Stepper Motor 5V 4 Phase 5 Wire & ULN2003 Driver Board For Arduino Geeetech Wiki
2017-06-24
: Pdf Stepper Motor 5V 4-Phase 5-Wire & Uln2003 Driver Board For Arduino - Geeetech Wiki Stepper Motor 5V 4-Phase 5-Wire & ULN2003 Driver Board for Arduino - Geeetech Wiki 107-93-1050 aftab
Open the PDF directly: View PDF ![]() .
.
Page Count: 6

6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 1/6
StepperMotor5V4Phase5Wire&ULN2003
DriverBoardforArduino
FromGeeetechWiki
Contents
1StepperIntroduction
2Features
3Steppermotor28BYJ48Parameters
4Interfacingcircuits
5Examplecode
5.1Code
5.2Stepperlibrary
6Document
7ReferenceMaterials
8Howtobuy
StepperIntroduction
Asteppermotorisanelectromechanicaldevicewhichconvertselectricalpulsesintodiscretemechanical
movements.Theshaftorspindleofasteppermotorrotatesindiscretestepincrementswhenelectricalcommand
pulsesareappliedtoitinthepropersequence.Themotorsrotationhasseveraldirectrelationshipstotheseapplied
inputpulses.Thesequenceoftheappliedpulsesisdirectlyrelatedtothedirectionofmotorshaftsrotation.The
speedofthemotorshaftsrotationisdirectlyrelatedtothefrequencyoftheinputpulsesandthelengthofrotation
isdirectlyrelatedtothenumberofinputpulsesapplied.Oneofthemostsignificantadvantagesofasteppermotor
{kind=link}
{kind=link}
6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 2/6
isitsabilitytobeaccuratelycontrolledinanopenloopsystem.Openloopcontrolmeansnofeedbackinformation
aboutpositionisneeded.Thistypeofcontroleliminatestheneedforexpensivesensingandfeedbackdevicessuch
asopticalencoders.Yourpositionisknownsimplybykeepingtrackoftheinputsteppulses.
Features
1.Therotationangleofthemotorisproportionaltotheinputpulse.
2.Themotorhasfulltorqueatstandstill(ifthewindingsareenergized)
3.Precisepositioningandrepeatabilityofmovementsincegoodsteppermotorshaveanaccuracyof–5%ofa
stepandthiserrorisnoncumulativefromonesteptothenext.
4.Excellentresponsetostarting/stopping/reversing.
5.Veryreliablesincetherearenocontactbrushesinthemotor.Thereforethelifeofthemotorissimply
dependantonthelifeofthebearing.
6.Themotorsresponsetodigitalinputpulsesprovidesopenloopcontrol,makingthemotorsimplerandless
costlytocontrol.
7.Itispossibletoachieveverylowspeedsynchronousrotationwithaloadthatisdirectlycoupledtotheshaft.
8.Awiderangeofrotationalspeedscanberealizedasthespeedisproportionaltothefrequencyoftheinput
pulses.
