OS Lab Manual 2017_modified 1 2017 Modified
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 171 [warning: Documents this large are best viewed by clicking the View PDF Link!]

DEPARTMENT OF COMPUTER SCIENCE & ENGG.
CERTIFICATE
This is to certify that Ms./Mr. …………………...……………………………………
Reg. No. …..…………………… Section: ………………… Roll No: ………………...
has satisfactorily completed the lab exercises prescribed for OPERATING SYSTEMS
LAB [CSE 3111] of Third Year B. Tech. Degree at MIT, Manipal, in the academic year
2017-2018.
Date: ……...................................
Signature
Faculty in Charge
CONTENTS
LAB
NO. TITLE PAGE
NO. REMARKS
COURSE OBJECTIVES AND OUTCOMES i
EVALUATION PLAN i
INSTRUCTIONS TO THE STUDENTS ii
1 LINUX BASIC COMMANDS, SHELL
CONCEPTS AND FILE FILTERS 1
2 SHELL SCRIPTING– 1 20
3 SHELL SCRIPTING– 2 30
4 SYSTEM CALLS IN LINUX 40
5 THREAD PROGRAMMING 59
6 CPU SCHEDULING ALGORITHMS 70
7 INTERPROCESS COMMUNICATION 80
8 PROCESS SYNCHRONIZATION 105
9 DEADLOCK ALOGIRITHMS 121
10 MEMORY MANAGEMENT 133
11 PAGE REPLACEMENT ALGORITHMS 144
12 DISK SCHEDULING ALGORITHMS 155
Page i of iii
Course Objectives
Illustrate and explore the basic commands, shell scripting and system calls related
to Linux operating system.
Learn process management concepts which include scheduling algorithms and
inter process communication.
Understand the working of memory management schemes, disk scheduling
algorithms, and page replacement algorithms through simulation.
Course Outcomes
At the end of this course, students will have the
Ability to execute Linux commands, shell scripting using appropriate Linux
system calls.
Ability to design thread programming, simulate process management and inter
process communication techniques.
Ability to implement the memory management, disk scheduling and page
replacement algorithms.
Evaluation plan
Internal Assessment Marks : 60%
Continuous evaluation component (for each experiment):10 marks
The assessment will depend on punctuality, program execution, maintaining the
observation note and answering the questions in viva voce
Total marks of the 12 experiments will sum up to 60
End semester assessment of 2 hour duration: 40 Marks
Page ii of iii
INSTRUCTIONS TO THE STUDENTS
Pre- Lab Session Instructions
1. Students should carry the Class notes, Lab Manual and the required stationery to
every lab session.
2. Be in time and follow the Instructions from Lab Instructors.
3. Must Sign in the log register provided.
4. Make sure to occupy the allotted seat and answer the attendance.
5. Adhere to the rules and maintain the decorum.
In- Lab Session Instructions
Follow the instructions on the allotted exercises given in Lab Manual.
Show the program and results to the instructors on completion of experiments.
On receiving approval from the instructor, copy the program and results in the
Lab record.
Prescribed textbooks and class notes can be kept ready for reference if required.
General Instructions for the exercises in Lab
The programs should meet the following criteria:
o Programs should be interactive with appropriate prompt messages, error
messages if any, and descriptive messages for outputs.
o Programs are properly indented and comments should be given whenever
it is required.
o Use meaningful names for variables and procedures.
Plagiarism (copying from others) is strictly prohibited and would invite severe
penalty during evaluation.
The exercises for each week are divided under three sets:
o Solved exercise
o Lab exercises - to be completed during lab hours
o Additional Exercises - to be completed outside the lab or in the lab to
enhance the skill.
In case a student misses a lab class, he/ she must ensure that the experiment is
completed at students end or in a repetition class (if available) with the permission
of the faculty concerned but credit will be given only to one day’s experiment(s).
Page iii of iii
Questions for lab tests and examination are not necessarily limited to the questions
in the manual, but may involve some variations and / or combinations of the
questions.
A sample note preparation is given later in the manual as a model for observation.
THE STUDENTS SHOULD NOT
Carry mobile phones while working with computer.
Go out of the lab without permission.
LAB NO: 1
Page 1 of 167
LAB NO: 1 Date:
LINUX BASIC COMMANDS, SHELL CONCEPTS AND FILE FILTERS
Objectives:
In this lab, student will be able to:
1. Learn Linux basic commands
2. Understand the working of commands and important shell concepts, file filters.
3. Write and execute basic commands in a Shell.
shell
a utility program that enables the user to interact with the Linux operating system.
Commands entered by the user are passed by the shell to the operating for
execution. The results are then passed back by the shell and displayed on the user's
display. There are several shells available like Bourne shell, C shell, Korn shell,
etc. Each shell differs from the other in Command interpretation. The most
popular shell is bash.
shell prompt
a character at the start of the command line which indicates that the shell is ready
to receive the commands. The character is usually a '%' (percentage sign) or a ‘$’
(dollar sign).
For. e.g.
Last login : Thu April 11 06:45:23
$ _ (This is the shell prompt, the cursor shown by the _ character).
Linux commands are executable binary files located in directories with the name bin (for
binary). Many of the commands that are generally used are located in the directory
/usr/bin.
echo is a command for displaying any string in the command prompt.
For e.g. $ echo “Welcome to MIT Manipal”
Environment variables: Shell has built in variables which are called environment
variables. For e.g. the user who has logged in can be known by typing
$echo $USER
The above will display the current user’s name.
When the command name is entered, the shell checks for the location of the command in
each directory in the PATH environment variable. If the command is found in any of the
LAB NO: 1
Page 2 of 167
directories mentioned in PATH, then it will execute. If not found, will give a message
“Command not found”.
COMMONLY USED LINUX COMMANDS
who: Unix is a system that can be concurrently used by multiple users and to know the
users who are using the system can be known by a who command. For e.g. Current users
are kumar, vipul and raghav. These are the user ids of the current users.
$ who [Enter]
kumar pts/10 May 1 09.32
vipul pts/4 May 1 09.32
raghav pts/5 May 1 09.32
The first columns indicates the user name of the user, second column indicates the
terminal name and the third column indicates the login time. To know the user who has
invoked the command can be known by the following command. For e.g. if kumar is the
user who has typed the who command above then,
$ who am i [Enter]
kumar pts/10 May 1 09.32
ls: UNIX system has a large number of files that control its functioning and users also
create files on their own. These files are stored in separate folders called directories. We
can list the names of the files available in this directory with ls command. The list is
displayed in the order of creation of files.
$ ls [Enter]
README
chap01
chap02
chap03
helpdir
progs
In the above output, ls displays a list of six files. We can also list specific files or
directories by specifying the file name or directory names. In this we can use regular
expressions.
LAB NO: 1
Page 3 of 167
For e.g. to list all files beginning with chap we can use the following command.
$ ls chap* [Enter]
chap01
chap02
chap03
To list further detailed information we can use ls -l command, where -l is an option
between the command and filenames. The details include, file type, file or directory
access permissions, number of links, owner name, group name, file or directory size,
modification time and name of file or directory.
$ ls -l chap* [Enter]
-rw-r- - r- - l kumar users 5670 Apr 3 09.30 chap01
-rw-r- - r- - l kumar users 5670 Feb 23 09.30 chap02
-rw-r- - r- - l kumar users 5670 Apr 30 09.34 chap03
The argument beginning with hyphen is known as option. The main feature of option is
it starts with hyphen. The command ls prints the columnar list of files and directories.
With the –l option it displays all the information as shown above.
General syntax of ls command:
ls –[options][file list][directory list]
In Linux, file names beginning with period are hidden files, are not normally displayed
in ls command. To display all files, including the hidden ones, use option –a in ls
command as shown below:
$ ls -a
$ ls / will display the name of the files and sub-directories under the root directory.
pwd: This command gives the present working directory where the user is currently
located.
$ pwd
/home/kumar/pis
LAB NO: 1
Page 4 of 167
cd: To move around in the file system use cd (change directory) command. When used
with argument, it changes the current directory to the directory specified as argument, for
instance:
$ pwd
/home/kumar
$ cd progs
$ pwd
$ /home/kumar/progs
cd .. : To change the working directory to the parent of the current directory we need to
use
$ cd ..
.. (double dot) indicates parent directory. A single dot indicates current directory.
cat: cat is a multipurpose command. Using this we can display a file, create a file as well
as concatenate files vertically.
$ cat > filename[Enter]
cat > os.txt
Welcome to Manipal. (This the content which will be placed in file with filename)
[Ctrl D] End of input
$_ (comes to the shell prompt)
The above command will create a file named os.txt in the current directory. To see the
contents of the file.
$ cat os.txt[Enter]
Welcome to Manipal.
To display a file we can use cat command as shown above.
We can use cat for displaying more than one file, one after the other by listing the files
after cat. For e.g.
$ cat os.txt lab.txt
will display os.txt followed with lab.txt
LAB NO: 1
Page 5 of 167
cp: To copy the contents of one file to another.
Syntax: cp sourcefilename targetfilename [Enter]
This command is also used to copy one or more files to a directory. The syntax of this
form of cp command is
Syntax : cp filename(s) directoryname
If the file os.txt in current directory i.e. /home/kumar/pis needs to be copied into /home
directory then it will be done as follows.
$ cp os.txt /home/ OR $ cp os.txt ../../
mv: This command renames or moves files. It has two distinct function: It renames a file
or a directory and it moves a group of files to a different directory.
Syntax: mv oldfilename newfilename
Syntax of another form of this command is
mv file(s) directory
mv doesn’t create a copy of the file, it merely renames it. No additional space is consumed
on disk for the file after renaming. To rename the file chap01 to man01,
$ mv chap01 man01.
If the destination file doesn’t exist, it will be created. For the above example, mv simply
replaces the filename in the existing directory with the new name. By default mv doesn’t
prompt for overwriting the destination file if it exist.
The following command moves three files to the progs directory:
$ mv chap01 chap02 chap03 progs
mv can also be used to rename a directory for instance pis to pos:
$ mv pis pos
rm: This command deletes one or more files.
Syntax: rm filename
LAB NO: 1
Page 6 of 167
The following command deletes three files
$ rm chap01 chap02 chap03[Enter]
A file once deleted can be recovered subject to conditions by using additional software.
rm won’t normally remove a directory but it can remove files from one or more
directories. It can remove two chapters from the progrs directory by using:
$ rm progrs/chap01 progrs/chap02
mkdir: Directories are created by mkdir command. The command is followed by the
name of the directories to be created.
Syntax: mkdir directoryname
$ mkdir data [Enter]
This creates a directory named data under the current directory.
$ mkdir data dbs doc
The above command creates three directories with names data, dbs and doc.
rmdir : Directories are removed by rmdir command. The command is followed by the
name of the directory to be removed. If a directory is not empty, then the directory will
not be removed.
Syntax: rmdir directoryname
$ rmdir patch [Enter]
The command removes the directory by the name patch.
In Linux every file and directory has access permissions. Access permissions define
which users have permission to access a file or directory. Permissions are three types,
read, write and execute. Access permissions are defined for user, group and others.
For e.g. If access permission is only read for user, group and others, then it will be
r- -r--r- -
Access permissions can also be represented as a number. This number is in octal system.
An access permission represented in numerical octal format is called absolute permission.
The absolute permission for the above is
444
LAB NO: 1
Page 7 of 167
If the access permission is read, write for user, read, execute for group and only execute
for others then it will be,
rw-r-x- -x
The absolute permission for the above is
651
chmod: changes the permission specified in the argument and leaves the other
permissions unaltered. In this mode the following is the syntax.
Sytax: chmod category operation permission filename(s)
chmod takes as its argument an expression comprising some letters and symbols that
completely describe the user category and the type of permission being assigned or
removed. The expression contains three components:
User category (user, group, others)
The operation to be performed (assign or remove a permission). The type of permission
(read, write and execute)
The abbreviations used for these three components are shown in Table 1.1.
E.g. to assign execute permission to the user of the file xstart;
$ chmod u+x xstart
$ ls –l xstart
- rwxr- - r- - l kumar metal 1980 May 01 20:30 xstart.
The command assigns (+) execute (x) permission to the user (u), but other permissions
remain unchanged. Now the owner of the file can execute the file but the other categories
i.e. group and others still can’t. To enable all of them to execute this file:
$ chmod ugo+x xstart
$ ls –l xstart
- rwxr-x r- x l kumar metal 1980 May 01 20:30 xstart.
The string ugo combines all the three categories user, group and others. This command
accepts multiple filenames in the command line:
$ chmod u+x note note1 note3
$ chmod a-x, go+r xstart; ls –l xstart (Two commands can be run simultaneously with
;)
- rw-r--rwx l kumar metal 1980 May 01 20:30 xstart.
LAB NO: 1
Page 8 of 167
Table 1.1 Abbreviations Used by chmod
Category Operation Permission
u- User + Assigns permission r- Read permission
g- Group - Removes permission w- Write permission
o- Others = Assigns absolute
permission
x- Execute permission
a- All(ugo)
Absolute Permissions:
Sometimes without needing to know what a file’s current permissions the need to set all
nine permission bits explicitly using chmod is done.
Read permission – 4 (Octal 100)
Write permission – 2 (Ocal 010)
Execute permission -1 (Octal 001)
For instance, 6 represents read and write permissions, and 7 represents all permissions as
can easily be understood from Table 1,2.
Table 1.2 Absolute Permissions
Binary
Octal Permissions
Significance
000 0 --- No permissions
001 1 --x Executable only
010 2 -w- Writable only
011 3 -wx Writable and executable
100 4 r-- Readable only
101 5 r-x Readable and executable
LAB NO: 1
Page 9 of 167
110 6 rw- Readable and writable
111 7 rwx Readable, writable and
executable
$ chmod 666 xstart; ls –l xstart
- rw-rw- rw - l kumar metal 1980 May 01 20:30 xstart.
The 6 indicates read and write permissions (4 + 2).
date: This displays the current date as maintained in the internal clock run perpetually.
$ date [Enter]
clear: The screen clears and the prompt and cursor are positioned at the top-left corner.
$ clear [Enter]
man: is used to display help file related to a command or system call.
Syntax: man {command name/system call name}
e.g. man date
man open
wc: displays a count of lines, words and characters in a file.
e.g. wc os.txt
1 3 19 os.txt
Syntax: wc [ -c | -m | -C] [ -l] [-w] [file….]
Options: The following options are supported:
-c Count bytes.
-m Count characters.
-C Same as –m,
-l Count lines
-w Count words delimited by white space characters or new line characters.
If no option is specified the default is –lwc (count lines, words, and bytes).
LAB NO: 1
Page 10 of 167
Redirection Operators
For any program whether it is developed using C, C++ or Java, by default three streams
are available known as input stream, output stream and error stream. In programming
languages, to refer to them some symbolic names are used (i.e. they are system defined
variables).
The following operators are the redirection operators
1. > standard output operator
> is the standard output operator which sends the output of any command into a file.
Syntax: command > file1
e.g. ls > file1
Output of the ls command is sent to a file1. First, file file1 is created if not exists
otherwise, its content is erased and then output of the command is written.
E.g.: cat file1 > file2
Here, file2 get the content of file1.
E.g.: cat file1 file2 file3 > file4
This creates the file file4 which gets the content of all the files file1, file2 and file3 in
order.
2. < standard input operator
< operator (standard input operator ) allows a command to take necessary input from a
file.
Syntax: $ command < file
E.g.: cat<file1
This displays output of file file1 on the screen.
E.g.: cat <file1 >file2
This makes cat command to take input from the file file1 and write its output to the file
file2. That is, it works like a cp command.
3. >> appending operator
Similarly, >> operator can be used to append standard output of a command to a file.
E.g.: command>>file1
This makes, output of the given command to be appended to the file1. If the file1 doesn’t
exist, it will be created and then standard output is written.
LAB NO: 1
Page 11 of 167
4. << document operator
There are occasions when the data of your program reads is fixed and fairly limited. The
shell uses the << symbols to read data from the same file containing the script. This is
referred to as here document, signifying that the data is here rather than in a separate
file. Any command using standard input can also take input from a here document.
Example.:
#!/bin/bash
cat <<DELIMITER
hello
this is a here
document
DELIMITER
This gives the output:
hello
this is a here
document
Shell Concepts
This section will describe some of the features that are common in all of the shells.
1. Wild-card: The metacharacters that are used to construct the generalized pattern for
matching filenames belong to a category called wild-cards.
List of shell’s wild-cards:
Wild-card Matches
* Any number of characters including none
? A single or zero character
[ijk] A single character- either an i, j or k
[x –z] A single character between x and z
[!ijk] A single character that is not an i, j or k.
[!x–z] A single character not between x and z.
{pat1, pat2, ….} pat1, pat2, etc
LAB NO: 1
Page 12 of 167
Example: Consider a directory structure /home/kumar which have the following files:
README
chap01
chap02
chap03
helpdir
progs
Then with the below command the following output would be displayed.
$ ls chap*
chap chap01 chap02 chap03
$ ls .*
.bash_profile .exrc .netscape .profile
2. Pipes: Standard input and standard output constitute two separate streams that can be
individually manipulated by the shell. If so then one command can take input from the
other. This is possible with the help of pipes.
