O Arm Clinical Evidence Eguide
O-Arm Clinical Evidence Eguide o-arm_clinical_evidence_eguide o-arm_clinical_evidence_eguide 3 2013 pdf 258413772373414384
O-Arm Clinical Evidence Eguide o-arm_clinical_evidence_eguide o-arm_clinical_evidence_eguide 2 2013 pdfdoc 258413772373414384 3:
O-Arm Clinical Evidence Eguide o-arm_clinical_evidence_eguide o-arm_clinical_evidence_eguide 3 2013 pdfdoc 258413772373414384 3:
2013-02-24
: Pdf O-Arm Clinical Evidence Eguide o-arm_clinical_evidence_eguide 2 2013 pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 46

Clinical Evidence eGuide
O-arm® Imaging System
Innovating for life.
Version 1.0 (January 2012)
Medtronic Navigation
826 Coal Creek Circle
Louisville, CO 80027 USA
Toll Free: 877-242-9504
Telephone: 720-890-3200
twitter.com/mdtnavedu
facebook.com/medtronicnavigationinc
youtube.com/user/MedtronicNavEdu
© 2012 Medtronic Navigation, Inc. All Rights reserved. 9671000 v1
www.medtronicnavigation.com

Clinical Evidence eGuide O-arm® Imaging System
Purpose
Clarifications
Table of Contents

Purpose
This guide is to be used as an education tool. The purpose is to provide health care
providers with a reference tool of peer-reviewed articles that discuss the use the
O-arm® imaging system in surgery.
Medtronic Navigation conducted a literature search of published articles across
many scientific journals. All articles found that reference the O-arm ® imaging system
were selected to be included in this guide.
HOME

Clarications
Medtronic Navigation wishes to clarify the following points:
(1) The O-arm® Intraoperative Imaging System is a Class II Medical Device in the US
and has been cleared for marketing under a 510(k) submission by the FDA. This
type of clearance means that FDA has concurred with the manufacturer’s asser-
tion that the device is substantially equivalent to other devices legally marketed
in the US.
(2) The O-arm® Intraoperative Imaging System is cleared as a Mobile X-ray System
under 21 CFR 892.1720 and as a Solid State X-ray Imager under 21 CFR 892.1650.
Medtronic Navigation makes no claim that the O-arm® system complies with the
necessary performance standards to be called a Computed Tomography X-Ray
System under 21 CFR 892.1750.
(3) The cleared Indications for Use statement for the O-arm® Imaging System is: The
O-arm® Imaging System is a mobile x-ray system designed for 2D fluoroscopic
and 3D imaging and is intended to be used where a physician benefits from 2D
and 3D information of anatomic structures and objects with high x-ray attenua-
tion such as bony anatomy and metallic objects. The O-arm® imaging System is
compatible with certain Image Guided Surgery Systems.
HOME

Table of Contents
SPINE AND ORTHOPEDICS
CRANIAL AND ENT
ONCOLOGY
IMAGING TECHNOLOGY
HOME

Table of contents - Spine and Orthopedics
Lead Author Year Abbreviated Title Journal
Schils 2011 O-Arm–Guided Balloon Kyphoplasty: Prospective Single-Center Case Series of 54
Consecutive Patients Neurosurgery
Oertel 2011 Clinical and methodological precision of spinal navigation assisted by 3
intraoperative O-arm radiographic imaging Neurosurgery Spine
Silbermann 2011
Computer tomography assessment of pedicle screw placement in lumbar
and sacral spine: comparison between free-hand and O-arm based navigation
techniques
Eur Spine J
Wood 2011 A comparison of CT-based navigation techniques for minimally invasive lumbar
pedicle screw placement.
Spinal Disorders
& Techniques
Ishikawa 2011 Intraoperative, full-rotation, three-dimensional image (O-arm)–based navigation
system for cervical pedicle screw insertion- Clinical Article
Journal of Neurosurgery:
Spine
Sclafani 2011
Use of a quantitative pedicle screw accuracy system to assess new technology:
Initial studies on O-arm navigation and its effect on the learning curve of
percutaneous pedicle screw insertion.
SAS Journal
Garrido 2011 Navigated placement of iliac bolts: description of a new technique. Spine J
Mofidi 2011 Use of Intraoperative Computed Tomography Scanning in Determining the
Magnitude of Arthroscopic Osteochondroplasty Arthroscopy
Gonschorek S 2011 O-arm based spinal navigation and intraoperative 3D-imaging: first experiences European Journal of Trauma
and Emergency Surgery
Ailawadhi 2011 Use of O-arm for spinal surgery in academic institution in India: Experience from
JPN apex trauma centre Neurology India
Please tap any title to view article
TABLE OF CONTENTS
MAIN

