Peek Traffic SL58P DETECTS THE PRESENCE OF VEHICLES ON ROADWAY User Manual SL 58P Loop Detector Operating Manual
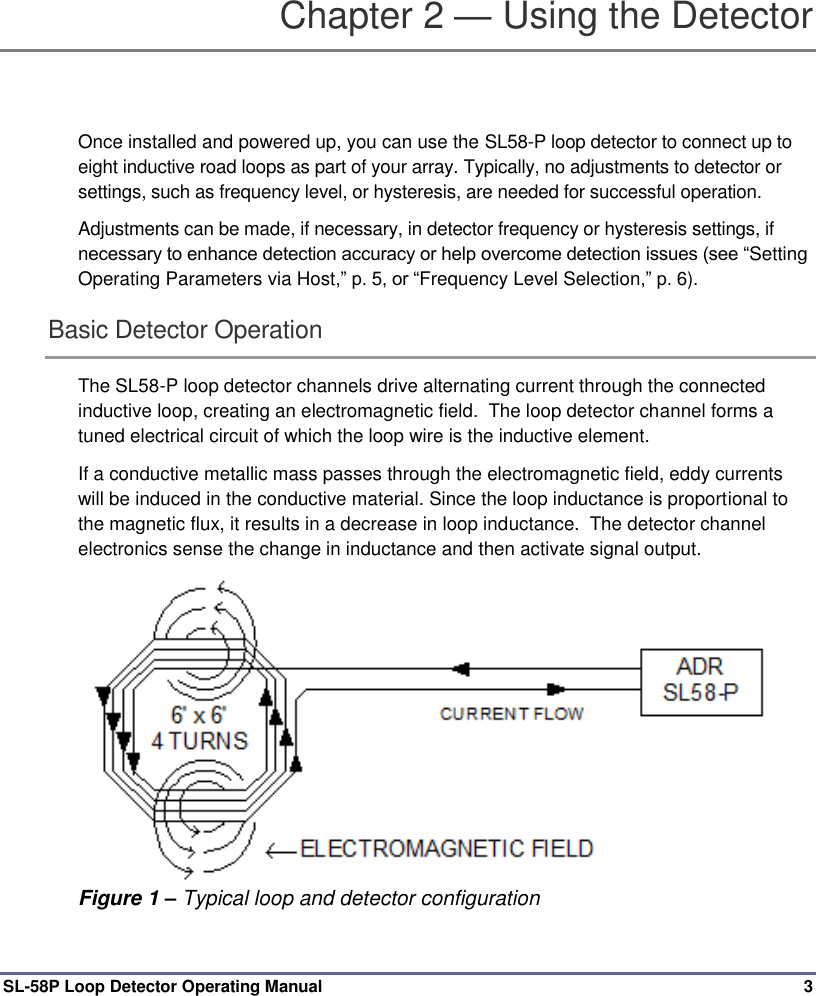
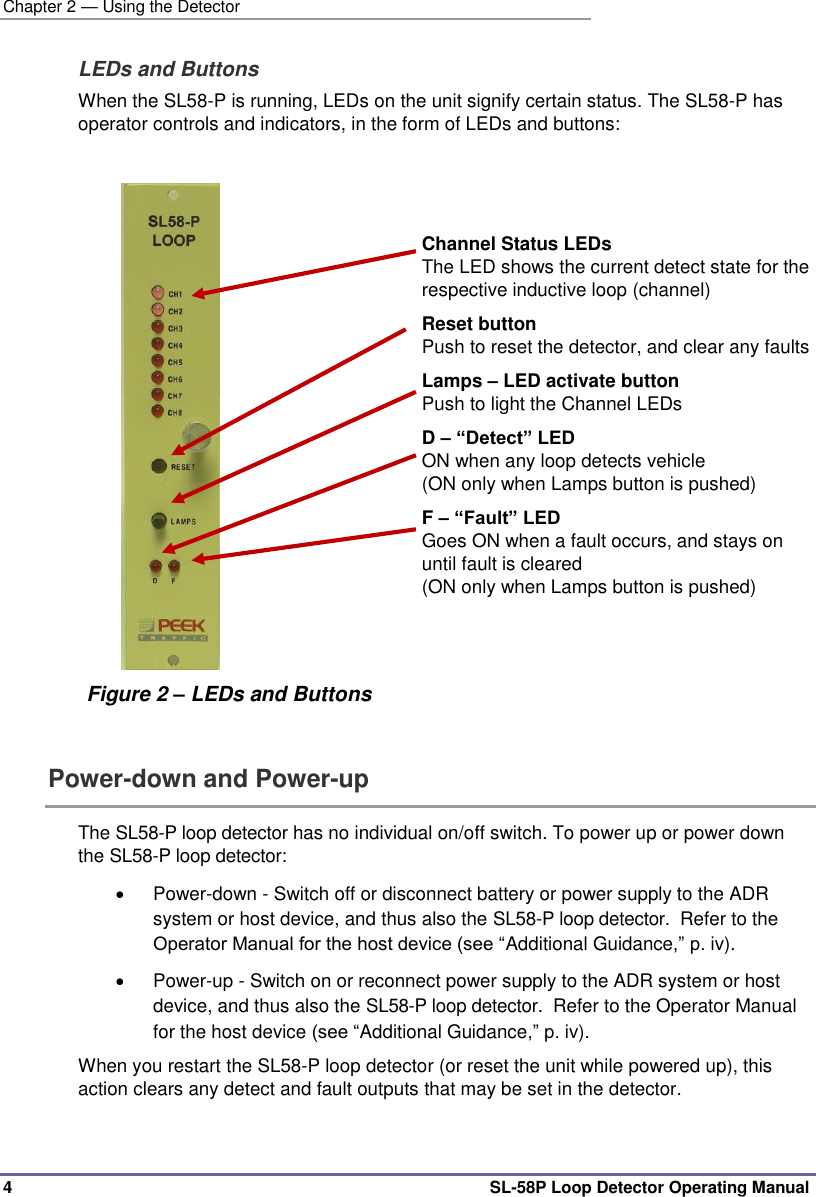
Peek Traffic Corporation DETECTS THE PRESENCE OF VEHICLES ON ROADWAY SL 58P Loop Detector Operating Manual
UserManual.wiki
>
Peek Traffic
>
SL58P User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation