Trimble 7486-CIRAA GPS data transceiver User Manual
Trimble Navigation Ltd GPS data transceiver
Trimble >
Contents
- 1. User manual
- 2. User Manual
User manual
BoB
(Beacon On a Belt)
USER’S MANUAL
Draft Only
Revision 0.10
April 3, 2000
Copyright
Copyright © 1998-1999 Trimble Navigation Limited. All rights reserved. No part of this manual may be copied,
photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form without prior
written consent from Trimble Navigation Limited

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
2
CONTENTS
1. System Description.......................................................................................................3
1.1 User Features.......................................................................................................... 3
1.2 System Operation.................................................................................................... 4
1.2.1 Modes of Operation..................................................................................................................4
1.3 User Interface......................................................................................................... 6
1.3.1 LED interface............................................................................................................................6
1.3.2 Button Control...........................................................................................................................8
1.3.3 Displaying and Changing the BoB Configuration......................................................................9
1.3.4 Transmission of Data from a Datalogger...................................................................................9
1.3.5 Best Mode station tracking......................................................................................................10
1.3.6 Firmware upgrade...................................................................................................................10
1.3.7 Keypad/Display......................................................................................................................10
1.4 BoB Sub Systems .................................................................................................. 11
1.4.2 Mechanical..............................................................................................................................12
1.4.3 Configuration Manager Software ............................................................................................13
1.4.4 Data Backup Scheme...............................................................................................................13
2. Additional Information..............................................................................................14
2.1 Warranty Information........................................................................................... 14
2.2 Coast Guard MSK Signals.................................................................................... 14
