NVIDIA OptiX 5.0 Programming Guide Opti X 5.0.0
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 115 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- OptiX overview
- Programming model
- Host API
- Programs
- Motion blur
- Post-processing framework
- Building with OptiX
- Interoperability with OpenGL
- Interoperability with CUDA
- OptiXpp: C++ wrapper for the OptiX C API
- OptiX Prime: low-level ray tracing API
- OptiX Prime++: C++ wrapper for the OptiX Prime API
- Performance guidelines
- Caveats
- Appendix: Texture formats

NVIDIA OptiX 5.0
Programming Guide
14 December 2017
Version 5.0

Copyright Information
© 2017 NVIDIA Corporation. All rights reserved.
This document is protected under copyright law. The contents of this document may not be
translated, copied or duplicated in any form, in whole or in part, without the express written
permission of NVIDIA Corporation.
The information contained in this document is subject to change without notice. NVIDIA
Corporation and its employees shall not be responsible for incidental or consequential
damages resulting from the use of this material or liable for technical or editorial omissions
made herein.
NVIDIA, the NVIDIA logo, and OptiX are trademarks and/or registered trademarks of
NVIDIA Corporation. Other product names mentioned in this document may be trademarks
or registered trademarks of their respective companies and are hereby acknowledged.
Document build number 300255
ii NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

Contents
1OptiX overview ..................................................... 1
1.1 Motivation ..................................................... 1
1.2 Programming model ............................................. 1
1.3 Ray tracing basics ............................................... 2
2Programming model ................................................. 5
2.1 Object model ................................................... 5
2.2 Programs ...................................................... 6
2.3 Variables ...................................................... 6
2.4 Execution model ................................................ 7
3Host API .......................................................... 9
3.1 Context ....................................................... 9
3.1.1 Entry points ................................................ 9
3.1.2 Ray types .................................................. 10
3.1.3 Global state ................................................ 12
3.2 Buffers ........................................................ 14
3.2.1 Buffers of buffer ids .......................................... 16
3.3 Textures ....................................................... 18
3.4 Graph nodes ................................................... 20
3.4.1 Geometry .................................................. 21
3.4.2 Material ................................................... 22
3.4.3 GeometryInstance ........................................... 23
3.4.4 GeometryGroup ............................................ 23
3.4.5 Group .................................................... 24
3.4.6 Transform ................................................. 24
3.4.7 Selector ................................................... 25
3.5 Acceleration structures for ray tracing ............................... 25
3.5.1 Acceleration objects in the node graph ........................... 26
3.5.2 Acceleration structure builders ................................. 27
3.5.3 Acceleration structure properties ............................... 29
3.5.4 Acceleration structure builds .................................. 30
3.5.5 Shared acceleration structures .................................. 30
3.6 Rendering on the VCA ........................................... 31
3.6.1 Remote launches ............................................ 32
3.6.2 Parallelization .............................................. 32
3.6.3 Remote devices ............................................. 32
3.6.4 Progressive launches ......................................... 32
3.6.5 Stream buffers .............................................. 33
3.6.6 Device code ................................................ 34
3.6.7 Limitations ................................................ 34
3.6.8 Example ................................................... 35
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide iii

4Programs .......................................................... 37
4.1 OptiX program objects ........................................... 37
4.1.1 Managing program objects .................................... 37
4.1.2 Communication through variables .............................. 38
4.1.3 Internally provided semantics ................................. 39
4.1.4 Attribute variables .......................................... 39
4.1.5 Program variable scoping ..................................... 40
4.1.6 Program variable transformation ............................... 41
4.2 The program scope of API function calls ............................. 42
4.3 Ray generation programs ......................................... 42
4.3.1 Entry point indices .......................................... 43
4.3.2 Launching a ray generation program ............................ 43
4.3.3 Ray generation program function signature ....................... 43
4.3.4 Example ray generation program ............................... 44
4.4 Exception programs ............................................. 44
4.4.1 Exception program entry point association ....................... 45
4.4.2 Exception types ............................................. 45
4.4.3 Exception program function signature ........................... 46
4.4.4 Example exception program ................................... 46
4.5 Closest hit programs ............................................. 46
4.5.1 Closest hit program material association ......................... 47
4.5.2 Closest hit program function signature .......................... 47
4.5.3 Recursion in a closest hit program .............................. 47
4.5.4 Example closest hit program ................................... 47
4.6 Any hit programs ............................................... 48
4.6.1 Any hit program material association ............................ 48
4.6.2 Termination in an any hit program .............................. 48
4.6.3 Any hit program function signature ............................. 48
4.6.4 Example any hit program ..................................... 48
4.7 Miss programs .................................................. 49
4.7.1 Miss program function signature ............................... 49
4.7.2 Example miss program ....................................... 49
4.8 Intersection and bounding box programs ............................. 50
4.8.1 Intersection and bounding box program function signatures ......... 50
4.8.2 Reporting intersections ....................................... 50
4.8.3 Specifying bounding boxes .................................... 51
4.8.4 Example intersection and bounding box programs ................. 51
4.9 Selector programs ............................................... 52
4.9.1 Selector visit program function signature ......................... 52
4.9.2 Example visit program ....................................... 53
4.10 Callable programs .............................................. 53
4.10.1 Defining a callable program in CUDA .......................... 53
4.10.2 Using a callable program variable in CUDA ...................... 54
4.10.3 Setting a callable program on the host .......................... 55
iv NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

4.10.4 Bound versus bindless callable programs ........................ 57
5Motion blur ........................................................ 59
5.1 Motion in Geometry nodes ........................................ 59
5.1.1 Defining motion range for Geometry nodes ....................... 60
5.1.2 Bounding boxes for motion blur ................................ 60
5.1.3 Border modes .............................................. 61
5.1.4 Acquiring motion parameter values ............................. 61
5.2 Motion in Acceleration nodes ...................................... 61
5.3 Motion in Transform nodes ........................................ 62
5.3.1 Key types .................................................. 62
5.3.1.1 Key type RT_MOTIONKEYTYPE_MATRIX_FLOAT12 .......... 62
5.3.1.2 Key type RT_MOTIONKEYTYPE_SRT_FLOAT16 .............. 62
5.3.2 Border modes for Transform nodes ............................. 63
5.3.3 Acquiring motion parameter values ............................. 64
5.4 Examples of motion transforms .................................... 64
5.5 Motion in user programs .......................................... 64
6Post-processing framework ............................................ 67
6.1 Overview ...................................................... 67
6.2 Post-processing stage ............................................ 67
6.2.1 Creating a post-processing stage ................................ 67
6.2.2 Querying variables .......................................... 68
6.2.2.1 Declaring a named variable ............................... 68
6.2.2.2 Getting a named variable ................................. 68
6.2.2.3 Iterating over existing variables ............................ 69
6.3 Command List .................................................. 69
6.3.1 Creating a command list ...................................... 69
6.3.2 Adding a post-processing stage to a command list ................. 69
6.3.3 Appending a launch to a command list .......................... 69
6.3.4 Finalizing a command list ..................................... 70
6.3.5 Running a command list ...................................... 70
6.4 Built-In Post-Processing Stages ..................................... 71
6.4.1 Deep-learning based Denoiser ................................. 71
6.4.1.1 Performance ........................................... 73
6.4.1.2 Limitations ............................................ 73
6.4.2 Simple Tone Mapper ......................................... 73
7Building with OptiX ................................................. 75
7.1 Libraries ....................................................... 75
7.2 Header files .................................................... 75
7.3 PTX generation ................................................. 76
7.4 SDK build ..................................................... 77
8Interoperability with OpenGL .......................................... 79
8.1 Opengl interop ................................................. 79
8.1.1 Buffer objects ............................................... 79
8.1.2 Textures and render buffers ................................... 79
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide v

9Interoperability with CUDA ........................................... 81
9.1 Primary CUDA contexts .......................................... 81
9.2 Sharing CUDA device pointers ..................................... 81
9.2.1 Buffer synchronization ....................................... 82
9.2.1.1 Automatic single-pointer synchronization .................... 82
9.2.1.2 Manual single-pointer synchronization ...................... 82
9.2.1.3 Multi-pointer synchronization ............................. 82
9.2.2 Restrictions ................................................ 82
9.2.3 Zero-copy pointers .......................................... 83
10 OptiXpp: C++ wrapper for the OptiX C API ............................. 85
10.1 OptiXpp objects ................................................ 85
10.1.1 Handle class ............................................... 85
10.1.2 Attribute classes ........................................... 86
10.1.2.1 API attribute .......................................... 86
10.1.2.2 Destroyable attribute .................................... 86
10.1.2.3 Scoped attribute ........................................ 86
10.1.2.4 Attributes of OptiXpp objects ............................. 87
10.1.3 API objects ................................................ 87
10.1.3.1 Context .............................................. 87
10.1.3.2 Buffer ................................................ 88
10.1.3.3 Variable .............................................. 88
10.1.3.4 TextureSampler ........................................ 88
10.1.3.5 Group and GeometryGroup .............................. 88
10.1.3.6 GeometryInstance ...................................... 88
10.1.3.7 Geometry ............................................. 88
10.1.3.8 Material .............................................. 88
10.1.3.9 Transform ............................................ 89
10.1.3.10 Selector ............................................. 89
10.1.4 Exceptions ................................................ 89
11 OptiX Prime: low-level ray tracing API ................................. 91
11.1 Overview ..................................................... 91
11.2 Context ...................................................... 91
11.3 Buffer descriptor ............................................... 92
11.4 Model ........................................................ 93
11.4.1 Triangle models ............................................ 93
11.4.2 Instancing ................................................ 94
11.4.3 Masking .................................................. 95
11.5 Query ........................................................ 95
11.6 Utility functions ................................................ 96
11.6.1 Page-locked buffers ......................................... 96
11.6.2 Error reporting ............................................. 96
11.7 Multi-threading ................................................ 96
11.8 Streams ...................................................... 97
vi NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
12 OptiX Prime++: C++ wrapper for the OptiX Prime API ..................... 99
12.1 OptiX Prime++ objects .......................................... 99
12.1.1 Context object ............................................. 99
12.1.2 BufferDesc object ...........................................100
12.1.3 Model object .............................................. 100
12.1.4 Query object .............................................. 100
12.1.5 Exception class ............................................100
13 Performance guidelines ..............................................101
14 Caveats ..........................................................105
15 Appendix: Texture formats ...........................................107
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide vii

viii NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

1 OptiX overview
GPUs are best at exploiting very high degrees of parallelism, and ray tracing fits that
requirement perfectly. However, typical ray tracing algorithms can be highly irregular, which
poses serious challenges for anyone trying to exploit the full raw computational potential of a
GPU. The NVIDIA®OptiX™ ray tracing engine and API address those challenges and
provide a framework for harnessing the enormous computational power of both current- and
future-generation graphics hardware to incorporate ray tracing into interactive applications.
By using OptiX together with NVIDIA®CUDA®architecture, interactive ray tracing is finally
feasible for developers without a Ph.D. in computer graphics and a team of ray tracing
engineers.
OptiX is not itself a renderer. Instead, it is a scalable framework for building ray tracing based
applications. The OptiX engine is composed of two symbiotic parts: 1) a host-based API that
defines data structures for ray tracing, and 2) a CUDA C++-based programming system that
can produce new rays, intersect rays with surfaces, and respond to those intersections.
Together, these two pieces provide low-level support for “raw ray tracing.” This allows
user-written applications that use ray tracing for graphics, collision detection, sound
propagation, visibility determination, etc.
1.1 Motivation
By abstracting the execution model of a generic ray tracer, OptiX makes it easier to assemble a
ray tracing system, leveraging custom-built algorithms for object traversal, shader dispatch
and memory management. Furthermore, the resulting system will be able to take advantage
of future evolution in GPU hardware and OptiX SDK releases — similar to the manner that
OpenGL and Direct3D provide an abstraction for the rasterization pipeline.
Wherever possible, the OptiX engine avoids specification of ray tracing behaviors and instead
provides mechanisms to execute user- provided CUDA C code to implement shading
(including recursive rays), camera models, and even color representations. Consequently, the
OptiX engine can be used for Whitted-style ray tracing, path tracing, collision detection,
photon mapping, or any other ray tracing-based algorithm. It is designed to operate either
standalone or in conjunction with an OpenGL or DirectX application for hybrid ray
tracing-rasterization applications.
1.2 Programming model
At the core of OptiX is a simple but powerful abstract model of a ray tracer. This ray tracer
employs user-provided programs to control the initiation of rays, intersection of rays with
surfaces, shading with materials, and spawning of new rays. Rays carry user-specified
payloads that describe per-ray variables such as color, recursion depth, importance, or other
attributes. Developers provide these functions to OptiX in the form of CUDA C-based
functions. Because ray tracing is an inherently recursive algorithm, OptiX allows user
programs to recursively spawn new rays, and the internal execution mechanism manages all
the details of a recursion stack. OptiX also provides flexible dynamic function dispatch and a
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 1

1 OptiX overview 1.3 Ray tracing basics
sophisticated variable inheritance mechanism so that ray tracing systems can be written very
generically and compactly.
1.3 Ray tracing basics
“Ray tracing” is an overloaded term whose meaning can depend on context. Sometimes it
refers to the computation of the intersection points between a 3D line and a set of 3D objects
such as spheres. Sometimes it refers to a specific algorithm such as Whitted’s method of
generating pictures or the oil exploration industry’s algorithm for simulating ground wave
propagation. Other times it refers to a family of algorithms that include Whitted’s algorithm
along with others such as distribution ray tracing. OptiX is a ray tracing engine in the first
sense of the word: it allows the user to intersect rays and 3D objects. As such it can be used to
build programs that fit the other use of “ray tracing” such as Whitted’s algorithm. In addition
OptiX provides the ability for users to write their own programs to generate rays and to
define behavior for when rays hit objects.
For graphics, ray tracing was originally proposed by Arthur Appel in 1968 for rendering solid
objects. In 1980, Turner Whitted pursued the idea further by introducing recursion to enable
reflective and refractive effects. Subsequent advances in ray tracing increased accuracy by
introducing effects for depth of field, diffuse inter- reflection, soft shadows, motion blur, and
other optical effects. Simultaneously, numerous researchers have improved the performance
of ray tracing using new algorithms for indexing the objects in the scene.
Realistic rendering algorithms based on ray tracing have been used to accurately simulate
light transport. Some of these algorithms simulate the propagation of photons in a virtual
environment. Others follow adjoint photons “backward” from a virtual camera to determine
where they originated. Still other algorithms use bidirectional methods. OptiX operates at a
level below such algorithmic decisions, so can be used to build any of those algorithms.
Ray tracing has often been used for non-graphics applications. In the computer-aided design
community, ray tracing has been used to estimate the volume of complex parts. This is
accomplished by sending a set of parallel rays at the part; the fraction of rays that hit the part
gives the cross-sectional area, and the average length that those rays are inside the part gives
the average depth. Ray tracing has also often been used to determine proximity (including
collision) for complex moving objects. This is usually done by sending “feeler” rays from the
surfaces of objects to “see” what is nearby. Rays are also commonly used for mouse-based
object selection to determine what object is seen in a pixel, and for projectile-object collision in
games. OptiX can be used for any of those applications.
The common feature in ray tracing algorithms is that they compute the intersection points of
3D rays (an origin and a propagation direction) and a collection of 3D surfaces (the “model”
or “scene”). In rendering applications, the optical properties of the point where the ray
intersects the model determine what happens to the ray (e.g., it might be reflected, absorbed
or refracted). Other applications might not care about information other than where the
intersection happens, or even if an intersection occurs at all. This variety of needs means it is
desirable for OptiX to support a variety of ray-scene queries and user-defined behavior when
rays intersect the scene.
One of ray tracing’s nice features is that it is easy to support any geometric object that can be
intersected with a 3D line. For example, it is straightforward to support spheres natively with
no tessellation. Another nice feature is that ray tracing’s execution is normally “sub-linear” in
the number of objects—doubling the number of objects in the scene should less than double
2 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

1.3 Ray tracing basics 1 OptiX overview
the running time. This is accomplished by organizing the objects into an acceleration
structure that can quickly reject whole groups of primitives as not candidates for intersection
with any given ray. For static parts of the scene, this structure can be reused for the life of the
application. For dynamic parts of the scene, OptiX supports rebuilding the acceleration
structure when needed. The structure only queries the bounding box of any geometric objects
it contains, so new types of primitives can be added and the acceleration structures will
continue to work without modification, so long as the new primitives can provide a bounding
box.
For graphics applications, ray tracing has advantages over rasterization. One of these is that
general camera models are easy to support; the user can associate points on the screen with
any direction they want, and there is no requirement that rays originate at the same point.
Another advantage is that important optical effects such as reflection and refraction can be
supported with only a few lines of code. Hard shadows are easy to produce with none of the
artifacts typically associated with shadow maps, and soft shadows are not much harder.
Furthermore, ray tracing can be added to more traditional graphics programs as a pass that
produces a texture, letting the developer leverage the best of both worlds. For example, just
the specular reflections could be computed by using points in the depth buffer as ray origins.
There are a number of such “hybrid algorithms” that use both z-buffer and ray tracing
techniques.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 3

1 OptiX overview 1.3 Ray tracing basics
4 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
2 Programming model
The OptiX programming model consists of two halves: the host code and the GPU device
programs. This chapter introduces the objects, programs, and variables that are defined in
host code and used on the device.
2.1 Object model
OptiX is an object-based C API that implements a simple retained mode object hierarchy. This
object-oriented host interface is augmented with programs that execute on the GPU. The
main objects in the system are:
Context
An instance of a running OptiX engine
Program
A CUDA C function, compiled to NVIDIA’s PTX virtual assembly language
Variable
A name used to pass data from C to OptiX programs
Buffer
A multidimensional array that can be bound to a variable
TextureSampler
One or more buffers bound with an interpolation mechanism
Geometry
One or more primitives that a ray can be intersected with, such as triangles or other
user-defined types
Material
A set of programs executed when a ray intersects with the closest primitive or potentially
closest primitive.
GeometryInstance
A binding between Geometry and Material objects.
Group
A set of objects arranged in a hierarchy
GeometryGroup
A set of GeometryInstance objects
Transform
A hierarchy node that geometrically transforms rays, so as to transform the geometric
objects
Selector
A programmable hierarchy node that selects which children to traverse
Acceleration
An acceleration structure object that can be bound to a hierarchy node
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 5

2 Programming model 2.3 Variables
Remote Device
A network connection for optional remote rendering.
These objects are created, destroyed, modified and bound with the C API and are further
detailed in Chapter 3. The behavior of OptiX can be controlled by assembling these objects
into any number of different configurations.
2.2 Programs
The ray tracing pipeline provided by OptiX contains several programmable components.
These programs are invoked on the GPU at specific points during the execution of a generic
ray tracing algorithm. There are eight types of programs:
Ray generation
The entry point into the ray tracing pipeline, invoked by the system in parallel for each
pixel, sample, or other user-defined work assignment
Exception
Exception handler, invoked for conditions such as stack overflow and other errors
Closest hit
Called when a traced ray finds the closest intersection point, such as for material shading
Any hit
Called when a traced ray finds a new potentially closest intersection point, such as for
shadow computation
Intersection
Implements a ray-primitive intersection test, invoked during traversal
Bounding box
Computes a primitive’s world space bounding box, called when the system builds a new
acceleration structure over the geometry
Miss
Called when a traced ray misses all scene geometry
Visit
Called during traversal of a Selector node to determine the children a ray will traverse
The input language for these programs is PTX. The OptiX SDK also provides a set of wrapper
classes and headers for use with the NVIDIA C Compiler (nvcc) that enable the use of CUDA
C as a way of generating appropriate PTX.
These programs are further detailed in <a href="optix_programs.htm">Programs</a>.
2.3 Variables
OptiX features a flexible and powerful variable system for communicating data to programs.
When an OptiX program references a variable, there is a well-defined set of scopes that will
be queried for a definition of that variable. This enables dynamic overrides of variable
definitions based on which scopes are queried for definitions.
For example, a closest hit program may reference a variable called color. This program may
then be attached to multiple Material objects, which are, in turn, attached to
GeometryInstance objects. Variables in closest hit programs first look for definitions directly
6 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

2.4 Execution model 2 Programming model
attached to their Program object, followed by GeometryInstance,Material and Context
objects, in that order. This enables a default color definition to exist on the Material object but
specific instances using that material to override the default color definition.
See the “Graph nodes” section (page 93) for more information.
2.4 Execution model
Once all of these objects, programs and variables are assembled into a valid context, ray
generation programs may be launched. Launches take dimensionality and size parameters
and invoke the ray generation program a number of times equal to the specified size.
Once the ray generation program is invoked, a special semantic variable may be queried to
provide a runtime index identifying the ray generation program invocation. For example, a
common use case is to launch a two-dimensional invocation with a width and height equal to
the size, in pixels, of an image to be rendered.
See the “Launching a ray generation program” section (page 50) for more information on
launching ray generation programs from a context.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 7

2 Programming model 2.4 Execution model
8 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3 Host API
3.1 Context
An OptiX context provides an interface for controlling the setup and subsequent launch of the
ray tracing engine. Contexts are created with the rtContextCreate function. A context object
encapsulates all OptiX resources — textures, geometry, user-defined programs, etc. The
destruction of a context, via the rtContextDestroy function, will clean up all of these
resources and invalidate any existing handles to them.
The functions rtContextLaunch1D,rtContextLaunch2D and rtContextLaunch3D (collectively
known as rtContextLaunch) serve as entry points to ray engine computation. The launch
function takes an entry point parameter, discussed in the “Entry points” section (page 93), as
well as one, two or three grid dimension parameters. The dimensions establish a logical
computation grid. Upon a call to rtContextLaunch, any necessary preprocessing is
performed and then the ray generation program associated with the provided entry point
index is invoked once per computational grid cell. The launch precomputation includes state
validation and, if necessary, acceleration structure generation and kernel compilation. Output
from the launch is passed back via OptiX buffers, typically but not necessarily of the same
dimensionality as the computation grid.
RTcontext context;
rtContextCreate( &context );
unsigned int entry_point = ...;
unsigned int width = ...;
unsigned int height = ...;
// Set up context state and scene description
...
rtContextLaunch2D( context, entry_point, width, height );
rtContextDestroy( context );
While multiple contexts can be active at one time in limited cases, this is usually unnecessary
as a single context object can leverage multiple hardware devices. The devices to be used can
be specified with rtContextSetDevices. By default, the highest compute capable set of
compatible OptiX-capable devices is used. The following set of rules is used to determine
device compatibility. These rules could change in the future. If incompatible devices are
selected an error is returned from rtContextSetDevices.
3.1.1 Entry points
Each context may have multiple computation entry points. A context entry point is associated
with a single ray generation program as well as an exception program. The total number of
entry points for a given context can be set with rtContextSetEntryPointCount. Each entry
point’s associated programs are set by rtContextSetRayGenerationProgram and
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 9

3 Host API 3.1 Context
rtContextSetExceptionProgram and are queried by rtContextGetRayGenerationProgram
and rtContextGetExceptionProgram. Each entry point must be assigned a ray generation
program before use; however, the exception program is an optional program that allows users
to specify behavior upon various error conditions. The multiple entry point mechanism
allows switching between multiple rendering algorithms as well as efficient implementation
of techniques such as multi-pass rendering on a single OptiX context.
RTcontext context = ...;
rtContextSetEntryPointCount( context, 2 );
RTprogram pinhole_camera = ...;
RTprogram thin_lens_camera = ...;
RTprogram exception = ...;
rtContextSetRayGenerationProgram( context, 0, pinhole_camera );
rtContextSetRayGenerationProgram( context, 1, thin_lens_camera );
rtContextSetExceptionProgram( context, 0, exception );
rtContextSetExceptionProgram( context, 1, exception );
3.1.2 Ray types
OptiX supports the notion of ray types, which is useful to distinguish between rays that are
traced for different purposes. For example, a renderer might distinguish between rays used to
compute color values and rays used exclusively for determining visibility of light sources
(shadow rays). Proper separation of such conceptually different ray types not only increases
program modularity, but also enables OptiX to operate more efficiently.
Both the number of different ray types as well as their behavior is entirely defined by the
application. The number of ray types to be used is set with rtContextSetRayTypeCount.
The following properties may differ among ray types:
•The ray payload
•The closest hit program of each individual material
•The any hit program of each individual material
•The miss program
The ray payload is an arbitrary user-defined data structure associated with each ray. This is
commonly used, for example, to store a result color, the ray’s recursion depth, a shadow
attenuation factor, and so on. It can be regarded as the result a ray delivers after having been
traced, but it can also be used to store and propagate data between ray generations during
recursive ray tracing.
The closest hit and any hit programs assigned to materials correspond roughly to shaders in
conventional rendering systems: they are invoked when an intersection between a ray and a
geometric primitive is found. Since those programs are assigned to materials per ray type, not
all ray types must define behavior for both program types. See the “Closest hit programs”
section (page 50) and the “Any hit programs” section (page 48) for a more detailed discussion
of material programs.
10 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.1 Context 3 Host API
The miss program is executed when a traced ray is determined to not hit any geometry. A
miss program could, for example, return a constant sky color or sample from an environment
map.
As an example of how to make use of ray types, a Whitted-style recursive ray tracer might
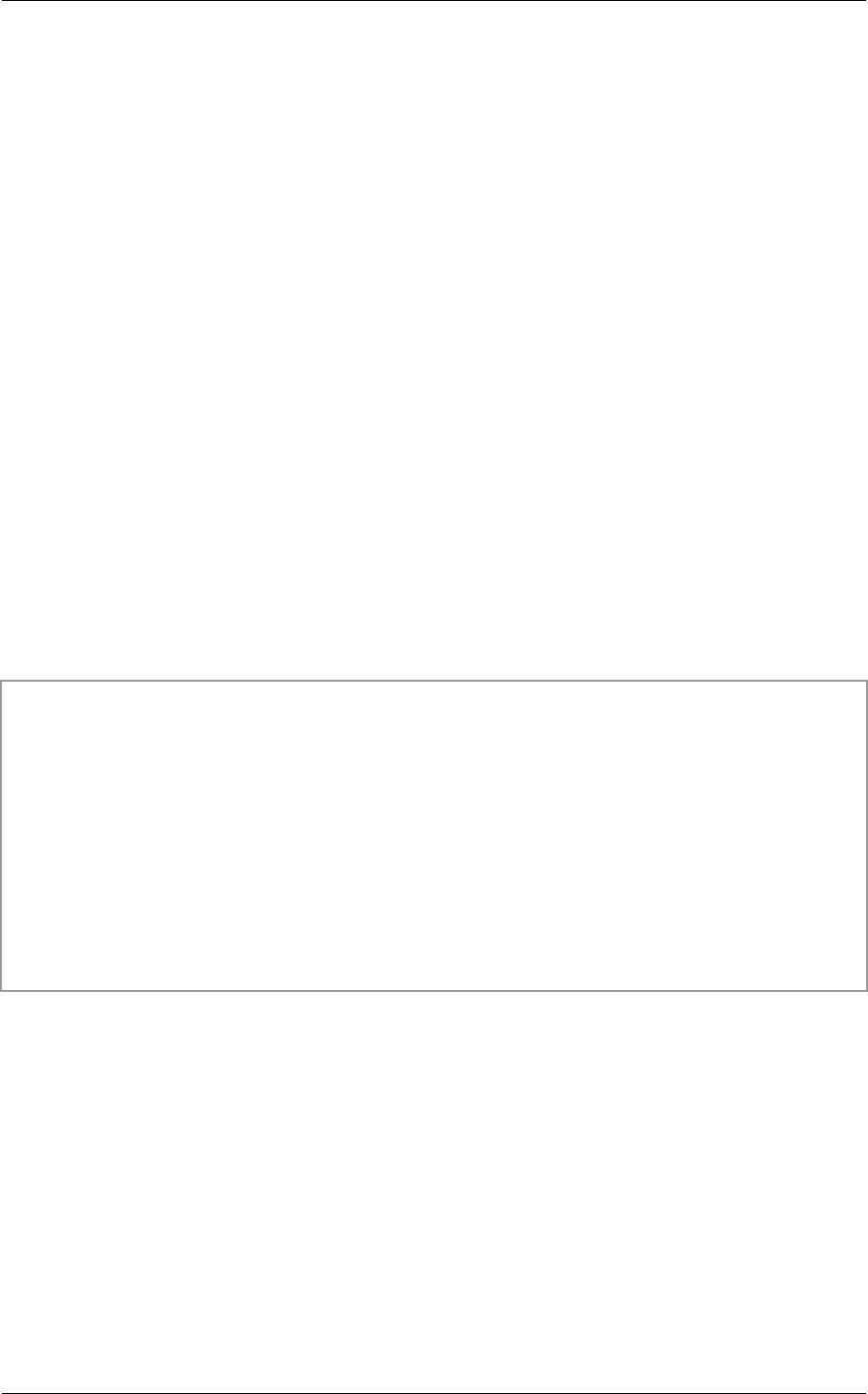
define the ray types listed in Table 1:
Use Radiance Shadow
Payload RadiancePL ShadowPL
Closest hit Compute color, keep track of
recursion depth
—
Any hit — Compute shadow attenuation and
terminate ray if opaque
Miss Environment map lookup —
Table 1 – Example ray types
The ray payload data structures in the above example might look as follows:
// Payload for ray type 0: radiance rays
struct RadiancePL
{
float3 color;
int recursion_depth;
};
// Payload for ray type 1: shadow rays
struct ShadowPL
{
float attenuation;
};
Upon a call to rtContextLaunch, the ray generation program traces radiance rays into the
scene, and writes the delivered results (found in the color field of the payload) into an output
buffer for display:
RadiancePL payload;
payload.color = make_float3( 0.f, 0.f, 0.f );
payload.recursion_depth = 0; // Initialize recursion depth
Ray ray = ... // Some camera code creates the ray
ray.ray_type = 0; // Make this a radiance ray
rtTrace( top_object, ray, payload );
// Write result to output buffer
writeOutput( payload.color );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 11
3 Host API 3.1 Context
A primitive intersected by a radiance ray would execute a closest hit program which
computes the ray’s color and potentially traces shadow rays and reflection rays. The shadow
ray part is shown in the following code snippet:
ShadowPL shadow_payload;
shadow_payload.attenuation = 1.0f; // initialize to visible
Ray shadow_ray = ... // create a ray to light source
shadow_ray.ray_type = 1; // make this a shadow ray
rtTrace( top_object, shadow_ray, shadow_payload );
// Attenuate incoming light (’light’ is some user-defined
// variable describing the light source)
float3 rad = light.radiance * shadow_payload.attenuation;
// Add the contribution to the current radiance ray’s
// payload (assumed to be declared as ’payload’)
payload.color += rad;
To properly attenuate shadow rays, all materials use an any hit program which adjusts the
attenuation and terminates ray traversal. The following code sets the attenuation to zero,
assuming an opaque material:
shadow_payload.attenuation = 0; // Assume opaque material
rtTerminateRay(); // It won’t get any darker, so terminate
3.1.3 Global state
Aside from ray type and entry point counts, there are several other global settings
encapsulated within OptiX contexts.
Each context holds a number of attributes that can be queried and set using
rtContext{Get|Set}Attribute. For example, the amount of memory an OptiX context has
allocated on the host can be queried by specifying
RT_CONTEXT_ATTRIBUTE_USED_HOST_MEMORY as attribute parameter.
To support recursion, OptiX uses a small stack of memory associated with each thread of
execution. rtContext{Get|Set}StackSize allows for setting and querying the size of this
stack. The stack size should be set with care as unnecessarily large stacks will result in
performance degradation while overly small stacks will cause overflows within the ray
engine. Stack overflow errors can be handled with user defined exception programs.
The rtContextSetPrint* functions are used to enable C-style printf printing from within
OptiX programs, allowing these programs to be more easily debugged. The CUDA C
function rtContextSetPrintEnabled turns on or off printing globally while
rtContextSetPrintLaunchIndex toggles printing for individual computation grid cells. Print
statements have no adverse effect on performance while printing is globally disabled, which
is the default behavior.
Print requests are buffered in an internal buffer, the size of which can be specified with
rtContextSetPrintBufferSize. Overflow of this buffer will cause truncation of the output
12 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.1 Context 3 Host API
stream. The output stream is printed to the standard output after all computation has
completed but before rtContextLaunch has returned.
RTcontext context = ...;
rtContextSetPrintEnabled( context, 1 );
rtContextSetPrintBufferSize( context, 4096 );
Within an OptiX program, the rtPrintf function works similarly to C’s printf. Each
invocation of rtPrintf will be atomically deposited into the print output buffer, but separate
invocations by the same thread or by different threads will be interleaved arbitrarily.
rtDeclareVariable(uint2, launch_idx ,rtLaunchIndex, );
RT_PROGRAM void any_hit()
{
rtPrintf( "Hello from index %u, %u!\n", launch_idx.x, launch_idx.y );
}
The context also serves as the outermost scope for OptiX variables. Variables declared via
rtContextDeclareVariable are available to all OptiX objects associated with the given
context. To avoid name conflicts, existing variables may be queried with either
rtContextQueryVariable (by name) or rtContextGetVariable (by index), and removed
with rtContextRemoveVariable.
rtContextValidate can be used at any point in the setup process to check the state validity of
a context and all of its associated OptiX objects. This will include checks for the presence of
necessary programs (e.g., an intersection program for a geometry node), invalid internal state
such as unspecified children in graph nodes and the presence of variables referred to by all
specified programs. Validation is always implicitly performed upon a context launch.
rtContextSetTimeoutCallback specifies a callback function of type RTtimeoutcallback that
is called at a specified maximum frequency from OptiX API calls that can run long, such as
acceleration structure builds, compilation, and kernel launches. This allows the application to
update its interface or perform other tasks. The callback function may also ask OptiX to cease
its current work and return control to the application. This request is complied with as soon
as possible. Output buffers expected to be written to by an rtContextLaunch are left in an
undefined state, but otherwise OptiX tracks what tasks still need to be performed and
resumes cleanly in subsequent API calls.
// Return 1 to ask for abort, 0 to continue.
// An RTtimeoutcallback.
int timeout_callback()
{
update_gui();
return check_gui_status();
}
...
// Call timeout_callback() at most once every 100 ms.
rtContextSetTimeoutCallback( context, timeout_callback, 0.1 );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 13

