Trimble Outdoors Tv Antenna Acutimetm2000 Synchronization Kit Users Manual
AcutimeTM2000 Synchronization Kit to the manual 581bf6bb-0435-4731-ab42-aba593fb2a33
2015-02-03
: Trimble-Outdoors Trimble-Outdoors-Tv-Antenna-Acutimetm2000-Synchronization-Kit-Users-Manual-460258 trimble-outdoors-tv-antenna-acutimetm2000-synchronization-kit-users-manual-460258 trimble-outdoors pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 320 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Acutime 2000 Synchronization Kit
- Contents
- List of Figures
- List of Tables
- About This Manual
- Introduction
- Getting Started
- Acutime 2000 Installation
- Acutime 2000 Connections
- System Operation
- NTP Software Installation and Configuration
- Trimble Standard Interface Protocol
- Timing Receiving Monitor
- NMEA 0183
- Specifications and Drawings
- NTP Diagnostics and Debugging
- Theory of Operation
- Glossary
- Index
- Reader Comment Form
F
Part Number 45005-00-ENG
Revision A
April 2001
Acutime™2000
Synchronization Kit
User Guide
Corporate Office
Trimble Navigation Limited
Timing and Synchronization Group
645 North Mary Avenue
Post Office Box 3642
Sunnyvale, CA 94088-3642
U.S.A.
Phone: +1-408-481-8940, 1-800-545-7762
Fax: +1-408-481-7744
www.trimble.com
Support Offices
Trimble Navigation Europe Limited
Trimble House, Meridian Office Park
Osborn Way, Hook
Hampshire RG27 9HX
ENGLAND
+44-1256-760-150
Fax: +44-1256-760-148
Voicemail: +44-1256-761-130
Trimble Navigation Singapore PTE Limited
79 Anson Road
# 05-02
Singapore 079906
SINGAPORE
+65-325-5668
Fax: +65-225-9989
Voicemail: +65-325-5668
Trimble Japan K.K.
Sumitomo Hamamatsu-cho, Building 10F
1-18-16 Hamamatsu-cho Minato-ku
Tokyo 105
JAPAN
+81-3-5472-0880
Fax: +81-3-5472-2326
Trimble Navigation Australia Pty Limited
P.O. Box 769
Spring Hill QLD 4004
AUSTRALIA
+61-7-3216-0044
Fax: +61-7-3216-0088
Copyright and Trademarks
© 2001, Trimble Navigation Limited. All rights
reserved. No part of this manual may be
copied, reproduced, translated, or reduced to
any electronic medium or machine-readable
form for any use other than with the
Acutime™ 2000 GPS Smart Antenna, or
Acutime 2000 Synchronization Kit.
The Sextant logo with Trimble is a trademark of
Trimble Navigation Limited, registered in the
United States Patent and Trademark Office.
The Globe & Triangle logo, Trimble, and Acutime
are trademarks of Trimble Navigation Limited.
All other trademarks are the property of their
respective owners.
Release Notice
This is the April 2001 release (Revision A) of
the Acutime 2000 Synchronization Kit
User Guide, part number 45005-00-ENG. It
applies to the Acutime ™ 2000 Synchronization
Kit software.
The following limited warranties give you specific
legal rights. You may have others, which vary
from state/jurisdiction to state/jurisdiction.
Hardware Limited Warranty
Trimble warrants that this Trimble hardware
product (the “Product”) shall be free from defects
in materials and workmanship and will
substantially conform to Trimble’s applicable
published specifications for the Product for a
period of one (1) year, starting from the date of
delivery. The warranty set forth in this paragraph
shall not apply to software/firmware products.
Software and Firmware License, Limited
Warranty
This Trimble software and/or firmware product
(the “Software”) is licensed and not sold. Its use is
governed by the provisions of the applicable End
User License Agreement (“EULA”), if any,
included with the Software. In the absence of a
separate EULA included with the Software
providing different limited warranty terms,
exclusions, and limitations, the following terms
and conditions shall apply. Trimble warrants that
this Trimble Software product will substantially
conform to Trimble’s applicable published
specifications for the Software for a period of
ninety (90) days, starting from the date of
delivery.
Warranty Remedies
Trimble's sole liability and your exclusive remedy
under the warranties set forth above shall be, at
Trimble’s option, to repair or replace any Product
or Software that fails to conform to such warranty
(“Nonconforming Product”), or refund the
purchase price paid by you for any such
Nonconforming Product, upon your return of any
Nonconforming Product to Trimble in accordance
with Trimble’s standard return material
authorization procedures.
Warranty Exclusions and Disclaimer
These warranties shall be applied only in the event
and to the extent that: (i) the Products and
Software are properly and correctly installed,
configured, interfaced, maintained, stored, and
operated in accordance with Trimble’s relevant
operator's manual and specifications, and; (ii) the
Products and Software are not modified or
misused. The preceding warranties shall not apply
to, and Trimble shall not be responsible for defects
or performance problems resulting from (i) the
combination or utilization of the Product or
Software with products, information, data,
systems or devices not made, supplied or specified
by Trimble; (ii) the operation of the Product or
Software under any specification other than, or in
addition to, Trimble's standard specifications for
its products; (iii) the unauthorized modification or
use of the Product or Software; (iv) damage
caused by accident, lightning or other electrical
discharge, fresh or salt water immersion or spray;
or (v) normal wear and tear on consumable parts
(e.g., batteries).
THE WARRANTIES ABOVE STATE TRIMBLE'S
ENTIRE LIABILITY, AND YOUR EXCLUSIVE
REMEDIES, RELATING TO PERFORMANCE OF
THE PRODUCTS AND SOFTWARE. EXCEPT AS
OTHERWISE EXPRESSLY PROVIDED HEREIN,
THE PRODUCTS, SOFTWARE, AND
ACCOMPANYING DOCUMENTATION AND
MATERIALS ARE PROVIDED “AS-IS” AND
WITHOUT EXPRESS OR IMPLIED WARRANTY
OF ANY KIND BY EITHER TRIMBLE
NAVIGATION LIMITED OR ANYONE WHO HAS
BEEN INVOLVED IN ITS CREATION,
PRODUCTION, INSTALLATION, OR
DISTRIBUTION, INCLUDING, BUT NOT LIMITED
TO, THE IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR A
PARTICULAR PURPOSE, TITLE, AND
NONINFRINGEMENT. THE STATED EXPRESS
WARRANTIES ARE IN LIEU OF ALL
OBLIGATIONS OR LIABILITIES ON THE PART
OF TRIMBLE ARISING OUT OF, OR IN
CONNECTION WITH, ANY PRODUCTS OR
SOFTWARE. SOME STATES AND
JURISDICTIONS DO NOT ALLOW LIMITATIONS
ON DURATION OR THE EXCLUSION OF AN
IMPLIED WARRANTY, SO THE ABOVE
LIMITATION MAY NOT APPLY TO YOU.
TRIMBLE NAVIGATION LIMITED IS NOT
RESPONSIBLE FOR THE OPERATION OR
FAILURE OF OPERATION OF GPS SATELLITES
OR THE AVAILABILITY OF GPS SATELLITE
SIGNALS.
Limitation of Liability
TRIMBLE’S ENTIRE LIABILITY UNDER ANY
PROVISION HEREIN SHALL BE LIMITED TO
THE GREATER OF THE AMOUNT PAID BY YOU
FOR THE PRODUCT OR SOFTWARE LICENSE OR
U.S.$25.00. TO THE MAXIMUM EXTENT
PERMITTED BY APPLICABLE LAW, IN NO
EVENT SHALL TRIMBLE OR ITS SUPPLIERS BE
LIABLE FOR ANY INDIRECT, SPECIAL,
INCIDENTAL, OR CONSEQUENTIAL DAMAGES
WHATSOEVER UNDER ANY CIRCUMSTANCE
OR LEGAL THEORY RELATING IN ANY WAY TO
THE PRODUCTS, SOFTWARE, AND
ACCOMPANYING DOCUMENTATION AND
MATERIALS, (INCLUDING, WITHOUT
LIMITATION, DAMAGES FOR LOSS OF
BUSINESS PROFITS, BUSINESS INTERRUPTION,
LOSS OF BUSINESS INFORMATION, OR ANY
OTHER PECUNIARY LOSS), REGARDLESS OF
WHETHER TRIMBLE HAS BEEN ADVISED OF
THE POSSIBILITY OF ANY SUCH LOSS AND
REGARDLESS OF THE COURSE OF DEALING
WHICH DEVELOPS OR HAS DEVELOPED
BETWEEN YOU AND TRIMBLE. BECAUSE SOME
STATES AND JURISDICTIONS DO NOT ALLOW
THE EXCLUSION OR LIMITATION OF LIABILITY
FOR CONSEQUENTIAL OR INCIDENTAL
DAMAGES, THE ABOVE LIMITATION MAY NOT
APPLY TO YOU.
Notices
Class B Statement – Notice to Users. This
equipment has been tested and found to comply
with the limits for a Class B digital device,
pursuant to Part 15 of the FCC rules. These limits
are designed to provide reasonable protection
against harmful interference in a residential
installation. This equipment generates, uses, and
can radiate radio frequency energy and, if not
installed and used in accordance with the
instructions, may cause harmful interference to
radio communication. However, there is no
guarantee that interference will not occur in a
particular installation. If this equipment does
cause harmful interference to radio or television
reception, which can be determined by turning the
equipment off and on, the user is encouraged to
try to correct the interference by one or more of
the following measures:
–Reorient or relocate the receiving antenna.
–Increase the separation between the equipment
and the receiver.
–Connect the equipment into an outlet on a
circuit different from that to which the receiver
is connected.
–Consult the dealer or an experienced radio/TV
technician for help.
Changes and modifications not expressly
approved by the manufacturer or registrant of this
equipment can void your authority to operate this
equipment under Federal Communications
Commission rules.
European Community (CE) Directive
Conformance Statement
The Acutime 2000 GPS Smart Antenna conforms
with the essential requirements of the EMC
Directive 89/336/EEC. A Declaration of
Conformity indicating the requirements met has
been signed at Trimble Navigation Limited, 645
North Mary Avenue, Sunnyvale, CA 94086, USA.

Acutime 2000 Synchronization Kit User Guide v
Contents
About This Manual
Scope and Audience . . . . . . . . . . . . . . . . . . . . . . . . xix
Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . xx
Reader Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . xxi
Related Information . . . . . . . . . . . . . . . . . . . . . . . . xxii
Update Notes . . . . . . . . . . . . . . . . . . . . . . .xxii
World Wide Web (WWW) Site . . . . . . . . . . . . . .xxii
Technical Assistance. . . . . . . . . . . . . . . . . . . .xxiii
Abbreviations. . . . . . . . . . . . . . . . . . . . . . . . . . . . xxiii
Document Conventions. . . . . . . . . . . . . . . . . . . . . . . xxiii
Cautions and Notes . . . . . . . . . . . . . . . . . . . . . . . . . xxiv
1 Introduction
1.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 Acutime 2000 GPS Smart Antenna Features. . . . . . . . . . . . 1-2
1.3 Starter Kit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
2 Getting Started
2.1 Connecting the Smart Antenna. . . . . . . . . . . . . . . . . . . 2-2
2.2 Connecting the Computer and Power Source . . . . . . . . . . . 2-3
2.3 Communicating with the Acutime 2000 . . . . . . . . . . . . . . 2-4

vi Acutime 2000 Synchronization Kit User Guide
Contents
3 Acutime 2000 Installation
3.1 Choosing a Location . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.2 Mounting the Smart Antenna. . . . . . . . . . . . . . . . . . . . 3-4
3.3 Routing and Securing the Interface Cable . . . . . . . . . . . . . 3-5
3.4 Connecting the Host System . . . . . . . . . . . . . . . . . . . . 3-6
4 Acutime 2000 Connections
4.1 Interface and Power Connections. . . . . . . . . . . . . . . . . . 4-2
4.2 Interface Cables and Connectors . . . . . . . . . . . . . . . . . . 4-4
4.2.1 Pin-Outs . . . . . . . . . . . . . . . . . . . . . . . . . .4-5
4.3 Connection Instructions . . . . . . . . . . . . . . . . . . . . . . 4-7
4.3.1 Power Connection (Red and Black Wires) . . . . . . . .4-7
4.3.2 Timing Pulse Connections. . . . . . . . . . . . . . . . .4-7
4.3.3 Serial Port Connections . . . . . . . . . . . . . . . . . .4-8
4.3.4 Event Input. . . . . . . . . . . . . . . . . . . . . . . . .4-9
5 System Operation
5.1 Start-Up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.2 Automatic Operation . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5.2.1 Satellite Masks. . . . . . . . . . . . . . . . . . . . . . .5-2
5.2.2 Tracking Modes . . . . . . . . . . . . . . . . . . . . . .5-4
5.2.3 PPS Output Options . . . . . . . . . . . . . . . . . . . .5-6
5.2.4 PPS Quantization Error . . . . . . . . . . . . . . . . . .5-7
5.2.5 External Event Input. . . . . . . . . . . . . . . . . . . .5-9
5.2.6 Cable Delay Compensation . . . . . . . . . . . . . . . .5-9
5.3 Serial Data Communication . . . . . . . . . . . . . . . . . . . . 5-10
5.3.1 Port B . . . . . . . . . . . . . . . . . . . . . . . . . . .5-10
5.3.2 Port A (Timing) . . . . . . . . . . . . . . . . . . . . . .5-10
5.4 GPS Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-12
5.4.1 Timing Operation . . . . . . . . . . . . . . . . . . . . .5-13

Acutime 2000 Synchronization Kit User Guide vii
Contents
5.5 Using the Acutime 2000 in Mobile Applications . . . . . . . . . 5-15
5.6 Customizing Acutime 2000 Operations . . . . . . . . . . . . . . 5-16
6 NTP Software Installation and Configuration
6.1 Network Time Protocol. . . . . . . . . . . . . . . . . . . . . . . 6-1
6.1.1 NTP Time Servers . . . . . . . . . . . . . . . . . . . . .6-2
6.2 Software Sources and Compatibility . . . . . . . . . . . . . . . . 6-3
6.2.1 Installation Support . . . . . . . . . . . . . . . . . . . .6-4
6.3 Pre-Installation Check List . . . . . . . . . . . . . . . . . . . . . 6-4
6.3.1 GPS Preparation . . . . . . . . . . . . . . . . . . . . . .6-5
6.3.2 Host System Preparation . . . . . . . . . . . . . . . . .6-6
6.3.3 Operating System Specific Information . . . . . . . . . .6-7
6.4 Time Transfer Cable Connection . . . . . . . . . . . . . . . . . . 6-8
6.4.1 Optional Connections . . . . . . . . . . . . . . . . . . .6-9
6.5 NTP Software Installation . . . . . . . . . . . . . . . . . . . . . 6-10
6.5.1 NTP Configuration File . . . . . . . . . . . . . . . . . .6-11
6.5.2 Acutime Configuration . . . . . . . . . . . . . . . . . .6-12
6.5.3 Network Server Selection . . . . . . . . . . . . . . . . .6-13
6.5.4 Additional Configuration Information. . . . . . . . . . .6-14
6.6 Windows NT Installation . . . . . . . . . . . . . . . . . . . . . . 6-15
6.6.1 Automatic Installation . . . . . . . . . . . . . . . . . . .6-16
6.6.2 Manual Installation . . . . . . . . . . . . . . . . . . . .6-17
6.6.3 Starting the Service . . . . . . . . . . . . . . . . . . . .6-23
6.7 UNIX Installation. . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.7.1 Create the Configuration File . . . . . . . . . . . . . . .6-25
6.7.2 Set Up Device Links. . . . . . . . . . . . . . . . . . . .6-26
6.7.3 Hardware Configuration . . . . . . . . . . . . . . . . . .6-28
6.7.4 Copying Executable Files . . . . . . . . . . . . . . . . .6-29
6.7.5 System Initialization. . . . . . . . . . . . . . . . . . . .6-30
6.7.6 Start NTP . . . . . . . . . . . . . . . . . . . . . . . . .6-31

viii Acutime 2000 Synchronization Kit User Guide
Contents
6.8 Monitoring NTP . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.8.1 NTP Events on Windows NT . . . . . . . . . . . . . . .6-32
6.8.2 UNIX System Log Files . . . . . . . . . . . . . . . . . .6-34
6.8.3 NTPQ – The NTP Query Utility . . . . . . . . . . . . .6-35
A Trimble Standard Interface Protocol
A.1 Interface Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
A.1.1 Packet Structure . . . . . . . . . . . . . . . . . . . . . .A-2
A.2 Physical Interface Characteristics . . . . . . . . . . . . . . . . . A-3
A.2.1 Nomenclature . . . . . . . . . . . . . . . . . . . . . . .A-4
A.2.2 Protocol Capabilities. . . . . . . . . . . . . . . . . . . .A-4
A.2.3 Event Input. . . . . . . . . . . . . . . . . . . . . . . . .A-6
A.3 Packets Output at Power-Up . . . . . . . . . . . . . . . . . . . . A-6
A.4 Receiver Warm Start . . . . . . . . . . . . . . . . . . . . . . . . A-7
A.5 Default Background Packets for Acutime 2000 . . . . . . . . . . A-8
A.6 Default Automatic Position and Velocity Reports
for Acutime 2000 . . . . . . . . . . . . . . . . . . . . . . . . . A-9
A.7 Automatic Primary and Supplemental Timing Reports
for ACE UTC . . . . . . . . . . . . . . . . . . . . . . . . . . . A-9
A.8 Low-Latency Timing Packets . . . . . . . . . . . . . . . . . . . A-10
A.9 Event Packets . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-11
A.10 Satellite Data Packets. . . . . . . . . . . . . . . . . . . . . . . . A-11
A.11 Customizing Receiver Operations . . . . . . . . . . . . . . . . . A-12
A.12 Command Packets Sent to the Receiver . . . . . . . . . . . . . . A-14
A.13 Report Packets Sent by the GPS Receiver to the User . . . . . . . A-16
A.14 Packet Structure . . . . . . . . . . . . . . . . . . . . . . . . . . A-19
A.15 Packet Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . A-20
A.16 Custom OEM Packets . . . . . . . . . . . . . . . . . . . . . . . A-85
A.17 TSIP Superpackets . . . . . . . . . . . . . . . . . . . . . . . . . A-85
A.18 Datums . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-126
A.19 Sample TSIP Routines . . . . . . . . . . . . . . . . . . . . . . . A-134

Acutime 2000 Synchronization Kit User Guide ix
Contents
B Timing Receiver Monitor
B.1 Start-Up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
B.2 Main screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-2
C NMEA 0183
C.1 The NMEA 0183 Communication Interface . . . . . . . . . . . . C-2
C.2 NMEA 0183 Message Format . . . . . . . . . . . . . . . . . . . C-2
C.3 NMEA 0183 Message Options . . . . . . . . . . . . . . . . . . . C-4
C.4 NMEA 0183 Message Formats. . . . . . . . . . . . . . . . . . . C-5
C.4.1 GGA – GPS Fix Data . . . . . . . . . . . . . . . . . . .C-5
C.4.2 GLL – Geographic Position – Latitude/Longitude . . . .C-6
C.4.3 GSA – GPS DOP and Active Satellites . . . . . . . . . .C-7
C.4.4 GSV – GPS Satellites in View. . . . . . . . . . . . . . .C-8
C.4.5 RMC – Recommended Minimum Specific
GPS/Transit Data . . . . . . . . . . . . . . . . . . . . .C-9
C.4.6 VTG – Track Made Good and Ground Speed. . . . . . .C-10
C.4.7 ZDA – Time & Date . . . . . . . . . . . . . . . . . . . .C-11
D Specifications and Drawings
D.1 Acutime 2000 GPS Smart Antenna Specifications. . . . . . . . . D-1
D.2 Acutime 2000 Standard Interface Cable Diagram . . . . . . . . . D-5
E NTP Diagnostics and Debugging
E.1 Diagnostics and Debugging . . . . . . . . . . . . . . . . . . . . E-1
E.1.1 System Log Entries . . . . . . . . . . . . . . . . . . . .E-1
E.1.2 Error Log Entries . . . . . . . . . . . . . . . . . . . . .E-3
E.2 Running NTP in Debug Mode . . . . . . . . . . . . . . . . . . . E-8
E.2.1 Debug Mode Not Available . . . . . . . . . . . . . . . .E-9
E.2.2 NTP Startup and Acutime Poll . . . . . . . . . . . . . .E-9
E.2.3 Acutime is not Responding . . . . . . . . . . . . . . . .E-11

x Acutime 2000 Synchronization Kit User Guide
Contents
E.2.4 Running NTP with Event Polling Disabled . . . . . . . .E-12
E.2.5 Incorrect Port and Bad Data . . . . . . . . . . . . . . . .E-15
E.2.6 Serial Port is Unavailable . . . . . . . . . . . . . . . . .E-16
E.3 Compiling the NTP Distribution . . . . . . . . . . . . . . . . . . E-17
E.4 Windows NT Administration. . . . . . . . . . . . . . . . . . . . E-21
E.4.1 Controlling the NTP Service . . . . . . . . . . . . . . .E-21
E.4.2 Removing the NTP Service . . . . . . . . . . . . . . . .E-21
E.5 Additional Information . . . . . . . . . . . . . . . . . . . . . . . E-23
F Theory of Operation
F.1 GPS Satellite Message . . . . . . . . . . . . . . . . . . . . . . . F-2
F.2 Satellite Acquisition and Time to First Fix. . . . . . . . . . . . . F-3
F.2.1 Cold Start . . . . . . . . . . . . . . . . . . . . . . . . .F-3
F.2.2 Warm Start. . . . . . . . . . . . . . . . . . . . . . . . .F-4
F.2.3 "Garage Search" Strategy . . . . . . . . . . . . . . . . .F-5
F.2.4 Hot Start . . . . . . . . . . . . . . . . . . . . . . . . . .F-5
F.3 Position Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . F-6
F.3.1 Selective Availability (S/A) . . . . . . . . . . . . . . . .F-6
F.4 Coordinate Systems. . . . . . . . . . . . . . . . . . . . . . . . . F-7
F.4.1 TSIP . . . . . . . . . . . . . . . . . . . . . . . . . . . .F-7
F.4.2 NMEA 0183 . . . . . . . . . . . . . . . . . . . . . . . .F-7
F.5 Performance Characteristics . . . . . . . . . . . . . . . . . . . . F-8
F.5.1 Update Rate . . . . . . . . . . . . . . . . . . . . . . . .F-8
F.5.2 Dynamic Limits . . . . . . . . . . . . . . . . . . . . . .F-8
F.5.3 Re-Acquisition. . . . . . . . . . . . . . . . . . . . . . .F-8
F.6 System Architecture . . . . . . . . . . . . . . . . . . . . . . . . F-10
Glossary
Index

Acutime 2000 Synchronization Kit User Guide xi
List of Figures
Figure 1-1 Acutime 2000 GPS Smart Antenna Enclosure . . . . . . . 1-3
Figure 2-1 Connection Diagram . . . . . . . . . . . . . . . . . 2-3
Figure 3-1 Mounted Antenna . . . . . . . . . . . . . . . . . . 3-2
Figure 4-1 Acutime 2000 Interface Connector . . . . . . . . . . . 4-2
Figure 4-2 Acutime 2000 12-pin Connector format. . . . . . . . . . 4-3
Figure 5-1 PPS Quantization Error . . . . . . . . . . . . . . . . 5-7
Figure 5-2 Removing the Quantization Error from the PPS Output . . . 5-8
Figure 6-1 Time Transfer Connection Diagram . . . . . . . . . . . 6-8
Figure 6-2 NTP Configuration File . . . . . . . . . . . . . . . . 6-11
Figure 6-3 Disabling Serial Port Services Using an Administrative Tool . 6-28
Figure 6-4 Sample UNIX Log Entries . . . . . . . . . . . . . . . 6-34
Figure D-1 Acutime 2000 Standard Interface Cable. . . . . . . . . . D-5
Figure D-2 NTP Interface Cable . . . . . . . . . . . . . . . . . D-6
Figure F-1 Acutime 2000 Block Diagram (RS-232 Version) . . . . . . F-11
Figure F-2 Acutime 2000 Block Diagram (RS-422 Version) . . . . . . F-11

xii Acutime 2000 Synchronization Kit User Guide
List of Figures

Acutime 2000 Synchronization Kit User Guide xiii
List of Tables
Table 4-1 Mating Connectors . . . . . . . . . . . . . . . . . . . . . . . 4-4
Table 4-2 Acutime 2000 RS-422 Cable Pin-Out . . . . . . . . . . . . . 4-5
Table 4-3 Acutime 2000 RS-232 Cable Pin-Out . . . . . . . . . . . . . 4-6
Table 5-1 Default Satellite Mask Settings. . . . . . . . . . . . . . . . . 5-2
Table 5-2 Receiver Configuration (segment 2) . . . . . . . . . . . . . . 5-17
Table 5-3 OEM Configuration (segment 3) . . . . . . . . . . . . . . . . 5-17
Table 5-4 Port A and B Configuration (segment 4) . . . . . . . . . . . . 5-18
Table 5-5 PPS Configuration (segment 5). . . . . . . . . . . . . . . . . 5-18
Table 5-6 Position Information (segment 6) . . . . . . . . . . . . . . . 5-18
Table 5-7 Self-Survey Configuration (segment 7) . . . . . . . . . . . . 5-19
Table 5-8 NMEA Configuration (segment 8) . . . . . . . . . . . . . . . 5-19
Table 5-9 UTC Information (segment 11) . . . . . . . . . . . . . . . . 5-19
Table 6-1 System Serial Ports and Symbolic Link Names . . . . . . . . 6-27
Table A-1 Ace UTC Port Translation Table. . . . . . . . . . . . . . . . A-4
Table A-2 Acutime 2000 Port Translation Table . . . . . . . . . . . . . A-4
Table A-3 Secondary Port Features (Acutime 2000) . . . . . . . . . . . A-5
Table A-4 Secondary Port Features (Ace UTC) . . . . . . . . . . . . . . A-6
Table A-5 Event Packets . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Table A-6 Packets Output at Power-Up . . . . . . . . . . . . . . . . . . A-7
Table A-7 Receiver Warm Start Commands . . . . . . . . . . . . . . . A-7
Table A-8 Background Packets . . . . . . . . . . . . . . . . . . . . . . A-8
Table A-9 Automatic position and Velocity Reports . . . . . . . . . . . A-9
Table A-10 Low-Latency Timing Packets . . . . . . . . . . . . . . . . . A-10

xiv Acutime 2000 Synchronization Kit User Guide
List of Tables
Table A-11 Satellite Data Packets. . . . . . . . . . . . . . . . . . . . . . A-11
Table A-12 Customizing Receiver Operations . . . . . . . . . . . . . . . A-12
Table A-13 Advanced Packets . . . . . . . . . . . . . . . . . . . . . . . A-13
Table A-14 Command Packets Sent to the Receiver . . . . . . . . . . . . A-14
Table A-15 Report Packets Sent by GPS Receiver to User . . . . . . . . . A-16
Table A-16 Command Packet 1D - Clear Oscillator Offset. . . . . . . . . A-20
Table A-17 Command Packet 1D - Set Oscillator Offset . . . . . . . . . . A-20
Table A-18 Command Packet 1E . . . . . . . . . . . . . . . . . . . . . . A-21
Table A-19 Command Packet 23 . . . . . . . . . . . . . . . . . . . . . . A-22
Table A-20 Command Packet 2B . . . . . . . . . . . . . . . . . . . . . . A-26
Table A-21 Command Packet 2E . . . . . . . . . . . . . . . . . . . . . . A-27
Table A-22 Command Packet 35 . . . . . . . . . . . . . . . . . . . . . . A-31
Table A-23 Command Packet 38 . . . . . . . . . . . . . . . . . . . . . . A-36
Table A-24 Command Packet 39 . . . . . . . . . . . . . . . . . . . . . . A-37
Table A-25 Command Packet 3A . . . . . . . . . . . . . . . . . . . . . . A-38
Table A-26 Command Packet 3B . . . . . . . . . . . . . . . . . . . . . . A-38
Table A-27 Command Packet 3C . . . . . . . . . . . . . . . . . . . . . . A-39
Table A-28 Command Packet 3F-11 . . . . . . . . . . . . . . . . . . . . A-40
Table A-29 Report Packet 40 . . . . . . . . . . . . . . . . . . . . . . . . A-40
Table A-30 Report Packet 41 . . . . . . . . . . . . . . . . . . . . . . . . A-41
Table A-31 Relationship Between Packet 41 and Packet 46 . . . . . . . . A-42
Table A-32 Report Packet 42 . . . . . . . . . . . . . . . . . . . . . . . . A-43
Table A-33 Report Packet 43 . . . . . . . . . . . . . . . . . . . . . . . . A-44
Table A-34 Report Packet 45 . . . . . . . . . . . . . . . . . . . . . . . . A-45
Table A-35 Report Packet 46 . . . . . . . . . . . . . . . . . . . . . . . . A-46
Table A-36 Report Packet 46 . . . . . . . . . . . . . . . . . . . . . . . . A-47
Table A-37 Report Packet 47 . . . . . . . . . . . . . . . . . . . . . . . . A-48
Table A-38 Report Packet 49 . . . . . . . . . . . . . . . . . . . . . . . . A-49
Table A-39 Report Packet 4A – Report Reference Altitude . . . . . . . . A-49
Table A-40 Report Packet 4A – Report Single-Precision LLA Position . . A-50

Acutime 2000 Synchronization Kit User Guide xv
List of Tables
Table A-41 Report Packet 4B . . . . . . . . . . . . . . . . . . . . . . . . A-51
Table A-42 Byte 1 Bit Encoding – Status 1. . . . . . . . . . . . . . . . . A-51
Table A-43 Report Packet 4C . . . . . . . . . . . . . . . . . . . . . . . . A-52
Table A-44 Report Packet 4E . . . . . . . . . . . . . . . . . . . . . . . . A-53
Table A-45 Report UTC Parameters . . . . . . . . . . . . . . . . . . . . A-54
Table A-46 Report Packet 54 . . . . . . . . . . . . . . . . . . . . . . . . A-55
Table A-47 0x56 – Velocity Fix, East-North-Up (ENU) Report . . . . . . A-56
Table A-48 Report Packet 57 . . . . . . . . . . . . . . . . . . . . . . . . A-57
Table A-49 Report Packet 58 . . . . . . . . . . . . . . . . . . . . . . . . A-58
Table A-50 Report Packet 58 – ALMANAC Data Report . . . . . . . . . A-59
Table A-51 Report Packet 58 – ALMANAC HEALTH Data Report. . . . A-60
Table A-52 Report Packet 58 – IONOSPHERE Data Report. . . . . . . . A-60
Table A-53 Report Packet 58 – UTC Data Report . . . . . . . . . . . . . A-61
Table A-54 Report Packet 58 – EPHEMERIS Data Report . . . . . . . . A-61
Table A-55 Report Packet 59 . . . . . . . . . . . . . . . . . . . . . . . . A-63
Table A-56 Report Packet 5A. . . . . . . . . . . . . . . . . . . . . . . . A-64
Table A-57 Report Packet 5B . . . . . . . . . . . . . . . . . . . . . . . . A-67
Table A-58 Report Packet 5C . . . . . . . . . . . . . . . . . . . . . . . . A-68
Table A-59 Report Packet 5F-11 – EEPROM Segment Status Report . . . A-70
Table A-60 Report Packet 0x60 Data Formats . . . . . . . . . . . . . . . A-71
Table A-61 Report Packet 0x60 Data Formats for Health and Power . . . A-72
Table A-62 Command Packet 0x61 Data Formats . . . . . . . . . . . . . A-73
Table A-63 Report Packet 6D . . . . . . . . . . . . . . . . . . . . . . . . A-74
Table A-64 Command Packet 7A . . . . . . . . . . . . . . . . . . . . . . A-75
Table A-65 Report Packet 83 . . . . . . . . . . . . . . . . . . . . . . . . A-76
Table A-66 Report Packet 84 . . . . . . . . . . . . . . . . . . . . . . . . A-77
Table A-67 Survey State Configurations . . . . . . . . . . . . . . . . . . A-78
Table A-68 Vaild GPS Configuration Settings . . . . . . . . . . . . . . . A-79
Table A-69 Command Packet BB. . . . . . . . . . . . . . . . . . . . . . A-81
Table A-70 Command Packet BC. . . . . . . . . . . . . . . . . . . . . . A-83

xvi Acutime 2000 Synchronization Kit User Guide
List of Tables
Table A-71 Command Packet 8E-14 . . . . . . . . . . . . . . . . . . . . A-87
Table A-72 Command Packet 8E-14 . . . . . . . . . . . . . . . . . . . . A-88
Table A-73 Command Packet 8E-20 . . . . . . . . . . . . . . . . . . . . A-89
Table A-74 Command Packet 0x8E-45 . . . . . . . . . . . . . . . . . . . A-90
Table A-75 Command Packet 8E-4A . . . . . . . . . . . . . . . . . . . . A-91
Table A-76 Command Packet 8E-4D . . . . . . . . . . . . . . . . . . . . A-92
Table A-77 Command Packet 8E-4D - Packets Affected By Bits . . . . . A-93
Table A-78 Command Packet 0x8E-4E. . . . . . . . . . . . . . . . . . . A-95
Table A-79 Command Packet 0x8E-4F . . . . . . . . . . . . . . . . . . . A-95
Table A-80 Command Packet 8E-A5 . . . . . . . . . . . . . . . . . . . . A-97
Table A-81 Command Packet 8E-A6 . . . . . . . . . . . . . . . . . . . . A-98
Table A-82 Command Packet 8E-A9 Data Format <<segment 7>> . . . . A-99
Table A-83 Command Packet 8E-AB. . . . . . . . . . . . . . . . . . . . A-100
Table A-84 Command Packet 8E-AC . . . . . . . . . . . . . . . . . . . . A-101
Table A-85 Report Packet 8F-0B . . . . . . . . . . . . . . . . . . . . . . A-103
Table A-86 Report Packet 8F-14 . . . . . . . . . . . . . . . . . . . . . . A-105
Table A-87 Report Packet 8F-20 . . . . . . . . . . . . . . . . . . . . . . A-106
Table A-88 Report Packet 8F-20 . . . . . . . . . . . . . . . . . . . . . . A-107
Table A-89 Report Packet 0x8F-26 . . . . . . . . . . . . . . . . . . . . . A-108
Table A-90 Report Packet 8F-41 . . . . . . . . . . . . . . . . . . . . . . A-109
Table A-91 Report Packet 8F-42 . . . . . . . . . . . . . . . . . . . . . . A-110
Table A-92 Command Packet 8E-AD. . . . . . . . . . . . . . . . . . . . A-111
Table A-93 Report Packet 8F-4A . . . . . . . . . . . . . . . . . . . . . . A-112
Table A-94 Report Packet 8F-4D . . . . . . . . . . . . . . . . . . . . . . A-113
Table A-95 Report Packet 8F-4D . . . . . . . . . . . . . . . . . . . . . . A-113
Table A-96 Report Packet 0x8F-AB . . . . . . . . . . . . . . . . . . . . A-117
Table A-97 Report Packet 8F-AC . . . . . . . . . . . . . . . . . . . . . . A-121
Table A-98 Report Packet 8F-AD. . . . . . . . . . . . . . . . . . . . . . A-123
Table A-99 Tracking Status Flag Definitions . . . . . . . . . . . . . . . . A-124
Table A-100 Leap Second Flag Definitions . . . . . . . . . . . . . . . . . A-125

Acutime 2000 Synchronization Kit User Guide xvii
List of Tables
Table A-101 Datums . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-126
Table C-1 NMEA 0183 Characteristics . . . . . . . . . . . . . . . . . . C-2
Table C-2 Acutime 2000 NMEA Messages . . . . . . . . . . . . . . . . C-4
Table C-3 GGA – GPS Fix Data Message Parameters . . . . . . . . . . C-5
Table C-4 GLL – Geographic Position – Latitude / Longitude Message
Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . C-6
Table C-5 GSA – GPS DOP and Active Satellites Message Parameters . C-7
Table C-6 GSV – GPS Satellites in View Message Parameters. . . . . . C-8
Table C-7 RMC – Recommended Minimum Specific GPS / Transit Data
Message Parameters . . . . . . . . . . . . . . . . . . . . . . C-9
Table C-8 VTG – Track Made Good and Ground Speed Message
Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . C-10
Table C-9 ZDA – Time & Date Message Parameters . . . . . . . . . . . C-11
Table D-1 Physical Specifications . . . . . . . . . . . . . . . . . . . . . D-1
Table D-2 Environmental Specifications . . . . . . . . . . . . . . . . . D-2
Table D-3 Performance Specifications . . . . . . . . . . . . . . . . . . D-2
Table D-4 Electrical Specifications . . . . . . . . . . . . . . . . . . . . D-3
Table D-5 Serial Protocols. . . . . . . . . . . . . . . . . . . . . . . . . D-4
Table E-1 Troubleshooting: Acutime is Not Responding . . . . . . . . . E-12
Table E-2 Troubleshooting: Incorrect Port and Bad Data . . . . . . . . . E-15
Table F-1 Dynamic Upper Bound . . . . . . . . . . . . . . . . . . . . . F-8

xviii Acutime 2000 Synchronization Kit User Guide
List of Tables
Acutime™ 2000 Synchronization Kit User Guide xix
About This Manual
Welcome to the Acutime™ 2000 Synchronization Kit User Guide.
This manual describes how to integrate the Acutime 2000 smart
antenna with your host system.
!Note – The Acutime 2000 has replaced the Palisade™ and Palisade
Network Time Protocol (NTP). It can be used with NTP (See Chapter
6) or as a stand-alone timing receiver. In some instances the term
Palisade is still used in the screen captures and text in this manual.
This will be updated in future revisions.
Scope and Audience
Even if you have used other Global Positioning System (GPS)
products before, Trimble recommends that you spend some time
reading this manual to learn about the special features of this product.
If you are not familiar with GPS, Trimble recommends that you do
one of the following:
•Read the booklet GPS, A Guide to the Next Utility (available
from Trimble).
• Complete the GPS tutorial at:
•www.trimble.com/gps
The following sections provide you with a guide to this manual, as
well as to other documentation that you may have received with this
product.

xx Acutime™ 2000 Synchronization Kit User Guide
About This Manual
Organization
This manual contains the following:
•Chapter 1, Introduction, describes the Acutime 2000 GPS
smart antenna.
•Chapter 2, Getting Started, describes how to quickly install,
connect and operate the Acutime 2000.
•Chapter 3, Acutime 2000 Installation, provides general
installation guidelines.
•Chapter 4, Acutime 2000 Connections, provides detailed
interfacing guidelines for connecting the Acutime 2000 GPS
smart antenna to the host system.
•Chapter 5, System Operation, describes the operating
characteristics of the Acutime 2000 from power-up through
the output of GPS information. GPS timing applications are
also described.
•Chapter 6, NTP Software Installation and Configuration,
desrcibes the use of the Acutime 2000 in a NTP time server
implemintation.
•Appendix A, Trimble Standard Interface Protocol, defines the
TSIP protocol and the structure of all message packets.
•Appendix B, Timing Receiver Monitor, describes the monitor
program included on the Acutime 2000 CD-ROM.
•Appendix C, NMEA 0183, provides a brief description of the
NMEA 0183 protocol and defines the structure of the NMEA
message output by the Acutime 2000.
•Appendix D, Specifications and Drawings, includes the
specifications and mechanical drawings for the Acutime 2000
GPS smart antenna interface cables.
•Appendix E, NTP Diagnostics and Debugging, provides
information to help troubleshoot NTP problems.

Acutime™ 2000 Synchronization Kit User Guide xxi
About This Manual
•Appendix F, Theory of Operation, gives a more detailed
technical description of many of the Acutime 2000 GPS
smart antenna's operating characteristics. A brief overview of
the system architecture is also presented.
•The Glossary contains definitions of GPS and technical terms
used in this manual.
Reader Feedback
Your feedback about the product documentation helps us to improve it
with each revision. To forward your comments, do one of the
following:
• Send an email to ReaderFeedback@trimble.com.
• Complete the Reader Comment Form at the back of this manual
and mail or fax it according to the instructions at the bottom of
the form.
If the Reader Comment Form is not available, send your
comments and suggestions to the address in the front of this
manual. Please mark it Attention: Documentation Group.
All comments and suggestions become the property of Trimble
Navigation Limited. Thank you for your help.

xxii Acutime™ 2000 Synchronization Kit User Guide
About This Manual
Related Information
The following sections discuss other sources of information that
introduce, extend, or update this manual.
Update Notes
If any changes are made to the firmware, update notes and firmware
are posted to the Trimble Web site.
World Wide Web (WWW) Site
For more information about Trimble, visit our site on the
World Wide Web:
•www.trimble.com

Acutime™ 2000 Synchronization Kit User Guide xxiii
About This Manual
Technical Assistance
If you have a problem and cannot find the information you need in the
product documentation, contact your sales representative.
Alternatively, request technical support via email at
trimble_support@trimble.com or by phone at 1-800-767-4822.
Abbreviations
In this manual, the following abbreviations are used:
•TSIP - Trimble Standard Interface Protocol
•host system or host - the device or instrument connected to
the Acutime 2000 smart antenna
The host system can be a PC, network equipment, or timing
system, depending on the application.
Document Conventions
Italics identify software menus, menu commands, dialog boxes, and
the dialog box fields.
SMALL CAPITALS identify user commands, directories, filenames, and
filename extensions.
Helvetica represents messages printed on the screen.
Courier Bold represents information that you must type in a
software screen or window.
Helvetica Bold identifies a software command button.
[Ctrl] is an example of a hardware function key that you must press on
a personal computer (PC). If you must press more than one of these at
the same time, this is represented by a plus sign, for example,
[Ctrl] + [C].
xxiv Acutime™ 2000 Synchronization Kit User Guide
About This Manual
Cautions and Notes
Cautions, notes, and tips draw attention to important information and
indicate its nature and purpose.
"Caution – Cautions describe operating procedures and practices
required for correct operation and alert you to situations that could
cause hardware damage or malfunction or software error.
!Note – Notes give additional significant information about the subject
to increase your knowledge, or guide your actions.
#Warning – Warnings alert you to situations that could cause personal
injury or unrecoverable data loss. A warning precedes the text it
references.

Acutime 2000 Synchronization Kit User Guide 1-1
1 Introduction
This chapter provides an overview of the Acutime 2000 GPS smart
antenna.
1.1 Overview
The Acutime 2000 is the latest in the Trimble family of GPS smart
antennas. The smart antenna allows OEMs and systems integrators to
add GPS capability to their product lines quickly and easily, without
becoming GPS experts. The Trimble Acutime 2000 GPS smart
antenna encompasses the experience of four product lines: Acutis™,
Acutime™, Acutime™ II and Palisade™.
The Acutime 2000, using Trimble’s latest GPS technology, is
designed for wireless voice and data network synchronization. It
offers precise PPS output, event input, and also supports long cable
runs.
The Acutime 2000 is composed of a set of matched subsystems. This
ensures optimal GPS performance, long-term reliability, ease of
operation, and easy integration.
The Acutime 2000 houses the GPS receiver, antenna, power supply,
interface and other support circuitry in a single enclosure that mounts
like an antenna. As a sealed, shielded, self-contained unit with a
digital interface, the Acutime 2000 eliminates most of the difficulties
associated with integrating GPS. Once power is applied, the
Acutime 2000 self-initializes, acquires satellite signals, and computes
position and time, automatically outputting this data to the host
system.

1-2 Acutime 2000 Synchronization Kit User Guide
Introduction 1
To integrate the Acutime 2000, the OEM only needs to add a standard
serial interface port on the host system and develop a software
interface. Commonly used interface protocols, such as NMEA 0183,
and the software interface tool (the Timing Receiver Monitor),
simplify this task, minimizing the engineering costs associated with
integrating the Acutime 2000.
1.2 Acutime 2000 GPS Smart Antenna Features
The Acutime 2000 has many features common to previous products
in the Trimble family of smart antennas, including:
•an 8 to 36-volt DC power supply with protection against
reverse polarity.
•Trimble's advanced multi-channel GPS receiver architecture,
including:
•the reference oscillator
•the synthesizer and IF circuits
•the digital signal processing hardware
•a microprocessor
•the serial interface circuitry
•a patch GPS antenna with a proprietary pre-amp design for
excellent performance against jamming signals.
•a sealed, waterproof connector supporting both the power and
interface connections.
Acutime 2000 Synchronization Kit User Guide 1-3
1Introduction
•a waterproof, UV-resistant, plastic (polycarbonate) enclosure
with a proven epoxy seal.
(The enclosure is illustrated in Figure 1-1).
Figure 1-1 Acutime 2000 GPS Smart Antenna Enclosure
Acutime 2000 generates a PPS synchronized to UTC within 50
nanoseconds (one sigma). This level of precision is obtained using an
overdetermined time solution, an 80-nanosecond pulse steering
resolution and a T-RAIM (Time-Receiver Autonomous Integrity
Monitor) algorithm. The Acutime 2000’s PPS conforms to RS-422,
which supports long cable runs. The Acutime 2000 outputs a
comprehensive time packet after each PPS on a dedicated serial port.
It also features an automatic operating mode that requires no user or
host intervention. The Acutime 2000 accepts an event input and
reports time stamps in response to an external event signal.
The Acutime 2000 is available in the following configurations:
•Acutime 2000 with RS-422 Interface and 8-channel receiver
•Acutime 2000 with RS-232 Interface and 8-channel receiver

1-4 Acutime 2000 Synchronization Kit User Guide
Introduction 1
1.3 Starter Kit
The Acutime 2000 Synchronization Kit includes the following:
•Acutime 2000 with RS-422 interface and 8-channel receiver
•Acutime 2000 User Guide
•100’ interface cable with DB25 connectors
•RS-422 to RS-232 converter
•Timing Receiver Monitor software
•Power Supply
For information about Acutime 2000 interface cables, see Chapter 4,
Acutime 2000 Connections.
For information about part numbers, refer to:
•www.trimble.com/products/acutime2000
Acutime 2000 Synchronization Kit User Guide 2-1
2 Getting Started
This chapter describes how to quickly install, connect and
communicate with the Acutime 2000 GPS Smart Antenna.
!Note – For permanent installations, see the instructions in Chapter 3.
You will need the following items:
•a PC running Windows
•the Timing Receiver Monitor software for Windows
(also available on the web site)
•an interface cable for the smart antenna
•an RS-422 to RS-232 converter
(included in the Acutime 2000 Starter Kit)
You may require this if you are using an Acutime 2000 with
an RS-422 interface. In many cases, however, a PC’s
communication port is flexible enough to accept an RS-422
signal without a converter.
•connectors/adapters for connecting the interface cable to the
PC’s communication port
The interface cable included in the Acutime 2000 Starter Kit
is terminated with a DB25 connector. The standard interface
cables are not terminated with connectors.
•a DC power source
The Acutime 2000 accepts 8-36 V DC power, and draws
approximately 110 milliamps at 12 volts.

2-2 Acutime 2000 Synchronization Kit User Guide
Getting Started 2
•A mounting pole
The Acutime 2000 accepts a standard 1"-14 straight thread.
2.1 Connecting the Smart Antenna
The Acutime 2000 can be placed anywhere with a clear view of
the sky.
Connect the interface cable to the smart antenna. The connector on
the interface connector has a locking ring for securing the connection.
Acutime 2000 Synchronization Kit User Guide 2-3
2Getting Started
2.2 Connecting the Computer and Power Source
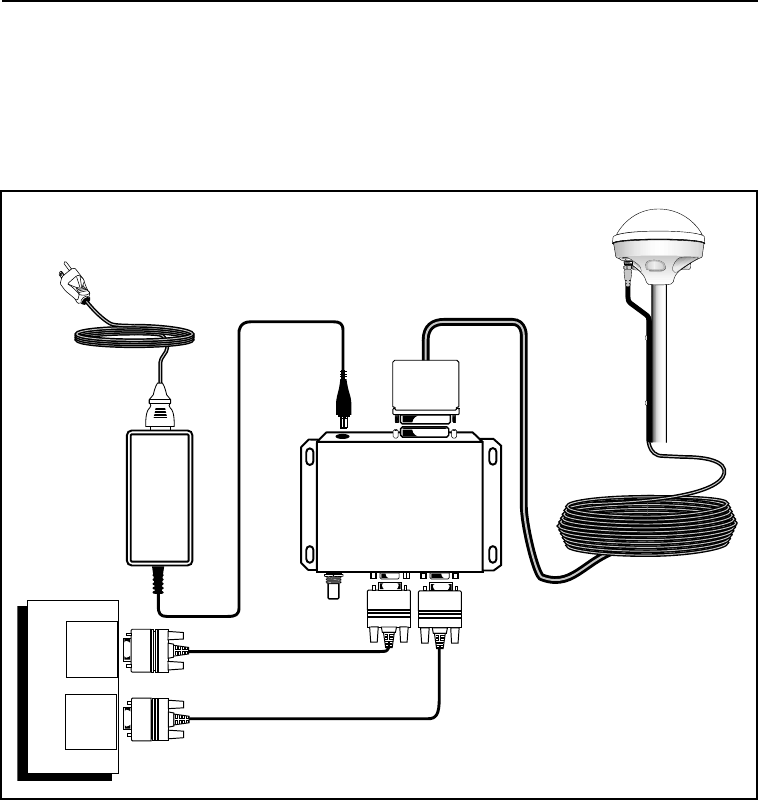
The connection instructions illustrated in Figure 2-1 assume use of
the Trimble interface cable included in the Synchronization Kit. If
you are using your own cable, modify the instructions accordingly.
Figure 2-1 Connection Diagram
Synchronization
Interface
Module
Wall Power Acutime 2000
PPS Port A Port B
Port A
PC
Port B
(primary port)
(RS-422 to RS-232
converter)
(The starter kit includes only one cable.)

2-4 Acutime 2000 Synchronization Kit User Guide
Getting Started 2
2.3 Communicating with the Acutime 2000
When power is applied, the Acutime 2000 acquires a valid set of
satellites and automatically transmits position and time messages.
During the satellite acquisition process, the Acutime 2000 outputs
periodic status messages.
To begin communicating with the Acutime 2000, start the Timing
Receiver Monitor program. Data fields in the Timing Receiver
Monitor program fill up as the data becomes available. For more
information, see Appendix B, Timing Receiver Monitor.

Acutime 2000 Synchronization Kit User Guide 3-1
3 Acutime 2000
Installation
This chapter provides installation guidelines for the Acutime 2000
GPS smart antenna. Installation of the Acutime 2000 requires four
steps:
1. Choosing a location.
2. Mounting the smart antenna.
3. Routing and securing the interface cable.
4. Connecting the host system.
Each of these installation steps is described on the following pages.
3-2 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Installation 3
3.1 Choosing a Location
Select an outdoor location for the antenna (such as the roof of your
building) that has a relatively unobstructed view of the sky. Consider
the length of the cable run and the length of the interface cable when
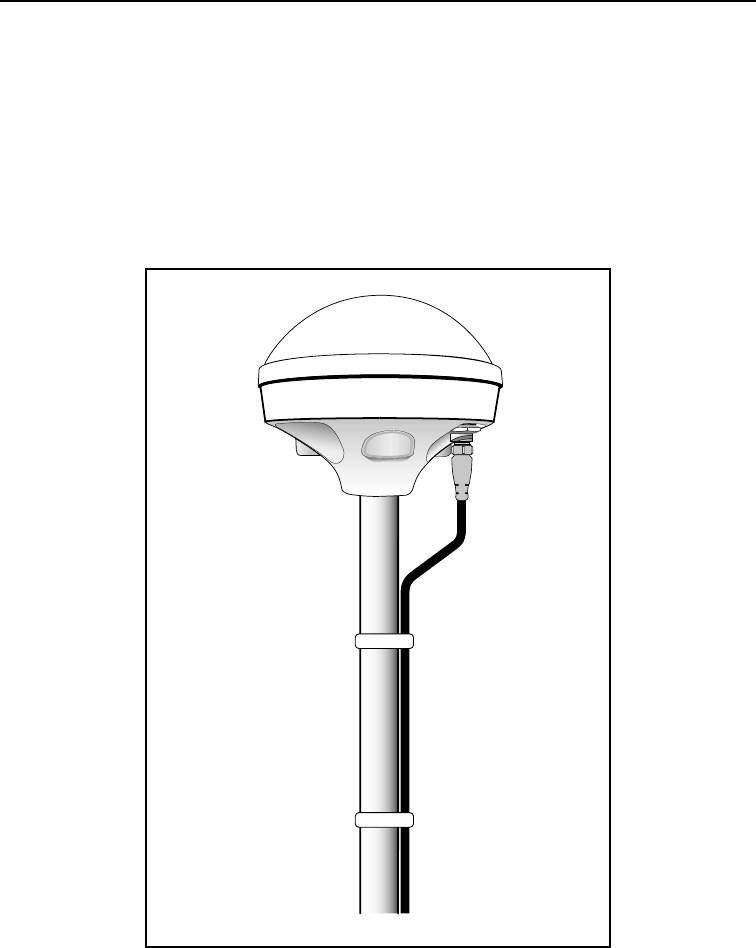
selecting a location. The Acutime 2000 GPS smart antenna is
designed for a pole mount. (The mounting pole is not included with
the Acutime 2000.) Pole mounting is illustrated in Figure 3-1.
Figure 3-1 Mounted Antenna

Acutime 2000 Synchronization Kit User Guide 3-3
3Acutime 2000 Installation
The antenna can receive satellite signals through glass, canvas, and
thin fiberglass, but dense wood, concrete and metal structures shield
the antenna from satellite signals.
The Acutime 2000 GPS smart antenna contains an active antenna. For
optimal performance, place it as far as possible from transmitting
antennas, including radars, satellite communication equipment and
cellular transmitters. When locating the antenna near a radar
installation, ensure that the antenna is positioned outside of the
radar’s cone of transmission. When installing the antenna near
satellite communication equipment, follow the same guideline. For
best results, mount the antenna below and at least ten feet away from
satellite communication equipment.
For installations exposed to shock or vibration exceeding the limits
specified in Appendix D, Specifications and Drawings, use a
mounting scheme that isolates the Acutime 2000 from the excessive
shock or vibration.
3-4 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Installation 3
3.2 Mounting the Smart Antenna
The smart antenna is designed for a pole mount, as illustrated in
Figure 3-1. The threaded socket in the base of the antenna accepts a
standard 1"-14 straight thread. A wide variety of 1"-14 pole mounts
are available from marine hardware suppliers.
After obtaining an appropriate mounting pole, follow these simple
steps to install the Acutime 2000 GPS smart antenna.
1. Secure the mounting pole to a solid structure so that it is
oriented vertically.
2. Thread the smart antenna onto the pole or pipe and hand-
tighten until snug.
"Caution – Do not over-tighten the smart antenna on the pole or use a
tool—this could damage the threaded socket in the base of the
antenna. Also, do not use a thread-locking compound because it can
damage the plastic housing.
3. Connect the interface cable to the smart antenna.
The connector on the interface connector has a locking ring
for securing the connection.
"Caution – Do not over-tighten the locking ring—this can strip the
connector.
Acutime 2000 Synchronization Kit User Guide 3-5
3Acutime 2000 Installation
3.3 Routing and Securing the Interface Cable
After the smart antenna is mounted:
1. Route the interface cable from the smart antenna to the host
location.
!Note – The interface cable is a digital cable, so it can be spliced and
extended, if necessary.
Choose the most direct path to the host system, while
avoiding the following hazards:
•sharp bends or kinks in the cable
•hot surfaces (exhaust manifolds or stacks)
•rotating or reciprocating equipment
•sharp or abrasive surfaces
•door and window jambs
•corrosive fluids or gases
2. When you have established the ideal cable routing, secure the
cable along the routing using tie-wraps.
When securing the cable, start at the antenna and work
towards the host system. To provide strain relief for the
interface cable connections, ensure that the cable is secured at
points close to the smart antenna and the host system.
!Note – Additional protection (for example, heat-shrink tubing) may be
required to protect the cable jacket at points where the cable enters or
exits bulkheads, especially if the opening is rough or sharp.
3. Once the cable is secured, the host end of the cable can be cut
to an appropriate length (if necessary).
Leave enough slack to allow for easy connection to the host
and normal movement (for example, rack, gimbal or swivel
mounts).

3-6 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Installation 3
3.4 Connecting the Host System
The final step, if applicable, is the installation of the connector on the
host end of the cable. The connector installation instructions depend
on the type of connector required by the host system.
For information on pin-outs, see Chapter 4, Acutime 2000
Connections.