2.3 RTCM Message Support....................................................................................... 14
2.4 Integrity Monitoring.............................................................................................. 14
BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
3
1. System Description
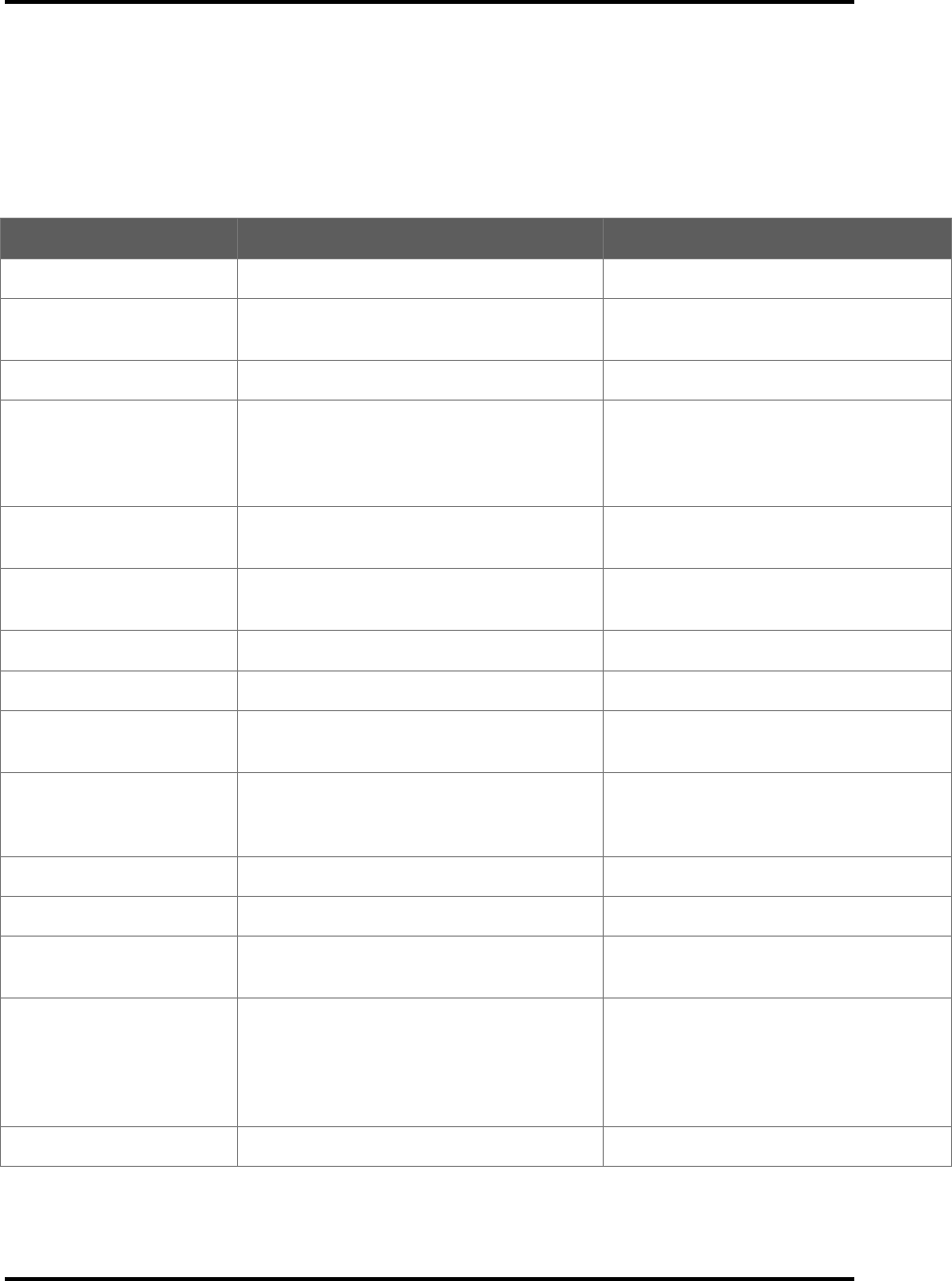
1.1 User Features
The following table identifies the operational features for BoB.
ITEM SPECIFICATION NOTES
Beacon Receiver Antenna Built-in Omni-directional
Beacon Almanac BoB must store the last recorded beacon
almanac. This is to be updated whenever a more
recent almanac is received
Beacon Channel tracking Tracks 2 channels simultaneously
Wireless Link Transmitter only, license free frequency
band. Must be able to be used in any location
where the user is capable of receiving
beacon correction data.
Must be enabled/disabled by Firmware, or
permanently disabled at build time.
900Mcs transmitter primarily for use in
the USA.
Configuration Must be ready ‘out of the box’ Also via PC
based software. Two-button UI
Battery Life At the least the same or better on single
charge. Regular day shift.
External Antenna support External antenna support is NOT required
Wireless link 5 foot spec Typical operational range
Operational Indications Minimum of power status and Beacon
tracking status.
RTCM capability SC-104, version 2 Output in standard format on cabled serial
connection, supportable by any product
with RTCM input ability.
Operational Modes Best and Fixed
Firmware Upgrade Serial port connection. User can upgrade.
Ergonomic Easy to get into and out of vehicles with no
requirement to detach and re-attach. Comfortable and light to wear on hip.
Standard Accessories Must be supplied with a pouch that enables
the user to access the buttons. simple nylon
belt with plastic buckle (similar to the hip
pack shoulder strap). Cable for connection to
PC (Null Modem)
The pouch padded to the users hip from
the unit. This will probably be dependent
on the final weight and shape of the
product.
Optional Accessories Vehicle kits will be available. Not necessarily in time for release.

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
4
1.2 System Operation
1.2.1 Modes of Operation
BoB will track frequencies using one of two modes: Best and Fixed. The list of frequencies that can be
tracked, plus the startup mode, can be controlled using PC-BoB software.
Normally users will either have a very short include list (e.g. one to five stations) or will have a very long
include list (excluding only one or two dominant stations). Those with a short list will operate either in Best
or Fixed mode depending on their situation, however those with a very long list will usually always be in
Best mode.
1.2.1.1 Best
When BoB is in Best mode it will track the best frequency that it can, and will change frequencies if its
current frequency becomes unsatisfactory.
The algorithm for determining the next Best channel will use the following inputs:
• The PC-BoB filter as defined by the user. This includes excluding frequencies all together and
overriding default health rules.
