Veoneer US SQ24 24 GHz UWB Radar Sensor SQ User Manual 06 Manual
Autoliv ASP, Inc. 24 GHz UWB Radar Sensor SQ 06 Manual
06 Manual
Copyright Autoliv Inc., All Rights Reserved
Vervielfältigung oder Weitergabe ohne ausdrückliche, vorherige Genehmigung von Autoliv ist ausdrücklich verboten.
Ver 1.0ger
Technical Description & Installation Guide
Model 24 SQ Sensor
Version: 1.0
Date: 31. July 2013
File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
2 (9)
Content
CONTENT 2
1 GENERAL DESCRIPTION 3
1 SENSOR DESCRIPTION 4
1.1 SENSOR COMPONENTS 4
1.2 SENSOR DIMENSIONS 4
1.3 SENSING CHARACTERISTICS 5
2 RADAR WAVEFORM DESCRIPTION FOR MITIGATION 6
3 WAVEFORM TIMING DIAGRAM 7
4 VEHICLE INTEGRATION 8
5 REGULATORY HINTS 9

File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
3 (9)
1 General Description
Autoliv manufactures different types of 24 GHz Short Range Radar sensors. The sensor types are working in two
modes, NB (Narrowband) mode and UWB (Ultra Wide Band) mode. In the NB mode the sensor is working in the
frequency band 24.25-24.25 GHz, in the UWB mode in the frequency band 24.25-26.65 GHz.
The 24 GHz Short Range Radar platform is based on UWB technology using a proprietary frequency hopped,
pulsed, coded FMCW like waveform. This advanced waveform enables very high resolution to be achieved in both
range and Doppler. The fast signal processing allows very low latency and fast radar cycle times, a prerequisite for
highly dynamic driving characteristics. The waveform is scalable in software.
The sensors are used for automotive applications for both side looking and forward/back looking applications.
Examples are warning and braking functions to improve the safety on the road.
The 24 GHz radar platform covers variants which differ in their individual waveform and signal processing.