Table of contents - Spine and Orthopedics
Lead Author Year Abbreviated Title Journal
Costa 2011 Evaluation of the rate of decompression in anterior cervical corpectomy using an
intra-operative computerized tomography scan (O-arm system) European Spine Journal
Santos 2011 The Accuracy of Intraoperative O-arm Images for the Assessment of Pedicle
Screw Postion. Spine J
Schils F. 2011 O-arm guided balloon kyphoplasty: preliminary experience of 16 consecutive
patients. Acta Neurochirugica
Santos 2011 Validity of surgeon perception of navigated pedicle screw position: a cadaveric
study Spine J
Kim 2011 Modified transcorporeal anterior cervical microforaminotomy assisted by O-arm-
based navigation: a technical case report. European Spine Journal
Nottmeier EW 2010 Image-guided placement of occipitocervical instrumentation using a reference
arc attached to the headholder. Neurosurgery
Nottmeier EW 2010 Three-dimensional image-guided placement of S2 alar screws to adjunct or
salvage lumbosacral fixation. Spine J
Kim 2010 Pedicle screw fixation under navigation guidance based on O-arm
The Internet Journal of Minimally
Invasive Spinal Technology
Wood 2010 Improving accuracy and reducing radiation exposure in minimally invasive
lumbar interbody fusion. Neurosurgery Spine
Park 2010 Minimally invasive pedicle screw fixation utilizing O-arm fluoroscopy with
computer-assisted navigation: Feasability, technique, and preliminary results. Surg Neurol Int.
Please tap any title to view article
TABLE OF CONTENTS
MAIN
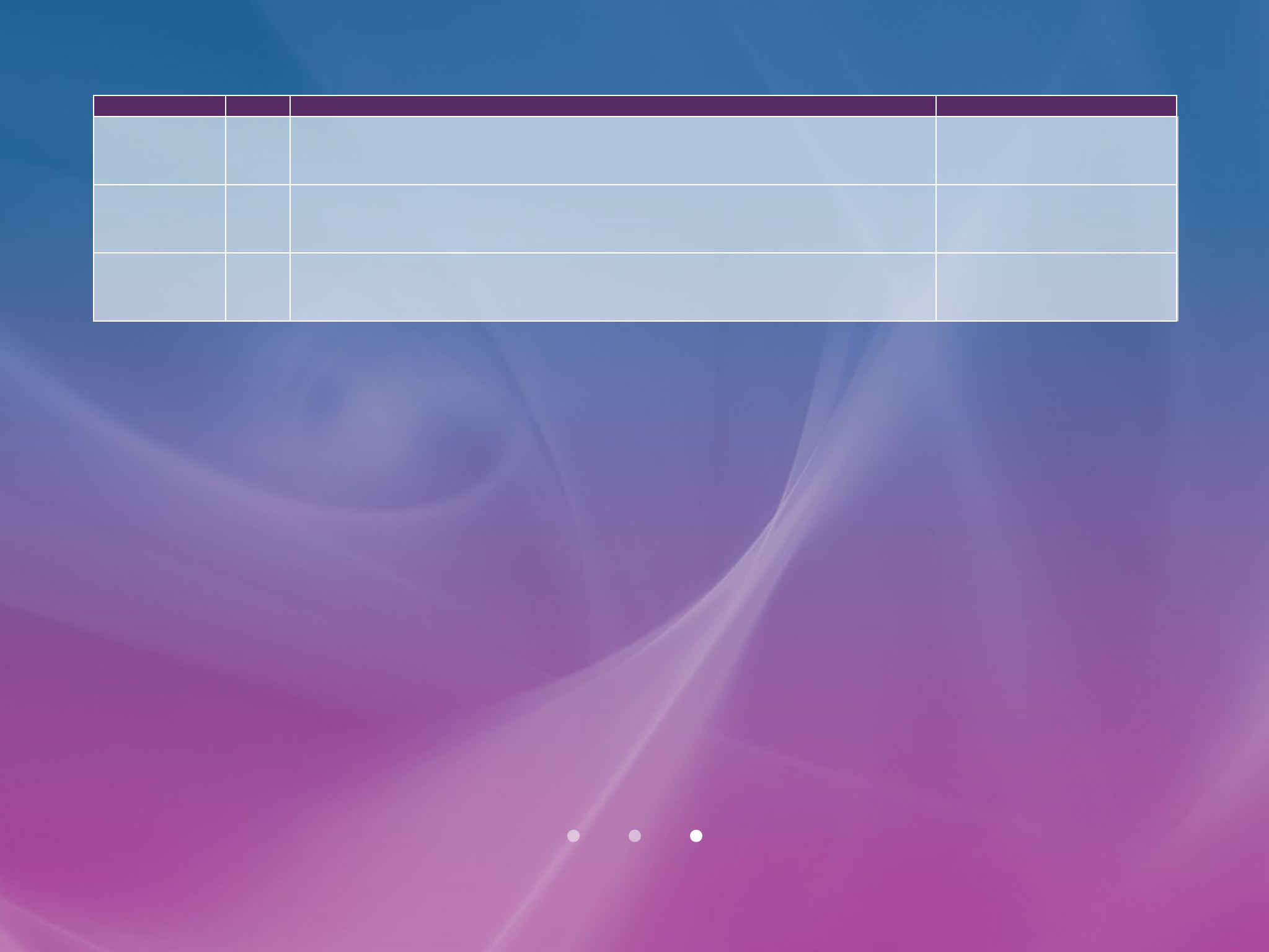
Table of contents - Spine and Orthopedics
Lead Author Year Abbreviated Title Journal
Kim 2010 An assistive image-guided surgical robot system using O-arm fluoroscopy for
pedicle screw insertion: preliminary and cadaveric study. Neurosurgery
Brennen 2008 Minimally invasive image-guided direct repair of bilateral L-5 pars
interarticularis defects. Neurosurgery Focus
Metz, LN 2008 Computer-Assisted Surgical Planning and Image-Guided Surgical Navigation in
Refractory Adult Scoliosis Surgery: Case Report and Review of the Literature Spine J
Please tap any title to view article
TABLE OF CONTENTS
MAIN
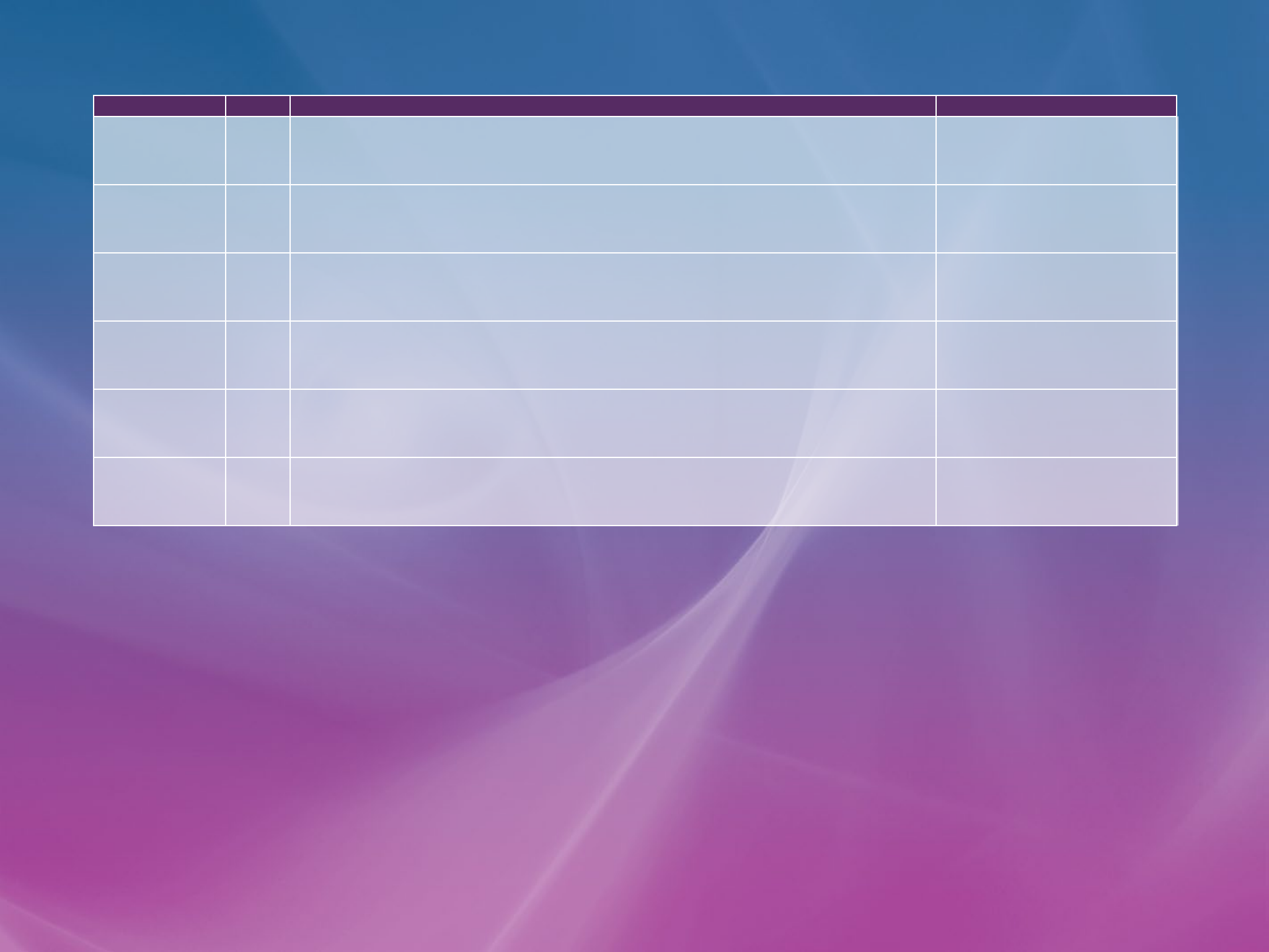
Table of contents - Cranial and ENT
Lead Author Year Abbreviated Title Journal
Shahlaie K 2011 Intraoperative computed tomography for deep brain stimulation surgery:
technique and accuracy assessment Neurosurgery
Smith 2011 Frameless deep brain stimulation using intraoperative O-arm technology Neurosurgery
Conley 2011 Comparison of Intraoperative Portable CT Scanners in Skull Base and Endoscopic
Sinus Surgery: Single Center Case Series Skull Base
Leung 2011 Advancements in computed tomography management of chronic rhinosinusitis American Journal of
Rhinology & Allergy
Caire F 2010 Intraoperative use of the Medtronic O-arm for deep brain stimulation procedures.
Stereotact Funct
Neurosurgy
Bloom 2009 Real-Time Intraoperative Computed Tomography to Assist Cochlear Implant
Placement in the Malformed Inner Ear: Otology & Neurotology Otology & Neurotology
Please tap any title to view article
TABLE OF CONTENTS
MAIN
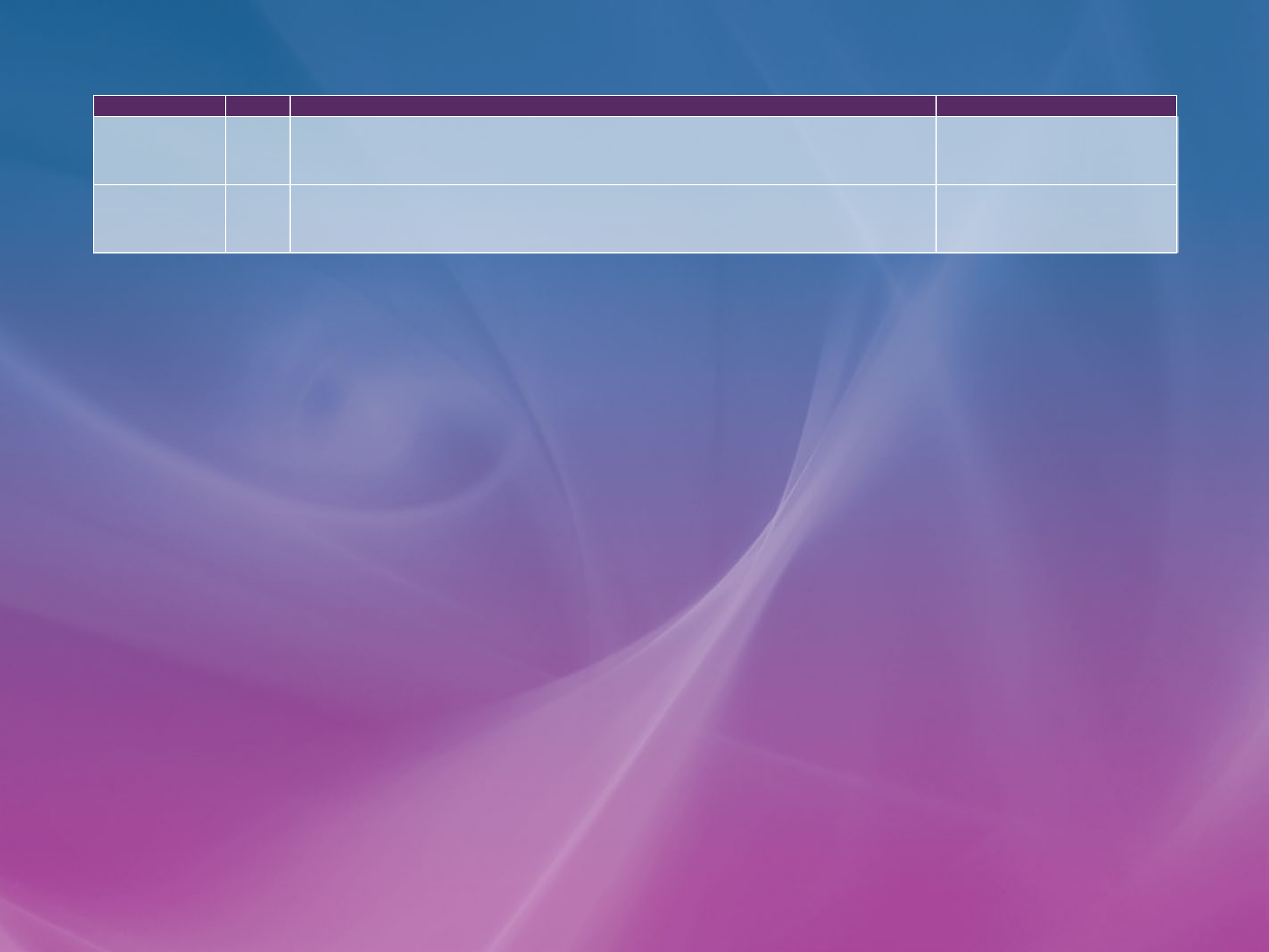
Table of contents - Oncology
Lead Author Year Abbreviated Title Journal
Wu 2011 Intraoperative Navigation for Minimally Invasive Resection of Periarticular and
Pelvic Tumors. Orthopedics
Zelefsky 2010 Real-time intraoperative computed tomography assessment of quality of
permanent interstitial seed implantation for prostate cancer. Urology
Please tap any title to view article
TABLE OF CONTENTS
MAIN
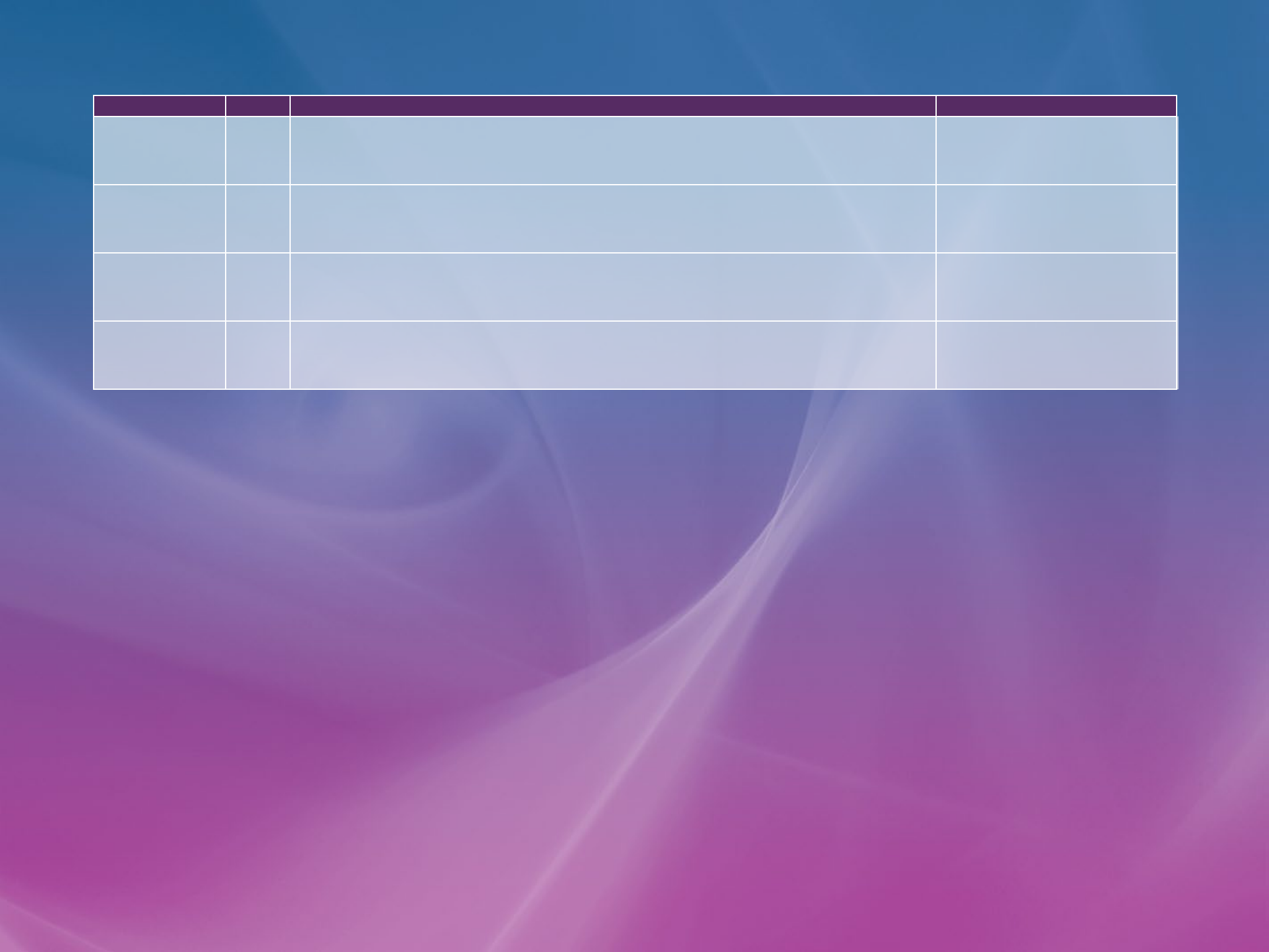
Table of contents - Imaging Technology
Lead Author Year Abbreviated Title Journal
Abul Kasim 2011 Optimization of Radiation Exposure and Image Quality of the Cone-beam O-arm
Intraoperative Imaging System in Spinal Surgery.
Journal of Spinal
Disorders and Techniques
Park 2011 The perspectives of users and developers in designing and developing O-arm
imaging system
Journal of X-ray Science
and Technology
Park 2011 Comparison of operator radiation exposure between C-arm and O-arm
fluoroscopy for orthopaedic surgery
Radiation Protection
Dosimetry
Zhang 2009 Dosimetric characterization of a cone-beam O-arm imaging system. Journal of X-ray Science
and Technology
Please tap any title to view article
TABLE OF CONTENTS
MAIN

