Q CSF Instructions
qCSF_instructions
qCSF_instructions
qCSF_instructions
qCSF_instructions
qCSF_instructions
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 8
School of Geography, Beijing Normal University
Airborne LiDAR Data Filtering Algorithm
Based on Cloth Simulation
CSF_CC
Wuming Zhang, Jianbo Qi, Peng Wan, Hongtao Wang, Donghui Xi,
Guangjian Yan, Xihan Mu
State Key Laboratory of Remote Sensing Science, Beijing Key Laboratory of Environmental Remote
Sensing and Digital City, School of Geography, Beijing Normal University, Beijing 100875, China.
June, 2016
1 Introduction
Separating point clouds into ground and non-ground measurements is an essential step to generate
digital terrain models (DTMs) from airborne LiDAR (light detection and ranging) data. Many
filtering algorithms have been developed. However, even state-of-the-art filtering algorithms need
to set up a number of complicated parameters carefully to achieve high accuracy.
For the purpose of reducing the parameters users to set, and promoting the filtering algorithms, we
present a new filtering method which only needs a few easy-to-set integer and Boolean parameters.
This method is based on cloth simulation which is a 3D computer graphics algorithm and is used
for simulating cloth within a computer program. In this proposed approach, a LiDAR point cloud is
inverted, and then a rigid cloth is used to cover the inverted surface. By analyzing the interactions
between the cloth nodes and the corresponding LiDAR points, the locations of the cloth nodes can
be determined to generate an approximation of the ground surface. Finally, the ground points can
be extracted from the LiDAR point cloud by comparing the original LiDAR points and the generated
surface. This filtering algorithm could be called cloth simulation filtering, CSF.
To promote the application of the CSF, the researchers developed a graphic user interface based the
Cloud Compare (http://www.cloudcompare.org/). The GUI was developed for the Microsoft’s
Windows platform. The source code and executable program are available in the CSF_CC_Filelist.
If you use Cloth Simulation Filter (CSF) in your work, please cite the following paper, which can
be downloaded from researchgate(https://www.researchgate.net/profile/Wuming_Zhang2). Thank
you.
Zhang W, Qi J, Wan P, Wang H, Xie D, Wang X, Yan G. An Easy-to-Use Airborne LiDAR Data
Filtering Method Based on Cloth Simulation. Remote Sensing. 2016; 8(6):501.
BibTex
2 Algorithm Details
Our method is based on the simulation of a simple physical process. Imagine a piece of cloth is
placed above a terrain, and then this cloth drops because of gravity. Assuming that the cloth is soft
enough to stick to the surface, the final shape of the cloth is the DSM (digital surface model).
However, if the terrain is firstly turned upside down and the cloth is defined with rigidness, then the
final shape of the cloth is the DTM. To simulate this physical process, we employ a technique that
is called cloth simulation (Weil, 1986). Based on this technique, we developed our cloth simulation
filtering (CSF) algorithm to extract ground points from LiDAR points. The overview of the
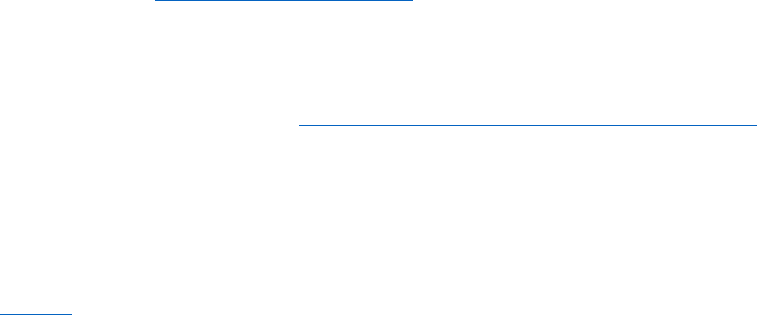
proposed algorithm is illustrated in Fig. 1. First, the original point cloud is turned upside down, and
then a cloth drops to the inverted surface from above. By analyzing the interactions between the
nodes of the cloth and the corresponding LiDAR points, the final shape of the cloth can be
determined and used as a base to classify the original points into ground and non-ground parts.
