Program Explanation Manual
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 186 [warning: Documents this large are best viewed by clicking the View PDF Link!]
Version 1.00 [ANDTR101]
March 2014
Renesas MCU Car Rally Secretariat
MCU Car Kit, Ver. 5.1
Program Explanation Manual
– kit12_rx62t Version
(Version for RX62T)
All trademarks and registered trademarks are the property of their respective owners.
Important Notice (Revision 1.2)
Copyright
Copyright of this manual and its contents belongs to the Renesas MCU Car Rally Secretariat.
This manual is protected under copyright law and international copyright conventions.
Prohibited Use
The user is prohibited from doing any of the following:
Sale of the manual to a third party, or advertisement, use, marketing, or reproduction of the manual for
purpose of sale
Transfer or reauthorization to a third party of usage rights to the manual
Modification or deletion of the contents of the manual, in whole or in part
Translation into another language of the contents of the manual
Use of the contents of the manual for a purpose that may pose a danger of death or injury to persons
Reprinting and Reproduction
Prior written permission from the Renesas MCU Car Rally Secretariat is required in order to reprint or
reproduce this manual.
Limitation of Liability
Every effort has been made to ensure the accuracy of the information contained in this manual. However, the
Renesas MCU Car Rally Secretariat assumes no responsibility for any loss or damage that may arise due to
errors this manual may contain.
Other
The information contained in this manual is current as of the date of publication. The Renesas MCU Car Rally
Secretariat reserves the right to make changes to the information or specifications contained in this manual
without prior notice. Make sure to check the latest version of this manual before starting fabrication.
Contact Information
MCU Car Rally Secretariat, Renesas Solutions Corp.
MN Building, 2-1 Karuko-saka, Ageba-cho, Shinjuku-ku, Tokyo, 162-0824, Japan
Tel. (03) 3266-8510
E-mail: official@mcr.gr.jp
I
Contents
1. Overview of MCU Car Rally Kit Ver. 5.1 ................................................................................ 1
1.1. Exterior View of MCU Car Rally Kit Ver. 5.1 ........................................................................................... 1
1.2. Power Supply Configuration of Standard Kit ............................................................................................ 2
1.3. Power Supply Configuration with Boosted Drive Voltage ......................................................................... 3
2. Sensor Board Ver. 5 .................................................................................................................. 5
2.1. Specifications ............................................................................................................................................. 5
2.2. Circuit Diagram ......................................................................................................................................... 6
2.3. Dimensions ................................................................................................................................................ 7
2.4. Sensor Mounting Positions ........................................................................................................................ 7
2.5. Exterior View ............................................................................................................................................. 8
2.6. Relationship between the Sensor Board Ver.5 CN1 and the RMC-RX62T Board ..................................... 9
2.7. Method of Distinguishing Between White and Black Portions of the Course ......................................... 10
2.8. Method of Determining Whether Start Bar Is Open or Closed ................................................................ 10
2.9. Output signals of U8 and U9 ................................................................................................................... 11
2.10. Operating Principle of Circuit .................................................................................................................. 12
2.11. Sensor Adjustment Procedure .................................................................................................................. 13
3. Motor Drive Board Ver. 5 ....................................................................................................... 16
3.1. Specifications ........................................................................................................................................... 16
3.2. Circuit Diagram ....................................................................................................................................... 17
3.3. Dimensions .............................................................................................................................................. 18
3.4. External Appearance ................................................................................................................................ 19
3.5. Relationship between the Motor Drive Board Ver. 5 CN2 and the RMC-RX62T Board ......................... 21
3.6. Motor Control .......................................................................................................................................... 22
3.6.1. Role of the Motor Drive Board ................................................................................................... 22
3.6.2. Operating Principle of Speed Control ......................................................................................... 22
3.6.3. Operating Principle of Forward and Reverse .............................................................................. 23
3.6.4. Brake and free ............................................................................................................................. 24
3.6.5. H-bridge circuit ........................................................................................................................... 25
3.6.6. Using FETs as the Switches in an H-Bridge Circuit .................................................................... 25
3.6.7. P-Channel and N-Channel Short FETs Prevention Circuit .......................................................... 29
3.6.8. Free Circuit .................................................................................................................................. 32
3.6.9. Actual Circuit .............................................................................................................................. 33
3.6.10. Operation of Left Motor .............................................................................................................. 35
3.6.11. Operation of Right Motor ............................................................................................................ 35
3.7. Servo Control ........................................................................................................................................... 36
3.7.1. Operating Principle ..................................................................................................................... 36
3.7.2. Circuit .......................................................................................................................................... 37
3.8. LED Control ............................................................................................................................................ 37
3.9. Pushbutton Control .................................................................................................................................. 38
4. Sample Programs .................................................................................................................... 39
4.1. Program Development Environment ....................................................................................................... 39
4.2. Installing the Sample Programs ............................................................................................................... 39
4.3. Opening the kit12_rx62t Workspace ........................................................................................................ 41
4.4. Project ...................................................................................................................................................... 42
II
5. Program Explanation – kit12_rx62t.c ..................................................................................... 43
5.1. Program Code Listing .............................................................................................................................. 43
5.2. Differences between programs for kit07_rx62t.c and kit12_rx62t.c ........................................................ 53
5.3. On-Chip Peripheral Functions of RX62T MCU Used by the Program .................................................... 53
5.4. Program Explanation ............................................................................................................................... 54
5.4.1. Start ............................................................................................................................................. 54
5.4.2. Including External Files .............................................................................................................. 54
5.4.3. Symbol Definitions ..................................................................................................................... 54
5.4.4. Prototype Declarations ................................................................................................................ 56
5.4.5. Global Variable Declarations ....................................................................................................... 57
5.4.6. init Function(Clock Choice) ....................................................................................................... 58
5.4.7. init Function (Port I/O Settings) ................................................................................................. 58
5.4.8. init Function (Compare Match Timer Settings) .......................................................................... 61
5.4.9. init Function (Multi-Function Timer Pulse Unit 3 Settings) ....................................................... 62
5.4.10. Excep_CMT0_CMI0 Function (Interrupt Every 1 ms) ............................................................. 63
5.4.11. timer Function (Pause) ............................................................................................................... 64
5.4.12. sensor_inp Function (Read State of Sensors) ............................................................................. 65
5.4.13. check_crossline Function (Crossline Detection) ........................................................................ 72
5.4.14. check_rightline function (Right Half Line Detection) ............................................................... 74
5.4.15. check_leftline function (Left Half Line Detection) .................................................................... 75
5.4.16. dipsw_get Function (Reading DIP Switches) ............................................................................. 76
5.4.17. buttonsw_get Function (Reading the Pushbutton State in MCU board) .................................... 77
5.4.18. pushsw_get Function (Reading the Pushbutton State) ............................................................... 78
5.4.19. startbar_get Function (Reading the Start Bar Detection Sensor) .............................................. 79
5.4.20. led_out_m Function (LED Control in MCU board) ................................................................... 80
5.4.21. led_out Function (LED Control) ................................................................................................ 81
5.4.22. motor Function (Motor Speed Control) ..................................................................................... 82
5.4.23. handle Function (Servo Steering Operation) .............................................................................. 88
5.4.24. Start ............................................................................................................................................. 90
5.4.25. Patterns ........................................................................................................................................ 91
5.4.26. Writing a Program ....................................................................................................................... 91
5.4.27. Pattern Descriptions .................................................................................................................... 93
5.4.28. Initial while and switch when Using Patterns ............................................................................. 94
5.4.29. Pattern 0: Wait For Button Input ................................................................................................. 95
5.4.30. Pattern 1: Check if Start Bar Is Open .......................................................................................... 97
5.4.31. Pattern 11: Normal Trace............................................................................................................. 99
5.4.32. Pattern 12: Check End of Large Turn to Right .......................................................................... 110
5.4.33. Pattern 13: Check End of Large Turn to Left ............................................................................ 114
5.4.34. Crank Overview ........................................................................................................................ 119
5.4.35. Pattern 21: Processing at 1st Crossline Detection ..................................................................... 120
5.4.36. Pattern 23: Trace, Crank Detection After Crossline .................................................................. 122
5.4.37. Patterns 31 and 32: Clearing from Left Crank .......................................................................... 125
5.4.38. Patterns 41 and 42: Right Crank Clearing Processing ............................................................... 129
5.4.39. Right Lane Change Outline ....................................................................................................... 133
5.4.40. Pattern 51: Processing at 1st Right Half Line Detection ........................................................... 134
5.4.41. Pattern 53: Trace after Right Half Line ..................................................................................... 137
5.4.42. Pattern 54: Right Lane Change End Check ............................................................................... 139
5.4.43. Left Lane Change Outline ......................................................................................................... 141
5.4.44. Processing at 1st Left Half Line Detection ................................................................................ 142
5.4.45. Pattern 63: Trace after Left Half Line ....................................................................................... 145
III
5.4.46. Pattern 64: Left Lane Change End Check ................................................................................. 147
6. Adjusting the Servo Center and Maximum Turn Angle ....................................................... 149
6.1. Outline ................................................................................................................................................... 149
6.2. Install the communication program Tera Term ...................................................................................... 150
6.3. Adjusting the Servo Center .................................................................................................................... 154
6.4. Determining the Maximum Turning Angle of the Servo ....................................................................... 162
6.5. Overwriting the kit12_62t.c Program Code ........................................................................................... 168
7. Hints on Modifying the Program .......................................................................................... 170
7.1. Outline ................................................................................................................................................... 170
7.2. Examples of the MCU Car Going Off the Track ................................................................................... 171
7.2.1. Crossline Not Detected Correctly .............................................................................................. 171
7.2.2. Crank Not Detected Correctly ................................................................................................... 172
7.2.3. Half Line Not Detected Correctly ............................................................................................. 174
7.2.4.
After Clearing from Crank, MCU Car Mistakes Outer White Line for Center Line and Goes off Track
.. 175
7.2.5. End of Lane Change Not Detected Correctly ............................................................................ 178
7.3. Conclusion ............................................................................................................................................. 179
8. Calculating the Left-Right Motor Speed Differential ........................................................... 180
8.1. Calculation Method ................................................................................................................................ 180
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
1
1. Overview of MCU Car Rally Kit Ver. 5.1
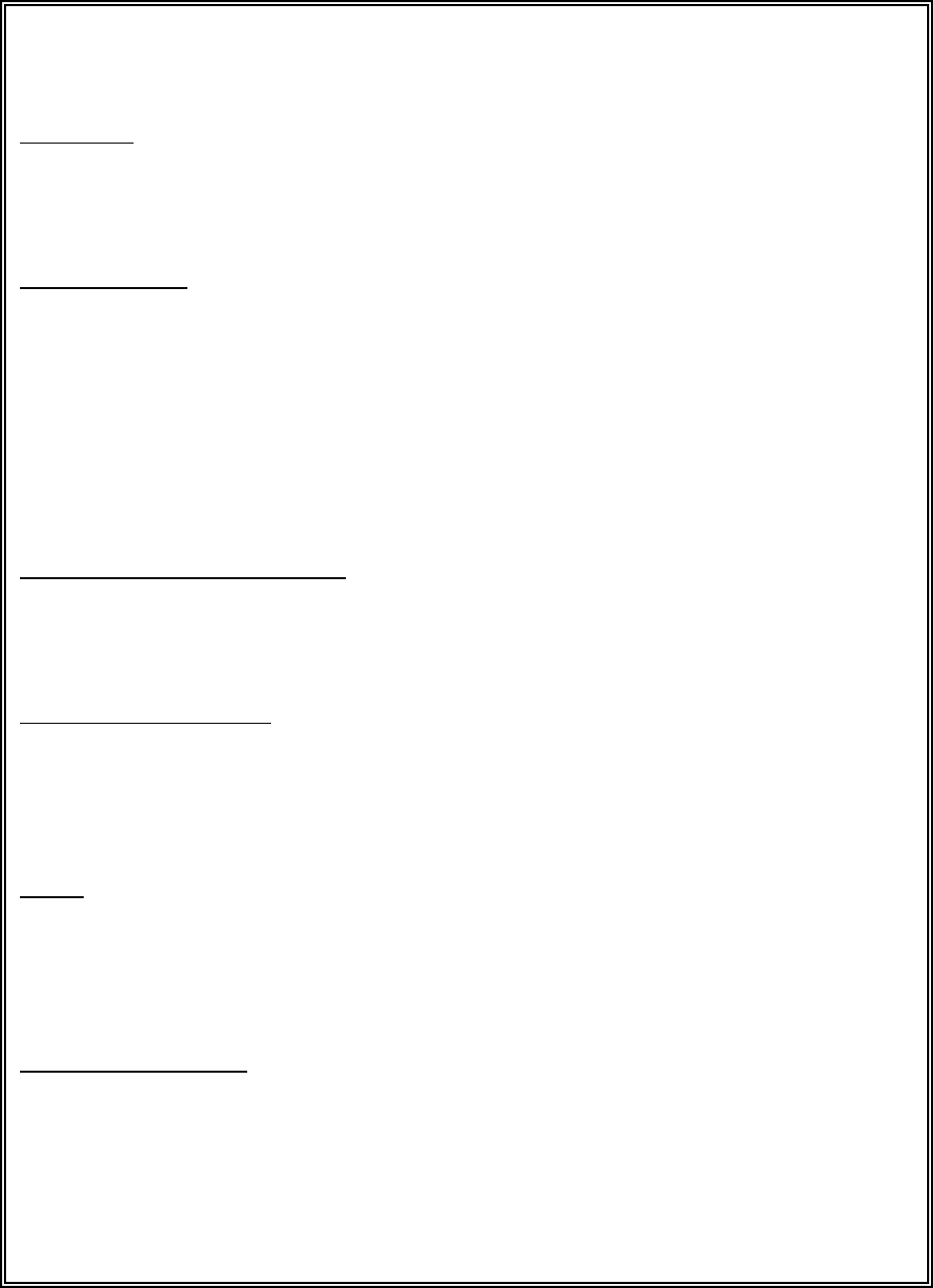
1.1. Exterior View of MCU Car Rally Kit Ver. 5.1
Left rear wheel
Sensor board Ver. 5
Flat cable B
Motor drive board Ver. 5
Right motor
Left motor
Control battery box
Drive battery box
Servo
Right rear wheel
Right front wheel
Left front wheel
RMC-RX62T MCU board
Drive power supply switch
Control power supply switch
Flat cable A
The MCU Car Rally Kit Ver. 5.1, comprises a control system consisting of the RMC-RX62T board (a MCU board
with an RX62T MCU mounted on it), the sensor board Ver. 5, and the motor drive board Ver. 5, and a drive system
consisting of the right motor, the left motor, and the servo.
Right motor
Left motor
Sensor board Ver. 5
8-bit
RMC-RX62T
MCU board
Motor drive board
Ver.5
8-bit
Servo
Port 4
Port 7
(bit 0 to 6)
Port 0
(bit 0)
SW
LED2
LED3
Flat
cable
A
8 sensors for monitoring the course
1 sensor for monitoring the start bar
CN2
CN3
Flat
cable
B
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
2
RMC-RX62T
MCU board
The MCU board reads the state of the sensors via port 4, calculates the PWM output values for
the right and left motors and the turn angle for the servo, and outputs this data to the motor
drive board connected to port 7. The manner in which output values for the motors and servo
are decided, based on the state of the sensors, is determined by the software program.
Sensor board
Ver. 5
8 sensors which detect state of the course are here. They output “0” if bottom of the sensor is
white, and output “1” if it is black.
※The program inverts the signal, and it judges white is “1” and black is “0”.
There is one sensor which detects if there is the start bar or not. It outputs “0” if the start bar is
present, and output “1” if it is absent.
※The rightmost course state detection sensor and start bar detection sensor have an OR
relationship connected to bit 0. The rightmost sensor is initially not responding because only
the middle of the board should be able to detect the start line, leaving the board able to judge
the state of the start bar. After the start, the board does not to look for the start bar and therefore
can instead detect the track using the rightmost sensor on the board’s underside.
Motor drive
board Ver. 5
The motor drive board converts low-power signals from the MCU board into high-power
signals that operate the motors. The motor power supply is also used to drive the servo.
A pushbutton is connected to the motor drive board, and the software program is written such
that pressing this button starts the MCU car. There are also two LEDs mounted on the motor
drive board for debugging.
Batteries
Control (MCU) power supply: Four size AA rechargeable batteries (1.2 V × 4 = 4.8 V) are
used.
Drive (motor and servo) power supply: Four size AA rechargeable batteries or four size AA
alkaline batteries (1.5 V × 4 = 6.0 V) are used.
Note: Ensure that the voltage of the control system is 4.0 V to 5.5 V.
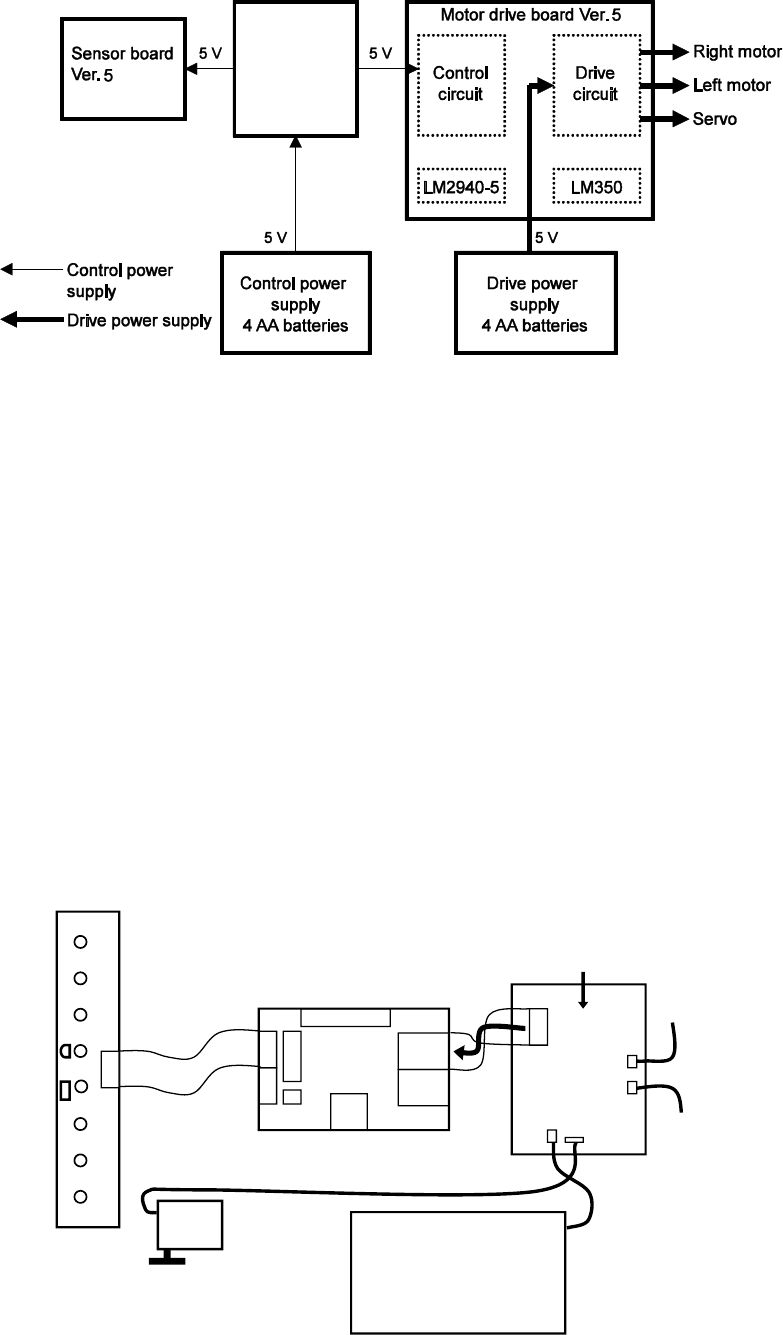
1.2. Power Supply Configuration of Standard Kit
The standard kit uses separate power supplies for the control and drive blocks. This ensures that the MCU will not
be reset due to low power no matter how much current the motors and servo consume.
The power supply configuration of the standard kit is shown below.
Right motor
Left motor
5 V
5 V
Control power
supply of MCU,
sensor, and motor
drive boards
4 AA batteries
Drive power
supply for right
and left motors
and servo
4 AA batteries
5 V
5 V
Sensor board
Ver. 5
Motor drive
board Ver. 5
7
6
5
2
1
0
3
0
RMC-RX62T
MCU board
P9
Servo
5 V
P4
PB
micro
SD
P7
and
P0
4
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
3
The flow of current from the power supplies is shown below.
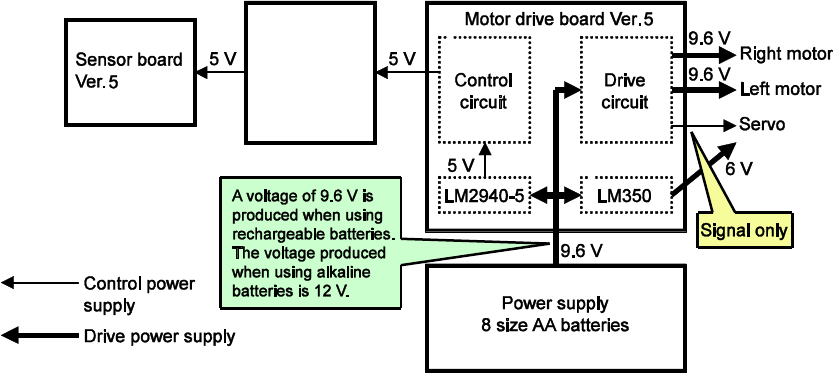
1.3. Power Supply Configuration with Boosted Drive Voltage
It is possible to increase the speed of the motors by boosting the drive voltage (increasing the number of batteries).
Using six batteries as the motor power supply increases the voltage to 7.2 V, and using eight batteries increases it
to 9.6 V. Note, however, that the maximum number of batteries allowed is eight. This means it is necessary for the
control and drive blocks to use a common power supply. Applying a voltage of 9.6 V to the motors will not wreck
them (though it is not really desirable, since their rated voltage is 6 V), but the MCU has a guaranteed
operating voltage range of 4.0 V to 5.5 V and applying a voltage exceeding 5.5 V will cause it to stop
operating. (The absolute maximum voltage rating is 6.5 V. Applying a voltage in excess of 6.5 V will destroy
the MCU.) In like manner, the voltage applied to the servo must not exceed 6 V. It is therefore necessary to
install a three-pin regulator to bring the MCU and servo voltage down to the rated level. Note that when a
common power supply is used, the MCU will be reset if the voltage drops below 4.0 V due to large current
consumption by the motors, etc. It is necessary to be careful regarding MCU resets when using a common power
supply.
When the LM350 add-on set is installed and a power supply voltage of 6 V or greater is used, the LM2940-5
generates a 5 V voltage for the control block, including the MCU, and the LM350 generates a 6 V voltage for the
servo.
Right motor
Left motor
9.6 V
9.6 V
Sensor board
Ver.5
RMC-RX62T
MCU board
Motor drive board
Ver.5
P9
P7
and
P0
7
6
5
2
1
0
4
0
5 V control power supply and 6 V
servo power supply generated by
3-pin regulator
LM350 add-on set
+
5.0 V
9.6 V
Common power supply
8 batteries
Servo
6 V
P4
PB
3
RMC-RX62T
MCU board
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
4
The flow of current from the power supplies is shown below.
Note: The springs in the battery box of the kit are weak, and this can cause the battery terminals to become
disconnected from the battery box contacts when the MCU car accelerates or decelerates. This can reset the
MCU (due to a disconnection of several tens of milliseconds). This problem can be prevented by using a
battery box that holds the batteries firmly in place.
RMC-RX62T
MCU board
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
5
2. Sensor Board Ver. 5
2.1. Specifications
The specifications of the sensor board Ver. 5 are shown below.
Name
Sensor Board Ver. 5
Abbreviation
Sensor Board 5
Contained in kit
MCU car kit Ver. 5.1
Date released for sale
Jun 2013 (Still available as of September 2013.)
Number of boards
1
Number of sensors for monitoring course
8
Number of sensors for monitoring start bar
1
Signal inverter circuit
None (inversion performed by software program)
Connections to MCU board
RX62T: Port4
Voltage
DC5.0 V ±10%
Weight (actual measured weight of completed board)
Approx. 18 g
Resist (board colour)
Black
Board dimensions
W 140 × D 38 × T 1.2 mm
Dimensions (actual measured dimensions)
Max. W 140 × D 38 × H 14 mm
Note: The weight will vary depending on factors such as the length of the lead wires and the amount of solder
used.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
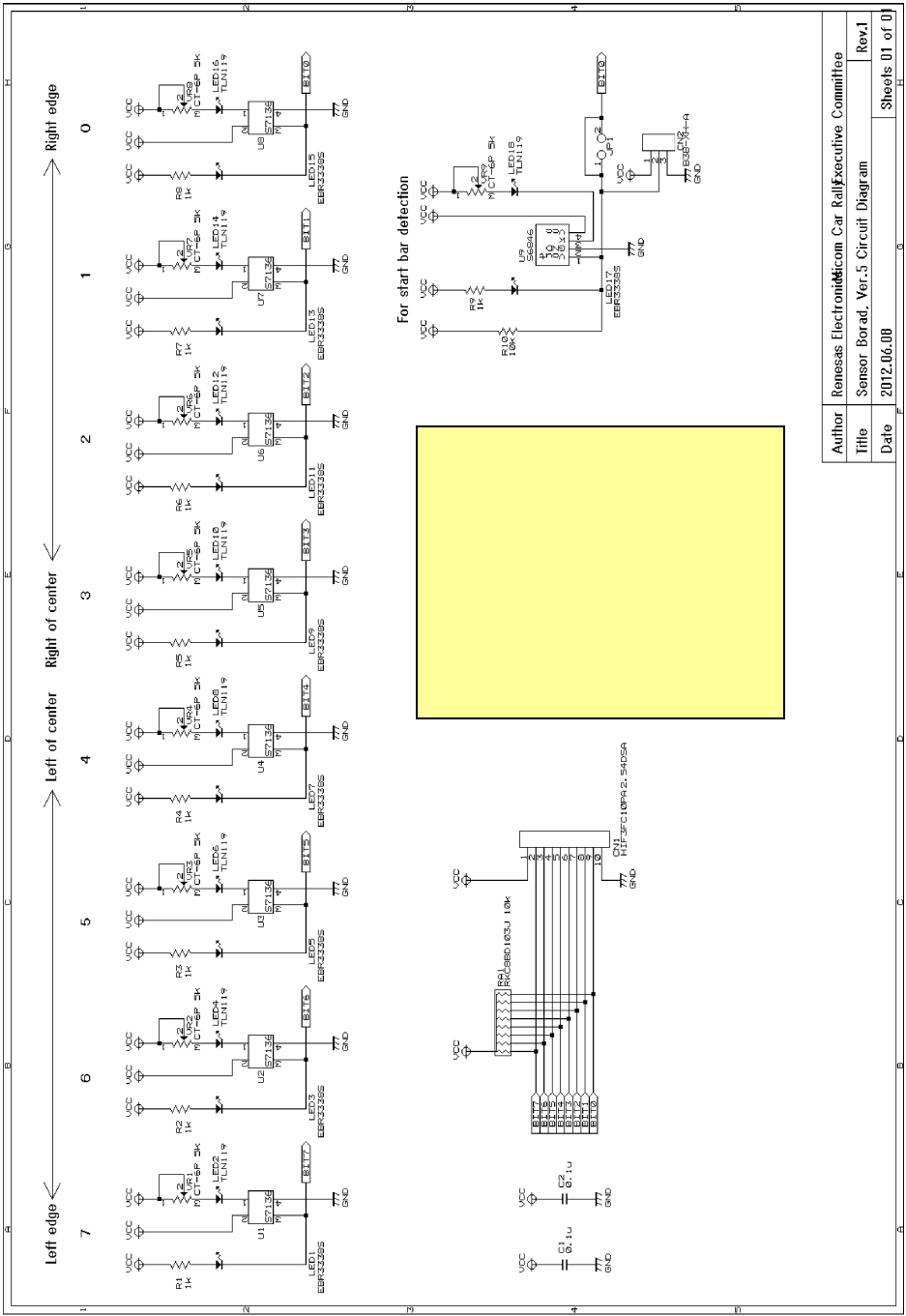
6
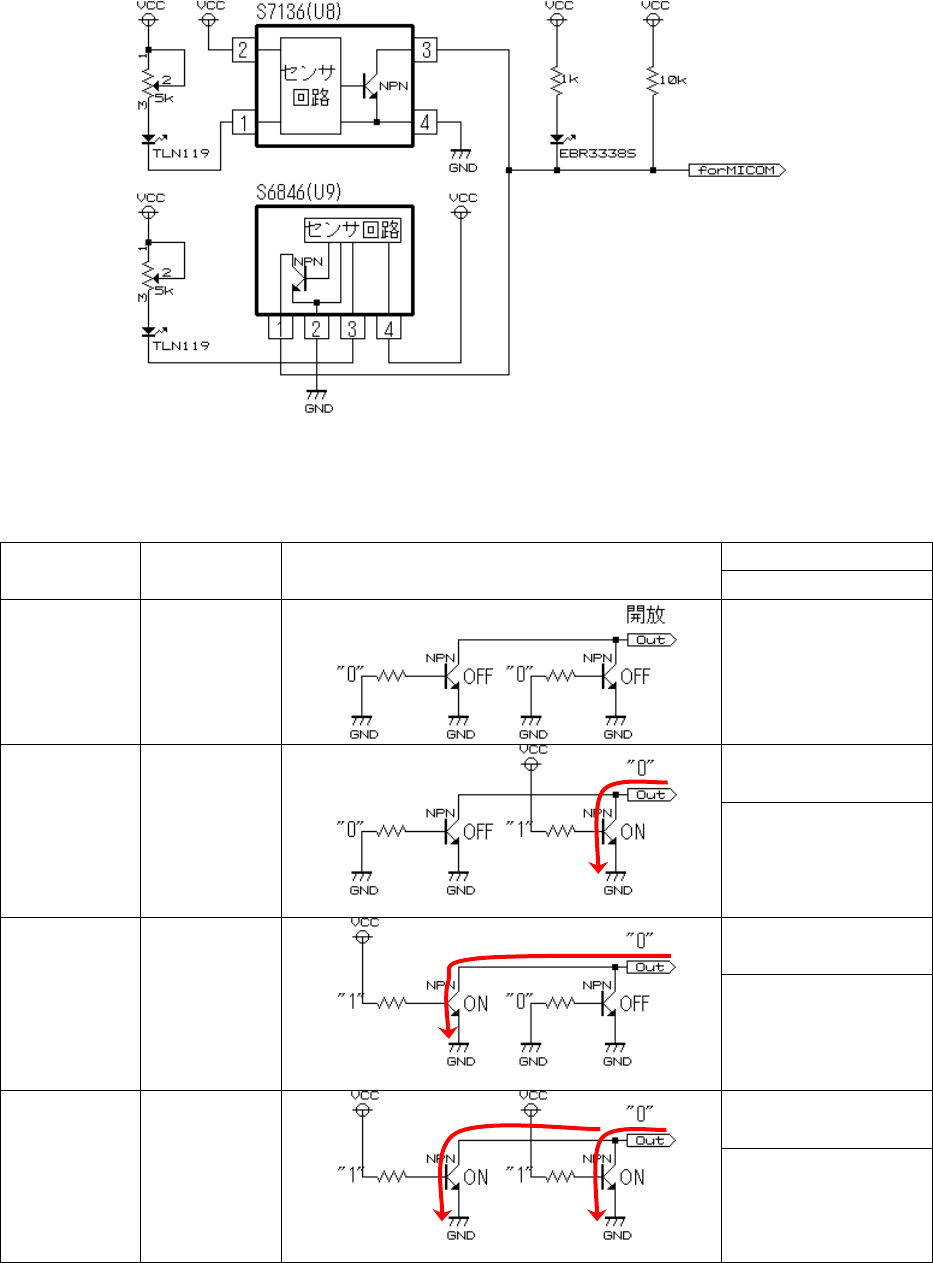
2.2. Circuit Diagram
The 9th pin of CN1 doubles as below.
・Detect the color of the course at
rightmost
・Detect the start bar
It used for whether there is a start bar
before start, and used for detection of
the color of the course after start. It is
unknown which sensor reacts by this
circuit.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
7
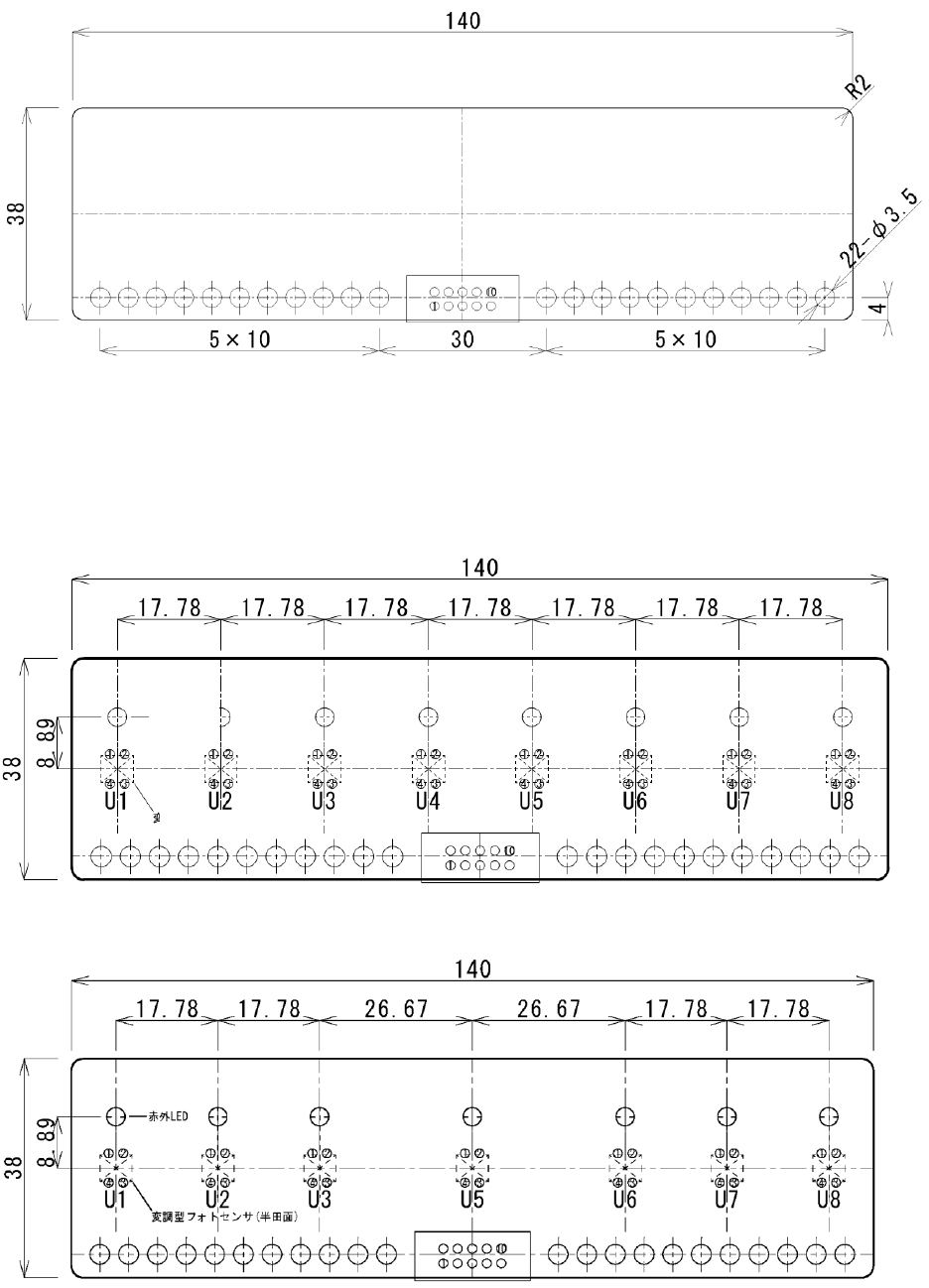
2.3. Dimensions
The sensor board has a total of 22 mounting holes, 11 on the right and 11 on the left. These holes are used to
secure the sensor board in place.
2.4. Sensor Mounting Positions
Eight sensors are used to detect the black and white portions of the course. These are mounted on the board in the
positions indicated below.
Note: Sensor mounting positions on sensor board Ver.5 for reference
Infrared LED
Modulation-type photosensor
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
8
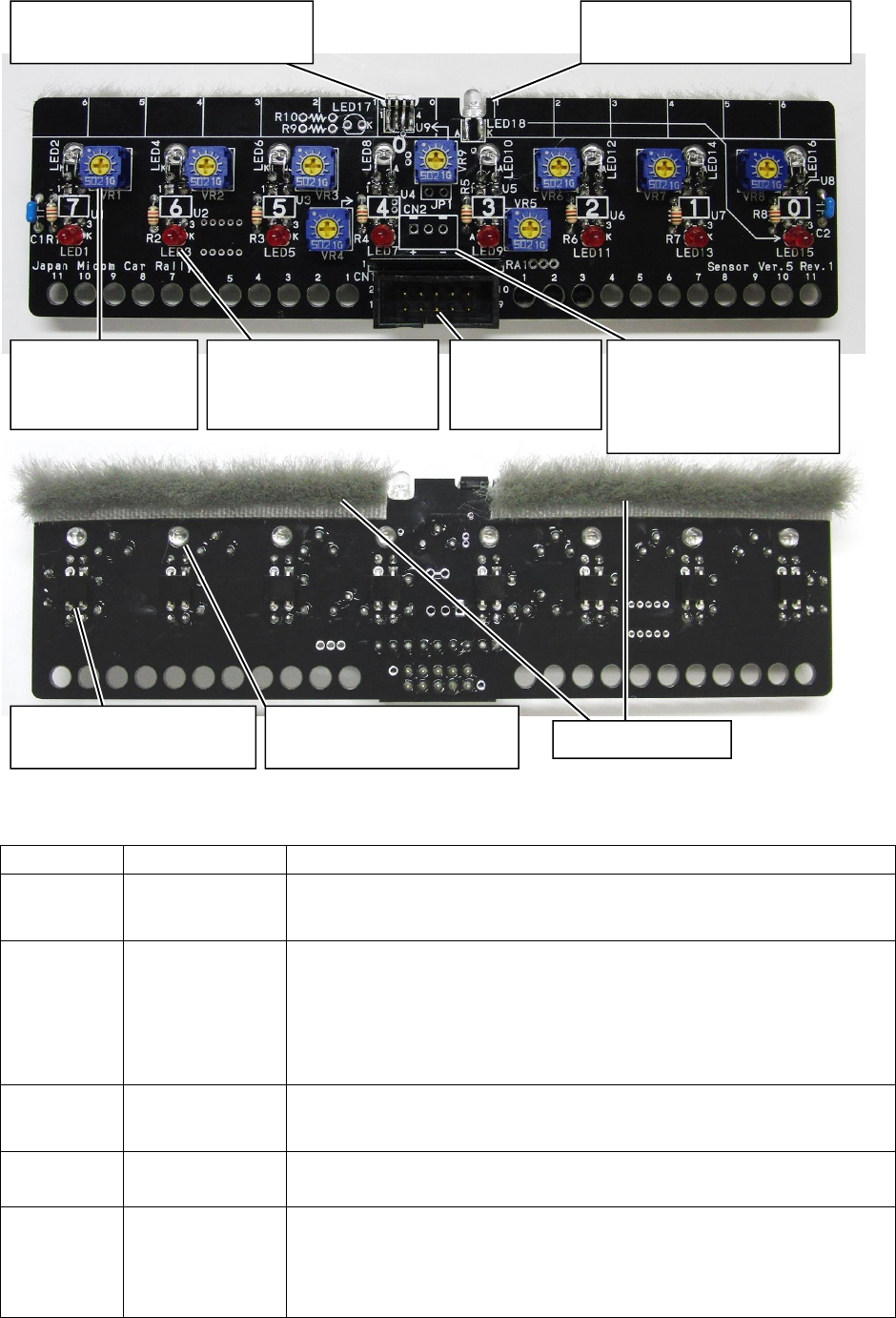
2.5. Exterior View
Front of board
VR 1,2,3,4,5,6,7,8,9
Volume for setting
sensor sensitivity
LED 1,3,5,7,9,11,13,15,17
LED for confirming of
sensor sensitivity
CN1
Connector for sensor
signal outputs
Back of board
U 1,2,3,4,5,6,7,8
Modulation type photsensor (for course)
LED 2,4,6,8,10,12,14,16
Infrared LED (for course)
U9
Modulation type photosensor (for start bar)
LED18
Infrared LED (for start bar)
1
2
9
10
CN2
Connector for output of sensor
signal of detect start bar.
(It needs pattern cut for use)
Polyester pile tape
T
he following shows the connection of connectors and the content of signals:
Parts number
Item
Description
CN1
Connector
(connect to
MCU board)
Item reference
CN2
Connector
(option)
The signal of rightmost of the course state detection sensor doubles as the
signal of the start bar detection sensor. It can let CN2 become independent
and output the signal of the start bar detection sensor.
In addition, it needs to implement the parts (R9, R10, LED17) to let the start
bar detection sensor become independent.
For more details, refer to Sensor Board Ver.5 Assembly Manual.
LED2,4,6,8,
10,12,14,16
Infrared LED
The TLN119 element is used. It emits infrared light. Since the light emitted
is in the infrared range, it is not visible to humans. There are eight infrared
LEDs for course detection.
LED18
Infrared LED
The TLN119 element is used. There is an infrared LED for start bar
detection..
U1,2,3,4,
5,6,7,8
Modulation type
photosensor
The S7136 element (for course) from Hamamatsu Photonics K.K. is used.
Light emitted by the infrared LED is picked up by this element. When
infrared light is detected, the current portion of the course is determined to
be white. When no infrared light is detected, the current portion of the course
is determined to be black. There are eight modulation type photosensors.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
9
U9
Modulation type
photosensor
The S6846 element (for start bar) from Hamamatsu Photonics K.K. is used.
Light emitted by the infrared LED is picked up by this element. When
infrared light is detected, it is determined that there is a start bar present.
When no infrared light is detected, it determined that there is no start bar
present.
VR1,2,3,4,
5,6,7,8
Volume for
adjusting sensor
sensitivity
(for course)
The amounts of light output from infrared LEDs are adjusted in these
volumes. Some portions of the MCU car course are grey. By adjusting the
sensitivity with the volume, it is possible to make the grey areas be detected
as white or as black. The standard software program assumes that grey areas
will be detected as white.
VR9
Volume for
adjusting sensor
sensitivity
(for start bar)
The amount of light output from LED18 is adjusted using these volumes. If
there is a start bar, it becomes white. If there is not a start bar, there will be
no reflection. Adjust this volume to react (for turn lights LED15) when there
is a start bar.
LED1,3,5,7,
9,11,13,15
LED for
confirming sensor
sensitivity
The LED lights when white is detected and is dark when black is detected.
The LED is used for confirmation when adjusting the sensitivity with the
variable resistor.
-
Polyester pile tape
Polyester pile tape is mounted on the solder side of the sensor board and is
made a constant height so as to not rub the course and the sensor directly and
also to allow the sensor to react appropriately.
2.6. Relationship between the Sensor Board Ver.5 CN1 and the RMC-RX62T Board
The Sensor Board Ver. 5 connector CN1 and the RMC-RX62T board connector CN2 (port 4) must be connected
with a 10-pin flat cable. The following table lists the signals carried by this cable.
RMC-RX62T
Board CN2
Signal
Direction
Motor Driver
Board Ver.5 CN1
Description
Pin 1 (+5V)
-
Pin 1
It provides +5V±10%(4.5~5.5V) to the circuits of the Sensor
Board Ver.5.
Pin 2 (P47)
←
Pin 2
Inputs a signal from U1 (The first sensor from left)
"0":White (LED1 on) "1":Black (LED1 off)
Pin 3(P46)
←
Pin 3
Inputs a signal from U2(The second sensor from left)
"0":White (LED3 on) "1":Black (LED3 off)
Pin 4(P45)
←
Pin 4
Inputs a signal from U3 (The third sensor from left)
"0":White (LED5 on) "1":Black (LED5 off)
Pin 5(P44)
←
Pin 5
Inputs a signal from U4 (The fourth sensor from left)
"0":White (LED7 on) "1":Black (LED7 off)
Pin 6(P43)
←
Pin 6
Inputs a signal from U5 (The fourth sensor from right)
"0":White (LED9 on) "1":Black (LED9 off)
Pin 7(P42)
←
Pin 7
Inputs a signal from U6(The third sensor from right)
"0":White (LED11 on) "1":Black (LED11 off)
Pin 8(P41)
←
Pin 8
Inputs a signal from U7(The second sensor from right)
"0":White (LED13 on) "1":Black (LED13 off)
Pin 9 (P40)
←
Pin 9
Inputs a signal from U8(The first sensor from right) and a signal
from U9(Sensor which detect start bar).
"0":White (LED15 on) "1":Black (LED15 off)
or
"0":There is start bar (LED15 on) "1":none (LED15 off).
Because the car initially sits on the middle of the course, U8 (The
first sensor from right) detects black at the start. The data from U9
(start bar) is then checked. After the start the start bar will not be
present and the activity of U8(course) is used.
Pin10 (GND)
-
Pin 10
GND
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
10
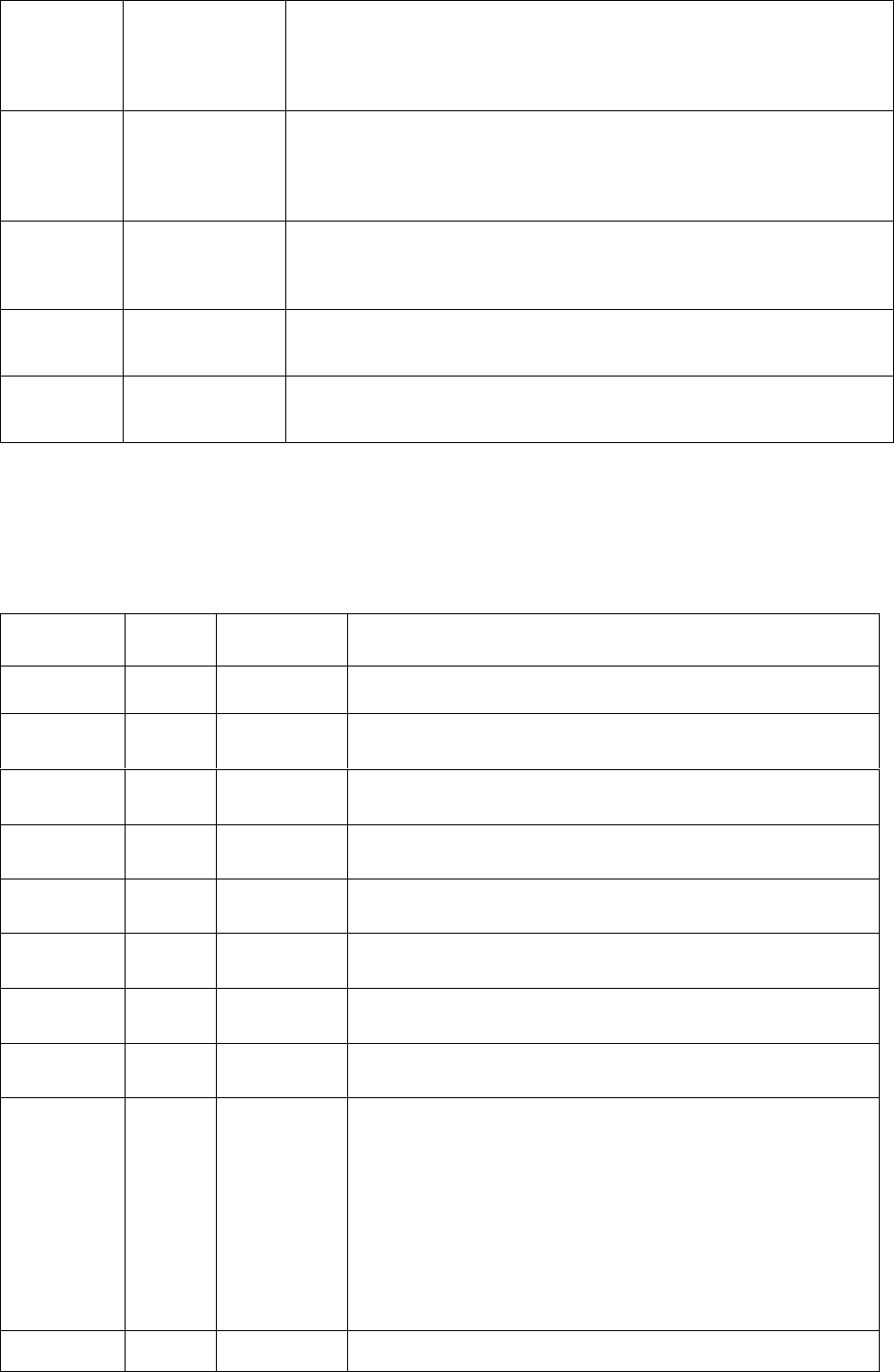
2.7. Method of Distinguishing Between White and Black Portions of the Course
The sensor board is equipped with eight pairs of elements, each pair comprising one element that shines infrared
light onto the course and one element that detects reflected infrared light. The system makes use of the fact that
white areas reflect light and black areas absorb it. The emitter element is used to shine infrared light onto the
course. When this infrared light is reflected back and detected by the receiver element, the current portion of the
course is determined to be white. When no infrared light is detected, the current portion of the course is
determined to be black.
The amount of infrared light emitted can be adjusted by using a variable resistor. Some portions of the MCU car
course are grey. By adjusting the sensitivity with the variable resistor, it is possible to make the grey areas be
detected as white or as black. The standard software program assumes that grey areas will be detected as
white.
2.8. Method of Determining Whether Start Bar Is Open or Closed
Initially, the white start bar is closed. An infrared LED and S6846 (modulation type photo sensor) are mounted on
the board facing forward. The following is determined based on the sensor state.
●Start bar closed
Light is reflected
↓
Start bar is there
Light receiving element
Light emitting element
On
Sensitivity setting
●Start bar open
No light is reflected
↓
No start bar there
Off
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
11
2.9. Output signals of U8 and U9
Output of sensor is open collector output, and connects NPN type transistor (type 2SC ). Pin 9 of CN1 doubles as
output of the sensor which detects the rightmost course sensor (U8) and the sensor which detects the start bar, as in
the circuit below.
The behaviour of 2 sensors and output signals are as shown below.
Sensor which
detect the course
Sensor which
detect the start bar
Circuit
Output
Mind
Black
absent
open
(High impedance)
In fact, it outputs 5V
after being pulled up.
Black
present
0V
The start bar
detection sensor is
judged to be present if
it is 0V before start.
White
absent
0V
The course state
detection judges the
surface to be white if
it is 0V
after start.
White
present
0V
Never both states – OR
system.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
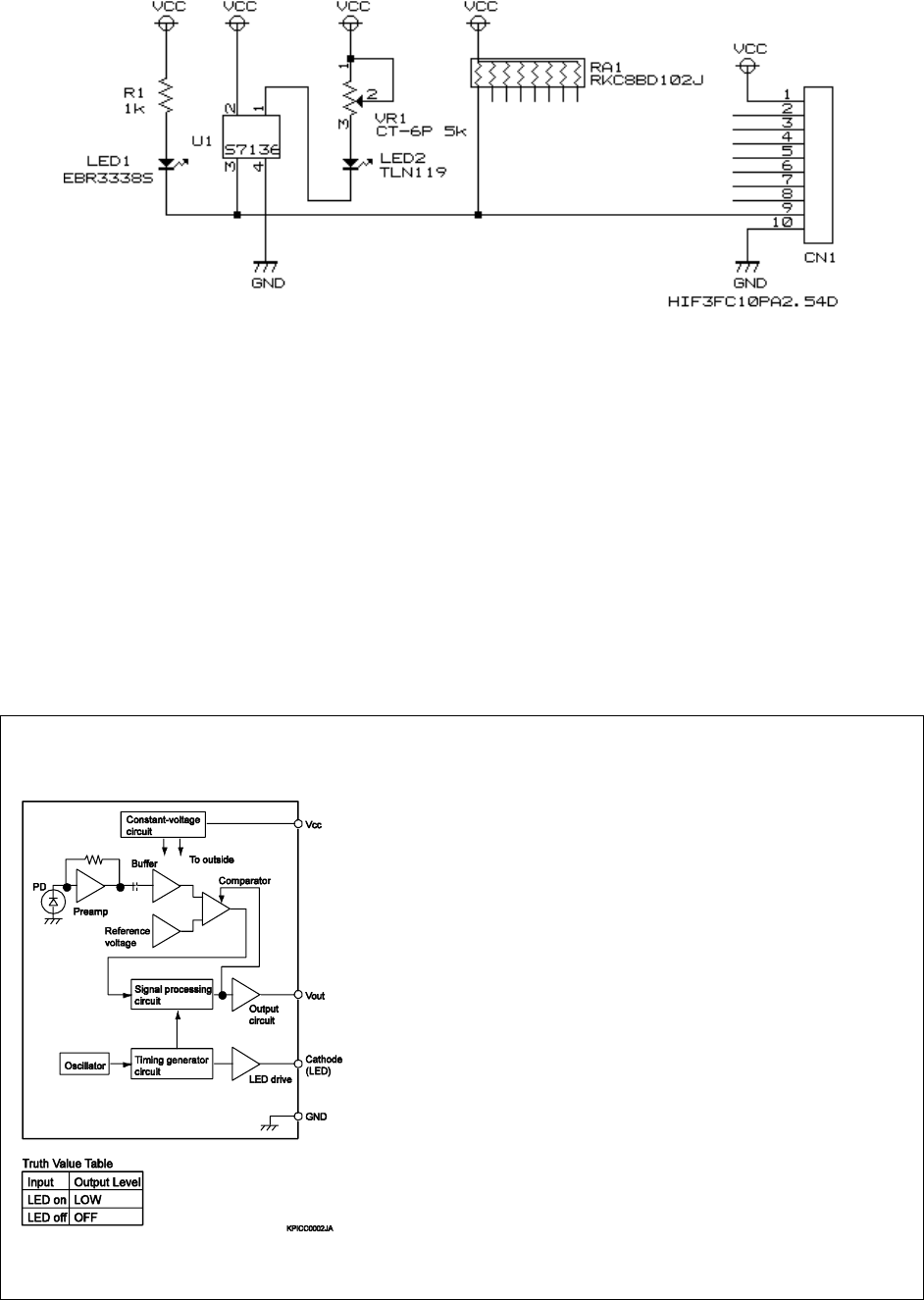
12
2.10. Operating Principle of Circuit
1. U1 is a photo sensor. It combines a light receiver and an infrared LED oscillator circuit.
2. Pin 1 of U1 is connected to an infrared LED (LED2). The infrared light emitted by LED2 is received by U1.
VR1 is used to adjust the brightness of the infrared LED.
3. The signal indicating whether or not infrared light is being received is output on pin 3 of U1. This pin is
connected to an LED (LED1), providing a visual confirmation of whether the signal value is 0 or 1.
4. When light from the infrared LED reaches U1 (course white), 0 is output. The anode of the LED is positive
and the cathode is negative, causing the LED to light.
5. When no light from the infrared LED reaches U1 (course black), 1 is output. (See below for details.) The
anode of the LED is positive and the cathode is also positive, so the LED is dark.
6. It is stated above that 1 is output when no light reaches U1, but in fact pin 3 of U1 is an open collector output.
“Open collector output” means a value of 0 = 0 V and any other value is open, a state in which the pin is not
connected to anything. In the digital world, there are no values other than 0 and 1. Therefore, a resistor (RA1)
is used to pull up the signal, resulting in a value of 1 when the photosensor is open.
Note: Operating Principle of Modulation Type Photosensor (S7136) for Reference
(from the Product Data Sheet)
(a) Oscillator and Timing Signal Generator Circuit
The reference oscillator output is obtained by charging and discharging the built-in
capacitor with a constant current. The oscillator output is input to the timing signal
generator circuit, which produces the LED drive pulses and the timing pulses used
for digital signal processing.
(b) LED Drive Circuit
This circuit uses the LED drive pulses produced by the timing signal generator circuit
to drive a light emitting diode. The drive duty ratio is 1/16.
(c) Photodiode and Preamp Circuit
The photodiode is of the on-chip type. The photoelectric current from the photodiode
is converted into a voltage by the preamp circuit. An independent AC amplifier circuit
is used as the preamp circuit. In addition to expanding the dynamic range through
increased tolerance for DC and low-frequency ambient light, it boosts the signal
detection sensitivity.
(d) C-Coupling, Buffer Amplifier, and Reference Voltage Circuit
A C-coupling is used to further remove the effects of low-frequency ambient light and
to eliminate the DC offset from the preamp. The signal is boosted to the comparator
level by the buffer amplifier, and the comparator-level signal is generated by the
reference voltage circuit.
(e) Comparator Circuit
The comparator circuit has an added hysteresis function to prevent chattering
caused by tiny fluctuations in the input light.
(f) Signal Processing Circuit
The signal processing circuit comprises a gate circuit and a digital integrating circuit.
The gate circuit prevents malfunctions due to non-synchronous ambient light by
distinguishing the input signal during synchronous detection. Since the gate circuit
cannot eliminate synchronous ambient light, the digital integrating circuit does so at
a later stage.
(g) Output Circuit
This circuit buffers the output from the signal processing circuit and outputs it
externally.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
13
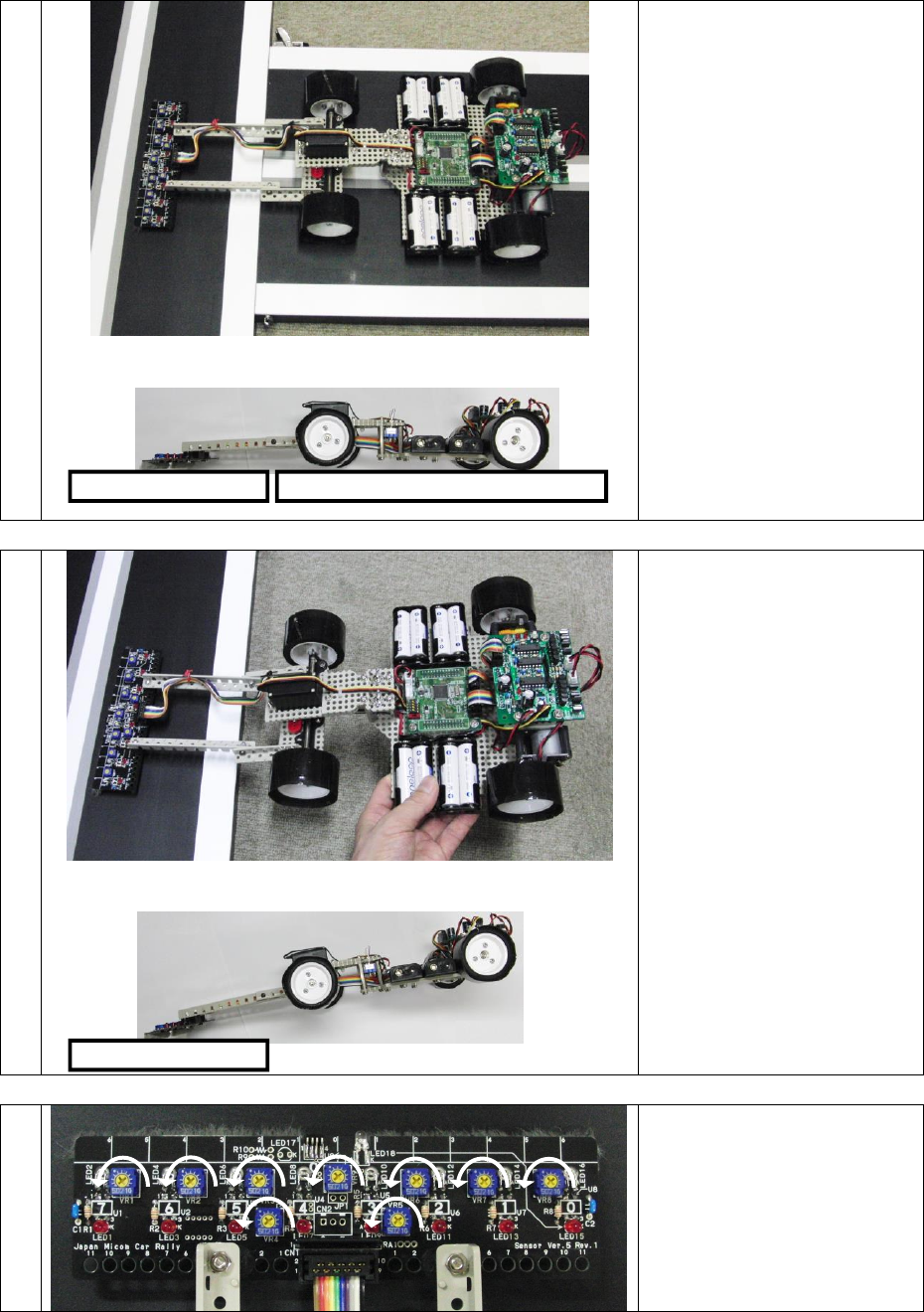
2.11. Sensor Adjustment Procedure
1
※View from side
As shown in the photo, place the
MCU car such that the edge of
the sensor board is parallel with
the grey line at the centre of the
track. Place the MCU car on a
surface that is the same level as
the track, just as if it was
running on the course.
2
※View from side
If you try to adjust the sensors by
holding the MCU car in your
hand as shown here, the results
will not be satisfactory because
of the unevenness of the gap
between the sensors and the
track surface. Make sure to
place the MCU car on a
surface that is the same level as
the track
3
Turn all nine of the variable
resistors all the way
counter clockwise.
NO!
NO!

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
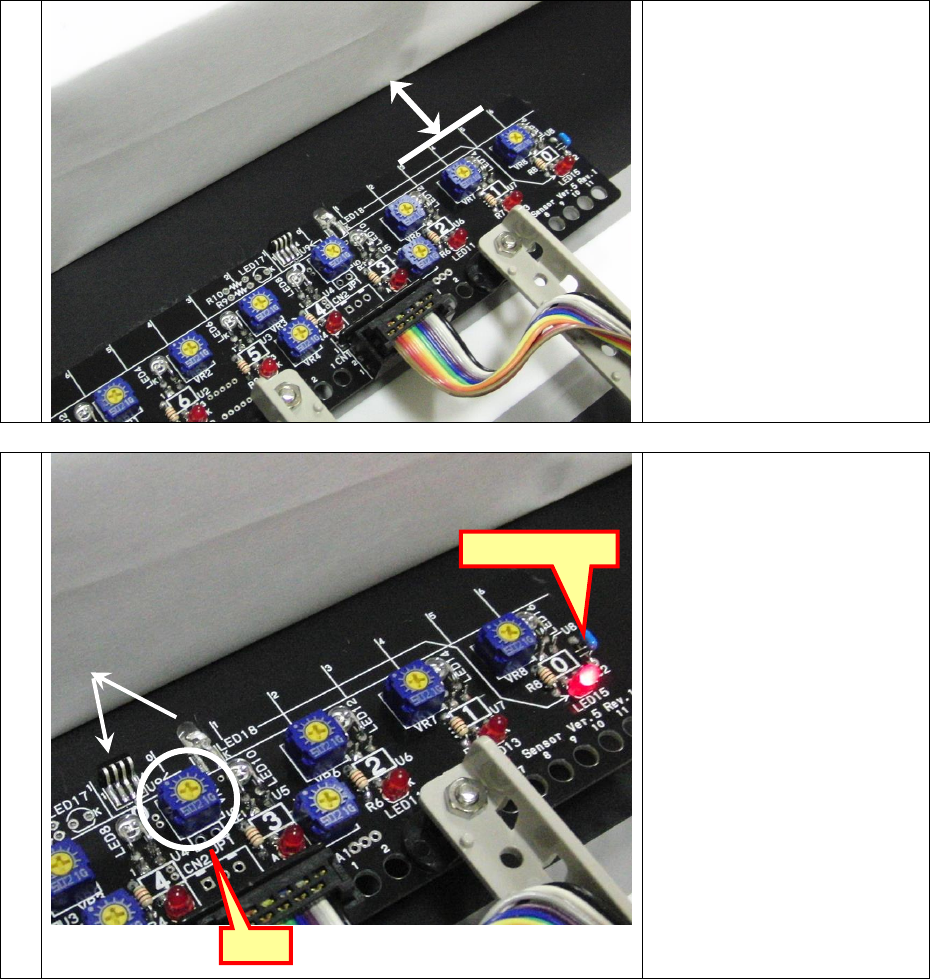
14
4
Align the horizontal line on the
board with the line where the
white and grey stripes on the
track meet. Look straight down
from above when doing the
alignment.
5
Turn each of the eight variable
resistors clockwise until the
corresponding LED lights. Turn
each variable resistor slowly
and stop turning the moment
the LED lights. Next, adjust the
variable resistors so that the
sensors also react to the grey
stripe. The MCU car kit
should be adjusted so the
sensors react to both the white
and grey stripes.
6
Move the sensors back slightly.
The LEDs should all go dark.
7
Once again, slowly move the
sensors in parallel toward the
grey stripe. If one of the LEDs
lights before the others, lower its
sensitivity (turn the variable
resistor counter clockwise). If an
LED does not light, increase its
sensitivity (turn the variable
resistor clockwise). Repeat the
adjustments several times until
all the LEDs light at about the
same time.
VR9 is for start bar. We do not adjust it now
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
15
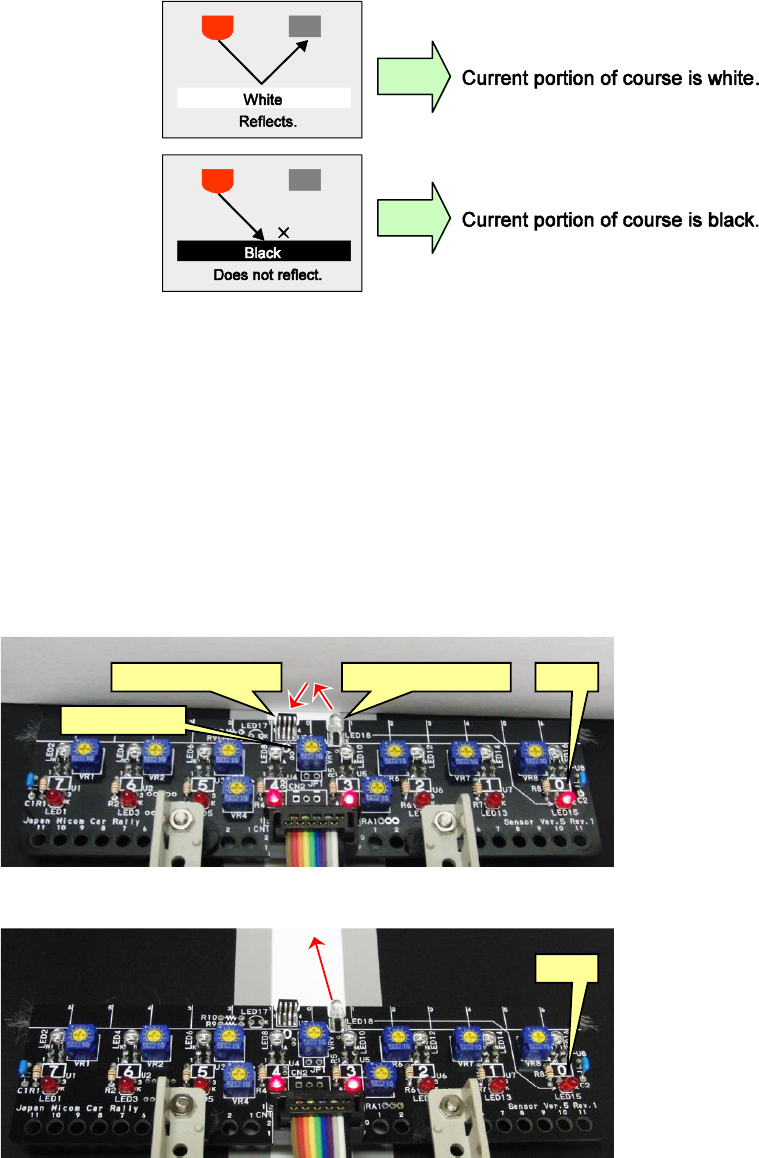
8
Next, we will adjust the sensor
that detects the start bar.
Stand a vertical white panel or
sheet of paper several
centimetres away from the front
of the sensor board. This white
panel or sheet of paper will be a
substitute for the start bar.
Confirm that under the
rightmost sensor which detects
the course is black and LED15
is off at that time.
9
Slowly turn VR9, indicated by
the circle ○, clockwise until
LED15 lights and then stop
turning it.
Adjust that under LED 15 is
black because it doubles as the
rightmost of the course state
sensor .
If the LED goes dark when the
white panel or sheet of paper is
removed, the adjustment is
complete.
Approx. 1cm
LED of bit 0 ON
VR9
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
16
3. Motor Drive Board Ver. 5
3.1. Specifications
The table below lists the specifications of the motor driver board Ver. 5.
Motor Drive Board Ver. 5
Abbreviation
Drive board 5
Number of components
Components with leads: 66
The component lead pitches are 2.54 mm or greater
Connection to the RMC-RX62T board
Connection using port 7 and bit 0 of port 1
Motors controlled
Two motors (the left and right motors)
Servos controlled
One motor
LEDs turned on/off under program control
Two motors
Pushbutton switches
One switch
Control system voltage
(voltage that can be applied to CN2)
DC5.0 V 10 %
Drive system voltage
(voltage that can be applied to CN1)
4.5 to 5.5 V or 7 to 15 V
Note, however, that if 7 V or higher is used the voltages applied to
the microcontroller board and servo board must be limited to 5 V
and 6 V respectively with the LM350 Add-On Set.
Servo and motor control period
Motor: 16 ms, Servo: 16 ms
Individual setting of these values is not possible.
Motor free-running control
Supported by the addition of the Free-Running Add-On Set.
Note: There are two motor stop modes: Brake and Free.
See the sections on the Free-Running Add-On Set
for details.
Board dimensions
80 × 65 × 1.6 mm (W × D × T)
Dimensions when completed (actual
dimensions)
80 × 65 × 20 mm (W × D × H)
Weight
About 33 g
Note: The weight varies with the length of the lead wires
and the amount of solder used.
Standard software
RX62T microcontroller: kit12_rx62t.c
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
17
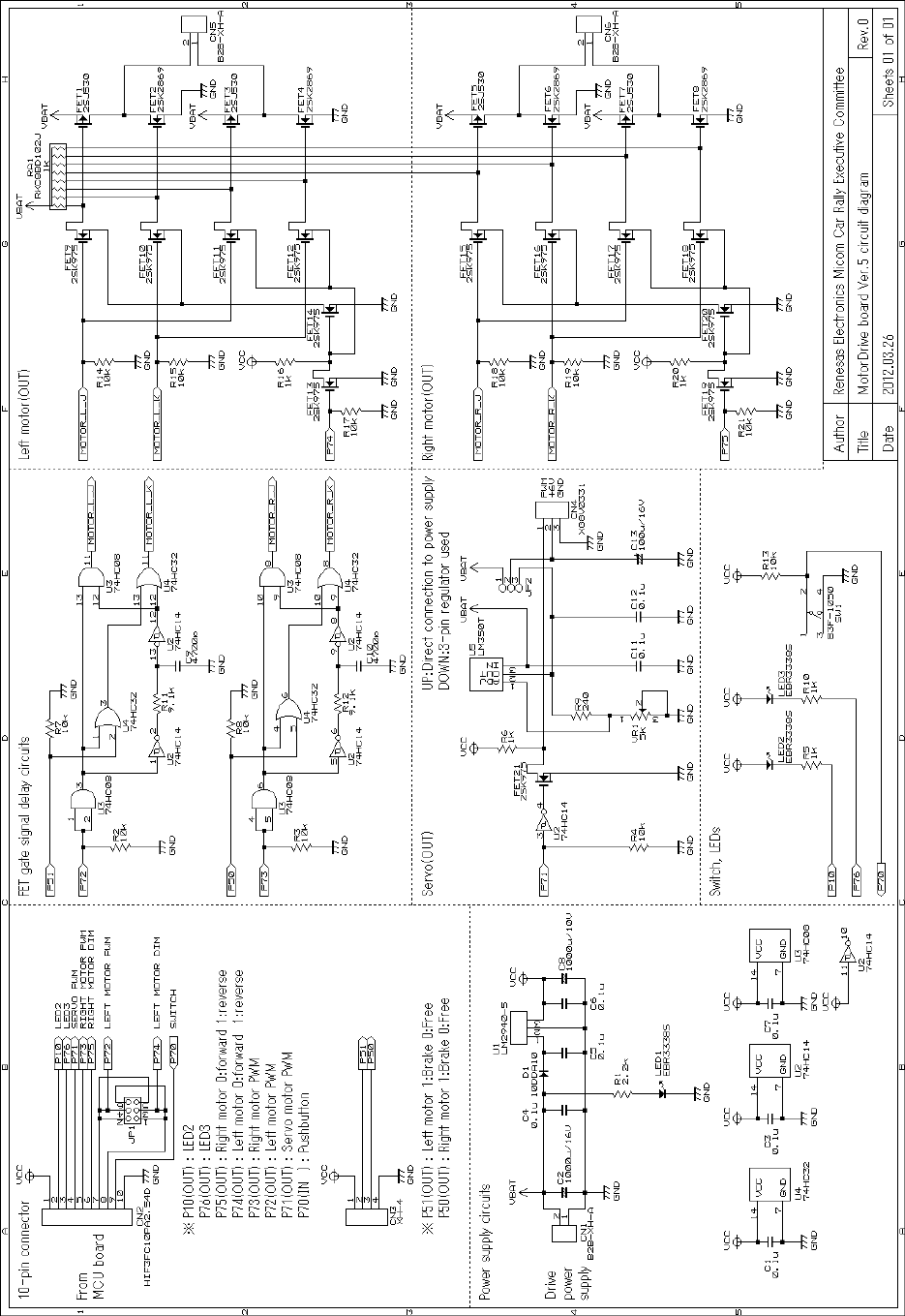
3.2. Circuit Diagram
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
18
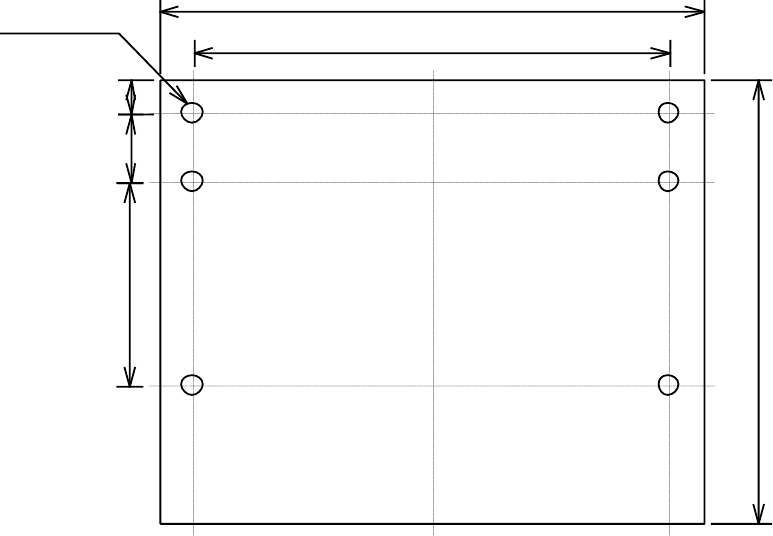
3.3. Dimensions
The motor drive board has six mounting holes. These holes are used to secure the motor drive board to the rest of
the MCU car rally kit.
8 0
6 5
3 0
7 0
φ3.5-6
1 0 5
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
19
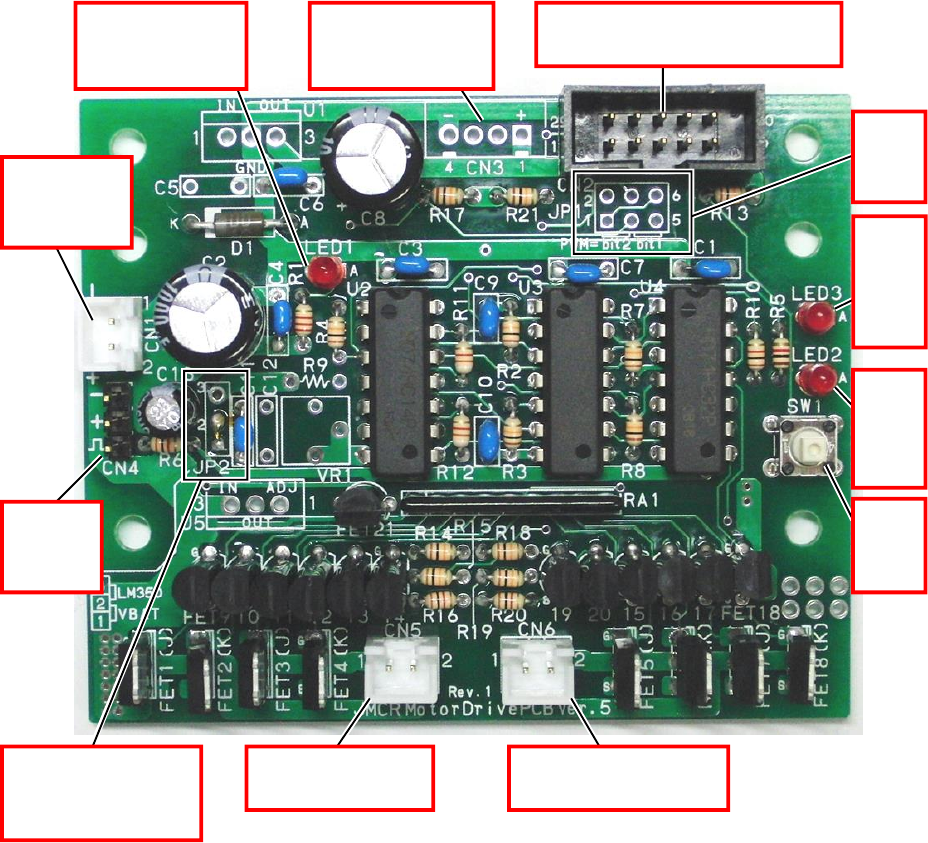
3.4. External Appearance
The photo below shows the external appearance of the motor drive board Ver. 5.
1
2
9
10
1(-)
CN2
Motor driver board control connector
CN3
Motor free-running
control connector
2(+)
3(-)
2(+)
1(PWM)
CN1
Power supply
connection
1
2
CN4
Servo
connector
CN5
Left motor connector
JP1
PWM signal
selection
LED3
ON/OFF
Controllable
programmatically
SW1
Push
switch
1
2
CN6
Right motor connector
JP2
Servo power
supply selection
LED2
ON/OFF
Controllable
programmatically
LED1
Always on when
power is applied
Note: Two-pin connectors CN1, CN5, and CN6 have been changed from IL connectors manufactured by
Japan Aviation Electronics Industry, Ltd., to XH connectors manufactured by J.S.T. Mfg. Co., Ltd.
This means that the female connectors must be changed as well.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
20
The following table lists the connector connections and the contents carried by these signals.
Part No.
