section.
File contents The steady boundary conditions for the turbulence kinetic energy k
and (optional) the energy dissipation εfor each boundary section
concerned.
File format Free formatted.
Generated Manually offline.
592 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Remarks:
Keywords are case sensitive!
Values of character-type must be enclosed between two number signs (#).
More than one values on a line are space separated.
Record description:
Record Record description
each record Sequence number of the open boundary section (Data Group Boundaries)
(1 integer),
Interface number (1 integer),
Time independent boundary condition for k(k-Lturbulence model; 1 real)
or kand ε(k-εturbulence model; 2 reals).
Restrictions:
The open boundary section must be specified in the same sequence as specified in the
Data Group Boundaries (i.e. section 2 must always precede section 3 and so on).
You may skip sections which do not require boundary condition for kand ε.
The turbulence kinetic energy kand the energy dissipation εare defined at interfaces
between the layers. For a model with Kmax layers there are Kmax+1 interfaces. Con-
sequently, Kmax+1 boundary condition values must be specified for each segment.
Input items in a record must be separated by one or more blanks.
Example:
For a model containing four open boundary sections and three layers, you want to prescribe k
and εat open boundary sections two (variable kand uniform εover the vertical) and boundary
section four (kand εuniform), for interface 0 to 4. The comments (not in the file) is enclosed
between brackets.
2 0 0.000039 0.00005 {kand εfor open boundary section 2 at the surface}
2 1 0.000041 0.00005 {kand εfor open boundary section 2 between layers 1 and 2}
2 2 0.000047 0.00005 {item at interface between layer 2 and layer 3}
2 3 0.000051 0.00005 {item at interface between layer 3 and layer 4}
2 4 0.000052 0.00005 {item at the bottom layer}
4 0 0.000048 0.00005 {kand εfor open boundary section 4 at the surface}
4 1 0.000048 0.00005 {kand εfor open boundary section 4 between layers 1 and 2}
4 2 0.000048 0.00005 {item at interface between layer 2 and layer 3}
4 3 0.000048 0.00005 {item at interface between layer 3 and layer 4}
4 4 0.000048 0.00005 {item at the bottom layer}
Deltares 593 of 688
DRAFT
Delft3D-FLOW, User Manual
B.13.2 Diagnostic mode
Keyword Value Description Default
Prcusr #diagnostic mode# Use diagnostic mode none
Nprinp 0 1 0 0 No filename
One real
No integers
No strings
0100
Rcousr 1 real [min] Time in minutes after the simulation
Reference Date, section 4.5.3
0.0
In the diagnostic mode you keep the distributions of the salinity, temperature and the concen-
trations of the conservative substances the same for all times after the time specified by the
parameter Rcousr. Rcousr is given in minutes after the Reference Date, see Data Group
Time frame,section 4.5.3. If Rcousr is set to zero the initial condition is applied during the
whole computation.
You can apply the diagnostic mode to investigate the influence of the quantities mentioned
above, especially the salinity and the temperature, on the flow without having the feedback of
the flow on the parameter of interest.
Restriction:
You can not combine the diagnostic mode with:
secondary flows
3D sediment transport
morphological computations
B.13.3 Particle wind factor
Keyword Value and unit Description Default
Prcusr #particle wind factor# Additional wind drift of drogues none
Nprinp 0 3 0 0 No filename
Three reals
No integers
No strings
0300
Rcousr 1 real [m/s] Wind speed 0.0
Rcousr 1 real [degrees] Wind direction relative to North 0.0
Rcousr 1 real [-] Wind factor αw0.0
With the user defined function ’particle wind factor’ you can add an additional drift to drogues.
This can be useful to take into account an additional wind effect on drogues, for instance
because they are more exposed to the wind than drifting with the flow.
The wind direction is relative to North, positive clockwise and the nautical definition is used.
594 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
The velocity components of a drogue are increased by the additional wind drift as given by:
~u|new =~u|old +αw·~
W , (B.54)
where ~u is the drogue velocity vector, ~
Wis the wind vector and αwis the wind factor specified
as input.
B.14 Domain decomposition
B.14.1 Introduction
Domain decomposition is a technique in which a model is divided into several smaller model
domains. The subdivision is based on the horizontal and vertical model resolution required for
adequately simulating physical processes. Then, the computations can be carried out sepa-
rately on these domains. The communication between the domains takes place along internal
boundaries, or so-called DD-boundaries. If these computations are carried out concurrently,
we speak of parallel computing. Parallel computing will reduce the turn around time of multiple
domain simulations.
Domain decomposition allows for local grid refinement, both in horizontal direction and in
vertical direction. Grid refinement in horizontal direction means that in one domain smaller
mesh sizes (fine grid) are used than in other domains (coarse grid). In case of vertical grid
refinement one domain e.g. uses ten vertical layers and an other domain five layers, or a
single layer (depth-averaged).
Functionality
In Delft3D-FLOW domain decomposition can be applied, including local grid refinement in
both horizontal and vertical direction. Domain decomposition is available in the (standard) op-
erational version of Delft3D-FLOW. Thus, with the operational version both single domain and
multiple domain simulations can be carried out. This appendix contains a detailed description
of how domain decomposition in Delft3D-FLOW should be applied.
Hardware platforms
Multiple domain simulations with Delft3D-FLOW run on computers on which P-threading is
available. This is the case for Windows and Linux.
The current implementation does not allow yet parallel computing on distributed memory sys-
tems, such as on a cluster of PCs.
B.14.2 Motivations for domain decomposition
Domain decomposition is widely recognised as an efficient and flexible tool for the simulation
of complex physical processes. The advantages of a multi-domain modelling approach for
flow and transport problems can be summarised by:
1 Modelling flexibility
coupling of different models
coupling of models of different dimension
coupling of models with different, independently generated grids
2 Modelling accuracy
Deltares 595 of 688
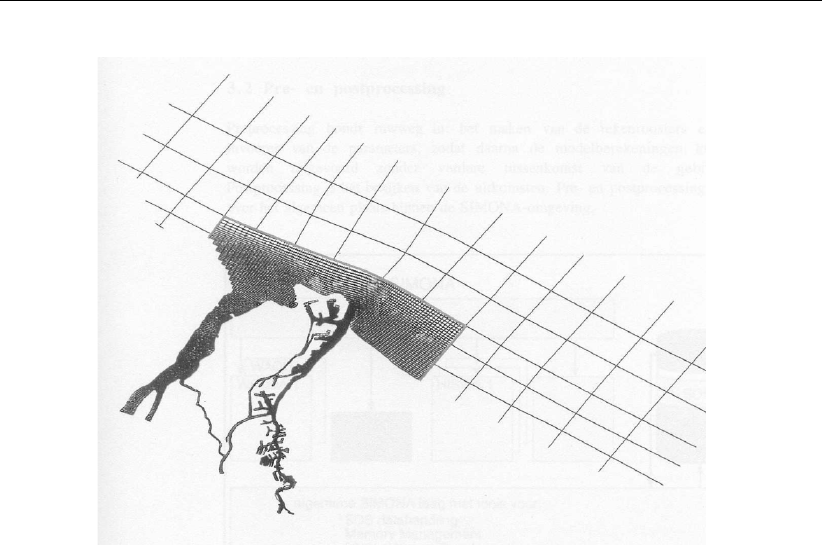
DRAFT
Delft3D-FLOW, User Manual
Figure B.22: Example of grid refinement
smooth, structured grids per domain
local grid refinements
3 Efficiency
reduced memory demands by decomposition into smaller domains
parallel execution of domains
better software engineering and maintenance due to modular approach
It should be noted that numerical techniques other than domain decomposition may also of-
fer some (but not all) of the above-mentioned advantages. The use of a fully unstructured
grid, for example, would offer as much or even more flexibility in the specification of the com-
putational grid. However, the drawbacks that come with that approach may be severe: the
numerical scheme would be rather inaccurate or otherwise highly complex, and may turn out
to be inefficient. At Deltares this and other considerations have led to the conclusion that a
domain decomposition approach based on a subdivision of the model into non-overlapping
domains, each covered by its own structured grid, is the numerical approach that meets best
the demands of efficiency, accuracy and general applicability. The structured multi-domain ap-
proach combines the advantages of the modelling flexibility of the single-domain unstructured
approach with the efficiency and accuracy of the single-domain structured approach.
596 of 688 Deltares
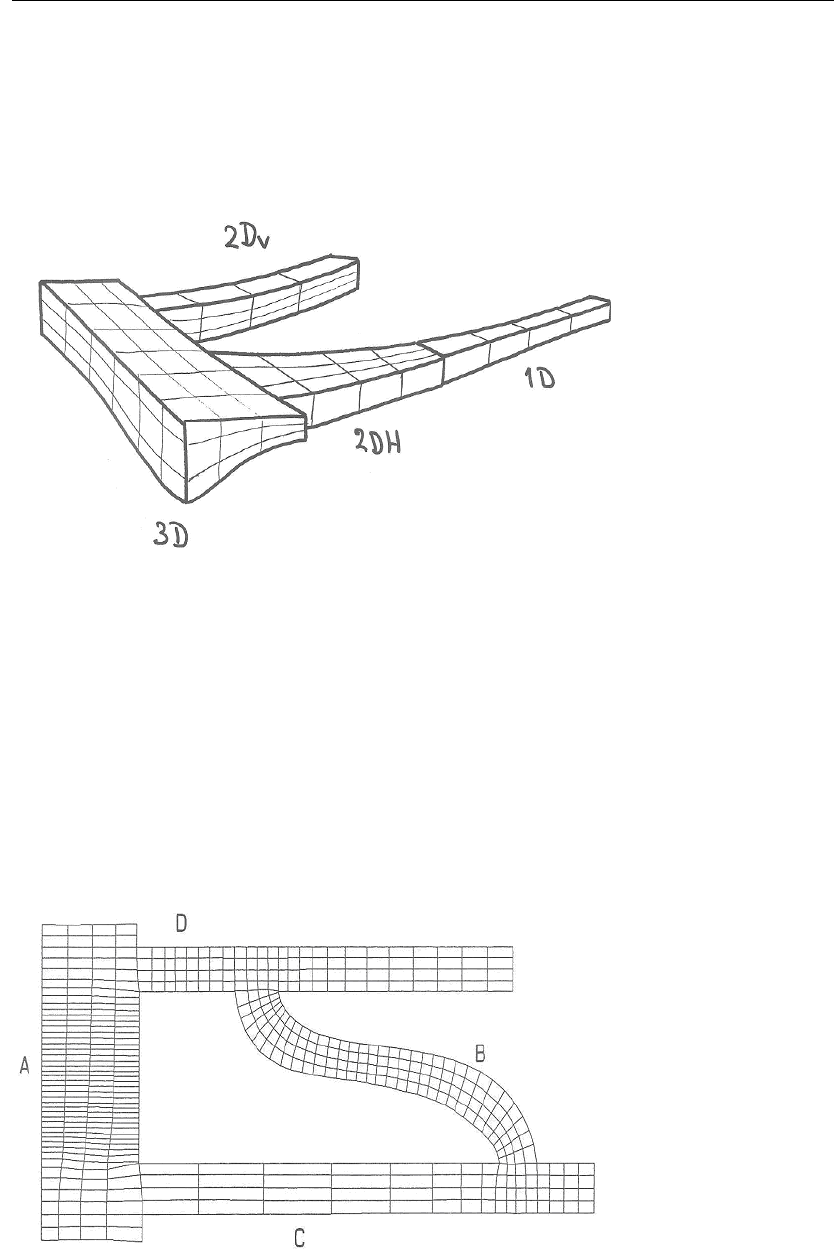
DRAFT
Special features of Delft3D-FLOW
Figure B.23: Example of coupling of models with a different dimension
Figure B.24: Schematised island without domain decomposition
Deltares 597 of 688
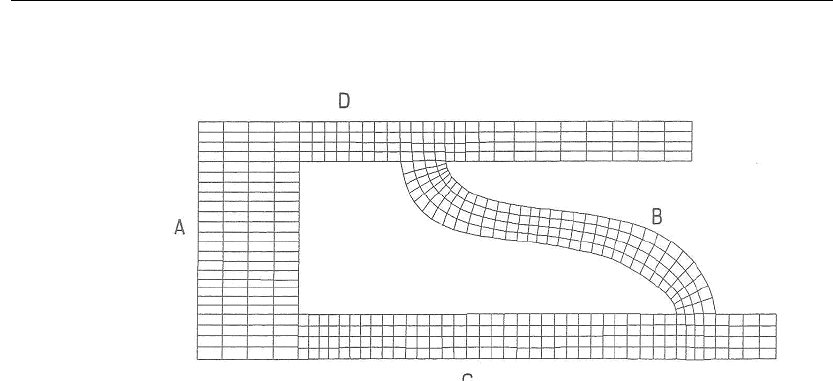
DRAFT
Delft3D-FLOW, User Manual
Figure B.25: Schematised island with domain decomposition
Flexibility of domain decomposition implementation
At Deltares the main motivation was increasing the modelling flexibility of the system rather
than focussing on increasing the efficiency of the system by using many processors. The
most well known example is the use of local grid refinement (see Figure B.22) and the use
of domains with different dimensions. This is illustrated in Figure B.23, in which a 3D model
is coupled to a 2Dv (two-dimensional vertical), a 2Dh (two-dimensional horizontal) and a 1D
(one-dimensional) model.
Less well known, but also quite important is the increased flexibility when modelling complex
geometries. In practice, the model area can be quite complex due to, for example, irregular
land boundaries and the existence of (a lot of) islands. A complex geometry in combination
with the fact that very often a curvilinear grid is applied in Delft3D-FLOW may lead to a situ-
ation in which the set-up of an accurate and efficient model grid can be very tedious. This is
illustrated in Figure B.24 in which the geometry is even rather simple because there is only
one island. When using the single domain version of Delft3D-FLOW the grid should be such
that at both sides of the island the number of grid lines should be equal. Thus, at the left side
A of the island the number of grid lines should be equal to the number at the right B (similarly,
for the top and bottom side). As a result a lot of unnecessary grid points might be needed. In
Figure B.24 this is, for example, the case at the left side of the model domain. In Figure B.25
the situation with domain decomposition is sketched. By defining at each side of the island a
separate domain (called A, B, C and D) it is no longer required that the number of grid lines
at both sides should be equal. Then, the number of grid lines can be chosen on the basis of
accuracy considerations.
When using domain decomposition one often thinks of local grid refinement. However, the
increased flexibility, such as illustrated in Figure B.25, is also a major step forward.
598 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Accuracy of domain decomposition implementation
The domain decomposition approach implemented in Delft3D-FLOW is based on a subdivi-
sion of the domain into non-overlapping domains, with the possibility for grid refinement in
both the horizontal and vertical direction. This allows for a nearly optimal distribution of grid
points. Furthermore, an efficient iterative method has been used for solving the discretised
equations over the domains.
Owing to the overlap of only one grid cell, the spatial discretisation at or near the interface may
be of lower order than the discretisations in the interior. Since, in general only a few domains
are used, it is assumed that this approach is acceptable. In case of grid refinement a special
approach at or near the interface is always required.
Multiple domain simulations with Delft3D-FLOW are not able to identically reproduce the re-
sults of a single domain simulation. Owing to the iteration procedure over the domains and
the possibly lower order discretisations at the interface will lead to small differences. However,
these differences are acceptable, which is confirmed in numerical experiments.
Robustness of domain decomposition implementation
In case of an explicit coupling of domains, the implementation can be done straightforwardly.
This only requires an exchange of data between neighbouring domains. However, such an
approach would lead to a reduced robustness of the system compared to the (single domain)
Delft3D-FLOW system. Therefore, domain decomposition has been implemented in such a
way that it has a similar robustness as the single domain Delft3D-FLOW code.
This has been achieved by using a direct iterative solver for the continuity equation that is
comparable to the single domain implementation. For the momentum equations, the trans-
port equation and the turbulence equations we used the so-called additive Schwarz method,
which allows for parallelism over the domains. Upon convergence, almost the same numerical
solution is obtained compared to the single domain case. This explicit type of iteration pro-
cess is comparable to the corresponding iterative solution methods in the single domain code.
Thus, the domain decomposition implementation of Delft3D-FLOW is based on a comparable
robustness.
B.14.3 Local refinement horizontal and vertical
Implementation of local grid refinement requires special numerical techniques, in particular for
interpolation between domains. We will distinguish grid refinement in vertical and horizontal
direction. Grid refinement in the vertical is implemented rather straightforward, whereas grid
refinement in the horizontal direction is rather complex.
Both for horizontal and vertical grid refinement it is required that grid lines in the coarse domain
are continued in the fine domain. Thus, only “regular” couplings are allowed. In Figure B.26
an example of grid refinement in the horizontal direction is shown (a 1-to-3 refinement).
Horizontal grid refinement
In Delft3D-FLOW local grid refinement along domain interfaces has been based on a 1-to-N
refinement with N an integer number. This means that a grid cell near the interface in the
coarse domain corresponds to N grid cells in the other refined domain.
Deltares 599 of 688
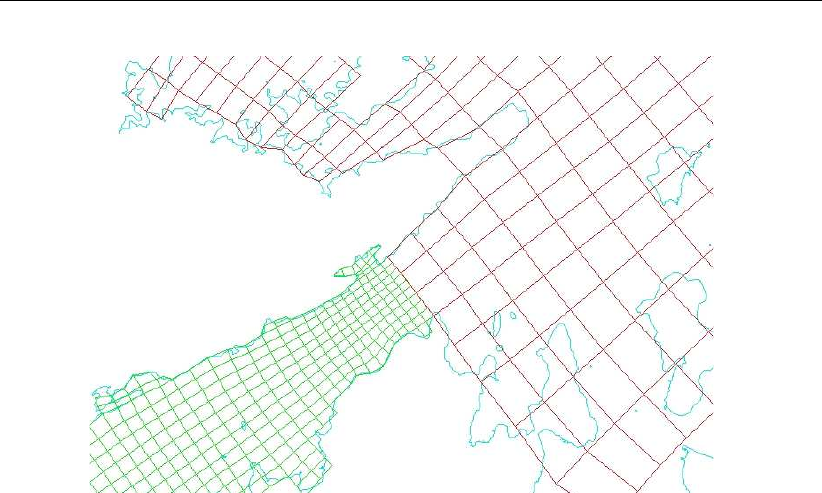
DRAFT
Delft3D-FLOW, User Manual
Figure B.26: Example of grid refinement in the horizontal direction
Vertical grid refinement
In case of grid refinement in the vertical, the implications are rather limited. Only in the
momentum equations and the transport equation some interpolation has to be carried out.
For the continuity equation, the implementation of vertical grid refinement does not require
any adaptations.
In case of vertical grid refinement it is assumed that the number of layers in the refined do-
main is a integer multiple of the number of layers in the coarse domain. Moreover, the layer
distribution is such that for each layer in the coarse domain its layer thickness is identical to
the sum of the layer thicknesses of the corresponding layers in the neighbouring domain. In
Table B.12 an example of a possible refinement is given.
B.14.4 Pre-processing, processing and post-processing
Pre-processing
When running a single domain simulation with Delft3D-FLOW all relevant input data is stored
in the so-called Master Definition Flow (MDF) file. For preparing such an input file we refer to
Chapter 4. When using domain decomposition in Delft3D-FLOW for each domain an MDF-file
has to be specified, similarly to a single domain simulation. Thus, exactly the same input
parameters have to be specified. It is advised to run all domains separately (a few time steps)
in order to check the input files, before you start with coupling the domains into a domain
decomposition simulation.
Furthermore, the following additional input file is required, which specifies which domains and
where they are coupled:
A configuration file (<name.ddb>), which specifies all domains couplings and the location of
the DD-boundaries.
How this file should be generated, is described in the RGFGRID User Manual, RGFGRID UM
(2016).
600 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.12: Example of vertical grid refinement
Layer number Layer thickness
coarse fine coarse fine
1 1 0.1 0.03
2 0.07
2 3 0.2 0.09
4 0.11
3 5 0.4 0.20
6 0.20
4 7 0.2 0.11
8 0.09
5 9 0.1 0.07
10 0.03
Processing
The <name.ddb>file as output from RGFGRID has to be adjusted before this file can be
used by FLOW: the grid filenames have to be replaced by the MDF-filename in which the grid
is used. For example: if <dom1.grd>is used by <runid1.mdf>, then you have to replace all
<dom1.grd>references in <name.ddb>by <runid1.mdf>.
A multi-domain simulation with Delft3D-FLOW is started with the appropriate input file. An ex-
ample can be found at https://svn.oss.deltares.nl/repos/delft3d/trunk/
examples/02_domaindecomposition. Note the DDB specification in the <.ini>and/or
<.xml>configure file.
Post-processing
Not only an input file is required for each domain, also for each domain output files will be
generated. In case of a single-domain simulation we end-up with one history file (<trih-
runid.def/dat>), one map file (<trim-runid.def/dat>) and possibly other output files such as
restart and communication files. In case of domain decomposition, for each domain (with its
own runid) output files are generated. For example, in case of five domains we arrive at five
history and map files. This means that post-processing will require more effort compared to a
single domain simulation. For example, in case of post-processing with Delft3D-QUICKPLOT,
to generate an overall contour map of water levels at a certain point in time, you should define
for each domain a water level data set and assign all these data sets in the figure.
Summarising, when using domain decomposition with Delft3D-FLOW the standard way of
plotting is used (Delft3D-QUICKPLOT).
Deltares 601 of 688

DRAFT
Delft3D-FLOW, User Manual
B.14.5 Restrictions
As described in section B.14.4 for each domain an MDF-file has to be prepared. However,
this does not mean that arbitrary combinations of input parameters are allowed. For example,
a restriction is that in all domains the same time step is applied. This and other restrictions
are listed below:
Grid restrictions
At domain interfaces the grids should be nicely connected (no overlap and “no holes”
between domains).
The maximum number of domain interfaces is limited to 50.
In case of horizontal and vertical grid refinement, grid lines (or layers) in the coarse domain
should be continued in the fine domain, see Figure B.26 and Table B.12. Thus, there
should be a 1-to-N refinement, with N an integer number.
In case of horizontal refinement it is advised to have an equidistant refinement.
Grids must be of the same type (thus, all in spherical co-ordinates, or all in Cartesian
co-ordinates).
The grid orientation should be the same (increasing M- and N-numbering in the same
direction).
No coupling of columns to rows or vice versa.
Domain interfaces should be straight lines (no staircase interfaces).
When coupling a subdomain inside a coarse domain (as a way of nesting), the hole in the
coarse domain must be at least 3 rows and 3 columns.
Bathymetry
At domain interfaces the depth values in corresponding depth points should be identical
in both domains.
In case of grid refinement corresponding depth points should have identical depth values
(see also previous point). Furthermore, for the refined model, it is proposed that the depth
values in the intermediate points are determined by linear interpolation.
Model input
Each MDF-file should satisfy the requirements for a single domain Delft3D-FLOW simula-
tion.
In all domains the same simulation period and time step should be used.
In all domains the same processes for transport should be used (e.g. salinity and temper-
ature). Note that turbulence processes may vary (e.g. k-εin one domain and an Algebraic
turbulence model in another domain).
No permanently dry points are allowed along domain interfaces. Note that temporary dry
points are allowed.
Thin dams may be specified perpendicular to a domain interface, but not parallel.
Part of Delft3D-FLOW functionality does not work in combination with domain decompo-
sition:
Direct coupling with water quality module
Z-model (strictly horizontal layers)
Internal Wave model
Fluid Mud
Drogue
It is advised to avoid special points (see section 10.9) at domain interfaces.
Though not strictly necessary it is advised to have the output timings the same in all
domain models.
602 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Table B.13: Example of a <name.ddb>file
DOM1.GRD 9 31 21 31 DOM2.GRD 12 1 16 1
DOM4.GRD 1 4 1 10 DOM1.GRD 9 1 9 2
DOM3.GRD 5 61 5 65 DOM2.GRD 1 1 1 5
DOM1.GRD 1 1 1 5 DOM3.GRD 5 14 5 26
Online visualisation can be activated for each domain.
If you want to visualise all domains in the online visualisation, you have to set Output →
Refresh screen at each step off.
B.14.6 How to set-up a domain decomposition model
When applying domain decomposition with Delft3D-FLOW there are two different options for
the user:
Subdivision of an existing model: You start with an existing model and subdivide this overall
domain into smaller domains. Next, one or more domains may be refined to enhance the
accuracy of the model application.
Combining separate models: You start with separate, independent models that are com-
bined into a multi domain configuration. Some of the domains may be more refined at the
interface than other domains, as long as all interface points in the coarse domain coincide
with interface points in the refined domain. Often, the corresponding grid points do not coin-
cide and have to be adapted.
Subdivision of an existing model
Generating grids of domains
When dividing an existing model into several domains a few actions have to be carried out
manually. At first, the grid of the model area has to be divided into smaller sub-grids. The grid
generator RGFGRID should be applied to create a grid for each domain.
Remark:
We remark that it is your responsibility to define sub-grids that are connected at the
interfaces. Moreover, there should be no overlap or “gaps” between the domains.
Defining domain interfaces
RGFGRID has been extended with the option to define domain interfaces. We presume that
the grids already satisfy the rules for domain decomposition.
An example of a <name.ddb>file is given in Table B.13.
In this example there is a subdivision into four sub-grids (dom1.grd, dom2.grd, etc.). The grid
indices of corresponding interface segments are specified. For example, the interface at the
first line indicates that (M=9–21, N=31) in domain dom1.grd corresponds to (M=12–16, N=1)
in domain dom2.grd. So, this is a 3-to-1 coupling.
The <name.ddb>file is the starting point for a Delft3D-FLOW multi-domain simulation.
The <name.ddb>file as output from RGFGRID has to be adjusted before this file can be
used by FLOW: the grid filenames have to be replaced by the MDF-filename in which the grid
Deltares 603 of 688

