L010353 MBC12101 Series Users Guide
User Manual: Pdf L010353 - MBC12101 Series Users Guide
Open the PDF directly: View PDF ![]() .
.
Page Count: 9
January 2013L010353
MBC12101
Bipolar Microstep Driver
User’s Guide
910 East Orangefair Lane, Anaheim, CA 92801
e-mail: info@anaheimautomation.com
(714) 992-6990 fax: (714) 992-0471
website: www.anaheimautomation.com
ANAHEIM AUTOMATION
January 2013L010353
General Description
The MBC12101 Microstep Motor Driver has an output current capability of 1.5 Amps minimum to 10.0
Amps maximum (Peaking Rating). The MBC12101 driver operates from a DC voltage of 20-80 Volts. The
inputs are optically isolated with a minimum sourcing of 1.0 mA per input (+3.5VDC minimum to +8.6VDC
maximum). The clock input is set to receive either positive or negative edge clocks with a maximum fre-
quency of 100KHz. The MBC12101 driver offers direction control, motor current ON/OFF capabilities, and
built in short circuit and mis-wire shutdown. The Reduce Current Enabled automatically reduces motor
current to 50% of set value after the last step is made. The driver has built-in features to indicate power
on (Green LED) and Clocks being received (Yellow LED). The MBC12101 has a xed step resolution of
2000 steps per revolution with a 200 step/revolution stepper motor and the bipolar drive congurations
handles 4, 6, and 8 lead motors.
Optically Isolated Input Pin Descriptions
The inputs of the MBC12101 are optically isolated with the anode (+) and cathode (-) both brought out
to the user. With no current going through the opto-diode the input is considered high. To enable the
input a minimum of 1.0 mA needs to be sourced or sinked through the opto-diode. This is done simply
by placing a voltage of +3.5 to +8.6VDC across the two inputs of the opto-diode. If sourcing current
into the inputs, then all three cathodes (-) should be tied together and grounded as shown in Figure 3.
If sinking current, then all three anodes (+) should be tied together to the +voltage as shown in Figure
4.
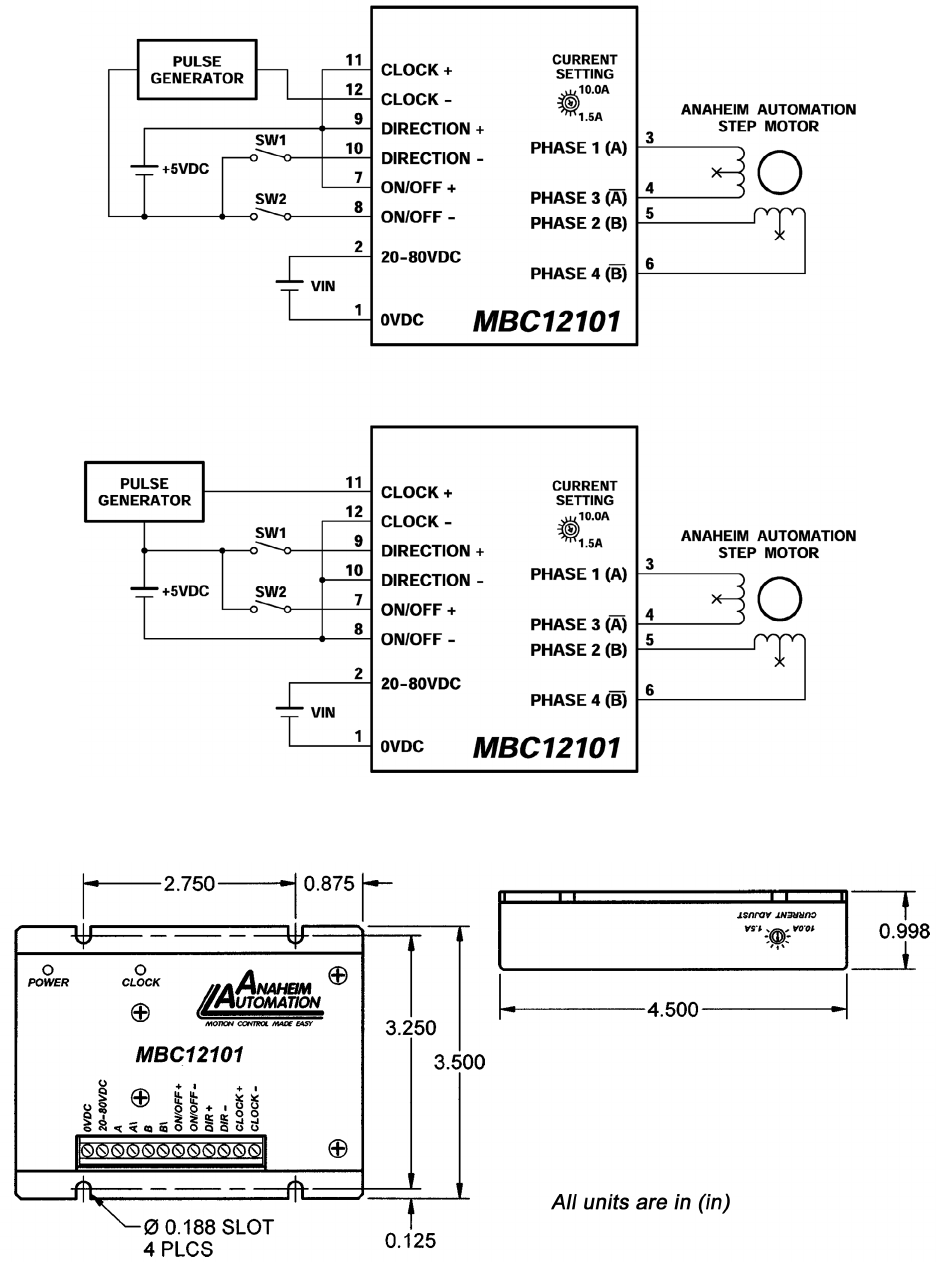
To enable an input, apply a DC voltage source of +5VDC to 8.6VDC across the inputs. The Anodes (+)
are pins 7, 9, and 11 and the Cathodes (-) are pins 8, 10, and 12.
Connecting the Step Motor