Acutime 2000 Synchronization Kit User Guide 4-1
4 Acutime 2000
Connections
This chapter provides instructions on connecting the Acutime 2000 to
the host system and power source.
4-2 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Connections 4
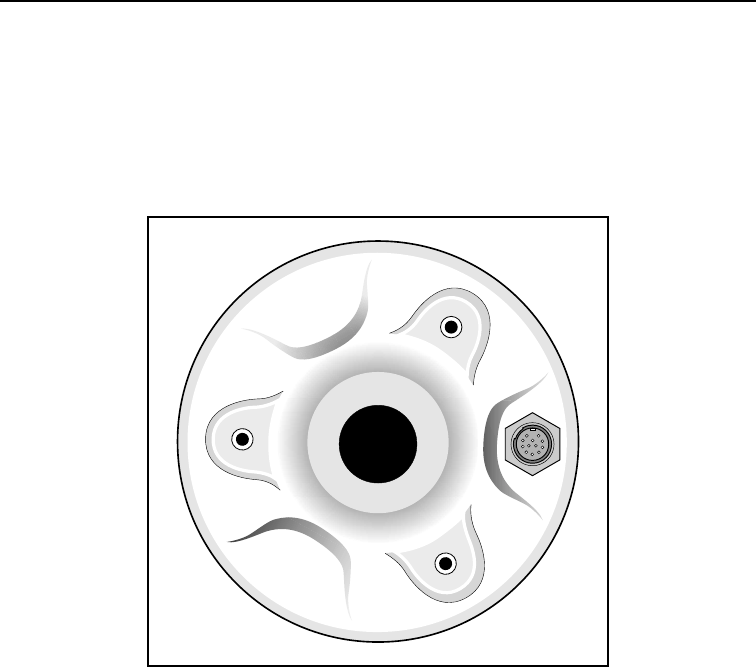
4.1 Interface and Power Connections
The black plastic connector located in the base of the Acutime 2000
supports both the interface and power connections. The Acutime
2000 uses a 12-pin connector. Figure 4-1 illustrates the location of the
connector.
Figure 4-1 Acutime 2000 Interface Connector
2
3
4
5
6
7
8
91
10
11
12
Acutime 2000 Synchronization Kit User Guide 4-3
4Acutime 2000 Connections
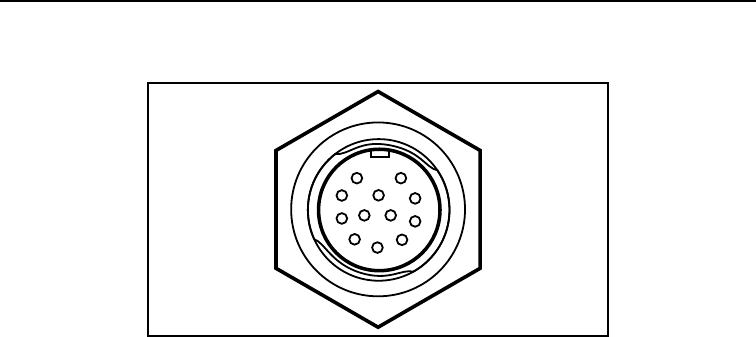
Figure 4-2 illustrates the pin arrangement for this connector.
Figure 4-2 Acutime 2000 12-pin Connector format
2
3
4
5
6
7
8
91
10
11
12
4-4 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Connections 4
4.2 Interface Cables and Connectors
Interface cables for the Acutime 2000 are available in the following
standard lengths.
•50' (15-meter)
•100' (30-meter)
•200' (60-meter)
•400' (120-meter)
Contact Trimble for custom-length cables up to 300 m.
For a list of part numbers, refer to:
•www.trimble.com/products/acutime2000
Note – The standard interface cables offered by Trimble are not
terminated on the host end, so the appropriate connector must be
installed before connecting the cable to the host system.
For OEMs and integrators who want to produce their own interface
cables, Table 4-3 specifies the source and part number of the mating
cable connectors for the 12-pin connector.
Table 4-1 Mating Connectors
Antenna
Connector
Mating
Connector
Manufacturer Description
MMP Series
#68001-2212P1
MMP Series
#26C-2212S1
Deutsch Commercial Products
5733 W. Whittier Avenue
Hemet, California 92545
Phone: (909) 765-2200
Fax: (909) 922-1544
Connector
body
(requires a
molded
backshell)
Acutime 2000 Synchronization Kit User Guide 4-5
4Acutime 2000 Connections
4.2.1 Pin-Outs
Table 4-2 lists the pin-out descriptions and color codes for the
standard interface cables.
Table 4-2 Acutime 2000 RS-422 Cable Pin-Out
Signal Description Wire Color Protocol Acutime 2000
Connector
DC Power
(+8 to +36 Volts DC)
Red +8 to 36 V Pin 1
Port B: RS-422 / Receive Violet TSIP RS422 Pin 2
Port B: RS-422 / Receive + Orange TSIP RS422 Pin 3
Port B: RS-422 / Transmit - Brown TSIP RS422 Pin 4
Port B: RS-422 / Transmit
+
Yellow TSIP RS422 Pin 5
Port A: RS-422 / Receive - White Event Input / RTCM
RS422
Pin 6
Port A: RS-422 / Receive + Gray Event Input/ RTCM
RS422
Pin 7
Port A: RS-422 / Transmit - Green NMEA / TSIP RS422 Pin 8
DC Ground Black Ground Pin 9
Port A: RS-422 / Transmit
+
Blue NMEA / TSIP RS422 Pin 10
One PPS: Transmit + Orange w/
White
stripe
RS422 Pin 11
One PPS: Transmit - Black w/
White
stripe
RS422 Pin 12
4-6 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Connections 4
!Note – The cable color codes listed in this table apply only if you are
using the Trimble interface cable.
!Note – Receive and Transmit are with respect to the Acutime 2000
GPS smart antenna. The host Transmit should be connected to the
Acutime 2000’s Receive, and vice versa.
!Note – The Acutime 2000 with an RS-232 interface is designed
especially for short cable runs (usually under 50 feet). For longer
cable runs, an RS-422 interface is recommended.
Table 4-3 Acutime 2000 RS-232 Cable Pin-Out
Signal Description Wire Color Protocol Acutime 2000
Connector
DC Power Red +8 to +36V Pin 1
Port B: RS-232 Receive Violet TSIP RS232 Pin 2
Not Used Orange Not Used Pin 3
Port B: RS-232
Transmit
Brown TSIP RS232 Pin 4
Not Used Yellow Not Used Pin 5
Port A: RS-232 Receive White Event Input/RTCM Pin 6
Port A: RS-232
Transmit
Gray TSIP RS232 Pin 7
Vback Green Battery Backup Pin 8
DC Ground Black Ground Pin 9
Not Used Blue Not Used Pin 10
One PPS: Transmit + Orange/White RS422 Pin 11
One PPS: Transmit - Black/White RS422 Pin 12
Acutime 2000 Synchronization Kit User Guide 4-7
4Acutime 2000 Connections
4.3 Connection Instructions
This section provides detailed information for connecting the
Acutime 2000's power, timing pulse and data packet lines.
4.3.1 Power Connection (Red and Black Wires)
The red wire (Acutime 2000 pin #1) and black wire (Acutime 2000
pin #9) in the interface cable support the power and ground
connections, respectively. The Acutime 2000 features a switching DC
power supply, which accepts from 8 to 36 volts. The Acutime 2000 is
protected against reverse polarity and brief over-voltage conditions;
however, sustained over-voltage conditions can cause
permanent damage.
#Warning – Voltages exceeding 36 volts can cause permanent
damage to the Acutime 2000's power supply.
The typical power consumption of the Acutime 2000 at an input
voltage of 12 volts is 110 milliAmps, or 1.3 watts.
!Note – The Acutime 2000 requires a minimum of 8 volts at the
interface connector. When specifying the supply voltage, line losses
in the interface cable must be considered. To account for line loss, the
supply voltage may need to exceed 8 volts to satisfy the minimum
voltage at the Acutime 2000.
4.3.2 Timing Pulse Connections
The Acutime 2000 outputs a timing pulse for use in timing and
synchronization applications. The timing pulse is generated using an
RS-422 line driver circuit (pins #11 and #12). The leading edge of the
PPS output pulse is synchronized to UTC. The width of the pulse's
leading edge is 20 nanoseconds or less. The exact width and shape of
the pulse depends on the distributed capacitance in the interface
cable.

4-8 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Connections 4
For more information on using the timing pulse, see Chapter 5,
System Operation.
4.3.3 Serial Port Connections
The recommended use of the serial ports on the Acutime 2000 for
most users is as follows:
•Use Port B to configure the Acutime 2000 as necessary.
•Disable the automatic output packets on Port B using
command packet 8E-A5.
•Use Port B to transmit the desired timing packet.
•Use Port B to query for specific satellite data as needed.
•Use the Port A receive line to time-tag external events or
input RTCM data.
If you have two serial ports, use ports A and B on the Acutime 2000
as follows:
•Use Port B to configure the Acutime 2000 as necessary.
•Use Port A to transmit the desired timing packet.
•Use Port B to query for specific satellite data as needed.
•Use the Port A receive line to time-tag external events or
input RTCM data.
Port B
Port B is the primary serial port for the Acutime 2000. You can send
commands, receive command replies, and query for and receive a
variety of satellite data (for example, ephemeris, tracking
information, signal levels, and so on) using Port B. You can also
receive timing packets that are synchronized with the PPS output on
Port B.

Acutime 2000 Synchronization Kit User Guide 4-9
4Acutime 2000 Connections
TSIP timing packets 8F-0B, 8F-AB and 8F-AC (which work together
as a pair of packets) or 8F-AD can be enabled on Port B using
command packet 8E-A5. These packets are sent within 30
milliseconds after the PPS pulse when enabled.
By default, the Acutime 2000 automatically sends a variety of
satellite data packets on Port B that you may not need. You can
disable these automatic output packets with command packet 8E-A5
so that only the timing packets are sent. You can also choose to
receive these timing packets on Port A, which serves as a dedicated
transmit port for timing packets, and use Port B to send commands
and receive satellite data.
Port B can also be configured to transmit NMEA packets, but these
packets are not guaranteed to be sent within 30 milliseconds after the
PPS output.
Port A
By default, the Port A receive line is used to receive external event
inputs as described below; however, Port A can also receive serial
RTCM (differential corrections.) When you enable RTCM messages
on Port A (by sending command packets on Port B), the event input
mechanism is automatically disabled. When RTCM messages are off
(the default state), the event input mechanism is automatically
enabled.
4.3.4 Event Input
The Acutime 2000 accepts an external event input in the form of an
RS-422 pulse. The external event pulse input is supported on Port A
(pins #6 and #7). The Acutime 2000 transmits a TSIP time packet
(8Fx0B or 8FxAD) in response to the event input. The TSIP packet
increments the event count field for each event received.
The event time stamp is generated within 320 nanoseconds of arrival
at the Acutime 2000’s interface connector. The precision of the time
stamp is subject to Selective Availability.
4-10 Acutime 2000 Synchronization Kit User Guide
Acutime 2000 Connections 4
!Note – These Port A pins are shared between the external event
input and serial RTCM message inputs. When differential GPS is
enabled, this input is set up to receive RTCM messages. When
differential GPS is off, this input is set up to receive external event
signals.
Acutime 2000 Synchronization Kit User Guide 5-1
5 System Operation
This chapter describes the operating characteristics of the Acutime
2000 GPS smart antenna, including start-up, satellite acquisition,
operating modes, serial data communication, and the timing pulse.
The Acutime 2000 acquires satellites and computes position and time
solutions. It outputs data in the TSIP (or NMEA) protocol through its
serial ports.
For more technical information on system operation, see Appendix F,
Theory of Operation .
5.1 Start-Up
At power-up, the Acutime 2000 automatically begins to acquire and
track GPS satellite signals. It typically obtains its first fix in under
two minutes.
During the satellite acquisition process, the Acutime 2000 outputs
periodic TSIP status messages on Port B. These status messages
confirm that the receiver is working.
!Note – The Acutime 2000 has no provision for external backup power
and always begins operation from a cold start unless a warm start is
forced by uploading almanac data and time.
5-2 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.2 Automatic Operation
When the Acutime 2000 has acquired and locked onto a set of
satellites that pass the mask criteria listed below, and has obtained a
valid ephemeris for each satellite, it performs a self-survey. After a
number of position fixes, lasting approximately 40 minutes, the self-
survey is complete. At that time, the Acutime 2000 automatically
switches to a time-only mode and periodic outputs of navigation
information cease.
5.2.1 Satellite Masks
The Acutime 2000 continuously tracks and uses up to eight satellites
in an overdetermined clock solution. The satellites must pass the
mask criteria to be included in the solution.
Table 5-1 lists the default satellite masks used by the Acutime 2000.
These masks serve as the screening criteria for satellites used in fix
computations and ensure that solutions meet a minimum level of
accuracy. The satellite masks can be adjusted using the TSIP protocol
described in Appendix A, Trimble Standard Interface Protocol.
Elevation Mask
Satellites below 10° elevation are not used in the solution. Generally,
signals from low-elevation satellites are of poorer quality than signals
from higher elevation satellites. These signals travel farther through
the ionospheric and tropospheric layers and undergo distortion due to
these atmospheric conditions.
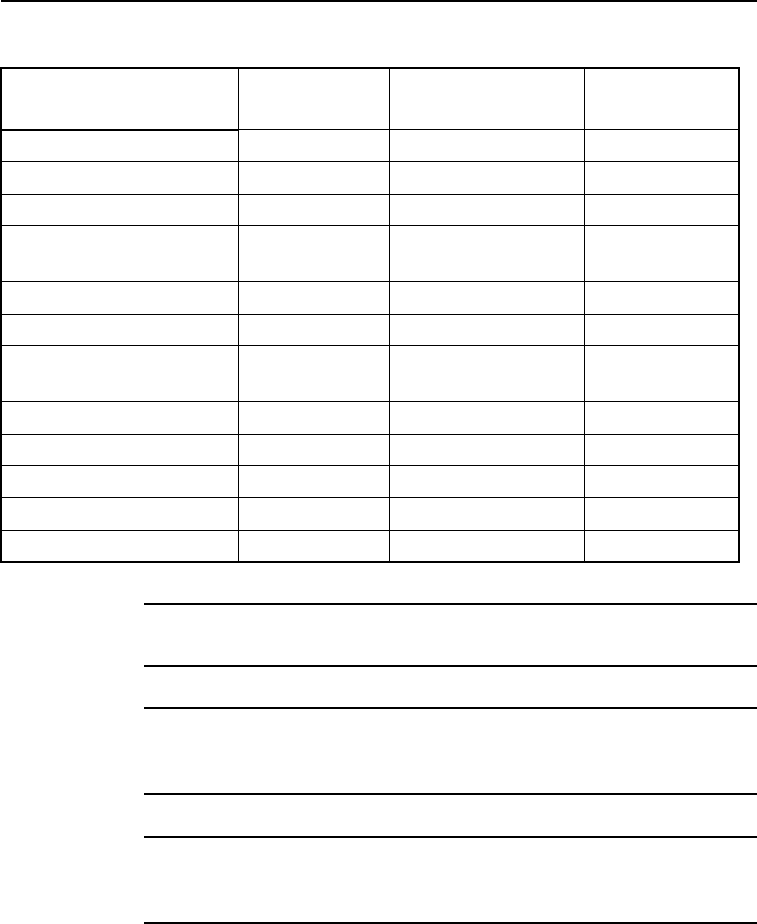
Table 5-1 Default Satellite Mask Settings
Mask Setting Notes
Elevation 10° SV elevation above horizon
SNR 4 Signal strength
DOP 8 Self-survey only
Acutime 2000 Synchronization Kit User Guide 5-3
5System Operation
SNR Mask
Although the Acutime 2000 is capable of tracking signals with SNRs
as low as 2, the default SNR mask is set to 4 to eliminate poor quality
signals from the fix computation. Low SNR values can result from:
•low-elevation satellites
•partially obscured signals (for example, dense foliage)
•multi-reflected signals (multipath)
Multi-reflected signals, also known as multipath, can degrade the
position solution. Multipath is most commonly found in urban
environments with many tall buildings and a preponderance of
mirrored glass. Multi-reflected signals tend to be weak (low SNR
value), since each reflection diminishes the signal. Setting the SNR
mask to 4 or higher minimizes the impact of multi-reflected signals.
PDOP Mask
Position Dilution of Position (PDOP) is a measure of the error caused
by the geometric relationship of the satellites used in the position
solution. Satellite sets that are tightly clustered or aligned in the sky
have a high PDOP and contribute to a lower position accuracy. For
most applications, a PDOP mask of 8 offers a satisfactory trade-off
between accuracy and GPS coverage. With worldwide GPS coverage,
the PDOP mask can be lowered even more for many applications
without sacrificing coverage.
!Note – PDOP is only applicable during self-survey or whenever the
receiver is performing position fixes.

5-4 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.2.2 Tracking Modes
The Acutime 2000 operates in one of two main fix modes:
•Self-Survey (Position fix mode)
•Overdetermined Clock mode
After establishing a reference position in Self-Survey mode, the
Acutime 2000 automatically switches to Overdetermined (OD) Clock
mode.
Self-Survey Mode
At power-on, the Acutime 2000 performs a self-survey by averaging
2000 position fixes. The number of position fixes until survey
completion is configurable using the 8E-4B or 8E-A9 command.
The default mode during self-survey is 3-D manual, where the
receiver must obtain a 3-D solution with a PDOP below both the
PDOP mask and PDOP switch. The PDOP mask and switch criteria
can be set and queried using a TSIP packet. If fewer than four
conforming satellites are visible, the Acutime 2000 suspends data
output.
The highest accuracy fix mode is 3-D manual, where altitude is
always calculated along with the latitude, longitude, and time.
Obtaining a position requires four satellites with a PDOP below the
PDOP mask. Depending on how the PDOP mask is set, 3-D mode can
be restrictive when the receiver is subjected to frequent obscuration
or when the geometry is poor due to an incomplete constellation.
If only a 2-D solution is desired, or if the exact altitude is known, 2-D
manual should be requested. In this case, the receiver uses either the
last altitude obtained in a 3-D fix, or the altitude supplied by the user.
Any error in the assumed altitude affects the accuracy of the latitude
and longitude solution. Use packet BB to set the desired position
fix mode.
!Note – Altitude and the fix mode are stored in non-volatile memory.

Acutime 2000 Synchronization Kit User Guide 5-5
5System Operation
Overdetermined Clock Mode
Overdetermined Clock Mode is used only in stationary timing
applications. This is Acutime 2000's default mode. After the Acutime
2000 self-surveys its static reference position, it automatically
switches to Overdetermined Clock Mode and determines the clock
solution. The timing solution is qualified by a T-RAIM algorithm,
which automatically detects and rejects faulty satellites from the
solution.
In this mode, the Acutime 2000 does not navigate or update positions
and velocities, but maintains the PPS output, solving only for the
receiver clock error (bias) and error rate (bias rate).
5-6 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.2.3 PPS Output Options
The PPS (Pulse Per Second) output is the primary timing output
generated by the Acutime 2000. In all configurations of the product,
the PPS output is provided through a RS-422 differential driver.
Although using a RS-422 differential receiver to receive the PPS
provides the best noise immunity, you can use just one side of the
differential signal for single-ended applications.
You can program the characteristics of the PPS output using TSIP
packets. Packet 0x8E-4A allows you to enable or disable (turn it on or
off), control the polarity, select the time base (GPS or UTC) and set
the offset (control the cable delay compensation) of the PPS output.
Packet 0x8E-4E allows you to set an accuracy criterion for the
generation of the PPS signal based on the number of usable satellites.
The accuracy of the PPS output depends to some degree on the
number of satellites used in the solution that determine the placement
of the PPS output. In some systems, it is preferable to have the PPS
generated only when it meets the highest levels of accuracy and to
leave it off if these accuracy levels are not met. Packet 0x8E-4F
allows you to select the width of the PPS output from 10 us to 500 ms.
!Note – For a complete description of the packets described here, see
Appendix A, Trimble Standard Interface Protocol.
Acutime 2000 Synchronization Kit User Guide 5-7
5System Operation
5.2.4 PPS Quantization Error
The Acutime 2000 uses a high-precision, fixed-frequency oscillator
as the timing source to down-convert and decode the GPS signal and
to generate the PPS output signal. Since a fixed-frequency oscillator
is used, the Acutime 2000 must place the PPS output on the clock
edge that it determines is closest to UTC or GPS. This situation
results in a quantization error on the placement of the PPS whose
magnitude is equal to one-half the period of the fixed frequency
oscillator. The oscillator frequency is 12.504 MHz, which is
equivalent to a period just under 80 nanoseconds; therefore, the
quantization error on the PPS output is between +/-40ns.
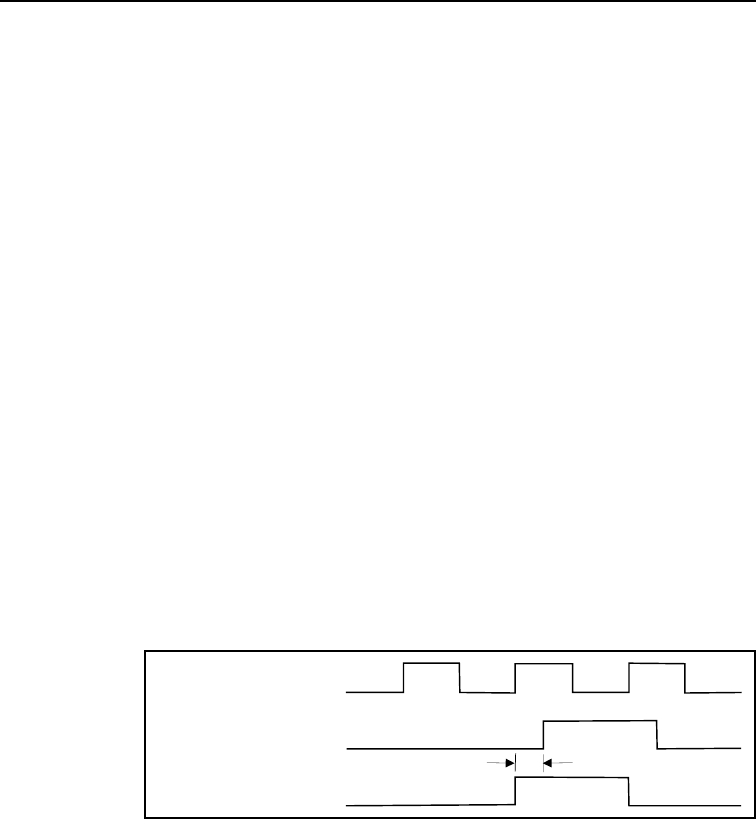
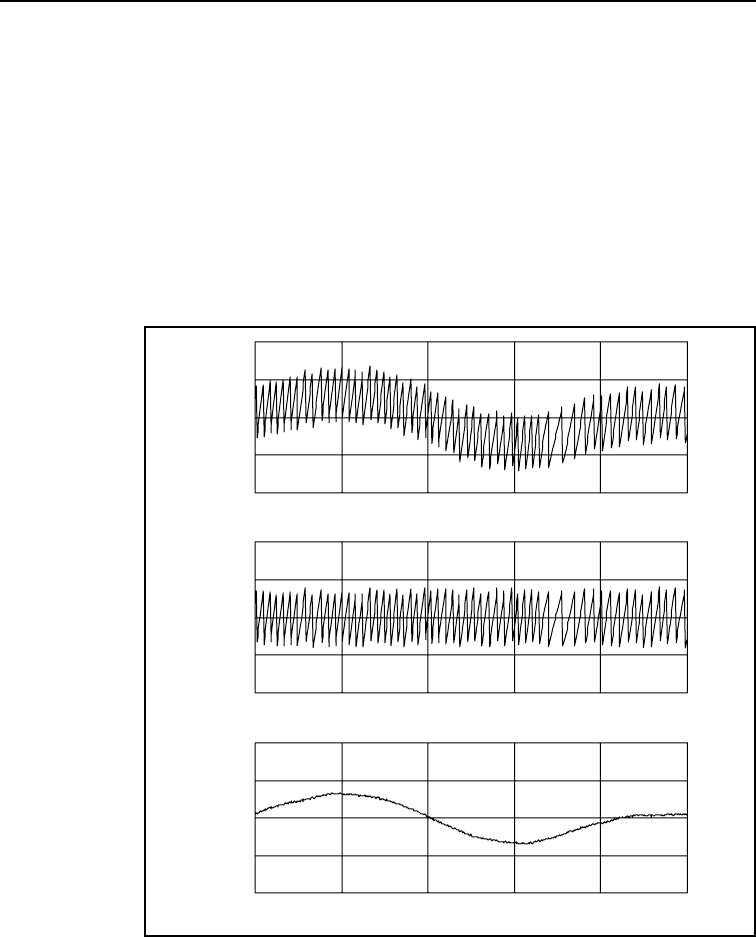
Figure 5-1 illustrates quantization error.
The top waveform represents the 12.504 MHz clock.
The Acutime 2000 PPS output must be placed on one of the rising
edges of this clock. The middle waveform represents the UTC/GPS
on-time mark as determined by the Acutime 2000’s GPS receiver
electronics.
The bottom waveform represents the Acutime 2000’s PPS output,
which is output on the clock edge closest to the actual UTC/GPS on-
time mark.
Figure 5-1 PPS Quantization Error
The amount of quantization error present on each PPS output pulse is
reported in packet 0x8F-AC. This quantization error information can
be used to reduce the effective amount of jitter on the PPS pulse.
12.504 Mhz Clock
UTC or GPS PPS
Acutime 2000 PPS
5-8 Acutime 2000 Synchronization Kit User Guide
System Operation 5
Figure 5-2 illustrates the result of removing the quantization error
from the PPS output in a user system.
The top plot shows the offset of the PPS output pulse relative to a
stable standard such as a Cesium atomic clock. The quantization error
is responsible for the jagged appearance of the waveform.
The middle plot shows the quantization error as reported by the
Acutime 20000 in packet 0x8F-AC.
The bottom plot is the result of subtracting the quantization error
from the PPS offset.
Figure 5-2 Removing the Quantization Error from the
PPS Output
0 100 200 300 400 500
Time (seconds)
-100
-50
0
50
100
PPS Offset (ns)
Quantization Error (ns)
Corrected PPS Offset (ns)
-100
-50
0
50
100
-100
-50
0
50
100
0 100 200 300 400 500
Time (seconds)
0 100 200 300 400 500
Time (seconds)

Acutime 2000 Synchronization Kit User Guide 5-9
5System Operation
5.2.5 External Event Input
The Acutime 2000 provides an External Event Input that allows the
user to time tag external event pulses. The event capture mechanism
is triggered on the low-to-high transition of the external event input.
The time tag provides a resolution of 320 nanoseconds and represents
the time at which the event pulse occurred at the Acutime 2000
connector input. Therefore, it is offset by the amount of delay in the
cable. The time tag information is reported in packet 0x8F-0B (or 8F-
AD). This feature is intended for use with relatively infrequent event
pulses. A practical limit on event pulse frequency is about 10 Hz. To
prevent the Acutime 2000 hardware and firmware from being overrun
with event pulse inputs, make sure that an event pulse will not occur
until the time tag from the previous event pulse reported in packet
0x8F-0B (or 8F-AD) is received.
5.2.6 Cable Delay Compensation
The PPS output from the Acutime 2000 is calibrated to be aligned
with UTC/GPS at the connector. The PPS you receive is delayed by
the amount of propagation delay in the cable between the Acutime
2000 and your equipment. You can compensate for this delay by
setting the PPS offset field of packet 0x8E-4A. The propagation delay
through the cable depends on the cable type used, but in general, the
delay is approximately 1.25 nanosecond per foot of cable. Negative
PPS offset values cause the PPS output to occur early, which
compensates for the propagation delay of the cable.

5-10 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.3 Serial Data Communication
When the Acutime 2000 has acquired a set of satellites that conforms
to the mask and mode settings and has collected a valid ephemeris for
each satellite, it automatically commences periodic outputs of GPS
data and generates a timing pulse (PPS).
5.3.1 Port B
The Acutime 2000 outputs periodic TSIP health, mode, and time
messages on Port B. These status messages confirm that the receiver
is working. These packets are described in Appendix A, Trimble
Standard Interface Protocol.
The factory default port setting is 9600 baud in/out, 8 data bits, odd
parity, 1 stop bit. The serial port setting can be changed and stored in
serial EEPROM using a TSIP command.
This port can also be configured to transmit timing packets, using
packet 8E-A5 to determine which timing packet to output on this port.
5.3.2 Port A (Timing)
The Acutime 2000 has a dedicated serial port for outputting
comprehensive time packets. Messages are output after the PPS and
after external events. The factory default setting is TSIP, 9600,
8-odd-1, output only.
The host system receives both the PPS and the time packet
identifying each pulse. Use packet 8E-A5 to determine which timing
superpacket to output on this port.
The Acutime 2000 generates a packet in response to the external
event input. The event count field in packet 8F-0B (or 8F-AD)
increments for each event received. This field resets after a power
cycle and rolls over at 65535. The event tag messages are interleaved
with the PPS messages. PPS tags are distinguished by a zero (0) in the
event count field. The Acutime 2000 accepts external events up to a

Acutime 2000 Synchronization Kit User Guide 5-11
5System Operation
10 Hertz rate. Use packet 8E-A5 to configure this port to output the
8F-0B (or 8F-AD) packet in response to external events.

5-12 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.4 GPS Timing
In many timing applications, such as time/frequency standards, site
synchronization systems, wireless voice and data networks, and event
measurement systems, GPS receivers are used to steer a local
reference oscillator. The steering algorithm combines the short-term
stability of the oscillator with the long-term stability of the GPS PPS.
An accurate GPS PPS allows the use of cost-effective crystal
oscillators, which have poorer stability than expensive, high-quality
oscillators, such as atomic cells.
The GPS constellation consists of at least 24 orbiting satellites.
Unlike most telecommunications satellites, GPS satellites are not
geostationary, so satellites in view are constantly changing. Each GPS
satellite contains four highly-stable atomic clocks, which are
continuously monitored and corrected by the GPS control segment.
Consequently, the GPS constellation can be considered a set of 24
orbiting "clocks" with worldwide 24-hour coverage.
A Trimble GPS receiver uses the signals from these GPS "clocks" to
correct its own internal clock, which is not as stable or accurate as the
GPS atomic clocks. A GPS receiver like the Acutime 2000 outputs a
highly accurate timing pulse (PPS) generated by its internal clock,
which is constantly corrected using the GPS clocks. In the case of the
Acutime 2000, this timing pulse is synchronized to UTC within 50
nanoseconds (one sigma) after survey is complete.
In addition to serving as highly-accurate stand-alone time sources,
GPS receivers are used to synchronize distant clocks in
communication or data networks. This is possible because all GPS
satellites are corrected to a common master clock. Therefore, the
relative clock error is the same, regardless of which satellites are
used. For synchronization applications requiring a common clock,
GPS is the ideal solution.

Acutime 2000 Synchronization Kit User Guide 5-13
5System Operation
GPS time accuracy is affected by the same major source of error that
affects position accuracy: Selective Availability (S/A). The position
and time errors are related by the speed of light. Therefore, a position
error of 100 meters corresponds to a time error of approximately 333
nanoseconds. The GPS receiver's clocking rate and software affect
PPS accuracy. The Acutime 2000’s 12.5 MHz clocking rate enables a
steering resolution of 80 ns (±40 ns). Using software algorithms like
an overdetermined clock solution, the Acutime 2000 mitigates the
effects of S/A to achieve a PPS accuracy of 50 ns (one sigma) after
survey is complete.
5.4.1 Timing Operation
The Acutime 2000 automatically outputs a PPS and time tag. With an
accurate reference position, the Acutime 2000 automatically switches
to an overdetermined clock mode, activates its T-RAIM algorithm
and outputs a precise PPS. The overdetermined clock solution
mitigates the effects of S/A. Using a simple voting scheme based on
pseudo-range residuals, the Acutime 2000's integrity algorithm
automatically removes the worst satellite with the highest residual
from the solution set if that satellite’s residual is above a certain
threshold.
The Acutime 2000's default configuration provides optimal timing
accuracy. The only item under user or host control that can affect the
Acutime 2000’s absolute PPS accuracy is the delay introduced by the
interface cable. For long cable runs, this delay can be significant (1.25
nanoseconds per foot). TSIP packet 8Ex4A sets the cable delay
parameter, which is stored in non-volatile memory. For the best
absolute PPS accuracy, adjust the cable delay to match the installed
cable length. The cable delay is 1.25 nanoseconds per foot of cable.
To compensate for cable delay, use a negative offset to advance the
PPS output.
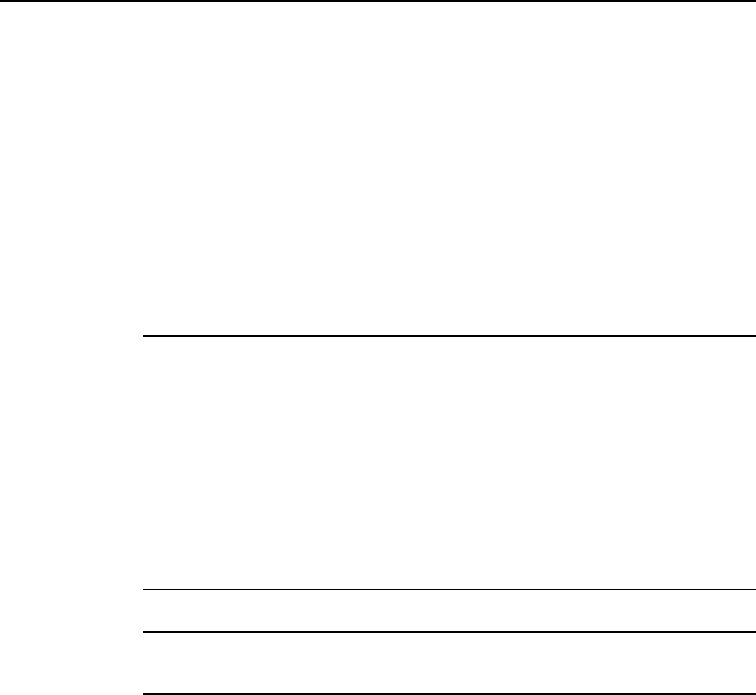
5-14 Acutime 2000 Synchronization Kit User Guide
System Operation 5
Timing Pulse Output (PPS)
A pulse-per-second (PPS), 1 microsecond-wide pulse is available on
the Acutime 2000’s interface connector. The pulse is sent once per
second and the leading edge of the pulse is synchronized to UTC or
GPS time. The pulse shape is affected by the distributed capacitance
of the attached cabling and input circuit. The leading edge is typically
less than 20 nanoseconds wide. The pulse's trailing edge should never
be used for timing applications. An accurate timing pulse is available
only when the Acutime 2000 is operating in the static
Overdetermined Clock mode.
!Note – GPS time differs from UTC (Universal Coordinated Time) by a
small, sub-microsecond offset and an integer-second offset. The
small offset is the steering offset between the GPS DoD clock
ensemble and the UTC (NIST) clock ensemble. The large offset is the
cumulative number of leap seconds since 1 January 1970, which, on
31 December 1998, was increased from 12 to 13 seconds.
Historically, the offset increases by one second approximately every
18 months, usually just before midnight on 30 June or 31 December.
System designers should note whether the output time is UTC or
GPS time.
!Note – The event time reported in 8F-0B and 8-AD is corrected for
the fractional UTC offset if UTC PPS (default) is selected.
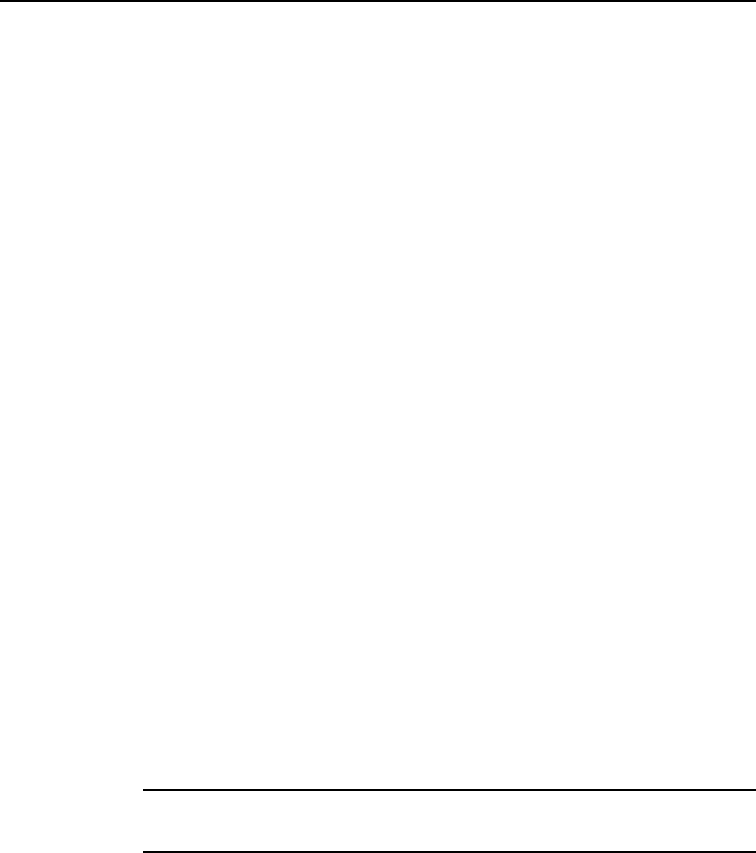
Acutime 2000 Synchronization Kit User Guide 5-15
5System Operation
5.5 Using the Acutime 2000 in Mobile Applications
Although it is intended primarily for use in static applications, the
Acutime 2000 can also be used in mobile applications. The factory
default settings for the Acutime 2000 assume that the antenna is
going to be used in a static timing application. To use the Acutime
2000 in mobile applications, you must disable the Acutime’s self-
survey mechanism and ensure that a stored position does not exist in
the nonvolatile EEPROM.
To prepare the Acutime 2000 for mobile applications, complete the
following steps.
•Make sure that there is no stored position in the nonvolatile
EEPROM by using command packet 8E-45 with data byte 1
set to 6 (accurate position segment.)
This operation clears any stored position from the EEPROM.
•Disable the self-survey mechanism using command packet
8E-A9.
If not disabled, the self-survey mechanism will automatically
survey the antenna’s position and then set the receiver to
operate in a static, time-only mode.
•Set the desired position fix mode using command packet BB.
After these steps are completed, the Acutime 2000 is ready to operate
properly in mobile applications. While operating in a mobile
application, the Acutime 2000 can continue to output a PPS pulse as
well as timing packets.
!Note – The accuracy of the PPS output pulse will be degraded by a
factor of about 3 when the unit is operated in a mobile application.

5-16 Acutime 2000 Synchronization Kit User Guide
System Operation 5
5.6 Customizing Acutime 2000 Operations
The Acutime 2000 provides a number of user configurable
parameters that allow you to customize the operation of the unit.
These parameters are stored in a non-volatile memory chip
(EEPROM) to be retained during loss of power and through resets. At
reset or power-up, the Acutime 2000 configures itself based on the
parameters stored in the EEPROM. You can change the values of
these parameters to achieve the desired operations using a variety of
TSIP packets. The Acutime 2000 configures itself based on the new
parameter immediately, but the new parameter value is not
automatically saved to the EEPROM. You must direct the Acutime
2000 to save the parameters to the EEPROM.
Parameters are grouped into sections of the EEPROM called
segments. Each segment is identified with a number and contains a
group of related parameters. To change the parameter values stored in
EEPROM, send packet 0x8E-26 to direct the Acutime 2000 to save
the current parameter values in a specified segment in the EEPROM.
You can also direct the Acutime 2000 to set the parameter values to
their factory default settings with packet 0x8E-45. When a segment is
set to its factory defaults, the contents of the EEPROM segment are
set and the Acutime 2000 configures itself with the default settings.
In brief, to customize the Acutime 2000 operations for your
application:
•Configure the Acutime 2000 using TSIP command packets
until the desired operation is achieved.
•Use TSIP packet 0x8E-26 to save the settings in non-volatile
memory (EEPROM.)
The new settings will control the Acutime 2000 operations whenever
it is reset or power cycled.
Tables 5-2 through 5-12 list the user configurable parameters by
segment number. Each table lists the parameter name, its factory
default value, and the TSIP packet that sets or reads the parameter
value (typically, one TSIP packet sets or reads several related
parameters.)
Acutime 2000 Synchronization Kit User Guide 5-17
5System Operation
Table 5-2 Receiver Configuration (segment 2)
Parameter Factory default Set Request Report
Operating dimension 4 (Full Position 3D) BB BB BB
DGPS mode 3 (Auto DGPS/GPS) BB BB BB
Dynamics code 1 (Land) BB BB BB
Elevation mask 0.175 radians (10 degrees) BB BB BB
Signal level mask 4.0 AMU BB BB BB
PDOP mask 8.0 BB BB BB
PDOP switch 6.0 BB BB BB
Foliage mode 0 (never) BB BB BB
DGPS age limit 30 seconds BB BB BB
Have reference
altitude flag
FALSE 2A 2A 4A
Reference altitude
(meters)
0.0 2A 2A 4A
Table 5-3 OEM Configuration (segment 3)
Parameter Factory Default Set Request Report
Datum index WGS 84 Ellipsoid 8E-14 8E-15 8F-15
Position 0x12 35 35 35
Velocity 0x02 35 35 35
Time 0x01 35 35 35
Auxiliary 0x02 35 35 35
Super packets output
mask (byte 1)
0x32 8E-A5 8E-A5 8F-A5
Super packets output
mask (byte 2)
0x21 8E-A5 8E-A5 8F-A5
Auto TSIP output
mask
0xFFFFFFFC0 8E-4D 8E-4D 8F-4D
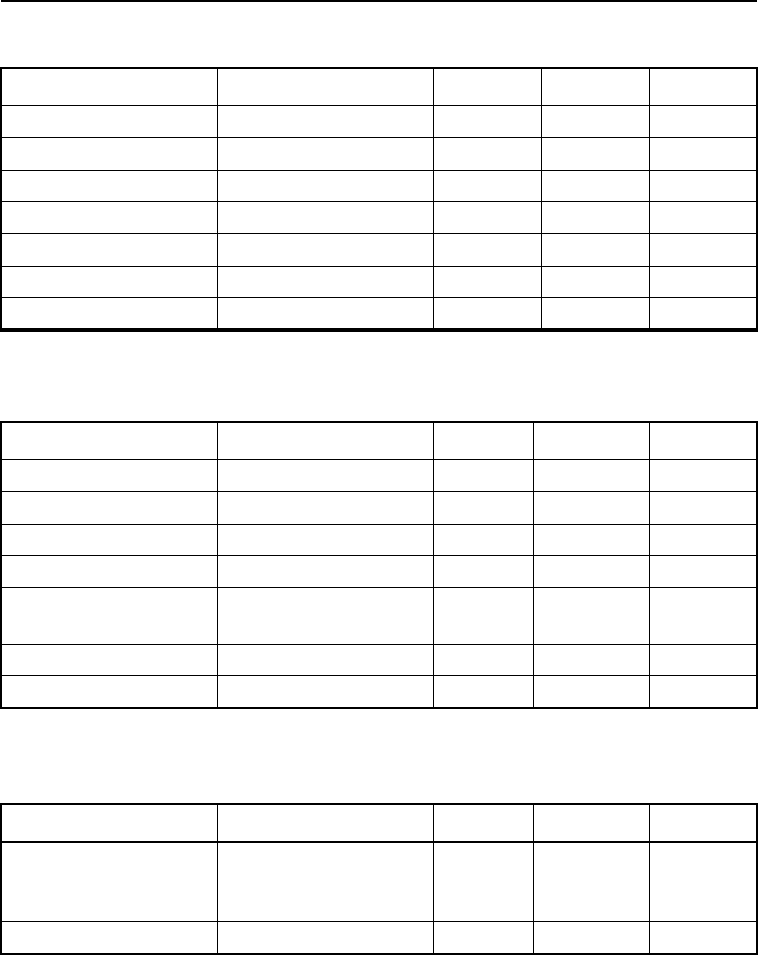
5-18 Acutime 2000 Synchronization Kit User Guide
System Operation 5
Table 5-4 Port A and B Configuration (segment 4)
Parameter Factory default Set Request Report
Input baud rate 9600 BC BC BC
Output baud rate 9600 BC BC BC
Parity Odd BCBCBC
Data bits 8 BC BC BC
Stop bits 1 BC BC BC
Input protocol none BC BC BC
Output protocol TSIP BC BC BC
Table 5-5 PPS Configuration (segment 5)
Parameter Factory default Set Request Report
PPS enabled switch Enabled 8E-4A 8E-4A 8E-4A
PPS timebase UTC 8E-4A 8E-4A 8E-4A
Polarity TRUE 8E-4A 8E-4A 8E-4A
PPS offset 0.0 Seconds 8E-4A 8E-4A 8E-4A
Bias uncertainty
threshold
300.0 Meters 8E-4A 8E-4A 8E-4A
PPS width 10.0e-6 Seconds 8E-4F 8E-4F 8E-4F
PPS driver switch 3 (At least 1 SV) 8E-4E 8E-4E 8E-4E
Table 5-6 Position Information (segment 6)
Parameter Factory default Set Request Report
XYZ coordinates Such that LLA
coordinates are all
zeros
31
Have position flag FALSE
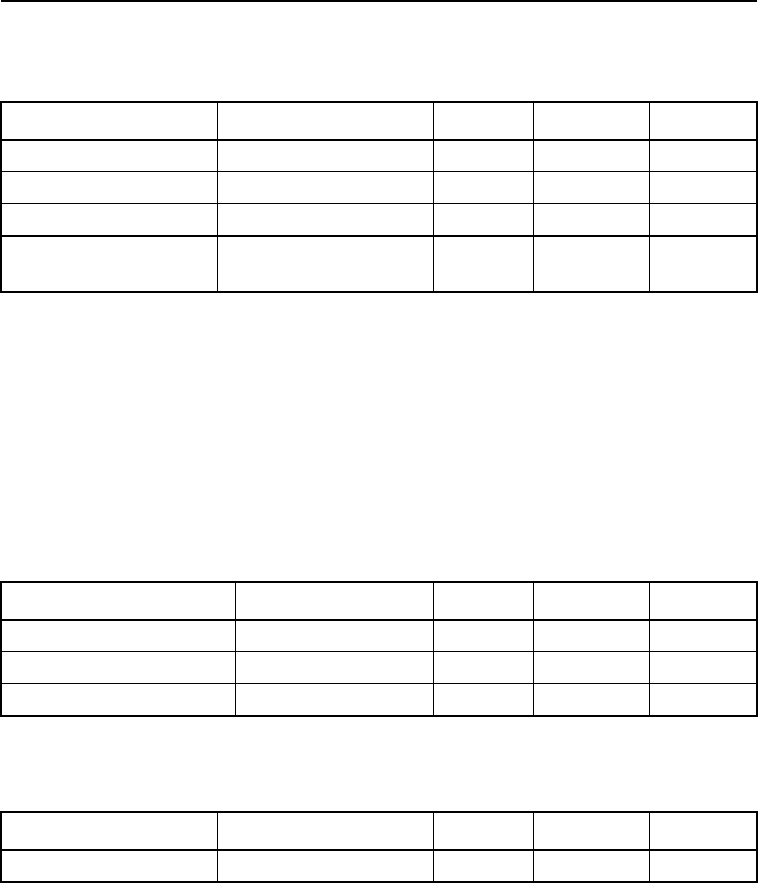
Acutime 2000 Synchronization Kit User Guide 5-19
5System Operation
The survey operating dimension can be set to auto and 2D if segments
are saved (8E-26) while a survey is in process. The receiver uses the
dimension setting saved for the next survey. If a reference altitude has
been entered and the receiver is set to 2D survey, the reference
altitude is used. If a reference altitude has not been entered and the
receiver is set to 2D survey, an altitude of 0 is used for 2D survey (not
recommended).
Table 5-7 Self-Survey Configuration (segment 7)
Parameter Factory default Set Request Report
Survey enable flag TRUE 8E-A6 8E-A6 8F-A6
Survey length 2000 8E-A6 8E-A6 8F-A6
Survey save flag FALSE 8E-A6 8E-A6 8F-A6
Survey operating
dimension
Full Position 3D 0xBB 0xBB 0xBB
Table 5-8 NMEA Configuration (segment 8)
Parameter Factory default Set Request Report
NMEA message mask 0x00000020 (ZDA) 7A 7A 7A
NMEA message rate 1 7A 7A 7A
NMEA options 0 7A 7A 7A
Table 5-9 UTC Information (segment 11)
Parameter Factory default Set Request Report
have_utc FALSE

5-20 Acutime 2000 Synchronization Kit User Guide
System Operation 5

Acutime 2000 Synchronization Kit User Guide 6-1
6 NTP Software
Installation and
Configuration
6.1 Network Time Protocol
The Network Time Protocol (NTP) is a family of programs that are
used to adjust the system clock on your computer and keep it
synchronized with external sources of time. NTP was developed by
Dr. David Mills at the University of Delaware. Information is
available at the official NTP web site:
www.eecis.udel.edu/~ntp
The Network Time Protocol is designed to function as a background
task on the host operating system, so that its operation is transparent
to the user and system tasks. Time data is transferred from external
time sources to clients within your domain. NTP achieves accuracy in
the sub-microsecond to low-millisecond range with hardware
currently available.
This section describes installation of the NTP software on a
designated network computer for use with the Acutime Smart
Antenna as primary reference clock.
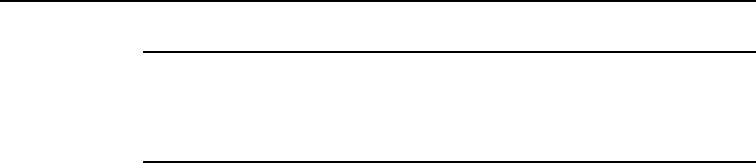
6-2 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
!Note – The Acutime 2000 has replaced the Palisade and Palisade
NTP. It can be used with NTP or as a stand-alone timing receiver. In
some instances the term Palisade is still used in the screen captures
and text in this manual. This will be updated in future revisions.
6.1.1 NTP Time Servers
A primary network time server is a networked computer connected to
an accurate external source of reference time. The time server
synchronizes its clock to the reference clock’s time, and provides
accurate time of day information to clients on the network. The
network computer is also referred to as the host, because it provides a
serial interface for the Acutime and processing facilities for time
transfer.
NTP Time Server Requirements
The Acutime NTP Synchronization Kit can be used on any Windows
NT or UNIX system with an available serial port. The NTP software
used must include support for the Acutime Smart Antenna.
•Windows NT 4.0 or UNIX System with RS-232 Port
•NTP Version 4 Executable with Acutime NTP reference
clock support
As many as four Acutime receivers can be connected to a single time
server.
Optional Equipment:
DOS/Windows 95/98/NT System for monitoring GPS operation
through Acutime Port B.

Acutime 2000 Synchronization Kit User Guide 6-3
6NTP Software Installation and Configuration
6.2 Software Sources and Compatibility
The list of systems supporting the Acutime NTP reference clock is
continuously growing. For updated information, see the Trimble web
site at www.trimble.com/oem/ntp.
For the latest documentation for the Acutime driver, or if Acutime
NTP reference clocks are not supported by the version of NTP
shipped with your operating system, see the Trimble FTP site at
ftp://ftp.trimble.com/pub/ntp. You may also be able to obtain
binaries supporting Acutime NTP through your operating system
vendor’s support channel.
You can also download and compile a late release of the NTP
distribution yourself. For more information, see Compiling the NTP
Distribution, page E-17.

6-4 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.2.1 Installation Support
Trimble is attempting to provide the best possible support for
customers who use the Acutime NTP Synchronization Kit to transfer
time to NTP hosts. Due to the wide variety of systems, peripherals,
and associated configurations, Trimble is not able to provide
assistance installing and testing NTP. Technical support for
installation and configuration of NTP servers is limited to NTP
documentation and software available on the Trimble Navigation
NTP Web site at www.trimble.com/oem/ntp.
Please consult with a qualified systems administrator to verify I/O
connections between the Acutime NTP reference clock and your host
system.
For more information, consult the Internet news group
news://comp.protocols.time.ntp.
If you suspect a problem with the Acutime GPS receiver, please see
Chapter 2, Getting Started, before calling Trimble technical support.
6.3 Pre-Installation Check List
Before beginning installation and configuration of NTP, complete the
following tasks:
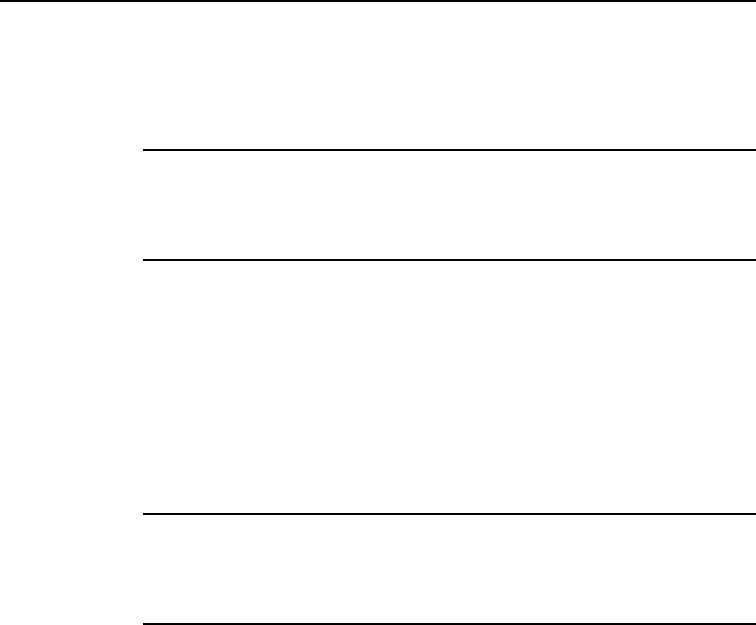
Acutime 2000 Synchronization Kit User Guide 6-5
6NTP Software Installation and Configuration
6.3.1 GPS Preparation
•Perform the checkout, installation and connection
instructions in chapters 1–4.
!Note – Temporary installations, as described in Chapter 2, can be
used to establish functionality of NTP, but reliable performance
cannot be achieved until the Acutime smart antenna is properly
installed with clear view of the sky.
•The Acutime and Synchronization Interface Module should
be powered up.
•PPS indicator LED should be flashing once per second,
indicating the output of data packets.
•A valid UTC almanac has been acquired by the Acutime
Smart Antenna. This should be confirmed using the Acutime
Monitor or TSIPCHAT applications.
!Note – NTP will not accept time stamps from the Acutime NTP
reference clock until a valid UTC almanac has been obtained. The
UTC information is stored in non volatile memory and only erased
during a factory reset operation.

6-6 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.3.2 Host System Preparation
•Installation of NTP must be performed by a user with
administrative or super-user privileges.
•Network Time Protocol can not coexist with other clock
synchronization utilities, such as the TimeServ utility
available in the Microsoft Windows NT Resource Kit. Any
other time synchronization utility running on the host system
must be stopped, disabled or de-installed.
•The host system clock should be set manually to the correct
time. If your network already has a time server, use the
NTPDATE utility to reset the system clock is recommended.
For more information on using NTPDATE, see Appendix E,
NTP Diagnostics and Debugging. In absence of existing time
servers, use the operating system date/time facilities to reset
the clock to the approximate local time.

Acutime 2000 Synchronization Kit User Guide 6-7
6NTP Software Installation and Configuration
6.3.3 Operating System Specific Information
This documentation is applicable to Windows NT and UNIX
Installation. Separate instructions for the different operating systems
are provided where required.
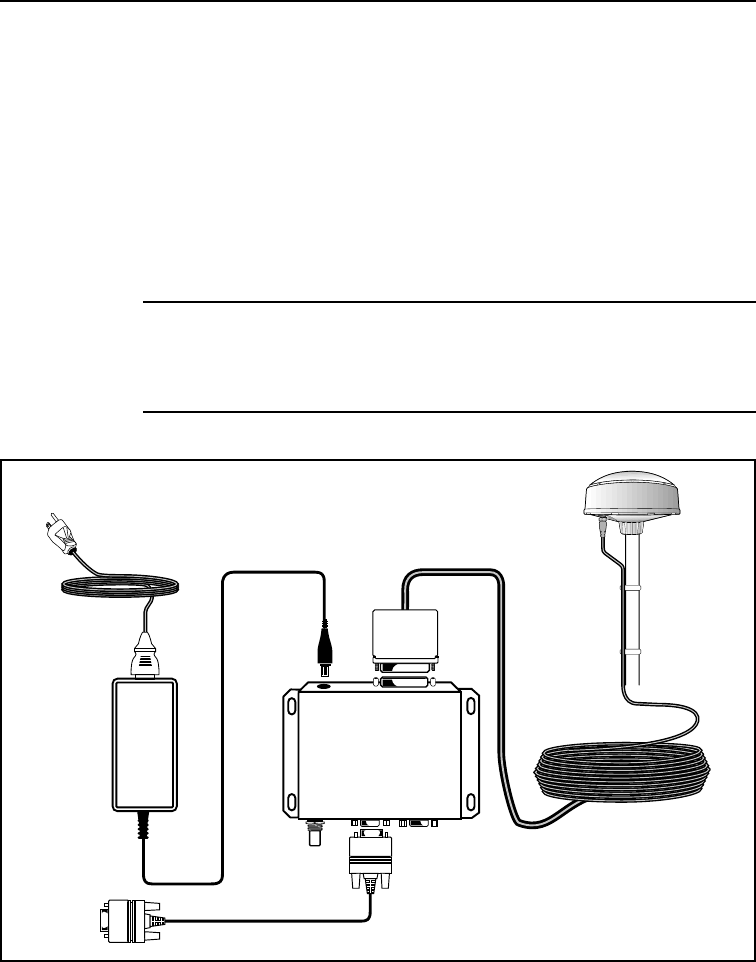
6-8 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.4 Time Transfer Cable Connection
The serial port of the host computer serves as a precision
synchronization interface between NTP and the Acutime smart
antenna.
Connect Port A on the Acutime Synchronization Interface Module, to
the NTP time server’s serial port, as shown in Figure 6-1. Trimble
provides a standard DB-9 serial cable with the Acutime NTP
Synchronization Kit.
!Note – If your network host’s serial port is not a standard DB-9 serial
connector, you need an appropriate converter. Ensure that proper
Ground, Request To Send, Data Transmit and Data Receive
connections are supported by the converter.
Figure 6-1 Time Transfer Connection Diagram
Synchronization
Interface
Module
Wall Power
To PC
Serial
Port
Actutime
PPS Port A Port B

Acutime 2000 Synchronization Kit User Guide 6-9
6NTP Software Installation and Configuration
6.4.1 Optional Connections
Port B and the PPS output of the Synchronization Interface Module
are not currently used by the Acutime NTP reference clock driver,
and do not require connection. They are available for other
applications, such as backup timing interfaces on the time server.

6-10 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.5 NTP Software Installation
NTP software installation consists of copying the NTP program and
utilities to the host system’s fixed disk, and configuring the system to
start NTP after booting.
The same NTP software can be used on servers and client
workstations. This versatility allows efficient reconfiguration of time
servers to function with the Acutime NTP reference clock if
necessary.
Acutime 2000 Synchronization Kit User Guide 6-11
6NTP Software Installation and Configuration
6.5.1 NTP Configuration File
The NTP configuration file, NTP.CONF, is a human readable text file
which contains information about security settings, time servers and
reference clocks. NTP reads the information in this file at startup, and
initializes itself according to the configuration entries.
The order of the line items in the configuration file is arbitrary. You
must edit the configuration file for the serial port connection on your
system. You should also include any available time servers on your
network.
!Note – The configuration file is a security sensitive file. It should be
protected from accidental or intentional modification by users, and
should only be modified by a qualified systems administrator.
Create a NTP configuration file similar to the one shown in
Figure 6-2.
Figure 6-2 NTP Configuration File
!Note – If your system already has a configuration file, you may want
to review the entries or make a backup file before modifying the
existing configuration.
#------------------------------------------------------
# Simple NTP Configuration File for Acutime NTP
#
# Trimble Acutime Smart Antenna GPS (Stratum 1).
server 127.127.29.1
#
# A network time server
server terrapin.trimble.com
#------------------------------------------------------

6-12 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.5.2 Acutime Configuration
The following line must be found in the NTP configuration file to
declare an external Acutime NTP reference clock:
server 127.127.29.x
The prefix 127.127.29 uniquely identifies the Acutime NTP reference
clock.
The last number, represented by x, represents the reference clock unit
number.
Unit Number
The unit number identifies the physical serial port to which Acutime
is connected. Selection of the unit number, location of the NTP
configuration file and installation of the software are different for
Windows NT and UNIX. Follow the appropriate instructions to select
the correct unit number for your Acutime Reference Clock.

Acutime 2000 Synchronization Kit User Guide 6-13
6NTP Software Installation and Configuration
6.5.3 Network Server Selection
To complete the configuration file, you need to define additional
sources of time for the server. Each time server on the network should
have at least three independent clock references to function optimally.
In large organizations there may already be network time servers in
operation. Consult your system administrators for their names or IP
numbers. If you have Internet Access, look at the list of public time
servers and choose geographically close sites for your sources.
You should choose a minimum of one time server, and it is a good
idea to choose three or more for redundancy. An example of a time
server entry is provided in the sample configuration file. Create one
server line item with the name or IP number for each available time
server.

