TBS Avionics TX2W TBS CROSSFIRE User Manual Users manual
TBS Avionics Limited TBS CROSSFIRE Users manual
Contents
- 1. Users manual
- 2. Users manual addendum
Users manual

TBS CROSSFIRE R/C System
Revision 2016-10-31
Adaptive Long Range Remote Control System
The TBS CROSSFIRE (XF) system is a R/C link system made for FPV enthusiasts. It features unheard of range
without sacrificing basic functionality such as being immune to interference from onboard equipment, low
latency control or two-way communications including telemetry functionality.
Key features
• Long range, adaptive and robust remote control system for your aircraft
• Immune to on-board noise
• Two-way communication link with real-time link vitals and telemetry
• Self-healing frequency hopping link
• Receiver beacon mode to recover your downed aircraft
• Super easy binding and configuration via built-in OLED display
• Low latency control for perfect immersive feeling
• Free output mappable 8 output diversity with integrated backup battery or super tiny receiver ( 4g
weight only ) both with up to 12 channel PPM
• Ability to fly with multiple friends at the same time (10 or more)
• Dynamic self-selecting or selectable RF power from 10mW to 2W (local restrictions apply)
• Dedicated head-tracking input option for full FPV immersion
• Transmitter LED shows link health, OLED display for built in configuration
• Expansion port for future feature support
1
Table of content
Attention
Overview
Setup
Connecting transmitter to radio
Using JR-adapter
Using Hitec/Graupner/JR-cable
Using Futaba-cable
Using custom PPM cable
Connecting 8ch diversity receiver to model
Connecting micro receiver
Connecting antenna
Binding
Head-tracking
Set failsafe
Connecting TBS equipment
Operation
Status display
Up- and downlink status
Find mode
Direction finder
How does find mode work
Testing find mode
Preparations
Simulating flight
Simulating a Crash
Search and rescue
Link regained
Transmitter LED status indicator
Receiver LED status indicator
Real-time telemetry using Bluetooth
Configuration
Receiver
PWM or PPM servo output
Receiver SBUS output
Receiver RSSI or/and LQ output
Serial bridge
MAVLink
Disable telemetry
Transmission power
Dynamic transmission power
Transmission frequency
Operating modes
RF Profiles
Re-bind receiver
Firmware upgrade
Installing TBS Agent
Over-The-Air software updates
Emergency update
FAQ
Good practices
2

Attention
These Long Range Systems are capable to use radio frequency transmissions and output power that may be
not allowed in your country.
Please always check your local RF legislation to set the frequency and output power according with
the regulation.
A general rule for RC aircrafts is that they must be controlled always under sight of view, check your RC
regulation to keep up to date with regulations.
4
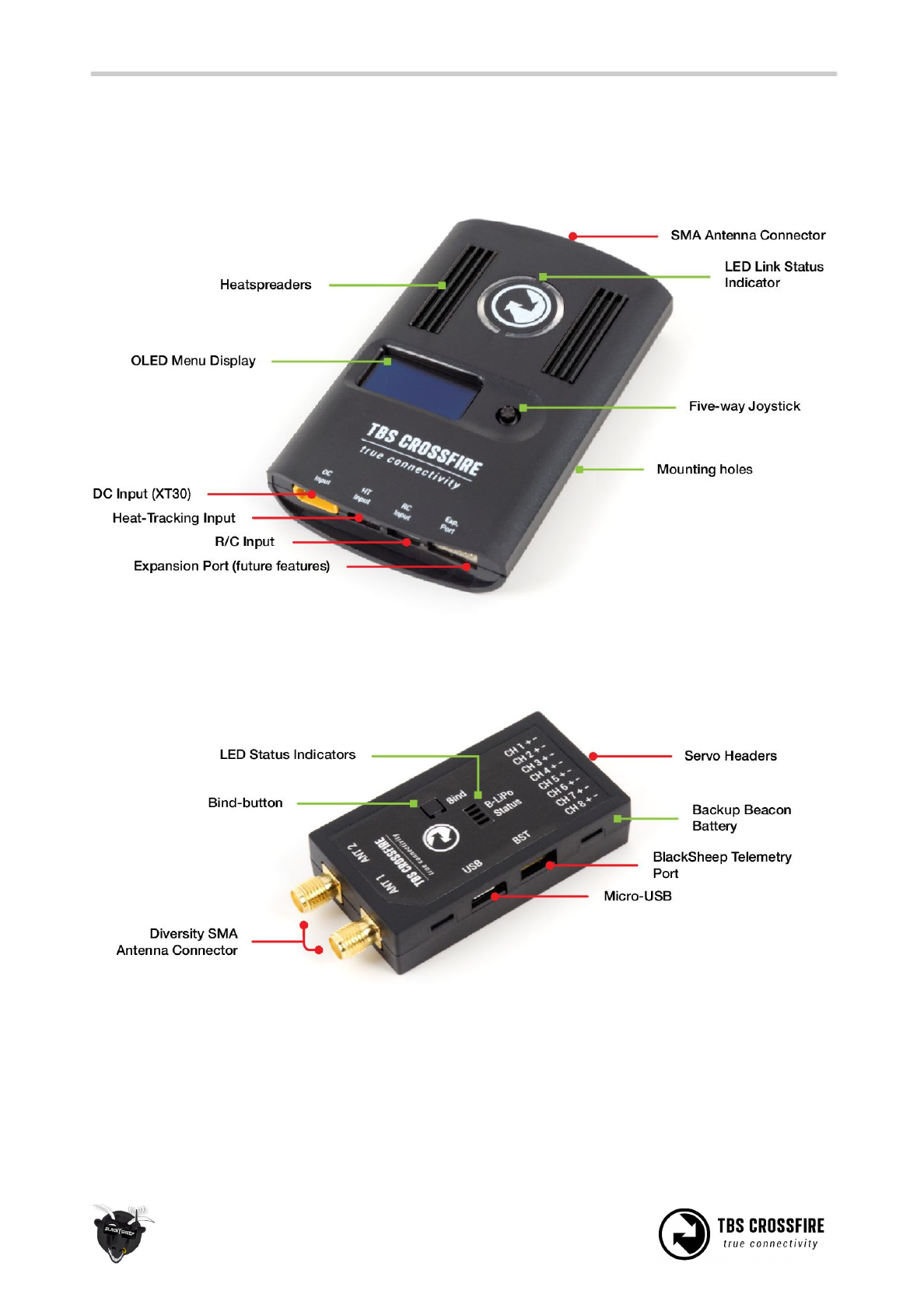
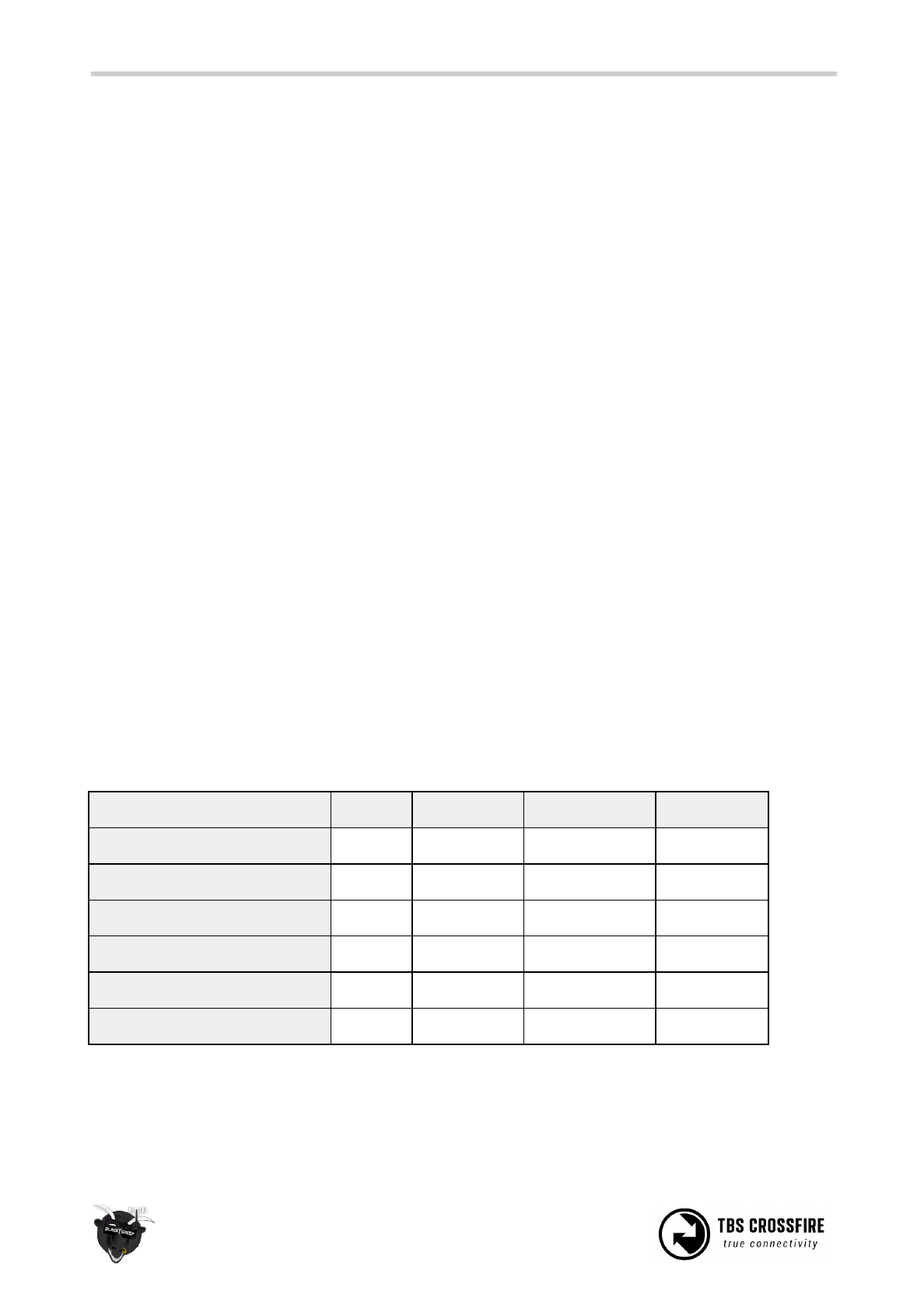
Overview
The following diagram indicates the essential inputs and features of the transmitter and receiver.
5

Setup
Getting set up and ready to fly is a quick and simple task. In most cases plug&play when using common R/C
equipment.
Connecting transmitter to radio
Using JR-adapter
The kit comes with a JR-adapter which simply works as a connection bridge between the JR-pins on the radio
and the TBS CROSSFIRE transmitter. The adapter simply fits into the slot on the back of the radio. The radio
battery power to the TBS CROSSFIRE and no additional power is necessary for RF output up to 500mW.
Insert the JR-adapter into the slot on the back of the radio, remove the adhesive sheet from the TBS
CROSSFIRE back and align the four studs with the matching holes on the transmitter. Connect the 3-pin to the
left port (RC) and 6-pin cable (expansion) to the right port on the transmitter.
6