Phase 1 and 3 of the Step Motor is connected between pins 3 and 4 on the terminal block connector.
Phase 2 and 4 of the Step Motor is connected between pins 5 and 6 on the terminal block connector.
Refer to Figures 3 & 4 for Typical Application Hook-Up.
NOTE: The physical direction of the motor with respect to the direction input will depend on the con-
nection of the motor windings. To reverse the direction of the motor with respect to the direction input,
swap the wires on Phase 1 and Phase 3.
WARNING: Do not connect or disconnect motor wires while power is applied! This driver does
not protect itself if the motor is disconnect while powered.
MBC12101 Driver Features
• Size (4.50”L x 3.500”W x 0.935”H)
• Output Current 10.0 Amps Peak
• Built in Short Circuit and Mis-Wire Shut Down
• Fixed Step Resolution of 2000 Steps per Revolution
• No Minimum Inductance
• Optical Isolation of Control Inputs
• Motor ON/OFF Input
January 2013L010353
12 Pin Terminal Block Description
Pin # Description
10VDC: Return path for driver voltage
220-80VDC: Input voltage for the driver (+20-80VDC)
3A: Phase 1 of the Step Motor
4Ā: Phase 3 of the Step Motor
5B: Phase 2 of the Step Motor
6B: Phase 4 of the Step Motor
7
ON/OFF: On/Off Anode (+) - This isolated input is used to enable and disable the
output section of the driver. When HIGH (open) the outputs are enabled. However,
this input does not inhibit the step clock.
8ON/OFF: On/Off Cathode (-)
9Dir+: Direction Anode (+) - This isolated input is used to change the direction of the
motor. Physical direction also depends on the connection of the motor windings.
10 DIR-: Direction Cathode (-)
11
Clock+: Step Clock Input Anode (+) - A positive going edge on this isolated input
advances the motor one increment. The size of the increment is dependent on the
Microstep Select Inputs of Switch 1.
12 Clock-: Step Clock Input Cathode (-)
Power Supply Requirements
It is recommended that the MBC12101 be powered by the PSA80V4A or the PSAM48V3.2A. The
PSA80V4A is a 80 Volt, 4 Amp power supply that will take either 110VAC or 220 VAC inputs and de-
liver 320 Watts. The PSAM48V3.2A is a 48 Volt, 3.2 Amp power supply with a universal input to accept
input voltages in the range of 95- 265VAC and deliver 150Watts.