O-arm–Guided Balloon Kyphoplasty: Prospective Single-Center Case
Series of 54 Consecutive Patients
Schils, Frédéric MD
Department of Neurosurgery, Clinique Saint Joseph, Liège, Belgium
Neurosurgery June 2011
Background:
Balloon kyphoplasty is widely used to treat vertebral compression
fractures. Procedure outcome and safety are directly linked to
precise radiological imaging requiring 1 or 2 C arms to allow
correct visualization throughout the procedure. This minimally
invasive spinal surgery is associated with radiation exposure for
both patient and surgeon. In our center, we switched from using
a C-arm to an O-arm image guidance system to perform balloon
kyphoplasty. Our preliminary experience is reported in Acta
Neurochirurgica, and the encouraging results led us to study this
subject more extensively. This article presents our complete results.
To the best of our knowledge, there is no comparable clinical series
describing O-arm use in kyphoplasty procedures published in the
literature.
Objective:
To report our complete results of using the O-arm guidance system
to perform balloon kyphoplasty.
Methods:
We prospectively evaluated O-arm-guided kyphoplasty procedure in
54 consecutive patients and measured x-ray exposure and fluoros-
copy time.
Results:
The mean surgical time for the procedure was 38 minutes with
a mean fluoroscopy procedure time of 3.1 minutes. The mean
fluoroscopy time by level was 2.5 minutes. Mean irradiation dose
by procedure was 220 mGy and by level was 166 mGy. There was a
significant reduction in fluoroscopy time and x-ray exposure from
5.1 minutes with classic C-arm use to 3.1 minutes when with O-arm
use without additional time required for positioning the system.
Conclusion:
With this new intraoperative system, the overall surgical and
fluoroscopy times can be further reduced in the near future.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD

Clinical and methodological precision of spinal navigation assisted
by 3D intraoperative O-arm radiographic imaging
Matthias F. Oertel, M.D, et al
Department of Neurosurgery, University Hospital Giessen and Marburg GmbH,
Giessen, Germany
Spine J. 2011 April
Objective:
In recent years, the importance of intraoperative navigation in
neurosurgery has been increasing. Multiple studies have proven
the advantages and safety of computer-assisted spinal neurosur-
gery. The use of intraoperative 3D radiographic imaging to acquire
image information for navigational purposes has several advantag-
es and should increase the accuracy and safety of screw guidance
with navigation. The aim of this study was to evaluate the clinical
and methodological precision of navigated spine surgery in
combination with the O-arm multidimensional imaging system.
Methods:
Thoracic, lumbar, and sacral pedicle screws that were placed
with the help of the combination of the O-arm and StealthStation
TREON plus navigation systems were analyzed. To evaluate clinical
precision, 278 polyaxial pedicle screws in 139 vertebrae were
reviewed for medial or caudal perforations on coronal projection.
For the evaluation of the methodological accuracy, virtual and intra-
operative images were compared, and the angulation of the pedicle
screw to the midsagittal line was measured.
Results:
Pedicle perforations were recorded in 3.2% of pedicle screws. None
of the perforated pedicle screws damaged a nerve root. The differ-
ence in angulation between the actual and virtual pedicle screws
was 2.8° ± 1.9°.
Conclusion:
The use of the StealthStation TREON plus navigation system in
combination with the O-arm system showed the highest accuracy
for spinal navigation compared with other studies that used
traditional image acquisition and registration for navigation.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Computer tomography assessment of pedicle screw placement in
lumbar and sacral spine: comparison between free-hand and O-arm®
based navigation techniques
J. Silbermann, F. Riese, Y. Allam, T. Reichert, H. Koeppert and M. Gutberlet
Department of Spine Surgery, Park-Krankenhaus, Leipzig, Germany
Eur Spine J (2011)
Transpedicular screw fixation has been accepted worldwide since
Harrington et al. first placed pedicle screws through the isthmus. In
vivo and in vitro studies indicated that pedicle screw insertion
accuracy could be significantly improved with image-assisted
systems compared with conventional approaches. The O-arm is a
new generation intraoperative imaging system designed without
compromise to address the needs of a modern OR like no other
system currently available. The aim of our study was to check the
accuracy of O-arm based and S7-navigated pedicle screw implants
in comparison to free-hand technique described by Roy-Camille at
the lumbar and sacral spine using CT scans.
The material of this study was divided into two groups, free-hand
group (group I) (30 patients; 152 screws) and O-arm group (37
patients; 187 screws). The patients were operated upon from
January to September 2009. Screw implantation was performed
during PLIF or TLIF mainly for spondylolisthesis, osteochondritis
and post-laminectomy syndrome.
The accuracy rate in our work was 94.1% in the free-hand group
compared to 99% in the O-arm navigated group. Thus it was
concluded that free-hand technique will only be safe and accurate
when it is in the hands of an experienced surgeon and the accuracy
of screw placement with O-arm can reach 100%.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

