Siemens 6Ra70 Users Manual Ch 0 Cover Contentswopix
6RA70 to the manual ce03091a-16d5-418a-a642-83c481f2eb5a
2015-02-05
: Siemens Siemens-6Ra70-Users-Manual-410333 siemens-6ra70-users-manual-410333 siemens pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 232 [warning: Documents this large are best viewed by clicking the View PDF Link!]
SIMOREG DC Master
6RA70 Series Base Drive Instructions
Microprocessor-based converters from 15A to 1680A
for variable speed DC drives
Rev6.0
Siemens Energy & Automation, Inc.
3333 Old Milton Parkway
Alpharetta, GA 30005
1-800-964-4114
seainfo@sea.siemens.com
www.sea.siemens.com/drives
©© 22000044 SSiieemmeennss EEnneerrggyy && AAuuttoommaattiioonn,, IInncc..
The Siemens logo and SIMOREG are registered trademarks of Siemens AG. Product names mentioned may be trade-
marks or registered trademarks of their respective companies. Specifications are subject to change without notice.
Order Number DCOM-80011-1500-0804SSS Printed in USA.
Global network of innovation
6RA70 Base Drives dc drives instructions • 2004
dc drives
© Siemens Energy & Automation 2006 All rights reserved
Converter software version:
As these Operating Instructions went to print, SIMOREG 6RA70 DC Master converters were being delivered
from the factory with software version 2.2 installed.
These Operating Instructions also apply to other software versions.
Earlier software versions: Some parameters described in this document might not be available in the software
(i.e. the corresponding functionality is not available on the converter) or some
parameters will have a restricted setting range. SIMOREG 6RA70 Base Drive Panel
series requires software version 1.8 or later.
Later software versions: Additional parameters might be available on the SIMOREG DC Master (i.e. extra
functions might be available which are not described in these Operating Instructions)
or some parameters might have an extended setting range. In this case, leave the
relevant parameters at their factory setting, or do not set any parameter values which
are not described in these Instructions !
The latest software version of the SIMOREG DC Master can be read in parameters r060 and r065.
The latest software version is available at the following Internet site:
http://www4.ad.siemens.de/view/cs/en/8467834
The reproduction, transmission or use of this document or contents is
not permitted without express written authority. All rights, including
rights created by patent grant or registration of a utility model or design,
are reserved.
We have checked that the contents of this publication agree with the
hardware and software described herein. Nonetheless, differences
might exist and therefore we cannot guarantee that they are completely
identical. The information given in this publication is reviewed at regular
intervals and any corrections that might be necessary are made in the
subsequent printings. Suggestions for improvement are welcome at all
times. SIMOREG ® is a registered trademark of Siemens
Siemens Energy & Automation 0-1
SIMOREG DC Master Base Drive Panel Operating Instructions
0 Contents
Page
1 Safety information 1-1
2 Introduction
2.1 Base Drive Panel Description 2-1
2.2 General Information 2-1
2.3 Rated DC Current 2-2
2.4 Card Rack Assembly 2-2
3 Parts and Service
3.1 Base Drive Panel model numbers 3-1
3.2 Service 3-2
3.3 Option part numbers 3-3
3.4 Spare Parts 3-4
3.5 Standard Terms & Conditions 3-10
4 Receiving and Unpacking 4-1
5 Technical Data
5.1 15 to 100 ADC Base Drive Panels 5-1
5.2 140 to 850 ADC Base Drive Panels 5-2
5.3 1180 to 1680 ADC Base Drive Panels 5-3
5.4 Applicable Standards 5-5
6 Installation and Dimensions
6.1 Installation Information 6-1
6.2 Base Drive Panel Outlines 6-2
7 Base Drive Panel Connections
7.1 Base Drive Panel Schematics 7-2
7.2 Control Connections CUD1 7-16
7.3 Control Connections CUD2 7-18
7.4 Description of Power/Control Terminals 7-20
0-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
8 Start-up
8.1 General safety information 8-1
8.2 Operator control panels 8-2
8.3 Parameterization procedure 8-4
8.4 Typical connection diagrams 8-6
8.5 Reset to factory default values 8-8
8.6 Start-up procedure 8-9
9 Faults and Alarms
9.1 Fault messages 9-1
9.2 Alarm messages 9-28
10 Abbreviated Parameter List
Overview 10-1
Overview of Abbreviations 10-3
10.1 Operating Status Display 10-5
10.2 General Visualization Parameters 10-7
10.3 Access Authorization Levels 10-11
10.4 Definition of SIMOREG Converter 10-13
10.5 Setting Values for Converter Control 10-17
10.6 Definition of Motor 10-22
10.7 Definition of Speed Sensing Pulse Encoder 10-27
10.8 Armature Current Control, Reversing, Gating 10-30
10.9 Current/Torque Limitation 10-32
10.10 Auto-reserving stage. Armature gating unit 10-34
10.11 Speed Controller 10-34
10.12 Field Current Control, Gating 10-36
10.13 Closed Loop EMF Control 10-38
10.14 Ramp Function Generator 10-39
10.15 Setpoint Processing 10-41
10.16 Ramp Function generator 10-42
10.17 Monitoring Functions and Limits 10-42
10.18 Limit-Value Monitors 10-43
10.19 Settable fixed values 10-45
10.20 Fixed control bits 10-46
10.21 Digital Setpoint Inputs 10-46
10.22 Position sensing with pulse encoder 10-48
10.23 Connector selector switches 10-49
Siemens Energy & Automation 0-3
SIMOREG DC Master Base Drive Panel Operating Instructions
10.24 Motorized potentiometer 10-49
10.25 Oscillation 10-51
10.26 definition of Motor Interface 10-52
10.27 Torque Shell Input 10-53
10.28 Speed limiting controller 10-54
10.29 Friction compensation 10-54
10.30 Compensation of moment of inertia(dv/dt injection) 10-55
10.31 Speed controller 10-57
10.32 Field reversal 10-59
10.33 Input Quantities for Signals 10-59
10.34 Configuring of Closed-Loop Control 10-60
10.35 Control and Status Word 10-68
10.36 Further Configuring Measures 10-71
10.37 Analog Inputs 10-72
10.38 Analog Outputs 10-76
10.39 Binary Outputs 10-78
10.40 Configuration of Serial Interfaces 10-79
10.41 Deactivation of Monitoring Functions 10-89
10.42 Compensation values 10-89
10.43 Thyristor Diagnostics 10-90
10.44 Parameters for DriveMonitor and OP1S 10-90
10.45 Profile Parameters 10-90
10.46 Fault memory 10-91
10.47 Visualization parameters: Alarms 10-92
10.48 Device identification 10-93
10.49 Visualization parameters: Control and status word 10-93
10.50 Resetting and Storing Parameters 10-93
11 Simplified Block Diagrams 11-1
Siemens Energy & Automation 1-1
SIMOREG DC Master Base Drive Panel Operating Instructions
1 Safety information
WARNING
Hazardous voltages and rotating parts are present in this electrical equipment during
operation. Non-observance of the safety instructions can result in death, severe
personal injury or substantial property damage.
Only qualified personnel should work on or around the equipment after first becoming
thoroughly familiar with all warning and safety notices and maintenance procedures contained
herein. The successful and safe operation of this equipment is dependent on proper handling,
installation, operation and maintenance.
Definitions:
• QUALIFIED PERSONNEL
For the purpose of this Instruction Manual and product labels, a "Qualified Person" is someone who
is familiar with the installation, construction and operation of the equipment and the hazards
involved. He or she must have the following qualifications:
1. Trained and authorized to energize, de-energize, clear, ground and tag circuits and equipment in
accordance with established safety procedures.
2. Trained in the proper care and use of protective equipment in accordance with established
safety procedures.
3. Trained in providing first aid.
• DANGER
For the purpose of this Instruction Manual and product labels, "Danger" indicates that death,
severe personal injury or substantial property damage will result if proper precautions are not
taken.
• WARNING
For the purpose of this Instruction Manual and product labels, "Warning" indicates that death,
severe personal injury or substantial property damage can result if proper precautions are not
taken.
• CAUTION
For the purpose of this Instruction Manual and product labels, "Caution" indicates that minor
personal injury or property damage can result if proper precautions are not taken.
• NOTE
For the purpose of this Instruction Manual, "Note" indicates information about the product or the
respective part of the Instruction Manual which requires particular attention.
1-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTE
These operating instructions do not purport to cover all details or variations in equipment, nor to
provide for every possible contingency to be met in connection with installation, operation or
maintenance.
Should further information be desired or should particular problems arise which are not covered
sufficiently for the purchaser's purposes, the matter should be referred to the local Siemens
Sales Office.
The contents of these operating instructions shall not become part or modify any prior or existing
agreement, commitment or relationship. The Sales Contract contains the entire obligations of
Siemens. The warranty contained in the contract between the parties is the sole warranty of
Siemens. Any statements contained herein do not create new warranties or modify the existing
warranty.
DANGER
Converters contain hazardous electrical voltages, Death, severe bodily injury or significant
material damage can occur if the safety measures are not followed.
1. Only qualified personnel, who are knowledgeable about the converters and the provided
information, can install, start up, operate, troubleshoot or repair the converters.
2. The converters must be installed in accordance with all relevant safety regulations (e.g.
NEC, DIN, VDE) as well as all other national or local regulations. Operational safety and
reliability must be ensured by correct grounding, cable sizing and appropriate short-circuit
protection.
3. All panels and doors must be kept closed during normal operation.
4. Before carrying out visual checks and maintenance work, ensure that the AC power supply
is disconnected and locked out. Before the AC supply is disconnected, both converters and
motors have hazardous voltage levels. Even when the converter contactor is open,
hazardous voltages are still present.
5. When making measurements with the power supply switched on, electrical connections
must not be touched under any circumstances. Remove all jewelry from wrists and fingers.
Ensure that the test equipment is in good conditions and operationally safe.
6. When working on units that are switched on, stand on an insulating surface, i.e. ensure that
you are not grounded.
7. Carefully follow the relevant instructions and observe all danger, warning and cautionary
instructions.
8. This does not represent a full listing of all the measures necessary for safe operation of the
equipment. If you require other information or if certain problems occur which are not
handled in enough detail in the information provided in the Instruction Manual, please
contact your local Siemens office.
Siemens Energy & Automation 1-3
SIMOREG DC Master Base Drive Panel Operating Instructions
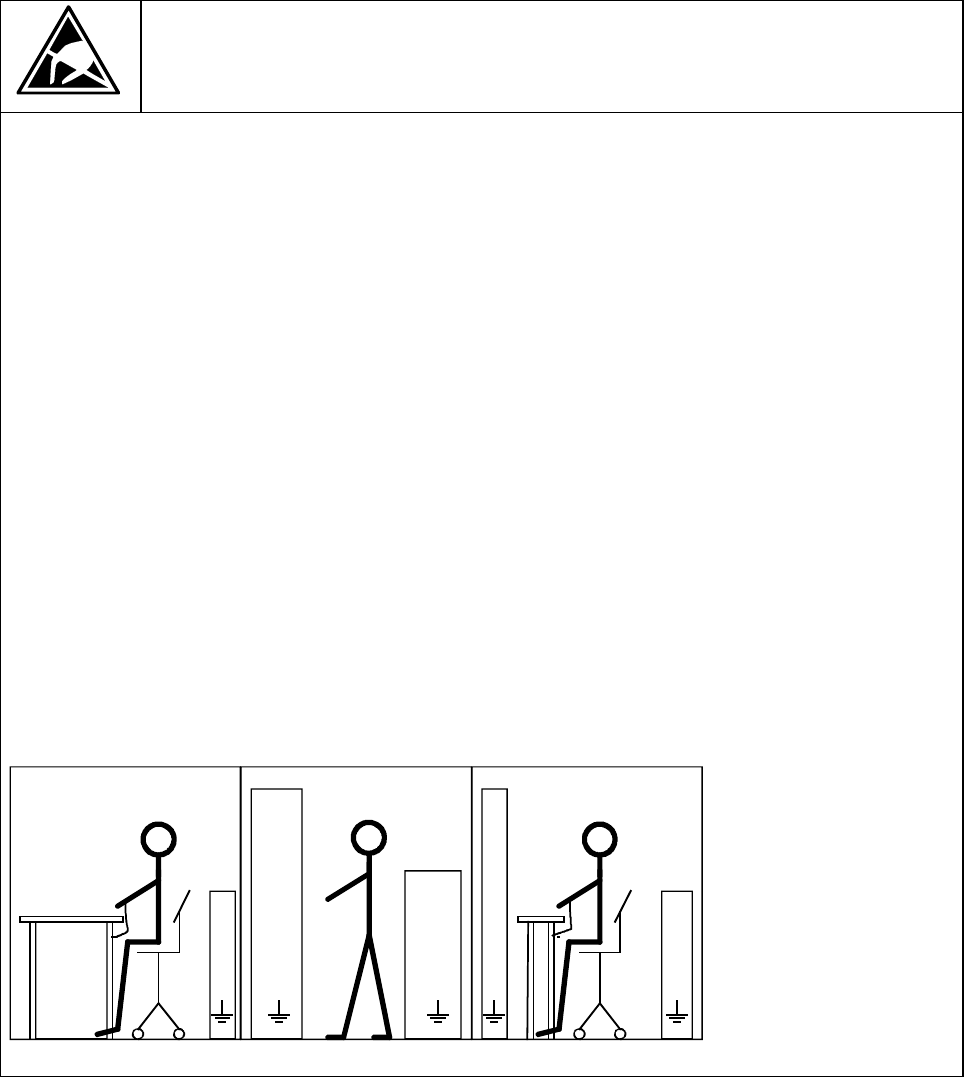
CAUTION
Electro-statically sensitive devices
The converter contains electro-statically sensitive devices. These can easily be destroyed if they are not
handled correctly. If, however, it is absolutely essential for you to work on electronic modules, please pay
careful attention to the following instructions:
• Electronic modules (PCBs) should not be touched unless work has to be carried out on them.
• Before touching a PCB, the person carrying out the work must himself be electro-statically discharged.
The simplest way of doing this is to touch an electrically conductive ground object, e.g. socket outlet
ground contact.
• PCBs must not be allowed to come into contact with electrically insulating materials − plastic foil,
insulating table tops or clothing made of synthetic fibers −
• PCBs may only be set down or stored on electrically conducting surfaces.
• When carrying out soldering jobs on PCBs, make sure that the soldering tip has been grounded.
• PCBs and electronic components should generally be packed in electrically conducting containers
(such as metallized-plastic boxes or metal cans) before being stored or shipped.
• If the use of non-conducting packing containers cannot be avoided, PCBs must be wrapped in a
conducting material before being put in them. Examples of such materials include electrically
conducting foam rubber or household aluminum foil.
For easy reference, the protective measures necessary when dealing with sensitive electronic components
are illustrated in the sketches below.
a = Conductive flooring d = Anti-static overall
b = Anti-static table e = Anti-static chain
c = Anti-static footwear f = Grounding connections of cabinets
a
b
e
d
f f f
d
a
c
e
d
f f
b
c
a
Seated workstation Standing workstation Standing/seated workstation
1-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 2-1
SIMOREG DC Master Base Drive Panel Operating Instructions
2 Description
2.1 Base Drive Panel Description
Series 6RA70 SIMOREG DC MASTER Base Drive Panels are complete drive assemblies ready to be
installed and operated. They include a 3-phase armature converter, single-phase field converter, main
contactor, protective semiconductor fuses, control power transformer, and power / control terminals.
Base Drive Panels are fully digital, compact units which supply the armature and field of variable-
speed DC drives with rated armature currents from 15A to 1680A. The motor field circuit can be
supplied with DC currents of up to 85A (current levels depend on the armature rated current).
2.2 General Information
Series 6RA70 SIMOREG DC MASTER converters are characterized by their compact, space-saving
construction. Their compact design makes them particularly easy to service and maintain since
individual components are readily accessible. The electronics box contains the basic electronic
circuitry as well as any supplementary option boards.
All SIMOREG DC MASTER units are equipped with a PMU simple operator panel mounted in the
converter door. The panel consists of a five-digit, seven-segment display, three LED’s as status
indicators and three parameterization keys. The PMU also features connector X300 with an USS
interface in accordance with the RS232 or RS485 standard. The panel provides all the facilities for
making adjustments or settings and displaying measured values required to start-up the converter.
The OP1S optional converter operator panel can be mounted directly in the converter door or
externally, e.g., in the cubicle door. When mounted remotely, the OP1S can be connected to the
converter with cables up to 5 meters (15 feet) length. Cable up to 50 meter (164 feet) in length can be
used if a separate 5 VDC power supply is available. The OP1S connects to the SIMOREG through
connector X300 using the RS485 interface. The OP1S can be installed as an economic alternative to
conventional door mounted metering devices (i.e., voltmeters, ammeters, and speed indicator).
The OP1S features a liquid crystal display with 4 x 16 characters for displaying parameter names in
plain text. English, German, French, Spanish and Italian can be selected as the display languages. In
addition the OP1S can store parameter sets for easy downloading to other drives.
The converter can also be parameterized on a standard PC with appropriate software connected to the
serial interface on the basic unit. This PC interface is used during start-up, for maintenance during
shutdown and for diagnosis in operation. Furthermore, converter software upgrades can be loaded
through this interface for storage in flash memory.
On single-quadrant converters, a fully controlled three-phase bridge supplies the armature. On four-
quadrant converters, two fully controlled three-phase bridges are connected in an inverse-parallel
connection to allow both positive and negative armature current. For the field converter, a single-
phase, half-controlled 2-pulse bridge supplies the motor shunt field.
The armature and field converters can operate with AC line frequencies from 45 to 65 Hz. If required
for a specific application, the frequency of the armature and field AC supplies can be different. The
armature converter 3 phase AC supply is phase insensitive however on base drives rated 1180, 1660
and 1680 amperes, the 3 phase cooling fan must be connected to get the proper direction of rotation.
The power section cooling system is monitored by means of temperature sensors.
2-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
The power section for the armature and field converters is constructed of isolated thyristor modules for
converters rated from 15A to 850A at 460VAC-line voltage. The heat sink in this case is electrically
isolated and at ground potential. On converters rated 1180, 1660 and 1680 amperes at 460 VAC, the
power section for the armature circuit is constructed using disk thyristors and the heat sinks are at line
voltage potential. The housing and terminal covers on power connections provide protection against
accidental contact for operators working in the vicinity. All connecting terminals are accessible from the
front.
All open and closed-loop drive control and communication functions are performed by two powerful
microprocessors. Drive control functions are implemented in the software as program modules that can
be "wired up" and changed by parameters.
2.3 Rated DC Current:
The rating plate of the 6RA70 power module has 2 rated currents listed on it. The first output rating is a
IEC class I ratings and has no bearing on the base drive panel rating. The second rating is the US
(NEMA) rating which the Base Drive Panel rating is derived from.
The US (NEMA) rated current allows operation at this rated current followed by an overload of 150%
for 60 seconds in a 45°C ambient. The overload can be applied no sooner than every 10 minutes.
Base Drive Panels are designed using the US rating which means that fuses, contactors, and terminal
blocks are sized for the rated US (NEMA) current.
The IEC class I rating is the maximum current the power module can supply continuously with no
overload. Because an overload is not possible the class I rated current is higher than the US rating.
The IEC class I rating cannot be used with Base Drive Panels because the Base Drive Panel fuses,
contactors, and terminal blocks will be overloaded.
The microprocessor calculates the current I2t value of the power section cyclically to ensure that the
thyristors are not damaged in overload operation.
2.4 Card Rack Assembly
One of the many features of the 6RA70 is its ability to expand its functionality modularly through the
use of adding additional option cards inserted in the internal card rack of the power module. A
complete list of the option cards can be found in 6RA70 catalog available from your local Siemens
Sales office.
The card rack assembly contains the CUD1 microprocessor board and two additional slots for two full
size option cards or four half-size option cards. The back plane of the card rack assembly contains an
EEPROM allowing the CUD1 to be replaced without reprogramming of the parameters. Since
additional information specific to the individual unit is programmed into the back plane of the
card rack assembly (model #, serial #, PIN code, etc..) the card rack assembly should never be
interchanged with another unit. If ordering an additional back plane (part # 6RY1703-0GA01)
the model and serial number of the power module will be required.
Siemens Energy & Automation 3-1
SIMOREG DC Master Base Drive Panel Operating Instructions
3 Parts and Service
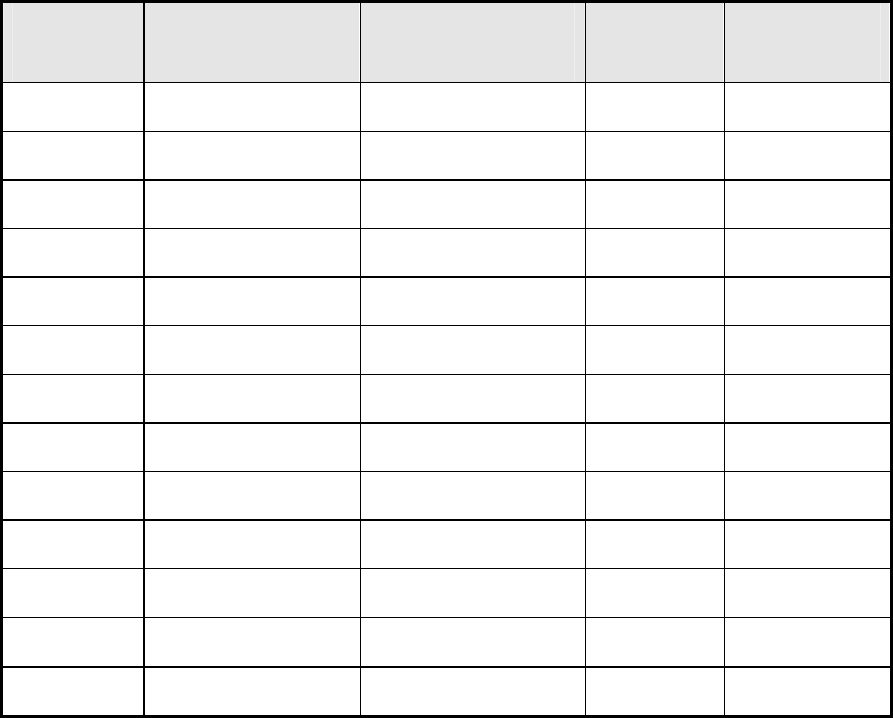
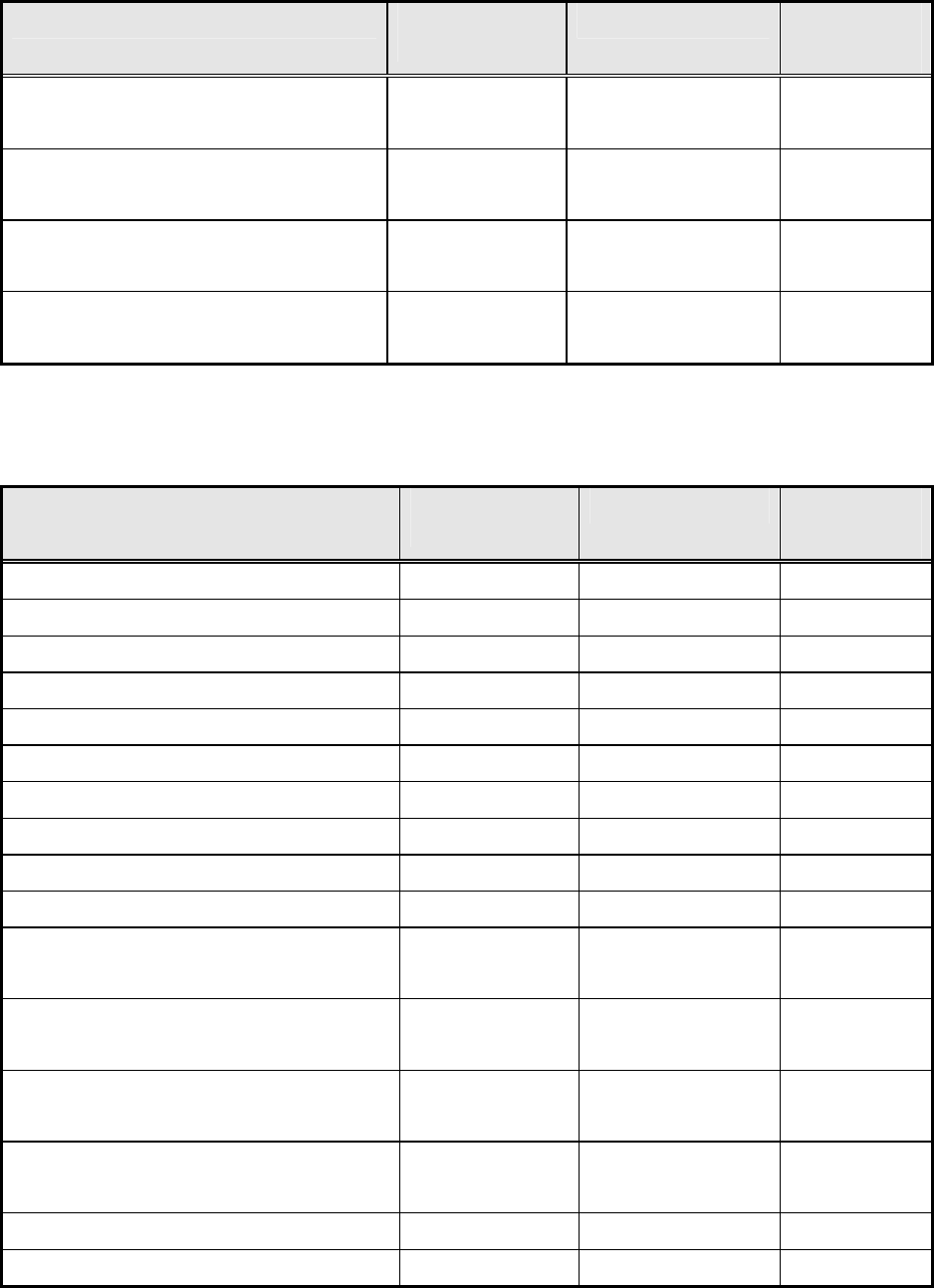
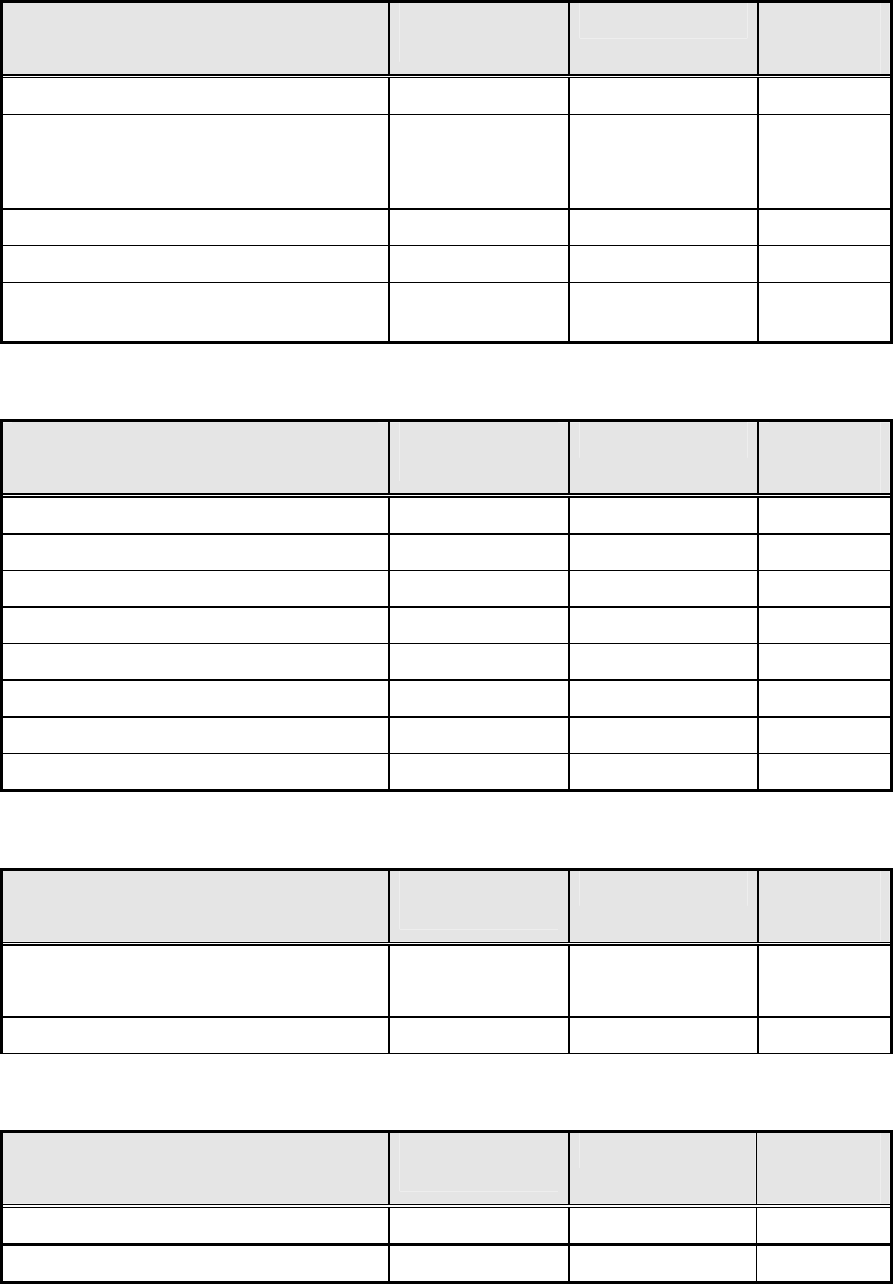
3.1 Base Drive Panel Catalog Numbers
US RATING
(Amps DC)
1-QUAD TYPE
(Catalog No.)
4-QUAD TYPE
(Catalog No.)
Horsepower
(240V DC 1)
Horsepower
(500V DC)
15 6RA7013-2FS22-0 6RA7013-2FV62-0 3HP 7.5HP
30 6RA7018-2FS22-0 6RA7018-2FV62-0 7.5HP 15HP
60 6RA7025-2FS22-0 6RA7025-2FV62-0 15HP 30HP
100 6RA7030-2FS22-0 6RA7030-2FV62-0 25HP 60HP
140 6RA7072-2FS22-0 6RA7072-2FV62-0 40HP 75HP
210 6RA7075-2FS22-0 6RA7075-2FV62-0 60HP 125HP
255 6RA7077-2FS22-0 6RA7077-2FV62-0 75HP 150HP
430 6RA7082-2FS22-0 6RA7082-2FV62-0 125HP 250HP
510 6RA7083-2FS22-0 6RA7083-2FV62-0 150HP 300HP
850 6RA7087-2FS22-0 6RA7087-2FV62-0 250HP 500HP
1180(2) 6RA7091-2FS22-0 6RA7091-2FV62-0 350HP 700HP
1660(2) 6RA7094-2FS22-0 6RA7094-2FV62-0 500HP 1000HP
1680(2) 6RA7094-2FS22-085 6RA7094-2FV62-085 500HP 1000HP
1) Standard voltage configuration
as shipped is 460V AC.
See Technical application note
for 230V AC connection.
2) Standard voltage configuration
as shipped is 460V AC.
See Technical application note
for 575V AC connection on 1180
1660 & 1680A Base drives
3-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
3.2 Service
Spare Parts
An excellent stock of drive products spare parts is maintained at the Alpharetta, Georgia factory. Same
day delivery and after hour shipments can be serviced from this stock, including on weekends and
holidays. To contact Customer Service, simply call our Customer Service Group general phone number:
1-800-333-PIC1 (7421)
Technical Assistance
Should you need technical assistance (other than ordering a part), a reliable answering service ensures
that your request is relayed immediately to one of our technical support engineers 24 hours a day. To
contact the Technical Support and Field Service groups simply call:
1-800-333-PIC1 (7421)
Siemens Energy & Automation 3-3
SIMOREG DC Master Base Drive Panel Operating Instructions
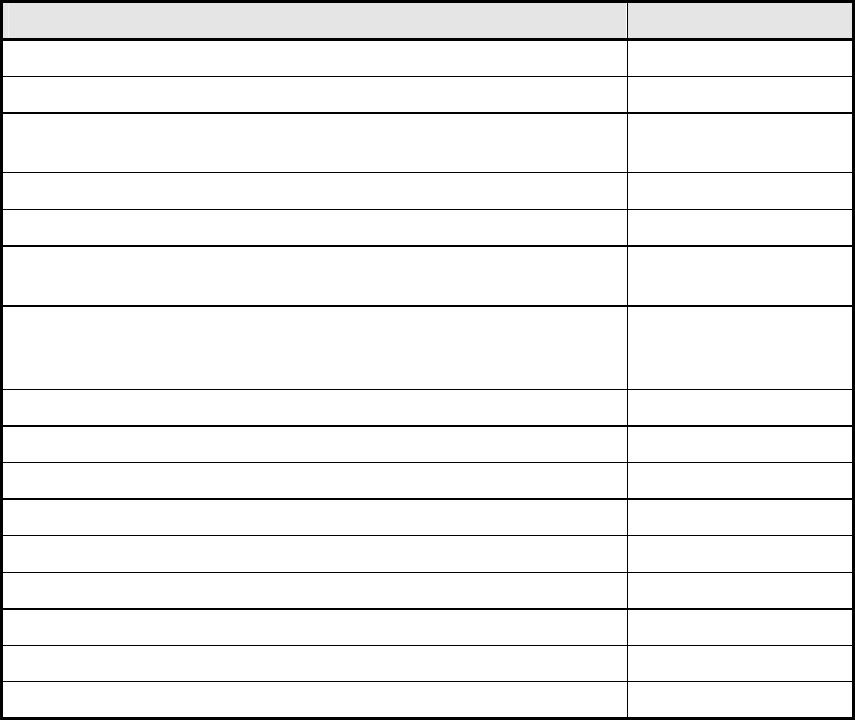
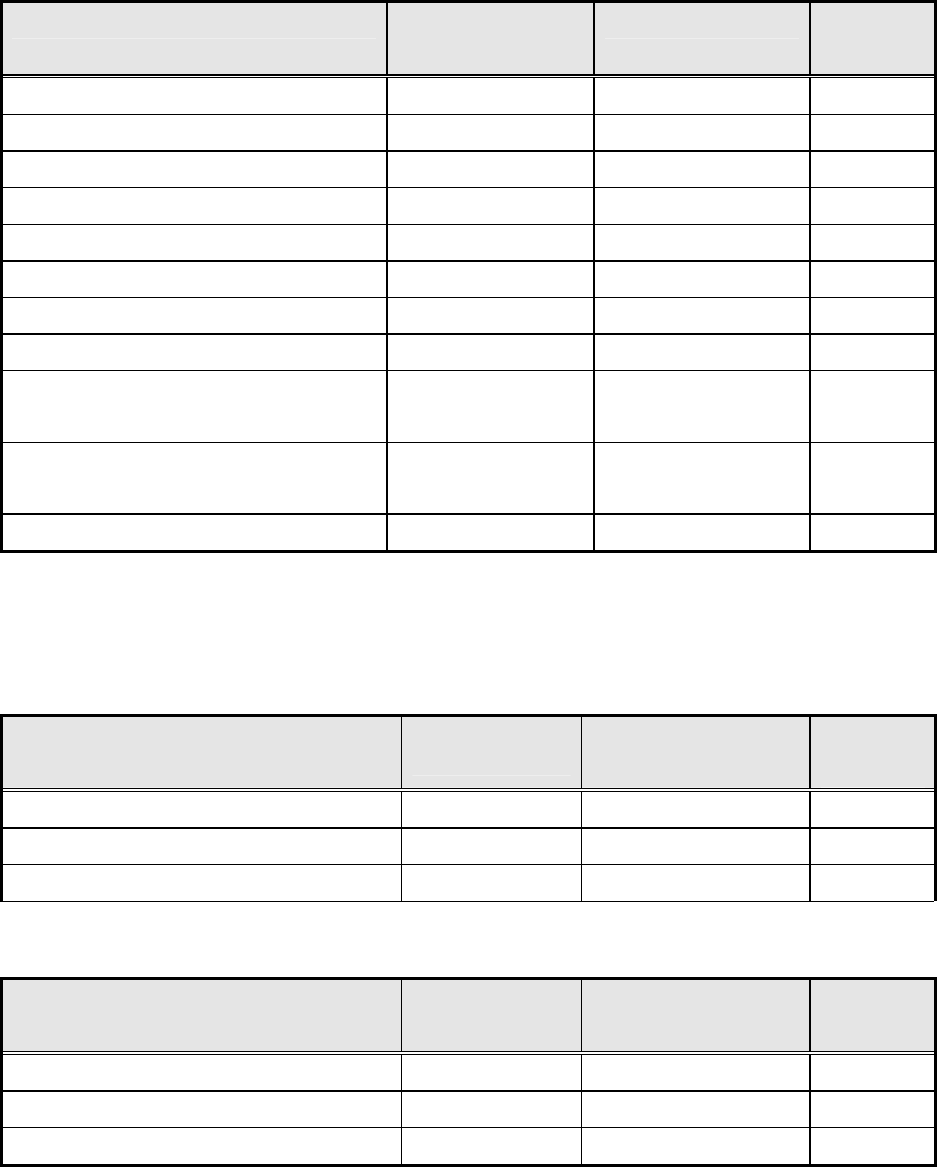
3.3 Option Part Numbers
Options Order No.
Terminal expansion card (CUD2) 6RX1700-0AK00
User-friendly operator control panel (OP1S) 6SE7090-0XX84-2FK0
AOP1 adapter for mounting OP1A in cubicle door, including
5 m connecting cable
6SX7010-0AA00
PMU-OP1S connecting cable, 3m 6SX7010-0AB03
PMU-OP1S connecting cable, 5m 6SX7010-0AB05
LBA Local bus adapter for the electronics box
Note: LBA is needed to install any boards listed below
6SE7090-0XX84-4HA0
ADB Adapter board
Note: ADB is always needed to install CBC, CBP2, CBD,
EB1, EB2, SBP and SLB boards
6SE7090-0XX84-0KA0
SBP Pulse encoder evaluation board 1) 2) 6SX7010-0FA00
EB1 Terminal expansion board 2) 6SX7010-0KB00
EB2 Terminal expansion board 2) 6SX7010-0KC00
SLB SIMOLINK board 2) 6SX7010-0FJ00
CBP2 Communications board interface for PROFIBUS 2) 6SX7010-0FF05
CBC Communications board interface for CAN protocol 2) 6SX7010-0FG00
CBD Communications board interface for DeviceNet protocol 2) 6SX7010-0FK00
T400 Technology board with SPW 420 Axial winder software 2) 6DD1-842-0AA0
T400 Technology board with SPW 440 Angular Synchr. Software 2) 6DD1-842-0ABO
1) A pulse encoder evaluation circuit is a standard component of the basic SIMOREG converter. The SBP only
needs to be ordered in configurations requiring evaluation of a second pulse encoder.
2) The LBA local bus adapter and ADB adapter board must be ordered as additional components for installing
supplementary boards in the SIMOREG converter.
3-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
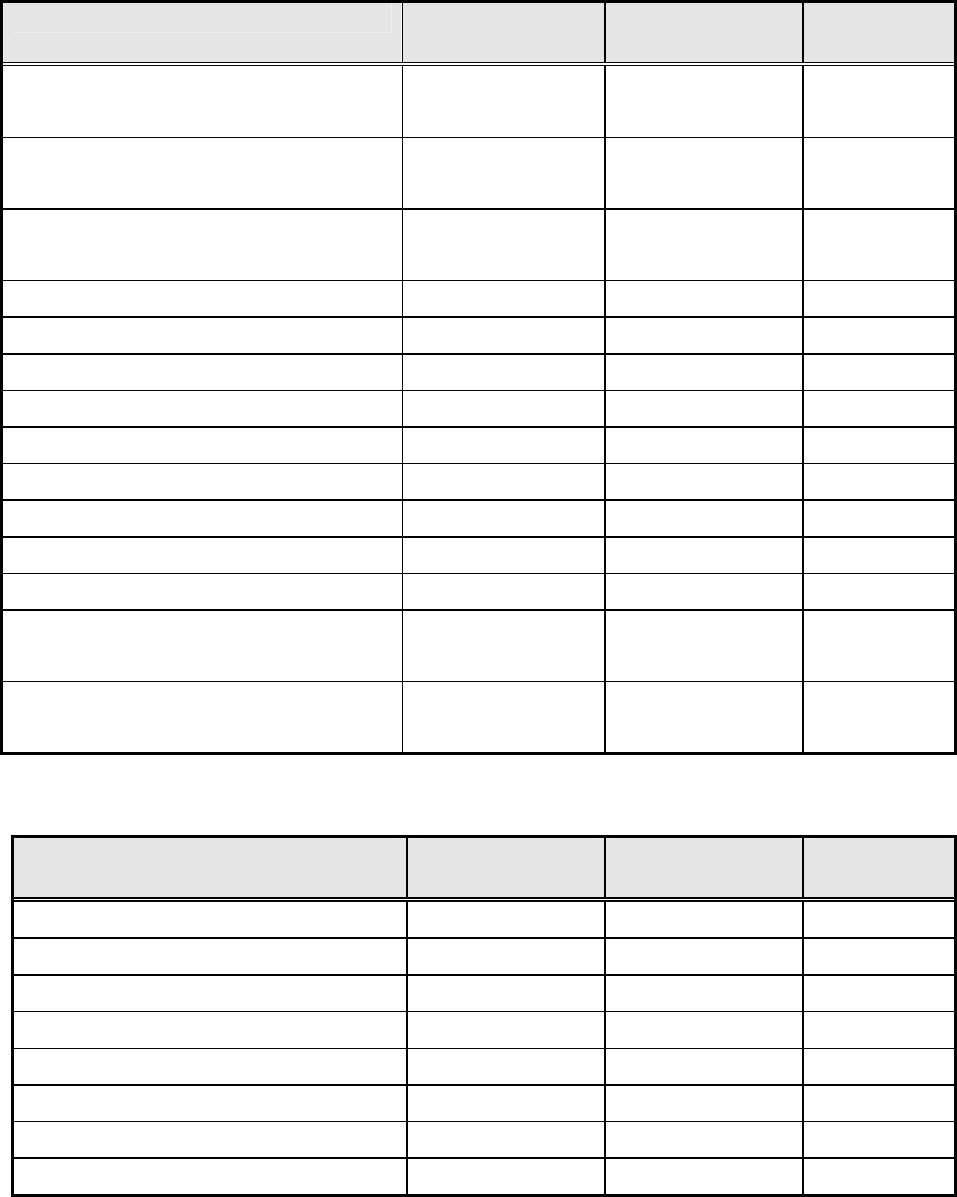
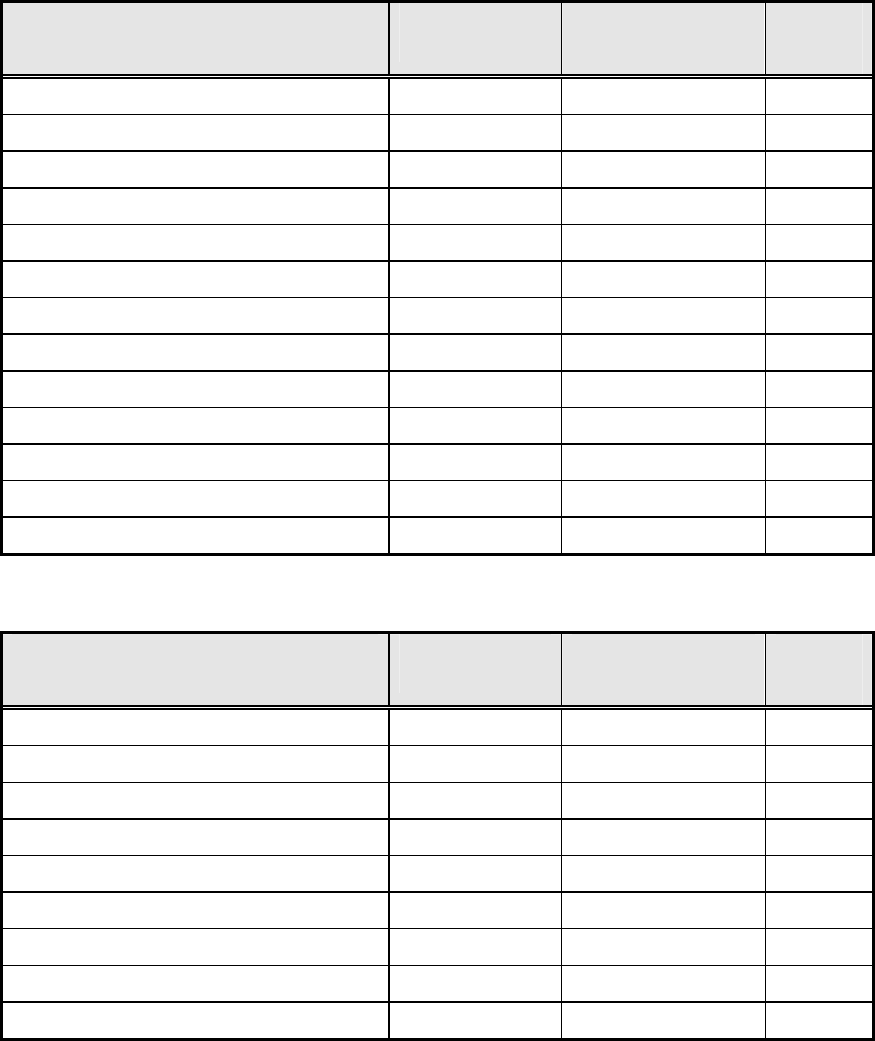
3.4 Spare Parts
Printed Circuit Boards
DESCRIPTION WHERE USED
US Rating 460V
PART
NUMBER
RECOM
SPARE
Microprocessor board CUD1
(C98 043-A7001-L1)
All Ratings 6RY1703-0AA00 1
Power Interface board 1Q (85 to 575 VAC)
(C98 043-A7002-L1)
All 1Q Ratings 6RY1703-0DA01 1
Power Interface board 4Q (85 to 575 VAC)
(C98 043-A7002-L4)
All 4Q Ratings 6RY1703-0DA02 1
PMU Operator Panel (C98 043-A7005-L1) All Ratings 6RY1704-0AA00 -
Field Supply board (C98 043-A7014-L1) 30 to 100 Amp 6RY1703-0CA03 1
Field Supply board (C98 043-A7014-L2) 140 to 510 Amp 6RY1703-0CA01 1
Field Supply board (C98 043-A7004-L1) 850 to 1660 Amp 6RY1703-0EA01 1
Field Supply board (C98 043-A7004-L3) 1680 Amp 6RY1703-0EA03 1
Snubber board (C98 043-A7007-L4) 60 to 100 Amp 6RY1703-0FA04
Snubber board (C98 043-A7007-L6) 30, 140 & 210 Amp 6RY1703-0FA11 -
Snubber board (C98 043-A7011-L6) 255 & 430 Amp 6RY1703-0FA10 -
Snubber boards (C98 043-A7011-L1) 510 & 850 Amp 6RY1703-0FA06 -
Main Power Section Connector board
(C98 043-A7010-L2)
15 Amp (1Q, 4Q) 6RY1703-0CA04 1
Fuse for Power Supply, 1 amp F1, F2
Mounted on Power Interface board
15 – 1680 Amp 6RY1702-0BA00 2
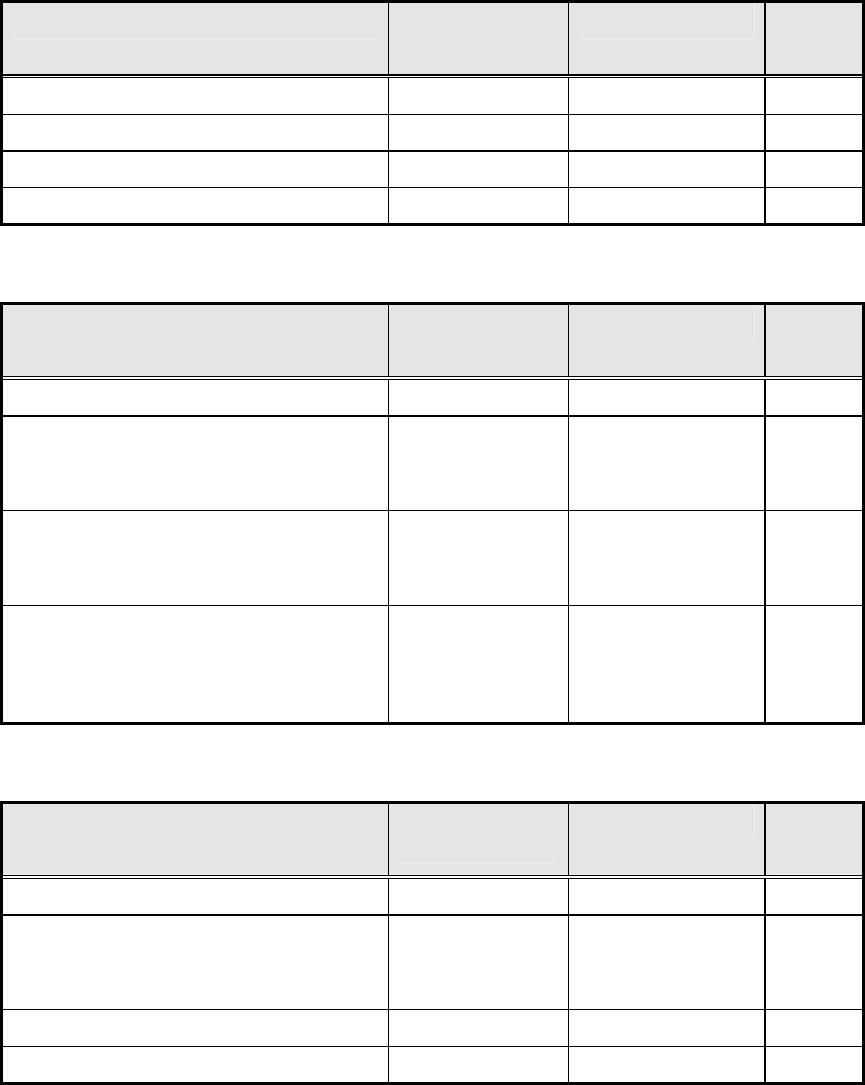
Cables
DESCRIPTION WHERE USED
US Rating 460V
PART
NUMBER
RECOM
SPARE
Ribbon Cable 20 pole X102 15 amp 6RY1707-0AA00
Ribbon Cable 64 pole X101 15 to 430 amp 6RY1707-0AA01 -
Ribbon Cable 20 pole X102 30 to 210 amp 6RY1707-0AA02 -
Ribbon Cable 20 pole X102 255 & 430 amp 6RY1707-0AA03 -
Ribbon Cable 20 pole X102 510 amp 6RY1707-0AA12 -
Ribbon Cable 64 pole X101 510 amp 6RY1707-0AA05 -
Ribbon Cable 20 pole X102 850 to 1680 amp 6RY1707-0AA06 -
Ribbon Cable 64 pole X101 850 to 1680 amp 6RY1707-0AA07 -
Siemens Energy & Automation 3-5
SIMOREG DC Master Base Drive Panel Operating Instructions
Fans/Blowers
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
FAN, 24 VDC
(C98130-A1256-C553)
140 & 210 amp 6RY1701-0AA07 2
FAN, 230 VAC, 1 Phase
(C98130-A7004-B130)
255, 430 & 510
amp
6RY1701-0AA11 1
FAN, 230 VAC, 1 Phase
(C98130-A7004-B330)
850 amp 6RY1701-0AA12 1
FAN, 460 VAC, 3 Phase
(C98 247-S1002-C25)
1180, 1660
&1680 amp
6RY1701-0AA04 1
Thyristors & Diodes
Armature Converter Thyristor Modules, (for 1-Quad Drives)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Dual Thyristor Module 15 amp 1Q 6RY1700-0AA16 3
Dual Thyristor Module 30 amp 1Q 6RY1700-0AA17 3
Dual Thyristor Module 60 amp 1Q 6RY1700-0AA18 3
Dual Thyristor Module 100 amp 1Q 6RY1700-0AA11 3
Dual Thyristor Module 140 amp 1Q 6RY1700-0AA14 3
Dual Thyristor Module 210 amp 1Q 6SY7010-0AA02 3
Dual Thyristor Module 255 amp 1Q 6RY1700-0AA15 3
Dual Thyristor Module 430 amp 1Q 6SY7010-0AA05 3
Dual Thyristor Module 510 amp 1Q 6SY7010-0AA04 3
Dual Thyristor Module 850 amp 1Q 6RY1700-0AA04 3
Thyristor/Heatsink Assembly, Front
(C98 130-A1255-B510)
1180 amp 1Q 6RY1702-0CA15 2
Thyristor/Heatsink Assembly, Back
(C98 130-A1255-B511)
1180 amp 1Q 6RY1702-0CA16 2
Thyristor/Heatsink Assembly, Front
(C98 130-A1255-B520)
1660 amp 1Q 6RY1702-0CA17 2
Thyristor/Heatsink Assembly, Back
(C98 130-A1255-B521)
1660 amp 1Q 6RY1702-0CA18 2
Thyristor/Heatsink Assembly, Front 1680 amp 1Q 6RY1702-0CA30 2
Thyristor/Heatsink Assembly, Back 1680 amp 1Q 6RY1702-0CA31 2
3-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Armature Converter Thyristor Modules, (for 4-Quad Drives)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Dual Thyristor Module 15 amp 4Q 6RY1700-0AA16 3
Dual Thyristor Module 30 amp 4Q 6RY1700-0AA17 3
Dual Thyristor Module 60 & 100 amp 4Q 6RY1700-0AA11 3
Dual Thyristor Module 140 amp 4Q 6RY1700-0AA14 3
Dual Thyristor Module 210 amp 4Q 6SY7010-0AA02 3
Dual Thyristor Module 255 amp 4Q 6RY1700-0AA15 3
Dual Thyristor Module 430 amp 4Q 6SY7010-0AA05 3
Dual Thyristor Module 510 to 850 amp 4Q 6SY7010-0AA04 3
Thyristor/Heatsink Assembly
C98 130-A1256-B510
1180 amp 4Q 6RY1702-0CA02 2
Thyristor/Heatsink Assembly
C98 130-A1256-B520
1660 amp 4Q 6RY1702-0CA03 2
Thyristor/Heatsink Assembly 1680 amp 4Q 6RY1702-0CA34 2
Field Converter Thyristor Modules
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Dual Thyristor Module 15 to 430 amp 6RY1700-0AA12 1
Dual Thyristor Module 510 to 1660 amp 6RY1700-0AA17 1
Dual Thyristor Module 1680 amp 6RY1700-0AA05 1
Field Converter Diode Modules
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Dual Diode Module 15 to 430 amp 6RY1700-0BA04 1
Dual Diode Module 510 to 1660 amp 6RY1700-0BA01 1
Dual Diode Module 1680 AMP 6RY1700-0BA05 1
Siemens Energy & Automation 3-7
SIMOREG DC Master Base Drive Panel Operating Instructions
Power Fuses
Armature Converter AC Line Fuses, (1PFU - 3 PFU)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
25 amp, 700 volt 15 amp A1-FUF-END-C25 3
50 amp, 700 volt 30 amp A1-FUF-END-CDN 3
70 amp, 500 volt 60 amp A1-FUF-00D-014 3
125 amp, 500 volt 100 amp A1-FUF-00D-018 3
150 amp, 500 volt 140 amp A1-FUF-00D-019 3
200 amp, 500 volt 210 amp A1-FUF-00D-021 3
250 amp, 500 volt 255 amp A1-FUF-00D-023 3
400 amp, 500 volt 430 amp A1-FUF-00D-028 3
500 amp, 500 volt 510 amp A1-FUF-00D-030 3
800 amp, 800 volt (Leg Fuse) 850 amp 3NE3338-8 3
1000 amp, 660 volt (Leg Fuse) 1180 amp 6RY1702-0BA02 3
1250 amp, 660 volt (Leg Fuse) 1660 amp 6RY1702-0BA01 3
1500 amp, 660 volt (Leg Fuse) 1680 amp 6RY1702-0BA05 3
Armature Converter DC Fuses, 4-Quad Only, (4PFU)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
25 amp, 700 volt 15 amp A1-FUF-END-C25 2
50 amp, 700 volt 30 amp A1-FUF-END-CDN 2
90 amp, 700 volt 60 amp A1-FUF-00E-016 2
150 amp, 700 volt 100 amp A1-FUF-00E-019 2
175 amp, 700 volt 140 amp A1-FUF-00E-020 2
250 amp, 700 volt 210 amp A1-FUF-00E-023 2
300 amp, 700 volt 255 amp A1-FUF-00E-025 2
500 amp, 700 volt 430 amp A1-FUF-00E-030 2
600 amp, 700 volt 510 amp A1-FUF-00E-031 2
3-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Field Converter AC Line Fuses (1 & 2FSFU)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
20 amp, 700 volt 60 to 210 amp A1-FUF-END-C20 2
40 amp, 700 volt 255 to 850 amp A1-FUF-END-C40 2
50 amp, 700 volt 1180 to 1660 amp A1-FUF-END-C50 2
125 amp, 600 volt 1680 amp A1-FUF-HHA-024 2
Control Transformer Primary Fuses (1CFU, 2CFU)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
1.25 amp, 600 volt, Class "CC" 15 to 100 amp A1-FUF-AFA-006 2
2.5 amp, 600 volt, Class "CC" 140 & 210 amp
1180, 1660 &
1680 amp
A1-FUF-AFA-011 2
3.5 amp, 600 volt, Class "CC" 255 to 510 amp
850 amp, (460
volt input only)
A1-FUF-AFA-014 2
5 amp, 600 volt, Class "CC" 1180, 1660 &
1680 amp
(4CFU, 5CFU,
6CFU, 7CFU)
A1-FUF-AFA-016 4
Control Transformer Secondary Fuse (3CFU)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
0.75 amp, 250 volt, Type MDL 15 to 100 amp A1-FUF-DKA-GBF 2
1.5 amp, 250 volt, Type MDL 140 & 210 amp
1180,1660 &
1680 amp
A1-FUF-DKA-GBP 2
2 amp, 250 volt, Type MDL 255 to 510 amp A1-FUF-DKA-GBV 2
6.25 amp, 250 volt, Type MDL 850 amp A1-FUF-DKA-GCM 2
Siemens Energy & Automation 3-9
SIMOREG DC Master Base Drive Panel Operating Instructions
Control Transformer (1CTR, 2CTR, 3CTR)
DESCRIPTION
460 VAC Primary
WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
115 VA, 230 VAC secondary 15 to 100 amp A1-TRC-Q0C-285 -
250 VA, 230 VAC secondary 140 & 210 amp
1180, 1660 &
1680 amp
A1-TRC-Q0C-286 -
350 VA, 230 VAC secondary 255 to 510 amp A1-TRC-Q0C-287 -
1000 VA, 230 VAC secondary 850 amp A1-TRC-Q0C-288 -
750 VA, 460 VAC secondary 1180,1660 &
1680 amp
A1-TRC-Q0C-289 -
Main Contactor (M)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
3 Pole AC contactor, 240 VAC coil 15 amp 3RT1016-1AP61 -
3 Pole AC contactor, 240 VAC coil 30 amp 3RT1025-1AP60 -
3 Pole AC contactor, 240 VAC coil 60 amp 3RT1035-1AP60 -
3 Pole AC contactor, 240 VAC coil 100 amp 3RT1044-1AP60 -
3 Pole AC contactor, 240 VAC coil 140 amp 3RT1045-1AP60 -
3 Pole AC contactor, 240 VAC coil 210 amp 3RT1456-6AP36 -
3 Pole AC contactor, 240 VAC coil 255 amp 3RT1456-6AP36 -
1 Pole DC contactor, 250 VDC coil 430 to 1680 amp A1-CRD-CAC-010 -
Contactor Coil Suppressor (1SP, ENSP)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Suppressor, varistor type 127 – 240 V 15 amp
430 to 1680 amp
3RT1916-1BD00 -
Suppressor, varistor type 127 – 240 V 30 to 140 amp 3RT1926-1BD00 -
Auxiliary Relay, (EN), and Rectifier Bridge, (MREC)
DESCRIPTION WHERE USED
US Rating 460V
PART NUMBER RECOM
SPARE
Relay, 2-NO, 2-NC, 230 VAC coil 430 to 1680 amp 3RH1122-1AP60 -
Rectifier Bridge, 1 Phase, 5A, 800 V 430 to 1680 amp A1-116-002-001 -

3-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
3.5 Standard Terms and Conditions of Sale
Siemens Energy & Automation, Inc. ("Seller")
1. WARRANTY - Seller warrants that on the date of shipment the goods are of the kind and quality described herein and are free of non-
conformities in workmanship and material. This warranty does not apply to goods delivered by Seller but manufactured by others.
(b) Buyer's exclusive remedy for a nonconformity in any item of the goods shall be the repair or the replacement (at Seller's option) of
the item and any affected part of the goods. Seller's obligation to repair or replace shall be in effect for a period of one (1) year from
initial operation of the goods but not more than eighteen (18) months from Seller's shipment of the goods, provided Buyer has sent
written notice within that period of time to Seller that the goods do not conform to the above warranty. Repaired and replacement parts
shall be warranted for the remainder of the original period of notification set forth above, but in no event less than 12 months from repair
or replacement. At its expense, Buyer shall remove and ship to Seller any such nonconforming items and shall reinstall the repaired or
replaced parts. Buyer shall grant Seller access to the goods at all reasonable times in order for Seller to determine any nonconformity in
the goods. Seller shall have the right of disposal of items replaced by it. If Seller is unable or unwilling to repair or replace, or if repair or
replacement does not remedy the nonconformity, Seller and Buyer shall negotiate an equitable adjustment in the contract price, which
may include a full refund of the contract price for the nonconforming goods.
(c) SELLER HEREBY DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE. SPECIFICALLY,
IT DISCLAIMS THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, COURSE OF
DEALING AND USAGE OF TRADE.
(d) Buyer and successors of Buyer are limited to the remedies specified in this article and shall have no others for a nonconformity in
the goods. Buyer agrees that these remedies provide Buyer and its successors with a minimum adequate remedy and are their
exclusive remedies, whether Buyer's or its successors' remedies are based on contract, warranty, tort (including negligence), strict
liability, indemnity, or any other legal theory, and whether arising out of warranties, representations, instructions, installations, or non-
conformities from any cause.
Note: This article 1 does not apply to any software which may be furnished by Company. In such cases, the attached Software License
Addendum applies.
2. PATENTS - Seller shall pay costs and damages finally awarded in any suit against Buyer or its vendees to the extent based upon a
finding that the design or construction of the goods as furnished infringes a United States patent (except infringement occurring as a
result of incorporating a design or modification at Buyer's request), provided that Buyer promptly notifies Seller of any charge of
infringement, and Seller is given the right at its expense to settle such charge and to defend or control the defense of any suit based
upon such charge. Seller shall have no obligation hereunder with respect to claims, suits or proceedings, resulting from or related to, in
whole or in part, (i) the use of software or software documentation, (ii) compliance with Buyer's specifications, (iii) the combination with,
or modification of, the goods after delivery by Seller, or (iv) the use of the goods, or any part thereof, in the practice of a process. THIS
ARTICLE SETS FORTH SELLER'S ENTIRE LIABILITY WITH RESPECT TO PATENTS.
3. PERFORMANCE; DELAYS - TTimely performance by Seller is contingent upon Buyer's supplying to Seller, when needed, all
required technical information and data, including drawing approvals, and all required commercial documentation. If Seller suffers delay
in performance due to any cause beyond its reasonable control, the time of performance shall be extended a period of time equal to the
period of the delay and its consequences. Seller will give to Buyer notice within a reasonable time after Seller becomes aware of any
such delay.
4. SHIPMENT, TITLE AND RISK OF LOSS - (a) The term "shipment" means delivery to the initial carrier in accordance with the delivery
terms of this contract. Seller may make partial shipments. Seller shall select method of transportation and route, unless terms are f.o.b
point of shipment and Buyer specifies the method and route and is to pay the freight costs in addition to the price. When terms are f.o.b.
destination or freight allowed to destination, "destination" means common carrier delivery point (within the United States, excluding
Alaska and Hawaii) nearest the destination.
(b) Title to the goods and risk of loss or damage shall pass to Buyer at the f.o.b. point. Seller shall not be responsible for damage to the
goods after having received "in good order" receipts from the carrier.
5. TAXES - Any applicable duties or sales, use, excise, value-added or similar taxes will be added to the price and invoiced separately
(unless an acceptable exemption certificate is furnished).
6. TERMS OF PAYMENT - (a) Unless otherwise stated, all payments shall be in United States dollars, and a pro rata payment shall
become due as each shipment is made. If shipment is delayed by Buyer, date of notice of readiness for shipment shall be deemed to be
date of shipment for payment purposes.
(b) On late payments, the contract price shall, without prejudice to Seller's right to immediate payment, be increased by 1 1/2% per
month on the unpaid balance, but not to exceed the maximum permitted by law.
(c) If any time in Seller's judgment Buyer is unable or unwilling to meet the terms specified, Seller may require satisfactory assurance or
full or partial payment as a condition to commencing or continuing manufacture or making shipment, and may, if shipment has been
made, recover the goods from the carrier, pending receipt of such assurances.
Siemens Energy & Automation 3-11
SIMOREG DC Master Base Drive Panel Operating Instructions
7. NONCANCELLATION - Buyer may not cancel or terminate for convenience, or direct suspension of manufacture, except with Seller's
written consent and then only upon terms that will compensate Seller for its engineering, fabrication and purchasing charges and any other
costs relating to such cancellation, termination or uspension, plus a reasonable amount for profit.
8. NUCLEAR - Buyer represents and warrants that the goods covered by this contract shall not be used in or in connection with a nuclear
facility or application. If Buyer is unable to make such representation and warranty, then Buyer agrees to indemnify and hold harmless Seller
and to waive and require its insurers to waive all right of recovery against Seller for any damage, loss, destruction, injury or death resulting
from a "nuclear incident", as that term is defined in the Atomic Energy Act of 1954, as amended, whether or not due to Seller's negligence.
9. LIMITATION OF LIABILITY - Neither Seller, nor its suppliers shall be liable, whether in contract, warranty, failure of a remedy to achieve
its intended or essential purposes, tort (including negligence), strict liability, indemnity or any other legal theory, for loss of use, revenue or
profit, or for costs of capital or of substitute use or performance, or for indirect, special, liquidated, incidental or consequential damages, or for
any other loss or cost of a similar type, or for claims by Buyer for damages of Buyer's customers. Seller's maximum liability under this
contract shall be the contract price. Buyer and Seller agree that the exclusions and limitations set forth in this article are separate and
independent from any remedies which Buyer may have hereunder and shall be given full force and effect whether or not any or all such
remedies shall be deemed to have failed of their essential purpose.
10. GOVERNING LAW AND ASSIGNMENT - The laws of the State of Georgia shall govern the validity, interpretation and enforcement of
this contract, without regard to its conflicts of law principles. The application of the United Nations Convention on Contracts for the
International Sale of Goods shall be excluded. Assignment may be made only with written consent of both parties; provided, however, Seller
may assign to its affiliate without Buyer's consent.
11. ATTORNEY FEES - Buyer shall be liable to Seller for any attorney fees and costs incurred by Seller in enforcing any of its rights
hereunder.
12. DISPUTES - Either party may give the other party written notice of any dispute arising out of or relating to this contract and not resolved
in the normal course of business. The parties shall attempt in good faith to resolve such dispute promptly by negotiations between executives
who have authority to settle the dispute. If the matter has not been resolved within 60 days of the notice, either party may initiate non-binding
mediation of the dispute.
13. STATUTE OF LIMITATIONS - To the extent permitted by applicable law, any lawsuit for breach of contract, including breach of warranty,
arising out of the transactions covered by this contract, must be commenced not later than twelve (12) months from the date the cause of
action accrued.
14. PRICES - In the event of a price increase or decrease, the price of goods on order will be adjusted to reflect such increase or decrease.
This does not apply to a shipment held by request of Buyer. Goods already shipped are not subject to price increase or decrease. Orders on
a bid or contract basis are not subject to this article. Orders amounting to less than $100.00 net will be invoiced at $100.00 plus
transportation charges for goods covered by discount schedules. Seller's prices include the costs of standard domestic packing only. Any
deviation from this standard packing (domestic or export), including U.S. Government sealed packing, will result in extra charges. To
determine such extra charges, consult Seller's sales offices.
15. ADDITIONAL TERMS OF PAYMENT - (a) Invoice payment terms are as shown on latest discount sheets as issued from time to time.
Cash discounts are not applicable to notes or trade acceptances, to prepaid transportation charges when added to Seller's invoices or to
discountable items if there are undisputed past due items on the account. Portions of an invoice in dispute should be deducted and the
balance remitted with a detailed explanation of the deduction. Cash discounts will only be allowed on that portion of the invoice paid within
the normal discount period.
(b) Freight will be allowed to any common-carrier free-delivery point within the United States, excluding Alaska and Hawaii, on shipments
exceeding $1,000 net or more providing Seller selects the carrier. On shipments to Alaska and Hawaii, freight will be allowed to dockside at
the listed port of debarkation nearest the destination point on shipments of $1,000 net or more. Buyer shall pay all special costs such as
cartage, stevedoring and insurance. Special freight allowances are as shown on latest discount sheets as issued from time to time.
Cataloged weights are estimated, not guaranteed. Seller assumes no responsibility for tariff classifications on carriers.
16. CHANGES IN LAWS AND REGULATIONS - Seller's prices and timely performance are based on all applicable laws, rules, regulations,
orders, codes, standards or requirements of governmental authorities effective on the date of Seller's proposal. Any change to any law, rule,
regulation, order, code, standard or requirement which requires any change hereunder shall entitle Seller to an equitable adjustment in the
prices and any time of performance.
3-12 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 4-1
SIMOREG DC Master Base Drive Panel Operating Instructions
4 Receiving, unpacking
SIMOREG Base Drive Panels are packed at the manufacturing plant in protective containers suitable
for shipping. Avoid dropping and shocks during unloading and moving the SIMOREG during receiving.
Observe the instructions on the package for transport, storage, and correct handling.
If you discover that the Base Drive Panel has been damaged during shipment, please inform your
shipping agent immediately.
WARNING
If a SIMOREG Base Drive Panel was damaged during transport, it must not be connected up
without first being repaired and tested by a qualified repair person.
Non-observance of the safety instructions can result in death, severe personal injury or
substantial property damage.
Only qualified personnel should work on or around the equipment after first becoming
thoroughly familiar with all warning and safety notices and maintenance procedures contained
herein. The successful and safe operation of this equipment is dependent on proper handling,
installation, operation and maintenance.
Procedure for Shipping Damage
SIMOREG Base Drive Panels are normally shipped FOB factory making it the buyers responsibility to
make sure the equipment is received undamaged. Carefully examine the equipment before accepting
the shipment from the transport carrier. If you do not notify the carrier immediately of any damage you
may lose your right to file a damage claim. If required you can request support from the local Siemens
office.
• When received, examine the shipment to ensure that it is complete and not damaged.
• Damaged or missing items that are obviously visible should be specified in the shipping papers
and must be countersigned by personnel from the transport company.
• Immediately notify the transport company in writing of any damage or missing items
4-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 5-1
SIMOREG DC Master Base Drive Panel Operating Instructions
5 Technical data:
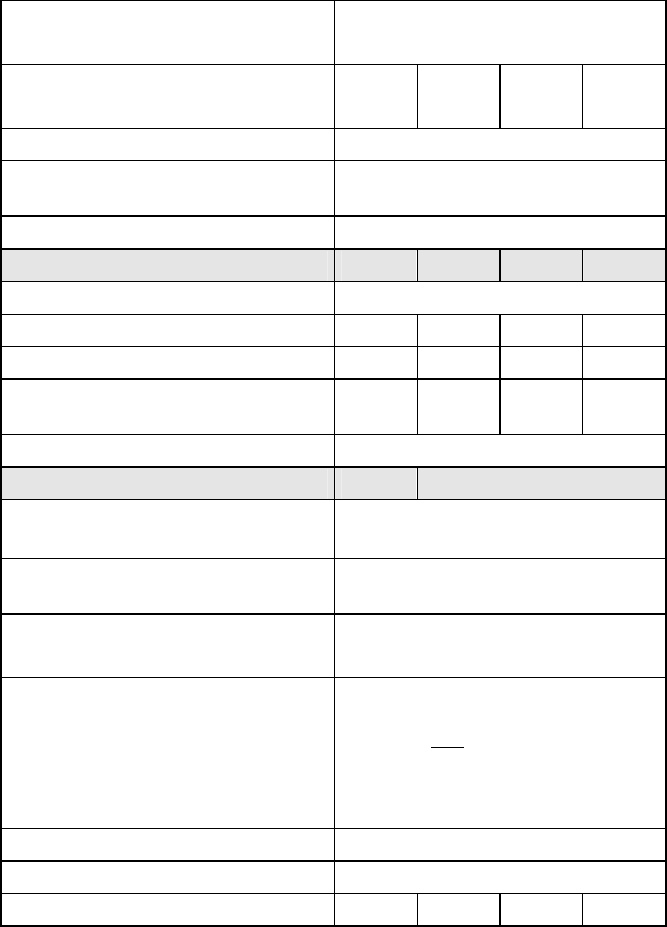
5.1 15ADC to 100ADC Base Drive Panels, 3AC 460V, 1 & 4Q
Rated supply voltage
armature 1)
V 3 Phase
460 (+10% / – 5%)
Rated input current
armature + field 2)
A 17.3 34.6 59.2 92
Rated supply voltage field V 1 Phase 460 (+10%)
Rated frequency Hz 45 to 65 Hz self adapting (armature
and field are independent)
Rated DC voltage 3) V 500
Rated DC armature current A 15 30 60 100
Overload capability 60s 7) 150% of rated DC current
Rated output @ 500 VDC Hp 7 ½ 15 30 60
Rated output @ 240 VDC Hp 3 7 ½ 15 25
Power loss at rated DC current
(approximate)
W 150 200 360 510
Rated DC voltage field V 300
Rated DC field current A 5 10
Operational ambient
temperature
°C 0 to 45 at Irated
self-cooled 4)
Storage and transport
temperature
°C – 25 to +70
Installation altitude above sea
level
≤ 1000 m at rated DC current 5)
Control stability ∆n = 0.006% of the rated motor
speed, valid for pulse encoder
operation and digital setpoint
∆n = 0.1% of the rated motor
speed, valid for analog tachometer
or analog setpoint 6)
Degree of protection Open Chassis (IP00)
Dimensions See dimension drawings in Section 6
Weights (approx.) Lbs. 35 55 60 70
x) Explanation at end of list of tables
5-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
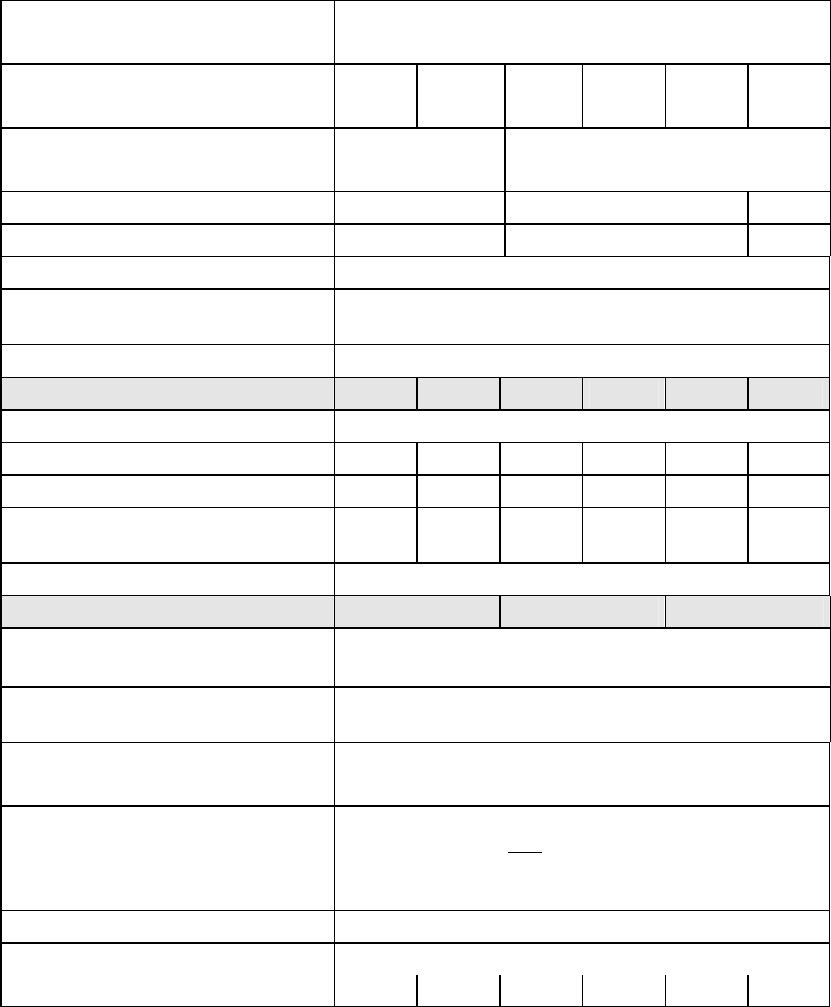
5.2 140ADC to 850ADC Base Drive Panels, 3AC 460V, 1 & 4Q
Rated supply voltage
armature 1)
V 3 Phase
460 (+10% / – 5%)
Rated input current
armature + field 2)
A 129.8 187.2 234.1 377.6 448.2 727
Fan type V Internal 24VDC 1 Phase
230V
Air flow rate ft3/min 100 570 1300
Fan noise level dBA 40 76 85
Rated supply voltage field V 1 Phase 460 (+10%)
Rated frequency Hz 45 to 65 Hz self adapting (armature and field are
independent)
Rated DC voltage 3) V 500
Rated DC armature current A 140 210 255 430 510 850
Overload capability 60s 7) 150% of rated DC current
Rated output @ 500 VDC Hp 75 125 150 250 300 500
Rated output @ 240 VDC Hp 40 60 75 125 150 250
Power loss at rated DC current
(approximately)
W 740 1000 1300 1915 2180 3850
Rated DC voltage field V 300
Rated DC field current A 15 25 30
Operational ambient
temperature
°C 0 to 45 at Irated
fan-cooled 4)
Storage and transport
temperature
°C – 25 to +70
Installation altitude above sea
level
≤ 1000 m at rated DC current 5)
Control stability ∆n = 0.006% of the rated motor speed, valid for pulse
encoder operation and digital setpoint
∆n = 0.1% of the rated motor speed, valid for analog
tachometer or analog setpoint 6)
Degree of protection Open Chassis (IP00)
Dimensions Refer to dimension drawings in Section 6
Weights (approx.) Lbs. 90 95 145 160 210 400
Siemens Energy & Automation 5-3
SIMOREG DC Master Base Drive Panel Operating Instructions
5.3 1180ADC, 1660ADC & 1680ADC Base Drive Panels, 3AC 460V, 1 & 4Q
Rated supply voltage armature
1)
V 3 Phase
460 (+10% / – 5%)
Rated input current armature
2)
A 1000 1401 1455
Fan type V 3 Phase
460V
Air flow rate ft3/min 824
Fan noise level dBA 88
Rated supply voltage field V 1 Phase 460 (+10%)
Rated frequency Hz 45 to 65 Hz self adapting (armature and field are
independent)
Rated DC voltage 2) V 500
Rated DC armature current A 1180 1660 1680
Overload capability 60s 7) 150% of rated DC current
Rated output @ 500 VDC Hp 700 1000 1000
Rated output @ 240 VDC Hp 350 500 500
Power loss at rated DC current
(approximately)
W 5540 7590 7280
Rated DC voltage field V 300
Rated DC field current A 40 85
Operational ambient
temperature
°C 0 to 45 at Irated
fan-cooled 4)
Storage and transport
temperature
°C – 25 to +70
Installation altitude above sea level ≤ 1000 m at rated DC current 5)
Control stability ∆n = 0.006% of the rated motor speed, valid for pulse
encoder operation and digital setpoint
∆n = 0.1% of the rated motor speed, valid for analog
tachometer or analog setpoint 6)
Degree of protection Open Chassis (IP00)
Dimensions Refer to dimension drawings in Section 6
Weights (approx.) Lbs. 725 755 760
5-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Notes:
1) Operation with reduced input voltage will result in reduced maximum output voltage accordingly.
2) Values apply for rated DC output current on both the armature and field circuits.
3) The specified output DC voltage can be guaranteed up to an undervoltage of 5% of rated line voltage.
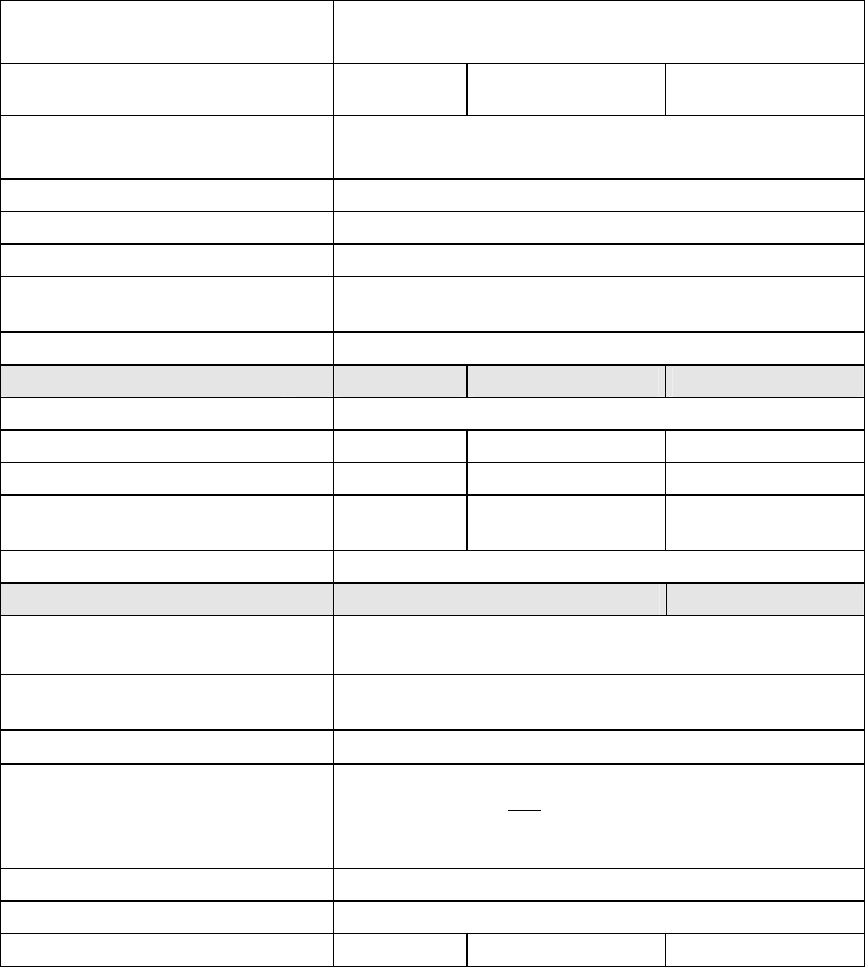
4) The table below gives load values, (DC current), as a function of ambient temperature surrounding the
Base Drive Panel, (refer to P077). Note, Important: When Base Drive Panels are installed into
enclosures, make sure the temperature inside does not exceed 45oC, otherwise derate the DC current
rating per the table below.
Ambient temperature % reduction in base drive dc ampere rating
Self-cooled converters Fan-cooled converters
(15, 30, 60, 100 ADC) (140 - 1660 ADC)
+40ºC
+45ºC
+50ºC
+55ºC
+60ºC
– 0 %
– 0 %
– 6 %
– 11 %
– 18 %
– 0 %
– 0 %
– 5 % a)
– 5 % a)
– 5 % a)
a) Operation of fan cooled units at ambients above 50oC is not permitted
because of limitations on the allowable fan operating temperature.
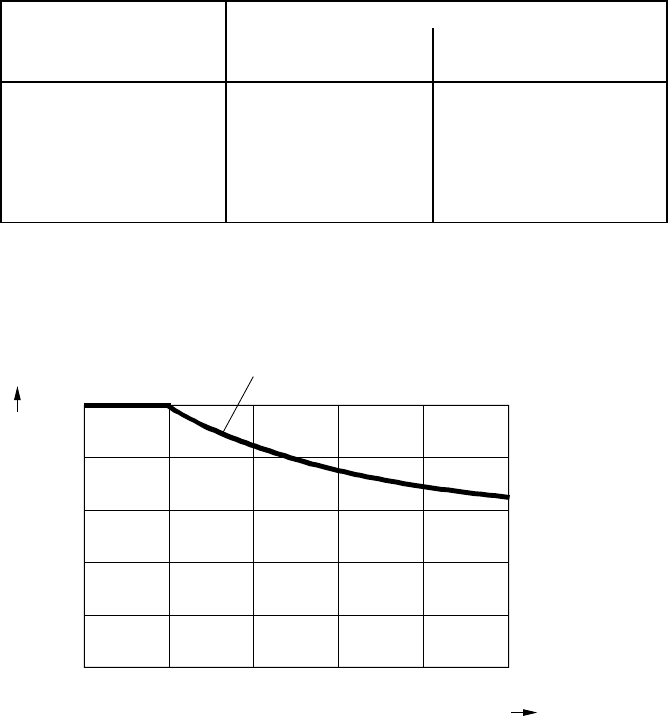
5) Load values, (DC current), as a function of installation altitude (refer to P077)
0
20
40
60
80
100
%
Installation altitude
1000 2000 3000 4000 5000 m
Percentage
load "b"
67%
b1
Curve b1: Reduction factor of load values, (DC current),
at installation altitudes above 1000 m.
No derating of the supply voltages to any circuits is required
up to an installation altitude of 5000 m for basic insulation.
Siemens Energy & Automation 5-5
SIMOREG DC Master Base Drive Panel Operating Instructions
6) Requirements to achieve control stability:
The control stability (closed-loop PI control) is referred to the rated motor speed and applies
when the SIMOREG converter is warm. The following conditions are applicable:
• Temperature changes of ±10 °C.
• Line voltage changes corresponding to +10% / – 5% of the rated input voltage.
• Temperature coefficient of temperature-compensated tachometer 0.15‰ per 10 °K,
(applies only to analog tachometer).
• Constant setpoint (14-bit resolution).
• Motor, load, and encoder are correctly aligned and the load is balanced.
7) Details of overload capability:
Following operation at rated load, base drive panels are capable of carrying 150% of rated load
for 1 minute, followed by a period of light load operation of such duration that the rms load does
not exceed rated continuous current. Base Drive Panels are designed for operation with
heatsink air inlet temperatures up to 45°C.