Assume if the ls command which produces the list of files, one file per line, use
redirection to save this output to a file:
$ ls > user.txt
$ cat user.txt
The file shows the list of files.
Now to count the number of files:
$ ls | wc – l
The above command gives the number of files. This is how | (pipe) is used. There’s no
restriction on the number of commands to be used in pipe.
3. Command substitution: The shell enables the connecting of two commands in yet
another way. While a pipe enables a command to obtain its standard input from the
standard output of another command, the shell enables one or more command arguments
to be obtained from the standard output of another command. This feature is called
command substitution.

LAB NO: 1
Page 13 of 167
$ echo The date today is `date`
The date today is Sat May 6 19:01:56 IST 2017
$ echo “There are total `ls | wc –l ` files and sub-directory in the current directory
There are 15 files in the current directory.
4. Sequences: Two separate commands can be written in one line using “; “ in sequences.
$ chmod 666 xstart; ls –l xstart
5. Conditional Sequences: The shell provides two operators that allow conditional
execution- the && and ||, which typically have this syntax:
cmd1 && cmd2
cmd1 || cmd2
The && delimits two commands; the command cmd2 is executed only when cmd1
succeeds.
The || operator plays inverse role; the second command cmd2 is executed only when the
first command cmd1 fails.
Note: All built-in shell commands returns non-zero if they fail. They return zero on
success.
e.g: if there is a program hello.c which displays ‘Hello World’ on compilation and
execution. Then the following command in conditional sequences could be used to
display the same:
$ cc hello.c && ./a.out
This command displays the output ‘Hello World’ if the compilation of the program
succeeds. Similarly in case the compilation fails for the program the following output
‘Error’ could be displayed with the following command:
$ cc hello.c || echo ‘Error’
File Filters commands in Linux:
1. head: To see the top 10 lines of a file - $ head <file name>
To see the top 5 lines of a file - $ head -5 <file name>
2. tail: To see last 10 lines of a file - $ tail < file name>
To see last 20 lines of a file - $ tail -20 <file name>

LAB NO: 1
Page 14 of 167
3. more: To see the contents of a file in the form of page views - $ more <file name>
$ more f1.txt
4. grep: To search a pattern of word in a file, grep command is used.
Syntax: $ grep < word name> < file name>
$ grep hi file_1
To search multiple words in a file
$ grep -E 'word1|word2|word3' <file name>
$ grep -E 'hi|beyond|good' file_1
5. sort: This command is used to sort the file .
$ sort <file name>
$ sort file_1
To sort the files in reverse order
$ sort -r <file name>
To display only files
$ ls –l | grep "^-"
To display only directories
$ ls –l | grep "^d"
Some basic system calls:
The directory functions are declared in the header file dirent.h. This uses a structure DIR
as a basis for directory manipulation. A pointer to this structure called the directory stream
(a DIR *), acts in much the same way as a file stream (FILE *) does for the file
manipulation. Directory entries themselves are returned in dirent structure, also declared
in dirent.h. One should never alter the fields in DIR structure directly. Some functions
reviewed below are:
opendir: This function opens a directory and establishes a directory stream. If successful,
it returns a pointer to a DIR structure to be used for reading directory entries.
#include <sys/types.h>
#include <dirent.h>

LAB NO: 1
Page 15 of 167
DIR *opendir(const char *name);
opendir returns a null pointer on failure. Note that a directory stream uses a low-level
file descriptor to access the directory itself, so opendir could fail with too many open files.
readdir: The readdir function returns a pointer to a structure detailing the next directory
entry in the directory stream dirp. Successive calls to readdir return further directory
entries. On error, and at the end of the directory, readdir returns NULL. POSIX-
compliant systems leave errno unchanged when returning NULL at end of directory and
set it when an error occurs.
#include <sys/types.h>
#include <dirent.h>
struct dirent *readdir(DIR *dirp);
Note that readdir scanning isn’t guaranteed to list all the files (and subdirectories) in a
directory if there are other processes creating and deleting files in the directory at the
same time. The dirent structure containing directory entry details includes the following
entries:
ino_t d_ino: The inode of the file
char d_name[]: The name of the file
On Linux, the dirent structure is defined as follows:
struct dirent {
ino_t d_ino; /* inode number */
off_t
d_off;
/* offset to the next dirent */
unsigned short d_reclen; /* length of this record */
unsigned char d_type; /* type of file */
char d_name[256]; /* filename */
};
To create and remove directories the mkdir and rmdir system calls are used.
#include <sys/stat.h>
int mkdir(const char *path, mode_t mode);
The mkdir system call is used for creating directories and is the equivalent of the mkdir
program. The mkdir makes a new directory with path as its name. The directory
permissions are passed in the parameter mode and are given as in the O_CREAT option
of the open system call and, again, subject to umask.
LAB NO: 1
Page 16 of 167
#include <unistd.h>
int rmdir(const char *path);
The rmdir system call removes directories, but only if they are empty. The rmdir
program uses this system call to do its job.
closedir: The closedir function closes a directory stream and frees up the resources
associated with it. It returns 0 on success and 1 if there is an error.
#include <sys/types.h>
#include <dirent.h>
int closedir(DIR *dirp);
Lab Exercises:
1. Write shell commands for the following.
(i) To create a directory in your home directory having 2 subdirectories.
(ii) In the first sub directory create 3 different files with different content in each of
them.
Program to simulate ls command
//Write a program for the simulation of ls command.
#include<stdio.h>
#include<dirent.h> //for directory commands
#include<stdlib.h> //for exit
int main()
{
char dirname[10];
DIR*p; // pointer to directory
struct dirent *d; // pointer to directory entry structure
printf("Enter directory name\n");
scanf("%s", dirname);
p=opendir(dirname);
if(p==NULL)
{
printf("Cannot find directory");
exit(-1);
}
while(d = readdir(p))
LAB NO: 1
Page 17 of 167
(iii) Copy the first file from the first subdirectory to the second subdirectory.
(iv) Create one more file in the second subdirectory which has the output of the
number of users and number of files.
(v) To list all the files which starts with either a or A.
(vi) To count the number of files in the current directory.
(vii) Display the output if the compilation of a program succeeds.
2. Execute the following commands in sequence: i) date ii) ls iii ) pwd
3. Write a C program to simulate the grep command.
Additional Exercises:
1. Write shell commands for the following.
(i) To Display an error message if the compilation of a program fails.
(ii) To write a text block into a new file.
(iii) List all the files.
(iv) To count the number of users logged on to the system.
2. Write a C program to simulate wc command to count number of characters, words
and lines in a file.
----------------------------------------------------------------------------------------------------------
[OBSERVATION SPACE – LAB1]
[OBSERVATION SPACE – LAB1]
LAB NO: 1
Page 18 of 167
[OBSERVATION SPACE – LAB1]
LAB NO: 1
Page 19 of 167
LAB NO: 2
Page 20 of 167
LAB NO: 2 Date:
SHELL SCRIPTING-1
Objectives:
In this lab, student will be able to:
1. Understand the importance of scripts.
2. Write and execute shell scripts.
The Linux shell is a program that handles interaction between the user and the system.
Many of the commands that are typically thought of as making up the Linux system are
provided by the shell. Commands can be saved as files called scripts, which can be
executed like a program.
SHELL PROGRAMS: SCRIPTS
SYNTAX: scriptname
NOTE: A file that contains shell commands is called a script. Before a script can be run,
it must be given execute permission by using chmod utility (chmod +x script). To run the
script, only type its name. They are useful for storing commonly used sequences of
commands to full-blown programs.
VARIABLES
Parameter Variables
$@ an individually quoted list of all the positional parameters
$# the number of positional parameters
$! the process ID of the last background command
$0 The name of the shell script.
$$ The process ID of the shell script, often used inside a script for
generating unique temporary filenames; for example /tmp/tmpfile_$$.
$1, $2,
…
The parameters given to the script.
$* A list of all the parameters, in a single variable, separated by the first
character in the environment variable IFS.
LAB NO: 2
Page 21 of 167
Exercise:
1. Try the following:
$ echo $HOME, $PATH
$ echo $MAIL
$ echo $USER, $SHELL, $TERM
2. Try the following, which illustrates the difference between local and environment
variable:
$ firstname=Rakesh ……local variables
$ lastname=Sharma
$ echo $fristname $lastname
$ export lastname …..make “lastname” an envi var
$ sh …..start a child shell
$ echo $firstname $lastname
$ ^D …..terminate child shell
$ echo $firstname $lastname
3. Try the following, which illustrates the meaning of special local variables:
$ cat >script.sh
echo the name of this script is $0
echo the first argument is $1
echo a list of all the arguments is $*
echo this script places the date into a temporary file
echo called $1.$$
date > $1.$$ # redirect the output of date
ls $1.$$ # list the file
rm $1.$$ # remove the file
^D
$ chmod +x script.sh
$ ./script.sh Rahul Sachin Kumble
NOTE: A shell supports two kinds of variables: local and environment variables. Both
hold data in a string format. The main difference between them is that when a shell
invokes a subshell, the child shell gets a copy of its parent shell’s environment variables,
but not its local variables. Environment variables are therefore used for transmitting
useful information between parent shells and their children.
LAB NO: 2
Page 22 of 167
Few predefined environment variables:
$HOME pathname of our home directory
$PATH list of directories to search for commands
$MAIL pathname of our mailbox
$USER our username
$SHELL pathname of our login shell
$TERM type of the terminal
Creating a local variable:
variableName=value
Operations:
Simple assignment and access
Testing of a variable for existence
Reading a variable from standard input
Making a variable read only
Exporting a local variable to the environment
Creating / Assigning a variable:
Syntax: {name=value}+
Example: $ firstName=Anand lastname=Sharma age=35
$ echo $firstname $lastname $age
$ name = Anand Sharma
$ echo $name
$ name = “Anand Sharma”
$ echo $name
Accessing variable:
Syntax: $name / ${name} / ${name-word} / ${name+word} / ${name=word} /
Example: $ verb=sing
$ echo I like $verbing
$ echo I like ${verb}ing
$date
$ startDate=${startDate-`date`}
$ echo $startDate
$x=5
$ echo x=${x=10}
$ echo $x
LAB NO: 2
Page 23 of 167
Reading a variable from standard input:
Syntax: read {variable}+
Example: $ cat > script.sh
echo “Please enter your name: “
read name
echo your name is $name
^D
Read-only variables:
Syntax: readonly {variable}+
Example: $ password=manipal
$ echo $password
$ readonly password
$ readonly …..list
$ password=mangalore
Running jobs in Background
A multitasking system lets a user do more than one job at a time. Since there can be only
one job in foreground, the rest of the jobs have to run in the background. There are two
ways of doing this: with the shell’s & operator and nohup command. The latter permits
to log out while the jobs are running, but the former doesn’t allow that.
$ sort –o emp.lst &
550
The shell immediately returns a number the PID of the invoked command (550). The
prompt is returned and the shell is ready to accept another command even though the
previous command has not been terminated yet. The shell however remains the parent of
the background process. Using an & many jobs can be run in background as the system
load permits.
In the above case, if the shell which has started the background job is terminated, the
background job will also be terminated. nohup is a command for running a job in
background in which case the background job will not be terminated if the shell is close.
nohup stands for no hang up.
e.g.
$ nohup sort-o emp.lst &
586
The shell returns the PID too. When the nohup command is run it sends the standard
LAB NO: 2
Page 24 of 167
output of the command to the file nohup.out. Now the user can log out of the system
without aborting the command.
JOB CONTROL
1. ps: ps is a command for listing processes. Every process in a system will have unique
id called process id or PID. This command when used displays the process attributes.
$ ps
PID TTY TIME CMD
291 console 0:00 bash
This command shows the PID, the terminal TTY with which the process is associated,
the cumulative processor time that has been consumed since the process has started and
the process name (CMD).
2. kill: This command sends a signal usually with the intention of killing one or more
process. This command is an internal command in most shells. The command uses one
or more PIDs as its arguments and by default sends the SIGTERM(15) signal. Thus:
$ kill 105
terminates the job having PID 105. The command can take many PIDs at a time to be
terminated.
3. sleep: This command makes the calling process sleep until the specified number of
seconds or a signal arrives which is not ignored.
$ sleep 2
Exercise:
1. Try the following, which illustrates the usage of ps:
$ (sleep 10; echo done) &
$ ps
2. Try the following, which illustrates the usage of kill:
$ (sleep 10; echo done) &
$ kill pid …..pid is the process id of background process
3. Try the following, which illustrates the usage of wait:
$ (sleep 10; echo done 1 ) &
$ (sleep 10; echo done 2 ) &
$ echo done 3; wait ; echo done 4 ….wait for children
LAB NO: 2
Page 25 of 167
NOTE: The following two utilities and one built-in command allow the listing
Controlling the current processes.
ps: generates a list of processes and their attributes, including their names, process ID
numbers, controlling terminals, and owners
kill: allows to terminate a process on the basis of its ID number
wait: allows a shell to wait for one or all of its child processes to terminate
Sample Program:
$ cat>script.sh
echo there are $# command line arguments: $@
^D
$ script.sh arg1 arg2
Example:
#!/bin/sh
salutation=”Hello”
echo $salutation
echo “The program $0 is now running”
echo “The second parameter was $2”
echo “The first parameter was $1”
echo “The parameter list was $*”
echo “The user’s home directory is $HOME”
echo “Please enter a new greeting”
read salutation
echo $salutation
echo “The script is now complete”
exit 0
If we save the above shell script as try.sh, we get the following output:
$ ./try.sh foo bar baz
Hello
The program ./try.sh is now running
The second parameter was bar
The first parameter was foo
The parameter list was foo bar baz
The user’s home directory is /home/rick
Please enter a new greeting
Sire
Sire
The script is now complete
$
LAB NO: 2
Page 26 of 167
Lab Exercises:
Write Shell Scripts to do the following:
1. To list all the files under the given input directory, whose extension has only one
character?
2. Write a shell script which accepts two command line parameters. First parameter
indicates the directory and the second parameter indicates a regular expression. The
script should display all the files and directories in the directory specified in the first
argument matching the format specified in the second argument.
3. Count the number of users logged on to the system. Display the output as Number of
users logged into the system.
4. Count the only the number of files in the current directory.
5. Echo today’s date along with the string “The date today is: “
6. Write a shell script which accepts two command line arguments. First argument
indicates format of file and the second argument indicates the destination directory.
The script should copy all the files as specified in the first argument to the location
indicated by the second argument. Also, try the script where the destination directory
name has space in it.
Additional Exercises:
1. Write Shell Scripts to do the following
(i) To list all the .c files in any given input subdirectory.
(ii) Write a script to include n different commands.
[OBSERVATION SPACE – LAB2]
LAB NO: 2
Page 27 of 167
[OBSERVATION SPACE – LAB2]
LAB NO: 2
Page 28 of 167
[OBSERVATION SPACE – LAB2]
LAB NO: 2
Page 29 of 167
[OBSERVATION SPACE – LAB2]
LAB NO: 3
Page 30 of 167
LAB NO: 3 Date:
SHELL SCRIPTING-2
Objectives:
In this lab, student will be able to
1. Grasp the utility of the various variables in the Linux operating system
2. Understand the different arithmetic and relational operators.
3. Understand the syntax and working of the various looping and decision statements.
The shell is not just a collection of commands but a really good programming language.
A lot of tasks could be automated with it, along with this the shell is very good for system
administration tasks. Many of the ideas could be easily tried with it thus making it as a
very useful tool for simple prototyping and it is very useful for small utilities that perform
some relatively simple tasks where efficiency is less important as compared to the ease
of configuration, maintenance and portability.
COMMENTS
Comments in shell programming start with # and go until the end of the line.
List variables
Syntax: declare [-ax] [listname]
Example: $ declare –a teamnames
$ teamnames[0] = “India” …..assignment
$ teamnames[1] = “England”
$ teamnames[2] = “Nepal”
$ echo “There are ${#teamnames[*]} teams ….accessing
$ echo “They are: ${teamnames [*]}”
$ unset teamnames[1] …delete
Aliases
Allows to define your own commands
Syntax: alias [word[=string]]
Unalias [-a] {word}+
Example: $ alias dir=”ls –aF”
$ dir
LAB NO: 3
Page 31 of 167
ARITHMETIC
expr utility is s used for arithmetic operations. All of the components of expression must
be separated by blanks, and all of the shell metacharacters must be escaped by a \.
