Q 821 User Manual MP173E111
User Manual: Pdf Q-821 Q-Motion® Miniature SpaceFAB Robot
Open the PDF directly: View PDF ![]() .
.
Page Count: 29
- 1 About this Document
- 2 Safety
- 3 Product Description
- 4 Unpacking and Repacking for Transport
- 5 Installation
- 6 Start-Up and Operation
- 7 Maintenance
- 8 Troubleshooting
- 9 Customer Service
- 10 Technical Data
- 11 Old Equipment Disposal
- 12 EC Declaration of Conformity

User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 2 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
Contents
1 About this Document 4
1.1 Symbols and Typographic Conventions ........................................................................................... 4
1.2 Figures .............................................................................................................................................. 5
1.3 Downloading Manuals ..................................................................................................................... 5
2 Safety 6
2.1 Intended Use .................................................................................................................................... 6
2.2 Safety Precautions............................................................................................................................ 7
2.3 Organizational Measures ................................................................................................................. 8
3 Product Description 9
3.1 Product View .................................................................................................................................... 9
3.2 Scope of Delivery .............................................................................................................................. 9
3.3 Suitable Controller ......................................................................................................................... 10
3.4 Technical Features ......................................................................................................................... 10
3.4.1 Reference Point Switch ................................................................................................................... 10
4 Unpacking and Repacking for Transport 10
5 Installation 13
5.1 General Notes on Installation ........................................................................................................ 13
5.2 Determining the Permissible Load ................................................................................................. 14
5.3 Mounting the Q-821 on a Surface .................................................................................................. 14
5.4 Affixing the Load onto the Q-821 ................................................................................................... 16
5.5 Connecting the Q-821 to the Protective Earth Conductor............................................................. 17
5.6 Connecting the Q-821 to the Controller ........................................................................................ 19
6 Start-Up and Operation 20
6.1 General Notes on Start-Up ............................................................................................................. 20
6.2 Starting Up the Q-821 .................................................................................................................... 23
6.2.1 Performing a Reference Move ........................................................................................................ 23
7 Maintenance 23
8 Troubleshooting 24
9 Customer Service 24
10 Technical Data 25
10.1 Data Table ...................................................................................................................................... 25
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 3 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
10.2 Maximum Ratings .......................................................................................................................... 25
10.3 Operating Time .............................................................................................................................. 26
10.4 Ambient Conditions and Classifications ......................................................................................... 26
10.5 Dimensions ..................................................................................................................................... 27
10.6 Pin Assignment ............................................................................................................................... 28
10.6.1 Sub-D 15 (m) Controller Connection ............................................................................................... 28
11 Old Equipment Disposal 29
12 EC Declaration of Conformity 29
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 4 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
1 About this Document
This manual contains information on the intended use of the Q-821.140 SpaceFAB (hereafter
referred to as “Q-821”).
It assumes that the reader has a fundamental understanding of basic servo systems as well as
motion control concepts and applicable safety procedures.
1.1 Symbols and Typographic Conventions
The following symbols and typographic conventions are used in this user manual:
CAUTION
Dangerous situation
If not avoided, the dangerous situation will result in minor injury.
Actions to take to avoid the situation.
NOTICE
Dangerous situation
If not avoided, the dangerous situation will result in damage to the equipment.
Actions to take to avoid the situation.
INFORMATION
Information for easier handling, tricks, tips, etc.
The following symbols and markings are used in the user manuals of PI:
Symbol Meaning
1.
2.
Action consisting of several steps whose sequential order must be
observed
Action consisting of one or several steps whose sequential order is
irrelevant
List item
S. 5 Cross-reference to page 5
SVO?
Command line or command from PI's General Command Set (GCS)
(example: command to get the servo mode)
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 5 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
RS-232 Operating element labeling on the product (example: socket of the
RS-232 interface)
Warning sign on the product which refers to detailed information in
this manual.
1.2 Figures
For better understandability, the colors, proportions and degree of detail in illustrations can
deviate from the actual circumstances. Photographic illustrations may also differ and must not
be seen as guaranteed properties.
1.3 Downloading Manuals
INFORMATION
If a manual is missing or problems occur with downloading:
Contact our customer service department (p. 24).
INFORMATION
For products that are supplied with software (CD in the scope of delivery), access to the
manuals is protected by a password. Protected content is only displayed on the website after
entering the access data.
You need the product CD to get the access data.
For products with CD: Get access data
1. Insert the product CD into the PC drive.
2. Switch to the Manuals directory on the CD.
3. In the Manuals directory, open the Release News (file including releasenews in the file
name).
4. Get the access data for downloading protected content in the "User login for software
download" section of the Release News. Possible methods for getting:
− Link to a page for registering and requesting the access data
− Direct input of user name and password
5. If the access data needs to be requested via a registration page:
a) Follow the link in the Release News.
b) Enter the required information in the browser window.
c) Click Show login data in the browser window.
d) Note the user name and password shown in the browser window.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 6 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
Downloading Manuals
If you have requested access data for protected contents via a registration page (see above):
Click the links in the browser window to change to the content for your product and
login in using the access data that you received.
General procedure:
1. Open the website www.pi.ws.
2. If access to the manuals is protected by a password:
a) Click Login.
b) Log in with the user name and password.
3. Click Search.
4. Enter the product number up to the period (e.g., P-882) or the product family (e.g.,
PICMA® Bender) into the search field.
5. Click Start search or press the Enter key.
6. Open the corresponding product detail page in the list of search results:
a) If necessary: Scroll down the list.
b) If necessary: Click Load more results at the bottom of the list.
c) Click the corresponding product in the list.
7. Scroll down to the Downloads section on the product detail page.
The manuals are shown under Documentation.
8. Click the desired manual and save it to the hard disk of your PC or to a data storage
medium.
2 Safety
2.1 Intended Use
The Q-821.140 SpaceFAB (hereafter referred to as “Q-821”) is a laboratory device in accordance
with DIN EN 61010-1. It is intended to be used in interior spaces and in an environment that is
free of dirt, oil and lubricants.
Based on its design and realization, the Q-821 is intended for positioning, adjusting and shifting
of loads in six axes at various velocities.
The intended use of the Q-821 is only possible in connection with the controller which
coordinates all motions of the Q-821.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 7 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
2.2 Safety Precautions
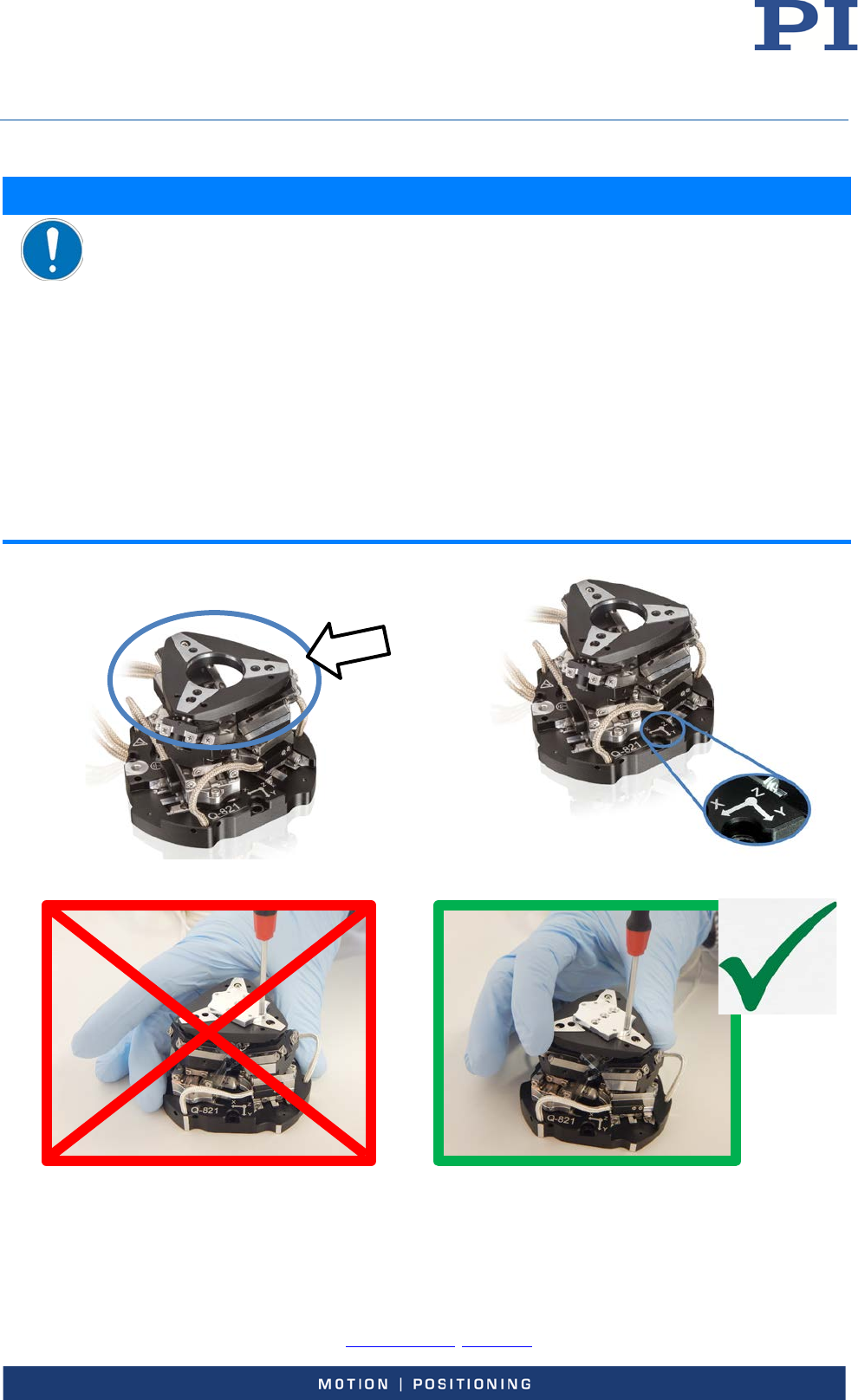
NOTICE
Damage due to impermissibly high forces and torques!
Impermissibly high forces and torques that are applied to the motion platform (see Figure 1)
can damage the Q-821.