Steppermotor28BYJ48Parameters
Model:28BYJ48
Ratedvoltage:5VDC
NumberofPhase:4
SpeedVariationRatio:1/64
StrideAngle:5.625°/64
Frequency:100Hz
DCresistance:50Ω±7%(25℃)
IdleIntractionFrequency:>600Hz
IdleOuttractionFrequency:>1000Hz
IntractionTorque>34.3mN.m(120Hz)
SelfpositioningTorque>34.3mN.m
Frictiontorque:6001200gf.cm
Pullintorque:300gf.cm
Insulatedresistance>10MΩ(500V)
Insulatedelectricitypower:600VAC/1mA/1s
Insulationgrade:A
RiseinTemperature<40K(120Hz)
Noise<35dB(120Hz,Noload,10cm)
Interfacingcircuits
6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 3/6
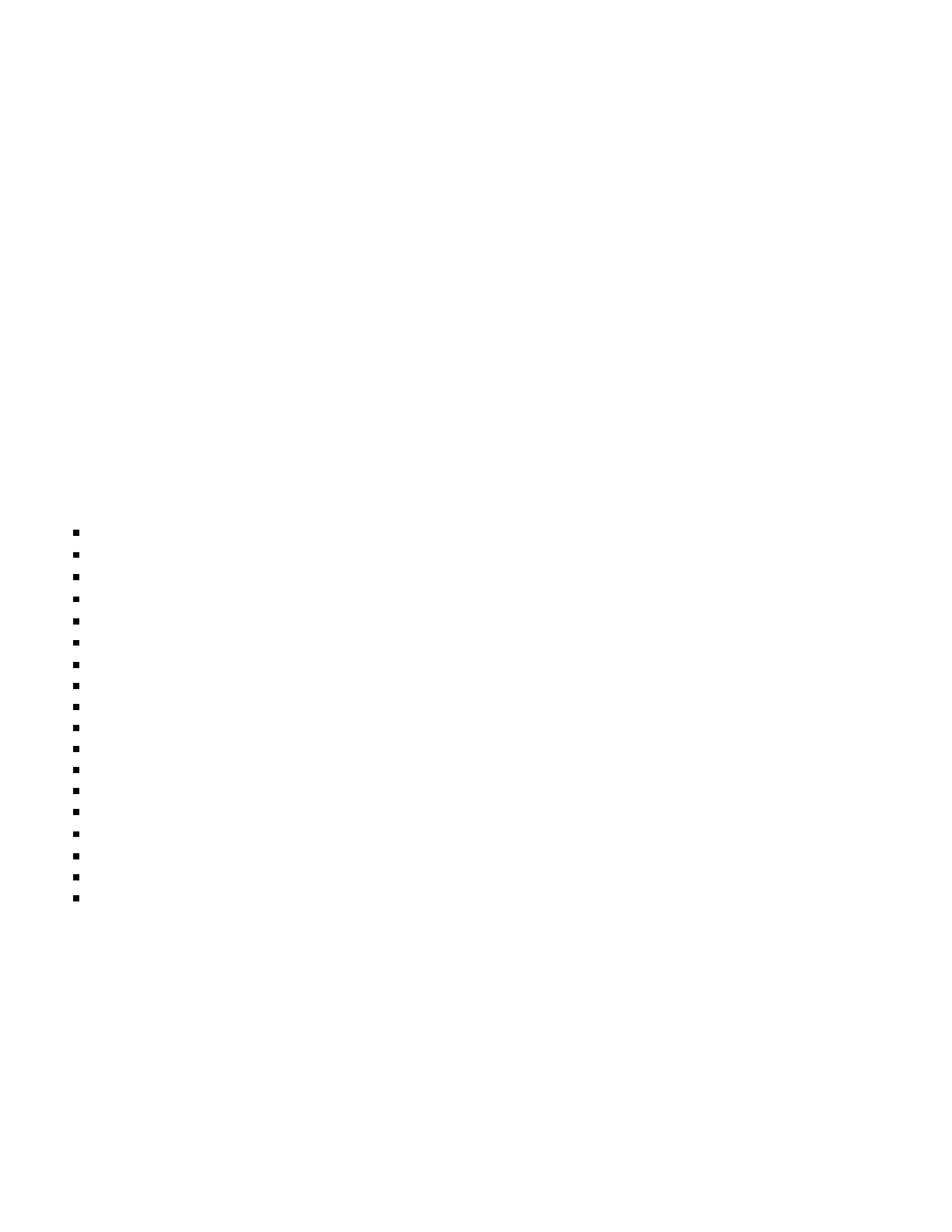
Thebipolarsteppermotorusuallyhasfourwirescomingoutofit.Unlikeunipolarsteppers,bipolarsteppershave
nocommoncenterconnection.Theyhavetwoindependentsetsofcoilsinstead.Youcandistinguishthemfrom
unipolarsteppersbymeasuringtheresistancebetweenthewires.Youshouldfindtwopairsofwireswithequal
resistance.Ifyou’vegottheleadsofyourmeterconnectedtotwowiresthatarenotconnected(i.e.notattachedto
thesamecoil),youshouldseeinfiniteresistance(ornocontinuity).