Syntax: expr expression
Example: $ x=1
$ x=`expr $x +1`
$ echo $x
$ x=`expr 2 + 3 \* 5`
$echo $x
$echo `expr \( 4 \> 5 \)`
$echo `expr length “cat”`
$echo `expr substr “donkey” 4 3`
TEST EXPRESSION
Syntax: test expression
Test
Meaning
!= not equal
= equal
-eq
equal
-gt greater than
-ge greater than or equal
-lt less than
-le less than or equal
! logic negation
-a logical and
-o logical or
-r file
true if the file exists and is readable
-w
file
true if the file exists and is writable
-
x file
true if the file exists and is executable
-
s file
true if the file exists and its size > 0
-
d file
true if the file is a directory
-
f file
true if the file is an ordinary file
LAB NO: 3
Page 32 of 167
-t
filed
true if the file descriptor is associated with a
terminal
-n str
true if the length of str is > 0
-z str
true if the length of str is zero
CONTROL STRUCTURES
(i) The if conditional
Syntax: if command1
then command2
fi
Example:
echo “enter a number: “
read number
if [ $number -lt 0 ]
then
echo “negative”
elif [ $number -eq 0 ]
then
echo “zero”
else
echo “positive”
fi
(ii) The case conditional
Syntax: case string in
pattern1) commands1 ;;
pattern2) commands2 ;;
……..
esac
case selectively executes statements if string matches a pattern. You can have any number
of patterns and statements. Patterns can be literal text or wildcards. You can have multiple
patterns separated by the "|" character.
LAB NO: 3
Page 33 of 167
Example:
The above example performs a compile if the filename ends in .c, does nothing for files
ending in .h or .sh. else it writes to stdout that the file is an unknown type. Note that the:
character is a NULL command to the shell (similar to a comment field).
case $1 in
[AaBbCc])
option=0
;;
*)
option=1
;;
esac
echo $option
In the above example, if the parameter $1 matches A, B or C (uppercase or lowercase),
the shell variable option is assigned the value 0, else is assigned the value 1.
(iii) while: looping
Syntax: while condition is true
do
commands
done
case $1 in
*.c)
cc $1
;;
*.h | *.sh)
# do nothing
;;
*)
echo "$1 of unknown type"
;;
esac
LAB NO: 3
Page 34 of 167
Example 1:
# menu program
echo “menu test program”
stop=0
while test $stop -eq 0
do
cat << ENDOFMENU
1: print the date
2,3 : print the current working directory
4: exit
ENDOFMENU
echo
echo “your choice ? “
read reply
echo
case $reply in
“1”)
date
;;
“2” | “3”)
pwd
;;
“4”)
stop =1
;;
*)
echo “illegal choice”
;;
esac
done
LAB NO: 3
Page 35 of 167
Example 2:
#!/bin/bash
X=0
while [ $X -le 20 ]
do
echo $X
X=$((X+1))
done
# echo all the command line arguments
while test $# != 0
do
echo $1
#The shift command shifts arguments to the left
shift
done
(iv) until: Looping
Syntax: until command-list1
do
command-list2
done
Example:
x=1
until [ $x –gt 3 ]
do
echo x = $x
x=`expr $x + 1`
done
(v) for: Looping
Syntax: for variable in list
do
command-list
done
LAB NO: 3
Page 36 of 167
Sample Program
The above example lists the names of all files under / (the root directory)
Lab exercises:
1. Write a shell script which accepts a directory name. The shell script should display
the largest file in the given directory.
2. Write a shell script which accepts a directory name. The script should delete the oldest
file in the given input directory.
3. Assume there is a file named TOC.txt which contains list of file names. Write a script
which accepts a directory name as argument. The script should check each file name
in the directory whether it exists in the TOC.txt file. If not exists, it should add the
filename to TOC.txt.
4. Write a shell script which takes two sorted numeric files as input and produces a single
sorted numeric file.
Additional Exercises
1. Write Shell scripts to do the following
(i) Find whether a input string name is a file, directory or sub-directory.
(ii) Find the file which is the latest modified file in the given directory.
homedir=`pwd`
for files in /*
do
echo $files
done
cd $homedir
LAB NO: 3
Page 37 of 167
[OBSERVATION SPACE – LAB 3]
LAB NO: 3
Page 38 of 167
[OBSERVATION SPACE – LAB 3]
LAB NO: 3
Page 39 of 167
[OBSERVATION SPACE – LAB 3]
LAB NO: 4
Page 40 of 167
LAB NO: 4 Date:
LINUX SYSTEM CALLS
Objectives:
In this lab, student will be able to:
1. Understand the working of the different system calls.
2. Understand the creation of new processes with fork and altering the code space of
process using exec.
getpid()
This function returns the process identifiers of the calling process.
#include <sys/types.h>
#include <unistd.h>
pid_t getpid(void); // this function returns the process identifier (PID)
pid_t getppid(void); // this function returns the parent process identifier (PPID)
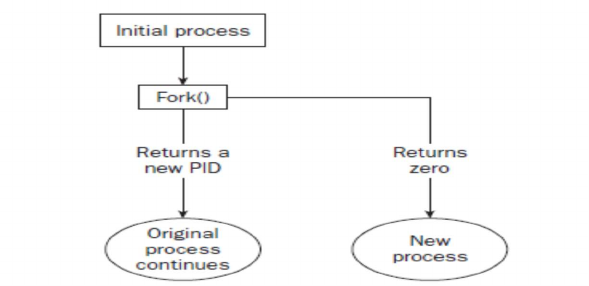
fork()
A new process is created by calling fork. This system call duplicates the current process,
creating a new entry in the process table with many of the same attributes as the current
process. The new process is almost identical to the original, executing the same code but
with its own data space, environment, and file descriptors. Combined with the exec
functions, fork is all we need to create new processes.
#include <sys/types.h>
#include <unistd.h>
pid_t fork(void);
The return value of fork() is pid_t (defined in the header file sys/types.h). As seen in the
Fig. 4.1, the call to fork in the parent process returns the PID of the new child process.
The new process continues to execute just like the parent process, with the exception that
in the child process, the PID returned is 0. The parent and child process can be determined
by using the PID returned from fork() function. To the parent the fork() returns the PID
LAB NO: 4
Page 41 of 167
of the child, whereas to the child the PID returned is zero. This is shown in the following
Fig. 4.1.
Figure 4.1 : Fork system call
In Linux in case of any error observed in calling the system functions, then a special
variable called errno will contain the error number. To use errno a header file named
errno.h has to be included in the program. If fork fails, it returns -1. This is commonly due
to a limit on the number of child processes that a parent may have (CHILD_MAX), in
which case errno will be set to EAGAIN. If there is not enough space for an entry in the
process table, or not enough virtual memory, the errno variable will be set to ENOMEM.
A typical code fragment using fork is
pid_t new_pid;
new_pid = fork();
switch(new_pid) {
case -1 : /* Error */
break;
case 0 : /* We are child */
break;
default : /* We are parent */
break;
}
LAB NO: 4
Page 42 of 167
Sample Program on fork1.c
#include <sys/types.h>
#include <unistd.h>
#include <stdio.h>
int main()
{
pid_t pid;
char *message;
int n;
printf(“fork program starting\n”);
pid = fork();
switch(pid)
{
case -1:
perror(“fork failed”);
exit(1);
case 0:
message = “This is the child”;
n = 5;
break;
default:
message = “This is the parent”;
n = 3;
break;
}
for(; n > 0; n--) {
puts(message);
sleep(1);
}
exit(0);
}
This program runs as two processes. A child process is created and prints a message five
times. The original process (the parent) prints a message only three times. The parent
process finishes before the child has printed all of its messages, so the next shell prompt
appears mixed in with the output.
LAB NO: 4
Page 43 of 167
$ ./fork1
fork program starting
This is the parent
This is the child
This is the parent
This is the child
This is the parent
This is the child
This is the child
This is the child
When fork is called, this program divides into two separate processes. The parent process
is identified by a nonzero return from fork and is used to set a number of messages to print,
each separated by one second.
The wait() System Call
A parent process usually needs to synchronize its actions by waiting until the child process
has either stopped or terminated its actions. The wait() system call allows the parent
process to suspend its activities until one of these actions has occurred.
The wait() system call accepts a single argument, which is a pointer to an integer and
returns a value defined as type pid_t. If the calling process does not have any child
associated with it, wait will return immediately with a value of -1. If any child processes
are still active, the calling process will suspend its activity until a child process
terminates.
LAB NO: 4
Page 44 of 167
Example of wait():
#include <sys/types.h>
#include <sys/wait.h>
void main()
{
int status;
pid_t pid;
pid = fork();
if(pid = -1)
printf(“\nERROR child not created “);
else if (pid == 0) /* child process */
{
printf("\n I'm the child!");
exit(0);
}
else /* parent process */
{
wait(&status);
printf("\n I'm the parent!")
printf("\n Child returned: %d\n", status)
}
}
A few notes on this program:
wait(&status) causes the parent to sleep until the child process has finished execution. The
exit status of the child is returned to the parent.
The exit() System Call
This system call is used to terminate the current running process. A value of zero is passed
to indicate that the execution of process was successful. A non-zero value is passed if the
execution of process was unsuccessful. All shell commands are written in C including
grep. grep will return 0 through exit if the command is successfully runs (grep could find
pattern in file). If grep fails to find pattern in file, then it will call exit() with a non-zero
value. This is applicable to all commands.
LAB NO: 4
Page 45 of 167
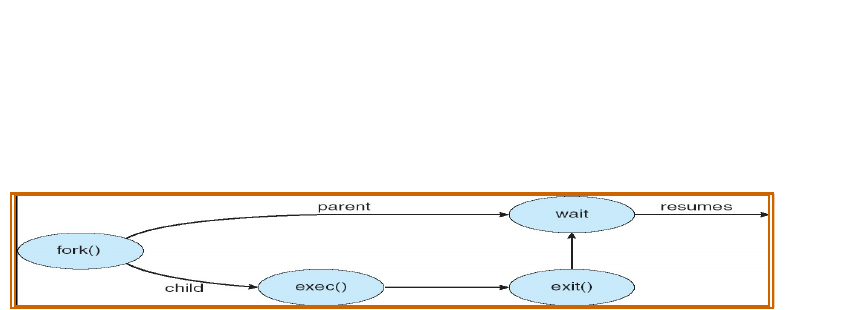
The exec() System Call
The exec function will execute a specified program passed as argument to it, in the same
process (Fig. 4.2). The exec() will not create a new process. As new process is not created,
the process ID (PID) does not change across an execute, but the data and code of the calling
process are replaced by those of the new process.
fork() is the name of the system call that the parent process uses to "divide" itself ("fork")
into two identical processes. After calling fork(), the created child process is actually an
exact copy of the parent - which would probably be of limited use - so it replaces itself
with another process using the system call exec().
The versions of exec are:
execl
execv
execle
execve
execlp
execvp
The naming convention: exec*
'l' indicates a list arrangement (a series of null terminated arguments)
'v' indicate the array or vector arrangement (like the argv structure).
'e' indicates the programmer will construct (in the array/vector format) and pass
their own environment variable list
'p' indicates the current PATH string should be used when the system searches
for executable files.
Figure 4.2: exec() system call
LAB NO: 4
Page 46 of 167
The parent process can either continue execution or wait for the child process to
complete. If the parent chooses to wait for the child to die, then the parent will receive
the exit code of the program that the child executed. If a parent does not wait for the
child, and the child terminates before the parent, then the child is called zombie process.
If a parent terminates before the child process then the child is attached to a process called
init (whose PID is 1). In this case, whenever the child does not have a parent then child
is called orphan process.
Sample Program:
C program forking a separate process.
#include<sys/types.h>
#include<stdio.h>
#include<unistd.h>
int main()
{
pid_t pid;
/* fork another process */
pid = fork();
if (pid < 0) { /* error occurred */
fprintf(stderr, "Fork Failed");
exit(-1);
}
else if (pid == 0) { /* child process */
execlp("/bin/ls", "ls", NULL);
}
else { /* parent process */
/* parent will wait for the child to complete */
wait (NULL);
printf ("Child Complete");
exit(0);
}
}
LAB NO: 4
Page 47 of 167
execl: is used with a list comprising the command name and its arguments:
int execl(const char *path, const char *arg0, …../*, (char *) 0 */);
This is used when the number of arguments are known in advance. The first argument is
the pathname which could be absolute or a relative pathname, The arguments to the
command to run are represented as separate arguments beginning with the name of the
command (*arg0). The ellipsis representation in the syntax (…/*) points to the varying
number of arguments.
Example: How to use execl to run the wc –l command with the filename foo as argument:
execl (“/bin/wc”, “wc”, “-l”, “foo”, (char *) 0);
execl doesn’t use PATH to locate wc so pathname is specified as the first argument.
execv: needs an array to work with.
int execv(const char *path, char *const argv[ ]);
Here path represents the pathname of the command to run. The second argument
represents an array of pointers to char. The array is populated by addresses that point to
strings representing the command name and its arguments, in the form they are passes to
the main function of the program to be executed. In this case also the last element of the
argv[ ] must be a null pointer.
Here the following program uses execv program to run grep command with two options
to look up the author’s name in /etc/passwd. The array *cmdargs[ ] are populated with
the strings comprising the command line to be executed by execv. The first argument is
the pathname of the command:
#include<stdio.h>
int main(int argc, char **argv){
char *cmdargs[ ] = {“grep”, “-I”, “-n”, “SUMIT”, “/etc/passed”, “NULL};
execv(“/bin/grep”, cmdargs);
printf (“execv error\n”);
}
Drawbacks:
LAB NO: 4
Page 48 of 167
Need to know the location of the command file since neither execl nor execv will use
PATH to locate it. The command name is specified twice- as the first two arguments.
These calls can’t be used to run a shell script but only binary executable. The program
has to be invoked every time there is a need to run a command.
execlp and execvp: requires pathname of the command to be located. They behave exactly
like their other counterparts but overcomes two of the four limitations discussed above.
First the first argument need not be a pathname it can be a command name. Second these
functions can also run a shell script.
int execlp(const char *file, const char *arg0, …./*, (char *) 0 */);
int execvp(const char *file, char *const argv[ ]);
execlp (“wc”, “wc”, “-l”, “foo”, (char *) 0);
execle and execve: All of the previous four exec calls silently pass the environment of the
current process to the executed process by making available the environ[ ] variable to the
overlaid process. Sometime there may be a need to provide a different environment to the
new program- a restricted shell for instance. In that case these functions are used.
int execle(const char *path, const char *arg0, … /*, (char *) 0, char * const envp[ ] */);
int execve(const char *path, char * const argv[ ], char *const envp[ ]);
These functions unlike the others use an additional argument to pass a pointer to an array
of environment strings of the form variable = value to the program. It’s only this
environment that is available in the executed process, not the one stored in envp[ ].
The following program (assume fork2.c) is the same as fork1.c, except that the number of
messages printed by the child and parent processes is reversed. Here are the relevant lines
of code:
switch(pid)
{
case -1:
perror(“fork failed”);
exit(1);
LAB NO: 4
Page 49 of 167
case 0:
message = “This is the child”;
n = 3;
break;
default:
message = “This is the parent”;
n = 5;
break;
}
When the preceding program is run with ./fork2 & and then call the ps program after the
child has finished but before the parent has finished, a line such as this. (Some systems
may say <zombie> rather than <defunct>) is seen.
I/O SYSTEM CALLS
I/O through system calls is simpler and operates at a lower level than making calls to the
C file-I/O library.
There are seven fundamental file-I/O system calls:
creat() Create a file for reading or writing.
open() Open a file for reading or writing.
close() Close a file after reading or writing.
unlink() Delete a file.
write() Write bytes to file.
read() Read bytes from file.
The creat() System Call
The "creat()" system call creates a file. It has the syntax: int fp; /* fp is the file descriptor
variable */
fp = creat( <filename>, <protection bits> );
LAB NO: 4
Page 50 of 167
Ex: fp=creat(“students.dat”,RD_WR);
This system call returns an integer, called a "file descriptor", which is a number that
identifies the file generated by "creat()". This number is used by other system calls in the
program to access the file. Should the "creat()" call encounter an error, it will return a file
descriptor value of -1.
The "filename" parameter gives the desired filename for the new file.
The "permission bits" give the "access rights" to the file. A file has three "permissions"
associated with it:
Write permission - Allows data to be written to the file.
Read permission - Allows data to be read from the file.
Execute permission -Designates that the file is a program that can be run.
These permissions can be set for three different levels:
User level: Permissions apply to individual user.
Group level: Permissions apply to members of user's defined "group".
System level: Permissions apply to everyone on the system
The open() System Call
The "open()" system call opens an existing file for reading or writing. It has the syntax:
<file descriptor variable> = open( <filename>, <access mode> );
The "open()" call is similar to the "creat()" call in that it returns a file descriptor for the
given file, and returns a file descriptor of -1 if it encounters an error. However, the second
parameter is an "access mode", not a permission code. There are three modes (defined in
the "fcntl.h" header file):
O_RDONLY Open for reading only.
O_WRONLY Open for writing only.
LAB NO: 4
Page 51 of 167
O_RDWR Open for reading and writing
For example, to open "data" for writing, assuming that the file had been created by another
program, the following statements would be used:
int fd;
fd = open( "students.dat", O_WRONLY );
A few additional comments before proceeding:
A "creat()" call implies an "open()". There is no need to "creat()" a file and then "open()"
it.
The close() System Call
The "close()" system call is very simple. All it does is "close()" an open file when there is
no further need to access it. The "close()" system call has the syntax:
close( <file descriptor> );
The "close()" call returns a value of 0 if it succeeds, and returns -1 if it encounters an error.
The write() System Call
The "write()" system call writes data to an open file. It has the syntax:
write( <file descriptor>, <buffer>, <buffer length> );
The file descriptor is returned by a "creat()" or "open()" system call. The "buffer" is a
pointer to a variable or an array that contains the data; and the "buffer length" gives the
number of bytes to be written into the file.
While different data types may have different byte lengths on different systems, the
"sizeof()" statement can be used to provide the proper buffer length in bytes. A "write()"
call could be specified as follows:
float array[10];
write( fd, array, sizeof( array ) );
LAB NO: 4
Page 52 of 167
The "write()" function returns the number of bytes it actually writes. It will return -1 on
an error.
The read() Sytem Call
The "read()" system call reads data from a open file. Its syntax is exactly the same as
that of the "write()" call:
read( <file descriptor>, <buffer>, <buffer length> );
The "read()" function returns the number of bytes it actually returns. At the end of file it
returns 0, or returns -1 on error.
lseek: The lseek system call sets the read/write pointer of a file descriptor, fildes; that is,
we can use it to set where in the file the next read or write will occur. We can set the
pointer to an absolute location in the file or to a position relative to the current position
or the end of file.
#include <unistd.h>
#include <sys/types.h>
off_t lseek(int fildes, off_t offset, int whence);
The offset parameter is used to specify the position, and the whence parameter specifies
how the offset is used. whence can be one of the following:
SEEK_SET: offset is an absolute position
SEEK_CUR: offset is relative to the current position
SEEK_END: offset is relative to the end of the file
lseek returns the offset measured in bytes from the beginning of the file that the file
pointer is set to, or -1 on failure. The type off_t, used for the offset in seek operations, is
an implementation-dependent type defined in sys/types.h.
Errors:
EACCES Permission denied.
LAB NO: 4
Page 53 of 167
EMFILE Too many file descriptors in use by process.
ENFILE Too many files are currently open in the system.
ENOENT Directory does not exist, or name is an empty string.
ENOMEM Insufficient memory to complete the operation.
Lab Exercises:
1. Write a C program to block a parent process until child completes using wait system
call.
2. Write a C program to load the binary executable of the previous program in a child
process using exec system call.
3. Write a program to create a child process. Display the process IDs of the process,
parent and child (if any) in both the parent and child processes.
4. Create a zombie (defunct) child process (a child with exit() call , but no corresponding
wait() in the sleeping parent) and allow the init process to adopt it (after parent
terminates). Run the process as background process and run “ps” command.
5. Write a C program to create a file and write contents to it.
6. Write a C program to copy the content of one file to other.
Additional Exercises:
1. Create a orphan process (parent dies before child – adopted by “init” process) and
display the PID of parent of child before and after it becomes orphan. Use sleep(n)
in the child to delay the termination.
2. Modify the program in the previous question to include wait(&status) in the parent
and to display the exit return code(left most byte of status) of the child.
3. Use lseek() to copy different parts(initial, middle and last) of the file to other. (For
lseek() refer to man pages)
4. Create a child process which returns a 0 exit status when the minute of time is odd
and returning a non-zero (can be 1) status when the minute of time is even.
[OBSERVATION SPACE – LAB 4]
LAB NO: 4
Page 54 of 167
[OBSERVATION SPACE – LAB 4]
LAB NO: 4
Page 55 of 167
[OBSERVATION SPACE – LAB 4]
LAB NO: 4
Page 56 of 167
[OBSERVATION SPACE – LAB 4]
LAB NO: 4
Page 57 of 167
[OBSERVATION SPACE – LAB 4]
LAB NO: 5
Page 58 of 167
LAB NO: 5 Date:
THREAD PROGRAMMING
Objectives:
In this lab, student will be able to:
1. Understand the concepts of the multithreading.
2. Grasp the execution of the different processes with respect to multithreading.
A process will start with a single thread which is called main thread or master thread.
Calling pthread_create() creates a new thread. It takes the following parameters.
A pointer to a pthread_t structure. The call will return the handle to the thread
in this structure.
A pointer to a pthread attributes structure, which can be a null pointer if the
default attributes are to be used. The details of this structure will be discussed
later.
The address of the routine to be executed.
A value or pointer to be passed into the new thread as a parameter.
#include <pthread.h>
#include <stdio.h>
void* thread_code( void * param )
{
printf( "In thread code\n" );
}
int main()
{
pthread_t thread;
pthread_create( &thread, 0, &thread_code, 0 );
printf( "In main thread\n" );
}
LAB NO: 5
Page 59 of 167
In this example, the main thread will create a second thread to execute the routine
thread_code(), which will print one message while the main thread prints another. The
call to create the thread has a value of zero for the attributes, which gives the thread
default attributes. The call also passes the address of a pthread_t variable for the function
to store a handle to the thread. The return value from the thread_create() call is zero if the
call is successful; otherwise, it returns an error condition.
Thread termination :
Child threads terminate when they complete the routine they were assigned to run. In the
above example child thread thread will terminate when it completes the routine
thread_code().
The value returned by the routine executed by the child thread can be made available to
the main thread when the main thread calls the routine pthread_join().
The pthread_join() call takes two parameters. The first parameter is the handle of the
thread that is to be waited for. The second parameter is either zero or the address of a
pointer to a void, which will hold the value returned by the child thread.
The resources consumed by the thread will be recycled when the main thread calls
pthread_join(). If the thread has not yet terminated, this call will wait until the thread
terminates and then free the assigned resources.
#include <pthread.h>
#include <stdio.h>
void* thread_code( void * param )
{
printf( "In thread code\n" );
}
int main()
{
pthread_t thread;
pthread_create( &thread, 0, &thread_code, 0 );
printf( "In main thread\n" );
pthread_join( thread, 0 );
}
LAB NO: 5
Page 60 of 167
Another way a thread can terminate is to call the routine pthread_exit(), which takes a
single parameter—either zero or a pointer—to void. This routine does not return and
instead terminates the thread. The parameter passed in to the pthread_exit() call is
returned to the main thread through the pthread_join(). The child threads do not need to
explicitly call pthread_exit() because it is implicitly called when the thread exits.
Passing Data to and from Child Threads
In many cases, it is important to pass data into the child thread and have the child thread
return status information when it completes. To pass data into a child thread, it should
be cast as a pointer to void and then passed as a parameter to pthread_create().
for ( int i=0; i<10; i++ )
pthread_create( &thread, 0, &thread_code, (void *)i );
Following is a program where the main thread passes a value to the Pthread and the thread
returns a value to the main thread.
#include <pthread.h>
#include <stdio.h>
void* child_thread( void * param )
{
int id = (int)param;
printf( "Start thread %i\n", id );
return (void *)id;
}
int main()
{
pthread_t thread[10];
int return_value[10];
for ( int i=0; i<10; i++ )
{
pthread_create( &thread[i], 0, &child_thread, (void*)i );
}
for ( int i=0; i<10; i++ )
{
LAB NO: 5
Page 61 of 167
pthread_join( thread[i], (void**)&return_value[i] );
printf( "End thread %i\n", return_value[i] );
}
}
Setting the Attributes for Pthreads
The attributes for a thread are set when the thread is created. To set the initial thread
attributes, first create a thread attributes structure, and then set the appropriate attributes
in that structure, before passing the structure into the pthread_create() call.
#include <pthread.h>
...
int main()
{
pthread_t thread;
pthread_attr_t attributes;
pthread_attr_init( &attributes );
pthread_create( &thread, &attributes, child_routine, 0 );
}
Lab Exercises:
1. Write multithreaded program that generates the Fibonaaci series. The program should
work as follows: The user will enter on the command line the number of Fibonacci
numbers that the program is to generate. The program then will create a separate
thread that will generate the Fibonacci numbers, placing the sequence in data that is
shared by the threads (an array is probably the most convenient data structure). When
the thread finishes execution the parent will output the sequence generated by the
child thread. Because the parent thread cannot begin outputting the Fibonacci
sequence until the child thread finishes, this will require having the parent thread wait
for the child thread to finish.
2. Write a multithreaded program that calculates summation of non-negative integers in
a separate thread and passes the result to main thread.
3. Write a multithreaded program for generating prime numbers from a given starting
number to the given ending number.
Additional Exercises:
1. Write a multithreaded program for matrix multiplication.
LAB NO: 5
Page 62 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 63 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 64 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 65 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 66 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 67 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 5
Page 68 of 167
[OBSERVATION SPACE – LAB 5]
LAB NO: 6
Page 69 of 167
LAB NO: 6 Date:
CPU SCHEDULING ALGORITHMS
Objectives:
In this lab, student will be able to:
1. Understand the different CPU scheduling algorithms.
2. Compute the turnaround time, response time and waiting time for each process.
Scheduling Criteria & Optimization:
CPU utilization – keep the CPU as busy as possible
o Maximize CPU utilization
Throughput – # of processes that complete their execution per time unit
o Maximize throughput
Turnaround time – amount of time to execute a particular process
o Minimize turnaround time
Waiting time – amount of time a process has been waiting in the ready queue
o Minimize waiting time
Response time – time from the submission of a request until the first response is
produced (response time, is the time it takes to start responding, not the time it takes
to output the response )
o Minimize response time
CPU Scheduling algorithms:
(i) First-Come First Served (FCFS) Scheduling:
The process that requests the CPU first is allocated the CPU first.
(ii) Shortest-Job-First (SJF) Scheduling:
This algorithm associates with each process the length of its next CPU burst. When the
CPU is available, it is assigned to the process that has the smallest next CPU burst. If the
next CPU bursts of two processes are the same, FCFS scheduling is used to break the tie.
Two schemes:
Non-preemptive – once CPU given to the process it cannot be preempted until it
completes its CPU burst.
LAB NO: 6
Page 70 of 167
Preemptive – if a new process arrives with CPU burst length less than remaining
time of current executing process, preempt. This scheme is known as the Shortest-
Remaining-Time-First (SRTF).
(iii) Priority Scheduling:
A priority number (integer) is associated with each process. The CPU is allocated to the
process with the highest priority. A smaller value means a higher priority.
Two schemes:
Preemptive
Non-preemptive
Note: SJF is a priority scheduling where priority is the predicted next CPU burst time.
(iv) Round-Robin (RR) Scheduling:
The RR scheduling is the Preemptive version of FCFS. In RR scheduling, each process
gets a small unit of CPU time (time quantum). Usually 10-100 ms. After quantum expires,
the process is preempted and added to the end of the ready queue.
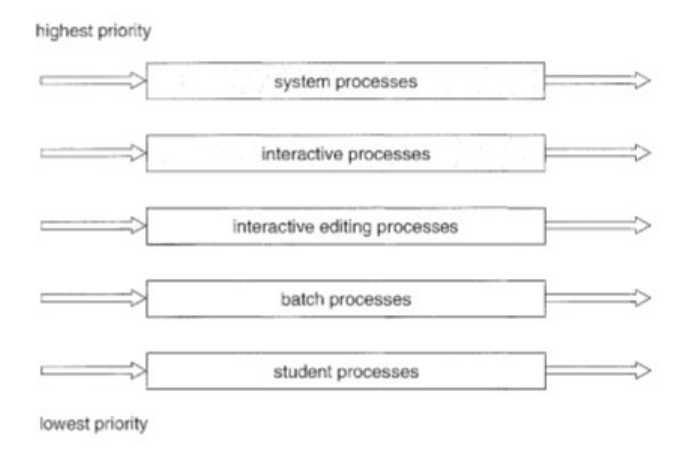
(v) Multilevel Queue (MQ) Scheduling:
Figure 6.1 Multilevel queue scheduling
LAB NO: 6
Page 71 of 167
MQ scheduling is used when processes can be classified into groups. For example,
foreground (interactive) processes and background (batch) processes. A MQ scheduling
algorithm partitions the ready queue into several separate queues:
foreground (interactive)
background (batch)
Each process assigned to one queue based on its memory size, process priority, or process
type. Each queue has its own scheduling algorithm
foreground – RR
background – FCFS
Scheduling must be done between the queues
Fixed priority scheduling; (i.e., serve all from foreground then from background
as shown Fig. 6.1).
Time slice – each queue gets a certain portion of CPU time which it can schedule
amongst its processes; i.e., 80% to foreground in RR and 20% to background in
FCFS
(vi) Multilevel Feedback Queue (MFQ) Scheduling:
In MQ scheduling algorithm processes do not move from one queue to the other. In
contrast, the MFQ scheduling algorithm, allows a process to move between queues. The
idea is to separate processes according to the characteristics of their CPU bursts. If a
process uses too much CPU time, it will be moved to a lower-priority queue. This scheme
leaves I/O-bound and interactive processes in the higher-priority queues. In addition, a
process that waits too long in a lower-priority queue may be moved to a higher-priority
queue.
Example of Multilevel Feedback Queue:
Consider multilevel feedback queue scheduler with three queues as shown in Fig. 6.2.
Q0 – RR with time quantum 8 milliseconds
Q1 – RR time quantum 16 milliseconds
Q2 – FCFS
MFQ Scheduling
A process queue in Q0 is given a time quantum of 8 milliseconds. If it does not
finish in 8 milliseconds, the job is moved to the tail of queue Q1.
When Q0 is empty, the process at the head of Q1 is given a quantum of 16
milliseconds. If it does not complete, it is pre-empted and moved to queue Q2 .
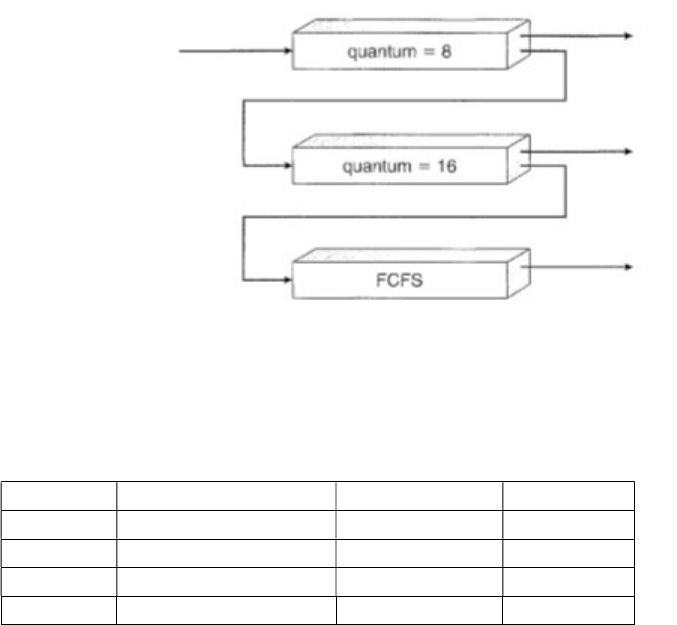
LAB NO: 6
Page 72 of 167
Figure 6.2 Multilevel feedback queues
Lab Exercises:
1. Consider the following set of processes, with length of the CPU burst given in
milliseconds:
Process Arrival time Burst time Priority
P1 0 60 3
P2 3 30 2
P3 4 40 1
P4 9 10 4
Write a C program to simulate the following CPU scheduling algorithms. Display Gantt
chart showing the order of execution of each process. Compute waiting time and
turnaround time for each process. Hence compute average waiting time and average
turnaround time.
(i) FCFS (ii) SRTF (iii) non-preemptive priority (iv) Round-Robin (quantum = 10 )
Additional Exercises:
1. Write a C program to simulate the following CPU scheduling algorithms. Display Gantt
chart showing the order of execution of each process. Compute waiting time and
turnaround time for each process. Hence compute average waiting time and average
turnaround time.
(i) SJF (ii) preemptive priority
2. Write a C program to simulate multi-level queue scheduling algorithm.
3. Write a C program to simulate multi-level feedback queue scheduling algorithm.
LAB NO: 6
Page 73 of 167
[OBSERVATION SPACE – LAB 6]
LAB NO: 6
Page 74 of 167
[OBSERVATION SPACE – LAB 6]
LAB NO: 6
Page 75 of 167
[OBSERVATION SPACE – LAB 6]
LAB NO: 6
Page 76 of 167
[OBSERVATION SPACE – LAB 6]
LAB NO: 6
Page 77 of 167
[OBSERVATION SPACE – LAB 6]
LAB NO: 6
Page 78 of 167
[OBSERVATION SPACE – LAB 6]

LAB NO: 7
Page 79 of 167
LAB NO: 7 Date:
INTERPROCESS COMMUNICATION
Objectives:
In this lab, student will be able to:
1. Gain knowledge as to how IPC (Interprocess Communication) happens between two
processes.
2. Execute programs with respect to IPC using the different methods of message queues,
pipes and shared memory.
Inter-Process communication (IPC), is the mechanism whereby one process can
communicate with another process, i.e exchange of data. IPC in Linux can be
implemented by using a pipe, shared memory and message queue.
Pipe
Pipes are unidirectional byte streams which connect the standard output from one
process into the standard input of another process. A pipe is created using the
system call pipe that returns a pair of file descriptors.
i/p file descriptor o/p file descriptor read()
write()
Call to the pipe () function which returns an array of file descriptors fd[0] and fd
[1]. fd [1] connects to the write end of the pipe, and fd[0] connects to the read
end of the pipe. Anything can be written to the pipe, and read from the other end
in the order it came in.
