Ssm Manual
ssm_manual
User Manual: Pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 44

State Space Models Manual
Jyh-Ying Peng1, John A. D. Aston2
1Institute of Information Science, Academia Sinica∗
2Department of Statistics, University of Warwick
July 1, 2011
∗Address for Correspondence:
Institute of Information Science,
Academia Sinica
128 Academia Road, Sec 2
Taipei 115, Taiwan
email: jypeng@iis.sinica.edu.tw

2 Peng & Aston
Contents
1 Introduction 4
2 How to Cite State Space Models Toolbox 4
3 The State Space Model Equations 4
3.1 LinearGaussianmodels.......................................... 4
3.2 Non-Gaussianmodels........................................... 5
3.3 Nonlinearmodels............................................. 5
4 The State Space Algorithms 5
4.1 Kalmanfilter ............................................... 6
4.2 Statesmoother .............................................. 7
4.3 Disturbancesmoother........................................... 8
4.4 Simulationsmoother ........................................... 8
5 Getting Started 9
5.1 Preliminaries ............................................... 9
5.2 Modelconstruction ............................................ 9
5.3 Modelandstateestimation ........................................ 9
6 SSM Classes 10
6.1 ClassSSMAT............................................... 10
6.2 ClassSSDIST............................................... 11
6.3 ClassSSFUNC .............................................. 11
6.4 ClassSSPARAM ............................................. 12
6.5 ClassSSMODEL ............................................. 12
7 SSM Functions 14
8 Data Analysis Examples 14
8.1 Structuraltimeseriesmodels....................................... 15
8.1.1 Univariateanalysis........................................ 15
8.1.2 Bivariateanalysis......................................... 20
8.2 ARMAmodels .............................................. 21
8.3 Cubicsplinesmoothing.......................................... 22
8.4 Poisson distribution error model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
8.5 t-distributionmodels ........................................... 25
8.6 Hillmer-Tiaodecomposition ....................................... 26
A Predefined Model Reference 28
B Class Reference 31
B.1 SSMAT .................................................. 31
B.1.1 Subscripted reference and assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
B.1.2 Classmethods .......................................... 31

SSM Toolbox for Matlab 3
B.2 SSDIST .................................................. 32
B.2.1 Subscripted reference and assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
B.2.2 Classmethods .......................................... 33
B.2.3 Predefined non-Gaussian distributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
B.3 SSFUNC ................................................. 34
B.3.1 Subscripted reference and assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
B.3.2 Classmethods .......................................... 34
B.4 SSPARAM ................................................ 35
B.4.1 Subscripted reference and assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
B.4.2 Classmethods .......................................... 35
B.5 SSMODEL ................................................ 36
B.5.1 Subscripted reference and assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
B.5.2 ClassMethods .......................................... 36
C Function Reference 37
C.1 User-definedupdatefunctions ...................................... 37
C.2 Dataanalysisfunctions .......................................... 38
C.3 Stockelementfunctions.......................................... 40
C.4 Miscellaneoushelperfunctions...................................... 43
C.5 TRAMO model selection and Hillmer-Tiao decomposition . . . . . . . . . . . . . . . . . . . . . . . 43

4 Peng & Aston
1 Introduction
State Space Models (SSM) is a MATLAB toolbox for doing time series analysis using general state space models
and the Kalman filter [1]. The goal of this software package is to provide users with an intuitive, convenient and
efficient way to do general time series modeling within the state space framework. Specifically, it seeks to provide
users with easy construction and combination of arbitrary models without having to explicitly define every component
of the model, and to maximize transparency in their data analysis usage so no special consideration is needed for
any individual model. This is achieved through the unification of all state space models and their extension to non-
Gaussian and nonlinear special cases. The user creation of custom models is also implemented to be as general,
flexible and efficient as possible. Thus, there are often multiple ways of defining a single model and choices as
to the parametrization versus initialization and to how the model update functions are implemented. Stock model
components are also provided to ease user extension to existing predefined models. Functions that implement standard
algorithms such as the Kalman filter and state smoother, log likelihood calculation and parameter estimation will work
seamlessly across all models, including any user defined custom models.
These features are implemented through object-oriented programming primitives provided by MATLAB and
classes in the toolbox are defined to conform to MATLAB conventions whenever possible. The result is a highly
integrated toolbox with support for general state space models and standard state space algorithms, complemented by
the built-in matrix computation and graphic plotting capabilities of MATLAB.
2 How to Cite State Space Models Toolbox
Please cite the following paper if you use this software in your research:
Jyh-Ying Peng and John A.D. Aston. The State Space Models toolbox for MATLAB. Journal of Statistical Software,
41(6):1-26, May 2011. Software available at http://sourceforge.net/projects/ssmodels.
3 The State Space Model Equations
This section presents a summary of the basic definition of models supported by SSM. Currently SSM implements the
Kalman filter and related algorithms for model and state estimation, hence non-Gaussian or nonlinear models need
to be approximated by linear Gaussian models prior to or during estimation. However the approximation is done
automatically and seamlessly by the respective routines, even for user-defined non-Gaussian or nonlinear models.
The following notation for various sequences will be used throughout the paper:
ytp×1Observation sequence
εtp×1Observation disturbance (Unobserved)
αtm×1State sequence (Unobserved)
ηtr×1State disturbance (Unobserved)
3.1 Linear Gaussian models
SSM supports linear Gaussian state space model in the form
yt=Ztαt+εt,ε
t∼N(0,H
t),
αt+1 =ct+Ttαt+Rtηt,η
t∼N(0,Q
t),
α1∼N(a1,P
1),t=1,...,n.
(1)

SSM Toolbox for Matlab 5
Thus the matrices Zt,c
t,T
t,R
t,H
t,Q
t,a
1,P
1are required to define a linear Gaussian state space model. The matrix
Ztis the state to observation linear transformation, for univariate models it is a row vector. The matrix ctis the same
size as the state vector, and is the “constant” in the state update equation, although it can be dynamic or dependent
on model parameters. The square matrix Ttdefines the time evolution of states. The matrix Rttransforms general
disturbance into state space, and exists to allow for more varieties of models. Htand Qtare Gaussian variance matrices
governing the disturbances, and a1and P1are the initial conditions. The matrices and their dimensions are listed:
Ztp×mState to observation transform matrix
ctm×1State update constant
Ttm×mState update transform matrix
Rtm×rState disturbance transform matrix
Htp×pObservation disturbance variance
Qtr×rState disturbance variance
a1m×1Initial state mean
P1m×mInitial state variance
3.2 Non-Gaussian models
SSM supports non-Gaussian state space models in the form
yt∼p(yt|θt),θ
t=Ztαt,
αt+1 =ct+Ttαt+Rtηt,η
t∼Qt=p(ηt),
α1∼N(a1,P
1),t=1,...,n.
(2)
The sequence θtis the signal and Qtis a non-Gaussian distribution (e.g. heavy-tailed distribution). The non-Gaussian
observation disturbance can take two forms: an exponential family distribution
Ht=p(yt|θt)=expyT
tθt−bt(θt)+ct(yt),−∞ <θ
t<∞,(3)
or a non-Gaussian additive noise
yt=θt+εt,ε
t∼Ht=p(εt).(4)
With model combination it is also possible for Htand Qtto be a combination of Gaussian distributions (represented
by variance matrices) and various non-Gaussian distributions.
3.3 Nonlinear models
SSM supports nonlinear state space models in the form
yt=Zt(αt)+εt,ε
t∼N(0,H
t),
αt+1 =ct+Tt(αt)+Rtηt,η
t∼N(0,Q
t),
α1∼N(a1,P
1),t=1,...,n.
(5)
Ztand Ttare functions that map m×1vectors to p×1and m×1vectors respectively. With model combination it
is also possible for Ztand Ttto be a combination of linear functions (matrices) and nonlinear functions.
4 The State Space Algorithms
This section summarizes the core algorithms implemented in SSM, starting with the Kalman filter. Normally the initial
conditions a1and P1should be given for these algorithms, but the exact diffuse initialization implemented permits

6 Peng & Aston
elements of either to be unknown, and derived implicitly from the first few observations. The unknown elements in a1
are set to 0, and the corresponding diagonal entry in P1is set to ∞, this represents an improper prior which reflects the
lack of knowledge about that particular element a priori. See [1] for details. To keep variables finite in the algorithms
we define another initial condition P∞,1with elements
(P∞,1)i,j =0,if (P1)i,j <∞,
1,if (P1)i,j =∞,(6)
and set infinite elements of P1to 0. All the state space algorithms supports exact diffuse initialization.
For non-Gaussian and nonlinear models linear Gaussian approximations are performed by linearization of the
loglikelihood equation and model matrices respectively, and the Kalman filter algorithms can then be used on the
resulting approximation models.
4.1 Kalman filter
Given the observation yt, the model and initial conditions a1,P
1,P
∞,1, Kalman filter outputs at=E(αt|y1:t−1)
and Pt= Var(αt|y1:t−1), the one step ahead state prediction and prediction variance. Theoretically the diffuse state
variance P∞,t will only be non-zero for the first couple of time points (usually the number of diffuse elements, but may
be longer depending on the structure of Zt), after which exact diffuse initialization is completed and normal Kalman
filter is applied. Here ndenotes the length of observation data, and ddenotes the number of time points where the
state variance remains diffuse.
The normal Kalman filter recursion (for t>d) are as follows:
vt=yt−Ztat,
Ft=ZtPtZT
t+Ht,
Kt=TtPtZT
tF−1
t,
Lt=Tt−KtZt,
at+1 =ct+Ttat+Ktvt,
Pt+1 =TtPtLT
t+RtQtRT
t.
The exact diffuse initialized Kalman filter recursion (for t≤d) is divided into two cases, when F∞,t =ZtP∞,tZT
tis
nonsingular:
vt=yt−Ztat,
F(1)
t=(ZtP∞,tZT
t)−1,
F(2)
t=−F(1)
t(ZtPtZT
t+Ht)F(1)
t,
Kt=TtP∞,tZT
tF(1)
t,
K(1)
t=Tt(PtZT
tF(1)
t+P∞,tZT
tF(2)
t),
Lt=Tt−KtZt,
L(1)
t=−K(1)
tZt,
at+1 =ct+Ttat+Ktvt,
Pt+1 =TtP∞,tL(1)T
t+TtPtLT
t+RtQtRT
t,
P∞,t+1 =TtP∞,tLT
t,

SSM Toolbox for Matlab 7
and when F∞,t =0:
vt=yt−Ztat,
Ft=ZtPtZT
t+Ht,
Kt=TtPtZT
tF−1
t,
Lt=Tt−KtZt,
at+1 =ct+Ttat+Ktvt,
Pt+1 =TtPtLT
t+RtQtRT
t,
P∞,t+1 =TtP∞,tTT
t.
4.2 State smoother
Given the Kalman filter outputs, the state smoother outputs ˆαt=E(αt|y1:n)and Vt= Var(αt|y1:n), the smoothed
state mean and variance given the whole observation data, by backwards recursion.
To start the backwards recursion, first set rn=0and Nn=0, where rtand Ntare the same size as atand Pt
respectively. The normal backwards recursion (for t>d) is then
rt−1=ZT
tF−1
tvt+LT
trt,
Nt−1=ZT
tF−1
tZt+LT
tNtLt,
ˆαt=at+Ptrt−1,
Vt=Pt−PtNt−1Pt.
For the exact diffuse initialized portion (t≤d) set additional diffuse variables r(1)
d=0and N(1)
d=N(2)
d=0
corresponding to rdand Ndrespectively, the backwards recursion is
r(1)
t−1=ZT
tF(1)
tvt+LT
tr(1)
t+L(1)T
trt,
rt−1=LT
trt,
N(2)
t−1=ZT
tF(2)
tZt+LT
tN(2)
tLt+LT
tN(1)
tL(1)
t
+L(1)T
tN(1)
tLt+L(1)T
tNtL(1)
t,
N(1)
t−1=ZT
tF(1)
tZt+LT
tN(1)
tLt+L(1)T
tNtLt,
Nt−1=LT
tNtLt,
ˆαt=at+Ptrt−1+P∞,tr(1)
t−1,
Vt=Pt−PtNt−1Pt−(P∞,tN(1)
t−1Pt)T
−P∞,tN(1)
t−1Pt−P∞,tN(2)
t−1P∞,t,
if F∞,t is nonsingular, and
r(1)
t−1=TT
tr(1)
t,
rt−1=ZT
tF−1
tvt+LT
trt,
N(2)
t−1=TT
tN(2)
tTt,
N(1)
t−1=TT
tN(1)
tLt,
Nt−1=ZT
tF−1
tZt+LT
tNtLt,
ˆαt=at+Ptrt−1+P∞,tr(1)
t−1,

8 Peng & Aston
Vt=Pt−PtNt−1Pt−(P∞,tN(1)
t−1Pt)T
−P∞,tN(1)
t−1Pt−P∞,tN(2)
t−1P∞,t,
if F∞,t =0.
4.3 Disturbance smoother
Given the Kalman filter outputs, the disturbance smoother outputs ˆεt=E(εt|y1:n),Var(εt|y1:n),ˆηt=E(ηt|y1:n)
and Var(ηt|y1:n). Calculate the sequence rtand Ntby backwards recursion as before, the disturbance can then be
estimated by
ˆηt=QtRT
trt,
Var(ηt|y1:n)=Qt−QtRT
tNtRtQt,
ˆεt=Ht(F−1
tvt−KT
trt),
Var(εt|y1:n)=Ht−Ht(F−1
t+KT
tNtKt)Ht,
if t>dor F∞,t =0, and
ˆηt=QtRT
trt,
Var(ηt|y1:n)=Qt−QtRT
tNtRtQt,
ˆεt=−HtKT
trt,
Var(εt|y1:n)=Ht−HtKT
tNtKtHt,
if t≤dand F∞,t is nonsingular.
4.4 Simulation smoother
The simulation smoother randomly generates an observation sequence ˜ytand the underlying state and disturbance
sequences ˜αt,˜�tand ˜ηtconditional on the model and observation data yt. The algorithm is as follows (each step is
performed for all time points t):
1. Draw random samples of the state and observation disturbances:
ε+
t∼N(0,H
t),
η+
t∼N(0,Q
t).
2. Draw random samples of the initial state:
α+
1∼N(a1,P
1).
3. Generate state sequences α+
tand observation sequences y+
tfrom the random samples.
4. Use disturbance smoothing to obtain
ˆεt=E(εt|y1:n),
ˆηt=E(ηt|y1:n),
ˆε+
t=E(ε+
t|y+
1:n),
ˆη+
t=E(η+
t|y+
1:n).