3 Host API 3.2 Buers
rtContextGetErrorString can be used to get a description of any failures occurring during
context state setup, validation, or launch execution.
3.2 Buers
OptiX uses buffers to pass data between the host and the device. Buffers are created by the
host prior to invocation of rtContextLaunch using the rtBufferCreate function. This
function also sets the buffer type as well as optional flags. The type and flags are specified as
a bitwise OR combination.
The buffer type determines the direction of data flow between host and device. Its options are
enumerated by RTbuffertype:
RT_BUFFER_INPUT
Only the host may write to the buffer. Data is transferred from host to device and device
access is restricted to be read-only.
RT_BUFFER_OUTPUT
The converse of RT_BUFFER_INPUT. Only the device may write to the buffer. Data is
transferred from device to host.
RT_BUFFER_INPUT_OUTPUT
Allows read-write access from both the host and the device.
RT_BUFFER_PROGRESSIVE_STREAM
The automatically updated output of a progressive launch. Can be streamed efficiently
over network connections. (See the “Progressive launches” section (page 32).)
Buffer flags specify certain buffer characteristics and are enumerated by RTbufferflags:
RT_BUFFER_GPU_LOCAL
Can only be used in combination with RT_BUFFER_INPUT_OUTPUT. This restricts the host
to write operations as the buffer is not copied back from the device to the host. The device
is allowed read-write access. However, writes from multiple devices are not coherent, as
a separate copy of the buffer resides on each device.
RT_BUFFER_LAYERED
If RT_BUFFER_LAYERED flag is set, buffer depth specifies the number of layers, not the
depth of a 3D buffer, when it is used as a texture buffer.
RT_BUFFER_CUBEMAP
If RT_BUFFER_CUBEMAP flag is set, buffer depth specifies the number of cube faces, not the
depth of a 3D buffer.
Before using a buffer, its size, dimensionality and element format must be specified. The
format can be set and queried with rtBuffer{Get|Set}Format. Format options are
enumerated by the RTformat type. Formats exist for C and CUDA C data types such as
unsigned int and float3. Buffers of arbitrary elements can be created by choosing the
format RT_FORMAT_USER and specifying an element size with the rtBufferSetElementSize
function. The size of the buffer is set with rtBufferSetSize{1,2,3}D which also specifies the
dimensionality implicitly. rtBufferGetMipLevelSize can be used to get the size of a mip
level of a texture buffer, given the mip level number.
RTcontext context = ...;
RTbuffer buffer;
14 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.2 Buers 3 Host API
typedef struct { float r; float g; float b; } rgb;
rtBufferCreate( context, RT_BUFFER_INPUT_OUTPUT, &buffer );
rtBufferSetFormat( RT_FORMAT_USER );
rtBufferSetElementSize( sizeof(rgb) );
rtBufferSetSize2D( buffer, 512, 512 );
Host access to the data stored within a buffer is performed with the rtBufferMap function.
This function returns a pointer to a one dimensional array representation of the buffer data.
All buffers must be unmapped via rtBufferUnmap before context validation will succeed.
// Using the buffer created above
unsigned int width, height;
rtBufferGetSize2D( buffer, &width, &height );
void* data;
rtBufferMap( buffer, &data );
rgb* rgb_data = (rgb*)data;
for( unsigned int i = 0; i < width*height; ++I ) {
rgb_data[i].r = rgb_data[i].g = rgb_data[i].b =0.0f;
}
rtBufferUnmap( buffer );
rtBufferMapEx and rtBufferUnmapEx set the contents of a mip mapped texture buffer.
// Using the buffer created above
unsigned int width, height;
rtBufferGetMipLevelSize2D( buffer, &width, &height, level+1 );
rgb *dL, *dNextL;
rtBufferMapEx( buffer, RT_BUFFER_MAP_READ_WRITE, level, 0, &dL );
rtBufferMapEx( buffer, RT_BUFFER_MAP_READ_WRITE, level+1, 0, &dNextL );
unsigned int width2 = width*2;
for ( unsigned int y = 0; y < height; ++y ) {
for ( unsigned int x = 0; x < width; ++x ) {
dNextL[x+width*y] = 0.25f *
(dL[x*2+width2*y*2] +
dL[x*2+1+width2*y*2] +
dL[x*2+width2*(y*2+1)] +
dL[x*2+1+width2*(y*2+1)]);
}
}
rtBufferUnmapEx( buffer, level );
rtBufferUnmapEx( buffer, level+1 );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 15
3 Host API 3.2 Buers
Access to buffers within OptiX programs uses a simple array syntax. The two template
arguments in the declaration below are the element type and the dimensionality, respectively.
rtBuffer<rgb, 2> buffer;
...
uint2 index = ...;
float r = buffer[index].r;
3.2.1 Buers of buer ids
Beginning in OptiX 3.5, buffers may contain IDs to buffers. From the host side, an input
buffer is declared with format RT_FORMAT_BUFFER_ID. The buffer is then filled with buffer IDs
obtained through the use of either rtBufferGetId or OptiX::Buffer::getId. A special
sentinel value, RT_BUFFER_ID_NULL, can be used to distinguish between valid and invalid
buffer IDs. RT_BUFFER_ID_NULL will never be returned as a valid buffer ID.
The following example that creates two input buffers; the first contains the data, and the
second contains the buffer IDs.
Buffer inputBuffer0 =
context->createBuffer( RT_BUFFER_INPUT, RT_FORMAT_INT, 3 );
Buffer inputBuffers =
context->createBuffer( RT_BUFFER_INPUT, RT_FORMAT_BUFFER_ID, 1);
int* buffers = static_cast<int*>(inputBuffers->map());
buffers[0] = inputBuffer0->getId();
inputBuffers->unmap();
From the device side, buffers of buffer IDs are declared using rtBuffer with a template
argument type of rtBufferId. The identifiers stored in the buffer are implicitly cast to buffer
handles when used on the device. This example creates a one dimensional buffer whose
elements are themselves one dimensional buffers that contain integers.
rtBuffer<rtBufferId<int,1>, 1> input_buffers;
Accessing the buffer is done the same way as with regular buffers:
// Grab the first element of the first buffer in
// ’input_buffers’
int value = input_buffers[buf_index][0];
The size of the buffer can also be queried to loop over the contents:
for(size_t i = 0; k < input_buffers.size(); ++i)
result += input_buffers[i];
Buffers may nest arbitrarily deeply, though there is memory access overhead per nesting level.
Multiple buffer lookups may be avoided by using references or copies of the rtBufferId.
16 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.2 Buers 3 Host API
rtBuffer<rtBufferId<rtBufferId<int,1>, 1>, 1> input_buffers3;
...
rtBufferId<int,1>& buffer = input_buffers[buf_index1][buf_index2];
size_t size = buffer.size();
for(size_t i = 0; i < size; ++i)
value += buffer[i];
Currently only non-interop buffers of type RT_BUFFER_INPUT may contain buffer IDs and they
may only contain IDs of buffers that match in element format and dimensionality, though
they may have varying sizes.
The RTbuffer object associated with a given buffer ID can be queried with the function
rtContextGetBufferFromId or if using the C++ interface,
OptiX::Context::getBufferFromId.
In addition to storing buffer IDs in other buffers, you can store buffer IDs in arbitrary structs
or RTvariables or as data members in the ray payload as well as pass them as arguments to
callable programs. An rtBufferId object can be constructed using the buffer ID as a
constructor argument.
rtDeclareVariable(int, id, ,);
rtDeclareVariable(int, index, ,);
...
int value = rtBufferId<int,1>(id)[index];
An example of passing to a callable program:
#include <OptiX_world.h>
using namespace OptiX;
struct BufInfo {
int index;
rtBufferId<int, 1> data;
};
rtCallableProgram(int, getValue, (BufInfo));
RT_CALLABLE_PROGRAM
int getVal( BufInfo bufInfo )
{
return bufInfo.data[bufInfo.index];
}
rtBuffer<int,1> result;
rtDeclareVariable(BufInfo, buf_info, ,);
RT_PROGRAM void bindlessCall()
{
int value = getValue(buf_info);
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 17
3 Host API 3.3 Textures
result[0] = value;
}
Note that because rtCallProgram and rtDeclareVariable are macros, typedefs or structs
should be used instead of using the templated type directly in order to work around the C
preprocessor’s limitations.
typedef rtBufferId<int,1> RTB;
rtDeclareVariable(RTB, buf, ,);
There is a definition for rtBufferId in OptiXpp_namespace.h that mirrors the device side
declaration to enable declaring types that can be used in both host and device code.
Here is an example of the use of the BufInfo struct from the host side:
BufInfo buf_info;
buf_info.index = 0;
buf_info.data = rtBufferId<int,1>(inputBuf0->getId());
context["buf_info"]->setUserData(sizeof(buf_info), &buf_info);
3.3 Textures
OptiX textures provide support for common texture mapping functionality including texture
filtering, various wrap modes, and texture sampling. rtTextureSamplerCreate is used to
create texture objects. Each texture object is associated with one or more buffers containing
the texture data. The buffers may be 1D, 2D or 3D and can be set with
rtTextureSamplerSetBuffer.
rtTextureSamplerSetFilteringModes can be used to set the filtering methods for
minification, magnification and mipmapping. Wrapping for texture coordinates outside of [0,
1] can be specified per-dimension with rtTextureSamplerSetWrapMode. The maximum
anisotropy for a given texture can be set with rtTextureSamplerSetMaxAnisotropy. A value
greater than 0 will enable anisotropic filtering at the specified value.
rtTextureSamplerSetReadMode can be used to request all texture read results be
automatically converted to normalized float values.
RTcontext context = ...;
RTbuffer tex_buffer = ...; // 2D buffer
RTtexturesampler tex_sampler;
rtTextureSamplerCreate( context, &tex_sampler );
rtTextureSamplerSetWrapMode( tex_sampler, 0, RT_WRAP_CLAMP_TO_EDGE);
rtTextureSamplerSetWrapMode( tex_sampler, 1, RT_WRAP_CLAMP_TO_EDGE);
rtTextureSamplerSetFilteringModes(
tex_sampler, RT_FILTER_LINEAR, RT_FILTER_LINEAR, RT_FILTER_NONE );
rtTextureSamplerSetIndexingMode(
tex_sampler, RT_TEXTURE_INDEX_NORMALIZED_COORDINATES );
rtTextureSamplerSetReadMode(
tex_sampler, RT_TEXTURE_READ_NORMALIZED_FLOAT );
rtTextureSamplerSetMaxAnisotropy( tex_sampler, 1.0f );
rtTextureSamplerSetBuffer( tex_sampler, 0, 0, tex_buffer );
18 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.3 Textures 3 Host API
As of version 3.9, OptiX supports cube, layered, and mipmapped textures using new API
calls rtBufferMapEx,rtBufferUnmapEx,rtBufferSetMipLevelCount.1Layered textures are
equivalent to CUDA layered textures and OpenGL texture arrays. They are created by calling
rtBufferCreate with RT_BUFFER_LAYERED and cube maps by passing RT_BUFFER_CUBEMAP. In
both cases the buffer’s depth dimension is used to specify the number of layers or cube faces,
not the depth of a 3D buffer.
OptiX programs can access texture data with CUDA C’s built-in tex1D,tex2D and tex3D
functions.
rtTextureSampler<uchar4, 2, cudaReadModeNormalizedFloat> t;
...
float2 tex_coord = ...;
float4 value = tex2D( t, tex_coord.x, tex_coord.y );
As of version 3.0, OptiX supports bindless textures. Bindless textures allow OptiX programs
to reference textures without having to bind them to specific variables. This is accomplished
through the use of texture IDs.
Using bindless textures, it is possible to dynamically switch between multiple textures
without the need to explicitly declare all possible textures in a program and without having
to manually implement switching code. The set of textures being switched on can have
varying attributes, such as wrap mode, and varying sizes, providing increased flexibility over
texture arrays.
To obtain a device handle from an existing texture sampler, rtTextureSamplerGetId can be
used:
RTtexturesampler tex_sampler = ...;
int tex_id;
rtTextureSamplerGetId( tex_sampler, &tex_id );
A texture ID value is immutable and is valid until the destruction of its associated texture
sampler. Make texture IDs available to OptiX programs by using input buffers or OptiX
variables:
RTbuffer tex_id_buffer = ...; // 1D buffer
unsigned int index = ...;
void* tex_id_data;
rtBufferMap( tex_id_buffer, &tex_id_data );
((int*)tex_id_data)[index] = tex_id;
rtBufferUnmap( tex_id_buffer );
1rtTextureSamplerSetArraySize and rtTextureSamplerSetMipLevelCount were never implemented and
are deprecated.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 19
3 Host API 3.4 Graph nodes
Similar to CUDA C’s texture functions, OptiX programs can access textures in a bindless way
with rtTex1D<>,rtTex2D<>, and rtTex3D<>. functions:
rtBuffer<int, 1> tex_id_buffer;
unsigned int index = ...;
int tex_id = tex_id_buffer[index];
float2 tex_coord = ...;
float4 value = rtTex2D<float4>( tex_id, tex_coord.x, tex_coord.y );
Textures may also be sampled by providing a level of detail for mip mapping or gradients for
anisotropic filtering. An integer layer number is required for layered textures (arrays of
textures):
float4 v;
if( mip_mode == MIP_DISABLE )
v = rtTex2DLayeredLod<float4>( tex, uv.x, uv.y, tex_layer );
else if( mip_mode == MIP_LEVEL )
v = rtTex2DLayeredLod<float4>( tex, uv.x, uv.y, tex_layer, lod );
else if( mip_mode == MIP_GRAD )
v = rtTex2DLayeredGrad<float4>(
tex, uv.x, uv.y, tex_layer, dpdx, dpdy );
3.4 Graph nodes
When a ray is traced from a program using the rtTrace function, a node is given that
specifies the root of the graph. The host application creates this graph by assembling various
types of nodes provided by the OptiX API. The basic structure of the graph is a hierarchy,
with nodes describing geometric objects at the bottom, and collections of objects at the top.
The graph structure is not meant to be a scene graph in the classical sense. Instead, it serves
as a way of binding different programs or actions to portions of the scene. Since each
invocation of rtTrace specifies a root node, different trees or subtrees may be used. For
example, shadowing objects or reflective objects may use a different representation — for
performance or for artistic effect.
Graph nodes are created via rt*Create calls, which take the Context as a parameter. Since
these graph node objects are owned by the context, rather than by their parent node in the
graph, a call to rt*Destroy will delete that object’s variables, but not do any reference
counting or automatic freeing of its child nodes.
Figure 3.1 (page 21) shows an example of what a graph might look like. The following
sections will describe the individual node types.
20 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
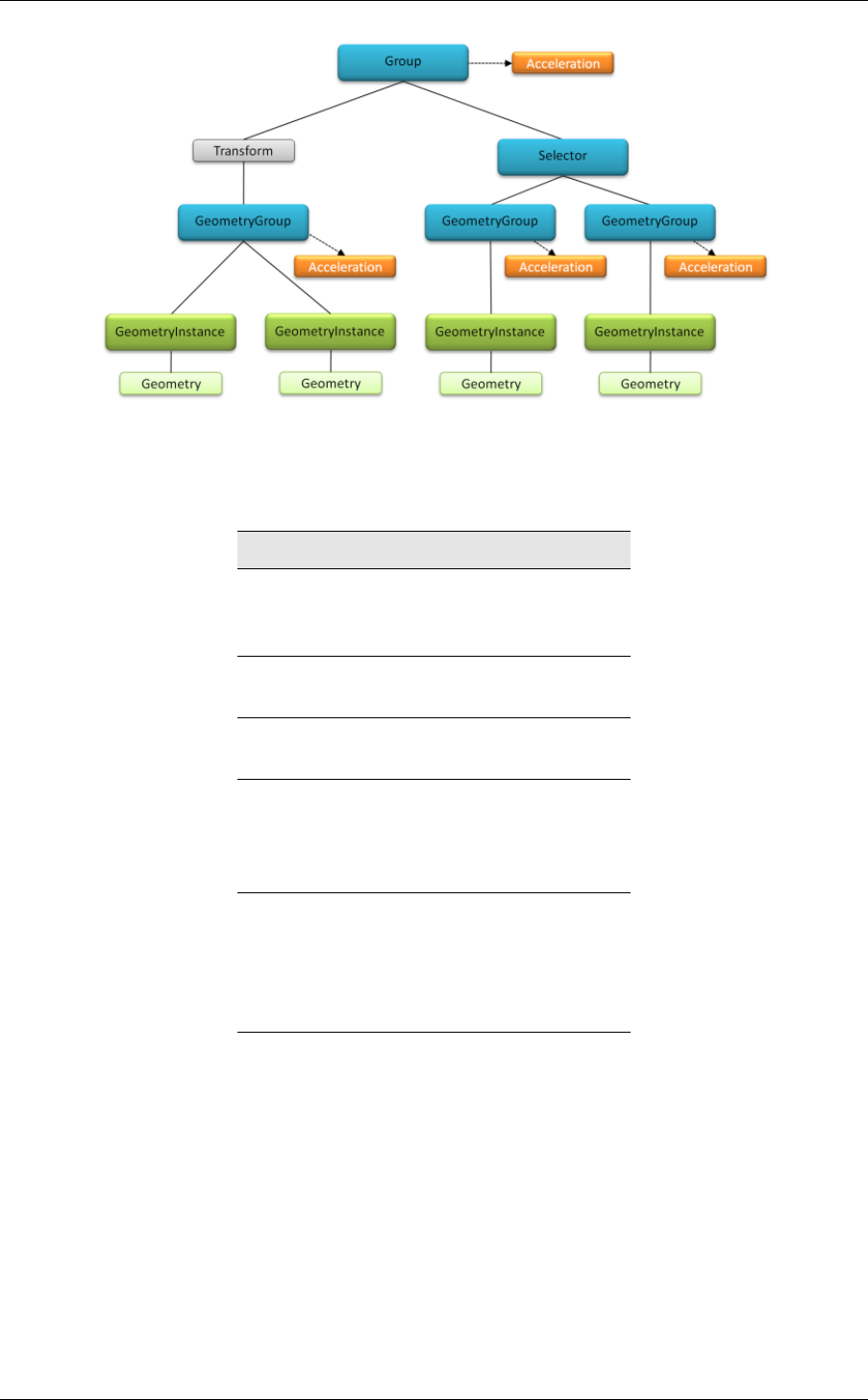
3.4 Graph nodes 3 Host API
Fig. 3.1 – A sample graph
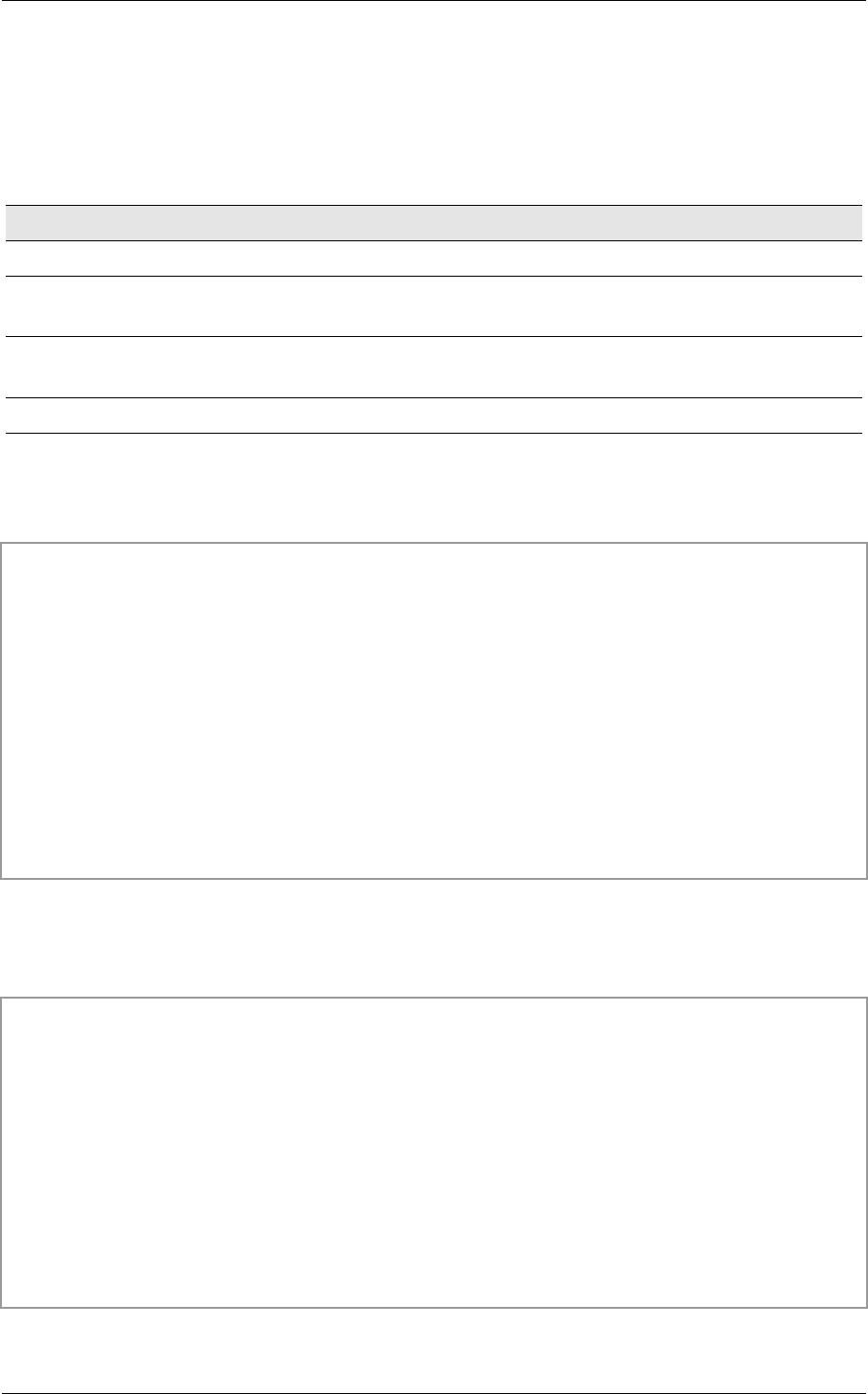
Table 2 indicates which nodes can be children of other nodes including association with
acceleration structure nodes.
Parent node type Child node types
Geometry
Material
Acceleration
none
GeometryInstance Geometry
Material
GeometryGroup GeometryInstance
Acceleration
Transform
Selector
GeometryGroup
Group
Selector
Transform
Group
GeometryGroup
Group
Selector
Transform
Acceleration
Table 2 – Parent nodes and the types of nodes allowed as children
3.4.1 Geometry
A geometry node is the fundamental node to describe a geometric object: a collection of
user-defined primitives against which rays can be intersected. The number of primitives
contained in a geometry node is specified using rtGeometrySetPrimitiveCount.
To define the primitives, an intersection program is assigned to the geometry node using
rtGeometrySetIntersectionProgram. The input parameters to an intersection program are a
primitive index and a ray, and it is the program’s job to return the intersection between the
two. In combination with program variables, this provides the necessary mechanisms to
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 21
3 Host API 3.4 Graph nodes
define any primitive type that can be intersected against a ray. A common example is a
triangle mesh, where the intersection program reads a triangle’s vertex data out of a buffer
(passed to the program via a variable) and performs a ray-triangle intersection.
In order to build an acceleration structure over arbitrary geometry, it is necessary for OptiX to
query the bounds of individual primitives. For this reason, a separate bounds program must
be provided using rtGeometrySetBoundingBoxProgram. This program simply computes
bounding boxes of the requested primitives, which are then used by OptiX as the basis for
acceleration structure construction.
The following example shows how to construct a geometry object describing a sphere, using a
single primitive. The intersection and bounding box program are assumed to depend on a
single parameter variable specifying the sphere radius:
RTgeometry geometry;
RTvariable variable;
// Set up geometry object.
rtGeometryCreate( context, &geometry );
rtGeometrySetPrimitiveCount( geometry, 1 );
rtGeometrySetIntersectionProgram( geometry, sphere_intersection );
rtGeometrySetBoundingBoxProgram( geometry, sphere_bounds );
// Declare and set the radius variable.
rtGeometryDeclareVariable( geometry, "radius", &variable );
rtVariableSet1f( variable, 10.0f );
3.4.2 Material
A material encapsulates the actions that are taken when a ray intersects a primitive associated
with a given material. Examples for such actions include: computing a reflectance color,
tracing additional rays, ignoring an intersection, and terminating a ray. Arbitrary parameters
can be provided to materials by declaring program variables.
Two types of programs may be assigned to a material, closest hit programs and any hit
programs. The two types differ in when and how often they are executed. The closest hit
program, which is similar to a shader in a classical rendering system, is executed at most once
per ray, for the closest intersection of a ray with the scene. It typically performs actions that
involve texture lookups, reflectance color computations, light source sampling, recursive ray
tracing, and so on, and stores the results in a ray payload data structure.
The any hit program is executed for each potential closest intersection found during ray
traversal. The intersections for which the program is executed may not be ordered along the
ray, but eventually all intersections of a ray with the scene can be enumerated if required (by
calling rtIgnoreIntersection on each of them). Typical uses of the any hit program include
early termination of shadow rays (using rtTerminateRay) and binary transparency, e.g., by
ignoring intersections based on a texture lookup.
It is important to note that both types of programs are assigned to materials per ray type,
which means that each material can actually hold more than one closest hit or any hit
program. This is useful if an application can identify that a certain kind of ray only performs
specific actions. For example, a separate ray type may be used for shadow rays, which are
22 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.4 Graph nodes 3 Host API
only used to determine binary visibility between two points in the scene. In this case, a
simple any hit program attached to all materials under that ray type index can immediately
terminate such rays, and the closest hit program can be omitted entirely. This concept allows
for highly efficient specialization of individual ray types.
The closest hit program is assigned to the material by calling
rtMaterialSetClosestHitProgram, and the any hit program is assigned with
rtMaterialSetAnyHitProgram. If a program is omitted, an empty program is the default.
3.4.3 GeometryInstance
A geometry instance represents a coupling of a single geometry node with a set of materials.
The geometry object the instance refers to is specified using
rtGeometryInstanceSetGeometry. The number of materials associated with the instance is
set by rtGeometryInstanceSetMaterialCount, and the individual materials are assigned
with rtGeometryInstanceSetMaterial. The number of materials that must be assigned to a
geometry instance is determined by the highest material index that may be reported by an
intersection program of the referenced geometry.
Note that multiple geometry instances are allowed to refer to a single geometry object,
enabling instancing of a geometric object with different materials. Likewise, materials can be
reused between different geometry instances.
This example configures a geometry instance so that its first material index is mat_phong and
the second one is mat_diffuse, both of which are assumed to be rtMaterial objects with
appropriate programs assigned. The instance is made to refer to the rtGeometry object
triangle_mesh.
RTgeometryinstance ginst;
rtGeometryInstanceCreate( context, &ginst );
rtGeometryInstanceSetGeometry( ginst, triangle_mesh );
rtGeometryInstanceSetMaterialCount( ginst, 2 );
rtGeometryInstanceSetMaterial( ginst, 0, mat_phong );
rtGeometryInstanceSetMaterial( ginst, 1, mat_diffuse);
3.4.4 GeometryGroup
A geometry group is a container for an arbitrary number of geometry instances. The number
of contained geometry instances is set using rtGeometryGroupSetChildCount, and the
instances are assigned with rtGeometryGroupSetChild. Each geometry group must also be
assigned an acceleration structure using rtGeometryGroupSetAcceleration. (See the
“Acceleration structures for ray tracing” section (page 25).)
The minimal sample use case for a geometry group is to assign it a single geometry instance:
RTgeometrygroup geomgroup;
rtGeometryGroupCreate( context, &geomgroup );
rtGeometryGroupSetChildCount( geomgroup, 1 );
rtGeometryGroupSetChild( geomgroup, 0, geometry_instance );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 23
3 Host API 3.4 Graph nodes
Multiple geometry groups are allowed to share children, that is, a geometry instance can be a
child of more than one geometry group.
3.4.5 Group
A group represents a collection of higher level nodes in the graph. They are used to compile
the graph structure which is eventually passed to rtTrace for intersection with a ray.
A group can contain an arbitrary number of child nodes, which must themselves be of type
rtGroup,rtGeometryGroup,rtTransform, or rtSelector. The number of children in a group
is set by rtGroupSetChildCount, and the individual children are assigned using
rtGroupSetChild. Every group must also be assigned an acceleration structure via
rtGroupSetAcceleration.
A common use case for groups is to collect several geometry groups which dynamically move
relative to each other. The individual position, rotation, and scaling parameters can be
represented by transform nodes, so the only acceleration structure that needs to be rebuilt
between calls to rtContextLaunch is the one for the top level group. This will usually be
much cheaper than updating acceleration structures for the entire scene.
Note that the children of a group can be shared with other groups, that is, each child node can
also be the child of another group (or of any other graph node for which it is a valid child).
This allows for very flexible and lightweight instancing scenarios, especially in combination
with shared acceleration structures. (See the “Acceleration structures for ray tracing” section
(page 25).)
3.4.6 Transform
A transform node is used to represent a projective transformation of its underlying scene
geometry. The transform must be assigned exactly one child of type rtGroup,
rtGeometryGroup,rtTransform, or rtSelector, using rtTransformSetChild. That is, the
nodes below a transform may simply be geometry in the form of a geometry group, or a
whole new subgraph of the scene.
The transformation itself is specified by passing a 4x4 floating point matrix (specified as a
16-element one-dimensional array) to rtTransformSetMatrix. Conceptually, it can be seen as
if the matrix were applied to all the underlying geometry. However, the effect is instead
achieved by transforming the rays themselves during traversal. This means that OptiX does
not rebuild any acceleration structures when the transform changes.
This example shows how a transform object with a simple translation matrix is created:
RTtransform transform;
const float x=10.0f, y=20.0f, z=30.0f;
// Matrices are row-major.
const float m[16] = { 1, 0, 0, x,
0, 1, 0, y,
0, 0, 1, z,
0, 0, 0, 1 };
rtTransformCreate( context, &transform );
24 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