Do not exceed the maximum permissible forces and torques that are allowed to act on the
motion platform (see Figure 2 for the coordinate system):
- Maximum force in Z: 2 N
- Maximum force in X and Y: 1 N
- Maximum torque in Rx, Ry, and Rz: 0,1 Nm
Hold the Q-821 externally on the base only
Figure 1: Motion platform of the Q-821 Figure 2: Coordinate system for maximum forces
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 8 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
NOTICE
Damage from collisions during the reference move!
The Q-821 moves unpredictably during a reference move. The approach of the reference
position always takes place via the negative or positive hard stop of the linear drives. Soft limits
that have been set for the motion platform of the Q-821 with the NLM and PLM commands are
ignored during the reference move. In addition, no collision check or prevention takes place.
As a result, collisions are possible between the Q-821, the load to be moved, and the
surroundings. Collisions can damage the Q-821, the load to be moved, and the surroundings.
Make sure that no collisions between the Q-821, the load to be moved, and the
surroundings are possible during the reference move of the Q-821.
Make sure that the installation space is sufficient to allow motion along the complete
travel range of each axis.
Do not place any objects in areas where they can be caught by moving parts during the
reference move.
After a successful reference move, supply a command for the corresponding target
position in order to return to the reference position (default: zero position) from any given
position.
Do not start a new reference move, but send a command line as follows:
MOV X 0 Y 0 Z 0 U 0 V 0 W 0
.
NOTICE
Damage to Q-821 without original packaging during transport!
An unallowable mechanical load on the Q-821 due to transport without original packaging can
damage the Q-821.
Only ship the Q-821 in its original packaging.
The Q-821 is built according to state-of-the-art technology and recognized safety standards.
Improper use can result in personal injury and/or damage to the Q-821.
Only use the Q-821 for its intended purpose, and only use if it is in a good working
order.
Read the user manual.
Immediately eliminate any faults and malfunctions that are likely to affect safety.
The operator is responsible for the correct installation and operation of the Q-821.
2.3 Organizational Measures
User manual
Always keep this user manual available with the Q-821.
Add all information from the manufacturer to the user manual, for example
supplements or technical notes.
If you give the Q-821 to other users, also include this user manual as well as other
relevant information provided by the manufacturer.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 9 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
Only use the device on the basis of the complete user manual. Missing information due
to an incomplete user manual can result in minor injury and damage to equipment.
Only install and operate the Q-821 after you have read and understood this user
manual.
Personnel qualification
The Q-821 may only be installed, started up, operated, maintained and cleaned by authorized
and appropriately qualified personnel.
3 Product Description
3.1 Product View
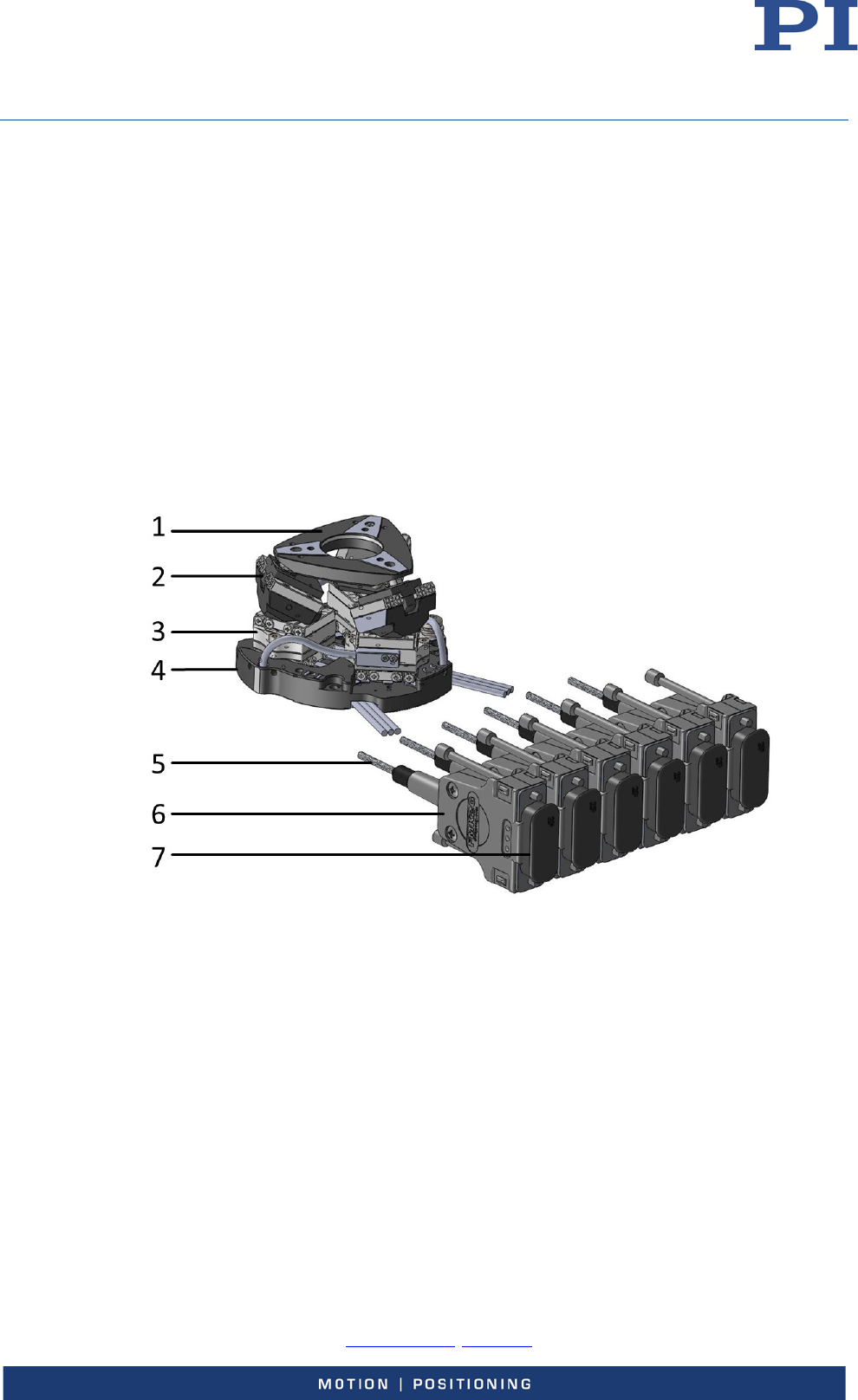
Figure 3: Product view
1. Motion platform
2. Y stage as part of a strut
3. X stage as part of a strut
4. Base plate
5. Cable
6. Connector (sub-D 15-pin (m))
7. ESD protection: ESD protective cap
3.2 Scope of Delivery
The following table contains the scope of delivery of the Q-821.
The scope of delivery of the controller is listed in the user manual of the controller.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 10 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
Order Number Items
Q-821.140 Miniature 6D positioning system
Screw set:
Q821B0008 Mounting accessories:
3x M3x12 hex-head cap screws ISO 4762 A2
2 x dowel pins A2 3 m6 x 8 ISO 2238
Documentation:
MP173E User manual for the SpaceFAB
Packaging material, consisting of:
Outer box
Inner box
Foam packaging for the sides of the inner box
Internal cushion, bottom
Internal cushion, cover
Pallet
3.3 Suitable Controller
Controller Description
C-886.31 Digital controller for Q-821 SpaceFAB
PC software is included in the scope of delivery of the controllers from PI. The operation of the
controllers is described in the corresponding user manuals.
3.4 Technical Features
3.4.1 Reference Point Switch
The Q-821 features a reference point switch without direction sensing.
4 Unpacking and Repacking for Transport
The Q-821.140 is delivered in a special packaging with adapted foam inserts.
NOTICE
Impermissible mechanical load!
An impermissible mechanical load can damage the Q-821.
Only send the Q-821 in the original packaging.