A pipe is one directional providing one-way flow of data and it is created by the
pipe() system call.
int pipe ( int *filedes ) ;
Pipe
LAB NO: 7
Page 80 of 167
Array of two file descriptors are returned- fd[0] which is open for reading , and
fd[1] which is open for writing. It can be used only between parent and child
processes.
PROTOTYPE: int pipe( int fd[2] );
RETURNS: 0 on success
-1 on error: errno = EMFILE (no free descriptors)
EMFILE (system file table is full)
EFAULT (fd array is not valid)
fd[0] is set up for reading, fd[1] is set up for writing. i.e., the first integer in the array
(element 0) is set up and opened for reading, while the second integer (element 1) is set
up and opened for writing.
#include <stdlib.h>
#include <stdio.h> /* for printf */
#include <string.h> /* for strlen */
int main(int argc, char **argv)
{
int n;
int fd[2];
char buf[1025];
char *data = "hello... this is sample data";
pipe(fd);
write(fd[1], data, strlen(data));
if ((n = read(fd[0], buf, 1024)) >= 0) {
buf[n] = 0; /* terminate the string */
printf("read %d bytes from the pipe: \"%s\"\n", n, buf);
}
else
perror("read");
exit(0);
}
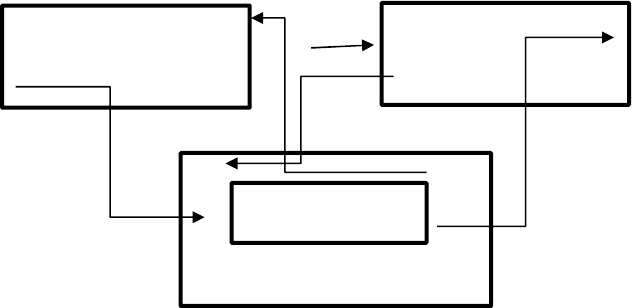
LAB NO: 7
Page 81 of 167
fork
Fig. 7.1 Working of pipe in single process which is immediately after fork()
First, a process creates a pipe and then forks to create a copy of itself
The parent process closes the read end of the pipe
The child process closes the write end of the pipe.
The fork system call creates a copy of the process that was executing.
The process which executes the fork is called the parent process and the new
process is which is created is called the child process.
#include <sys/wait.h>
#include <assert.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
int main(int argc, char *argv[])
{
int pfd[2];
pid_t cpid;
char buf;
assert(argc == 2);
Read fd
Write fd
Read fd
Write fd
flow of data
Pipe
LAB NO: 7
Page 82 of 167
if (pipe(pfd) == -1) { perror("pipe");
exit(EXIT_FAILURE); }
cpid = fork();
if (cpid == -1) { perror("fork");
exit(EXIT_FAILURE); }
if (cpid == 0) { /* Child reads from pipe */
close(pfd[1]); /* Close unused write end */
while (read(pfd[0], &buf, 1) > 0)
write(STDOUT_FILENO, &buf, 1);
write(STDOUT_FILENO, "\n", 1);
close(pfd[0]);
exit(EXIT_SUCCESS);
} else { /* Parent writes argv[1] to pipe */
close(pfd[0]); /* Close unused read end */
write(pfd[1], argv[1], strlen(argv[1]));
close(pfd[1]); /* Reader will see EOF */
wait(NULL); /* Wait for child */
exit(EXIT_SUCCESS);
}
}
Message Queues
It is an IPC facility. Message queues are similar to named pipes without the opening
and closing of pipe. It provides an easy and efficient way of passing information or
data between two unrelated processes.
The advantages of message queues over named pipes is, it removes few difficulties
that exists during the synchronization, the opening and closing of named pipes.
A message queue is a linked list of messages stored within the kernel. A message
queue is identified by a unique identifier. Every message has a positive long integer
type field, a non-negative length, and the actual data bytes. The messages need not be
fetched on FCFS basis. It could be based on type field.
Creating a Message Queue
In order to use a message queue, it has to be created first. The msgget() system call is
used for that. This system call accepts two parameters- a queue key and flags.
LAB NO: 7
Page 83 of 167
IPC_PRIVATE- use to create a private message queue. A positive integer- used to
create or access a publicly accessible message queue.
The message queue function definitions are
#include <sys/msg.h>
int msgctl(int msqid, int cmd, struct msqid_ds *buf);
int msgget(key_t key, int msgflg);
int msgrcv(int msqid, void *msg_ptr, size_t msg_sz, long int msgtype, int msgflg);
int msgsnd(int msqid, const void *msg_ptr, size_t msg_sz, int msgflg);
msgget
We create and access a message queue using the msgget function:
int msgget(key_t key, int msgflg);
The program must provide a key value that, as with other IPC facilities, names a particular
message queue. The special value IPC_PRIVATE creates a private queue, which in
theory is accessible only by the current process. The second parameter, msgflg, consists
of nine permission flags. A special bit defined by IPC_CREAT must be bitwise ORed
with the permissions to create a new message queue. It’s not an error to set the
IPC_CREAT flag and give the key of an existing message queue. The IPC_CREAT flag
is silently ignored if the message queue already exists.
The msgget function returns a positive number, the queue identifier, on success or –1 on
failure.
msgsnd
The msgsnd function allows us to add a message to a message queue:
int msgsnd(int msqid, const void *msg_ptr, size_t msg_sz, int msgflg);
The structure of the message is constrained in two ways. First, it must be smaller than the
system limit, and second, it must start with a long int, which will be used as a message
type in the receive function. When you’re using messages, it’s best to define your message
structure something like this:
struct my_message {
long int message_type;
/* The data you wish to transfer */
}
LAB NO: 7
Page 84 of 167
The first parameter, msqid, is the message queue identifier returned from a msgget
function. The second parameter, msg_ptr, is a pointer to the message to be sent, which
must start with a long int type as described previously. The third parameter, msg_sz, is
the size of the message pointed to by msg_ptr. This size must not include the long int
message type. The fourth parameter, msgflg, controls what happens if either the current
message queue is full or the system wide limit on queued messages has been reached. If
msgflg has the IPC_NOWAIT flag set, the function will return immediately without
sending the message and the return value will be –1. If the msgflg has the IPC_NOWAIT
flag clear, the sending process will be suspended, waiting for space to
become available in the queue. On success, the function returns 0, on failure –1. If the
call is successful, a copy of the message data has been taken and placed on the message
queue.
msgrcv
The msgrcv function retrieves messages from a message queue:
int msgrcv(int msqid, void *msg_ptr, size_t msg_sz, long int msgtype, int msgflg);
The first parameter, msqid, is the message queue identifier returned from a msgget
function. The second parameter, msg_ptr, is a pointer to the message to be received,
which must start with a long int type as described above in the msgsnd function. The third
parameter, msg_sz, is the size of the message pointed to by msg_ptr, not including the
long int message type. The fourth parameter, msgtype, is a long int, which allows a simple
form of reception priority to be implemented. If msgtype has the value 0, the first
available message in the queue is retrieved. If it’s greater than zero, the first message with
the same message type is retrieved. If it’s less than zero, the first message that has a type
the same as or less than the absolute value of msgtype is retrieved. This sounds more
complicated than it actually is in practice. If you simply want to retrieve messages in the
order in which they were sent, set msgtype to 0. If you want to retrieve only messages
with a specific message type, set msgtype equal to that value. If you want to receive
messages with a type of n or smaller, set msgtype to -n. The fifth parameter, msgflg,
controls what happens when no message of the appropriate type is waiting to be received.
If the IPC_NOWAIT flag in msgflg is set, the call will return immediately with a return
value of –1. If the IPC_NOWAIT flag of msgflg is clear, the process will be suspended,
waiting for an appropriate type of message to arrive. On success, msgrcv returns the
number of bytes placed in the receive buffer, the message is copied into the user-allocated
LAB NO: 7
Page 85 of 167
buffer pointed to by msg_ptr, and the data is deleted from the message queue. It returns
–1 on error.
msgctl
The final message queue function is msgctl.
int msgctl(int msqid, int command, struct msqid_ds *buf);
The msqid_ds structure has at least the following members:
struct msqid_ds {
uid_t msg_perm.uid;
uid_t msg_perm.gid
mode_t msg_perm.mode;
}
The first parameter, msqid, is the identifier returned from msgget. The second parameter,
command, is the action to take. It can take three values:
Command Description
Command Description
IPC_STAT
Sets the data in the msqid_ds structure to reflect the values associated
with the message queue.
IPC_SET
If the process has permission to do so, this sets the values associated
with the message queue to those provided in the msqid_ds data
structure.
IPC_RMID
Deletes the message queue.
0 is returned on success, –1 on failure. If a message queue is deleted while a process is
waiting in a msgsnd or msgrcv function, the send or receive function will fail.
Receiver program:
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <errno.h>
LAB NO: 7
Page 86 of 167
#include <unistd.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
struct my_msg_st {
long int my_msg_type;
char some_text[BUFSIZ];
};
int main()
{
int running = 1;
int msgid;
struct my_msg_st some_data;
long int msg_to_receive = 0;
msgid = msgget((key_t)1234, 0666 | IPC_CREAT);
if (msgid == -1) {
fprintf(stderr, “msgget failed with error: %d\n”, errno);
exit(EXIT_FAILURE);
}
while(running) {
if (msgrcv(msgid, (void *)&some_data, BUFSIZ,
msg_to_receive, 0) == -1) {
fprintf(stderr, “msgrcv failed with error: %d\n”, errno);
exit(EXIT_FAILURE);
}
printf(“You wrote: %s”, some_data.some_text);
if (strncmp(some_data.some_text, “end”, 3) == 0) {
running = 0;
}
}
if (msgctl(msgid, IPC_RMID, 0) == -1) {
fprintf(stderr, “msgctl(IPC_RMID) failed\n”);
exit(EXIT_FAILURE);
}
exit(EXIT_SUCCESS);
}
LAB NO: 7
Page 87 of 167
Sender Program:
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
#define MAX_TEXT 512
struct my_msg_st {
long int my_msg_type;
char some_text[MAX_TEXT];
};
int main()
{
int running = 1;
struct my_msg_st some_data;
int msgid;
char buffer[BUFSIZ];
msgid = msgget((key_t)1234, 0666 | IPC_CREAT);
if (msgid == -1) {
fprintf(stderr, “msgget failed with error: %d\n”, errno);
exit(EXIT_FAILURE);
}
while(running) {
printf(“Enter some text: “);
fgets(buffer, BUFSIZ, stdin);
some_data.my_msg_type = 1;
strcpy(some_data.some_text, buffer);
if (msgsnd(msgid, (void *)&some_data, MAX_TEXT, 0) == -1) {
fprintf(stderr, “msgsnd failed\n”);
exit(EXIT_FAILURE);
LAB NO: 7
Page 88 of 167
}
if (strncmp(buffer, “end”, 3) == 0) {
running = 0;
}
}
exit(EXIT_SUCCESS);
}
Shared memory
Shared memory allows two or more processes to access the same logical memory. Shared
memory is an efficient of transferring data between two running processes. Shared
memory is a special range of addresses that is created by one process and the Shared
memory appears in the address space of that process. Other processes then attach the same
shared memory segment into their own address space. All processes can then access the
memory location as if the memory had been allocated just like malloc. If one process
writes to the shared memory, the changes immediately become visible to any other
process that has access to the same shared memory.
The functions for shared memory are,
#include <sys/shm.h>
int shmget(key_t key, size_t size, int shmflg);
void *shmat(int shm_id, const void *shm_addr, int shmflg);
int shmctl(int shm_id, int cmd, struct shmid_ds *buf);
int shmdt(const void *shm_addr);
The include files sys/types.h and sys/ipc.h are normally also required before shm.h is
included.
shmget
We create shared memory using the shmget function:
int shmget(key_t key, size_t size, int shmflg);
The argument key names the shared memory segment, and the shmget function returns a
shared memory identifier that is used in subsequent shared memory functions. There’s a
LAB NO: 7
Page 89 of 167
special key value, IPC_PRIVATE, that creates shared memory private to the process. The
second parameter, size, specifies the amount of memory required in bytes. The third
parameter, shmflg, consists of nine permission flags that are used in the same way as the
mode flags for creating files. A special bit defined by IPC_CREAT must be bitwise ORed
with the permissions to create a new shared memory segment. It’s not an error to have
the IPC_CREAT flag set and pass the key of an existing shared memory segment. The
IPC_CREAT flag is silently ignored if it is not required.
The permission flags are very useful with shared memory because they allow a process
to create shared memory that can be written by processes owned by the creator of the
shared memory but only read by processes that other users have created. We can use this
to provide efficient read-only access to data by placing it in shared memory without the
risk of its being changed by other users.
If the shared memory is successfully created, shmget returns a nonnegative integer, the
shared memory identifier. On failure, it returns –1.
shmat
When we first create a shared memory segment, it’s not accessible by any process. To
enable access to the shared memory, we must attach it to the address space of a process.
We do this with the shmat function:
void *shmat(int shm_id, const void *shm_addr, int shmflg);
The first parameter, shm_id, is the shared memory identifier returned from shmget. The
second parameter, shm_addr, is the address at which the shared memory is to be attached
to the current process. This should almost always be a null pointer, which allows the
system to choose the address at which the memory appears. The third parameter, shmflg,
is a set of bitwise flags. The two possible values are SHM_RND, which, in conjunction
with shm_addr, controls the address at which the shared memory is attached, and
SHM_RDONLY, which makes the attached memory read-only. It’s very rare to need to
control the address at which shared memory is attached; you should normally allow the
system to choose an address for you, as doing otherwise will make the application highly
hardware-dependent. If the shmat call is successful, it returns a pointer to the first byte of
shared memory. On failure –1 is returned.
The shared memory will have read or write access depending on the owner (the creator
of the shared memory), the permissions, and the owner of the current process. Permissions
LAB NO: 7
Page 90 of 167
on shared memory are similar to the permissions on files. An exception to this rule arises
if shmflg & SHM_RDONLY is true. Then the shared memory won’t be writable, even if
permissions would have allowed write access.
shmdt
The shmdt function detaches the shared memory from the current process. It takes a
pointer to the address returned by shmat. On success, it returns 0, on error –1. Note that
detaching the shared memory doesn’t delete it; it just makes that memory unavailable to
the current process.
shmctl
int shmctl(int shm_id, int command, struct shmid_ds *buf);
The first parameter, shm_id, is the identifier returned from shmget. The second
parameter, command, is the action to take. It can take three values:
Command Description
IPC_STAT Sets the data in the shmid_ds structure to
reflect the values associated with the
shared memory.
IPC_SET Sets the values associated with the shared
memory to those provided in the
shmid_ds data structure, if the process
has permission to do so.
IPC_RMID Deletes the shared memory segment.
The shmid_ds structure has the following members:
struct shmid_ds {
uid_t shm_perm.uid;
uid_t shm_perm.gid;
mode_t shm_perm.mode;
}
The third parameter, buf, is a pointer to structure containing the modes and permissions
for the shared memory. On success, it returns 0, on failure returns –1.
LAB NO: 7
Page 91 of 167
We will write a pair of programs shm1.c and shm2.c. The first will create a shared
memory segment and display any data that is written into it. The second will attach into
an existing shared memory segment and enters data into shared memory segment.
First, we create a common header file to describe the shared memory we wish to pass
around. We call this shm_com.h.