5.4 Applicable standards
UL508A
National Electrical Code 1999
5-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 6-1
SIMOREG DC Master Base Drive Panel Operating Instructions
6 Installation and Dimensions
6.1 Installation Information
SIMOREG Base Drive Panels are designed as chassis units intended to be mounted inside a protective
enclosure or inside a control room. The units are to be mounted vertically in cubicles usually with the power
connections at the top and the control connections at the bottom. A minimum 100-mm (4-inch) clearance must
be kept above and below the converter in order to ensure unrestricted cooling airflow. The minimum
enclosure size to be used is 23.6 by 23.6 by 86.6 inch high. The open chassis units are designed to operate in
a 45°C ambient. When enclosed in a cubicle the ambient temperature outside the cubicle should not exceed
40°C, which then allows for a 5°C-temperature rise inside the cubicle. Care must be taken in the selection of
the cubicle so that the internal temperature rise does not exceed 5°C. Refer to section 5 for approximate
power loss data.
Note, Important: This equipment is designed and package-protected to handle the normal shock and
vibration typically encountered in shipment. Do not install these Base Drive Panels on equipment subject
to shock or vibration. Select a reasonably clean location for installation, free from corrosive or
conductive materials or fumes.
CAUTION
Failure to lift the Base Drive Panel in the correct manner can result in bodily injury and/or
property damage.
The Base Drive Panel must be lifted using suitable equipment and under the instruction of
appropriately qualified personnel.
The user is responsible for installing the Base Drive Panel, motor, transformer as well as other
equipment according to safety regulations (e.g. NEC), as well as all other relevant national or
local regulations regarding cable sizing and protection, grounding, disconnects, overcurrent
protection, etc.
The Base Drive Panels must be installed in accordance with the relevant safety regulations
(e.g. NEC), as well as all other relevant national and local regulations. It must be ensured that
the grounding, cable sizing and appropriate short-circuit protection have been implemented to
guarantee operational safety and reliability.
Note, Important: Base Drive Panels have high-speed semiconductor fuses installed for
protection of the thyristors in the event high fault currents are encountered. These fuses are
“special purpose” fuses, and do not meet the requirements of the NEC for short-circuit
protection in motor branch circuits. It is necessary to provide other devices for short-circuit
protection. Typically molded case circuit breakers or NEC style fuses are used for this purpose.
Refer to applicable sections of the NEC for additional information.
NOTE
The fundamental principles of EMC in Section 6.1 of SIMOREG 6RA70 DC Master operating
instructions (Order # 6RX1700-0AD76) must be adhered to when installing any unit.
6-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
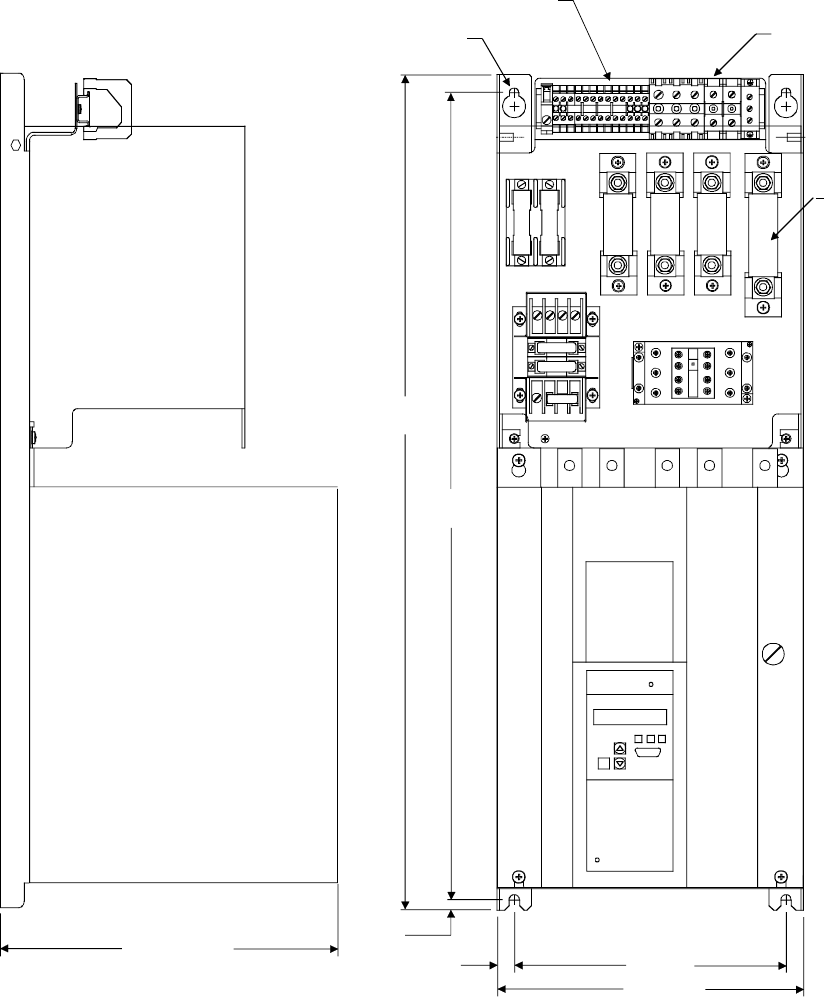
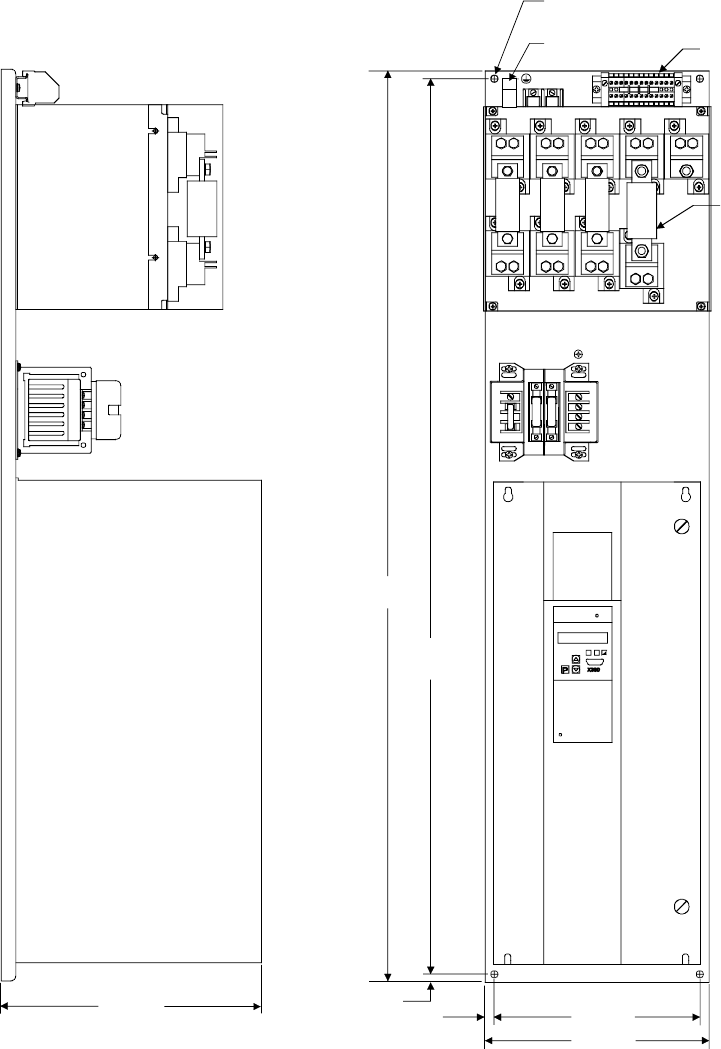
6.2 Base Drive Panel Outlines:
Dimensions are mm (inches)
PX300
SIEMENS 6RA70
238 (9.4)
613
(24.1)
638
(25.1)
15
(0.6)
9
(0 .4 )
265 (10.4)
POWER TERMINALS
L1, L2, L3, A1, A2, GND
TERMINALS 80 - 92
15 - 30 AMP BASE DRIVE PANELS, (1 & 4Q)
268 (10.6)
(15 Amp)
339 (13.4)
(30 Amp)
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED ON
1-QUAD UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
Siemens Energy & Automation 6-3
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
6RA70SIEMENS
PX300
339 (13.4)
TERMINALS 80 - 92
POWER TERMINALS
L1, L2, L3, A1, A2, GND
709
(27.9)
734
(28.9)
9
(0 .4 )
238 (9.4)
268 (10.6)
15
(0.6)
60 AMP BASE DRIVE PANEL, (1 & 4Q)
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED ON
1-QUAD UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
6-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
SIEMENS
PX300
6RA70
339 (13.4) 238 (9.4)
268 (10.6)
15
(0.6)
806
(31.7)
831
(32.7)
POWER TERMINALS
L1, L2 , L3, A1, A2, GND
TERMINALS 80 - 92
100 AMP BASE DRIVE PANEL, (1 & 4Q)
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED
ON 1-QUAD
UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
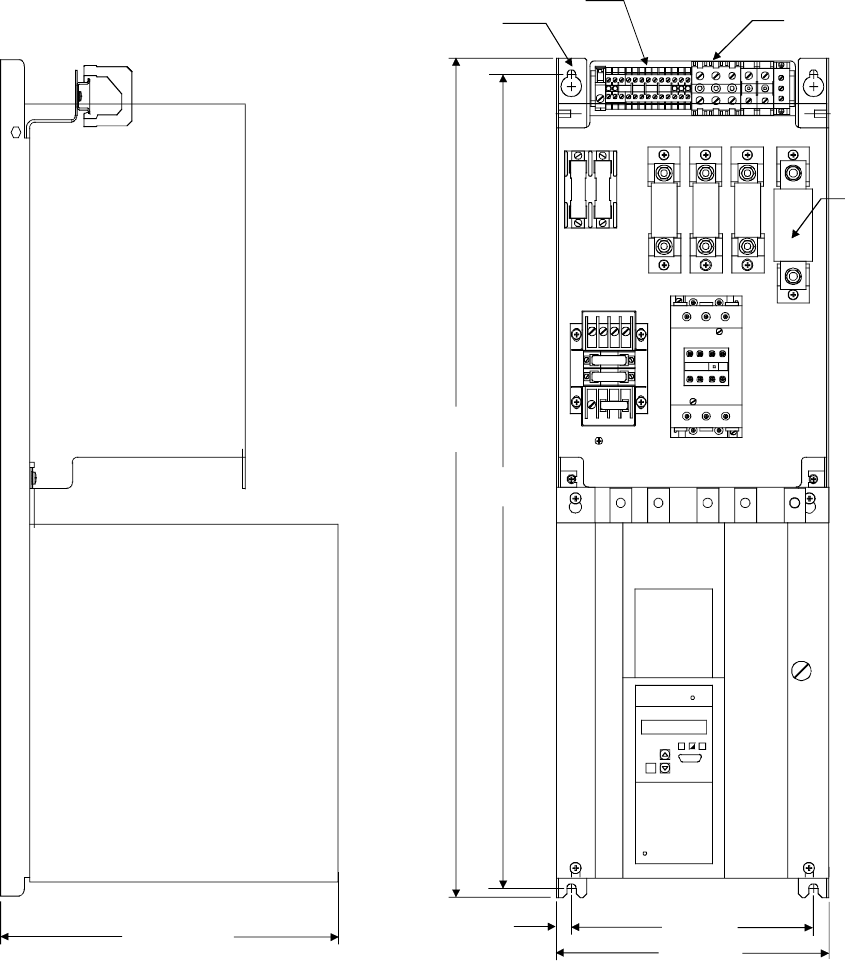
Siemens Energy & Automation 6-5
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
SIEMENS
PX300
6RA70
L1 L2 L3 A1 A2
326(12.8)
TERMINALS 80 - 92
266(10.5)
290(11.4)
12
(0.45)
10
(0.4)
980
(38.6)
960
(37.8)
140 AMP BASE DRIVE PANEL, (1 & 4Q)
GROUND
TERMINAL
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED
ON 1-QUAD
UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
6-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
SIEMENS
PX300
6RA70
326(12.8)
10
(0.4) 12
(0.45)
1100
(43.3)
1120
(44.1)
266 (10.5)
290 (11.4)
210 AMP BASE DRIVE PANEL, (1 & 4Q)
L1 L2 L3 A1 A2
TERMINALS 80 - 92
GROUND
TERMINAL
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED ON
1-QUAD UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
Siemens Energy & Automation 6-7
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
6RA70SIEMENS
TERMINALS 80 - 92
L1 L2 L3 A1 A2
266 (10.5)
10
(0.4)
290 (11.4)
12
(0.45)
1160
(45.7)
1180
(46.5)
331 (13.0)
255 AMP BASE DRIVE PANEL, (1 & 4Q)
GROUND
TERMINAL
MOUNTING HOLES FOR M8,
(.312"), SCREWS, 4-PLACES
FUSE NOT
SUPPLIED ON
1-QUAD UNITS
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
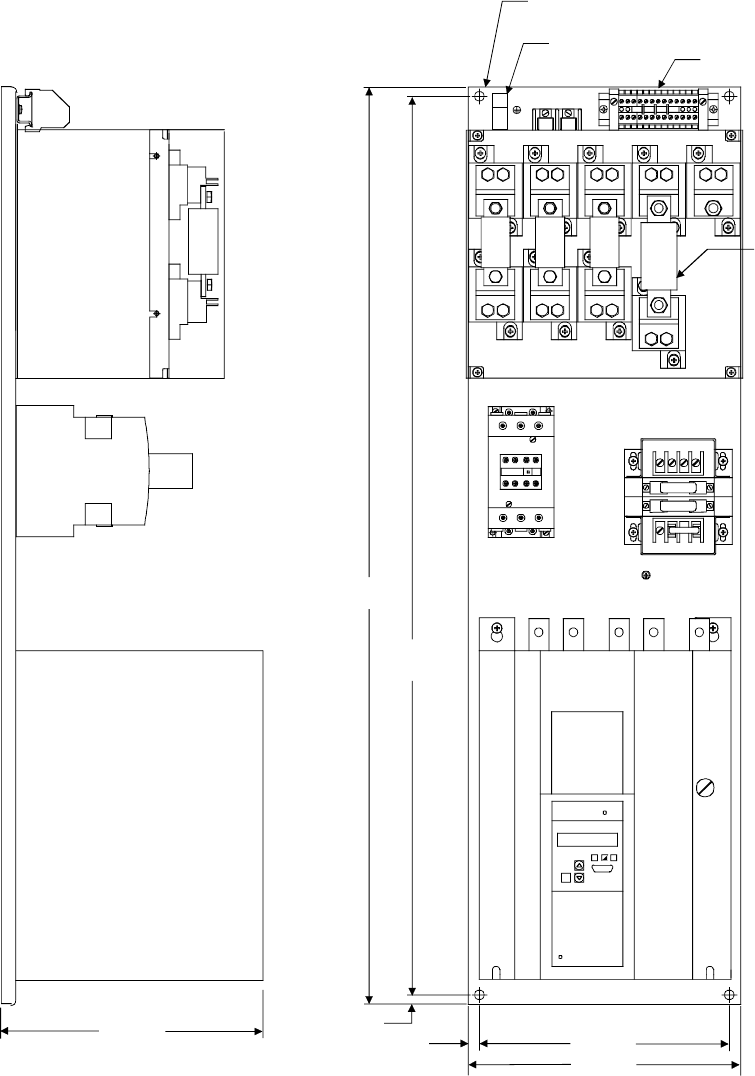
6-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
PX300
SIEMENS 6RA70
L1 L2 L3 A1 A2
430 AMP BASE DRIVE PANEL, (1 & 4Q)
ADDITIONAL CLEARANCE
REQ'D FROM CONTACTOR
ARC CHUTE TO ANY
GROUNDED METAL
35
(1.4)
TERMINALS 80 - 94
334 (13.1)
520 (20.5)
550 (21.6)
15
(0.6)
20
(0.8)
1200
(47.2)
880
(34.6)
280
(11.0)
FUSE NOT SUPPLIED
ON 1-QUAD UNITS
GROUND TERMINALMOUNTING HOLES FOR M10,
(.375"), SCREWS, 6-PLACES
348 (13.7)
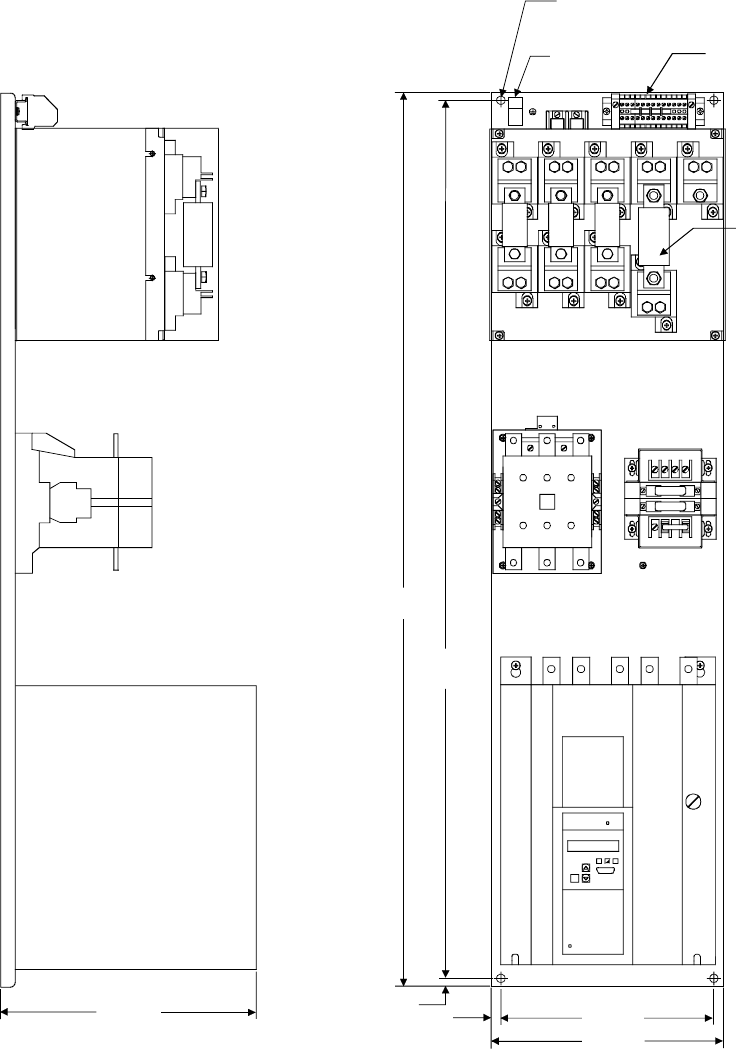
Siemens Energy & Automation 6-9
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
L1 L2 L3 A1 A2
PX300
SIEMENS 6RA70
376 (14.8)
520 (20.5)
550 (21.6)
15
(0.6)
20
(0.8)
1200
(47.2)
880
(34.6)
280
(11.0) TERMINALS 80 - 94
35
(1.4)
510 AMP BASE DRIVE PANEL, (1 & 4Q)
MOUNTING HOLES FOR M10,
(.375"), SCREWS, 6-PLACES GROUND TERMINAL
FUSE NOT SUPPLIED
ON 1-QUAD UNITS
ADDITIONAL CLEARANCE
REQ'D FROM CONTACTOR
ARC CHUTE TO ANY
GROUNDED METAL
348 (13.7)
NOTE, IMPORTANT: ALLOW AT LEAST 100 MILLIMETERS, (4"), OF CLEARANCE ABOVE AND BELOW THE UNIT
TO ENSURE UNRESTRICTED AIR FLOW. ADDITIONAL CLEARANCE MAY BE REQUIRED TO ALLOW FOR WIRE
OR CABLE ENTRY/EXIT AND BENDING. REFER TO APPLICABLE CODES FOR FURTHER INFORMATION.
6-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
X300
P
A1 A2 L1 L2 L3
SIEMENS 6RA70
TERMINALS
80 - 94
CABLE CONNECTIONS
TO POWER MODULE
THIS AREA
850 AMP BASE DRIVE PANEL, (1 & 4Q)
425 (16.7) 768 (30.2)
813 (32.0)
22
(0.9)
740
(29.1)
740
(29.1)
1524
(60.0)
22
(0.9)
MOUNTING HOLES FOR M10,
(.375"), SCREWS, 6-PLACES GROUND
TERMINAL
NOTE:
SEMICONDUCTOR
FUSES ARE
LOCATED INSIDE
THE 6RA70
POWER MODULE
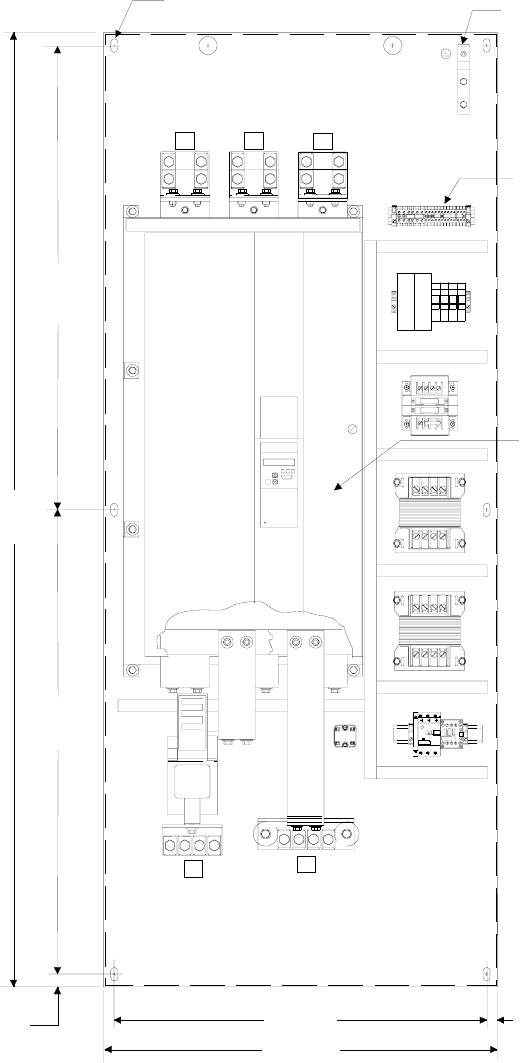
Siemens Energy & Automation 6-11
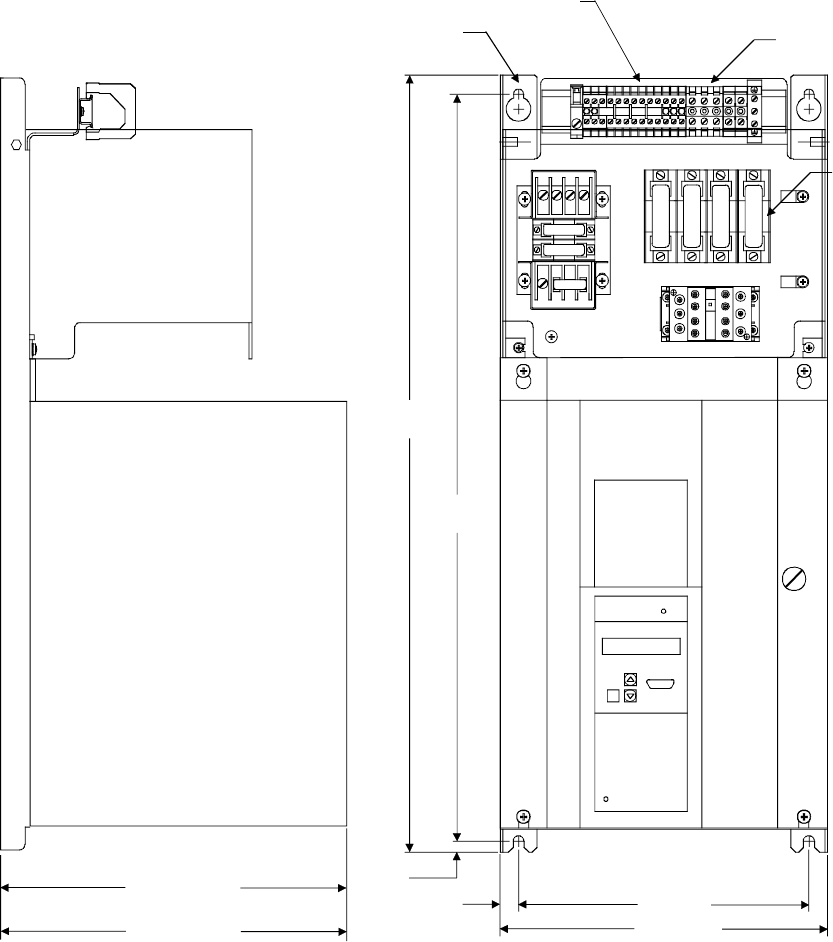
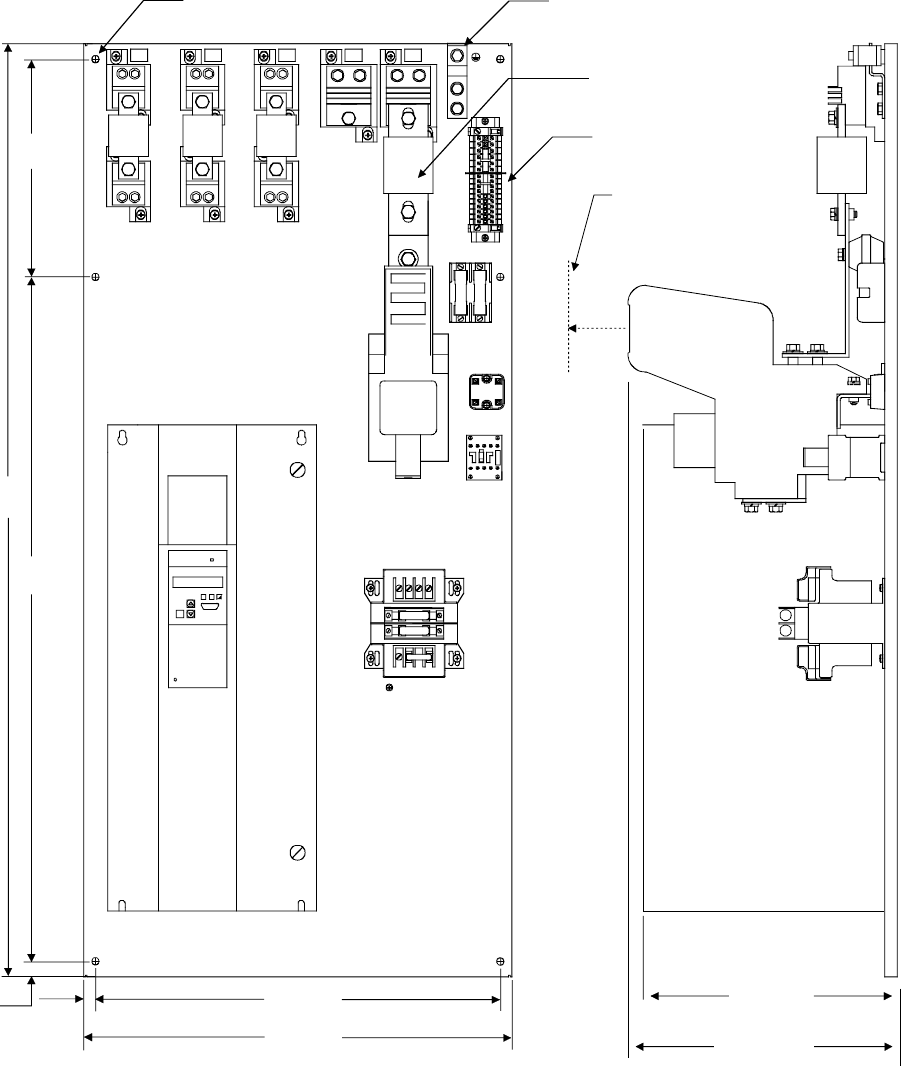
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
X300
PM
P
M
1D11C1
H4H2H3H1
X1X2
1FSFU
2FSFU
4CFU
5CFU
6CFU
7CFU
RATED
600V,30ATM
DO NOT OPEN UNDER LOAD
RATED
600V,30A
TM
DO NOT OPEN UNDER LOAD
RATED
600V,30A
TM
DO NOT OPEN UNDER LOAD
RATED
600V,30A
TM
DO NOT OPEN UNDER LOAD
22 22
1111
11
22
1CTR
X2 XF X1
L2
L1
2CF U
1CF U
2.5A , 600V
2.5A , 600V
1.5A , 250 V
3CFU
H4H2H3H1
2CTR
80
80
81
81 82
82 858483
83 84 85
90 91 92 93 9495 96 97 98 99
99989796959493929190
100
100
101
101102
102
CTB
L3-1L2-1L1-1
GROUND
TERMINAL
MOUNTING SLOTS, FOR M12
(0.50"), SCREWS, 6-PLACES
767 (30.2)
813 (32.0)
23 (0.9)
965
(38.0)
965
(38.0)
1981
(78.0)
25
(1.0)
TERMINALS
80 - 102
NOTE:
SEMICONDUCTOR FUSES
ARE LOCATED INSIDE THE
POWER MODULE, (PM).
L1 L2 L3
A1 A2
NOTE: FROM THE BACK OF THE MOUNTING PANELTO THE TOP
OF THE POWER MODULE, (TALLEST COMPONENT) = 629 (24.8")
1180 AMP BASE DRIVE PANEL, (1 & 4Q)
H4H2H3H1
X1X2
3CTR
EN
MSP
MSPAUX
MREC
6-12 Siemens Energy & Automation
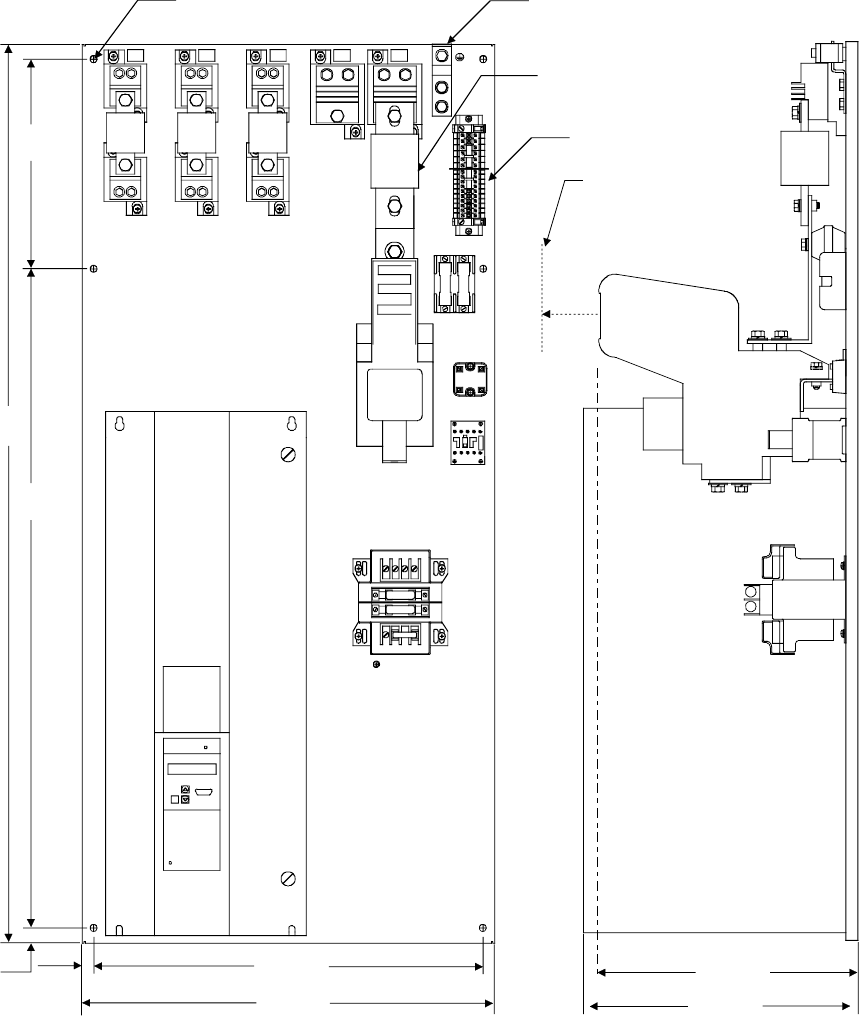
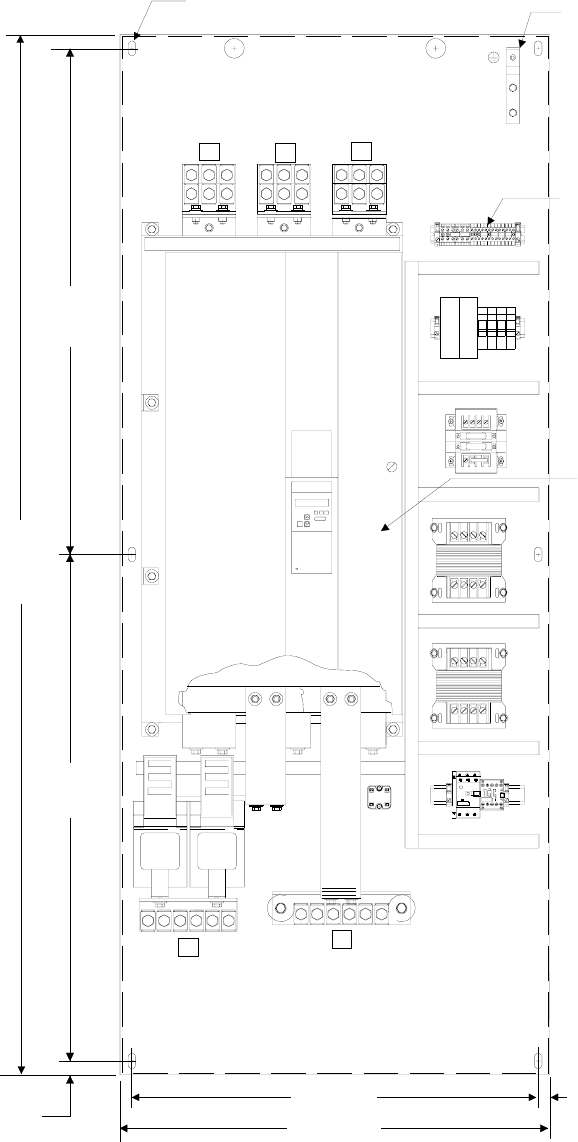
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
X300
PM
P
M2
1D11C1
MREC
1FSFU
2FSFU
4CFU
5CFU
6CFU
7CFU
RATED
600V,30ATM
DO NOT OPEN UNDER LOAD
RATED
600V,3 0A
TM
DO NOT OPEN UNDER LOAD
RATED
600V,3 0A
TM
DO NOT OPEN UNDER LOAD
RATED
600V,30ATM
DO NOT OPEN UNDER LOAD
22 22
1111
11
2
2
1CTR
X2 XF X1
L2
L1
2C FU
1C FU
2.5 A, 6 00V
2.5 A, 6 00V
1.5A, 250 V
3CFU
H4H2H3H1
80
80
81
81 82
82 858483
83 84 85
90 91 92 93 9495 96 97 98 99
99989796959493929190
100
100
101
101102
102
L3-1L2-1L1-1
A1
M1
A2
L1 L2 L3
MOUNTING SLOTS, FOR M12
(0.50"), SCREWS, 6-PLACES GROUND
TERMINAL
TERMINALS
80 - 102
NOTE:
SEMICONDUCTOR FUSES
ARE LOCATED INSIDE THE
POWER MODULE, (PM).
NOTE: FROM THE BACK OF THE MOUNTING PANELTO THE TOP
OF THE POWER MODULE, (TALLEST COMPONENT) = 629 (24.8")
1660 AMP BASE DRIVE PANEL, (1 & 4Q)
767 (30.2)
813 (32.0)
23 (0.9)
965
(38.0)
965
(38.0)
1981
(78.0)
25
(1.0)
H4H2H3H1
X1X2
2CTR
H4H2H3H1
X1X2
3CTR
EN
MSP
MSPAUX
Siemens Energy & Automation 6-13
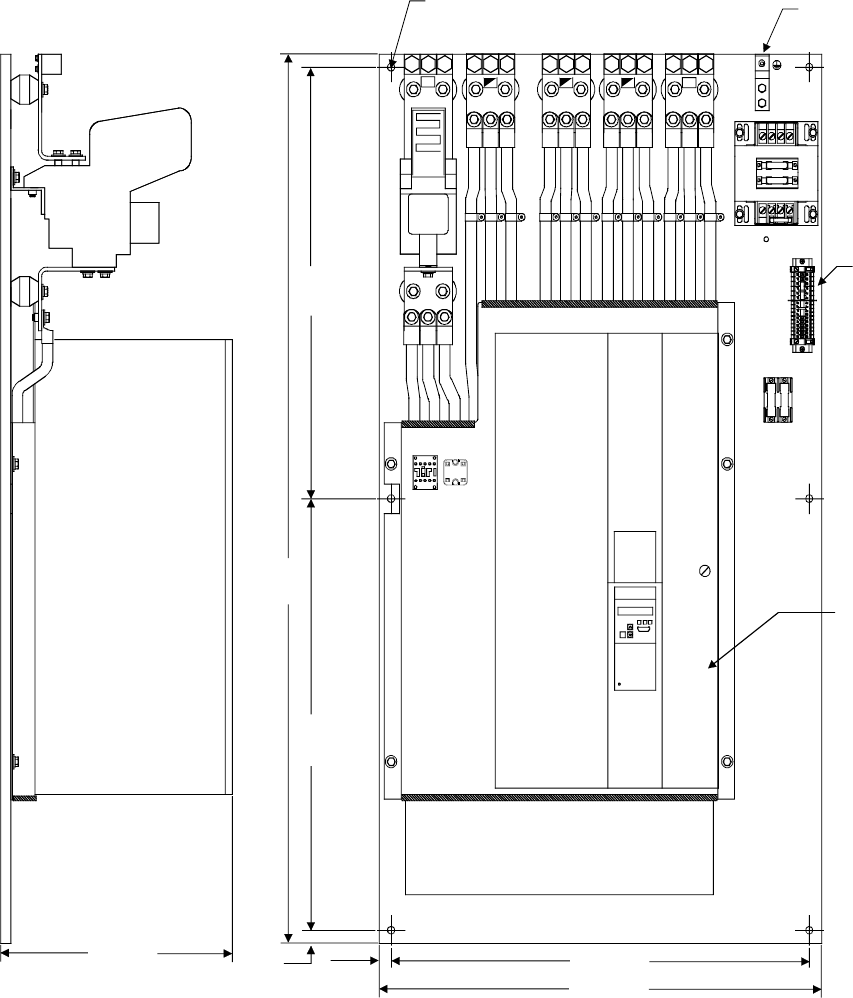
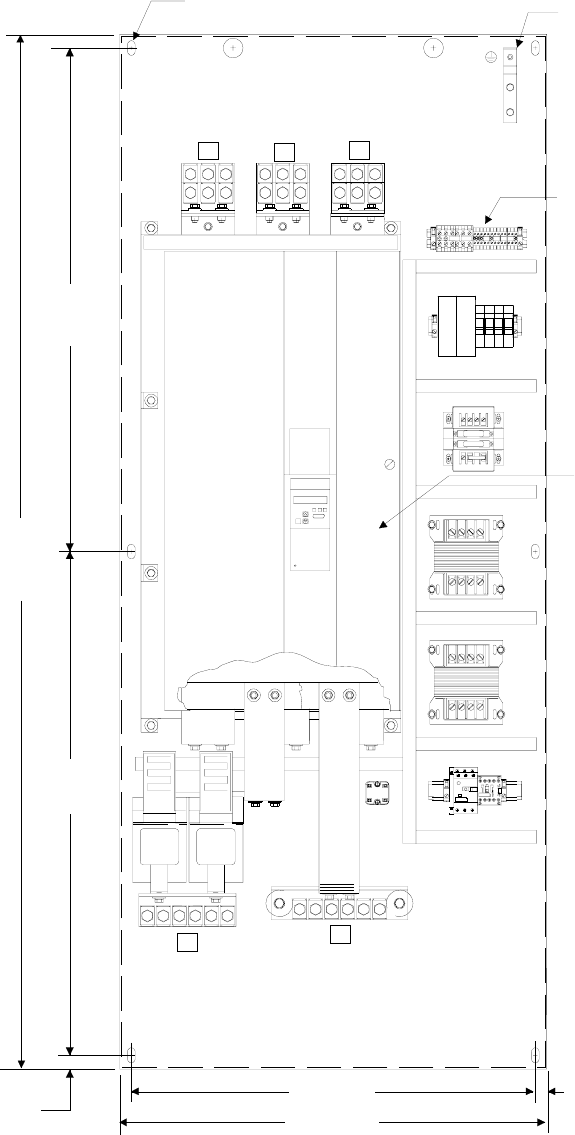
SIMOREG DC Master Base Drive Panel Operating Instructions
Dimensions are mm (inches)
NOTE:
SEMICONDUCTOR FUSES
ARE LOCATED INSIDE THE
POWER MODULE, (PM).
X300
PM
P
M2
1D11C1
MREC
1FSFU
2FSFU
4CFU
5CFU
6CFU
7CFU
RATED
600V,3 0ATM
DO NOT OPEN UNDER LOAD
RATED
600V,30ATM
DO NOT OPEN UNDER LOAD
RATED
600V,30ATM
DO NOT OPEN UNDER LOAD
RATED
600V,3 0ATM
DO NOT OPEN UNDER LOAD
22 22
1111
11
2
2
1CTR
X2 XF X1
L2
L1
2C FU
1C FU
2.5A , 6 00V
2.5A , 6 00V
1.5A, 250 V
3CFU
H4H2H3H1
L3-1L2-1L1-1
A1
M1
A2
L1 L2 L3
MOUNTING SLOTS, FOR M12
(0.50"), SCREWS, 6-PLACES GROUND
TERMINAL
TERMINALS
80 - 102
NOTE: FROM THE BACK OF THE MOUNTING PANELTO THE TOP
OF THE POWER MODULE, (TALLEST COMPONENT) = 629 (24.8")
1680 AMP BASE DRIVE PANEL, (1 & 4Q)
767 (30.2)
813 (32.0)
23 (0.9)
965
(38.0)
965
(38.0)
1981
(78.0)
25
(1.0)
H4H2H3H1
X1X2
2CTR
H4H2H3H1
X1X2
3CTR
EN
MSP
MSPAUX
80
80
81
81 82
82 85
8483
83 84 85
90 91 92 9394 95 96 97 98 99
99989796959493929190
100
100
101
101102
102
6-14 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 7-1
SIMOREG DC Master Base Drive Panel Operating Instructions
7 Base Drive Panel Connections
WARNING
Base Drive Panels are operated at high voltages.
Disconnect the power supply before making any connections!
Only qualified personnel who are thoroughly familiar with all safety notices contained in the
operating instructions as well as erection, installation, operating and maintenance instructions
should be allowed to work on these devices.
Non-observance of the safety instructions can result in death, severe personal injury or
substantial property damage.
Failure to make the correct connections may result in irreparable damage to the unit.
Voltage may be present at the power and control terminals even when the motor is stopped.
The snubber capacitors may still carry a hazardous voltage for up to 2 minutes after
disconnection. For this reason, wait for at least 2 minutes before opening the converter.
When working on the open converter, remember that live parts are exposed. The unit must
always be operated with the standard front covers in place.
The user is responsible for ensuring that the motor, SIMOREG Base Drive Panel and other
devices are installed and connected up in accordance with the approved codes of practice of
the country concerned and any other regional or local codes that may apply. Special attention
must be paid to proper conductor sizing, fusing, grounding, isolation and disconnection
measures and to overcurrent protection.
These units contain hazardous rotating machinery (fans) and control rotating mechanical
components (motors). Death, serious bodily injury or substantial property damage may occur if
the instructions in the relevant operating manuals are not observed.
The successful and safe operation of this equipment is dependent on careful transportation,
proper storage and installation as well as correct operation and maintenance.
7-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
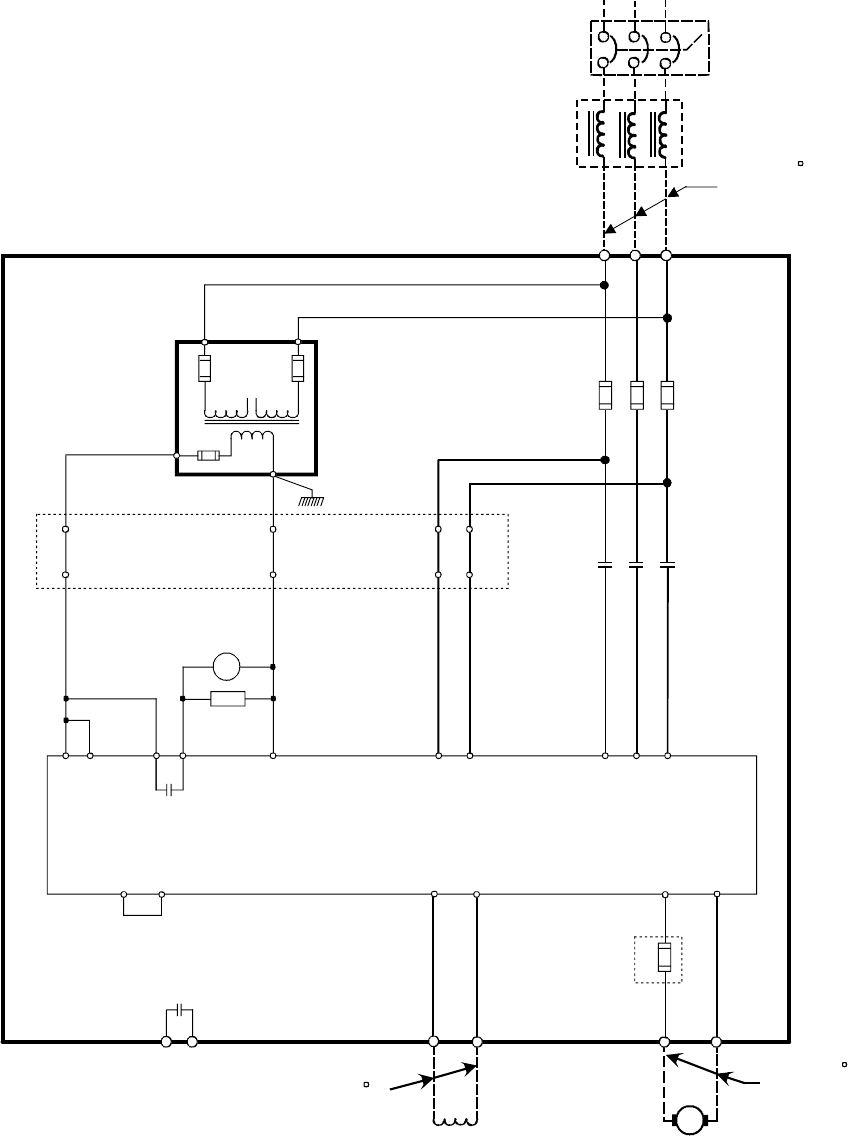
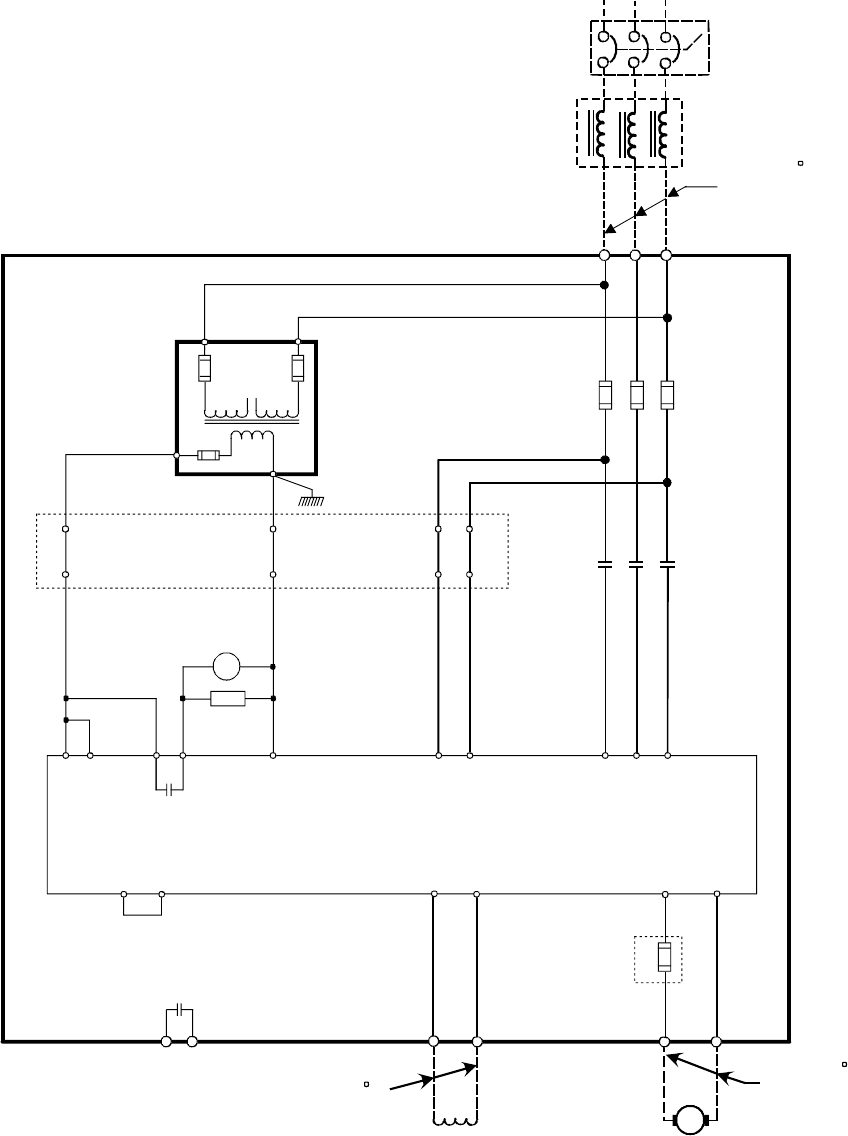
7.1 Base Drive Panel Schematics
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 15 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
25A,700V
A1-FUF-END-C25
25A,700V
A1-FUF-END-C25
1D1
4Q UNITS
ONLY
115VA
A1-TRC-Q0C-285
1.25A,600V
A1-FUF-AFA-006
1CFU - 2CFU
0.75A,250V
A1-FUF-DKA-GBF
3CFU
CONTROL
CONTACTOR
3RT1016-1AP61
SUPPRESSOR
3RT1916-1BD00
MAIN
F(+) F(-)
CATALOG NO. 6RA7018-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7018-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 15 AMPS DC
460 VAC
L2
L1 L3
#4 AWG,60 C
TORQUE TO
11 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
#4 AWG,60 C
TORQUE TO
11 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
Siemens Energy & Automation 7-3
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 30 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
50A,700V
A1-FUF-END-CDN
50A,700V
A1-FUF-END-CDN
1D1
4Q UNITS
ONLY
115VA
A1-TRC-Q0C-285
1.25A,600V
A1-FUF-AFA-006
1CFU - 2CFU
0.75A,250V
A1-FUF-DKA-GBF
3CFU
CONTROL
CONTACTOR
3RT1025-1AP60
SUPPRESSOR
3RT1926-1BD00
MAIN
F(+) F(-)
CATALOG NO. 6RA7025-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7025-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 30 AMPS DC
460 VAC
L2
L1 L3
#4 AWG,60 C
TORQUE TO
11 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
#4 AWG,60 C
TORQUE TO
11 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
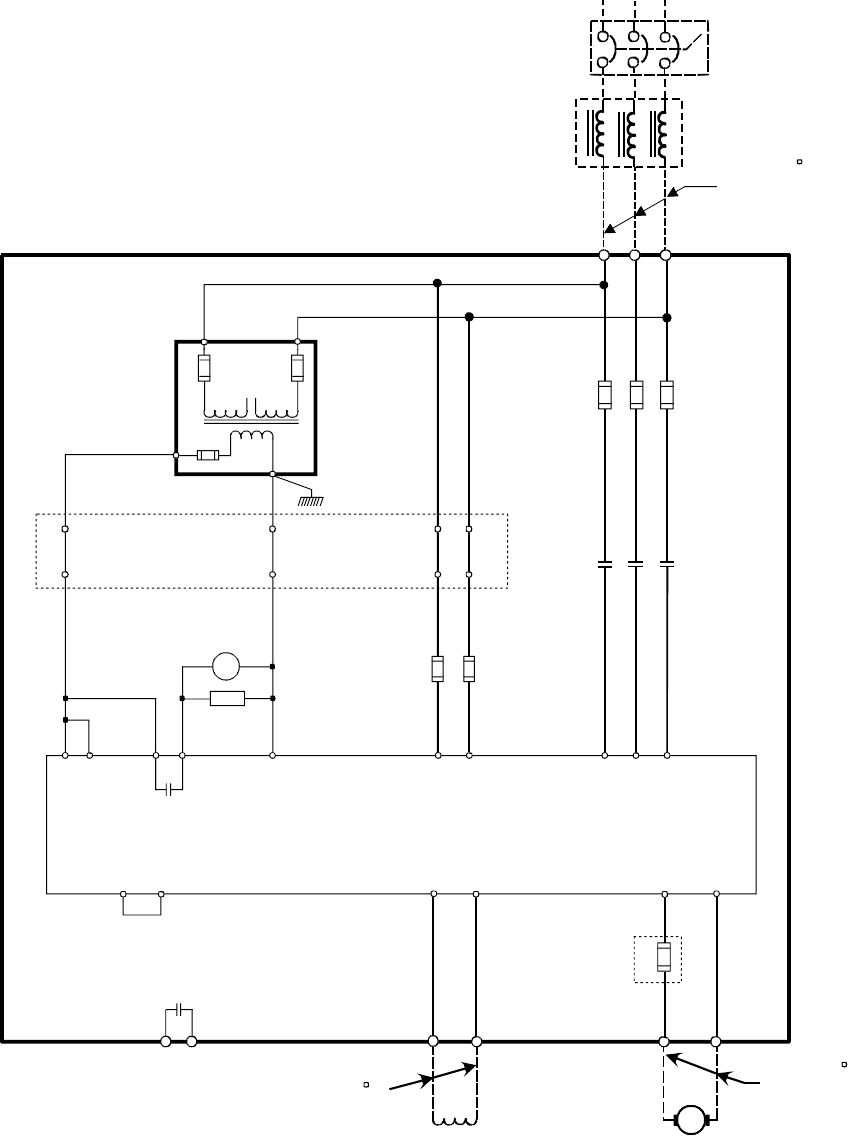
7-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 60 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
70A,500V
A1-FUF-00D-014
90A,700V
A1-FUF-00E-016
1D1
4Q UNITS
ONLY
115VA
A1-TRC-Q0C-285
1.25A,600V
A1-FUF-AFA-006
1CFU - 2CFU
0.75A,250V
A1-FUF-DKA-GBF
3CFU
CONTROL
CONTACTOR
3RT1035-1AP60
SUPPRESSOR
3RT1926-1BD00
MAIN
F(+) F(-)
CATALOG NO. 6RA7028-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7028-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 60 AMPS DC
460 VAC
L2
L1 L3
#1 AWG,60 C
TORQUE TO
27 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
#1 AWG,60 C
TORQUE TO
27 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
1FSFU
2FSFU
20A,700V
A1-FUF-END-C20
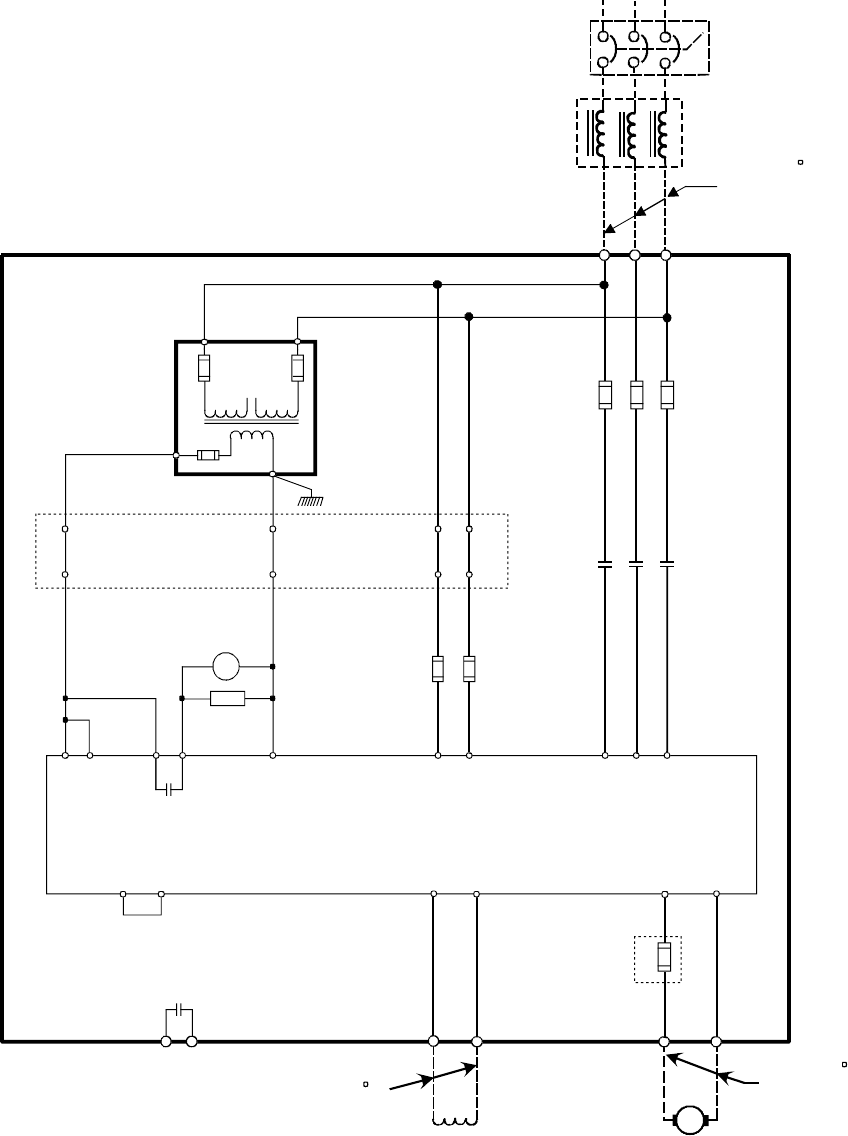
Siemens Energy & Automation 7-5
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 100 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
125A,500V
A1-FUF-00D-018
150A,700V
A1-FUF-00E-019
1D1
4Q UNITS
ONLY
115VA
A1-TRC-Q0C-285
1.25A,600V
A1-FUF-AFA-006
1CFU - 2CFU
0.75A,250V
A1-FUF-DKA-GBF
3CFU
CONTROL
CONTACTOR
3RT1044-1AP60
SUPPRESSOR
3RT1926-1BD00
MAIN
F(+) F(-)
CATALOG NO. 6RA7031-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7031-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 100 AMPS DC
460 VAC
L2
L1 L3
#1 AWG,60 C
TORQUE TO
27 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
#1 AWG,60 C
TORQUE TO
27 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
1FSFU
2FSFU
20A,700V
A1-FUF-END-C20
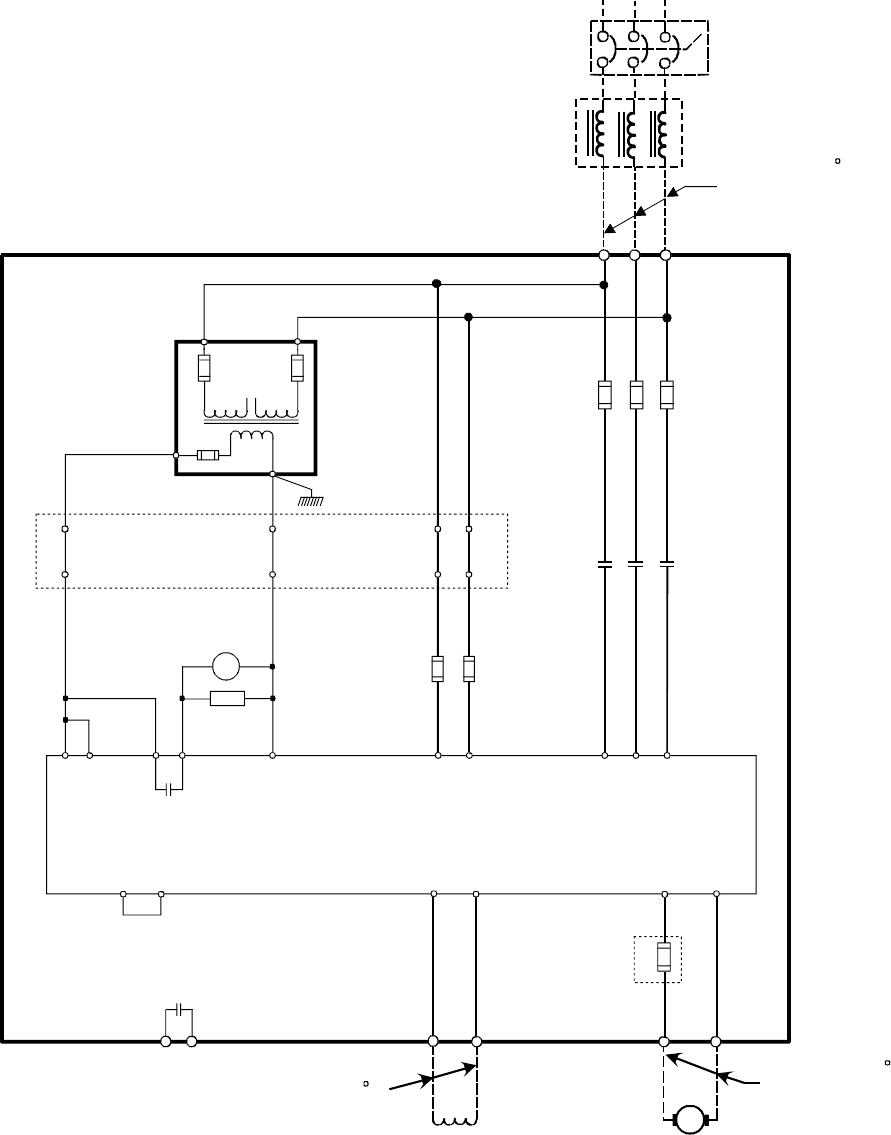
7-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 140 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
150A,500V
A1-FUF-00D-019
175A,700V
A1-FUF-00E-020
1D1
4Q UNITS
ONLY
250VA
A1-TRC-Q0C-286
2.5A,600V
A1-FUF-AFA-011
1CFU - 2CFU
1.5A,250V
A1-FUF-DKA-GBP
3CFU
CONTROL
CONTACTOR
3RT1045-1AP60
SUPPRESSOR
3RT1926-1BD00
MAIN
F(+) F(-)
CATALOG NO. 6RA7075-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7075-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 140 AMPS DC
460 VAC
L2
L1 L3
2 - #250 MCM,75 C
TORQUE TO
275 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
2 - #250 MCM, 75 C
TORQUE TO
275 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
1FSFU
2FSFU
20A,700V
A1-FUF-END-C20
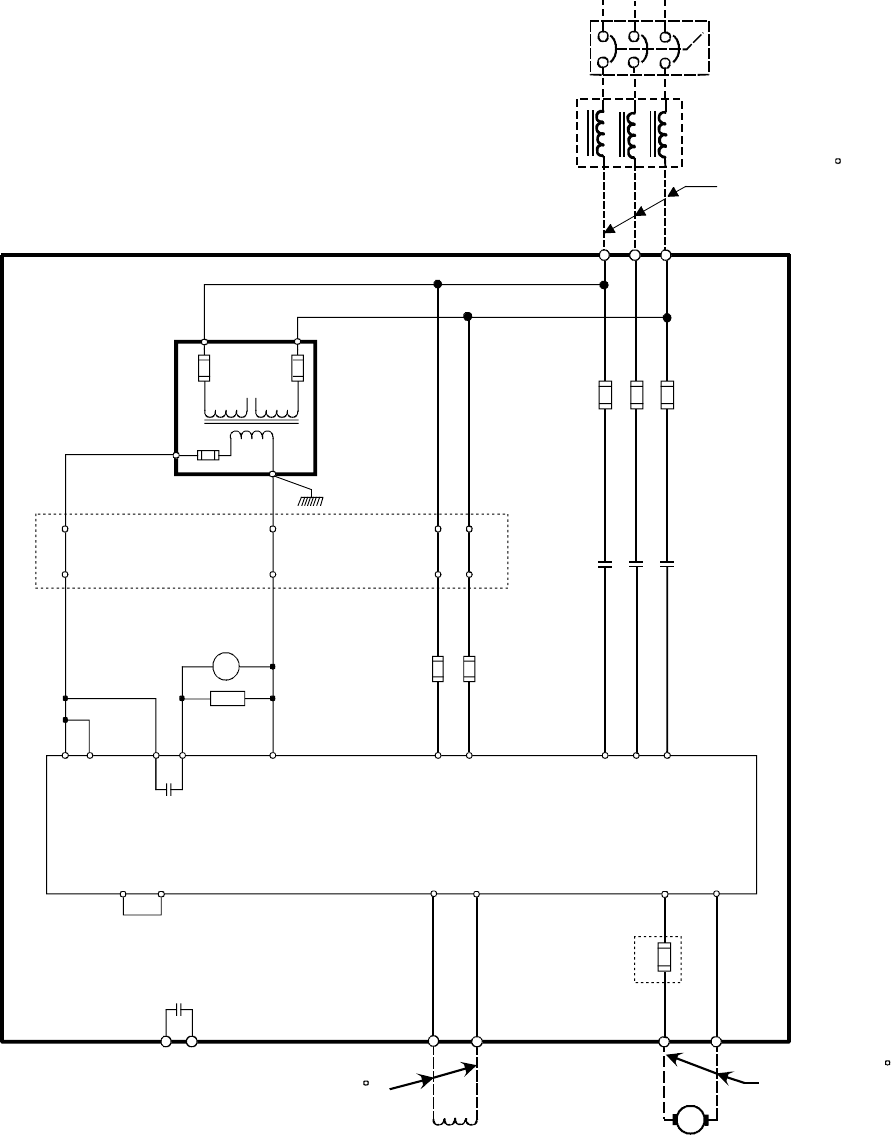
Siemens Energy & Automation 7-7
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 210 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
200A,500V
A1-FUF-00D-021
250A,700V
A1-FUF-00E-023
1D1
4Q UNITS
ONLY
250VA
A1-TRC-Q0C-286
2.5A,600V
A1-FUF-AFA-011
1CFU - 2CFU
1.5A,250V
A1-FUF-DKA-GBP
3CFU
CONTROL
CONTACTOR
3TF5222-0AP6
SUPPRESSOR
3TX7462-3J
MAIN
F(+) F(-)
CATALOG NO. 6RA7078-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7078-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 210 AMPS DC
460 VAC
L2
L1 L3
2 - #250 MCM,75 C
TORQUE TO
275 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
2 - #250 MCM, 75 C
TORQUE TO
275 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
1FSFU
2FSFU
20A,700V
A1-FUF-END-C20
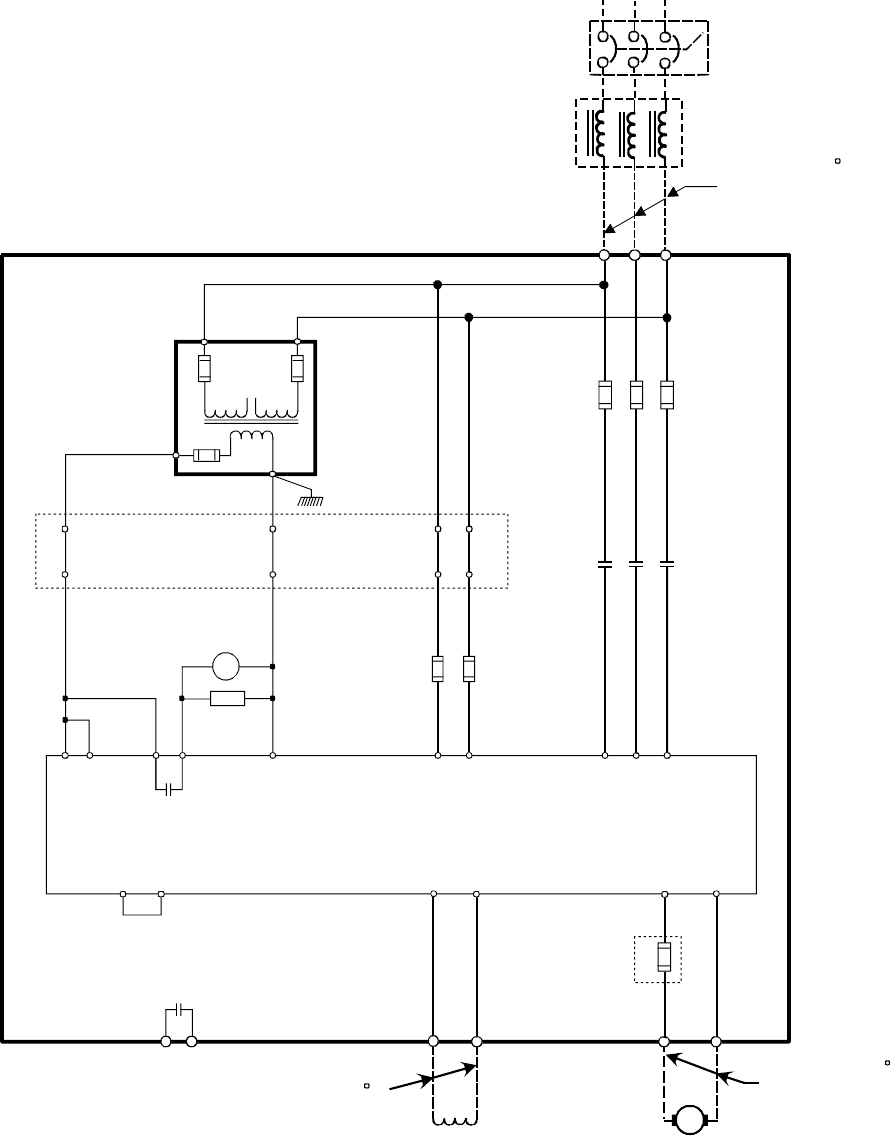
7-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
M
BASE DRIVE PANEL, 255 AMPS, 1 & 4 QUAD
TRANSFORMER
1PFU
2PFU
3PFU
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C13C 3D
4PFU
XR
5U1 5W1 5N1
PWR
SUPPLY
PWR
SUPPLY
K1
J4
88
89
1SP
L2L1
XF
X2
J3
86
87
M
XP XP
109
XR
110
XP XF1-2 XF1-1
XF2-2 XF2-1
CTB
250A,500V
A1-FUF-00D-023
300A,700V
A1-FUF-00E-025
1D1
4Q UNITS
ONLY
350VA
A1-TRC-Q0C-287
3.5A,600V
A1-FUF-AFA-014
1CFU - 2CFU
2A,250V
A1-FUF-DKA-GBV
3CFU
CONTROL
CONTACTOR
3TF5322-0AP6
SUPPRESSOR
3TX7462-3J
MAIN
F(+) F(-)
CATALOG NO. 6RA7082-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7082-6FV62-0Z+X01, (4-QUAD)
1CTR
80 81
#10 AWG, 60 C
TORQUE TO
5 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 255 AMPS DC
460 VAC
L2
L1 L3
2 - #250 MCM,75 C
TORQUE TO
275 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
2 - #250 MCM, 75 C
TORQUE TO
275 INCH- LBS
106 105
XS
E-STOP
XS
MAUX
90 91
1FSFU
2FSFU
40A,700V
A1-FUF-END-C40
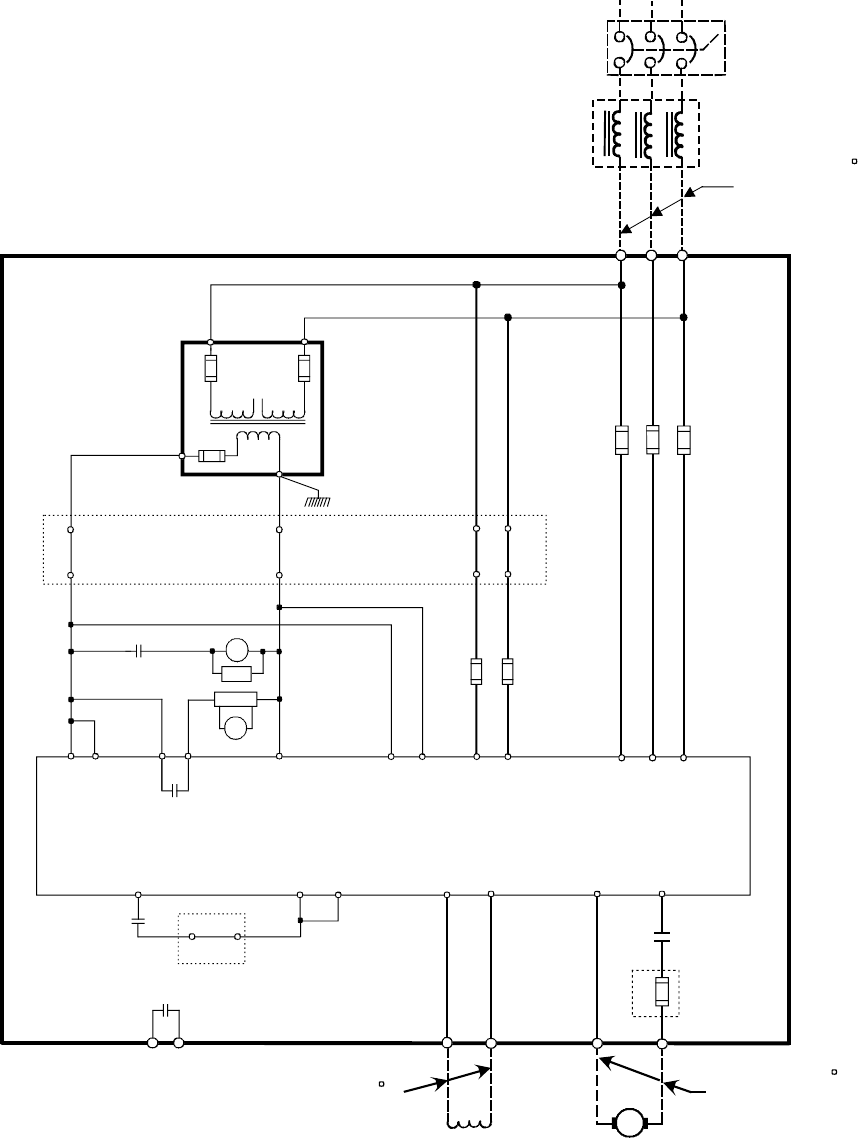
Siemens Energy & Automation 7-9
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 430 AMPS, 1 & 4 QUAD
TRANSFORMER
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C1 1D1
3C 3D
XR
5U1 5W1 5N1
PWR
SUPPLY PWR
SUPPLY
K1
J4
88
89
MREC
L2L1
XF
X2
J3
86
87
M
ENSP
M AUX
M
EN
38
EN
XRXPXP
109 110
XP XF1-2 XF1-1
XF2-2 XF2-1
X171
CTB
CONTROL
350VA
A1-TRC-Q0C-287
3.5A,600V
1CFU-2CFU
A1-FUF-AFA-014
2A,250V
3CFU
A1-FUF-DKA-GBV 400A,500V
A1-FUF-00D-028
500A,700V
A1-FUF-00E-030
4Q UNITS
ONLY
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
4N14U1
RECT. BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
FAN
SUPPLY
106 105
XS
E-STOP
XS
EN
90 91
ENABLE
94 93
J5
CTB
F(+) F(-)
POWER MODULE
CATALOG NO. 6RA7085-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7085-6FV62-0Z+X01, (4-QUAD)
1CTR
1PFU
2PFU
3PFU
4PFU
1FSFU
2FSFU
40A,700V
A1-FUF-END-C40
460 VAC
L2
L1 L3
2 - #250 MCM,75 C
TORQUE TO
275 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
80 81
#8 AWG, 60 C
TORQUE TO
7 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 430 AMPS DC
2 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
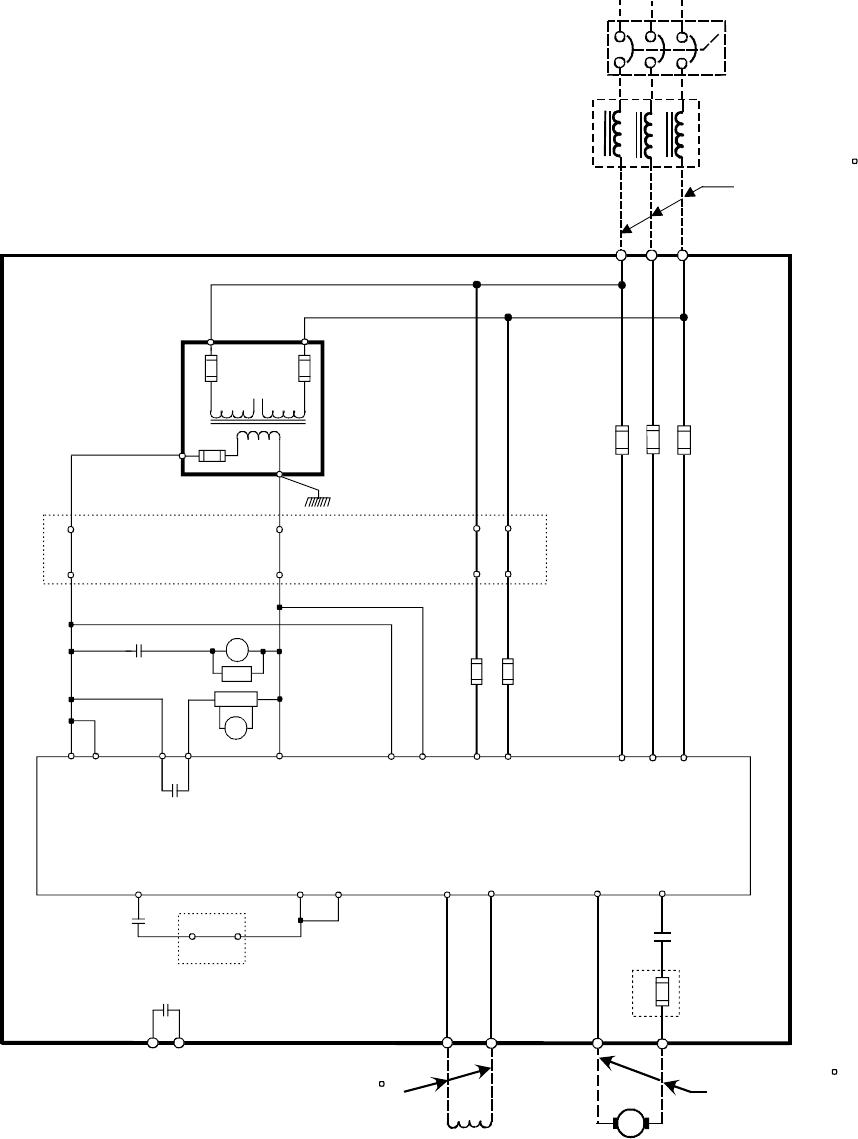
7-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 510 AMPS, 1 & 4 QUAD
TRANSFORMER
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C1 1D1
3C 3D
XR
5U1 5W1 5N1
PWR
SUPPLY PWR
SUPPLY
K1
J4
88
89
MREC
L2L1
XF
X2
J3
86
87
M
ENSP
M AUX
M
EN
38
EN
XRXPXP
109 110
XP XF1-2 XF1-1
XF2-2 XF2-1
X171
CTB
CONTROL
350VA
A1-TRC-Q0C-287
3.5A,600V
1CFU-2CFU
A1-FUF-AFA-014
2A,250V
3CFU
A1-FUF-DKA-GBV 500A,500V
A1-FUF-00D-030
600A,700V
A1-FUF-00E-031
4Q UNITS
ONLY
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
4N14U1
RECT. BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
FAN
SUPPLY
106 105
XS
E-STOP
XS
EN
90 91
ENABLE
94 93
J5
CTB
F(+) F(-)
POWER MODULE
CATALOG NO. 6RA7087-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7087-6FV62-0Z+X01, (4-QUAD)
1CTR
1PFU
2PFU
3PFU
4PFU
1FSFU
2FSFU
40A,700V
A1-FUF-END-C40
460 VAC
L2
L1 L3
2 - #500 MCM,75 C
TORQUE TO
375 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
80 81
#8 AWG, 60 C
TORQUE TO
7 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 510 AMPS DC
2 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
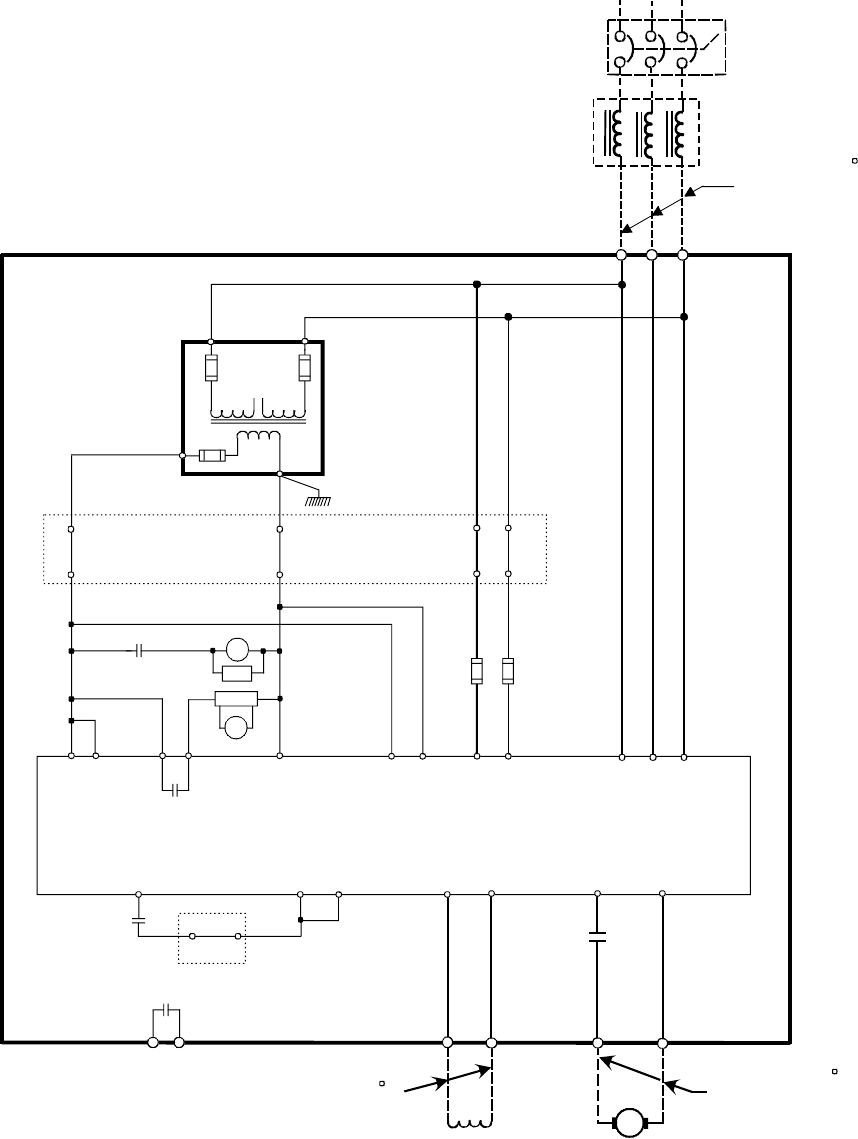
Siemens Energy & Automation 7-11
SIMOREG DC Master Base Drive Panel Operating Instructions
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 850 AMPS, 1 & 4 QUAD
TRANSFORMER
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD
SUPPLY
1C1 1D1
3C 3D
XR
5U1 5W1 5N1
PWR
SUPPLY PWR
SUPPLY
K1
J4
88
89
MREC
L2L1
XF
X2
J3
86
87
M
ENSP
M AUX
M
EN
38
EN
XRXPXP
109 110
XP XF1-2 XF1-1
XF2-2 XF2-1
X171
CTB
CONTROL
1000VA
A1-TRC-Q0C-288
3.5A,600V
1CFU-2CFU
A1-FUF-AFA-014
6.25A,250V
3CFU
A1-FUF-DKA-GCM
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
4N14U1
RECT. BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
FAN
SUPPLY
106 105
XS
E-STOP
XS
EN
90 91
ENABLE
94 93
J5
CTB
F(+) F(-)
POWER MODULE
CATALOG NO. 6RA7091-6FS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7091-6FV62-0Z+X01, (4-QUAD)
1CTR
1FSFU
2FSFU
40A,700V
A1-FUF-END-C40
460 VAC
L2
L1 L3
3 - #500 MCM,75 C
TORQUE TO
375 INCH- LBS
MAIN DISCONNECT AND
BRANCH CIRCUIT
PROTECTION SIZED
PER N.E.C.