• The almanac if one exists.
• The initial position if one exists and if beacon co-ordinate information is being broadcast.
• FFT information
• Information on whether a particular frequency has been tracked before and contains or does not contain
valid RTCM information.
A frequency becomes unsatisfactory if:
• the SNR of the currently tracked frequency falls below a predetermined level
• the data stream has more than 10% parity errors
To summarize, Best mode uses the algorithms already in place in the Beast receiver called Auto-Range if
BoB knows its position and has positional information on the beacons it can track; otherwise it uses Auto-
Power. This is not user-selectable.

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
5
1.2.1.2 Fixed
Fixed mode means that BoB will track one frequency consistently until the user intervenes. This intervention
may be in the following fashions:
• by short-pressing the beacon button (to stay in Fixed mode and move to the next frequency in the list)
• by long-pressing the beacon button (to move to Best mode)
• by long-pressing both buttons to return to the default settings
The user can go from Best mode to Fixed mode at any time by short-pressing the beacon button (see section
3.5.2 Button Control). At this point BoB will continue tracking the frequency that was last tracked in Best
mode.
When the unit starts up in Fixed mode it begins to track the initial frequency as defined by PC-BoB,
regardless of the availability or condition of this frequency. A short-press of the beacon tracks a new
frequency as per the following rules:
• If the list of included beacons contains less than 42 frequencies, a short button press simply moves to the
next frequency in the list (sorted numerically), regardless of the presence or quality of a signal at that
frequency.
• If the list of included beacons contains 42 or more frequencies (or no list is provided, which means that
all frequencies are enabled) then the second channel should track the next frequency in the list for which
a signal can be detected.
1.2.1.3 Default operation
By default, all frequencies are enabled and the mode is Best. The method of modifying this default behaviour
is to:
• select a list of frequencies and an initial mode using PC-BoB and download this information to the BoB
unit OR
• control BoB using the Beacon button.
The default behaviour can be restored with a dual button press (see section 3.5.2 Button Control).
1.2.1.4 Other operational
It the Beacon Almanac (Type 7) is retained in the BoB non-volatile data system.
