第一章 产品简介 Ginkgo USB CAN Interface User Manual V1.2
Ginkgo%20USB-CAN%20Interface%20User%20Manual%20v1.2
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 21

Ginkgo
USB-CAN Interface
VTG203B
User Manual
v1.2

ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2 www.viewtool.com
Chapter 1 Product Introduction ....................................................................................... - 1 -
1.1 General Introduction .......................................................................................... - 1 -
1.2 Property and Technical Specification ................................................................ - 1 -
1.3 Typical Application............................................................................................. - 2 -
1.4 Sales Order ....................................................................................................... - 2 -
1.5 Operation Condition........................................................................................... - 2 -
1.6 Technical Support and Service ......................................................................... - 3 -
Chapter 2 Outline and Interface Description .................................................................. - 4 -
2.1 Outline and Interface ......................................................................................... - 4 -
2.2 Interface Definition............................................................................................. - 4 -
2.3 Wiring ................................................................................................................. - 4 -
Chapter 3 Software Instruction ....................................................................................... - 5 -
3.1 Software Download & Install ............................................................................. - 5 -
3.1.1 Software Download ................................................................................. - 5 -
3.1.2 Software Install ........................................................................................ - 5 -
3.2 Software Operation Instruction .......................................................................... - 9 -
3.2.1 Software Introduction .............................................................................. - 9 -
3.2.2 Initialization Settings ............................................................................. - 10 -
3.2.3 Filter Setting .......................................................................................... - 11 -
3.2.4 Send Data ............................................................................................. - 12 -
3.2.5 Color Setting.......................................................................................... - 13 -
3.2.6 Alias Definition ...................................................................................... - 14 -
3.2.7 CAN Bus Status Display ....................................................................... - 14 -
3.2.8 Data Receive ......................................................................................... - 15 -
3.2.9 Data Sending in Identifier List Mode ..................................................... - 16 -
3.2.10 Adapter Status Display ....................................................................... - 16 -
Chapter 4 CAN bus Frame Format ............................................................................... - 17 -
4.1 Standard Data Frame Structure ...................................................................... - 17 -
4.2 Extended Data Frame Structure ..................................................................... - 17 -
4.3 Standard Remote Frame Structure ................................................................. - 17 -
4.4 Extended Remote Frame Structure ................................................................ - 18 -
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 1 -
Chapter 1 Product Introduction
1.1 General Introduction
Ginkgo USB-CAN Interface is an adapter equipped with both USB2.0 interface and
2-channel CAN interface which can be used for bidirectional data transmission.
As a standard CAN node, Ginkgo USB-CAN Interface is a powerful tool in CAN bus
product development, CAN bus device test and data analysis. PC is connected to
standard CAN network via USB interface to perform data collection, data process as well
as data communication when forging an onsite bus testing laboratory or in industrial
control and automotive electronics development etc. Ginkgo USB-CAN Interface is small
in size and convenient to install thus is an ideal portable device in real application.
CAN bus configuration, data sending and receiving are realized via PC software. A
set of standard universal software (for free) and quadratic programmable API are provided
to the user and the user can write the PC software on the basis of real needs. Application
routine of development tools provided at present includes: Labview, C#, VC, Qt, Python,
Labwindows/CVI, C++ Builder, VB, VB.NET, Delphi, CodeBlocks etc. Please download at
the official website of ViewTool (www.viewtool.com). It is no need to learn complicated
USB interface communication protocol when develop quadratic software.
1.2 Property and Technical Specification
- USB and CAN bus protocol conversion.
- CAN interface with two isolated channels.
- USB supports USB2.0 with USB1.1 compatible.
- 2500 VRMS isolation.
- Low loop delay: 150ns (Typical), 210ns (Max).
- Interface has a typical TI (transient immunity) of 50kV/μs.
- -27V to 40V bus fault protection.
- Port featured with electrostatic protection function(Air - 15kV,Contact - 8kV).
- Supports CAN2.0A, CAN2.0B protocol, standard frame and extended frame. Each
channel supports 14 filters for most. Filtering has identifier mask mode and identifier
list mode for selection.
- Supports bidirectional transmission, CAN sending and receiving.
- Supports data frame and remote frame format.
- Baud rate of CAN controller is selectable in a range of 20Kbps-1Mbps which can be
set via software.
- Maximum flow reaches 8000 FPS (Standard ID data frame 8 byte) or above.
Standard remote frame rate reaches 18000 FPS.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 2 -
- Each channel has an isolated buffer of 2000 frame.
- USB bus powered directly without any external power supply.
- With USB interface protection function.
- Working temperature: -40 to 85℃.
- Working current 80mA, with a consumption less than 400mW.
- Size: 103mm×53mm×28mm.
1.3 Typical Application
- CAN bus network data sending and receiving via USB of PC.
- CAN network data monitoring in industrial site.
- Automotive CAN bus application.
- CAN network diagnosis and test.
- CAN network data acquisition and analysis.
- CAN bus to USB gateway.
- Extend the distance of CAN bus network communication.
- USB to CAN network interface.
1.4 Sales Order
NO.
Name
Quantity
1
Ginkgo USB-CAN Interface
1 PCS
2
USB A→B cable
1 PCS
3
Quick guide of Ginkgo series
1 PCS
*In case of any damage or accessories missing, please contact the nearest agency as
soon as possible.
1.5 Operation Condition
Requirement on operating system:
Name of OS
Specification
Windows XP(32-Bit and 64-Bit version)
Support
Windows7(32-Bit and 64-Bit version)
Support
Windows VISTA(32-Bit and 64-Bit version)
Support
Windows8(32-Bit and 64-Bit version)
Support(ban digital signature of 64-Bit
system )
Linux(32-Bit and 64-Bit version)
Support
MAC OS
Support
Android
Support
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 3 -
Requirement on hardware:
Name of Hardware
Min. Configuration
Requirements
Recommend
Configuration
RAM
166 MHz
900 MHz
Display
64 MB
256 MB
HDD
Resolution ratio:
800*600 or higher
Resolution ratio: 1024*768
USB
100MB or more available space
100MB or more available
space
RAM
Support USB1.1
Support USB2.0
1.6 Technical Support and Service
- Lifetime technical support, free services and maintenance within one year.
- Down load diver, software, User’s Manual and application routine source code at
www.viewtool.com.
- Technical exchange forum: www.viewtool.com/bbs
- Technical support Email:FAE@viewtool.com
- Sales Email:Sales@viewtool.com

ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 4 -
Chapter 2 Outline and Interface
Description
2.1 Outline and Interface
2.2 Interface Definition
- H: CAN-High signal
- L: CAN-Low signal
- R: 120Ω terminal resistance connecting selection
- G: CAN bus GND
2.3 Wiring
- H: Connected to CAN-High signal of CAN bus
- L: Connected to CAN-Low signal of CAN bus
- R and L: 120Ω terminal resistance connected to CAN bus after short circuit
- G: Connected to GND of CAN bus
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 5 -
Chapter 3 Software Instruction
3.1 Software Download & Install
3.1.1 Software Download
Download the software on the official website of ViewTool: www.viewtool.com, or click
here to download.
