Weatronic 2754-70 FHSS Equipment User Manual
Weatronic GmbH FHSS Equipment
User Manual

PROFESSIONAL RC COMPONENTS
Instruction manual
for weatronic 2.4 Dual FHSS Systems
12 channel TX module
Dual Receiver
micro 8/10/12
12-22 R
12-22 R Gyro II
12-22 R Gyro III
12-22 R Gyro III + GPS
12-30 R Gyro III + GPS
Foto: Flying Bulls

0 Regulatory compliance................................................................................................................................................... 4
1 Introduction ............................................................................................................................................................................. 6
2 Contents ............................................................................................................................................................................. 6
3 Safety advice ............................................................................................................................................................................. 6
3.1 At the flying field .......................................................................................................................................................................... 6
3.2 Range testing ............................................................................................................................................................................. 7
3.3 Routine checks ............................................................................................................................................................................. 7
3.4 Installation ............................................................................................................................................................................. 7
4 Understanding your system ...................................................................................................................................................... 7
5 Transmitter module weatronic 2.4 Dual FHSS ...................................................................................................................... 8
5.1 Fitting the transmitter module ...................................................................................................................................................... 8
5.1.1 Transmitter module for Futaba FF7/FF9/FF10/WZ-2 transmitters ............................................................................................ 8
5.1.2 Transmitter module for Futaba FC-18/FC-28 transmitters ....................................................................................................... 9
5.1.3 Transmitter module for Futaba T12FG, T14MZ, FX-30, FX-40 transmitters .............................................................................. 9
5.1.4 Transmitter module for Futaba T12FG, T14MZ, FX-30, FX-40 transmitters US version (72 MHz) ............................................ 10
5.1.5 Transmitter module for Graupner MC 24 transmitters .......................................................................................................... 10
5.1.6 Transmitter module for Graupner MX 22/JR 9X/JR10X/MX24S transmitters .......................................................................... 10
5.1.7 Transmitter module for Graupner MC19/MC22/MC22S transmitters .................................................................................... 11
5.1.8 Transmitter module for Multiplex Evo/Royal Evo Pro 7/9/12 transmitters .............................................................................. 11
5.1.9 Transmitter module for Multiplex Profi 4000/3030/3010 transmitters .................................................................................. 12
5.2 Transmitter module LEDs and their functions ............................................................................................................................... 13
6 Fitting the receiver .................................................................................................................................................................... 14
6.1 Fitting the 2.4 Dual FHSS micro series receivers. .......................................................................................................................... 14
6.2 Routing the 2.4 Dual FHSS micro series receiver antenna............................................................................................................. 14
6.3 Fitting the 2.4 Dual FHSS 12-22 R series receivers ....................................................................................................................... 14
6.4 Routing the 2.4 Dual FHSS 12-22 R series receiver antenna ........................................................................................................ 15
6.5 Safety notes ........................................................................................................................................................................... 15
6.5.1 Checking the cables and soldered joints ............................................................................................................................. 15
6.5.2 Electronic ‘noise’ suppression – Electric motors ................................................................................................................... 15
6.5.3 Electronic ‘noise’ suppression – Electronic ignition systems ................................................................................................. 15
6.6 Laying the cables for use on jets ................................................................................................................................................. 15
7 Using the system with a 2.4 Dual FHSS micro series receiver ....................................................................................... 16
7.1 General ........................................................................................................................................................................... 16
7.2 2.4 Dual FHSS micro 8/10/12 series receivers ............................................................................................................................. 16
7.2.1 Receiver LEDs and their function ......................................................................................................................................... 16
7.2.2 Binding a 2.4 Dual FHSS micro series receiver to the transmitter module ............................................................................. 17
7.2.3 Quick Binding .................................................................................................................................................................... 17
7.2.4 Failsafe settings for the 2.4 Dual FHSS micro series receiver ................................................................................................ 17
7.2.5 Range testing..................................................................................................................................................................... 18
7.2.6 Setting the country code ..................................................................................................................................................... 18
7.3 2.4 Dual FHSS micro receiver with Gyro ...................................................................................................................................... 18

3
8 Power supply for the Dual FHSS micro receiver ............................................................................................................. 19
9 Using the system with a 2.4 Dual FHSS 12-22 R series receiver ................................................................................. 19
9.1 General ........................................................................................................................................................................... 19
9.2 Features ........................................................................................................................................................................... 19
9.3 Versions ........................................................................................................................................................................... 20
9.4 The ON/OFF switching board ...................................................................................................................................................... 20
9.5 Binding the transmitter to a Dual Receiver .................................................................................................................................. 20
9.6 Quick Binding ........................................................................................................................................................................... 21
9.7 Range Testing ........................................................................................................................................................................... 21
10 Power management for the 2.4 Dual FHSS 12-22 R series receivers ......................................................................... 21
10.1 Functions ........................................................................................................................................................................... 21
10.2 Battery test function .............................................................................................................................................................. 22
10.3 Selecting a battery with the correct capacity ............................................................................................................................ 22
10.4 Caring for battery packs .......................................................................................................................................................... 22
10.5 Lithium Polymer (LiPo) Batteries .............................................................................................................................................. 23
10.6 Lithium Iron Phosphate (LiFe) Batteries .................................................................................................................................... 23
10.7 Nickel Metal Hydride (NiMH) Batteries..................................................................................................................................... 23
11 The GigaControl Software ................................................................................................................................................... 24
11.1 General ........................................................................................................................................................................... 24
11.2 Installing the Software ............................................................................................................................................................ 24
11.3 Configuring 2.4 Dual FHSS RC Systems receivers ..................................................................................................................... 27
11.3.1 Transmitter configuration ................................................................................................................................................... 28
11.3.2 Receiver settings ............................................................................................................................................................... 29
11.3.3 Servo mapping .................................................................................................................................................................. 30
11.3.4 Configuring the Servos ...................................................................................................................................................... 32
11.3.4.1 Single servo grouping ............................................................................................................................................... 32
11.3.4.2 Synchronising servo groups ....................................................................................................................................... 33
11.3.4.3 Setting the servo input pulse ..................................................................................................................................... 34
11.3.4.4 Slow function ........................................................................................................................................................... 35
11.3.4.5 Configuring servo curves........................................................................................................................................... 35
11.3.4.6 Failsafe settings ....................................................................................................................................................... 36
11.3.4.6.1 Channel Failsafe .............................................................................................................................................. 37
11.3.4.6.2 Servo Failsafe .................................................................................................................................................. 37
11.3.4.7 Copying servo settings .............................................................................................................................................. 37
11.3.4.8 Setting the servo voltage .......................................................................................................................................... 37
11.3.4.9 Fixed values ............................................................................................................................................................. 38
11.4 Monitor ........................................................................................................................................................................... 38
11.5 Spectrum analyser .................................................................................................................................................................. 39
11.6 Configuring the Store/Charge/ Off-Line and On-Line modes ..................................................................................................... 40
12 Indemnity Statement/Compensation-Warranty Claims ................................................................................................ 40
Appendix 1 technical specifications ......................................................................................................................................... 41
1.1 Transmitter module 2.4 Dual FHSS 12 channels .......................................................................................................................... 41
1.2 Dual Receiver 2.4 Dual FHSS micro8/10/12 ................................................................................................................................ 41
1.3 Dual Receiver 2.4 Dual FHSS 12-22 R ........................................................................................................................................ 41
1.4 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro II ............................................................................................................................. 41
1.5 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III ............................................................................................................................ 41
1.6 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III + GPS .................................................................................................................. 41
1.7 Dual Receiver 2.4 Dual FHSS 12-30 R Gyro III + GPS .................................................................................................................. 41
Appendix 2 ........................................................................................................................................................................... 42
2.1 Flash codes on switch board Dual Receiver 2.4 Dual FHSS 12-22 R series ................................................................................... 42
2.2 Flash codes on switch board Dual Receiver 2.4 Dual FHSS 12-22 R series ................................................................................... 42
2.3 Flash codes on case Dual Receiver 2.4 Dual FHSS 12-22 R series ................................................................................................ 42
Appendix 3 ........................................................................................................................................................................... 43
3.1 Certification 2.4 GHz systems .................................................................................................................................................... 43
CONTENTS

4
Regulatory compliance
EMC compliance USA
FCC Radio Frequency Rules and Regulations
This equipment has been tested and found to comply with the limits for a Class A device, pursuant to Part 15 of the FCC Rules. These limits are de-
signed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment
generates, uses, and can emit radiated radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause
harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case
the user will be required to correct the interference at his own expense.
NO MODIFICATIONS. Modifications to these devices shall not be made without the written consent of weatronic Company. Unauthorized modifi-
cations may void the authority granted under Federal Communications Commission Rules permitting the operation of this device.
FCC intentional radiator certification
FCC ID: W3X2754-10 for weatronic Dual Receiver 2.4 Dual FHSS 12-22 R series
FCC ID: W3X2754-20 for weatronic Dual Receiver 2.4 Dual FHSS transmitter module
FCC ID: W3X2754-30 for weatronic Dual Receiver 2.4 Dual FHSS micro series
This equipment contains an intentional radiator approved by the FCC under the FCC ID numbers shown above. These devices comply with Part 15 of
the FCC Rules. Operation is subject to the following two conditions:
(1) These devices may not cause harmful interference, and
(2) These devices must accept any interference received, including interference that may cause undesired operation.
EMC compliance Europe
This equipment meets the requirements of the RTTE and EMC directives.
CE Conformity
This equipment has been developed and constructed in conformance with the current CE regulations and guidelines:
2006/42/EC Machine Directive
2006/95/EC Low Voltage Directive
2004/108/EC EMC Directive
1999/5/EC R&TTE Directive
Safety information
The weatronic 2.4 Dual FHSS Radio Control system is a complex system requiring strict observance of relevant safety rules and guidelines. Before
working with the weatronic RC system, ensure that you are familiar with the system and its operating parts, and with the specific safety instructions
included in this manual.
This manual describes potential hazards you may encounter during operation of this product, but we cannot predict all possible hazards. Safety mes-
sages included in this manual may not represent an exhaustive list, and the guidelines included in this manual should be applied using your judgment
and experience.
Prior to using this equipment, read and observe all safety information and instructions included in this manual. If you are unsure about any of the
potential hazards discussed, contact your dealer or importer immediately.
Read, understand, and follow all safety information contained in these instructions before using your weatronic 2.4 Dual FHSS
Radio Control system. Retain these instructions for future reference.
Intended use
The weatronic 2.4 Dual FHSS Radio Control system consists of modular components. The system is designed for exclusive use of remote controlled
airplane models, model ships and cars and other models.
EMC compliance Canada
This device complies with Industry Canada licence-exempt RSS standard(s). Operation is subject to the following two conditions:
(1) this device may not cause interference, and
(2) this device must accept any interference, including interference that may cause undesired operation of the device.
Cet appareil est conforme à la norme RSS Industrie Canada exempt de licence. Son fonctionnement est soumis aux deux conditions suivantes:
(1) cet appareil ne doit pas provoquer d’interférences et
(2) cet appareil doit accepter toute interférence, y compris les interférences pouvant causer un mauvais fonctionnement du dispositif.

5
INSTRUCTION MANUAL
Label locations
FCC-ID location on weatronic 2.4 Dual FHSS 12-22 R series
FCC-ID location on weatronic 2.4 Dual FHSS micro series
FCC-ID location on weatronic 2.4 Dual FHSS transmitter module
www.weatronic.com
6
1 Introduction
The weatronic 2.4 Dual FHSS series of products have been developed in Germany by a selected team of electronic engineers and IT experts. The result
is to have produced a system which is at the cutting edge of today’s technology manufactured to exacting standards from the latest components.
The very highest quality standards and the best possible level of reliability were the design criteria and every component is subjected to an extensive
visual and computer controlled electronic testing to ensure the highest standards possible. All of the research and development work was conducted
in Germany and our products are assembled in Germany where the casings are also made, a product which really is ‘Made in Germany’.
All components used to construct the weatronic 2.4 Dual FHSS RC-Systems are CE tested and approved and meet not only the current EU (ETSI)
requirements but also those of the American Communications Commission (FCC). All of our products have been vigorously flight tested under the
most exerting conditions and we have concentrated on developing a system which provides the ultimate in resistance to interference as well as unsur-
passed reliability. To make the most of this systems potential and to obtain the best results please take the time to read these instructions thoroughly
as only then will you be able to exploit the full potential of our 2.4 Dual FHSS Radio Control System.
The Certificates of Conformity for both the ETSI and the FCC are contained in Annex 3 of this handbook.
2 Contents
A complete 2.4 Dual FHSS radio control system consists of the following items:
• 2.4 Dual FHSS 12 channel transmitter module
• Antenna stalk
• Patch cable
• Adapter Module for the chosen transmitter (with housing if required)
• 2.4 Dual FHSS Micro Receiver with binding jumper or
• 2.4 Dual FHSS 12-22 R, 12-22 R Gyro II, 12-22 R Gyro II, 12-22 R Gyro III + GPS or 12-30 R Gyro III + GPS receiver
including electronic switching unit and 2 jumpers
Accessories (not included):
• Micro SD card for the Dual 2.4 Dual FHSS transmitter module
• Micro SD card for the Dual 2.4 Dual FHSS receiver 12-22 R variants
• Coaxial-antenna cable and antennas for external mounting
• USB mini cable to connect the transmitter module with a PC (only required if one of the larger range of receivers is used)
• USB adapter cable to carry out firmware updates to the 2.4 Dual FHSS micro receiver
• 2 Cell High Amp. (C) rated LiPo pack or 3 Cell High Amp. (C) rated Lithium Iron Phosphate pack
• Electronic ON/OFF switch for 2.4 Dual FHSS micro receivers
• Electronic LiPo ON/OFF switch with regulator for 2.4 Dual FHSS micro receivers in two versions
3 Safety Advice
The weatronic 2.4 Dual FHSS radio control systems have been exclusively produced for controlling models, in particular for use with model aircraft
or model helicopters and as such they may only be used for that purpose. Children under the age of 14 should only be allowed to operate radio
controlled models under the supervision of an adult. Weatronic will accept no liability for the incorrect use of its products.
3.1 At the Flying Field
Only ever operate your models on approved flying sites and always show respect and consideration for other pilots. Stand
close to the other pilots so that you can warn them of when you taking off and landing and pay attention to what they tell
you as this will reduce the risk of accidents when models are close to the ground. Keep you model within the sector allo-
cated for flying in and never over-fly spectators, other pilots or anyone else who may be in the vicinity.
The weatronic 2.4 Dual FHSS system can safely be operated along-side transmitters using the 35 or 72 MHz bands with no risk of interference.
Checking frequencies is not necessary and it is quite safe to have up to 120 weatronic systems operating simultaneously.
7
INSTRUCTION MANUAL
3.2 Range Testing
Before you operate a model for the first time it is imperative that you carry out a full range test as described in para.
7.2.6.
3.3 Routine checks
The following routine checks should be carried out before every take-off:
• Check that the correct model slot is selected within your transmitter.
• Make sure that all control surfaces move in the correct direction and that they have full movement in each direction.
• Ensure that all battery packs are sufficiently charged.
• If you wish to save the data from your flight, check that a Micro SD card is inserted (see Para 5. for Data Saving).
• Any switched mixers should be checked to ensure that they work correctly.
• When the system is switched on, both the left green LED on the transmitter module (‘STATUS’) and the green LED on the receiver must
illuminate solidly. The transmitter module’s red ‘ERROR’ LED must not illuminate.
• The meanings of and functions performed by the other LED’s are explained in Para. 9.
A model must be secured to a solid object, anchored down or restrained by a helper before the engine is started.
When starting you engine ensure that no-one is within a radius of 3 metres of the propeller and in the case of a turbine
make sure that no-one is within 5 meters of the rear of the model.
The throttle stick must always be checked to ensure that it is in the low position before starting. This is particularly impor-
tant with electric models to prevent the engine and prop. from spinning unexpectedly.
3.4 Installation
The correct installation of the receiver, battery pack, switches, antenna and cables is vital to the safe operation of the receiver system. Please adhere
closely to the instructions laid out in para. 10 of this hand book.
4 Understanding your system
The weatronic 2.4 Dual FHSS radio control system is an system exclusively developed by the company weatronic and operates within the 2.4 GHz
ISM microwave band. Users of this frequency band who are not required to be licensed are governed by the regulations set by the ETSI (European
Telecommunications Standards Institute). The ESTI is a communal body who’s aim is to standardise telecommunications regulations Europe wide.
To be allowed to transmit with the maximum output of 100 mW EIRP (effective isotropic radiated power) the ETSI have set a series of regulations
governing the use of FHSS (frequency hopping spread spectrum) systems. In line with this weatronic systems use 81 channels spaced at 1 MHz and
both transmitter and receiver jump within these channels at 100 times per second following a random pattern which is individual to each trans-
mitter/receiver combination. This sequence is communicated analogically between the transmitter and the receiver and is therefore only known to
transmitters and receivers which have been bonded. If interference is experienced on any channel, such channels are excluded from use until they
become clear again and this system is called adaptive FHSS. The use of adaptive FHSS ensures that the minimum interference is caused to other users
of this band and so making maximum use of the available frequency spectrum.
Furthermore, Dual FHSS also means another two important things:
• The transmitter module is a transceiver, which means that it not only transmits a signal but receives one as well.
• The receiver contains 2 separate and independent receiver circuits and is fitted with a separate antenna for each one.
• Outward signal – the transmitter transmits a signal to the receiver to control the model – return signal – The receiver transmits data back
to the transmitter.
The transmitter antenna is a so-called polar (flat) type antenna as used in GPS navigation systems as well as mobile phones. This type of antenna
has the great advantage that the signal generated is spherical as opposed to being directional which is the case when using a dipole type antenna.
This creates a virtually equal signal regardless of where the transmitter is pointed ensuring a far greater level of reliability over the traditional ‘stick’
antennas used by many systems.
Polar antennas also generate a far better signal when operating in areas with obstacles such as buildings or trees. Such obstacle deteriorate the
performance of traditional stick antennas by masking and absorbing the signal much of which is dependant upon what material the obstacle is made