It BoB will accept an NMEA –GGA message from any device (including PC-BoB) over an RS-232
connection to specify its initial position, to which it will then use to determine the range to the tracked
beacons in order to determine the nearest station.
{Note baud rates fixed for GGA strings}
BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
6
1.3 User Interface
the user interface on BoB
• Power on and off
• Switch between best and fixed modes
• Total power off
• Reset unit to defaults
• To scan through either a user list of frequencies, or through the range of beacon transmissions available at the time.
• The user feedback showing the following
• Whether the unit is on or off.
• Battery charge status
• Beacon tracking status
1.3.1 LED interface
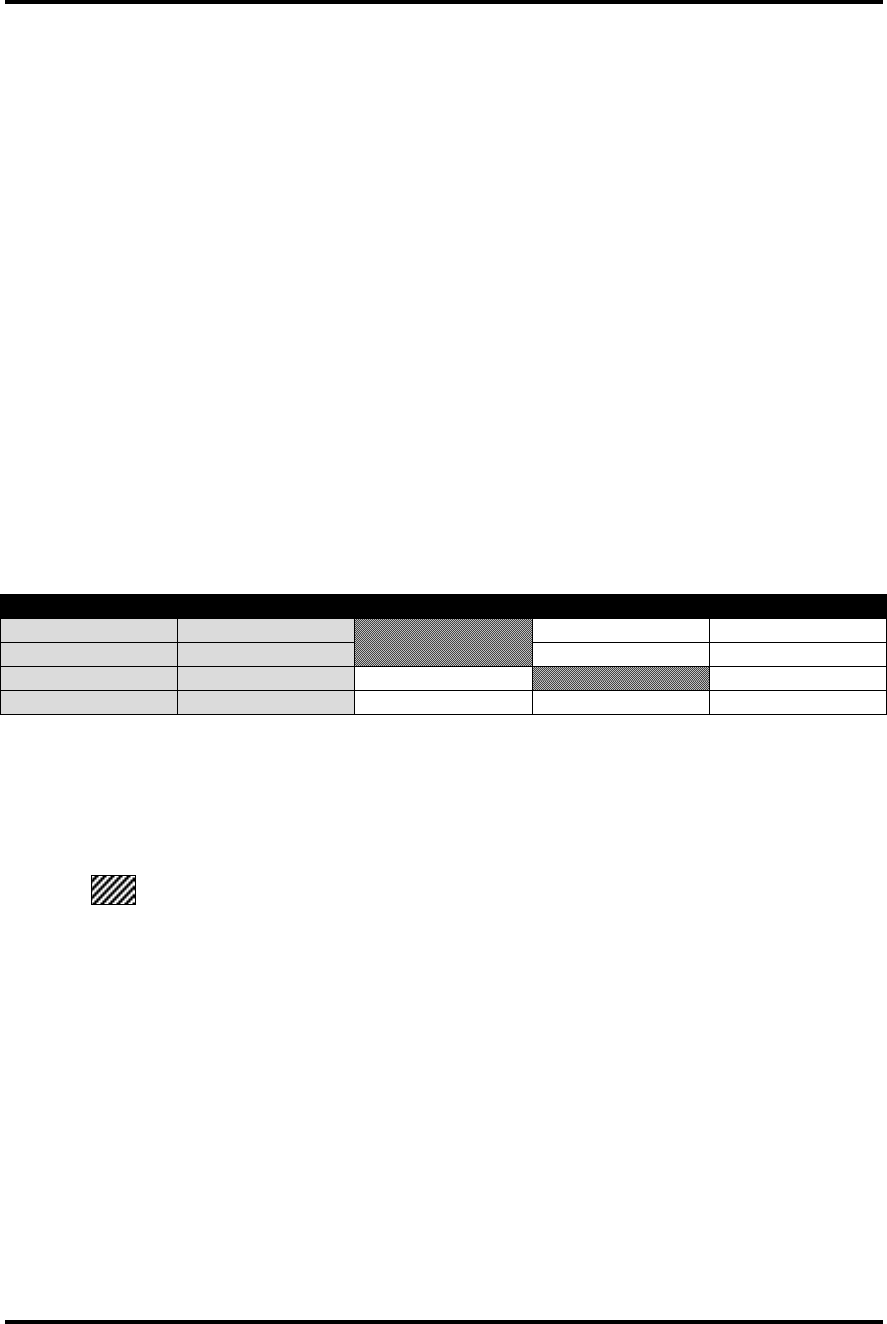
It is a dual colour, green and orange.
The blinking of the LED’s shall be at a rate of 1Hz (i.e. 0.5 secs on, 0.5 sec’s off etc). The strobe flash is a
very quick blink every 3 seconds.
Power Source BoB on/off Low battery Charging battery Full/not charging
External On Orange flash Orange steady
External Off Orange strobe Off
Internal On Green flash Green steady
Internal Off Off Off Off
• If the battery has adequate charge and power is on, the LED is steady. The colour indicates the power
source.
• If the battery has adequate charge and power is off, the LED is off.
• If the battery is low or charging and the unit is on, the LED will flash, and the colour indicates the power
source. If the unit is charging and is off, the unit will strobe orange.
• The indicates a non-applicable situation. When external power is applied the unit will always
start charging, therefore it can never be defined as “low”. Also, on internal power the unit can never be
charging.
BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
7
The following table contains the same information but the axes are colour states.
Power LED
Color Off On Blinking Strobe Flash
Green
(no external power) Unit is off Unit is on and battery
not low Unit is on and battery
low (<5% energy
remaining)
N/A
Orange
(no external power) Unit is off
Internal battery
Is not being
charged1
Unit is on , is fully charged Unit is on and is charging
the internal battery Unit is off, and
is charging the
internal battery
1. The reason why the battery is not being charged is because it is fully charged, or if the battery is out of temperature or
time specs. If the unit is off and connected to external power, and the battery is low the strobe flash will be used to
indicate charging is taking place. Once the unit is fully charged, the strobe light will cease to flash.