DRAFT
Delft3D-FLOW, User Manual
is used. For example: if <dom1.grd>is used by <runid1.mdf>, then you have to replace all
<dom1.grd>references in <name.ddb>by <runid1.mdf>.
Combining separate models
When combining independently generated domain grids to one multi-domain model, the ac-
tions to be carried out are quite similar to the ones for subdividing an existing model. The
most important difference is that, when combining independent models, the grid boundaries
may not coincide. Therefore, at first, the model grid has to be adapted so that grid points at
the proposed domain interfaces coincide. This can be done in RGFGRID.
B.15 Surfbeat/roller model
This extension of the original Delft3D program allows the modelling of the effect of short-wave
groups on long waves. This effect is caused by spatial variations in the radiation stresses and
causes long waves to travel along with groups of short waves (called carrier waves). The long
waves attached to the groups of short waves are called locked waves or bound waves. The
groups of short waves and thus the long waves attached to these groups travel with the group
velocity (Cg) of the carrier waves.
The Delft3D program does not model the individual carrier waves but it does model the forcing
caused by the short waves. It can only be used in cases where the wave spectrum is narrow-
banded both with respect to frequency as with respect to direction. Given these limitations it
is possible to determine a dominant frequency (the peak frequency) and a dominant direction
from the wave field information. These two parameters are then used to determine a direc-
tional field which indicates the direction of propagation of the carrier waves. This is also the
direction in which the short-wave energy propagates. This short-wave energy is a quantity
that is modelled by Delft3D and it is directly determined from the short-wave components pro-
vided at the boundaries (we will come to these later). The short-wave energy is transported
into the domain travelling with the group velocity which is based on the peak frequency.
The mean wave direction field along which wave energy and roller energy are transported is
not predicted by the surfbeat model but imported from SWAN via the Delft3D-WAVE module.
B.15.1 Domain
A typical domain for the application of the roller model is given by a stretch of sea along the
coast. From the sea side the coast is attacked by a directionally spread wave field. The
domain may contain a harbour basin, in which case the model can be used to predict harbour
oscillations caused by wave groups and the long waves released from these groups as they
approach the harbour.
A sketch of a typical problem layout is given in Figure B.27.
In Figure B.27 Boundary A represents the sea boundary. At this boundary the depth must
be such that incoming bound and free waves can be considered long waves as to allow the
shallow water approximation to be valid. Boundary C represents the coast. It is modelled as
an impermeable boundary at a small depth. Boundaries B and D are the lateral boundaries. In
the sketch we show the case where a locked wave enters the domain at a. Due to refraction of
the carrier wave groups (which force the locked wave) the trajectory curves toward the normal
at the coast. Wave breaking causes the carrier waves to vanish thereby releasing the locked
wave. This is a gradual process that takes place along the shallow part of the trajectory a–b.
The free (released) wave reflects at the coast and travels seaward along trajectory b–c. As
the waves are released gradually and the free waves refract more due to bottom changes
604 of 688 Deltares
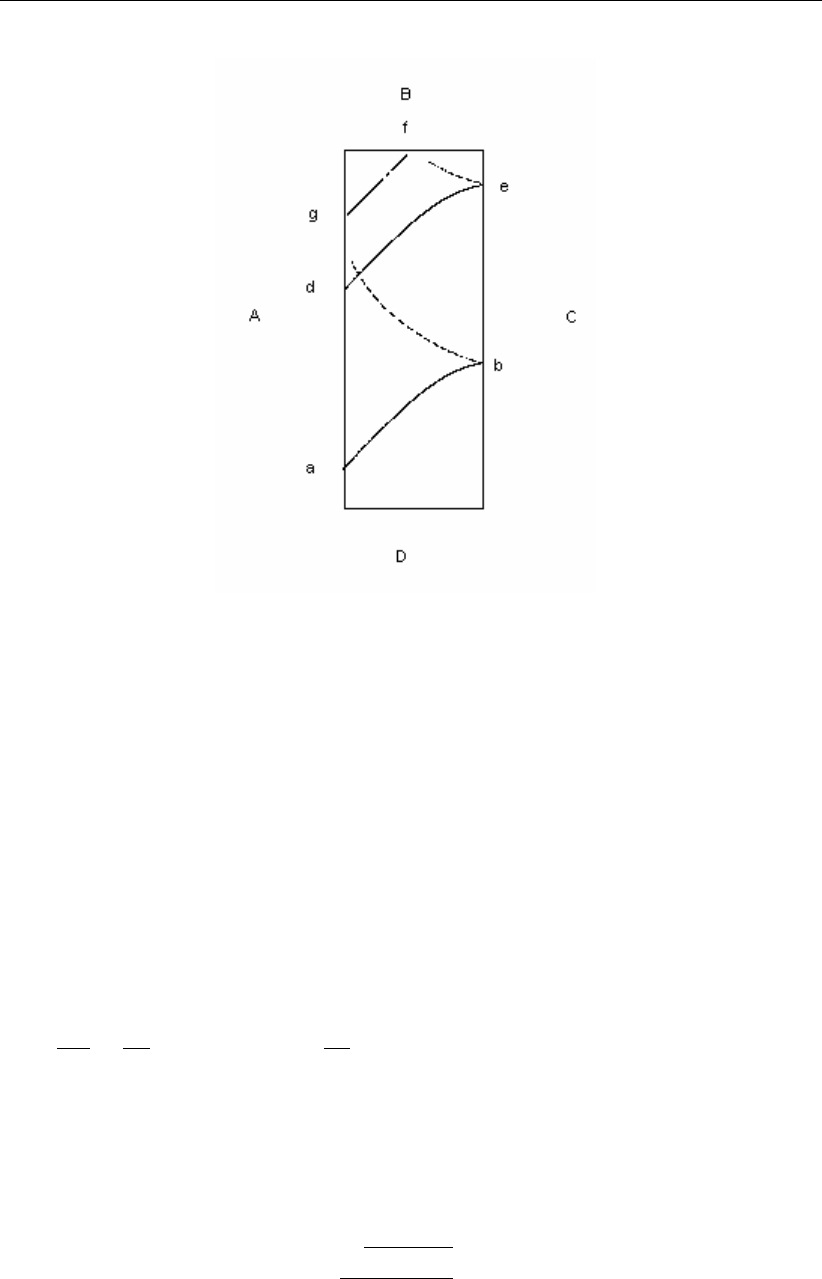
DRAFT
Special features of Delft3D-FLOW
Figure B.27: Problem layout sketch
(they are long waves) than the carrier waves there will be a range of directions to the right
of the curve a–b in which free waves propagate. The curve b–c represents these waves
after reflection at the coast. At the sea boundary the free waves must be allowed to leave
the computational domain without (significant) reflections. At d bound waves also enter the
domain. They propagate along curve d–e. Reflected free waves have to leave at the lateral
boundary B now (curve e–f). Bound waves entering the domain at g should leave the domain
at the lateral boundary B directly (curve g–f). If wave breaking takes place along the path
g-f some of the waves will be released and free waves will also need to leave the domain at
lateral boundary B.
B.15.2 Formulations
The short wave energy balance reads:
∂E
∂t +∂
∂x (ECgcos (α)) + ∂
∂y (ECgsin (α)) = −Dw(B.55)
(αis user-defined)
Here Eis the short-wave energy, Cgthe group velocity, αthe wave direction and Dwthe
dissipation of wave energy, for which we use the expression by Roelvink (1993), which was
derived for the situation of propagating wave groups where the energy varies slowly:
Dw= 2αfm 1−exp − p8E/ (ρg)
γh !n!!E(B.56)
(γand nare user-defined)
Through the process of wave breaking the wave energy is reduced and transformed into
roller energy. This energy is located in the down-wave region after wave breaking. Spatial
Deltares 605 of 688
DRAFT
Delft3D-FLOW, User Manual
variations in the roller energy also generate forces on the water. The propagation of this
form of energy is not yet well understood. Ignoring the effect it has on the generation of long
waves is not an option as recent studies have shown. We model the propagation of roller
energy by transporting it with twice the local celerity of the carrier waves. The roller energy is
rapidly dissipated in shallow regions. The energy that is lost from the organised wave motion
is converted to roller energy through the roller energy balance:
∂Er
∂t +∂
∂x (2ErCcos (α)) + ∂
∂y (2ErCsin (α)) = Dw−Dr(B.57)
where Cis the wave celerity. The roller energy dissipation Dris a function of the roller energy
Er:
Dr= 2βg Er
C(B.58)
Here βis a user-defined coefficient of approximately 0.1 and gthe acceleration of gravity.
The time-and space-varying wave energy and roller energy cause a variation in radiation
stresses (vertically averaged), through the following relations:
Sxx =Cg
C1 + cos2(α)−1
2E+ 2 cos2(α)Er(B.59)
Sxy =Syx = sin (α) cos (α)Cg
CE+ 2Er(B.60)
Syy =Cg
C1 + sin2(α)−1
2E+ 2 sin2(α)Er(B.61)
The radiation stresses are subdivided into surface stresses and depth-uniform stresses. Here,
the surface stresses will always generate a (vertical) circulation. This is only allowed in regions
where dissipation takes place. As the roller model has been introduced to delay the transfer
of wave energy to the current, the shear stress related to the roller is the only surface stress
that is applied. This surface stress reads:
Fx,r =Dr
Ccos (α)(B.62)
Fy,r =Dr
Csin (α)(B.63)
The depth-invariant part of the radiation stresses is now simply the total radiation stress gra-
dient minus the surface stress:
Fw,x =−∂Sxx
∂x +∂Sxy
∂y −Fx,r (B.64)
Fw,y =−∂Sxy
∂x +∂Syy
∂y −Fy,r (B.65)
606 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.15.3 Boundary conditions
At the boundary, the bound wave is determined from the local short-wave energy field using
the horizontal-bottom approximation:
ζb=2n−1
2
ρC2
g−ghE−¯
E(B.66)
ub=Cg
hcos (θb)ζb(B.67)
vb=Cg
hsin (θb)ζb(B.68)
Here we have assumed that the average of ζbis zero. The time averaged wave energy is
given by
¯
E=1
2ρg
N
X
j=js
a2
j(B.69)
The user-defined parameter fsis used to distinguish long waves from short waves. Wave
components with a frequency smaller than fsare considered long and are prescribed at the
boundary as free waves (provided the direction of these waves is incoming at the boundary).
The free surface elevation and the xand ycomponents of the velocity of the free incoming
waves are given respectively by:
ηi=
js
X
j=1
ajcos ((cos (θj)xb+ sin (θj)yb)kj−ωjt+ϕj)(B.70)
ui=
js
X
j=1
ajωj
kjhcos (θj) cos ((cos (θj)xb+ sin (θj)yb)kj−ωjt+ϕj)(B.71)
and
vi=
js
X
j=1
ajωj
kjhsin (θj) cos ((cos (θj)xb+ sin (θj)yb)kj−ωjt+ϕj)(B.72)
In these expressions it is assumed that all of the free waves are incoming at the boundary. If
this is not the case the outgoing components have to be ignored in the summations.
The Riemann boundary condition uses the information of the incoming free and bound waves
and the outgoing reflected wave (which is also assumed to be a free wave). The direction of
the outgoing wave is computed from the velocity and surface elevation in the previous time
step.
Deltares 607 of 688
DRAFT
Delft3D-FLOW , User Manual
The parameters θi,θrand θbare the angles between the direction of propagation and the
normal at the boundary. ~n is the inward pointing normal unit vector at the boundary. We use
the abbreviations ci= cos(θi) = ~n ·~ei,cr= cos(θr) = −~n ·~er,cb= cos(θb) = ~n ·~eb.
The weakly reflective boundary condition can be written as:
u+ζrg
hcr=rg
hζi(cr+ci) + ζbcr+Cg
√ghcb.(B.73)
Here udenotes the normal component of the depth averaged velocity vector: ~u ·~n.
Since the boundary condition only allows reflected (free) waves to leave the domain, situa-
tions where bound waves approach the boundary have to be avoided. This can be achieved
by defining strips along such boundaries where the wave forces (which drive the bound
waves) are gradually reduced towards the boundary. The bound waves travelling towards
the open boundary are thus gradually transformed into free waves which can be dealt with
using Eq. (B.73). The location of the strips is provided by you through the input file as de-
scribed in section B.15.6. It is advised to choose for the width of the strip at least the length
of a typical wave group.
References: Van Dongeren and Svendsen (1997) and Roelvink (1993).
B.15.4 Coupling with other modules
The model needs wave direction and period information from SWAN, which it reads from the
communication file in the same way as it does this without the surfbeat/roller option.
The surfbeat/roller model can be combined with the online sediment and morphology features.
B.15.5 Modes of operation
The surfbeat/roller model can be run with quasi-stationary boundary conditions or with the
instationary boundary conditions described above. In the first case, the boundary conditions
are taken over from the wave information on the communications file; the main purpose of
the surfbeat/roller model is then to include the roller equations, which leads to a shoreward
shift of the wave set-up and the longshore and cross-shore flow. In this case, very little extra
information is needed, except to switch the roller model on and to specify some coefficients.
In the case of instationary boundary conditions, spectral components of the surface elevation
at a point with given depth are converted to boundary conditions for short-wave energy and
free long wave elevation at all boundaries as outlined above. In this case an additional file
with the spectral components and some additional information must be specified.
B.15.6 Input description
To set up a model including the wave energy and roller energy balance, first a standard wave-
flow model must be set up, as described in the WAVE and FLOW manuals. A set-up must be
chosen where a dummy FLOW call sets up the administration, after which a WAVE computa-
tion is carried out for a single time point, followed by a FLOW run that takes into account wave
forcing.
For the typical small coastal models where we apply the roller model in stationary mode we
recommend a combination of water level boundaries for the offshore boundary and Neumann
boundaries for the lateral boundaries. Also add the keyword:
608 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Cstbnd=#yes#
This helps avoiding the formation of artificial boundary layers along the domain boundaries.
These may occur due to normal components of the advection terms.
Now we can turn on the roller model in stationary mode by specifying in the MDF-file the extra
keyword:
Roller =#yes#
Optionally, the roller model parameters can be specified if values other than their default
values as given below are required, by adding the keyword/value combinations:
Alfaro = 1.0
Betaro = 0.1
Gamdis = 0.55
Ndis = 10
(Alfaro see Equation (B.55),Betaro see Equation (B.58),Gamdis and Ndis see Equa-
tion (B.56))
These keywords can be entered using a text editor or (preferably) through the FLOW user
interface, in Data Group Additional parameters.
In instationary mode, for the boundary conditions of the surfbeat model to work properly it
is necessary to set all flow boundaries to Riemann type. The input for the Riemann bound-
ary conditions will be generated automatically based on the given wave spectrum; a dummy
boundary condition file <∗.bct>or <∗.bch>has to be created, i.e. by doing a ‘save all’ in
the FLOW user interface.
The input wave spectrum that is used to create the instationary boundary conditions has to
be given in a file specified in the mdf file through a keyword:
Filwcm= #wavcmp#
Here <wavcmp>may be any legitimate filename. The contents of this file are described
below.
Deltares 609 of 688
DRAFT
Delft3D-FLOW, User Manual
Wave components file
In this section we will describe the structure of the file <wavcmp>that prescribes the Fourier
components of the incoming short- and long- wave signals. The following records must be
provided in free format; after the prescribed number of values in each record, any comment
can be added as only the required values per record are read.
Record Record description
1 The file may start with an arbitrary number of description records start-
ing with an asterisk (∗). Thes lines will be ignored except for the line
containing the version number which should read “∗version 1”.
2Nc
3h
4fsplit
5 to 4 + Ncfjabc,j ϕbc,j θbc,j
5 + Ncnmskf nmskl mmskf mmskl
6 + Nctimtap [sec]
Ncis the number of spectral components.
his the characteristic water depth in [m] at the open boundaries.
fsplit is the splitting frequency in [Hz] between free long waves and short waves. Only
the components which have a frequency lower than fsplit will be prescribed at
the boundary as free waves. The other components are used to determine the
incoming high frequency wave energy field which will generate forced waves in
the model.
fjis the frequency of wave component jin [Hz].
Warning:
The wave components should be specified in order of increasing wave
frequency, i.e. fj< fpif j < p.
abc,j is the amplitude of wave component jin [m].
ϕbc,j is the phase angle of the incoming wave component jin [deg] at x= 0,y= 0.
θbc,j is the direction of the incoming wave component jin [deg] in Cartesian conven-
tion, i.e. θbc,j = 90 represents a wave travelling to the north.
The wave components generate the following free surface elevation relative to
the tidal elevation:
η(x, y, t) =
Nc
X
j=1
abc,j exp {i(kjcos (θbc,j)x+kjsin (θbc,j)y−ωbc,j t+ϕbc,j )}
(B.74)
Here kjis related to fjand prescribed water depth hthrough the linear disper-
sion relation and ωj= 2πfj.
nmskf is the grid number in ηdir below which the wave forces are gradually and artifi-
cially reduced to zero at the lower boundary. Set to -1 if the wave forces should
not be reduced. At boundaries at which waves enter, this parameter should be
-1.
610 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
nmskl is the grid number in ηdir above which the wave forces are gradually and artifi-
cially reduced to zero at the upper boundary. Set to -1 if the wave forces should
not be reduced. At boundaries at which waves enter, this parameter should be
-1.
mmskf is the grid number in ξdir below which the wave forces are gradually and arti-
ficially reduced to zero at the left boundary. Set to -1 if the wave forces should
not be reduced. At boundaries at which waves enter, this parameter should be
-1.
mmskl is the grid number in ξdir above which the wave forces are gradually and artifi-
cially reduced to zero at the right boundary. Set to -1 if the wave forces should
not be reduced. At boundaries at which waves enter, this parameter should be
-1.
timtap is the time in seconds that is used by the taper for the incoming signals. It is
advised to define timtap at least several times as large as the period of a typical
group in the signal.
Remark:
The parameters nmskf, nmskl, mmskf and mmskl can in general be set to -1.
Determining wave components from a given spectrum
Here we distinguish between an analytically prescribed spectrum and a numerically provided
spectrum. As an example of the first we choose the combination of a JONSWAP spectrum
and a cos-m distribution for the directional spreading of the waves.
JONSWAP-cos-m
We assume the wave energy spectrum to be of the following form:
S(f, θ) = D(θ)E(f)(B.75)
where
D(θ) = Γ1
2Γm+1
2
Γm
2+ 1cosm(θ−θ0)(B.76)
and JONSWAP frequency spectrum:
E(f) = A0ν−5exp −5
4ν−4γexp(−(ν−1)2/(2σ2))
0(B.77)
with ν=f/fmand σ=0.07, ν ≤1
0.09, ν > 1
The parameters θ0,m,γ0,fmand A0are assumed to be known constants. The parameter
A0is related to the significant wave height through:
H2
sig = 16 Z∞
0
E(f)df (B.78)
The method described here is the ’single summation method’ where one direction is assigned
to each frequency bin. This direction is determined by using the directional spreading function
for the frequency bin to define a probability density function and then randomly draw from this
distribution.
Deltares 611 of 688