8
of as well as where the antenna is pointed. As the signal generated by polar antennas is nearly equal in all directions they are much less susceptible
to such losses.
With a weatronic system it is irrelevant how the pilot holds the transmitter or in which direction he points it, which in turn means that regardless of
the model’s attitude relative to the transmitter, the maximum signal strength will always be reaching the receiver.
The data transmitted is coded so that only the receiver which knows the coding can use the signal to move the servos. There are many million different
codes to use so that interference or being ‘shot down’ as know from the old narrow band technology can be ruled out. It is safe to use up to 120
weatronic systems simultaneously in the same area and the old narrow band (35 or 72 MHz) transmitter will have no effect on a weatronic system
what so ever.
The transmitter module is fitted with a micro SD card which stores all data transmitted or received during the flight. Thanks to a small condenser the
information will not be lost if the transmitter power fails or if the transmitter malfunctions and the information can be recalled for analysis at a later
date. This function effectively gives you a black box in the event of a system failure or crash which will assist you in identifying the cause.
All weatronic Dual 2.4 Dual FHSS systems are designed as powerful transceivers which transmit a variety of useful information back to the transmitter
such as the signal strength received by both receiver circuits, the voltage of the receiver batteries, the receiver temperature as well as various telemetry
and sensor details. As standard, our 2.4 Dual FHSS micro receivers transmit the following data:
• Signal strength (range warning)
• Receiver battery pack voltage
• Temperature
to the transmitter and if these values fall outside of certain values a warning will given. The red ‘ERROR’ LED will begin to flash on the transmitter
module and if an earphone is fitted an acoustic signal will be heard. By using our GigaControl software a variety of other user defined information
can be indicated by the ‘ERROR’ LED and earphone. Parallel to this the Micro SD card will be storing all of the data received and transmitted and this
information can be shown as a ‘live stream’ on a PC.
Weatronic transmitter modules are available for all of the popular Multiplex, Futaba and JR/Graupner transmitters which are fitted with a plug-in
transmitter module. 12 channels can be operated with the current modules and a 16 channel version is being developed.
Modules are currently available for the following transmitters:
• Futaba T12 FG/T14 MZ/FX-30/FX-40
• Futaba FF 7/FF 9/FF 10/WZ-2/FC-18/FC-28
• Multiplex Royal Evo/Royal Pro/Profi MC 3010/3030/4000
• Graupner MC19/MC20/MC 22/MC 22S
• Graupner MX 22/MC 24/JR 9X/JR 10X, JR12X
• Graupner MX 24S
This range is soon to be extended to include the Graupner MC 32 and Multiplex Evo transmitters, both will operate 16 channels.
5 Transmitter module weatronic 2.4 Dual FHSS
5.1 Fitting the transmitter module
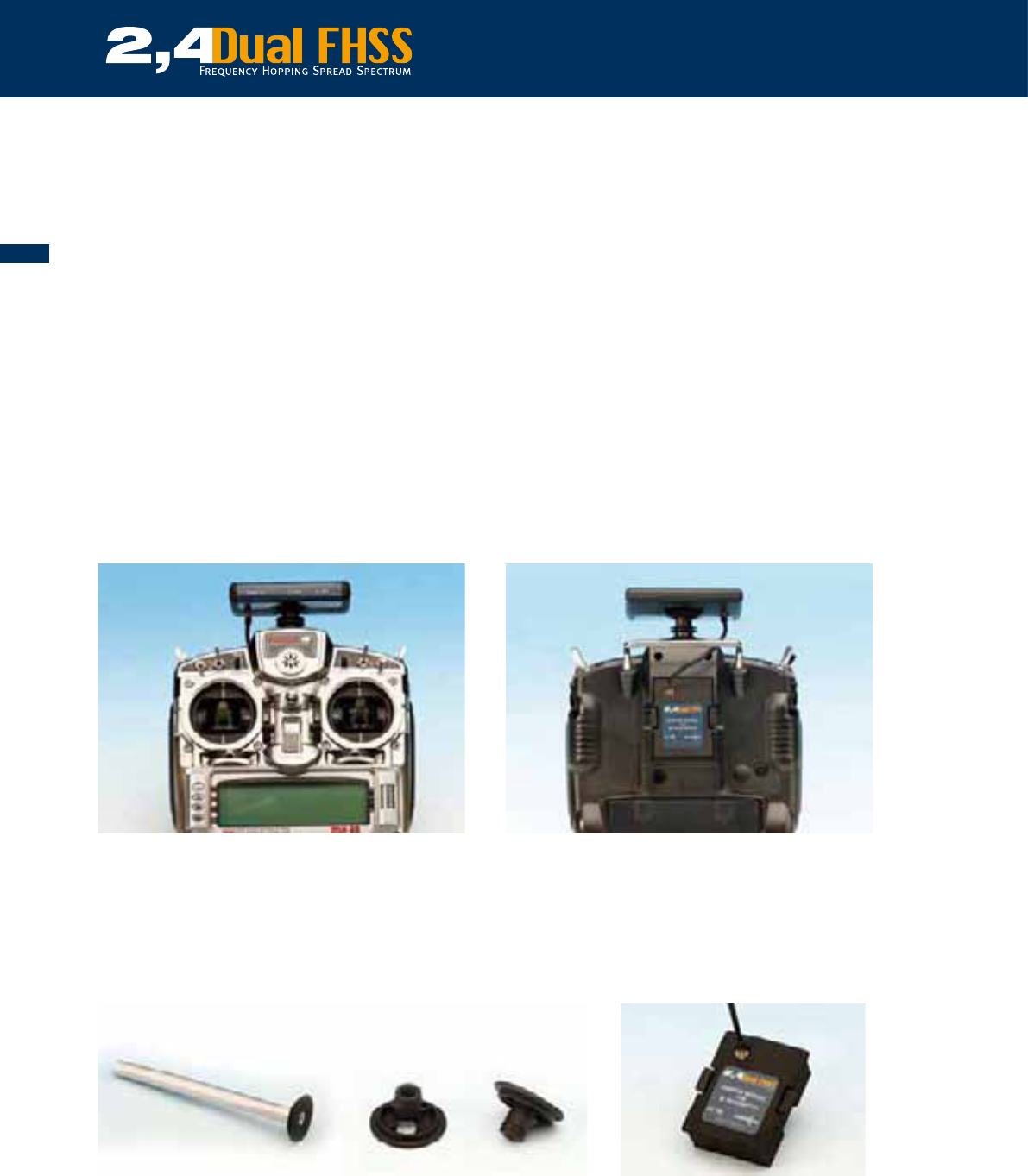
A transmitter conversion kit consists of the following items:
• Transmitter module
• Fitting to utilise the original antenna mounting
• Connecting cable with 2 locking plugs
• Adapter module with casing to fit the transmitter
5.1.1 Transmitter module for Futaba FF7/FF9/FF10/WZ-2 transmitters
Remove the original antenna and HF module. Screw the adapter stalk into where the original antenna was fitted (in the case of the WZ-2 the adapter
is slid over the collapsed antenna) and plug the weatronic adapter module into where the original HF module was fitted to the rear of the transmitter.
Plug one end of the connecting cable into the adapter module and fit the transmitter module to the antenna stalk so that the LEDs are on the upper
side (visible when looking at the front of the transmitter). The connecting cable should now be plugged into the transmitter module.

9
INSTRUCTION MANUAL
5.1.2 Transmitter module for Futaba FC-18/FC-28 transmitters
Remove the original antenna and HF module. Screw the adapter stalk into where the original antenna was fitted (in the case of the WZ-2 the adapter
is slid over the collapsed antenna) and plug the weatronic adapter module into where the original HF module was fitted to the rear of the transmitter.
Plug one end of the connecting cable into the adapter module and fit the transmitter module to the antenna stalk so that the LEDs are on the upper
side (visible when looking at the front of the transmitter). The connecting cable should now be plugged into the transmitter module.
weatronic transmitter module fitted to a Futaba FC-28 transmitter Adapter module for Futaba FC-18 and FC-28 transmitters
5.1.3 Transmitter module for Futaba T12FG, T14MZ, FX-30, FX-40 transmitters
Remove the original HF module and carefully replace it with the weatronic adapter module ensuring that it seats correctly.
weatronic adapter module on Futaba's T14MZ transmitter Choose this modulation
Connect the adapter module to the transmitter module ensuring that the cable is properly locked home. To release the connecting cable, gently press
both sides of the plug.
Settings:
• Set your Futaba transmitter to channel 285 (35.250 MHz).
• Both PPM and PCM 1024 modulation can be used.
• If using PPM 12 modulation, set the middle point to ‘1.5’.
• Make sure that you do NOT select ‘invert’.
These settings are purely to enable the adapter module to communicate with the transmitter module. The actual signal which will be transmitted is
dictated by the weatronic system.
Note:
If using the transmitter types T12FG, T14MZ you will require the adapter module with the part number WZ 6.FU5_35 and for transmitter models
FX-30, FX-40 the adapter module with the part number WZ 6.FU6_35 should be used.
10
5.1.4 Transmitter module for Futaba T12FG, T14MZ, FX-30, FX-40 transmitters US version
(72 MHz)
Follow the instructions in para. 6.1.9. Inform about the frequency to be set under http://www.weatronic.com/en/downloads/cat_view/41-technische-
anleitungen.
If using the transmitter types T12FG, T14MZ you will require the adapter module with the part number WZ 6.FU5_72 and for transmitter models
FX-30, FX-40 the adapter module with the part number WZ 6.FU6_72 should be used.
5.1.5 Transmitter module for Graupner MC 24 transmitters
Remove the original telescopic antenna and open the casing. Remove the original HF module and screw the adapter stalk into the antenna mounting.
The weatronic adapter module is now fitted into the HF module mount and the connecting cable plugged into it. Fit the transmitter module to the
adapter stalk so that the LEDs are visible when viewed from the front. The plastic visibility window on the casing should now be removed to allow
you to route the connecting cable out of the casing, or, alternatively the cable may be fed out via a free external switch hole. Connect the connecting
cable to the transmitter module ensuring that both plugs are correctly seated and replace the casing.
5.1.6 Transmitter module for Graupner MX 22/JR 9X/JR10X/MX24S transmitters
Weatronic 2.4 Dual FHSS Transmitter module fitted to a Graupner/ MX 22 transmitter converted to weatronics Dual 2.4 MHz Dual FHSS
JR MX22 transmitter
Remove the original antenna and HF module. Screw the adapter stalk into where the original antenna was fitted and plug the weatronic adapter module
into where the original HF module was fitted to the rear of the transmitter. Plug one end of the connecting cable into the adapter module and fit the
transmitter module to the antenna stalk so that the LEDs are on the upper side (visible when looking at the front of the transmitter). The connecting cable
should now be plugged into the transmitter module.
Adapter stalk for the MC 22 For the JR 9X/JR10X/MX24S/JR12X Weatronic adapter module for JR/Graupner

11
INSTRUCTION MANUAL
5.1.7 Transmitter module for Graupner MC19/MC22/MC22S transmitters
Unscrew the original 35 MHz antenna and replace it with the adapter stalk. Remove the back plate and disconnect the blue plug which goes into
the original HF module. This plug is now inserted into the weatronic module adapter which is then fixed to the transmitter’s main circuit board in the
position shown on the picture below using double sided sticky tape. The plastic visibility window on the casing should now be removed to allow you
to route the connecting cable out of the casing, or, alternatively the cable may be fed out via a free external switch hole.
Weatronic adapter module fitted to a Graupner Weatronic transmitter module fitted to a MC 19S transmitter
MC19S/MC22S transmitter
5.1.8 Transmitter module for Multiplex Evo/Royal Evo Pro 7/9/12 transmitters
Remove the original pole antenna from its housing and open the casing. Plug the special connector cable which is supplied fitted to the adapter stalk
into the transmitter module ensuring that it is correctly seated.
The connecting cable for the EVO transmitter is fed down through The weatronic adapter module replaces the original Multiplex HF module
the antenna tube.
Guide the connecting cable down through the antenna tube into the inside of the transmitter and plug it into the free socket on the weatronic adapter
module. Remove the original HF module and replace it with the weatronic adapter module. The casing may now be replaced and the adapter stalk
pushed into place where it is retained by an ‘O’ ring. Fit the transmitter module to the stalk ensuring that the LEDs are visible when viewed from the
front.