Only hold the Q-821 by the base plate
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 11 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
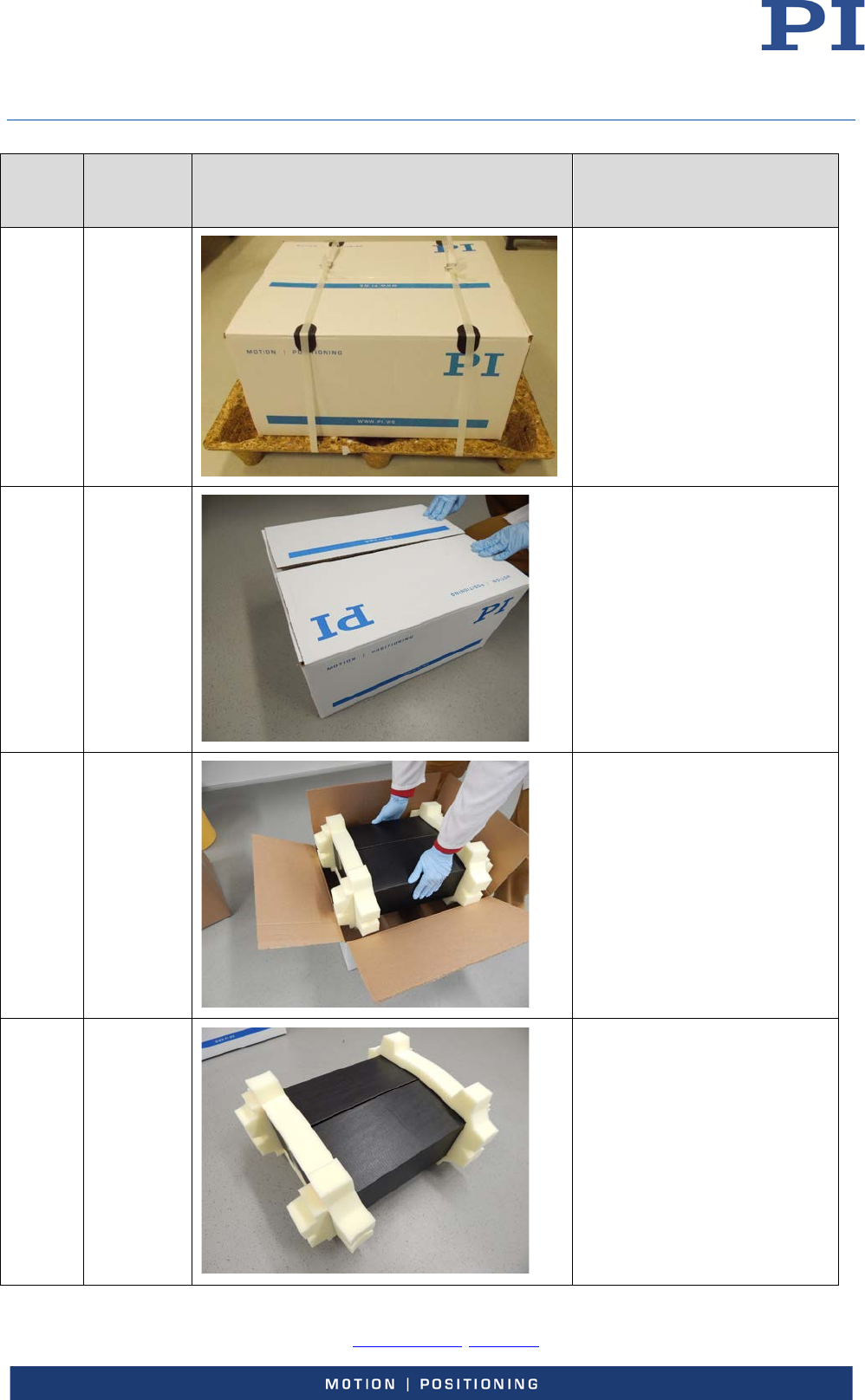
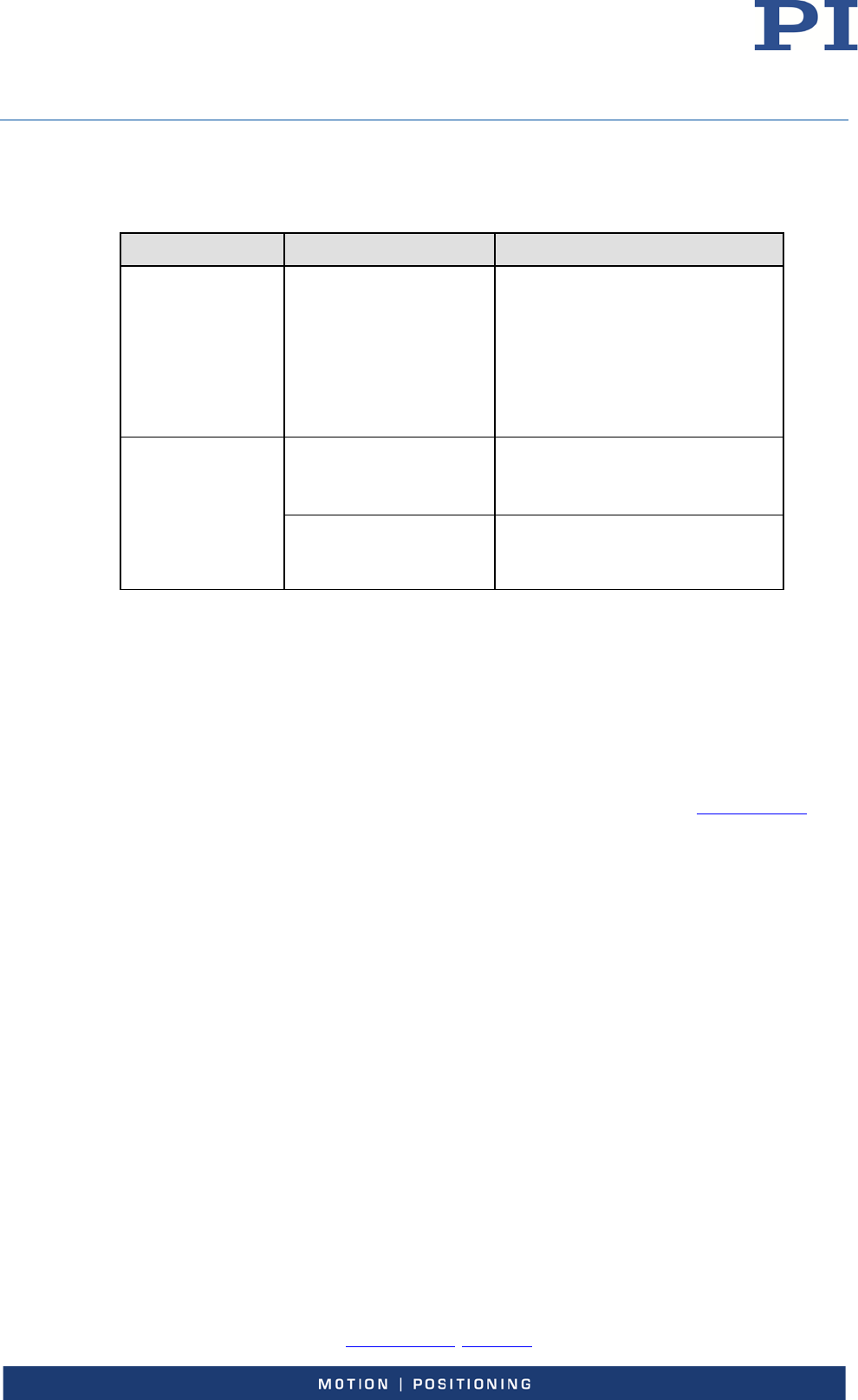
Un-
packing
steps
Repacking
steps
Figure Comment
1 9
Keep all packaging
materials in case the
product needs to be
transported again later.
Only ship the Q-821 in its
original packaging.
2 8
Open the outer box
3 7
Lift the inner box with the
foam packaging out of the
outer box
4 6
Remove the foam
packaging
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 12 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
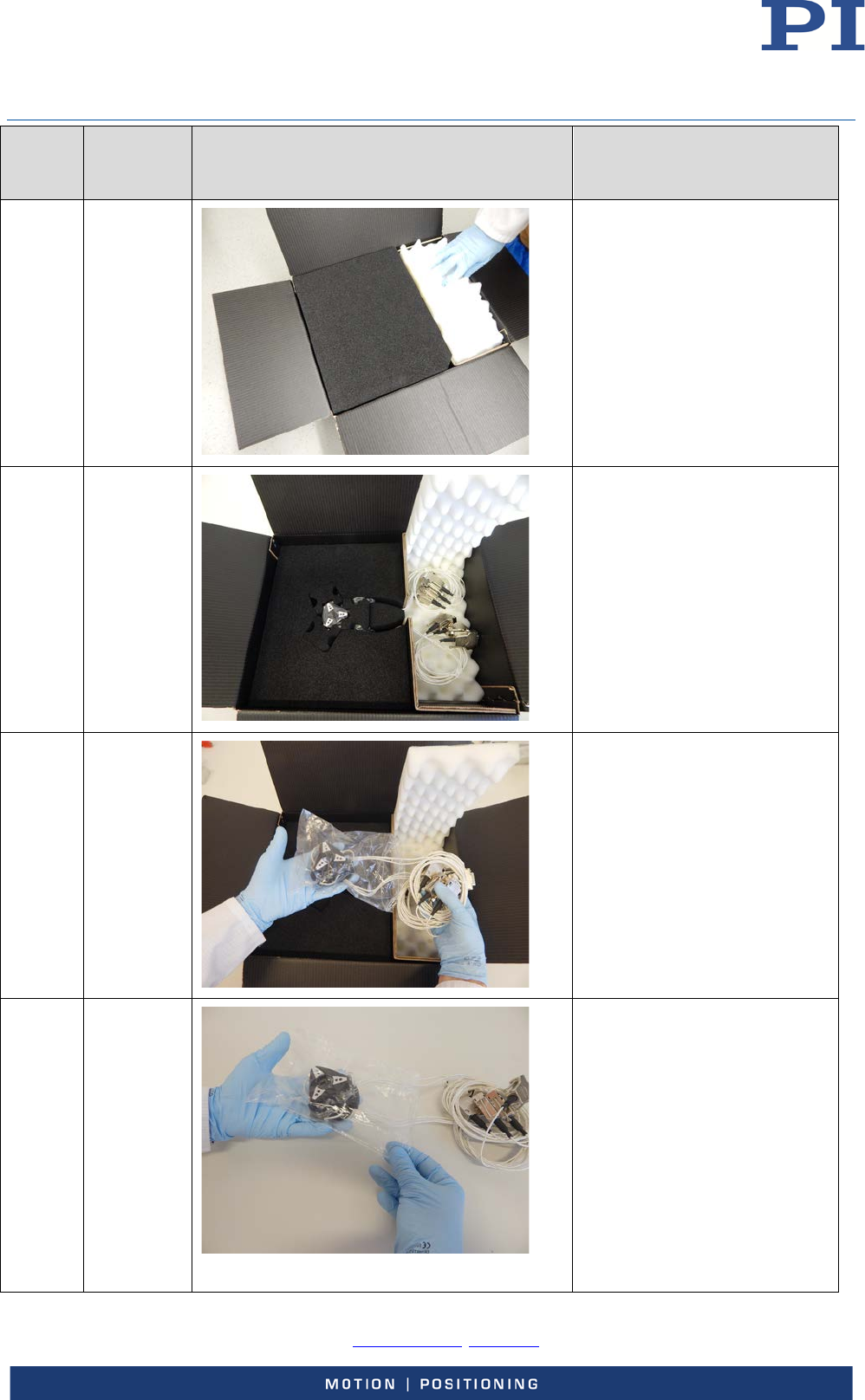
Un-
packing
steps
Repacking
steps
Figure Comment
5 5
Open the inner box
6 4
Remove the foam covers
7 3
Lift the Q-821 by holding
the base plate and take it
out of the foam insert
8 2
Remove the bag
Compare the contents
against the items covered
by the contract and against
the packing list. If parts are
incorrectly supplied or
missing, contact PI
immediately.