SSM Toolbox for Matlab 9
5. Use state smoothing to obtain
ˆαt=E(αt|y1:n),
ˆα+
t=E(α+
t|y+
1:n).
6. Calculate
˜αt=ˆαt−ˆα+
t+α+
t,
˜εt=ˆεt−ˆε+
t+ε+
t,
˜ηt=ˆηt−ˆη+
t+η+
t.
7. Generate ˜ytfrom the output.
5 Getting Started
The easiest and most frequent way to start using SSM is by constructing predefined models, as opposed to creating a
model from scratch. This section presents some examples of simple time series analysis using predefined models, the
complete list of available predefined models can be found in Appendix A.
5.1 Preliminaries
Some parts of SSM is programmed in c for maximum efficiency, before using SSM, go to the subfolder csrc and
execute the script mexall to compile and distribute all needed c mex functions.
5.2 Model construction
To create an instance of a predefined model, call the functions ssm *where the wildcard is the short name for the
model, with arguments as necessary. For example:
•model = ssm llm creates a local level model.
•model = ssm arma(p, q) creates an ARMA(p, q)model.
The resulting variable model is a SSMODEL object and can be displayed just like any other MATLAB variables.
To set or change the model parameters, use model.param, which is a row vector that behaves like a MATLAB
matrix except its size cannot be changed. The initial conditions usually defaults to exact diffuse initialization, where
model.a1 is zero, and model.P1 is ∞on the diagonals, but can likewise be changed. Models can be combined
by horizontal concatenation, where only the observation disturbance model of the first one will be retained. The class
SSMODEL will be presented in detail in later sections.
5.3 Model and state estimation
With the model created, estimation can be performed. SSM expects the data yto be a matrix of dimensions p×n, where
nis the data size (or time duration). The model parameters are estimated by maximum likelihood, the SSMODEL
class method estimate performs the estimation. For example:
•model1 = estimate(y, model0) estimates the model and stores the result in model1, where the pa-
rameter values of model0 is used as initial value.

10 Peng & Aston
•[model1 logL] = estimate(y, model0, psi0, [], optname1,
optvalue1, optname2, optvalue2, ...) estimates the model with psi0 as the initial parameters
using option settings specified with option value pairs, and returns the resulting model and loglikelihood.
After the model is estimated, state estimation can be performed, this is done by the SSMODEL class method
kalman and statesmo, which is the Kalman filter and state smoother respectively.
•[a P] = kalman(y, model) applies the Kalman filter on yand returns the one-step-ahead state predic-
tion and variance.
•[alphahat V] = statesmo(y, model) applies the state smoother on yand returns the expected state
mean and variance.
The filtered and smoothed state sequences aand alphahat are m×n+1 and m×nmatrices respectively, and the
filtered and smoothed state variance sequences Pand Vare m×m×n+1 and m×m×nmatrices respectively, except
if m=1, in which case they are squeezed and transposed.
6 SSM Classes
SSM is composed of various MATLAB classes each of which represents specific parts of a general state space model.
The class SSMODEL represents a state space model, and is the most important class of SSM. It embeds the classes
SSMAT,SSDIST,SSFUNC and SSPARAM, all designed to facilitate the construction and usage of SSMODEL for
general data analysis. Consult Appendix B for complete details about these classes.
6.1 Class SSMAT
The class state space matrix (SSMAT) forms the basic components of a state space model, they can represent linear
transformations that map vectors to vectors (the Zt,Ttand Rtmatrices), or variance matrices of Gaussian disturbances
(the Htand Qtmatrices).
The first data member of class SSMAT is mat, which is a matrix that represents the stationary part of the state
space matrix, and is often the only data member that is needed to represent a state space matrix. For dynamic state
space matrices, the additional data members dmmask and dvec are needed. dmmask is a logical matrix the same
size as mat, and specifies elements of the state space matrix that varies with time, these elements arranged in a column
in column-wise order forms the columns of the matrix dvec, thus nnz(dmmask) is equal to the number of rows in
dvec, and the number of columns of dvec is the number of time points specified for the state space matrix. This is
designed so that the code
mat(dmmask) = dvec(:, t);
gets the value of the state space matrix at time point t.
Now these are the constant part of the state space matrix, in that they do not depend on model parameters. The
logical matrix mmask specifies which elements of the stationary mat is dependent on model parameters (variable),
while the logical column vector dvmask specifies the variable elements of dvec. Functions that update the state space
matrix take the model parameters as input argument, and should output results so that the following code correctly
updates the state space matrix:
mat(mmask) = func1(psi);
dvec(dvmask, :) = func2(psi);

SSM Toolbox for Matlab 11
where func1 update the stationary part, and func2 updates the dynamic part. The class SSMAT is designed to
represent the “structure” and current value of a state space matrix, thus the update functions are not part of the class
and will be described in detail in later sections.
Objects of class SSMAT behaves like a matrix to a certain extent, calling size returns the size of the stationary
part, concatenations horzcat,vertcat and blkdiag can be used to combine SSMAT with each other and ordi-
nary matrices, and same for plus. Data members mat and dvec can be read and modified provided the structure of
the state space matrix stays the same, parenthesis indexing can also be used.
6.2 Class SSDIST
The class state space distributions (SSDIST) is a child class of SSMAT, and represents non-Gaussian distributions for
the observation and state disturbances (Htand Qt). Since disturbances are vectors, it’s possible to have both elements
with Gaussian distributions, and elements with different non-Gaussian distributions. Also in order to use the Kalman
filter, non-Gaussian distributions are approximated by Gaussian noise with dynamic variance. Thus the class SSDIST
needs to keep track of multiple non-Gaussian distributions and also their corresponding disturbance elements, so that
the individual Gaussian approximations can be concatenated in the correct order.
As non-Gaussian distributions are approximated by dynamic Gaussian distribution in SSM, its representation need
only consist of data required in the approximation process, namely the functions that take disturbance samples as input
and outputs the dynamic Gaussian variance. Also a function that outputs the probability of the disturbance samples
is needed for loglikelihood calculation. These functions are stored in two data members matf and logpf, both cell
arrays of function handles. A logical matrix diagmask is needed to keep track of which elements each non-Gaussian
distribution governs, where each column of diagmask corresponds to each distribution. Elements not specified in
any columns are therefore Gaussian. Lastly a logical vector dmask of the same length as matf and logpf specifies
which distributions are variable, for example, t-distributions can be variable if the variance and degree of freedom are
model parameters. The update function func for SSDIST objects should be defined to take parameter values as input
arguments and output a cell matrix of function handles such that
distf = func(psi);
[matf{dmask}] = distf{:, 1};
[logpf{dmask}] = distf{:, 2};
correctly updates the non-Gaussian distributions.
In SSM most non-Gaussian distributions such as exponential family distributions and some heavy-tailed noise
distributions are predefined and can be constructed similarly to predefined models, these can then be inserted in stock
components to allow for non-Gaussian disturbance generalizations.
6.3 Class SSFUNC
The class state space functions (SSFUNC) is another child class of SSMAT, and represents nonlinear functions that
transform vectors to vectors (Zt,Ttand Rt). As with non-Gaussian distribution it is possible to “concatenate” non-
linear functions corresponding to different elements of the state vector and destination vector. The dimension of input
and output vector and which elements they corresponds to will have to be kept track of for each nonlinear function,
and their linear approximations are concatenated using these information.
Both the function itself and its derivative are needed to calculate the linear approximation, these are stored in
data members fand df, both cell arrays of function handles. horzmask and vertmask are both logical matrices
where each column specifies the elements of the input and output vector for each function, respectively. In this

12 Peng & Aston
way the dimensions of the approximating matrix for the ith function can be determined as nnz(vertmask(:,
i)) ×nnz(horzmask(:, i)). The logical vector fmask specifies which functions are variable with respect to
model parameters. The update function func for SSFUNC objects should be defined to take parameter values as input
arguments and output a cell matrix of function handles such that
funcf = func(psi);
[f{fmask}] = funcf{:, 1};
[df{fmask}] = funcf{:, 2};
correctly updates the nonlinear functions.
6.4 Class SSPARAM
The class state space parameters (SSPARAM) stores and organizes the model parameters, each model parameter has
a name, value, transform and possible constraints. Transforms are necessary because most model parameters have a
restricted domain, but most numerical optimization routines generally operate over the whole real line. For example
a variance parameter σ2are suppose to be positive, so if σ2is optimized directly there’s the possibility of error, but
by defining ψ= log(σ2)and optimizing ψinstead, this problem is avoided. Model parameter transforms are not
restricted to single parameters, sometimes a group of parameters need to be transformed together, the same goes for
constraints. Hence the class SSPARAM also keeps track of parameter grouping.
Like SSMAT,SSPARAM objects can be treated like a row vector of parameters to a certain extent. Specifically, it is
possible to horizontally concatenate SSPARAM objects as a means of combining parameter groups. Other operations
on SSPARAM objects include getting and setting the parameter values and transformed values. The untransformed
values are the original parameter values meaningful to the model defined, and will be referred to as param in code
examples; the transformed values are meant only as input to optimization routines and have no direct interpretation in
terms of the model, they are referred to as psi in code examples, but the user will rarely need to use them directly if
predefined models are used.
6.5 Class SSMODEL
The class state space model (SSMODEL) represents state space models by embedding SSMAT,SSDIST,SSFUNC
and SSPARAM objects and also keeping track of update functions, parameter masks and general model component
information. The basic constituent elements of a model is described earlier as Z,T,R,H,Q,c,a1 and P1.Z,Tand
Rare vector transformations, the first two can be SSFUNC or SSMAT objects, but the last one can only be a SSMAT
object. Hand Qgovern the disturbances and can be SSDIST or SSMAT objects. c,a1 and P1 can only be SSMAT
objects. These form the “constant” part of the model specification, and is the only part needed in Kalman filter and
related state estimation algorithms.
The second part of SSMODEL concerns the update functions and model parameters, general specifications for the
model estimation process. func and grad are cell arrays of update functions and their gradient for the basic model
elements respectively. It is possible for a single function to update multiple parts of the model and these information
are stored in the data member A,alength(func) ×18 adjacency matrix. Each row of Arepresents one update
function, and each column represents one updatable element. The 18 updatable model elements in order are
H Z T R Q c a1 P1 Hd Zd Td Rd Qd cd Hng Qng Znl Tnl
where the dsuffix means dynamic, ng means non-Gaussian and nl means nonlinear. It is therefore possible for a
function that updates Zto output [vec dsubvec funcf] updating the stationary part of Z, dynamic part of Zand
the nonlinear functions in Zrespectively. The row in Afor this function would be

SSM Toolbox for Matlab 13
H Z T R Q c a1 P1 Hd Zd Td Rd Qd cd Hng Qng Znl Tnl
010000 0 0 0 1 0 0 0 0 0 0 1 0
Any function can update any combination of these 18 elements, the only restriction is that the output should follow
the order set in Awith possible omissions.
On the other hand Aalso allows many functions to update a single model element, this is the main mechanism that
enables smooth model combination. Suppose T1 of model 1is updated by func1, and T2 of model 2by func2,
combination of models 1and 2requires block diagonal concatenation of T1 and T2:T = blkdiag(T1, T2). It
is easy to see that the vertical concatenation of the output of func1 and func2 correctly updates the new matrix T
as follows
vec1 = func1(psi);
vec2 = func2(psi);
T.mat(T.mmask) = [vec1; vec2];
This also holds for horizontal concatenation, but for vertical concatenation of more than one column this would fail,
luckily this case never occurs when combining state space models, so can be safely ignored. The updates of dynamic,
non-Gaussian and nonlinear elements can also be combined in this way, in fact, the whole scheme of the update
functions are designed with combinable output in mind. For an example adjacency matrix A
H Z T R Q c a1 P1 Hd Zd Td Rd Qd cd Hng Qng Znl Tnl
func1 1 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0
func2 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0
func3 0 1 1 0 1 0 0 0 0 1 0 0 0 0 0 0 1 0
model update would then proceed by first invoking the three update functions
[Hvec1 Tvec1 Qvec1 Zfuncf1] = func1(psi);
[Tvec2 Zdsubvec2] = func2(psi);
[Zvec3 Tvec3 Qvec3 Zdsubvec3 Zfuncf3] = func3(psi);
and then update the various elements
H.mat(H.mmask) = Hvec1;
Z.mat(Z.mmask) = Zvec3;
T.mat(T.mmask) = [Tvec1; Tvec2; Tvec3];
Q.mat(Q.mmask) = [Qvec1; Qvec3];
Z.dvec(Z.dvmask, :) = [Zdsubvec2; Zdsubvec3];
Z.f(Z.fmask) = [Zfuncf1{:, 1}; Zfuncf3{:, 1}];
Z.df(Z.fmask) = [Zfuncf1{:, 2}; Zfuncf3{:, 2}];
Now to facilitate model construction and alteration, functions that need adjacency matrix Aas input actually
expects another form based on strings. Each of the 18 elements shown earlier is represented by the corresponding
strings, ’H’,’Qng’,’Zd’, . . . etc., and each row of Ais a single string in a cell array of strings, where each string is
a concatenation of various elements in any order. This form (a cell array of strings) is called “adjacency string” and is
used in all functions that require an adjacency matrix as input.
The remaining data members of SSMODEL are psi and pmask.psi is a SSPARAM object that stores the model
parameters, and pmask is a cell array of logical row vectors that specifies which parameters are required by each up-
date function. So each update function are in fact provided a subset of model parameters funci(psi.value(pmask{i})).
It is trivial to combine these two data members when combining models.