A Comparison of CT-based Navigation Techniques for Minimally
Invasive Lumbar Pedicle Screw Placement
Wood, Martin FRACS, MBChB* Mannion, Richard PhD, FRCS
The Mater Private Hospital Brisbane, Queensland, Australia.
Journal of Spinal Disorders
& Techniques, February 2011
Study Design:
A comparison of 2 surgical techniques.
Objective:
To determine the relative accuracy of minimally invasive lumbar
pedicle screw placement using 2 different CT-based image-guided
techniques.
Summary of Background:
Three-dimensional intraoperative fluoroscopy systems have
recently become available that provide the ability to use CT-quality
images for navigation during image-guided minimally invasive
spinal surgery. However, the cost of this equipment may negate
any potential benefit in navigational accuracy. We therefore assess
the accuracy of pedicle screw placement using an intraoperative
3-dimensional fluoroscope for guidance compared with a technique
using preoperative CT images merged to intraoperative 2-dimen-
sional fluoroscopy.
Methods:
Sixty-seven patients undergoing minimally invasive placement
of lumbar pedicle screws (296 screws) using a navigated, image-
guided technique were studied and the accuracy of pedicle screw
placement assessed. Electromyography (EMG) monitoring of lumbar
nerve roots was used in all.
Group 1: 24 patients in whom a preoperative CT scan was merged
with intraoperative 2-dimensional fluoroscopy images on the
image-guidance system. Group 2: 43 patients using intraoperative
3-dimensional fluoroscopy images as the source for the image guid-
ance system. The frequencies of pedicle breach and EMG warnings
(indicating potentially unsafe screw placement) in each group were
recorded.
Results:
The rate of pedicle screw misplacement was 6.4% in group 1vs 1.6%
in group 2 (P=0.03). There were no cases of neurologic injury from
suboptimal placement of screws. Additionally, the incidence of EMG
warnings was significantly lower in group 2 (3.7% vs. 10% (P=0.03).
Conclusion:
The use of an intraoperative 3-dimensional fluoroscopy system with
an image-guidance system results in greater accuracy of pedicle
screw placement than the use of preoperative CT scans, although
potentially dangerous placement of pedicle screws can be prevent-
ed by the use of EMG monitoring of lumbar nerve roots.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Object:
The aim of this study was to retrospectively evaluate the reliability
and accuracy of cervical pedicle screw (CPS) placement using an
intraoperative, full-rotation, 3D image (O-arm)–based navigation
system and to assess the advantages and disadvantages of the
system.
Methods:
The study involved 21 consecutive patients undergoing posterior
stabilization surgery of the cervical spine between April and Decem-
ber 2009. The patients, in whom 108 CPSs had been inserted, un-
derwent screw placement based on intraoperative 3D imaging and
navigation using the O-arm system. Cervical pedicle screw positions
were classified into 4 grades, according to pedicle-wall perforations,
by using postoperative CT.
Results:
Of the 108 CPSs, 96 (88.9%) were classified as Grade 0 (no perfora-
tion), 9 (8.3%) as Grade 1 (perforations < 2 mm, CPS exposed, and <
50% of screw diameter outside the pedicle), and 3 (2.8%) as Grade
2 (perforations between ≥ 2 and < 4 mm, CPS breached the pedicle
wall, and > 50% of screw diameter outside the pedicle).
No screw was classified as Grade 3 (perforation > 4 mm, complete
perforation). No neurovascular complications occurred because of
CPS placement.
Conclusion:
The O-arm offers high-resolution 2D or 3D images, facilitates accu-
rate and safe CPS insertion with high-quality navigation, and pro-
vides other substantial benefits for cervical spinal instrumentation.
Even with current optimized technology, however, CPS perforation
cannot be completely prevented, with 8.3% instances of minor
violations, which do not cause significant complications, and 2.8%
instances of major pedicle violations, which may cause catastrophic
complications. Therefore, a combination of intraoperative 3D im-
age–based navigation with other techniques may result in more
accurate CPS placement.
Abstract
Intraoperative, full-rotation, three-dimensional image (O-arm)–based
navigation system for cervical pedicle screw insertion- Clinical Article
Yoshimoto Ishikawa et al. Department of Orthopedic Surgery, Spine Center, Konan
Kosei Hospital, Takaya Chou, Konan City, Japan
Journal of Neurosurgery: Spine , Nov 2011
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Use of a quantitative pedicle screw accuracy system to assess new
technology: Initial studies on O-arm navigation and its eect on the
learning curve of percutaneous pedicle screw insertion.
Joseph A. Sclafani, MD et al. Department of Orthopaedic Surgery, University of
California, San Diego, Center for Minimally Invasive Surgery at Alvarado Hospital CA,
San Diego.
SAS Journal, September 2011
Background:
A quantitative screw accuracy system is proposed that allows for
high-fidelity discrimination between various methods of pedicle
screw insertion. Our purpose was to study the utility of a quantita-
tive screw accuracy scoring system to assess new imaging technolo-
gies and their effects on the minimally invasive spine learning curve.
Methods:
By use of a hypothetical “perfect screw,” a scoring system is proposed
that may be used to compare the position of a small number of
screws inserted according to a desired optimal position. This study
incorporates a retrospective review of imaging studies for 10 pa-
tients who underwent percutaneous pedicle screw placement with
either navigation-assisted O-arm imaging or navigation-assisted
C-arm imaging. For the learning-curve portion of the study, 2 cadav-
eric adult torsos were used for instrumentation. Computed tomog-
raphy imaging studies were used in both studies to assess screw
position in the pedicle and vertebral body in relation to an optimal
screw by use of a quantitative scoring system to rate accuracy.
Results:
The quantitative scoring system allowed a statistically significant
accuracy difference to be ascertained between 2 different technolo-
gies using fewer data points than previously published methods.
When this screw scoring system is applied to minimally invasive
percutaneous pedicle screw insertion, an optimal screw position
can be achieved with greater accuracy through navigation-assisted
technology (O-arm with computer-assisted navigation). When the
O-arm with computer-assisted navigation was used by a novice
surgeon learning the technique of percutaneous screw insertion,
screws were inserted in a shorter period without loss of accuracy. In
contrast, use of the traditional C-arm fluoroscopy leads to a loss of
accuracy with faster insertion times. Increased accuracy can be seen
clinically when compared with fluoroscopic navigation.
Conclusion:
The use of a quantitative scoring system allows for rapid assessment
of screw accuracy. As additional technologies and new teaching
techniques for pedicle screw insertion are developed, this
scoring system may be useful as an early assessment tool.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Navigated placement of iliac bolts: description of a new technique.
Garrido BJ, Wood KE. Lake Norman Orthopedic Spine Center, 170 Medical Park Rd,
Suite 102, Mooresville, NC 28117
Spine J. 2011 April
Background Context:
Image navigation has improved the safety and ability to perform
complex spinal procedures where visibility is not optimal or
anatomic deformity is present. Numerous published studies are
available demonstrating its effectiveness in improved pedicle screw
placement in complex multiplanar deformities. Studies have also
demonstrated image navigation technology versatility; however,
stabilization of the lumbopelvic junction with navigated iliac bolt
fixation has not been reported.
Purpose:
To describe an innovative versatile application of image navigation
technology in spine surgery. We examine the safety, accuracy, and
effectiveness of navigated iliac bolt placement while minimizing
challenges associated with current techniques.
Study Design: Patient Sample:
Five patients requiring lumbopelvic fixation for multiple indications,
including lumbosacral pseudoarthrosis, complex sacral fracture
patterns, compromised revision sacral fixation, and as an adjunct
to degenerative deformity with multilevel fusion, underwent
navigated iliac bolt placement.
Outcome Measures:
Accurate placement was verified using intraoperative computed
tomography (CT) imaging using O-ARM (Medtronic, Inc.) after
placement.
Methods:
Five patients requiring lumbopelvic fixation have undergone
navigated iliac bolt placement using Medtronic Stealth Station
Treon in conjunction with the O-ARM (Medtronic, Inc.). A right
percutaneous posterior superior iliac spine (PSIS) reference frame
was placed at the superior lateral margin of the PSIS, and bilateral
iliac bolts were placed via navigation using both the anatomic and
traditional surgical techniques. Both techniques were performed
without direct notch palpation and minimal soft-tissue exposure.
Postplacement intraoperative CT imaging was obtained to confirm
position and trajectory of the bolts using O-ARM (Medtronic, Inc.).
Results:
Ten iliac bolts were successfully placed in five patients. Intraopera-
tive CT demonstrated ideal iliac screw bone placement projecting
within 2 cm over sciatic notch, between pelvic tables. With image
navigation, both anatomic and traditional iliac bolt placement tech-
niques were performed with less surgical exposure, no radiation
exposure, and complete accuracy using image navigation tech-
niques with a percutaneous reference frame. The percutaneous
reference frame placed in the superior lateral PSIS did not cause
any interference with our navigated trajectory or bolt.
Conclusion:
Image-navigated iliac fixation allows for safe and accurate placement
of bilateral iliac bolts without PSIS percutaneous reference frame
interference. Image guidance eliminates fluoroscopic radiation
exposure and extensive soft-tissue dissection and facilitates both
traditional and anatomic iliac bolt placement techniques.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Use of intraoperative computed tomography scanning in
determining the magnitude of arthroscopic osteochondroplasty
Mofidi A, Shields JS, Tan JS, Poehling GG, Stubbs AJ.
Arthroscopy. 2011 Jul
Femoroacetabular impingement has recently become a recognized
cause of disability and hip arthritis. Hip arthroscopy and femoro-
acetabular reshaping have been performed to treat this condition.
Quantification of the excess femoral and acetabular bone requiring
resection has been challenging with the less invasive arthroscopic
technique. We describe the use of intraoperative computed tomog-
raphy assessing osteochondroplasty during arthroscopic surgery to
treat cam- and pincer-type femoroacetabular impingement. We also
describe the technical steps and present the important radiologic
findings we have been able to visualize.
We found intraoperative computed tomography scanning to be a
reliable and reproducible method of assessing the quality of femo-
roacetabular impingement surgery. We believe that femoroacetabu-
lar impingement surgery can be assessed intraoperatively by use of
computed tomography scanning where corrections can be made if
necessary.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

O-arm based spinal navigation and intraoperative 3D-imaging:
rst experiences
Gonschorek S. Hauck U. Spiegl T. Weis
Department of Spinal Surgery, Trauma Center, BGU-Murnau, Germany
Eur J Trauma Emerg Surg, March 2011
Since the first use of instrument-tracking techniques in the early
1990s, image-guided technologies became a leading topic in all
branches of spine surgery. Today, navigation is a idely available tool
in spine surgery and has become a part of clinical routine in many
centers for a large variety of indications. Spinal navigation may not
only contribute to more precision during surgery, but it may also
reduce radiation exposure and fiuoroscopy time, with advantages
not only for the patient but also for the operating room personnel.
Different registration algorithms have been developed differing
in terms of the type of image data used by the navigation system
(preoperatively acquired computed tomography [CT] images, intra-
operatively acquired fiuoroscopy images) and the way virtual and
physical reality is matched.
There is a tendency toward a higher accuracy for 3D fiuoroscopy-
based Registration algorithms. The 0-arm represents a new fiat-
panel technology with the source and detector moving in a 360 arc
around the patient. In combination with the Stealth station system,
navigation may start immediately after automated registration with
already referenced instruments. After instrumentation, an additional
scan may confirm intraoperatively the correct positioning of the
instrumenttation. The first experiences with the system are
described in this paper.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

There is a relatively high incidence of screw misplacement during
spinal instrumentation due to distortion of normal anatomy
following spinal trauma. The O-arm® is the next-generation spinal
navigation tool that provides intraoperative 3-D imaging for
complex spine surgeries. In this prospective study over 1-month
period, 25 patients (mean age 29.16 years (range 7-58 years), 22
(88%) males) with spinal injury who underwent spinal instrumenta-
tion under O-arm® guidance were included.
Fall from height (64%) was the most common etiology seen in 16
patients. The majority (68%) had dorsolumbar fractures. Spinal canal
compromise was seen in 21 patients (84%). Ten patients (40%) had
American Spinal Injury Association (ASIA) grade A injuries, two pa-
tients (8%) had grade B, five patients (20%) had grade C, four
patients (16%) each had grade D, and grade E injuries.
A total of 140 screws were inserted under O-arm guidance. Of these,
113 (81%) were dorsolumbar pedicle screws, 2 were odontoid
screws, 12 were anterior cervical screws, and 12 screws (48%) were
lateral mass screws. Mean duration of surgery was 4.5 h with a mean
blood loss of 674 mL. The mean postoperative stay was 6.3 days.
None of the patients had screw misplacement ort canal breach. No
patient deteriorated in ASIA grade postoperatively. The system was
rated as excellent for ease of use by all faculty using the system.
Accurate screw placement provides better patient safety and
reduces the in hospital stay thereby leading early patient mobiliza-
tion and may reduce the cost incurred in patient management.
Abstract
Use of O-arm for spinal surgery in academic institution in India:
Experience from JPN apex trauma centre
Pankaj Ailawadhi et al
Department of Neurosurgery, JPN Apex Trauma Centre, All India Institute of Medical
Sciences, New Delhi, India
Neurology India 2011
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Evaluation of the rate of decompression in anterior cervical
corpectomy using an intra-operative computerized tomography scan
(O-arm® system)
Francesco Costa et al
Neurosurgery Department- Istituto Clinico Humanitas,
Istituto IRCCS Galeazzi Milan, Italy
European Spine Journal 2011
Object:
The purpose of this study was to evaluate the efficacy of intra-
operative computerized tomography (CT) scanning in the analysis
of bone removal accuracy during anterior cervical corpectomy, in
order to allow any necessary immediate correction in the event of
inadequate bone removal.
Methods:
From September 2009 to December 2010 we performed an intra-
operative (CT) scan using the O-Arm™ Image system to assess the
rate of central and lateral decompression in all patients treated for
cervical spondylotic myelopathy by anterior cervical corpectomy
and fusion.
Results:
Out of a population of 187 patients admitted to our department,
with a diagnosis of myelopathy due to spondylotic degenerative
cervical stenosis, 15 patients underwent a surgical treatment with
anterior cervical corpectomy and fusion. There were nine males
(60%) and six females (40%); the mean age was 52.4 years, ranging
from 41 to 57 years.
The pre-operative radiologic investigations (MRI and CT scans)
revealed in the nine patients (60%) the extent of the compression to
one vertebral body (C4 one case, C5 four cases, C6 four cases), while
in the six cases (40%) the compression regarded two vertebral body
(C3 and C4 one case, C4 and C5 two cases, C5 and C6 three cases).
During surgery, when the decompression was judged completely,
a CT scan was performed: in 11 cases (73.3%) the decompression
was considered adequate, while in four cases (26.7%) it was deemed
insufficient and the surgical strategy was changed in order to opti-
mize the bone removal. In these cases an additional scan was taken
to prove the efficacy of decompression, achieved in all patients.
Conclusion:
Intra-operative CT scan performed during cervical corpectomy is a
really useful tool in helping to ensure complete bone removal and
the adequacy of surgery. The O-arm™ Image system grants optimal
image quality, allowing correctly assessing the rate of decompres-
sion and, in any case of doubt, allows an intra-operative evaluation
of the final correct positioning of the graft.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