3.5 Acceleration structures for ray tracing 3 Host API
rtTransformSetMatrix( transform, 0, m, 0 );
Note that the transform child node may be shared with other graph nodes. That is, a child
node of a transform may be a child of another node at the same time. This is often useful for
instancing geometry.
Transform nodes should be used sparingly as they cost performance during ray tracing. In
particular, it is highly recommended for node graphs to not exceed a single level of transform
depth.
3.4.7 Selector
A selector is similar to a group in that it is a collection of higher level graph nodes. The
number of nodes in the collection is set by rtSelectorSetChildCount, and the individual
children are assigned with rtSelectorSetChild. Valid child types are rtGroup,
rtGeometryGroup,rtTransform, and rtSelector.
The main difference between selectors and groups is that selectors do not have an
acceleration structure associated with them. Instead, a visit program is specified with
rtSelectorSetVisitProgram. This program is executed every time a ray encounters the
selector node during graph traversal. The program specifies which children the ray should
continue traversal through by calling rtIntersectChild.
A typical use case for a selector is dynamic (i.e. per-ray) level of detail: an object in the scene
may be represented by a number of geometry nodes, each containing a different level of detail
version of the object. The geometry groups containing these different representations can be
assigned as children of a selector. The visit program can select which child to intersect using
any criterion (e.g. based on the footprint or length of the current ray), and ignore the others.
As for groups and other graph nodes, child nodes of a selector can be shared with other graph
nodes to allow flexible instancing.
3.5 Acceleration structures for ray tracing
Acceleration structures are an important tool for speeding up the traversal and intersection
queries for ray tracing, especially for large scene databases. Most successful acceleration
structures represent a hierarchical decomposition of the scene geometry. This hierarchy is
then used to quickly cull regions of space not intersected by the ray.
There are different types of acceleration structures, each with their own advantages and
drawbacks. Furthermore, different scenes require different kinds of acceleration structures for
optimal performance (e.g., static vs. dynamic scenes, generic primitives vs. triangles, and so
on). The most common tradeoff is construction speed vs. ray tracing performance, but other
factors such as memory consumption can play a role as well.
No single type of acceleration structure is optimal for all scenes. To allow an application to
balance the tradeoffs, OptiX lets you choose between several kinds of supported structures.
You can even mix and match different types of acceleration structures within the same node
graph.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 25
3 Host API 3.5 Acceleration structures for ray tracing
3.5.1 Acceleration objects in the node graph
Acceleration structures are individual API objects in OptiX, called rtAcceleration. Once an
acceleration object is created with rtAccelerationCreate, it is assigned to either a group
(using rtGroupSetAcceleration) or a geometry group (using
rtGeometryGroupSetAcceleration) Every group and geometry group in the node graph
needs to have an acceleration object assigned for ray traversal to intersect those nodes.
This example creates a geometry group and an acceleration structure and connects the two:
RTgeometrygroup geomgroup;
RTacceleration accel;
rtGeometryGroupCreate( context, &geomgroup );
rtAccelerationCreate( context, &accel );
rtGeometryGroupSetAcceleration( geomgroup, accel );
By making use of groups and geometry groups when assembling the node graph, the
application has a high level of control over how acceleration structures are constructed over
the scene geometry. If one considers the case of several geometry instances in a scene, there
are a number of ways they can be placed in groups or geometry groups to fit the application’s
use case.
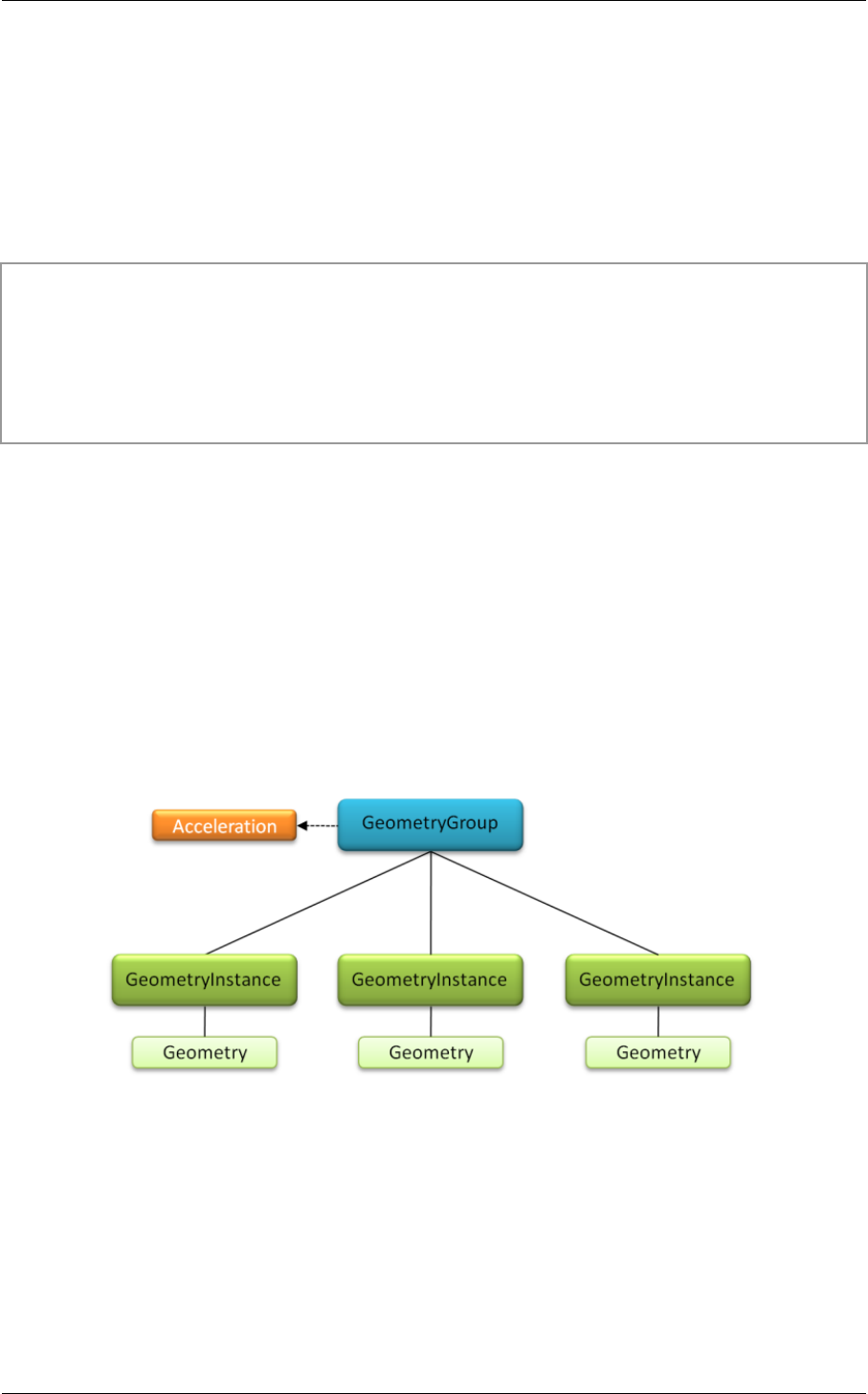
For example, Figure 3.2 places all the geometry instances in a single geometry group. An
acceleration structure on a geometry group will be constructed over the individual primitives
defined by the collection of child geometry instances. This will allow OptiX to build an
acceleration structure which is as efficient as if the geometries of the individual instances had
been merged into a single object.
Fig. 3.2 – Multiple geometry instances in a geometry group
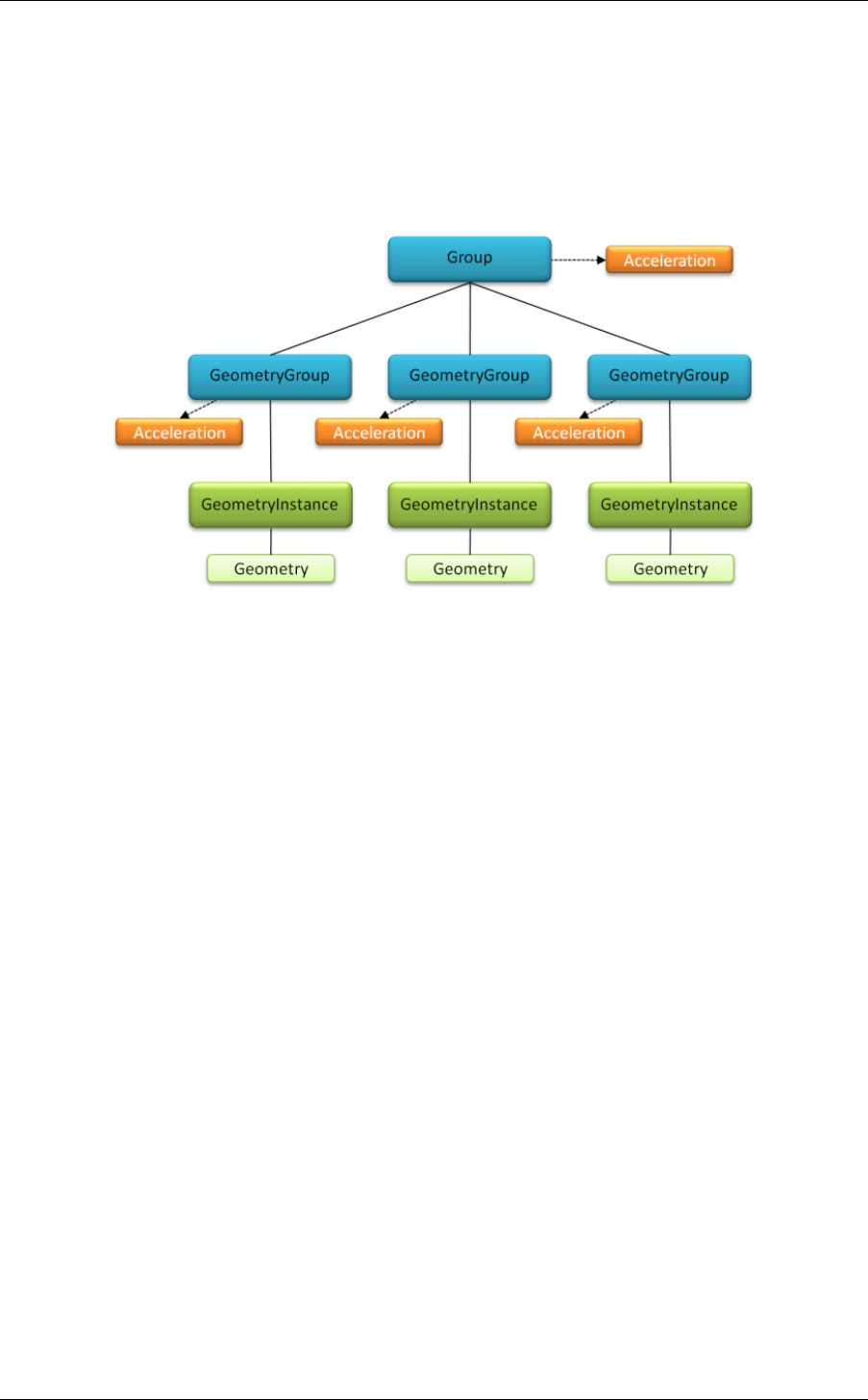
A different approach to managing multiple geometry instances is shown in Figure 3.4
(page 31). Each instance is placed in its own geometry group, i.e. there is a separate
acceleration structure for each instance. The resulting collection of geometry groups is
aggregated in a top level group, which itself has an acceleration structure. Acceleration
structures on groups are constructed over the bounding volumes of the child nodes. Because
the number of child nodes is usually relatively low, high level structures are typically quick to
update. The advantage of this approach is that when one of the geometry instances is
26 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.5 Acceleration structures for ray tracing 3 Host API
modified, the acceleration structures of the other instances need not be rebuilt. However,
because higher level acceleration structures introduce an additional level of complexity and
are built only on the coarse bounds of their group’s children, the graph in Figure 3 will likely
not be as efficient to traverse as the one in Figure 2. Again, this is a tradeoff the application
needs to balance, e.g. in this case by considering how frequently individual geometry
instances will be modified.
Fig. 3.3 – Multiple geometry instances, each in a separate geometry group
3.5.2 Acceleration structure builders
An rtAcceleration has a builder. The builder is responsible for collecting input geometry
(in most cases, this geometry is the bounding boxes created by geometry nodes’ bounding
box programs) and computing a data structure that allows for accelerated ray-scene
intersection query. Builders are not application-defined programs. Instead, the application
chooses an appropriate builder from Table 3.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 27
3 Host API 3.5 Acceleration structures for ray tracing
Builder Description
Trbvh The Trbvh2. builder performs a very fast GPU-based BVH build. Its ray
tracing performance is usually within a few percent of SBVH, yet its build
time is generally the fastest. This builder should be strongly considered for
all datasets. Trbvh uses a modest amount of extra memory beyond that
required for the final BVH. When the extra memory is not available on the
GPU, Trbvh may automatically fallback to build on the CPU.
Sbvh The Split-BVH (SBVH) is a high quality bounding volume hierarchy. While
build times are highest, it was traditionally the method of choice for static
geometry due to its high ray tracing performance, but may be superseded
by Trbvh. Improvements over regular BVHs are especially visible if the
geometry is non-uniform (e.g. triangles of different sizes). This builder can
be used for any type of geometry, but for optimal performance with
triangle geometry, specialized properties should be set (see Table 4)3.
Bvh The Bvh builder constructs a classic bounding volume hierarchy. It has
relatively good traversal performance and does not focus on fast
construction performance, but it supports refitting for fast incremental
updates (Table 4).
Bvh is often the best choice for acceleration structures built over groups.
NoAccel This is a dummy builder which does not construct an actual acceleration
structure. Traversal loops over all elements and intersects each one with
the ray. This is very inefficient for anything but very simple cases, but can
sometimes outperform real acceleration structures, for example, on a
group with very few child nodes.
Table 3 – Supported builders
Table 3 shows the builders currently available in OptiX. A builder is set using
rtAccelerationSetBuilder. The builder can be changed at any time; switching builders will
cause an acceleration structure to be flagged for rebuild.
This example shows a typical initialization of an acceleration object:
RTacceleration accel;
rtAccelerationCreate( context, &accel );
rtAccelerationSetBuilder( accel, "Trbvh" );
2See Tero Karras and Timo Aila, Fast Parallel Construction of High-Quality Bounding Volume Hierarchies.http:
//highperformancegraphics.org/wp-content/uploads/Karras-BVH.pdf
3See Martin Stich, Heiko Friedrich, Andreas Dietrich. Spatial Splits in Bounding Volume Hierarchies.http://
www.nvidia.com/object/nvidia_research_pub_012.html
28 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.5 Acceleration structures for ray tracing 3 Host API
3.5.3 Acceleration structure properties
Fine-tuning acceleration structure construction can be useful depending on the situation. For
this purpose, builders expose various named properties, which are listed in Table 4:
Property Available Description
refit Bvh
Trbvh
If set to 1, the builder will only readjust the node
bounds of the bounding volume hierarchy instead of
constructing it from scratch. Refit is only effective if
there is an initial BVH already in place, and the
underlying geometry has undergone relatively modest
deformation. In this case, the builder delivers a very
fast BVH update without sacrificing too much ray
tracing performance.
The default is 0.
vertex_buffer_name Bvh
Trbvh
The name of the buffer variable holding triangle vertex
data. Each vertex consists of 3 floats. Mandatory for
TriangleKdTree, optional for Sbvh (but recommended
if the geometry consists of triangles).
The default is vertex_buffer.
vertex_buffer_stride Bvh
Trbvh
The offset between two vertices in the vertex buffer,
given in bytes.
The default value is 0, which assumes the vertices are
tightly packed.
index_buffer_name Bvh
Trbvh
The name of the buffer variable holding vertex index
data. The entries in this buffer are indices of type int,
where each index refers to one entry in the vertex buffer.
A sequence of three indices represents one triangle. If
no index buffer is given, the vertices in the vertex buffer
are assumed to be a list of triangles, i.e. every 3 vertices
in a row form a triangle.
The default is index_buffer.
index_buffer_stride Bvh
Trbvh
The offset between two indices in the index buffer,
given in bytes.
The default value is 0, which assumes the indices are
tightly packed.
chunk_size Trbvh Number of bytes to be used for a partitioned
acceleration structure build. If no chunk size is set, or
set to 0, the chunk size is chosen automatically. If set to
-1, the chunk size is unlimited. The minimum chunk
size is currently 64MB. Please note that specifying a
small chunk size reduces the peak-memory footprint of
the Trbvh, but can result in slower rendering
performance.
Table 4 – Acceleration structure properties
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 29

3 Host API 3.5 Acceleration structures for ray tracing
Properties are specified using rtAccelerationSetProperty. Their values are given as strings,
which are parsed by OptiX. Properties take effect only when an acceleration structure is
actually rebuilt. Setting or changing the property does not itself mark the acceleration
structure for rebuild; see the next section for details on how to do that. Properties not
recognized by a builder will be silently ignored.
// Enable fast refitting on a BVH acceleration.
rtAccelerationSetProperty( accel, "refit", "1" );
3.5.4 Acceleration structure builds
In OptiX, acceleration structures are flagged (marked “dirty”) when they need to be rebuilt.
During rtContextLaunch, all flagged acceleration structures are built before ray tracing
begins. Every newly created rtAcceleration object is initially flagged dirty.
An application can decide at any time to explicitly mark an acceleration structure for rebuild.
For example, if the underlying geometry of a geometry group changes, the acceleration
structure attached to the geometry group must be recreated. This is achieved by calling
rtAccelerationMarkDirty. This is also required if, for example, new child geometry
instances are added to the geometry group, or if children are removed from it.
The same is true for acceleration structures on groups: adding or removing children,
changing transforms below the group, etc., are operations which require the group’s
acceleration to be marked as dirty. As a rule of thumb, every operation that causes a
modification to the underlying geometry over which the structure is built (in the case of a
group, that geometry is the children’s axis-aligned bounding boxes) requires a rebuild.
However, no rebuild is required if, for example, some parts of the graph change further down
the tree, without affecting the bounding boxes of the immediate children of the group.
Note that the application decides independently for each single acceleration structure in the
graph whether a rebuild is necessary. OptiX will not attempt to automatically detect changes,
and marking one acceleration structure as dirty will not propagate the dirty flag to any other
acceleration structures. Failure to mark acceleration structures as dirty when necessary may
result in unexpected behavior — usually missing intersections or performance degradation.
3.5.5 Shared acceleration structures
Mechanisms such as a graph node being attached as a child to multiple other graph nodes
make composing the node graph flexible, and enable interesting instancing applications.
Instancing can be seen as inexpensive reuse of scene objects or parts of the graph by
referencing nodes multiple times instead of duplicating them.
OptiX decouples acceleration structures as separate objects from other graph nodes. Hence,
acceleration structures can naturally be shared between several groups or geometry groups,
as long as the underlying geometry on which the structure is built is the same:
// Attach one acceleration to multiple groups.
rtGroupSetAcceleration( group1, accel );
rtGroupSetAcceleration( group2, accel );
rtGroupSetAcceleration( group3, accel );
30 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
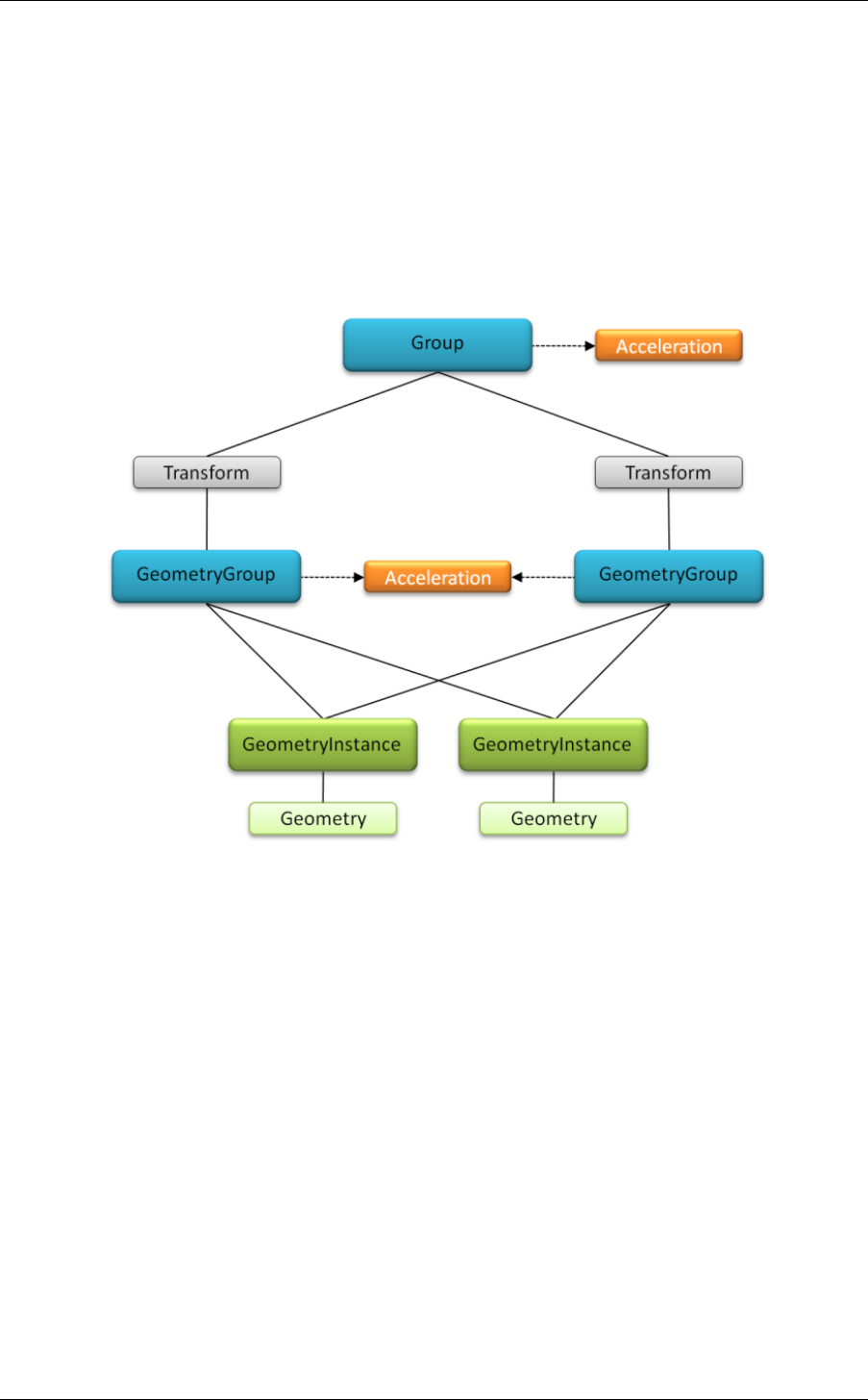
3.6 Rendering on the VCA 3 Host API
Note that the application must ensure that each node sharing the acceleration structure has
matching underlying geometry. Failure to do so will result in undefined behavior. Also,
acceleration structures cannot be shared between groups and geometry groups.
The capability of sharing acceleration structures is a powerful concept to maximize efficiency,
as shown in Figure 4. The acceleration node in the center of the figure is attached to both
geometry groups, and both geometry groups reference the same geometry objects. This reuse
of geometry and acceleration structure data minimizes both memory footprint and
acceleration construction time. Additional geometry groups could be added in the same
manner at very little overhead.
Fig. 3.4 – Two geometry groups sharing an acceleration structure and the underlying
geometry objects.
3.6 Rendering on the VCA
OptiX 3.8 introduced remote network rendering as well as a new type of launch called the
progressive launch. Using these APIs, common progressive rendering algorithms can be
implemented easily and executed efficiently on NVIDIA’s Visual Computing Appliance
servers (VCAs). All OptiX computation can happen remotely on the VCA, with the rendered
result being sent back to the client as a video stream. This allows even relatively
low-performance client computers to run heavyweight OptiX applications efficiently, using
the substantial computational resources provided by tens or hundreds of GPUs in a VCA
cluster.
The Progressive Launch API mainly serves to address the following aspects not covered by
the traditional OptiX API:
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 31