2.1Fundamentaloftheclothsimulation
During cloth simulation, the cloth can be modeled as a grid that consists of particles with mass and
interconnections called a Mass-Spring Model (Provot, 1995). Fig. 2 shows the structure of the grid
model. A particle on the node of the grid has no size but is assigned with a constant mass.
Fig. 1. Overview of the cloth simulation algorithm
Fig. 2. Mass-Spring Model of cloth
2.2ImplementationofCSF
First, we calculate the displacement of each particle only from gravity, i.e., solve equation (1) with
internal forces equal to zero. Then, the explicit integration form of this equation is
where m is the mass of the particle (usually, m is set to 1) and ∆t is the time step. Given the time
step and initial position, the current position can be calculated directly because G is a constant.
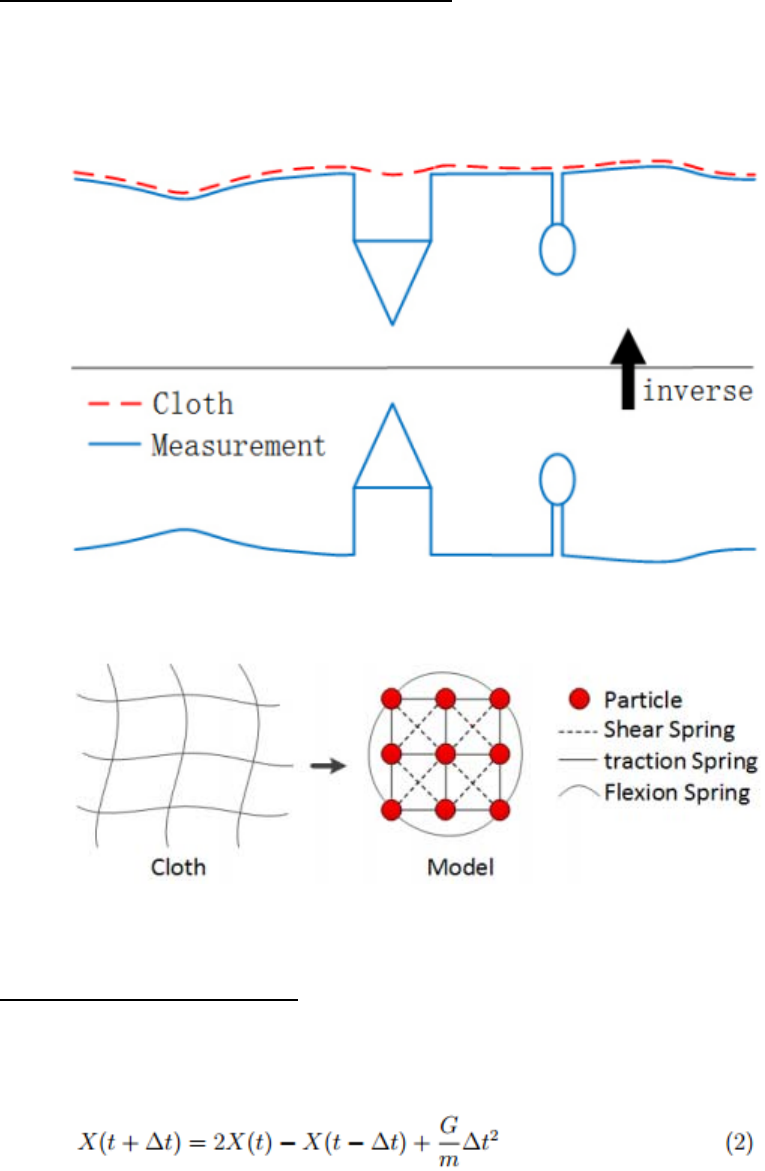
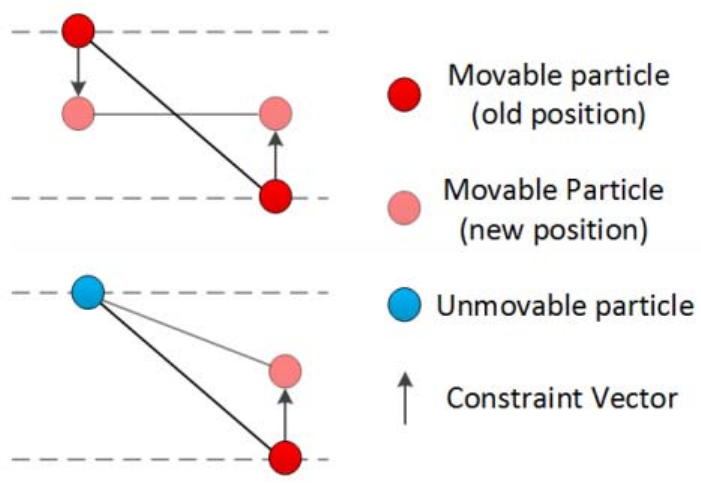
To constrain the displacement of particles in the void areas of the inverted surface, we consider the
internal forces at the second step after the particles have been moved by gravity. Because of internal
forces, particles will try to stay in the grid and return to the initial position. This procedure is
illustrated in Fig. 3.
Fig. 3. Constraint between particles