Power on the radio, configure a new model profile and enable the external RF module - see the radio
manufacturers manual for further details on how to complete this step.
Using Hitec/Graupner/JR-cable
If you own a Hitec, Graupner or JR radio without a JR-module slot, you can still use the trainer output
connector to get the necessary power and PPM control signals to the TBS CROSSFIRE transmitter.
Connect the included cable to the radio trainer port and the other end to the left port (RC) on the transmitter.
7
Using Futaba-cable
For Futaba radios you can use the trainer port to feed the PPM signal to the TBS CROSSFIRE transmitter.
Connect the included cable to the radio trainer port and the other end to the left port (RC) on the transmitter.
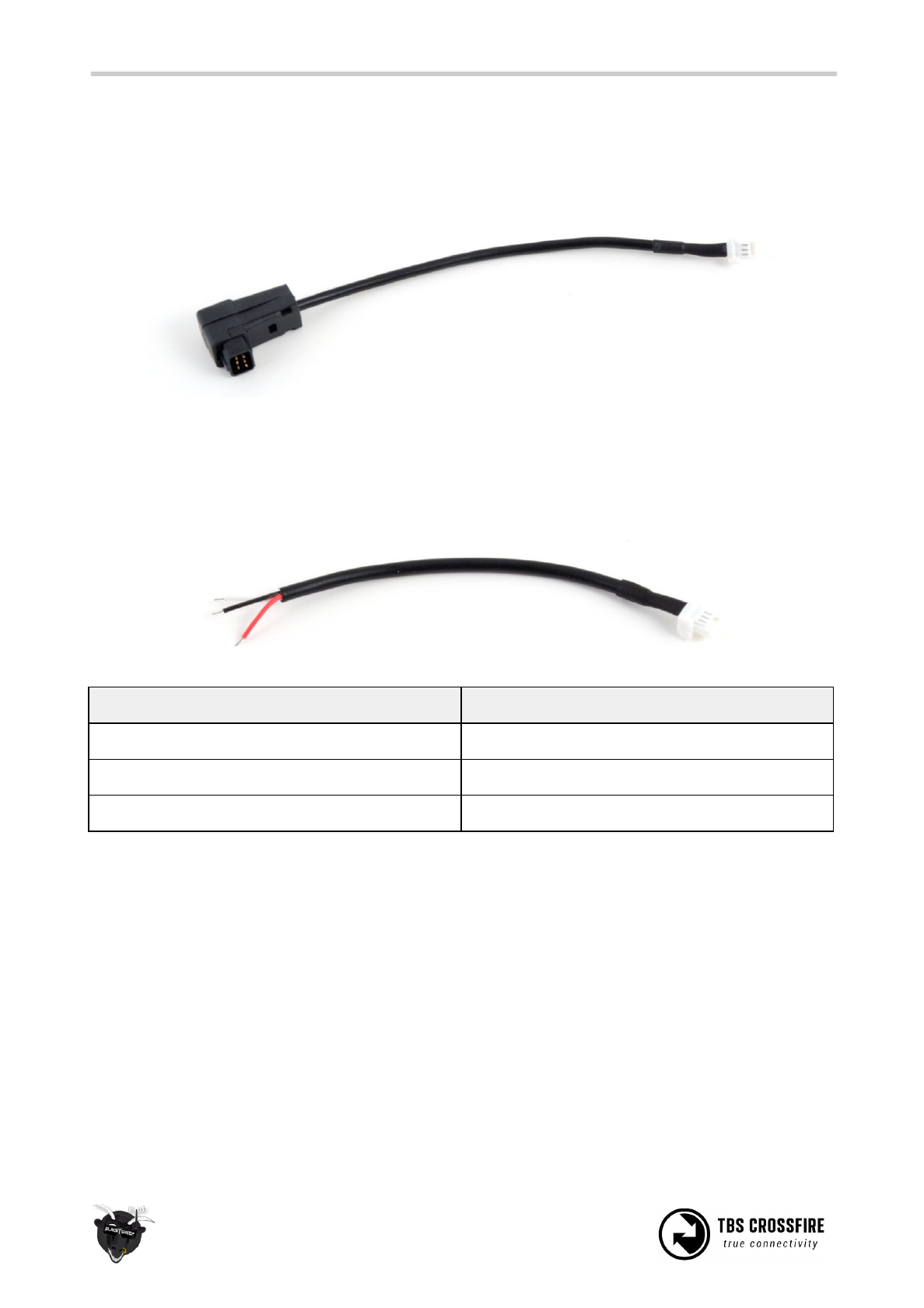
Using custom PPM cable
If you want to connect any other radio, or have a custom setup, you can use the 3-pin pigtail-cable and solder
the wires according to the table below to suite your needs.
Radio pin (left in photo above) TBS CROSSFIRE 3-pin cable
White - PPM 1 - PPM
Red - Power 2 - Power
Black - Ground 3 - Ground
8
Connecting 8ch diversity receiver to model
The compact receiver unit fits everything from small multirotors to very large airplanes. The receiver is
capable up to 8.4V and needs at least 4.5V input voltage.This can be applied to any of the eight servo headers,
e.g. a servo cable from a ESC with BEC, or a stand-alone BEC, with a suitable amperage rating - min. 1A
recommended. Make sure that adequate power is available by letting the model run for a few minutes with
servos connected, and check your BEC temperature.
If you want to connect additional TBS products to you setup, e.g. CORE PRO, CURRENT SENSOR, BLACKBOX
and GPS, we are providing a 4-way BST splitter adapter to connect everything together.
The receiver servo header pin-polarity is standard and shown in the photo below. All the power pins are
reverse-polarity protected.
9
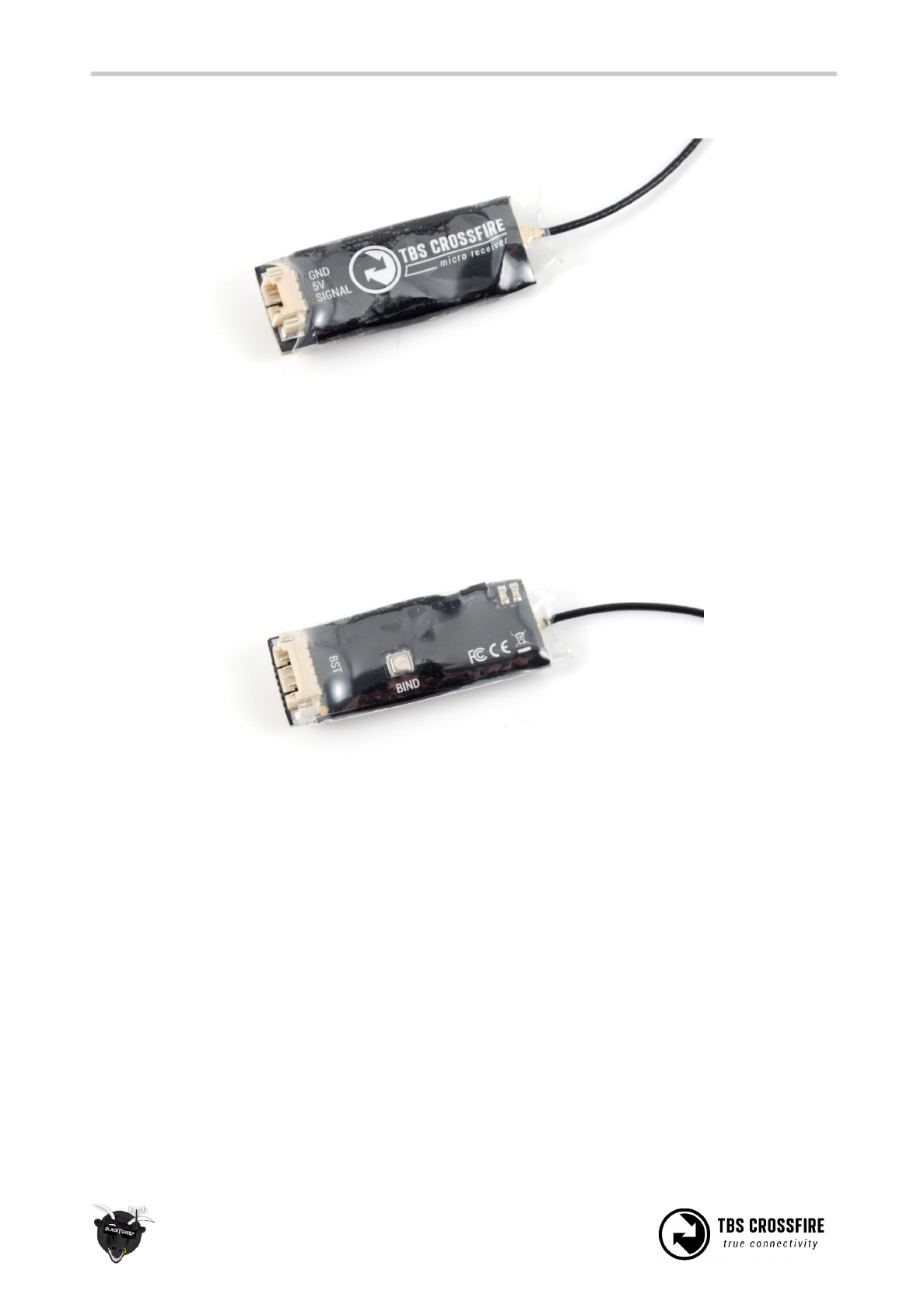
Connecting micro receiver
The TBS CROSSFIRE micro receiver comes with two sockets. One is for BST capability (BlackSheep Telemetry),
the other is for one (1) R/C output which can be configured to either PWM, PPM or SBUS. The receiver can run
off anything between 4.5V and 8.4V and can either drive one servo, or connect to any PPM or SBUS capable
flight control. Binding the receiver to the transmitter is described on the next page and is the same as the
diversity receiver.
CleanFlight pilots with a STM32F1 processor board (e.g. Naze32 and similar) can select the “n.i. SBUS”
(Not-Inverted SBUS) to directly connect to your FC without any inverters or special soldering hacks.
Connecting antenna
The CROSSFIRE system used regular SMA connectors - where the antenna has the center pin. Connect the
supplied antennas to the SMA connectors on the transmitter and receiver. The straight connector is for the
transmitter and the other two for the diversity receiver.
For optimal radio coverage and range, mount the receiver antennas perpendicular (90°) to each other.
Caution: It is never safe to run a RF transmitting device without an antenna, regardless if it is the transmitter
or receiver as both function as transceivers in this system. The absolute maximum rating for the receiving
part is +10dBm, so if you use high power settings (>500mW ) and hold the antennas (TX and RX) very close
together the RX can be damaged.
10