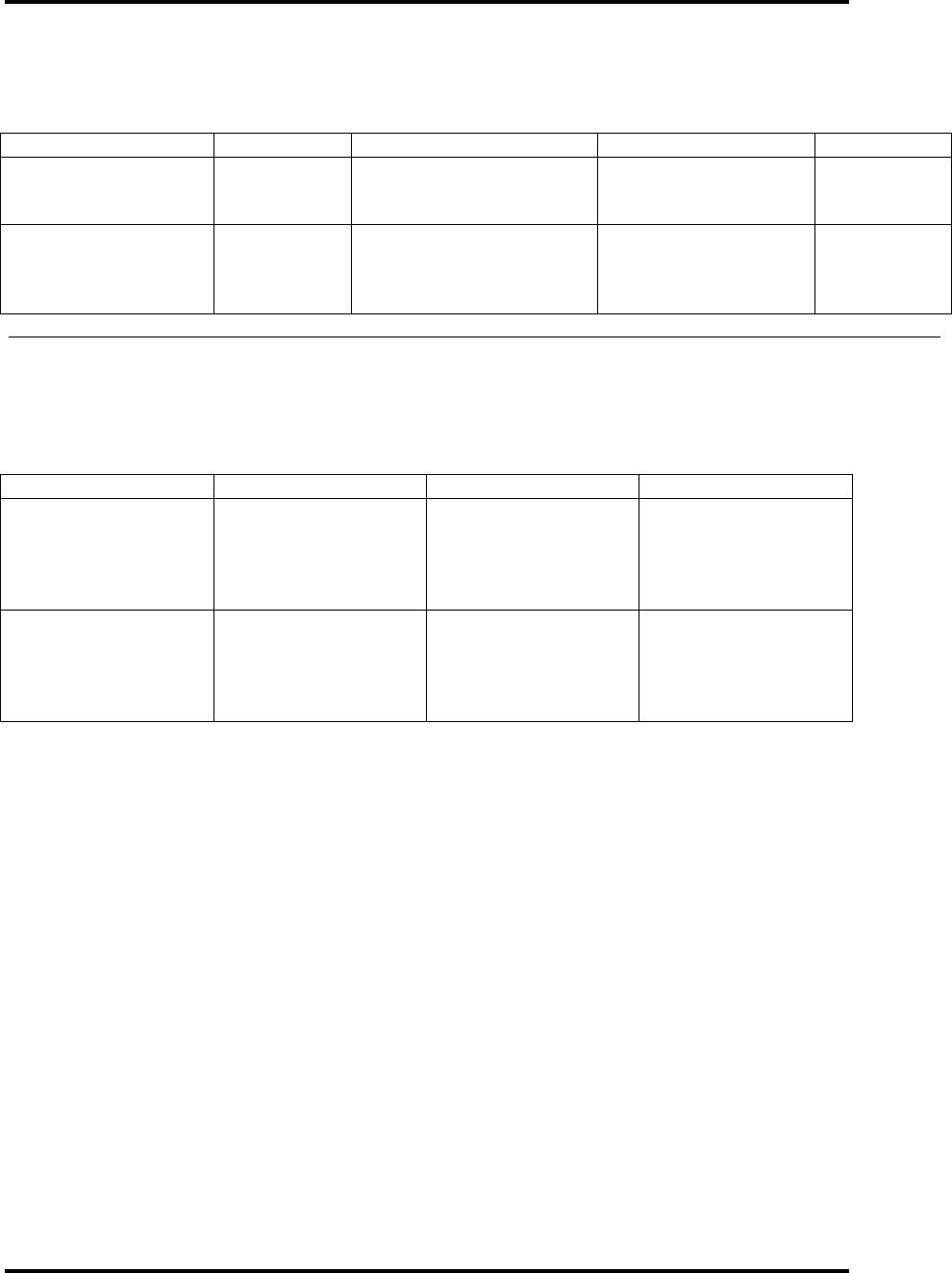
Beacon LED
Colour Off On Blinking
Green
(Best Mode) Failure condition
(if BoB is powered on) Locked onto Signal
and Good RTCM data
being sent to GPS
receiver
Unit is either searching
the frequency band, or is
tracking a signal, but
not using the signal
Orange
(Fixed Mode) Failure condition
(if BoB is powered on) Locked onto Signal
and Good RTCM data
being sent to GPS
receiver
Unit is either searching
the frequency band, or is
tracking a signal, but
not using the signal
Note that the Beacon status LED is reporting the status of the Primary channel only.
BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
8
1.3.1.1 LED Events
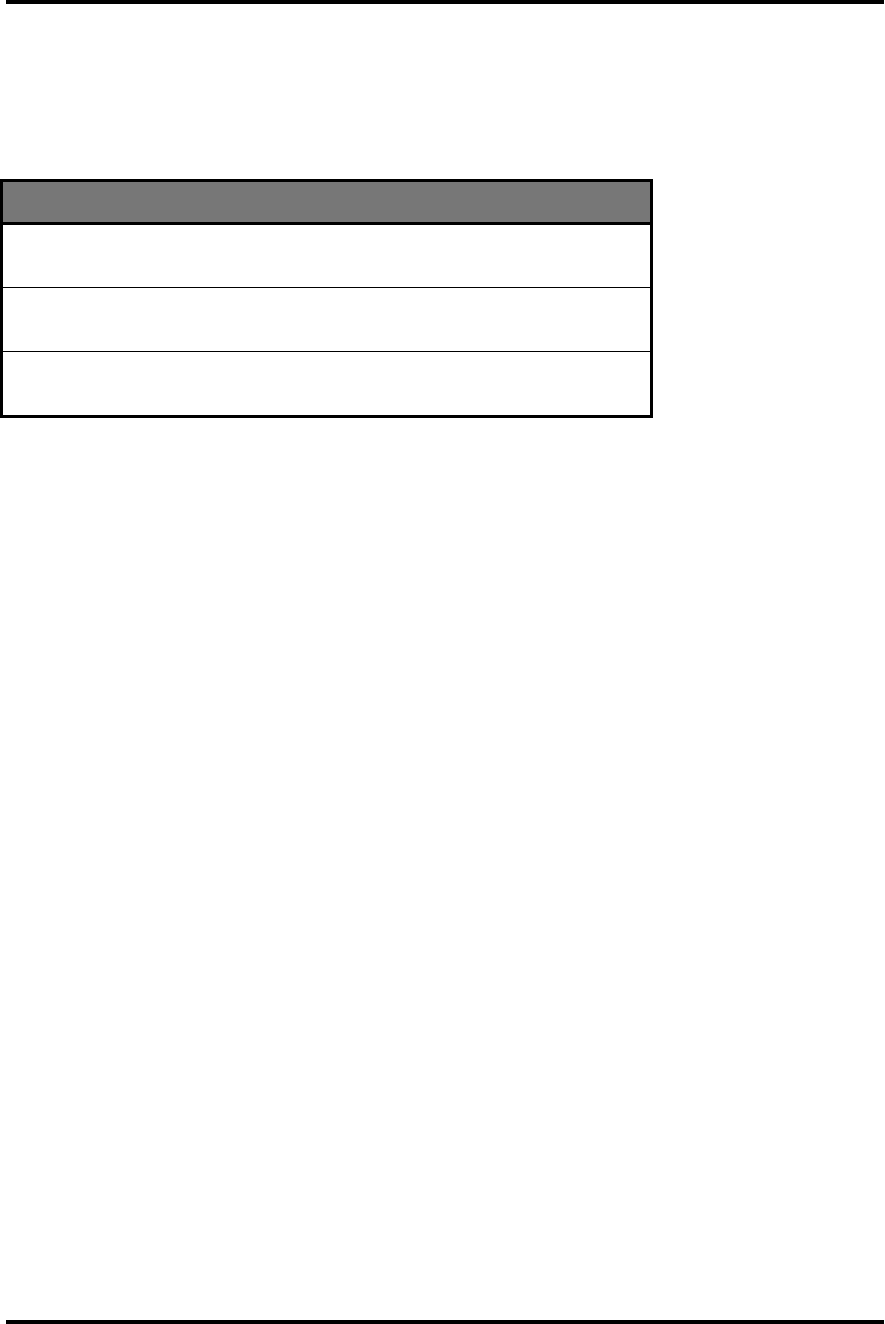
In addition to the above LED states, the LEDs will flash to indicate events. The events and LED codes are
outlined in the following table.
Event LED Code
Wireless enabled (see section 1.3.2.2) Beacon LED flashes green at 4Hz
for 1 second
Wireless disabled (see section 1.3.2.2) Beacon LED flashes orange at 4Hz
for 1 second
Reset to Factory Defaults initiated (see
section 1.3.4.1) Both LEDs flash green at 2Hz for
2 seconds
1.3.2 Button Control
there be two buttons on the BoB unit (One for power, the other for Beacon operations). These two buttons
should be designed in a manner that makes them easily identifiedd as different operations.
1.3.2.1 Power Button Functionality
Short Press (<0.25 second)
• The short press operation on the power key will turn the unit on. If the unit is already on, then this is a
no-op
Long press (1 second)
• The long press operation on the power key will turn the unit off if the unit was on. If the unit is already
off, then this operation will also turn the unit on.
Very Long Press (10 seconds)
• The very long press operation on the power key is a hardware-controlled press which will completely
reset the unit in case of total software failure. This will not be documented in the manual but will be
available for TAC to use to help users recover when the unit cannot be reset through software control.

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
9
1.3.2.2 Beacon Button Functionality
Short Press (<0.25 second)
• The short press operation on the beacon button has a number of similar functions.
If in Best mode, the short press operation will force the beacon receiver into Fixed mode and will lock
the frequency to the frequency currently being tracked. Performing further short press operations will
move to the next frequency in the list of enabled frequencies. The next frequency to choose is determined
by the number of enabled frequencies configured in BoB. See section 3.2.1.2 for more information.
Long press (1 second)
• The long press operation in the Beacon button will switch the operating mode of the beacon receiver
from Fixed to Best mode and selects the current best frequency. If the receiver is already operating in
Best mode, then this should function as per a short button press.
Very long press (10 seconds)
• The very long press operation in the Beacon button will toggle wireless transmission on or off. This can
also be done via PC-BoB. On startup, the wireless state will revert back to that configured by PC-BoB,
or On (default) if there is no configuration.
1.3.3 Displaying and Changing the BoB Configuration
The current BoB configuration can be displayed or configured (uploaded or downloaded) via the PC-BoB
software running on a Windows 95, 98, or NT computer.
1.3.4 Transmission of Data from a Datalogger
When operating in wireless mode it is not possible to transmit data from a datalogger to BoB. When
operating in cabled mode, the only information BoB will accept from a datalogger (such as a GPS position
and time.

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
10
1.3.4.1 Dual Button Operation
Dual button press (5 seconds)
• The Dual button press operation resets the configuration of BoB. Performing this operation is a cold boot
of the BoB receiver. It clears any configuration sent from PC-BoB, as well as the current almanac.
1.3.5 Best Mode station tracking
This section has been incorporated into section 3.2.1.1.
1.3.6 Firmware upgrade
Winflash be used as the mechanism to put the firmware onto BoB. Further definition may be as to exactly
what options, but the initial options will be;
• Wireless enabled
• Wireless disabled
• Encoded beacon stations support
1.3.7 Keypad/Display
No display or keypad. All other UI is via the serial port or wireless link. Commands to BoB must be sent via the serial
port, but status can be received on either the link or serial port.
Commands and Status are defined in the Software Document.
BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
11
1.4 BoB Sub Systems
1.4.1.1 Beacon channels
There are to be two channels (Primary and Secondary).