Connects To
Pins
Description
CN1
Power supply input
1
GND
2
The + power supply connection (4.5 to 5.5 V or 7 to 15 V)
Note: However, that if 7 V or higher is used, the LM350
Add-On Set must be installed.
CN2
Connects to MCU
board
1 to 10
See next page.
CN3
Connected to the
microcontroller board
1
+5 V
2
Left motor stop state selection. 1: Free, 0: Brake
3
Right motor stop state selection. 1: Free, 0: Brake
4
GND
CN4
Servo
1
Servo PWM signal output
2
Servo power supply (6 V output)
3
GND
CN5
Left motor
1, 2
Left motor output
CN6
Right motor
1, 2
Right motor output
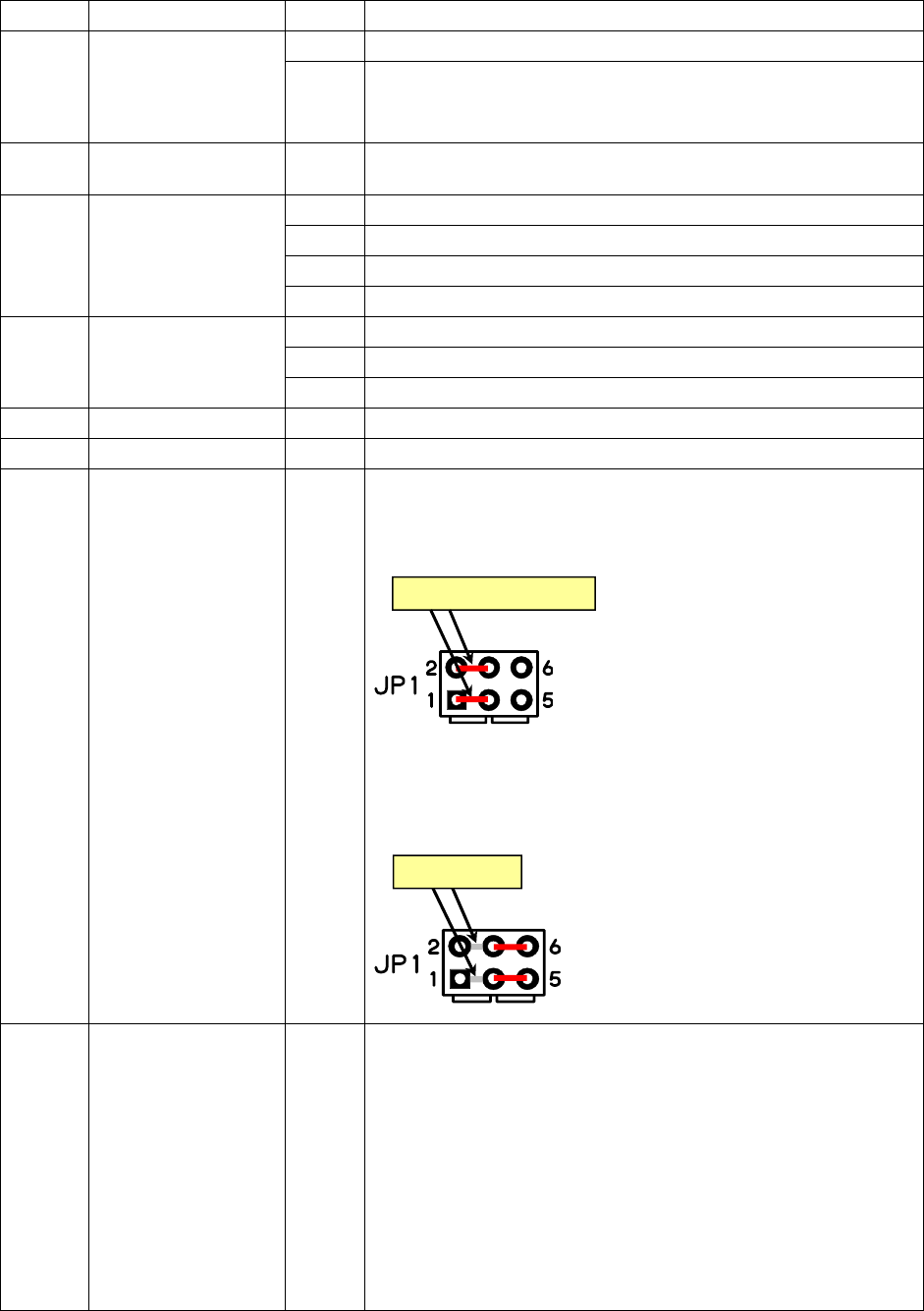
JP1
PWM signal selection
of left motor
1~6
This jumper switches PWM output terminal and direction selection
terminal.
●RMC-RX62T board and RY_R8C38 Board
Short (done on the solder side)
・Between pin 1-3 short
・Between pin 2-4 short
・Between pin 3-5 no connection
・Between pin 4-6 no connection
※It has been short-circuited on the solder side.
No need to do in anything in particular.
●RY3048FoneBoard
Cut (solder side)
・Between pin 1-3 pattern cut (solder side)
・Between pin 2-4 pattern cut (solder side)
・Between pin 3-5 short
・Between pin 4-6 short
JP2
Servo power supply
switching
1 to 3
This jumper switches the source for power supply to the servo
power supply pin (pin 2 on CN2).
If the supply voltage provided to CN1 is under 6 V
Short pins 1 and 2 together. Connect the CN1 power supply
directly to pin 2 on CN2.
If the supply voltage provided to CN1 is over 6 V
Since this would exceed the voltage that can be applied to the
servo, the components from the LM350 Add-On Set must be
installed and pins 2 and 3 shorted together. A 6 V level will be
supplied to pin 2 on CN2 through the LM350 3-terminal
regulator.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
21
3.5. Relationship between the Motor Drive Board Ver. 5 CN2 and the RMC-RX62T
Board
The motor drive board Ver. 5 connector CN2 and the RMC-RX62T board connector CN3 (port 7 and bit 0 of port 1)
must be connected with a 10-pin flat cable. The following table lists the signals carried by this cable.
RMC-RX62T
Board CN3
Signal
Direction
Motor Drive Board
Ver. 5 CN2
Description
Pin 1 (+5 V)
Pin 1
This is the +5 V level provided to the control system circuits,
including the Motor Drive Board Ver. 5 and logic ICs.
Regardless of whether or not the LM350 Add-On Set is used,
this is always a 5 V source.
If the control system and drive system power supplies are
separate (the LM350 Add-On Set is not used)
Here, a 5 V level is supplied to the Motor Drive Board Ver.
5 from the RMC-RX62T board.
If the control system and drive system share a power supply
(the LM350 Add-On Set is used)
The Motor Drive Board Ver. 5 control system circuits and
the RMC-RX62T board are supplied from the Motor Driver
Board Ver. 5 LM2940-5 (a 5 V output 3-terminal
regulator).
Pin 2 (P1_0)
Pin 2
Connected to LED 2.
0: LED on, 1: LED off
Pin 3 (P7_6)
Pin 3
Connected to LED 3.
0: LED on, 1: LED off
Pin 4 (P7_5)
Pin 6
Controls the right motor direction of rotation.
0: Forward, 1: Reverse
Pin 5 (P7_4)
Pin 8
Controls the left motor direction of rotation.
0: Forward, 1: Reverse
Pin 6 (P7_3)
Pin 5
Outputs a PWM signal to the right motor.
Pin 7 (P7_2)
Pin 7
Outputs a PWM signal to the left motor.
Pin 8 (P7_1)
Pin 4
Outputs a PWM signal to the servo.
Pin 9 (P7_0)
Pin 9
Detects the state of the pushbutton switch.
0: Pressed, 1: Released
Pin 10 (GND)
Pin 10
GND
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
22
3.6. Motor Control
3.6.1. Role of the Motor Drive Board
The motor drive board operates the motors according to instructions received from the MCU. The signals from the
MCU meaning “run motor” or “stop motor” are very weak, so the motors will not operate if they are connected
directly to the signal lines. The motor drive board converts the weak signals into signals with a large current level
of several hundred to several thousand milliamperes (mA) in order to operate the motors.
MCU board
M
Signal is too weak to operate motor.
MCU board
M
Converted to large current to drive motor!
○
Motor drive
board
3.6.2. Operating Principle of Speed Control
To make a motor run, it is enough to apply a current. To make it stop, cease supplying the current. But how do you
regulate the speed to, say, 10% or 20% of the maximum? How do you make fine adjustments to the speed at which
the motor operates?
A variable resistor can be used to reduce the voltage. But since a large current flows to the motor, a very large
resistance would be required. In addition, the voltage not applied to the motor would be converted to heat by the
resistor.
A better way to control the speed of the motor is to switch the power on and off repeatedly at high speed,
producing an effect that is equivalent to applying an intermediate voltage. The signal on and off states are
controlled by using a fixed cycle and altering the ratio of on and off. This control method is called “pulse width
modulation,” abbreviated as PWM control. The proportion of the pulse width for which the signal is on is called
the duty cycle. If the on-width is 50% of the cycle, the duty cycle is 50%. This can also be simplified to “PWM
50%” or just “motor 50%.”
Pulse width
On width
Off width
Duty cycle = on-width / pulse width (on-width + off-width). For example, if the pulse duration is 100 ms and the
on-width is 60 ms, duty cycle = 60 ms / 100 ms = 0.6 = 60%. If the signal is on for the entire pulse duration, the
duty cycle is 100%. If it is off for the entire pulse duration, the duty cycle is 0%.
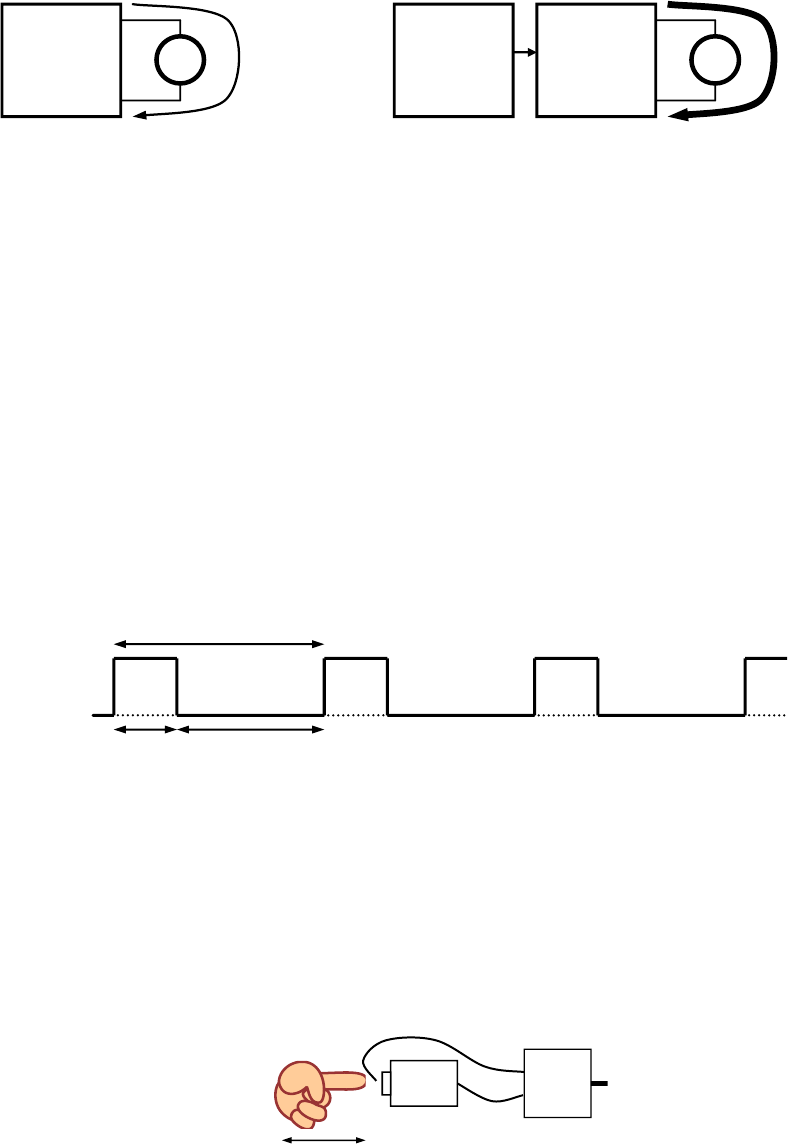
“PWM” sounds complicated, but a simple arrangement like that shown below, in which you control the speed by
repeatedly connecting and disconnecting a motor and a battery with a wire, can also be considered an example of
PWM. The longer you keep the wire connected, the faster the motor runs. The longer the periods it is disconnected,
the slower it gets. A person can repeat this connect, disconnect operation at intervals of a couple of seconds, but
the MCU can accomplish it at intervals of a few milliseconds.
Battery
OFF
Motor
ON
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
23
Let’s assume a waveform consisting of output at 0 V and 5 V. The longer the on-duration is during each cycle, the
higher the average voltage value, as shown in the figure below. If output is at 5 V for the entire cycle, the average
voltage value is 5 V, as you would expect. This is the maximum voltage. What if the signal is on 50% of the time?
This works out to an average of 5 V × 0.5 = 2.5 V, so the result is the same as changing the voltage.
In this way, if we reduce the on-duration of each cycle to 90%, 80%, and so on down to 0%, the result is
equivalent to gradually lowering the voltage until we finally reach 0 V.
By connecting this signal output to a motor, we can change the motor’s speed a little bit at a time, making precise
speed control possible. If we connect the signal output to an LED, we can change the brightness of the LED. A
MCU is capable of performing this operation in microsecond or millisecond increments. Control on this order
enables extremely smooth motor control.
25%
50%
75%
100%
0%
Duty cycle
1 cycle
1.25 V
2.5 V
3.75 V
5 V
0 V
=
=
=
=
=
Converted voltage
equivalent
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
0 V
5 V
Why would we want to use pulse width control rather than voltage control to regulate the speed of a motor? MCUs
are very good at handling digital values expressed as zeroes and ones. They are less good at dealing with analogue
values such as voltages. This is why we use a system of changing the width of the zeroes and ones to simulate
controlling the voltage. The system is called PWM control.
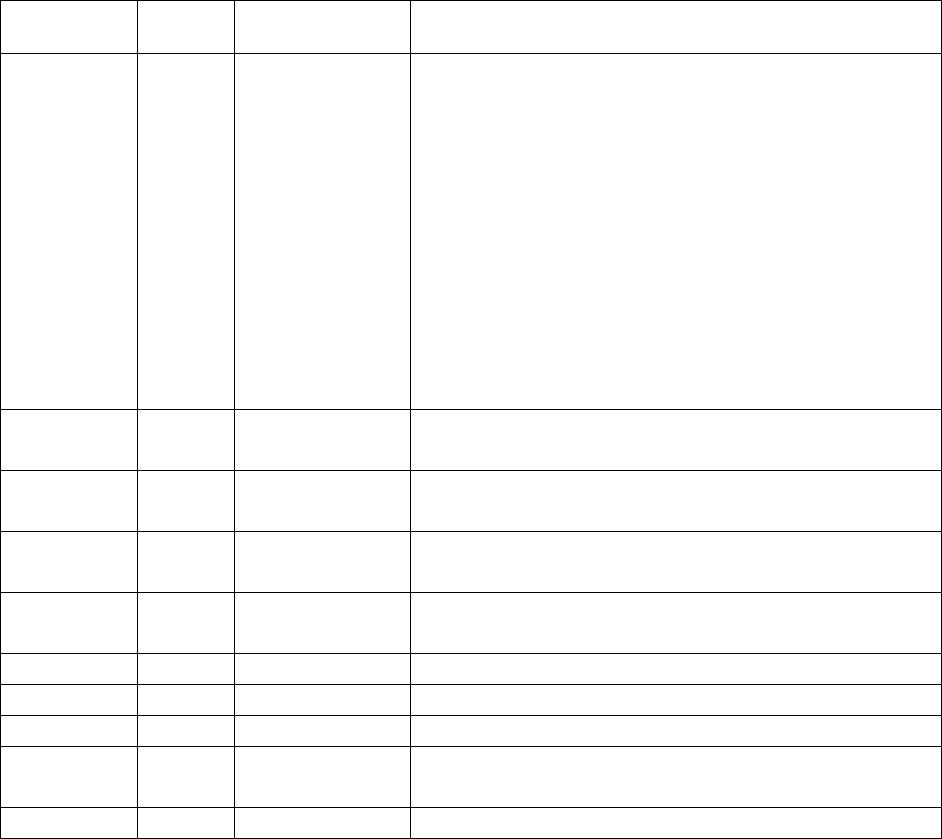
3.6.3. Operating Principle of Forward and Reverse
The motor drive board, Ver. 5, can control the forward, reverse, and brake operation of the motors. The voltages
applied to the motor terminals for forward and reverse control are shown in the table below.
Forward
Reverse
Voltages
applied to
motor
terminals
M
1
2
Pin 1 is connected to GND (0 V) and pin 2 to a
positive voltage.
M
1
2
Pin 1 is connected to GND (0 V) and pin 2 to a
positive voltage.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
24
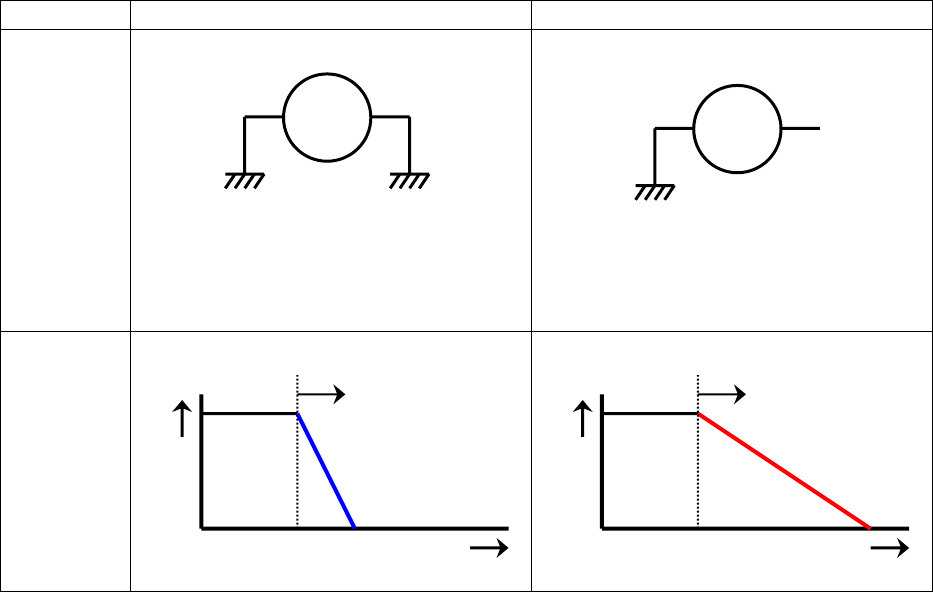
3.6.4. Brake and free
Stopping and slowing the car with the normal circuit of the Motor drive board Ver.5 is done by breaking. With the
free addition set added, there are two methods of halting the car, break and free.
The difference of brake and free is as shown below.
Brake
Free
Voltages
applied to
motor
terminals
M
1
2
Brake
GND
GND
Connect both terminals to GND. As a result,
both terminals are short-circuited.
M
1
2
Free
No
connection
GND
Make one side connectionless.
Falling of
speed
(image)
Speed
Time
Forward
Brake
Time
Forward
Speed
Free
As for the free, the slowdown of the stop is slower than brakes. Use the free for the cases that want to cut down
speed slowly.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
25
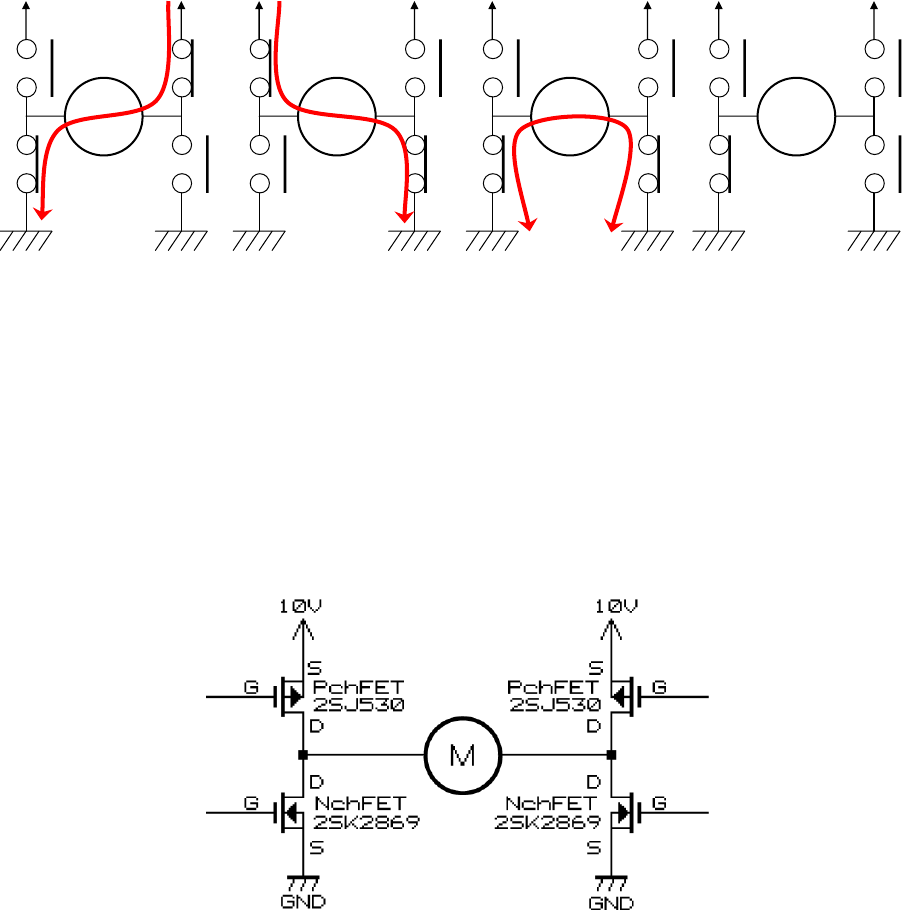
3.6.5. H-bridge circuit
How does this actually work? Four switches are arranged with the motor in the centre, forming an H-pattern, as
shown in the figure below. Forward, reverse, brake, and free control is accomplished by turning these four
switches on and off in specific combinations. The name “H-bridge circuit” refers to the circuit’s H-pattern.
10 V
10 V
M
Forward
10 V
10 V
M
Reverse
10 V
10 V
M
Brake
10 V
10 V
M
Free
3.6.6. Using FETs as the Switches in an H-Bridge Circuit
Field-effect transistors (FETs) are used as the switches. A P-channel FET (2SJ type) is used on the positive side of
the power supply and an N-channel FET (2SK type) on the negative side.
A P-channel FET allows current to flow between drain and source (D-S) when the gate voltage (VG) is less than
the source voltage (VS).
An N-channel FET allows current to flow between drain and source (D-S) when the gate voltage (VG) is greater
than the source voltage (VS).
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
26
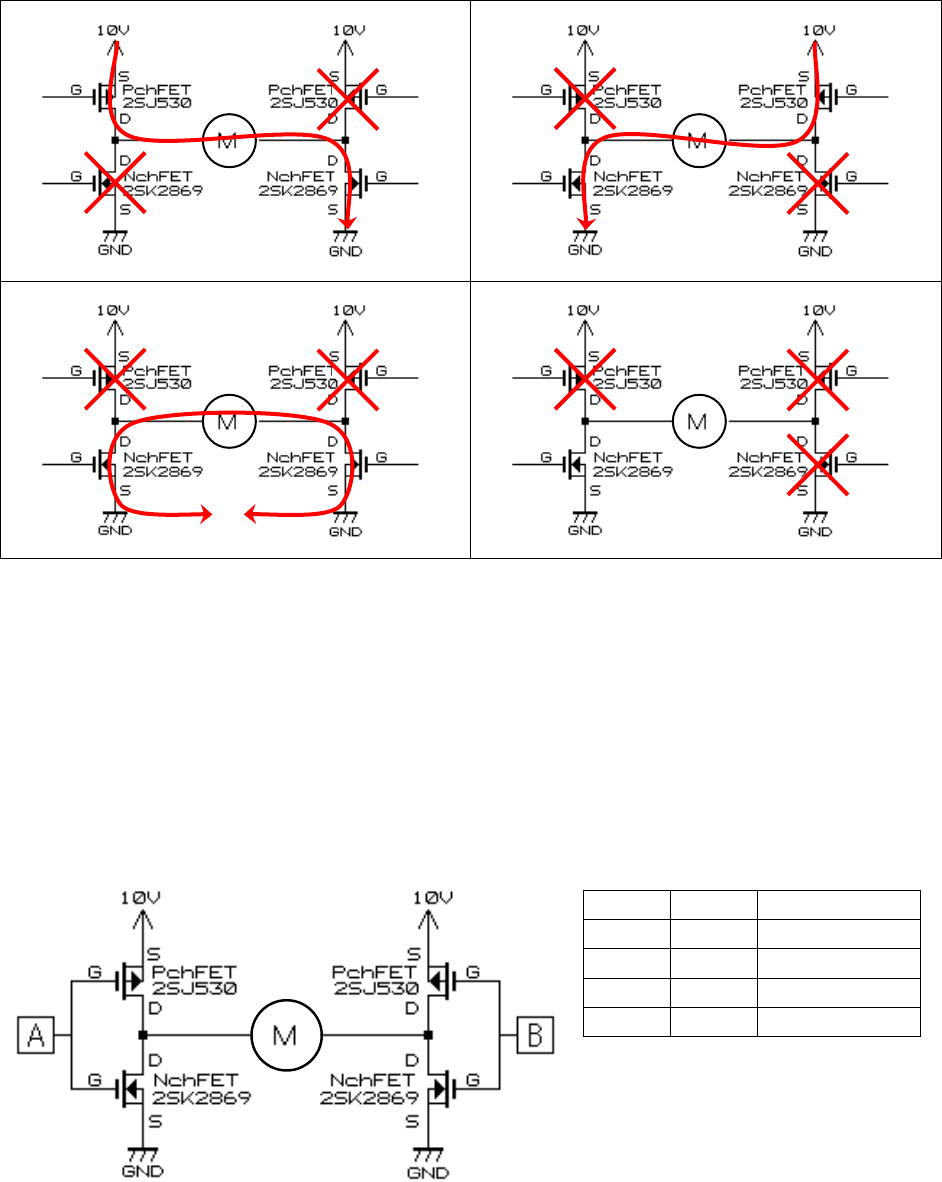
Forward, reverse, and brake operations are performed by changing the voltages applied to the gates of the four
FETs.
Reverse
10V
10V
0V
0V
Forward
0V
0V
10V
10V
Brake
10V
10V
10V
10V
Free
10V
0V
10V
10V
One point to keep in mind is that the two FETs on the right side or the two FETs on the left side must never both
be on at the same time. Having both on at the same time connects the 10 V and GND pins with no load at all,
which is the same as shorting them. This could cause the FETs or the trace patterns to burn out, which would be
dangerous.
A look at the four gate voltages reveals that the same voltage is applied to the P-channel and N-channel FETs on
the right side and to the P-channel and N-channel FETs on the left side. Therefore, we tried using the circuit
shown below.
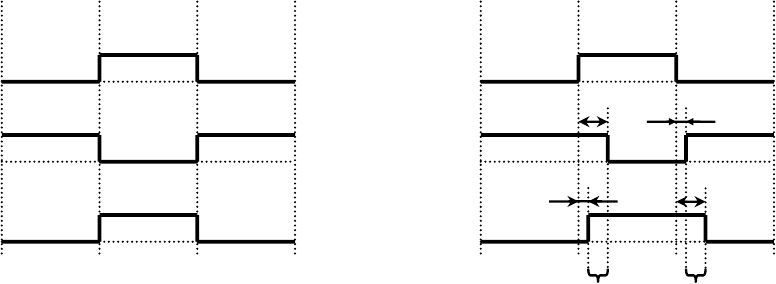
When we actually input a PWM waveform to the circuit, the FETs became very hot. Why might this be?
We might assume that in on-off switching of the channel between drain and source when signals are input to the
gates of the FETs, the P-channel and N-channel FETs would respond instantly as in the Ideal Waveforms figure at
A
B
Operation
0 V
0 V
Brake
0 V
10 V
Reverse
10 V
0 V
Forward
10 V
10 V
Brake
Note: When a power supply voltage of
10 V is input to the G (gate) pin,
that voltage is either applied
unchanged to the motor or a
voltage of 0 V is applied. Note that
the voltage applied to the motor
differs depending on whether the
value of the control signal is 0 or 1.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
27
left, resulting in smooth switching between brake and forward operation. In fact, however, the FETs do not operate
instantly and there is a time delay. This delay is greater when the FET switches from on to off than when it
switches from off to on. Therefore, there is a short duration during which both FETs are in the on state, as shown
in the Actual Waveforms figure at right. This state is equivalent to a short circuit.
Motor
Brake
Forward
Brake
Gate
P-ch FET
operation
Nch FET
operation
ON
OFF
ON
OFF
Ideal Waveforms
Motor
Brake
Forward
Brake
Gate
P-ch FET
operation
NchFET
operation
ON
OFF
ON
OFF
Actual Waveforms
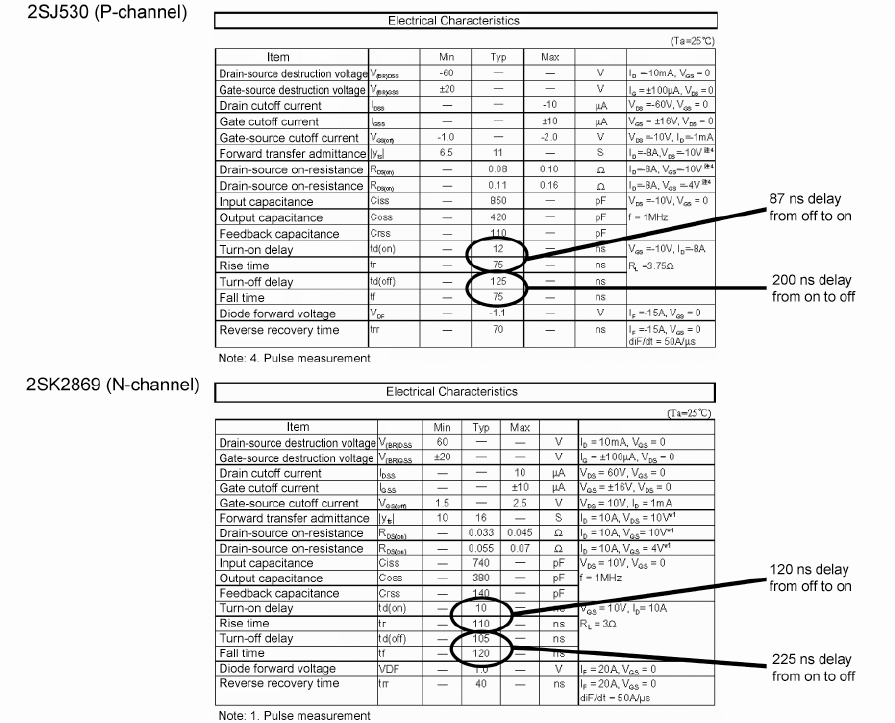
200 ns
87 ns
120 ns
225 ns
Short circuit
Short circuit
The delay between the on signal and the start of the response is called the “turn-on delay,” the duration from the
start of the on response to the actual on state is the “rise time,” the delay between the off signal and the start of the
response is the “turn-off delay,” and the duration from the start of the off response to the actual off state is the “fall
time.”
Thus, the actual duration from off to on is the turn-on delay plus the rise time, and the actual duration from on to
off is the turn-off delay plus the fall time. These are the delays shown in the figure at right above.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
28
The electrical characteristics of the FETs used on the motor drive board, 2SJ530 and 2SK2869 from Renesas
Electronics, are shown below.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
29
3.6.7. P-Channel and N-Channel Short FETs Prevention Circuit
As a solution, instead of turning the P-channel and N-channel FETs on side A on and off at the same time as in the
previous circuit diagram, we will introduce a short time shift to prevent the formation of a short circuit.
Motor
Forward
Brake
Forward
X
(PchIN)
Y
(NchIN)
PchFET
operation
NchFET
operation
ON
OFF
ON
OFF
Both sides do not turn on at the same time
OFF
10 V
0 V
10 V
0 V
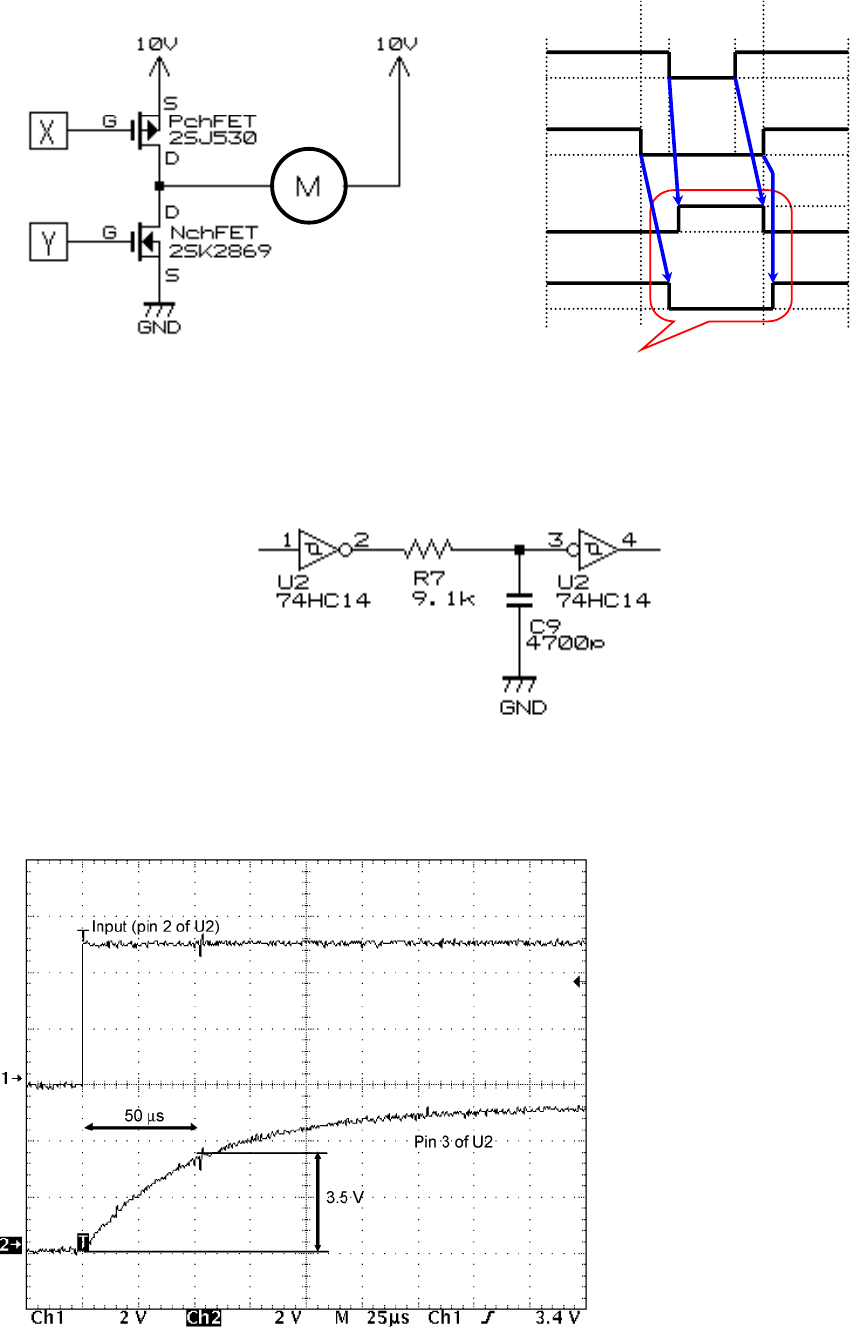
The delay is generated by an integrating circuit. There are many technical books available with information on
integrating circuits, and we refer you to them if you wish to learn more. A diagram of the integrating circuit is
shown below.
The delay time is calculated as follows:
The time constant T = CR [s].
In the present case, the figures are 9.1 kΩ and 4700 pF, so the calculation is as follows:
T = 9.1 × 103 × 4,700 × 10-12 = 42.77 [μs].
The 74HC series treats an input voltage
of 3.5 V or more as 1. By measuring
actual waveforms, we determined that
the time required to reach 3.5 V is
approximately 50 μs.
Though the maximum shift is 225 ns in
the Actual Waveforms figure above, we
decided to generate a delay of 50 μs
with the integrating circuit. This is to
accommodate delay from voltage
conversion digital transistors other than
FETs, as well as delay from
capacitance components in the FET
gates.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
30
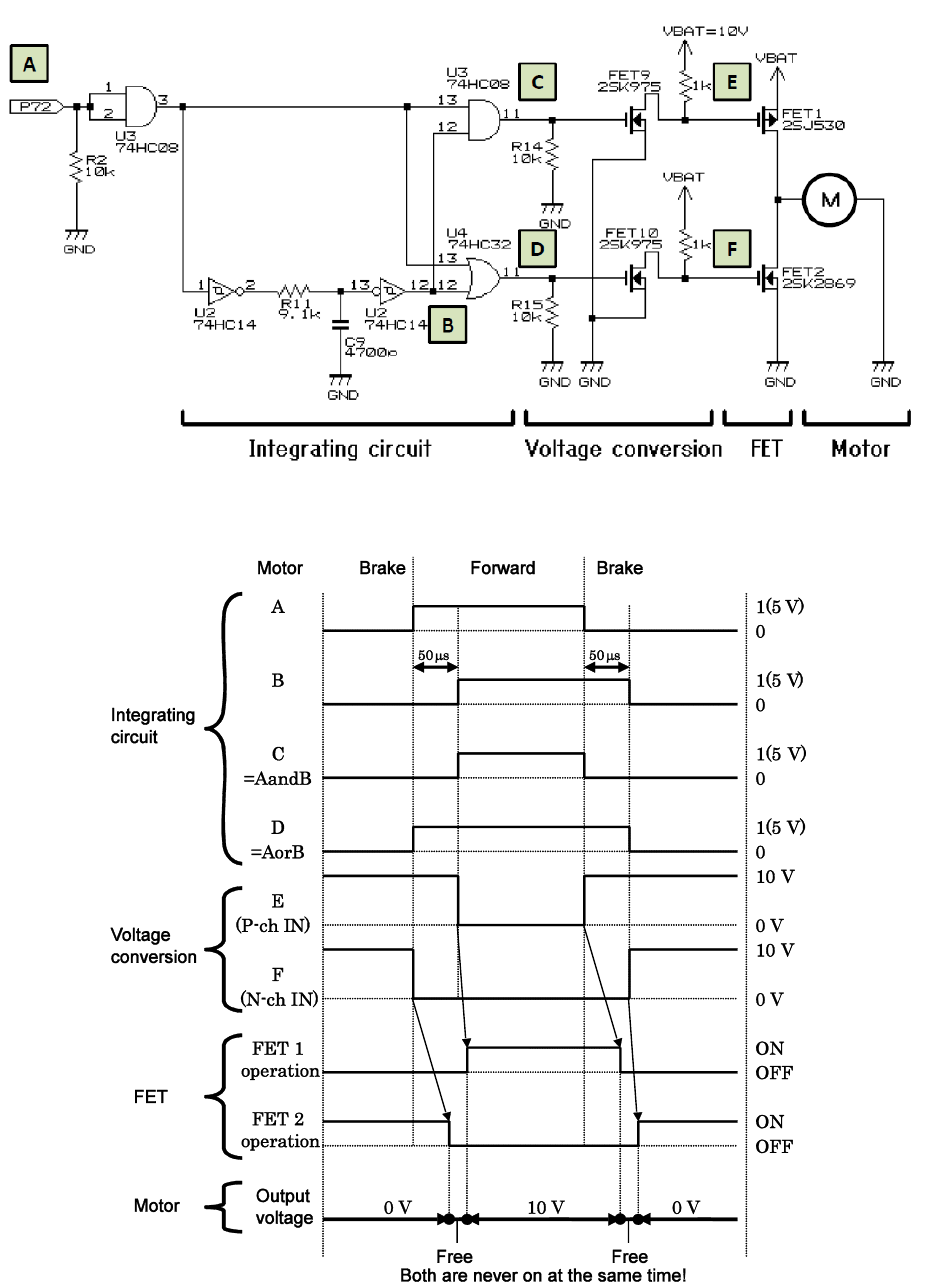
A circuit diagram combining an integrating circuit and the FETs is shown below.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
31
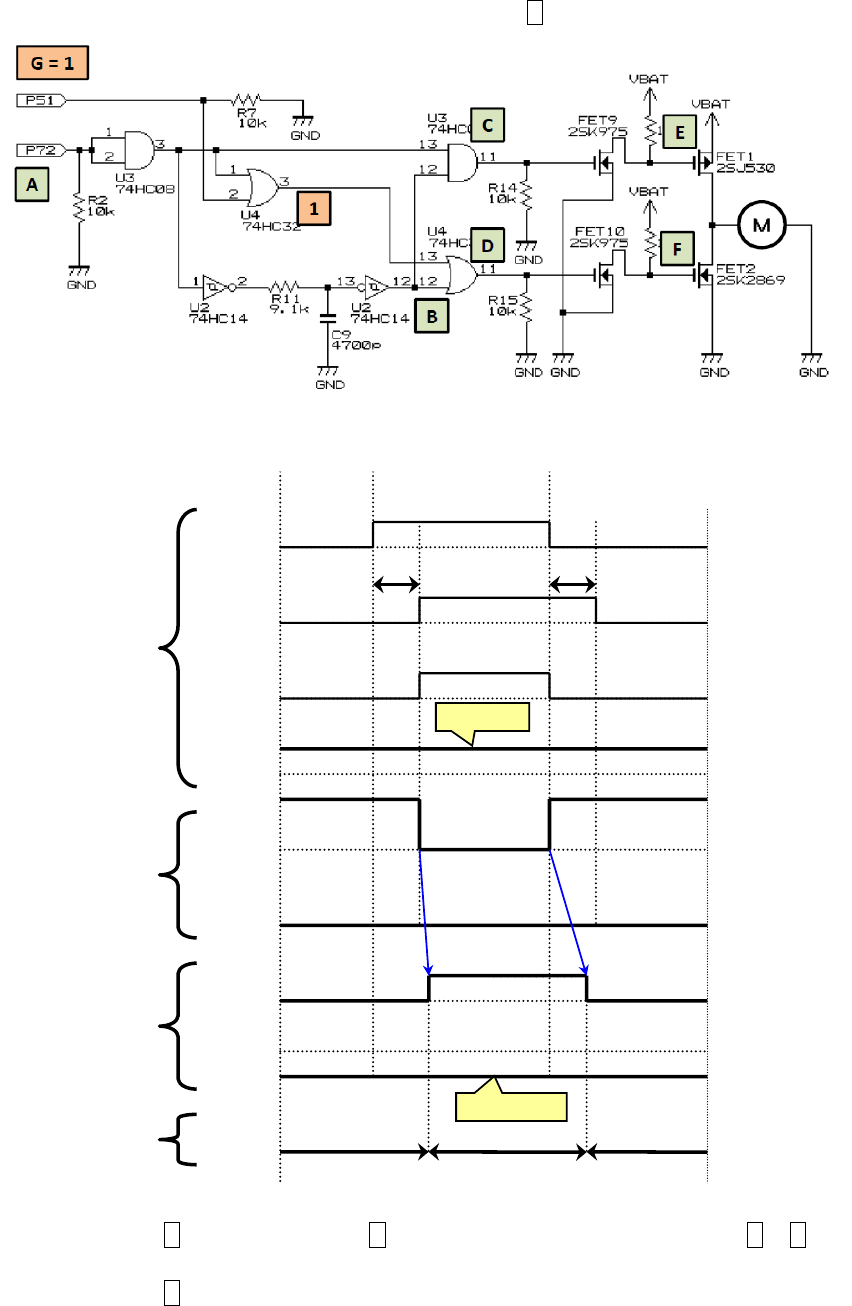
(1) Changing from Brake to Forward Operation
1. At point A, a 0 signal corresponds to brake and a 1 signal to forward. The output changes from 0 (brake) to
1 (forward) at point A.
2. At point B, the integrating circuit outputs a waveform with a 50 μs delay.
3. An A-and-B waveform is output from point C.
4. An A-or-B waveform is output from point D.
5. A signal that has been voltage converted by the digital transistor is output from point E. The 0 V-5 V signal
from point C has been converted to a 10 V-0 V signal.
6. In like manner, a 10 V-0 V signal converted from the 0 V-5 V signal from point D is output from point F.
7. When the signal at point A changes from 0 to 1, the gate voltage of FET2 changes from 10 V to 0 V and
FET2 turns off. However, it does not enter the off state immediately due to the delay. Both FET1 and FET2
are off at the point, and the motor is in the free state.
8. The gate voltage of FET1 changes from 10 V to 0 V 50 μs after the signal at point A changes, and FET1
turns on. A voltage of 10 V is applied to the motor, causing it to run in the forward direction.
(2) Changing from Forward to Brake Operation
1. When the signal at point A changes from 1 (forward) to 0 (brake), the gate voltage of FET1 changes from 0
V to VBAT and FET1 turns off. However, it does not enter the off state immediately due to the delay. Both
FET1 and FET2 are off at this point, and the motor is in the free state.
2. The gate voltage of FET2 changes from 0 V to 10 V 50 μs after the signal at point A changes, and FET2
turns on. A voltage of 0 V is applied to both terminals of the motor, causing it to perform brake operation.
In this way, a short circuit is prevented when switching between operations by turning both FETs off for a
short time and putting the motor into the free state.
Note: In this example the voltage applied to the gates is 10 V. In actual practice, the voltage matches the power
supply voltage (VBAT).
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
32
3.6.8. Free Circuit
The free circuit described here is not for the purpose of preventing shorting of the P-channel and N-channel FETs.
Rather, it is used to put the motors into the free or brake state when stopped.
By installing the free add-on set on the motor drive board, Ver. 5, it is possible to select between free and brake
states when the motors are stopped. The state when the value of point G is 1 is shown below.
Motor
Free
Forward
Free
A
B
C
= A and B
A
D
= G or B = 1
1 (5 V)
0
E
(PchIN)
作
F
(NchIN)
FET1
operation
FET2
operation
ON
OFF
ON
OFF
10 V
0 V
10 V
0 V
Free
Output
voltage
10 V
Free
50 s
1 (5 V)
0
1 (5 V)
0
1 (5 V)
0
50 s
Integrating
circuit
Voltage
conversion
FET
Motor
Always OFF
Always 1
When the value of point G is 1, the value of point D is always 1 regardless of the states of points A or B. This
means that FET2 is always off and the motor changes repeatedly between the forward and free states.
When the value of point G is 0, the motor changes repeatedly between the forward and brake states, as above.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
33
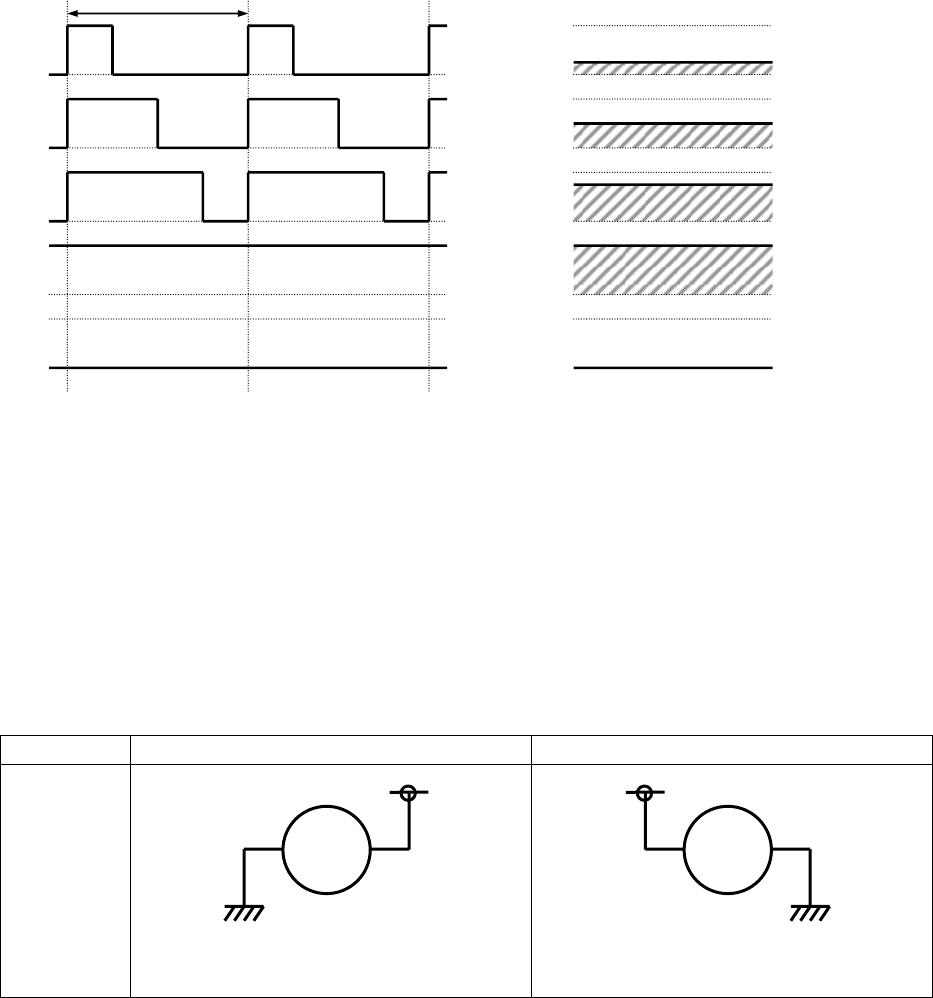
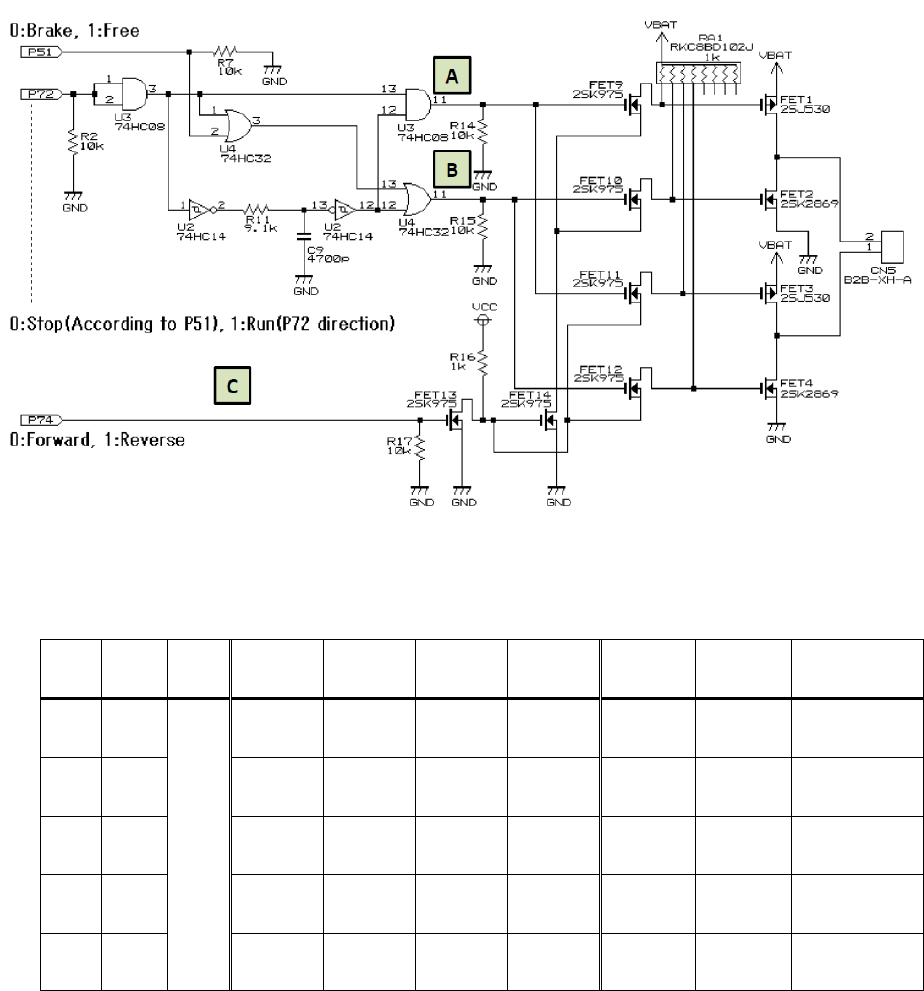
3.6.9. Actual Circuit
The actual circuit configuration adds a forward/reverse switching circuit to the integrating circuit, FET circuit, and
free circuit described above. The circuit configuration for the left motor is shown below. The following three pins
are used.
P72: Pin for applying PWM signal
P74: Forward/reverse switching pin
P51: Brake/free switching pin
(1) Circuit Diagram
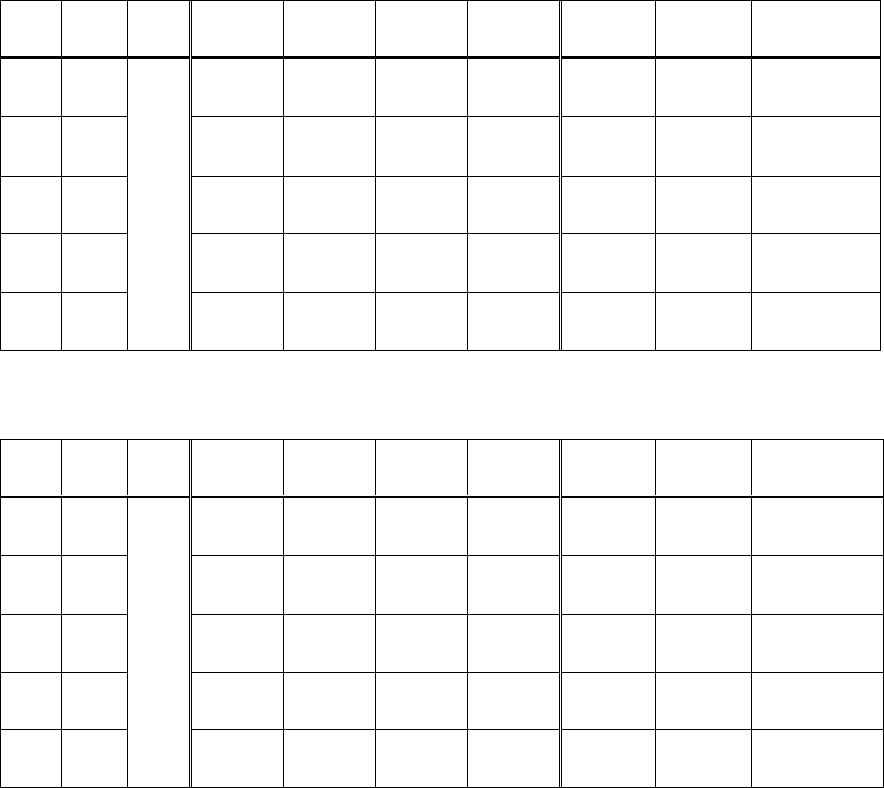
(2) Direction: Forward, Stop: Signal Levels and Motor Operation in Brake State
A
B
C
FET1
gate
FET2
gate
FET3
gate
FET4
gate
Pin 2 of
CN5
Pin 1 of
CN5
Motor
Operation
0
0
0
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
10 V
(ON)
0 V
0 V
Brake
0
1
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
1
1
0 V
(ON)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
10 V
0 V
Forward
0
1
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
0
0
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
10 V
(ON)
0 V
0 V
Brake
Note: A, B, C: 0 = 0 V, 1 = 5 V
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
34
(3) Direction: Reverse, Stop: Signal Levels and Motor Operation in Brake State
A
B
C
FET1
gate
FET2
gate
FET3
gate
FET4
gate
Pin 2 of
CN5
Pin 1 of
CN5
Motor
Operation
0
0
1
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
10 V
(ON)
0 V
0 V
Brake
0
1
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
0 V
(OFF)
0 V
Free
(Open)
Free
1
1
10 V
(OFF)
10 V
(ON)
0 V
(ON)
0 V
(OFF)
0 V
10 V
Reverse
0
1
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
0 V
(OFF)
0 V
Free
(Open)
Free
0
0
10 V
(OFF)
10 V
(ON)
10 V
(OFF)
10 V
(ON)
0 V
0 V
Brake
(4) Direction: Forward, Stop: Signal Levels and Motor Operation in Free State
A
B
C
FET1
gate
FET2
gate
FET3
gate
FET4
gate
Pin 2 of
CN5
Pin 1 of
CN5
Motor
Operation
0
1
0
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
0
1
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
1
1
0 V
(ON)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
10 V
0 V
Forward
0
1
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
0
1
10 V
(OFF)
0 V
(OFF)
10 V
(OFF)
10 V
(ON)
Free
(Open)
0 V
Free
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
35
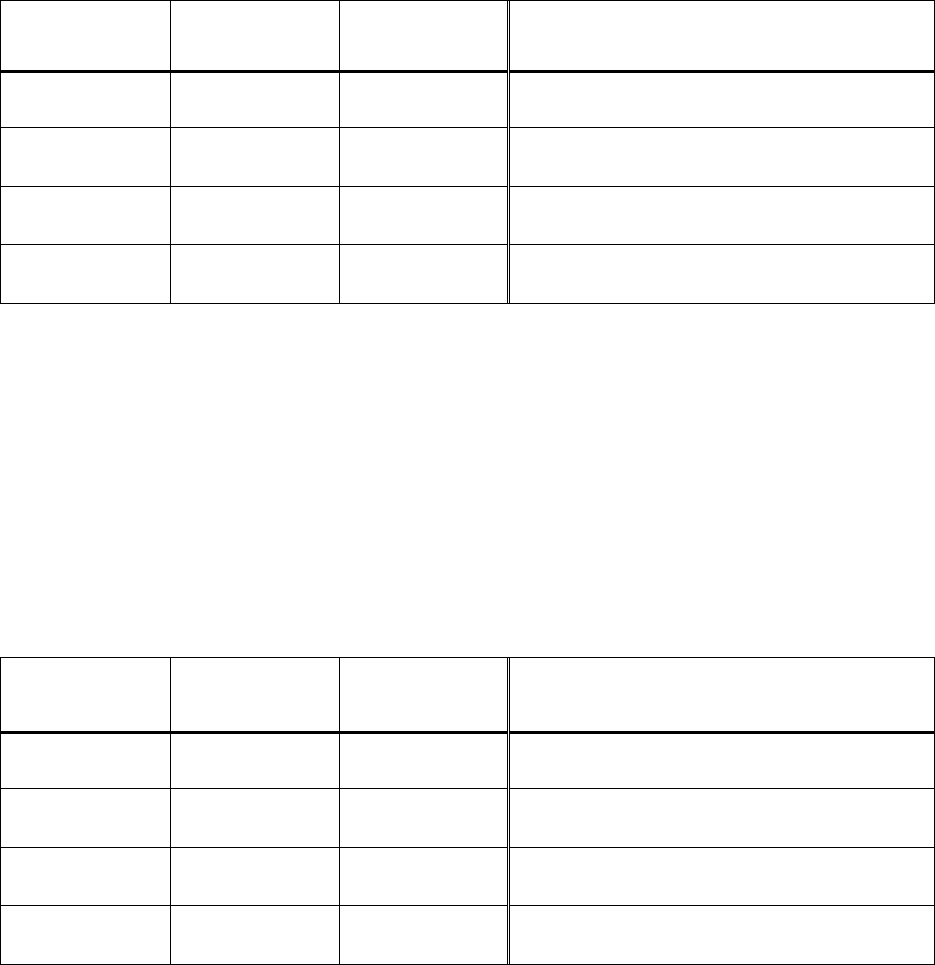
3.6.10. Operation of Left Motor
The left motor is controlled by three pins: P74, P72, and P51. If the free add-on set is not installed, the value of
P5_1 is always 0.
Left Motor
Direction
P74
Left Motor PWM
P72
Left Motor Stop
Operation
P51
Motor Operation
0
PWM
0
PWM = 1: forward, PWM = 0: brake
0
PWM
1
PWM = 1: forward, PWM = 0: free
1
PWM
0
PWM = 1: reverse, PWM = 0: brake
1
PWM
1
PWM = 1: reverse, PWM = 0: free
To operate the left motor in the forward and brake states, set P74 to 0 and P51 to 0 and input a PWM waveform on
P72. The left motor will run forward according to the PWM ratio. For example, when the PWM ratio is 0% the
motor will be stopped, when PWM ratio is 50% the motor will run forward at 50% voltage, and when the PWM
ratio is 100% the motor will run forward at 100% voltage. In this case the motor is in the brake state when
stopped.
3.6.11. Operation of Right Motor
The right motor is controlled by three pins: P75, P73, and P50. If the free add-on set is not installed, the value of
P50 is always 0.
Right Motor
Direction
P75
Right Motor
PWM
P73
Right Motor Stop
Operation
P50
Motor Operation
0
PWM
0
PWM = 1: forward, PWM = 0: brake
0
PWM
1
PWM = 1: forward, PWM = 0: free
1
PWM
0
PWM = 1: reverse, PWM = 0: brake
1
PWM
1
PWM = 1: reverse, PWM = 0: free
To operate the right motor in the forward and free states, set P75 to 0 and P50 to 1 and input a PWM waveform on
P73. The right motor will run forward according to the PWM ratio. For example, when the PWM ratio is 0% the
motor will be stopped, when PWM ratio is 50% the motor will run forward at 50% voltage, and when the PWM
ratio is 100% the motor will run forward at 100% voltage. In this case the motor is in the free state when stopped.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
36
3.7. Servo Control
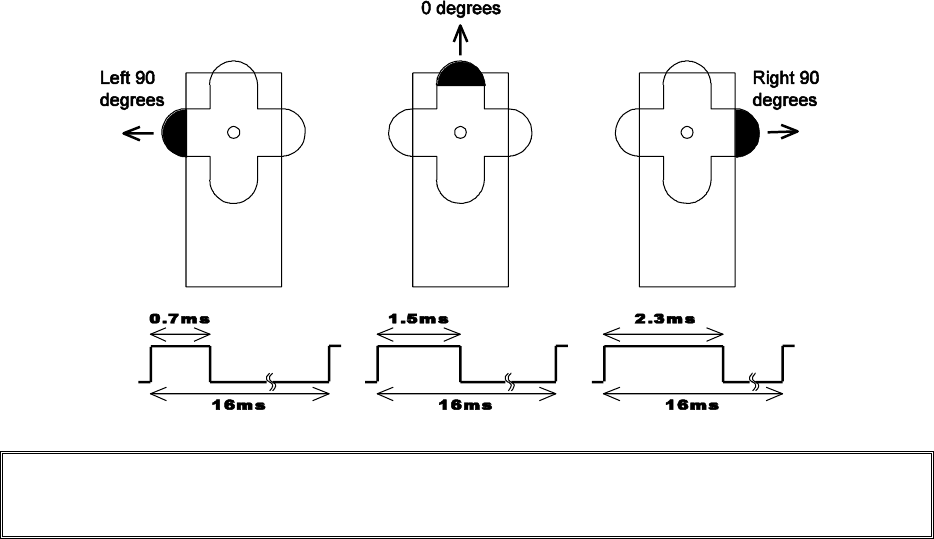
3.7.1. Operating Principle
Pulses with a cycle of 16 ms are applied to the servo, and the servo angle is determined by the pulse on-width.
There is some variation among servo manufacturers and individual devices in the correspondence between the
servo turn angle and the pulse on-width, but generally speaking the correspondence is roughly a shown below.
The cycle is 16 ms.
The Centre position corresponds to a pulse on-width of 1.5 ms, and a change of ±0.8 ms produces a change in
the servo angle of ±90 degrees.
The PWM signals for servo control are generated in the reset-synchronized PWM mode of the RX62T MCU.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
37
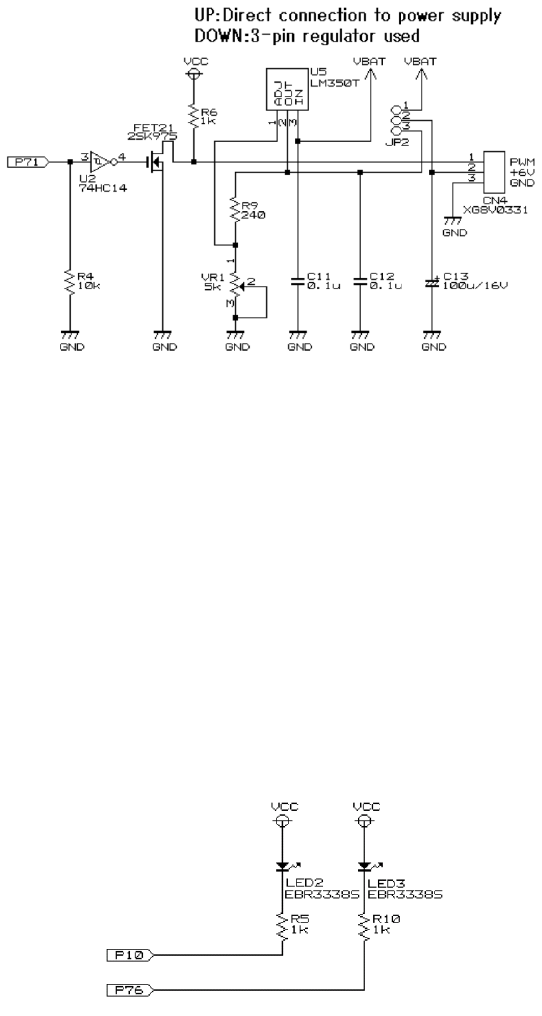
3.7.2. Circuit
1. The PWM signal is output on bit 1 of port 7. The on-width is changed by changing the value of MTU3.TGRD
in the software.
2. A transistor with an internal resistor between the port and pin 1 of the servo acts as a buffer. If bit 1 of port 7
and pin 1 of the servo were connected directly, the MCU port could be destroyed if, for example, the power
supply were accidentally connected to pin 1 or if noise were introduced. This would be fatal. In contrast, the
transistor with internal resistor can be replaced easily if it is destroyed.
3. Pin 2 connects to the servo’s power supply. If the motor drive power supply uses four or fewer batteries, short
JP2 and the pin above it for a direct connection to the power supply. A motor drive power supply voltage
higher than that produced by four batteries exceeds the rating of the servo, so it is necessary in this case to use
the LM350 3-pin regulator, which has a 3 A current flow, to fix the voltage at 6 V. In this case, short JP2 and
the pin below it.
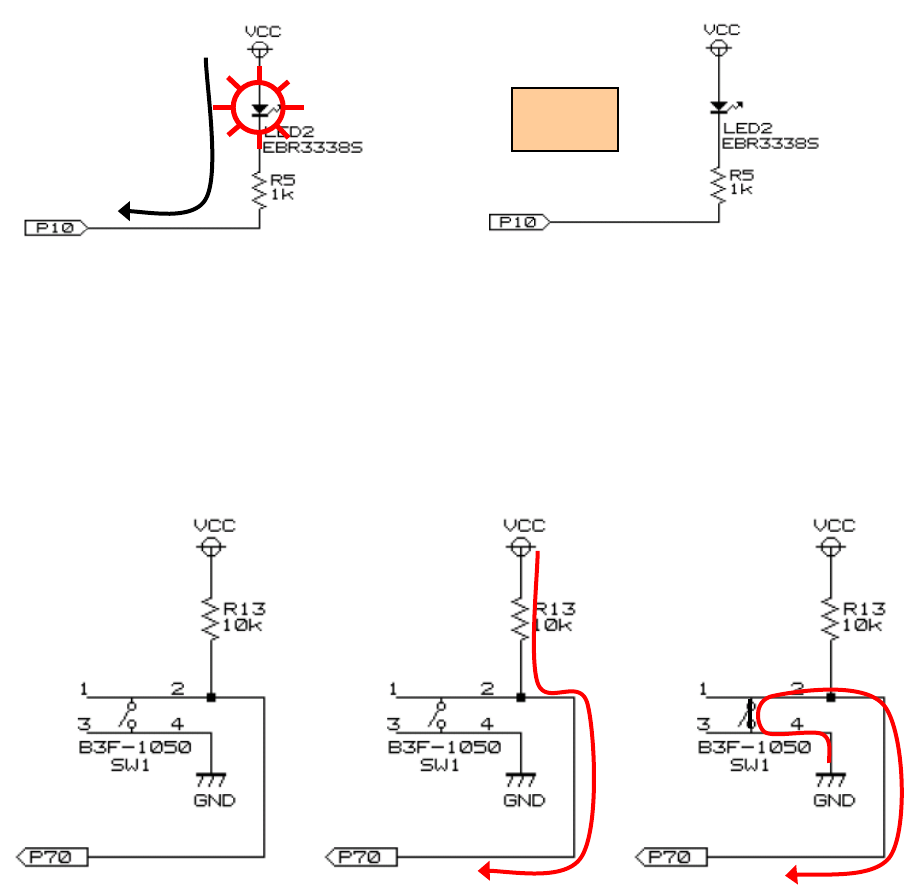
3.8. LED Control
Three LEDs are mounted on the motor drive board. Of these, two can be turned on and off by the MCU.
The cathode of each LED is connected directly to a port of the MCU. The current limiting resistance is 1 kΩ.
A current of 20 mA can be input to the EBR3338S with a forward voltage of 1.7 V. The current limiting resistance
is calculated as follows:
Resistance = (power supply voltage – voltage applied to LED) / current to be input to the LED
= (5 – 1.7) / 0.02
= 165 Ω
In practice, a 1 kΩ resistor is connected to reduce battery current consumption and limit the current flowing
through the port. The current is calculated as follows:
Current = (power supply voltage – voltage applied to LED) / resistance
= (5 – 1.7) / 1,000 = 3.3 [mA]
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
38
When 0 is output to P10, the voltage on the
LED cathode side becomes 0 V, current flows,
and the LED lights.
When 1 is output to P10, the voltage on the LED cathode
side becomes 5 V, the potential difference between the two
terminals of the LED is 0 V, and the LED does not light.
3.9. Pushbutton Control
One pushbutton is mounted on the motor drive board.
The pushbutton is pulled up by a
10 kΩ resistor and is connected to
bit 0 of port 7.
When the pushbutton is not
depressed, 1 is input to P70 via the
pull-up resistor.
When the pushbutton is depressed,
0 is input to P70 via the ground
(GND).
0 V
5 V
Lit!
Dark
No current
flow!
"0"
ON
"1"
OFF
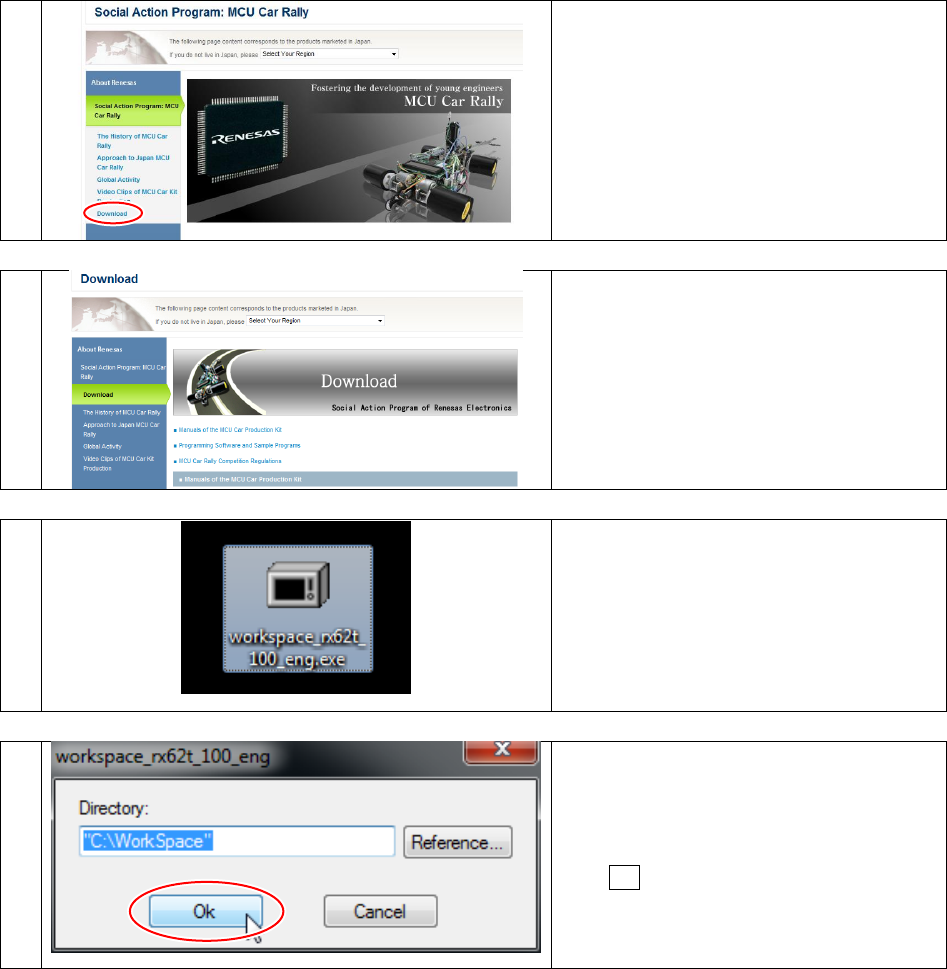
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
39
4. Sample Programs
4.1. Program Development Environment
The Renesas integrated development environment is used for program development. For instructions on installing
and using the Renesas integrated development environment, see Renesas Integrated Development Environment
Operation Manual (Version for RX62T).
4.2. Installing the Sample Programs
Note: Continue with step 3, if you have CD-R for this seminar.
1
Get the Sample Program
(workspace_rx62t_100_eng.exe) from the
Renesas site.
Renesas Electronics
http:¥www.renesas.com/company_info/carr
ally/
Click Download
2
Download workspace_rx62t_100_eng.exe
3
Run workspace_rx62t_100_eng.exe.
Please execute
"workspace_rx62t_100_eng.exe " in the
following folder, if you have CD-R for this
seminar.
"CD-R drive:¥ 04-Programs"
4
The installed file is in "C:¥WorkSpace".
Click OK.
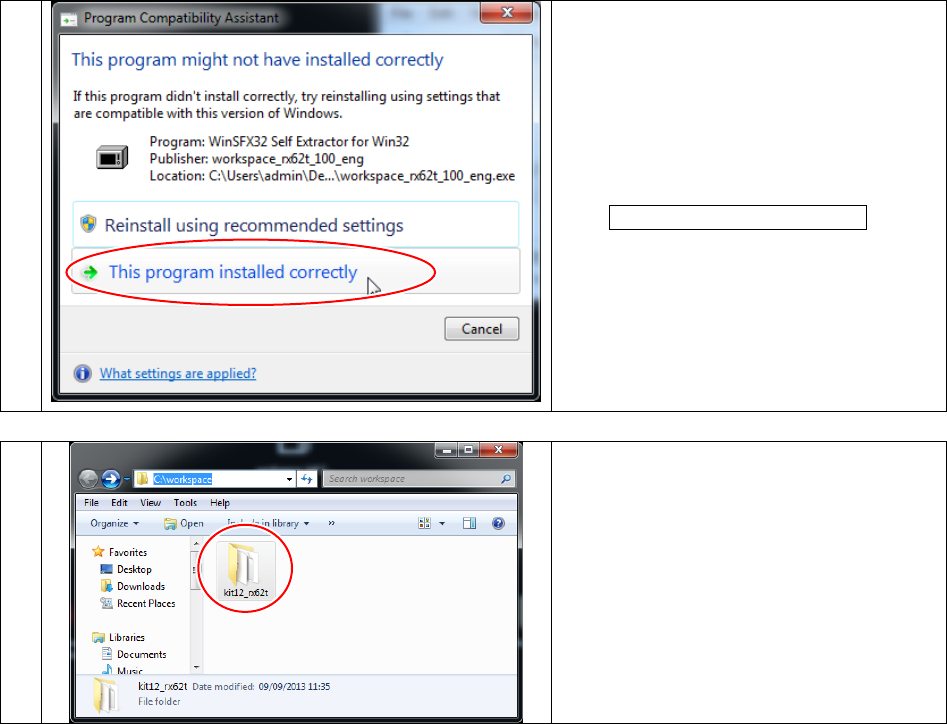
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
40
5
Installation has been completed.
Click This program installed correctly.
6
Open The "C:¥Workspace" folder
There is the operation test program at the
folder "kit12_rx62t".
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
41
4.3. Opening the kit12_rx62t Workspace
1
Launch the Renesas integrated development
environment.
2
Select Browse to another project
workspace.
3
Select kit12_rx62t.hws from the
C:¥Workspace¥kit12_rx62t folder.
4
The kit12_rx62t workspace opens.
kit12_rx62t
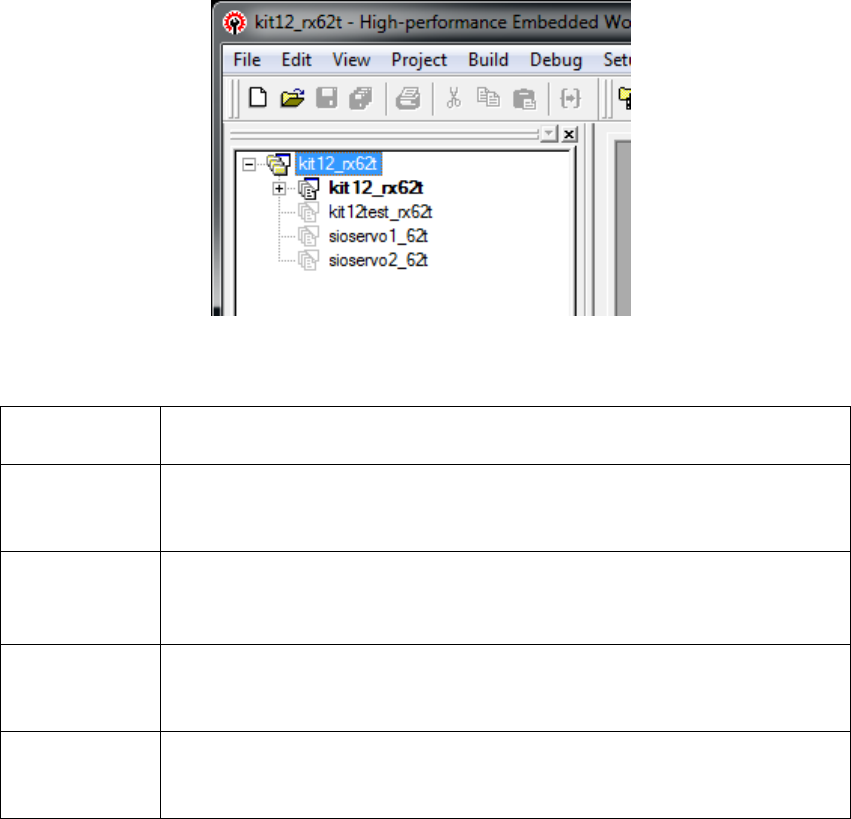
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
42
4.4. Project
One project is registered in the kit12_rx62t workspace.
Project
Contents
kit12_rx62t
This is the MCU car running program. The explanation of this program starts in the
next section of this manual.
kit12test_rx62t
This is a program for testing the components of the completed MCU car, such as
the motor drive board and sensor board, to see if they operate correctly.