12
5.1.9 Transmitter module for Multiplex Profi 4000/3030/3010 transmitters
Unscrew the original 35 MHz antenna and replace it by screwing the adapter stalk into its place. Open the casing and remove the original 35 MHz
module from its housing. Remove the plastic window from the rear of the transmitter to enable you to feed the connecting cable through.
Weatronic 2.4 Dual FHSS transmitter module fitted to a Multiplex Opened Multiplex Profi MC 4000 transmitter showing the adapter
Profi MC 4000 transmitter module fitted
Adapter module and connecting cable for Multiplex Profi MC 3030 Connecting cable fed out through the visibility window hole on a
/4000-Series and EVO Royal/Royal Pro 7/9/12 transmitters Multiplex Profi MC 4000 transmitter
Plug the connecting cable into the weatronic transmitter module ensuring that it is correctly seated and fit the transmitter module to the adapter stalk
with the LEDs upwards so that they can be viewed from the front. Feed the cable through the hole in the casing which you made by removing the
window, or, alternatively the cable may be fed through a vacant external switch hole. The cable should now be plugged into the Weatronic adapter
module as shown above ensuring that it is correctly seated which is then plugged into the original HF module housing (shown above). Replace the
cover to complete the conversion.
www.weatronic.com

13
INSTRUCTION MANUAL
5.2 Transmitter module LEDs and their functions
The transmitter module is fitted with 3 LEDs:
• 1 green LED situated on the left labelled “STATUS“
• 1 red LED situated in the middle labelled “ERROR“
• 1 yellow LED situated on the right labelled “TEST“
On switching on all of the LEDs will illuminate briefly.
• Left LED (green):
LED off -> transmitter switched off
Permanently on -> connection OK, bi-directional mode
Short intermittent flashes -> Uni-directional modus
Fast regular flashes -> Quick binding
Slow regular flashes -> Binding
• Middle LED (red):
LED off -> OK, all values are below the warning levels
Flashing -> Error, warning over the following conditions:
• The signal quality received by the receiver
• The receiver battery voltage
• The receiver temperature
• The transmitter voltage
• The transmitter module temperature
• The signal quality of the return signal
• The transmitter signal
All warnings will also be accompanied by an acoustic signal if an earphone
is connected (see Annex 2).
• Right LED (yellow):
LED off -> Range test not in progress
Flashing -> Range test in progress
For further information regarding the codes indicated by the LEDs please see Annex 2.
14
6 Fitting the receiver
Weatronic 2.4 Dual FHSS Dual Receivers have been thoroughly tested against and designed to resist vibration and temperature extremes, however
our receivers should always be mounted as far away as possible from likely sources of heat or vibration, for example the exhaust systems fitted to
internal combustion (i/c) engines.
6.1 Fitting the Dual 2.4 Dual FHSS micro series receivers.
The best method for mounting this type of receiver is go use 2 strips of self adhesive cellular sponge rubber (not foam) attached to a suitable plate
which is secured to the model. The strips should be positioned to allow air to circulate under the receiver and under no circumstances should the
receiver be wrapped in foam or any other material which may cause a heat build-up.
6.2 Routing the Dual 2.4 Dual FHSS micro series receiver antenna.
Each receiver circuit of a Dual 2.4 Dual FHSS Micro receiver is fitted with a 200 mm long antenna. These antennas should each be routed in a
straight line and should be positioned so that they are at an angle of 90 degrees to each other to ensure the best possible reception.
Exception: Fuselages which are constructed from Carbon fibre or those which have a high level of carbon fibre reinforce-
ment should have the antenna routed outside the fuselage. Carbon fibre is a very good insulator against radio waves and
mounting the antenna internally would greatly reduce the range of the system. This warning also applies to models with
metal or metallic coverings which includes metallic paint.
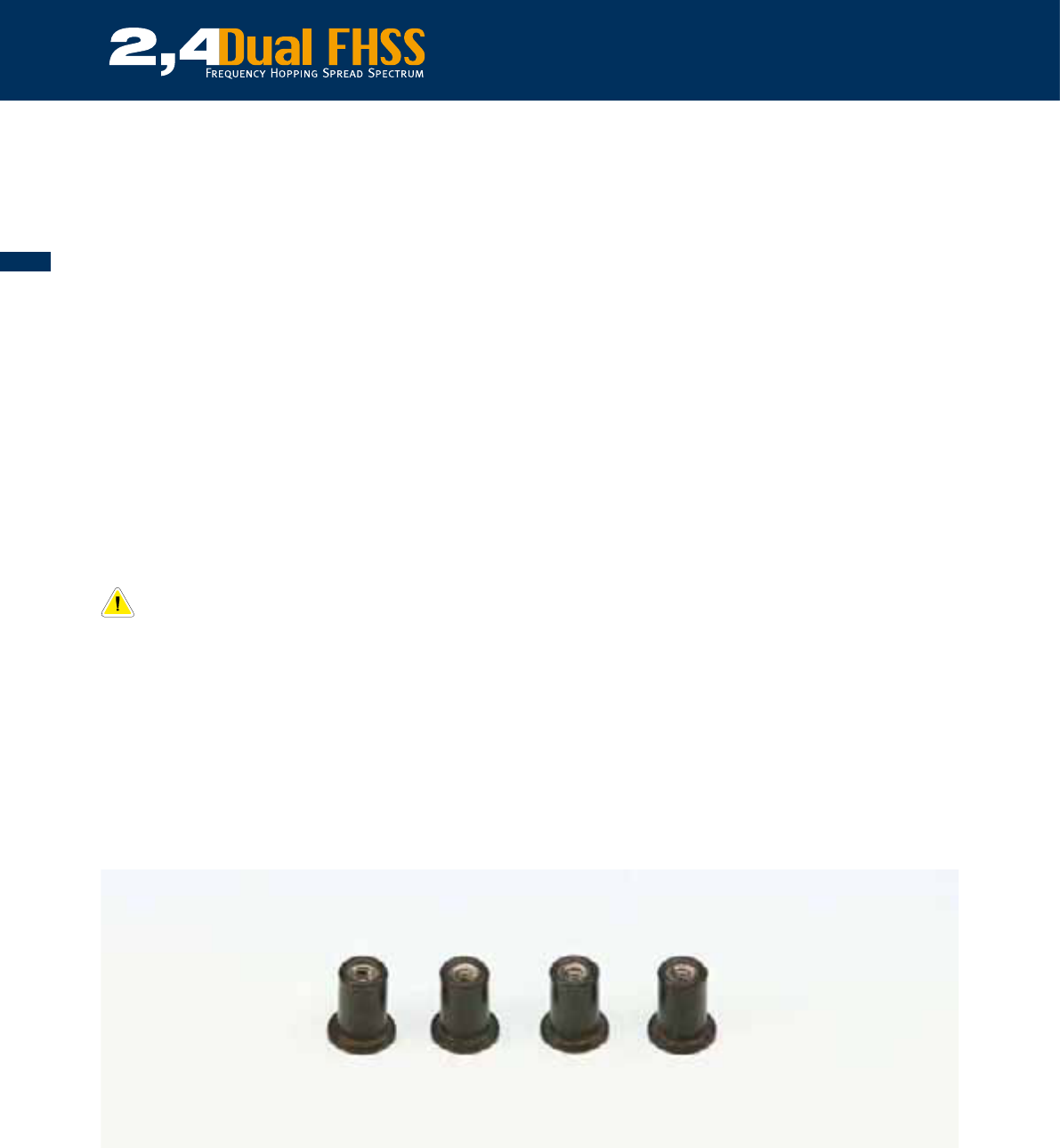
6.3 Fitting the 2.4 Dual FHSS 12-22 R series receivers.
The perfect method of mounting a Dual 2.4 MHz Dual FHSS 12-22 R receiver is to use our rubber blind nuts which are available from us. These nuts
provide the best protection against vibration whilst providing a stable and convenient method of fitting the receiver. To utilise these nuts a plate
made from ply, GRP or any other suitable material should be constructed noting that the plate must have holes cut into it in the vicinity of the bottom
of the receiver to allow sufficient cooling air to circulate around the receivers casing. The plate should then be drilled Ø 8mm and the rubber mounts
inserted, the receiver is then screwed onto the mount using 4 mm bolts.
Receiver mounting dimensions: 130 x 70 mm, Ø 8 mm.
Ø 8 mm Blind nuts provide optimal vibration protection.
If using a Dual 2.4 Dual FHSS 12-22 R Gyro II receiver, the receiver should be mounted at 90 degrees to the longitudinal axis or the fuselage and
horizontal to ensure that both gyros function correctly.
The Dual 2.4 Dual FHSS 12-22 R Gyro III, 2.4 Dual FHSS 12-22 R Gyro III + GPS and 2.4 Dual FHSS 12-30 R Gyro III + GPS receivers are fitted with
giro on all 3 axes which means that they can be mounted along or across the fuselage as long as they are mounted horizontally.
If using a GPS equipped receiver you must ensure that the top of the receiver (the side with a label attached) is upwards to ensure that the receiver
receives a good signal from the GPS satellite. Also, the fuselage directly above the receiver should not be constructed from Carbon fibre, metal,
metallic covering (chrome effect) or any other material which may shield the receiver and deteriorate the signal. Cables may also shield the receiver
and should not be routed above the receiver.

15
INSTRUCTION MANUAL
6.4 Routing the Dual 2.4 Dual FHSS 12-22 R series receiver antenna
The receiver is fitted with 2 shielded 200 mm long antennas which are equipped with SMA type screw sockets. The gold coloured locking nuts are
10 mm and should be gently hand tightened using a suitable short spanner. If the model is susceptible to vibration, a drop of ‘Pattex’ glue may be
applied to the threads to act as low tensile thread lock. In effect, only the last un-shielded 29 mms of the antenna receive the signal and they should
be located as far apart as possible at an angle of 90 degrees to each other. The antennas must lay straight and we recommend mounting them into
plastic tubes (NOT carbon fibre!) for protection.
Original antennas with SMA type connectors Coax cable extensions for external External stump areal for better reception
mounting with SMA type connectors
For fuselages which are constructed from Carbon fibre or those which have a high level of carbon fibre reinforcement we
recommend using extensions to mount the antennas outside of the fuselages (these are available in varying lengths).
Carbon fibre is a very good insulator against radio waves and mounting the antenna internally would greatly reduce the
range of the system. This warning also applies to models with metal or metallic coverings which includes metallic paint.
6.5 Safety notes
6.5.1 Checking the cables and soldered joints
We strongly recommend that you inspect all cables and soldered joints regularly for damage and that any damage is repaired immediately. Cables
and soldered joints are particularly susceptible to damage where vibration is present which is often the case with models. All soldered joints should
be re-enforced with heat shrink tube of the correct diameter.
6.5.2 Electronic ‘noise’ suppression – Electric motors
Convention brushed electric motors must have a suitable condenser fitted to suppress any electrical ‘noise’ that they may generate. Such electric
‘noise’ is created by the brush to collector contact and may cause severe interference to the receiver if it is not correctly suppressed. In particular,
the fuel pump fitted to a model jet’s turbine may create a considerable amount of electrical ‘noise’ and as such you should follow the manufactur-
ers recommendations closely when fitting the pump.
6.5.3 Electronic ‘noise’ suppression – Electronic ignition systems
Electronic and magnet driven ignition systems also produce high levels of electronic ‘noise’ which can cause interference or drastically reduce the
system’s range. Always use a separate battery supply for the ignition to enable you to place the pack as near as possible to the ignition unit and
keep the leads as short as possible. Spark plugs, plug caps and HT/LT cables must be screened and the receiver system including all servos and cables
should be kept as far as possible away from the ignition system.
6.6 Laying the cables for use on jets
The ECU must not be positioned near to the receiver (minimum distance 10 cms). All cabling for the ECU and its components (battery pack, pump,
data BUS, turbine cables etc.) must be kept away from the receiver system cables (receiver battery, servo, switch etc.).
www.weatronic.com