CUSTOMER SUPPLIED
IF APPLICABLE
80 81
#8 AWG, 60 C
TORQUE TO
7 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 850 AMPS DC
3 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
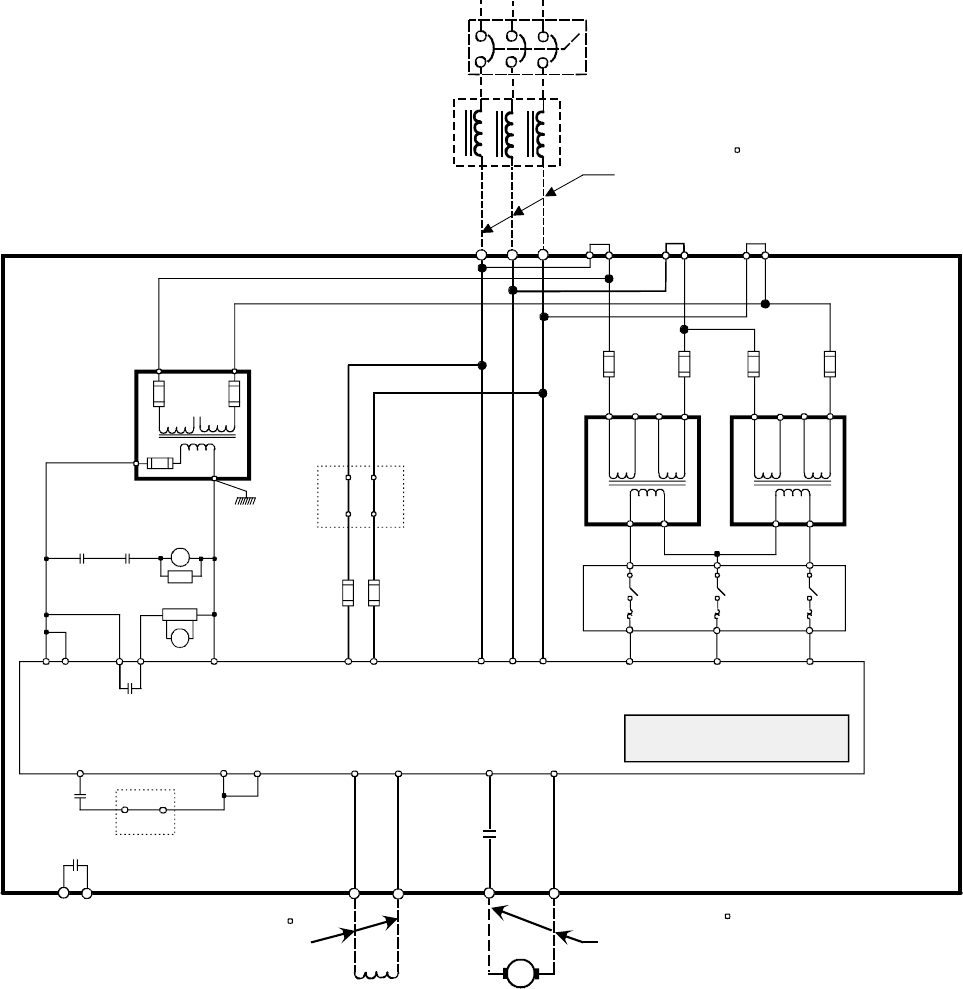
7-12 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
80 81
#4 AWG, 60 C
TORQUE TO
11 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 1180 AMPS DC
4 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 1180 AMPS, 1 & 4 QUAD
CONTROL
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD SUPPLY SEMICONDUCTOR
FUSES ARE INTERNAL
TO POWER MODULE
1C1 1D13C 3D
XR
5U1 5W1 5N1
PWR SUPPLY PWR SUPPLY
K1
MREC
L2L1
XF
X2
1FSFU
2FSFU
M
ENSP
M AUX
M
H1 H3H2 H4
460 V
X1 X2
H1 H3H2 H4
460 V
X1 X2
4CFU
5CFU
6CFU
7CFU
L2L1 L3
T1 T2 T3
FAN
SUPPLY
MSP
CTB
XR
109 110
XPXP XP XF 1-2 XF 1- 1
XF2-2 XF2-1
4U1 4V1 4W1
250VA
A1-TRC-Q0C-286
1CFU-2CFU
2.5A,600V
A1-FUF-AFA-011
3CFU
1.5A,250V
A1-FUF-DKA-GBP
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
RECT.BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
50A,700V
A1-FUF-END-C50
5A,600V
A1-FUF-AFA-016
3RV1011-1AA10
CONTROL
TRANSFORMERS
750VA
A1-TRC-Q0C-289
1.1-1.6A
SET@1.50A
EN
90 91
J8
101100
J7
98 99
J6
9796
MSP
EN
Note:
FAN MUST ROTATE COUNTER-CLOCKWISE
WHEN VIEWED FROM ABOVE
EN
38
X171
106 105
XS
E-STOP
XS
ENABLE
94 93
J5
CTB
F(+) F(-)
CATALOG NO. 6RA7093-4GS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7093-4GV62-0Z+X01, (4-QUAD)
CTB CTB
1CTR
2CTR
3CTR
460 VAC
L2
L1 L3
4 - #500 MCM,75 C
TORQUE TO
375 INCH- LBS
CUSTOMER SUPPLIED
IF APPLICABLE
TRANSFORMER
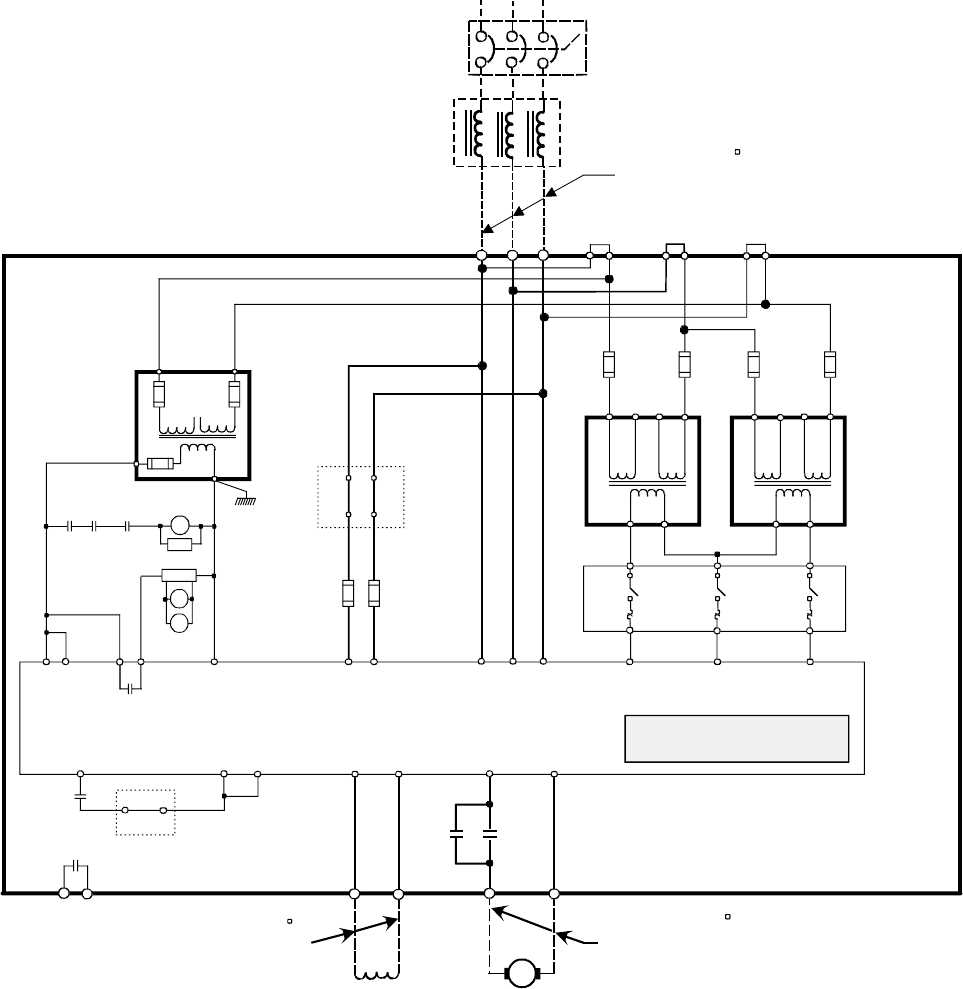
Siemens Energy & Automation 7-13
SIMOREG DC Master Base Drive Panel Operating Instructions
80 81
#4 AWG, 60 C
TORQUE TO
11 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 1660 AMPS DC
6 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 1660 AMPS, 1 & 4 QUAD
CONTROL
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD SUPPLY SEMICONDUCTOR
FUSES ARE INTERNAL
TO POWER MODULE
1C1 1D13C 3D
XR
5U1 5W1 5N1
PWR SUPPLY PWR SUPPLY
K1
MREC
L2L1
XF
X2
1FSFU
2FSFU
M2
ENSP
M1
M1
H1 H3H2 H4
460 V
X1 X2
H1 H3H2 H4
460 V
X1 X2
4CFU
5CFU
6CFU
7CFU
L2L1 L3
T1 T2 T3
FAN
SUPPLY
MSP
CTB
XR
109 110
XPXP XP XF 1-2 XF 1- 1
XF2-2 XF2-1
4U1 4V1 4W1
250VA
A1-TRC-Q0C-286
1CFU-2CFU
2.5A,600V
A1-FUF-AFA-011
3CFU
1.5A,250V
A1-FUF-DKA-GBP
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
RECT.BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
50A,700V
A1-FUF-END-C50
5A,600V
A1-FUF-AFA-016
3RV1011-1AA10
CONTROL
TRANSFORMERS
750VA
A1-TRC-Q0C-289
1.1-1.6A
SET@1.50A
EN
90 91
J8
101100
J7
98 99
J6
9796
MSP
EN
Note:
FAN MUST ROTATE COUNTER-CLOCKWISE
WHEN VIEWED FROM ABOVE
EN
38
X171
106 105
XS
E-STOP
XS
ENABLE
94 93
J5
CTB
F(+) F(-)
CATALOG NO. 6RA7095-4GS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7095-4GV62-0Z+X01, (4-QUAD)
CTB CTB
1CTR
2CTR
3CTR
460 VAC
L2
L1 L3
6 - #500 MCM,75 C
TORQUE TO
375 INCH- LBS
CUSTOMER SUPPLIED
IF APPLICABLE
TRANSFORMER
M1
M2
M2
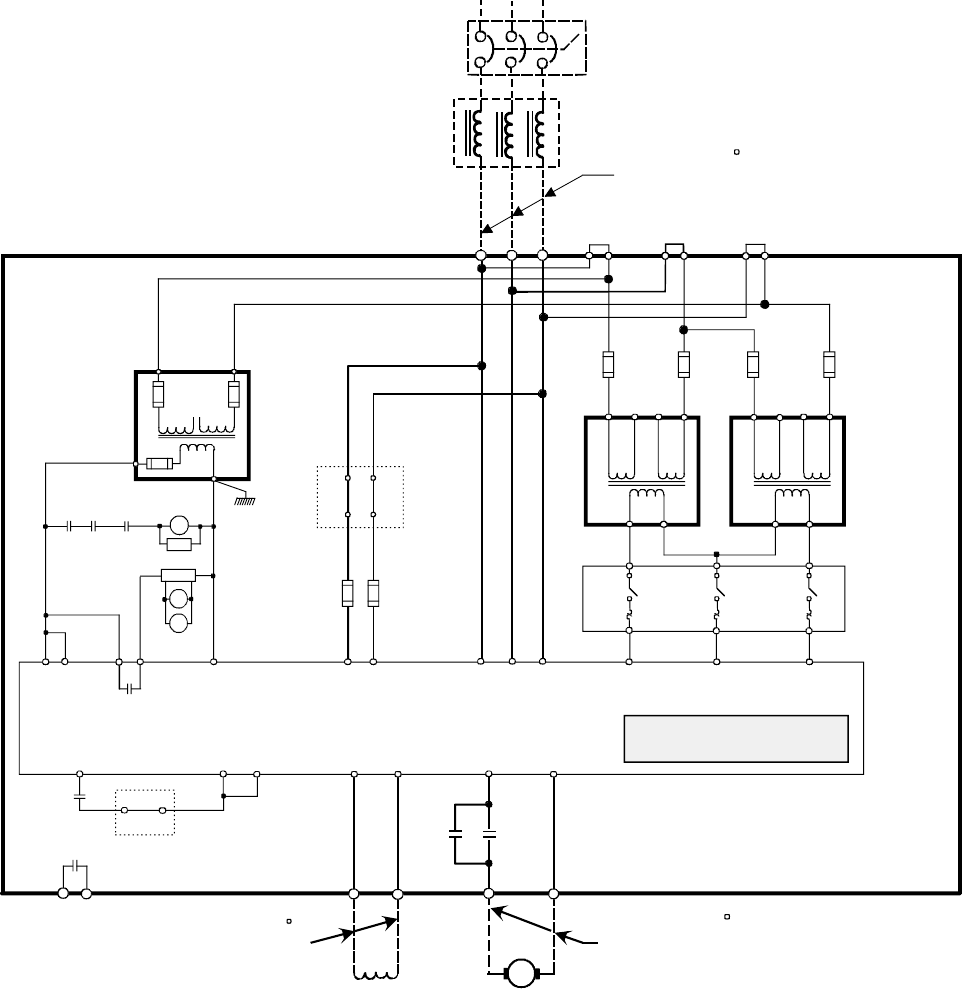
7-14 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
80 81
#1 AWG, 60 C
TORQUE TO
22 INCH- LBS
A1 A2
MOTOR = 500 VOLTS DC
F.L.A. = 1680 AMPS DC
6 - #500 MCM, 75 C
TORQUE TO
375 INCH- LBS
H1 H2 H3 H4
230 V
BASE DRIVE PANEL, 1680 AMPS, 1 & 4 QUAD
CONTROL
1CFU
3CFU
2CFU
J2 J1
85 82
84 83
POWER MODULE
3U1 3W1 1U1 1V1 1W1
ARMATURE
SUPPLY
FIELD SUPPLY SEMICONDUCTOR
FUSES ARE INTERNAL
TO POWER MODULE
1C1 1D13C 3D
XR
5U1 5W1 5N1
PWR SUPPLY PWR SUPPLY
K1
MREC
L2L1
XF
X2
1FSFU
2FSFU
M2
ENSP
M1
M1
H1 H3H2 H4
460 V
X1 X2
H1 H3H2 H4
460 V
X1 X2
4CFU
5CFU
6CFU
7CFU
L2L1 L3
T1 T2 T3
FAN
SUPPLY
MSP
CTB
XR
109 110
XPXP XP XF 1-2 XF 1- 1
XF2-2 XF2-1
4U1 4V1 4W1
250VA
A1-TRC-Q0C-286
1CFU-2CFU
2.5A,600V
A1-FUF-AFA-011
3CFU
1.5A,250V
A1-FUF-DKA-GBP
ENABLE RELAY
3RH1122-1AP60
SUPPRESSOR
3RT1916-1BD00
RECT.BR
A1-116-002-001
DC CONTACTOR
A1-CRD-CAC-010
125A,600V
A1-FUF-HHA-024
5A,600V
A1-FUF-AFA-016
3RV1011-1AA10
CONTROL
TRANSFORMERS
750VA
A1-TRC-Q0C-289
1.1-1.6A
SET@1.50A
EN
90 91
J8
101100
J7
98 99
J6
9796
MSP
EN
Note:
FAN MUST ROTATE COUNTER-CLOCKWISE
WHEN VIEWED FROM ABOVE
EN
38
X171
106 105
XS
E-STOP
XS
ENABLE
94 93
J5
CTB
F(+) F(-)
CATALOG NO. 6RA7096-4GS22-0Z+X01, (1-QUAD)
CATALOG NO. 6RA7096-4GV62-0Z+X01, (4-QUAD)
CTB CTB
1CTR
2CTR
3CTR
460 VAC
L2
L1 L3
6 - #500 MCM,75 C
TORQUE TO
375 INCH- LBS
CUSTOMER SUPPLIED
IF APPLICABLE
TRANSFORMER
M1
M2
M2
Siemens Energy & Automation 7-15
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
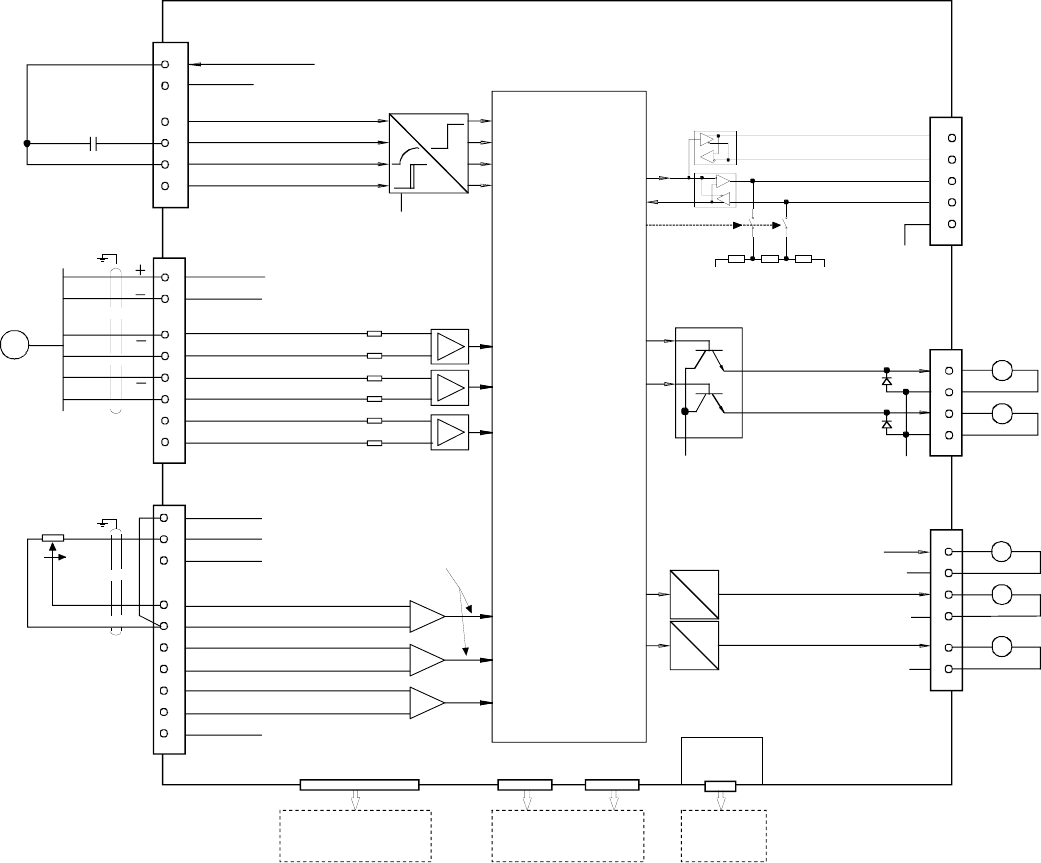
7-16 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
7.2 Control Connections CUD1
TYPICAL CONTROL CONNECTIONS
V
V
V
Iact
M
ANALOG 1
ANALOG 2
M
M
13
14
15
16
17
12
GND
10K 1
24
23
22
7
6
5
4
3
2
MOTOR TEMP -
MOTOR TEMP +
ANALOG 1 -
ANALOG 1 +
MAIN SETPOINT +
MAIN SETPOINT -
N10
P10
SELECT INPUT BINARY 2
ENABLE OPERATION
POWER ON / SHUTDOWN
SELECT INPUT BINARY 1
+24VDC SUPPLY 100mA
39
38
37
36
35
34
RS485
+
56
57
58
59
60
TX+ RS485
TX- RS485
RX+/TX+ RS485
RX-/TX- RS485
BA
SELECT OUTPUT 1
54
48
47
46
+24VDC
D
A
D
A
GND
ZERO MARKER
(OPTIONAL)
POSITIVE
NEGATIVE
NEGATIVE
POSITIVE
33
26
27
28
29
30
31
32
+15VDC SUPPLY 200mA
COMMON
POSITIVE
NEGATIVE
INPUTS OUTPUTS
CUD 1
BA
M
CPU
START
X171 BINARY INPUTS
X173 PULSE ENCODER INPUTS
A
A
B
B
SPEED
POT
CW
X174 REFERENCE, ANALOG INPUTS, MOTOR TEMP
ANALOG OUTPUTS X175
BINARY OUTPUTS X171
M
SELECT OUTPUT 2
SERIAL INTERFACE #2 RS485 X172
M
OUTPUT TYPICAL
24 VDC, 100 ma MAX
RELAY 1
RELAY 2
OPTIONAL CUD2
TERMINAL EXPANSION
8.5ma @ 24 V
(10V = 200% converter amps)
RESOULTION ADJUSTABLE
+/- 11 BITS TO +/- 14 BITS
150 K ohms
515 K ohms Analog Outputs:
RESOULTION +/- 11 BITS
O to +/- 10 Volts, 2mA MAX
X107 X110 X111
OPERATOR
PANEL
X300
OPTIONAL
OP1S
OPERATOR
OPTIONAL
COMMUNICATIONS AND
TECHNOLOGY BOARDS
M
M
COMMON M
COMMON M
COMMON M
Also see Start-up 8.4.1 and 8.4.2
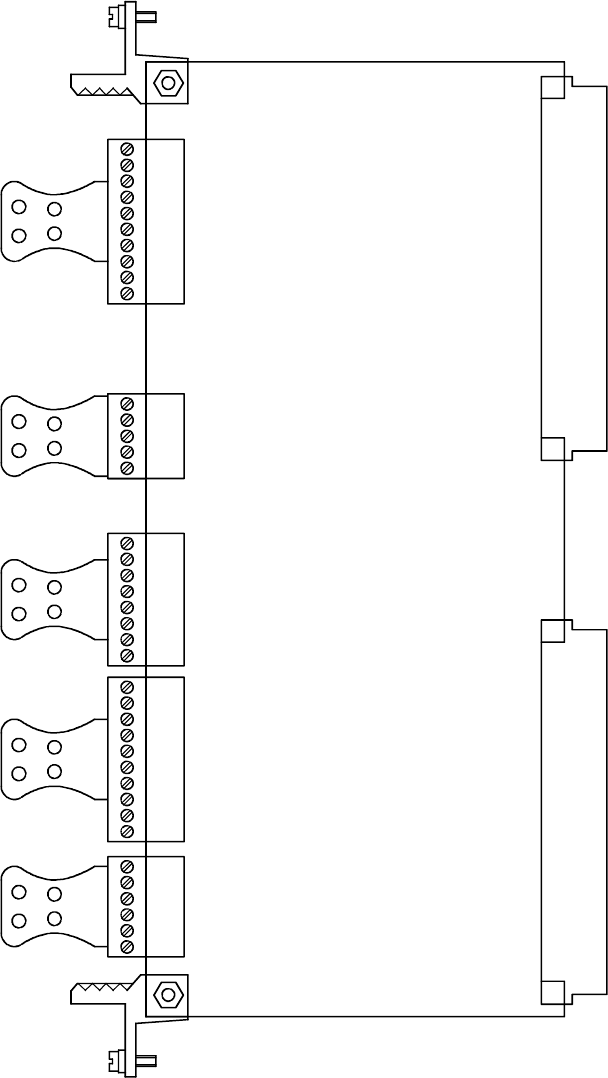
Siemens Energy & Automation 7-17
SIMOREG DC Master Base Drive Panel Operating Instructions
Terminal Locations CUD1
34
35
36
37
38
39
46
47
48
54
56
57
58
59
60
26
27
28
29
30
31
32
33
1
2
3
4
5
6
7
22
23
24
12
13
14
15
16
17
X107
X109
X171
X172
X173
X174
X175
C98043-A7001-L1
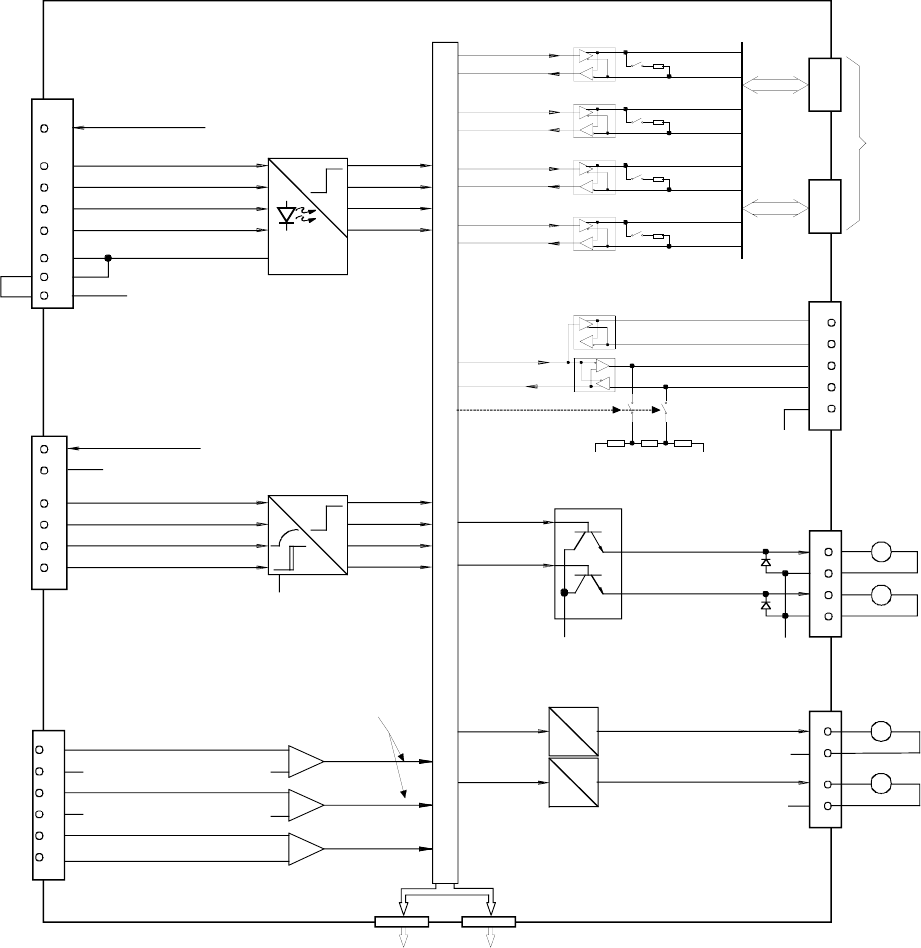
7-18 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
7.3 Control Connections CUD2
OPTIONAL CUD2 CONTROL CONNECTIONS
V
V
ANALOG 3
ANALOG 4
M
M
18
19
20
21
205
204
11
10
9
8
MOTOR TEMP -
MOTOR TEMP +
ANALOG 3 +
RS485
+
61
62
63
64
65
TX+ RS485
TX- RS485
RX+/TX+ RS485
RX-/TX- RS485
BA
SELECT OUTPUT 3
53
52
51
50
+24VDC
D
A
D
A
INPUTS
OUTPUTS
CUD 2
BA
M
X164 ANALOG INPUTS
ANALOG OUTPUTS X164
BINARY OUTPUTS X163
M
SELECT OUTPUT 4
SERIAL INTERFACE #3 RS485 X162
M
OUTPUT TYPICAL
24 VDC, 100 ma MAX
RELAY 3
RELAY 4
RESOULTION +/- 10 BITS
52 K ohms Analog Outputs:
RESOULTION +/- 11 BITS
O to +/- 10 Volts, 2mA MAX
X110 X111
CONNECTION TO CUD1
RX+/TX+
RX-/TX-
RX+/TX+
RX-/TX-
RX+/TX+
RX-/TX-
RX+/TX+
RX-/TX-
X165
X166
PARALLEL
CONVERTER
INTERFACE
ANALOG 2 +
M
M
52 K ohms
M
M
SELECT INPUT BINARY 6
+24VDC SUPPLY 100mA
43
42
41
40
45
44
X163 BINARY INPUTS
8.5ma @ 24 V
SELECT INPUT BINARY 5
SELECT INPUT BINARY 4
SELECT INPUT BINARY 3
+24VDC SUPPLY 100mA
210
X161BINARY INPUTS
8.5ma @ 24 V
SELECT INPUT BINARY
211
212
213
214
215
216
217 M
RETURN
OPTICALLY
ISOLATED
SELECT INPUT BINARY
SELECT INPUT BINARY
SELECT INPUT BINARY
M
M
Siemens Energy & Automation 7-19
SIMOREG DC Master Base Drive Panel Operating Instructions
Terminal Locations CUD2
210
211
212
213
214
215
216
217 X161
61
62
63
64
65 X162
44
45
40
41
42
43
50
51
52
53 X163
8
9
10
11
18
19
20
21
204
205 X164
C98043-A7006
7-20 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
7.4 Description of Power/Control Terminals
WARNING
The Base Drive Panel might sustain serious or irreparable damage if connected incorrectly.
The power cables and/or busbars must be secured mechanically outside the converter in order
to provide proper stress relief at the terminals.
Base Drive Panels are complete drive assemblies that include all semiconductor type fuses, main contactor, and
a control transformer, ready to be connected and operated. All external connections to Base Drive Panels,
including power connections are made with compression type terminals on the drive.
The user is responsible for installation of the motor, SIMOREG Base Drive Panel, transformer, and other devices
in accordance with the National Electric Code and other applicable local codes that cover such items as wire
size, protective grounding, disconnects, and short circuit protection. Depending on the rating, base drives can
accommodate a range of cable sizes as indicated below.
Base Drive Panel Power Connections 15 to 100 Amp
RATING CABLE RANGE RECOMMENDED TORQUE
15 AMP
L1, L2, L3, A1, A2, GND
#12 to #4 AWG 1.2 Nm (11 IN-LBS)
30 AMP
L1, L2, L3, A1, A2, GND
#12 to #4 AWG 1.2 Nm (11 IN-LBS)
60 AMP
L1, L2, L3, A1, A2, GND
#10 to #1 AWG 3 Nm (27 IN-LBS)
100 AMP
L1, L2, L3, A1, A2, GND
#10 to #1 AWG 3 Nm (27 IN-LBS)
Base Drive Panel Power Connections 140 to 255 Amp
RATING CABLE RANGE RECOMMENDED TORQUE
140 AMP
L1, L2, L3, A1, A2
2 CABLES PER CONNECTION
#6 AWG to 250 MCM
31 Nm (275 IN-LBS)
210 AMP
L1, L2, L3, A1, A2
2 CABLES PER CONNECTION
#6 AWG to 250 MCM
31 Nm (275 IN-LBS)
255AMP
L1, L2, L3, A1, A2
2 CABLES PER CONNECTION
#6 AWG to 250 MCM
31 Nm (275 IN-LBS)
Ground Terminal
140, 210, 255 Amp
#8 to #2 AWG 5 Nm (45 IN-LBS)
Siemens Energy & Automation 7-21
SIMOREG DC Master Base Drive Panel Operating Instructions
Base Drive Panel Power Connections 430 to 1680 Amp
RATING CABLE RANGE RECOMMENDED TORQUE
430AMP
L1, L2, L3 ----------------
A1, A2 ---------------------
2 CABLES PER CONNECTION
#6 AWG to 250 MCM (L1, L2, L3) -----------
#6 AWG to 500 MCM (A1, A2) ----------------
31 Nm (275 IN-LBS)
43 Nm (375 IN-LBS)
510 AMP
L1, L2, L3, A1, A2
2 CABLES PER CONNECTION
#6 AWG to 500 MCM
43 Nm (375 IN-LBS)
850 AMP
L1, L2, L3, A1, A2
3 CABLES PER CONNECTION
#1/0 AWG to 500 MCM
43 Nm (375 IN-LBS)
1180 AMP
L1, L2, L3, A1, A2
4 CABLES PER CONNECTION
#1/0 AWG to 500 MCM
43 Nm (375 IN-LBS)
1660 / 1680 AMP
L1, L2, L3, A1, A2
6 CABLES PER CONNECTION
#1/0 AWG to 500 MCM
43 Nm (375 IN-LBS)
Ground Terminal
430 TO 850 Amp
1180/1660/1680 Amp
#2 to #4/0 AWG ----------------------------------
#1/0 to 350 MCM --------------------------------
17 Nm (150 IN-LBS)
31 Nm (275 IN-LBS)
Base Drive Panel Control Connections, (CTB), 15 TO 1680 Amp
RATING WIRE RANGE RECOMMENDED TORQUE
15 TO 255 Amp
CTB-80…….CTB-92
#18 to #10 AWG
0.55 Nm (5 IN-LBS)
430 TO 850 Amp
CTB-80…….CTB-85
CTB-86…….CTB-95
#14 to #8 AWG ---------------------------------
#18 to #10 AWG ---------------------------------
0.8 Nm (7 IN-LBS)
0.55 Nm (5 IN-LBS)
1180 & 1660 Amp
CTB-80…….CTB-85
CTB-86…….CTB-95
#12 to #4 AWG ---------------------------------
#18 to #10 AWG ---------------------------------
1.3 Nm (11 IN-LBS)
0.55 Nm (5 IN-LBS)
1680 Amp
CTB-80…….CTB-85
CTB-86…….CTB-95
#10 to #1 AWG ---------------------------------
#18 to #10 AWG ---------------------------------
2.5 Nm (22 IN-LBS)
0.55 Nm (5 IN-LBS)
7-22 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Motor Armature circuit
Function Terminal Connection values/Remarks Possible
settings
Armature supply AC input
Ground PE conductor
Armature circuit motor
connection
L1
L2
L3
A1
A2
See technical data, section 5 for
actual maximum current values.
P078
P100
P101
Motor Field circuit
Function Terminal Connection values/Remarks Possible
settings
AC Supply connection CTB 83 Single Phase 460 VAC P076
CTB 84 See section 5 for current rating P078
Motor Field connection CTB 80 + Rated DC voltage 300V P102
CTB 81 -
Electronics power supply, main contactor, fans (if used) 15 to 850 amp
Function Terminal
Connection values/Remarks Possible
settings
Incoming AC supply 230V
(supplied by internal
control transformer)
CTB
CTB
87
89
Single Phase, 230 VAC, (hot)
(ground side)
Current Requirement for Terminals 87, 89 if supplied from a separate source
15 amp to 100 amp base drive panels: 0.55 amps
140 and 210 amp base drive panels: 1.2 amps
255 to 510 amp base drive panels: 1.6 amps
850 amp base drive panel: 4.6 amps
Siemens Energy & Automation 7-23
SIMOREG DC Master Base Drive Panel Operating Instructions
Electronics power supply, main contactor, and fans 1180 to 1680 amps
Function Terminal
Connection values/Remarks Possible
settings
Incoming AC supply
460 VAC, 3 Phase
CTB
CTB
CTB
97
99
101
Internally connected to incoming
460V supply
Current Requirement for Terminals if supplied from a separate source
1180, 1660 and 1680 amp base drives: 2.5 amps at 460 VAC 3 phase
Note: Phase sequence is important for the fan direction of rotation. The fan must rotate counter-
clockwise when viewed from above. If necessary, swap the L1 and L2 phase wiring at
incoming supply to change the fan direction of rotation.
Remote relay Enable terminals: 430 amp to 1680 amp base drive panels
Function Terminal
Connection values/Remarks Possible
settings
External enable (if used) CTB
CTB
93
94
If a remote enable function is required
using a relay contact, then remove jumper
J5 and install a normally open low voltage
contact at terminals 93 – 94.
The 430 amp to 1680 amp Base Drive Panels use a DC contactor that is interlocked through the enable function
at regulator terminals 34 and 38. This circuit is brought out to CBT terminals 93 and 94 to allow an easy point to
add an external enable contact if required. A remote enable contact can be wired directly to terminals 34 and 38
of the regulator for Base Drive Panels rated 15 to 255 amps.
7-24 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 8-1
SIMOREG DC Master Base Drive Panel Operating Instructions
8 Start-Up
8.1 General safety information for start-up
NOTE
Before handling any boards (in particular, the A7001 electronics board), please make sure that your body
is electrostatically discharged to protect electronic components against high voltages caused by
electrostatic charges. The simplest way of doing this is to touch a conductive, grounded object (e.g. bare
metal cabinet component immediately beforehand).
PCBs must not be allowed to come into contact with highly insulating materials (e.g. plastic foil, insulating
tabletops or clothing made of synthetic fibers).
PCBs may only be set down on electrically conducting surfaces.
WARNING
Hazardous voltages and rotating parts (fans) are present in this electrical equipment during
operation. Non-observance of the safety instructions can result in death, severe personal injury
or substantial property damage.
Hazardous voltage may be present at the signaling relays in the customer’s installation.
The units must not be connected to an AC supply with an earth-leakage ground detector since,
in the event of a fault to ground, the fault current may contain a DC component that may either
prevent or hinder a higher-level ground fault detector from tripping. In this case, all loads
connected to this ground fault detector will not be protected.
Only qualified personnel who are thoroughly familiar with all safety notices contained in the
operating instructions as well as erection, installation, operating and maintenance instructions
should be allowed to work on these devices.
The successful and safe operation of this equipment is dependent on careful transportation,
proper storage and installation as well as correct operation and maintenance.
The unit is at a hazardous voltage level even when the line contactor is open. The gating board
(board mounted directly to lower part of housing) has many circuits at hazardous voltage
levels. Before carrying out any maintenance or repair work, all Base Drive Panel power
sources must be disconnected and locked out.
These instructions do not claim to list all of the measures required to ensure the safe and
reliable operation of the converter. For special applications, additional, supplementary
information or instructions might be required. If problems do occur and you feel in any way
uncertain, please contact your local Siemens office or representative.
The use of unauthorized parts in the repair of this unit and handling of the equipment by
unqualified personnel can give rise to hazardous conditions which may cause death, severe
personal injury or substantial property damage. All safety notices contained in this instruction
manual and attached to the converter itself must be carefully observed.
Please read the safety information given in Section 1 of this instruction manual.
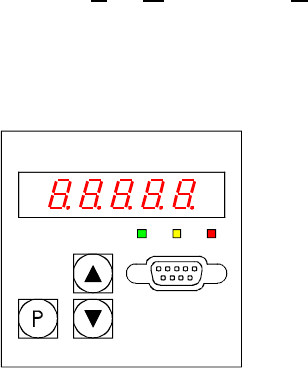
8-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
8.2 Operator control panels
The basic converter is equipped with a simple operator panel (PMU) as standard. A user-friendly panel with
plain text display (OP1S) can be connected as an option.
8.2.1 Simple operator control panel (PMU “Parameterization Unit“)
The simple operator control panel is mounted in the converter door and consists of a 5-digit, 7-segment
display with three status display LED’s and three parameterization keys.
All adjustments, settings and measurements that need to be undertaken for the purpose of start-up can be
made on the simple control panel.
X300
Run Ready Fault
• P key
− Switches over between parameter number (parameter mode), parameter value (value mode)
and index number (index mode) on indexed parameters.
− Acknowledges active fault messages.
− P and RAISE keys to switch a fault message and alarm to the background to get access to the
parameter mode.
− P and LOWER key to switch a fault message and alarm from the background back to the
foreground display on the PMU.
• UP key ()
− Selects a higher parameter number in parameter mode. When the highest parameter number is
displayed, the key can be pressed again to roll over to the lowest parameter number.
− Increases the displayed parameter value in value mode.
− Increases the index number in index mode (for indexed parameters)
− If the DOWN key is pressed, then, also pressing the UP key will accelerate the DOWN adjustment
process.
• DOWN key ()
− Selects a lower parameter number in parameter mode. When the lowest parameter number is
displayed, the key can be pressed again to roll over to the highest parameter number.
− Decreases the displayed parameter value in value mode.
− Decreases the index number in index mode (for indexed parameters)
− If the UP key is pressed, then, also pressing the DOWN key will accelerate the UP adjustment
process.
Siemens Energy & Automation 8-3
SIMOREG DC Master Base Drive Panel Operating Instructions
LED displays
Run green LED
LED illuminated ⇒ in “Torque direction active” state (MI, MII, M0).
(See parameter r000)
Ready yellow LED
LED illuminated ⇒ in “Ready” state (o1 .. o7).
(See parameter r000)
Fault red LED
LED illuminated ⇒ in “Fault signal present” state (o11)
(See parameter r000)
LED flashing ⇒ An alarm is active (see Faults and Alarms).
8.2.2 User-friendly operator control panel (OP1S)
The optional, user-friendly, operator control panel with plain text display (order no.: 6SE7090-0XX84-2FK0)
can be mounted in the special location provided in the converter door or remotely mounted on the enclosure
door. The OP1S connects to the basic converter interface SST1 at sub D connector X300.
Parameters can be selected directly through input of the parameter number by the keyboard of the OP1S.
The following interrelationships apply:
Displayed
number
Number to be keyed in
on OP1S
rxxx, Pxxx (0)xxx
Basic converter
parameter Uxxx, nxxx 2xxx
Hxxx, dxxx 1xxx
Technology board
parameter Lxxx, cxxx 3xxx
For more information on the operation of the OP1S, refer to the power module operating instructions and the
instructions that were provided with the OP1S.

8-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
8.3 Parameterization procedure
Parameterization is the process of changing or setting parameter values, activating converter functions, or
displaying measured values with the operator panel.
Parameters for the basic converter are called P, r, U or n parameters.
Parameters for an optional supplementary board are called H, d, L or c parameters.
The basic unit parameters are displayed first on the PMU, followed by the technology board parameters (if
such a board is installed). It is important not to confuse the parameters of the S00 technology software of
the basic unit with the parameters of an optional supplementary board (T400).
Depending on how parameter P052 is set, only some parameter numbers are displayed.
8.3.1 Parameter types
Display parameters (r, n, d, and c), are used to display current quantities such as the main setpoint,
armature voltage, feedback signals, outputs of controller, etc. The values of display parameters are read-
only values and cannot be changed.
Setting parameters (P, U, H, L), are used to both display and change parameter quantities such as the
rated motor current, thermal motor time constant, speed controller P gain, etc.
Indexed parameters (P, U, H, L), are used to both display and change several parameter values which are
all assigned to the same parameter number but identified by the index number.
8.3.2 Parameterization on simple operator control panel
After the electronics supply voltage has been switched on, the PMU is either in the operational display state
and indicating the current operating status of the SIMOREG 6RA70 (e.g. o7.0), or in the fault/alarm display
state and indicating a fault or alarm (e.g. F021).
Drive operational states are described by parameter r000 whereas fault and alarm messages are described
in the power module operating instructions in Section 10.
1. To enter the parameter number level from the operational display state (e.g. o7.0), press the P key and
then the <Up> or <Down> key to select individual parameter numbers.
2. To enter the parameter index levels (for indexed parameters) from the parameter number level, press P
again and then the <Up> or <Down> key to select individual indices. If you press P when a non-indexed
parameter is displayed, you go directly to the parameter value level.
3. To reach the parameter value level from the parameter index level (for indexed parameters), press P
again and the parameter value will be displayed.
4. On the parameter value level, you can change the setting of a parameter value by pressing the <Up> or
<Down> key.
CAUTION!
Parameters can be altered only if the following conditions are fulfilled:
− The key code is set with P051 = 40.
− The converter is in the correct operational state. Some parameters are “off-line” and cannot be changed
when the converter is in the “Run” or on-line state.
− The values of display parameters can not be changed (read only).
Siemens Energy & Automation 8-5
SIMOREG DC Master Base Drive Panel Operating Instructions
5. Manual shifting
If the 5 existing digits on the 7-segment display are not sufficient to display a parameter value, the display
first shows just 5 digits (see Fig. 8.1). To indicate that more digits are concealed to the right or left of this
“window”, the right-hand or left-hand digit flashes. By pressing the <P>+<Down> or <P>+<Up> key, you
can shift the window over the remaining digits of the parameter value. As an orientation guide, the position
of the right-hand digit within the overall parameter value is displayed briefly during manual shifting.
Example: Parameter value “208.173“
"208.17" is displayed when the parameter is selected. When the
P and LOWER keys are pressed, "1" appears briefly followed by
“08.173“, i.e. the right-hand digit 3 is the 1st position in the
parameter value.
When the P and RAISE keys are pressed, "2" appears briefly
followed by “208.17“, i.e. the right-hand digit 7 is the 2nd position
in the parameter value.
Fig. 8.1 Shifting the PMU display for parameter values with more than 4 digits
+
P
+
P
6. Press the P key to return to the parameter number level from the parameter value level.
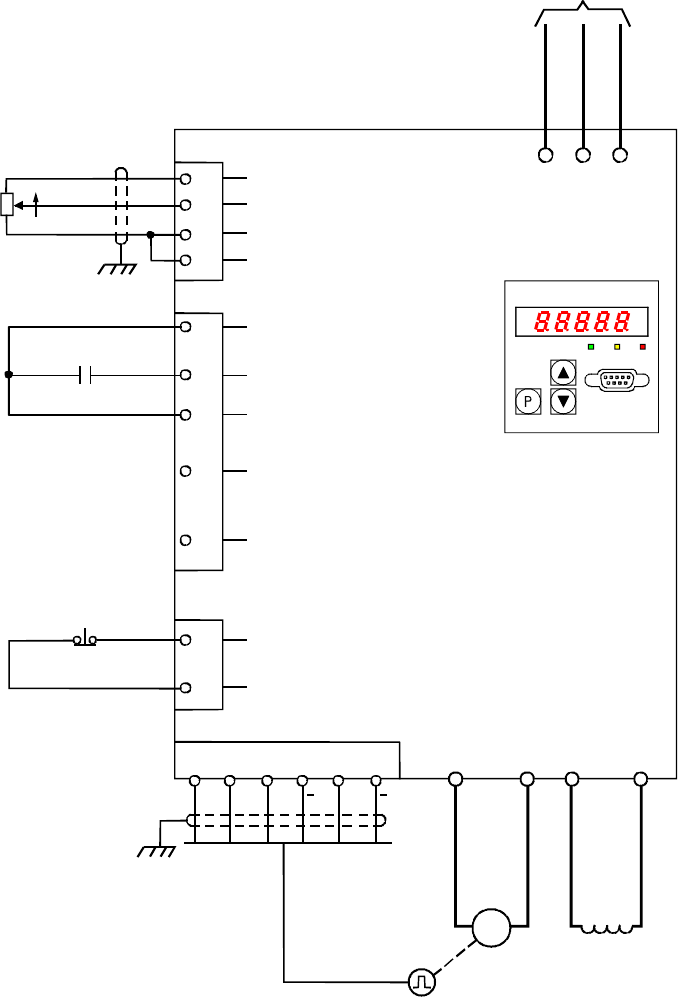
8-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
8.4 Typical Connection Diagrams
L1 L2 L3
E-STOP
START
SPEED
SETPOINT
(10K)
X174
2
4
5
1
P10
REF+
REF-
COM
34
X171
37
38
39
36
P24
RUN
ENABLE
SELECT INPUT
SELECT INPUT
XS
106
105
ES/P24
E-STOP WHEN DE-ENERGIZED
26 27 28 29 30 31
X174
P15 COM A A BB
ENCODER
MOTOR FIELD
460 VOLT
3 PHASE, 50 / 60 HZ.
A1(+) A2(-) 80(+) 81(-)
CW
X300
Run Ready Fault
PMU
8.4.1 Configured with Analog Speed Setpoint and
Start/Stop Control by Contacts
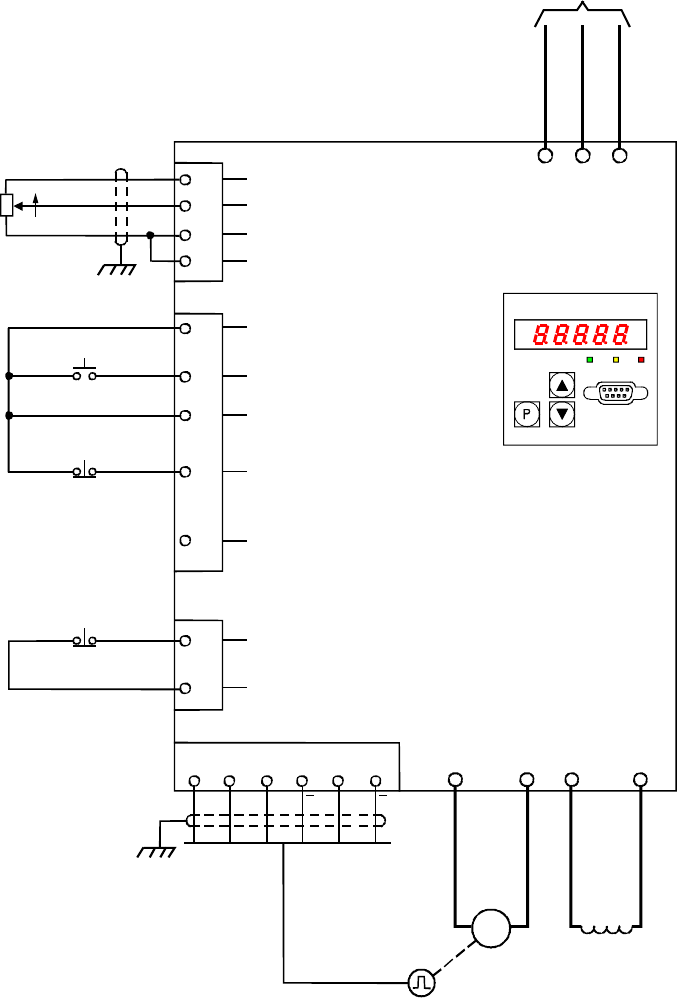
Siemens Energy & Automation 8-7
SIMOREG DC Master Base Drive Panel Operating Instructions
L1 L2 L3
E-STOP
START
STOP
SPEED
SETPOINT
(10K)
X174
2
4
5
1
P10
REF+
REF-
COM
34
X171
37
38
39
36
P24
RUN
ENABLE
SELECT INPUT
SELECT INPUT
P445 = 1
(PUSH-BUTTON CONTROL)
XS
106
105
ES/P24
E-STOP WHEN DE-ENERGIZED
26 27 28 29 30 31
X174
P15 COM A A BB
ENCODER
MOTOR FIELD
460 VOLT
3 PHASE, 50 / 60 HZ.
A1(+) A2(-) 80(+) 81(-)
CW
X300
Run Ready Fault
PMU
8.4.2 Configured with Analog Speed Setpoint and
Push-Button Start/Stop Control
P444 = 16
(OFF 1 WHEN DE-ENERGIZED)
8-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
8.5 Reset to factory default values and adjust offsets
In order to start from a predefined set of parameter values, it is highly recommended that the “Restore to
default” function be executed before a complete new start-up operation is begun.
NOTE
When the “Restore to default” function is activated, all parameters set for a specific installation
are overwritten (deleted). If the old settings are to be retained they should be recorded before
the default procedure is executed. The old settings can be read out and stored in a file using a
PC and either the Quick Start or DriveMonitor PC program.
“Restore to default” must be followed by a completely new start-up operation since none of the
application related parameters are set.
Execution of the default function:
1. Set parameter P051 = 21
2. When the “P” key is pressed the parameter values are reset to the factory value.
The parameter values are stored in non-volatile storage (EEPROM) so that they will still be available
when the converter is switched off. This operation takes at least 5 s (but may also last several minutes).
The number of the parameter currently being processed is displayed on the PMU during the process.
The electronics power supply must remain powered up while this operation is in progress.
3. Field offset adjustments
Parameter P825.ii is automatically set (takes approx. 10 s) to provide proper calibration of the field
converter rated current. The offset adjustment can also be activated as an individual function by means
of parameter P051 = 22.
Siemens Energy & Automation 8-9
SIMOREG DC Master Base Drive Panel Operating Instructions
8.6 Start-up procedure
WARNING
The Base Drive Panel is at a hazardous voltage level even when the line contactor is open.
The gating board (board mounted directly to lower part of housing) has many circuits at
hazardous voltage levels.
Non-observance of the safety instructions given in this manual can result in death, severe
personal injury or substantial property damage.
The following steps summarize the start-up procedure.
Always begin by defaulting the parameters back to the factory value as outlined in paragraph 8.5
Step Procedure
1 Set P051 = 40 to gain access to change parameters
2 Set P067 = 5 for US rating. This parameter setting is mandatory on Base Drive
Panels.
3 Set the actual operating AC supply voltage for the armature and field converters (P078)
4 Input motor data (P100, P101, P102, P114)
5 Select speed feedback method (P083) [analog tach, encoder, EMF voltage, custom]
6 Select field control and weakening (P081, P082)
7 Set current limits and ramp generator time (P171, P172, P303, P304, P305, P306)
8 Perform self tuning (P051 = 25, 26, 27, 28)
9 Set application specific parameters
10 Documentation of final parameter values
The following details explain how to do each of the above steps.

8-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
1 Access authorization
P051 . . . Key parameter
0 Parameter cannot be changed
40 Parameter can be changed
P052 . . . Selection of parameters to be displayed
0 Only parameters that are not set to default are visible
3 All parameters are visible
2 Adjustment of converter rated currents
Base Drive Panels are designed to continuously operate at the converter US rated current and then provide
150% overload current for 60 seconds. In order to meet this requirement it is mandatory that P067 be set to a
value of 5. The IEC Class 1 rating provides a higher continuous current but has no overload capability. The
fuses, contactor, power terminals, and power wiring used on base drives have been selected based on the US
rating. Failure to set P067 on Base Drive Panels to the US rating may cause damage to Base Drive Panel
components and void warranty.
Set parameter P067 = 5 “U.S. Rating“.
Set parameter P075 = 1 to allow dynamic overload capability.
3 Adjustment to actual converter supply voltage
P078.001 . . . Supply voltage for armature circuit (in volts)
P078.002 . . . Supply voltage for field circuit (in volts)
4 Input of motor data
The motor data as given on the motor rating plate must be entered in parameters P100, P101, P102 and P114.
P100 . . . Rated armature current (in amps)
P101 . . . Rated armature voltage (in volts)
P102 . . . Rated field current (in amps)
P114 . . . Thermal time constant of motor (in minutes). If not known use the default 10-minute value.
5 Actual speed sensing data
5.1 Operation with analog tachometer
P083 = 1: The actual speed is supplied from the “Main actual value” channel (K0013)
(terminals XT.103, XT.104)
P741 Tachometer voltage at maximum speed (– 270,00V to +270,00V)
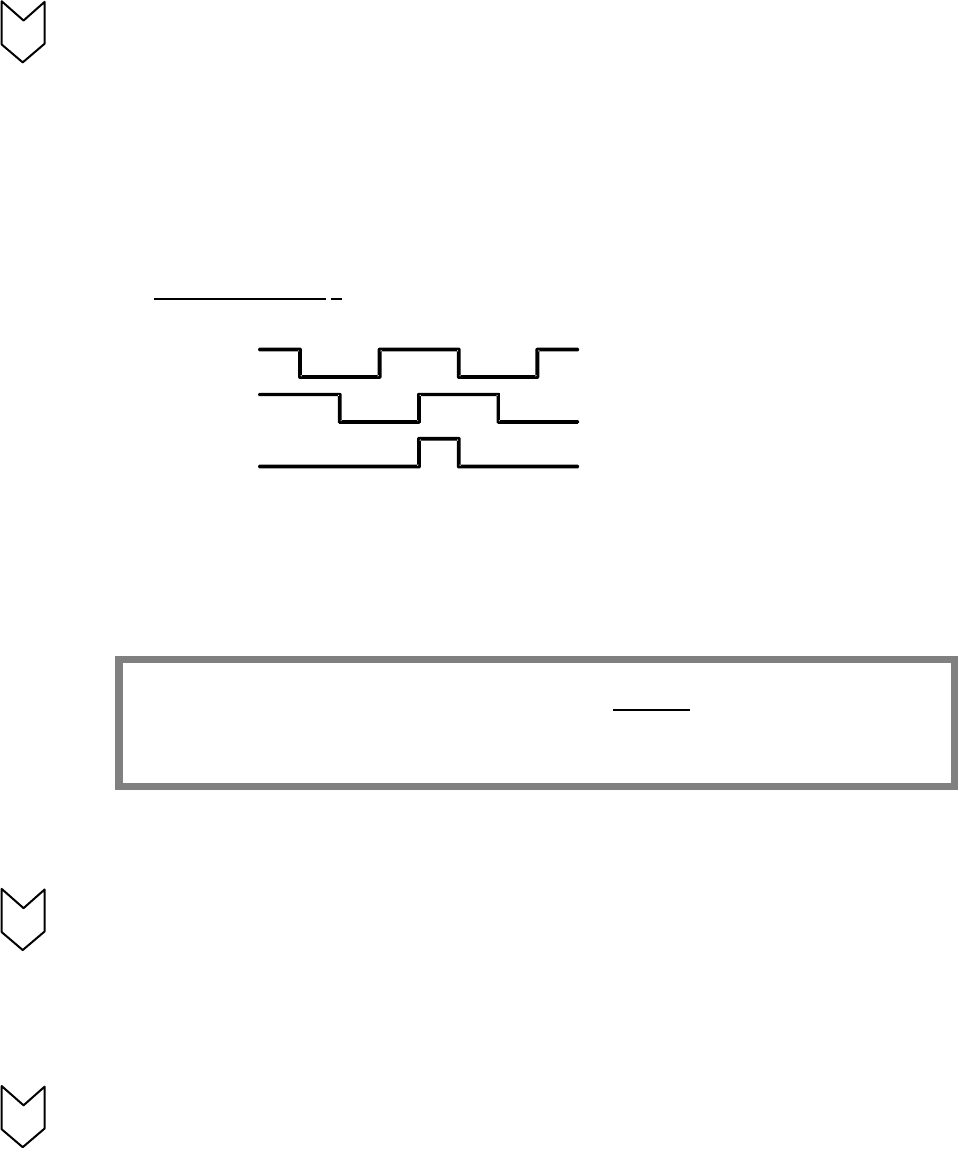
Siemens Energy & Automation 8-11
SIMOREG DC Master Base Drive Panel Operating Instructions
5.2 Operation with pulse encoder
P083 = 2: The actual speed is supplied by the pulse encoder (K0040)
P140 Selecting a pulse encoder type (pulse encoder types see below)
0 No encoder/"Speed sensing with pulse encoder" function not selected
1 Pulse encoder type 1 (Normal selection)
2 Pulse encoder type 1a (Special encoder)
3 Pulse encoder type 2 (Special encoder)
4 Pulse encoder type 3 (Special encoder)
1. Pulse encoder type 1
Encoder with two pulse tracks mutually displaced by 90° (with or without zero marker)
Track 1
X173 28, 29
Track 2
X173 30, 31
Zero marker
X173 32, 33
Heidenhain ROD
Teldix Rotaswitch Serie 26
P141 Number of pulses of pulse encoder (in pulses/revolution)
P142 Matching to pulse encoder signal voltage
0 Pulse encoder outputs 5 V signals (requires separate 5V encoder supply voltage)
1 Pulse encoder outputs 15V signals (uses internal 15V encoder supply voltage)
CAUTION
Resetting parameter P142 to the alternative 5V setting does not switch over the supply
voltage for the pulse encoder (terminals X173.26 and 27).
Terminal X173.26 always supplies +15V. An external voltage supply must be provided for
pulse encoders requiring a 5V supply.
P143 Setting the maximum operating speed for pulse encoder operation (in revolutions/minute).
The speed set in this parameter corresponds to an actual speed (K0040) of 100%.
5.3 Operation without tachometer (EMF control)
P083 = 3: The actual speed is supplied from the “Actual EMF” channel (K0287),
but scaled with P115.
P115 EMF at maximum speed (Note: EMF = Terminal voltage – IxR)
1.00% to 140.00% of rated converter supply voltage at r071.
5.4 Freely wired actual value
P083 = 4: The actual value input is defined with P609.
P609 Number of connector to which actual speed controller value is connected.

8-12 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
6 Field data
6.1 Field control
P082 = 0: Internal field is not used and field functions are not used.
(e.g. with permanent-field motors)
P082 = 1: The field is switched together with the line contactor
(field pulses are enabled/disabled when line contactor closes/opens)
P082 = 2: Automatic connection of standstill field set by P257 after a delay parameterized by P258,
after operating status o7 or higher has been reached
P082 = 3: Field current permanently connected
6.2 Field weakening
P081 = 0: No field weakening as a function of speed or EMF
P081 = 1: Field weakening operation as a function of internal EMF control so that, in the field
weakening range, i.e. at speeds above motor base speed, the motor EMF is maintained
constant. Note: Rated EMF = Rated Terminal voltage – IratedxRarmature
EMFsetpoint (K289) = P101 – P100 * P110.
7 Selection of basic technological functions
7.1 Current limits
P171 Motor current limit in torque direction I (in % of P100, default value = 100%)
US setting P171 = 150%
P172 Motor current limit in torque direction II (in % of P100, default value = -100%)
US setting P172 = -150%
7.2 Ramp-function generator
P303 Acceleration time 1 (in seconds, default value = 10)
P304 Deceleration time 1 (in seconds, default value = 10)
P305 Initial rounding 1 (in seconds, default value = 0)
P306 Final rounding 1 (in seconds, default value = 0)
Siemens Energy & Automation 8-13
SIMOREG DC Master Base Drive Panel Operating Instructions
8 Execution of optimization runs
8.1 The unit must be in operating state o7.0 or o7.1 (enter SHUTDOWN!).
8.2 Select one of the following optimization runs in key parameter P051:
P051 = 25 Optimization run for precontrol and current controller for armature and field
P051 = 26 Speed controller optimization run
P051 = 27 Optimization run for field weakening
P051 = 28 Optimization run for compensation of friction moment and moment of inertia
Note: The optimization runs should be performed in the above order.
8.3 The SIMOREG converter switches to operating state o7.4 for several seconds and then to o7.0 or o7.1
and waits for the START command and ENABLE.
Enter the commands START and ENABLE.
The flashing of the decimal point in the operational status display on the PMU (simple operator control
panel) indicates that an optimization run will be performed after the Start command.
If the start command is not given within 30 s, this waiting status is terminated and fault message F052
displayed.
8.4 As soon as the converter reaches operating status <o1.0 (RUN), the optimization run is executed.
An activity display appears on the PMU, consisting of two 2-digit numbers, separated by a bar that moves
up and down. These two numbers indicate (for SIEMENS personnel) the current status of the
optimization run.
P051 = 25 Optimization run for precontrol and current controller for armature and field (process
lasts approximately 40s).
The following parameters are set automatically: P110, P111, P112, P155, P156, P255,
and P256.
NOTE
Permanent-field motors (and motors with an extremely high residual flux) must be
mechanically locked during this optimization run.
WARNING
The set current limits are not effective during the current controller
optimization run. 75% of the rated motor armature current flows for
approximately 0.7s. Furthermore, individual current spikes of
approximately 120% of the motor rated armature current are
generated.
8-14 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
P051 = 26 Speed controller optimization run (process lasts approximately 6s).
The following parameters are set automatically: P225, P226 and P228.
Note:
The speed controller optimization run takes only the filtering of the actual speed controller
value parameterized in P200 into account and, if P083=1, filtering of the main actual value
parameterized in P745.
When P200 < 20ms, P225 (gain) is limited to a value of 30.00.
The speed controller optimization run sets P228 (speed setpoint filter) to the same value
as P226, speed controller integration time, for the purpose of achieving an optimum control
response to abrupt setpoint changes. In many process applications, it may be better to set
P228 = 0 so that the actual speed follows the process setpoint with less delay.
WARNING
During the speed controller optimization run, the motor is accelerated
at a maximum of 45% of its rated armature current. The motor may
reach speeds of up to approximately 20% of maximum speed.
If field weakening is selected (P081 = 1), or if closed-loop torque control (P170=1) or torque limiting
(P169=1) is selected or if a variable field current setpoint is applied the optimization run for field weakening
must be run:
P051 = 27 Optimization run for field weakening (process lasts approx. 1min).
The following parameters are set automatically: P117 to P139, P275 and P276.
Note:
In order to determine the magnetization characteristic, the field current setpoint is reduced
during the optimization run from 100% of the motor rated field current as set in P102 down
to a minimum of 8%. The field current setpoint is limited to a minimum according to P103 by
setting P103 to values < 50% of P102 for the duration of the run. This might be necessary in
the case of uncompensated motors with a very high armature reaction.
The magnetizing characteristic is approximated linearly to 0, starting from the measuring
point, at a minimum field current setpoint.
To execute this optimization run, the minimum motor field current, P103, must be
parameterized to less than 50% of the rated motor field current (P102).
WARNING
During this optimization run, the motor accelerates to approximately
80% of rated motor speed (the armature voltage corresponds to
maximum 80% of the rated motor armature voltage (P101)).
Siemens Energy & Automation 8-15
SIMOREG DC Master Base Drive Panel Operating Instructions
P051 = 28 Optimization run for compensation of friction moment
and moment of inertia (if desired) (process lasts approx. 40s)
The following parameters are set automatically: P520 to P530, P540
WARNING
The motor accelerates up to maximum speed during this optimization
run.
On completion of this run, the friction and inertia moment compensation function must be
activated manually by setting P223=1.
When the operating mode is switched from current control to torque control with P170, the
optimization run for friction and inertia moment compensation must be repeated.
Note:
The speed controller may not be parameterized as a pure P controller or as a controller with
droop when this optimization run is executed.
8.5 At the end of the optimization run, P051 is displayed on the operator panel and the drive switches to
operating state o7.2.
NOTE
In the case of motors with a limited travel path, the optimization run for field weakening
(P051=27) may not be interrupted by the SHUTDOWN command until the 1st field weakening
measuring point has been plotted. Likewise, the optimization run for the friction moment and
moment of inertia compensation function (P051=28) may not be interrupted by SHUTDOWN until
the measuring point at 10% of maximum speed has been determined. Premature interruption in
both cases will lead to activation of fault message F052. When either of these optimization runs
is restarted (P051=27 or P051=28), it will be continued at a more advanced position. In this way,
the respective run can be completed in several stages, even if the travel path is limited.
Note:
The respective optimization run is executed completely after a restart if:
a) a fault message is activated during the optimization run
b) if the electronics supply is disconnected before the relevant optimization run is restarted
c) if another function data set than the one before is selected or
d) if another optimization run is started in-between.
The parameters of the function data set selected in each case are optimized.
While optimization runs are being executed, the function data set selection must not be changed
or else a fault message will be activated.
8-16 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTE
Optimization runs should be executed in the order listed above (precontrol and current controller,
speed controller, and field weakening control, friction moment and moment of inertial
compensation).
The determined parameters are dependent on the motor temperature. Values set automatically
when the motor is cold can be used as effective defaults.
For highly dynamic drives, the optimization runs P051=25 should be repeated after the drive has
been operated under load (i.e. when motor is warm).
Checking and possible fine adjustment of maximum speed
After the optimization runs have been executed, the maximum speed should be checked and if necessary
adjusted to its final value. If it is necessary to change the maximum speed setting by more than about 10%, the
control response of the speed control loop must be checked. It may be necessary to repeat the speed controller
optimization run or re-optimize the controller manually.
The optimization runs for field weakening and friction motor and moment of inertial compensation must be
repeated every time the maximum speed setting is changed.
9 Setting Application Functions
9.1 Starting the Drive
With factory defaults, the Base Drive Panel is automatically configured to enable the drive with terminal 38 at
X171 and to start the drive with terminal 37 also at connector X171. The function of these terminals is fixed.
With all other methods of starting the drive, terminals 37 and 38 act as permissive to start and must be
energized to allow the selected method to start the drive.
Alternatively, the drive can be configured to start from the CUD1 serial ports at connectors X300 or X172, and
from optional communication boards or serial port located on the optional CUD2 board.
If an alternative method of starting the drive is required, the source of the start command is selected with
parameter P654. The normal choices are:
Source of Start Command P654 =
Terminal 37 @ connector X171 (factory default setting) B0001
Serial Interface 1, X300, USS protocol, Word 1, Bit 0 B2100
Serial Interface 2, X172, USS protocol, Word 1, Bit 0 B6100
Technology Board or First Communication Board, Word 1, Bit 0 B3100
Second Communication Board, Word 1, Bit 0 B8100
Serial Interface 3, CUD2 X162, USS protocol, Word 1, Bit 0 B9100
Siemens Energy & Automation 8-17
SIMOREG DC Master Base Drive Panel Operating Instructions
9.2 Speed Setpoint Selection
With factory defaults, the Base Drive Panel is automatically configured to get the speed reference from the main
setpoint analog input at terminals 4 and 5 on connector X174. The default scaling provides, +10 volts at
terminals 4 with respect to 5, equals 100% speed setpoint in the forward direction. If the input is -10 volts at
terminals 4 with respect to 5 then -100% speed setpoint in the reverse direction is provided.
Alternatively, the drive can be configured receive the speed setpoint from the CUD1 serial ports at connectors
X300 or X172, and from optional communication boards or serial port located on the optional CUD2 board.
If an alternative source of the speed setpoint is required, it can be set using parameter P433.
The normal choices are:
Source of Speed Setpoint P433 =
Main setpoint analog input (factory default setting) K0011
Serial Interface 1, X300, USS protocol, Word 2 K2002
Serial Interface 2, X172, USS protocol, Word 2 K6002
Technology Board or First Communication Board, Word 2 K3002
Second Communication Board, Word 2 K8002
Serial Interface 3, CUD2 X162, USS protocol, Word 2 K9002
The speed setpoint can come from many other sources such as other analog inputs, other words in the serial
protocols, MOP function, and other freely selectable function in the base drive software. The ultimate selection
of the setpoint source depends on the application requirements. To use any other source, locate the connector
number for the source and set P433 to that value.
8-18 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
9.3 Jog (Inching) Configuration
If the unit is not already running, a JOG command can be given to the unit to cause it to start and run at a pre-
selected speed. When the JOG command is released the motor speed will come to zero and the unit will stop.
Up to 8 jog speeds can be configured. If positive reference values are used, the motor will jog forward while
negative reference values will jog the motor in reverse.
Sources for both the jog command and the jog setpoint need to be configured. The source of the Jog
commands is selected using parameter P435, however the first two, Jog1 and Jog2, can also be set from the
source selected with parameters P668 and P669 through the control word 1 bits 8 and 9.
The following tables show a few examples of how the Jog commands and setpoints can be configured. The
source of the command and setpoint are completely independent for maximum flexibility.
Source of Jog Command P435 = Value
Terminal 36 @ connector X171 = Jog 1 Index .01 B0010
Terminal 39 @ connector X171 = Jog 2 Index .02 B0016
Serial Interface 1, X300, USS protocol, Word 1, Bit 8 = Jog 3 Index .03 B2108
Serial Interface 2, X172, USS protocol, Word 1, Bit 9 = Jog 4 Index .04 B6109
Technology Board or First Communication Board, Word 1, Bit 4 = Jog 5 Index .05 B3104
Second Communication Board, Word 1, Bit 5 = Jog 6 Index .06 B8105
Serial Interface 3, CUD2 X162, USS protocol, Word 1, Bit 3 = Jog 7 Index .07 B9107
If more than one source is selected for the same command, then the command will be issued when either one
is issued. If more than one jog function is selected, then the selected jog setpoints are added together. This
feature allows the available jog speeds to be greatly expanded using various jog combinations.
Source of Jog Setpoint P436 = Value
Analog select Input 1, terminals 6 to 7 @ connector X174 = Jog 1 setpoint Index .01 K0015
Fixed Jog 2 setpoint from parameter P401 Index .02 K0401
Fixed Jog 3 setpoint from parameter P402 Index .03 K0402
Serial Interface 1, X300, USS protocol, Word 4 = Jog 4 Index .04 K2004
Serial Interface 2, X172, USS protocol, Word 5 = Jog 5 Index .05 K6005
Technology Board or First Communication Board, Word 3 = Jog 6 Index .06 K3003
Second Communication Board, Word 3 = Jog 7 Index .07 K8003
Serial Interface 3, CUD2 X162, USS protocol, Word 4 = Jog 8 Index .08 K9004
Siemens Energy & Automation 8-19
SIMOREG DC Master Base Drive Panel Operating Instructions
10 Documentation of setting values
• Save the parameter values using either Quick Start or the DriveMonitor PC program
or
• Document parameters manually
If P052=0, only parameters that have been changed from the factory default are displayed. This makes it
relatively easy to record the changed parameters.
NOTE
In the factory setting several fault codes are masked out with P820 and must be enabled if required.
NOTE
The 1180 amp, 1660 amp and 1680 units contain a three phase fan. Although the armature circuit is phase
insensitive a check must be made to insure that the airflow in these units is from bottom to top. If the fan
direction is incorrect, swap the L1 and L2 phase wiring at incoming supply once the unit has been de-
energized. See drawings on pages 7-12 and 7-13.
NOTE
If the fan unit on the 1180 amp, 1660 amp and 1680 amp units become misaligned during shipment the fan
housing can be re-aligned by loosing the front two mounting screws and re-aligning.
8-20 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
Siemens Energy & Automation 9-1
SIMOREG DC Master Base Drive Panel Operating Instructions
9 Faults and alarms
When a fault or alarm message is activated, it is displayed both on the simple operator control panel
(PMU) and on the OP1S user-friendly operator control panel (see also Section 7.2, Operator control
panels).
An alarm stops being displayed immediately the cause of the alarm signal has been eliminated.
A fault message must be cancelled by pressing the P key on the PMU or Reset key on the OP1S (panel
must be in "Operational display" status) as soon as the cause has been eliminated.
NOTE
Setting parameters when fault or alarm message is active
On the PMU:
You can shift an active fault message or alarm "to the background" by pressing the P key and
Higher key simultaneously on the PMU.
If you do not press any key on the PMU within a 30 s period, the fault message or active alarm in
the background is automatically displayed again.
You can fetch a message back to the foreground earlier by pressing the P key and Lower key
simultaneously on the PMU when the parameter number level is selected.
On the OP1S:
You can set parameters normally even if a fault message or alarm is active.
9.1 Fault messages
9.1.1 General information about faults
Fault message display:
On the PMU: F (fault) and a three-digit number. The red LED (Fault) lights up.
On the OP1S: On bottom line of operational display: The red LED (Fault) lights up.
Only one current fault message can be displayed at a time, i.e. other simultaneously active faults are
ignored.
Many fault messages (see List of Fault Messages) can only be active in certain operating states.
The system responses to a fault are as follows:
• The armature current is reduced, the firing pulses are disabled and the SIMOREG unit switches to
operating state o11.0 (fault)
• Fault message is displayed on the operator panel (PMU, OP1S)
• B0106 ( = status word 1, bit 3) is set and B0107 cancelled (see also alarm bits for special faults such
as undervoltage, overtemperature, external faults, etc.)
• The following parameters are refreshed:
r047 fault diagnostic memory
(The displayed values are decimal. For bit-serial evaluation, the values must be
converted from decimal to binary notation, e.g. to be able to determine the
relevant terminal in the case of F018)
r049 Fault time
r947 fault memory, see also r947 in Section 11, Parameter List
r949 fault value
(The displayed values are decimal. For bit-serial evaluation, the values must be
converted from decimal to binary notation, e.g. to be able to determine the
9-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
relevant terminal in the case of F018)
P952 number of faults
A text is also displayed for each individual fault in parameter r951 (fault text list). These texts can, for
example, be displayed on the OP1S.
If a fault is not acknowledged before the electronics supply voltage is switched off, then fault message
F040 will be displayed when the supply is next switched on.
9.1.2 List of fault messages
NOTE
Further information about the causes of fault messages
When a fault message is activated, values providing more information about the fault cause are
stored in parameter r047. Where the values can be interpreted by the user, they are included in
the following list of fault messages.
The value in r047.001 is referred to as the "fault value". This is also stored in r949 which also
contains the fault values belonging to older fault messages. The values in r047 are overwritten
when the next fault message occurs.
Values for r047 which are not included in the list below can help a SIEMENS specialist to locate a
fault cause. For this reason, all indices of parameter r047 should be read out whenever a fault
message occurs, even if the meaning of the individual indices of parameter r047 is not specified
for every fault message listed below.
Please note: Before you contact SIEMENS with any query regarding a fault message, please
make a note of the contents of all indices of parameter r047.
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
9.1.2.1 Supply faults
F001 Failure of electronics power supply
(active in all operating states)
Failure of the electronics supply voltage (terminals 5U1, 5W1, 5N1) in “RUN” state for longer than the “restart” time set in
parameter P086 or the electronics are operating on undervoltage.
Possible fault causes:
♦ Line contactor has opened in “RUN” state
♦ Brief supply failure
♦ Supply voltage too low
Fault value: r047 Index 002 to 016:
1 Electronics supply voltage in “RUN” has been interrupted
for longer than setting in P086
i002 Duration of actual supply failure in 1/10 seconds
2 Supply failure prewarning responds periodically -
3 Supply failure prewarning is active for longer than 1.28 s -
Siemens Energy & Automation 9-3
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F004 Phase failure in armature supply
(active in operating states of ≤ o4)
The supply voltage RMS value, calculated from the area of each supply half-wave (rectified average value * peak factor), must be
greater than the response value for phase failure monitoring
100%
P353
P078.001 ∗
The distance between two identical supply zero passages of a phase must not exceed 450 degrees.
If one of these two conditions remains unfulfilled for longer than the “restart time” set in P086, a fault message is activated.
After switch-on, the converter waits in operating states o4 and o5 together for a period not exceeding the setting in P089 for
voltage to appear at the power terminals (and for field current) before activating the fault message.
Possible fault causes:
♦ Parameter P353 is incorrectly set
♦ Armature phase has failed
♦ Line contactor opened in operation
♦ Fuse has blown on three-phase side in armature circuit
♦ Fuse has blown in power section
♦ Interruption in a thyristor firing pulse cable (auxiliary cathodes at connectors X12, X14, X16 are voltage carriers).
Fault value:
1 Voltage failure has occurred in armature supply (1U1, 1V1, 1W1) (when P086=0)
2 Delay time set in parameter P089 has expired in operating state o4
3 Fuse has blown in power section
4 Voltage failure has lasted longer than period set in P086 (if this is >0)
6 The "Main contactor checkback" (control word 2 bit 31) [see also P691] did not switch to "1" before the time set in P095 ran
out, or switched back to "0" during operation [V1.8 and later].
F005 Fault in the field circuit
(active in operating states of ≤ o5)
The line voltage RMS value calculated from the area of each network half-wave (rectification average value * peak factor) must
be greater than the response value for phase failure monitoring
100%
P353
P078.002 ∗
The distance between two identical network zero passages of the voltage for the field converter must not exceed 450 degrees.
The actual field current K0265 equals < 50% of the required field current setpoint K0268 for more than 500ms. This monitoring
function is effective only if the field current setpoint corresponds to >2% of the converter rated field current.
[In SW 1.9 and later, the percentage (50%) and time (500ms) can be altered in P396 and P397 respectively]
If one of the fault conditions described persists in operation (or ≤ o4) for longer than the “restart” time set in P086, the fault
message is output.
After the converter is switched on, it waits in operating state o5 for a period not exceeding the setting in P089 for the field supply
voltage or sufficiently high field current before this fault message is activated.
Monitoring for timeout as the field decays or builds up after initiation of field reversal (fault values 6 and 7) is not implemented
until SW 1.7 and later.
Possible fault causes
♦ Threshold for phase failure (P353) set incorrectly
♦ Field phase failed
♦ Line contactor opened during operation
♦ Fuse blown in the field circuit
♦ Field current controller and/or field current precontrol not optimized or badly optimized (check P112, P253 to P256; possibly
execute current controller optimization)
♦ Check P396 (field current monitoring threshold) and P397 (field current monitoring time)
♦ If the fault value is 6: Offset fault in the actual field current value sensing, relevant parameter: P825.i01-i03 (Offset depends
on P076.i02) or P394, P395 (Threshold and hysteresis for message I_field < I_field_min) must be checked
♦ If the fault value is 7: Circuit for the "new" field direction is interrupted (e.g. because the contactor for "new" field direction
does not pick up), P398, P399 (Threshold and hysteresis for message I_field < I_field_x) must be checked
9-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
Fault value:
1 Voltage failure occurred in the field supply (terminals 3U1 and 3W1) (if P086 = 0)
2 Delay time according to P089 elapsed in state o5.1 (waiting for voltage at the field power section)
3 Delay time according to P089 elapsed in state o5.0
(waiting until Ifield act (K0265) is > 50% of the instantaneous field current setpoint K0268)
[threshold settable in P396 as of SW 1.9]
4 After P086 > 0 has elapsed (time for automatic restart) in operating state ≤ o4:
Voltage failure in the field supply or Ifield act (K0265) < 50% Ifield set (K0268) for longer than 500 ms
[settable via P396 and P397 as of SW 1.9]
5 When P086 = 0 (no automatic restart) in operating state ≤ o4:
Ifield act (K0265) < 50% Ifield set (K0268) for longer than 500 ms
[settable via P396 and P397 as of SW 1.9]
6 If field reduction before field reversal, I_field ≤ I_field_min (P394) is not reached within 30 s
7 If field build-up after field reversal, I_field > I_field_x (P398) is not reached within 30 s
F006 Undervoltage
(active in operating states of ≤ o4)
The voltage at terminals 1U1, 1V1 or 1W1 and 3U1, 3W1 is lower than the response threshold for longer than the “restart time”
set in P086.
Response threshold for armature supply voltage:
)
100%
P351
(1P078.001 +∗
Response threshold for field supply voltage:
)
100%
P351
(1P078.002 +∗
Possible fault causes
♦ Line undervoltage
♦ Monitoring values set too sensitively or incorrectly (P351, P078)
Fault value: r047 Index 002 to 016:
1 Undervoltage has occurred i002 Number of phase that has activated fault message
0 ... Phase UV
1 ... Phase VW
2 ... Phase WU
3 ... Phase field
i003 Incorrect voltage value (normalized to 16384)
4 Undervoltage persists for longer than time set in
parameter P086 (if this is set to >0)
-
F007 Overvoltage
(active in operating states of ≤ o4)
The voltage at terminals 1U1, 1V1 or 1W1 and 3U1, 3W1 is higher than the response threshold (for longer than the “restart time”
set in P086).
Response threshold for armature supply voltage:
)
100%
P352
(1P078.001 +∗
Response threshold for field supply voltage:
)
100
%
P352
(1P078.002 +∗
Possible fault causes
♦ Line overvoltage
♦ Monitoring values set too sensitively or incorrectly (P352, P078)
Siemens Energy & Automation 9-5
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
NOTICE
This monitoring function is deactivated in the delivery state. It can be activated via parameter P820.
Fault value: r047 Index 002 to 016:
1 Overvoltage has occurred 002 Number of phase that has activated fault message
0....Phase UV
1....Phase VW
2....Phase WU
3....Phase field
i003 Incorrect voltage value (normalized to 16384)
4 Undervoltage persists for longer than time set in
parameter P086 (if this is >0)
-
F008 Line frequency less than the minimum line frequency acc. to parameter P363
(active in operating states of ≤ o5)
This fault message is activated if the line frequency is less than the minimum line frequency (for longer than the “restart time” set
in parameter P086).
Note: Up to software version 1.7 the threshold for activation of the fault message (minimum line frequency) is 45Hz.
Fault value:
1 Frequency of the armature supply < minimum line frequency
2 Frequency of the field supply < minimum line frequency
4 Line frequency less than the minimum line frequency for longer than set in parameter P086 (if >0)
F009 Line frequency greater than the maximum line frequency acc. to parameter P364
(active in operating states of ≤ o5)
This fault message is activated if the line frequency is greater than the maximum line frequency (for longer than the “restart time”
set in parameter P086).
Note: Up to software version 1.7 the threshold for activation of the fault message (maximum line frequency) is 65Hz
Fault value:
1 Frequency of the armature supply > maximum line frequency
2 Frequency of the field supply > maximum line frequency
4 Line frequency greater than the maximum line frequency for longer than set in parameter P086 (if >0)
9.1.2.2 Interface error
F011 Telegram failure at GSST1
when P780 = 2:
USS telegram failure at G-SST1
(active from the first receipt of a valid protocol in all operating states)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter P787.
Possible fault causes
♦ Cable break
♦ Error in USS master
9-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F012 Telegram failure at GSST2
when P790 = 2:
USS telegram failure at G-SST2
(active from the first receipt of a valid protocol in all operating states)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter P797.
Possible fault causes
♦ Cable break
♦ Error in USS master
when P790 = 4 or 5 and P798 = 32 or 33:
Peer-to-peer telegram failure at G-SST2
(active in operating states of ≤ o6)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter P797.
Possible fault causes
♦ Interruption in connecting cable
♦ EMC interference on connecting cable
♦ P797 is set too low
F013 Telegram failure at GSST3
when P800 = 2 and P808 = 32 or 33:
USS telegram failure to G-SST3
(active from the first receipt of a valid protocol in all operating states)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter P807.
Possible fault causes
♦ Cable break
♦ Error in USS master
when P800 = 4 or 5:
Peer-to-peer telegram failure at G-SST3
(active in operating states of ≤ o6)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter P807.
Possible fault causes
♦ Interruption in connecting cable
♦ EMC interference on connecting cable
♦ P807 is set too low
F014 Telegram failure at paralleling interface
(active when U800 = 1 or 2 from the first receipt of a valid protocol in all operating states)
After the receipt of the first valid protocol, no further telegrams have been received within the time period set in parameter U807.
Possible fault causes
♦ Interruption in connecting cable
♦ EMC interference on connecting cable
♦ U807 is set too low
Siemens Energy & Automation 9-7
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F015 Telegram failure on one SIMOLINK board
(active when U741 > 0 as soon as the first valid telegram is received)
After receipt of one valid telegram, no further valid telegrams have arrived within the period set in parameter U741.
Possible fault causes
♦ Break in connecting cable
♦ Parameter setting change during telegram exchange (for parameters see Section 11 "Configuration of SIMOLINK board)
♦ U741 is set to low
Fault value:
1 Telegram failure on 1st SLB
2 Reserved
F016 Hardware fault on expansion board EB1
Fault value:
1 Fault on first EB1
2 Fault on second EB1
F017 Hardware fault on expansion board EB2
Fault value:
1 Fault on first EB2
2 Fault on second EB2
F018 Short circuit or overloading of binary outputs
(active in all operating states)
Possible fault causes
♦ Short circuit or overload at terminals 46, 48, 50 or 52 and 26 or 34
Fault value: r047 Index 002 to 016:
1 Short circuit or overload at binary outputs i002 Bit 8 = 1: Overload at terminal 46
Bit 9 = 1: Overload at terminal 48
Bit 10 = 1: Overload at terminal 50
Bit 11 = 1: Overload at terminal 52
Bit 12 = 1: Overload at terminal 26 (15 V output)
Bit 13 = 1: Overload at terminal 34, 44 and/or 210
(24 V output)
NOTICE
This monitoring function is deactivated in the delivery state. It can be activated via parameter P820.
9.1.2.3 External faults
Fault message from free function block FB286
(active in all operating states)
Fault value:
F019
1 the binector wired via parameter U100 Index.005 is in the state log.”1”
2 the binector wired via parameter U100 Index.006 is in the state log.”1”
3 the binector wired via parameter U100 Index.007 is in the state log.”1”
4 the binector wired via parameter U100 Index.008 is in the state log.”1”
Fault message from free function block FB287
(active in all operating states)
Fault value:
F020
1 the binector wired via parameter U101 Index.005 is in the state log.”1”
2 the binector wired via parameter U101 Index.006 is in the state log.”1”
3 the binector wired via parameter U101 Index.007 is in the state log.”1”
4 the binector wired via parameter U101 Index.008 is in the state log.”1”
9-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F021 External fault 1
(active in all operating states)
Bit 15 in control word 1 was in the log. "0" state for longer than the time set in P360 index 001
F022 External fault 2
(active in all operating states)
Bit 26 in control word 2 was in the log. "0" state for longer than the time set in P360 index 002
Fault message from free function block FB2
(active in all operating states)
Fault value:
F023
1 the binector wired via parameter U100 Index.001 is in the state log.”1”
2 the binector wired via parameter U100 Index.002 is in the state log.”1”
3 the binector wired via parameter U100 Index.003 is in the state log.”1”
4 the binector wired via parameter U100 Index.004 is in the state log.”1”
Fault message from free function block FB3
(active in all operating states)
Fault value:
F024
1 the binector wired via parameter U101 Index.001 is in the state log.”1”
2 the binector wired via parameter U101 Index.002 is in the state log.”1”
3 the binector wired via parameter U101 Index.003 is in the state log.”1”
4 the binector wired via parameter U101 Index.004 is in the state log.”1”
9.1.2.4 Fault messages from motor sensors
F025 Brush length too short
(active in operating states of ≤ o3)
When parameter P495=2 (binary sensing of brush length), fault message at log.”0” signal (longer than 10s) at terminal 211
Possible fault causes
♦ Encoder for brush length has responded
♦ Open circuit in encoder cable
F026 Bearings in bad condition
(active in operating states of ≤ o6)
When parameter P496=2 (bearing condition sensing) fault message at log. “1” signal (longer than 2 s) at terminal 212
Possible fault causes
♦ Encoder for bearing condition has responded
F027 Air-flow monitoring of motor fan
(active in operating states of < o6)
When parameter P497=2 (air-flow monitoring), fault message at log ”0” signal (longer than 40s) at terminal 213
Possible fault causes
♦ Encoder for fan monitoring has responded
♦ Open circuit in encoder cable
F028 Motor overtemperature
(active in operating states of ≤ o6)
When parameter P498=2 (thermostat connected), fault message at log. “0” signal (longer than 10s) at terminal 214
Possible fault causes
♦ Thermostat for monitoring motor temperature has responded
♦ Open circuit in encoder cable
Siemens Energy & Automation 9-9
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F029 Motor overtemperature
(active in all operating states)
Select via P493=2 or 3 (temperature sensor at terminals 22 / 23) or
P494=2 or 3 (temperature sensor at terminals 204 / 205)
When parameter P490.01=1 (KTY84 at terminals 22 / 23) or P490.02=1 (KTY84 at terminals 204 / 205):
The fault message is activated if the motor temperature reaches or exceeds the value set in parameter P492.