#define TEXT_SZ 2048
struct shared_use_st {
int written_by_you;
char some_text[TEXT_SZ];
};
//shm1.c – Consumer process
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include “shm_com.h”
int main()
{
int running = 1;
void *shared_memory = (void *)0;
struct shared_use_st *shared_stuff;
int shmid;
srand((unsigned int)getpid());
shmid = shmget((key_t)1234, sizeof(struct shared_use_st), 0666 | IPC_CREAT);
if (shmid == -1) {
fprintf(stderr, “shmget failed\n”);
exit(EXIT_FAILURE);
}
shared_memory = shmat(shmid, (void *)0, 0);
if (shared_memory == (void *)-1) {
LAB NO: 7
Page 92 of 167
fprintf(stderr, “shmat failed\n”);
exit(EXIT_FAILURE);
}
printf(“Memory attached at %X\n”, (int)shared_memory);
shared_stuff = (struct shared_use_st *)shared_memory;
shared_stuff->written_by_you = 0;
while(running) {
if (shared_stuff->written_by_you) {
printf(“You wrote: %s”, shared_stuff->some_text);
sleep( rand() % 4 ); /* make the other process wait for us ! */
shared_stuff->written_by_you = 0;
if (strncmp(shared_stuff->some_text, “end”, 3) == 0) {
running = 0;
}
}
if (shmdt(shared_memory) == -1) {
fprintf(stderr, “shmdt failed\n”);
exit(EXIT_FAILURE);
}
if (shmctl(shmid, IPC_RMID, 0) == -1) {
fprintf(stderr, “shmctl(IPC_RMID) failed\n”);
exit(EXIT_FAILURE);
}
exit(EXIT_SUCCESS);
}
//shm2.c
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>
#include “shm_com.h”
int main()
{
int running = 1;
LAB NO: 7
Page 93 of 167
void *shared_memory = (void *)0;
struct shared_use_st *shared_stuff;
char buffer[BUFSIZ];
int shmid;
shmid = shmget((key_t)1234, sizeof(struct shared_use_st), 0666 | IPC_CREAT);
if (shmid == -1) {
fprintf(stderr, “shmget failed\n”);
exit(EXIT_FAILURE);
}
shared_memory = shmat(shmid, (void *)0, 0);
if (shared_memory == (void *)-1) {
fprintf(stderr, “shmat failed\n”);
exit(EXIT_FAILURE);
}
printf(“Memory attached at %X\n”, (int)shared_memory);
shared_stuff = (struct shared_use_st *)shared_memory;
while(running) {
while(shared_stuff->written_by_you == 1) {
sleep(1);
printf(“waiting for client...\n”);
}
printf(“Enter some text: “);
fgets(buffer, BUFSIZ, stdin);
strncpy(shared_stuff->some_text, buffer, TEXT_SZ);
shared_stuff->written_by_you = 1;
if (strncmp(buffer, “end”, 3) == 0) {
running = 0;
}
}
if (shmdt(shared_memory) == -1) {
fprintf(stderr, “shmdt failed\n”);
exit(EXIT_FAILURE);
}
exit(EXIT_SUCCESS);
}
Named Pipes: FIFOs
LAB NO: 7
Page 94 of 167
Pipes can share data between related processes, i.e. processes that have been started from
a common ancestor process. We can use named pipe or FIFOs to overcome this. A named
pipe is a special type of file that exists as a name in the file system but behaves like the
unnamed pipes we have discussed already.We can create named pipes from the command
line using
$ mkfifo filename
From inside a program, we can use
#include <sys/types.h>
#include <sys/stat.h>
int mkfifo(const char *filename, mode_t mode);
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
int main()
{
int res = mkfifo(“/tmp/my_fifo”, 0777);
if (res == 0) printf(“FIFO created\n”);
exit(EXIT_SUCCESS);
}
We can look for the pipe with
$ ls -lF /tmp/my_fifo
prwxr-xr-x 1 rick users 0 July 10 14:55 /tmp/my_fifo|
Notice that the first character of output is a p, indicating a pipe. The | symbol at the end
is added by the ls command’s -F option and also indicates a pipe. We can remove the
FIFO just like a conventional file by using the rm command, or from within a program by
using the unlink system call.
LAB NO: 7
Page 95 of 167
Producer-Consumer Problem (PCP):
Producer process produces information that is consumed by a consumer process.
To allow producer and consumer processes to run concurrently, we must have
available a buffer of items that can be filled by the producer and emptied by
consumer. Two types of buffers can be used.
o unbounded-buffer places no practical limit on the size of the buffer.
o bounded-buffer assumes that there is a fixed buffer size.
For bounded-buffer PCP basic synchronization requirement is:
o Producer should not write into a full buffer (i.e. producer must wait if the
buffer is full)
o Consumer should not read from an empty buffer (i.e. consumer must
wait if the buffer is empty)
o All data written by the producer must be read exactly once by the
consumer
Following is a program for Producer-Consumer problem using named pipes.
//producer.c
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <limits.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FIFO_NAME “/tmp/my_fifo”
#define BUFFER_SIZE PIPE_BUF
#define TEN_MEG (1024 * 1024 * 10)
int main()
{
int pipe_fd;
int res;
int open_mode = O_WRONLY;
int bytes_sent = 0;
char buffer[BUFFER_SIZE + 1];
if (access(FIFO_NAME, F_OK) == -1) {
LAB NO: 7
Page 96 of 167
res = mkfifo(FIFO_NAME, 0777);
if (res != 0) {
fprintf(stderr, “Could not create fifo %s\n”, FIFO_NAME);
exit(EXIT_FAILURE);
}
}
printf(“Process %d opening FIFO O_WRONLY\n”, getpid());
pipe_fd = open(FIFO_NAME, open_mode);
printf(“Process %d result %d\n”, getpid(), pipe_fd);
if (pipe_fd != -1) {
while(bytes_sent < TEN_MEG) {
res = write(pipe_fd, buffer, BUFFER_SIZE);
if (res == -1) {
fprintf(stderr, “Write error on pipe\n”);
exit(EXIT_FAILURE);
}
bytes_sent += res;
}
(void)close(pipe_fd);
}
else {
exit(EXIT_FAILURE);
}
printf(“Process %d finished\n”, getpid());
exit(EXIT_SUCCESS);
}
//consumer.c
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <limits.h>
#include <sys/types.h>
#include <sys/stat.h>
#define FIFO_NAME “/tmp/my_fifo”
LAB NO: 7
Page 97 of 167
#define BUFFER_SIZE PIPE_BUF
int main()
{
int pipe_fd;
int res;
int open_mode = O_RDONLY;
char buffer[BUFFER_SIZE + 1];
int bytes_read = 0;
memset(buffer, ‘\0’, sizeof(buffer));
printf(“Process %d opening FIFO O_RDONLY\n”, getpid());
pipe_fd = open(FIFO_NAME, open_mode);
printf(“Process %d result %d\n”, getpid(), pipe_fd);
if (pipe_fd != -1) {
do {
res = read(pipe_fd, buffer, BUFFER_SIZE);
bytes_read += res;
} while (res > 0);
(void)close(pipe_fd);
}
else {
exit(EXIT_FAILURE);
}
printf(“Process %d finished, %d bytes read\n”, getpid(), bytes_read);
exit(EXIT_SUCCESS);
}
The Readers-Writers Problem:
Concurrent processes share a file, record, or other resources
Some may read only (readers), some may both read and write (writers)
Two concurrent reads have no adverse effects
Problems if
concurrent reads and writes
multiple writes
Two Variations
First Readers-Writers problem: No reader be kept waiting unless a writer has
already obtained exclusive write permissions (Readers have high priority)
Second Readers-Writers problem: If a writer is waiting/ready , no new readers
may start reading (Writers have high priority)
LAB NO: 7
Page 98 of 167
Lab Exercises:
1. Write a first writer-reader program in C in which writer program writes a string into
a pipe and then the reader program reads the string and displays.
2. Write a producer and consumer program in C using FIFO queue. The producer should
write a set of 4 integers into the FIFO queue and the consumer should display the 4
integers.
3. Implement a parent process which sends an English alphabet to child process using
shared memory. Child process responds back with next English alphabet to the
parent. Parent displays the reply from the Child.
4. Write a producer-consumer program in C in which producer writes a set of words
into shared memory and then consumer reads the set of words from the shared
memory. The shared memory need to be detached and deleted after use.
Additional Exercises:
1. Demonstrate creation, writing to and reading from a pipe.
2. Demonstrate creation of a process which writes through a pipe while the parent process
reads from it.
3. Write a program which creates a message queue and writes message into queue which
contains number of users working on the machine along with observed time in hours and
minutes. This is repeated for every 10 minutes. Write another program which reads this
information form the queue and calculates on average in each hour how many users are
working.
[OBSERVATION SPACE – LAB 7]
LAB NO: 7
Page 99 of 167
[OBSERVATION SPACE – LAB 7]
LAB NO: 7
Page 100 of 167
[OBSERVATION SPACE – LAB 7]
LAB NO: 7
Page 101 of 167
[OBSERVATION SPACE – LAB 7]
LAB NO: 7
Page 102 of 167
[OBSERVATION SPACE – LAB 7]
LAB NO: 7
Page 103 of 167
[OBSERVATION SPACE – LAB 7]
LAB NO: 8
Page 104 of 167
LAB NO: 8 Date:
PROCESS SYNCHRONIZATION
In this lab, students will be able to:
1. Synchronize various processes with the use of semaphore.
2. Understand how communication between two processes can take place with the help
of named pipe.
For a multithreaded application spanning a single process or multiple processes to do
useful work, it is necessary for some kind of common state to be shared between the
threads. The degree of sharing that is necessary depends on the task. At one extreme, the
only sharing necessary may be a single number that indicates the task to be performed.
For example, a thread in a web server might be told only the port number to respond to.
At the other extreme, a pool of threads might be passing information constantly among
themselves to indicate what tasks are complete and what work is still to be completed.
Data Races
Data race occurs when multiple threads spanning single process or multiple processes use
the same data item and one or more of those threads are updating it.
Suppose there is a function update, which takes an integer pointer and updates the value
of the content pointer by 4. If multiple threads call the function, then there is a possibility
of data race. If the current value of *a is 10, then when two threads simultaneously call
update function, then the final value of *a might be 14, instead of 18. To visualize this,
we need to write the corresponding assembly language code for this function.
void update(int * a)
{
*a = *a + 4;
}
Another situation might be when one thread is running, but the other thread has been
context switched off of the processor. Imagine that the first thread has loaded the value
of the variable a and then gets context switched off the processor. When it eventually runs
again, the value of the variable a will have changed, and the final store of the restored
LAB NO: 8
Page 105 of 167
thread will cause the value of the variable a to regress to an old value. The following code
has data race.
//race.c
#include <pthread.h>
int counter = 0;
void * func(void * params)
{
counter++;
}
void main()
{
pthread_t thread1, thread2;
pthread_create( &thread1, 0, func, 0);
pthread_create( &thread2, 0, func, 0);
pthread_join( thread1, 0 );
pthread_join( thread2, 0 );
}
Using tools to detect data races
We can compile the above code using gcc, and then use Helgrind tool which is part of
Valgrind suite to identify the data race.
$ gcc –g race.c -lpthread
$ valgrind –tool=helgrind ./a.out
Avoiding Data Races
Although it is hard to identify data races, avoiding them can be very simple. The easiest
way to do this is to place a synchronization lock around all accesses to that variable and
ensure that before referencing the variable, the thread must acquire the lock.
LAB NO: 8
Page 106 of 167
Synchronization Primitives:
Mutex Locks:
A mutex lock is a mechanism that can be acquired by only one thread at a time. Other
threads that attempt to acquire the same mutex must wait until it is released by the thread
that currently has it.
Mutex locks need to be initialized to the appropriate state by a call to
pthread_mutex_init() or for statically defined mutexes by assignment with the
PTHREAD_MUTEX_INITIALIZER. The call to pthread_mutex_init() takes an optional
parameter that points to attributes describing the type of mutex required. Initialization
through static assignment uses default parameters, as does passing in a null pointer in the
call to pthread_mutex_init().
Once a mutex is no longer needed, the resources it consumes can be freed with a call to
pthread_mutex_destroy().
#include <pthread.h>
...
pthread_mutex_t m1 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t m2;
pthread_mutex_init( &m2, 0 );
...
pthread_mutex_destroy( &m1 );
pthread_mutex_destroy( &m2 );
A thread can lock a mutex by calling pthread_mutex_lock(). Once it has finished with the
mutex, the thread calls pthread_mutex_unlock(). If a thread calls pthread_mutex_lock()
while another thread holds the mutex, the calling thread will wait, or block, until the other
thread releases the mutex, allowing the calling thread to attempt to acquire the released
mutex.
#include <pthread.h>
#include <stdio.h>
pthread_mutex_t mutex;
LAB NO: 8
Page 107 of 167
volatile int counter = 0;
void * count( void * param )
{
for ( int i=0; i<100; i++ )
{
pthread_mutex_lock( &mutex );
counter++;
printf( "Count = %i\n", counter );
pthread_mutex_unlock( &mutex );
}
}
int main()
{
pthread_t thread1, thread2;
pthread_mutex_init( &mutex, 0 );
pthread_create( &thread1, 0, count, 0 );
pthread_create( &thread2, 0, count, 0 );
pthread_join( thread1, 0 );
pthread_join( thread2, 0 );
pthread_mutex_destroy( &mutex );
return 0;
}
Semaphores:
A semaphore is a counting and signaling mechanism. One use for it is to allow threads
access to a specified number of items. If there is a single item, then a semaphore is
essentially the same as a mutex, but it is more commonly useful in a situation where there
are multiple items to be managed.
A semaphore is initialized with a call to sem_init(). This function takes three parameters.
The first parameter is a pointer to the semaphore. The next is an integer to indicate
whether the semaphore is shared between multiple processes or private to a single
process. The final parameter is the value with which to initialize the semaphore. A
semaphore created by a call to sem_init() is destroyed with a call to sem_destroy().
The code below initializes a semaphore with a count of 10. The middle parameter of the
call to sem_init() is zero, and this makes the semaphore private to the process; passing
LAB NO: 8
Page 108 of 167
the value one rather than zero would enable the semaphore to be shared between multiple
processes.
#include <semaphore.h>
int main()
{
sem_t semaphore;
sem_init( &semaphore, 0, 10 );
...
sem_destroy( &semaphore );
}
The semaphore is used through a combination of two methods. The function sem_wait()
will attempt to decrement the semaphore. If the semaphore is already zero, the calling
thread will wait until the semaphore becomes nonzero and then return, having
decremented the semaphore. The call to sem_post() will increment the semaphore. One
more call, sem_getvalue(), will write the current value of the semaphore into an integer
variable.
In the following program a order is maintained in displaying Thread 1 and Thread 2. Try
removing the semaphore and observe the output.
#include <pthread.h>
#include <stdio.h>
#include <semaphore.h>
sem_t semaphore;
void *func1( void * param )
{
printf( "Thread 1\n" );
sem_post( &semaphore );
}
void *func2( void * param )
{
sem_wait( &semaphore );
printf( "Thread 2\n" );
}
LAB NO: 8
Page 109 of 167
int main()
{
pthread_t threads[2];
sem_init( &semaphore, 0, 1 );
pthread_create( &threads[0], 0, func1, 0 );
pthread_create( &threads[1], 0, func2, 0 );
pthread_join( threads[0], 0 );
pthread_join( threads[1], 0 );
sem_destroy( &semaphore );
}
Solution to Producer-Consumer problem using semapores:
#include <pthread.h>
#include <stdio.h>
#include <semaphore.h>
sem_t semaphore;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int queue[200];
int queueLength;
void *producer( void * param)
{
for ( int i=0; i<500; i++ )
{
// Add item to queue
pthread_mutex_lock( &mutex );
queue[ queueLength++ ] = i;
pthread_mutex_unlock( &mutex );
// Signal semaphore
sem_post( &semaphore );
}
}
void *consumer(void * param)
LAB NO: 8
Page 110 of 167
{
for ( int i=0; i<500; i++ )
{
int item;
// Wait if nothing in queue
if (queueLength==0) { sem_wait(&semaphore); }
pthread_mutex_lock( &mutex );
item = queue[ --queueLength ];
pthread_mutex_unlock( &mutex );
printf( "Received %i\n", item);
}
}
int main()
{
pthread_t threads[2];
sem_init( &semaphore, 0, 0 );
pthread_create( &threads[0], 0, producer, 0 );
pthread_create( &threads[1], 0, consumer, 0 );
pthread_join( threads[0], 0 );
pthread_join( threads[1], 0 );
sem_destroy( &semaphore );
}
Solution to First Readers-Writers Problem using semaphores:
The reader processes share the following data structures:
semaphore mutex , wrt;
int readcount;
The binary semaphores mutex and wrt are initialized to 1; readcount is initialized
to 0;
Semaphore wrt is common to both reader and writer process
o wrt functions as a mutual exclusion for the writers
o It is also used by the first or last reader that enters or exits the critical
section
o It is not used by readers who enter or exit while other readers are in their
critical section
The readcount variable keeps track of how many processes are currently reading
the object
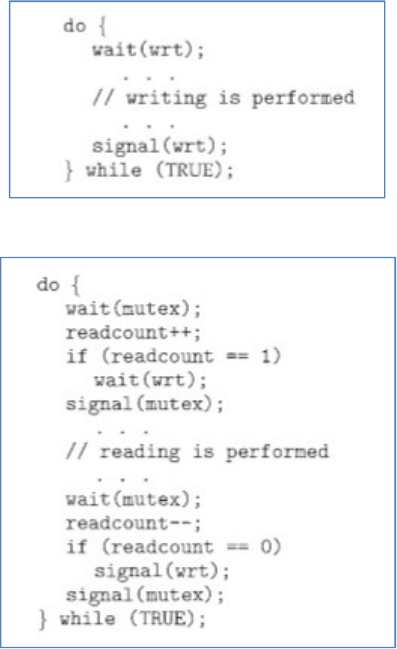
LAB NO: 8
Page 111 of 167
The mutex semaphore is used to ensure mutual exclusion when readcount is
updated
The structure of a writer process
The structure of a reader process
The Dining Philosophers Problem:
Five philosophers sit at a round table - thinking and eating
Each philosopher has one chopstick
o five chopsticks total
A philosopher needs two chopsticks to eat
o philosophers must share chopsticks to eat
No interaction occurs while thinking
The situation of the dining philosophers is shown in Fig. 8.1

LAB NO: 8
Page 112 of 167
Figure 8.1
Lab Exercises:
1. Modify the above Producer-Consumer program so that, a producer can produce at the
most 10 items more than what the consumer has consumed.