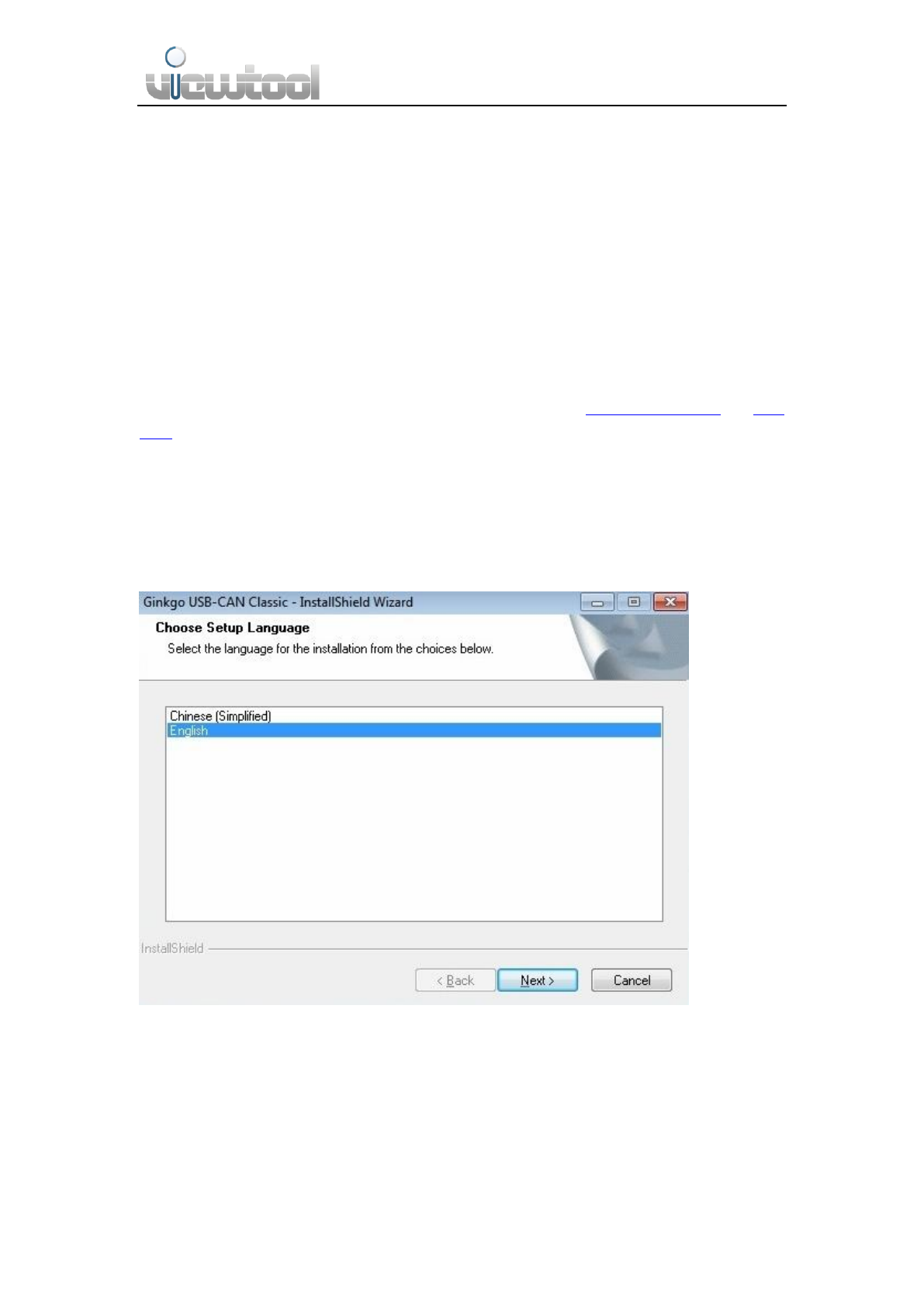
3.1.2 Software Install
STEP 1. Unzip the RAR to Local, double click the executable file, dialog box pops up for
language selection. Select the language and click “Next”.
STEP 2. Click “Next” directly.

ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 6 -
STEP 3. Select Accept License Agreement, and click “Next”.
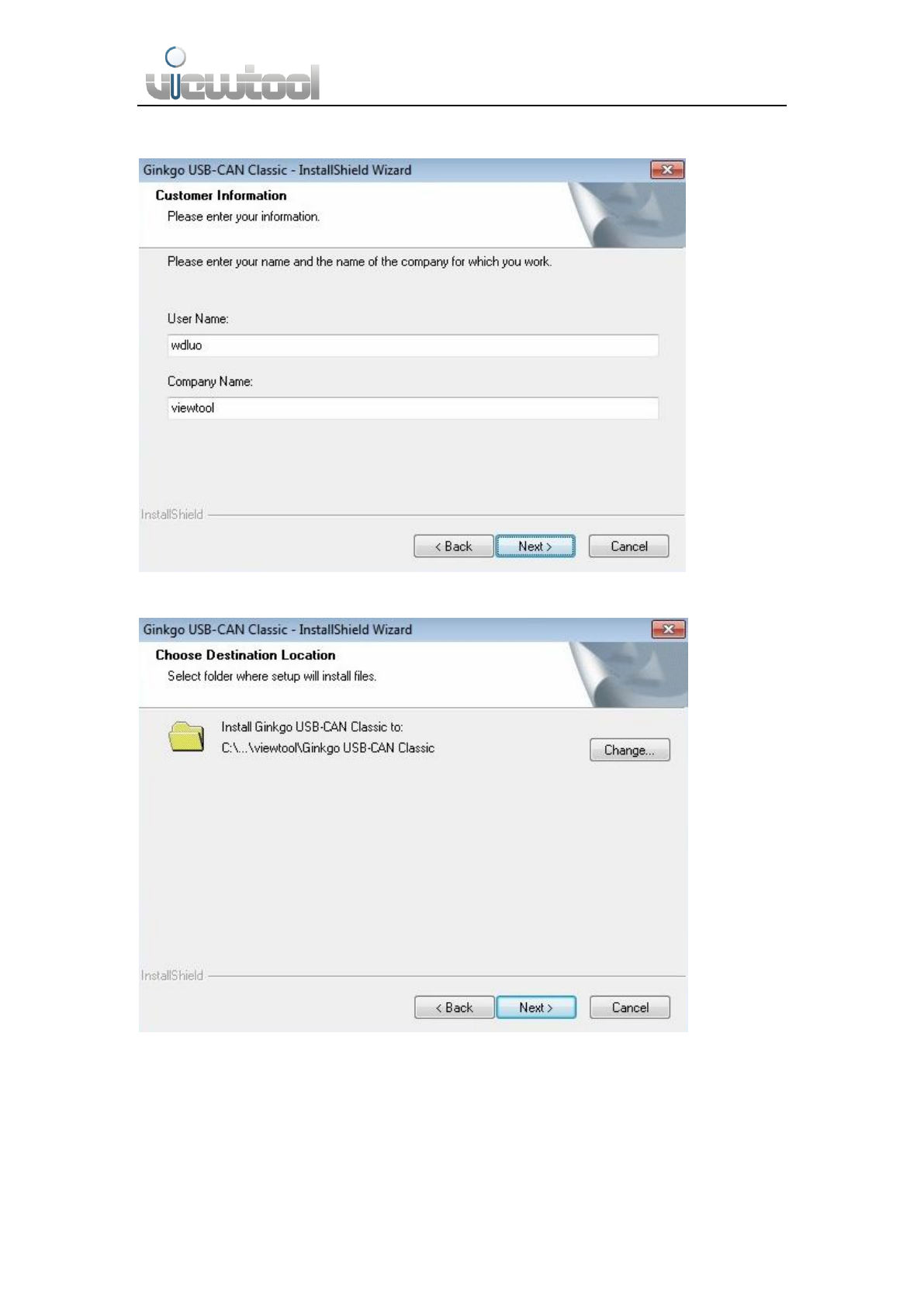
STEP 4. Enter your name and company name, click “Next”.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 7 -
STEP 5. Select installation destination location according to your needs, click “Next”.