For details, please refer to "Operation Test Manual MCU Car Kit, Ver.5.1 (RX62T
Version)".
sioservo1_62t
This is the program for adjusting the servo centre.
For details, please refer to "6. Adjusting the Servo Centre and Maximum Turn
Angle".
sioservo2_62t
This is the program for determining the maximum turning angle of the servo.
For details, please refer to "6. Adjusting the Servo Centre and Maximum Turn
Angle".

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
43
5. Program Explanation – kit12_rx62t.c
5.1. Program Code Listing
A code listing of the program that controls the MCU car by using the RX62T MCU appears below.
1 : /***********************************************************************/
2 : /* Supported Microcontroller:RX62T */
3 : /* File: kit12_rx62t.c */
4 : /* File Contents: MCU Car Trace Basic Program(RX62T version) */
5 : /* Version number: Ver.1.00 */
6 : /* Date: 2013.09.01 */
7 : /* Copyright: Renesas Micom Car Rally Secretariat */
8 : /***********************************************************************/
9 : /*
10 : This program supports the following boards:
11 : * RMC-RX62T board
12 : * Sensor board Ver. 5
13 : * Motor drive board Ver. 5
14 : */
15 :
16 : /*======================================*/
17 : /* Include */
18 : /*======================================*/
19 : #include "iodefine.h"
20 :
21 : /*======================================*/
22 : /* Symbol definitions */
23 : /*======================================*/
24 :
25 : /* Constant settings */
26 : #define PWM_CYCLE 24575 /* Motor PWM period (16ms) */
27 : #define SERVO_CENTER 2300 /* Servo center value */
28 : #define HANDLE_STEP 13 /* 1 degree value */
29 :
30 : /* Masked value settings X:masked (disabled) O:not masked (enabled) */
31 : #define MASK2_2 0x66 /* X O O X X O O X */
32 : #define MASK2_0 0x60 /* X O O X X X X X */
33 : #define MASK0_2 0x06 /* X X X X X O O X */
34 : #define MASK3_3 0xe7 /* O O O X X O O O */
35 : #define MASK0_3 0x07 /* X X X X X O O O */
36 : #define MASK3_0 0xe0 /* O O O X X X X X */
37 : #define MASK4_0 0xf0 /* O O O O X X X X */
38 : #define MASK0_4 0x0f /* X X X X O O O O */
39 : #define MASK4_4 0xff /* O O O O O O O O */
40 :
41 : /*======================================*/
42 : /* Prototype declarations */
43 : /*======================================*/
44 : void init(void);
45 : void timer( unsigned long timer_set );
46 : unsigned char sensor_inp( unsigned char mask );
47 : unsigned char startbar_get( void );
48 : int check_crossline( void );
49 : int check_rightline( void );
50 : int check_leftline( void );
51 : unsigned char dipsw_get( void );
52 : unsigned char buttonsw_get( void );
53 : unsigned char pushsw_get( void );
54 : void led_out_m( unsigned char led );
55 : void led_out( unsigned char led );
56 : void motor( int accele_l, int accele_r );
57 : void handle( int angle );
58 :
59 : /*======================================*/
60 : /* Global variable declarations */
61 : /*======================================*/
62 : unsigned long cnt0;
63 : unsigned long cnt1;
64 : int pattern;
65 :
66 : /***********************************************************************/
67 : /* Main program */
68 : /***********************************************************************/
69 : void main(void)
70 : {

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
44
71 : /* Initialize MCU functions */
72 : init();
73 :
74 : /* Initialize micom car state */
75 : handle( 0 );
76 : motor( 0, 0 );
77 :
78 : while( 1 ) {
79 : switch( pattern ) {
80 :
81 : /****************************************************************
82 : Pattern-related
83 : 0: wait for switch input
84 : 1: check if start bar is open
85 : 11: normal trace
86 : 12: check end of large turn to right
87 : 13: check end of large turn to left
88 : 21: processing at 1st cross line
89 : 22: read but ignore 2nd time
90 : 23: trace, crank detection after cross line
91 : 31: left crank clearing processing ? wait until stable
92 : 32: left crank clearing processing ? check end of turn
93 : 41: right crank clearing processing ? wait until stable
94 : 42: right crank clearing processing ? check end of turn
95 : 51: processing at 1st right half line detection
96 : 52: read but ignore 2nd line
97 : 53: trace after right half line detection
98 : 54: right lane change end check
99 : 61: processing at 1st left half line detection
100 : 62: read but ignore 2nd line
101 : 63: trace after left half line detection
102 : 64: left lane change end check
103 : ****************************************************************/
104 :
105 : case 0:
106 : /* Wait for switch input */
107 : if( pushsw_get() ) {
108 : pattern = 1;
109 : cnt1 = 0;
110 : break;
111 : }
112 : if( cnt1 < 100 ) { /* LED flashing processing */
113 : led_out( 0x1 );
114 : } else if( cnt1 < 200 ) {
115 : led_out( 0x2 );
116 : } else {
117 : cnt1 = 0;
118 : }
119 : break;
120 :
121 : case 1:
122 : /* Check if start bar is open */
123 : if( !startbar_get() ) {
124 : /* Start!! */
125 : led_out( 0x0 );
126 : pattern = 11;
127 : cnt1 = 0;
128 : break;
129 : }
130 : if( cnt1 < 50 ) { /* LED flashing processing */
131 : led_out( 0x1 );
132 : } else if( cnt1 < 100 ) {
133 : led_out( 0x2 );
134 : } else {
135 : cnt1 = 0;
136 : }
137 : break;
138 :
139 : case 11:
140 : /* Normal trace */
141 : if( check_crossline() ) { /* Cross line check */
142 : pattern = 21;
143 : break;
144 : }
145 : if( check_rightline() ) { /* Right half line detection check */
146 : pattern = 51;
147 : break;
148 : }
149 : if( check_leftline() ) { /* Left half line detection check */
150 : pattern = 61;

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
45
151 : break;
152 : }
153 : switch( sensor_inp(MASK3_3) ) {
154 : case 0x00:
155 : /* Center -> straight */
156 : handle( 0 );
157 : motor( 100 ,100 );
158 : break;
159 :
160 : case 0x04:
161 : /* Slight amount left of center -> slight turn to right */
162 : handle( 5 );
163 : motor( 100 ,100 );
164 : break;
165 :
166 : case 0x06:
167 : /* Small amount left of center -> small turn to right */
168 : handle( 10 );
169 : motor( 80 ,67 );
170 : break;
171 :
172 : case 0x07:
173 : /* Medium amount left of center -> medium turn to right */
174 : handle( 15 );
175 : motor( 50 ,38 );
176 : break;
177 :
178 : case 0x03:
179 : /* Large amount left of center -> large turn to right */
180 : handle( 25 );
181 : motor( 30 ,19 );
182 : pattern = 12;
183 : break;
184 :
185 : case 0x20:
186 : /* Slight amount right of center -> slight turn to left */
187 : handle( -5 );
188 : motor( 100 ,100 );
189 : break;
190 :
191 : case 0x60:
192 : /* Small amount right of center -> small turn to left */
193 : handle( -10 );
194 : motor( 67 ,80 );
195 : break;
196 :
197 : case 0xe0:
198 : /* Medium amount right of center -> medium turn to left */
199 : handle( -15 );
200 : motor( 38 ,50 );
201 : break;
202 :
203 : case 0xc0:
204 : /* Large amount right of center -> large turn to left */
205 : handle( -25 );
206 : motor( 19 ,30 );
207 : pattern = 13;
208 : break;
209 :
210 : default:
211 : break;
212 : }
213 : break;
214 :
215 : case 12:
216 : /* Check end of large turn to right */
217 : if( check_crossline() ) { /* Cross line check during large turn */
218 : pattern = 21;
219 : break;
220 : }
221 : if( check_rightline() ) { /* Right half line detection check */
222 : pattern = 51;
223 : break;
224 : }
225 : if( check_leftline() ) { /* Left half line detection check */
226 : pattern = 61;
227 : break;
228 : }
229 : if( sensor_inp(MASK3_3) == 0x06 ) {
230 : pattern = 11;
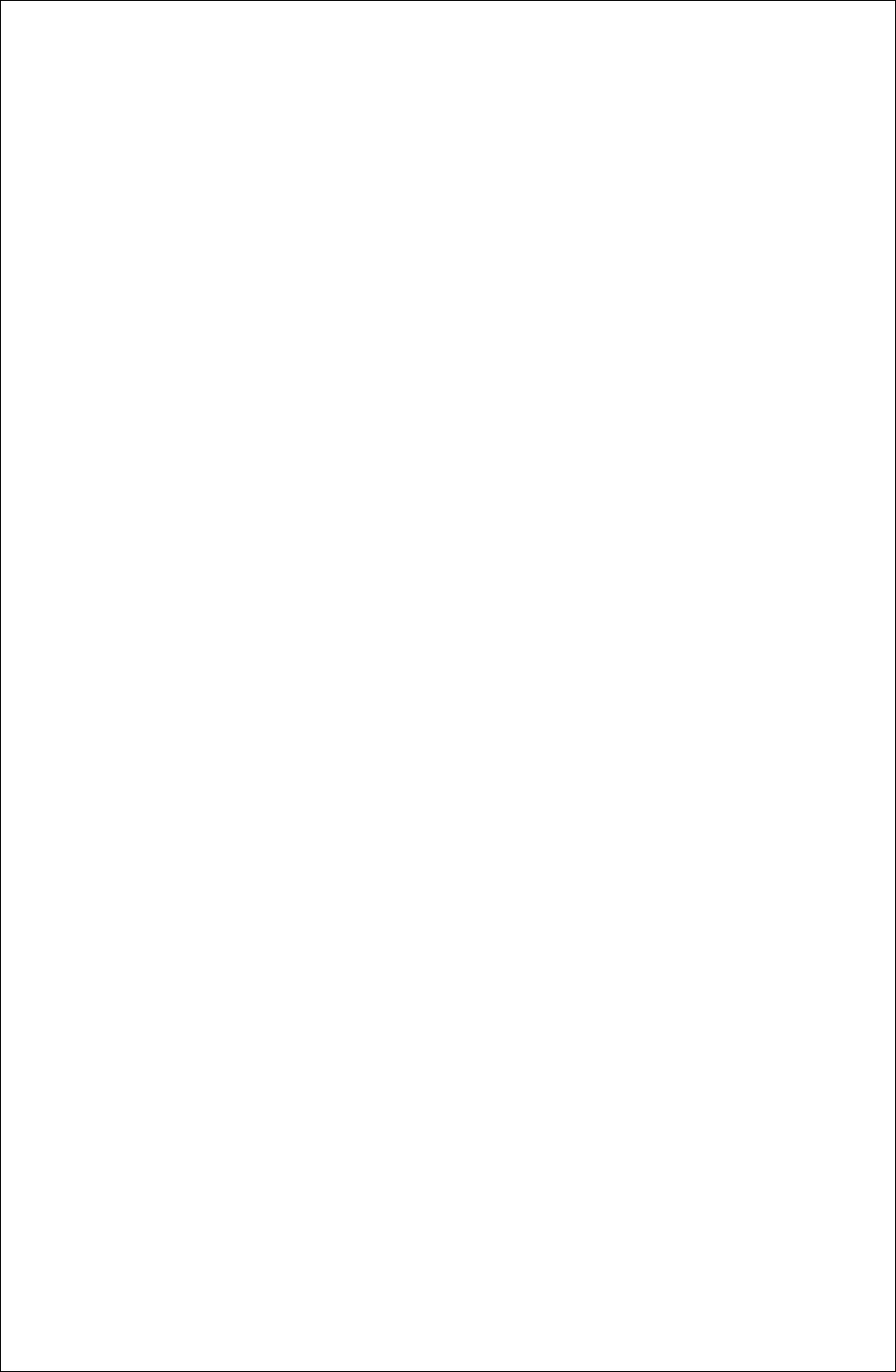
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
46
231 : }
232 : break;
233 :
234 : case 13:
235 : /* Check end of large turn to left */
236 : if( check_crossline() ) { /* Cross line check during large turn */
237 : pattern = 21;
238 : break;
239 : }
240 : if( check_rightline() ) { /* Right half line detection check */
241 : pattern = 51;
242 : break;
243 : }
244 : if( check_leftline() ) { /* Left half line detection check */
245 : pattern = 61;
246 : break;
247 : }
248 : if( sensor_inp(MASK3_3) == 0x60 ) {
249 : pattern = 11;
250 : }
251 : break;
252 :
253 : case 21:
254 : /* Processing at 1st cross line */
255 : led_out( 0x3 );
256 : handle( 0 );
257 : motor( 0 ,0 );
258 : pattern = 22;
259 : cnt1 = 0;
260 : break;
261 :
262 : case 22:
263 : /* Read but ignore 2nd line */
264 : if( cnt1 > 100 ){
265 : pattern = 23;
266 : cnt1 = 0;
267 : }
268 : break;
269 :
270 : case 23:
271 : /* Trace, crank detection after cross line */
272 : if( sensor_inp(MASK4_4)==0xf8 ) {
273 : /* Left crank determined -> to left crank clearing processing */
274 : led_out( 0x1 );
275 : handle( -38 );
276 : motor( 10 ,50 );
277 : pattern = 31;
278 : cnt1 = 0;
279 : break;
280 : }
281 : if( sensor_inp(MASK4_4)==0x1f ) {
282 : /* Right crank determined -> to right crank clearing processing */
283 : led_out( 0x2 );
284 : handle( 38 );
285 : motor( 50 ,10 );
286 : pattern = 41;
287 : cnt1 = 0;
288 : break;
289 : }
290 : switch( sensor_inp(MASK3_3) ) {
291 : case 0x00:
292 : /* Center -> straight */
293 : handle( 0 );
294 : motor( 40 ,40 );
295 : break;
296 : case 0x04:
297 : case 0x06:
298 : case 0x07:
299 : case 0x03:
300 : /* Left of center -> turn to right */
301 : handle( 8 );
302 : motor( 40 ,35 );
303 : break;
304 : case 0x20:
305 : case 0x60:
306 : case 0xe0:
307 : case 0xc0:
308 : /* Right of center -> turn to left */
309 : handle( -8 );
310 : motor( 35 ,40 );

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
47
311 : break;
312 : }
313 : break;
314 :
315 : case 31:
316 : /* Left crank clearing processing ? wait until stable */
317 : if( cnt1 > 200 ) {
318 : pattern = 32;
319 : cnt1 = 0;
320 : }
321 : break;
322 :
323 : case 32:
324 : /* Left crank clearing processing ? check end of turn */
325 : if( sensor_inp(MASK3_3) == 0x60 ) {
326 : led_out( 0x0 );
327 : pattern = 11;
328 : cnt1 = 0;
329 : }
330 : break;
331 :
332 : case 41:
333 : /* Right crank clearing processing ? wait until stable */
334 : if( cnt1 > 200 ) {
335 : pattern = 42;
336 : cnt1 = 0;
337 : }
338 : break;
339 :
340 : case 42:
341 : /* Right crank clearing processing ? check end of turn */
342 : if( sensor_inp(MASK3_3) == 0x06 ) {
343 : led_out( 0x0 );
344 : pattern = 11;
345 : cnt1 = 0;
346 : }
347 : break;
348 :
349 : case 51:
350 : /* Processing at 1st right half line detection */
351 : led_out( 0x2 );
352 : handle( 0 );
353 : motor( 0 ,0 );
354 : pattern = 52;
355 : cnt1 = 0;
356 : break;
357 :
358 : case 52:
359 : /* Read but ignore 2nd time */
360 : if( cnt1 > 100 ){
361 : pattern = 53;
362 : cnt1 = 0;
363 : }
364 : break;
365 :
366 : case 53:
367 : /* Trace, lane change after right half line detection */
368 : if( sensor_inp(MASK4_4) == 0x00 ) {
369 : handle( 15 );
370 : motor( 40 ,31 );
371 : pattern = 54;
372 : cnt1 = 0;
373 : break;
374 : }
375 : switch( sensor_inp(MASK3_3) ) {
376 : case 0x00:
377 : /* Center -> straight */
378 : handle( 0 );
379 : motor( 40 ,40 );
380 : break;
381 : case 0x04:
382 : case 0x06:
383 : case 0x07:
384 : case 0x03:
385 : /* Left of center -> turn to right */
386 : handle( 8 );
387 : motor( 40 ,35 );
388 : break;
389 : case 0x20:
390 : case 0x60:

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
48
391 : case 0xe0:
392 : case 0xc0:
393 : /* Right of center -> turn to left */
394 : handle( -8 );
395 : motor( 35 ,40 );
396 : break;
397 : default:
398 : break;
399 : }
400 : break;
401 :
402 : case 54:
403 : /* Right lane change end check */
404 : if( sensor_inp( MASK4_4 ) == 0x3c ) {
405 : led_out( 0x0 );
406 : pattern = 11;
407 : cnt1 = 0;
408 : }
409 : break;
410 :
411 : case 61:
412 : /* Processing at 1st left half line detection */
413 : led_out( 0x1 );
414 : handle( 0 );
415 : motor( 0 ,0 );
416 : pattern = 62;
417 : cnt1 = 0;
418 : break;
419 :
420 : case 62:
421 : /* Read but ignore 2nd time */
422 : if( cnt1 > 100 ){
423 : pattern = 63;
424 : cnt1 = 0;
425 : }
426 : break;
427 :
428 : case 63:
429 : /* Trace, lane change after left half line detection */
430 : if( sensor_inp(MASK4_4) == 0x00 ) {
431 : handle( -15 );
432 : motor( 31 ,40 );
433 : pattern = 64;
434 : cnt1 = 0;
435 : break;
436 : }
437 : switch( sensor_inp(MASK3_3) ) {
438 : case 0x00:
439 : /* Center -> straight */
440 : handle( 0 );
441 : motor( 40 ,40 );
442 : break;
443 : case 0x04:
444 : case 0x06:
445 : case 0x07:
446 : case 0x03:
447 : /* Left of center -> turn to right */
448 : handle( 8 );
449 : motor( 40 ,35 );
450 : break;
451 : case 0x20:
452 : case 0x60:
453 : case 0xe0:
454 : case 0xc0:
455 : /* Right of center -> turn to left */
456 : handle( -8 );
457 : motor( 35 ,40 );
458 : break;
459 : default:
460 : break;
461 : }
462 : break;
463 :
464 : case 64:
465 : /* Left lane change end check */
466 : if( sensor_inp( MASK4_4 ) == 0x3c ) {
467 : led_out( 0x0 );
468 : pattern = 11;
469 : cnt1 = 0;
470 : }

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
49
471 : break;
472 :
473 : default:
474 : /* If neither, return to standby state */
475 : pattern = 0;
476 : break;
477 : }
478 : }
479 : }
480 :
481 : /***********************************************************************/
482 : /* RX62T Initialization */
483 : /***********************************************************************/
484 : void init(void)
485 : {
486 : // System Clock
487 : SYSTEM.SCKCR.BIT.ICK = 0; //12.288*8=98.304MHz
488 : SYSTEM.SCKCR.BIT.PCK = 1; //12.288*4=49.152MHz
489 :
490 : // Port I/O Settings
491 : PORT1.DDR.BYTE = 0x03; //P10:LED2 in motor drive board
492 :
493 : PORT2.DR.BYTE = 0x08;
494 : PORT2.DDR.BYTE = 0x1b; //P24:SDCARD_CLK(o)
495 : //P23:SDCARD_DI(o)
496 : //P22:SDCARD_DO(i)
497 : //CN:P21-P20
498 : PORT3.DR.BYTE = 0x01;
499 : PORT3.DDR.BYTE = 0x0f; //CN:P33-P31
500 : //P30:SDCARD_CS(o)
501 : //PORT4:input //sensor input
502 : //PORT5:input
503 : //PORT6:input
504 :
505 : PORT7.DDR.BYTE = 0x7e; //P76:LED3 in motor drive board
506 : //P75:forward reverse signal(right motor)
507 : //P74:forward reverse signal(left motor)
508 : //P73:PWM(right motor)
509 : //P72:PWM(left motor)
510 : //P71:PWM(servo motor)
511 : //P70:Push-button in motor drive board
512 : PORT8.DDR.BYTE = 0x07; //CN:P82-P80
513 : PORT9.DDR.BYTE = 0x7f; //CN:P96-P90
514 : PORTA.DR.BYTE = 0x0f; //CN:PA5-PA4
515 : //PA3:LED3(o)
516 : //PA2:LED2(o)
517 : //PA1:LED1(o)
518 : //PA0:LED0(o)
519 : PORTA.DDR.BYTE = 0x3f; //CN:PA5-PA0
520 : PORTB.DDR.BYTE = 0xff; //CN:PB7-PB0
521 : PORTD.DDR.BYTE = 0x0f; //PD7:TRST#(i)
522 : //PD5:TDI(i)
523 : //PD4:TCK(i)
524 : //PD3:TDO(o)
525 : //CN:PD2-PD0
526 : PORTE.DDR.BYTE = 0x1b; //PE5:SW(i)
527 : //CN:PE4-PE0
528 :
529 : // Compare match timer
530 : MSTP_CMT0 = 0; //CMT Release module stop state
531 : MSTP_CMT2 = 0; //CMT Release module stop state
532 :
533 : ICU.IPR[0x04].BYTE = 0x0f; //CMT0_CMI0 Priority of interrupts
534 : ICU.IER[0x03].BIT.IEN4 = 1; //CMT0_CMI0 Permission for interrupt
535 : CMT.CMSTR0.WORD = 0x0000; //CMT0,CMT1 Stop counting
536 : CMT0.CMCR.WORD = 0x00C3; //PCLK/512
537 : CMT0.CMCNT = 0;
538 : CMT0.CMCOR = 96; //1ms/(1/(49.152MHz/512))
539 : CMT.CMSTR0.WORD = 0x0003; //CMT0,CMT1 Start counting
540 :
541 : // MTU3_3 MTU3_4 PWM mode synchronized by RESET
542 : MSTP_MTU = 0; //Release module stop state
543 : MTU.TSTRA.BYTE = 0x00; //MTU Stop counting
544 :
545 : MTU3.TCR.BYTE = 0x23; //ILCK/64(651.04ns)
546 : MTU3.TCNT = MTU4.TCNT = 0; //MTU3,MTU4TCNT clear
547 : MTU3.TGRA = MTU3.TGRC = PWM_CYCLE; //cycle(16ms)
548 : MTU3.TGRB = MTU3.TGRD = SERVO_CENTER; //PWM(servo motor)
549 : MTU4.TGRA = MTU4.TGRC = 0; //PWM(left motor)
550 : MTU4.TGRB = MTU4.TGRD = 0; //PWM(right motor)

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
50
551 : MTU.TOCR1A.BYTE = 0x40; //Selection of output level
552 : MTU3.TMDR.BYTE = 0x38; //TGRC,TGRD buffer function
553 : //PWM mode synchronized by RESET
554 : MTU4.TMDR.BYTE = 0x00; //Set 0 to exclude MTU3 effects
555 : MTU.TOERA.BYTE = 0xc7; //MTU3TGRB,MTU4TGRA,MTU4TGRB permission for output
556 :
557 : MTU.TSTRA.BYTE = 0x40; //MTU0,MTU3 count function
558 : }
559 :
560 : /***********************************************************************/
561 : /* Interrupt */
562 : /***********************************************************************/
563 : #pragma interrupt Excep_CMT0_CMI0(vect=28)
564 : void Excep_CMT0_CMI0(void)
565 : {
566 : cnt0++;
567 : cnt1++;
568 : }
569 :
570 : /***********************************************************************/
571 : /* Timer unit */
572 : /* Arguments: timer value, 1 = 1 ms */
573 : /***********************************************************************/
574 : void timer( unsigned long timer_set )
575 : {
576 : cnt0 = 0;
577 : while( cnt0 < timer_set );
578 : }
579 :
580 : /***********************************************************************/
581 : /* Sensor state detection */
582 : /* Arguments: masked values */
583 : /* Return values: sensor value */
584 : /***********************************************************************/
585 : unsigned char sensor_inp( unsigned char mask )
586 : {
587 : unsigned char sensor;
588 :
589 : sensor = ~PORT4.PORT.BYTE;
590 :
591 : sensor &= mask;
592 :
593 : return sensor;
594 : }
595 :
596 : /***********************************************************************/
597 : /* Read start bar detection sensor */
598 : /* Return values: Sensor value, ON (bar present):1, */
599 : /* OFF (no bar present):0 */
600 : /***********************************************************************/
601 : unsigned char startbar_get( void )
602 : {
603 : unsigned char b;
604 :
605 : b = ~PORT4.PORT.BIT.B0 & 0x01; /* Read start bar signal */
606 :
607 : return b;
608 : }
609 :
610 : /***********************************************************************/
611 : /* Cross line detection processing */
612 : /* Return values: 0: no cross line, 1: cross line */
613 : /***********************************************************************/
614 : int check_crossline( void )
615 : {
616 : unsigned char b;
617 : int ret;
618 :
619 : ret = 0;
620 : b = sensor_inp(MASK3_3);
621 : if( b==0xe7 ) {
622 : ret = 1;
623 : }
624 : return ret;
625 : }
626 :
627 : /***********************************************************************/
628 : /* Right half line detection processing */
629 : /* Return values: 0: not detected, 1: detected */
630 : /***********************************************************************/

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
51
631 : int check_rightline( void )
632 : {
633 : unsigned char b;
634 : int ret;
635 :
636 : ret = 0;
637 : b = sensor_inp(MASK4_4);
638 : if( b==0x1f ) {
639 : ret = 1;
640 : }
641 : return ret;
642 : }
643 :
644 : /***********************************************************************/
645 : /* Left half line detection processing */
646 : /* Return values: 0: not detected, 1: detected */
647 : /***********************************************************************/
648 : int check_leftline( void )
649 : {
650 : unsigned char b;
651 : int ret;
652 :
653 : ret = 0;
654 : b = sensor_inp(MASK4_4);
655 : if( b==0xf8 ) {
656 : ret = 1;
657 : }
658 : return ret;
659 : }
660 :
661 : /***********************************************************************/
662 : /* DIP switch value read */
663 : /* Return values: Switch value, 0 to 15 */
664 : /***********************************************************************/
665 : unsigned char dipsw_get( void )
666 : {
667 : unsigned char sw,d0,d1,d2,d3;
668 :
669 : d0 = ( PORT6.PORT.BIT.B3 & 0x01 ); /* P63~P60 read */
670 : d1 = ( PORT6.PORT.BIT.B2 & 0x01 ) << 1;
671 : d2 = ( PORT6.PORT.BIT.B1 & 0x01 ) << 2;
672 : d3 = ( PORT6.PORT.BIT.B0 & 0x01 ) << 3;
673 : sw = d0 | d1 | d2 | d3;
674 :
675 : return sw;
676 : }
677 :
678 : /***********************************************************************/
679 : /* Push-button in MCU board value read */
680 : /* Return values: Switch value, ON: 1, OFF: 0 */
681 : /***********************************************************************/
682 : unsigned char buttonsw_get( void )
683 : {
684 : unsigned char sw;
685 :
686 : sw = ~PORTE.PORT.BIT.B5 & 0x01; /* Read ports with switches */
687 :
688 : return sw;
689 : }
690 :
691 : /***********************************************************************/
692 : /* Push-button in motor drive board value read */
693 : /* Return values: Switch value, ON: 1, OFF: 0 */
694 : /***********************************************************************/
695 : unsigned char pushsw_get( void )
696 : {
697 : unsigned char sw;
698 :
699 : sw = ~PORT7.PORT.BIT.B0 & 0x01; /* Read ports with switches */
700 :
701 : return sw;
702 : }
703 :
704 : /***********************************************************************/
705 : /* LED control in MCU board */
706 : /* Arguments: Switch value, LED0: bit 0, LED1: bit 1. 0: dark, 1: lit */
707 : /* */
708 : /***********************************************************************/
709 : void led_out_m( unsigned char led )
710 : {

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
52
711 : led = ~led;
712 : PORTA.DR.BYTE = led & 0x0f;
713 : }
714 :
715 : /***********************************************************************/
716 : /* LED control in motor drive board */
717 : /* Arguments: Switch value, LED0: bit 0, LED1: bit 1. 0: dark, 1: lit */
718 : /* Example: 0x3 -> LED1: ON, LED0: ON, 0x2 -> LED1: ON, LED0: OFF */
719 : /***********************************************************************/
720 : void led_out( unsigned char led )
721 : {
722 : led = ~led;
723 : PORT7.DR.BIT.B6 = led & 0x01;
724 : PORT1.DR.BIT.B0 = ( led >> 1 ) & 0x01;
725 : }
726 :
727 : /***********************************************************************/
728 : /* Motor speed control */
729 : /* Arguments: Left motor: -100 to 100, Right motor: -100 to 100 */
730 : /* Here, 0 is stopped, 100 is forward, and -100 is reverse. */
731 : /* Return value: None */
732 : /***********************************************************************/
733 : void motor( int accele_l, int accele_r )
734 : {
735 : int sw_data;
736 :
737 : sw_data = dipsw_get() + 5;
738 : accele_l = accele_l * sw_data / 20;
739 : accele_r = accele_r * sw_data / 20;
740 :
741 : /* Left Motor Control */
742 : if( accele_l >= 0 ) {
743 : PORT7.DR.BYTE &= 0xef;
744 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * accele_l / 100;
745 : } else {
746 : PORT7.DR.BYTE |= 0x10;
747 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * ( -accele_l ) / 100;
748 : }
749 :
750 : /* Right Motor Control */
751 : if( accele_r >= 0 ) {
752 : PORT7.DR.BYTE &= 0xdf;
753 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * accele_r / 100;
754 : } else {
755 : PORT7.DR.BYTE |= 0x20;
756 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * ( -accele_r ) / 100;
757 : }
758 : }
759 :
760 : /***********************************************************************/
761 : /* Servo steering operation */
762 : /* Arguments: servo operation angle: -90 to 90 */
763 : /* -90: 90-degree turn to left, 0: straight, */
764 : /* 90: 90-degree turn to right */
765 : /***********************************************************************/
766 : void handle( int angle )
767 : {
768 : /* When the servo move from left to right in reverse, replace "-" with "+". */
769 : MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP;
770 : }
771 :
772 : /***********************************************************************/
773 : /* end of file */
774 : /***********************************************************************/
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
53
5.2. Differences between programs for kit07_rx62t.c and kit12_rx62t.c
The points of difference between kit07_rx62t.c and kit12_rx62t.c, are listed in the table below.
kit07_rx62t.c
(for use Sensor Board Ver.4)
kit12_rx62t.c
(for use Sensor Board Ver.5)
sensor_inp
function
unsigned char sensor_inp(
unsigned char mask )
{
unsigned char sensor;
sensor = ~PORT4.PORT.BYTE;
sensor &= 0xef;
if( sensor & 0x08 ) sensor |= 0x10;
sensor &= mask;
return sensor;
}
unsigned char sensor_inp(
unsigned char mask )
{
unsigned char sensor;
sensor = ~PORT4.PORT.BYTE;
// delete this line
// delete this line
sensor &= mask;
return sensor;
}
startbar_get
function
unsigned char startbar_get( void )
{
unsigned char b;
b = ~PORT4.PORT.BIT.B4 & 0x01;
return b;
}
unsigned char startbar_get( void )
{
unsigned char b;
b = ~ PORT4.PORT.BIT.B0 & 0x01;
return b;
}
5.3. On-Chip Peripheral Functions of RX62T MCU Used by the Program
The on-chip peripheral modules used for control on the RMC-RX62T board (RX62T MCU) included in the
MCU Car Rally Kit, Ver. 5.1, are listed below.
Items
On-Chip Peripheral Module of RMC-RX62T used to Control MCU Car
Generating interrupts at
1 ms intervals 1ms
CMT
Control of left motor,
right motor, and servo
Reset-synchronized PWM mode using MTU3
Rotary encoder*
(pulse count)
MTU0
Note: * These are not covered in Program Explanation Manual (this manual).
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
54
5.4. Program Explanation
5.4.1. Start
1 : /***********************************************************************/
2 : /* Supported Microcontroller:RX62T */
3 : /* File: kit12_rx62t.c */
4 : /* File Contents: MCU Car Trace Basic Program(RX62T version) */
5 : /* Version number: Ver.1.00 */
6 : /* Date: 2013.09.01 */
7 : /* Copyright: Renesas Micom Car Rally Secretariat */
8 : /***********************************************************************/
First comes the comments section. The beginning of a comment is designated by /* and the end of a comment by
*/. All characters from the beginning to the end of a comment are ignored by the compiler. Comment lines are
used to include notes about the program.
5.4.2. Including External Files
16 : /*======================================*/
17 : /* Include */
18 : /*======================================*/
19 : #include "iodefine.h"
The #include statement is used to include (call) an external file.
File Name
Description
iodefine.h
This file defines registers used to control the on-chip peripheral functions of RX62T.
5.4.3. Symbol Definitions
21 : /*======================================*/
22 : /* Symbol definitions */
23 : /*======================================*/
24 :
25 : /* Constant settings */
26 : #define PWM_CYCLE 24575 /* Motor PWM period (16ms) */
27 : #define SERVO_CENTER 2300 /* Servo center value */
28 : #define HANDLE_STEP 13 /* 1 degree value */
29 :
30 : /* Masked value settings X:masked (disabled) O:not masked (enabled) */
31 : #define MASK2_2 0x66 /* X O O X X O O X */
32 : #define MASK2_0 0x60 /* X O O X X X X X */
33 : #define MASK0_2 0x06 /* X X X X X O O X */
34 : #define MASK3_3 0xe7 /* O O O X X O O O */
35 : #define MASK0_3 0x07 /* X X X X X O O O */
36 : #define MASK3_0 0xe0 /* O O O X X X X X */
37 : #define MASK4_0 0xf0 /* O O O O X X X X */
38 : #define MASK0_4 0x0f /* X X X X O O O O */
39 : #define MASK4_4 0xff /* O O O O O O O O */
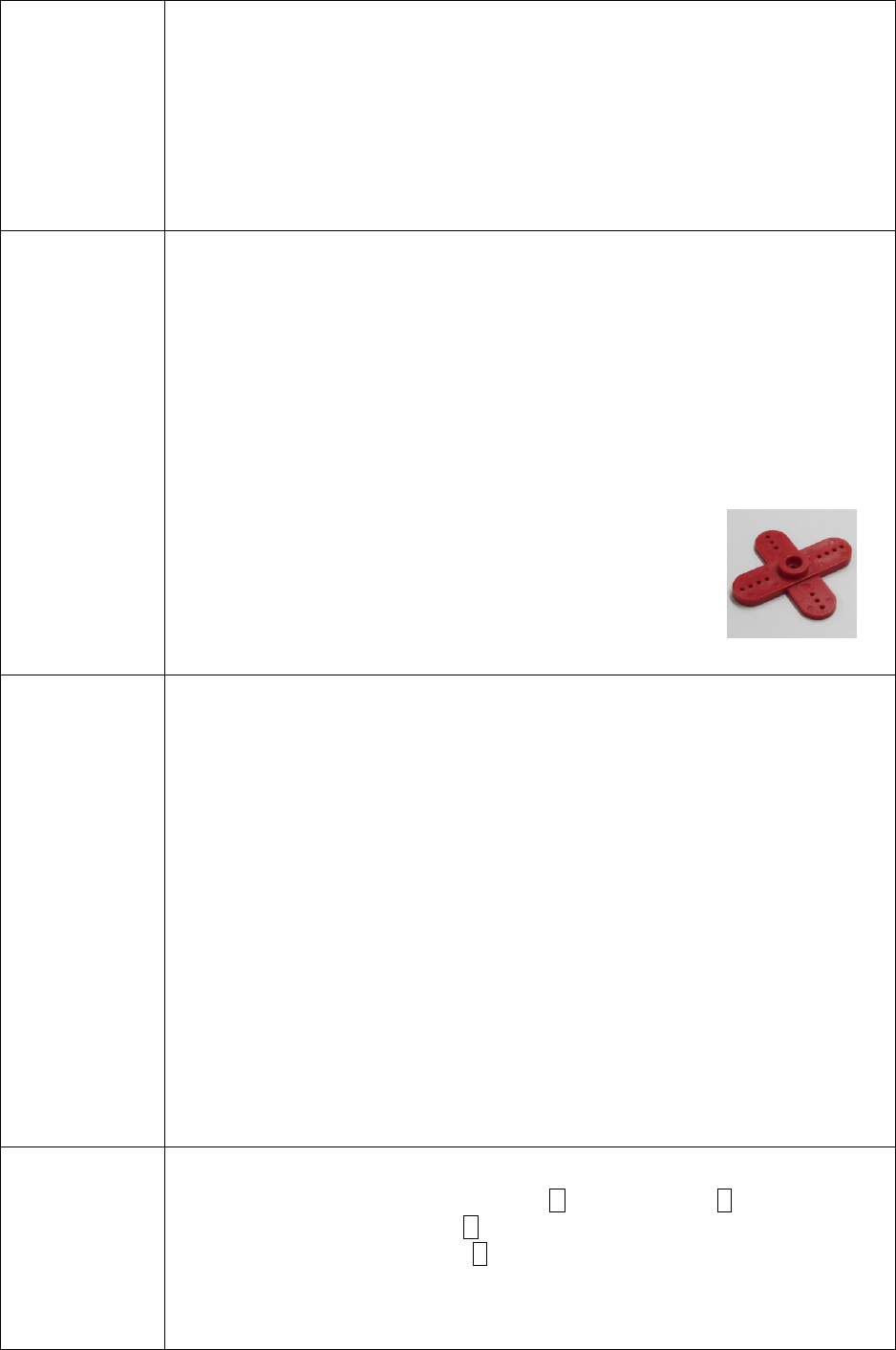
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
55
PWM_CYCLE
PWM_CYCLE sets the PWM cycle for the signals applied to the right motor, left motor,
and servo. Here it is set to a PWM cycle of 16 ms. The value is calculated as follows:
PWM_CYCLE = desired PWM cycle / MTU3_3 timer general register C (MTU3.TGRC) count
source – 1
=16 ms / 651.04 ns – 1
= (16 10–3) / (651.04 10–9) – 1
= 24576 – 1 = 24575
For a detailed explanation, see the discussion of reset-synchronized PWM mode.
SERVO_CENTER
SERVO_CENTER sets the value at which the servo angle is 0 degrees (pointing straight
ahead). A standard servo will point forward when a 1.5 [ms] pulse width is applied.
Therefore, the pulse on width is set at 1.5 ms. The SERVO_CENTER setting value is
calculated as follows:
SERVO_CENTER = pulse on width / MTU3_3 timer general register C (MTU3.TGRC)
count source select bit setting – 1
= 1.5 ms /651.04 ns – 1
= (1.5 × 10-3) / (651.04 × 10–9) – 1
= 2304
Calculated servo centre is 2304.
In this sample program, 2300 is used for servo centre.
However, the actual servo centre value is slightly different for
every MCU car because of factors such as variation among
individual servos and the way the grooves in the holes in the
servo horn match up. This is analogous to the way that
everyone’s fingerprints are different. For this reason, this value
needs to be changed for each MCU car to adjust the servo
angle such that the car runs in a straight line when the
software specifies a turning angle of 0 degrees.
▲Servo horn
HANDLE_STEP
HANDLE_STEP sets a value equivalent to 1 degree of servo movement. A 0.7 ms PWM on
width causes the servo to turn 90 degrees to the left, and a 2.3 ms on width causes it to turn
90 degrees to the right. If we divide the difference between these two by 180, we can obtain
the value equivalent to 1 degree.
On width of 90 degrees left
MTU3.TGRD + PWM waveform on width / MTU3_3 timer counter count source – 1
= (0.7 × 10–3) / (651.04 × 10–9) – 1
= 1075 – 1 = 1074
On width of 90 degrees right
MTU3.TGRD + PWM waveform on width / MTU3_3 timer counter count source – 1
= (2.3 × 10–3) / (651.04 × 10–9) – 1
= 3532 – 1 = 3531
Value equivalent to 1 degree
(Right – left) / 180 = (3531 – 1074) / 180 = 13.65 13
Therefore, the value of HANDLE_STEP is defined as 13. Change this value to adjust the
value equivalent to 1 degree of servo movement.
MASK2_2
MASK2_0
MASK0_2
MASK3_3
MASK0_3
MASK3_0
MASK4_0
MASK0_4
MASK4_4
The sensor_inp function defines common mask values used when masking sensor values.
These values are defined in the format MASK + A + _ (underscore) + B.
A: Of the four sensors on the left, A sensors are valid (unmasked).
B: Of the four sensors on the right, B sensors are valid (unmasked).
The other sensors are masked.
For details, see 6.4.12, sensor_inp Function.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
56
5.4.4. Prototype Declarations
41 : /*======================================*/
42 : /* Prototype declarations */
43 : /*======================================*/
44 : void init(void);
45 : void timer( unsigned long timer_set );
46 : unsigned char sensor_inp( unsigned char mask );
47 : unsigned char startbar_get( void );
48 : int check_crossline( void );
49 : int check_rightline( void );
50 : int check_leftline( void );
51 : unsigned char dipsw_get( void );
52 : unsigned char buttonsw_get( void );
53 : unsigned char pushsw_get( void );
54 : void led_out_m( unsigned char led );
55 : void led_out( unsigned char led );
56 : void motor( int accele_l, int accele_r );
57 : void handle( int angle );
58 :
Prototype declarations must be made before functions are used to allow checking of the types and quantity of
arguments of the user-created functions. A semicolon (;) is appended after a function to indicate a function
prototype.
An example prototype declaration is shown below.
void motor( int accele_l, int accele_r ); /* Prototype declarations */
void main( void )
{
int a, b;
a = 50;
b = 100;
motor( a, b ); Check to confirm that the first and second arguments are of type int as specified in
the prototype declaration. If either argument is not type int, the compiler will
return an error.
}
/* Motor control function */
void motor( int accele_l, int accele_r )
{
Program
}
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
57
5.4.5. Global Variable Declarations
59 : /*======================================*/
60 : /* Global variable declarations */
61 : /*======================================*/
62 : unsigned long cnt0;
63 : unsigned long cnt1;
64 : int pattern;
65 :
Global variables are defined separately from functions and may be referenced by any function. By means of
comparison, the usual type of variable, which is defined within a function, is called a local variable and may be
referenced only within that function.
An example prototype declaration is shown below.
void a( void ); /* Prototype declarations */
int timer; /* Global variable */
void main( void )
{
int i;
timer = 0;
i = 10;
printf(“%/n”,timer ); 0 is displayed.
a();
printf(“%/n”,timer ); timer is a global variable,
so the value 20 set by function a is displayed.
printf(“%/n”,i ); Function a also uses variable i, but since it is a local variable,
} the value of variable i within function a is irrelevant.
The value of 10 set by this function is displayed.
void a( void )
{
int i;
i = 20;
timer = i;
}
The program kit12_rx62t.c contains three global variable declarations.
Variable name
Type
Usage
cnt0
unsigned long
This function increments the count value by 1 at 1 ms intervals.
Used by the timer function to count at 1 ms intervals.
The details are described in the section covering the timer function.
cnt1
unsigned long
This function increments the count value by 1 at 1 ms intervals.
This variable can be used freely by the program to measure duration. For
example, it can be used to “do ○○ if 300 ms has elapsed and do □□
otherwise.” The details are described in the section covering the main
function.
pattern
int
This is the pattern number. The details are described in the section
covering the main function.
Under the ANSI C standard (the C language standard), un-initialised data must have an initial value of
0x00. Therefore, these variables all have a value of 0.

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
58
5.4.6. init Function(Clock Choice)
The init function initialises the on-chip peripheral functions of the RX62T MCU. The name init stands for
“initialise.” The init function initialises several on-chip peripheral functions. These are described below, broken
down by function.
The RX62T MCU board already has a 12.288MHz crystal oscillator.
So choose 98.304MHz (12.288 x 8) for system clock and 49.152MHz (12.288 x 4) for peripheral clock.
481 : /***********************************************************************/
482 : /* RX62T Initialization */
483 : /***********************************************************************/
484 : void init(void)
485 : {
486 : // System Clock
487 : SYSTEM.SCKCR.BIT.ICK = 0; //12.288*8=98.304MHz
488 : SYSTEM.SCKCR.BIT.PCK = 1; //12.288*4=49.152MHz
5.4.7. init Function (Port I/O Settings)
Next, the init function makes port I/O settings.
490 : // Port I/O Settings
491 : PORT1.DDR.BYTE = 0x03; //P10:LED2 in motor drive board
492 :
493 : PORT2.DR.BYTE = 0x08;
494 : PORT2.DDR.BYTE = 0x1b; //P24:SDCARD_CLK(o)
495 : //P23:SDCARD_DI(o)
496 : //P22:SDCARD_DO(i)
497 : //CN:P21-P20
498 : PORT3.DR.BYTE = 0x01;
499 : PORT3.DDR.BYTE = 0x0f; //CN:P33-P31
500 : //P30:SDCARD_CS(o)
501 : //PORT4:input //sensor input
502 : //PORT5:input
503 : //PORT6:input
504 :
505 : PORT7.DDR.BYTE = 0x7e; //P76:LED3 in motor drive board
506 : //P75:forward reverse signal(right motor)
507 : //P74:forward reverse signal(left motor)
508 : //P73:PWM(right motor)
509 : //P72:PWM(left motor)
510 : //P71:PWM(servo motor)
511 : //P70:Push-button in motor drive board
512 : PORT8.DDR.BYTE = 0x07; //CN:P82-P80
513 : PORT9.DDR.BYTE = 0x7f; //CN:P96-P90
514 : PORTA.DR.BYTE = 0x0f; //CN:PA5-PA4
515 : //PA3:LED3(o)
516 : //PA2:LED2(o)
517 : //PA1:LED1(o)
518 : //PA0:LED0(o)
519 : PORTA.DDR.BYTE = 0x3f; //CN:PA5-PA0
520 : PORTB.DDR.BYTE = 0xff; //CN:PB7-PB0
521 : PORTD.DDR.BYTE = 0x0f; //PD7:TRST#(i)
522 : //PD5:TDI(i)
523 : //PD4:TCK(i)
524 : //PD3:TDO(o)
525 : //CN:PD2-PD0
526 : PORTE.DDR.BYTE = 0x1b; //PE5:SW(i)
527 : //CN:PE4-PE0
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
59
Following table shows relationship between ports of RX62T and kit car.
Port
bit7
bit6
bit5
bit4
bit3
bit2
bit1
bit0
1
Not connected
LED2 in motor
drive board
output
2
SDCARD_CLK
SDCARD_DI
SDCARD_DO
Not connected
Not connected
3
Not connected
Not connected
Not connected
SDCARD_CS
4
Sensor board
course state
input
Sensor board
course state
input
Sensor board
course state
input
Sensor board
start bar state
input
Sensor board
course state
input
Sensor board
course state
input
Sensor board
course state
input
Sensor board
course state
input
5
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
6
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
7
LED3 in
motor drive
board /output
forward reverse
signal
(right motor)
forward reverse
signal
(left motor)
PWM
(right motor)
PWM
(left motor)
PWM
(servo motor)
Push-button in
motor drive
board
8
Not connected
Not connected
Not connected
9
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
A
Not connected
Not connected
LED3 in
MCU board
output
LED2 in
MCU board
output
LED1 in
MCU board
output
LED0 in
MCU board
output
B
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
Not connected
D
TRST#
TMS
TDI
TCK
TDO
Not connected
Not connected
Not connected
E
Push-button
in MCU board
input
Not connected
Not connected
Not connected
Not connected
Not connected
Bits that are crossed out in the table have no pins associated with them.
All ports become input ports after a reset.
Port4,5,6 and bit2 of portE are input only.
According to following rules, every ports are set by PnDDR.( n=1 to 3,7 to 9,A,B,D and E)
[1] Pins on which signals are output are set to 1.
[2] Pins on which signals are input are set to 0.
[3] Unconnected pins should either be connected to a pull-up or pull-down resistor and set to input mode (0) or
left open (not connected to anything) and set to output mode (1). Here, the latter setting is used.
[4] Bits with no associated pins (crossed out in the table) are set to 0.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
60
Based on rules [1] to [4], the table can be rewritten with 1s and 0s as follows:
Port
bit7
bit6
bit5
bit4
bit3
bit2
bit1
bit0
Hexadecimal
1
0
0
0
0
0
0
1
1
0x03
2
0
0
0
1
1
0
1
1
0x1b
3
0
0
0
0
1
1
1
1
0x0f
7
0
1
1
1
1
1
1
0
0x7e
8
0
0
0
0
0
1
1
1
0x07
9
0
1
1
1
1
1
1
1
0x7f
A
0
0
1
1
1
1
1
1
0x3f
B
1
1
1
1
1
1
1
1
0xff
D
0
0
0
0
1
1
1
1
0x0f
E
0
0
0
1
1
0
1
1
0x1b
In the C language numeric values cannot be expressed in binary notation, so they must be converted to decimal or
hexadecimal format. The conversion is generally from binary to hexadecimal format, since that is easier than
converting to decimal format.
From above table, value of Direction Register set as follows.
Port
Direction Register
Setting value
1
PORT1.DDR.BYTE
0x03
2
PORT2.DDR.BYTE
0x1b
3
PORT3.DDR.BYTE
0x0f
7
PORT7.DDR.BYTE
0x7e
8
PORT8.DDR.BYTE
0x07
9
PORT9.DDR.BYTE
0x7f
A
PORTA.DDR.BYTE
0x3f
B
PORTB.DDR.BYTE
0xff
D
PORTD.DDR.BYTE
0x0f
E
PORTE.DDR.BYTE
0x1b
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
61
5.4.8. init Function (Compare Match Timer Settings)
CMT0 is used to generate an interrupt at 1 ms intervals.
529 : // Compare match timer
530 : MSTP_CMT0 = 0; //CMT Release module stop state
531 : MSTP_CMT2 = 0; //CMT Release module stop state
532 :
533 : ICU.IPR[0x04].BYTE = 0x0f; //CMT0_CMI0 Priority of interrupts
534 : ICU.IER[0x03].BIT.IEN4 = 1; //CMT0_CMI0 Permission for interrupt
535 : CMT.CMSTR0.WORD = 0x0000; //CMT0,CMT1 Stop counting
536 : CMT0.CMCR.WORD = 0x00C3; //PCLK/512
537 : CMT0.CMCNT = 0;
538 : CMT0.CMCOR = 96; //1ms/(1/(49.152MHz/512))
539 : CMT.CMSTR0.WORD = 0x0003; //CMT0,CMT1 Start counting
Line 530
to
Line 531
According to the state of the module stop function, the compare match timer will be set to permitted
or prohibited. At the initial state, the compare match timer is set to prohibited. So change it to
permitted.
Line 533
Sets priority of interrupts. In this program, maximum level (level 15) is set.
Line 534
Permission for interrupt request to CPU.
Line 535
Sets timer counting function to stop.
Line 536
Choose clock for counting up. In this program, PCLK/512 is chosen.
1/(49.152MHz /512) = 10.42 us
Line 537
Initialises counter to zero.
Line 538
Sets cycle of compare match. To generate interrupts every ms, set the value of CMT0.CMCOR as
96.
CMT0.CMCOR = cycle(1ms)/ counting clock(10.42 us)
CMT0.CMCOR = (1×10-3)/(10.42×10-6)
CMT0.CMCOR = 95.97
Set CMT0.CMCOR = 96.
Line 539
Sets timer counting function to start.
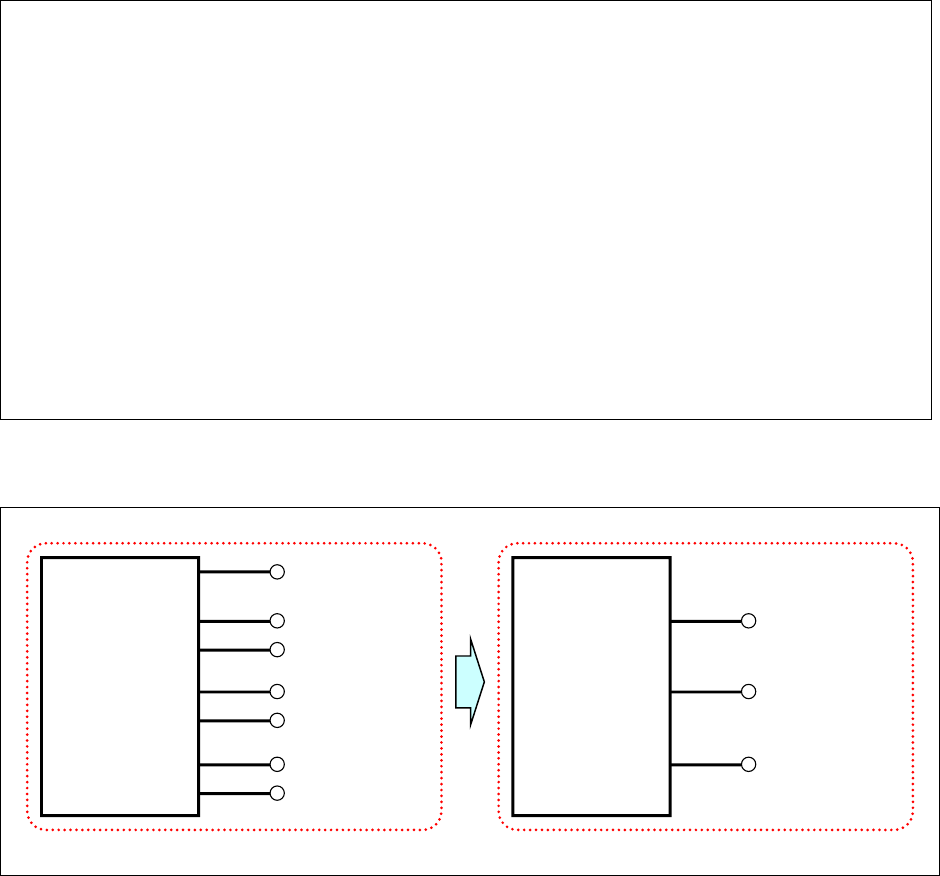
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
62
5.4.9. init Function (Multi-Function Timer Pulse Unit 3 Settings)
MTU3_3 and MTU3_4 are used in reset-synchronized PWM mode to output PWM signals to the left motor, right
motor, and servo.
541 : // MTU3_3 MTU3_4 PWM mode synchronized by RESET
542 : MSTP_MTU = 0; //Release module stop state
543 : MTU.TSTRA.BYTE = 0x00; //MTU Stop counting
544 :
545 : MTU3.TCR.BYTE = 0x23; //ILCK/64(651.04ns)
546 : MTU3.TCNT = MTU4.TCNT = 0; //MTU3,MTU4TCNT clear
547 : MTU3.TGRA = MTU3.TGRC = PWM_CYCLE; //cycle(16ms)
548 : MTU3.TGRB = MTU3.TGRD = SERVO_CENTER; //PWM(servo motor)
549 : MTU4.TGRA = MTU4.TGRC = 0; //PWM(left motor)
550 : MTU4.TGRB = MTU4.TGRD = 0; //PWM(right motor)
551 : MTU.TOCR1A.BYTE = 0x40; //Selection of output level
552 : MTU3.TMDR.BYTE = 0x38; //TGRC,TGRD buffer function
553 : //PWM mode synchronized by RESET
554 : MTU4.TMDR.BYTE = 0x00; //Set 0 to exclude MTU3 effects
555 : MTU.TOERA.BYTE = 0xc7; //MTU3TGRB,MTU4TGRA,MTU4TGRB permission
for output
556 :
557 : MTU.TSTRA.BYTE = 0x40; //MTU0,MTU3 count function
558 : }
The output settings for reset-synchronized PWM mode in the present case are shown at right below.
Reset-synchronized
PWM mode
MTIOC3A pin (P33)
MTIOC3B pin (P71)
MTIOC3D pin (P74)
MTIOC4A pin (P72)
MTIOC4C pin (P75)
MTIOC4B pin (P73)
MTIOC4D pin (P76)
Forward phase
Forward phase
Reverse phase
Forward phase
Reverse phase
Forward phase
Reverse phase
MTU3_3
MTU3_4
Reset-synchronized PWM mode output settings in present case
Reset-synchronized
PWM mode
MTIOC3B pin (P71)
MTIOC4A pin (P72)
MTIOC4B pin (P73)
Forward phase
Forward phase
Forward phase
All PWM signals output in reset-synchronized PWM mode
To servo motor
To left motor
To right motor
MTU3_3
MTU3_4
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
63
5.4.10. Excep_CMT0_CMI0 Function (Interrupt Every 1 ms)
The Excep_CMT0_CMI0 function is set by Compare Match Timer to run once every 1 ms.
560 : /***********************************************************************/
561 : /* Interrupt */
562 : /***********************************************************************/
563 : #pragma interrupt Excep_CMT0_CMI0(vect=28)
564 : void Excep_CMT0_CMI0(void)
565 : {
566 : cnt0++;
567 : cnt1++;
568 : }
Line 563
This syntax of this line is:
#pragma interrupt interrupt handler function name (vect = software interrupt number)
So whenever the interrupt designated by software interrupt number occurs, interrupt handler function
name is executed. From the software interrupt table we can see that the Compare Match Timer
interrupt is designated as number 28. The source code uses #pragma interrupt to specify that the
Excep_CMT0_CMI0 function is run when interrupt number 28 occurs.
Line 564
This is the function triggered by the Compare Match Timer interrupt. It is not possible to specify
arguments or return values for an interrupt function. Therefore, the syntax void function name
( void ) must be used.
Line 566
Increments (+1) variable cnt0. The function is executed at 1 ms intervals, so the value of variable
cnt0 increases by 1 every 1 ms.
Line 567
Increments (+1) variable cnt1. The function is executed at 1 ms intervals, so the value of variable
cnt1 increases by 1 every 1 ms.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
64
5.4.11. timer Function (Pause)
The timer function is used to pause operation.
570 : /***********************************************************************/
571 : /* Timer unit */
572 : /* Arguments: timer value, 1 = 1 ms */
573 : /***********************************************************************/
574 : void timer( unsigned long timer_set )
575 : {
576 : cnt0 = 0;
577 : while( cnt0 < timer_set );
578 : }
(1) Using the timer Function
The usage of the timer function is illustrated below.
timer( desired pause duration );
The argument specifies the pause duration in milliseconds. An example is shown below.
motor( 50, 100 ); Several 100 s
timer( 1000 ); 1000 ms
Following motor control, the timer function pauses operation for 1,000 ms.
(2) Program Explanation
The following explanation assumes that the function is executed as follows:
timer( 1000 );
Line 576
Clears cnt0 to 0.
Line 577
1.
First, the following statement is processed:
while( cnt0 < timer_set );
Variable cnt0 was cleared to 0 on line 576. Variable timer_set is an argument of the timer
function. The line is therefore equivalent to:
while( 0 < 1000 );
The condition within the parentheses is not satisfied, so processing of the statement repeats over
and over.
2.
After 1 ms elapses an Excep_CMT0_CMI0 interrupt occurs. Processing of the while statement
in the current line stops, and the following line in the interrupt handler is processed:
560 : cnt0++; This is equivalent to 0++, therefore the value becomes 1.
The value of cnt0 is now 1. Processing of the interrupt handler ends, and control returns to the
line at which the interrupt occurs.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
65
Line 577
3.
Control returns to the line with the while statement:
while( 1 < 1000 );
The value of cnt0 is now 1 because it was incremented by the interrupt handler. Once again, the
condition within the parentheses is not satisfied, and processing of the statement repeats over
and over.
4.
When 2. has been processed 1,000 times, the value of cnt0 is 1,000.
while( 1000 < 1000 );
The condition of the while statement is satisfied. Processing of the while statement ends, and
processing continues to the next line. There is no next line in the function, so the timer function
ends. The Excep_CMT0_CMI0 function is executed every 1 ms when a Compare Match
Timer interrupt occurs. Processing the while statement repeatedly until the value of cnt0
reaches 1,000 means that the while statement repeats over a duration of 1,000 ms. In this way, a
specified duration of time can be measured by using the timer function to count the occurrences
of an interrupt, which is triggered at 1 ms intervals by Compare Match Timer.
5.4.12. sensor_inp Function (Read State of Sensors)
The sensor_inp function reads the state of the sensors on the sensor board.
580 : /***********************************************************************/
581 : /* Sensor state detection */
582 : /* Arguments: masked values */
583 : /* Return values: sensor value */
584 : /***********************************************************************/
585 : unsigned char sensor_inp( unsigned char mask )
586 : {
587 : unsigned char sensor;
588 :
589 : sensor = ~PORT4.PORT.BYTE;
590 :
591 : sensor &= mask;
592 :
593 : return sensor;
594 : }
Line 587
Specifies variable sensor as type unsigned char. This variable is used in the sensor_inp function to
process the states of the sensors. Sensor board data is read from port 4 with a bit width of 8 bits.
Therefore, variable sensor is specified as an unsigned 8-bit char.
Line 589
Reads the sensor board data from port 4. The output from the sensors is 0 for white and 1 for black,
which is confusing because it is the reverse of the human sense of sight. Therefore, a tilde (~) is used
to reverse the values so that 1 represents white and 0 represents black.
Line 591
Performs an AND operation on variable sensor, which contains the sensor data processed up to line
585, and the mask value used as an argument of the sensor_inp function. This forces the value of all
unneeded bits to 0.
Line 593
Returns variable sensor as a return value, ending the function.
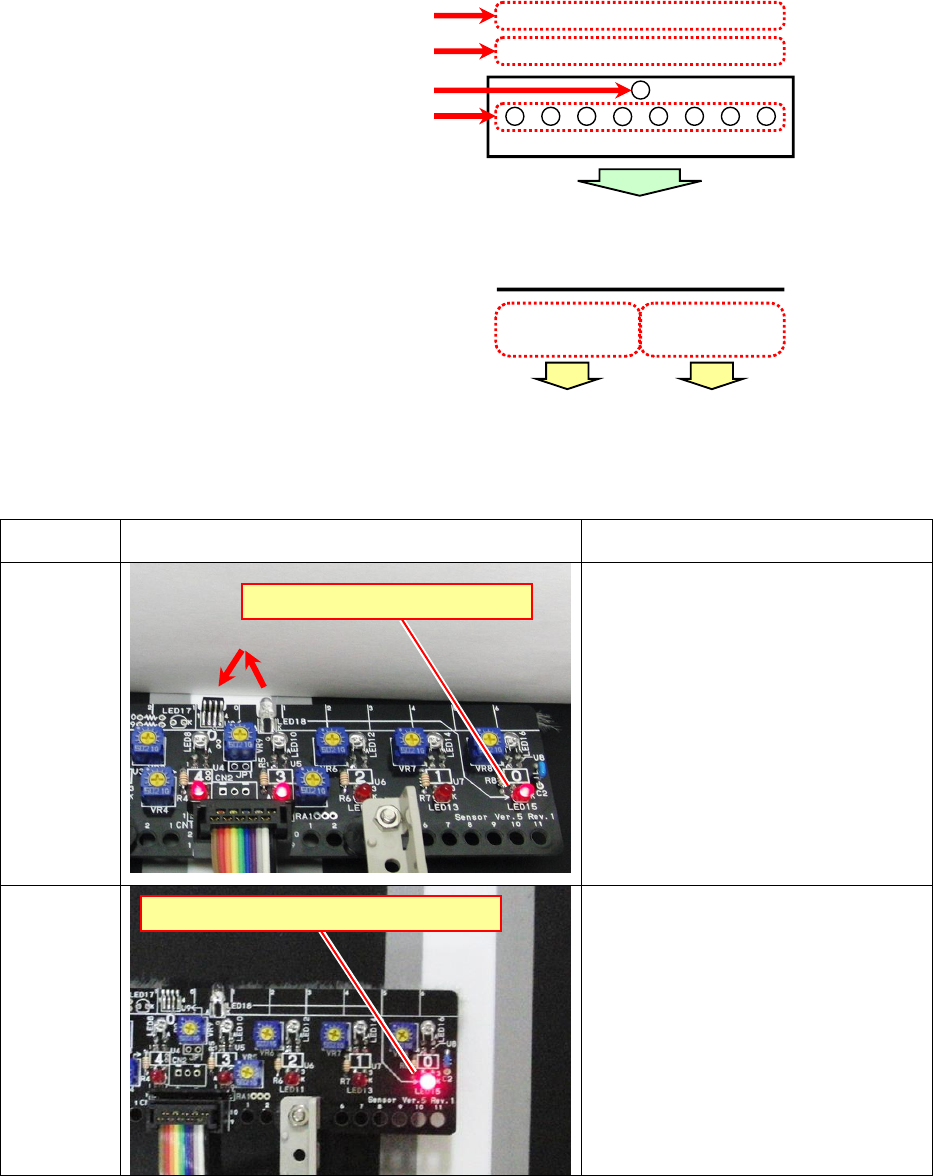
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
66
(1) Treatment of bit0
The rightmost sensor which detects the course and the sensor which detects the start bar of the Sensor Board Ver.5
are input in an OR connection to bit 0 terminal of port 0. This is shown below.
00000110
Course sensor
7
0
1
2
3
5
6
4
B
B
B
B
B
W
W
B
Value of course sensor
0
6
Hexadecimal
0
Value of Start bar sensor
0
Start bar sensor
Course state
Result
00000110
OR)
No start bar
Start bar state
It is unknown whether the start bar detection sensor reacted when bit 0 became “1” or whether bit 0 of the course
detection sensor reacted. But the two states shown in the table below cannot happen simultaneously.
State
Picture
Description
Before
start
It judges
bit0="1": There is start bar
"0": No start bar
because the rightmost sensor is surely
black if the Sensor Board is set over the
centre line.
After
start
It judges
bit0="1":Rightmost course :white
"0":Rightmost course : black
because there is no need to check the
reading of the start bar sensor after the
start.
Monitor of rightmost course sensor
Monitor of Start bar sensor
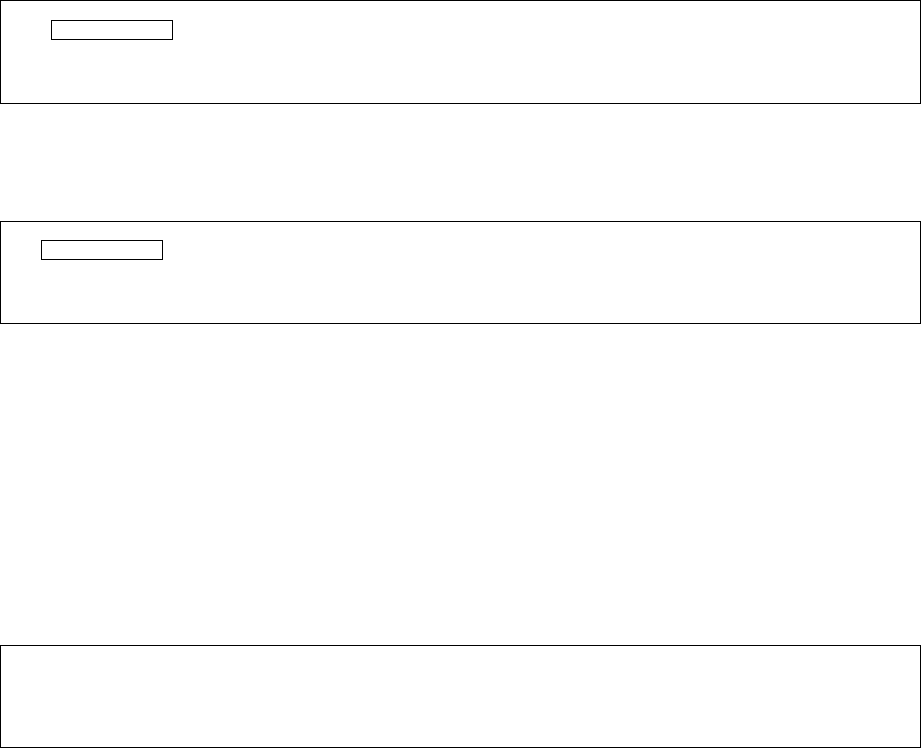
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
67
(3) Masking
Line 587 performs masking on the sensor data. Masking forces to 0 the value of the bits that do not require
checking. It is accomplished by using an AND operation.
(a) Why Is Masking Necessary?
Since each port comprises 8 bits, it is not possible to check bits singly. (Actually, it is possible if we use a
method called a bit field, but we will not deal with that here.) Instead, all 8 bits are checked at the same time.
For example, if we want to determine whether or not the value of the bit corresponding to the leftmost sensor is 1,
you might think we could use the following code:
if( Sensor value == 0x80 ) {
/* Run this code if value of bit 7 is 1 */
}
But we don’t know the values of bits 6 to 0. If, for example, the values of both bit 7 and bit 0 are 1, the result
would be as follows:
if(Sensor value 0x81 == 0x80 ) { Sensor value =1000 0001=0x81
/* Run this code if value of bit 7 is 1 */
}
The value of bit 7 is 1, but since the value of bit 0 is also 1 the sensor value is determined not to be 0x80 and the
code between the brackets is not executed. Proper checking is not possible in this case. This is why we need
masking.
117B(b) What Masking Does
The above method does not enable us to perform proper checking because we do not know if the values of the bits
other than 7 are 0 or 1. Masking lets us force the values of bits 6 to 0 to 0.
Since we know the values of bits 6 to 0 must be 0, we can check the sensor value based on this assumption. For
example, we can check whether or not the value of bit 7 is 1 as follows:
if(sensor value with bit 7 unchanged and bits 6 to 0 cleared to 0 =0x80 ) {
/* Run this code if value of bit 7 is 1 */
}
Now it is possible to determine whether the value of bit 7 is 0 or 1, and if it is 1 the code between the brackets is
executed.
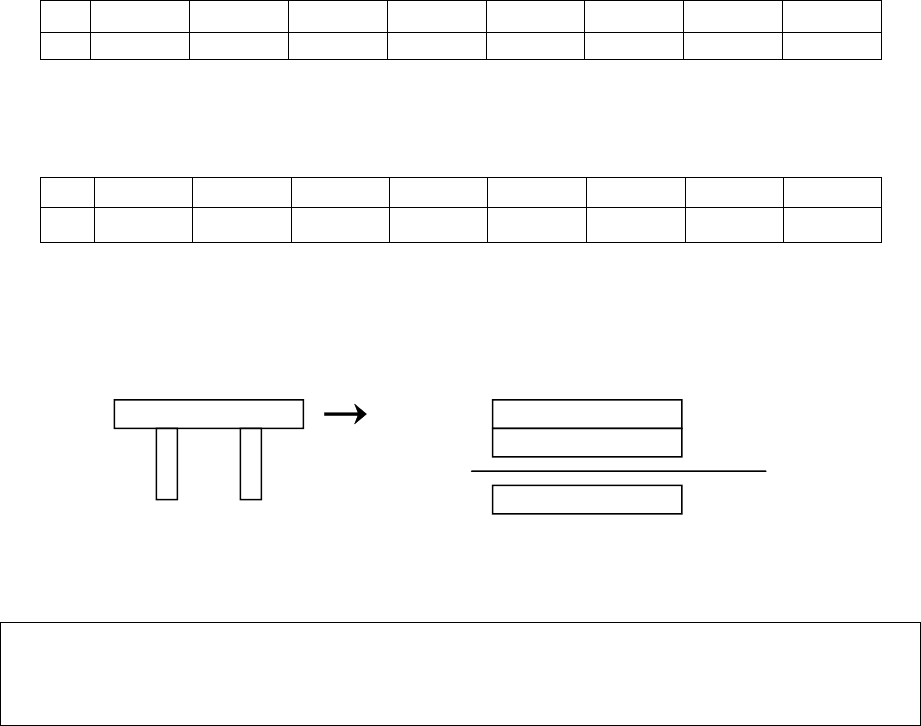
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
68
(c) Determining Masking Values and Performing Masking
In software we can use a logic operation known as the logical product, which is also called an AND operation. For
example, if the state of the sensors is BBBWWWWW, the sensor value will be 00011111. When checking bit 7
there is no need to check bits 6 to 0.
Bit
7
6
5
4
3
2
1
0
Necessary
Unnecessary
Unnecessary
Unnecessary
Unnecessary
Unnecessary
Unnecessary
Unnecessary
To clear the unnecessary bits to 0, we set the mask value for those bits to 0 and perform an AND operation.
Consequently, in the mask value the unnecessary bits should be cleared to 0 and the necessary bits set to 1.
Bit
7
6
5
4
3
2
1
0
Mask
value
1
0
0
0
0
0
0
0
We perform an AND operation on the sensor value and mask value, and then check the result against the bits to be
checked (see figure below).
○○○○○●●●
1 1 1 1 1 0 0 0
Mask value
Sensor value
1 1 1 1 1 0 0 0
1 0 0 0 0 0 0 0
)AND
1 0 0 0 0 0 0 0
Result
Return value
Sensor state
This can be converted into the following lines of code:
if( (Sensor value & 0x80) == 0x80 ) {
/* Run this code if value of bit 7 is 1 */
}
We know that bits 6 to 0 have all been forcibly cleared to 0 by masking, so we can assume the value of bits 6 to 0
is 0 when making the comparison.
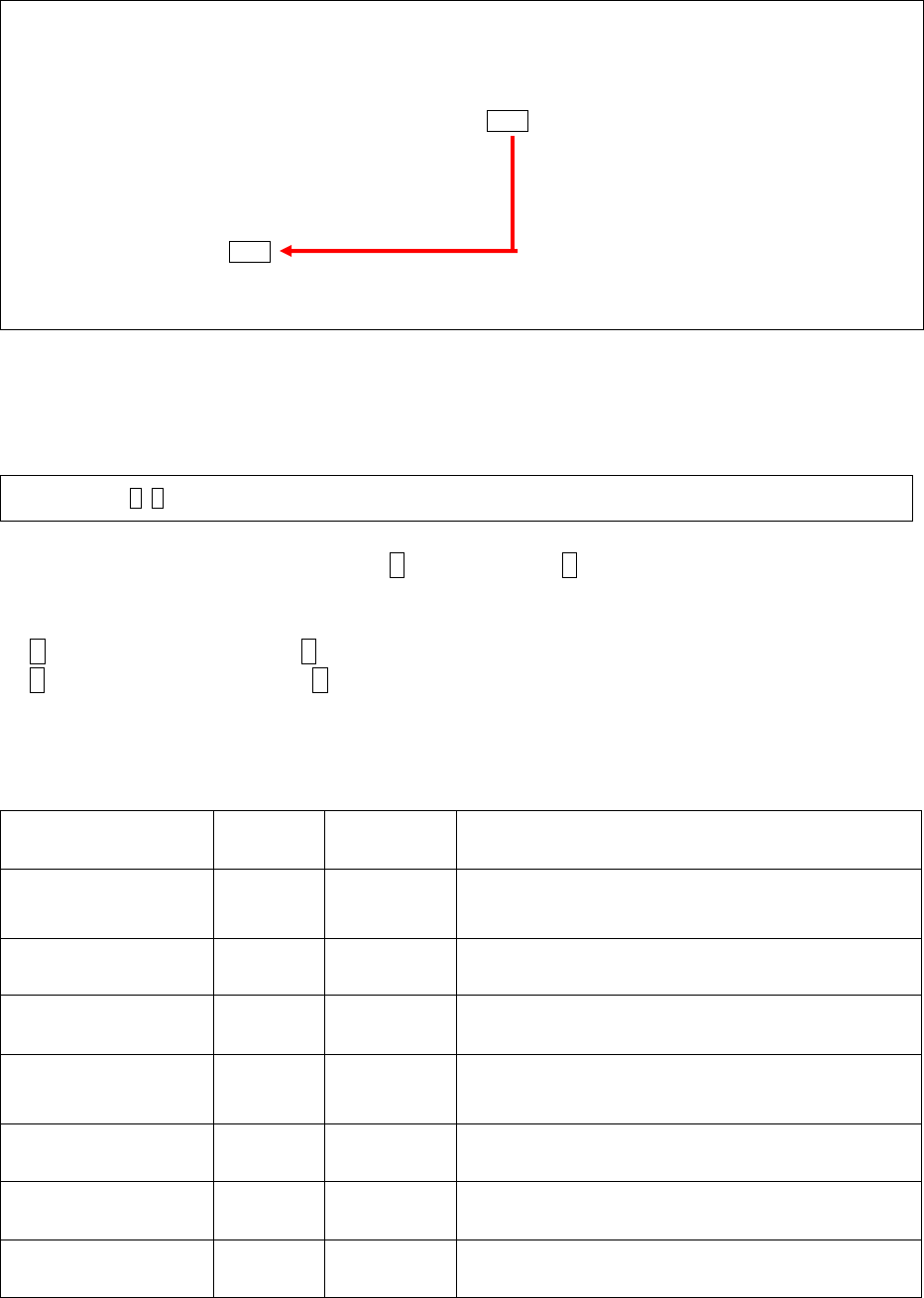
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
69
(d) Structure of sensor_inp Function
The sensor_inp function obtains sensor data and performs masking. Masking, the last step in processing the
sensor value, is performed after the sensor value is processed by inversion, bit copying, etc.
580 : /***********************************************************************/
581 : /* Sensor state detection */
582 : /* Arguments: masked values */
583 : /* Return values: sensor value */
584 : /***********************************************************************/
585 : unsigned char sensor_inp( unsigned char mask )
586 : {
587 : unsigned char sensor;
588 :
589 : sensor = ~PORT4.PORT.BYTE;
590 :
591 : sensor &= mask;
592 :
593 : return sensor;
594 : }
(e) Mask Value Definition
In kit12_rx62t.c the most commonly used mask values are predefined using define. This is performed in lines 31
to 39 of the source code. The format used for these definitions is as follows:
#define MASKA_B Mask value
Mask values are defined using the rule MASK + A + _ (underscore) + B. The meanings of these elements are as
follows:
A: Of the four sensors on the left, A sensors are valid (unmasked).
B: Of the four sensors on the right, B sensors are valid (unmasked).
The other sensors are masked.
The definitions used in the program are listed in the following table:
Defined Mask
Character String
Mask
Value
Binary
Description
MASK2_2
0x66
0110 0110
The two middle sensors on the left and the two middle
sensors on the right are valid (unmasked), and the
others are masked.
MASK2_0
0x60
0110 0000
The two middle sensors on the left are valid
(unmasked), and the others are masked.
MASK0_2
0x06
0000 0110
The two middle sensors on the right are valid
(unmasked), and the others are masked.
MASK3_3
0xe7
1110 0111
The three sensors on the left and the three sensors on
the right are valid (unmasked), and the others are
masked.
MASK0_3
0x07
0000 0111
The three sensors on the right are valid (unmasked),
and the others are masked.
MASK3_0
0xe0
1110 0000
The three sensors on the left are valid (unmasked), and
the others are masked.
MASK4_0
0xf0
1111 0000
The four sensors on the left are valid (unmasked), and
the others are masked.
Masking is the last step in
processing the sensor value.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
70
MASK0_4
0x0f
0000 1111
The four sensors on the right are valid (unmasked), and
the others are masked.
MASK4_4
0xff
1111 1111
Four sensors on the right and four sensors on the left
are valid (unmasked), and the others are masked.
Note: The result of MASK4_4 is that all of the
sensors are valid (unmasked). This pattern
is provided because the parentheses of
the sensor_inp function must contain a
value. When masking is not necessary,
using MASK4_4 results in a mask value
of 0xff: all sensors valid (unmasked).
The mask value specified between the parentheses of the sensor_inp function can be set by using one of the mask
character strings described above.
If none of the provided mask character strings correspond to your desired mask values, add additional definitions
of your own. Alternately, you can specify the mask value directly as a numeric value, without using a mask
character string.