16
7 Using the system with a Dual 2.4 Dual FHSS micro series receiver
7.1 General
The Dual 2.4 Dual FHSS micro series receivers are available in 8, 10 and 12 channel versions and can be used as any other ‘normal’ receiver would be
used. In this case the transmitter functions are used to alter the behaviour of the sevos (for example, Dual Rate). However, before use all Dual 2.4
dual FHSS micro servos must be bound to the transmitter before use.
For the more demanding or experienced modeller we have developed our programming program, GigaControl. Using this
program the receiver can be programmed to perform several useful functions, for example, for setting the receiver outputs
to the function which you require, programming servo travel, delayed reaction and sequencing. Unfortunately, the Dual
2.4 Dual FHSS micro series of receivers does not support the multi-servo synchronising feature or the individual servo
voltage settings. For more information, please see Para. 9.
7.2 Dual 2.4 Dual FHSS micro 8/10/12 series receivers
7.2.1 Receiver LEDs and their function
The Dual 2.4 Dual FHSS micro receiver is fitted with 2 LEDs
• 1 green LED labelled “Binding” – “On/Off“
• 1 red LED labelled “Status“
On switching on the system, both LEDs will illuminate briefly.
• Green LED:
LED off -> Receiver switched off
Illuminates solidly -> Connection OK, bi-directional mode
Shoirt flashes-> Uni-directional mode
Slow regular flashes -> Binding
• Red LED:
Flashing -> Failsafe programming active
Further codes/flash combinations -> Not yet allocated
Dual Receiver 2.4 Dual FHSS micro 12
17
INSTRUCTION MANUAL
7.2.2 Binding a Dual 2.4 Dual FHSS micro series receiver to the transmitter module
You can bind as many receivers as are required to each transmitter module/transmitter as each transmitter module transmits an individual code, of
which there are millions, to the receiver which must store the code before it will become ‘live’. This makes it impossible for more than one weatronic
receiver to react to a weatronic transmitter module at the same time.
Before a weatronic transmitter module and a weatronic Dual 2.4 Dual FHSS series receiver can communicate with each other they must be bonded
together (Quick Binding). During this binding process the receiver will receive and store the code transmitted by the transmitter module and the
transmitter module will receive and store the receiver’s serial number. Once this process is complete, the receiver will only react to signals transmitted
by that transmitter module. The process for binding a receiver to a transmitter module is very simple and should be carried out as follows:
During this process, you must ensure that the transmitter module and the receiver are a minimum of half a metre (50 cms)
apart.
Two buttons are fitted to the transmitter module, labelled “Button 1” and “Button 2”. These buttons become active a few seconds after switching
on the transmitter and this will be signalled by all 3 LEDs flashing. Once the transmitter is switched on and the module has conducted it’s self-test
the red LED will flash as the module is not receiving a return signal and the green LED will omit a short double flash indicating that it is not bonded.
The transmitter module is now ready for bonding. Begin the bonding process by pressing “Button 2” for at least 5 seconds, at which point the green
LED will begin to flash rhythmically.
The Dual 2.4 Dual FHSS micro receiver should now be switched on or power connected. Once the receiver is switched on the red jumper should be
fitted to the pins on the side of the receiver opposite the servo sockets. The jumper can be fitted either to the upper and middle or to the lower and
middle pins and binding will begin after approximately 5 seconds.
Once the transmitter module and the receiver are bonded together the green “STATUS“ LED will illuminate solidly on both components. The red
jumper may now be removed from the receiver.
Weatronic transmitter module showing the earphone socket on the left, the USB cable socket and the SD Micro card slot
7.2.3 Quick Binding
As the serial number of each Dual 2.4 Dual FHSS micro receiver which has been bonded to it is stored within the module’s memory, re-bonding (quick
Binding) a receiver is extremely quick and easy. Simply switch on the transmitter followed by the receiver and once the self test is complete press
“Button 2” once briefly, finished! When the Quick Binding process is complete the green “STATUS” LEDs on both the transmitter module and the
receiver will flash at regular intervals (twice per second). / will illuminate solidly.
7.2.4 Failsafe settings for the Dual 2.4 Dual FHSS micro series receiver
The Fail Safe function of a Dual 2.4 Dual FHSS micro receiver is activated and set using the transmitter and all channels can be given a Fail Safe
position. To set the Fail Safe positions the red jumper must be fitted to the lower (red, black) pins on the receiver before the receiver is switched on.
18
This will have put the receiver into Fail Safe setting mode. To set any the value for any function that function must be moved through it’s full range
(to facilitate this, the Servo Travel value must be set at more than 60% on the transmitter) and then moved to the desired position. If the jumper is
then removed before the receiver is switched off, the value will be stored.
Fail Safe will be activated for all functions which have been moved before the jumper is removed and the last position of any sticks, knobs or sliders
will be stored by the receiver. Any functions which have not been moved to activate the Fail Safe function will default to the middle (neutral) position.
The Fail Safe settings are only saved within the receiver if the jumper is removed before the receiver is switched off, if the receiver is switched off before
the jumper is removed the previous settings will be retained.
7.2.5 Range Testing
Before you can conduct a range test the transmitter module must have been bonded to the 2.4 Dual FHSS receiver, see Para. 8.2.2.
• The first Step in conducting a range test is to put the transmitter module into range test mode which will reduce the transmitter’s output to
10 mW which is 1/10 of the normal output. To access to this mode switch the transmitter on and wait until the yellow “TEST“ LED goes
out indicating that the self test is complete “Button 1” (the right hand button) should then be pressed for at least 5 seconds.
• The yellow LED (“TEST“) will then begin to flash slowly at regular intervals indicating that the transmitter module is in range test mode.
For safety reasons, the transmitter module will only remain in range test mode for 60 seconds, after which time it will revert to normal mode
and the output return to full strength.
• Once 1 minute has expired if you have not completed the range test but wish to continue with it, the system must be switched off before
switching it back on prior to carrying out the steps detailed above once again. This will put the module back into range test mode for a
further 60 seconds.
• Walk away from the model with the transmitter and operate all of the controls for a distance of 80-100 steps. Keep the transmitter pointed
at the model and all of the controls must work perfectly.
If the range check fails, do not attempt to operate your model under any circumstances!! If the receiver fails to receive a
‘clean’ signal, the red “ERROR“ LED on the transmitter will flash. If the range check has failed, carefully check the model’s
installation including all cables, the receiver battery, the receiver switch as well as all plugs and sockets. The transmitter
battery should also be checked for sufficient power.
When conducting the range test, the return signal from the receiver will also be tested. This signal is transmitted from the
left hand antenna and for this reason if the left antenna is located in a poor position relative to the transmitter, a lack of
range may be indicated by the transmitter module. This situation will be amplified if the model is placed on wet grass.
7.2.6 Setting the country code
There are 2 country code settings:
• World: the complete frequency band from 2,401 to 2,4835 GHz will be used
• France: 2,401 – 2,453 GHz will be used
The factory setting is 2,401 to 2,4835 GHz (world).
To change the country code switch on the transmitter and wait until the self test is finished and press both buttons on the transmitter module si-
multaneously for 5 seconds. The module will now be in change country code mode which will be indicated by all 3 LEDs flashing together.
Slow rhythmical single flashes: World
Slow rhythmical double flashes: France
Pressing both buttons again will change the country code
A further method of changing the country code is outlined in Para 10.2
7.3 Dual 2.4 Dual FHSS micro receiver with Gyro
A 2.4 Dual FHSS Micro Gyro receiver must be configured using the GigaControl software. Please install the Software in accordance with Para 9.4.

19
INSTRUCTION MANUAL
8 Power supply for the Dual FHSS micro receiver
The 2.4 Dual FHSS micro receiver operates on a voltage of between 4.00 and 10.0 volts. If you are operating a model which is fitted with 4.8 V servos
a 4 cell NiMH battery pack should be used. If using 6.0 V servos you should use a 5 cell pack. In both cases we recommend the use of a weatronic
electronic switch.
You can of course choose another make of switch or use a LiPo voltage regulator if desired. The capacity of the packs which you use will depend upon
how many servos you operate and what their current draw is.
The total current draw of all of the servos working under full load must not exceed 6 Amps otherwise the receivers circuit
board may be damaged.
9 Using the system with a 2.4 Dual FHSS 12-22 R series receiver
9.1 General
Professionally developed, tried and tested firmware driving high power micro processors make the weatronic 2.4 Dual FHSS 12-22 R series receivers
combined with the weatronic transmitter module an incredibly reliable and powerful combination. To get the best performance out of your system
you will need a laptop or PC loaded with our GigaControl software which will not only allow you to analyse data gathered during your flights, but
will also enable you to make many changes to the internal settings of the hardware. Our software is included with all components which we supply
and it can also be downloaded from www.weatronic.com under Downloads. To ensure the best possible results, always install the software from you
own disk or download and do not use a version from a third party. Once you have the software installed onto your PC, all you will need is a Mini USB
cable and you will be able to perfectly tune your system to your model.
Dual Receiver 2.4 Dual FHSS 12-22 R Gyro II with electronic switch board
9.2 Features
The 2.4 Dual FHSS 12-22 R series receivers and a further development to our well known Dual Receiver12-20 R 35, 36 and 72 MHz range. Our design
target was quite simple, to create an on-board control system that will offer the maximum in reliability using the new 2.4 GHz broad band technology
which incorporates a dual power supply circuit capable of handling enough current to be able to supply today’s modern digital servos.

20
The power supply system consists of no less that 8 separate power circuits which can be independently set to a value of 4.8 or 6 Volts and which
can deliver a constant 32 Amps. at 6 Volts with a 50 Amp. Burst rating. The voltage regulators are cooled by anodised milled aluminium heat-sinks
located on the bottom of the unit.
A further aim was to incorporate a system whereby various data could be stored during the flight to be later recalled for analysis. We have achieved
this by incorporating a flash drive using an SD Micro card into the receiver and a similar system in the transmitter module to record the data sent
back from the receiver.
2.4 GHz technology allows information regarding the telemetry and system information to be transmitted back to the transmitter and by using our
GigaControl Software you can follow the flight on your PC in real time.
We also wanted to use the latest technology to make flying large expensive models not only safer but also to assist the pilot in flying them. This has
been achieved with our 2.4 Dual FHSS 12-22 R Gyro II, 2.4 Dual FHSS 12-22 R Gyro III, 2.4 Dual FHSS 12-22 R Gyro III + GPS und 2.4 Dual FHSS 12-
30 R Gyro III + GPS receivers by incorporating a 2 or 3 channel state of the art Gyro. These Gyros are extremely temperature stable and can operate
in Normal or Heading Hold mode. The rate can be set via the software or from the transmitter and can be assigned to any channel.
The receiver outputs can be freely assigned to any transmitter output and up to 8 servos can be synchronised if they are connected to the same control
surface simply by a click of the mouse. The full description of all of the functions which can be set using the GigaControl software are fully described
in Para. 10.
9.3 Versions
Dual Receiver 2.4 Dual FHSS 12-22 R
12 channel (extendable to 16), 22 freely programmable outputs, 8 voltage regulators, data record, return channel, external sensor sockets, battery
test
Dual Receiver 2.4 Dual FHSS 12-22 R Gyro II
As above, plus a 2 channel Normal/Heading Hold Gyro for use on the X/Y axes
Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III
As above, plus a 3 channel Normal/Heading Hold Gyro for use on the X/Y/Z axes
Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III + GPS
As above, plus a GPS Logger
Dual Receiver 2.4 Dual FHSS 12-30 R Gyro III + GPS
As above, with 30 outputs
9.4 The ON/OFF switching board
The ON/OFF switching board is fitted with 2 LEDs, 1 red (labelled “Battery”) and 1 green (labelled “Status”) which provide information regarding the
condition of the receiver battery. The Dual receiver itself is equipped with 3 LEDs, 2 of which (red for “Battery” and green for “Status”) mirror the
LEDs on the ON/OFF switching board, and there meaning and an explanation of the flashes which they omit is shown in Annex 3. The 3rd yellow LED
indicates that information is been written to the SD Micro card. On the rear side of the switching board are 2 sockets for further LEDs.
9.5 Binding the transmitter to a Dual Receiver
You can bind as many receivers as are required to each transmitter module/transmitter as each transmitter module transmits an individual code, of
which there are millions, to the receiver which must store the code before it will become ‘live’. This makes it impossible for more than one weatronic
receiver to react to a weatronic transmitter module at the same time.
Before a wWeatronic transmitter module and a weatronic Dual 2.4 Dual FHSS series receiver can communicate with each other they must be bonded
together (Quick Binding). During this binding process the receiver will receive and store the code transmitted by the transmitter module and the

21
INSTRUCTION MANUAL
transmitter module will receive and store the receiver’s serial number. Once this process is complete, the receiver will only react to signals transmitted
by that transmitter module. The process for binding a receiver to a transmitter module is very simple and should be carried out as follows:
During this process, you must ensure that the transmitter module and the receiver are a minimum of half a metre (50 cms)
apart.
Two buttons are fitted to the transmitter module, labelled “Button 1” and “Button 2”. These buttons become active a few seconds after switching
on the transmitter and this will be signalled by all 3 LEDs flashing. Once the transmitter is switched on and the module has conducted it’s self-test
test the red LED will flash as the module is not receiving a return signal and the green LED will omit a short double flash indicating that it is not
bonded. The transmitter module is now ready for bonding. Begin the bonding process by pressing “Button 2” for at least 5 seconds, at which point
the green LED will begin to flash rhythmically.
Switch the 2.4 Dual FHSS 12-22 R series receiver on by removing the red “Remove Before Flight” jumper and then insert the blue “Binding”
jumper into place in the switching board. Once the transmitter and receiver are bound, the green “Status” LED on the both the transmitter module
and the receiver will go solid and the blue “Binding” jumper can be removed.
9.6 Quick Binding
As the serial number of each 2.4 Dual FHSS receiver which has been bonded to it is stored within the module’s memory, re-bonding (quick Binding)
a receiver is extremely quick and easy. Simply switch on the transmitter followed by the receiver and once the self test is complete press “Button 2”
once briefly, finished! When the Quick Binding process is complete the green “STATUS” LEDs on both the transmitter module and the switching
board will illuminate solidly.
9.7 Range testing
Before you can conduct a range test the transmitter module must have been bonded to the 2.4 Dual FHSS, see Para. 9.5.
• The first step in conducting a range test is to put the transmitter module into range test mode which will reduce the transmitter’s output to
10 mW which is 1/10 of the normal output. To access to this mode switch the transmitter on and wait until the yellow “TEST“ LED goes
out indicating that the self test is complete “Button 1” (the right hand button) should then be pressed for at least 5 seconds.
• The yellow LED (“TEST“) will then begin to flash slowly at regular intervals indicating that the transmitter module is in range test mode.
For safety reasons, the transmitter module will only remain in range test mode for 60 seconds, after which time it will revert to normal mode
and the output return to full strength.
• Once 1 minute has expired if you have not completed the range test but wish to continue with it, the system must be switched off before
switching it back on prior to carrying out the steps detailed above once again. This will put the module back into range test mode for a
further 60 seconds.
• Walk away from the model with the transmitter and operate all of the controls for a distance of 80-100 steps. Keep the transmitter pointed
at the model and all of the controls must work perfectly.
If the range check fails, do not attempt to operate your model under any circumstances!! If the receiver fails to receive a
‘clean’ signal, the red “ERROR“ LED on the transmitter will flash. If the range check has failed, carefully check the model’s
installation including all cables, the receiver battery, the receiver switch as well as all plugs and sockets. The transmitter
battery should also be checked for sufficient power.
When conducting the range test, the return signal from the receiver will also be tested. This signal is transmitted from
antenna 1 and for this reason if antenna 1 is located in a poor position relative to the transmitter, a lack of range may be
indicated by the transmitter module. This situation will be amplified if the model is placed on wet grass.
10 Power management for the 2.4 Dual FHSS 12-22 R series receivers
10.1 Functions
The weatronic Dual Receivers are fitted with a high current power system for dealing with modern high current draw digital servos and consists of 8
separate circuits, all of which are protected against shorting. Each circuit can draw a maximum of 5 Amps constant which means that you can safely
draw up to 40 Amps. in total providing that the receiver is sufficiently cooled and for short (burst ) periods even higher currents can be drawn. The
GigaControl software can be used to change the output voltage form 4.8 to 6 Volts and the factory settings it 4.8 Volts so please be aware of this
when choosing your servos.