2. Write a C program for first readers-writers problem using semaphores.
Additional Exercises:
1. Write a C program for Dining-Philosophers problem using monitors.
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 113 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 114 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 115 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 116 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 117 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 8
Page 118 of 167
[OBSERVATION SPACE – LAB 8]
LAB NO: 9
Page 119 of 167
LAB NO:
9
Date:
DEADLOCK ALGORITHMS
Objectives:
In this lab, student will be able to:
1. Understand how deadlocks occurs in a computer system.
2. Implement different algorithms for preventing or avoiding deadlocks in a computer
system.
The deadlock problem:
A set of blocked processes each holding a resource and waiting to acquire a
resource held by another process in the set.
Figure 9.1: Deadlock Situation.
Above Fig. 9.1 shows, a situation of deadlock where Process P1 waiting for resource R2,
which is held with process P2 and in the meantime, Process P2 is waiting for resource
R1, which is held with process P1. Neither P1 nor P2 can proceed their execution until
their needed resources are fulfilled forming a cyclic wait. It is the deadlock situation
among processes as both are not progressed. In a single instance of resource type, a cyclic
wait is always a deadlock.
Consider Figure 9.2 below, the situation with 4 processes P1, P2, P3 and P4 and 2
resources R1 and R2 both are of two instances. Here, there is no deadlock even though
R1
R2
P1
P2
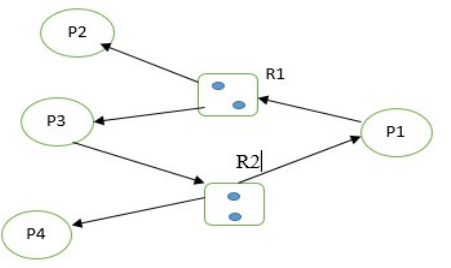
LAB NO: 9
Page 120 of 167
the cycle exists between processes P1 and P3. Once P2 finishes its job, 1 instance of
resource will be available which can be accessed by process P1, which turns request edge
to assignment edge, thereby removing cyclic-wait. So, in multiple instances of resource
type, the cyclic-wait need not be deadlock.
Figure 9.2: Cyclic-wait but no deadlock.
Methods for Handling Deadlocks:
(i) Deadlock Avoidance:
The deadlock-avoidance algorithm dynamically examines the resource-allocation state to
ensure that there can never be a circular-wait condition. Resource-allocation state is
defined by the number of available and allocated resources, and the maximum demands
of the processes.
Safe State:
System is in safe state if there exists a safe sequence of all processes. Sequence of
processes <P1, P2, …, Pn> is safe if for each Pi, the resources that Pi can still request can
be satisfied by currently available resources + resources held by all the Pj, with j < i.
If Pi resource needs are not immediately available, then Pi can wait until all Pj
have finished.
When Pj is finished, Pi can obtain needed resources, execute, return allocated
resources, and terminate.
When Pi terminates, Pi+1 can obtain its needed resources, and so on.
If a system is in safe state no deadlocks.
If a system is in unsafe state possibility of deadlock.
Avoidance ensure that a system will never enter an unsafe state.
LAB NO: 9
Page 121 of 167
Banker’s Algorithm:
Used when there exists multiple instances of a resource type. Each process must declare
in advance the maximum number of instances of each resource type that it may need.
When a process requests a resource, it may have to wait. When a process gets all its
resources, it must return them in a finite amount of time
Data Structures for the Banker’s Algorithm:
Let n = number of processes, and m = number of resources types.
Safety Algorithm:
Allocationi means resources allocated to process Pi
Needi means resources needed for the process Pi
Available: Vector of length m. If available [ j ] = k, there are k
instances of resource type Rj available.
Max: n x m matrix. If Max [i, j ] = k, then process Pi may
request at most k instances of resource type Rj.
Allocation: n x m matrix. If Allocation[i, j ] = k then Pi is
currently allocated k instances of Rj.
Need: n x m matrix. If Need[i, j ] = k, then Pi may need k more
instances of Rj to complete its task.
1. Let Work and Finish be vectors of length m and n,
respectively. Initialize:
Work = Available
Finish [i ] = false for i = 0,1, …, n-1.
2. Find an i such that both:
(a) Finish [i ] = false
(b) Needi Work
If no such i exists, go to step 4.
3. Work = Work + Allocationi
Finish[i ] = true
go to step 2.
4. If
Finish
[
i
] == true for all
i
, then the system is in a safe
LAB NO: 9
Page 122 of 167
The above algorithm may require an O(m x n2) operations to determine whether a state
is safe.
Resource-Request Algorithm:
Requesti = request vector for process Pi.
Requesti [ j ] == k means that process Pi wants k instances of resource type Rj.
(ii) Deadlock Detection:
For deadlock detection, the system must provide
An algorithm that examines the state of the system to detect whether a deadlock
has occurred
And an algorithm to recover from the deadlock
Deadlock detection algorithm:
If a resource type can have multiple instances, then an algorithm very similar to the
banker’s algorithm can be used.
1. If Requesti
Needi go to step 2. Otherwise, raise error condition, since process has
exceeded its maximum claim
2. If Requesti Available, go to step 3. Otherwise Pi must wait, since resources are not
available.
3. Pretend to allocate requested resources to Pi by modifying the state as follows:
Available = Available - Requesti;
Allocationi = Allocationi + Requesti;
Needi = Needi – Requesti;
If safe the resources are allocated to Pi.
If unsafe Pi must wait for Requesti, and the old resource-allocation state is
restored
LAB NO: 9
Page 123 of 167
Required data structures:
Detection Algorithm:
The above algorithm requires an order of O(m x n2) operations to detect whether the
system is in deadlocked state.
Lab Exercises:
1. Consider the following snapshot of the system. Write C program to implement
Banker’s algorithm for deadlock avoidance.
Available:
A vector of length
m
indicates the number of available
resources of each type.
Allocation: An n x m matrix defines the number of resources of each
type currently allocated to each process.
Request: An n x m matrix indicates the current request of each
process. If Request [i ][j] == k, then process Pi is requesting k more
instances of resource type Rj.
1.
Let
Work
and
Finish
be vectors of length
m
and
n
, respectively Initialize:
Work = Available. For i = 0,2, …, n-1, if Allocationi 0, then Finish[i] = false;
otherwise, Finish[i] = true.
2. Find an index i such that both:
(a) Finish[i ] == false
(b) Requesti Work
If no such i exists, go to step 4.
3. Work = Work + Allocationi
Finish[i ] = true
go to step 2.
4. If Finish[i ] == false, for some i, 0 i < n, then the system is in deadlock
state. Moreover, if Finish[i ] == false, then process Pi is deadlocked
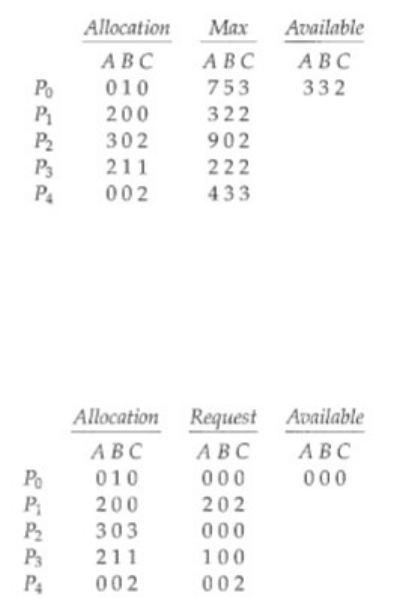
LAB NO: 9
Page 124 of 167
(a) What is the content of the matrix Need?
(b) Is the system in a safe state?
(c) If a request from process P4 arrives for (3, 3, 0), can the request be granted
immediately?
(d) If a request from process P0 arrives for (0, 2, 0), can the request be granted
immediately?
2. Consider the following snapshot of the system. Write C program to implement
deadlock detection algorithm.
(a) Is the system in a safe state?
(b) Suppose that process P2 make one additional request for instance of type C, can the
system still be in a safe state?
Additional Exercises:
1. Write a multithreaded program that implements the banker's algorithm. Create n
threads that request and release resources from the bank. The banker will grant the request
only if it leaves the system in a safe state. You may write this program using either
Pthreads. It is important that shared data be safe from concurrent access. To ensure safe
access to shared data, you can use mutex locks, which are available in the Pthreads
libraries.
LAB NO: 9
Page 125 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 9
Page 126 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 9
Page 127 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 9
Page 128 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 9
Page 129 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 9
Page 130 of 167
[OBSERVATION SPACE – LAB 9]
LAB NO: 10
Page 131 of 167
LAB NO:
10
Date:
MEMORY MANAGEMENT
Objectives:
In this lab, students will be able to
1. Understand various memory management schemes.
2. Simulate contiguous memory allocation techniques like First Fit, Best Fit and Worst
Fit.
Memory allocation methods:
1. Fixed-size partition: Divide memory into a fixed no. of partitions, and allocate a
process to each. Partitions can be different fixed sizes. Each partition may contain
exactly one process.
2. Variable size partition : The Operating system keeps a table indicating which part of
memory are available and which are occupied. Initially, all memory is available to
user processes and is considered as one large block of available memory called a hole.
Hence, memory contains a set of holes of various sizes.
Dynamic storage allocation problem:
Which concerns how to satisfy a request of size n from a list of free holes. There are
many solutions to this problem. First fit, best fit and worst fit strategies are the ones most
commonly used to select a free hole from a set of available holes.
First-fit: Allocate the first hole that is big enough
Best-fit: Allocate the smallest hole that is big enough; must search entire list,
unless ordered by size
o Produces the smallest leftover hole
Worst-fit: Allocate the largest hole; must also search entire list
o Produces the largest leftover hole
Fragmentation: Both first-fit and best-fit strategies suffer from external fragmentation.
External fragmentation exists, when there is enough total memory exists to satisfy a
LAB NO: 10
Page 132 of 167
memory request but the available spaces are not contiguous; storage is fragmented into a
large number of small holes.
One solution to the problem of external fragmentation is compaction. The goal is to
shuffle the memory contents so as to place all free memory together in one large block.
Memory fragmentation can be internal also. With this approach, the memory allocated to
a process may be slightly larger than the requested memory. The difference between these
two numbers is internal fragmentation – unused memory that is internal to a partition.
Paging:
Paging is a memory-management scheme that permits the physical address space
of a process to be noncontiguous
o Avoids external fragmentation
o Avoids the need for compaction
o May still have internal fragmentation
Divide physical memory into fixed-sized blocks called frames
the frames may be located anywhere in memory
Divide logical memory into blocks of same size called pages
o Backing store is also split into pages of the same size
To run a program of size N pages, need to find N free frames and load program.
Each logical address has two parts:
o Page number (p) - index to page table
page table contains the mapping from a page number to the base
address of its corresponding frame
o Page offset (d) - offset into page/frame
The size of a page is typically a power of 2:
o 512 (29) -- 8192 (213) bytes
This makes it easy to split a machine address into page number and offset parts.
For example, assume:
o the memory size is 2m bytes
o a page size is 2n bytes (n < m)
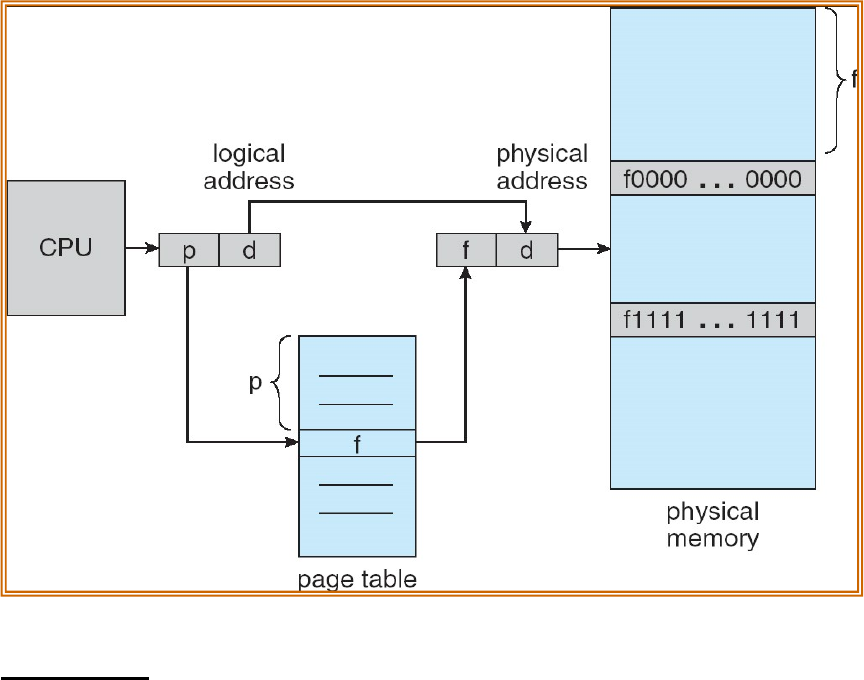
LAB NO: 10
Page 133 of 167
Paging Hardware is shown in the following Figure 10.2.
Figure 10.2 Paging Hardware
Segmentation:
Memory-management scheme that supports user view of memory
A program is a collection of segments.
A segment is a logical unit such as:
o main program,
o procedure,
o function,
o method,
o object,
o local variables, global variables,
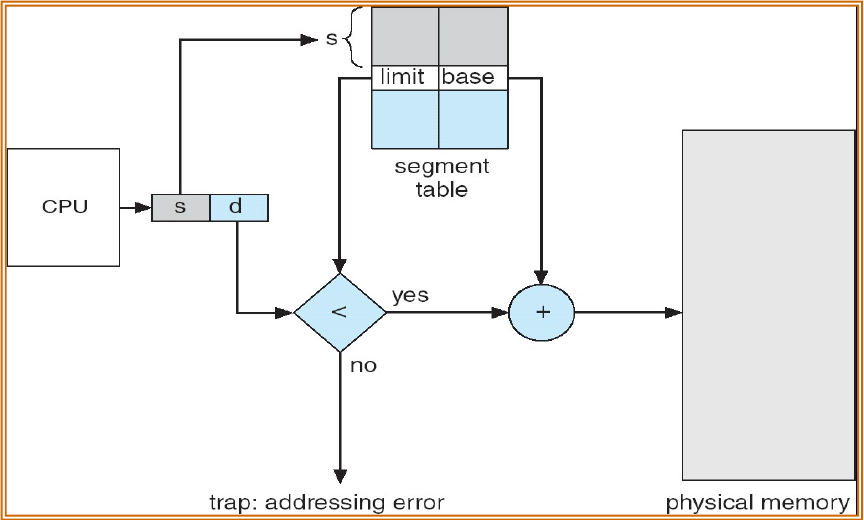
LAB NO: 10
Page 134 of 167
o common block,
o stack,
o symbol table, arrays
Segmentation architecture:
Logical address consists of a two tuple:
<segment-number (s), offset (d)>,
Segment table maps two-dimensional user defined address into one-dimensional
physical address
Each segment table entry has:
o Segment base – contains the starting physical address where the segments
reside in memory
o Segment limit – specifies the length of the segment
Segmentation Hardware is shown in Fig. 10.3.
Fig 10.3 Segmentation hardware
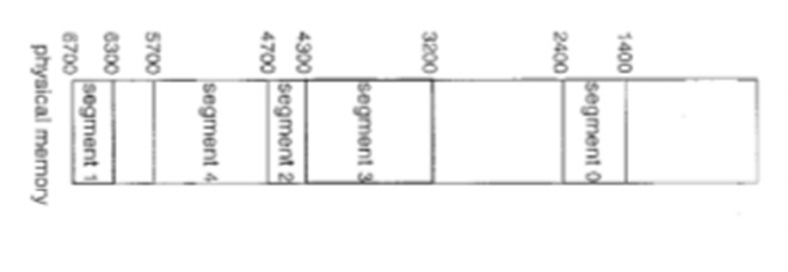
LAB NO: 10
Page 135 of 167
Lab Exercises:
1. Write a C program to simulate First-fit, Best-fit and Worst-fit strategies. Given
memory partitions of 100K, 500K, 200K, 300K, and 600K(in order), how would each
of the First-fit, Best-fit, and Worst-fit algorithms place processes of 212K, 417K,
112K, and 426K (in order)? Which algorithm makes efficient use of memory?
2. Assuming a page size of 32 bytes and there are total of 8 such pages totaling 256
bytes. Write a C program to simulate this memory mapping. The program should read
the logical memory address and display the page number and page offset in decimal.
How many bytes do you need to represent the address in this scenario? Display the
page number and offset to reference the following logical addresses.
(i) 204 byte (ii) 56 byte
Additional Exercises:
1. We have five segments numbered 0 through 4. The segments are stored in physical
memory as shown in the following Fig 10.1. Write a C program to create segment table.
Write methods for converting logical address to physical address. Compute the physical
address for the following.