(4) Using the sensor_inp Function
if( sensor_inp( Mask value ) == Sensor check value) {
Run this code if the expression is true.
} else {
Run this code if the expression is not true.
}
In the sensor_inp function, mask value contains the value used when applying masking to the sensor value, and
sensor check value contains the value after masking is applied that is used for checking. For example, the process
is as follows when the sensor value is 0x1f, the mask value is MASK0_2, and the sensor check value is 0x04:
if( sensor_inp( MASK0_2 ) == 0x04 ) {
Run this code if the expression is true.
} else {
Run this code if the expression is not true.
}
1.
The sensor value is 0001 1111 and the mask value of the sensor_inp function is 0000 0110. The result of
the AND operation is as follows:
Sensor value 0001 1111
Mask value 0000 0110 (AND
Result 0000 0110 0x06 after conversion to hexadecimal
2.
The result 0x06 and sensor check value 0x04 are compared. Since they do not match, the lines represented
by “Run this code if the expression is not true” are processed.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
71
(5) Notes
We have explained above how the sensor_inp function uses the same value for bits 4 and 3. However, depending
on the mask value, the values of bits 4 and 3 may differ in the return value of the sensor_inp function. When
writing program code, also pay attention to the mask value of the sensor_inp function.
if( sensor_inp(MASK4_4) == 0x1f ) { ●●●○○○○○ Possible
}
if( sensor_inp(MASK4_4) == 0x07 ) { ●●●●●○○○ Possible
}
if( sensor_inp(MASK4_4) == 0x0f ) { ●●●●○○○○ 0x0f not possible
}
if( sensor_inp(MASK4_4) == 0xf8 ) { ○○○○○●●● Possible
}
if( sensor_inp(MASK4_4) == 0xe0 ) { ○○○●●●●● Possible
}
if( sensor_inp(MASK4_4) == 0xf0 ) { ○○○○●●●● 0xf0 not possible
}
if( sensor_inp(MASK0_4) == 0x0f ) { ××××○○○○ 0x0f possible depending
on mask value!
}
if( sensor_inp(MASK4_0) == 0xf0 ) { ○○○○×××× 0xf0 possible depending
on mask value!
}
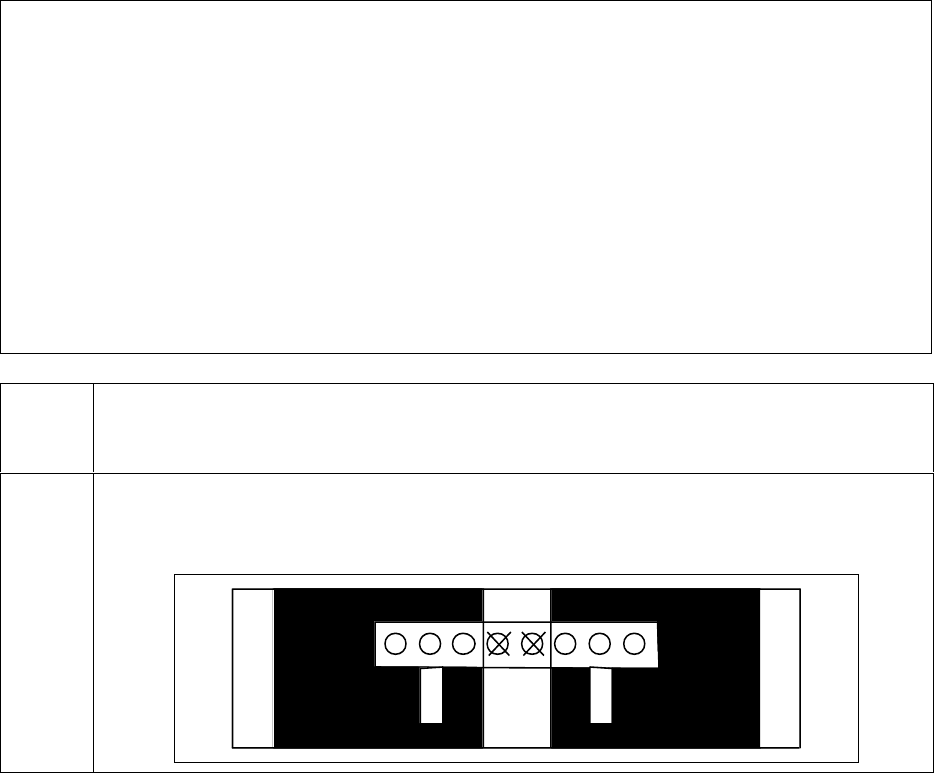
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
72
5.4.13. check_crossline Function (Crossline Detection)
There are two white lines on the track 500 mm to 1,000 mm before a crank. These are called cross lines. The
check_cross line function detects these cross lines.
The return value is 1 when a cross line is detected and 0 when no cross line is detected.
610 : /***********************************************************************/
611 : /* Cross line detection processing */
612 : /* Return values: 0: no cross line, 1: cross line */
613 : /***********************************************************************/
614 : int check_crossline( void )
615 : {
616 : unsigned char b;
617 : int ret;
618 :
619 : ret = 0;
620 : b = sensor_inp(MASK3_3);
621 : if( b==0xe7 ) {
622 : ret = 1;
623 : }
624 : return ret;
625 : }
Line 619
This initialises the variable ret, which stores the return value. A value of 1 is stored in variable ret
when a cross line is detected and 0 when no cross line is detected. For the time being we do not know
which is correct, so we insert a value of 0, no cross line detected.
Line 620
This reads the sensors and stores the result in variable b. The sensor mask value is MASK3_3 (0xe7),
so a total of six sensors are read, three on the right and three on the left.
The sensors that are read are illustrated below:
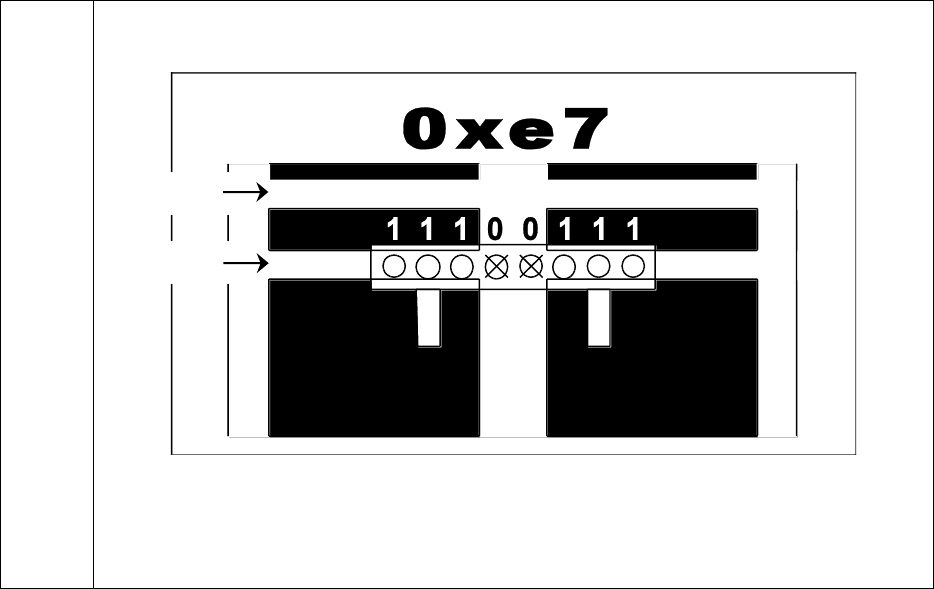
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
73
Line 621
This checks whether or not the sensor state is 0xe7. A cross line is detected when the sensor value is
0xe7. This is illustrated below:
The if condition is met when the sensor value is 0xe7, and variable ret is set to 1. If the value is
something else, the condition is not met and the value of variable ret remains unchanged at 0.
Variable ret is the return value, so a value of 1 means “cross line detected” and a value of 0 means
“no cross line detected.”
Cross line
Cross line
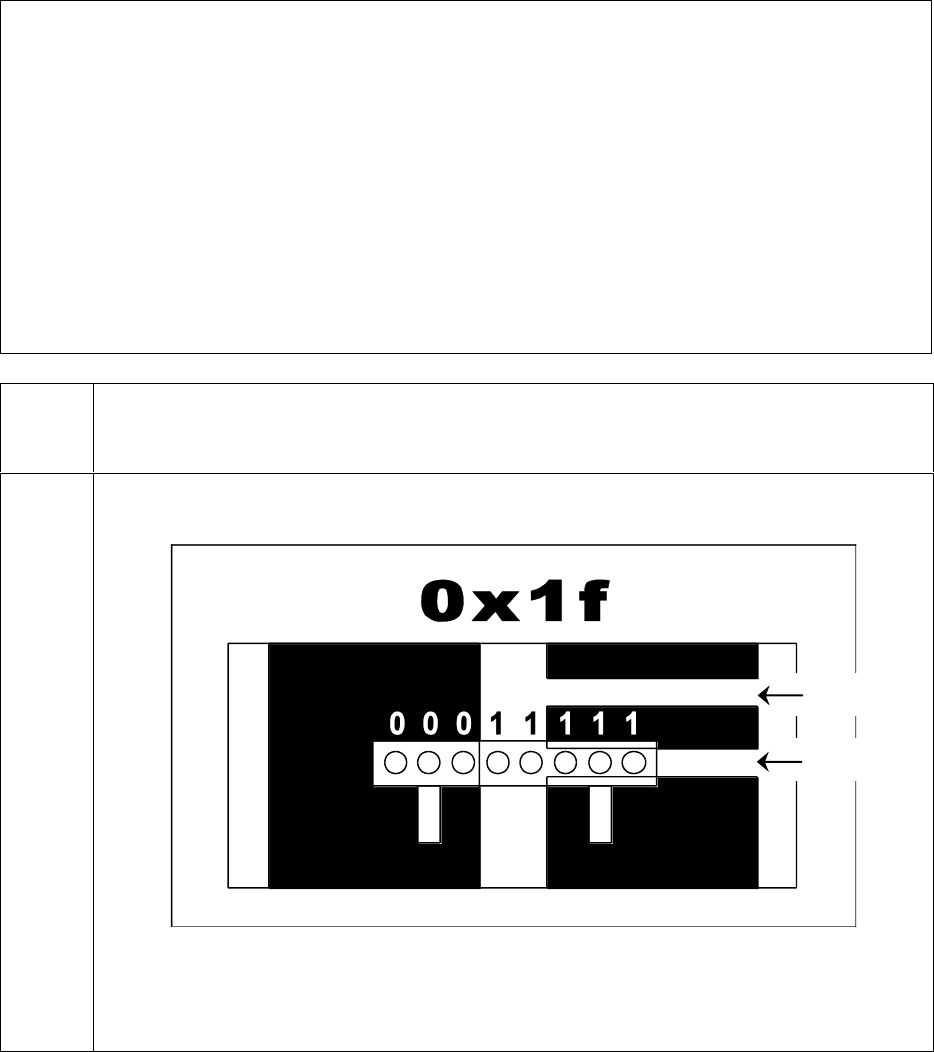
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
74
5.4.14. check_rightline function (Right Half Line Detection)
There are two right half lines on the track 500 mm to 1,000 mm before a right lane change. The check_rightline
function detects the right half lines.
The return value is 1 when a right half line is detected and 0 when no right half line is detected.
627 : /***********************************************************************/
628 : /* Right half line detection processing */
629 : /* Return values: 0: not detected, 1: detected */
630 : /***********************************************************************/
631 : int check_rightline( void )
632 : {
633 : unsigned char b;
634 : int ret;
635 :
636 : ret = 0;
637 : b = sensor_inp(MASK4_4);
638 : if( b==0x1f ) {
639 : ret = 1;
640 : }
641 : return ret;
642 : }
Line 636
This initialises the variable ret, which stores the return value. A value of 1 is stored in this variable
when a right half line is detected and 0 when no right half line is detected. For the time being we do
not know which is correct, so we insert a value of 0, no right half line detected.
Lines
637 and
638
This checks the sensor state. The mask value is MASK4_4, so all the sensors are read. A right half
line is detected when the sensor value is 0x1f. This is illustrated below:
The if condition is met when the sensor value is 0x1f, and variable ret is set to 1. If the value is
something else, the condition is not met and the value of variable ret remains unchanged at 0.
Variable ret is the return value, so a value of 1 means “right half line detected” and a value of 0 means
“no right half line detected.”
Half line
Half line
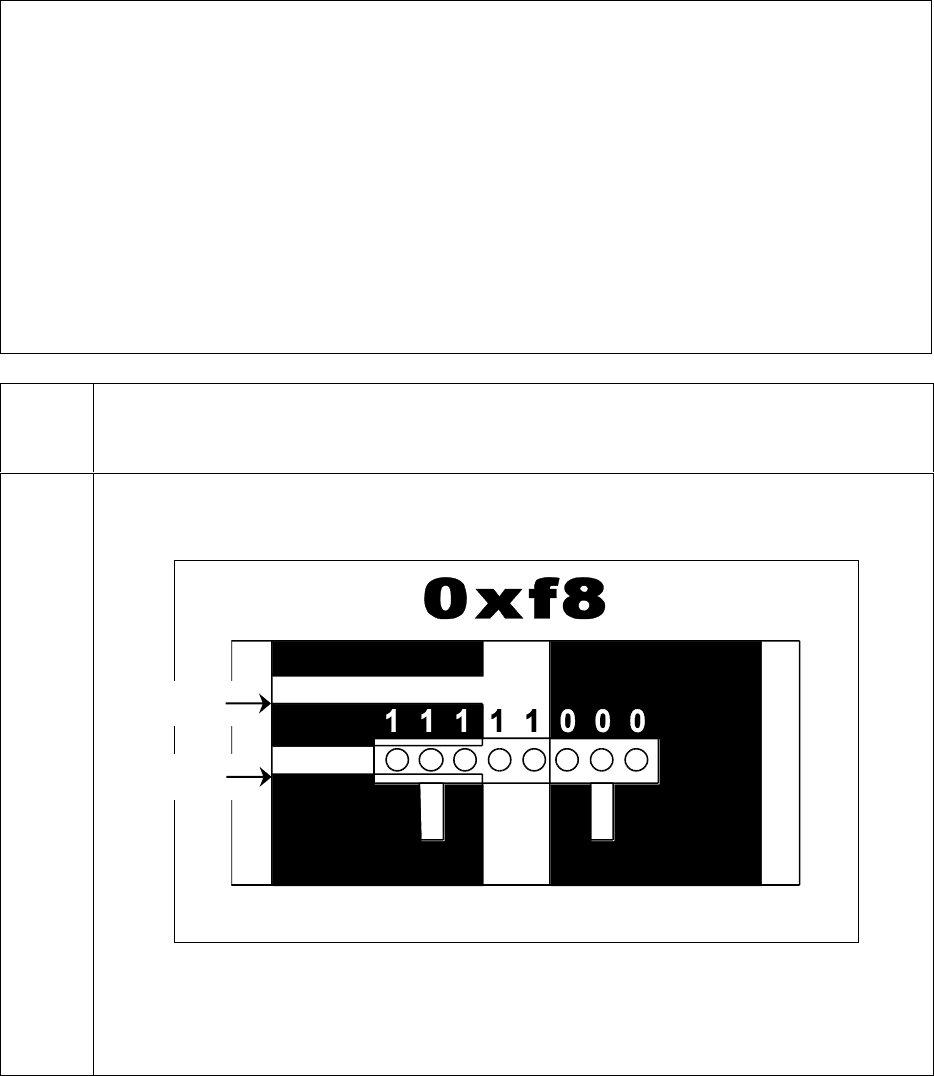
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
75
5.4.15. check_leftline function (Left Half Line Detection)
There are two left half lines on the track 500 mm to 1,000 mm before a left lane change. The check_leftline
function detects the left half lines.
The return value is 1 when a left half line is detected and 0 when no left half line is detected.
644 : /***********************************************************************/
645 : /* Left half line detection processing */
646 : /* Return values: 0: not detected, 1: detected */
647 : /***********************************************************************/
648 : int check_leftline( void )
649 : {
650 : unsigned char b;
651 : int ret;
652 :
653 : ret = 0;
654 : b = sensor_inp(MASK4_4);
655 : if( b==0xf8 ) {
656 : ret = 1;
657 : }
658 : return ret;
659 : }
Line 653
This initialises the variable ret, which stores the return value. A value of 1 is stored in this variable
when a left half line is detected and 0 when no left half line is detected. For the time being we do not
know which is correct, so we insert a value of 0, no left half line detected.
Lines
654 and
655
This checks the sensor state. The mask value is MASK4_4, so all the sensors are read. A left half line
is detected when the sensor value is 0xf8. This is illustrated below:
The if condition is met when the sensor value is 0xf8, and variable ret is set to 1. If the value is
something else, the condition is not met and the value of variable ret remains unchanged at 0.
Variable ret is the return value, so a value of 1 means “left half line detected” and a value of 0 means
“no left half line detected.”
Half line
Half line
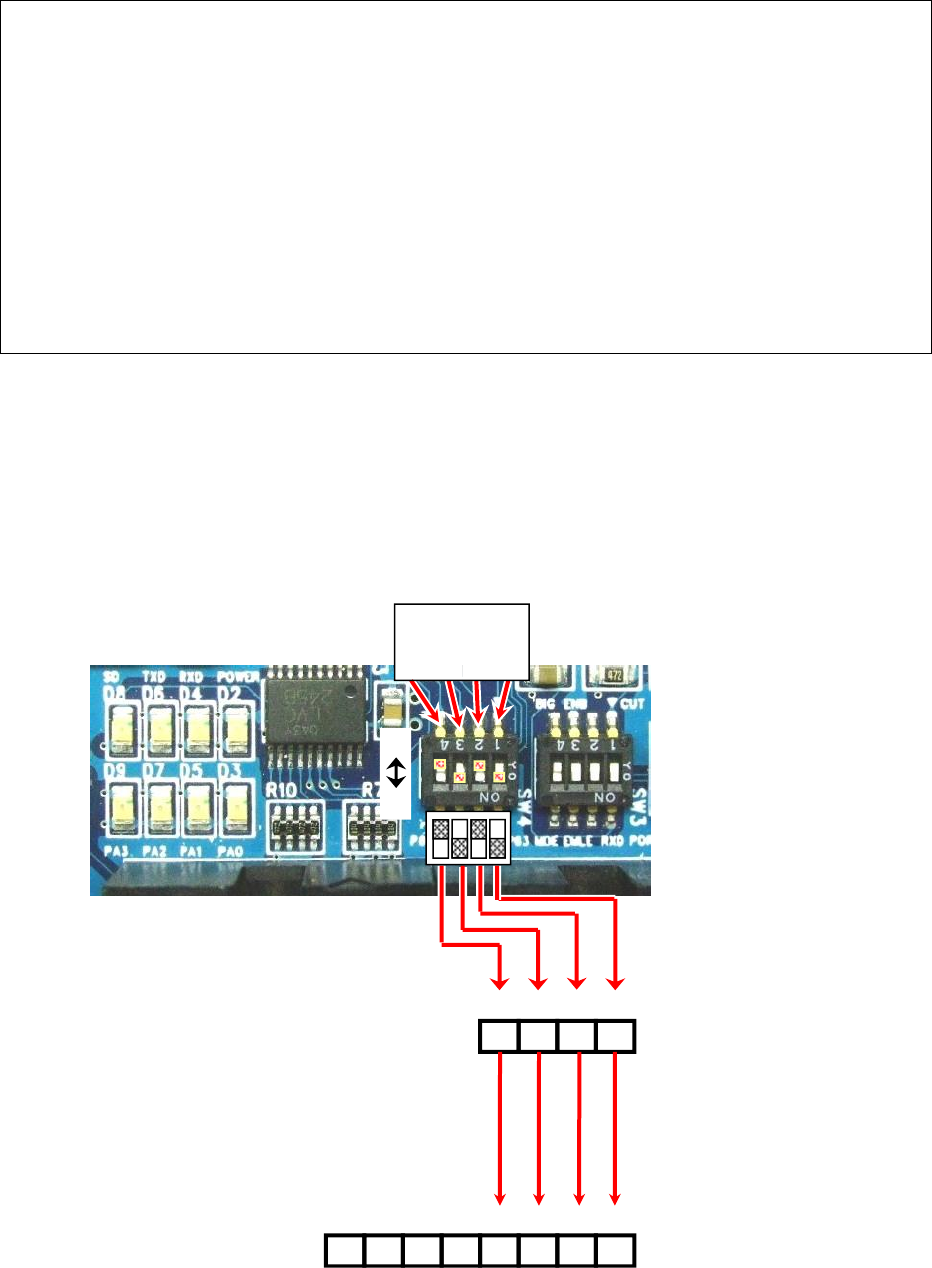
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
76
5.4.16. dipsw_get Function (Reading DIP Switches)
The dipsw_get function reads the state of the DIP switches on the RMC-RX62T board.
The return value is a value between 0 and 15, according to the DIP switch value.
661 : /***********************************************************************/
662 : /* DIP switch value read */
663 : /* Return values: Switch value, 0 to 15 */
664 : /***********************************************************************/
665 : unsigned char dipsw_get( void )
666 : {
667 : unsigned char sw,d0,d1,d2,d3;
668 :
669 : d0 = ( PORT6.PORT.BIT.B3 & 0x01 ); /* P63~P60 read */
670 : d1 = ( PORT6.PORT.BIT.B2 & 0x01 ) << 1;
671 : d2 = ( PORT6.PORT.BIT.B1 & 0x01 ) << 2;
672 : d3 = ( PORT6.PORT.BIT.B0 & 0x01 ) << 3;
673 : sw = d0 | d1 | d2 | d3;
674 :
675 : return sw;
676 : }
A 4-bit DIP switch used on the RMC-RX62T MCU board is connected to Port 6. Switch #1 of this DIP switch is
connected to bit 3 of Port 6. Similarly, switch #4 is connected to bit 0 of Port 6.
The operation of the dipsw_get function when the DIP switch setting is 1010 (ON, OFF, ON, OFF) is illustrated
below.
3
2
1
0
Read
Result
1
0
1
0
1
0
P60
P61
P62
P63
0
0
0
0
1
0
1
0
MCU
0
1
2
3
4
5
6
7
bit #
bit #
Value of bit #3 of Read is set to bit #0 of Result.
:
:
Value of bit #0 of Read is set to bit #3 of Result.
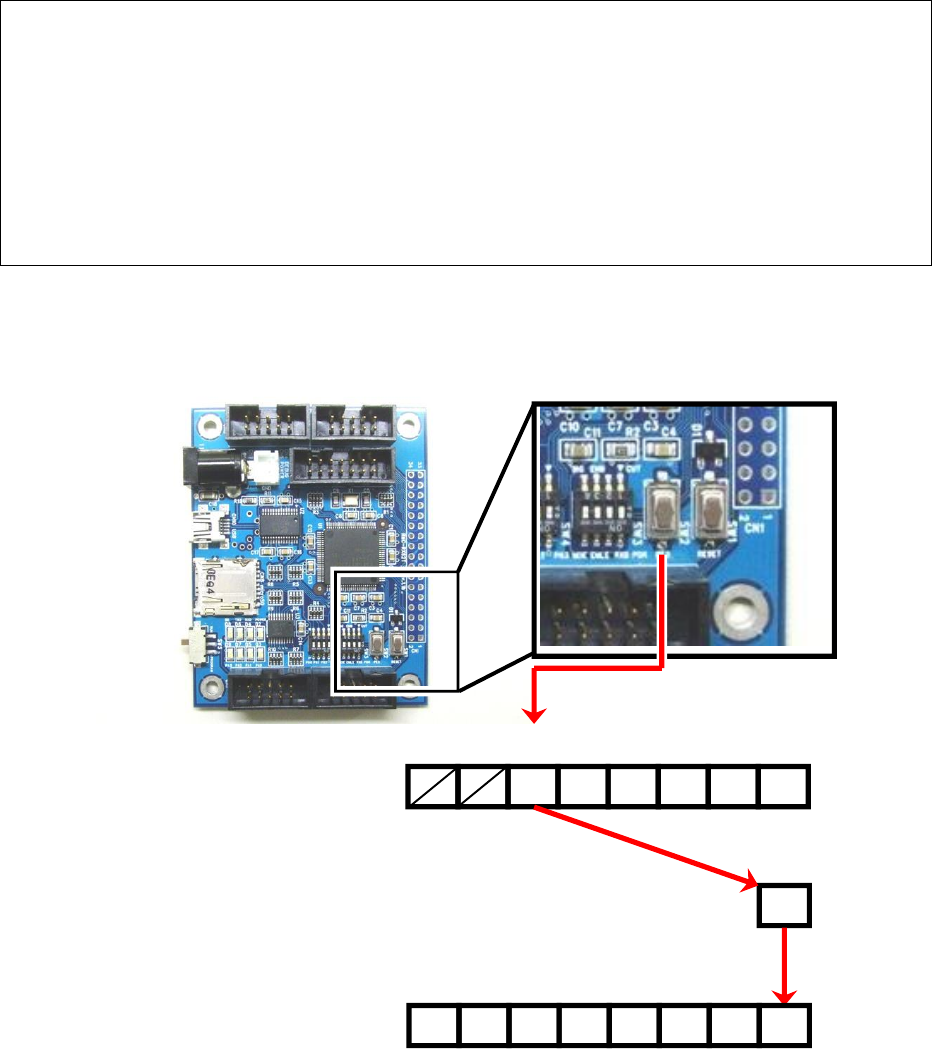
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
77
5.4.17. buttonsw_get Function (Reading the Pushbutton State in MCU board)
The buttonsw_get function reads the state of the pushbutton on the MCU board.
The return value is 1 when the button is depressed and 0 when it is released.
678 : /***********************************************************************/
679 : /* Push-button in MCU board value read */
680 : /* Return values: Switch value, ON: 1, OFF: 0 */
681 : /***********************************************************************/
682 : unsigned char buttonsw_get( void )
683 : {
684 : unsigned char sw;
685 :
686 : sw = ~PORTE.PORT.BIT.B5 & 0x01; /* Read ports with switches */
687 :
688 : return sw;
689 : }
The pushbutton is connected to bit 5 of port E. The operation of the button_get function when the pushbutton is
depressed is illustrated below.
7
6
5
4
3
2
1
0
Read.
0
?
?
?
?
?
1
Result.
0
0
0
0
0
0
0
1
Line 686: Read port E.
Line 686: Invert.
Line 686: Apply 0x01
mask value.
ON
5
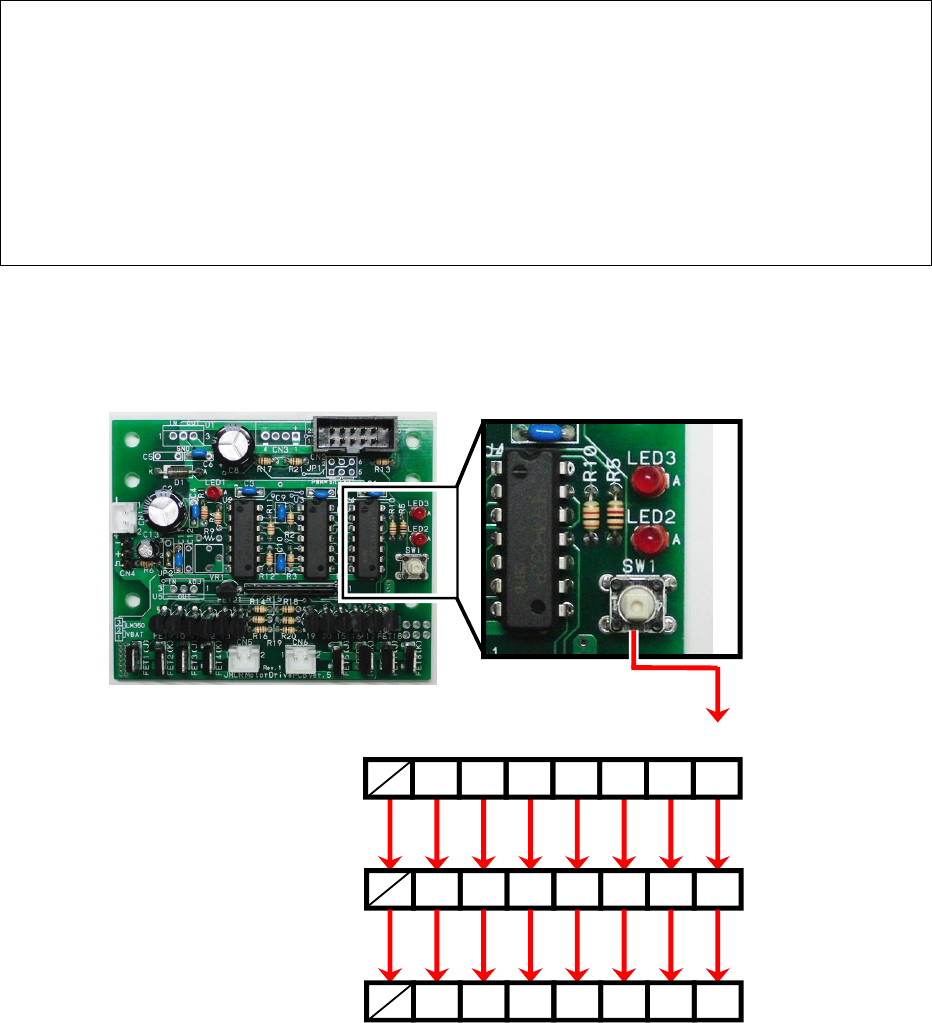
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
78
5.4.18. pushsw_get Function (Reading the Pushbutton State)
The pushsw_get function reads the state of the pushbutton on the motor drive board.
The return value is 1 when the button is depressed and 0 when it is released.
691 : /***********************************************************************/
692 : /* Push-button in motor drive board value read */
693 : /* Return values: Switch value, ON: 1, OFF: 0 */
694 : /***********************************************************************/
695 : unsigned char pushsw_get( void )
696 : {
697 : unsigned char sw;
698 :
699 : sw = ~PORT7.PORT.BIT.B0 & 0x01; /* Read ports with switches */
700 :
701 : return sw;
702 : }
The pushbutton is connected to bit 0 of port 7. Bits 6 to 1 of port 7 do not interest us, so bit operations are used to
fetch the value of only the bit associated with the pushbutton.
The operation of the pushsw_get function when the pushbutton is depressed is illustrated below.
7
6
5
4
3
2
1
0
Read.
?
?
?
?
?
?
0
?
?
?
?
?
?
1
Result.
0
0
0
0
0
0
1
Line 699: Read port 7.
Line 699: Invert.
Line 699: Apply 0x01
mask value.
ON
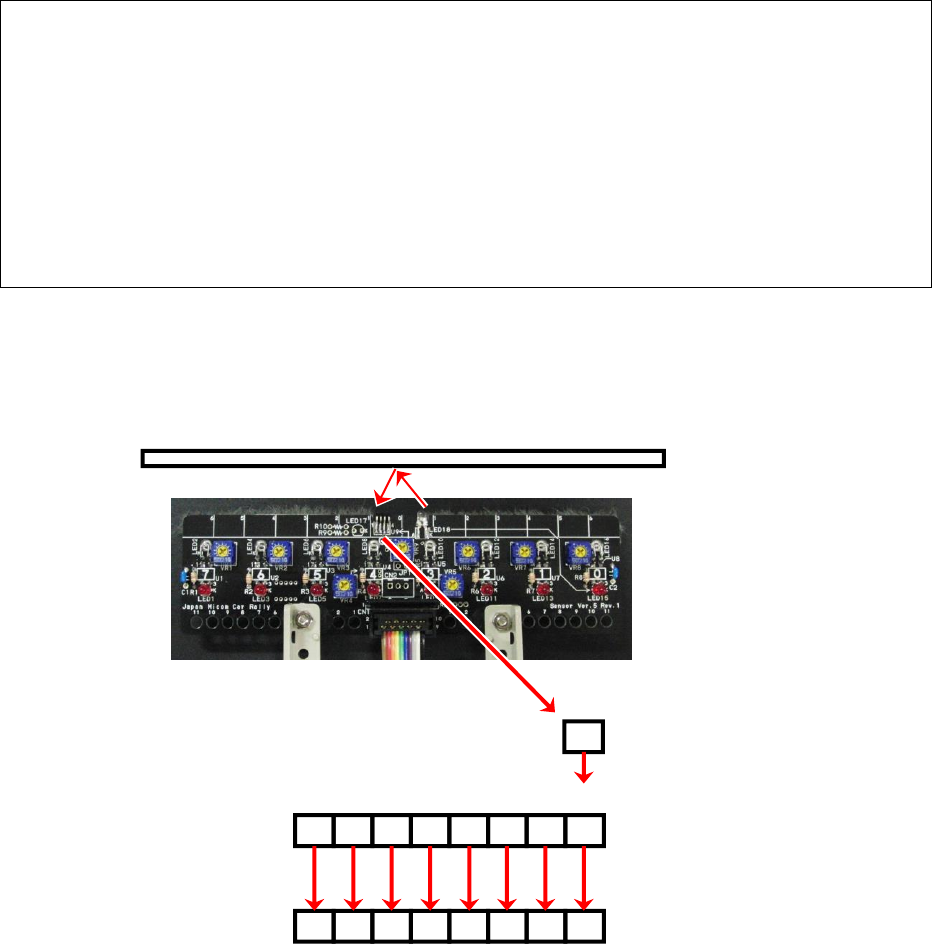
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
79
5.4.19. startbar_get Function (Reading the Start Bar Detection Sensor)
The startbar_get function determines whether the start bar is present (closed) or not (open).
The return value is 1 when the start bar is present and 0 when it is not.
596 : /***********************************************************************/
597 : /* Read start bar detection sensor */
598 : /* Return values: Sensor value, ON (bar present):1, */
599 : /* OFF (no bar present):0 */
600 : /***********************************************************************/
601 : unsigned char startbar_get( void )
602 : {
603 : unsigned char b;
604 :
605 : b = ~PORT4.PORT.BIT.B0 & 0x01; /* Read start bar signal */
606 :
607 : return b;
608 : }
The start bar detection sensor is connected to bit 4 of port 4. The bits other than bit 4 of port 4 do not interest us,
so bit operations are used to fetch the value of only the bit associated with the sensor.
The operation of the startbar_get function when the start bar is present is illustrated below.
7
6
5
4
3
2
1
0
Read.
0
?
?
?
?
?
?
?
1
0
0
0
0
0
0
0
1
Line 605: Read bit0 of port 4.
Line 605: Invert
Line 605: Apply 0x01
mask value.
Result.
Start bar
0
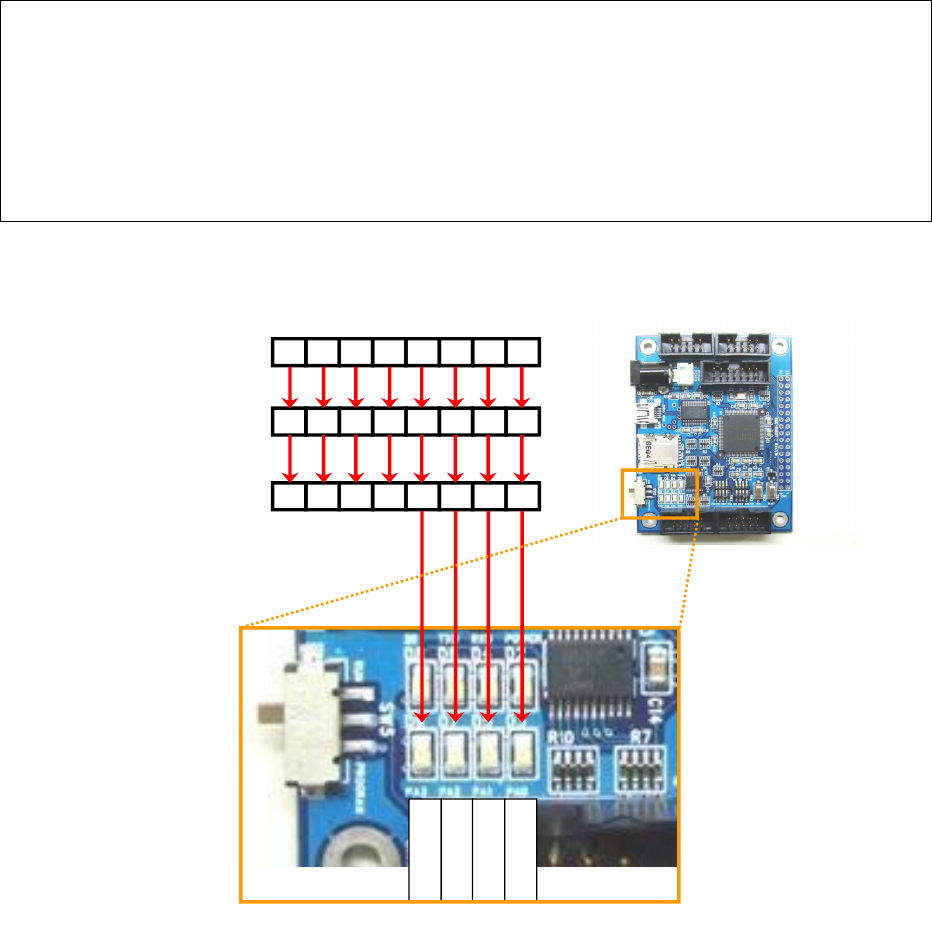
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
80
5.4.20. led_out_m Function (LED Control in MCU board)
The led_out_m function turns on and off LED0, LED1, LED2, and LED3 on the MCU board.
704 : /***********************************************************************/
705 : /* LED control in MCU board */
706 : /* Arguments: Switch value, LED0: bit 0, LED1: bit 1. 0: dark, 1: lit */
707 : /* */
708 : /***********************************************************************/
709 : void led_out_m( unsigned char led )
710 : {
711 : led = ~led;
712 : PORTA.DR.BYTE = led & 0x0f;
713 : }
The operation of the led_out function when the value of the argument is 2 is illustrated below.
7
6
5
4
3
2
1
0
0
0
0
0
1
0
1
0
?
?
?
?
0
1
0
1
Argument = A
Line 707: Invert.
Line 708: Apply 0x0f mask
value
LED3:ON
0
0
0
0
0
1
0
1
Result.
LED2:OFF
LED1:ON
LED0:OFF
711
712
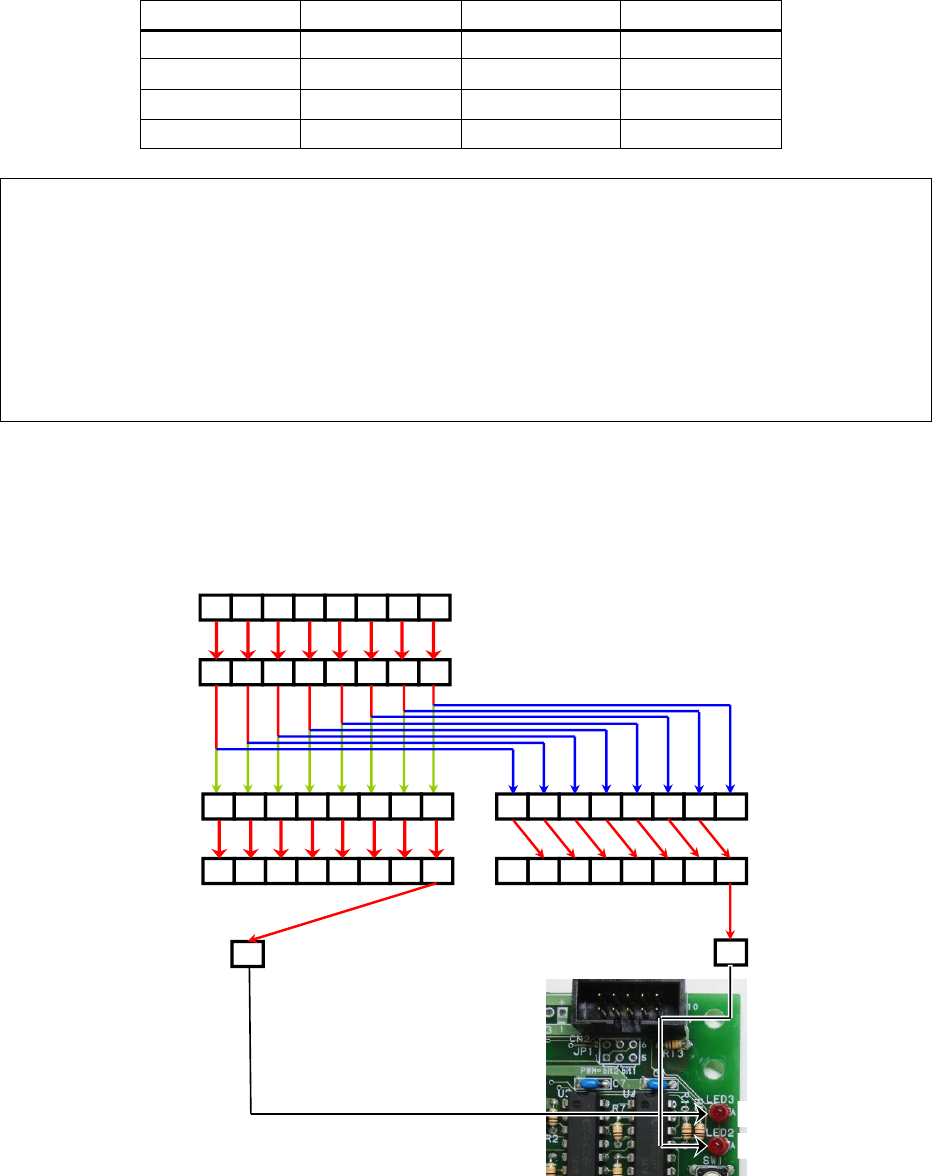
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
81
5.4.21. led_out Function (LED Control)
The led_out function turns on and off LED3 and LED2 on the motor drive board.
The correspondence between the argument supplied to the function and the illumination status of LED3 and LED2
is as follows:
Argument
Binary
LED3
LED2
0
0 0
OFF
OFF
1
0 1
OFF
ON
2
1 0
ON
OFF
3
1 1
ON
ON
715 : /***********************************************************************/
716 : /* LED control in motor drive board */
717 : /* Arguments: Switch value, LED0: bit 0, LED1: bit 1. 0: dark, 1: lit */
718 : /* Example: 0x3 -> LED1: ON, LED0: ON, 0x2 -> LED1: ON, LED0: OFF */
719 : /***********************************************************************/
720 : void led_out( unsigned char led )
721 : {
722 : led = ~led;
723 : PORT7.DR.BIT.B6 = led & 0x01;
724 : PORT1.DR.BIT.B0 = ( led >> 1 ) & 0x01;
725 : }
Be careful that LED2 should be connected to bit0 of port1 and LED3 should be connected to bit6 of port7.
The operation of the led_out function when the value of the argument is 2 is illustrated below.
7
6
5
4
3
2
1
0
0
0
0
0
0
0
1
0
1
1
1
1
1
1
0
1
Argument = 2
Line 722: Invert.
Line 723: Apply 0x01 mask
value
1
LED3: OFF
LED2: ON
bit 6 of Port 7
1
1
1
1
1
1
0
1
1
1
1
1
1
1
0
1
0
0
0
0
0
0
0
1
6
0
1
1
1
1
1
1
0
1
bit 0 of Port 1
Line 724:Shift 1bit to right.
Apply 0x01 mask value
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
82
5.4.22. motor Function (Motor Speed Control)
The motor function generates PWM output to the left and right motors. Forward and reverse operation is
controlled by the sign of the argument.
727 : /***********************************************************************/
728 : /* Motor speed control */
729 : /* Arguments: Left motor: -100 to 100, Right motor: -100 to 100 */
730 : /* Here, 0 is stopped, 100 is forward, and -100 is reverse. */
731 : /* Return value: None */
732 : /***********************************************************************/
733 : void motor( int accele_l, int accele_r )
734 : {
735 : int sw_data;
736 :
737 : sw_data = dipsw_get() + 5;
738 : accele_l = accele_l * sw_data / 20;
739 : accele_r = accele_r * sw_data / 20;
740 :
741 : /* Left Motor Control */
742 : if( accele_l >= 0 ) {
743 : PORT7.DR.BYTE &= 0xef;
744 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * accele_l / 100;
745 : } else {
746 : PORT7.DR.BYTE |= 0x10;
747 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * ( -accele_l ) / 100;
748 : }
749 :
750 : /* Right Motor Control */
751 : if( accele_r >= 0 ) {
752 : PORT7.DR.BYTE &= 0xdf;
753 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * accele_r / 100;
754 : } else {
755 : PORT7.DR.BYTE |= 0x20;
756 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * ( -accele_r ) / 100;
757 : }
758 : }
(1) Using the motor Function
The use of the motor function is described below.
motor(left motor PWM value, right motor PWM value );
The arguments are assigned the left motor PWM value and right motor PWM value, separated by a comma. The
correspondence between the PWM values and motor operation are as follows:
Value
Description
-100 to -1
The motor operates in the reverse direction. A value of –100 corresponds to “reverse 100%.”
The value cannot exceed –100. The setting must be an integer value.
0
The motor is stopped.
1 to 100
The motor operates in the forward direction. A value of 100 corresponds to “forward 100%.”
The value cannot exceed 100. The setting must be an integer value.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
83
The actual motor output ratios are as follows:
PWM output to left motor = left motor PWM value set by motor function × DIP switch value + 5 / 20
PWM output to right motor = right motor PWM value set by motor function × DIP switch value + 5 / 20
For example, it is not actually the case that the left motor operates in the forward direction at 80% when the left
motor PWM value set by the motor function is 80. The actual PWM ratio output to the motor differs depending on
the setting of the DIP switches on the MCU board.
Let’s assume that the following line of code is processed when the DIP switch setting is 1100 (12 in decimal
notation):
motor( -70 , 100 );
The actual PWM values output to the motors will be as follows:
PWM output to left motor = –70 × (12 + 5) ÷ 20 = –70 × 0.85 = –59.5 = –59%
PWM output to right motor = 100 × (12 + 5) ÷ 20 = 100 × 0.85 = 85%
The calculation result for the left motor is –59.5%, but the portion after the decimal point is discarded to produce
an integer value. Thus, the PWM value output to the left motor is reverse 59% and the PWM value output to the
right motor is forward 85%.
The manner in which the above is processed in practice is described below.
(2) Change to PWM Value According to DIP Switch Setting
737 : sw_data = dipsw_get() + 5; dipsw_get() = DIP switch value of 0 to 15
738 : accele_l = accele_l * sw_data / 20;
739 : accele_r = accele_r * sw_data / 20;
Line 737
This assigns a value of (DIP switch value + 5) to variable sw_data. The range of DIP switch values
is 0 to 15, so variable sw_data can have a value of 5 to 20.
Line 738
The PWM value ratio applied to the left motor is assigned to the variable accele_l on the left of the
equal sign. The value of the variable accele_l on the right of the equal sign is the left motor PWM
value set by the motor function. Thus, the PWM value applied to the left motor can be calculated as
follows:
accele_l = accele_l (left motor PWM value set by motor function)×sw_data/20
Variable accele_l can have a value within a range of –100 to 100.
Line 739
The PWM value ratio applied to the right motor is assigned to the variable accele_r on the left of
the equal sign. The value of the variable accele_r on the right of the equal sign is the right motor
PWM value set by the motor function. Thus, the PWM value applied to the right motor can be
calculated as follows:
accele_r = accele_r (right motor PWM value set by motor function)×sw_data/20
Variable accele_r can have a value within a range of –100 to 100.
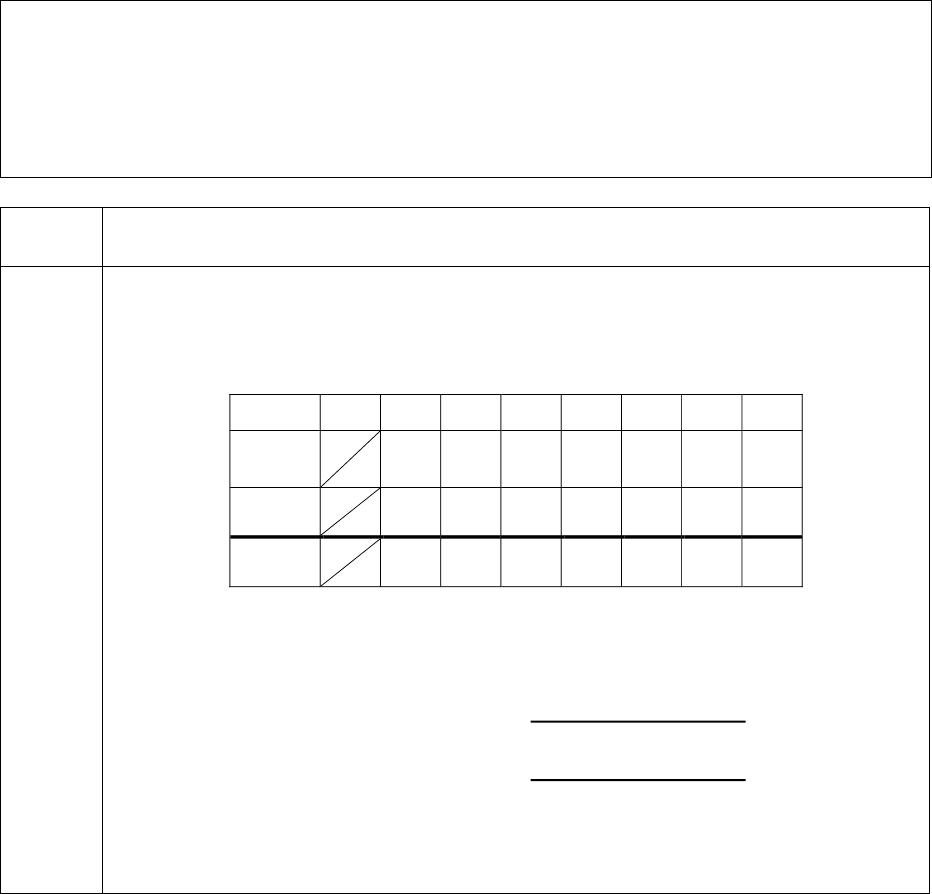
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
84
(3) Left Motor Control
This portion of the function controls the left motor. The left motor PWM output is on pin P72. The PWM output
on pin P72 is specified by the PWM value setting in MTU3_4 timer general register A (MTU4.TGRA). However,
this setting is not made directly but to MTU3_4 timer general register C (MTU4.TGRC), which functions as a
buffer register, instead.
741 : /* Left Motor Control */
742 : if( accele_l >= 0 ) {
743 : PORT7.DR.BYTE &= 0xef;
744 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * accele_l / 100;
745 : } else {
746 : PORT7.DR.BYTE |= 0x10;
747 : MTU4.TGRC = (long)( PWM_CYCLE - 1 ) * ( -accele_l ) / 100;
748 : }
Line 742
Checks whether the left motor PWM value ratio is a positive or a negative value. If positive, lines
743 and 744 are processed, if negative, lines 746 and 747.
Lines 743
to 744
If the value is positive, lines 743 and 744 are processed.
P74 is cleared to 0 and PWM is output on P72, causing the left motor to operate in the forward
direction according to the PWM ratio.
Line 743 performs the following bit operations and clears pin P74 to 0:
bit
7
6
5
4
3
2
1
0
Original
value
(port 2)
P76
P75
P74
P73
P72
P71
P70
AND value
1
1
0
1
1
1
1
Result
P76
P75
0
P73
P72
P71
P70
Line 744 performs the calculation below and sets the PWM value in MTU3_4 timer general register
C (MTU4.TGRC). If there are digits after the decimal point, they are discarded.
MTU4.TGRC
accele_l (0 to 100)
100
= ( PWM_CYCLE - 1 )
accele_l (0 to 100)
100
= 24575
For example, when accele_l = 80 the calculation of the value written to MTU4.TGRC is as follows:
MTU4.TGRC = 24575 80/100 = 19660
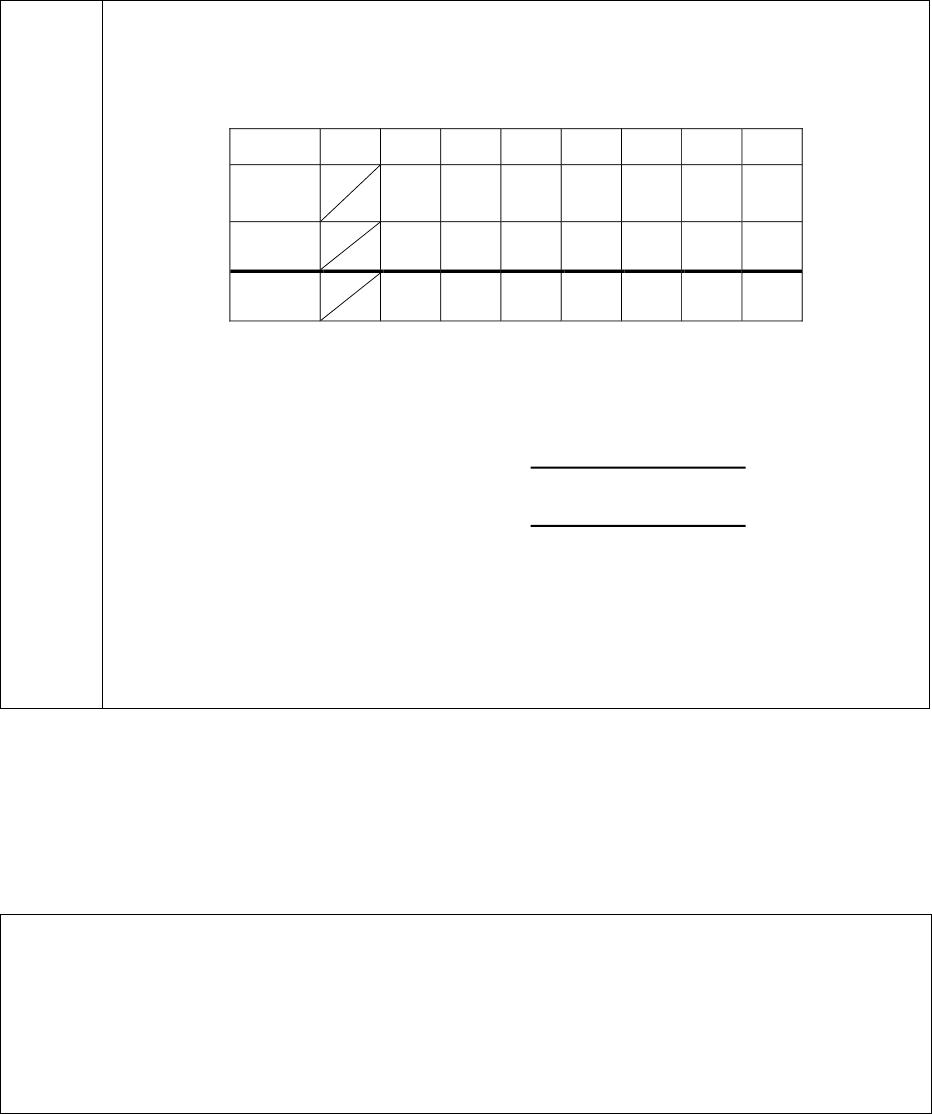
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
85
Lines 746
to 747
If the value is negative, lines 746 and 747 are processed.
P74 is set to 1 and PWM is output on P72, causing the left motor to operate in the reverse direction
according to the PWM ratio.
Line 746 performs the following bit operations and sets pin P74 to 1:
bit
7
6
5
4
3
2
1
0
Original
value
(port 2)
P76
P75
P74
P73
P72
P71
P70
OR value
0
0
1
0
0
0
0
Result
P76
P75
1
P73
P72
P71
P70
Line 747 performs the calculation below and sets the PWM value in timer MTU3_4 timer general
register C (MTU4.TGRC). If there are digits after the decimal point, they are discarded.
MTU4.TGRC
-accele_l (-1 to -100)
100
= ( PWM_CYCLE - 1 )
-accele_l (-1 to -100)
100
= 24575
A key point is that the value of variable accele_l is a negative number. In circuit terms, setting P74
to 1 specifies reverse operation, so accele_l is converted to a positive number for the calculation.
The conversion method is to specify -accele_l in the expression. For example, when accele_l = –50
the calculation of the value written to MUT4.TGRC is as follows:
MTU4.TGRC = 24575 {-(-50)}/100 = 24575 50/100 = 12287.5 = 12287
(4) Right Motor Control
This portion of the function controls the right motor. The right motor PWM output is on pin P73. The PWM output
on pin P73 is specified by the PWM value setting in MTU3_4 timer general register B (MTU4.TGRB). However,
this setting is not made directly but to MTU3_4 timer general register D (MTU4.TGRD), which functions as a
buffer register, instead.
750 : /* Right Motor Control */
751 : if( accele_r >= 0 ) {
752 : PORT7.DR.BYTE &= 0xdf;
753 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * accele_r / 100;
754 : } else {
755 : PORT7.DR.BYTE |= 0x20;
756 : MTU4.TGRD = (long)( PWM_CYCLE - 1 ) * ( -accele_r ) / 100;
757 : }
758 : }
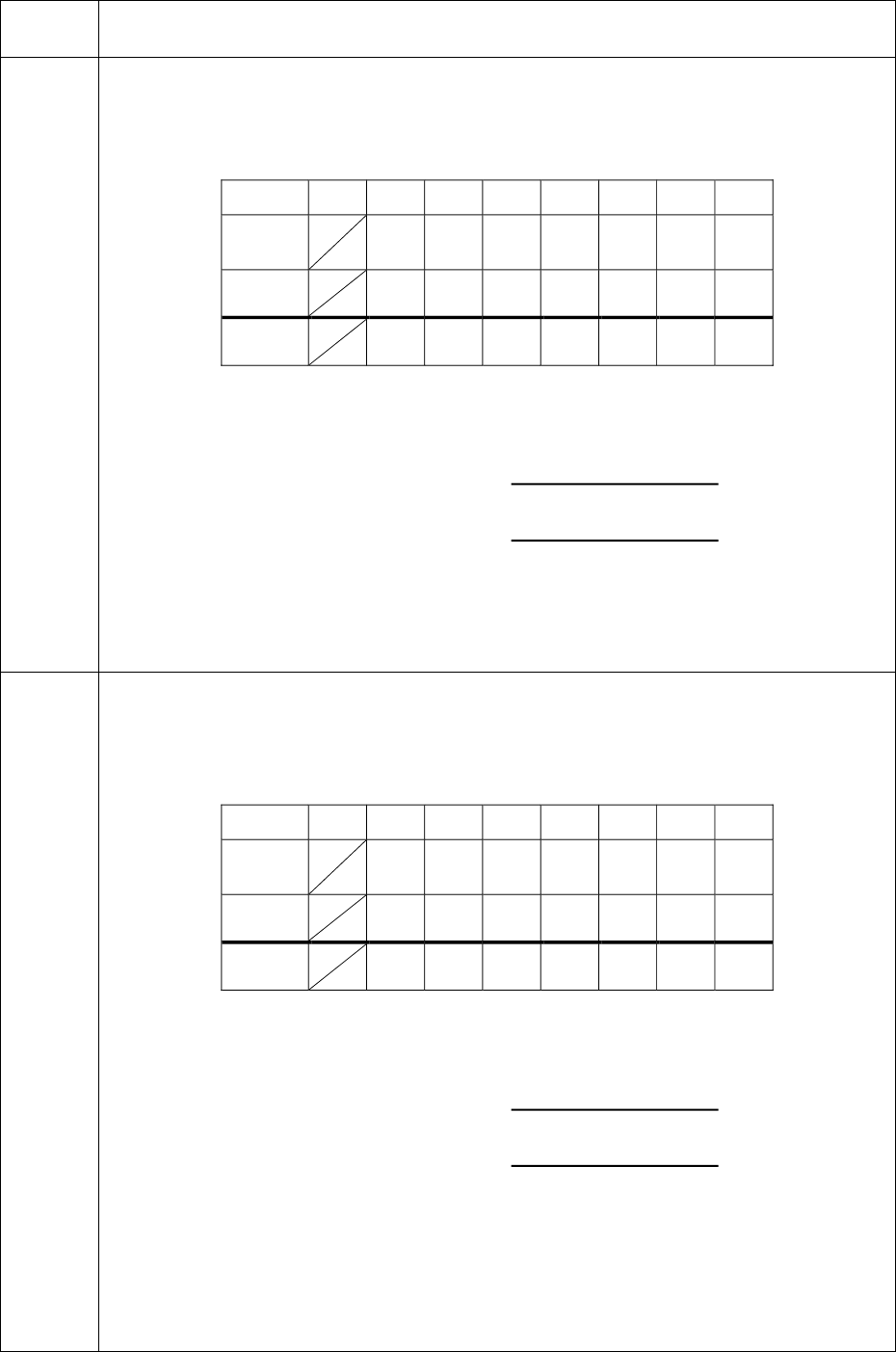
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
86
Line 751
Checks whether the left motor PWM value ratio is a positive or a negative value. If positive, lines
752 and 753 are processed, if negative, lines 755 and 756.
Lines 752
to 753
If the value is positive, lines 752 and 753 are processed.
P75 is cleared to 0 and PWM is output on P73, causing the right motor to operate in the forward
direction according to the PWM ratio.
Line 752 performs the following bit operations and clears pin P75 to 0:
bit
7
6
5
4
3
2
1
0
Original
value
(port 7)
P76
P75
P74
P73
P72
P71
P70
AND value
1
0
1
1
1
1
1
Result
P76
0
P74
P73
P72
P71
P70
Line 753 performs the calculation below and sets the PWM value in MTU3_4 timer general register
D (MTU4.TGRD). If there are digits after the decimal point, they are discarded.
MTU4.TGRD
accele_r (0 to 100)
100
= ( PWM_CYCLE - 1 )
accele_r (0 to 100)
100
= 24575
For example, when accele_r = 20 the calculation of the value written to MTU4.TGRD is as follows:
MTU4.TGRD = 24575 20/100 = 4915
Lines 755
to 756
If the value is negative, lines 755 and 756 are processed.
P75 is set to 1 and PWM is output on P73, causing the right motor to operate in the reverse direction
according to the PWM ratio.
Line 755 performs the following bit operations and sets pin P75 to 1:
bit
7
6
5
4
3
2
1
0
Original
value
(port 7)
P76
P75
P74
P73
P72
P71
P70
OR value
0
1
0
0
0
0
0
Result
P76
1
P74
P73
P72
P71
P70
Line 756 performs the calculation below and sets the PWM value in MTU3_4 timer general register
D (MTU4.TGRD). If there are digits after the decimal point, they are discarded.
MTU4.TGRD
-accele_r (-1 to -100)
100
= ( PWM_CYCLE - 1 )
-accele_r (-1 to -100)
100
= 24575
A key point is that the value of variable accele_r is a negative number. In circuit terms, setting P2_3
to 1 specifies reverse operation, so accele_r is converted to a positive number for the calculation.
The conversion method is to specify -accele_r in the expression. For example, when accele_r = –90
the calculation of the value written to TRDGRC1 is as follows:
MTU4.TGRD = 24575 {-(-90)}/100 = 24575 90/100 = 22117.5 = 22117
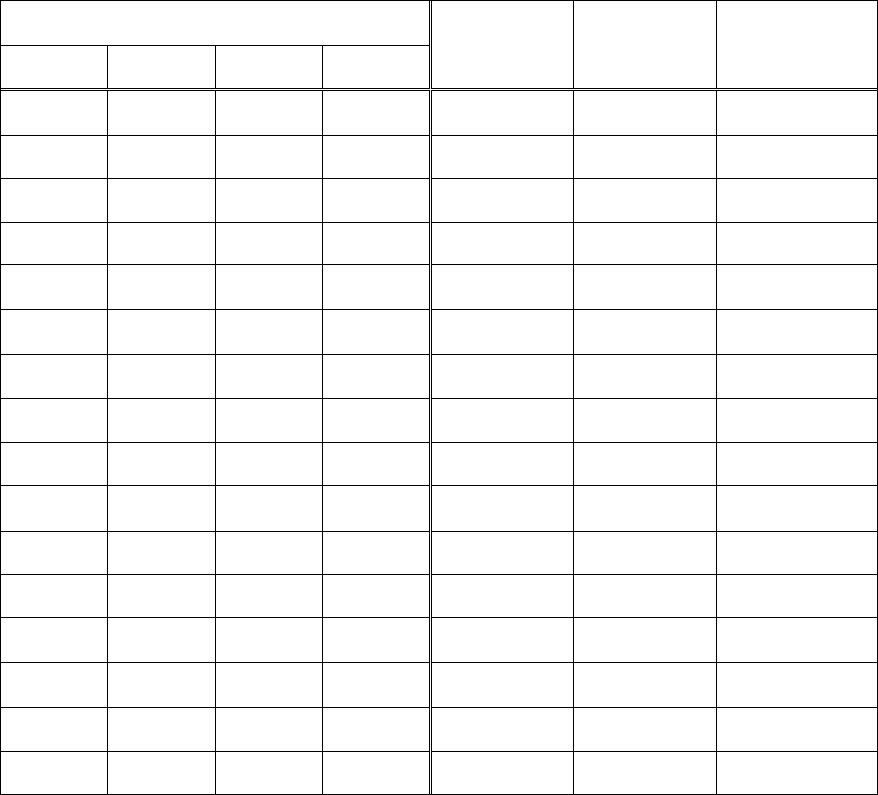
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
87
(5) Dip Switch Value and Motor Output
When the motor function setting is 100%, the DIP switch setting determines the actual output, as follows:
DIP Switch
Decimal
Calculation
Motor Ratio
P60
P61
P62
P63
0
0
0
0
0
5/20
25%
0
0
0
1
1
6/20
30%
0
0
1
0
2
7/20
35%
0
0
1
1
3
8/20
40%
0
1
0
0
4
9/20
45%
0
1
0
1
5
10/20
50%
0
1
1
0
6
11/20
55%
0
1
1
1
7
12/20
60%
1
0
0
0
8
13/20
65%
1
0
0
1
9
14/20
70%
1
0
1
0
10
15/20
75%
1
0
1
1
11
16/20
80%
1
1
0
0
12
17/20
85%
1
1
0
1
13
18/20
90%
1
1
1
0
14
19/20
95%
1
1
1
1
15
20/20
100%
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
88
5.4.23. handle Function (Servo Steering Operation)
760 : /***********************************************************************/
761 : /* Servo steering operation */
762 : /* Arguments: servo operation angle: -90 to 90 */
763 : /* -90: 90-degree turn to left, 0: straight, */
764 : /* 90: 90-degree turn to right */
765 : /***********************************************************************/
766 : void handle( int angle )
767 : {
768 : /* When the servo move from left to right in reverse, replace "-" with "+". */
769 : MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP;
770 : }
(1) Using the handle Function
The use of the handle function is described below.
handle( Servo angle );
The argument specifies the servo angle. The correspondence between the value and the servo angle is as follows:
Value
Description
Negative
The servo turns to the left the specified number of degrees.
0
The servo is oriented to 0 degrees (straight ahead). If the servo does not point straight ahead
when the setting value is 0, the SERVO_CENTER value is off and requires adjustment.
Positive
The servo turns to the right the specified number of degrees.
Observe the following code examples:
handle( 0 ); 0 degree
handle( 30 ); Right 30 degrees
handle( -45 ); Left 45 degrees
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
89
(2) Program Description
765 : MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP;
[1] [2] [3] [4]
[1]
The PWM on width setting for pin P71, which is connected to the servo, is specified by the setting of
MTU3.TGRB. However, this setting is not made directly but to MTU3.TGRD, which functions as a buffer
register, instead.
[2]
Value corresponding to 0 degrees.
[3]
The angle specified by the handle function is assigned to this variable.
[4]
Among of increase equivalent to 1 degree.
The examples below illustrate the calculation of the value assigned to MTU3.TGRD.
Note: In these examples, SERVO_CENTER = 2320 and HANDLE_STEP = 13.
0 degrees
MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP
= 2320 - 0 * 13
= 2320
30 degrees
MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP
= 2320 - 30 * 13
= 2320 - 390
= 1930
–45 degrees
MTU3.TGRD = SERVO_CENTER - angle * HANDLE_STEP
= 2320 - (-45) * 13
= 2320 - (-585)
= 2905
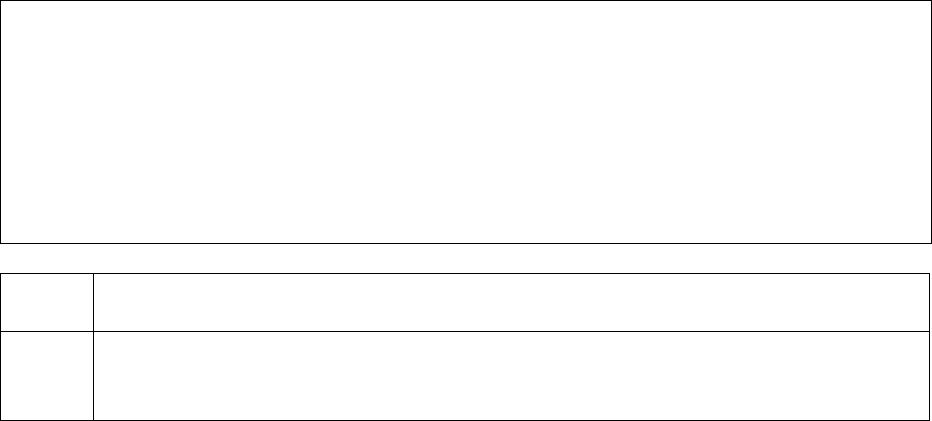
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
90
5.4.24. Start
This is the main function. It is the first C language program to be called from the startup routine and run.
66 : /***********************************************************************/
67 : /* Main program */
68 : /***********************************************************************/
69 : void main(void)
70 : {
71 : /* Initialize MCU functions */
72 : init();
73 :
74 : /* Initialize micom car state */
75 : handle( 0 );
76 : motor( 0, 0 );
Line 72
This function initialises the on-chip peripheral functions of the RX62T MCU.
Lines 75
to 76
This initialises the state of the MCU car.
The servo angle is set to 0 degrees by the handle function.
The left motor and right motor are set to 0% by the motor function.
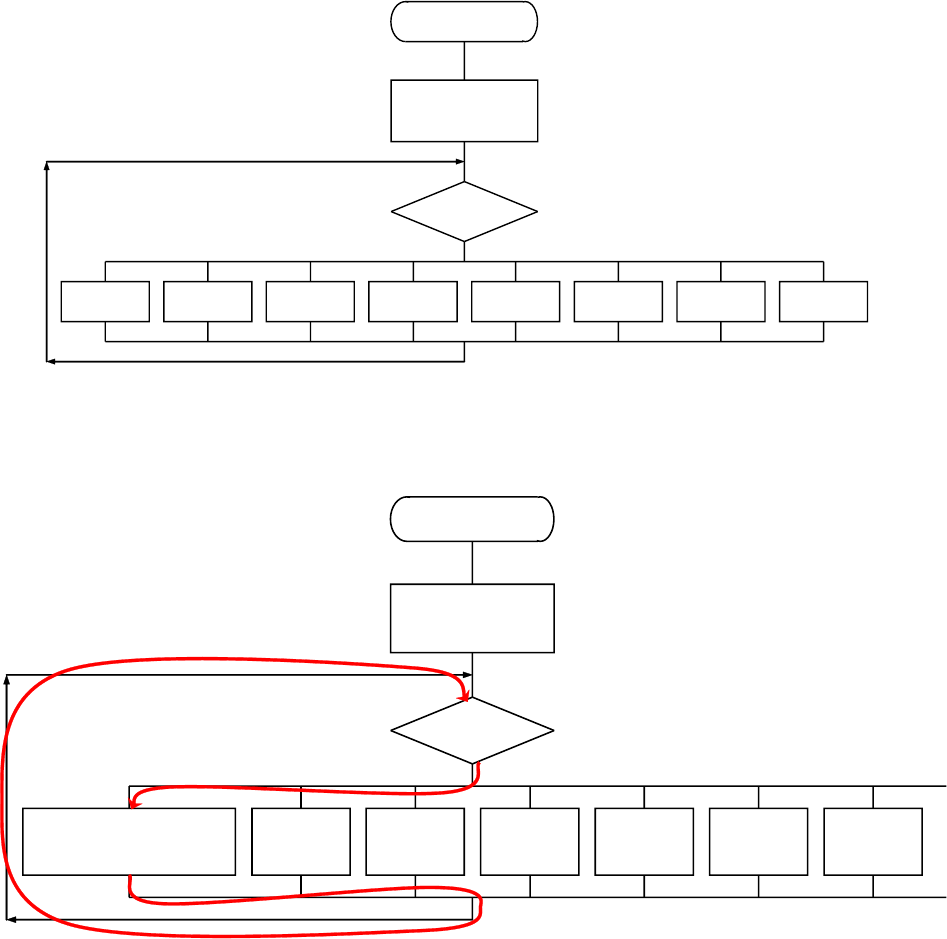
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
91
5.4.25. Patterns
In kit12_rx62t.c a method called patterns is used to organize the program.
This basically involves dividing the program up into small sections. For example, there is a section for button
input standby processing, one for checking whether or not a start bar is present, and so on.
Next, a variable called pattern is created. This makes it possible to select the program section to be run by setting
the value of the variable pattern.
For example, setting the value of variable pattern to 0 causes button input standby processing to be performed,
setting variable pattern to 1 causes processing to check whether or not a start bar is present to be performed, and
so on.
Using this method of dividing the processing into various patterns makes the program code easier to read. Such
use of patterns is sometimes called modular programming.
5.4.26. Writing a Program
When writing a C language program with patterns, switch statements are used for branching. This is shown in the
following flowchart:
Program start
init();
handle( 0 );
motor( 0, 0 );
Pattern 0
Pattern 1
Pattern 11
Pattern 12
Pattern 13
Pattern …
Pattern 63
case 0:
case 1:
case 63:
...
case 11:
Pattern 64
case 64:
case 12:
case 13:
switch( pattern )
Initialize micom car state
Branch using switch statement.
At startup, the value of variable pattern is 0. The switch statement causes execution to continue with pattern 0,
which is the portion of the program corresponding to case 0. This will be described in detail later, but pattern 0 is
button input standby processing. When the button is depressed, pattern=1 is executed. This is shown in the
following figure:
Program start
init();
handle( 0 );
motor( 0, 0 );
Pattern 0
Button depressed?
When depressed, pattern=1
Pattern 1
Pattern 11
Pattern 12
Pattern 13
Pattern 21
Pattern 22
case 0:
case 1:
case 22:
case 21:
case 11:
case 12:
case 13:
switch( pattern )
Initialize micom car state
Branch using switch statement.
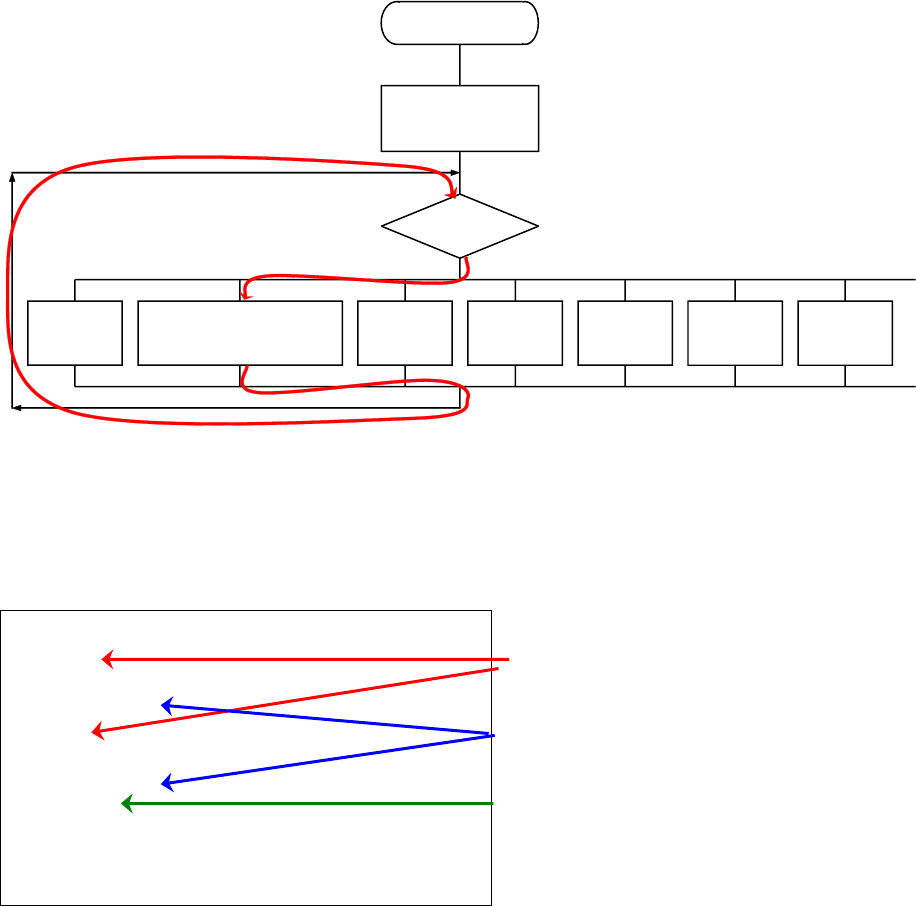
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
92
The value of variable pattern is 1 the next time the switch statement is executed, so the portion of the program
corresponding to case 1 is run. In this program, running the portion of the program corresponding to switch
( pattern ) case 1 means running pattern 1.
Pattern 1 is the portion of the program that checks whether or not the start bar is open. The processing flow is as
follows:
Program start
init();
handle( 0 );
motor( 0, 0 );
Pattern 1
Start bar open?
Not open, so do nothing.
Pattern 0
Pattern 11
Pattern 12
Pattern 13
Pattern 21
Pattern 22
switch( pattern )
Initialize micom car state
Branch using switch statement.
case 0:
case 1:
case 22:
case 21:
case 11:
case 12:
case 13:
As the above illustrates, the program has a modular organization. Each module performs a simple check, such as
“start button depressed?” or “start bar open?”, and changes the pattern number (the value of variable pattern)
when the condition it met.
The program code is as follows. It uses ordinary switch and case statements.
switch( pattern ) {
case 0:
/* pattern=0 processing */
break;
case 1:
/* pattern=1 processing */
break;
default:
/* if neither */
break;
}
The value of pattern is compared to the values
defined in the various case statements, and
execution jumps to the case position whose
value matches.
Processing ends when a break statement or the
end of the switch statement is encountered.
If none of the values defined in the case
statements matches, the default statement is
executed. Incidentally, nothing is executed if
there is no default statement.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
93
5.4.27. Pattern Descriptions
The pattern numbers used in kit12_rx62t.c, the processing performed by each pattern, and the conditions for
changes between patterns are listed below.