3 Host API 3.6 Rendering on the VCA
3.6.1 Remote launches
The rtContextLaunch calls offered by traditional OptiX work for remote rendering but are
not well suited to it. Because the API calls are synchronous, each launch/display cycle incurs
the full network roundtrip latency, and thus performance is usually not acceptable over
standard network connections. Progressive launches, on the other hand, are asynchronous,
and can achieve smooth application performance even over a high latency connection.
3.6.2 Parallelization
OptiX can parallelize work across a small number of local GPUs. To enable first class support
for VCA clusters, however, the system needs to be able to scale to potentially hundreds of
GPUs efficiently. Progressive renderers, such as path tracers, are one of the most common use
cases of OptiX. The fact that the image samples they compute are independent of each other
provides a natural way to parallelize the problem. The Progressive Launch API therefore
combines the assumption that work can be split into many independent parts with the
capability to launch kernels asynchronously.
Note that the Progressive Launch API may be used to render on local devices, as well as
remotely on the VCA. Except for the code that sets up the RemoteDevice (see the “Remote
devices” section (page 32)), whether rendering happens locally or remotely is transparent to
the application. For applications that are amenable to the progressive launch programming
model an advantage of using this model all the time, rather than traditional synchronous
launches is that adapting the application to the VCA with full performance is virtually
automatic.
3.6.3 Remote devices
The connection to a VCA (or cluster of VCAs) is represented by the RTremotedevice API
object. On creation, the network connection is established given the URL of the cluster
manager (in form of a WebSockets address) and user credentials. Information about the
device can then be queried using rtRemoteDeviceGetAttribute. A VCA cluster consists of a
number of nodes, of which a subset can be reserved for rendering using
rtRemoteDeviceReserve. Since several server configurations may be available, that call also
selects which one to use.
After node reservation has been initiated, the application must wait for the nodes to be ready
by polling the RT_REMOTEDEVICE_STATUS attribute. Once that flag reports
RT_REMOTEDEVICE_STATUS_READY, the device can be used for rendering.
To execute OptiX commands on the remote device, the device must be assigned to a context
using rtContextSetRemoteDevice. Note that only newly created contexts can be used with
remote devices. That is, the call to rtContextSetRemoteDevice should immediately follow
the call to rtContextCreate.
3.6.4 Progressive launches
While most existing OptiX applications will work unchanged when run on a remote device
(see the “Limitations” section (page 34) for caveats), progressive launches must be used
instead of rtContextLaunch for optimal performance.
Instead of requesting the generation of a single frame, a progressive launch, triggered by
rtContextLaunchProgressive2D, requests multiple subframes at once. A subframe is output
32 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

3.6 Rendering on the VCA 3 Host API
buffer content which is composited with other subframes to yield the final frame. In most
progressive renderers, this means that a subframe simply contains a single sample per pixel.
Progressive launch calls are non-blocking. An application typically executes a progressive
launch, and then continuously polls the stream buffers associated with its output, using
rtBufferGetProgressiveUpdateReady. If that call reports that an update is available, the
stream buffer can be mapped and the content displayed.
If any OptiX API functions are called while a progressive launch is in progress, the launch
will stop generating subframes until the next time a progressive launch is triggered (the
exception is the API calls to poll and map the stream buffers). This way, state changes to
OptiX, such as setting variables using rtVariableSet, can be made easily and efficiently in
combination with a render loop that polls for stream updates and executes a progressive
launch. This method is outlined in the example pseudocode below.
3.6.5 Stream buers
Accessing the results of a progressive launch is typically done through a new type of buffer
called a stream buffer. Stream buffers allow the remotely rendered frames to be sent to the
application client using compressed video streaming, greatly improving response times while
still allowing the application to use the result frame in the same way as with a non-stream
output buffer.
Stream buffers are created using rtBufferCreate with the type set to
RT_BUFFER_PROGRESSIVE_STREAM. A stream buffer must be bound to a regular output buffer
via rtBufferBindProgressiveStream in order to define its data source.
By executing the bind operation, the system enables automatic compositing for the output
buffer. That is, any values written to the output buffer by device code will be averaged into
the stream buffer, rather than overwriting the previous value as in regular output buffers.
Compositing happens automatically and potentially in parallel across many devices on the
network, or locally if remote rendering is not used.
Several configuration options are available for stream buffers, such as the video stream
format to use, and parameters to trade off quality versus speed. Those options can be set
using rtBufferSetAttribute. Note that some of the options only take effect if rendering
happens on a remote device, and are a no-op when rendering locally. This is because stream
buffers don’t undergo video compression when they don’t have to be sent across a network.
In addition to automatic compositing, the system also tonemaps and quantizes the averaged
output before writing it into a stream. Tonemapping is performed using a simple built-in
operator with a user- defined gamma value (specified using rtBufferSetAttribute). The
tonemap operator is defined as:
final_value = clamp( pow( hdr_value, 1/gamma ), 0, 1 )
Accessing a progressive stream happens by mapping the stream buffer, just like any regular
buffer, and reading out the frame data. The data is uncompressed, if necessary, when
mapped. The data available for reading will always represent the most recent update to the
stream if a progressive launch is in progress, so a frame that is not read on time may be
skipped (e.g., if polling happens at a low frequency).
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 33
3 Host API 3.6 Rendering on the VCA
It is also possible to map an output buffer that is bound as a data source for a stream buffer.
This can be useful to access “final frame” data, i.e. the uncompressed and unquantized
accumulated output. Note that mapping a non-stream buffer will cause the progressive
launch to stop generating subframes, and that such a map operation is much slower than
mapping a stream.
3.6.6 Device code
In OptiX device code, the subframe index used for progressive rendering is exposed as a
semantic variable of type unsigned int. Its value is guaranteed to be unique for each subframe
in the current progressive launch, starting at zero for the first subframe and increasing by one
with each subsequent subframe. For example, an application performing stochastic sampling
may use this variable to seed a random number generator. (For a description of semantic
variables, see the “Communication through variables” section (page 38).)
The current subframe index can be accessed in shader programs by declaring the following
variable:
rtDeclareVariable(unsigned int, index, rtSubframeIndex,);
Computed pixel values can be written to an output buffer, just like for non-progressive
rendering. Output buffers that are bound as sources to stream buffers will then be averaged
automatically and processed (as described in the “Buffers” section (page 14)).
Note in particular that device code does not use stream buffers directly.
3.6.7 Limitations
•OpenGL interoperability is limited with remote rendering, and using it is discouraged
for performance reasons. See the “Interoperability with OpenGL” section (page 79) for
more information. Direct3D and CUDA interop are not supported.
•Using buffers of type RT_BUFFER_INPUT_OUTPUT in combination with remote rendering
yields undefined results.
•rtPrintf and associated host functions are not supported in combination with remote
rendering.
•rtContextSetTimeoutCallback is not supported in combination with remote
rendering.
•Error codes and messages returned by API calls may apply to errors encountered on
prior API calls, rather than the current call since return codes are streamed back
asynchronously from the VCA.
•Output buffers used as data sources for progressive stream buffers must be of
RT_FORMAT_FLOAT3 or RT_FORMAT_FLOAT4 format. For performance reasons, using
RT_FORMAT_FLOAT4 is strongly recommended.
•Stream buffers must be of RT_FORMAT_UNSIGNED_BYTE4 format.
34 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
3.6 Rendering on the VCA 3 Host API
3.6.8 Example
For complete example applications using remote rendering and progressive launches, please
refer to the “progressive” and “queryRemote” examples in the SDK. The following illustrates
basic API usage in pseudocode.
// Set up the remote device. To use progressive rendering locally,
// simply skip this and the call to rtContextSetRemoteDevice.
RTremotedevice rdev;
rtRemoteDeviceCreate(
"wss://myvcacluster.example.com:443", "user", "password", &rdev );
// Reserve 1 VCA node with config #0
rtRemoteDeviceReserve( rdev, 1, 0 );
// Wait until the VCA is ready
int ready;
bool first = true;
do {
if (first)
first = false;
else
sleep(1); // poll once per second.
rtRemoteDeviceGetAttribute(
rdev, RT_REMOTEDEVICE_ATTRIBUTE_STATUS, sizeof(int), &ready ) );
} while( ready != RT_REMOTEDEVICE_STATUS_READY );
// Set up the OptiX context
RTcontext context;
rtContextCreate( &context );
// Enable rendering on the remote device.
// Must immediately follow context creation.
rtContextSetRemoteDevice( context, rdev );
// Set up a stream buffer/output buffer pair
RTbuffer output_buffer, stream_buffer;
rtBufferCreate( context, RT_BUFFER_OUTPUT, &output_buffer );
rtBufferCreate( context, RT_BUFFER_PROGRESSIVE_STREAM, &stream_buffer );
rtBufferSetSize2D( output_buffer, width, height );
rtBufferSetSize2D( stream_buffer, width, height );
rtBufferSetFormat( output_buffer, RT_FORMAT_FLOAT4 );
rtBufferSetFormat( stream_buffer, RT_FORMAT_UNSIGNED_BYTE4 );
rtBufferBindProgressiveStream( stream_buffer, output_buffer );
// [The usual OptiX scene setup goes here. Geometries, acceleration
// structures, materials, programs, etc.]
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 35
3 Host API 3.6 Rendering on the VCA
// Non-blocking launch, request infinite number of subframes
rtContextLaunchProgressive2D( context, width, height, 0 );
while( !finished )
{
// Poll stream buffer for updates from the progressive launch
int ready;
rtBufferGetProgressiveUpdateReady( stream_buffer, &ready, 0, 0 );
if( ready )
{
// Map and display the stream. This won’t interrupt rendering.
rtBufferMap( stream_buffer, &data );
display( data );
rtBufferUnmap( stream_buffer );
}
// Check whether scene has changed, e.g. because of user input
if( scene_changed() )
{
// [Update OptiX state here, e.g. by calling rtVariableSet
// or other OptiX functions. This will cause the server to
// stop generating subframes, so we call launch again below].
rtVariableSet( ... );
}
// Start a new progressive launch, in case the OptiX state has been
// changed above. If it hasn’t, then this is a no-op and the
// previous launch just continues running, accumulating further
// subframes into the stream.
rtContextLaunchProgressive2D( context, width, height, 0 );
}
// Clean up.
rtContextDestroy( context );
rtRemoteDeviceRelease( rdev );
rtRemoteDeviceDestroy( rdev );
36 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4 Programs
This chapter describes the different kinds of OptiX programs, which provide programmatic
control over ray intersection, shading, and other general computation in OptiX ray tracing
kernels. OptiX programs are associated with binding points serving different semantic roles
during a ray tracing computation. Like other concepts, OptiX abstracts programs through its
object model as program objects.
4.1 OptiX program objects
The central theme of the OptiX API is programmability. OptiX programs are written in
CUDA C, and specified to the API through a string or file containing PTX, the parallel thread
execution virtual assembly language associated with CUDA. The nvcc compiler that is
distributed with the CUDA SDK is used to create PTX in conjunction with the OptiX header
files.
These PTX files are then bound to Program objects via the host API. Program objects can be
used for any of the OptiX program types discussed later in this section.
4.1.1 Managing program objects
OptiX provides two API entry points for creating Program objects:
rtProgramCreateFromPTXString, and rtProgramCreateFromPTXFile. The former creates a
new Program object from a string of PTX source code. The latter creates a new Program object
from a file of PTX source on disk:
RTcontext context = ...;
const char *ptx_filename = ...;
const char *program_name = ...;
RTprogram program = ...;
rtProgramCreateFromPTXFile(
context, ptx_filename, function_name, &program );
In this example, ptx_filename names a file of PTX source on disk, and function_name names
a particular function of interest within that source. If the program is ill-formed and cannot
compile, these entry points return an error code.
Program objects may be checked for completeness using the rtProgramValidate function, as
the following example demonstrates:
if ( rtProgramValidate(context, program)!=RT_SUCCESS ) {
printf( "Program is not complete." );
}
An error code returned from rtProgramValidate indicates an error condition due to the
program object or any other objects bound to it.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 37
4 Programs 4.1 OptiX program objects
Finally, the rtProgramGetContext function reports the context object owning the program
object, while rtProgramDestroy invalidates the object and frees all resources related to it.
4.1.2 Communication through variables
OptiX program objects communicate with the host program through variables. Variables are
declared in an OptiX program using the rtDeclareVariable macro:
rtDeclareVariable( float, x, , );
This declaration creates a variable named xof type float which is available to both the host
program through the OptiX variable object API, and to the device program code through
usual C language semantics. Notice that the last two arguments are left blank in this example.
The commas must still be specified.
Taking the address of a variable on the device is not supported. This means that pointers and
references to x in the above example are not allowed. If, for instance, you needed to pass x
into a function taking a float* argument you would need to first copy x into a stack variable
and then pass in the address of this local variable:
void my_func( float* my_float) {...}
RT_PROGRAM call_my_func()
{
my_func(&x); // not allowed
float local_x = x;
my_func(&local_x); // allowed
}
Variables declared in this way may be read and written by the host program through the
rtVariableGet* and rtVariableSet* family of functions. When variables are declared this
way, they are implicitly const-qualified from the device program’s perspective. If
communication from the program to the host is necessary, an rtBuffer should be used
instead.
As of OptiX 2.0, variables may be declared inside arbitrarily nested namespaces to avoid
name conflicts. References from the host program to namespace-enclosed OptiX variables
will need to include the full namespace.
Program variables may also be declared with semantics. Declaring a variable with a semantic
binds the variable to a special value which OptiX manages internally over the lifetime of the
ray tracing kernel. For example, declaring a variable with the rtCurrentRay semantic creates
a special read-only program variable that mirrors the value of the Ray currently being traced
through the program flow:
rtDeclareVariable( OptiX::Ray, ray, rtCurrentRay, );
Variables declared with a built-in semantic exist only during ray tracing kernel runtime and
may not be modified or queried by the host program. Unlike regular variables, some
semantic variables may be modified by the device program.
38 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
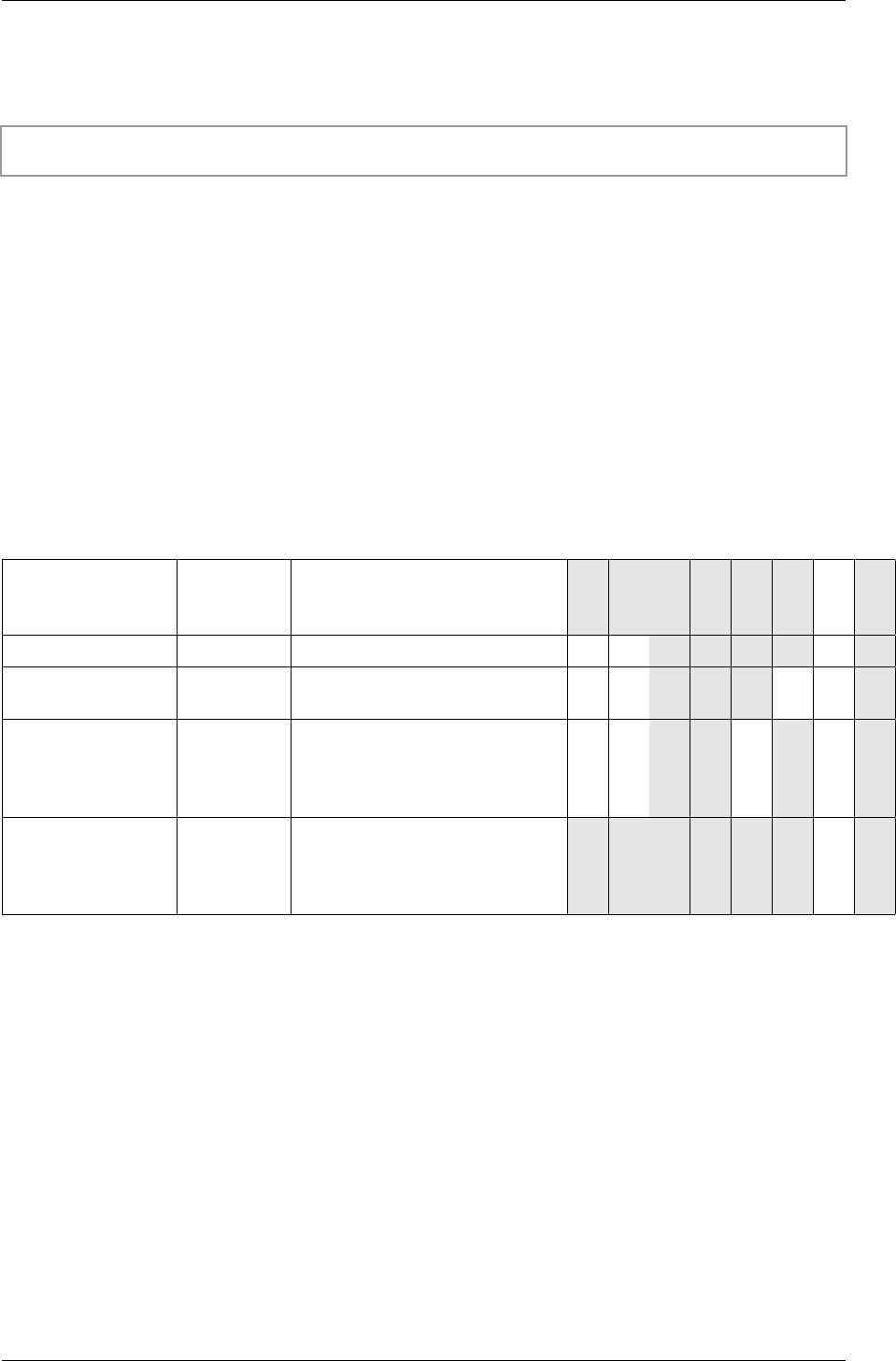
4.1 OptiX program objects 4 Programs
Declaring a variable with an annotation associates with it a read-only string which, for
example, may be interpreted by the host program as a human-readable description of the
variable. For example:
rtDeclareVariable( float, shininess, , "The shininess of the sphere" );
A variable’s annotation is the fourth argument of rtDeclareVariable, following the
variable’s optional semantic argument. The host program may query a variable’s annotation
with the rtVariableGetAnnotation function.
4.1.3 Internally provided semantics
OptiX manages five internal semantics for program variable binding. Table 5 summarizes in
which types of program these semantics are available, along with their access rules from
device programs and a brief description of their meaning.
Name Access Description
Ray generation
Exception
Closest hit
Any hit
Miss
Intersection
Bounding box
Visit
rtLaunchIndex read only
The unique index identifying
each thread launched by
rtContextLaunch{1|2|3}D.
XXXXXX X
rtCurrentRay read only The state of the current ray. XXXX X
rtPayload read/write The state of the current ray’s
payload of user-defined data. X X X X
rtIntersection-
Distance read only
The parametric distance from
the current ray’s origin to the
closest intersection point yet
discovered.
X X X X
rtSubframeIndex read only
The unique index identifying
each subframe in a
progressive launch. Zero for
non-progressive launches.
XXXXXX X
Table 5 – Semantic variables
4.1.4 Attribute variables
In addition to the semantics provided by OptiX, variables may also be declared with
user-defined semantics called attributes. Unlike built-in semantics, the value of variables
declared in this way must be managed by the programmer. Attribute variables provide a
mechanism for communicating data between the intersection program and the shading
programs (e.g., surface normal, texture coordinates). Attribute variables may only be written
in an intersection program between calls to rtPotentialIntersection and
rtReportIntersection. Although OptiX may not find all object intersections in order along
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 39
4 Programs 4.1 OptiX program objects
the ray, the value of the attribute variable is guaranteed to reflect the value at the closest
intersection at the time that the closest hit program is invoked.
Note: Because intersections may not be found in order, programs should use attribute
variables (as opposed to the ray payload) to communicate information about the local
hit point between intersection and shading programs.
The following example declares an attribute variable of type float3 named normal. The
semantic association of the attribute is specified with the user-defined name normal_vec. This
name is arbitrary, and is the link between the variable declared here and another variable
declared in the closest hit program. The two attribute variables need not have the same name
as long as their attribute names match.
rtDeclareVariable( float3, normal, attribute normal_vec, );
4.1.5 Program variable scoping
OptiX program variables can have their values defined in two ways: static initializations, and
(more typically) by variable declarations attached to API objects. A variable declared with a
static initializer will only use that value if it does not find a definition attached to an API
object. A declaration with static initialization is written:
rtDeclareVariable( float, x, , ) = 5.0f;
The OptiX variable scoping rules provide a valuable inheritance mechanism that is designed
to create compact representations of material and object parameters. To enable this, each
program type also has an ordered list of scopes through which it will search for variable
definitions in order. For example, a closest hit program that refers to a variable named color
will search the Program,GeometryInstance,Material and Context API objects for
definitions created with the rt* functions, in that order. Similar to scoping rules in a
programming language, variables in one scope will shadow those in another scope.
summarizes the scopes that are searched for variable declarations for each type of program.
Program type Search order
Closest hit
Any hit
Intersection
Bounding box
Program GeometryInstance Geometry Context
Ray generation
Exception
Miss
Program Context
Visit Program Node
Table 6 – Scope search order for each type of program (from left to right)
It is possible for a program to find multiple definitions for a variable in its scopes depending
upon where the program is called. For example, a closest hit program may be attached to
40 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.1 OptiX program objects 4 Programs
several Material objects and reference a variable named shininess. We can attach a variable
definition to the Material object as well as attach a variable definition to specific
GeometryInstance objects that we create that reference that Material.
During execution of a specific GeometryInstance’ closest hit program, the value of shininess
depends on whether the particular instance has a definition attached: if the
GeometryInstance defines shininess, then that value will be used. Otherwise, the value will
be taken from the Material object. As you can see from Table 6 above, the program searches
the GeometryInstance scope before the Material scope. Variables with definitions in
multiple scopes are said to be dynamic and may incur a performance penalty. Dynamic
variables are therefore best used sparingly.
4.1.6 Program variable transformation
Recall that rays have a projective transformation applied to them upon encountering
Transform nodes during traversal. The transformed ray is said to be in object space, while the
original ray is said to be in world space.
Programs with access to the rtCurrentRay semantic operate in the spaces summarized in
Table 7:
Program type Space
Closest hit world
Any hit object
Miss world
Intersection object
Visit object
Table 7 – Space of rtCurrentRay for each program type
To facilitate transforming variables from one space to another, OptiX’s CUDA C API provides
a set of functions:
__device__ float3 rtTransformPoint(
RTtransformkind kind, const float3& p )
__device__ float3 rtTransformVector(
RTtransformkind kind, const float3& v )
__device__ float3 rtTransformNormal(
RTtransformkind kind, const float3& n )
__device__ void rtGetTransform(
RTtransformkind kind, float matrix[16] )
The first three functions transform a float3, interpreted as a point, vector, or normal vector,
from object to world space or vice versa depending on the value of a RTtransformkind flag
passed as an argument. rtGetTransform returns the four-by-four matrix representing the
current transformation from object to world space (or vice versa depending on the
RTtransformkind argument). For best performance, use the rtTransform* functions rather
than performing your own explicit matrix multiplication with the result of rtGetTransform.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 41
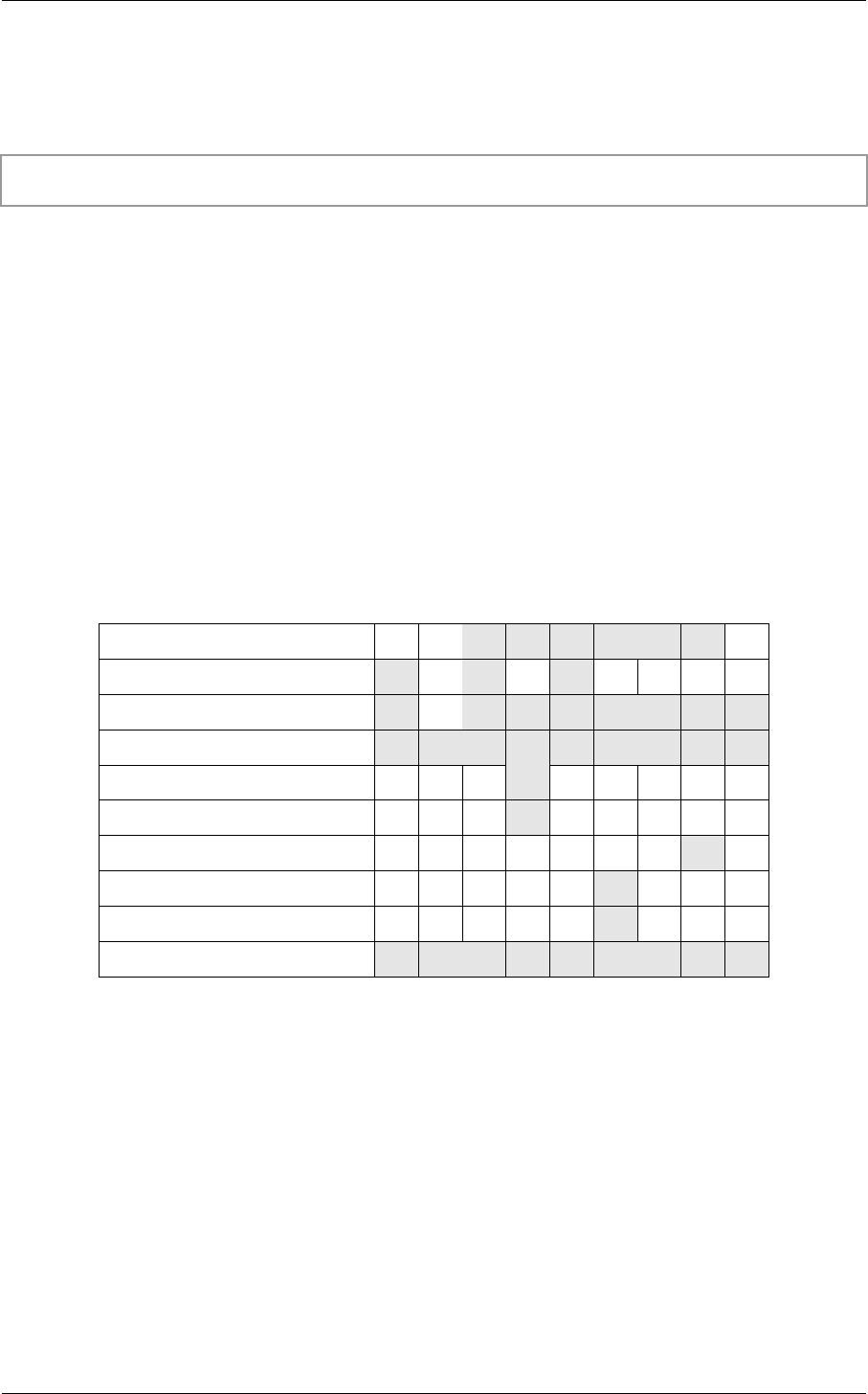
4 Programs 4.3 Ray generation programs
A common use case of variable transformation occurs when interpreting attributes passed
from the intersection program to the closest hit program. Intersection programs often produce
attributes, such as normal vectors, in object space. Should a closest hit program wish to
consume that attribute, it often must transform the attribute from object space to world space:
float3 n = rtTransformNormal( RT_OBJECT_TO_WORLD, normal );
4.2 The program scope of API function calls
Not all OptiX function calls are supported in all types of user-provided programs. For
example, it doesn’t make sense to spawn a new ray inside an intersection program, so this
behavior is disallowed. A complete table of what device-side functions are allowed is given
below. (Callable programs are described in the “Callable programs” section (page 93).)
Ray generation
Exception
Closest hit
Any hit
Miss
Intersection
Bounding box
Visit
Bindless callable program
rtTransform* X X X X X X
rtTrace X X X
rtThrow X X X X X X X X
rtPrintf XXXXXXXXX
rtTerminateRay X
rtIgnoreIntersection X
rtIntersectChild X
rtPotentialIntersection X
rtReportIntersection X
Callable program XXXXXXXXX
Table 8 – Scopes allowed for device-side API functions
4.3 Ray generation programs
Aray generation program serves as the first point of entry upon a call to
rtContextLaunch{1|2|3}D. As such, it serves a role analogous to the main function of a C
program. Like C’s main function, any subsequent computation performed by the kernel, from
casting rays to reading and writing from buffers, is spawned by the ray generation program.
However, unlike a serial C program, an OptiX ray generation program is executed many
times in parallel — once for each thread implied by rtContextLaunch{1|2|3}D’s parameters.
42 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.3 Ray generation programs 4 Programs
Each thread is assigned a unique rtLaunchIndex. The value of this variable may be used to
distinguish it from its neighbors for the purpose of, e.g., writing to a unique location in an
rtBuffer:
rtBuffer<float, 1> output_buffer;
rtDeclareVariable( unsigned int, index, rtLaunchIndex, );
...;
float result = ...;
output_buffer[index] = result;
In this case, the result is written to a unique location in the output buffer. In general, a ray
generation program may write to any location in output buffers, as long as care is taken to
avoid race conditions between buffer writes.
4.3.1 Entry point indices
To configure a ray tracing kernel launch, the programmer must specify the desired ray
generation program using an entry point index. The total number of entry points for a
context is specified with rtContextSetEntryPointCount:
RTcontext context = ...;
unsigned int num_entry_points = ...;
rtContextSetEntryPointCount( context, num_entry_points );
OptiX requires that each entry point index created in this manner have a ray generation
program associated with it. A ray generation program may be associated with multiple
indices. Use the rtContextSetRayGenerationProgram function to associate a ray generation
program with an entry point index in the range [0, num_entry_points).
RTprogram prog = ...;
// index is >= 0 and < num_entry_points
unsigned int index = ...;
rtContextSetRayGenerationProgram( context, index, prog );
4.3.2 Launching a ray generation program
rtContextLaunch{1|2|3}Dtakes as a parameter the entry point index of the ray generation
program to launch:
RTsize width = ...;
rtContextLaunch1D( context, index, width );
If no ray generation program has been associated with the entry point index specified by
rtContextLaunch{1|2|3}D’s parameter, the launch will fail.
4.3.3 Ray generation program function signature
In CUDA C, ray generation programs return void and take no parameters. Like all OptiX
programs, ray generation programs written in CUDA C must be tagged with the RT_PROGRAM
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 43