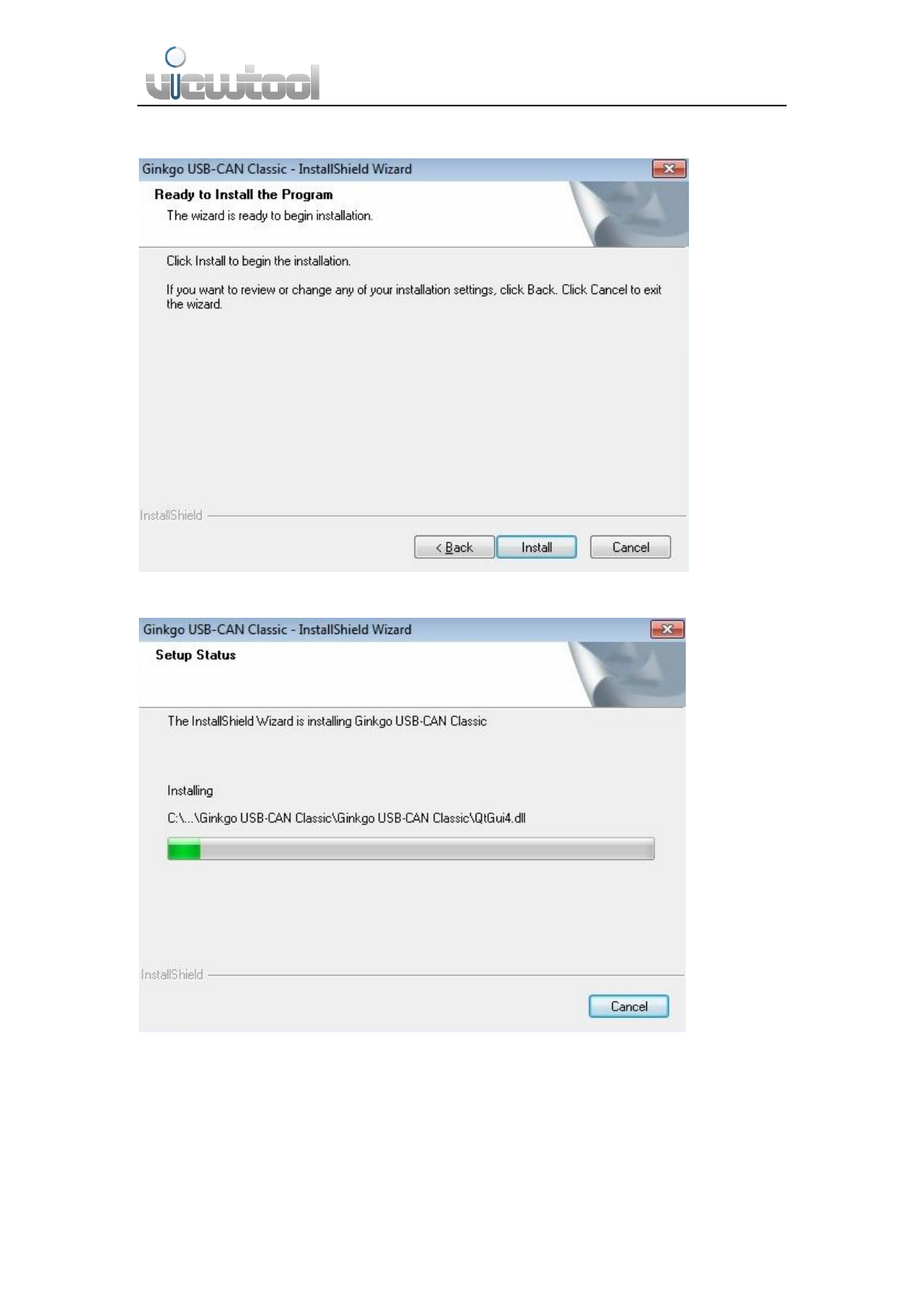
STEP 6. Click “Install” to begin installation.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 8 -
STEP 7. Installing, please wait.
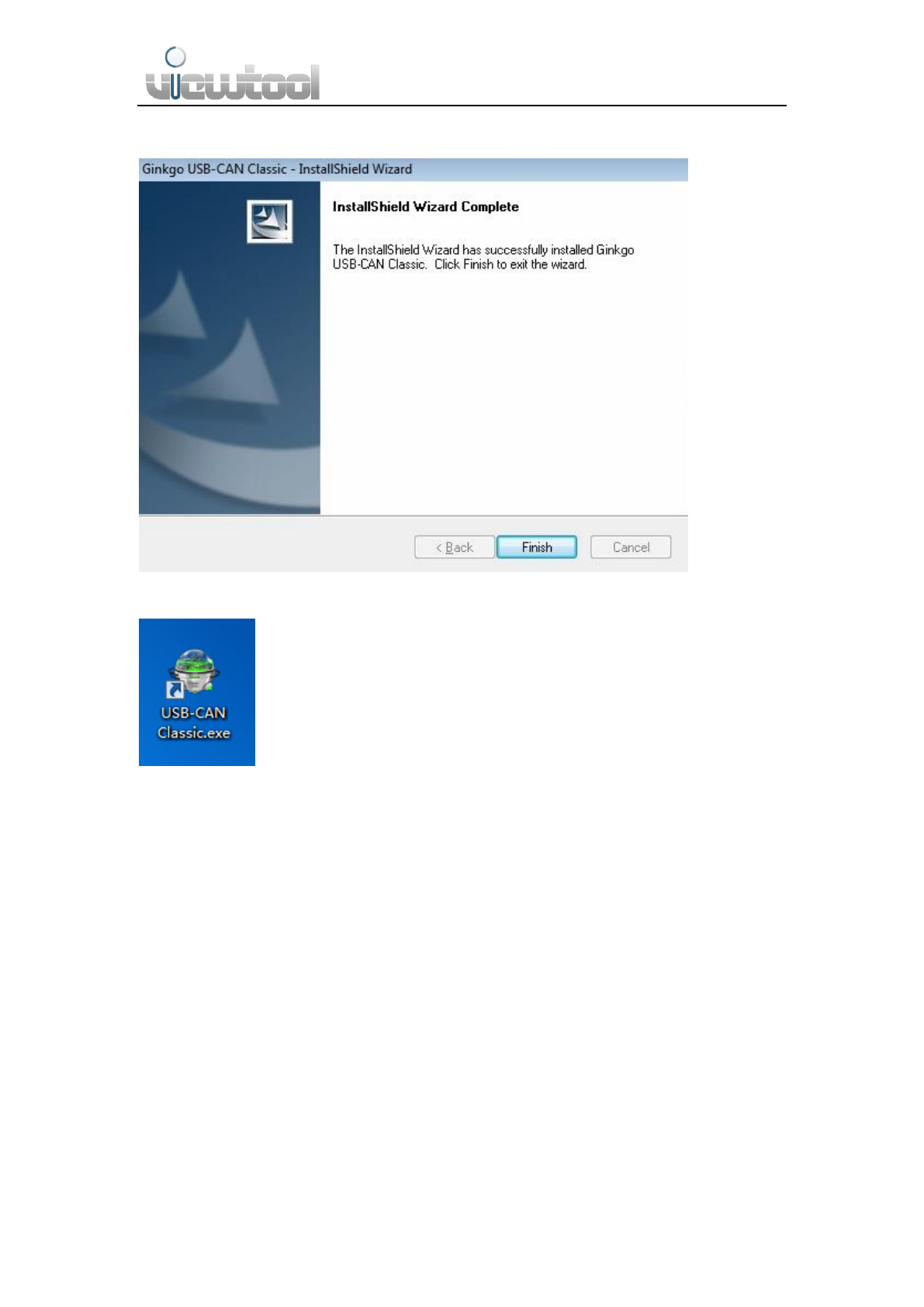
STEP 8. Click “Finish” to exist the wizard.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 9 -
Program installation finished, and an icon as below is shown on the computer desktop.