Current
pattern
Processing description
Pattern change condition
0
Wait for button input
When button depressed, to pattern 1
1
Check if start bar is open
When start bar open detected, to pattern 11
11
Normal trace
At large turn to right, to pattern 12
At large turn to left, to pattern 13
When crossline detected, to pattern 21
When right half line detected, to pattern 51
When left half line detected, to pattern 61
12
Check end of large turn to
right
When large turn to right completed, to pattern 11
When crossline detected, to pattern 21
When right half line detected, to pattern 51
When left half line detected, to pattern 61
13
Check end of large turn to
left
When large turn to left completed, to pattern 11
When crossline detected, to pattern 21
When right half line detected, to pattern 51
When left half line detected, to pattern 61
21
Processing at 1st crossline
detection
When servo and speed settings completed, to pattern 22
22
Read but ignore 2nd time
After 100 ms, to pattern 23
23
Trace, crank detection after
crossline
When left crank detected, to pattern 31
When right crank detected, to pattern 41
31
Clearing from Left crank
- wait until stable
After 200 ms, to pattern 32
32
Clearing from Left crank
- check end of turn
After clearing from left crank, to pattern 11
41
Clearing from Right crank
- wait until stable
After 200 ms, to pattern 42
42
Clearing from Right crank
- check end of turn
After clearing from right crank, to pattern 11
51
Processing at 1st right half
line detection
When servo and speed settings completed, to pattern 52
52
Read but ignore 2nd time
After 100 ms, to pattern 53
53
Trace after right half line
If centre line disappears, turn steering wheel to right and go to
pattern 54
54
Right lane change end check
When new centre line is at sensor centre position, to pattern 11
61
Processing at 1st left half line
detection
When servo and speed settings completed, to pattern 62
62
Read but ignore 2nd time
After 100 ms, to pattern 63
63
Trace after left half line
If centre line disappears, turn steering wheel to left and go to
pattern 64
64
Left lane change end check
When new centre line is at sensor centre position, to pattern 11
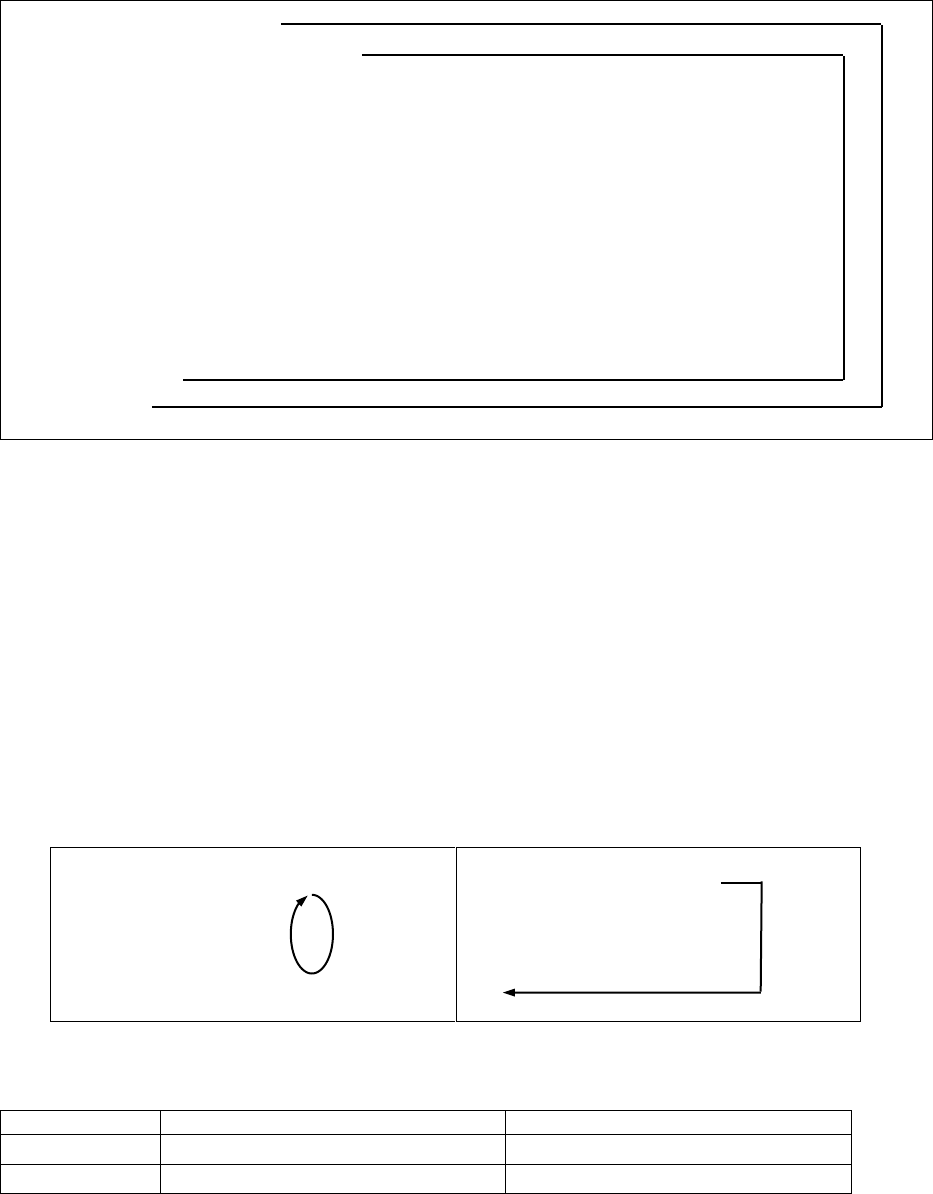
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
94
5.4.28. Initial while and switch when Using Patterns
78 : while( 1 ) {
79 : switch( pattern ) {
105 : case 0:
Pattern 0 processing
119 : break;
120 :
121 : case 1:
Pattern 1 processing
137 : break;
Pattern processing
473 : default:
474 : /* If neither, return to standby state */
475 : pattern = 0;
476 : break;
477 : }
478 : }
while( 1 ) { in line 78 and } in line 478 form a pair, and switch( pattern ) { in line 79 and } in line 477 form a pair.
Generally speaking, lines enclosed between opening and closing curly brackets { } are indented four characters
to make the code easier to read. This convention is generally followed in the code listing of this program. However,
the lines containing while and switch are not indented. This is to prevent complex lines from exceeding the right
margin and being split into two lines in the listing, which would be more difficult to read. After all, the reason for
indenting some lines is to make the code listing easier to read. Extra spaces at the beginning of lines have no effect
when the code is compiled. However, if this exception is bothersome, feel free to indent lines 79 to 477 by adding
four spaces at the beginning of each line.
while( condition ) is a control statement that causes the code enclosed in the curly brackets { } to be executed
repeatedly for as long as the condition is true, and the code following the curly brackets { } to be executed when
the condition is false.
while( condition true ) {
…
…
…
}
while( condition false ) {
…
…
…
}
…
“True” and “false” are defined as follows:
Description
Example
True
Correct, other than 0
3 < 5 3==3 1 2 3 -1 -2 -3
False
Not correct, 0
5 < 3 3==6 0
The code listing reads while( 1 ). A value of 1 is always true, so the code enclosed in the curly brackets { } is
repeated infinitely. In a Windows program, for example, such an infinite loop would be a problem because it
would prevent the user from quitting the application. But since our program is designed to operate a MCU car,
there is no problem. Once the MCU car crosses the finish line (or runs off the course), someone can pick it up and
Pair
Pair
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
95
switch it off. On the other hand, if the MCU were to fail to complete its processing correctly and execution of the
program ended, processing would continue into an area of memory containing no executable code, resulting in
unpredictable behaviour. The usual approach in MCU car programs is to have the MCU repeatedly do nothing
(enter an endless loop) without exiting the program or to have it transition to a low-power mode called sleep mode,
in which operation stops and the MCU waits to be awakened.
5.4.29. Pattern 0: Wait For Button Input
Pattern 0 is the section of the program that checks whether or not the pushbutton has been depressed. While this
checking is taking place, there is no way to know whether the program is running or not. To provide such an
indication, LED0 and LED1 are illuminated alternately.
First is the section for detecting pushbutton input. The pushsw_get function checks the pushbutton state. It returns
a value of 1 when the button is depressed, so the code enclosed in the curly brackets is executed and the value of
pattern is set to 1.
105 : case 0:
106 : /* Wait for switch input */
107 : if( pushsw_get() ) {
108 : pattern = 1;
109 : cnt1 = 0;
110 : break;
111 : }
If button depressed (return value other than 0)…
Set pattern to 1.
Clear cnt1 to 0.
End switch statement.
Line 107
When the pushbutton is depressed, the code enclosed in the curly brackets (lines 102 to 104) is
executed. Nothing is executed if the pushbutton is not depressed.
The if statement performs a comparison. The following line compares the return value of the
pushsw_get function with the value 1:
if( pushsw_get() == 1 ) { If the return value of the pushsw_get function is 1...
But our code listing reads as follows:
if( pushsw_get() ) {
There is no value provided for comparison. In the C language, the meaning is as follows:
if( Value ) {
If the value is other than 0, the condition is considered true and this section is executed.
} else {
If the value is other than 0, the condition is considered true and this section is executed.
}
The return value of the pushsw_get function is 1 when the button is in the depressed state and 0
when it is not depressed. Therefore, operation is as follows when the pushbutton is depressed:
if( 1 ) { pushsw_get() returns a value of 1.
The value is other than 0, so the code between the curly brackets is executed.
}
Line 108
The value 1 is assigned to variable pattern. The case 1: portion of the program is run the next time
the switch-case statement is executed.
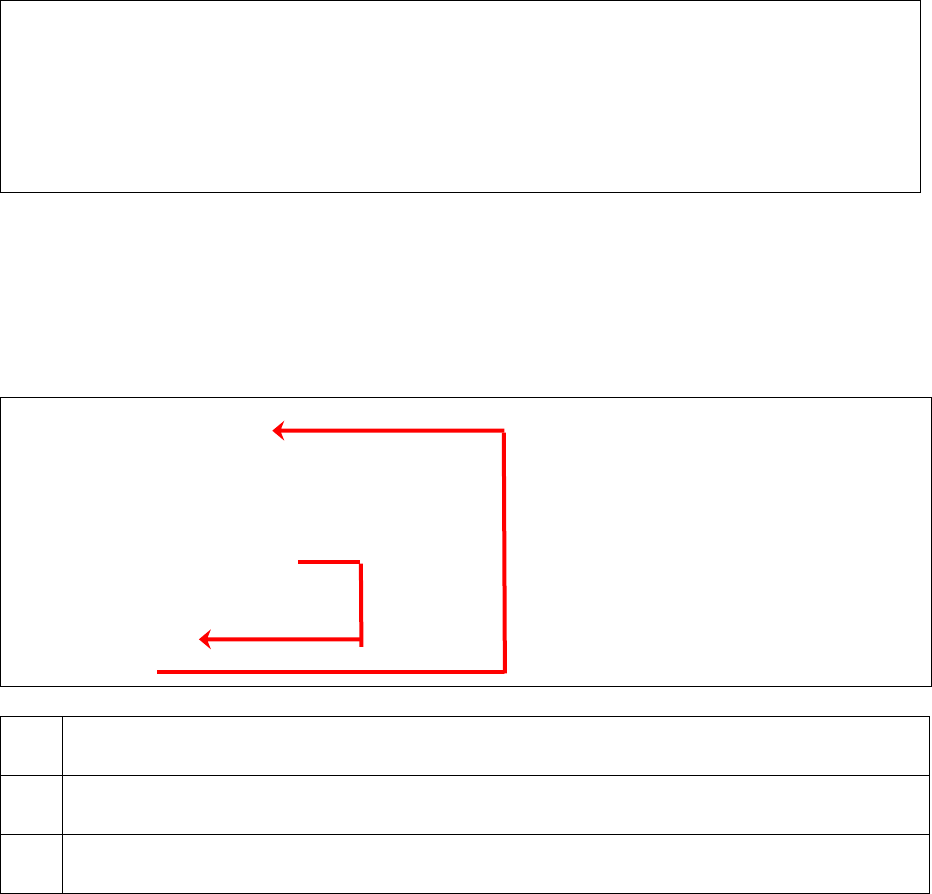
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
96
After this are added the lines that cause the LEDs to turn on and off. First LED2 lights for 0.1 second, then LED3
lights for 0.1 second, then the sequence is repeated.
112 : if( cnt1 < 100 ) {
113 : led_out( 0x1 );
114 : } else if( cnt1 < 200 ) {
115 : led_out( 0x2 );
116 : } else {
117 : cnt1 = 0;
118 : }
Is value of cnt1 0 to 99?
If so, light LED2 only.
Is value of cnt1 100 to 199?
If so, light LED3 only.
If value of cnt1 is something else (200 or greater)…
Clear cnt1 to 0.
Most variables, such as the variable pattern, do not change value once set until they are explicitly set to a new
value. In kit12_rx62t.c, variables cnt0 and cnt1 only are exceptions to this. Variables cnt0 and cnt1 are each
incremented (+1) every 1 ms by the interrupt function. This means these variables can be used to measure time.
The purpose of the break statement in line 113 is to end case 0.
78 : while( 1 ) {
79 : switch( pattern ) {
105 : case 0:
Lines omitted
119 : break;
Lines omitted
477 : }
478 : }
[1]
The break statement in line 119 causes control to jump to the next line after line 477, which contains the
closing curly bracket of the switch-case statement.
[2]
Line 478 is processed next, but since it contains the closing curly bracket of a while statement matching
the opening curly bracket in line 78, control returns to line 78.
[3]
The switch-case statement starting on line 79 is processed, and control moves to a case statement
according to the value of variable pattern.
[1]
[2]
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
97
Note: Not Using Variable cnt1
What if we used the timer function instead of cnt1?
if( pushsw_get() ) {
pattern = 1;
cnt1 = 0;
break;
}
timer( 100 ); This line triggers a pause of 100 ms!!
led_out( 0x1 );
timer( 100 ); This line triggers a pause of 100 ms!!
led_out( 0x2 );
break;
This is simpler. Maybe this approach is better. But the timer function does nothing but wait for a period of time
to elapse. If the pushbutton is depressed and then released while the timer function is executing, the button may
no longer be in the depressed state when the pushsw_get function executes. The depress would not be detected in
that case. In this example code the timer function takes 0.1 seconds to run, so you would have to depress and
release the button very quickly for it not to be detected. However, if the duration was longer, say, several seconds,
the periods when the button state was not being checked would be too long and it would not be possible to detect
depresses reliably. This is why variable cnt1 is used to check the time while the button state checking is
taking place.
5.4.30. Pattern 1: Check if Start Bar Is Open
Pattern 1 is the section of the program that checks whether or not the start bar is open. While this checking is
taking place, there is no way to know whether the program is running or not. To provide such an indication, LED2
and LED3 are illuminated alternately.
First is the section for detecting whether the start bar is open or closed.
121 : case 1:
122 : /* Check if start bar is open */
123 : if( !startbar_get() ) {
124 : /* Start!! */
125 : led_out( 0x0 );
126 : pattern = 11;
127 : cnt1 = 0;
128 : break;
129 : }
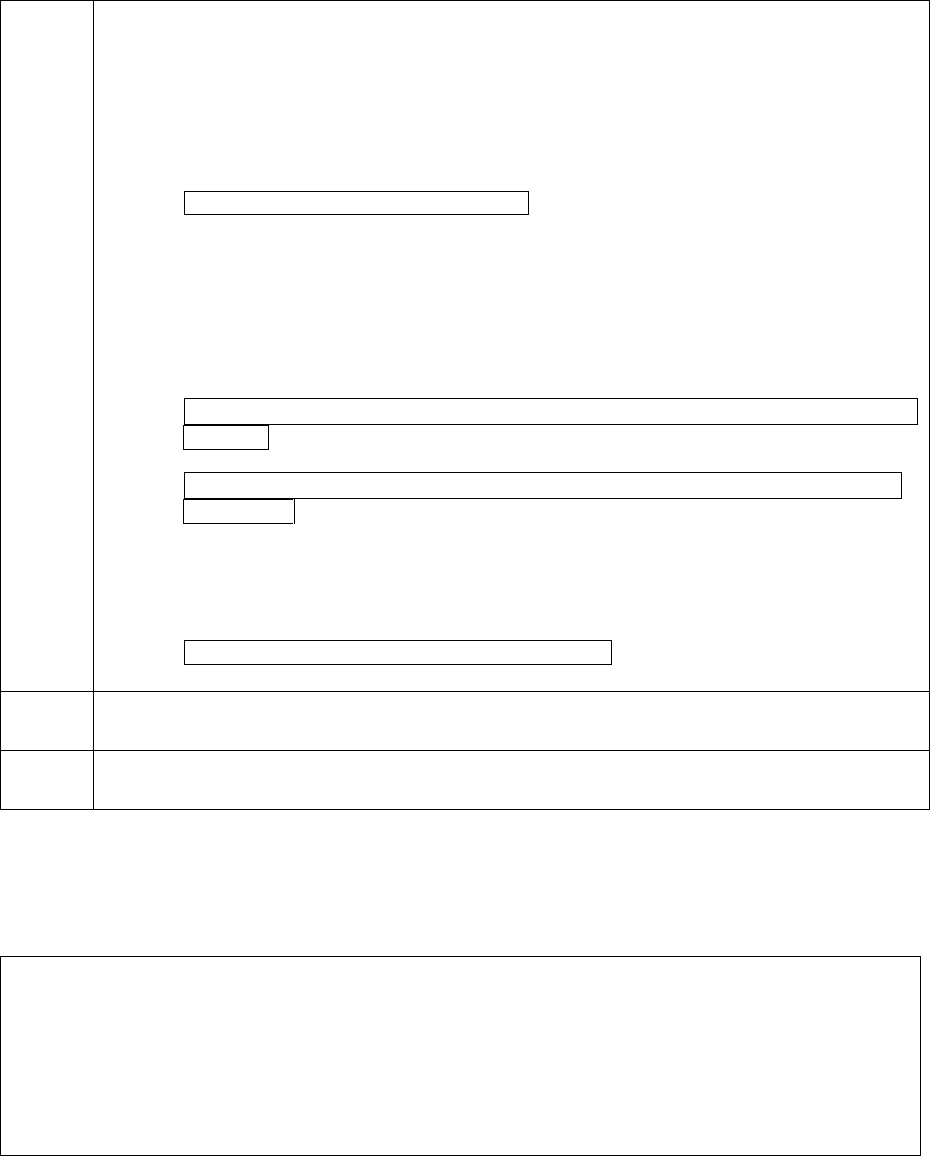
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
98
Line 123
If the start bar is open, the code enclosed in the curly brackets (lines 125 to 128) is executed. Nothing
is executed if it is closed.
The startbar_get function returns a value of 1 when the start bar is present (the sensors produce a
response) and a value of 0 when the start bar is absent (the sensors produce no response). The code is
analogous to that used in the pushsw_get function described earlier.
if( startbar_get() ) {
Execute this code if the start bar is present.
}
This would mean the code between the curly brackets would be executed if the start bar were present.
We actually want this code to run if the start bar is not present. Therefore, we add an exclamation
mark ! to negate the statement, so now the code between the curly brackets is executed if the start bar
is absent. The exclamation mark ! means negation.
if( ! Value ) {
If the value is not other than 0, this section is executed. This section is executed if the
value is 0.
} else {
If the value is not 0, this section is executed. This section is executed if the value is
other than 0.
}
This results in the following:
if( !startbar_get() ) {
If the start bar is not present, this section is executed.
}
Line 126
The value 11 is assigned to variable pattern. The case 11: portion of the program is run the next time
the switch-case statement is executed.
Line 128
The break statement causes control to jump to the closing curly bracket of the switch-case statement.
Next come lines that cause the LEDs to turn on and off. First LED2 lights for 0.05 seconds, then LED3 lights for
0.05 seconds, then the sequence is repeated. The flashing is faster than in pattern 1, so you know that the MCU car
is waiting for the start bar to open.
130 : if( cnt1 < 50 ) {
131 : led_out( 0x1 );
132 : } else if( cnt1 < 100 ) {
133 : led_out( 0x2 );
134 : } else {
135 : cnt1 = 0;
136 : }
137 : break;
Is value of cnt1 0 to 49?
If so, light LED0 only.
Is value of cnt1 50 to 99?
If so, light LED1 only.
If value of cnt1 is something else (100 or greater)...
Clear cnt1 to 0.
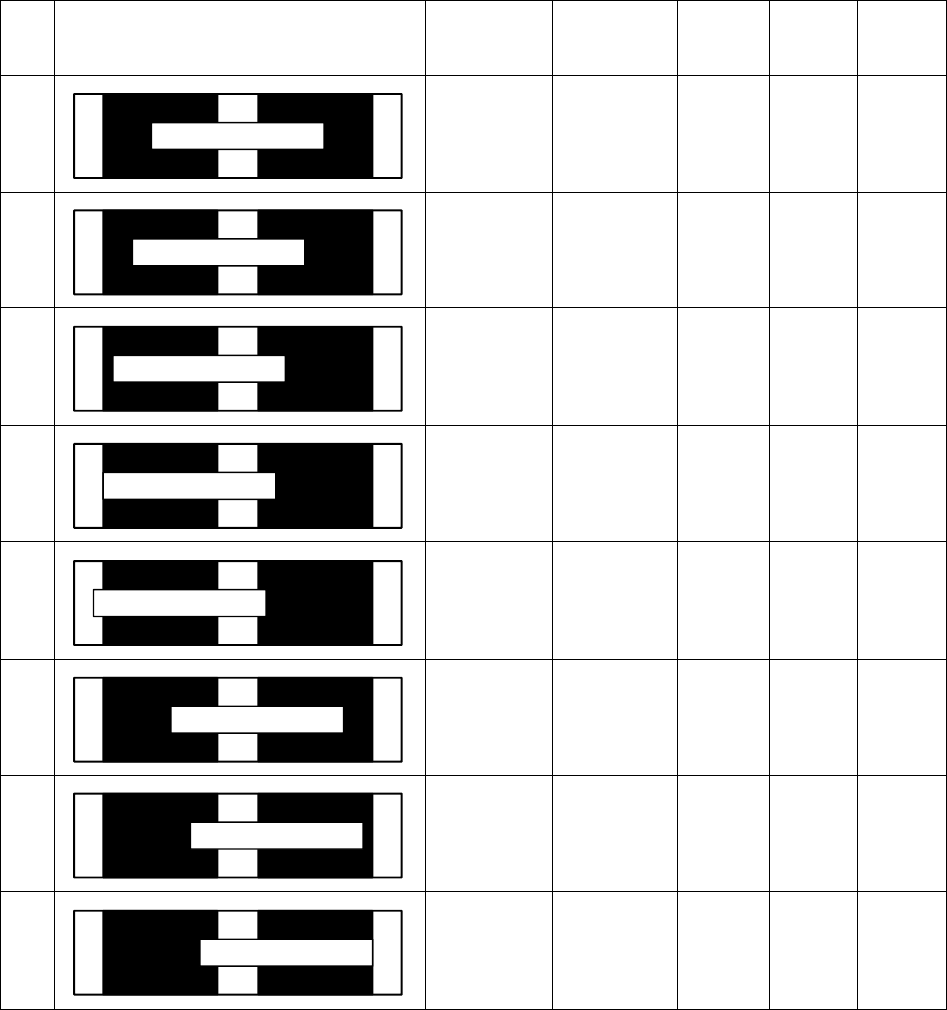
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
99
5.4.31. Pattern 11: Normal Trace
Pattern 11 is a status in which the program reads the sensor data and controls the left motor, right motor, and servo.
First, let’s imagine the possible sensor states. There are eight sensors, but if we tried to make use of them all we
would have to deal with too much detection state data and the program code would become overly complex.
Instead, we will apply masking with MASK3_3 and use data from a total of six sensors, three on the right and
three on the left, to determine the state of the course.
Next, let’s consider the turn angle as well as the left motor and right motor PWM values. The idea is that we will
keep the steering wheel pointed straight ahead and increase the speed when the sensors indicate that the MCU car
is in the centre of the track. When the sensors indicate that the MCU car has deviated from the centre, we will turn
the steering wheel and lower the speed of the left and right motors.
This works as follows in kit07_rx62t.c:
Course and sensor state
Value read
by sensors
Hexadecimal
Steering
angle
Left
motor
PWM
Right
motor
PWM
1
●●●××●●●
00000000
0x00
0
100
100
2
●●●××○●●
00000100
0x04
5
100
100
3
●●●××○○●
00000110
0x06
10
80
67
4
●●●××○○○
00000111
0x07
15
50
38
5
●●●××●○○
00000011
0x03
25
30
19
6
●●○××●●●
00100000
0x20
-5
100
100
7
●○○××●●●
01100000
0x60
-10
67
80
8
○○○××●●●
11100000
0xe0
-15
38
50
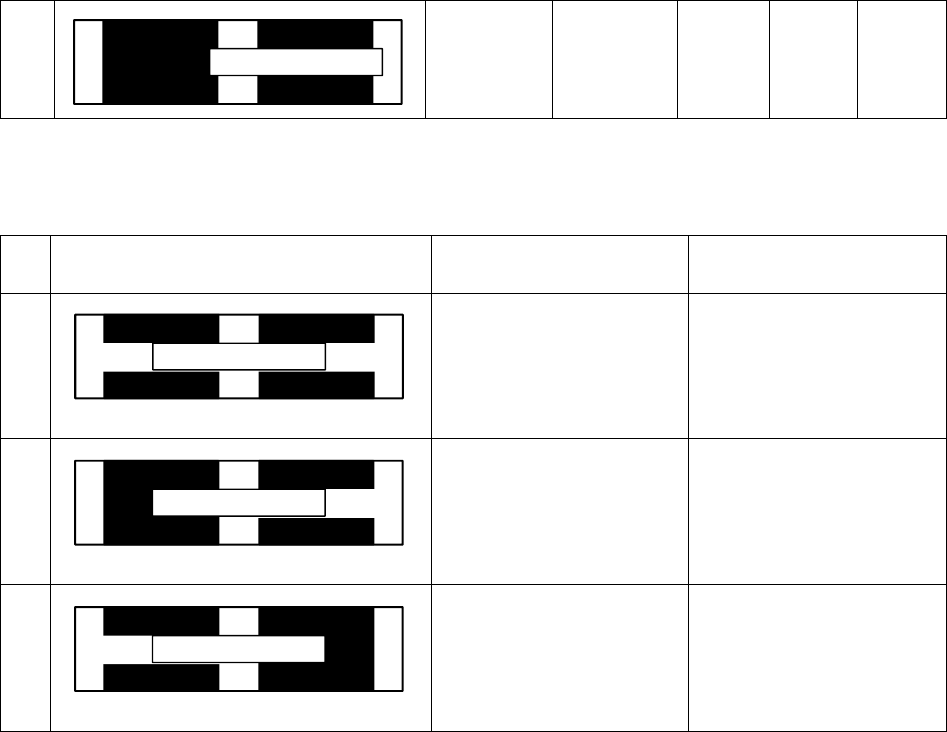
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
100
9
○○●××●●●
11000000
0xc0
-25
19
30
The MCU car course also includes crosslines, right half lines, and left half lines. There are functions designed to
detect each of these, and we will make use of them.
Course and sensor state
Course feature and
processing
Function used for checking
10
○○○××○○○
6 sensors used
Horizontal line (crossline)
↓
When detected, to crank
processing (pattern 21)
check_crossline
11
●●●○○○○○
8 sensors used
Horizontal line from centre
to right edge only
(right half line)
↓
When detected, to right half
line processing (pattern 51)
check_rightline
12
○○○○○●●●
8 sensors used
Horizontal line from centre
to left edge only
(left half line)
↓
When detected, to left half
line processing (pattern 61)
check_leftline
We will write the program code using the above tables as a basis.
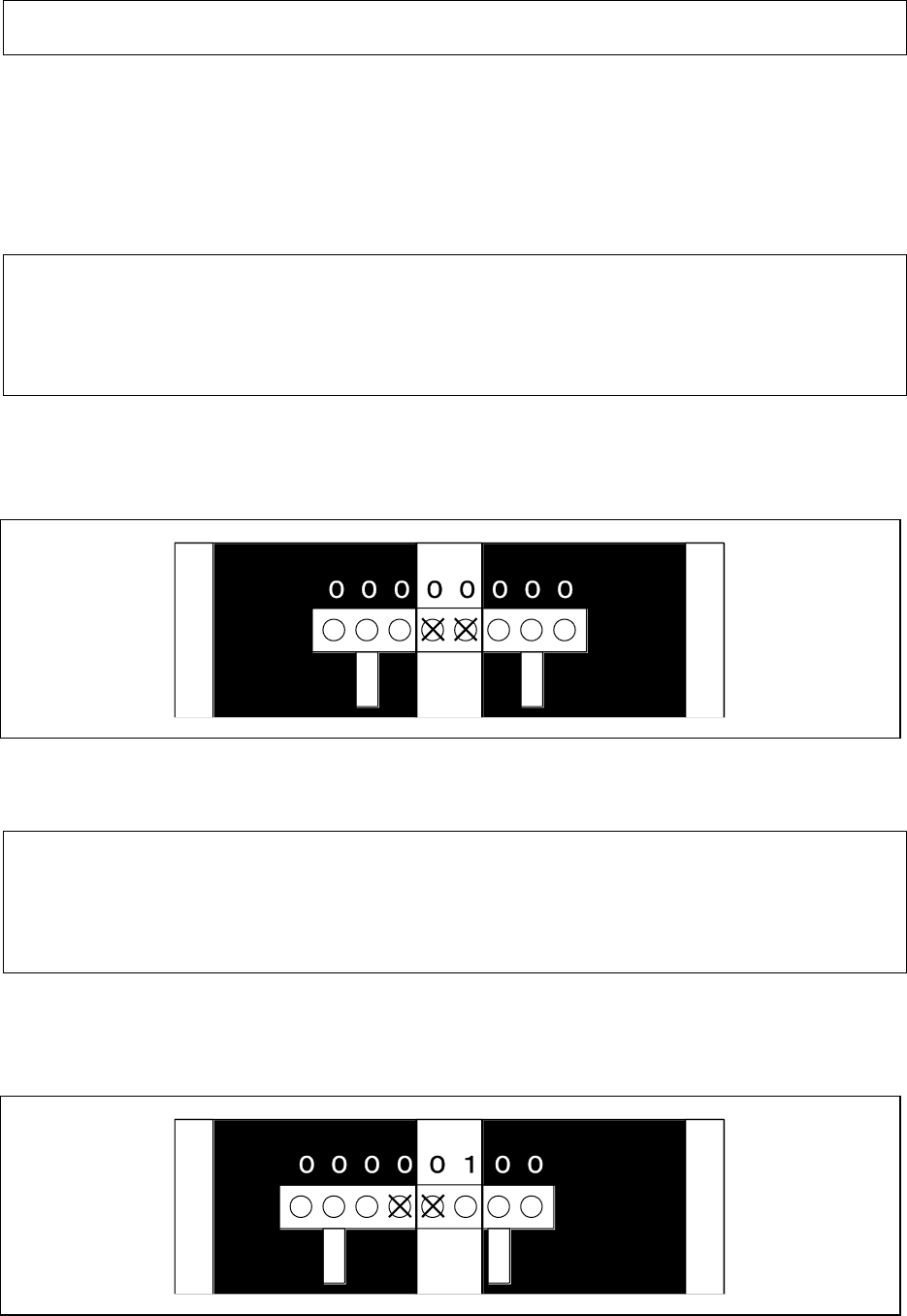
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
101
(1) Read Sensors
153 : switch( sensor_inp(MASK3_3) ) {
This reads the state of the sensors. MASK3_3 is used so that three sensors on the right and three on the left are
read. A switch-case statement is used to branch to different locations in the program code according to the sensor
state.
(2) Straight Forward
154 : case 0x00:
155 : /* Center -> straight */
156 : handle( 0 );
157 : motor( 100 ,100 );
158 : break;
This is the state when the sensor value is 0x00. In this state the MCU car is moving straight forward, as shown in
the figure below. It proceeds using the following setting values: servo angle 0 degrees, left motor 100%, the right
motor 100%.
(3) Slight Amount Left of Centre
160 : case 0x04:
161 : /* Slight amount left of center -> slight turn to right */
162 : handle( 5 );
163 : motor( 100 ,100 );
164 : break;
This is the state when the sensor value is 0x04. In this state the MCU car is positioned a slight amount to the left
of centre, as shown in the figure below. It proceeds using the following setting values in order to move back to the
centre position: servo angle 5 degrees right, left motor 100%, and right motor 100%.
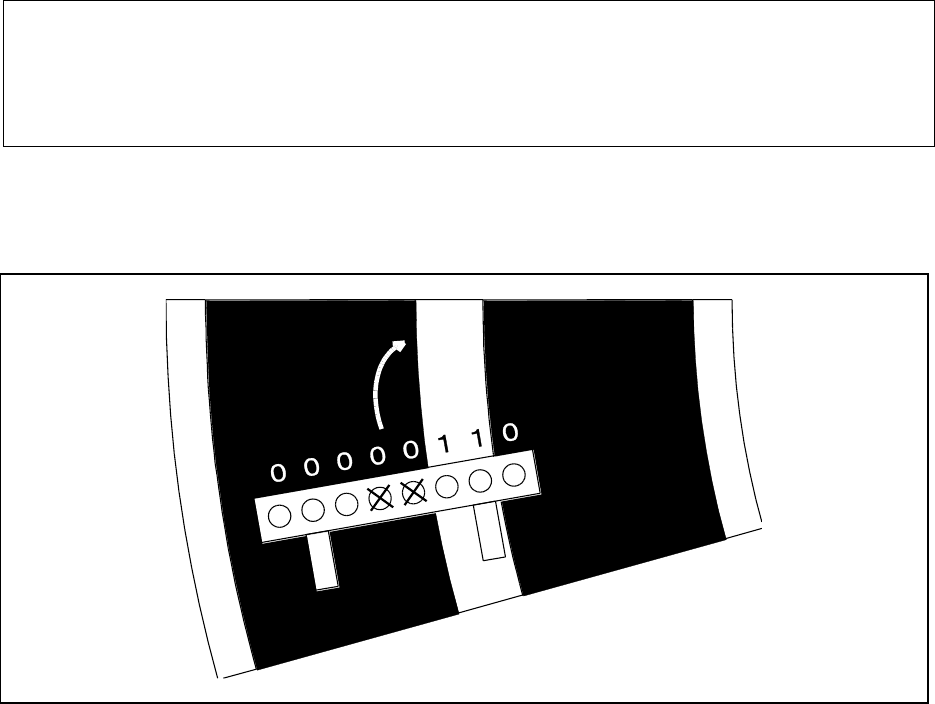
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
102
(4) Small Amount Left of Centre
166 : case 0x06:
167 : /* Small amount left of center -> small turn to right */
168 : handle( 10 );
169 : motor( 80 ,67 );
170 : break;
This is the state when the sensor value is 0x06. In this state the MCU car is positioned a small amount to the left of
centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in order
to move back to the centre position: servo angle 10 degrees right, left motor 80%, and right motor 67%.
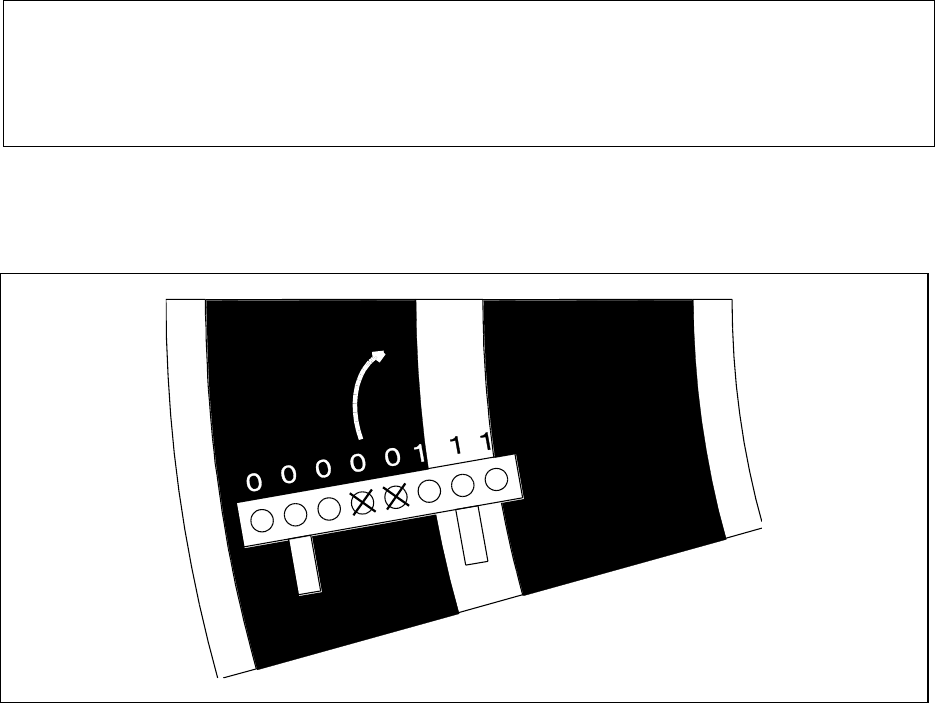
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
103
(5) Medium Amount Left of Centre
172 : case 0x07:
173 : /* Medium amount left of center -> medium turn to right */
174 : handle( 15 );
175 : motor( 50 ,38 );
176 : break;
This is the state when the sensor value is 0x07. In this state the MCU car is positioned a medium amount to the left
of centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in
order to move back to the centre position: servo angle 15 degrees right, left motor 50%, and right motor 38%.
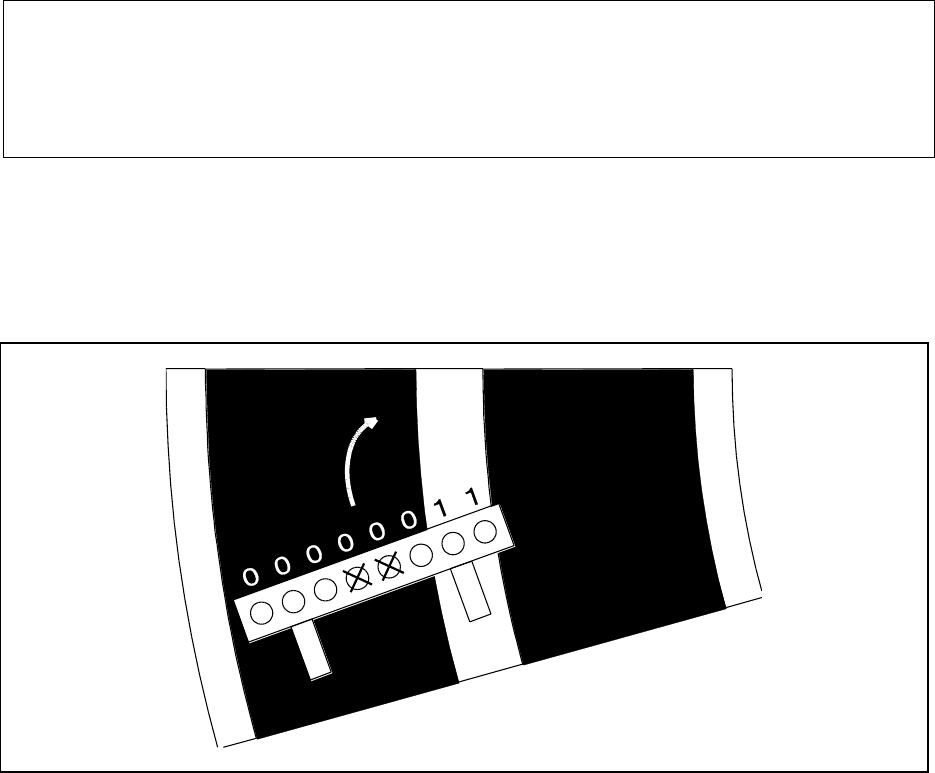
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
104
(6) Large Amount Left of Centre
178 : case 0x03:
179 : /* Large amount left of center -> large turn to right */
180 : handle( 25 );
181 : motor( 30 ,19 );
183 : break;
Note: The actual program code starts from line 182. The description here is abbreviated, but details are
provided later in this manual.
This is the state when the sensor value is 0x03. In this state the MCU car is positioned a large amount to the left of
centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in order
to move back to the centre position: servo angle 25 degrees right, left motor 30%, and right motor 19%.
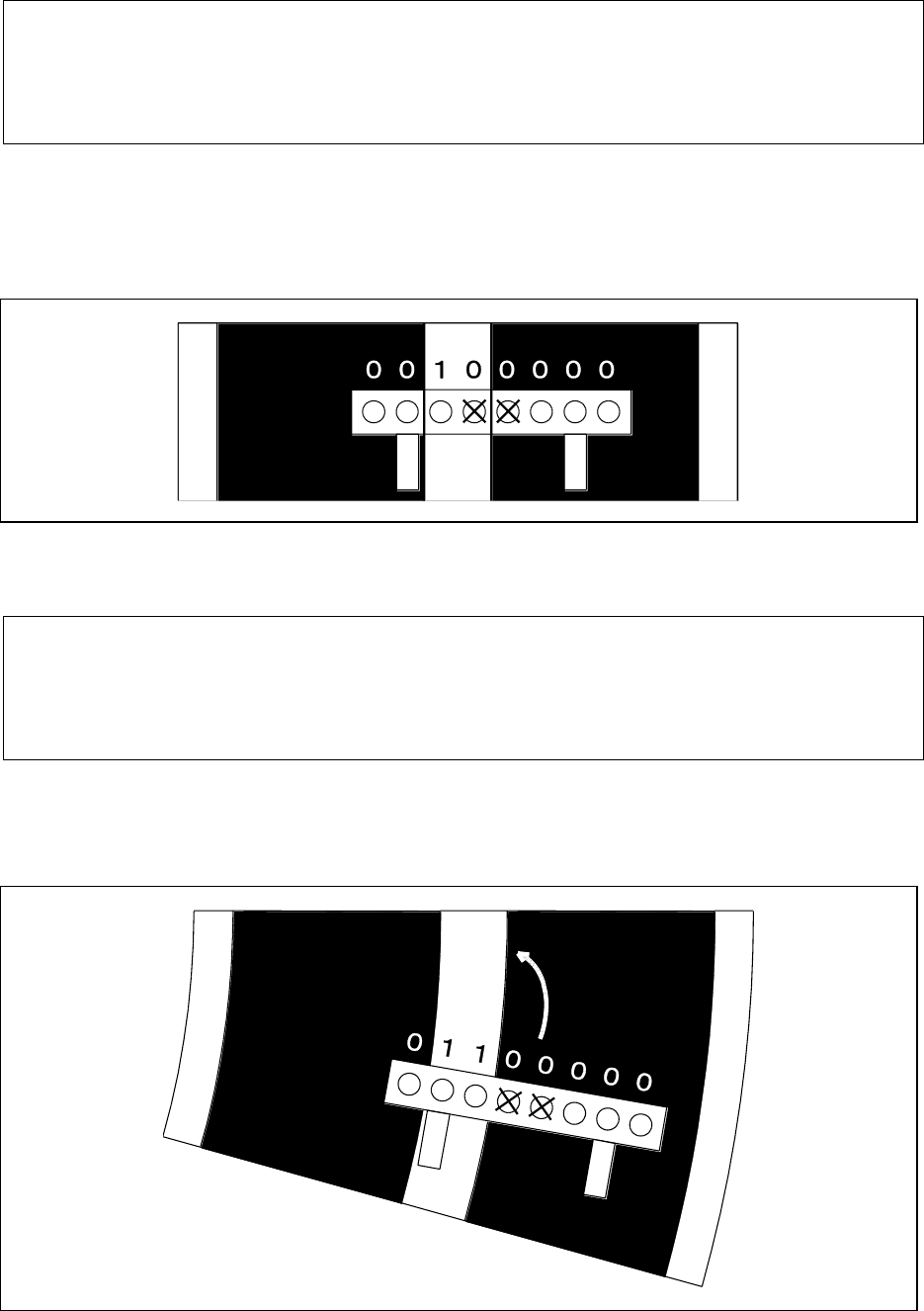
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
105
(7) Slight Amount Right of Centre
185 : case 0x20:
186 : /* Slight amount right of center -> slight turn to left */
187 : handle( -5 );
188 : motor( 100 ,100 );
189 : break;
This is the state when the sensor value is 0x20. In this state the MCU car is positioned a slight amount to the right
of centre, as shown in the figure below. It proceeds using the following setting values in order to move back to the
centre position: servo angle 5 degrees left, left motor 100%, and right motor 100%.
(8) Small Amount Right of Centre
191 : case 0x60:
192 : /* Small amount right of center -> small turn to left */
193 : handle( -10 );
194 : motor( 67 ,80 );
195 : break;
This is the state when the sensor value is 0x60. In this state the MCU car is positioned a small amount to the right
of centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in
order to move back to the centre position: servo angle 10 degrees left, left motor 67%, and right motor 80%.
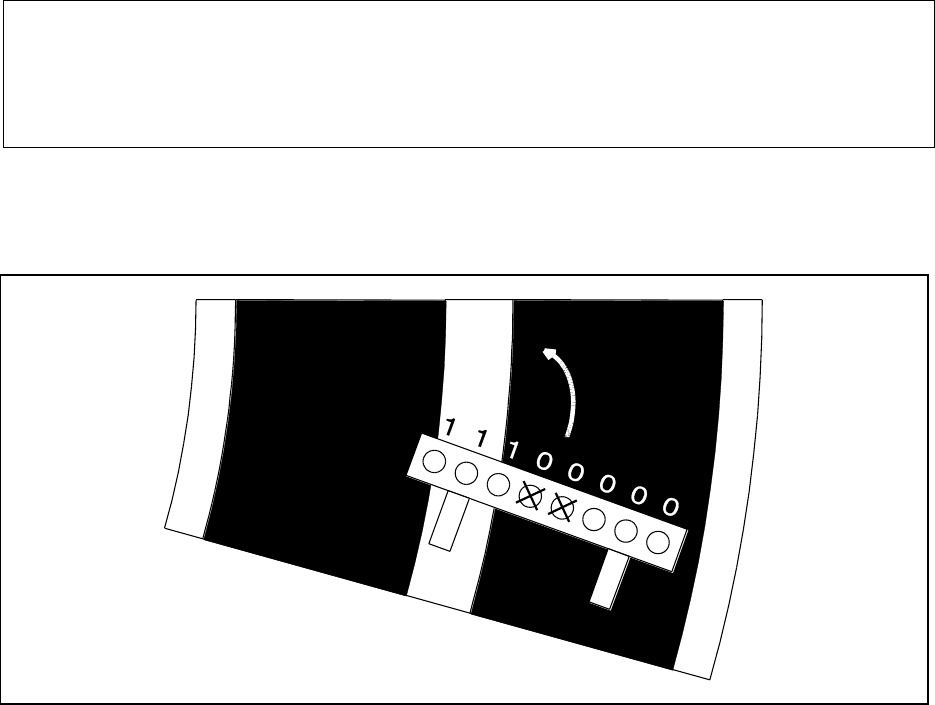
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
106
(9) Medium Amount Right of Centre
197 : case 0xe0:
198 : /* Medium amount right of center -> medium turn to left */
199 : handle( -15 );
200 : motor( 38 ,50 );
201 : break;
This is the state when the sensor value is 0xe0. In this state the MCU car is positioned a medium amount to the
right of centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in
order to move back to the centre position: servo angle 15 degrees left, left motor 38%, and right motor 50%.
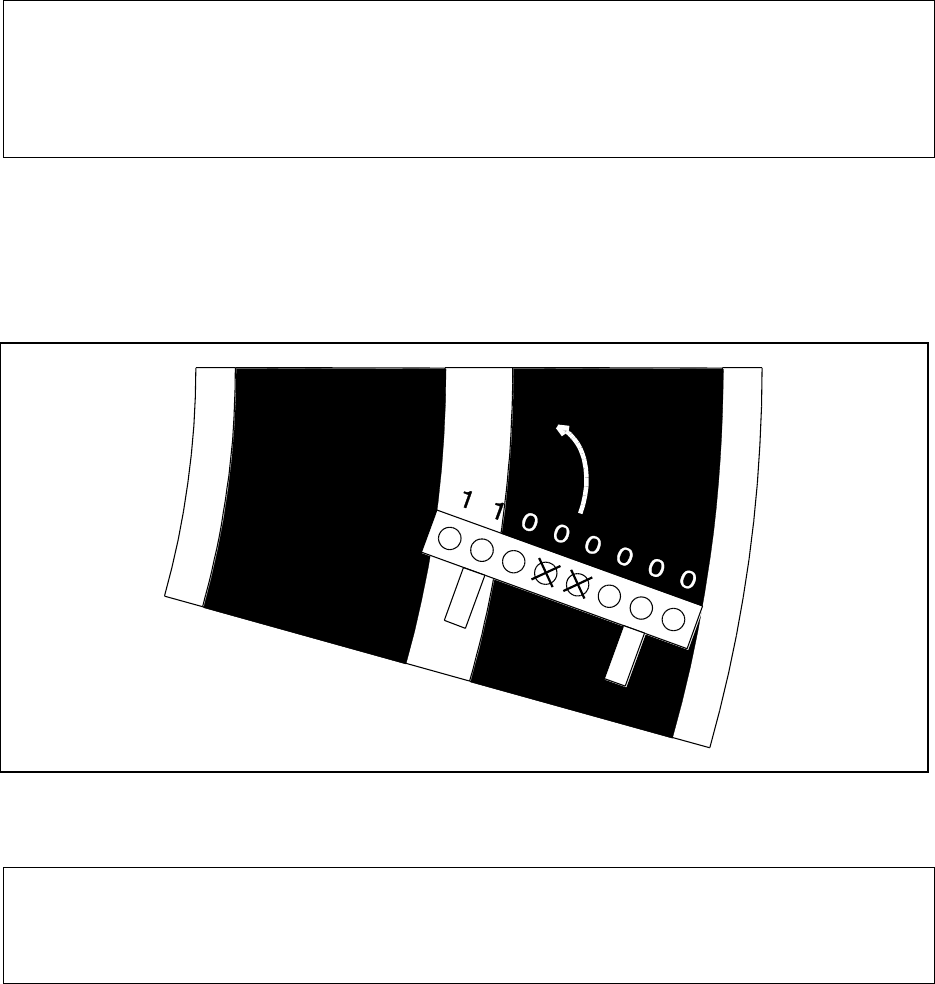
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
107
(10) Large Amount Right of Centre
203 : case 0xc0:
204 : /* Large amount right of center -> large turn to left */
205 : handle( -25 );
206 : motor( 19 ,30 );
208 : break;
Note: The actual program code starts from line 207. The description here is abbreviated, but details are
provided later in this manual.
This is the state when the sensor value is 0xc0. In this state the MCU car is positioned a large amount to the right
of centre, as shown in the figure below. It proceeds using the following setting values and at reduced speed in
order to move back to the centre position: servo angle 25 degrees left, left motor 19%, and right motor 30%.
(11) Check Crossline
141 : if( check_crossline() ) { /* Cross line check */
142 : pattern = 21;
143 : break;
144 : }
The check_crossline function returns a value of 0 to indicate no crossline detected and 1 to indicate crossline
detected. When a crossline is detected, pattern is set to 21 and a break statement is used to end processing of the
switch-case statement. Crossline checking is important, so this code is executed before the normal trace program
code.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
108
(12) Right Half Line
145 : if( check_rightline() ) { /* Right half line detection check */
146 : pattern = 51;
147 : break;
148 : }
The check_rightline function returns a value of 0 to indicate no right half line detected and 1 to indicate right half
line detected. When a right half line is detected, pattern is set to 51 and a break statement is used to end
processing of the switch-case statement. Right half line checking is important, so this code is executed before the
normal trace program code.
(13) Left Half Line
149 : if( check_leftline() ) { /* Left half line detection check */
150 : pattern = 61;
151 : break;
152 : }
The check_leftline function returns a value of 0 to indicate no left half line detected and 1 to indicate left half line
detected. When a left half line is detected, pattern is set to 61 and a break statement is used to end processing of
the switch-case statement. Left half line checking is important, so this code is executed before the normal trace
program code.
(14) Other
210 : default:
211 : break;
When a pattern other than those described above is encountered, control jumps to this default section, which does
nothing.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
109
(15) Position of break Statements to Terminate Execution
A break statement is used to terminate execution of a switch statement or a for, while, or do-while loop. When a
break statement is used within overlapping loops, it only terminates one of the loops within which it is
enclosed, and control passes immediately to the outer loop. It is important to remember this point that a break
statement only terminates one of the loops within which it is enclosed.
The positions exited from by break statements within pattern 11 are shown below. These positions differ, so it is
important to examine carefully within which loop the break statement is used.
while( 1 ) {
switch( pattern ) {
Line omitted
case 11:
/* Normal trace */
if( check_crossline() ) {
pattern = 21;
break;
}
if( check_rightline() ) {
pattern = 51;
break;
}
if( check_leftline() ) {
pattern = 61;
break;
}
switch( sensor_inp(MASK3_3) ) {
case 0x00:
/* Center straight */
handle( 0 );
speed( 100 ,100 );
break;
case 0x04:
/* Slight amount left of centre
slight turn to right */
handle( 5 );
speed( 100 ,100 );
break;
Line omitted
default:
break;
}2
break;
Line omitted
}1
}
case corresponding to switch( pattern )
break from switch( pattern ), control passes to 1
If statement not terminated!!
break from switch( pattern ), control passes to 1
break from switch( pattern ), control passes to 1
case corresponding to
switch( sensor_inp(MASK3_3) )
break from switch( sensor_inp(MASK3_3) ),
control passes to 2
case corresponding to
switch( sensor_inp(MASK3_3) )
break from switch( sensor_inp(MASK3_3) ),
control passes to 2
default corresponding to
switch( sensor_inp(MASK3_3) )
break from switch( sensor_inp(MASK3_3) ),
control passes to 2
break from switch( pattern ), control passes to 1
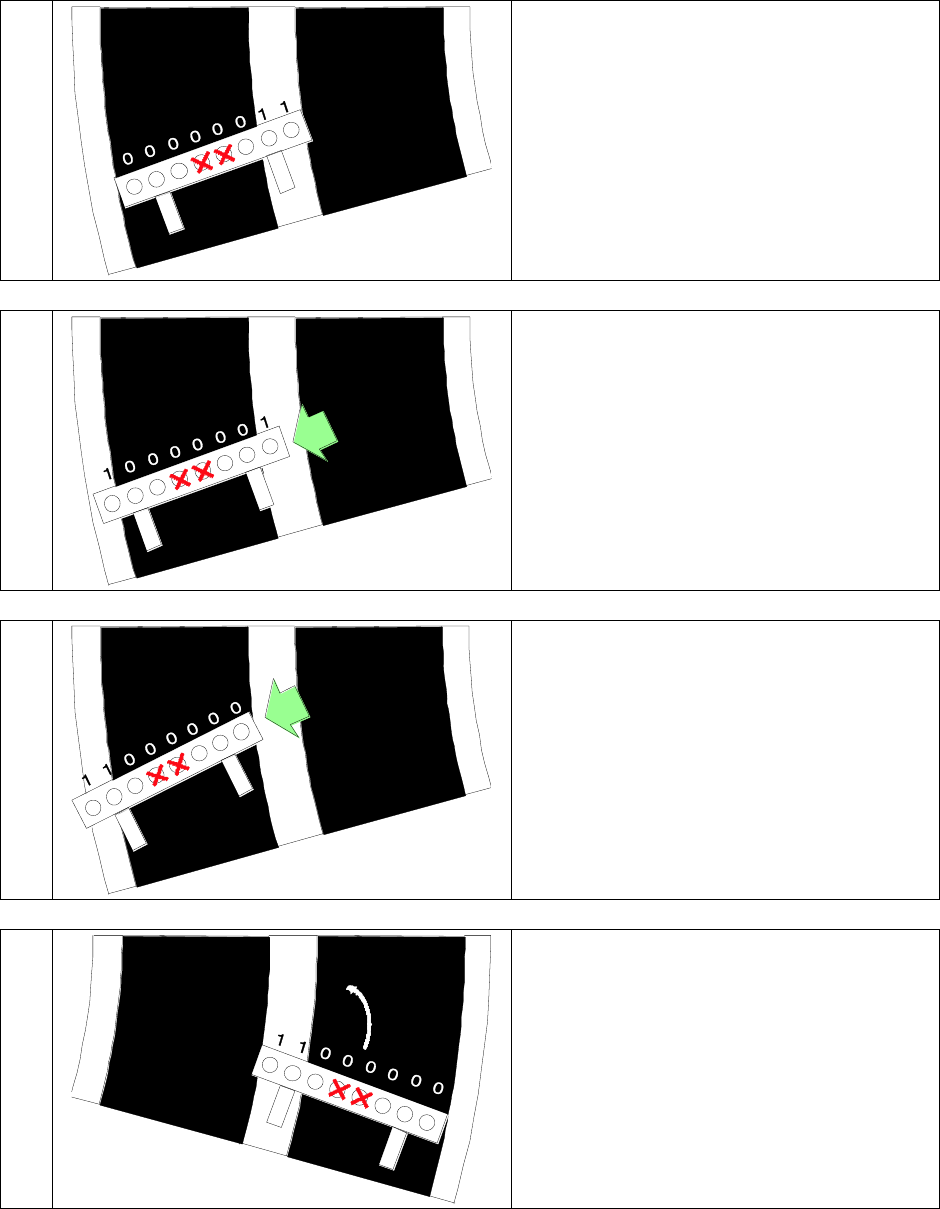
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
110
5.4.32. Pattern 12: Check End of Large Turn to Right
A sensor state of 0x03 indicates the largest amount of skew to left of centre. Therefore, any further move away
from the centre could produce results like those shown in the figure below:
1
This is the sensor state when a large amount left of
centre. The sensor value is 0000 0011. When this
state is encountered, the following lines of code
are executed:
handle( 25 );
motor( 30, 19 );
This causes a turn with the servo angle 25 degrees
right, left motor 30%, and right motor 19%.
2
The leftward skew has increased. The sensor value
is 1000 0001. No code is provided for execution in
this state. Instead, the previous state is maintained.
The previous state was a sensor value of 0000
0011, so the motor speed and servo angle settings
for that sensor state are used.
3
The car has moved even further to the left. The
sensor value is 1100 0000.
4
As shown in the figure at left, a sensor value is
1100 0000 is associated with a state in which the
MCU car is right of centre. The assumption is that
the steering wheel should turn to the left in this
case. Therefore, the following lines of code are
executed:
handle( -25 );
motor( 19, 30 );
This causes a turn with the servo angle 25 degrees
right, left motor 19%, and right motor 30%.
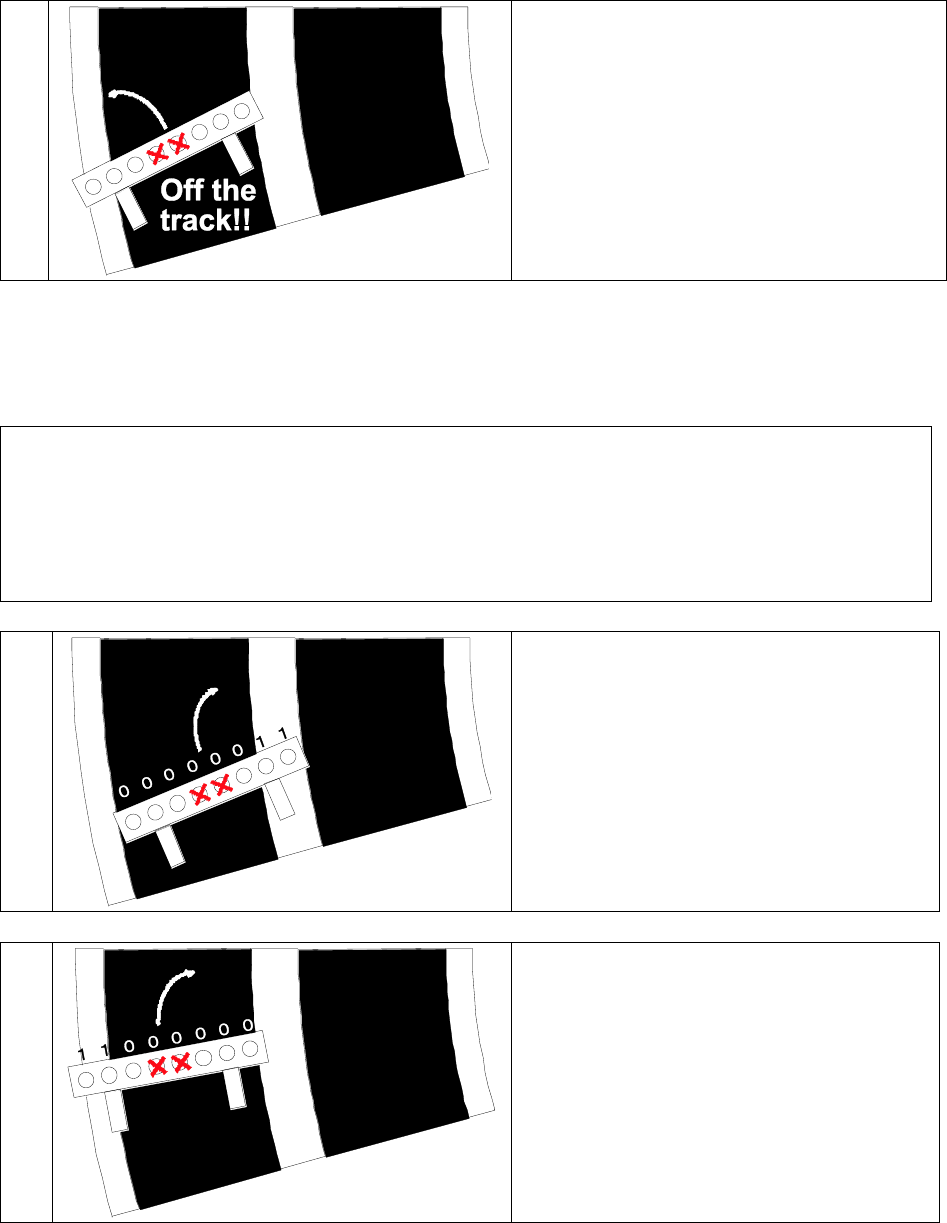
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
111
5
In fact, the MCU car is far to the left of centre.
Turning the steering wheel to the left will cause it
to go off the track.
To prevent this, once a large turn to the right begins the software needs to continue turning the MCU car to the
right until the sensors return to a certain state. Pattern 12 is designed to identify this “certain state.”
case 0x03 portion of pattern 11
178 : case 0x03:
179 : /* Large amount left of center -> large turn to right */
180 : handle( 25 );
181 : motor( 30 ,19 );
182 : pattern = 12; Added: Move to pattern 12.
183 : break;
6
When the sensor value is 0000 0011, control
passes to pattern 12. Pattern 12 is designed to hand
control back to pattern 11 once the sensor value is
0000 0110, one sensor closer to the centre. Let’s
see how this approach works.
7
The sensor value is now 1100 0000. Since it is not
the expected value of 0000 0110, the MCU car
continues to turn to the right. Previously, the
program mistakenly assumed that the MCU car
was too far to the right, but now that we have
pattern 12 this problem does not arise.
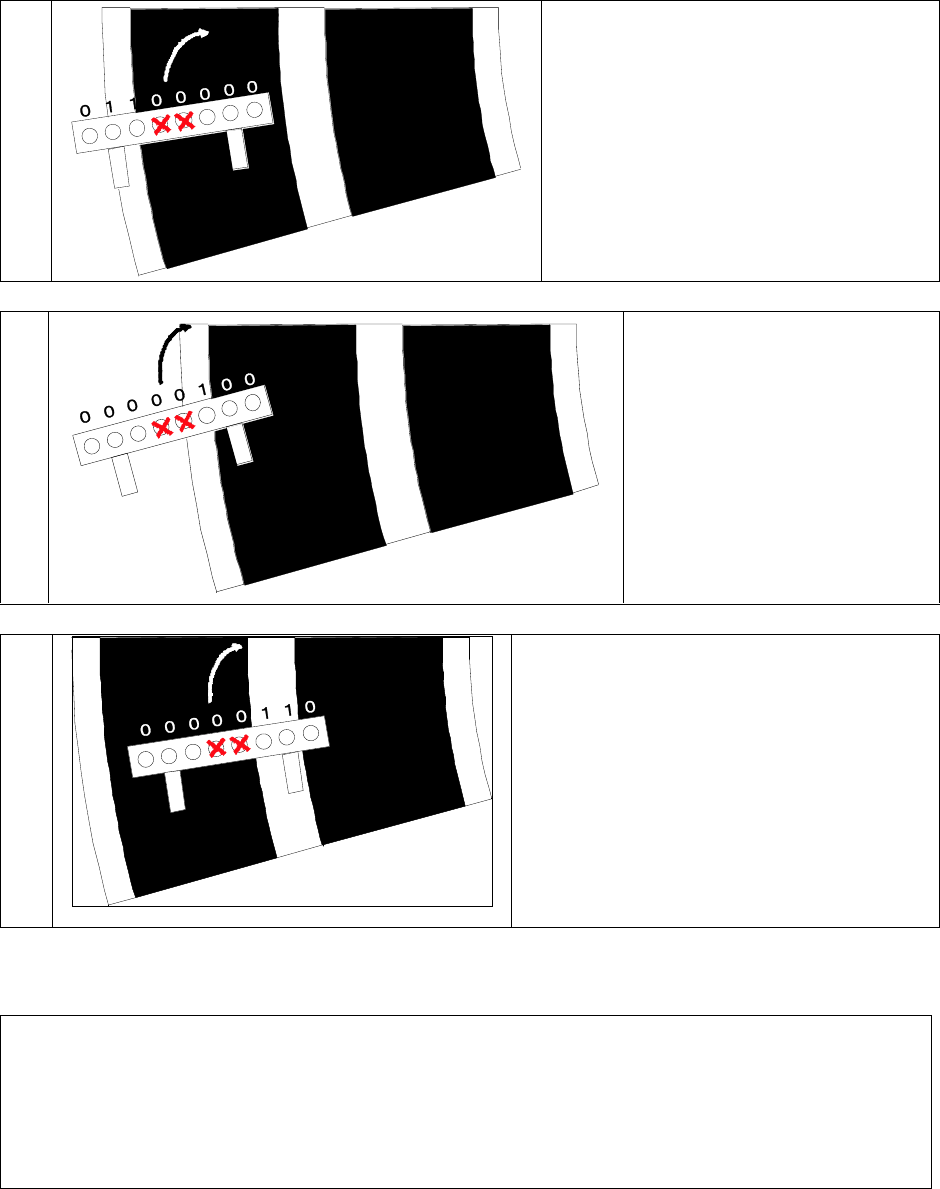
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
112
8
The sensor value is now 0110 0000. It is still
not 0000 0110, so the MCU car continues to
turn to the right.
9
The sensor value is now 0000 0100.
The MCU car has almost left the
track, but the program continues to
turn to the right because the sensor
value is not 0000 0110.
Nevertheless, once things get to this
stage the MCU car may go off the
track anyway.
10
The skew to the left has started to be reduced by a
shift to the right, and now the sensor value is 0000
0110. In this state, control returns to pattern 11.
This is the program code based on the above thinking:
case 12:
/* Check end of large turn to right */
if( sensor_inp(MASK3_3) == 0x06 ) {
pattern = 11;
}
break;
But not so fast! Pattern 11 includes checks for crosslines, right half lines, and left half lines. Don’t we need these
in pattern 12 as well?
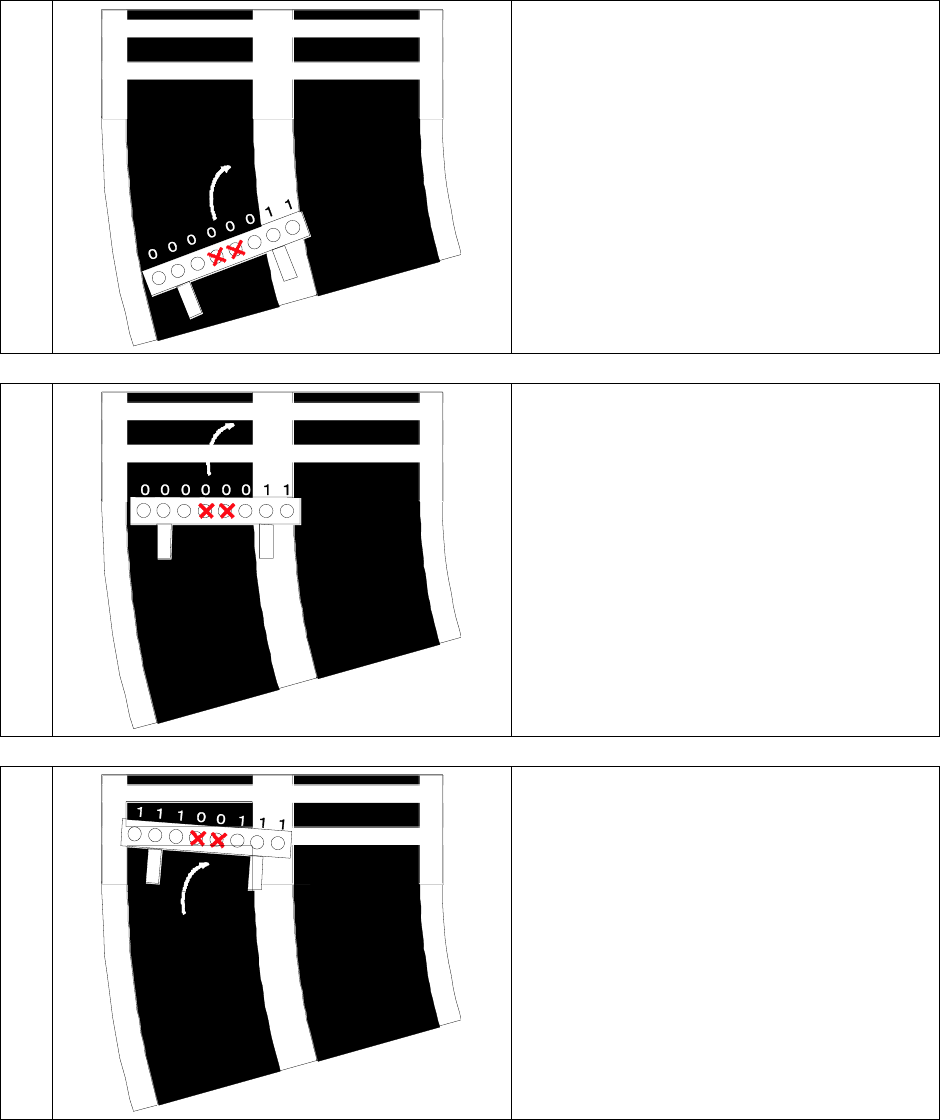
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
113
11
The sensor value is now 0000 0011, and the
crosslines are ahead. Go to pattern 12.
12
The sensor value is not 0000 0110, so continue
turning to the right.
13
Crossline encountered, so we should switch to
crank detection processing. But pattern 12 only
checks whether or not the sensor value is 0000
0110. This means the MCU car continues on
without detecting the crossline.
As the above illustrates, it may be necessary to
detect crosslines even when pattern 12 processing
is taking place. The same goes for right half line
and left half line checking. So we’ll add these
three types of checks to pattern 12 as well.
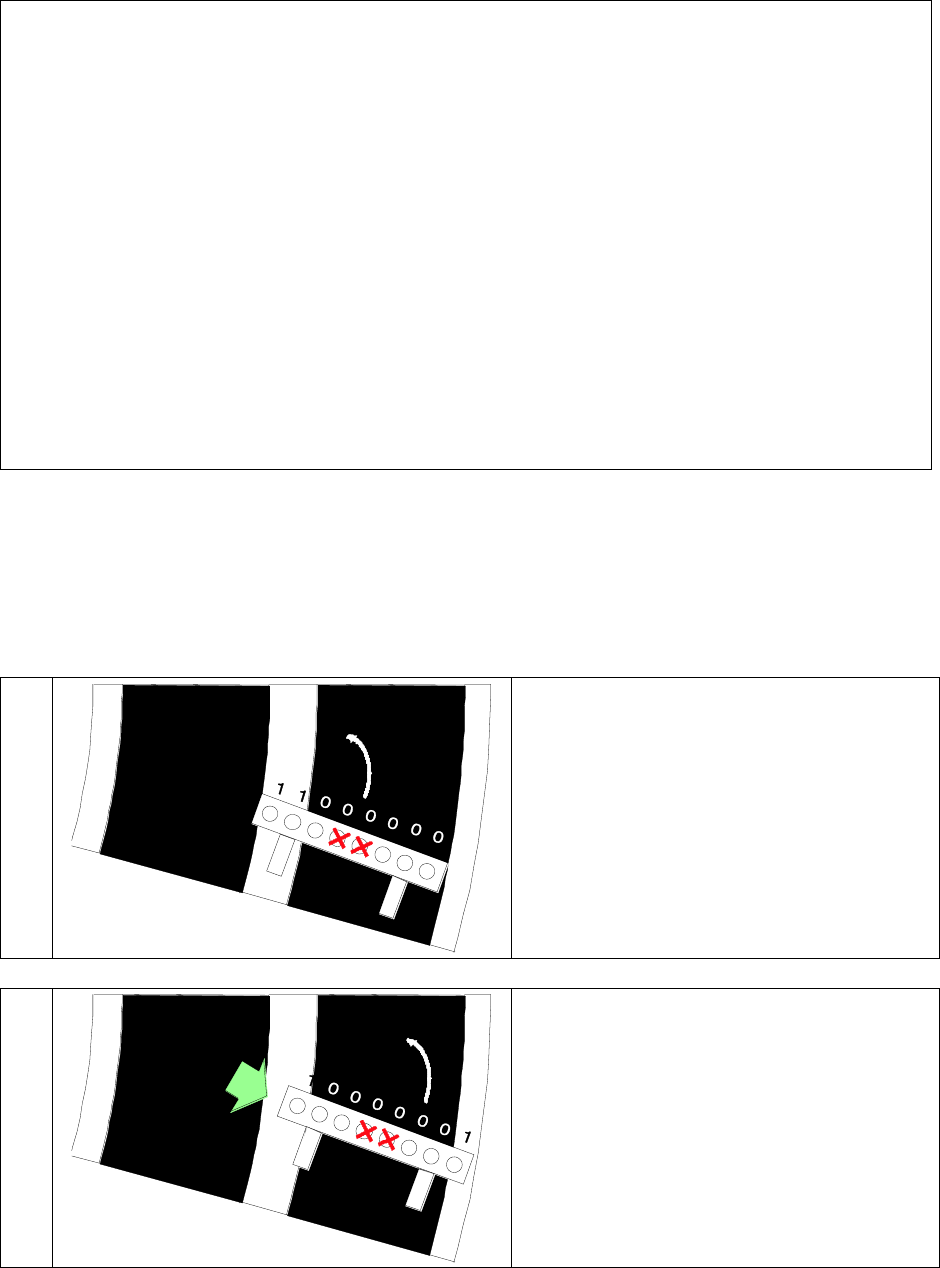
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
114
This is the final program code:
215 : case 12:
216 : /* Check end of large turn to right */
217 : if( check_crossline() ) { /* Cross line check during large turn */
218 : pattern = 21;
219 : break;
220 : }
221 : if( check_rightline() ) { /* Right half line detection check */
222 : pattern = 51;
223 : break;
224 : }
225 : if( check_leftline() ) { /* Left half line detection check */
226 : pattern = 61;
227 : break;
228 : }
229 : if( sensor_inp(MASK3_3) == 0x06 ) {
230 : pattern = 11;
231 : }
232 : break;
This is the completed program code for pattern 12.
5.4.33. Pattern 13: Check End of Large Turn to Left
A sensor state of 0xC0 indicates the largest amount of skew to right of centre. Therefore, any further move away
from the centre could produce results like those shown in the figure below:
1
This is the sensor state when a large amount left of
centre. The sensor value is 1100 0000. When this
state is encountered, the following lines of code
are executed:
handle( -25 );
motor( 19, 30 );
This causes a turn with the servo angle 25 degrees
left, left motor 19%, and right motor 30%.
2
The rightward skew has increased. The sensor
value is 1000 0001. No code is provided for
execution in this state. Instead, the previous state
is maintained. The previous state was a sensor
value of 1100 0000, so the motor speed and servo
angle settings for that sensor state are used.
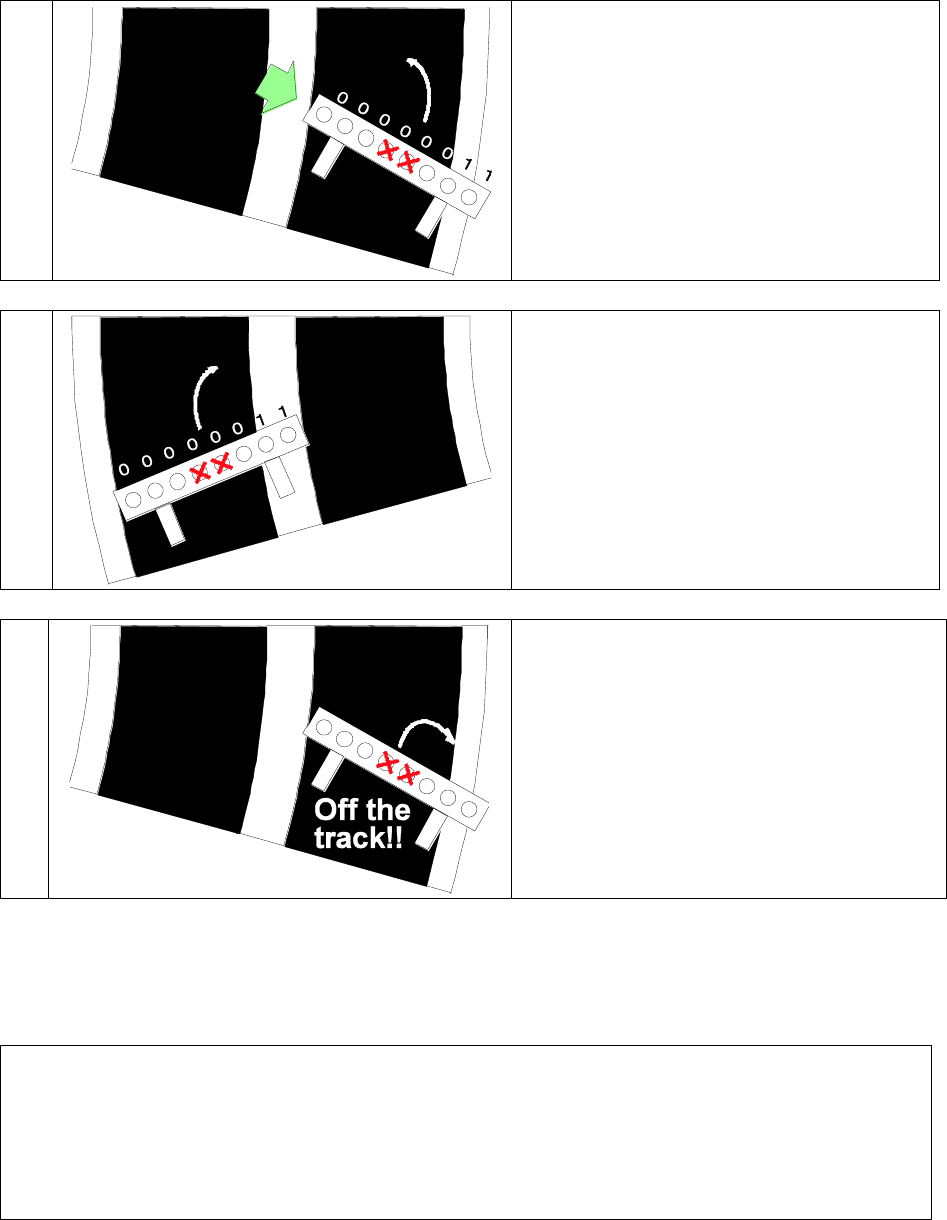
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
115
3
The car has moved even further to the right. The
sensor value is 0000 0011.