e Accuracy of Intraoperative O-arm Images for the
Assessment of Pedicle Screw Position.
Santos ER, Ledonio CG, Castro CA, Truong WH, Sembrano JN.
Department of Orthopaedics, University of Minnesota
Spine 2011 Jun
Study Design: Human cadaveric study
Objective: The objective of the study was to determine the
accuracy of intraoperative O-arm images in determining pedicle
screw position using open dissection as the gold standard.
Summary of Background Data: Pedicle screws are widely
used in the treatment of various spinal disorders. Post-operative CT
scans are the imaging gold standard to detect pedicle screw mal-
position. However, a second procedure is necessary if such malpo-
sitioned screws have to be revised. The O-arm is an intraoperative
scanner that allows revision of a screw without having to return the
patient to the OR for a separate procedure. No previous studies have
looked at the accuracy of intraoperative O-arm images in
determining pedicle screw position.
Methods: This factorial validation study utilized 9 cadavers in a
comparison of intraoperative O-arm images and the dissection gold
standard. Four hundred sixteen screws were inserted using three-
dimensional image (O-arm) guidance from C2 to S1. The screw
positions were randomized into three groups:
“IN” (fully contained within the pedicle), “OUT-lateral” or “OUT-
medial”. After screw insertion, O-arm images were obtained and
reviewed in a blinded fashion by three independent observers.
Dissection identified the true position of the screws. Specificity,
sensitivity, positive predictive value (PPV) and negative predictive
value (NPV) were calculated using dissection results as the gold
standard. The interobserver reliability was also determined.
Results: The overall accuracy, specificity, sensitivity, PPV, and NPV
of O-arm images for the thoracic and lumbar spine were 73%, 76%,
71%, 74%, and 72%, respectively. Accuracy of surgeon perception in
the cervical spine was significantly less than in the thoracic and
lumbosacral spine. There was substantial interobserver agreement
between the three readers.
Conclusion: Intraoperative O-arm images accurately detect
significant pedicle screw violations in the thoracic and lumbosacral
spine, but are less accurate for the cervical spine.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

O-arm guided balloon kyphoplasty: preliminary experience
of 16 consecutive patients
Schils F.
Department of Neurosurgery, Clinique Saint Joseph, Liège, Belgium
Acta Neurochir Suppl. 2011
Balloon kyphoplasty is now widely used for the treatment of
vertebral compression fractures. Excellent pain relief is achieved
with cement injection, but the safety of the procedure relys on
excellent radiological exposure. The balloon kyphoplasty technique
is usually performed using one or two C-Arm devices to allow
correct antero-posterior (AP) and lateral view throughout the
surgical procedure. By definition, this minimal invasive spine
surgery is associated with radiation exposure for both the patient
and the surgeon. In our center, we recently moved from this way
of proceeding to the use of an O-Arm image guidance system to
perform cement augmentation in vertebral fractures.
To our knowledge, there is no clinical series describing the O-arm
use in a balloon kyphoplasty procedure published in the scientific
literature. We prospectively evaluate on 16 consecutive patients,
the feasibility of the O-Arm guided kyphoplasty procedure with the
original, usual tools, and we measured the fluoroscopy time and the
X-ray exposure. We didn’t experience any device related problem
and demonstrated a significant reduction of X-ray exposure and
time of fluoroscopy. We believe that using this new intraoperative
system, the overall time of surgery and fluoroscopy could still be
reduced in a near future.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Validity of surgeon perception of navigated pedicle screw position:
a cadaveric study.
Santos ER, Ledonio CG, Castro CA, Truong WH, Sembrano JN.
Department of Orthopaedics, University of Minnesota
Spine 2011 Jul
Study Design:
Human Cadaveric Experimental Study.
Objective:
To determine the validity of surgeon perception of pedicle screw
position inserted using intraoperative three-dimensional (O-arm)
image-guided screw insertion.
Summary of Background Data:
A surgeon’s ability to detect pedicle wall violations intraoperatively
is crucial for optimal pedicle screw placement. Accuracy of use of
a probe or sound to assess pedicle breach is not optimal and may
require experience. Intraoperative navigation has been shown
to improve screw placement accuracy. It has not been shown,
however, whether navigation in combination with screw tract
palpation can further increase the surgeon’s ability to detect a
pedicle breach in pedicle screw placement in the cervical, thoracic,
and lumbosacral spine.
Methods:
Four hundred eighteen screws were inserted using three-dimension-
al image guidance transpedicularly from C2 to S1 in 10 fresh frozen
cadavers. Screw tracts were created using navigation and then
probed. After probing, the surgeon stated whether he perceived
that the screw would be in, out laterally, or out medially. After screw
insertion for all the levels, open dissection was then performed to
determine the actual pedicle screw position. The surgeon’s percep-
tion of screw position was compared to the dissection results.
Results:
The overall specificity, sensitivity, positive predictive value, and
negative predictive value of the surgeon perception of pedicle
screw position were 87%, 80%, 78% and 88%, respectively. Accuracy
of surgeon perception of pedicle screw position was significantly
less than in the cervical spine when compared with thoracic and
lumbosacral spine.
Conclusion:
Surgeon perception of a navigated pedicle screw position is accurate
in the thoracic and lumbar spine. Detection of pedicle screw viola-
tions by surgeon perception in the cervical spine is less accurate
and does not reliably lead to accurate screw placement.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Modied transcorporeal anterior cervical microforaminotomy
assisted by O-arm-based navigation: a technical case report.
Kim JS, Eun SS, Prada N, Choi G, Lee SH.
Wooridul Spine Hospital, 47-4 Chungdam-dong, Gangnam-gu, Seou
Eur Spine J. 2011 Jul
This study was done to present our surgical experience of modi-
fied transcorporeal anterior cervical microforaminotomy (MTACM)
assisted by the O-arm-based navigation system for the treatment
of cervical disc herniation. We present eight patients with foraminal
disc herniations at the C5-C6, C6-C7, and C7-T1 levels. All patients
had unilateral radicular arm pain and motor weakness. The inclusion
criteria for the patients were the presence of single-level unilateral
foraminal cervical disc herniation manifesting persistent radiculopa-
thy despite conservative treatment. Hard disc herniation, down-
migrated disc herniation, concomitant moderate to severe bony spur
and foraminal stenosis were excluded. We performed MTACM to
expose the foraminal area of the cervical disc and removed the
herniated disc fragments successfully using O-arm-based navigation.
Postoperatively, the patients’ symptoms improved and there was no
instability during the follow-up period. MTACM assisted by O-arm-
based navigation is an effective, safe, and precise minimally invasive
procedure that tends to preserve non-degenerated structures as
much as possible while providing a complete removal of ruptured
disc fragments in the cervical spine.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Image-guided placement of occipitocervical instrumentation using a
reference arc attached to the headholder.
Nottmeier EW, Young PM.
Department of Neurosurgery, Mayo Clinic, Jacksonville, FL
Neurosurgery. 2010 Mar
Objective:
To develop a safe and accurate method of image-guided placement
of instrumentation in the upper cervical spine and occiput in which
the reference arc is fixed to the headholder.
Methods:
The authors describe a technique for placing screws at the occipital,
C1, and C2 levels using 3-dimensional image guidance in which
the reference arc is fixed to the headholder. Technical details are
discussed as well as modifications to the technique to maximize
navigation accuracy and decrease the need for re-registration. One
of 2 paired systems, the BrainLAB Vector Vision system (BrainLAB
Inc., Westchester, IL) used in conjunction with the Arcadis Orbic
Isocentric C-arm (Siemens Medical Solutions, Erlangen, Germany)
or the Stealth Treon system (Medtronic, Littleton, MA) paired with
the O-arm (Medtronic), was used for image guidance in this study. A
total of 18 patients had 82 screws placed at the occipital, C1, or C2
level using this technique. An independent radiologist interpreted
postoperative computed tomographic scans of these patients and
graded the screws for bony breach.
Results:
No complications resulted from the use of image guidance or from
the placement of instrumentation. Postoperative computed tomog-
raphy revealed 1 screw with a minimal breach of the outer lamina
of C2. Another screw was replaced intraoperatively secondary to a
minimal bony breach. No other bony breach occurred.
Conclusion:
This technique allows safe and accurate placement of instrumenta-
tion in the posterior occipitocervical junction using 3-dimensional
image guidance in which the reference arc is attached to the
headholder.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