14 Peng & Aston
In summary the class SSMODEL can be divided into two parts, a “constant” part that corresponds to an instance
of a theoretical state space model given all model parameters, which is the only part required to run Kalman filter
and related state estimation routines, and a “variable” part that keeps track of the model parameters and how each
parameter effects the values of various model elements, which is used (in addition to the “constant” part) in model
estimation routines that produce parameter estimates. This division is the careful separation of the “structure” of a
model and its “instantiation” given model parameters, and allows logical separation of various structural elements
of the model (with the classes SSMAT,SSDIST and SSFUNC) to facilitate model combination and usage, without
compromising the ability to efficiently define and combine complex model update mechanisms.
7 SSM Functions
There are several types of functions in SSM besides class methods, these are data analysis functions, stock element
functions and various helper functions. Most data analysis functions are Kalman filter related and implemented as
SSMODEL methods, but for the user this is transparent since class methods and functions are called in the same way
in MATLAB. Examples for data analysis functions include kalman,statesmo and loglik, all of which uses the
kalman filter and outputs the filtered states, smoothed states and loglikelihood respectively. These and similar functions
take three arguments, the data y, which must be p×n, where pis the number of variables in the data and nthe data
size, the model model,aSSMODEL object, and optional analysis option name value pairs (see function setopt in
Appendix C.4), where settings such as tolerance can be specified. The functions linear and gauss calculates the
linear Gaussian approximation models, and requires y,model and optional initial state estimate alpha0 as input
arguments. The function estimate runs numerical optimization routines for model estimation; model updates,
necessary approximations and loglikelihood calculations are done automatically in the procedure, input arguments
are y,model and initial parameter estimate psi0, the function outputs the maximum likelihood model. There are
also some functions specific to ARIMA-type models, such as Hillmer-Tiao decomposition [2] and TRAMO model
selection [3].
Stock element functions create predefined models and components, they range from the general to the specific.
These functions have names of the form (element) (description), for example, the function mat arma
creates matrices for the ARMA model. Currently there are five types of stock element functions: ssm *creates state
space models (SSMODELs), fun *creates model update functions, mat *creates matrix structures, dist *creates
non-Gaussian distributions (SSDISTs), and x*creates stock regression variables such as trading day variables.
Miscellaneous helper functions provide additional functionality unsuitable to be implemented in the previous two
categories. The most important of which is the function setopt, which specifies the global options or settings
structure that is used by almost every data analysis function. One time overrides of individual options are possible for
each function call, and each option can be individually specified, examples of possible options include tolerance and
verbosity. Other useful functions include ymarray which generates a year, month array from starting year, starting
month and number of months and is useful for functions like x td and x ee which take year, month arrays as input.
8 Data Analysis Examples
Many of the data analysis examples are based on the data in the book by Durbin and Koopman [1], to facilitate easy
comparison and understanding of the method used here.

SSM Toolbox for Matlab 15
8.1 Structural time series models
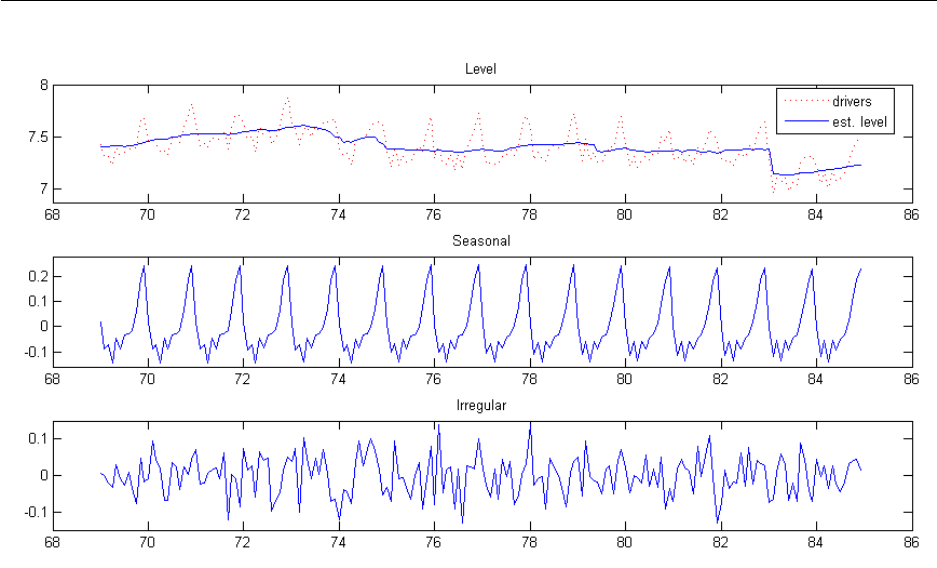
In this example data on road accidents in Great Britain [4] is analyzed using structural time series models following
[1]. The purpose the the analysis is to assess the effect of seat belt laws on road accident casualties, with individual
monthly figures for drivers, front seat passengers and rear seat passengers. The monthly price of petrol and average
number of kilometers traveled will be used as regression variables. The data is from January 1969 to December 1984.
8.1.1 Univariate analysis
The drivers series will be analyzed with univariate structural time series model, which consists of local level compo-
nent µt, trigonometric seasonal component γt, regression component (on price of petrol) and intervention component
(introduction of seat belt law) βxt. The model equation is
yt=µt+γt+βxt+εt,(7)
where εtis the observation noise. The following code example constructs this model:
lvl = ssm_llm;
seas = ssm_seasonal(’trig1’, 12);
intv = ssm_intv(n, ’step’, 170);
reg = ssm_reg(petrol, ’price of petrol’);
bstsm = [lvl seas intv reg];
bstsm.name = ’Basic structural time series model’;
bstsm.param = [10 0.1 0.001];
The MATLAB display for object bstsm is
bstsm =
Basic structural time series model
==================================
p=1
m = 14
r = 12
n = 192
Components (5):
==================
[Gaussian noise]
p=1
[local polynomial trend]
d=0
[seasonal]
subtype = trig1
s = 12
[intervention]
subtype = step

16 Peng & Aston
tau = 170
[regression]
variable = price of petrol
H matrix (1, 1)
-------------------
10.0000
Z matrix (1, 14, 192)
----------------------
Stationary part:
110101010101DYNDYN
Dynamic part:
Columns 1 through 9
000000000
-2.2733 -2.2792 -2.2822 -2.2939 -2.2924 -2.2968 -2.2655 -2.2626 -2.2655
Columns 10 through 18
000000000
-2.2728 -2.2757 -2.2828 -2.2899 -2.2956 -2.3012 -2.3165 -2.3192 -2.3220
...
Columns 181 through 189
111111111
-2.1390 -2.1646 -2.1565 -2.1597 -2.1644 -2.1648 -2.1634 -2.1646 -2.1707
Columns 190 through 192
111
-2.1502 -2.1539 -2.1536
T matrix (14, 14)
-------------------

SSM Toolbox for Matlab 17
Columns 1 through 9
100000000
0 0.8660 0.5000 0 0 0 0 0 0
0 -0.5000 0.8660 0 0 0 0 0 0
0 0 0 0.5000 0.8660 0 0 0 0
0 0 0 -0.8660 0.5000 0 0 0 0
0 0 0 0 0 0.0000 1 0 0
0 0 0 0 0 -1 0.0000 0 0
0 0 0 0 0 0 0 -0.5000 0.8660
0 0 0 0 0 0 0 -0.8660 -0.5000
000000000
000000000
000000000
000000000
000000000
Columns 10 through 14
00000
00000
00000
00000
00000
00000
00000
00000
00000
-0.8660 0.5000 0 0 0
-0.5000 -0.8660 0 0 0
0 0 -1 0 0
00010
00001
R matrix (14, 12)
-------------------
100000000000
010000000000
001000000000
000100000000
000010000000
000001000000
000000100000
000000010000
000000001000
000000000100

18 Peng & Aston
000000000010
000000000001
000000000000
000000000000
Q matrix (12, 12)
-------------------
Columns 1 through 9
0.100000000000
0 0.0010 0 0 0 0 0 0 0
0 0 0.0010 0 0 0 0 0 0
0 0 0 0.0010 0 0 0 0 0
0 0 0 0 0.0010 0 0 0 0
0 0 0 0 0 0.0010 0 0 0
0 0 0 0 0 0 0.0010 0 0
0 0 0 0 0 0 0 0.0010 0
0 0 0 0 0 0 0 0 0.0010
000000000
000000000
000000000
Columns 10 through 12
000
000
000
000
000
000
000
000
000
0.0010 0 0
0 0.0010 0
0 0 0.0010
P1 matrix (14, 14)
-------------------
Inf0000000000000
0Inf000000000000
00Inf00000000000
000Inf0000000000
0000Inf000000000