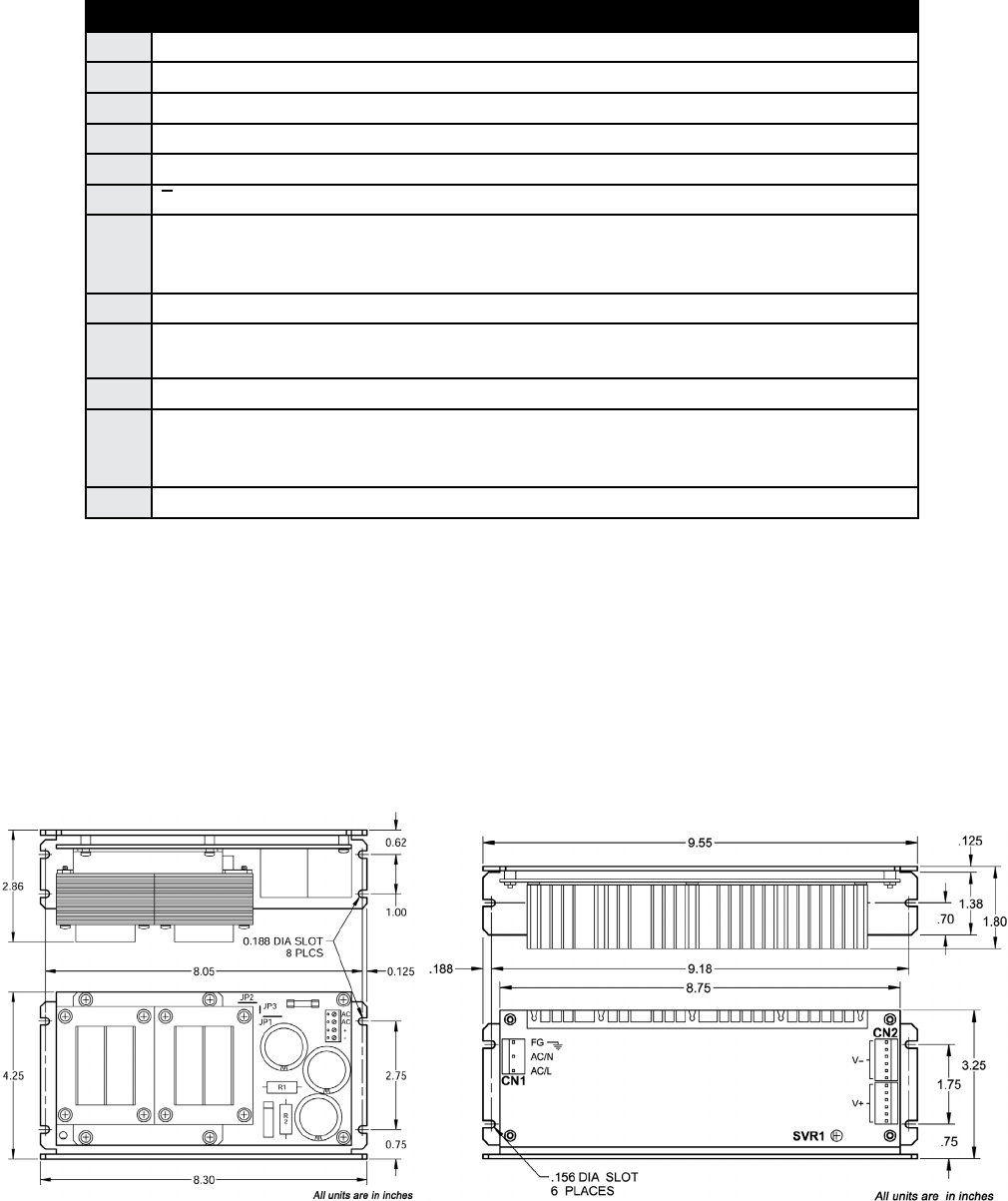
Power Supply Drawings for PSA80V4A and PSAM48V3.2A
Figure 2: Dimensions for PSAM48V3.2AFigure 1: Dimensions for PSA80V4A
Table 1: Pin Descriptions for Terminal Block
Note:
1. For 110VAC Input Install JP1 & JP2 Only.
2. For 220VAC Input Install JP3 Only.
January 2013L010353
Absolute Maximum Ratings
Input Voltage: 80VDC
Output Current: 10.0 Amps Peak
Max Plate Temperature: 70°C
Storage Temperature: 0° to +50°C
Electrical Specications
Item Min Typ Max Units
Input Voltage 20 80 80 VDC
Phase Output Current 1.1 7.1 A (RMS)
Phase Output Current 1.5 10.0 A (PEAK)
Input Voltage (Inputs) 3.5 8.6 VDC
Clock Frequency 0 100 kHz
Chopping Frequency 27 30 33 kHz
Operation Temperature 0 70 C
Setting the Output Current
WARNING: Do not set the current setting above the step motors rated current. When using a
higher current into a motor, the motor will overheat and burnup. Should this occur, the driver will
also be damaged.
The output current on the MBC12101 is set by and onboard potentiometer. This potentiometer determines
the per phase peak output current of the driver. The relationship between the output current and the
potentiometer value is as follows:
Peak Current Potentiometer Setting Peak Current Potentiometer Setting
1.5A 0% 7.0A 60%
2.3A 10% 7.9A 70%
3.1A 20% 8.7A 80%
4.0A 30% 9.6A 90%
5.0A 40% 10A 100%
6.0A 50% -- --
Reducing Output Current
Reducing the output current occurs approximately 1 second after the last positive going edge of the step
clock input. The amount of current per phase in the reduction mode is approximately 50% of the set
current. Reducing the output current is accomplished when no current ows through the opto-diode at the
CLOCK (+) and CLOCK (-) pins after the last step has occured. The clock LED should be off at this time.
Refer to Table 5 for specic motor current settings.
Table 3: Potentiometer values with respect to the output current
Table 2: MBC12101 Electrical Specications
January 2013L010353
Wiring Diagrams
Dimensions
Table 5: MBC12101 Dimensions
Table 4: Hook up for current sinking inputs
Table 3: Hook up for current sourcing inputs
January 2013L010353
Motor Selection
The MBC12101 is a Bipolar Microstep driver that is compatible with both Bipolar and Unipolar Stepper
Motor Congurations, (i.e. 8 and 4 lead motors, and 6 lead center tapped motors).
Stepper Motors with low current ratings and high inductance will perform better at low speeds, providing
higher low-end torque. Motors with high current ratings and low inductance will perform better at higher
speeds, providing more high-end torque. Higher voltages will cause the current to ow faster through the
motor coils. This in turn means higher step rates can be achieved. Care should be taken not to exceed
the maximum voltage of the driver.
Since the MBC12101 is a constant current source, it is not necessary to use a stepper motor that is rated at
the same voltage as the supply voltage. What is important is that the MBC12101 is set to the appropriate
current level based on the motor being used. Refer to the following chart for setting the current potenti-
ometer based on the current code in the part number of the motor. Examples of motor part numbers are
shown below. Anaheim Automation offers a comprehensive line of step motors in 08, 11, 14, 15, 17, 23,
24, 34 and 42 frame sizes. Contact the factory to verify motor compatibility with the MBC12101.