ree-dimensional image-guided placement of S2 alar screws to
adjunct or salvage lumbosacral xation.
Background Context: Achieving fusion across the lumbosa-
cral junction is challenging because of the unfavorable biomechan-
ics associated with ending a fusion at this level. Bicortical placement
of S1 pedicle screws can increase the construct stability at the
lumbosacral junction; however, construct failure and pseudoarthro-
sis can still result. Iliac screws have been shown to increase the stiff-
ness of lumbosacral constructs, but disadvantages include difficulty
in connecting the iliac screw to adjacent sacral screws, painful screw
loosening or prominence requiring removal, and the inability to
place the screws in some patients with previous iliac crest autograft
harvest.
Purpose: The purpose of the study is to describe a technique of S2
alar screw placement using three-dimensional image guidance.
Study Design/Setting:
The study design is a retrospective analysis.
Patient Sample: Twenty patients undergoing lumbosacral fu-
sion had 32 screws placed using this technique.
Outcome Measures: An independent radiologist graded
screw placement and lumbosacral fusion on thin-cut postoperative
computed tomographic (CT) scans.
Methods: Image guidance in this study was accomplished with
the Medtronic Stealth Station Treon (Medtronic Inc., Littleton, MA,
USA) used in conjunction with the O-ARM (Medtronic Inc.).
Indications for placement of S2 alar screws included the following:
to adjunct S1 pedicle screws in multilevel fusion cases; as an adjunct
or alternative to S1 pedicle screws in pseudoarthrosis revision cases
in which the S1 screws had loosened; as an alternative to S1 pedicle
screws in cases where medial trajectory of an S1 pedicle screw was
difficult to obtain because of a low-set lumbosacral junction; and
a combination of the above. The entry point of the screw was typi-
cally chosen lateral and superior to the S2 dorsal foramen with
the trajectory directed anterior, inferior, and lateral. Attempt was
made to place the screw with the tip purchasing, but not penetrat-
ing through, the triangular area of cortical bone that can be found
at the anterior, inferior, and lateral boundary of the sacral ala. An
independent radiologist graded the placement of the screws on the
intraoperative CT scan obtained with the O-ARM or on postopera-
tive CT scans. Lumbosacral fusion was assessed on postoperative CT
scans obtained at follow-up.
Results: No complications occurred in this study as a result of S2
alar screw placement or image guidance. Five screws did penetrate
the anterior cortex of the sacrum, with no clinical consequence.
At the time of abstract submission, 16 patients were able to have
follow-up CT scans, 15 of which were graded as solid fusion at the
lumbosacral junction by the grading radiologist.
Conclusion: Three-dimensional image guidance allows for safe
placement of large S2 sacral alar screws that can provide
additional biomechanical stability to lumbosacral constructs or
serve as an alternate point of sacral fixation when S1 pedicle
screws cannot be salvaged or placed in a medial trajectory.
Abstract
Nottmeier EW, Pirris SM, Balseiro S, Fenton D. Department of Neurosurgery, Mayo Clinic,
Jacksonville, FL - Spine J. 2010 Jul
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Pedicle screw xation under navigation guidance based on O-arm.
Jin-Sung Kim et al.
Department of Neurosurgery, Wooridul Spine Hospital . Korea
The internet Journal of Minimally Invasive Spinal Technology. 2010 Supplement
Objectives:
The purpose of this study is to describe a surgical technique and the
accuracy of pedicle screw fixation under navigation guidance based
on O-arm.
Design:
Prospective study Methods: Instrumentation using transpedicular
screw fixation was performed using navigation guidance based
on O-arm with 19 patients (78 screws). Evaluation of screw place-
ment in every case was done on each instrumented vertebra by
using intraoperative O -arm and plain X-ray. Screw placements were
graded as good if the screws were placed in the central core of the
pedicle and the cancellous portion of the body. Screw placements
were graded as fair if the screws were placed slightly eccentrically,
causing erosion of the pedicle cortex, and with less than a 2-mm
perforation of the pedicular cortex. Screw placements were graded
as poor if the screws were placed eccentrically with large portion of
the screw extending outside the cortical margin of the pedicle and
with more than a 2-mm perforation of the pedicular cortex, causing
erosion of the pedicle cortex, and with less than a 2-mm perforation
of the pedicular cortex.
Results:
1 patient was excluded due to connection error between O-arm and
navigation. A total 72 pedicle screws were placed in 18 patients.
94.4% (68/72) were categorized as good; 5.6% (4/72), fair; and 0%
were poor. All 4 fair screws were placed extending lateral margin
of the pedicle without any neurologic complications. Conclusions:
Aided by navigation guidance based on O-arm, surgeons can more
safely navigate complex anatomy, and more accurately complete
the procedure making this technology particularly helpful for
pedicle screw fixation. This technique also makes complete avoid-
ance of radiation exposure to surgeons while increasing accuracy
and reliability of the surgical procedure for pedicle screw fixation
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Improving accuracy and reducing radiation exposure in minimally
invasive lumbar interbody fusion.
Wood MJ, Mannion RJ.
Department of Neurosurgery, The Princess Alexandra Hospital, Brisbane, Australia
J Neurosurg Spine. 2010 May
Objective:
The authors assessed the accuracy of placement of lumbar transpe-
dicular screws by using a computer-assisted, imaged-guided, mini-
mally invasive technique with continuous electromyography (EMG)
monitoring.
Methods:
This was a consecutive case series with prospective assessment of
procedural accuracy. Forty-seven consecutive patients underwent
minimally invasive lumbar interbody fusion and placement of
pedicle screws (PSs). A computer-assisted image guidance system
involving CT-based images was used to guide screw placement,
while EMG continuously monitored the lumbar nerve roots at the
operated levels with a 5-mA stimulus applied through the pedicle
access needle. All patients underwent CT scanning to determine
accuracy of PS placement. All episodes of adjusted screw trajectory
based on positive EMG responses were recorded. Pedicle screw
misplacement was defined as breach of the pedicle cortex by the
screw of more than 2 mm.
Results:
Two hundred twelve PSs were inserted in 47 patients. The screw mis-
placement rate was 4.7%. One patient experienced new postopera-
tive radiculopathy resulting from a sacral screw that was too long,
with lumbosacral trunk impingement. The trajectory of the pedicle
access needle was altered intraoperatively on 20 occasions (9.4% of
the PSs) based on positive EMG responses, suggesting that nerve
root impingement may have resulted from these screws had the
EMG monitoring not been used.
Conclusion:
The combination of computer-assisted navigation combined with
continuous EMG monitoring during pedicle cannulation results in
a low rate of PS misplacement, with avoidance of screw positions
that might cause neural injury. Furthermore, this technique allows
reduction of the radiation exposure for the surgical team without
compromising the accuracy of screw placement.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Minimally invasive pedicle screw xation utilizing O-arm uoroscopy
with computer-assisted navigation: Feasibility, technique, and
preliminary results.
Abstract
Park P, Foley KT, Cowan JA, Marca FL.
Department of Neurosurgery, University of Michigan Health System, Ann Arbor, MI, USA
Surg Neurol Int. 2010 Aug
Background:
Pedicle screw misplacement is relatively common, with reported
rates ranging up to 42%. Although computer-assisted image guid-
ance (CaIG) has been shown to improve accuracy in open spinal
surgery, its use in minimally invasive procedures has not been as
well evaluated. We present our technique and review the results
from a cohort of patients who underwent minimally invasive lumbar
pedicle screw placement utilizing the O-arm imaging unit in
conjunction with the StealthStation Treon System.
Methods:
A retrospective review of patients who underwent minimally
invasive pedicle screw fixation with CaIG was performed. Eleven
consecutive patients were identified and all were included. Nine
patients underwent a single-level transforaminal lumbar interbody
fusion. Two patients underwent multi-level fusion. Inaccurate
pedicle screw placement was determined by postoperative
computed tomography (CT) and graded as 0-2, 2-4, 4-6, or 6-8 mm.
Results:
A total of 52 screws were placed. Forty screws were inserted in eight
patients who had postoperative CT, and a misplacement rate of
7.5% was noted including one lateral and two medial breaches. All
breaches were graded as 0-2 mm and were asymptomatic. In the
remaining three patients, post-instrumentation O-arm imaging did
not demonstrate pedicle screw misplacement.
Conclusion:
Although this initial study evaluates a relatively small number of
patients, minimally invasive pedicle screw fixation utilizing the
O-arm and StealthStation for CaIG appears to be safe and accurate.
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

An assistive image-guided surgical robot system using o-arm uoros-
copy for pedicle screw insertion: preliminary and cadaveric study.
Abstract
Kim S, Chung J, Yi BJ, Kim YS.
Hanyang University, Seoul. Kyushu University, Fukuoka, Japan
Neurosurgery. 2010 Dec
Background:
The biplane fluoroscopy guided robot system (BFRS) was developed
for surgical robotic systems, minimally invasive surgeries, and coop-
erative robotic systems, as well as enhanced surgical planning and
navigation with preoperative and intraoperative image data.
Objective:
To propose a novel surgical robot system for percutaneous
pedicle screw insertion.
Methods:
The BFRS consists of an O-shaped biplane fluoroscope (O-arm),
a surgical planning and operating system, and an assistive robot.
Each part of the BFRS has a role in conducting percutaneous
pedicle screw placements. To evaluate BFRS accuracy, each part
was analyzed, and to assess the safety and feasibility of percutane-
ous pedicle screw insertions with the BFRS, cadaveric studies
involving 14 levels in the thoracic and lumbar spine regions
were conducted on 2 cadavers.
Results:
Errors in each part of the system and within the entire system were
evaluated. The accuracy of generating coordinates using O-arm
images was 0.30 ± 0.15 mm. The robot demonstrated a duplication
value of 4.97 μm RMS and an accuracy of 0.358 mm RMS. Total
system error was 1.38 ± 0.21 mm. The results of the cadaveric stud-
ies show that inserted pedicular screws were adequately located
within the spine with no unexpected malpositioning of the screws.
The axial angle difference between planned and postoperative data
was 2.45 ± 2.56°, and the sagittal angle difference was 0.71 ± 1.21°.
Conclusion:
The BFRS might be helpful in improving the accuracy of percuta-
neous pedicular screw insertion procedures. In the future, we will
attempt to improve the accuracy and reliability of the BFRS and to
determine new clinical applications for the BFRS.
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Minimally invasive image-guided direct repair of bilateral L-5 pars
interarticularis defects.
Brennen, R, et al.
Technical Note. Neurosurgery Focus 2008
Objective:
Lower back pain from spondylolysis historically has been treated
with a variety of options ranging from conservative care to open
fusion.
The authors describe the novel technique of minimally invasive
bilateral pars interarticularis screw placement by utilizingintraop-
erative 3D imaging and frameless navigation in a 17-year-old male
athlete. This technique is a modification of the open technique first
described in 1970 by Buck and has the advantages of minimal
dissection requirements with improved screw trajectory
visualization.
The patient’s postoperative course is discussed, followed by a brief
literature review of pars interarticularis defect treatment.
Conclusion:
We described a modified form of the Buck screw procedure with
a minimally invasive, image-guided method of pars interarticularis
fixation. The utilization of image guidance simplifies the otherwise
difficult visualization required for pars interarticularis screw place-
ment and allows minimal skin and muscle dissection, which may
translate into a more rapid postoperative recovery. Future applica-
tions of frameless navigation in the spine may allow such
uncommon hardware applications to be both successful
and less invasive.
Abstract
TABLE OF CONTENTS
SPINE & ORTHO
FORWARD
BACK

Computer-Assisted Surgical Planning and Image-Guided Surgical
Navigation in Refractory Adult Scoliosis Surgery: Case Report and
Review of the Literature
Objective:
Objective: In this case report, we present the utility of computer-
assisted surgical planning and image-guided surgical navigation in
the planning and execution of a major osteotomy to correct severe
kyphoscoliosis.
Summary of Background Data:
Computer-assisted surgical planning is useful to appreciate the
three-dimensional nature of scoliotic deformities and allows for
operative maneuvers to be simulated on a computer before their
implementation in the operating room. Imageguided surgical
navigation improves surgical accuracy and can help translate a
virtual surgical plan to the operative setting.
Methods:
We report the case of a 38- year-old woman with severe, congenital
kyphoscoliosis refractory to many previous surgeries, who presents
with moderate progressive myelopathy and severe pain attributable
to a sharp angular deformity at T12. Three-dimensional computed
tomography reconstruction and computer-assisted surgical plan-
ning were used to determine the optimal corrective osteotomy. The
surgical plan was translated to the operating room where a posteri-
or vertebrectomy and instrumented correction were executed with
the aid of image-guided surgical navigation.
Results:
The osteotomy was safely performed resulting in improved
sagittal and coronal alignments, as well as, correction of the sharp
kyphoscoliotic deformity at the thoracolumbar junction. At 6-month
follow-up, the patient’s myelopathy and pain had largely resolved
and she expressed high satisfaction with the procedure.
Conclusion:
We advocate this novel application of virtual surgical planning and
intraoperative surgical navigation to improve the safety and efficacy
of complex spinal deformity corrections.
Abstract
Metz, LN & Burch S.,
Spine Journal 33(9): E287-E292
BACK
TABLE OF CONTENTS
SPINE & ORTHO