The procedure of the proposed filtering algorithm is presented as follows:
(1) Inverting the original LIDAR point cloud.
(2) Initiating cloth grid. Determining numbers of particles according to the user defined
grid resolution (GR). The initial position of cloth is usually set above the highest point.
(3) Projecting all the LIDAR points and grid particles to a horizontal plane and finding
the nearest LIDAR point for each grid particle in this plane. Then recording the height
value (h) of the nearest LIDAR point.
(4) For each grid particle, comparing the height difference between cloth particle and its
nearest LIDAR point. If the height of particle is equal to or smaller than h, then this
particle is set as unmovable.
(5) For each grid particle, calculating the position affected by gravity if this particle is
movable; and calculating the displacement of each particle affected by internal forces.
(6) Repeating (4)-(5) until the maximum height variation (M HV) all particles less than a
threshold or the program exceeds the maximum number of iterations which is specified
by the user.
(7) Computing the cloud to cloud distance between the grid particles and LIDAR point
cloud. Hence, for each LIDAR point, a distance value is obtained (d).
(8) Differentiating ground from non-ground points. For each LIDAR points, if the distance
value (d) is smaller than hcc, then this point is classified as BE, otherwise it is classified
as OBJ.
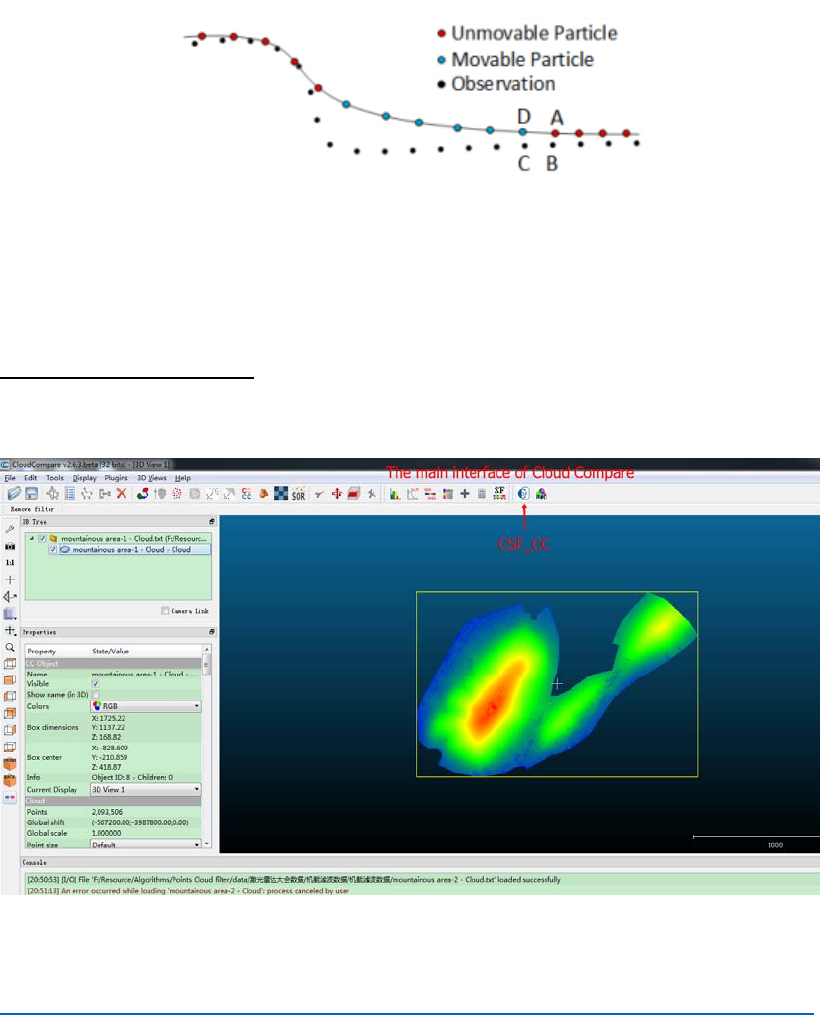
For steep slopes, this algorithm may yield relatively large errors because the simulated cloth is above
the steep slopes and does not fit with the ground measurements very well due to the internal
constraints among particles, which is illustrated in Fig. 4. Some ground measurements around steep
slopes are mistakenly classified as OBJ. This problem can be solved by a post-processing method
that smoothes the margins of steep slopes.
Fig. 4. Post-processing of the steep slope.
3 GUI Details
GraphicUserInterface
Here is a quick overview of the main user interface:
The detailed information of Cloud Compare refers to the user manual:
http://www.cloudcompare.org/doc/qCC/CloudCompare%20v2.6.1%20-%20User%20manual.pdf
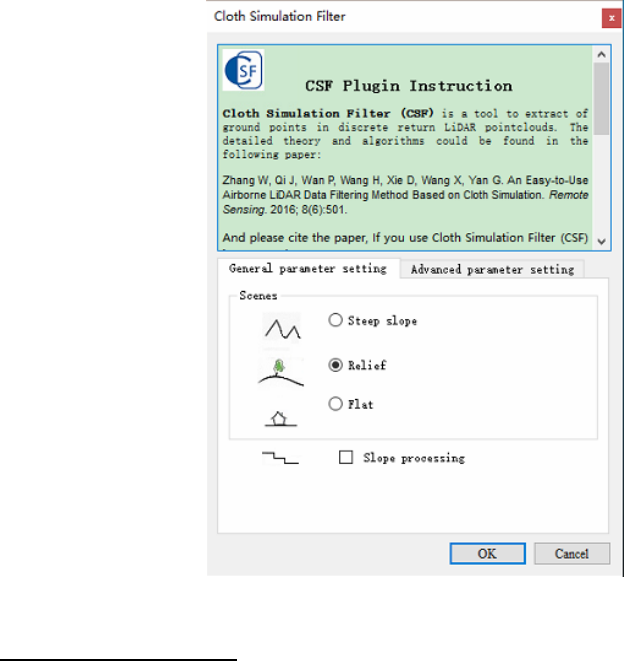
An overview of the CSF_CC interface
Setupofparameters
The parameters which need to be set by user can be divided into General parameter and Advanced
parameter. The general parameter means that it must be set each time the program runs. The advance
parameter means that it can be set according to the users need.
