Intel Aero RTF Guide
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 4
Intel Aero Ready to Fly UAV
KEY AIRCRAFT AND SYSTEMS NOTES
Specifications
● Voltage Input 11.1 - 14.8V
● Intel Aero Compute Board
● Intel® AtomTM x7-Z8750 processor, 4 GB
LPDDR3-1600, 32 GB eMMC
● Dual Band Wireless-AC 8260
● MicroSD slot
● M.2 connector 1 lane PCIe for SSD
● USB 3.0 OTG
● Programmable I/O via Altera Max 10 FPGA
● Insyde Software InsydeH2O UEFI BIOS
optimized for Aero Platform
● Dronecode PX4 autopilot (STM32 MCU, MAVLink
protocol over HSUART)
● Sensors
○ Intel RealSense camera (R200)
○ 8MP RGB camera (front-facing)
○ down-facing monochrome VGA camera w/
global shutter
○ 6 degrees of freedom (DoF) inertial
measurement unit (IMU)
○ Magnetometer
○ Altitude
○ GPS
○ compass
● Props Yuneec Typhoon H 230mm
● Spektrum* DSMX* Serial Receiver
● Spektrum DXe Transmitter (2.4GHz DSMX
● Flight time: 20 min (4S 4000mAh battery,
hovering, no added payload)
● Max sustained wind: 15 knots
● Max control range: 300m
● Max airspeed: 15 m/s
● Max operational altitude: 5000msl
● Temperature range (min / max): -0 C / +45 C
● Weight without battery: 865g
● Max takeoff gross weight: 1900g
● Width: 360 mm (hub-to-hub)
● Height: 222 mm (base to top of GPS arra
Use Notes
Use credible brand lithium-Ion polymer (Li-Po) 4 cell 14.4v (4S) 4000mAh+ (with XT60 connector).
Charge with credible brand charger. Battery must be secured tightly in the cavity with velcro straps. If
battery shifts, control may be lost.
Test UAV balance at frame side center points with battery inserted. Adjust forward or backward for
best balance. Out of balance airframes add pressure to autopilots unnecessarily using battery
capacity to compensate.
GPS array mast may be stiff. Grip mast at center to raise 90°. Tightening clamp may take several
spins to fully secure.
Attach Yuneec Typhoon H 230mm props noting A and B types:
●A-types attach to motors with black caps by gripping motor and pressing down on the prop and twisting
counter-clockwise (per the arrows on the prop).
●B-types attach to motors with white caps by gripping motor and pressing down on the prop and twisting
clockwise (per the arrows on the prop).
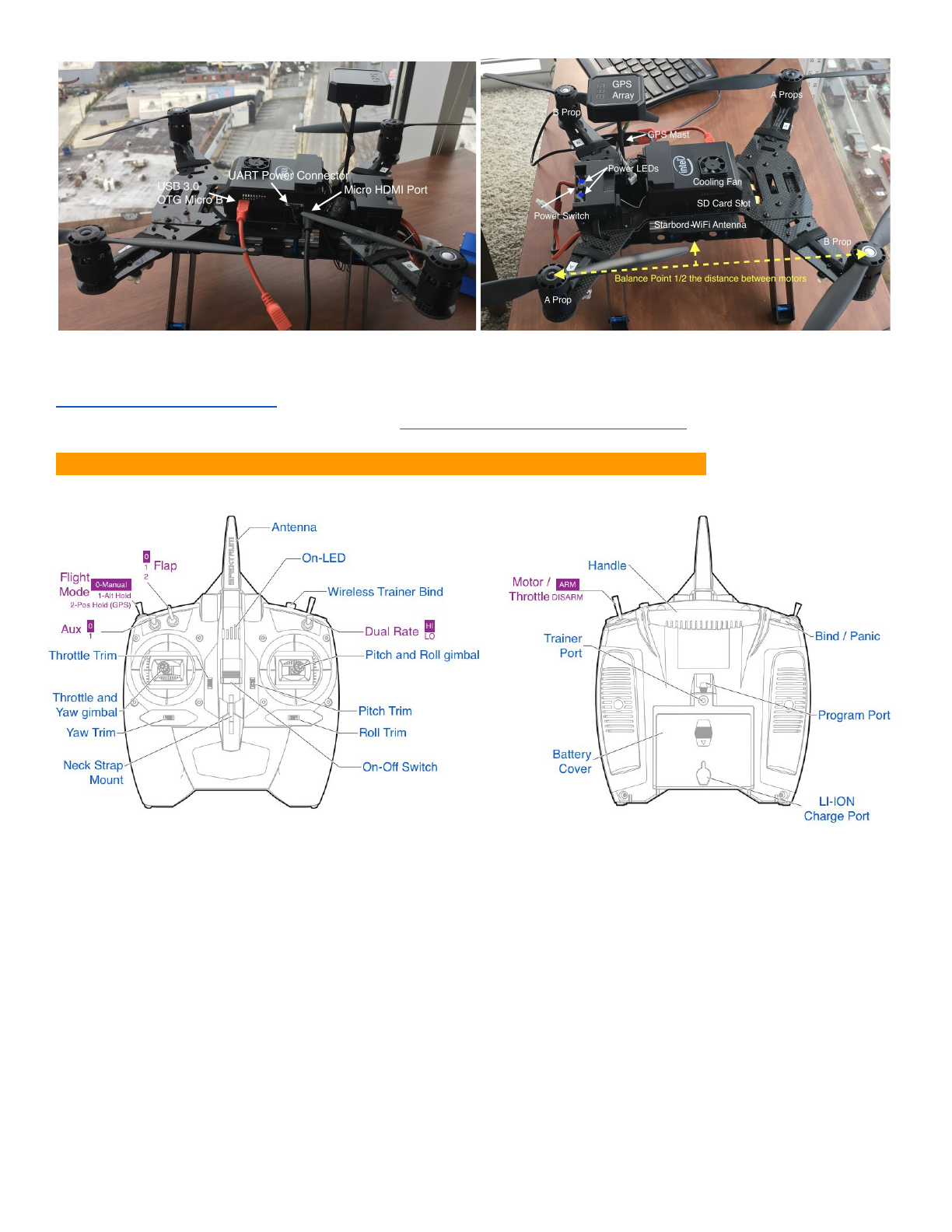
Transmitter
Spektrum DXe Transmitter manual
Install supplied 4 AA batteries or optional Spektrum 2000mAh LI-ION battery
Set all switches as shown for normal flight modes.