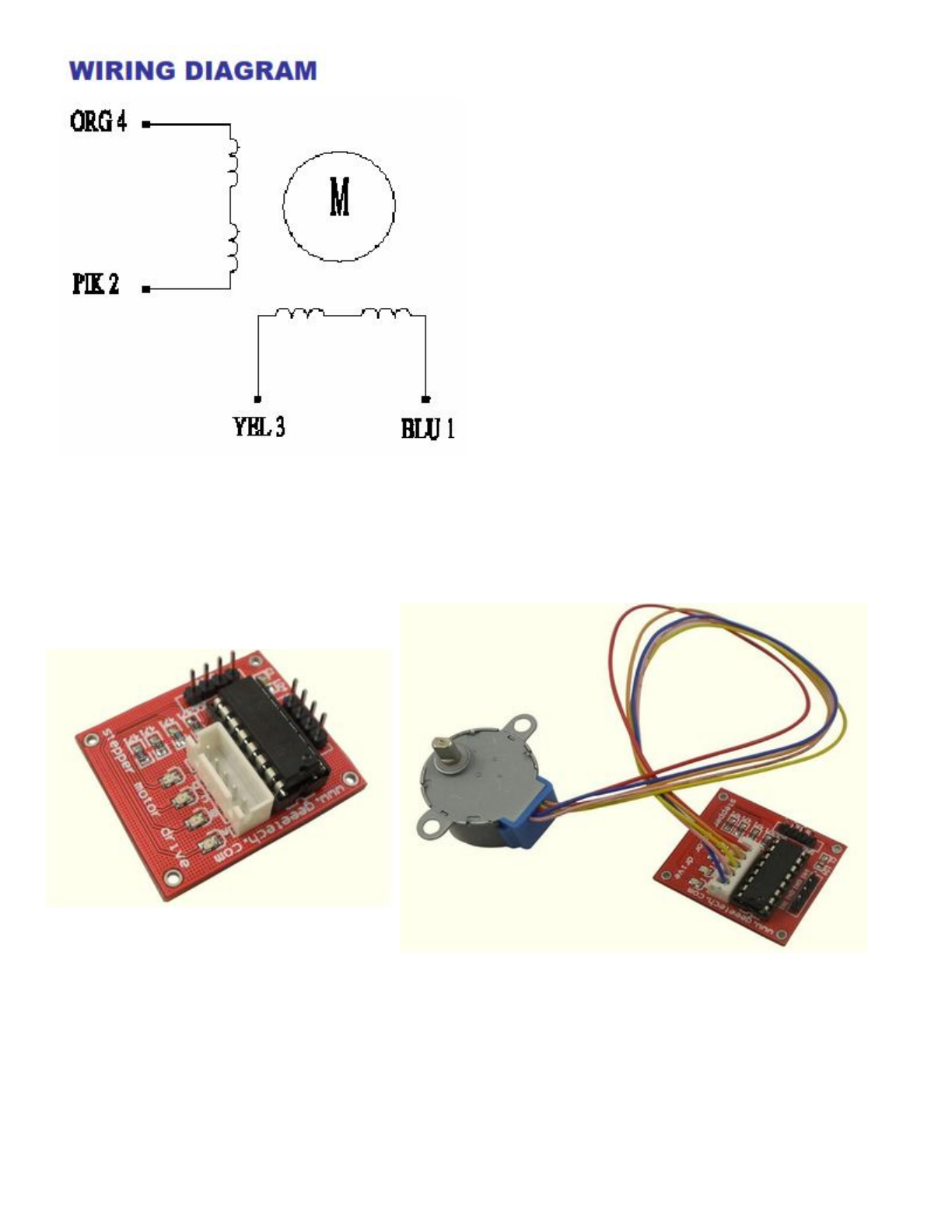
ThesimplestwayofinterfacingaunipolarsteppertoArduinoistouseabreakoutforULN2003Atransistorarray
chip.TheULN2003AcontainssevendarlingtontransistordriversandissomewhatlikehavingsevenTIP120
transistorsallinonepackage.TheULN2003Acanpassupto500mAperchannelandhasaninternalvoltagedrop
ofabout1Vwhenon.Italsocontainsinternalclampdiodestodissipatevoltagespikeswhendrivinginductive