General parameters
※ Scenes
Three options are under this parameter : Mountain area with dense vegetation, complex scenes, and
flat terrain with high-rise buildings. This parameter help users to set scenes type of the point clouds.
When you set up this parameter, the rigidness will be determined actually. Please refers to the article:
An Easy-to-Use Airborne LIDAR Data Filtering Method Based on Cloth Simulation.
※ Slope post processing for disconnected terrain
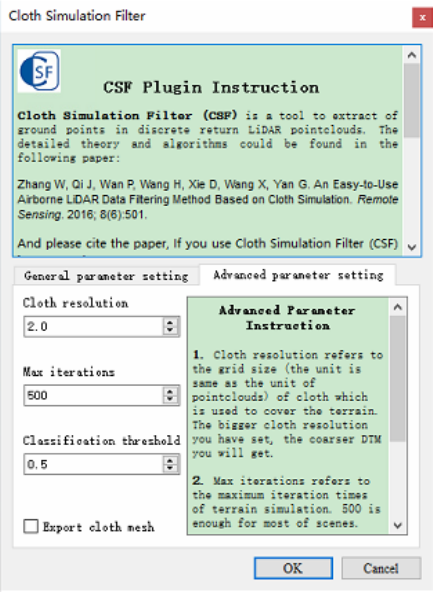
For steep slopes, this algorithm may yield relatively large errors because the simulated
cloth is above the steep slopes and does not fit with the ground measurements very well
due to the internal constraints among particles. This problem can be solved by selecting this
option. If there are no steep slopes in your scenes, just neglect it.
Advanced parameters
※ Cloth resolution
Cloth resolution refers to the grid size of cloth which is use to cover the terrain. The bigger cloth
resolution you have set, the coarser DTM you will get.
※ Max iterations
Max iterations refers to the maximum iteration times of terrain simulation. 500 is enough for most
of scenes.
※ Classification threshold
Classification threshold refers to a threshold to classify the original point cloud into ground and
non-ground parts based on the distances between original point cloud and the simulated terrain. 0.5
is adapted to most of scenes.
BibTex
@Article{rs8060501,
AUTHOR={Zhang,WumingandQi,JianboandWan,PengandWang,HongtaoandXie,Donghui
andWang,XiaoyanandYan,Guangjian},
TITLE={AnEasy‐to‐UseAirborneLiDARDataFilteringMethodBasedonClothSimulation},
JOURNAL={RemoteSensing},
VOLUME={8},
YEAR={2016},
NUMBER={6},
PAGES={501},
URL={http://www.mdpi.com/2072‐4292/8/6/501},
ISSN={2072‐4292},
ABSTRACT={Separatingpointcloudsintogroundandnon‐groundmeasurementsisanessential
steptogeneratedigitalterrainmodels(DTMs)fromairborneLiDAR(lightdetectionandranging)
data. However, most filtering algorithms need to carefully set up a number of complicated
parameterstoachievehighaccuracy.Inthispaper,wepresentanewfilteringmethodwhichonly
needsafeweasy‐to‐setintegerandBooleanparameters.Withintheproposedapproach,aLiDAR
pointcloudisinverted,andthenarigidclothisusedtocovertheinvertedsurface.Byanalyzing
theinteractionsbetweentheclothnodesandthecorrespondingLiDARpoints,thelocationsofthe
clothnodescanbedeterminedtogenerateanapproximationofthegroundsurface.Finally,the
groundpointscanbeextractedfromtheLiDARpointcloudbycomparingtheoriginalLiDARpoints
and the generated surface. Benchmark datasets provided by ISPRS (International Society for
Photogrammetry and Remote Sensing) working Group III/3 are used to validate the proposed
filtering method, and the experimental results yield an averagetotalerrorof4.58%,whichis
comparable with most of the state‐of‐the‐art filtering algorithms. The proposed easy‐to‐use
filtering method may help the users without much experience to use LiDAR data and related
technologyintheirownapplicationsmoreeasily.},
DOI={10.3390/rs8060501}
}