Binding
Binding the transmitter and receiver is super simple.
1. Just power up the TBS CROSSFIRE transmitter
2. Enter the configuration menu by pressing and holding the joystick for 3 seconds, select “General” and
“Binding” - a message “Binding” will start blinking, waiting for the receiver
3. Now, power up the receiver (without pressing the Bind button!), if your receiver has not been
previously bound, it will automatically bind. Otherwise, press and release the “BIND” button on the
receiver to initiate binding. On the receiver is a timeout of one minute for after power up to enter
bind mode. If the status LED will start blinking slowly you the receiver has switched successfully to
bind mode.
Within a few seconds the process will finish with a “Binding complete” message. The receiver has now stored
the unique serial number of that particular CROSSFIRE transmitter. If it doesn’t bind, please verify that your
firmware is to the newest version on both the receiver and the transmitter.
Head-tracking
The TBS CROSSFIRE supports standard head-tracking input via the right 3-pin HT port on the transmitter.
Solder the included pigtail cable to suite your particular head-tracking setup. Only a two wire connection
between TBS CROSSFIRE and the head-tracker is required. The PPM feed from the head-tracker needs to be
connected to the PPM pin of the PPM pin and ground need to be connected to ground of the 3-pin PPM cable.
The status display will indicate if the signal has been recognized properly. Inside the menu under
headtracker, two functions for pan and tilt are freely mappable. Each function has a source and destination
selection. The selected channel under source will replace the channel selected unter destination. This gives
you the ability to map your head-tracker channels from any channel of the head-tracker input to the RC link
frame.
11
Set failsafe
Setting the R/C failsafe parameters is a very important part of the configuration, don't skip it! You never know
when you will have problems with uplink and lose control of your aircraft.
1. Power up both the transmitter and receiver
2. Adjust the radio stick positions or trims to the desired failsafe position, i.e. low throttle, flat glide
angle or failsafe mode on your flight control. Make sure no propellers are mounted - just in case.
3. There are two ways to set failsafe, either simply press the joystick Up for 3 seconds, or enter the
configuration menu by pressing and holding the joystick for 3 seconds, select “General” and “Set
failsafe” - this will transfer the current R/C control parameters to the receiver which will store them
internally
4. Try the failsafe by turning off the transmitter and watch the servo outputs engage in the pre-set
failsafe positions
Connecting TBS equipment
There is an issue when you want to run BST devices like the GPS or BLACKBOX direct without a CORE PRO.
Most of the BST devices needs 5V which the CORE PRO provides. The CROSSFIRE RX does not power the BST
when 5V is applied to the servo connectors.
The following explains the required power needs:
●TBS BLACKBOX - Can be powered by the BST 5V or by the Flight Controller over the ext. FC port
●TBS GPS - Can only be powered by the BST 5V
●TBS CURRENT SENSOR - Provides VBatt but needs BST 5V to run itself
●TBS CROSSFIRE RX - Can be powered over one of the eight servo connectors or by BST 5V
●TBS CORE PRO - This is only device is providing 5V on the BST line
Power type: BST 5V VBATT ESC/BEC 5V FC 5V
TBS CROSSFIRE ✔ IN ✔ IN
TBS BLACKBOX ✔ IN ✔ IN
TBS GPS ✔ IN
TBS CORE PRO ✔ OUT ✔ IN
TBS CURRENT SENSOR ✔ IN ✔ OUT
TBS BULLETPROOF ESC (SET) ✔ OUT
12
TBS BST DEVICES - Power Connectivity
Sept. 2015 - by ivc.no/tbs
GPS
COMPASS
TBS CORE
PNP PRO
CAM
BST
RSSI
BST
VTX
LINK
B-PWR
USB
UP ENTER DN
XT60
XT60
XT60
PWR
IN
BST
PWR
OUT
XT60
BST BST
TBS BLACKBOX
SD Card Ext FC
telemetry distribution
CH 1 + -
CH 2 + -
CH 3 + -
CH 4 + -
CH 5 + -
CH 6 + -
CH 7 + -
CH 8 + -
ANT 1 ANT 2
TRB CROSSFIRE
true connectivity
Bind
B-LiPo
Status
USB BST
NAZA
4WAY
SPLITTER
BST BST
TBS BLACKBOX
SD Card Ext FC
telemetry distribution
CH 1 + -
CH 2 + -
CH 3 + -
CH 4 + -
CH 5 + -
CH 6 + -
CH 7 + -
CH 8 + -
ANT 1 ANT 2
TRB CROSSFIRE
true connectivity
Bind
B-LiPo
Status
USB BST
GPS
CORE PRO supplies 5V power to all BST devices
Flight Controller provides 5V via ESC/BEC to all devices
Note: CROSSFIRE requires 400mA
PMU
5V
Operation
Status display
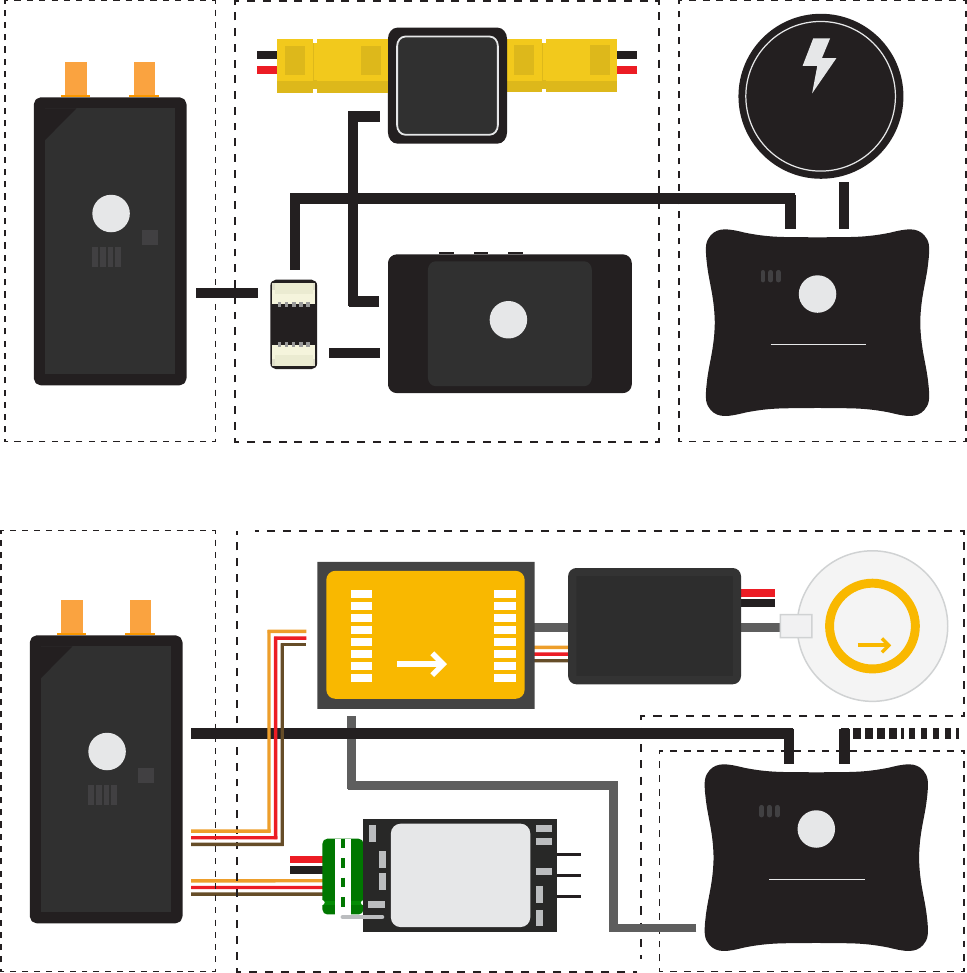
After power-on, the main screen shows the current state of the transmitter, i.e. link status, transmission
power, R/C- and head-tracking input signal state.
●Link Status - State of the wireless link [Connecting, Running]
●TX Power - Output transmission power [10mW, 25mW, 100mW, 500mW, 1W, 2W]
●RC Input - Radio R/C PPM signal input status [No signal, Signal OK]
●HT Input - Head-tracking PPM signal input status[No signal, Signal OK]
Up- and downlink status
Toggle the joystick to the right to show the status of the up- and downlink.
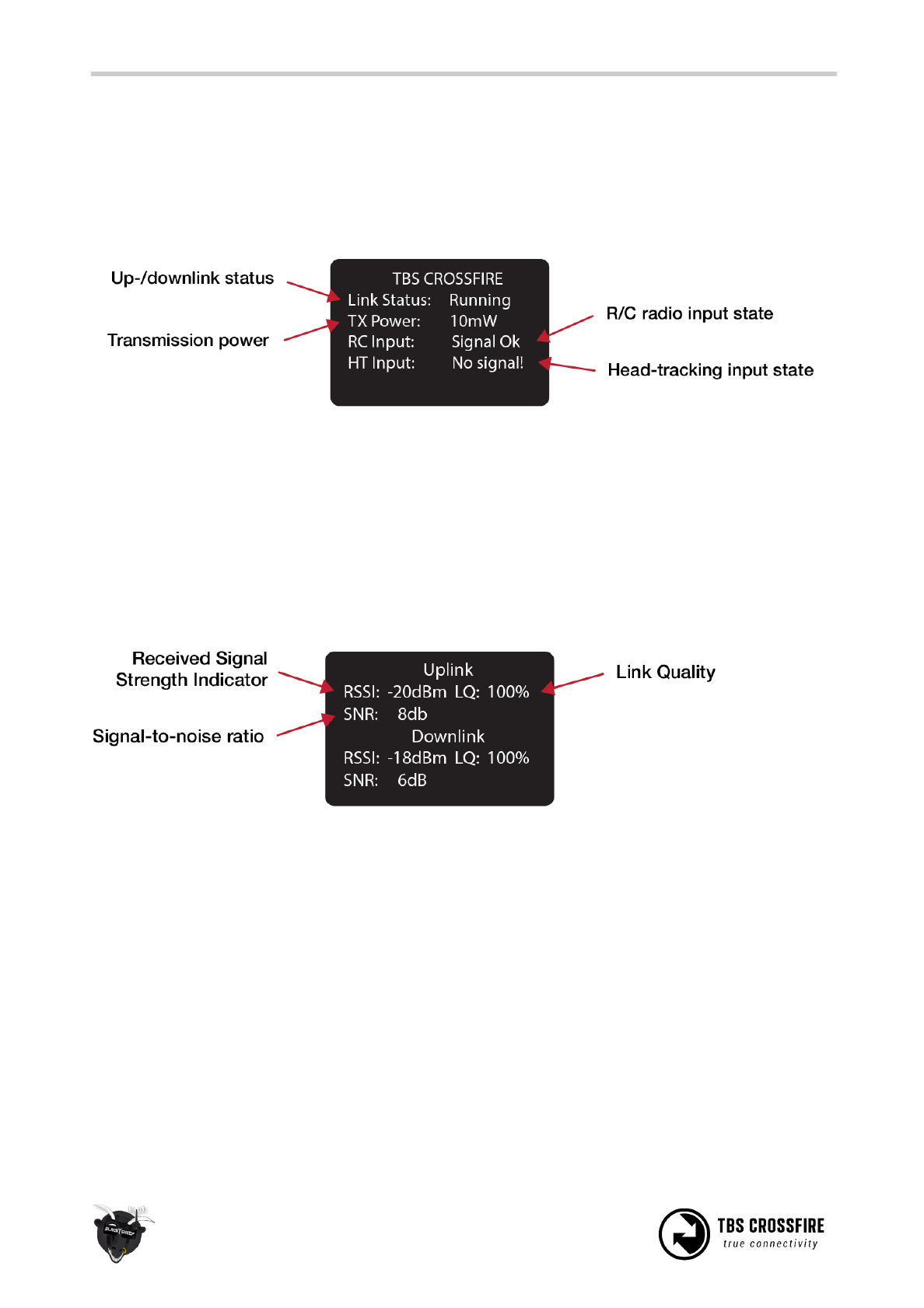
●RSSI - Received signal strength indicator, measurement of the power present in a received radio
signal [typ. -1dBm (good) to -130dBm (bad), logarithmic scale]
●LQ - Link Quality, based on the percentage of signal data received at the end-point [0 to 300%]
●SNR - Signal-to-noise ratio, compares the level of a desired signal to the level of background noise
The RSSI determines your available link budget on a logarithmic scale, with each additional -6dBm
representing twice the range of your current distance. E.g. you are at 5km range with a RSSI of -84dBm. At a
range of 10km you are expected to see a -90dBm RSSI. The receiver is capable of receiving signals up to
-130dBm. The SNR plots your current RSSI against the noise floor, giving you a rough indication of the
remaining range in real-time. The CROSSFIRE can receive signals down to about -12dB SNR, way below the
noise floor. Any SNR above 8dB cannot be accurately measured and will result in an SNR of 8dBm.
13
Uplink
RSSI: -20dBm LQ: 100%
SNR: 8db
Downlink
RSSI: -18dBm LQ: 100%
SNR: 6dB
TBS CROSSFIRE
Link Status: Running
TX Power: 25mW
RC Input: PPM 10Ch.
HT Input: No signal!
Find Mode
Inactive ( Press Enter )
Signal: 100%
Alt: 0m ASL
Lat: 0.000000°
Lon: 0.000000°
Long press enter
Setting Failsafe
Long press up
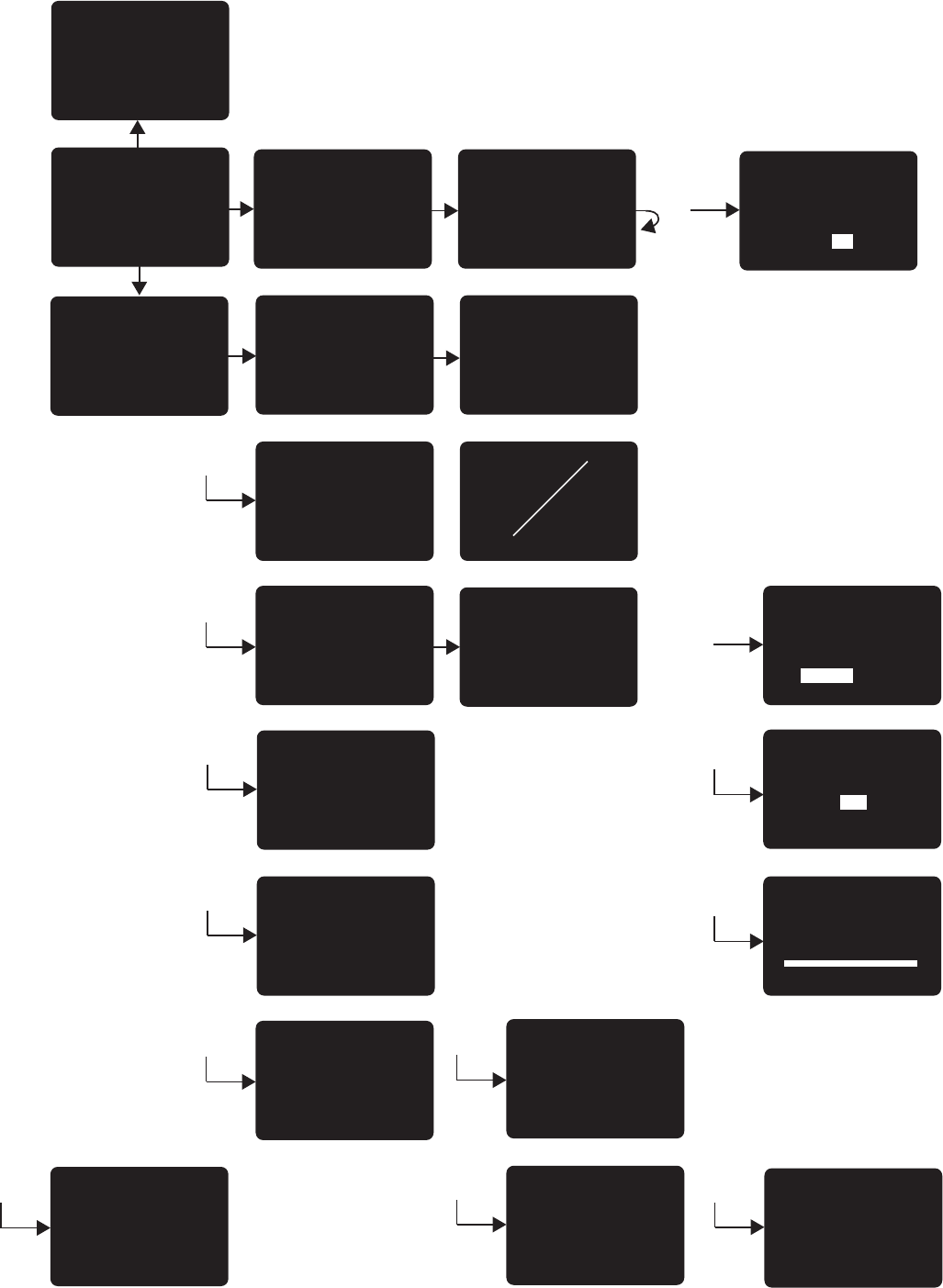
TBS CROSSFIRE Transmitter - Menu Overview
Feb. 2016 - by ivc.no/tbs
Binding
Bindin
General
Set Failsafe
Binding
RX Micro/Diversity (only link)
Headtracker
About
Binding
Output Map.
PPM Map.
PPM Channels 8, 12
Telemetry On, O
Failsafe Mode FS. Pos, Cut
MAVLink PPM On, O
Binding Complete
Setting Failsafe
Max. Power 10mW to 2W
Dyn. Power On, O
Frequency 868, 915Mhz
Op. Mode Normal, Force
Bluetooth O, MAV Emu,
TBS, Bridge, MAVLink
Selected Power too high!
LiPo Input: Up to 2W
HT Input: Up to 500mW
TX Input: Up to 500mW
USB Input: Up to 10mW
Output PPM, n.i. SBUS,
SBUS
PPM Map.
PPM Channels 8, 12
Telemetry On, O
Failsafe Mode FS. Pos, Cut
!
Set Failsafe
RX Diversity
Binding
! Critical Warning !
Signal level too high.
System can be
damaged if you hold
TX and RX antennas to
close to each other.
Failsafe
Failed
Failsafe
Set
About Device
Firmware: V 1.00
Hardware: V 1.02
Bootloader: V 1.06
Serial No: 016-000123
About
Are you sure to leave/
switch TX and RX to nd
mode?
Yes No
Find Mode
Output 1-5 Ch. 1-12, PPM
(Out 1&2), RSSI/LQ, LQ, RSSI
Output 6 .. Seral RTS
Output 7 .. Serial RX,
Output 8 .. SBUS, n.i.SBUS,
Serial TX, MAVL. TX
Output Map.
(Diversity RX only)
MAVLink PPM available when
Output 8 is set to MAVLink TX PPM Ch. 1 Ch. 1-12, RSSI/LQ,
LQ, RSSI
... ...
... ...
... ...
PPM Ch. 8 (same options)
PPM Map.
Pan Source O, Ch. 1-12
Pan Dest. O, Ch. 1-12
Tilt Source O, Ch. 1-12
Tilt Dest. O, Ch. 1-12
Headtracker
Update micro RX?
Receiver needs new
rmware to work with
this transmitter
UPDATE CANCEL
Warning
Do not interrupt the
following process!
Ok
Update
Prepairing receiver
Updating rmware
0 - 100%
RX Micro
CROSSFIRE runs different RF Profiles at time. For a better understanding which RF profile is active we assume
50Hz update rate as 100%. This will give you up to 300% LQ for operation mode normal and up to 100% LQ
for force telemetry. Any LQ above 80% is fine. LQ at 50% you can still comfortably fly a gimbal-quad in ATTI
or GPS mode since there is still a certain amount of valid data reaching the flight controller.
Find mode
The Find-mode provides you with a way to locate a downed aircraft. A GPS signal is currently required to use
this mode (other detection modes are being developed). Install our TBS GPS module or TBS BLACKBOX
logging unit (via APM/NAZA GPS) to the BST-port on side of the receiver.
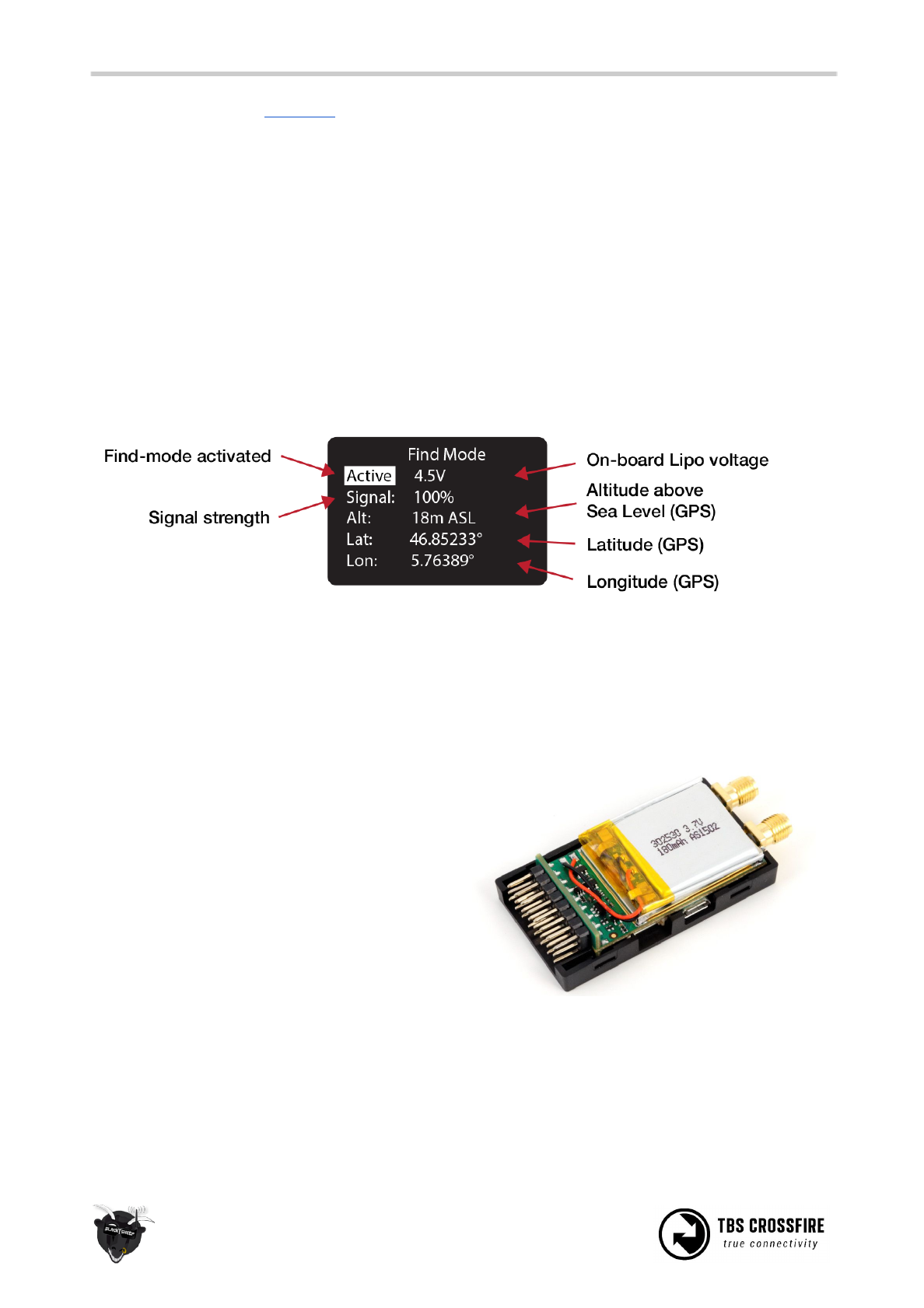
In normal use the GPS coordinates are continuously updated and the latest data is displayed on the “Find
Mode” screen. If the model looses power you can review the last known coordinates to locate your model.
●Inactive (Press Enter) / Active - Enable/disable the Find-mode, shows on-board LiPo voltage
Do NOT enable during flight!
●Signal - Receiver signal strength, makes it possible to triangulate the location [0 to 100%]
●Alt - Altitude above Sea Level, GPS required [0 to 5000m]
●Lat - Latitude, GPS required
●Lat - Longitude, GPS required
The receiver has an on-board LiPo battery to
operate in beacon-mode. This allows the
transmitter to send the last known GPS coordinates
to the display on the transmitter, after certain
trigger events have happened. See the operation
flow diagram on the following page.
Direction finder
Using the transmitter antenna together with a parabolic reflector, you can estimate the heading of the
receiver by looking at the signal strength indicator. Print out the DIY reflector template included on the last
pages of this manual with no scaling on thick paper, place a of aluminium foil on top of the main reflector
sheet and cut out the shapes with an exacto knife. Place the reflector in the middle of the antenna.
14
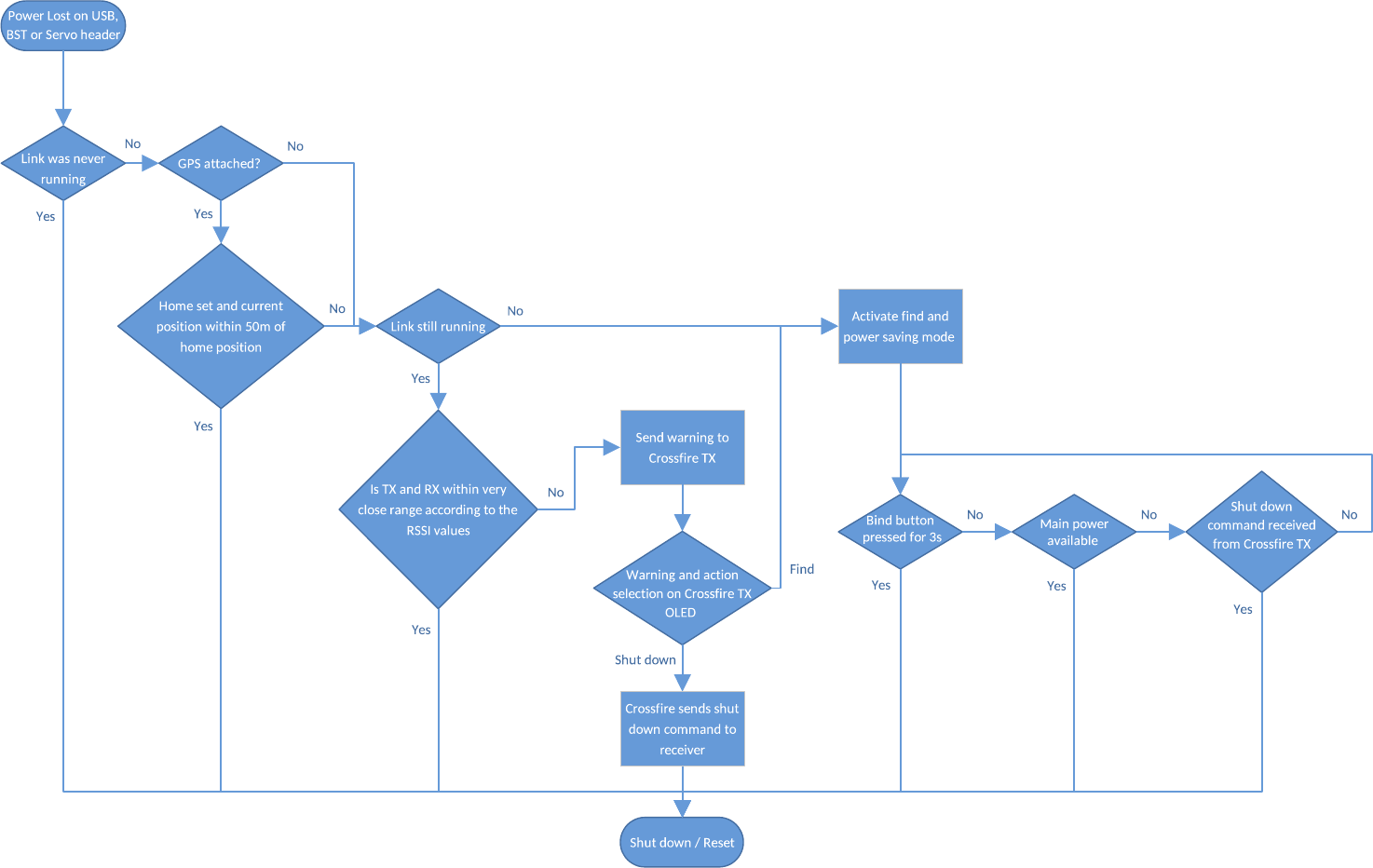
TBS CROSSFIRE - Find Mode Operation
Sept. 2015 - by Remo