4 Programs 4.4 Exception programs
qualifier. The following snippet shows an example ray generation program function
prototype:
RT_PROGRAM void ray_generation_program( void );
4.3.4 Example ray generation program
The following example ray generation program implements a pinhole camera model in a
rendering application. This example demonstrates that ray generation programs act as the
gateway to all ray tracing computation by initiating traversal through the rtTrace function,
and often store the result of a ray tracing computation to an output buffer.
Note the variables eye,U,V, and W. Together, these four variables allow the host API to specify
the position and orientation of the camera.
rtBuffer<uchar4, 2> output_buffer;
rtDeclareVariable( uint2, index, rtLaunchIndex, );
rtDeclareVariable( rtObject, top_object, , );
rtDeclareVariable(float3, eye, , );
rtDeclareVariable(float3, U, , );
rtDeclareVariable(float3, V, , );
rtDeclareVariable(float3, W, , );
struct Payload
{
uchar4 result;
};
RT_PROGRAM void pinhole_camera( void )
{
uint2 screen = output_buffer.size();
float2 d = (make_float2( index ) / make_float2( screen )) * 2.f - 1.f;
float3 origin = eye;
float3 direction = normalize( d.x*U + d.y*V + W );
OptiX::Ray ray =
OptiX::make_Ray( origin, direction, 0, 0.05f, RT_DEFAULT_MAX );
Payload payload;
rtTrace( top_object, ray, payload );
output_buffer[index] = payload.result;
}
4.4 Exception programs
OptiX ray tracing kernels invoke an exception program when certain types of serious errors
are encountered. Exception programs provide a means of communicating to the host
44 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.4 Exception programs 4 Programs
program that something has gone wrong during a launch. The information an exception
program provides may be useful in avoiding an error state in a future launch or for
debugging during application development.
4.4.1 Exception program entry point association
An exception program is associated with an entry point using the
rtContextSetExceptionProgram function:
RTcontext context = ...;
RTprogram program = ...;
// index is >= 0 and < num_entry_points
unsigned int index = ...;
rtContextSetExceptionProgram( context, index, program );
Unlike with ray generation programs, the programmer need not associate an exception
program with an entry point. By default, entry points are associated with an internally
provided exception program that silently ignores errors.
As with ray generation programs, a single exception program may be associated with many
different entry points.
4.4.2 Exception types
OptiX detects a number of different error conditions that result in exception programs being
invoked. An exception is identified by its code, which is an integer defined by the OptiX API.
For example, the exception code for the stack overflow exception is
RT_EXCEPTION_STACK_OVERFLOW.
The type or code of a caught exception can be queried by calling rtGetExceptionCode from
the exception program. More detailed information on the exception can be printed to the
standard output using rtPrintExceptionDetails.
In addition to the built in exception types, OptiX provides means to introduce user-defined
exceptions. Exception codes between RT_EXCEPTION_USER (0x400) and 0xFFFF are reserved
for user exceptions. To trigger such an exception, rtThrow is used:
// Define user-specified exception codes.
#define MY_EXCEPTION_0 RT_EXCEPTION_USER + 0
#define MY_EXCEPTION_1 RT_EXCEPTION_USER + 1
RT_PROGRAM void some_program()
{
...
// Throw user exceptions from within a program.
if( condition0 )
rtThrow( MY_EXCEPTION_0 );
if( condition1 )
rtThrow( MY_EXCEPTION_1 );
...
}
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 45
4 Programs 4.5 Closest hit programs
In order to control the runtime overhead involved in checking for error conditions, individual
types of exceptions may be switched on or off using rtContextSetExceptionEnabled.
Disabling exceptions usually results in faster performance, but is less safe. By default, only
RT_EXCEPTION_STACK_OVERFLOW is enabled. During debugging, it is often useful to turn on all
available exceptions. This can be achieved with a single call:
...
rtContextSetExceptionEnabled(context, RT_EXCEPTION_ALL, 1);
...
4.4.3 Exception program function signature
In CUDA C, exception programs return void, take no parameters, and use the
RT_PROGRAM qualifier:
RT_PROGRAM void exception_program( void );
4.4.4 Example exception program
The following example code demonstrates a simple exception program which indicates a
stack overflow error by outputting a special value to an output buffer which is otherwise
used as a buffer of pixels. In this way, the exception program indicates the rtLaunchIndex of
the failed thread by marking its location in a buffer of pixels with a known color. Exceptions
which are not caused by a stack overflow are reported by printing their details to the console.
rtDeclareVariable( int, launch_index, rtLaunchIndex, );
rtDeclareVariable( float3, error, , ) = make_float3(1,0,0);
rtBuffer<float3, 2> output_buffer;
RT_PROGRAM void exception_program( void )
{
const unsigned int code = rtGetExceptionCode();
if( code == RT_EXCEPTION_STACK_OVERFLOW )
output_buffer[launch_index] = error;
else
rtPrintExceptionDetails();
}
4.5 Closest hit programs
After a call to the rtTrace function, OptiX invokes a closest hit program once it identifies the
nearest primitive intersected along the ray from its origin. Closest hit programs are useful for
performing primitive-dependent processing that should occur once a ray’s visibility has been
established. A closest hit program may communicate the results of its computation by
modifying per-ray data or writing to an output buffer. It may also recursively call the
rtTrace function. For example, a computer graphics application might implement a surface
shading algorithm with a closest hit program.
46 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.5 Closest hit programs 4 Programs
4.5.1 Closest hit program material association
A closest hit program is associated with each (material,ray_type) pair. Each pair’s default
program is a no-op. This is convenient when an OptiX application requires many types of
rays but only a small number of those types require special closest hit processing.
The programmer may change an association with the rtMaterialSetClosestHitProgram
function:
RTmaterial material = ...;
RTprogram program = ...;
unsigned int type = ...;
rtMaterialSetClosestHitProgram( material, type, program );
4.5.2 Closest hit program function signature
In CUDA C, closest hit programs return void, take no parameters, and use the RT_PROGRAM
qualifier:
RT_PROGRAM void closest_hit_program( void );
4.5.3 Recursion in a closest hit program
Though the rtTrace function is available to all programs with access to the rtLaunchIndex
semantic, a common use case of closest hit programs is to perform recursion by tracing more
rays upon identification of the closest surface intersected by a ray. For example, a computer
graphics application might implement Whitted- style ray tracing by recursive invocation of
rtTrace and closest hit programs. Care must be used to limit the recursion depth to avoid
stack overflow.
4.5.4 Example closest hit program
The following code example demonstrates a closest hit program that transforms the normal
vector computed by an intersection program (not shown) from the intersected primitive’s
local coordinate system to a global coordinate system. The transformed normal vector is
returned to the calling function through a variable declared with the rtPayload semantic.
Note that this program is quite trivial; normally the transformed normal vector would be
used by the closest hit program to perform some calculation (e.g., lighting). See the document
Introductory tutorials in the OptiX documentation set for examples.
rtDeclareVariable( float3, normal, attribute normal_vec, );
struct Payload
{
float3 result;
};
rtDeclareVariable( Payload, ray_data, rtPayload, );
RT_PROGRAM void closest_hit_program( void )
{
float3 norm;
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 47
4 Programs 4.6 Any hit programs
norm = rtTransformNormal( RT_OBJECT_TO_WORLD, normal );
norm = normalize( norm );
ray_data.result = norm;
}
4.6 Any hit programs
Instead of the closest intersected primitive, an application may wish to perform some
computation for any primitive intersection that occurs along a ray cast during the rtTrace
function; this usage model can be implemented using any hit programs. For example, a
rendering application may require some value to be accumulated along a ray at each surface
intersection.
4.6.1 Any hit program material association
Like closest hit programs, an any hit program is associated with each (material,ray_type)
pair. Each pair’s default association is with an internally-provided any hit program which
implements a no-op.
The rtMaterialSetAnyHitProgram function changes the association of a (material,
ray_type) pair:
RTmaterial material = ...;
RTprogram program = ...;
unsigned int type = ...;
rtMaterialSetAnyHitProgram( material, type, program );
4.6.2 Termination in an any hit program
A common OptiX usage pattern is for an any hit program to halt ray traversal upon discovery
of an intersection. The any hit program can do this by calling rtTerminateRay. This
technique can increase performance by eliminating redundant traversal computations when
an application only needs to determine whether any intersection occurs and identification of
the nearest intersection is irrelevant. For example, a rendering application might use this
technique to implement shadow ray casting, which is often a binary true or false computation.
4.6.3 Any hit program function signature
In CUDA C, any hit programs return void, take no parameters, and use the RT_PROGRAM
qualifier:
RT_PROGRAM void any_hit_program( void );
4.6.4 Example any hit program
The following code example demonstrates an any hit program that implements early
termination of shadow ray traversal upon intersection. The program also sets the value of a
per-ray payload member, attenuation, to zero to indicate the material associated with the
program is totally opaque.
48 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.7 Miss programs 4 Programs
struct Payload
{
float attenuation;
};
rtDeclareVariable( Payload, payload, rtPayload, );
RT_PROGRAM void any_hit_program( void )
{
payload.attenuation = 0.f;
rtTerminateRay();
}
4.7 Miss programs
When a ray traced by the rtTrace function intersects no primitive, a miss program is
invoked. Miss programs may access variables declared with the rtPayload semantic in the
same way as closest hit and any hit programs.
4.7.1 Miss program function signature
In CUDA C, miss programs return void, take no parameters, and use the RT_PROGRAM
qualifier:
RT_PROGRAM void miss_program( void );
4.7.2 Example miss program
In a computer graphics application, the miss program may implement an environment
mapping algorithm using a simple gradient, as this example demonstrates:
rtDeclareVariable( float3, environment_light, , );
rtDeclareVariable( float3, environment_dark, , );
rtDeclareVariable( float3, up, , );
struct Payload
{
float3 result;
};
rtDeclareVariable( Payload, payload, rtPayload, );
rtDeclareVariable( OptiX::Ray, ray, rtCurrentRay, );
RT_PROGRAM void miss(void)
{
float t = max( dot( ray.direction, up ), 0.0f );
payload.result = lerp( environment_light, environment_dark, t );
}
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 49
4 Programs 4.8 Intersection and bounding box programs
4.8 Intersection and bounding box programs
Intersection and bounding box programs represents geometry by implementing
ray-primitive intersection and bounding algorithms. These program types are associated with
and queried from Geometry objects using rtGeometrySetIntersectionProgram,
rtGeometryGetIntersectionProgram,rtGeometrySetBoundingBoxProgram, and
rtGeometryGetBoundingBoxProgram.
4.8.1 Intersection and bounding box program function signatures
Like the previously discussed OptiX programs, in CUDA C, intersection and bounding box
programs return void and use the RT_PROGRAM qualifier. Because Geometry objects are
collections of primitives, these functions require a parameter to specify the index of the
primitive of interest to the computation. This parameter is always in the range [0, N), where
N is given by the argument to the rtGeometrySetPrimitiveCount function.
Additionally, the bounding box program requires an array of floats to store the result of the
bounding box computation, yielding these function signatures:
RT_PROGRAM void intersection_program( int prim_index);
RT_PROGRAM void bounding_box_program( int prim_index, float result[6]);
4.8.2 Reporting intersections
Ray traversal invokes an intersection program when the current ray encounters one of a
Geometry object’s primitives. It is the responsibility of an intersection program to compute
whether the ray intersects with the primitive, and to report the parametric t-value of the
intersection. Additionally, the intersection program is responsible for computing and
reporting any details of the intersection, such as surface normal vectors, through attribute
variables.
Once the intersection program has determined the t-value of a ray- primitive intersection, it
must report the result by calling a pair of OptiX functions, rtPotentialIntersection and
rtReportIntersection:
__device__ bool rtPotentialIntersection( float tmin )
__device__ bool rtReportIntersection( unsigned int material )
rtPotentialIntersection takes the intersection’s t-value as an argument. If the t-value
could potentially be the closest intersection of the current traversal the function narrows the
t-interval of the current ray accordingly and returns true. If the t-value lies outside the
t-interval the function returns false, whereupon the intersection program may trivially
return.
If rtPotentialIntersection returns true, the intersection program may then set any
attribute variable values and must subsequently call rtReportIntersection. This function
takes an unsigned int specifying the index of a material that must be associated with an any
hit and closest hit program. This material index can be used to support primitives of several
different materials flattened into a single Geometry object. Traversal then immediately
invokes the corresponding any hit program. Should that any hit program invalidate the
50 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
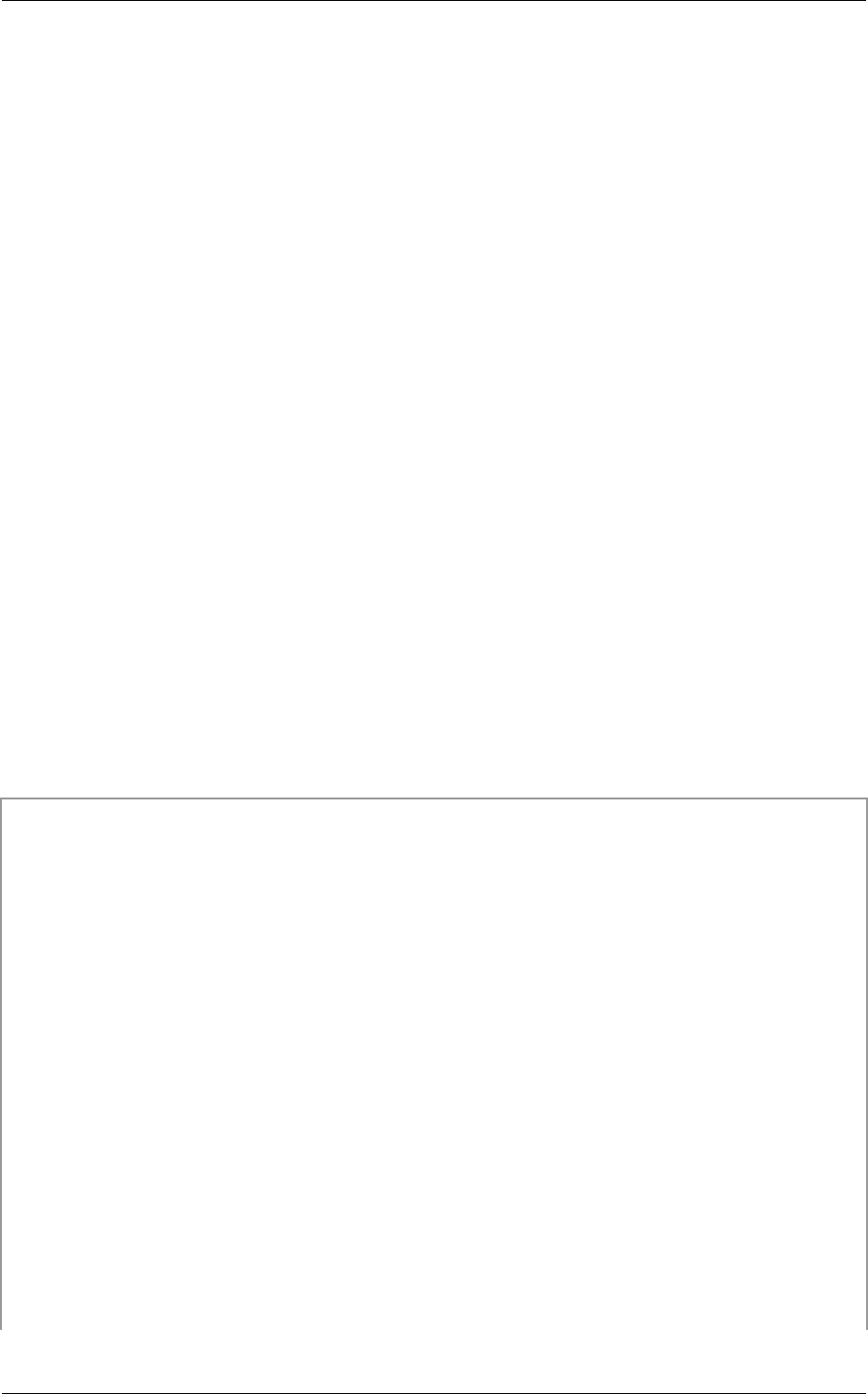
4.8 Intersection and bounding box programs 4 Programs
intersection via the rtIgnoreIntersection function, then rtReportIntersection will return
false. Otherwise, it will return true.
The values of attribute variables must be modified only between the call to
rtPotentialIntersection and the call to rtReportIntersection. The result of writing to an
attribute variable outside the bounds of these two calls is undefined. The values of attribute
variables written in this way are accessible by any hit and closest hit programs.
If the any hit program invokes rtIgnoreIntersection, any attributes computed will be reset
to their previous values and the previous t-interval will be restored.
If no intersection exists between the current ray and the primitive, an intersection program
need only return.
4.8.3 Specifying bounding boxes
Acceleration structures use bounding boxes to bound the spatial extent of scene primitives to
accelerate the performance of ray traversal. A bounding box program’s responsibility is to
describe the minimal three dimensional axis-aligned bounding box that contains the primitive
specified by its first argument and store the result in its second argument. Bounding boxes are
always specified in object space, so the user should not apply any transformations to them.
For correct results bounding boxes must merely contain the primitive. For best performance
bounding boxes should be as tight as possible.
4.8.4 Example intersection and bounding box programs
The following code demonstrates how an intersection and bounding box program combine to
describe a simple geometric primitive. The sphere is a simple analytic shape with a
well-known ray intersection algorithm. In the following code example, the sphere variable
encodes the center and radius of a three-dimensional sphere in a float4:
rtDeclareVariable( float4, sphere, , );
rtDeclareVariable( OptiX::Ray, ray, rtCurrentRay, );
rtDeclareVariable( float3, normal, attribute normal );
RT_PROGRAM void intersect_sphere( int prim_index )
{
float3 center = make_float3( sphere.x, sphere.y, sphere.z );
float radius = sphere.w;
float3 O = ray.origin - center;
float b = dot( O, ray.direction );
float c = dot( O, O ) - radius*radius;
float disc = b*b - c;
if ( disc > 0.0f ) {
float sdisc = sqrtf( disc );
float root1 = (-b - sdisc);
bool check_second = true;
if( rtPotentialIntersection( root1 ) ) {
normal = (O + root1*D) / radius;
if( rtReportIntersection( 0 ) )
check_second = false;
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 51
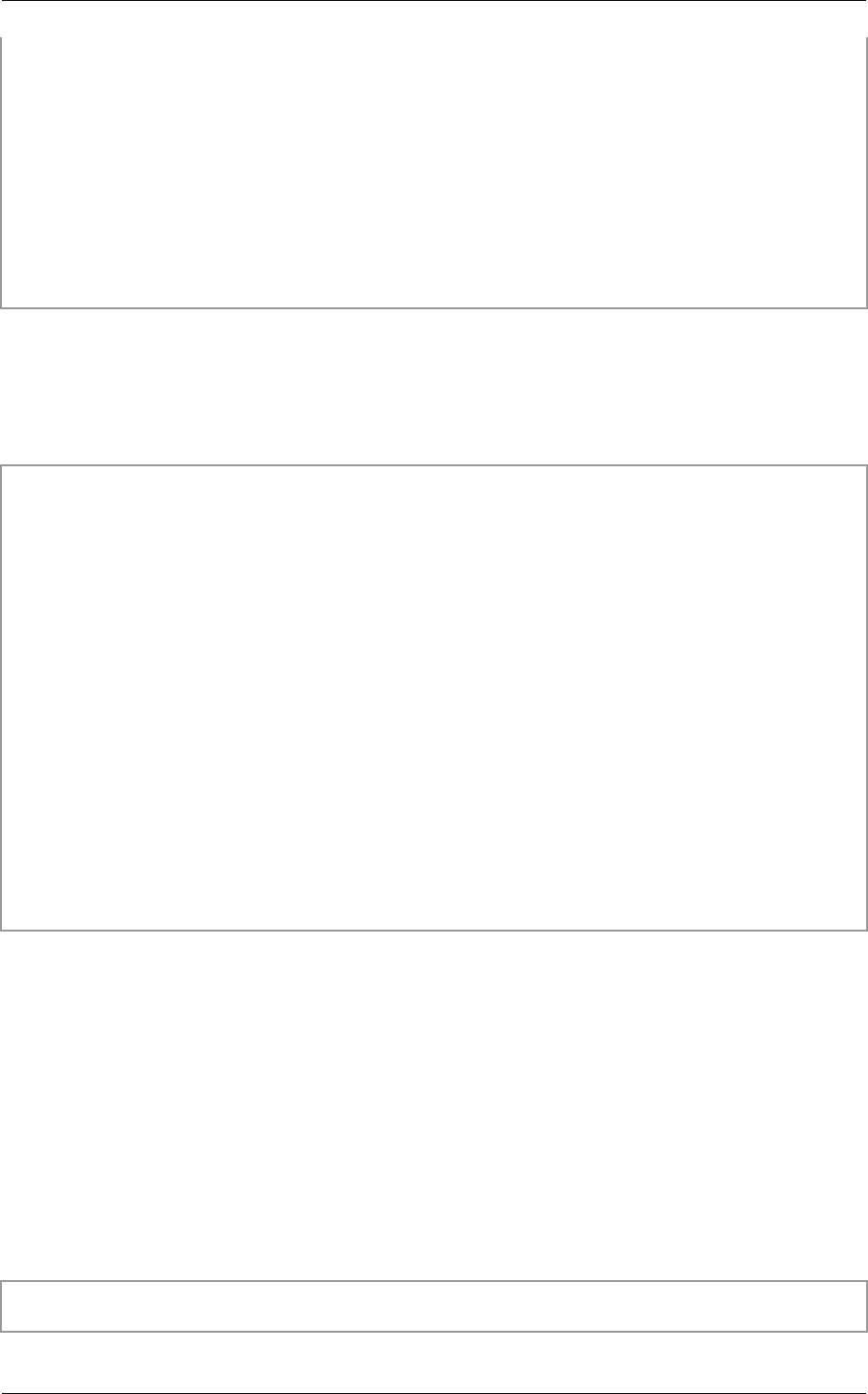
4 Programs 4.9 Selector programs
}
if ( check_second ) {
float root2 = (-b + sdisc);
if( rtPotentialIntersection( root2 ) ) {
normal = (O + root2*D) / radius;
rtReportIntersection( 0 );
}
}
}
}
Note that this intersection program ignores its prim_index argument and passes a material
index of 0 to rtReportIntersection; it represents only the single primitive of its
corresponding Geometry object.
The bounding box program for the sphere is very simple:
RT_PROGRAM void bound_sphere( int, float result[6] )
{
float3 cen = make_float3( sphere.x, sphere.y, sphere.z );
float3 rad = make_float3( sphere.w, sphere.w, sphere.w );
// Compute the minimal and maximal corners of
// the axis-aligned bounding box
float3 min = cen - rad;
float3 max = cen + rad;
// Store results in order
result[0] = min.x;
result[1] = min.y;
result[2] = min.z;
result[3] = max.x;
result[4] = max.y;
result[5] = max.z;
}
4.9 Selector programs
Ray traversal invokes selector visit programs upon encountering a Selector node to
programmatically select which of the node’s children the ray shall visit. A visit program
dispatches the current ray to a particular child by calling the rtIntersectChild function. The
argument to rtIntersectChild selects the child by specifying its index in the range [0, N),
where N is given by the argument to rtSelectorSetChildCount.
4.9.1 Selector visit program function signature
In CUDA C, visit programs return void, take no parameters, and use the RT_PROGRAM
qualifier:
RT_PROGRAM void visit_program( void );
52 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
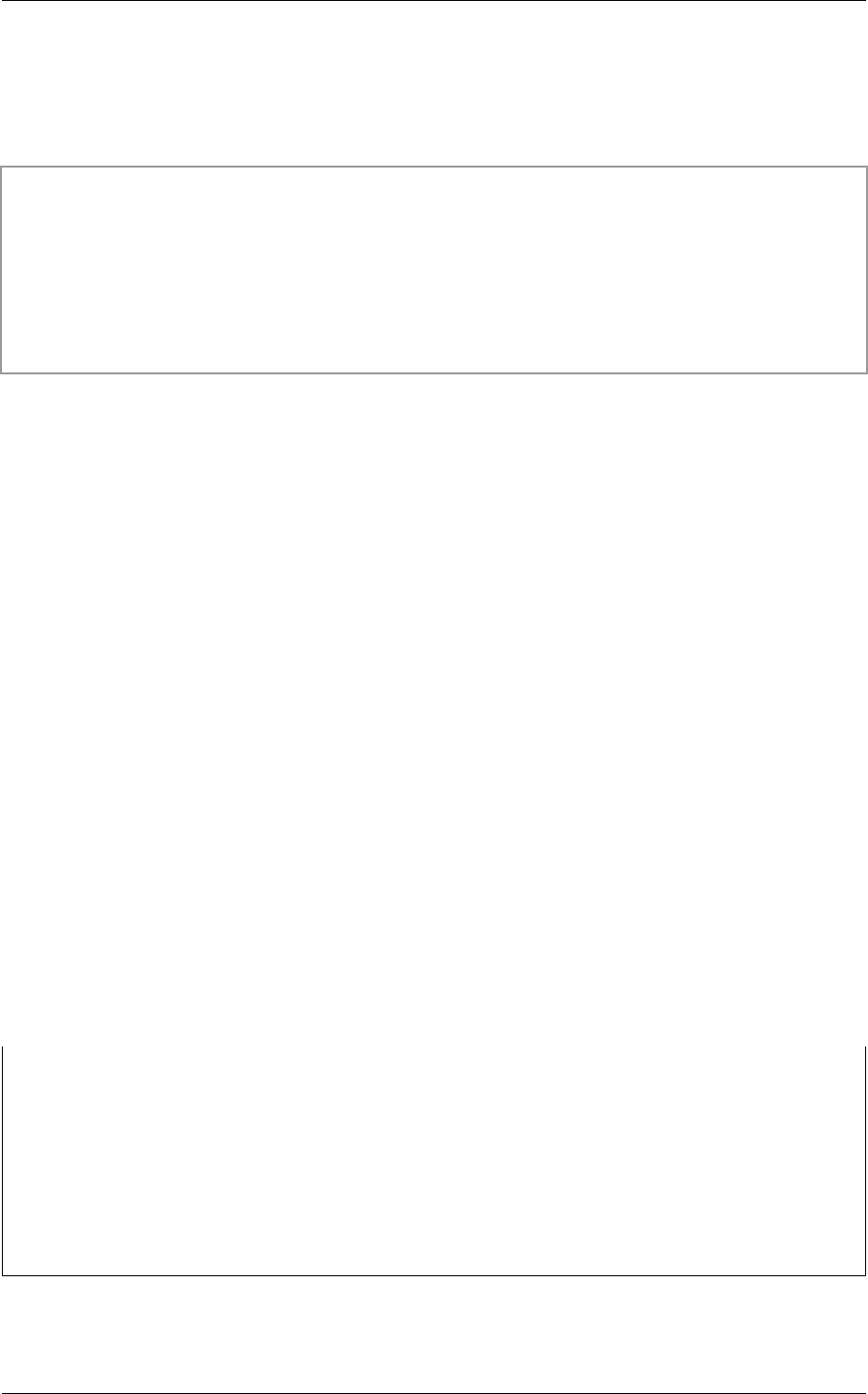
4.10 Callable programs 4 Programs
4.9.2 Example visit program
Visit programs may implement, for example, sophisticated level-of- detail systems or simple
selections based on ray direction. The following code sample demonstrates an example visit
program that selects between two children based on the direction of the current ray:
rtDeclareVariable( OptiX::Ray, ray, rtCurrentRay, );
RT_PROGRAM void visit( void )
{
unsigned int index = (unsigned int)( ray.direction.y < 0 );
rtIntersectChild( index );
}
4.10 Callable programs
Callable programs allow for additional programmability within the standard set of OptiX
programs. Callable programs are referenced by handles that are set via RTvariables or
RTbuffers on the host. This allows the changing of the target of a function call at runtime to
achieve, for example, different shading effects in response to user input or customize a more
general program based on the scene setup. Also, if you have a function that is invoked from
many different places in your OptiX node graph, making it an RT_CALLABLE_PROGRAM can
reduce code replication and compile time, and potentially improve runtime through
increased warp utilization.
There are three pieces of callable programs. The first is the program you wish to call. The
second is a declaration of a proxy function used to call the callable program. The third is the
host code used to associate a callable program with the proxy function that will call it within
the OptiX node graph.
Callable programs come in two variants, bound and bindless. Bound programs are invoked
by direct use of a program bound to a variable through the host API and inherit the semantic
type and variable scope lookup as the calling program. Bindless programs are called via an
ID obtained from the RTprogram on the host and unlike bound programs do not inherit the
semantic type or scope lookup of the calling program
4.10.1 Defining a callable program in CUDA
Defining an RT_CALLABLE_PROGRAM is similar to defining an RT_PROGRAM:
RT_CALLABLE_PROGRAM float3 get_color( float3 input_color, float scale)
{
uint2 tile_size = make_uint2(launch_dim.x/N, launch_dim.y/N);
if (launch_index.x/tile_size.x ˆ launch_index.y/tile_size.y)
return input_color;
else
return input_color * scale;
}
RT_CALLABLE_PROGRAMs can take arguments and return values just like other functions in
CUDA, whereas RT_PROGRAMs must return void.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 53
4 Programs 4.10 Callable programs
4.10.2 Using a callable program variable in CUDA
To invoke an RT_CALLABLE_PROGRAM from inside another RT_PROGRAM, you must first declare
its handle. The handles can be one of two types, rtCallableProgramId or
rtCallableProgramX. Both of these types are templated on the return type followed by the
argument types (up to 10 arguments are supported as of OptiX 3.6). The difference between
these two will be discussed later in this section.
typedef rtCallableProgramId<int(int)> callT;
rtDeclareVariable(callT, do_work, ,);
typedef rtCallableProgramX<float(int,int)> call2T;
rtDeclareVariable(call2T, do_more_work, ,);
OptiX versions 3.5 and older declared callable programs via the rtCallableProgram macro.
This macro still works for compatibility, but for SM_20 and newer targets rtCallableProgram
now creates a declaration similar to rtCallableProgramX.
rtCallableProgram(return_type, function_name, (argument_list) );
Note: The third argument must be contained in parentheses.
It is recommended to replace all uses of the macro version of rtCallableProgram with the
templated version, rtCallableProgramX. In addition, if the preprocessor macro
RT_USE_TEMPLATED_RTCALLABLEPROGRAM is defined then the old rtCallableProgram macro is
supplanted by a definition that uses rtCallableProgramX.
// Before
#include <optix_world.h>
rtCallableProgram(int, func, (int,float));
// After
#define RT_USE_TEMPLATED_RTCALLABLEPROGRAM
#include <optix_world.h>
rtDeclareVariable(rtCallableProgram<int(int,float)>, func, , );
Once the program variable is declared, your OptiX program may invoke function_name as if
it were a standard CUDA function. For example:
rtDeclareVariable(
rtCallableProgramId<float3(float3,float)>, get_color,,);
RT_PROGRAM camera()
{
float3 initial_color, fi
nal_color;
// ... trace a ray, get the initial color ...
final_color = get_color( initial_color, 0.5f );
// ... write new final color to output buffer ...
54 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
4.10 Callable programs 4 Programs
}
Because the target of the get_color program variable is specified at runtime by the host, the
camera function does not need to take into accoun how its colors are being modified by the
get_color function.
In addition to declaring single rtCallableProgramId variables, you can also declare a buffer
of them, as follows.
rtCallableProgram(float3, get_color, (float3, float));
RT_PROGRAM camera()
{
float3 initial_color, final_color;
// ... trace a ray, get the initial color ...
final_color = get_color( initial_color, 0.5f );
// ... write new final color to output buffer ...
}
You can also pass rtCallableProgramId objects to other functions and store them for later
use.
4.10.3 Setting a callable program on the host
To set up an RT_CALLABLE_PROGRAM in your host code, load the PTX function using
rtProgramCreateFromPTXFile, just like you would any other OptiX program. The resulting
RTprogram object can be used in one of two ways. You can use the object directly to set an
RTvariable via rtVariableSetObject. This is done for rtCallableProgramX and
rtCallableProgram declared variables.
Alternatively, an ID for the RTprogram can be obtained through rtProgramGetId. This ID can
be used to set the value of a rtCallableProgramId typed RTvariable (via
rtVariableSetInt) or the values in a RTbuffer declared with type RT_FORMAT_PROGRAM_ID.
For example:
RTprogram color_program;
RTvariable color_program_variable;
rtProgramCreateFromPTXFile(
context, ptx_path, "my_color_program", &color_program );
rtProgramDeclareVariable(
camera_program, "get_color", &color_program_variable );
// for rtCallableProgramX and rtCallableProgram
rtVariableSetObject( color_program_variable, color_program );
// For rtCallableProgramId
int id;
rtProgramGetId( color_program, &id );
rtVariableSetInt( color_program_variable, id );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 55