Intraoperative computed tomography for deep brain stimulation
surgery: technique and accuracy assessment.
Background:
The efficacy of deep brain stimulation (DBS) is highly dependent on
the accuracy of lead placement.
Objective:
To describe the use of intraoperative computed tomography (iCT)
to confirm lead location before surgical closure and to study the
accuracy of this technique.
Methods:
Fifteen patients underwent awake microelectrode-guided DBS
surgery in a stereotactic frame. A portable iCT scanner (Medtronic
O-arm) was positioned around the patient’s head throughout the
procedure and was used to confirm lead location before fixation
of the lead to the skull. Images were computationally fused with
preoperative magnetic resonance imaging (MRI), and lead tip
coordinates with respect to the midpoint of the anterior commis-
sure-posterior commissure line were measured. Tip coordinates
were compared with those obtained from postoperative MRI.
Results:
iCT was integrated into standard frame-based microelectrode-
guided DBS surgery with a minimal increase in surgical time or
complexity. Technically adequate 2-dimensional and 3-dimensional
images were obtained in all cases. Head positioning and fixation
techniques that allow unobstructed imaging are described. Lead tip
measurements on iCT fused with preoperative MRI were statistically
indistinguishable from those obtained with postoperative MRI.
Conclusion:
iCT can be easily incorporated into standard DBS surgery, replaces
the need for C-arm fluoroscopy, and provides accurate intraopera-
tive 3-dimensional confirmation of electrode tip locations relative
to preoperative images and surgical plans. iCT fused to preoperative
MRI may obviate the need for routine postoperative MRI in DBS
surgery. Technical nuances that must be mastered for the efficient
use of iCT during DBS implantation are described.
Abstract
Shahlaie K, Larson PS, Starr PA.
University of California, San Francisco and San Francisco Veterans Affairs Medical
Center, San Francisco, California, USA
Neurosurgery. 2011 Mar
FORWARD
TABLE OF CONTENTS
CRANIAL & ENT

Frameless deep brain stimulation using intraoperative
O-arm technology
Abstract
Adam P. Smith, M.D., and Roy A. E. Bakay, M.D.
Department of Neurosurgery, Rush University Medical Center, Chicago, Illinois
J Neurosurg / April 15, 2011
Objectve:
Correct lead location in the desired target has been proven to be
a strong influential factor for good clinical outcome in deep brain
stimulation (DBS) surgery. Commonly, a surgeon’s first reliable
assessment of such location is made on postoperative imaging.
While intraoperative CT (iCT) and intraoperative MR imaging have
been previously described, the authors present a series of frameless
DBS procedures using O-arm iCT.
Methods:
Twelve consecutive patients with 15 leads underwent frameless DBS
placement using electrophysiological testing and O-arm iCT. Initial
target coordinates were made using standard indirect and direct
assessment. Microelectrode recording (MER) with kinesthetic re-
sponses was performed, followed by microstimulation to evaluate
the side-effect profile. Intraoperative 3D CT acquisitions obtained
between each MER pass and after final lead placement were fused
with the preoperative MR image to verify intended MER movements
around the target area and to identify the final lead location. Tip
coordinates from the initial plan, final intended target, and actual
lead location on iCT were later compared with the lead location on
postoperative MR imaging, and euclidean distances were calcu-
lated. The amount of radiation exposure during each procedure was
calculated and compared with the estimated radiation exposure if
iCT was not performed.
Results:
The mean euclidean distances between the coordinates for the
initial plan, final intended target, and actual lead on iCT compared
with the lead coordinates on postoperative MR imaging were 3.04 ±
1.45 mm (p = 0.0001), 2.62 ± 1.50 mm (p = 0.0001), and 1.52 ± 1.78
mm (p = 0.0052), respectively. The authors obtained good merging
error during image fusion, and postoperative brain shift was mini-
mal. The actual radiation exposure from iCT was invariably less than
estimates of exposure using standard lateral fluoroscopy and
anteroposterior radiographs (p < 0.0001).
Conclusion:
O-arm iCT may be useful in frameless DBS surgery to approximate
microelectrode or lead locations intraoperatively. Intraoperative
CT, however, may not replace fundamental DBS surgical techniques
such as electrophysiological testing in movement disorder surgery.
Despite the lack of evidence for brain shift from the procedure,
iCT-measured coordinates were statistically different from those
obtained postoperatively, probably indicating image merging
inaccuracy and the difficulties in accurately denoting lead location.
Therefore, electrophysiological testing may truly be the only means
of precisely knowing the location in 3D space intraoperatively. While
iCT may provide clues to electrode or lead location during the
procedure, its true utility may be in DBS
BACK
FORWARD
TABLE OF CONTENTS
CRANIAL & ENT

Comparison of Intraoperative Portable CT Scanners in Skull Base
and Endoscopic Sinus Surgery: Single Center Case Series
David B. Conley et al.
Northwestern University Feinberg School of Medicine, Chicago
Skull Base 2011
Precise and safe management of complex skull base lesions can be
enhanced by intraoperative computed tomography (CT) scanning.
Surgery in these areas requires real-time feedback of anatomic
landmarks.
Several portable CT scanners are currently available. We present
a comparison of our clinical experience with three portable
scanners in skull base and craniofacial surgery. We present clinical
case series and the participants were from the Northwestern
Memorial Hospital. Three scanners are studied: one conventional
multidetector CT (MDCT), two digital flat panel cone-beam CT
(CBCT) devices.
Technical considerations, ease of use, image characteristics, and
integration with image guidance are presented for each device.
All three scanners provide good quality images. Intraoperative
scanning can be used to update the image guidance system in
real time. The conventional MDCT is unique in its ability to resolve
soft tissue.
The flat panel CBCT scanners generally emit lower levels of radia-
tion and have less metal artifact effect. In this series, intraoperative
CT scanning was technically feasible and deemed useful in surgical
decision-making in 75% of patients.
Intraoperative portable CT scanning has significant utility in
complex skull base surgery. This technology informs the surgeon
of the precise extent of dissection and updates intraoperative
stereotactic navigation.
Abstract
BACK
FORWARD
TABLE OF CONTENTS
CRANIAL & ENT

Advancements in computed tomography management of
chronic rhinosinusitis
Leung, Randy et al
American Journal of Rhinology & Allergy, 2011
Background:
Advances in cone beam computed tomography (CBCT) technology
have allowed for reduction in radiation dosages as well as the
miniaturization of CT scanner units. This has given rise to new
applications for CT scanning, including point-of-care (POC) in-
office and intraoperative applications.
Methods:
A review of recent changes to radiological modalities as applied to
otolaryngology-head and neck surgery was performed. A discussion
of the physics, applications, and role of diagnostic imaging in the
evaluation of chronic rhinosinusitis (CRS) is conducted.
Results:
The adaptation of cone beam technology has allowed for the
practical implementation of CT scanning at the bedside, be it in
the clinic or operating room setting.
Conclusion:
Given their relative low cost, ease of storage, and low-dose
radiation exposure, POC-CT scanners have become an indispens-
able tool in the diagnosis and treatment of CRS. In the setting of
increasing antibiotic costs, overtreatment with antibiotics, and
fewer required return visits, POC-CT challenges the conventional
role of empiric medical therapy before progression to imaging for
the diagnosis of CRS.
Abstract
BACK
FORWARD
TABLE OF CONTENTS
CRANIAL & ENT

Intraoperative use of the Medtronic O-arm for deep brain
stimulation procedures.
Caire F, Gantois C, Torny F, Ranoux D, Maubon A, Moreau JJ.
Service de Neurochirurgie, Centre Hospitalier Universitaire de Limoges, Hôpital Du-
puytren, Limoges, France.
Stereotact Funct Neurosurg. 2010
The purpose of this study was to analyze the feasibility and utility
of 3D imaging to help lead positioning during a deep brain stimula-
tion (DBS) procedure. A bilateral subthalamic DBS procedure was
conducted in 2 patients for idiopathic Parkinson’s disease. Subtha-
lamic nucleus targeting was based on preoperative stereotactic MRI.
We used the Medtronic O-arm to perform 2D-imaging control
(frontal and lateral) as well as quick (<30 s) 3D acquisition. This
allowed us to check the positioning of micro-macro electrodes and
definite electrodes. 3D images were fused with postoperative CT
to assess their accuracy, and with preoperative MRI to visualize the
anatomical location of the electrodes.
3D imaging is a quick and safe method to ensure perioperative
control of lead placement during DBS procedures.
Abstract
BACK
FORWARD
TABLE OF CONTENTS
CRANIAL & ENT

Real-Time Intraoperative Computed Tomography to Assist
Cochlear Implant Placement in the Malformed Inner Ear
Bloom, J, et al.
Otology & Neurotology January 2009
Objective:
Cochlear implantation is increasingly being performed in children
with inner ear malformations. In severe cochleovestibular anoma-
lies, such as severe partitioning defects and common cavity dyspla-
sia, positioning of the electrode array can be hazardous, with
inadvertent placement into the internal auditory canal (IAC) or
carotid canal being well known. We describe a case in which real-
time intraoperative computed tomographic scanning was used to
help achieve proper electrode positioning in a child with a severe
malformation.
Patient:
Child with common cavity malformations undergoing cochlear
implantation. Intervention: Intraoperative computed tomography
used during implantation procedure.
Main Outcome Measure:
Use of technique in determining electrode position.
Results:
A 10-year-old patient with bilateral common cavity malformations
presented with declining performance in a functioning implant
placed 7 years earlier. The family elected implantation of the contra-
lateral ear. Via a posterior labyrinthotomy approach, a straight array
was placed into the common cavity. Intraoperative computed
tomographic scanning was immediately performed on the
operating room table, showing that the array was in the IAC.
A second attempt with a different insertion angle also resulted in
IAC placement. In a third attempt, the electrode was advanced as a
loop, grasping the tip through an adjacent second labyrinthotomy.
Computed tomography confirmed good position against the outer
wall of the cavity.
Conclusion:
Real-time intraoperative computed tomography is a new technol-
ogy with many potential applications in surgery. In our patient, it
allowed rapid and accurate determination of electrode position and
helped achieve ideal placement in a severely malformed inner ear.
Abstract
BACK
TABLE OF CONTENTS
CRANIAL & ENT