4
As shown in the figure at left, a sensor value is
0000 0011 is associated with a state in which the
MCU car is left of centre. The assumption is that
the steering wheel should turn to the right in this
case. Therefore, the following lines of code are
executed:
handle( 25 );
motor( 30, 19 );
This causes a turn with the servo angle 25 degrees
right, left motor 30%, and right motor 19%.
5
In fact, the MCU car is far to the right of centre.
Turning the steering wheel to the right will cause it
to go off the track.
To prevent this, once a large turn to the left begins the software needs to continue turning the MCU car to the left
until the sensors return to a certain state. Pattern 13 is designed to identify this “certain state.”
case 0xc0 portion of pattern 11
203 : case 0xc0:
204 : /* Large amount right of center -> large turn to left */
205 : handle( -25 );
206 : motor( 19 ,30 );
207 : pattern = 13; Added: Move to pattern 13.
208 : break;
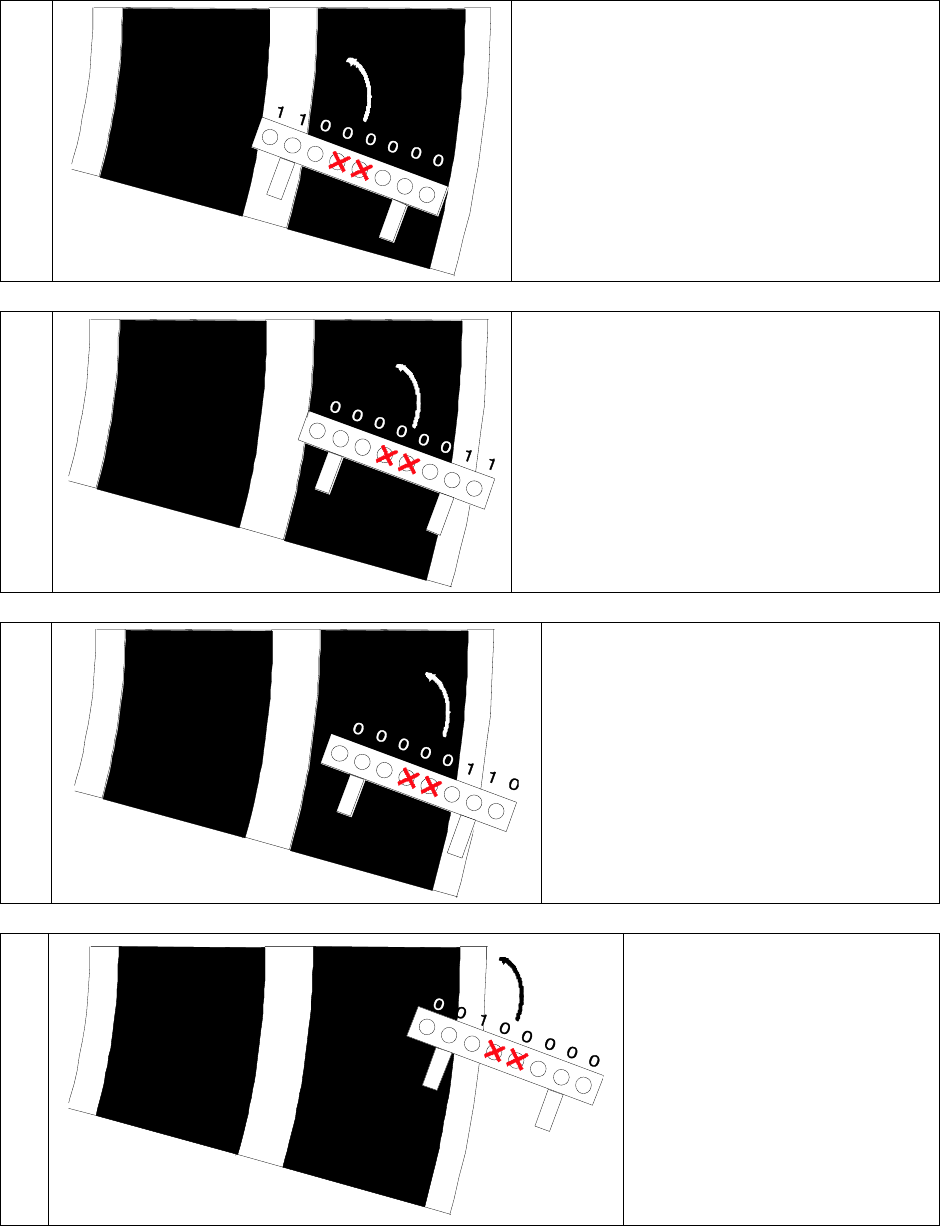
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
116
6
When the sensor value is 1100 0000, control
passes to pattern 13. Pattern 13 is designed to hand
control back to pattern 11 once the sensor value is
0110 0000, one sensor closer to the centre. Let’s
see how this approach works.
7
The sensor value is now 0000 0011. Since it is not
the expected value of 0110 0000, the MCU car
continues to turn to the left. Previously, the
program mistakenly assumed that the MCU car
was too far to the left, but now that we have
pattern 13 this problem does not arise.
8
The sensor value is now 0000 0110. It is still
not 0110 0000, so the MCU car continues to
turn to the left.
9
The sensor value is now 0010 0000.
The MCU car has almost left the
track, but the program continues to
turn to the left because the sensor
value is not 0110 0000.
Nevertheless, once things get to this
stage the MCU car may go off the
track anyway.
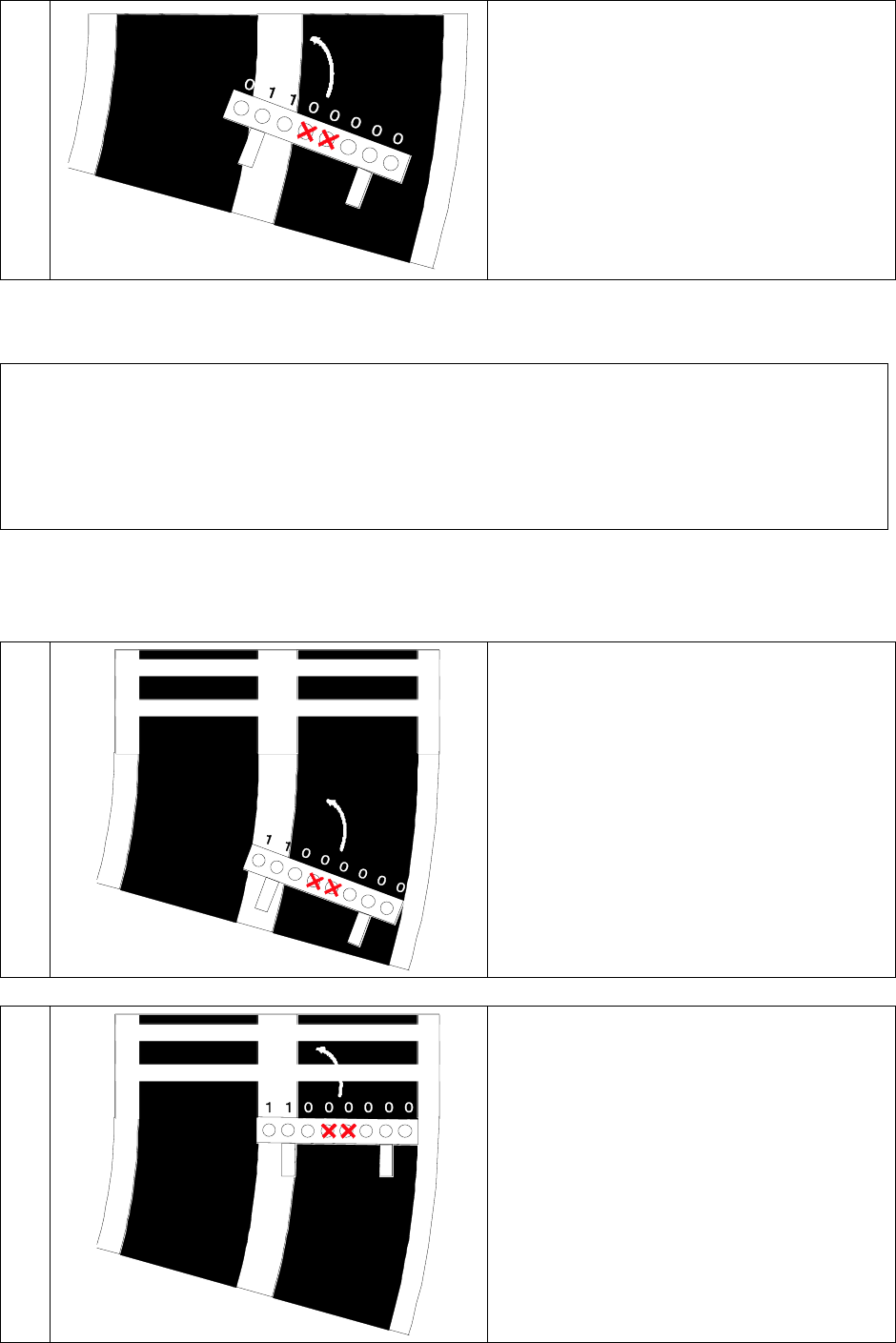
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
117
10
The skew to the right has started to be reduced by
a shift to the left, and now the sensor value is 0110
0000. In this state, control returns to pattern 11.
This is the program code based on the above thinking:
case 13:
/* Check end of large turn to left */
if( sensor_inp(MASK3_3) == 0x60 ) {
pattern = 11;
}
break;
But not so fast! Pattern 11 includes checks for crosslines, right half lines, and left half lines. Don’t we need these
in pattern 13 as well?
11
The sensor value is now 1100 0000, and the
crosslines are ahead. Go to pattern 13.
12
The sensor value is not 0110 0000, so continue
turning to the left.
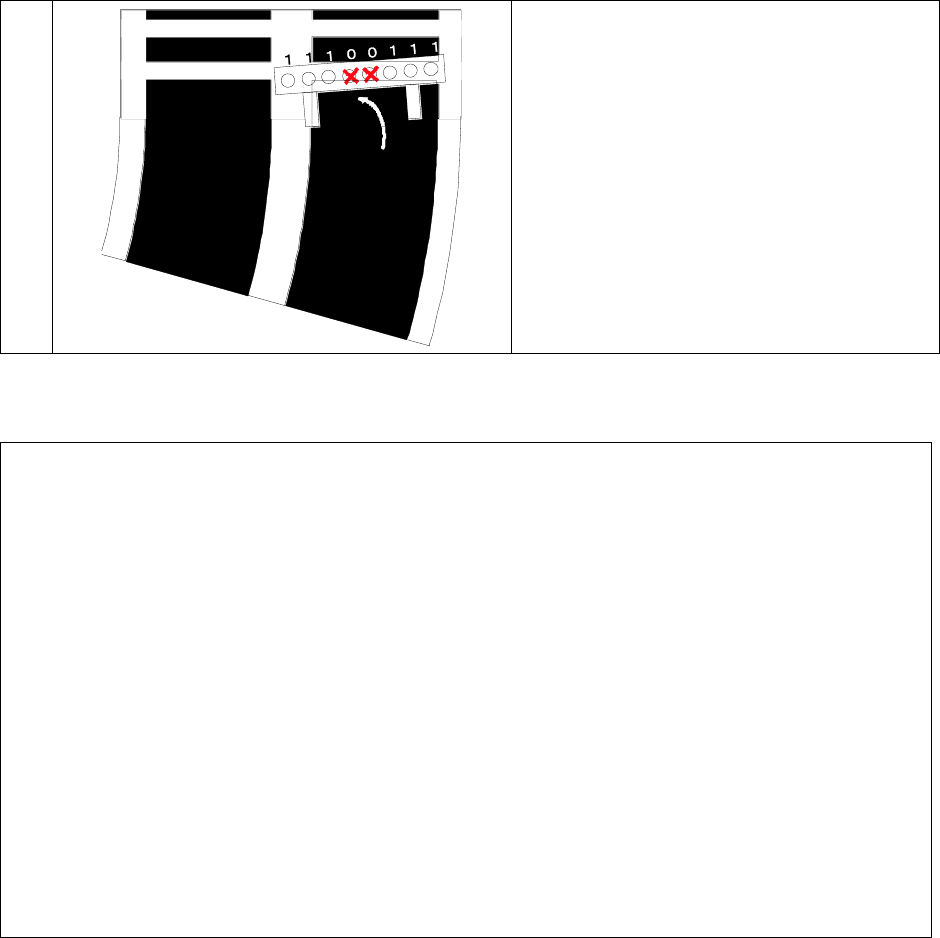
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
118
13
Crossline encountered, so we should switch to
crank detection processing. But pattern 13 only
checks whether or not the sensor value is 0110
0000. This means the MCU car continues on
without detecting the crossline.
As the above illustrates, it may be necessary to
detect crosslines even when pattern 13 processing
is taking place. The same goes for right half line
and left half line checking. So we’ll add these
three types of checks to pattern 13 as well.
This is the final program code:
234 : case 13:
235 : /* Check end of large turn to left */
236 : if( check_crossline() ) { /* Cross line check during large turn */
237 : pattern = 21;
238 : break;
239 : }
240 : if( check_rightline() ) { /* Right half line detection check */
241 : pattern = 51;
242 : break;
243 : }
244 : if( check_leftline() ) { /* Left half line detection check */
245 : pattern = 61;
246 : break;
247 : }
248 : if( sensor_inp(MASK3_3) == 0x60 ) {
249 : pattern = 11;
250 : }
251 : break;
This is the completed program code for pattern 13.
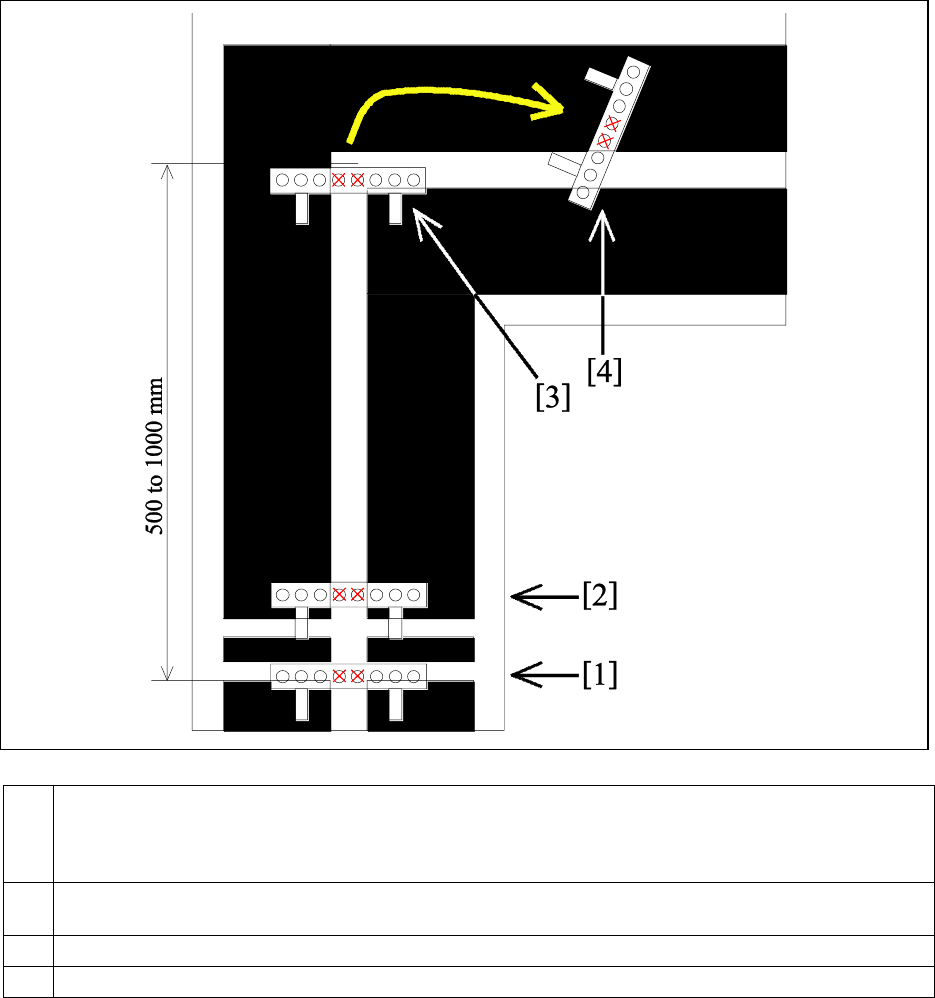
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
119
5.4.34. Crank Overview
Patterns 21 to 42 contain code related to “cranks” (right-angle turns). The figure below provides an overview of
the processing:
[1]
The check_crossline function detects the presence of crosslines. A crossline indicates that 500 mm to 1000
mm ahead is a right or left crank, so the MCU car must apply the brakes to reduce speed in order to
navigate it successfully. In addition, the sensor data is not referenced until position [2] to ensure that the
second crossline does not result in detection of erroneous sensor data.
[2]
This position is the start of the proceed slowly area. The MCU car advances straight ahead along the centre
line.
[3]
When the crank is detected, the MCU car turns in the direction of the crank.
[4]
When the centre line is detected, control returns to pattern 11 and line tracing restarts.
In this way, the MCU car clears from crank. The specifics of the program code used are described below.
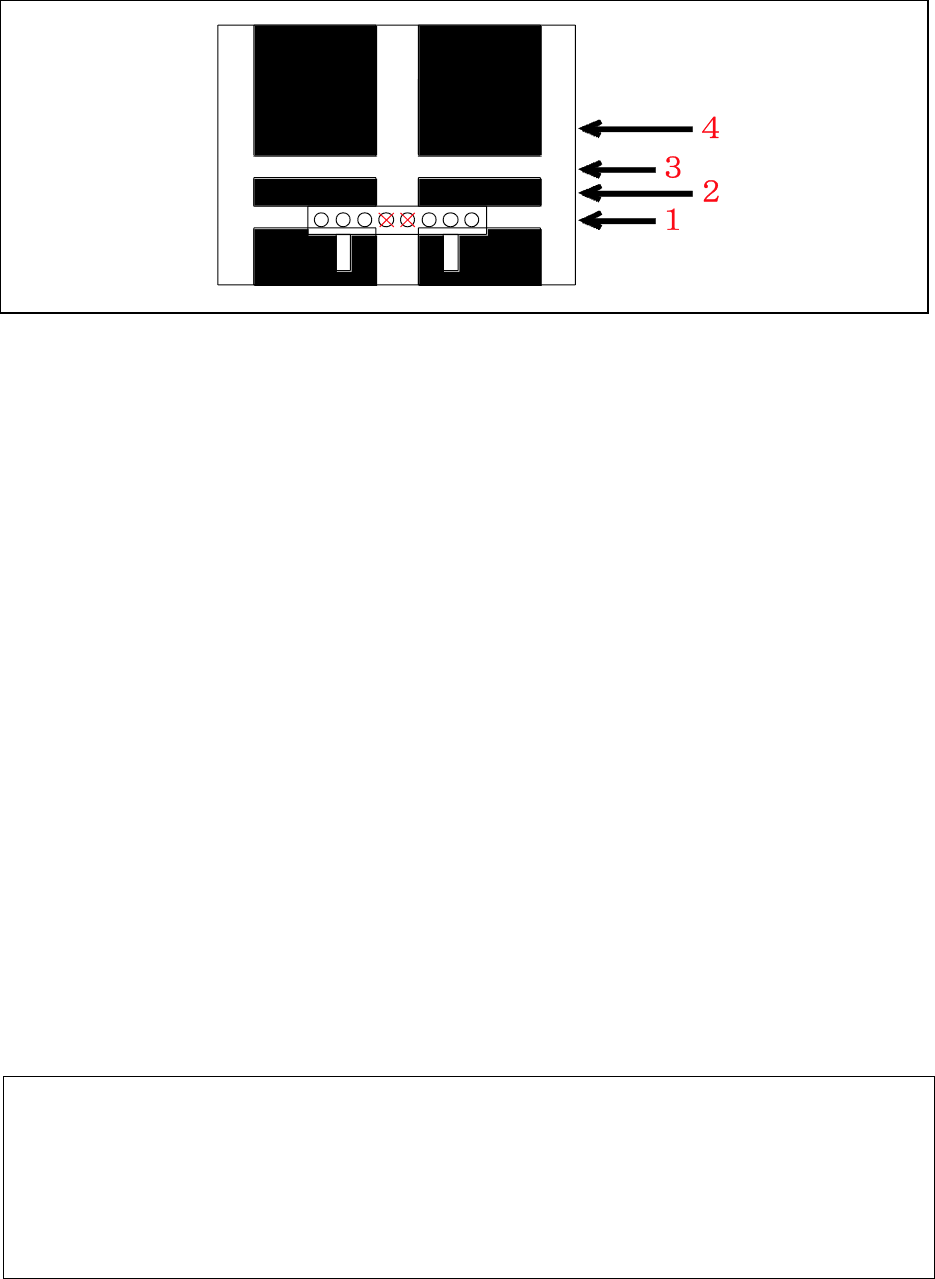
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
120
5.4.35. Pattern 21: Processing at 1st Crossline Detection
Control passes to pattern 21 the moment a crossline is detected. First, the MCU car passes over the crosslines. The
characteristics of the portion of track from the position at which the first crossline is discovered to the position
immediately after the second crossline are shown in the following figure:
[1] First crossline
[2] Normal track
[3] Second crossline
[4] Normal track, proceed slowly while tracing centre line
The track, other than the centre line, changes from white to black to white to black again by the time position [4] is
reached. The program must detect these changes and respond appropriately. That sounds pretty complicated.
Let’s look at this in a different way. The distance from position [1] to position [4] is about 100 mm, allowing some
margin for error. (The precise distance is 70 mm: 20 mm for the first crossline + 30 mm of black area + 20 mm for
the second crossline = 70 mm.) If the MCU car is positioned roughly over the centre line and continues to move
forward for about 100 mm while we ignore the sensor data, we’ll probably come out roughly on course. The kit
car includes no mechanism for detecting distances, but we can use the timer to interrupt reading of sensor data for
a specified duration. We don’t know how long a duration yet because that will depend on how fast the MCU car is
travelling. For the time being, let’s use a pause duration of 0.1 seconds and do fine tuning later. In addition, we’ll
make the LEDs on the motor drive board light to indicate externally that processing of pattern 21 has started.
To summarize:
Illuminate LED2 and LED3.
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Wait 0.1 seconds.
After 0.1 seconds elapse, go to next pattern.
This is what the program code of pattern 21 must accomplish.
case 21:
/* Processing at 1st cross line */
led_out( 0x3 );
handle( 0 );
speed( 0 ,0 );
if( cnt1 > 100 ) {
pattern = 22; /* After 0.1 seconds, to pattern 22 */
}
break;
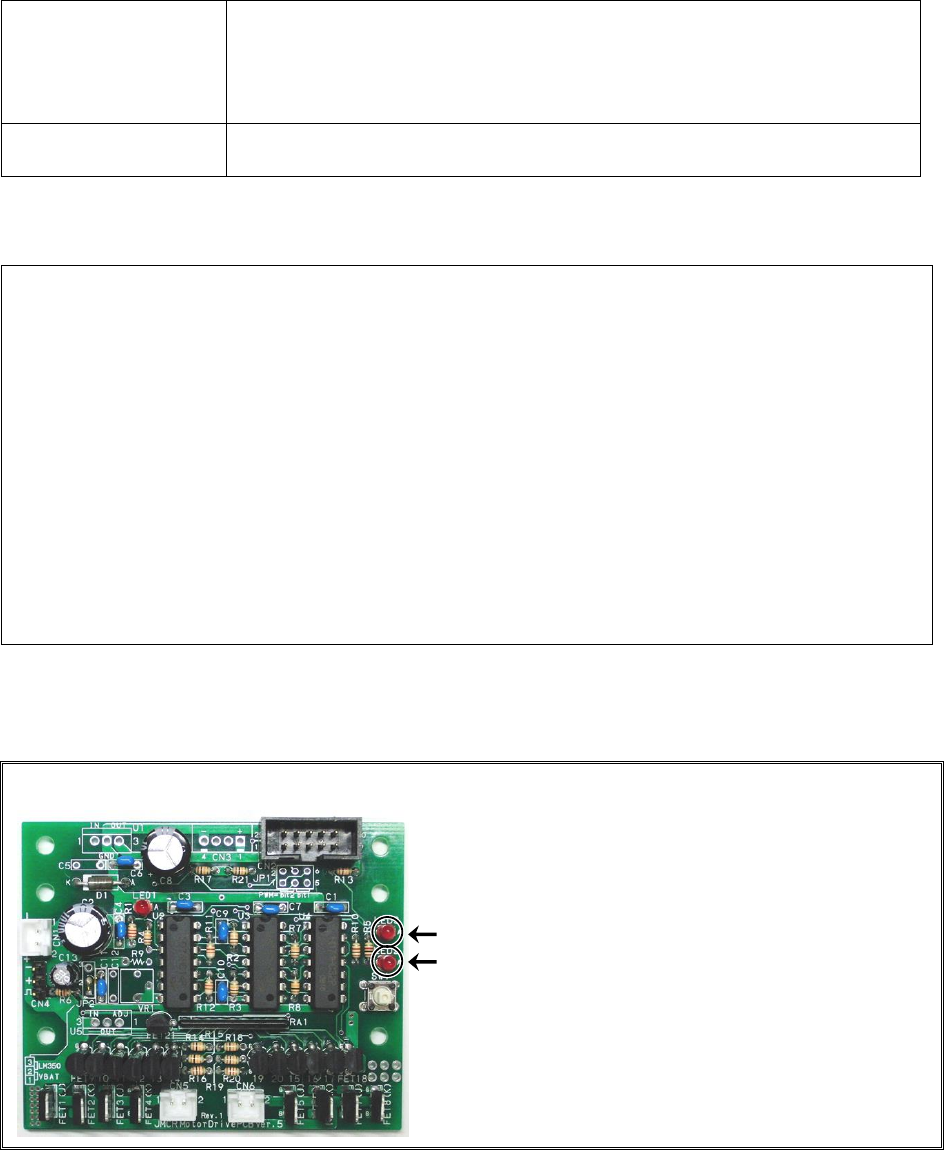
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
121
This is the completed program code. Let’s take a moment to review it. When the value of cnt1 is 100 or greater
(after 100 milliseconds have elapsed), control passes to pattern 22. For this to work as expected, the value of cnt1
must be 0 when pattern 21 starts. For example, if the value of cnt1 is 1000 when control passes to pattern 21, the
value of cnt1 will be judged to be 100 or greater the first time the condition is tested, and control will pass
immediately to pattern 22. Execution of pattern 21 takes place only once (a duration of a few dozen µs) rather than
lasting for 0.1 seconds. We need to add another pattern. Pattern 21 will start brake operation and clear cnt1 to 0,
and pattern 22 will check whether 0.1 seconds have elapsed.
To summarize once again:
Let’s rewrite the program to reflect the above changes.
253 : case 21:
254 : /* Processing at 1st cross line */
255 : led_out( 0x3 );
256 : handle( 0 );
257 : motor( 0 ,0 );
258 : pattern = 22;
259 : cnt1 = 0;
260 : break;
261 :
262 : case 22:
263 : /* Read but ignore 2nd line */
264 : if( cnt1 > 100 ){
265 : pattern = 23;
266 : cnt1 = 0;
267 : }
268 : break;
The portion of the program code from detection of the crossline to the start of the trace centre line area is now
complete.
Hint
When a crossline is detected, the two LEDs on
the motor drive board light. No crossline has
been detected if they do not light.
If crossline detection is not working properly, try
unplugging the motor connectors and pushing the
MCU car forward by hand.
Tasks performed by
pattern 21:
Illuminate LED2 and LED3.
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Go to next pattern.
Clear cnt1.
Tasks performed by
pattern 22:
If value of cnt1 is 100 or greater, go to next pattern.
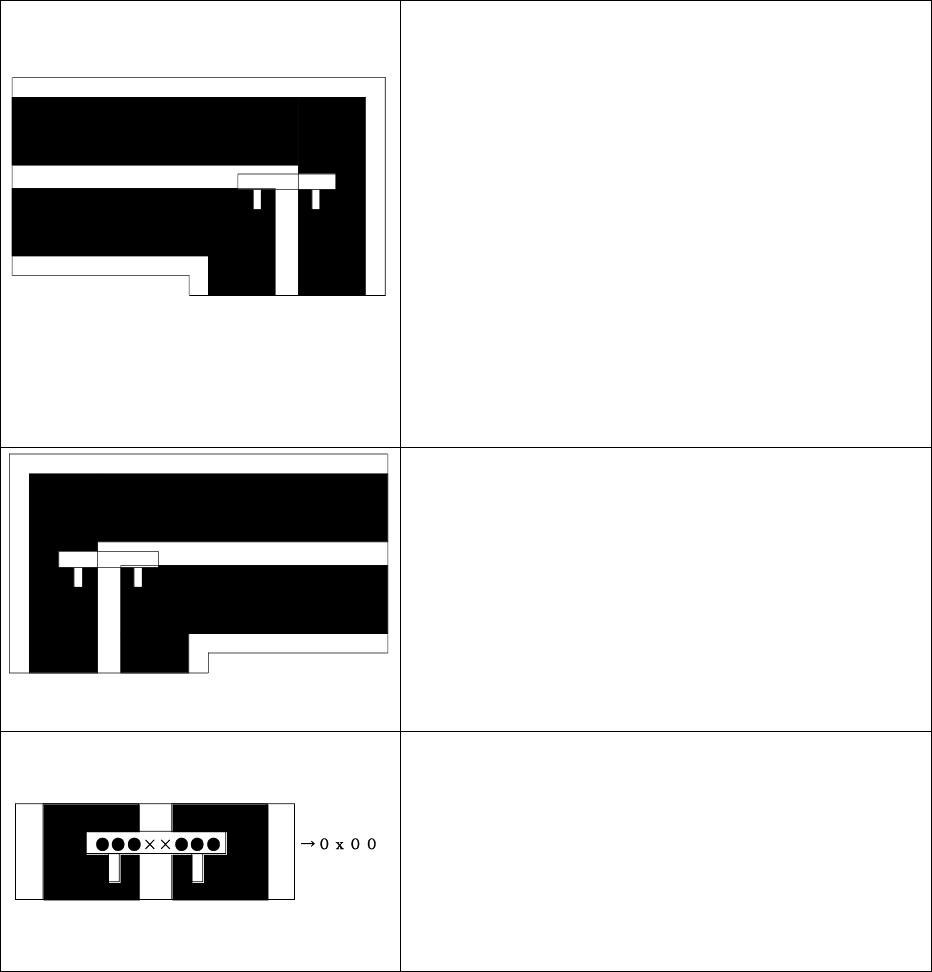
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
122
5.4.36. Pattern 23: Trace, Crank Detection After Crossline
Patterns 21 and 22 perform brake operation for 0.1 seconds after detection of the first crossline, allowing the MCU
car to pass the second crossline. Pattern 23 continues the processing after this.
The MCU car is past the crosslines, so the next task is detecting the crank (right-angle turn). The MCU car must
turn immediately as soon as the crank is encountered, so it is proceeding at low speed. In addition, the MCU car
must continue to trace the centre line up to the crank.
We envision the present situation as shown in the following figures:
○○ ○○ ○ ●● ●
→0xf8
(Checking with all 8 sensors)
At a left crank, the state of the eight sensors is 0xf8, as shown in the
figure at left. The software judges a sensor state of 0xf8 as indicating a
left crank.
At this point, the MCU car will drift toward the edge and go off the
track if the steering wheel is not turned all the way to the left. How
many degrees of turn is this? The actual value depends on the physical
characteristics of the individual MCU car, so it is necessary to confirm
how far the steering wheel can turn by looking at the actual car. We will
use a value of about 38 degrees.
To accomplish a sharp left turn, we will use a left motor speed that is
lower and a right motor speed that is higher. As for the actual
percentages, we can’t say for sure until we try it out. For the time being,
we’ll use settings of 10% for the left motor and 50% for the right motor.
The settings can be summarized as follows:
Steering angle: –38 degrees
Left motor: 10%, Right motor: 50%
Afterward, go to pattern 31.
●● ●○ ○ ○○ ○
→0x1f
(Checking with all 8 sensors)
This is a right crank. The basic approach is the same as for a left crank.
The settings can be summarized as follows:
Steering angle: 38 degrees
Left motor: 50%, Right motor: 10%
Afterward, go to pattern 41.
When proceeding straight ahead, the sensor state is 0x00. The software
judges this as meaning that the MCU car is positioned over the centre
line. The steering angle is 0 degrees. The problem is the PWM values
of the motors. The motor PWM values must be such that the MCU car
can negotiate a 90-degree turn when the crank is encountered. For the
time being, we’ll use a setting 40% for both motors. This can be fine
tuned later when doing test runs. The settings can be summarized as
follows:
Steering angle: 0 degrees
Left motor: 40%, Right motor: 40%
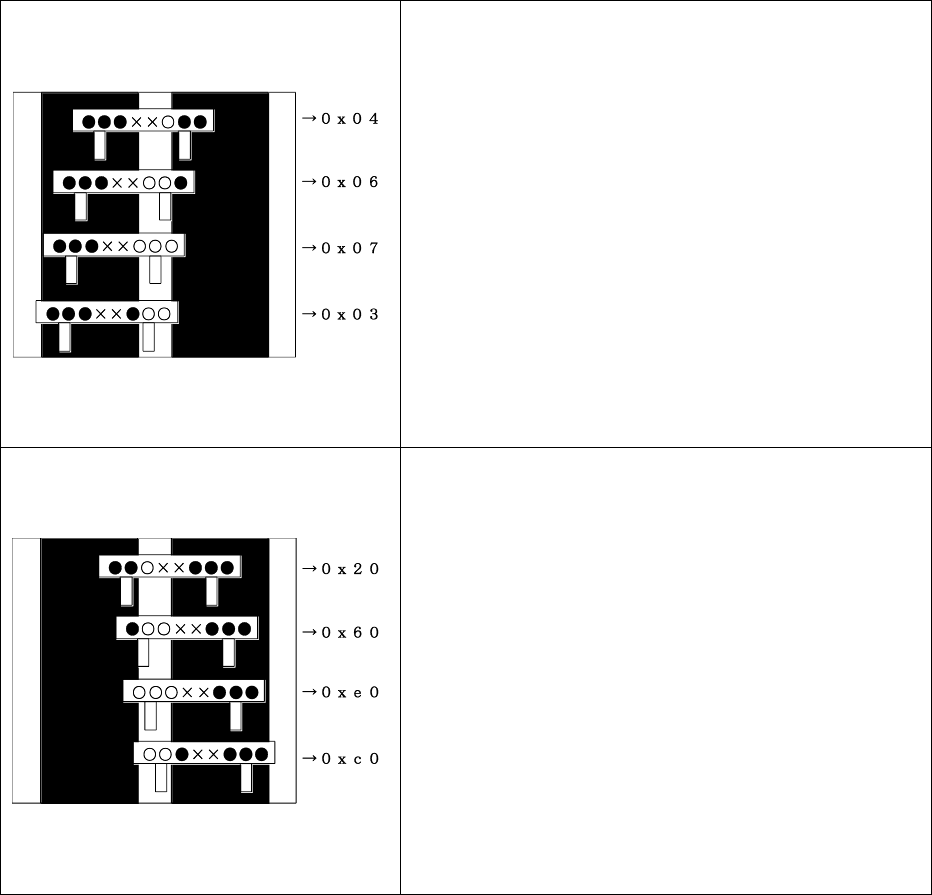
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
123
Let’s assume the MCU car has drifted left of centre.
As little by little the MCU car drifts farther left of centre, the four
resulting sensor states are as shown in the figure at left. Additional
sensor states are possible when the MCU car is even farther left of
centre, but we will not add more sensor states because we know that the
section of track following the crosslines will be straight and further
movement to the left is not likely.
Since the MCU car is left of centre, it is necessary to turn the steering
wheel to the right. If the amount of turn is too small and the amount of
drift is large, the MCU car will be unable to return to the centre. If the
amount of turn is too large, it will overshoot the centre and the car will
end up zigzagging right and left. Fine adjusting the angle to precisely
the right value is difficult. For the time being, we will use a setting of 8
degrees. We’ll make the right motor PWM value lower than that of the
left motor since we’re turning to the right. The settings can be
summarized as follows:
Steering angle: 8 degrees
Left motor: 40%, Right motor: 35%
Let’s assume the MCU car has drifted right of centre.
As little by little the MCU car drifts farther right of centre, the four
resulting sensor states are as shown in the figure at left. Additional
sensor states are possible when the MCU car is even farther right of
centre, but we will not add more sensor states because we know that the
section of track following the crosslines will be straight and further
movement to the right is not likely.
Since the MCU car is right of centre, it is necessary to turn the steering
wheel to the left. If the amount of turn is too small and the amount of
drift is large, the MCU car will be unable to return to the centre. If the
amount of turn is too large, it will overshoot the centre and the car will
end up zigzagging right and left. Fine adjusting the angle to precisely
the right value is difficult. For the time being, we will use a setting of -8
degrees. We’ll make the left motor PWM value lower than that of the
right motor since we’re turning to the left. The settings can be
summarized as follows:
Steering angle: –8 degrees
Left motor: 35%, Right motor: 40%
It is important to remember that the all eight sensors are used for crank checking. For other checking, MASK3_3
masking is applied and the two middle sensors are not used.
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
124
The finished program code is as follows:
270 : case 23:
271 : /* Trace, crank detection after cross line */
272 : if( sensor_inp(MASK4_4)==0xf8 ) {
273 : /* Left crank determined -> to left crank clearing processing */
274 : led_out( 0x1 );
275 : handle( -38 );
276 : motor( 10 ,50 );
277 : pattern = 31;
278 : cnt1 = 0;
279 : break;
280 : }
281 : if( sensor_inp(MASK4_4)==0x1f ) {
282 : /* Right crank determined -> to right crank clearing processing */
283 : led_out( 0x2 );
284 : handle( 38 );
285 : motor( 50 ,10 );
286 : pattern = 41;
287 : cnt1 = 0;
288 : break;
289 : }
290 : switch( sensor_inp(MASK3_3) ) {
291 : case 0x00:
292 : /* Center -> straight */
293 : handle( 0 );
294 : motor( 40 ,40 );
295 : break;
296 : case 0x04:
297 : case 0x06:
298 : case 0x07:
299 : case 0x03:
300 : /* Left of center -> turn to right */
301 : handle( 8 );
302 : motor( 40 ,35 );
303 : break;
304 : case 0x20:
305 : case 0x60:
306 : case 0xe0:
307 : case 0xc0:
308 : /* Right of center -> turn to left */
309 : handle( -8 );
310 : motor( 35 ,40 );
311 : break;
312 : }
313 : break;
The program uses if statements to distinguish between left and right cranks. Also, a switch statement is used to
branch to the appropriate case according to the value of sensor_inp(MASK3_3).
The meaning of these consecutive case statements
is: “when 0x04 or 0x06 or 0x07 or 0x03 is the
case.”
The meaning of these consecutive case statements
is: “when 0x20 or 0x60 or 0xe0 or 0xc0 is the
case.”
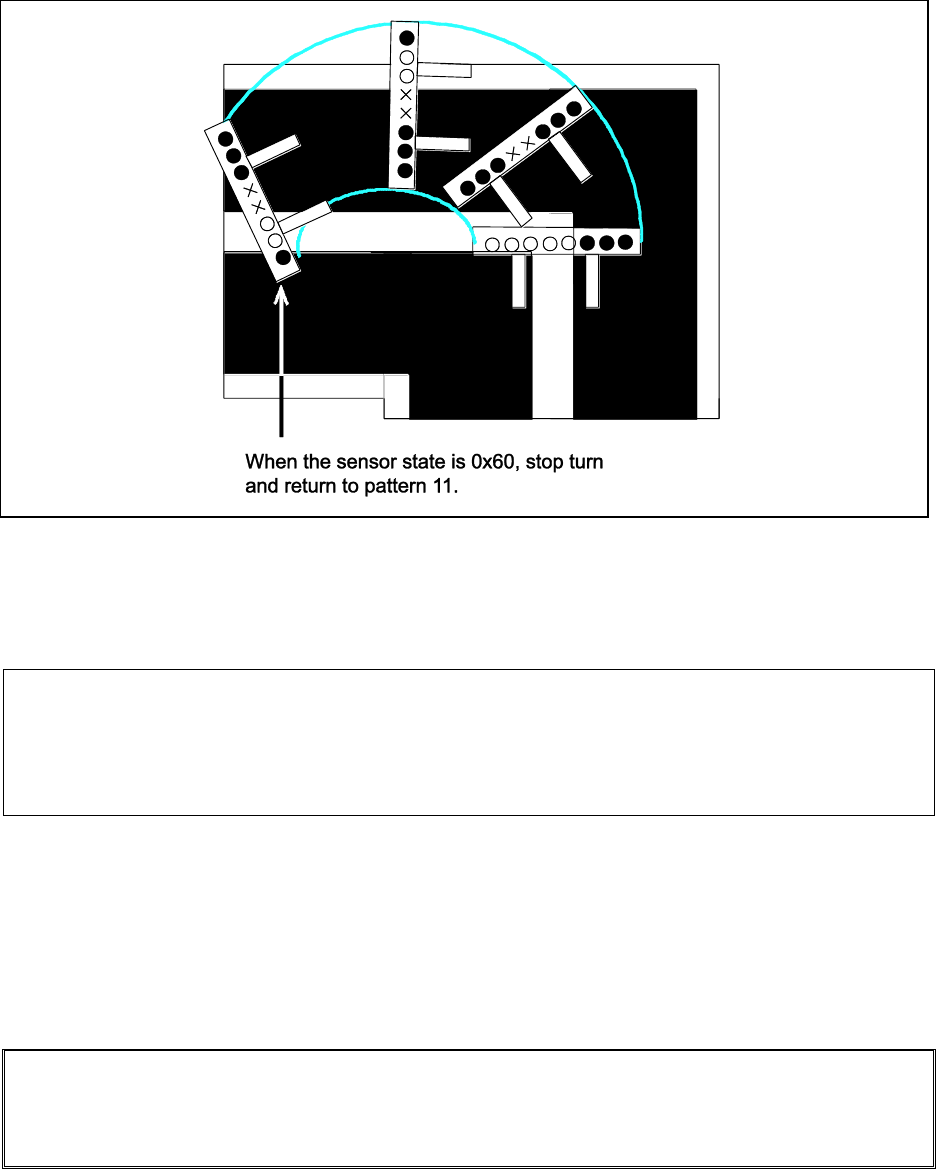
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
125
5.4.37. Patterns 31 and 32: Clearing from Left Crank
Pattern 23 judges a value of 0xf8 from all eight sensors to indicate a left crank and starts a large turn to the left in
order to clear from the crank.
The following issue arises: How long should the large left turn continue? This portion of the program is dedicated
to patterns 31 and 32.
We envision the situation as shown in the following figures:
The software executes a large turn to left when a sensor state of 0xf8 occurs, but due to the speed at which the
MCU car is travelling it turns gradually rather than sharply. When the sensor value is 0x60, indicating that the car
is back near the centre line, the turn is judged to be finished and control returns to pattern 11.
This can be coded as follows:
case 31:
if( sensor_inp(MASK3_3) == 0x60 ) {
pattern = 11;
}
break;
We tried actually running the MCU car using this program code. What happened was that the moment the sensors
detected the left crank and the sensor state was 0xf8 the steering wheel started turning to the left. We anticipated
that the turn would continue until the sensor state was 0x60, but instead of continuing to turn, it immediately
straightened out again and the MCU car ran straight through the crank and off the track. Since the MCU car moves
too fast for us to see exactly what happened, we tried disconnecting the motors and servo and then slowly moving
the car by hand. Careful observation reveals the sensor states to be as shown in the figures that follow.
Note
When you are unsure exactly how the MCU car is moving,
we recommend disconnecting the motors and pushing it by hand to check.
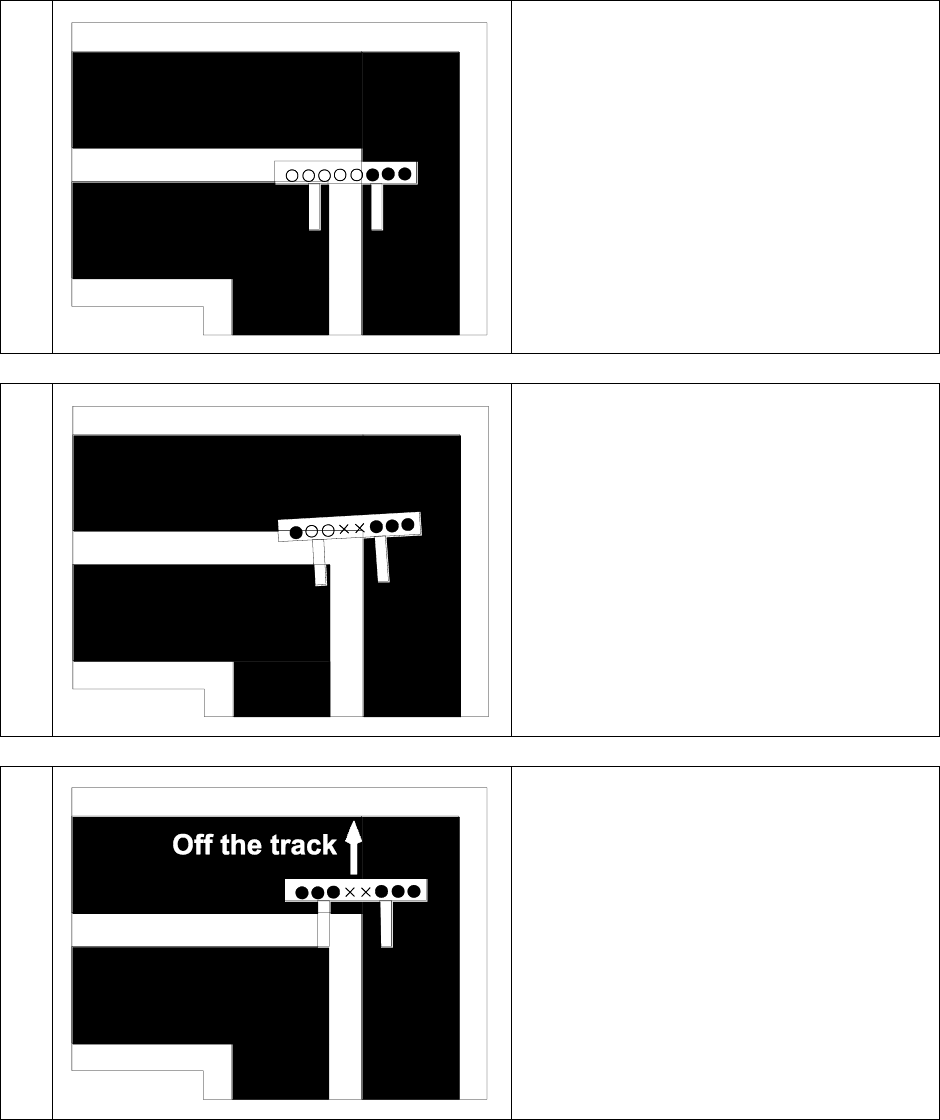
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
126
1
Sensor state 0xf8 is detected, so turn to the left
with a turn angle of 38 degrees until the sensor
state is 0x60.
2
At the moment the turn starts, the sensor state is
0x60 at the place where the white line changes to
black. (Actually, there are white, grey, and black
areas, but we will consider the grey areas to be
white.) When the software recognizes the sensor
state of 0x60 it passes control to pattern 11.
3
Pattern 11 interprets the sensor state of 0x00 to
mean that the MCU car is centred over the centre
line and proceeds straight ahead at turn angle 0
and motor speed 100%. The MCU car runs
straight off the track.
When we checked the sensors we discovered that the leftmost sensor was not optimally adjusted, and it
erroneously gave a reading of 0 before the second and third sensors from the left. This caused an incorrect value of
0x60 at the change from write to black. This could be corrected by adjusting the leftmost sensor to increase its
sensitivity a small amount. But we don’t want the MCU car to run off the track just because of a small difference
in sensor sensitivity, so we’ll modify the program to correct the problem.
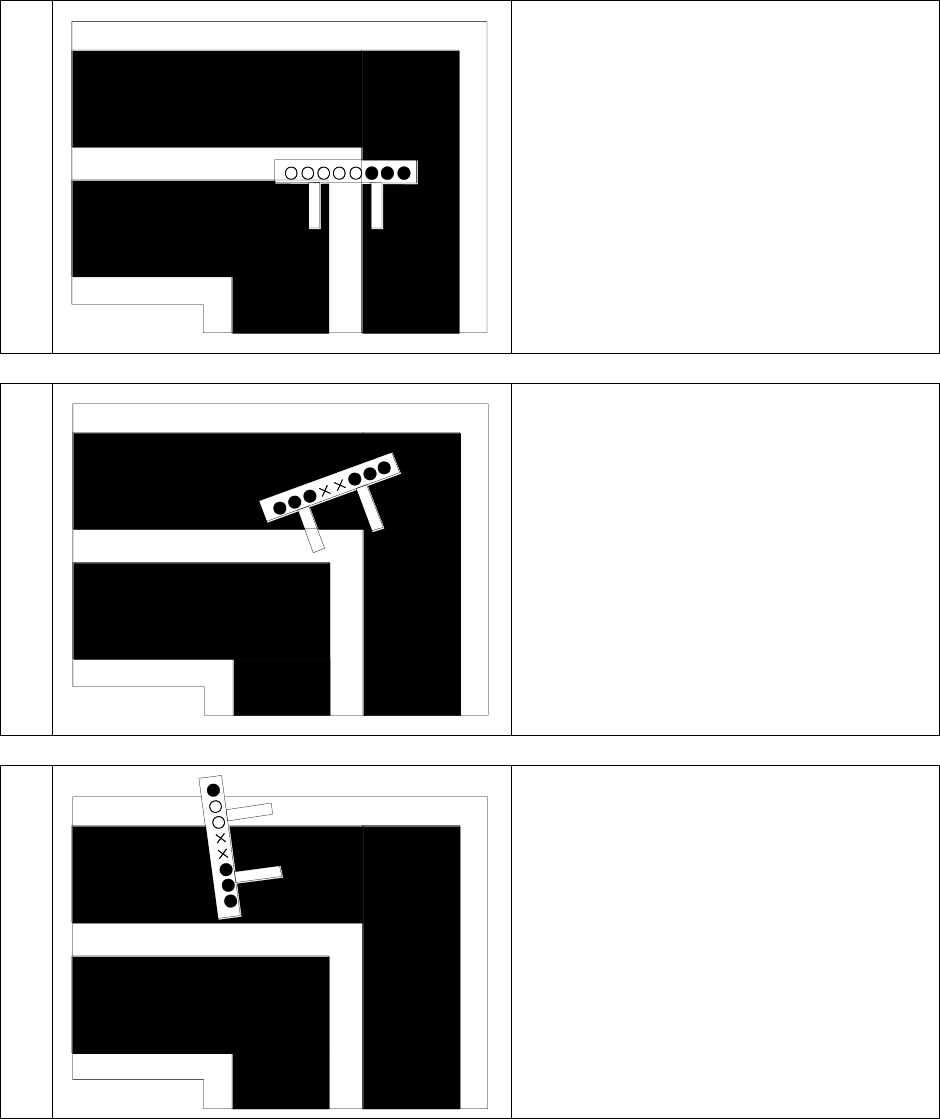
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
127
Come to think of it, a certain amount of time has to pass between when 0xf8 is detected and when the final sensor
state of 0x60 occurs at the detection of the centre line. We can rewrite the code so that after the left crank is
encountered, the motor settings are made and the sensors are ignored for 0.2 seconds. Once the portion of the track
where the colour changes has been passed over, we can reactivate checking of the sensors 0.2 seconds later. We
can illustrate this idea with figures as follows:
4
Sensor state 0xe8 is detected, so turn to the left
with a turn angle of 38 degrees. Then proceed for
0.2 seconds while ignoring the sensors.
5
After 0.2 seconds, check sensors to see if their
value is 0x60.
6
Sensor state is still not 0x60, so continue turning.
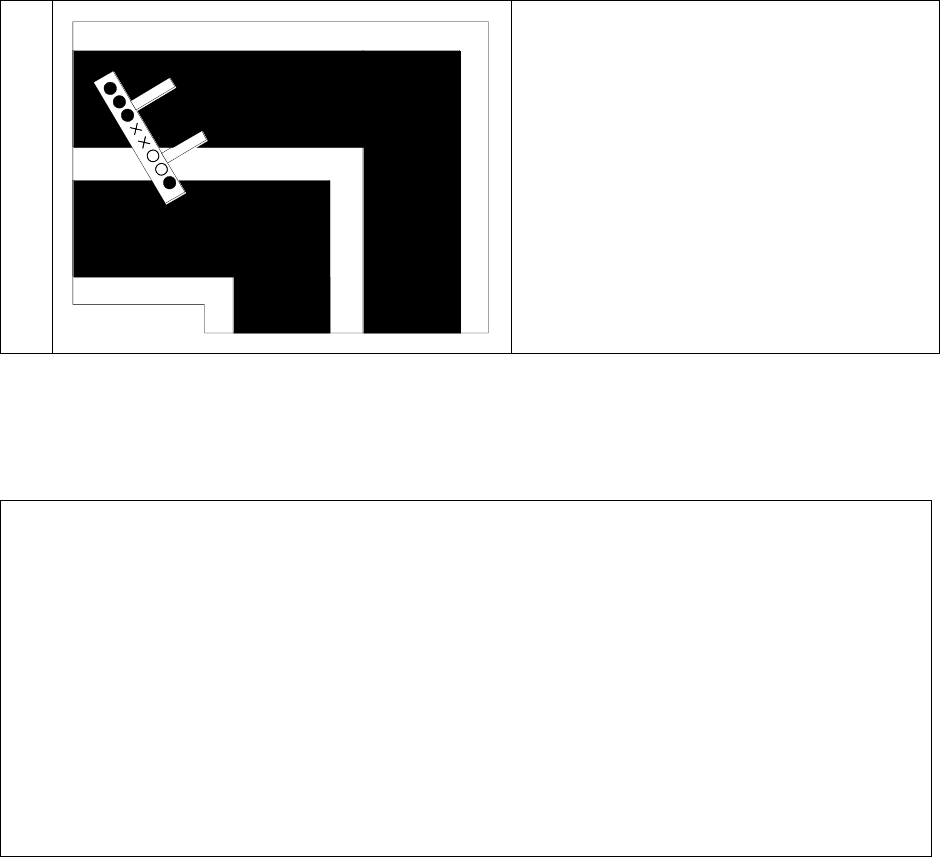
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
128
7
Sensor state is now 0x60. Go to pattern 11, normal
tracing.
As figure 5 shows, after 0.2 seconds the sensors are past the place where the white line changes to black. After this,
the MCU car can safely continue turning until the sensor state is 0x60. This should do it. It can be coded as
follows:
315 : case 31:
316 : /* Left crank clearing processing ? wait until stable */
317 : if( cnt1 > 200 ) {
318 : pattern = 32;
319 : cnt1 = 0;
320 : }
321 : break;
322 :
323 : case 32:
324 : /* Left crank clearing processing ? check end of turn */
325 : if( sensor_inp(MASK3_3) == 0x60 ) {
326 : led_out( 0x0 );
327 : pattern = 11;
328 : cnt1 = 0;
329 : }
330 : break;
Line 311 checks if the value of cnt1 is 200 or greater. If it is, that means 0.2 seconds have elapsed, so control
passes to pattern 32. Incidentally, cnt1 is cleared to 0 in line 272 before the jump to pattern 31.
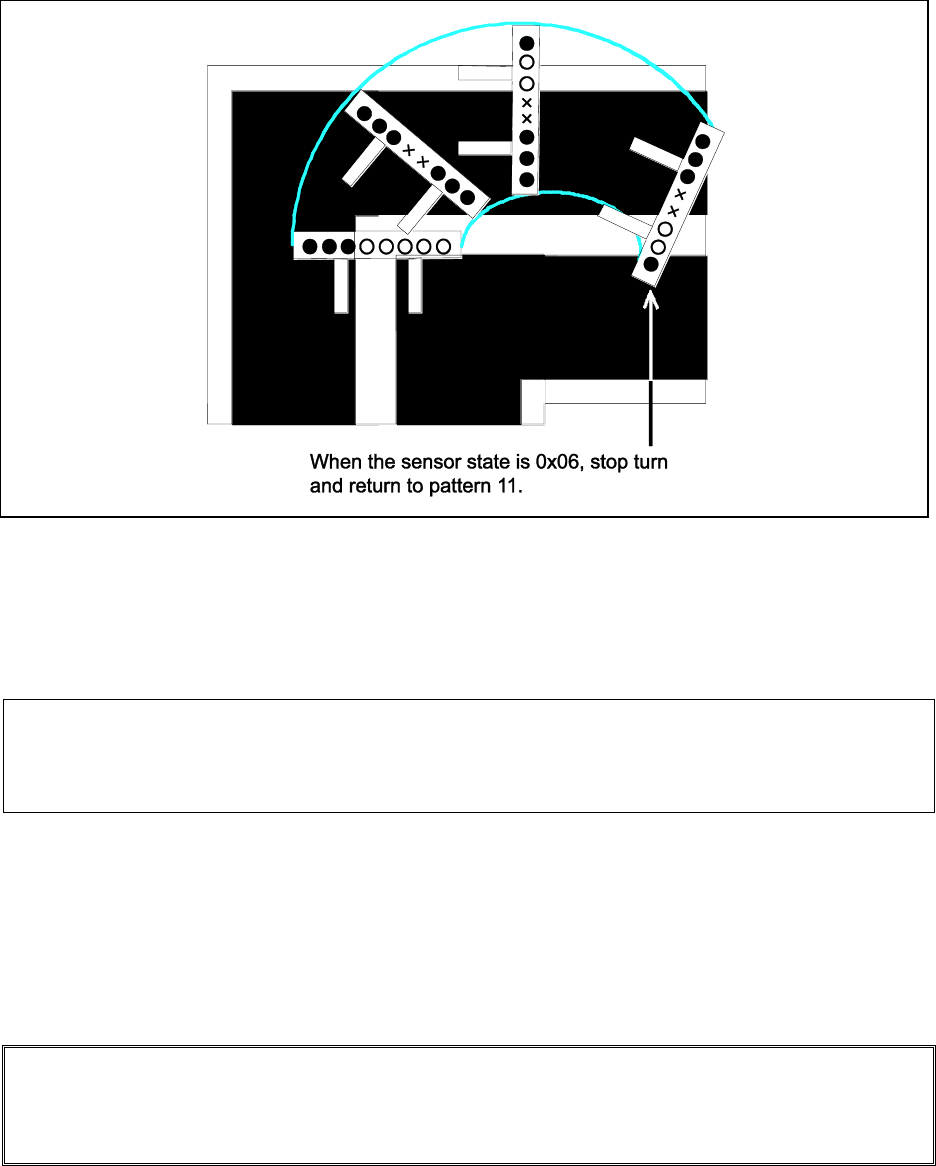
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
129
5.4.38. Patterns 41 and 42: Right Crank Clearing Processing
Pattern 23 judges a value of 0x1F from all eight sensors to indicate a right crank and starts a large turn to the right
in order to clear from the crank.
The following issue arises: How long should the large right turn continue? This portion of the program is
dedicated to patterns 41 and 42.
We envision the situation as shown in the following figures:
The software executes a large turn to right when a sensor state of 0x1f occurs, but due to the speed at which the
MCU car is travelling it turns gradually rather than sharply. When the sensor value is 0x06, indicating that the car
is back near the centre line, the turn is judged to be finished and control returns to pattern 11.
This can be coded as follows:
case 41:
if( sensor_inp(MASK3_3) == 0x06 ) {
pattern = 11;
}
break;
We tried actually running the MCU car using this program code. What happened was that the moment the sensors
detected the right crank and the sensor state was 0x1f the steering wheel started turning to the right. We anticipated
that the turn would continue until the sensor state was 0x06, but instead of continuing to turn, it immediately
straightened out again and the MCU car ran straight through the crank and off the track. Since the MCU car moves
too fast for us to see exactly what happened, we tried disconnecting the motors and servo and then slowly moving
the car by hand. Careful observation reveals the sensor states to be as shown in the figures that follow.
Note
When you are unsure exactly how the MCU car is moving,
we recommend disconnecting the motors and pushing it by hand to check.
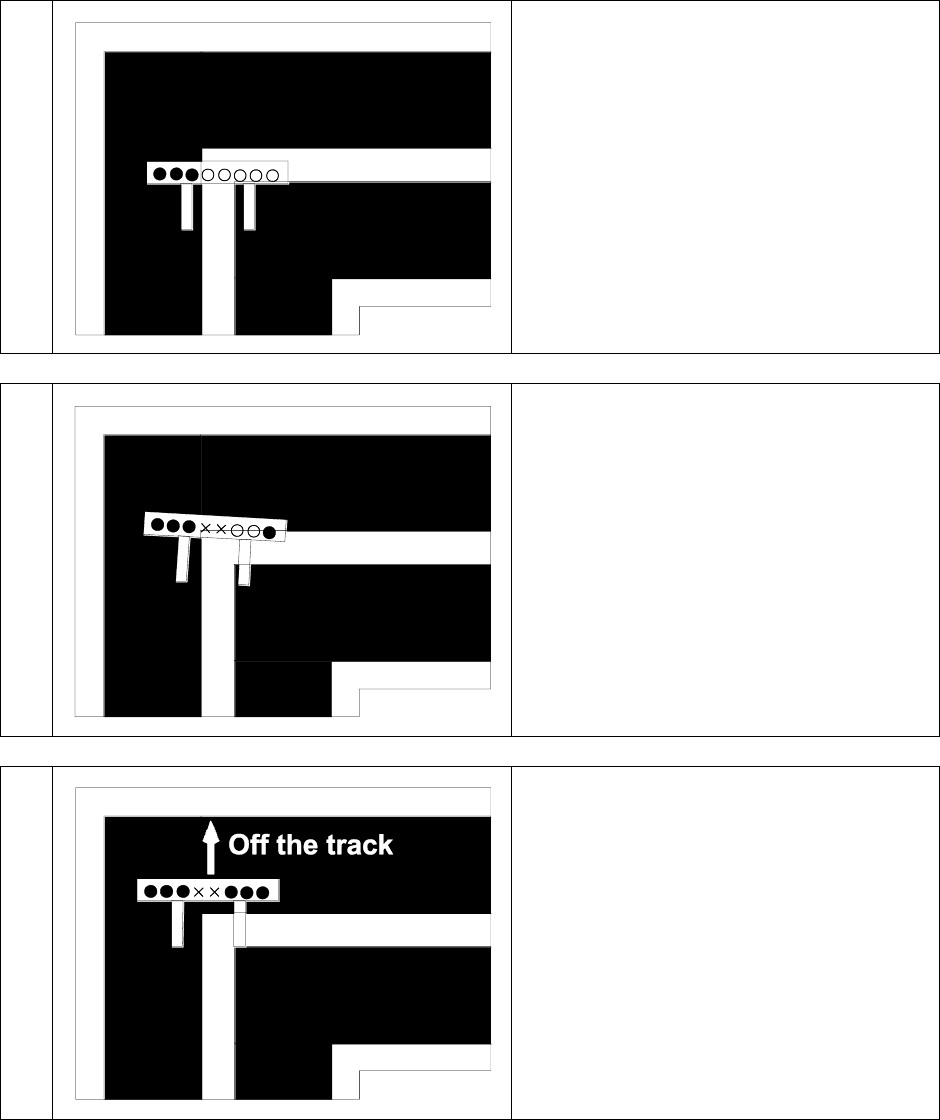
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
130
1
Sensor state 0x1f is detected, so turn to the left
with a turn angle of 38 degrees until the sensor
state is 0x06.
2
At the moment the turn starts, the sensor state is
0x06 at the place where the white line changes to
black. (Actually, there are white, grey, and black
areas, but we will consider the grey areas to be
white.) When the software recognizes the sensor
state of 0x06 it passes control to pattern 11.
3
Pattern 11 interprets the sensor state of 0x00 to
mean that the MCU car is centred over the centre
line and proceeds straight ahead at turn angle 0
and motor speed 100%. The MCU car runs
straight off the track.
When we checked the sensors we discovered that the rightmost sensor was not optimally adjusted, and it
erroneously gave a reading of 0 before the second and third sensors from the right. This caused an incorrect value
of 0x06 at the change from write to black. This could be corrected by adjusting the rightmost sensor to increase its
sensitivity a small amount. But we don’t want the MCU car to run off the track just because of a small difference
in sensor sensitivity, so we’ll modify the program to correct the problem.
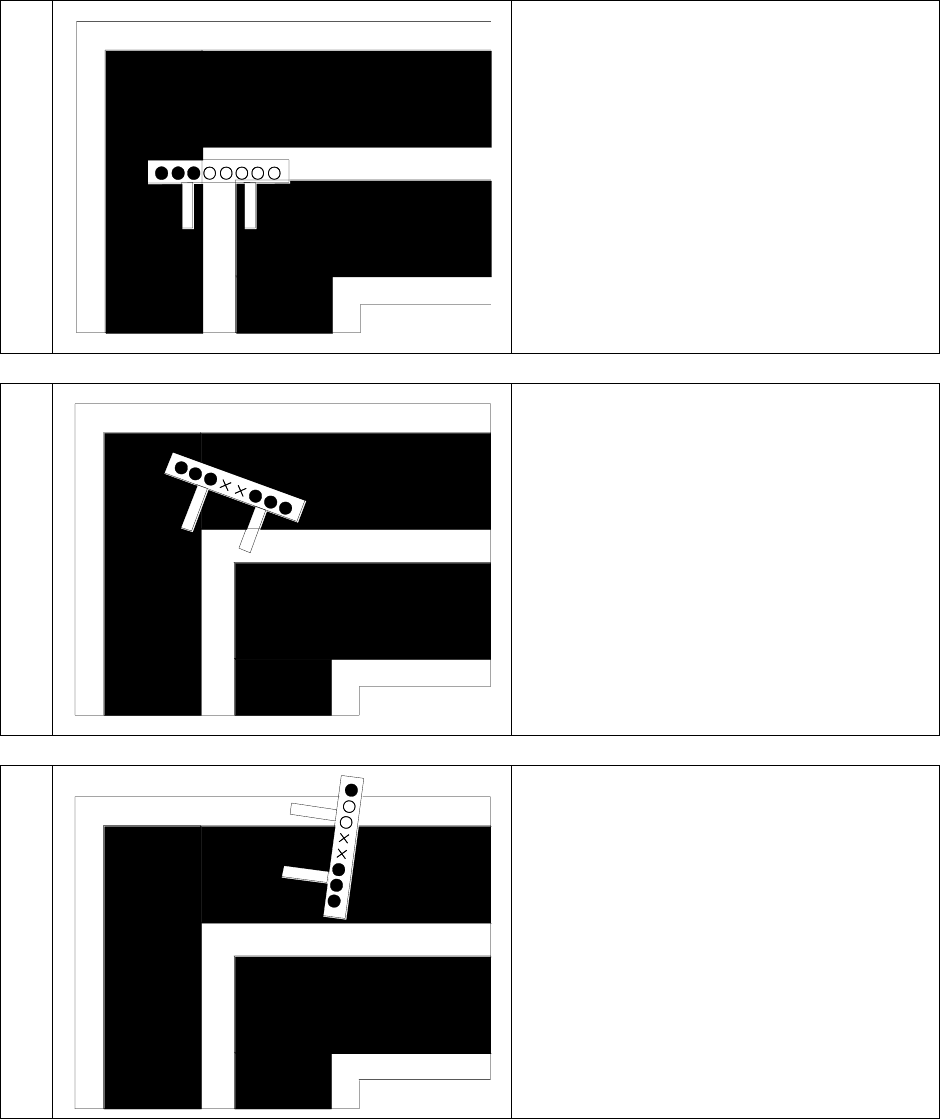
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
131
Come to think of it, a certain amount of time has to pass between when 0x1f is detected and when the final sensor
state of 0x06 occurs at the detection of the centre line. We can rewrite the code so that after the right crank is
encountered, the motor settings are made and the sensors are ignored for 0.2 seconds. Once the portion of the track
where the colour changes has been passed over, we can reactivate checking of the sensors 0.2 seconds later. We
can illustrate this idea with figures as follows:
4
Sensor state 0x1f is detected, so turn to the right
with a turn angle of 38 degrees. Then proceed for
0.2 seconds while ignoring the sensors.
5
After 0.2 seconds, check sensors to see if their
value is 0x06.
6
Sensor state is still not 0x06, so continue turning.
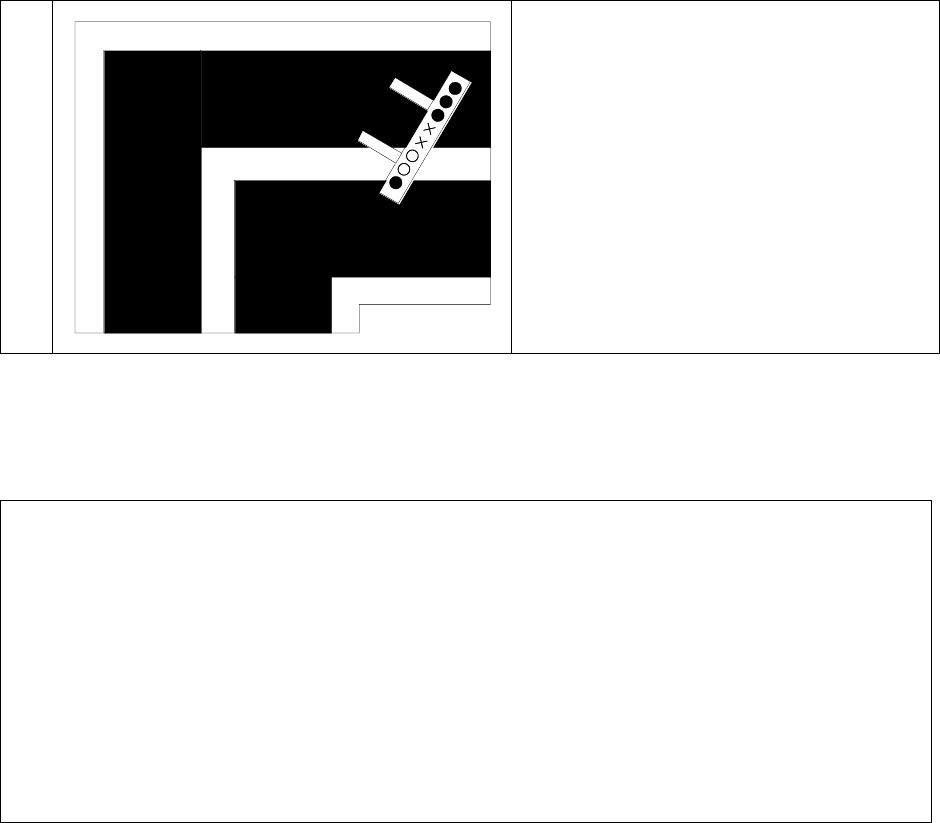
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
132
7
Sensor state is now 0x06. Go to pattern 11, normal
tracing.
As figure 5 shows, after 0.2 seconds the sensors are past the place where the white line changes to black. After this,
the MCU car can safely continue turning until the sensor state is 0x06. This should do it. It can be coded as
follows:
332 : case 41:
333 : /* Right crank clearing processing ? wait until stable */
334 : if( cnt1 > 200 ) {
335 : pattern = 42;
336 : cnt1 = 0;
337 : }
338 : break;
339 :
340 : case 42:
341 : /* Right crank clearing processing ? check end of turn */
342 : if( sensor_inp(MASK3_3) == 0x06 ) {
343 : led_out( 0x0 );
344 : pattern = 11;
345 : cnt1 = 0;
346 : }
347 : break;
Line 328 checks if the value of cnt1 is 200 or greater. If it is, that means 0.2 seconds have elapsed, so control
passes to pattern 42. Incidentally, cnt1 is cleared to 0 in line 281 before the jump to pattern 41.
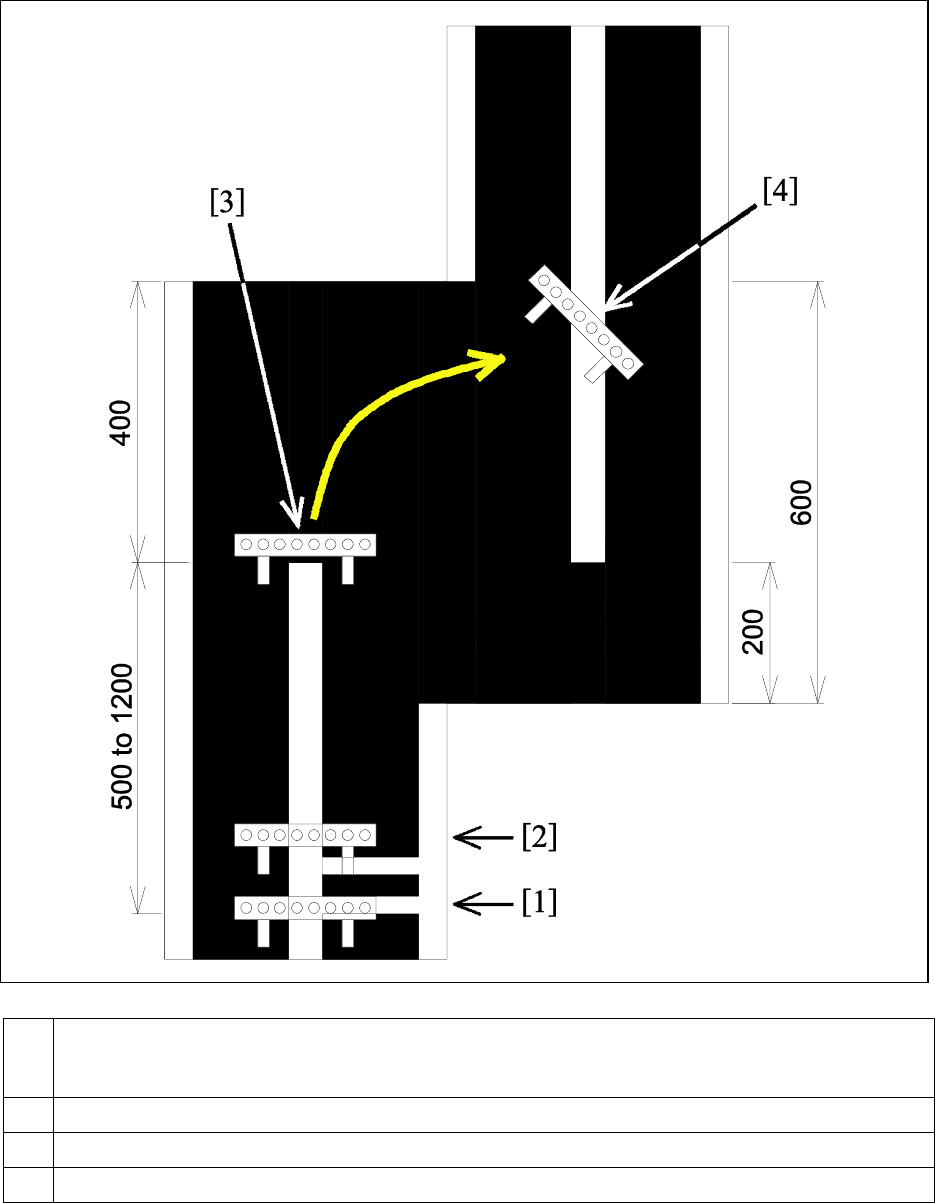
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
133
5.4.39. Right Lane Change Outline
Patterns 51 to 54 contain program code related to executing a right lane change. An outline of the processing
involved is provided below:
[1]
The check_rightline function detects a right half line. The MCU car must change to the right lane 500 to
1200 mm ahead, so brake operation is performed. Also, sensor input is ignored up to position [2] to prevent
erroneous sensor detection at the second right half line.
[2]
The MCU car starts to proceed slowly from this point. It advances while tracing the centre line.
[3]
When the centre line ends, the steering wheel turns to the right.
[4]
When a new centre line is detected, line tracing restarts using the new centre line.
In this way, the MCU car manoeuvres right lane change. The specifics of the program code used are described
below.
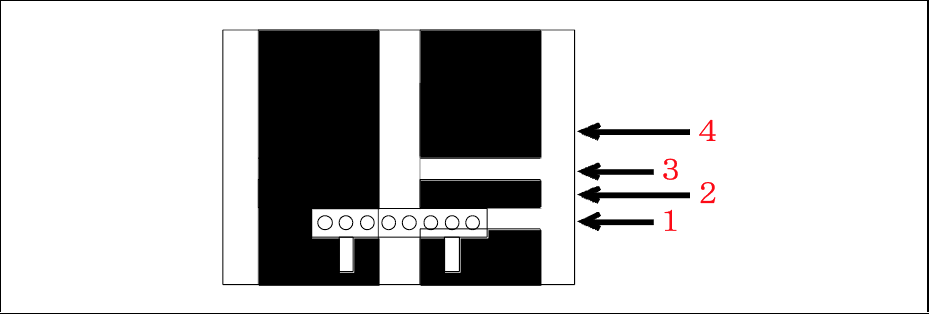
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
134
5.4.40. Pattern 51: Processing at 1st Right Half Line Detection
Control passes to pattern 51 the moment a right half line is detected. First, the MCU car passes over the right half
lines. The characteristics of the portion of track from the position at which the first right half line is discovered to
the position immediately after the second right half line are shown in the following figure:
[1] First crossline
[2] Normal track
[3] Second crossline
[4] Normal track, proceed slowly while tracing centre line
The track, other than the centre line, changes from white to black to white to black again by the time position [4] is
reached. The program must detect these changes and respond appropriately. That sounds pretty complicated.
Let’s look at this in a different way. The distance from position [1] to position [4] is about 100 mm, allowing some
margin for error. (The precise distance is 70 mm: 20 mm for the first half line + 30 mm of black area + 20 mm for
the second half line = 70 mm.) If the MCU car is positioned roughly over the centre line and continues to move
forward for about 100 mm while we ignore the sensor data, we’ll probably come out roughly on course. The kit
car includes no mechanism for detecting distances, but we can use the timer to interrupt reading of sensor data for
a specified duration. We don’t know how long a duration yet because that will depend on how fast the MCU car is
travelling. For the time being, let’s use a pause duration of 0.1 seconds and do fine tuning later. In addition, we’ll
make the LEDs on the motor drive board light to indicate externally that processing of pattern 51 has started.
To summarize:
Illuminate LED2. (This differs from the processing of crossline to make it possible to tell them apart.)
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Wait 0.1 seconds.
After 0.1 seconds elapse, go to next pattern.