How does find mode work
Please see the flow chart to see when the receiver decide to shut down or enter find mode. In short the
receiver shuts down if transmitter and receiver are close to each other or the receiver never got a signal from
the TX, In any other case it enters the find mode if there is a power down event. If the main battery still
powering the system after a crash the receiver will not enter the find mode and keeps running in the selected
operation mode.
Once the receiver entered the find mode also a power saving mode will be activated. This power saving mode
will decrease the beacon signal interval over time. It stays for 10 beacon signals on the same interval level
and remain on the slowest once reached. The interval levels are 1s, 5s, 10s, 15s, 30s and 60s. This means it
can take up to 60s for your transmitter to pick up a beacon signal. This is required to make the receiver run
as long as possible. Once the transmitter receives a beacon signal and send an acknowledge the receiver will
switch back to the fastest interval until the link is lost again.
Once a connection is established the receiver will share the GPS information with the transmitter if a GPS
source is connected or RSSI values to find the receiver with signal strength and the DYI reflector.
Testing find mode
It is highly recommended to go through a crash scenario first so that you are fully aware of all the neat things
we have packed into the Find Mode or Beacon Mode of the TBS Crossfire system.
Preparations
The find mode needs to be armed before it will take any action.
●Receiver only:
○Power up receiver and transmitter and make sure they are connected to each other.
●Receiver with GPS:
○Make all steps above and ensure the GPS is having a solid sat lock.
●Receiver with GPS and TBS CORE PRO:
○Make all steps above and simulate a take off. This can be done throttle above 3A or walking
your receiver until you see the take off message on the OSD.
Simulating flight
The find mode is armed now and you need to simulate a flight. Just separate transmitter and receiver by
more than 50 meters.
15