Inspect the Q-821 for signs
of damage. If you notice
signs of damage, contact PI
immediately.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 13 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
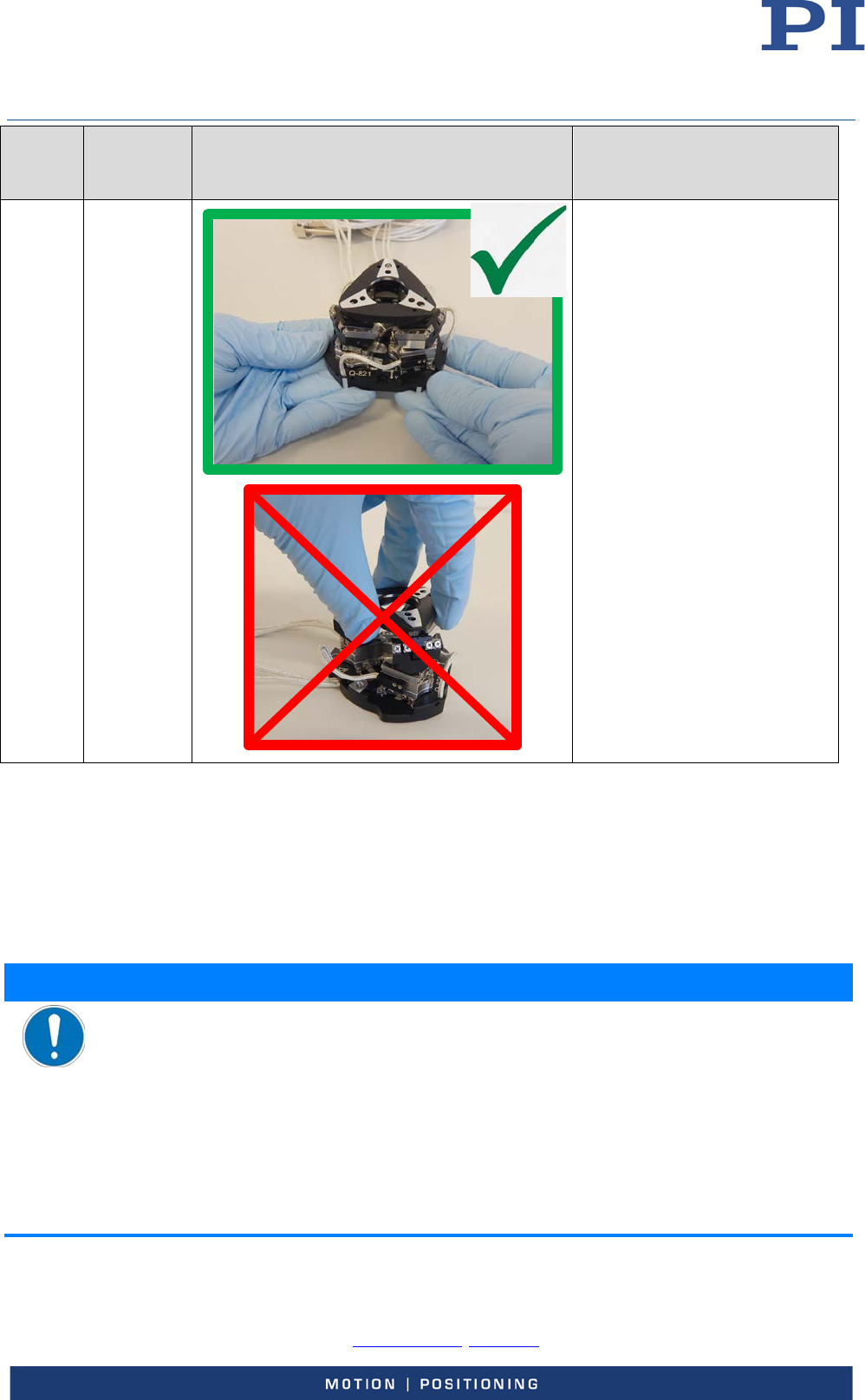
Un-
packing
steps
Repacking
steps
Figure Comment
9 1
Hold the Q-821 at the base
plate only
5 Installation
5.1 General Notes on Installation
The Q-821 can be mounted in any orientation.
NOTICE
Impermissible mechanical load and collisions!
Impermissible mechanical load and collisions between the Q-821, the load to be moved and
the environment can damage the.
Hold the Q-821 at the base plate only.
Avoid high forces and torques on the motion platform during installation.
Ensure an uninterruptible power supply in order to prevent an unintentional deactivation
of the Q-821 system and resulting unintentional position changes of the Q-821.
Make sure that no collisions between the Q-821, the load to be moved and the
environment are possible in the working space of the Q-821.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 14 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
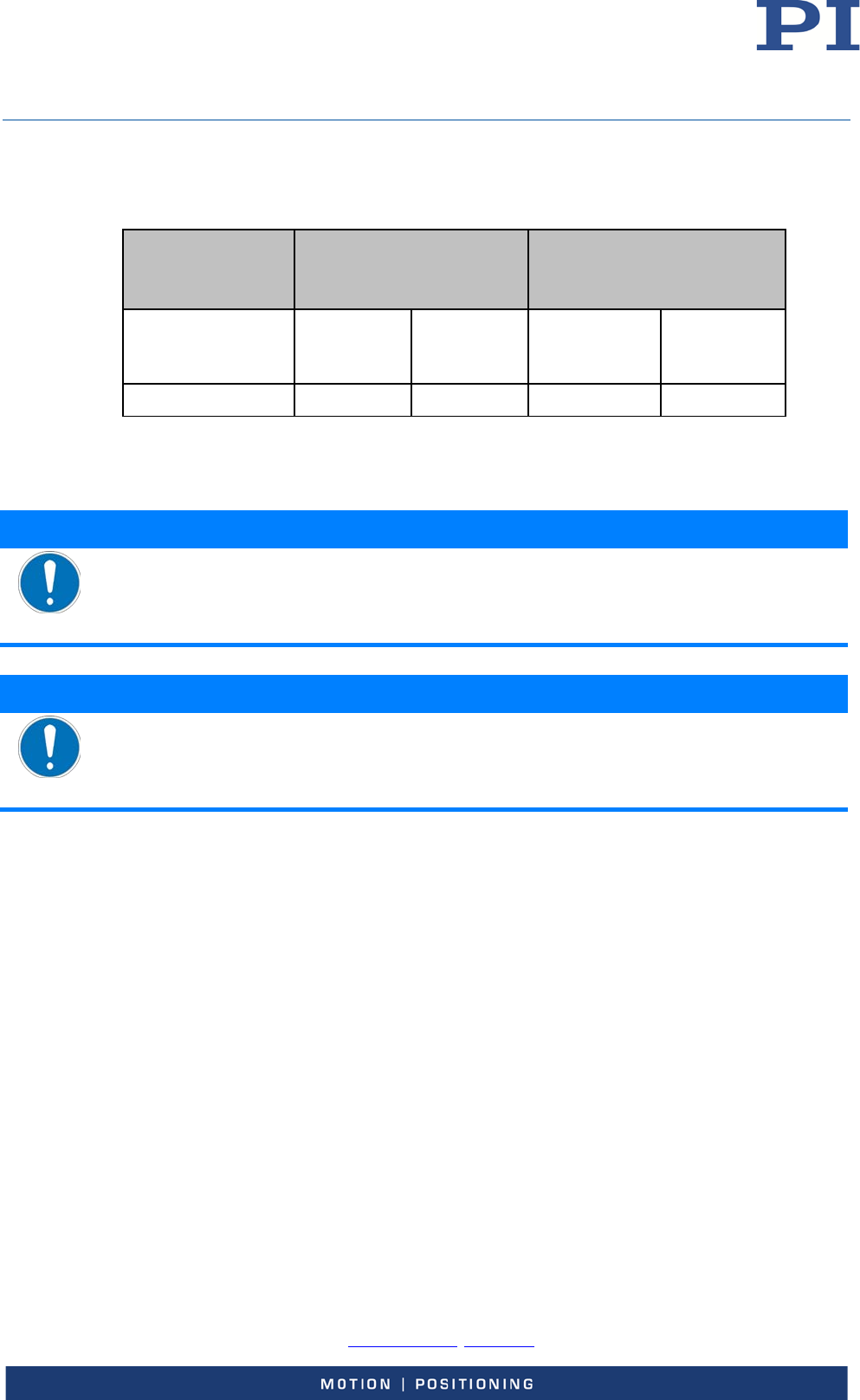
5.2 Determining the Permissible Load
The limit values in the following table are for orientation. They only apply when the center of
mass is at the origin of the XYZ coordinate system (0,0,0).
Servo mode switched on for
SpaceFAB –
Max. load capacity
Servo mode switched off for
SpaceFAB –
Max. holding force
Mounting position of
the base plate Mounted
horizontally
Mounted in
any
orientation
Mounted
horizontally
Mounted in
any
orientation
Q-821.140 0.2 kg 0.1 kg 0.3 kg 0.15 kg
5.3 Mounting the Q-821 on a Surface
NOTICE
Impermissible mechanical load!
An impermissible mechanical load can damage the Q-821.
Only hold the Q-821 by the base plate, seee figure of unpacking step 9 on p. 13.
NOTICE
Warping of the base plate!
Incorrect mounting can warp the base plate. Warping of the base plate reduces the accuracy.