When parameter P490.01=2, 3, 4 or 5 (PTC thermistor at terminals 22 / 23) or P490.02=2, 3, 4 or 5 (PTC thermistor at terminals
204/ 205):
The fault message is activated if the motor temperature reaches or exceeds the response value of the selected PTC thermistor.
Fault value:
1 Fault activation through temperature sensor at terminals 22 / 23
2 Fault activation through temperature sensor at terminals 204 / 205
9.1.2.5 Drive faults
NOTICE
The monitoring functions F031, F035, F036, and F037 are deactivated in the delivery state.
They can be activated via parameter P820.
F030 Commutation failure or overcurrent has occurred
(active in operating states of – –, I, II)
Possible error causes
♦ Mains voltage dip in regenerative feedback mode
♦ Current control loop not optimized
Fault value: r047 Index 002 to 016:
1 The blocking voltage time area for the commutating
thyristor pair was too small
2 The current crest curve breaks upwards
3 The maximum current value was higher than 250% of
rated device current
i002 Delay angle (K0100) in case of error
i003 Actual EMF (K0287) in case of error
i004 Trigger circuitry diagnostics (K0989) in case of error
i005 Actual field current (K0265) in case of error
i006 Number of pulses (K0105) in case of error
4 A paralleled SIMOREG DC Master has detected a
commutation failure or overcurrent
F031 Speed controller monitoring
(active in operating states of – –, I, II)
The monitor responds when the difference between the connectors selected in P590 and P591 (factory setting: Setpoint/actual
value difference of speed controller) exceeds the limit set in parameter P388 for longer than the time set in parameter P390.
Possible fault causes
♦ Open control loop
♦ Controller not optimized
♦ P590 or P591 is not correctly parameterized
9.1.2.6 External faults
Fault message from free function block FB4
(active in all operating states)
Fault value:
F033
1 the binector wired via parameter U102 Index.001 is in the state log.”1”
2 the binector wired via parameter U102 Index.002 is in the state log.”1”
3 the binector wired via parameter U102 Index.003 is in the state log.”1”
4 the binector wired via parameter U102 Index.004 is in the state log.”1”
9-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
Fault message from free function block FB5
(active in all operating states)
Fault value:
F034
1 the binector wired via parameter U103 Index.001 is in the state log.”1”
2 the binector wired via parameter U103 Index.002 is in the state log.”1”
3 the binector wired via parameter U103 Index.003 is in the state log.”1”
4 the binector wired via parameter U103 Index.004 is in the state log.”1”
9.1.2.7 Drive faults
F035 Drive is blocked
(active in operating states of – –, I, II)
This monitoring function responds if the following conditions are fulfilled for longer than the period set in parameter P355:
♦ Positive or negative torque or armature current limit
♦ The armature current is higher than 1% of the converter rated armature DC current
♦ The actual speed is less than 0.4% of maximum speed
Possible fault causes
♦ Drive is blocked
F036 No armature current is flowing
(active in operating states of – –, I, II)
This monitoring function responds if the armature firing angle is at the rectifier stability limit for more than 500 ms and the
armature current is less than 1% of the converter rated armature DC current.
Possible fault causes
♦ Armature circuit is open
(e.g. DC fuses have blown, open circuit, etc.)
♦ Rectifier stability limit αG (P150) is incorrectly set
♦ Drive is operating at αG limit (e.g. due to supplyundervoltage
♦ EMF is too high because maximum speed setting is too high,
refer to P083, P115, P143, P741)
♦ EMF is too high because field weakening is not selected (refer to P082)
♦ EMF is too high because field current is set too high (refer to P102)
♦ EMF is too high because transition speed for field weakening is set too high (refer to P101) ??
F037 I2t motor monitor has responded
(active in operating states of – –, I, II)
This monitoring function responds when an I2t value is reached which corresponds to the final temperature at 110% of the rated
motor armature current.
Possible fault causes
♦ Parameter P114 is incorrectly set
♦ Drive has been operating for too long at >110% of rated motor armature current
F038 Overspeed
(active in operating states of – –, I, II)
This fault message is activated if the actual speed value (selected in P595) exceeds the positive (P380) or negative (P381)
threshold by 0.5%.
Possible fault causes
♦ Lower current limit has been input
♦ Current-controlled operation
♦ P512, P513 are set too low
♦ Tachometer cable contact fault in operation close to maximum speed
Siemens Energy & Automation 9-11
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F039 I2t power section monitor has responded
(active in operating states of – –, I, II)
This monitoring function responds if the calculated I2t value of the power section reaches the permissible value for the power
section concerned (see also P075).
Possible fault causes
♦ Drive has been operating at overload for too long
♦ Parameter P075 is incorrectly set
♦ Parameter P077 is incorrectly set
F040 Electronics supply disconnected in active fault status
(active in all operating states)
This fault message is activated if the electronics power supply has been disconnected, even though a fault was displayed and not
yet acknowledged.
Possible fault causes
♦ Not all fault messages have been acknowledged
Fault value:
Last active fault message
F041 Ambiguous selection of parameter set or ramp-function generator
(active in all operating states)
♦ While an optimization run is in progress, the function data set selection must not be changed. Fault F041 is displayed if
another, different function data set is selected while an optimization run is being executed.
♦ Check whether ramp-function generator parameter set 1 or 2 or 3 (parameters P303 to P314) is clearly selected. If parameter
sets 2 and 3 are selected simultaneously for more than 0.5s, then fault message F041 is displayed. While the parameter set
selection is ambiguous, the system continues to apply the last clearly identified ramp-function generator parameters.
Possible fault causes
♦ P676 or P677 (selection of binectors which determine the active function data set in control word 2, bits 16 and 17) is
incorrectly set
♦ P637 or P638 (selection of binectors which determine ramp-function generator setting) is incorrectly set
Fault value:
2 The selection of the function data set has been changed during an optimization run
3 Ambiguous selection of ramp-function generator parameter set
9-12 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F042 Tachometer fault
(active in operating states of – –, I, II)
A check is performed every 20ms to ensure that
(K0287) EMF Actual
(K0179) speedActual is > +5%
If the check result is incorrect for 4 times in succession, the fault message is activated.
The following rule applies:
100% actual speed = maximum speed
100% actual EMF = ideal average DC voltage at α ≥ 0, i.e. when the thyristor bridge is fully gated
The ideal DC voltage average value at α = 0 is π
23
P078.001 ∗
∗
The monitoring function is effective only if the EMF > a % of π
23
P078.001 ∗
∗
"a" is a percentage that can be set in parameter P357 (default setting 10%).
The monitoring function is effective only if the armature current is > 2% of the converter rated DC current set in r072.002.
Possible fault causes
♦ Open circuit in tachometer or pulse encoder cable.
♦ Tachometer of pulse encoder cable incorrectly connected.
♦ Pulse encoder supply has failed.
♦ Polarity for actual speed value (P743) is incorrectly set.
♦ Armature circuit data (P110 und P111) are incorrectly set (execute current controller optimization run).
♦ Tachometer or pulse encoder defective
♦ Pulse encoder supply voltage is incorrectly set (P140)
♦ The field polarity is not reversed by the external hardware when the field is reversed.
Fault value: r047 Index 002 to 016:
1 Open circuit in tachometer or pulse encoder cable i002 Actual speed value (K0179) in case of fault
2 Polarity of tachometer or pulse encoder is incorrect i003 Actual EMF value (K0287) in case of fault
Siemens Energy & Automation 9-13
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F043 EMF too high for braking operation
(active in operating states of – –, I, II)
This fault message is activated if the following 5 conditions are fulfilled when a torque direction reversal is requested (selection of
MI or MII):
♦ P272=0 (fault message is parameterized and not alarm + field weakening)
♦ A parameterized, additional, torque-free interval (P160 ≠ 0) has expired
♦ Parallel drive is ready for engagement of the new torque direction
♦ The absolute value of the armature current (K0118) requested in the new torque direction is >0.5% of P072
♦ The calculated firing angle (K0101) for the armature current requested for the new torque direction is >165 degrees.
Possible fault causes
♦ No “speed-dependent field weakening" (P081=0) is parameterized even though operation in the field weakening range is
needed for the requested maximum speed
Note:
In motor operation, it is possible to reach EMF values corresponding to the peak of the phase-to-phase supply voltage at a
firing angle of αG=30° (rectifier stability limit P150) and low armature currents.
♦ Setpoint EMF for field weakening operation too high (parameter P101 is set too high)
♦ Supply voltage dip
♦ EMF controller or field current controller is not optimized, possibly resulting in excessive EMF on power-up.
Fault value: r047 Index 002 to 016:
Calculated firing angle (armature) before limitation (K0101) i002 Instantaneously measured actual EMF (K0287)
i003 Armature current controller setpoint (K0118)
F044 A slave connected to the paralleling interface is not operating
(active when U800 = 1 or 2 and U806>10 (master) after receipt of the first valid protocol in operating states – –, I, II)
Fault value:
1 A fault message is active on a slave
2 A slave is not in operation (e.g. because its enable input is set to "0")
F046 Analog select input for main setpoint (terminals 4 and 5) faulty
(active in operating states of ≤ o6)
This fault message is activated when P700=2 (current input 4 to 20 mA) and an input current of less than 2mA is flowing.
Possible fault causes
♦ Open circuit in supply cable
♦ P700 is incorrectly set
F047 Analog select input 1 (terminals 6 and 7) is faulty
(active in operating states of ≤ o6)
This fault message is activated when P710=2 (current input 4 to 20 mA) and an input current of less than 2mA is flowing.
Possible fault causes
♦ Open circuit in supply cable
♦ P710 is incorrectly set
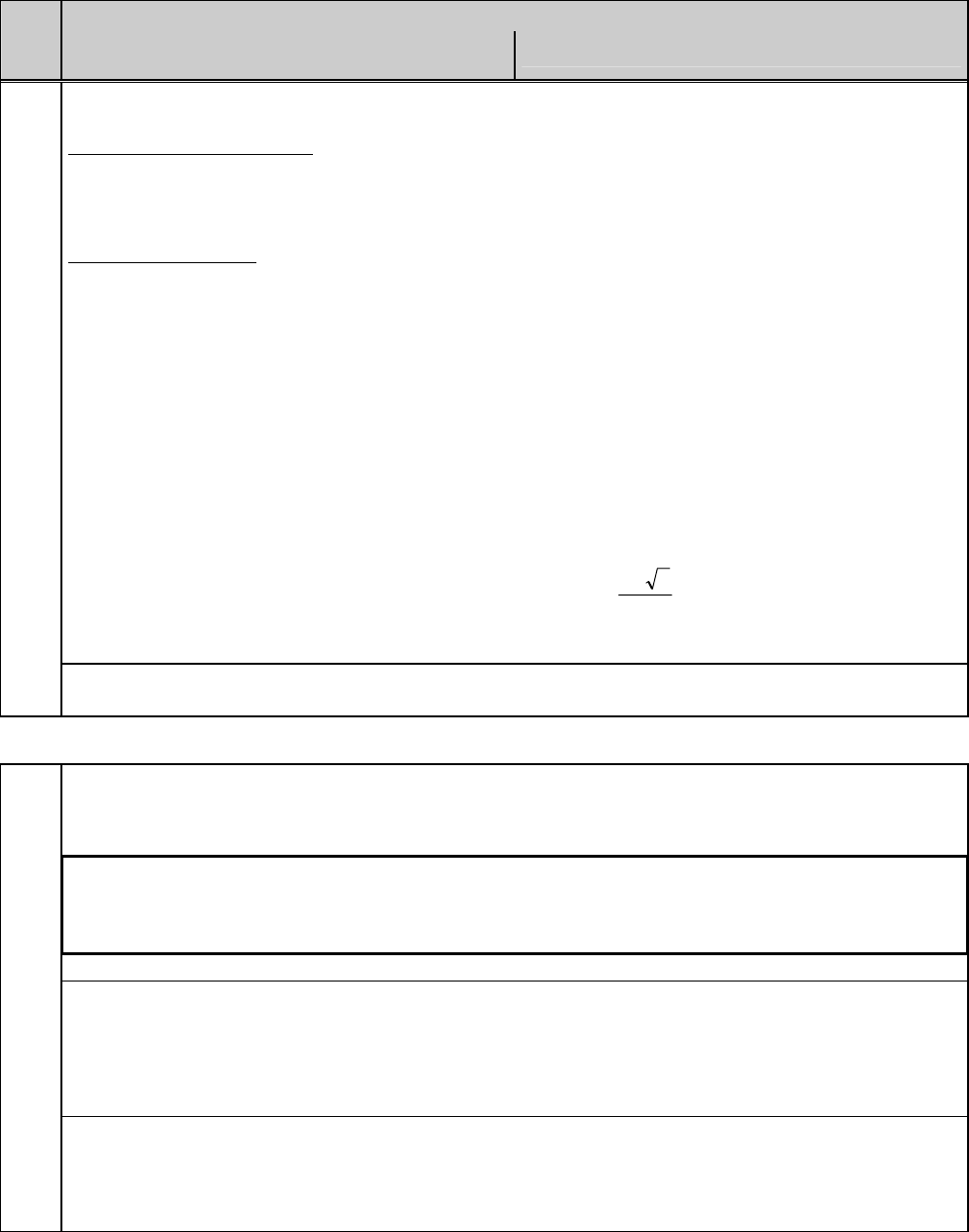
9-14 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F048 Fault in measuring channel for digital speed sensing using pulse encoder
(active in all operating states)
1. Disturbances on encoder cables:
Faults on the encoder cables (transitions to 0 with a 1 signal or to 1 with a 0 signal) are signalled as a rotational direction change
by the evaluation circuit. Frequent changes in rotational direction can occur only at speeds around 0.
The fault message is activated if 10 consecutive pulse encoder signal evaluations identify “direction of rotation change” at a
speed of ≥ 48 rev/min and an EMF > threshold (see below).
2. Pulse encoder defective:
The fault message is activated if, at an EMF > threshold (see below) 10 consecutive pulse encoder signal evaluations identify
“implausible characteristics” of these signals (i.e. frequent rotational direction changes, edges too close together, failure of an
encoder cable or short circuit between two encoder cables).
Possible fault causes
♦ EMC-related interference on a pulse encoder signal (terminals 28 to 31)
♦ Pulse encoder defective
♦ Interruption in an encoder cable
♦ Short circuit between an encoder cable and the supply voltage or another encoder cable
♦ P110 or P111 is incorrectly set (resulting in incorrectly calculation of EMF)
Note:
When the speed encoder is operating correctly, signal sequences, which are characteristic of a faulty pulse encoder or
disturbances on the pulse encoder cables, may occur continuously at the input terminals (e.g. continuous changes in rotational
direction or short pulse intervals) at about 0 speed, e.g. as the result of slight oscillation around a bright/dark transition on the
speed encoder disk).
For this reason, fault F048 is not activated until the EMF > 10% of π
23
P078.001 ∗
∗ .
Fault value:
1 Disturbances on encoder cables
2 Defective pulse encoder
9.1.2.8 Start-up faults
F050 Optimization run not possible
(active in all operating states)
A fault has occurred during an optimization run.
NOTE
The contents of r047, Index 002 to 016, can provide specialists with more detailed information about fault causes. For this
reason, please read out and document all the indices associated with this fault and pass them on when you contact Siemens for
help.
Fault value:
1 Armature current is too low when α=30° and EMF=0.
(average armature current <75% of IA, motor or <75% of IA, rated)
Possible cause:
• Armature circuit interrupted
• High-resistance load
• P150 (Alpha G limit) has been set to excessively high value
2 It was not possible to determine the armature circuit resistance (P110) because the armature current was ≥ 37.5 % of P100
in fewer than 20 of the 150 firing cycles of the measuring phase.
Possible cause:
•Armature current of 37.5% of P100 (I A, motor) is no longer possible (although a current of 75% of P100 was already
flowing, maybe a fuse has blown).
Siemens Energy & Automation 9-15
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
3 Armature current peaks are too small at α=30° and EMF=0
(armature current peak value <50% of IA, motor or <50% of IA,rated)
Possible cause:
• Armature circuit inductance is too high (field supply from armature terminals)
• P150 (Alpha G limit) has been set to excessively high value
Possible remedy:
• Reduce P100 (IA,motor) while this optimization run is in progress
4 The armature circuit inductance (P111) cannot be determined from the sampled values of the armature current and line
voltage of the armature current crest last generated
Possible cause:
•P100 (IA,motor) or r072.i002 (IA,rated) very much smaller than actual motor rated current of the armature
•LA >327.67mH (armature circuit inductance too large)
•P100 (IA,motor) very much smaller than r072.i002 (IA,rated)
•Armature circuit short-circuited
5 Offset adjustment of actual field current sensing is not possible
(value detected for P825 is outside permissible value range)
Possible cause:
• Fault in actual field current sensing circuit
(defective A7004 gating board or A7001 electronics board)
7 The field circuit resistance (P112) is indeterminable
(the actual field current does not reach the internally specified setpoint of 95% of P102 as a result of P112 variation)
Possible cause:
• R
A >3276.7Ω
• Fault in actual field current sensing circuit (defective gating board or A7001 electronics board)
• The command “Inject standstill field” is applied
• P102 is set too high
• A thyristor in the field bridge is not firing
8 80% of rated EMF (K287=P101 – P100 * P110) cannot be reached within 15s (or maximum of the three set acceleration
times)
Possible cause:
• Acceleration time (P303, P307, P311) is set too low
• P101 does not match the set maximum speed (UA at nmax < P101) or setting for P102 is too low
• The command “Ramp-function generator enable”=0 or ”Ramp-function generator stop”=1
9 Field current control loop is not stable enough to record field characteristics
(30s after injection of internal field current setpoint, actual field current is deviating by more than (0.39% of P102 + 0.15 %
of r073.002) from the setpoint)
Possible cause:
• Field current controller or field current precontrol is not optimized or optimized badly (check P112, P253 to P256 or
execute a current controller optimization run (P051=25))
10 Field characteristic is not uniform
(i.e. in spite of field current setpoint reduction, the flux values of this measuring point calculated from EMF and actual speed
are rising)
Possible cause:
• High armature reaction and sharp load variations during recording of field characteristics
• Field current controller or field current precontrol is not optimized or optimized badly (check P112, P253 to P256 or
execute a current controller optimization run (P051=25))
11 A lower field current limit of ≥ 50% of P102 (IF,motor) is applied
(for this reason, it is not possible to plot a minimum of 9 field weakening measuring points)
Possible cause:
• P103 ≥ 50% of P102
Check P614 !
9-16 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
12 The drive has reached the positive torque limit even though the applied field current setpoint is still ≥ 50% of P102
(IF,motor)
Possible cause:
• Armature current is very “unsteady”, e.g. due to high speed controller P gain setting in P225 (on drive with high integral-
action time). In this case, setting a lower actual speed filtering value in P200 and execution of another speed controller
optimization run (P051=26) may help.
• Check torque limits
13 The drive has reached the positive armature current limit even through the applied field current setpoint is still ≥ 50% of
P102 (IF,motor)
Possible cause:
• Armature current is very “unsteady”, e.g. due to high speed controller P gain setting in P225 (on drive with high integral-
action time). In this case, setting a lower actual speed filtering value in P200 and execution of another speed controller
optimization run (P051=26) may help
• Check armature current limits
14 The speed has changed by more than 12.5% at a constant speed setpoint even through the applied field current setpoint is
still ≥ 50% of P102 (IF,motor)
Possible cause: as for fault value 12
15 The EMF setpoint is too small to plot a field characteristic
EMFset
= UA – IA,motor * RA = P101 – P100 * P110 < 10% of 1.35 * P078.i001
(e.g. P078.i001 = 400 V . . . minimum EMFset = 54 V)
16 Field weakening operation is not allowed in operation without a tachometer (P083=3)
17 The field current controller cannot be optimized because the field circuit time constant cannot be determined (actual field
current does not decay after switch-off to below 0.95*initial value within approximately 1s or to below 0.8 * 0.95*initial
values within approximately 2 s)
Possible cause:
• Setting in P103 is too high
• Field circuit inductance is too high
• Fault in actual field current sensing circuit (gating board or A7001 electronics board defective)
• Ratio r073.02 / P102 is too high (change P076.02 if necessary)
18 Field weakening range is too wide, i.e. during power-up (at full field) to a speed setpoint of +10% nmax , the |EMK| is > 77%
of setpoint EMF (P101 – P100 * P110)
Possible cause:
• Maximum speed setting is incorrect
• Pulse encoder parameters are incorrect (P140 to P143)
• Parameters for tachometer adaptation are incorrect (P741)
• Setpoint EMF is not correct (P101, P100, P110)
• An excessively high load torque (in positive or negative direction, e.g. a suspended load) causes the drive to rotate, one
of the armature current or torque limits may be parameterized too low
19 A steady-state actual speed of +10%, +20%, +30% . . . or +100% of the maximum speed cannot be reached within 3
minutes (or maximum value of the three set acceleration times) in speed-controlled operation (the speed setpoint/actual
value difference averaged over 90 firing cycles must equal <0.1% nmax for a specific time period)
Possible cause:
• Acceleration time is set too low (P303, P307, P311)
• Drive is blocked
• An excessively high load torque (in positive or negative direction, e.g. a suspended load) causes the drive to rotate, one
of the armature current or torque limits may be parameterized too low
• Poor speed controller setting (P225, P226, P228) or speed controller is parameterized as pure P controller or with
droop
• A band elimination filter (P201, P202 or P203, P204) is active
• Command “Ramp-function generator enable” =0 or ”Ramp-function generator STOP” =1 is applied
Siemens Energy & Automation 9-17
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
20 Current limit is too low
(With speed controller optimization run: Less than 30% or 45% of P100 (IA,motor) + the armature current required for zero
speed,
With optimization run for friction moment and moment of inertia compensation: Less than 20% of P100 (IA, motor) + the
armature current required for a steady-state speed corresponding to 10% of maximum speed)
21 Field weakening range is too wide (nact < +7% nmax produces |EMF| > 54% setpoint EMF)
(setpoint EMF= K289= P101 – P100 * P110)
Possible cause:
• Maximum speed setting is incorrect
• Pulse encoder parameters are incorrect (P140 to P143)
• Parameters for tachometer adaptation are incorrect (P741)
• Setpoint EMF is not correct (P101, P100, P110)
• Caution:
Even a high absolute negative actual speed value can produce an | EMF | of > 54% setpoint EMF
22 With speed controller optimization run:
With an acceleration current equaling 20% or 30% of P100 (IA, motor) + armature current required for zero speed or
With optimization run for friction moment and moment of inertia compensation:
With an acceleration current equaling the current required to achieve a steady-state speed of 10% of maximum speed +
20% of P100 (IA, motor), the maximum speed cannot be reached within 45s +7%
Possible cause:
• Centrifugal mass is too large
• Drive is blocked, heavily speed-dependent or excessively high load torque
• “Active” load is attempting to maintain a certain speed
Possible remedy:
• Increase P100 while the optimization run is in progress in order to raise the applied acceleration current during
optimization (during the speed controller optimization run, a maximum of 45% of IA, motor (+ armature current for zero
speed) is applied as the armature current setpoint, IA,motor (P100) can thus be increased to 2.2 times the value at
maximum without exceeding 100% IA, motor during optimization)
23 With speed controller optimization run:
With an acceleration current equaling 20% or 30% of P100 (IA, motor) + armature current required for zero speed or
With optimization run for friction moment and moment of inertia compensation:
With an acceleration current equalling the current required to achieve a steady-state speed of 10% of maximum speed +
20% of P100 (IA, motor), the maximum speed or 100% of setpoint EMF cannot be reached within 90s +13%
Possible cause:
• Flywheel mass is too large
• Drive is blocked, heavily speed-dependent or excessively high load torque
• “Active” load is attempting to maintain a certain speed
Possible remedy:
• Increase P100 while the optimization run is in progress in order to raise the applied acceleration current during
optimization (during the speed controller optimization run, a maximum of 45% of IA, motor (+ armature current for zero
speed) is applied as the armature current setpoint, IA,motor (P100) can thus be increased to 2.2 times the value at
maximum without exceeding 100% IA, motor during optimization)
24 With speed controller optimization run:
The actual speed does not drop to below +2% of maximum speed or to below the speed threshold nmin set in P370 within 2
minutes
With optimization run for field weakening:
The actual speed does not drop to below +2% of maximum speed or to below the speed threshold nmin set in P370 within
10 minutes
With optimization run for friction moment and moment of inertia compensation:
The actual speed does not drop to below +2% of maximum speed or to below the speed threshold nmin set in P370 within
11 or 2 minutes
Possible cause:
• Single-quadrant drive coasts to a standstill too slowly
9-18 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
25 The average armature current required for the speed range from +7% to approximately +13% of maximum speed to cover
the friction and/or steady-state load torque cannot be calculated
Possible cause:
• Drive with very little friction or very small integral-action time and, as a result of the very short measuring time,
computational inaccuracies during evaluation
• Distorted or disturbed actual speed value
• Large flywheel mass that is coupled to the drive via long shaft with high torsion, possibly via a
coupling with large amount of play
Possible remedy:
• Reduce P100 for duration of the optimization run to decrease the acceleration current applied during optimization and
thus to lengthen the measuring time
26 Load torque too high (nset =0% nmax results in nict ≥ 40% nmax) (actual speed value is averaged over 90 firing cycles,
speed monitoring at ≥ 40% nmax does not start for 1s after application of speed setpoint of nset=0)
Possible cause:
• An excessively high load torque (in a positive or negative direction, e.g. suspended load) causes the drive to rotate (the
speed controller parameters are parameterized according to the factory setting during this run)
• One of the armature current or torque limits is parameterized too low (the motor field may not be reaching full field
strength fast enough with the result that the initial motor torque is too low)
• Maximum speed setting is incorrect
• Pulse encoder parameters are incorrect (P140 to P143)
• Parameters for tachometer adjustment are not correct (P741)
27 Load torque is too high (nset=0% nmax results in |EMF| >100% setpoint EMF) (EMF monitoring at ≥ (P101 – P100 * P110)
does not start for 1 s after application of speed setpoint of nset=0)
Possible cause:
• An excessively high load torque (in a positive or negative direction, e.g. suspended load) causes the drive to rotate (the
speed controller parameters are parameterized according to the factory setting during this run)
• One of the armature current or torque limits is parameterized too low (the motor field may not be reaching full field
strength fast enough with the result that the initial motor torque is too low)
• Maximum speed setting is incorrect
• Pulse encoder parameters are incorrect (P140 to P143)
• Parameters for tachometer adjustment are not correct (P741)
• Setpoint EMF settings are incorrect (P101, P100, P110)
28 A steady-state actual speed corresponding to 0% of maximum speed cannot be reached within 0 s in speed-controlled
operation (the speed setpoint/actual value difference averaged over 90 firing cycles must be <1.0% nmax for a total of 4s)
Possible cause: As for fault value 26
29 The calculated armature circuit inductance is greater than 327.67 mH, therefore P111 = 327,67 mH has been set. All other
parameters (the current controller parameters P155 and P156 too) have been set correctly despite that. (For the real
armature circuit inductance in mH, see r047.i010).
Possible cause:
•e.g. field supply from the armature terminals
30 The calculated armature circuit inductance is greater than 327.67 mH and the calculated armature circuit resistance is
greater than 32.767 Ω, therefore P111 = 327,67 mH and P110 = 32,767 Ω has been set. All other parameters have also
been set. However, the values of the current controller parameters P155 and P156 might differ from the optimum setting.
Possible cause:
•e.g. field supply from the armature terminals
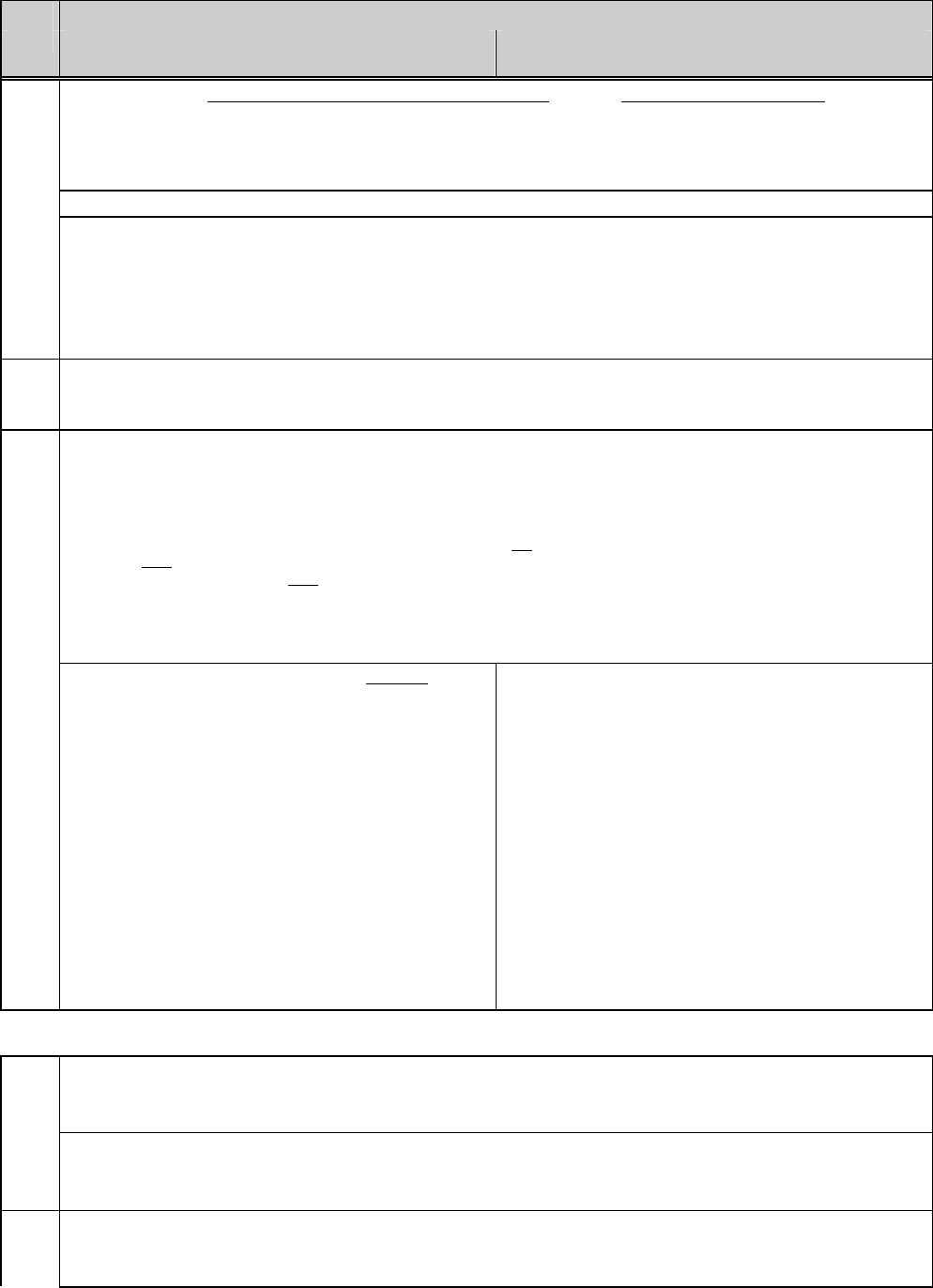
Siemens Energy & Automation 9-19
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
31 The calculated armature circuit resistance is greater than 32.767 Ω, therefore P110 = 32,767 Ω has been set. All other
parameters have also been set. Possibly the calculated P111 and therefore also the current controller parameters P155
and P156 have been distorted by the limitation in P110 .
Possible cause:
•e.g. field supply from the armature terminals
r047 Index 002:
1 Fault has occurred during optimization run for current controller and precontrol for armature and field (selected by means of
P051=25)
2 Fault has occurred during optimization run for speed controller (selected through setting P051=26)
3 Fault has occurred during optimization run for field weakening (selected through setting P051=27)
4 Fault has occurred during internal offset adjustments (selected through P051=22)
5 Fault has occurred in optimization run for friction and moment of inertia compensation (selected through setting P051=28)
F051 No optimization run when permanent memory is disabled [V2.1 and later]
(active in all operating states)
If P051.001 is set to 0 (write access to permanent memory disabled), it is not possible to execute an optimization run.
F052 Optimization run aborted as a result of external cause
(active in operating states of – –, I, II)
This fault message is activated when the converter ceases operating in the RUN state (state I, II or --) during an optimization run
(and thus in response to every FAULT) or if the EMERGENCY STOP or SHUTDOWN command is applied. The optimization run
is aborted. Only those parameters which had been fully optimized prior to activation of the fault message are altered.
When the STANDSTILL command is applied, this fault message is not activated if the optimization run for field weakening is
interrupted after the 1st field weakening measuring point has been recorded or, in the case of the optimization run for friction and
moment of inertia compensation, after the measuring point at 10% maximum speed has been determined. In these cases, the run
may be interrupted by STANDSTILL so as to be able to complete the run in several stages (by repeated restarts) for a limited
travel path.
Fault value: r047 Index 002 to 016:
1 Run was aborted because converter is no longer
operating in RUN mode
2 Run was aborted because EMERGENCY STOP
command was applied (speed controller setpoint =0)
3 Run was aborted because STANDSTILL command was
applied (ramp-function generator setpoint=0)
4 Operation has been aborted because P051 was changed
during the optimization run
5 Run was aborted because SWITCH-ON command was
not applied within 30 s of selection of optimization run
6 Operation has been aborted because the OPERATING
ENABLE command was not entered within 1 minute of
selection of the optimization run.
7 Operation has been aborted because converter was not
in operating state < o7.2 15 s after selection of the
optimization run with P051 = 25, 26, 27 or 28 (input of
OFF1 command may have been forgotten)
i002=1 Fault has occurred during optimization run for current
controller and precontrol for armature and field
(selected by means of P051=25)
i002=2 Fault has occurred during optimization run for speed
controller (selected through setting P051=26)
i002=3 Fault has occurred during optimization run for field
weakening (selected through setting P051=27)
i002=5 Fault has occurred in optimization run for friction and
moment of inertia compensation (selected through
setting P051=28)
9.1.2.9 External faults
Fault message from free function block FB288
(active in all operating states)
Fault value:
F053
1 the binector wired via parameter U102 Index.005 is in the state log.”1”
2 the binector wired via parameter U102 Index.006 is in the state log.”1”
3 the binector wired via parameter U102 Index.007 is in the state log.”1”
4 the binector wired via parameter U102 Index.008 is in the state log.”1”
F054 Fault message from free function block FB289
(active in all operating states)
Fault value:
9-20 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
1 the binector wired via parameter U103 Index.005 is in the state log.”1”
2 the binector wired via parameter U103 Index.006 is in the state log.”1”
3 the binector wired via parameter U103 Index.007 is in the state log.”1”
4 the binector wired via parameter U103 Index.008 is in the state log.”1”
9.1.2.10 Start-up faults
F055 No field characteristic recorded
(active in operating states of – –, I, II)
Possible fault causes
♦ The optimization run for field weakening (P051=27) has not yet been executed.
Fault value:
1 P170 = 1 (”torque control”) selected, but “no valid field characteristic has been recorded” (P117=0) yet
2 P081 = 1 (”speed-dependent field weakening”) selected, but “no valid field characteristic has been recorded” (P117=0) yet
(P117=0)
F056 Important parameter is not set
(active in operating states of ≤ o6)
This fault message is activated if certain parameters are still set to 0.
Fault value:
1 Speed controller actual value selection in P083 is still set to 0
2 Rated motor armature current in P100 is still set to 0.0
3 Rated motor field current in P102 is still set to 0.00 (fault message only when P082 ≠ 0)
4 Rated DC current of external field device is still set to 0.00 in U838 (error message if P082 >= 21 only)
F058 Parameter settings are not consistent
(active in operating states of ≤ o6)
Inconsistent values have been set in mutually dependent parameters.
Fault value:
2 The parameters for speed-dependent current limitation are not set correctly (the following applies: P105>P107 (I1>I2) and
P104 < P106 (n1<n2))
3 The field characteristic is not uniform
4 The first threshold for P gain adaptation of the speed controller set in parameter P556 is higher than the second threshold
setting in parameter P559
4 P557 is set to greater than P560
5 P558 is set to greater than P561
7 If P083=1 (analog tachometer), then P746 may not equal 0 (main actual value is not connected)
8 If P083=2 (pulse encoder), then P140 may not equal x0 (no pulse encoder installed)
9 If P083=3 (EMF control) then P082 may not equal x1x (field weakening operation)
10 P090 (stabilization time for supply voltage) >P086 (time for automatic restart)
11 P090 (stabilization time for supply voltage) >P089 (waiting time in state o4 or o5)
12 P445=1 is set (switch-on, shutdown and crawl act as a pushbutton) although no binector is parameterized as a shudown
button (P444=0)
13 If P067 > 1, then P075 must also be > 0
14 Parameter U673 > U674 (this setting is not permitted; see function diagram B152)
15 Parameter P169 = 1 and P170 = 1 (impermissible setting)
F059 Technology option S00 is disabled/will be disabled soon
(active in all operating statuses)
Siemens Energy & Automation 9-21
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
Fault value:
1 Time credit for S00 = 0 hrs
The technology option S00 for 500 operating hours no longer applies. The functions are now no longer available, but the
parameter settings have been retained.
If you wish to continue using technology option S00, please contact your nearest Siemens Sales Office to obtain the PIN
number you will require to permanently enable this option.
You will need to know the serial number of your SIMOREG DC Master. For further details, please refer to the description of
parameters U977 and n978 in Chapter 11 of the Parameter List.
2 Time credit S00 < 100 Std.
The remaining time period of temporary enabling of technology option S00 is now less than 100 operating hours. The
technology functions will not be available for much longer.
If you wish to continue using technology option S00, please contact your nearest Siemens Sales Office to obtain the PIN
number you will require to permanently enable this option.
for permanent enabling of technology option S00.
You will need to know the serial number of your SIMOREG DC Master. For further details, please refer to the description of
parameters U977 and n978 in Chapter 11 of the Parameter List.
3 S00 operation will not be possible if an SLB cycle time of < 1 ms is set
Owing to the available capacity of the electronics board, it is not possible to operate the S00 technology option at the same
time as a SIMOLINK bus with an extremely short cycle time (U746 < 1 ms).
See also parameter U746.
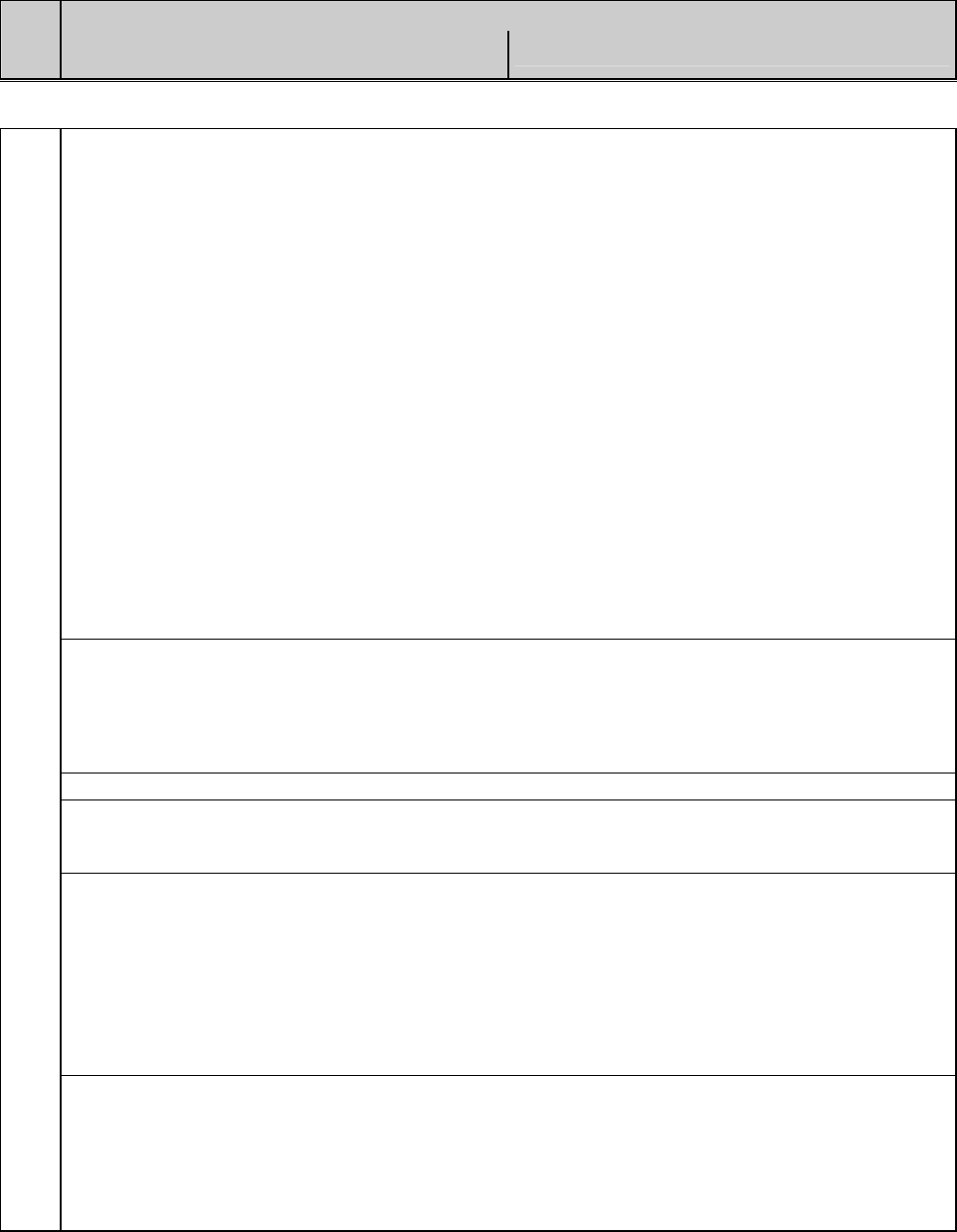
9-22 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
9.1.2.11 Hardware faults
F061 Fault message from thyristor check function
(active in operating state o3)
This fault message can be activated only if the thyristor check is activated via parameter P830.
If “Thyristor defective” or “Thyristor unable to block” is signaled, then the relevant thyristor module must be replaced.
Possible causes for irreparable damage to thyristors:
♦ Interruption in snubber circuit
♦ Current controller and precontrol are not optimized (excessive current peaks)
♦ Inadequate cooling (e.g. fan is not operating, ambient temperature is too high, fan is rotating in wrong direction (incorrect
phase sequence), inadequate air supply, heatsink is very dirty)
♦ Excessive voltage peaks in incoming supply system
♦ External short circuit or fault to ground (check armature circuit)
If “Thyristor unable to block” is signaled, the cause can generally be attributed to a firing circuit fault, rather than to a defective
thyristor.
Possible causes:
♦ Firing pulse cable to relevant thyristor is interrupted
♦ Ribbon cable X101 or X102 is incorrectly inserted or interrupted
♦ Defective electronics or gating board
♦ Internal interruption in gating cable in thyristor module
The designations of the firing cables and associated thyristors can be found in Section 6.4 (power connections).
Fault value:
1 Defective thyristor (short circuit in module V1, on 15A and 30 converters: V1 or V4)
2 Defective thyristor (short circuit in module V2, on 15A and 30 converters: V2 or V5)
3 Defective thyristor (short circuit in module V3, on 15A and 30 converters: V3 or V6)
4 Defective thyristor (short circuit in module V4, on 15A and 30 converters: V4 or V1)
5 Defective thyristor (short circuit in module V5, on 15A and 30 converters: V5 or V2)
6 Defective thyristor (short circuit in module V6, on 15A and 30 converters: V6 or V3)
8 Fault to ground in armature circuit
9 I=0 message defective
Possible fault cause
• Defective A7001 electronics board
11 Thyristor cannot be fired (X11)
12 Thyristor cannot be fired (X12)
13 Thyristor cannot be fired (X13)
14 Thyristor cannot be fired (X14)
15 Thyristor cannot be fired (X15)
16 Thyristor cannot be fired (X16)
17 2 or more thyristors (MI) cannot be fired
Possible fault cause
• Armature circuit interrupted
21 Thyristor cannot be fired (X21)
22 Thyristor cannot be fired (X22)
23 Thyristor cannot be fired (X23)
24 Thyristor cannot be fired (X24)
25 Thyristor cannot be fired (X25)
26 Thyristor cannot be fired (X26)
27 2 or more thyristors (MII) cannot be fired
Siemens Energy & Automation 9-23
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
31 Thyristor unable to block (X11 or X21)
32 Thyristor unable to block (X12 or X22)
33 Thyristor unable to block (X13 or X23)
34 Thyristor unable to block (X14 or X24)
35 Thyristor unable to block (X15 or X25)
36 Thyristor unable to block (X16 or X26)
9.1.2.12 Internal faults
F062 Fault in parameter memory
(active in all operating states)
Software monitoring of correct functioning of the EEPROM module (non-volatile memory) on the A7009 board.
The EEPROM values contains all data which must be protected in the case of a power failure (i.e. parameter values and process
data which must remain stored during power failures).
The following are monitored:
♦ Connection between the A7001 electronics board and the EEPROM on the A7009 backplane wiring assembly
♦ Whether the parameter values stored on the EEPROM are within the permissible value range
♦ Whether data are being correctly stored on the EEPROM. For this purpose, values are read and checked for correctness
after they are transferred to the module
♦ Whether the checksum of the non-volatile process data in the EEPROM is correct
Possible causes for all fault types:
Excessive EMC-related interference is present (e.g. due to unprotected contactors, unscreened cables, loose shield connections)
Fault value: r047 Index 002 to 016:
1 Connection to EEPROM is faulty
Possible fault causes
• A7001 electronics board is defective
• A7009 backplane wiring assembly is defective
• Plug-in connection X109 is defective
2 Parameter value is outside permissible value range
Possible fault causes
• “Restore to default value” has never been executed
with this software (e.g. after software replacement)
• A7009 backplane wiring assembly is defective
Possible remedy:
• Acknowledge fault, execute “Restore to default value”
and start up the drive again
i002 Number of faulty parameter
i003 Index of faulty parameter
i004 Faulty parameter value
3 Parameter value cannot be stored on EEPROM
Possible fault causes
• A7001 electronics board is defective
• A7009 backplane wiring assembly is defective
• Plug-in connection X109 is defective
i002 Address of fault memory location
i003 Faulty value in EEPROM
i004 Correct parameter value
9-24 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
11 Checksum of non-volatile data (part 1)
is not correct
12 Checksum of non-volatile data (part 2)
is not correct
13 Checksum of non-volatile data (part 3)
is not correct
20 Checksum of configuring table of parameter values is not
correct
Possible fault causes
• Defective EEPROM
• “Restore to default value” has never been executed
with this software (e.g. after software replacement)
Possible remedy:
• Acknowledge fault, execute “Restore to default value”
and start up the drive again! Check interference
suppression measures and improve if necessary.
i002 Calculate checksum
i003 Checksum found in EEPROM
F063 Errors in compensation data of analog inputs and outputs
(active in all operating states)
This function monitors whether the factory-set compensation data for the analog inputs and outputs are plausible
Possible fault cause:
♦ Defective A7001 or A7006 electronics board
Fault value: r047 Index 002 to 016:
11 Incorrect number of words in compensation values
for analog inputs and outputs of A7001
i002 Incorrect number of words
12 Checksum error in compensation values for
analog inputs and outputs of A7001
i002 Calculated checksum
i003 Errored checksum
13 Incorrect value among compensation values for
analog inputs and outputs of A7001
i002 Incorrect value
23 Incorrect value among compensation values for
analog inputs and outputs of A7006
i002 Incorrect value
F064 Watchdog timer has initiated a reset
(active in all operating states)
An internal microprocessor hardware counter monitors whether the program for calculating the firing pulses runs at least once
every 14 ms (program is executed on average every 2.7 to 3.3 ms). If this is not the case, the counter initiates a reset, F064 is
then displayed.
Possible fault causes
♦ A7001 electronics board is defective
♦ Excessive EMC-related interference is present (e.g. due to unprotected contactors, unscreened cables, loose shield
connections)
F065 Illegal microprocessor status
(active in all operating states)
An internal microprocessor hardware function monitors the microprocessor for illegal operating states.
Possible fault causes
♦ A7001 electronics board is defective
♦ Excessive EMC-related interference is present (e.g. due to unprotected contactors, unscreened cables, loose shield
connections)
F067 Converter cooling faulty
(active in operating states of ≤ o13)
The heatsink temperature monitoring function is activated 6s after connection of the electronics supply.
(The current heat sink temperature is indicated at parameter r013 and on connector K050)
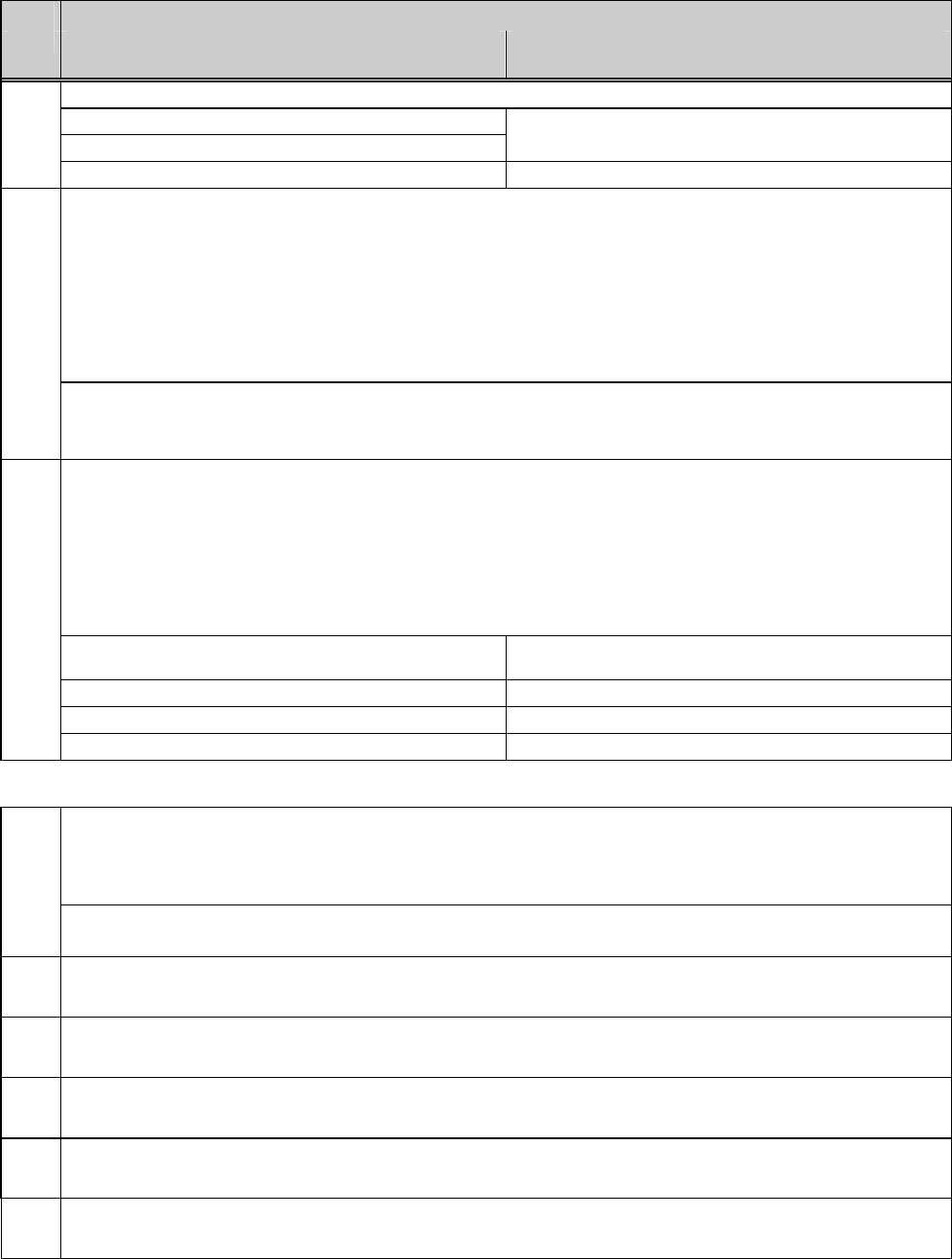
Siemens Energy & Automation 9-25
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
Fault value: r047 Index 002 to 016:
1 Heatsink temperature > permissible heatsink temperature i002 Measured heatsink temperature (16384 .. 100°C)
2 Heatsink temperature sensor is defective i003 Measured ADC value
3 Converter fan is defective
F068 Analog measuring channel faulty (main setpoint, main actual value or analog select input)
(active in all operating states)
Hardware monitoring of measuring circuits
Possible fault causes
• A7001 module defective
• Measuring circuit saturated (input voltage at terminals 4 and 5 or 6 and 7 higher than approx. 11.3V)
Fault value:
1 Measuring channel for main setpoint / analog select input 1 faulty (terminals 4 and 5)
2 Measuring channel for main actual value faulty (terminals 103 and 104)
3 Measuring channel for analog select input 1 faulty (terminals 6 and 7)
F069 MLFB data are faulty
(active in all operating states)
Possible fault causes
♦ Excessive EMC-related interference is present
(e.g. due to unprotected contactors, unscreened cables, loose shield connections)
♦ A7009 backplane wiring assembly is defective
Fault value: r047 Index 002 to 016:
1 MLFB code number (r070) = MLFB code number (r070)
is illegal
i002 Incorrect MLFB code number
2 MLFB data checksum error -
3 Works number checksum error -
4 Number of words of MLFB data is incorrect -
9.1.2.13 Communication errors with supplementary boards
F070 SCB1: Serious initialization error
(active in all operating states)
SCB1 and SCI cannot power up correctly (see diagnostic parameter n697 for details)
Fault value:
12 No connection to slave 1
22 No connection to slave 2
F073 SCB1: Current below 4mA minimum value at analog input1 of slave 1
(active in all operating states)
The cause of the fault may be a cable break
F074 SCB1: Current below 4mA minimum value at analog input2 of slave 1
(active in all operating states)
The cause of the fault may be a cable break
F075 SCB1: Current below 4mA minimum value at analog input3 of slave 1
(active in all operating states)
The cause of the fault may be a cable break
F076 SCB1: Current below 4mA minimum value at analog input1 of slave 2
(active in all operating states)
The cause of the fault may be a cable break
F077 SCB1: Current below 4mA minimum value at analog input2 of slave 2
(active in all operating states)
The cause of the fault may be a cable break
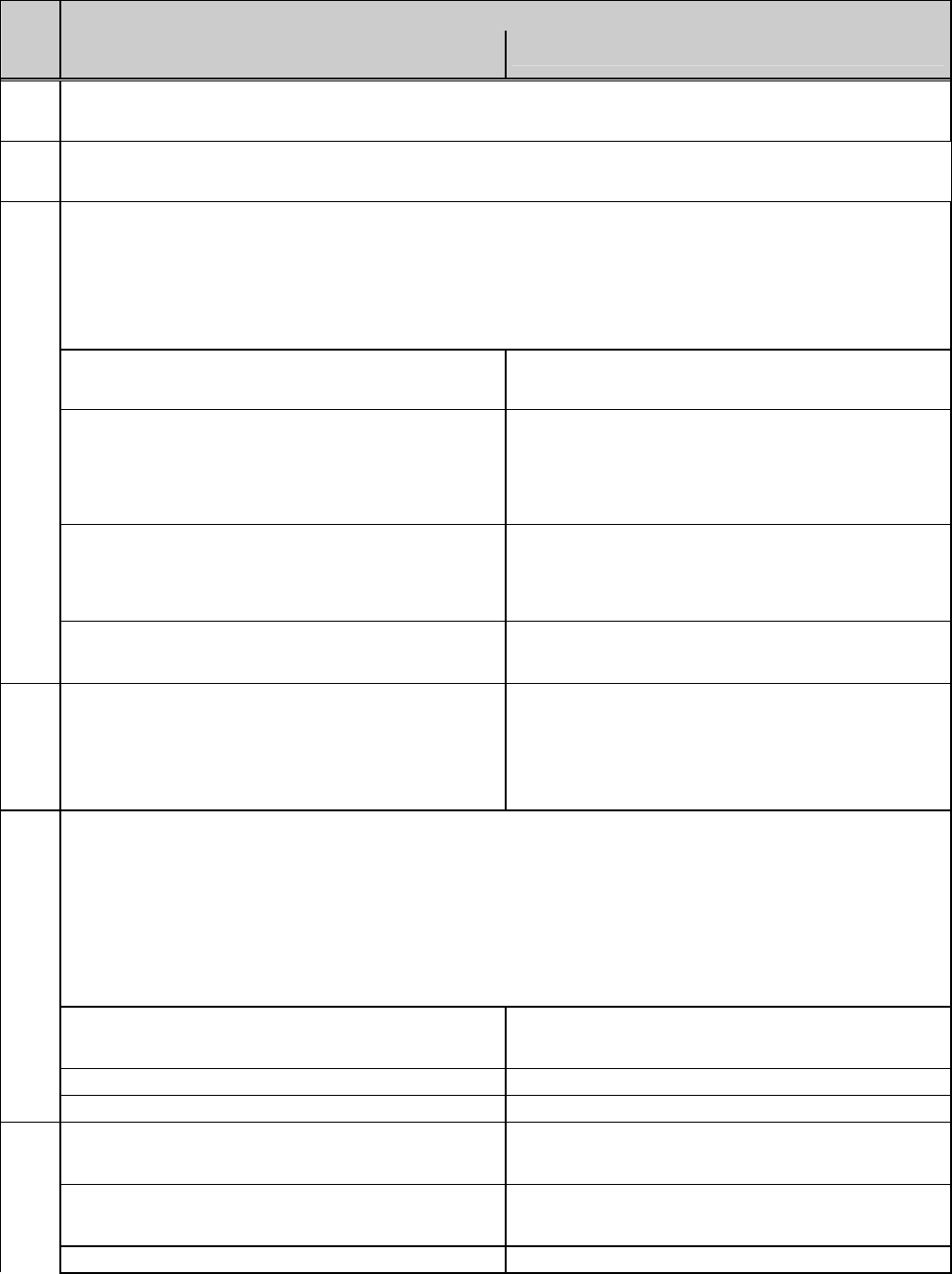
9-26 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
F078 SCB1: Current below 4mA minimum value at analog input3 of slave 2
(active in all operating states)
The cause of the fault may be a cable break
F079 SCB1: Telegram failure
(active in all operating states)
Check function of SCB1 (activity LEDs) and connection to SCI slaves (fiber optics)
F080 Error in initialization of a CB/TB board
Possible causes for fault values 1 and 6:
♦ CB/TB board is defective
♦ CB/TB board is not installed correctly
♦ CB/TB board is taking too long to run up (e.g. due to very complex TB configuration)
Fault value (r949 index 001): r047 index 002 to 016:
1 The "Heartbeat counter“ of the CB/TB has not started to
count within 20 s
i015 Code number of board:
1 TB or 1st CB
2 2nd CB
2 The product version of the installed CT/TB board is not
compatible with the SIMOREG 6RA70 converter
i002 Code number of slot containing incompatible board:
2 Slot D
3 Slot E
4 Slot F
5 Slot G
6 CB when configuration includes TB
5 Parameters P918, U711 to U721 are not correctly set or
not accepted after a change by means of U710 = 0
setting. (The meanings of these parameters are defined
in the manual for the relevant CB board, see also function
diagrams, Section 8, Sheets Z110 and Z111)
i015 Code number of board:
1 TB or 1st CB
2 2nd CB
6 The initialization run for a CB/TB board has not been
completed within 40 s
i015 Code number of board:
1 TB or 1st CB
2 2nd CB
F081 CB/TB heartbeat error
CB/TB has not incremented the monitoring counter for a period
of 800 ms
Possible causes of fault
♦ CB/TB board is defective
• CB/TB board is not correctly installed
i015 Code number of board:
1 TB or 1st CB
2 2nd CB
F082 CB/TB message timeout or error in data exchange
Possible causes of fault
♦ CB/TB PZD message timeout (with fault value 10)
♦ Excessive EMC-related interference
(e.g. due to unprotected contactors, unscreened cables, loose screen connections)
♦ CB/TB board is defective
♦ CB/TB board is not correctly inserted
Fault value (r949 index 001): r047 Index 002 to 016:
1 Fault in alarm channel from CB to basic unit i015 Code number of board:
1 TB or 1st CB
2 2nd CB
2 Fault in alarm channel from TB to basic unit
3 Fault in fault channel from TB to basic unit
5 Fault in parameter job channel from CB to basic unit i015 Code number of board:
1 TB or 1st CB
2 2nd CB
6 Fault in parameter response channel from basic unit to
CB
i015 Code number of board:
1 1st TB or 1st CB
2 2nd CB
7 Fault in parameter job channel from TB to basic unit
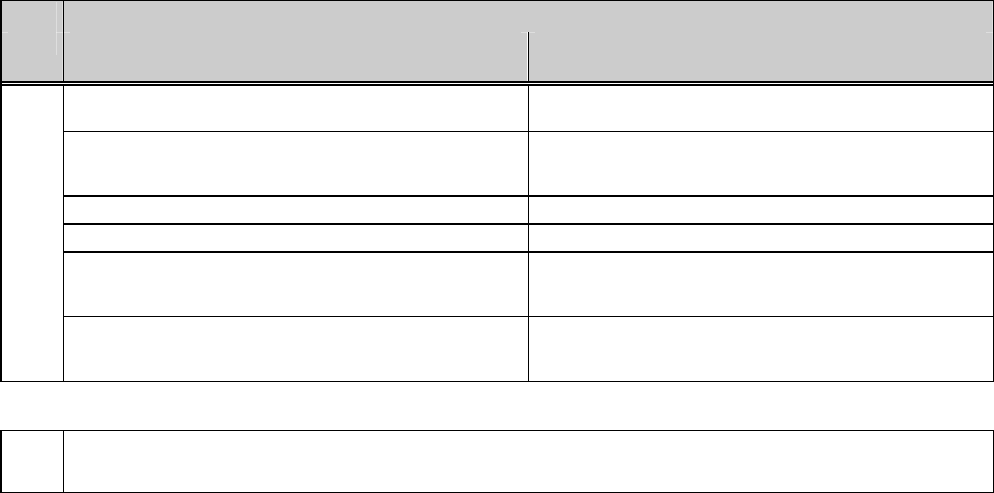
Siemens Energy & Automation 9-27
SIMOREG DC Master Base Drive Panel Operating Instructions
Fault Description
No. Cause as a function of fault value
(r047.001, r949.001 or r949.009 with acknowledged error) Further information (r047.002 to r047.016)
8 Fault in parameter response channel from basic unit to
TB
10 CB/TB process data failure (message timeout period set
in U722)
i015 Code number of board:
1 TB or 1st CB
2 2nd CB
11 Fault in parameter job channel from PMU to TB
12 Fault in parameter response channel from TB to PMU
15 Fault in setpoint channel from CB/TB to basic unit i015 Code number of board:
1 TB or 1st CB
2 2nd CB
16 Fault in actual value channel from basic unit to CB/TB i015 Code number of board:
1 TB or 1st CB
2 2nd CB
9.1.2.14 Fault messages from supplementary boards
F101
to
F147
This group of fault messages is activated by supplementary boards
Please refer to the operating manual of the relevant supplementary board for explanation of the fault messages and fault values
9-28 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
9.2 Alarm messages
Alarm message display:
On the PMU: A (Alarm) and a three-digit number. The red LED (Fault) flashes.
On the OP1S: On the bottom line of the operational display. The red LED (Fault) flashes.
An alarm message cannot be acknowledged, but disappears automatically when the cause has been
eliminated.
Several alarm messages can be active at the same time, these are then displayed in succession.
Many alarms (see List of Alarm Messages) can only be active in certain operating states.
The system responses to an alarm are as follows:
• Alarm message is displayed on the operator panel (PMU, OP1S)
• B0114 ( = status word 1, bit 7) is set and B0115 is cancelled
(see also special alarm bits in status word 2, e.g. for an external alarm, overload, etc.)
• The corresponding bit in one of the alarm words r953 (K9801) to r960 (K9808) is set
Alarm
No.
Description
A015 Simolink start
(active in all operating states)
Although the board has been initialized, it cannot yet exchange telegrams (parameters have not yet been correctly configured on
all nodes or the boards have not yet been linked via fiber optics to form a closed ring).
A018 Short circuit at binary outputs
(active in all operating states)
Hardware monitoring function to check for short circuit at one of the binary select outputs (see also F018 and r011).
A019 Alarm message from free function block FB256
(active in all operating states)
The binector wired via parameter U104 Index.002 is in the state log.”1”
A020 Alarm message from free function block FB257
(active in all operating states)
The binector wired via parameter U105 Index.002 is in the state log.”1”
A021 External alarm 1
(active in all operating states)
Bit 28 in control word 2 was in the log. "0" state for longer than the time set in P360 index 003.
A022 External alarm 2
(active in all operating states)
Bit 29 in control word 2 was in the log. "0" state for longer than the time set in P360 index 004.
A023 Alarm message from free function block FB6
(active in all operating states)
The binector wired via parameter U104 Index.001 is in the state log.”1”
A024 Alarm message from free function block FB7
(active in all operating states)
The binector wired via parameter U105 Index.001 is in the state log.”1”
Siemens Energy & Automation 9-29
SIMOREG DC Master Base Drive Panel Operating Instructions
Alarm
No.
Description
A025 Brush length too short
(active in all operating states)
When parameter P495=1 (binary sensing of brush length):
Alarm in response to log. “0” signal (longer than 10s) at terminal 211
Possible causes
♦ Encoder for brush length has responded
♦ Interruption in encoder cable
A026 Poor bearing condition
(active in all operating states)
When parameter P496=1 (bearing condition sensing):
Alarm in response to log. “0” signal (longer than 2s) at terminal 212
Possible causes
♦ Encoder for bearing condition has responded
A027 Air flow monitoring
(active in operating states of < o6)
When parameter P497=1 (air flow monitoring):
Alarm in response to log. “0” signal (longer than 40s) at terminal 213
Possible causes
♦ Encoder for fan monitoring has responded
♦ Interruption in encoder cable
A028 Motor overtemperature
(active in all operating states)
When parameter P498=1 (thermostat connected):
Alarm in response to log. “0” signal (longer than 10s) at terminal 214
Possible causes
♦ Thermostat for monitoring motor temperature has responded
♦ Interruption in encoder cable
A029 Motor overtemperature
(active in all operating states)
Selection via P493=1 or 3 (thermostat at terminals 22 / 23) or
P494=1 or 3 (thermostat at terminals 204 / 205)
When parameter P490.01=1 (KTY84 at terminals 22 / 23) or P490.02=1 (KTY84 at terminals 204 / 205):
The alarm is activated if the motor temperature reaches or exceeds the values set in parameter P492.
When parameter P490.01=2, 3, 4 or 5 (PTC thermistor at terminals 22 / 23) or P490.02=2, 3, 4 or 5 (PTC thermistor at terminals
204 / 205):
The alarm is activated if the motor temperature reaches or exceeds the trip value of the selected PTC.
A030 Commutation failure or overcurrent has occurred
(active in operating states of – –, I, II)
Possible error causes
♦ Mains voltage dip in regenerative feedback mode
♦ Current control loop not optimized
A031 Speed controller monitoring
(active in operating states of – –, I, II)
The monitor responds when the difference between the connectors selected in P590 and P591 (factory setting: Setpoint/actual
value difference of speed controller) exceeds the limit set in parameter P388 for longer than the time set in parameter P390.
Possible causes
♦ Control loop interrupted
♦ Controller is not optimized
♦ P590 or P591 is not correctly parameterized
9-30 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Alarm
No.
Description
A033 Alarm message from free function block FB8
(active in all operating states)
The binector connected via parameter U106 Index.001 is in the log. "1" state
A034 Alarm message from free function block FB9
(active in all operating states)
The binector connected via parameter U107 Index.001 is in the log. "1" state
A035 Drive blocked
(active in operating states of – –, I, II)
The monitoring function responds if the following conditions are fulfilled for longer than the time set in parameter P355:
♦ Positive or negative torque or armature current limit reached
♦ Armature current is greater than 1% of converter rated armature DC current
♦ The actual speed value is less than 0.4% of maximum speed
A036 No armature current can flow
(active in operating states of – –, I, II)
This monitoring function responds if the armature firing angle is at the rectifier stability limit for more than 500 ms and the
armature current is less than 1% of the converter rated armature DC current.
A037 I2t motor monitor has responded
(active in operating states of – –, I, II)
The alarm is activated when the calculated I2t value of the motor reaches the value which corresponds to the final temperature
at 100% of permissible continuous motor current (= P113*P100).
A038 Overspeed
(active in operating states of – –, I, II)
The monitoring function responds if the actual speed value (selected in P595) exceeds the positive (P512) or negative (P513)
threshold by 0.5%.
Possible causes
♦ Lower current limit has been input
♦ Current-controlled operation
♦ P512, P513 are set too low
♦ Tachometer cable contact fault in operation close to maximum speed
A039 I2t value of power section too high
(active in all operating states)
This alarm is activated if the permissible I2t value for the relevant power section is reached. At the same time, the current limit is
set to P077 * 100% of the converter rated DC current. This limit is not cancelled again until the setpoint drops below 100% of the
converter rated DC current. See also Fault F039 and Parameter P075.
A043 Automatic field current reduction if EMF is too high in operation
(active in operating states of – –, I, II)
This alarm is active only when parameter P272=1 and activated if the following equation applies to firing angle α (armature)
before limitation (K101):
α > (αW (inverter stability limit acc. to P151) – 5 degrees) or , at a low (pulsating) current
α > (165 degrees – 5 degrees)
The field is reduced simultaneously with A043, implemented through control of the armature firing angle to (αW (or 165 degrees)
- 5 degrees) using a P controller whose output reduces the EMF controller setpoint. For this reason, “Field current setpoint input
through internal EMF control” (PO81=1) must be parameterized.
When a change in torque direction is requested, both torque directions are inhibited until the calculated control angle (K101) is
<165 degrees for the armature current requested in the new torque direction, i.e. until the field, and thus the EMF, have been
reduced accordingly.
See also parameter P082.
A044 An alarm is active on one slave connected to the paralleling interface
(active in all operating states)
A046 Analog select input for main setpoint (terminals 4 and 5) faulty
(active in operating states of ≤ o6)
This alarm is activated when P700=2 (current input 4 to 20 mA) and the input current is less than 3mA.
A047 Analog select input 1 (terminals 6 and 7) faulty
(active in operating states of ≤ o6)
This alarm is activated when P710=2 (current input 4 to 20 mA) and the input current is less than 3mA.
Siemens Energy & Automation 9-31
SIMOREG DC Master Base Drive Panel Operating Instructions
Alarm
No.
Description
A049 SCB1: No SCI slave connected
(active in all operating states)
A050 SCB1: Not all required SCI slaves are available
(active in all operating states)
The SCI slave required to perform the parameterized functions is not available
A053 Alarm message from free function block FB258
(active in all operating states)
The binector connected via parameter U106 Index.002 is in the log. "1" state
A054 Alarm message from free function block FB259
(active in all operating states)
The binector connected via parameter U107 Index.002 is in the log. "1" state
A059 Remaining time for temporary enabling of the S00 technology option is now less than 100 operating hours
(active in all operating statuses)
Remaining time for temporary enabling of the S00 technology option is now less than 100 operating hours. The functions will
soon be unavailable.
If you wish to continue using technology option S00, please contact to your nearest Siemens Regional Office for a PIN number
for permanent enabling of technology option S00.
You will need to know the serial number of your SIMOREG DC Master. For further details, please refer to the description of
parameters U977 and n978 in Chapter 11 of the Parameter List.
A067 Converter cooling faulty
(active in all operating states)
The heatsink temperature is > 90 °C.
The monitoring function is activated 6s after the electronics supply is connected.
(The current heat sink temperature is indicated at parameter r013 and on connector K050)
A081
to
A088
CB alarm of 1st CB
(active in all operating states ≤ o11)
The meaning of these alarms depends on the type of board used.
For further information, refer to Section 7.7, Start-Up of Optional Supplementary Boards, in the relevant board description.
A089
to
A096
CB alarm of 2nd CB
(active in all operating states ≤ o11)
The meaning of these alarms depends on the type of board used.
For further information, refer to Section 7.7, Start-Up of Optional Supplementary Boards, in the relevant board description.
A097
to
A128
TB alarms
(active in operating states ≤ o11)
For more information about TECH BOARD alarms, please refer to Operating Instructions or Configuring Guide of the relevant
board.
9-32 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:
SIEMENS Energy & Automation 10-1
SIMOREG DC Master Base Drive Panel Operating Instructions
10 Parameter list
Overview
The Base Drive Panel Operating Instructions does not contain information about all available
parameters. Only the parameters mentioned in this book are included. For a complete list of
parameters please refer to power module Operating Instructions 6RX1700-0AD76.
Range of parameter numbers Function
r000 Operating display
r001 - P050 General visualization parameters
P051- r059 Access authorization levels
r060 - r065 Definition of SIMOREG DC MASTER converter
P067 - P079 Definition of SIMOREG DC MASTER power section
P080 - P098 Setting values for converter control
P100 - P139 Definition of motor
P140 - P148 Definition of pulse encoder, speed sensing using pulse encoder
P150 - P165 Closed-loop armature current control, auto-reversing stage, armature gating unit
P169 - P191 Current limitation, torque limitation
P192 Auto-reversing stage, armature gating unit
P200 - P236 Speed controller (further parameters for the speed controller P550 - P567)
P250 - P265 Closed-loop field current control, field gating unit
P272 - P284 Closed-loop EMF control
P295 - P319 Ramp-function generator
P320 - P323 Setpoint processing
P330 Ramp-function generator
P351 - P364 Setting values for monitoring functions and limits
P370 - P399 Setting values for limit-value monitors
P401 - P416 Settable fixed values
P421 - P428 Fixed control bits
P430 - P445 Digital setpoint input (fixed setpoint, inching and crawling setpoints)
P450 - P453 Position sensing with pulse encoder
P455 - P458 Connector selector switches
P460 - P473 Motorized potentiometer
P480 - P485 Oscillation
P490 - P498 Definition of "Motor interface”
P500 - P503 Configuring of torque shell input
P509 - P515 Speed limiting controller
P519 - P530 Friction compensation
P540 - P546 Compensation of moment of inertia (dv/dt injection)
P550 - P567 Speed controller (further parameters for the speed controller P200 - P236)
P580 - P583 Field reversal
P590 - P597 Input quantities for signals
P600 - P647 Configuring of closed-loop control
P648 - P691 Control word, status word
P692 - P698 Further configuring measures
P700 - P746 Analog inputs (main actual value, main setpoint, selectable inputs)
P749 - P769 Analog outputs
P770 - P778 Binary outputs
P780 - P819 Configuration of serial interfaces on basic converter
P820 - P821 Deactivation of monitoring functions
r824 - r829 Compensation values
P830 Thyristor diagnosis
10-2 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Range of parameter numbers Function
P831 - P899 Parameters for DriveMonitor and OP1S
P918 - P927 Profile parameters
r947 - P952 Fault memory
r953 - r960 Visualization parameters: Alarms
r964 Device identification
r967 - r968 Visualization parameters: Control and status word
P970 - r999 Resetting and storing parameters, list of existing and modified P and r parameters
U710 - n739 Configuration of supplementary boards in board locations 2 and 3
n980 - n999 List of existing and modified U and n parameters
SIEMENS Energy & Automation 10-3
SIMOREG DC Master Base Drive Panel Operating Instructions
Overview of abbreviations
Example:
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P520
* 1)
FDS
2)
8) 9)
(G153)
10)
Friction at 0% speed
Setting as % of converter rated DC current or converter rated torque
0.0 to 100.0
[%]
0.1%4)
Ind: 4
FS=0.0 5)
Type: O2 3)
P052 = 3
P051 ≥ 20
Online6)
1) An
* under the parameter number means that the parameter requires confirmation, i.e. the altered value
does not take effect until the P key is pressed.
2) Abbreviation indicating that the parameter belongs to a data set (refers only to indexed parameters) (see
Section 9.11 “Switch over parameter sets“)
FDS Parameter belongs to the function data set (see Section 9.1, subsection "Data sets")
BDS Parameter belongs to the BICO data set (see Section 9.1, subsection "Data sets")
3) Specification of parameter type
O2 Unsigned 16-bit value
I2 Signed 16-bit value
O4 Unsigned 32-bit value
I4 Signed 32-bit value
V2 Bit-coded quantity
L2 Nibble-coded quantity
4) Setting steps for access via PKW mechanism
5) Factory setting
6) Minimum setting required (P052) to allow display of the relevant parameter
Minimum access level required (P051) to allow modification of the relevant parameter
Online: The parameter can be changed in all converter operating states
Offline: The parameter can only be changed in converter operating states of ≥ o1.0
8)
S00 Parameter belongs to the technology software in the basic converter, S00 option
9) The "OP parameter number" (i.e. the number to be entered via the OP1S operator panel) is specified in
brackets in the "PNU" column for all parameters which are not "P parameters" or "r parameters": e.g. (2010)
under n010 or (2100) under U100.
10) The parameter is shown in the specified function diagram in Section 8 (here G153) in SIMOREG DC Master
Operating Instructions (6RX1700-0AD76)
10-4 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:

SIEMENS Energy & Automation 10-5
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.1 Operating status display
r000 Operating status display
Status display, fault and alarm messages
Torque direction M0, MI or MII (=RUN)
- - No torque direction active
I Torque direction I active (MI)
I I Torque direction II active (MII)
o1 Waiting for operating enable (=READY)
o1.0 Brake release delay time running.
o1.1 Waiting for operating enable at terminal 38.
o1.2 Waiting for operating enable via binector (acc. to selection in
P661) or control word, bit 3 (acc. to selection in P648)
o1.3 Inching command cancellation delay time running.
o1.4 Waiting for field to be reversed.
Waiting for cancellation of command "Brake by field reversal"
o1.5 Waiting for operating enable from optimization run
(the optimization run does not output the operating enable signal
at the end until n<nmin has been reached and SHUTDOWN
input).
o1.6 Waiting for cancellation of immediate pulse disable via binector
(acc. to selection with P177) [SW 1.8 and later]
o2 Wait for setpoint > P091.002
o2.0 If |n-set| (|K0193|) and |n-actual| (K0166) are less than
P091.002, the firing pulses are disabled and the drive goes into
state o2.0. [SW 2.0 and later]
o3 Test phase
o3.0 Waiting for completion of thyrsitor check (selectable function).
o3.1 Waiting for completion of line symmetry check.
o3.2 Waiting for a DC contactor to pick up
o3.3 Waiting for "Main contactor checkback"
(control word 2 bit 31, see P691) [SW 1.8 and later]
o4 Waiting for voltage (armature)
o4.0 Waiting for voltage at power terminals 1U1, 1V1, 1W1 (the
threshold set in parameters P351 and P353 must be exceeded,
see also P078.001)
o4.1 Waiting for fuse monitoring to signal OK [SW 1.7 and later]
o5 Waiting for field current
o5.0 Waiting until actual field current K0266 equals > P396 (FS=50%
of field current setpoint K0275) and for "I field extern > I f min"
(see P265).
o5.1 Waiting for voltage at power terminals 3U1, 3W1
(the threshold set in parameters P351 and P353 must be
exceeded, see also P078.002)
NOTE
The converter dwells in states o4 and o5 for a maximum total delay time
that is set in parameter P089. The appropriate fault message is output if
the corresponding conditions are still not fulfilled at the end of this
period.
o6 Wait status before the line contactor is closed
o6.0 Waiting for auxiliaries to be switched on (delay in P093)
o6.1 Waiting for a setpoint ≤ P091 to be applied to the ramp-function
generator input (K0193)
o7 Waiting for switch-on command (=READY TO SWITCH ON)
o7.0 Waiting for switch-on command via terminal 37.
o7.1 Waiting for switch-on command via binector (acc. to selection in
P654) or control word, bit 0 (acc. to selection in P648).
o7.2 Waiting for cancellation of internal shutdown through input of an
internal shutdown command or
waiting for cancellation of command "Braking with field reversal"
Ind: None
Type: O2
P052 = 3
10-6 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
o7.3 Waiting for completion of "Restore factory settings" operation.
o7.4 Waiting for switch-on command before execution of an
optimization run
o7.5 Wait for completion of "Read in parameter set" operation.
o7.6 Wait for completion of "Load MLFB" operation (performed at
factory)
o7.9 reserved for firmware download for optional supplementary
modules [SW 2.0 and later]
o8 Waiting for acknowledgement of starting lockout
o8.0 Waiting for acknowledgement of starting lockout through input of
SHUTDOWN command (OFF1).
o8.1 Simulation operation active (see under U840) [SW1.7 and later]
o9 Fast stop (OFF3)
o9.0 Fast stop has been input via binector (acc. to selection in P658)
or control word, bit 2 (acc. to selection in P648).
o9.1 Fast stop has been input via binector (acc. to selection in P659).
o9.2 Fast stop has been input via binector (acc. to selection in P660).
o9.3 Fast stop is stored internally (memory can be reset by cancelling
FAST STOP command and entering SHUTDOWN).
o10 Voltage disconnection (OFF2)
o10.0 Voltage disconnection has been input via binector (acc. to
selection in P655) or control word, bit 1 (acc. to selection in
P648).
o10.1 Voltage disconnection has been input via binector (acc. to
selection in P656).
o10.2 Voltage disconnection has been input via binector (acc. to
selection in P657).
o10.3 E-Stop (safety shutdown) has been input via terminal 105 or 107
o10.4 Wait for receipt of a valid telegram on G-SST1 (only if telegram
failure time monitoring is set with P787 ≠ 0)
o10.5 Waiting for receipt of a valid telegram on G-SST2 (only if
telegram failure time monitoring is set with P797 ≠ 0)
o10.6 Waiting for receipt of a valid telegram on G-SST3 (only if
telegram failure time monitoring is set with P807 ≠ 0)
o11 Fault
o11.0 = Fxxx Fault message is displayed, red LED lights up.
o12 Electronics initialization in progress
o12.1 Basic converter electronics initialization in progress
o12.2 Initialization of supplementary board in location 2 in progress
o12.3 Initialization of supplementary board in location 3 in progress
o12.9 Restructuring of parameters in non-volatile storage after
software update (takes approx. 15s)
o13 Software update in progress
o13.0 Waiting for arrival of start command from HEXLOAD PC routine
(press the DOWN key to abort this status and start a RESET)
o13.1 Deletion of Flash EPROM in progress
xxxxx Display of address currently being programmed
o13.2 The Flash EPROM has been successfully programmed
(a RESET is performed automatically after approx. 1 second)
o13.3 Programming of the Flash EPROM has failed
(press UP key to return to operating state o13.0)
o14 Loading of boot sector in progress
(this operation is performed only in factory)
o15 Electronics not connected to voltage
Dark display: Waiting for voltage at terminals 5U1, 5W1
(electronics supply voltage).
SIEMENS Energy & Automation 10-7
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.2 General visualization parameters
r001
(G113)
Display of terminals 4 and 5 (main setpoint) -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r002
(G113)
Analog input, terminals 103 and 104 (main actual value)
-200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r003
(G113)
Analog input, terminals 6 and 7 (selectable input 1) -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r004
(G114)
Analog input, terminals 8 and 9 (selectable input 2) -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r005
(G114)
Analog input, terminals 10 and 11 (selectable input 3) -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r006
(G115)
Analog output, terminals 14 and 15
Display of output value before normalization and offset
-200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r007
(G115)
Analog output, terminals 16 and 17
Display of output value before normalization and offset
-200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r008
(G116)
Analog output, terminals 18 and 19
Display of output value before normalization and offset
-200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r009
(G116)
Analog output, terminals 20 and 21
Display of output value before normalization and offset
-200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r010
(G110)
Display of status of binary inputs
Representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segment ON: Corresponding terminal is activated
(HIGH level is applied)
Segment OFF: Corresponding terminal is not activated
(LOW level is applied)
Segment or bit
0 ....... Terminal 36
1 ....... Terminal 37 (switch-on)
2 ....... Terminal 38 (operating enable)
3 ....... Terminal 39
4 ....... Terminal 40
5 ....... Terminal 41
6 ....... Terminal 42
7 ....... Terminal 43
8 ....... Terminal 211
9 ....... Terminal 212
10 ....... Terminal 213
11 ....... Terminal 214
12 ....... Safety shutdown (E-Stop is applied) 1)
13 ....... (not used)
14 ....... (not used)
15 ....... (not used)
1) The safety shutdown command is applied (segment dark) if
- terminal XS-105 is open (switch operation, see also Section 9)
or
- terminal XS-107 (Stop pushbutton) is opened briefly and terminal XS-
108 (Reset pushbutton) is not yet activated (pushbutton operation,
see also Section 9)
Ind: None
Type: V2
P052 = 3
10-8 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r011
(G112)
(G117)
Display of status of binary outputs
Representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segment ON: Corresponding terminal is activated
(HIGH level is applied) or overloaded or short-circuited
Segment OFF: Corresponding terminal is not activated
(LOW level is applied) or not overloaded or not short-
circuited
Display of status of binary output terminals:
Segment or bit
0 ..... Terminal 46
1 ..... Terminal 48
2 ..... Terminal 50
3 ..... Terminal 52
7 ..... Terminal 109/110 (relay contact for line contactor)
Display of overloading of binary outputs:
Segment or bit
8 ..... Terminal 46
9 ..... Terminal 48
10 .... Terminal 50
11 .... Terminal 52
12 .... Terminal 26 (15V output)
13 .... Terminal 34, 44 and/or 210 (24V output)
Ind: None
Type: V2
P052 = 3
r012
(G185)
Motor temperature
Display of motor temperature when a KTY 84 temperature sensor is
connected (P490.x=1).