6-14 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.5.4 Additional Configuration Information
This documentation provides only minimal required configuration
information. For complete information about available configuration
options, please refer to documentation provided with your NTP
distribution.
Acutime 2000 Synchronization Kit User Guide 6-15
6NTP Software Installation and Configuration
6.6 Windows NT Installation
The following instructions are specific to installing the port of NTP
for Windows NT distributed by Trimble Navigation at
ftp://ftp.timble.com/pub/ntp/binaries/winnt.
!Note – To install NTP, you must log into the Windows NT system as a
user with administrator privileges.
!Note – Other third-party distributions of NTP for Windows NT may not
support the Acutime NTP reference clock.
!Note – Not all features documented in the UNIX Version of NTP are
supported in the Windows NT port. Trimble makes every effort to
maintain the Windows NT port at the highest performance levels, but
cannot maintain complete compatibility with UNIX versions, or
provide technical support on the NTP port beyond the online
documentation.

6-16 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.6.1 Automatic Installation
The automatic installation program for Windows NT performs all the
steps required to install and configure the Network Time Protocol
Service for Windows NT, with minimal input from the user.
For detailed installation instructions, please refer to the
documentation accompanying the NTP installation program. The
installation program creates the NTP configuration file after allowing
the user to input the names or IP numbers of Network Time Servers,
and information about the Acutime NTP reference clock.
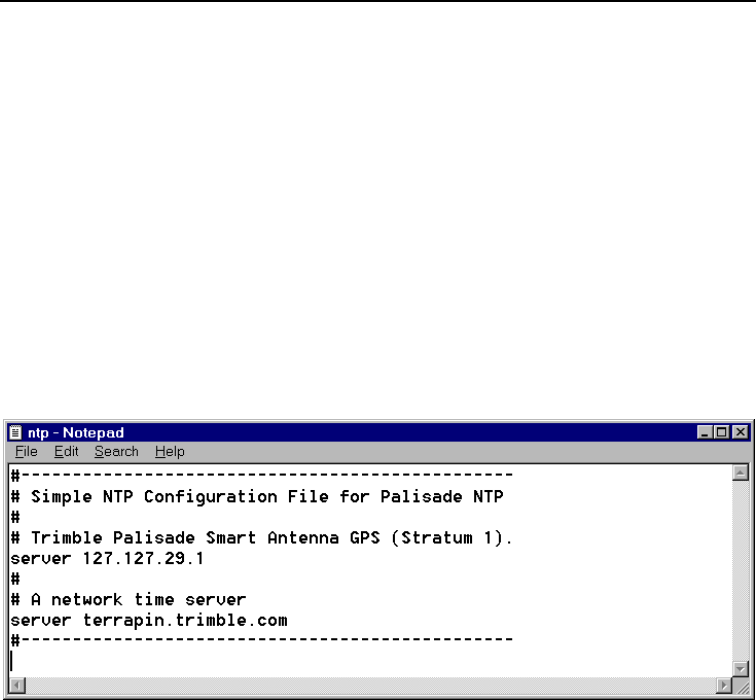
Acutime 2000 Synchronization Kit User Guide 6-17
6NTP Software Installation and Configuration
6.6.2 Manual Installation
Manual installation requires the user to create the configuration file,
copy the NTP executable to the appropriate location on disk, and then
install, configure and start the NTP service.
The manual installation procedures for the NTP software are below.
Create the Configuration File
The NTP configuration file, NTP.CONF, should be created in the
\WINNT\ directory.
The lines preceded by # symbols are comments and are ignored by
NTP.
Valid unit numbers on Windows NT are 1–255. The unit number
identifies the number of the serial port on the Windows NT host. For
example, if the Acutime NTP reference clock is connected to COM2,
the entry line should read:
server 127.127.29.2
1. Copy the sample configuration file above.
2. Change the Acutime unit number to the correct number
corresponding to the COM port you are using.
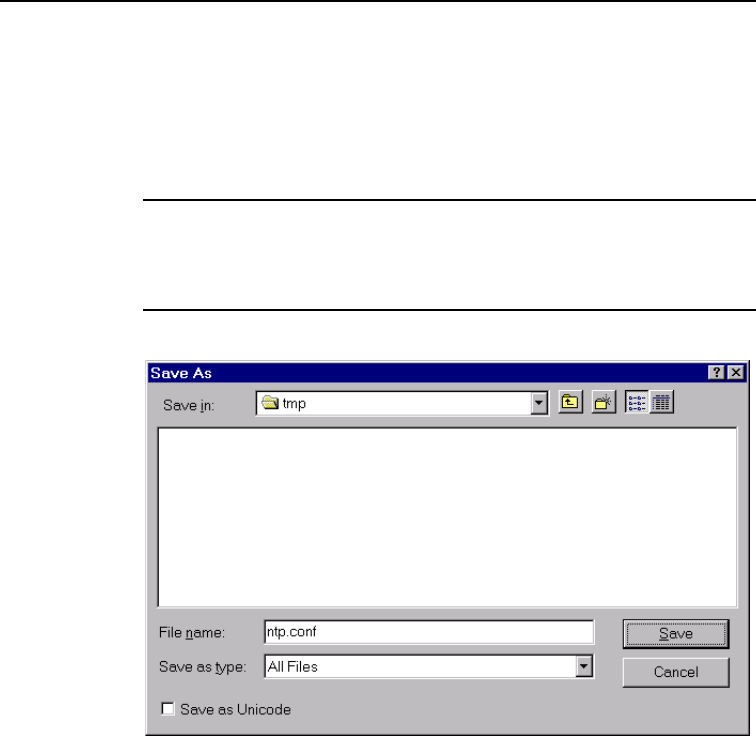
6-18 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
3. Add SERVER lines for available NTP servers on your
network. You must add one line for each NTP server with
which you want your time server to communicate.
4. NTP clients should not be included in the SERVER
configuration entries in the configuration file.
!Note – If you are using NOTEPAD to create the configuration file,
make sure that you select All files in the Save as type drop-down
menu (this avoids creating a file named NTP.CONF.TXT, which NTP will
not recognize).
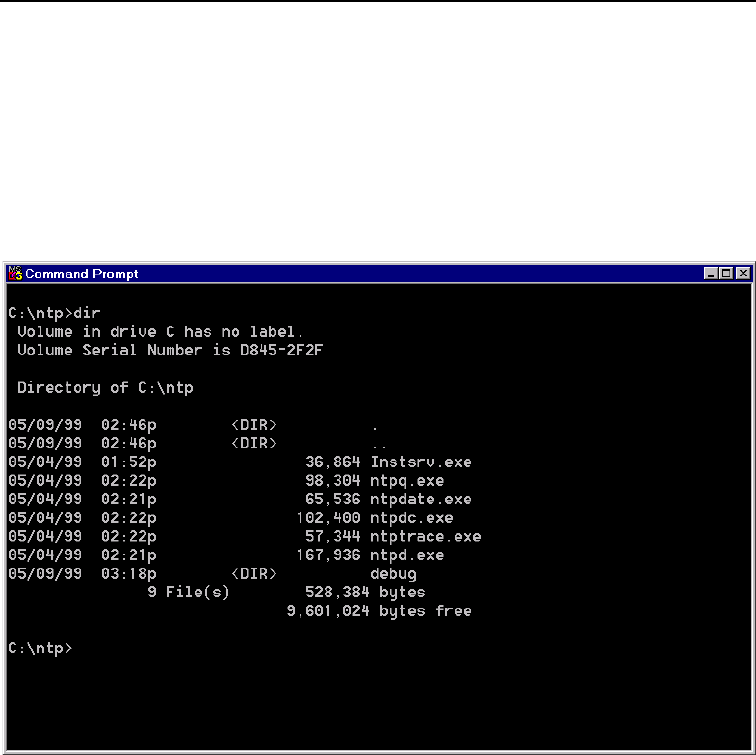
Acutime 2000 Synchronization Kit User Guide 6-19
6NTP Software Installation and Configuration
Copying Executable Files
The NTP service requires the NTP service executable, NTPD.EXE, to
be available at system boot. In this example, the NTP executable is
located in the \WINNT\SYSTEM32 directory.
1. Verify that all required files are present. The file sizes and
dates may vary, but all files must be present for successful
installation.
The debug directory contains a debug version of NTP, which can be
used to obtain more information about system operation or to
diagnose problems. For more information on using the debug version
of NTP, refer to Appendix E, NTP Diagnostics and Debugging.
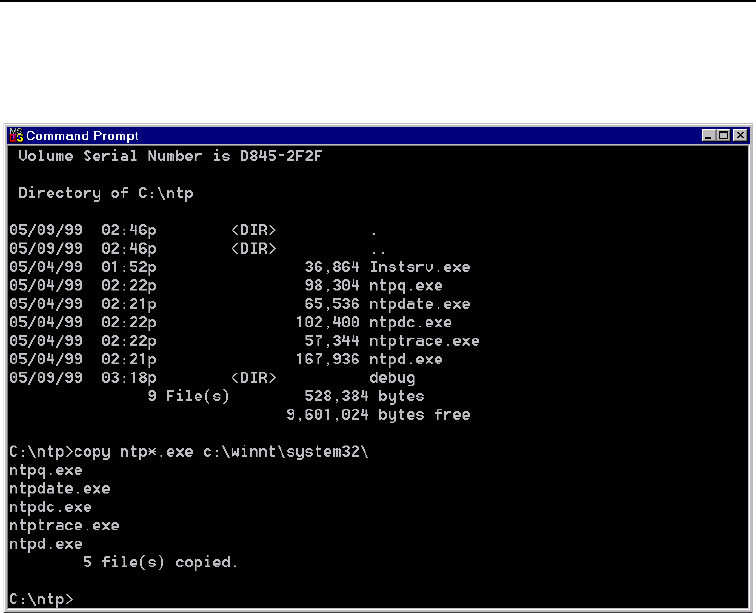
6-20 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
2. Copy NTPQ.EXE, NTPDATE.EXE, NTPDC.EXE, NTPTRACE.EXE
and NTPD.EXE to the \WINNT\SYSTEM32 directory.
This operation ensures the NTP service files are available to
Windows NT when the system starts.
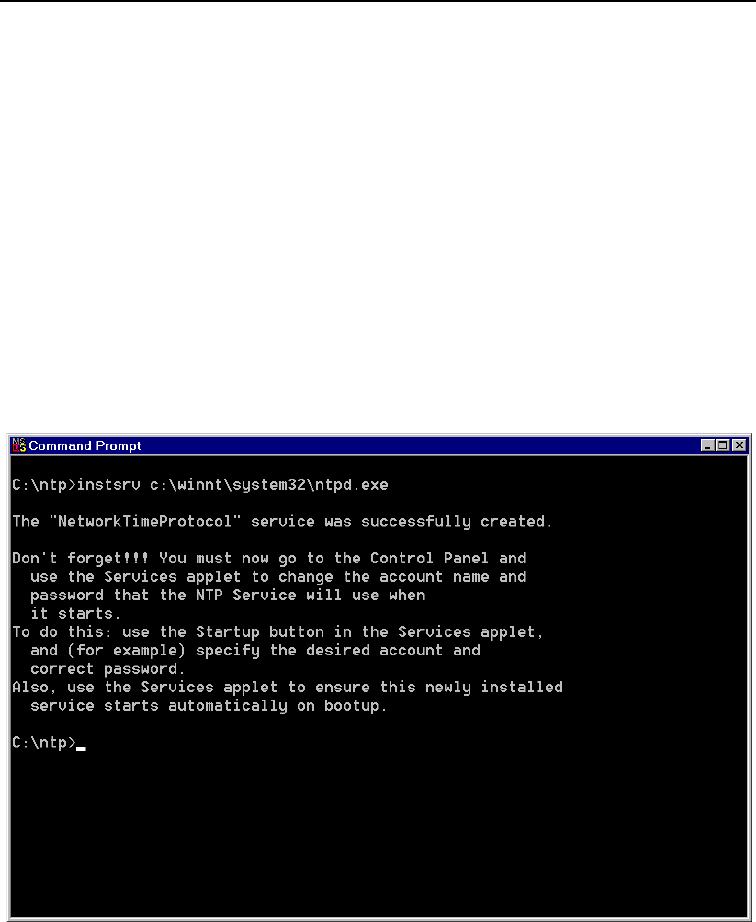
Acutime 2000 Synchronization Kit User Guide 6-21
6NTP Software Installation and Configuration
Installing the Service
The NTP service must be registered with the Windows NT Service
Control Manager and configured to start at system boot.
To register the service, use the command line utility, INSTSRV.EXE,
provided with NTP. The INSTSRV.EXE utility requires a single
parameter representing the complete path to the location of the
NTPD.EXE executable. This example assumes Windows NT is
installed in: C:\WINNT. If your system directory is different, modify
the path to the NTP executable accordingly.
1. Start a command prompt window, and change to the directory
containing the INSTSRV.EXE utility.
2. Type instsrv c:\winnt\system32\ntpd.exe.

6-22 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
!Note – Make sure to also type the .exe extension of the file name.
The program has registered the NTP service with the operating
system. A message is printed informing the user to change the
account name and password for NTP. This is not necessary in later
versions of the Windows NT port.
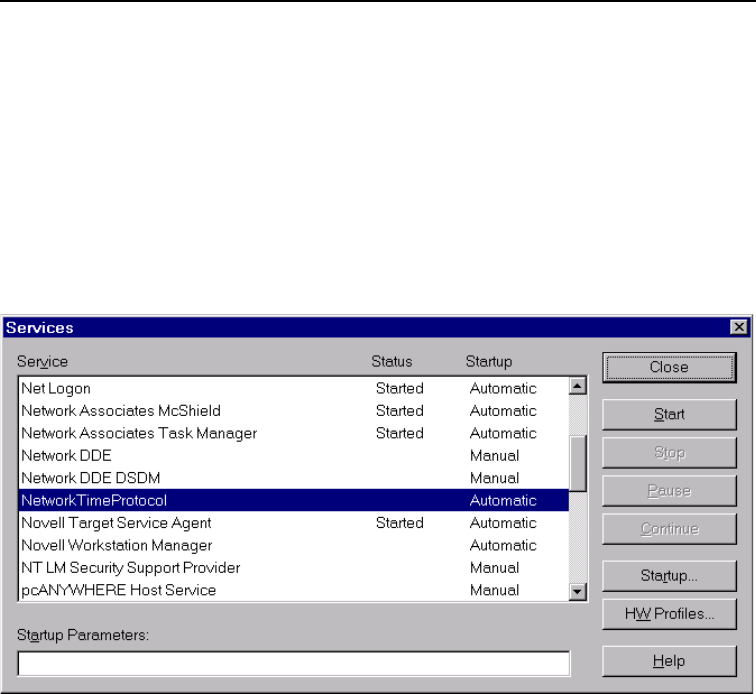
Acutime 2000 Synchronization Kit User Guide 6-23
6NTP Software Installation and Configuration
6.6.3 Starting the Service
The last steps are performed using the Services Applet in the
Windows NT Control panel.
1. Open the Control Panel Services Applet.
2. Scroll to Network Time Protocol.
3. Make sure Startup is set to Automatic.
4. Click Start.
NTP starts and the Network Time Protocol service status changes to
Started. Close the Services Applet.
Manual NTP configuration is complete. NTP will start each time the
system is booted. To verify the correct operation of NTP and the
Acutime NTP reference clock, follow the instructions in
Monitoring NTP, page 6-31.

6-24 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.7 UNIX Installation
Unix installation must be performed by a user with root
(or super-user) privileges on the system.
The host system is usually configured to start NTP when the system
boots, so that re-synchronization can be established quickly in case of
a power or network failure.
Consult your UNIX system documentation to determine what start-up
scripts must be modified to load NTP at system boot time. Many late
Unix distributions contain administration tools that perform
automatic installation and configuration of startup system tasks such
as NTP.
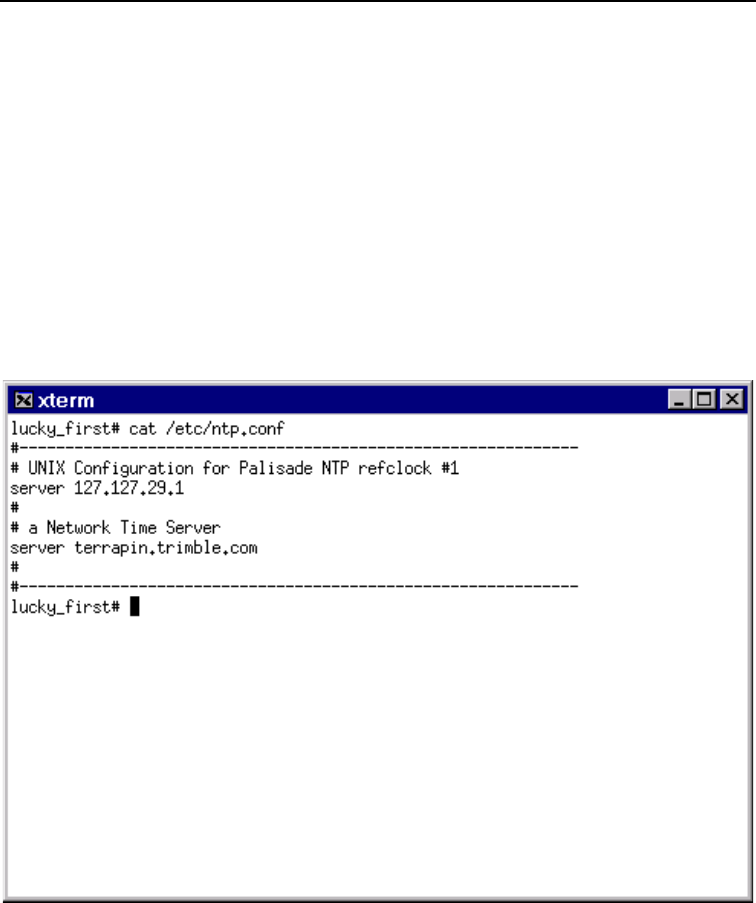
Acutime 2000 Synchronization Kit User Guide 6-25
6NTP Software Installation and Configuration
6.7.1 Create the Configuration File
The NTP configuration file, NTP.CONF, should be located in the
/ETC directory.
The window below shows a simple configuration file declaring a
Acutime NTP reference clock and a network time server in the
Trimble.COM domain. The Acutime NTP reference clock is declared
as unit #1.
A maximum of four Acutime NTP reference clocks can be connected
to any UNIX host. Valid unit numbers on UNIX systems are 0–3. The
next section examines the use of the unit number in mapping to
physical serial ports on the host system.
The /ETC/DRIFT file is used to record information about the onboard
system’s intrinsic frequency error. For more information on this
feature, please refer to NTP documentation .
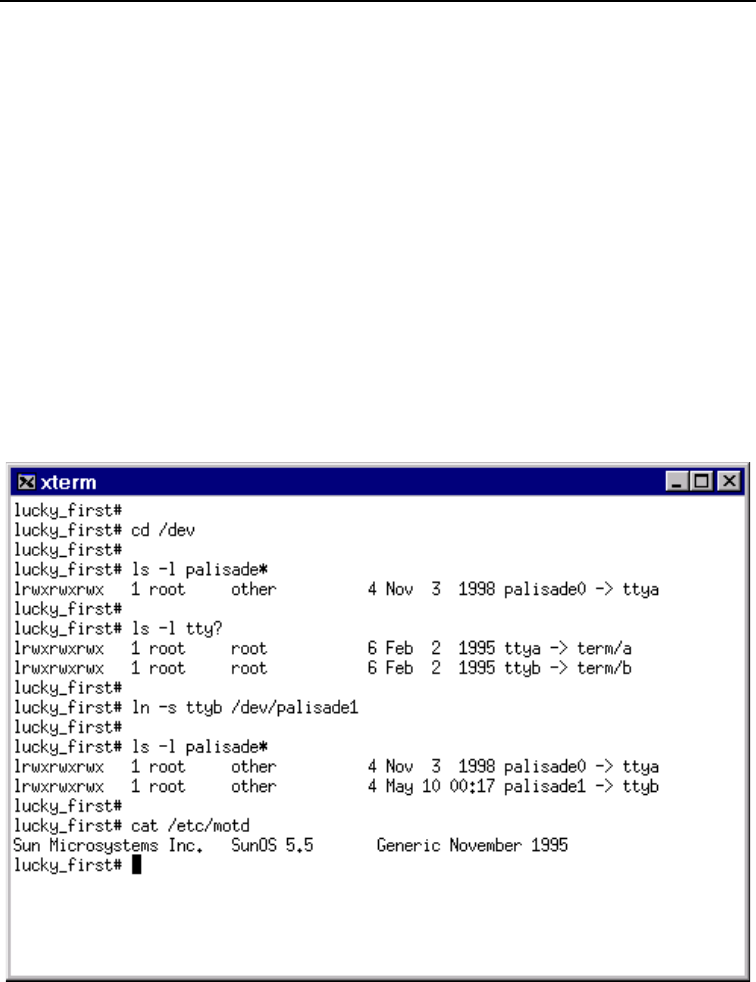
6-26 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.7.2 Set Up Device Links
NTP attempts to open the I/O file /DEV/ACUTIMEX, to communicate
with the Acutime NTP reference clock. The x represents the unit
number of the reference clock in the configuration file.
A symbolic link /DEV/ACUTIMEX must be set up to point to the correct
host serial port. This is typically performed by a sequence of shell
commands similar to:
cd /dev
ln -s ttyS0 /dev/Acutime0
Creation of a symbolic link for Acutime NTP reference clock unit #1
connected to the second serial port, ttyb, is shown below for a
Solaris system. The link for unit 0 has already been established and
remains unused in this configuration.
Acutime 2000 Synchronization Kit User Guide 6-27
6NTP Software Installation and Configuration
1. Replace the string ttyb in the ln command with the
appropriate serial port designator for your system.
2. Replace the number 1 in the string /dev/Acutime1 with
the unit number in your NTP configuration file.
Serial port designators on UNIX systems are usually designated by
/dev/cuau or /dev/ttyu, where u may be composed of one or
more alphanumeric characters.
The following table may assist you in locating the appropriate serial
port and symbolic link names for your system. Verify presence of the
actual device files and validity of all links in the /DEV directory before
using a serial device.
Table 6-1 System Serial Ports and Symbolic Link Names
Operating system Port Name /
Enumeration
Serial Port Sample Link
Linux ttyS / 0, 1, 2, ... /dev/ttyS0 /dev/Acutime0
HPUX cua / 0, 1, 2, ... /dev/cua1 /dev/Acutime1
SUN OS / Solaris tty / a, b, c, ... /dev/ttyc /dev/Acutime2
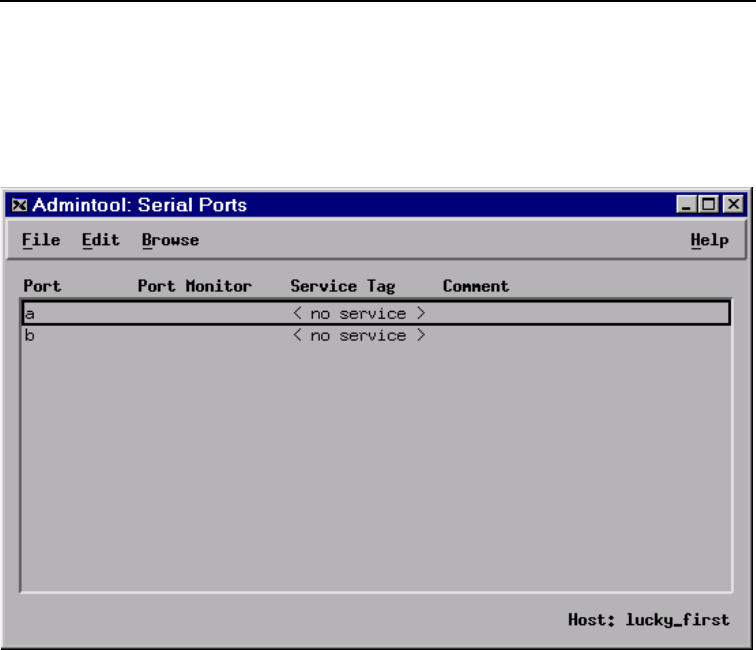
6-28 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.7.3 Hardware Configuration
You may want to use a system configuration tool to enable and
configure system serial ports to function with Acutime. Turn off any
login service or modem server that may be attempting to use the port.
Figure 6-3 Disabling Serial Port Services Using an
Administrative Tool
Acutime NTP uses the following serial port configuration:
•9600 baud, 8-bits, 1-stop bit, odd parity.
•No DSR signal is generated.
•No DTR signal is required.
•Flow control protocols are not acknowledged.
If your UNIX system requires initialization of serial devices, use a
configuration corresponding to these parameters.

Acutime 2000 Synchronization Kit User Guide 6-29
6NTP Software Installation and Configuration
6.7.4 Copying Executable Files
If you obtained binary executable versions of the NTP daemon and
its utilities, you will have to unpack the archive and manually move
the files to the desired storage directory. NTP is commonly located in
/USR/LOCAL/BIN.
You must also edit your startup scripts to point to the location of the
NTP executable you choose.
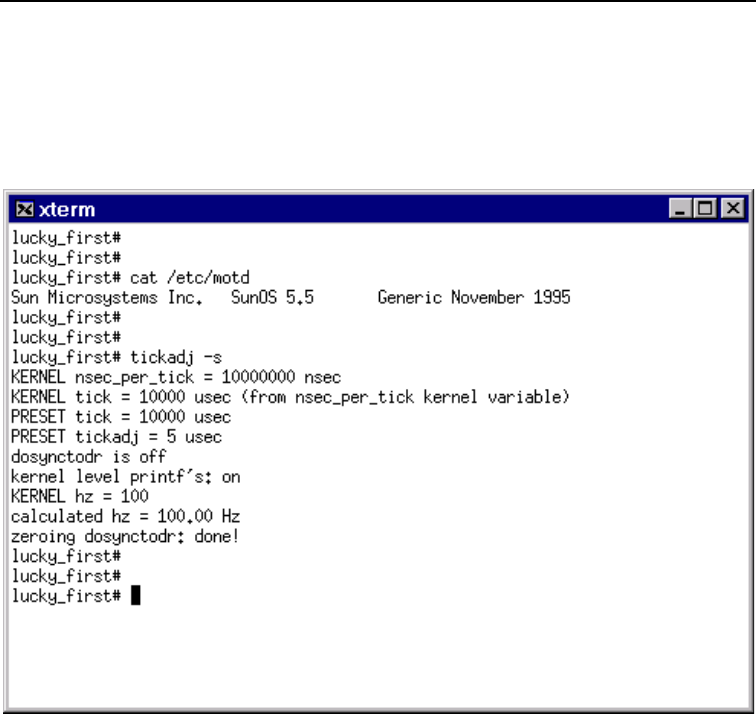
6-30 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.7.5 System Initialization
Some systems may require additional initialization before NTP can
run. Sun OS and Solaris may require running the TICKADJ utility to
turn off synchronization with the onboard real-time clock.

Acutime 2000 Synchronization Kit User Guide 6-31
6NTP Software Installation and Configuration
6.7.6 Start NTP
Execute NTP from the command line by typing the path and name of
the ntp executable:
/usr/local/bin/ntpd
Installation of NTP is complete. You still need to modify startup
scripts to ensure NTP is loaded when the system reboots.
To verify the correct operation of NTP and the Acutime NTP
reference clock, follow the instructions in the next section,
Monitoring NTP. To diagnose possible problems communicating
with the Acutime, see Appendix E, NTP Diagnostics and Debugging.
6.8 Monitoring NTP
This section briefly describes the tools and operating system facilities
used when monitoring NTP for correct operation. For more
information of the capabilities of these tools, please refer to your
Operating System and NTP documentation.
NTP provides a network accessible management interface that allows
the NTP utilities included in the distribution to communicate with
different servers. The NTP utilities are virtually identical on both
UNIX and Windows platforms.
NTP query is a utility to quickly check the status of NTP servers or
clients. The use of the NTP Query utility, NTPQ.EXE, is outlined on
page 6-35.
NTP start-up and synchronization events are written into the
Operating System Log files. The same messages are generated for
UNIX and Windows NT, although the log interface is different for the
two system classes.
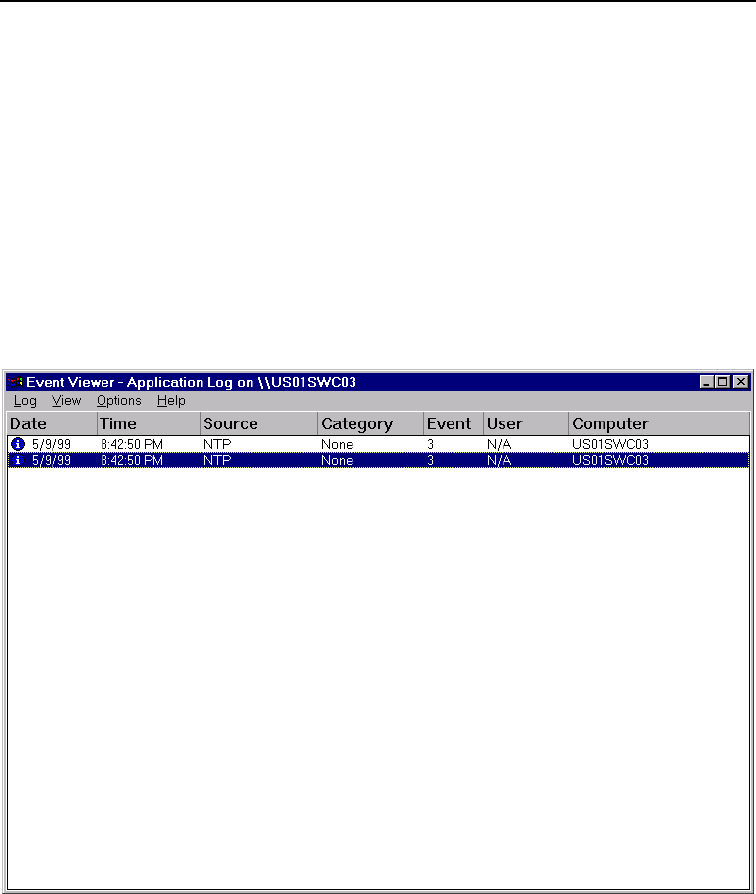
6-32 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.8.1 NTP Events on Windows NT
On Windows NT, the Application Event Log is used to record NTP
events.
Event Log Entries
Check the Application Event Log for status messages from the NTP
task. Event log entries generated by the NTP service appear in the
event log as shown. When reviewing events in the event log, begin
with the first event, and move upwards reviewing events in
chronological order.
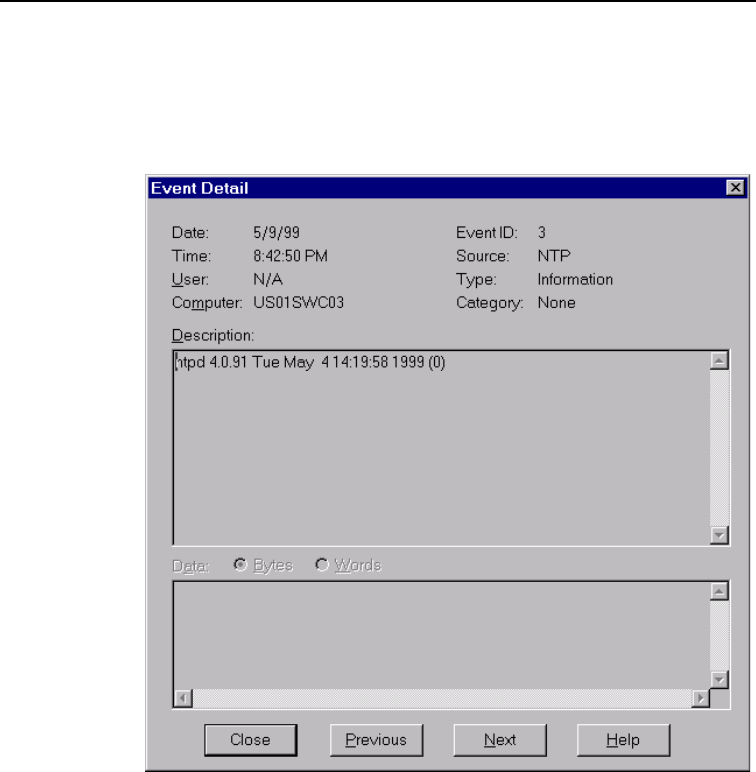
Acutime 2000 Synchronization Kit User Guide 6-33
6NTP Software Installation and Configuration
The first entry in the Application log is the NTP startup message,
reporting the NTP Version and build date. This entry indicates that
NTP has started. For more information on system log entries
generated by NTP, see Appendix E, NTP Diagnostics and Debugging.
6-34 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
6.8.2 UNIX System Log Files
In its native UNIX environment, NTP uses the host system’s system
log facilities to send reports to the operating system log files. Refer to
your specific system’s documentation to learn how to check the
system log reports.
Monitor the host’s system message log for status messages from the
NTP task. A sample sequence of log entries generated by the NTPD
daemon at startup are shown below:
Figure 6-4 Sample UNIX Log Entries
May 3 17:42:27 terrapin ntpd[4032]: ntpd 4.0.92h Mon
May 3 14:28:00 PDT 1999
May 3 17:42:28 terrapin ntpd[4032]: precision = 25 usec
May 3 17:42:28 terrapin ntpd[4032]: using kernel phase-
lock loop 0041
May 3 17:42:28 terrapin ntpd[4032]: Acutime(0) fd: 8
dev: /dev/Acutime0

Acutime 2000 Synchronization Kit User Guide 6-35
6NTP Software Installation and Configuration
6.8.3 NTPQ – The NTP Query Utility
NTP includes a network-enabled monitoring utility called NTP
QUERY. This utility has a number of features that enable the user to
monitor the performance of all time servers from a single console.
To learn more about NTPQ, please refer to NTP documentation.
When NTPQ is first started, it presents a prompt:
ntpq>
The user enters pe to request the Peer Status List from the local
server:
ntpq> pe
A table similar to the following one is generated. Each entry in the
table provides information about a reference clock that NTP is
attempting to synchronize with.
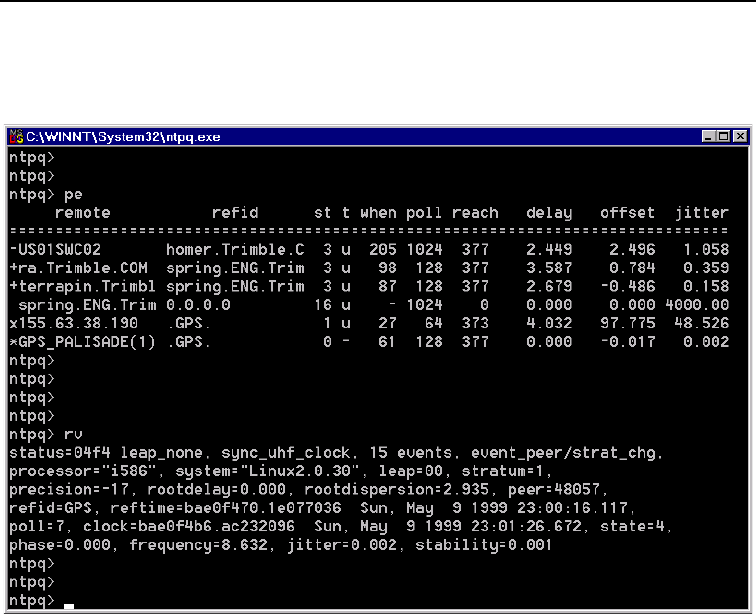
6-36 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
NTP is Communicating with the Acutime NTP Reference
Clock
The Acutime NTP reference clock is identified in the list as
GPS_ACUTIME. The data indicates that the Acutime GPS is selected as
reference clock, that it was last polled 61 seconds ago, and that it has
responded to each of the last 11 polls. The offset between the system
clock and UTC is 17 microseconds, with a jitter of 2 microseconds.
The use of the rv command is also shown above. It reveals more
information about the reference clock source in use by NTP.
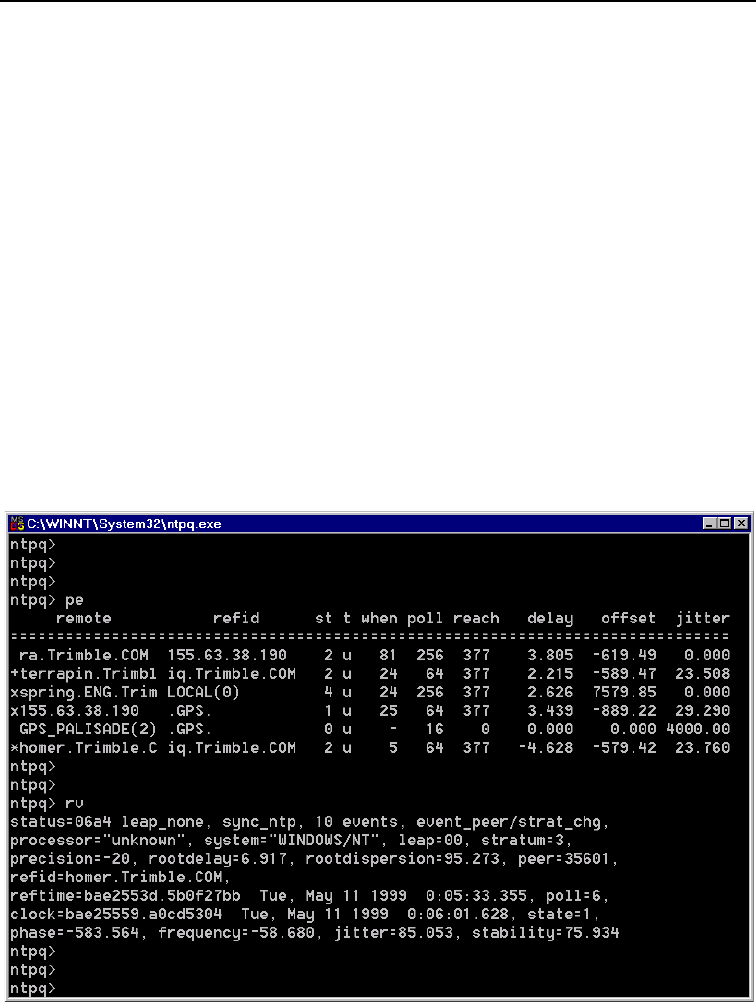
Acutime 2000 Synchronization Kit User Guide 6-37
6NTP Software Installation and Configuration
NTP is not Running
If NTP is not running on the machine, you will see a timeout
message:
ntpq> pe
hostname.trimble.com: timed out, nothing
received
***Request timed out
ntpq>
Problems with NTP and the Acutime NTP reference clock can be
observed using NTPQ by monitoring the when and reach fields of the
GPS_ACUTIME line item.
No Response from the Acutime NTP Reference Clock
If the Acutime is not responding to NTP poll requests, the debug
output appears as follows:

6-38 Acutime 2000 Synchronization Kit User Guide
NTP Software Installation and Configuration 6
The reach count for GPS_ACUTIME is 0, which indicates a clock or
communication failure.
Observe also that the status reports sync_ntp, and that refid
is no longer GPS, indicating the server has fallen back to an available
network time source.
For more information on correcting this condition, see Appendix E.

Acutime 2000 Synchronization Kit User Guide A-1
A Trimble Standard
Interface Protocol
The Trimble Standard Interface Protocol (TSIP) provides commands
that the system designer can use to configure a GPS receiver for
optimum performance in a variety of applications. TSIP enables the
system designer to customize the configuration of a GPS module to
meet the requirements of a specific application.
TSIP is a simple bidirectional, binary packet protocol used in a wide
variety of Trimble GPS receivers. TSIP offers a broad range of
command packets and report packets that provide the GPS user with
maximum control over the Acutime 2000 and ACE UTC receivers.
This appendix provides the information needed to make use of the
powerful TSIP features, enhance overall system performance, and
reduce the total development time. The reference tables beginning on
page A-7 help you determine which packets apply to your
application. For those applications requiring customization, see
Table A-12 for a detailed description of the key setup parameters.
Application guidelines are provided for each TSIP command packet,
beginning on page A-10.
A.1 Interface Scope
The Trimble Standard Interface Protocol (TSIP) is based on the
transmission of packets of information between the user equipment
(host) and the GPS receiver. Each packet includes an identification
code (1 byte, representing 2 hexadecimal digits) that identifies the
A-2 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
meaning and format of the data that follows. Each packet begins and
ends with control characters.
A.1.1 Packet Structure
TSIP packet structure is the same for both commands and reports.The
packet format is:
<DLE> <id> <data string bytes> <DLE> <ETX>
<DLE> is the byte 0x10, <ETX> is the byte 0x03, and <id> is
apacket identifier byte, which can have any value except for
<ETX>and <DLE>. The bytes in the data string can have any value.
To prevent confusion with the frame sequences <DLE> <id> and
<DLE><ETX>, every <DLE> byte in the data string is preceded by
an extra<DLE> byte ('stuffing'). These extra <DLE> bytes must be
added ('stuffed') before sending a packet, and removed ('unstuffed')
after receiving the packet.
!Note – A simple <DLE> <ETX> sequence does not necessarily
signify the end of the packet, as these can be bytes in the middle of a
data string.The end of a packet is <ETX> preceded by an odd number
of <DLE> bytes.
Multiple-byte numbers (integer, float, and double) follow the ANSI/
IEEE Std 754 IEEE Standard for Binary Floating-Point Arithmetic as
illustrated below. They are sent most-significant-byte-first. This may
involve switching the order of the bytes as they are normally stored in
Intel-based machines. Only the fractional part of the mantissa for real
numbers, SINGLE and DOUBLE, is reported because the leading bit
on the mantissa is always 1. Specifically:
INTEGER is a 16-bit unsigned number sent in two's complement
format.
SINGLE (float, or 4 byte REAL) is sent as a series of four bytes; it
has a precision of 24 significant bits, approximately 6.5 digits.

Acutime 2000 Synchronization Kit User Guide A-3
ATrimble Standard Interface Protocol
DOUBLE (8 byte REAL) is sent as a series of eight bytes (a, b, c, d, e,
f, g, h); it has a precision of 52 significant bits, a little better than 15
digits.
The TSIP protocol is the primary protocol used by the Ace UTC and
Acutime 2000 receivers. This document describes in detail all TSIP
packet identification codes, the format of each packet, and all
available information that can be output from the Ace UTC and
Acutime 2000. This manual allows the user to configure the receiver
to output information required for a particular application. The
receiver transmits some of the information (position and velocity
solutions, etc.) automatically when it is available, while other
information is transmitted only on request.
A.2 Physical Interface Characteristics
The Ace UTC and the Acutime 2000 utilize high-quality serial I/O
components to drive the available serial transmit and receive
channels.
The Acutime 2000 is available in RS-232 and RS-422 configurations,
while the Ace UTC utilizes single-ended technology the proven in a
long series of embedded board-level receiver products.
Regardless of the physical transmission medium, the receiver
architectures allow both products to achieve identical performance,
while the firmware offers a proven standardized interface.
The Ace UTC’s I/O capabilities differ from those of Acutime 2000 as
a result of physical differences, between the two boards. Some
options in the serial port configuration packet 0xBC are not
applicable to either Ace UTC or Acutime 2000 and are labeled as
such.
This section is provided to provide the user with a complete
understanding of the capabilities of each receiver.
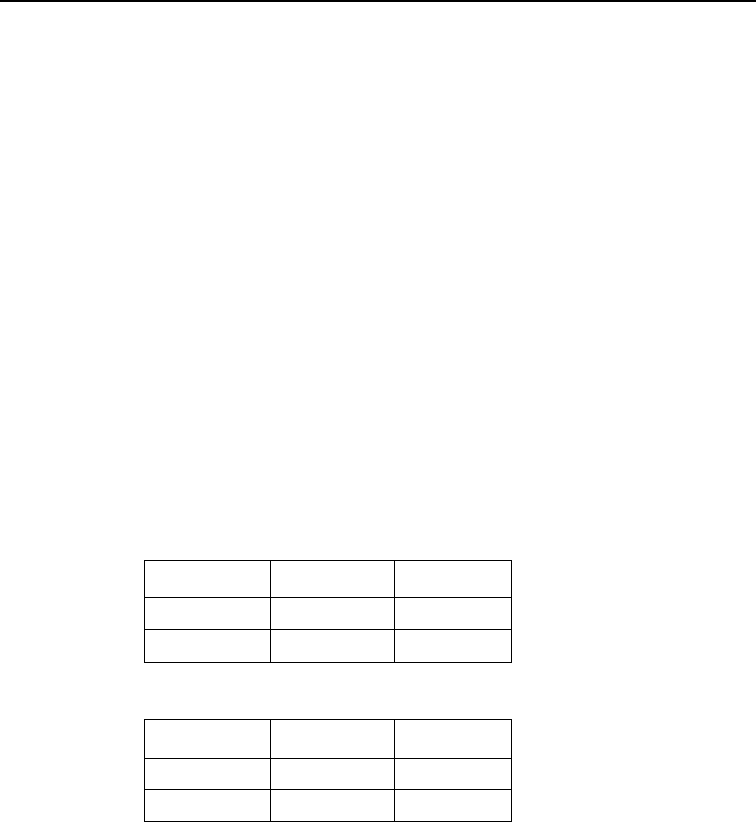
A-4 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.2.1 Nomenclature
Historically, the ports of the Smart Antenna product lines which
include Acutis, Acutime and Palisade products, have been described
using letters "A" and "B". The board-level products, such as Lassen,
Ace and Core Module 3, have historically used port numbers "1" and
"2" to label the ports on the starter kit.
The Acutime 2000 ports are referenced by letters "A" and "B",
conformant to standards established by the Palisade product line.
The Ace UTC ports are referenced by numbers, conformant with the
conventions of previous board-level products.
This manual reconciles the naming schemes of both receiver lines,
and generally refers to the ports using the Ace UTC convention of
using "1" and "2". Exclusively, where designations apply only to
Acutime 2000, the ports will be referenced as letters "A" or "B".
The following tables can be used to cross reference the port
identifiers:
A.2.2 Protocol Capabilities
The I/O ports of Ace UTC and Acutime 2000 are highly configurable.
Port settings are stored in non-volatile memory, and are retained
across power outages.
Table A-1 Ace UTC Port Translation Table
Function Label Internal
Primary Port 1 Port 0
Secondary Port 2 Port 1
Table A-2 Acutime 2000 Port Translation Table
Function Label Internal
TSIP Port B Port 0
Timing Port A Port 1