DRAFT
Delft3D-FLOW, User Manual
In the case of a cos-m directional spreading this can be transformed to drawing from a uniform
distribution on [0,1], yielding a value for p, and then solving the problem:
Γ1
2Γm+1
2
Γm
2+ 1Zα
−π/2
cosm(β)dβ =p(B.79)
The solution αis then used to determine the direction θj=θ0+αwhich is assigned to this
frequency bin. If we use an equidistant grid (with grid size ∆f) for the frequency, the energy
in one frequency bin can be approximated by ∆fE (j∆f) = 1
2a2
j, where ajis the amplitude
assigned to the bin. The phase ϕjof the j-th component is drawn from a uniform distribution
on [0,2π]
The wave component to be used in the file <wavcmp>is now given by the string: j∆f,aj,
ϕj,θj
Determining the components in the case of a numerical spectrum
In the case where the spectrum is not given analytically as in the former section but numer-
ically we can follow the same procedure to find the single summation components. Here
we assume that the spectrum is given on a equidistant grid: [θi, fj],i= 0,1, . . . , M and
j= 0,1, . . . , N. We furthermore assume that the spectrum has one peak inside the domain
[θ0, θM]×[f0, fN]around which most of the energy is concentrated. At the boundary of this
domain the spectrum is assumed to be small. For each frequency bin we approximate the
directional spreading D(θ, fj)through linear interpolation such that
D(θi, fj) = S(θi, fj), ∆θ 1
2S(θ0, fj) + 1
2S(θM, fj) +
M−1
X
p=1
S(θp, fj)!!
(B.80)
We again have to solve:
Zθ
θ0
D(τ, fj)dτ =p(B.81)
where pis drawn from a uniform distribution on [0,1].
We find i0such that
1
2∆θ
i0
X
i=1
(D(θi, fj) + D(θi−1, fj)) ≤p < 1
2∆θ
i0+1
X
i=1
(D(θi, fj) + D(θi−1, fj))
(B.82)
and interpolate linearly to find:
θj=i0∆θ+
p−∆θ1
2(D(θ0, fj) + D(θi0, fj)) + Pi0−1
i=1 D(θi, fj)
1
2(D(θi0, fj) + D(θi0+1, fj)) .(B.83)
The amplitude of the component corresponding with the frequency bin is found from:
∆f∆θ 1
2S(θ0, fj) + 1
2S(θM, fj) +
M−1
X
p=1
S(θp, fj)!=1
2a2
j.(B.84)
612 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
The phase ϕjis again drawn from a uniform distribution on [0,2π].
The wave component is again given by the string: j∆f,aj,ϕj,θj.
B.16 Bedform heights
The bedform height functionality allows you to include a dynamic dune height predictor or
ripple, mega-ripple, and dune roughness height predictors in the simulation. The formula-
tions have been described in Section 9.11.1. Several keywords in the MDF file influence the
functioning; these are indicated in Table B.14. If Bdf is false, then the keyword BdfRpC,
BdfRpR,BdfMrC,BdfMrR,BdfDnC,BdfDnR and BdfOut will still be processed for use
by the Van Rijn (2007) formulations.
Table B.14: Bedform keywords in mdf file
Keyword Value Description Default
Bdf #Y# or #N# Switch for dune height predic-
tor
#N#
BdfMor #Y# or #N# Switch for time scale to be
used for relaxation processes;
by default the bedform adapt
based on the hydrodynamic
time step. Set #Y# if the mor-
phological time step should be
used (equal to the flow time
step multiplied by the morpho-
logical factor). If BdfMor is
true, then bedforms will not
adapt during the initial mor-
phological period as specified
by MorStt.
#N#
BdfH #vanrijn84#
#fredsoempm#
#fredsoeeh#
#powerrelation#
Dune height predictor #vanrijn84#
BdfEps pos. real Multiplication factor εin case
BdfH equals #vrijn84#, #fred-
soempm# or #fredsoeeh#
1.0
BdfThC pos. real Critical bed shear stress used
in dune height predictor. Set
to a positive value to overrule
the default value based on the
Shields curve.
Shields curve
BdfaH pos. real Multiplication factor aHin
case BdfH equals #powerre-
lation#
0.0
BdfbH pos. real Exponent bHin case BdfH
equals #powerrelation#
1.0
continued on next page
Deltares 613 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.14 – continued from previous page
Keyword Value Description Default
BdfRlx #none#
#thconst#
#lhconst#
#lhfactor#
#lhchhmax#
Relaxation behaviour #none#
BdfT_H pos. real Relaxation time scale THin
[Tunit] in case BdfRlx
equals #thconst#
0.0
BdfL_H pos. real Relaxation distance LHin [m]
in case BdfRlx equals #lh-
const#
0.0
BdfLHc pos. real Multiplication factor fLH in
case BdfRlx equals #lhfac-
tor#
0.0
BdfHmx pos. real Critical water depth Hmax in
[m] in case BdfRlx equals
#lhchhmax#
1.0
BdfLHp pos. real Exponent bLH in case
BdfRlx equals #lhchhmax#
2.5
BdfPmx pos. real Limiter φmax in case BdfRlx
equals #lhchhmax#
3.0
BdfADV #Y# or #N# Switch for dune migration (this
option becomes only active if
dune relaxation is included,
which is not the case by de-
fault)
#Y#
BdfCFL #Y# or #N# CFL check for dune migration #N#
BdfaC pos. real Multiplication factor aC
in case BdfRlx equals
#thconst#, #lhconst# or
#lhfactor#
0.0
BdfbC pos. real Exponent bCin case BdfRlx
equals #thconst#, #lhconst#
or #lhfactor#
1.0
BdfCHn pos. real Multiplication factor acH in
case BdfRlx equals #lhchh-
max#
5.5
BdfCHp pos. real Exponent bcH in case
BdfRlx equals #lhchhmax#
3.5
BdfGmn pos. real Limiter γmin in case BdfRlx
equals #lhchhmax#
0.2
continued on next page
614 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Table B.14 – continued from previous page
Keyword Value Description Default
BdfUni pos. real or file-
name
Initial dune height in [m]:
uniform value or filename
<*.dnh>with non-uniform
values at cell centres. In case
of restarting from a previ-
ous simulation with simulated
dune height, the results of the
previous simulation overrule
the value(s) specified here.
0.0
BdfL #vanrijn84#
#powerrelation#
Dune length predictor #vanrijn84#
BdfaL pos. real Multiplication factor aLin case
BdfL equals #powerrelation#
0.0
BdfbL pos. real Exponent bLin case BdfL
equals #powerrelation#
1.0
BdfRou #vanrijn07#
#vanrijn84#
#powerrelation#
Roughness height predictor.
The default is #vanrijn84# if
dune height predictor is in-
cluded in the simulation (Bdf
is true), and #vanrijn07# oth-
erwise since it predicts the
roughness height directly.
#vanrijn84#
or
#vanrijn07#
BdfRpC pos. real Ripple calibration factor αrin
case BdfRou equals #van-
rijn07#
1.0
BdfRpR pos. real Ripple relaxation time Trin
[Tunit] in case BdfRou
equals #vanrijn07#
0.0
BdfMrC pos. real Mega-ripple calibration factor
αmr in case BdfRou equals
#vanrijn07#
0.0
BdfMrR pos. real Mega-ripple relaxation time
Tmr in [Tunit] in case
BdfRou equals #vanrijn07#
0.0
BdfDnC pos. real Dune calibration factor αdin
case BdfRou equals #van-
rijn07#
0.0
BdfDnR pos. real Dune relaxation time Tdin
[Tunit] in case BdfRou
equals #vanrijn07#
0.0
continued on next page
Deltares 615 of 688
DRAFT
Delft3D-FLOW, User Manual
Table B.14 – continued from previous page
Keyword Value Description Default
BdfaR pos. real Multiplication factor aRin
case BdfRou equals #power-
relation#
0.0
BdfbR pos. real Exponent bRin case BdfRou
equals #powerrelation#
1.0
BdfOut #Y# or #N# Flag to indicate whether dune
height/length and/or bedform
roughness height data should
be written to the Delft3D-
FLOW map-file. If you want
to reuse dune height/length
information in a subsequent
simulation upon restart, then
you need to set this flag to
#Y#.
#N#
B.17 Trachytopes
The trachytope functionality allows for the usage of different types of roughness formulations
at different locations within the computational domain. Multiple formulation may be active in
the same grid cell. Several keywords in the MDF file influence the functioning.
Keyword Value Description Default
Trtrou #Y# or #N# Trachytope option activated #N#
Trtdef #name# Definition file trachytopes
Trtu #name# Area file trachytopes u-direction
Trtv #name# Area file trachytopes v-direction
TrtDt pos. real Time step in minutes for updat-
ing roughness and resistance co-
efficients based on trachytopes.
Must be a multiple of Dt.
1Dt
TrtClu #name# Spatial calibration factor for tra-
chytopes u-direction
uniform 1
TrtClv #name# Spatial calibration factor for tra-
chytopes v-direction
uniform 1
TrtMnH pos. real Minimum water depth in rough-
ness computation
Dryflc
TrtMth 1 or 2 Area averaging method 1
TrtAsr real ∈[0,1] Serial factor in averaging of area
roughnesses
0.6
616 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Using trachytopes does not eliminate the need for defining the standard roughness input.
The standard roughness values will be overruled by the trachytope defined values for those
locations for which trachytopes have been defined. When trachytopes cover less than 100%
of a grid cell, the standard roughness value is used as a default roughness value for the
remaining percentage of the grid cell. The roughnesses based on the trachytopes are updated
based on the interval specified by TrtDt. When TrtDt is larger than 1, the roughnesses are
kept constant expressed roughness formulation chosen for the default roughness (Roumet).
The keywords refer to three (types of) attribute files, namely
1 Trachytope definition file for defining the different types of trachytopes and the associated
roughness formulations (Trtdef). This file is described in section B.17.1.
2 Area files for defining the fraction of the grid cell covered by a certain area trachytope type
(Trtu/Trtv). It also contains the data for the linear and point trachytope types. This file
is described in section B.17.2. If the trachytope definition file defines only one trachytope,
then the area files are optional: if the area files are not specified in such a case, then all
points will use that one trachytope.
3 Calibration files (TrtClu/TrtClv). These are files with positive numbers in QUICKIN/Delft3D
DEP file format.
B.17.1 Trachytope definition file
The trachytope definition file contains lines of the following format defining the different types
of trachytopes.
TrachytopeNr FormulaNr ...Parameters...
where ...Parameters... indicates a space separated list of formula specific parame-
ters; the parameters required and their order are specified in the following table. The user must
specify for each trachytope (combination of formula number and parameters) a unique posi-
tive trachytope number. This trachytope number is used in the area files (see section B.17.2)
to indicate the roughness types within a grid cell. The following roughness formulations have
been defined (see section 9.11.2 for the related formulae):
FormulaNr Description Parameters
Special classes (1–50)
1 flood protected area, reduces the effective
area of the grid cell. It has no influence on
the continuity equation (i.e. it does not de-
crease the surface area of the grid cell).
–
2 composite trachytope: fraction αof type T1
and fraction β(generally β= 1 −α) of type
T2
T1,T2,α,β
Area trachytope classes: simple type (51–100)
51 constant White-Colebrook/Nikuradse value k[m]
52 constant Chézy value C[m1/2/s]
53 constant Manning value n[s/m1/3]
54 constant z0value z0[m]
Deltares 617 of 688
DRAFT
Delft3D-FLOW , User Manual
FormulaNr Description Parameters
Area trachytope classes: alluvial type (101–150)
101 simplified Van Rijn A[m0.3], B[m0.3]
102 power relation A[m1/2/s], B[-]
1035Van Rijn predictor -
1045Struiksma predictor A1[m1/2/s], A2[-], θc[-],
θm[-], Cmin [m1/2/s]
1055bedforms quadratic -
1065bedforms linear -
Area trachytope classes: vegetation type (151–200)
151 Barneveld 1 hv[m], n[1/m]
152 Barneveld 2 hv[m], n[1/m], CD[-], kb
[m]
153 Baptist 1 hv[m], n[1/m], CD[-], Cb
[m1/2/s]
154 Baptist 2 hv[m], n[1/m], CD[-], Cb
[m1/2/s]
Linear trachytope classes: various (201–250)
201 hedges 1 hv[m], n[1/m]
202 hedges 2 hv[m], n[1/m]
Linear trachytope classes: various (201–250)
251 trees hv[-], CD[-]
B.17.2 Area files
The area files (for u- and v-direction) contain lines of the following format defining the surface
area of the grid cell covered by a certain trachytope.
N M TrachytopeNr AreaFraction
The trachytopes numbers should be defined in the trachytope definition file as described in
the previous section. Records referring to the same grid cell (m,n) should be consecutive.
When records referring to the same grid cell (m,n) occur at different locations within the same
input file separated by records referring to other grid cells, only the last block of data is used.
The AreaFraction is a value between 0.0 and 1.0. For linear trachytopes (trachytope number
201) the AreaFraction should be the projected length of the hedge in the u- and v-direction.
The notation
5Formulae 103, 104, 105 and 106 use the D50 and D90 data from the sediment transport and morphology
module if available. In case of a simulation without sediment, these values are obtained from the keywords
BdfD50 and optionally BdfD90 in the mdf-file. The values of BdfD50 and BdfD90 may be a constant value
for the whole grid, or the filename of a file containing a spatial varying field. The default value for D50 is 0.2mm,
and the default value for D90 is 1.5D50.
618 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
N1 M1 N2 M2 TrachytopeNr1 AreaFraction1
N1 M1 N2 M2 TrachytopeNr2 AreaFraction2
can be used as a shorthand notation for
N1 M1 TrachytopeNr1 AreaFraction1
N1 M1 TrachytopeNr2 AreaFraction2
:
N2 M2 TrachytopeNr1 AreaFraction1
N2 M2 TrachytopeNr2 AreaFraction2
If the trachytope definition file defines only one trachytope (not necessarily trachytope number
1), then the area files are optional: if the area files are not specified in such a case, then all
points will use that one trachytope, i.e. it will be like specifying
1 1 NMAX MMAX TrachytopeNr 1.0
for both area files.
B.18 Creating D-Water Quality input files
The output of Delft3D-FLOW is by default stored in a file that cannot be read using D-Water
Quality. Therefore, a coupling program Coup203 was required to convert the Delft3D-FLOW
output files into D-Water Quality input files. This is no longer required as Delft3D-FLOW can
now optionally write D-Water Quality input files directly. The following three keywords have
been introduced for this purpose.
Keyword Value Description Default
Flwq 3 reals start time, time step and end time
for writing data to D-Water Qual-
ity input files
–
ilAggr integers vertical aggregation: number of
flow layers aggregated per waq
layer
all ones
WaqAgg #name.dwq# horizontal aggregation: name of
aggregation file
–
When Flwq is present, the production of WAQ input files is switched on and execution of
Coup203 is not needed any more. Flwq specifies the simulation times at which WAQ input
is written (start time, time interval, stop time). ilAggr specifies the vertical aggregation;
WaqAgg the horizontal aggregation.
More detailed description:
Flwq This keyword activates the writing of output to the WAQ module for
the 3D domain. Flwq specifies the simulation times at which WAQ
input is written: start time, time interval, stop time. The start time,
time interval and stop time are specified in minutes. Start and stop
time are relative to the reference date (time 00:00:00). The time in-
terval should be a whole multiple of the FLOW time step size and pro-
duces a mass conservative internal integration of FLOW time steps
to the larger WAQ-file time step size. The start and stop time should
be within the FLOW simulation timings range.
Deltares 619 of 688
DRAFT
Delft3D-FLOW, User Manual
ilAggr This keyword controls the vertical aggregation. t holds a set of inte-
ger numbers. Each integer denotes the number of vertical layers to
be aggregated. The sum of the integers must be equal to the total
sum of hydrodynamic layers (kmax). Example: For example 5 WAQ
layers with aggregation “1 2 2 3 2” are specified, which means that
the hydrodynamic layers 2/3, 4/5, 6/7/8 and 9/10 are aggregated.
Warning:
The number of layers to be aggregated is always (so also for
the Z-layer model) defined from top to bottom.
WaqAgg This keyword controls the horizontal aggregation. It may have one of
the following values:
# # (empty): No horizontal aggregation is performed and the so
called #active only# value is assumed.
#name.dwq#: The name of an aggregation file as created with D-
Waq DIDO to join computational elements and/or limit the WAQ
files to a subset of the FLOW area.
#full matrix#: Indicates that the WAQ files do contain the full-
matrix representation of the flow grid. Otherwise the so called
#active only# value is assumed.
Example lines in MDF-file:
Flwq = 7.5000000e+002 1.5000000e+001 1.5000000e+003
ilAggr= 1 2 2 3 2
WaqAgg= # #
B.19 Dry run
An option has been added to Delft3D-FLOW to perform a simulation without actually perform-
ing all computations, a so-called dry run. When the dry run option is switched on, Delft3D-
FLOW reads all input data, generates all the required variables in the computational engine,
performs all normal checks and writes to the output files. In this way, all time steps are per-
formed, but very little actual computations are performed. Using this option, one can verify a
scenario and determine total disk usage before running an actual computation. The dry run
option can be switched on by adding the keyword DryRun to the Additional parameters.
Keyword Value Description Default
DryRun #Y# or #N# Dry run option activated #N#
620 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
B.20 Reuse temporary files
Before the actual calculation is started, a few temporary files are created, containing time
dependent information. The creation of these temporary files normally takes a few seconds.
But for some models (with a very big number of open boundaries or discharges) the creation
of these files may take long. Reusing them may be an option when doing several similar
calculations in a row. When switched on, a message is generated in the diagnostic file. The
ReTMP option can be switched on by adding the keyword to the Additional parameters.
Warning:
It is the users responsibility to check whether reusing the temporary files is applicable.
Keyword Value Description Default
ReTMP #Y# or #N# Reuse temporary files #N#
B.21 Change the update frequency of the nodal factors
When using astronomic boundary conditions, the nodal factors are updated every 6 hours by
default, see section 4.5.6.1. To change this update frequency, add the keyword NodalT to
the Additional parameters.
Warning: It is the users responsibility to check what the influence is of changing the update
frequency on the results.
Keyword Value Description Default
NodalT real in [0,∞) Time interval between two up-
dates of the astronomic nodal
factors [timeUnit]
360.0 min
B.22 Bubble screen
A so called bubble screen can be modelled by Delft3D-FLOW. Bubble screens are construc-
tions that inject air in a water system and are located at the bottom (or higher). This results
into a bubble plume in which water, heat and dissolved substances are mixed and transported
towards the free water surface. In practice, this bubble induced circulation can be applied
to suppress unwanted phenomena such as algae growth. Bubble screens can be used in
nearly stagnant and non-stratified or very strongly stratified water systems, such as lakes and
reservoirs. In all other application we recommend to contact the Delft3D helpdesk for further
advice whether bubble screens can be applied or not.
We distinguish between a single nozzle bubble plume (axisymmetric) and a bubble screen,
i.e. a (2D) line bubble plume. For a single nozzle bubble plume we rely on the analysis
and experiments of Milgram (1983) in a 50 m deep non-stratified reservoir as well as on the
experiments of Fannelop and Sjoen (1980) in about 2.8 m and 9 m water depth. The injected
air flux ranges from 0.024 to 0.590 m3/s under normal atmospheric conditions. Figure B.28
shows the general concept of a bubble plume created by air injected from a single nozzle.
The bubble plume is about 20% narrower than the plume of entrained water (Milgram,1983).
An example of the use of bubble screens is Lake Nieuwe Meer in The Netherlands. For many
years in summer months algae blooms occurred. The so-called Microcystis bacterium dom-
inated the lake in these periods. This caused a disgusting smell and other inconveniences,
Deltares 621 of 688
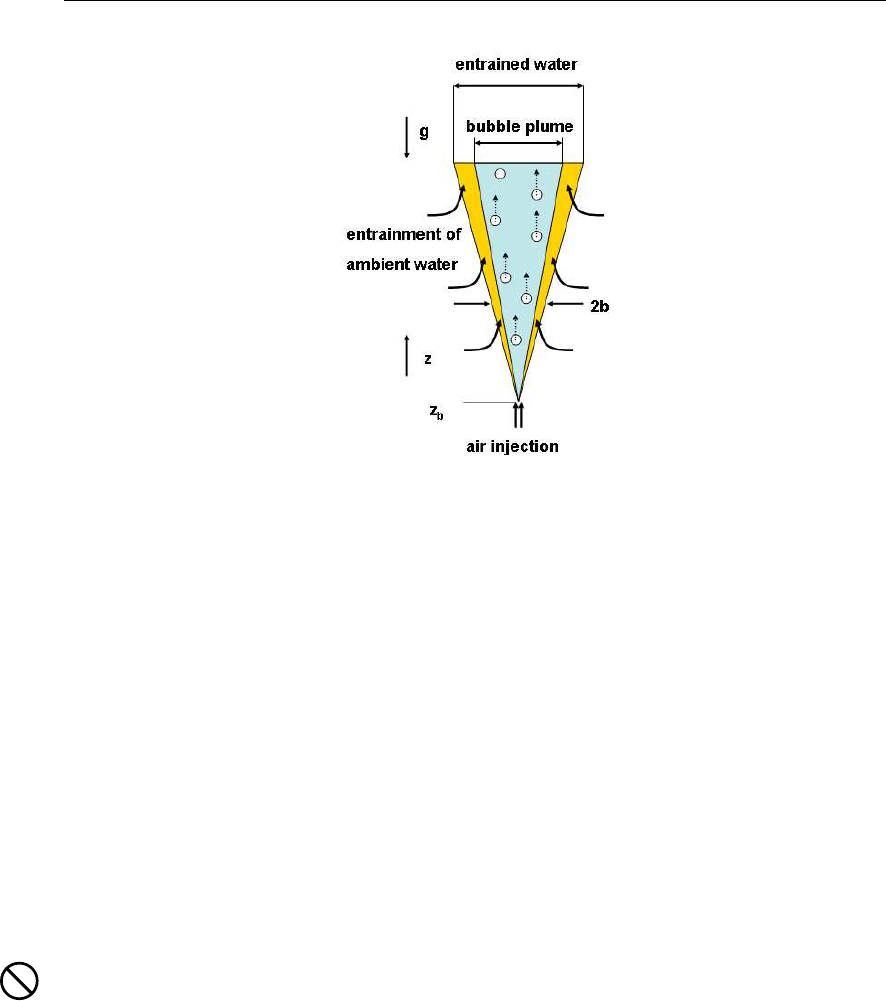
DRAFT
Delft3D-FLOW, User Manual
Figure B.28: Schematic axisymmetric bubble plume with entrainment of water by the ris-
ing bubbles
for example for water recreation. To suppress the algae blooms, in 1993, the Water Board
Rijnland started artificial mixing of Lake Nieuwe Meer by means of air bubbling. A system
of seven bubble screens, which can be seen as perforated air tubes, were put at the bottom
of the lakes at different positions. This artificial mixing removed the thermal stratification and
consequently the inconvenience caused by the algae.
Figure B.29 presents the definitions of the near-, mid- and far-field of the bubble screen and
the associated horizontal length scales in relation to the axis of the bubble plume. The near-
field and mid-field circulation due to a bubble screen is modelled in Delft3D-FLOW via the
so-called subgrid approach. The far-field circulation, however, is computed by Delft3D-FLOW.
In practice, a bubble screen is applied to increase the vertical recirculation in a water system
in order to break-down stratification of salinity or temperature. We note, however, that in
Delft3D-FLOW a bubble screen can also be applied without any substances in the model
schematisation.
Restriction:
In Delft3D-FLOW the bubble screen functionality is only available for 3D modelling. So,
it can not be applied in a 2DH (2D Horizontal) model.
B.22.1 Entrained water as function of the air injection
For a bubble screen in Delft3D-FLOW the user has to specify the water flux entrained by a
bubble-plume and not the amount of air that is injected in the water system. This section
presents engineering rules for both a single nozzle axisymmetric bubble plume and a (2D)
line bubble plume. Conversion factors between the flux of entrained water and the amount
of injected air are given. The user should take into account these conversion factors when
specifying input values for bubble screens in Delft3D-FLOW (see section B.22.4).
622 of 688 Deltares
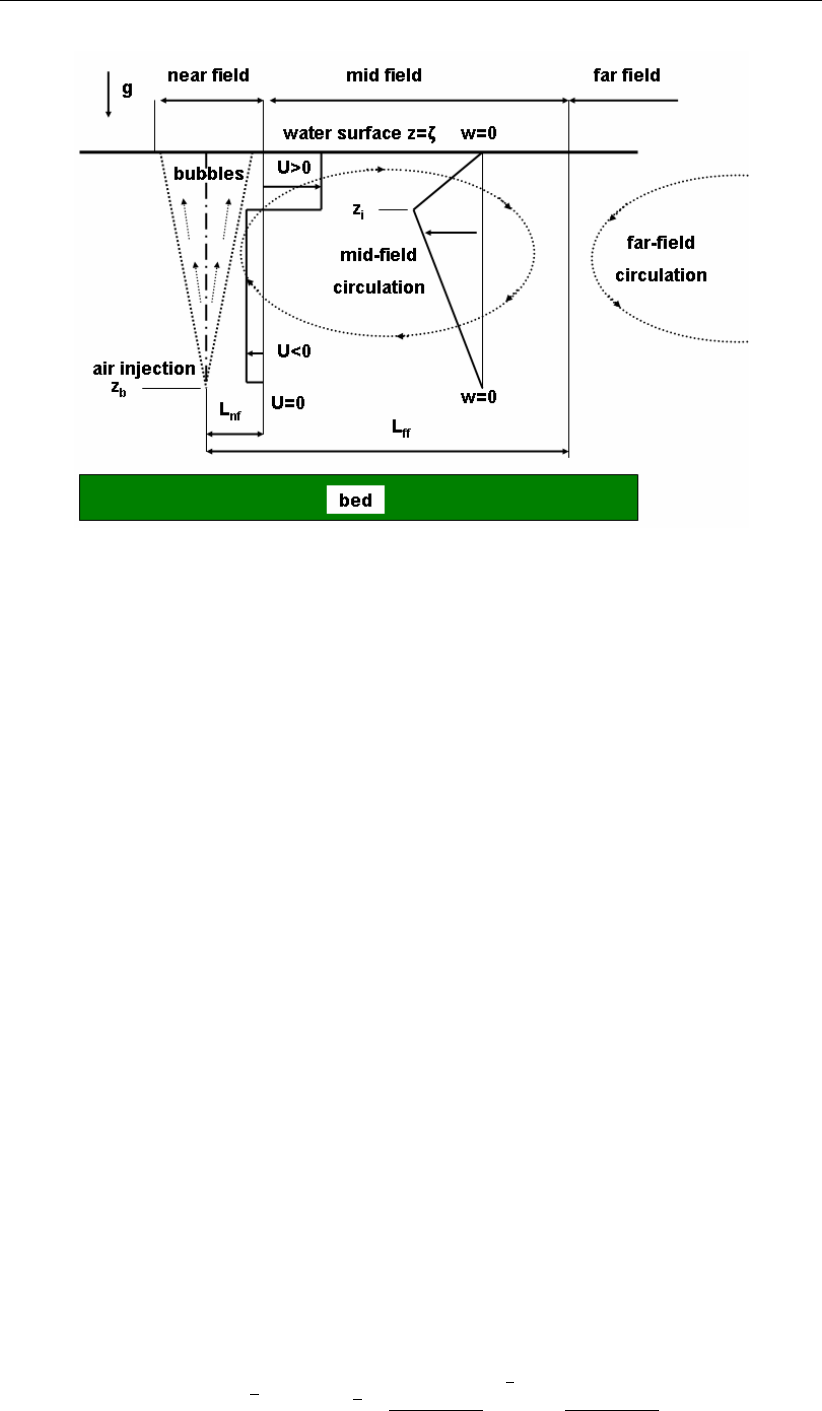
DRAFT
Special features of Delft3D-FLOW
Figure B.29: Definition of near-, mid- and far-field of the circulation induced by a bubble
screen and the vertical profile of the vertical (downward) velocity in the mid-
field circulation cell
B.22.1.1 Single nozzle bubble plume
For a single nozzle plume we use an engineering rule for the ratio between the flux of entrained
water and the amount of injected air that is based on Figure B.30. In the experiments by
Milgram (1983) was shown that the flux of entrained water Qent in [m3/s] scales with the
injected air flux Qair in [m3/s] to the power 0.66. This air flux is inhaled by the compressor
and Qair is expressed in [m3/s] under normal atmospheric conditions.
According to Figure B.30 we advise, in practice for single nozzle bubble plumes, to apply a
conversion factor αof 1000 between the amount of entrained water and the amount of injected
air in a Delft3D-FLOW model with bubble screens, using:
Qent = (αQair)0.66 (B.85)
This means that the user has to multiply the amount of injected air with a conversion factor of
1000 and specify these values in the Delft3D-FLOW input file.
B.22.1.2 Bubble screen or line bubble plume
For bubble screens/line plumes, we rely on Bulson (1961) who instrumented and flooded an
entire ship dock, located a 20 m long perforated horizontal pipe on its bed and varied the
water depths from 2.8 to 11 m. In vertical and horizontal sections the vertical and horizontal
velocity profiles were observed and reported by Bulson (1961). The injected air fluxes ranged
from 0.0046 (m3/s)/m to 0.15 (m3/s)/m at the considered water depths.
Bulson defines, semi-empirical, the entrained water flux Qent by a bubble screen created by
Qair air flux under atmospheric conditions over a perforated tube of length Ltube at depth
Hinj as
Qent = 0.47 HatmL
2
3
tube (gQair)1
3H
H+Hinj 1
3ln H+Hinj
H(B.86)
Deltares 623 of 688
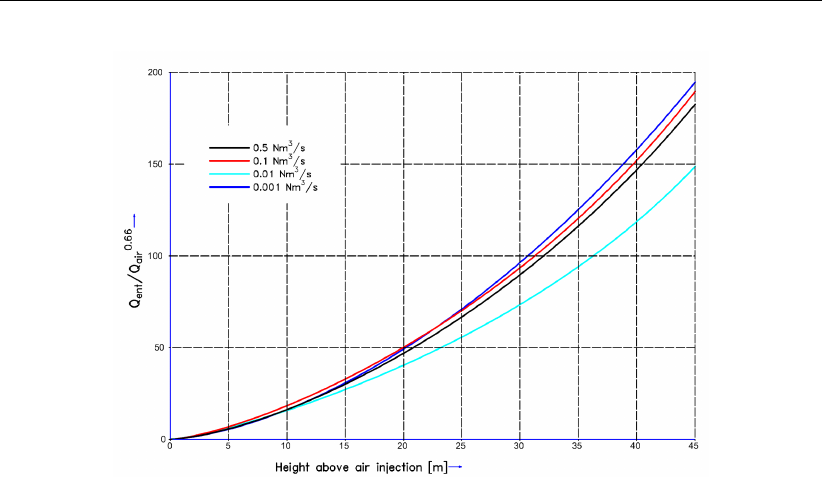
DRAFT
Delft3D-FLOW, User Manual
Figure B.30: Flux of entrained water as function or air flow under atmospheric conditions
and height above the nozzle in stagnant non-stratified water based on ex-
periments in (Milgram,1983)
The injected air flux is given in [Nm3/s] where N stands for normal at-
mospheric conditions.
where Hrepresents the height of a water column. Equation (B.86) is our second engineering
rule. By applying Equation (B.86), it is possible to estimate the conversion factor between the
amount of entrained water and the amount of injected air. As a first very rough estimate, the
same conversion factor as for single nozzle bubble screens (i.e. 1000) might be used.
B.22.1.3 Bubble plume in stagnant stratified water
Depending on the air flux and stratification conditions, a bubble plume can experience one or
more so-called plunge points where the entrained water flows away horizontally and above
which the bubbles re-create a new plume, see McDougall (1978) and Asaeda and Imberger
(1992). Figure B.31 contains an illustration in which bubble plumes are applied for the de-
stratification of a lake. The right graph of Figure B.31 shows the typical temperature increase
towards the water surface in a thermally stratified lake, where usually the hypolimnion has
a uniform lower temperature. The entrainment Qent (see Figure B.31) of hypolimnion water
cools the epilimnion and this process is simulated in Delft3D-FLOW.
The engineering rules of the previous paragraphs can be applied to the case of Figure B.31,
but the entrained water flux should be based on the typical height of the thermocline (sep-
arating hypolimnion from epilimnion) above the nozzle. This is our third engineering rule. If
additional application specific assistance is required, please contact the Delft3D helpdesk.
624 of 688 Deltares
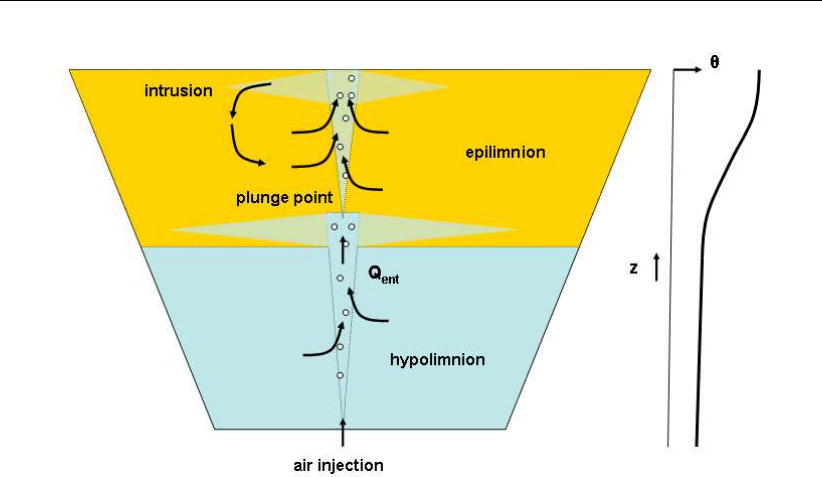
DRAFT
Special features of Delft3D-FLOW
Figure B.31: Schematic overview of the introduction of cold hypolimnion water into the
lower part of the warmer epilimnion by a bubble plume. Above the first
plunge point the second plunge point creates an intrusion and recirculation
inside the epilimnion.
B.22.2 Theory
Bubble-induced circulation patterns are often based on the following characteristics:
1 The water entrained into the bubble plume is diverted laterally into a horizontal flow.
2 The rising bubbles drag along water and transfer their potential energy to kinetic energy
of the entrained water.
3 Upon reaching the water surface, this kinetic energy is first converted into an increase in
potential energy i.e. the level of the water surface increase above the rising bubble plume.
4 Subsequently, this locally increased water level induces a horizontal, lateral current away
from the vertical symmetry axis/plane of the bubble plume. This lateral current forms
another jet that also entrains water from below.
5 The latter is a secondary entrainment that creates a large amplification factor compared
to the injected air flow.
6 Experiments of 2D bubble screens show that the lateral, horizontal jet initially has a thick-
ness that is roughly 20–25 % of the injection depth (see “U > 0”inFigure B.29).
7 The conversion from kinetic energy of the rising flow into potential energy (local surface
elevation) and the latter converted into horizontal flow implies that the initial momentum in
the lateral jet equals the momentum of the entrained water in the rising jet.
Based on the above-mentioned characteristics, it is evident that for simulating the bubble-
induced recirculation patterns the vertical water flow due to the rising bubble jet should be
taken into account. Therefore, in Delft3D-FLOW we apply the approach of redistributing of
sinks and sources in a certain water column for simulation bubble screens. Because of these
changes in vertical flow, the horizontal flow is influenced as well.
In the remainder of this section we will describe the conceptual model for bubble screens for
a 1DV (1-Dimensional Vertical) situation. The equation for the transport of heat content His
considered and reduced to its application in the 1DV model including recirculation of cooling
water as well as by the recirculation by a bubble screen. The heat content His defined by
H=ρ cp(T+ 273.15) (B.87)
Deltares 625 of 688
DRAFT
Delft3D-FLOW, User Manual
The Reynolds-averaged version of the conservation equation of heat in an incompressible
fluid reads
∂ H
∂t +∂ uH
∂x +∂ wH
∂z =∂
∂z DV
∂ H
∂z +Q(B.88)
The right-hand side in Equation (B.88) contains the most dominant contribution to diffusion
i.e. vertical diffusion with the sum of molecular and eddy diffusivity, the latter due to mixing by
turbulent fluid motions. Qrepresents the local or distributed heat source or sink.
For application in numerical codes, the contribution due to horizontal advection should be
taken into account. Below, this is derived for the recirculation by a bubble screen or bubble
plume. To that purpose, we consider Equation (B.88) without additional heat sources/sinks
and without any diffusion terms. It then reduces to the following conservation equation
∂ H
∂t +∂ uH
∂x +∂ wH
∂z = 0 (B.89)
Near and in the bubble screen the fluid moves upward. We define this fluid volume as the near-
field. Its horizontal extent from the centre of the plume is defined by Lnf , see Figure B.29.
Adjacent to the near field, we define the mid-field encompassing the recirculation induced by
the near-field. In this mid-field, the fluid has a downward velocity profile. This mid-field ends at
some remote distance from the near field. This distance is defined as Lff , see Figure B.29.
We remark that this represents the distance from the bubble plume to the mid-field/far-field
interface. By definition, at the transition from mid-field to the far-field the velocity contributions
due to recirculation vanish (i.e. u(Lff ) = w(Lf f )=0). Subsequently, the far-field is
affected by vertical profiles of temperature.
We assume a profile is presented with a downward velocity increasing in magnitude to some
level ziand then decreasing to zero at the level z=zbat which the bubbles are released,
see also Figure B.29. The question is how this recirculation of heat can be represented in
the 1DV-version of Equation (B.89). To that purpose, we introduce the horizontal averaging
operator
(. . . )mf =1
Lff −Lnf
Lff
Z
Lnf
(. . .)dx (B.90)
We define this as a mid-field averaging operator based on the transition length Lnf from near
field to mid field as well as to the transition Lff from the mid field to the far field. At the mid
field to far field transition, by definition u(x=Lff )=0and w(x=Lff )=0hold. Now,
we derive a model for the mid-field recirculation and this model aims at its application in a 1DV
model or a 3D hydrostatic-pressure (shallow-water) model. The horizontal velocity in the mid-
field and at some distance Lfrom the plume’s centre line follows from the mass conservation
equation for incompressible fluid (Equation (B.89) with H= 1 m; take the integral RL
Lff dx)
∂ u
∂x +∂ w
∂z = 0 (B.91)
Using the definition u(Lff ) = 0, inserting Equation (B.90) into Equation (B.91) yields
u(L) = (Lff −L)∂ w
∂z
mf
(B.92)
626 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Equation (B.92) shows a positive horizontal velocity i.e. directed away from the bubble plume
for positive vertical velocity gradient such as the profile above the level z=zi. Below the
level z=zito the injection point level z=zbwe have the opposite situation with a negative
horizontal velocity and a negative vertical velocity gradient. Figure B.29 shows an example of
the vertical profile of the vertical (downward) velocity and the related horizontal velocity profile
according to Equation (B.92).
Similarly, we consider the mid-field average of the horizontal advection of heat, which reads
∂ uH
∂x
mf
=−(uH)Lnf
Lff −Lnf
(B.93)
The mid-field average operator defined by Equation (B.90) and applied to Equation (B.89)
while using (Equation (B.93)) yields
∂ H
∂t
mf
+∂ wH
∂z
mf
=(uH)Lnf
Lff −Lnf
(B.94)
After substitution of Equation (B.92) in Equation (B.94), we arrive at
∂ H
∂t
mf
+∂ wH
∂z
mf
=H(Lnf , z, t)∂ w
∂z
mf
(B.95)
The result Equation (B.95) shows that the mid-field-averaged effect of the recirculation, in-
duced by the bubble plume, can be represented by a vertically distributed heat source/sink.
Equation (B.86) is a significant step towards a model for the mid-field effect applicable in 1DV
or 3D shallow-water codes. This source/sink distribution represents the lateral inflow or out-
flow of water at the near field – mid field transition, see Figure B.29. The vertically distributed
heat source/sink is positive above the level z=ziof maximum downward velocity, negative
below this level and zero below the level z=zbof the injection of the bubbles, which is also
shown in Figure B.29.
The total depth-integrated heat content of the water body is not changed by the bubble plume.
Consequently, the depth-integral of the right-hand side of Equation (B.95) yields zero. The
latter constraint requires the integral of the distributed heat source above z=ziequals the
sum of the distributed heat sinks below z=zi, thus
ζ
Z
zi
H(Lnf , z, t)∂ w
∂z
mf
dz =−
zi
Z
zb
H(Lnf , z, t)∂ w
∂z
mf
dz (B.96)
We note that the heat content H(L, z, t)below ziis transported toward the bubble plume
i.e. flowing out of the mid-field volume x > Lnf , see also Equation (B.92). Therefore, the
following is a reasonable approximation
for z < zi:H(Lnf , z, t) = Hmf (B.97)
because to x=Lnf the heat content from the mid field is transported passively. Equa-
tion (B.97) is the first model assumption about the near field action. With Equation (B.97) and
introducing a representative far-field vertical velocity wmf ,Equation (B.95) can be written as
for z < zi:∂ H
∂t
mf
+∂ wmf H
∂z
mf
=Hmf ∂ w
∂z
mf
(B.98)
Deltares 627 of 688
DRAFT
Delft3D-FLOW, User Manual
Note that Equation (B.98) is a non-conservative form of the advection equation
for z < zi:∂ H
∂t
mf
+wmf ∂ H
∂z
mf
= 0 (B.99)
For discretisation on a vertically staggered grid, Equation (B.98) is preferred above Equa-
tion (B.99).
Using the conservation requirement Equation (B.96), the heat content Hbyields
Hb=1
wmf (zi)
zi
Z
zb
H(Lnf , z, t)∂ w
∂z
mf
dz (B.100)
In Equation (B.100), note that wmf (zi)is the maximum vertical velocity and negative but also
the vertical gradient of the vertical velocity in the integral is negative below zi.
Substitution of the constraint Equation (B.100) into Equation (B.95) yields for the level above
zi:
for z≥zi:∂H
∂t
mf
+∂ wmf H
∂z
mf
=Hb
∂w
∂z
mf
(B.101)
Summarizing, the 1DV version of the equation for heat content including recirculation by a
bubble plume reads
∂ H
∂t
mf
+∂ wmf H
∂z
mf
=Q(B.102)
in which the distributed source/sink Qis defined by:
Q=
Hmf ∂ w
∂z
mf
zb< z < zi
Hb
∂ w
∂z
mf
zi≤z < ζ
(B.103)
B.22.3 Numerical implementation
In this section some implication with respect to the numerical implementation are described.
Equation (B.103) is applied to a single horizontal grid box containing the air injection or a
segment of a line injection of air. Vertically, the grid box is divided into computational layers,
see Figure B.32. In this figure only the six top layers are shown. In this example only these
six layers are influenced by a bubble screen and not the layers that are deeper in the water
column.
For a consistent and mass-conserving implementation we start by defining a vertical distribu-
tion of water-volume sources qkwith krepresenting the layer numbering from the air injection
point at layer lto the free surface with layer number ksurf . The physical dimensions of qkare
in [1/s] because of the introduction of volume flux [m3/s] per volume [m3] of water. By defi-
nition of the circulation of the water dragged along with the rising bubble, this vertical source
628 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
distribution must be zero. Otherwise, extra mass is generated, which is not physical. This
condition for mass conservation can be written as
ksurf
X
k=1
qk∆zk= 0 (B.104)
in which the discharges qkare defined according to
qk=∂ wmf
∂z (B.105)
The vertical velocity then follows from vertically integrating the continuity equation and in dis-
cretised form this integral reads:
wk=
k
X
k=1 qk∆zk−∂ u
∂x +∂ v
∂y ∆zk(B.106)
Although Equation (B.104) and Equation (B.106) suggest a reverse procedure, in the imple-
mentation in Delft3D-FLOW qkis determined by a given vertical profile of the vertical velocity
averaged over the mid-field (Figure B.29). The vertical velocity follows a profile as shown in
Figure B.32 and also depends on the amount of injected air. Given this qk-distribution with the
constraint Equation (B.104),Equation (B.106) yields the vertical velocity that is used in the
heat transport equation.
The discrete version of constraint Equation (B.104), indicating that the vertically integrated
heat sources are zero, reads:
Hb
ksurf
X
ki
qk∆zk+
ki−1
X
k=1
Hkqk∆zk= 0 (B.107)
for which in the layers with a sink holds that
for z < zi:∂ H
∂t +∂ Hu
∂x +∂ Hv
∂y +∂ Hw
∂z k
∆zk=Hkqk∆zk(B.108)
The z-independent heat content Hb, defined by Equation (B.107), is used in the heat transport
equation for computational levels above the inversion of the vertical velocity. In other words,
in the layer with a source term due to a bubble screen (with qk>0) we have
for z≥zi:∂ H
∂t +∂ Hu
∂x +∂ Hv
∂y +∂ Hw
∂z k
∆zk=Hbqk∆zk(B.109)
Summarizing, the application of bubble screens leads to a redistribution of water masses
in a water column. This is illustrated in Figure B.32. From the layer at which the bubble
injection starts till some distance from the free water surface, water and heat is rejected,
which is modelled via a sink term. In the upper layers of the water column this water and
heat is discharged into the water column via a source term. This is done in such a way that
conservation of mass and conservation of heat is guaranteed.
Deltares 629 of 688
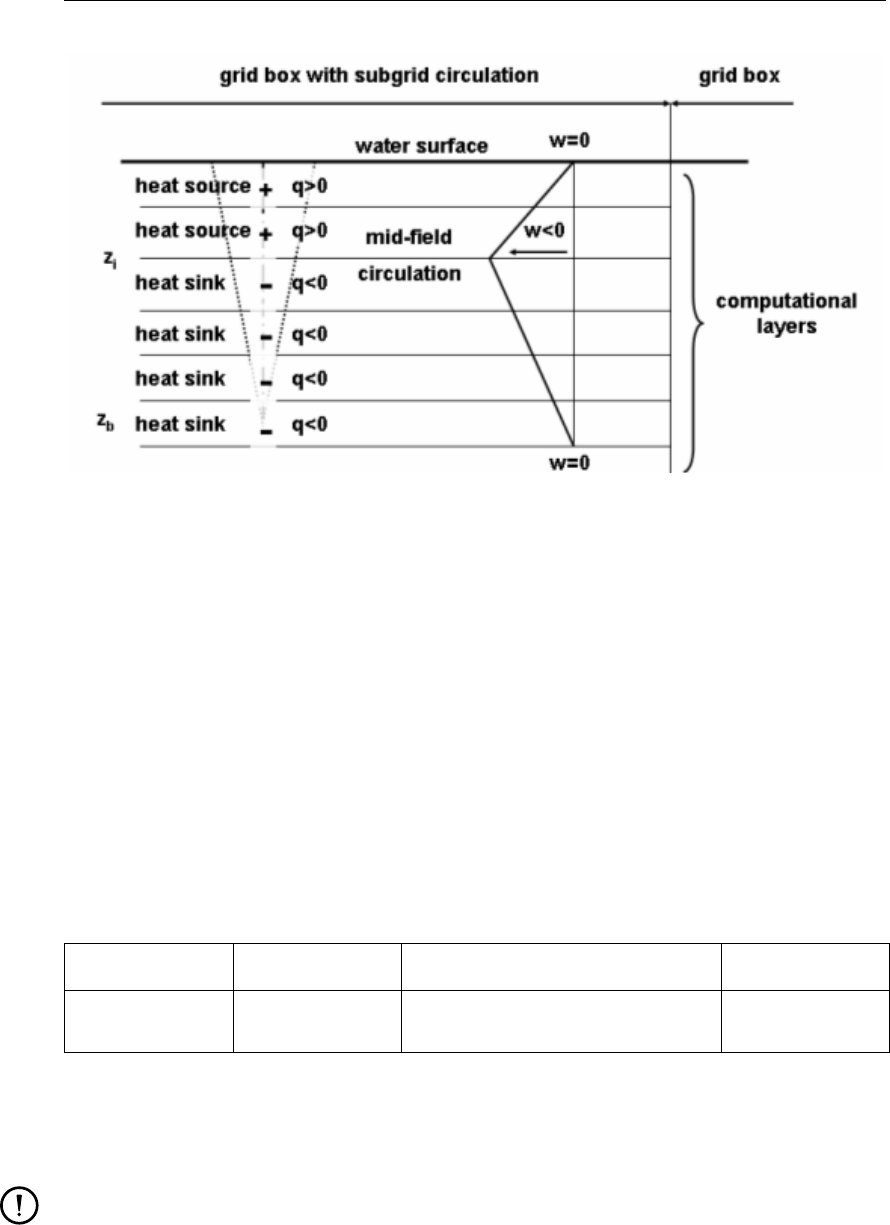
DRAFT
Delft3D-FLOW, User Manual
Figure B.32: The mid field averaged heat equation with vertical distribution of
sources/sinks and vertical (downward) velocity profile and the model equa-
tion applied to a single grid box.
B.22.4 Input description
This section describes how the Delft3D-FLOW input should be extended in order to simulate
bubble screens.
It is emphasized that the User Interface of Delft3D-FLOW is not able to generate input data for
bubble screens. Therefore, this has to be done by hand. The input format, however, is rather
similar to other formats. This consists of three steps, which are now described one by one:
B.22.4.1 Generating a file with bubble screen locations
At first the location of the bubble screens has to be defined. This is done via an attribute file.
The user is advised to use the file extension <bub>.
Keyword Value Description Default
Filbub #name.bub# Filename for bubble screen loca-
tions
none
File contents Definition of location of bubble screens blocking the flow in M- or
N-direction and the vertical position of the injection point (see below)
File format Free formatted.
Generated Manually offline.
Remarks:
The keyword is case sensitive!
Value MUST be enclosed between two number signs (#).
Record description:
630 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Record Record description
each record Name of the bubble screen (20 characters)
Begin and end indices of the bubble screen, i.e. m1, n1, m2, n2 (4 inte-
gers)
Vertical position of the injection point, relative to the reference level with
the orientation positive upwards (1 real).
Restriction:
A multiple bubble screen can be defined along a line segment. The angle of the line
segment and the M-direction must be an integer multiple of 45 degrees. Of course,
bubble screens along M- or N-coordinate lines are also possible.
Example:
screen north 3 8 8 3 -8.0
screen south 5 2 5 2 -12.0
B.22.4.2 Extending the discharge locations file with bubble screens
The discharge locations file (<∗.src>) should be extended with the bubble screens. We
remark that the (M, N, K)grid co-ordinates in the <∗.src>file are not used in case of
bubble screens. The grid information from the <∗.bub>file is used in stead.
Restriction:
For the time-series only a block interpolation is allowed for bubble screens. This means
that for the type of interpolation in the <∗.src>file a “N” is compulsory.
Example:
power station P1 Y 3 3 2 p 8 8 8
screen north N 3 8 0 b
screen south N 5 4 0 b
Noted that an identifier “b” is applied for bubble screens, whereas a “p” is used for inlet-outlets.
B.22.4.3 Extending the time-series file (<∗.dis>) with amount of entrained water
The amount of entrained water due to a bubble screen has to be specified by the user. This is
a time dependent quantity, which can be specified via the User Interface of Delft3D-FLOW. We
remark that steps 1 and 2 (generating <∗.bub>file and extending the <∗.src>file) should
be done manually. However, extension of the <∗.dis>file can be done via the User Interface,
because this step is comparable with defining discharge rates for “normal” discharges. We
remark that in section B.22.1.2 and section B.22.1.3 engineering rules have been given how
to estimate the amount of entrained water flux given the amount of injected air.
Remarks:
A bubble screen can be more than one computation cell wide (see step 1). If so, the
associated water flux is subdivided proportionally over all involved computational cells.
Bubble screens are implemented using automatically generated discharges of a spe-
cial type. A discharge will be generated for each computational cell containing a bubble
screen, for each vertical layer above the layer containing the bubble screen. The to-
Deltares 631 of 688
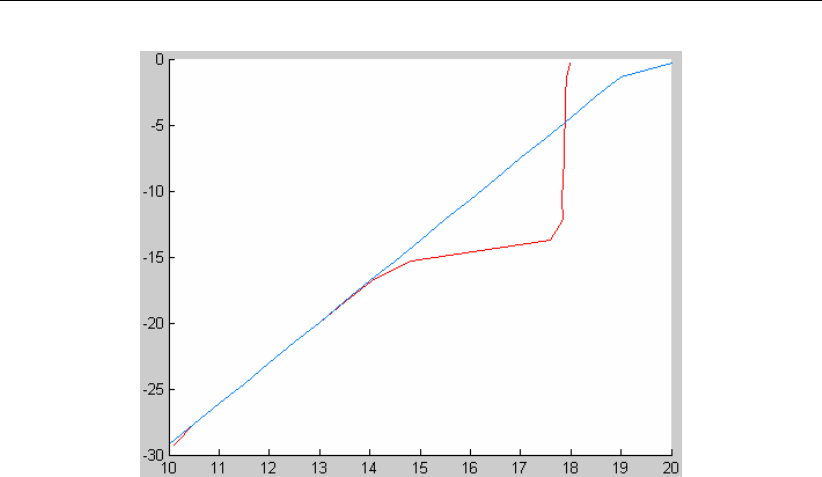
DRAFT
Delft3D-FLOW, User Manual
Figure B.33: Initial temperature profile (blue) and after application of a bubble screen at
z=−16 m (red line). On horizontal axis the temperature (in ◦C) and on the
vertical axis the vertical position in the water column (in m).
tal number of discharges is limited to 5000, including these automatically generated
discharges.
In Delft3D-FLOW it is not possible to withdraw more water than available in a computation cell,
but here are no limitations on the discharge in computational cells. However, large amounts
of associated water flux can lead to unrealistic current profiles.
B.22.5 Coupling with other models
Deltares’ hydrodynamic and water quality modules Delft3D-FLOW and D-Water Quality are
able to accurately compute the effect of bubble screens on the water circulation. Bubble
screens are available in the operational (Main Stream Development) version of Delft3D-FLOW.
In D-Water Quality this functionality is available in a special version. In particular, a special
dynamic link library (dll) for waste loads is required. So, please contact the Delft3D helpdesk
in case of a combined FLOW-WAQ application with bubble screens.
B.22.6 Model results
In this section the application of bubble screens in Delft3D-FLOW is illustrated via a simple
test basin. A small basin of 10 by 10 grid points in horizontal direction is used without open
boundaries and with a uniform depth of 30 m. Initially, we have a linearly increasing temper-
ature profile with 20 ◦C at the surface and 10 ◦C near the bed (see blue line in Figure B.33).
Without bubble screen the temperature hardly changes. In case of application of a bubble
screen, with the injection point at x=−16 m, from this point towards the free surface a
well-mixed temperature occurs (see red line in Figure B.33). Below the injection point, the
temperature does not change due to the bubble screen.
632 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
B.23 1D–3D Coupling
Online Delft3D-SOBEK coupling is a technique in which Delft3D (either 2D or 3D) models are
coupled with 1D SOBEK models. This is done online, implying that at each time step model
state information is exchanged between the models. Thus in essence, the coupled SOBEK
and Delft3D models constitute to one overall model system.
By doing so, specific qualities of both the Delft3D and SOBEK models can be utilized in the
overall model system. For example, using SOBEK to resolve the upstream catchment of a
river system (where an adequate representation of the river network geometry is essential),
while using Delft3D to model the downstream estuary in 3D (resolving stratification and com-
plex horizontal circulation).
At present, 1D–3D coupling is possible between the hydrodynamic modules of Delft3D and
SOBEK and between the water quality modules of these packages. For the hydrodynamic
modules, exchanged state information consists of water levels (Delft3D-FLOW) and discharges
(SOBEK).
Restriction:
In the current implementation no constituents are exchanged (like temperature and
salinity).
For the water quality modules, constituents are exchanged between the models (using the
hydrodynamics from the coupled hydrodynamic model as input). The present section of the
manual will focus on the online Delft3D-SOBEK coupling for the hydrodynamic modules. Cou-
pling of the D-Water Quality and SOBEK-WQ modules is described elsewhere.
In the remainder of this section Delft3D-SOBEK coupling implies the online coupling between
the hydrodynamic modules of these packages.
B.23.1 Motivation for online Delft3D-SOBEK coupling
As described above, in case of Delft3D-SOBEK coupling an overall model system is setup
which consists of a 1D part in SOBEK and a 2D or 3D part in Delft3D-FLOW. Exchange of
relevant state information occurs at each model time step (i.e. online). For specific applica-
tions, like river/estuary modelling, this method can offer a number of advantages with regard
to stand-alone 1D (SOBEK) or 2D/3D (Delft3D-FLOW) modelling or offline coupling between
these models (implying stand-alone SOBEK and Delft3D-FLOW models running sequentially).
In this case SOBEK can be used to model the upstream catchment, enabling an accurate
representation of the river network geometry and the storage (important for high water waves)
and also to represent hydraulic structures like flood control gates. Delft3D can then be used
to model complex horizontal and vertical variability in the downstream estuary, like circulation
and stratification (also taking density effects by temperature and salinity into account).
By using online instead of offline coupling, two-way exchange between these models is en-
abled in a mass conserving way, which is relevant for subsequent water quality applications.
Deltares 633 of 688
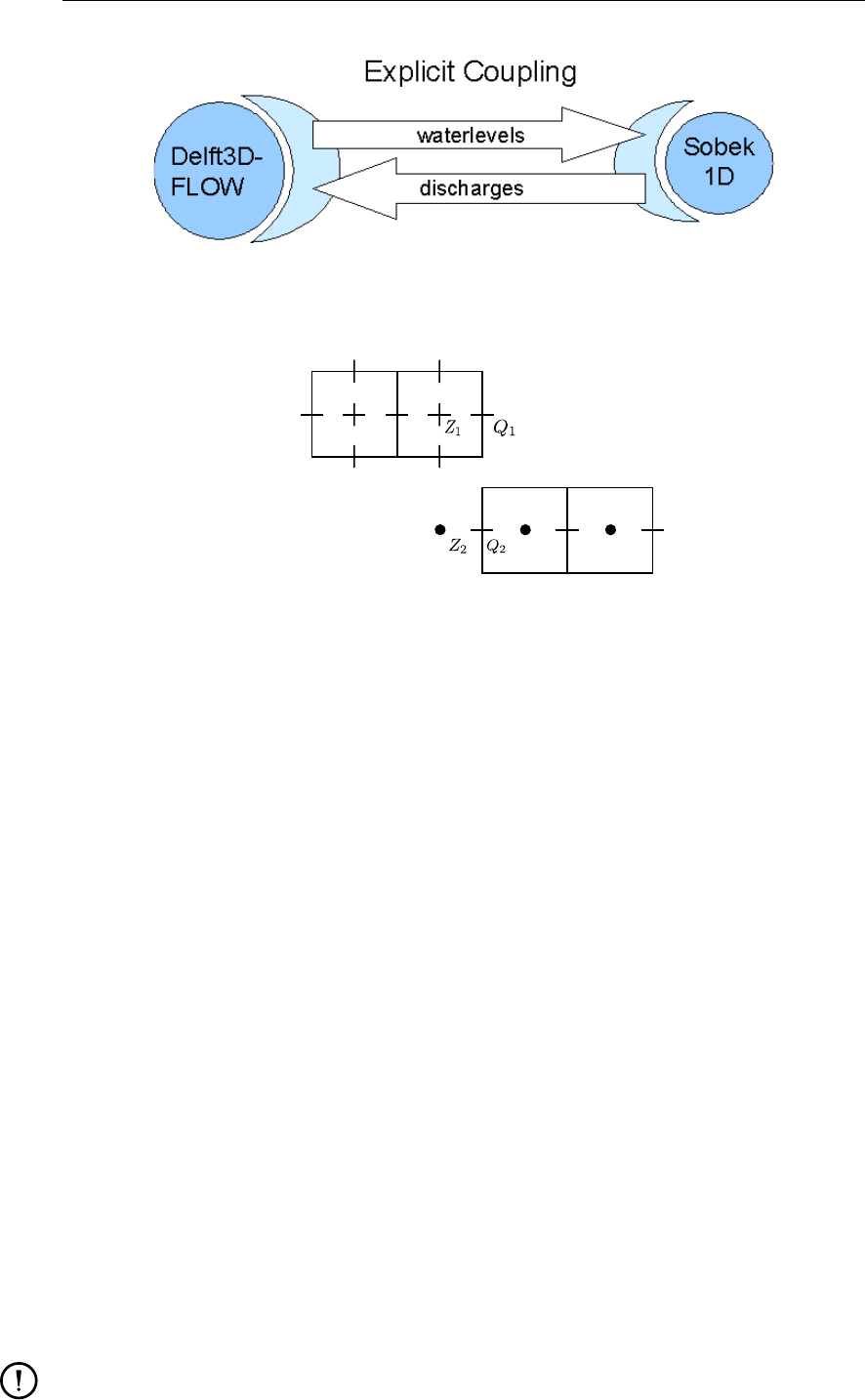
DRAFT
Delft3D-FLOW, User Manual
Figure B.34: Explicit exchange of water levels and discharges between Delft3D-FLOW
and SOBEK.
Delft3D-FLOW domain
SOBEK domain
Figure B.35: Coupling of the Delft3D-FLOW and SOBEK grids.
B.23.2 Implementation of Delft3D-SOBEK coupling
The online Delft3D-FLOW and SOBEK coupling is implemented as an explicit coupling us-
ing the DelftIO library. Relevant state parameters are exchanged at time step level; SOBEK
sends discharges to Delft3D-FLOW, while Delft3D-FLOW sends water levels to SOBEK (see
Figure B.34). In SOBEK, these water levels are subsequently prescribed at specified bound-
ary nodes. In Delft3D-FLOW, these discharges are prescribed at specified total discharge
boundaries.
At a more fundamental level this is shown by Figure B.35; both SOBEK and Delft3D-FLOW
apply a so-called Arakawa-C grid, which among others implies that velocities/discharges are
computed at a different location from water levels.
In Figure B.35, the “round dots” in the SOBEK domain (lower part) represent nodes. In the
Delft3D-FLOW domain (upper part) the “+” signs indicate water level points, whereas the “|”
and “—” signs indicate velocity/discharge points on the Arakawa-C grid. Water levels and
discharges are indicated by Z and Q, respectively.
Assuming that the relevant water level (SOBEK) and discharge (Delft3D-FLOW) boundaries
are defined, SOBEK discharge Q2will be passed to Delft3D-FLOW to be imposed as bound-
ary conditions at Q1. Vice versa, Delft3D-FLOW water level Z1will be passed to SOBEK to
be imposed as boundary conditions at Z2.
The implementation is such that one SOBEK grid cell interacts with one boundary segment in
Delft3D-FLOW. If this boundary segment consists of multiple grid cells, the SOBEK discharge
is divided evenly over these grid cells. In this case the water level from the centre most grid
cell along the Delft3D-FLOW boundary segment is passed to SOBEK.
Remark:
634 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Note that since the default discharge and water level boundaries are used, offline dis-
charge (Delft3D-FLOW) and water level (SOBEK) boundary forcing has to be prescribed
at these nodes/boundaries initially. These are dummy values, however, which are over-
ruled by online values obtained from the other module during runtime.
The explicit implementation of the coupling poses more severe restrictions on the maximum
allowable Courant-(Friedrichs-Lewy) number (CFL in Equation (B.110)) than would otherwise
be the case for the stand-alone models:
CFL =∆t
∆xpgH. (B.110)
In this case, the maximum allowable Courant number differs based on the directionality of the
flow; if water flows from Delft3D to SOBEK a maximum Courant number of 1 is allowed. If,
however, water flows from SOBEK to Delft3D-FLOW the maximum Courant number may be
somewhat larger.
If these criteria are not sufficiently met, problems will arise with regard to the accuracy of the
coupling. Subsequent oscillations at the model boundaries may cause the models to crash.
With regard to the model time step, SOBEK and Delft3D-FLOW use different time integration
methods, whereas SOBEK applies a 1-stage method, Delft3D-FLOW applies a 2-stage (ADI)
method. Because of this difference, for a coupled Delft3D-SOBEK model the SOBEK time
step should be half that of the Delft3D-FLOW model (as such coupling occurs at both stages
of the Delft3D-FLOW ADI scheme).
Remark:
Note that in SOBEK the model time step automatically can be modified during runtime
based on model stability properties. If this occurs there is no communication at the
intermediate time steps. So there is only communication on the user defined time steps.
Summarizing some of the important aspects of the implementation:
The coupling occurs at total discharge boundaries in Delft3D-FLOW, where discharges
are obtained from SOBEK reach segments. In SOBEK, the coupling occurs at boundary
nodes where water levels are obtained from the Delft3D-FLOW discharge boundaries.
Coupling occurs at time step level. Due to the different time integration methods for
SOBEK (1-stage) and Delft3D (2-stage) the SOBEK time step should be half that of
Delft3D-FLOW for a coupled model.
Due to the explicit implementation of the coupling the maximum allowable Courant number
at the coupling boundaries is 1, so CFL ≤1. If this criteria is not fulfilled, problems with
accuracy and stability may occur.
B.23.3 Model setup and input (including best practise)
In the present section the setup and running of a coupled Delft3D-SOBEK simulation will be
outlined. This topic is subdivided into the following sub-sections:
1 Preparation of the individual Delft3D-FLOW and SOBEK models.
2 Setup of the communication file used by the coupling.
3 Running of the coupled model system.
4 Best practice with regard to running coupled Delft3D-SOBEK simulations.
Deltares 635 of 688