3.2 Software Operation Instruction
3.2.1 Software Introduction
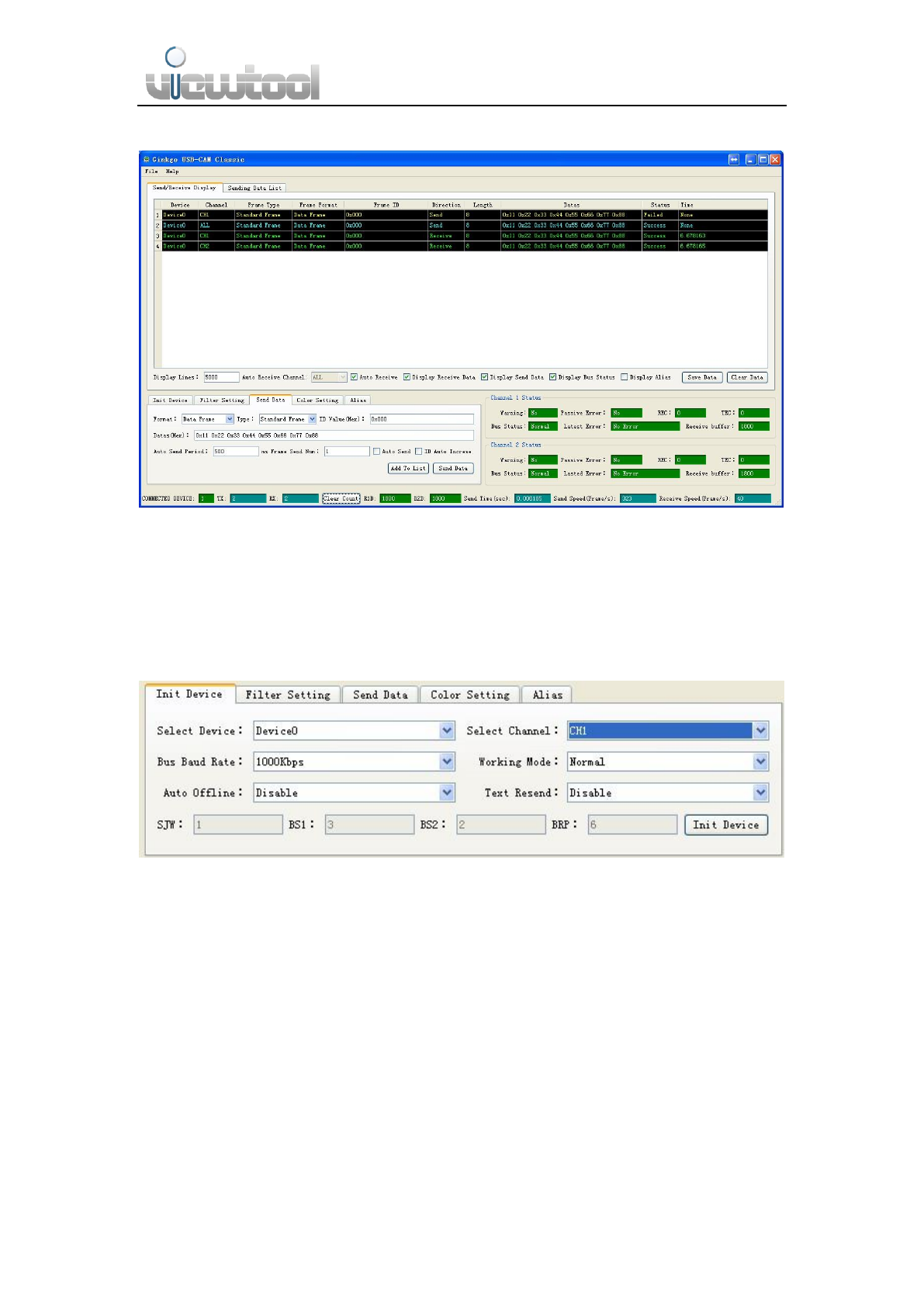
Ginkgo USB-CAN Classic software is general purpose software for Ginkgo USB-CAN
adapter. It can be used to control Ginkgo USB-CAN adapter data reading and writing. The
main interface of the software is shown as below:
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 10 -
3.2.2 Initialization Settings
Initialize Ginkgo USB-CAN adapter before reading and writing data to CAN bus via
Ginkgo USB-CAN adapter. Initialization interface of USB-CAN Classic software is shown
as below.
- Select Device: software counts the number of adapter connected to PC
automatically and adapter connected are listed in the drop-down box. Select the
device. The number of device connected is shown at the left bottom.
- Select Channel: select CAN channel that to be used. To operate two channels
simultaneously, select All.
- Bus Baud Rate: 2kbps~1000kbps selectable, or user-defined.
- SJW (setting value: 1~4), upper limit of time unit to be extend or shorten in each bit.
BS1 (setting value: 1~16), define sampling location.
BS2 (setting value: 1~8), define sending point location.
BRP (setting value: 1~1024), baud rate frequency divider.
CAN baud rate = 36MHz / (BRP) / (SJW + BS1 + BS2)
- Working Mode:
1) Normal: receive and send text normally;

ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 11 -
2) Look Back mode: adapter sends the self-test message to the bus, but cannot
receive data from bus;
3) Silent mode: in this mode, adapter can receive data on the bus normally but
cannot send message;
4) Look back combined with silent mode: this mode can be used for a “Hot Selftest”,
which means the CAN can be tested like in Loop Back mode but without affecting
bus data sending and receiving.
Look Back mode Silent mode Look back combined
with silent mode
- Auto Offline: if Enable is selected, adapter exits auto offline status once it detects 11
recessive bit for 128 times.
- Text Resend: if Enable is selected, system resends text continuously until success in
case of text sending failure. If Disable is selected, text is sent only once no matter
whether the text is sent successfully or not. If resend fails all the time, overtime error
would be returned for sending timeout.
3.2.3 Filter Setting
Set data receiving conditions via Filter Setting based on the real application needs.
Adapter can only get the data on the bus that meets the conditions. Filter setting has two
modes: Identifier List mode and Identifier Mask mode. Filter setting interface is shown as
below.
- Identifier List mode:
In Identifier List mode, adapter can receive text only when the text identifier on the bus
keeps the same as the identifier set here.
For instance, provided acceptance ID is 0x35, Mask IDE (Identifier Extension Bit) is 1,
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 12 -
Mask RTR (Remote Transmission Request) is 0, then only the extended data frame with a
identifier of 0x35 can go through filter and be received by adapter. Any other text cannot.
- Identifier Mask mode
In Identifier Mask mode, the user can appoint which bit with what value can be seen as
transited. That is to say only identifiers within a certian defined range can be transitted. If
Mask bit is “1”, the CAN frame of identifier to be accepted must be same as that of
acceptance code. If Mask bit is “0”, then no matter same or not, the identifier can be
transitted.
For instance, provided Mask ID is 1111 1111 101 (11 bits), Mask IDE is 1, Mask RTR is 0;
Acceptance code ID is 0000 0000 001 (11 bits), acceptance code IDE is 1, and
acceptance RTR is 0.
Except the second bit (0) from the right side of Mask ID and Mask RTR (0), other bits are
all 1. So only 4 group of CAN frame with identifier of 0000 0000 001 10, 0000 0000 001 11,
0000 0000 011 10, 0000 0000 011 11 can be transitted.