Mount the Q-821 on an even surface. The recommended flatness of the surface is 5 µm.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 15 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
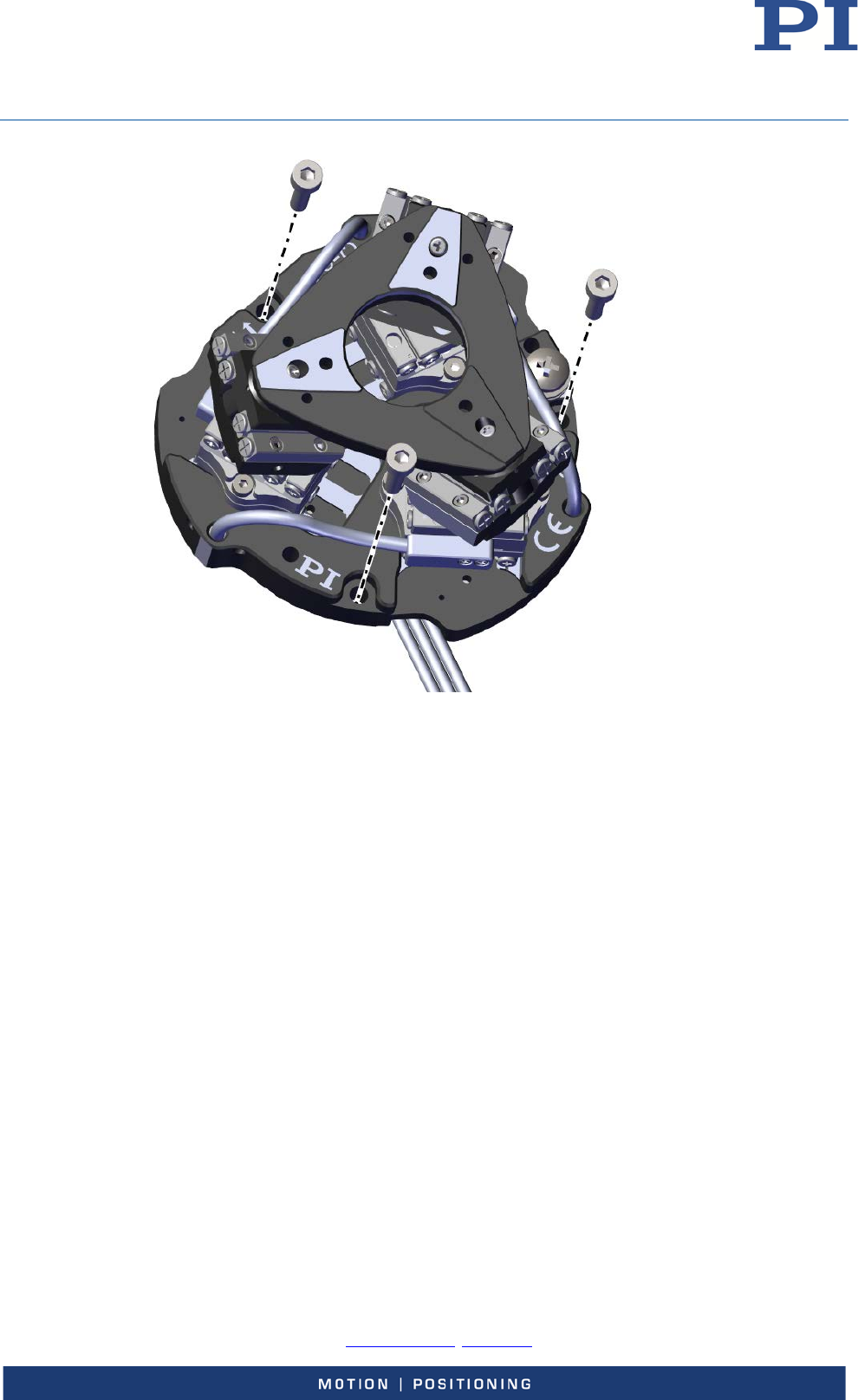
Figure 4: Product view with mounting accessories
Requirements
You have read and understood the General Notes on Installation (p. 13).
Tools and accessories
For the dimensions of the Q-821 and the position and depth of the M6 countersunk
holes, see “Dimensions” (p. 27).
You have provided a suitable surface:
− Optional: at least 2 mounting holes with Ø 3 mm H7 for alignment are provided.
− 3 mounting holes for M3 screws are provided.
− The flatness of the surface is 5 µm.
Screw set Q821B0008, included in delivery (p. 9):
− 3 x M3x12 hex-head cap screws ISO 4762
− 2 x dowel pins A2 3 m6 x 8 ISO 2338
Suitable tools
Mounting the Q-821
1. Optional: Align the Q-821 on the surface using the mounting holes at the bottom of the
Q-821 intended for this purpose.
2. Mount the Q-821 using the 3 countersunk holes intended for this purpose, see figure
above or the dimensional drawings on p. 27.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 16 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
5.4 Affixing the Load onto the Q-821
NOTICE
Impermissible mechanical load and collisions!
Impermissible mechanical load and collisions between the Q-821, the load to be moved, and
the environment can damage the Q-821.
Avoid high forces and torques on the motion platform during installation.
Make sure that no collisions between the Q-821, the load to be moved and the
environment are possible in the work space of the Q-821.
NOTICE
Screws that are too long!
The Q-821 can be damaged by excessively long screws.
When selecting the screw length, observe the thickness of the motion platform or the
depth of the mounting holes together with the load to be mounted.
Only use screws that do not project under the motion platform after being screwed in.
Only mount the Q-821 and the load on the mounting fixtures (holes) intended for this
purpose.
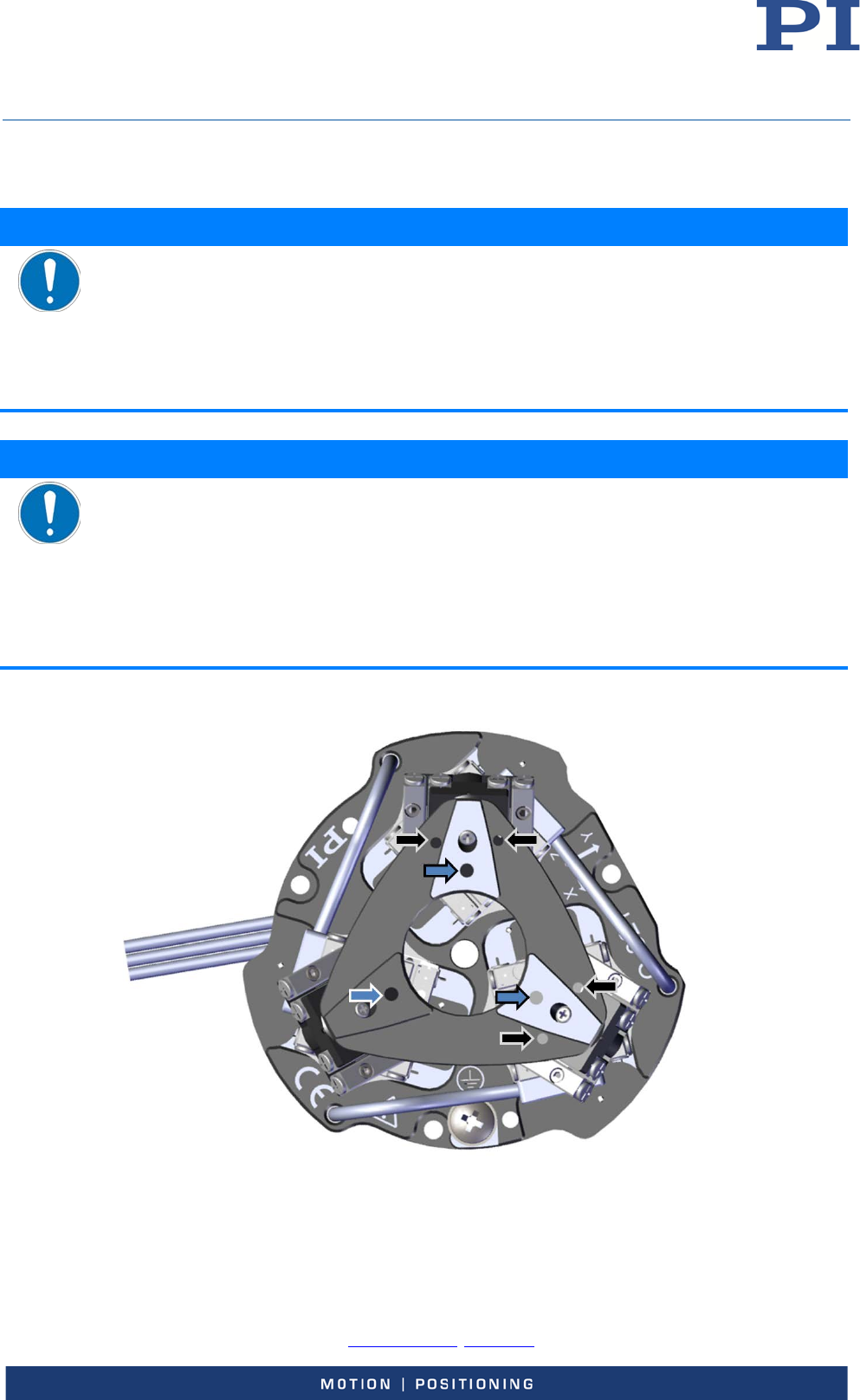
Figure 5: Top view of Q-821, black arrows mark where to align the load, blue arrows mark where to mount
the load onto the motion platform

User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 17 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
Requirements
You have read and understood the General Notes on Installation (p. 13).
You have determined the permissible load and the work space of the Q-821 (p. 14).
You have designed the load and the environment of the Q-821 so that the permissible
load of the Q-821 is observed and no collisions can occur.
Tools and accessories
A suitable load with mounting holes that correspond to the following mounting holes:
− Optional: 2 suitably long alignment pins for holes with Ø 2mm H7
− 3 suitably long M3 screws
Suitable tools
Affixing the Load
1. Optional: align the load onto the Q-821 using the mounting holes intended for this
purpose, see the figure above
2. Mount the load onto the Q-821 using the mounting holes intended for this purpose, see
the figure above.