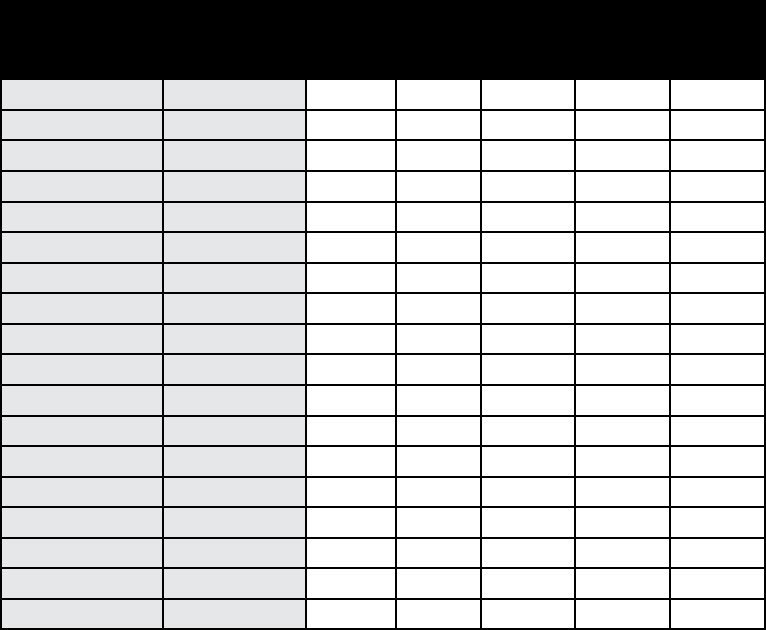
Step Motor Current Setting Guide
Motor Example Motor Current
Number Code
Unipolar
Rating
Series
Peak
Rating
Parallel
Peak
Rating
Series
Current
Setting
Parallel
Current
Setting
23D102S 02 1.0A 1.0A 2.0A ---- 5%
23L303D-LW8 03 1.5A 1.5A 3.0A 0% 20%
34N104S-LW8 04 2.0A 2.0A 4.0A 5% 30%
23L4005D-LW8 05 2.5A 2.5A 5.0A 10% 40%
34A106B 06 3.0A 3.0A 6.0A 20% 50%
34N207S-LW8 07 3.5A 3.5A 7.0A 25% 60%
34K108S-LW8 08 4.0A 4.0A 8.0A 30% 70%
42N209S-CB 09 4.5A 4.5A 9.0A 35% 85%
23L310S-LW8 10 5.0A 5.0A 10.0A 40% 100%
34D311D 11 5.5A 5.5A 11.0A 45% 100%
42K112S-CB 12 6.0A 6.0A 12.0A 50% 100%
34D213S 13 6.5A 6.5A 13.0A 55% 100%
34N314S-LW8 14 7.0A 7.0A 14.0A 60% 100%
42N115D-CB 15 7.5A 7.5A 15.0A 65% ----
34K416S-LW8 16 8.0A 8.0A 16.0A 70% ----
42D119D 19 9.5A 9.5A 19.0A 90% ----
42322S-CB 22 11.0A 11.0A 22.0A 100% ----
42D225S 25 12.5A 12.5A 25.0A 100% ----
Anaheim Automation offers motor cable, making hook-ups quick and easy!
Contact the factory or visit our website for more motor and cable offerings.
Table 4: Table selection for Anaheim Automation motor current settings.
January 2013L010353
Setting the Output Current
The output current for the stepper motor being used when microstepping is determined differently from
that of a full/half step unipolar driver. In the MBC12101, a sine/cosine output function is used in rotating
the motor. The output current for a given motor is determined by the motors current rating and the wiring
conguration of the motor. There is a current adjustment potentiometer used to set the output current of
the MBC12101. This sets the peak output current of the sine/cosine waves. The specied motor current
(which is the unipolar value) is multiplied by a factor of 1.0, 1.4, or 2.0 depending on the motor conguration
(series, half-coil, or parallel).
WARNING: Do not set the current setting above the step motors rated current. When using a
higher current into a motor, the motor will overheat and burnup. Should this occur, the driver will
also be damaged.
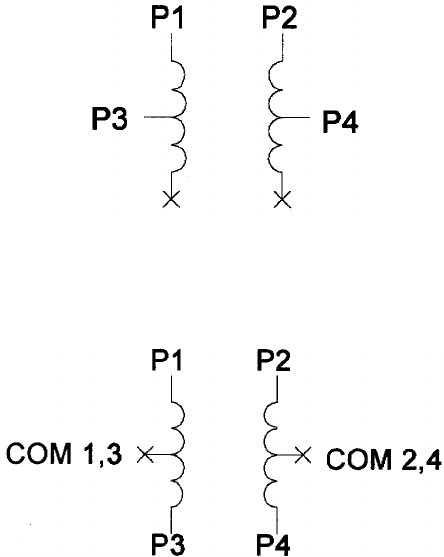
Stepper Motor Congurations
Stepper Motors can be wired with 4, 6, or 8 leads. Each conguration requires different currents. Refer
to the lead congurations and the procedures to determine their output current.
WARNING: Step motors will run hot even when congured correctly. Damage may occur to the motor if
a higher than specied current is used. Most specied motor currents are maximum values. Care should
be taken to not exceed these ratings.