22
The power supply circuit is fed by two battery packs, in normal operation a high current main pack will provide the power and in the event of the
failure of the main pack due to a cell being defective, an empty pack, a short circuit, a poor contact within the plug/socket or any other cut the 2nd
battery pack will cut-in. If the receiver switches to the back-up (2nd) battery it will be indicated by the red “Battery” LED on the receiver. For this
reason it is useful if this LED is visible from outside the aircraft and a second LED can be remotely mounted from the unit.
10.2 Battery test function
On switching on, a battery test will be conducted which consists of the main and secondary battery packs being subjected to a 25 msec. 7 Amp load
during which time the packs voltage drop will be measured. If either of the packs drops to below a pre-set value the red “Battery” LED will illuminate
and this will prevent you from taking off with batteries which are not sufficiently charged. Depending upon the type of battery packs used, the warning
voltage can be set as outlined in Para. 12.2.2
The following battery packs can be used:
• 2 Cell (2C) Lithium Polymer Batteries nominal voltage 7,4 Volt, minimum current rating 20 C. minimum capacity 2500 mAh
• 3 Cell (3C) Lithium Iron Phosphate Batteries (A123 Cells), nominal voltage 9,9 Volt
• 6 Cell NimH Batteries, nominal voltage 7,2 Volt, minimum size SUB C
All weatronic battery packs are of high quality high current draw packs with the lowest internal resistance. They are all fitted with silicon wire and
Multiplex high current plugs. You may of course use battery packs from a 3rd party providing that they meet the required specifications and quality.
On no account should AA of Eneloop type cells be used. To be on the safe side we strongly recommend that you use packs
which are currently favoured by pilots flying with the current breed of high power brushless systems.
10.3 Selecting a battery with the correct capacity
When choosing batteries for your system, the capacity of the main battery pack is most important factor and if necessary packs should be connected
in parallel to achieve sufficient capacity. The nominal voltage should be between 7.2 and 10.0 volts. For the secondary pack 2000 mAh will normally
be sufficient as this pack will only be required to power the model for 1 flight + 100% for a safety margin. The red LED will warn you of a problem
with the main battery pack (see Annex 2 for blink codes) giving you a chance to solve the problem or to re-charge the pack
We recommend battery packs with the following capacities:
• Acrobatic models with a wingspan of 3 Meters and 9-12 high current digital servos:
Main pack: 4000 - 6000 mAh
Reserve pack: 2000 - 4000 mAh
• Acrobatic models with a wingspan of 2.5 Meters and 7-10 high current digital servos:
Main pack: 3000 - 4000 mAh
Reserve pack: 1500 - 2000 mAh
• Medium sized jets:
Main pack: 3000 - 6000 mAh
Reserve pack: 1500 - 2000 mAh
• Large jets or scale model with many functions and features:
Main pack: 4000 - 8000 mAh
Reserve pack: 2000 - 4000 mAh
10.4 Caring for battery packs
Caring for your battery packs correctly is vitally important! Failure to do so can lead to a failure of the on-board electronics with catastrophic results,
which may not only be dangerous but will also be very expensive! Although the chances of suffering a failure of 2 packs is considerable less than
when flying with only one pack, you should still take great care over the choice and maintenance of your battery packs. Disregarding pilot error
battery failure is one of the main reasons for aircraft crashing. For safety reasons weatronic recommend the use of high quality battery packs which
are charged with and maintained by a good quality micro processor driven charger.
23
INSTRUCTION MANUAL
Warning: Before charging your battery packs test the charger to see if the voltage begins at 0 V and then rises to the
correct voltage or if it give a short ‘burst’ of high voltage to test the battery first. If your charger gives a high voltage burst
to begin, you must disconnect your packs from the Weatronic receiver first as the high voltage ‘burst’ will damage the re-
ceiver.
10.5 Lithium Polymer (LiPo) Batteries
LiPo battery packs have no memory effect and do not suffer from self-discharge (less that 5% per year) and due to this you should store your packs
with a 50% charge and they do not need to be discharged before you re-charge them. The perfect method of storing LiPo packs is to have each cell
at a voltage of 3.7 – 3.9 V which should equate to 50 – 70% charge and that is the condition in which the manufacturers distribute them. The only
time when it is advantageous to discharge your packs is after storing them over winter, during which time the packs should be kept cool (cellar) if
possible. You can expect the capacity of your packs to drop by around 20% over a period of 3 years. As individual cell voltages tend to drift, you
should always use a Balancer connected between the packs and the charger when charging. The following points should be followed when charging
LiPo battery packs to prevent the risk of a fire.
Avoid short-circuits at all costs! Never let the poles of a LiPo cell or pack come into contact with a metal object as the high
discharge current will cause the cells to ignite within milliseconds.
Never subject them to a mechanical load and protect them from damage.
Do not damage the soldering tags or attempt to re-solder them.
To ensure 100% safety when charging LiPo packs, they should be removed from the model and placed into a ceramic con-
tainer or a specially designed LiPo bag or a metal container.
LiPo packs can only be charged using a charger which is designed for that use. LiPos require a different method of
charging than other types of cells and the use of an incorrect charger will destroy the cell and could lead to a fire.
Double check that your charger is set to the correct number of cells and that the current and discharge voltage settings
correspond to the capacity of the cells which you are using. Refer to the battery manufacturers recommendations as well
as your chargers instructions.
After a crash LiPo cells should always be replaced as they may be damaged internally even if they appear to be OK from
the outside.
To prevent one of the cells within a pack being over-charged or too deeply discharged it is vital that a balancer is used.
10.6 Lithium Iron Phosphate (LiFe) Batteries
Lithium Iron Phosphate packs have an extremely low internal resistance which mean that they can be subjected to high loads without the voltage
dropping. They can also be fast charged and have a long life expectancy. The nominal voltage per cell is 3.3 Volt and due to their chemical composition
they can be charged at up to 4 C which means that the pack can be fully charged in 15 – 30 minutes.
10.7 Nickel Metal Hydride (NiMH) Batteries