A value of "0" is always output in r012 when a PTC thermistor or no
temperature sensor is installed.
i001: Motor temperature 1 (sensor at terminals 22 / 23)
i002: Motor temperature 2 (sensor at terminals 204 / 205)
-58 to +200
[°C]
1°C
Ind: 2
Type: I2
P052 = 3
r013 Heatsink temperature
Display of heatsink temperature
-47 to +200
[°C]
1°C
Ind: None
Type: I2
P052 = 3
r014 Temperature rise
i001: Calculated motor temperature rise (see P114)
i002: Calculated thyristor temperature rise (see P075)
0.0 to 200.0
[%]
0.1%
Ind: 2
Type: O2
P052 = 3
r015 Display of line voltage (armature)
(generated as arithmetic rectification average, RMS value display applies to
sinusoidal voltage, average over 3 line-to-line voltages)
0.0 to 2800.0
[V]
0.1V
Ind: None
Type: O2
P052 = 3
r016 Display of line voltage (field)
(generated as arithmetic rectification average, RMS value display applies to
sinusoidal voltage)
0.0 to 800.0
[V]
0.1V
Ind: None
Type: O2
P052 = 3
r017 Display of line frequency 0.00 to 120.00
[Hz]
0.01Hz
Ind: None
Type: O2
P052 = 3
r018
(G163)
Display of firing angle (armature) 0.00 to 180.00
[degrees]
0.01degrees
Ind: None
Type: O2
P052 = 3
r019
(G162)
Display of actual armature current
The internal actual armature current value is displayed (arithmetic average
over the last 6 current peaks in each case)
-400.0 to 400.0
[% of P100]
0.1% of P100
Ind: None
Type: I2
P052 = 3
r020
(G162)
Display of the absolute value of armature current setpoint 0.0 to 300.0
[% of P100]
0.1% of P100
Ind: None
Type: I2
P052 = 3
r021
(G160)
Display of torque setpoint after torque limitation
Steps: 1 =
∧ 0.1% of rated motor torque (=rated motor armature current
(P100) * magnetic flux at rated motor field current (P102))
-400.0 to 400.0
[%]
0.1% (see column on
left)
Ind: None
Type: I2
P052 = 3
SIEMENS Energy & Automation 10-9
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r022
(G160)
Display of torque setpoint before torque limitation
Steps: 1 =
∧ 0.1% of rated motor torque (=rated motor armature current
(P100) * magnetic flux at rated motor field current (P102))
-400.0 to 400.0
[%]
0.1% (see column on
left)
Ind: None
Type: I2
P052 = 3
r023
(G152)
Display of speed controller setpoint/actual value deviation -200.00 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r024
(G145)
Display of actual speed value from pulse encoder -200.00 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r025
(G151)
Display of actual speed controller value -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r026
(G152)
Display of speed controller setpoint -200.0 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r027
(G136)
Display of ramp-function generator output -200.00 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r028
(G136)
Display of ramp-function generator input -200.00 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r029
(G135)
Display of main setpoint before limitation -200.00 to 199.99
[%]
0.01%
Ind: None
Type: I2
P052 = 3
r034
(G166)
Display of firing angle (field) 0.00 to 180.00
[degrees]
0.01degrees
Ind: None
Type: O2
P052 = 3
r035
(G166)
Display of field current controller actual value 0.0 to 199.9
[% of P102]
0.1% of P102
Ind: None
Type: O2
P052 = 3
r036
(G166)
Display of field current controller setpoint 0.0 to 199.9
[% of P102]
0.1% of P102
Ind: None
Type: O2
P052 = 3
r037
(G165)
Display of actual EMF value -1500.0 to 1500.0
[V]
0.1V
Ind: None
Type: I2
P052 = 3
r038 Display of actual armature voltage value -1500.0 to 1500.0
[V]
0.1V
Ind: None
Type: I2
P052 = 3
r039
(G165)
Display of EMF setpoint
This parameter displays the EMF setpoint which is applied as the control
quantity in the field-weakening range.
This value is calculated from:
Umotorrated – Imotorrated * RA (= P101 – P100 * P110)
0.0 to 1500.0
[V]
0.1V
Ind: None
Type: O2
P052 = 3
10-10 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r040 Display of limitations:
Representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segment ON: Corresponding limitation is reached
Segment OFF: Corresponding limitation is not reached
Segment or bit
0 αW limit (field) reached (P251)
1 Negative current limit (field) reached (K0274)
2 αW limit (armature) reached (αW acc. to P151
for continuous current, 165° for discontinuous current)
3 ....... Negative current limit (armature) reached (K0132)
4 ....... Negative maximum speed reached (P513)
Speed limiting controller responds (B0201)
5 ....... Negative torque limit reached (B0203)
6 ....... Neg. limitation at ramp generator output reached (K0182)
7 ....... Neg. limitation at ramp generator input reached (K0197)
8 ....... αG limit (field) reached (P250)
9 ....... Positive current limit (field) reached (K0273)
10 ....... αG limit (armature) reached (P150)
11 ....... Positive current limit (armature) reached (K0131)
12 ....... Positive maximum speed reached (P512)
Speed limiting controller responds (B0201)
13 ....... Positive torque limit reached (B0202)
14 ....... Pos. limitation at ramp generator output reached (K0181)
15 ....... Pos. limitation at ramp generator input reached (K0196)
Note: This parameter has the same bit assignments as connector K0810.
Ind: None
Type: V2
P052 = 3
Connector and binector displays
r041
(G121)
High-resolution connector display:
i001: Display of connector selected in P042.01
i002: Display of connector selected in P042.02
The display value is filtered with a time constant of 300ms (see Section 8,
Sheet G121)
-200.00 to 199.99
[%]
0.01%
Ind: 2
Type: I2
P052 = 3
P042
*
(G121)
High-resolution connector display:
i001: Selection of connector to be displayed in r041.01
i002: Selection of connector to be displayed in r041.02
The display value is filtered with a time constant of 300ms (see Section 8,
Sheet G121)
All connector
numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Online
r043
(G121)
Connector display:
i001: Display of connector selected in P044.01
i002: Display of connector selected in P044.02
i003: Display of connector selected in P044.03
i004: Display of connector selected in P044.04
i005: Display of connector selected in P044.05
i006: Display of connector selected in P044.06
i007: Display of connector selected in P044.07
-200.0 to 199.9
[%]
0.1%
Ind: 7
Type: I2
P052 = 3
P044
*
(G121)
Connector display:
i001: Selection of connector displayed in r043.01
i002: Selection of connector displayed in r043.02
i003: Selection of connector displayed in r043.03
i004: Selection of connector displayed in r043.04
i005: Selection of connector displayed in r043.05
i006: Selection of connector displayed in r043.06
i007: Selection of connector displayed in r043.07
All connector
numbers
1
Ind: 7
FS=0
Type: L2
P052 = 3
P051 = 40
Online
r045
(G121)
Binector display:
i001: Display of binector selected in P046.01
i002: Display of binector selected in P046.02
i003: Display of binector selected in P046.03
i004: Display of binector selected in P046.04
0 to 1 Ind: 4
Type: O2
P052 = 3
SIEMENS Energy & Automation 10-11
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P046
*
(G121)
Binector display:
i001: Selection of binector displayed in r045.01
i002: Selection of binector displayed in r045.02
i003: Selection of binector displayed in r045.03
i004: Selection of binector displayed in r045.04
All binector numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
Online
r047 Display of fault diagnostic memory
Provides more detailed information about the cause of a fault after activation
of a fault message (see Section 10).
i001 Word 1 (fault value)
i002 Word 2
...
i016 Word 16 (fault number)
0 to 65535
1
Ind: 16
Type: O2
P052 = 3
r048
(G189)
Hours run
Display of time (hours) in which drive has been operating in states I, II or - -.
All times of ≥ approx. 0.1 s are included in the count.
0 to 65535
[hours]
1 hour
Ind: None
Type: O2
P052 = 3
r049
(G189)
Fault time
Display of time at which the current fault, and the last 7 acknowledged
faults, were activated.
i001: Current fault hours
i002: 1st acknowledged fault hours
i003: 2nd acknowledged fault hours
i004: 3rd acknowledged fault hours
i005: 4th acknowledged fault hours
i006: 5th acknowledged fault hours
i007: 6th acknowledged fault hours
i008: 7th acknowledged fault hours
0 to 65535
[hours]
1 hour
Ind: 8
Type: O2
P052 = 3
P050
* Language
Language of plaintext display on optional OP1S operator panel and in
DriveMonitor PC service routine
0: German
1: English
2: Spanish
3: French
4: Italian
0 to 4
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 ≥ 0
Online
10.3 Access authorization levels
P051
* Key parameters
0 No access authorization
6 Do not set (for use by DriveMonitor)
7 Do not set (for use by DriveMonitor)
9 Do not set (for use by DriveMonitor)
21 Restore factory settings
All parameters are reset to their defaults (factory settings).
Parameter P051 is then automatically reset to factory setting
"40".
22 Execute internal offset compensation (see Section 7.4)
25 Optimization run for precontrol and current controller (armature
and field) (see Section 7.5)
26 Optimization run for speed controller (see Section 7.5)
27 Optimization run for field weakening (see Section 7.5)
28 Optimization run for compensation of friction and moment of
inertia (see Section 7.5)
29 Optimization run for the speed controller with an oscillating
mechanical system (see Section 7.5)
40 Access authorization to parameter values for authorized service
personnel
see column on left Ind: None
FS=40
Type: O2
P052 = 3
P051 ≥ 0
Online
P052
*
Selection of display parameters
0 0 Display only parameters that are not set to original factory
settings
1 Display only parameters for simple applications
3 Display all parameters used
0, 1, 3 Ind: None
FS=3
Type: O2
P052 = 3
P051 ≥ 0
Online
10-12 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P053
* Control word for the permanent memory [SW 1.7 and later]
Disabling or enabling write accesses to the permanent memory
i001: Disabling or enabling write accesses to the parameter memory
0 Only save parameter P053 in the permanent memory;
parameter changes are active immediately but the changed
values are only stored temporarily and are lost when the
electronics supply voltage is switched off
1 Save all parameter values in the permanent memory
i002: Disabling or enabling write accesses to the memory of the
nonvolatile process data
0 Do not save nonvolatile process data in the permanent
memory
1 Save all nonvolatile process data in the permanent memory
If the nonvolatile process data are not stored (P053.002=0),
data are lost when the electronics supply of the SIMOREG DC
Master is switched off, i.e. they have the value 0 after the
electronics supply is switched on again:
K0240: Setpoint of the motor potentiometer
K0309: Motor heating
K0310: Thyristor heating
K9195: Output of the 1st tracking/storage element
K9196: Output of the 2nd tracking/storage element
0 to 1
1
Ind: 2
FS=1
Type: O2
P052 = 3
P051 = 0
on-line
P054 OP1S – Background lighting
0 ON continuously
1 ON when panel is in use
0, 1 Ind: None
FS=0
Type: O2
P052 = 3
P051 ≥ 0
Online
P055
*
(G175)
Copy function data set
This parameter allows parameter set 1, 2, 3 or 4 to be copied to parameter
set 1, 2, 3 or 4. This function is applicable only to parameters with 4 indices
in the function data set (see also Section 9.1, Data sets and Section 9.11,
and Section 8, Sheet G175).
0xy Do nothing, automatic resetting value at the end of a copy
operation.
1xy The contents of parameter set x (source data set, x=1, 2, 3 or 4)
are copied to parameter set y (target data set, y=1, 2, 3 or 4)
(parameter set x remains unchanged, the original contents of
parameter set y are overwritten).
x and y are the respective parameter set numbers (1, 2, 3 or 4)
of the source and target parameter sets.
The copy operation is started by switching P055 over into parameter mode
when P055=1xy.
During the copy operation, the numbers of the parameters being copied are
displayed on the operator panel (PMU).
At the end of the copy operation, P055 is reset to P055=0xy.
011 to 143
1
Ind: None
FS=012
Type: L2
P052 = 3
P051 = 40
Offline
r056
(G175) Display of active function data set 1 to 4
1
Ind: None
Type: O2
P052 = 3
P057
*
(G175)
Copy Bico data set
This parameter allows parameter set 1 or 2 to be copied to parameter set 1
or 2. This function is applicable only to parameters with 2 indices in the Bico
data set (see also Section 9.1, Data sets and Section 9.11, and Section 8,
Sheet G175).
0xy Do nothing, automatic resetting value at the end of a copy
operation.
1xy The contents of parameter set x (source data set, x=1 or 2) are
copied to parameter set y (target data set, y=1 or 2) (parameter
set x remains unchanged, the original contents of parameter set
y are overwritten).
x and y are the respective parameter set numbers (1 or 2) of the
source and target parameter sets.
The copy operation is started by switching P057 over into parameter mode
when P057=1xy.
During the copy operation, the numbers of the parameters being copied are
displayed on the operator panel (PMU).
At the end of the copy operation, P057 is reset to P057=0xy.
011 to 121
1
Ind: None
FS=012
Type: L2
P052 = 3
P051 = 40
Offline
r058
(G175) Display of active Bico data set 1 to 2
1
Ind: None
Type: O2
P052 = 3
SIEMENS Energy & Automation 10-13
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r059 Display of operating state
Meaning as for r000
0.0 to 14.5
0.1
Ind: None
Type: O2
P052 = 3
10.4 Definition of SIMOREG DC MASTER converter
r060
(G101)
Software version
Converter software release
i001: CUD
i002: Slot D (board location 2)
i003: Slot E (board location 2)
i004: Slot F (board location 3)
i005: Slot G (board location 3)
0.0 to 9.9
0.1
Ind: 5
Type: O2
P052 = 3
r061
(G101)
Creation date of software
i001: Year
i002: Month
i003: Day
i004: Hour
i005: Minute
Ind: 5
Type: O2
P052 = 3
r062
(G101)
Checksum
i001: Converter firmware checksum
i002: Boot sector checksum
Ind: 2
Type: L2
P052 = 3
r063
(G101)
Board code
Identification code of boards mounted in locations 1 to 3 of electronics box.
CUDx
FD
EG
132
Arrangement of
board locations 1 to 3
and slots D to G in
electronics box
i001: Board in location 1
71: CUD1
72: CUD1 + CUD2
i002: Board in slot D (upper slot of location 2)
111: Pulse encoder board (SBP) [SW 1.8 and later]
131 to 139: Technology board
141 to 149: Communications board
151, 152, 161: Special board (EB1, EB2, SLB)
i003: Board in slot E (lower slot of location 2)
111: Pulse encoder board (SBP) [SW 1.8 and later]
131 to 139: Technology board
141 to 149: Communications board
151, 152, 161: Special board (EB1, EB2, SLB)
i004: Board in slot F (upper slot of location 3)
111: Pulse encoder board (SBP) [SW 1.8 and later]
141 to 149: Communications board
151, 152, 161: Special board (EB1, EB2, SLB)
i005: Board in slot G (lower slot of location 3)
111: Pulse encoder board (SBP) [SW 1.8 and later]
141 to 149: Communications board
151, 152, 161: Special board (EB1, EB2, SLB)
Ind: 5
Type: O2
P052 = 3
10-14 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r064
(G101)
Board compatibility
Compatibility identifier of boards in locations 1 to 3 of electronics box.
The compatibility identifier is bit-coded. To ensure the compatibility of a
board, it must have a "1" setting at the same bit location of the parameter
value as the CUD (in location 1 / index i001).
Indices:
i001: Compatibility identifier of board in location 1
i002: Compatibility identifier of board in slot D
i003: Compatibility identifier of board in slot E
i004: Compatibility identifier of board in slot F
i005: Compatibility identifier of board in slot G
Example:
Index Value Bit representation Compatible with CUD
i001 253 0000 0000 1111 1101
i002 002 0000 0000 0000 0010 no
i003 001 0000 0000 0000 0001 yes
Ind: 5
Type: O2
P052 = 3
r065
(G101)
Software identifiers
Extended software version identifiers in locations 1, 2, and 3 of the
electronics box
Indices:
i001: Software identifier of the board in location 1
i002: Software identifier of the board in slot D
i003: Software identifier of the board in slot E
i004: Software identifier of the board in slot F
i005: Software identifier of the board in slot G
Ind: 5
Type: O2
P052 = 3
P067
*
(G101)
Load class [SW1.8 and later]
1 Load class DC I
2 Load class DC II
3 Load class DC III
4 Load class DC IV
5 US rating
The load classes are described in Chapter 3.4.1.
Depending on the load class selected, the device rated DC of the
SIMOREG DC Master is reduced to a value of different magnitude to suit
the power section and load class.
The current value of the device rated DC is indicated in parameter r072.002.
Notes:
If the device rated DC is reduced via parameter P076.001, the lesser of the
two values is active.
If you set a value of > 1 in P067, you must ensure that the "Dynamic
overload capability of power module“ is enabled, i.e. a value of > 0 must be
set in parameter P075.
The SIMOREG DC Master does not monitor for compliance with the criteria
of the load class set in parameter P067. If permitted by the power module,
the unit can operate for overload periods in excess of those defined by the
load class. The permissible overload period for the installed power module
is always longer than the period defined for the load class. The SIMOREG
DC Master does monitor the actual permissible overload period for the
power module. See Section 9.15.
1 to 5
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
off-line
r068
(G101)
Options according to rating plate
0 No option
1 Option L04 (low voltage, 85V)
2 Option K00 (terminal expansion)
3 L04 and K00
Ind: None
Type: 02
P052 = 3
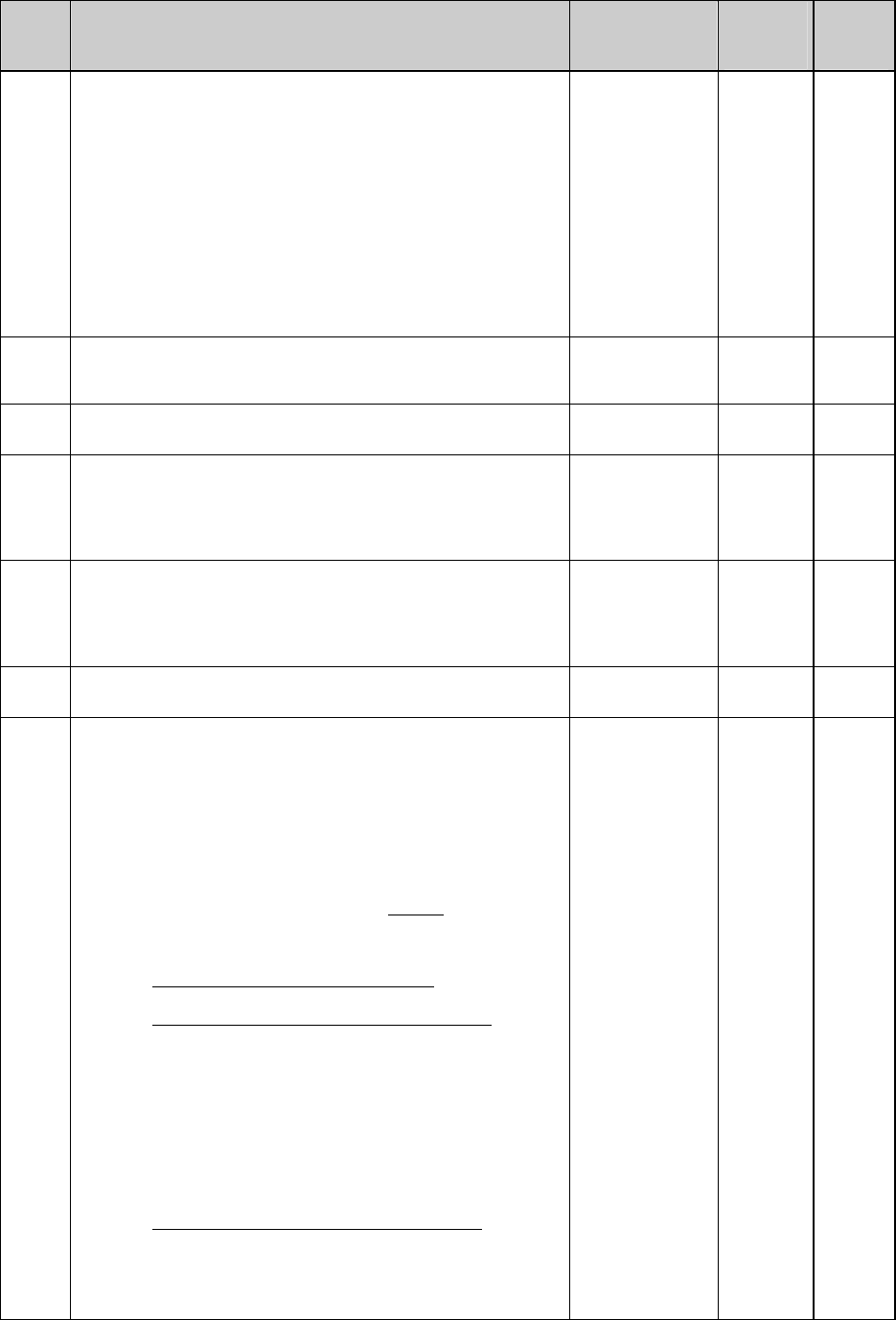
SIEMENS Energy & Automation 10-15
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r069
(G101)
Serial number of SIMOREG DC Master converter
i001: 1st and 2nd places of serial number
i002: 3rd and 4th places of serial number
i003: 5th and 6th places of serial number
i004: 7th and 8th places of serial number
i005: 9th and 10th places of serial number
i006: 11th and 12th places of serial number
i007: 13th and 14th places of serial number
i008 to i015: 0
i016: Checksum for serial number
The serial number ASCII code is displayed in this parameter. The number is
output in plaintext on the OP1S panel.
Ind: 16
Type: L2
P052 = 3
r070
(G101)
MLFB (order number) of SIMOREG DC Master converter
The corresponding MLFB is displayed in encoded form in this parameter.
The MLFB is displayed in plaintext on the OP1S panel.
0 to 120
1
Ind: None
Type: O2
P052 = 3
r071
(G101)
Converter rated supply voltage (armature)
Converter rated supply voltage (armature) as specified on rating plate
10 to 830
[V]
1V
Ind: None
Type: O2
P052 = 3
r072
(G101)
Converter rated DC current (armature)
i001: Converter rated DC current (armature) as specified on rating
plate (output DC current at power terminals 1C1 and 1D1)
i002: Actual converter rated DC current (armature) according to
setting in parameter P076.001 or P067
0.0 to 6553.5
[A]
0.1A
Ind: 2
Type: O2
P052 = 3
r073
(G101)
Converter rated DC current (field)
i001: Converter rated DC current (field) as specified on rating plate
(output DC current at power terminals 3C and 3D)
i002: Actual converter rated DC current (field) as set in parameter
P076.002
0.00 to 100.00
[A]
0.01A
Ind: 2
Type: O2
P052 = 3
r074
(G101)
Converter rated supply voltage (field)
Converter rated supply voltage (field) as specified on rating plate
10 to 460
[V]
1V
Ind: None
Type: O2
P052 = 3
P075
*
(G101)
(G161)
Control word for power section
Selection of operating characteristics of thermal monitor (I2t monitoring) of
power section (see also Section 9.16 ”Dynamic overload capability of power
section”).
The ”Dynamic overload capability of the power module“ allows the
SIMOREG DC Master to operate for short periods on armature currents that
are higher than the converter rated DC current specified on the rating plate
(=r072.001).
The permissible overload period is determined solely by the power module
and the preceding operating history.
The "thermal power module monitoring" function does not monitor operation
in compliance with the load class criteria set in parameter P067. If permitted
by the power module, the unit can operate for overload periods in excess of
those defined by the load class.
0 Dynamic overload capability is not permitted
The armature current is limited to P077 * r072.001.
1 Dynamic overload capability is permitted, alarm A039
The armature current is limited to P077 * 1.8 * r072.001 as long
as the calculated thyristor temperature does not exceed the
permitted value.
If the temperature exceeds the permitted value, the SIMOREG
DC Master protects itself by reducing the current limit to P077 *
r072.001. Alarm A039 is output at the same time.
The armature current setpoint limit is not increased to P077 *
1.8 * r072.001 (alarm A039 also disappears) until the calculated
thyristor temperature has dropped below the limit value again
and the armature current setpoint is lower than the converter
rated DC current (r072.001).
2 Dynamic overload capability is permitted, fault F039
The armature current is limited to P077 * 1.8 * r072.001 as long
as the calculated thyristor temperature does not exceed the
permitted value.
Fault message F039 is output if the permissible temperature
limit is exceeded.
0 to 2
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
off-line
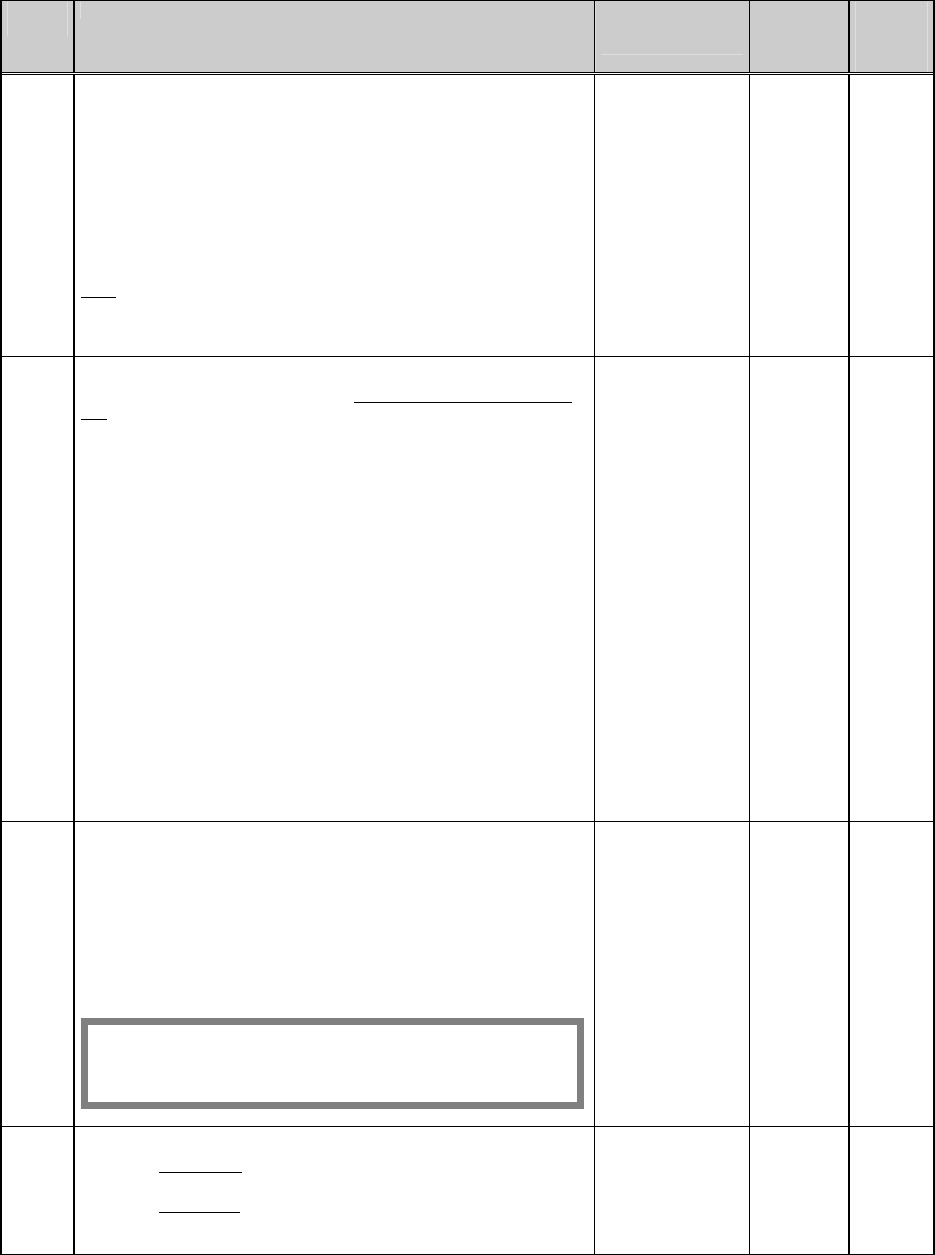
10-16 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P076
*
(G101)
Reduction of converter rated DC current
i001: Reduction of converter rated DC current (armature)
i002: Reduction of converter rated DC current (field)
For the purpose of achieving a close match between the converter and
motor, the converter rated DC current is reduced to the value entered here.
The current value of the device rated DC is indicated in parameter r072.002.
The following values can be set:
10.0%, 20.0%, 33.3%, 40.0%, 50.0%, 60.0%, 66.6% 70.0%, 80.0%, 90.0%
and 100.0%
Note:
If a load class is selected in parameter P067 which causes a reduction in
the converter rated DC current, then the lower of the two parameter setting
values is effective.
see column on left Ind: 2
FS=100.0
Type: O2
P052 = 3
P051 = 40
Offline
P077
(G101)
(G161)
Total thermal reduction factor
The factor set in this parameter effects a reduction in the armature current
limit (as defined by the setting in P075).
The converter must be derated in the following instances:
– Operation at high ambient temperatures:
If the ambient temperature is higher than 45°C (on naturally air-cooled
converters) or 35°C (on converters with forced air-cooling), the possible
load capability of the converter decreases as a consequence of the
maximum permissible thyristor junction temperature by percentage
reduction "a" as specified in the table in Section 3.4, resulting in a
temperature reduction factor of
ktemp = k1
– Installation altitudes of over 1000m above sea level:
In this case, the lower air density and thus less effective cooling reduce
the possible load capability of the converter to the percentage load "b1"
specified in the table in Section 3.4, resulting in an installation altitude
reduction factor of
kaltitude = k2
P077 must be set as follows: P077 = ktemp * kaltitude
Note:
A general reduction in the converter rated DC current (through appropriate
setting of parameter P076.001) can be included in this calculation.
0.50 to 1.00
0.01
Ind: None
FS=1.00
Type: O2
P052 = 3
P051 = 40
Offline
P078
(G101)
Reduction of converter rated supply voltage
i001: Rated input voltage converter armature
i002: Rated input voltage converter field
The rated voltage value of the power system actually used to supply the
power section must be set in this parameter.
This setting acts as the reference for the undervoltage, overvoltage and
phase failure monitoring functions (see also P351, P352 and P353) as well
as for connectors K0285 to K0289, K0291, K0292, K0301 K0302, K0303
and K0305
NOTE
If a SIMOREG converter is operated at a rated input voltage that is
lower than its rated supply voltage, then the rated DC voltage specified
in the technical data (Section 3.4) cannot be reached !
i001: 10 to r071
i002: 10 to r074
[V]
1V
Ind: 2
FS=
i001: r071
i002: 400V
except when
r071 = 460V
then 460V
Type: O2
P052 = 3
P051 = 40
Offline
P079
*
(G163)
Short pulses / long pulses, armature gating unit
0 Short pulses (0.89 ms=approx. 16 degrees at 50 Hz) are output
on the armature gating unit.
1 Long pulses (pulse duration up to approx. 0.1 ms before next
pulse) are output on the armature gating unit (e.g. required in
cases where field is supplied via armature terminals).
0 to 1
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
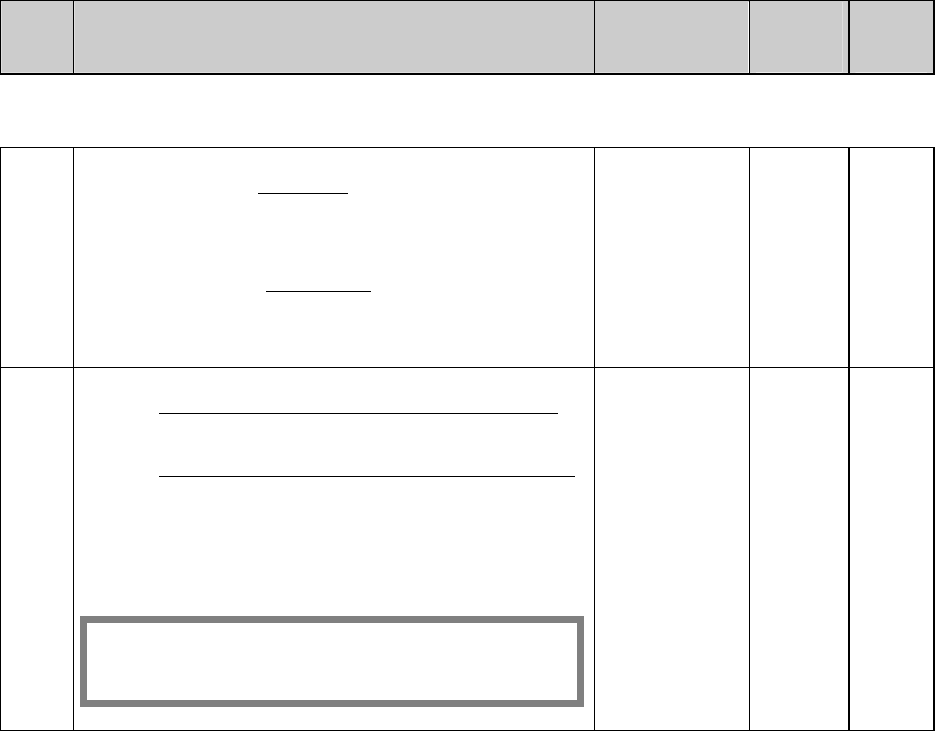
SIEMENS Energy & Automation 10-17
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.5 Setting values for converter control
P080
*
(G140)
Control word for brake control
1 The brake is a holding brake
When the "Operating enable" command is cancelled or when
the "Voltage disconnection" or "E-Stop" command is input, the
"Close brake" command is not input until n< nmin (P370, P371)
is reached.
2 The brake is an operating brake
When the "Operating enable" command is cancelled or when
the "Voltage disconnection" or "E-Stop" command is input, the
"Close brake" command is input immediately, i.e. while the
motor is still rotating.
1 to 2 Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P081
*
(G165)
EMF-dependent field weakening
0 No field-weakening operation as a function of speed or EMF
(100% of rated motor field current is applied constantly as the
internal field current setpoint).
1 Field-weakening operation by internal closed-loop EMF control
to ensure that in field-weakening operation, i.e. at speeds above
the motor rated speed (="field-weakening activation limit
speed”), the motor EMF is maintained constantly at the setpoint
EMFset (K0289) = P101 – P100 * P110 (field current setpoint is
the product of the EMF controller output and the precontrol
component determined by the actual speed according to the
field characteristic).
NOTICE
When P081=1, a valid field characteristic must be available (P117=1),
otherwise the optimization run for field weakening (P051=27) must be
executed.
0 to 1
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
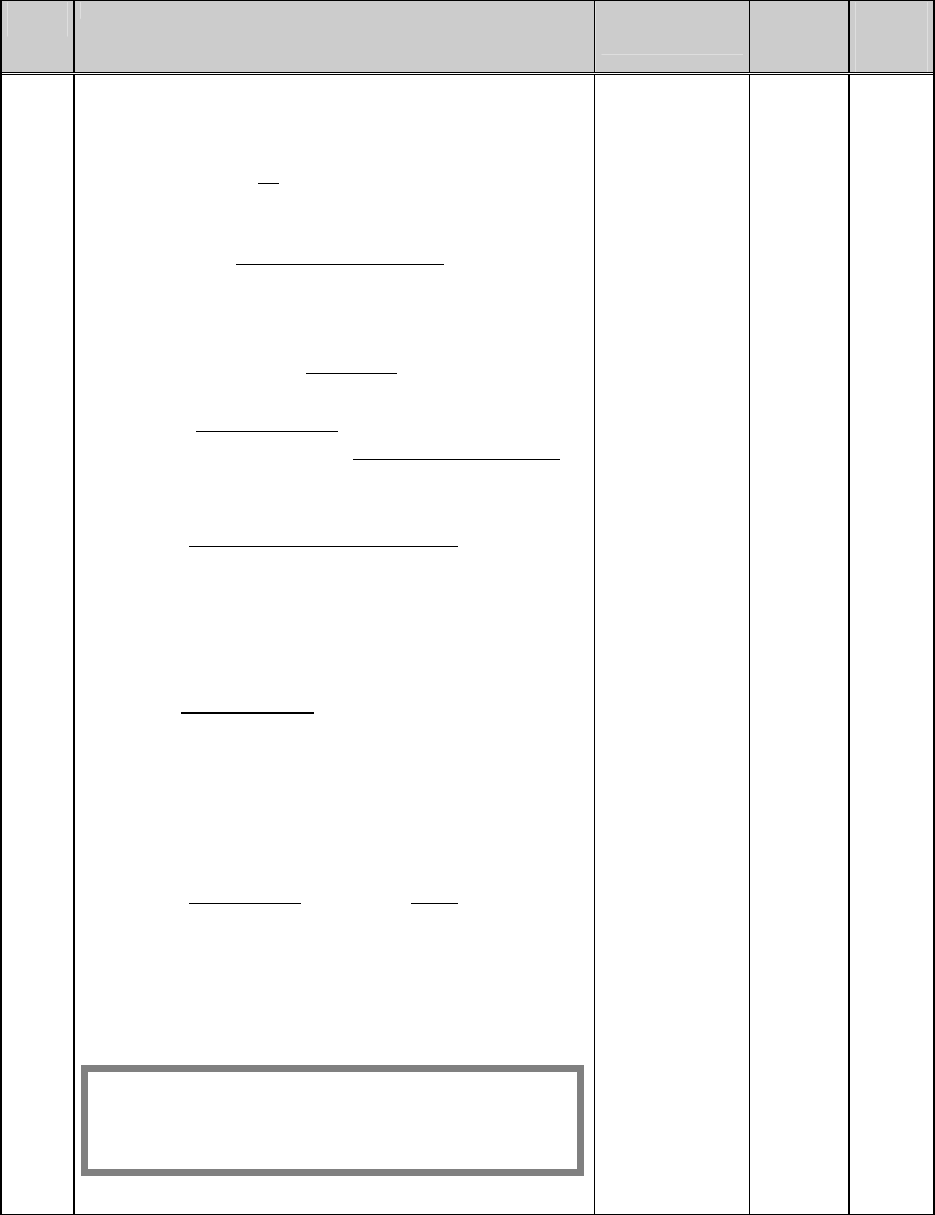
10-18 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P082
*
(G166)
Operating mode for field
No field
0 No field is used (e.g. in the case of permanent-field motors). The
field gating pulses are disabled. Unlike all other cases, the motor
flux (K0290) is not calculated according to the field characteristic
(P120 to P139) as a function of the actual field current (K0265),
but set to the value for 100% rated flux.
Internal field power module
1 The field is switched with the line contactor - this setting must be
selected if the mains supplies for the field and armature power
sections are connected or disconnected simultaneously (field
gating pulses are enabled/disabled at the same time as the line
contactor is closed/opened, the field current decays with the
field time constant).
2 Automatic injection of standstill field set in P257 after expiry of a
time period set in P258, after converter has reached operating
state o7 or higher.
3 Field ACTIVE continuously.
4 The field is switched with the "Auxiliaries ON“ (B0251) signal
External field power module (40.00A field)
11 Board C98043-A7044 (40A field power module) is inserted at
connector X102 on board C98043-A7002 or C98043-A7003.
The field is controlled as described in para. 1.
12 As described in para. 11, but
the field is controlled as described in para. 2.
13 As described in para. 11, but
the field is controlled as described in para. 3.
14 As described in para. 11, but
the field is controlled as described in para. 4.
External field device
21 An external field device is used. The setpoint for the external
field device is supplied via connector K0268 (e.g. via an analog
output or the peer-to-peer interface).
The rated DC current of the external field device is set in
parameter U838. This value is also displayed in parameter
r073.001. P076.002 is inoperative.
If the external field device supplies an actual field current signal,
then this can be fed in at P612. If not, then P263 should be set
to 1 or 2.
If the external field device supplies an "I field < I field min“
signal, then this can be fed in at P265.
The field is controlled as described in para. 1.
22 As described in para. 21, but
the field is controlled as described in para. 2.
23 As described in para. 21, but
the field is controlled as described in para. 3.
24 As described in para. 21, but
the field is controlled as described in para. 4.
NOTICE
Even though changes to the parameter value from > 0 to = 0 are
accepted in operating states of ≥ o1.0, they do not take effect until the
converter reaches an operating state of ≥ o7.0.
[Values 11 to 24 can be set only in SW 1.9 and later]
0 to 24
1
Ind: None
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-19
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P083
*
FDS
(G151)
Selection of actual speed value
0 Actual speed value is not yet selected (fixed value 0%)
1 Actual speed value supplied by "Main actual value” channel
(K0013) (terminals XT.103, XT.104)
2 Actual speed value supplied by "Actual speed from pulse
encoder” channel (K0040)
3 Actual speed value supplied by "Actual EMF" channel (K0287),
but weighted with P115 (operation without tacho)
Note:
The effectiveness of the overspeed monitoring function (see
Section 8, function diagram G188) is restricted, since very high
motor speeds can be reached if the EMF is utilized as the actual
speed value when the actual field current value is too low.
4 Actual speed value is wired up freely (selected in P609)
0 to 4
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P084
*
(G160)
Selection of closed-loop speed / current or torque control
1 Operation under closed-loop speed control
2 Operation under closed-loop current / torque control
The setpoint supplied by the ramp-function generator output is
input as a current or torque setpoint (speed controller is
bypassed)
1 to 2
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P085 Wait period after cancellation of inching command
After an inching command has been cancelled, the drive dwells in operating
state o1.3 for the time period set in this parameter with the controllers
disabled, but the line contactor closed. This wait period does not commence
until n<nmin (P370, P371) is reached. If a new inching command is input
within this period, then the drive switches to the next operating state (o1.2 or
lower). However, if the time runs out without a new inching command being
entered, then the line contactor drops out and the drive switches to
operating state o7 (see also Section 9).
0.0 to 60.0
[s]
0.1s
Ind: None
FS=10.0
Type: O2
P052 = 3
P051 = 40
Online
P086 Voltage failure period for automatic restart
If the voltage fails (F001, F004) at one of the terminals 1U1, 1V1, 1W1, 3U1,
3W1, 5U1 or 5W1, or if it drops below a certain threshold (F006
undervoltage) or exceeds a certain threshold (F007 overvoltage), or its
frequency is too low (F008 frequency < P363) or too high (F009 frequency >
P364), or if the actual field current drops to below 50% of the field current
setpoint for more than 0.5s (F005), then the corresponding fault message is
activated only if the fault condition has not been eliminated within the
"Automatic restart" period set in this parameter.
The gating pulses and controllers are disabled while the fault conditions are
present. The converter dwells in operating state o4 (in the case of armature
line voltage fault) or o5 (in the case of field line voltage or field current fault)
or in o13.
Setting this parameter to 0.00s deactivates the "Automatic restart" function.
NOTE:
Setting values higher than 2.00s are effective only in relation to the voltages
at terminals 1U1, 1V1, 1W1, 3U1 and 3W1.
A "restart time" of 2.00 s is operative in this case for the voltage at terminals
5U1 and 5W1 (electronics power supply).
0.00 to 10.00
[s]
0.01s
Ind: None
FS=0.40
Type: O2
P052 = 3
P051 = 40
Online
P087
(G140)
Brake release time
-10.00 to -0.01 s
The "Release brake" command is delayed in relation to enabling of the
gating pulses for thyristors and controllers (i.e. operating state I, II or --) by
the delay time set in this parameter. During this period, the motor rotates
against the closed brake. This setting is useful, for example, for vertical
loads.
0.00 to +10.00 s
When a "Switch-on" or "Inching" or "Crawling" command is input with
"Operating enable", the drive dwells in operating state o1.0 for the delay
period set in this parameter; the internal controller enabling signal, and thus
enabling of the thyristor gating pulses, do not take effect until the delay
period has elapsed so as to give the holding brake time to open.
-10.00 to 10.00
[s]
0.01s
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
10-20 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P088
(G140)
(G187)
Brake closing time
When the "Switch-on" or "Inching" or "Crawling" command is cancelled, or
when the "Switch-on" command is not applied, or when the "Fast stop"
command is input, the internal controller disabling signal, and thus the
thyristor gating pulse disabling signal, is not actually activated after n<nmin
has been reached until the time delay set in this parameter has elapsed.
During this period, the drive continues to produce a torque (operating state
I, II or – –), so as to give the holding brake enough time to close.
0.00 to 10.00
[s]
0.01s
Ind: None
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P089 Maximum wait time for voltage to appear at power section
When the line contactor has dropped out and the "Switch-on" or "Inching" or
"Crawling" command is applied, the converter waits in operating states o4
and o5 for voltage to appear at the power section, for the actual field current
value (K0265) to reach > 50% of the field current setpoint (K0268). The
corresponding fault message is activated if no power section voltage and no
field current is detected. This parameter specifies the maximum total delay
period in which the drive may dwell in operating states o4 and o5 (response
threshold for function which checks for voltage at power section, see
parameter P353).
0.0 to 60.0
[s]
0.1s
Ind: None
FS=2.0
Type: O2
P052 = 3
P051 = 40
Online
P090 Stabilization time for line voltage
When the line contactor has dropped out and the "Switch-on" or "Inching" or
"Crawling" command is applied, or after a phase failure has been detected
in the armature or field mains supply with active "Automatic restart" function
(P086>0), the converter dwells in operating state o4 and o5 until voltage
appears at the power section. Line voltage is not assumed to be applied to
the power terminals until the amplitude, frequency and phase symmetry
have remained within the permissible tolerance for a period exceeding the
setting in this parameter. The parameter applies to both the armature and
field power connections.
Caution:
The setting in P090 must be lower than the settings in P086 (except when
P086=0.0) and P089!
0.01 to 1.00
[s]
0.01s
Ind: None
FS=0.02
Type: O2
P052 = 3
P051 = 40
Online
P091 Setpoint threshold
i001: Threshold for function "Switch on only if setpoint is low“
The converter can be switched on only if a setpoint
|K0193| ≤ P091.001 is applied to the ramp-function generator
input. If the applied setpoint is higher, the converter dwells in
state o6 after "switch-on" until the absolute setpoint value is
≤ P091.001.
i002: Threshold for function
"Automatic pulse disable if setpoint is low“ [SW 2.0 and later]
If |n-set| (|K0193|) and |n-act| (K0166) are less than P091.002,
the firing pulses are disabled and the drive goes into state o2.0.
0.00 to 199.99
[%]
0.01%
Ind: 2
FS=
i001: 199.99
i002: 0.00
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-21
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P092
(G200)
Delay times for field reversal
These times are used to control a reversing contactor for reversing the field
polarity on a 1-quadrant converter with field reversal.
i001: Delay time for the field reduction before opening of the current
field contactor
When field polarity reversal is initiated, the delay time set in
P092.i001 elapsed after reaching Ifield (K0265) < Ifield min
(P394) before the current field contactor is opened.
i002: Delay time before actuation of the new field contactor
[only SW 1.7 and later]
After opening the current field contactor the delay time set in
P092.i002 elapsed before the field contactor for the "new" field
direction is actuated (drop-out delay time of the contactor use is
usually longer then the pick-up delay time).
i003: Delay time for enabling the field firing pulses
[only SW 1.7 and later]
After actuation of the field contactor for the "new" field direction,
the delay time acc. to P092.i003 elapses before the field firing
pulses are enabled. This time must be longer than the pick-up
delay time of the contactor used.
i004: Delay time after the field build-up before armature enable
[only SW 1.7 and later]
After - directly following the field firing pulse enable - the actual
field current value Ifield in the "new" field direction has reached
the value Ifield (K0265) > Ifield set (K0268)*P398/100%, the
delay time acc. to P092.i004 elapses. Then the internal
(armature) "Operating enable of field reversal" is issued, i.e. the
Stopping of the drive in operating state ≥ o1.4 is canceled. This
delay time permits waiting of the end of overshooting of the
actual field current value and therefore overshooting of the EMF
of the DC machine straight after the field current has been built
up again, before the "armature operating enable" is issued. This
is intended to prevent armature overcurrents due to excessive
EMF during overshooting.
0.0 to 10.0
[s]
0.1s
Ind: 4
FS=
i001: 3.0
i002: 0.2
i003: 0.1
i004: 3.0
Type: O2
P052 = 3
P051 = 40
Online
P093 Pick-up delay for line contactor
Pick-up of the line contactor is delayed in relation to "Switch on auxiliaries"
by the time delay set in this parameter.
0.0 to 120.0
[s]
0.1s
Ind: None
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P094 Switch-off delay for auxiliaries
Switch-off of the auxiliaries is delayed in relation to dropout of the line
contactor by the time delay set in this parameter.
0.0 to 6500.0
[s]
0.1s
Ind: None
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P095 Pick-up time for a contactor in the DC circuit
If the DC output (terminals 1C1 and 1D1) is switched through to the motor
via a contactor, and if this contactor is controlled by the "Relay for line
contactor" (terminals 109 and 110), then the gating pulses may not be
enabled until the contactor has safely picked up. For this purpose, it may be
necessary to parameterize an additional delay time for the pick-up
operation. The timer set in P095 commences during a pick-up operation
when the converter reaches operating state o5. If the timer has still not run
down by the time the converter exits state o4, then the converter dwells in
state o3.2 until the timer has finished.
During the time period set in P095, the "Main contactor checkback" signal
must also switch to "1" if this function is activated (see P691). Otherwise the
converter dwells in state o3.3 until the timer has finished and fault message
F004 is then output with fault value 6.
0.00 to 1.00
[s]
0.01s
Ind: None
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P096 After-running time for the device fan [SW 1.6 and later]
After the drive has been shut down (operating state ≥ 7.0 reached)
the device fan continues to run until the power section has cooled down.
With this parameter you can set the minimum duration for the after-running
time.
Note:
If the field current is not switched off after the drive is shut down (see P082),
the field current can prevent cooling of the power section. In this case, the
equipment blower is never switched off.
0.0 to 60.0
[min]
0.1min
Ind: None
FS=4.0
Type: O2
P052 = 3
P051 = 40
on-line
10-22 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P097
*
(G166)
Response of field current to fault messages [SW 2.1 and later]
0 Field pulses are blocked when a fault message is activated
1 Field pulses are not blocked when a fault message is activated,
but the field current setpoint cannot be increased above its
current setting.
0 to 1
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
Online
P098
* Contactor in DC circuit [SW 2.1 and later]
0 The DC circuit does not include a contactor
1 The DC circuit contains a contactor which is controlled by the
“relay for the line contactor" (terminals 109 and 110).
The values for the armature voltage Ua and for EMF (K0286,
K0287, K0291, K0292, r037, r038) are set to 0% whenever
B0124 = 0 (request main contactor not active). This is because
the motor terminals are separated in this case from output
terminals 1C and 1D of the SIMOREG DC Master and it is then
impossible to measure the armature voltage Ua (or the EMF).
0 to 1
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10.6 Definition of motor
P100
*
FDS
(G165)
Rated motor armature current (acc. to motor rating plate)
0.0 Parameter not yet set
0.0 to 6553.0
[A]
0.1A
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Offline
P101
*
FDS
(G165)
Rated motor armature voltage (acc. to motor rating plate)
Notes:
One of the functions of this parameter is to determine the point at which
field-weakening operation commences.
If possible, the rated motor armature voltage + the voltage drop in the motor
feeder cable (for a current setting acc. to P100) should be set in P101.
10 to 2800
[V]
1V
Ind: 4
FS=400
Type: O2
P052 = 3
P051 = 40
Offline
P102
*
FDS
(G165)
Rated motor field current (acc. to motor rating plate)
0.00 Parameter not yet set
0.00 to 600.00
[A]
0.01A
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P103
*
FDS
(G165)
Minimum motor field current
Note:
P103 must be set to <50% of P102 to execute the optimization run for field
weakening (P051=27).
0.00 to 100.00
[A]
0.01A
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Offline
P104
*
FDS
(G161)
Speed n1 (acc. to motor rating plate)
1st point (speed value) in speed-dependent current limitation.
This parameter is used together with P105, P106, P107 and P108 to define
the characteristic of the current limiting value as a function of actual speed.
1 to 10000
[rev/min]
1rev/min
Ind: 4
FS=5000
Type: O2
P052 = 3
P051 = 40
Offline
P105
*
FDS
(G161)
Armature current I1 (acc. to motor rating plate)
1st point (current value) in speed-dependent current limitation.
This parameter is used together with P104, P106, P107 and P108 to define
the characteristic of the current limiting value as a function of actual speed.
0.1 to 6553.0
[A]
0.1A
Ind: 4
FS=0.1
Type: O2
P052 = 3
P051 = 40
Offline
P106
*
FDS
(G161)
Speed n2 (acc. to motor rating plate)
2nd point (speed value) in speed-dependent current limitation.
This parameter is used together with P104, P105, P107 and P108 to define
the characteristic of the current limiting value as a function of actual speed.
1 to 10000
[rev/min]
1rev/min
Ind: 4
FS=5000
Type: O2
P052 = 3
P051 = 40
Offline
P107
*
FDS
(G161)
Armature current I2 (acc. to motor rating plate)
2nd point (current value) in speed-dependent current limitation.
This parameter is used together with P104, P105, P106 and P108 to define
the characteristic of the current limiting value as a function of actual speed.
0.1 to 6553.0
[A]
0.1A
Ind: 4
FS=0.1
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-23
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P108
*
FDS
(G161)
Maximum operating speed n3
When the speed-dependent current limitation is in use, the maximum speed
which is defined by the selection of the actual speed source as set in P083,
must be entered in this parameter:
When P083=1 (analog tacho):
Speed at which a tacho voltage as set in P741 is reached
When P083=2 (pulse encoder):
Same value as maximum speed set in P143
When P083=3 (operation without tacho):
Speed at which EMF as set in P115 is reached
1 to 10000
[rev/min]
1rev/min
Ind: 4
FS=5000
Type: O2
P052 = 3
P051 = 40
Offline
P109
*
FDS
(G161)
Control word for speed-dependent current limitation
0 Speed-dependent current limitation is deactivated
1 Speed-dependent current limitation is activated
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P110
FDS
(G162)
(G165)
Armature circuit resistance
This parameter is set automatically during the optimization run for precontrol
and current controller (armature and field) (P051=25).
0.000 to 32.767
[Ω]
0.001Ω
Ind: 4
FS=0.000
Type: O2
P052 = 3
P051 = 40
Online
P111
FDS
(G162)
(G165)
Armature circuit inductance
This parameter is set automatically during the optimization run for precontrol
and current controller (armature and field) (P051=25).
0.000 to 327.67
[mH]
0.01mH
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P112
FDS
(G166)
Field circuit resistance
This parameter is set automatically during the optimization run for precontrol
and current controller (armature and field) (P051=25).
0.0 to 3276.7
[Ω]
0.1Ω
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P113
*
FDS
Continuous current factor torque control / current control
This parameter defines the current to be permitted as a continuous current
by the I2t motor monitoring function without activation of alarm message
A037 or fault message F037.
This current is the product of calculation P113 * P100.
0.50 to 2.00
0.01
Ind: 4
FS=1.00
Type: O2
P052 = 3
P051 = 40
Offline
P114
FDS
Thermal time constant of motor
(see Section 9.15)
0.0 I2t monitoring deactivated
0.0 to 80.0
[min]
0.1min
Ind: 4
FS=10.0
Type: O2
P052 = 3
P051 = 40
Online
P115
FDS
(G151)
EMF at maximum speed in operation without tachometer
This parameter is used to adjust the speed in cases where the internal
actual EMF value is applied as the actual speed value. P115 defines the
EMF which corresponds to maximum speed as a percentage of P078.001.
1.00 to 140.00
[% of P078.001]
0.01%
Ind: 4
FS=100.00
Type: O2
P052 = 3
P051 = 40
Online
P117
*
FDS
Control word for field characteristic
0 No valid field characteristic has yet been recorded
1 Valid field characteristic (P118 to P139 valid)
The parameter is set automatically during the field-weakening optimization
run (P051=27).
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P118
FDS
(G165)
Rated EMF value
EMF that is reached with a full field (according to parameter P102) and a
speed as set in parameter P119.
The parameter is set automatically during the field-weakening optimization
run (P051=27) and specifies in this case the setpoint EMF in the field-
weakening range.
Note:
As regards the closed-loop field-weakening control, only the ratio between
P118 and P119 is relevant. The EMF setpoint in the field-weakening range
is determined by (P101 – P100 * P110). When the setting in P100, P101 or
P110 is changed subsequently, the field-weakening optimization run need
not be repeated. However, P118 then no longer defines the setpoint EMF in
the field-weakening range.
When the setting in parameter P102 is changed subsequently, the field-
weakening optimization run must be repeated, the same applies if the
maximum speed setting is subsequently re-adjusted.
0 to 2800
[V]
1V
Ind: 4
FS=340
Type: O2
P052 = 3
P051 = 40
Offline
10-24 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P119
FDS
(G165)
Rated speed
Speed at which an actual EMF value as set in parameter P118 is reached at
full field (according to parameter P102).
This parameter is set automatically during the optimization run for field
weakening (P051=27) and specifies in this case the field-weakening
activation limit speed.
Note:
As regards the closed-loop field-weakening control, only the ratio between
P118 and P119 is relevant. When the setting in P100, P101 or P110 is
changed subsequently, the field-weakening optimization run need not be
repeated. However, P119 then no longer defines the field-weakening
activation limit speed.
When the setting in parameter P102 is changed subsequently, the field-
weakening optimization run must be repeated, the same applies if the
maximum speed setting is subsequently re-adjusted.
0.0 to 199.9
[%]
0.1%
Ind: 4
FS=100.0
Type: O2
P052 = 3
P051 = 40
Offline
Magnetization characteristic (field characteristic)
Parameters P120 to P139 determine the curve shape of the magnetization characteristic (field characteristic) in normalized representation
(see example field characteristic below for further details).
Note:
When the setting in parameter P102 is changed subsequently, the field-weakening optimization run must be repeated, because this alters
the degree of saturation and thus the shape of the magnetization characteristic. (When parameter P100, P101 or P110, or the maximum
speed adjustment, is subsequently altered, the settings in P120 to P139 remain the same, but the values in P118 and/or P119 are
changed).
r120
FDS
(G165)
(G166)
Field current for 0% motor flux (field characteristic, point no. 0) 0.0
[% of P102]
0.1% of P102
Ind: 4
Type: O2
P052 = 3
P121
FDS
(G165)
(G166)
Field current for 5% motor flux (field characteristic, point no. 1) 0.0 to 100.0
[%]
0.1% of P102
Ind: 4
FS=3.7
Type: O2
P052 = 3
P051 = 40
Offline
P122
FDS
(G165)
(G166)
Field current for 10% motor flux (field characteristic, point no. 2) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=7.3
Type: O2
P052 = 3
P051 = 40
Offline
P123
FDS
(G165)
(G166)
Field current for 15% motor flux (field characteristic, point no. 3) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=11.0
Type: O2
P052 = 3
P051 = 40
Offline
P124
FDS
(G165)
(G166)
Field current for 20% motor flux (field characteristic, point no. 4) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=14.7
Type: O2
P052 = 3
P051 = 40
Offline
P125
FDS
(G165)
(G166)
Field current for 25% motor flux (field characteristic, point no. 5) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=18.4
Type: O2
P052 = 3
P051 = 40
Offline
P126
FDS
(G165)
(G166)
Field current for 30% motor flux (field characteristic, point no. 6) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=22.0
Type: O2
P052 = 3
P051 = 40
Offline
P127
FDS
(G165)
(G166)
Field current for 35% motor flux (field characteristic, point no. 7) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=25.7
Type: O2
P052 = 3
P051 = 40
Offline
P128
FDS
(G165)
(G166)
Field current for 40% motor flux (field characteristic, point no. 8) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=29.4
Type: O2
P052 = 3
P051 = 40
Offline
P129
FDS
(G165)
(G166)
Field current for 45% motor flux (field characteristic, point no. 9) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=33.1
Type: O2
P052 = 3
P051 = 40
Offline
P130
FDS
(G165)
(G166)
Field current for 50% motor flux (field characteristic, point no. 10) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=36.8
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-25
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P131
FDS
(G165)
(G166)
Field current for 55% motor flux (field characteristic, point no. 11) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=40.6
Type: O2
P052 = 3
P051 = 40
Offline
P132
FDS
(G165)
(G166)
Field current for 60% motor flux (field characteristic, point no. 12) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=44.6
Type: O2
P052 = 3
P051 = 40
Offline
P133
FDS
(G165)
(G166)
Field current for 65% motor flux (field characteristic, point no. 13) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=48.9
Type: O2
P052 = 3
P051 = 40
Offline
P134
FDS
(G165)
(G166)
Field current for 70% motor flux (field characteristic, point no. 14) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=53.6
Type: O2
P052 = 3
P051 = 40
Offline
P135
FDS
(G165)
(G166)
Field current for 75% motor flux (field characteristic, point no. 15) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=58.9
Type: O2
P052 = 3
P051 = 40
Offline
P136
FDS
(G165)
(G166)
Field current for 80% motor flux (field characteristic, point no. 16) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=64.9
Type: O2
P052 = 3
P051 = 40
Offline
P137
FDS
(G165)
(G166)
Field current for 85% motor flux (field characteristic, point no. 17) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=71.8
Type: O2
P052 = 3
P051 = 40
Offline
P138
FDS
(G165)
(G166)
Field current for 90% motor flux (field characteristic, point no. 18) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=79.8
Type: O2
P052 = 3
P051 = 40
Offline
P139
FDS
(G165)
(G166)
Field current for 95% motor flux (field characteristic, point no. 19) 0.0 to 100.0
[% of P102]
0.1% of P102
Ind: 4
FS=89.1
Type: O2
P052 = 3
P051 = 40
Offline
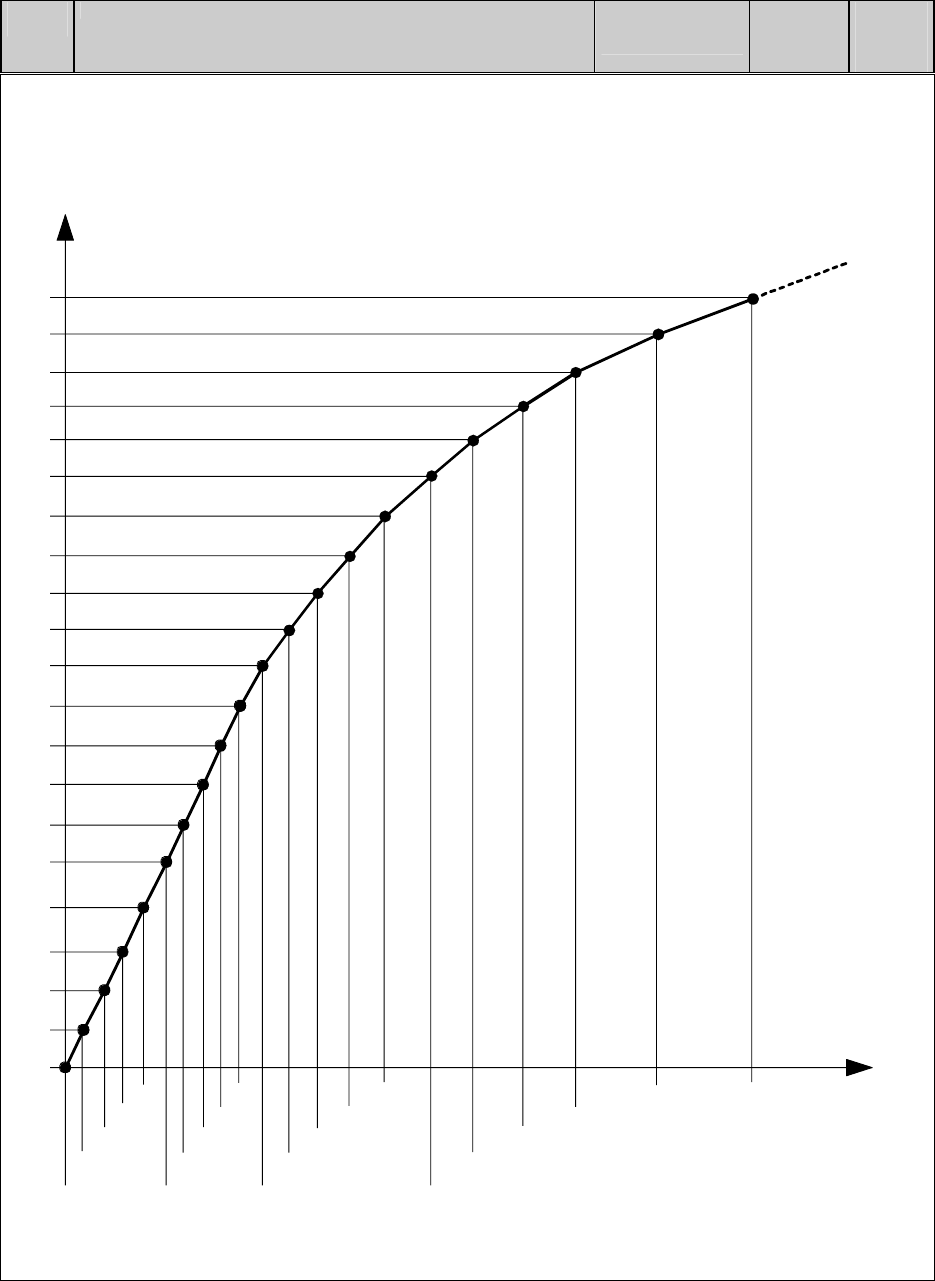
10-26 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Example of a field characteristic
The example characteristic exhibits a sharper curvature (i.e. a lower degree of saturation) than the field characteristic produced by the
factory setting.
P124 P129 P134
P123
P122
P121
r120
P128
P127
P126
P125
P133
P132
P131
P130 P135
P136
P137
P138
P139 100,0% If
1)
100
95
90
85
80
75
70
65
60
55
50
45
40
35
30
25
20
15
10
5
0
Φ
Field current in % of P102
Motor flux in % of ratet flux
1) For actual field currents If of > 100% of P102, the characteristic is extended linearly for internal calculation of the motor flux.
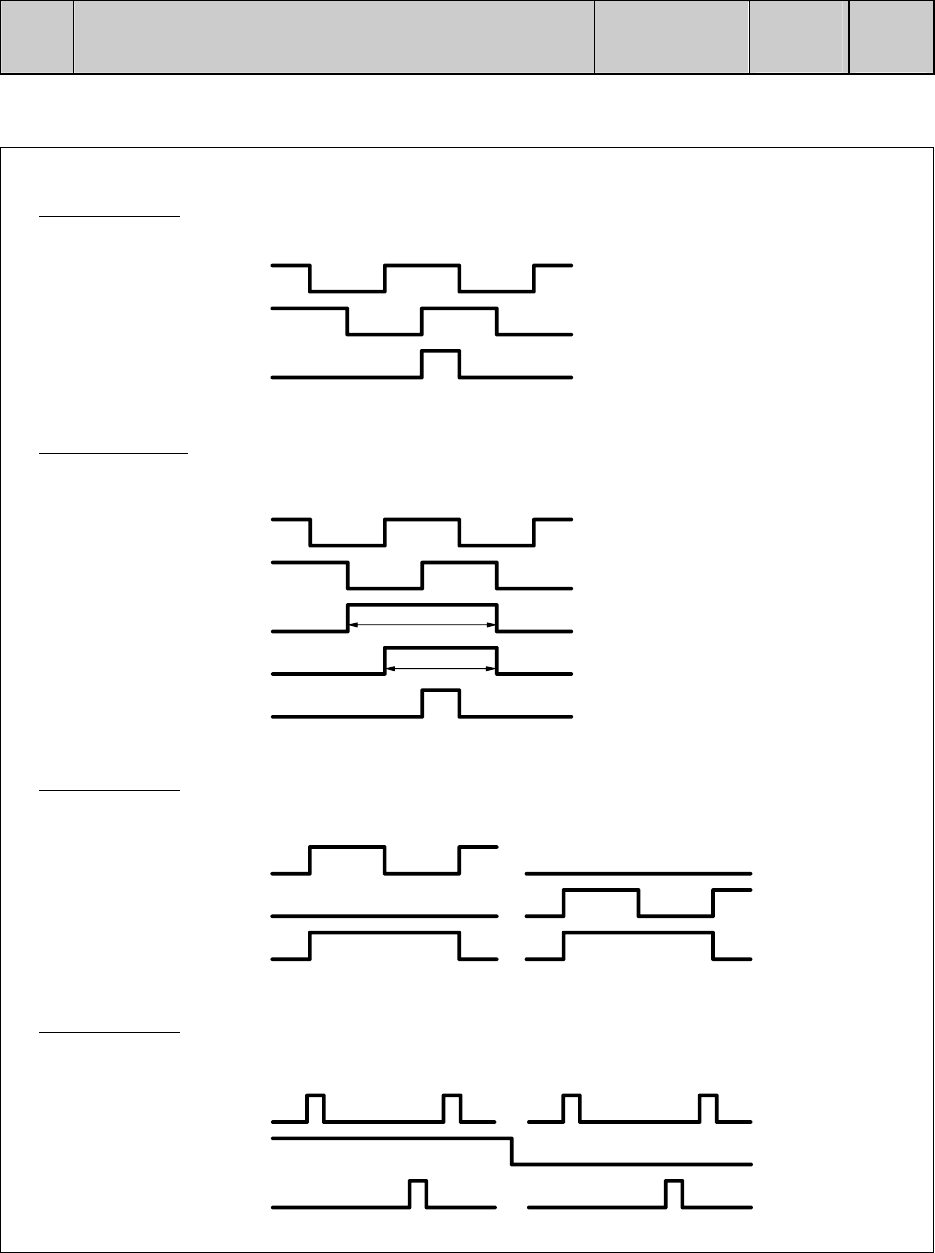
SIEMENS Energy & Automation 10-27
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.7 Definition of pulse encoder, speed sensing using pulse encoder
The following types of pulse encoder can be used (type selection in P140):
1. Pulse encoder type 1
Encoder with two pulse tracks mutually displaced by 90° (with/without zero marker)
Track 1
X173 28, 29
Track 2
X173 30, 31
Zero marker
X173 32, 33
2. Pulse encoder type 1a
Encoder with two pulse tracks mutually displaced by 90° (with/without zero marker). The zero marker is converted internally to a
signal
in the same way as on encoder type 1.
≤ 360°
225 ± 60°
Track 1
X173 28, 29
Track 2
X173 30, 31
Zero marker
X173 32, 33
internal zero marker
3. Pulse encoder type 2
Encoder with one pulse track per direction of rotation (with/without zero marker).
Track 1
X173 28, 29
Track 2
X173 30, 31
Zero marker
X173 32, 33
CCW rotationCW rotation
4. Pulse encoder type 3
Encoder with one pulse track and one output for direction of rotation (with/without zero marker).
Track 1
X173 28, 29
Track 2
X173 30, 31
Zero marker
X173 32, 33
CCW rotationCW rotation
Pulse output
Rot. direction
Zero marker
10-28 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Notes on selecting a pulse encoder (number of pulses):
The lowest speed which can be measured by a pulse encoder is calculated with the following equation:
141PX
1
21973min]/rev[n min ∗
∗= Formula applies with a nominal measuring time of 1 ms when P146=0 and P147=0
The following applies:
X = 1 for 1x evaluation of pulse encoder signals (P144=0)
2 for 2x evaluation of pulse encoder signals (P144=1)
4 for 4x evaluation of pulse encoder signals (P144=2)
see also ”Single/multiple evaluation of encoder pulses”
Lower speeds are interpreted as n=0.
The frequency of the pulse encoder signals at terminals 28 and 29 or 30 and 31 must not be higher than 300 kHz.
The highest speed which can be measured by a pulse encoder is calculated with the following equation:
141P
18000000
min]/rev[n max =
When selecting a pulse encoder, therefore, it is important to ensure that the lowest possible speed ≠ 0 is significantly higher than nmin and
the highest possible speed does not exceed nmax.
min]/rev[nX
21973
IM min∗
>> Equations for selection of pulses per revolution IM of pulse encoder
min]/rev[n
18000000
IM max
≤
Single/multiple evaluation of encoder pulses:
The setting for single/multiple evaluation of encoder pulses is applicable for both the speed and position sensing functions.
1x evaluation: Only the rising edges of one pulse track are evaluated (applies to all encoder types).
2x evaluation: The rising and falling edges of one pulse track are evaluated (can be set for encoder types 1, 1a and 2).
4x evaluation: The rising and falling edges of both pulse tracks are evaluated (can be set for encoder types 1 and 1a)
See parameters P450 and P451 for position sensing function
P140
(G145)
Selection of pulse encoder type
See beginning of this Section (11.8) for pulse encoder types
0 No encoder/"Speed sensing with pulse encoder" function not
selected
1 Pulse encoder type 1
2 Pulse encoder type 1a
3 Pulse encoder type 2
4 Pulse encoder type 3
0 to 4
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P141
(G145)
Number of pulses of pulse encoder 1 to 32767
[pulses/rev]
1 pulse/rev
Ind: None
FS=500
Type: O2
P052 = 3
P051 = 40
Offline
P142
(G145)
Matching to pulse encoder signal voltage
0 Pulse encoder outputs 5 V signals
1 Pulse encoder outputs 15V signals
Matching of internal operating points to signal voltage of incoming pulse
encoder signals.
CAUTION
Resetting parameter P142 to the alternative setting does not switch
over the supply voltage for the pulse encoder (terminals X173.26 and
27). Terminal X173.26 always supplies +15V. An external voltage
supply is must be provided for pulse encoders requiring a 5V supply.
0 to 1
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-29
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P143
FDS
(G145)
Setting the maximum speed for pulse encoder operation
The speed set in this parameter corresponds to an actual speed (K0040) of
100%.
1.0 to 6500.0
[rev/min]
0.1rev/min
Ind: 4
FS=500.0
Type: O4
P052 = 3
P051 = 40
Online
Control parameters for speed sensing with pulse encoder P144 to P147:
P144 and P147 determine the basic setting for actual speed sensing by means of pulse encoder (single or multiple evaluation of pulse
encoder signals and nominal measuring time) and thus also define the lowest possible measurable speed (minimum speed).
P145 and P146 can be used in special cases to extend the measurable speed range down to even lower speeds, on the basis of the
minimum speed defined by the settings in P144 and P147.
P144
*
FDS
(G145)
Multiple evaluation of encoder signals
0 1x
evaluation of pulse encoder signals
1 2x evaluation of pulse encoder signals (for encoder types 1, 1a, 2)
2 4x evaluation of pulse encoder signals (for encoder types 1, 1a)
Note:
In contrast to the 1x evaluation method, 2x or 4x evaluation reduces the
minimum measurable speed by a factor of 2 or 4 respectively, but may
produce an "unsteady" actual speed value on encoders with unequal
pulse/pause ratio or without an exact 90° displacement between encoder
signals.
0 to 2
1
Ind: 4
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
P145
*
FDS
(G145)
Automatic measuring range switchover for measurement of low
speeds - switchover of multiple evaluation
0 Automatic switchover of multiple evaluation of pulse encoder
signals OFF (i.e. P144 is always active)
1 Automatic switchover of multiple evaluation of pulse encoder
signals ON (i.e. when P144 = 0, 2x evaluation is selected for low
speeds and 4x evaluation for very low speeds. When P144 = 1,
4x evaluation is selected for low speeds)
As opposed to P145 = 0, this setting reduces the minimum
measurable speed by up to a factor of 4.
Caution:
Switching over the multiple evaluation method for encoder pulses also
affects the position sensing function in the measuring channel. For this
reason, this setting may not be used in conjunction with positioning
operations. Connectors K0042 to K0044 are inoperative when P145 = 1.
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P146
*
FDS
(G145)
Automatic measuring range switchover for measurement of low
speeds - switchover of measuring time
0 Automatic switchover of measuring time OFF
(i.e. P147 is always active)
1 Automatic switchover of measuring time ON
This setting extends the measuring time for low speeds (based
on the measuring time set in P147, i.e. when P147 = 0, the
nominal measuring time is switched over to 2 ms for low speeds
and to 4 ms for very low speeds. When P147 = 1, the nominal
measuring time is switched over to 4 ms for low speeds)
Caution:
When P146=1, the minimum measurable speed can be reduced by up to a
factor of 4 as opposed to a 0 setting. However, this setting results in a
longer actual speed sensing delay in the extended minimum speed range.
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10-30 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P147
*
FDS
(G145)
Nominal measuring time of pulse encoder signal evaluation
0 Nominal measuring time 1 ms, gating-pulse-synchronized
measurement
1 Nominal measuring time 2 ms, gating-pulse-synchronized
measurement (produces "steadier" actual speed value than
setting 0)
2 Nominal measuring time 4 ms, gating-pulse-synchronized
measurement (for drives with high moment of inertia, produces
"steadier" actual speed value than setting 0)
12 Nominal measuring time 0.2 ms, asynchronous measurement
13 Nominal measuring time 0.3 ms, asynchronous measurement
...
20 Nominal measuring time 1 ms, asynchronous measurement
Note:
12 to 20 Nominal measuring time 0.2 ms to 1 ms, asynchronous
measurement
for highly dynamic drives, reduces dead time in the actual speed
value channel, but "less steady" actual speed value than
achieved with setting 0 to 2 [can be set only in SW 1.9 and later]
Notice:
When P147=1 or 2 the minimum measurable speed can be reduced by a
factor of 2 or 4 respectively as opposed to 0 or 12 to 20. However, these
settings increase the actual speed sensing delay. For this reason, P200
should be parameterized to at least 5ms before the optimization run for the
speed controller is executed.
0 to 20
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P148
*
FDS
(G145)
Pulse encoder monitoring function
0 Pulse encoder monitoring OFF (activation of F048 in response
to a defective pulse encoder is disabled)
1 Pulse encoder monitoring ON (hardware monitoring of pulse
encoder signals for implausible behaviour (i.e. frequent speed
changes, distance between edges too short, encoder cable
defect or short between two encoder cables) may cause
activation of F048)
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
10.8 Closed-loop armature current control,auto-reversing stage,armature gating
unit
P150
FDS
(G163)
Alpha G limit (armature)
Rectifier stability limit for firing angle of armature converter.
0 to 165
[degrees]
1 degrees
Ind: 4
FS=5 / 30
(for 1Q / 4Q
converters)
Type: O2
P052 = 3
P051 = 40
Online
P151
FDS
(G163)
Alpha W limit (armature)
Inverter stability limit for firing angle of armature converter.
See also parameter P192 (Control word for Alpha W limit)
120 to 165
[degrees]
1 degrees
Ind: 4
FS=150
Type: O2
P052 = 3
P051 = 40
Online
P152
*
FDS
(G163)
Line frequency correction (armature)
The internal line synchronization for the armature gating pulses derived from
the power terminals (armature mains infeed) is averaged over the number of
line periods set in this parameter. In operation on "weak" power supplies
with unstable frequencies, for example, on a diesel-driven generator
(isolated operation), this parameter must be set lower than for operation on
"constant V/Hz" systems in order to achieve a higher frequency correction
speed.
1 to 20 Ind: 4
FS=20
Type: O2
P052 = 3
P051 = 40
Online
P153
*
FDS
(G162)
Control word for the armature precontrol
0 Armature precontrol disabled, output of the precontrol=165°
1 Armature precontrol active
2 Armature precontrol active but EMF influence only active on
change in torque direction
3 Armature precontrol active but without EMF influence., i.e. for
precontrol, the EMF is assumed to be 0.
(recommended setting for supplying large inductance from
armature terminals, e.g. solenoids, field supply)
[can only be set on SW 1.7 and later]
0 to 3
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
off-line
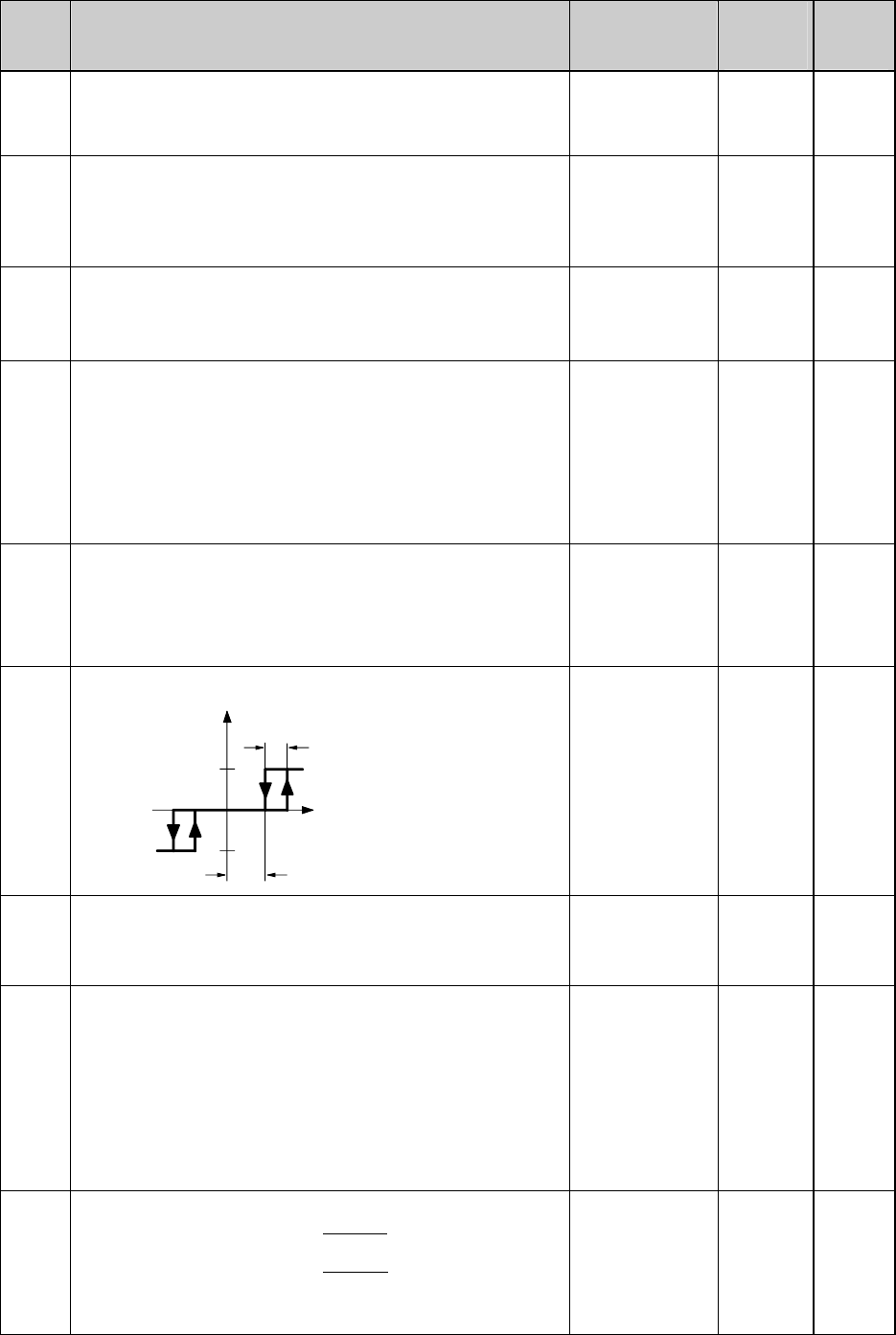
SIEMENS Energy & Automation 10-31
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P154
*
FDS
(G162)
Set armature current controller I component to zero
0 Set controller I component to zero (i.e. to obtain pure P
controller)
1 Controller I component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P155
FDS
(G162)
Armature current controller P gain
Proportional gain of armature current controller
This parameter is automatically set during the optimization run for precontrol
and current controller (armature and field) (P051=25).
See also parameter P175
0.01 to 200.00
0.01
Ind: 4
FS=0.10
Type: O2
P052 = 3
P051 = 40
Online
P156
FDS
(G162)
Armature current controller reset time
This parameter is automatically set during the optimization run for precontrol
and current controller (armature and field) (P051=25).
See also parameter P176
0.001 to 10.000
[s]
0.001s
Ind: 4
FS=0,200
Type: O2
P052 = 3
P051 = 40
Online
P157
*
FDS
(G162)
Control word for current setpoint integrator
0 Reduced gearbox stressing
The integrator is active only after a change in torque direction
(acts as ramp-function generator for armature current setpoint
only until the output reaches the setpoint at the integrator input
for the 1st time after a change in torque direction).
1 Current setpoint integrator
The integrator is always active (acts as ramp-function generator
for the armature current setpoint)
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P158
FDS
(G162)
Ramp-up time for current setpoint integrator (reduced gearbox
stressing)
Period of an acceleration ramp with a setpoint step change from 0% to
100% at r072.002.
For older DC machines (i.e. unsuitable for steep rates of current rise),
P157=1 and P158=0.040 must be set.
0.000 to 1.000
[s]
0.001s
Ind: 4
FS=0.000
Type: O2
P052 = 3
P051 = 40
Online
P159
FDS
(G163)
Switchover threshold for auto-reversing stage (armature)
P159
I
II
0
requested torque direction
Speed controller output
0.05%
0.00 to 100.00
[%]
0.01% of n controller
output
Ind: 4
FS=0.01
Type: O2
P052 = 3
P051 = 40
Online
P160
FDS
(G163)
Additional torque-free interval
Additional torque-free interval for torque direction change in 4Q operation.
It is particularly important to set this parameter to values of > 0 for converter
armatures which supply large inductances (e.g. lifting solenoids).
0.000 to 2.000
[s]
0.001s
Ind: 4
FS=0.000
Type: O2
P052 = 3
P051 = 40
Online
P161
FDS
(G163)
Additional Alpha W pulses with disabled second pulses
Number of additional Alpha W pulses with disabled second pulses after
detection of I=0 message prior to a change in torque direction.
It is particularly important to set this parameter to values of > 0 for converter
armatures which supply large inductances (e.g. lifting solenoids).
These pulses cause the current to decay prior to a change in torque
direction. When it drops below the thyristor holding current value, the
current is suddenly chopped by the unfired second thyristor and the residual
energy stored in the load inductor must be dissipated via a suppressor
circuit (e.g. a varistor) to prevent the load inductor from producing a surge
voltage. See also P179.
0 to 100
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P162
*
FDS
(G162)
EMF calculation method for armature precontrol
0 The EMF derived from the measured armature voltage is
applied
1 The EMF derived from the calculated armature voltage is
applied
(the purpose of this setting is to prevent the occurrence of any
low-frequency (< 15 Hz) armature current fluctuations)
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
10-32 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P163
*
FDS
(G162)
EMF filtering method for armature precontrol
0 No filtering
1 Filtering element, filter time constant = approx. 10 ms
(for use by works engineers only)
2 Averaging over the last 2 EMF values
(for use by works engineers only )
3 Averaging over the last 3 EMF values
0 to 3
1
Ind: 4
FS=3
Type: O2
P052 = 3
P051 = 40
Offline
P164
*
FDS
(G162)
Set armature current controller P component to zero
0 Set controller P component to zero (i.e. to obtain pure I
controller)
1 Controller P component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P165
*
BDS
(G163)
Select the binector to control the "Enable a torque direction for torque
direction change" function
0 = Binector B0000
1 = Binector B0001
etc.
Binector status =
0 ... Enable for M0 or MII
1 ... Enable for M0 or MI
All binector numbers
1
Ind: 2
FS=220
Type: L2
P052 = 3
P051 = 40
Offline
10.9 Current limitation, torque limitation
P169
*
FDS
(G160)
Select closed-loop torque / current control
See parameter P170
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P170
*
FDS
(G160)
Select closed-loop torque / current control
P169 P170
0 0 Closed-loop current control and current limitation
0 1 Closed-loop torque control with torque limitation (the
torque setpoint is converted to a current setpoint: Current
setpoint = torque setpoint / motor flux)
Current limitation is active additionally
1 0 Closed-loop current control with torque limitation (the
specified torque limit is converted to a current limit:
Current limit = torque limit / motor flux)
Current limitation is active additionally
1 1 Do not set!
Note:
A valid field characteristic (P117=1) must be available when P169 or
P170=1. If one is not, the optimization run for field weakening (P051=27)
must be executed.
P263 determines the input quantity for the motor flux calculation.