5.5 Connecting the Q-821 to the Protective Earth Conductor
Figure 6: Q-821 with protective earth connection
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 18 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
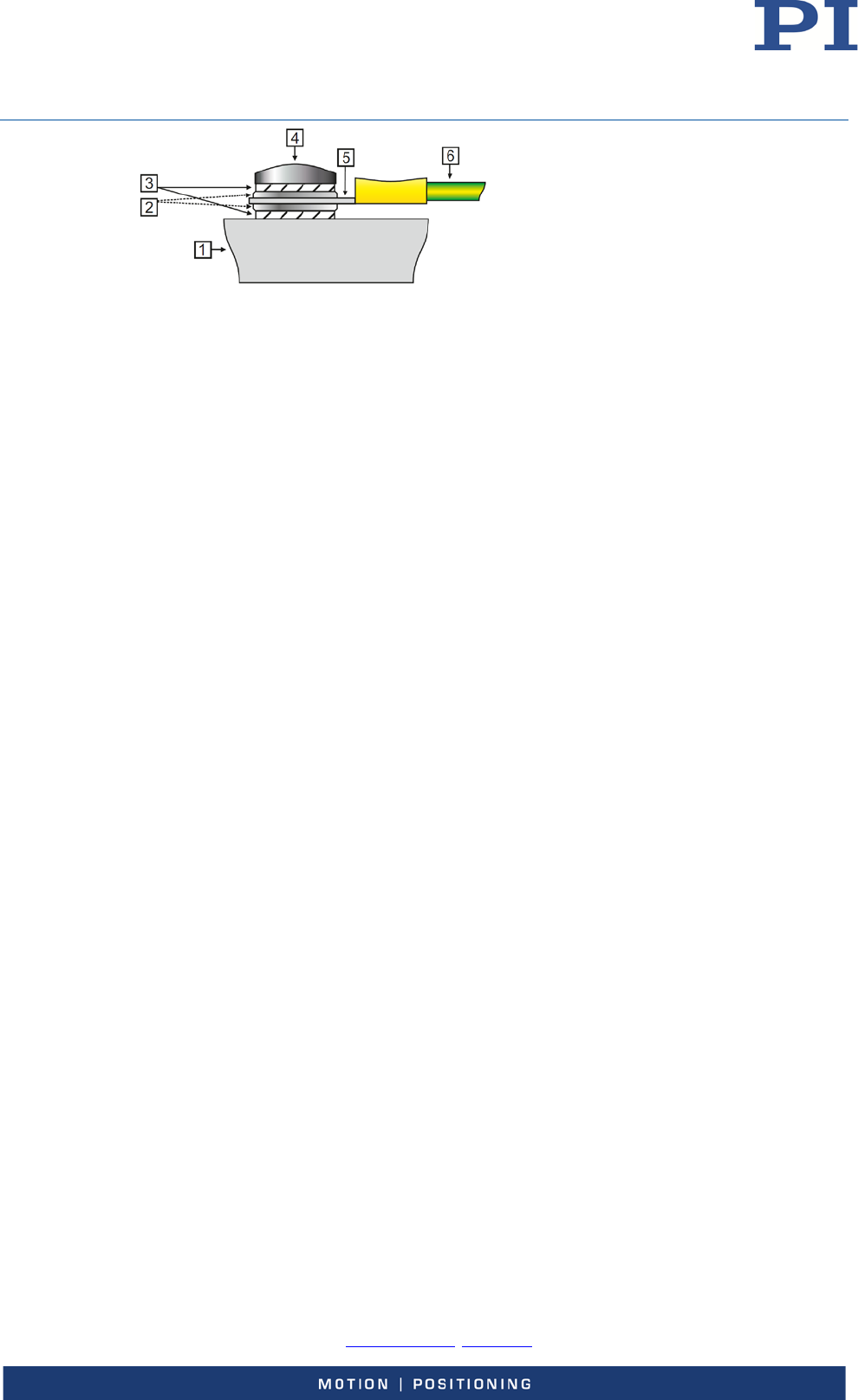
Figure 7: Recommended mounting of the protective earth conductor (profile view)
1. Base of the Q-821
2. Flat washer
3. Safety washer
4. Screw
5. Cable lug
6. Protective earth conductor
Requirements
You have read and understood the general notes on installation (p. 13).
The Q-821 is not connected to the controller.
Tools and accessories
Suitable protective earth conductor: Cross-sectional area of the cable ≥ 0.75 mm2
M4 protective earth screw set supplied and already inserted for connecting the
protective earth conductor
Suitable screwdriver
Connecting the Q-821 to the protective earth conductor
1. If necessary, attach a suitable cable lug to the protective earth conductor.
2. Use the M4 screw (together with the washers and self-locking washers) to affix the
cable lug of the protective earth conductor to the protective earth connection of the
Q-821 as shown in the profile view.
3. Tighten the M4 screw with a torque of 1.2 Nm to 1.5 Nm.
4. Make sure that the contact resistance at all connection points relevant for connecting
the protective earth conductor is <0.1 Ω at 25 A.

User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 19 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
5.6 Connecting the Q-821 to the Controller
Figure 8: Connect the Q-821 to the controller
Requirements
You have read and understood the general notes on installation (p. 13).
You have installed the controller.
You have read and understood the user manual of the controller.
The controller is switched off.
Connecting the Q-821 to the Controller
1. Remove the ESD protection from all connections of the Q-821.
2. Connect the Q-821 and the controller to each other:
Use the integrated screws to secure the connections against accidental disconnection.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 20 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
6 Start-Up and Operation
6.1 General Notes on Start-Up
NOTICE
Overheating during continuous operation!
The highest velocity is achieved at maximum operating frequency; however, the Q-821 can
overheat during continuous operation as a result.
Observe the recommended operating time according to the operating frequency in step
mode (p. 26).
Ensure sufficient ventilation at the place of installation.
NOTICE
Damage from collisions during the reference move!
The Q-821 moves unpredictably during a reference move. The approach of the reference
position always takes place via the negative or positive hard stop of the linear drives. Soft limits
that have been set for the motion platform of the Q-821 with the NLM and PLM commands are
ignored during the reference move. In addition, no collision check or prevention takes place.
As a result, collisions are possible between the Q-821, the load to be moved, and the
surroundings. Collisions can damage the Q-821, the load to be moved, and the surroundings.
Make sure that no collisions between the Q-821, the load to be moved and the
environment are possible during the reference move of the Q-821.
Make sure that the installation space is sufficient to allow motion along the complete
travel range of each axis.
Do not place any objects in areas where they can get caught by moving parts during the
reference move.
After a successful reference move, supply a command for the corresponding target
position in order to return to the reference position (default: zero position) from any given
position.
Do not start a new reference move, but send a command line as follows:
MOV X 0 Y 0 Z 0 U 0 V 0 W 0
NOTICE
Incorrect configuration of the controller!
The configuration data used by the controller (e.g. geometrical data and servo-control
parameters) must be adapted to the Q-821. If incorrect configuration data is used, the Q-821
can be damaged by uncontrolled motions or collisions. The configuration data is adapted
before delivery.
Check whether the controller matches the Q-821. A label on the rear panel of the
controller indicates for which Q-821 the controller is intended.
When you have established the communication via TCP/IP, send the CST? command. The
response shows the Q-821 to which the controller is adapted.
Only operate the Q-821 with a controller whose configuration data is adapted to the
Q-821.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 21 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
NOTICE
Damage from collisions!
Collisions can damage the Q-821, the load to be moved and the environment.
Make sure that no collisions between the Q-821, the load to be moved and the
environment are possible in the work space of the Q-821.
Do not place any objects in areas where they can get caught by moving parts.
If the controller malfunctions, stop the motion immediately.
NOTICE
Damage from unintentional position changes!
The limit value for the load of the Q-821 determined with the simulation program is only valid
when the servo mode is switched on for the axes of the motion platform. The maximum
holding force when the servo mode is switched off is based on the self-locking of the actuators
in the struts of the Q-821.
The maximum holding force with the servo mode switched-off is lower than the limit value
when the servo mode is switched on (see “Data Table” on p. 25).
When the actual load of the Q-821 exceeds the maximum holding force based on the self-
locking of the actuators, unintentional position changes of the Q-821 can occur in the following
cases:
Switching off the controller
Rebooting the controller
Switching off the servo mode for the axes of the Q-821
As a result, collisions are possible between the Q-821, the load to be moved, and the
environment. Collisions can damage the Q-821, the load to be moved, or the environment.
Make sure that the actual load of the motion platform of the SpaceFAB does not exceed
the maximum holding force based on the self-
locking of the actuators before you switch off
the servo mode, reboot or switch off the controller.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 22 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
NOTICE
Damage from uncontrolled motion of the Q-821!
In the following cases, the velocity and acceleration of the motion platform of the Q-821 are
not specified by the trajectory generator of the controller:
The Trajectory Source parameter (ID 0x19001900) has the value 1.
The Trajectory Source parameter has the value 0, and the Q-821 (axes X, Y, Z, U, V, W) is
still moving while a new motion command is sent. The previous target position is thereby
overwritten without the velocity and acceleration of the motion platform of the Q-821
being recalculated.
The platform of the Q-821 then moves on an undefined path. On this undefined path, collisions
with the environment of the Q-821 are possible. Collisions can damage the Q-821, the load to
be moved and the environment.
When the Trajectory Source parameter has the value 1:
Only set target positions whose distance from each other is maximally as large as the value
of the Path Control Step Size (mm) parameter (ID 0x19001504) with consecutive MOV
commands.
When the Trajectory Source parameter has the value 0:
Avoid sending new target positions while the Q-821 (axes X, Y, Z, U, V, W) is still moving.
If new target positions have to be sent while the Q-821
is still moving (axes X, Y, Z, U, V, W):
Only use motion commands to set target positions that maximally deviate from the current
position by the value of the Path Control Step Size (mm) parameter (ID 0x19001504).
INFORMATION
The communication interfaces of the controller (user interface, TCP/IP) are active at the same
time. Commands are executed in the order that the complete command lines arrive. The
simultaneous use of several communication interfaces can cause problems with the PC
software, however.
Always only use one interface of the controller.
INFORMATION
When switched on or rebooted, the controller automatically switches on the servo mode for all
axes. When the servo mode is switched off for the axes of the motion platform of the Q-821 (X,
Y, Z, U, V, W), it is automatically switched on when the reference move is started.
INFORMATION
For the axes of the motion platform of the Q-821 (X, Y, Z, U, V, W), motions can only be
commanded after a successful reference move (also referred to as "initialization").
A common reference move is always performed for the axes of the motion platform of the
Q-821 (X, Y, Z, U, V, W).
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 23 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
6.2 Starting Up the Q-821
Requirements
You have read and understood the General Notes on Start-Up.
You have correctly installed the Q-821, i.e. you have mounted the Q-821 on a surface
and affixed the load to the Q-821 according to the instructions in "Installation" (p. 13).
You have read and understood the user manual of the controller.
You have read and understood the manual of the PC software as, for example,
PIMikroMove.
The controller and the required PC software have been installed. All connections on the
controller have been set up (see user manual of the controller).
Accessories
Controller
PC with suitable software (see user manual of the controller)
Starting up the Q-821
1. Connect the Q-821 to the controller (see user manual of the controller).
2. Start up the controller (see user manual of the controller).
3. Start up the software (see software manual).
6.2.1 Performing a Reference Move
INFORMATION
Soft limits that have been set for the motion platform of the Q-821 with the NLM and PLM
commands are ignored during the reference move.
The linear drives of the Q-821 have optical reference point switches without direction sensing.
The approach of the reference position always takes place via the negative or positive hard stop
of the linear drives.
After a reference move each axis of the Q-821 is in center position.
See the user manual of the controller for more information abour the FRF command and
reference moves.
7 Maintenance
NOTICE
Misalignment from loosening screws!
The Q-821 is maintenance-free and precisely aligned.
Only loosen screws as mentioned in this document.
Do not loosen any other screws.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 24 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
8 Troubleshooting
Problem Possible Causes Solution
Unexpected Q-821
behavior.
Cable broken
Connector or
soldered joints
loosened
Check the data transmission
and power supply cables.
Replace the cables by cables of
the same type and test the
function of the Q-821.
Contact our customer service
department.
The Q-821
does not
achieve the
specified accuracy.