Simulating a Crash
A crash can happen in different ways. Let’s simulate it only :) Here are some scenarios.
●Turn off your transmitter ( failsafe ) and move your plane to another spot (scenario: flying behind a
mountain, with subsequent crash )
●Power down the battery (scenario: battery eject on crash)
●Just let it sit there (scenario: landing in a tree)
Search and rescue
The copter/plane is lost - now we’ll start the S&R mission. It’s important to get the link back to either get the
latest GPS coordinates or have the ability to point into the direction based on the signal strength.
●In some cases the link is not even lost. Skip below and move to “Link regained” chapter
●Read the coordinates from your OLED and go to the place of the latest coordinates. If you don’t have
a GPS try to go as close as possible to the last known position.
●Get yourself to an exposed position as close to the target as you remember from the crash or based
on OLED coordinates
●Toggle between find mode (greater range, less telemetry) and full link (less range, full telemetry). If
you have lost main power your quad will respond in find mode. For all other scenarios, you should
be able to regain control. When you see “find mode activated” on your LCD, give it more than a
minute before you deactivate it again ( beacon timing, see description above ). If you use the DIY
reflector point and hold in different directions until you get your link back.
Link regained
Once you got your link back to your copter/plane you can now try to find it. It’s recommended to keep the
mode you got your signal back no matter if it’s actually find mode or selected operation mode.
●GPS source attached to receiver
○The receiver will share the latest coordinates with the transmitter and display them on the
OLED.
○Use Droidplanner app connected over Bluetooth ( Bluetooth mode needs to be set to
MAVLink emulator ) to locate your copter/plane
○Write down the coordinates use any GPS to find the location
●No GPS source attached
○Make your transmitter antenna a directional one. This can be done by the DIY reflector or
you can use your body to lower the signal strength from one direction ( works for
emergencies )
○Turn yourself slowly in a circle and try to figure out the direction the signal strength is the
strongest. Walk this direction and repeat this until you found the copter/plane. For this
practice some exercise is recommended.
16
Transmitter LED status indicator
The RGB LED on the transmitter gives you at any moment an indication of your link status. Going from green
to yellow. Once you are in yellow your RSSI values are either very low or you are already in the low-framerate
link mode.
LED sequence Description
Pulsing
Ready, trying to connect to receiver or no down link established
Green ▀▀▀ Solid uplink, high framerate link mode
Yellow ▀▀▀ Unreliable uplink or low-framerate link mode
Fast green blinking ■ ■ ■ ■ Transmitter bootloader active or firmware upgrade
Fast red flashing ■ ■ ■ ■ Warning, a message is shown on the OLED display
Purple ▀▀▀ Find-mode engaged
Receiver LED status indicator
There are three LEDs on the receiver giving you an indication of link- and backup-battery status.
Receiver LED indicators Description
Solid green ▀▀▀ Link is up and running OK
Solid red ▀▀▀ No packages received from the transmitter and receiver is in failsafe
mode
Slow green blinking ▀ ▀ ▀ Receiver is in binding mode
Fast green blinking ■ ■ ■ ■ Receiver bootloader active or firmware upgrade
Green is flashing █ █ █ Receiver is in Find-mode (up to 1 min. delay between flashing)
If the receiver is in Find-mode it can be cancelled by pressing the “Bind”-button. So if you back home and the
receiver still thinks it got lost, you can turn it off like by pressing the button once.
The on-board LiPo battery in the receiver is automatically charged every time the receiver is used. The third
LED indicators on the receiver’s front face displays the current state of the battery.
Battery LED indicator Status
Red ▀▀▀ Backup battery is charging
The backup battery is used if the model gets lost. The receiver can stay alive even if the entire plane or copter
does not have power anymore.
17
Real-time telemetry using Bluetooth
The transmitter has Bluetooth communication functionality built-in for easy telemetry distribution to a PC,
MAC, tablet or phone. TBS CROSSFIRE supports different Bluetooth modes for different use cases.
●OFF
○Bluetooth is completely disabled and won’t show up if you search for Bluetooth devices.
●MAVLink Emulator (MAV Emu)
○This mode is recommended if you have any kind of GPS source attached over BST ( TBS GPS,
DJI NAZA over TBS BLACKBOX, MAVLink FC over TBS BLACKBOX, ET Vector). If this mode is
selected an FC is emulated inside the TBS CROSSFIRE transmitter. This gives you the ability to
track your copter/plane in real-time with any MAVLink capable app on your phone (e.g.
Droidplanner app ) or GCS on your PC or MAC (e.g. QGroundControl)
●TBS
○Telemetry data is sent in JSON format if this mode is active.
●Serial Bridge
○This mode is used for serial bridge between the Bluetooth module and the diversity receiver.
Please refer to the Serial bridge section for further information.
●MAVLink
○This mode is used to pass MAVLink messages back and forth. Use this mode if you have a
MAVLink FC connected to the diversity receiver. Please refer to the MAVLink section for
further information.
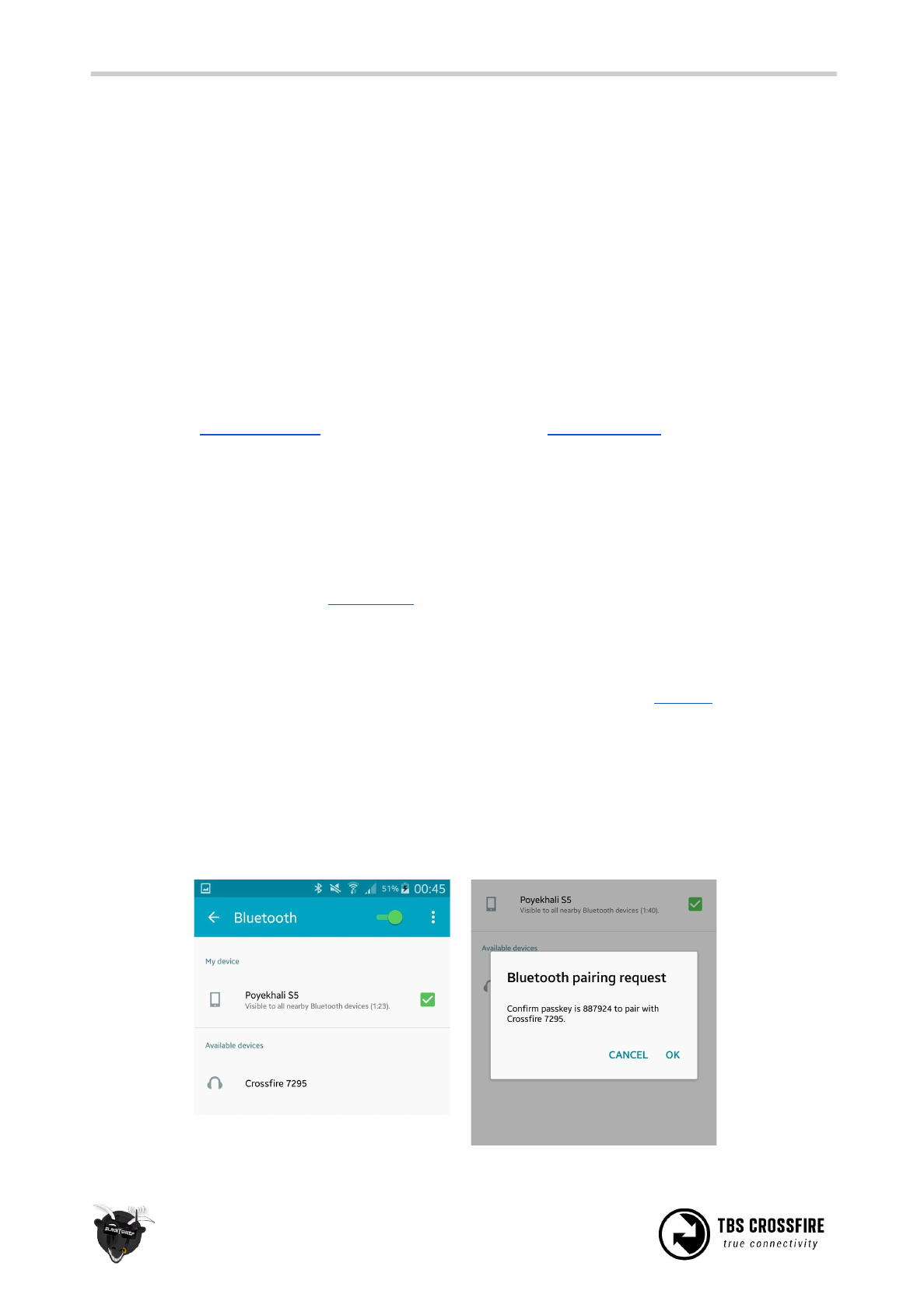
Device pairing
Once the CROSSFIRE is up and running, go to the Bluetooth pairing screen and look for a new device called
“Crossfire ####” in the list. Tap the CROSSFIRE entry and accept the pairing request. It is now ready to be
used with Droidplanner.
18
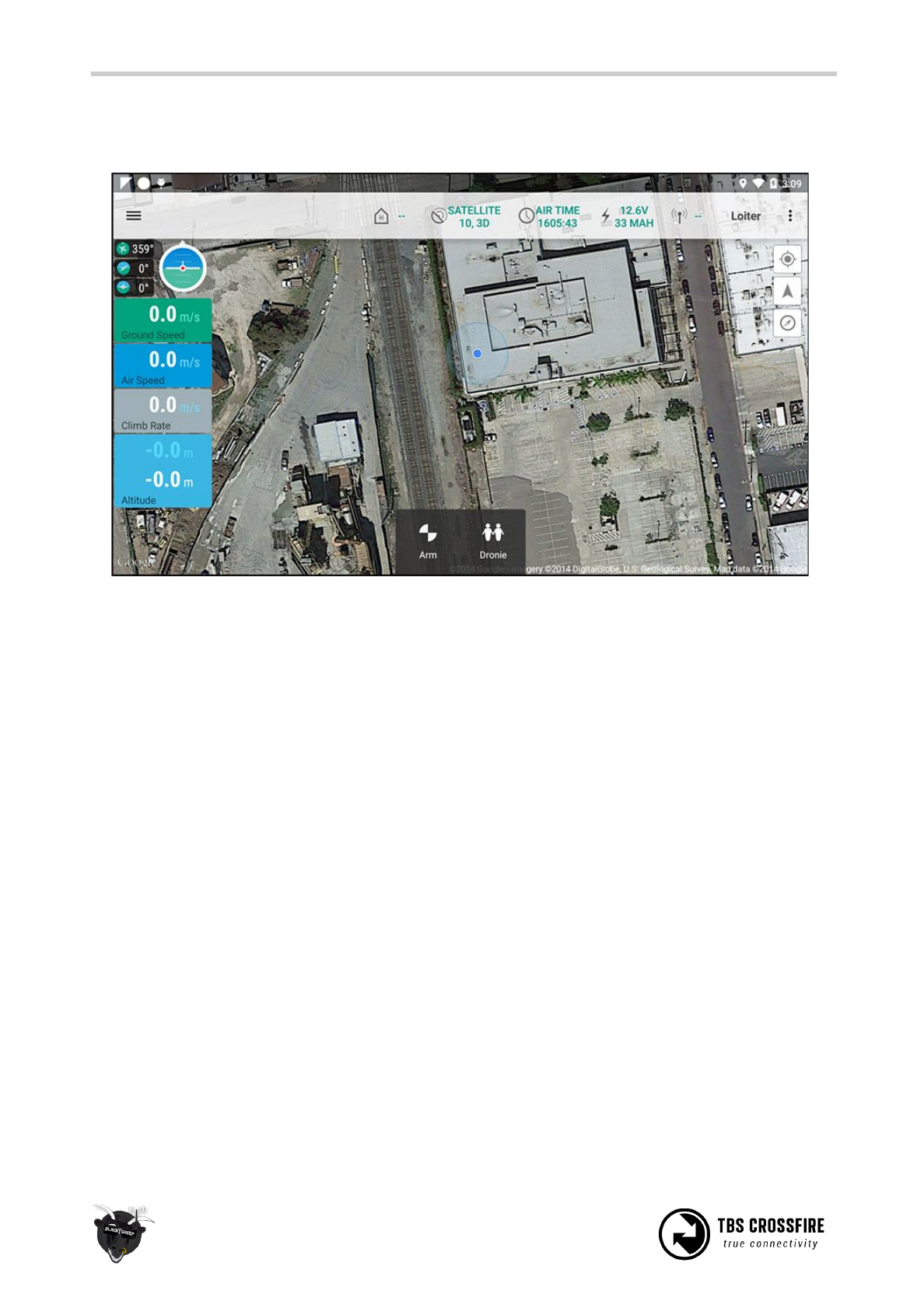
Real-time telemetry updates will now stream from the CROSSFIRE transmitter to your handheld device. For
instance a live map overlay makes this a great way to track race performance or to locate a down aircraft.
19
Configuration
Changing any setting related to the TBS CROSSFIRE R/C link is done using a handy OLED display and five-way
joystick on the back of the transmitter. All configuration for the receiver, including servo signal type and
binding, is initiated from the display only.
To enter and navigating the menu system:
●Configuration menu - long press the joystick, 3 seconds
●Enter change - short press the joystick or left navigation
●Select item - short press or right navigation
●Menu navigation - Up, down, left, right joystick press
Receiver
PWM or PPM servo output
The default setting is to output traditional PWM signals on all eight channels on the receiver. To output PPM,
e.g. for multirotors, you can enable this in the configuration menu. Each channel can be configured
independently to output traditional PWM, RSSI, LQ or RSSI/LQ combined. Channel 1 and 2 can be configured
to output PPM stream. If both channels are set to PPM, you will get the identical stream on both outputs, e.g.
useful for large aircraft with servo decoder hubs. To change output mapping:
1. Power on both the transmitter and receiver
2. Enter the configuration menu, select “RX Diversity” or “RX Micro” and then “Output Map” - Note: this
option is only available when the transmitter is detecting the receiver
3. Pick a channel from 1 to 8, and toggle between “Ch.1 to 12” (PWM), “PPM”, “RSSI, “LQ”, “RSSI/LQ” and
special options
The following table shows the available channel mapping options for the diversity RX:
Receiver pin Output type Default value
1 PWM Ch1 to 12, PPM, RSSI, LQ, RSSI/LQ PWM Ch. 1
2 PWM Ch1 to 12, PPM, RSSI, LQ, RSSI/LQ PWM Ch. 2
3 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ PWM Ch. 3
4 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ PWM Ch. 4
5 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ PWM Ch. 5
6 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ, Serial RTS PWM Ch. 6
7 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ, Serial RX,
MAVLink RX (switch ch.8 first)
PWM Ch. 7
8 PWM Ch1 to 12, RSSI, LQ, RSSI/LQ, SBUS,
n.i.SBUS, Serial TX, MAVLink TX
PWM Ch. 8
20