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P171
FDS
(G160)
(G161)
System current limit in torque direction I 0.0 to 300.0
[% of P100]
0.1% of P100
Ind: 4
FS=100.0
Type: O2
P052 = 3
P051 = 40
Online
P172
FDS
(G160)
(G161)
System current limit in torque direction II -300.0 to 0.0
[% of P100]
0.1% of P100
Ind: 4
FS=-100.0
Type: I2
P052 = 3
P051 = 40
Online
P173
*
BDS
(G160)
Source for "Torque control / Current control" switchover
[SW 1.9 and later]
The binector selected here has the same effect as parameter P170.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P175
*
FDS
(G162)
Source for variable P gain [SW 1.8 and later]
The content of the selected connector acts as the P gain for the armature
current controller after multiplication with P155.
All connector
numbers
1
Ind: 4
FS=1
Type: L2
P052 = 3
P051 = 40
off-line
SIEMENS Energy & Automation 10-33
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P176
*
FDS
(G162)
Source for variable Integration time [SW 1.8 and later]
The content of the selected connector acts as the integration time for the
armature current controller after multiplication with P156.
All connector
numbers
1
Ind: 4
FS=1
Type: L2
P052 = 3
P051 = 40
off-line
P177
*
BDS
(G163)
Source for the command "no immediate pulse disable"
[SW 1.8 and later]
A low signal causes the armature firing pulses to be disabled immediately
without waiting for the I=0 signal or without outputting alpha-W pulses for
current reduction. The additional alpha-W pulses (acc. to parameter P161)
are not output either. As long as this command is pending, it is not possible
to fall below operating state o1.6.
This command can be used, for example, if it is not a motor that is supplied
by the SIMOREG DC Master but a field and the current is to be reduced via
an external parallel-connected de-excitation resistance.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
off-line
P178
*
BDS
(G163)
Source for the command "fire all thyristors simultaneously"
[SW 1.8 and later]
Setting this command (high signal) causes all six thyristors of the thyristor
bridge I to be fired continuously and simultaneously. Switchover to long
pulses is automatic. This command is only active if no line voltage is applied
to the armature power section .
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P179
FDS
(G163)
Additional Alpha W pulses with disabled second pulses
[SW 1.9 and later]
Number of additional Alpha W pulses with disabled second pulses after
detection of I=0 message prior to a change in torque direction.
It is particularly important to set this parameter to values of > 0 for converter
armatures which supply large inductances (e.g. lifting solenoids).
These pulses cause the current to decay before a change in torque
direction; the thyristors are fired in pairs to prevent sudden chopping, and
the generation of a surge voltage by the load inductor, when the current
drops below the thyristor holding current.
When a change in torque direction is required, the current in the existing
direction must be reduced.
This is achieved in the following ways:
If P179 > 0:
1) Alpha W pulses with enabled second pulses
until the I=0 signal arrives
2) Additional Alpha W pulses with enabled second pulses
(number as set in P179.F)
3) Additional Alpha W pulses with disabled second pulses
(number as set in P161.F)
4) Additional torque-free interval (period as set in P160.F)
If P179 = 0:
1) Alpha W pulses with disabled second pulses
until the I=0 signal arrives
2) Additional Alpha W pulses with disabled second pulses
(number as set in P161.F)
3) Additional torque-free interval (period as set in P160.F)
0 to 100
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P180
FDS
(G160)
Positive torque limit 1 -300.00 to 300.00
[%]
0.01%
of rated motor torque
Ind: 4
FS=300.00
Type: I2
P052 = 3
P051 = 40
Online
P181
FDS
(G160)
Negative torque limit 1 -300.00 to 300.00
[%]
0.01%
of rated motor torque
Ind: 4
FS=-300.00
Type: I2
P052 = 3
P051 = 40
Online
P182
FDS
(G160)
Positive torque limit 2
If "Torque limit switchover" is selected (state of binector selected in P694
=1) and the speed is higher than the threshold speed set in parameter
P184, then torque limit 2 is activated in place of torque limit 1.
-300.00 to 300.00
[%]
0.01%
of rated motor torque
Ind: 4
FS=300.00
Type: I2
P052 = 3
P051 = 40
Online
P183
FDS
(G160)
Negative torque limit 2
If "Torque limit switchover" is selected (state of binector selected in P694
=1) and the speed is higher than the threshold speed set in parameter
P184, then torque limit 2 is activated in place of torque limit 1.
-300.00 to 300.00
[%]
0.01%
of rated motor torque
Ind: 4
FS=-300.00
Type: I2
P052 = 3
P051 = 40
Online
10-34 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P184
FDS
(G160)
Threshold speed for torque limits
If "Torque limit switchover" is selected (state of binector selected in P694
=1) and the speed (K0166) is higher than the threshold speed set in
parameter P184, then torque limit 2 (P182, P183) is activated in place of
torque limit 1 (P180, P181).
0.00 to 120.00
[%]
0.01%
of maximum speed
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P190
FDS
(G162)
Filter time for setpoint for armature current precontrol
[SW 1.9 and later]
Filtering of the armature current setpoint at the input of the precontrol for the
armature current controller.
The purpose of this filter is to decouple the armature current precontrol from
the armature current controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P191
FDS
(G162)
Filter time for setpoint for armature current controller
[SW 1.9 and later]
Filtering of the armature current setpoint at the input of the armature current
controller.
The purpose of this filter is to decouple the armature current precontrol from
the armature current controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
10.10 Auto-reversing stage, armature gating unit
P192
*
FDS
(G163)
Control word for the Alpha W limit (armature) [as of SW 2.1]
0 Continuous current:
Inverter stability limit for the delay angle of the armature
converter (Alpha W) = value according to parameter P151
Intermittent current:
Alpha W = 165°
1 Inverter stability limit for the delay angle of the armature
converter (Alpha W) = value according to parameter P151
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10.11 Speed controller
further parameters for the speed controller P550 - P567
Setting values for speed controller - actual value/setpoint processing
P200
FDS
(G152)
Filter time for actual speed controller value
Filtering of the actual speed value by means of a PT1 element.
This filter setting is taken into account by the speed controller optimization
run (P051=26).
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P201
FDS
(G152)
Band-stop 1: Resonant frequency 1 to 140
[Hz]
1Hz
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Online
P202
FDS
(G152)
Band-stop 1: Quality
0 Quality = 0.5
1 Quality = 1
2 Quality = 2
3 Quality = 3
0 to 3
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P203
FDS
(G152)
Band-stop 2: Resonant frequency 1 to 140
[Hz]
1Hz
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Online
P204
FDS
(G152)
Band-stop 2: Quality
0 Quality = 0.5
1 Quality = 1
2 Quality = 2
3 Quality = 3
0 to 3
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P205
FDS
(G152)
D element: Derivative-action time 0 to 1000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P206
FDS
(G152)
D element: Filter time 0 to 100
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
r217
(G151)
Indication of the active droop of the speed controller [SW 1.7 and later] 0.0 to 10.0
[%]
0.1%
Ind: None
Type: O2
P052 = 3
SIEMENS Energy & Automation 10-35
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r218
(G151)
(G152)
Indication of the active integration time of the speed controller
[SW 1.7 and later] 0.010 to 10.000
[s]
0.001s
Ind: None
Type: O2
P052 = 3
r219
(G151)
(G152)
Display of effective P gain of speed controller 0.01 to 200.00
0.01
Ind: None
Type: O2
P052 = 3
P221
FDS
(G152)
Speed controller: Hysteresis for speed-dependent PI/P controller
switchover [SW 1.9 and later]
See P222 for further details.
0.00 to 100.00
[%]
0.01% of maximum
speed
Ind: 4
FS=2.00
Type: O2
P052 = 3
P051 = 40
Online
P222
FDS
(G152)
Speed controller: Speed-dependent switchover threshold for PI / P
controller
0.00 Automatic switchover from PI to P controller deactivated.
> 0.00 Depending on the actual speed (K0166), the PI controller
switches over to a P controller if the speed drops below the
threshold set in parameter P222. The integrator is not switched
in again (with value of 0) until the actual speed is > P222 +
P221.
This function allows the drive to be stopped without overshoot
using a zero setpoint with the controllers enabled.
This function is active only if the binector selected in P698 is in
the log. "1" state.
0.00 to 10.00
[%]
0.01% of maximum
speed
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
Setting values for speed controller
P223
*
FDS
(G152)
Control word for speed controller precontrol
0 Speed controller precontrol disabled
1 Speed controller precontrol acts as torque setpoint (is added to
n controller output)
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P224
*
FDS
(G152)
Control word for speed controller I component
0 Set controller I component to 0 (i.e. to achieve a pure P
controller)
1 Controller I component is active
The I component is stopped when a torque or current limit is
reached
2 Controller I component is active
The I component is stopped when a torque limit is reached
3 Controller I component is active
The I component is stopped only when ±199.99% is reached
0 to 3
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P225
FDS
(G151)
Speed controller P gain
See also setting values for "Speed controller adaptation" function (P550 to
P559).
This parameter is set automatically during the speed controller optimization
run (P051=26).
0.10 to 200.00
0.01
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
Online
P226
FDS
(G151)
Speed controller reset time
This parameter is set automatically during the speed controller optimization
run (P051=26).
0.010 to 10.000
[s]
0.001s
Ind: 4
FS=0,650
Type: O2
P052 = 3
P051 = 40
Online
Speed controller droop
Function: A parameterizable feedback loop can be connected in parallel to the I and P components of the speed controller (acts on
summation point of setpoint and actual value).
P227
FDS
(G151)
Speed controller droop
A 10% speed droop setting causes a 10% deviation in the speed from the
setpoint at a 100% controller output (100% torque or armature current
setpoint) ("softening" of closed-loop control).
See also P562, P563, P630 and P684
0.0 to 10.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P228
FDS
(G152)
Filter time for speed setpoint
Filtering of setpoint by means of a PT1 element.
This parameter is automatically set to the same value as the speed
controller reset time during the speed controller optimization run (P051=26).
It may be useful to parameterize lower values when the ramp-function
generator is in use.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10-36 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P229
*
FDS
(G152)
Control of I component tracking for slave drive
0 On a slave drive, the I component of the speed controller is
made to follow such that M(set, ncontr.) = M(set, limit),
the speed setpoint is set to the actual speed value
1 Tracking deactivated
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P230
FDS
(G152)
Setting period of speed controller integrator [SW 1.9 and later]
After a positive edge at the binector set in P695, the integrator of the speed
controller is set to the instantaneous value of the connector set in P631.
If a time of > 0 is set on P230, this setting operation is not performed just
once, but the speed controller integrator is set continually to the setting
value for the parameterized time period.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P234
*
FDS
(G152)
Set speed controller P component to zero
0 Set controller P component to zero (i.e. to obtain a pure I
controller)
1 Controller P component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P236
*
FDS
Specifying the dynamic response of the speed control loop
[SW 2.0 and later]
The parameter value is used as the optimization criterion for the speed
control loop.
Note:
Changes to this value do not take effect until the speed controller
optimization run (P051 = 26, see Section 7.5) has been executed.
Setting instructions:
- For drives, for example, with gear backlash, optimization should be
started with low dynamic response values (from 10%).
- For drives with top synchronism and dynamic response requirements,
values up to 100% should be used.
10 to 100
[%]
1
Ind: 4
FS=75
Type: O2
P052 = 3
P051 = 40
online
10.12 Closed-loop field current control, field gating unit
P250
FDS
(G166)
Alpha G limit (field)
Rectifier stability limit for firing angle of field converter
0 to 180
[degrees]
1 degree
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P251
FDS
(G166)
Alpha W limit (field)
Inverter stability limit for firing angle of field converter
0 to 180
[degrees]
1 degree
Ind: 4
FS=180
Type: O2
P052 = 3
P051 = 40
Online
P252
*
FDS
(G166)
Filtering of line frequency correction (field)
The internal line synchronization for the field gating pulses derived from the
field mains infeed terminals is filtered with this time constant. In operation
on "weak" power supplies with unstable frequencies, for example, on a
diesel-driven generator (isolated operation), the filter time constant must be
set lower than for operation on "constant V/Hz" systems in order to achieve
a higher frequency correction speed.
Using the units position, the line synchronization function can be altered
additionally as follows:
When the parameter is set to an uneven number, the measured line zero
crossings for line synchronization are subjected to an extra "filter", may
improve performance in the case of difficulties with brief mains interruptions
(e.g. power supply via sliding current collectors), but may only be set for
constant V/Hz power supplies (not for weak isolated supply systems).
0 to 200
[ms]
1ms
Ind: 4
FS=200
Type: O2
P052 = 3
P051 = 40
Offline
P253
*
FDS
(G166)
Control word for field precontrol
0 Field precontrol disabled, precontrol output = 180°
1 Field precontrol active, output is dependent on field current
setpoint, field line voltage, P112
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P254
*
FDS
(G166)
Set field current controller I component to zero
0 Set controller I component to zero (i.e. to obtain pure P
controller)
1 Controller I component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P255
FDS
(G166)
Field current controller P gain
This parameter is set automatically during the optimization run for precontrol
and current controller (armature and field) (P051=25).
0.01 to 100.00
0.01
Ind: 4
FS=5.00
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-37
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P256
FDS
(G166)
Field current controller reset time
This parameter is set automatically during the optimization run for precontrol
and current controller (armature and field) (P051=25).
0.001 to 10.000
[s]
0.001s
Ind: 4
FS=0,200
Type: O2
P052 = 3
P051 = 40
Online
P257
FDS
(G166)
Standstill field
Value to which the field current is reduced when "Automatic field current
reduction" function is parameterized (by means of P082=2) or with signal-
driven selection of "Standstill excitation" function (selected in P692).
0.0 to 100.0
[%]
0.1% of P102
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P258
FDS
(G166)
Delay time with automatic field current reduction
Delay after which the field current is reduced to the value set in parameter
P257 with automatic or signal-driven "Field current reduction" function when
the drive is stopped after operating state o7.0 or higher is reached.
0.0 to 60.0
[s]
0.1s
Ind: 4
FS=10.0
Type: O2
P052 = 3
P051 = 40
Online
P260
FDS
(G166)
Filter time for setpoint for field current precontrol [SW 1.9 and later]
Filtering of the field current setpoint at the input of the precontrol for the field
current controller.
The purpose of this filter is to decouple the field current precontrol from the
field current controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P261
FDS
(G166)
Filter time for setpoint for field current controller [SW 1.9 and later]
Filtering of the field current setpoint at the input of the field current
controller.
The purpose of this filter is to decouple the field current precontrol from the
field current controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P263
*
FDS
(G166)
Input quantity for motor flux calculation
0 The input quantity for the motor flux calculation is the field
current controller actual value according to P612 (K0265), to be
used in connection with a fully compensated DC machine
1 The input quantity for the motor flux calculation is the precontrol
output for the EMF controller (K0293)
(exception: Field current controller setpoint (K0268) with active
standstill field or with disabled field pulses), to be used in
connection with an non-compensated DC machine. The EMF
controller must be active when this setting is selected (EMF
controller compensates the armature reaction).
2 The input quantity for the motor flux calculation is the field
current controller setpoint (K0268). Advantage: Quantities
derived from the setpoint are generally "steadier" than those
derived from actual values.
0 to 2
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P264
*
FDS
(G166)
Set field current controller P component to zero
0 Set controller P component to zero (i.e. to obtain pure I
controller)
1 Controller P component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P265
*
BDS
(G167)
Source for selection of external field current monitoring signal
[SW 1.9 and later]
Selection of the binector to supply the field monitoring signal when an
external field device is used.
(status "1" = field current is o.k., If > If-min)
The converter waits for this signal in state o5.0 as part of the power ON
routine. If the signal disappears during operation, the drive is shut down with
fault message F005, fault value 4.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
off-line
10-38 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.13 Closed-loop EMF control
P272
*
(G165)
Operating mode of closed-loop EMF control
0 Fault message F043
(”EMF too high for braking operation") is
active: If the EMF is too high when a torque direction change is
requested (i.e. if the calculated firing angle (K0101) for the
armature current in the new torque direction is > 165 degrees),
both torque directions are disabled. If, at the same time, the
absolute value of the armature current required in the new
torque direction is > 0.5% of rated converter DC current (P072),
fault message F043 is activated (see Section 10 for possible
fault causes).
1 Alarm A043 and automatic field reduction if EMF is too high in
braking operation.
If the EMF is too high in braking operation (i.e. if the following
applies to the armature firing angle α before limitation (K0101):
α > (αW – 5 degrees)), alarm A043 is activated (αW is the
inverter stability limit according to P151 or 165 degrees with a
discontinuous armature current).
The field is reduced with activation of A043. This field reduction
is achieved by regulating the armature firing angle to (αW – 5
degrees) by means of a P controller, whose output reduces the
EMF controller setpoint. "Field weakening operation by internal
closed-loop EMF control" (P081=1) must therefore be
parameterized so that the field reduction can take effect.
When a torque direction change is requested, both torque
directions remain disabled until the field, and thus the EMF,
have been reduced accordingly (i.e. until the calculated firing
angle (K0101) for the armature current required in the new
torque direction is <165 degrees).
0 to 1
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P273
*
FDS
(G165)
Control word for EMF controller precontrol
0 EMF controller precontrol disabled, precontrol output = rated
motor field current (P102)
1 EMF controller precontrol is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P274
*
FDS
(G165)
Set EMF controller I component to zero
0 Set controller I component to zero (i.e. to obtain pure P
controller)
1 Controller I component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P275
*
FDS
(G165)
EMF controller P gain
This parameter is automatically set during the field weakening optimization
run (P051=27).
0.10 to 100.00
0.01
Ind: 4
FS=0.60
Type: O2
P052 = 3
P051 = 40
Online
P276
*
FDS
(G165)
EMF controller reset time
This parameter is automatically set during the field weakening optimization
run (P051=27).
0.010 to 10.000
[s]
0.001s
Ind: 4
FS=0.200
Type: O2
P052 = 3
P051 = 40
Online
P277
*
FDS
(G165)
EMF controller droop 0.0 to 10.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P280
FDS
(G165)
Filter time for setpoint for EMF controller precontrol [SW 1.9 and later]
Filtering of the EMF setpoint at the input of the EMF controller precontrol.
The purpose of this filter is to decouple the EMF controller precontrol from
the EMF controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P281
FDS
(G165)
Filter time for setpoint for EMF controller [SW 1.9 and later]
Filtering of the EMF setpoint at the input of the EMF controller.
The purpose of this filter is to decouple the EMF controller precontrol from
the EMF controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P282
FDS
(G165)
Filter time for actual value for EMF controller [SW 1.9 and later]
Filtering of actual EMF value at the input of the EMF controller.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P283
FDS
(G165)
Filter time for actual value for EMF controller precontrol
[SW 1.9 and later]
Filtering of actual speed value at the input of the EMF controller precontrol.
The purpose of this filter is to stabilize the EMF controller precontrol, even
when the actual speed signal is unsteady or distorted by harmonics.
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
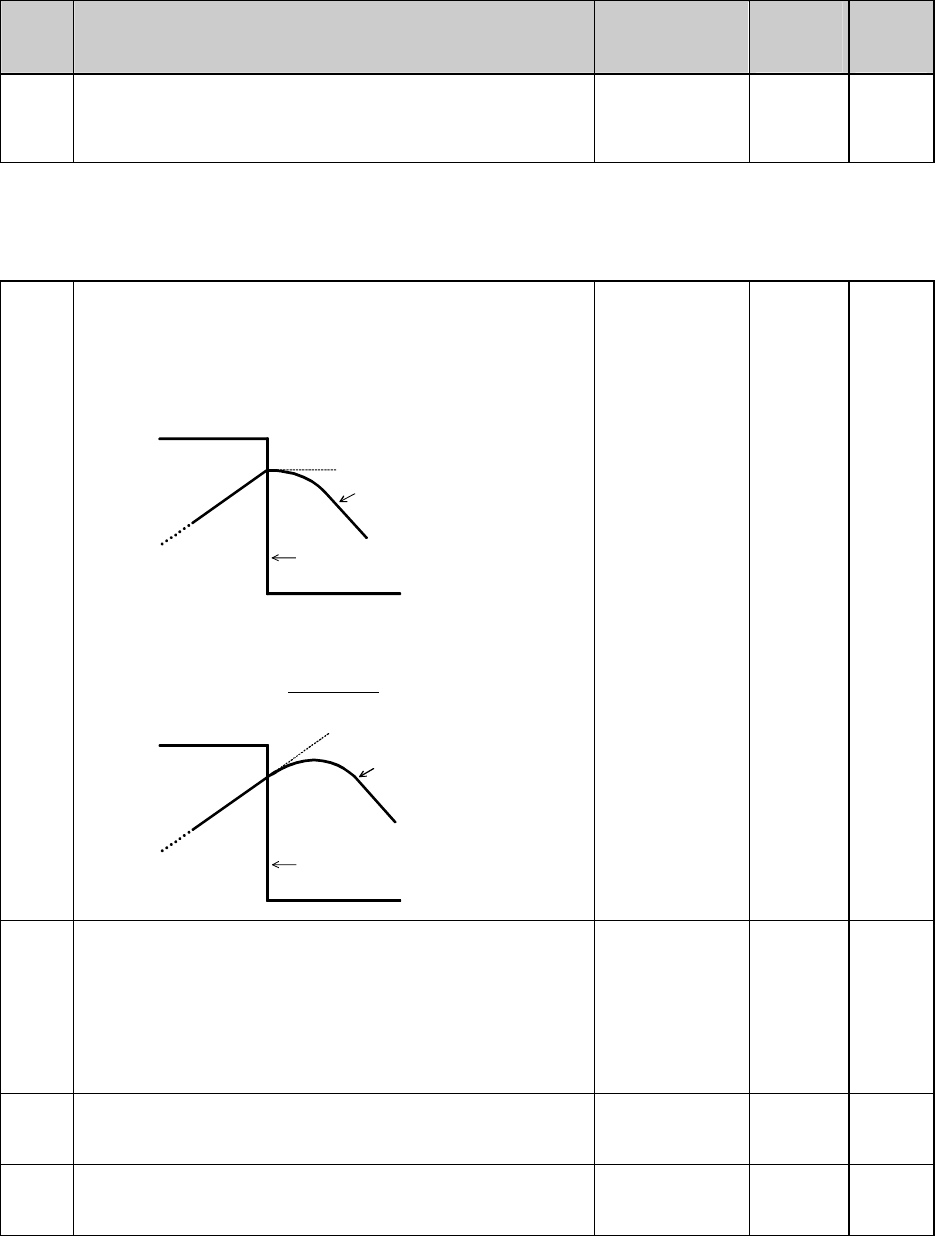
SIEMENS Energy & Automation 10-39
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P284
*
FDS
(G165)
Set EMF controller P component to zero
0 Set controller P component to zero
(i.e. to obtain pure I controller)
1 Controller P component is active
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
10.14 Ramp-function generator
(see also Section 8, Sheet G136 and Section 9 of Operating Instructions 6RX1700-0AD**)
See P639 and P640 for ramp-function generator setting parameters
P295
FDS
(G136)
Mode for rounding the ramp-function generator [SW 1.9 and later]
0 If the setpoint is reversed during ramp-up (or ramp-down),
acceleration (deceleration) is aborted and initial rounding of the
deceleration (acceleration) process begins immediately. The
setpoint is not increased (decreased) any further, but the signal
at the ramp-function generator output has a breakpoint (i.e. a
step change in the acceleration rate).
Ramp generator
output
Ramp generator
input
1 If the setpoint is reversed during ramp-up or ramp-down,
acceleration/deceleration gradually changes to
deceleration/acceleration. The setpoint increases/decreases
further, but there is no breakpoint in the signal at the generator
output (i.e. there is no step change in the acceleration rate).
Ramp generator
output
Ramp generator
input
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P296
FDS
(G136)
Ramp-down time of ramp generator with quick stop (OFF3)
[SW 1.9 and later]
When the "quick stop" command is issued, the drive must normally
brake down to 0 speed along the current limit. If the mechanical design of
the drive makes this option impermissible or undesirable, then a value of > 0
can be set here. In this case, the drive brakes along the deceleration ramp
programmed here when the "quick stop" command is issued.
see also parameter P330
0.00 to 650.00
[s]
0.01 s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P297
FDS
(G136)
Lower transition rounding of ramp generator with quick stop (OFF3)
[SW 1.9 and later]
see also parameter P330
0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P298
FDS
(G136)
Upper transition rounding of ramp generator with quick stop (OFF3)
[SW 1.9 and later]
see also parameter P330
0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
10-40 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Limitation at ramp-function generator output (setpoint limiting)
The effective limitations are:
Upper limit: Minimum value of P300 and the four connectors selected with P632
Lower limit: Maximum value of P301 and the four connectors selected with P633
Note: The limiting values for both the positive and negative setpoint limits can have a positive or negative sign. The negative
setpoint limit, for example, can therefore be parameterized to a positive value and the positive setpoint limit to a negative
value.
P300
FDS
(G137)
Positive limitation at ramp-function generator output -200.00 to 199.99
[%]
0.01%
Ind: 4
FS=100.00
Type: I2
P052 = 3
P051 = 40
Online
P301
FDS
(G137)
Negative limitation at ramp-function generator output -200.00 to 199.99
[%]
0.01%
Ind: 4
FS=-100.00
Type: I2
P052 = 3
P051 = 40
Online
P302
*
FDS
(G136)
Select ramp-function generator / ramp-up integrator mode
0 Normal ramp-function generator operation:
Ramp-function generator setting 1 (P303 to P306) is applied.
When a binary selectable input parameterized as "Ramp-
function generator setting 2" (P307 to P310)” (selected in P637)
or ”Ramp-function generator setting 3" (P311 to P314)”
(selected in P638), generator setting 2 or 3 is applied as
appropriate.
1 Ramp-up integrator operation:
When the setpoint is reached for the first time, ramp-function
generator setting 1 is switched over to a ramp-up/down
times = 0
2 Ramp-up integrator operation:
When the setpoint is reached for the first time, ramp-function
generator setting 1 is switched over to generator setting 2 (P307
to P310)
3 Ramp-up integrator operation:
When the setpoint is reached for the first time, ramp-function
generator setting 1 is switched over to generator setting 3 (P311
to P314)
0 to 3
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
Ramp-function generator parameter set 1 (see also parameter P330)
P303
FDS
(G136)
Ramp-up time 1 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P304
FDS
(G136)
Ramp-down time 1 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P305
FDS
(G136)
Lower transition rounding 1 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P306
FDS
(G136)
Upper transition rounding 1 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
Ramp-function generator parameter set 2 (see also parameter P330)
Ramp-function generator parameter set 2 is selected via the binector parameterized in P637.
P307
FDS
(G136)
Ramp-up time 2 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P308
FDS
(G136)
Ramp-down time 2 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P309
FDS
(G136)
Lower transition rounding 2 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P310
FDS
(G136)
Upper transition rounding 2 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
Ramp-function generator parameter set 3 (see also parameter P330)
Ramp-function generator parameter set 3 is selected via the binector parameterized in P638.
P311
FDS
(G136)
Ramp-up time 3 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-41
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P312
FDS
(G136)
Ramp-down time 3 0.00 to 650.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P313
FDS
(G136)
Lower transition rounding 3 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P314
FDS
(G136)
Upper transition rounding 3 0.00 to 100.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
Displays
r315
(G136)
Display of effective times
i001: Display of effective ramp-up time
i002: Display of effective ramp-down time
i003: Display of effective lower transition rounding
i004: Display of effective upper transition rounding
0.00 to
650.00 / 10.00
[s]
0.01s
Ind: 4
Type: O2
P052 = 3
r316
(G136)
Display of ramp-function generator status
Mode of representation on operator panel (PMU):
32104567
15
Segment:
0 RFG enable
1 RFG start
2 Setpoint enable & /OFF1
3 Set RFG
4 RFG tracking
5 Bypass RFG
7 Ramp-down
15 Ramp-up
Ind: None
Type: V2
P052 = 3
P317
*
FDS
(G136)
Ramp-function generator tracking
0 Ramp-function generator tracking is not active
1 Ramp-function generator tracking is active
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P318
*
FDS
(G136)
Set ramp-function generator output
This parameter determines how the ramp-function generator output is set at
the commencement of a "Shutdown" process:
0 The ramp-function generator output is not set at the
commencement of a "Shutdown" process”
1 At the commencement of "Shutdown", the output is set to the
actual speed value K0167 (actual speed value K0167 is
"unfiltered")
2 At the commencement of "Shutdown", the output is set to the
actual speed value K0179 (value is filtered by PT1 in P200,
other filters may also be active)
(setting may not be used in conjunction with P205 > 0)
During a "Shutdown" process, the limitation at the ramp-function generator
output is not effective. P318 must be set to 1 or 2 to prevent any
(temporary) excess speed during "Shutdown" when the generator output is
limited.
0 to 2
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P319
FDS
(G136)
Delay time for enabling ramp-function generator [SW 1.5 and later]
0.00 to 10.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
10.15 Setpoint processing
P320
FDS
(G135)
Multiplier for main setpoint -300.00 to 300.00
[%]
0.01%
Ind: 4
FS=100.00
Type: I2
P052 = 3
P051 = 40
Online
10-42 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P321
FDS
(G135)
Multiplier for additional setpoint -300.00 to 300.00
[%]
0.01%
Ind: 4
FS=100.00
Type: I2
P052 = 3
P051 = 40
Online
P322
*
FDS
(G135)
Source for multiplier for main setpoint
0 = Connector K0000
1 = Connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P323
*
FDS
(G135)
Source for multiplier for additional setpoint
0 = Connector K0000
1 = Connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
10.16 Ramp-function generator
P330
*
FDS
(G136)
Factor for ramp-function generator times [SW 2.1 and later]
Selection of a factor for the values set in parameters P296, P297, P298,
P303 to P314 and P542 (ramp-function generator times).
0 Factor = 1
1 Factor = 60
i.e. effective ramp-function generator times = values set in
[minutes] instead of in [seconds]
0 bis 1
1
Ind: 4
WE=0
Typ: O2
P052 = 3
P051 = 40
off-line
10.17 Setting values for monitoring functions and limits
Setting values for monitoring functions
P351
FDS
Threshold for undervoltage trip
If the line voltage drops below a specific value (P078) and does not return to
the permissible tolerance range within the "Restart time" set in P086, fault
message F006 is activated. The drive dwells in operating state o4 or o5
while the line undervoltage persists.
-90 to 0
[%]
Armature:
1% of P078.001
Field:
1% of P078.002
Ind: 4
FS=-20
Type: I2
P052 = 3
P051 = 40
Online
P352
FDS
Source for overvoltage trip
If the line voltage exceeds a specific value (P078) and does not return to the
permissible tolerance range within the "Restart time" set in P086, fault
message F007 is activated.
0 to 99
[%]
Armature:
1% of P078.001
Field:
1% of P078.002
Ind: 4
FS=20
Type: O2
P052 = 3
P051 = 40
Online
P353
FDS
Response threshold for phase failure monitoring
If the line voltage drops below the permissible value in operating states of
≤ o4 and does not return to an "acceptable" value within the "Restart time"
set in P086, fault message F004 or F005 is activated.
The drive dwells in operating state o4 or o5 for the period that the line
voltage remains below the threshold and during the subsequent voltage
stabilization period set in P090.
When a switch-on command is entered, the converter dwells in operating
states o4 and o5 for a maximum total delay period for both states set in
P089 until the voltages in all phases exceed the threshold set in this
parameter before fault message F004 or F005 is activated.
10 to 100
[%]
Armature:
1% of P078.001
Field:
1% of P078.002
Ind: 4
FS=40
Type: O2
P052 = 3
P051 = 40
Online
P355
FDS
Stall protection time
F035 is activated if the conditions for the "Stall protection" fault message are
fulfilled for longer than the period set in P355.
When P355=0.0, the "Drive blocked" monitoring function (F035) is
deactivated and alarm A035 is likewise suppressed.
0.0 to 600.0
[s]
0.1s
Ind: 4
FS=0,5
Type: O2
P052 = 3
P051 = 40
Online
P357
FDS
Threshold for tachometer interruption monitoring
F042 is suppressed if the actual EMF value is lower than the value set in
P357.
The setting is entered as a % of the ideal mean DC voltage value at α=0,
i.e. as a % of P078.001 * 1.35
10 to 70
[%]
1%
Ind: 4
FS=10
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-43
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P360
(G180)
(G181)
Response delay for external faults and alarms
The fault message or alarm is not activated on the converter until the
appropriate input or corresponding control word bit (as selected in P675,
P686, P688 or P689) has been in the LOW state for at least the time period
set in this parameter (see also Section 8, Sheets G180 and G181).
i001: Delay for external fault 1
i002: Delay for external fault 2
i003: Delay for external alarm 1
i004: Delay for external alarm 2
0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P361
FDS
Delay time for the undervoltage monitoring [SW 1.7 and later]
Activation of the fault message F006 (line undervoltage) is delayed by the
time that can be set in this parameter. During this delay time firing pulses
are output!
Another time which is parameterized for automatic restarting (P086) only
begins after the time set here has elapsed.
0 to 60000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
on-line
P362
FDS
Delay time for the overvoltage monitoring [SW 1.7 and later]
Activation of the fault message F007 (line overvoltage) is delayed by the
time that can be set in this parameter. During this delay time firing pulses
are output!
Another time which is parameterized for automatic restarting (P086) only
begins after the time set here has elapsed.
0 to 60000
[ms]
1ms
Ind: 4
FS=10000
Type: O2
P052 = 3
P051 = 40
on-line
P363
FDS
Threshold for the minimum line frequency [SW 1.8 and later]
If the line frequency falls below the value set here and does not rise above it
again within the "restart" time set in P086, the fault message F008 is
activated. As long as the line frequency is below the value set here, the
drive is kept in operating state o4 or o5.
[values < 45.0 Hz can be set in SW 1.9 and later]
CAUTION
Operation in the extended frequency range between 23 Hz and 110 Hz
is available on request.
23.0 to 60.0
[Hz]
0.1 Hz
Ind: 4
FS=45.0
Type: O2
P052 = 3
P051 = 40
on-line
P364
FDS
Threshold for the maximum line frequency [SW 1.8 and later]
If the line frequency rises above the value set here and does not fall below it
again within the "restart" time set in P086, the fault message F009 is
activated. As long as the line frequency is above the value set here, the
drive is kept in operating state o4 or o5.
CAUTION
Operation in the extended frequency range between 23 Hz and 110 Hz
is available on request.
50.0 to 110.0
[Hz]
0.1 Hz
Ind: 4
FS=65.0
Type: O2
P052 = 3
P051 = 40
on-line
10.18 Setting values for limit-value monitors
(see also Section 8, Sheet G187 and G188 of Operating Instructions 6RX1700-0AD**)
n < nmin signal
P370
FDS
(G187)
Speed threshold nmin
Speed threshold for n < nmin limit-value monitor.
Note:
This threshold also affects the sequence of control operations for
"Shutdown", "Fast stop", cancellation of the "Inching" or "Crawling"
command, the "Braking with field reversal" function and the brake control
operation (see Section 9).
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=0,50
Type: O2
P052 = 3
P051 = 40
Online
P371
FDS
(G187)
Hysteresis for n < nmin signal
This value is added to the response threshold if n < nmin is active.
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=0,50
Type: O2
P052 = 3
P051 = 40
Online
n < ncomp. signal

10-44 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P373
FDS
(G187)
Speed threshold ncomp.
Speed threshold for n < ncomp. signal
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=100.00
Type: O2
P052 = 3
P051 = 40
Online
P374
FDS
(G187)
Hysteresis for < ncomp. signal (n < ncomp. signal)
This value is added to the response threshold if n < ncomp. is active.
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
Online
P375
FDS
(G187)
OFF delay for n < ncomp. signal 0.0 to 100.0
[s]
0.1s
Ind: 4
FS=3.0
Type: O2
P052 = 3
P051 = 40
Online
Setpoint/actual value deviation 2
P376
FDS
(G187)
Permissible setpoint/actual value deviation 2 [SW 1.9 and later] 0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FD=3.00
Type: O2
P052 = 3
P051 = 40
on-line
P377
FDS
(G187)
Hysteresis for setpoint/actual value deviation 2 signal
[SW 1.9 and later]
This value is added to the response threshold if a setpoint/actual value
deviation signal is active
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=1.00
Type: O2
P052 = 3
P051 = 40
on-line
P378
FDS
(G187)
Response delay for setpoint/actual value deviation signal 2
[SW 1.9 and later] 0.0 to 100.0
[s]
0.1s
Ind: 4
FS=3.0
Type: O2
P052 = 3
P051 = 40
on-line
Overspeed
P380
FDS
(G188)
Maximum speed in positive direction of rotation 0.0 to 199.9
[%]
0.1% of maximum
speed
Ind: 4
FS=120.0
Type: O2
P052 = 3
P051 = 40
Online
P381
FDS
(G188)
Maximum speed in negative direction of rotation -199.9 to 0.0
[%]
0.1% of maximum
speed
Ind: 4
FS=-120.0
Type: I2
P052 = 3
P051 = 40
Online
Setpoint/actual value deviation 1
P388
FDS
(G187)
Permissible deviation between setpoint and actual value 1 0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
Online
P389
FDS
(G187)
Hysteresis for setpoint/actual value deviation signal 1
This value is added to the response threshold if a setpoint/actual value
deviation signal is active
0.00 to 199.99
[%]
0.01% of maximum
speed
Ind: 4
FS=1.00
Type: O2
P052 = 3
P051 = 40
Online
P390
FDS
(G187)
Response delay for setpoint/actual value deviation signal 1 0.0 to 100.0
[s]
0.1s
Ind: 4
FS=3.0
Type: O2
P052 = 3
P051 = 40
Online
If < If min signal
P394
FDS
(G188)
Field current threshold If min
Field current threshold for If < If min limit-value monitor.
Note:
This threshold affects the sequence of control operations for the "Direction
of rotation reversal using field reversal" and "Braking with field reversal"
functions (see Section 9).
The If < If min signal is connected to binector B0215, the actual value at
field current controller input K0265 is applied as If.
B0215 = 0 when K0265 > threshold set in P394
B0215 = 1 when K0265 < threshold set in P394 + hysteresis set in P395
0 → 1 transition takes place when K0265 < P394
1 → 0 transition takes place when K0265 > P394 + P395
0.00 to 199.99
[%]
0.01% of converter
rated field DC
current (r073.i02)
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
Online
P395
FDS
(G188)
Hysteresis for If < If min signal
This value is added to the response threshold if If < If min is active.
(see also P394)
0.00 to 100.00
[%]
0.01% of converter
rated field DC
current (r073.i02)
Ind: 4
FS=1.00
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-45
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Field current monitoring
Fault message F005 is activated if the actual field current (K0265) is lower than the percentage of the field current setpoint (K0268) set in
P396 for longer than the time set in parameter P397.
Note:
Fault message F005 is only activated, however, if the field current setpoint is > 2% of the converter rated DC current of the field (r073.i02)
ist.
P396
FDS
(G167)
Threshold for field current monitoring [SW 1.9 and later]
1 to 100
[%]
0.01% of setpoint at
field current con-
troller input (K0268)
Ind: 4
FS=50
Type: O2
P052 = 3
P051 = 40
on-line
P397
FDS
(G167)
Field current monitoring time [SW 1.9 and later]
0.02 to 60.00
[s]
0.01s
Ind: 4
FS=0.50
Type: O2
P052 = 3
P051 = 40
on-line
If < If x signal
P398
FDS
(G188)
Field current threshold If x
Setpoint-oriented field current threshold for If < If x limit-value monitor.
Note:
This threshold affects the sequence of control operations for the "Direction
of rotation reversal using field reversal" and "Braking with field reversal"
functions (see Section 9).
The If < If x signal is connected to binector B0216, the actual value at field
current controller input K0265 is applied as If.
B0216 = 0 when K0265 > threshold set in P398
B0216 = 1 when K0265 < threshold set in P398 + hysteresis set in P399
0 → 1 transition takes place when K0265 < P398
1 → 0 transition takes place when K0265 > P398 + P399
0.00 to 199.99
[%]
0.01% of setpoint at
field current
controller input
(K0268)
Ind: 4
FS=80.00
Type: O2
P052 = 3
P051 = 40
Online
P399
FDS
(G188)
Hysteresis for If < If x signal
This value is added to the response threshold if If < If x is active.
(see also P398)
0.00 to 100.00
[%]
0.01% of converter
rated field DC
current (r073.i02)
Ind: 4
FS=1.00
Type: O2
P052 = 3
P051 = 40
Online
10.19 Settable fixed values
Function: The value set in the parameter is applied to the specified connector
P401
FDS
(G120)
K401 fixed value
is applied to connector K0401
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P402
FDS
(G120)
K402 fixed value
is applied to connector K0402
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P403
FDS
(G120)
K403 fixed value
is applied to connector K0403
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P404
FDS
(G120)
K404 fixed value
is applied to connector K0404
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P405
FDS
(G120)
K405 fixed value
is applied to connector K0405
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P406
FDS
(G120)
K406 fixed value
is applied to connector K0406
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P407
FDS
(G120)
K407 fixed value
is applied to connector K0407
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P408
FDS
(G120)
K408 fixed value
is applied to connector K0408
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P409
FDS
(G120)
K409 fixed value
is applied to connector K0409
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P410
FDS
(G120)
K410 fixed value
is applied to connector K0410
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
10-46 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P411
FDS
(G120)
K411 fixed value
is applied to connector K0411
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P412
FDS
(G120)
K412 fixed value
is applied to connector K0412
-32768 to 32767
1
Ind: 4
FS=0
Type: I2
P052 = 3
P051 = 40
Online
P413
FDS
(G120)
K413 fixed value
is applied to connector K0413
-32768 to 32767
1
Ind: 4
FS=0
Type: I2
P052 = 3
P051 = 40
Online
P414
FDS
(G120)
K414 fixed value
is applied to connector K0414
-32768 to 32767
1
Ind: 4
FS=0
Type: I2
P052 = 3
P051 = 40
Online
P415
FDS
(G120)
K415 fixed value
is applied to connector K0415
-32768 to 32767
1
Ind: 4
FS=0
Type: I2
P052 = 3
P051 = 40
Online
P416
FDS
(G120)
K416 fixed value
is applied to connector K0416
-32768 to 32767
1
Ind: 4
FS=0
Type: I2
P052 = 3
P051 = 40
Online
10.20 Fixed control bits
Function: The value set in the parameter is applied to the specified binector
P421
FDS
(G120)
B421 fixed bit
is applied to binector B0421
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P422
FDS
(G120)
B422 fixed bit
is applied to binector B0422
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P423
FDS
(G120)
B423 fixed bit
is applied to binector B0423
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P424
FDS
(G120)
B424 fixed bit
is applied to binector B0424
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P425
FDS
(G120)
B425 fixed bit
is applied to binector B0425
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P426
FDS
(G120)
B426 fixed bit
is applied to binector B0426
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P427
FDS
(G120)
B427 fixed bit
is applied to binector B0427
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P428
FDS
(G120)
B428 fixed bit
is applied to binector B0428
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10.21 Digital setpoint input (fixed setpoint, inching and crawling setpoints)
(see also Section 8, Sheets G127, G129 and G130 of Operating Instructions 6RX1700-0AD**)
Fixed setpoint
Function: Up to 8 connectors can be selected in P431 indices .01 to .08. These can be applied as an additional fixed setpoint (K0204,
K0209) via the binectors selected in P430, indices .01 to .08 (setpoint is applied when binector switches to log. "1" state). P432
indices .01 to .08 can be set to define for each setpoint individually whether the ramp-function generator must be bypassed on
setpoint injection.
If fixed setpoint injection is not selected, the connector set in P433 is applied to K0209.
P430
*
(G127)
Source for fixed-setpoint injection
Selection of binector to control injection of the fixed setpoint
("1" state = fixed setpoint injected).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-47
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P431
*
(G127)
Source for fixed setpoint
Selection of connector to be injected as the fixed setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P432
*
(G127)
Source for selection of ramp-function generator bypass
Selection as to whether or not ramp-function generator must be bypassed
when the fixed setpoint is injected.
The ramp-function generator is bypassed if the AND operation between the
binector selected via an index of P430 and the setting in the same index of
P432 produces a log. "1"
0 to 1
1
Ind: 8
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P433
*
FDS
(G127)
Source for standard setpoint
Selection of the connector to be applied if fixed-setpoint injection is not
selected
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=11
Type: L2
P052 = 3
P051 = 40
Offline
Inching setpoint
Function: Up to 8 connectors can be selected in P436 indices .01 to .08. These can be applied as an inching setpoint (K0202, K0207) via
the binectors selected in P435, indices .01 to .08 (setpoint is applied when binector switches to log. "1" state). P437 indices .01
to .08 can be set to define for each setpoint individually whether the ramp-function generator must be bypassed on setpoint
injection. If more than one inching setpoint is injected, an output value corresponding to inching setpoint = 0% is applied.
If inching setpoint injection is not selected, the connector set in P438 is applied to K0207.
P435
*
(G129)
Source for injection of inching setpoint
Selection of binector to control injection of the inching setpoint
("1" state = inching setpoint injected).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P436
*
(G129)
Source for inching setpoint
Selection of connector to be injected as the inching setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P437
*
(G129)
Source for selection of ramp-function generator bypass
Selection as to whether or not ramp-function generator must be bypassed
when the inching setpoint is injected.
The ramp-function generator is bypassed if the AND operation between the
binector selected via an index of P435 and the setting in the same index of
P437 produces a log. "1".
0 to 1
1
Ind: 8
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P438
*
FDS
(G129)
Source for standard setpoint
Selection of the connector to be applied if inching-setpoint injection is not
selected
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=208
Type: L2
P052 = 3
P051 = 40
Offline
Crawling setpoint
Function: Up to 8 connectors can be selected in P441 indices .01 to .08. These can be applied as an additional crawling setpoint (K0201,
K0206) via the binectors selected in P440, indices .01 to .08. P445 can be set to define whether the setpoint must be applied
when the selected binectors have reached the log. "1" state (when P445=0) or in response to a 0 → 1 transition (when
P445=1). When setpoint injection in response to a 0 → 1 transition is selected, the setpoint injection function is reset when the
binector selected in P444 switches to the log. "0" state. P442 indices .01 to .08 can be set to define for each setpoint
individually whether the ramp-function generator must be bypassed on setpoint injection.
If crawling setpoint injection is not selected, the connector set in P443 is applied to K0206.
P440
*
(G130)
Source for injection of crawling setpoint
Selection of binector to control injection of the crawling setpoint.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
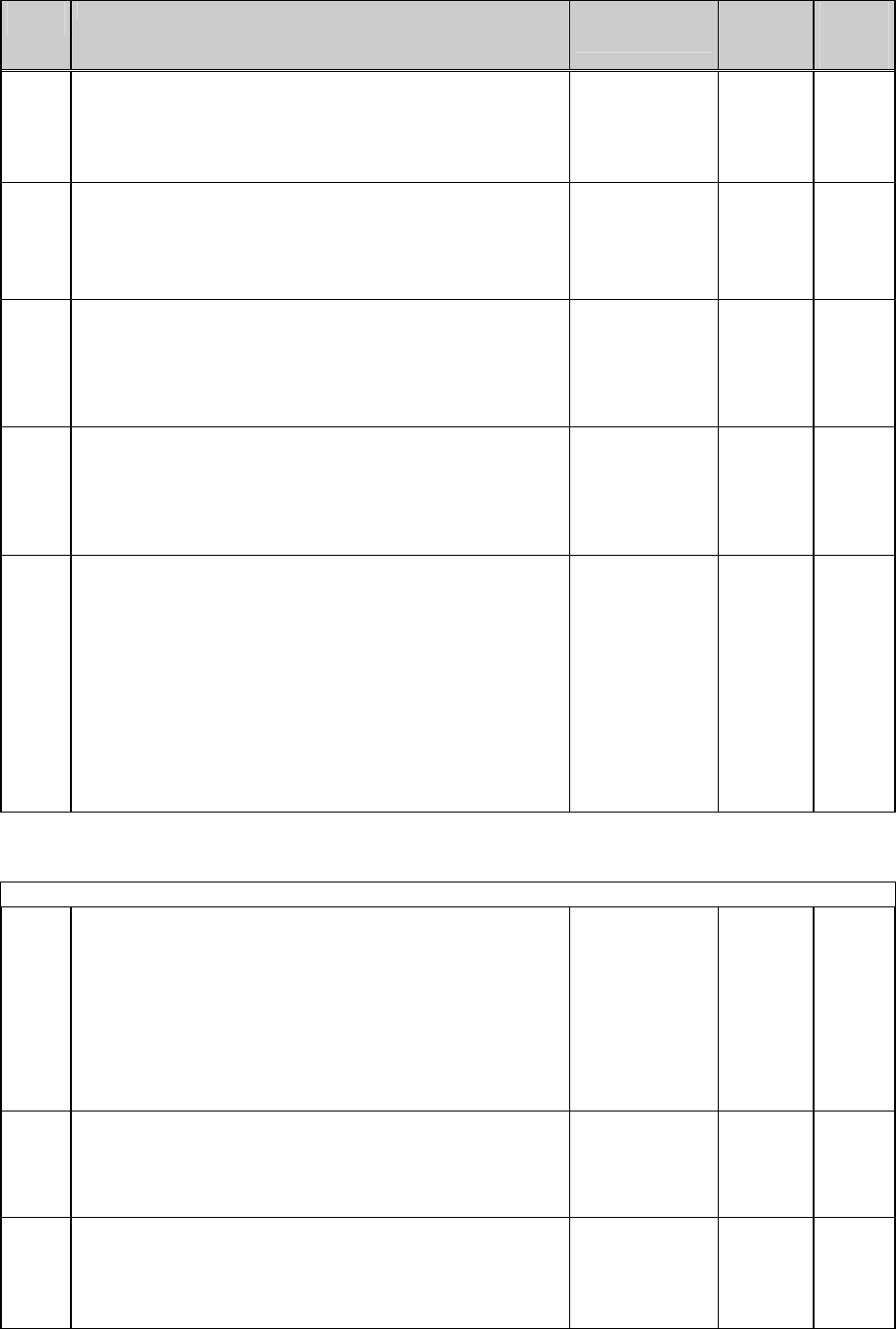
10-48 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P441
*
(G130)
Source for crawling setpoint
Selection of connector to be injected as the crawling setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 8
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P442
*
(G130)
Source for selection of ramp-function generator bypass
Selection as to whether or not ramp-function generator must be bypassed
when the crawling setpoint is injected.
The ramp-function generator is bypassed if the AND operation between the
binector selected via an index of P440 and the setting in the same index of
P442 produces a log. "1".
0 to 1
1
Ind: 8
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P443
*
FDS
(G130)
Source for standard setpoint
Selection of the connector to be applied if crawling-setpoint injection is not
selected
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=207
Type: L2
P052 = 3
P051 = 40
Offline
P444
*
BDS
(G130)
Source for standstill command
Selection of the binector to control the standstill operation (OFF1) or
resetting of crawling setpoint injection when P445=1 (log. "0" state = reset).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P445
*
(G130)
Selection of level/edge for switch-on/crawling
Selection to define whether ON command must be input via terminal 37 and
the crawling setpoint injected in response to a log. "1" level or to a 0 → 1
transition
0 ON with log. "1" state at terminal 37 and
injection of crawling setpoint with binectors selected in P440 in
log. "1" state
1 ON in response to 0 → 1 transition at terminal 37 and
injection of crawling setpoint in response to 0 → 1 transition of
binectors selected in P440
With this setting, the ON command or injection command for the
crawling setpoint is stored. The memory is reset when the
binector selected in P444 switches to the log. "0" state.
0 to 1
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10.22 Position sensing with pulse encoder
See parameters P140 to P148 for pulse encoder definition and monitoring
P450
*
FDS
(G145)
Resetting of position counter
0 Reset position counter OFF
1 Reset position counter with zero marker
2 Reset position counter with zero marker when LOW signal is
applied to terminal 39
3 Reset position counter when LOW signal is applied to terminal
39
Note: Counter resetting with P450 = 2 and 3 is executed in the hardware
and is not affected by how the binectors controlled by terminal 39 are
interconnected
0 to 3
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P451
*
FDS
(G145)
Position counter hysteresis
0 Hysteresis for rotational direction reversal OFF
1 Hysteresis for rotational direction reversal ON (the first pulse
encoder input pulse after a change in rotational direction is not
counted)
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P452
*
BDS
(G145)
Source for "Reset position counter" command [SW 1.9 and later]
Selection of binector to control resetting of the position counter.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
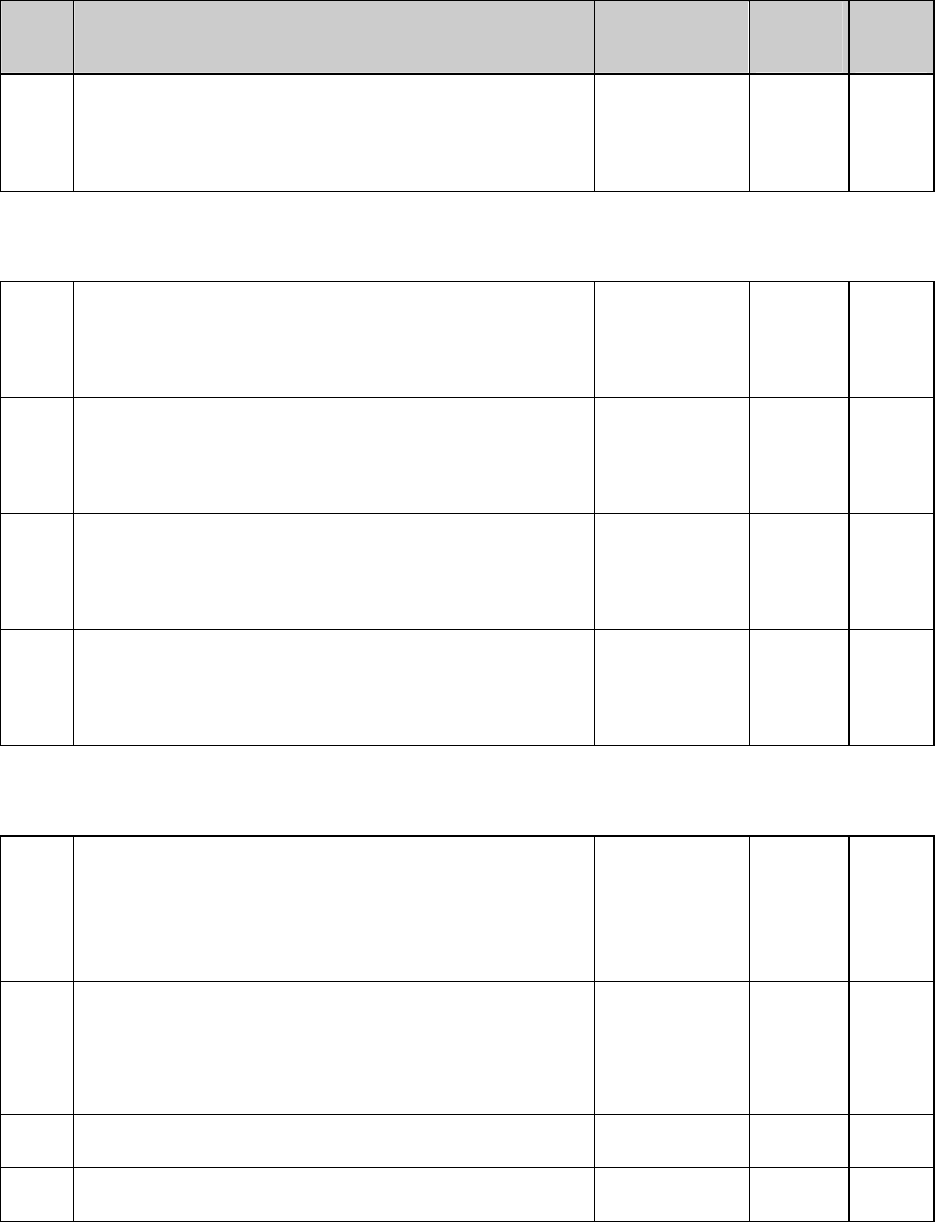
SIEMENS Energy & Automation 10-49
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P453
*
BDS
(G145)
Source for "Enable zero marker counter" command [SW 1.9 and later]
Selection of binector to control enabling of the zero marker counter
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
off-line
10.23 Connector selector switches
(see also Section 8, Function Diagram Sheet G124 of Operating Instructions 6RX1700-0AD**)
P455
*
(G124)
Source for inputs of connector selector switch 1 [SW 1.9 and later]
Selection of connectors for the input signals for connector selector switch 1.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 3
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P456
*
(G124)
Source for control of connector selector switch 1 [SW 1.9 and later]
Selection of binectors to control connector selector switch 1.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P457
*
(G124)
Source for inputs of connector selector switch 2 [SW 1.9 and later]
Selection of connectors for the input signals for connector selector switch 2.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 3
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P458
*
(G124)
Source for control of connector selector switch 2 [SW 1.9 and later]
Selection of binectors to control connector selector switch 2.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
10.24 Motorized potentiometer
(see also Section 8, Sheet G126 of Operating Instructions 6RX1700-0AD**)
P460
*
FDS
(G126)
Control word for motorized potentiometer ramp-function generator
0 The motorized potentiometer ramp generator is bypassed in
Automatic mode (same effect as for P462 and P463 = 0.01, i.e.
the generator output is made to follow the automatic setpoint
without delay)
1 Motorized potentiometer ramp generator is active in Manual and
Automatic modes
0 to 1
1
Ind: 4
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
P461
*
FDS
(G126)
Source for setpoint in Automatic mode
Selection of the connector to be applied as the Automatic setpoint to the
ramp-function generator in the motorized potentiometer
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P462
FDS
(G126)
Ramp-up time for motorized potentiometer 0.01 to 300.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P463
FDS
(G126)
Ramp-down time for motorized potentiometer 0.01 to 300.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
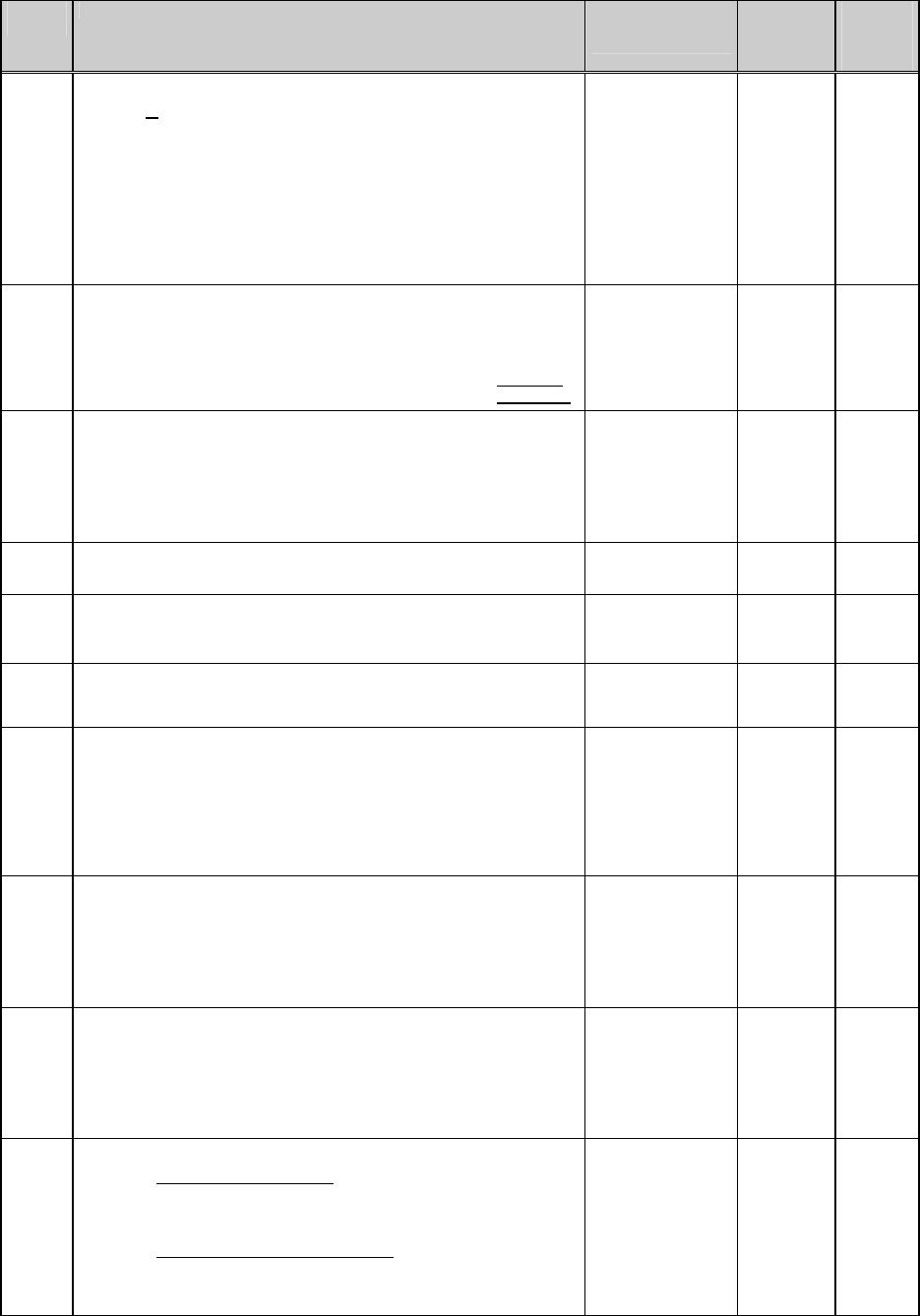
10-50 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P464
FDS
(G126)
Time difference for dy/dt
Setting of dt for the output of dy/dt at a connector,
i.e. on K0241 the change in the output quantity (K0240) is output within the
time set in P464, multiplied by the factor set in P465
(unit of time setting is [s] if P465=0 or [min] if P465=1)
Example: - The ramp-function generator is currently ramping up with a
ramp-up time of P462=5s, i.e. a ramp-up operation from y=0%
to y=100% takes 5s.
- A time difference dt of P464=2s is set.
- ⇒ A dy/dt of 40% appears at connector K0241 since the dy
within the set dt of 2 s equals (2s/5s)*100%.
0.01 to 300.00
[s]
0.01s
Ind: 4
FS=10.00
Type: O2
P052 = 3
P051 = 40
Online
P465
*
FDS
(G126)
Factor of expansion for motorized potentiometer
The effective ramp-up time, ramp-down time or time difference for dy/dt is
the product of the time setting in parameter P462, P463 and P464
respectively, multiplied by the factor set in this parameter.
0 Parameters P462, P463 and P464 are multiplied by a factor of 1
1 Parameters P462, P463 and P464 are multiplied by a factor of 60
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P466
*
FDS
(G126)
Source for motorized potentiometer setting value
Selection of the connector to be injected as the motorized potentiometer
setting value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P467
FDS
(G126)
Motorized potentiometer starting value
Starting value of motorized potentiometer after ON when P473 = 0
-199.9 to 199.9
[%]
0.1%
Ind: 4
FS=0.0
Type: I2
P052 = 3
P051 = 40
Online
P468
FDS
(G126)
Setpoint for "Raise motorized potentiometer”
Motorized potentiometer manual operation: Setpoint for "Raise motorized
potentiometer"
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=100.00
Type: I2
P052 = 3
P051 = 40
Online
P469
FDS
(G126)
Setpoint for "Lower motorized potentiometer ”
Motorized potentiometer manual operation: Setpoint for "Lower motorized
potentiometer"
-199.99 to 199.99
[%]
0.01%
Ind: 4
FS=-100.00
Type: I2
P052 = 3
P051 = 40
Online
P470
*
BDS
(G126)
Source for clockwise/counter-clockwise switchover
Selection of binector to control "Clockwise/counter-clockwise
switchover"
("0" state = clockwise).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P471
*
BDS
(G126)
Source for manual/automatic switchover
Selection of binector to control "Manual/automatic switchover"
("0" state = manual).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P472
*
BDS
(G126)
Source for set motorized potentiometer
Selection of binector to control "Set motorized potentiometer"
("0" to "1" transition = set motorized potentiometer).
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P473
*
FDS
(G126)
Storage of output value
0 No storage of output value:
The output is set to 0 in all operating states of >o5.
The starting point after ON is determined by P467 (MOP starting
value).
1 Non-volatile storage of output value:
The output value remains stored in all operating states and after
voltage disconnection or failure. The last value stored is output
again after voltage recovery/reconnection.
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
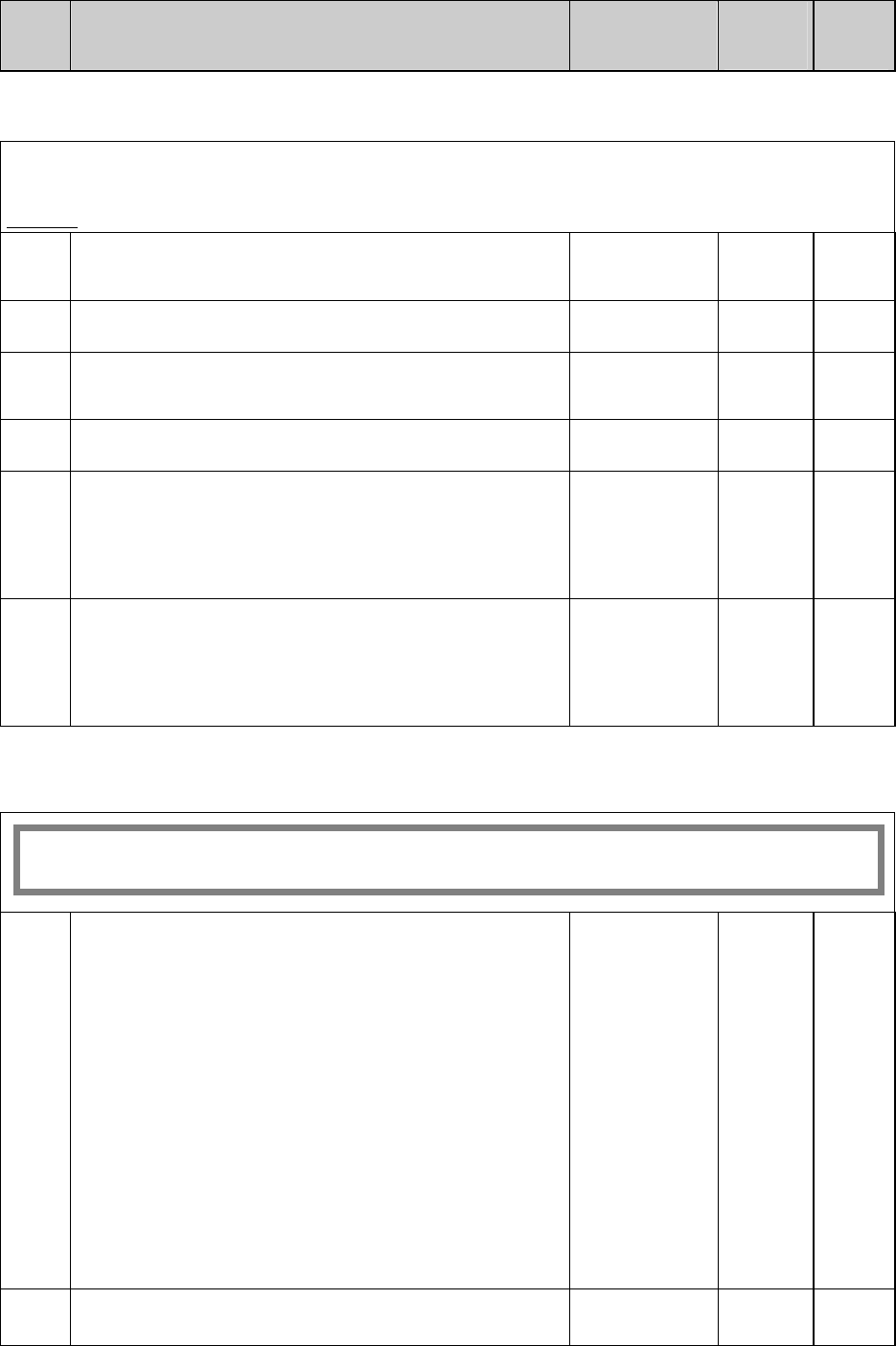
SIEMENS Energy & Automation 10-51
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.25 Oscillation
Function:
Parameters P480 to P483 define the waveshape of a rectangular signal (oscillation setpoint K0203). The value set in P480 determines the
signal level for the time period set in P481 and the value set in P482 the signal level for the time period set in P483.
Oscillation: Selected in P485. The free-running rectangular signal is switched through to the output K0208.
P480
FDS
(G128)
Oscillation setpoint 1 -199.9 to 199.9
[%]
0.1% of maximum
speed
Ind: 4
FS=0,5
Type: I2
P052 = 3
P051 = 40
Online
P481
FDS
(G128)
Oscillation time 1 0.1 to 300.0
[s]
0.1s
Ind: 4
FS=0.1
Type: O2
P052 = 3
P051 = 40
Online
P482
FDS
(G128)
Oscillation setpoint 2 -199.9 to 199.9
[%]
0.1% of maximum
speed
Ind: 4
FS=-0,4
Type: I2
P052 = 3
P051 = 40
Online
P483
FDS
(G128)
Oscillation time 2 0.1 to 300.0
[s]
0.1s
Ind: 4
FS=0.1
Type: O2
P052 = 3
P051 = 40
Online
P484
*
FDS
(G128)
Source for standard setpoint
Selection of connector to be injected as the output value when the
"Oscillation" function is not selected
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=209
Type: L2
P052 = 3
P051 = 40
Offline
P485
*
BDS
(G128)
Source for oscillation selection
Selection of binector to control activation of the "Oscillation" function
(log. "1" state = oscillation active)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
10.26 Definition of "Motor interface"
(see also Section 8, Sheets G185 and G186 of Operating Instructions 6RX1700-0AD**)
CAUTION!
The encoders for measurement and monitoring of the brush length, bearing condition, air flow and motor temperature must be
safely isolated from the power circuit.
P490
*
(G185)
Selection of temperature sensor for analog monitoring of motor
temperature
i001: Temperature sensor at terminals 22 / 23:
i002: Temperature sensor at terminals 204 / 205:
Settings:
0 No temperature sensor
1 KTY84
2 PTC thermistor with R=600Ω 1)
3 PTC thermistor with R=1200Ω 1)
4 PTC thermistor with R=1330Ω 1)
5 PTC thermistor with R=2660Ω 1)
1) PTC thermistor according to DIN 44081 / 44082 with specified R at rated
response temperature, 1330Ω on Siemens motors (setting 4 must be
selected). When a PTC thermistor is selected as the temperature
sensor, it is not necessary to set parameters P491 and P492 (alarm and
trip temperatures). These two temperatures are predetermined by the
type of PTC thermistor installed. Whether an alarm or fault is output
when the operating point of the PTC thermistor is reached depends on
how the relevant input is parameterized (P493.F or P494.F).
0 to 5
1
Ind: 2
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P491
FDS
(G185)
Analog monitoring of motor temperature: Alarm temperature
Operative only when P490.x=1.
0 to 200
[°C]
1°C
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10-52 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P492
FDS
(G185)
Analog monitoring of motor temperature: Trip temperature
Operative only when P490.x=1.
0 to 200
[°C]
1°C
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P493
*
FDS
(G185)
Motor temperature analog 1 (temperature sensor at terminals 22 / 23):
Tripping of alarm or fault message
Motor temperature grasped with KTY84
0 Monitoring deactivated
1 Alarm (A029) at temperature > P491
2 Fault message (F029) at temperature > P492
3 Alarm (A029) at temperature > P491 and
fault message (F029) at temperature > P492
Motor temperature grasped with PTC thermistor
0 Monitoring deactivated
1 Alarm message (A029) when operating point of PTC thermistor
is reached
2 Fault message (F029) when operating point of PTC thermistor is
reached
3 Illegal setting
0 to 3
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P494
*
FDS
(G185)
Motor temperature analog 2 (temperature sensor at terminals 204 /
205): Tripping of alarm or fault message
Motor temperature grasped with KTY84
0 Monitoring deactivated
1 Alarm (A029) at temperature > P491
2 Fault message (F029) at temperature > P492
3 Alarm (A029) at temperature > P491 and
fault message (F029) at temperature > P492
Motor temperature grasped with PTC thermistor
0 Monitoring deactivated
1 Alarm message (A029) when operating point of PTC thermistor
is reached
2 Fault message (F029) when operating point of PTC thermistor is
reached
3 Illegal setting
0 to 3
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P495
*
FDS
(G186)
Brush length sensing: Tripping of alarm or fault message
0 No brush length sensing (terminal 211 is not scanned)
1 Binary brush length sensing (terminal 211 is scanned)
Alarm (A025) in response to 0 signal
2 Binary brush length sensing (terminal 211 is scanned)
Fault message (F025) in response to 0 signal
0 to 2
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P496
*
FDS
(G186)
Bearing condition: Tripping of alarm or fault message
0 No bearing condition sensing (terminal 212 is not scanned)
1 Bearing condition sensing (terminal 212 is scanned)
Alarm (A026) in response to 1 signal
2 Bearing condition sensing (terminal 212 is scanned)
Fault message (F026) in response to 1 signal
0 to 2
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P497
*
FDS
(G186)
Air flow: Tripping of alarm or fault message
0 No air flow monitoring (terminal 213 is not scanned)
1 Air flow monitoring (terminal 213 is scanned)
Alarm (A027) in response to 0 signal
2 Air flow monitoring (terminal 213 is scanned)
Fault message (F027) in response to 0 signal
0 to 2
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P498
*
FDS
(G186)
Temperature switch: Tripping of alarm or fault message
0 No temperature switch connected (terminal 214 is not scanned)
1 Temperature switch connected (terminal 214 is scanned)
Alarm (A028) in response to 0 signal
2 Temperature switch connected (terminal 214 is scanned)
Fault message (F028) in response to 0 signal
0 to 2
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-53
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.27 Configuring of torque shell input
P500
*
BDS
(G160)
Source for torque setpoint for slave drive
Selection of the connector to be injected as the torque setpoint for a slave
drive
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=170
Type: L2
P052 = 3
P051 = 40
Offline
P501
*
BDS
(G160)
Source for additional torque setpoint
Selection of connector to be injected as the additional torque setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P502
*
(G152)
Source for value to be added to speed controller output
Selection of connector to be injected as the value to be added to the speed
controller output (in addition to friction and moment of inertia compensation)
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P503
FDS
(G160)
Multiplier for torque setpoint in slave mode -300.00 to 300.00
[%]
0.01%
Ind: 4
FS=100.00
Type: I2
P052 = 3
P051 = 40
on-line
10.28 Speed limiting controller
(see also Section 8, Sheet G160 of Operating Instructions 6RX1700-0AD**)
The output of the speed limiting controller comprises a positive (K0136) and a negative (K0137) torque limit. These limits are applied to
the torque limitation
P509
*
(G160)
Source for input quantity (n-act) of speed limiting controller
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
P510
*
(G160)
Source for pos. torque limit of speed limiting controller
Selection of the connector to be injected as the limit value for torque
limitation 1
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=2
Type: L2
P052 = 3
P051 = 40
Offline
P511
*
(G160)
Source for neg. torque limit of speed limiting controller
Selection of the connector to be injected as the limit value for torque
limitation 2
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=4
Type: L2
P052 = 3
P051 = 40
Offline
P512
FDS
(G160)
Maximum speed in positive direction of rotation 0.0 to 199.9
[%]
0.1% of rated speed
Ind: 4
FS=105.0
Type: O2
P052 = 3
P051 = 40
Online
P513
FDS
(G160)
Maximum speed in negative direction of rotation -199.9 to 0.0
[%]
0.1% of rated speed
Ind: 4
FS=-105.0
Type: I2
P052 = 3
P051 = 40
Online
P515
FDS
(G160)
P gain of speed limiting controller 0.10 to 200.00
0.01
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
Online
10-54 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.29 Friction compensation
(see also Section 8, Sheet G153 of Operating Instructions 6RX1700-0AD**)
Parameters P520 to P530 are the armature current and torque setpoint required for a stationary input signal (factory setting: speed
controller actual value K0179) of 0%, 10% to 100% of the maximum value (in steps of 10%).
These parameters are intermediate points along the friction curve. Depending on P170 (0 or 1) they are either an armature current or a
torque setpoint and are set automatically when the friction and moment of inertia compensation (P051=28) are optimized. P520 is then set
to 0.0%.
The intermediate points are interpolated linearly during which the output of the friction compensation assumes the sign of the input signal.
P530 is specified by the friction compensation even for input signals >100% of the maximum signal.
During operation in both directions we recommend leaving P520 at 0.0% in order to avoid armature current vibration at 0% of the input
signal.
P519
*
(G153)
Source for input signal of the friction compensation [SW 2.0 and later]
Selection of the input signals that are added and led to the input of the
friction compensation.
i001 Input signal, with sign
i002 Input signal with absolute value generator
Settings:
0 = Connector K0000
1 = Connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=
i001: 179
i002: 0
Type: L2
P052 = 3
P051 = 40
offline
P520
FDS
(G153)
Friction at 0% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P521
FDS
(G153)
Friction at 10% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P522
FDS
(G153)
Friction at 20% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P523
FDS
(G153)
Friction at 30% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P524
FDS
(G153)
Friction at 40% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P525
FDS
(G153)
Friction at 50% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P526
FDS
(G153)
Friction at 60% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P527
FDS
(G153)
Friction at 70% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P528
FDS
(G153)
Friction at 80% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P529
FDS
(G153)
Friction at 90% speed
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
P530
FDS
(G153)
Friction at 100% speed and higher
Setting as % of converter rated DC current or rated torque
0.0 to 100.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-55
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.30 Compensation of moment of inertia (dv/dt injection)
(see also Section 8, Sheet G153 of Operating Instructions 6RX1700-0AD**)
P540
FDS
(G153)
Acceleration time
The acceleration time is the time that would be needed to accelerate the
drive from 0% to 100% of maximum speed (with no friction) at 100%
converter rated DC current (armature) and 100% rated motor field current
(i.e. 100% flux). It is a measure of the moment of inertia on the motor shaft.
This parameter is set automatically during the optimization run for friction
and moment of inertia compensation (P051=28).
0.00 to 650.00
[s]
0.01s
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P541
FDS
(G153)
P gain of acceleration
Proportional gain for "SAD-dependent acceleration" function (see also
parameter P543)
0.00 to 650.00
0.01
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P542
FDS
(G136)
Time difference for dy/dt of ramp-function generator
Ramp-function generator:
Setting of dt for the output of dy/dt at a connector, i.e. at K0191, the change
in the output quantity of the ramp-function generator (K0190) is output within
the period set in P542
Example: - The ramp-function generator is currently ramping up with a
ramp-up time of P311=5s, i.e. a ramp-up operation from y=0%
to y=100% takes 5s.
- A time difference dt of P542=2s is set.
- ⇒ A dy/dt of 40% appears at connector K0191 since the dy
within the set dt of 2 s equals (2s/5s)*100%..
(see also parameter P330)
0.01 to 300.00
[s]
0.01s
Ind: 4
FS=0.01
Type: O2
P052 = 3
P051 = 40
Online
P543
FDS
(G153)
Threshold for SAD-dependent acceleration
With respect to the SAD-dependent acceleration function, only the
component of the speed controller setpoint/actual value difference which
has an absolute value in excess of the threshold set in this parameter is
switched through (see also parameter P541).
Input (setp./act. val. diff.)
Output (value to be multiplied by P541)
199.99%
199.99%
-200.00%
-200.00%
negative
threshold
(-P543)
positive
threshold
(P543)
0.00 to 100.00
[%]
0.01% of maximum
speed
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
Online
P546
FDS
(G153)
Filter time for compensation of moment of inertia 0 to 10000
[ms]
1ms
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
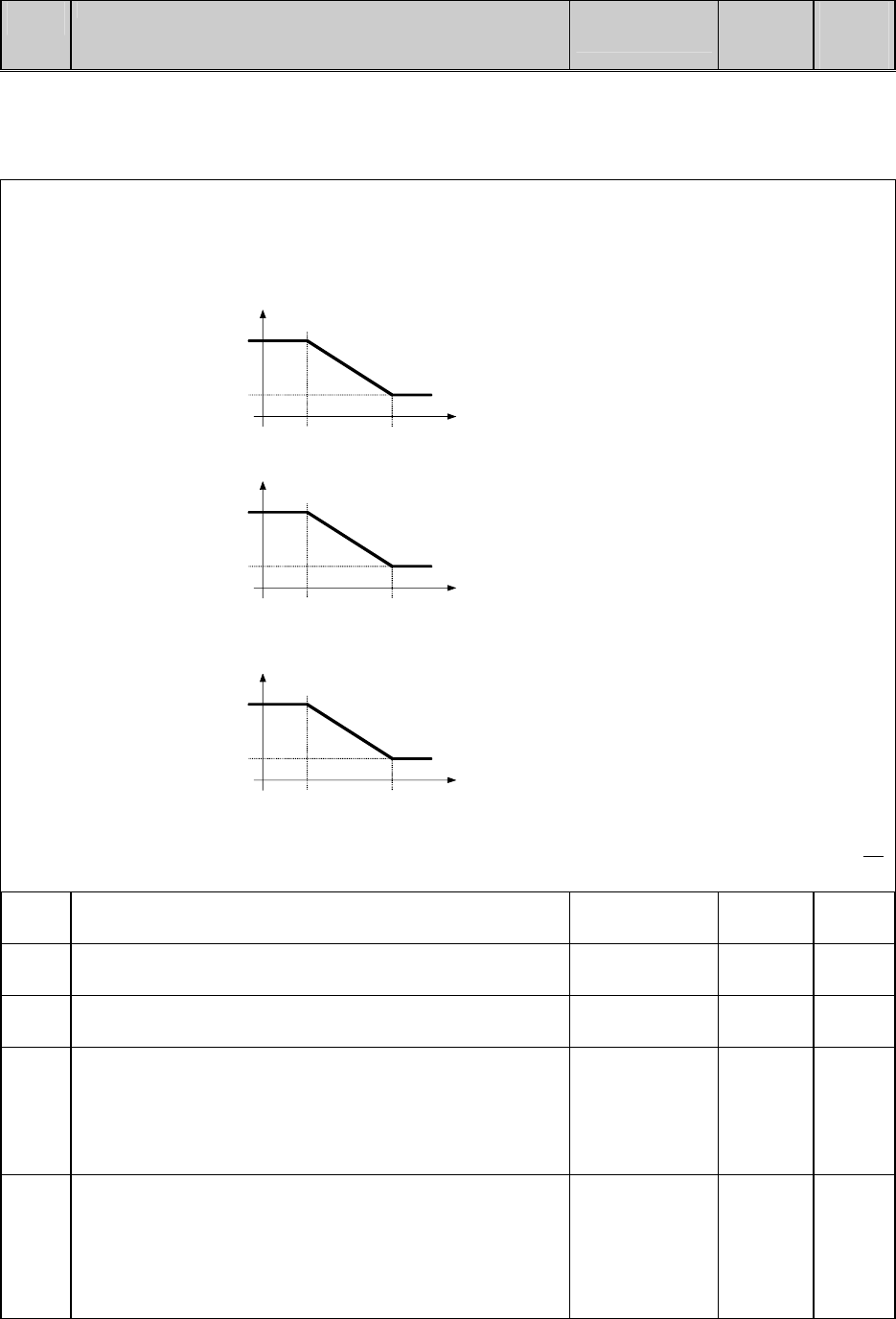
10-56 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.31 Speed controller
(see also Section 8, Sheet G151 of Operating Instructions 6RX1700-0AD**)
further parameters for the speed controller P200 - P236
Speed controller adaptation
The parameters of the speed controller (Kp, Tn, droop) can be altered as a function of any connector to adapt the speed controller
optimally to a changing controlled system.
The diagrams below show the active P gain, the active Integration time and the active droop depending on the value of the set connector.
Adaptation of the P gain:
P550
P225
KP
Input
selected in P553
Threshold 2
P559
Threshold 1
P556
Adaptation of the integration time:
P551
P226
Tn
Input
selected in P554
Threshold 2
P560
Threshold 1
P557
Adaptation of the droop:
P552
P227
St
Input
selected in P555
Threshold 2
P561
Threshold 1
P558
For parameter pairs P225/P550, P226/P551 and P227/P552 all values can be set completely mutually independently, e.g., P550 does not
have to be greater than P225. The above diagrams show only the effect of the individual parameters.
Threshold 1 must always be set smaller than threshold 2, otherwise the fault message F058 is activated.
P550
FDS
(G151)
P gain in the adaptation range
Value of Kp, if Influencing quantity ≤ Threshold 1
0.10 to 200.00
0.01
Ind: 4
FS=3.00
Type: O2
P052 = 3
P051 = 40
on-line
P551
FDS
(G151)
Integration time in the adaptation range [SW 1.7 and later]
Value of Tn, if Influencing quantity ≤ Threshold 1
0.010 to 10.000
[s]
0.001s
Ind: 4
FS=0.650
Type: O2
P052 = 3
P051 = 40
on-line
P552
FDS
(G151)
Droop in the adaptation range [SW 1.7 and later]
Value of droop, if Influencing quantity ≤ Threshold 1
0.0 to 10.0
[%]
0.1%
Ind: 4
FS=0.0
Type: O2
P052 = 3
P051 = 40
on-line
P553
*
FDS
(G151)
Source for the Influencing quantity of the Kp adaptation
Selection of which connector is connected at the influencing quantity for
adaptation of the n controllers P gain
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P554
*
FDS
(G151)
Source for the Influencing quantity of the Tn-adaptation
[SW 1.7 and later]
Selection of which connector is connected at the influencing quantity for
adaptation of the n controllers integration time
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
SIEMENS Energy & Automation 10-57
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P555
*
FDS
(G151)
Source for the Influencing quantity of the droop adaptation
[SW 1.7 and later]
Selection of which connector is connected at the influencing quantity for
adaptation of the n controllers droop
0 = Connector K0000
1 = Connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P556
FDS
(G151)
Adaptation n controller P gain: Threshold 1 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P557
FDS
(G151)
Adaptation n controller integration time: Threshold 1 [SW 1.7 and later] 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P558
FDS
(G151)
Adaptation n controller droop: Threshold 1 [SW 1.7 and later] 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P559
FDS
(G151)
Adaptation n controller P gain: Threshold 2 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P560
FDS
(G151)
Adaptation n controller integration time: Threshold 2 [SW 1.7 and later] 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
P561
FDS
(G151)
Adaptation n controller droop: Threshold 2 [SW 1.7 and later] 0.00 to 100.00
[%]
0.01%
Ind: 4
FS=0.00
Type: O2
P052 = 3
P051 = 40
on-line
Drehzahlregler - Begrenzung der Statik
P562
FDS
(G151)
Positive speed droop limitation 0.00 to 199.99
[%]
0.01%
Ind: 4
FS=100.00
Type: O2
P052 = 3
P051 = 40
Online
P563
FDS
(G151)
Negative speed droop limitation -199.99 to 0.00
[%]
0.01%
Ind: 4
FS=-100.00
Type: I2
P052 = 3
P051 = 40
Online
Speed controller optimization for drives with oscillating mechanical system
On drives with oscillating mechanical components, it can be useful to optimize the speed controller using optimization run P051=29. The
frequency response of the controlled system for frequencies from 1 Hz to 100 Hz is recorded during optimization.