Acutime 2000 Synchronization Kit User Guide A-5
ATrimble Standard Interface Protocol
For systems with minimal bandwidth for processing serial data
streams, the receivers can be configured as silent devices, which only
generate I/O when polled. On the other end of the spectrum, the Ace
UTC and Acutime 2000 receivers can be configured to output various
automatic report packets and protocols to satisfy demanding real-time
update requirements of complex monitoring systems.
Event Input
Both receivers feature an event input which can capture and report
time stamps with the same precision as the PPS signal.
Primary Port Features
The Acutime 2000 and Ace UTC both feature a primary bi-
directional port, which is factory configured as for TSIP input and
output.
Secondary Port Features (Acutime 2000)
The Acutime 2000 has a bi-directional, programmable secondary
port, that is designated as the Timing port. The timing port’s protocol
input lines are shared with the Event input feature.
The receiver can be configured to accept protocol input or event
signals, but not both. Acutime 2000 cannot generate event time tags if
port A is configured for RTCM input or TSIP input.
The port can be configured to accept and output data using various
protocols as shown in the table below.
Table A-3 Secondary Port Features (Acutime 2000)
Port Designator Input Default Output Default
“Port A” TSIP, RTCM none TSIP, NMEA TSIP
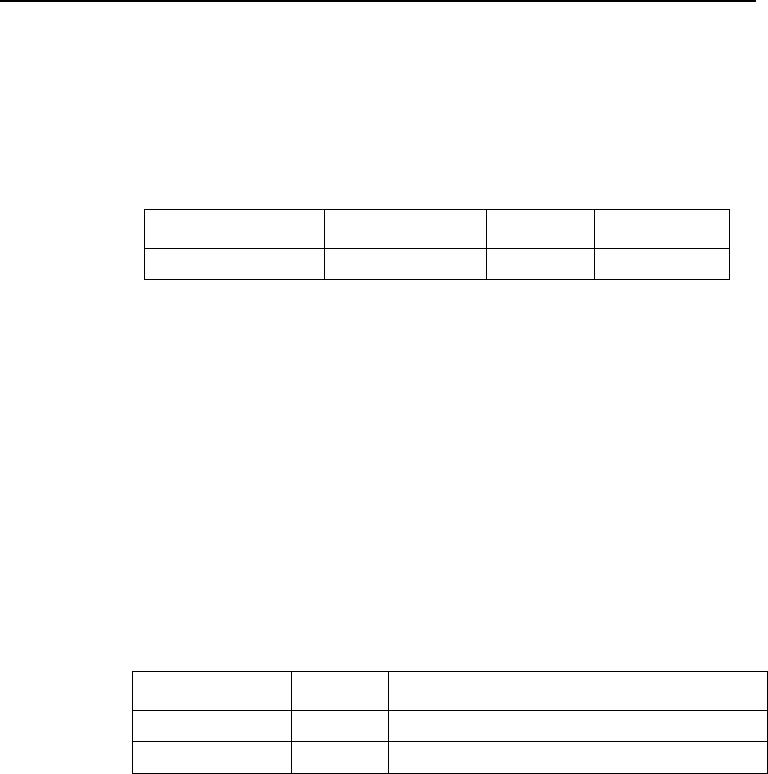
A-6 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Secondary Port Features (Ace UTC)
Due to the number of available I/O pins, the Ace UTC does not
generate output on its secondary port.
The input port may be configured as shown in the table below.
A.2.3 Event Input
The Ace UTC and Acutime 2000 receivers are capable of time-
stamping external events with high-precision. Events are triggered by
an input pulse, and can be reported by either or both of two super
packets. The output of the event packets can be configured using
packet 8E-A5.
The data in both packets allows constructing a unique 4-dimensional
coordinate identifying each event.
Event Reporting
The receivers can output the event reports on any available TSIP port.
A.3 Packets Output at Power-Up
The following table lists the messages output by the receiver at
power-up. After completing its self-diagnostics, the receiver
automatically outputs a series of packets that indicate the initial
Table A-4 Secondary Port Features (Ace UTC)
Port Designator Input Default Output
“Port 2” TSIP, RTCM TSIP N/A
Table A-5 Event Packets
Super Packet Length Description
8F-0B 74 Comprehensive time with LLA position
8F-AD 22 Primary UTC time with leap information
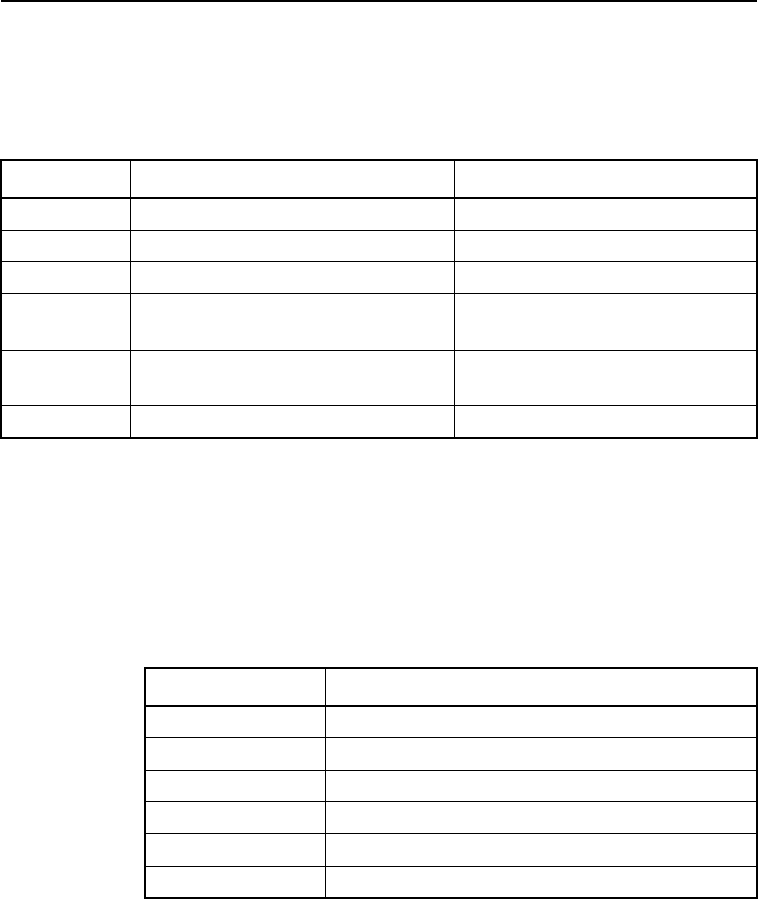
Acutime 2000 Synchronization Kit User Guide A-7
ATrimble Standard Interface Protocol
operating condition of the receiver. Messages are output in the
following order. Upon output of packet 82, the sequence is complete
and the receiver is ready to accept commands.
A.4 Receiver Warm Start
You can warm-start the receiver by sending each of the following
commands after the receiver has completed its internal initialization
and has output packet 82 (see Table ).
Table A-6 Packets Output at Power-Up
Output ID Description Notes
46 Receiver health
4B Machine code/status
45 Software version
83 Double precision XYZ position If single precision is selected,
packet 42 is output instead.
84 Double precision LLA position If single precision is selected,
packet 4A is output instead.
82 DGPS position fix mode --
Table A-7 Receiver Warm Start Commands
Input ID Description
2B/23 Initial position (LLA)/ECEF
2E Initial time
38 (type 2) Almanac (for each SV)
38 (type 3) Almanac health
38 (type 4) Ionosphere page
38 (type 5) UTC correction
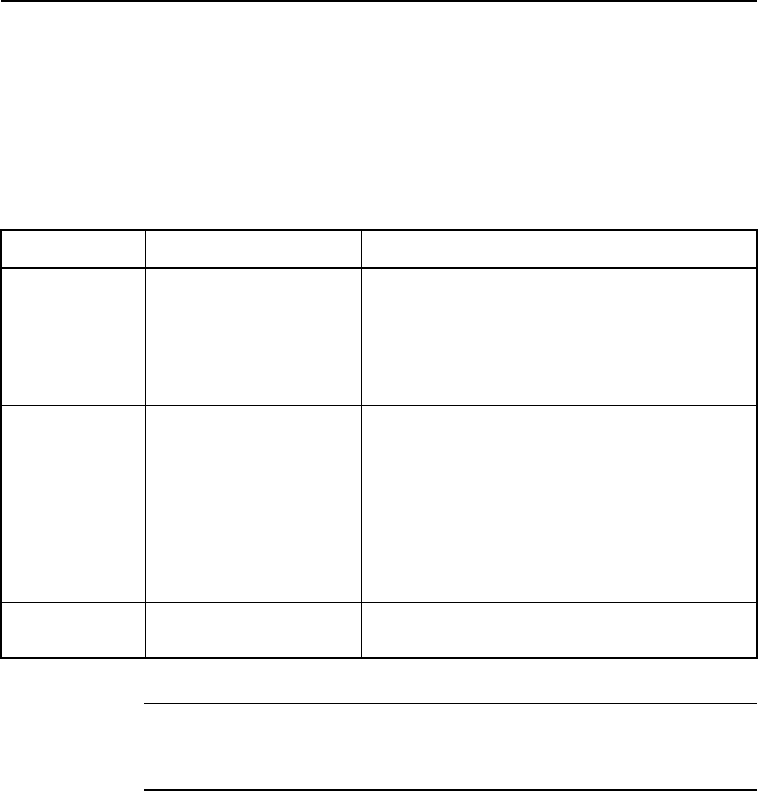
A-8 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.5 Default Background Packets for Acutime 2000
The Acutime 2000 automatically outputs a set of packets that you can
monitor for changes in receiver operations, including receiver health,
time, almanac pages, and ephemeris updates. These messages are
output at the rates indicated in the table below.
!Note – The background packets listed in this table are automatically
output. Background packets can be turned off. For more information
on this option, see Command Packet 8E-4D.
Table A-8 Background Packets
Output ID Description Notes
41 GPS time If the receiver's GPS clock is set and the
receiver is not outputting positions, time is
output approximately every 16 seconds.
Output approximately every 2.5 minutes if
the receiver is doing position fixes.
46 Receiver health Output approximately every 16 seconds, if
the receiver is not doing fixes.
Output approximately every 30 seconds if
the receiver is doing position fixes.
Whenever any bit in the health message
changes, receiver health is automatically
output.
6D Mode packet Output approximately every 30 seconds
or when a constellation change occurs.
Acutime 2000 Synchronization Kit User Guide A-9
ATrimble Standard Interface Protocol
A.6 Default Automatic Position and Velocity Reports
for Acutime 2000
The Acutime 2000 automatically outputs position and velocity
reports at set intervals. Report intervals are controlled by packet 35.
!Note – When the receiver is in the Manual or Overdetermined Clock
mode, it outputs packet 54 to provide the computed clock-only
solution.
A.7 Automatic Primary and Supplemental Timing
Reports for ACE UTC
Timing Packets 8F-AB and 8F-AC are automatically output at 1 Hz.
These packets are part of the low-latency packet series AB/AC/AD/
OB. See section A.8.
Table A-9 Automatic position and Velocity Reports
Output ID Description
42 Single precision XYZ position
83 Double-precision XYZ position
4A Single-precision LLA position
84 Double-precision LLA position
43 Velocity fix (XYZ ECEF)
54 See Note
56 Velocity fix (ENU)
A-10 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.8 Low-Latency Timing Packets
The Ace UTC and Acutime 2000 feature a sequence of high-priority
timing super packets, which are output within a bounded period of
time after the PPS. The LLT packets offer an advanced data interface
for applications requiring accurate data reports in a time constrained
environment.
On Acutime 2000 and Ace UTC, the first super packet will start
transmission no later than 15 – 25 ms after the PPS transition.
The super packets which meet the LLTP criteria are in the table
below. The packets are listed in order of output priority. Output of
each packet can be turned on/off by using the mask in packet 8E-A5,
but the output order cannot be changed.
The packets may also be requested, please refer to the specific packet
documentation for details.
The receiver will output all other TSIP packets after the transmission
of LLTP packet sequence is complete.
!Note – Only the first packet will meet the LLTP specification. All other
LLTP packets will be output immediately after the first LLTP packet
completes.
Table A-10 Low-Latency Timing Packets
LLTP Packet ID Description Request Packet ID
8F-AB Primary Timing 8E-AB
8F-AC Supplemental Timing 8E-AC
8F-AD Primary UTC Time 8E-AD
8F-0B Comprehensive Time and Position 8E-0B
Acutime 2000 Synchronization Kit User Guide A-11
ATrimble Standard Interface Protocol
A.9 Event Packets
Event packets 8F-0B and 8F-0A are output in response to the event
input as configrured by packet 8E-A5
A.10 Satellite Data Packets
The following packets request data transmitted by the GPS satellites
and satellite tracking information.
Table A-11 Satellite Data Packets
Input ID Description Output ID
20 Request almanac 40
27 Request signal levels 47
28 Request GPS system message 48
29 Request almanac health page 49
2F Request UTC parameters 4F
38 Request/load satellite system data 58
39 Set/request satellite disable or ignore health 59
3A Request last raw measurement 5A
3B Request satellite ephemeris status 5B
3C Request tracking status 5C
A-12 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.11 Customizing Receiver Operations
The following packets let you customize the receiver output for your
application.
Table A-12 Customizing Receiver Operations
Input ID Description Output ID
21 Request current time 41
23 Initial position (XYZ Cartesian ECEF)
24 Request receiver position fix mode 6D
26 Request receiver health 46 and 4B
27 Request satellite signal levels 47
2A Altitude for 2-D mode 4A
2B Initial position (LLA)
2E GPS time 4E
35 Set input/output options 55
37 Status and values of last position and velocity 57 (Note 1)
7A Set/request NMEA interval and message mask 7B
BB Set/request receiver configuration BB
BC Set/request port configuration BC
8E-14 Set/request datum value 8F-14
8E-15 Request datum values 8F-15
8E-4A Set/request PPS characteristics 8F-4A
8E-A5 Set/request packet broadcast mask 8F-A5
8E-A6 Issue self-survey command 8F-A6
Note 1: Output is determined by packet 35 settings (see Table A-3).
Acutime 2000 Synchronization Kit User Guide A-13
ATrimble Standard Interface Protocol
The following packets let you customize receiver operations.
Table A-13 Advanced Packets
Input ID Description Output ID
1E Clear memory, reset (Note 1)
25 Soft reset and self test (Note 1)
2D Request Oscillator offset 4D
37 Information about last computed fix 57 (Note 1)
39 Satellite disable or ignore health 59 (Note 2)
3A Last raw measurement 5A
3B Satellite ephemeris status 5B
3C Tracking status 5C
BB Set receiver configuration parameters BB
8E-4A Set PPS characteristics 8F-4A
8E-4E Set PPS output option 8F-4E
8E-4F Set PPS Width (Acutime 2000 only) 8F-4F
8E-20 Fixed Point Superpacket 8F-20
Note 1: Output is determined by packet 35 settings. For packets 1E and 25, see Table to
determine which packets are output at power-up.
Note 2: Not all modes of packet 39 cause a reply (see the description for packet 39, page
A-37).
A-14 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.12 Command Packets Sent to the Receiver
Table A-14 summarizes the command packets sent to the receiver. It
includes a short description of each packet and the associated output
packet. In some cases, the response packets depend on user-selected
options. These selections are described beginning on page A-20.
Table A-14 Command Packets Sent to the Receiver
Input Packet Description Output ID
1D Oscillator Offset
1E Reset receiver (Note 1)
1F Software version 45
20 Almanac 40
21 Current GPS time 41
22 Fix Mode select (Note 2)
23 Initial position (XYZ Cartesian ECEF)
24 Receiver position fix mode 6D
25 Soft reset and self-test (Note 1)
26 Receiver health 46, 4B
27 Signal levels 47
28 GPS system message 48
29 Almanac health page 49
2A Altitude for 2-D mode 4A
2B Initial position (LLA)
2C Operating parameters 4C
2D Oscillator offset 4D
2E Set GPS time 4E
2F UTC parameters 4F
31 Accurate initial position (XYZ Cartesian ECEF)
32 Accurate initial position (LLA)
34 Satellite # for 1-SV mode
35 I/O options 55
37 Status and values of last position and velocity 57 (Note 4)
Acutime 2000 Synchronization Kit User Guide A-15
ATrimble Standard Interface Protocol
38 Load satellite system data 58
39 Satellite enable/disable and health heed/ignore 59 (Note 3)
3A Last raw measurement 5A
3B Satellite ephemeris status 5B
3C Tracking status 5C
3D Timing port configuration 3D
3F-11 Request EEPROM segment status 5F-11
7A Set/request NMEA interval and message mask 7B
BB Set receiver configuration BB
BC Set port configuration BC
8E-0B 8F-0B output configuration 8F-A5/8F-0B
8E-14 Set new datum 8F-14
8E-15 Current datum values 8F-15
8E-20 Last fix (fixed point) 8F-20
8E-26 Write receiver configuration EEPROM 8F-26
8E-41 Manufacturing parameters 8F-41
8E-42 Production parameters 8F-42
8E-45 Revert segments to default settings 8F-45
8E-4A Set/request PPS characteristics 8F-4A
8E-4B Survey limit 8F-4B
8E-4D Packet Output Mask 8F-4D
8E-4E Set PPS output option 8F-4E
8E-4F Set PPS Width (Acutime 2000 only) 8F-4F
8E-A5 Set or request packet broadcast mask 8F-A5
8E-A6 Issue self-survey command 8F-A6
8E-AB Set/request primary timing packet 8F-AB
8E-AC Set/request supplemental timing packet 8F-AC
8E-AD 8F-AD output configuration 8F-A5/8F-AD
Note 1: Output is determined by packet 35 settings. See Table to determine which messages
are output at power-up.
Table A-14 Command Packets Sent to the Receiver (Continued)
Input Packet Description Output ID
A-16 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.13 Report Packets Sent by the GPS Receiver to the
User
Table A-15 summarizes the packets output by the receiver. It includes
the output packet ID, a short description of each packet, and the
associated input packet. In some cases, the response packets depend
on user-selected options. These selections are covered in the packet
descriptions beginning on page A-20.
Note 2: Entering 1SV mode initiates automatic output of packet 54.
Note 3: Not all packet 39 operations have a response. See packet 39 description.
Note 4: Output is determined by packet 35 settings.
Table A-15 Report Packets Sent by GPS Receiver to User
Output ID Packet Description Input
3D Timing port configuration 3D
40 Almanac data for one satellite 20
41 GPS time 21
42 Single-precision XYZ ECEF position 37
43 Velocity fix (XYZ ECEF) 37
45 Software version information 1F
46 Health of receiver 26
47 Signal level for all satellites 27
48 GPS system message 28
49 Almanac health for all sats 29
4A Single-precision LLA position 37
4B Machine code/status 26
4C Report operating parameters 2C
4D Oscillator offset 2D
4E Response to set GPS time 2E
4F UTC parameters 2F
Table A-14 Command Packets Sent to the Receiver (Continued)
Input Packet Description Output ID
Acutime 2000 Synchronization Kit User Guide A-17
ATrimble Standard Interface Protocol
54 One-satellite bias and bias rate 22
55 I/O options 35
56 Velocity fix (ENU) 37
57 Information about last computed fix 37
58 GPS system data/acknowledge 38
59 Satellite enable/disable and health heed/ignore 39
5A Raw measurement data 3A
5B Satellite ephemeris status 3B
5C Satellite tracking status 3C
5F-11 Request EEPROM segment status 3F-11
6D All-in-view satellite selection 24
7B NMEA interval and message mask 7A
83 Double-precision XYZ position 37
84 Double-precision LLA position 37
BB Receiver configuration BB
BC Port configuration BC
8F-0B Comprehensive time Auto/Event
8F-14 Current datum values 8E-14
8F-15 Current datum values 8E-15
8F-20 Last fix with extra information (fixed point) 8E-20
8F-26 Response to save EEPROM segments 8E-26
8F-41 Manufacturing parameters 8E-41
8F-42 Production parameters 8E-42
8F-45 Response to revert segments to default 8E-45
8F-4A PPS characteristics 8E-4A
8F-4B Survey limit 8E-4B
8F-4D Automatic packet output mask 8E-4D
8F-4E PPS output option 8E-4E
8F-4F Set PPS width (Acutime 2000 only) 8E-4F
8F-A5 Packet broadcast mask 8E-A5
Table A-15 Report Packets Sent by GPS Receiver to User (Continued)
Output ID Packet Description Input
A-18 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
8F-A6 Response to self-survey command 8E-A6
8F-AB Primary timing packet 8E-AB
8F-AC Supplemental timing packet 8E-AC
8F-AD UTC event time Event/Auto
Table A-15 Report Packets Sent by GPS Receiver to User (Continued)
Output ID Packet Description Input
Acutime 2000 Synchronization Kit User Guide A-19
ATrimble Standard Interface Protocol
A.14 Packet Structure
TSIP packet structure is the same for both commands and reports.
The packet format is:
<DLE> <id> <data string bytes> <DLE> <ETX>
<DLE> is the byte 0x10, <ETX> is the byte 0x03, and <id> is a
packet identifier byte, which can have any value except for <ETX>
and <DLE>. The bytes in the data string can have any value. To
prevent confusion with the frame sequences <DLE> <id> and <DLE>
<ETX>, every <DLE> byte in the data string is preceded by an extra
<DLE> byte ('stuffing'). These extra <DLE> bytes must be added
('stuffed') before sending a packet, and removed ('unstuffed') after
receiving the packet.
!Note – A simple <DLE> <ETX> sequence does not necessarily
signify the end of the packet, as these can be bytes in the middle of a
data string. The end of a packet is <ETX> preceded by an odd
number of <DLE> bytes.
Multiple-byte numbers (integer, float, and double) follow the
ANSI/ IEEE Std 754 IEEE Standard for Binary Floating-Point
Arithmetic as illustrated below. They are sent most-significant-byte-
first. This may involve switching the order of the bytes as they are
normally stored in Intel-based machines. Only the fractional part of
the mantissa for real numbers, SINGLE and DOUBLE, is reported
because the leading bit on the mantissa is always 1. Specifically:
INTEGER is a 16-bit unsigned number sent in two's complement
format.
SINGLE (float, or 4 byte REAL) is sent as a series of four bytes; it
has a precision of 24 significant bits, approximately 6.5 digits.
DOUBLE (8 byte REAL) is sent as a series of eight bytes (a, b, c, d, e,
f, g, h); it has a precision of 52 significant bits, a little better than
15 digits.
A-20 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.15 Packet Descriptions
Command packets are sent from an external device, such as a
computer or terminal, to the receiver when requesting report packets,
setting receiver parameters, or performing receiver command
operations such as resetting the receiver. Many command packets
have a corresponding report packet, which is sent to the external
device in response to the command packet. Some commands perform
discrete operations and have no matching report packet.
0x1D Command Packet 1D
Oscillator Offset
This packet commands the GPS receiver to set or clear the oscillator
offset in battery backed memory. This is normally used for servicing
the unit.
To set the oscillator offset, four data bytes are sent: the oscillator
offset in Hertz relative to L1 as a SINGLE real value. The oscillator
offset is automatically updated when the receiver is doing fixes.
!Note – Use of this packet is for diagnostic purposes only and is not
recommended for the user.
Table A-16 Command Packet 1D - Clear Oscillator Offset
Byte Item Type Value Response
0 Operation Byte "C," 43 hex Clear the oscillator offset
Table A-17 Command Packet 1D - Set Oscillator Offset
Byte Item Type Value Response
0-3 Offset Single Offset in
Hertz
Set the oscillator offset
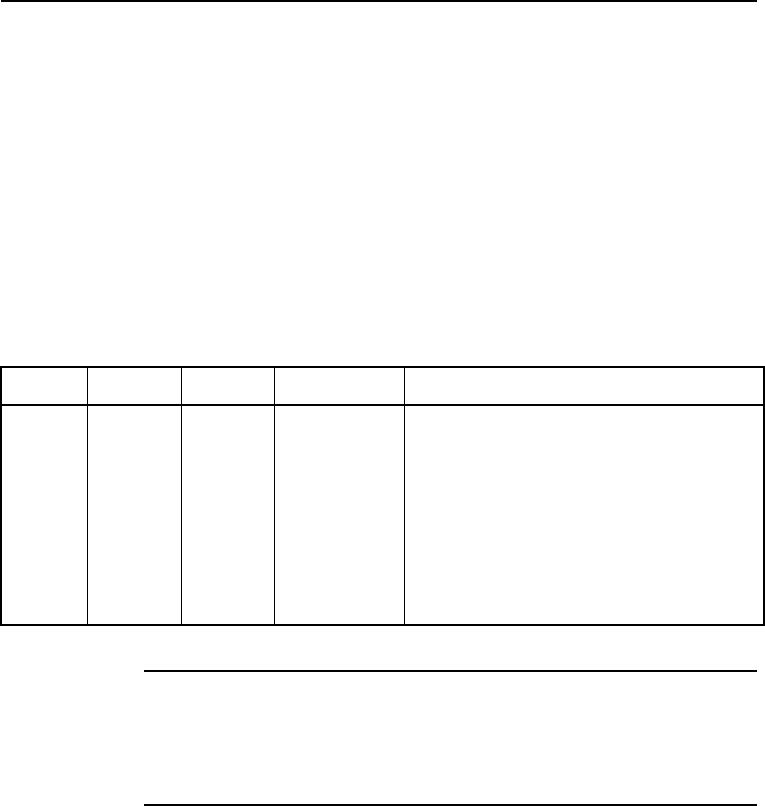
Acutime 2000 Synchronization Kit User Guide A-21
ATrimble Standard Interface Protocol
0x1E Command Packet 1E
Initiate Cold or Factory Reset
This command packet tells the receiver to perform either a cold reset
or a factory reset. A cold reset clears all navigation data (for example,
almanac, and ephemeris) stored in RAM and is equivalent to a power
cycle. A factory reset also restores the factory defaults for all
configuration and navigation parameters stored in non-volatile
memory. This packet can affect separately the configuration
parameters and navigation parameters. It contains one data byte equal
to one of the following ASCII letters: ‘K’, ‘F’, ‘C’,‘N’, or ‘R’.
"Caution – The factory reset commands 0x1E-‘F’ and 0x1E-‘R’ will
delete the stored position and cause a self-survey to restart. All
almanac, ephemeris, current position, mode, and communication port
setup information stored in RAM is lost by the execution of these
commands.
0x1F Command Packet 1F
Software Versions Request
This packet requests information about the version of software
running in the Navigation and Signal Processors. This packet contains
no data bytes. The GPS receiver returns packet 45.
Table A-18 Command Packet 1E
Byte Item Type Value Response
0 Rest BYTE ’K’ (0x4B)
’F’ (0x46)
’C’ (0x43)
’N’ (0x4E)
’R’ (0x52)
Cold reset
Factory reset
Compatibility re-start for the Palisade
firmware version v7.02
Clear navigation data in EEPROM
and cold reset
Set configuration parameters in
EEPROM to factory defaults
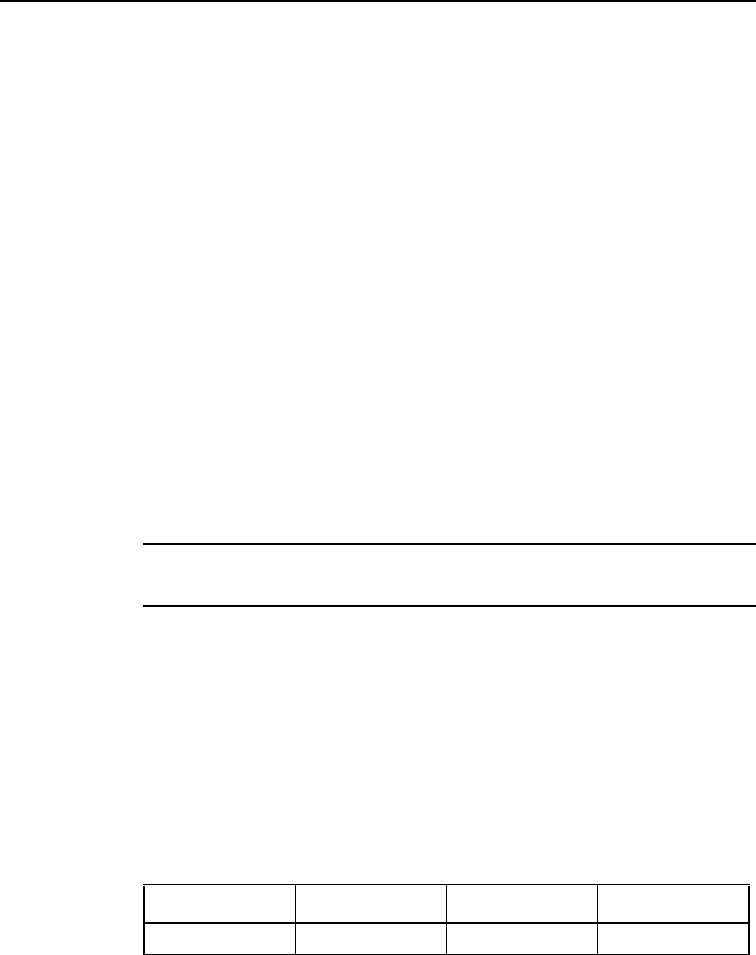
A-22 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x20 Command Packet 20
Almanac Request
This packet requests almanac data for one satellite from the GPS
receiver. This packet contains one data byte specifying the satellite
PRN number. The GPS receiver returns packet 40 hex.
0x21 Command Packet 21
Current Time Request
This packet requests current GPS time. This packet contains no data.
The GPS receiver returns packet 41 hex.
0x23 Command Packet 23
Initial Position (XYZ Cartesian ECEF) Command
This packet provides the GPS receiver with an approximate initial
position in XYZ coordinates. This packet is useful if the user has
moved more than about 1,000 miles since the previous fix.
!Note – The GPS receiver can initialize itself without any data from the
user; this packet merely reduces the time required for initialization.
This packet is ignored if the receiver is already calculating positions.
The origin is the earth’s center. The X-axis points toward the
intersection of the equator and the Greenwich meridian, the Y-axis
points toward the intersection of the equator and the 90o meridian,
and the Z-axis points toward the North Pole. The cold-start default
LLA (not XYZ) position is 0, 0, 0.
The data format is shown in the table below.
Table A-19 Command Packet 23
Byte Item Type Units
0-3 X Single meters
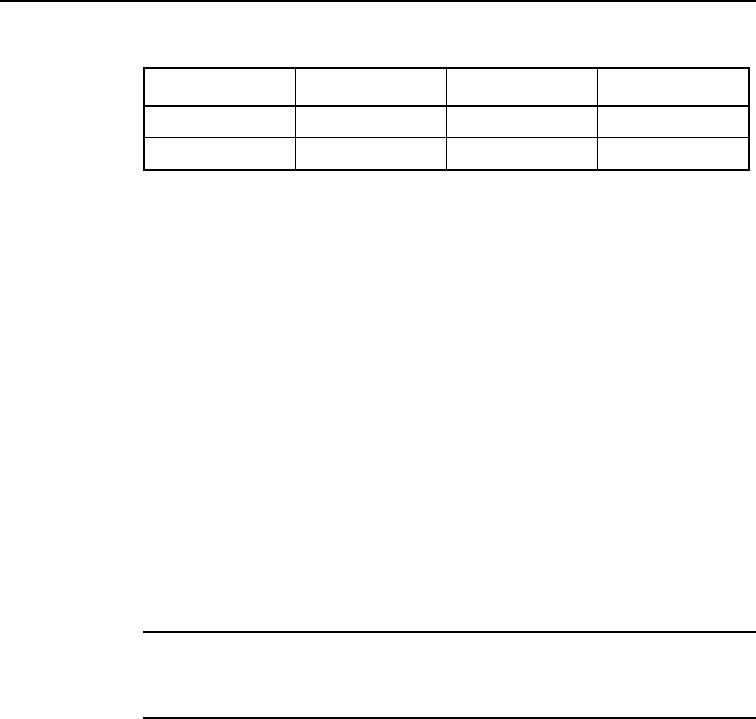
Acutime 2000 Synchronization Kit User Guide A-23
ATrimble Standard Interface Protocol
0x24 Command Packet 24
GPS Receiver Position Fix Mode Request
This packet requests the current position fix mode of the GPS
receiver. This packet contains no data. The GPS receiver returns
packet 6D.
0x25 Command Packet 25
Initiate Soft Reset / Self Test Command
This packet commands the GPS receiver to perform a software reset.
The GPS receiver performs a self-test as part of the reset operation.
This packet contains no data. Following completion of the reset, the
receiver outputs the startup messages (see Table A-1). The receiver
retains the time, survey position, port configuration, and almanac
contents during this operation.
!Note – The GPS receiver sends packet 45 only on power-up and
reset (or on request). If packet 45 appears unrequested, either the
GPS receiver power was cycled or the GPS receiver was reset.
0x26 Command Packet 26
Health Request
This packet requests health and status information from the GPS
receiver. This packet contains no data. The GPS receiver returns
packets 46 and 4B.
4-7 Y Single meters
8-11 Z Single meters
Table A-19 Command Packet 23
Byte Item Type Units

A-24 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x27 Command Packet 27
Signal Levels Request
This packet requests signal levels for all satellites currently being
tracked. This packet contains no data. The GPS receiver returns
packet 47.
0x28 Command Packet 28
GPS System Message Request
This packet requests the GPS system ASCII message sent with the
navigation data by each satellite. This packet contains no data. The
GPS receiver returns packet 48.
0x29 Command Packet 29
Almanac Health Page Request
This packet requests the health page from the almanac. This packet
contains no data. The GPS receiver returns packet 49.
0x2A Command Packet 2A
Altitude for 2-D Mode Command
This packet provides the altitude to be used for Manual 2-dimensional
navigation mode. This altitude is also used for Auto 2-D mode. This
packet contains one SINGLE number (4 bytes) specifying the altitude
in meters, using the WGS-84 model of the earth or MSL geoid
altitude, depending on I/O options (set by packet 35). The GPS
receiver returns packet 4A. It is recommended that the user upload the
reference altitude before the receiver starts doing position fixes.
If an altitude is not provided, the receiver will use the altitude of the
previous 3-D fix (altitude-hold mode). Sending packet 2A with one
data byte equal to 0xFF will cancel altitude-set mode and return the
reference altitude to 0. The altitude setting is stored in non-volatile
memory. Packet 0x8E-26 can be used to write receiver configuration
to EEPROM.
Acutime 2000 Synchronization Kit User Guide A-25
ATrimble Standard Interface Protocol
To use the fixed altitude survey mode, the receiver must be
configured to Manual 2-D navigation mode using packet BB. The
reference altitude will be used in 2-D survey from both warm and
cold starts.
!Note – If the receiver altitude is set above 18,000 m, the receiver will
be forced to reset each time it acquires satellites. This is implemented
to conform with the COCOM industry standard.
A-26 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x2B Command Packet 2B
Initial Position (Latitude, Longitude, Altitude)
Command
This packet provides the GPS receiver with an approximate initial
position in latitude and longitude coordinates (WGS-84). This packet
is useful if the user has moved more than about 1,000 miles since the
previous fix.
!Note – The GPS receiver can initialize itself without any data from the
user; this packet merely reduces the time required for initialization.
This packet is ignored if the receiver is already calculating positions.
The cold-start default LLA position is 0, 0, 0.
The data format is shown below.
The GPS receiver returns packet 4C.
0x2D Command Packet 2D
Oscillator Offset Request
This packet requests the calculated offset of the GPS receiver master
oscillator. This packet contains no data. The GPS receiver returns
packet 4D hex. This packet is used mainly for service.
Table A-20 Command Packet 2B
Byte Item Type Units
0-3 Latitude Single radians, north
4-7 Longitude Single radians, east
8-11 Altitude Single meters
Acutime 2000 Synchronization Kit User Guide A-27
ATrimble Standard Interface Protocol
0x2E Command Packet 2E
GPS Time Command
This packet provides the approximate GPS time of week and the
week number to the GPS receiver. The GPS receiver returns packet
4E. The data format is shown below. The GPS week number
reference is Week # 0 starting January 6, 1980. The seconds count
begins at the midnight which begins each Sunday morning.
This packet is ignored if the receiver has already calculated the time
from tracking a GPS satellite.
0x2F Command Packet 2F
UTC Parameters Request
This packet requests the current UTC-GPS time offset (leap seconds).
The packet has no data. The receiver returns packet 4F.
0x31 Command Packet 31
Accurate Initial Position (XYZ Cartesian ECEF)
Command
This packet is identical in content to packet 23. This packet provides
an initial position to the GPS receiver in XYZ coordinates. However,
the GPS receiver assumes the position provided in this packet to be
accurate. This packet is used for satellite acquisition aiding in systems
where another source of position is available and in time transfer
(one-satellite mode) applications. For acquisition aiding, the position
provided by the user to the GPS receiver in this packet should be
accurate to a few kilometers. For high-accuracy time transfer,
position should be accurate to a few meters. TRAIM flags come on if
this position is not accurate enough.
Table A-21 Command Packet 2E
Byte Item Type Units
0-3 GPS time of week Single seconds
4-5 GPS week number Integer weeks

A-28 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Inputting accurate position sets the self-survey completion state to
100%. The uploaded position is not stored in EEPROM unless it is
stored with command packet 8E-26. The input position is reported by
packet 8F-AC.

Acutime 2000 Synchronization Kit User Guide A-29
ATrimble Standard Interface Protocol
0x32 Command Packet 32
Accurate Initial Position (Latitude, Longitude,
Altitude) Command
This packet is identical in content to packet 2B. This packet provides
the GPS receiver with an initial position in latitude, longitude, and
altitude coordinates. However, the GPS receiver assumes the position
provided in this packet to be accurate. This packet is used for satellite
acquisition aiding in systems where another source of position is
available and in time transfer (one-satellite mode) applications. For
acquisition aiding, the position provided by the user to the GPS
receiver in this packet should be accurate to a few kilometers. For
high-accuracy time transfer, position should be accurate to a few
meters. TRAIM flags come on if this position is not accurate enough.
Inputting accurate position sets the self-survey completion state to
100%. The uploaded position is not stored in EEPROM unless it is
stored with command packet 8E-26. The input position is reported by
packet 8F-AC.
0x34 Command Packet 34
Satellite Number For One-Satellite Mode Command
This packet allows the user to control the choice of the satellite to be
used for the 1D Timing mode. This packet contains one byte. If the
byte value is 0, the GPS receiver automatically chooses the usable
satellite with the highest elevation above the horizon. This automatic
selection of the highest satellite is the default action, and the GPS
receiver does this unless it receives this packet. If the byte value is
from 1 to 32, the packet specifies the PRN number of the satellite to
be used. A subsequent value of 0 will return the receiver to automatic
1-SV mode.

A-30 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x35 Command Packet 35
I/O Option Flags Command
This packet requests the current I/O option states and optionally
allows the I/O option states to be set as desired.
To request the option states without changing them, the user sends the
packet with no data bytes included. To change any option states, the
user includes 4 data bytes with the values indicated below in the
packet. The I/O options, their default states, and the byte values for all
possible states are shown below. These option states are held in
non-volatile memory. The GPS receiver returns packet 55. Use
packet 8E-26 to save settings to EEPROM.
These abbreviations apply:
•ALT - Altitude
•ECEF - Earth-centered, Earth-fixed
•XYZ - Cartesian coordinates
•LLA - Latitude, Longitude, Altitude
•HAE - Height Above Ellipsoid
•WGS-84 - Earth model (ellipsoid)
•MSL geoid - Earth Mean Sea Level mode
•UTC - Universal Coordinated Time
Acutime 2000 Synchronization Kit User Guide A-31
ATrimble Standard Interface Protocol
Table A-22 Command Packet 35
Byte Parameter
Name
Bit
Position
Default
Bit
Value
Option Associated
Packets
0 Position 0 (LSB) 0 XYZ ECEF Output
0: Off, 1: On
42 or 83
1 1 LLA Output
0: Off, 1: On
4A or 84
2 0 LLA ALT Output
0: HAE (current datum)
1: MSL geoid WGS-84
4A or 84
30ALT input
0: HAE (current datum)
1: MSL geoid WGS-84
2A
41
Precision-of-position
output
0: Single-precision
packet 42 and/or 4A.
1: Double-precision
packet 83 and/or 84
5 0 8F-20 Output
0: Off
1: On
6-7 0 Unused
1 Velocity 0 0 XYZ ECEF Output
0: Off, 1: On
43
1 1 ENU output
0: Off, 1: On
56
2-7 0 Unused
2 Timing 0 1 Time type
0: GPS time, 1: UTC
1 0 Fix computation time
0: ASAP
1: Next integer sec
2 0 Fix output time
0: When computed
1: Only on request
37
A-32 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Packet 35 is used to control the format and timing of the position and
velocity output.
Bytes 0-1
Bytes 0 and 1 control the message output format.
Byte 2
Byte 2 contains the five time parameters described below:
•Time Type - This bit defines whether the time tags associated
with a position fix are in GPS time or UTC time. The default
is UTC time.
•Fix Computation Time - This bit controls the time and
frequency of position fixes. The default is ASAP.
2 Timing 3 0 Synchronized
measurements
0: Off
1: On
N/A
4 0 Minimize Projection
0: Off, 1: On
N/A
5-7 0 Unused
3 Auxiliary 0 0 Raw measurements
0: Off, 1: oN
5A
1 1 Doppler smoothed
codephase
0: Raw, 1: Smoothed
5A
2-7 Unused
Table A-22 Command Packet 35 (Continued)
Byte Parameter
Name
Bit
Position
Default
Bit
Value
Option Associated
Packets

Acutime 2000 Synchronization Kit User Guide A-33
ATrimble Standard Interface Protocol
Alternatively, in the integer second mode, the most recent
measurements are projected to next integer second, and the
solution is then valid at this time. The benefit of this mode is
the standard fix time and a 1 Hz output rate. The drawbacks
are that some measurement projection is performed and that
the fix may be slightly older than with the default option.
This mode also conforms to the output rate of NMEA.
•Output Time - This bit defines whether fixes are
automatically output when computed or only sent in response
to a packet 37 request. The default is automatic output.
•Synchronized Measurements - This bit controls whether all
satellite range measurements are required to have the same
time tag. The default is OFF. Slightly older measurements are
tolerated (on the order of 3-5 seconds) to provide solutions
when obscurations make it impossible to obtain exactly
concurrent measurements from each satellite.
When this bit is ON, all measurements are required to have
the same time tag. This mode is used only when the user
application requires all satellite measurements to be identical
to the position time tag. If a satellite that is in the selected set
for the solution is lost, then no fix will be made until a new
selection is made.
The synchronized measurement mode combined with the
minimized projection timing mode (see next paragraph)
allows absolutely no measurement projection. However,
obscurations may reduce the fix density when there are
limited satellites. Use this mode cautiously.

A-34 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
•Minimized Projection - This bit controls the time of the
position fix relative to the time of the satellite range
measurements. The default mode is OFF. In this mode, the
time of solution is the time at which the GPS position fix is
computed. Thus, all measurements are projected by an
interval which is roughly the amount of time it takes to
compute the solution. This approach minimizes the latency
between the time tag of the computed solution and the
solution output. The drawback is that the measurement
projection (which is only about 100 ms) may induce some
error during high accelerations.
Alternatively, when minimized projection is ON, the time of
the solution is the time of the most recent measurements.
Thus, if all measurements are taken at exactly the same time,
there is no measurement projection. If a selected satellite's
measurement time lags the most recent measurement, then it
is projected to this time. The difference is that the fix will
have more latency than a fix provided with the above timing
option. This is the best choice for users performing non real-
time error analysis, or non real-time DGPS solution-space
corrections. This is also the preferable mode for users
integrating GPS with other sensors, where communication
lags are the dominant latencies, and thus the time lag between
the applicability and availability of the fix is small.
Byte 3
Byte 3, the auxiliary byte, controls the output of additional fix data. It
contains two control bits:
•Bit 0 controls the output of raw measurements (Packet 5A).
•Bit 1 controls whether the raw measurements output in
packet 5A are doppler smoothed.
Acutime 2000 Synchronization Kit User Guide A-35
ATrimble Standard Interface Protocol
0x37 Command Packet 37
Last Position and Velocity Request
This packet requests information regarding the last position fix. The
GPS receiver returns packet 57 and the appropriate position packet 42
or 4A, or 83 or 84, and the appropriate velocity packet 43 or 56, based
on the I/O options in effect. In timing mode, the GPS receiver returns
packets 57 and 54.
0x38 Command Packet 38
Download and UpLoad Satellite System Data
This packet requests current satellite data (almanac, ephemeris, etc.)
or permits loading initialization data from an external source (for
example, by extracting initialization data from an operating GPS
receiver via a data logger or computer and then using that data to
initialize a second GPS receiver unit). The GPS receiver returns
packet 58.
!Note – The GPS receiver can initialize itself without any data from the
user; it just requires more time.
To request data without loading data, use only bytes 0 through 2.
To load data, use all bytes.
"Caution – Proper structure of satellite data is critical to receiver
operation. Requesting data is not hazardous; loading data improperly
is hazardous. Use this packet only with extreme caution. The data
should not be modified in any way. It should only be retrieved and
stored for later reload.
A-36 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Table A-23 Command Packet 38
Byte Item Type Value Meaning
0 Operation Byte 1
2
Request data from receiver
Load data into receiver
1 Type of data Byte 1
2
3
4
5
6
Not used
Almanac
Health page, T_oa, WN_oa
Ionosphere
UTC
Ephemeris
2 Sat PRN# Byte 0
1-32
Data that is not satellite-ID specific
satellite PRN number
3 length (n) Byte Number of bytes of data to be
loaded
4 to n+3 data n Bytes
Acutime 2000 Synchronization Kit User Guide A-37
ATrimble Standard Interface Protocol
0x39 Command Packet 39
Satellite Attribute Database Command
Normally the GPS receiver selects only healthy satellites (based on
transmitted values in the ephemeris and almanac) that satisfy all mask
values for use in the position solution. This packet allows you to
override the internal logic and force the receiver to either
unconditionally disable a particular satellite or to ignore a bad health
flag. The GPS receiver returns packet 59 for operation modes 3 and 6
only.
At power-on and after a reset the default values are set for all
satellites.
"Caution – Ignoring health can cause the GPS receiver software to
fail, as an unhealthy satellite may contain defective data. Use
extreme caution in ignoring satellite health.
Table A-24 Command Packet 39
Byte Item Type Value Meaning
0 Operation Byte 1
2
3
4
5
6
Enable for selection (default)
Disable for selection
Request enable or disable
status of all 32 satellites
Heed health on satellite (default)
Ignore health on satellite
Request heed or ignore health on
all 32 satellites
1 Satellite # Byte 0
1-32
All 32 satellites
Any one satellite PRN number
A-38 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x3A Command Packet 3A
Last Raw Measurement Request
This packet requests the most recent raw measurement data for one
specified satellite. The GPS receiver returns packet 5A if data is
available.
0x3B Command Packet 3B
Satellite Ephemeris Status Request
This packet requests the current status of satellite ephemeris data. The
GPS receiver returns packet 5B if data is available.
Table A-25 Command Packet 3A
Byte Item Type Value Meaning
1 Satellite # Byte 0
1-32
All satellites in the current
tracking set
Desired satellite
Table A-26 Command Packet 3B
Byte Item Type Value Meaning
1 Satellite # Byte 0
1-32
All satellites for which ephemeris
data is available
Desired satellite
Acutime 2000 Synchronization Kit User Guide A-39
ATrimble Standard Interface Protocol
0x3C Command Packet 3C
Satellite Tracking Status Request
This packet requests the current satellite tracking status. The GPS
receiver returns packet 5C if data is available.
Table A-27 Command Packet 3C
Byte Item Type Value Meaning
1 Satellite # Byte 0
1-32
All satellites in the current
tracking set
Desired satellite
A-40 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x3D Command Packet 3D
Timing Port Configuration Command
This packet is superceded by 0xBC.
0x3F-11Command Packet 3F-11
EEPROM Segment Commands
This command packet requests the status of the EEPROM segments
and clears the EEPROM status minor alarm bit (Bit 10) in the
supplemental timing packet 8F-AC. The ACE UTC replies with
report packet 5F-11.
0x40 Report Packet 40
Almanac Data Page Report
This packet provides almanac data for a single satellite. The GPS
receiver sends this packet on request (packet 20 hex) and optionally,
when the data is received from a satellite. The data format is shown
below.
Table A-28 Command Packet 3F-11
Byte Item Type Value Meaning
0 Subcode BYTE 0x11 EEPROM segment status
Table A-29 Report Packet 40
Byte Item Type Units
0 satellite BYTE (identification number)
1-4 T_zc SINGLE seconds
5-6 week number INTEGER weeks
7-10 eccentricity SINGLE (dimensionless)
11-14 T_oa SINGLE seconds
15-18 i_o SINGLE radians
19-22 OMEGA_dot SINGLE radians/second
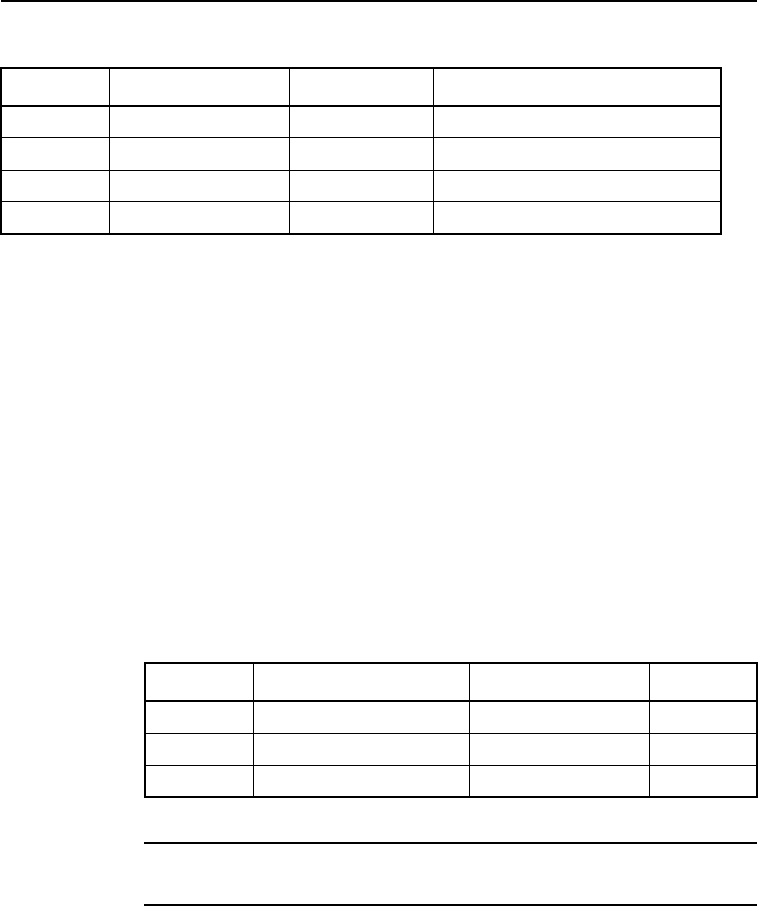
Acutime 2000 Synchronization Kit User Guide A-41
ATrimble Standard Interface Protocol
T_zc is normally positive. If no almanac data is available for this
satellite, then T_zc is negative. T_zc and the week number in this
packet refer to the Z-count time and week number at the time the
almanac was received. The remaining items are described in the
ICD-GPS-200.
0x41 Report Packet 41
GPS Time Report
This packet provides the current GPS time of week and the week
number. The GPS receiver sends this packet in response to packet 21
and during an update cycle. Update cycles occur approximately every
15 seconds when not doing fixes and occur approximately every 150
seconds when doing fixes. The data format is shown below.
!Note – GPS time differs from UTC by a variable integral number of
seconds. UTC = (GPS time) - (GPS/UTC offset).
23-26 square_root_A SINGLE (meters)1/2
27-30 OMEGA_0 SINGLE radians
31-34 omega SINGLE radians
35-38 M_0 SINGLE radians
Table A-30 Report Packet 41
Byte Item Type Units
0-3 GPS time of week SINGLE seconds
4-5 GPS week number INTEGER weeks
6-9 GPS/UTC offset SINGLE seconds
Table A-29 Report Packet 40
Byte Item Type Units
A-42 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
"Caution – GPS week numbers run from 0 to 1023 and then cycles
back to week #0. Week #0 began January 6, 1980. Another week #0
began August 22, 1999. The receiver automatically adds 1024 to the
GPS week number after August 21, 1999, and reports the cumulative
week number.
The seconds count begins with "0" each Sunday morning at midnight
GPS time. A negative indicated time-of-week indicates that time is
not yet known; in that case, the packet is sent only on request. The
following table shows the relationship between the information in
packet 41, and the packet 46 status code.
!Note – Before using the GPS time, verify that the packet 46 status
code is 0x00 ("Doing position fixes"). This ensures the most accurate
GPS time.
Table A-31 Relationship Between Packet 41 and Packet 46
Approximate Time
Accuracy
Time Source Sign
(TOW)
Packet 0x46
Status Code
None No time at all – 0x01
Unknown Approximate time from
real-time clock or packet 2E
+ 0x01
20 to 50 msec + clock
drift
Time from satellite + not 0x01
Full accuracy Time from GPS solution + 0x00
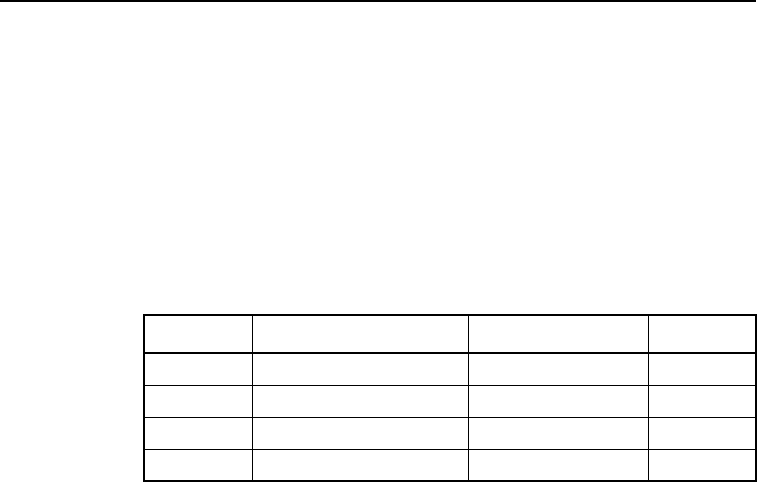
Acutime 2000 Synchronization Kit User Guide A-43
ATrimble Standard Interface Protocol
0x42 Report Packet 42
Single-Precision Position Fix, XYZ ECEF Report
This packet provides current GPS position fix in XYZ ECEF
coordinates. If the I/O "position" option is set to "XYZ ECEF" and
the I/O "precision-of-position output" (Packet 35) is set to single-
precision, and the packet is masked for output by packet 8E-4D, then
the GPS receiver sends this packet each time a fix is computed. The
data format is shown below.
The time-of-fix is in GPS time or UTC as selected by the I/O "timing"
option. At start-up, this packet or packet 83 is also sent with a
negative time-of-fix to report the current known position. Packet 83
provides a double-precision version of this information.
Table A-32 Report Packet 42
Byte Item Type Units
0-3 X SINGLE meters
4-7 Y SINGLE meters
8-11 Z SINGLE meters
12-15 time-of-fix SINGLE seconds
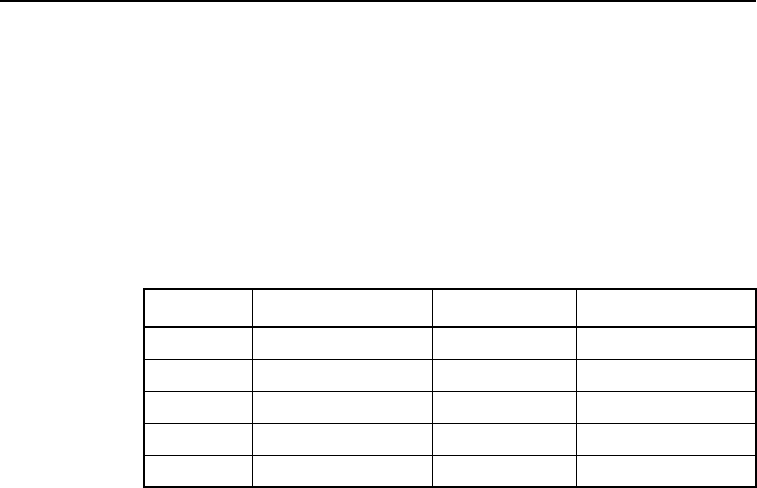
A-44 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x43 Report Packet 43
Velocity Fix, XYZ ECEF Report
This packet provides current GPS velocity fix in XYZ ECEF
coordinates. If the I/O "velocity" option (Packet 35) is set to "XYZ
ECEF ", and the packet is masked for output by packet 8E-4D, then
the GPS receiver sends this packet each time a fix is computed if
selected by the I/O "timing" option. The data format is shown below.
The time-of-fix is in GPS time or UTC as selected by the I/O "timing"
option.
Table A-33 Report Packet 43
Byte Item Type Units
0-3 X velocity SINGLE meters/second
4-7 Y velocity SINGLE meters/second
8-11 Z velocity SINGLE meters/second
12-15 bias rate SINGLE meters/second
16-19 time-of-fix SINGLE seconds
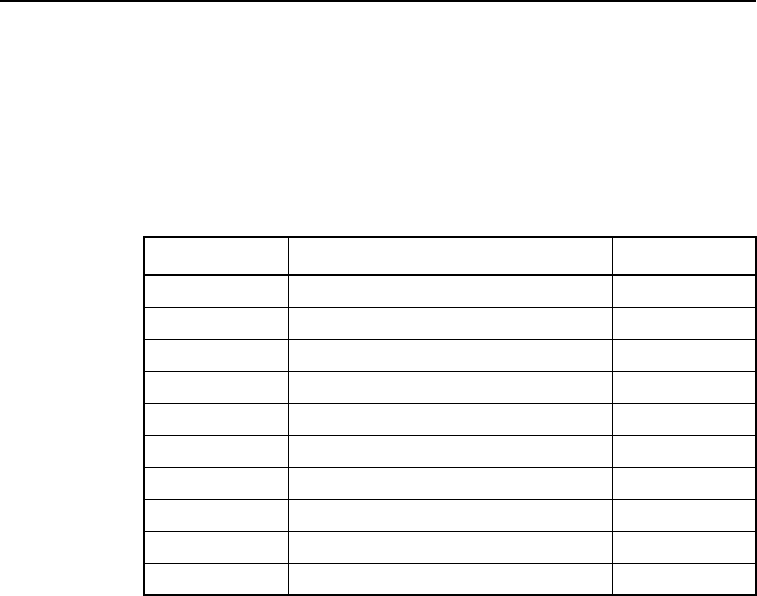
Acutime 2000 Synchronization Kit User Guide A-45
ATrimble Standard Interface Protocol
0x45 Report Packet 45
Software Version Information Report
This packet provides information about the version of software in the
Navigation and Signal Processors. The GPS receiver sends this
packet after power-on and in response to packet 1F.
The first five bytes refer to the Navigation Processor and the second
five bytes refer to the Signal Processor.
Table A-34 Report Packet 45
Byte Item Type
0 Major version number BYTE
1 Minor version number BYTE
2Month BYTE
3Day BYTE
4 Year number minus 1900 BYTE
5 Major revision number BYTE
6 Minor revision number BYTE
7Month BYTE
8Day BYTE
9 Year number minus 1900 BYTE
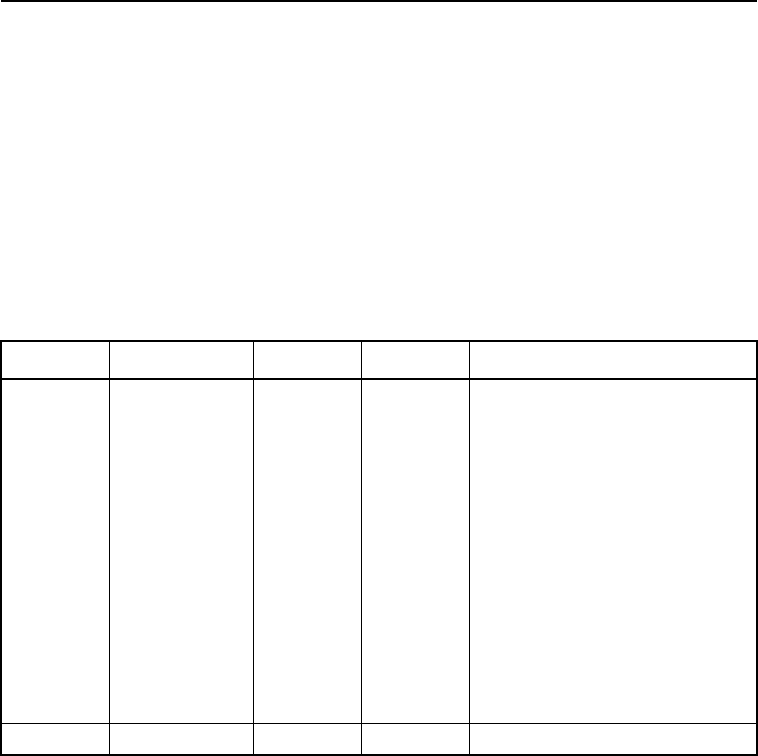
A-46 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x46 Report Packet 46
Health of Receiver Report
This packet provides information about the satellite tracking status
and the operational health of the receiver. The receiver sends this
packet after power-on or software-initiated resets, in response to
packet 26, during an update cycle, when a new satellite selection is
attempted, and when the receiver detects a change in its health.
Packet 4B is always sent with this packet. The data format is given in
the following table.
Table A-35 Report Packet 46
Byte Item Type Value Meaning
0 Status code Byte
00 hex Doing position fixes
01 hex Do not have GPS time yet
02 hex Not used
03 hex PDOP is too high
08 hex No usable satellites
09 hex Only 1 usable satellite
0A hex Only 2 usable satellites
0B hex Only 3 usable satellites
0C hex The chosen satellite is
unusable
1 Error codes Byte
Acutime 2000 Synchronization Kit User Guide A-47
ATrimble Standard Interface Protocol
The error codes in Byte 1 of packet 46 are encoded into individual
bits within the byte. The bit positions and their meanings are shown in
Table A-36.
Note 1: After this error is detected, the bit remains set until the receiver is reset.
Note 2: This bit is "1" if the last computed reference frequency error indicated
that the reference oscillator is out of tolerance. (Packet 2D requests the
oscillator offset and packet 4D returns the oscillator offset to the user.)
Note 3: The Acutime 2000 does not support BB-RAM, the bit is always set.
The ACE UTC supports BB-RAM, indicating BB-RAM checksum and the bit
reports the state of the BB-RAM at system startup.
Table A-36 Report Packet 46
Error Code
Bit Position
Meaning if bit value = 1
0 (LSB) Battery back-up failed (Note 3)
1 Signal Processor error (Note 1)
2 Alignment error, channel or chip 1 (Note 1)
3 Alignment error, channel or chip 2 (Note 1)
4 Antenna feed line fault (Open or Short)
5 Excessive reference frequency error (Note 2)
6 (Unused)
7 (MSB) (Unused)
A-48 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x47 Report Packet 47
Signal Levels for all Satellites Report
This packet provides received signal levels for all satellites currently
being tracked or on which tracking is being attempted (that is, above
the elevation mask and healthy according to the almanac). The
receiver sends this packet only in response to packet 27. Table A-37
shows the data format.
Up to 12 satellite number/signal level pairs may be sent, indicated by
the count field. Signal level is normally positive. If it is zero then that
satellite has not yet been acquired. If it is negative then that satellite is
not currently in lock. The absolute value of signal level field is the
last known signal level of that satellite.
The signal level provided in this packet is a linear measure of the
signal strength after correlation or de-spreading.
0x48 Report Packet 48
GPS System Message Report
This packet provides the 22-byte ASCII message carried in the GPS
satellite navigation message. The receiver sends this packet in
response to packet 28 and when this data is received from a satellite.
The message is effectively a bulletin board from the Air Force to GPS
users. The format is free-form ASCII. The message may be blank.
Table A-37 Report Packet 47
Byte Item Type
0 Count BYTE
1 Satellite number 1 BYTE
2-5 Signal level 1 SINGLE
6 Satellite number 2 BYTE
7-10 Signal level 2 SINGLE
(etc.) (etc.) (etc.)
Acutime 2000 Synchronization Kit User Guide A-49
ATrimble Standard Interface Protocol
0x49 Report Packet 49
Almanac Health Page Report
This packet provides health information on all 32 satellites. Packet
data consists of 32 bytes each containing the 6-bit health from
almanac page 25. The first byte is for satellite #1, and so on. The
receiver sends this packet in response to packet 29 and when this data
is received from a satellite.
In each data byte of this packet, a value "0" indicates that the satellite
is healthy; all other values indicate that the satellite is unhealthy.
0x4A Report Packet 4A
Reference Altitude or Single-Precision LLA Position
Fix Report
The Reference Altitude variation of the packet is returned in response
to command packet 2A when setting or requesting reference altitude.
Table A-38 Report Packet 49
Byte Item
0 health of satellite #1
1 health of satellite #2
- - - - - -
- - - - - -
- - - - - -
31 health of satellite #32
Table A-39 Report Packet 4A – Report Reference
Altitude
Byte Item Type Units
0-3 Altitude SINGLE Meters above WGS-84 or MSL
4-7 Reserved SINGLE Reserved
8 Flag BYTE Reserved
A-50 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
The Single-Precision LLA Position Fix variation of the packet
provides current GPS position fix in LLA (latitude, longitude, and
altitude) coordinates. If the I/O "position" option is set to "LLA" and
the I/O "precision-of-position output" is set to single-precision, and
the packet is masked with packet 8E-4D, then the receiver sends this
packet each time a fix is computed. The data format is shown below.
The LLA conversion is done according to the datum selected using
packet 8E-14. The default is WGS-84. Altitude is referred to the
WGS-84 ellipsoid or the MSL Geoid, depending on which I/O "LLA
altitude" option is selected. The time-of-fix is in GPS time or UTC,
depending on which I/O "timing" option is selected.
This packet also is sent at start-up with a negative time-of-fix to
report the current stored position. Packet 84 provides a double-
precision version of this information.
"Caution – When converting from radians to degrees, significant and
readily visible errors will be introduced by use of an insufficiently
precise approximation for the constant π(Pi). The value of the
constant Pi as specified in ICD-GPS-200 is 3.1415926535898.
The MSL option is only valid with the WGS-84 datum. When using
other datums, only the HAE option is valid.
Table A-40 Report Packet 4A – Report Single-Precision
LLA Position
Byte Item Type Units
0-3 Latitude SINGLE Radians; + for north,
- for south
4-7 Longitude SINGLE Radians; + for east,
- for west
8-11 Altitude SINGLE Meters
12-15 Clock Bias SINGLE Meters
6-19 Time-of-Fix SINGLE Seconds
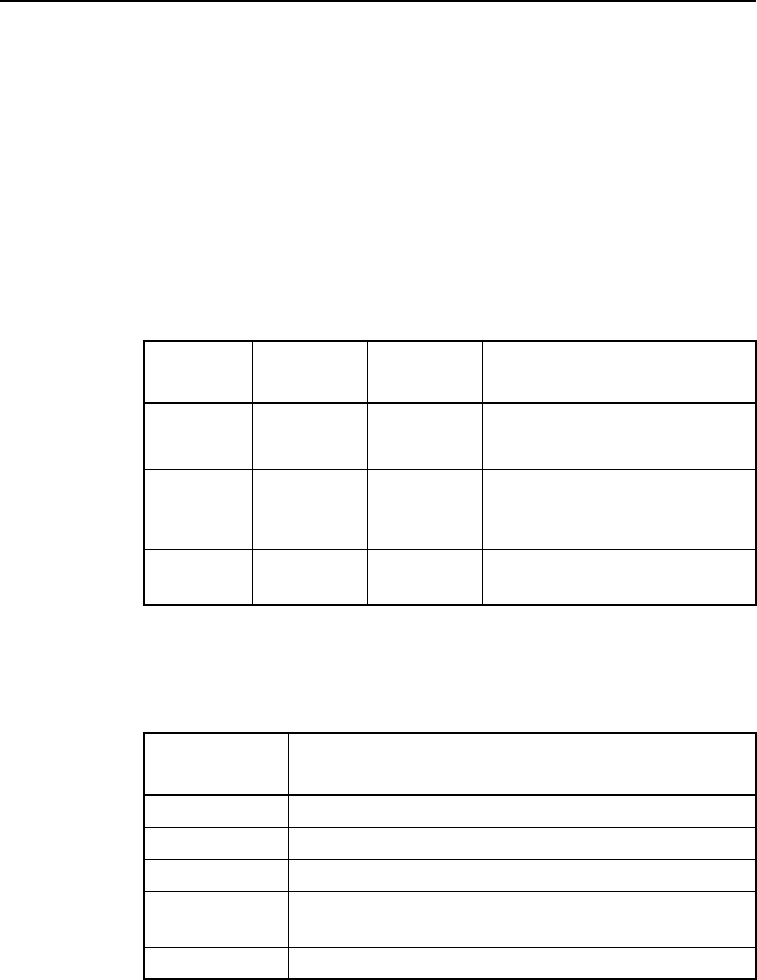
Acutime 2000 Synchronization Kit User Guide A-51
ATrimble Standard Interface Protocol
0x4B Report Packet 4B
Machine/Code ID and Additional Status Report
The receiver transmits this packet in response to packets 25 and 26
and following a change in state. This packet identifies the receiver
and may present error messages. Packet 46 is always sent with this
packet. The machine ID can be used by equipment communicating
with the receiver to determine the type of receiver to which the
equipment is connected. Then the interpretation and use of packets
can be adjusted accordingly.
The status codes are encoded into individual bits within the bytes.
The bit positions and their meanings are shown below.
Table A-41 Report Packet 4B
Byte Item Type/
Value
Status/Meaning
0 Machine
ID
BYTE 0x61 =Acutime 2000
0x62 = ACE UTC
1 Status 1 BYTE The Status 1 codes are
encoded into individual bits
within the byte
2 Status 2 BYTE Super packets are
supported.
Table A-42 Byte 1 Bit Encoding – Status 1
Status 1 Bit
Position
Meaning if bit value = 1
0 (LSB) (Not Used)
1 Battery Backed Time Clock (ACE UTC only)
2 (Not Used)
3 The Almanac stored in the receiver is not
complete and current
4-7 Not used
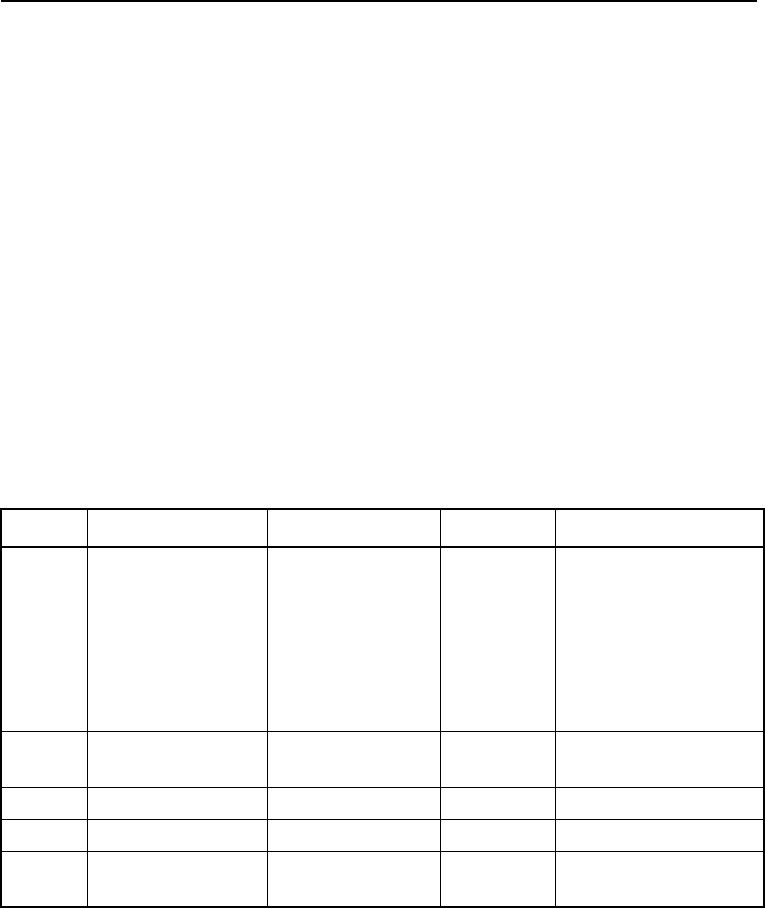
A-52 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x4C Report Packet 4C
Operating Parameters Report
This packet provides several operating parameter values of the
receiver. The receiver sends this packet in response to packet 2C.
The data string is four SINGLE values. The dynamics code indicates
the expected vehicle dynamics and is used to assist the initial
solution. The elevation angle mask determines the lowest angle at
which the receiver tries to track a satellite. The signal level mask sets
the required signal level for a satellite to be used for position fixes.
The PDOP mask sets the maximum PDOP with which position fixes
are calculated. The PDOP switch sets the threshold for automatic 3-
D/2-D mode. If 4 or more satellites are available and the resulting
PDOP is not greater than the PDOP mask value, then 3-dimensional
fixes are calculated. This information is stored in non-volatile
memory.
Table A-43 Report Packet 4C
Byte Item Type, Units Default Value, Velocity
0 Dynamics code BYTE Land (0) value left
unchanged
(1) land, <120 knots
(2) sea, <50 knots
(3) air, <800 knots
(4) static, stationary
1-4 Elevation angle
mask
SINGLE,
radians
0.1745 (or
10°)
5-8 Signal level mask SINGLE/--- 4.0
9-12 PDOP mask SINGLE/--- 8.0
13-16 PDOP switch
(3-D or 2-D)
SINGLE/--- 6.0
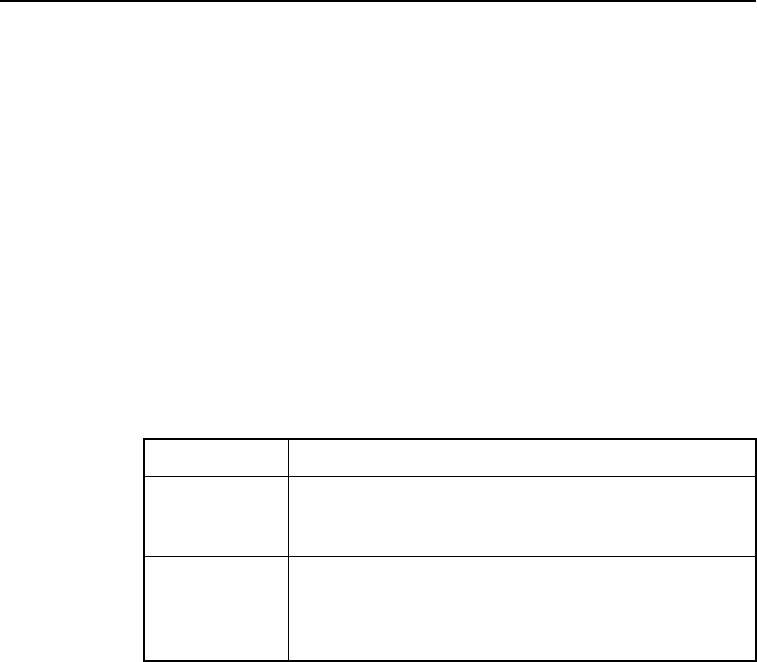
Acutime 2000 Synchronization Kit User Guide A-53
ATrimble Standard Interface Protocol
0x4D Report Packet 4D
Oscillator Offset
This packet provides the current value of the receiver master
oscillator offset in Hertz at carrier. This packet contains one SINGLE
number (4 Bytes). The receiver sends this packet in response to
packet 2D.
0x4E Report Packet 4E
GPS Time Change Acknowledgment
Indicates whether the receiver accepted the time given in a Set GPS
time packet. The receiver sends this packet in response to packet 2E.
This packet contains one byte.
Table A-44 Report Packet 4E
Value Meaning
ASCII "Y" The receiver accepts the time entered via packet
2E. The receiver has not yet received the time
from a satellite.
ASCII "N" The receiver does not accept the time entered via
packet 2E. The receiver has received the time
from a satellite and uses that time. The receiver
disregards the time in packet 2E.
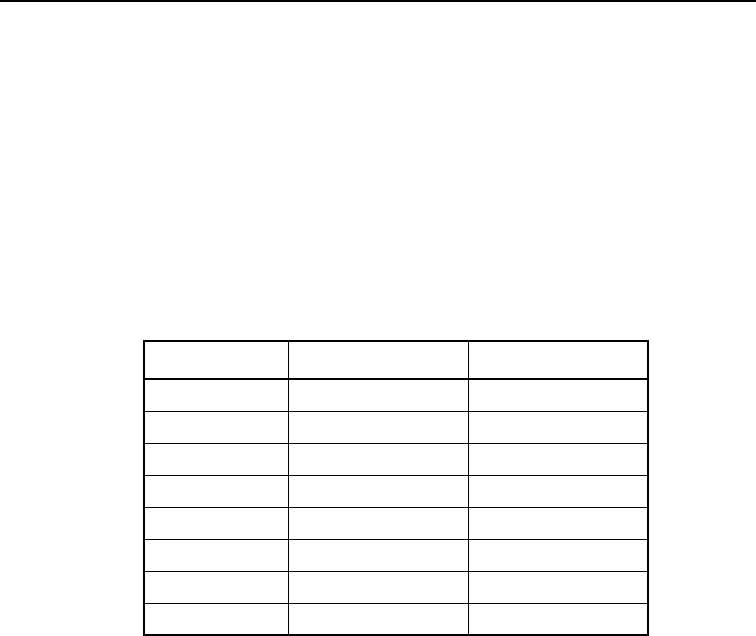
A-54 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x4F Report Packet 4F
UTC Parameters Report
This packet is sent in response to command packet 2F and contains 26
bytes. It reports the UTC information broadcast by the GPS system.
For details on the meanings of the following parameters, consult ICD-
200, Sections 20.3.3.5.2.4, 20.3.3.5.1.8, and Table 20-IX. On the
simplest level, to get UTC time from GPS time, subtract ∆TLS
seconds. The other information contained in this packet indicates
when the next leap second is scheduled to occur.
Table A-45 Report UTC Parameters
Byte Value Type
0-7 A0 DOUBLE
8-11 A1 SINGLE
12-13 ∆ TLS INTEGER
14-17 TOT SINGLE
18-19 WNTINTEGER
20-21 WNLSF INTEGER
22-23 DN INTEGER
24-25 ∆ TLSF INTEGER
Acutime 2000 Synchronization Kit User Guide A-55
ATrimble Standard Interface Protocol
0x54 Report Packet 54
Bias and Bias Rate Report
The receiver sends this packet to provide the computed clock-only
solution when the receiver is in the manual or automatic
Overdetermined Clock mode or Time Only (1-SV) mode.
The bias is the offset of the receiver internal time clock from GPS
time. Bias is expressed as meters of apparent range from the satellites.
It is used to correct the one PPS output. Bias rate is the frequency
error of the receiver internal oscillator. It is expressed as apparent
range rate. Time-of-fix is in GPS or UTC time as selected by the I/O
"timing" option in packet 0x35.
"Caution – For accurate interpretation of the propagation delay, the
precise constant for the speed of light must be used. The ICD-200
value for the speed of light is 299,792,458 meters per second.
0x55 Report Packet 55
I/O Option Flags Report
This packet provides current I/O options in response to packet 35
request. The data format is the same as for packet 35. See packet 35
for details.
Table A-46 Report Packet 54
Byte Item Type Units
0-3 Bias SINGLE meters
4-7 Bias rate SINGLE meters/second
8-11 Time of fix SINGLE seconds
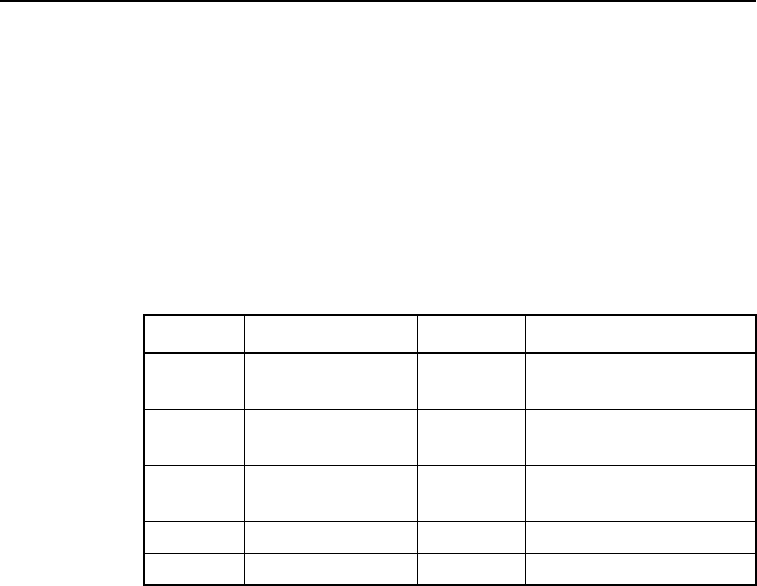
A-56 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x56 Report Packet 56
Velocity Fix, East-North-Up (ENU) Report
If East-North-Up (ENU) coordinates have been selected for the I/O
"velocity" option (Packet 35), the receiver sends this packet under the
following conditions: (1) each time that a fix is computed if masked
for output by packet 8E-4D; (2) in response to packet 37 (last known
fix). The data format is shown in Table A-47.
The time-of-fix is in GPS or UTC time as selected by the I/O "timing"
option.
Table A-47 0x56 – Velocity Fix, East-North-Up (ENU)
Report
Byte Item Type Units
0-3 East Velocity SINGLE m/s; + for east,
- for west
4-7 North Velocity SINGLE m/s; + for north,
- for south
8-11 Up Velocity SINGLE m/s; + for up, - for
down
12-15 Clock Bias Rate SINGLE m/s
16-19 Time-of-fix SINGLE seconds
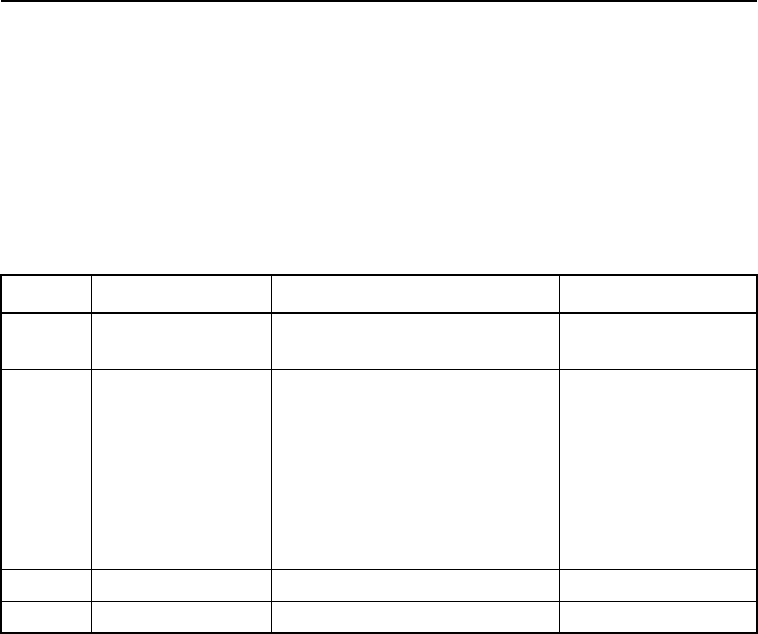
Acutime 2000 Synchronization Kit User Guide A-57
ATrimble Standard Interface Protocol
0x57 Report Packet 57
Information About Last Computed Fix Report
This packet provides information concerning the time and origin of
the previous position fix. The receiver sends this packet, among
others, in response to packet 37.
The data format is shown below.
Table A-48 Report Packet 57
Byte Item Type/Units Value
0 Source of
information
BYTE/- - - 0/none
1/regular fix
1 Tracking mode BYTE/- - - 0/Auto
1/Time Only 1-SV
2/2Dclock Hold
3/2D
4/3D
5/Overdetermined
Clock
6/DGPS Reference
2-5 Time of last fix SINGLE/seconds, GPS time
6-7 Week of last fix INTEGER/weeks, GPS time
A-58 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x58 Report Packet 58
Satellite System Data/Acknowledge from Receiver
This packet provides GPS data (almanac, ephemeris, etc.). The
receiver sends this packet under the following conditions: (1) on
request; (2) in response to packet 38 (acknowledges the loading of
data). The data format is shown below.
The binary almanac, health page, and UTC data streams are similar to
reports 40, 49, and 4F respectively, and those reports are preferred. To
get ionosphere or ephemeris, this report must be used.
Table A-49 Report Packet 58
Byte Item Type Value Meaning
0 Operation BYTE 1 Acknowledge
2Data Out
1 Type of data BYTE 1 not used
2 Almanac
3 Health page, T_oa, WN_oa
4 Ionosphere
5UTC
6 Ephemeris
2 Sat PRN # BYTE 0 Data that is not satellite ID-
specific
1 to 32 Satellite PRN number
3 length (n) BYTE Number of bytes of data to
follow
4 to n+3 data n BYTES
Acutime 2000 Synchronization Kit User Guide A-59
ATrimble Standard Interface Protocol
Table A-50 Report Packet 58 – ALMANAC Data Report
Byte Item Type Meaning
4 t_oa_raw BYTE (cf. ICD-200, Sec 20.3.3.5.1.2)
5 SV_HEALTH BYTE (cf. ICD-200, Sec 20.3.3.5.1.2)
6-9 e SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
10-13 t_oa SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
14-17 i_o SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
18-21 OMEGADOT SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
22-25 sqrt_A SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
26-29 OMEGA_0 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
30-33 omega SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
34-37 M_0 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
38-41 a_f0 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
42-45 a_f1 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
46-49 Axis SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
50-53 n SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
54-57 OMEGA_n SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
58-61 ODOT_n SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
62-65 t_zc SINGLE (cf. ICD-200, Sec 20.3.3.5.1.2)
66-67 weeknum INTEGER (cf. ICD-200, Sec 20.3.3.5.1.2)
68-69 wn_oa INTEGER (cf. ICD-200, Sec 20.3.3.5.1.2)
Note: All angles are in radians.
A-60 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Table A-51 Report Packet 58 – ALMANAC HEALTH Data Report
Byte Item Type Meaning
4 week # for health BYTE (cf. ICD-200, Sec 20.3.3.5.1.3)
5-36 SV_health 32 BYTES (cf. ICD-200, Sec 20.3.3.5.1.3)
37 t_oa for health BYTE (cf. ICD-200, Sec 20.3.3.5.1.3)
38 current t_oa BYTE units = seconds/2048
39-40 current week # INTEGER
Table A-52 Report Packet 58 – IONOSPHERE Data Report
Byte Item Type Meaning
4-11 --- --- compact storage of the following
info
12-15 alpha_0 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
16-19 alpha_1 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
20-23 alpha_2 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
24-27 alpha_3 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
28-31 beta_0 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
32-35 beta_1 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
36-39 beta_2 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
40-43 beta_3 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.9)
Acutime 2000 Synchronization Kit User Guide A-61
ATrimble Standard Interface Protocol
Table A-53 Report Packet 58 – UTC Data Report
Byte Item Type Meaning
4-16 --- --- compact storage of the following
info
17-24 A_0 DOUBLE (cf. ICD-200, Sec 20.3.3.5.1.8)
25-28 A_1 SINGLE (cf. ICD-200, Sec 20.3.3.5.1.8)
29-30 delta_t_LS INTEGER (cf. ICD-200, Sec 20.3.3.5.1.8)
31-34 t_ot SINGLE (cf. ICD-200, Sec 20.3.3.5.1.8)
35-36 WN t INTEGER (cf. ICD-200, Sec 20.3.3.5.1.8)
37-38 WN_LSF INTEGER (cf. ICD-200, Sec 20.3.3.5.1.8)
39-40 DN INTEGER (cf. ICD-200, Sec 20.3.3.5.1.8)
41-42 delta_t_LSF INTEGER (cf. ICD-200, Sec 20.3.3.5.1.8)
Table A-54 Report Packet 58 – EPHEMERIS Data Report
Byte Item Type Meaning
4 sv_number BYTE SV PRN number
5-8 t_ephem SINGLE time of collection
9-10 weeknum INTEGER (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
11 codeL2 BYTE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
12 L2Pdata BYTE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
13 SVacc_raw BYTE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
14 SV_health BYTE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
15-16 IODC INTEGER (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
17-20 T_GD SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
21-24 t_oc SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
25-28 a_f2 SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
29-32 a_f1 SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
33-36 a_f0 SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
37-40 SVacc SINGLE (cf. ICD-200, Sec 20.3.3.3, Table 20-I)
A-62 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
41 IODE BYTE (cf. ICD-200, Sec 20.3.3.4)
42 fit_interval BYTE (cf. ICD-200, Sec 20.3.3.4)
43-46 C_rs SINGLE (cf. ICD-200, Sec 20.3.3.4)
47-50 delta_n SINGLE (cf. ICD-200, Sec 20.3.3.4)
51-58 M_0 DOUBLE (cf. ICD-200, Sec 20.3.3.4)
59-62 C_uc SINGLE (cf. ICD-200, Sec 20.3.3.4)
63-70 e DOUBLE (cf. ICD-200, Sec 20.3.3.4)
71-74 C_us SINGLE (cf. ICD-200, Sec 20.3.3.4)
75-82 sqrt_A DOUBLE (cf. ICD-200, Sec 20.3.3.4)
83-86 t_oe SINGLE (cf. ICD-200, Sec 20.3.3.4)
87-90 C_ic SINGLE (cf. ICD-200, Sec 20.3.3.4)
91-98 OMEGA_0 DOUBLE (cf. ICD-200, Sec 20.3.3.4)
99-102 C_is SINGLE (cf. ICD-200, Sec 20.3.3.4)
103-110 i_o DOUBLE (cf. ICD-200, Sec 20.3.3.4)
111-114 C_rc SINGLE (cf. ICD-200, Sec 20.3.3.4)
115-122 omega DOUBLE (cf. ICD-200, Sec 20.3.3.4)
123-126 OMEGADOT SINGLE (cf. ICD-200, Sec 20.3.3.4)
127-130 IDOT SINGLE (cf. ICD-200, Sec 20.3.3.4)
131-138 Axis DOUBLE = (sqrt_A)2
139-146 n DOUBLE derived from delta_n
147-154 r1me2 DOUBLE = sqrt(1.0-e2)
155-162 OMEGA_n DOUBLE derived from OMEGA_0, OMEGADOT
163-170 ODOT_n DOUBLE derived from OMEGADOT
Note: All angles are in radians.
Table A-54 Report Packet 58 – EPHEMERIS Data Report (Continued)
Byte Item Type Meaning
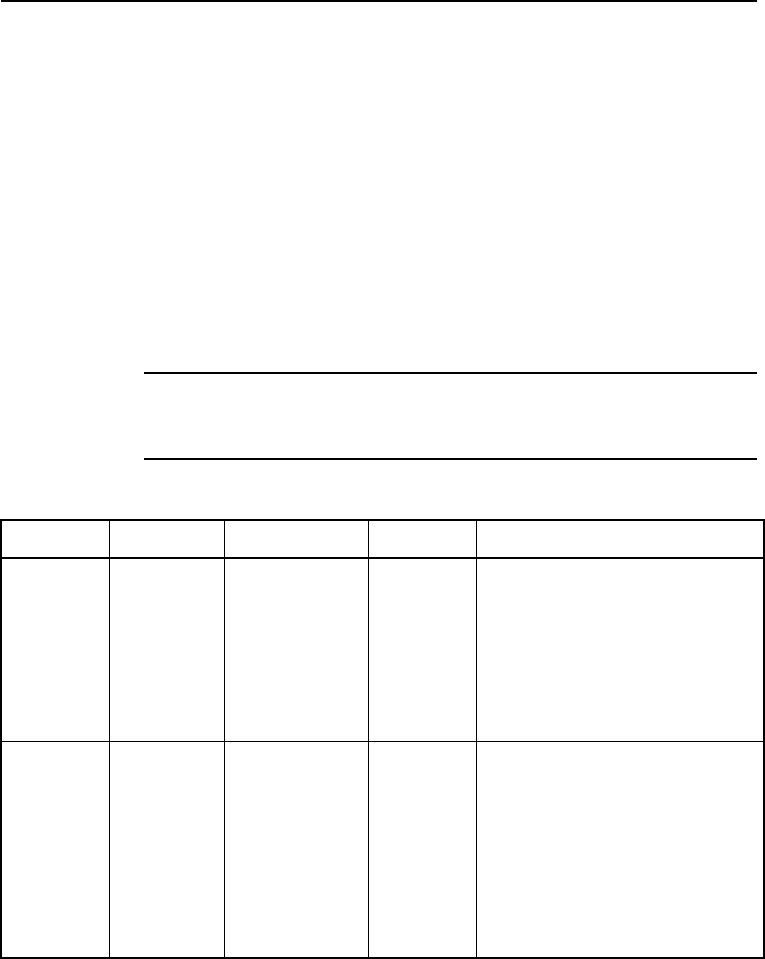
Acutime 2000 Synchronization Kit User Guide A-63
ATrimble Standard Interface Protocol
0x59 Report Packet 59
Satellite Attributes Database Report
This packet is returned in response to packet 39 if operation mode 3
or 6 is used with packet 39.
Normally the GPS receiver selects only healthy satellites (based on
transmitted values in the ephemeris and almanac) which satisfy all
mask values, for use in the position solution.
Packet 59 indicates whether each satellite is allowed or not allowed to
be selected for use in the position solution, or whether each satellite’s
health is to be heeded or ignored. The data format is shown below.
!Note – When viewing the satellite disabled list, the satellites are not
numbered but are in numerical order. The disabled satellites are
signified by a 1 and enabled satellites are signified by a 0.
Table A-55 Report Packet 59
Byte Item Type Value Meaning
0 Operation BYTE 3 The remaining bytes tell
whether receiver is allowed to
select each satellite.
6 The remaining bytes tell
whether the receiver heeds or
ignores each satellite's health
as a criterion for selection.
1 to 32 Satellite # 32 BYTES
(1 byte per
satellite)
(Depends on byte 0 value.)
0 Enable satellite selection or
heed satellite's health.
Default value.
1 Disable satellite selection or
ignore satellite's health.
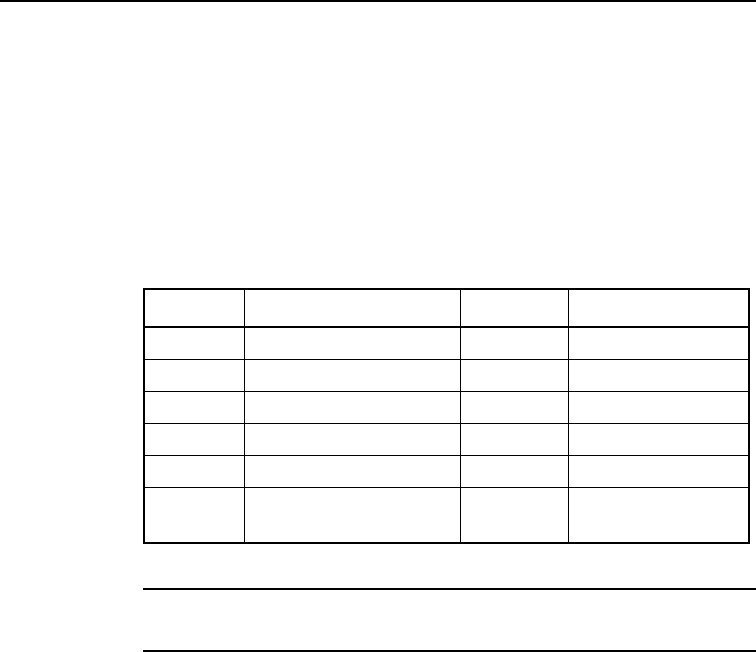
A-64 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x5A Report Packet 5A
Raw Measurement Data Report
This packet provides raw GPS measurement data. If the I/O auxiliary
option for "raw data" has been selected (packet 35), and it is masked
for output by packet 8E-4D, the receiver outputs a packet 5A for each
satellite being tracked, once per second. The receiver also sends this
packet in response to packet 3A. The data format is shown below.
!Note – Report Packet 5A provides the raw satellite signal
measurement information used in computing a fix.
The satellite PRN (Byte 0) number is a unique identification for each
of the 32 GPS satellites.
Table A-56 Report Packet 5A
Byte Item Type Units
0 Satellite PRN number BYTE ----
1-4 reserved SINGLE
5-8 Signal level SINGLE
9-12 Code phase SINGLE 1/16th chip
13-16 Doppler SINGLE Hertz
17-24 Time of
Measurement
DOUBLE seconds
Acutime 2000 Synchronization Kit User Guide A-65
ATrimble Standard Interface Protocol
Signal level
The Signal Level (Byte 5) is a linear approximation of C/N0 which is
stated in antenna amplitude measurement units (AMUs), a Trimble
devised unit.
Note – SNR (±3) = 20log((signal counts/noise counts)*(BW/2)) where:
signal counts = 64 * AMU; noise counts = 90, and BW = 1000Hz.
The C/N0 is affected by five basic parameters:
•signal strength from the GPS satellite
•receiver/antenna gain
•pre-amplifier noise figure
•receiver noise bandwidth
•accumulator sample rate and statistics
The approximation is very accurate from 0 to 25 AMUs.
Codephase
The codephase (Byte 9) value is the average delay over the sample
interval of the received C/A code and is measured with respect to the
receiver's millisecond timing reference. Thus, it includes all receiver,
satellite, and propagation biases and errors. It is expressed in 1/16th
of a C/A code chip.
Doppler
The Doppler (Byte 13) value is apparent carrier frequency offset
averaged over the sample interval. It is measured with respect to the
nominal GPS L1 frequency of 1575.42 MHz, referenced to the
receiver's internal oscillator. Thus, it includes all receiver and satellite
clock frequency errors. It is expressed in Hertz at the L1 carrier.