Warped base plate Mount the Q-821 on an even
surface. The recommended
flatness of the surface is 5 µm.
Increased wear due to
small motions over a long
period of time
Carry out a maintenance run
over the entire travel range.
If the problem with your Q-821 is not listed in the table or cannot be solved as described,
contact our customer service department.
9 Customer Service
For inquiries and orders, contact your PI sales engineer or send us an e-mail (service@pi.de).
If you have questions concerning your system, have the following information ready:
Product codes and serial numbers of all products in the system
Firmware version of the controller (if present)
Version of the driver or the software (if present)
Operating system on the PC (if present)
The latest versions of the user manuals are available for download (p. 5) on our website.
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 25 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
10 Technical Data
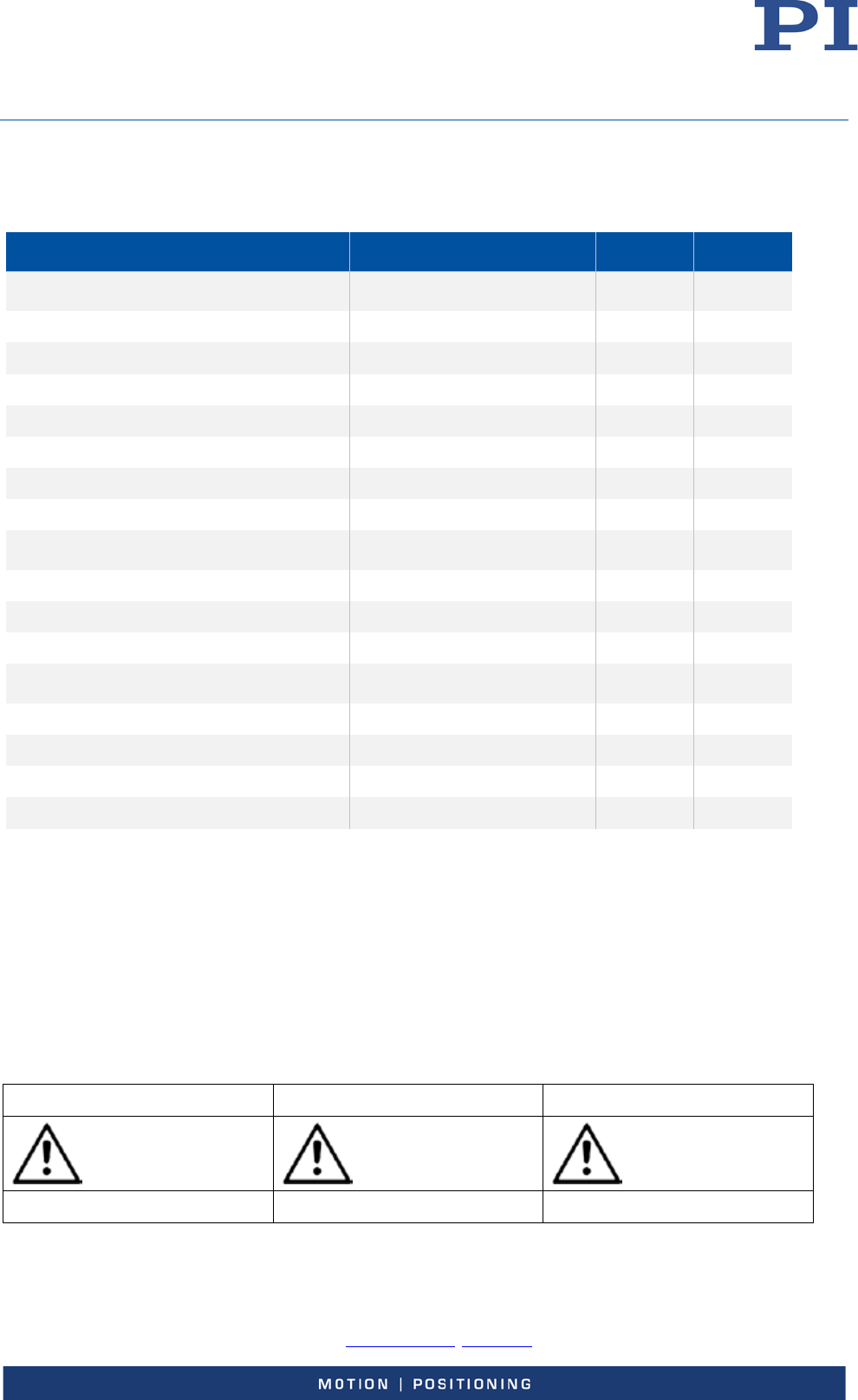
10.1 Data Table
Preliminary data Q-821.140 Unit Tolerance
Motion and positioning
Active axes X, Y, Z, θX, θY, θZ
Integrated sensor Incremental linear encoder
Travel range in X, Y* ±6 mm
Travel range in Z* ±3 mm
Rotation range in θX, θY* ±6 °
Rotation range in θZ* ±16.5 °
Sensor resolution 1 nm
Mechanical properties
Load capacity in X, Y 1 N max.
Load capacity in Z (base plate horizontal) 2 N max.
Drive type Piezoelectric inertia drive
Miscellaneous
Connection 6x Sub-D 15 (m)
Material Stainless steel, aluminum
Mass without cable and connector 0.3 kg ±5 %
Cable length 2 m ±10 mm
Technical data specified at 20±3°C.
* The travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis in this table shows its
maximum travel range, where all other axes and the pivot point are at the reference position. If the other linear or rotational
coordinates are not zero, the available travel may be less.
10.2 Maximum Ratings
The Q-821 spaceFAB is designed for the following operating data:
Maximum operating voltage Maximum operating frequency Maximum power consumption
48 V 20 kHz 30 W
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 26 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
10.3 Operating Time
The operating time and the operating frequency in step mode affect the lifetime of the
spaceFAB. In order to prevent overheating and high wear, the operating time with the given
operating frequency and 100 % duty cycle must not exceed the values given in the following
table.
Operating frequency in Hz1 Operating time2 / 48 V, ±0.2 A
10000 20 s (max.)
5000 60 s (max.)
≤ 1000 120 s (max.)
1 For the relevant parameters, see the user manual of the PI controller used.
2 With 100 % duty cycle without heat dissipation
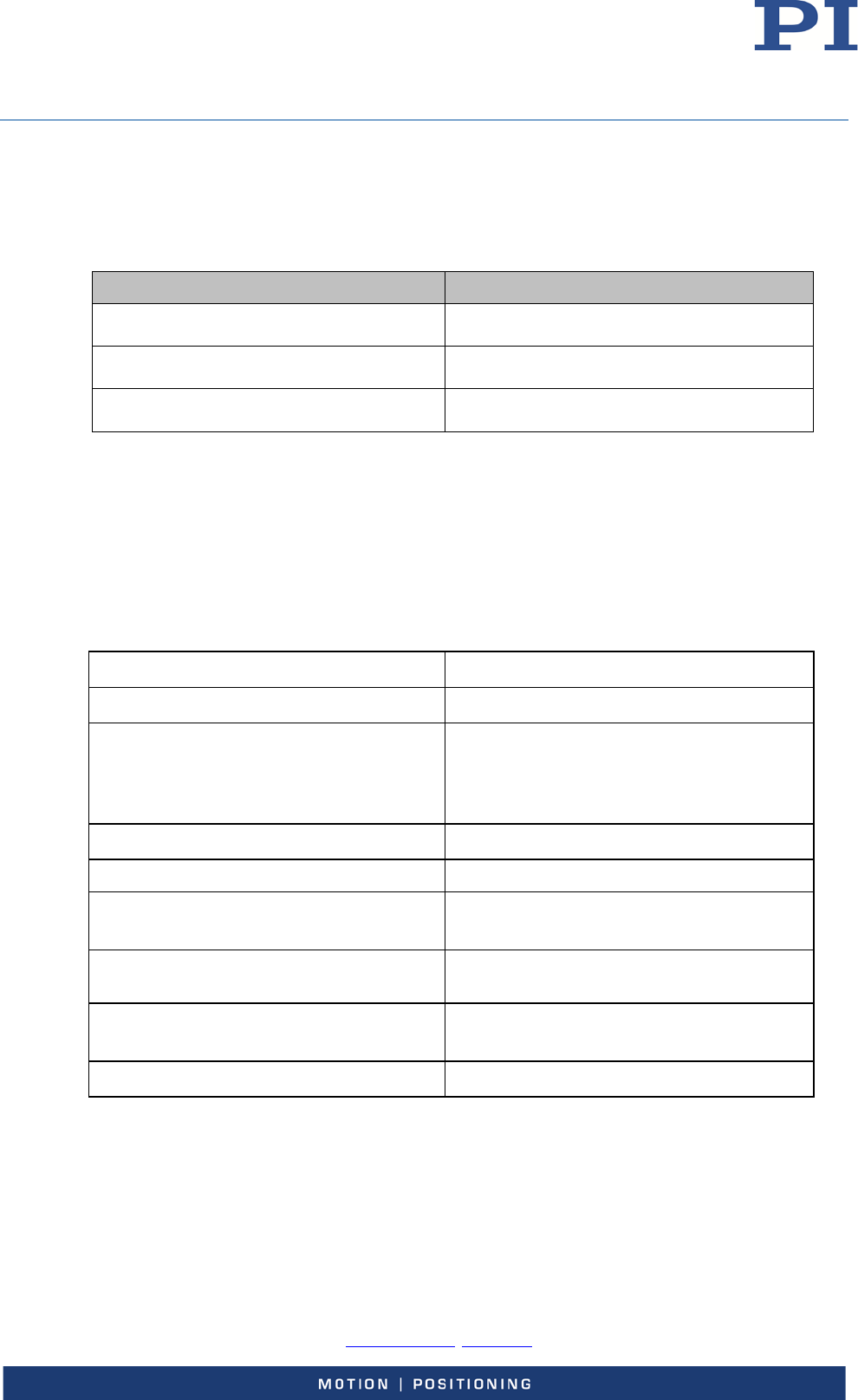
10.4 Ambient Conditions and Classifications
The following ambient conditions and classifications must be observed for the Q-821:
Area of application For indoor use only
Maximum altitude 2000 m