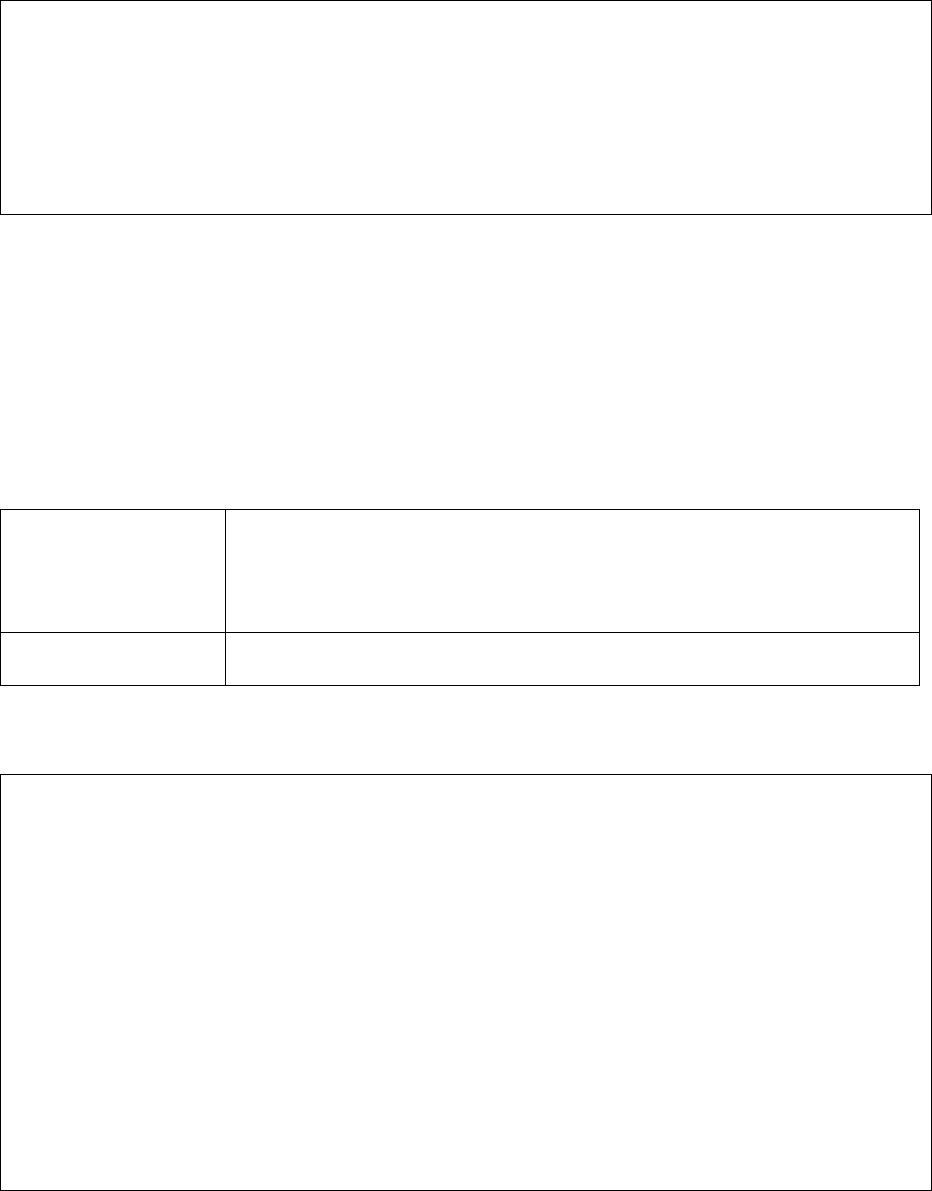
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
135
This is what the program code of pattern 51 must accomplish.
case 51:
/* Processing at 1st right half line detection */
led_out( 0x2 );
handle( 0 );
speed( 0 ,0 );
if( cnt1 > 100 ) {
pattern = 52; /* After 0.1 seconds, to pattern 52 */
}
break;
This is the completed program code. Let’s take a moment to review it. When the value of cnt1 is 100 or greater
(after 100 milliseconds have elapsed), control passes to pattern 52. For this to work as expected, the value of cnt1
must be 0 when pattern 51 starts. For example, if the value of cnt1 is 1000 when control passes to pattern 51, the
value of cnt1 will be judged to be 100 or greater the first time the condition is tested, and control will pass
immediately to pattern 52. Execution of pattern 51 takes place only once (a duration of a few dozen µs) rather than
lasting for 0.1 seconds. We need to add another pattern. Pattern 51 will start brake operation and clear cnt1 to 0,
and pattern 52 will check whether 0.1 seconds have elapsed.
To summarize once again:
Let’s rewrite the program to reflect the above changes.
349 : case 51:
350 : /* Processing at 1st right half line detection */
351 : led_out( 0x2 );
352 : handle( 0 );
353 : motor( 0 ,0 );
354 : pattern = 52;
355 : cnt1 = 0;
356 : break;
357 :
358 : case 52:
359 : /* Read but ignore 2nd time */
360 : if( cnt1 > 100 ){
361 : pattern = 53;
362 : cnt1 = 0;
363 : }
364 : break;
The portion of the program code from detection of the right half line to the start of the trace centre line area is now
complete.
Tasks performed by
pattern 51:
Illuminate LED2.
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Go to next pattern.
Clear cnt1.
Tasks performed by
pattern 52:
If value of cnt1 is 100 or greater, go to next pattern.
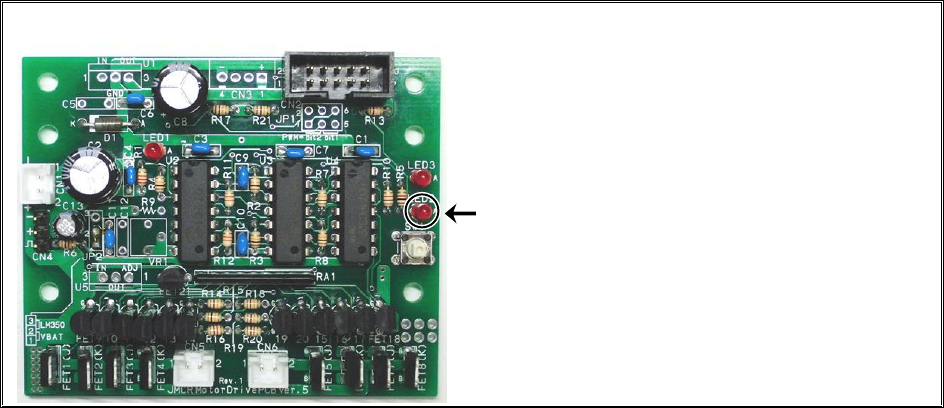
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
136
Hint
When a right half line is detected, one LED (the
bottom one) on the motor drive board lights.
No right half line has been detected if it does not
light.
If right half line detection is not working
properly, try unplugging the motor connectors
and pushing the MCU car forward by hand.
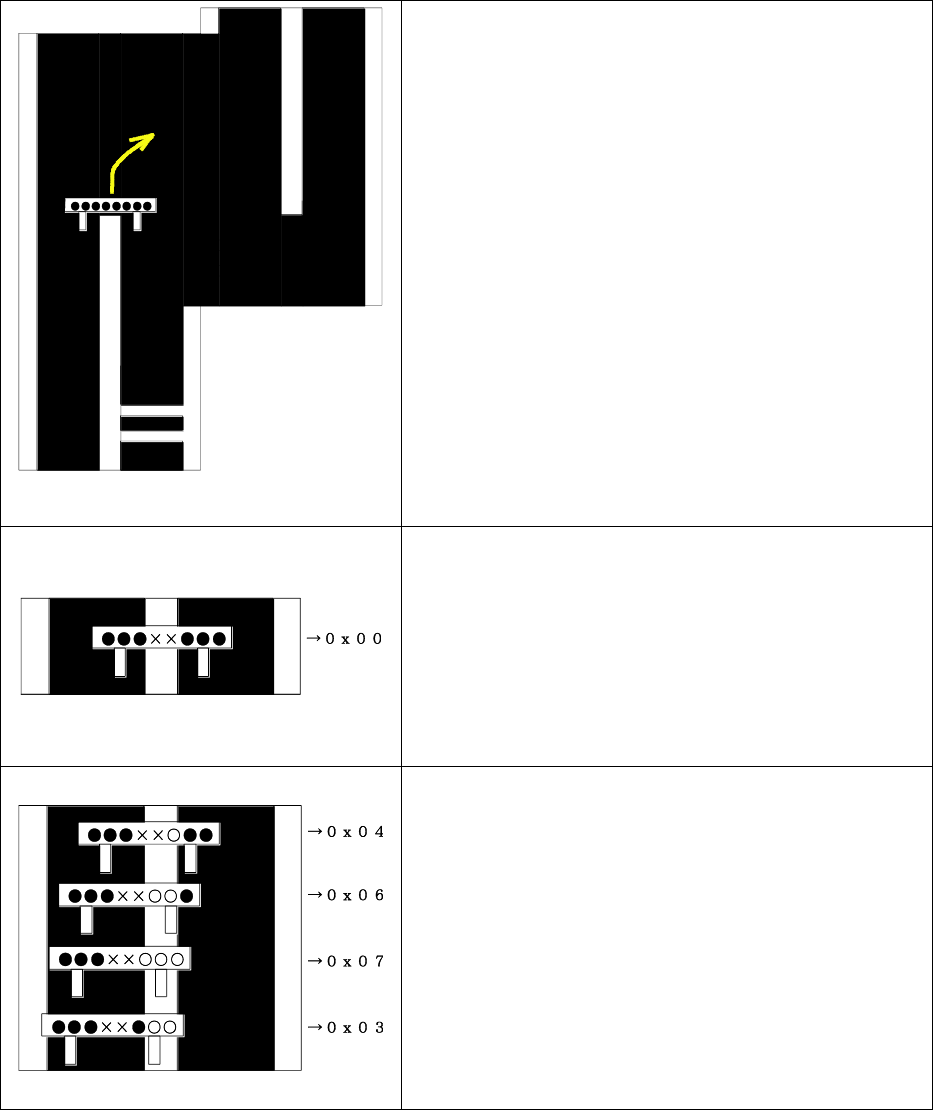
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
137
5.4.41. Pattern 53: Trace after Right Half Line
Patterns 51 and 52 perform brake operation for 0.1 seconds after detection of the first right half line, allowing the
MCU car to pass the second right half line. Pattern 53 continues the processing after this.
The MCU car is past the right half lines, so the next task is detecting the end of the centre line. In addition, the
MCU car must continue to trace the straight section of track that leads to the end of the centre line, so normal trace
operation is necessary.
We envision the present situation as shown in the following figures:
→0x00
(Checking with all 8 sensors)
After the right half line ends, the state of the eight sensors is 0x00, as
shown in the figure at left. When this state is detected, the MCU car
starts turning to the right. For a right turn, we would expect that the
right motor speed should be lower and the left motor speed higher. As
for the actual percentages, these will differ depending on factors such
as the speed of the MCU car, wheel slippage, and the response speed
of the servo. We’ll have to see what happens when we try it out with
the actual MCU car. For the time being, we’ll use following settings,
which can be modified later based on running tests.
Steering angle: 15 degrees
Left motor: 40%, Right motor: 31%
Afterward, go to pattern 54.
When proceeding straight ahead, the sensor state is 0x00. The
software judges a sensor state of 0x00 as indicating straight ahead.
There can be no doubt that the steering angle must be straight forward.
The problem is the PWM values of the motors. The speed associated
with a particular value can only be determined in an actual test run.
The speed must be sufficiently low that the MCU car can negotiate the
turn when the end of the centre line is encountered. For the time being,
we’ll use a setting 40% for both motors. This can be fine tuned later
when doing test runs. The settings can be summarized as follows:
Steering angle: 0 degrees
Left motor: 40%, Right motor: 40%
Let’s assume the MCU car has drifted left of centre. As little by little
the MCU car drifts farther left of centre, the four resulting sensor
states are as shown in the figure at left. Additional sensor states are
possible when the MCU car is even farther left of centre, but we will
not add more sensor states because we know that the section of track
following the right half lines will be straight.
Since the MCU car is left of centre, it is necessary to turn the steering
wheel to the right. If the amount of turn is too small and the amount of
drift is large, the MCU car will be unable to return to the centre. If the
amount of turn is too large, it will overshoot the centre and the car will
end up zigzagging right and left. Fine adjusting the angle to precisely
the right value is difficult. For the time being, we will use a setting of
8 degrees. The settings can be summarized as follows:
Steering angle: 8 degrees
Left motor: 40%, Right motor: 35%
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
138
Let’s assume the MCU car has drifted right of centre. As little by little
the MCU car drifts farther right of centre, the four resulting sensor
states are as shown in the figure at left. Additional sensor states are
possible when the MCU car is even farther right of centre, but we will
not add more sensor states because we know that the section of track
following the right half lines will be straight.
Since the MCU car is right of centre, it is necessary to turn the
steering wheel to the left. If the amount of turn is too small and the
amount of drift is large, the MCU car will be unable to return to the
centre. If the amount of turn is too large, it will overshoot the centre
and the car will end up zigzagging left and right. Fine adjusting the
angle to precisely the right value is difficult. For the time being, we
will use a setting of –8 degrees. The settings can be summarized as
follows:
Steering angle: –8 degrees
Left motor: 35%, Right motor: 40%
It is important to remember that all eight sensors are used for detecting the end of the centre line. For other
checking, MASK3_3 masking is applied and the two middle sensors are not used.
The finished program code is as follows:
366 : case 53:
367 : /* Trace, lane change after right half line detection */
368 : if( sensor_inp(MASK4_4) == 0x00 ) {
369 : handle( 15 );
370 : motor( 40 ,31 );
371 : pattern = 54;
372 : cnt1 = 0;
373 : break;
374 : }
375 : switch( sensor_inp(MASK3_3) ) {
376 : case 0x00:
377 : /* Center -> straight */
378 : handle( 0 );
379 : motor( 40 ,40 );
380 : break;
381 : case 0x04:
382 : case 0x06:
383 : case 0x07:
384 : case 0x03:
385 : /* Left of center -> turn to right */
386 : handle( 8 );
387 : motor( 40 ,35 );
388 : break;
389 : case 0x20:
390 : case 0x60:
391 : case 0xe0:
392 : case 0xc0:
393 : /* Right of center -> turn to left */
394 : handle( -8 );
395 : motor( 35 ,40 );
396 : break;
397 : default:
398 : break;
399 : }
400 : break;
The meaning of these consecutive case statements is:
“when 0x04 or 0x06 or 0x07 or 0x03 is the case.”
The meaning of these consecutive case statements is:
“when 0x20 or 0x60 or 0xe0 or 0xc0 is the case.”
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
139
5.4.42. Pattern 54: Right Lane Change End Check
Pattern 53 determines that a right lane change should start when the eight sensors have a value of 0x00 and turns
to the right with a turn angle of 15 degrees. The question then is how long the turn to the right should continue.
This portion of the program code is designated as pattern 54.
Pattern 54 causes the MCU car to proceed to the new centre line on the right. Once the new centre line is found, it
must trace that centre line. This will complete the processing for the right lane change operation. Now, what sort
of sensor status should be interpreted as the presence of the new centre line?
1
Proceeding while turning. Immediately before
detection of new centre line.
2
Rightmost sensors detect centre line. The sensor
state is 0000 0111.
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
140
3
Middle sensors detect centre line. The sensor
state is 0011 1100.
At this point the new centre line should be
detected and operation reverts to normal tracing.
We will write the program code so that control
passes to pattern 11, normal tracing, when the
sensor state is 0011 1100, while checking with
all eight sensors.
This is the resulting code, based on this thinking:
402 : case 54:
403 : /* Right lane change end check */
404 : if( sensor_inp( MASK4_4 ) == 0x3c ) {
405 : led_out( 0x0 );
406 : pattern = 11;
407 : cnt1 = 0;
408 : }
409 : break;
An LED was illuminated when the right half line was detected, so after turning off the LED in line 405 control is
passed to pattern 11. The situation after 0x3c is detected and control returns to pattern 11 is shown below. The
MCU car is travelling at a rightward angle when it encounters the centre line, so processing by pattern 11 brings it
back to the centre of the track.
0
0
1
1
1
1
0
0
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
141
5.4.43. Left Lane Change Outline
Patterns 61 to 64 contain program code related to executing a left lane change. An outline of the processing
involved is provided below:
[1]
The check_leftline function detects a left half line. The MCU car must change to the left lane 500 to 1200
mm ahead, so brake operation is performed. Also, sensor input is ignored up to position 2 to prevent
erroneous sensor detection at the second left half line.
[2]
The MCU car starts to proceed slowly from this point. It advances while tracing the centre line.
[3]
When the centre line ends, the steering wheel turns to the left.
[4]
When a new centre line is detected, line-tracing restarts using the new centre line.
In this way, the MCU car manoeuvres right lane change. The specifics of the program code used are described
below.
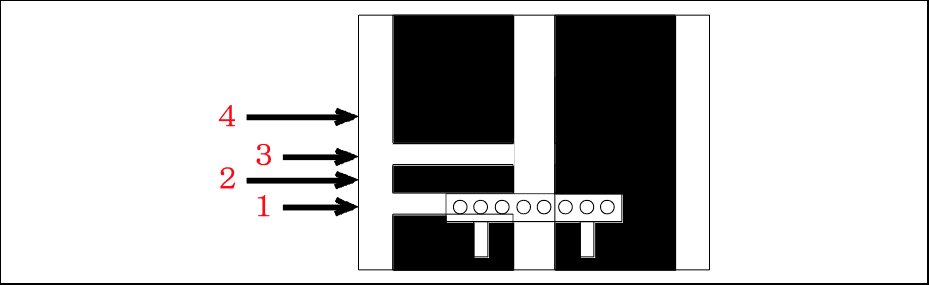
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
142
5.4.44. Processing at 1st Left Half Line Detection
Control passes to pattern 61 the moment a left half line is detected. First, the MCU car passes over the left half
lines. The characteristics of the portion of track from the position at which the first left half line is discovered to
the position immediately after the second left half line are shown in the following figure:
[1] First crossline
[2] Normal track
[3] Second crossline
[4] Normal track, proceed slowly while tracing centre line
The track, other than the centre line, changes from white to black to white to black again by the time position [4] is
reached. The program must detect these changes and respond appropriately. That sounds pretty complicated.
Let’s look at this in a different way. The distance from position [1] to position [4] is about 100 mm, allowing some
margin for error. (The precise distance is 70 mm: 20 mm for the first half line + 30 mm of black area + 20 mm for
the second half line = 70 mm.) If the MCU car is positioned roughly over the centre line and continues to move
forward for about 100 mm while we ignore the sensor data, we’ll probably come out roughly on course. The kit
car includes no mechanism for detecting distances, but we can use the timer to interrupt reading of sensor data for
a specified duration. We don’t know how long a duration yet because that will depend on how fast the MCU car is
travelling. For the time being, let’s use a pause duration of 0.1 seconds and do fine tuning later. In addition, we’ll
make the LEDs on the motor drive board light to indicate externally that processing of pattern 61 has started.
To summarize:
Illuminate LED3. (This differs from the processing of crossline to make it possible to tell them apart.)
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Wait 0.1 seconds.
After 0.1 seconds elapse, go to next pattern.
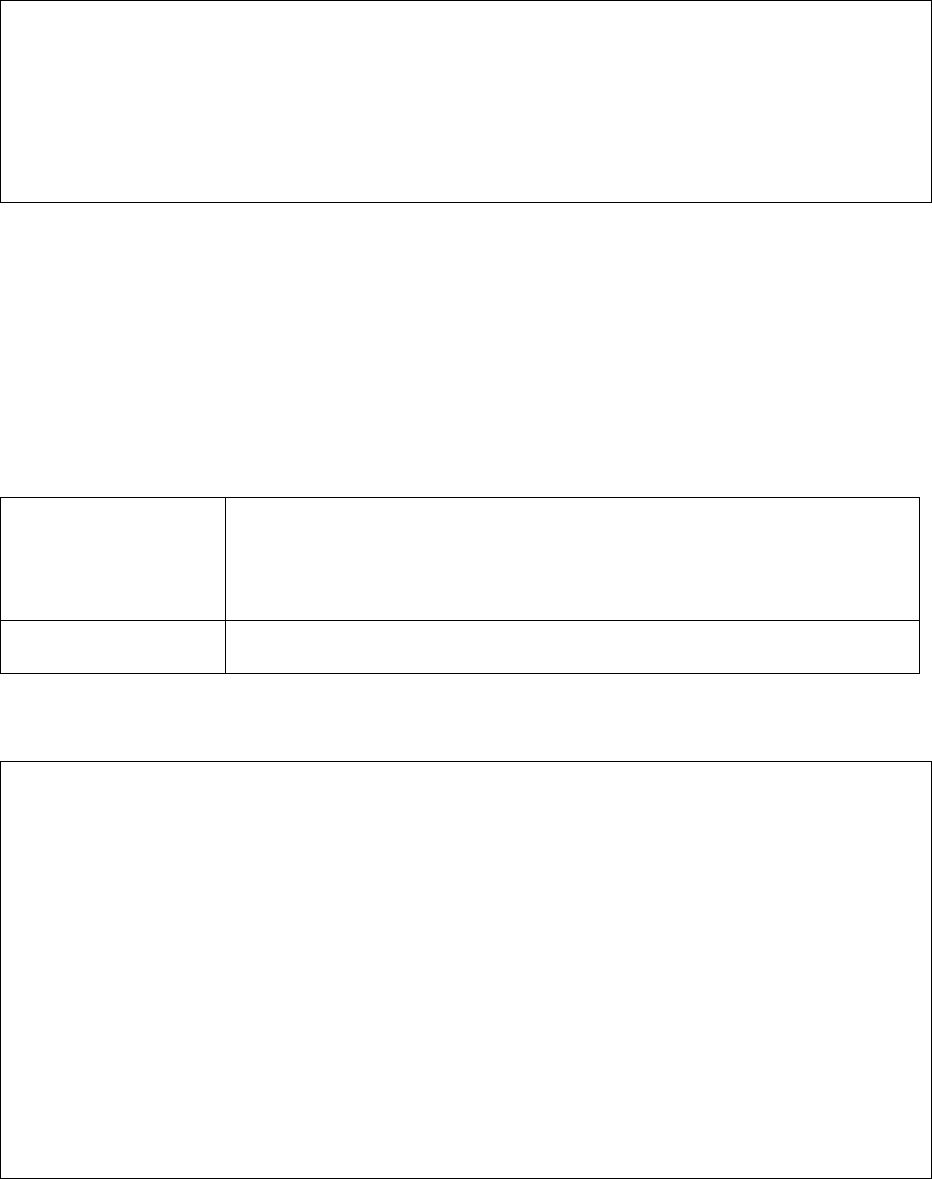
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
143
This is what the program code of pattern 61 must accomplish.
case 61:
/* Processing at 1st left half line detection */
led_out( 0x1 );
handle( 0 );
speed( 0 ,0 );
if( cnt1 > 100 ) {
pattern = 62; /* After 0.1 seconds, to pattern 62 */
}
break;
This is the completed program code. Let’s take a moment to review it. When the value of cnt1 is 100 or greater
(after 100 milliseconds have elapsed), control passes to pattern 62. For this to work as expected, the value of cnt1
must be 0 when pattern 61 starts. For example, if the value of cnt1 is 1000 when control passes to pattern 61, the
value of cnt1 will be judged to be 100 or greater the first time the condition is tested, and control will pass
immediately to pattern 62. Execution of pattern 61 takes place only once (a duration of a few dozen µs) rather than
lasting for 0.1 seconds. We need to add another pattern. Pattern 61 will start brake operation and clear cnt1 to 0,
and pattern 62 will check whether 0.1 seconds have elapsed.
To summarize once again:
Let’s rewrite the program to reflect the above changes.
411 : case 61:
412 : /* Processing at 1st left half line detection */
413 : led_out( 0x1 );
414 : handle( 0 );
415 : motor( 0 ,0 );
416 : pattern = 62;
417 : cnt1 = 0;
418 : break;
419 :
420 : case 62:
421 : /* Read but ignore 2nd time */
422 : if( cnt1 > 100 ){
423 : pattern = 63;
424 : cnt1 = 0;
425 : }
426 : break;
The portion of the program code from detection of the left half line to the start of the trace centre line area is now
complete.
Tasks performed by
pattern 61:
Illuminate LED3.
Set steering angle to 0 degrees.
Set PWM value of right and left motors to 0% to initiate brake operation.
Go to next pattern.
Clear cnt1.
Tasks performed by
pattern 62:
If value of cnt1 is 100 or greater, go to next pattern.
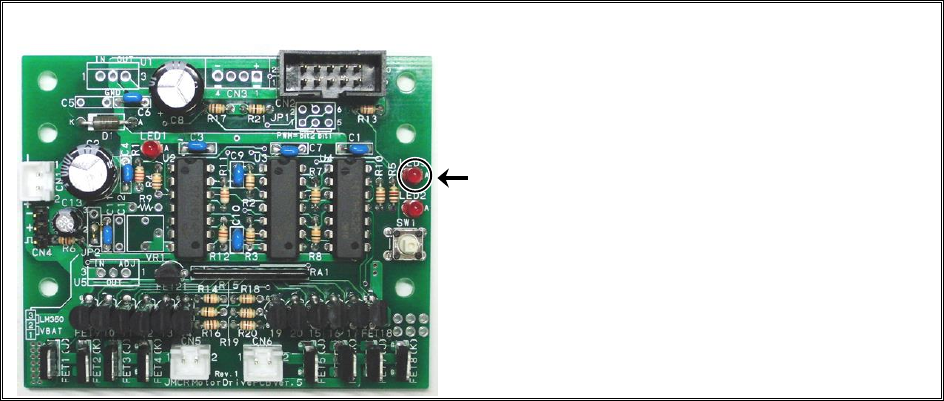
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
144
Hint
When a left half line is detected, one LED (the
top one) on the motor drive board lights.
No left half line has been detected if it does not
light.
If left half line detection is not working properly,
try unplugging the motor connectors and pushing
the MCU car forward by hand.
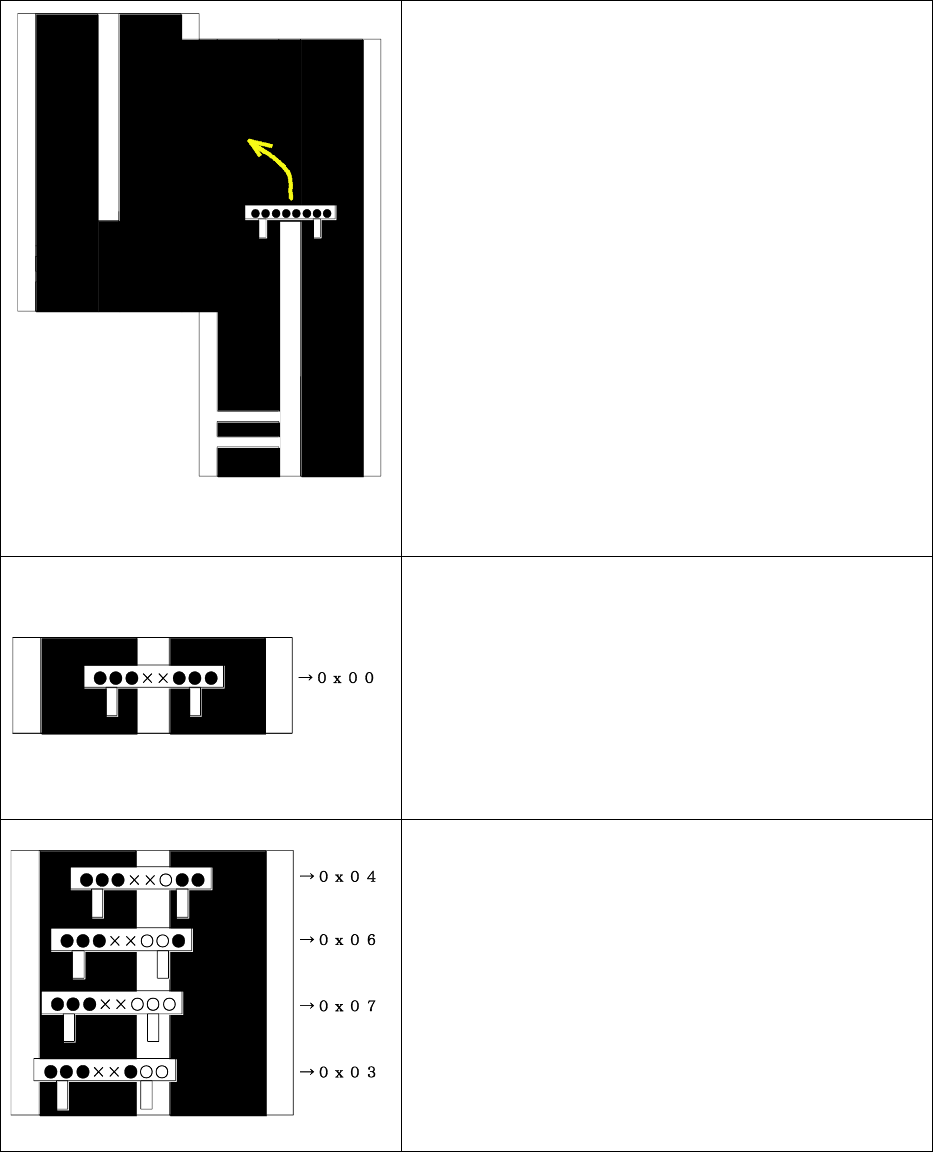
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
145
5.4.45. Pattern 63: Trace after Left Half Line
Patterns 61 and 62 perform brake operation for 0.1 seconds after detection of the first left half line, allowing the
MCU car to pass the second left half line. Pattern 63 continues the processing after this.
The MCU car is past the left half lines, so the next task is detecting the end of the centre line. In addition, the
MCU car must continue to trace the straight section of track that leads to the end of the centre line, so normal trace
operation is necessary.
We envision the present situation as shown in the following figures:
0x00
(Checking with all 8 sensors)
After the left half line ends, the state of the eight sensors is 0x00, as
shown in the figure at left. When this state is detected, the MCU car
starts turning to the left. For a left turn, we would expect that the left
motor speed should be lower and the right motor speed higher. As for
the actual percentages, these will differ depending on factors such as
the speed of the MCU car, wheel slippage, and the response speed of
the servo. We’ll have to see what happens when we try it out with the
actual MCU car. For the time being, we’ll use following settings,
which can be modified later based on running tests.
Steering angle: –15 degrees
Left motor: 31%, Right motor: 40%
Afterward, go to pattern 64.
When proceeding straight ahead, the sensor state is 0x00. The
software judges a sensor state of 0x00 as indicating straight ahead.
There can be no doubt that the steering angle must be straight forward.
The problem is the PWM values of the motors. The speed associated
with a particular value can only be determined in an actual test run.
The speed must be sufficiently low that the MCU car can negotiate the
turn when the end of the centre line is encountered. For the time being,
we’ll use a setting 40% for both motors. This can be fine tuned later
when doing test runs. The settings can be summarized as follows:
Steering angle: 0 degrees
Left motor: 40%, Right motor: 40%
Let’s assume the MCU car has drifted left of centre. As little by little
the MCU car drifts farther left of centre, the four resulting sensor
states are as shown in the figure at left. Additional sensor states are
possible when the MCU car is even farther left of centre, but we will
not add more sensor states because we know that the section of track
following the right half lines will be straight.
Since the MCU car is left of centre, it is necessary to turn the steering
wheel to the right. If the amount of turn is too small and the amount of
drift is large, the MCU car will be unable to return to the centre. If the
amount of turn is too large, it will overshoot the centre and the car will
end up zigzagging right and left. Fine adjusting the angle to precisely
the right value is difficult. For the time being, we will use a setting of
8 degrees. The settings can be summarized as follows:
Steering angle: 8 degrees
Left motor: 40%, Right motor: 35%
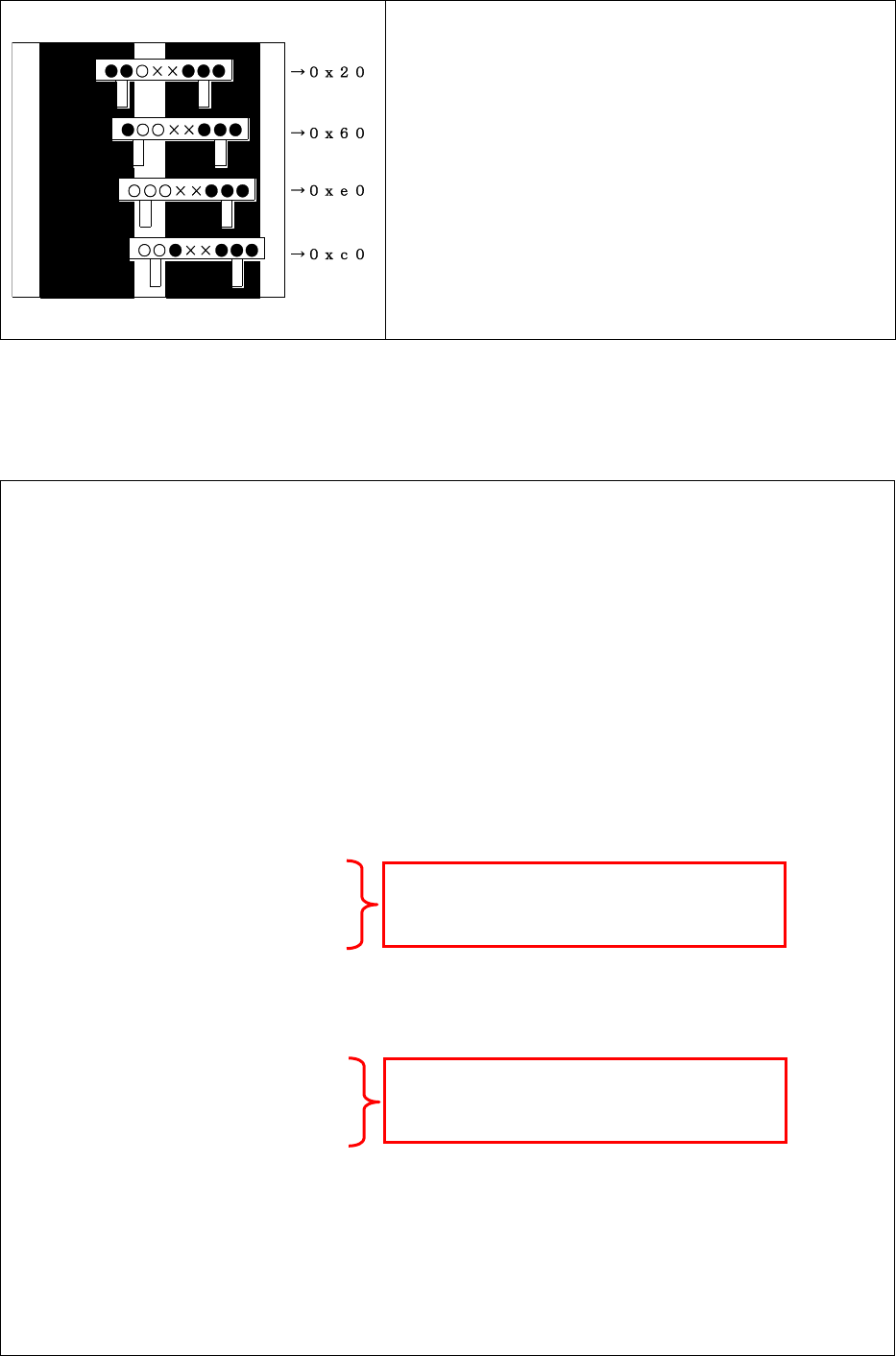
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
146
Let’s assume the MCU car has drifted right of centre. As little by little
the MCU car drifts farther right of centre, the four resulting sensor
states are as shown in the figure at left. Additional sensor states are
possible when the MCU car is even farther right of centre, but we will
not add more sensor states because we know that the section of track
following the right half lines will be straight.
Since the MCU car is right of centre, it is necessary to turn the
steering wheel to the left. If the amount of turn is too small and the
amount of drift is large, the MCU car will be unable to return to the
centre. If the amount of turn is too large, it will overshoot the centre
and the car will end up zigzagging left and right. Fine adjusting the
angle to precisely the right value is difficult. For the time being, we
will use a setting of –8 degrees. The settings can be summarized as
follows:
Steering angle: –8 degrees
Left motor: 35%, Right motor: 40%
It is important to remember that all eight sensors are used for detecting the end of the centre line. For other
checking, MASK3_3 masking is applied and the two middle sensors are not used.
The finished program code is as follows:
428 : case 63:
429 : /* Trace, lane change after left half line detection */
430 : if( sensor_inp(MASK4_4) == 0x00 ) {
431 : handle( -15 );
432 : motor( 31 ,40 );
433 : pattern = 64;
434 : cnt1 = 0;
435 : break;
436 : }
437 : switch( sensor_inp(MASK3_3) ) {
438 : case 0x00:
439 : /* Center -> straight */
440 : handle( 0 );
441 : motor( 40 ,40 );
442 : break;
443 : case 0x04:
444 : case 0x06:
445 : case 0x07:
446 : case 0x03:
447 : /* Left of center -> turn to right */
448 : handle( 8 );
449 : motor( 40 ,35 );
450 : break;
451 : case 0x20:
452 : case 0x60:
453 : case 0xe0:
454 : case 0xc0:
455 : /* Right of center -> turn to left */
456 : handle( -8 );
457 : motor( 35 ,40 );
458 : break;
459 : default:
460 : break;
461 : }
462 : break;
The meaning of these consecutive case statements
is: “when 0x04 or 0x06 or 0x07 or 0x03 is the
case.”
The meaning of these consecutive case statements
is: “when 0x20 or 0x60 or 0xe0 or 0xc0 is the
case.”
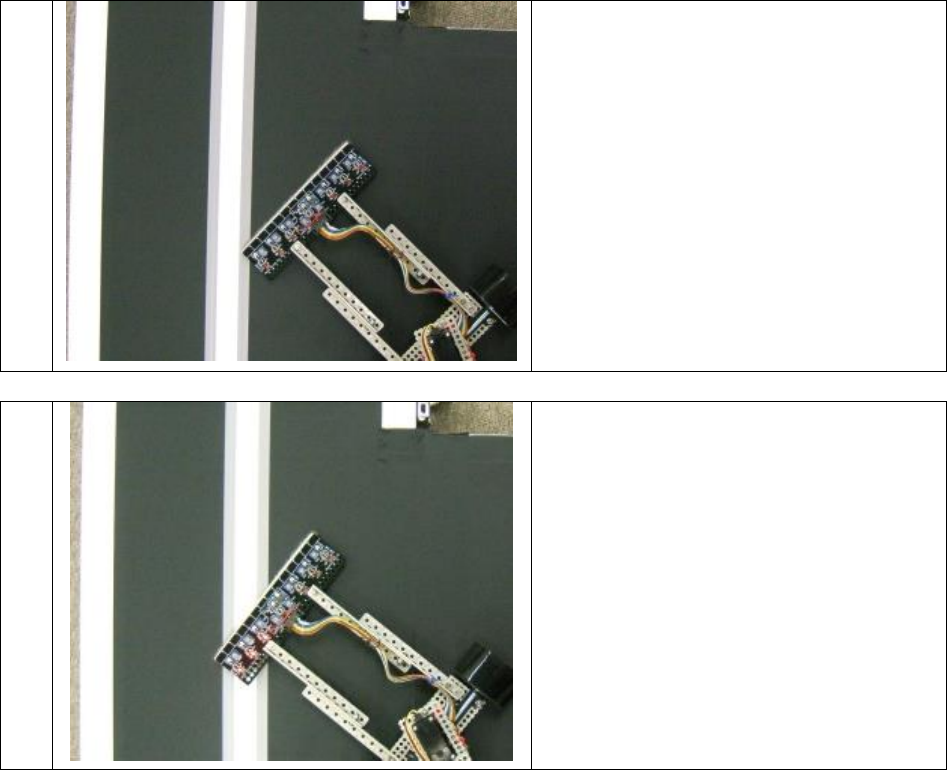
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
147
5.4.46. Pattern 64: Left Lane Change End Check
Pattern 63 determines that a left lane change should start when the eight sensors have a value of 0x00 and turns to
the left with a turn angle of 15 degrees. The question then is how long the turn to the left should continue. This
portion of the program code is designated as pattern 64.
Pattern 64 causes the MCU car to proceed to the new centre line on the left. Once the new centre line is found, it
must trace that centre line. This will complete the processing for the left lane change operation. Now, what sort of
sensor status should be interpreted as the presence of the new centre line?
1
Proceeding while turning. Immediately before
detection of new centre line.
2
Leftmost sensors detect centre line. The sensor
state is 1110 0000.
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
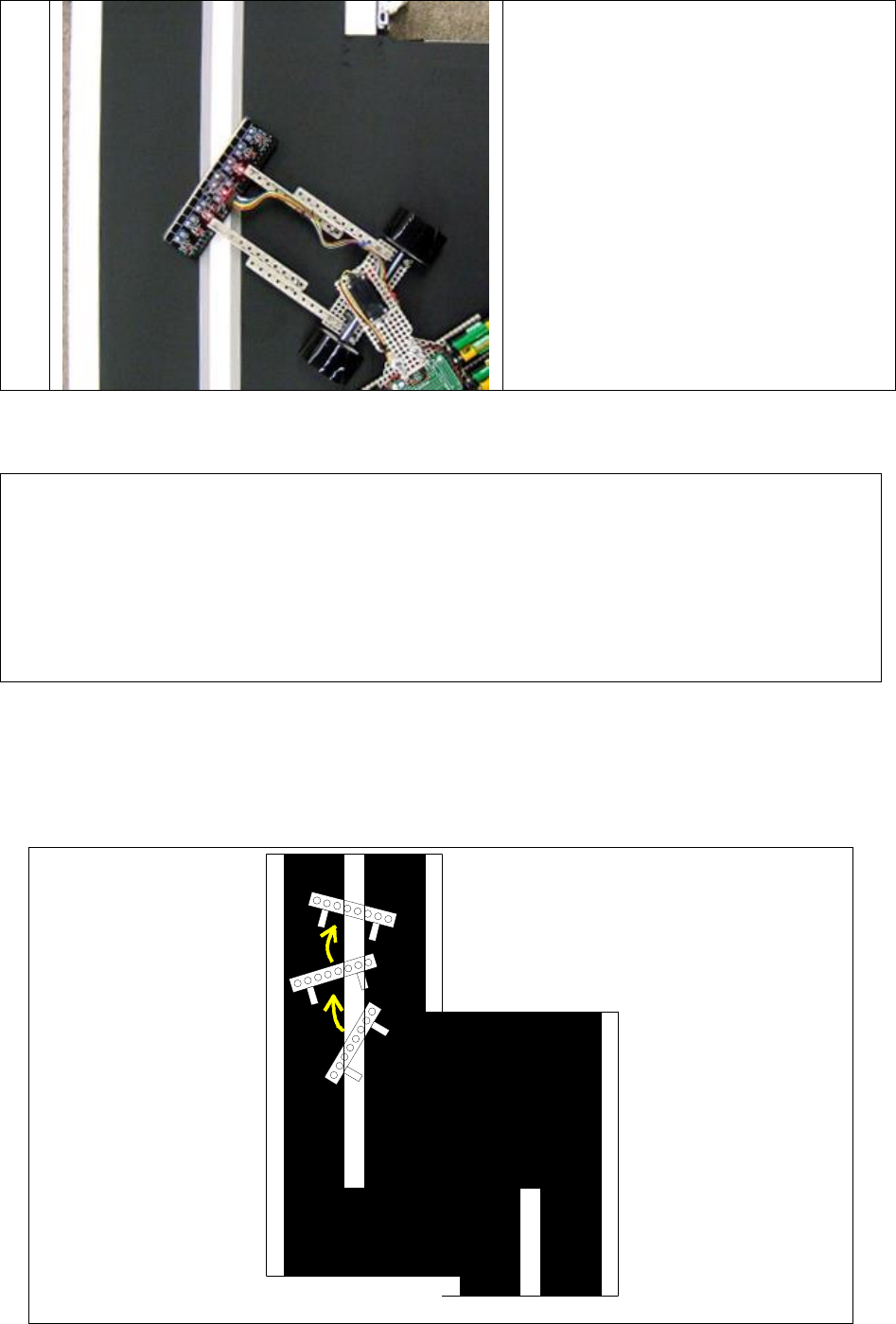
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
148
3
Middle sensors detect centre line. The sensor
state is 0011 1100.
At this point the new centre line should be
detected and operation reverts to normal tracing.
We will write the program code so that control
passes to pattern 11, normal tracing, when the
sensor state is 0011 1100, while checking with
all eight sensors.
This is the resulting code, based on this thinking:
464 : case 64:
465 : /* Left lane change end check */
466 : if( sensor_inp( MASK4_4 ) == 0x3c ) {
467 : led_out( 0x0 );
468 : pattern = 11;
469 : cnt1 = 0;
470 : }
471 : break;
An LED was illuminated when the left half line was detected, so after turning off the LED in line 467 control is
passed to pattern 11. The situation after 0x3c is detected and control returns to pattern 11 is shown below. The
MCU car is travelling at a leftward angle when it encounters the centre line, so processing by pattern 11 brings it
back to the centre of the track.
0
0
1
1
1
1
0
0
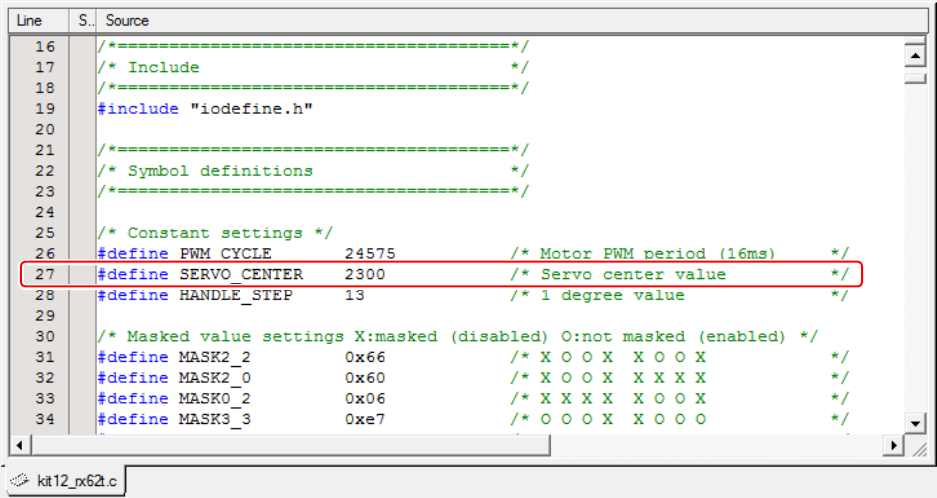
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
149
6. Adjusting the Servo Centre and Maximum Turn Angle
6.1. Outline
After writing kit12_rx62t to the MCU and powering on the MCU car, the steering angle will not be exactly 0
degrees (straight ahead) in most cases. Just as each person’s fingerprints are different from those of everyone else,
each servo has a different numerical value that translates into “straight ahead.”
This section explains how to adjust the servo centre. The servo centre value appears on line 27 of kit12_rx62t.c
To adjust it so that the servo is centred correctly, it is generally necessary to repeat the following steps several
times:
Adjust the value based on the amount of skew (13 is equivalent to 1 degree, and the servo position moves to
the left when the value is decreased and to the right when it is increased).
Build the program.
Write the program to the RMC-RX62T board.
Check the 0-degree position.
Adjust again if it is not straight ahead.
Therefore connect a PC and a MCU car with communications cable.
Adjusting is OK to do following steps.
・Adjust the centre of the servo and find the value of 0 degree while using the keyboard of the PC.
・Write the value to the program.
・Build the program
・Write the program to the RMC-RX62T board.
It is straighter than before. This section explains how to adjust the following using the keyboard of the PC.
① Adjust the value of the servo centre simply (implementation at sioservo1_62t project).
② Find the right maximum turning angle: how many degrees the car can turn to the right
(implementation at sioservo2_62t project).
③ Find the left maximum turning angle how many degrees the car can turn to the left (implementation at
sioservo2_62t project).

MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
150
6.2. Install the communication program Tera Term
Perform communication with MCU using free communication soft Tera Term. This section explains how to install
it. If you already have installed it, there is no need to install again.
Note: Continue with step 3, if you have CD-R for this seminar.
1
First download the software.
Open the following URL in a Web browser
http://www.forest.impress.co.jp/library/softwa
re/utf8teraterm/
Note: Download from the site named
“windows forest”, or a similar site.
2
Click DOWNLOAD and the download the
file.
3
Launch the teraterm-4.79.exe.
Please execute "teraterm-4.79.exe" in the
following folder, if you have CD-R for this
seminar.
"CD-R drive:¥01-Softwares"
Note: The number 4.79 is different
depending on the version.
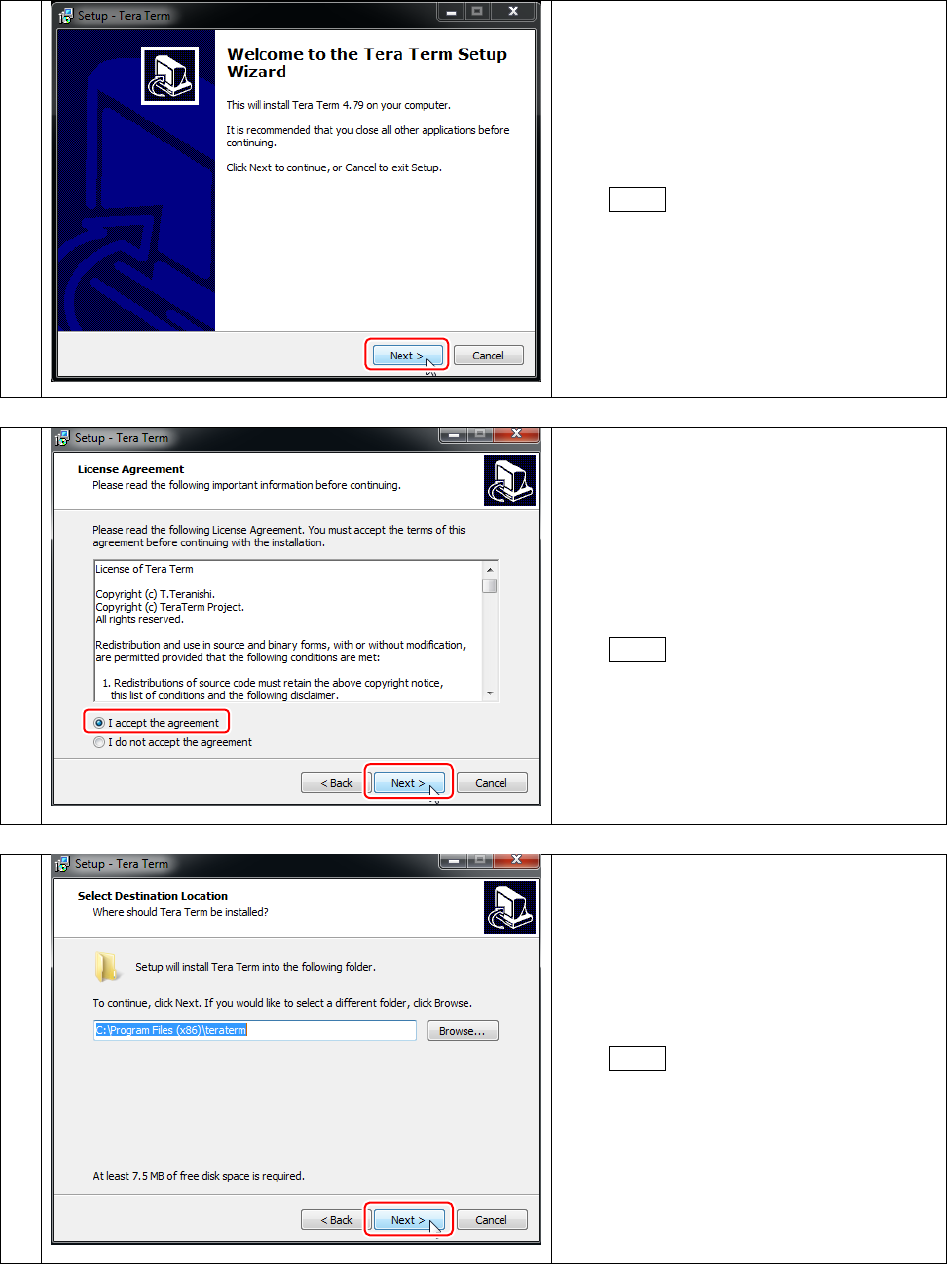
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
151
4
Click Next >.
5
Click accept after reading the agreement.
Click Next >.
6
Click Next >.
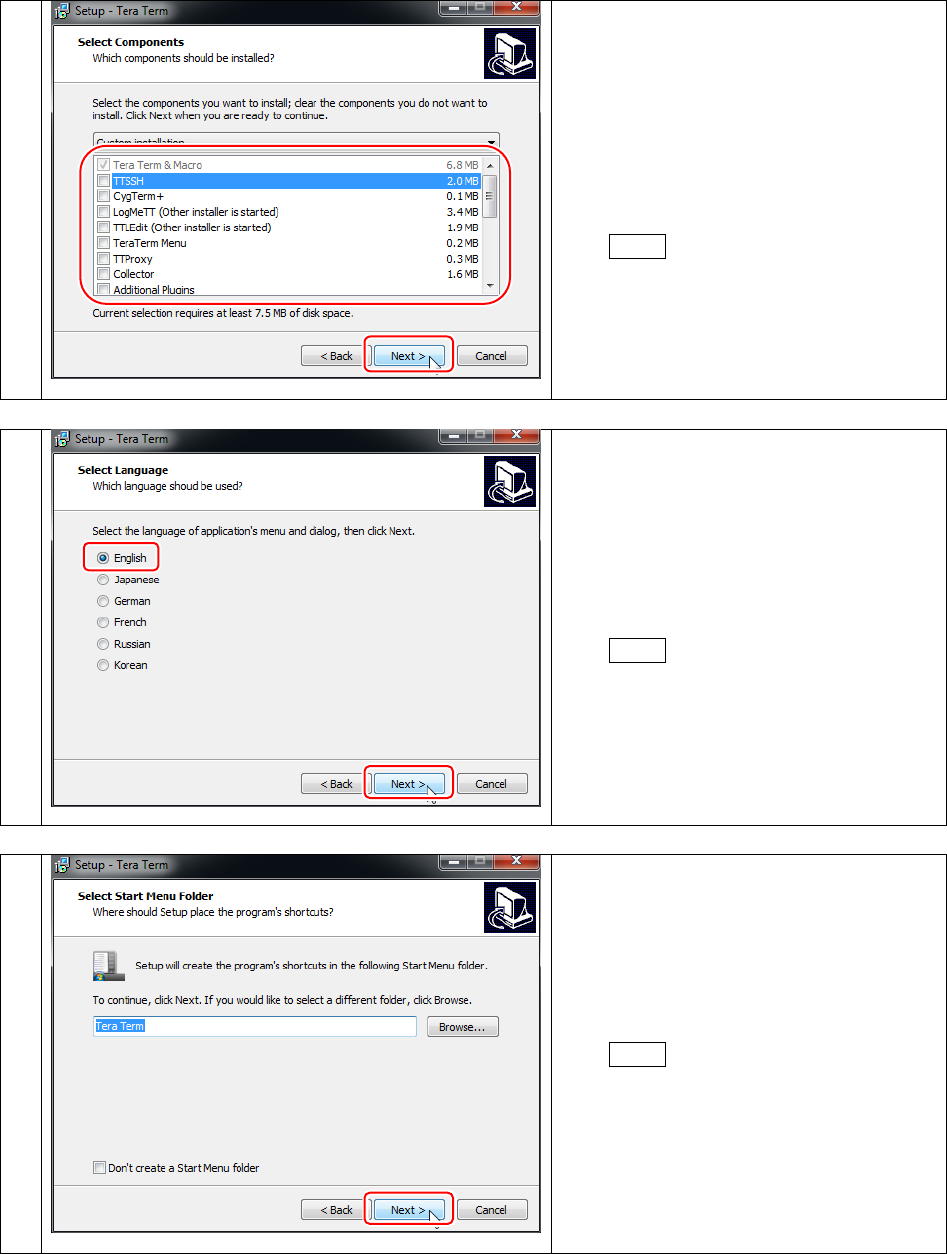
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
152
7
Choosing the components.
Uncheck all of the extra components, they are
not needed.
Click Next >.
8
Select English.
Click Next >.
9
Click Next >.
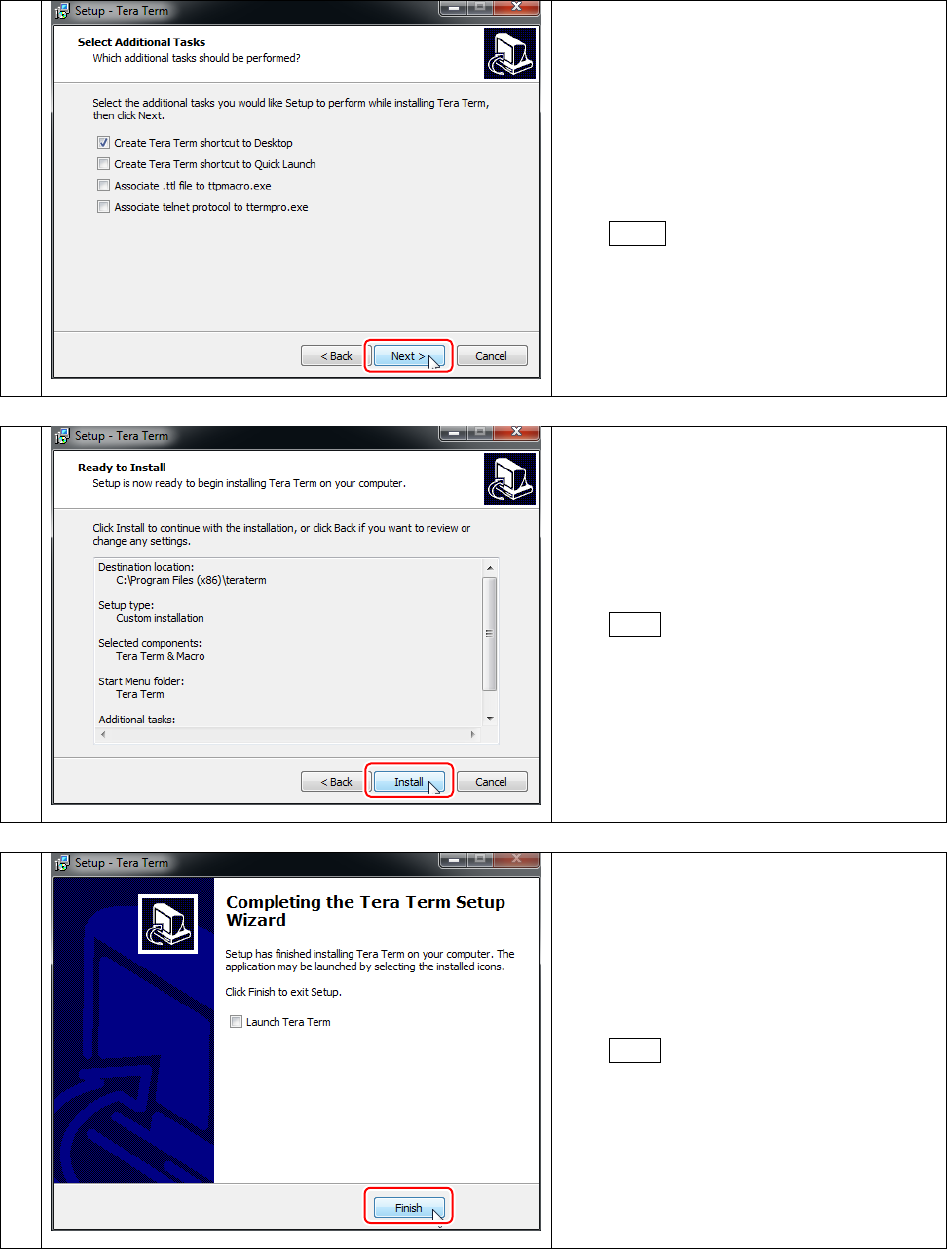
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
153
10
Select the additional task (no need to change
normally).
Click Next >.
11
Click Install.
12
Click Finish to close the installer.
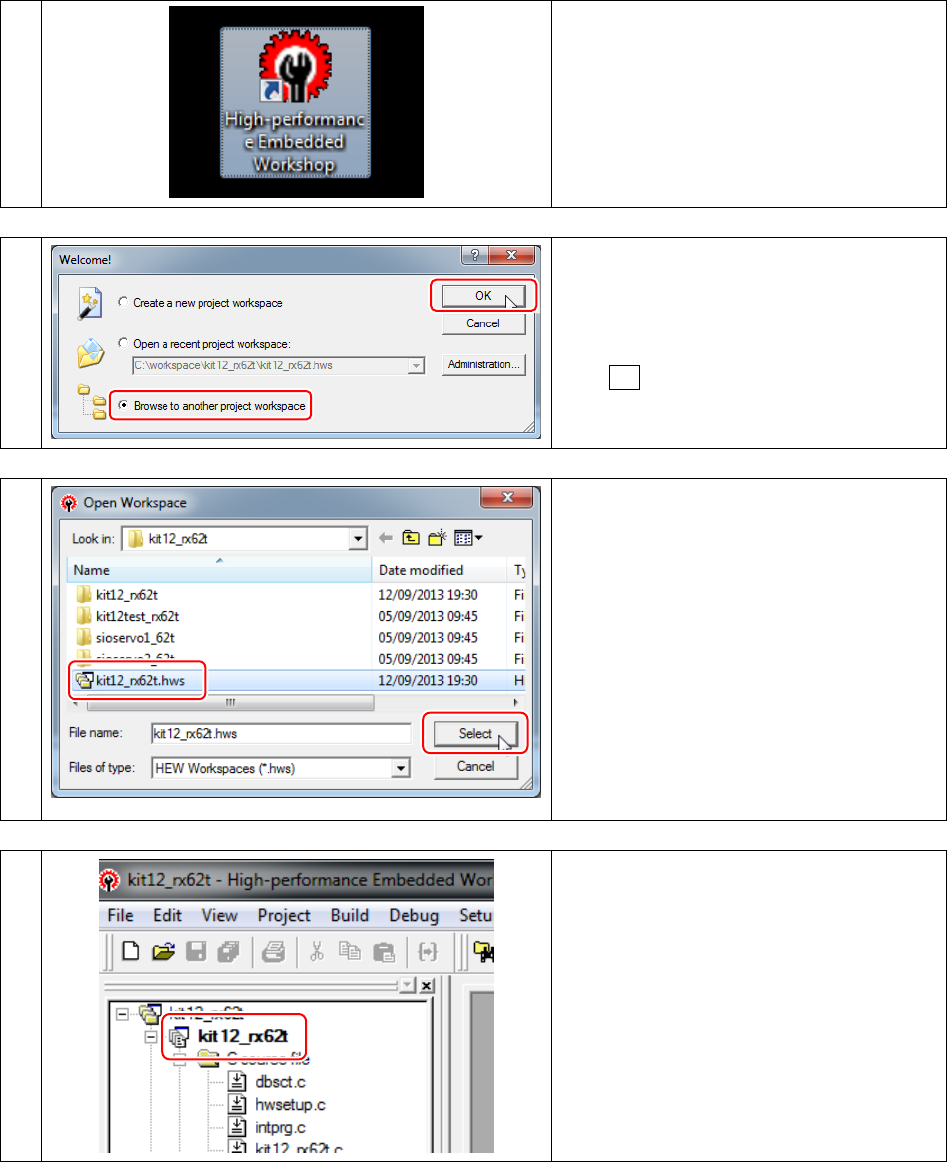
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
154
6.3. Adjusting the Servo Centre
1
Launch the Renesas integrated development
environment.
2
Select Browse to another project
workspace.
Click OK.
3
Select kit12_rx62t.hws from the
C:¥Workspace¥kit12_rx62t folder.
4
The kit12_rx62t workspace opens.
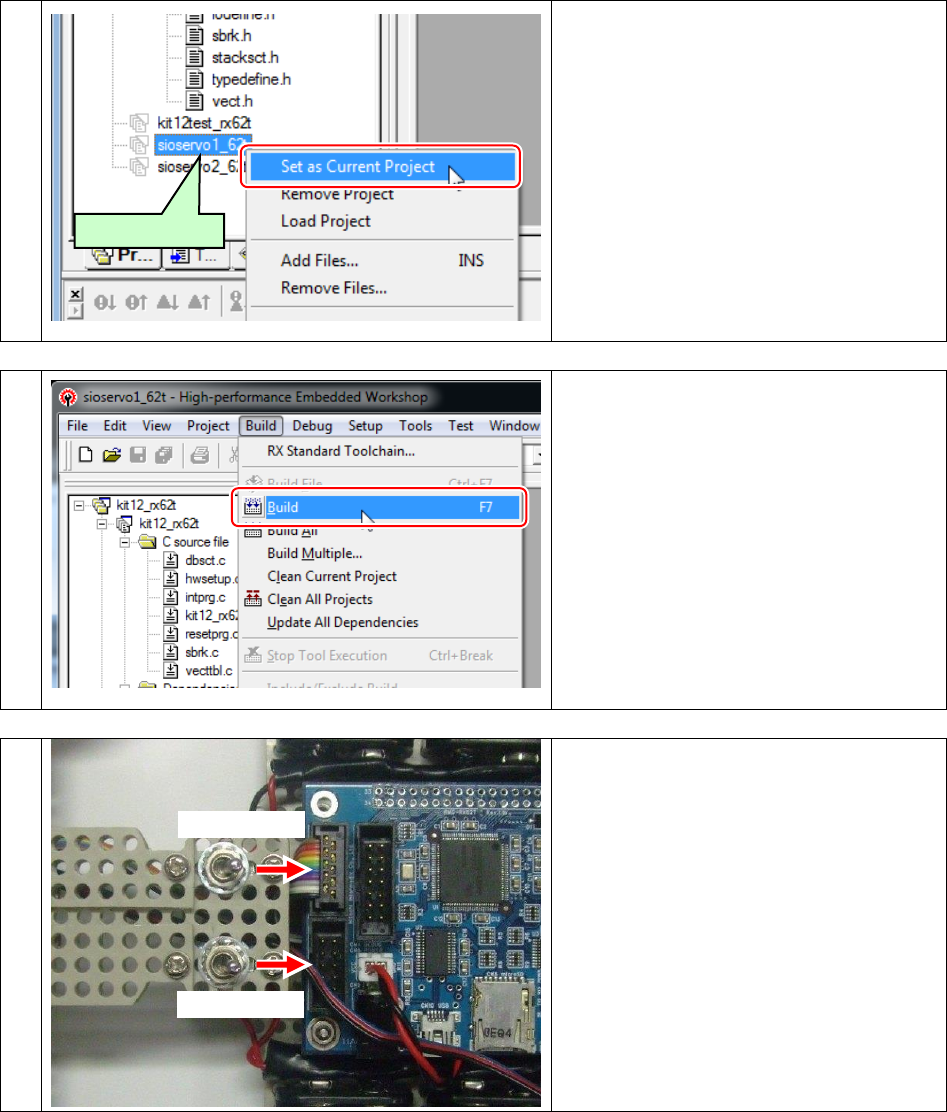
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
155
5
Set project sioservo1_62t as the current
project.
6
Select Build from the Build menu.
This generates a MOT file.
7
Move the two power switches of the MCU car
to the off position.
Switch OFF
Switch OFF
sioservo1_62t
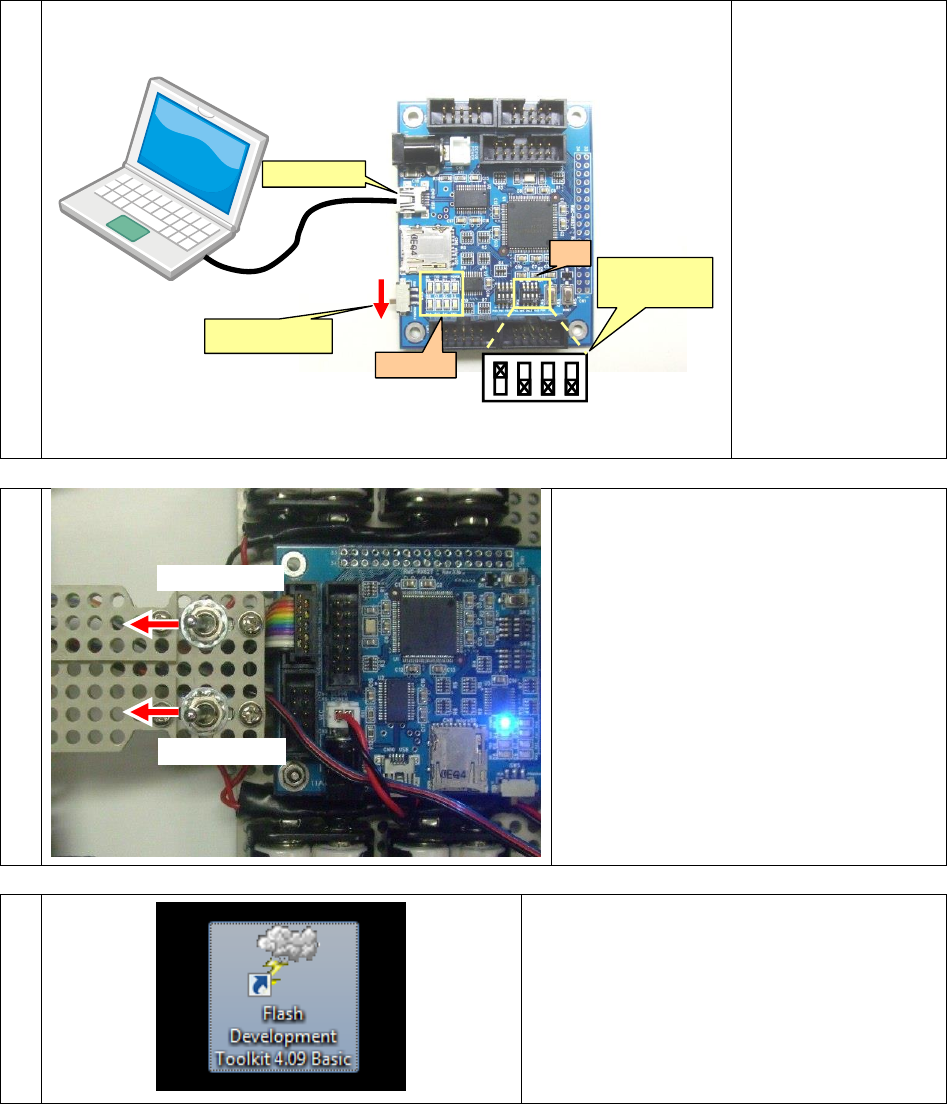
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
156
8
USB cable
[3] program position
[1] Connect
LED lights
SW3
POR
RXD
EMLE
MDE
OFF
ON
[2] Change mode of
RXD and EMLE
[1] Connect PC and
MCU board by USB
cable.
[2] Turn on RXD and
EMLE of SW3.
[3] Turn SW5 to
PROGRAM.
SW5 must change
states while the
power is off.
9
Move the two power switches of the MCU car
to the on position.
10
Launch the Flash Development Toolkit 4.09
Basic.
Switch ON
Switch ON
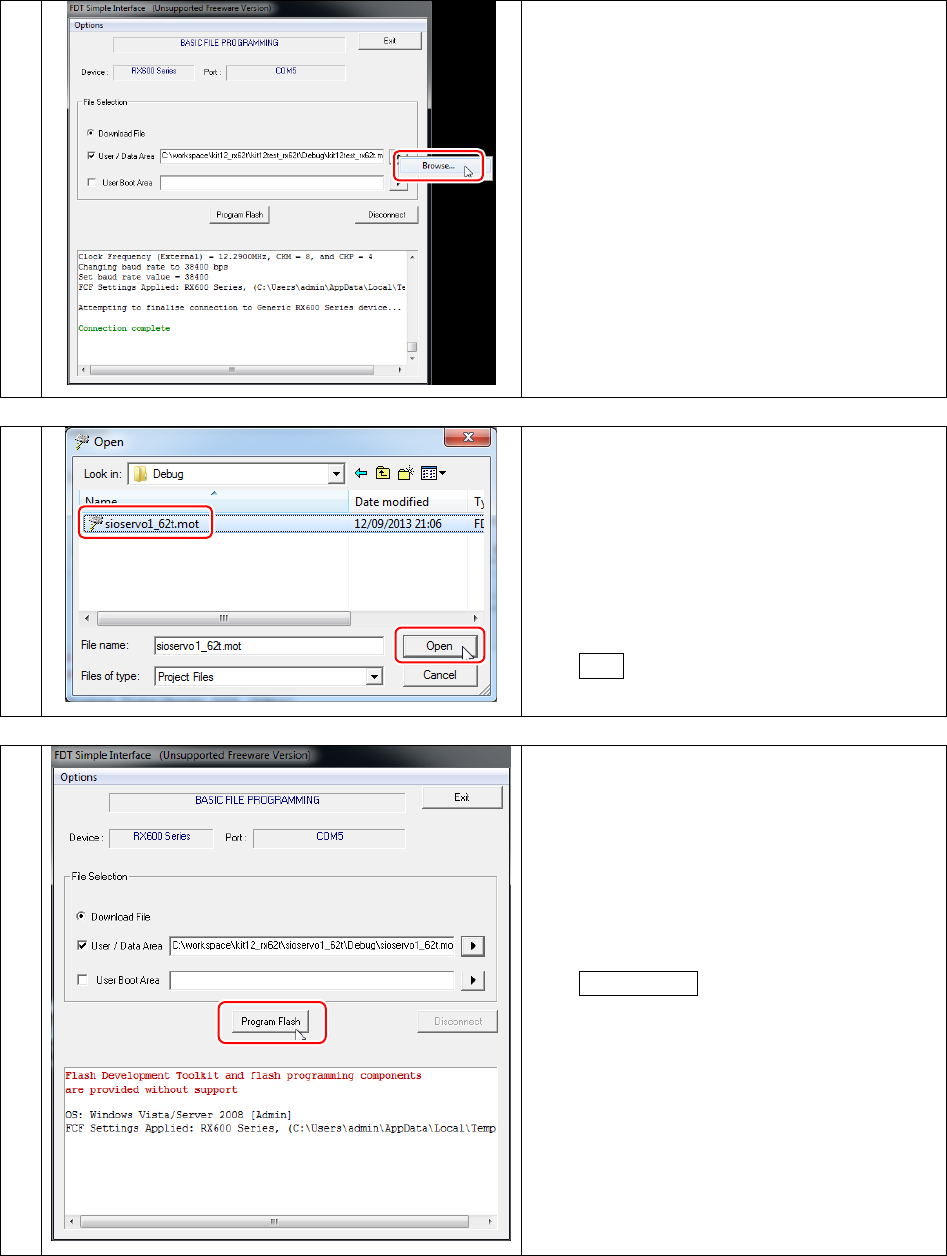
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
157
11
Check User/Data Area.
Then click the triangle on the far right and click
Browse.
12
Open the sioservo1_62t.mot file.
The sioservo1_62t.mot file is found in the below
folder.
"C:¥WorkSpace¥kit12_rx62t¥sioservo1_62t¥Deb
ug"
Click Open.
13
Click Program Flash.
Then program writing will begin.
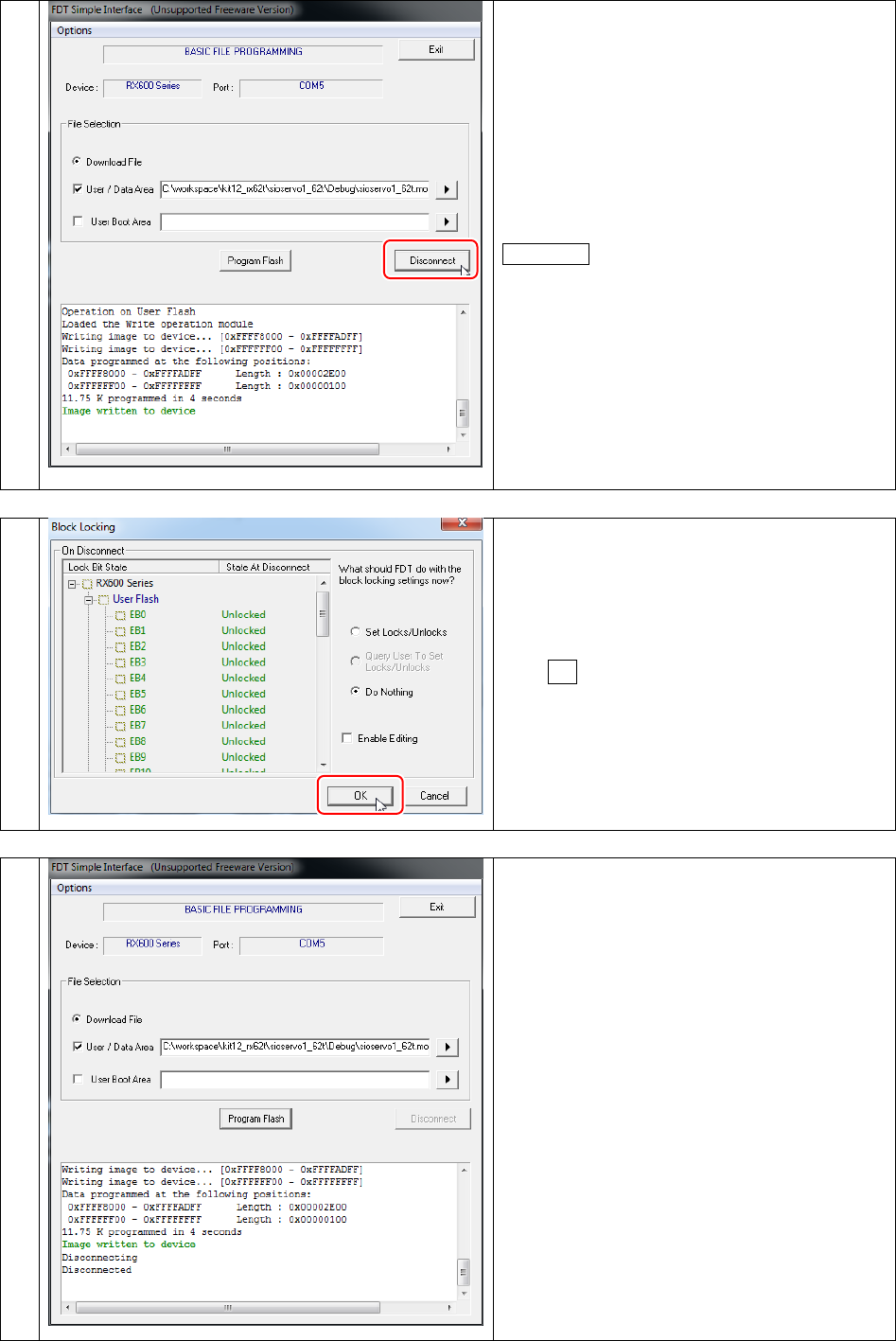
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
158
14
After programming has finished, click
Disconnect.
15
Click OK.
16
Program writing completed.