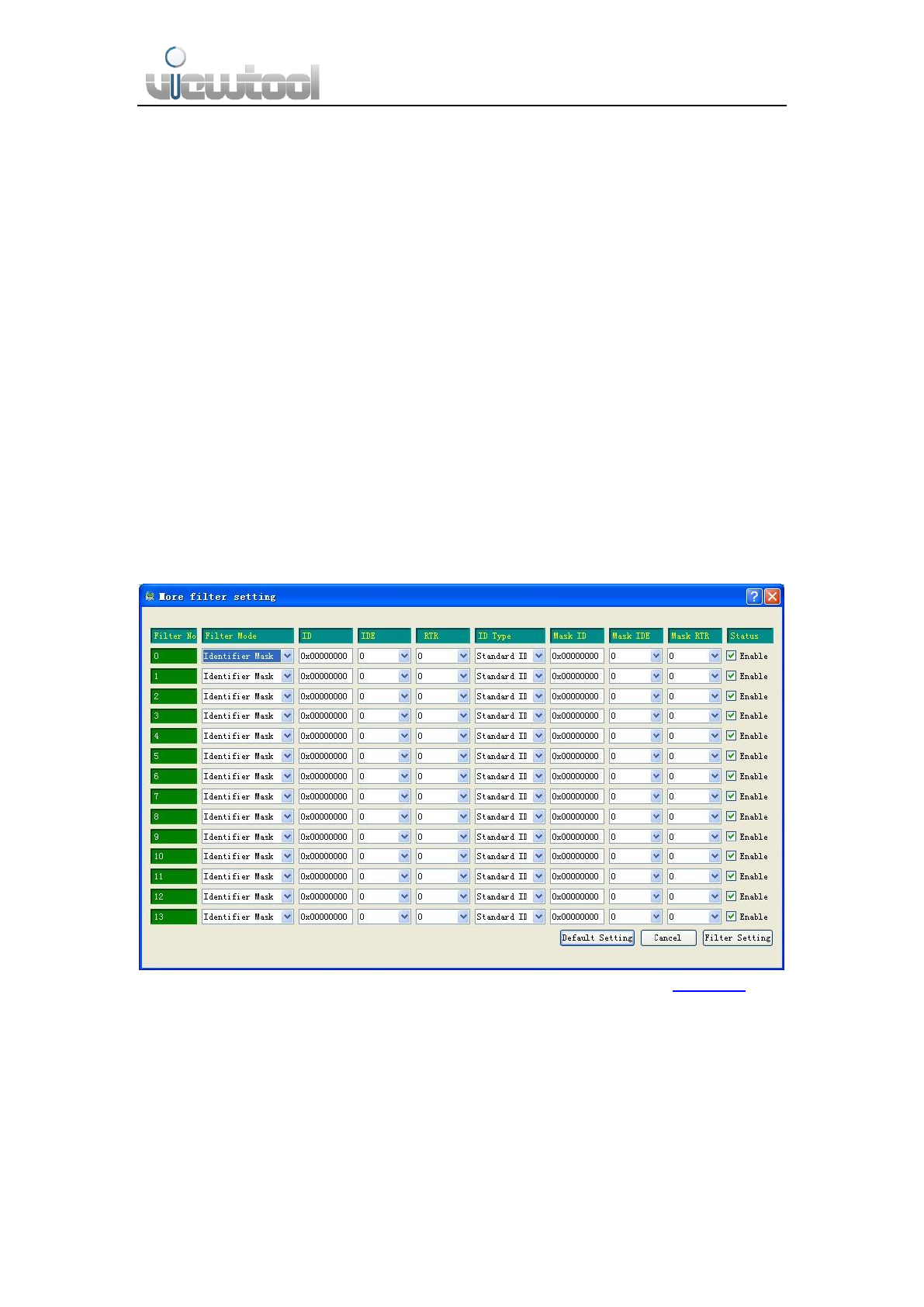
Each CAN channel of Ginkgo USB-CAN adapter can match with 14 filters, and each filter
works independently. If more filters are required, click “More Filter” to set. More filter
setting interface is shown as below.
After setting, click “Filter Setting” to ensure more filter setting works. Click here for
more filters setting guide.
3.2.4 Send Data
Select data send format and type in Send Data interface. The selection interface is shown
as below.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 13 -
- Format: select the frame format of data to be sent with Data Frame and Remote
Frame selectable;
- Type: select the frame type of data to be sent with Standard Frame and Extended
Frame selectable;
- ID Value (Hex): when Standard Frame is selected, ID value range is 0~0x7FF; when
Extended Frame is selected, ID value range is 0~0x1FFF FFFF;
- Datas(Hex): input hex data or int data with byte number less than or equal to 8.
- Frame Send Num: frame send number indicats the times this frame been sent after
clicking “Send Data” button.
- Auto Send: when selected, data would be sent automatically in periodical time that
has set in “Auto Send Period” box.
- Add To List: Click to add current frame to sending data list;
When auto send period time is set as 0, then fast data send mode is activated. In this
mode, system do not check the data sending status, in case data sending failure, sending
status is shown on bus.
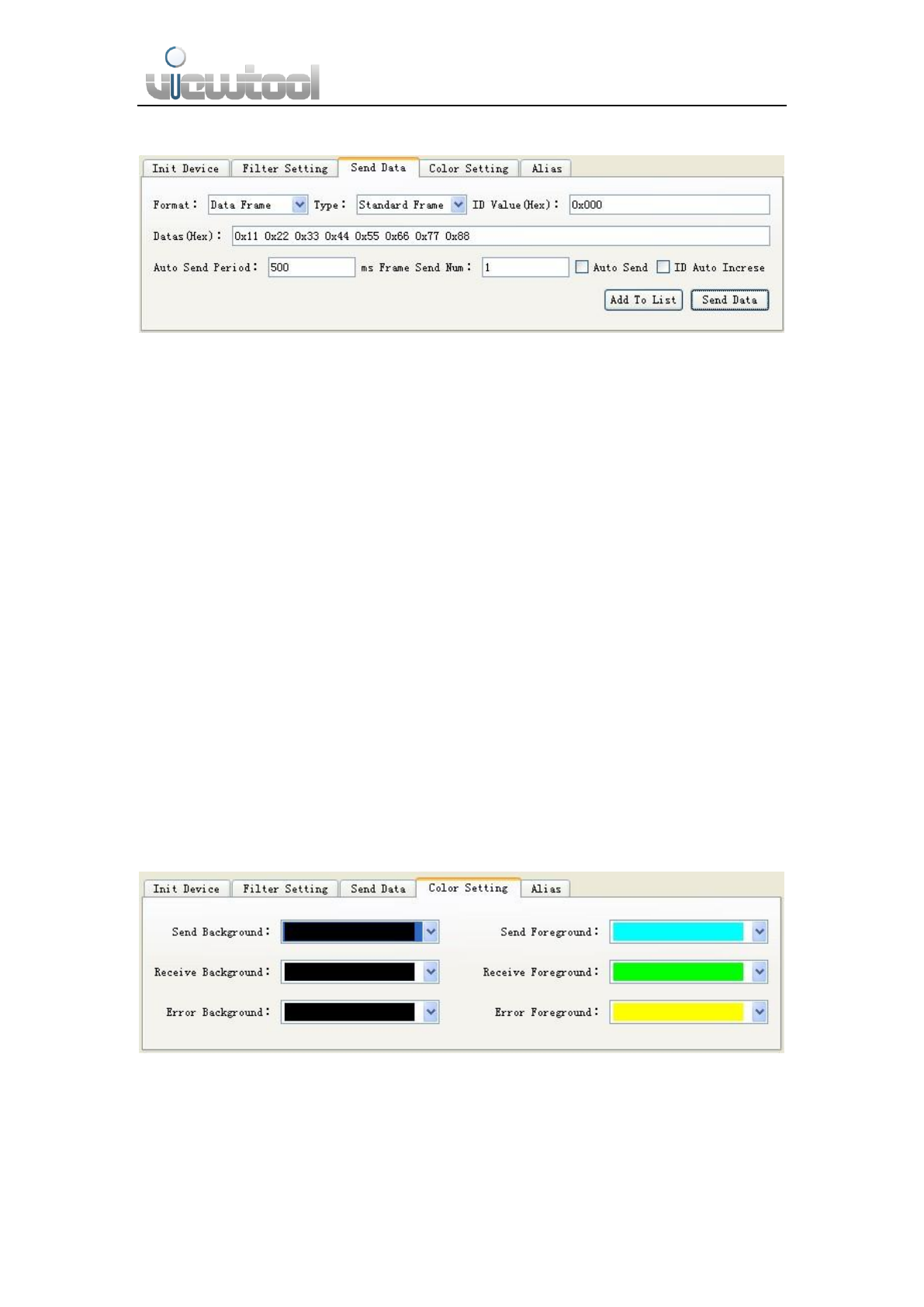
3.2.5 Color Setting
In order to distinguish Send Data, Receive Data and Error Frame, different displaying
foreground and background color are used. This software is featured with such kind of
function, and the setting interface is shown as below.