A-66 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Time of measurement
The time of measurement (Byte 17) is the center of the sample
interval adjusted by adding the receiver-supplied codephase
(modulo mS) to a user-determined integer number of mS between
user and satellite.
The receiver codephase resolution is 1/16th of a C/A code chip.
This corresponds to:
The integer millisecond portion of the pseudo-range must then be
derived by utilizing the approximate user and satellite positions.
Rough user position (within a few hundred kilometers) must be
known; the satellite position can be found in its almanac/ephemeris
data.
Each mS integer corresponds to:
The satellite time-of-transmission for a measurement can be
reconstructed using the code phase, the time of measurement, and the
user-determined integer number of milliseconds.
0x5B Report Packet 5B
Satellite Ephemeris Status Report
This packet is sent in response to packet 3B and optionally, when a
new ephemeris (based on IODE) is received. It contains information
1/16 × C/A code chip
≈977.517ns/16 ≈ 61.0948 ns
≈61.0948 × speed of light, m/s
≈18.3158 meters
C/A code epoch × speed of light
=1 ms × speed of light m/s
≈300 km (approximate)
≈299.792458 km (precise)
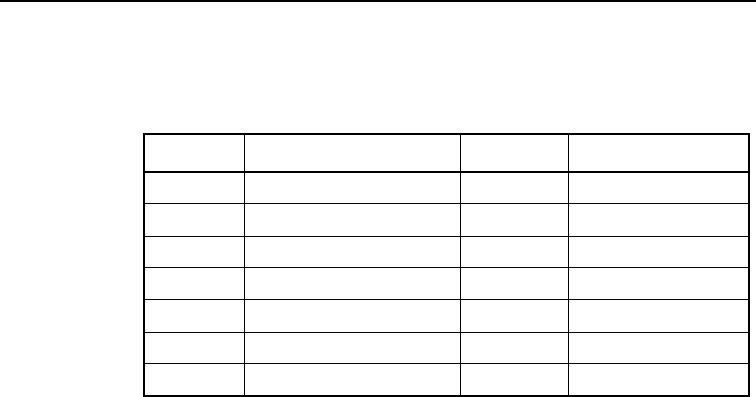
Acutime 2000 Synchronization Kit User Guide A-67
ATrimble Standard Interface Protocol
on the status of the ephemeris in the receiver for a given satellite. The
structure of packet 5B is shown in the table below.
SV PRN Number is from 1 to 32 representing the satellite PRN
number. Time of Collection is the GPS time when this ephemeris data
was collected from the satellite. Health is the 6-bit ephemeris health.
IODE, toe, and Fit Interval Flag are as described in ICD-GPS-200.
SV Accuracy (URA) is converted to meters from the 4-bit code as
described in ICD-GPS-200.
Table A-57 Report Packet 5B
Byte Item Type Units
0 Satellite PRN number BYTE
1-4 Time of Collection SINGLE seconds
5Health BYTE
6IODE BYTE
7-10 toe SINGLE seconds
11 Fit Interval Flag BYTE
12-15 SV Accuracy (URA) SINGLE meters
A-68 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x5C Report Packet 5C
Satellite Tracking Status Report
This packet provides tracking status data for a specified satellite.
Some of the information is very implementation-dependent and is
provided mainly for diagnostic purposes. The receiver sends this
packet in response to packet 3C hex. The data format is shown below.
Table A-58 Report Packet 5C
Byte/Item Type/Units Value/Meaning
Byte 0 / Satellite PRN
number
BYTE/
number 1-32
Byte 1 / Channel and
slot code
BYTE
Bit position within Byte 1: bits 7(MSB)-3
(channel number beginning with 0)
(MSB)
0 0 0 0 0 channel 1: used by all receivers
0 0 0 0 1 channel 2: 8-channel receivers
0 0 0 1 0 channel 3: 8-channel receivers
0 0 0 1 1 channel 4: 8-channel receivers
0 0 1 0 0 channel 5: 8-channel receivers
0 0 1 0 1 channel 6: 8-channel receivers
0 0 1 1 0 channel 7: 8-channel receivers
0 0 1 1 1 channel 8: 8-channel receivers
Byte 2 / Acquisition
flag
BYTE 0 never acquired
1 acquired
2 re-opened search
Byte 3 / Ephemeris
flag
BYTE 0 flag not set
≠ (0 or 33) good ephemeris for this
satellite
(<4 hours old, good health)
Byte 4-7 / Signal level SINGLE same as in packet 47 hex
Byte 8-11 / GPS time
of last measurement
SINGLE/
seconds
<0 no measurements have been taken
≥0 center of the last measurement taken
from this satellite
Acutime 2000 Synchronization Kit User Guide A-69
ATrimble Standard Interface Protocol
Byte 12-15 /
Elevation
SINGLE/
radians
Approximate elevation of this satellite
above the horizon. Updated about every
15 seconds. Used for searching and
computing measurement correction
factors.
Byte 16-19 / Azimuth SINGLE/
radians
Approximate azimuth from true north to
this satellite. Updated about every 15
seconds. Used for computing
measurement correction factors.
Byte 20 / old
measurement flag
BYTE N/A
Byte 21 / Integer
msec flag
BYTE N/A
Byte 22 / bad data
flag
BYTE N/A
Byte 23 / Data
collection flag
BYTE N/A
Table A-58 Report Packet 5C (Continued)
Byte/Item Type/Units Value/Meaning
A-70 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x5F-11
Report Packet 5F-11
EEPROM Segment Status Reports
This report packet is sent in response to command packet 3F-11. It
contains all the segments in the EEPROM. The Segment Status is
bitwise encoded with the status of each segment and is cleared to 0
after it is read. A zero in the bit field indicates that the segment
contents are valid. A one in the bit field indicates that the segment
contents were corrupt and had to be reverted to their factory default
values. The Manufacturing and Production parameters (Bits 0, 1) do
not have factory default values.
Table A-59 Report Packet 5F-11 – EEPROM Segment Status Report
Byte Bit Item Type Value Meaning
0 Subcode BYTE 0x11
1-2 0
1
2
3
4
5
6
7
8
9-10
11
12-15
Segment
Status
Bit field
U16
Manufacturing parameters (8F-41)
Production parameters (8F-42)
Receiver configuration
Packet I/O control
Serial port configuration
Timing output configuration
Accurate position
Self-survey configuration
NMEA configuration
(Not Used)
UTC information
(Not used)
Acutime 2000 Synchronization Kit User Guide A-71
ATrimble Standard Interface Protocol
0x60 Command Packet 0x60
Type 1 Differential GPS Corrections
This packet provides the ACE UTC GPS with differential corrections
from RTCM SC-104 record types 1 and 9, in the TSIP format. There
is no response to this packet. If bit 6 is set, the corrections are as in
RTCM Type 9 records. The format for this packet is shown in
Table A-60.
Table A-60 Report Packet 0x60 Data Formats
Byte Bit Item Type Range Units
0 - 1 Modified z-count UINT16 0-5999 .6 SEC
2 Station health UINT8 --
3 0 - 5 Number of SVs in packet Bits 0-31 0 - 5
3 6 Type 9 flag Bit 0
1
type 1
type 9
3 7 Version 2 flag Bit 1 must be set
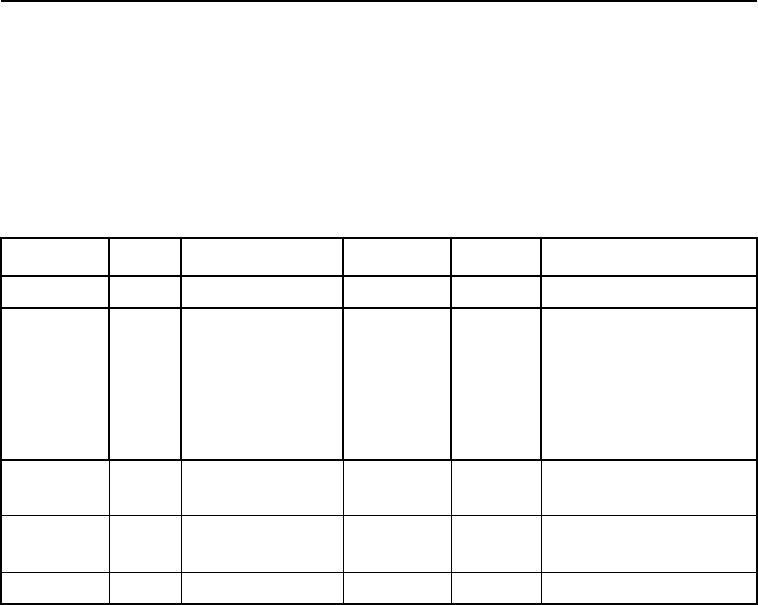
A-72 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
The next 5 bytes are repeated as a group for each satellite. The SV
PRN and scale factor contains the SV PRN in the lower 5 bits, and the
scale factor in the upper 3 bits. Range corrections are scaled by 0.02
meters times 2 raised to the scale factor power. Range-rate corrections
are scaled by 0.002 meters per second times 2 raised to the scale
factor power. The format is shown in Table A-61.
Table A-61 Report Packet 0x60 Data Formats for Health and Power
Byte Bit Item Type Value Definition
4+ (N*5) 0-4 SV PRN 0-31 "0" Is SV 32
4+ (N*5) 5-7 Scale factor 0
4
7
Low Scale factor
(.02m, .002 m/s)
High Scale factor
(.32m, .032 m/s)
Correction not usable
5+ (N*5) Range
correction
UINT16 RTCM-104
7+ (N*5) Range-rate
correction
UINT8 RTCM-104
8+ (N*5) IODE UINT8
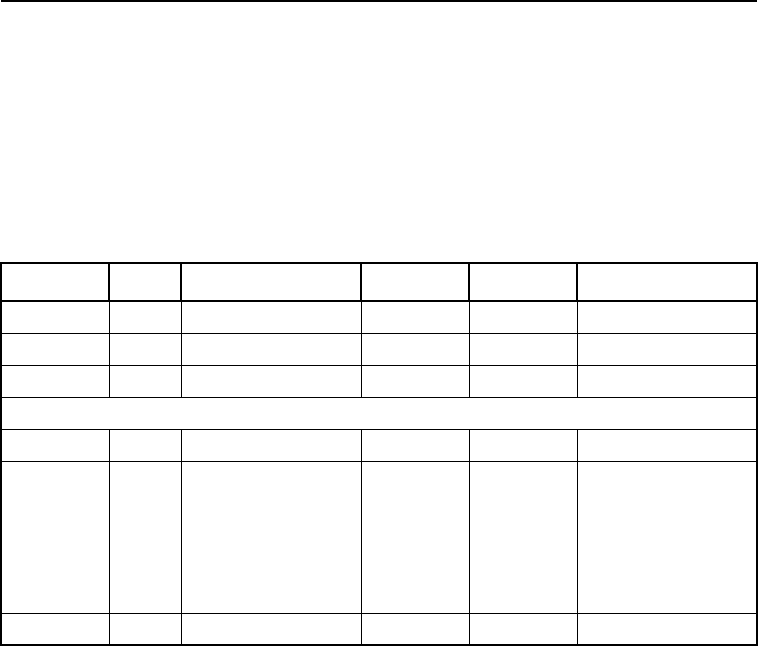
Acutime 2000 Synchronization Kit User Guide A-73
ATrimble Standard Interface Protocol
0x61 Command Packet 0x61
Set Differential GPS Corrections
This TSIP packet provides the delta differential corrections from
RTCM-104 record type 2. There is no response to this packet. Scale
factors are version 1 unless the version 2 flag is set. The format for
this packet is shown in Table A-62.
The units and scale factors are as defined by Packet 0x60. Delta range
correction rates are not entered.
Table A-62 Command Packet 0x61 Data Formats
Byte Bit Item Type Value Definition
0 - 1 Modified Z-count UINT16 0-5999 .6 SEC
2 0-6 Number of SVs 0-31
2 7 Version 2 flag Bit 1 must be set
The next 3 bytes are repeated as a group for each satellite:
3+(N*2) 0-4 SV PRN 0-31 "0" Is SV 32
3+(N*2) 5-7 Scale factor 0
4
7
Low Scale factor
(.02m, .002 m/s)
High Scale factor
(.32m, .032 m/s)
Correction not
usable
4+(N*2) Range correction UINT16 RTCM-104
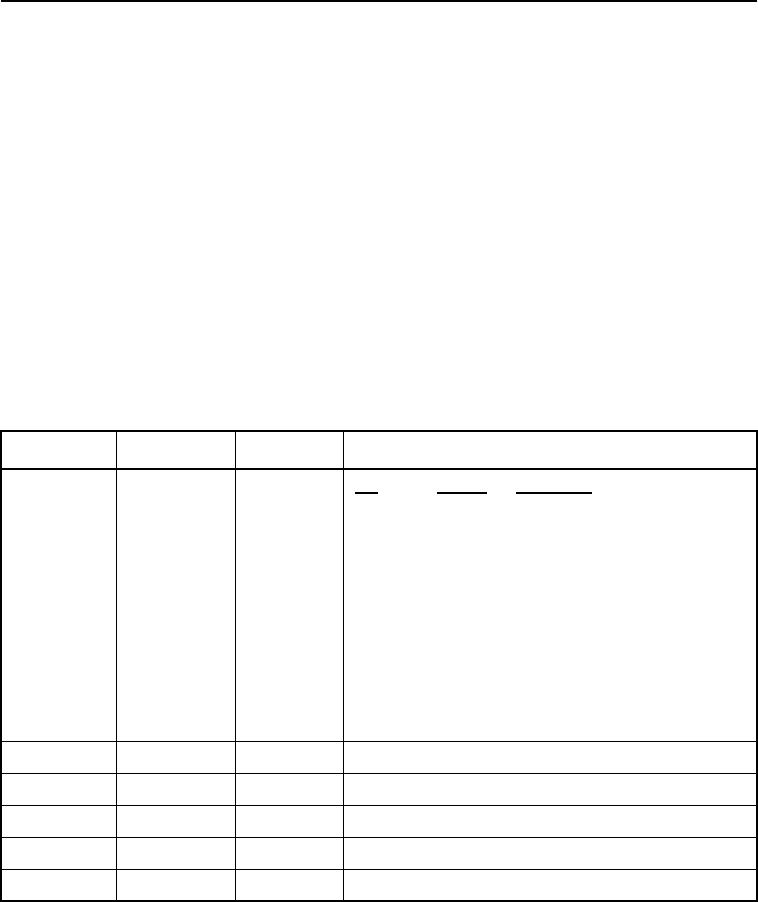
A-74 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x6D Report Packet 6D
All-In-View Satellite Selection Report
This packet provides a list of satellites used for position fixes by the
GPS receiver. The packet also provides the PDOP, HDOP, and VDOP
of that set and provides the current mode (automatic or manual, 3-D
or 2-D). This packet has variable length equal to 16+nsvs (minimum
4), where "nsvs" is the number of satellites used in the solution.
The GPS receiver sends this packet in response to packet 24 or
whenever a new satellite selection is attempted. The GPS receiver
attempts a new selection every 30 seconds and whenever satellite
availability and tracking status change. The data format is shown
below.
Table A-63 Report Packet 6D
Byte Item Type Units
0ModeBYTEBit
Value Meaning
0-2 0 Auto
1 Time Only (1-SV)
2 2D Clock Hold
32D
43D
5 Overdetermined Clock
6 DGPS Reference
30Auto
1 manual
4-7 - - nsvs
1-4 PDOP SINGLE PDOP
5-8 HDOP SINGLE HDOP
9-12 VDOP SINGLE VDOP
13-16 TDOP SINGLE TDOP
(16+nsvs) SV PRN BYTE
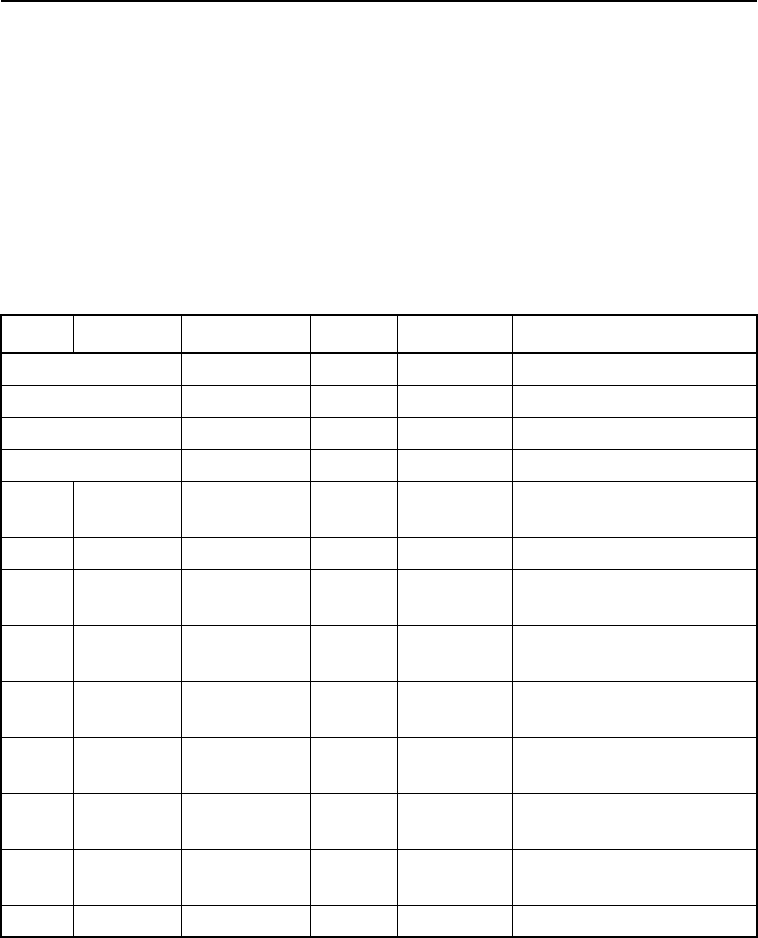
Acutime 2000 Synchronization Kit User Guide A-75
ATrimble Standard Interface Protocol
0x7A Command Packet 7A
Set or Request NMEA Interval and Message Mask
The NMEA mask determines whether or not a given NMEA message
will be output. If the bit for a message is set, the message will be sent
every “interval” seconds. To determine the NMEA interval and
message mask, use the values shown in Table A-64. While fixes are
being generated, the output order is: ZDA, GGA, GLL, VTG, GSA,
GSV, RMC.
Table A-64 Command Packet 7A
Byte Bit Item Type Value Definition
0 Subcode UINT8 0
1 Interval UINT8 1-255 Fix interval in seconds
2 Reserved UINT8 0
3 Reserved UINT8 0
40 RMC Bit0
1
Off
On
4 1-7 Reserved Bit 0
50 GGA Bit0
1
Off
On
51 GLL Bit 0
1
Off
On
52 VTG Bit0
1
Off
On
53 GSV Bit0
1
Off
On
54 GSA Bit0
1
Off
On
55 ZDA Bit 0
1
Off
On
5 6-7 Reserved Bit 0
A-76 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x7B Report Packet 7B
NMEA Message Output
This packet is sent in response to command packet 7A and has the
same data format as packet 7A.
0x83 Report Packet 83
Double-precision XYZ Position Fix And Bias
Information
This packet provides current GPS position fix in XYZ ECEF
coordinates. If the I/O "position" option is set to "XYZ ECEF" and
the I/O double-precision option is selected (packet 35), the receiver
sends this packet each time a fix is computed. The data format is
shown below.
The time-of-fix is in GPS time or UTC, as selected by the I/O
"timing" option in packet 0x35. At start-up, if the I/O double-
precision option is selected, this packet is also sent with a negative
time-of-fix to report the current stored position.
Packet 42 provides a single-precision version of this information.
Table A-65 Report Packet 83
Byte Item Type Units
0-7 X DOUBLE meters
8-15 Y DOUBLE meters
16-23 Z DOUBLE meters
24-31 clock bias DOUBLE meters
32-35 time of fix SINGLE seconds
Acutime 2000 Synchronization Kit User Guide A-77
ATrimble Standard Interface Protocol
0x84 Report Packet 84
Double-precision LLA Position Fix and Bias
Information
This packet provides current GPS position fix in LLA coordinates. If
the I/O "position" option is set to "LLA" and the double-precision
option is selected (packet 35), the receiver sends this packet each time
a fix is computed. The data format is shown in the table below.
The time-of-fix is in GPS time or UTC, as selected by the I/O
"timing" option "packet 35." At start-up, this packet is also sent with a
negative time-of-fix to report the current stored position.
Packet 4A provides a single-precision version of this information.
"Caution – When converting from radians to degrees, using an
insufficiently precise approximation for the constant π (Pi) introduces
significant and readily visible errors. The value of π as specified in
ICD-GPS-200 is 3.1415926535898.
Table A-66 Report Packet 84
Byte Item Type Units
0-7 latitude DOUBLE radians;
+ for north, − for south
8-15 longitude DOUBLE radians;
+ for east, − for west
16-23 altitude DOUBLE meters
24-31 clock bias DOUBLE meters
32-35 time of fix SINGLE seconds

A-78 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0xBB Command Packet BB
Set Primary Receiver Configuration
TSIP command packet BB contains the primary receiver
configuration parameters.
The Ace UTC and Acutime 2000 store 3 independent sets of
configuration parameters. These are designated as the "Mobile",
"Survey" and "Timing" configurations.
The active configuration is determined by the survey state:
When the survey state changes, the receiver automatically switches to
the new configuration. Only the active configuration can be
programmed.
To program configurations, switch the active configuration by
changing to the appropriate survey state using packets 8E-A6 and 8E-
A9, update the configuration (BB), and save settings (8E-26).
There are restrictions to the dynamics code and operating dimension
settings, which take effect when survey is enabled, ensuring that the
receiver performs a valid survey and enters a timing mode afterwards.
The following table shows valid settings for each configuration.
Table A-67 Survey State Configurations
Survey State Active Configuration
Survey Disabled Mobile
Survey Active Survey
Survey Complete Timing

Acutime 2000 Synchronization Kit User Guide A-79
ATrimble Standard Interface Protocol
Send packet BB with subcode 0 as the only data byte, to query for the
primary receiver configuration. The receiver will respond with report
packet BB. The table below lists the individual fields within the BB
packet. When sending this packet, enter 0xFF or –1.0 to leave any
parameter unchanged.
Dynamics Code
The default is LAND mode, where the receiver assumes a moderate
dynamic environment. In this case, the satellite search and
re-acquisition routines are optimized for vehicle-type environments.
In SEA mode, the search and re-acquisition routines assume a low
acceleration environment and the receiver reverts to the user-entered
altitude in 2-D auto. In AIR mode, the search and re-acquisition
routines are optimized for high acceleration conditions.
Elevation Mask
This is the minimum elevation angle for satellites to be used in a
solution output by the receiver. Satellites near the horizon are
typically more difficult to track due to signal attenuation, and are also
generally less accurate due to higher variability in the ionospheric and
tropospheric corruption of the signal. When there are no obstructions,
the receiver can generally track a satellite down to near the horizon.
However, when this mask is set too low, the receiver may experience
frequent constellation switching due to low elevation satellites being
obscured.
Table A-68 Vaild GPS Configuration Settings
Survey State Active Configuration Dynamics Code Operating Dimension
Survey Disabled Mobile any any
Survey Active Survey Land/Sea/Air 2D or 3D or Auto
Survey Complete Timing Stationary 1SV or Over-determined

A-80 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Frequent constellation switching is undesirable because position
jumps may be experienced when Selective Availability is present and
DGPS is not available to remove these effects. The benefit of a low
elevation mask is that more satellites are available for use in a
solution and a better PDOP may be yielded. The current default mask
is set to 0.1745 radians (10°) and provides a reasonable trade-off
between the benefits and drawbacks.
Signal Level Mask
This mask defines the minimum signal strength for a satellite used in
a solution. There is some internal hysteresis on this threshold, which
allows brief excursions below the threshold if lock is maintained and
the signal was previously above the mask. This mask should be
lowered only with caution since it is also used to minimize the effects
of jammers and reflected signals on the receiver. Users who require
high accuracy can use a slightly higher mask of 6.0-8.0, since weaker
measurements may be noisier and are often caused by reflected
signals, which provide erroneous ranges.
Make sure that the elevation and SNR masks are not set too low. The
satellite geometry is sometimes improved considerably by selecting
low-elevation satellites. These satellites are, however, subject to
significant signal degradation by the greater ionospheric and
tropospheric attenuation that occurs. They are also subject to more
obscuration by the passing scenery when the receiver is in a moving
vehicle. The code phase data from those satellites is more difficult to
decode and therefore has more noise.
!Note – A level of hysteresis in the signal level mask is allowed in the
core operating software. The hysteresis allows the receiver to
continue using satellite signals which fall slightly below the mask and
prevents the receiver from incorporating a new signal until the signal
level slightly exceeds the mask. This feature minimizes constellation
changes caused by temporary fluctuations in signal levels.
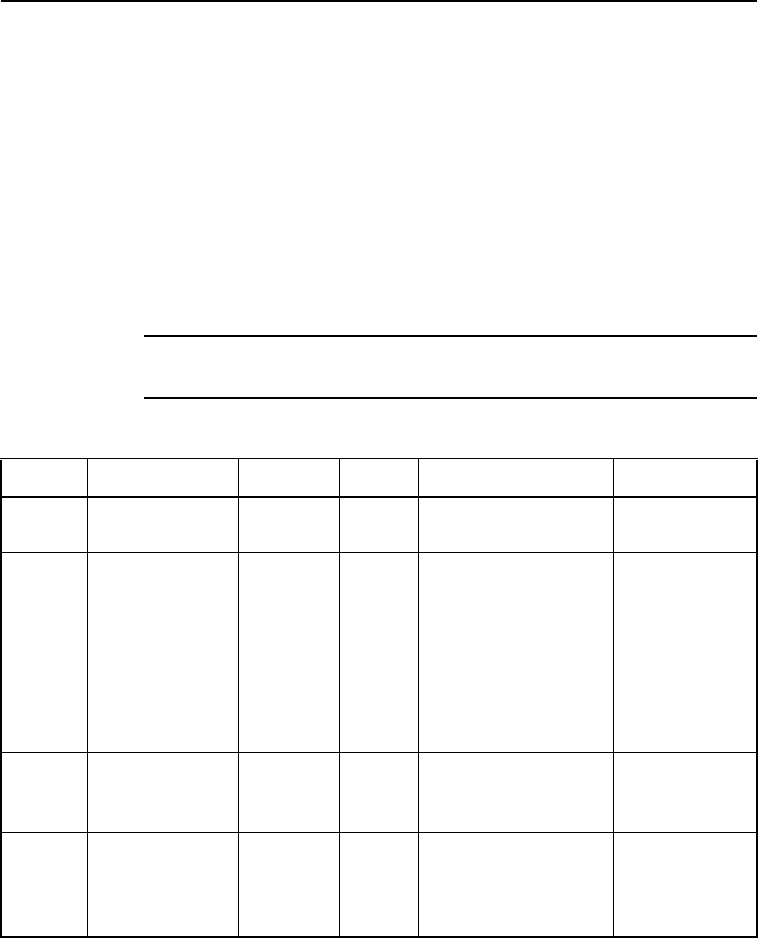
Acutime 2000 Synchronization Kit User Guide A-81
ATrimble Standard Interface Protocol
PDOP Mask and Switch
The PDOP mask is the maximum PDOP limit for which any 2-D or
3-D position solution will be made. The PDOP switch is the level at
which the receiver stops attempting a 3-D solution, and tries for a 2-D
solution when in automatic 2-D, 3-D mode. The switch level has no
effect on either manual mode. Raising the PDOP mask generally
increases the fix density during obscuration, but the fixes with the
higher PDOP are less accurate (especially with Selective Availability
present). Lowering the mask improves the average accuracy at the
risk of lowering the fix density.
!Note – The receiver may require an initial position fix before switching
to some modes.
Table A-69 Command Packet BB
Byte # Item Type Value Meaning Default
0 Subcode BYTE 0 Primary receiver
configuration block
1 Operating
Dimension
BYTE 0
1
3
4
5
6
7
Automatic
Time only (1-SV)
Horizontal (2D)
Full position (3D)
DGPS reference
2D clock hold
Overdetermined
clock
Full Position
2DGPS ModeBYTE0
1
3
DGPS off
DGPS only
DGPS auto
DGPS Auto
3 Dynamics
Code
BYTE 1
2
3
4
Land, <120 knots
Sea, <50 knots
Air, <800 knots
Static
Land
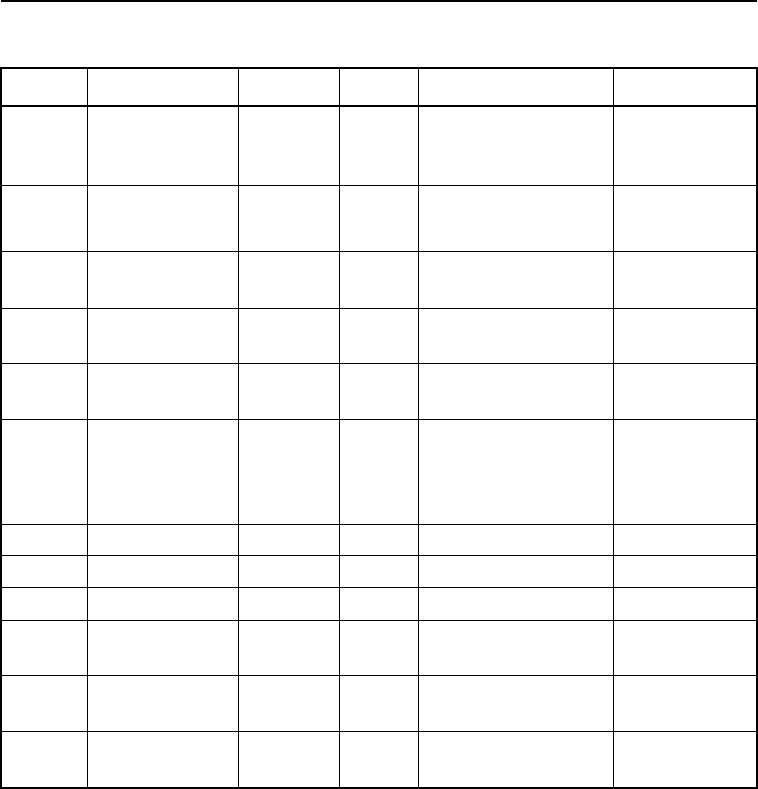
A-82 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
4 Solution
Mode
BYTE 1 Overdetermined fix Over-
determined
fix
5-8 Elevation
Mask
SINGLE 0-π/2 Lowest satellite
elevation for fixes
0.1745
(10 deg.)
9-12 AMU Mask SINGLE Minimum signal
level for fixes
4.0
13-16 PDOP Mask SINGLE Maximum PDOP
for fixes
8
17-20 PDOP Switch SINGLE Selects 2D/3D
mode
6
21 DGPS Age BYTE Maximum time to
use a DGPS
correction
(seconds)
30 seconds
22 Foliage Mode BYTE 0 Never Never
23 Reserved BYTE N/A N/A
24 Reserved BYTE N/A N/A
25 Measurement
Rate
BYTE 0 1 Hertz 1 Hz
26 Position Fix
Rate
BYTE 0 1 Hertz 1 Hz
27-42 Reserved BYTE -1 Reserved for future
use
Table A-69 Command Packet BB (Continued)
Byte # Item Type Value Meaning Default
Acutime 2000 Synchronization Kit User Guide A-83
ATrimble Standard Interface Protocol
0xBB Report Packet BB
Report Receiver Configuration
TSIP report packet BB is used to report the GPS Processing options.
For information about the data formats, see command packet BB.
0xBC Command Packet BC
Set Port Configuration Parameters
TSIP command packet BC is used to set the communication
parameters on Port 1 and Port 2. The table below lists the individual
fields within the BC packet.
Flow control is not supported. Please refer to section A.2 “Physical
Interface Characteristics” for details on the capabilities of each port
on the Ace UTC and Acutime 2000.
Table A-70 Command Packet BC
Byte # Item Type Value Meaning Default
0 Port Number BYTE 0
1
0xFF
Port 2 / Port B
Port 1 / Port A
current port
1 Input Baud
Rate
BYTE 0
1
2
3
4
5
6
7
8
9
None
110 baud
300 baud
600 baud
1200 baud
2400 baud
4800 baud
9600 baud
19200 baud
38400 baud
9600
2 Output Baud
Rate
BYTE As
above
As above 9600
3 # Data Bits BYTE 2
3
7 bits
8 bits
8 bits
A-84 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0xBC Report Packet BC
Request Port Configuration Parameters
TSIP packet BC is used to request the communication parameters on
Port 2 and Port B. To query a port’s configuration parameters, send
packet BC with only Byte 0. Table A-70, above, lists the individual
fields within the BC report packet.
4Parity BYTE0
1
2
None
Odd
Even
Odd
5 # Stop Bits BYTE 0
2
1 bit
2 bits
1 bit
6 reserved BYTE 0-15 0 = none 0
7 Input
Protocols
BYTE 0
2
8
none
TSIP
RTCM (Port 2 only)
none
8 Output
Protocols
BYTE 0
2
4
none
TSIP
NMEA
TSIP
9 Reserved BYTE 0 None
Table A-70 Command Packet BC (Continued)
Byte # Item Type Value Meaning Default

Acutime 2000 Synchronization Kit User Guide A-85
ATrimble Standard Interface Protocol
A.16 Custom OEM Packets
Several packets have been added to the core TSIP protocol to provide
additional capability for OEM receivers. In OEM packets 8E and
their 8F responses, the first data byte is a subcode that indicates the
superpacket type. For example, in packet 8E-14, 14 is the subcode
that indicates the superpacket type. Therefore, the ID code for OEM
packets is 2 bytes long, followed by the data.
A.17 TSIP Superpackets
Superpackets describes packets that reduce the I/O traffic with the
receiver and facilitate interpretation to a modem or data acquisition
device with limited programming facilities.