Nickel Metal Hydride packs do not suffer from memory effect but do have a noticeable self-discharge rate and for this reason packs should be
discharged after use to 90% of their nominal voltage and then re-charged shortly before you intend to use them. If the packs have been stored over
a longer period of time, it is advantageous to cycle the packs a couple of times using a computer controlled charger to ensure that they are producing
their full capacity. Long-term storage (for example, over winter) should be at between +10 and +30°C.
Weatronic recommend replacing NiMH packs every 2 years as after 2 years their reliability may reduce and a new pack will cost a fraction of what
a crash would.
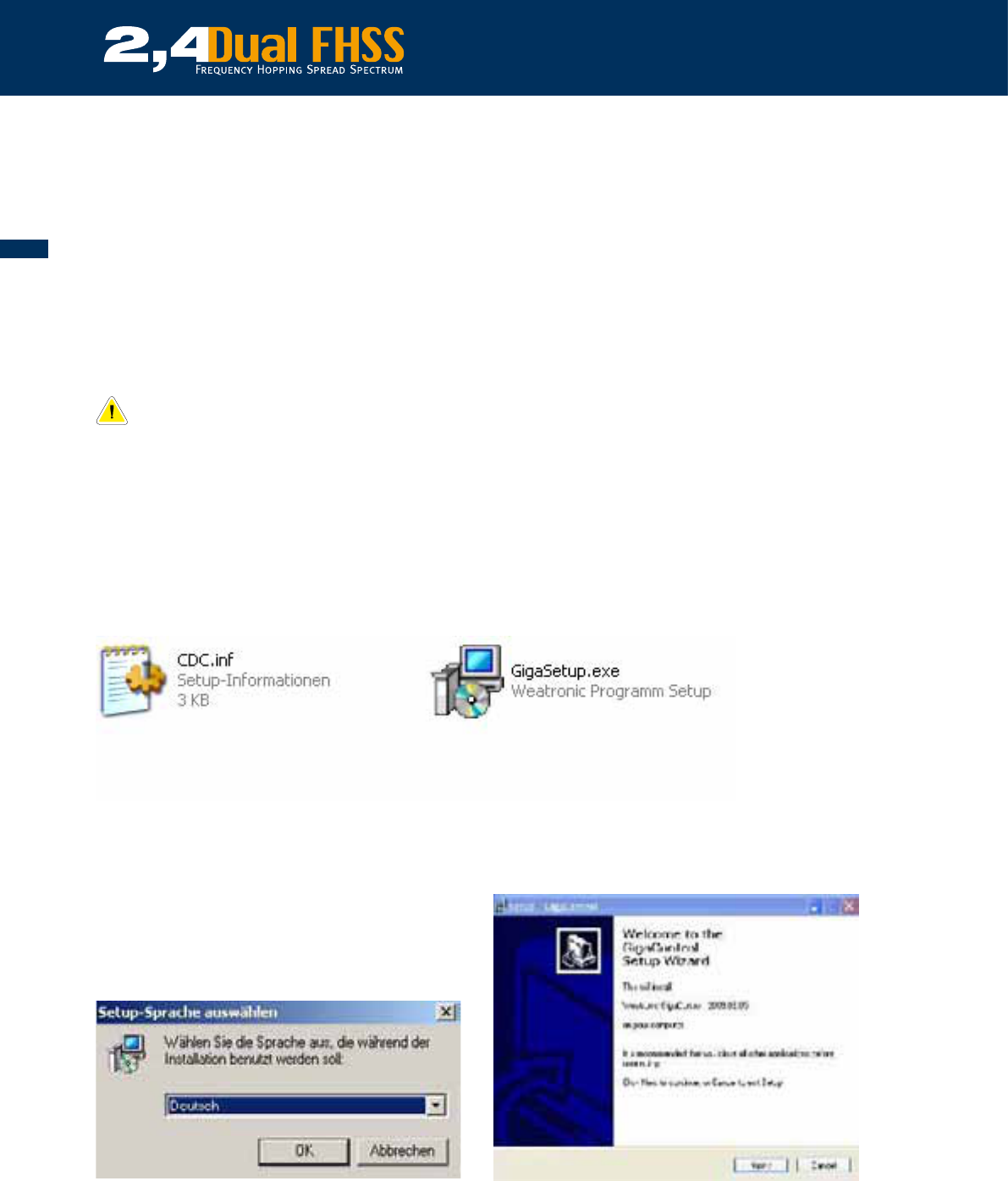
24
11 The GigaControl software
11.1 General
The weatronic GigaControl software offers a multitude of options for programming you system, for example, output channel allocation, delay, sequen-
cing, synchronising groups of servos and many more functions.
Another useful feature is the option to store the settings which you have selected on your computer for future use.
11.2 Installing the software
Note: The GigaControl software must be fully installed onto your PC before you connect a 2.4 Dual FHSS receiver to the
computer via the USB cable.
• Place the installation CD into the CD/DVD drive of your computer. The CD contains the weatronic software packet, the weatronic GigaControl,
the firmware for the transmitter module, firmware for both receiver variants as well as configuration examples.
• The installation program should start automatically. Follow the on-screen instructions.
• If you have switched the auto-start function off on your computer you will have to open ‘My Computer’ and select your disk drive. Use the Explo-
rer option to open the disk and select GigaSetup.exe from the list. This will start the installation assistant and you should then follow the ins-
tructions on your screen to install the GigaControl Software.
Double clicking the Icon GigaSetup (weatronic program setup) will open the following window:
Select your desired language and click ‘OK’. The following window Click ‘Next’ to open the next window:
will open:
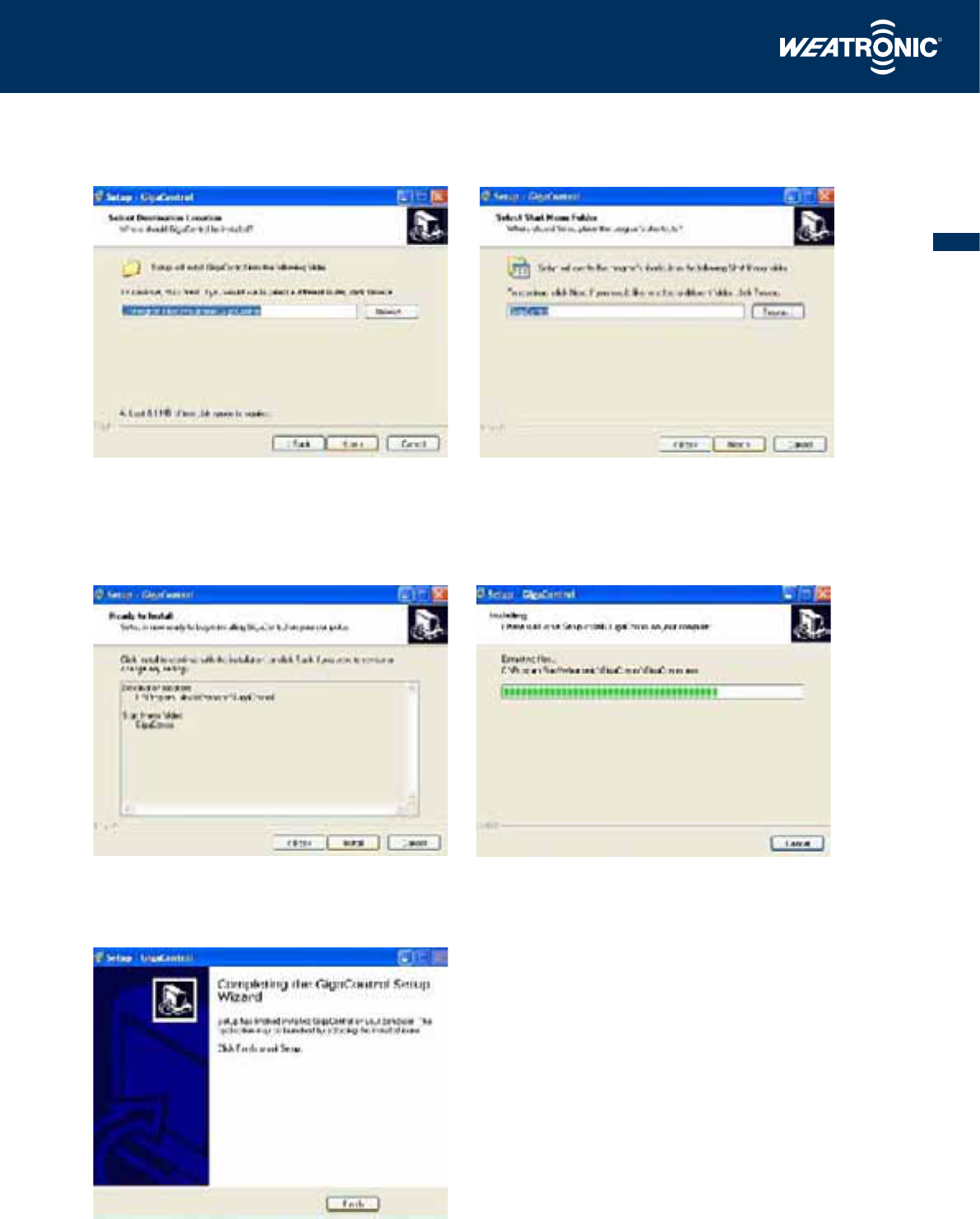
25
INSTRUCTION MANUAL
The GigaControl Software will be installed into the directory shown. Click ‘Next’.
Click ‘Next’ to accept the choice of folder and the following
information window will open: After a few seconds the following window will open:
Click ‘Install’ and the GigaControl software will begin with the in- Wait until the installation is complete at which time the following
stallation. After a few seconds the following window will open: window will open:
Please click ‚Finish’ to complete the installation and the software will have been installed onto your computer.
Using Windows Explorer the path C:\Programs\Weatronic\GigaControl will reveal the Icons for the software which has been installed as well as the
folder ‘Firmware’ which contains the latest software versions for the weatronic transmitter module and receivers.
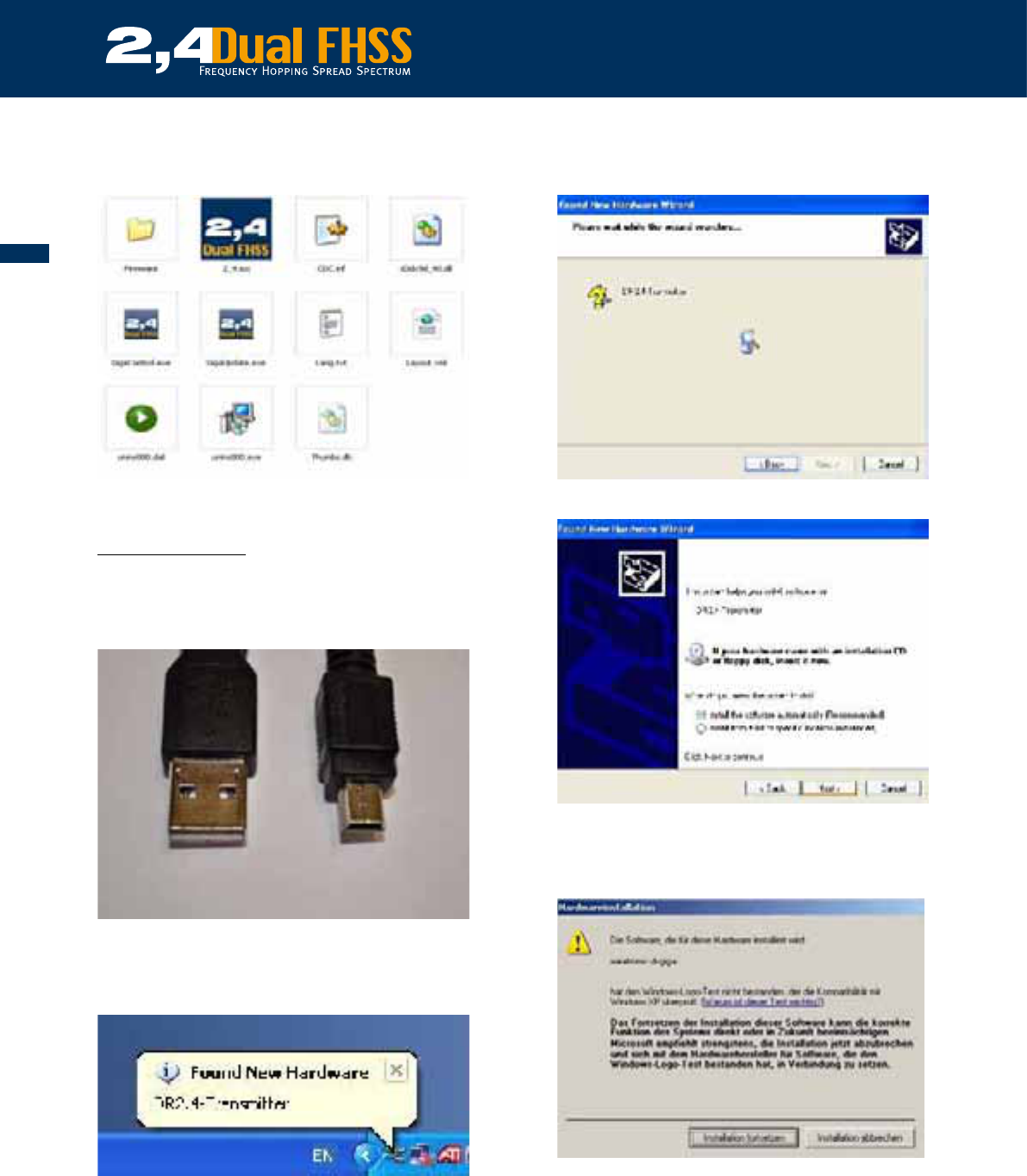
26
Now you will have to install the USB drivers so that the weatronic
hardware will be recognised by your computer.
Installing the USB drivers:
Connect your weatronic transmitter module to your computer by
plugging the Mini USB cable into the transmitter module and then
into a free USB socket on your computer.
Your computer will recognise the weatronic hardware:
The following screen will then open:
Select the option ‘Automatically install software’ and allow Win-
dows to install the drivers. If Windows fails to find the drivers,
select ‘Include this location in the search’ and select the path C:\
programs\Weatronic\GigaControl.
Choose ‘Install’.
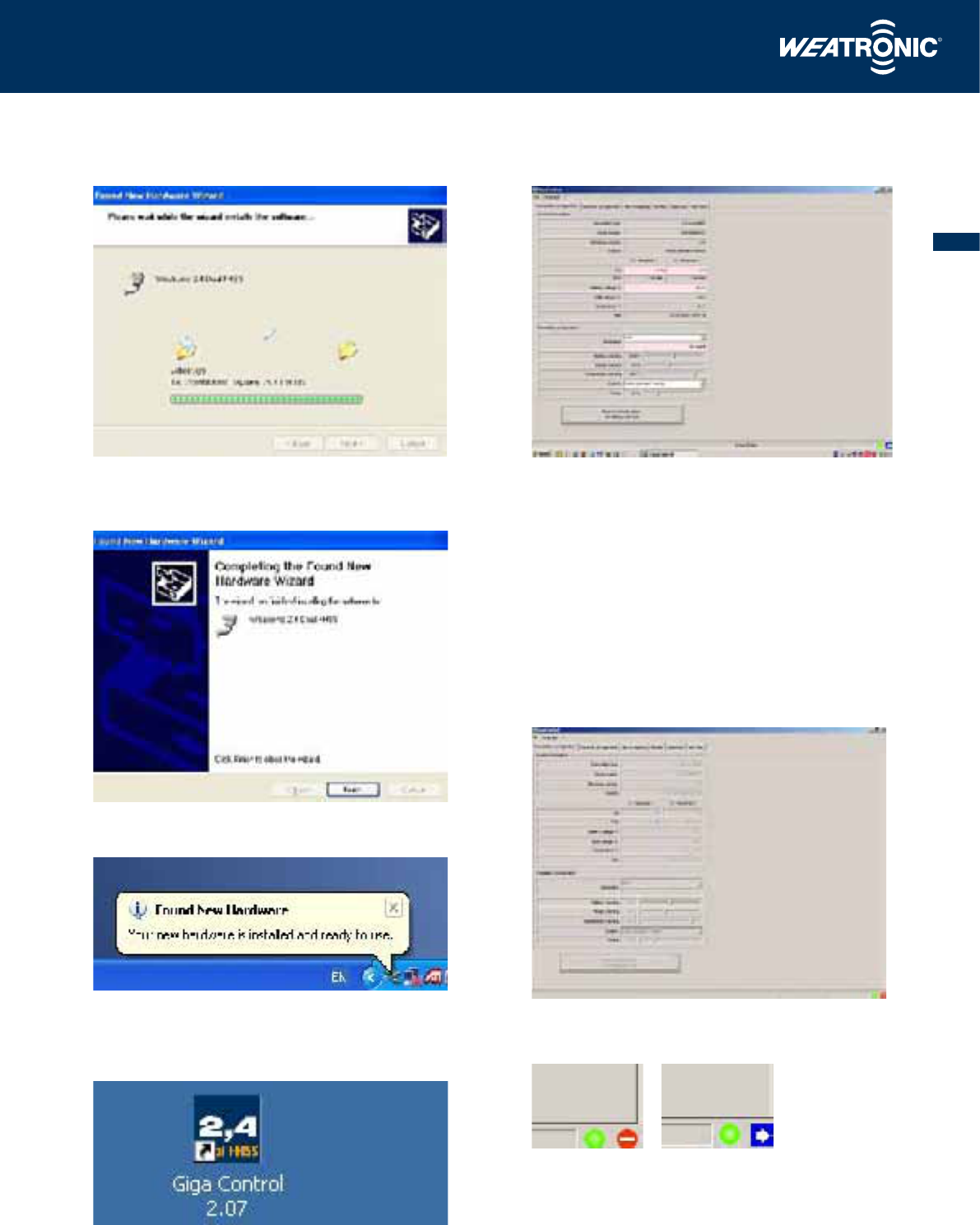
27
INSTRUCTION MANUAL
The USB drivers for the weatronic transmitter module will now be
installed. Wait until the drivers are installed and the following win-
dow will open:
Click ‘finished’ and Windows will inform you that the hardware
was successfully installed:
Your computer can now communicate with the transmitter module.
To test this, left mouse click on the weatronic GigaControl icon on
your desktop.
The start-up window will now open:
Check that a white arrow on a blue background is displayed in
the bottom right hand corner as shown here, this proves that the
transmitter module is communicating with the computer.
11.3 Configuring 2.4 Dual FHSS
RC Systems receivers
Various settings within the GigaControl software can be changed
using a simple ‘mouse click’ and “Arrow up” and “Arrow down
“keys. ¥£¢¤
Start the GigaControl software and the following window will be
displayed. This window is the ‘Transmitter Configuration’ window:
In the lower right hand corner the following symbol will be dis-
played:
The red ‘No-Entry’ symbol indicates that nothing is connected to
the USB cable. A white arrow on a blue background indicates that
a transmitter module is connected to the USB cable but no receiver
is in use.
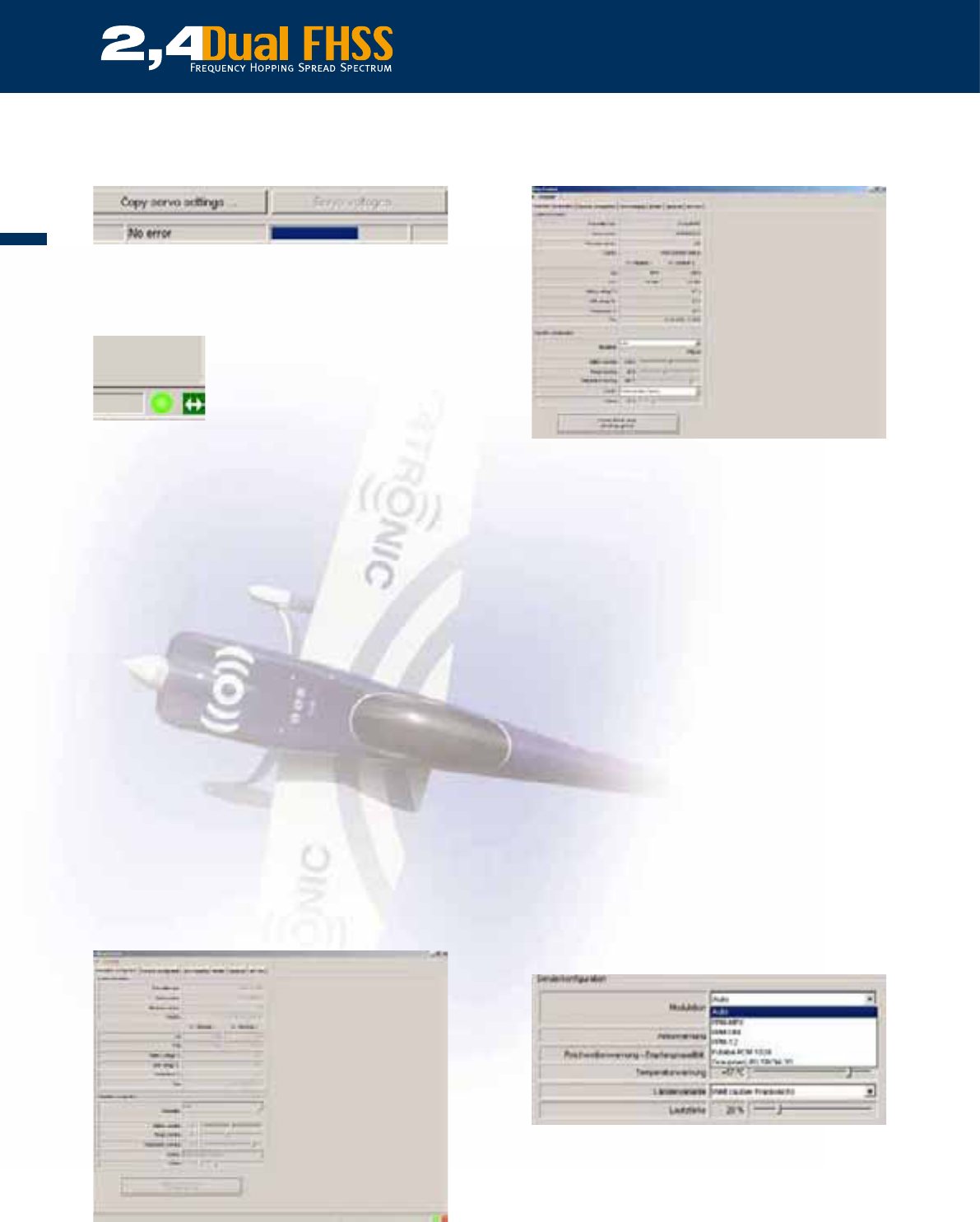
28
This screen will be displayed after a receiver is connected but before
the software is ready. This process can take several seconds and the
progress will be indicated by the blue bar and the hour glass.
A white double ended arrow on a green background indicates that
a transmitter module is connected to the computer via a USB cable
and that the computer is communicating with a receiver.
Plug the red ‘Remove Before Flight’ jumper into the switching
board and connect at least 1 suitable batter pack, remove the red
jumper and the receiver is switched on. If using a Dual 2.4 Dual
FHSS Micro receiver it is only necessary to connect a battery.
The receiver communicates with the computer via the transmitter
module which is why the transmitter module must be connected
using the Mini USB cable and the receiver switched on to make
the link.
The following windows can be opened:
• Transmitter configuration
• Receiver configuration
• Servo mapping
• Monitor
• Spectrum
• NavView
11.3.1 Transmitter configuration
Click on the window “Transmitter configuration” and various infor-
mation will be displayed regarding the transmitter and weatronic
transmitter module which is connected to the computer. If a trans-
mitter in NOT connected, the window will look like this:
Once a transmitter is connected via the USB cable and information
is being received by the computer the window will look like this:
The first 4 boxes display system information, the transmitter type,
the serial number, the firmware version and the country setting.
The next 6 boxes show the actual measured values for the trans-
mitter and display the information as follows:
• The signal quality of the return signal for both channels
• The transmitter voltage
• The temperature on the TX module`s pcb
• The USB voltage
• The transmitter module main circuit board temperature