SSM Toolbox for Matlab 19
00000Inf00000000
000000Inf0000000
0000000Inf000000
00000000Inf00000
000000000Inf0000
0000000000Inf000
00000000000Inf00
000000000000Inf0
0000000000000Inf
Adjacency matrix (3 functions):
-----------------------------------------------------------------------------
Function H Z T R Q c a1 P1 Hd Zd Td Rd Qd cd Hng Qng Znl Tnl
fun_var/psi2var 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
fun_var/psi2var 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
fun_dupvar/psi2dupvar1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
Parameters (3)
------------------------------------
Name Value
epsilon var 10
zeta var 0.1
omega var 0.001
The constituting components of the model and the model matrices are all displayed, note that Zis dynamic with the
intervention and regression variables, and matrices cand a1 are omitted if they are zero, also Hand Qtake on values
determined by the parameters set.
With the model constructed, estimation can proceed with the code:
[bstsm logL] = estimate(y, bstsm);
[alphahat V] = statesmo(y, bstsm);
irr = disturbsmo(y, bstsm);
ycom = signal(alphahat, bstsm);
ylvl = sum(ycom([1 3 4], :), 1);
yseas = ycom(2, :);
The estimated model parameters are [0.0037862 0.00026768 1.162e-006], which can be obtained by dis-
playing bstsm.param, the loglikelihood is 175.7790. State and disturbance smoothing is performed with the
estimated model, and the smoothed state is transformed into signal components by signal. Because p=1, the out-
put ycom is M×n, where Mis the number of signal components. The level, intervention and regression are summed as
the total data level, separating seasonal influence. Using MATLAB graphic functions the individual signal components
and data are visualized:
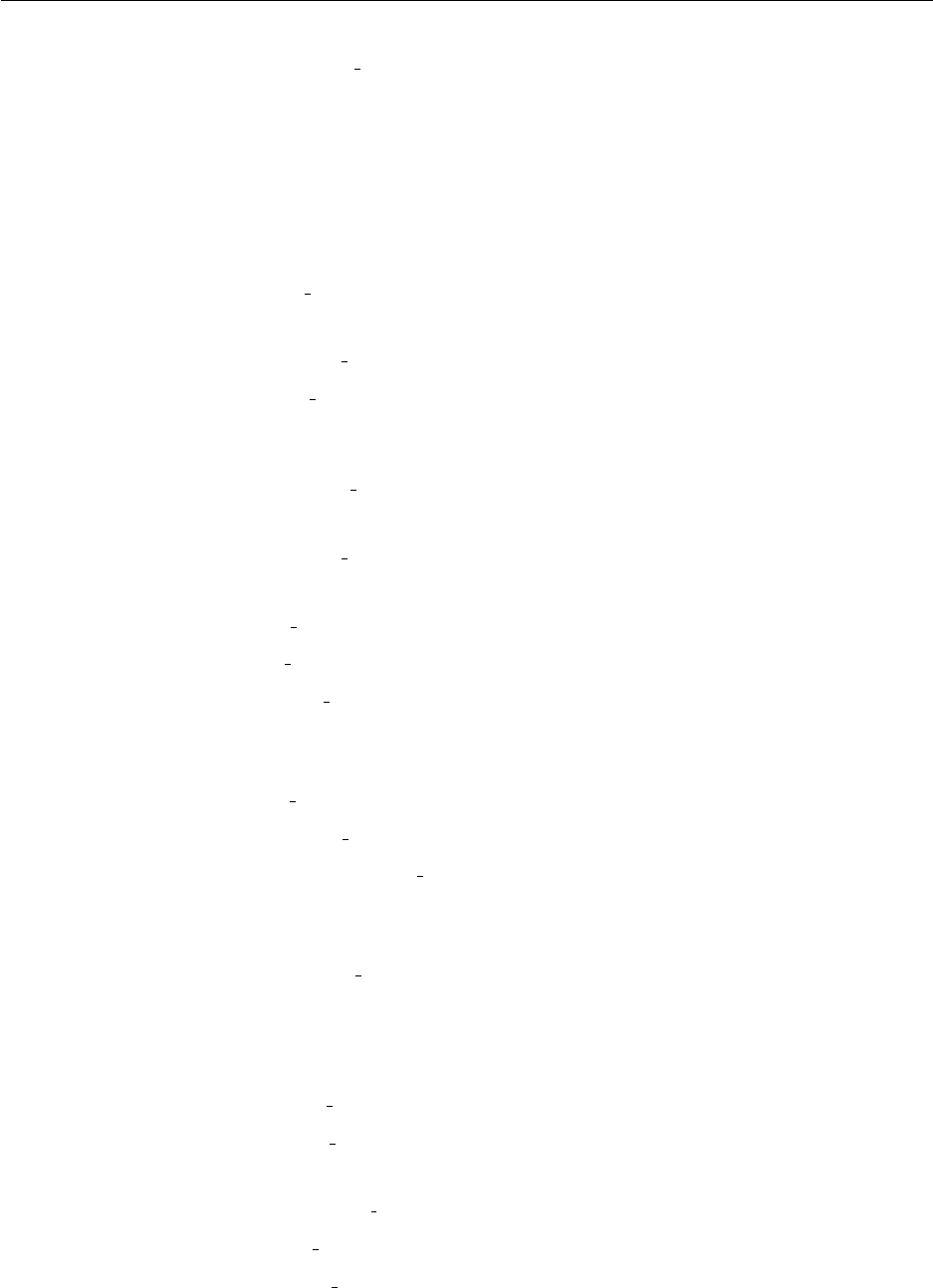
subplot(3, 1, 1), plot(time, y, ’r:’, ’DisplayName’, ’drivers’), hold all,
plot(time, ylvl, ’DisplayName’, ’est. level’), hold off,
title(’Level’), ylim([6.875 8]), legend(’show’);
20 Peng & Aston
Figure 1: Driver casualties estimated by basic structural time series model
subplot(3, 1, 2), plot(time, yseas), title(’Seasonal’), ylim([-0.16 0.28]);
subplot(3, 1, 3), plot(time, irr), title(’Irregular’), ylim([-0.15 0.15]);
The graphical output is shown in figure 1. The coefficient for the intervention and regression is defined as part of the
state vector in this model, so they can be obtained from the last two elements of the smoothed state vector (due to the
order of component concatenation) at the last time point. Coefficient for the intervention is alphahat(13, n) =
-0.23773, and coefficient for the regression (price of petrol) is alphahat(14, n) = -0.2914. In this way
diagnostics of these coefficient estimates can also be obtained by the smoothed state variance V.
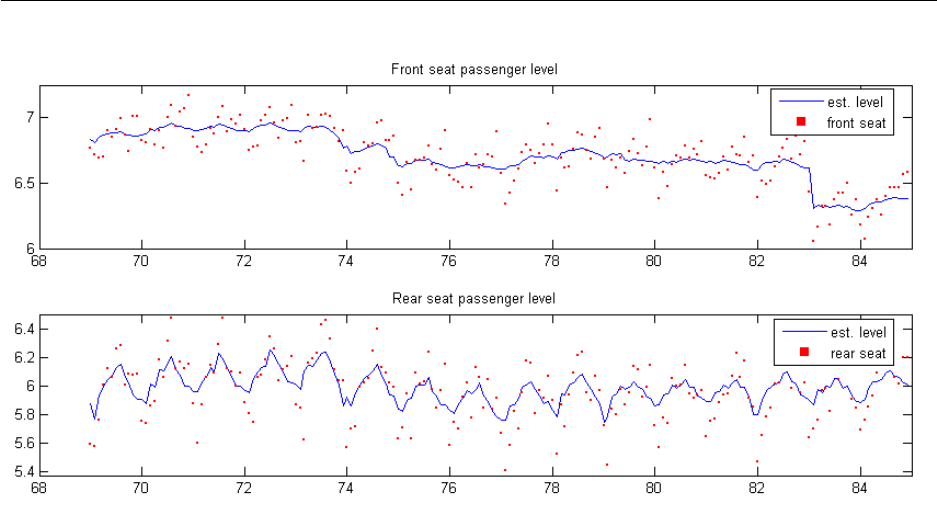
8.1.2 Bivariate analysis
The front seat passenger and rear seat passenger series will be analyzed together using bivariate structural time series
model, with components as before. Specifically, separate level and seasonal components are defined for both series, but
the disturbances are assumed to be correlated. To reduce the number of parameters estimated the seasonal component
is assumed to be fixed, so that the total number of parameters is six. We also include regression on the price of petrol
and kilometers traveled, and intervention for only the first series, since the seat belt law only effects the front seat
passengers. The following is the model construction code:
bilvl = ssm_mvllm(2);
biseas = ssm_mvseasonal(2, [], ’trig fixed’, 12);
biintv = ssm_mvintv(2, n, {’step’ ’null’}, 170);
bireg = ssm_mvreg(2, [petrol; km]);
bistsm = [bilvl biseas biintv bireg];
bistsm.name = ’Bivariate structural time series model’;
The model is then estimated with carefully chosen initial values, and state smoothing and signal extraction proceeds
as before:
SSM Toolbox for Matlab 21
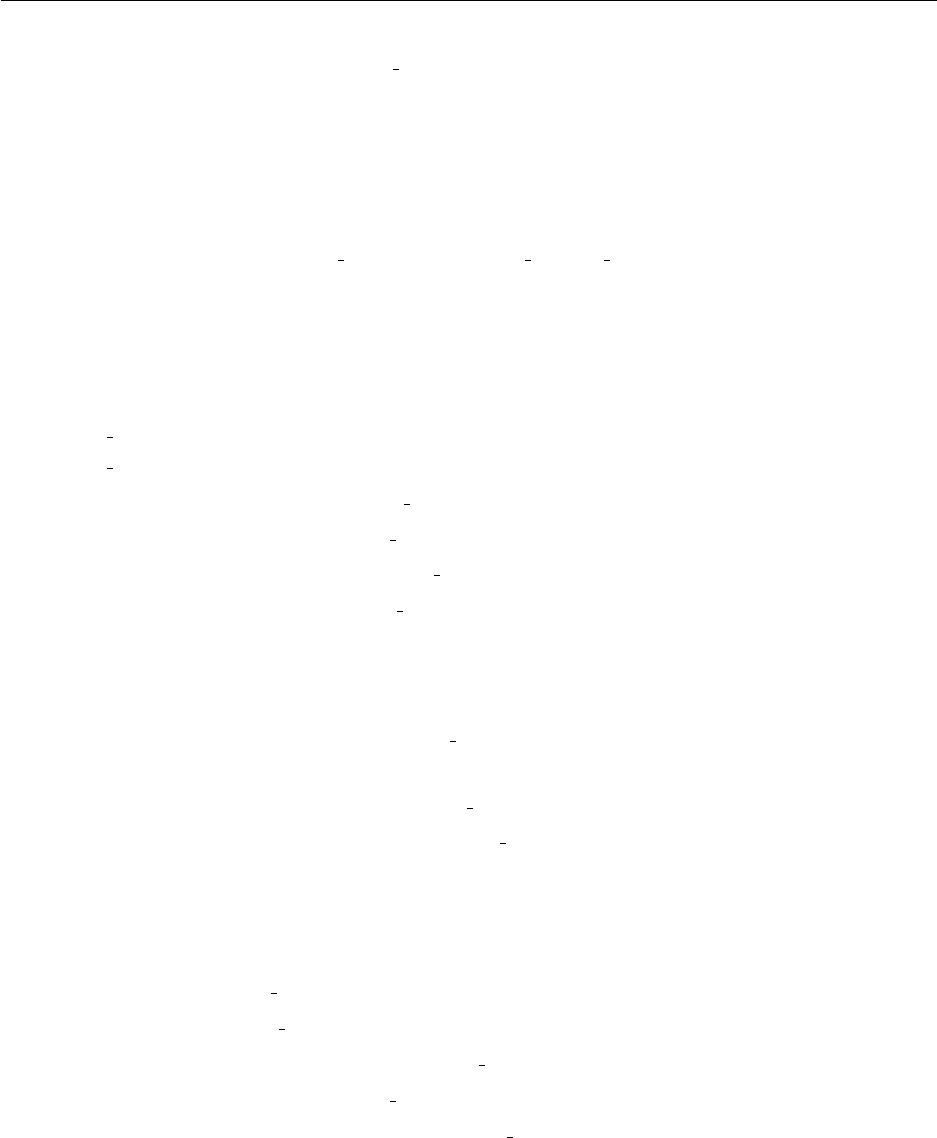
Figure 2: Passenger casualties estimated by bivariate structural time series model
[bistsm logL] = estimate(y2, bistsm, [0.0054 0.0086 0.0045 0.00027 0.00024 0.00023]);
[alphahat V] = statesmo(y2, bistsm);
y2com = signal(alphahat, bistsm);
y2lvl = sum(y2com(:,:, [1 3 4]), 3);
y2seas = y2com(:,:, 2);
When p>1the output from signal is of dimension p×n×M, where Mis the number of components. The
level, regression and intervention are treated as one component of data level as before, separated from the seasonal
component. The components estimated for the two series is plotted:
subplot(2, 1, 1), plot(time, y2lvl(1, :), ’DisplayName’, ’est. level’), hold all,
scatter(time, y2(1, :), 8, ’r’, ’s’, ’filled’, ’DisplayName’, ’front seat’), hold off,
title(’Front seat passenger level’), xlim([68 85]), ylim([6 7.25]), legend(’show’);
subplot(2, 1, 2), plot(time, y2lvl(2, :), ’DisplayName’, ’est. level’), hold all,
scatter(time, y2(2, :), 8, ’r’, ’s’, ’filled’, ’DisplayName’, ’rear seat’), hold off,
title(’Rear seat passenger level’), xlim([68 85]), ylim([5.375 6.5]), legend(’show’);
The graphical output is shown in figure 2. The intervention coefficient for the front passenger series is obtained by
alphahat(25, n) = -0.30025, the next four elements are the coefficients of the regression of the two series
on the price of petrol and kilometers traveled.
8.2 ARMA models
In this example the difference of the number of users logged on an internet server [5] is analyzed by ARMA models,
and model selection via BIC and missing data analysis are demonstrated. To select an appropriate ARMA(p, q)model
for the data various values for pand qare tried, and the BIC of the estimated model for each is recorded, the model
with the lowest BIC value is chosen.
forp=0:5
forq=0:5
[arma logL output] = estimate(y, ssm_arma(p, q), 0.1);