DRAFT
Delft3D-FLOW, User Manual
B.23.3.1 Preparation of the Delft3D-FLOW and SOBEK models
Requirements posed to the Delft3D-FLOW and SOBEK models used for the coupled sys-
tem follow primarily from the technical implementation of the coupling as described in sec-
tion B.23.3.3;
The simulation start and end time of the SOBEK and (all) Delft3D models must be the
same.
The SOBEK time step has to be half that of Delft3D.
At the Delft3D-FLOW model boundaries where online coupling with SOBEK is applied,
the Courant number should be smaller than 1.
The bed levels in the SOBEK and Delft3D models should coincide on both sides of the
coupling boundaries. The same holds for Domain Decomposition (DD) boundaries.
The initial water levels and velocities should be equal on both sides of the coupling bound-
aries.
In Delft3D-FLOW total discharge boundaries have to be used to prescribe discharges
obtained from SOBEK. Dummy forcing data has to be prescribed at these boundaries
initially, to be overwritten by the coupling. This dummy forcing must have the value 0.0
during the whole computation, Qtstart =Qtend = 0.0.
Optionally; apply upwind for “Depth at grid cell faces” in Delft3D-FLOW for consistency
with SOBEK (this can have a small possitive effect on stability).
Enable online coupling with SOBEK in the Delft3D-FLOW MDF-file by means of the addi-
tional keyword Sbkol = #delft3d_SOBEK _conf.ini# where <delft3d_sobek_conf.ini>
is the file describing the coupling communication (see section B.23.3.2).
In SOBEK boundary nodes have to be used to prescribe water levels obtained from
Delft3D-FLOW. Dummy forcing data has to be prescribed at these boundaries initially, to
be overwritten by the coupling. This dummy forcing must have the value 0.0during the
whole computation, Qtstart =Qtend = 0.0.
Enable Delft3D-FLOW in the SOBEK settings and refer to the correct MDF and coupling
communication file (see Figure B.36).
In the SOBEK installation directory, e.g. <C:\Sobek212\>, in the directory <Programs>,
one can modify the <simulate.ini>file. In this file there is a reference to the executable
line for Delft3D-FLOW under the header:
[D3DFLOW Simulation]
The user must make sure the correct arguments are provided for running the Delftflow
executable for Delft3D-FLOW. Delftflow requires three arguments:
1 An input file name (default: delft3d-flow_args.txt)
2 An output file name (functionality not supported yet; provide a dummy argument, de-
fault dummy)
3 The computational engine; in this case delft3d
With this the executable line for Delft3D-FLOW will look as follows, e.g.:
Task1=%D3D_HOME%\w32\flow\bin\delftflow.exe delft3d-flow_args.txt dummy delft3d
The %D3D_HOME% environment variable is set to the Delft3D installation directory, e.g.
<C:\Delft3D>, if you have a Delft3D installation. The Delftflow executable in the directory
<%D3D_HOME%\w32\flow\bin\>is used for the simulation.
Remark:
Note that only discharge and water level information is exchanged between Delft3D-
FLOW and SOBEK. If either temperature or salinity are active transport processes in
Delft3D, the temperature and salinity of water entering the Delft3D model from SOBEK
will have to be specified in the default offline way in Delft3D-FLOW. As such there is no
direct relation between discharge water entering the Delft3D-FLOW model (obtained
online from SOBEK) and the temperature or salinity of this water (specified offline in
636 of 688 Deltares
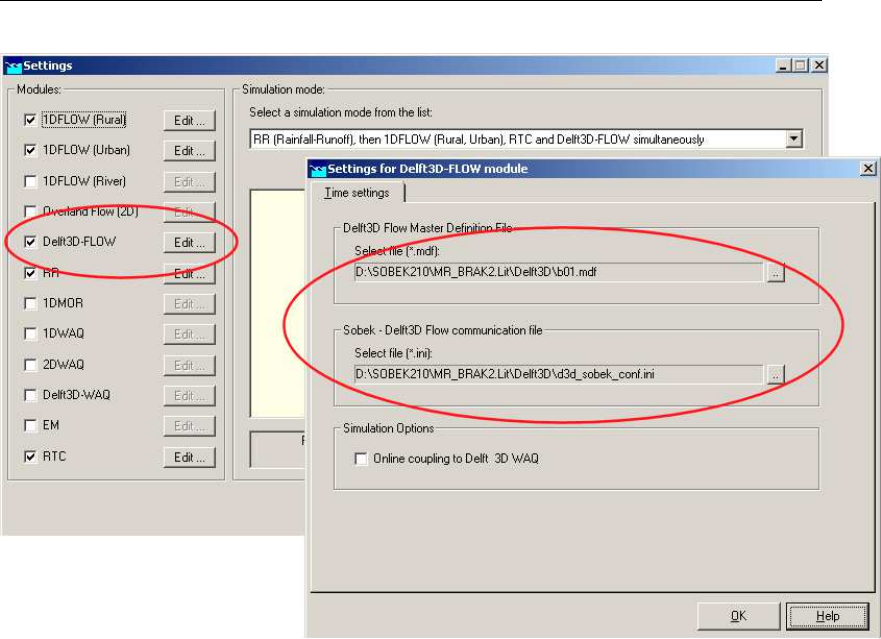
DRAFT
Special features of Delft3D-FLOW
Figure B.36: Enable Delft3D-FLOW in SOBEK settings and select MDF-file and
communication-file.
Delft3D-FLOW). The user should keep this limitation in mind when setting up a model,
for example by placing the Delft3D-SOBEK model interface upstream where no salinity
intrudes and by assuming that all water which enters the system here is as such fresh.
B.23.3.2 Setup of the communication file used by coupling
To enable the coupling, the relevant Delft3D-FLOW boundaries and SOBEK nodes and reach
segments are prescribed in an ASCII file containing the coupling administration, called <delft3d_sobek_conf.ini>
(located in the Delft3D working folder). Example input from this file is shown below:
[General]
FileType=D3dSOBEKMapping
[D3dSOBEK coupling]
D3dToSOBEKWaterlevelShift=0
FakeCommunication=0
DumpMapping=-1
DumpCoordinates=0
NumberOfConnections=2
[Connection1]
SOBEKBoundaryID=SOBEKBoundary_1
SOBEKSegmentID=SOBEKReach_1
D3dOpenBoundaryID=Delft3DBoundary_1
SOBEKSegmentDirectionOutgoing=-1
[Connection2]
SOBEKBoundaryID=SOBEKBoundary_2
SOBEKSegmentID=SOBEKReach_2
D3dOpenBoundaryID=Delft3DBoundary_2
Deltares 637 of 688
DRAFT
Delft3D-FLOW, User Manual
SOBEKSegmentDirectionOutgoing=1
Where the keywords under [General] and [D3dSOBEK coupling] indicate:
Keyword Status Description
[General]
FileType Required
[D3dSOBEK Coupling]
D3dToSOBEKWaterlevelShift Optional Offset added to water levels passed
to SOBEK (allows working with differ-
ent datums in SOBEK and Delft3D).
Default value is 0.
FakeCommunication Optional If this keyword has a value other than
0 no communication will occur be-
tween Delft3D-FLOW and SOBEK.
DumpMapping Optional Debug option, writes file containing
Delft3D and SOBEK boundary map-
ping applied. Default filename is
<d3s-mapping.txt>.
DumpCoordinates Optional Debug option, if enabled the files
<D3DDumpFileName>and
<SOBEKDumpFileName>con-
taining mapped data will be made.
NumberOfConnections Required Number of coupling boundaries.
The keywords under [Connection#] indicate:
Keyword Status Description
[Connection#]
SOBEKBoundaryID Required Name of SOBEK boundary node
used for coupling.
SOBEKSegmentID Required Name of (active) SOBEK segment
used for coupling.
D3dOpenBoundaryID Required Name of Delft3D boundary used for
coupling.
638 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
SOBEKSegmentDirectionOutgoing Optional Direction of SOBEK schematisation
at coupling boundary (-1 if direction-
ality is into Delft3D grid, 1 if direction-
ality is into the SOBEK grid). Default
value of 1 if keyword is omitted.
A[Connection#] field has to be specified for each of the coupled boundaries (two bound-
aries included in example).
B.23.3.3 Running of the coupled model system
The coupled Delft3D-SOBEK model system is run from the SOBEK Case Manager. This
implies that the model runs only on a MS Windows platform. If Delft3D-FLOW is enabled as
an option in the SOBEK settings, SOBEK will launch both the SOBEK and the Delft3D-FLOW
executables.
The path of the Delft3D-FLOW executable used is specified in the SOBEK <simulate.ini>
file and by default is set to the %D3D_HOME% path as specified in the Windows environment
variables.
Remark:
Note that simulations involving Delft3D-FLOW may take considerably longer than stand-
alone SOBEK simulations. As such it is practical to run these simulations on dedicated
PC’s.
B.23.3.4 Best practice with regard to running coupled Delft3D-SOBEK simulations
Running a coupled Delft3D-SOBEK model is no trivial exercise, given the fact that experience
with both systems (SOBEK and Delft3D) is required. Moreover, since the systems run in
parallel and are interdependent this experience is preferably combined in the person running
the simulations. In addition, by using multiple models the overall model is significantly more
complex than the individual building blocks. In practise, the following steps have proven to be
helpful when running the model:
Prior to developing the model, discuss with both the Delft3D and SOBEK modelling parties
how and where the coupling will be made and possible consequences this may have on
the model schematisations.
When developing the Delft3D model, take into account from start that the maximum
Courant number at the coupled boundaries should be smaller than 1. This will have con-
sequences on the model time step and grid size.
Give logical names to the SOBEK reach segments and nodes and the Delft3D-FLOW
boundaries used for coupling (for example SOBEKNode_1, SOBEKSegment_1 and
Delft3DBoundary_1). If the number of boundaries increases this will make administration
more manageable.
Be aware that if the SOBEK network is changed at a later stage reach ID’s might change,
which could effect the coupling administration.
In Delft3D-FLOW, add cross-sections on your boundaries and observation points next to
them in order to validate results between Delft3D-FLOW and SOBEK and to ensure that
the coupling is working satisfactory.
Run the coupled simulations on dedicated PC’s, given the fact that simulations involving
Delft3D-FLOW may take considerably longer than stand-alone SOBEK simulations.
Deltares 639 of 688