Depending on the application (front or side or rear) the variants cover a specific detection range (short range or mid
range) and detection zone.
MRR (Mid Range Range): 0.2 – 65m ±8° detection zone
SRR (Short Range Radar) Front: 0.2 – 30m ±40° detection zone
SRR (Short Range Radar) Side: 0.2 – 10m ±40° detection zone
MMR (Multi Mode Radar): 0.2 – 30m ±40° detection zone
0.2 – 65m ±8° detection zone
SQ (Multi Mode Radar): 0.2 – 30m ±40° detection zone
0.2 – 65m ±8° detection zone
MRR sensors are used for medium range applications such as forward collision warning. SRR sensors are used for
short range applications such as Stop&Go or blind spot monitoring.
MMR & SQ sensors have combined SRR and MRR functionality and are designed to function in both a short range
and a longer range.
The 24 GHz SQ sensor is an advanced development of the 24 GHz MMR sensor. The technical specification for
the 24 GHz SQ sensor remain the same.
File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
4 (9)
1 Sensor Description
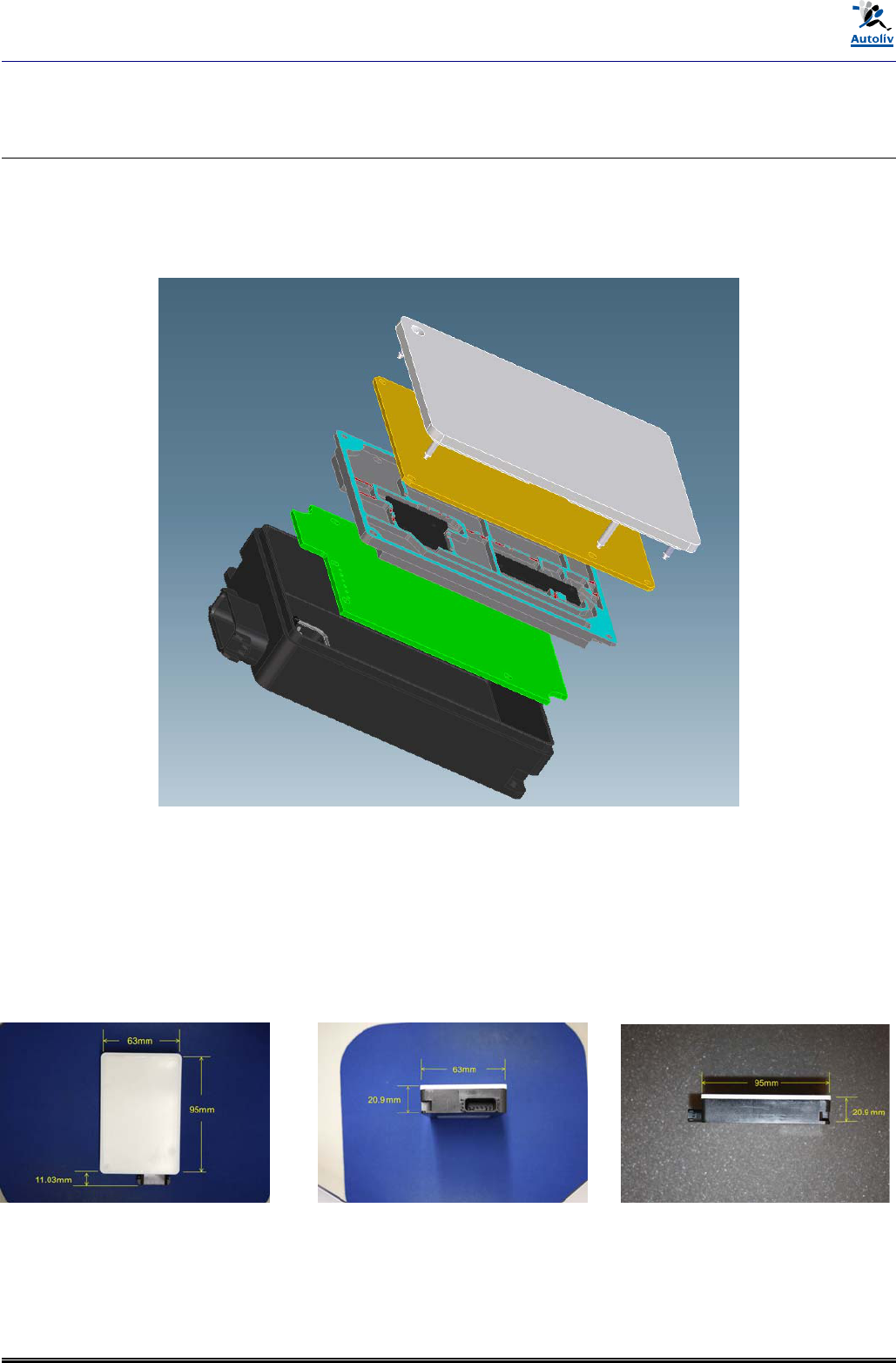
1.1 Sensor Components
The sensor consists of five main mechanical components (Housing, DSP Board, Shielding, RF Board, Radome).
Sensor Components
The connector header is part of the sensor plastic housing. Two connector options are possible.
• 1x6 Hirschman (shown)
• 1x8 USCAR
1.2 Sensor Dimensions
The assembly process is in an advanced robot based production process. The size and light weight of approx.140
grams reduce the complexity of integration across a wide range of vehicle platforms.
File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
5 (9)
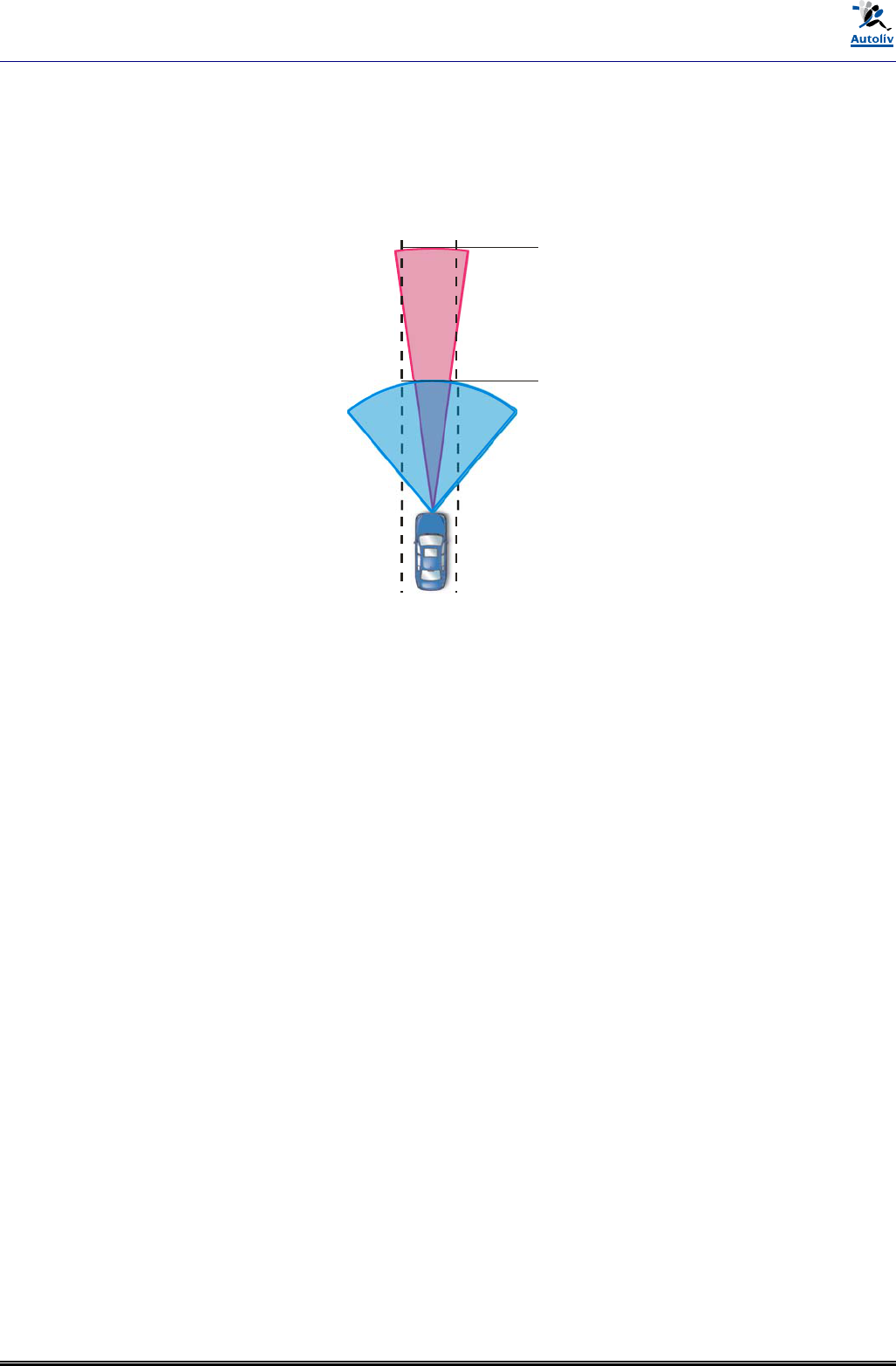
1.3 Sensing Characteristics
The specification for SRR (Short Range Radar) and MRR (Mid Range Radar) are different due to a different range