22 Peng & Aston
BIC(p+1, q+1) = output.BIC;
end
end
[m i] = min(BIC(:));
arma = estimate(y, ssm_arma(mod(i-1, 6), floor((i-1)/6)), 0.1);
The BIC values obtained for each model is as follows:
q=0 q=1 q=2 q=3 q=4 q=5
p=0 6.3999 5.6060 5.3299 5.3601 5.4189 5.3984
p=1 5.3983 5.2736 5.3195 5.3288 5.3603 5.3985
p=2 5.3532 5.3199 5.3629 5.3675 5.3970 5.4436
p=3 5.2765 5.3224 5.3714 5.4166 5.4525 5.4909
p=4 5.3223 5.3692 5.4142 5.4539 5.4805 5.4915
p=5 5.3689 5.4124 5.4617 5.5288 5.5364 5.5871
The model with the lowest BIC is ARMA(1,1), second lowest is ARMA(3,0), the former model is chosen for subse-
quent analysis.
Next missing data is simulated by setting some time points to NaN, model and state estimation can still proceed
normally with missing data present.
y([6 16 26 36 46 56 66 72 73 74 75 76 86 96]) = NaN;
arma = estimate(y, arma, 0.1);
yf = signal(kalman(y, arma), arma);
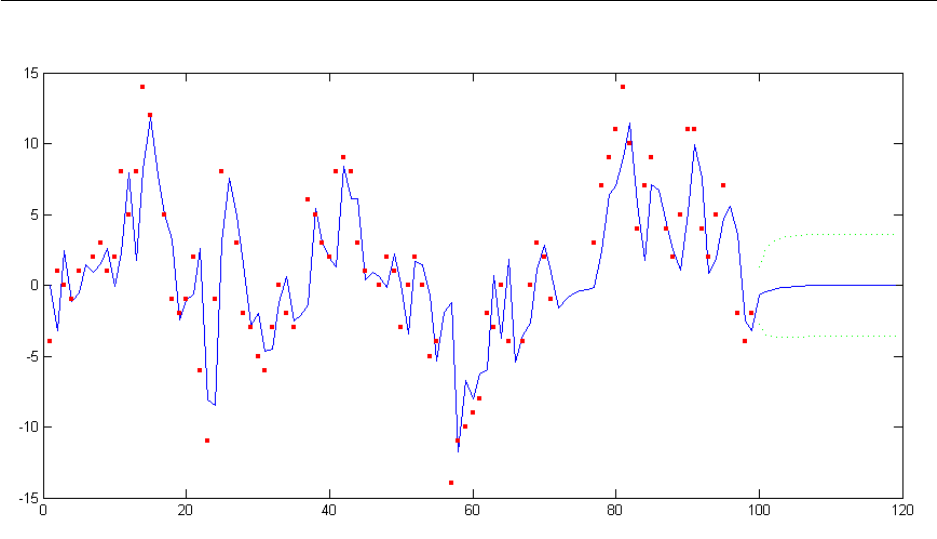
Forecasting is equivalent to treating future data as missing, thus the data set yis appended with as many NaN
values as the steps ahead to forecast. Using the previous estimated ARMA(1,1) model the Kalman filter will then
effectively predict future data points.
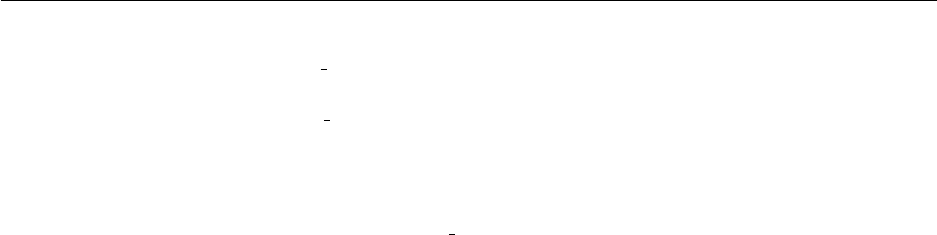
[a P v F] = kalman([y repmat(NaN, 1, 20)], arma);
yf = signal(a(:, 1:end-1), arma);
conf50 = 0.675*realsqrt(F); conf50(1:n) = NaN;
plot(yf), hold all, plot([yf+conf50; yf-conf50]’, ’g:’),
scatter(1:length(y), y, 10, ’r’, ’s’, ’filled’), hold off, ylim([-15 15]);
The plot of the forecast and its confidence interval is shown in figure 3. Note that if the Kalman filter is replaced with
the state smoother, the forecasted values will still be the same.
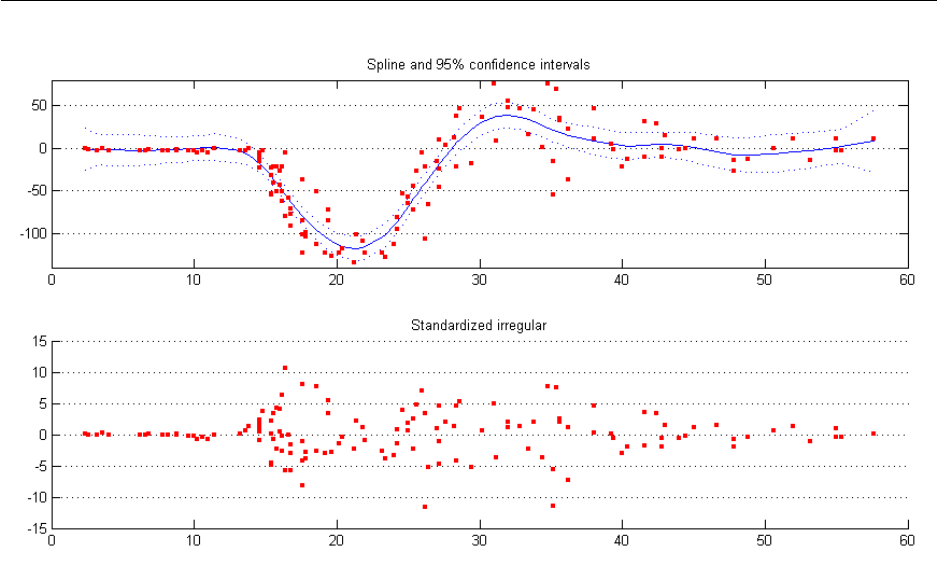
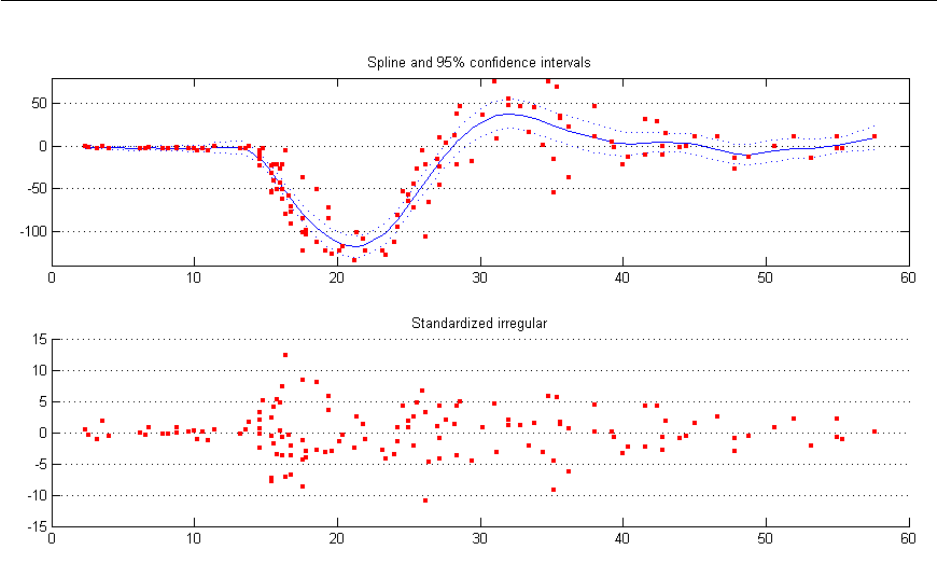
8.3 Cubic spline smoothing
The general state space formulation can also be used to do cubic spline smoothing, by putting the cubic spline into
an equivalent state space form, and accounting for the continuous nature of such smoothing procedures. Here the
continuous acceleration data of a simulated motorcycle accident [6] is smoothed by the cubic spline model, which is
predefined.
spline = estimate(y, ssm_spline(delta), [1 0.1]);
[alphahat V] = statesmo(y, spline);
conf95 = squeeze(1.96*realsqrt(V(1, 1, :)))’;
[eps eta epsvar] = disturbsmo(y, spline);
SSM Toolbox for Matlab 23
Figure 3: Forecast using ARMA(1,1) model with 50% confidence interval
The smoothed data and standardized irregular is plotted and shown in figure 4.
subplot(2, 1, 1), plot(time, alphahat(1, :), ’b’), hold all,
plot(time, [alphahat(1, :) + conf95; alphahat(1, :) - conf95], ’b:’),
scatter(time, y, 10, ’r’, ’s’, ’filled’), hold off,
title(’Spline and 95% confidence intervals’), ylim([-140 80]),
set(gca,’YGrid’,’on’);
subplot(2, 1, 2), scatter(time, eps./realsqrt(epsvar), 10, ’r’, ’s’, ’filled’),
title(’Standardized irregular’), set(gca,’YGrid’,’on’);
It is seen from figure 4 that the irregular may be heteroscedastic, an easy ad hoc solution is to model the changing
variance of the irregular by a continuous version of the local level model. Assume the irregular variance is σ2
εh2
tat
time point tand h1=1, then we model the absolute value of the smoothed irregular abs(eps) with htas its level.
The continuous local level model with level htneeds to be constructed from scratch.
contllm = ssmodel(’’, ’continuous local level’, ...
0, 1, 1, 1, ssmat(0, [], true, zeros(1, n), true), ...
’Qd’, {@(X) exp(2*X)*delta}, {[]}, ssparam({’zeta var’}, ’1/2 log’));
contllm = [ssm_gaussian contllm];
alphahat = statesmo(abs(eps), estimate(abs(eps), contllm, [1 0.1]));
h2 = (alphahat/alphahat(1)).ˆ2;
h2 is then the relative magnitude of the noise variance h2
tat each time point, which can be used to construct a custom
dynamic observation noise model as follows.
hetnoise = ssmodel(’’, ’Heteroscedastic noise’, ...
ssmat(0, [], true, zeros(1, n), true), zeros(1, 0), [], [], [], ...
’Hd’, {@(X) exp(2*X)*h2}, {[]}, ssparam({’epsilon var’}, ’1/2 log’));
hetspline = estimate(y, [hetnoise spline], [1 0.1]);
[alphahat V] = statesmo(y, hetspline);
24 Peng & Aston
Figure 4: Cubic spline smoothing of motorcycle acceleration data
conf95 = squeeze(1.96*realsqrt(V(1, 1, :)))’;
[eps eta epsvar] = disturbsmo(y, hetspline);
The smoothed data and standardized irregular with heteroscedastic assumption is shown in figure 5, it is seen that the
confidence interval shrank, especially at the start and end of the series, and the irregular is slightly more uniform.
In summary the motorcycle series is first modeled by a cubic spline model with Gaussian irregular assumption,
then the smoothed irregular magnitude itself is modeled with a local level model. Using the irregular level estimated
at each time point as the relative scale of irregular variance, a new heteroscedastic irregular continuous model is
constructed with the estimated level built-in, and plugged into the cubic spline model to obtain new estimates for the
motorcycle series.
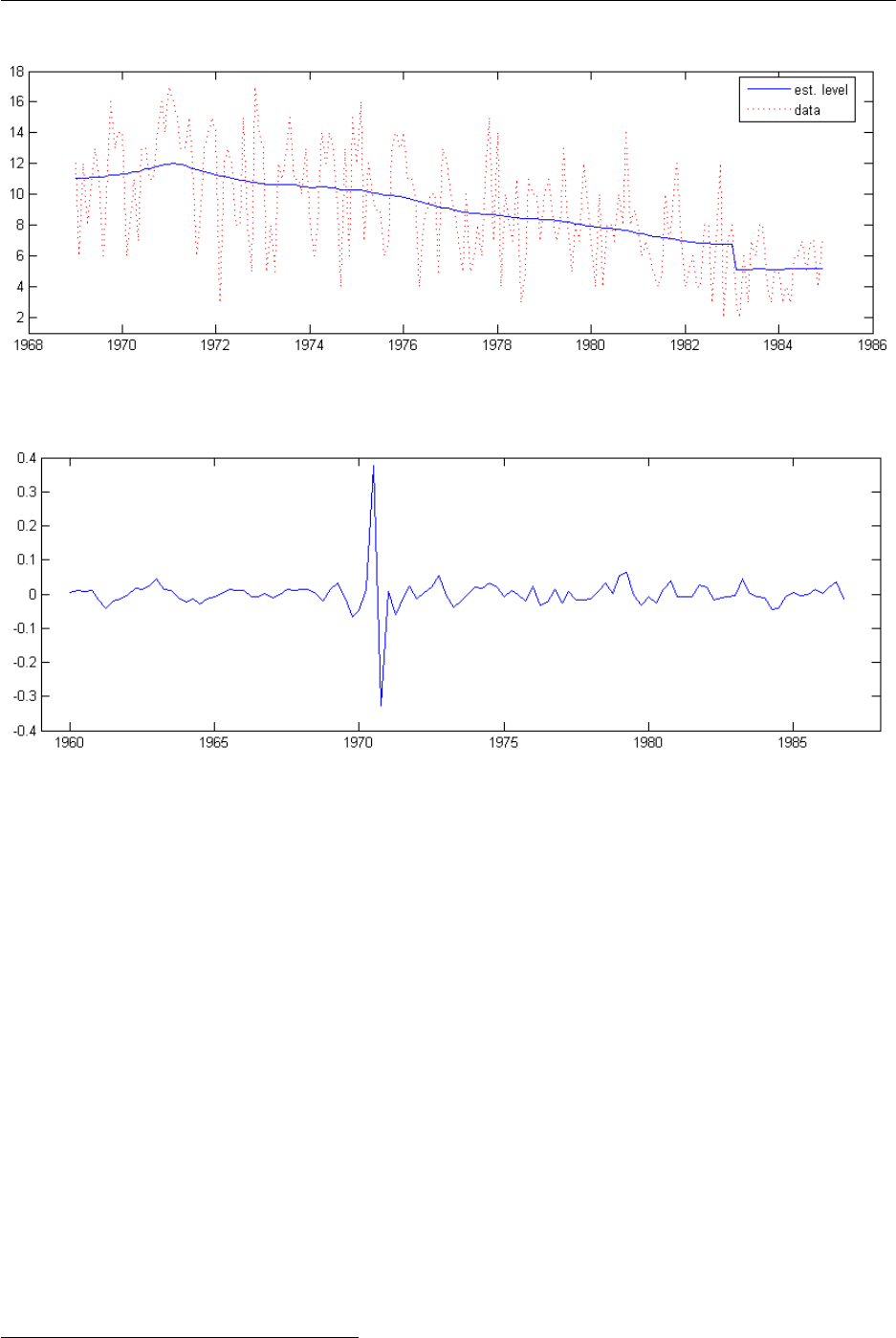
8.4 Poisson distribution error model
The road accident casualties and seat belt law data analyzed in section 8.1 also contains a monthly van driver casualties
series. Due to the smaller numbers of van driver casualties the Gaussian assumption is not justified in this case,
previous methods cannot be applied. Here a poisson distribution is assumed for the data, the mean is exp(θt)and the
observation distribution is
log p(yt|θt)=θT
tyt−exp(θt)−log yt!
The signal θtin turn is modeled with the structural time series model. The total model is then constructed by con-
catenating a poisson distribution model with a standard structural time series model, the former model will replace the
default Gaussian noise model.
pbstsm = [ssm_poisson ssm_llm ...
ssm_seasonal(’dummy fixed’, 12) ssm_intv(n, ’step’, 170)];
pbstsm.name = ’Poisson basic STSM’;
SSM Toolbox for Matlab 25
Figure 5: Cubic spline smoothing of motorcycle acceleration data with heteroscedastic noise
Model estimation will automatically calculate the Gaussian approximation to the poisson model. Since this is an
exponential family distribution the data ytalso need to be transformed to ˜yt, which is stored in the output argument
output, and used in place of ytfor all functions implementing linear Gaussian (Kalman filter related) algorithms.
The following is the code for model and state estimation
[pbstsm logL output] = estimate(y, pbstsm, 0.0006, [], ’fmin’, ’bfgs’, ’disp’, ’iter’);
[alphahat V] = statesmo(output.ytilde, pbstsm);
thetacom = signal(alphahat, pbstsm);
Note that the original data yis input to the model estimation routine, which also calculates the transform ytilde.
The model estimated then has its Gaussian approximation built-in, and will be treated by the state smoother as a linear
Gaussian model, hence the transformed data ytilde needs to be used as input. The signal components thetacom
obtained from the smoothed state alphahat is the components of θt, the mean of ycan then be estimated by
exp(sum(thetacom, 1)).
The exponentiated level exp(θt)with the seasonal component eliminated is compared to the original data in figure
6. The effect of the seat belt law can be clearly seen.
thetalvl = thetacom(1, :) + thetacom(3, :);
plot(time, exp(thetalvl), ’DisplayName’, ’est. level’), hold all,
plot(time, y, ’r:’, ’DisplayName’, ’data’), hold off, ylim([1 18]), legend(’show’);
8.5 t-distribution models
In this example another kind of non-Gaussian models, t-distribution models is used to analyze quarterly demand for
gas in UK [7]. A structural time series model with a t-distribution heavy-tailed observation noise is constructed similar
to the last section, and model estimation and state smoothing performed.
tstsm = [ssm_t ssm_llt ssm_seasonal(’dummy’, 4)];
26 Peng & Aston
Figure 6: Van driver casualties and estimated level
Figure 7: t-distribution irregular
tstsm = estimate(y, tstsm, [0.0018 4 7.7e-10 7.9e-6 0.0033], [], ’fmin’, ’bfgs’);
[alpha irr] = fastsmo(y, tstsm);
plot(time, irr), title(’Irregular component’), xlim([1959 1988]), ylim([-0.4 0.4]);
Since t-distribution is not an exponential family distribution, data transformation is not necessary, and yis used
throughout. A plot of the irregular in figure 7 shows that potential outliers with respect to the Gaussian assumption
has been detected by the use of heavy-tailed distribution.
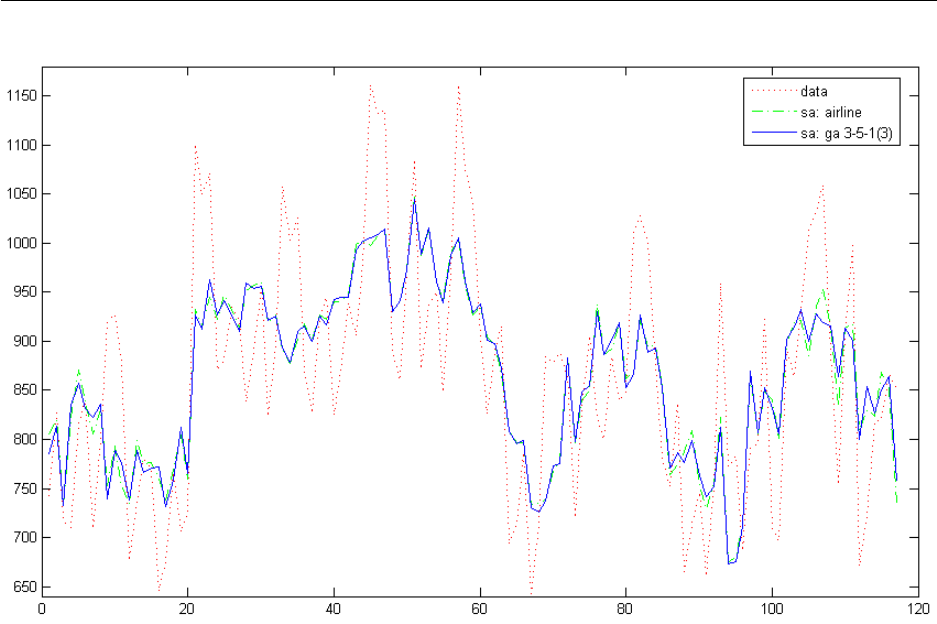
8.6 Hillmer-Tiao decomposition
In this example seasonal adjustment is performed by the Hillmer-Tiao decomposition [2] of airline models. The data
(Manufacturing and reproducing magnetic and optical media, U.S. Census Bureau) is fitted with the airline model, then
the estimated model is Hillmer-Tiao decomposed into an ARIMA components model with trend and seasonal compo-
nents. The same is done for the generalized airline model1[8], and the seasonal adjustment results are compared. The
following are the code to perform seasonal adjustment with the airline model:
air = estimate(y, ssm_airline, 0.1);
aircom = ssmhtd(air);
1Currently renamed Frequency Specific ARIMA model.
SSM Toolbox for Matlab 27
Figure 8: Seasonal adjustment with airline and generalized airline models
ycom = signal(statesmo(y, aircom), aircom);
airseas = ycom(2, :);
aircom is the decomposed ARIMA components model corresponding to the estimated airline model, and airseas
is the seasonal component, which will be subtracted out of the data yto obtain the seasonal adjusted series. ssmhtd
automatically decompose ARIMA type models into trend, seasonal and irregular components, plus any extra MA
components as permissible.
The same seasonal adjustment procedure is then done with the generalized airline model, using parameter estimates
from the airline model as initial parameters:
param0 = air.param([1 2 2 3]); param0(1:3) = -param0(1:3); param0(2:3) = param0(2:3).ˆ(1/12);
ga = estimate(y, ssm_genair(3, 5, 3), param0);
gacom = ssmhtd(ga);
ycom = signal(statesmo(y, gacom), gacom);
gaseas = ycom(2, :);
The code creates a generalized airline 3-5-1 model, Hillmer-Tiao decomposition produces the same components as for
the airline model since the two models have the same order. From the code it can be seen that the various functions
work transparently across different ARIMA type models. Figure 8 shows the comparison between the two seasonal
adjustment results.
References
[1] J. Durbin and S. J. Koopman. Time Series Analysis by State Space Methods. Oxford University Press, New York,
2001.
28 Peng & Aston
[2] S. C. Hillmer and G. C. Tiao. An arima-model-based approach to seasonal adjustment. J. Am. Stat. Assoc.,
77:63–70, 1982.
[3] V. Gomez and A. Maravall. Automatic modelling methods for univariate series. In D. Pena, G. C. Tiao, and R. S.
Tsay, editors, A Course in Time Series Analysis. John Wiley & Sons, New York, 2001.
[4] A. C. Harvey and J. Durbin. The effects of seat belt legislation on british road casualties: A case study in structural
time series modelling. J. Roy. Stat. Soc. A, 149:187–227, 1986.
[5] S. Makridakis, S. C. Wheelwright, and R. J. Hyndman. Forecasting: Methods and Applications, 3rd Ed. John
Wiley and Sons, New York, 1998.
[6] B. W. Silverman. Some aspects of the spline smoothing approach to non-parametric regression curve fitting. J.
Roy. Stat. Soc. B, 47:1–52, 1985.
[7] S. J. Koopman, A. C. Harvey, J. A. Doornik, and N. Shephard. STAMP 6.0: Structural Time Series Analyser,
Modeller and Predictor. Timberlake Consultants, London, 2000.
[8] J.A.D. Aston, D.F. Findley, T.S. McElroy, K.C. Wills, and D.E.K. Martin. New arima models for seasonal time
series and their application to seasonal adjustment and forecasting. Research Report Series, US Census Bureau,
2007.
A Predefined Model Reference
The predefined models can be organized into two categories, observation disturbance models and normal models. The
former contains only specification of the observation disturbance, and is used primarily for model combination; the
latter contains all other models, and can in turn be partitioned into structural time series models, ARIMA type models,
and other models.
The following is a list of each model and function name.
•Observation disturbance models
– Gaussian noise: ssm gaussian([p, cov]) or ssm normal([p, cov])
pis the number of variables, default 1.
cov is true if they are correlated, default true.
– Null noise: ssm null([p])
pis the number of variables, default 1.
– Poisson error: ssm poisson
– Binary error: ssm binary
– Binomial error: ssm binomial(k)
kis the number of trials, can be a scalar or row vector.
– Negative binomial error: ssm negbinomial(k)
kis the number of trials, can be a scalar or row vector.
– Exponential error: ssm exp
– Multinomial error: ssm multinomial(h, k)
his the number of cells.
kis the number of trials, can be a scalar or row vector.
SSM Toolbox for Matlab 29
– Exponential family error: ssm expfamily(b, d2b, id2bdb, c)
p(y|θ)=expyTθ−b(θ)+c(y)
bis the function b(θ).
d2b is ¨
b(θ), the second derivative of b(θ).
id2bdb is ¨
b(θ)−1˙
b(θ).
cis the function c(y).
– t-distribution noise: ssm t([nu])
nu is the degree of freedom, will be estimated as model parameter if not specified.
– Gaussian mixture noise: ssm mix
– General error noise: ssm err
•Structural time series models
– Integrated random walk: ssm irw(d)
dis the order of integration.
– Local polynomial trend: ssm lpt(d)
dis the order of the polynomial.
– Local level model: ssm llm
– Local level trend: ssm llt
– Seasonal components: ssm seasonal(type, s)
type can be ’dummy’,’dummy fixed’,’h&s’,’trig1’,’trig2’ or ’trig fixed’.
sis the seasonal period.
– Cycle component: ssm cycle
– Regression components: ssm reg(x[, varname])
– Dynamic regression components: ssm dynreg(x[, varname])
xis a m×nmatrix, mis the number of regression variables.
varname is the name of the variables.
– Intervention components: ssm intv(n, type, tau)
nis the total time duration.
type can be ’step’,’pulse’,’slope’ or ’null’.
tau is the onset time.
– Constant components: ssm const
– Trading day variables: ssm td(y, m, N, td6)
’td6’ is set to true to use six variables.
– Length-of-month variables: ssm lom(y, m, N)
– Leap-year variables: ssm ly(y, m, N)
– Easter effect variables: ssm ee(y, m, N, d)
yis the starting year.
mis the starting month.
Nis the total number of months.
dis the number of days before Easter.
30 Peng & Aston
– Structural time series models: ssm stsm(lvl, seas, s[, cycle, x])
lvl is ’level’ or ’trend’.
seas is the seasonal type (see seasonal components).
sis the seasonal period.
cycle is true if there’s a cycle component in the model, default false.
xis explanatory (regression) variables (see regression components).
– Common levels models: ssm commonlvls(p, A ast, a ast)
yt=0
a∗+Ir
A∗µ∗
t+εt
µ∗
t+1 =µ∗
t+η∗
t
pis the number of variables (length of yt).
A ast is A∗,a(p−r)×rmatrix.
a ast is a∗,a(p−r)×1vector.
– Multivariate local level models: ssm mvllm(p[, cov])
– Multivariate local level trend: ssm mvllt(p[, cov])
– Multivariate seasonal components: ssm mvseasonal(p, cov, type, s)
– Multivariate cycle component: ssm mvcycle(p[, cov])
pis the number of variables.
cov is a logical vector that is true for each correlated disturbances, default all true.
Other arguments are the same as the univariate versions.
– Multivariate regression components: ssm mvreg(p, x[, dep])
dep is a p×mlogical matrix that specifies dependence of data variables on regression variables.
– Multivariate intervention components: ssm mvintv(p, n, type, tau)
– Multivariate structural time series models: ssm mvstsm(p, cov, lvl, seas, s[, cycle,
x, dep])
cov is a logical vector that specifies the covariance structure of each component in turn.
•ARIMA type models
– ARMA models: ssm arma(p, q, mean)
– ARIMA models: ssm arima(p, d, q, mean)
– Multiplicative seasonal ARIMA models: ssm sarima(p, d, q, P, D, Q, s, mean)
– Seasonal sum ARMA models: ssm sumarma(p, q, D, s, mean)
– SARIMA with Hillmer-Tiao decomposition: ssm sarimahtd(p, d, q, P, D, Q, s, gauss)
pis the order of AR.
dis the order of I.
qis the order of MA.
Pis the order of seasonal AR.
Dis the order of seasonal I.
Qis the order of seasonal MA.
sis the seasonal period.
mean is true if the model has mean.
gauss is true if the irregular component is Gaussian.