DRAFT
Delft3D-FLOW, User Manual
B.23.4 Versions and limitations
The Delft3D-SOBEK coupling was originally implemented for the coupled Pearl River Estuary
(PRE) model (project in period 2005–2008). Developments during that project were consoli-
dated in Delft3D-FLOW version 3.60.01.8345 and SOBEK version 2.12.
The method was subsequently used for the Marina Reservoir project (project in period 2006–
. . . ) during which some modifications were made to the implementation.
At the moment the Delft3D-SOBEK coupling has been tested on Windows XP (32-bit and
64-bit) in the following setups:
Delft3D-FLOW + SOBEK + SOBEK-RR + SOBEK-RTC
Delft3D-FLOW + SOBEK + D-Water Quality + SOBEK-WQ
When using the coupling with other Delft3D or SOBEK modules or on other platforms, the
user is advised to be cautious that these might not work properly or are at least untested.
B.24 Output of Courant number messages
After every computation of the advective terms in the momentum equations, Delft3D-FLOW
computes the largest local Courant number that has occurred. If this Courant number is larger
than 1.0, a warning will be written to the <tridiag>file. A suggestion for the time step to avoid
too large Courant numbers is included in the warning. To make sure that for long simulations,
the <tridiag>file does not get too large, the number of warnings is limited to 100. Using
the keyword CflMsg, the user can enable the writing of these warnings also after the 100th
message. This can be of use to find the cause of possible instabilities. In the Additional
parameters group, you should then add the line:
CflMsg=#Y#
The default setting is CflMsg=#N#, resulting the writing of CFL-messages to the <tridiag>
file to be truncated after 100 warnings.
B.25 Initialisation of water depth in dry points
To avoid possible difficulties in the flooding of dry areas in the Z-model of Delft3D-FLOW all
dry cells are initiated by default with a water depth of 10 % of the wetting and drying threshold
Dryflc. This is also equal to the minimum layer thickness in the Z-model. Using the keyword
DepIni, the user can modify this initial water depth for initially ’dry’ cells. E.g. for simulations
where the flooding of completely dry areas is to be simulated (dry dambreak problem), the
initial depth in dry cells can be set to zero by specifying in the Additional parameters group:
DepIni=0.0
Any other value for DepIni is allowed, but one should take care not to introduce any un-
wanted effects in a simulation, such as downhill flow from higher-lying ’dry’ areas. This will
occur when DepIni is chosen larger than the flooding threshold Dryflc.
The value for DepIni is in meters. It concerns a total water depth, not a water level.
640 of 688 Deltares
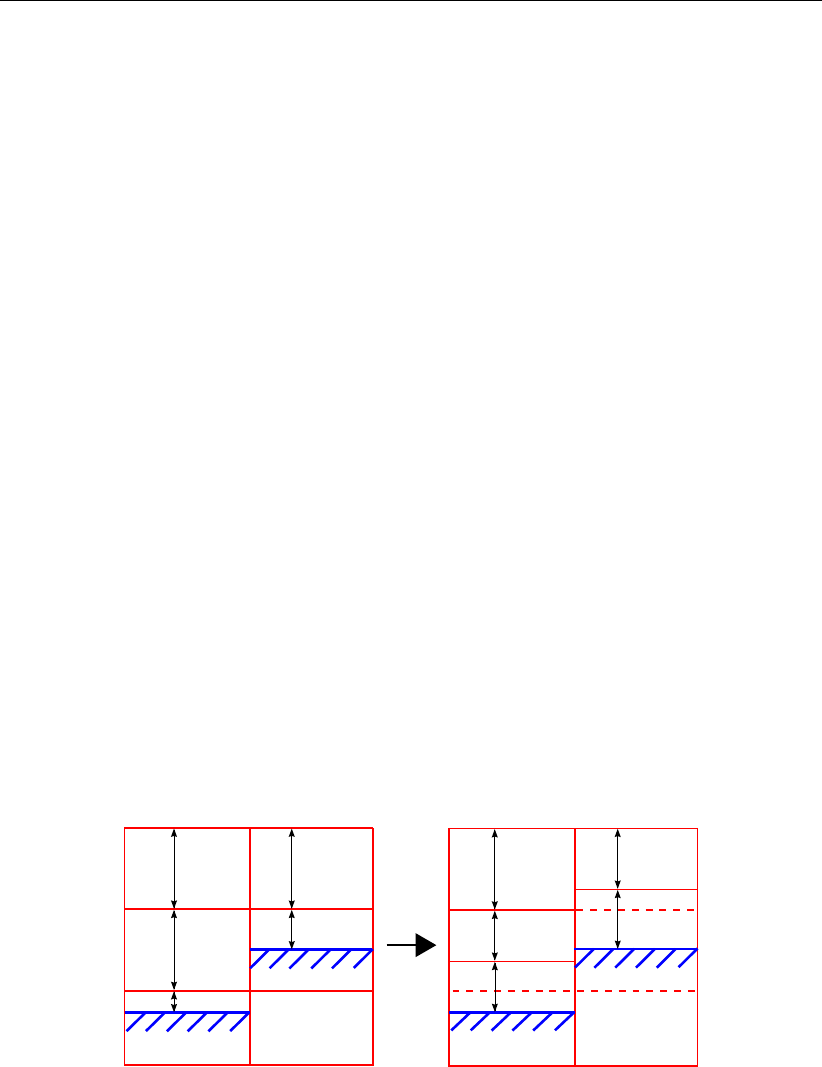
DRAFT
Special features of Delft3D-FLOW
B.26 Remapping of near-bottom layers for accurate and smooth bottom shear stress in
Z-layers
In the Delft3D-FLOW Z-layer model, the partial cell approach is applied to approximate the
bottom and free-surface positions with greater accuracy than with a full cell approach (see e.g.
Adcroft et al. (1997); Pacanowski and Gnanadesikan (1998)). Due to the partial cell approach,
thin cells can exist near the bottom and free-surface. These thin cells are known to introduce
inaccuracies and discontinuities in bottom shear stress, velocity profiles and even water levels.
Platzek et al. (2012) showed that these inaccuracies and discontinuities can be reduced by
performing a near-bottom layer remapping as shown in Figure B.37 for a schematic 2D vertical
layer distribution. The remapping is done in both x- and y-direction.
One should note that this remapping, causes horizontally-neighbouring cells to be vertically
shifted with respect to each other. This can have some effect on the horizontal transport
through advection and diffusion, and may introduce some spurious mixing. This mixing will
however commonly be less than the mixing due to the discontinuities that would exist without
the remapping.
When the transport of constituents (salinity, temperature, etc.) is involved, the concentrations
of the constituents in the cells that are remapped are modified to maintain mass conservation.
This remapping to obtain more accurate and smooth bottom shear stress and velocity profiles
can be switched on by specifying in the Additional parameters group:
Ztbml=#Y#
The keyword Ztbml stands for Z-model Taubot (τb) Modified Layering.
Δzi,k
Δzi+1,k+2
Δzi+1,k+1
Δz´i,k
Δz´i,k+1
Δzi,k+2 Δz´i+1,k+2
Δz´i+1,k+1
Remapped layering
(α = 0.5)
Original layering
Δzi,k+1
Δzi,k+2
Figure B.37: Remapping of two near-bed layers to an equidistant layering. Figure from
Platzek et al. (2012).
Deltares 641 of 688

DRAFT
Delft3D-FLOW, User Manual
B.27 Slope Limiter
A slope limiter was implemented in Delft3D-FLOW to avoid the computation of high velocities
along very steep bottom slopes. This e.g. occurs in the case of precipitation on steep banks,
i.e. dry cells that ly much higher than the adjacent wet cells. Once the dry cells become wet
(after sufficient precipitation), the cells will discharge into the neighbouring (lower-lying) active
cells. It was found that very large velocities could occur in such situations, if the water level
gradient is not limited for such situations. Using the additional parameter:
SlpLim=#Y#,
this functionality can be switched on. In the momentum equations the water level gradient is
then explicitly corrected using a pressure gradient involving the bottom level of the high-lying
cell. This is realised using the following algorithm (in pseudo-code):
if (slplim)
do nm = 1, nmmax
dpsmax = max(-dps(nm),-dps(nm+1))
if (s0(nm) < dpsmax) then
do k = 1, kmax
dpdx(nm,k) = dpdx(nm,k) - g*(s0(nm)-dpsmax)/dxu(nm)
enddo
elseif (s0(nmu) < dpsmax) then
do k = 1, kmax
dpdx(nm,k) = dpdx(nm,k) + g*(s0(nmu)-dpsmax)/dxu(nm)
enddo
endif
enddo
endif
where nm is the cell index counter, kis the layer index counter, dpdx is the pressure-gradient
correction, dps is the bottom depth, s0is the water level, gis the gravitational acceleration
and dxu is the horizontal grid size in a u-velocity point. In the y-direction, a similar correction
is performed.
B.28 Real-time control
The real-time control (abbreviated to RTC) module allows you to vary the bottom level of a
barrier gate during a simulation. This feature should be activated in the Delft3D-FLOW input
file using the keyword Rtcmod. The RTC module can be used to prescribe a time function for
a quantity (e.g. overrule a constant barrier height by a time varying barrier height following a
user defined time function) or to change a quantity by means control rules based on simulation
results. Switch on the RTC mode using Rtcmod and use the Filbcb keyword in case you
want to merely overrule a quantity using a prescribed time function. To control a quantity
based on simulation results use the Filrtc keyword and specify the control rules using
the <D3D_Loc.Rtc>,<DECISPAR.RTC>, and <D3D_MEAS.RTC>input files of the RTC
module.
642 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Keyword Value Description Default
Rtcmod #Y# or #N# Switch indicating whether
Delft3D-FLOW needs to wait
for data from RTC module
#N#
Filbcb #filename# Name of the forcings file con-
taining time functions for over-
ruled quantities. See Sec-
tion B.28.2 for a description of
the file format.
none
Filrtc #filename# Name of the file containing
locations for which simulation
results will be used to con-
trol the quantities. The format
of this file is identical to that
of the observation points file
(see A.2.26).
none
The contents of the <D3D_Loc.Rtc>,<DECISPAR.RTC>, and <D3D_MEAS.RTC>files
are described in the Sections B.28.3,B.28.4 and B.28.5 respectively. Please note that on
case-sensitive platforms (such as Linux) the names of these files need to use the same capi-
talization as listed here.
B.28.1 Run procedure
A Delft3D-FLOW that includes coupling to RTC cannot be started by means of the Delt3D
menu. For these simulations a batch file or script must be used. The following instructions as-
sume that you are working from a standard Delft3D installation on Windows. The environment
variable %D3D_HOME% points to the root folder of the Delft3D installation. The environment
variable %ARCH% indicates the platform configuration, e.g. win32 or win64.
To start the simulation first start Delft3D-FLOW as
%D3D_HOME%\%ARCH%\flow2d3d\bin\d_hydro.exe config_flow2d3d.xml
where the <config_flow2d3d.xml>is as created by the Delft3D-MENU. Subsequently, you
have to wait a few moments for the <TMP_SYNC.RUN>to appear. Then you can start the
RTC program as
%D3D_HOME%\%ARCH%\rtc\bin\rtc.exe %D3D_HOME%\%ARCH%\rtc\RTC.FNM rtc.rtn
Please make sure that the run folder contains a <dioconfig.ini>file as copied from the
%D3D_HOME%/%ARCH%/flow2d3d/default folder.
B.28.2 Time-series forcing of controlled structures
File contents Time-series for forcing conditions of RTC controlled structures.
Filetype ASCII
File format Fix format for header information; free format for time-series data.
Filename <name.bcb>
Generated manually offline
Deltares 643 of 688
DRAFT
Delft3D-FLOW, User Manual
Record description:
If the forcing of an RTC controlled hydraulic structure are known in advance, this file can be
used to specify the forcing time series. RTC can currently be used to control
the elevation of the bottom of a barrier gate
the flow rate of a discharge
Since the flow rate of a discharge can already be forced via the flow rate and concentrations
at discharges file (see Section A.2.22), the current file will typically be used for forcing the
elevation of the barrier gate. In the following, please read this quantity when we write about
the RTC controlled structure parameter.
The format of this file is identical to that of the time-series flow boundary conditions file, see
Section A.2.15. The table-name and contents lines are not used. The location line needs to
refer to the name of the hydraulic structure (barrier or discharge) to be controlled.
For each RTC controlled structure parameter the data is given in two related blocks:
1 A header block containing a number of compulsory and optional keywords accompanied
by their values.
2 A data block containing the time dependent data.
Description header block:
Record Text Format Value Format
1 location a20, 1x ’name hydraulic structure’
(see <name.bar>and
<name.src>files as de-
scribed in Sections B.3.2.1 and
A.2.21 respectively)
a
2 time-function a20, 1x ’non-equidistant’ a
3 reference-time a20, 1x yyyymmdd (must be equal to it-
date)
i8
4 time-unit a20, 1x ’minutes’ a
5 interpolation a20, 1x ’linear’ a
6 parameter a20, 1x ’time’, unit ’[min]’ a, ’unit’,
a
7 parameter a20, 1x ’parameter name’, unit ’[par
unit]’
a, ’unit’,
a
8 records-in-table a20, 1x number of records in the data
block
integer
Description data block:
644 of 688 Deltares
DRAFT
Special features of Delft3D-FLOW
Record Record description
each record Time in minutes after the Reference Date and value representing the
forcing parameter for which a time varying condition is specified (both
reals).
Remarks:
The parameter name in record 7 of the header block is not checked but is assumed to
be equal to ‘barrier height’ with unit ‘m’, or ‘flow rate’ with unit ‘m*3/s’ for barrier gate
height and discharge flow rate respectively.
The sequence of header/data block pairs is independent of the order of specification of
barriers and discharges in the <name.bar>and <name.src>files.
If any barrier or discharge is not specified, the constant barrier height specified in the
<name.bar>file or the flow rate specified in the <name.dis>file will be used, unless
an RTC control rule is specified.
Restrictions:
Maximum record length is 5000.
Position, format of the keywords and the format of keyword-values in the header are
fixed (see example).
All keywords have a length of 20 characters.
Header in each block must be ended with the (compulsory) keyword: ‘records-in-table’
accompanied by the number of data records to follow.
Times must be multiples of the integration time step; the times specified will be checked
on their domain (i.e. data must be specified for the whole simulation period).
Example:
Model with 2 barriers named ‘Barrier 1’ and ‘Barrier 2’ and 3 discharges named ‘River 1’, ‘River
2’, and ‘Intake-Outfall’. The <name.bcb>is used to overrule the constant barrier height of
‘Barrier 2’ and the flow rates of discharges ‘River 1’ and ‘Intake-Outfall’. The gate of barrier 2
rises from 5 m above the reference plane at the beginning of the simulation to 7.5 m after 8000
minutes. The inflow flow rate at the discharge point called ‘River 1’ rises linearly from 0 to 150
m3/s over the same period. In the meantime the the flow rate across the Intake-Outfall link will
increase from 0 to 50 m3/s during the first half of the period, and remain constant afterwards.
The final block for the location ‘Unused’ will not be used in the simulation since there is neither
a barrier nor a discharge with the name ‘Unused’, but the time points associated with this data
set will be checked in the same manner as the time points of the data sets actually used. Note
that the order of specification isn’t important.
location ’Intake-Outfall ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time’ unit ’[min]’
parameter ’flow rate’ unit ’[m*3/s]’
records in table 3
0.0000 0.000
4000.0000 50.000
8000.0000 50.000
location ’Unused ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
Deltares 645 of 688

DRAFT
Delft3D-FLOW, User Manual
parameter ’time’ unit ’[min]’
parameter ’barrier height’ unit ’[m]’
records in table 2
0.0000 -1.000
8000.0000 -2.000
location ’Barrier 2 ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time’ unit ’[min]’
parameter ’barrier height’ unit ’[m]’
records in table 2
0.0000 5.0
8000.0000 7.5
location ’River 1 ’
time-function ’non-equidistant ’
reference-time 19941001
time-unit ’minutes’
interpolation ’linear’
parameter ’time’ unit ’[min]’
parameter ’flow rate’ unit ’[m*3/s]’
records in table 2
0.0000 0.00
8000.0000 1500.00
B.28.3 Data Locations layer
The <D3D_Loc.Rtc>file lists the Delft3D-FLOW locations which can be used in the control
rules to be specified in the decision layer (Section B.28.4). These names should match one
of the following strings:
name of a location listed in the file referred to by the Filrtc followed by an underscore
and the layer number (always 1 in a 2D model). For these locations and layers Delft3D-
FLOW passes the concentrations of the constituents (including ‘Salinity’ and ‘Temperature’
as appropriate), the layer ‘Elevation’, and the ‘Water level’.
name of a structure (barrier, discharge) to be controlled by RTC For these locations
Delft3D-FLOW passes the ‘Elevation’ (in case of barrier) or ‘Flow Rate’ (in case of dis-
charge).
Delft3D-FLOW may pass more information to the RTC module, but only data of the selected
locations will be used in the decision rules.
Example:
This file indicates to RTC that it can expect from Delft3D-FLOW data for the locations ‘Obs-
Point1’ and ‘ObsPoint2’ where it will use data layer 1 in both cases, as well as structure state
information for ‘Barrier 2’ and ‘River 1’.
D3DO id ’ObsPoint1_1’ nm ’’ d3do
D3DO id ’ObsPoint2_1’ nm ’’ d3do
D3DO id ’Barrier 1’ nm ’’ d3do
D3DO id ’River 1’ nm ’’ d3do
B.28.4 Decision layer
The <DECISION.RTC>file specifies the control logic which in the end determines the new
state (height or flow rate) of structure (barrier or discharge). For the general Delft3D-FLOW
locations listed in the <D3D_Loc.Rtc>file (see previous section), the control logic rules
646 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
can use the following variables: the concentrations of the constituents (indicated by their
Delft3D-FLOW names: ‘Salinity’, ‘Temperature’, ...), the elevation of layer centre (indicated by
‘Elevation’), and the local water level (indicated by ‘Water level’). For the barriers listed in the
<D3D_Loc.Rtc>file, the control rules can use the variable ‘Elevation’ of the gate. For the
discharges listed in the file, the rules can use the variable ‘Flow Rate’.
Example:
A data line in the decision rules file which uses the salinity as computed by Delft3D-FLOW at
the location ObsPoint1 in layer 1 reads:
DATA ty ’D3DLoc’ lo ’ObsPoint1_1’ va ’Salinity’ ca 1 cb 0 cn 0 data
where the meaning of the keywords ca,cb and cn are given in the general description of the
decision file below.
The decision parameter file contains the definition of the decision parameters. There are four
possible ways of defining decision parameters:
A first possible definition of a decision parameter is a linear combination of Water Flow re-
sults, Rainfall-Runoff results, predicted rainfall or other external (wind) data, on-line water
quality data, and other decision parameters.
A second option is to define decision parameters as a non-linear function of other decision
parameters.
A third option is to define decision parameters as SOBEK tables.
The fourth option is to define SOBEK reservoirs.
Furthermore, there are some standard predefined decision parameters which can be used to
define other decision parameters or measures. These predefined decision parameters are:
Year
Month
Day
Hour (an integer between 0 and 23)
Minute (an integer between 0 and 59)
Second (an integer between 0 and 59)
Date (a number defined as 10000*year+100*month+day)
Time (a number defined as 10000*hour+100*minute+second)
Date_Time (the number defined as date + time/10000)
Day of Week
0=Sunday;
1=Monday;
..
6=Saturday;
DECISPAR.RTC-file (Decision layer)
Function Decision Parameters
The value of decision parameters is based on data locations and also may be dependent of
other decision parameters. These decision parameters are specified in the PAR2 records.
In the User Interface these records are presented under Decision Parameters as Function
Parameters.
Deltares 647 of 688