of detection and field of view. The MMR (Multi Mode Radar) is a combination of SRR and MRR. The SQ sensor is
an advanced version of the MMR sensor.
65m
30m
Short Range
Field of View
SR FOV
Mid Range
Field of View
MR FOV
Detection Zone for SRR and MRR

File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
6 (9)
2 Radar Waveform Description for Mitigation
Autoliv has developed a proprietary frequency hopped, pulsed, coded FMCW like waveform. The radar codes
transmit information in time and frequency and separates return information in both the doppler domain and
distance domain. A target return can be separated from a target return of another transmitter station in three ways.
1. During the frequency dwell segment of the waveform (very short, approx. 6us) the waveform is transmitted
with a coded pulse waveform. The receiver gate is only open for specific time slots. These two combine to
reduce the effect of interfering "on frequency" transmitters.
2. The waveform sweeps over a very wide bandwidth in a short period of time (1GHz in 20ms). The IF
bandwidth is very small (less than approx.. 1MHz) thus the rejection of interfering stations is very high as it
is related to the ratio of the spread bandwidth and the IF bandwidth.
3. The transmit waveform is a random frequency hop (actually a coded frequency). Thus any interfering
stations can be distinguished from the required transmitter as they do not transmit in the same coded
frequency space.
The randomness of the pulse waveform and the frequency hopping results in the overall effect that interferers are
mitigated and are suppressed to behave as noise like signals in the receiver chain. This mitigates the deleterious
effects on the signal processing chain.