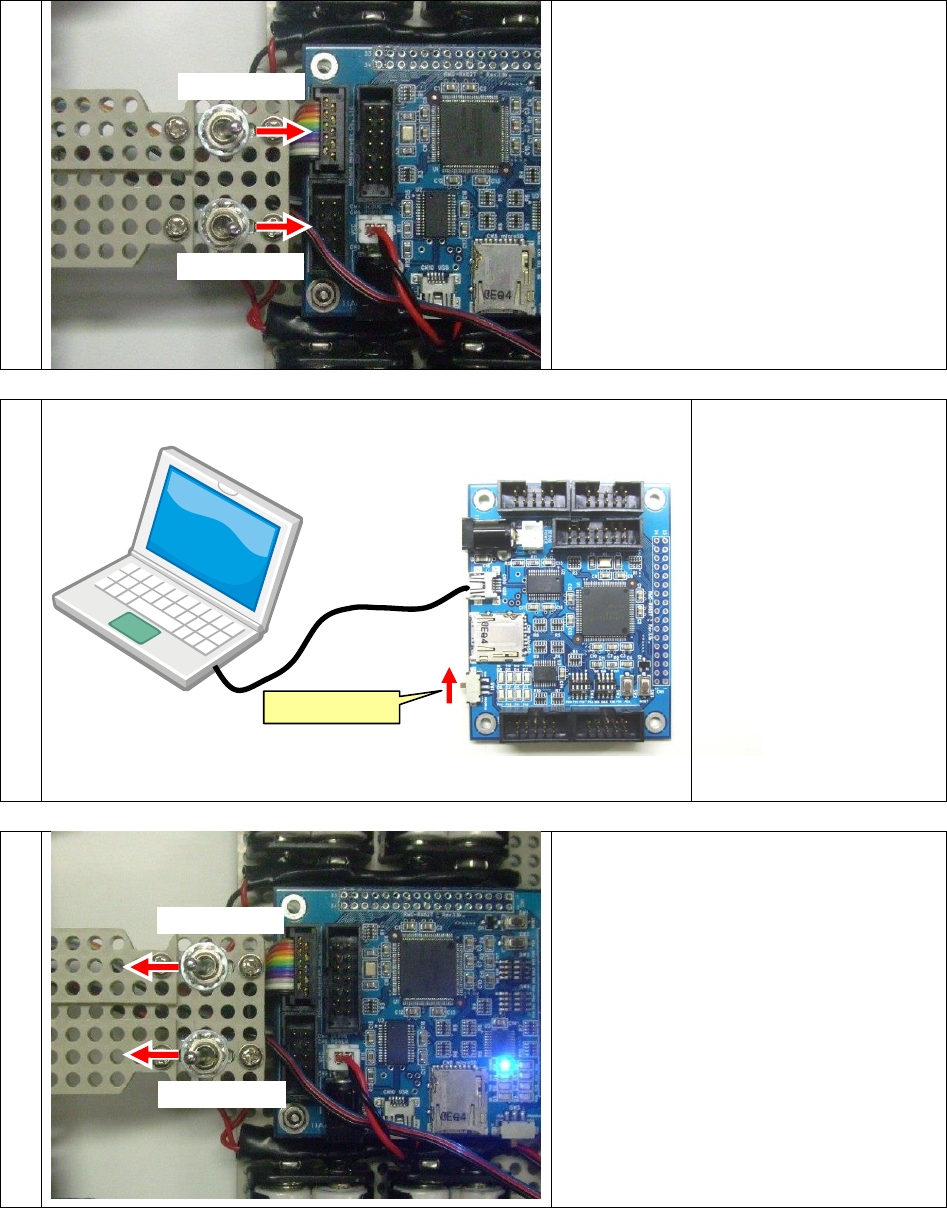
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
159
17
Move the two power switches of the MCU car
to the off position.
18
USB cable
[1] Run position
[1] Turn SW5 to RUN.
Note: keep on having
connected the USB cable.
19
Move the two power switches of the MCU car
to the on position.
Switch ON
Switch ON
Switch OFF
Switch OFF
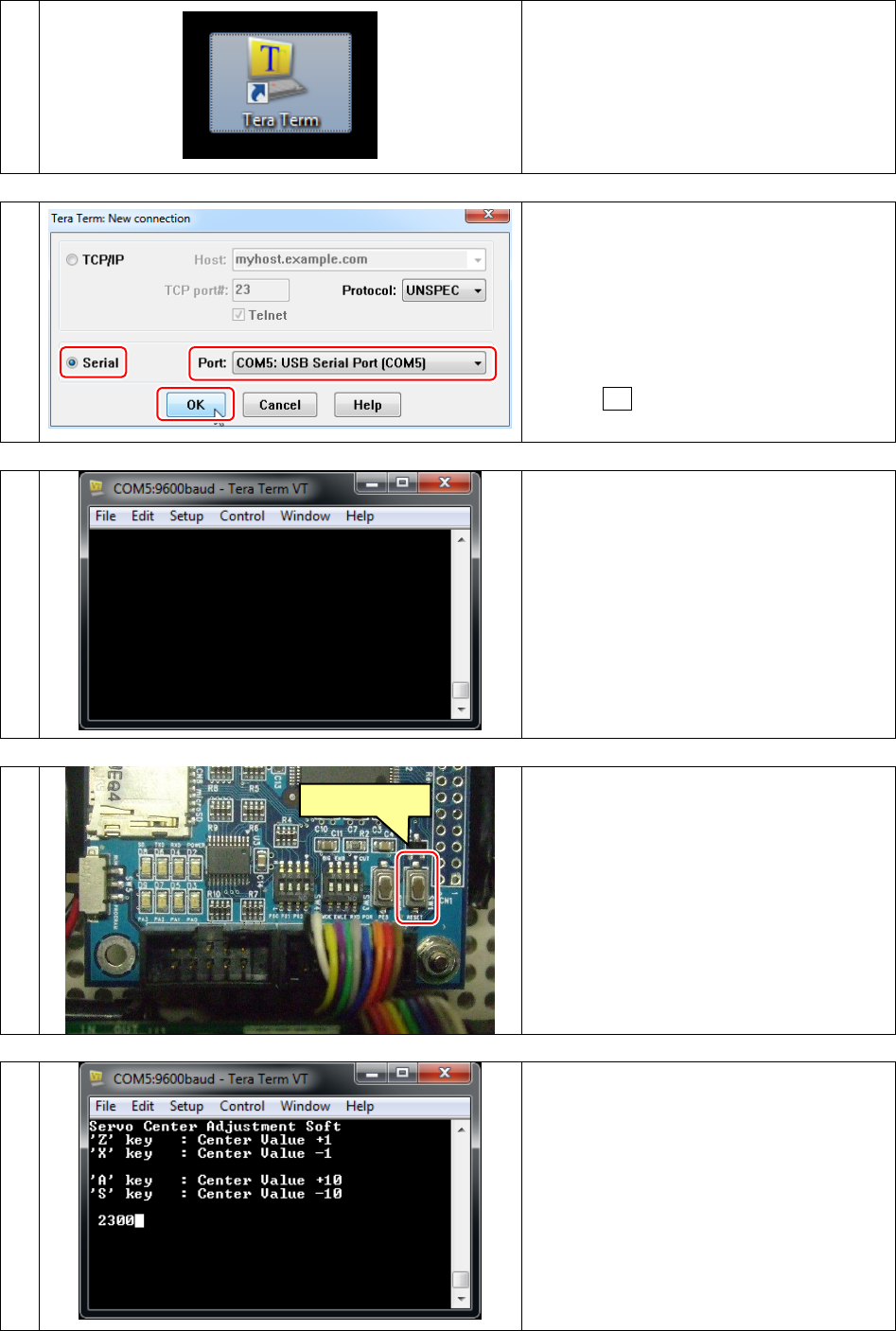
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
160
20
Launch the Tera Term.
21
[1] A new connection window appears.
Select Serial.
[2] For Port select the number with the USB
Serial Port indication or the number of
the currently connected serial port.
[3] Click OK.
22
The Tera Term terminal window appears.
23
Push the reset button of RMC-RX62T board.
24
A message like the one shown on the left
appears on the screen when the MCU car is
powered on.
The number 2300 at the bottom is the current
servo centre value.
1
2
3
Reset button
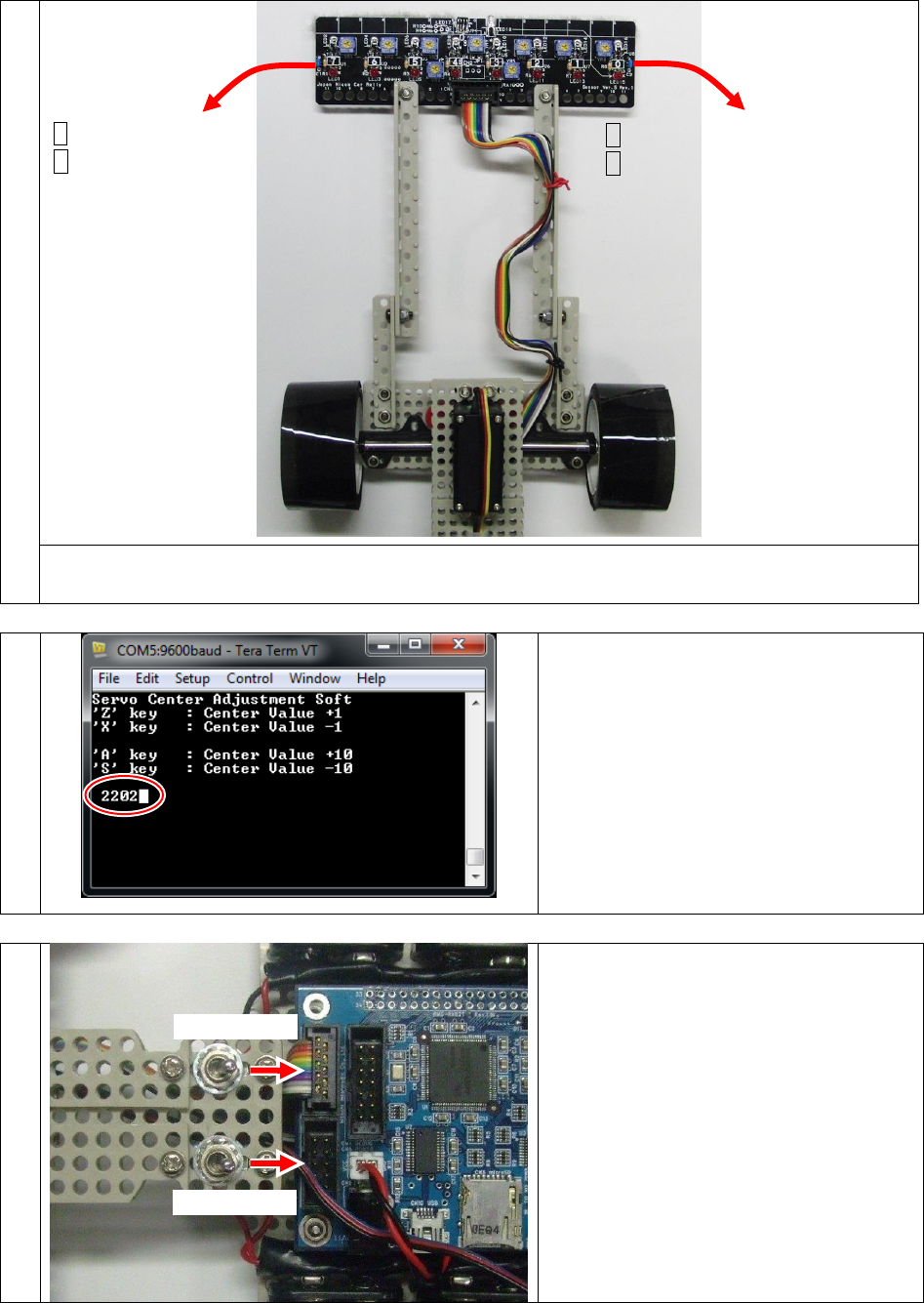
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
161
25
Pressing and holding down the A, S, Z, or X key causes the servo to move as indicated. Use the keys to
adjust the servo angle so that it is pointed straight.
26
Once the servo has been adjusted to the
straight-ahead position, check the number
displayed in the Tera Term screen. In this
case, it is 2202. This is the MCU car’s servo
centre (SERVO_CENTER) value. Write it
down for later reference.
Next, we will proceed to the sioservo2_62t
project.
Close Tera Term.
27
Move the two power switches of the MCU car
to the off position.
Switch OFF
Switch OFF
A Key…Large amount to left
Z Key…Small amount to left
Note: Keep key depressed.
S Key…Large amount to right
X Key…Small amount to right
Note: Keep key depressed.
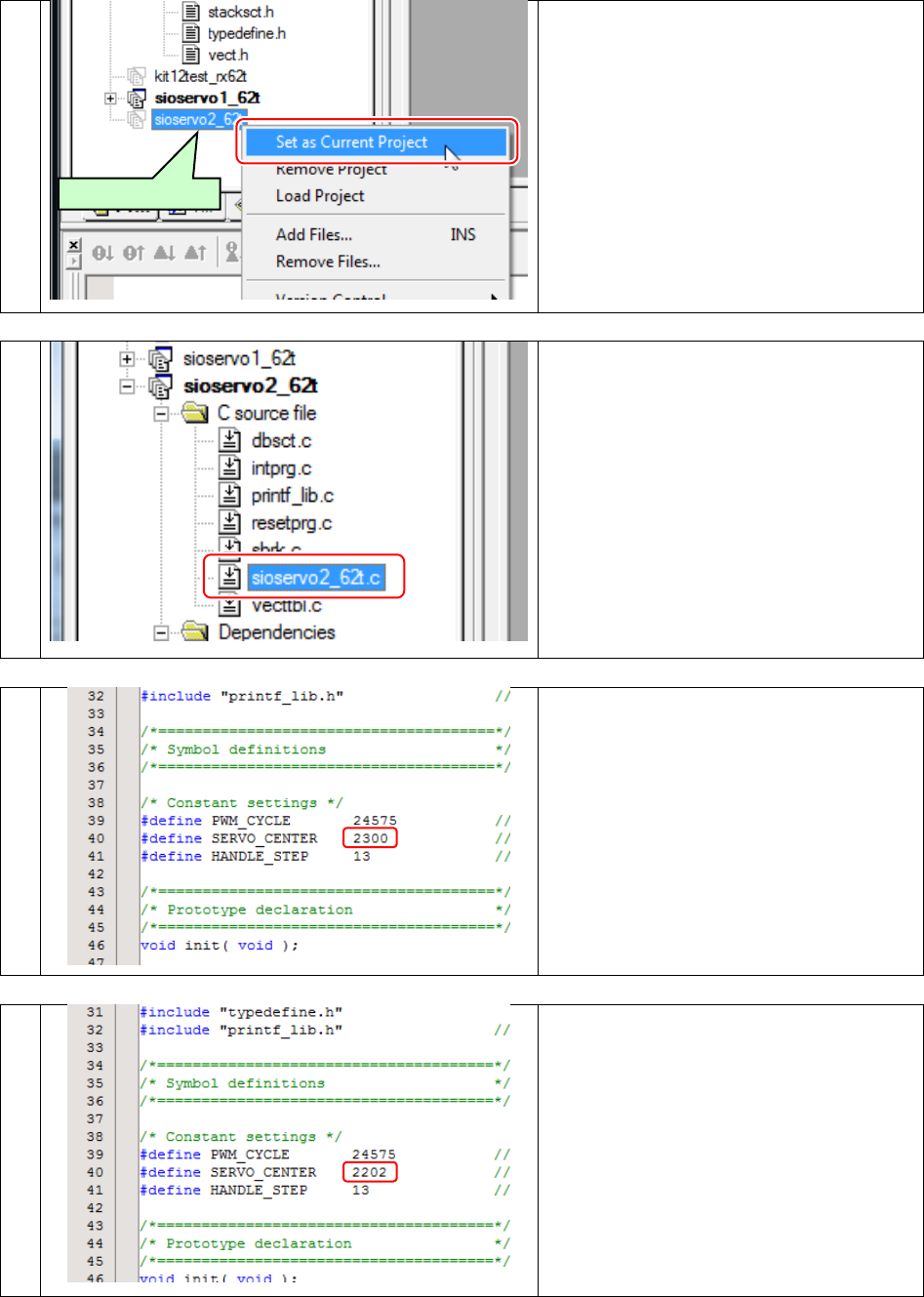
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
162
6.4. Determining the Maximum Turning Angle of the Servo
Next, we will determine the maximum turning angle of the servo.
1
Set sioservo2_62t as the current project.
2
Double click sioservo2_62t.c to open the
editor window.
3
Line 40 contains the following definition:
SERVO_CENTER 2300
4
Replace this value with the servo centre value
identified earlier. The screenshot shows a
value of 2202, as an example.
sioservo2_62t
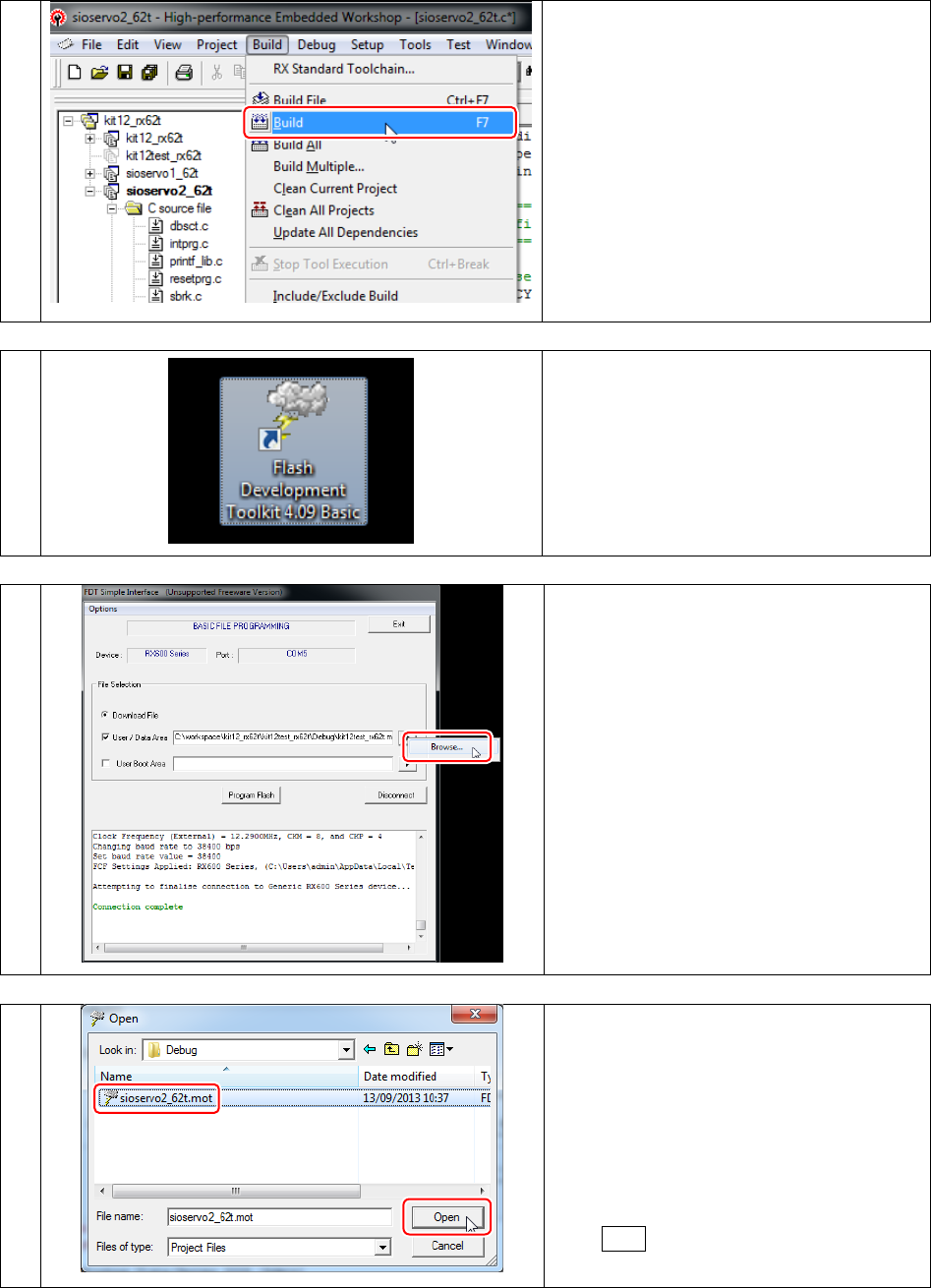
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
163
5
Select Build from the Build menu to generate
a MOT file.
6
Launch the Flash Development Toolkit 4.09
Basic.
7
Check User/Data Area.
Then click the triangle on the far right and
click Browse.
8
Open the sioservo2_62t.mot file.
The sioservo2_62t.mot file is found in the
below folder.
"C:¥WorkSpace¥kit12_rx62t¥sioservo2_62t¥
Debug"
Click Open.
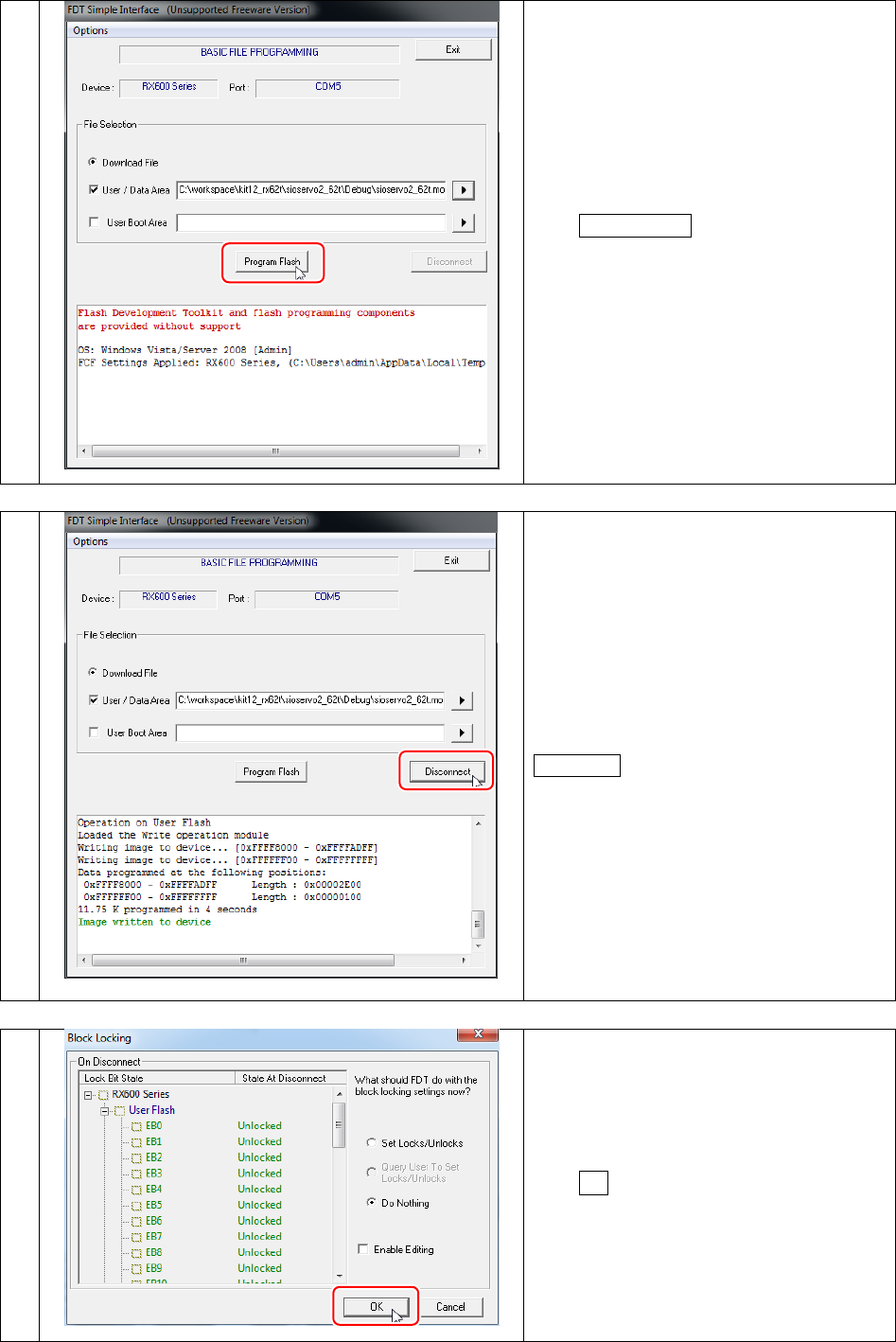
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
164
9
Click Program Flash.
Then program writing will begin.
10
After programming has finished, click
Disconnect.
11
Click OK.
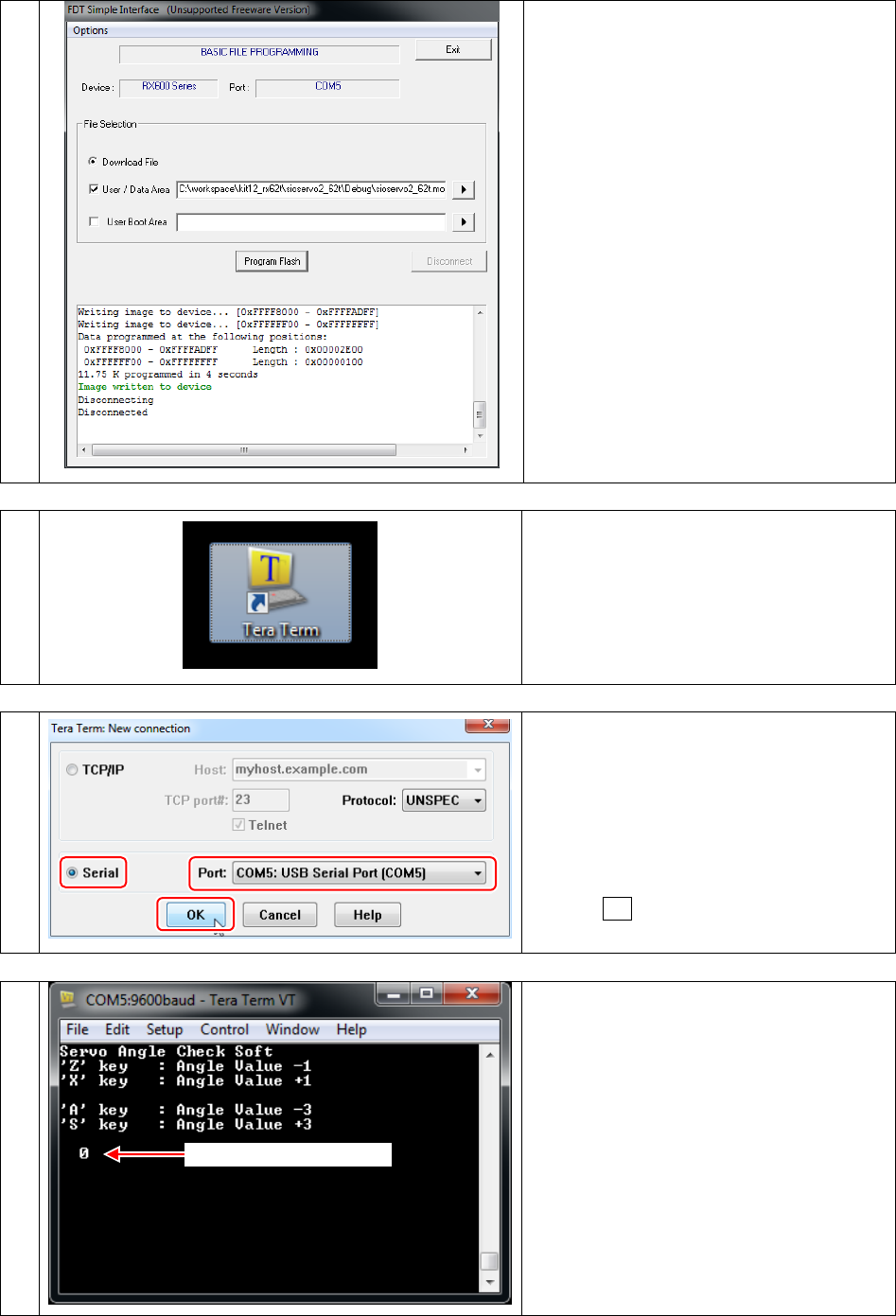
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
165
12
Program writing completed.
After program writing, following execute.
[1] Move the two power switches of the MCU
car to the off position.
[2] Turn SW5 to RUN.
Note: keep the USB cable connected.
13
[1] Switch on the two power switches of the
MCU car.
[2] Launch the Tera Term.
14
[1] A new connection window appears.
Select Serial.
[2] For Port select the number with the USB
Serial Port indication or the number of
the currently connected serial port.
[3] Click OK.
15
When you power on the MCU car, the
message shown at left is displayed. If this
message does not appear, check the cable
connection, the batteries of the MCU car, the
position of the write switch on the MCU
board, the number of the communication port,
and that the program you wrote to the MCU is
actually sioservo2_62t.mot from the project
sioservo2_62t.
1
2
3
Current angle is shown.
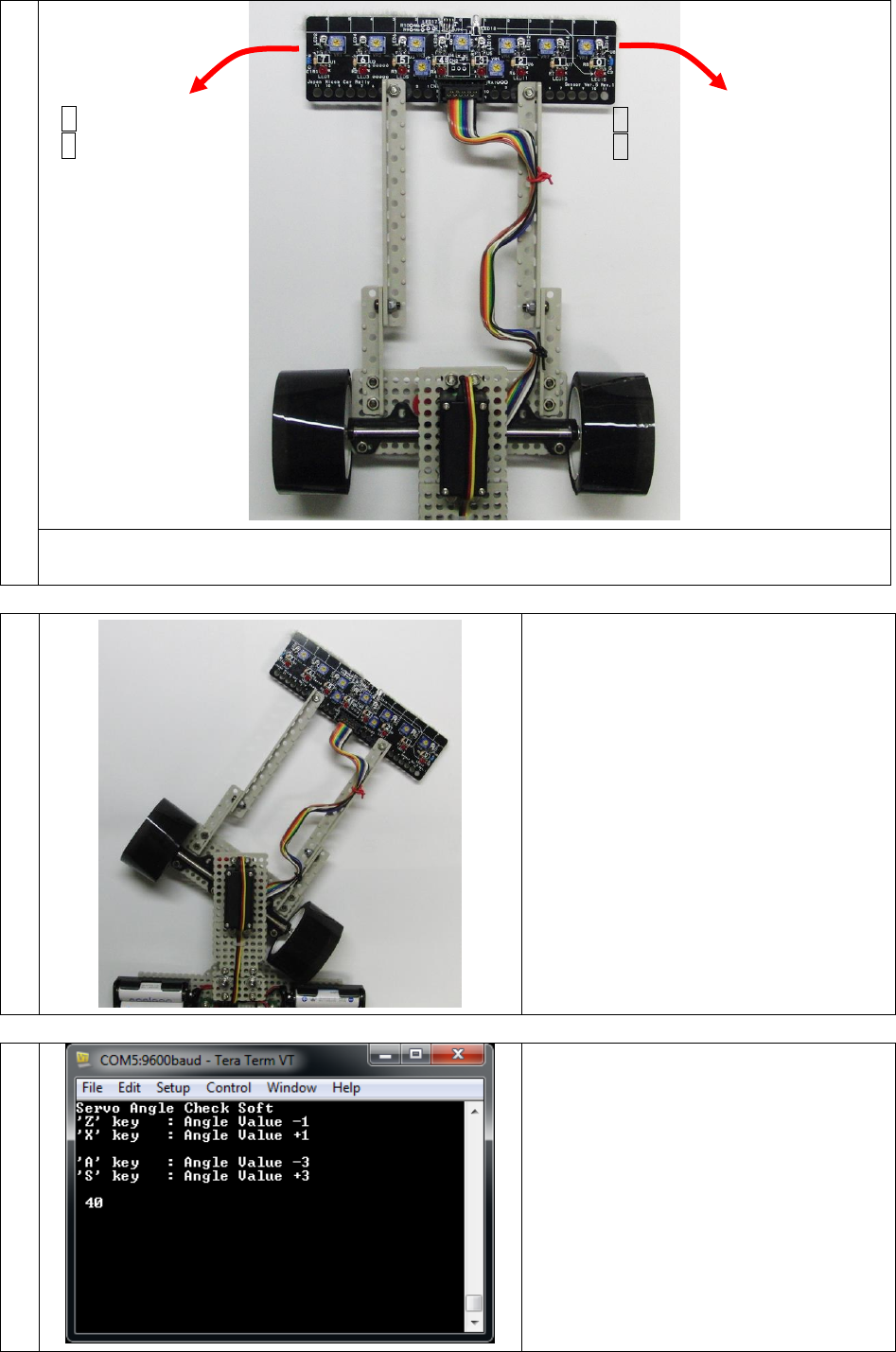
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
166
16
Pressing the A, S, Z, or X key causes the servo to move as indicated. See how far to the right you can turn
the steering wheel. Then do the same for turning to the left.
17
First, use the S and X keys to find the limit on
the right. Confirm that the wheels really turn
when you press the keys. If the wheel is about
to touch the chassis, press the Z key to reduce
the turn angle by a small amount.
18
Tera Term displays a numerical value. This is
the number of degrees to the right the steering
wheel is currently turned. In this case, the
turn angle is 40 degrees.
However, that the maximum right turn
angle is 40 does not necessarily mean that
the maximum left turn angle is –40. Make
sure to test both right and left.
A Key…3 degrees to left
Z Key…1 degree to left
S Key…3 degrees to right
X Key…1 degree to right
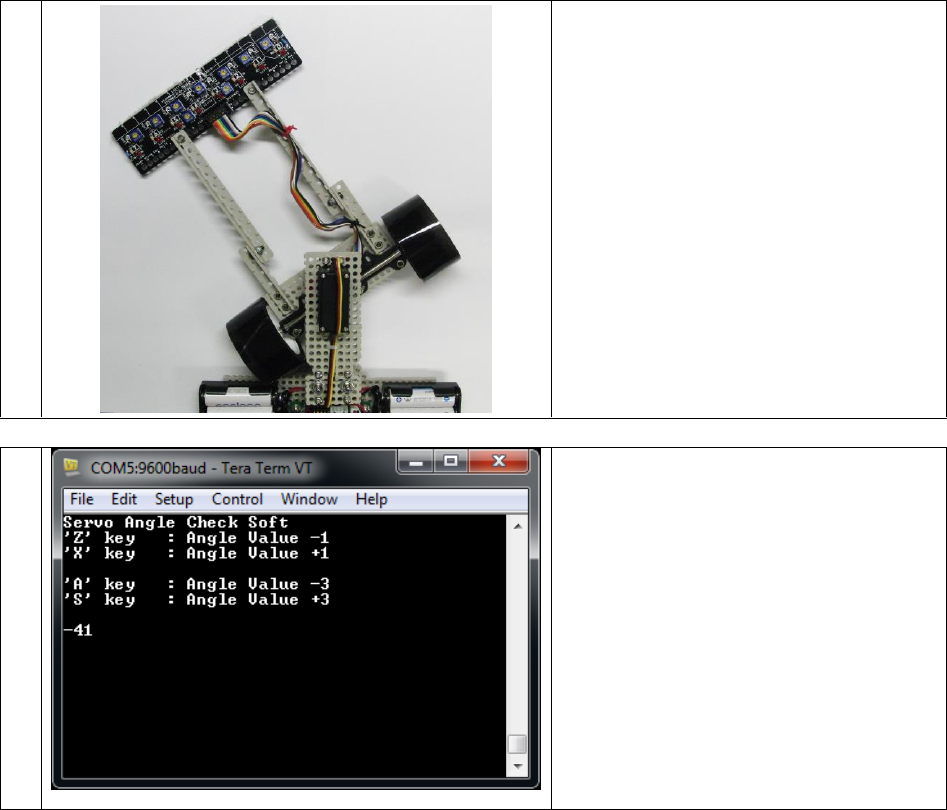
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
167
19
Now use the A and Z keys to find the limit on
the left. Once again, confirm that the wheels
really turn when you press the keys. If the
wheel is about to touch the chassis, press the
X key to reduce the turn angle by a small
amount.
20
Tera Term displays a numerical value. This is
the number of degrees to the left the steering
wheel is currently turned. In this case, the
turn angle is –41 degrees.
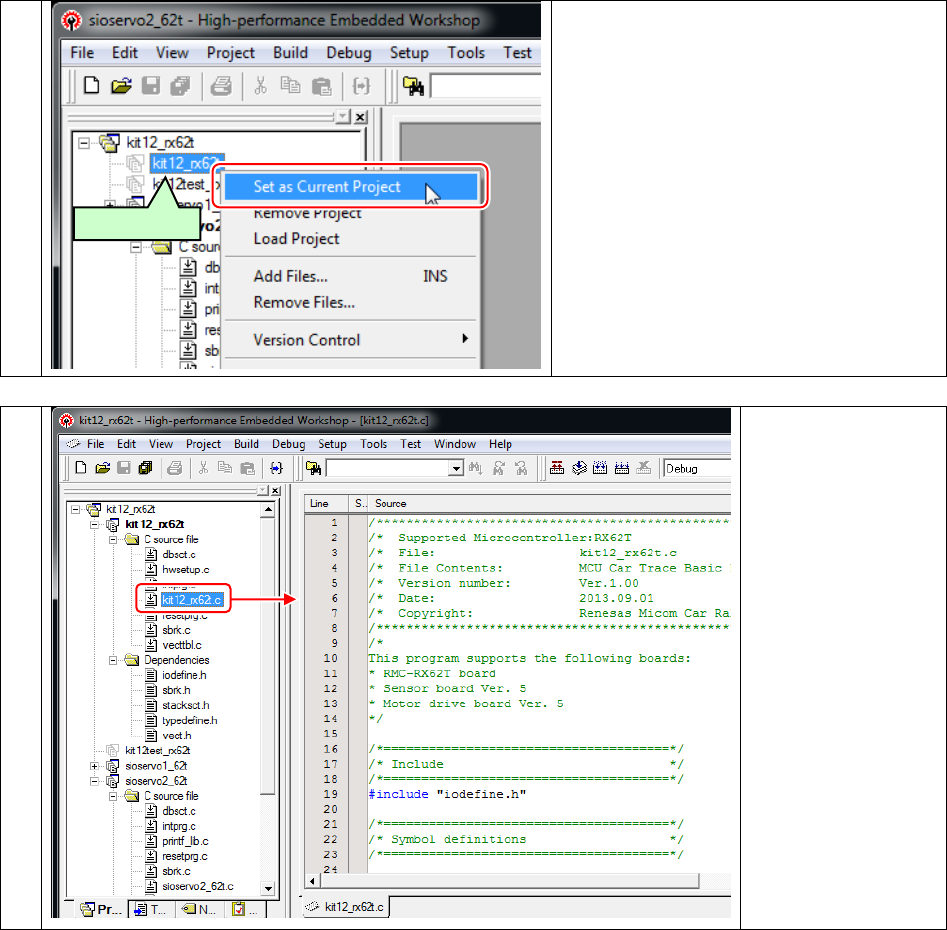
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
168
6.5. Overwriting the kit12_62t.c Program Code
The sioservo1_62t and sioservo2_62t projects enabled us to determine three numerical values. We must now plug
these numerical values into kit12_rx62t.c, the program that controls the operation of the MCU car. The source file
is part of the kit12_rx62t project.
1
Set project kit12_rx62t as the current project.
2
Double click
Kit12_rx62t.c to open
the editor window.
kit12_rx62t
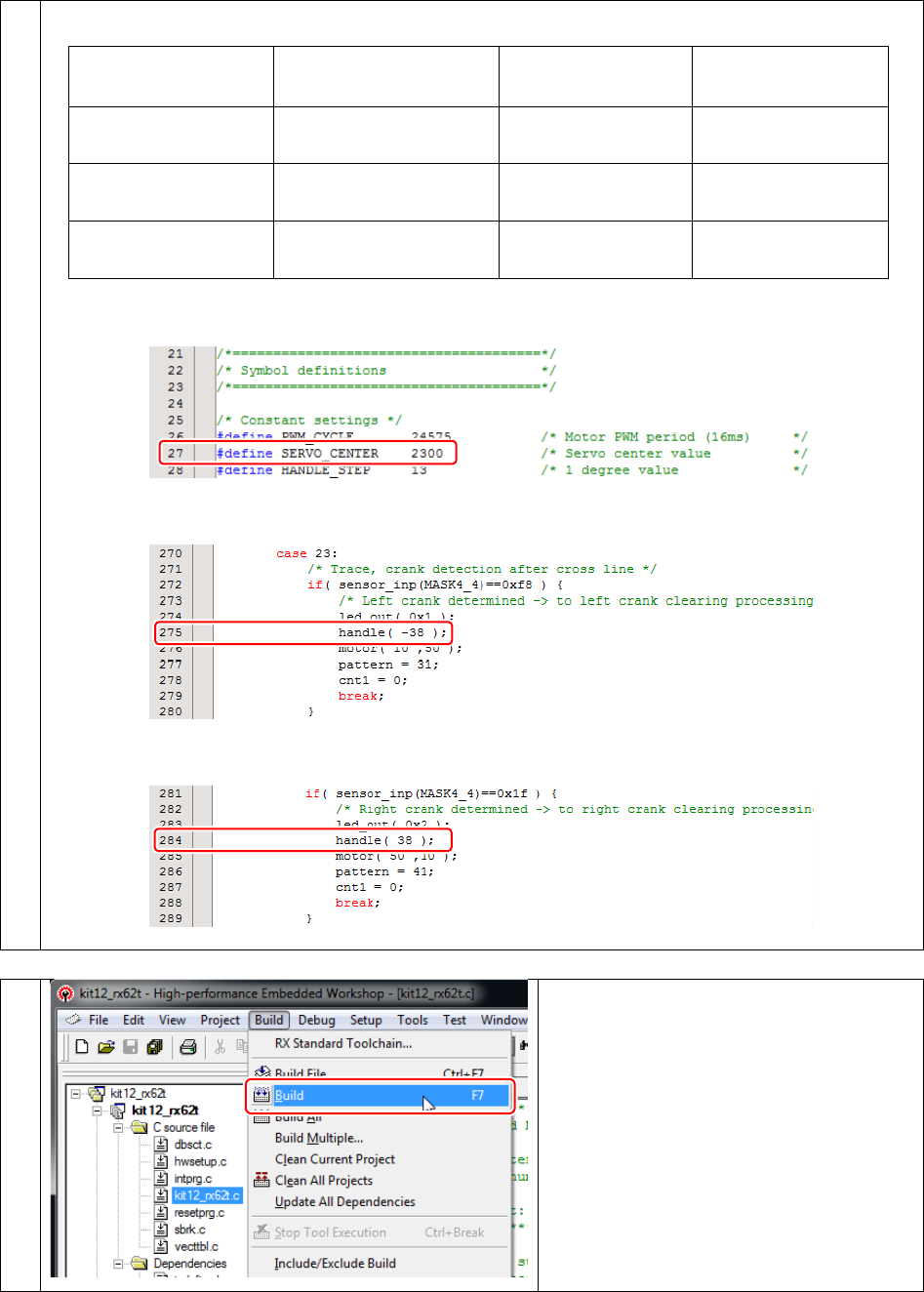
MCU Car Kit, Ver. 5.1 Program Explanation Manual - kit12_rx62t Version (Version for RX62T)
169
3
Change the three values indicated below to match your own MCU car.
Description
Line number to be
modified in kit12_rx62t.c
Kit standard value
Value from
present example
Servo centre
Line 27
2300
2202
Max. turn angle left
Line 275
-38
-41
Max. turn angle right
Line 284
38
40
[1]Servo centre
[2]Max. turn angle left
[3]Max. turn angle right
4
Select Build from the Build menu to generate
a MOT file.
Launch the FDT, and please transfer a
program "kit12_rx62t.mot"
Now kit12_rx62t.c has been adjusted and
written to the MCU. Now let’s try out the
MCU car on the course!
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
170
7. Hints on Modifying the Program
7.1. Outline
After building the kit12_rx62t program, write it to the RMC-RX62T board and try running the MCU car. Even if
no modifications are made to the sample program code (except for changing values such as SERVO_CENTER to
match the unique characteristics of the MCU car), in most cases the MCU car will probably go off the track at
some point.
The explanation up to this point is based on the following assumptions about the course conditions:
All the sensors respond in the same manner when the colour of the track changes from white to black.
The MCU car is travelling straight when it encounters crosslines and half lines.
When travelling straight ahead, the MCU car is tracing roughly the centre of the track.
But in most cases, conditions such as the following occur:
The response of the sensors is uneven.
The MCU car encounters crosslines and half lines at something of an angle.
The MCU car is skewed to the right or left side of the track even when it is travelling straight ahead.
These factors can cause the MCU car to go off the track.
The explanation that follows is based on careful observation of the conditions under which MCU cars go off the
track. The results of these observations are presented from the next section onward.
In each of the discussions that follows, the following three topics are treated as a set:
(a) Description of Problem
How did the MCU car go off the track?
(b) Analysis Findings
Why did the MCU car go off the track?
(c) Example Solution
How can the problem be corrected?
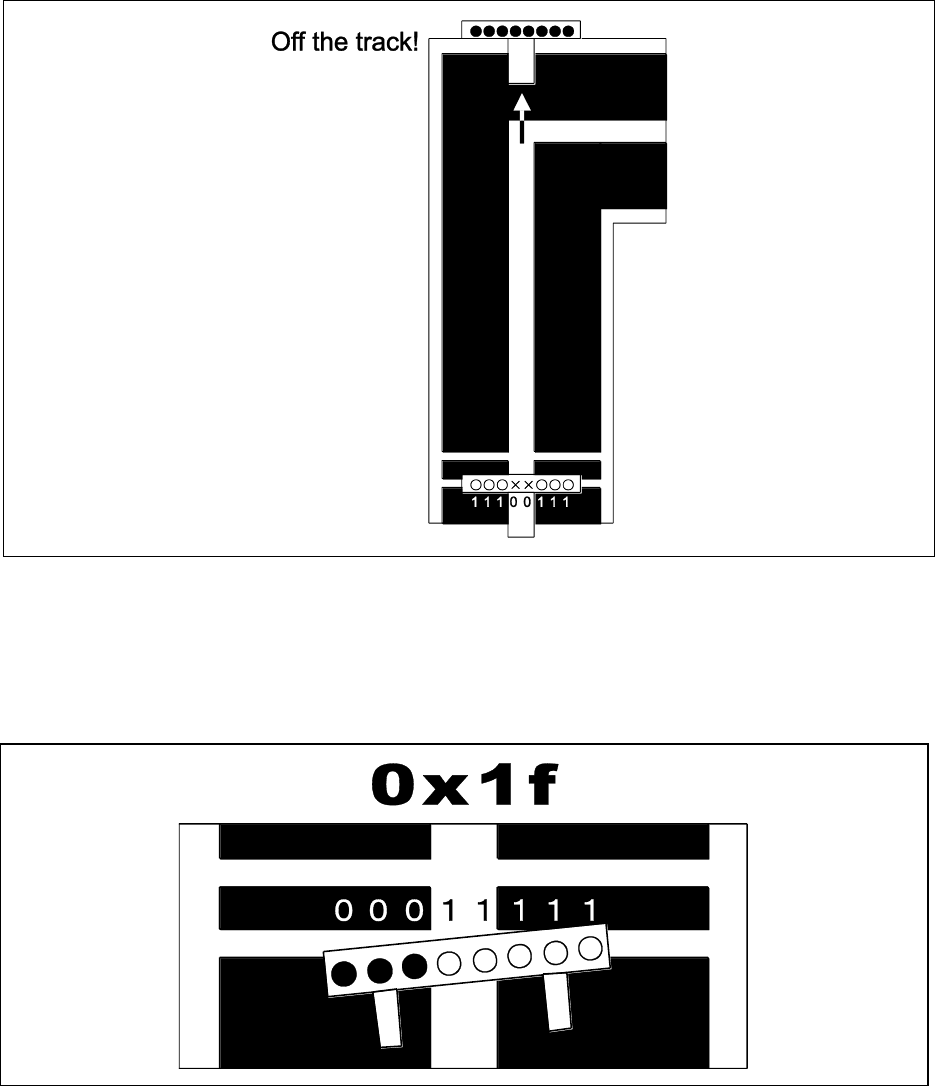
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
171
7.2. Examples of the MCU Car Going Off the Track
7.2.1. Crossline Not Detected Correctly
(a) Description of Problem
After the crosslines were encountered, the MCU car failed to turn at the crank and instead continued straight off
the track.
(b) Analysis Findings
Collection and analysis of the running data showed that at the moment of crossline detection, the sensor state was
0x1f rather than the anticipated value of 0xe7. (See following figure.)
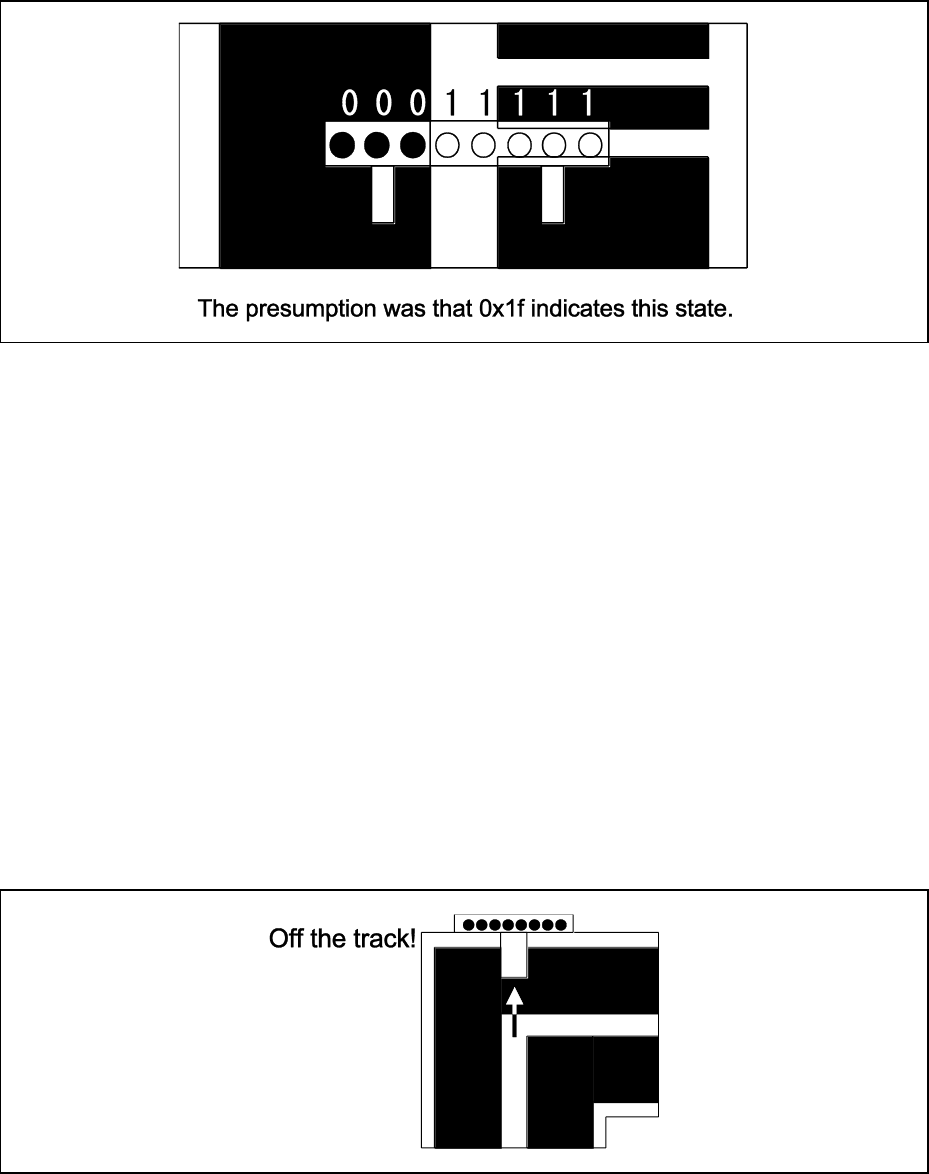
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
172
A sensor response of 0x1f seems familiar. During right half line detection, using all eight sensors, a value of 0x1f
is interpreted as indicating a right half line.
Thus, the sensor data matched that for right half line detection, even though the actual course feature was a
crossline, and the result was a malfunction.
(c) Example Solution
The program code is pretty hopeless in cases where the sensors are oriented at an angle. Even if the servo centre
value is aligned properly, it seems that only the sensors on one side or the other register at the moment when the
line is encountered. As a possible solution, sensor checking could continue for a short time even when a right half
line is detected. Then the judgment could be changed to “crossline” in cases where this is appropriate. Left half
line detection would be analogous.
7.2.2. Crank Not Detected Correctly
(a) Description of Problem
At the crank, the MCU car failed to turn and instead continued straight off the track. Two LEDs were lit on the
motor drive board, so it would seem that pattern 23 was being processed.
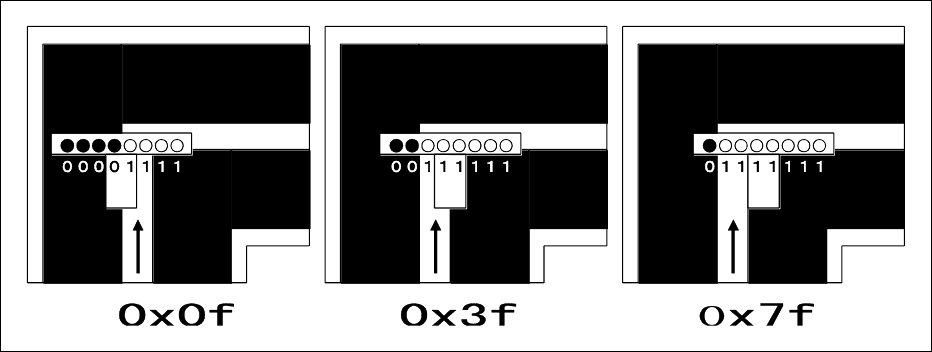
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
173
(b) Analysis Findings
Collection and analysis of the running data showed that at the moment of right crank detection, the sensor state
was 0x0f, 0x3f, or 0x7f rather than the anticipated value of 0x1f. (See following figure.)
Thus, even though a right crank was encountered, the sensor data did not match the anticipated sensor state for a
right crank and the MCU car proceeded straight off the track.
(c) Example Solution
In the program code supplied with the kit, the only sensor state detected as a right crank is 0x1f. In fact, actually
encountering a right crank sometimes produces states such as 0x0f, 0x3f, or 0x7f. Therefore, these sensor states
should be added as also indicating a right crank. A similar malfunction is likely at left cranks as well, so analogous
sensor states should be added for left crank detection.
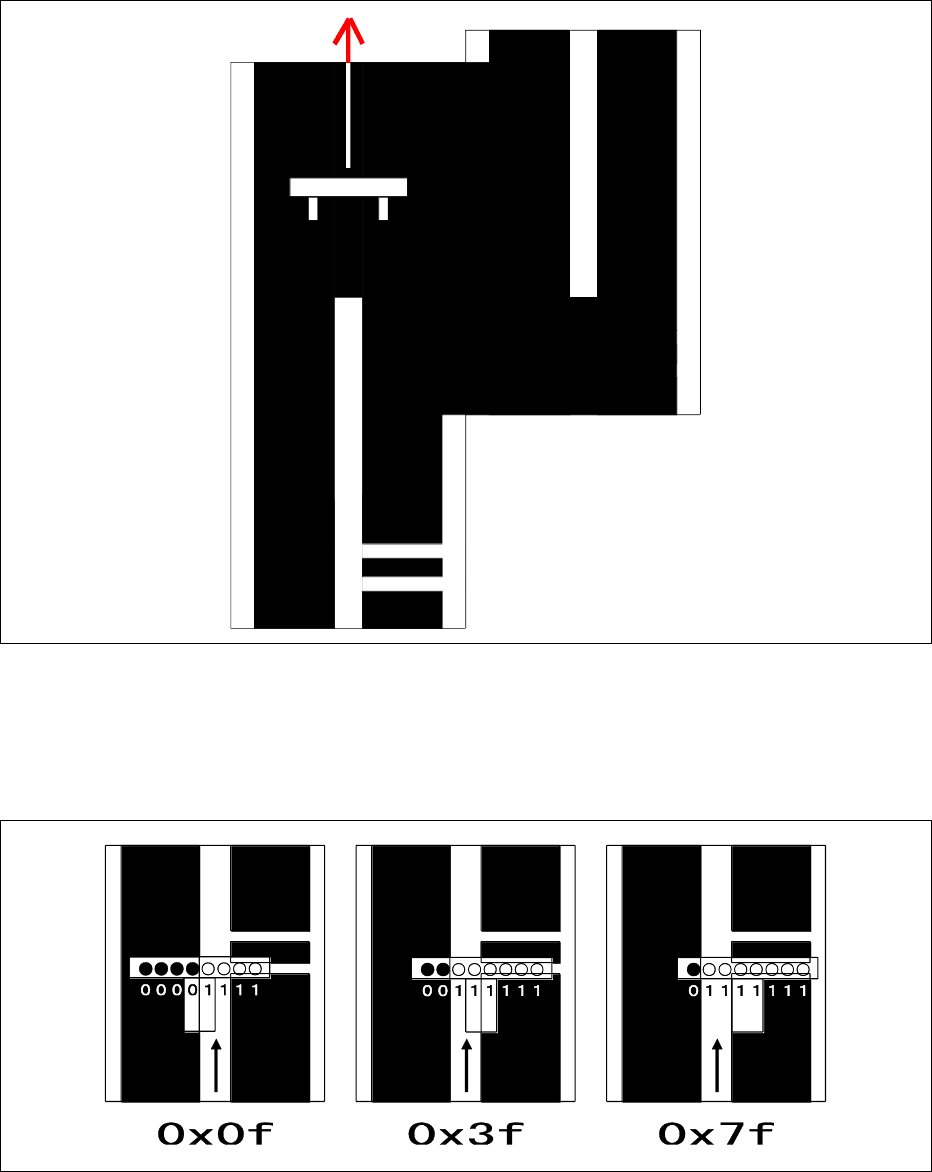
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
174
7.2.3. Half Line Not Detected Correctly
(a) Description of Problem
At a right lane change, the MCU car continued straight ahead and off the track.
●● ●● ●●● ●
(b) Analysis Findings
Collection and analysis of the running data showed that at the moment of right half line detection, the sensor state
was 0x0f, 0x3f, or 0x7f rather than the anticipated value of 0x1f. (See following figure.)
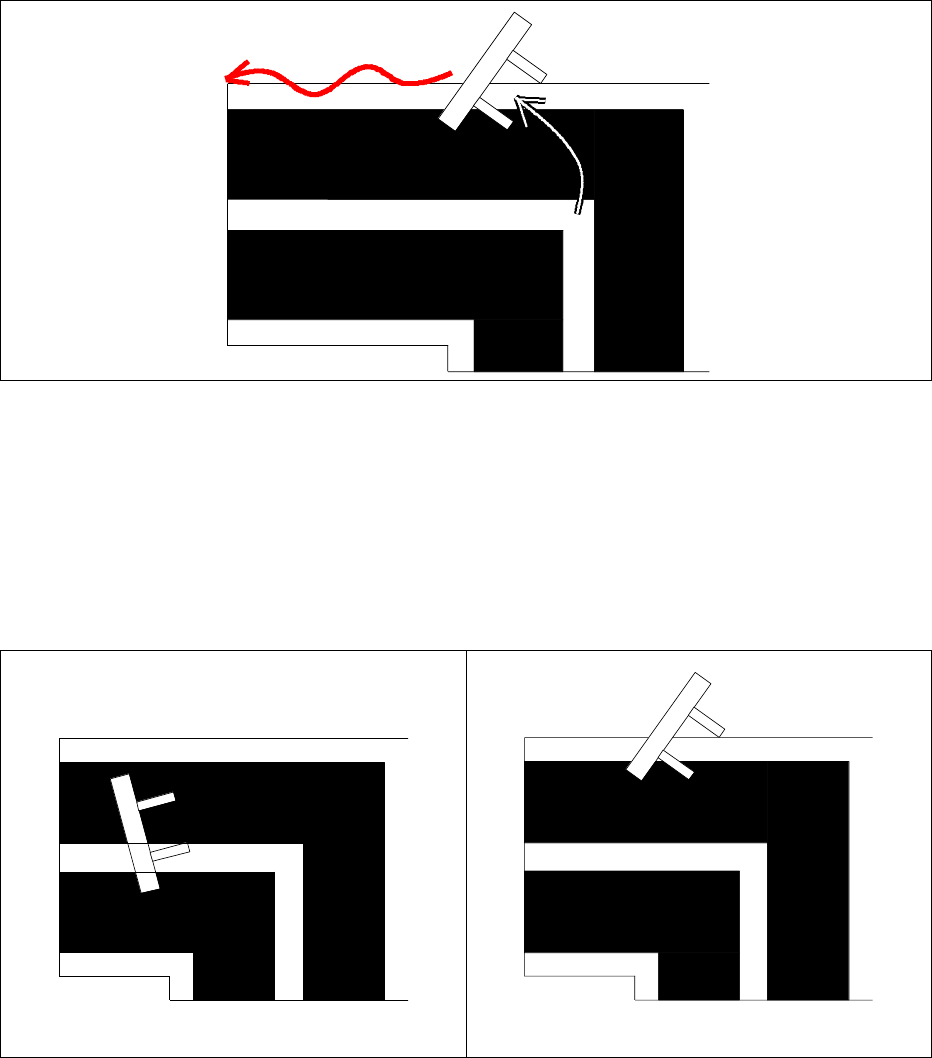
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
175
(c) Example Solution
In the program code supplied with the kit, the only sensor state detected as a right half line is 0x1f. In fact, actually
encountering a right half line sometimes produces states such as 0x0f, 0x3f, or 0x7f. Therefore, these sensor states
should be added as also indicating a right half line. A similar malfunction is likely at left half lines as well, so
analogous sensor states should be added for left half line detection.
7.2.4.
After Clearing from Crank, MCU Car Mistakes Outer White Line for Center Line and Goes off Track
(a) Description of Problem
When a left crank was detected, the steering wheel turned to the left. After turning for a while in a somewhat wide
arc, the MCU car started to trace the outer white line and eventually went off the track.
●○○××●●●
(b) Analysis Findings
Let’s assume the settings when a left crank is encountered are left 38 degrees, left motor 10%, right motor 50%.
When will the MCU car finish the turn and return to the normal pattern under these conditions? In the sample
program code, it is when the sensor state is 0x60. This is assumed to occur when the centre line is detected, as in
the figure at left below. But if the MCU car is moving too fast, it may not turn tightly enough and end up at the
outer edge of the track, resulting in the outer white line producing a sensor state of 0x60, as in the figure at right
below. This will cause the MCU car to return to the normal pattern and run off the track.
●○○××●●●
●○○××●●●
Normal case where centre line produces a sensor
state of 0x60
Case where outer white line produces sensor state of
0x60, causing MCU car to run off the track.
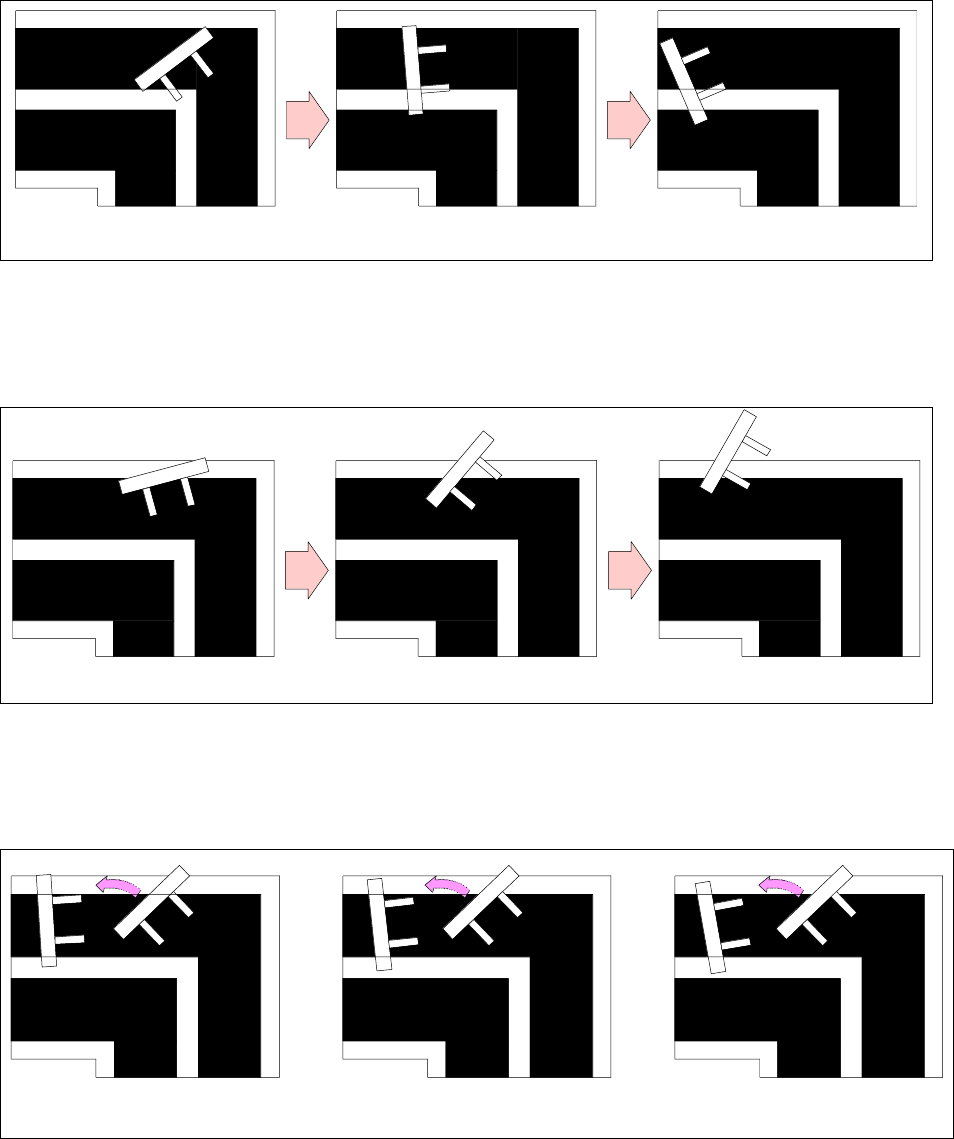
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
176
(c) Example Solution
Let’s review the changes in the sensor state when the centre line is correctly detected. The sensor state changes
from 0x00 to 0xc0 to 0x60, finally returning to normal running operation. (See following figure.)
●●●××●●●
○○●××●●●
●○○××●●●
0x00 0xc0 0x60
Now let’s review the changes in the sensor state when the outer white line is incorrectly detected as the centre line.
The sensor state changes from 0x07 to 0x00 to 0x60, finally returning to normal running operation. (See following
figure.)
●●●××○○○
●●●××●●●
●○○××●●●
0x07 0x00 0x60
A comparison of the two sequences shows that the malfunction occurs when a sensor state of 0x07 is followed by
0x60. So how about modifying the program code so that when a sensor state of 0x07 is encountered, turning
continues until the state changes to 0x83, 0x81, or 0xc1. (See following figure.)
●●●××○○○
0x83 0x81 0xc1
○●●××●○○
○●●××●●○
○○●××●●○
●●●××○○○
●●●××○○○
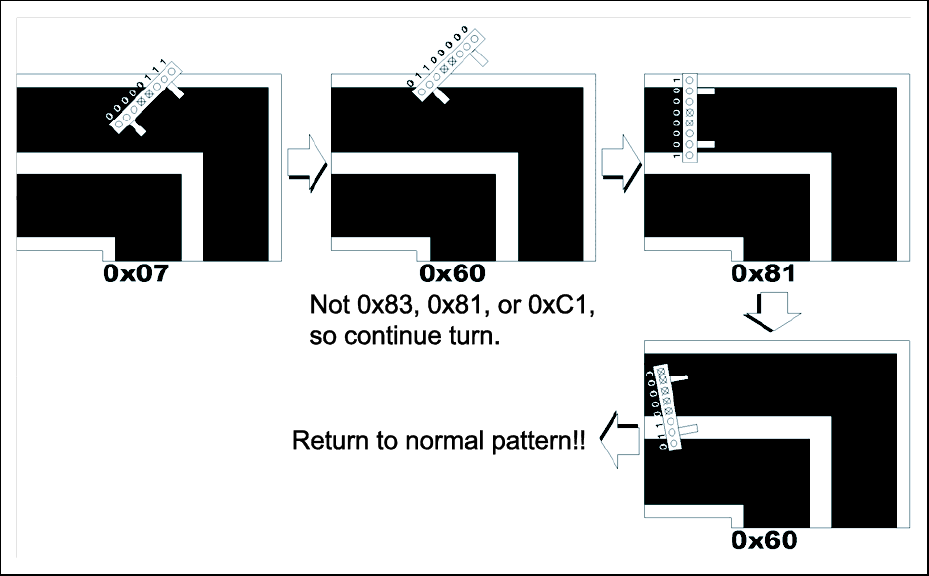
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
177
Let’s try a simulation. When a sensor state of 0x07 occurs, turning continues until the state changes to 0x83, 0x81,
or 0xc1. This means turning continues even if a sensor state of 0x60 occurs. Previously, control would return to
the normal pattern at this point and the MCU car would end up going off the track. Now the turn continues until a
sensor state of 0x81 occurs, after which the program checks for a state of 0x60. When the state changes to 0x60, it
is judged to be the centre line and control returns to the normal pattern.
Try modifying the program code based on this idea. This will eliminate cases where malfunctions result from the
outer white line being mistakenly detected as the centre line. The right crank is analogous.
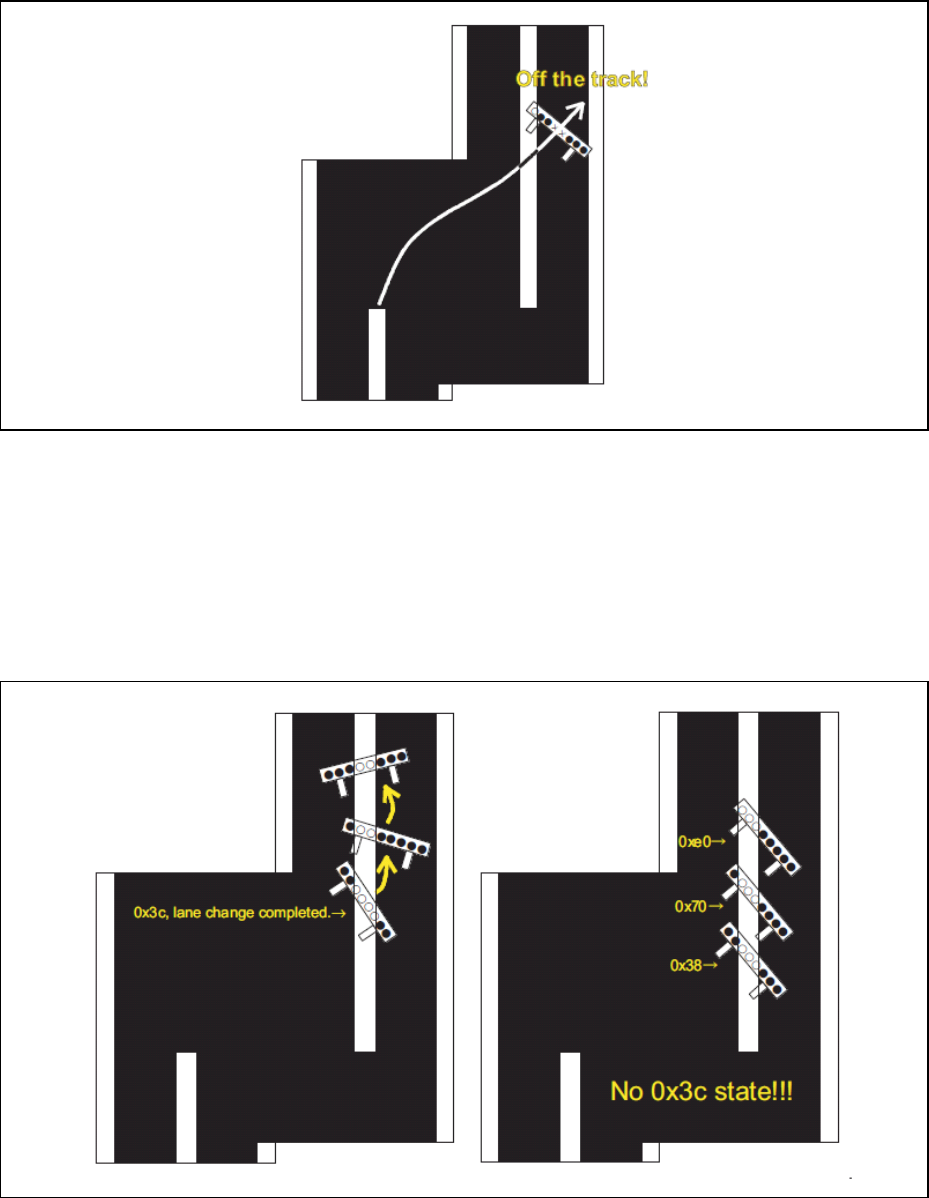
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
178
7.2.5. End of Lane Change Not Detected Correctly
(a) Description of Problem
A right lane change was detected and the MCU car turned to the right. Then, instead of detecting the new centre
line and beginning to trace it, the MCU car continued past it and went off the track. (See following figure.)
(b) Analysis Findings
An analysis of the sensor states shows a sequence of 0x38 to 0x70 to 0xe0 when the new centre line was detected.
In the sample program code, the right lane change is determined to have completed when the sensor state is 0x3c,
checking with all eight sensors (left figure below). But depending on the angle at which the MCU car is
proceeding, a sensor state of 0x3c may never occur (right figure below).

MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
179
(c) Example Solution
To the sensor state 0x3c indicating detection of a new centre line, add the other sensor states identified in the
analysis findings. In addition, a variety of other modifications come to mind, such as changing the sensor detection
state to a completely different value or switching the servo to a shallower steering angle once the centre line is
detected and then proceeding. Try out several different approaches to determine which enables a stable (and
quicker) lane change manoeuvre.
7.3. Conclusion
This applies to every case, but to use crossline detection as an example, let’s say a sensor state of is used.
A sensor state of indicates a crossline.
However, a sensor state of can also occur at a half line.
As a result, misdetection occurs and the MCU car goes off the track.
In other words, a sensor state match occurs in a place where the program (you) did not expect it, causing the MCU
car to go off the track.
The key thing when devising solutions is to discover suitable sensor states for specific situations on your own.
A sensor state of indicates a crossline.
A sensor state of does not occur under other circumstances.
Therefore, there is no danger of malfunction!!
Several example problems are illustrated above, but you may still encounter cases where the MCU car goes off the
track after applying the suggestions provided. When this happens, don’t just accept it as bad luck. Thoroughly
investigate possible causes (involving both hardware and software) and devise countermeasures. The secret to
completing the course at the competition is a commitment to patient and steady problem solving, one step at a
time.
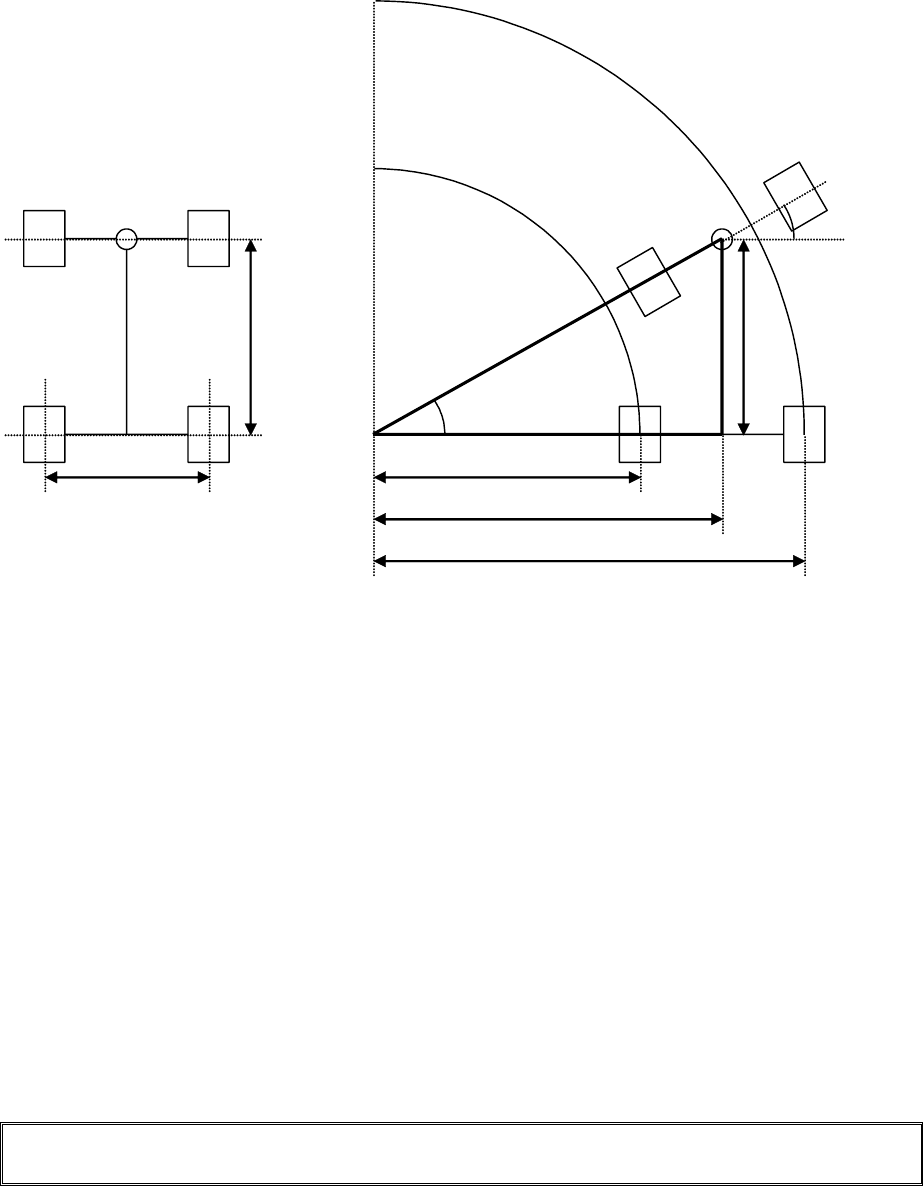
MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
180
8. Calculating the Left-Right Motor Speed Differential
8.1. Calculation Method
When the steering wheel is turned, the inside and outside wheels turn at different speeds. The method of
calculating this speed differential is described below:
MCU car kit, Ver.5.1
MCU car with steering wheel
turned 30 degrees left
W = 0.17 m
T = 0.17 m
= 30 = /6
W
r1
r2
r3
T = tread: The distance from the centre line of the left and right wheels. This is 0.17 [m] in the case of the kit.
W = wheelbase: The distance from the front to the rear wheels. This is 0.17 [m] in the case of the kit.
As shown in the figure, the following triangle is formed between the base r2, the height W, and the angle θ:
tanθ = W / r2
We know the angle θ and W, so we can calculate r2 as follows:
r2 = W / tanθ = 0.17 / tan (π / 6) = 0.294 [m]
The radius r1 of the inside wheel is as follows:
r1 = r2 – T / 2 = 0.294 – 0.085 = 0.209
The radius r3 of the outside wheel is as follows:
r3 = r2 + T / 2 = 0.294 + 0.085 = 0.379
Therefore, if the rotational speed of the outside wheel is 100, that of the inside wheel is:
r1 / r3 × 100 = 0.209 / 0.379 × 100 = 55
When the steering wheel is turned 30 degrees left,
the rotational speed of the left wheel is 55 relative to a right wheel rotational speed of 100.

MCU Car Rally Kit, Ver. 5 Program Explanation Manual — kit07_rx62t Version for RX62T
181
The following code can be used to ensure that the left and right wheels turn at a speed at which no loss occurs:
handle( -30 );
motor( 55, 100 );