A-86 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8E-0B
Command Packet 8E-0B
Request or Configure Super Packet Output
The 8E-0B packet is identical in function to the 8E-AD packet. If the
8E-0B byte sequence is sent with no data, the receiver will return an
8F-0B packet on port 1. The time reported by the 8F-0B packet on
port 1 is always the beginning of the current second.
Acutime 2000 Synchronization Kit User Guide A-87
ATrimble Standard Interface Protocol
0x8E-14
Command Packet 8E-14
Set New Datum
This packet allows the user to change the default datum from
WGS-84 to one of 180 selected datums or to a user-entered custom
datum. The datum is a set of 5 parameters which describe an ellipsoid
to convert the GPS receiver's internal coordinate system of XYZ
ECEF into Latitude, Longitude and Altitude (LLA). This will affect
all calculations of LLA in packets 4A and 84 and 8F-AC and 8F-0B.
The receiver responds with packet 8F-14.
The user may want to change the datum to match coordinates with
some other system (usually a map). Most maps are marked with the
datum used and in the US the most popular datum for maps is
NAD-27. The user may also want to use a datum that is more
optimized for the local shape of the earth in that area. However, these
optimized datums are truly "local" and will provide very different
results when used outside of the area for which they were intended.
WGS-84 is an excellent general ellipsoid valid around the world.
To change to one of the internally held datums the packet must
contain exactly 2 bytes representing the integer value of the index of
the datum desired. For a list of the datums and their indexes, see
Table A-101.
Table A-71 Command Packet 8E-14
Byte # Type Value
0 Superpacket ID 0x14
1-2 INTEGER Datum index
A-88 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Alternatively, the unit will accept a 40 byte input packet containing 5
double-precision floating point values representing the ellipse. The
first 3 are DX, DY, and DZ, which represent an offset in meters from
the ECEF origin for the ellipse. The fourth parameter is the
semi-major axis of the ellipse (called the a-axis) and is also in meters.
The fifth parameter is the eccentricity of the ellipse and is
dimensionless.
"Caution – The GPS receiver does not perform an integrity check on
the datum values. If unusual inputs are used, the output will be
equally unusual.
0x8E-15
Command Packet 8E-15
Request Current Datum Values
This packet contains only the subpacket ID, 0x15. The response to
this packet is 8F-15.
Table A-72 Command Packet 8E-14
Byte # Type Value Units
0 Superpacket ID 0x14
1-8 DOUBLE DX meters
9-16 DOUBLE DY meters
17-24 DOUBLE DZ meters
25-32 DOUBLE A-axis meters
33-40 DOUBLE Eccentricity
Squared
None
Acutime 2000 Synchronization Kit User Guide A-89
ATrimble Standard Interface Protocol
0x8E-20
Command Packet 8E-20
Request Last Fix with Extra Information
This packet requests packet 8F-20 or marks it for automatic output. If
only the first byte (20) is sent, an 8F-20 report containing the last
available fix will be sent immediately. If two bytes are sent, the
packet is marked/unmarked for auto report according to the value of
the second byte.
!Note – Auto-report requires that superpacket output is enabled. Refer
to command packet 35. This packet must also be enabled with
packet 8E-4D.
0x8E-26
Command Packet 8E-26
Write Receiver Configuration to EEPROM
This command packet causes the current configuration settings to be
written to the EEPROM. It also generates a report packet 8F-26. This
packet contains only a single byte: the subpacket ID.
0x8E-41
Command Packet 8E-41
Manufacturing Operating Parameters
This packet is used to request the manufacturing parameters stored in
nonvolatile memory. The packet contains only a single byte, the
subpacket ID. The receiver returns packet 8F-41.
Table A-73 Command Packet 8E-20
Byte # Item Type Value
0 Sub-packet ID BYTE 0x20
1 Mark for Auto-report BYTE 0 = do not auto-report
1 = auto-report
A-90 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8E-42
Command Packet 8E-42
Production Parameters
This packet is used to request the production parameters stored in
nonvolatile memory. This packet contains only a single byte, the
subpacket ID. The receiver returns packet 8F-42.
0x8E-45
Command Packet 8E-45
Revert Segments to Default Settings
This command packet reverts the parameters stored in a specific
EEPROM segment (or all segments) to their factory default settings
and reconfigures the ACE UTC GPS using those settings. The
receiver returns packet 8F-45.
Table A-74 Command Packet 0x8E-45
Byte Item Type Value Segment Description
0 Subcode BYTE 0x45
1Segment
number
BYTE 2
3
4
5
6
7
8
11
0xFD
0xFF
Receiver configuration
Packet I/O control
Serial port configuration
Timing output configuration
Accurate position
Self-survey configuration
NMEA configuration
UTC information
Segments 2 through 8
All segments
Acutime 2000 Synchronization Kit User Guide A-91
ATrimble Standard Interface Protocol
0x8E-4A
Command Packet 8E-4A
Set/Request PPS Characteristics
Using this packet, you can query and control the receiver’s PPS
characteristics. The receiver responds to a query or control command
with packet 8F-4A. The packet contains 16 bytes in the following
order:
To request 8F-4A, send a two-byte 8E-4A packet without any
parameters. To update parameters, send the entire 16-byte message.
Table A-75 Command Packet 8E-4A
Byte # Item Type Meaning
0 Sub-packet ID BYTE Always 0x4A
1 PPS Driver Switch BYTE 0 = off
1 = on (default)
2 Time Base BYTE 0: GPS
1: UTC (default)
3 PPS Polarity BYTE 0: positive (default)
1: negative
4-11 PPS Offset or Cable Delay DOUBLE seconds (default = 0.0)
12-15 Bias Uncertainty Threshold FLOAT meters (default = 300)
A-92 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
The default setting for byte 3 is positive. Bytes 4 to 11 define the PPS
cable delay offset. The default offset is 0, which corresponds to a 100-
foot (30-meter) cable. These bytes allow the application to adjust the
cable delay offset for longer or shorter cable lengths. Use a cable
delay of ± 1.25 ns/foot to adjust PPS offset for cable lengths different
than 100 feet. For a longer cable, a negative value should be used to
advance the PPS. ACE UTC GPS estimates the bias uncertainty as
part of a PPS validity monitor. If the bias uncertainty exceeds the
threshold, then ACE UTC GPS disables the PPS output. The default
bias uncertainty threshold is 300 meters, but this parameter may be
programmed by the application. ACE UTC GPS limits the threshold
to 3x108 meters. Each time the application adjusts the packet 8E-4A
settings, the new settings are stored in nonvolatile memory.
0x8E-4D
Command Packet 8E-4D
Automatic Packet Output Mask
Automatic output of packets on Port 1 can be throttled using this
command packet. The current mask can be requested by sending this
packet with no data bytes except the subcode byte. The receiver
returns packet 8F-4D.
The automatic packet output mask can be set by sending this packet
with 4 data bytes. This mask only disables automatic packet output.
Packets generated in response to TSIP set or query commands will
always be output by the receiver.
Table A-76 Command Packet 8E-4D
Byte # Item Type Meaning
0 Subcode BYTE ID for this subpacket is
always 0x4D
1-4 Auto-output
mask
LONG 32-bit packet enable
bitmap
Acutime 2000 Synchronization Kit User Guide A-93
ATrimble Standard Interface Protocol
The bits are numbered in descending order of receipt, starting with bit
31 as the MSB of Byte 1, down to bit 0 as the LSB of Byte 4. A "0" in
the bit position disables automatic output of the associated packets; a
"1" in the bit position makes the associated packets available for
automatic output. Table A-77 describes the packets affected by
each bit.
Table A-77 Command Packet 8E-4D - Packets Affected By Bits
Bit # Output
Packets
Default
A2K
Default
ACE
UTC
When
Output
Meaning
0 (LSB) 40 0 0 After Decode Almanac data
collected from
satellite.
1 58, 5B 0 0 After Decode Ephemeris data
collected from
satellite.
2 4F 0 0 After Decode UTC data
collected from
satellite.
3 58 0 0 After Decode Ionospheric
data collected
from satellite.
4 48 0 0 After Decode GPS Message.
5 49 0 0 After Decode Almanac health
page collected
from satellite.
6 1 0 Reserved
7 1 0 Reserved
8 41 1 0 New Fix Partial and full
fix complete
and packet
output timer
has expired.
9 1 0 Reserved
A-94 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Note 1: A 1 in the bit mask turns on the associated packets and a 0 turns off the output of the
associated packets.
0x8E-4E
Command Packet 8E-4E
Set PPS Output Option
This command packet sets the PPS driver switch to one of the values
listed in Table A-78. The receiver returns packet 8F-4E. The current
driver switch value can be requested by sending this packet with no
data bytes except the subcode byte.
Driver switch values 3 and 4 only make sense in Overdetermined
Timing mode. In any position fix mode the effective choices are
10 1 0 Reserved
11
(Note 1)
6D, 46, 4B, 82 1 0 Constellation
Change,
New Fix
New satellite
selection
12 1 0 Reserved
13-29 1 0 Reserved
30 42, 43, 4A, 54,
56, 83, 84,
8F-20,
10New Fix
Update
Kinetic and
Timing
information.
Output must be
enabled using
I/O options.
31 5A 1 0 New Fix Raw
Measurement
Data
Output must be
enabled using
I/O options.
Table A-77 Command Packet 8E-4D - Packets Affected By Bits
Bit # Output
Packets
Default
A2K
Default
ACE
UTC
When
Output
Meaning
Acutime 2000 Synchronization Kit User Guide A-95
ATrimble Standard Interface Protocol
always on or during fixes which you get if you set the driver switch to
3 or 4.8E-4
0x8E-4F
Command Packet 8E-4F for Acutime 2000 only
Set PPS Width
This command packet sets the PPS width to a value in the range of 10
microseconds to 500 milliseconds. The receiver returns packet 8F-4F.
The current PPS width can be requested by sending this packet with
no data bytes except the subcode byte.
0x8E-A5
Command Packet 8E-A5
Set or Request Packet Broadcast Mask
Use command packet 8E-A5 to set the packet broadcast masks or to
request the current mask settings. The ACE UTC replies to requests
with response packet 8F-A5. The broadcast mask is bitwise encoded
to allow the user to turn on and off the automatic output (broadcast) of
certain packets. For those broadcast packets that have multiple
Table A-78 Command Packet 0x8E-4E
Byte Item Type Value Meaning
0 Subcode BYTE 0x4E
1PPS
driver
switch
BYTE 2
3
4
PPS is always output
PPS is output when at least
one satellite is tracking
PPS is output when at least
three satellites are tracking
Table A-79 Command Packet 0x8E-4F
Byte Item Type Value Meaning
0 Subcode BYTE 0x4F
1-8 PPS
width
DOUBLE Seconds

A-96 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
formats, the ACE UTC GPS will broadcast only one of the formats. If
more than one of the formats is masked on for broadcast, then the
format with the greatest precision of content will be sent and the rest
will not. The coding for each bit in the mask follows:
0: Turn off automatic output (broadcast) of this packet
1: Turn on automatic output (broadcast) of this packet
Acutime 2000 Synchronization Kit User Guide A-97
ATrimble Standard Interface Protocol
Table A-80 Command Packet 8E-A5
Byte Bit Item Type Default Description
0 Subcode UINT8 A
2
K
A
C
E
0xA5
1-2 0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0x8F-20
0x8F-AB
0x8F-AC
0x8F-0B
0x8F-0B
0x8F-0B
0x8F-0B
0x8F-AD
0x8F-AD
0x8F-AD
0x8F-AD
Bit
field
1
0
0
0
0
1
0
0
0
1
0
0
1
1
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
1
0
Enable 0x8F-20 output on Port
Reserved
Reserved
Reserved
Reserved
Enable auto TSIP outputs
0x8F-AB, Primary timing info on all
TSIP output ports
0x8F-AC, Supplemental timing info
on all TSIP output ports
Synchronous 0x8F-0B (1 Hertz) on
Port A (Acutime 2000 only)
Event output of 0x8F-0B on Port A
(Acutime 2000 only)
Event output of 0x8F-0B on Port 1
Synchronous 0x8F-0B on Port 1
Synchronous 0x8F-AD (1 Hertz) on
Port A (Acutime 2000 only)
Event output of 0x8F-AD on Port A
(Acutime 2000 only)
Event output of 0x8F-AD on Port 1
Synchronous 0x8F-AD on Port 1
3-4 0-15 Bit
field
0 Reserved (always 0)
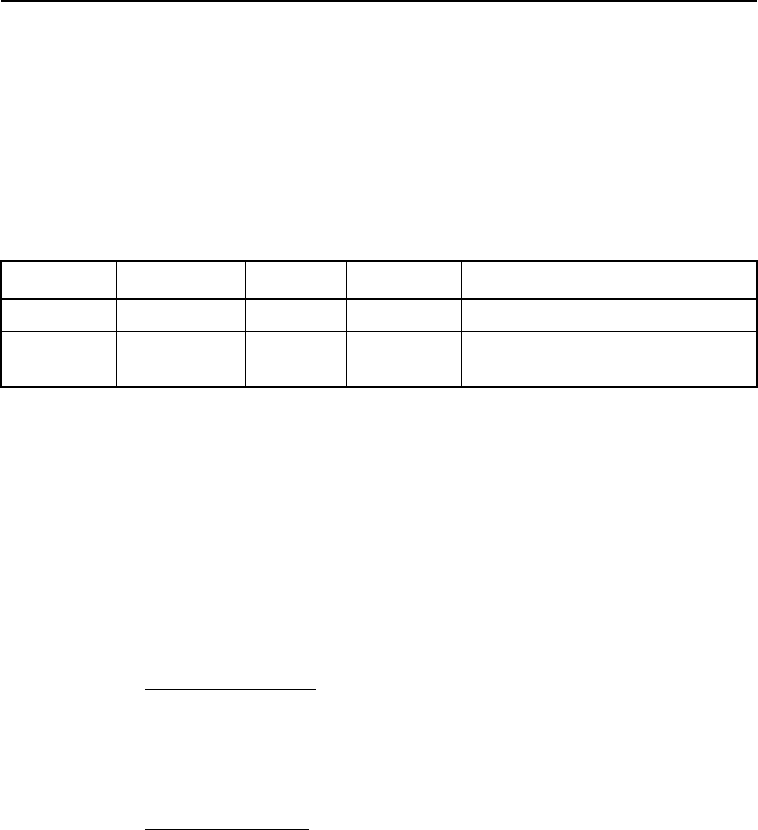
A-98 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8E-A6
Command Packet 8E-A6
Issue Self-Survey Command
This command packet starts a self-survey. The ACE UTC GPS
responds with report packet 8F-A6. This command has no effect
when survey is disabled.
0x8E-A9
Command Packet 8E-A9
Set Self-Survey Parameters
Use command packet 8E-A9 to set the self-survey parameters or to
request the current settings. The ACE UTC GPS replies with response
packet 8F-A9.
Data Fields:
Self-Survey Enable: Use this field to enabled or disabled the self-
survey mechanism.
0: Disable the self-survey mechanism
1: Enable the self-survey mechanism
Position Save Flag: Use this field to tell the self-survey mechanism to
automatically save (or to not save) the self-surveyed position at the
end of the self-survey procedure.
0: Do not automatically save the surveyed position when the
self-survey is complete
Table A-81 Command Packet 8E-A6
Byte Item Type Value Meaning
0 Subcode BYTE 0xA6
1 Self-survey
command
BYTE 0 Restart self-survey
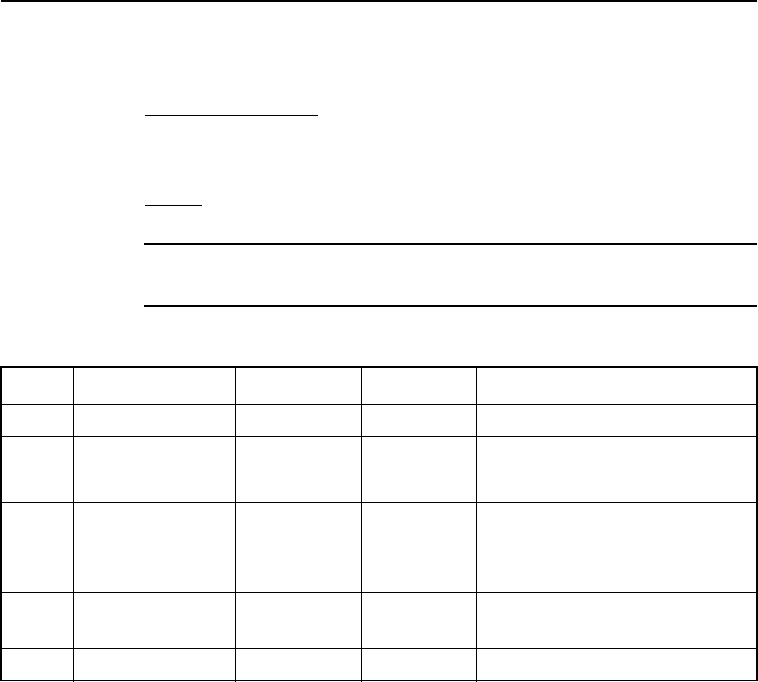
Acutime 2000 Synchronization Kit User Guide A-99
ATrimble Standard Interface Protocol
1: Automatically save the surveyed position when the self-
survey is complete.
Self-Survey Length: Use this field to specify the number of position
fixes that are to be averaged together to form the self-surveyed
position used for clock-only fixes.
Limits: 1 to (231 - 1) fixes.
!Note – After disabling the self-survey, the survey in progress can be
stopped by issuing a restart self-survey command (0x8E-A6).
Table A-82 Command Packet 8E-A9 Data Format <<segment 7>>
Byte Item Type Value Description
0 Subcode UINT8 0xA9
1 Self-Survey
Enable
UINT8 0
1
Disabled
Enabled (factory default)
2Position Save
Flag
UINT8 0
1
Don’t save position (factory
default)
Save self-surveyed position
3-6 Self-Survey
Length
UINT32 see
above
Number of fixes
(factory default = 2000)
7-10 Reserved UINT32 0 0
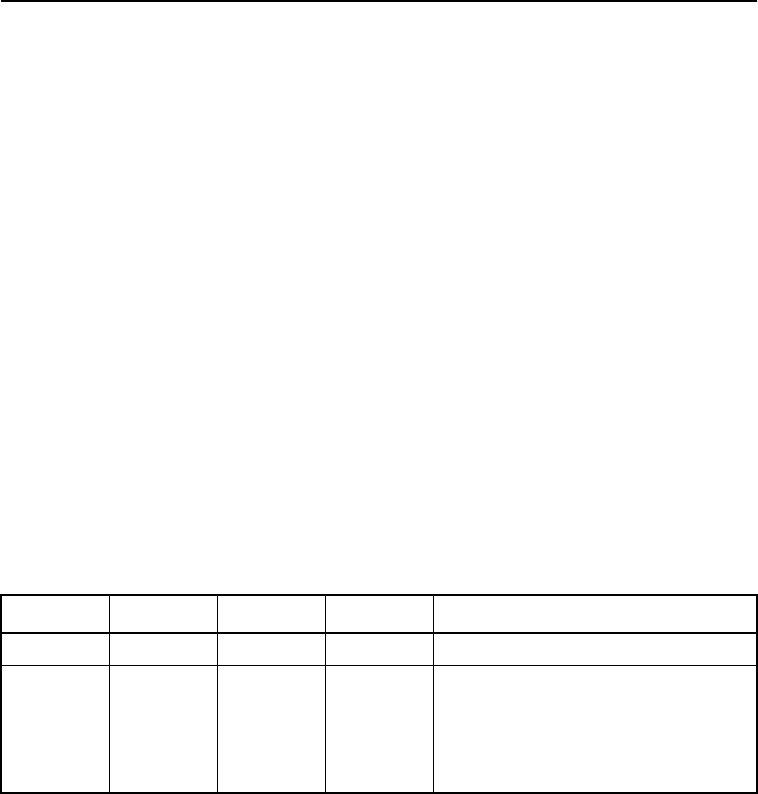
A-100 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8E-AB
Command Packet 8E-AB
Request Primary Timing Packet
This command packet may be used to request the primary timing
packet 8F-AB. To receive report packet 8F-AB once per second use
command 8E-A5 to enable the automatic output.
The Request Type item determines how the ACE UTC GPS will reply
to this command.
•Request Type 0: The most current primary timing values will
be sent in report packet 8F-AB immediately.
•Request Type 1: The response is not sent immediately.
Instead report packet 8F-AB is sent within 20ms after the
next PPS output. This is the same time that the packet would
be automatically sent if enabled.
•Request Type 2: Same as type 1 except that both report
packets 8F-AB and 0x8F-AC are sent after the next PPS
output.
Table A-83 Command Packet 8E-AB
Byte Item Type Value Meaning
0 Subcode BYTE 0xAB
1 Request
type
BYTE 0
1
2
Send 0x8F-AB immediately
Send 0x8F-AB on-time next
second
Send 0x8F-AB and 0x8F-AC on-
time next second
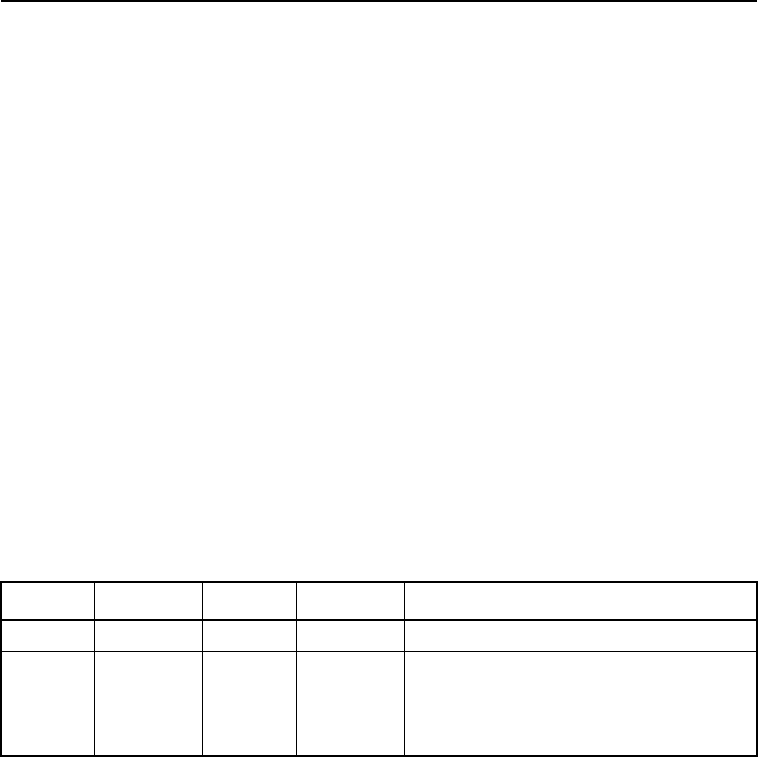
Acutime 2000 Synchronization Kit User Guide A-101
ATrimble Standard Interface Protocol
0x8E-AC
Command Packet 8E-AC
Request Supplemental Timing Packet
This command packet can be used to request the supplemental timing
packet 8F-AC. To receive report packet 8F-AC once per second use
command 8E-A5 to enable the automatic output.
The Request Type item determines how the ACE UTC GPS will reply
to this command.
•Request Type 0: The most current supplemental timing
values will be sent in report packet 8F-AC immediately.
•Request Type 1: The response is not sent immediately.
Instead report packet 8F-AC is sent within 300ms after the
next PPS output. This is the same time that the packet would
be automatically sent if enabled.
•Request Type 2: Same as type 1 except that both report
packets 8F-AB and 8F-AC are sent after the next PPS output.
Table A-84 Command Packet 8E-AC
Byte Item Type Value Meaning
0 Subcode BYTE 0xAC
1 Request
type
BYTE 0
1
2
Send 0x8F-AC immediately
Send 0x8F-AC on-time next second
Send 0x8F-AB and 0x8F-AC on-time
next second

A-102 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8E-AD
Command Packet 8E-AD (Acutime 2000 only)
Request or Configure Super Packet Output
If the 8E-AD byte sequence is sent with no data, the receiver will
generate an 8F-AD packet on port 1. The time reported by the 8F-AD
packet on port 1 is always the beginning of the current second.
Acutime 2000 Synchronization Kit User Guide A-103
ATrimble Standard Interface Protocol
0x8F-0B
Report Packet 8F-0B
Comprehensive Time
The output of the packet is synchronized with the PPS, and may also
be generated in response to external events. Report packet 8F-0B
provides easy identification of each timing pulse and contains all the
information required for most timing and synchronization
applications. Output of this packet can be disabled and configured
using the 8E-A5 packet on Port 1. If output of the 8F-AD packet is
also enabled, the 8F-0B packet will always be output after the 8F-AD
packet. The packet contains 74 bytes in the following order:
Table A-85 Report Packet 8F-0B
Byte # Item Type Meaning
0 Subpacket ID BYTE Subcode 0x0B
1-2 Event Count INTEGER External event counter. Zero for PPS.
3-10 UTC/GPS TOW DOUBLE UTC/GPS time of week (seconds)
11 Date BYTE Date of event or PPS
12 Month BYTE Month of event or PPS
13-14 Year INTEGER Year of event or PPS
15 Receiver Mode BYTE Receiver operating dimensions
0 Horizontal (2D)
1 Full position (3D) (Survey)
2 Single satellite (0D)
3 Automatic (2D/3D)
4 DGPS reference
4 Clock hold (2D)
6 Overdetermined clock (default)
16-17 UTC Offset INTEGER UTC offset value (seconds)
18-25 Oscillator Bias DOUBLE Oscillator bias (meters)
26-33 Oscillator Drift
Rate
DOUBLE Oscillator drift (meters/second)
34-37 Oscillator Bias
Uncertainty
SINGLE Oscillator bias uncertainty (meters)
A-104 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Bytes 66 through 73 identify the tracking and usable satellites. A
tracked satellite is distinguished from a usable satellite by a negative
sign (−) appended to its PRN number.
In this superpacket, time is referenced to UTC to correspond to the
default PPS timebase. To configure the receiver to output time
relative to GPS, the PPS must be characterized accordingly.
Command packet 8E-4A enables the PPS to be re-defined at run-time
and stores the new settings in nonvolatile memory.
!Note – Leap seconds can not be predicted in advance using only the
8F-0B packet. A leap second can be identified by observing that the
date does not increment after 86400 seconds have elapsed in the
current day. The date rollover is delayed for the duration of the leap
second, and the day/month/year count reported does not increment
to the next day until the beginning of the second following the leap
event. Decoding of the 8F-AD packet provides complete leap status
information.
The UTC offset is incremented at the beginning of the first second
following the leap second.
38-41 Oscillator Drift
Uncertainty
SINGLE Oscillator bias rate uncertainty
(meters/second)
42-49 Latitude DOUBLE Latitude in radians
50-57 Longitude DOUBLE Longitude in radians
58-65 Altitude DOUBLE Altitude according to current datum,
meters
66-73 Satellite ID 8 BYTES Identification numbers of tracking and
usable satellites
Table A-85 Report Packet 8F-0B (Continued)
Byte # Item Type Meaning
Acutime 2000 Synchronization Kit User Guide A-105
ATrimble Standard Interface Protocol
0x8F-14
Report Packet 8F-14
Current Datum Values
This packet contains 43 data bytes with the values for the datum
currently in use and is sent in response to packet 8E-14. If a built-in
datum is being used, both the datum index and the five
double-precision values for that index are returned. If the receiver is
operating on a custom user-entered datum, the datum index is set
to −1 and the five values are displayed. These five values describe an
ellipsoid to convert ECEF XYZ coordinate system into LLA.
!Note – A complete list of datums is provided at the end of this
appendix.
Table A-86 Report Packet 8F-14
Byte # Type Value Units
0 Super packet ID 14
1-2 Datum index
(-1 for custom)
Datum index
3-10 DOUBLE DX meters
11-18 DOUBLE DY meters
19-26 DOUBLE DZ meters
27-34 DOUBLE A-axis meters
35-42 DOUBLE Eccentricity squared none
A-106 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
00x8F-20
Report Packet 8F-20
Last Fix with Extra Information (binary fixed point)
This packet provides information concerning the time and origin of
the previous position fix. This is the last-calculated fix; it could be
quite old. The receiver sends this packet in response to Packet 8E-20;
it also can replace automatic reporting of position and velocity
packets. Automatic output of 8F-20 must also be enabled by setting
bit 5 of byte 0 in command packet 0x35 and bit 0 of bytes 1-2 in
command packet 0x8E-A5.
The data format is shown in the table below.
Table A-87 Report Packet 8F-20
Byte # Item/Type Meaning
0 Subpacket ID / BYTE ID for this subpacket (always 0x20)
1 KeyByte/BYTE Reserved for Trimble DGPS postprocessing
2-3 east velocity /
INTEGER
units 0.005 m/s or 0.020 m/s (see Byte 24).
Overflow = 0 x 8000
4-5 north velocity /
INTEGER
units 0.005 m/s or 0.020 m/s (see Byte 24).
Overflow = 0 x 8000
6-7 up velocity /INTEGER units 0.005 m/s or 0.020 m/s (see Byte 24).
Overflow = 0 x 8000
8-11 Time of Week /
UNSIGNED LONG
GPS Time in milliseconds
12-15 Latitude / LONG
INTEGER
Latitude, units = 2-31 semicircle, according to
current datum.
Range = -230 to 232
16-19 Longitude /
UNSIGNED LONG
Longitude east of meridian, units = 2-31
semicircle, according to current datum.
Range = 0 to 232
20-23 Altitude / LONG
INTEGER
Altitude above ellipsoid, mm, according current
datum.
24 Velocity Scaling When bit 0 is set to 1, velocities in Bytes 2-7
have been scaled by 4.
Acutime 2000 Synchronization Kit User Guide A-107
ATrimble Standard Interface Protocol
25 Reserved 0
26 Datum Datum index + 1
27 Fix Type / BYTE Type of fix. This is a set of flags.
0 (LSB) 0: Fix was available
1: No fix available
1 0: Fix is autonomous
1: Fix was corrected with RTCM
2 0: 3D fix
1: 2D fix
3 0: 2D fix used last-circulated altitude
1: 2D fix used entered altitude
4 0: Unfiltered
1: Position or altitude filter on
5-7 unused (always 0)
28 NumSVs/BYTE Number of satellites used for fix. Will be zero if
no fix was available.
29 UTC Offset / BYTE Number of leap seconds between UTC time
and GPS time.
30-31 Week/INTEGER GPS time of fix (weeks)
32-47 Fix SVs Repeated groups of 2 bytes, one for each
satellite. The bytes are 0 if group N/A. The
following table describes the contents of each
group.
48-55 Iono Param /
8 CHARS
The broadcast ionospheric parameters.
Table A-88 Report Packet 8F-20
Bytes
32-47
Item/Type Meaning
0 PRNX/BYTE Satellite number and IODC - IODE. PRN = the lower six
bits of PRNX. IODC = (PRNX/64)×256 + IODE
1 IODE/BYTE
Table A-87 Report Packet 8F-20 (Continued)
Byte # Item/Type Meaning
A-108 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8F-26
Report Packet 0x8F-26
Response to Save EEPROM Segments
This report packet is output after the command packet 8E-26 has been
executed.
Table A-89 Report Packet 0x8F-26
Byte Item Type Value Meaning
0 Subcode BYTE 0x26
1-4 Reserved ULONG 0x00
Acutime 2000 Synchronization Kit User Guide A-109
ATrimble Standard Interface Protocol
0x8F-41
Report Packet 8F-41
Manufacturing Parameters
This packet provides information on the manufacturing parameters
stored in nonvolatile memory in response to command packet 8E-41.
Table A-90 Report Packet 8F-41
Byte # Item Type Meaning
0 Subcode BYTE ID for this subpacket
is always 0x41
1-2 Board serial number prefix INTEGER
3-6 Board serial number ULONG
7 Year of build BYTE
8 Month of build BYTE
9 Day of build BYTE
10 Hour of build BYTE
11-14 Oscillator offset SINGLE
15-16 Test code identification number INTEGER
A-110 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8F-42
Report Packet 8F-42
Production Parameters
This packet provides information on the production parameters stored
in nonvolatile memory in response to command packet 8E-42.
0x8F-45
Report Packet 8F-45
This report packet is output after the command packet 8E-45 has been
executed. See the corresponding command packet for information
about the data formats.
Table A-91 Report Packet 8F-42
Byte # Item Type Meaning
0 Subcode BYTE ID for this subpacket
is always 0x42
1 Production options prefix BYTE
2 Production number extension BYTE
3-4 Case serial number prefix INTEGER
5-8 Case serial number ULONG
9-12 Production number ULONG
13-14 Reserved INTEGER
15-16 Machine identification number INTEGER
17-18 Reserved INTEGER
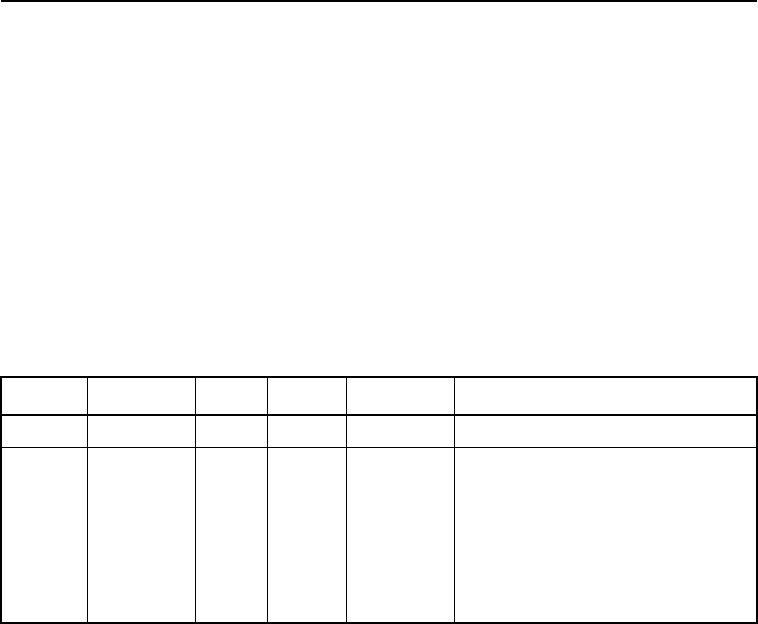
Acutime 2000 Synchronization Kit User Guide A-111
ATrimble Standard Interface Protocol
0x8E-AD
Command Packet 8E-AD (Request 8F-AD)
Request or Configure Super Packet Output
If the 8E-AD byte sequence is sent with no data, the receiver will
generate an 8F-AD packet on port B. The time reported by the 8F-AD
packet on port B is always the beginning of the current second.
Output of the 8F-AD Primary UTC timing packet on Port A is
configured by sending a 3 byte message 8E-AD n, where n ranges
from 0 to 3, as defined below. The receiver returns the 8F-A5 Super
Packet Output Mask.
Table A-92 Command Packet 8E-AD
Byte # Item Type Value Default Meaning
0 Subcode Byte AD Required Super-packet ID
1FlagByte0
1
2
3
3 Disable packet output on port A
Output packet on port A only at
PPS
Output packet on port A only at
event input
Output at both event input and
PPS
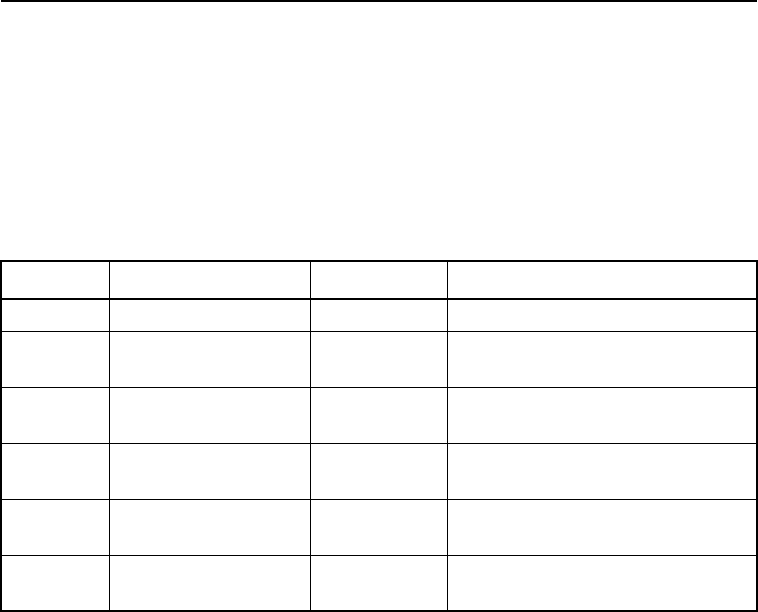
A-112 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8F-4A
Report Packet 8F-4A
PPS Characteristics
This packet reports ACE UTC’s PPS characteristics. This packet is
sent in response to a query or control command with packet 8E-4A.
The packet contains 16 bytes in the following order:
Table A-93 Report Packet 8F-4A
Byte # Item Type Units
0 Subpacket ID BYTE Always 0x4A
1 PPS Driver Switch BYTE 0: Off
1: On
2 Time Base BYTE 0: GPS
1: UTC (default)
3 PPS Polarity BYTE 0: Positive (default)
1: Negative
4-11 PPS Offset or
Cable Delay
DOUBLE seconds
12-15 Bias Uncertainty
Threshold
SINGLE meters
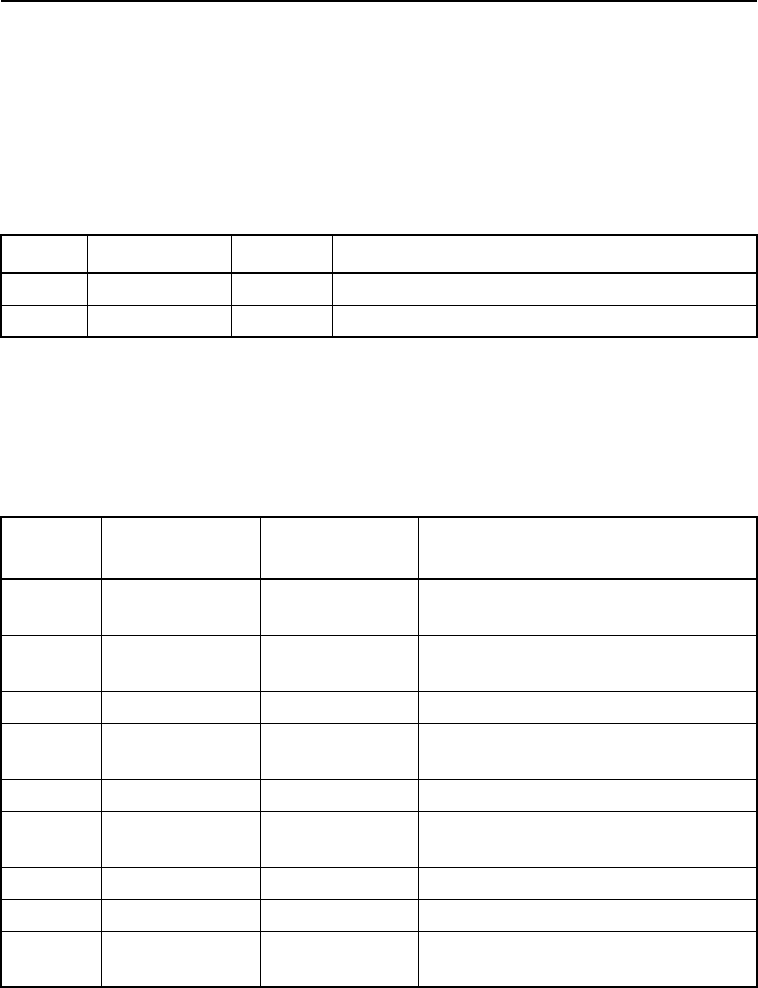
Acutime 2000 Synchronization Kit User Guide A-113
ATrimble Standard Interface Protocol
0x8F-4D
Report Packet 8F-4D
Automatic Packet Output Mask
This packet provides information on the automatic packets that may
be output by the receiver. Sent in response to 8E-4D query or set.
A "0" in the bit position means that automatic output of the associated
packets is disabled; a "1" in the bit positions means that the associated
packets can be automatically output. The following table describes
the meaning and packets output by each set bit.
Table A-94 Report Packet 8F-4D
Byte # Item Type Meaning
0 Subcode BYTE ID for this sub-packet is always 0x4D
1-4 Bit Mask ULONG Bits in the mask enable output packets
Table A-95 Report Packet 8F-4D
Bit # Output
Packets
When Output Meaning
0(LSB) 40 Alm After Decode Almanac data collected from
satellite
1 58, 5B After Decode Ephemeris data collected from
satellite.
2 4F After Decode UTC data collected from satellite
3 58 After Decode Ionospheric data collected from
satellite
4 48 After Decode GPS Message.
5 49 After Decode Almanac health page collected
from satellite.
6 Reserved
7 Reserved
8 41 New Fix Partial and full fix complete and
packet output timer has expired.
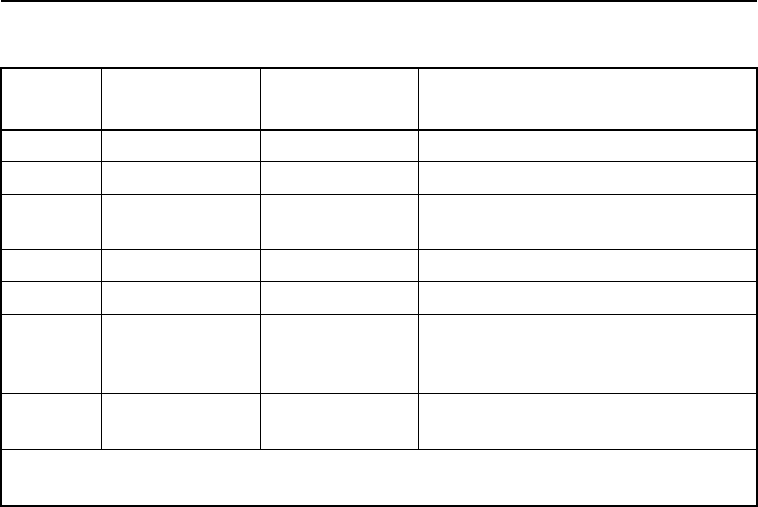
A-114 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8F-4E
Report Packet 0x8F-4E
This report packet is output after the command packet 8E-4E has
been executed. See the corresponding command packet for
information about the data formats.
0x8F-A5
Report Packet 8F-A5
This report packet is output after the command packet 8E-A5 has
been executed and is identical in structure to packet 8E-A5. See the
corresponding command packet for information about the data
formats.
9 Reserved
10 Reserved
11 6D, 82 Constellation
Change
New satellite selection
12 Reserved
13-29 Reserved
30 4A, 8F-20, 42,
43, 54, 56, 82,
83, 84
New Fix
Update
Dynamic and Timing information.
Output must be enabled with I/O
options.
31
(Note 1)
5A New Fix Output must be enabled with I/O
options.
Note 1: A 1 in the bit mask indicates that output for the associated packets is ON; a 0
indicates that the output is turned OFF.
Table A-95 Report Packet 8F-4D (Continued)
Bit # Output
Packets
When Output Meaning

Acutime 2000 Synchronization Kit User Guide A-115
ATrimble Standard Interface Protocol
0x8F-A6
Report Packet 8F-A6
This report packet is output after the command packet 8E-A6 has
been executed and is identical in structure to packet 8E-A6. See the
corresponding command packet for information about the data
formats.
0x8F-A9
Report Packet 0x8F-A9
This report packet is output after the command packet 8E-A9 has
been executed and is identical in structure to packet 8E-A9. See the
corresponding command packet for information about the data
formats.
0x8F-AB
Report Packet 8F-AB
This automatic report packet provides time information once per
second if enabled with command packet 8E-A5. GPS week number,
GPS time-of-week (TOW), UTC integer offset, time flags, date and
time-of-day (TOD) information is provided. This packet can be
requested with packet 8E-AB. This packet will begin transmission
within 30 ms after the PPS pulse to which it refers.
Data Fields:
Time of Week: This field represents the number of seconds since
Sunday at 00:00:00 GPS time for the current GPS week. Time of
week is often abbreviated as TOW.
Week Number: This field represents the current GPS week number.
GPS week number 0 started on January 6, 1980. Unfortunately, the
GPS system has allotted only 10-bits of information to carry the GPS
week number and therefore it rolls-over to 0 in just 1024 weeks (19.6
years), and there is no mechanism built into GPS to tell the user to
which 1024 week epoch the week number refers. The first week

A-116 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
number roll-over occurred as August 21, 1999 (GPS) transitioned to
August 22, 1999 (GPS). The ACE UTC GPS adjusts for this week
rollover by adding 1024 to any week number reported by GPS that is
less than week number 1023, which began on December 14, 1997.
With this technique, the ACE UTC GPS will provide an accurate
translation of GPS week number and TOW to time and date until July
30, 2017.
UTC Offset: This field represents the current integer leap second
offset between GPS and UTC according to the relationship: Time
(UTC) = Time (GPS) - UTC Offset. The UTC offset information is
reported to ACE UTC GPS by the GPS system and can take up to
12.5 minutes to obtain. Before the ACE UTC GPS has received UTC
information from the GPS system, it is only capable of representing
time in the GPS time scale, and the UTC offset will be shown as 0.
Timing Flags: This field is bitwise encoded to provide information
about the timing outputs. Unused bits should be ignored.
Bit 0: When 0, the date and time fields broadcast in packet
0x8F-AB are in the GPS time scale. When 1, these fields are
in the UTC time scale and are adjusted for leap seconds.
Bit 2: When 0, time has been set from GPS. When 1, time has
not yet been set from GPS.
Bit 3: When 0, UTC offset information has been received.
When 1, UTC offset information is not yet known.
Time of Day: The time of day is sent in hours-minutes-
seconds format and varies from 00:00:00 to 23:59:59, except
when time is in UTC and a leap second insertion occurs. In
this case the time will transition from 23:59:59 to 23:59:60 to
00:00:00.
Date: The date is sent in day-month-year format.
Acutime 2000 Synchronization Kit User Guide A-117
ATrimble Standard Interface Protocol
Table A-96 Report Packet 0x8F-AB
Byte Bit Item Type Value Meaning
0 Subcode BYTE 0xAB
1-4 Time of
week
ULONG GPS seconds of week
5-6 Week
Number
UINTEGER GPS Week Number
(see above)
7-8 UTC
Offset
INTEGER UTC Offset (seconds)
90
1
2
3
Timing
Flag
Bit Field 0
1
0
1
0
1
0
1
GPS time
UTC time
Reserved
Reserved
Time is set
Time is not set
Have UTC info
No UTC info
10 Seconds BYTE 0-59 (60 for UTC leap second event)
11 Minutes BYTE 0-59 Minutes of Hour
12 Hours BYTE 0-23 Hour of Day
13 Day of
Month
BYTE 1-31 Day of Month
14 Month BYTE 1-12 Month of Year
15-16 Year UINTEGER Four digits of Year (e.g. 1999)

A-118 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
0x8F-AC
Report Packet 8F-AC
This report packet provides supplemental timing information once per
second if enabled with command packet 8E-A5. Information
regarding position, unit status and health, and the operational state of
the unit is provided. This packet can be requested with command
packet 8E-AC. When enabled, this packet is transmitted once per
second shortly after report packet 8F-AB.
The position sent in report packet 8F-AC depends on the Receiver
Operating Mode and on self-survey activity. When a self-survey is in
progress, the position sent is the running average of all of the position
fixes collected so far. When the self-survey ends or whenever the
receiver is using a time-only operating mode, then the position sent is
the position the receiver is using to perform time-only fixes. When
the self-survey is disabled or otherwise inactive and the receiver is
using a position fix operating mode, then the position sent is the
position fix computed on the last second.
Data Fields:
Receiver Mode: This field shows the fix mode that the GPS receiver
is currently configured for. The ACE UTC GPS spends most of its
time in the Overdetermined Clock mode where it uses all available
satellites to perform the best time-only fix possible. See packet 0xBB
for a description of all available receiver modes.
Self-Survey Progress: When a self-survey procedure is in progress,
this field shows the progress of the survey as a percentage of fixes
collected so far. The self-survey will be complete when the self-
survey progress reaches 100 percent.

Acutime 2000 Synchronization Kit User Guide A-119
ATrimble Standard Interface Protocol
Minor Alarms: This field is bitwise encoded with several minor
alarm indicators. A minor alarm indicates a condition that the user
should be alerted to, but does not indicate an immediate (or
necessarily any) impairment of functionality. For each bit, a value of
0 means that the condition is not indicated. Bits not described below
should be ignored.
Bit 1 Antenna Open (ACE UTC only)
Bit 2 Antenna Short( (ACE UTC only)
Bit 3 When 1, indicates that no satellites are yet usable. In order for a
satellite to be usable, it must be tracked long enough to obtain
ephemeris and health data.
Bit 5 When 1, indicates that a self-survey procedure is in progress.
Bit 6 When 1, indicates that there is no accurate position stored in
EEPROM.
Bit 7 When 1, indicates that the GPS system has alerted the GPS that
a leap second transition is pending.
Bit 8 When 1, indicates that the GPS is operating in one of its test
modes.
Bit 9 When 1, indicates that the accuracy of the position being used
for a time-only fix is questionable. While operating in the
Overdetermined Clock mode (which is most of the time) with at
least 2 satellites available, the receiver can detect position
inaccuracies as small as 1/2 to 1 mile. If this bit is set, it is likely
that the receiver is using a stored position but has been moved
to a new site. The stored position should be cleared (packet
0x8E-45) and a new position should be established either by
user input (packet 0x31 or 0x32) or by self-survey
(packet 0x8E-A6).
Bit 10 When 1, indicates that one or more EEPROM segments where
found to be corrupt at reset and had to be set to their factory
default settings. Use packet 0x3F-11 to retrieve details about
which segments where corrupt and to clear this bit. The GPS
will send packet 0x5F-11 with the segment status. Only bits 2-
12 of the segment status are used to set this alarm bit.
Bit 11 When 1, indicates that the almanac is not current or complete.