SSM Toolbox for Matlab 31
– Airline models: ssm airline([s])
sis the period, default 12.
– Frequency specific SARIMA models: ssm freqspec(p, d, q, P, D, nparam, nfreq, freq)
– Frequency specific airline models: ssm genair(nparam, nfreq, freq)
nparam is the number of parameters, 3or 4.
nfreq is the size of the largest subset of frequencies sharing the same parameter.
freq is an array containing the members of the smallest subset.
– ARIMA component models: ssm arimacom(d, D, s, phi, theta, ksivar)
The arguments match those of the function htd, see its description for details.
•Other models
– Cubic spline smoothing (continuous time): ssm spline(delta)
delta is the time duration of each data point.
– 1/f noise models (approximated by AR): ssm oneoverf(m)
mis the order of the approximating AR process.
B Class Reference
B.1 SSMAT
The class SSMAT represents state space matrices, can be stationary or dynamic. SSMAT can be horizontally, vertically,
and block diagonally concatenated with each other, as well as with ordinary matrices. Parenthesis reference can also
be used, where two or less indices indicate the stationary part, and three indices indicates a 3-d matrix with time as the
third dimension.
B.1.1 Subscripted reference and assignment
.mat RA2Stationary part of SSMAT Assignment cannot change size.
.mmask R Variable mask A logical matrix the same size as mat.
.n R Time duration Is equal to size(dvec, 2).
.dmmask R Dynamic mask A logical matrix the same size as mat.
.d R Number of dynamic elements Is equal to size(dvec, 1).
.dvec RA Dynamic vector sequence A d×nmatrix. Assignment cannot change d.
.dvmask R Dynamic vector variable mask A d×1logical vector.
.const R True if SSMAT is constant A logical scalar.
.sta R True if SSMAT is stationary A logical scalar.
(i, j) RA Stationary part of SSMAT Assignment cannot change size.
(i, j, t) RA SSMAT as a 3-d matrix Assignment cannot change size.
B.1.2 Class methods
•ssmat
SSMAT constructor.
SSMAT(m[, mmask]) creates a SSMAT.mcan be a 2-d or 3-d matrix, where the third dimension is time.
2R - reference, A - assignment.

32 Peng & Aston
mmask is a 2-d logical matrix masking the variable part of matrix, which can be omitted or set to [] for
constant SSMAT.
SSMAT(m, mmask, dmmask[, dvec, dvmask]) creates a dynamic SSMAT.mis a 2-d matrix forming
the stationary part of the SSMAT.mmask is a logical matrix masking the variable part of matrix, which can
be set to [] for constant SSMAT.dmmask is a logical matrix masking the dynamic part of SSMAT.dvec is
annz(dmmask) ×nmatrix, dvec(:, t) is the values for the dynamic part at time t(m(dmmask) =
dvec(:, t) for time t), default is a nnz(dmmask) ×1zero matrix. dvmask is a nnz(dmmask) ×1
logical vector masking the variable part of dvec.
•isconst
ISCONST(·3)returns true if the stationary part of SSMAT is constant.
•isdconst
ISDCONST(·)returns true if the dynamic part of SSMAT is constant.
•issta
ISSTA(·)returns true if SSMAT is stationary.
•size
[ ... ] = SIZE(·, ...) is equivalent to [ ... ] = SIZE(·.mat, ...).
•getmat
GETMAT(·)returns SSMAT as a matrix if stationary, or as a cell array of matrices if dynamic.
•getdvec
GETDVEC(·, mmask) returns the dynamic elements specified in matrix mask mmask as a vector sequence.
•getn
GETN(·)returns the time duration of SSMAT.
•setmat
SETMAT(·, vec) updates the variable stationary matrix, vec must have size nnz(mmask) ×1.
•setdvec
SETDVEC(·, dsubvec) updates the variable dynamic vector sequence, dsubvec must have nnz(dvmask)
rows.
•plus
SSMAT addition.
B.2 SSDIST
The class SSDIST represents state space distributions, a set of non-Gaussian distributions that governs a disturbance
vector (which can also have Gaussian elements), and is a child class of SSMAT.SSDIST are constrained to be square
matrices, hence can only be block diagonally concatenated, any other types of concatenation will ignore the non-
Gaussian distribution part. Predefined non-Gaussian distributions can be constructed via the SSDIST constructor.
3An instance of the class in question.