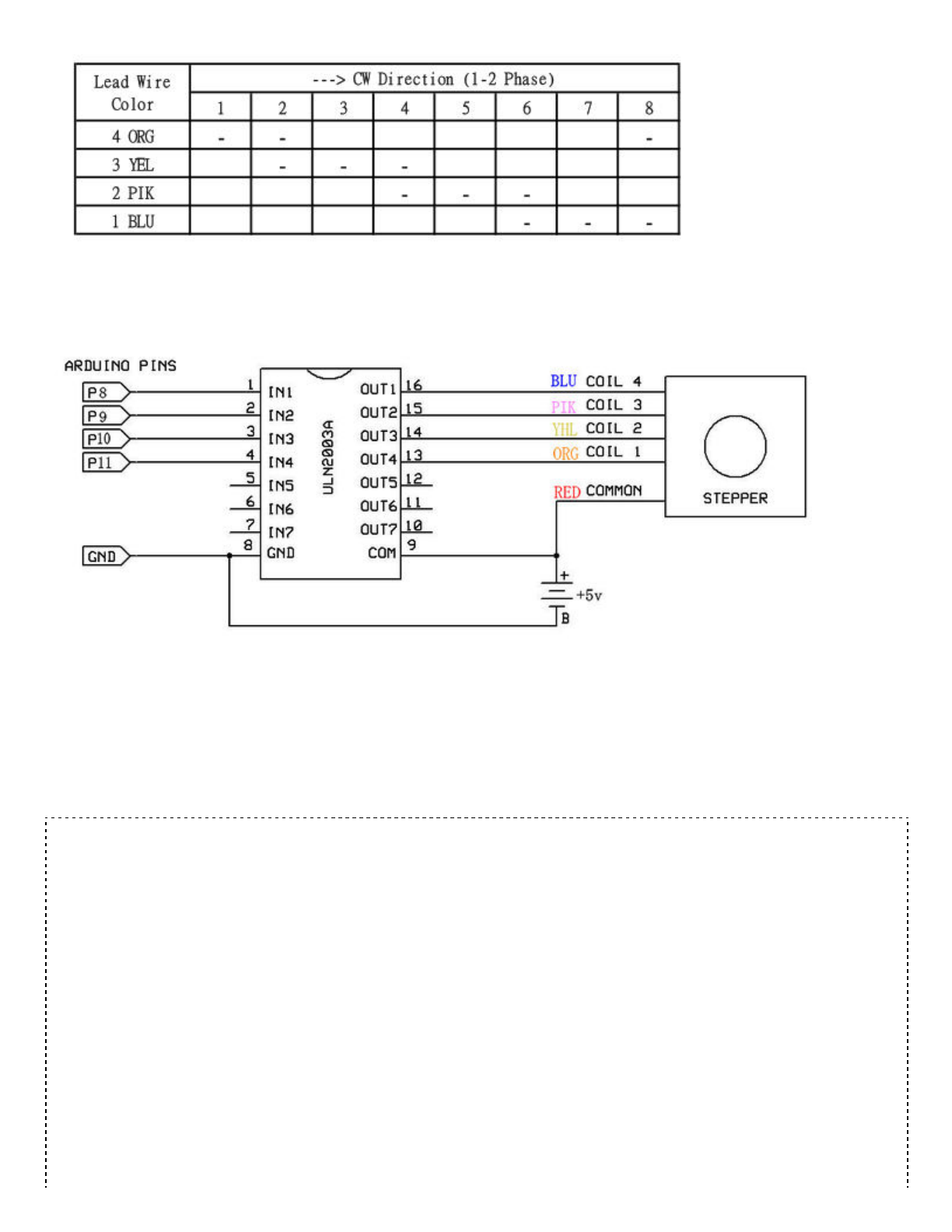
loads.Tocontrolthestepper,applyvoltagetoeachofthecoilsinaspecificsequence.
Thesequencewouldgolikethis:
{kind=link}
{kind=link}
{kind=link}
6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 4/6
HereareschematicsshowinghowtointerfaceaunipolarsteppermotortofourcontrollerpinsusingaULN2003A,
andshowinghowtointerfaceusingfourTIP120's.