- Send Background: background color of data sending;
- Send Foreground: foreground color of data sending;
- Receive Background: background color of data receiving;
- Receive Foreground: foreground color of data receiving;
- Error Background: background color of error frame;
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 14 -
- Error Foreground: foreground color of error frame;
Picture shown below is an example.
3.2.6 Alias Definition
Generally, each frame ID has a specific meaning in bus data analysis. The meaning of
frame ID is displayed along with ID value in this software which is convenient for data
analysis. Picture below is Alias setting interface.
When received a frame with ID alias, software displays the specific alias along with frame
ID value. For instance, if the alias of ID value 0x100 is set as ”Motor Parameter” , when
the software received a frame whose ID value is 0x100, "0x100 [Motor Parameter] would
be shown on the interface. An example is given below.
3.2.7 CAN Bus Status Display
Since unexpected things may happen for some certain reason during CAN bus data

ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 15 -
receiving and sending such as data sending/receiving failure or adapter cannot work
normally, it is required for CAN adapter to shown real time operation status.
- Warning: indicate whether adapter error exists or not. Error warning includes
sending error warning and receiving error warning;
- Passive Error: indicate whether passive error exists or not;
- REC: indicate the counting value of adapter receiving error counter.
- TEC: indicate the counting value of adapter transmission error counter.
- Bus Status: indicate status of adapter and CAN bus connection: normal status or
offline status;
- Latest Error: interpretation of the latest error of adapter;
- Receive buffer: shows the free space of adapter data receive buffer.
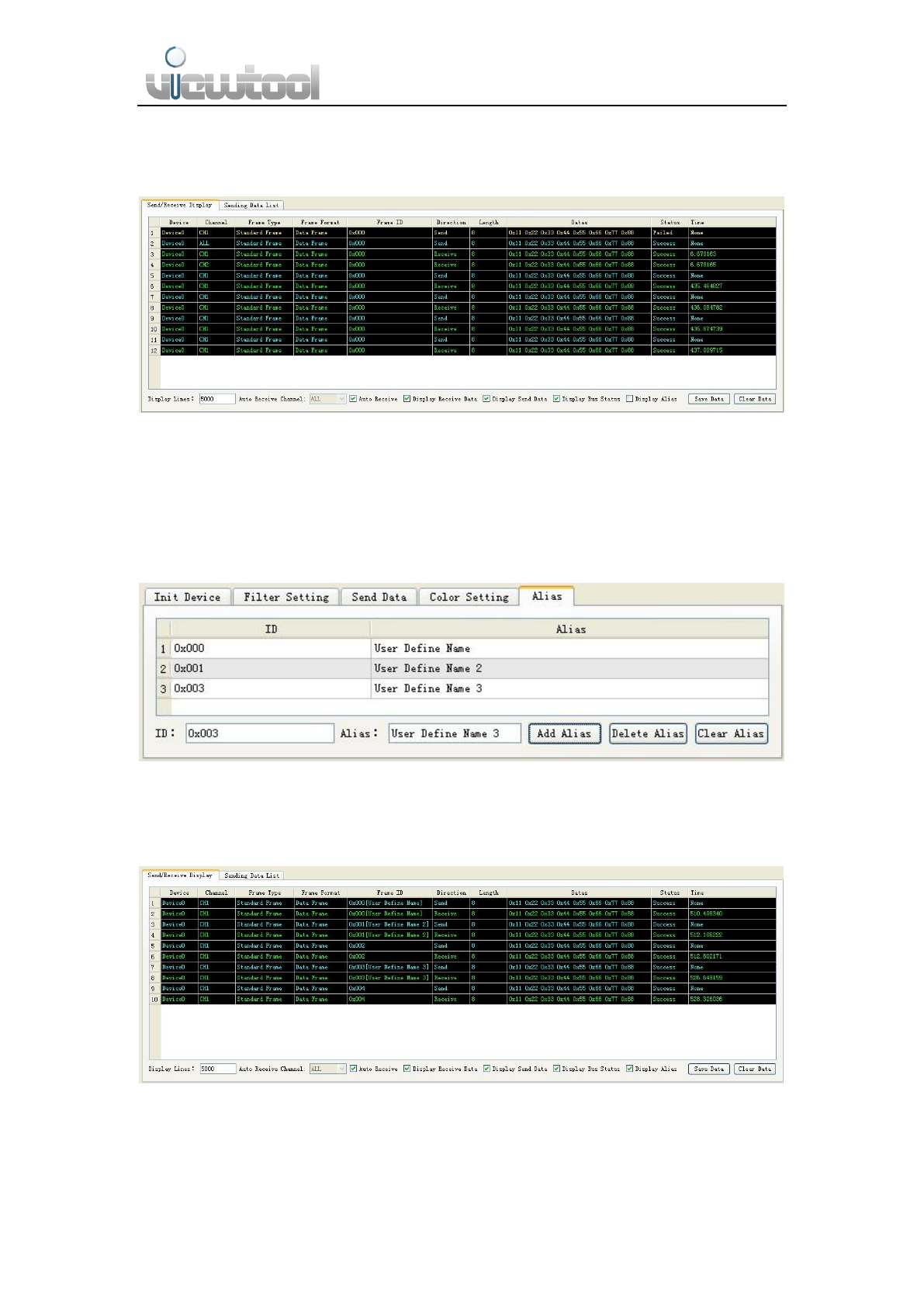
3.2.8 Data Receive
Data received is displayed in list form with Frame Type, Frame Format, Frame ID, Length,
Datas and Time etc shown clearly. Displaying interface is shown as below.
If adapter is required to receive data automatically, select “Auto Receive”. Set the display
contents such as data sent or received, bus status, frame ID alias in display settings.
Software works slowly when many contents are selected to display and data receive and
send speed are relatively high. So please make a reasonable displaying setting when data
is sent or received at a high speed.
Click “Save Data” button to save the data in the list to TXT or forms. Click “Clear Data” to
clear all data in the list.