4 Programs 4.10 Callable programs
// For convenience the C++ wrapper has a Variable::setProgramId method
// that gets the ID and sets the variable with it
camera_program["get_color"]->setProgramId( color_program );
Here is an example of creating a buffer of rtCallableProgramIds using the C++ API. This
sets up several programs one of which (times_multiplier) makes use of a locally defined
RTvariable called multiplier that is unique to each instance of the program.
Program plus10 =
context->createProgramFromPTXFile( ptx_path, "plus10" );
Program minus10 =
context->createProgramFromPTXFile( ptx_path, "minus10" );
Program times_multiplier2 =
context->createProgramFromPTXFile( ptx_path, "times_multiplier" );
times_multiplier2["multiplier"]->setInt(2);
Program times_multiplier3 =
context->createProgramFromPTXFile( ptx_path, "times_multiplier" );
times_multiplier3["multiplier"]->setInt(3);
Buffer functions =
context->createBuffer( RT_BUFFER_INPUT, RT_FORMAT_PROGRAM_ID, 5 );
context["functions"]->set( functions );
// Here you can use the host defined type of callableProgramId<> or int
callableProgramId<int(int)>* f_data =
static_cast<callableProgramId<int(int)>*>(functions->map());
f_data[0] = callableProgramId<int(int)>(plus10->getId());
f_data[1] = callableProgramId<int(int)>(plus10->getId());
f_data[2] = callableProgramId<int(int)>(times_multiplier2->getId());
f_data[3] = callableProgramId<int(int)>(minus10->getId());
f_data[4] = callableProgramId<int(int)>(times_multiplier3->getId());
functions->unmap();
int* f_data_int = static_cast<int*>(functions->map());
f_data_int[0] = plus10->getId();
f_data_int[1] = plus10->getId();
f_data_int[2] = times_multiplier2->getId();
f_data_int[3] = minus10->getId();
f_data_int[4] = times_multiplier3->getId();
functions->unmap();
Buffers created using RT_FORMAT_PROGRAM_ID can either cast the mapped pointer to a
callableProgramId type or to int as seen above.
56 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

4.10 Callable programs 4 Programs
4.10.4 Bound versus bindless callable programs
Bound callable programs are defined using either the rtCallableProgramX templated class or
with the backward compatible rtCallableProgram macro. Bound programs are referred to as
bound because you bind an RTprogram directly to an RTvariable that is then used to call the
program. Binding a program to a variable enables OptiX to extend certain features to the
program. Bound programs can be thought of as an extension to the caller, inheriting the
semantic type as well as the RTvariable lookup scope based on where the program variable is
called from. For example, if a callable program is called from a closest hit program then
attributes are available to the callable program as well as being able to call functions such as
rtTrace. Additionally, OptiX will look up identifiers in your callable program in the same
scopes as the OptiX programs that invoke it. For example, if invoked from a closest hit
program the lookup scopes will be program, geometry instance, material, then context where
the program scope is the callable program itself instead of the caller’s.
Bindless callable programs, on the other hand, inherit neither a program semantic type nor
scope. Their scope is always itself (the RTprogram object) then the context regardless of where
the program is invoked from. This is to enable calling these programs from arbitray locations.
Obtaining the ID via rtProgramGetId will mark the RTprogram as bindless and this
RTprogram object can no longer be bound to an RTvariable (used with rtCallableProgramX
or rtCallableProgram) Bindless programs can only call callable programs, rtPrintf,
rtThrow, and inlineable CUDA functions. Buffer, texture, and variable accesses also work.
Where the callable program variable is attached to the OptiX node graph determines which
callable program is invoked when called from another OptiX program. This follows the same
variable lookup method that other rtVariables employ. The only difference is that you
cannot specify a default initializer.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 57

4 Programs 4.10 Callable programs
58 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

5 Motion blur
The previous chapters have described the software structures and functions that OptiX
provides as a foundation for implementing a ray-tracing application. A ray generation
program (page 42) is responsible for defining pixels in the output image from the result of
rays traced into the scene. It is useful to think of this as analogous to a camera. For example,
the “Example ray generation program” section (page 93) presents a simple pinhole camera
model.
However, a photographic image is not made instantaneously; it is created by exposing film to
light for a finite period of time. Objects moving quickly enough with respect to the shutter
duration will appear as streaks in the photograph. This streaking effect is called motion blur.
To create “photorealistic” images — images that look like photographs — the camera model
must also simulate the artifact of motion blur.
The OptiX API as previously described provides two places where motion blur can be
implemented:
1. The ray generation program can define a starting time and a duration for a simulated
camera shutter, sampling at random times within the shutter duration.
2. The primitive intersection program can define animated primitives by storing multiple
positions and interpolating between them, given a random sampling time. However,
there is a gap between the time of ray generation and primitive intersection; some parts
of scene traversal triggered by rtTrace are, for efficiency, not programmable and
remain internal to OptiX.
Beginning with OptiX version 5.0, programmers can specify motion data for Transform and
Geometry nodes; OptiX automatically builds Acceleration structures that respect this
motion.
The rtTrace call was also extended in version 5.0 to take an optional time argument for the
ray. OptiX automatically evaluates Transform and Geometry motion at this time when
traversing the scene. The time value is then available to user programs for intersection and
shading.
In the mathematical expressions of this chapter, lowercase letters represent scalars and
vectors, uppercase letters represent matrices. A name in the C++ API is written in a
fixed-font typeface. A product of a scalar with a scalar or vector is represented by dot, as in
a·v, a vector multiplied by a matrix is represented by ×, as in v×T, and matrix
multiplications is represented by adjacency, as in SRT for the the multiplication of Sby Rand
then by T.
5.1 Motion in Geometry nodes
The motion blur implementation in OptiX adds functions to define the simulated camera
shutter and a variation of the bounding-box program described in the “Intersection and
bounding box programs” section (page 50).
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 59
5 Motion blur 5.1 Motion in Geometry nodes
5.1.1 Defining motion range for Geometry nodes
The interval within which the simulated shutter is open is defined in OptiX by including time
as a factor in the ray generation program. A related concept is the time interval during which
aGeometry node moves. This interval is called the Geometry node’s motion range. These two
intervals may not correspond; for example, the motion range may be larger than necessary to
allow later adjustments to the shutter interval within the motion range.
The motion range for a Geometry node is is defined by rtGeometrySetMotionRange.
RTresult RTAPI rtGeometrySetMotionRange(
RTgeometry geometry, float timeBegin, float timeEnd );
The time range is inclusive, with timeBegin ≤timeEnd. It defaults to the range [0.0, 1.0]if not
set.
The Geometry node’s motion within the motion range is defined by two or more positions
through which the node moves, similar to key frames in traditional animation. These
positions are called motion steps and are defined by rtGeometrySetMotionSteps.
RTresult RTAPI rtGeometrySetMotionSteps(
RTgeometry geometry, unsigned int n );
If rtGeometrySetMotionSteps is not called, or is passed a value of 1, then the Geometry node
remains static and the time range is ignored during traversal. Note that both here and in
Transform nodes, motion is specified with a set of keys representing the end points of
connected segments. The simplest definition of motion therefore requires two keys.
5.1.2 Bounding boxes for motion blur
Without motion blur, the bounding box program has the following signature.
RT_PROGRAM void bounding_box_program (
int prim_index, float result[6]);
When motion blur is enabled, the bounding box program adds an integer argument for the
motion index as the second argument:
RT_PROGRAM void motion_blur_bounding_box_program (
int prim_index, int motion_index, float result[6]);
The motion_index argument is an integer in the range [0, motion-steps - 1], where motion-steps
has been defined by rtGeometrySetMotionSteps. The relationship of motion-steps to time tis:
t=motion-index ·time-end −time-begin
motion-steps (1)
AGeometry node with more than one motion step must have a bounds program that takes
this argument for the motion index. This requirement is enforced during context validation.
However, static geometry can use either form of the bounding-box program.
60 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
5.2 Motion in Acceleration nodes 5 Motion blur
The bounding-box program is responsible for returning the bounding box at the motion
index. The set of bounding boxes for a given primitive will be interpolated linearly by OptiX
when building and traversing a bounding volume hierarchy. If you want to do something
other than linear interpolation later in the intersection program, you must pad the bounding
boxes so that when linearly interpolated during traversal, they still bound the nonlinear
motion path of the primitive.
Currently only custom primitives can have motion, not “built-in” triangles used optionally
for some builders, for example, the Trbvh builder.
5.1.3 Border modes
OptiX defines the treatment of Geometry nodes evaluated outside its time range using border
modes:
RTresult RTAPI rtGeometrySetMotionBorderMode(
RTgeometry geometry,
RTmotionbordermode beginMode, RTmotionbordermode endMode );
The two border modes can be applied separately for timeBegin and timeEnd:
RT_MOTIONBORDERMODE_CLAMP
This is the default border mode. The Geometry node exists at times less than timeBegin
or greater than timeEnd, with the associated bounding box clamped to its value at
timeBegin or timeEnd, respectively.
RT_MOTIONBORDERMODE_VANISH
The geometry vanishes for times less than timeBegin or greater than timeEnd.
5.1.4 Acquiring motion parameter values
The following functions return the values of motion parameters set on Geometry nodes:
•rtGeometryGetMotionSteps
•rtGeometryGetMotionBorderMode
•rtGeometryGetMotionRange
5.2 Motion in Acceleration nodes
An Acceleration attached to a GeometryGroup automatically becomes a motion BVH (or
NoAccel) if any of its Geometry has more than one motion step. A top level Acceleration for
aGroup becomes a motion BVH if anything in the scene under it (Transform or Geometry
nodes) has motion. Not all types of Acceleration support motion; those that do not will
throw an exception.
OptiX by default will use two motion steps for a motion BVH even if input Geometry or
Transform nodes have more than two motion steps. Users can change this value via the
motion_steps property. For example, to use three motion steps in the BVH:
rtAccelerationSetProperty( accel, motion_steps, "3" );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 61
5 Motion blur 5.3 Motion in Transform nodes
The value of the motion_steps property has several performance implications:
•The value of motion_steps must be an integer greater than 0. Setting motion_steps to 1
is valid and will produce a static BVH over the union of input bounding boxes.
•Device memory for the BVH scales linearly with motion_steps.
•The internal time range for the BVH is the maximum time range over all the child
Geometry and Transform nodes, and cannot be overridden. For performance reasons, it
may be better for you to split parts of the scene with different time ranges into different
Acceleration objects, to minimize empty space in each, but OptiX does not require this.
5.3 Motion in Transform nodes
Motion is added to Transform nodes using a set of keys uniformly distributed over a time
range. The function rtTransformSetMotionKeys defines the key values.
RTresult RTAPI rtTransformSetMotionKeys(
RTtransform transform, unsigned int n, RTmotionkeytype type,
const float* keys );
The beginning and ending times within which the motion keys are in effect are defined by the
function rtTransformSetMotionRange.
RTresult RTAPI rtTransformSetMotionRange(
RTtransform transform, float timeBegin, float timeEnd );
Motion keys are set by a single assignment and replace any existing data set with previous
calls to rtTransformSetMatrix or rtTransformSetMotionKeys.
5.3.1 Key types
A motion key is defined by either a 3 ×4 matrix or by a 16-element array that encodes scaling,
rotation, and translation.
5.3.1.1 Key type RT_MOTIONKEYTYPE_MATRIX_FLOAT12
ART_MOTIONKEYTYPE_MATRIX_FLOAT12 key is a 12-float 3 ×4 matrix in row major order (3
rows, 4 columns). When transforming points, vectors and normals at time tduring scene
traversal, OptiX will linearly interpolate the two matrices that bracket tto get a matrix M,
then apply M,M−1, or their transposes.
5.3.1.2 Key type RT_MOTIONKEYTYPE_SRT_FLOAT16
ART_MOTIONKEYTYPE_SRT_FLOAT16 key can represent a smooth rotation with fewer keys.
Each key is constructed from elements taken from a matrix, a quaternion, and a translation.
A scaling matrix S
The upper nine elements of an upper triangular 4 ×4 matrix in row-major order. This
matrix can include scale, shear, and a translation. The translation can, for example, define
a pivot point for rotation, specified as pxpypzin matrix S:
62 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

5.3 Motion in Transform nodes 5 Motion blur
S=
sxa b px
0syc py
0 0 szpz
0 0 0 1
(2)
A quaternion R
A rotation by an angle θin quaternion format with angular component qw =cos(θ/2)
and other components qxqyqz=sin(θ/2)·axayazwhere the axis axayazis
normalized.
R=hqxqyqzqwi(3)
A translation matrix T
A translation defined by tx,ty, and tzcomponents to be applied after the rotation.
T=
100tx
010ty
001tz
0 0 0 1
(4)
The transformations are applied in the order S, then R, then T. For column vectors pand p0,
p0=T×R×S×p.
OptiX will store and interpolate Ras a quaternion. Other components are interpolated
linearly during traversal. For this type, the dimension of the keys array is 16 ×Nfor Nkeys.
A single key would have these components that refer to the elements of S,R, and T.
key =hsxa b pxsyc pyszpzqxqyqzqwtxtytzi
Note that the order of the elements in this key is based on a serialization of the component
values of S(first nine, by row), R, and T.
When transforming points, vectors, and normals at time t, OptiX will effectively first
interpolate S,T, and R, then build a combined transform C=T×R×Sat time t, then apply
C,C−1, or their transposes.
5.3.2 Border modes for Transform nodes
As with Geometry nodes, you also can define how a Transform node is evaluated outside its
time range. For example, a time value of 1.2 is passed to rtTrace but the Transform node has
a time range of [0.0, 1.0].
RTresult RTAPI rtTransformSetMotionBorderMode( RTtransform transform,
RTmotionbordermode beginMode, RTmotionbordermode endMode );
The arguments are the same as for Geometry:RT_MOTIONBORDERMODE_CLAMP or
RT_MOTIONBORDERMODE_VANISH. For transforms, RT_MOTIONBORDERMODE_VANISH means that
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 63

5 Motion blur 5.5 Motion in user programs
the sub-tree under the transform is ignored when the specified time is outside the motion
time range.
5.3.3 Acquiring motion parameter values
The following functions return the values of motion parameters set on Transform nodes:
•rtTransformGetMotionBorderMode
•rtTransformGetMotionKeyCount
•rtTransformGetMotionKeys
•rtTransformGetMotionKeyType
•rtTransformGetMotionRange
5.4 Examples of motion transforms
The hollowing are examples of the use of motion transforms.
Case 1: Translation by txtytz
Use the MATRIX_FLOAT12 key type with two keys. Set the first key to the identity matrix
and the second key to a 3 ×4 translation matrix with txtytzas the rightmost column.
Case 2: Rotation about the origin, with spherical interpolation
Use the SRT_FLOAT16 key type with two keys. Set the first key to identity values. For the
second key, define a quaternion from an axis and angle, for example, a 60-degree rotation
about the zaxis is given by:
q=h0 0 sin(π/6)cos(π/6)i(5)
Case 3: Rotation about a pivot point, with spherical interpolation of rotation
Use the SRT_FLOAT16 key type with two keys. Set the first key to identity values.
Represent the pivot as a translation P, and define the second key as follows:
S0=PinvS(6)
T0=TP (7)
p0=T0RS0×p(8)
Case 4: Scaling about a pivot point
Represent the pivot as a translation G=GxGyGzand modify the pivot point
described above:
P0
x=Px+ (−Sx·Gx+Gx)
P0
y=Py+ (−Sy·Gy+Gy)
P0
z=Pz+ (−Sz·Gz+Gz)
(9)
5.5 Motion in user programs
A variant of the rtTrace function sets the time for the traced ray through an additional
argument.
rtTrace( ..., float time = rtCurrentTime );
64 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

5.5 Motion in user programs 5 Motion blur
Time is not necessarily in the interval of [0.0, 1.0]; the interpretation as a relative or absolute
time is up to the application. If time is not given, it defaults to one of the following:
•The time of the parent ray that triggered the program
•0.0 if there is no parent ray, for example, in a ray-generation program
In typical use, the sample time is fixed for an entire ray tree. To achieve this, the
ray-generation program would specify a sample time for each primary ray traced, but
closest-hit programs would not need to specify a time when tracing secondary rays.
The time defined for the current ray can be read from the rtCurrentTime semantic variable.
Reading rtCurrentTime is supported in all programs where rtCurrentRay is supported.
The value for the current time is also used by these four functions that set or acquire
transform values:
•rtTransformPoint
•rtTransformNormal
•rtTransformVector
•rtGetTransform
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 65

5 Motion blur 5.5 Motion in user programs
66 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

6 Post-processing framework
6.1 Overview
Starting with OptiX 5.0 a post-processing framework has been added to OptiX. The
post-processing framework allows to post-process images rendered by an OptiX based
renderer. The post-processing framework introduces two new types of objects to the OptiX
API:
•Post-processing stage — A post-processing stage usually transforms at least one input
buffer into an output buffer by post-processing it. The current version of OptiX features
two post-processing stage types built into OptiX:
•Deep-learning based denoiser
•Simple tonemapper
•Command lists — A command list is an ordered list of post-processing stages and OptiX
launches
The post-processing framework can be used by instantiating any number of built-in
post-processing stages. Those stages and additionally OptiX launches can then be added to a
command list. Command lists can later be executed and will execute the launches and all the
post-processing stages in the command list, eventually producing one or more output buffers.
Each post-processing stage operates on a number of inputs and produces at least one output.
Subsequent post-processing stages can then take the outputs of a post-processing stage which
is earlier in the command list and operate on them. Input and outputs are given as OptiX
variables of arbitrary types and are managed by the user.
Post-processing stages can be configured using a fixed set of input and output variables with
specific names. Note that those variables, even though they are builtin, must still be declared
in the application like any other OptiX variable.
The available variables are described in the description of the respective post-processing
stages. API calls support iteration over the set of pre-defined variables of a stage as well as
direct access to them by name.
A simple command list would start with a launch command which outputs to an RTBuffer
object. After that a post-processing stage would be added. The variable named input_buffer
would be set to the RTBuffer which holds the output of the launch command. A variable
named output_buffer would be set to a new RTBuffer. When a second post-processing
stage would be added after the first one, its input_buffer variable would be set to the same
RTBuffer as the output_buffer of the first stage.
6.2 Post-processing stage
6.2.1 Creating a post-processing stage
To create a post-processing stage, use rtPostProcessingStageCreateBuiltin.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 67

6 Post-processing framework 6.2 Post-processing stage
Input parameters:
context
The OptiX context to which the post-processing stage belongs. The post-processing stage
can only be added to a command list belongs to the same context.
builtin_name
The name of the post-processing stage type. See the description of the currently existing
built-in post-processing stages for supported names.
Output parameter:
stage
If the call is successful, the created post-processing stage is stored here.
The call returns an error code.
6.2.2 Querying variables
6.2.2.1 Declaring a named variable
Before getting a named variable, you must first declare it using
rtPostProcessingStageDeclareVariable.
Input parameters:
stage
The post-processing stage to get the variable from.
name
The name of the variable.
Output parameter:
vIf the call is successful, a handle to the newly declared variable is returned.
The call returns an error code.
6.2.2.2 Getting a named variable
To get a named variable, use rtPostProcessingStageQueryVariable.
Input parameters:
stage
The post-processing stage to get the variable from.
name
The name of the variable.
Output parameter:
variable
If the call is successful, the variable is stored here.
The call returns an error code.
After obtaining a variable, you can set it to a value that matches the expected type.
68 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

6.3 Command List 6 Post-processing framework
6.2.2.3 Iterating over existing variables
To iterate over all existing variables of a post-processing stage, use
rtPostProcessingStageGetVariableCount and rtPostProcessingStageGetVariable. After
obtaining a variable, you can query the name and the type of the variable.
Note: You can only iterate over variables declared by the application. You cannot use
these API calls to find out which variables are supported.
6.3 Command List
6.3.1 Creating a command list
To create a command list, use rtCommandListCreate.
Input parameter:
context
The OptiX context to which the command list belongs. Only post-processing stages
belonging to the same context can be added to the command list.
Output parameter:
list
If the call is successful, the created command list will be stored here
The call returns an error code.
You can create any number of post-processing stages and use them in the same or different
command lists.
6.3.2 Adding a post-processing stage to a command list
To add a post-processing stage to a command list, use the API call
rtCommandListAppendPostprocessingStage.
Input parameters:
list
The command list to append to.
stage
The post-processing stage to append to the command list.
launch_width
This is a hint for the width of the launch dimensions to use for this stage.
launch_height
This is a hint for the height of the launch dimensions to use for this stage.
The call returns an error code.
6.3.3 Appending a launch to a command list
To append a launch to a command list, use rtCommandListAppendLaunch2D.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 69
6 Post-processing framework 6.3 Command List
Appending a launch to a command list has the same effect as calling rtContextLaunch2D
directly except that the launch is executed as part of the command list and at the position in
the command list defined by the order in which stages and launches were added to the
command list.
Input parameters:
list
The command list to append to.
entry_point_index
The initial entry point into the kernel.
launch_width
Width of the computation grid.
launch_height
Height of the computation grid.
The call returns an error code.
6.3.4 Finalizing a command list
After adding all stages and launches to the command list, finalize the command list using
rtCommandListFinalize. This call prepares the command list for execution.
Note: After calling finalize it is still possible to set and change the input and output
variables. However it is no longer possible to add stages or launches.
6.3.5 Running a command list
To run a command list, use rtCommandListExecute. This function can only be called after
rtCommandListFinalize has been called. The execution operation runs all launches and
stages in an order that is compatible with the command list. Later stages and launches can
rely on the previous stages to be finished if they use output variables written to by the earlier
stages and launches.
Running a command list will first validate the command list. If the setup of the command list
is not valid, then execution fails. This can be the case, for example, when necessary variables
have not been set or when the type of the variables is not matching the set of expected types.
For example, it is not possible to set a variable to a float type if the expected type is a buffer.
After the execution call has returned, the output variables can be read and used for their
respective purposes, for example a rendered image can be displayed.
Note: Variable contents must not be changed during the execution of a command list.
Doing this will result in undefined behavior. Also note that a command list can be
executed any number of times, but only one execution may be active at a time.
See the new optixDenoiser example. It demonstrates a full post-processing pipeline with a
rendering followed by tone mapping and then denoising.
70 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