Receiver SBUS output
The CROSSFIRE 8ch diversity receiver as well as the CROSSFIRE micro receiver support SBUS and n.i.SBUS
(non-inverted) respectively. The diversity receiver exposes this functionality on output port 8, selectable via
the output port mapping menu. The micro receiver only has one output port, and it is either PWM, PPM, SBUS
or n.i.SBUS capable. The setting for this is also available via the output port mapping menu.
Receiver RSSI or/and LQ output
To get digital (PWM) RSSI, LQ (Link Quality) or RSSI/LQ output for use on OSD and similar equipment, pick a
free channel and set the output to signal type you need. You can also output one of those signals by injecting
it into the PPM stream for processing on an OSD or FC. Use the “PPM Mapping” menu for this.
Beside of RSSI the receiver can also output link quality (LQ) or a combined value (RSSI/LQ). The RSSI/LQ value
will always show the worse value of both. This is mostly useful if the used OSD only has one input for link
statistics. It will show you an estimation for your range based on RSSI but you will also see if the LQ drops
when you have bad reception because of interference or any other reason.
Serial bridge
(Diversity RX only) The bridge feature gives you the ability to pass any kind of serial uart data from any device
connected to the receiver to any device connected to the transmitter's Bluetooth serial interface. If you select
“Bridge TX” on output 8, then output 7 will automatically change to “Bridge RX” and channel 6 to “Bridge RTS”.
Please connect your device according to this information. The baudrate is set to 57600 8N1 and the voltage
level is 3.3V only. The RTS pin will change to logical high when the internal FIFO is almost full and low if the
FIFO is almost empty. There is no hardware flow control for the uplink as the Bluetooth module does not
support it. The Bluetooth mode on the TX will automatically change to bridge on the first few bytes sent down
from the receiver if the mode is not set to “OFF”.
MAVLink
(Diversity RX only) MAVLink is a very lightweight, header-only message marshalling library for air vehicles.
Most of the common flight controller support MAVLink message format. For specific message documentation
please refer here: MAVLink Messages
If you select “MAVLink TX” on output 8, then output 7 will automatically change to “MAVLink RX”. There is no
hardware flow control required as we support software flow control (RADIO_STATUS message) on both ends.
You can connect it to any telemetry port of a MAVLink compatible FC. The MAVLink baudrate is set to 57600
baud. The MAVLink TX pin (output 8) needs to be connected to the FC telemetry RX pin and the MAVLink RX
pin (output 7) need to be connected to the FC telemetry TX pin. The Bluetooth mode on the TX will
automatically change to MAVLink on the first frame sent down from the receiver if the mode is not set to
“OFF”.
Also, if you enable MAVLink for output 8 there will be an option to send RC signals over the MAVLink
connection. You can find this setting under “RX Diversity” menu called “MAVLink PPM”. If this setting is
21