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 16 -
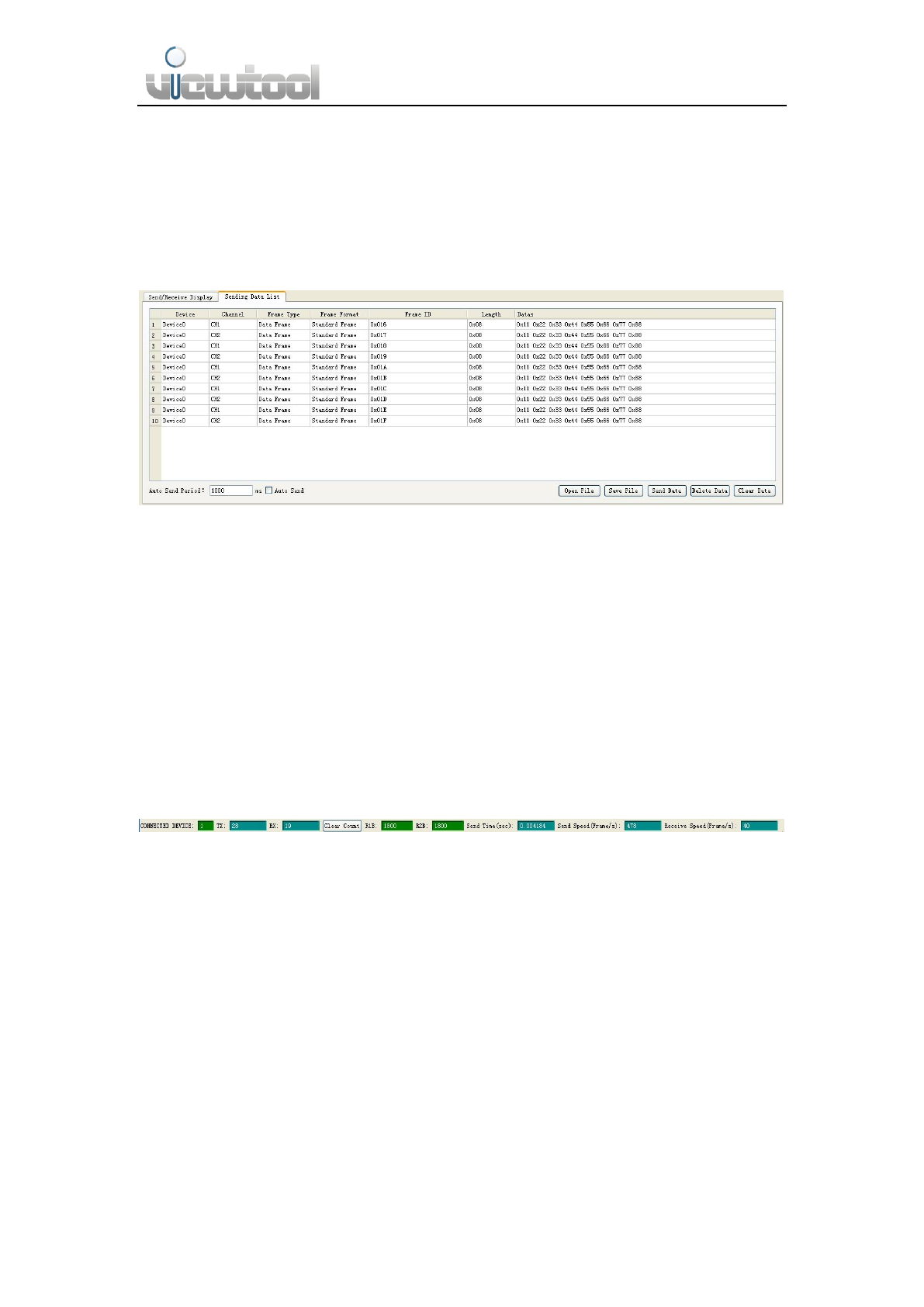
3.2.9 Data Sending in Identifier List Mode
Data in this software can also be sent in list format. Add multiple CAN frames into a list,
and then send the data in turn. This function is very useful in realizing upper layer protocol
or of that kind. Data sending interface in Identifier List mode is shown as below.
- Auto Send: send data periodically according to the time set in “Auto Send Period”
box;
- Open File: open the well-edited list file. Please refer to file save format for file format;
- Save File: save data in the list to files. It is convenient to use for the next time by
opening the file directly;
- Send Data: send data in the list via adapter CAN interface.
- Delete Data: delete data line selected.
- Clear Data: clear all data in the list.
3.2.10 Adapter Status Display
Real time operation status of software is shown in the status bar which is shown as below.
- CONNECTED DEVICE:the number of USB-CAN adapter devices connected to PC
at present;
- TX:CAN frame number that software has sent successfully;
- RX:CAN frame number that software has received successfully;