DRAFT
Delft3D-FLOW, User Manual
These data records may look like:
PAR2 id ’beslispar_1’ nm ’para_1’ iv 1 do ‘None’
DATA ty ‘ExtLoc’ lo ’Extern_id’ va 1 ca 0.1 cb -1 cn 0 data par2
or
PAR2 id ’beslispar_2’ nm ’para_2’ do ’Interpolate’
DATA ty ’2DFlowLoc’ lo ’2D_Weurt’ va 1 ca 1 cb 0 cn 0 data
DATA ty ’InterpolationTable’ lo ’InpTable_1’ va 1 ca 0 cb 0 cn 0 data par2
or
PAR2 id ’beslispar_3’ nm ’para_3’ do ‘multiply’
DATA ty ‘FlowLoc’ lo ’Sobek-id1’ va 1 ca 1. cb 0. cn 0 data
DATA ty ‘RRLoc’ lo ’3b-stuw’ va 3 ca 1. cb 0. cn 0 data
DATA ty ‘PrecipLoc’ lo ’Neerslag-id’ va 1 ca 1. cb 0. cn 0 data
DATA ty ‘RRLoc’ lo ’3B-ow’ va 1 ca 0.5 cb 0. cn 0 data
DATA ty ‘ParLoc’ lo ’beslispar_1’ va 1 ca 0 cb -1 cn -1 data
DATA ty ‘ExtLoc’ lo ’Extern_id’ va 1 ca 0.1 cb -1 cn 0 data
DATA ty ‘FlowLoc’ lo ’Sobek-id2’ va 2 ca. 2. cb. 1. cn -1 data par2 where:
id id of decision parameter
nm name of decision parameter
iv initial value to be used at beginning of simulation when parameter is used in
computations with negative time shift; the default initial value is 0 for all param-
eters
do mathematical actions or functions on location value[s]
The following functions (or mathematical actions) can be defined in PAR2 records:
Functions that can be applied using one argument only:
Arccosine (result in degrees)
Arccosine (result in radians)
Arcsine (result in degrees)
Arcsine (argument in radians)
Arctangent (result in degrees)
Arctangent (result in radians)
Ceiling (smallest integer >= x)
Cosine (input argument in degrees)
Cosine (argument in radians)
Exponent
Floor (largest integer <= x)
Hyperbolic cosine
648 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Hyperbolic sine
Hyperbolic tangens
Logarithm with base 10
Natural logarithm
Nearest integer
None (no function is applied)
Sine (input argument in degrees)
Sine (argument in radians)
Square
Square root
Tangent (input argument in degrees)
Tangent (argument in radians)
Functions that can be applied for two arguments only:
Interpolate (determine values using an Interpolation table)
Functions that can be applied for two or more arguments:
Add
Average
Divide
Max
Min
Multiply
Power
Subtract
The PAR2 record contains DATA sub-records with data for the specified locations. The data
items will appear in the same order as specified in the PAR2-record, so the order may influ-
ence the results, depending on the specified action function.
The DATA sub-record contains the following keywords:
ty Type of location, which can be:
‘FlowLoc’ = Water Flow Location in 1D schematization
‘RRLoc’ = Rainfall-Runoff Location
‘ExtLoc’ = External data from file
‘PrecipLoc’ = Precipitation Prediction Location
‘DateTimLoc’ = Date Time
‘ParLoc’ = (Other) Decision Parameter
‘WQLoc’ = Sobek-WQ Monitoring Location
’2DFlowLoc’ = Water Flow Location in 2D schematization
’InterpolationTable’ = Interpolation Table
lo Location-id (defined in RTC on the “Data Location” Tab)
va Selected variable, which has different values for the different data types:
Water Flow Location in 1D schematization:
Node:
1 = Water Level
4 = Water Depth
Reach Segment:
2 = Discharge
Structure:
5 = Crest Level
6 = Crest Width
7 = Gate Lower Level
8 = Opening Height
9 = Structure Flow Area
Deltares 649 of 688

DRAFT
Delft3D-FLOW, User Manual
10 = Discharge Structure
11 = Structure Velocity
12 = Water Level Up
13 = Water Level Down
14 = Head
15 = Pressure Difference
16 = Pump Capacity
Measurement Location:
1D Flow Measurement Station:
1 = Water level
2 = Discharge
3 = Storage Surface Area
4 = Water Depth
Manhole Measurement Station:
1 = Water level
3 = Storage Surface Area
4 = Water Depth
Pipe Measurement Station:
2 = Discharge
Reach Location:
1 = Water level
2 = Discharge
3 = Storage Surface Area
4 = Water Depth
Water Flow Location in 2D schematization:
2D History Station & 2D Breaking - Dam:
1 = Water level
4 = Water depth
17 = Bed level
18 = U-velocity
19 = V-velocity
20 = C-Abs. flow velocity [=√U2+V2]
Rainfall-Runoff Location
1 = Open Water Level
2 = Groundwater Level
External data
From HIS-file
1 = Value
In case of Public Wind
1 = Wind Direction
2 = Wind Velocity
Precipitation Prediction Location
1 . . . n = Prediction period in number of time steps
Decision Parameter
1 = Parameter Value
Date Time
1 = Actual Value, that can be
Integer value of:
Year(yyyy),
Month(mm),
Day(dd),
Hour(hh),
Minute(mm),
650 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Second(ss),
Date(yyyymmdd),
Time(hhmmss),
Day_of_week(day no)
Real value of
Date+Time(yyyymmdd.hhmmss)
CompTimeStep (Timestep as defined in RTC settings)
Sobek-WQ Monitoring Location
SOBEK WQ variable (series id as character string)
ca coefficient for multiplication
cb constant for addition
cn time shift: integer values
1 represents: t+1
0 represents: t
-1 represents: t-1
-2 represents: t-2
etc.
When using negative time shifts, the value used for the first time steps will be
equal to the initial value of that parameter (see the iv keyword).
The value of the decision parameter is determined by executing the specified action over the
calculated values of all locations.
The time indexes are t,t−1,t−2. At the moment the time shift is limited to at most 720
time steps (based on 5 days memory of a computation time step of 10 minutes). This can be
specified in the INI file (keyword DecisionHorizon).
By using different time indices, a moving average or a trend can be determined. For instance,
by defining as a decision parameter: the water level at time step tminus the water level in time
step t−1, in fact the increase in water level will be determined. If the water level rises quickly,
you may want to take some measure. Real-time Control will remember the data values of all
data locations of the previous time steps; the communication with the other modules is such
that it only receives the values for the current time steps.
When you are using SOBEK-RTC in combination with WQ, you could define the decrease in
O2concentration, or the (increase) in fraction of WWTP water in the system as decision pa-
rameters, and define measures to set structure set points in the SOBEK Water Flow modules,
based on these (water quality based) decision parameters.
The coefficients for multiplication and addition can be positive, negative or zero. This gives
many possibilities in the definition of decision parameters. Even the definition of a constant
decision parameter is possible (specify zero for the multiplication value, and set the proper
addition value)
The time shifts can be zero or negative, meaning that the decision parameter is depending on
current or previous values of variables at data locations. If a decision parameter is depending
on other decision parameters, it should depend on values of previous time steps (since the
values for the current time step may not yet be defined). In that case only negative values for
the time shift are allowed.
PAR2 records may refer to decision parameter values for the current timesteps or for previ-
ous timesteps. When defining decision parameters depending on values of other decision
Deltares 651 of 688

DRAFT
Delft3D-FLOW, User Manual
parameters in the same timesteps, dependency loops should be avoided.
The first set of functions can accommodate multiple arguments; in case of 1 argument (only
1 input decision parameter), the result is equal to that decision parameter. In case of 2 input
decision parameters a and b, the result is obvious. In case of 3 input decision parameters a,b,
and c, the result for the maximum operation will be: max (max(a,b),c)) which is the same as
max(a,b,c); the result of the power operation will be ((a**b)**c).
The result of the computations is as the name suggests; using the short notation d1for deci-
sion parameter 1, being equal to di1∗dc1+da1, the results are:
multiply: d1*d2
divide : d1 / d2
add: d1 + d2
subtract: d1 - d2
max: max (d1, d2)
min: min (d1, d2)
average: average (d1, d2) = add (d1, d2) / 2
power: power(d1,d2) = d1 ** d2
The generalisation to more than 2 arguments is obvious, e.g.
subtract (d1, d2, d3, d4) = d1- d2 - d3 - d4
divide (d1, d2, d3, d4) = ((( d1 / d2) / d3) / d4 )
average (d1, d2, d3) = add (d1, d2, d3) / 3 = (d1+d2+d3) / 3
Some example records:
PAR2 id ’PreviousLvlShimen’ nm ” do ’none’
DATA ty ’FlowLoc’ lo ’Lvl Lower Shimen’ va 1 ca 1 cb 0 cn -1 data par2
PAR2 id ’ExpectedRain402001_7’ nm ” do ’add’
DATA ty ’PrecipLoc’ lo ’402001_7’ va 1 ca 0.166 cb 0 cn 0 data
DATA ty ’PrecipLoc’ lo ’402001_7’ va 2 ca 0.166 cb 0 cn 0 data
DATA ty ’PrecipLoc’ lo ’402001_7’ va 3 ca 0.166 cb 0 cn 0 data
DATA ty ’PrecipLoc’ lo ’402001_7’ va 4 ca 0.166 cb 0 cn 0 data
DATA ty ’PrecipLoc’ lo ’402001_7’ va 5 ca 0.166 cb 0 cn 0 data
DATA ty ’PrecipLoc’ lo ’402001_7’ va 6 ca 0.166 cb 0 cn 0 data par2
PAR2 id ’ExpectedInflowShimen’ nm ” do ’max’
DATA ty ’ParLoc’ lo ’PreviousInflowShimen’ va 1 ca 1 cb 0 cn 0 data
DATA ty ’ParLoc’ lo ’ExpectedRunoffShimen’ va 1 ca 0.5 cb 0 cn 0 data par2
PAR2 id ’Downstream demands Shimen’ nm ” do ’add’
DATA ty ’ParLoc’ lo ’DemandTaoYuan’ va 1 ca 1 cb 0 cn 0 data
DATA ty ’ParLoc’ lo ’PWS Shimen’ va 1 ca 1 cb 0 cn 0 data
DATA ty ’ParLoc’ lo ’Irr Demand Shimen’ va 1 ca 1 cb 0 cn 0 data par2
As the example indicates, records may be more than one line long. The beginning of a record
is indicated by PAR2 in capitals (upper case), and the end of a record is indicated by par2 in
lower case.
Time Decision Parameters
A third way for defining decision parameters is by defining SOBEK time-tables. In this way, a
decision parameter is simply defined as a standard SOBEK time-table. SOBEK-RTC allows
tables for one decision parameter at a time only. The table can contain interpolation and
652 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
periodicity switches.
The tables are defined using the PAR3 record.
PAR3 id ’MaxFlowOutlet2TimeTable’ PDIN 1 1 365;00:00:00 pdin
TBLE
’1995/01/01;00:00:00’ 9999. <
’1995/02/15;00:00:00’ 500. <
’1995/03/01;00:00:00’ 9999. <
’1995/06/01;00:00:00’ 750. <
’1995/12/31;23:59:00’ 750. <
tble par3
PAR3 id ’Cons.DemandOutlet1TimeTable’ PDIN 1 1 365;00:00:00 pdin
TBLE
’1995/01/01;00:00:00’ 0. <
’1995/03/01;00:00:00’ 60. <
’1995/12/31;23:59:00’ 60. <
tble par3
Where:
id id of decision parameter
PDIN .. pdin= option for interpolation and periodicity
= 1 1 365;00:00:00 means block functions, periodicity one year
= 0 0 means linear interpolation, no periodicity
= 0 1 365;00:00:00 means linear interpolation, period one year
= 1 0 means block function, no periodicity
TBLE .. tble = the table, containing date; time string, value, and
Interpolation Tables
Interpolation tables can be applied by an “Interpolate” function, that determines the values of
a particular “Interpolate Function Decision Parameter”. Values for the independent variable
are contained in the first column of an interpolation table, while values for the dependent
variable are contained in the second column. For the interpolation table given below yields
that an input (independent) value of 0.15 results in an output (dependent) value of 0.025.
Independent values may be contained in any data series defined in RTC. The dependent
values will be assigned to the concerning “Interpolate Function Decision Parameter.
Note that:
1 Independent values in the Interpolation Table (i.e. the values in the first Table column)
should be given in ascending order,
2 If the independent value is less than the independent value on first Table row, than the
dependent value will be equal to the dependent value on the first Table row,
3 If the independent value is larger than the independent value on the last Table row, than
the dependent value will be equal to the dependent value on the last Table row.
Deltares 653 of 688

DRAFT
Delft3D-FLOW, User Manual
INTP id ’InpTable1’ nm ’InterpolationTable1’ v1 ’Heading_v1’ v2 ’Heading_v2’
TBLE
0.0 0.0 <
0.1 0.0 <
0.2 0.05 <
0.3 0.15 <
0.4 0.25 <
0.5 0.25 <
tble intp
where:
id id of interpolation table
nm name of interpolation table
v1 heading of column 1 (Independent input variable)
v2 heading of column 2 (Dependent variable)
SOBEK reservoir
SOBEK offers functionality of modelling reservoirs. This is done by defining a RSVP record in
the decision parameter file, and detailed reservoir information in the reservoir input file. An ex-
ample of the RSVP record is described in this subsection and the reservoir file (Reservoi.Rtc)
is described in the next subsection.
An example of the RSVP record:
RSVP id ’Res1’ nm ’ ’ nb 2 nq 5 nt 2 ns 1 hav ’HeadVolumeReservoir1’
rule ’RuleCurveRsv1’ hedg ’HedgingRule’
bg ’Bottom gate Definition’ tg ’Turbine gate Definition’ sg ’Spillway gate Definition’
dp ’RsvRes1BotGate1’ ’RsvRes1BotGate2’ ’RsvRes1TurbGate1’
’RsvRes1TurbGate2’ ’RsvRes1SpillGate1’
no 2 gb 1 2 gt 1 2 gs 2 dm ’Cons.DemandOutlet1TimeTable’
’Cons.DemandOutlet2’
mf ’9999’ ’MaxFlowOutlet2TimeTable’ il ’Initial RsvLvl1’ ei ’Expected Inflow1’ rsvp
Where:
id reservoir id
nm name of the reservoir
nq total number of gates
nb number of bottom gates
nt number of turbine gates
ns number of spillway gates
SOBEK will check that nq=nb+nt+ns
dp id’s of decision parameters (flows over individual gates)
hav reference to head-area-volume curve definition
rule reference to rule curve definition
hedg reference to hedging rule definition
654 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
il reference to decision parameter representing initial reservoir level in
m (initial= at begin of time step)
ei reference to decision parameter representing expected inflow
(in m3/s)
no number of outlet links (check: no <= ng)
gb assignment of bottom gates to outlet links
gt assignment of turbine gates to outlet links
gs assignment of spillway gates to outlet links
mf reference to maximum flow definition for each outlet link
dm reference to demand definition for each outlet link
Combination of different type of decision parameters
In the decision parameter file, all type of decision parameters (PARA, PAR2, PAR3, and RSVP)
records can be used. There is no specific order of specification required. It is possible to use
decision parameters inRSVP records (i.e. the discharges over the different gates) as ’input’
decision parameters in PAR2 records.
Also the RSVP decision parameters may depend on other parameters (initial reservoir level,
expected inflow, consumptive demands on each downstream outlet) which itself may be de-
fined as decision parameters in PARA, PAR2, PAR3, or even other RSVP records.
Default RTC will compute the decision parameters in the order in which they are specified
in the input file. However, SOBEK-RTC can also determine the order of computations itself
(use the option SetSequenceDecisionParameters=-1 in the Ini file RTC.DAT). RTC will check
whether cyclic definitions of decision parameters occur. It is not allowed to define decision
parameter A depending on decision parameter B, decision parameter B depending on C,
and C on A for the same time step. Such cyclic chains of dependencies are only allowed
if somewhere a time delay is introduced (like the value of decision parameter A at time t is
depending on the value of decision parameter B at time t−1).
reservoi.rtc-file (Decision layer)
This file contains the detailed information of the SOBEK-reservoirs. The information is related
to the RSVP records in the decision parameter file (DECISPAR.RTC). The information in the
reservoir input file consists of:
level-area-volume curve of the reservoir (HAVC record)
reservoir rule curves (RULE record)
bottom gate data (BOTG record)
turbine data (TURB record)
spillway data (SPIL record)
Q-h relation data for individual gates (QHRE record)
maximum flow data for individual gates (MAXF record)
flow demands (for energy generation) for individual turbine gates (ENGD record)
hedging rule (HEDG record)
Each of these records is described below.
An example of each record with a description:
HAVC id ’HeadVolumeReservoir1’
TBLE
0100000000
1010000000100000000
Deltares 655 of 688

DRAFT
Delft3D-FLOW, User Manual
2010000000200000000
3010000000300000000
4010000000400000000
5010000000500000000
tble havc
Where:
id id of the head-area-volume curve relation
TBLE .. tble contains the relation;
the first column is the level (in m with respect to reference level),
the second column is the area [m2]
the third column is the volume (m3)
RULE id ’RuleCurveRsv1’ PDIN 0 1 365;00:00:00 pdin
TBLE
’1995/01/01;00:00:00’ 50. 45. 40.
’1995/02/01;00:00:00’ 50. 45. 40.
’1995/03/01;00:00:00’ 50. 45. 40.
’1995/04/01;00:00:00’ 50. 45. 35.
’1995/05/01;00:00:00’ 50. 40. 30.
’1995/06/01;00:00:00’ 45. 35. 25.
’1995/07/01;00:00:00’ 40. 30. 20.
’1995/08/01;00:00:00’ 35. 30. 20.
’1995/09/01;00:00:00’ 35. 30. 20.
’1995/10/01;00:00:00’ 40. 35. 25.
’1995/11/01;00:00:00’ 45. 40. 30.
’1995/12/01;00:00:00’ 50. 45. 35.
’1995/12/30;00:00:00’ 50. 45. 40.
tble rule
Where:
id id of the rule curve
TBLE .. tble contains the rule curve time table;
the first column is the flood control level;
the second column is the target level;
the third column is the firm level;
(all levels in m with respect to reference level)
the flood control level >= the target level >= the firm level
BOTG id ’Bottom gate Definition’ lv 0 10 qh ’Q-NetHead bottom gate’ ’Q-NetHead bottom
gate’
mf ’Max.Flow 999’ ’Max.Flow 999’ botg
656 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
Where:
id id of the bottom gate definition
lv intake levels for the number of bottom gates
(this number is defined in the RSVP record in DECISPAR.RTC)
qh reference to Q-h relations for all bottom gates
mf maximum flow definition for each individual bottom gate
TURB id ’Turbine gate Definition’ lv 20 15 qh ’Q-NetHead turbine gate’ ’Q-NetHead turbine
gate’
ed ’Energy demands’ ’Energy demands 2nd turbine’ mf ’Max.Flow turbine gate’ ’Max.Flow
turbine gate’ turb
Where:
id id of the turbine gate definition
lv intake levels for the number of turbines
(this number is defined in the RSVP record in DECISPAR.RTC)
qh reference to Q-h relations for all turbine gates
mf maximum flow definition for each individual turbine gate
ed energy demand definition for each individual turbine gate
(energy demands can of course only be defined for the turbine gates, not for
bottom gates or spillway gates)
SPIL id ’Spillway gate Definition’ lv 50 qh ’Q-NetHead spillway gate’ mf ’Max.Flow 999’ spil
Where:
id id of the spillway gate definition
lv intake levels for the number of spillways
(this number is defined in the RSVP record in DECISPAR.RTC)
qh reference to Q-h relations for all spillways
mf maximum flow definition for each individual spillway gate
MAXF id ’Max.Flow turbine gate’ PDIN 1 1 365;00:00:00 pdin
TBLE
’1995/01/01;00:00:00’ 31.25
’1995/01/15;00:00:00’ 27.
’1995/02/01;00:00:00’ 24.5
’1995/02/15;00:00:00’ 19.
’1995/03/01;00:00:00’ 50.
’1995/05/01;00:00:00’ 50.5
’1995/06/01;00:00:00’ 59.5
’1995/06/15;00:00:00’ 59.5
’1995/07/01;00:00:00’ 50.
’1995/07/15;00:00:00’ 50.
’1995/08/01;00:00:00’ 50.
’1995/08/15;00:00:00’ 50.
’1995/09/01;00:00:00’ 50.
’1995/10/01;00:00:00’ 50.
’1995/11/01;00:00:00’ 50.
’1995/12/01;00:00:00’ 50.
’1995/12/15;00:00:00’ 50.
’1995/12/31;23:59:00’ 50.
Deltares 657 of 688

DRAFT
Delft3D-FLOW, User Manual
tble maxf
Where:
id id of the maximum flow definition
PDIN .. pdin = option for interpolation and periodicity
= 1 1 365;00:00:00 means block functions, periodicity one year
= 0 0 means linear interpolation, no periodicity
= 0 1 365;00:00:00 means linear interpolation, period one year
= 1 0 means block function, no periodicity
TBLE .. tble = the table, containing date;time string, value, and
QHRE id ’Q-NetHead bottom gate’
TBLE
0 999
10 999
20 999
30 999
40 999
45 999
50 999 tble qhre
Where:
id id of Q-h relation
TBLE .. tble contains the relation;
the first column is the flow (m3/s)
the second column is the water level h (m)
ENGD id ’Energy demands’ PDIN 1 1 365;00:00:00 pdin
TBLE
’1995/01/01;00:00:00’ 31.25
’1995/01/15;00:00:00’ 27.
’1995/02/01;00:00:00’ 24.5
’1995/02/15;00:00:00’ 19.
’1995/03/01;00:00:00’ 12.5
’1995/04/01;00:00:00’ 12.5
’1995/05/01;00:00:00’ 12.5
’1995/06/01;00:00:00’ 12.5
’1995/10/01;00:00:00’ 12.5
’1995/11/01;00:00:00’ 12.5
’1995/12/31;23:59:00’ 12.5
tble engd
Where:
658 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
id id of the energy demand definition
PDIN .. pdin = option for interpolation and periodicity
= 1 1 365;00:00:00 means block functions, periodicity one year
= 0 0 means linear interpolation, no periodicity
= 0 1 365;00:00:00 means linear interpolation, period one year
= 1 0 means block function, no periodicity
TBLE .. tble = the table, containing date;time string, value, and <
The values specified in the table are flows in m3/s.
HEDG id ’HedgingRule’
TBLE
100 100
90 100
70 75
50 50
30 25
10 0 tble hedg
Where:
id id of hedging rule relation
TBLE .. tble contains the relation;
the first column is the level percentage (between 0 and 100)
( 0 corresponds with the level at dead storage (=the level at the lowest outlet);
100 corresponds with the firm level).
the second column is the release percentage (between 0 and 100)
B.28.5 Measures layer
The <D3D_MEAS.RTC>file links the structures to the decision values which contain the
values to be used for controlling the structure (the measures). The file starts with the keyword
FLM2.1 on the first line. The measures are specified in an FLCM record for each structure
which is controlled by RTC. Each FLCM record contains one or more SBMS sub-records in
which the measures for the structure are specified.
The general syntax reads:
FLCM id ’Delft3D structure name’ nm ’’ na 0
SBMS pr 1 ty 10 psp ’Decision variable name’ iv 0.0 sbms
flcm
Deltares 659 of 688
DRAFT
Delft3D-FLOW, User Manual
where in the FLCM record:
id Delft3D structure name on which the measure is working
nm not used for Delft3D, leave empty
na option not active, 0 = active, <> 0 means not active. This option can be used
to switch off RTC for this structure while keeping the definition
and in the SBMS record:
pr priority
ty type of measure; the format of the record is depending on the type
2 = table with n check values, n set points
5 = record with n decision parameters, n check values and 1 set point (number);
6 = record with n decision parameters, n check values and 1 set point as a
decision variable
7 = record with n decision parameters, n check parameters, 1 set point (number)
8 = record with n decision parameters, n check parameters and a set point as a
decision parameter
9 = MATLAB measure
10 = record with 1 setpoint decision parameter only
bp id of decision parameter
nv number of values or decision parameters (only for type ty 2, 5, 6, 7, 8)
cv check value (only for type 2, 5, 6; nv values for type 2, 5, 6)
ch check to be carried on on the check value (not for type 2)
cp check decision parameter (only for measure type 7, 8)
sp set point of the controller (PID or interval controller) or the controlled parameter
(hydraulic controller or time controller) controlling the Flow-structure.
psp parameter set point (only for ty 6, 8, 10)
mi MATLAB communication id, the id which is used in MATLAB for this measure
iv initial set point value;
The following table gives a concise overview of the measure types:
Measure
Description
Decision
parameters
Check
value/parameters
Setpoint
value/parameter
Measure
Type No.
Type A 1 none Interpolation Ta-
ble
2
Type B1 n n values 1 value 5
Type B2 n n values 1 parameter 6
Type B3 n n parameters 1 value 7
Type B4 n n parameters 1 parameter 8
Type A none none from MATLAB 9
Type B5 1 none 1 parameter 10
Remarks:
For measure type 5-8, the value of n may also be equal to 1.
660 of 688 Deltares

DRAFT
Special features of Delft3D-FLOW
It is possible to define multiple measures at one Flow controller. These measures can
be linked to the same decision parameter as well, but that is not required. If one of the
defined measures is active, the set point of local controller controlling the Flow structure
will be adjusted to that measure.
In defining measures of type 5 to type 8, the multiple condition check is performed using
‘AND’ logic: only of all conditions hold, the set point will be set according to the decision
rule.
With the exception of the MATLAB measure of type 9, all measure types are related
to a decision parameter (‘bp’ field in the data record). For the MATLAB measure type,
everything has to be defined in the MATLAB m-file.
Example:
The following lines define that the new flow rate of discharge point ‘River 2’ is given by the
decision parameter ‘River2_NewQ’ and the new gate height of barrier ‘Barrier 1’ is given by
‘Barrier1_NewH’.
FLM2.1
FLCM id ’River 2’ nm ’’ na 0
SBMS pr 1 ty 10 psp ’River2_NewQ’ iv 0.0 sbms
flcm
FLCM id ’Barrier 1’ nm ’’ na 0
SBMS pr 1 ty 10 psp ’Barrier1_NewH’ iv 0.0 sbms
flcm
Deltares 661 of 688

DRAFT
Delft3D-FLOW, User Manual
662 of 688 Deltares
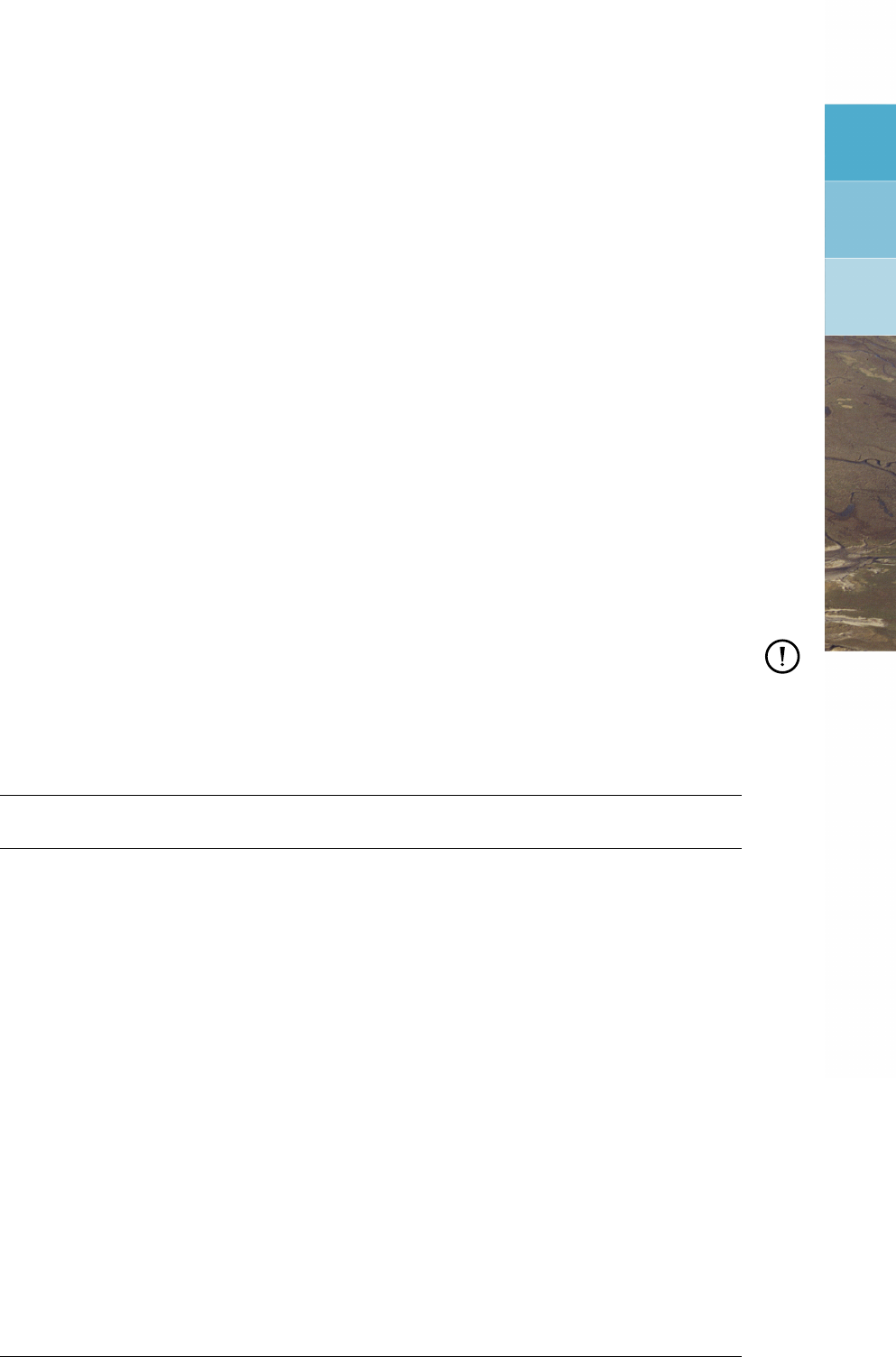
DRAFT
C Astronomical constituents
C.1 Introduction
In this Appendix we list the astronomical constituents that you can use when prescribing as-
tronomical boundary conditions for the flow. In total you can select from 234 tidal constituents.
See section 4.5.6 for details on how to use them in boundary conditions.
C.2 List of astronomical constituents
The set of constituents can be divided into the primary constituents, which appear in the
equilibrium tide (no land masses; only one deep ocean), and compound constituents. The
latter are linear combinations of the primary constituents.
The names and frequencies of all 234 internally available constituents of Deltares tidal anal-
ysis program Delft3D-TIDE are given below. For the primary constituents the relative magni-
tude in the equilibrium tide is given as well.
If you have only a short time-series for a tidal analysis you can use astronomical coupling
between nearby constituents. To this end also the equilibrium amplitude relation with their
main constituents is given. The equilibrium phase relation is equal to zero.
Remark:
If you want to apply astronomical coupling, first try to find the amplitude and phase rela-
tions based on a long period analysis of a neighbouring station. Only if such information
is not available, you may resort to the equilibrium tide relations.
Table C.1: Astronomical constituents
Constituent
name
Angular frequency
[degrees/hour]
Amplitude in equilibrium
tide [m]
Amplitude coupling
relation
SA 0.0410686 0.01156
SSA 0.0821373 0.07281
MSM 0.4715211 0.01579
MM 0.5443747 0.08254
MSF 1.0158958 0.01369
MS0 1.0158958
MF 1.0980331 0.15647
KO0 1.0980331
MK0 1.0980331
SNU 1.4874169
SN 1.5602705
MSTM 1.5695542 0.00569
MFM 1.6424078 0.02996
2SM 2.0317916
MSQM 2.1139289 0.00478
MQM 2.1867825 0.00396
2SMN 2.5761663
2OK1 12.8450025
2Q1 12.8542862 0.00955 0.025 ×O1
NJ1 12.8542862
SIGMA1 12.9271398 0.01152
MUK1 12.9271398
NUJ1 12.9271398
Q1 13.3986609 0.07343 0.191 ×O1
continued on next page
Deltares 663 of 688