Relative humidity Highest relative humidity 80 % for
temperatures up to 31 °C, non-condensing
Decreasing linearly to 50 % relative humidity
at 40 °C, non-condensing
Storage temperature -20 °C to 70 °C
Transport temperature -20 °C to 70 °C
Overvoltage category
(acc. to EN 60664-1:2007 / VDE 0110-1)
II
Protection class (acc. to EN 61140 /
VDE 0140 1)
I
Degree of pollution (acc. to EN 60664
1:2007 / VDE 0110 1)
1
Degree of protection (acc. to IEC 60529) IP20
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 27 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
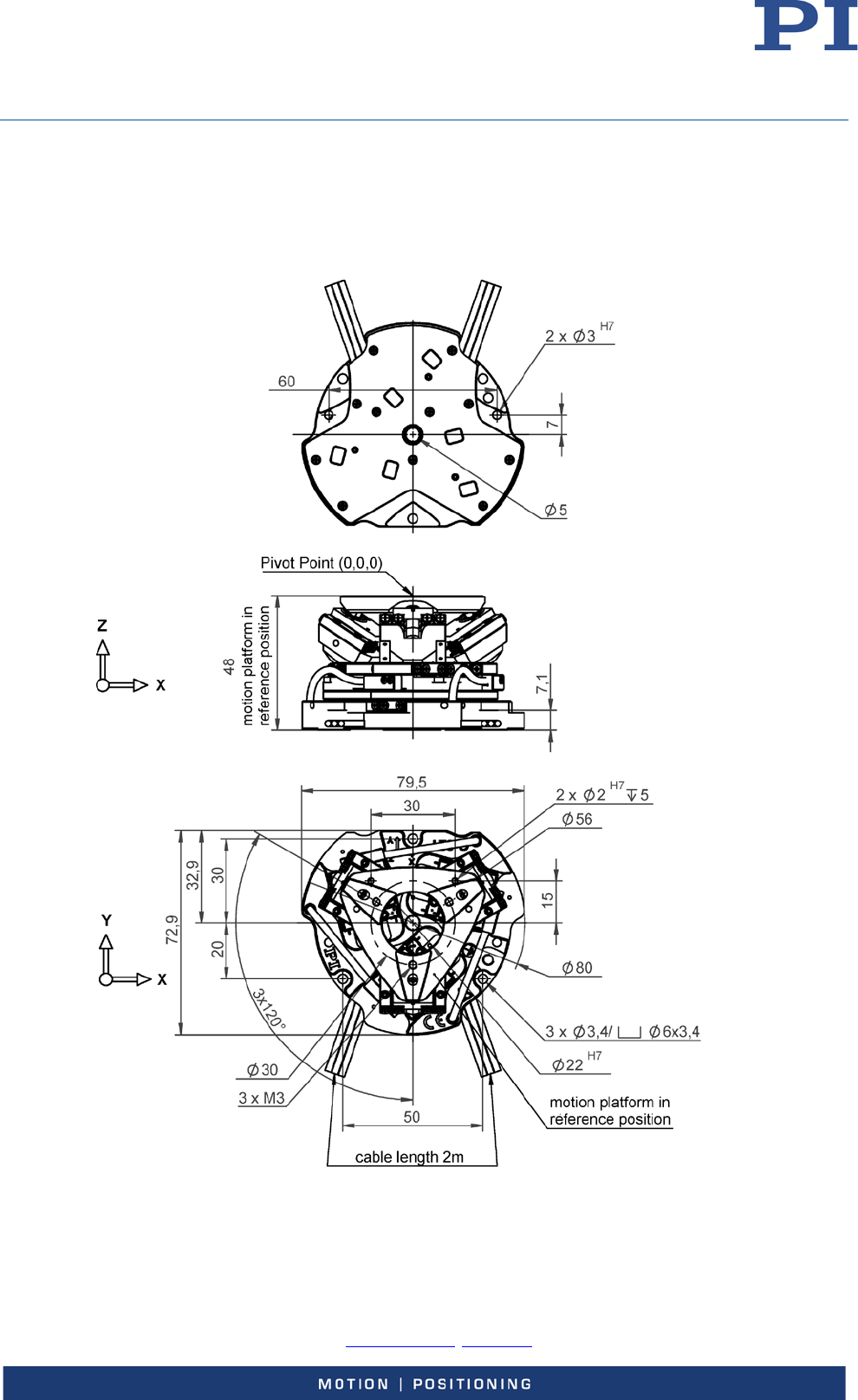
10.5 Dimensions
All figures show the SpacFAB in the reference position. The reference position equals the center
position of all axes.
Dimensions in mm. Note that the decimal places are separated by a comma in the drawings.
Figure 9: Top: View at bottom side, bottom: lateral view of Q-821.140
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 28 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
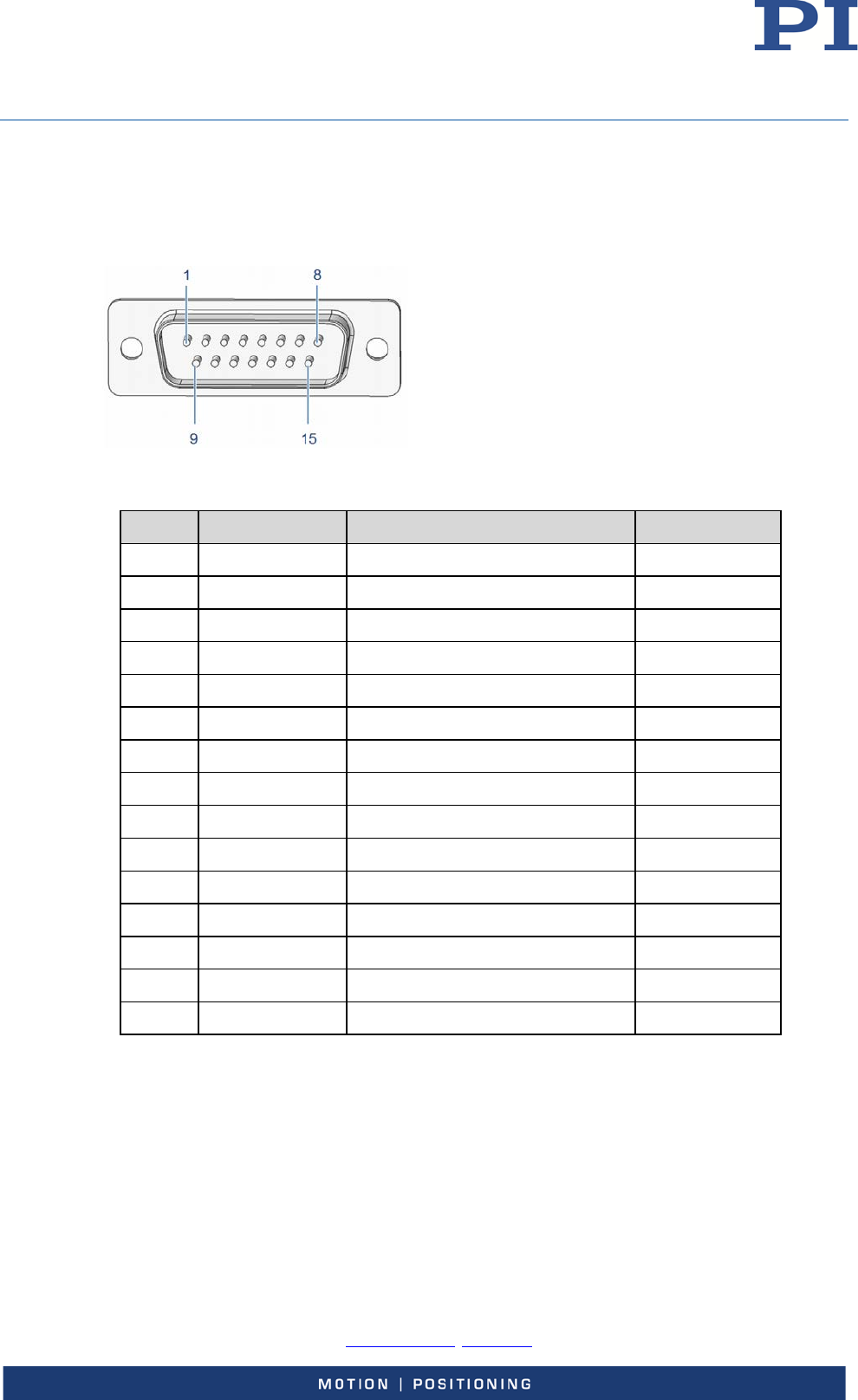
10.6 Pin Assignment
10.6.1 Sub-D 15 (m) Controller Connection
The Sub-D 15 (m) connector transmits the signals of the drive, the signals of the sensor and of
the ID chip.
Figure 10: Sub-D 15 (m) connector
Pin Signal1 Function Direction
1 REF - Reference signal differential (-) Output
2 Motor (-) Motor signal differential (-) Input
3 Motor (+) Motor signal differential (+) Input
4 VDD Supply voltage (+5 V) Input
5 - - -
6 ID chip data 2 ID chip data Output
7 SIN - Encoder A (-) Output
8 COS - Encoder B (-) Output
9 Motor (-) Motor signal differential (-) Input
10 GND GND GND
11 Motor (+) Motor signal differential (+) Input
12 - - -
13 REF + Reference signal differential (+) Output
14 SIN + Encoder A (+) Output
15 COS + Encoder B (+) Output
User Manual
MP173E, valid for Q-821
PMMSc/KSch, 3/19/2018
PI miCos GmbH, Freiburger Strasse 30, 79427 Eschbach, Germany Page 29 / 29
Phone
+49 7634 5057-0, Fax +49 7634 5057-99, Email info@pimicos.ws, www.pi.ws
11 Old Equipment Disposal
In accordance with EU law, electrical and electronic equipment may not be disposed of in EU
member states via the municipal residual waste.
Dispose of your old equipment according to international, national, and local rules and
regulations.
In order to fulfil the responsibility as the product manufacturer, PI miCos GmbH undertakes
environmentally correct disposal of all old PI miCos equipment made available on the market
after 13 August 2005 without charge.
Any old PI miCos equipment can be sent free of charge to the following address:
PI miCos GmbH
Freiburger Strasse 30
79427 Eschbach, Germany
12 EC Declaration of Conformity
For the Q-821, an EC Declaration of Conformity has been issued in accordance with the
following European directives:
Low Voltage Directive
EMC Directive
RoHS Directive
The applied standards certifying the conformity are listed below.
Safety (Low Voltage Directive): EN 61010-1
EMC: EN 61326-1
RoHS: EN 50581