File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
7 (9)
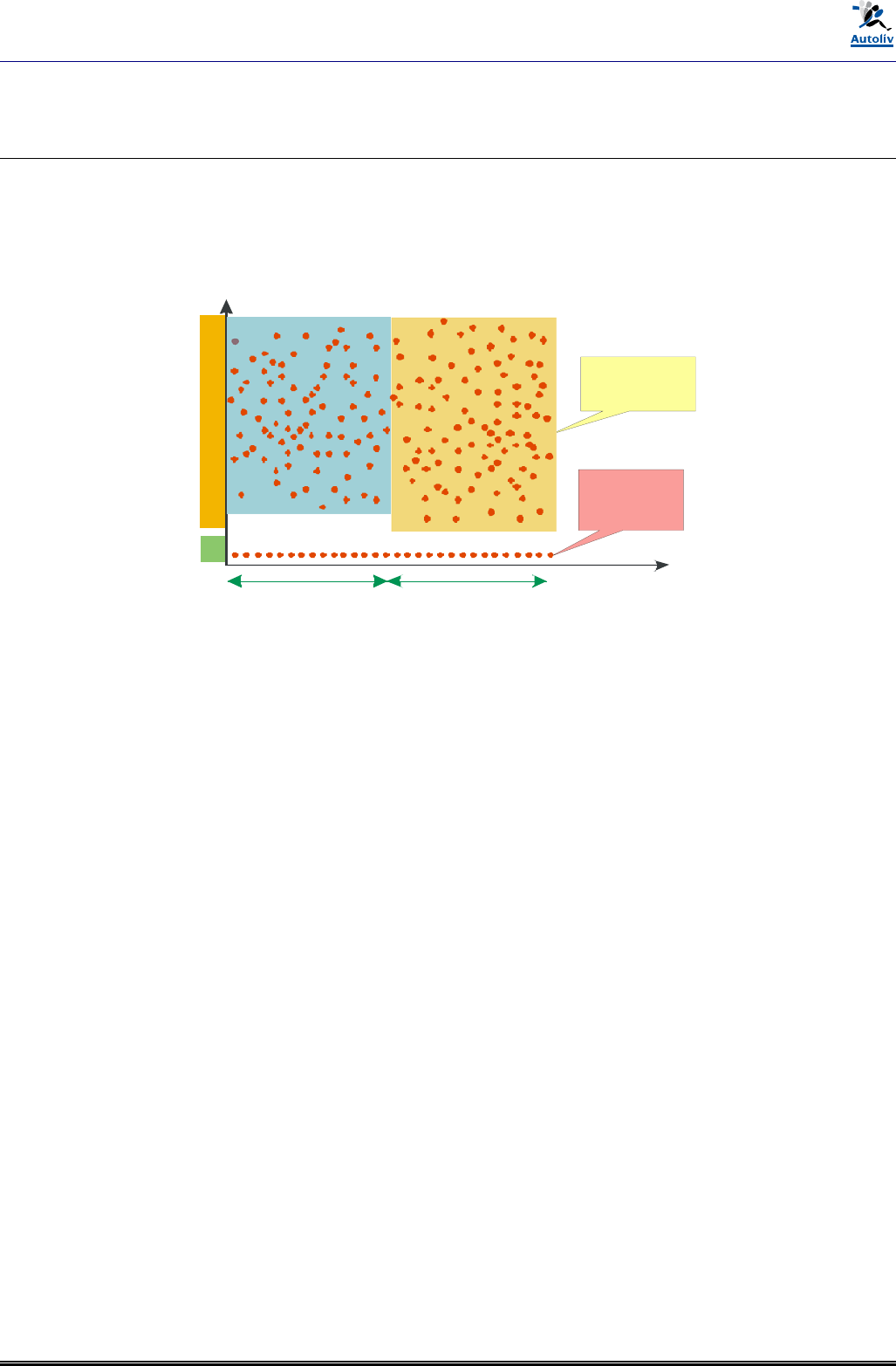
3 Waveform Timing Diagram
Freq.