Intraoperative Navigation for Minimally Invasive Resection of
Periarticular and Pelvic Tumors
Karl Wu, MD; Nicholas P. Webber, MD; Russell A. Ward, MD; Kevin B. Jones, MD;
R. Lor Randall, MD Huntsman Cancer Institute, Utah, USA.
ORTHOPEDICS May 2011
The surgical approach to benign, metastatic, and some low-grade
malignant tumors is often difficult due to their typically precarious
locations. This article presents a series of cases where intraoperative
stealth navigation was used to treat periarticular tumors. The use of
paired point imaging with image fusion has made approaching
tumors through an accurate and minimally invasive technique a
viable option for the treatment of a subset of musculoskeletal tumors.
Conventional resection of periarticular and pelvic tumors of bone
usually requires an extensive surgical approach to adequately
visualize the tumor and protect the nearby neurovascular struc-
tures. When tumors in periarticular locations are encountered, dis-
location of the affected joint may be necessary, putting periarticular
and subchondral bone at risk for osseous necrosis and articular
surfaces at risk of mechanical insult at the time of dislocation. While
arthroscopic techniques may enable a minimally invasive mode of
surgical approach in certain anatomic locations, this is not always
feasible and can add additional operative time and morbidity to
the patient. This article describes 5 cases where locally aggressive
tumors in challenging periarticular anatomic locations were treated
in a minimally invasive manner with the assistance of image fusion
and paired-point registration.
Results:
All of the patients in this case series had an excellent Musculoskeletal
Tumor Society Functional Score (range, 26–29) postoperatively.
Basic demographic data and postoperative results are listed in the
Table. Average follow-up was 8.8 months (range, 6–16 months).
Musculoskeletal Tumor Society Functional Scores were satisfactory
in all patients. Near-complete relief of preoperative symptoms was
obtained in all patients. Excellent 3-D multiplanar visualization
of the tumor was obtained in all patients, and minimal invasive
approaches were completed successfully by using intraoperative
navigation guidance. No surgery-related complications were
encountered during any of the procedures. Average intraoperative
blood loss was 78 mL (range, 10–100 mL). Average operative time
was 92 minutes (range, 65– 125 minutes).
Abstract
TABLE OF CONTENTS
ONCOLOGY
FORWARD

Real-time intraoperative computed tomography assessment of
quality of permanent interstitial seed implantation for prostate cancer.
Zelefsky MJ, et al.
Brachytherapy Service, Memorial Sloan-Kettering Cancer Center, New York, NY
Urology. 2010 Nov
Objectives:
To evaluate the use of real-time kilovoltage cone-beam computed
tomography (CBCT) during prostate brachytherapy for intraopera-
tive dosimetric assessment and correcting deficient dose regions.
Methods:
A total of 20 patients were evaluated intraoperatively with a mobile
CBCT unit immediately after implantation while still anesthetized.
The source detector system was enclosed in a circular CT-like
geometry with a bore that accommodates patients in the lithotomy
position. After seed deposition, the CBCT scans were obtained. The
dosimetry was evaluated and compared with the standard post-
implantation CT-based assessment. In 8 patients, the deposited
seeds were localized in the intraoperative CBCT frame of reference
and registered to the intraoperative transrectal ultrasound images.
With this information, a second intraoperative plan was generated
to ascertain whether additional seeds were needed to achieve the
planned prescription dose. The final dosimetry was compared with
the postimplantation scan assessment.
Results:
The mean differences between the dosimetric parameters from the
intraoperative CBCT and postimplant CT scans were < .5% for
percentage of volume receiving 100% of the prescription dose,
minimal dose received by 90% of the prostate, and percentage of
volume receiving 150% of the prescription dose. The minimal dose
received by 5% (maximal dose) of the urethra differed by 8% on
average and for the rectum an average difference of approximately
18% was observed. After fusion of the implanted seed coordinates
from the intraoperative CBCT scans to the intraoperative transrectal
ultrasound images, the dosimetric outcomes were not significantly
different from the postimplantation CT dosimetric results.
Conclusion:
Intraoperative CT-based dosimetric evaluation of prostate perma-
nent seed implantation before anesthesia reversal is feasible and
might avert misadministration of dose delivery. The dosimetric
measurements using the intraoperative CBCT scans were
dependable and correlated well with the postimplant diagnostic
CT findings.
Abstract
TABLE OF CONTENTS
ONCOLOGY
BACK

Optimization of Radiation Exposure and Image Quality of the Cone-
beam O-arm Intraoperative Imaging System in Spinal Surgery.
Abstract
Abul-Kasim K, Söderberg M, Selariu E, Gunnarsson M, Kherad M, Ohlin A.
Skåne University Hospital, Lund University, Malmö, Sweden.
J Spinal Disord Tech. 2011 Mar
Study Design:
Retrospective study.
Objectives:
To optimize the radiation doses and image quality for the
cone-beam O-arm surgical imaging system in spinal surgery.
Summary of Background:
Neurovascular compromise has been reported after screw misplace-
ment during thoracic pedicle screw insertion. The use of O-arm with
or without navigation system during spinal surgery has been shown
to lower the rate of screw misplacement. The main drawback of
such imaging surgical systems is the high radiation exposure.
Methods:
Chest phantom and cadaveric pig spine were examined on the
O-arm with different scan settings: 2 were recommended by the
O-arm manufacturer (120 kV/320 mAs, and 120 kV/128 mAs), and 3
low-dose settings (80 kV/80 mAs, 80 kV/40 mAs, and 60 kV/40 mAs).
The radiation doses were estimated by Monte Carlo calculations.
Objective evaluation of image quality included interobserver agree-
ment in the measurement of pedicular width in chest phantom and
assessment of screw placement in cadaveric pig spine.
Results:
The effective dose/cm for 120 kV/320 mAs scan was 13, 26, and 69
times higher than those delivered with 80 kV/80 mAs, 80 kV/40 mAs,
and 60 kV/40 mAs scans, respectively. Images with 60 kV/40 mAs
were unreliable. Images with 80 kV/80 mAs were considered reliable
with good interobserver agreement when measuring the pedicular
width (random error 0.38 mm and intraclass correlation coefficient
0.979) and almost perfect agreement when evaluating the screw
placement (κ value 0.86).
Conclusions:
The radiation doses of the O-arm system can be reduced 5 to 13
times without negative impact on image quality with regard to
information required for spinal surgery.
FORWARD
TABLE OF CONTENTS
IMAGING TECHNOLOGY

e perspectives of users and developers in designing and developing
O-arm imaging system
Park MS, Chung CY, Kwon DG, Huh Y, Lee K, Lee KM.
Department of Orthopedic Surgery, Seoul National University Bundang Hospital
J Xray Sci Technol 2011
A questionnaire survey was performed to investigate the different knowledge of radiation exposure, awareness and expectation for
O-arm imaging system between the users (orthopaedic surgeons) and the developers (engineers). A total of 93 orthopaedic surgeons
and 19 engineers participated and answered the questionnaire consisting of 18 items designed for this study.
The items were focused on knowlege, awareness, and expectation. Orthopaedic surgeons had higher scores for items of knowledge
domains regarding radiation exposure than the engineers while the engineers were more sensitive to radiation hazards and adopted
higher levels of radiation protection than orthopaedic surgeons in the awareness domain. Most engineers and orthopaedic surgeons
answered that the requirements of diagnostic and intraoperative imaging systems differ.
Image resolution, a low radiation exposure, and the time required for image acquisition was the top three requirements of O-arm selected
by engineers. On the other hand, the top three requirements according to orthopaedic surgeons were; image resolution, expediency, and
spatial occupancy. User requirements need to be reflected in developing O-arm along with basic requirements such as image resolution
and low radiation exposure.
Abstract
BACK
FORWARD
TABLE OF CONTENTS
IMAGING TECHNOLOGY

Comparison Of Operator Radiation Exposure Between C-arm And
O-arm Fluoroscopy For Orthopaedic Surgery
Moon Seok Park, Kyoung Min Lee, Boram Lee, et al.
Department of Orthopedic Surgery, Seoul National University Bundang Hospital
Radiation Protection Dosimetry April 2011
The O-arm system has recently been introduced and has the capability of combined two-dimensional (2-D) fluoroscopy imaging and
three-dimensional computed tomography imaging. In this study, an orthopaedic surgical procedure using C-arm and O-arm systems
in their 2-D fluoroscopy modes was simulated and the radiation doses to susceptible organs to which operators can be exposed were
investigated.
The experiments were performed in four configurations of the location of the X-ray source and detector. Shielding effects on the thyroid
surface and the direct exposure delivered to the surgeon’s hands were also compared. The results obtained show that the O-arm delivered
higher doses to the sensitive organs of the operator in all configurations. The thyroid shield cut-off 89 % of the dose in the posteroanterior
configuration of both imaging systems. Thus, the operators need to pay more attention to managing radiation exposure, especially when
using the O-arm system
Abstract
BACK
FORWARD
TABLE OF CONTENTS
IMAGING TECHNOLOGY

Dosimetric characterization of a cone-beam O-arm imaging system.
Zhang J, Weir V, Fajardo L, Lin J, Hsiung H, Ritenour ER.
Medical Physics Section, Department of Radiology, University of Minnesota,
Minneapolis, MN
J Xray Sci Technol. 2009
This study compared patient dose and image quality of a mobile
O-arm cone beam imaging system in the 3D scan acquisition mode
to those of a 64 slice Computed Tomography (CT) imaging system.
The investigation included patient dose, scattered radiation, and
image quality measurements. The patient dose was measured using
a 0.6 cc Farmer ion chamber and 30 cm long Computed Tomogra-
phy (CT) head and body polymethylmethacrylate (PMMA) phantoms.
The results show that under identical radiographic techniques (kVp,
mAs, etc.) and with the same scan length, the O-arm in 3D scan
acquisition mode delivers approximately half the radiation dose of
a 64 slice CT scanner. Scattered radiation was measured at several
locations around the O-arm, at 1 m, 2 m and 3 m distances in 3D
CT scan acquisition mode with a RadCal 10 x 5-180 pancake ion
chamber using a 30 cm long CT body phantom as the source of
scatter. Similar measurements were made in a 64 slice CT scanner.
The data demonstrate that scattered radiation from the O-arm
to personnel involved in a clinical procedure is comparable to that
from a 64 slice CT scanner. Image quality was compared by expos-
ing a CATPHAN phantom to comparable doses in both the O-arm
and the CT scanner. The resultant images were then evaluated for
modulation transfer function (MTF), high-contrast spatial resolution,
and low contrast sensitivity for clinical application purpose. The
O-arm shows comparable high contrast to the CT (7 lp/cm vs. 8 lp/
cm). The low contrast in the O-arm is not visible due to fixed pattern
noise. For image guided surgery applications where the location
of a structure is emphasized over a survey of all image details, the
O-arm has some advantages due to wide radiation beam cover-
age and lower patient dose. The image quality of the O-arm needs
significant improvement for other clinical applications where high
image quality is desired.
Abstract
BACK
TABLE OF CONTENTS
IMAGING TECHNOLOGY