SSM Toolbox for Matlab 33
B.2.1 Subscripted reference and assignment
.nd R Number of distributions A scalar.
.type R Type of each distribution A 0-1 row vector.
.matf R Approximation functions A cell array of functions.
.logpf R Log probability functions A cell array of functions.
.diagmask R Non-Gaussian masks A size(mat, 1) ×nd logical matrix.
.dmask R Variable mask for the distributions A 1×nd logical vector.
.const R True if SSDIST is constant A logical scalar.
B.2.2 Class methods
•ssdist
SSDIST constructor.
SSDIST(type[, matf, logpf, n, p]) creates a single univariate non-Gaussian distribution. type is
0 for exponential family distributions and 1 for additive noise distributions. matf is the function that generates
the approximated Gaussian variance matrix given observations and signal or disturbances. logpf is the function
that calculates the log probability of observations given observation and signal or disturbances. If the last two
arguments are omitted, then the SSDIST is assumed to be variable. SSDIST with multiple non-Gaussian
distributions can be formed by constructing a SSDIST for each and then block diagonally concatenating them.
•isdistconst
ISDISTCONST(·)returns true if the non-Gaussian part of SSDIST is constant.
•setdist
SETDIST(·, distf) updates the non-Gaussian distributions. distf is a cell matrix of functions.
•setgauss
SETGAUSS(·, eps) or
[·ytilde] = SETGAUSS(·, y, theta) calculates the approximating Gaussian covariance, the first
form is used if there are no exponential family distributions, and the data yneed to be transformed into ytilde
in the second form if there are.
•logprobrat
LOGPROBRAT(·, N, eps) or
LOGPROBRAT(·, N, y, theta, eps) calculates the log probability ratio between the original non-Gaussian
distribution and the approximating Gaussian distribution of the observations, it is used when calculating the
non-Gaussian loglikelihood by importance sampling. The first form is used if there are no exponential family
distributions. Nis the number of importance samples.
B.2.3 Predefined non-Gaussian distributions
•Poisson distribution: dist poisson
•Binary distribution: dist binary
•Binomial distribution: dist binomial(k)
•Negative binomial distribution: dist negbinomial(k)
kis the number of trials, can be a scalar or row vector.
34 Peng & Aston
•Exponential distribution: dist exp
•Multinomial distribution: dist multinomial(h, k)
his the number of cells.
kis the number of trials, can be a scalar or row vector.
•General exponential family distribution: dist expfamily(b, d2b, id2bdb, c)
p(y|θ)=expyTθ−b(θ)+c(y)
bis the function b(θ).
d2b is ¨
b(θ), the second derivative of b(θ).
id2bdb is ¨
b(θ)−1˙
b(θ).
cis the function c(y).
B.3 SSFUNC
The class SSFUNC represents state space functions, a set of nonlinear functions that describe state vector transfor-
mations, and is a child class of SSMAT. Since linear transformations in SSM are represented by left multiplication of
matrices, it is only possible for nonlinear functions (and hence it’s matrix approximation) to be either block diagonally
or horizontally concatenated. The former concatenation method produces multiple resulting output vectors, whereas
the latter produces the sum of the output vectors of all functions as output. Vertical concatenation will ignore the
nonlinear part of SSFUNC.
B.3.1 Subscripted reference and assignment
.nf R Number of functions A scalar.
.f R The nonlinear functions A cell array of functions.
.df R Derivative of each function A cell array of functions.
.horzmask R Nonlinear function output masks A size(mat, 1) ×nf logical matrix.
.vertmask R Nonlinear function input masks A size(mat, 2) ×nf logical matrix.
.fmask R Variable mask for the functions A 1×nf logical vector.
.const R True if SSFUNC is constant A logical scalar.
B.3.2 Class methods
•ssfunc
SSFUNC constructor.
SSFUNC(p, m[, f, df]) creates a single nonlinear function. pis the input vector dimension and mis
the output vector dimension. Hence the approximating linear matrix will be p×m.fand df is the nonlinear
function and its derivative. fmaps m×1vectors and time tto p×1vectors, and df maps m×1vectors and
time tto p×mmatrices. If fand df are not both provided, the SSFUNC is assumed to be variable. SSFUNC
with multiple functions can be constructed by defining individual SSFUNC for each function, and concatenating
them.
•isfconst
ISFCONST(·)returns true if the nonlinear part of SSFUNC is constant.

SSM Toolbox for Matlab 35
•getfunc
GETFUNC(·, x, t) returns f(x, t), the transform of xat time t.
•getvertmask
GETVERTMASK(·)returns vertmask.
•setfunc
SETFUNC(·, funcf) updates the nonlinear functions. funcf is a cell matrix of functions.
•setlinear
[·c] = SETLINEAR(·, alpha) calculates the approximating linear matrix, cis an additive constant in
the approximation.
B.4 SSPARAM
The class SSPARAM represents state space model parameters. SSPARAM can be seen as a row vector of parameter
values, hence they are combined by horizontal concatenation with a slight difference, as described below.
B.4.1 Subscripted reference and assignment
.w R Number of parameters A scalar.
.name R Parameter names A cell array of strings.
.value RA Transformed parameter values A 1×wvector. Assignment cannot change size.
B.4.2 Class methods
•ssparam
SSPARAM constructor.
SSPARAM(w[, transform, group]) creates a SSPARAM with wparameters.
SSPARAM(name[, transform, group]) creates a SSPARAM with parameter names name, which is a
cell array of strings.
transform is a cell array of strings describing transforms used for each parameter.
group is a row vector that specifies the number of parameters included in each parameter subgroup, and
transform is of the same length which specifies transforms for each group.
•get
GET(·)returns the untransformed parameter values.
•set
SET(·, value) sets the untransformed parameter values.
•remove
REMOVE(·, mask) removes the parameters specified by mask.
•horzcat
[·pmask] = HORZCAT(·1,·2, ...) combines multiple SSPARAM into one, and optionally generates a
cell array of parameter masks pmask, masking each original parameter sets with respect to the new combined
parameter set.

36 Peng & Aston
B.5 SSMODEL
The class SSMODEL represents state space models and embeds all the previous classes. SSMODEL can be combined
by horizontal or block diagonal concatenation. The former is the basis for additive model combination, where the
observation is the sum of individual signals. The latter is an independent combination in which the observation is the
vertical concatenation of the individual signals, which obviously needs to be further combined or changed to be useful.
Only SSMODEL objects are used directly in data analysis functions, knowledge of embedded objects are needed only
when defining custom models. For a list of predefined models see appendix A.
B.5.1 Subscripted reference and assignment
.name RA Model name A string.
.Hinfo R Observation disturbance info A structure.
.info R Model component info A cell array of structures.
.p R Model observation dimension A scalar.
.m R Model state dimension A scalar.
.r R Model state disturbance dimension A scalar.
.n R Model time duration A scalar. Value is 1for stationary models.
.H R Observation disturbance A SSMAT or SSDIST.
.Z R State to observation transform A SSMAT or SSFUNC.
.T R State update transform A SSMAT or SSFUNC.
.R R Disturbance to state transform A SSMAT.
.Q R State disturbance A SSMAT or SSDIST.
.c R State update constant A SSMAT.
.a1 RA Initial state mean A stationary SSMAT, can assign matrices.
.P1 RA Initial state variance A stationary SSMAT, can assign matrices.
.sta R True for stationary SSMODEL A logical scalar.
.linear R True for linear SSMODEL A logical scalar.
.gauss R True for Gaussian SSMODEL A logical scalar.
.w R Number of parameters A scalar.
.paramname R Parameter names A cell array of strings.
.param RA Parameter values A 1×wvector. Assignment cannot change w.
.psi RA Transformed parameter values A 1×wvector. Assignment cannot change w.
.q R Number of initial diffuse elements A scalar.
B.5.2 Class Methods
•ssmodel
SSMODEL constructor.
SSMODEL(info, H, Z, T, R, Q) creates a constant state space model with complete diffuse initial-
ization and c=0.SSMODEL(info, H, Z, T, R, Q, A, func, grad, psi[, pmask, P1,
a1, c]) create a state space model. info is a string or a free form structure with field ’type’ describing the
model component. His a SSMAT or SSDIST.Zis a SSMAT or SSFUNC.Tis a SSMAT or SSFUNC.Ris a
SSMAT.Qis a SSMAT or SSDIST.Ais a cell array of strings or a single string, each corresponding to func,
a cell array of functions or a single function. Each string of Ais a concatenation of some of ’H’,’Z’,’T’,
’R’,’Q’,’c’,’a1’,’P1’,’Hd’,’Zd’,’Td’,’Rd’,’Qd’,’cd’,’Hng’,’Qng’,’Znl’,’Tnl’,

SSM Toolbox for Matlab 37
representing each part of each element of SSMODEL. For example, ’Qng’ specifies the non-Gaussian part of
Q, and ’Zd’ specifies the dynamic part of Z. A complicated example of a string in Ais
[’H’ repmat(’ng’, 1, gauss) repmat(’T’, 1, p+P>0) ’RQP1’],
which is the adjacency string for a possibly non-Gaussian ARIMA components model. func is a cell array of
functions that updates model matrices. If multiple parts of the model are updated the output for each part must
be ordered as for the adjacency matrix, but parts not updated can be skipped, for example, a function that updates
H,Tand Qmust output [Hvec Tvec Qvec] in this order. grad is the derivative of func, each of which can
be [] if not differentiable. For the example function above the gradient function would output [Hvec Tvec
Qvec Hgrad Tgrad Qgrad] in order. psi is a SSPARAM.pmask is a cell array of parameter masks for
the corresponding functions, can be omitted or set to [] if there’s only one update function (which presumably
uses all parameters). P1 and a1 are both stationary SSMAT.cis a SSMAT. All arguments expecting SSMAT
can also take numeric matrices.
•isgauss
ISGAUSS(·)is true for Gaussian SSMODEL.
•islinear
ISLINEAR(·)is true for linear SSMODEL.
•issta
ISSTA(·)is true for stationary SSMODEL. Note that all SSFUNC are implicitly assumed to be dynamic, but
are treated as stationary by this and similar functions.
•set
SET(·, A, M, func, grad, psi, pmask) changes one specific element of SSMODEL.Ais an adja-
cency string, specifying which elements the function or functions func updates. Ais a adjacency string as
described earlier, corresponding to func.Mshould be the new value for one of H,Z,T,R,Q,c,a1 or P1, and A
is constrained to contain only references to that element. grad is the same type as func and is its gradient, set
individual functions to 0 if gradient does not exist or needed. psi is a SSPARAM that stores all the parameters
used by functions in func, and pmask is the parameter mask for each function.
•setparam
SETPARAM(·, psi, transformed) sets the parameters for SSMODEL. If transformed is true, psi
is the new value for the transformed parameters, else psi is the new value for the untransformed parameters.
C Function Reference
C.1 User-defined update functions
This section details the format of update functions for various parts of classes SSMAT,SSDIST and SSFUNC.
•Stationary part
vec = func(psi) updates the stationary part of SSMAT.vec must be a column vector such that mat(mmask)
= vec would correctly update the stationary matrix mat given parameters psi.

38 Peng & Aston
•Dynamic part
dsubvec = func(psi) updates the dynamic part of SSMAT.dsubvec must be a matrix such that dvec(dvmask,
1:size(dsubvec, 2)) = dsubvec would correctly update the dynamic vector sequence dvec given
parameters psi.
•Non-Gaussian part
distf = func(psi) updates the non-Gaussian part of SSDIST.distf must be a cell matrix of function
handles such that [matfdmask] = distf:, 1 and [logpfdmask] = distf:, 2 would correctly
update the distributions given parameters psi.
•Nonlinear part
funcf = func(psi) updates the nonlinear part of SSFUNC.funcf must be a cell matrix of function
handles such that [ffmask] = funcf:, 1 and [dffmask] = funcf:, 2 would correctly update the
nonlinear functions given parameters psi.
Note that an update function can return more than one of the four kind of output, thus updating multiple part of a
SSMODEL, but the order of the output arguments must follow the convention: stationary part of H,Z,T,R,Q,c,a1,
P1, dynamic part of H,Z,T,R,Q,c, non-Gaussian part of H,Q, nonlinear part of Z,T, with possible omissions.
C.2 Data analysis functions
Most functions in this section accepts analysis settings options, specified as option name and option value pairs (e.g.
(’disp’, ’off’)). These groups of arguments are specified at the end of each function that accepts them, and
are represented by opt in this section.
•batchsmo
[alphahat epshat etahat] = BATCHSMO(y, model[, opt]) performs batch smoothing of mul-
tiple data sets. yis the data of dimension p×n×N, where nis the data length and Nis the number of data
sets, there must be no missing values. model is a SSMODEL. The output is respectively the smoothed state,
smoothed observation disturbance and smoothed state disturbance, each of dimensions m×n×N,p×n×N
and r×n×N. This is equivalent to doing fastsmo on each data set.
•disturbsmo
[epshat etahat epsvarhat etavarhat] = DISTURBSMO(y, model[, opt]) performs dis-
turbance smoothing. yis the data of dimension p×n, and model is a SSMODEL. The output is respectively
the smoothed observation disturbance (p×n), smoothed state disturbance (r×n), smoothed observation dis-
turbance variance (p×p×nor 1×nif p=1) and smoothed state disturbance variance (r×r×nor 1×n
if r=1).
•estimate
[model logL output] = ESTIMATE(y, model[, param0, alpha0, opt]) estimates the pa-
rameters of model starting from the initial parameter value param0.yis the data of dimension p×n, and
model is a SSMODEL.param0 can be empty if the current parameter values of model is used as initial value,
and a scalar param0 sets all parameters to the same value. Alternatively param0 can be a logical row vec-
tor specifying which parameters to estimate, or a 2×wmatrix with the first row as initial value and second
row as estimated parameter mask. The initial state sequence estimate alpha0 is needed only when model is
non-Gaussian or nonlinear. output is a structure that contains optimization routine information, approximated
observation sequence ˜yif non-Gaussian or nonlinear, and the AIC and BIC of the output model.