U
W
B
N
B
Time/ms
20 20
Frequency vs. Time Diagra
m
Narrowband
Emission
UWB
Emission
File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
8 (9)
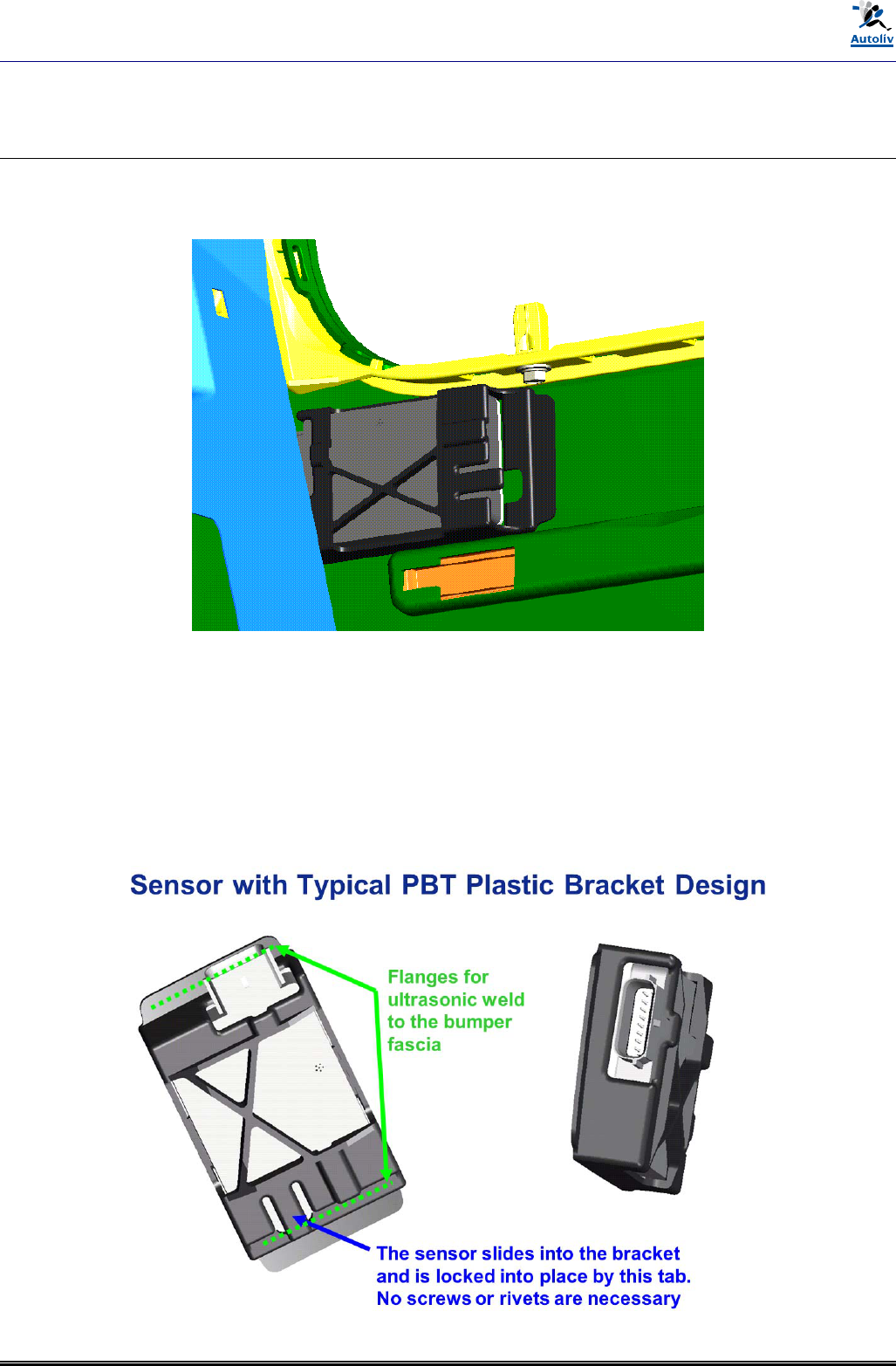
4 Vehicle Integration
Autoliv has experienced with body mounted and fascia mounted attachment. Preferably, the sensor slides in a
plastic bracket attached onto the fascia as represented below:
The packaging guidelines have proven to be effective in use at several OEM’s in series production using AUTOLIV
radars. Highlights of the guidelines:
• Keep out zone in front of sensor
• No metal parts (screws, license plates, clips, etc), impact absorbing foam, fascia creases) inside +/- 65 deg
azimuth, +/- 30 deg elevation
• Sensor spacing from fascia 5mm to 20 mm

File Name: 24 GHz SQ_Technical Description_Installation Guide
Date: 31. July 2013
Autoliv Document, DUPLICATION or DISCLOSURE PROHIBITED without prior written consent
9 (9)
5 Regulatory Hints
The 24 GHz radar sensor system needs an individual approval for each country. If you are driving in a country in
which the radar sensor system is not approved the system has to be deactivated.
We declare that the 24 GHz radar sensor is in conformity with the essential requirements as described in the
Directive 1999/5/EC of the European Parliament on radio equipment and telecommunications terminal equipment
(R&TTE Directive).
The 24 GHz radar sensor complies with Part 15 of the FCC Rules. Operation is subject to the following two
conditions:
(1) this device may not cause harmful interference, and
(2) this device must accept any interference received, including interference that may cause undesired
operation.
The 24 GHz radar sensor complies with Industry Canada licence-exempt RSS standard(s). Operation is subject to
the following two conditions:
(1) this device may not cause interference, and
(2) this device must accept any interference, including interference that may cause undesired operation of the
device.
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence.
L'exploitation est autorisée aux deux conditions suivantes :
(1) l'appareil ne doit pas produire de brouillage, et
(2) l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible
d'en compromettre le fonctionnement.