Warning: setting switches to other positions may interfere with motor disarming
Flight Modes
0 - Manual required for indoor or areas without GPS signal lock. There are no automated flight
controls requiring a certain level of skill to fly safely.
2 - Position Hold takes advantage of all automated flight control features compensating for flight
variables like wind. This mode also controls descent making safe landings more
certain.
Return to Home: On intentional or accidental UAV loss of signal an automated program return and
lands the aircraft at the location recorded by the GPS at takeoff governed by
remaining battery capacity.
Intel Aero Ready to Fly UAV
SOFTWARE UPDATES
See Quick Start Guide
Flash Latest Image
Download latest image (e.g. intel-aero-image-intel-aero.iso)
Prepare USB drive with image: good guide for here: https://www.pendrivelinux.com
$ sudo dd if=tmp/deploy/images/intel-aero/intel-aero-image-intel-aero.iso of=/dev/sdX bs=1M
Plug in USB installer & keyboard into powered USB hub
Connect hub via USB OTG cable into USB 3.0 OTG port
Connect HDMI monitor into micro HDMI port.
Power up the board and press Escape at splash screen to enter BIOS setup
Select Boot Manager
Under EFI Boot Devices select EFI USB Device
In GRUB menu, select Install
Follow the console prompts to install image to the eMMC
Console will prompt the user to remove the USB installer and press enter
This will reboot the system into new image
Update BIOS with latest capsule
Download latest BIOS rpm package (e.g. capsule-01.00.12-r0.core2_64)
Verify md5sum checksum - if not matching, board could be bricked .
Log into console via ssh, USB or direct connection with USB drive
copy BIOS image into root directory of Aero board
Run command $ root@intel-aero:~# rpm -ivh capsule-01.00.12-r0.core2_64
Message indicates rpm successfully installed in /boot/
Preparing... ############################################ [100%]
1. capsule ############################################ [100%]
confirm BIOSUPDATE.fv is located in /boot/
$ reboot
Update FPGA Firmware
$ root@intel-aero:~# cd /etc
$ root@intel-aero:~# jam -aprogram aero_RTF_kit_fpga.jam
Update Dronecode PX4 firmware
$ root@intel-aero:~# cd /etc/px4-fw
$ root@intel-aero:~# aerofc_update.sh nuttx-aerofc-v1-default.px4
Intel Aero Ready to Fly UAV
NORMAL PROCEDURES CHECKLISTS
POWER UP / SAFETY CHECK
1. Inspect frame for loose, cracked or damaged parts
2. Inspect props for imperfections and securely attached
3. GPS array is raised and secured
4. Verify UAV battery fully charged, fully inserted and tightly secured by the straps
5. Inspect that all wires secure and do not interference with props
6. Verify transmitter batteries are fresh or fully charged
7. Switch on transmitter
8. Connect UAV battery
9. Press UAV power button for 1 second until blue leds illuminate and cooling fan spins
10.Verify transmitter bound to receiver
a. if receiver orange led steady on > proceed to item 11
b. if receiver orange LED blinking > bind to transmitter
i. turn off transmitter
ii. while pressing Bind / Panic button turn on transmitter
iii. wait for receiver orange LED to change to steady
iv. Proceed to item 11
11.Certify a clear flight zone of at least 10 meters
12.Set flight mode
a. outdoors with strong GPS signal >
i. wait for at least 2 minutes to establish strong GPS lock
ii. set flight mode to 2 - Position Hold (GPS)
b. indoors or weak GPS reception > set flight mode to 0 - Manual
13.Arm motors
a. move left Throttle / Pitch gimbal down and to right for 2 seconds until props begin to
spin (without enough thrust for lift)
b. release gimbal to lowest middle position
Cleared for flight
POST LANDING
1. Disarm motors: move left Throttle / Pitch gimbal down and to left for 2 seconds until props spin
down.
2. Press and hold UAV power button for 5 seconds until blue LEDs blink 3 times.
3. Wait 30 seconds as drone powers down gracefully, fan will stop
4. Disconnect UAV battery
5. Turn off transmitter
Secured from flight