Best Mode Fixed Mode
Primary Channel Pass RTCM through to Datalogger Pass RTCM through to Datalogger
Secondary Channel Searches for the second Best
frequency Searches for next frequency on the
filter list (if 42 or more
frequencies available from user’s
list) or track the next frequency (if
less than 42 frequencies
available)
1.4.1.2 Signal Acquisition
Cold Start Time <45 seconds
Warm Start Time <5 seconds
1.4.1.3 Power
An internal 2-cell Li-Ion battery will power the unit. The intention is to build the battery into the unit and it will not be
removable by the user. An external power source connection is, and the unit must operate from 9 to 24 VDC. When
connected to an external power source, this will not only power the BoB unit, but also charge the BoB internal battery.
An internal battery charger is required to charge the Li-Ion battery. There are many special requirements of the battery
system:
1.4.1.4 I/O
In addition to power and ground, the following I/O exists
Name Type I/O Other
Rx RS-232 Input Data into BoB
Tx RS-232 Output Data out of BoB

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
12
1.4.1.5 Beacon Antenna
A internal antenna has been selected.
It is not a requirement to connect to an external antenna.
1.4.2 Mechanical
The following information is detailed herein and does not necessarily appear in the mechanical specification.
The specification will detail the how and why of obtaining the following product level specifications.
Mounting
• BoB will be supplied with a pouch that will allow BoB to be easily removed from the pouch. This
pouch must be easily attachable and detachable from a belt.
• Cannot catch or snag in difficult environments, causing detachment.
• User need not detach unit when getting in and out of a vehicle.
• Must be comfortable and fit snugly on a hip.
• Must take into account variances in body sizes.
1.4.2.1 Connectors
• External Power Latching
• Data Port DE-9 male , DTE Device
1.4.2.2 Environmental
• Operating range -10 to +50 degrees C.
• Storage tbd
• Shock tbd
• Vibration TBD
• Water Heavy, wind driven rain and dunk proof for 2 seconds.
• Weight No more than 700grams (1.5lb)

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
13
1.4.3 Configuration Manager Software
The configuration of BoB will be done through a Windows based configuration program called PC-BoB.
Basic configuration of BoB can also be achieved on the unit itself. A complete description of the
configuration manager software can be found in “PC-BoB Specification”. Configuration parameters and how
they are communicated to BoB are described in the BoB Software Specification.
1.4.4 Data Backup Scheme
At power-off, BoB will save all current parameters and re-instate them at power-on. A software crash means
that this will not happen, and parameters will be reset to those last saved. For more details refer to section
3.8.3 of the Software Specification.

BoB Product Requirements Specification 26 February 1999
Trimble Company Confidential
Issue : 1.10
J:\BoB\PRS\BoB PRS110.doc
14
2. Additional Information
This section is for informational purposes only and serves as a place to retain product information and
development ideas not yet targeted for other sub system documents.
2.1 Warranty Information
BoB ships with a 1 year warranty. Additional support agreements will allow the user to extend this warranty
in 1 year increments.
2.2 Coast Guard MSK Signals
Frequency range 283.5 to 325 kHz
Bandwidth 2 kHz
Modulation MSK
Polarisation Vertical
Signal Strength 5 uV/m (The coverage area is defined in this way)
Bit rate 50, 100, 200 bps
Common RTCM msgs (US) 1 and 9
2.3 RTCM Message Support
All RTCM messages will be passed onto the destination device. It is then the responsibility of the target device to then
filter out the unnecessary messages. Type 16 messages will NOT be used to carry any BoB status information. Type 59
can be used for this (refer to “BoB/PC-BoB. Interface Specification”).
2.4 Integrity Monitoring
In both Best and Fixed MSK operating modes, BoB will continuously monitor the integrity of the RTCM data
received from the differential radiobeacon. If BoB detects more than 10% of parity errors in the data stream,
the MSK receiver will automatically switch to a different radiobeacon (if in Best mode) where available and
specified. In Fixed mode, these messages will not be used, but the receiver will stay locked to that station.