The drive is first accelerated up to a base speed (P565, FS=20%). A sinusoidal speed setpoint with low amplitude (P566, FS=1%) is then
injected. The frequency of this supplementary setpoint is incremented in 1 Hz steps from 1 Hz up to 100 Hz. An average per frequency is
calculated over a parameterizable number of current peaks (P567, FS=300).
P565 Base speed for frequency response recording [SW 1.9 and later]
1.0 to 30.0
[%]
0.1%
Ind: None
FS=20.0
Type: O2
P052 = 3
P051 = 40
on-line
P566 Amplitude for frequency response recording [SW 1.9 and later]
0.01 to 5.00
[%]
0.01%
Ind: None
FS=1.00
Type: O2
P052 = 3
P051 = 40
on-line
P567 Number of current peaks for frequency response recording
[SW 1.9 and later]
While the frequency response is being recorded, an average over the
number of current peaks set here is calculated for each measuring
frequency. High values improve the result, but extend the measuring time.
When P567 = 1000, the frequency response recording takes about 9
minutes.
100 to 1000
1
Ind: None
FS=300
Type: O2
P052 = 3
P051 = 40
on-line
10-58 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.32 Field reversal
(see also Section 9 of Operating Instructions 6RX1700-0AD**)
P580
*
BDS
(G200)
Source for selection of "Direction of rotation reversal using field
reversal”
Selection of binector to control the "Direction of rotation reversal using field
reversal" function
0 = binector B0000
1 = binector B0001
etc.
Signal 0: Positive field direction is selected (B0260 = 1, B0261 = 0),
actual speed value is not inverted
Signal 1: Negative field direction is selected (B0260 = 0, B0261 = 1),
actual speed value is inverted
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P581
*
BDS
(G200)
Source for selection of "Braking with field reversal”
Selection of binector to control the ”Braking with field reversal" function
0 = binector B0000
1 = binector B0001
etc.
Signal change 0→1: Reversal of field direction (causes braking);
When n<n-min is reached, the original field direction is
selected again. The drive switches to state o7.2
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P582
*
BDS
(G200)
Source for selection of "Field reversal” [SW 1.9 and later]
Selection of binector to control "Field reversal" function
0 = binector B0000
1 = binector B0001
etc.
Signal 0: Positive field direction is selected (B0260 = 1, B0261 = 0)
Signal 1: Negative field direction is selected (B0260 = 0, B0261 = 1)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
off-line
P583
*
(G200)
Source for actual speed signal for field reversal logic
[SW 1.9 and later]
Selection of connector to be used as actual speed value for the field
reversal logic.
0 = binector B0000
1 = binector B0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
off-line
10.33 Input quantities for signals
(see also Section 8, Sheet G187 and G188 of Operating Instructions 6RX1700-0AD**)
P590
*
(G187)
Source for setpoint of “nset = nact signal 1”
Setpoint/actual value deviation signal:
Selection of connector to be injected as input quantity "nset" for the
setpoint/actual value deviation signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=174
Type: L2
P052 = 3
P051 = 40
Offline
P591
*
(G187)
Source for actual value of "n-set = n-act signal 1"
Setpoint/actual value deviation signal:
Selection of connector to be injected as input quantity "nact" for the
setpoint/actual value deviation signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-59
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P592
*
(G187)
Source for actual value of "n < ncomp. signal”
n < ncomp. signal:
Selection of connector to be injected as input quantity (n) for the n < ncomp.
signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
P593
*
(G187)
Source for actual value of “n < nmin signal”
n < nmin signal:
Selection of connector to be injected as input quantity (n) for the n < nmin
signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
P594
*
(G188)
Source for input quantity of "Polarity signal”
Polarity signal of speed setpoint:
Selection of connector to be injected as input quantity "nset" for the polarity
signal of the speed setpoint.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=170
Type: L2
P052 = 3
P051 = 40
Offline
P595
*
(G188)
Source for actual value of "Overspeed signal”
Overspeed signal:
Selection of connector to be injected as input quantity "nact" for the
overspeed signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
P596
*
(G187)
Source for setpoint of "nset = nact signal 2” [SW 1.9 and later]
Setpoint/actual value deviation signal:
Selection of connector to be injected as input quantity "nset" for the
setpoint/actual value deviation signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=174
Type: L2
P052 = 3
P051 = 40
off-line
P597
*
(G187)
Source for actual value of “nset = nact signal 2” [SW 1.9 and later]
Setpoint/actual value deviation signal:
Selection of connector to be injected as input quantity "nact" for the
setpoint/actual value deviation signal.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=167
Type: L2
P052 = 3
P051 = 40
off-line
10.34 Configuring of closed-loop control
Setting values for configuring of torque shell
P600
*
(G163)
Source for gating unit input (armature)
i001 to i004:
Selects which connectors are applied as the gating unit input
(armature). All four values are added.
Settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=
i001: 102
i002: 0
i003: 0
i004: 0
Typ: L2
P052 = 3
P051 = 40
off-line
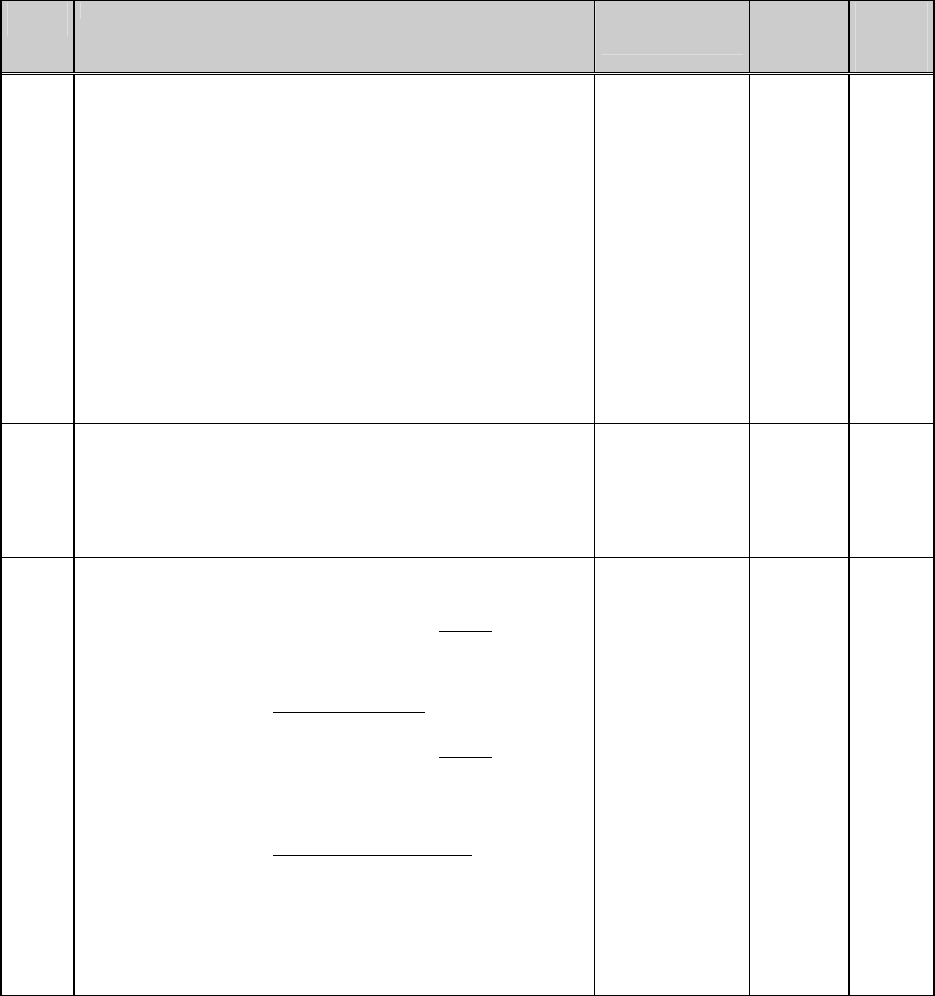
10-60 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P601
*
(G160)
(G161)
(G162)
Source for armature current controller setpoint
i001,i002 Speed limiting controller:
Selection of connectors to be injected as input quantities for
the speed limiting controller. Both values are added.
i003,i004 Current limitation:
Selection of connectors to be injected as armature current
controller setpoint (before current limitation). Both values are
added.
i005,i006 Current control: [SW 1.8 and later]
Selection of which connectors are connected as the armature
current controller setpoint (before current controller). The
two values are added. The magnitude is formed from the
value selected with index 6.
Settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 6
FS=
i001: 141
i002: 0
i003: 134
i004: 0
i005: 125
i006: 0
Type: L2
P052 = 3
P051 = 40
Offline
P602
*
(G162)
Source for armature current controller actual value
Selection of connector to be injected as armature current controller
actual value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=117
Type: L2
P052 = 3
P051 = 40
Offline
P603
*
(G161)
Source for variable current limit in torque direction I
i001..i004 Selection of connector to be injected as variable current limit
in torque direction I
Normalization: +100% corresponds to P100*P171
i005 Selection of connector to be injected as current limit in torque
direction I with Fast Stop or Shutdown
Normalization: +100% corresponds to P100*P171
i006 Selection of connector to be injected as variable current limit
in torque direction I
Normalization: +100% corresponds to r072.002
[can be set in SW 1.9 and later]
i007 Selection of connector to be injected as current limit in torque
direction I with Emergency Stop or Shutdown
Normalization: +100% corresponds to r072.002
[can be set in SW 1.9 and later]
Settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 7
FS=
i001: 1
i002: 1
i003: 1
i004: 1
i005: 1
i006: 2
i007: 2
Type: L2
P052 = 3
P051 = 40
Offline
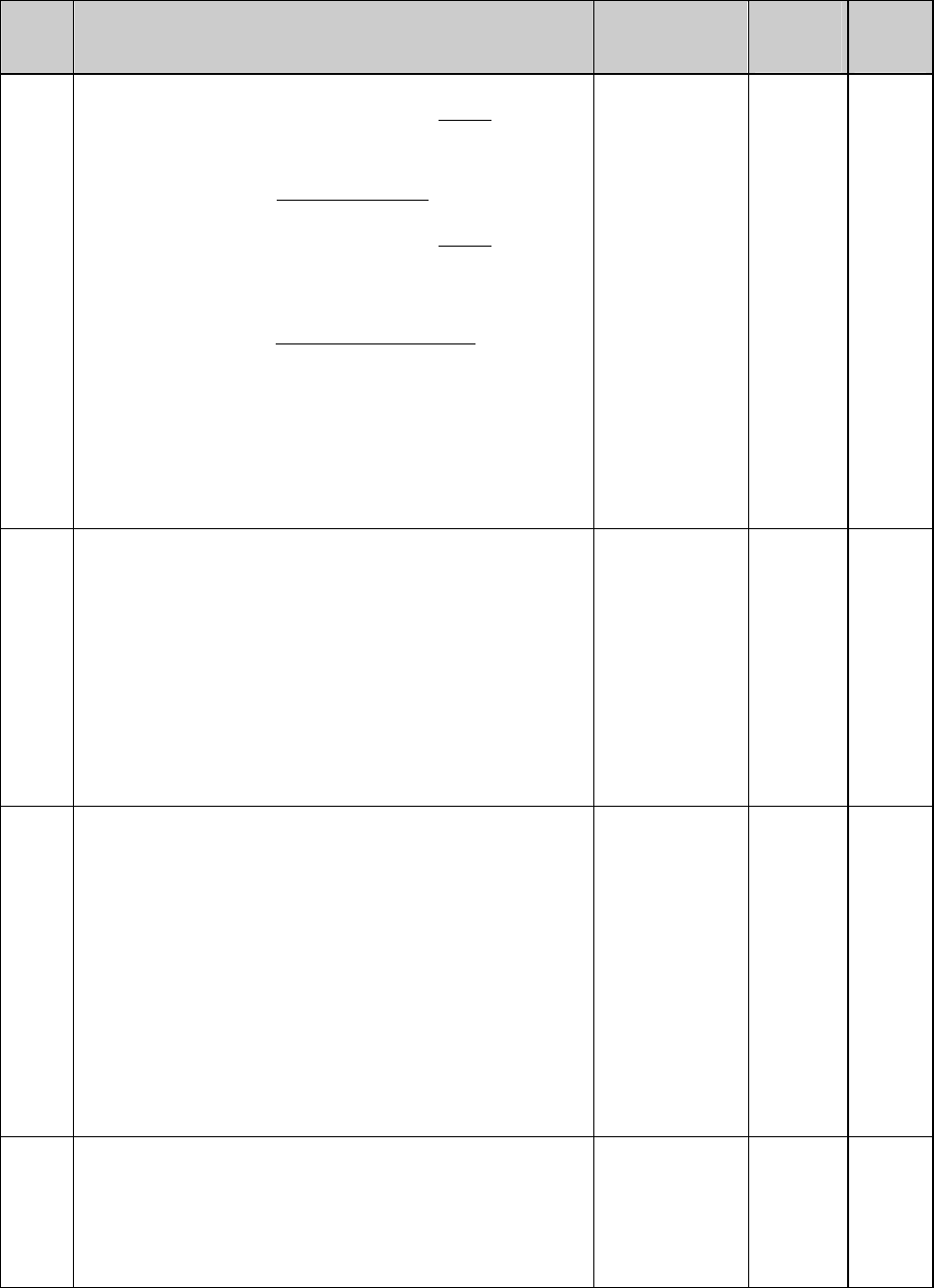
SIEMENS Energy & Automation 10-61
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P604
*
(G161)
Source for variable current limit in torque direction II
i001..i004 Selection of connector to be injected as variable current limit
in torque direction II
Normalization: -100% corresponds to P100*P172
i005 Selection of connector to be injected as current limit in torque
direction II with Fast Stop or Shutdown
Normalization: -100% corresponds to P100*P172
i006 Selection of connector to be injected as variable current limit
in torque direction II
Normalization: -100% corresponds to r072.002
[can be set in SW 1.9 and later]
i007 Selection of connector to be injected as current limit in torque
direction II with Emergency Stop or Shutdown
Normalization: -100% corresponds to r072.002
[can be set in SW 1.9 and later]
Settings:
0 = connector K0000
...
8 = connector K0008
9 = value as set in parameter P603.ixx ∗ (−1)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 7
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
P605
*
(G160)
Source for variable positive torque limit
Torque limitation:
Selection of connectors to be injected as the variable positive torque limit
i001..i004 Normalization:
100% of the connector value corresponds to the positive
system torque limit according to Ia=P171 and If = P102
i005 Normalization:
100% of the connector value corresponds to the positive
torque limit according to Ia=r072.002 and If = P102
[can be set in SW 1.9 and later]
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 5
FS=2
Type: L2
P052 = 3
P051 = 40
Offline
P606
*
(G160)
Source for variable negative torque limit
Torque limitation:
Selection of connectors to be injected as the variable negative torque limit
i001..i004 Normalization:
100% of the connector value corresponds to the negative
system torque limit according to Ia=P172 and If = P102
i005 Normalization:
100% of the connector value corresponds to the negative
torque limit according to Ia=r072.002 and If = P102
[can be set in SW 1.9 and later]
0 = connector K0000
...
8 = connector K0008
9 = value as set in parameter P605 ∗ (−1)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 5
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
P607
*
BDS
(G160)
Source for torque setpoint for master drive
Torque limitation:
Selection of connector to be injected as the torque setpoint for a master
drive
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=148
Type: L2
P052 = 3
P051 = 40
Offline
10-62 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Speed controller
P609
*
(G151)
Source for actual speed controller value
Selection of connector to be injected as the actual speed controller value
when P083=4
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
Setting values for configuring of closed-loop field and EMF control
P610
*
(G166)
Source for gating unit input (field)
Selection of connector to be applied to the gating unit input (field)
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=252
Type: L2
P052 = 3
P051 = 40
Offline
P611
*
(G165)
Source for field current controller setpoint
Limitation at EMF controller output:
Selection of connectors to be injected as the field current controller
setpoint. The connectors selected in the four indices are added.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=
i001: 277
i002: 0
i003: 0
i004: 0
Type: L2
P052 = 3
P051 = 40
Offline
P612
*
(G166)
Source for actual field current controller value
Selection of connectors to be injected as the field current controller actual
value. The two values are added.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=
i001: 266
i002: 0
Type: L2
P052 = 3
P051 = 40
Offline
P613
*
(G165)
Source for variable field current setpoint upper limit
Limitation at EMF controller output
Selection of connector to be injected as the variable field current setpoint
upper limit
i001..i004 Normalization:
100% of the connector value corresponds to the rated
excitation current of the motor (P102)
i005 Normalization:
100% of the connector value corresponds to the actual
converter rated DC current (field) (r073.002)
[can be set in SW 1.9 and later]
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 5
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P614
*
(G165)
Source for variable field current setpoint lower limit
Limitation at EMF controller output
Selection of connector to be injected as the variable field current setpoint
lower limit
i001..i004 Normalization:
100% of the connector value corresponds to the minimum
excitation current of the motor (P103)
i005 Normalization:
100% of the connector value corresponds to the actual
converter rated DC current (field) (r073.002)
[can be set in SW 1.9 and later]
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 5
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-63
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P615
*
(G165)
Source for EMF controller setpoint
Selection of connectors to be injected as the EMF controller setpoint. The
connectors selected in the four indices are added.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=
i001: 289
i002: 0
i003: 0
i004: 0
Type: L2
P052 = 3
P051 = 40
Offline
P616
*
(G165)
Source for actual EMF controller value
Selection of connector to be injected as the actual EMF controller value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=286
Type: L2
P052 = 3
P051 = 40
Offline
Configuring of injection of acceleration value
P619
*
(G153)
Source for acceleration injection value
Selection of connector to be applied as the acceleration injection value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=191
Type: L2
P052 = 3
P051 = 40
Offline
Speed controller
Speed controller, setpoint/actual value deviation
Function:
The connectors selected in parameters P621 and P622 are added and those selected in P623 and 624 subtracted
P620
*
(G152)
Source for speed controller setpoint/actual value deviation
Selection of connector to be injected as the control deviation
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=165
Type: L2
P052 = 3
P051 = 40
Offline
P621
*
(G152)
Source for speed controller setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=176
Type: L2
P052 = 3
P051 = 40
Offline
P622
*
(G152)
Source for speed controller setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=174
Type: L2
P052 = 3
P051 = 40
Offline
P623
*
(G152)
Source for actual speed controller value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=179
Type: L2
P052 = 3
P051 = 40
Offline
P624
*
(G152)
Source for actual speed controller value
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
Speed controller: Filtering of setpoint and actual value, band-stop filters
P625
*
FDS
(G152)
Source for speed controller setpoint
Selection of connector to be injected as the input signal for speed setpoint
filtering
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=170
Type: L2
P052 = 3
P051 = 40
Offline
P626
*
FDS
(G152)
Source for actual speed controller value
Selection of connector to be injected as the input signal for actual speed
value filtering
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=167
Type: L2
P052 = 3
P051 = 40
Offline
10-64 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P627
*
(G152)
Source for input of D element
Selection of connector to be injected as the input signal for the D element
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=178
Type: L2
P052 = 3
P051 = 40
Offline
P628
*
(G152)
Source for input of band-stop filter 1
Selection of connector to be injected as the input signal for band-stop filter 1
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=179
Type: L2
P052 = 3
P051 = 40
Offline
P629
*
(G152)
Source for band-stop filter 2
Selection of connector to be injected as the input signal for band-stop filter 2
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=177
Type: L2
P052 = 3
P051 = 40
Offline
Speed controller droop
P630
*
(G151)
Source for influencing quantity for speed droop
Selection of connector to be injected as the influencing quantity
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=162
Type: L2
P052 = 3
P051 = 40
Offline
Setting the speed controller I component
Function: When the binector selected in P695 switches state from log. "0" to log. "1", the I component of the speed controller is set to the
value of the connector selected in P631.
With this function it is possible, for example, to use the same signal (binector) to control controller enabling commands and
setting of the I component.
P631
*
(G152)
Source for setting value for speed controller integrator
Selection of connector to be injected as the setting value for the I
component
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
Setting values for configuring the setpoint processing function and ramp-function generator
Limitation at ramp-function generator output (setpoint limitation)
(see also Section 8, Sheet G136 of Operating Instructions 6RX1700-0AD**)
The effective limitations are:
Upper limit: Minimum value of P300 and the four connectors selected with P632
Lower limit: Maximum value of P301 and the four connectors selected with P633
Note: The limiting values for both the positive and negative setpoint limits can have a positive or negative sign. The negative setpoint
limit, for example, can therefore be parameterized to a positive value and the positive setpoint limit to a negative value.
P632
*
(G137)
Source for variable positive limitation at ramp-function generator
output
Selection of connectors to be injected at the variable positive limitation at
the ramp-function generator output (setpoint limitation).
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P633
*
(G137)
Source for variable negative limitation at ramp-function generator
output
Selection of connectors to be injected at the variable negative limitation at
the ramp-function generator output (setpoint limitation).
0 = connector K0000
...
8 = connector K0008
9 = value as set in parameter P632 ∗ (−1)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 4
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-65
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P634
*
(G137)
Source for limitation input at ramp-function generator output
Selection of connectors which must be added up to provide the limitation
input at the ramp-function generator output (setpoint limitation).
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=
i001: 190
i002: 0
Type: L2
P052 = 3
P051 = 40
Offline
P635
*
FDS
(G135)
Source for ramp-function generator setpoint
Selection of connector to be injected as the ramp-function generator
setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=194
Type: L2
P052 = 3
P051 = 40
Offline
P636
*
(G136)
Source for reduction signal for ramp-function generator times
Selection of connector to be injected as the reduction signal for the ramp-
function generator times
i001 acts on ramp-up and ramp-down time (P303, P304)
i002 acts on lower and upper transition roundings (P305, P306)
i003 acts on ramp-up time (P303)
i004 acts on ramp-down time (P304)
i005 acts on lower transition rounding (P305)
i006 acts on upper transition rounding (P306)
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 6
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P637
*
BDS
(G136)
Source for selection of "Ramp-function generator setting 2"
Selection of binector to control switchover to "Ramp-function generator
setting 2".
With a log. "1" signal at the binector, ramp-function generator parameter set
2 (P307 - P310) is selected. This function has a higher priority than the
ramp-up integrator function.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P638
*
BDS
(G136)
Source for selection of "Ramp-function generator setting 3”
Selection of binector to control switchover to "Ramp-function generator
setting 3".
With a log. "1" signal at the binector, ramp-function generator parameter set
3 (P311 - P314) is selected. This function has a higher priority than the
ramp-up integrator function.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P639
*
(G136)
Source for the ramp-function generator setting values
Selection of the connectors that are connected as the ramp-function
generator setting values.
i001 Setting value for the ramp-function generator output in state log.
"1" of the binector selected via P640
i002 Setting value for the ramp-function generator output if the drive
is not in state "Operating" (B0104=0) and the binector selected
via P640 is in state log. "0"
[i002 only available with SW 1.6 and later]
0 = Connector K0000
1 = Connector K0001
etc.
All connector
numbers
1
Ind: 2
FS=167
Type: L2
P052 = 3
P051 = 40
≥off-line
P640
*
BDS
(G136)
Source for selection of "Set ramp-function generator”
Selection of binector to control the "Set ramp-function generator" function
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
10-66 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P641
*
BDS
(G136)
Source for selection of "Bypass ramp-function generator”
Selection of binector to control the "Bypass ramp-function generator"
function
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P642
*
(G135)
Source for variable positive limitation of main setpoint
Selection of connectors to be injected at the variable positive limitation of
the main setpoint.
The lowest value in each case of the connectors selected via the 4 indices
is applied as the limit.
Note: Negative values at the selected connectors result in a negative
maximum value at the output of the limitation.
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=2
Type: L2
P052 = 3
P051 = 40
Offline
P643
*
(G135)
Source for variable negative limitation of main setpoint
Selection of connectors to be injected at the variable negative limitation of
the main setpoint.
The lowest value in each case of the connectors selected via the 4 indices
is applied as the limit.
Note: Positive values at the selected connectors result in a positive
minimum value at the output of the limitation.
0 = connector K0000
...
8 = connector K0008
9 = value as set in parameter P642 ∗ (−1)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 4
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
P644
*
FDS
(G135)
Source for main setpoint
Selection of connector to be injected as the main setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=206
Type: L2
P052 = 3
P051 = 40
Offline
P645
*
FDS
(G135)
Source for additional setpoint
Selection of connector to be injected as an additional setpoint
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 4
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P646
*
BDS
(G136)
Source for enable signal for ramp-up integrator switchover
Selection of binector to control enabling of the ramp-function integrator
switchover function.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P647
*
BDS
(G136)
Source for enable signal for ramp-function generator tracking
[SW 2.1 and later]
Selection of binector to control enabling of the ramp-function generator
tracking function.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-67
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.35 Control word, status word
Selection of sources of control words 1 and 2
P648
*
BDS
(G180)
Source for control word 1
Selection of connector to act as the source for control word 1.
0 = connector K0000
...
8 = connector K0008
9 = parameters P654 to P675 are effective
(every individual bit of control word 1 is input by a binector)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 2
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
P649
*
BDS
(G181)
Source for control word 2
Selection of connector to act as the source for control word 2.
0 = connector K0000
...
8 = connector K0008
9 = parameters P676 to P691 are effective
(every individual bit of control word 2 is input by a binector)
10 = connector K0010
etc.
All connector
numbers
1
Ind: 2
FS=9
Type: L2
P052 = 3
P051 = 40
Offline
Display of control words 1 and 2
r650
(G180)
Display of control word 1
Mode of representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segments 0 to 15 correspond to bits 0 to 15 of the control word
Segment ON: Corresponding bit is in log. "1" state
Segment OFF: Corresponding bit is in log. "0" state
Ind: None
Type: V2
P052 = 3
r651
(G181)
Display of control word 2
Mode of representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segments 0 to 15 correspond to bits 16 to 31 of the control word
Segment ON: Corresponding bit is in log. "1" state
Segment OFF: Corresponding bit is in log. "0" state
Ind: None
Type: V2
P052 = 3
Display of status words 1 and 2
r652
(G182)
Display of status word 1
Mode of representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segments 0 to 15 correspond to bits 0 to 15 of the status word
Segment ON: Corresponding bit is in log. "1" state
Segment OFF: Corresponding bit is in log. "0" state
Ind: None
Type: V2
P052 = 3
10-68 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r653
(G183)
Display of status word 2
Mode of representation on operator panel (PMU):
3210
4
5
6
7
89101112131415
Segments 0 to 15 correspond to bits 16 to 31 of the status word
Segment ON: Corresponding bit is in log. "1" state
Segment OFF: Corresponding bit is in log. "0" state
Ind: None
Type: V2
P052 = 3
The following parameters are used to select the binectors (some of which are gated with one another or with other signals) to be applied to
the individual bits of the control word.
The settings of all these parameters are as follows:
0 = binector B0000
1 = binector B0001
etc.
The functions and logic operations are also shown on Sheets G180 and G181 in Section 8 of Operating Instructions 6RX1700-0AD**.
Control word 1
P654
*
BDS
(G130)
Source for control word 1, bit0
(0=OFF1, 1=ON; ANDed with terminal 37)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P655
*
BDS
(G180)
1st source for control word 1, bit1
(0=OFF2; ANDed with 2nd and 3rd sources for bit1)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P656
*
BDS
(G180)
2nd source for control word 1, bit1
(0=OFF2; ANDed with 1st and 3rd sources for bit1)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P657
*
BDS
(G180)
3rd source for control word 1, bit1
(0=OFF2; ANDed with 1st and 2nd sources for bit1)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P658
*
BDS
(G180)
1st source for control word 1, bit2
(0=OFF3=Fast stop; ANDed with 2nd and 3rd sources for bit2)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P659
*
BDS
(G180)
2nd source for control word 1, bit2
(0=OFF3=Fast stop; ANDed with 1st and 3rd sources for bit2)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P660
*
BDS
(G180)
3rd source for control word 1, bit2
(0=OFF3=Fast stop; ANDed with 1st and 2nd sources for bit2)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P661
*
BDS
(G180)
Source for control word 1, bit3
(0=pulse disable, 1=enable; ANDed with terminal 38)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P662
*
BDS
(G180)
Source for control word 1, bit4
(0=set ramp-function generator to zero, 1=enable ramp-function generator)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P663
*
BDS
(G180)
Source for control word 1, bit5
(0=ramp-function generator stop, 1=ramp-function generator start)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P664
*
BDS
(G180)
Source for control word 1, bit6
(0=enable setpoint, 1=disable setpoint)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P665
*
BDS
(G180)
1st source for control word 1, bit7
(0→1 transition=acknowledge; ORed with 2nd and 3rd sources for bit7)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-69
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P666
*
BDS
(G180)
2nd source for control word 1, bit7
(0→1 transition=acknowledge; ORed with 1st and 3rd sources for bit7)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P667
*
BDS
(G180)
3rd source for control word 1, bit7
(0→1 transition=acknowledge; ORed with 1st and 2nd sources for bit7)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P668
*
BDS
(G180)
Source for control word 1, bit8
(1=inching bit0)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P669
*
BDS
(G180)
Source for control word 1, bit9
(1=inching bit1)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P671
*
BDS
(G180)
Source for control word 1, bit11
(0=pos. direction of rotation disabled, 1=pos. direction of rotation enabled)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P672
*
BDS
(G180)
Source for control word 1, bit12
(0= neg. direction of rotation disabled, 1= neg. direction of rotation enabled)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P673
*
BDS
(G180)
Source for control word 1, bit13
(1=raise motorized potentiometer)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P674
*
BDS
(G180)
Source for control word 1, bit14
(1=lower motorized potentiometer)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P675
*
BDS
(G180)
Source for control word 1, bit15
(0=external fault, 1=no external fault)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
Control word 2
P676
*
BDS
(G181)
Source for control word 2, bit16
(select function data set bit 0)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P677
*
BDS
(G181)
Source for control word 2, bit17
(select function data set bit 1)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P680
*
BDS
(G181)
Source for control word 2, bit20
(select fixed setpoint 0)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P681
*
BDS
(G181)
Source for control word 2, bit21
(select fixed setpoint 1)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P684
*
BDS
(G181)
Source for control word 2, bit24
(0=n controller speed droop disabled, 1=enabled)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P685
*
BDS
(G181)
Source for control word 2, bit25
(0=n controller disabled, 1=n controller enabled)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P686
*
BDS
(G181)
Source for control word 2, bit26
(0=external fault 2, 1=no external fault 2)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P687
*
BDS
(G181)
Source for control word 2, bit27
(0=master drive, speed control, 1=slave drive, torque control)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P688
*
BDS
(G181)
Source for control word 2, bit28
(0=external alarm 1, 1=no external alarm 1)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
10-70 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P689
*
BDS
(G181)
Source for control word 2, bit29
(0=external alarm 2, 1=no external alarm 2)
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P690
*
(G181)
Source for control word 2, bit30
(0=select Bico data set 1, 1=select Bico data set 2)
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P691
*
BDS
(G181)
Source for control word 2, Bit31 [SW 1.8 and later]
Main contactor checkback signal:
(0 = main contactor dropped out, 1 = main contactor picked up)
This control input is intended as a means of looping an auxiliary contact of
the main contactor into the device control.
During the Power ON routine, this signal must switch to "1" within the time
period set in P095. If it does not, or it disappears during operation, fault
message F004 with fault value 6 is activated.
P691 = 0: Bit 31 of control word 2 is inoperative.
(This setting of P691 is always active, regardless of whether
control word 2 is input in word mode [P649 = 9] or bit mode
[P649 <> 9])
P691 = 1: Bit 31 of control word 2 is inoperative.
(This setting of P691 is active only when control word 2 is input
in bit mode, i.e. when P649 <> 9)
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
10.36 Further configuring measures
P692
*
BDS
(G166)
Source for selection of injection of standstill field
Selection of binector to control injection of the standstill field ("0" state =
inject standstill field)
Note: The delay time set in P258 is not effective when this function is
active.
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P693
*
BDS
(G165)
Source for selection of enabling command for EMF controller
Selection of binector which is to control enabling of the EMF controller
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P694
*
BDS
(G160)
Source for selection of enabling command for "Torque limit
switchover”
Selection of binector which is to control enabling of the "Torque limit
switchover" function (1=enable, see also Sheet G160 in Section 8 of
Operating Instructions 6RX1700-0AD** and P180 to P183)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P695
*
BDS
(G152)
Source for selection of "Set speed controller I component" function
Selection of binector to control the "Set I component" function
0 = binector B0000
1 = binector B0001
etc.
When the binector selected in P695 switches from log. "0" to log. "1", the I
component of the speed controller is set to the value of the connector
selected in P631.
With this function it is possible, for example, to use the same signal
(binector) to control controller enabling commands and setting of the I
component.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-71
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P696
*
BDS
(G152)
Source for selection of "Stop speed controller I component" function
Selection of binector to control the "Stop I component" function
0 = binector B0000
1 = binector B0001
etc.
When the binector selected in P696 changes to the log. "1" state, the I
component of the speed controller is stopped.
All binector numbers
1
Ind: 2
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P697
*
BDS
(G153)
Source for selection of enabling of dv/dt injection
Selection of binector to control enabling of dv/dt injection (state "1" =
enable)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P698
*
BDS
(G152)
Source for selection of enabling command for speed-dependent speed
controller PI / P function switchover
Selection of binector to control enabling of the speed-dependent PI / P
controller switchover function (see also P222)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: 2
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
10.37 Analog inputs (main actual value, main setpoint, selectable inputs)
(see also Section 8, Sheets G113 and G114 of Operating Instructions 6RX1700-0AD**)
Analog input terminals 4 / 5 (main setpoint)
P700
*
(G113)
Signal type of "Main setpoint" analog input
0 = Voltage input 0 to ±10 V
1 = Current input 0 to ±20 mA
2 = Current input 4 to 20 mA
0 to 2
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P701
FDS
(G113)
Normalization of "Main setpoint" analog input
This parameter specifies the percentage value which is generated for an
input voltage of 10V (or an input current of 20mA) at the analog input.
The following generally applies:
For voltage input:
PV
Y
X
701 10[%] =∗ X .. Input voltage in volts
Y .. % value which is generated for input
voltage X
With current input:
PmA
Y
X
701 20[%] =∗ X .. Input current in mA
Y .. % value which is generated for input
current X
-1000.0 to 1000.0
[%]
0.1%
Ind: 4
FS=100.0
Type: I2
P052 = 3
P051 = 40
Online
P702
(G113)
Offset for "Main setpoint" analog input -200.00 to 199.99
[%]
0.01%
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P703
*
(G113)
Mode of signal injection at "Main setpoint" analog input
0 = Injection of signal with sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P704
*
(G113)
Source for selection of sign reversal at "Main setpoint" analog input
Selection of binector to control sign reversal at the analog input ("1" state
= reverse sign)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P705
(G113)
Filtering time for "Main setpoint" analog input
Note: Hardware filtering of approximately 1 ms is applied as standard.
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
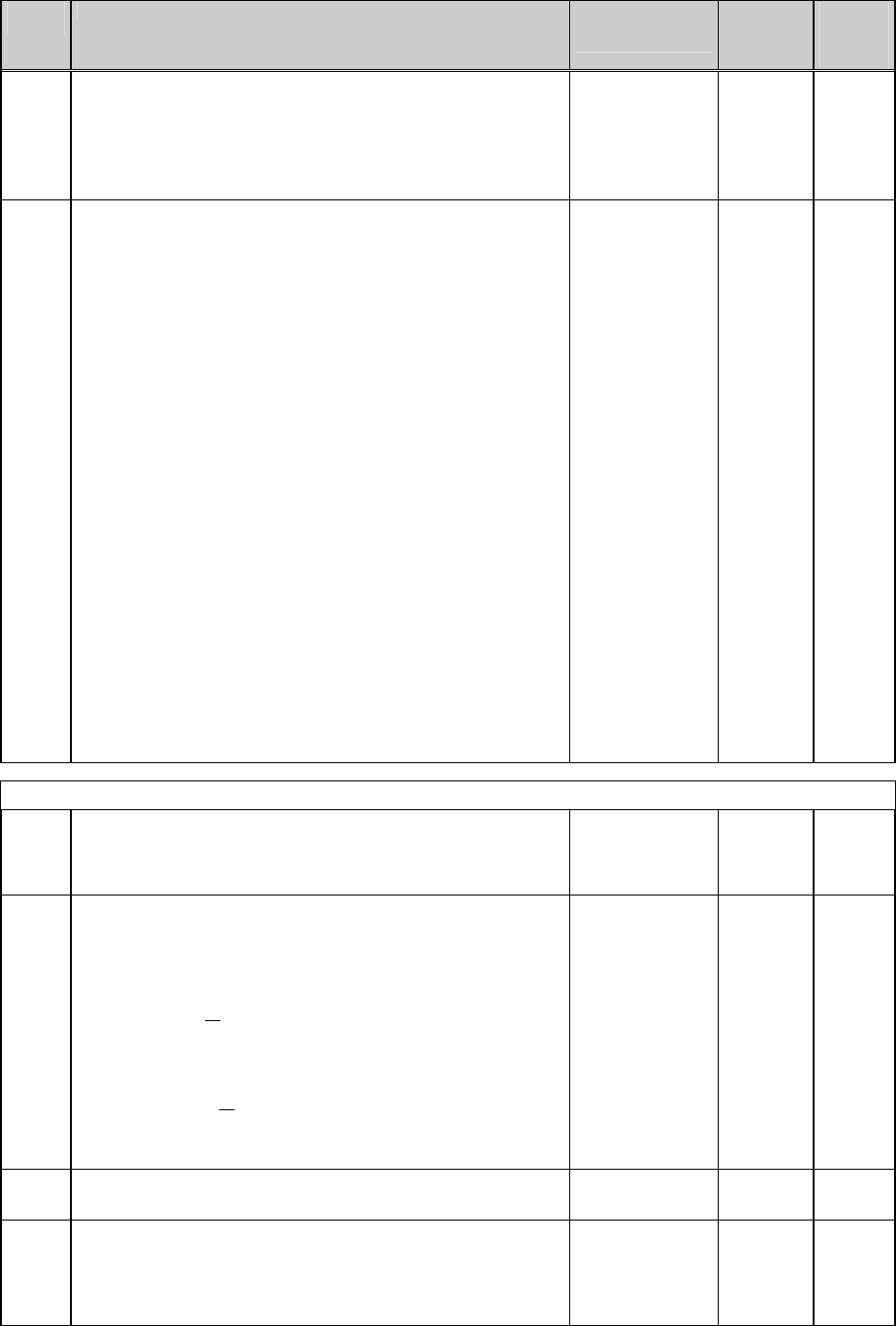
10-72 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P706
*
(G113)
Source for enabling of "Main setpoint" analog input
Selection of binector to control enabling of the analog input ("1" state =
enabled)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P707
*
(G113)
Resolution of "Main setpoint" analog input
The voltage applied to the analog input is converted to a digital value (A/D
conversion) for further processing. The method used calculates an average
value of the input voltage over a specific measuring time.
The A/D conversion process produces a scale for the voltage range of 0 to ±
10V, the number of steps (divisions) along this scale can be set in P707 (i.e.
the smallest possible differentiable change in the input voltage
(quantization) can be set in this parameter). The number of scale steps or
intervals is referred to as "Resolution".
The resolution is normally specified in bits:
± 11 bits means 2 * 2048 scale divisions
± 12 bits means 2 * 4096 scale divisions
± 13 bits means 2 * 8192 scale divisions
± 14 bits means 2 * 16384 scale divisions
The following applies:
The higher the resolution, the longer the averaging time and thus also the
delay period between the application of an analog step change and the
earliest possible moment of availability of the digital value for further
processing.
For this reason, it is important to find a compromise between the resolution
and delay period.
Param. Resolution Quantization Delay period
value better than
11 ± 11 bits 4.4 mV 0.53 ms
12 ± 12 bits 2.2 mV 0.95 ms
13 ± 13 bits 1.1 mV 1.81 ms
14 ± 14 bits 0.56 mV 3.51 ms
If the analog input is operating as a current input (0 to 20 mA or 4 to 20 mA),
the above applies analogously.
11 to 14
[Bit]
1 bit
Ind: None
FS=12
Type: O2
P052 = 3
P051 = 40
Offline
Analog input terminals 6 / 7 (analog selectable input 1)
P710
*
(G113)
Signal type of "Analog selectable input 1"
0 = Voltage input 0 to ±10 V
1 = Current input 0 to ±20 mA
2 = Current input 4 to 20 mA
0 to 2
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P711
FDS
(G113)
Normalization of "Analog selectable input 1"
This parameter specifies the percentage value which is generated for an
input voltage of 10V (or an input current of 20mA) at the analog input.
The following generally applies:
For voltage input:
PV
Y
X
711 10[%] =∗
X .. Input voltage in volts
Y .. % value which is generated for input
voltage X
With current input:
PmA
Y
X
711 20[%] =∗
X .. Input current in mA
Y .. % value which is generated for input
current X
-1000.0 to 1000.0
[%]
0.1%
Ind: 4
FS=100.0
Type: I2
P052 = 3
P051 = 40
Online
P712
(G113)
Offset for "Analog selectable input 1" -200.00 to 199.99
[%]
0.01%
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P713
*
(G113)
Mode of signal injection at "Analog selectable input 1"
0 = Injection of signal with sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-73
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P714
*
(G113)
Source for selection of sign reversal at "Analog selectable input 1"
Selection of binector to control sign reversal at the analog input ("1" state
= reverse sign)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P715
(G113)
Filtering time for "Analog selectable input 1"
Note: Hardware filtering of approximately 1 ms is applied as standard.
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P716
*
(G113)
Source for enabling of "Analog selectable input 1"
Selection of binector to control enabling of the analog input ("1" state =
enabled)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P717
*
(G113)
Resolution of "Analog selectable input 1"
See P707
10 to 14
[Bit]
1 bit
Ind: None
FS=12
Type: O2
P052 = 3
P051 = 40
Offline
Analog input terminals 8 / 9 (analog selectable input 2)
P721
FDS
(G114)
Normalization of "Analog selectable input 2"
This parameter specifies the percentage value which is generated for an
input voltage of 10V (or an input current of 20mA) at the analog input.
The following generally applies:
For voltage input:
PV
Y
X
721 10[%] =∗ X .. Input voltage in volts
Y .. % value which is generated for input
voltage X
With current input:
PmA
Y
X
721 20[%] =∗ X .. Input current in mA
Y .. % value which is generated for input
current X
-1000.0 to 1000.0
[%]
0.1%
Ind: 4
FS=100.0
Type: I2
P052 = 3
P051 = 40
Online
P722
(G114)
Offset for "Analog selectable input 2" -200.00 to 199.99
[%]
0.01%
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P723
*
(G114)
Mode of signal injection at "Analog selectable input 2"
0 = Injection of signal with sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P724
*
(G114)
Source for selection of sign reversal at "Analog selectable input 2"
Selection of binector to control sign reversal at the analog input ("1" state
= reverse sign)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P725
(G114)
Filtering time for "Analog selectable input 2"
Note: Hardware filtering of approximately 1 ms is applied as standard.
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P726
*
(G114)
Source for enabling of "Analog selectable input 2"
Selection of binector to control enabling of the analog input ("1" state =
enabled)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
10-74 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
Analog input terminals 10 / 11 (analog selectable input 3)
P731
FDS
(G114)
Normalization of "Analog selectable input 3"
This parameter specifies the percentage value which is generated for an
input voltage of 10V (or an input current of 20mA) at the analog input.
The following generally applies:
For voltage input:
PV
Y
X
731 10[%] =∗
X .. Input voltage in volts
Y .. % value which is generated for input
voltage X
With current input:
PmA
Y
X
731 20[%] =∗
X .. Input current in mA
Y .. % value which is generated for input
current X
-1000.0 to 1000.0
[%]
0.1%
Ind: 4
FS=100.0
Type: I2
P052 = 3
P051 = 40
Online
P732
(G114)
Offset for "Analog selectable input 3" -200.00 to 199.99
[%]
0.01%
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P733
*
(G114)
Mode of signal injection at "Analog selectable input 3"
0 = Injection of signal with sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P734
*
(G114)
Source for selection of sign reversal at "Analog selectable input 3"
Selection of binector to control sign reversal at the analog input ("1" state
= reverse sign)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P735
(G114)
Filtering time for "Analog selectable input 3"
Note: Hardware filtering of approximately 1 ms is applied as standard.
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P736
*
(G114)
Source for enabling of "Analog selectable input 3"
Selection of binector to control enabling of the analog input ("1" state =
enabled)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
Analog input terminals 103 / 104 (main actual value)
P741
FDS
(G113)
Normalization for "Main actual value”
Rated value of input voltage at nmax (=tachometer voltage at maximum
speed)
This parameter defines the maximum speed when P083=1.
-270.00 to 270.00
[V]
0.01V
Ind: 4
FS=60.00
Type: I2
P052 = 3
P051 = 40
Online
P742
(G113)
Offset for "Main actual value" analog input -200.00 to 199.99
[%]
0.01%
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
P743
*
(G113)
Mode of signal injection at "Main actual value" analog input
0 = Injection of signal with sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P744
*
(G113)
Source for selection of sign reversal at "Main actual value" analog
input
Selection of binector to control sign reversal at the analog input ("1" state
= reverse sign)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Offline
P745
(G113)
Filtering time for "Main actual value" analog input
Note: Hardware filtering of approximately 1 ms is applied as standard.
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-75
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P746
*
(G113)
Source for enabling of "Main actual value" analog input
Selection of binector to control enabling of the analog input ("1" state =
enabled)
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
10.38 Analog outputs
(see also Section 8, Sheets G115 and G116 of Operating Instructions 6RX1700-0AD**)
Analog output terminals 12 / 13 (actual current display)
P749
*
(G115)
Control word for terminal 12 (actual current display)
0 Output with correct sign
(positive voltage: Current in torque direction MI)
(negative voltage: Current in torque direction MII)
1 Output of absolute value (positive voltage only)
2 Output with sign, inverted
(positive voltage: Current in torque direction MII)
(negative voltage: Current in torque direction MI)
3 Output of absolute value, inverted (negative voltage only)
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
Analog output terminals 14 / 15
P750
*
(G115)
Source for output value at analog output 1
Selection of connector whose value is to applied to the analog output
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P751
*
(G115)
Mode of signal injection at analog output 1
0 = Injection of signal with correct sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P752
(G115)
Filtering time for analog output 1 0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P753
(G115)
Normalization of analog output 1
yV x P
[] %
=∗753
100
x = Normalization input (corresponds to filtering output)
y = Normalization output (corresponds to output voltage at analog output
with offset = 0)
-200.00 to 199.99
[V]
0.01V
Ind: None
FS=10.00
Type: I2
P052 = 3
P051 = 40
Online
P754
(G115)
Offset for analog output 1 -10.00 to 10.00
[V]
0.01V
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
Analog output terminals 16 / 17
P755
*
(G115)
Source for output value at analog output 2
Selection of connector whose value is to applied to the analog output
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P756
*
(G115)
Mode of signal injection at analog output 2
0 = Injection of signal with correct sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P757
(G115)
Filtering time for analog output 2 0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10-76 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P758
(G115)
Normalization of analog output 2
yV x P
[] %
=∗758
100
x = Normalization input (corresponds to filtering output)
y = Normalization output (corresponds to output voltage at analog output
with offset = 0)
-200.00 to 199.99
[V]
0.01V
Ind: None
FS=10.00
Type: I2
P052 = 3
P051 = 40
Online
P759
(G115)
Offset for analog output 2 -10.00 to 10.00
[V]
0.01V
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
Analog output terminals 18 / 19
P760
*
(G116)
Source for output value at analog output 3
Selection of connector whose value is to applied to the analog output
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P761
*
(G116)
Mode of signal injection at analog output 3
0 = Injection of signal with correct sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P762
(G116)
Filtering time for analog output 3 0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P763
(G116)
Normalization of analog output 3
yV x P
[] %
=∗763
100
x = Normalization input (corresponds to filtering output)
y = Normalization output (corresponds to output voltage at analog output
with offset = 0)
-200.00 to 199.99
[V]
0.01V
Ind: None
FS=10.00
Type: I2
P052 = 3
P051 = 40
Online
P764
(G116)
Offset for analog output 3 -10.00 to 10.00
[V]
0.01V
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
Analog output terminals 20 / 21
P765
*
(G116)
Source for output value at analog output 4
Selection of connector whose value is to applied to the analog output
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P766
*
(G116)
Mode of signal injection at analog output 4
0 = Injection of signal with correct sign
1 = Injection of absolute value of signal
2 = Injection of signal with sign, inverted
3 = Injection of absolute value of signal, inverted
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P767
(G116)
Filtering time for analog output 4 0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P768
(G116)
Normalization of analog output 4
yV x P
[] %
=∗768
100
x = Normalization input (corresponds to filtering output)
y = Normalization output (corresponds to output voltage at analog output
with offset = 0)
-200.00 to 199.99
[V]
0.01V
Ind: None
FS=10.00
Type: I2
P052 = 3
P051 = 40
Online
P769
(G116)
Offset for analog output 4 -10.00 to 10.00
[V]
0.01V
Ind: None
FS=0.00
Type: I2
P052 = 3
P051 = 40
Online
SIEMENS Energy & Automation 10-77
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.39 Binary outputs
(see also Section 8, Sheet G112 of Operating Instructions 6RX1700-0AD**)
P770
*
(G112)
(G200)
Control word for binary selectable outputs
i001: 0 Binary selectable output at terminal 46 is not inverted
1 Binary selectable output at terminal 46 is inverted
i002: 0 Binary selectable output at terminal 48 is not inverted
1 Binary selectable output at terminal 48 is inverted
i003: 0 Binary selectable output at terminal 50 is not inverted
1 Binary selectable output at terminal 50 is inverted
i004: 0 Binary selectable output at terminal 52 is not inverted
1 Binary selectable output at terminal 52 is inverted
0 to 1
1
Ind: 4
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P771
*
(G112)
(G200)
Source for output value at binary output 1
Selection of binector to be injected at binary selectable output, terminal 46
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P772
*
(G112)
(G200)
Source for output value at binary output 2
Selection of binector to be injected at binary selectable output, terminal 48
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P773
*
(G112)
Source for output value at binary output 3
Selection of binector to be injected at binary selectable output, terminal 50
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P774
*
(G112)
Source for output value at binary output 4
Selection of binector to be injected at binary selectable output, terminal 52
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=0
Type: L2
P052 = 3
P051 = 40
Online
P775
(G112)
(G200)
Delay for output value at binary output 1
The logic level at the binary selectable output changes only if the internal
signal level remains constant for the set delay period (internal signal level
changes which do not last as long as this delay period are not switched
through to the output)
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P776
(G112)
(G200)
Delay for output value at binary output 2
The logic level at the binary selectable output changes only if the internal
signal level remains constant for the set delay period (internal signal level
changes which do not last as long as this delay period are not switched
through to the output)
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P777
(G112)
Delay for output value at binary output 3
The logic level at the binary selectable output changes only if the internal
signal level remains constant for the set delay period (internal signal level
changes which do not last as long as this delay period are not switched
through to the output)
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
P778
(G112)
Delay for output value at binary output 4
The logic level at the binary selectable output changes only if the internal
signal level remains constant for the set delay period (internal signal level
changes which do not last as long as this delay period are not switched
through to the output)
0 to 10000
[ms]
1ms
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Online
10-78 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.40 Configuration of serial interfaces on basic converter
G-SST 1 (RS485 / RS232 on X300) (see also Section 8, Sheet G170 and Section 9 of Operating Instructions 6RX1700-0AD**)
P780
*
(G170)
Selection of protocol for G-SST1 basic converter interface
0 Setting has no function
2 USS protocol
8 for factory purposes
9 For internal factory test purposes
0, 2, 8, 9
1
Ind: None
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
P781
*
(G170)
Number of process data for G-SST1
When P780 = 0 or 9 is selected: Parameter is irrelevant
When USS protocol (P780=2) is selected: Number of PZD elements
0 No process data are expected or sent in the USS protocol
1...16 Number of process data words in USS protocol (same number
applies to transmission and receipt)
The received PZD elements (1 to max. 16) are available at
connectors (K2001 to K2016) and, in some cases, bit-serially at
binectors for "internal wiring" purposes.
The PZD elements to be transmitted (1 to max. 16) are selected
in parameters P784.01 to P784.16.
0 to 16
1
Ind: None
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
P782
*
(G170)
Length of parameter jobs for G-SST1
This parameter is effective only when P780=2 (USS protocol).
0 No PKW data are expected or sent in the USS protocol.
3, 4 3 or 4 PKW data words are expected in the USS protocol and 3
or 4 PKW data words are also sent (for transmission of
parameter values).
127 Number of PKWs is determined by the telegram length
0, 3, 4, 127
1
Ind: None
FS=127
Type: O2
P052 = 3
P051 = 40
Offline
P783
*
(G170)
Baud rate for G-SST1
1 300 baud
2 600 baud
3 1200 baud
4 2400 baud
5 4800 baud
6 9600 baud
7 19200 baud
8 38400 baud
9 56700 baud
11 93750 baud
13 187500 baud
1 to 13
1
Ind: None
FS=6
Type: O2
P052 = 3
P051 = 40
Offline
P784
*
(G170)
Source for transmit data for G-SST1
Selection of connectors to be transferred as transmit data to the USS
master via USS interface 1.
i001: Selection for word 1
i002: Selection for word 2
...
i016: Selection for word 16
Applicable settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 16
FS=
i001: 32
i002: 167
i003: 0
i004: 33
i005-i016: 0
Type: L2
P052 = 3
P051 = 40
Offline
P785
(G170)
Options for G-SST1
i001: 0 = Bus terminator OFF
1 = Bus terminator ON
i002: 0 = Bit 10 of the 1st receive word does not function as "Control
by PLC".
1 = Bit 10 of the 1st receive word does function as "Control by
PLC“, i.e. when bit 10 = 0, all other bits of the 1st receive word,
as well as receive words 2 to 16, are not written to connectors
K2001 to K2016, or to binectors B2100 to B2915. All these
connectors and binectors retain their old values.
0 to 1
1
Ind: 2
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-79
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P786
*
(G170)
USS bus address for G-SST1
This parameter is functional only when P780=2 (USS protocol). Address via
which the unit can be addressed in USS bus operation.
0 to 30
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P787
(G170)
Telegram failure time for G-SST1
The failure time set in this parameter is valid when setting P780=2 (USS
protocol) is selected.
0.000 No time monitoring
0.001...65.000 Time which may elapse between the receipt of two
telegrams addressed to the unit before a fault message
is activated.
Fault message F011 is activated if no valid telegram is received within this
time period.
Note:
The telegram monitoring function is active
• from the receipt of the first error-free telegram after connection of the
electronics power supply
• from the receipt of the first error-free telegram after the telegram monitor
has responded (i.e. monitoring timeout).
0.000 to 65.000
[s]
0.001s
Ind: None
FS=0.000
Type: O2
P052 = 3
P051 = 40
Offline
P788
*
(G170)
Source for activation of F011
Selection of binector which will activate fault message F011 when it
switches to log. "1"
2030 = binector B2030
2031 = binector B2031
2030, 2031 Ind: None
FS=2030
Type: L2
P052 = 3
P051 = 40
Offline
r789
(G170)
Diagnostic information for G-SST1
Free-running counter, overflow at 65535
i001: Number of error-free telegrams
i002: Number of errored telegrams:
Byte frame, parity, overrun or BCC error
i003: Number of byte frame errors
i004: Number of overrun errors
i005: Parity error
i006: STX error:
Start interval before STX not observed,
telegram residual transfer time not observed,
delay time of LGE character too long,
erroneous STX, i.e. ≠ 02
i007: Violation of telegram residual transfer time
i008: Block check error
i009: Incorrect telegram length:
With P782=3 or 4 only:
The length of the received telegram is ≠ P781 + P782
(Note: If the received values are correct, they will be processed
even when this error has been detected)
i010: Timeout error:
No valid telegram has been received for a period exceeding the
setting in P787. After the occurrence of a timeout error, this
counter is not activated again until the next valid telegram is
received.
Ind: 10
Type: O2
P052 = 3
G-SST 2 (RS485 on X172) (see also Section 8, Sheets G171 and G173 and Section 9 of Operating Instructions 6RX1700-0AD**)
P790
*
(G171)
(G173)
Selection of protocol for G-SST2 basic converter interface
0 Setting has no function
2 USS protocol
5 ”Peer-to-peer” communication
9 For internal factory test purposes
0, 2, 5, 9
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10-80 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P791
*
(G171)
(G173)
Number of process data for G-SST2
When P790 = 0 or 9 is selected: Parameter is irrelevant
When USS protocol (P790=2) is selected: Number of PZD elements
0 No process data are expected or sent in the USS protocol
1...16 Number of process data words in USS protocol (same number
applies to transmission and receipt)
The received PZD elements (1 to max. 16) are available at
connectors (K6001 to K6016) and, in some cases, bit-serially at
binectors for "internal wiring" purposes.
The PZD elements to be transmitted (1 to max. 16) are selected
in parameters P794.01 to P794.16.
When peer-to-peer (P790= 5) is selected: Number of transferred words
0 Illegal setting
1...5 Number of transferred words
6...16 Illegal setting
0 to 16
1
Ind: None
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
P792
*
(G171)
Length of parameter jobs for G-SST2
This parameter is effective only when P790=2 (USS protocol).
0 No PKW data are expected or sent in the USS protocol.
3, 4 3 or 4 PKW data words are expected in the USS protocol and 3
or 4 PKW data words are also sent (for transmission of
parameter values).
127 Number of PKWs is determined by the telegram length
0, 3, 4, 127
1
Ind: None
FS=127
Type: O2
P052 = 3
P051 = 40
Offline
P793
*
(G171)
(G173)
Baud rate for G-SST2
1 300 baud
2 600 baud
3 1200 baud
4 2400 baud
5 4800 baud
6 9600 baud
7 19200 baud
8 38400 baud
9 56700 baud
11 93750 baud
13 187500 baud
1 to 13
1
Ind: None
FS=6
Type: O2
P052 = 3
P051 = 40
Offline
P794
*
(G171)
(G173)
Source for transmit data for G-SST2
Selection of connectors to be transferred as transmit data via basic
converter interface 2
When USS protocol (P790=2) is selected:
i001: Selection for word 1
i002: Selection for word 2
...
i016: Selection for word 16
When peer-to-peer (P790=5) is selected:
i001: Selection for word 1
i002: Selection for word 2
...
i005: Selection for word 5
i006: Not used
...
i016: Not used
Applicable settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 16
FS=
i001: 32
i002: 167
i003: 0
i004: 33
i005-i016: 0
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-81
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P795
(G171)
(G173)
Options for G-SST2
i001: 0 = Bus terminator OFF
1 = Bus terminator ON
i002: 0 = Bit 10 of the 1st receive word does not function as "Control
by PLC".
1 = Bit 10 of the 1st receive word does function as "Control by
PLC“, i.e. when bit 10 = 0, all other bits of the 1st receive word,
as well as receive words 2 to 16, are not written to connectors
K6001 to K6016, or to binectors B6100 to B6915. All these
connectors and binectors retain their old values.
0 to 1
1
Ind: 2
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P796
*
(G171)
USS bus address for G-SST2
This parameter is functional only when P790=2 (USS protocol). Address via
which the unit can be addressed in USS bus operation.
0 to 30
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P797
(G171)
(G173)
Telegram failure time for G-SST2
The failure time set in this parameter is valid when setting P790=2 (USS
protocol) or P790=5 (peer-to-peer) is selected.
0.000 No time monitoring
0.001...65.000 Time which may elapse between the receipt of two
telegrams addressed to the unit before a fault message
is activated.
Fault message F012 is activated if no valid telegram is received within this
time period.
Note:
The telegram monitoring function is active
• from the receipt of the first error-free telegram after connection of the
electronics power supply
• from the receipt of the first error-free telegram after the telegram monitor
has responded (i.e. monitoring timeout).
Since the telegram transfer time is dependent on the set baud rate, the
following minimum setting values for P797 are recommended:
Baud rate as set in P793: Recommended minimum value for P797:
300 baud 0.520s
600 baud 0.260s
1200 baud 0.140s
2400 baud 0.080s
≥ 4800 baud 0.040s
Note:
If the "Automatic restart" function is selected (P086>0) on the peer-to-peer
communication partner, then only a parameter setting of P797>P086 (on the
communication partner) is meaningful.
0.000 to 65.000
[s]
0.001s
Ind: None
FS=0.000
Type: O2
P052 = 3
P051 = 40
Offline
P798
*
(G171)
(G173)
Source for activation of F012
Selection of binector which will activate fault message F012 when it
switches to log. "1"
6030 = binector B6030
6031 = binector B6031
6030, 6031 Ind: None
FS=6030
Type: L2
P052 = 3
P051 = 40
Offline
10-82 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r799
(G171)
(G173)
Diagnostic information for G-SST2
Free-running counter, overflow at 65535
i001: Number of error-free telegrams
i002: Number of errored telegrams:
Byte frame, parity, overrun or BCC error
i003: Number of byte frame errors
i004: Number of overrun errors
i005: Parity error
i006: STX error:
Start interval before STX not observed,
telegram residual transfer time not observed,
delay time of LGE character too long,
erroneous STX, i.e. ≠ 02
i007: Violation of telegram residual transfer time (USS prot. only)
i008: Block check error
i009: Incorrect telegram length:
With P792=3 or 4 only:
The length of the received telegram is ≠ P791 + P792
(Note: If the received values are correct, they will be processed
even when this error has been detected)
i010: Timeout error:
No valid telegram has been received for a period exceeding the
setting in P797. After the occurrence of a timeout error, this
counter is not activated again until the next valid telegram is
received.
Ind: 10
Type: O2
P052 = 3
G-SST 3 (RS485 on X162) (see also Section 8, Sheets G172 and G174 and Section 9 of Operating Instructions 6RX1700-0AD**)
P800
*
(G172)
(G174)
Selection of protocol for G-SST3 basic converter interface
0 Setting has no function
2 USS protocol
5 ”Peer-to-peer” communication
9 For internal factory test purposes
0, 2, 5, 9
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P801
*
(G172)
(G174)
Number of process data for G-SST3
When P800 = 0 or 9 is selected: Parameter is irrelevant
When USS protocol (P800=2) is selected: Number of PZD elements
0 No process data are expected or sent in the USS protocol
1...16 Number of process data words in USS protocol (same number
applies to transmission and receipt)
The received PZD elements (1 to max. 16) are available at
connectors (K6001 to K6016) and, in some cases, bit-serially at
binectors for "internal wiring" purposes.
The PZD elements to be transmitted (1 to max. 16) are selected
in parameters P804.01 to P804.16.
When peer-to-peer (P800= 5) is selected: Number of transferred words
0 Illegal setting
1...5 Number of transferred words
6...16 Illegal setting
0 to 16
1
Ind: None
FS=2
Type: O2
P052 = 3
P051 = 40
Offline
P802
*
(G172)
Length of parameter jobs for G-SST3
This parameter is effective only when P800=2 (USS protocol).
0 No PKW data are expected or sent in the USS protocol.
3, 4 3 or 4 PKW data words are expected in the USS protocol and 3
or 4 PKW data words are also sent (for transmission of
parameter values).
127 Number of PKWs is determined by the telegram length
0, 3, 4, 127
1
Ind: None
FS=127
Type: O2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-83
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P803
*
(G172)
(G174)
Baud rate for G-SST3
1 300 baud
2 600 baud
3 1200 baud
4 2400 baud
5 4800 baud
6 9600 baud
7 19200 baud
8 38400 baud
9 56700 baud
11 93750 baud
13 187500 baud
1 to 13
1
Ind: None
FS=13
Type: O2
P052 = 3
P051 = 40
Offline
P804
*
(G172)
(G174)
Source for transmit data for G-SST3
Selection of connectors to be transferred as transmit data via basic
converter interface 3
When USS protocol (P800=2) is selected:
i001: Selection for word 1
i002: Selection for word 2
...
i016: Selection for word 16
When peer-to-peer (P800=5) is selected:
i001: Selection for word 1
i002: Selection for word 2
...
i005: Selection for word 5
i006: Not used
...
i016: Not used
Applicable settings:
0 = connector K0000
1 = connector K0001
etc.
All connector
numbers
1
Ind: 16
FS=
i001: 32
i002: 167
i003: 0
i004: 33
i005-i016: 0
Type: L2
P052 = 3
P051 = 40
Offline
P805
(G172)
(G174)
Options for G-SST3
i001: 0 = Bus terminator OFF
1 = Bus terminator ON
i002: 0 = Bit 10 of the 1st receive word does not function as "Control
by PLC".
1 = Bit 10 of the 1st receive word does function as "Control by
PLC“, i.e. when bit 10 = 0, all other bits of the 1st receive word,
as well as receive words 2 to 16, are not written to connectors
K9001 to K9016, or to binectors B9100 to B9915. All these
connectors and binectors retain their old values.
0 to 1
1
Ind: 2
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
P806
*
(G172)
USS bus address for G-SST3
This parameter is functional only when P800=2 (USS protocol). Address via
which the unit can be addressed in USS bus operation.
0 to 30
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10-84 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P807
(G172)
(G174)
Telegram failure time for G-SST3
The failure time set in this parameter is valid when setting P800=2 (USS
protocol) or P800=5 (peer-to-peer) is selected.
0.000 No time monitoring
0.001...65.000 Time which may elapse between the receipt of two
telegrams addressed to the unit before a fault message
is activated.
Fault message F013 is activated if no valid telegram is received within this
time period.
Note:
The telegram monitoring function is active
• from the receipt of the first error-free telegram after connection of the
electronics power supply
• from the receipt of the first error-free telegram after the telegram monitor
has responded (i.e. monitoring timeout).
Since the telegram transfer time is dependent on the set baud rate, the
following minimum setting values for P807 are recommended:
Baud rate as set in P803: Recommended minimum value for P807:
300 baud 0.520s
600 baud 0.260s
1200 baud 0.140s
2400 baud 0.080s
≥ 4800 baud 0.040s
Note:
If the "Automatic restart" function is selected (P086>0) on the peer-to-peer
communication partner, then only a parameter setting of P807>P086 (on the
communication partner) is meaningful.
0.000 to 65.000
[s]
0.001s
Ind: None
FS=0.000
Type: O2
P052 = 3
P051 = 40
Offline
P808
*
(G172)
(G174)
Source for activation of F013
Selection of binector which will activate fault message F013 when it
switches to log. "1"
9030 = binector B9030
9031 = binector B9031
9030, 9031 Ind: None
FS=9030
Type: L2
P052 = 3
P051 = 40
Offline
r809
(G172)
(G174)
Diagnostic information for G-SST3
Free-running counter, overflow at 65535
i001: Number of error-free telegrams
i002: Number of errored telegrams:
Byte frame, parity, overrun or BCC error
i003: Number of byte frame errors
i004: Number of overrun errors
i005: Parity error
i006: STX error:
Start interval before STX not observed,
telegram residual transfer time not observed,
delay time of LGE character too long,
erroneous STX, i.e. ≠ 02
i007: Violation of telegram residual transfer time (USS prot. only)
i008: Block check error
i009: Incorrect telegram length:
With PP802=3 or 4 only:
The length of the received telegram is ≠ P801 + P802
(Note: If the received values are correct, they will be processed
even when this error has been detected)
i010: Timeout error:
No valid telegram has been received for a period exceeding the
setting in P807. After the occurrence of a timeout error, this
counter is not activated again until the next valid telegram is
received.
Ind: 10
Type: O2
P052 = 3
SIEMENS Energy & Automation 10-85
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r810
(G170)
Receive data on G-SST1
Display of data received via USS interface 1
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
Ind: 20
Type: L2
P052 = 3
r811
(G170)
Transmit data on G-SST1
Display of the data to be transmitted via USS interface 1
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
Ind: 20
Type: L2
P052 = 3
r812
(G171)
(G173)
Receive data on G-SST2
When USS protocol (P790=2) is selected:
Display of data received via USS interface 2
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
When peer-to-peer (P790=5) is selected:
Display of data received via peer-to-peer interface 2
i001: Receive data word 1
...
i005 Receive data word 5
i006: Not used
...
i020 Not used
Ind: 20
Type: L2
P052 = 3
r813
(G171)
(G173)
Transmit data on G-SST2
When USS protocol (P790=2) is selected:
Display of the data to be transmitted via USS interface 2
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
When peer-to-peer (P790=5) is selected:
Display of the data to be transmitted via peer-to-peer interface 2
i001: Transmit data word 1
...
i005 Transmit data word 5
i006: Not used
...
i020 Not used
Ind: 20
Type: L2
P052 = 3
10-86 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r814
(G172)
(G174)
Receive data on G-SST3
When USS protocol (P800=2) is selected:
Display of data received via USS interface 3
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
When peer-to-peer (P800=5) is selected:
Display of data received via peer-to-peer interface 3
i001: Receive data word 1
...
i005 Receive data word 5
i006: Not used
...
i020 Not used
Ind: 20
Type: L2
P052 = 3
r815
(G172)
(G174)
Transmit data on G-SST3
When USS protocol (P800=2) is selected:
Display of the data to be transmitted via USS interface 3
i001: Display process data word 1
...
i016 Display process data word 16
i017: Display parameter data word 1
...
i020: Display parameter data word 4
When peer-to-peer (P800=5) is selected:
Display of the data to be transmitted via peer-to-peer interface 3
i001: Transmit data word 1
...
i005 Transmit data word 5
i006: Not used
...
i020 Not used
Ind: 20
Type: L2
P052 = 3
Peer-to-peer interfaces: Enable transmission and receipt of telegrams:
If transmission on a peer-to-peer interface is disabled, the associated output drivers are connected to high impedance. If reception is
disabled on a peer-to-peer interface, then the telegram failure monitoring function is deactivated.
P816
(G173)
Peer-to-peer 2: Source for data reception enabling command
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P817
(G173)
Peer-to-peer 2: Source for data transmission enabling command
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P818
(G174)
Peer-to-peer 3: Source for data reception enabling command
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
P819
(G174)
Peer-to-peer 3: Source for data transmission enabling command
0 = binector B0000
1 = binector B0001
etc.
All binector numbers
1
Ind: None
FS=1
Type: L2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-87
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.41 Deactivation of monitoring functions
WARNING
If monitoring functions are deactivated, there may be a risk to the safety of operating personnel or of
substantial property damage if a fault or error actually occurs!
P820
* Deactivation of fault messages
The numbers of all fault messages to be deactivated must be entered in this
parameter. Fault numbers can be entered in any order. 0 must be entered
for any unused indices of the parameter.
Factory setting:
i001 = 7 (overvoltage)
i002 = 18 (short circuit at binary outputs)
i003 = 31 (monitoring of speed controller)
i004 = 35 (drive blocked)
i005 = 36 (armature current cannot flow)
i006 = 37 (I2t motor monitoring function has responded)
i007 to i099 = 0
0 to 147
1
Ind: 99
FS=
see column
on left
Type: O2
P052 = 3
P051 = 40
Online
P821
* Deactivation of alarms
The numbers of all alarm messages to be deactivated must be entered in
this parameter. Alarm numbers can be entered in any order. 0 must be
entered for any unused indices of the parameter.
0 to 147
1
Ind: 99
FS= 0
Type: O2
P052 = 3
P051 = 40
Online
10.42 Compensation values
r824 A7006 compensation values
These data contain compensation values for the analog section of
electronics board A7006
0 to 65535
1
Ind: 10
Type: O2
P052 = 3
P825 Offset compensation for actual field current channel
These data contain compensation values for the actual field current sensing
function. They are automatically set during "Restore factory settings"
(P051=21) and during the automatic offset compensation run (P051=22).
13000 to 25000
1
Ind: 3
FS=19139
Type: O2
P052 = 3
P051 = 40
Online
P826
(G163)
Correction of natural commutation timing
If there is a variation in the armature current peak value (in spite of a
constant firing angle), it can be corrected by offsetting the firing angle
reference time of the appropriate line phase in parameter P826. One line
phase (UV, UW, VW, VU, WU, WV) is assigned to each parameter index
(i001 to i006).
Increasing the parameter setting by a value of 1 corresponds to an increase
of 1.333 µs in the firing angle (0.024 degrees at 50Hz line frequency),
consequently reducing the armature current peak in the appropriate line
phase.
P826 is automatically set during the optimization run for precontrol and
current controller (armature and field) (P051=25) (only when U800=0; when
U800=1 or 2, parameters P826.001 to 006 are set to 0).
Caution:
Even an asymmetrical system causes variations in the magnitude of
armature current peaks. However, the system asymmetry may also change.
-100 to 100 * 1.333
[µs]
1.333µs
Ind: 6
FS=0
Type: I2
P052 = 3
P051 = 40
Online
r827 Internal diagnosis
i001: Number of write access operations to EEPROM
i002: Number of Page-Write access operations to EEPROM
i003: Counter for DUAL-PORT RAM timeouts
0 to 65535
1
Ind: 3
Type: O2
P052 = 3
r828 MLFB data
These data contain details about the power section design (model)
0 to 65535
1
Ind: 16
Type: O2
P052 = 3
r829 A7001 compensation values
These data contain compensation values for the analog section of
electronics board A7001
0 to 65535
1
Ind: 68
Type: O2
P052 = 3
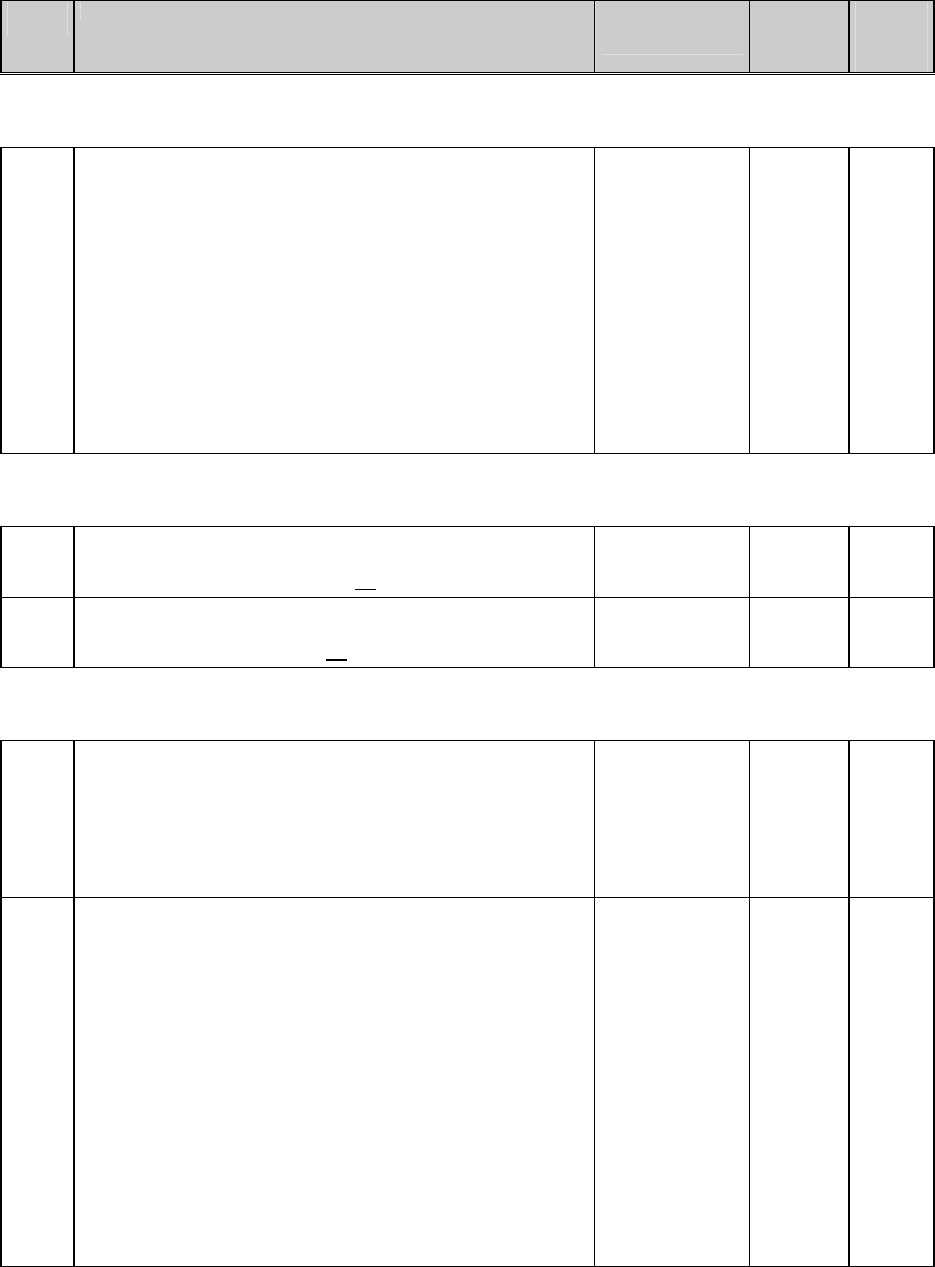
10-88 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.43 Thyristor diagnosis
P830
* Control word for thyristor diagnosis
0 Thyristor check function deactivated
1 Thyristors are checked on initial SWITCH-ON or INCHING
command after connection of the electronics supply voltage.
2 Thyristors are checked on every SWITCH-ON or INCHING
command.
3 Thyristors will be checked on the next SWITCH-ON or INCHING
command. Parameter P830 is set to 0 if no fault is detected.
Note:
The thyristor check function may not be activated (setting P830=0 must be
selected)
− when the ”Enable a torque direction for torque direction change by
parallel drive” function is in use (see also parameter P165) or
− when the converter is used to supply large inductances (e.g. field supply
from armature terminals, supply of lifting solenoids, etc.).
0 to 3
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10.44 Parameters for DriveMonitor and OP1S
P831
to
r849
Parameters for the Trace function of DriveMonitor
These parameters are settings for the data exchange between DriveMonitor
and the SIMOREG converter. They must not be changed!
P052 = 3
r850
to
P899
Parameters for the OP1S
These parameters are settings for the data exchange between OP1S and
the SIMOREG converter. They must not be changed!
P052 = 3
10.45 Profile parameters
P918
(Z110)
(Z111)
CB bus address
Protocol-dependent bus address for communication boards
Note:
The validity of the bus address is monitored by the communication board.
(Bus addresses 0 to 2 are reserved for Master stations on PROFIBUS
boards and must not therefore be set for other purposes). If the value is not
accepted by the COM BOARD, fault F080 is displayed with fault value 5
0 to 200
1
Ind: 2
FS=3
Type: O2
P052 = 3
P051 = 40
Offline
P927
*
(G170)
(G171)
(G172)
(Z110)
(Z111)
Parameterization enable
Enabling of interfaces for parameterization. A parameter value can only be
altered via an enabled interface.
0: None
1: Communications board (CB)
2: Parameterizing unit (PMU)
4: G-SST1 serial interface and OP1S
8: Reserved
16: Technology board (TB)
32: G-SST2 serial interface
64: G-SST3 serial interface
Setting information:
Every interface has a numeric code.
The number for one specific interface, or the sum of various numbers
assigned to several interfaces, must be entered in this parameter in order to
enable the relevant interface(s) for use as a parameterization interface.
Example:
Factory setting value 6 (=4+2) means that the PMU and G-SST1 interfaces
are enabled for parameterization purposes.
0 to 127
1
Ind: None
FS=6
Type: V2
P052 = 3
P051 = 40
Offline
SIEMENS Energy & Automation 10-89
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.46 Fault memory
r947
(G189)
Fault memory
Display of fault messages generated in response to recent faults. A fault
value and fault time is assigned to each fault number (see Section 10 for
details of fault numbers and fault values).The interrelationship between the
associated parameters is shown in the diagram below.
The fault numbers of the last (maximum 8) fault events are stored under the
indices of parameter P947. r947.001 displays the fault number of the current
(still not acknowledged) fault, index 9 displays the number of the most
recent acknowledged fault, index 17 the fault number of the second most
recent acknowledged fault, etc. An entry of "0" means that no "earlier" fault
has occurred. Since only one fault message can be stored with respect to
any fault event on the SIMOREG 6RA70, only indices 1, 9, 17, 25, 33, 41,
49 and 57 are relevant.
A fault value is assigned to each fault number in the corresponding index of
parameter r949. This provides further information about the nature of the
fault.
In addition, the fault time (the current reading of the hours run counter as
the fault occurred (r048)), is stored for each fault in r049. The data for the
current (not yet acknowledged) fault are stored as the "Hours run counter
reading" in index 1. The data for earlier, already acknowledged faults are
stored under the following indices.
0
0
0
0
0
0
0
0
0
0
0
0
0
0
. . .
0
0
0
0
0
0
0
0
0
0
0
0
0
0
. . .
Index 1
Index 9
Index 17
Current
1st acknowl.
Current
r947
Fault number
r949
Fault value
r049
Fault time [h]
Index 1
Index 2
Index 3
Index 4
Index 5
Index 6
Index 7
Index 8
Current
1st acknowl.
2nd acknowl. 2nd acknowl.
1st acknowl.
2nd acknowl.
3rd acknowl.
4th acknowl.
5th acknowl.
6th acknowl.
7th acknowl.
Plaintext information about the fault numbers is available under the
corresponding index of parameter r951.
Ind: 64
Type: O2
P052 = 3
r949
(G189)
Fault value
Fault value of faults, allows more detailed diagnosis for a variety of
parameters.
The fault values are stored in the same indices as the associated fault
numbers (r947) - see parameter r947.
Ind: 64
Type: O2
P052 = 3
r951 Fault text 0 to 65535
1
Ind: 101
Type: O2
P052 = 3
P952 Number of faults
Settings:
0 Deletes the entire fault memory (r947, r949 and r049) by
resetting to 0
Note: P952 cannot be reset while a fault is pending
>0 Display of the faults stored in the fault memory (r947, r949 and
r049)
0 to 65535
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
10-90 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
10.47 Visualization parameters: Alarms
r953 Alarm parameter 1
Display of active alarms in bit-coded form (A001 to A016).
If one of the alarms between 1 and 16 is generated, the corresponding
segment in the display lights up.
4321
5
6
7
8
910111213141516
See Section 10.2 for meaning of individual alarms.
Ind: None
Type: V2
P052 = 3
r954 Alarm parameter 2
Display of active alarms in bit-coded form (A017 to A032).
If one of the alarms between 17 and 32 is generated, the corresponding
segment in the display lights up.
20 19 18 17
21
22
23
24
2526272829303132
See Section 10.2 for meaning of individual alarms
Ind: None
Type: V2
P052 = 3
r955 Alarm parameter 3
Parameter alarms 3
If one of the alarms between 33 and 48 is generated, the corresponding
segment in the display lights up.
36 35 34 33
37
38
39
40
4142434445464748
Ind: None
Type: V2
P052 = 3
r956 Alarm parameter 4
Parameter alarms 4
If one of the alarms between 49 and 64 is generated, the corresponding
segment in the display lights up.
52 51 50 49
53
54
55
56
5758596061626364
Ind: None
Type: V2
P052 = 3
r957 Alarm parameter 5
Parameter alarms 5
If one of the alarms between 65 and 80 is generated, the corresponding
segment in the display lights up..
68 67 66 65
69
70
71
72
7374757677787980
Ind: None
Type: V2
P052 = 3
r958 Alarm parameter 6
Parameter alarms 6 (CB alarms)
If one of the alarms between 81 and 96 is generated, the corresponding
segment in the display lights up.
84 83 82 81
85
86
87
88
8990919293949596
Ind: None
Type: V2
P052 = 3
SIEMENS Energy & Automation 10-91
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r959 Alarm parameter 7
Parameter alarms 7 (TB alarms 1)
If one of the alarms between 97 and 112 is generated, the corresponding
segment in the display lights up.
100 99 98 97
101
102
103
104
105106107108109110111112
Ind: None
Type: V2
P052 = 3
r960 Alarm parameter 8
Parameter alarms 8 (TB alarms 2)
If one of the alarms between 113 and 128 is generated, the corresponding
segment in the display lights up.
116 115 114 113
117
118
119
120
121122123124125126127128
Ind: None
Type: V2
P052 = 3
10.48 Device identification
r964 Parameters for device identification on the PROFIBUS
[SW 2.0 and later]
Display parameters to support overview and diagnosis of all nodes on the
PROFIBUS-DP during and after commissioning
(coding according to PROFIBUS profile V3)
i001: Display of the manufacturer of the
SIMOREG DC Master 6RA70 : SIEMENS = 42
i002: Display of device type: SIMOREG DC Master 6RA70 = 4110
i003: Display of the software version of the SIMOREG DC Master
6RA70
(see r060.001)
i004: Display of year of generation of the software of the SIMOREG
DC Master 6RA70: y y y y
(see r061.001)
i005: Display of the month and day of generation of the software of
the SIMOREG DC Master 6RA70: d d m m
(see r061.003 and r061.002)
i006: Display of the controlled axes of the SIMOREG DC Master
6RA70: 1
0 to 65535
1
Ind: 6
Type: O2
P052 = 1
10.49 Visualization parameters: Control and status word
r967 Display of control word 1
Visualization parameter for control word 1 (bits 0-15)
Identical to r650 (control word 1)
Ind: None
Type: V2
P052 = 3
r968 Display of status word 1
Visualization parameter for status word 1 (bits 0 - 15)
Identical to r652 (status word 1)
Ind: None
Type: V2
P052 = 3
10.50 Resetting and storing parameters,
list of existing and modified P and r parameters
P970
* Restore factory setting
Reset parameters to factory setting (default)
0: Parameter reset: All parameters are reset to their original values
(factory setting). This parameter is then automatically reset to 1.
1: No parameter reset
Note: Function can also be selected by setting P051=21.
0 to 1
1
Ind: None
FS=1
Type: O2
P052 = 3
P051 = 40
Offline
10-92 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
P971
* EEPROM transfer
Transfer of parameter values from RAM to EERPROM on switchover from 0
to 1.
It takes approximately 15s to process all values. The PMU remains in value
mode for this period.
0 to 1
1
Ind: None
FS=0
Type: O2
P052 = 3
P051 = 40
Offline
r980 List of existing parameter numbers, start
Visualization parameter for displaying the first 100 parameter numbers in
the P or r parameter range (0 to 999). The parameter numbers are listed in
ascending sequence.
Repetition of a number over several indices means that there are no further
parameter numbers in the 0 to 999 range.
The list is continued at the parameter whose number is displayed under
index 101.
See also r989
Ind: 101
Type: O2
P052 = 3
r981 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r982 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r983 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r984 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r985 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r986 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r987 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r988 List of existing parameter numbers, continuation
See r980.
Ind: 101
Type: O2
P052 = 3
r989 List of existing parameter numbers, continuation
Continuation of the list can be found under index 101. Please note:
860 = r860 (TECH BOARD installed)
2980 = n980
See also r980.
Ind: 101
Type: O2
P052 = 3
r990 List of modified parameter numbers, start
Visualization parameter for displaying the first 100 modified parameters in
the P or r parameter range (0 to 999). The parameter numbers are listed in
ascending sequence.
Repetition of a number over several indices means that there are no further
modified parameters in the 0 to 999 range.