- Clear Count: clear all frame sent and received, i.e. the value of “TX” and “RX”;
- R1B:free space of channel 1 receiving buffer;
- R2B:free space of channel 2 receiving buffer;
- Send Time (sec): time spend on data sending;
- Send Speed (Frame/s): data sending speed at present;
- Receive Speed (Frame/s): data receiving speed at present;
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 17 -
Chapter 4 CAN bus Frame Format
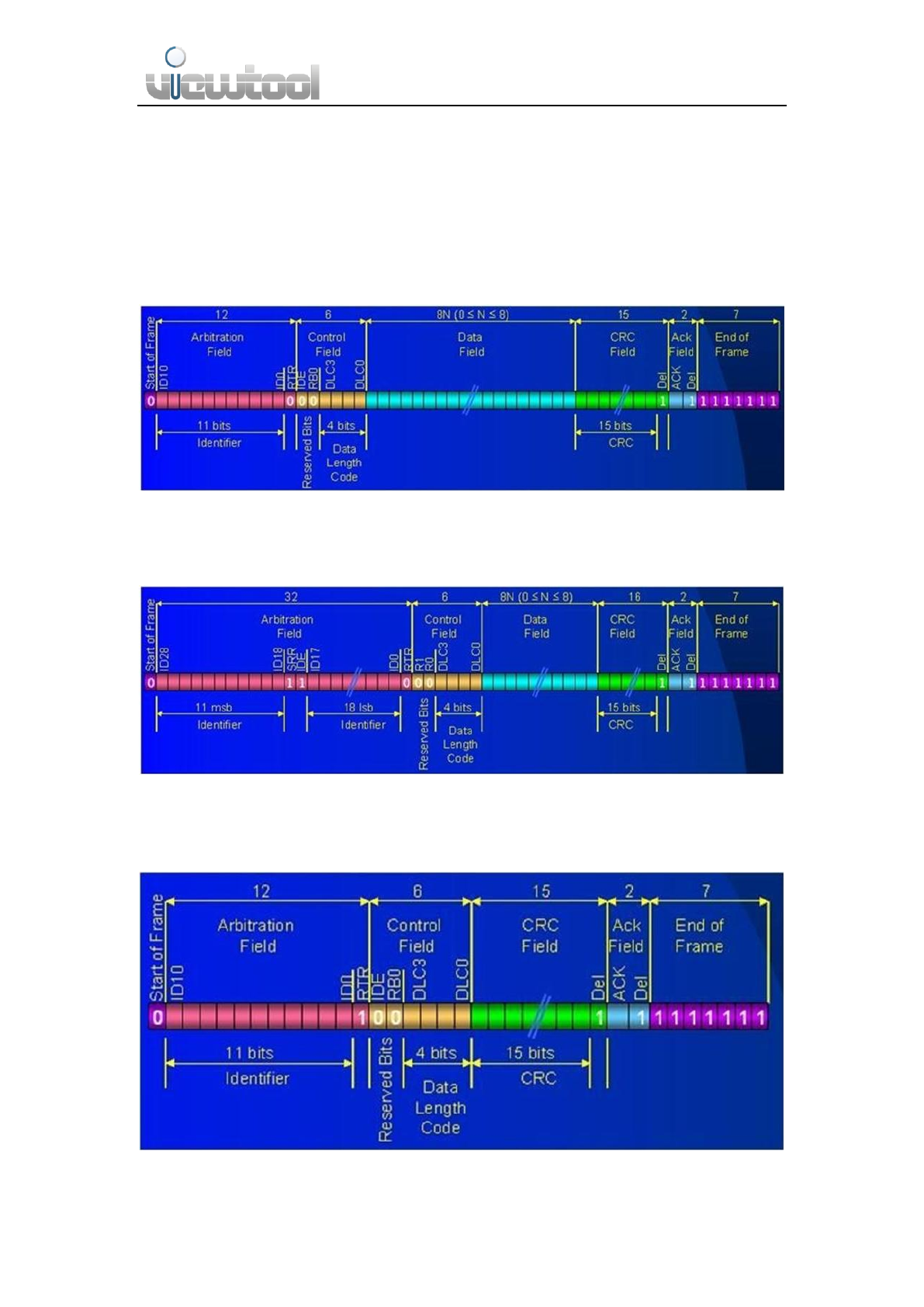
4.1 Standard Data Frame Structure
4.2 Extended Data Frame Structure
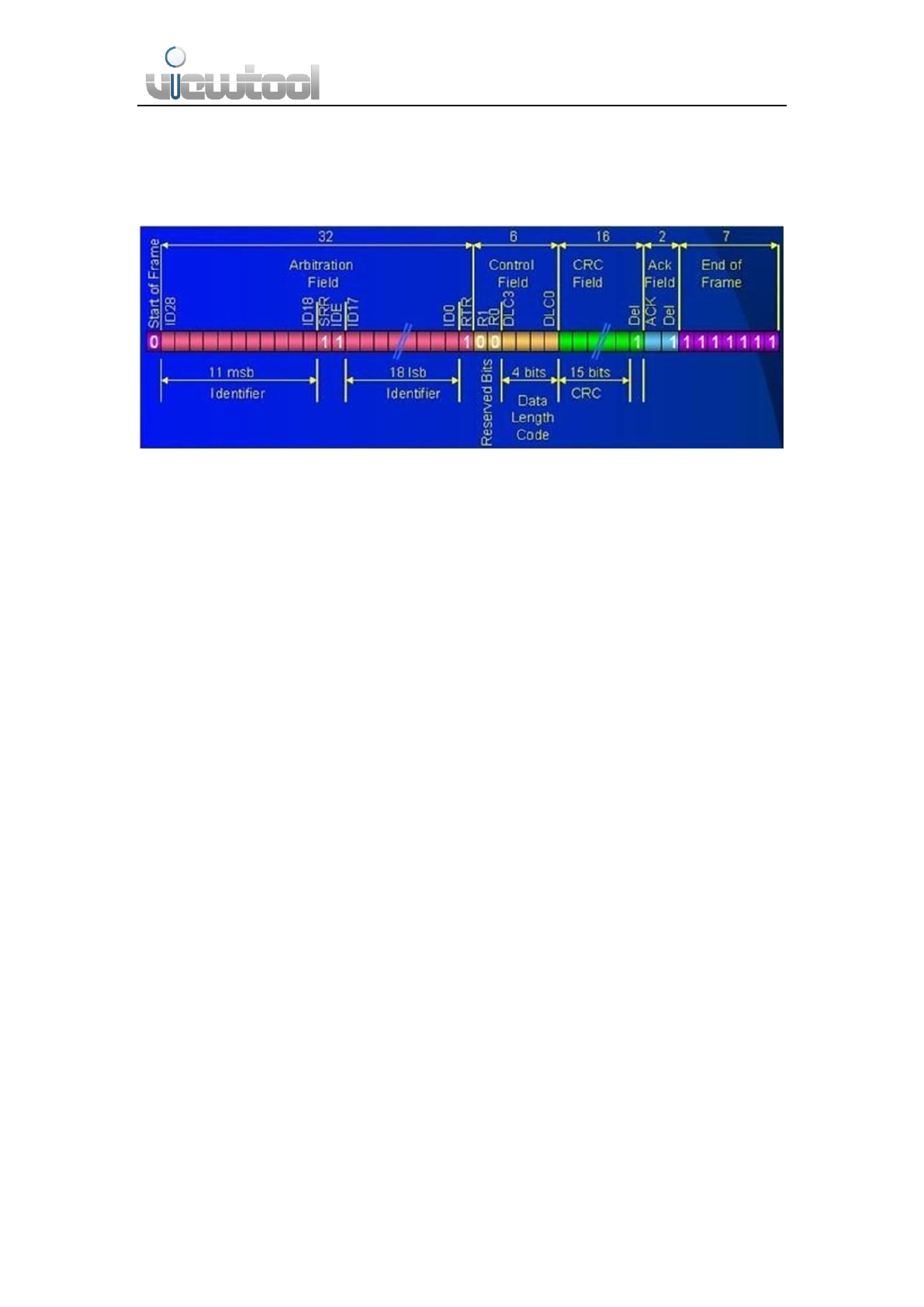
4.3 Standard Remote Frame Structure
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 18 -
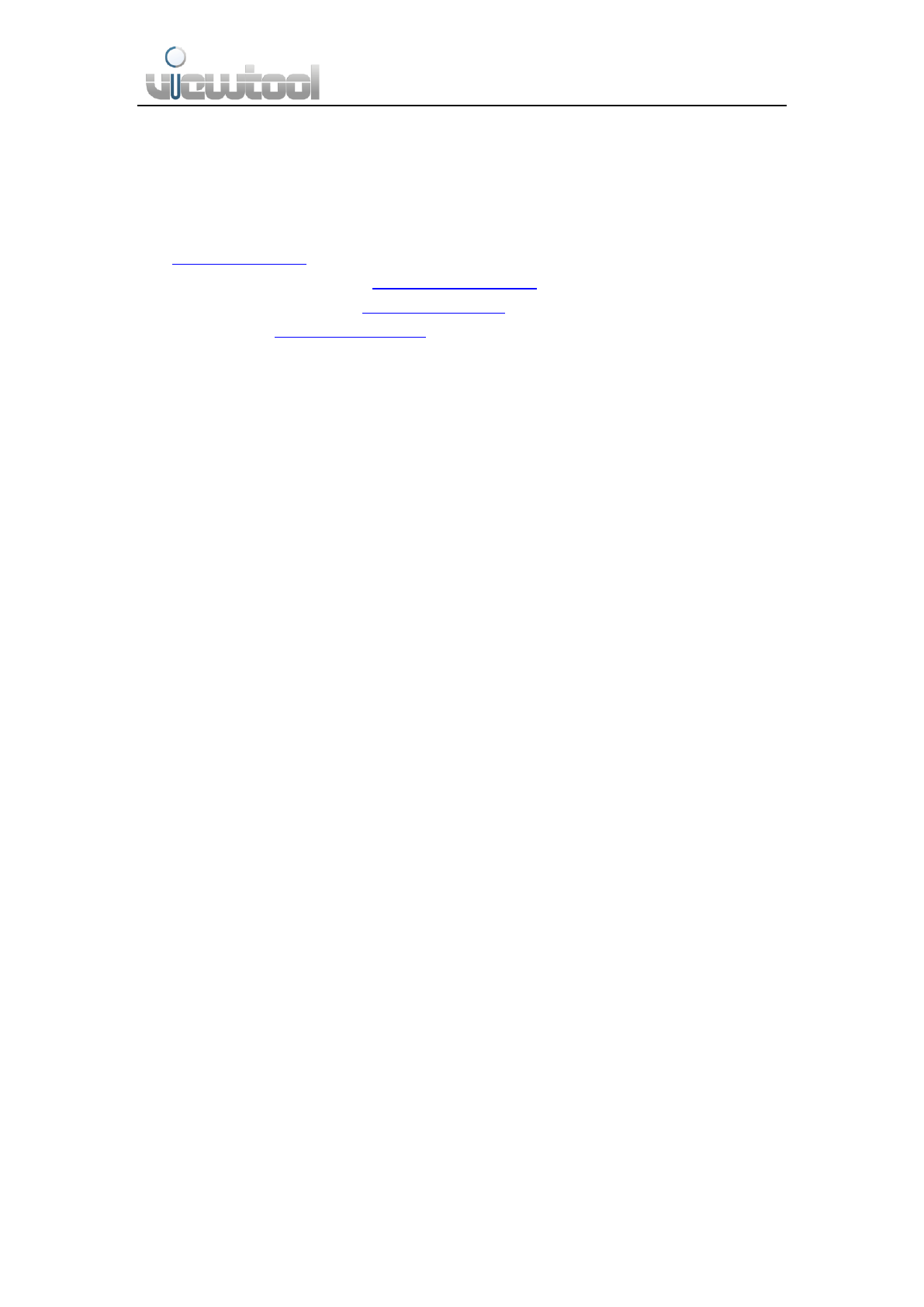
4.4 Extended Remote Frame Structure
ViewTool IoT Technology CO., LTD
Ginkgo USB-CAN Interface User Manual v1.2
- 19 -
Technical Support and Service
- Lifetime technical support, free services and maintenance within one year.
- Down load diver, software, User’s Manual and application routine source code at
www.viewtool.com.
- Technical exchange forum: www.viewtool.com/bbs
- Technical support Email:FAE@viewtool.com
- Sales Email:Sales@viewtool.com