DRAFT
Delft3D-FLOW, User Manual
Table C.1 – continued from previous page
Constituent
name
Angular frequency
[degrees/hour]
Amplitude in equilibrium
tide [m]
Amplitude coupling
relation
NK1 13.3986609
RO1 13.4715145 0.01395 0.036 ×O1
NUK1 13.4715145
O1 13.9430356 0.38358
TAU1 14.0251728 0.00504
MP1 14.0251728
M1B 14.4874103 0.01065 0.350 ×M1A
M1C 14.4920521
M1A 14.4966939 0.02964
M1 14.4966939 0.03150 0.082 ×O1
NO1 14.4966939
CHI1 14.5695476 0.00580
LP1 14.5695476
PI1 14.9178647 0.01028
TK1 14.9178647
P1 14.9589314 0.17543 0.328 ×K1
SK1 14.9589314
S1 15.0000000 0.00416
K1 15.0410686 0.53496
MO1 15.0410686
SP1 15.0410686
PSI1 15.0821353 0.00109
RP1 15.0821353
FI1 15.1232059 0.00755
KP1 15.1232059
THETA1 15.5125897 0.00578
LABDAO1 15.5125897
J1 15.5854433 0.03022 0.079 ×O1
MQ1 15.5854433
2PO1 15.9748272
SO1 16.0569644
OO1 16.1391017 0.01939 0.051 ×O1
2KO1 16.1391017
UPSILON1 16.6834764 0.00372
KQ1 16.6834764
2MN2S2 26.4079379
3MKS2 26.8701753
2NS2 26.8794590
3MS2 26.9523126
OQ2 27.3416964
MNK2 27.3416964
EPSILON2 27.4238337 0.00671
MNS2 27.4238337
2ML2S2 27.4966873
MNUS2 27.4966873
MNK2S2 27.5059710
2MS2K2 27.8039339
O2 27.8860711
NLK2 27.8860711
2MK2 27.8860711
2N2 27.8953548 0.02303 0.132 ×N2
MU2 27.9682084 0.02776 0.031 ×M2
2MS2 27.9682084
SNK2 28.3575922
continued on next page
664 of 688 Deltares

DRAFT
Astronomical constituents
Table C.1 – continued from previous page
Constituent
name
Angular frequency
[degrees/hour]
Amplitude in equilibrium
tide [m]
Amplitude coupling
relation
NA2 28.3986628
N2 28.4397295 0.17398 0.191 ×M2
KQ2 28.4397295
NB2 28.4807962
NU2 28.5125831 0.03304 0.194 ×N2
3MSN2 28.6040041
2KN2S2 28.6040041
OP2 28.9019669
MSK2 28.9019669
GAMMA2 28.9112506 0.00273
ALFA2 28.9430356 0.00313
MPS2 28.9430356
MA2 28.9430356
M2 28.9841042 0.90872
KO2 28.9841042
MSP2 29.0251728
MB2 29.0251728
DELTA2 29.0662415
MKS2 29.0662415
M2(KS)2 29.1483788
2SN(MK)2 29.3734880
LABDA2 29.4556253 0.00466 0.005 ×M2
SNM2 29.4556253
2MN2 29.5284789
L2 29.5284789 0.02663 0.029 ×M2
L2A 29.5284789 0.02569
L2B 29.5377626 0.00704 0.274 ×L2A
2SK2 29.9178627
T2 29.9589333 0.02476 0.059 ×S2
S2 30.0000000 0.42248
KP2 30.0000000
R2 30.0410667 0.00366 0.009 ×S2
K2 30.0821373 0.12004 0.284 ×S2
MSNU2 30.4715211
MSN2 30.5443747
ZETA2 30.5536584 0.00134
ETA2 30.6265120 0.00702
KJ2 30.6265120
MKN2 30.6265120
2KM(SN)2 30.7086493
2SM2 31.0158958
SKM2 31.0980331
2MS2N2 31.0887494
2SNU2 31.4874169
2SN2 31.5602705
SKN2 31.6424078
MQ3 42.3827651
NO3 42.3827651
MO3 42.9271398
2MK3 42.9271398
2MP3 43.0092771
M3 43.4761563 0.01780
NK3 43.4807981
SO3 43.9430356
continued on next page
Deltares 665 of 688

DRAFT
Delft3D-FLOW, User Manual
Table C.1 – continued from previous page
Constituent
name
Angular frequency
[degrees/hour]
Amplitude in equilibrium
tide [m]
Amplitude coupling
relation
MP3 43.9430356
MK3 44.0251728
SP3 44.9589314
2MQ3 44.5695476
SK3 45.0410686
2SO3 46.0569644
K3 45.1232059
4MS4 55.9364168
2MNS4 56.4079379
3MK4 56.8701753
MNLK4 56.8701753
3MS4 56.9523126
MSNK4 57.3416964
MN4 57.4238337
MNU4 57.4966873
2MLS4 57.4966873
2MSK4 57.8860711
M4 57.9682084
2MKS4 58.0503457
SN4 58.4397295
3MN4 58.5125831
2SMK4 58.9019669
MS4 58.9841042
MK4 59.0662415
2SNM4 59.4556253
2MSN4 59.5284789
SL4 59.5284789
S4 60.0000000
SK4 60.0821373
2SMN4 60.5443747
3SM4 61.0158958
2SKM4 61.0980331
MNO5 71.3668693
3MK5 71.9112440
3MP5 71.9933813
M5 72.4649024
MNK5 72.4649024
2MP5 72.9271398
MSO5 72.9271398
3MO5 73.0092771
MSK5 74.0251728
3KM5 74.1073101
2(MN)S6 84.8476674
3MNS6 85.3920421
4MK6 85.8542796
2NM6 85.8635632
4MS6 85.9364168
2MSNK6 86.3258006
2MN6 86.4079379
2MNU6 86.4807915
3MSK6 86.8701753
M6 86.9523126
MSN6 87.4238337
MNK6 87.5059710
continued on next page
666 of 688 Deltares

DRAFT
Astronomical constituents
Table C.1 – continued from previous page
Constituent
name
Angular frequency
[degrees/hour]
Amplitude in equilibrium
tide [m]
Amplitude coupling
relation
4MN6 87.4966873
MKNU6 87.5788246
2(MS)K6 87.8860711
2MS6 87.9682084
2MK6 88.0503457
2SN6 88.4397295
3MSN6 88.5125831
MKL6 88.5947204
2SM6 88.9841042
MSK6 89.0662415
S6 90.0000000
2MNO7 100.3509735
2NMK7 100.9046319
M7 101.4490066
2MSO7 101.9112440
MSKO7 103.0092771
2(MN)8 114.8476674
3MN8 115.3920421
3MNKS8 115.4741794
M8 115.9364168
2MSN8 116.4079379
2MNK8 116.4900752
3MS8 116.9523126
3MK8 117.0344499
2SNM8 117.4238337
MSNK8 117.5059710
2(MS)8 117.9682084
2MSK8 118.0503457
3SM8 118.9841042
2SMK8 119.0662415
S8 120.0000000
2(MN)K9 129.8887361
3MNK9 130.4331108
4MK9 130.9774855
3MSK9 131.9933813
4MN10 144.3761463
M10 144.9205210
3MSN10 145.3920421
4MS10 145.9364168
2(MS)N10 146.4079379
2MNSK10 146.4900752
3M2S10 146.9523126
4MSK11 160.9774855
M12 173.9046253
4MSN12 174.3761463
5MS12 174.9205210
3MNKS12 175.4741794
4M2S12 175.9364168
Deltares 667 of 688

DRAFT
Delft3D-FLOW, User Manual
668 of 688 Deltares

DRAFT
D Some modelling guidelines
D.1 Introduction
When setting up a model application you have to make many decisions and choices, such
as do I need to resolve the full three dimensional hydrodynamics and transport processes,
or are the main characteristics of the model area represented in a depth averaged model.
Other choices concern coefficients and parameters to select, such as how large can I choose
the time step and still represent the time dependent processes accurately, or in case of a 3D
computation do I need to apply the advanced k-εmodel or can I use a simpler formulation for
the vertical eddy viscosity and diffusivity.
Answering these questions in general terms is almost impossible as they are strongly related
to the problem area at hand and the questions posed and answering them appeals to your
modelling experience and even to some extent to your personal preferences. Having said this,
you still have to make these choices and you are not helped by just saying ‘it is not a simple
matter’. Therefore we discuss some of the criteria you can and in our opinion should apply to
make a decision.
In the next section we present and discuss some guidelines to determine if you may need a
3D computation, what kind of model formulation you may need for the vertical eddy viscosity
and diffusivity and on the time step you can apply.
D.2 Depth-averaged or 3D model
In this section we give some guidelines to determine if you need to resolve the vertical profile
of the flow and the transport quantities or that you can use a depth averaged simulation.
In Figure D.1 we present a decision tree to support your decision:
What kind of area is to be modelled and can stratification occur?
Non-tidal rivers and open seas are generally well-mixed and you can rely on a 2D (depth
averaged) computation, unless the project requires the vertical profile of some quantities.
Estuaries can range from well-mixed to strongly stratified.
To determine the possibility of stratification you should determine the Estuary Number
given by:
ED=ρu3
t
π∆ρgh0ur
,(D.1)
where:
gacceleration of gravity [m/s2],
h0depth at the mouth of the estuary [m],
urriver velocity, i.e. the river flow rate divided by the cross-sectional
area at the mouth of the estuary [m/s],
utamplitude of the profile averaged tidal velocity at the mouth of
the estuary [m/s],
ρdensity of sea water [kg/m3],
∆ρdensity difference between sea water and river water [kg/m3].
Depending ED(Thatcher,1981), the estuary is strongly stratified, partly stratified or well-
mixed:
Deltares 669 of 688
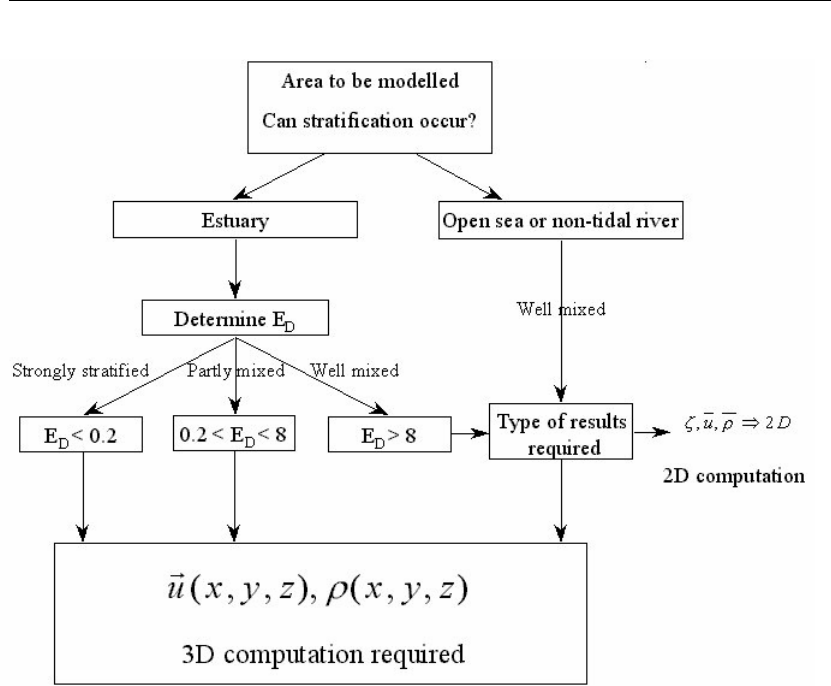
DRAFT
Delft3D-FLOW, User Manual
Figure D.1: Steps to determine if a 3D model is required
ED<0.2strongly stratified,
0.2< ED<8partly mixed,
8< EDwell-mixed.
Only in case of a well-mixed estuary you can apply a 2D or depth averaged computation,
unless of course the vertical profile of some quantity is required.
In both the partly mixed and strongly stratified case you should in principal always use
a 3D computation. If only depth averaged quantities are required you might apply a 2D
computation in the partly mixed estuary, but in case of the strongly stratified estuary you
should obtain depth averaged quantities from depth integration of the full 3D quantities.
In the next section we will discuss the choice of the vertical turbulence model in case of a 3D
computation.
D.3 Selection of the vertical turbulence model
In this section we discuss the selection of the vertical turbulence model to be used, so it is
assumed a full 3D computation will be executed.
We discuss the selection in relation to the vertical stratification.
670 of 688 Deltares

DRAFT
Some modelling guidelines
D.3.1 Well-mixed
The resolution of the vertical profile was required for some specific reason, but not because
some quantities were vertically stratified.
We distinguish two situations depending on the existence of (important) vertical circulations
or not. These vertical circulations might be driven by the wind or by discharges into the area
of concern:
1 No (important) vertical circulations.
You can apply a simple constant or spatially varying eddy viscosity or the k-Lturbulence
model.
2 Yes, (wind driven) vertical circulations are important.
Depending on the complexity of the circulations you are suggested to apply the k-L(sim-
ple cases) or the k-εturbulence model.
D.3.2 Partly mixed
You are suggested to apply the k-Lor the k-εturbulencemodel. The latter is the best alterna-
tive since it is user independent and its coefficients are fixed and well investigated (Uittenbo-
gaard et al.,1992). The former is simpler and requires less computing time. In case of doubt:
select the k-εturbulence model.
D.3.3 Strongly stratified
It is recommended to use the k-εturbulence model.
Deltares 671 of 688

DRAFT
Delft3D-FLOW, User Manual
672 of 688 Deltares

DRAFT
E Computational grid
In this Appendix we discuss several details related to the use of the staggered grid, the grid
enclosure and the numbering and location of open and closed boundaries. For the general
use of Delft3D this information is not needed, for all practical applications the use of these
items is completely transparent to you and you do not need to be aware of the definition and
implementation details.
However, if you want to inspect certain files, such as the grid file or the bathymetry file and
want to check all details in relation to values and locations, you must be aware of certain
details related to definition and implementation. These details are discussed and illustrated
with examples in this Appendix. You can find details related to the numerical scheme in
chapter 10 and a detailed description of the structure and the contents of the related files in
section A.2.
Essential to understanding the use and implementation of the staggered grid system is the
grid numbering and the definition of a computational control volume (sometimes called a com-
putational grid cell, or a computational tile). In Figure E.1 (left) the staggered grid and the
numbering is given, indicating which water level, velocity components and depth have the
same (array) number in x- and y-direction in the computational code.
The numerical grid developed with the grid generation program RGFGRID is the grid defining
a computational control volume. With the depth defined at the corners of the computational
control volume, the numerical grid is drawn through the depth points. This relation between
the numerical grid and the computational control volume also controls the location of the open
and closed boundaries.
From Figure E.1 right it is clear that left and below the first computational control volume
there must exist a grid (array) point to hold the boundary condition, be it a water level or a
velocity controlled boundary. This is even more clear from Figure E.2 left where the lower left
computational control volume is displayed.
To the right and above the most right and upper computational control volume no additional
grid point is required if the boundary condition would always be a velocity or discharge bound-
ary condition. The boundary condition would simply be described at the velocity point in the
respective edge. However, for water level boundaries the situation is less simple. An addi-
tional grid (array) point must exist outside the last computational control volume to prescribe
the boundary condition, Figure E.2 right.
To discuss the relation between the computational grid and the location of boundary conditions
we use the simple case of a rectilinear area without any islands, Figure E.3.
Remark:
From Figure E.3 alone it can not be decided whether the area is an open sea area, an
area fully enclosed by land or some mixture.
At closed boundaries the normal velocity is zero. From Figure E.2 it is obvious that closed
boundaries can be defined at the velocity point of the first or last grid point. The same holds
for an open boundary with velocity or discharge boundary conditions. For the left and lower
boundary this velocity point is located at the first numerical grid line and its logical grid number
is 1. For the right and upper boundary the velocity at the edge of the last computational
control volume is located at grid (array) point Mmax-1 or Nmax-1. However, for implementation
reasons the velocity boundary at the right and upper side of the area is virtually also defined
at grid point Mmax or Nmax; in the implementation of the computational core the boundary
Deltares 673 of 688
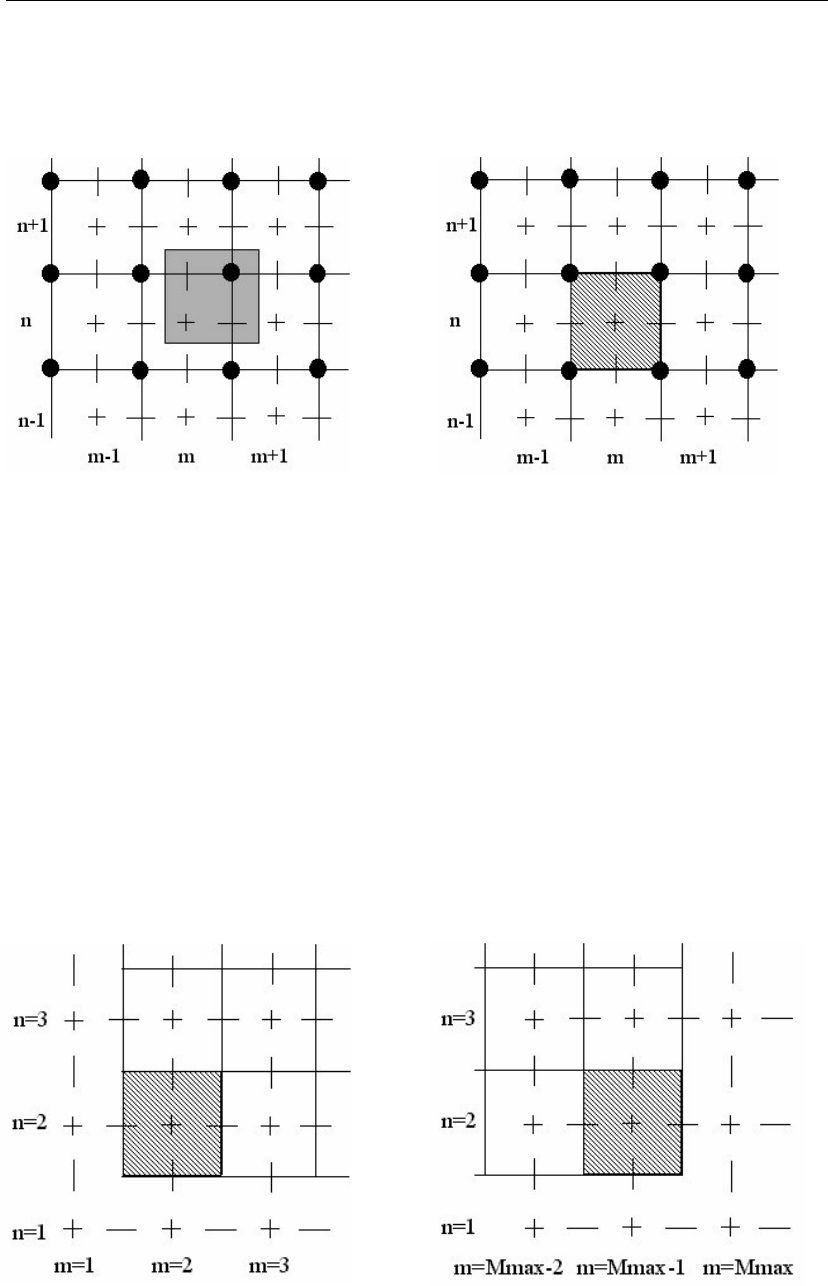
DRAFT
Delft3D-FLOW, User Manual
Legend:
full lines the numerical grid.
grey area left figure: items with the same (array) number (m, n).
right figure: computational control volume.
+ water level, concentration of constituents, salinity, temperature.
−horizontal velocity component x-, ξ-, u- or m-direction.
| horizontal velocity component in y-, η-, v- or n-direction.
•depth.
Figure E.1: Left: items with the same (array) number. Right: a computational control
volume
Figure E.2: Lower-left (left) and lower right (right) computational grid cell
674 of 688 Deltares
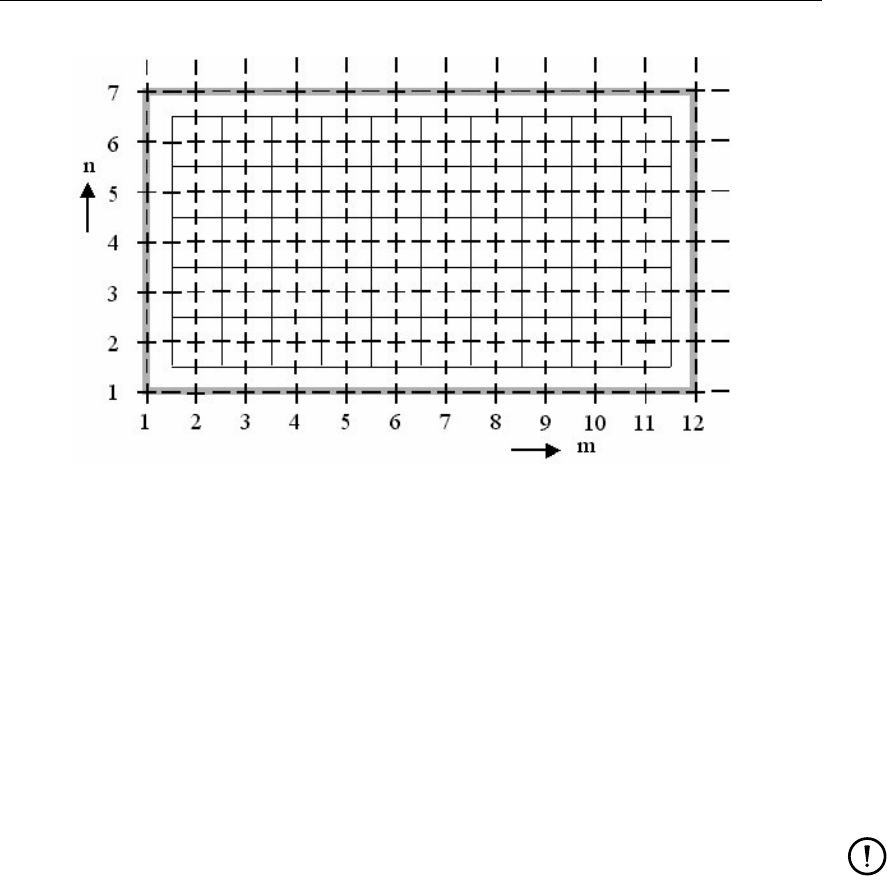
DRAFT
Computational grid
Figure E.3: Definition sketch of a (12 ∗7) staggered grid with grid enclosure (thick line)
and numerical grid
condition is shifted to the grid (array) points Mmax-1 and Nmax-1. For open boundaries with
water level control the water level point is located just outside the first or last computational
control volume used.
In most practical applications both open and closed boundaries are used and both water level
and velocity controlled open boundaries are used in the same application.
In Figure E.4 we use the more general case of Figure E.3 with the location and combination of
water level and velocity controlled open boundaries at the four edges and corners. The open
boundary points are indicated by encircled water level or velocity points.
Remark:
The shift in the location of water level and velocity controlled open boundary has conse-
quences for the overall dimensions of the area being modelled. For all practical applica-
tions this relation is transparent, but for simple cases where you want to check certain
properties, such as mass conservation, this is important, see the example.
Water level controlled open boundaries:
Water level controlled open boundaries are always located just outside the first or last compu-
tational control volume. The line through these water level points is called the (external) grid
enclosure.
For Figure E.4 water level controlled open boundaries can be located at:
1 lower: (m=2 to Mmax-1, n=1),
2 left: (m=1, n=2 to Nmax-1),
3 upper: (m=2 to Mmax-1, n=Nmax),
4 right: (m=Mmax, n=2 to Nmax-1).
Deltares 675 of 688
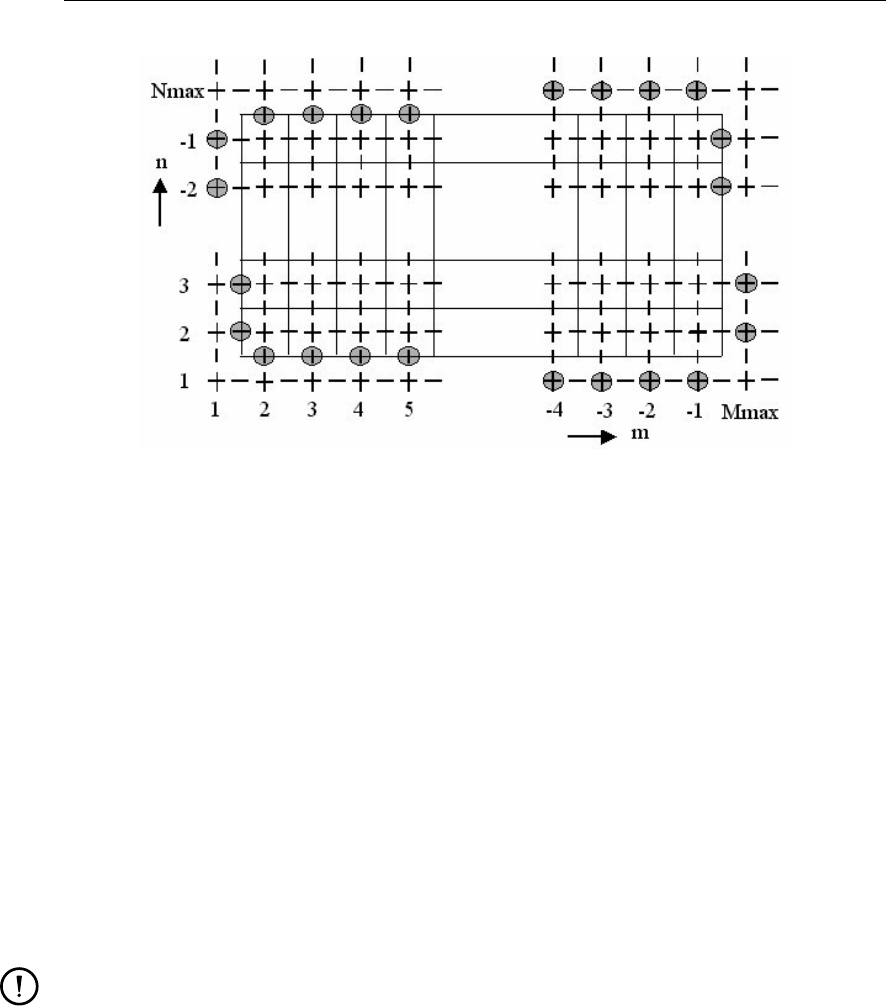
DRAFT
Delft3D-FLOW, User Manual
Figure E.4: Location and combination of water level and velocity controlled open bound-
aries
Velocity controlled open boundaries:
Velocity controlled open boundaries are either located at the (external) grid enclosure (in
terms of the grid point (array) number) for the left and lower boundaries, or just inside the grid
enclosure (in terms of the grid point (array) number) for the right and upper boundaries.
However, to make the location of open boundaries irrespective of the open boundary type,
also the right and upper boundaries are indicated as being located at the grid enclosure (at
implementation level the grid number is decreased by one).
For Figure E.4 the velocity controlled open boundaries can be located at:
1 lower: (m=2 to Mmax-1, n=1),
2 left: (m=1, n=2 to Nmax-1),
3 upper: (m=2 to Mmax-1, n=Nmax), internally (m=2 to Mmax-1, Nmax-1),
4 right: (m=Mmax, n=2 to Nmax-1), internally (m=Mmax-1, n=2 to Nmax-1).
Remark:
The water level points at the corner points (1,1), (1,Mmax), (Mmax, Nmax) and (1,
Nmax) are not used in the numerical approximation of the hydrodynamic equations.
For internal grid enclosures (defining an internal area with either closed or open boundaries)
the same rules apply.
676 of 688 Deltares
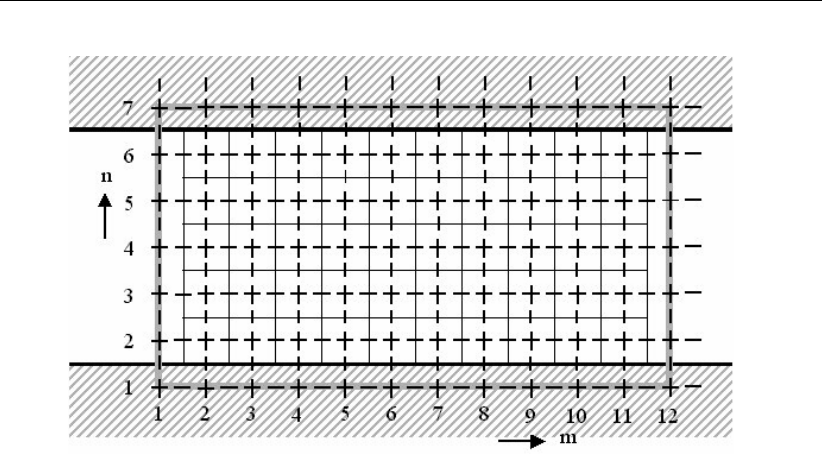
DRAFT
Computational grid
Figure E.5: Straight channel with 10 ∗5computational grid cells
On summarising:
1 The grid generator displays the computational control volumes, i.e. the grid cells that are
(potentially) used in the computation.
2 For the definition of open boundaries the number of (possibly) active grid points in both
(horizontal) directions is extended by one grid point.
3 These additional grid (array) points are included in the number of grid points as displayed
in the FLOW-GUI; Mmax and Nmax.
4 The grid file of the grid generator only includes the indices of the computational control
volumes, i.e. does not include indices of the additional grid (array) points.
5 The grid enclosure generated by RGFGRID takes these additional (array) points into ac-
count.
6 QUICKIN takes the additional grid (array) points into account and automatically assigns
them a value of -999.
7 In the Visualisation Area of the FLOW-GUI the numerical grid is displayed as created
with RGFGRID . The additional points nor the grid enclosure are displayed.
Example:
Suppose you want to define a rectilinear grid in a channel of dimensions 10 000 ∗5 000 m2
with a grid size of 1000 m. This will require a grid of 10 ∗5grid cells and thus 11 ∗6grid
points. When you apply RGFGRID to generate this grid you must set the grid dimensions to
11 ∗6(RGFGRID handles grid points, not grid cells).
The grid file will contain 2 blocks of 6 rows with 11 grid point indices, one block for the x-co-
ordinates and the second block for the y-co-ordinates.
The grid enclosure will include the extra grid (array) points and the default grid enclosure will
go through the points (1, 1), (12, 1), (12, 7) and (1, 7).
In the Visualisation Area a grid will be displayed of 11 ∗6grid points (with 10 ∗5grid cells).
In the FLOW-GUI Mmax = 12 and Nmax = 7.
Figure E.5 shows the grid and the grid enclosure for this example.
The closed (thick) outer line is the grid enclosure, the thinner inner line represents the compu-
Deltares 677 of 688