A-120 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
GPS Decoding Status: This field indicates the decoding status of the
GPS receiver.
Local Clock Offset: This field carries the offset of the local clock
relative to UTC or GPS as reported by the GPS receiver in
nanoseconds. Positive values indicate that the ACE UTC GPS’s local
clock is late relative to GPS or UTC. Also known as bias.
Oscillator Offset: This field carries the frequency offset of the local
clock relative to UTC or GPS as reported by the GPS receiver in ppb
(parts-per-billion). Positive values indicate that the ACE UTC GPS’s
local clock is running slow relative to GPS or UTC. Also known as
bias rate.
Latitude: This field carries the latitude of the position being shown.
The units are in radians and vary from -π/2 to +π/2. Negative values
represent southern latitudes. Positive values represent northern
latitudes.
Longitude: This field carries the longitude of the position being
shown. The units are in radians and vary from -π to +π. Negative
values represent western longitudes. Positive values represent eastern
longitudes.
Altitude: This field carries the altitude of the position being shown.
The units are in meters according to the current datum.
PPS Quantization Error: This field identifies the PPS quantization
error in nanoseconds.
PPS Output Status: This field identifies the status of the PPS output.
Acutime 2000 Synchronization Kit User Guide A-121
ATrimble Standard Interface Protocol
The table below identifies the fields associated with packet 8F-AC.
Table A-97 Report Packet 8F-AC
Byte Bit Item Type Value Meaning
0 Subcode BYTE 0xAC
1 Receiver
Mode
BYTE 0
1
3
4
5
6
7
Automatic (2D/3D)
Single Satellite (Time)
Horizontal (2D)
Full Position (3D)
DGPS Reference
Clock Hold (2D)
Overdetermined Clock
2 Reserved
3 Self-Survey
Progress
BYTE 0-100 Percent completed
4-7 Reserved
8-9 Reserved
10-11 Minor Alarms UINTEGER Bit field Bit 1: Antenna Open
Bit 2: Antenna Shorted
Bit 3: Not tracking satellites
Bit 5: Survey-in progress
Bit 6: No stored position
Bit 7: Leap second pending
Bit 8: In test mode
Bit 10: EEPROM segments
status
Bit 11: Almanac status
12 GPS
Decoding
Status
BYTE 0
1
3
8
9
0x0A
0x0B
0x0C
0x10
Doing fixes
Do not have GPS time
PDOP is too high
No usable satellites
Only 1 usable satellite
Only 2 usable satellites
Only 3 usable satellites
The chosen satellite is unusable
TRAIM rejected the fix
A-122 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
13 Reserved
14 Reserved
15 Reserved
16-19 Bias SINGLE Estimate of UTC/GPS offset (ns)
of local clock
20-23 Bias Rate SINGLE Estimate of UTC/GPS offset
(ppb) of local clock
24-27 Reserved
28-31 Reserved
32-35 Reserved
36-43 Latitude DOUBLE Radians
44-51 Longitude DOUBLE Radians
52-59 Altitude DOUBLE Meters
60-63 PPS
Quantization
Error
Single PPS quantization error (ns)
64 PPS output
status
UINT8 0: PPS Not Generated
1: PPS Was Generated
65-67 Reserved
Table A-97 Report Packet 8F-AC (Continued)
Byte Bit Item Type Value Meaning
Acutime 2000 Synchronization Kit User Guide A-123
ATrimble Standard Interface Protocol
0x8F-AD
Report Packet 8F-AD
Primary UTC Time
The output of the 8F-AD packet is synchronized with the PPS, and
may also be generated in response to external events. This packet
provides accurate time and date information for time stamping and
time transfer. The leap flag provides complete UTC event
information, allowing implementation of sophisticated distributed
systems intended to operate synchronously with UTC time. This
packet is always output first in a possible sequence of up to 4
synchronous packets. Output of this packet can be disabled and
configured using the 8E-AD packet .
Table A-98 Report Packet 8F-AD
Byte # Item Type Meaning
0 Subpacket ID BYTE Subcode 0xAD
1-2 Event Count INTEGER External event counter. Zero for PPS.
3-10 Fractional
Second
DOUBLE Time elapsed in current second (seconds)
11 Hour BYTE UTC Hour
12 Minute BYTE UTC Minute
13 Second BYTE Second (0-59; 60 = leap)
14 Day BYTE Date (1-31)
15 Month BYTE Month (1-12)
16-17 Year INTEGER Year (4 digit)
18 Receiver
Status
BYTE Tracking Status (see definition below)
19 UTC Flags BYTE Leap Second Flags (see definition below)
20 Reserved BYTE Contains 0xFF
21 Reserved BYTE Contains 0xFF
A-124 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
The tracking status flag allows precise monitoring of receiver
tracking status and allows a host system to determine whether the
time output by the receiver is valid. After self-survey has completed,
the receiver only needs to track one satellite to maintain precise
synchronization with UTC.
Table A-99 Tracking Status Flag Definitions
Flag Value Status Meaning
0 DOING_FIXES Receiver is navigating.
1 GOOD_1SV Receiver is timing using one satellite
2 APPX_1SV Approximate time
3 NEED_TIME Start-up
4 NEED_INITALIZATION Start-up
5 PDOP_HIGH Dilution of Precision too High
6 BAD_1SV Satellite is unusable
7 0SVs No satellites usable
8 1SV Only 1 satellite usable
9 2SVs Only 2 satellites usable
10 3SVs Only 3 satellites usable
11 NO_INTEGRITY Invalid solution
12 DCORR_GEN Differential corrections
13 OVERDET_CLK Overdetermined fixes
Acutime 2000 Synchronization Kit User Guide A-125
ATrimble Standard Interface Protocol
Leap Second Flag
Leap seconds are inserted into the UTC timescale to counter the effect
of gradual slowing of the earth’s rotation due to friction. The 8F-AD
packet provides extensive UTC leap second information to the user
application.
The Leap Scheduled bit is set by the receiver, when the leap second
has been scheduled by the GPS control segment. The Control
segment may schedule the leap second several weeks before the leap
second takes place.
The Leap Pending bit indicates that the leap second will be inserted at
the end of the current day.
The GPS Leap Warning bit is set while GPS is operating in the leap
exception mode specified in ICD-200.
The Leap in Progress bit is set to 1 at the beginning of the leap
second, and cleared at the beginning of the second following the leap
event. The date rollover is delayed by one second on the day the leap
second is inserted. The date will not increment until the beginning of
the first second following the leap second.
Table A-100 Leap Second Flag Definitions
Bit # Name Meaning if set to 1
0 UTC Flag UTC Time is available
1-3 Reserved N/A
4 Leap Scheduled GPS Almanac’s leap second date is not in the past.
5 Leap Pending 24-hour warning. Cleared before leap second.
6 GPS Leap Warning Set +/- 6 hours before/after leap event.
7 Leap in Progress Leap second is now being inserted.
A-126 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.18 Datums
The table on the following pages lists datums.
Table A-101 Datums
Index DX DY DZ A-axis Eccentricity Description
0 0 0 0 6378137.000 0.00669437999014 /*WGS-84*/
1 -128 481 664 637797.155 0.00667437311265 /*Tokyo from old J6
values*/
2 -8 160 176 6378206.400 0.0067865799761 /*NAD-27*/
3 -9 151 185 6378206.400 0.00676865799761 /*Alaska/Canada*/
4 -87 -98 -121 6378388.000 0.00672267002233 /*European*/
5 -133 -48 148 6378160.000 0.00669454185459 /*Australian*/
6 0 0 4 6378135.000 0.00669431777827 /*WGS-72*/
7 0 0 0 6378137.000 0.00669438002290 /*NAD-83*/
8 0 0 0 6378137.000 0.00669437999014 /*NAD-02*/
9 0 0 0 6378137.000 0.00669437999014 /*Mexican*/
10 0 0 0 6378137.000 0.00669437999014 /*Hawaiian*/
11 0 0 0 6378137.000 0.00669437999014 /*Astronomic*/
12 0 0 0 6378137.000 0.00669437999014 /*U S Navy*/
13 -87 -98 -121 6378388.000 0.00672267002233 /*European*/
14 -134 -48 149 6378160.000 0.00669454185459 /*Australian 1984*/
15 -166 -15 204 6378249.145 0.00680351128285 /*Adindan-Mean*/
16 -165 -11 206 6378249.145 0.00680351128285 /*Adindan-Ethiopia*/
17 -123 -20 220 6378249.145 0.00680351128285 /*Adindan-Mali*/
18 -128 -18 224 6378249.145 0.00680351128285 /*Adindan-Senegal*/
19 -161 -14 205 6378249.145 0.00680351128285 /*Adindan-Sudan*/
20 -43 -163 45 6378245.000 0.00669342162297 /*Afgooye-Somalia*/
21 -150 -250 -1 6378388.000 0.00672267002233 /*Ain El Abd-
Bahrain*/
22 -491 -22 435 6378160.000 0.00669454185459 /*Anna 1 Astr 1965*/
23 -143 -90 -294 6378249.145 0.00680351128285 /*Arc 1950-Mean*/
24 -138 -105 -289 6378249.145 0.00680351128285 /*Arc 1950-
Botswana*/
Acutime 2000 Synchronization Kit User Guide A-127
ATrimble Standard Interface Protocol
25 -125 -108 -295 6378249.145 0.00680351128285 /*Arc 1950-Lesotho*/
26 -161 -73 -317 6378249.145 0.00680351128285 /*Arc 1950-Malawi*/
27 -134 -105 -295 6378249.145 0.00680351128285 /*Arc 1950-
Swaziland*/
28 -169 -19 -278 6378249.145 0.00680351128285 /*Arc 1950-Zaire*/
29 -147 -74 -283 6378249.145 0.00680351128285 /*Arc 1950-Zambia*/
30 -142 -96 -293 6378249.145 0.00680351128285 /*Arc 1950-
Zimbabwe*/
31 -160 -6 -302 6378249.145 0.00680351128285 /*Arc 1960-Mean*/
32 -160 -6 -302 6378249.145 0.00680351128285 /*Arc 1960-Kenya*/
33 -160 -6 -302 6378249.145 0.00680351128285 /*Arc 1960-
Tanzania*/
34 -205 107 53 6378388.000 0.00672267002233 /*Ascension Isl
1958*/
35 145 75 272 6378388.000 0.00672267002233 /*Astro Beacon E
1945*/
36 114 -116 -333 6378388.000 0.00672267002233 /*Astro B4 Sorol
Atoll*/
37 -320 550 -494 6378388.000 0.00672267002233 /*Astro Dos 71/4*/
38 124 -234 -25 6378388.000 0.00672267002233 /*Astro Station 1952*/
39 -133 -48 148 6378160.000 0.00669454185459 /*Australian Geo
1966*/
40 -127 -769 472 6378388.000 0.00672267002233 /*Bellevue (IGN)*/
41 -73 213 296 6378206.400 0.00676865799761 /*Bermuda 1957*/
42 307 304 -318 6378388.000 0.00672267002233 /*Bogota
Observatory*/
43 -148 136 90 6378388.000 0.00672267002233 /*Compo Inchauspe*/
44 298 -304 -375 6378388.000 0.00672267002233 /*Canton Island
1966*/
45 -136 -108 -292 6378249.145 0.00680351128285 /*Cape*/
46 -2 151 181 6378206.400 0.00676865799761 /*Cape Canaveral
mean*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
A-128 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
47 -263 6 431 6378249.145 0.00680351128285 /*Carthage*/
48 175 -38 113 6378388.000 0.00672267002233 /*Chatham 1971*/
49 -134 229 -29 6378388.000 0.00672267002233 /*Chua Astro*/
50 -206 172 -6 6378388.000 0.00672267002233 /*Corrego Alegre*/
51 -377 681 -50 6377397.155 0.00667437223180 /*Djakarta (Batavia)*/
52 230 -199 -752 6378388.000 0.00672267002233 /*DOS 1968*/
53 211 147 111 6378388.000 0.00672267002233 /*Easter Island
1967*/
54 -87 -98 -121 6378388.000 0.00672267002233 /*Euro 1950-Mean*/
55 -104 -101 -140 6378388.000 0.00672267002233 /*Euro 1950-Cyprus*/
56 -130 -117 -151 6378388.000 0.00672267002233 /*Euro 1950-Egypt*/
57 -86 -96 -120 6378388.000 0.00672267002233 /*Euro 1950-Eng/
Scot*/
58 -86 -96 -120 6378388.000 0.00672267002233 /*Euro 1950-Eng/Ire*/
59 -84 -95 -130 6378388.000 0.00672267002233 /*Euro 1950-
Greece*/
60 -117 -132 -164 6378388.000 0.00672267002233 /*Euro 1950-Iran*/
61 -97 -103 -120 6378388.000 0.00672267002233 /*Euro 1950-
Sardinia*/
62 -97 -88 -135 6378388.000 0.00672267002233 /*Euro 1950-Sicily*/
63 -87 -95 -120 6378388.000 0.00672267002233 /*Euro 1950-
Norway*/
64 -87 -107 -120 6378388.000 0.00672267002233 /*Euro 1950-Port/
Spain*/
65 -86 -98 -119 6378388.000 0.00672267002233 /*European 1979*/
66 -133 -321 50 6378388.000 0.00672267002233 /*Gandajika Base*/
67 84 -22 209 6378388.000 0.00672267002233 /*Geodetic Datum
1949*/
68 -100 -248 259 6378206.400 0.00676865799761 /*Guam 1963*/
69 252 -209 -751 6378388.000 0.00672267002233 /*GUX 1 Astro*/
70 -73 46 -86 6378388.000 0.00672267002233 /*Hjorsey 1955*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
Acutime 2000 Synchronization Kit User Guide A-129
ATrimble Standard Interface Protocol
71 -156 -271 -189 6378388.000 0.00672267002233 /*Hong Kong 1963*/
72 209 818 290 6377276.345 0.00663784663020 /*Indian-Thai/Viet*/
73 295 736 257 6377301.243 0.00663784663020 /*Indian-India/Nepal*/
74 506 -122 611 6377340.189 0.00667053999999 /*Ireland 1965*/
75 208 -435 -229 6378388.000 0.00672267002233 /*ISTS O73 Astro
1969
76 89 -79 -202 6378388.000 0.00672267002233 /*Johnston Island
1961*/
77 -97 787 86 6377276.345 0.00663784663020 /*Kandawala*/
78 145 -187 103 6378388.000 0.00672267002233 /*Kerguelen Island*/
79 -11 851 5 6377304.063 0.00663784663020 /*Kertau 1948*/
80 94 -948 -1262 6378388.000 0.00672267002233 /*La Reunion*/
81 42 124 147 6378206.400 0.00676865799761 /*L.C. 5 Astro*/
82 -90 40 88 6378249.145 0.00680351128285 /*Liberia 1964*/
83 -133 -77 -51 6378206.400 0.00676865799761 /*Luzon-Phillippines*/
84 -133 -79 -72 6378206.400 0.00676865799761 /*Luzon-Mindanao*/
85 41 -220 -134 6378249.145 0.00680351128285 /*Mahe 1971*/
86 -289 -124 60 6378388.000 0.00672267002233 /*Marco Astro*/
87 639 405 60 6377397.155 0.00667437223180 /*Massawa*/
88 31 146 47 6378249.145 0.00680351128285 /*Merchich*/
89 912 -58 1227 6378388.000 0.00672267002233 /*Midway Astro
1961*/
90 -92 -93 122 6378249.145 0.00680351128285 /*Minna*/
91 -247 -148 369 6378249.145 0.00680351128285 /*Nahrwan-Masirah*/
92 -249 -156 381 6378249.145 0.00680351128285 /*Nahrwan-UAE*/
93 -243 -192 477 6378249.145 0.00680351128285 /*Nahrwan-Saudia*/
94 616 97 -251 6377483.865 0.00667437223180 /*Namibia*/
95 -10 375 165 6378388.000 0.00672267002233 /*Naparima*/
96 -8 159 175 6378206.400 0.00676865799761 /*NAD 27-Western
US*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
A-130 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
97 -9 161 179 6378206.400 0.00676865799761 /*NAD 27-Eastern
US*/
98 -5 135 172 6378206.400 0.00676865799761 /*NAD 27-Alaska*/
99 -4 154 178 6378206.400 0.00676865799761 /*NAD 27-Bahamas*/
100 1 140 165 6378206.400 0.00676865799761 /*NAD 27-San
Salvador*/
101 -10 158 187 6378206.400 0.00676865799761 /*NAD 27-Canada*/
102 -7 162 188 6378206.400 0.00676865799761 /*NAD 27-Alberta/
BC*/
103 -22 160 190 6378206.400 0.00676865799761 /*NAD 27-East
Canada*/
104 -9 157 184 6378206.400 0.00676865799761 /*NAD 27-Manitoba/
Ont*/
105 4 159 188 6378206.400 0.00676865799761 /*NAD 27-NW Ter/
Sask*/
106 -7 139 181 6378206.400 0.00676865799761 /*NAD 27-Yukon*/
107 0 125 201 6378206.400 0.00676865799761 /*NAD 27-Canal
Zone*/
108 -3 143 183 6378206.400 0.00676865799761 /*NAD 27-
Caribbean*/
109 0 125 194 6378206.400 0.00676865799761 /*NAD 27-Central
Amer*/
110 -9 152 178 6378206.400 0.00676865799761 /*NAD 27-Cuba*/
111 11 114 195 6378206.400 0.00676865799761 /*NAD 27-
Greenland*/
112 -12 130 190 6378206.400 0.00676865799761 /*NAD 27-Mexico*/
113 0 0 0 6378137.0 0.00669438002290 /*NAD 83-Alaska*/
114 0 0 0 6378137.0 0.00669438002290 /*NAD 83-Canada*/
115 0 0 0 6378137.0 0.00669438002290 /*NAD 83-CONUS*/
116 0 0 0 6378137.0 0.00669438002290 /*NAD 83-Mex/Cent
Am*/
117 -425 -169 81 6378388.0 0.00672267002233 /*Observatorio
1966*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
Acutime 2000 Synchronization Kit User Guide A-131
ATrimble Standard Interface Protocol
118 -130 110 -13 6378200.0 0.00669342162297 /*Old Egyptian
1907*/
119 61 -285 -181 6378206.400 0.00676865799761 /*Old Hawaiian-
mean*/
120 89 -279 -183 6378206.400 0.00676865799761 /*Old Hawaiian-
Hawaii*/
121 45 -290 -172 6378206.400 0.00676865799761 /*Old Hawaiian*/
122 65 -290 -190 6378206.400 0.00676865799761 /*Old Hawaiian*/
123 58 -283 -182 6378206.400 0.00676865799761 /*Old Hawaiian*/
124 -346 -1 224 6378249.15 0.00680351128285 /*Oman*/
125 375 -111 431 6377563.4 0.00667053999999 /*Ord Sur Brit ’36-
Mean*/
126 375 -111 431 6377563.4 0.00667053999999 /*OSB-England*/
127 375 -111 431 6377563.4 0.00667053999999 /*OSB-Isle of Man*/
128 375 -111 431 6377563.4 0.00667053999999 /*OSB-Scotland/
Shetland*/
129 375 -111 431 6377563.4 0.00667053999999 /*OSB-Wales*/
130 -307 -92 127 6378388.0 0.00672267002233 /*Pico De Las
Nieves*/
131 -185 165 42 6378388.0 0.00672267002233 /*Pitcairn Astro
1967*/
132 16 196 93 6378388.0 0.00672267002233 /*Prov So
Chilean1963*/
133 -288 175 -376 6378388.0 0.00672267002233 /*Prov S. American
1956-Mean*/
134 -270 188 -388 6378388.0 0.00672267002233 /*Prov S. American
1956-Bolivia*/
135 -270 183 -390 6378388.0 0.00672267002233 /*Prov S. American
1956-N Chile*/
136 -305 243 -442 6378388.0 0.00672267002233 /*Prov S. American
1956-S Chile*/
137 -282 169 -371 6378388.0 0.00672267002233 /*Prov S. American
1956-Colom*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
A-132 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
138 -278 171 -367 6378388.0 0.00672267002233 /*Prov S. American
1956-Equador*/
139 -298 159 -369 6378388.0 0.00672267002233 /*Prov S. American
1956-Guyana*/
140 -279 175 -379 6378388.0 0.00672267002233 /*Prov S. American
1956-Peru*/
141 -295 173 -371 6378388.0 0.00672267002233 /*Prov S. American
1956-Venez*/
142 11 72 -101 6378206.4 0.00676865799761 /*Puerto Rico*/
143 -128 -283 22 6378388.0 0.00672267002233 /*Quatar National*/
144 164 138 -189 6378388.0 0.00672267002233 /*Qornoq*/
145 -225 -65 9 6378388.0 0.00672267002233 /*Rome 1940*/
146 -203 141 53 6378388.0 0.00672267002233 /*Santa Braz*/
147 170 42 84 6378388.0 0.00672267002233 /*Santo (DOS)*/
148 -355 21 72 6378388.0 0.00672267002233 /*Sapper Hill 1943*/
149 -57 1 -41 6378160.0 0.00669454185459 /*S. American 1969-
Mean*/
150 -62 -1 -37 6378160.0 0.00669454185459 /*S. American 1969-
Argentina*/
151 -61 2 -48 6378160.0 0.00669454185459 /*S. American 1969-
Bolivia*/
152 -60 -2 -41 6378160.0 0.00669454185459 /*S. American 1969-
Brazil*/
153 -75 -1 -44 6378160.0 0.00669454185459 /*S. American 1969-
Chile*/
154 -44 6 -36 6378160.0 0.00669454185459 /*S. American 1969-
Colombia*/
155 -48 3 -44 6378160.0 0.00669454185459 /*S. American 1969-
Ecuador*/
156 -53 3 -47 6378160.0 0.00669454185459 /*S. American 1969-
Guyana*/
157 -61 2 -33 6378160.0 0.00669454185459 /*S. American 1969-
Paraguay*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description
Acutime 2000 Synchronization Kit User Guide A-133
ATrimble Standard Interface Protocol
158 -58 0 -44 6378160.0 0.00669454185459 /*S. American 1969-
Peru*/
159 -45 12 -33 6378160.0 0.00669454185459 /*S. American 1969-
Trin/Tob*/
160 -45 8 -33 6378160.0 0.00669454185459 /*S. American 1969-
Venezuela*/
161 7 -10 -26 6378155.0 0.00669342162297 /*South Asia*/
162 -499 -249 314 6378388.0 0.00672267002233 /*Southeast Base*/
163 -104 167 -38 6378388.0 0.00672267002233 /*Southwest Base*/
164 -689 691 -46 6377276.345 0.00663784663020 /*Timbalai 1948*/
165 -148 507 685 6377397.16 0.00667437223180 /*Tokyo-Mean*/
166 -146 507 687 6377397.16 0.00667437223180 /*Tokyo-Korea*/
167 -158 507 676 6377397.16 0.00667437223180 /*Tokyo-Okinawa*/
168 -632 438 -609 6378388.0 0.00672267002233 /*Tristan Astro 1968*/
169 51 391 -36 6378249.15 0.00680351128285 /*Viti Levu 1916*/
170 102 52 -38 6378270.0 0.00672267002233 /*Wake-Eniwetok*/
171 -265 120 -358 6378388.0 0.00672267002233 /*Zanderij*/
172 -384 664 -48 6377397.16 0.00667437223180 /*Bukit Rimpah*/
173 -104 -129 239 6378388.0 0.00672267002233 /*Camp Area Astro*/
174 -403 684 41 6377397.16 0.00667437223180 /*Gunung Segara*/
175 -333 -222 114 6378388.0 0.00672267002233 /*Herat North*/
176 -637 -549 -203 6378388.0 0.00672267002233 /*Hu-Tzu-Shan*/
177 -189 -242 -9 6378388.0 0.00672267002233 /*Tananarive Observ.
1925*/
178 -155 171 37 6378388.0 0.00672267002233 /*Yacare*/
179 -146.43 507.89 681.46 6377397.155 0.00667437223180 /*Tokyo GSI coords*/
Table A-101 Datums (Continued)
Index DX DY DZ A-axis Eccentricity Description

A-134 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
A.19 Sample TSIP Routines
The following sections give sample routines that use command
packet 0x1F and report packet 0×45 for getting software version
information from the ACE UTC GPS via COM1. Source code for a
working TSIP monitor program is available at www.trimble.com/
support/files.
Sending out TSIP command packet 0x1F
In general, all TSIP packets use the structure TSIPPKT:
#define MAX_RPTBUF 256
typedef struct {
short
cnt; /* size of buf */
unsigned char
status, /* TSIP packet format and parse status */
code, /* TSIP id code */
buf[MAX_RPTBUF]; /* command or report string */
} TSIPPKT;
Communication with the ACE UTC GPS is accomplished through
command routines and report routines. Each command routine use
send_cmd() which supplies the DLE stuffing to the command string
and sends the command to the serial port using the primitive function
sendb().

Acutime 2000 Synchronization Kit User Guide A-135
ATrimble Standard Interface Protocol
All TSIP packet formats take the form <DLE><ID><Data String
Bytes><DLE><ETX>, where <DLE> and <ETX> are reserved
frame characters with values 0x10 and 0x03, respectively, and <ID>
is the packet identifier. The following routines perform DLE stuffing
on a command packet and send it to the ACE UTC GPS.
#define DLE 0x10
#define ETX 0x03
#define PORT 1
/* Send a byte to Port 1 */
short sendb(unsigned char db)
{
/* put_char outputs a character to the serial port; it
* returns 0 for success and 1 for failure.
*/
return(put_char(PORT, db));
}
/* Format a command for sending to a TSIP receiver */
void send_cmd(TSIPPKT *cmd)
{
short i;
sendb(DLE);
sendb(cmd->code);
for (i = 0; i < cmd->cnt; i++) {
if (cmd->buf[i] == DLE)
sendb(DLE);
sendb(cmd->buf[i]);
}
sendb(DLE);
sendb(ETX);
}

A-136 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
To issue command packet 0x41 to request software version from the
ACE UTC GPS use the following routine.
/* Request software version */
void cmd_0x1F(void)
{
TSIPPKT cmd;
cmd.cnt = 0;
cmd.code = 0x1F;
send_cmd(&cmd);
}
Handling incoming TSIP packet 0x45
Report routines handle incoming receiver packets. They call the
routine end_of_rptpkt() which accumulates from the serial buffer,
unstuffs these bytes, and checks whether the end-of-packet sequence
<DLE><EXT> has been received.
#define FALSE 0
#define TRUE !FALSE
#define INCOMPLETE 0
#define HAVE_DLE 1
#define COMPLETE 2
#define MAXEND_RPTBUF 256
/* Read bytes until serial buffer is empty or a complete report has
* been received; end of report is signified by DLE ETX.
*/
short end_of_rptpkt(TSIPPKT *rpt)
{
short this_byte;
for (;;) {
this_byte = getb();
if (this_byte == -1) {
return(FALSE);
}
if (rpt->status == HAVE_DLE) {
switch (this_byte) {
case DLE: /* DLE-stuffed, so it’s a data byte */
break;

Acutime 2000 Synchronization Kit User Guide A-137
ATrimble Standard Interface Protocol
case ETX: /* End of message. */
rpt->status = COMPLETE;
return(TRUE);
default: /* If previous message has ended, this is new ID
code. */
reset_rptbuf(rpt); /* if not, this is an error. */
rpt->code = this_byte;
return(FALSE);
}
}
else if (this_byte == DLE) {
/* DLE byte without previous DLE stuffing…must be stuffing.
*/
rpt->status = HAVE_DLE;
continue;
}
/* normal byte; add to report */
rpt->status = INCOMPLETE;
rpt->buf[rpt->cnt] = this_byte;
rpt->cnt++;
if (rpt->cnt > MAX_RPTBUF) {
reset_rptbuf (rpt);
return(FALSE);
}
}
}
/* Prepare for receipt of new report */
void reset_rptbuf (TSIPPKT *rpt)
{
rpt->cnt = 0;
rpt->code = ETX;
rpt->status = INCOMPLETE;
}

A-138 Acutime 2000 Synchronization Kit User Guide
Trimble Standard Interface Protocol A
Acutime 2000 Synchronization Kit User Guide B-1
B Timing Receiver Monitor
The Timing Receiver Monitor program disk is included with the
Acutime 2000 Synchronization Kit. The latest version of the program
is also available on the Trimble website:
•www.trimble.com/products/acutime2000
B.1 Start-Up
The Serial Port Selection screen shown below appears at the start of
the program:
This screen lets you choose which PC serial port the Acutime 2000 is
connected to. If the desired port is not available in the selection box,
you can start the program using the parameter –c*, with * being the
number of the serial port you want to select.
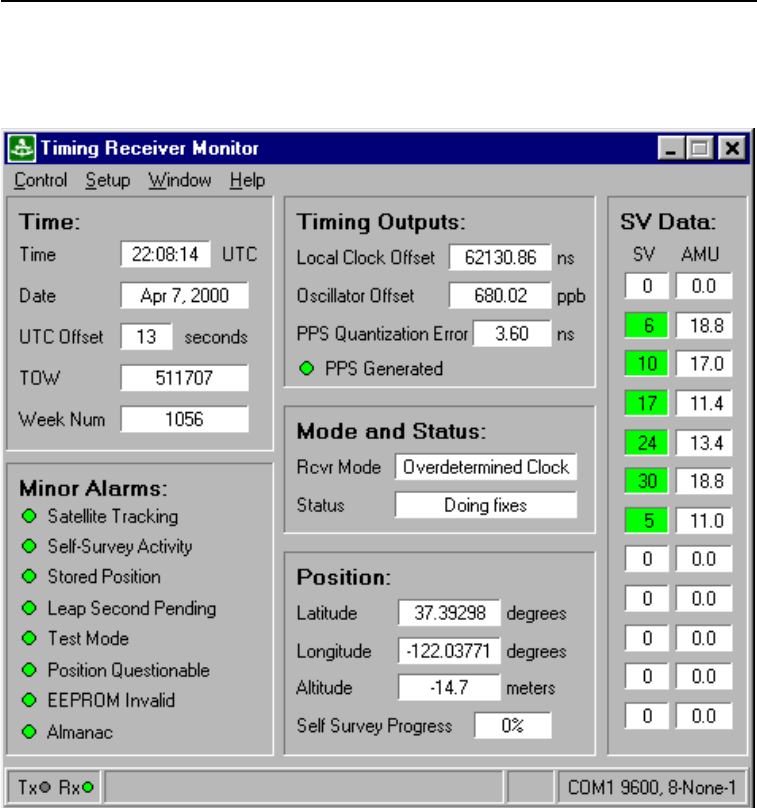
B-2 Acutime 2000 Synchronization Kit User Guide
Timing Receiver Monitor B
B.2 Main screen
The main screen for the Timing Receiver Monitor is shown below:
The main screen displays time, position, SV selection and data,
receiver status, and timing outputs. The status bar displays Tx and Rx
activity, program hints, firmware version number, and serial port
settings. The menu provides other options for sending data to and
requesting data from the receiver.
For additional program information and help, see the Help menu.

Acutime 2000 Synchronization Kit User Guide C-1
C NMEA 0183
NMEA 0183 is an interface protocol created by the National Marine
Electronics Association. The latest release of NMEA 0183 is Version
2.1 (October 15, 1995). This protocol was originally established to
allow marine navigation equipment to share information. NMEA
0183 is a simple, yet comprehensive ASCII protocol which defines
both the communication interface and the data format. Since it is a
well established industry standard, NMEA 0183 has also gained
popularity for use in applications other than marine electronics.
For those applications requiring output only from the GPS receiver,
NMEA 0183 is a popular choice since, in many cases, an NMEA
0183 software application code already exists. The Acutime 2000
GPS smart antenna is available with firmware that supports a subset
of the NMEA 0183 messages: GGA and VTG. For a nominal fee,
Trimble can offer custom firmware with a different selection of
messages to meet your application requirements.
This appendix provides a brief overview of the NMEA protocol and
describes both the standard and optional messages offered by the
Acutime 2000.
For a complete copy of the NMEA 0183 standard, contact:
NMEA National Office
PO Box 3435
New Bern, NC 28564-3435
U.S.A.
Telephone: +1-919-638-2626
Fax: +1-919-638-4885
C-2 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
C.1 The NMEA 0183 Communication Interface
NMEA 0183 allows a single source (talker) to transmit serial data
over a single twisted wire pair to one or more receivers (listeners).
The table below lists the characteristics of the NMEA 0183 data
transmissions.
C.2 NMEA 0183 Message Format
The NMEA 0183 protocol covers a broad array of navigation data.
This broad array of information is separated into discrete messages,
which convey a specific set of information. The entire protocol
encompasses over 50 messages, but only a sub-set of these messages
apply to a GPS receiver like the Acutime 2000. The NMEA message
structure is described below.
$IDMSG,D1,D2,D3,D4,.......,Dn*CS[CR][LF]
“$”The “$” signifies the start of a message.
ID The talker identification is a two-letter mnemonic
that describes the source of the navigation
information. The GP identification signifies a GPS
source.
MSG The message identification is a three-letter
mnemonic that describes the message content and the
number and order of the data fields.
“,”Commas serve as delimiters for the data fields.
Table C-1 NMEA 0183 Characteristics
Signal Characteristic NMEA Standard
Baud Rate 4800
Data Bits 8
Parity None (Disabled)
Stop Bits 1

Acutime 2000 Synchronization Kit User Guide C-3
CNMEA 0183
Dn Each message contains multiple data fields (Dn),
which are delimited by commas.
“*”The asterisk serves as a checksum delimiter.
CS The checksum field contains two ASCII characters
which indicate the hexadecimal value of the
checksum.
[CR][LF] The carriage return [CR] and line feed [LF]
combination terminate the message.
NMEA 0183 messages vary in length, but each message is limited to
79 characters or less. This length limitation excludes the “$” and the
[CR][LF]. The data field block, including delimiters, is limited to 74
characters or less.
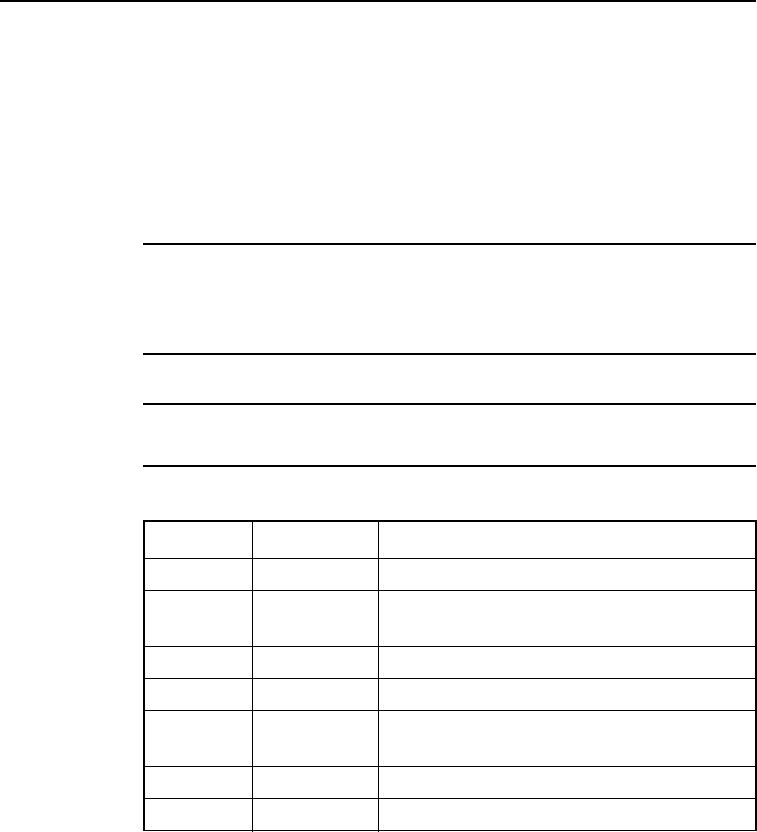
C-4 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
C.3 NMEA 0183 Message Options
The Acutime 2000 can output any or all of the messages listed in
Table C-2. When NMEA is chosen, its default configuration (as
shipped from the factory) outputs two messages: GGA and VTG.
These messages are output at a one-second interval with the
“GP” talker ID and checksums.
!Note – The user can configure a custom mix of the messages listed
in Table C-2. See Port A (Timing), page 5-10, and TSIP command
packets 0xBC, 0x7A, and 0x8E 0x26 in Appendix A, Trimble Standard
Interface Protocol, for details on configuring NMEA output.
#Warning – If too many messages are specified for output, you may
need to increase the unit’s baud rate.
Table C-2 Acutime 2000 NMEA Messages
Setting Message Description
Default GGA GPS fix data (NMEA Version 2.1)
GLL Geographic position - Latitude/
Longitude
GSA GPS DOP and active satellites
GSV GPS satellites in view
RMC Recommended minimum specific GPS/
Transit data
Default VTG Track made good and ground speed
ZDA Time & Date
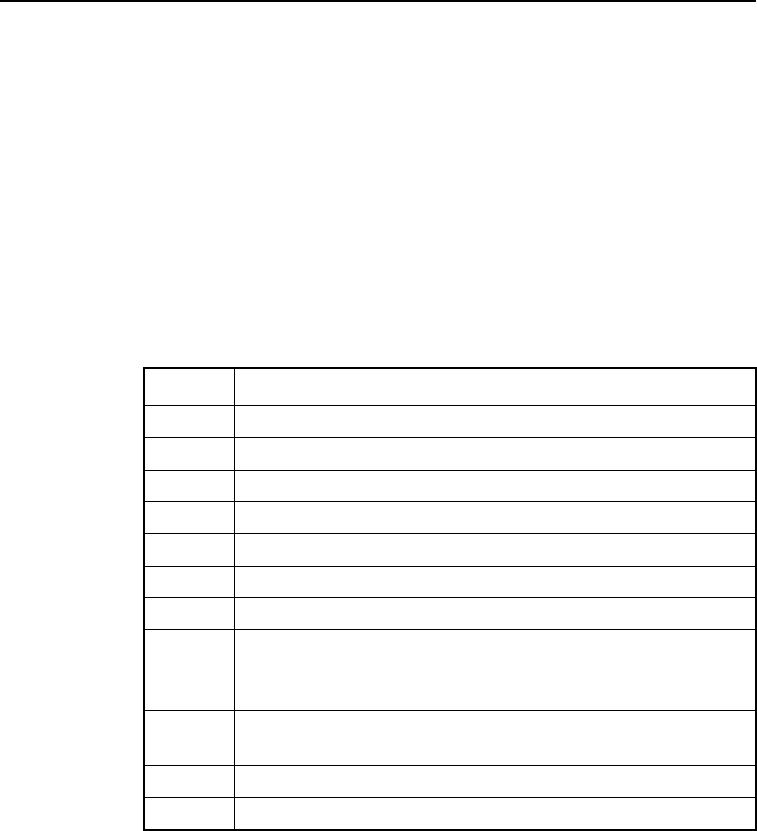
Acutime 2000 Synchronization Kit User Guide C-5
CNMEA 0183
C.4 NMEA 0183 Message Formats
The format for each message is described in more detail in the
following sections.
C.4.1 GGA – GPS Fix Data
The GGA message includes time, position and fix related data for the
GPS receiver.
$GP GGA,hhmmss,llll.lll,a,nnnnn.nnn,b,t,uu,v.v,w.w,
M,x.x,M,y.y,zzzz*hh <CR><LF>
Table C-3 GGA – GPS Fix Data Message Parameters
Field Description
1 UTC of Position
2,3 Latitude, N (North) or S (South)
4,5 Longitude, E (East) or W (West)
6 GPS Quality Indicator: 0 = No GPS, 1 = GPS, 2 = DGPS
7 Number of Satellites in Use
8 Horizontal Dilution of Precision (HDOP)
9, 10 Antenna Altitude in Meters, M = Meters
11, 12 Geoidal Separation in Meters, M=Meters. Geoidal
separation is the difference between the WGS-84 earth
ellipsoid and mean-sea-level.
13 Age of Differential GPS Data. Time in seconds since the
last Type 1 or 9 Update
14 Differential Reference Station ID (0000 to 1023)
hh Checksum
C-6 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
C.4.2 GLL – Geographic Position – Latitude/Longitude
The GLL message contains the latitude and longitude of the present
vessel position, the time of the position fix and the status.
$GP GLL,llll.lll,a,yyyyy.yyy,a,hhmmss.s,
A*hh<CR><LF>
Table C-4 GLL – Geographic Position – Latitude /
Longitude Message Parameters
Field # Description
1,2 Latitude, N (North) or S (South)
3,4 Longitude, E (East) or W (West)
5 UTC of position
6 Status: A = Valid, V= Invalid
hh Checksum
Acutime 2000 Synchronization Kit User Guide C-7
CNMEA 0183
C.4.3 GSA – GPS DOP and Active Satellites
The GSA messages indicates the GPS receiver's operating mode and
lists the satellites used for navigation and the DOP values of the
position solution.
$GP GSA,a,x,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,
xx,xx,x.x,x.x,x.x*hh<CR><LF>
Table C-5 GSA – GPS DOP and Active Satellites
Message Parameters
Field # Description
1 Mode: M = Manual, A = Automatic. In manual mode, the
receiver is forced to operate in either 2D or 3D mode. In
automatic mode, the receiver is allowed to switch
between 2D and 3D modes subject to the PDOP and
satellite masks.
2 Current Mode: 1 = fix not available, 2 = 2D, 3 = 3D
3 to 14 PRN numbers of the satellites used in the position
solution. When less than 12 satellites are used, the
unused fields are null
15 Position dilution of precision (PDOP)
16 Horizontal dilution of precision (HDOP)
17 Vertical dilution of precision (VDOP)
hh Checksum
C-8 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
C.4.4 GSV – GPS Satellites in View
The GSV message identifies the GPS satellites in view, including
their PRN number, elevation, azimuth and SNR value. Each message
contains data for four satellites. Second and third messages are sent
when more than four satellites are in view. Fields #1 and #2 indicate
the total number of messages being sent and the number of each
message respectively.
$GP GSV,x,x,xx,xx,xx,xxx,xx,xx,xx,xxx,xx,xx,xx,
xxx,xx,xx,xx,xxx,xx*hh<CR><LF>
Table C-6 GSV – GPS Satellites in View Message
Parameters
Field # Description
1 Total number of GSV messages
2 Message number: 1 to 3
3 Total number of satellites in view
4 Satellite PRN number
5 Satellite elevation in degrees (90° Maximum)
6 Satellite azimuth in degrees true (000 to 359)
7 Satellite SNR (C/No), null when not tracking
8,9,10,11 PRN, elevation, azimuth and SNR for second
satellite
12,13,14,15 PRN, elevation, azimuth and SNR for third satellite
16,17,18,19 PRN, elevation, azimuth and SNR for fourth
satellite
hh Checksum
Acutime 2000 Synchronization Kit User Guide C-9
CNMEA 0183
C.4.5 RMC – Recommended Minimum Specific GPS/Transit
Data
The RMC message contains the time, date, position, course, and
speed data provided by the GPS navigation receiver. A checksum is
mandatory for this message and the transmission interval may not
exceed two seconds. All data fields must be provided unless the data
is temporarily unavailable. Null fields may be used when data is
temporarily unavailable.
$GP RMC,hhmmss.s,A,llll.lll,a,yyyyy.yyy,a,x.x,x.x,
xxxxxx,x.x,a*hh<CR><LF>
Table C-7 RMC – Recommended Minimum Specific
GPS / Transit Data Message Parameters
Field # Description
1 UTC of Position Fix.
2 Status: A = Valid, V = navigation receiver warning
3,4 Latitude, N (North) or S (South).
5,6 Longitude, E (East) or W (West).
7 Speed over the ground (SOG) in knots
8 Track made good in degrees true.
9 Date: dd/mm/yy
10,11 Magnetic variation in degrees, E = East / W= West
hh Checksum (Mandatory for RMC)
C-10 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
C.4.6 VTG – Track Made Good and Ground Speed
The VTG message conveys the actual track made good (COG) and
the speed relative to the ground (SOG).
$GP VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh<CR><LF>
Table C-8 VTG – Track Made Good and Ground Speed
Message Parameters
Field # Description
1 Track made good in degrees true.
2 Track made good in degrees magnetic.
3,4 Speed over the ground (SOG) in knots.
5,6 Speed over the ground (SOG) in kilometer per hour.
hh Checksum
Acutime 2000 Synchronization Kit User Guide C-11
CNMEA 0183
C.4.7 ZDA – Time & Date
The ZDA message contains UTC, the day, the month, the year and the
local time zone.
$GP ZDA,hhmmss.s,xx,xx,xxxx,,*hh<CR><LF>
!Note – Fields #5 and #6 are null fields in the Acutime 2000 output. A
GPS receiver cannot independently identify the local time zone
offsets.
"Caution – If UTC offset is not available, time output will be in
GPS time.
!Note – GPS time can be used as a time tag for the 1 PPS. The ZDA
message comes out 100–500 msec after the PPS.
Table C-9 ZDA – Time & Date Message Parameters
Field # Description
1UTC
2 Day (01 to 31)
3 Month (01 to 12)
4 Year
5 unused
6 unused
hh Checksum

C-12 Acutime 2000 Synchronization Kit User Guide
NMEA 0183 C
Acutime 2000 Synchronization Kit User Guide D-1
D Specifications and
Drawings
This appendix contains the specifications for the Acutime 2000 GPS
smart antenna and a diagram of the Acutime 2000 Interface Cable.
!Note – The interface cable specifications provided in this appendix
are for the 100-foot (30-meter) versions of the cables. Longer
versions of these cables are available. The specifications for the
longer cables are identical to that of the 100-foot version.
D.1 Acutime 2000 GPS Smart Antenna Specifications
The following tables list the specifications for the Acutime 2000 GPS
Smart Antenna.
Table D-1 Physical Specifications
Dimensions: 6.12" D, 5.0" H (155.5mm x 127.0mm)
Weight: 12.8 oz. (363 g)
Connector: 12-pin round, waterproof
Mounting: 1"-14 straight thread
Dimensions: Height: 5.0" (127 mm)
Width: 6.12" (155.5 mm)
D-2
Specifications and Drawings D
Table D-2 Environmental Specifications
Operating temp: -40 to +85° C
Storage temp: -55 to +105° C
Vibration: 0.008 g2/Hz 5 Hz to 20 Hz
0.05 g2/Hz 20 Hz to 100 Hz
-3dB/octave 100 Hz to 900 Hz
Operating
Humidity:
95% RH, non-condensing @ 60° C
EMC: CE, FCC Class B
Table D-3 Performance Specifications
General: L1 frequency, C/A code (SPS),
continuous tracking receiver.
Available in 8-channel
Update Rate: 1Hz
Accuracy: Dynamic SPS (with S/A) Dynamic DGPS
Position 40m CEP 1.5m CEP
Velocity 0.25 m/s CEP 0.05 m/s CEP
Time to First Fix
(no stored
position):
8-channel typical cold start: < 120 seconds
Time to First
PPS (stationary
with stored
position, e.g.,
recovery after
power outage):
<60 seconds
Re-acquisition
after 60-second
signal loss:
<2 seconds (90%)
Dynamics:
Velocity: 500 m/sec. maximum
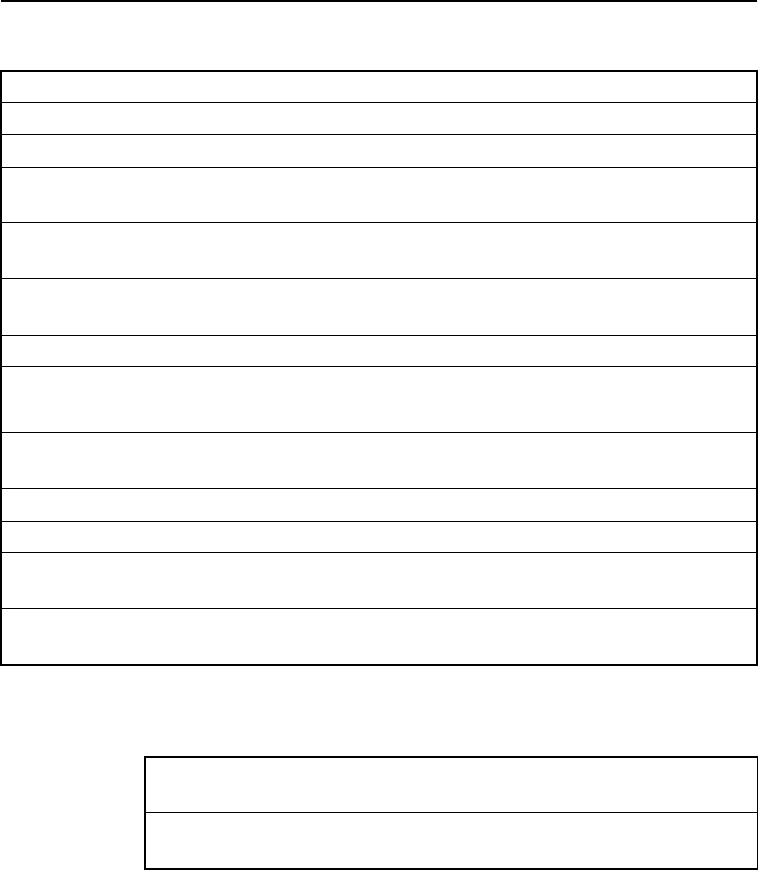
D-3
DSpecifications and Drawings
Acceleration: 4g (39.2 m/sec.2)
Jerk: 20 m/sec.3
PPS output
Physical
Interface:
RS-422
Width: 10 microseconds (default). User-programmable from 10
microseconds to 500 milliseconds.
On-Time Edge: Rising edge on-time (default). User-programmable rising or
falling.
Resolution: 80 nanoseconds (quantization error reported through TSIP)
Accuracy
(one sigma):
UTC 50 nanoseconds (static)
UTC 150 nanoseconds (dynamic, TDOP≤3)
External Event
Capture
Interface: RS-422/485 or RS-232
Resolution: 320 nanoseconds
Minimum Pulse
Width:
1 microsecond, rising edge on-time
Reporting
Mechanism:
TSIP Packet
Table D-4 Electrical Specifications
Prime Power: +8 Vdc to +36 Vdc, reverse polarity
protection
Power
Consumption:
110mA @ 12 volts, 1.3 watts (typical), <1.5
watts max
Table D-3 Performance Specifications (Continued)
D-4
Specifications and Drawings D
Table D-5 Serial Protocols
Port Interface Protocols Defaults
TxB (primary) RS-422/485 or
RS-232
TSIP, NMEA TSIP @ 9600,
8-odd-1
RxB (primary) RS-422/485 or
RS-232
TSIP TSIP @ 9600,
8-odd-1
TxA (secondary) RS-422/485 or
RS-232
TSIP TSIP @ 9600,
8-odd-1
RxA (secondary) RS-422/485 or
RS-232
Event/RTCM Event Input
All ports support baud rates of 300-38,400; 8 data bits; even, odd, no parity
NMEA messages
(default):
ZDA
Available messages: GGA, GLL, VTG, GSV, GSA, ZDA, RMC

D-5
DSpecifications and Drawings
D.2 Acutime 2000 Standard Interface Cable Diagram
Figure D-1 provides a technical drawing of the Acutime 2000
standard interface cable.
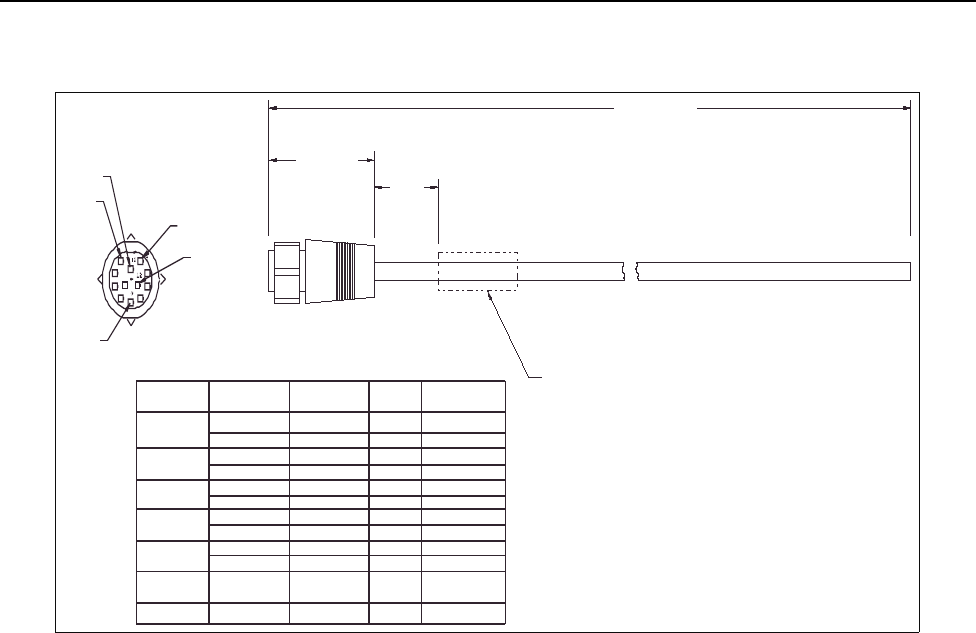
D-6
Specifications and Drawings D
Figure D-1 Acutime 2000 Standard Interface Cable
Color
Red
Black
Violet
Orange
Brown
Yellow
White
Gray
Green
Blue
Orange/Wht
Black/Wht
Unins.
Pin #
1
9
2
3
4
5
6
7
8
10
12
NC
11
NC
1 PPS
Signal Gnd
VFlash
Receive A
Transmit A
VBackup
RTS
Transmit B
CTS
Receive B
Ground
Power
Signal RS232
Drain Wires NC
Signal RS422
1 PPS -
1 PPS +
VFlash
VBackup
RTCM In +
RTCM In -
Transmit +
Transmit -
Receive +
Receive -
Ground
Power
Paired
Paired
Paired
Paired
Paired
Paired
Wires
50' ±6"
1.6"±0.1"
REF 4.0"
±1.0"
Part Number/Rev Level Label
Pin 10
Pin 1 Pin 9
Pin 12
Pin 5
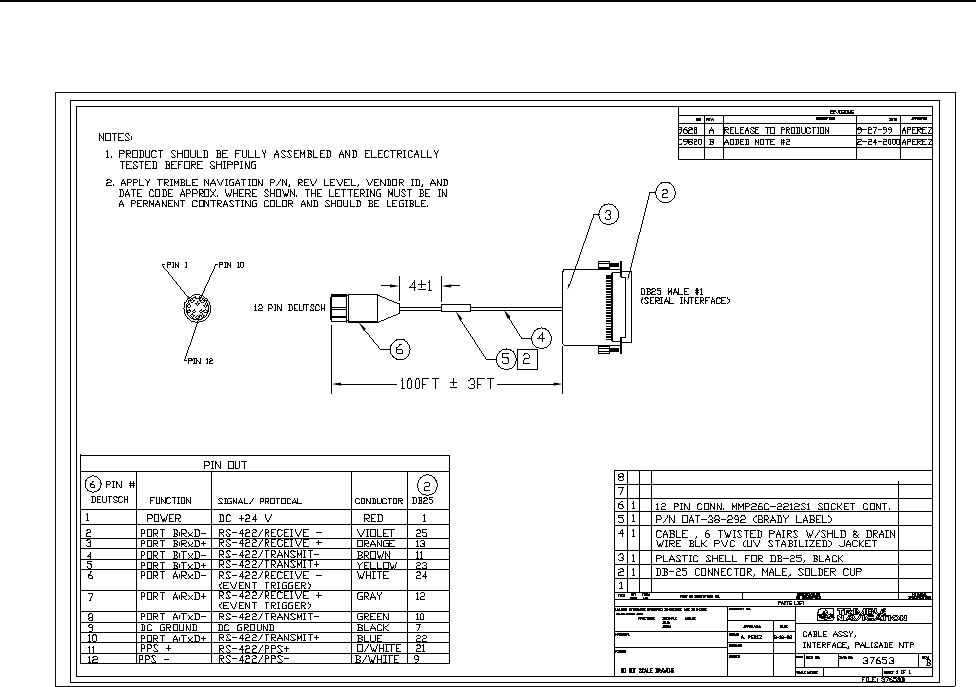
D-7
Specifications and Drawings D
Figure D-2 NTP Interface Cable