SSM Toolbox for Matlab 39
•fastsmo
[alphahat epshat etahat] = fastsmo(y, model[, opt]) performs fast smoothing. yis the
data of dimension p×n, and model is a SSMODEL. The output is respectively the smoothed state (m×n),
smoothed observation disturbance (p×n), and smoothed state disturbance (r×n).
•gauss
[model ytilde] = GAUSS(y, model[, alpha0, opt]) calculates the Gaussian approximation.
yis the data of dimension p×n, and model is a SSMODEL.alpha0 is the initial state sequence estimate and
can be empty or omitted.
•kalman
[a P v F] = KALMAN(y, model[, opt]) performs Kalman filtering. yis the data of dimension p×
n, and model is a SSMODEL. The output is respectively the filtered state (m×n+1), filtered state variance
(m×m×n+1, or 1×n+1 if m=1), one-step prediction error (innovation) (p×n), one-step prediction variance
(p×p×n, or 1×nif p=1).
•linear
[model ytilde] = LINEAR(y, model[, alpha0, opt]) calculates the linear approximation. y
is the data of dimension p×n, and model is a SSMODEL.alpha0 is the initial state sequence estimate and
can be empty or omitted.
•loglik
LOGLIK(y, model[, ytilde, opt]) returns the log likelihood of model given y.yis the data of
dimension p×n, and model is a SSMODEL.ytilde is the approximating observation ˜yand is needed for
some non-Gaussian or nonlinear models.
•sample
[y alpha eps eta] = SAMPLE(model, n[, N]) generates observation samples from model.model
is a SSMODEL,nspecifies the sampling data length, and Nspecifies how many sets of data to generate. yis
the sampled data of dimension p×n×N,alpha,eps,eta are respectively the corresponding sampled state
(m×n×N), observation disturbance (p×n×N), and state disturbance (r×n×N).
•signal
SIGNAL(alpha, model) generates the signal for each component according to the state sequence and
model specification. alpha is the state of dimension m×n, and model is a SSMODEL. The output is a cell
array of data each with dimension p×n, or a M×nmatrix where Mis the number of components if p=1.
•simsmo
[alphatilde epstilde etatilde] = SIMSMO(y, model, N[, antithetic, opt]) gen-
erates observation samples from model conditional on data y.yis the data of dimension p×n, and model
is a SSMODEL.antithetic should be set to 1if antithetic variables are used. The output is respectively the
sampled state sequence (m×n×N), sampled observation disturbance (p×n×N), and sampled state disturbance
(r×n×N).
•statesmo
[alphahat V] = STATESMO(y, model[, opt]) performs state smoothing. yis the data of dimen-
sion p×n, and model is a SSMODEL. The output is respectively the smoothed state (m×n), smoothed state
variance (m×m×n, or 1×nif p=1). If only the first output argument is specified, fast state smoothing is
automatically performed instead.
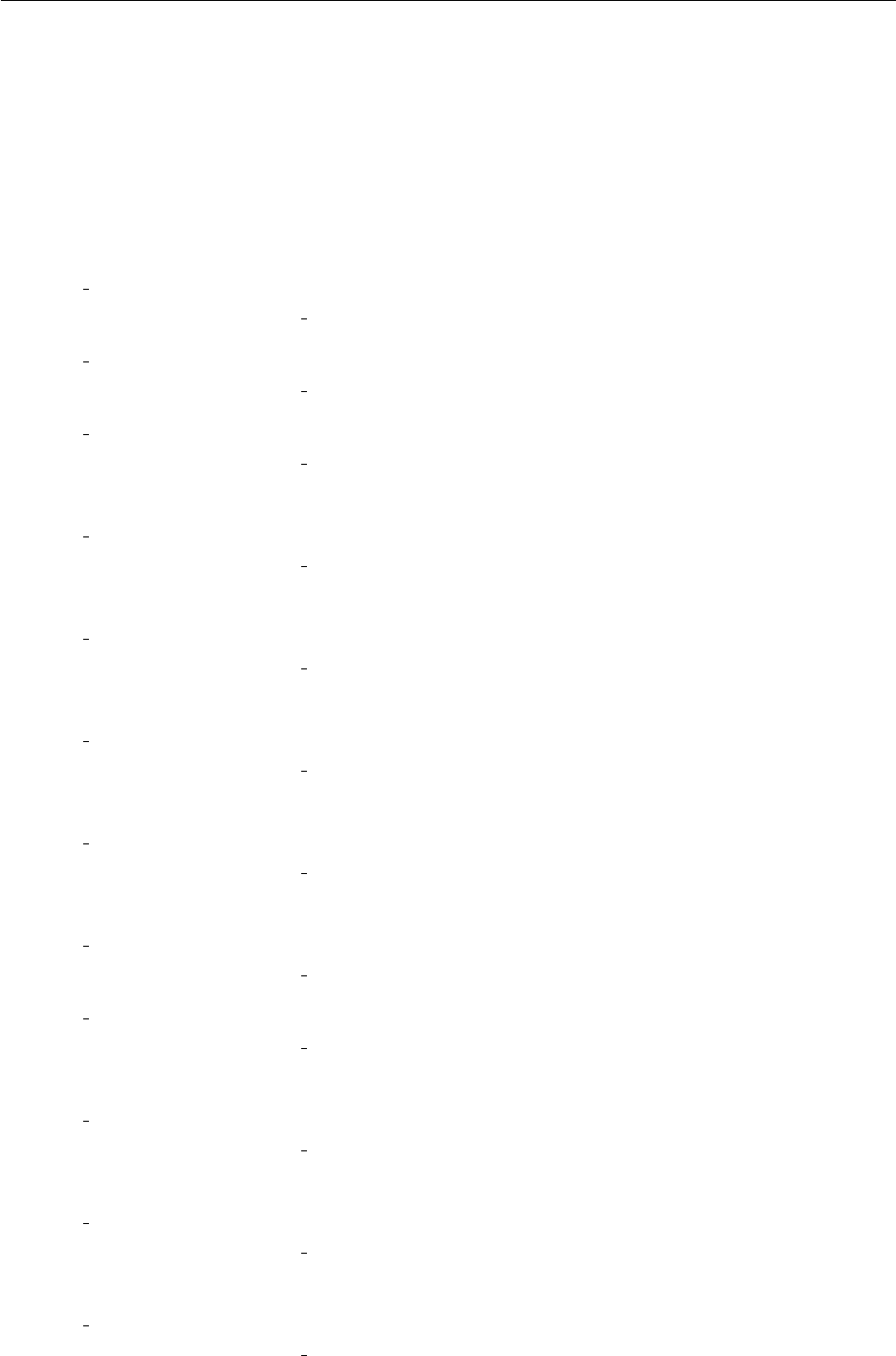
40 Peng & Aston
•oosforecast
[yf err SS] = OOSFORECAST(y, model, n1, h) performs out-of-sample forecast. yis the data
of dimension p×n,model is a SSMODEL,n1 is the number of time points to exclude at the end, and his the
number of steps ahead to forecast, which can be an array. The output yf is the forecast obtained, err is the
forecast error, and SS is the forecast error cumulative sum of squares.
C.3 Stock element functions
•fun arma
[fun grad param] = FUN ARMA(p, q) creates matrix update functions for ARMA models.
•fun cycle
[fun grad param] = FUN CYCLE() creates matrix update functions for cycle components.
•fun dupvar
[fun grad param] = FUN DUPVAR(p, cov, d[, name]) creates matrix update functions for du-
plicated variances.
•fun genair
[fun grad param] = FUN GENAIR(nparam, nfreq, freq) creates matrix update functions for
generalized airline models.
•fun homovar
[fun grad param] = FUN HOMOVAR(p, cov, q[, name]) creates matrix update functions for ho-
mogeneous variances.
•fun interlvar
[fun grad param] = FUN INTERLVAR(p, q, cov[, name]) creates matrix update functions for
q-interleaved variances.
•fun mvcycle
[fun grad param] = FUN MVCYCLE(p) creates matrix update functions for multivariate cycle compo-
nent.
•fun oneoverf
[fun grad param] = FUN ONEOVERF(m) creates matrix update functions for 1/f noise.
•fun sarimahtd
[fun grad param] = FUN SARIMAHTD(p, d, q, P, D, Q, s, gauss) creates matrix update
functions for SARIMA with Hillmer-Tiao decomposition and non-Gaussian irregular.
•fun sarma
[fun grad param] = FUN SARMA(p, q, P, Q, s) creates matrix update functions for seasonal
ARMA models.
•fun spline
[fun grad param] = FUN SPLINE(delta) creates matrix update functions for the cubic spline mod-
els.
•fun t
[fun grad param] = FUN T([nu]) creates update functions for the t-distribution.
SSM Toolbox for Matlab 41
•fun var
[fun grad param] = FUN VAR(p, cov[, name]) creates matrix update functions for variances.
•fun wvar
[fun grad param] = FUN WVAR(p, s[, name]) creates matrix update functions for W structure
variances.
•mat arima
[Z T R P1 Tmmask Rmmask P1mmask] = MAT ARIMA(p, d, q, mean) creates base matrices for
ARIMA models.
•mat arma
[Z T R P1 Tmmask Rmmask P1mmask] = MAT ARMA(p, q, mean) or
[T R P1 Tmmask Rmmask P1mmask] = MAT ARMA(p, q, mean) creates base matrices for ARMA
models.
•mat commonlvls
[Z T R a1 P1] = MAT COMMONLVLS(p, A, a) creates base matrices for common levels models.
•mat dummy
[Z T R] = MAT DUMMY(s[, fixed]) creates base matrices for dummy seasonal component.
•mat dupvar
[m mmask] = MAT DUPVAR(p, cov, d) creates base matrices for duplicated variances.
•mat homovar
[H Q Hmmask Qmmask] = MAT HOMOVAR(p, cov, q) creates base matrices for homogeneous vari-
ances.
•mat hs
[Z T R] = MAT HS(s) creates base matrices for Harrison and Stevens seasonal component.
•mat interlvar
[m mmask] = MAT INTERLVAR(p, q, cov) creates base matrices for q-interleaved variances.
•mat lpt
[Z T R] = MAT LPT(d, stochastic) creates base matrices for local polynomial trend or integrated
random walk models.
•mat mvcycle
[Z T Tmmask R] = MAT MVCYCLE(p) creates base matrices for multivariate cycle components.
•mat mvdummy
[Z T R] = MAT MVDUMMY(p, s[, fixed]) creates base matrices for multivariate dummy seasonal
components.
•mat mvhs
[Z T R] = MAT MVHS(p, s) creates base matrices for multivariate Harrison and Stevens seasonal com-
ponents.
42 Peng & Aston
•mat mvintv
[Z Zdmmask Zdvec T R] = MAT MVINTV(p, n, type, tau) creates base matrices for multivari-
ate intervention components.
•mat mvllt
[Z T R] = MAT MVLLT(p) creates base matrices for multivariate local level trend models.
•mat mvreg
[Z Zdmmask Zdvec T R] = MAT MVREG(p, x, dep) creates base matrices for multivariate regres-
sion components.
•mat mvtrig
[Z T R] = MAT MVTRIG(p, s[, fixed]) creates base matrices for multivariate trigonometric sea-
sonal components.
•mat reg
[Z Zdmmask Zdvec T R] = MAT REG(x[, dyn]) creates base matrices for regression components.
•mat sarima
[Z T R P1 Tmmask Rmmask P1mmask] = MAT SARIMA(p, d, q, P, D, Q, s, mean) or
[Z T R P1 Rmmask P1mmask] = MAT SARIMA(p, d, q, P, D, Q, s, mean) creates base ma-
trices for SARIMA models.
•mat sarimahtd
[Z T R Qmat P1 Tmmask Rmmask Qmmask P1mmask] = MAT SARIMAHTD(p, d, q, P, D,
Q, s) creates base matrices for SARIMA with Hillmer-Tiao decomposition.
•mat spline
[Z T Tdmmask Tdvec R] = MAT (delta) creates base matrices for the cubic spline model.
•mat sumarma
[Z T R P1 Tmmask Rmmask P1mmask] = MAT SUMARMA(p, q, D, s, mean) creates base ma-
trices for sum integrated ARMA models.
•mat trig
[Z T R] = MAT TRIG(s[, fixed]) creates base matrices for trigonometric seasonal components.
•mat var
[m mmask] = MAT VAR(p, cov) creates base matrices for variances.
•mat wvar
[m mmask] = MAT WVAR(p, s) creates base matrices for W structure variances.
•x ee
X EE(Y, M, d) generates Easter effect variable.
•x intv
X INTV(n, type, tau) generates intervention variables.
•x ly
X LY(Y, M) generates leap-year variable.

SSM Toolbox for Matlab 43
•x td
X TD(Y, M, td6) generates trading day variables.
C.4 Miscellaneous helper functions
•setopt
SETOPT(optname1, optvalue1, optname2, optvalue2, ...) sets the global analysis settings
and returns a structure containing the new settings, thus a call with no arguments just returns the current settings.
The available options are: ’disp’ can be set to ’off’,’notify’,’final’ or ’iter’.tol is the
tolerance. fmin is the minimization algorithm to use (’bfgs’ or ’simplex’). maxiter is the maximum
number of iterations. nsamp is the number of samples to use in simulation. Note that the same form of argument
sequence can be used at the end of most data analysis functions to specify one time overrides.
•ymarray
[Y M] = YMARRAY(y, m, N) generates an array of years and months from specified starting year y, start-
ing month m, and number of months N.
C.5 TRAMO model selection and Hillmer-Tiao decomposition
•arimaselect
[p d q mean] = ARIMASELECT(y) or
[p d q P D Q mean] = ARIMASELECT(y, s) performs TRAMO model selection. yis the data of
dimension p×n, and sis the seasonal period. The first form selects among ARIMA models with or without a
mean. The second form selects among SARIMA models with or without a mean.
•armadegree
[p q] = ARMADEGREE(y[, mean, mr]) or
[p q P Q] = ARMADEGREE(y, s[, mean, mr, ms]) determines the degrees of ARMA or SARMA
from observation y.yis the data of dimension p×n, and sis the seasonal period. mean is true if models with
mean are used for the selection. mr and ms is the largest degree to consider for regular ARMA and seasonal
ARMA respectively.
•diffdegree
[d mean] = DIFFDEGREE(y[, ub, tsig]) or
[d D mean] = DIFFDEGREE(y, s[, ub, tsig]) performs unit root detection. The first form only
considers regular differencing. yis the data of dimension p×n,sis the seasonal period, ub is the threshold
for unit roots, default is [0.97 0.88], and tsig is the t-value threshold for mean detection, default is 1.5.
•loglevel
LOGLEVEL(y, s) or
LOGLEVEL(y, p, q) or
LOGLEVEL(y, p, d, q[, P, D, Q, s]) determines the log level specification with respect to various
models. yis the observation data, sis the seasonal period. The output is 1if no logs are needed, else 0. The
first form uses the airline model with specified seasonal period, second form uses ARMA models, and the third
form uses SARIMA models.

44 Peng & Aston
•htd
[theta ksivar] = HTD(d, D, s, Phi, Theta[, etavar]) performs Hillmer-Tiao decompo-
sition. dis the order of regular differencing, Dis the order of seasonal differencing, sis the seasonal period,
Phi is a cell array of increasing order polynomials representing autoregressive factors for each component,
Theta is an increasing order polynomial representing the moving average factor, etavar is the disturbance
variance. The output theta is a cell array of decomposed moving average factors for each component, and
ksivar is the corresponding disturbance variance for each component (including the irregular variance at the
end).
•ssmhtd
SSMHTD(model) performs Hillmer-Tiao decomposition on SSMODEL model and returns an ARIMA com-
ponent model. This is a wrapper for the function htd.