6.4 Built-In Post-Processing Stages 6 Post-processing framework
6.4 Built-In Post-Processing Stages
The following sections describe the current built-in post-processing stages.
6.4.1 Deep-learning based Denoiser
Image areas that have not yet fully converged during rendering will often exhibit pixel-scale
grainy noise due to the insufficient amount of color information gathered by the renderer.
OptiX provides a method for estimating the converged image from a partially converged one,
a process called denoising. Instead of further improving image quality through a large number
of path tracing iterations, the denoiser can produce images of acceptable quality with far
fewer iterations by post-processing the image.
The OptiX type name for denoising used as an argument to
rtPostProcessingStageCreateBuiltin is DLDenoiser.
The OptiX denoiser comes with a built-in pre-trained model. The model, represented by a
binary blob called training data, is the result of training the underlying Deep Learning system
with a large group of rendered images in different stages of convergence. Since training needs
significant computational resources and obtaining a sufficient amount of image pairs can be
difficult, a general-purpose model is provided with OptiX. This model is suitable for many
renderers in practice, but might not always lead to optimal results when applied to images
produced by renderers with different noise characteristics compared to those that were
present in the original training data.
You can also create a custom model by training the denoiser with your own set of images and
use the resulting training data in OptiX, but this process is not provided as part of OptiX
itself. To learn how to generate your own training data based on your renderer’s images you
can attend the course Rendered Image Denoising using Autoencoders, which is part of the
NVIDIA Deep Learning Institute.
In general, the pixel color space of an image that is used as input for the denoiser should
match that of the images it was trained on, although slight variations such as substituting
sRGB with a simple gamma curve, should not have a noticeable impact. The images of the
training model provided with the OptiX distribution were rendered using a gamma value of
2.2.
Using the denoiser is only possible if an additional shared library is available at runtime. This
shared library is delivered with the OptiX installer and is named denoiser.dll on Windows
and denoiser.so on Linux. In addition the cudnn shared library is needed at runtime which
is installed with the OptiX SDK as well. If the application you are building does not require
denoising, then it is possible to not deliver the shared libraries. In that case creating a
denoising stage would fail.
The denoiser pre-defines the following variables:
input_buffer
A buffer of type RTBuffer which contains values of type float4 representing a noisy
image that is to be denoised. The fourth (alpha) channel of the image is not changed by
the denoiser. Note that this buffer must contain values between 0 and 1 for each of the
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 71
6 Post-processing framework 6.4 Built-In Post-Processing Stages
three color channels (i.e., a tone mapped image) and should be encoded in sRGB or
gamma space with a gamma value of 2.2.
Note:
•An image in linear color space can be tone mapped and converted into the
correct gamma space, for example, using the Simple Tone Mapper
post-processing stage with gamma set to 2.2, before denoising the image.
•Applying image blur techniques before denoising an image can have
detrimental effects on the quality of the denoised image, especially for very
small blur kernels that change the characteristics of the noise. It is therefore
recommended to apply image-space techniques only after denoising.
output_buffer
ARTBuffer of type float4. It must have the same dimensions as the input buffer as it
will be used to store the denoised image.
input_albedo_buffer optional
The albedo image represents an approximation of the color of the surface of the object,
independent of view direction and lighting conditions. In physical terms, the albedo is a
single color value approximating the ratio of radiant exitance to the irradiance under
uniform lighting. The albedo value can be approximated for simple materials by using
the diffuse color of the first hit, or for layered materials by using a weighted sum of the
individual BRDFs’ albedo values. For some objects such as perfect mirrors, the quality of
the result might be improved by using the albedo value of a subsequent hit instead. The
fourth channel of this buffer is ignored, but must have the same type and dimensions as
the input buffer.
input_normal_buffer optional
This buffer is expected to contain the surface normals of the primary hit in camera space.
The camera space is assumed to be right handed such that the camera is looking down
the negative z axis, and the up direction is along the y axis. The x axis points to the right.
The normal buffer can only be specified if the albedo buffer is present. The fourth channel
of this buffer is ignored. It must have the same type and dimensions as the input buffer.
training_data_buffer optional
It specifies an custom training set to be used for denoising. This must be an RTBuffer of
type byte. If this is not set, the built-in training set will be used.
blend optional
The blend variable is a value of type float between 0.0 and 1.0. A value of 0.0 means the
fully denoised image is written to the output buffer. A value of 1.0 means that the
original image is written to the output buffer. A value in between will produce a blend
between original image and denoised image. This can be used for example to reduce the
effect of denoising for early iterations and increase it over time. Use this if denoising
early iterations produces unacceptable artifacts with your renderer.
72 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
6.4 Built-In Post-Processing Stages 6 Post-processing framework
6.4.1.1 Performance
For HD and 4K images, denoising produced the following memory footprints and timings:
Size GPU Memory Time
1920x1080 GV100 732 MB 19 ms
P6000 635 MB 49 ms
P5000 635 MB 70 ms
3840x2160 GV100 2.9 GB 74 ms
P6000 2.5 GB 193 ms
P5000 2.5 GB 282 ms
6.4.1.2 Limitations
In Optix 5.0, the denoiser has the following limitations:
•The denoiser runs under the first GPU found by the system. A different GPU can be
selected by calling the functions cudaSetDevice()4.
•There is no CPU fallback for denoising.
•Objects behind transparent surfaces (for example, simulations of glass) will not denoise
correctly.
•Denoising produces flickering in a series of images rendered as an animation.
6.4.2 Simple Tone Mapper
The stage implements a simple tone mapper and optionally provides gamma correction. It is
suitable for example to tone map an image for later use with the denoiser.
The tone mapper pre-defines the following variables:
input_buffer
This should be an image rendered by a renderer, for example a path tracer. It must be of
type RTBuffer which contains values of type float4.
output_buffer
This must be an RTBuffer of type float4. It must have the same dimensions as the input
buffer as it will be used to store the tone mapped image.
gamma
This is a variable of float type and controls the gamma correction, applied to the first
three channels of the output values of the tone mapper. This operation is implemented as
pow(value, 1 / gamma). The default value is 1.0, i.e., no gamma correction is applied.
exposure
This is a variable of float type and acts as a simple multiplier that is applied to the first
three channels of the input values. The default value is 1.0.
4http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#device-enumeration
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 73

6 Post-processing framework 6.4 Built-In Post-Processing Stages
74 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

7 Building with OptiX
7.1 Libraries
OptiX comes with several header files and supporting libraries, primarily optix and optixu.
On Windows, these libraries are statically linked against the C runtime libraries and are
suitable for use in any version of Microsoft Visual Studio, though only the subset of versions
listed in the OptiX release notes are tested. If you wish to distribute the OptiX libraries with
your application, the VS redistributables are not required by our DLL.
The OptiX libraries are numbered not by release version, but by binary compatibility.
Incrementing this number means that a library will not work in place of an earlier version
(e.g. optix.2.dll will not work when an optix.1.dll is requested). On Linux, you will find
liboptix.so which is a soft link to liboptix.so.1 which is a soft link to
liboptix.so.Z.Y.Z, the actual library of OptiX version X.Y.Z. liboptix.so.1 is the binary
compatibility number similar to optix.1.dll. On MacOS X, liboptix.X.Y.Z.dylib is the
actual library, and you will also find a soft link named liboptix.1.dylib (again, with the 1
indicating the level of binary compatibility), as well as liboptix.dylib.
In addition to the OptiX libraries, the installation includes networking and video/image
decoding libraries required by the VCA remote rendering functionality. The main networking
library is libdice. It is not required to include these libraries in a distribution if remote
rendering is not used by the application. See the “Rendering on the VCA” section (page 93)
for more information.
7.2 Header files
There are two principal methods to gain access to the OptiX API. Including <optix.h> in host
and device code will give access strictly to the C API. Using <optix_world.h> in host and
device code will provide access to the C and C++ API as well as importing additional helper
classes, functions, and types into the OptiX namespace (including wrappers for CUDA’s
vector types such as float3).
Sample 5 from the SDK provides two identical implementations using both the C (<optix.h>)
and C++ (<optixpp_namespace.h>) API, respectively. Understanding this example should
give you a good sense of how the C++ wrappers work.
The optixu include directory contains several headers that augment the C API. The
namespace versions of the header files (see the list of files below) place all the classes,
functions, and types into the optix namespace. This allows better integration into systems
which would have had conflicts within the global namespace. Backward compatibility is
maintained if you include the old headers. It is not recommended to mix the old global
namespace versions of the headers with the new optix namespace versions of the headers in
the same project. Doing so can result in linker errors and type confusion.
<optix_world.h>
General include file for the C/C++ APIs for host and device code, plus various helper
classes, functions, and types all wrapped in the optix namespace.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 75

7 Building with OptiX 7.3 PTX generation
<optix.h>
General include file for the C API for host and device code.
<optixu/optixu_math_namespace.h>
Provides additional operators for CUDA’s vector types as well as additional functions
such as fminf,refract, and an ortho normal basis class.
<optixu/optixupp_namespace.h>
C++ API for OptiX (backward compatibility with OptiXu:: namespace is provided in
<optixpp.h>).
<optixu/optixu_matrix_namespace.h>
Templated multi- dimensional matrix class with certain operations specialized for specific
dimensions.
<optixu/optixu_aabb_namespace.h>
Axis- Aligned Bounding box class.
<optixu/optixu_math_stream_namespace.h>
Standard template library stream operators for CUDA’s vector types.
<optixu/optixu_vector_types.h>
Wrapper around CUDA’s <vector_types.h> header that defines the CUDA vector types
in the OptiX namespace.
<optixu/optixu_vector_functions.h>
Wrapper around CUDA’s <vector_functions.h> header that defines CUDA’s vector
functions (e.g. make_float3) into the optix namespace.
7.3 PTX generation
Programs supplied to the OptiX API must be written in PTX. This PTX could be generated
from any mechanism, but the most common method is to use the CUDA Toolkit’s nvcc
compiler to generate PTX from CUDA C/C++ code.
When nvcc is used, make sure the device code bitness is targeted by using the -m64 flag. The
bitness of all PTX given to the OptiX API must be 64-bit.
When using nvcc to generate PTX output specify the -ptx flag. Note that any host code in the
CUDA file will not be present in the generated PTX file. Your CUDA files should include
<OptiX_world.h> to gain access to functions and definitions required by OptiX and many
useful operations for vector types and ray tracing.
OptiX is not guaranteed to parse all debug information inserted by nvcc into PTX files. We
recommend avoiding the --device-debug flag of nvcc. Note that this flag is set by default on
debug builds in Visual Studio.
OptiX supports running with NVIDIA Nsight, but does not currently support kernel
debugging in Nsight. In addition, it is not recommended to compile PTX code using any -G
(debug) flags to nvcc.
In order to provide better support for compilation of PTX to different SM targets, OptiX uses
the .target information found in the PTX code to determine compatibility with the currently
utilized devices. If you wish your code to run an sm_20 device, compiling the PTX with
-arch sm_30 will generate an error even if no sm_30 features are present in the code.
Compiling to sm_20 will run on sm_20 and higher targets.
76 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

7.4 SDK build 7 Building with OptiX
7.4 SDK build
Our SDK samples’ build environment is generated by CMake. CMake is a cross platform tool
that generates several types of build systems, such as Visual Studio projects and makefiles.
The SDK comes with three text files describing the installation procedures on Windows,
Macintosh, and Linux, currently named INSTALL-WIN.txt,INSTALL-MAC.txt and
INSTALL-LINUX.txt respectively. See the appropriate file for your operating system for
details on how to compile the example source code provided as part of the OptiX SDK.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 77

7 Building with OptiX 7.4 SDK build
78 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

8 Interoperability with OpenGL
OptiX supports the sharing of data between OpenGL applications and both rtBuffers and
rtTextureSamplers. This way, OptiX applications can read data directly from objects such as
vertex and pixel buffers, and can also write arbitrary data for direct consumption by graphics
shaders. This sharing is referred to as interoperability or by the abbreviation interop.
8.1 Opengl interop
OptiX supports interop for OpenGL buffer objects, textures, and render buffers. OpenGL
buffer objects can be read and written by OptiX program objects, whereas textures and render
buffers can only be read.
Note that OpenGL interop in combination with VCA remote rendering is only available in
limited form (only regular buffers are allowed, not textures). Interop use is discouraged with
remote rendering for performance reasons.
8.1.1 Buer objects
OpenGL buffer objects like PBOs and VBOs can be encapsulated for use in OptiX with
rtBufferCreateFromGLBO. The resulting buffer is only a reference to the OpenGL data; the
size of the OptiX buffer as well as the format have to be set via rtBufferSetSize and
rtBufferSetFormat. When the OptiX buffer is destroyed, the state of the OpenGL buffer
object is unaltered. Once an OptiX buffer is created, the original GL buffer object is
immutable, meaning the properties of the GL object like its size cannot be changed while
registered with OptiX. However, it is still possible to read and write buffer data to the GL
buffer object using the appropriate GL functions. If it is necessary to change properties of an
object, first call rtBufferGLUnregister before making changes. After the changes are made
the object has to be registered again with rtBufferGLRegister. This is necessary to allow OptiX
to access the objects data again. Registration and unregistration calls are expensive and
should be avoided if possible.
8.1.2 Textures and render buers
OpenGL texture and render buffer objects must be encapsulated for use in OptiX with
rtTextureSamplerCreateFromGLImage. This call may return
RT_ERROR_MEMORY_ALLOCATION_FAILED for textures that have a size of 0. Once an OptiX
texture sampler is created, the original GL texture is immutable, meaning the properties of the
GL texture like its size cannot be changed while registered with OptiX. However, it is still
possible to read and write pixel data to the GL texture using the appropriate GL functions. If
it is necessary to change properties of a GL texture, first call rtTextureSamplerGLUnregister
before making changes. After the changes are made the texture has to be registered again with
rtTextureSamplerGLRegister. This is necessary to allow OptiX to access the textures data
again. Registration and unregistration calls are expensive and should be avoided if possible.
Only textures with the following GL targets are supported:
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 79
8 Interoperability with OpenGL 8.1 Opengl interop
•GL_TEXTURE_1D
•GL_TEXTURE_2D
•GL_TEXTURE_2D_RECT
•GL_TEXTURE_3D
•GL_TEXTURE_1D_ARRAY
•GL_TEXTURE_2D_ARRAY
•GL_TEXTURE_CUBE_MAP
•GL_TEXTURE_CUBE_MAP_ARRAY
Supported attachment points for render buffers are:
•GL_COLOR_ATTACHMENT<NUM>
Not all OpenGL texture formats are supported by OptiX. A table that lists the supported
texture formats can be found in Appendix A.
OptiX automatically detects the size, texture format, and number of mipmap levels of a
texture. rtTextureSampler( cannot be called for OptiX interop texture samplers and will
return RT_ERROR_INVALID_VALUE.
80 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

9 Interoperability with CUDA
General purpose CUDA programs can be used with OptiX-based ray tracing. For example,
you might use a CUDA program before launching OptiX to determine which rays to trace, or
to tabulate reflection properties for a material, or to compute geometry. In addition, you may
wish to write a CUDA program that post-processes the output of OptiX, especially if OptiX is
being used to generate data structures rather than just a rendered image, e.g. computing
object or character movement based on visibility and collision rays. These usage scenarios are
possible using the OptiX-CUDA interoperability functions described in this chapter.
Note that CUDA interop is not available with VCA remote rendering.
9.1 Primary CUDA contexts
In order for CUDA and OptiX to interoperate, it is necessary for OptiX and the application to
use the same CUDA context. Similar to the CUDA Runtime, OptiX will use the primary
context for each device, creating it on demand if necessary. Any device pointers that are
communicated to and from OptiX will be valid in the primary context. This enables
straightforward interoperability of OptiX with both CUDA Runtime API and CUDA Driver
API based applications.
Please refer to the CUDA documentation for detailed information about primary contexts.
9.2 Sharing CUDA device pointers
An OptiX buffer internally maintains a CUDA device pointer for each device used by the
OptiX context. A buffer device pointer can be retrieved by calling
rtBufferGetDevicePointer. An application can also provide a device pointer for the buffer
to use with rtBufferSetDevicePointer. A buffer device pointer can be used by CUDA to
update the contents of an OptiX input buffer before launch or to read the contents of an OptiX
output buffer after launch. The following example shows how a CUDA kernel can write data
to the device pointer retrieved from a buffer:
rtBufferGetDevicePointer( buffer, optix_device_ordinal, &device_ptr );
rtDeviceGetAttribute(
optix_device_ordinal, RT_DEVICE_ATTRIBUTE_CUDA_DEVICE_ORDINAL,
sizeof(int), &cuda_device_oridinal );
cudaSetDevice( cuda_device_ordinal );
writeData<<< blockDim, threadDim >>>( device_ptr );
Note that each device is assigned an OptiX device ordinal. rtDeviceGetDeviceCount can be
used to query the number of devices available to OptiX and rtDeviceGetAttribute can be
used to determine the corresponding CUDA device ordinal for each one (using
RT_DEVICE_ATTRIBUTE_CUDA_DEVICE_ORDINAL)
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 81

9 Interoperability with CUDA 9.2 Sharing CUDA device pointers
9.2.1 Buer synchronization
Copies of an OptiX buffer’s contents may exist on multiple devices and on the host. These
copies need to be properly synchronized. For example, if the host copy of a buffer’s contents
are not up-to-date, a call to rtBufferMap may require a copy from a device. If the buffer is an
input or input/output buffer, then sometime between the call to rtBufferUnmap and
rtContextLaunch modified host data must be copied to each device used by OptiX. With a
multi-GPU OptiX context, getting or setting a buffer pointer for a single device may also
require copies to other devices to synchronize buffer data.
9.2.1.1 Automatic single-pointer synchronization
If an application gets or sets a pointer for a single device only, OptiX always assumes that the
application has modified the contents of the device pointer and will perform any required
synchronizations to other devices automatically. The only exception to this assumption is
after a call to rtBufferUnmap. If synchronization from the host data to the devices is required,
it will override synchronization between devices. Therefore, an application should not
modify the contents of a buffer device pointer between a call to rtBufferUnmap on the buffer
and the next call to rtContextLaunch.
9.2.1.2 Manual single-pointer synchronization
If a buffer’s contents are not changing for every launch, then the per-launch copies of the
automatic synchronization are not necessary. Automatic synchronization can be disabled
when creating a buffer by specifying the RT_BUFFER_COPY_ON_DIRTY flag. With this flag, an
application must call rtBufferMarkDirty for synchronizations to take place. Calling
rtBufferMarkDirty after rtBufferUnmap will cause a synchronization from the buffer device
pointer at launch and override any pending synchronization from the host.
9.2.1.3 Multi-pointer synchronization
If OptiX is using multiple devices it performs no synchronization when an application
retrieves/provides buffer pointers for all the devices. OptiX assumes that the application will
manage the synchronization of the contents of a buffer’s device pointers.
9.2.2 Restrictions
An application must retrieve or provide device pointers for either one or all of the devices
used by a buffer’s OptiX context. Getting or setting pointers for any other number of devices
is an error. Getting pointers for some devices and setting them for others on the same buffer is
not allowed.
Calling rtBufferMap or rtBufferMarkDirty on a buffer with pointers retrieved/set on all of
multiple devices is not allowed. Calling rtBufferSetDevicePointer on output or
input/output buffers is not allowed.
Setting buffer device pointers for devices which are not used by the buffer’s OptiX context is
not allowed. An application that needs to copy data to/from a CUDA device that is not part
of the OptiX context can do so manually using CUDA, e.g. by calling cudaMemcpyPeer or
cudaMemcpyPeerAsync.
82 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

9.2 Sharing CUDA device pointers 9 Interoperability with CUDA
9.2.3 Zero-copy pointers
With a multi-GPU OptiX context and output or input/output buffers, it is necessary to
combine the outputs of each used device. Currently one way OptiX accomplishes this is by
using CUDA zero-copy memory. Therefore, rtBufferGetDevicePointer may return a
pointer to zero-copy memory. Data written to the pointer will automatically be visible to
other devices. Zero-copy memory may incur a performance penalty because accesses take
place over the PCIe bus.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 83

9 Interoperability with CUDA 9.2 Sharing CUDA device pointers
84 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
10 OptiXpp: C++ wrapper for the OptiX C API
OptiXpp wraps each OptiX C API opaque type in a C++ class and provides relevant
operations on that type. Most of the OptiXpp class member functions map directly to C API
function calls. For example, VariableObj::getContext wraps rtVariableGetContext and
ContextObj::createBuffer wraps rtBufferCreate.
Some functions perform slightly more complex sequences of C API calls. For example
ContextObj::createBuffer(unsigned int type, RTformat format, RTsize width)
provides in one call the functionality of
rtBufferCreate
rtBufferSetFormat
rtBufferSetSize1D
See the API reference in the OptiX documentation set or the header file OptiXpp_namespace.h
for a full list of the available OptiXpp functions. The usage of the API is described below.
10.1 OptiXpp objects
The OptiXpp classes consist of a Handle class, a class for each API opaque type, and three
classes that provide attributes to these objects.
10.1.1 Handle class
All classes are manipulated via the reference counted Handle class. Rather than working with
aContextObj directly you would use a Context instead, which is simply a typedef for
Handle<ContextObj>.
In addition to providing reference counting and automatic destruction when the reference
count reaches zero, the Handle class provides a mechanism to create a handle from a C API
opaque type, as follows:
RTtransform t;
rtTransformCreate( my_context, &t );
Transform Tr = Transform::take( t );
The converse of take is get, which returns the underlying C API opaque type, but does not
decrement the reference count within the handle.
Transform Tr;
...
rtTransformDestroy( Tr->get( ) );
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 85
10 OptiXpp: C++ wrapper for the OptiX C API 10.1 OptiXpp objects
These functions are typically used when calling C API functions, though such is rarely
necessary since OptiXpp provides nearly all OptiX functionality.
10.1.2 Attribute classes
The attributes are API, Destroyable, and Scoped.
10.1.2.1 API attribute
All object types have the API attribute. This attribute provides the following functions to
objects:
getContext
Return the context to which this object belongs
checkError
Check the given result code and throw an error with appropriate message if the code is
not RTsuccess.checkError is often used as a wrapper around a call to a function that
makes OptiX API calls:
my_context->checkError( sutilDisplayFilePPM( ... ) );
10.1.2.2 Destroyable attribute
This attribute provides the following functions to objects:
destroy
Equivalent to rt*
validate
Equivalent to rt*
10.1.2.3 Scoped attribute
This attribute applies only to API objects that are containers for RTvariables. It provides
functions for accessing the contained variables. The most basic access is via operator[], as
follows:
my_context["new_variable"]->setFloat( 1.0f );
This access returns the variable, but first creates it within the containing object if it does not
already exist.
This array operator syntax with the string variable name argument is probably the most
powerful feature of OptiXpp, as it greatly reduces the amount of code necessary to access a
variable.
The following functions are also available to Scoped objects:
declareVariable
Declare a variable associated with this object
queryVariable
Query a variable associated with this object by name
86 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
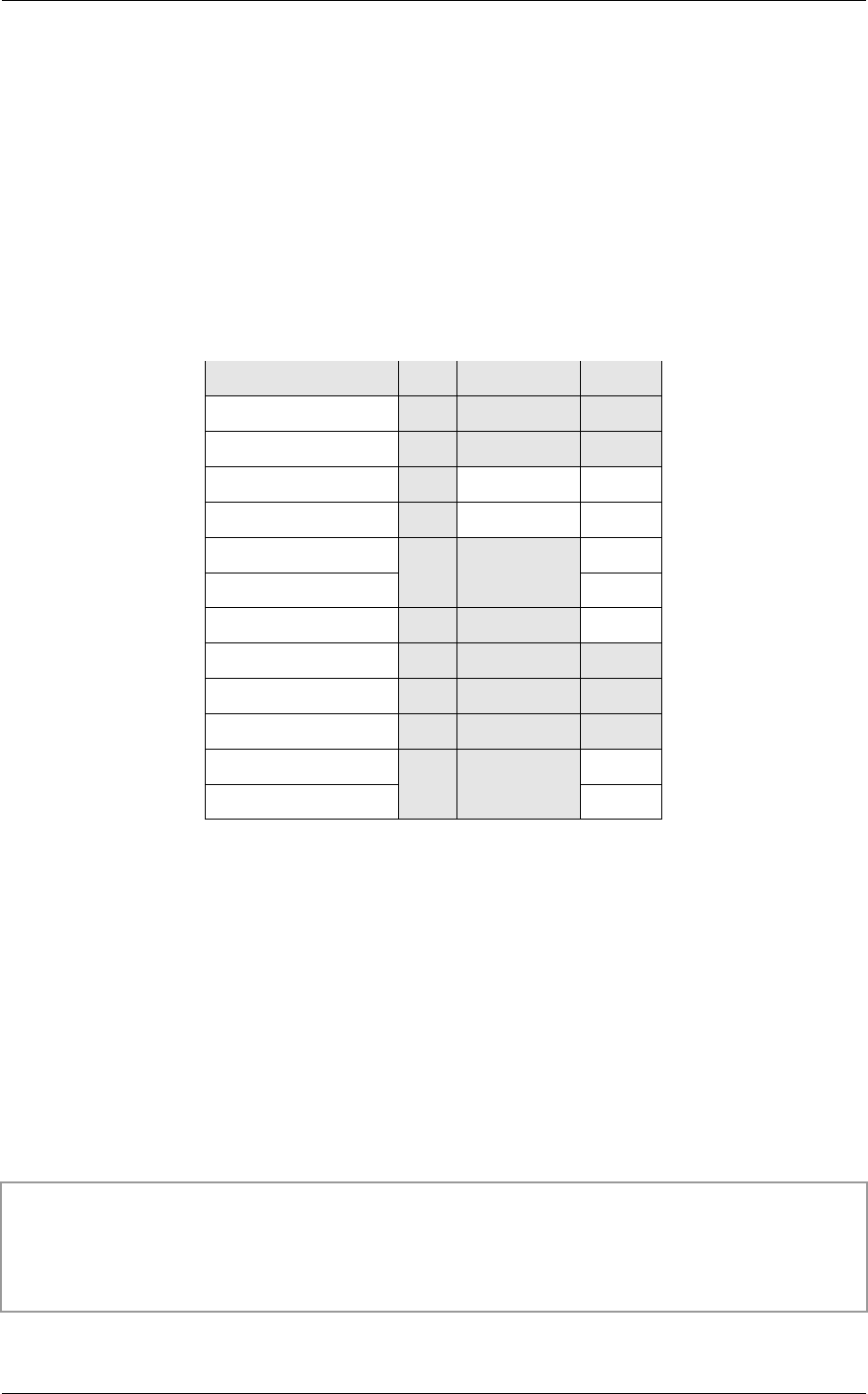
10.1 OptiXpp objects 10 OptiXpp: C++ wrapper for the OptiX C API
removeVariable
Remove a variable associated with this object
getVariableCount
Query the number of variables associated with this object, typically so as to iterate over
them
getVariable
Query variable by index, typically while iterating over them
10.1.2.4 Attributes of OptiXpp objects
The following table lists all of the OptiXpp objects and their attributes.
Object API Destroyable Scoped
Context X X X
Program X X X
Buffer X
Variable X
TextureSampler X X
Group X X
GeometryGroup X X
GeometryInstance X X X
Geometry X X X
Material X X X
Transform X X
Selector X X
Table 9 – OptiXpp opaque types and their attributes
10.1.3 API objects
In addition to the methods provided by the attribute classes that give commonality to the
different API objects each object type also has a unique set of methods. These functions cover
the complete set of functionality from the C API, although not all methods will be described
here. See OptiXpp_namespace.h for the complete set.
10.1.3.1 Context
The Context object provides create* functions for creating all other opaque types. These are
owned by the context and handles to the created object are returned:
Context my_context;
Buffer Buf =
my_context->createBuffer(
RT_BUFFER_INPUT, RT_FORMAT_FLOAT4, 1024, 1024);
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 87