6 Lead Motors
When conguring a 6 lead motor in a half-coil conguration (connected from one end of the coil to the
center tap), multiply the specied per Phase (or unipolar) current rating by 1.4 to determine the current
setting potentiometer value. This conguration will provide more torque at higher speeds when compared
to the series conguration.
When conguration the motor in a series conguration (connected from end to end with the center
tap oating) use the specied per Phase (or unipolar) current rating to determine the current setting
potentiometer value.
January 2013L010353
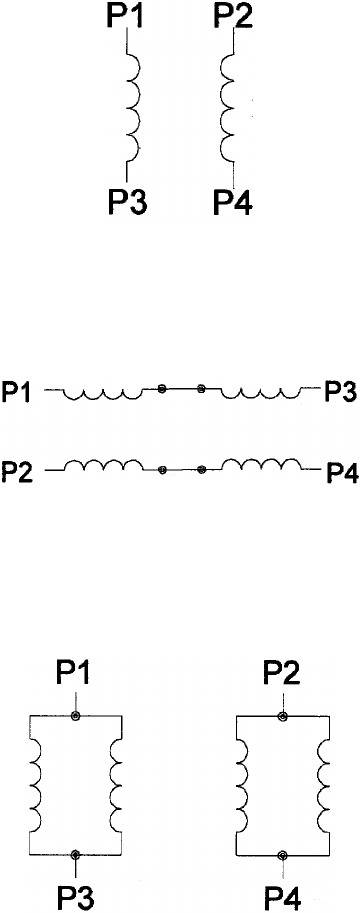
4 Lead Motors
Multiply the specied series motor current by 1.4 to determine the current adjustment potentiometer value.
Four Lead Motors are usually rated with their appropriate series current, as opposed to the Phase Current,
which is the rating for 6 and 8 lead motors.
8 Lead Motors
Series Connection: When conguring the motor windings in series, use the per Phase (or unipolar)
current rating to determine the current setting potentiometer value.
Parallel Connection: When conguring the motor windings in parallel, multiply the per Phase (or unipolar)
current rating by 2.0 to determine the current setting potentiometer value.
Note: After the current has been determined, according to the motor connections above, use Table 3 to
choose the proper setting for the current setting potentiometer.

January 2013L010353
ANAHEIM AUTOMATION
COPYRIGHT
Copyright 2013 by Anaheim Automation. All rights reserved. No part of this publication may be reproduced,
transmitted, transcribed, stored in a retrieval system, or translated into any language, in any form or by
any means, electronic, mechanical, magnetic, optical, chemical, manual, or otherwise, without the prior
written permission of Anaheim Automation, 910 E. Orangefair Lane, Anaheim, CA 92801.
DISCLAIMER
Though every effort has been made to supply complete and accurate information in this manual, the
contents are subject to change without notice or obligation to inform the buyer. In no event will Anaheim
Automation be liable for direct, indirect, special, incidental, or consequential damages arising out
of the use or inability to use the product or documentation.
Anaheim Automation’s general policy does not recommend the use of its’ products in life support applications
wherein a failure or malfunction of the product may directly threaten life or injury. Per Anaheim Automation’s
Terms and Conditions, the user of Anaheim Automation products in life support applications assumes all
risks of such use and indemnies Anaheim Automation against all damages.
LIMITED WARRANTY
All Anaheim Automation products are warranted against defects in workmanship, materials and construction,
when used under Normal Operating Conditions and when used in accordance with specications. This
warranty shall be in effect for a period of twelve months from the date of purchase or eighteen months
from the date of manufacture, whichever comes rst. Warranty provisions may be voided if products
are subjected to physical modications, damage, abuse, or misuse.
Anaheim Automation will repair or replace at its’ option, any product which has been found to be defective
and is within the warranty period, provided that the item is shipped freight prepaid, with previous authorization
(RMA#) to Anaheim Automation’s plant in Anaheim, California.
TECHNICAL SUPPORT
If you should require technical support or if you have problems using any of the equipment covered by this
manual, please read the manual completely to see if it will answer the questions you have. If you need
assistance beyond what this manual can provide, contact your Local Distributor where you purchased the
unit, or contact the factory direct.