(i) 53 byte of segment 2 (ii) 852 byte of segment 3 (iii) 1222 byte of segment 0
Figure 10.1 Physical memory
LAB NO: 10
Page 136 of 167
[OBSERVATION SPACE – LAB 10]
LAB NO: 10
Page 137 of 167
[OBSERVATION SPACE – LAB 10]
LAB NO: 10
Page 138 of 167
[OBSERVATION SPACE – LAB 10]
LAB NO: 10
Page 139 of 167
[OBSERVATION SPACE – LAB 10]
LAB NO: 10
Page 140 of 167
[OBSERVATION SPACE – LAB 10]
LAB NO: 10
Page 141 of 167
[OBSERVATION SPACE – LAB 10]
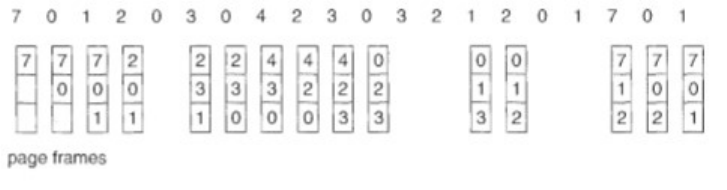
LAB NO: 11
Page 142 of 167
LAB NO: 11 Date:
PAGE REPLACEMENT ALGORITHMS
Objectives:
In this lab students will be
1. Able to understand the various page replacement algorithms
2. Design programmatic solution to the algorithms
Page Replacement Algorithms:
Below are some popular page replacement algorithms. Modern operating systems like
Linux use some variants of these simple algorithms.
1. FIFO (First In First Out) The page that was brought in first will be replaced first.
2. Optimal Page Replacement Algorithm. Replaces the page that will not be used for
the longest time in future.
3. The LRU (least recently used) replaces the page that is least recently used.
Example: Consider the following Page requests
7,0,1,2,0,3,0,4,2,3,0,3,2,1,2,0,1,7,0,1
(i) FIFO page replacement algorithm
Total Page faults =15.
(ii) Optimal page replacement algorithm
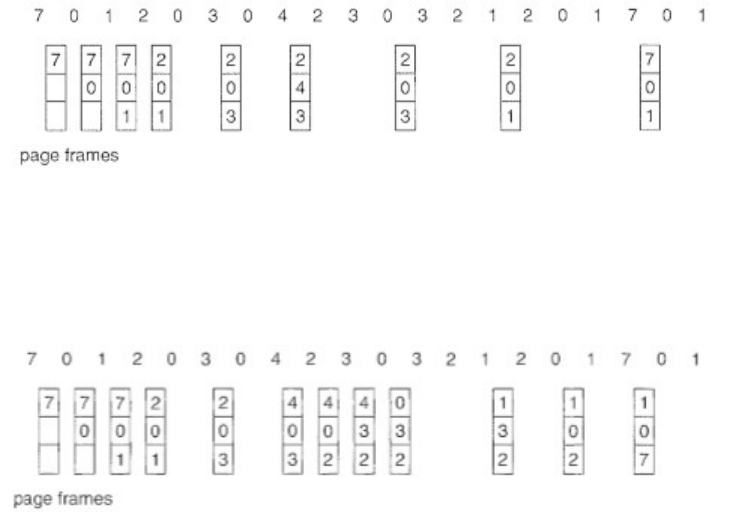
LAB NO: 11
Page 143 of 167
Total page faults=9.
(iii) Least recently used page replacement algorithm
Total page faults = 12.
LRU approximation page replacement algorithms:
1. Additional reference byte (e.g., 8 bits) algorithm:
Keep a reference byte for each page initialized to 00000000
Every time a page is referenced
o Shift the reference bits to the right by 1 bit and discarding low–order bit
o Place the reference bit (1 if being referenced 0 otherwise) into the high
order bit of the reference bits
o The page with the lowest reference bits value is the one that is Least
Recently Used, thus to be replaced
Example 1: the page with ref bits 11000100 is more recently used than the page with ref
bits 01110111 (11000100 > 01110111)
Example 2: 00000000 means this page not been used for 8 periods of time. So, it is LRU.
Example 3: 11111111 means this page have been used (referenced) 8 times.
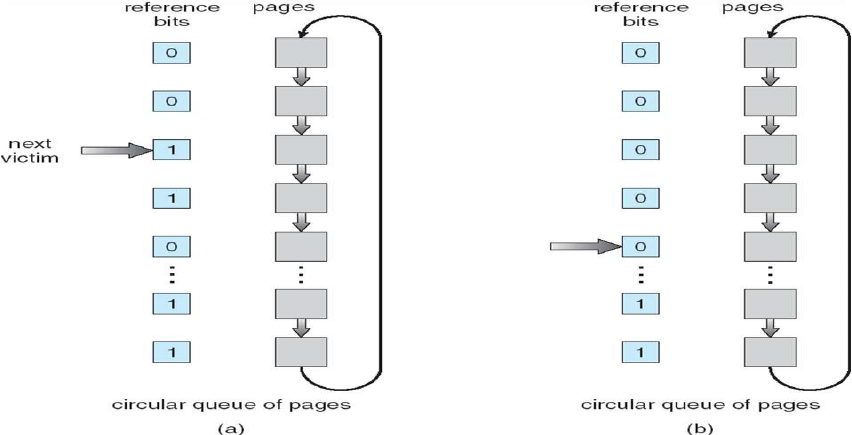
LAB NO: 11
Page 144 of 167
Note: If numbers are not unique, then replace (swap out) all pages with the smallest value
(have same value), or use a FIFO selection among them
2. Second chance algorithm (or clock algorithm):
The basic algorithm of second-chance is a FIFO (Fig. 11.1).
A reference bit for each frame is set to 1 whenever:
o a page is first loaded into the frame.
o the corresponding page is referenced.
When a page has been selected for replacement, inspect its reference bit:
If a page’s reference bit is 1
o set its reference bit to zero and skip it (give it a second chance)
If a page’s reference bit is set to 0
o select this page for replacement
Thus, a page that is given a second chance will not be replaced until all other pages
have been replaced (or given second chance)
Figure 11.1 Second-chance algorithm
3. Enhanced Second-Chance Algorithm (2-bits):
LAB NO: 11
Page 145 of 167
Very similar to Clock Algorithm
Consider also the reference bits and the modified bits of pages
o Reference (R) bit: page is referenced in the last interval
o Modified (M) bit: page is modified after being loaded into memory
Four possible cases (R,M):
o (0,0)– neither recently used nor modified (best page to replace).
o (0,1)– not recently used but modified (not quite as good, must write out
before replacement)
o (1,0)– recently used but clean (probably will be used again).
o (1,1)– recently used and modified (probably will be used again and need
to write out before replacement)
Major difference between this algorithm and clock algorithm is that here we give
preference to those pages that have been modified.
Counting-Based Page Replacement:
Keep a counter of the number of references that have been made to each page, and
develop the following two schemes:
The least frequently used (LFU) Algorithm: replaces page with smallest count
o Suffers from the situation in which a page is used heavily during the initial
phase of a process, but then is never used again.
The most frequently used (MFU) Algorithm: replaces the page with the largest
count
o Based on the argument that the page with the smallest count was probably
just brought in and has yet to be used
Lab Exercises:
1. Write a C program to simulate the following page replacement algorithms
(i) FIFO (ii) Optimal (iii) LRU
2. Write a C program to simulate LRU approximation page replacement using second
chance algorithm.
Additional Exercises:
1. Write a C program to simulate the following page replacement algorithms.
(i) LFU (ii) MFU
2. Write a C program to simulate the following LRU approximation page replacement
algorithms. (a) Additional Reference byte algorithm (b) Enhanced second chance
algorithm.
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 146 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 147 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 148 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 149 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 150 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 151 of 167
[OBSERVATION SPACE – LAB 11]
LAB NO: 11
Page 152 of 167
LAB NO: 12
Page 153 of 167
LAB NO:
12
Date:
DISK SCHEDULING ALGORITHMS
Objectives: In this lab, student will be able to:
1. Simulate different Disk Scheduling algorithms.
2. Understand the working and calculation of the number of tracks a disk traverses for
each of the algorithms.
A disk is basically a platter, which is made of metal or plastic with a magnetisable coating
on its surface, and it is in circular shape. It is possible to store information by recording
it magnetically on the platters. A conducting coil, called head, which is a relatively small
device, facilitates the data recording on and retrieval from the disk. In a disk system, head
rotates just above both surfaces of each platter. All heads, being attached to a disk arm,
move collectively as a unit. To enable a read and write operation, the platter rotates
beneath the stationary head.
Data are organized on the platter in tracks, which are in the form of concentric set of rings.
In medias using constant linear velocity, the track densities are uniform (bits per linear
inch of track). The outermost zone has about 40 percent more sectors than innermost zone.
The rotation speed increases as the head moves from the outer to the inner tracks to keep
the same data transfer rate. This method is also used in CD-ROM and DVDROM drives.
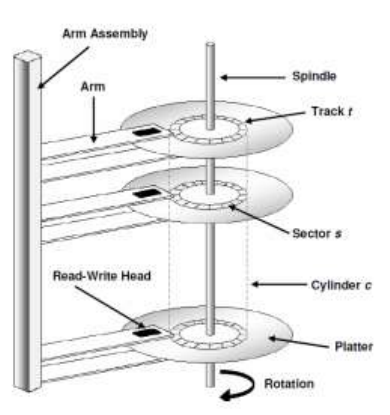
LAB NO: 12
Page 154 of 167
A common disk drive has a capacity in the size of gigabytes. While the set of tracks that
are at one arm position forms a cylinder, in a disk drive there may be thousands of
concentric cylinders.
In a movable-head disk, where there is only one access arm to service all the disk tracks,
the time spent by the Read and Write (R/W) head to move from one track to another is
called seek time.
Disk scheduling Algorithms: These select one of the requests from the queue of pending
requests for that drive. The various algorithms for disk scheduling are
FCFS-Selects request in the order of arrival
SSTF-Selects request with minimum seek time
SCAN-starts from one end and moves to the other end, servicing requests as it
reaches each cylinder, until it gets to the other end of the disk. At the other end the
direction is reversed and servicing continues.
C-SCAN-Similar to scan, but on reversing it returns to the beginning, without
servicing requests on its return trip.
LOOK & C- LOOK-Similar to SCAN and C-LOOK, but the arm goes only as far as
the final request in each direction.
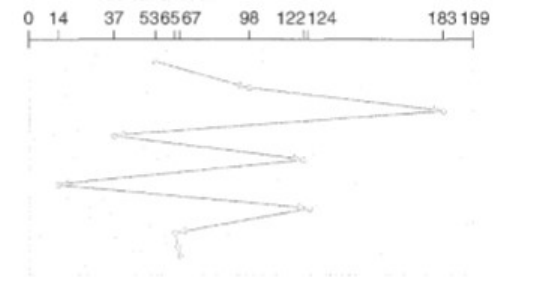
LAB NO: 12
Page 155 of 167
Suppose that a disk drive has 200 cylinders, numbered 0 to 199. The drive is currently
servicing a request at cylinder 53, and the previous request was at cylinder 125. The
queue of pending requests in FIFO order is
98, 183, 37, 122, 14, 124, 65, 67
Starting from the current head position, what is the total distance (in cylinders) that the
disk arm moves to satisfy all the pending requests, for each of the above algorithms?
FCFS:
It is the simplest form of disk scheduling algorithms. The I/O requests are served or
processes according to their arrival. The request arrives first will be accessed and served
first. Since it follows the order of arrival, it causes the wild swings from the innermost to
the outermost tracks of the disk and vice versa. The farther the location of the request
being serviced by the read/write head from its current location, the higher the seek time
will be.
Given the following track requests in the disk queue, compute for the Total Head
Movement (THM) of the read/write head
98, 183, 37, 122, 14, 124, 65, 67
Consider that the read/write head is positioned at location 53.
THM = |98 – 53| + |183-98| + |37-183| + |122-37| + |14-122| + |124-14| + |65-124| + |67-
65|= 45+85+146+85+108+110+59+2 = 640 tracks.
Figure 12.1: FCFS disk scheduling
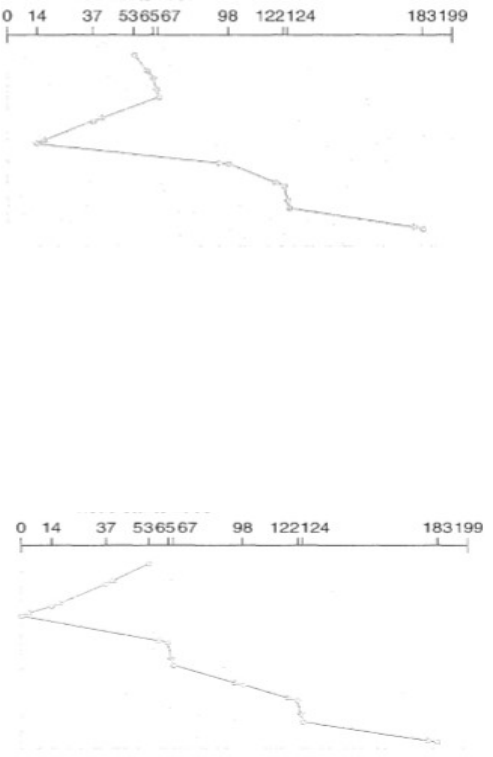
LAB NO: 12
Page 156 of 167
Shortest Seek Time First (SSTF)
This algorithm is based on the idea that that the R/W head should proceed to the track
that is closest to its current position. The process would continue until all the track
requests are taken care of. Using the same sets of example in FCFS the solution are as
follows:
THM = |53-65|+|67-65|+|67-37|+|14-37|+|98-14|+|122-98|+|124-122|+|183-
124|=12+2+30+23+84+24+2+59=236 tracks
Figure 12.2: SSTF disk scheduling
SCAN Scheduling Algorithm (Elevator Algorithm)
Disk arm starts at one end of the disk and moves towards the other end servicing requests
until it gets to the other end of the disk, where the head movement is reversed and
servicing continues. This is also known as the Elevator algorithm
THM= |53-37|+|37-14|+|14-0|+|0-65|+|67-65|+|98-67|+|122-98|+|124-122|+|183-124| =
16+23+14+65+2+31+24+2+59=236 tracks
Figure 12.3 SCAN disk scheduling
Circular SCAN (C-SCAN) Algorithm
LAB NO: 12
Page 157 of 167
Disk head moves from one end to the other servicing requests as it goes. When it reaches
the other end, it immediately returns to the beginning of the disk, without servicing any
requests in the return trip.
THM = |65-53|+|67-65|+|98-67|+|122-98|+|124-122|+|183-124|+|199-183|+|14-0|+|37-
14| =12+2+31+24+2+59+16+14+23=183 tracks
Figure 12.3 C-SCAN disk scheduling
Note: Huge jump from one end to the other end, will not be considered in total head
movement.
LOOK Scheduling Algorithm
This algorithm is similar to SCAN algorithm except for the end-to-end reach of each
sweep. The R/W head is only tasked to go the farthest location in need of servicing. This
is also a directional algorithm, as soon as it is done with the last request in one direction
it then sweeps in the other direction. Using the same sets of example in FCFS the solution
are as follows:
THM = |37-53|+|14-37|+|65-14|+|67-65|+|98-67|+|122-98|+|124-122|+|183-124| =
16+23+51+2+31+24+2+59=208 tracks
C-LOOK
This scheduling algorithm is Circular LOOK is like a C-SCAN which uses a return sweep
before processing a set of disk requests. It does not reach the end of the tracks unless
there is a request, either read or write on such disk location similar with the LOOK
algorithm. Using the same sets of example in FCFS the solutions are as follows:
THM = |65-53|+|67-65|+|98-67|+|122-98|+|124-122|+|183-124|+|37-14| =
12+2+31+24+2+59+23 = 153 tracks
LAB NO: 12
Page 158 of 167
Figure 12.4: C-LOOK disk scheduling
Lab Exercises:
1. Write a C Program to simulate the following algorithms find the total no of cylinder
movements for various input requests
(i) FCFS (ii) SSTF (iii) SCAN (iv) C-SCAN
Additional Exercises:
1. Write a C Program to simulate the following algorithms find the total no of cylinder
movements for various input requests
(i) LOOK (ii) C-LOOK
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 159 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 160 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 161 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 162 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 163 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 164 of 167
[OBSERVATION SPACE – LAB 12]
LAB NO: 12
Page 165 of 167

Page 166 of 167
REFERENCES
1. Maurice Bach, The Design of the Unix Operating System, PHI, 1986.
2. Graham Glass and King Abels, Unix for Programmers and Users – A complete guide,
PHI, 1993.
3. Sumitabha Das, Unix Concepts and Applications, McGraw Hill, 4th Edition, 2015.
4. Neil Matthew and Richard Stones, Beginning Linux Programming, 3rd Edition,
Wiley, 1999.
5. A. Silberschatz, P. B. Galvin and G. Gagne, Operating System Concepts, Wiley, 8th
Edi Edition, 2014.
6. Darryl Gove, Multicore Application Programming for Windows, Linux and Oracle
Solaris, Addison Wesley, 2011.
7. W. R. Stevens, UNIX Network Programming-Volume II (IPC), PHI, 1998.