The list is continued at the parameter whose number is displayed under
index 101.
See also r999.
Ind: 101
Type: O2
P052 = 3
r991 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r992 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r993 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r994 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r995 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r996 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
SIEMENS Energy & Automation 10-93
SIMOREG DC Master Base Drive Panel Operating Instructions
PNU
Description Value range
[Unit]
Steps
No. indices
Factory
setting
Type
See
Change
(Access /
Status)
r997 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r998 List of modified parameter numbers, continuation
See r990.
Ind: 101
Type: O2
P052 = 3
r999 List of modified parameter numbers, continuation
Continuation of the list can be found under index 101. Please note:
2990 = n990
See also r990.
Ind: 101
Type: O2
P052 = 3
10-94 SIEMENS Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
NOTES:

Siemens Energy & Automation 11-1
SIMOREG DC Master Base Drive Panel Operating Instructions
11 Simplified block diagrams
Basic functions
Page
Sheet 1 Legend ............................................................................................................................ 11-2
Sheet 2 Speed Setpoint System ................................................................................................... 11-3
Sheet 3 Speed Control & Current Limit......................................................................................... 11-4
Sheet 4 Armature Current Control ................................................................................................ 11-5
Sheet 5 EMF & Field Current Control ........................................................................................... 11-6
Sheet 6 USS Interface 1 ( X300 ) ................................................................................................. 11-7
Sheet 7 USS Interface 2 ( X172 ) ................................................................................................. 11-8
Sheet 8 Peer to Peer Interface ( X172 )........................................................................................ 11-9
Sheet 9 Data Exchange CB / TB to Base (PZD) ........................................................................ 11-10
Sheet 10 Control Word 1............................................................................................................... 11-11
Sheet 11 Control Word 2............................................................................................................... 11-12
Sheet 12 Status Word 1 ................................................................................................................ 11-13
Sheet 13 Status Word 2 ................................................................................................................ 11-14
Sheet 14 Signals .......................................................................................................................... 11-15
NOTE
The simplified block diagrams do not show all details or functions. Please refer to
Operating Instructions 6RX1700-0AD76 if additional detail or functions are required
including S00 functions and accessory boards.
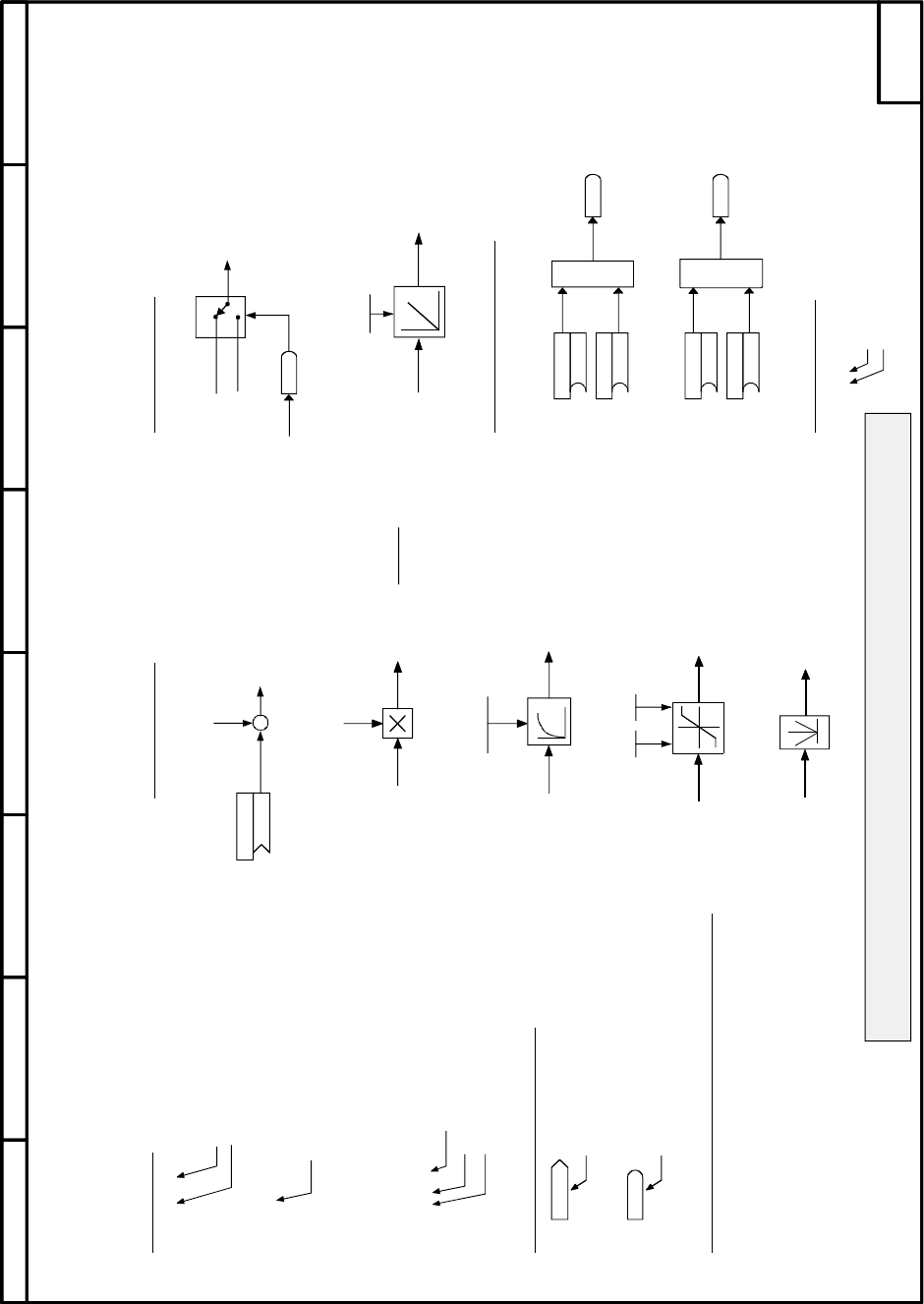
11-2 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 1 Legend
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
1
&
1
≥
Pxxx (0)
FILTER TIME
MIN
Pxxx
MAX
Pxxx
Pxxx (0)
K
Bxxx
r xxx
Kxxx Pxxx (0)
B
0
1
Pxxx (0)
TIME
AND
OR
BINECTOR
SELECTORS
Pxxx (0)
B
OUTPUT
BINECTOR
Pxxx (0)
B
Pxxx (0)
B
Bxxx
OUTPUT
BINECTOR
BINARY LOGIC FUNCTIONS
BINECTOR
SELECTORS
CONNECTORS AND BINECTORS
Bxxx
CONNECTOR (SIGNAL VALUE)
BINECTOR (LOGIC VALUE)
CONNECTOR NUMBER
BINECTOR NUMBER
PARAMETERS
Pxxx (0)
PARAMETER NUMBER
FACTORY DEFAULT VALUE
BASIC SETTING PARAMETER (P or U)
TECH BOARD (H or L)
BASIC DISPLAY PARAMETER (r or n)
TECH BOARD (d or c)
PARAMETER NUMBER
INDEX parameters are used to both display and change
several parameter values which are all assigned to
the same parameter number
Pxxx.01 F/B
PARAMETER NUMBER
INDEX NUMBER
VALUE FUNCTIONS
+
+
A%
B%
OUTPUT = A% + B%
A%
B%
OUTPUT A% x B%
=100%
CONNECTOR
SELECTOR
IN OUT
LIMITER
IN OUT
ABSOLUTE VALUE
IN OUT
FILTER
MULTIPLIER
ADDER SWITCH
A%
B%
Bxxx
OUTPUT = A% IF BINECTOR VALUE = 0
OUTPUT = B% IF BINECTOR VALUE = 1
IN OUT
RATE LIMITER
PAGE REFERENCE
[ 4.6 ]
PAGE NUMBER
PAGE COLUMN NUMBER
LEGEND
VALUE FUNCTIONS
K0000 = 0%
K0001 = 100%
K0002 = 200%
K0003 = -100%
K0004 = -200%
K0005 = 50%
K0006 = 150%
K0007 = -50%
K0008 = -150%
B0000 = L0GIC "0"
B0001 = LOGIC "1"
PRE-ASSIGNED CONNECTORS AND BINECTORS
SIMPLIFIED BLOCK DIAGRAM DOES NOT SHOW ALL DETAILS
REFER TO OPERATING MANUAL 6RX1700-0AD76 FOR COMPLETE BLOCK DIAGRAM
PART OF FUNCTION OR BINARY PARAMETER SET
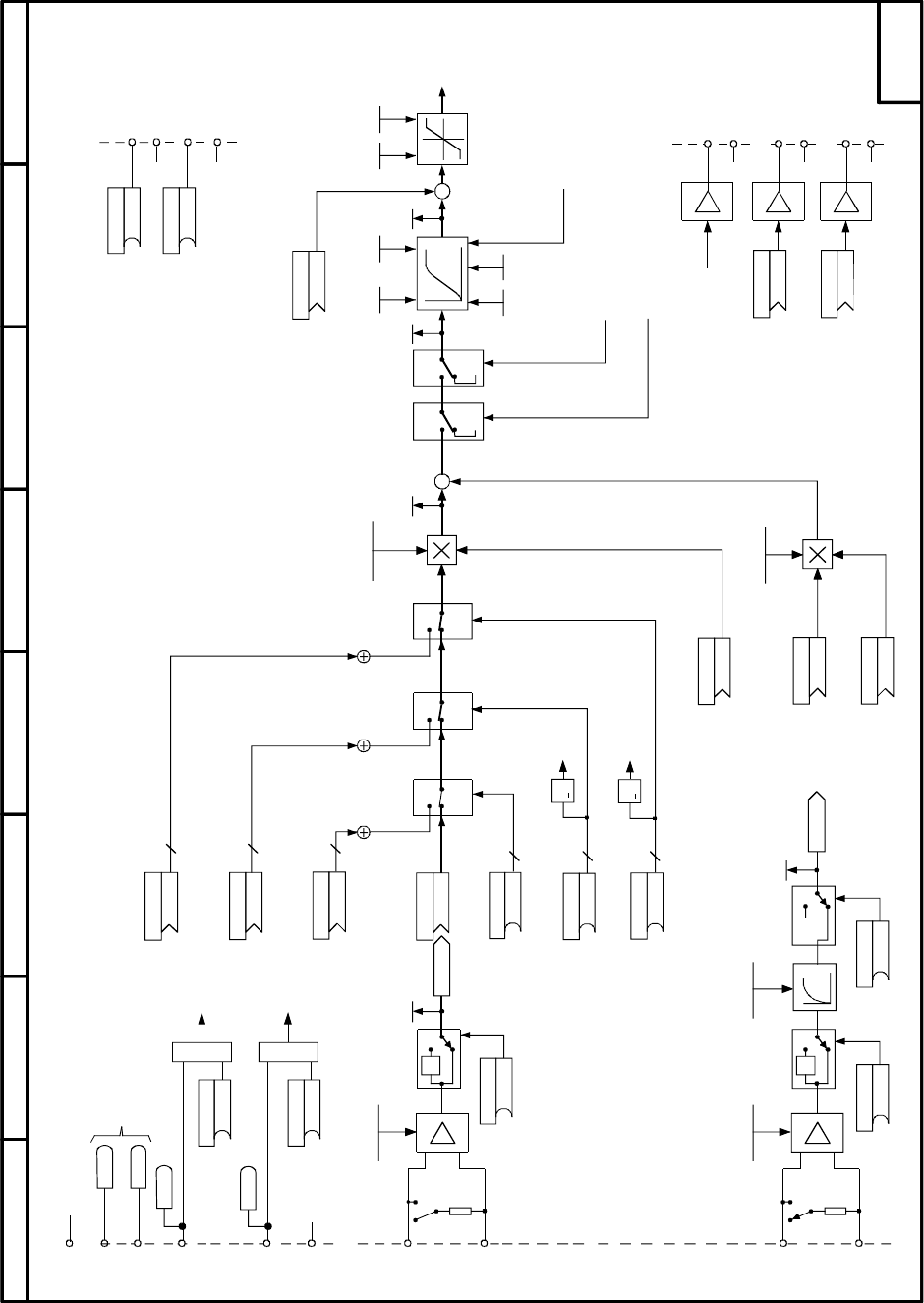
Siemens Energy & Automation 11-3
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 2 Speed Setpoint System
r001
+
-FIXED COMMAND
INCH COMMAND
CRAWL COMMAND
RAMP
-
+
P710
SPEED SETPOINT SYSTEM
FIXED
SETPOINT
INCH
SETPOINT
CRAWL
SETPOINT
K198
-1
-1
K0015
P0433.F (11)
K
K0011
P0430 (0)
B
P0435 (0)
B
P0440 (0)
B
Index .01 - .08
Index .01 - .08
Index .01 - .08
P0431 (0)
K
Index .01 - .08
SPEED SETPOINT
SOURCE
FIXED SETPOINT
SOURCE
ASSIGNABLE
BINARY INPUTS
BINARY
INPUTS
(CUD1)
X171
B0016
B0012
B0010
P700
X174
r003
P704 (0)
B
0
1
P714 (0)
B
P0436 (0)
K
Index .01 - .08
INCH SETPOINT
SOURCE
P0441 (0)
K
Index .01 - .08
CRAWL SETPOINT
SOURCE
8
8
8
8
8
8
r029
P320.F (100.00)
P322.F (1)
K
P645.F (0)
K
P321.F (100.00)
P323.F (1)
K
ADDITIONAL SETPOINT
BEFORE RAMP
SCALING
ADDITIONAL SETPOINT
SCALING
SETPOINT SCALING
K190
r028
0
1
K190
RAMP
OPERATE STOP
0%
0
1
Hold Stop
Run Run
Control Word 1 Bit 5
Control Word 1 Bit 0
AND
Control Word 1 Bit 6
P634 (0)
K.02
ADDITIONAL SETPOINT
AFTER RAMP
X171
46
47
48
54
M
M
P771 (0)
B
BINARY
OUTPUTS
(CUD1)
P772 (0)
B
4
5
6
7
39
36
37
38
MIN
P301
MAX
P300
SPEED
SETPOINT
TO SPEED
CONTROLLER
[ 3.1 ]
34 P24
35 M
P305.F
START
RND
P306.F
END
RND
UP
RATE
P303.F
DOWN
RATE
P304.F
SCALING
K209 K207 K206 K194
K192
r027
K170
P711.F (100.00)
SCALING
SELECTABLE
ANALOG 1 (CUD1)
P701.F (100.00)
SCALING
MAIN
SETPOINT
ANALOG INPUT
P715 (0)
FILTER TIME
REVERSE
POLARITY ON / OFF
P716 (1)
B
0% 0
1
0
1
REVERSE
POLARITY
X175
M
M
M
12
13
14
15
16
17
ANALOG
OUTPUTS
(CUD1)
ARMATURE
CURRENT
P750 (0)
K
P755 (0)
K
P654 (1)
B
P661 (1)
B
&
&
ON / OFF
ENABLE
Cntrl Word 1
Bit 0 [ 10.1 ]
Cntrl Word 1
Bit 3 [ 10.3 ]
Cntrl
Word 1
Bit 0
> 1
Cntrl
Word 1
Bit 0
> 1
ON / OFF
ON / OFF
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
2
[ 10.7 ]
[ 10.7 ]
[ 10.7 ]
Control Word 1 Bit 4
[ 10.7 ]
ENABLE
B0014
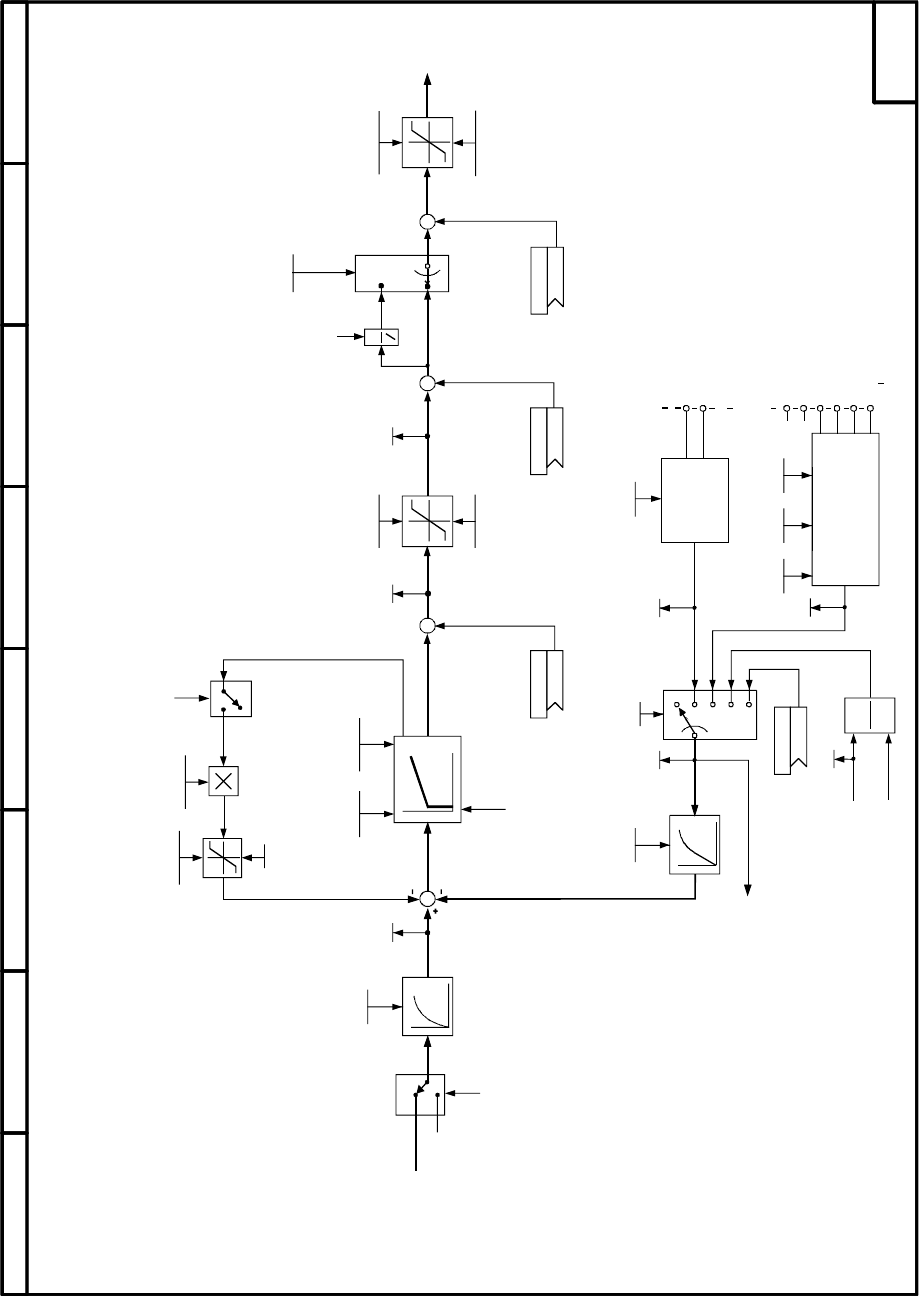
11-4 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 3 Speed Controller and Current Limit
X173
XT
P171 (100%)
P172 (-100%)
P170 (0)
1
O
CURRENT
TORQUE
r022
P225.F (3.0)
KP
P226.F (0.65)
TN
P228.F(0)
P200.F (0) P741.F
ANALOG
TACHOMETER
SCALING
103 +
104-
P141 P143.FP140
TYPE PPR
PULSE
ENCODER
SCALING
26 (+15 VOLTS)
27 (COMMON)
28 (SIGNAL A)
29 (SIGNAL NOT A)
30 (SIGNAL B)
31 (SIGNAL NOT B)
P083.F
EMF
ENCODER
ANALOG
TACH
r025
SPEED CONTROL & CURRENT LIMIT
r026
K174 K145 K140
K167 K013
r002
MAX
RPM
VOLTAGE AT
TOP SPEED
ACTUAL SPEED
FILTER TIME
SETPOINT
FILTER TIME
K040
r024
POSITIVE
CURRENT LIMIT
NEGATIVE
CURRENT LIMIT
K120
0
1
P180 (300%)
P181 (-300%)
POSITIVE
TORQUE LIMIT
NEGATIVE
TORQUE LIMIT
SPEED
SETPOINT
FROM RAMP
GENERATOR 0%
0
1
FAST STOP
P609 (0)
K
0
1
2
3
4
K170
P562.F (100)
P563.F (-100)
NEGATIVE
DROOP LIMIT
POSITIVE
DROOP LIMIT
P227.F (0.0)
DROOP
SCALING
0
1
DROOP ENABLE
CONTROL WORD 2
BIT 24
SPEED
CONTROLLER
P502 (0)
K
K160
K162
K165 K141
r021
P601 (0)
K.02
MOTOR FLUX
K290
P601 (0)
K.04
K133
ANALOG TACHOMETER
PULSE ENCODER
<1> <1>
<1>
<1> <1>
<1>
<1> 100% CORRESPONDS TO THE RATED MOTOR CURRENT (P100)
CURRENT
SETPOINT
TO CURRENT
CONTROL
135.05
P115
MOTOR EMF K287
r037
P115 (100%)
MAX SPEED
ADDITIONAL
TORQUE
ADDITIONAL
TORQUE
ADDITIONAL
CURRENT
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
3
[ 2.8 ] [ 14.2 ]
[ 10.7 ]
[ 5.3 ]
[ 5.7 ]
[ 4.2 ]
[ 11.6 ]
ENABLE
[ 11.6 ]
[ 14.2 ] [ 14.4 ]
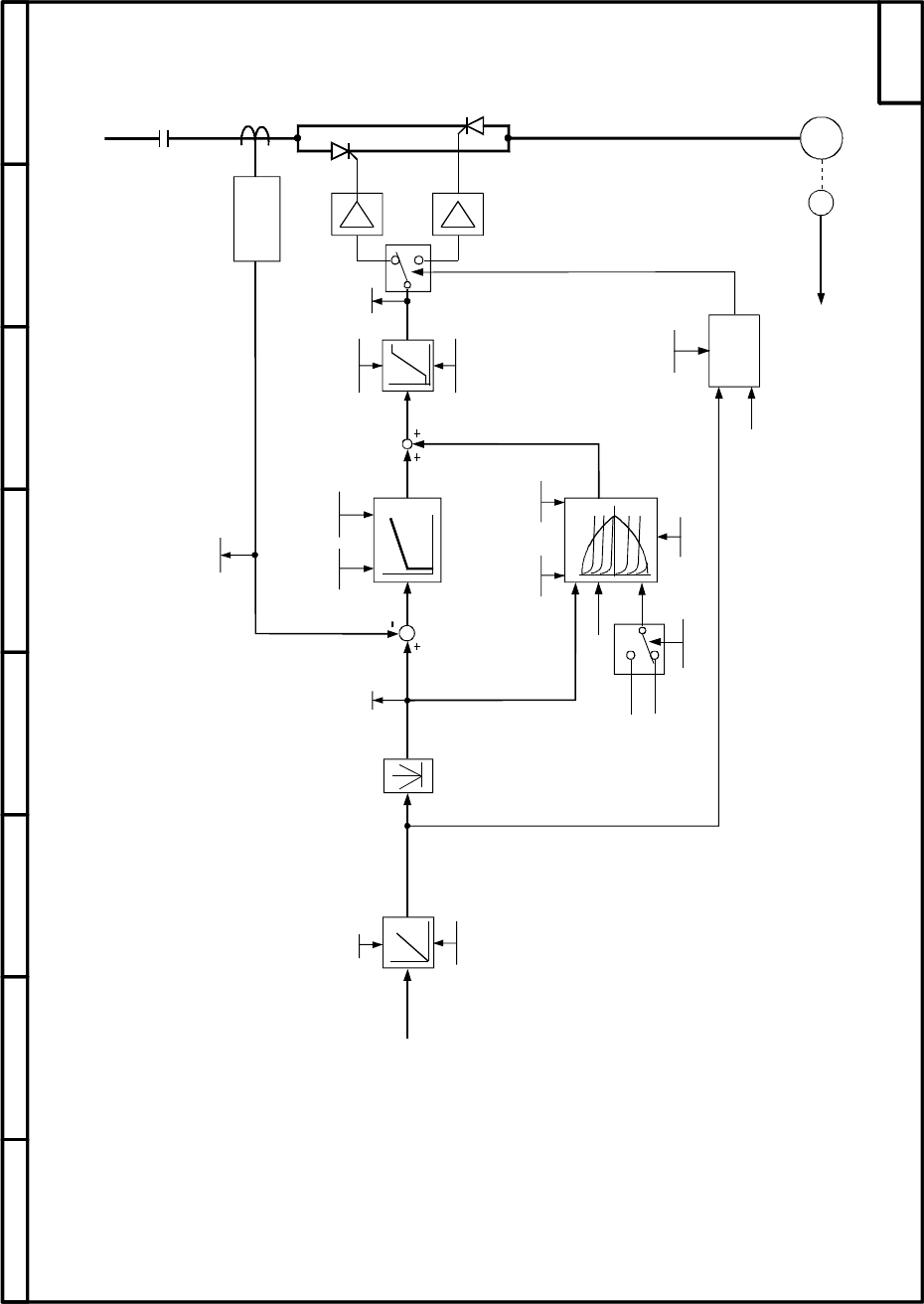
Siemens Energy & Automation 11-5
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 4 Armature Current Control
r018
FORWARD
REVERSE
P155.F (.1) P156.F (.2)
KPTN
CURRENT
CONTROLLER
P160.F (0)
REVERSING
DEAD BAND
REVERSING
LOGIC
ARMATURE CURRENT ACTUAL VALUE
r019
r020
M
P158.F (0)
P157.F (0)
MOTOR
TACH
ARMATURE CURRENT CONTROL
AC LINE
VOLTAGE
K100
K117
P110.F (0) P111.F (0)
ARMATURE
RESISTANCE
FEED FORWARD
MEASURED EMF
P153.F (1)
CONTROL
di/dt
TIME
MODE
0 = ACTIVE ONLY DURING
TORQUE DIRECTION
CHANGE
1 = ALWAYS ACTIVE
K120
CURRENT
SETPOINT
FROM SPEED
CONTROL
K119 K118
<1>
CT'S
CURRENT
RECTIFICATION
K121
K110 K102
P150.F (30 )
P151.F (150 )
ADVANCE
LIMIT
RETARD
LIMIT
0
0
ARMATURE CURRENT = 0
<1>
ARMATURE
INDUCTANCE
LINE VOLTAGE K305
K113
<1> 100% CORRESPONDS TO THE RATED MOTOR CURRENT (P100)
CALCULATED EMF
K123
K124
P162 (1)
1
0
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
4
[ 3.8 ]
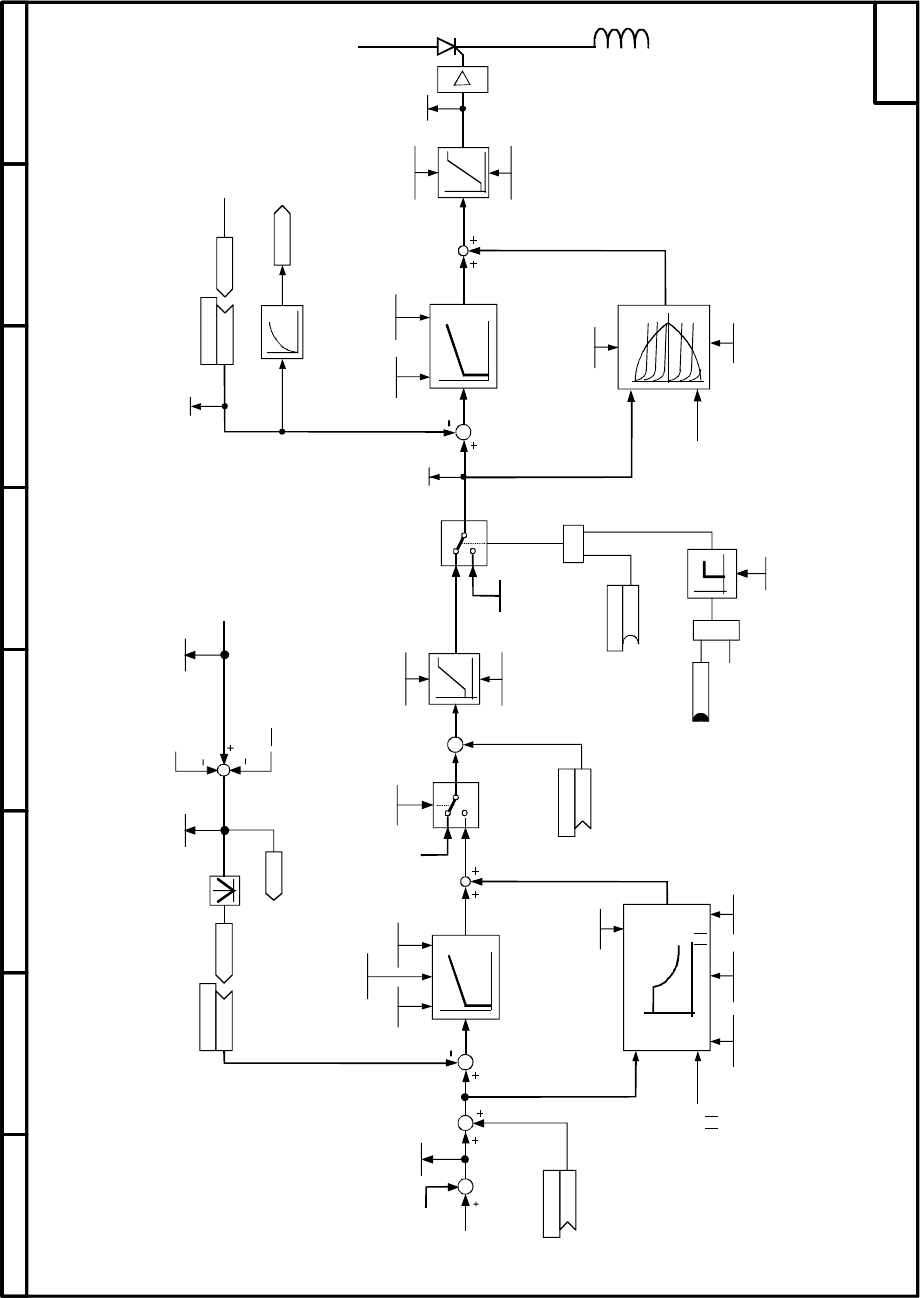
11-6 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 5 EMF and Field Current Control
r034
P255.F (5) P256.F (.2)
KPTN
CURRENT
CONTROLLER
K250
K260 K251
P250.F (0 )
P251.F (180 )
ADVANCE
LIMIT
RETARD
LIMIT
0
0
P112.F (0)
FIELD
RESISTANCE
FEED FORWARD
P253.F (1)
ENABLE
K271
K304
FIELD
LINE VOLTAGE
r036
K268
<1>
K263
P612 (266)
K
FIELD
ACTUAL VALUE
K266
INTERNAL
FIELD ACTUAL
CURRENT
MOTOR
FIELD
FIELD
LINE VOLTAGE
r035
<1>
K265
P275.F (.6) P276.F (.2)
KPTN
EMF
CONTROLLER
K280
P273 (1)
ENABLE
P120.F
to
P139.F
K293
K283
P102.F (0 A)
P103.F (0 A )
MINIMUM FIELD
CURRENT
t
1
0
1
≥
&
P257.F (0 %)
P258.F (10s)
P082=2
K0275
P692.B (0)
B
B0124
STANDSTILL
FIELD
Delay time
LINE CONTACTOR
CLOSED
FIELD
ECONOMY
CURRENT SETPOINT IS SET
TO ZERO WHEN FIELD GATE
PULSES ARE DISABLED
FIELD
CURRENT
SETPOINT
RATED MOTOR
FIELD CURRENT
ACTUAL FIELD
CURRENT
P611 (0)
K
ADDITIONAL
FIELD CURRENT
SETPOINTS
Index .02 - .04
1
0
FIELD
WEAKENING
ACTIVE
P081 (0)
100%
P277.F (0)
DROOP
K278
K277 K276
n
FIEL D
SETPOINT
P119.F (100)
BASE
SPEED
P118.F (340)
RATED
EMF
FIELD
CHARACTERISTICS
SPEED
ABSOLUTE
VALUE
K166
n
r037
K0287
EMF
EMF
K285
ARMATURE TERMINAL
VOLTAGE
i x R
aa
x La
a
di
dt
r038
-
r039
P100.F X P110.F
P101.F
EMF
SETPOINT
P615 (0)
K
Index .02 - .04
ADDITIONAL EMF
SETPOINT
EMF CONTROLLER FIELD CURRENT CONTROLLER
ACTUAL EMF
<1> 100% CORRESPONDS TO THE RATED MOTOR FIELDCURRENT (P102)
P616 (286)
K
EMF
ACTUAL VALUE
K286
K288
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
5
[ 3.3 ] K290 [ 3.6 ]
FLUX
P120.F - P139.F
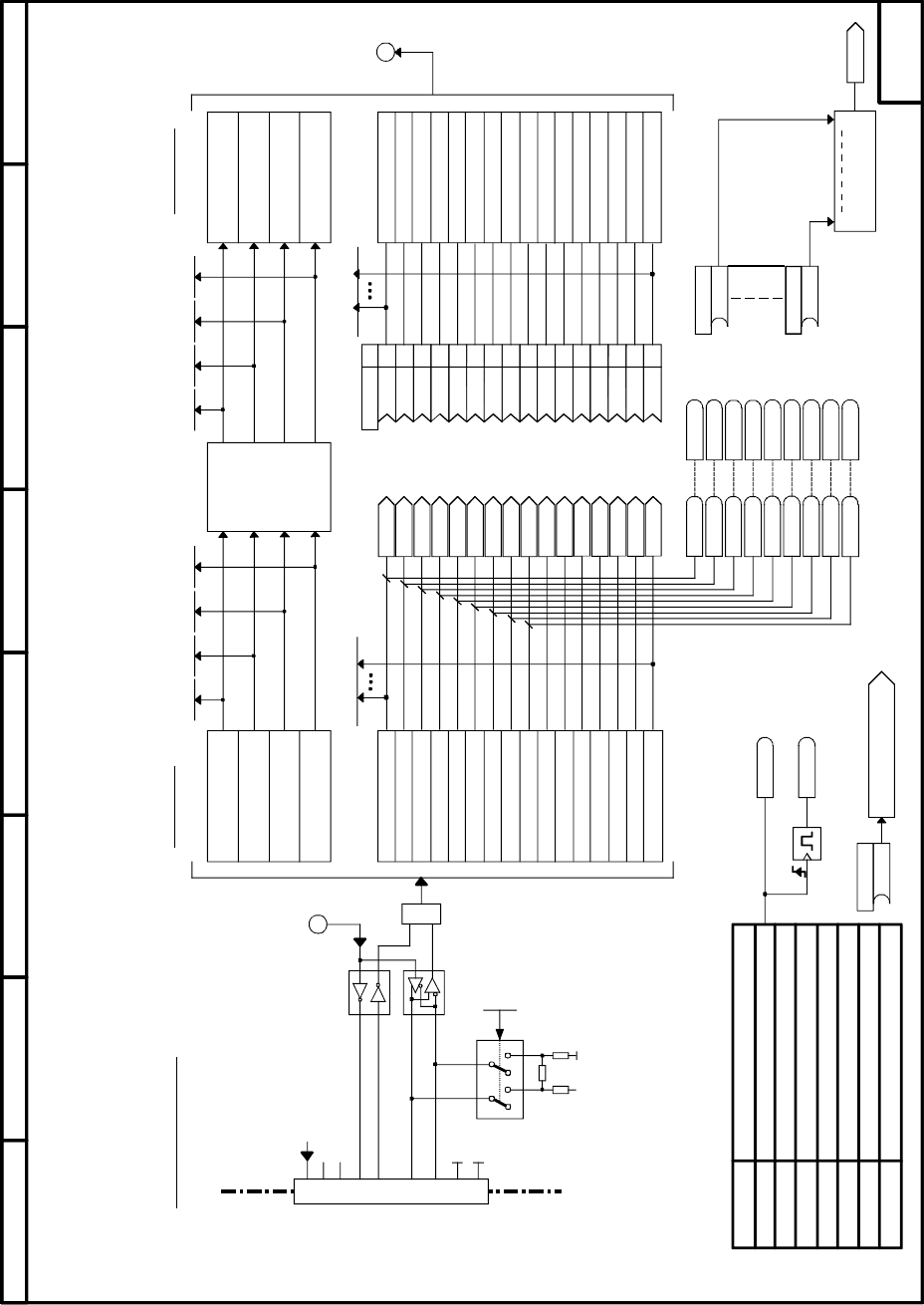
Siemens Energy & Automation 11-7
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 6 USS Interface 1 ( X300 )
.04
.01
.03
.02
.06
.05
.07
.08
.10
.09
.14
.11
.13
.12
.16
.15
Rx+/Tx+
Rx-/Tx-
RS485
M
1
1
RS232
1
≥
2
3
4
5
6
7
8
9
TxD
RxD
1
M
+5V
Submin D
M
+
10 10
WE
r810.01 to .16
K
r811.01 to .16
K
K
K
P784
K
K
K
K
K
K
K2001
K2002
K2003
K2004
K2005
K2006
K2007
K2008
K2009
K2010
K2011
K2012
K2013
K2014
K2015
K2016
B2100
Bit 0 ... Bit 15
B2200
B2300
B2400
B2500
B2600
B2700
B2800
B2900
K
K
K
K
K
K
r810.17 r810.18 r810.19 r810.20 r811.17 r811.18 r811.19 r811.20
B2115
B2215
B2315
B2415
B2515
B2615
B2715
B2815
B2915
P780 (2)
P787 (0,000s)
P786 (0)
P783 (6)
P781 (2)
P782 (127)
r789
P927
1s
B2030
B2031
P788 (2030)
B
X300:
G-SST1
P785 (0)
32
167
0
33
0
0
0
0
0
0
0
0
0
0
0
0
USS interface 1
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Process data
from USS interface
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Process Data
to USS interface
Receive data Transmit data
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
every 16 bits
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
Word 1: Param.-ID
(PKE)
Word 2: Param.Index
Word 3: Param.Value
Low Word
Word 4: Param.Value
High Word
Parameter
processing
Word 1: Param.-ID
(PKE)
Word 2: Param.Index
Word 3: Param.Value
Low Word
Word 4: Param.Value
High Word
USS parameter data USS parameter data
Bus terminator
1 = "Fault F011"
Fault message trigger
USS On/Off
Slave address
Baud rate
Length of process data
Length of parameter data
Telegram monitoring time
USS diagnostic parameter
Enable parameterization
1 = "Telegram
monitoring
timeout"
Parameters for USS interface
K2020
015
Binector / Connector
Converter
U116 (0)
B.01
U116 (0)
B.16
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
6
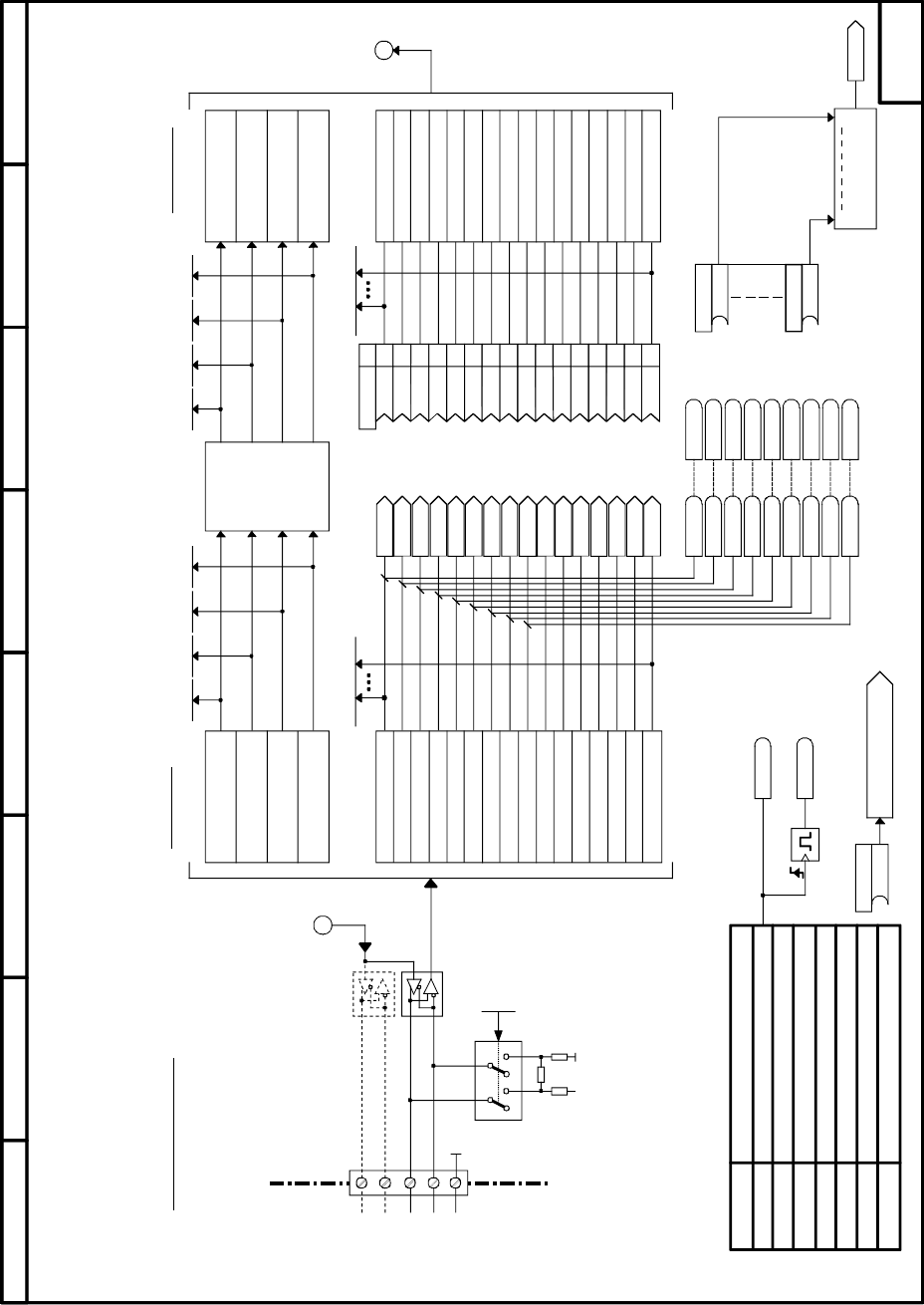
11-8 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 7 USS Interface 2 ( X172 )
.04
.01
.03
.02
.06
.05
.07
.08
.10
.09
.14
.11
.13
.12
.16
.15
Tx+
Tx-
Rx+/Tx+
Rx-/Tx-
RS485
M
56
57
58
59
60
1
1
M
+
10 10
X172
WE
Bit 0 ... Bit 15
P790 (0)
P797 (0,000s)
P796 (0)
P793 (6)
P791 (2)
P792 (127)
r799
P927
1s
B6030
B6031
P798 (6030)
B
K6001
K6002
K6003
K6004
K6005
K6006
K6007
K6008
K6009
K6010
K6011
K6012
K6013
K6014
K6015
K6016
B6100
B6200
B6300
B6400
B6500
B6600
B6700
B6800
B6900
B6115
B6215
B6315
B6415
B6515
B6615
B6715
B6815
B6915
r812.01 to .16
r812.17 r812.18 r812.19 r812.20 r813.17 r813.18 r813.19 r813.20
G-SST2
P795 (0)
K
K
K
K
P794
K
K
K
K
K
K
K
K
K
K
K
32
167
0
33
0
0
0
0
0
0
0
0
0
0
0
K0
USS interface 2
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Process data
to USS interface
Receive data Transmit data
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
Word 1: Param.-ID
(PKE)
Word 2: Param.Index
Word 3: Param.Value
Low Word
Word 4: Param.Value
High Word
Parameter
processing
Word 1: Param.-ID
(PKE)
Word 2: Param.Index
Word 3: Param.Value
Low Word
Word 4: Param.Value
High Word
USS parameter data USS parameter data
Process data
from USS interface
1 = "Fault F012"
Fault message trigger
USS On/Off
Slave address
Baud rate
Length of process data
Length of parameter data
Parameters for USS interface
Telegram monitoring time
USS diagnostic parameter
Enable parameterization
1 = "Telegram
monitoring
timeout"
Bus terminator
every 16 bits
r813.01 to .16
K6020
015
Binector / Connector
Converter
U117 (0)
B.01
U117 (0)
B.16
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
7
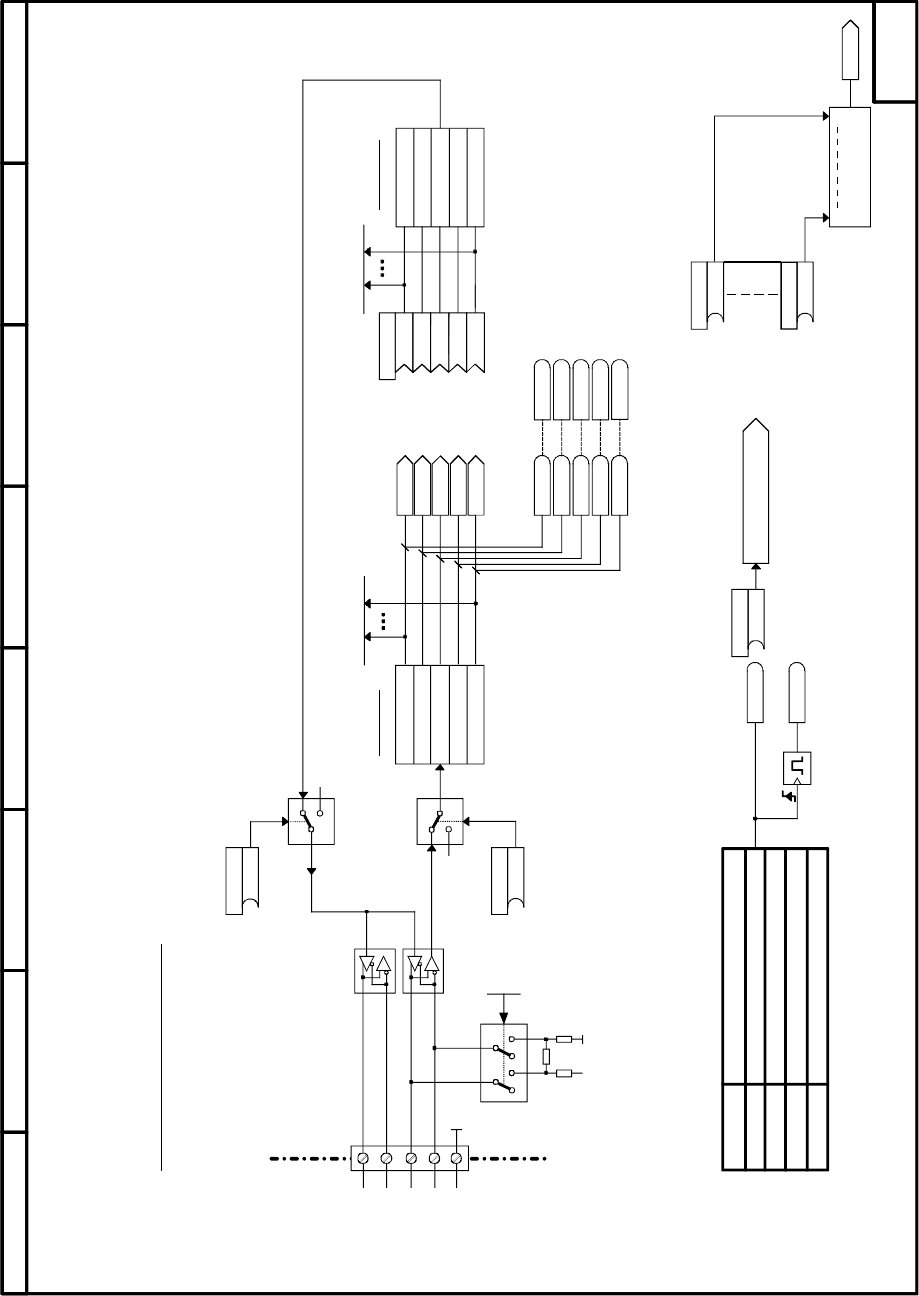
Siemens Energy & Automation 11-9
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 8 Peer to Peer Interface ( X172 )
.01
.02
.03
.04
.05
Tx+
Tx-
Rx+/Tx+
Rx-/Tx-
RS485
M
56
57
58
59
60
G-SST2
M
+
10 10
X172
1
0
1
0
<1>
<2>
P790 (0)
P797 (0,000s)
P793 (6)
P791 (2)
r799
r812.01 to .05 r813.01 to .05
Word 1
Word 2
Word 3
Word 4
Word 5
K6001
K6005
K6004
K6003
K6002
P794 (0)
K
K
K
K
K
P798 (6030)
B
1s
B6030
B6031
P795 (0)
Bit 0 ... Bit 15
B6100
B6200
B6300
B6400
B6500
B6115
B6215
B6315
B6415
B6515
P817 (1)
B
P816 (1)
B
Peer-to-peer interface 2
Receive data Transmit data
Peer-to-peer On/Off
Baud rate
No. of words (1...5)
Parametes for peer-to-peer interface :
Telegram monitoring time
Peer-to-peer diagnostic parameter
Word 1
Word 2
Word 3
Word 4
Word 5
Fault signal trip
1 = "Telegram
monitoring
timeout"
Bus terminator
1 = "Fault F012"
every 16Bits
From preceding
drive
To following
drive
<1> Binector = 0:
Output drivers are high resistance
<2> Binector = 0:
Telegram sign-of-life-monitorig is not active
Enable data send
Enable data receive
K6020
015
Binector / Connector
Converter
U117 (0)
B.01
U117 (0)
B.16
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
8
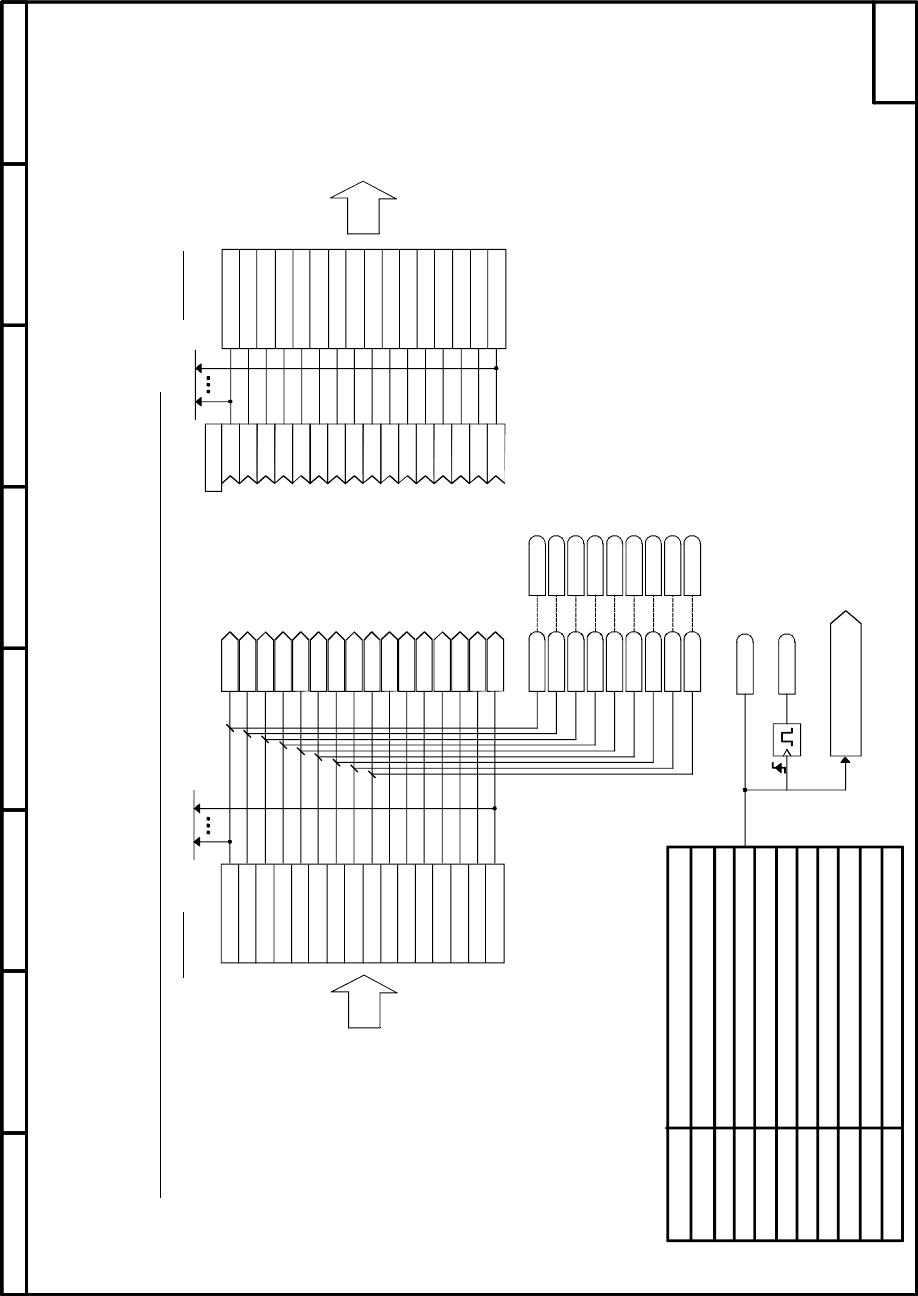
11-10 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 9 Data Exchange CB / TB to Base (PZD)
.04
.01
.03
.02
.06
.05
.07
.08
.10
.09
.14
.11
.13
.12
.16
.15
n733.01 to .16
U734 (0)
K
K
K
K
K
1s
B3030
B3031
K
K
K
K
K
n735.01 to .16
K
K
K
K
K
K
K3001
K3002
K3003
K3004
K3005
K3006
K3007
K3008
K3009
K3010
K3011
K3012
K3013
K3014
K3015
K3016
B3100
Bit 0 ... Bit 15
B3200
B3300
B3400
B3500
B3600
B3700
B3800
B3900
B3115
B3215
B3315
B3415
B3515
B3615
B3715
B3815
B3915
U722.1 (0 ms)
U711-U720 Index.01
n732 Index.01-.32
n738 Index.01-.04
n739 Index.01-.04
P927
U721 Index.01-.05
P918 Index.01
Receive data
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Transmit data
Fault message trigger
1 = "Telegram monitoring timeout"
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
Word 1
Word 2
Word 3
Word 4
Word 5
Word 6
Word 7
Word 8
Word 9
Word 10
Word 11
Word 12
Word 13
Word 14
Word 15
Word 16
every 16 bits
1 = "Fault F082"
(fault value = 10)
Parameters for the first CB board
Telegram receive monitoring time
CB parameters 1 to 10
CB or TB diagnosis
CB parameter 11
Bus address
Enable parameterization
Display parameter job (PKW) from CB
Display parameter response (PKW) to CB
From supplementary board To supplementary board
Process data exchange with a communications board (CB) or technology board (TB)
U710 Index.01 Initialize link to supplementary boards
n738 Index.09-.12 Display parameter job (PKW) from TB
n739 Index.09-.12 Display parameter response (PKW) to TB
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
9
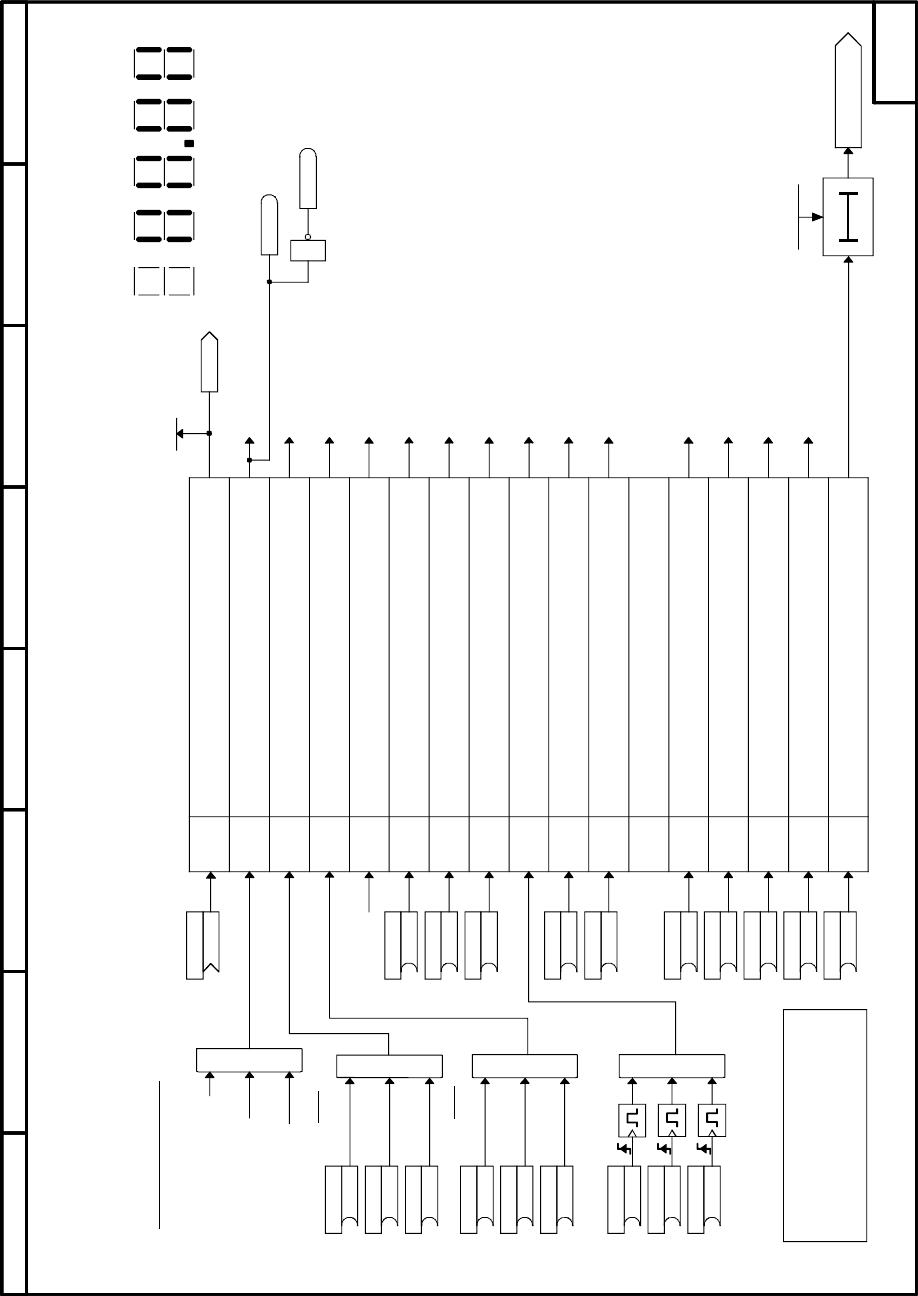
Siemens Energy & Automation 11-11
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 10 Control Word 1
&
&
1
≥
321Bit0
4
5
6
7
Bit8
910
11
121314
15
1
≥
1
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
Bit 9
Bit 10
Bit 11
Bit 12
Bit 13
Bit 14
Bit 15
P667.B (0)
B
P666.B (0)
B
P665.B (0)
B
B
B
B
B
B
P655.B (1)
B
P656.B (1)
P657.B (1)
P658.B (1)
P659.B (1)
P660.B (1)
P675.B (1)
B
P674.B (0)
B
P673.B (0)
B
P672.B (1)
B
P671.B (1)
B
P668.B (0)
B
P669.B (0)
B
P662.B (1)
B
P663.B (1)
B
P664.B (1)
B
<1>
<1>
r650
K0030
P360.01 (0ms)
(0...10000ms)
P648.B (9)
K
B0160
B0161
0=OFF1, shutdown via ramp-function generator followed by
pulse disable
1=ON, operating condition (edge-controlled)
0=OFF2, pulse disable, motor coasts to standstill
1=operating condition
0=OFF3, fast stop
1=operating condition
1=Enable, enable pulses
0=Pulse disable
1=Enable ramp-function generator
0=Set ramp-function generator to 0
1=Ramp-function generator start
0=Ramp-function generator stop
1=Enable setpoint
0=Disable setpoint
0 =>1 edge Acknowledge
1=Inching 1
1=Inching 2
1=Control requested
0=No control requested
1=Enable positive direction of rotation
0=Positive direction of rotation disabled
1=Enable negative direction of rotation
0=Negative direction of rotation disabled
1=Increase motorized potentiometer
1=Decrease motorized potentiometer
0=External fault 1
1=No external fault
Bit No. Meaning
Pulse generator
Note:
Bit 10 must be set in the first PZD word
of the telegram received via the serial
interfaces to ensure that the process data
will be accepted as valid (cf. USS,
Profibus, etc.).
Control word 1
Control word 1
to sequencing control
to sequencing control
to sequencing control
to sequencing control,
to brake control
to sequencing control,
to brake control
Display of control word 1 (r650)
on 7-segment display
External fault 1
1 = "Fault F021"
to "Ramp-function generator"
to "Ramp-function generator"
to "Ramp-function generator"
"Inching setpoint 1" [ 2.3 ]
"Inching setpoint 2" [ 2.3 ]
When P648 = 9, bit-serial input of control bits (P654 to P675 are effective)
When P648 <> 9, word-serial input of control bits (P654 to P675 are not effective)
Terminals 37 and 38 are always active. They are ANDed to get bit 0 or bit 3.
TERMINAL 37 ON / OFF
INCHING ON / OFF
CRAWL ON / OFF
ENABLE
COAST STOP
NORMAL START / STOP
FAST STOP
FAULT ACK
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
10
[ 2.2 ]
[ 2.2 ]
[ 2.7 ]
[ 2.7 ]
[ 2.7 ]
[ 2.7 ]
[ 3.2 ]
OR'd WITH P435.01
OR'd WITH P435.02
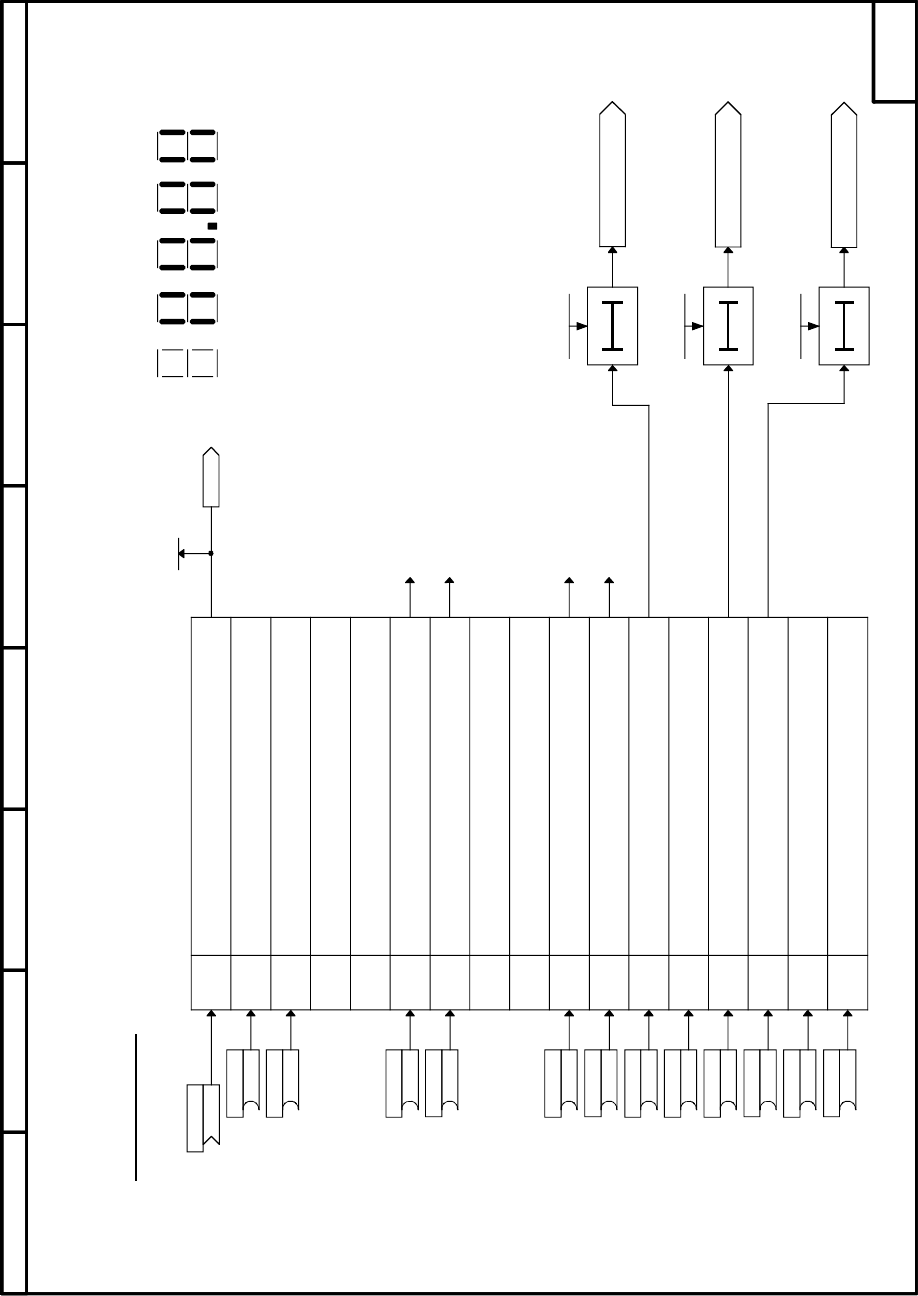
11-12 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 11 Control Word 2
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
11
19 18 17 Bit16
20
21
22
23
Bit242526
27
28293031
Bit 16
Bit 17
Bit 18
Bit 19
Bit 20
Bit 21
Bit 22
Bit 23
Bit 24
Bit 25
Bit 26
Bit 27
Bit 28
Bit 29
Bit 30
Bit 31
P691.B (1)
B
P690 (0)
B
P689.B (1)
B
P688.B (1)
B
P687.B (0)
B
P684.B (1)
B
P685.B (1)
B
P680.B (0)
B
P681.B (0)
B
P676.B (0)
B
r651
K0031
P677.B (0)
B
P686.B (1)
B
P360.02 (0ms)
(0...10000ms)
P360.03 (0ms)
(0...10000ms)
P360.04 (0ms)
(0...10000ms)
P649.B (9)
K
Control word 2
Bit No. Meaning
Control word 2
Select function data set bit 0
Select function data set bit 1
Spare
Spare
Select fixed setpoint 1
Select fixed setpoint 2
Spare
1=Enable speed controller droop
0=Speed controller droop disabled
1=Enable speed controller
0=Speed controller disabled
0=External fault 2
1=No external fault 2
0=Master drive (speed control)
1=Slave drive (torque control)
0=External alarm 1
1=No external alarm 1
0=External alarm 2
1=No external alarm 2
0=Select Bico data set 1
1=Select Bico data set 2
Main contactor check-back signal
Spare
Display of control word 2 (r651)
on 7-segment display
External fault 2
1 = "Fault F022"
External alarm 2
1 = "Alarm A022"
External alarm 1
1 = "Alarm A021"
to sheet "Speed controller"
to sheet "Speed controller"
to sheet "Fixed setpoint" [ 2.3 ]
to sheet "Fixed setpoint" [ 2.3 ]
When P649 = 9, bit-serial input of control bits (P676 to P691 are effective)
When P649 <> 9, word-serial input of control bits (P676 to P691 are not effective)
[ 3.4 ]
[ 3.4 ]
OR'd WITH P430.01
OR'd WITH P430.02
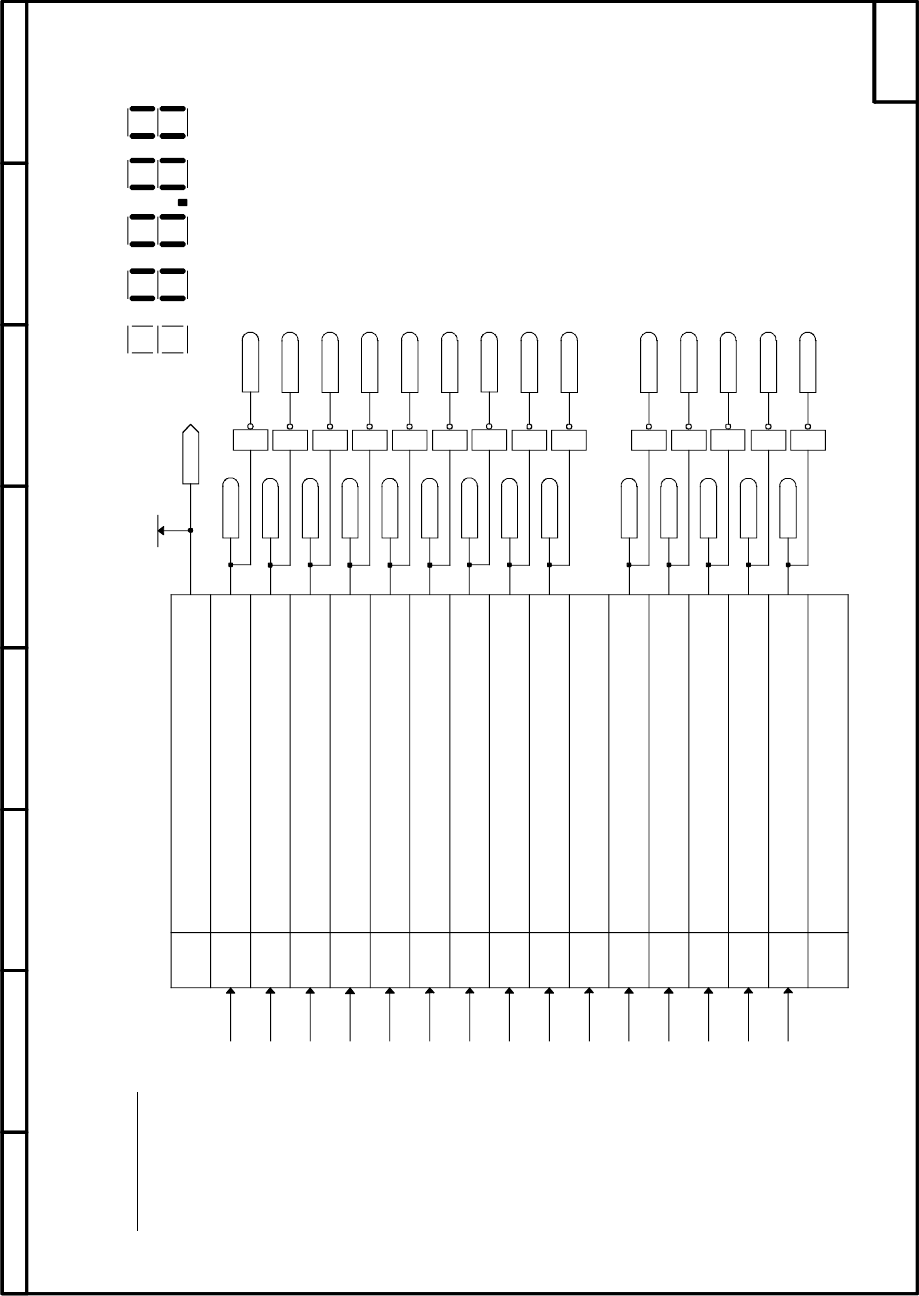
Siemens Energy & Automation 11-13
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 12 Status Word 1
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
12
1
1
1
1
1
1
1
1
1
1
1
1
1
1
321Bit0
4
5
6
7
Bit8
910
11
121314
15
r652
K0032
B0100
B0101
B0102
B0103
B0104
B0105
B0106
B0107
B0108
B0109
B0110
B0111
B0112
B0113
B0114
B0115
B0116
B0117
B0120
B0121
B0122
B0123
B0124
B0125
B0126
B0127
B0128
B0129
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
Bit 9
Bit 10
Bit 11
Bit 12
Bit 13
Bit 14
Bit 15
Status word 1
Meaning
Status word 1
1 = Ready to switch on
0 = Not ready to switch on
1 = Ready to operate (pulses disabled)
0 = Not ready to operate
1 = Run (output terminals energized)
0 = Pulses disabled
1 = Fault is active (pulses disabled)
0 = No fault is active
0 = OFF2 applied
1 = No OFF2 applied
0 = OFF3 applied
1 = No OFF3 applied
1 = Switch-on inhibit
0 = No switch-on inhibit (converter can be switched on)
1 = Alarm is active
0 = No alarm is active
0 = Setpoint/actual value deviation detected
1 = No setpoint/actual value deviation detected
1 = PZD control requests (always 1)
1 = Comparison setpoint reached
0 = Comparison setpoint not reached
1 = Undervoltage fault
0 = No undervoltage fault is active
1 = Request to energize main contactor
0 = Request not to energize main contactor
1 = Ramp-function generator active
0 = Ramp-function generator not active
1 = Positive speed setpoint
0 = Negative speed setpoint
Spare
from sequencing control
from sheet "Signals"
from alarm processing
from fault processing
from fault processing
from sheet "Signals"
from sheet "Signals"
from sequencing control
from sequencing control
rom sequencing control
from sequencing control
from sequencing control
from sequencing control
from sequencing control
from setpoint processing
(part 2)
Bit No. Display of status word 1 (r652)
on 7-segment display
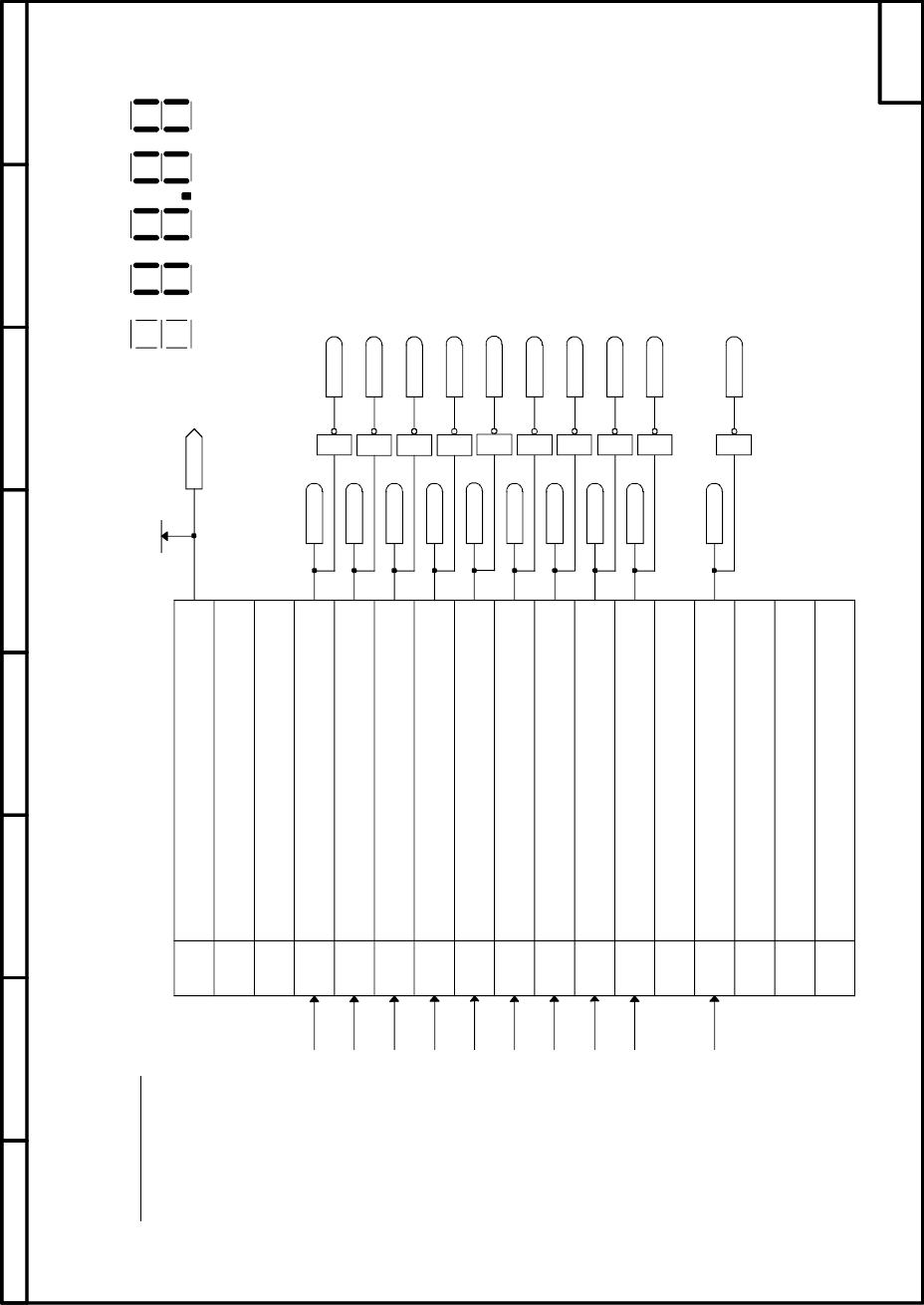
11-14 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 13 Status Word 2
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
13
1
1
1
1
1
1
1
1
1
1
19 18 17 Bit16
20
21
22
23
Bit2425262728293031
Bit 16
Bit 17
Bit 18
Bit 19
Bit 20
Bit 21
Bit 22
Bit 23
Bit 24
Bit 26
Bit 27
Bit 28
Bit 29
Bit 30
Bit 31
Bit No.
r653
K0033
B0136
B0137
B0138
B0139
B0140
B0141
B0142
B0143
B0144
B0145
B0146
B0147
B0148
B0149
B0150
B0151
B0152
B0153
B0156
B0157
Bit 25
Status word 2
Meaning
Status word 2
from sheet "Signals"
from alarm processing
from fault processing
from alarm processing
from alarm processing
from alarm processing
from fault processing
from sequencing control
from sequencing control
from sequencing control
Spare
0 = Overspeed
1 = No overspeed
1 = External fault 1 active
0 = No extern fault 1 active
1 = External fault 2 acrive
0 = No external fault 2 active
1 = External alarm active
0 = No external alarm active
1 = Motor overtemperature alarm active
0 = No motor overtemperature alarm active
1 = Motor overtemperature fault active
0 = No motor overtemperature fault active
spare
1 = Motor locked fault active
0 = No motor locked fault active
spare
spare
spare
Spare
1 = Power section overload alarm active
0 = No overload alarm active
1 = Power section overtemperature fault active
0 = No overtemperature faultactive
1 = Power section overtemperature alarm active
0 = No overtemperature alarm active
Display of status word 2 (r653)
on 7-segment display
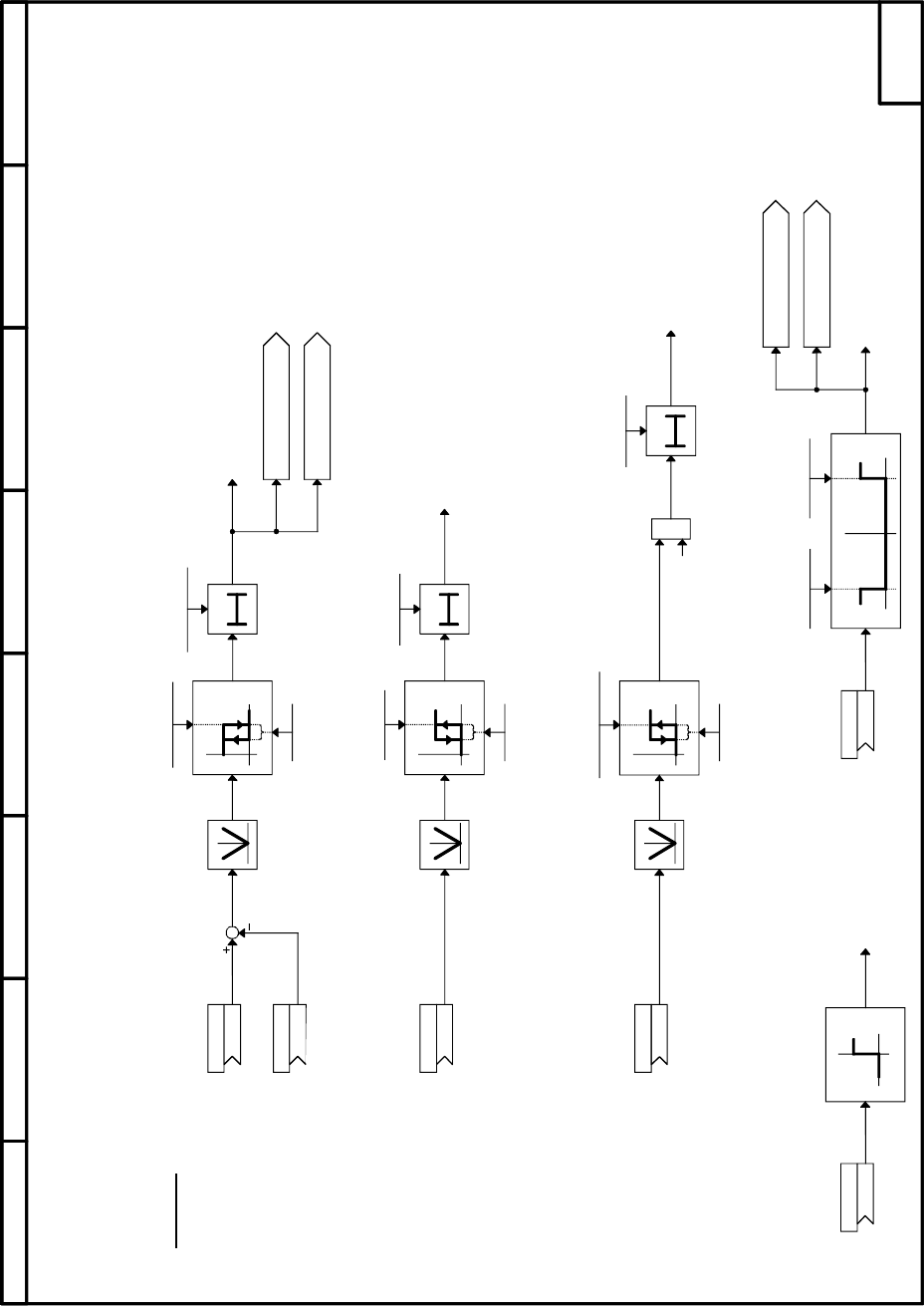
Siemens Energy & Automation 11-15
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 14 Signals
87564321
6RA70 DC MASTER
SIMPLIFIED BLOCK DIAGRAM
(ALL AVAILABLE FUNCTIONS ARE NOT SHOWN ON SIMPLIFIED BLOCK DIAGRAM)
14
0T
0
1
T0
0
1
0
1
&T
0
0
1
0
1
P381.F (-120.0)
(-199.9...0.0%)
P380.F (120.0)
(0.0...199.9%)
P388.F (3.00)
(0.00...199.99%) P390.F (3.0)
(0.0...100.0 s)
P373.F (100.00)
(0.00...199.99%)
P374.F (3.00)
(0.00...199.99%)
P389.F (3.00)
(0.00...199.99%)
P370.F (0.50)
(0.00...199.99%)
P590 (170)
K
P591 (167)
K
P375.F (3.0)
(0.0...100.0 s)
P593 (167)
K
P088.F (3.0)
(0.0...100.0 s)
P594 (170)
K
P595 (167)
K
P371.F (0.50)
(0.00...199.99%)
P592 (167)
K
n(act)
n(max. neg. rot.) n(max. pos. rot.)
n(comp.)
OFF delay
n(comp.hyst.)
OFF shutdown speed
Firing pulse disable
OFF1 or OFF3 from
sequencing control
Comparison (time)
n(act)
OFF delay
Comparison (time)
n(set)
OFF shutdown speed (hyst.)
Setp./act.val. dev. (perm.)
Setp./act.val. dev. (time)
OFF delay
Setp./act.val. hyst.
Signals
n(act)
n(set)
n(act)
Comparison setpoint reached
to status word 1, bit 10
Positive speed setpoint
to status word 1, bit14
Overspeed to
status word 2, bit 18
Setpoint/act. value deviation
to status word 1, bit 8
1 = "Fault F031"
1 = "Fault F038"
1 = "Alarm A038"
1 = "Alarm A031"
[ 3.1 ]
[ 3.3 ]
[ 3.3 ]
[ 3.3 ]
[ 3.1 ]
[ 3.3 ]
11-16 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
Sheet 15 Miscellaneous
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
...
87564321
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
...
P055. (012)
(011...244)
r056
P057 (012)
011...222
r058
87564321
15
Switchover between function parameters
Index 1
Parameter
number Index 2
Function data set bit 0
from control word 2
Function data set bit 1
from control word 2
Index 3 Index 4
active function data set
Target data set (1...4)
Source data set (1...4)
Switchover between binector
and connector parameters
Index 1 Index 2
Bico data set
from control word 2
active Bico data set
Target data set (1/2)
Source data set (1/2)
Note:
The applicable parameters
are identified by the code ".F"
Note:
The applicable parameters
are identified by the code ".B"
87564321
Data sets
Parameter
number
Copy function data set
Copy Bico data set
.01
.02
.03
.04
.05
.06
.07
.01
.02
.03
.04
K0401
K0402
K0403
P404.F (0,00)
K0404
P405.F (0,00)
K0405
P412.F (0)
K0412
P413.F (0)
K0413
P414.F (0)
K0414
P415.F (0)
K0415
P416.F (0)
K0416
P421.F (0)
B0421
P422.F (0)
B0422
P423.F (0)
B0423
P424.F (0)
B0424
P425.F (0)
B0425
P044 (0)
K
K
K
K
K
K
K
r043.01
r043.02
r043.03
r043.04
r043.05
r041.06
r043.07
P046 (0)
B
B
B
B
r045.01
r045.02
r045.03
r045.04
P403.F (0,00)
P402.F (0,00)
P401.F (0,00)
7 Connector Displays
4 Binector Displays
5 Fixed Values 5 Fixed Control Bits
setting range
-199.99 to +199.99%
5 Fixed Values
setting range
-32768 to +32767
ALSO SEE P406 TO P411 ALSO SEE P426 TO P428

SIMOREG DC Master
6RA70 Series Base Drive Instructions
Microprocessor-based converters from 15A to 1680A
for variable speed DC drives
Rev 5.0
Siemens Energy & Automation, Inc.
3333 Old Milton Parkway
Alpharetta, GA 30005
1-800-964-4114
seainfo@sea.siemens.com
www.sea.siemens.com/drives
©© 22000044 SSiieemmeennss EEnneerrggyy && AAuuttoommaattiioonn,, IInncc..
The Siemens logo and SIMOREG are registered trademarks of Siemens AG. Product names mentioned may be trade-
marks or registered trademarks of their respective companies. Specifications are subject to change without notice.
Order Number DCOM-80011-1500-0804SSS Printed in USA.
Global network of innovation
6RA70 Base Drives dc drives instructions • 2004
dc drives
