Robotiq 2 Finger Adaptive Gripper Specifications EN May26 2017 20171116
2017-11-16
: Pdf Robotiq-2-Finger-Adaptive-Gripper-Specifications-En-May26-2017 20171116 Robotiq-2-Finger-Adaptive-Gripper-Specifications-EN-May26-2017_20171116 support_s production
Open the PDF directly: View PDF ![]() .
.
Page Count: 2

ADAPTIVE GRIPPERS
2-FINGER 85 & 140
Program your robot in a few
minutes with our Gripper
URCap.
This adaptive gripper can pick
objects of dierent sizes and
shapes.
FLEXIBLE ROBOT GRIPPERS
DESIGNED FOR UNIVERSAL ROBOTS
EASY
PROGRAMMING
GET THE MOST
OUT OF YOUR ROBOT
PLUG + PLAY INTEGRATION
Everything you‘ll need for
a quick installation from
hardware to software.
EASY
INSTALLATION
Updated on May 26, 2017
Specications subject to change without notice
ADAPTIVE GRIPPERS TECHNICAL DATA
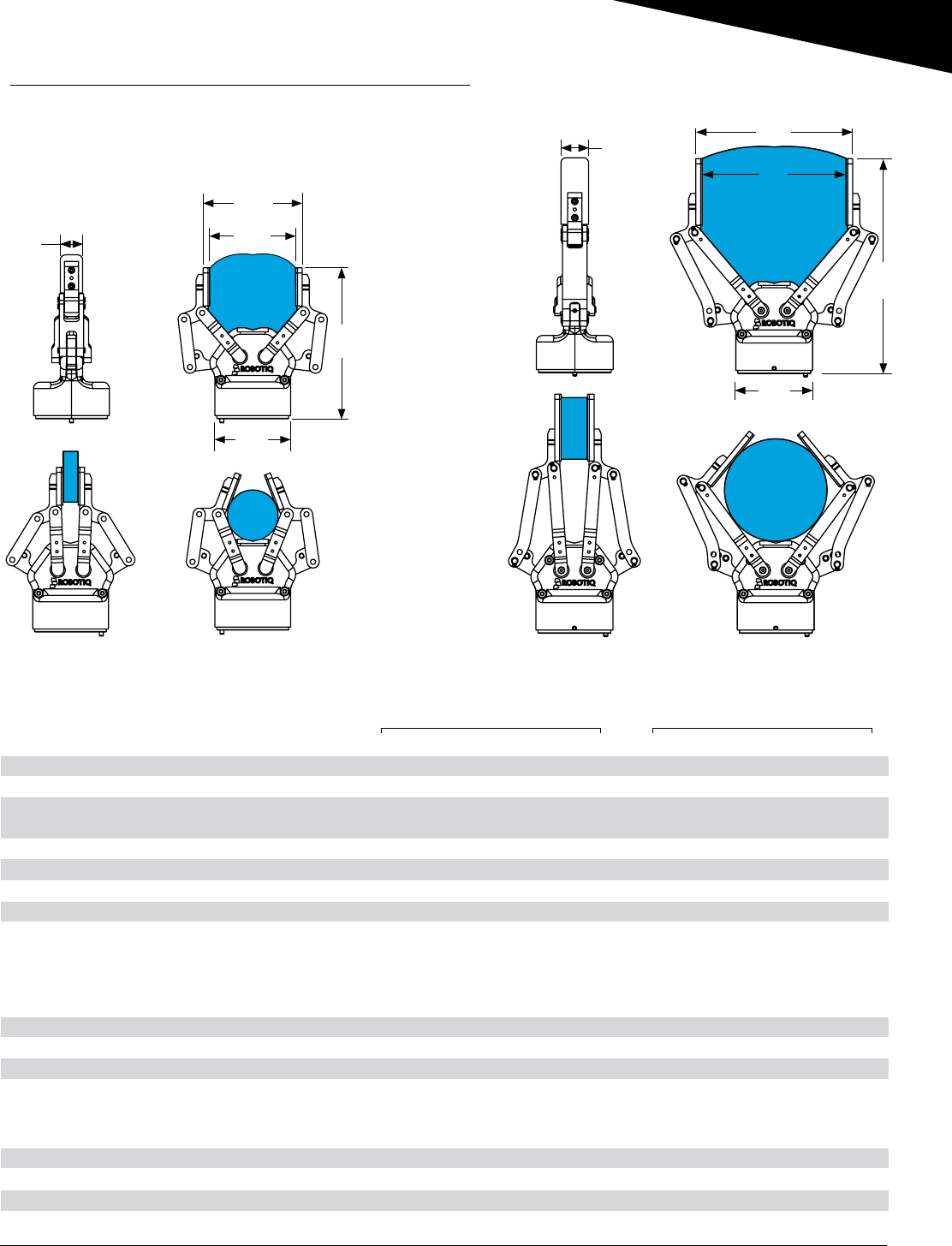
2-FINGER 85
T: 1.418.380.2788
support@robotiq.com
support.robotiq.com
[ in. ]
mm
UNITS:
[ 3.3 ]
85
Ø 75
149
98
[ 3.0 ]
[ 5.9 ]
[ 3.9 ]
WORK RANGE
22
[ 0.9 ]
Gripper opening (see gure)
Object diameter for encompassing grip
Gripper weight with mechanical coupling
Maximum recommended payload
Grip force**
Closing speed
Operating temperature
Parallel grip repeatability
0 to 85 mm
43 to 85 mm
900 g
5 kg
20 to 235 N
20 to 150 mm/s
-10°C to 50°C
0.05 mm
0 to 3.3 in
1.7 to 3.3 in
2 lbs
11 lbs
1.1 to 49.45 lbf
0.8 to 5.9 in/s
14°F to 122°F
0.002 in
MECHANICAL SPECIFICATIONS*
Communication protocol
Communication protocol options with controller
Programmable gripping parameters
Status LED
Feedback
Modbus RTU (RS-485, Half-duplex)
Ethernet/IP, Modbus TCP, PROFINET, DeviceNet, CANopen, EtherCAT
Position, speed and force control
Power, communication and fault status
Grip detection, gripper position and motor current
CONTROL
Nominal supply voltage
Absolute maximum supply voltage
Quiescent power (minimum power consumption)
Peak current
24 V DC ±10%
28 V DC
<1 W
1 A
ELECTRICAL SPECIFICATIONS
* Using Flat Silicone Fingertips for 2-Finger 85 and 2-Finger 140 Adaptive Grippers
0.3 friction coecient between nger and steel part, safety factor of 2.6
2-FINGER 140
2FINGER 1402FINGER 85
ENCOMPASSING GRIPENCOMPASSING GRIP PARALLEL GRIPPARALLEL GRIP
[ 5.5 ]
140
Ø 75
209
153
[ 3.0 ]
[ 8.2 ]
[ 6.0 ]
WORK RANGE
27
[ 1.1 ]
0 to 140 mm
90 to 140 mm
1000 g
2.5 kg
10 to 125 N
30 to 250 mm/s
-10°C to 50°C
0.08 mm
0 to 5.5 in
3.5 to 5.5 in
2.2 lbs
5.5 lbs
2.2 to 24.7 lbf
1.2 to 9.8 in/s
14°F to 122°F
0.003 in
** ±15%, varies with speed and force parameters