Examplecode
Code
intPin0=10;
intPin1=11;
intPin2=12;
intPin3=13;
int_step=0;
booleandir=true;//gre
voidsetup()
{
pinMode(Pin0,OUTPUT);
pinMode(Pin1,OUTPUT);
pinMode(Pin2,OUTPUT);
pinMode(Pin3,OUTPUT);
}
voidloop()
{
switch(_step){
case0:
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,HIGH);
break;
case1:
{kind=link}
{kind=link}
6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 5/6
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,HIGH);
digitalWrite(Pin3,HIGH);
break;
case2:
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,HIGH);
digitalWrite(Pin3,LOW);
break;
case3:
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,HIGH);
digitalWrite(Pin2,HIGH);
digitalWrite(Pin3,LOW);
break;
case4:
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,HIGH);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,LOW);
break;
case5:
digitalWrite(Pin0,HIGH);
digitalWrite(Pin1,HIGH);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,LOW);
break;
case6:
digitalWrite(Pin0,HIGH);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,LOW);
break;
case7:
digitalWrite(Pin0,HIGH);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,HIGH);
break;
default:
digitalWrite(Pin0,LOW);
digitalWrite(Pin1,LOW);
digitalWrite(Pin2,LOW);
digitalWrite(Pin3,LOW);
break;
}
if(dir){
_step++;
}else{
_step‐‐;
}
if(_step>7){
_step=0;
}
if(_step<0){
_step=7;
}
delay(1);
}
Stepperlibrary
TheArduinoprogrammingenvironmentcomeswithafunctionlibraryforcontrollingasteppermotor.Tousethe
library,intheArduinoEditorfromthetopmenubar:Sketch>ImportLibrary>Stepper.Copytheexamplecode
belowintoanArduinoprogram.
ArduinoExampleCodeNotes:
6/24/2017 StepperMotor5V4Phase5Wire&ULN2003DriverBoardforArduinoGeeetechWiki
http://www.geeetech.com/wiki/index.php/Stepper_Motor_5V_4Phase_5Wire_%26_ULN2003_Driver_Board_for_Arduino 6/6
1.TheexamplecodeassumesthatthestepperisbeingcontrolledbyArduinopins8,9,10and11,butyoucan
useanysetoffourpins.
2.The"#defineSTEPS100"linedefinesthenumberofstepsperrev.A3.75degmotorhas96steps/revwhile
a7.2degmotorhas48steps/rev.
3.The"Stepperstepper(STEPS,8,9,10,11)"lineiswhereyouenterthefourpinsusedtocontrolthestepper.
4.The"stepper.setSpeed(x)"commandsetsthemotorspeedtoxrpm.
5.The"stepper.step(x)"commandturnsthemotorxstepsatthespeedlastsetinthestepper.setSpeed()
command.Themotorturnsonedirectionforpostivexandthereversedirectionfornegativex.
Document
Steppermotorbasic(http://www.geeetech.com/Documents/Stepper%20motor%20basic.pdf)
StepperMotorDatasheet(http://www.geeetech.com/Documents/Stepper%20motor%20datasheet.pdf)
ULN2003Datasheet(http://www.geeetech.com/Documents/ULN2003%20datasheet.pdf)
ReferenceMaterials
tigoe'sbloghttp://www.tigoe.net/pcomp/code/circuits/motors/steppermotors/
silveir'bloghttp://silveiraneto.net/?s=stepper
MEarduinocoursehttp://www.me.umn.edu/courses/me2011/arduino/technotes/stepper/index.html
Howtobuy
Clickheretobuy5V4Phase5WireStepperMotor(http://www.geeetech.com/5v4phase5wiresteppermotorp
368.html)andStepperMotorDriverBoardULN2003forArduino(http://www.geeetech.com/steppermotor
driverboarduln2003forarduinop428.html)
Retrievedfrom"https://www.geeetech.com/wiki/index.php?title=Stepper_Motor_5V_4Phase_5
Wire_%26_ULN2003_Driver_Board_for_Arduino&oldid=1999"
Thispagewaslastmodifiedon28July2012,at02:31.
Thispagehasbeenaccessed220,076times.