D-8
Specifications and Drawings D
Acutime 2000 Synchronization Kit User Guide E-1
E NTP Diagnostics and
Debugging
E.1 Diagnostics and Debugging
This section presents common reports and failure conditions that may
occur on Windows NT and UNIX systems, and provides suggestions
for their possible sources.
!Note – Administrators should check the system’s log files periodically.
Failures usually do not occur unexpectedly, and can be averted in
many cases.
E.1.1 System Log Entries
The system log entries are shown here in a Windows NT context. The
text contained in the Description field of the Event Detail dialog is
the same that would be found in the System Log of a UNIX system.
Separate descriptions are provided where the log messages differ.
E-2 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
Serial Port Acces Report
The configuration of the Acutime NTP reference clock is
acknowledged by a report of the COM port used by the driver. Verify
that the correct port is being used by NTP. If this message does not
appear, there has been a failure. Refresh the system log to observe
additional error messages.
The UNIX version of the message reports the serial port device used
in a message similar to:
May 3 17:42:28 terrapin ntpd[4032]:
Acutime(0) fd: 8 dev: /dev/Palisade0
For more information on UNIX device names, see Set Up Device
Links, page 6-26.
Acutime 2000 Synchronization Kit User Guide E-3
ENTP Diagnostics and Debugging
E.1.2 Error Log Entries
The following entries show NTP errors that degrade system
operation. These failures should be corrected immediately.
Configuration File Not Found
If the Configuration File is not found, the following event log entry
will be generated:
On a UNIX system, the message will report the file name
</etc/ntp.conf>.
E-4 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
!Note – If you are using Windows NT, please review Create the
Configuration File, page 6-17 to ensure the configuration file is
named correctly.
#Warning – NTP does not stop because of this error. Provide a valid
configuration file, and stop and re-start NTP.
For more information on correcting this error, see NTP Configuration
File, page 6-11.
Acutime 2000 Synchronization Kit User Guide E-5
ENTP Diagnostics and Debugging
Acutime Configuration Failure
An Event Log message that indicates a problem configuring the
Acutime NTP reference clock is shown below:
This message is accompanied by additional messages indicating the
source of the failure.
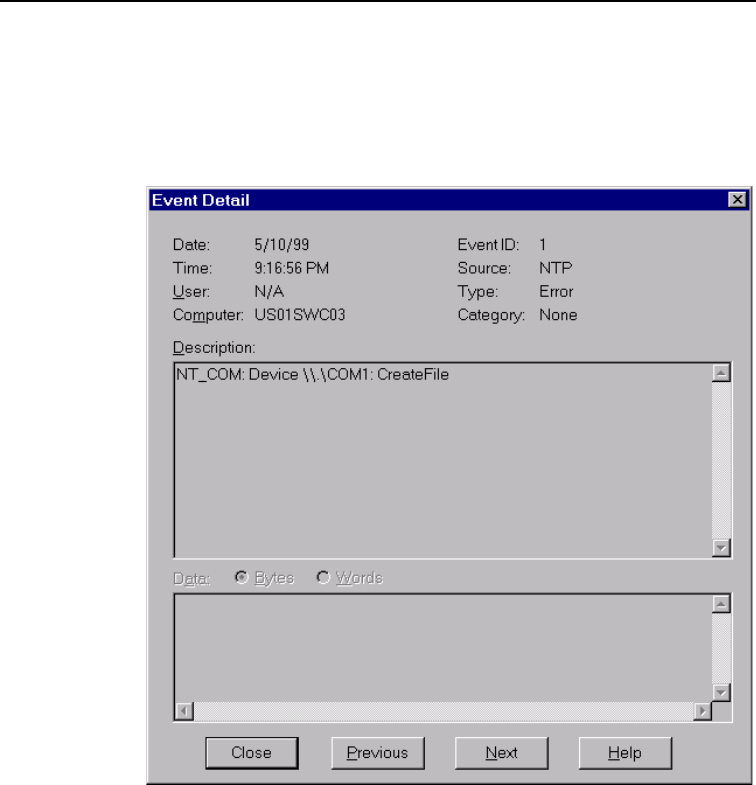
E-6 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
COM Port Unavailable
If the COM port defined in the NTP configuration file is not found, or
is locked by another application, the following Application Event
Message is generated:
This message is unique to Windows NT, but the solution is based on
general guidelines. For more information on resolving device
unavailablility, see page E-16.
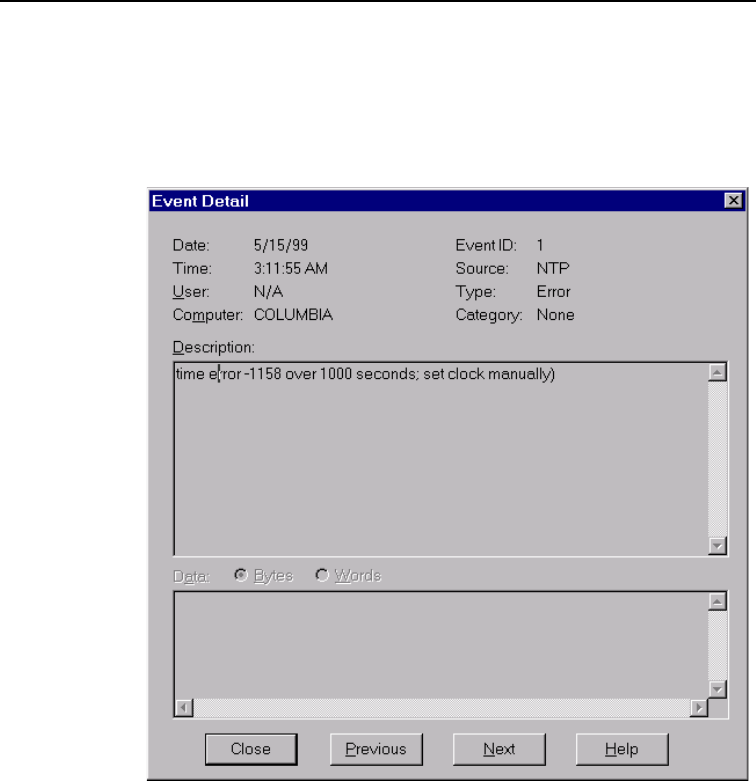
Acutime 2000 Synchronization Kit User Guide E-7
ENTP Diagnostics and Debugging
System Clock Not Set
The system clock must be set close to the correct local time. If NTP
finds the system clock too far offset, it will stop and report the
following error:
Solution:
The sample screen below demonstrates using NTPDATE to reset UNIX
system time to another NTP server. The utility requires an additional
–b parameter behind the server name when run on Windows NT. If
you cannot use NTPDATE, use your system’s native clock function to
reset the system clock.
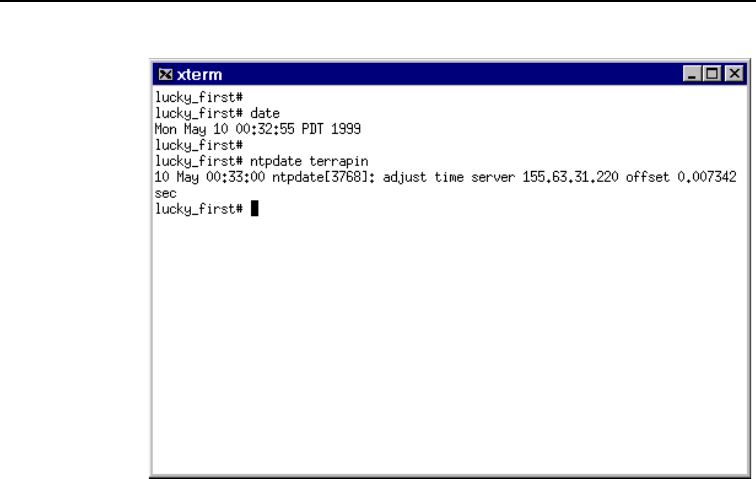
E-8 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
E.2 Running NTP in Debug Mode
NTP can be run in debug mode as a foreground command line
application. In this mode, messages reporting system events are
printed to the screen, which reveal more information about errors and
problems encountered by the program.
In order to be able to quickly diagnose communication problems with
the Acutime, it is helpful to have a debug version of NTP available.
The debug version allows starting NTP from the command line, and
observing text debug messages reporting events and failures.
If the normal operating exectable is not debug enabled, you may need
to consult your system documentation or obtain a debug-enabled
executable for your system using the software sources listed on page
6-3. This file should be stored in a dignostic tools folder on the
system.
NTP is run in debug mode by a command such as: ntpd –d
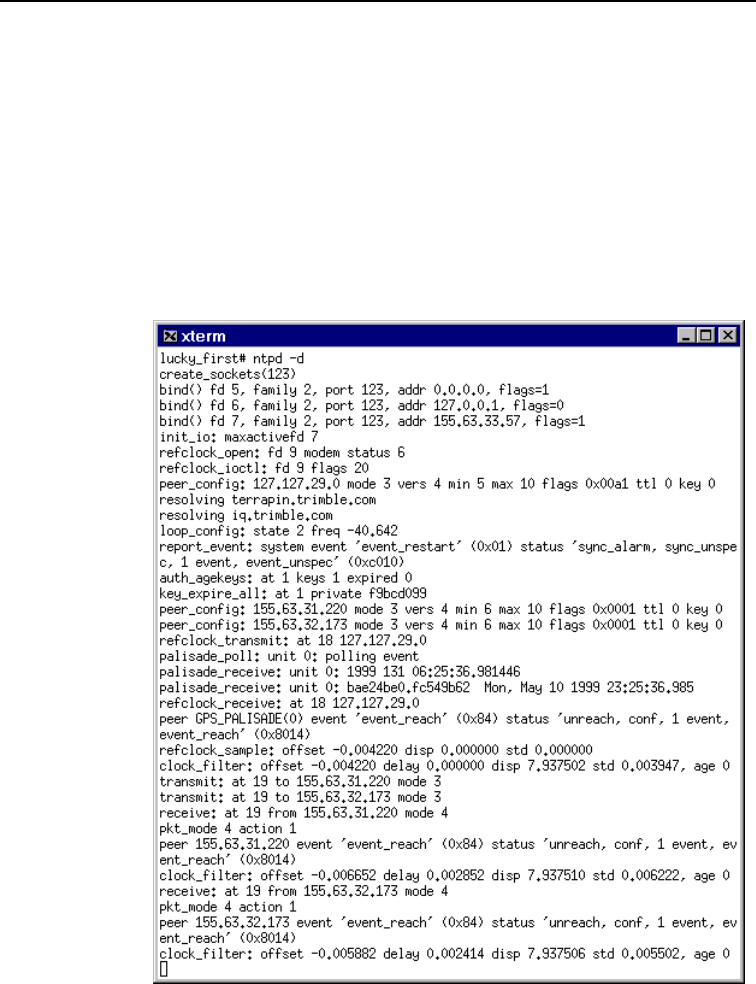
Acutime 2000 Synchronization Kit User Guide E-9
ENTP Diagnostics and Debugging
E.2.1 Debug Mode Not Available
If NTP is not compiled in debug mode, it will report:
ntpd not compiled with -DDEBUG option - no
DEBUG supportusage: ...
E.2.2 NTP Startup and Acutime Poll
The startup of NTP debug output from start to the Acutime NTP
reference clock’s first poll response is shown below:
E-10 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
The Acutime NTP reference clock driver reports requests and receipt
of the time stamp data. Typical Acutime NTP time transfer debug
output appears as four lines in the debug output, as shown here.
Palisade_poll: unit 0: polling event
Palisade_receive: unit 0: 1999 131 06:25:36.981446
Palisade_receive: unit 0: bae24be0.fc549b62 Mon, May 10
1999 23:25:36.985
refclock_receive: at 18 127.127.29.0
The Acutime driver reports the GPS time stamp in the first
Acutime_receive line. The second line reports the local NTP
and system time associated with the time transfer event. The third line
discloses the source identifier prefix and unit number of the time
source.
!Note – The Acutime_poll message may not be immediately
succeeded by a Acutime_receive event.
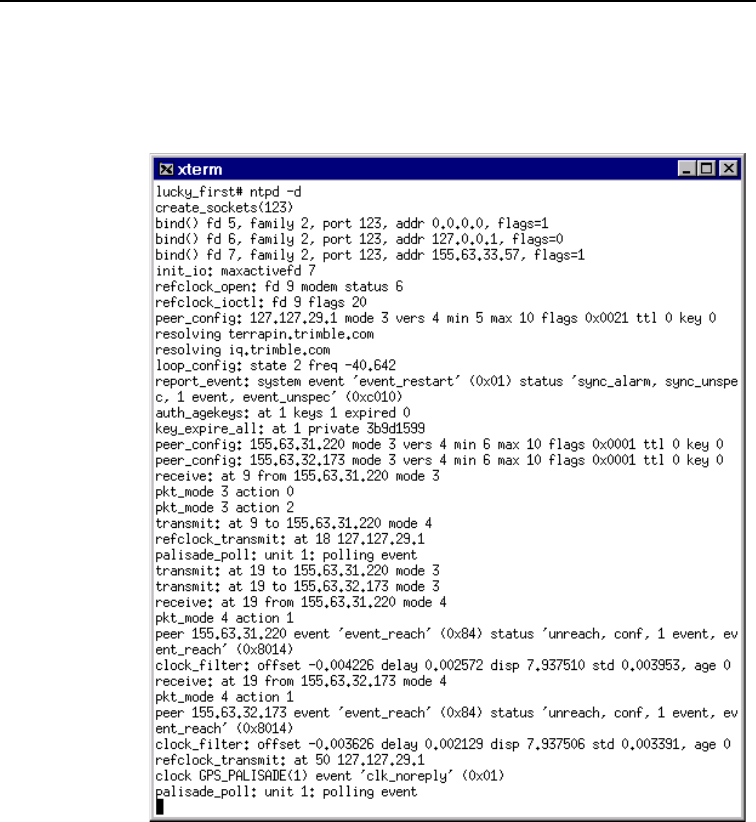
Acutime 2000 Synchronization Kit User Guide E-11
ENTP Diagnostics and Debugging
E.2.3 Acutime is not Responding
If the Acutime smart antenna is not responding to polls, the following
output is generated in the debug stream:
The last two lines of output on this screen show the Acutime NTP
driver reporting failure to receive a time stamp from the GPS. These
messages indicate that NTP is not receiving data from the reference
clock.
E-12 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
Table E-1 shows troubleshooting options.
If none of these options solve the problem, check your operating
system error log for failure reports.
E.2.4 Running NTP with Event Polling Disabled
The Acutime NTP reference clock can be operated without event
polling.
This mode can be used to confirm communication between the
Acutime NTP Reference Clock and NTP, without relying on the event
trigger connection. The event trigger feature may not be functional on
all systems. If the Acutime NTP driver detects a problem using the
event trigger, it reverts to event disabled mode.
!Note – Running NTP without the Event Trigger degrades
performance to the level of a conventional serial NTP reference clock.
Table E-1 Troubleshooting: Acutime is Not Responding
Possible Problem Solution
Cabling or connectors have become
detached.
Connect and secure loose or
disconnected cables and connectors.
System does not support event
polling.
Configure fallback to synchronous polling
mode. Update NTP software.
No activity of Power or PPS indicators
on the Acutime Synchronization
Interface Module.
Confirm availability of wall power. Use a
monitoring utility on Port B to check GPS
status.
GPS is not tracking satellites.
(The Acutime NTP driver will not
accept time stamps from the GPS
receiver if it is not tracking satellites.)
Receiver may be jammed or obscured.
Use a TSIP monitoring utility on Port B to
check GPS health and status. Verify that
adequate power is being supplied to the
receiver.
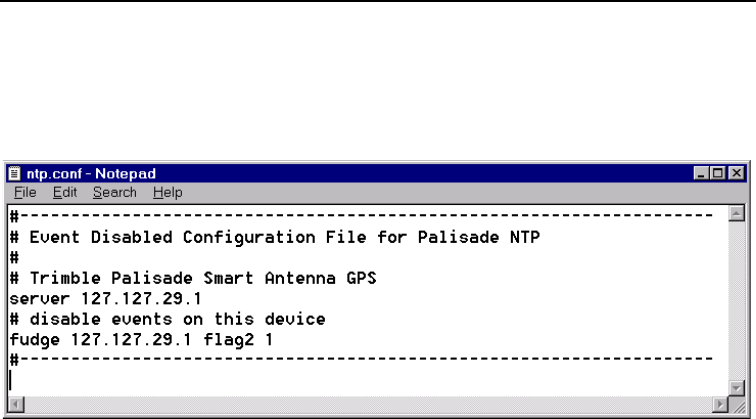
Acutime 2000 Synchronization Kit User Guide E-13
ENTP Diagnostics and Debugging
To configure NTP to disable output you need to edit the configuration
file and add the line:
fudge 127.127.127.x flag2 1
Then run NTP in debug mode (ntpd -d), to observe
Palisade_receive events.
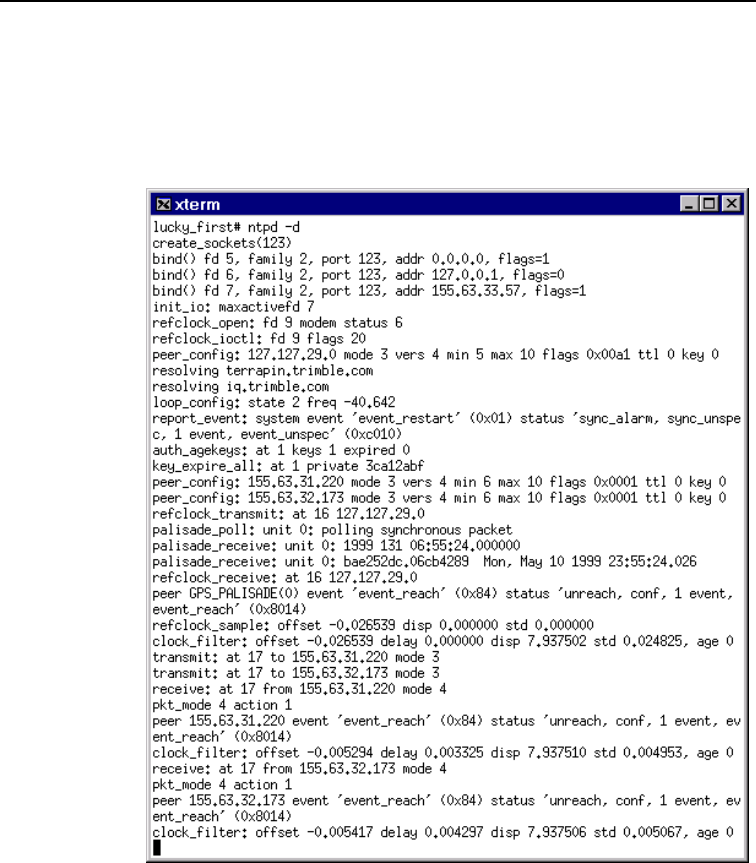
E-14 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
Receive events generated without event polling should be reported as
poll events of this format:
Palisade_poll: unit x: polling synchronous
packet
The seconds value reported by the Acutime NTP reference clock is
always an integer, since the synchronous packets are always
transmitted at the beginning of the second.
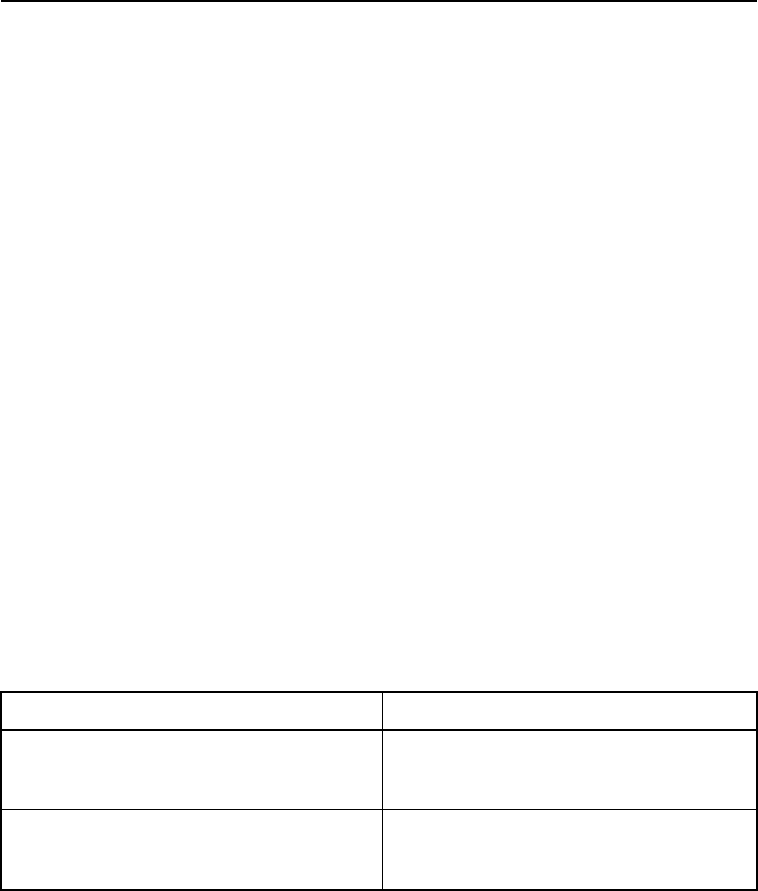
Acutime 2000 Synchronization Kit User Guide E-15
ENTP Diagnostics and Debugging
After confirming functionality of NTP using synchronous packets,
you can remove fudge flag2 from the configuration file and restart
NTPD in debug mode to observe event polling receive events.
E.2.5 Incorrect Port and Bad Data
If the Acutime NTP driver detects invalid packet data on the serial
line, it generates debug messages similar to the following. Run NTP
in a higher level debug mode to observe this message: ntpd -d -d
clock GPS_Palisade(1) event 'clk_badformat' (0x02)
TSIP_decode: unit 1: bad packet 6d-4d event 0 len 21
clock GPS_Palisade(1) event 'clk_badformat' (0x02)
TSIP_decode: unit 1: bad packet 82-02 event 0 len 1
clock GPS_Palisade(1) event 'clk_badformat' (0x02)
TSIP_decode: unit 1: bad packet 46-00 event 0 len 2
clock GPS_Palisade(1) event 'clk_badformat' (0x02)
TSIP_decode: unit 1: bad packet 4b-5b event 0 len 3
clock GPS_Palisade(1) event 'clk_badformat' (0x02)
TSIP_decode: unit 1: bad packet 54-48 event 0 len 12
Table E-2 shows troubleshooting options.
Table E-2 Troubleshooting: Incorrect Port and Bad Data
Possible Problem Solution
The host is connected to the wrong
Acutime port. NTP requires connection
with Acutime Port A.
Connect Acutime Port A to the host
serial port.
The Acutime Port A serial port
configuration does not match the NTP
configuration.
Verify Acutime Baud Rate, Parity, Start
and Stop Bits and Protocol settings.
E-16 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
E.2.6 Serial Port is Unavailable
When NTP is unable to open a serial port, the following debug
message is generated, along with an error report in the system log:
Palisade(2) start: open /dev/Acutime2 failed
A failed serial port open attempt is shown below:
On a Windows NT system, the device name would refer to a device
such as COM1:
Possible Problems:
•The configured serial port is not actually present on the
system.
Solution: Edit the configuration file and select a valid serial
port.
•The link to the actual UNIX device file is incorrect.
Solution: Delete and re-link the UNIX serial device using the
procedures outlined in Set Up Device Links, page 6-26.

Acutime 2000 Synchronization Kit User Guide E-17
ENTP Diagnostics and Debugging
•Other services or applications are attempting to use the same
port as NTP.
Solution: Reconfigure NTP or the conflicting application to
resolve the conflict.
E.3 Compiling the NTP Distribution
To obtain compatibility updates, download the latest published
versions of the Acutime NTP reference clock I/O module and
associated documentation from:
ftp://ftp.trimble.com/pub/ntp/Palisadedrv
If you cannot locate a copy of an NTP executable for your system
that supports Acutime, you can download and compile NTP yourself.
You will need to build NTP on a system with a compiler.
1. Download the current version of NTP to your working
directory.
2. Use GZIP to uncompress the NTP distribution archive file:
gzip –d ntp-4.xx.xx.tar.gz
3. Unpack the archive file using
tar xf ntp-4.xx.xx.tar
A directory named NTP-4.XX.XX will be created in your
working directory.
4. Change to the new directory: cd ntp-4.xx.xx
NTP is distributed with an automatic configuration utility.
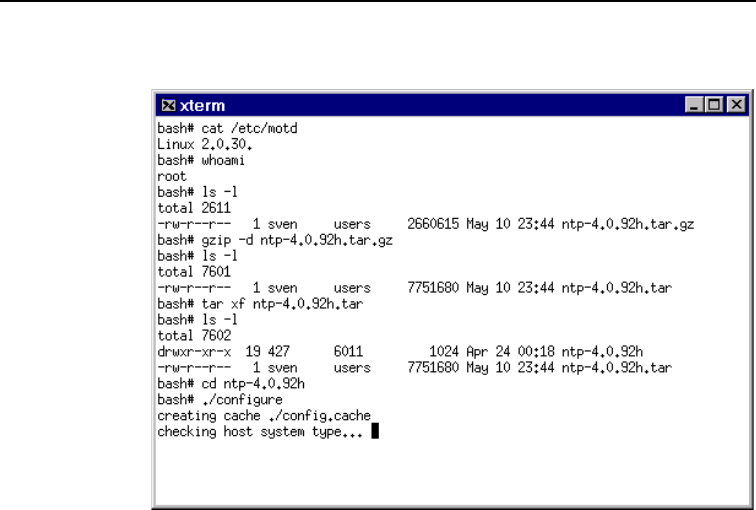
E-18 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
5. Start configuration by typing: ./configure
6. If the configuration program fails, or does not complete by
creating make files, you will need to consult with your
software or system administrator to obtain the correct
compiler and libraries for your system.
7. After configuration is complete, type make to begin the
software build. If the build does not complete sucessfully,
please consult with your software or system administrator to
diagnose the problem.
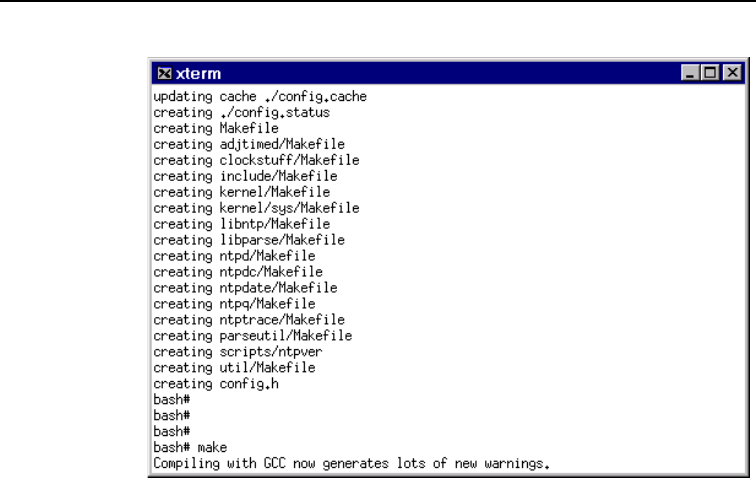
Acutime 2000 Synchronization Kit User Guide E-19
ENTP Diagnostics and Debugging
NTP installs into the directory /USR/LOCAL/BIN. If you wish
to install into a different directory, please consult the NTP
documentation.
8. To install NTP into the default directory, log in as super user,
or root, and type make install from the NTP-4.XX.XX
directory.
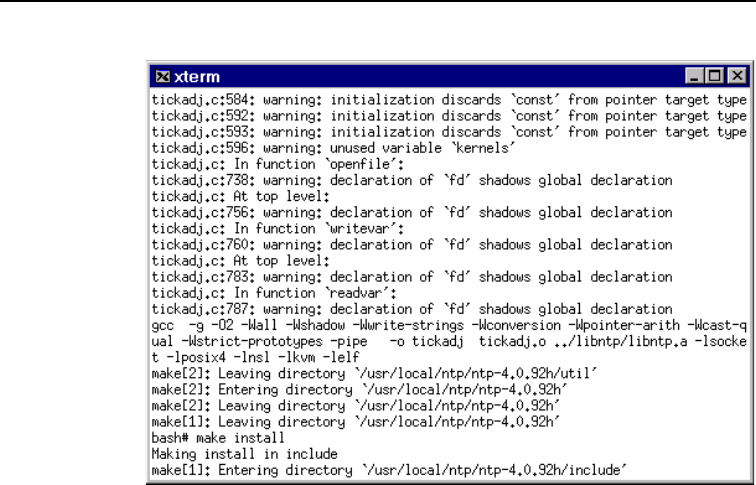
E-20 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
To complete installation of NTP on your system, see UNIX
Installation, page 6-24.

Acutime 2000 Synchronization Kit User Guide E-21
ENTP Diagnostics and Debugging
E.4 Windows NT Administration
This section describes starting and stopping NTP on Windows NT,
and removing the NTP service from the system.
E.4.1 Controlling the NTP Service
Use the Control Panel Services Applet to Stop or Disable the NTP
service at any time. This procedure is the same whether you installed
the NTP service manually or using the installation program.
E.4.2 Removing the NTP Service
If you used the automatic installation procedure for installing NTP,
de-install the NTP software using the Control Panel Add/Remove
programs applet.
The NTP service can only be removed using the INSTSRV.EXE utility.
The NTP service must be stopped prior to removing.
1. To stop the NTP Service, click Stop in the Control Panel
Services Applet.
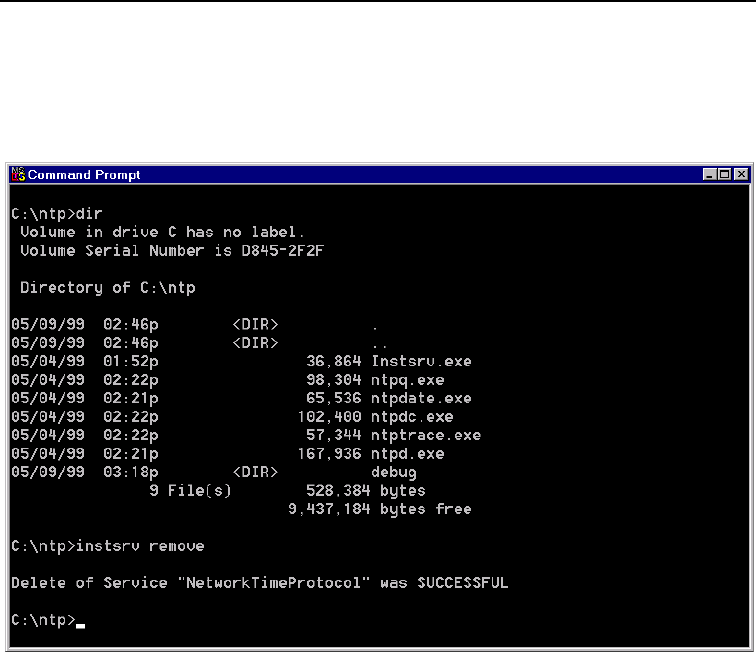
E-22 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E
2. Start a command prompt window, and change to the directory
containing the INSTSRV.EXE utility.
3. Type instsrv remove.
The program reports successful removal of the service. The
executable files copied during installation, as well as the
configuration file must be manually removed from the system if a
permanent installation is desired.
This concludes the manual Windows NT installation. The remaining
part of this section describes the Windows NT specific control, event
logging and diagnostics features available.

Acutime 2000 Synchronization Kit User Guide E-23
ENTP Diagnostics and Debugging
E.5 Additional Information
For up-to-date hardware, software, and configuration information,
please refer to the Trimble Navigation NTP Web Site at
www.trimble.com/oem/ntp.

E-24 Acutime 2000 Synchronization Kit User Guide
NTP Diagnostics and Debugging E

Acutime 2000 Synchronization Kit User Guide F-1
F Theory of Operation
This chapter describes the smart antenna's satellite acquisition and
tracking processes, performance characteristics and system
architecture. This discussion assumes you are familiar with basic
GPS theory.
The smart antenna's satellite acquisition and tracking algorithms can
achieve a position solution without any initialization. The receiver
tracks up to eight satellites and automatically selects the best
combination of satellites to compute position, velocity and time. As
satellites move out of view, the smart antenna automatically acquires
new satellites and includes them in the solution set as required.
Before proceeding to the detailed discussion of the satellite
acquisition and tracking process, please review the GPS satellite
message description on the next page.

F-2 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F
F.1 GPS Satellite Message
Every GPS satellite transmits the Coarse/Acquisition (C/A) code and
satellite data modulated onto the L1 carrier frequency
(1575.42 MHz). The C/A code is a unique pseudo-random sequence
for each satellite. The satellite data transmitted by each satellite
includes a satellite almanac for the entire GPS system, its own
satellite ephemeris, and its own clock correction.
The satellite data is transmitted in 30-second frames. Each frame
contains the clock correction and ephemeris for that specific satellite,
and two pages of the 50-page GPS system almanac. The time required
to transmit the complete system almanac is 12.5 minutes; the time to
transmit the satellite ephemeris is 30 seconds.
The system almanac contains information about each of the satellites
in the constellation, ionospheric data, and special system messages.
The ephemeris contains detailed orbital information for a specific
satellite. The GPS system almanac changes infrequently and is
typically valid for weeks. Ephemeris data changes hourly, but is valid
for up to four hours. The GPS control segment updates the system
almanac weekly and the ephemeris hourly through three ground-
based control stations. During normal operation, the smart antenna
updates the ephemeris stored in its memory at 30-minute intervals.
The performance of a GPS receiver at power-on is determined largely
by the availability and accuracy of the satellite ephemeris data and the
availability of a GPS system almanac.

Acutime 2000 Synchronization Kit User Guide F-3
FTheory of Operation
F.2 Satellite Acquisition and Time to First Fix
This section describes satellite acquisition times for different start
conditions.
F.2.1 Cold Start
The term cold start describes the performance of a GPS receiver at
power-on when no navigation data is available. Cold signifies that the
receiver does not have a current almanac, satellite ephemeris, initial
position, or time. The cold start search algorithm applies to a smart
antenna that is powered on without the memory backup circuit
connected to a source of DC power. Since the Acutime 2000 has no
provision for external backup power, it always operates from a cold
start. This is the condition of the GPS module as received from the
factory.
In a cold start condition, the receiver automatically selects a set of
satellites and dedicates an individual tracking channel to search the
Doppler frequency for each satellite in the set. If none of the selected
satellites are acquired after a pre-determined period of time
(time-out), the receiver selects a new search set of satellites and
repeats the process until the first satellite is acquired. As satellites are
acquired, the receiver automatically collects ephemeris and almanac
data. The smart antenna uses the information gained from acquiring a
specific satellite to eliminate other satellites (those below the horizon)
from the search set. This strategy speeds the acquisition of additional
satellites required to achieve the first position fix.
The cold start search sets are established to ensure that at least three
satellites are acquired within the first two time-out periods. As soon
as four satellites are acquired, the receiver computes an initial
position fix. The Acutime 2000 typically achieves a cold start in
under two minutes.
A complete system almanac is not required to achieve a first position
fix. The almanac is used in subsequent warm starts, and to aid in
acquiring GPS satellites that come into view.

F-4 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F
F.2.2 Warm Start
In a warm start condition, the receiver has a current almanac, an
initial position (within 3,000 km) and current time (within five
minutes) stored in memory. Although the smart antenna does not have
an onboard battery for preserving memory, it can be initialized using
the TSIP protocol. To force a warm start, the almanac, time, and
initial position must be uploaded to the receiver.
During a warm start, the smart antenna identifies the satellites that are
expected to be in view, given the system almanac, the initial position
and the time. The receiver calculates the elevation and expected
Doppler shift for each satellite in this expected set and directs the
eight tracking channels in a parallel search for these satellites. If the
internal oscillator error is known, the smart antenna compensates for
the offset to optimize the search. If the offset is not known, the search
algorithms are set wide enough to allow for oscillator tolerance,
aging, and temperature errors.
If the receiver has an almanac and an initial position, but does not
have the current time, it executes a cold start search until the first
satellite is acquired. Once this first satellite is acquired, the receiver
can obtain an approximate time and will convert to warm start mode
to acquire additional satellites. Although the time to first fix is
slightly longer in this case, it is significantly shorter than a complete
cold start.
The warm start time to first fix is usually less than 50 seconds (40
seconds is typical).

Acutime 2000 Synchronization Kit User Guide F-5
FTheory of Operation
F.2.3 "Garage Search" Strategy
During a warm start search, the smart antenna knows which satellites
to search for, based on the system almanac, the initial position and the
current time. In some cases, the receiver may not be able to acquire
the expected satellite signals (for example, if the Acutime 2000 is in a
jamming environment). Trimble's patented garage search strategy,
also known as a split search, is designed for such situations.
If the receiver does not acquire the expected set of satellites within
five minutes of a warm start, one of the channels is directed in a cold
start search. This strategy minimizes the time to first fix in cases
where the stored almanac, position and time are invalid. If the cold
start search proves effective and the garage search fails, the stored
information is flushed from memory.
F.2.4 Hot Start
A hot start strategy applies when the almanac, position, time and
ephemeris in memory are valid. The hot start search strategy is
similar to a warm start, but since the ephemeris data in memory is
considered current and valid, the acquisition time is typically less
than 30 seconds. This may occur if the GPS signals are temporarily
obscured or jammed.

F-6 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F
F.3 Position Accuracy
GPS position accuracy is degraded by atmospheric distortion, satellite
and receiver clock errors, and Selective Availability (S/A). Effective
models for atmospheric distortion of satellite signals have been
developed to minimize the impact of tropospheric and ionospheric
effects. The impact of satellite clock errors is minimized by
incorporating the clock corrections transmitted by each satellite used
in the position solution. S/A is the most significant contributor to
position error and cannot be effectively counteracted except with
differential GPS.
F.3.1 Selective Availability (S/A)
The U.S. Department of Defense, through a program called Selective
Availability, intentionally degrades GPS accuracy for civilian users.
The S/A program creates position errors by modifying the apparent
position of each satellite and introducing random dither into each
satellite's clock.
In extreme cases, all sources of error (natural, PDOP, and S/A) can
combine to produce large position errors. The DOD's definition of
accuracy under S/A is 100 meters 2 dRMS (horizontal two-
dimensional, 95 percent of the time).

Acutime 2000 Synchronization Kit User Guide F-7
FTheory of Operation
F.4 Coordinate Systems
This section lists the coordinate system formats supported by the
TSIP and NMEA 0183 protocols.
F.4. 1 TS I P
In the default TSIP configuration, position is output in a Latitude-
Longitude-Altitude (LLA) format based on a default datum, WGS-84.
The LLA format can be easily converted by the host system to other
coordinate systems using the appropriate translation algorithm. By
sending the appropriate TSIP command, the smart antenna's position
output can be changed to a Cartesian (XYZ) coordinate format. The
datum used for LLA transformations can also be changed using the
TSIP 8E packet. The smart antenna offers a selection of 179 datums,
which are listed in Appendix A, Trimble Standard Interface Protocol.
The TSIP velocity output format is also three-dimensional. The
default format is X-Y-Z with the option of an East-North-Up (ENU)
coordinate format. Time tags on fix messages default to UTC
(Universal Coordinated Time), but can be switched to GPS time by
sending the appropriate TSIP command.
F.4.2 NMEA 0183
The NMEA 0183 protocol supports only LLA format and UTC time.
If a custom datum is required, it can be set through TSIP using
command 0x8E-15.
F-8 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F
F.5 Performance Characteristics
This section lists performance information for the Acutime 2000.
F.5.1 Update Rate
The Acutime 2000 updates position at one-second intervals during
self-survey. The surveyed position is frozen after the survey
completes.
F.5.2 Dynamic Limits
The dynamic operating limits for the various receiver designs are
listed below. These operating limits assume that the smart antenna is
correctly installed and that the overall system is designed to operate
under the same dynamic conditions.
F.5.3 Re-Acquisition
When a satellite signal is momentarily interrupted during normal
operation, the receiver continues to search for the lost signal at the
satellite's last known Doppler frequency. If the lost signal is not re-
acquired within 15 seconds, the receiver initiates a broader frequency
search. The smart antenna uses the last known information about the
dynamics of the receiver and the satellite to establish the center
frequency and range for the search. Every 15 seconds, until the lost
signal is re-acquired, a new center frequency and search range is
computed. Each frequency range is searched in 500 Hz increments.
The duration of the code search at a given frequency is approximately
one second and switches automatically.
Table F-1 Dynamic Upper Bound
Dynamic Operating Limits
Velocity 500 m/s
Acceleration 4 g (39.2 m/s2)
Jerk 20 m/s3

Acutime 2000 Synchronization Kit User Guide F-9
FTheory of Operation
If ephemeris or almanac data is available for the lost satellite, then the
satellite's velocity is factored into the center frequency calculation.
The diminished accuracy of an older almanac is accounted for in the
width of the search range. If neither the ephemeris nor almanac is
available, then the Doppler frequency at last lock is searched for two
minutes. If the satellite has not been re-acquired after two minutes,
then the maximum expected Doppler frequency, based on satellite
dynamics, is searched.
If the current position is not accurately known, the search width is
increased. If the smart antenna is computing velocity or velocity
aiding is provided, then the receiver's motion is also factored into the
Doppler frequency. If velocity information is not available, then the
dynamics code is used to determine the maximum expected Doppler
frequency.
The re-acquisition time for momentary signal blockages is typically
under two seconds.

F-10 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F
F.6 System Architecture
The standard Acutime 2000 incorporates a proprietary DSP (Digital
Signal Processor), which operates at the L1 frequency (1575.42 MHz)
and processes the Coarse/Acquisition (C/A) code portion of the GPS
signal. The RF and digital signal processing components of the GPS
module are custom ASICs designed by Trimble. In addition to the
signal processing functions, these ASICs also contain support
circuitry for the microprocessor. The microprocessor performs the
navigation computations in addition to controlling the DSP channels
and managing the I/O operations.
GPS satellite signals are collected by the antenna, filtered and
amplified by the antenna's pre-amp and then fed to the RF down
converter. A highly stable, crystal reference oscillator, operating at
12.504 MHz, supports the down converter in producing the correct
signals for the digital signal processor. The signal processing stage
tracks the GPS satellite signals and extracts the carrier code
information, as well as the navigation data at 50 bits per second.
In addition to supporting the down conversion process, the crystal
oscillator also serves as the reference clock for the navigation
processor. This microprocessor controls the operation of the signal
processing channels by allocating the channels during satellite
acquisition and tracking. In the overdetermined mode of operation,
the smart antenna automatically tracks the highest eight (or twelve)
satellites above the horizon and selects the optimal set of satellites for
the position solution.
In addition to controlling the DSP stage, the navigation processor also
collects the ephemeris and almanac data for all of the satellites and
manages the Universal Asynchronous Receiver/Transmitter (UART
or DUART) interface. The UART supports full-duplex serial
communication with the smart antenna.
The RS-232 and RS-422 versions of the Acutime 2000 block diagram
for the GPS smart antenna are illustrated in Figure F-1 and
Figure F-2.
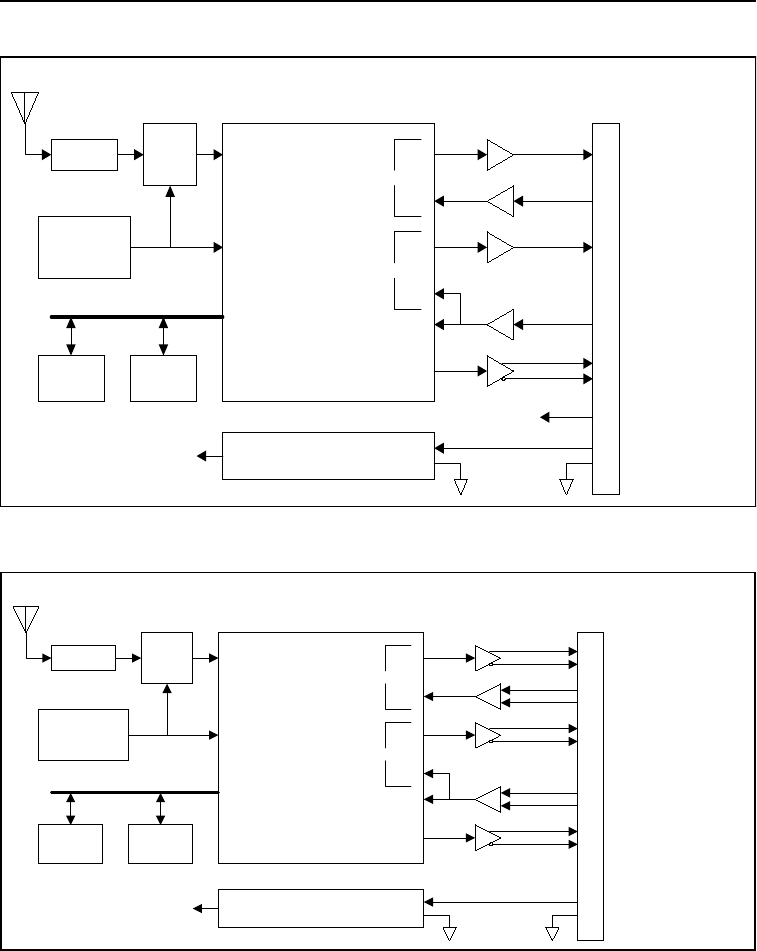
Acutime 2000 Synchronization Kit User Guide F-11
FTheory of Operation
Figure F-1 Acutime 2000 Block Diagram (RS-232 Version)
Figure F-2 Acutime 2000 Block Diagram (RS-422 Version)
Microcontroller/
GPS Receiver
ASIC
Preamp
Internal Patch Antenna
Switching Power Supply
RF In Tx
Rx
Tx
PPS Out
Event In
Port A
Port B
Vcc
RF
ASIC
Flash
EPROM RAM
TCXO
12.504MHz Clk In
MCU Bus
4
9
1
7
2
Port B Tx
Event In / Port A Rx
PPS Out (+)
PPS Out (-)
DC Power In
Ground
Acutime 2000
12-Pin
Connector
Port B Rx
Port A Tx
Rx
11
12
6
VBack8
Backup
Voltage
Microcontroller/
GPS Receiver
ASIC
Preamp
+
-
+
-
Internal Patch Antenna
Switching Power Supply
RF In Tx
Rx
Tx
PPS Out
Event In
Port A
Port B
Vcc
RF
ASIC
Flash
EPROM RAM
TCXO
12.504MHz Clk In
MCU Bus
5
4
9
1
12
11
6
7
8
10
2
3
Port B Tx(+)
Port B Tx(-)
Port B Rx(+)
Port B Rx(-)
Port A Tx(+)
Port A Tx(-)
Event In / Port A Rx (+)
Event In / Port A Rx (-)
PPS Out (+)
PPS Out (-)
DC Power In
Ground
Acutime 2000
12-Pin
Connector
Rx

F-12 Acutime 2000 Synchronization Kit User Guide
Theory of Operation F

Acutime 2000 Synchronization Kit User Guide Glossary-1
Glossary
This section defines technical terms and abbreviations used in this manual. It includes terms
from the field of GPS technology.
2-D Two Dimensional. A 2-D position is defined as latitude and
longitude. Altitude is assumed to be fixed.
2-D GPS mode A procedure of determining a 2-D position using signals
received from the best (or only) three available GPS
satellites. Altitude is assumed to be known and constant. A
2-D position solution will only be determined if signals
from three or more satellites are available.
3-D Three Dimensional. A 3-D position is defined as latitude,
longitude, and altitude.
3-D GPS mode A procedure of determining a 3-D position using signals
received from the best (or only) four available GPS
satellites. A 3-D position solution will only be determined if
signals from four or more satellites are available.
almanac A reduced-precision subset of the ephemeris parameters.
Used by the receiver to compute the elevation angle,
azimuth angle, and estimated Doppler of the satellites. Each
satellite broadcasts the almanac for all the satellites in the
system.

Glossary-2 Acutime 2000 Synchronization Kit User Guide
Glossary
ASCII American Standard Code for Information Interchange. A
standard set of 128 characters, symbols and control codes
used for computer communications. ASCII characters
require 7 bits of data to send, but are often sent 8 bits at a
time with the extra bit being a zero.
auto GPS mode A procedure of automatically determining either a 2-D or 3-
D position using signals received from GPS satellites. The
solution automatically transitions between 2-D and 3-D
depending on the number of satellites available, the PDOP
of the available satellites, and the defined PDOP switch
value. (See PDOP and PDOP constellation switch).
azimuth angle The angle of the line-of-site vector, projected on the
horizontal plane, measured clockwise from true North.
bandwidth The range of frequencies occupied by a signal. Also, the
information carrying capability of a communication channel
or line.
baud A measure of the speed of data transmission. Baud and bit
rate are the same for direct equipment interconnections (for
example, through RS-232). Baud and bit rate are not the
same for modulated data links, whether wire or radio.
bit Binary digit. The smallest unit of information into which
digital data can be subdivided and which a computer can
hold. Each bit has only two values (e.g., on/off, one/zero,
true/false).
bit rate The rate at which bits are transmitted over a communication
path. Normally expressed in bits per second (bps).
byte A set of contiguous bits that make up a discrete item of
information. A byte usually consists of a series of 8 bits, and
represents one character.

Acutime 2000 Synchronization Kit User Guide Glossary-3
Glossary
C/A code The Coarse/Acquisition code. This is the civilian code made
available by the Department of Defense. It is subject to
selective availability (SA). Users can reduce the effects of
SA by using differential GPS.
carrier The radio signal on which information is carried. The carrier
can be sensed to determine the presence of a signal.
channel Either a single frequency or a pair of radio frequencies used
as a communication path.
chip The length of time to transmit either a zero or a one in a
binary pulse code.
chip rate Number of chips per second (e.g., C/A code = 1.023 MHz).
configuration A set of conditions or parameters that define the structure of
an item. In regards to Placer, a configuration defines the
GPS processing and characteristics of the RS-232 interface
ports. The term configuration can also define the hardware
components that comprise a subsystem or system.
data bits The bits in a byte of data which carry the actual information.
datum A mathematical model of the earth. Many local datums
model the earth for a small region: for example, Tokyo
datum, Alaska, NAD-27 (North America). Others, such as
WGS-84, model the whole earth.
DCE Data Communications Equipment. The equipment that
provides the functions required to establish, maintain, and
terminate a communication connection. Any equipment that
connects to DTE using an RS-232 or CCITT V.24 standard
interface.
default setting A preset or initial value that is assumed to be the preferred
or appropriate selection for most situations. The Placer GPS
sensor is shipped with factory default configuration settings;
the settings were determined by Trimble.

Glossary-4 Acutime 2000 Synchronization Kit User Guide
Glossary
differential
relative
positioning
Determination of relative coordinates of two or more
receivers which are simultaneously tracking the same
satellites. Static differential GPS involves determining
baseline vectors between pairs of receivers. Also see
differential GPS.
dilution of
precision A description of the purely geometrical contribution to the
uncertainty in a position fix, given by the expression DOP =
SQRT TRACE (A A) where A A is the design matrix for the
instantaneous position solution (dependent on satellite-
receiver geometry). The DOP factor depends on the
parameters of the position-fix solution. Standard terms for
the GPS application are:
GDOP – Geometric (three position coordinates plus clock
offset in the solution)
PDOP – Position (three coordinates)
HDOP – Horizontal (two horizontal coordinates)
VDOP – Vertical (height only)
TDOP – Time (clock offset only)
RDOP – Relative (normalized to 60 seconds)
DOP See dilution of precision.
Doppler shift The apparent change in frequency of a received signal due
to the rate of change of the range between the transmitter
and receiver.
earth-centered
earth-fixed
(ECEF)
Cartesian coordinate system where the X direction is the
intersection of the prime meridian (Greenwich) with the
equator. The vectors rotate with the earth. Z is the direction
of the spin axis.
elevation angle The angle between the line of sight vector and the horizontal
plane.

Acutime 2000 Synchronization Kit User Guide Glossary-5
Glossary
elevation mask
angle A measure of the minimum elevation angle, above the
horizon, above which a GPS satellite must be located before
the signals from the satellite will be used to compute a GPS
location solution. Satellites below the elevation angle are
considered unusable. The elevation mask angle is used to
prevent the GPS receiver from computing position solutions
using satellites which are likely to be obscured by buildings
or mountains.
ellipsoid In geodesy, unless otherwise specified, a mathematical
figure formed by revolving an ellipse about its minor axis. It
is often used interchangeably with spheroid. Two quantities
define an ellipsoid; these are usually given as the length of
the semi-major axis, a, and the flattening, f = (a - b)/a, where
b is the length of the semi-minor axis.
ephemeris A set of parameters that describe the satellite orbit very
accurately. It is used by the receiver to compute the position
of the satellite. This information is broadcast by the
satellites.
epoch Measurement interval or data frequency, as in making
observations every 15 seconds. Loading data using 30-
second epochs means loading every other measurement.
firmware A set of software computer/processor instructions that are
permanently or semi-permanently resident in read-only
memory.
frequency The number of vibrations per second of an audio or radio
signal. Measured in hertz (Hz), kilohertz (kHz), or
megahertz (MHz).
GPS frequencies are:
L1 = 1575.42 MHz
L2 = 1227.60 MHz

Glossary-6 Acutime 2000 Synchronization Kit User Guide
Glossary
GDOP Geometric Dilution of Precision. GDOP describes how
much an uncertainty in pseudo-range and time affects the
uncertainty in a position solution. GDOP depends on where
the satellites are relative to the GPS receiver and on GPS
clock offsets.
geodetic datum A mathematical model designed to best fit part or all of the
geoid. It is defined by an ellipsoid and the relationship
between the ellipsoid and a point on the topographic surface
established as the origin of datum. This relationship can be
defined by six quantities, generally (but not necessarily) the
geodetic latitude, longitude, and the height of the origin, the
two components of the deflection of the vertical at the
origin, and the geodetic azimuth of a line from the origin to
some other point. The GPS uses WGS-84.
geoid The actual physical shape of the earth which is hard to
describe mathematically because of the local surface
irregularities and sea-land variations. In geodetic terms it is
the particular equipotential surface which coincides with
mean sea level, and which may be imagined to extend
through the continents. This surface is everywhere
perpendicular to the force of gravity.
GPD GPS with differential corrections applied.

Acutime 2000 Synchronization Kit User Guide Glossary-7
Glossary
GPS Global Positioning System. A satellite-based navigation
system operated and maintained by the U.S. Department of
Defense and consisting of a constellation of 24 satellites
providing worldwide, 24-hour, three-dimensional (3-D)
GPS coverage. These satellites transmit signals used (by
GPS receivers) to determine precise location (position,
velocity, and time) solutions. GPS signals are available in all
weather conditions. This system also includes 5 monitor
ground stations, 1 master control ground station, and 3
upload ground stations.
GPS is emerging as the technology of choice in many timing
applications, including site and network synchronization.
GPS antenna An antenna designed to receive GPS radio navigation
signals.
GPS processor An electronic device that interprets the GPS radio
navigation signals (received by a GPS antenna) and
determines a location solution. The GPS processor may also
be able to apply (and determine) differential GPS
corrections.
GPS receiver The combination of a GPS antenna and a GPS processor.
GPS time The length of the second is fixed and is determined by
primary atomic frequency standards. Leap-seconds are not
used, as they are in UTC. Therefore, GPS time and UTC
differ by a variable whole number of seconds.
HDOP Horizontal Dilution of Precision.
host system The device or instrument connected to the Acutime 2000
smart antenna. The host system can be a PC, network
equipment, or timing system, depending on the application.
HOW Hand-over word. The word in the GPS message that
contains time synchronization information for the transfer
from C/A to P-code.

Glossary-8 Acutime 2000 Synchronization Kit User Guide
Glossary
interface cable The interface cable allows data to flow between the
Acutime 2000 and the communication equipment.
interference Refers to the unwanted occurrences on communication
channels that are a result of natural or man-made noises and
signals, not properly a part of the signals being transmitted
or received.
integrated
Doppler A measurement of Doppler shift frequency or phase over
time.
IODE Issue Of Data, Ephemeris. Part of the navigation data. It is
the issue number of the ephemeris information. A new
ephemeris is available usually on the hour. Especially
important for Differential GPS operation that the IODE
change is tracked at both the reference station and mobile
stations.
jamming Interference (in either transmitting or receiving signals)
caused by other radio signals at exactly or approximately the
same frequency.
masks See satellite masks.
maximum PDOP A measure of the maximum Position Dilution of Precision
(PDOP) that is acceptable in order for the GPS processor to
determine a location solution (see PDOP).
NAVSTAR The name given to the GPS satellites, built by Rockwell
International, which is an acronym formed from NAVigation
System with Time And Ranging.
NMEA National Marine Electronics Association. An association
that defines marine electronic interface standards for the
purpose of serving the public interest.
NMEA 0183
message NMEA 0183 is a standard for interfacing marine electronics
navigational devices. The standard specifies the message
format used to communicate with marine devices/
components.

Acutime 2000 Synchronization Kit User Guide Glossary-9
Glossary
packet An "envelope" for data, which contains addresses and error
checking information as well as the data itself.
parity A scheme for detecting certain errors in data transmission.
Parity defines the condition (i.e., even or odd) of the number
of items in a set (e.g., bits in a byte).
PDOP Position Dilution of Precision. PDOP is a unitless figure of
merit that describes how an uncertainty in pseudo-range
affects position solutions.
PDOP
constellation
switch
A value, based on PDOP, that defines when the GPS
receiver/processor should switch between 2-D and 3-D GPS
modes. The PDOP constellation switch is only active when
the GPS mode of operation is set to Auto.
PRN Pseudo-random noise. Each GPS satellite generates its own
distinctive PRN code, which is modulated onto each carrier.
The PRN code serves as identification of the satellite, as a
timing signal, and as a subcarrier for the navigation data.
protocol A formal set of rules that describe a method of
communication. The protocol governs the format and
control of inputs and outputs.
pseudo-range A measure of the range from the GPS antenna to a GPS
satellite. Pseudo-range is obtained by multiplying the speed
of light by the apparent transit time of the signal from the
GPS satellite. Pseudo-range differs from actual range
because the satellite and user clocks are offset from GPS
time and because of propagation delays and other errors.
RAM Random-Access Memory.
random-access
memory Memory in which information can be referred to in an
arbitrary or random order. The contents of RAM are lost
when the System Unit is turned off.

Glossary-10 Acutime 2000 Synchronization Kit User Guide
Glossary
range A term used to refer to the distance radio signals can travel
before they must be received or repeated due to loss of
signal strength, the curvature of the earth and the noise
introduced because of moisture in the air surrounding the
earth's surface.
range rate The rate of change of range between the satellite and
receiver. The range to a satellite changes due to satellite and
observer motions. Range rate is determined by measuring
the Doppler shift of the satellite beacon carrier.
read-only memory Memory whose contents can be read, but not changed.
Information is placed into ROM only once. The contents of
ROM are not erased when the system unit's power is turned
off.
relative
positioning The process of determining the vector distance between two
points and the coordinates of one spot relative to another.
This technique yields GPS positions with greater precision
than a single point positioning mode can.
rise/set time The period during which a satellite is visible (i.e., has an
elevation angle that is above the elevation mask). A satellite
is said to "rise" when its elevation angle exceeds the mask
and "set" when the elevation drops below the mask.
ROM Read-Only Memory.
RTCM Radio Technical Commission for Maritime Services.
Commission that recommends standards for differential
GPS services. RTCM Recommended Standards For
Differential GPS Service, prepared by RTCM Special
Committee No. 104 (RTCM SC-104), defines a
communication protocol for sending GPS differential
corrections from a differential reference station to remote
GPS receivers.

Acutime 2000 Synchronization Kit User Guide Glossary-11
Glossary
satellite masks As satellites approach the horizon, their signals can become
weak and distorted, preventing the receiver from gathering
accurate data. Satellite masks enable you to establish criteria
for using satellite data in a position solution. There are three
types of satellite masks: Elevation, SNR, and PDOP.
SA Selective Availability. This is the name of the policy and the
implementation scheme by which unauthorized users of
GPS will have their accuracy limited to 100 meters 2D RMS
horizontal and 156 meters 2D RMS vertical.
SEP Spherical Error Probability. The radius of a sphere such that
50% of the position estimates will fall within the surface of
the sphere.
serial
communication A system of sending bits of data on a single channel one
after the other, rather than simultaneously.
serial port A port in which each bit of information is brought in/out on
a single channel. Serial ports are designed for devices that
receive data one bit at a time.
signal-to-noise
level GPS signals with SNRs that do not meet the mask criteria
are considered unusable.
signal-to-noise
ratio A measure of the relative power levels of a communication
signal and noise on a data line. SNR is expressed in decibels
(dB).
SNR Signal-to-Noise Ratio.
spread spectrum The received GPS signal is a wide bandwidth, low-power
signal (-160 dBW). This property results from modulating
the L-band signal with a PRN code in order to spread the
signal energy over a bandwidth which is much greater than
the signal information bandwidth. This is done to provide
the ability to receive all satellites unambiguously and to
provide some resistance to noise and multi-path.

Glossary-12 Acutime 2000 Synchronization Kit User Guide
Glossary
SPS Standard Positioning Service. Refers to the GPS as available
to the authorized user.
start bit In asynchronous transmission, the start bit is appended to
the beginning of a character so that the bit sync and
character sync can occur at the receiver equipment.
stop bit In asynchronous transmission, the stop bit is appended to
the end of each character. It sets the receiving hardware to a
condition where it looks for the start bit of a new character.
SV Space Vehicle (GPS satellite).
synchronous
communication A method of sending digital data in which the bits come at
fixed, rather than random, times and are synchronized to a
clock.
TSIP Trimble Standard Interface Protocol. A binary/hex packet
bi-directional protocol, also known as the TANS protocol.
Used by a large number of Trimble sensors. TSIP is the
subset of TANS which is recognized by all Trimble sensors
except the 4000 series. The TSIP protocol is defined in full
in Appendix A.
URA Satellite user range accuracy. The URA is sent by the
satellite and is computed by the GPS operators. It is a
statistical indicator of the contribution of the apparent clock
and ephemeris prediction accuracies to the ranging
accuracies obtainable with a specific satellite based on
historical data.
UTC Universal Coordinated Time. Uniform atomic time system/
standard that is maintained by the US Naval Observatory.
UTC defines the local solar mean time at the Greenwich
Meridian.
UTC offset The difference between local time and UTC (Example: UTC
- EST = 5 hours).

Acutime 2000 Synchronization Kit User Guide Index-1
Index
A
abbreviations used in manual xxiii
Acutime 2000 GPS Smart Antenna
12-pin connector format 4-3
communicating with 2-4
connecting 2-2
connecting host system 3-6
connection diagram 2-3
connections 4-1
enclosure illustration 1-3
installation
choosing location 3-2
routing and securing interface
cable 3-5
installing 2-1, 3-1
interface cables and connectors 4-4
interface connector 4-3
mounting 3-4
overview 1-2
specifications D-1
start-up 5-1
almanac A-40, A-58
Appendix F, Theory of Operation xxi, 5-1
Appendix F, Theory of Operation. 5-1
audience xix
automatic installation
Windows NT 6-16
C
cable delay compensation 5-9
cautions xxiv
choosing location for antenna 3-2
cold start F-3
command packets A-14
communicating with Acutime 2000 2-4
Timing Receiver Monitor 2-4
computer and power source
connecting 2-3
configuration
NTP software 6-1
Palisade 6-12
connecting computer and power source 2-3
connecting host system 3-6
connection
instructions 4-7
power 4-7
timing packet 4-8
timing pulse 4-7
connection diagram 2-3
coordinate systems F-7
NMEA 0183 F-7
TSIP F-7
D
Department of Defense Glossary-6
document conventions xxiii
dynamic limits F-8

Index-2 Acutime 2000 Synchronization Kit User Guide
E
ECEF A-30
electrical specifications D-3
elevation mask 5-2
environmental specifications D-2
event input 4-9
external event input 5-9
G
garage search strategy F-5
getting started 2-1
Glossary Glossary-1
GPS timing 5-12
H
HAE A-30
health of receiver A-46
health of satellite A-49
height above ellipsoid A-30
hot start F-5
I
installation 3-1
software 6-1
UNIX 6-24
Windows NT 6-15
interface and power connections 4-2
interface cable
routing and securing 3-5
introduction 1-1
items required for installation 2-1
M
main screen B-2
manual installation
Windows NT 6-17
monitoring NTP 6-31
mounting the smart antenna 3-4
N
Network Time Protocol (NTP) 6-1
NMEA 0183 F-7
NMEA 0183 message formats C-5
notes xxiv
NTP configuration file 6-11
monitoring 6-31
software installation 6-10
time servers 6-2
NTP software
installation and configuration 6-1
O
operation
theory F-1
organization xx
other information xxii
overdetermined timing mode 5-5
P
packet descriptions A-20
Palisade
configuration 6-12
PDOP mask 5-3
performance F-8
dynamic limits F-8
re-acquisition F-8

Acutime 2000 Synchronization Kit User Guide Index-3
update rate F-8
performance specifications D-2
physical specifications D-1
pin-out descriptions 4-5
position accuracy F-6
selective availability F-6
power connection 4-7
PPS output options 5-6
PPS quantization error 5-6, 5-7
pre-installation check list 6-4
preparation
GPS 6-5
host system 6-6
R
raw measurement data A-38
re-acquisition F-8
reader comment form 5
report packets A-16
routing interface cable 3-5
S
satellite acquisition F-3
cold start F-3
garage search strategy F-5
hot start F-5
warm start F-4
satellite masks 5-2
satellite signal levels A-48
scope xix
securing interface cable 3-5
selective availability F-6
self-survey mode 5-4
serial communication 5-10
serial port selection screen B-1
serial protocols D-4
SNR mask 5-3
specifications D-1
electrical D-3
environmental D-2
performance D-2
physical D-1
serial protocols D-4
start-up 5-1
system architecture F-10
system operation
overview 5-1
T
technical assistance xxiii
technical support 6-4
theory of operation F-1
timing packet serial connection 4-8
timing pulse connections 4-7
Timing Receiver Monitor 2-4
Timing Receiver Monitor screen
serial port selection B-1
Timing Receiver Monitor screens
main B-2
tips xxiv
tracking codes 5-4
Trimble Standard Interface Protocol see
TSIP A-1
TSIP F-7
command packets A-14
0x26, Health Request A-23
0x2B, Initial Position
(Latitude, Longitude,
Altitude) Command A-26
0x2F, UTC Parameters
Command A-27
0x3D, Timing Port
Configuration Command A-
40
report packets A-16

Index-4 Acutime 2000 Synchronization Kit User Guide
0x4C, Operating Parameters
Report A-52
0x4E, GPS Time Change
Acknowledgment A-53
0x57, Information About Last
Computed Fix Report A-57
0x59, Satellite Attributes
Database Report A-63
0x5A, Raw Measurement Data
Report A-64
0x5C, Satellite Tracking Status
Report A-68
0x5F, EEPROM Segment
Status Reports A-70
U
unit number 6-12
UNIX installation 6-24
hardware configuration 6-28
update notes xxii
update rate F-8
W
warm start F-4
Windows NT installation 6-15
automatic 6-16
manual 6-17
World Wide Web (WWW) site xxii

Reader Comment Form
Acutime 2000 Synchronization Kit User Guide April 2001
P/N: 45005-00-ENG Revision A
We appreciate your comments and suggestions for improving this publication.
Contributors of particularly helpful evaluations will receive a thank-you gift.
I use the following Trimble product________________________________________________
for__________________________________________________________________________
Please circle a response for each of the statements below:
1 = Strongly Agree 2 = Agree 3 = Neutral 4 = Disagree 5 = Strongly Disagree
The manual is well organized. 1 2 3 4 5
I can find the information I want. 1 2 3 4 5
The information in the manual is accurate. 1 2 3 4 5
I can easily understand the instructions. 1 2 3 4 5
The manual contains enough examples. 1 2 3 4 5
The examples are appropriate and helpful. 1 2 3 4 5
The layout and format are attractive and useful. 1 2 3 4 5
The illustrations are clear and helpful. 1 2 3 4 5
The manual is: too long just right too short
Please answer the following questions:
Which sections do you use the most? ______________________________________________
What do you like best about the manual? ___________________________________________
____________________________________________________________________________
What do you like least about the manual? ___________________________________________
____________________________________________________________________________
Optional
Name _______________________________________________________________________
Company ____________________________________________________________________
Address______________________________________________________________________
____________________________________________________________________________
Telephone_____________________________Fax __________________________________
Please mail to Trimble Navigation Limited, 645 North Mary Avenue, P.O. Box 3642,
Sunnyvale, CA 94088-3642. Alternatively, email your comments and suggestions to
ReaderFeedback@trimble.com. All comments and suggestions become the property of
Trimble Navigation Limited.