enabled there is no PPM, SBUS connection required anymore between TBS CROSSFIRE and the FC. Note this
MAVLink message (RC_CHANNELS_OVERRIDE) will only send channel 1 to 8 to the FC even if TBS CROSSFIRE is
set to 12 channels.
The TBS CROSSFIRE diversity receiver has a build in MAVLink engine which forwards messages like GPS,
attitude, current sensor, flight mode, time, air speed and more to the BST bus. In case you use the TBS CORE
PRO or TBS BLACKBOX all required messages will be forwarded. The engine also adapt the MAVLink
bandwidth to make it perfectly fit the RF link bandwidth. This gives you the best performance for both OSD on
the TBS CORE PRO side and on the telemetry over TBS CROSSFIRE in terms of latency and update rate.
If you run the system with a TBS CORE PRO you can decide if you want to run the digital TBS current sensors
or use the current sensor information from the FC for the OSD display. In case of using the current sensor
from the FC you need to make a custom wire to power the TBS CORE PRO. This cable requires only two leads
out of the default BST cable. +VBATT goes to the flight battery plus and GND goes to the flight battery minus.
Make sure the other leads do not touch anything or short against each other.
Note: If you use the TBS CROSSFIRE and the TBS BLACKBOX at the same time, make sure only the TBS
CROSSFIRE is connected to the FC by MAVLink. It will automatically forward all necessary information to all
other devices connected by BST to the TBS CROSSFIRE.
Disable telemetry
Telemetry can be disabled under RX Settings. If the telemetry is turned off the transmitter will not get any
feedback. This will affect the dynamic power and the status information on the transmitter side. Dynamic
power will be automatically switched off and remain on the max. power setting. Links statistics will not be
updated anymore and the link status will say “Connecting” with an orange pulsing LED.
Note: None of this will affect the the link. It just changes the link from a bidirectional one to a unidirectional
one. Refer this paper for further information: FPV Racing Whitepaper.
22
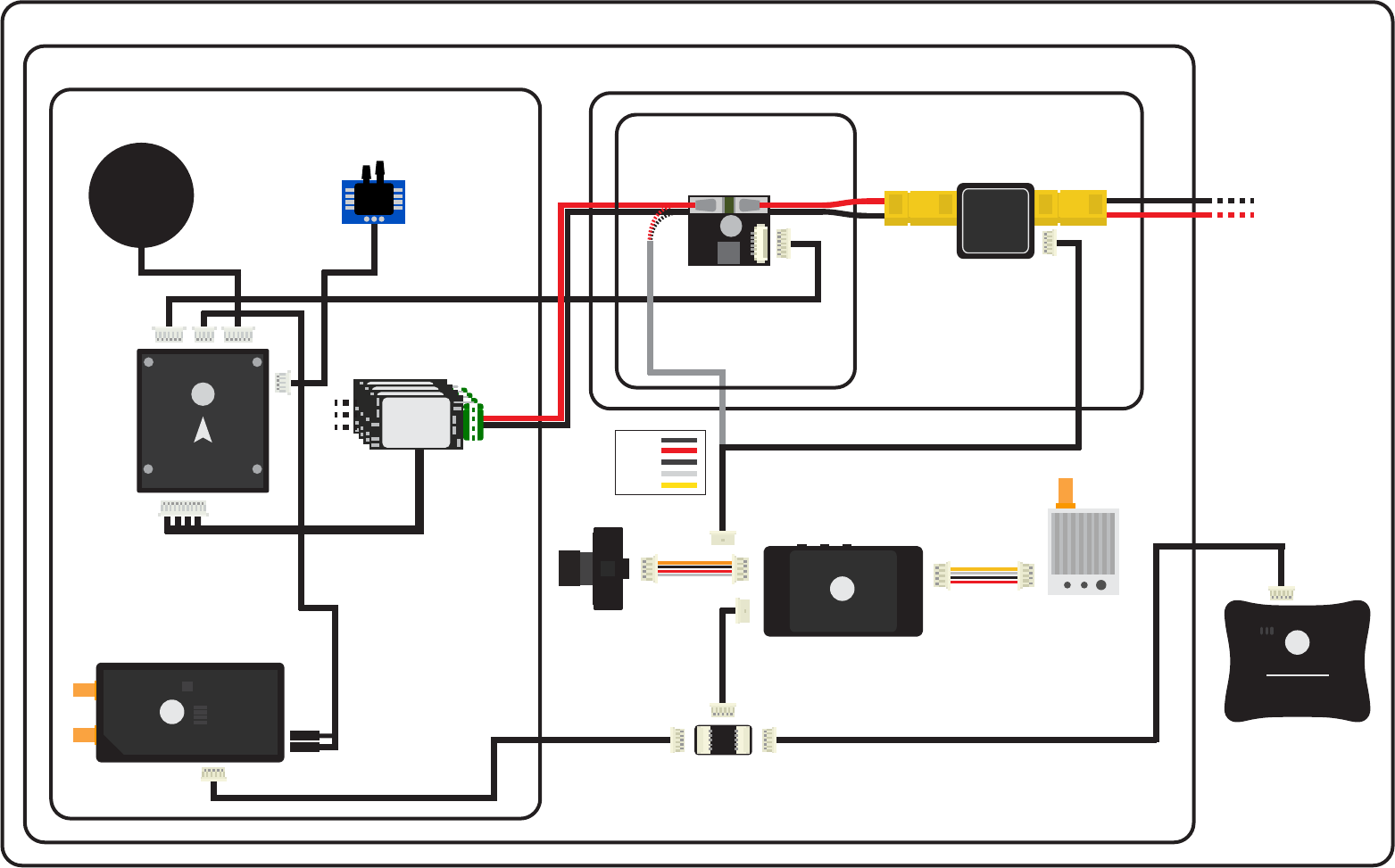
XT60
Connecting any PixFalcon/Pixhawk/APM �ight controller to the TBS ecosystem
TBS Current Sensor
XT60
XT60
PWR
IN
BST
PWR
OUT
Pilot Camera
Video Transmitter
From battery
TBS CORE PNP PRO
TBS CORE
PNP PRO
CAM
BST
RSSI
BST
VTX
LINK
B-PWR
USB
UP ENTER DN
XT60
May 2016 - by ivc.no/tbs
GPS/Compass
GPS
BST BST
TBS BLACKBOX
SD Card Ext FC
telemetry distribution
TBS BLACKBOX
CH 1 + -
CH 2 + -
CH 3 + -
CH 4 + -
CH 5 + -
CH 6 + -
CH 7 + -
CH 8 + -
ANT 1 ANT 2
TRB CROSSFIRE
true connectivity
Bind
B-LiPo
Status
USB BST
TBS CROSSFIRE
DIVERSITY Receiver
to CH 7
to CH 8
Speedcontrollers
CONTROLOUT
OSD option via TBS CORE PRO
Logging option via TBS BLACKBOX
Basic Setup
CROSSFIRE to FC cable, plug
into TELEM port:
• Servo header #1 on CH 7 (signal pin):
- Crossfire output 7 to FC telm. TX
• Servo header #2 on CH 8:
- Crossfire output 8 to FC telm. RX
- Servo header + rail to FC telm. +5V
- Servo header GND to FC telm. GND
The serial communication carries R/C
control signal, no need for R/C IN.
Enable MAVLINK PPM under RX settings
on CROSSFIRE receiver.
FC Current Sensor
Custom BST cable wiring!
Connect only +VBATT and GND
from FC Current Sensor to CORE!
Only if single FC Current sensor is used
Air Speed Sensor
Pix Flight Controller
4WAY
SPLITTER
TBS Current Sensor
(Optional)
Better accuracy, plug&play, but added weight
With FC Current Sensor/
Power Module
Less components
Setup note
FC Current Sensor is required
when using TBS Current Sensor,
but the FC Current Sensor
can be used independently.
PM TELEM GPS/I2C
I2C
SWITCH
MAIN OUT RCIN
+5V
+VBATT
GND
SCL
SDA
BSTPinlayout
IN
OUT
OR
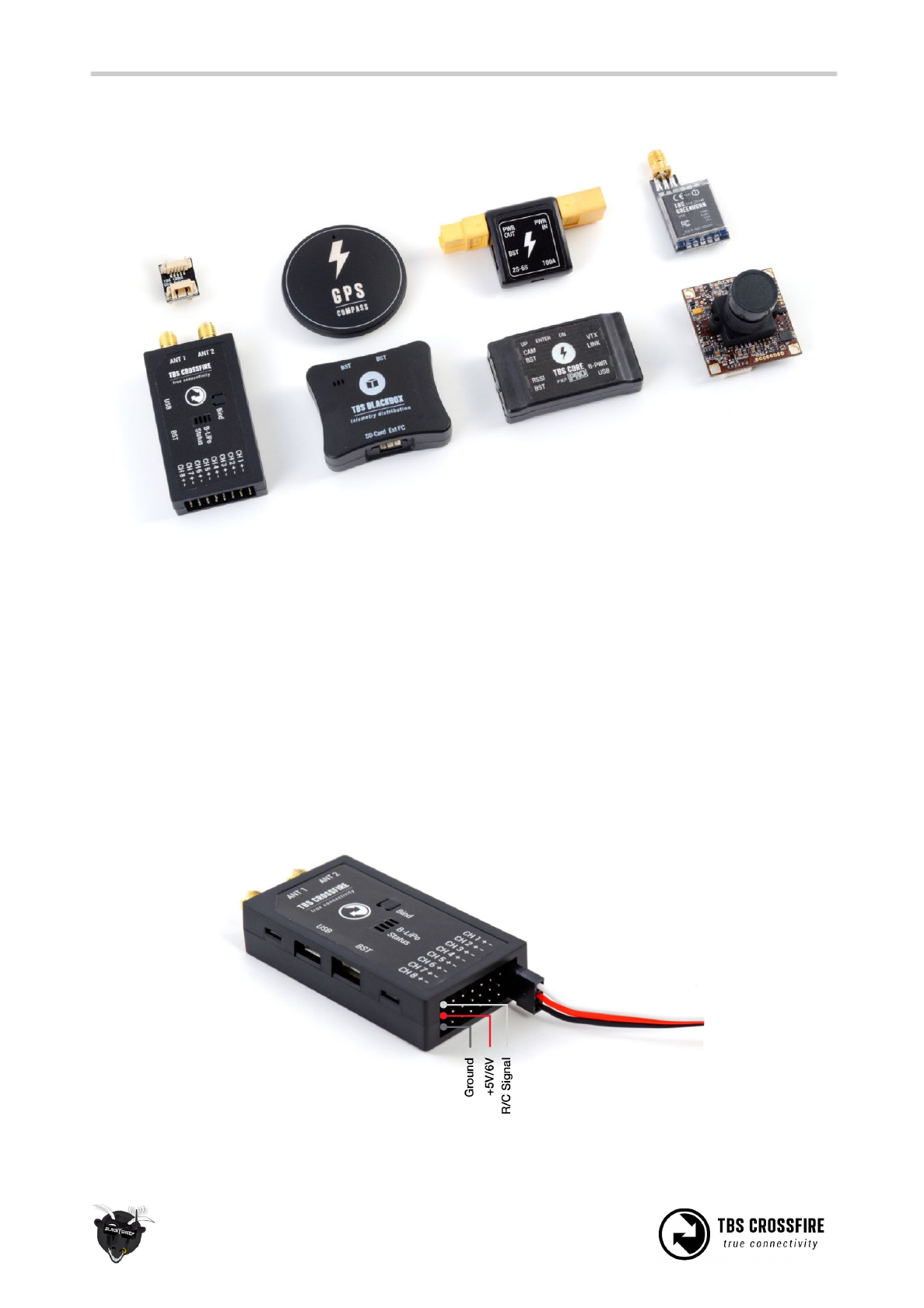
Transmission power
The transmitter’s RF output power is highly configurable and can be selected dynamically via the display
menu. It defaults to 100mW and will provide 15 km of safe range in rural conditions.
It is recommended to use dynamic power option. This will allow you to fly at very low power and the system
will increase the power automatically (faster than you can hit the power switch yourself) if you are about to
lose the link.
Some output power restrictions apply depending on the available power source:
Power source Available output power
USB power input (+5V) 10mW (10dBm)
RC/HT radio power input (+3.5 to +12.6V) 10mW (10dBm), 25mW (14dBm), 100mW (20dBm), 500mW
(27dBm)
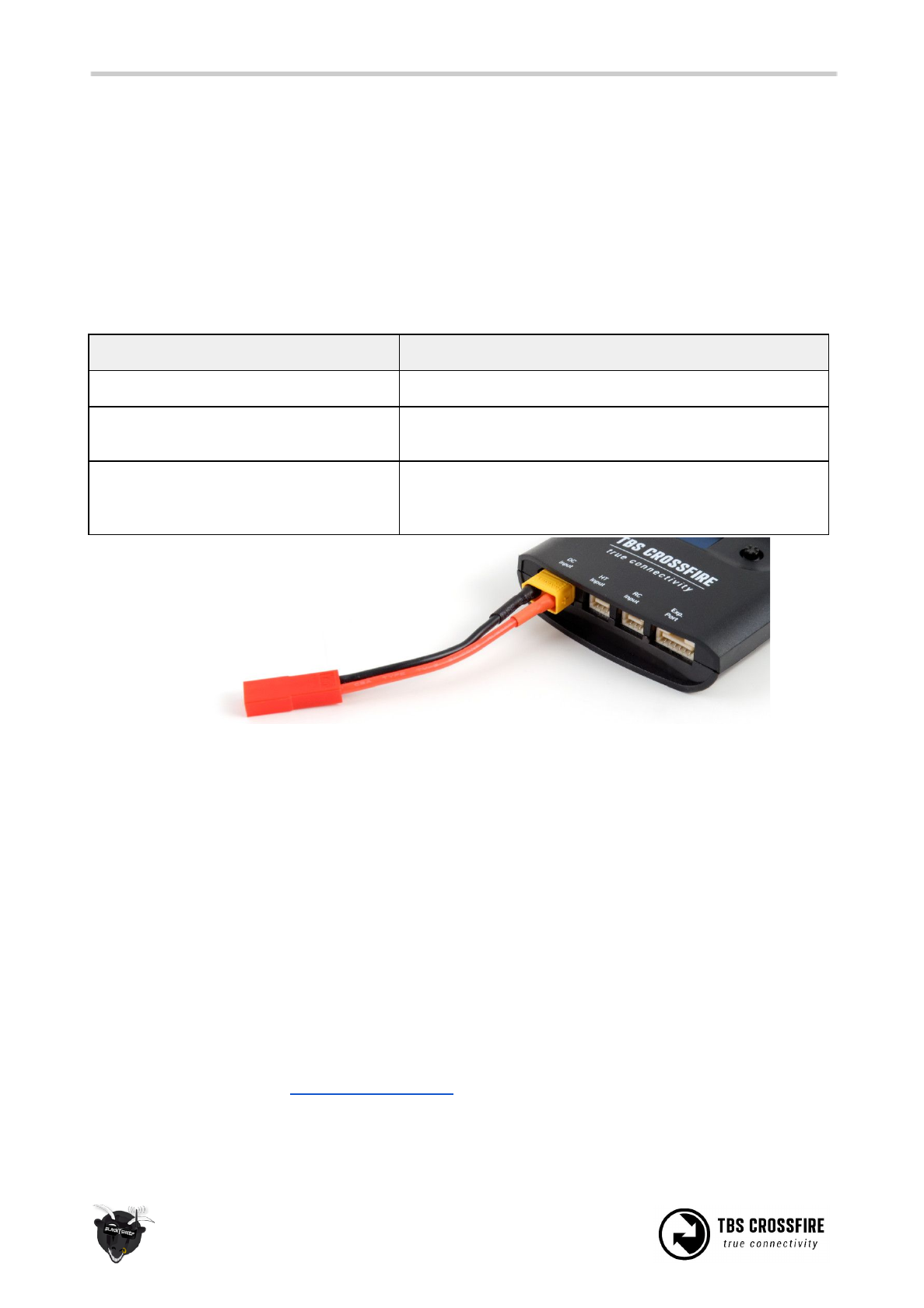
External LiPo power input (+3.5V to
+12.6V)
(XT30, shown in photo below)
10mW (10dBm), 25mW (14dBm), 100mW (20dBm), 500mW
(27dBm), 1W (30dBm), 2W (33dBm)
To change RF power:
1. Enter the configuration menu, select “General” and “Max Power”
2. Pick the RF output power you require and move joystick left to confirm
3. The change is instant if the required input power is available and can be done at any moment
Every 6 dBm increase in output power results in a doubling of the theoretical possible distance that is
achievable.
If you set a power level that is outside the connected power source, it will still be remembered for later but
the output power will be limited to according to the cable above.
You may hear a subtle buzzing or humming sound on some radios or nearby speakers on higher power
levels. This is completely normal and non-harmful. In the case of the Taranis it is an issue of the remote itself
and can be fixed by following this guide by boltrc.com.
23
Dynamic transmission power
The system can automatically choose the power level most suitable for the situation at hand. For instance, if
you fly close to the transmitter you normally only require minimal TX power and the system will therefore
switch to lowest possible TX power level required to maintain a good up-link.
The maximum TX power level the system is allowed to use, can be defined by changing “Max Power” in the
configuration menu.
To enable dynamic power:
1. Enter the configuration menu, select “General” and “Dyn. Power”
2. Toggle “Off” to “On” by pressing Down, press Left to apply the change
3. The current dynamic TX power level is displayed in the main display
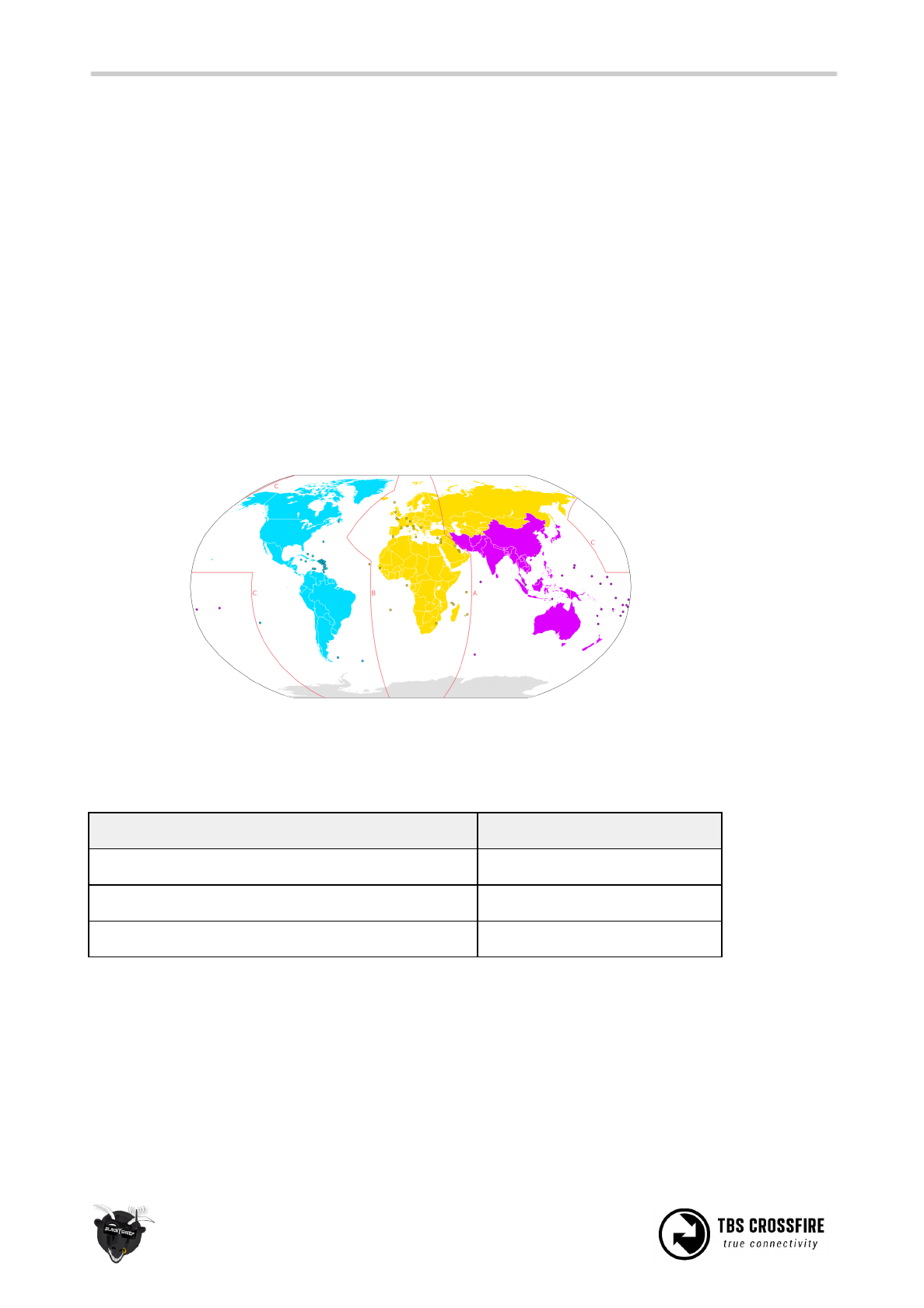
Transmission frequency
The TBS CROSSFIRE supports two different frequency bands, depending on your local regulation. The
frequency is locked to your locale when you upgrade the firmware, but can be changed in TBS AGENT.
Below is a general overview of the primary frequency segmentation.
General area Frequency
ITU Region 1 - Europe/Africa/Middle East (yellow) 868 MHz SRD band
ITU Region 2 - America/Greenland (blue) 915 MHz ISM band
ITU Region 3 - Asia/Oceania (purple) 915 MHz ISM band
To change frequency band:
1. Power up both the transmitter and receiver
2. Enter the configuration menu, select “General” and “Frequency”
3. Pick the either 868MHz or 915Mhz depending on your locale and press Enter
The frequency change is instant, and affects transmitter and receiver. It can even be changed in-flight if
necessary.
24
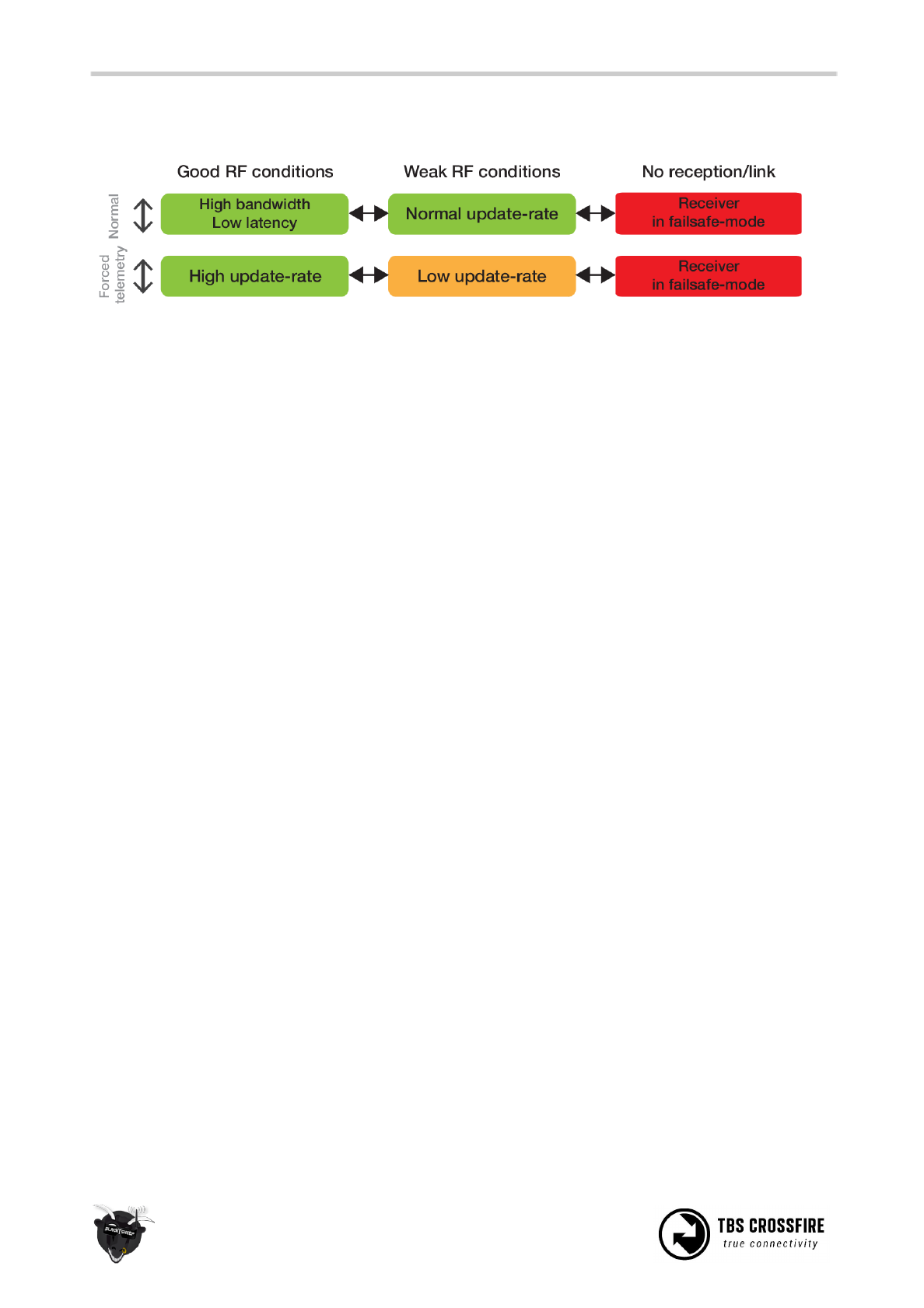
Operating modes
The link has two operation modes which are based on three RF profiles. Every mode has its pros and cons.
TBS CROSSFIRE always switches between two RF profiles, depending on the current link health while you are
flying. The two profiles used is according to your decision to use “Normal” or “Force telemetry” modes. Which
two RF profiles are in use for each mode is showed in the diagram above. We recommend to use the default
“Normal” mode as is fits the most of the use cases.
RF Profiles
●High bandwidth / Low latency profile
This mode is tuned for ultra-high update-rate and super low latency. Stick inputs translates to almost
instantaneous reaction (150Hz). It is capable of exchanging large amounts of serial data in both
directions besides the regular RC signals. The range of this mode is lower but comparable to other
LRS systems on the market. Provides full MAVLink or serial bridge, if used.
●Normal update-rate profile
This profile is made for long range flight with a normal update rate on your stick inputs (50Hz). It has
also telemetry support in both directions, but only for the most important information i.e. GPS,
current sensor, attitude, and simple commands. The range improves about two-fold.
●Low update-rate profile
This mode is made for ultra long range. It has a very low update rate (4Hz). Only 4 new servo
positions per second is sent over the link but it will give you 4 times more range compared to the
“Normal update-rate” profile. Telemetry has even less bandwidth. It is recommended to only use this
RF profile (Forced telemetry mode) when in assisted flight modes (GPS, position hold, waypoint
navigation).
To change link mode:
1. Enter the configuration menu, select “General”
2. Toggle between “Normal” and “Forced Telemetry””
3. Press Left to instantaneously enable the new link mode
25