DRAFT
Delft3D-FLOW, User Manual
tational grid. The number of computational control volumes inside the area enclosed by thin
lines is 10 ∗5, as it was meant to be.
Remarks:
The channel only has the required area of 5·107m2if the left and right open bound-
aries are velocity controlled. The channel area will be 5.5·107m2when both open
boundaries are water level controlled and 5.25 ·107m2with a combination of water
level and velocity controlled boundaries.
In (almost) all practical applications this artefact is unimportant and transparent, only in
these simple cases you must be aware of these peculiarities.
You must take into account the type of boundary conditions you are going to apply when
you define the computational grid.
678 of 688 Deltares

DRAFT
F Delft3D-NESTHD
F.1 Introduction
Delft3D-FLOW models require hydrodynamic and transport boundary conditions. In case
the boundary conditions of a model are generated by a larger (overall) model we speak of
a nested model. Nesting in Delft3D-FLOW is executed in three steps, using two separate
utilities and the Delft3D-FLOW program. This manual describes the steps to generate time-
series boundary conditions for a nested Delft3D-FLOW model.
In principle, the nested boundary conditions are generated by bi-linear interpolation of com-
putational results at monitoring stations of the overall model.
The procedure to generate nested time-series boundary conditions consists of 3 steps:
1 Using the tool NESTHD1 a list of monitoring stations in the overall model, needed for the
interpolation, can be generated. In addition to this, the program generates the nesting
administration, i.e. the link between the boundary support points in the nested model and
the monitoring stations in the overall model.
2 Run the overall model with the list of monitoring stations generated by NESTHD1.
3 The actual time-series boundary conditions for the nested model are generated by NESTHD2
using the history file of the overall model and the nest administration.
Restrictions:
At present, the nesting programs have the following limitations:
1 Both model grids must be supplied in separate grid files and must be defined in the same
co-ordinate system.
2 Hydrodynamic time-series boundary conditions for the nested model are of the water level
or (perpendicular) velocity type. Discharge and Riemann boundary conditions are not
implemented yet.
3 The boundary definition of the nested model has to be supplied as an attribute file.
4 Temporary dry points in the overall model are not taken into account in the nesting pro-
grams.
5 For a nested 3D model the number and the thickness of the layers must be identical to the
overall model.
6 The generated time-series boundary conditions are written to a time-series file. This im-
plies that the reference date of a simulation with the nested model must be identical to the
reference date of the overall model simulation used to generate the boundary conditions.
F.2 How to use NESTHD1
NESTHD1 is part of the Delft3D-FLOW tools. To access NESTHD1, first set the current
directory to the directory where you have stored the required input files. Then:
Select Tools in the Hydrodynamics selection window, see Figure F.1:
Next Figure F.2 is displayed.
To start NESTHD1:
Select Nesting (1).
You are asked to supply the following information, see also Figure F.3:
Deltares 679 of 688
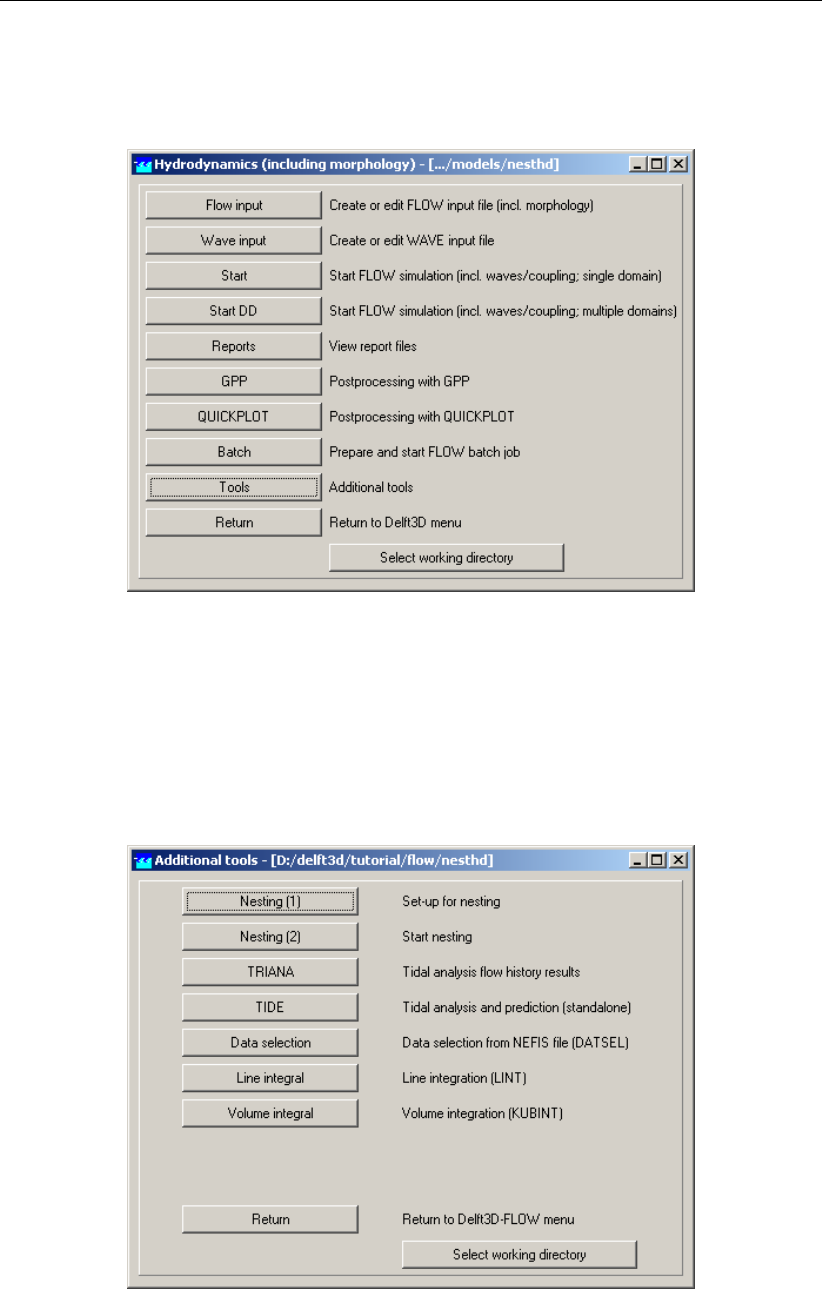
DRAFT
Delft3D-FLOW, User Manual
Figure F.1: Hydrodynamics selection window with the Tools option
Figure F.2: Additional tools window with the NESTHD1 and NESTHD2 options
680 of 688 Deltares
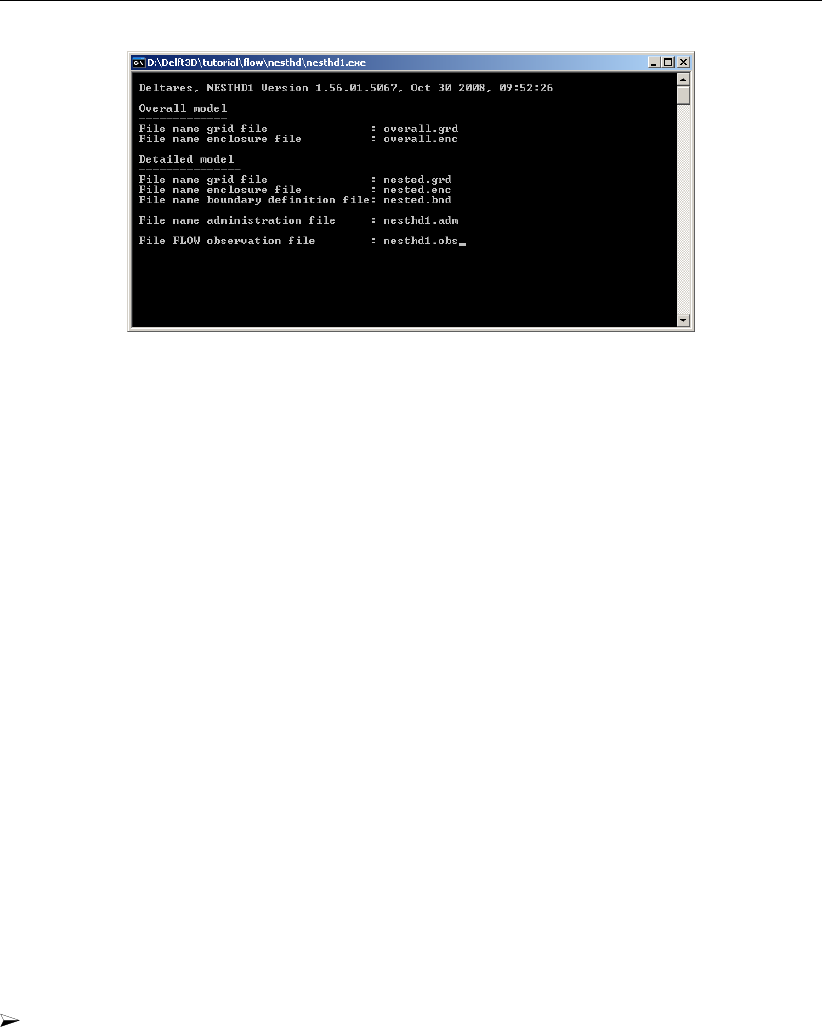
DRAFT
Delft3D-NESTHD
Figure F.3: Specification of input and output files for NESTHD1
1 The filename of the grid file of the overall model.
2 The filename of the enclosure file of the overall model.
3 The filename of the grid file of the nested model.
4 The filename of the enclosure file of the nested model.
5 The filename of the boundary definition file of the nested model. This file must fulfil the
conventions as specified in the Delft3D-FLOW manual.
6 The name of the file which will contain the nest administration. An example of this file as
used for nesting of the Stonecutters Island model in the Pearl Estuary model is given in
section F.4.
7 The name of the file which will contain the position of the monitoring stations in the overall
model. This file can be used directly in a Delft3D-FLOW simulation with the overall model.
After running NESTHD1 a simulation with the overall model should be executed using the
monitoring stations as generated by NESTHD1.
F.3 How to use NESTHD2
NESTHD2 is part of the Delft3D-FLOW tools. To access NESTHD2, first set the current
directory to the directory where you have stored the required input files. Then enter the Tools
menu, see Figure F.1.
To start NESTHD2, see Figure F.2:
Select Nesting (2).
You are asked to supply the following information, see also Figure F.4:
1 The boundary definition file of the detailed model.
2 The name of the administration file as generated by NESTHD1.
3 The extension (runid) of the history file of the overall model.
4 The name of the file which will contain the hydrodynamic boundary conditions. This file
can be used directly in a simulation with the nested model.
5 The name of the file which will contain the transport boundary conditions. This file can be
used directly in a simulation with the nested model.
6 The filename of the diagnostic file. You are advised to inspect this file.
7 An optional (constant) adjustment of the boundary values at water level boundaries. This
can be used if both models have a different vertical reference level.
8 In case of a 3-dimensional overall model and a nested model with velocity boundaries
you are asked if you want to generate depth-averaged or 3-dimensional velocity boundary
conditions.
Deltares 681 of 688
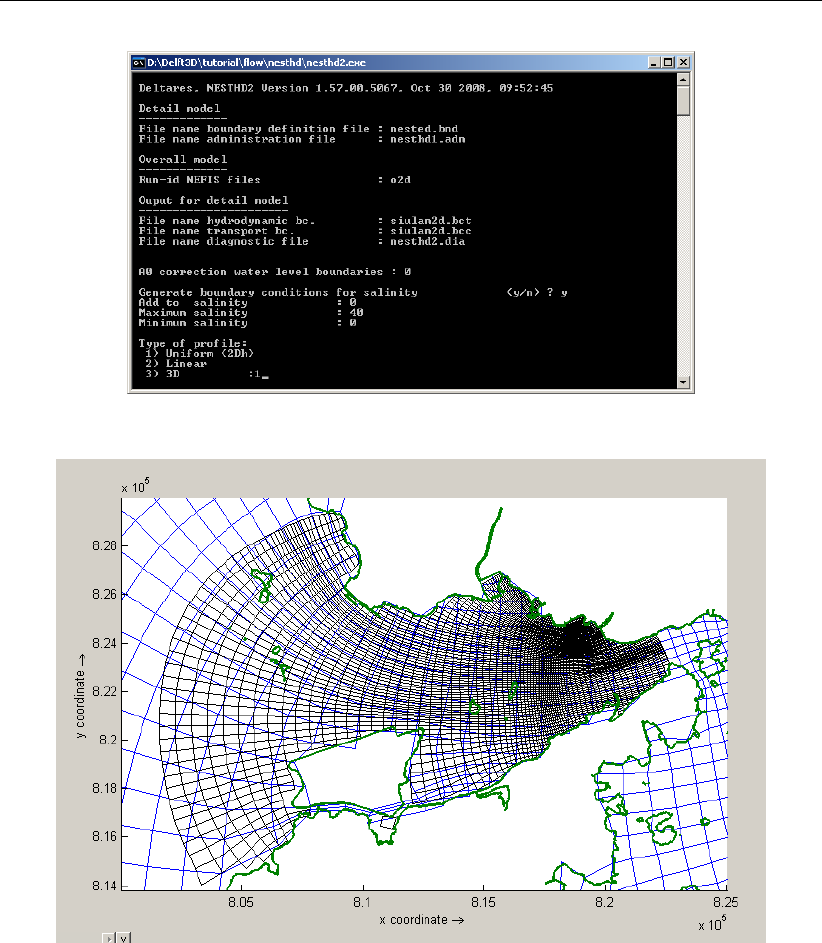
DRAFT
Delft3D-FLOW, User Manual
Figure F.4: Specification of input and output files for NESTHD2
Figure F.5: Overview grids overall and nested models
9 For each of the constituents in the overall model you are asked:
9.1 If you want to generate boundary conditions for this constituent.
9.2 How much you want to add to the computed overall model value for this constituent.
9.3 The maximum value for this constituent.
9.4 The minimum value for this constituent.
10 The type of transport profile. You can chose between a uniform profile for depth-averaged
computations with the nested model, a linear profile using only the computed boundary
values at the surface and the bed and a 3D-profile resulting in boundary values for all
computational layers of the nested model.
682 of 688 Deltares

DRAFT
Delft3D-NESTHD
F.4 Example
This example describes the nesting of the Siu Lam model in the Pearl Estuary model. The
grid layout of both models is given in Figure F.5:
The input and output files of this example are stored in the FLOW Tutorial directory: <tutorial\flow\nesthd>.
Using NESTHD1 the monitoring stations file and the administration file are generated. The
contents of these files are shown below:
Part of monitoring stations file <nesthd1.obs>:
(M,N) = ( 27, 35) 27 35
(M,N) = ( 27, 36) 27 36
(M,N) = ( 27, 41) 27 41
(M,N) = ( 27, 42) 27 42
(M,N) = ( 28, 35) 28 35
(M,N) = ( 28, 36) 28 36
.....
.....
(M,N) = ( 29, 35) 29 35
(M,N) = ( 29, 36) 29 36
(M,N) = ( 29, 41) 29 41
(M,N) = ( 29, 42) 29 42
(M,N) = ( 31, 30) 31 30
(M,N) = ( 31, 31) 31 31
These monitoring stations have been included (added) to the already existing <∗.obs>file
of the Pearl model. In this tutorial <hkcrssl1.obs>.
Part of the administration file <nesthd1.adm>:
*
*Deltares, NESTHD1 Version 1.56.01.5067, Oct 30 2008, 09:52:26
*
*Run date: 2008/10/30 09:56:52
*
*Name grid file overall model : overall.grd
*Name enclosure file overall model : overall.enc
*
*Name grid file detailed model : nested.grd
*Name enclosure file detailed model : nested.enc
*Name bnd. definition file detailed model : nested.bnd
*
*Name nest administration file : nesthd1.adm
*Name FLOW observation file : nesthd1.obs
*
Nest administration for water level support point (M,N) = ( 49, 1)
28 45 0.5107
29 45 0.1822
28 46 0.2264
29 46 0.0808
Nest administration for water level support point (M,N) = ( 56, 1)
28 43 0.1496
29 43 0.0271
28 44 0.6972
29 44 0.1261
....
....
Nest administration for water level support point (M,N) = ( 53, 74)
47 45 0.8563
Deltares 683 of 688
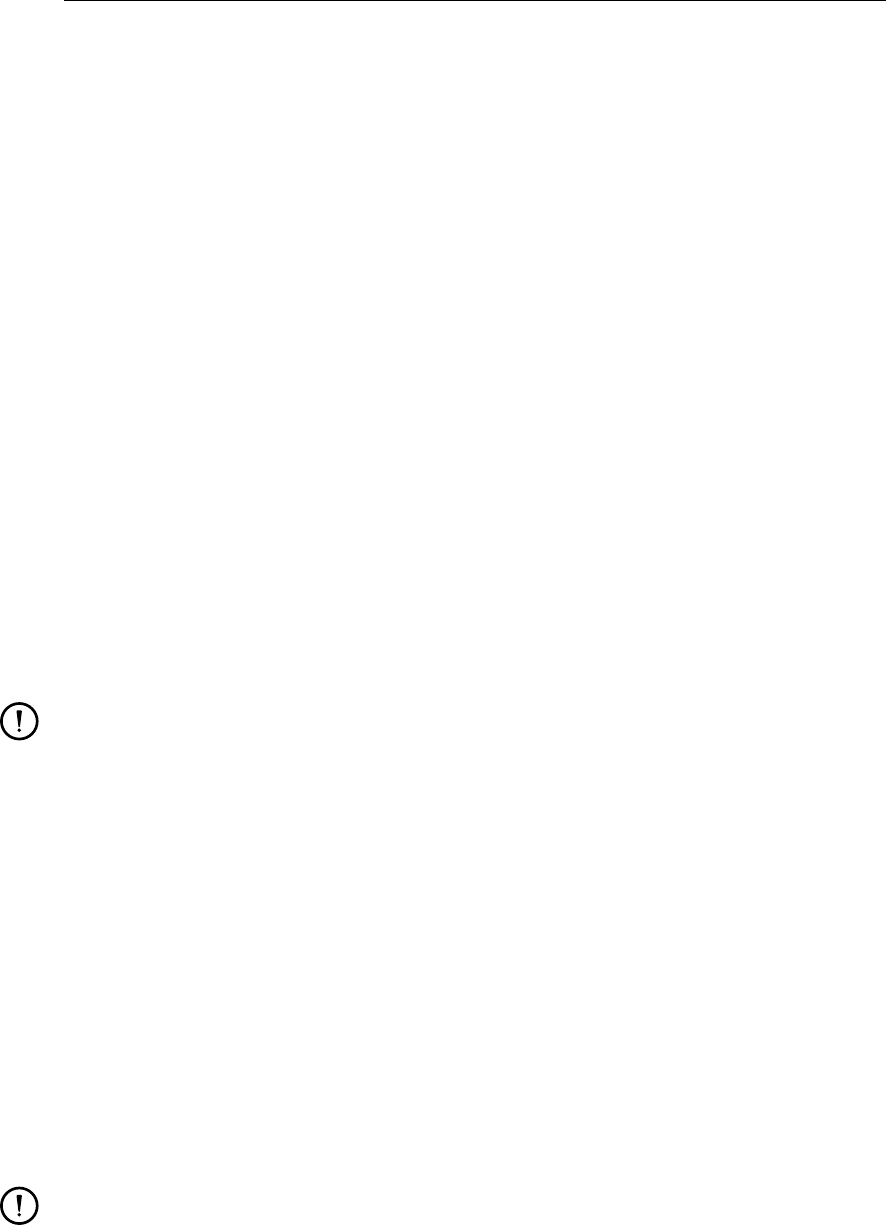
DRAFT
Delft3D-FLOW, User Manual
48 45 0.1437
0 0 0.0000
0 0 0.0000
Nest administration for water level support point (M,N) = ( 57, 74)
47 44 0.3268
48 44 0.0964
47 45 0.4454
48 45 0.1314
Nest administration for velocity support point (M,N) = ( 49, 1) Angle = 20.409
28 45 0.3888
29 45 0.3216
28 46 0.1585
29 46 0.1311
Nest administration for velocity support point (M,N) = ( 56, 1) Angle = 20.409
28 43 0.1368
29 43 0.0773
28 44 0.5022
29 44 0.2838
....
....
Nest administration for velocity support point (M,N) = ( 53, 74) Angle = 122.632
47 45 0.9973
48 45 0.0027
0 0 0.0000
0 0 0.0000
Nest administration for velocity support point (M,N) = ( 57, 74) Angle = 122.632
47 44 0.4247
48 44 0.0355
47 45 0.4982
48 45 0.0416
Remarks:
When you run the NESTHD1 tool, the location of the nested boundary should be final.
The type of data (water level or velocity) need not be final. That’s why NESTHD1
generates the administration for both.
The type of data should also be final. NESTHD1 only generates the administration for
time-series.
The first lines, starting with an asterisk, are comment lines. These are followed by several
blocks of 5 lines containing the information on nesting of water level and transport boundaries.
The first of these lines gives the indices of the boundary support point. This line is followed
by 4 lines containing the indices of the surrounding overall model monitoring stations and the
relative weights of these stations. The information on nesting of water levels and transport is
followed by information on nesting of velocities.
To adjust the nesting, for instance to avoid the use of a monitoring station that dries during the
computation, the administration file should be adjusted by hand.
Before running NESTHD2, first the overall model should be run, using the <o2d.mdf>file.
Remark:
It is a good modelling practice to re-generate the bathymetry in the overall model using
the detailed bathymetry of the nested model.
If you Verify this scenario the following warning will be generated:
*** WARNING Station (M,N) = ( 28, 46) lies outside the computational domain
This means that this required nesting stations lies on a dry point. If you check the adminis-
684 of 688 Deltares

DRAFT
Delft3D-NESTHD
tration file, you will see that every boundary support point has at least 2 overall nest stations.
Ignoring the nest station which lies on a dry point would result in the worst case that the nest-
ing information only comes from 1 overall station. (If you check the administration file carefully,
you will find out that the mentioned station is always part of a set of 4.)
Using the administration file <nesthd1.adm>and the history file <trih-o2d.∗>of the Pearl
Estuary model, the boundary conditions for the Siu Lam model have been generated by run-
ning NESTHD2.
The result files are the hydrodynamic flow boundary conditions <siulam2d.bct>and the
transport boundary conditions <siulam2d.bcc>.
The diagnostic file contains the following warning:
*** Warning: Nest station ( 28, 46) not on history file. Weights reset
This station, as noted before, lies on a dry point. NESTHD2 then resets weights.
Deltares 685 of 688

DRAFT
Delft3D-FLOW, User Manual
686 of 688 Deltares
DRAFT

PO Box 177
2600 MH Del
Rotterdamseweg 185
2629 HD Del
The Netherlands
+31 (0)88 335 81 88
sales@deltaressystems.nl
www.deltaressystems.nl
DRAFT