10 OptiXpp: C++ wrapper for the OptiX C API 10.1 OptiXpp objects
Context also provides launch functions, with overloads for 1D, 2D, and 3D kernel launches. It
provides many other functions that wrap rtContext* C API calls.
10.1.3.2 Buer
The Buffer class provides a map call that returns a pointer to the buffer data, and provides an
unmap call. It also provides set and get functions for the buffer format, element size, and
1D, 2D, and 3D buffer size. Finally, it provides registerGLBuffer and unregisterGLBuffer.
10.1.3.3 Variable
The Variable class provides getName,getAnnotation,getType, and getSize functions for
returning properties of the variable. It also contains a multitude of set* functions that set the
value of the variable and its type, if the type is not already set:
my_context["my_dim3"]->setInt( 512, 512, 1024 );
The Variable object also offers set functions for setting its value to an API object, and provides
setUserData and getUserData.
10.1.3.4 TextureSampler
The TextureSampler class provides functions to set and get the attributes of an
RTtexturesampler, such as setWrapMode,setMipLevelCount, etc.
It also provides setBuffer,getBuffer,registerGLTexture, and unregisterGLTexture.
10.1.3.5 Group and GeometryGroup
The remaining API object classes are for OptiX node types. They offer member functions for
setting and querying the nodes to which they attach.
The Group class provides setAcceleration,getAcceleration,setChildCount,
getChildCount,setChild, and getChild.
10.1.3.6 GeometryInstance
RTgeometryinstance is a binding of Geometry and Material. Thus, GeometryInstance
provides functions to set and get both the Geometry and the Materials. This includes
addMaterial, which increments the material count and appends the given Material to the list.
10.1.3.7 Geometry
The unique functions provided by the Geometry class set and get the BoundingBoxProgram,
the IntersectionProgram and the PrimitiveCount. It also offers markDirty and isDirty.
10.1.3.8 Material
A Material consists of a ClosestHitProgram and an AnyHitProgram, and is a container for the
variables appertaining to these programs. It contains set and get functions for these programs.
88 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

10.1 OptiXpp objects 10 OptiXpp: C++ wrapper for the OptiX C API
10.1.3.9 Transform
An RTtransform node applies a transformation matrix to its child, so the Transform class
offers setChild,getChild,setMatrix, and getMatrix methods.
10.1.3.10 Selector
A Selector node applies a Visit program to operate on its multiple children. Thus, the Selector
class includes functions to set and get the VisitProgram,ChildCount, and Child.
10.1.4 Exceptions
The Exception class of OptiXpp encapsulates an error message. These errors are often the
direct result of a failed OptiX C API function call and subsequent rtContextGetErrorString
call. Nearly all methods of all object types can throw an exception using the Exception class.
Likewise, the checkError function can throw an Exception.
Additionally, the Exception class can be used explicitly by user code as a convenient way to
throw exceptions of the same type as OptiXpp.
Call Exception::makeException to create an Exception.
Call getErrorString to return an std::string for the error message as returned by
rtContextGetErrorString.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 89

10 OptiXpp: C++ wrapper for the OptiX C API 10.1 OptiXpp objects
90 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
11 OptiX Prime: low-level ray tracing API
11.1 Overview
OptiX is generally used to represent an entire algorithm implementation, whether that be
rendering, visibility, radiation transfer, or anything else. The many user programmable
portions of OptiX allow the application to express complex operations, such as shading, that
are tightly intermingled, often recursively, with the ray tracing operations and expressed in a
single-ray programming model. By encapsulating the programmable portions of the
algorithm and owning the entire algorithm, OptiX can execute the entire algorithm on the
GPU and optimize the execution for each new GPU as it is released or for other platforms
such as cloud rendering on the NVIDIA VCA.
Sometimes the algorithm as a whole does not benefit from this tight coupling of user code
and ray tracing code, and only the ray tracing functionality is needed. Visibility, trivial ray
casting rendering, and ray tracing very large batches of rays in phases may have this
property. OptiX Prime is a set of OptiX APIs designed for these use cases. Prime is specialized
to deliver high performance for intersecting a set of rays against a set of triangles. Prime is a
thinner, simpler API, since programmable operations, such as shading, are excluded. Prime is
also suitable for some quick experimentation and hobby projects.
The OptiX Prime API consist of three main objects:
BufferDesc
Wraps application managed buffers and provides descriptive information about them.
Context
Manages resource allocation.
Model
Represents a set of triangles and an acceleration structure.
Query
Coordinates the intersection of rays with a model.
11.2 Context
An OptiX Prime context performs two main functions. The first function is to manage objects
created by the API. The context can create objects, some of which can also create other objects.
All of these objects are registered with the context and will be destroyed when the context is
destroyed. The second function is to encapsulate a particular backend that performs the
actual computation.
Currently the following context types are supported:
•RTP_CONTEXT_TYPE_CPU
•RTP_CONTEXT_TYPE_CUDA
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 91
11 OptiX Prime: low-level ray tracing API 11.3 Buer descriptor
RTP_CONTEXT_TYPE_CPU is intended to be used as a fallback when an acceptable CUDA device
is not available. It will allow an application to run, despite the absence of CUDA-capable
GPUs, but will have lower performance. In certain situations it might also make sense to use
CPU and CUDA contexts in parallel.
RTP_CONTEXT_TYPE_CUDA by default will only use the fastest available device. It is also
possible to specify a specific device (or a list of devices) to be used by the context by
supplying a list of device numbers to rtpContextSetCudaDevices. The fastest device in this
list is used as the primary device. Acceleration structures will be built on that primary device
and copied to the others. Specified devices must feature compute capability SM 3.0 or greater.
All devices will be used for ray tracing with work being distributed proportionally to each
device’s computational power. Note that this distribution can be rather costly if the rays are
stored in device memory though. For maximum efficiency it is recommended to only ever
select one device per context. The CUDA context of the primary device is made current after
a call to rtpContextCreate or rtpContextSetDevices.
The following code demonstrates how to create a context and specify which devices to use. In
this example, a CPU context is created as a fallback.
RTPcontext context;
if(rtpContextCreate( RTP_CONTEXT_TYPE_CUDA, &context ) == RTP_SUCCESS ) {
int deviceNumbers[] = {0,1};
rtpContextSetCudaDeviceNumbers( 2, deviceNumbers );
}
else {
rtpContextCreate( RTP_CONTEXT_TYPE_CPU, &context );
}
11.3 Buer descriptor
The buffers used to send and receive data from OptiX Prime are managed by the application.
A buffer descriptor is an object that provides information about a buffer, such as its format
and location, as well as the pointer to the buffer’s data. OptiX Prime supports the following
buffer types:
•RTP_BUFFER_TYPE_HOST
•RTP_BUFFER_TYPE_CUDA_LINEAR
A buffer descriptor is created by calling rtpBufferDescCreate. A buffer of type
RTP_BUFFER_TYPE_CUDA_LINEAR is assumed to reside on the current CUDA device. The
device number for the buffer can be specified explicitly by calling
rtpBufferDescSetCudaDeviceNumber.
The portion of the buffer to use for input or output is specified by calling
rtpBufferDescSetRange. The range is specified in terms of the number of elements.
For buffers containing vertex data, it is possible to specify a stride in bytes between each
element. This is useful for vertex buffers that contain interleaved vertex attributes, as shown
in the following example:
struct Vertex {
float3 pos, normal, color;
92 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
11.4 Model 11 OptiX Prime: low-level ray tracing API
};
...
RTPbufferdesc vertsBD;
rtpBufferDescCreate(
context, RTP_BUFFER_FORMAT_VERTEX_FLOAT3, RTP_BUFFER_TYPE_HOST,
verts, &vertsBD);
rtpBufferDescSetRange(vertsBD, 0, numVerts);
rtpBufferDescSetStride(vertsBD, sizeof(Vertex));
The functions that accept buffer descriptors as parameters have copy semantics. This means,
for example, when a buffer descriptor is used in a call to set the rays to be queried and
afterwards the range of the buffer descriptor is changed, the changes to the buffer descriptor
will not be visible to the query. However, changing the contents of the buffer itself could
affect the query.
Buffer descriptors are lightweight objects and can be created and destroyed as needed.
Buffers of any type can be passed to OptiX Prime functions and the will automatically be
copied to the appropriate location. For example, a vertex buffer on the host will be copied to
the primary device when the context is of type RTP_CONTEXT_TYPE_CUDA. While convenient,
this automatic copying may require the allocation of memory on the device and can
negatively impact performance. For best performance it is recommended that the following
buffer and context types be used together:
Context type Buffer type
RTP_CONTEXT_TYPE_CPU RTP_BUFFER_TYPE_HOST
RTP_CONTEXT_TYPE_CUDA RTP_BUFFER_TYPE_CUDA_LINEAR (on the primary device)
11.4 Model
A model represents either a set of triangles or a group of model instances, in addition to an
acceleration structure built over the triangles or instances. A model is created with an
associated context by calling rtpModelCreate, and can be destroyed with rtpModelDestroy.
11.4.1 Triangle models
Triangle data for the model is supplied by calling rtpModelSetTriangles with a vertex buffer
descriptor and an optional index buffer descriptor. If no index buffer is supplied then the
vertex buffer is considered to be a flat list of triangle vertices, with every set of three vertices
forming a triangle (i.e., a triangle soup).
rtpModelUpdate creates the acceleration structure over the triangles. It is important that the
vertex and index buffers specified in rtpModelSetTriangles remain valid until
rtpModelUpdate is finished. If the flag RTP_MODEL_HINT_ASYNC is specified, some or all of the
acceleration structure update may run asynchronously and rtpModelUpdate may return
before the update is finished. rtpModelFinish blocks the calling thread until the update is
finished. rtpModelGetFinished can be used to poll until the update is finished. Once the
update has finished, the input buffers can be modified.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 93

11 OptiX Prime: low-level ray tracing API 11.4 Model
The following code demonstrates how to create a model from a vertex buffer with an
asynchronous update. The code assumes that a vertex buffer descriptor vertsBD already
exists:
RTPmodel model;
rtpModelCreate(context, &model);
rtpModelSetTriangles(model, 0, vertsBD);
rtpModelUpdate(model, RTP_MODEL_HINT_ASYNC);
// ... do useful work on CPU while GPU is busy
rtpModelFinish(model);
// safe to modify vertex buffer
For some use cases, the user may wish to have explicit control over multi-GPU computation
rather than using the automatic multi-GPU support provided by OptiX Prime. A context can
be created for each device and work can be distributed manually to each context. OptiX
Prime provides rtpModelCopy to copy a model from one context to another so that it is not
necessary to create and update the model in each context. rtpModelCopy can also be used to
build multiple models in parallel on different devices, then broadcast the results to each
device. When using older devices, rtpModelCopy can be used to build an acceleration
structure in a CPU context and copy it to the context that uses the devices.
Beyond the memory used by the final acceleration structure, some additional memory is
needed during rtpModelUpdate. The amount used may be controlled by calling
rtpModelSetBuilderParameter. The RTP_BUILDER_PARAM_CHUNK_SIZE controls the amount
of scratch space used while building. The minimum scratch space is currently 64MB, and the
default scratch space is 10available video memory for CUDA contexts, and 512MB for CPU
contexts. A chunk size of -1 signifies unlimited. In this case about 152 bytes per triangle are
used while building the acceleration structure.
RTP_BUILDER_PARAM_USE_CALLER_TRIANGLES controls whether to create a possibly
transformed copy of the vertex buffer data, or to use the buffer supplied by the user, thus
saving memory. If a model is copied, and the source model is using the user supplied triangle
data to save memory, the user triangles will be automatically copied as well. If this is not
intended, it is necessary to set RTP_BUILDER_PARAM_USE_CALLER_TRIANGLES on the
destination model as well, before the copy is performed. Afterward, rtpModelSetTriangles
must be called to supply the user triangles on the destination model.
11.4.2 Instancing
Using instancing, it is possible to compose complex scenes using existing triangle models
(compare section the “Triangle models” section (page 93)). Instancing data for a model is
supplied by calling rtpModelSetInstances with an instance buffer descriptor and a
transformation buffer descriptor. The ranges for these buffer descriptors must be identical.
The type of the instance buffer descriptor must be RTP_BUFFER_TYPE_HOST, and the format
RTP_BUFFER_FORMAT_INSTANCE_MODEL. For transformations, the buffer descriptor format can
be either RTP_BUFFER_FORMAT_TRANSFORM_FLOAT4x4 or
RTP_BUFFER_FORMAT_TRANSFORM_FLOAT4x3. If a stride is specified for the transformations, it
must be a multiple of 16 bytes. Furthermore, the matrices must be stored in row-major order.
94 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

11.5 Query 11 OptiX Prime: low-level ray tracing API
Please note that only affine transformations are supported, and that the last row is always
assumed to be [0.0, 0.0, 0.0, 1.0].
In contrast to triangle models, instance models can not be copied.
For an example of instancing please refer to the primeInstancing sample which ships with the
OptiX SDK.
11.4.3 Masking
With masking, it is possible to specify per triangle visibility information in combination with
a per ray mask. In order to use masking, triangle data must be specified with the
RTP_BUFFER_FORMAT_INDICES_INT3_MASK_INT buffer format. Furthermore the user-triangle
build parameter must be set, as well as ray format
RTP_BUFFER_FORMAT_RAY_ORIGIN_MASK_DIRECTION_TMAX must be used. The per triangle
visibility flags are evaluated by a bitwise AND operation with the currently processed ray’s
MASK field before a ray-triangle intersection is performed. If the result is non-zero, the
ray-triangle intersection test is skipped. The combination of a per triangle mask with a per
ray mask e.g. allows to exclude triangles based on different ray generations.
If the per triangle mask values need to be updated, rtpModelSetTriangles must be called
again, with a successive call to rtpModelUpdate. Using the RTP_MODEL_HINT_MASK_UPDATE
flag indicates that only the per triangle mask has changed, but that no rebuild of the
acceleration structure is needed.
For an example of masking, please refer to the primeMasking sample which ships with the
OptiX SDK.
11.5 Query
A query is used to perform the actual ray tracing against a model. The query is created from a
model using rtpQueryCreate. The following types of queries are supported:
•RTP_QUERY_TYPE_ANY
•RTP_QUERY_TYPE_CLOSEST
Along any given ray there may be a number of intersection points. RTP_QUERY_TYPE_CLOSEST
returns the first hit along the ray. RTP_QUERY_TYPE_ANY returns the first hit found, whether it
is the closest or not. The query takes a buffer of rays to intersect and a buffer to store the
resulting hits. There are several formats for the rays and hits. The main advantage of the
different formats is that some require less storage than others. This is important for
minimizing the transfer time of rays and hit data between the host and the device and
between devices.
Once the ray and hit buffers have been specified, the query can be executed by calling
rtpQueryExecute. The ray buffer must not be modified until after this function returns. If the
flag RTP_QUERY_HINT_ASYNC is specified, rtpQueryExecute may return before the query is
actually finished. rtpQueryFinish can be called to block the current thread until the query is
finished, or rtpQueryGetFinished can be used to poll until the query is finished. At this point
all of the hits are guaranteed to have been returned, and it is safe to modify the ray buffer.
The following code demonstrates how to execute a query using ray and hit buffers:
RTPquery query;
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 95

11 OptiX Prime: low-level ray tracing API 11.7 Multi-threading
RTPbufferdesc raysBD, hitsBD;
// fill in raysBD with rays
rtpQueryCreate(model, RTP_QUERY_TYPE_CLOSEST, &query);
rtpQuerySetRays(query, raysBD);
rtpQuerySetHits(hits, hitsBD);
rtpQueryExecute(query, 0);
// safe to modify ray buffer and process hits
With rtpQuerySetCudaStream, it is possible to specify a specific CUDA stream which can be
used to synchronize (asynchronous) queries and user CUDA kernel launches. If no stream is
specified, the CUDA default stream is used.
A query may be executed multiple times. Note that rtpQueryFinish and
rtpQueryGetFinished only apply to the stream corresponding to the last call to
rtpQueryExecute. Therefore, if the stream has been changed between asynchronous calls to
rtpQueryExecute it may be necessary to manually synchronize the streams, i.e. by calling
cudaStreamSynchronize or using CUDA events (see the CUDA Programming Guide).
11.6 Utility functions
In addition to the basic objects and their functions, OptiX Prime has several utility functions.
11.6.1 Page-locked buers
The performance of transfers between devices and the host can be improved by page-locking
the host memory. Functions for page-locking already allocated memory are provided in the
CUDA runtime. For convenience, OptiX Prime provides the functions rtpHostBufferLock
and rtpHostBufferUnlock so that it is possible to achieve better performance with host
buffers without having to invoke CUDA functions directly. Note that page- locking excessive
amounts of memory may degrade system performance, since it reduces the amount of
memory available to the system for paging. As a result, this function is best used sparingly to
register staging areas for data exchange between host and device.
11.6.2 Error reporting
All functions in OptiX Prime return an error code. The function rtpGetErrorString
translates an error code into a string. rtpContextGetLastErrorString returns an error string
for the last error encountered. This error string may contain additional information beyond a
simple error code. Note that this function may also return errors from previous asynchronous
launches, or from other threads.
11.7 Multi-threading
The OptiX Prime API is thread safe. It is possible to share a single context among multiple
host threads. However only one thread may access a context (or objects associated with it) at
a time. Therefore to avoid locking other threads out of the API for extensive periods of time,
the asynchronous APIs should be used. Care must also be taken to synchronize state changes
to API objects. For example, if two threads try to set the ray buffer on the same query at the
same time, a race condition can occur.
96 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
11.8 Streams 11 OptiX Prime: low-level ray tracing API
11.8 Streams
By default, all computation in OptiX Prime (e.g. updating models and executing queries)
takes place within the default CUDA stream of the primary device. However, with
rtpQuerySetCudaStream it is possible to specify a specific CUDA stream which can be used
to synchronize (asynchronous) queries and user CUDA kernel launches.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 97

11 OptiX Prime: low-level ray tracing API 11.8 Streams
98 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

12 OptiX Prime++: C++ wrapper for the OptiX Prime API
OptiX Prime++ wraps each OptiX Prime C API opaque type in a C++ class and provides
relevant operations on that type. Most of the OptiX Prime++ class member functions map
directly to C API function calls. For example, ContextObj::setCudaDeviceNumbers maps
directly to rtpContextSetCudaDeviceNumbers.
Some functions perform slightly more complex sequences of C API calls. For example
ModelObj::setTriangles
provides in one call the functionality of
rtpBufferDescCreate
rtpBufferDescSetRange
rtpBufferDescSetStride
rtpModelSetTriangles
rtpBufferDescDestroy
See the OptiX API Reference.pdf or OptiX_primepp.h for a full list of the available OptiX
Prime++ functions. The usage of the API is described below.
12.1 OptiX Prime++ objects
Manipulation of OptiX Prime objects is performed via reference counted Handle classes
which encapsulate all OptiX Prime objects functionalities.
All classes are manipulated via the reference counted Handle class. Rather than working with
aContextObj directly you would use a Context instead, which is simply a typedef for
Handle<ContextObj>.
12.1.1 Context object
The Context object wraps the OptiX Prime C API RTPcontext opaque type and its associated
function set representing an OptiX Prime context.Its constructor requires a
RTPcontexttype type in order to specify the type of the context to be created (CPU or GPU).
By default, only the fastest GPU will be used. A different device (or a list of devices) can be
selected by using ContextObj::setCudaDeviceNumbers. Note that for maximum efficiency it
is recommended to only ever select one device per context.
Context context( Context::create(contextType) );
For all objects the following pattern is also possible:
Context context;
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 99

12 OptiX Prime++: C++ wrapper for the OptiX Prime API 12.1 OptiX Prime++ objects
context = Context::create(contextType);
The Context also provides functions to create OptiX Prime objects directly owned by it.
ContextObj::createBufferDesc
ContextObj::createModel
ContextObj::createQuery
12.1.2 BuerDesc object
The BufferDesc object wraps a RTPbufferdesc object opaque type and its associated function
set representing an OptiX Prime buffer descriptor.
The creation of a BufferDesc object is demanded to an owning Context object since each
BufferDesc object needs to be assigned to an OptiX Prime context.
12.1.3 Model object
The Model object wraps a RTPmodel object opaque type and its associated function set
representing an OptiX Prime model.
The creation of a Model object is demanded to an owning Context object since each Model
object needs to be assigned to an OptiX Prime context.
Variants of the setTriangles functions are provided to allow creating a model by either a
custom-format triangle soup , with a supplied indices buffer descriptor or directly from a
supplied vertices buffer descriptor.
12.1.4 Query object
The Query object wraps a RTPquery object opaque type and its associated function set
representing an OptiX Prime query.
The creation of a Query object is demanded to an owning Context object since each Query
object needs to be assigned to an OptiX Prime context.
Variants of the setRays and setHits functions are provided to allow setting the rays and the
hits for a query from either a custom-format user supplied buffer or from a buffer descriptor.
12.1.5 Exception class
The Exception class provides methods to deal with OptiX Prime exceptions. Both error code
and error description methods are provided as well as a wrapper for the
rtpContextGetLastErrorString function
catch ( Exception& e ) {
std::cerr << "An error occurred with error code "
<< e.getErrorCode() << " and message "
<< e.getErrorString() << std::endl;
}
100 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

13 Performance guidelines
Subtle changes in your code can dramatically alter performance. This list of performance tips
should help when using OptiX.
•Where possible use floats instead of doubles. This also extends to the use of literals and
math functions. For example, use 0.5f instead of 0.5 and sinf instead of sin to prevent
automatic type promotion. To check for automatic type promotion, search the PTX files
for the .f64 instruction modifier.
•OptiX will try to partition thread launches into tiles that are the same dimensionality as
the launch. To have maximal coherency between the threads of a tile you should choose
a launch dimensionality that is the same as the coherence dimensionality of your
problem. For example, the common problem of rendering an image has 2D coherency
(adjacent pixels both horizontally and vertically look at the same part of the scene), so a
2D launch is appropriate. Conversely, a collision detection problem with many agents
each looking in many directions may appear to be 2D (the agents in one dimension and
the ray directions in another), but there is rarely coherence between different agents, so
the coherence dimensionality is one, and performance will be better by using a 1D
launch.
•Do not build an articulate scene graph with Groups,Transforms and
GeometryInstances. Try to make the topology as shallow and minimal as possible. For
example, for static scenes the fastest performance is achieved by having a single
GeometryGroup, where transforms are flattened to the geometry. For scenes where
Transforms are changing all the static geometry should go in one GeometryGroup and
each Transform should have a single GeometryGroup. Also, if possible, combine
multiple meshes into a single mesh.
•Each new Program object can introduce execution divergence. Try to reuse the same
program with different variable values. However, don’t take this idea too far and
attempt to create an “über shader.” This will create execution divergence within the
program. Experiment with your scene to find the right balance.
•Try to minimize live state across calls to rtTrace in programs. For example, in a closest
hit program temporary values used after a recursive call to rtTrace should be computed
after the call to rtTrace, rather than before, since these values must be saved and
restored when calling rtTrace, impacting performance. RTvariables declared outside
of the program body are exempt from this rule.
•In multi-GPU environments INPUT_OUTPUT and OUTPUT buffers are stored on the host. In
order to optimize writes to these buffers, types of either 4 bytes or 16 bytes (e.g. float,
uint, or float4) should be used when possible. One might be tempted to make an
output buffer used for the screen out of float3’ (RGB), however using a float4 buffer
will result in improved performance (e.g.
output_buffer[launch_index] = make_float4( result_color )). This also affects
defined types (see the progressivePhotonMap sample for an example of accessing user
defined structs with float4s)
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 101

13 Performance guidelines
•Memory accesses to structs containing four-vectors, such as float4, need to be 16-byte
aligned for optimal performance. Do so by placing the largest aligned variables first in
structs.
•In multi-GPU environments, INPUT_OUTPUT buffers may be stored on the device, with a
separate copy per device by using the RT_BUFFER_GPU_LOCAL buffer attribute. This is
useful for avoiding the slower reads and writes by the device to host memory.
RT_BUFFER_GPU_LOCAL is useful for scratch buffers, such as random number seed
buffers and variance buffers.
•Use iteration instead of recursion where possible (e.g. path tracing with no ray
branching). See the path_tracer sample for an example of how to use iteration instead of
recursion when tracing secondary rays.
•For best performance, use the rtTransform* functions rather than explicitly
transforming by the matrix returned by rtGetTransform.
•Disable exceptions that are not needed. While it is recommended to turn on all available
exception types during development and for debugging, the error checking involved
e.g. to validate buffer index bounds is usually not necessary in the final product.
•Avoid recompiling the OptiX kernel. These recompiles can be triggered when certain
changes to the input programs or variables occur. For example, swapping the
ClosestHit program of a Material between two programs will cause a recompile on each
swap because the kernel consists of different code, whereas creating two Materials, one
with each program, and swapping between the two Materials will not cause a recompile
because only the node graph is changing, not the code. Creating dummy nodes with the
alternate programs is one way to provide all of the code at once. Also avoid changing
the layout of variables attached to scope objects.
•It is possible for a program to find multiple definitions for a variable in its scopes
depending upon where the program is called. Variables with definitions in multiple
scopes are said to be dynamic and may incur a performance penalty.
•Uninitialized variables can increase register pressure and negatively impact
performance.
•When creating PTX code using nvcc, adding --use-fast-math as a compile option can
reduce code size and increase the performance for most OptiX programs. This can come
at the price of slightly decreased numerical floating point accuracy. See the nvcc
documentation5for more details.
•Avoid using OpenGL interop in combination with VCA remote rendering.
•Use output buffers in float4 format for VCA remote rendering, even if only three
components are needed.
The following performance guidelines apply to OptiX Prime:
•Use page-locked host memory for host buffers to improve performance when using
contexts of type RTP_CONTEXT_TYPE_CUDA. Asynchronous API calls involving host
buffers can may not actually be asynchronous if the host memory is not page-locked.
•Multi-GPU contexts, while convenient, are limited by PCIe bandwidth. That is because
ray and hit buffers reside in a single location (either the host or a device) and must be
copied over the PCIe bus to multiple devices. It is possible to obtain better performance
5http://docs.nvidia.com/cuda/cuda-compiler-driver-nvcc/index.html
102 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

13 Performance guidelines
by managing multiple GPUs manually. By allocating a context for each device and
generating rays and consuming hits on the device, transfers can be avoided.
•For maximum concurrency with model updates, it is best to use a separate context for
each device, each running in its own host thread. There are currently some limitations
on the amount of concurrency that can be achieved from a single host thread which will
be addressed in a future release.
•Prime contexts allocate a small amount of page-locked host memory. Because the
allocation of page-locked memory can sometimes block when other kernels are running,
it is best to initialize contexts when no long-running kernels are active.
•With the current implementation, the performance of queries created from a multi-GPU
context are generally better when used with buffers residing in page-locked host
memory rather than on a device.
•Use the asynchronous API when using Prime in a multi-threaded setting to achieve
better concurrency.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 103

13 Performance guidelines
104 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation

14 Caveats
Keep in mind the following caveats when using OptiX.
•Setting a large stack size will consume GPU device memory. Try to minimize the stack
as much as possible. Start with a small stack and with the use of an exception program
that will make it obvious you have exceeded your memory, increase the stack size until
the stack is sufficiently large.
•The use of __shared__ memory within a program is not allowed.
•The use of PTX bar or CUDA syncthreads within a program is not allowed.
•threadIdx in CUDA can map to multiple launch indices (e.g. pixels). Use the
rtLaunchIndex semantic instead.
•Use of the CUDA malloc,free, and printf functions within a program is not
supported. Attempts to use these functions will result in an illegal symbol error.
•Currently, the OptiX host API is not guaranteed to be thread-safe. While it may be
successful in some applications to use OptiX contexts in different host threads, it may
fail in others. OptiX should therefore only be used from within a single host thread.
•On Fermi architecture the number of cube, layered, and half float textures is limited to
127. Mip levels of textures over the 127 limit are stripped to one level.
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 105

14 Caveats
106 NVIDIA OptiX 5.0 — Programming Guide ©2017 NVIDIA Corporation
15 Appendix: Texture formats
OpenGL texture format
GL_RGBA8
GL_RGBA16
GL_R32F
GL_RG32F
GL_RGBA32F
GL_R8I
GL_R8UI
GL_R16I
GL_R16UI
GL_R32I
GL_R32UI
GL_RG8I
GL_RG8UI
GL_RG16I
GL_RG16UI
GL_RG32I
GL_RG32UI
GL_RGBA8I
GL_RGBA8UI
GL_RGBA16I
GL_RGBA16UI
GL_RGBA32I
GL_RGBA32UI
©2017 NVIDIA Corporation NVIDIA OptiX 5.0 — Programming Guide 107