Re-bind receiver
If you need to rebind the receiver, enable “Bind” in the TBS CROSSFIRE transmitter configuration menu and,
with the receiver already powered on, press the "BIND" button once. The display should display “Binding
complete”.
Note that there is no complicated - “3-hands-required” - plug-in and push button procedure. Just power your
model, wait for the receiver to turn on and then push the “Bind”-button. Be sure that the same firmware
version is installed on both the transmitter and receiver.
26

Firmware upgrade
Updates to the transmitter and receiver is applied using our TBS Agent software. This takes care of all the
downloading of the latest firmware, verification- and upgrade process.
Installing TBS Agent
Download the installer from http://www.team-blacksheep.com/corepro/agent (Windows7/8/10+, 64-bit
required) - no drivers needed to use the application, but an Internet connection is required to download the
latest firmware versions.
Turn off the radio or disconnect any model batteries. Plug in a micro-USB cable on the transmitter or
receiver, power is provided via USB. The software will automatically detect the device and offer you the
option to upgrade the firmware if a newer version is available.
When the status indicator is green and says “Connected”, you can upgrade or downgrade the firmware.
To upgrade the firmware, select the latest version from the drop-down menu and click Update. You can also
upgrade the Crossfire receiver via the CORE PRO if it is connected on BST. Rapid blinking indicates that the
process is working and being updated. The process will take about 1 minute. Check all settings after the
process is finished.
27

Over-The-Air software updates
As of V1.06, the TBS CROSSFIRE supports over-the-air (OTA) software updates to the receiver. This means that
the last time you ever need to remove your receiver from the aircraft to reach the USB socket is your update
to V1.06 or higher.
To use over-the-air software updates, connect your CROSSFIRE transmitter to the TBS Agent and run the
update. Once finished, bind to your receiver and follow the instructions on the OLED screen as normal. Apply
this update once for each aircraft/receiver you have set up.
Emergency update
Every device has the option to still upload the firmware if something went wrong during the normal update
procedure. For the devices with USB it is very simple. You just press and hold the bind button for the diversity
receiver or the joystick enter button for the transmitter while you plug in the USB cable. The device will show
up inside the TBS Agent and you have the ability to reload the firmware.
For the micro receiver it is a little bit more complicated. As the device itself does not have a USB connecter
the firmware needs to be loaded by BST for emergency update. This requires a TBS CORE PRO or a diversity
receiver. Connect the micro receiver to one of those devices by BST. Press and hold the bind button of the
micro receiver while powering up the TBS CORE PRO or the diversity receiver by USB. In case of the diversity
receiver you need to keep pressing the bind button while powering up the micro receiver with an own power
supply.
The LED of the micro receiver should blink fast which indicates the receiver is in bootloader mode.
Open your TBS Agent and load the latest version. Once the device connected directly to the USB is updated,
the TBS Agent will update the micro receiver too.
28

FAQ
Some common and some special outlier questions for the CROSSFIRE system.
●Droidplanner can’t connect to Bluetooth
○Use DroidPlanner 2 only for MAVLink emulator not the Tower app
○Go under settings and make sure connection type is set to Bluetooth
○Go under Settings -> Advanced -> Connection Preferences and press Forget default device
●Transmitter keep saying “connecting” and the LED is pusing orange even when I can control the
servos
○This means your telemetry channel is disabled. If the receiver doesn’t receive any signal back
from the receiver he can’t tell if there is a receiver connected or not. There is nothing wrong
about this behavior. Re-enable telemetry will bring back a solid green to your transmitter.
●TBS CROSSFIRE Seems not to work with Futaba T18SG
○It required you use an external battery to power the TBS Crossfire
○Go to Trainer port settings and select ACT, Student and 8 Ch. or 12 Ch.
●Does the transmitter forget the receiver when I bind a new receiver
○No. The receiver stores the serial number of the transmitter. Everything is based on this. So
you can bind as many receivers as you want.
●What happens if I have more than one receiver running at time
○We recommend to run only one receiver at time but if you like to, you can run more than
one receiver at time. As the system is not designed for this use case some features need to
be disabled to make it work properly. Make sure both receivers run in the same operation
mode, 8 or 12 channel mode and both have telemetry disabled.
29

Good practices
We have compiled a list of all of practices which have been tried and tested in countless environments and
situations by the TBS crew and other experienced FPV pilots.
Follow these simple rules, even if rumors on the internet suggest otherwise, and you will have success in FPV.
●Start with the bare essentials and add equipment one step at a time, after each new equipment was
added to proper range- and stress tests.
●Do not fly with a video system that is capable of outperforming your R/C system in terms of range.
●Do not fly with a R/C frequency higher than the video frequency (e.g. 2.4GHz R/C, 900MHz video).
●Monitor the vitals of your plane (R/C link and battery). Flying with a digital R/C link without RSSI is
dangerous.
●Do not use 2.4GHz R/C unless you fly well within its range limits, in noise-free environments and
always within LOS. Since this is most likely never the case, it is recommended to not use 2.4GHz R/C
systems for longer range FPV.
●Do not fly at the limits of video, if you see noise in your picture, turn around and buy a higher-gain
receiver antenna before going out further.
●Shielded wires or twisted cables only, anything else picks up RF noise and can cause problems.
●When using powerful R/C transmitters, make sure your groundstation equipment is properly
shielded.
●Adding Return-To-Home (RTH) to an unreliable system does not increase the chances of getting your
plane back. Work on making your system reliable without RTH first, then add RTH as an additional
safety measure if you must.
●Avoid powering the VTx directly from battery, step-up or step-down the voltage and provide a
constant level of power to your VTx. Make sure your VTx runs until your battery dies.
●Do not power your camera directly unless it works along the complete voltage range of your battery.
Step-up or step-down the voltage and provide a constant level of power to your camera. Make sure
your camera runs until your battery dies.
●A single battery system is safer than using two dedicated batteries for R/C and FPV. Two batteries in
parallel even further mitigate sources of failure.
●For maximum video range and “law compatibility”, use 2.4GHz video with high-gain antennas.
●When flying with R/C buddies that fly on 2.4GHz, or when flying in cities, it is perfectly possible to use
2.4GHz video provided you stick to the channels that do not lie in their band (CH5 to CH8 for
Lawmate systems, available from TBS).
●Do not use diversity video receivers as a replacement for pointing your antennas, diversity should be
used to mitigate polarization issues.
●Improving the antenna gain on the receiver end is better than increasing the output power (except in
RF-noisy areas). More tx power causes more issues with RF on your plane. 500mW is plenty of power!
30

●Try to achieve as much separation of the VTx and R/C receiver as possible to lower the RF noise floor
and EMI interference.
●Do not buy the cheapest equipment unless it is proven to work reliably (e.g. parts falling off,
multitudes of bug fix firmware updates, community hacks and mods are a good indicator of poor
quality and something you do NOT want to buy for a safe system). Do due diligence and some
research before sending your aircraft skyward.
Manual written and designed by ivc.no in cooperation with TBS.
31