• The time and date
The date and time settings are read from a ‘real time’ clock chip
built into the transmitter module and they form the base for data
stored on the Micro SD card if fitted. This will enable you to analyse
flight data accurately.
The next 6 boxes show the transmitter configuration information
and these are the setting which can be altered. The factory setting
for modulation is “Auto” which can be changed if your transmitter
uses a particular type of modulation, for example:
• JR/Graupner S-PCM,
• Futaba PCM 1024,
• PPM variations,
The correct modulation for your transmitter can be selected by clik-
king the drop down box next to “Modulation“ where one of the
following settings can be selected.
The following 3 options can be used to set the level at which an
acoustic signal (if an earphone is fitted) or when the red transmit-
ter module “Error“ LED will flash.
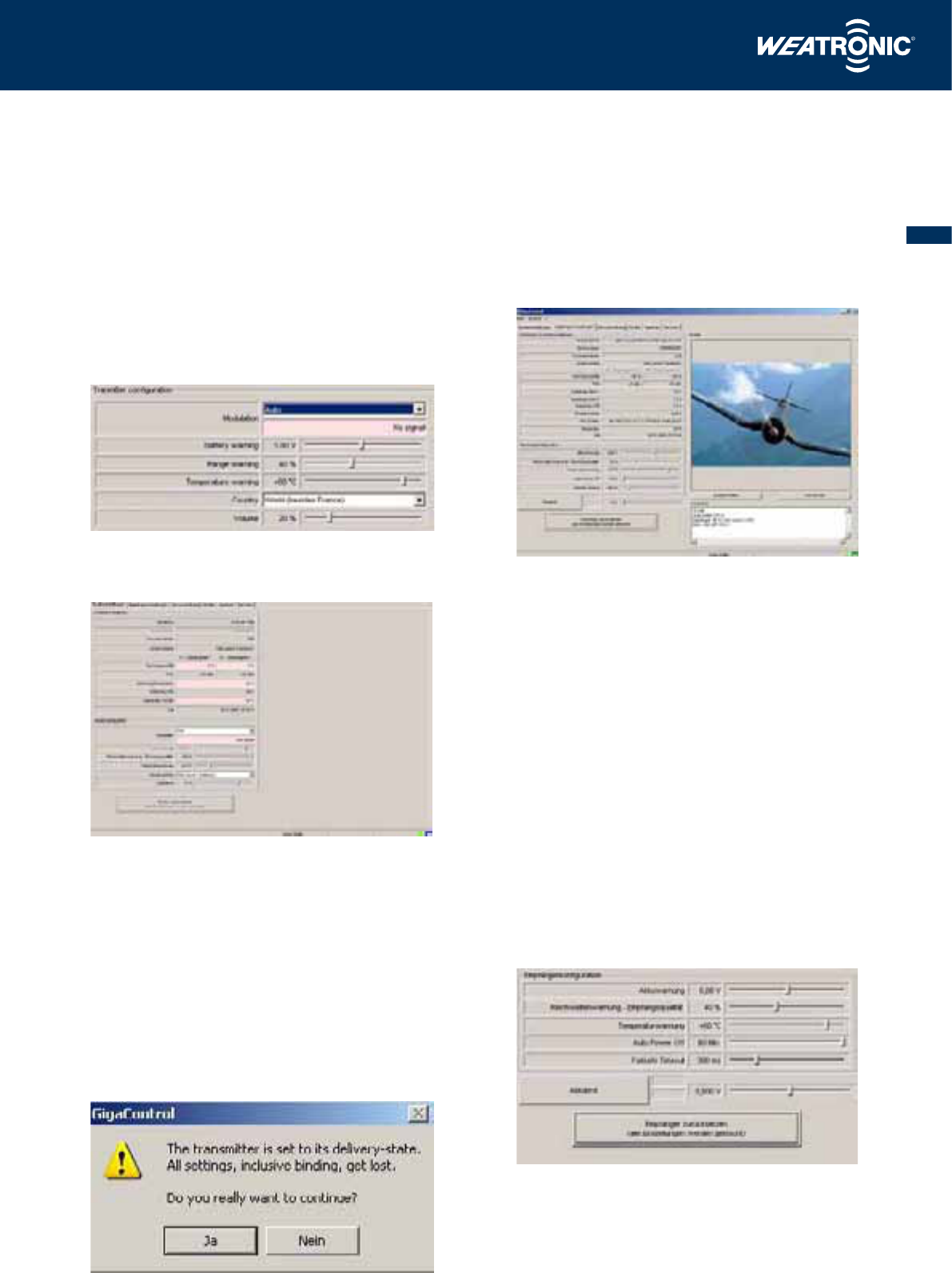
29
INSTRUCTION MANUAL
The options are:
• Battery warning, this warns of when the transmitter
battery voltage is too low and is set in Volts
• Range warning, which warns of when the percentage of
good frames drops to below the set level
• Temperature warning, which alerts you when the trans-
mitter module circuit board gets too hot and is set in
degrees Celsius
In addition, within the modulation field the signal quality recei-
ved by the receiver can be seen and the earphone volume can be
adjusted.
If the values selected fall outside of the recommended settings, the
field will be highlighted in pink.
The country setting is used to select either the entire 2.4 GHz fre-
quency band (81 channels) for use world wide, or to select limited
band width for use within France. If using a 2.4 Dual FHSS Mi-
cro receiver the country setting can be selected without using the
GigaControl Software. Please see Para 8.2.7.
The transmitter module can be reset back to the factory settings
but it should be noted that this will delete all of the old settings
and data, including the details of any receivers bonded to the
transmitter module. If the module is reset, all receivers must be
bonded to the module again as outlined in Para. 10.5. A warning
message will be displayed which must be acknowledged before
the reset will take place.
11.3.2 Receiver settings
Click on the window “Receiver settings” and the following win-
dow will open. You will now be presented with a variety of infor-
mation regarding any weatronic Dual receiver which is bound to
the transmitter module. This information is sent to the computer via
the return signal to the transmitter module.
You can choose a picture which is stored on your computer to
identify the receiver by clicking ‘Select picture’ and choosing a sui-
table picture from your files. The picture can be deleted by clicking
‘Delete picture’. Furthermore, details of the model can be added to
the field below the picture (‘comment’).
The first 4 boxes display system information, the receiver type, the
serial number, the Firmware version and the country setting.
The boxes below that show the actual current values of the recei-
ver, namely
• Signal strength received by both of the receiver circuits
• Output signal strength of both of the receiver circuits
• Voltage of both receiver batteries
• USB voltage
• Total current draw
• GPS position
• Receiver circuit board temperature
• Time and date
The area below that shows the values which can be adjusted by
the user and are as follows:
The following settings will cause the transmitter “ERROR“ LED to
flash and an warning tone to be heard (if an earphone is fitted) if
the value is exceeded:
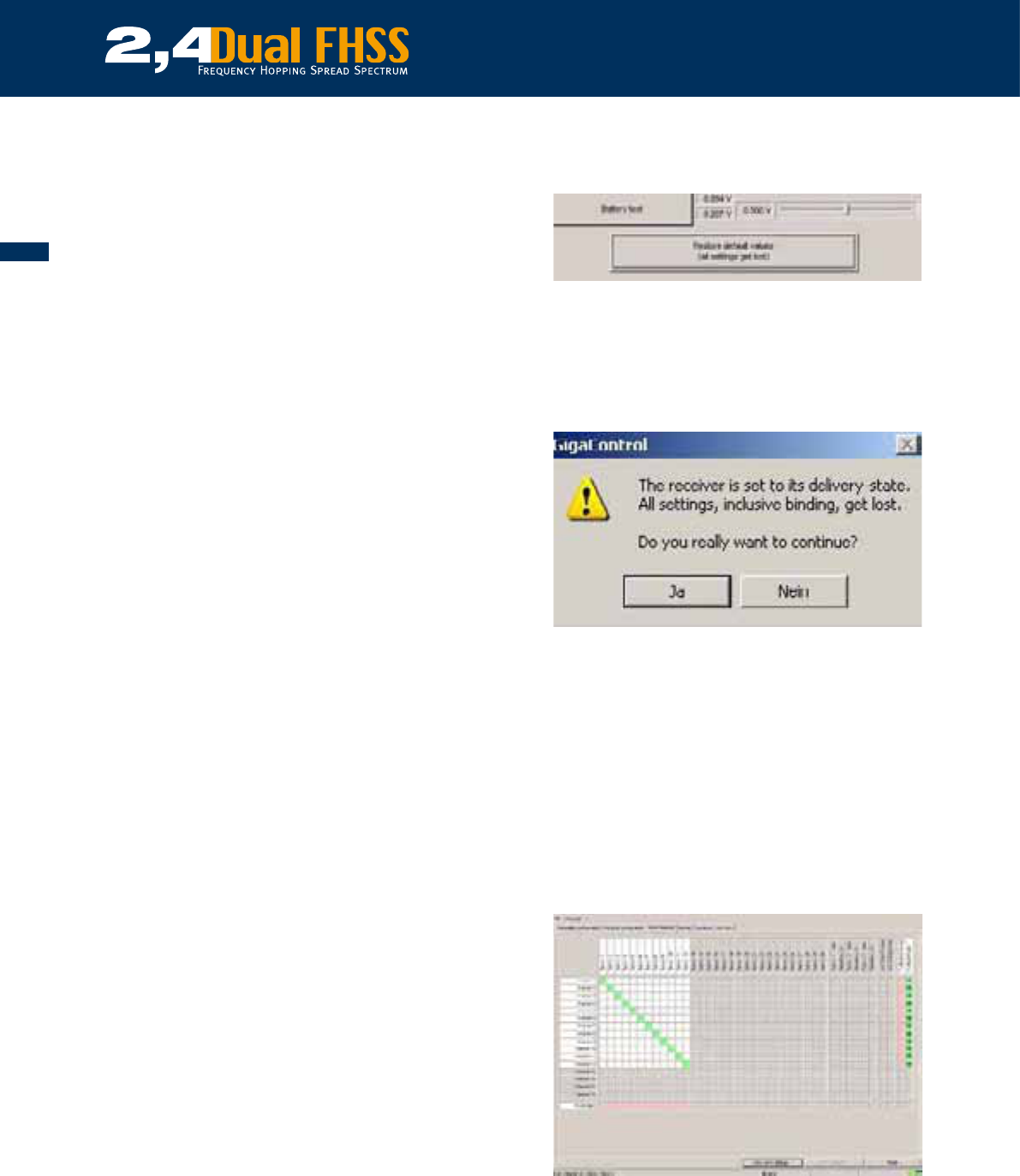
30
• Battery warning, warns of when the receiver battery
voltage is too low
• Range warning, warns of when the receiver signal
quality is too low
• Temperature warning, warns when the receiver tempera-
ture is too high
• Battery test, warns when the voltage drops below the se-
lected value
The value set in the battery test field is also the voltage at which
the receiver will switch between the main (primary) receiver batte-
ry pack and the secondary (back-up) receiver battery pack. The de-
fault setting for this value is 4.8 Volt if a 2.4 Dual FHSS micro series
receiver is bonded and 6.0 Volt if a 2.4 Dual FHSS 12-22 R series
receiver is bonded.
If using a 2.4 Dual FHSS 12-22 R series receiver with two receiver
battery packs, the following settings are recommended:
• Battery warning/switching value when using a 2 cell
Lithium Polymer (LiPo) battery pack: 6.0 Volt
• Battery warning/switching value when using a 6 cell Nickel
Metal Hydride (NiMH) pack: 5.7 Volt
• Battery warning/switching value when using a 3 cell
Lithium Iron Phosphate (A123) battery pack: 8.8 Volt
Range warning: The weatronic 2.4 Dual FHSS system has a transfer
rate of 100 signal packets (frames) per second. When the percen-
tage of packets sent which cannot be read by the receiver drops
below the set value, the system will give a range warning. A value
of 40% will ensure that the receiver can still operate accurately but
will warn you of an impeding problem. 40% is the default setting.
Temperature warning: The internal temperature of the receiver is
monitored. The factory setting is 55 degrees Celsius.
Auto power off: This is the setting which dictates how long the re-
ceiver will stay switched on before entering sleep mode. This func-
tion has been incorporated to protect your receiver battery packs
if you forget to switch off your receiver. The switch off point is set
in minutes and the range is from 1 to 60 minutes, if you wish to
deactivate this function the slider must be moved fully to the left.
The factory setting is 15 minutes.
Failsafe timeout: By using the slide control you can set the value at
which the Failsafe will activate if no or a corrupt signal is received.
The value is in milliseconds and can be set be set between 100
and 1000 Milliseconds which equals 1 second. The factory setting
is 300 Milliseconds.
Battery test: Upon switching on the receiver, it will self-test both of
the receiver battery packs as outlined in Para 10.2. The two fields
next to the battery test button show the voltage drop measured
under load (the upper field shows the value for the main ((primary))
battery pack and the lower field shows the value for the secondary
((back-up)) battery pack). The voltage drop warning value can be
set using the slider and the factory setting is 0.500 Volt. The batte-
ry test can be manually conducted by pressing the “Battery test”
button.
Last but not least the receiver can be returned to the factory setting
by using the “Restore default values” button. All values will be
returned to the factory settings which will mean that any bonding
information will also be lost. This will entail your having to re-bond
the receiver to your transmitter module before use and because of
this the following warning message will be displayed:
11.3.3 Servo mapping
This window, together with the “Servo Configuration” field (the
next option) form the heart of the GigaControl software. Within
this window a multitude of parameters can be altered which will
improve every model’s performance from large scale jets through
to gliders.
The left hand side of the matrix lists the transmitter’s channels
or functions and the software is currently capable of handling 12
channels but this will soon be raised to 16. The top row corre-
sponds to the receiver outputs of which the micro series receivers
have 8 to 12 and the 12-22 R series have 22 to 30 outputs.
Standard setting for a 2.4 Dual FHSS micro 12 receiver
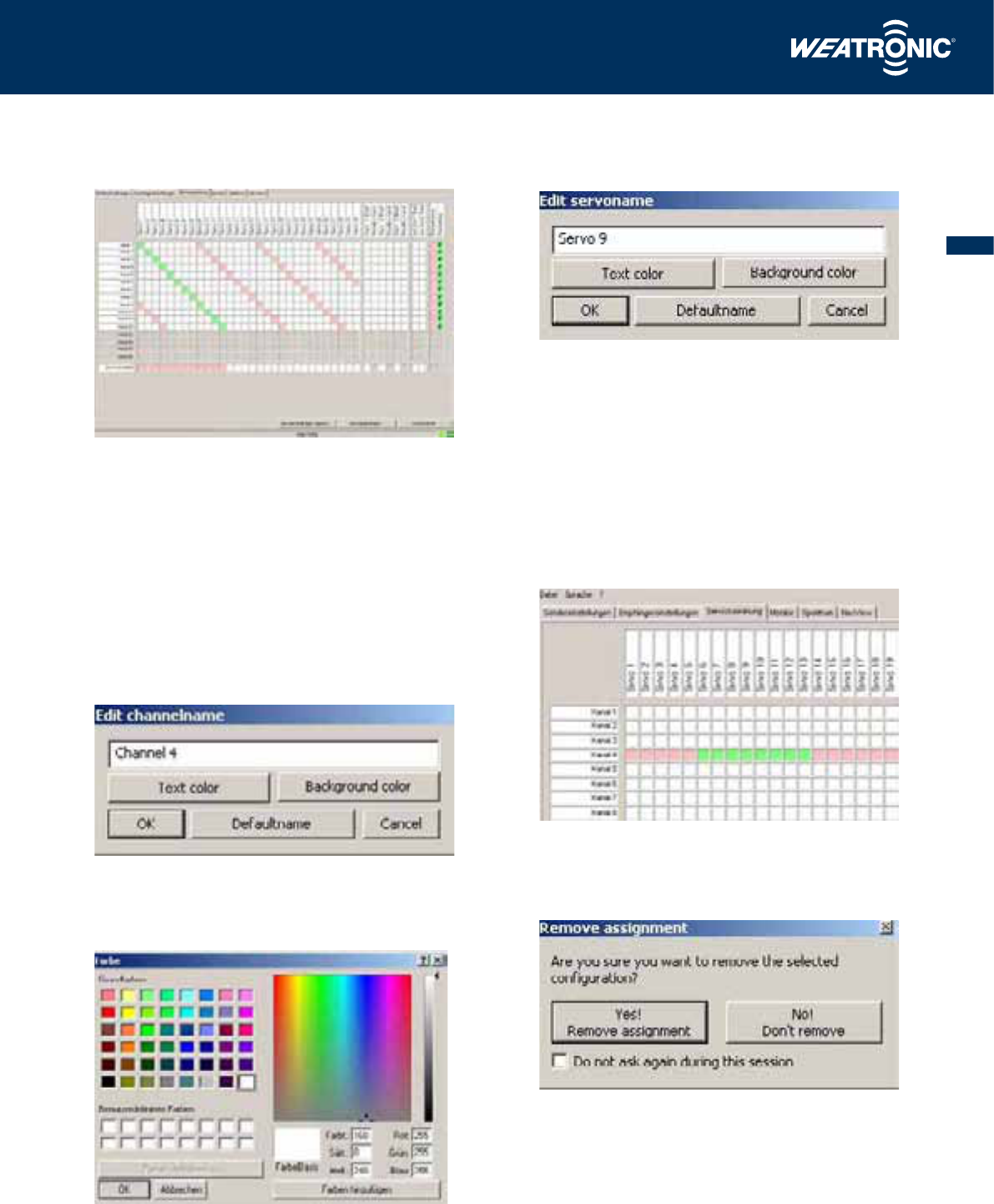
31
INSTRUCTION MANUAL
Standard setting for a 2.4 Dual FHSS 12-30 R Gyro III + GPS
receiver
The pink coloured fields cannot be selected. This is because with
the 2.4 Dual FHSS 12-22 R series receivers several servos can be
linked to the same function and to optimise the current draw, each
servo must be driven from a different circuit.
In order for you to be able to easily identify which function is lin-
ked to which output we have incorporated the facility to enter
a name and to change the background colour of both the input
and the output fields. To carry this out, click on the relevant field,
for example Channel 1, and the following window will open:
Type in the name of the function, for example Elevator, and then
select a colour for both the text and the background as this will
assist you identifying the function.
The receiver output fields can be changed in the same way to
match the transmitter function driving it
Receiver output field coloured for easier identification
You can link up to a maximum of 8 receiver outputs to each trans-
mitter channel or function which will allow you to drive up to 8
servos or other devices simultaneously, almost as if you had an 8
way ‘V’ cable connected to the receiver output but with the excep-
tion that each servo can be programmed independently. To assign
an output to a function, simply click onto the relevant field with the
left mouse button which will turn the field green. In this example
transmitter channel 4 has been linked to receiver outputs 6 to 13.
To delete an allocation simply click onto the green field and after
acknowledging the following warning message the selection will
be cleared.
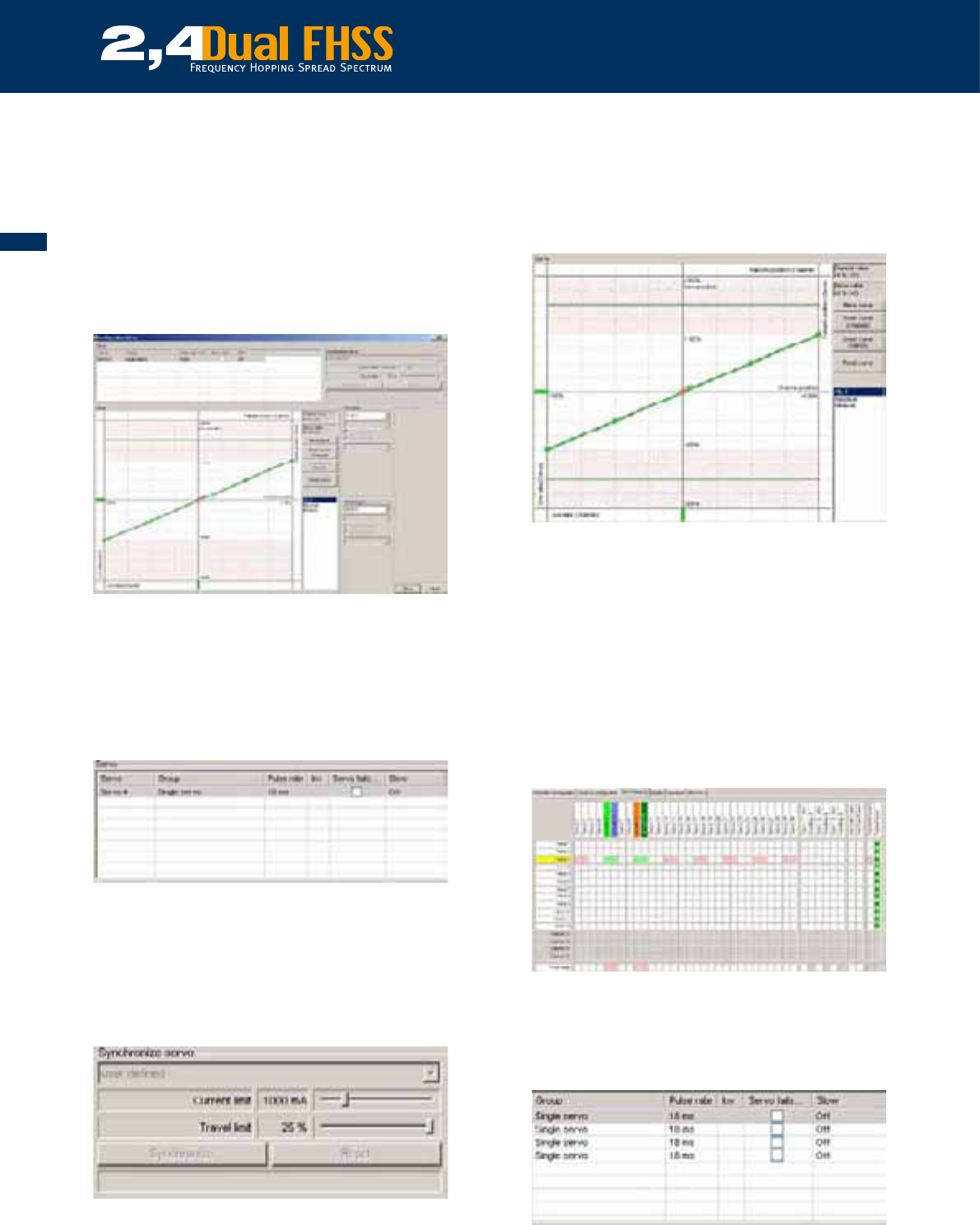
32
11.3.4 Configuring the servos
Return to the servo mapping matrix. All transmitter control func-
tions which have been assigned a servo or other devices for ex-
ample magnetic valves, switches etc. can now be configured. To
access these options simply ‘right click’ on the relevant green field
and the following window will open.
This is where all of the settings for each servo output can be adju-
sted relative to the control input.
Any setting changed must be stored before they become effective.
To save your settings, click the ‘Store’ button which is located in
the lower right hand corner. If you do not wish to save the changes,
click ‘Abort’.
Firstly lets look at the window located in the top left hand corner:
This example is showing a receiver output which has been which
has been previously named “AIL 6” (for ailerons on channel 6) as
was explained in the last Para. This is the simplest combination
where a single servo is linked to a single transmitter function, ple-
ase refer to Para. 11.4.3.1 to 11.3.4.4.
The upper right hand boxes are where a group of servos mecha-
nically connected to a single control surface can be synchronised.
Please refer to Para. 11.3.4.2. for further details.
This is where the parameters for the servos to be synchronised can
be entered.
The total throw, direction and fail safe position can be set for each
servo in this section of the window.
Finally, the right hand section is where the setting for the integrated
Gyro can be set if using a weatronic receiver which incorporates a
Gyro. Please see “Handbook Special Gyro“ for further details.
11.3.4.1 Single servo grouping
It is possible to link up to 8 servos to one transmitter function
and this can be achieved by simply clicking on the corresponding
fields within the servo mapping matrix. The following is an examp-
le using channel 3 (ailerons) using a total of 4 servos, 2 for the left
aileron and 2 for the right aileron. Each servo can be configured
as required, please refer to Para. 11.3.4.5
4 Single servos connected to outputs 5,6,9 and 10 will all be driven
by transmitter channel 3.
The upper boxes in the servo configuration window will appear
so:
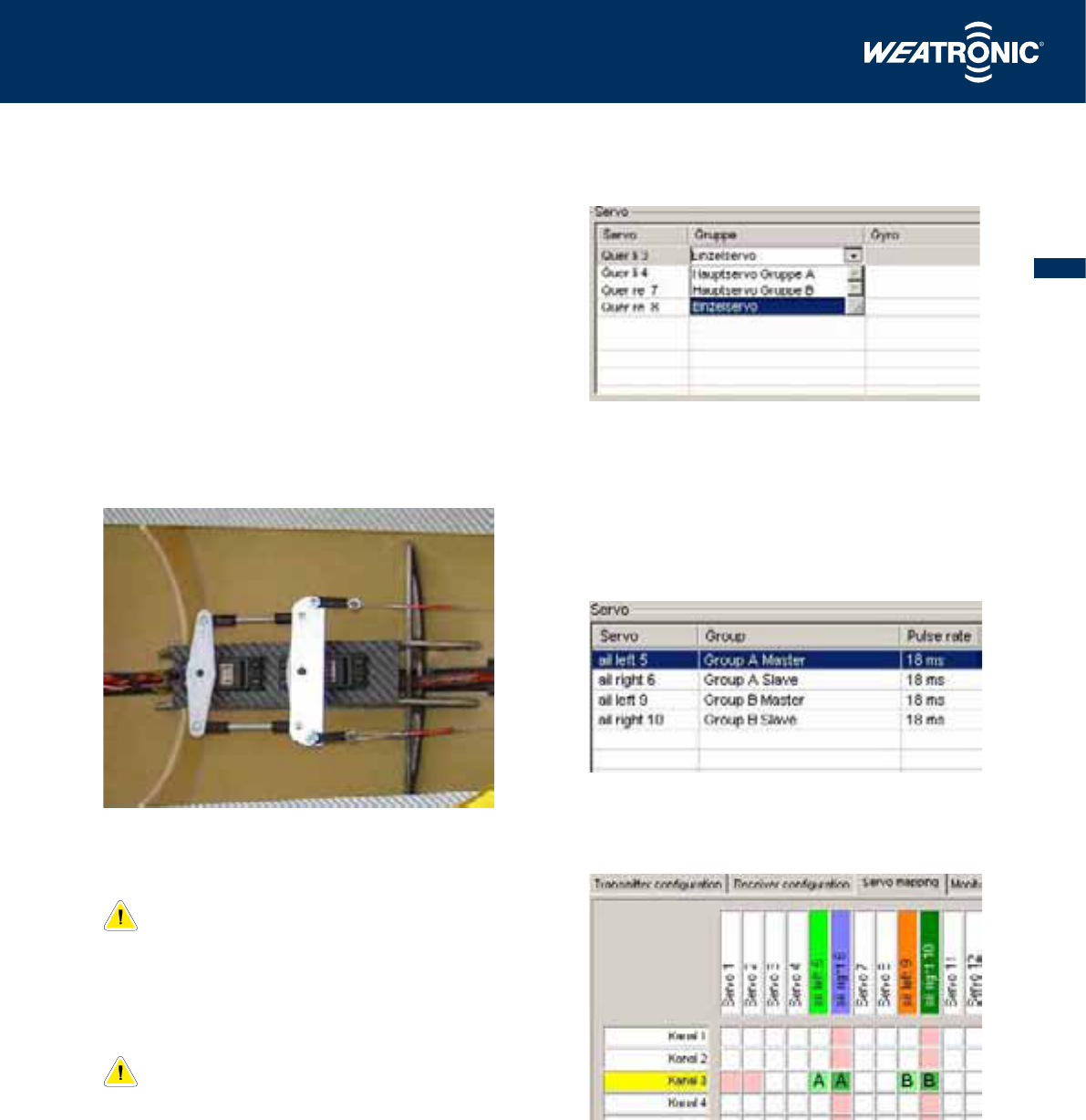
33
INSTRUCTION MANUAL
11.3.4.2 Synchronising servo groups
In particular large models often suffer from the problem that a
single servo does not have sufficient torque to drive the control
surfaces and so more than one servo must be connected to the
ailerons, elevator, rudder or landing gear. Due the slight difference
in reaction times and speeds of servos of the same type, all 2.4
Dual FHSS 12-22 series receivers offer the facility of synchronising
servos over their full throw to produce mirrored movements. The
servos must be connected rigidly together to ensure that the diffe-
rence in current drawn is kept to a minimum.
A synchronised group of servos must have a master servo and up
to 7 slave servos and it goes without saying that the servos must
be of the same make and type.
An example of a sound mechanical linkage of 2 servos driving a
Yak’s rudder
At this point, only the master servo should be con-
nected to the control surface. Do not connect the
slave servos yet!
During the automatic synchronisation process the
servo will move through all of the points along
the servo curve from end to end.
Make sure that the servo is free to move through
it’s whole range without causing any damage to
the servo, push-rods, linkages, horns or hinges. Al-
ways set the servo throw using the servo curve and
not the transmitter! Please refer to Para. 11.3.4.5.
A group of servos can be synchronised as follow. (The following
example is based on the configuration shown above):
Use the mouse to click onto the field ‘Single servo’, labelled ‘Ail left
5’ under the heading ‘Group’. A drop down window will appear
with the options Group A Master, Group B Master and Single servo
to choose from.
After choosing the following options for the 4 servos
Ail Le 3 -> Master Servo Group A
Ail Le 4 -> Slave Servo Group A
Ail Ri 7 -> Master Servo Group B
Ail Ri 8 -> Slave Servo Group B
You will see the following in the servo window:
2 groups have now been grouped to function 3. The master servo
fields will be coloured light green and brown and the slave servos
will be indicated by a light blue and a dark green field.
Function 3 is now driving two groups of two servos. One group of
two servos to drive the left aileron and one group of two servos
driving the right aileron.
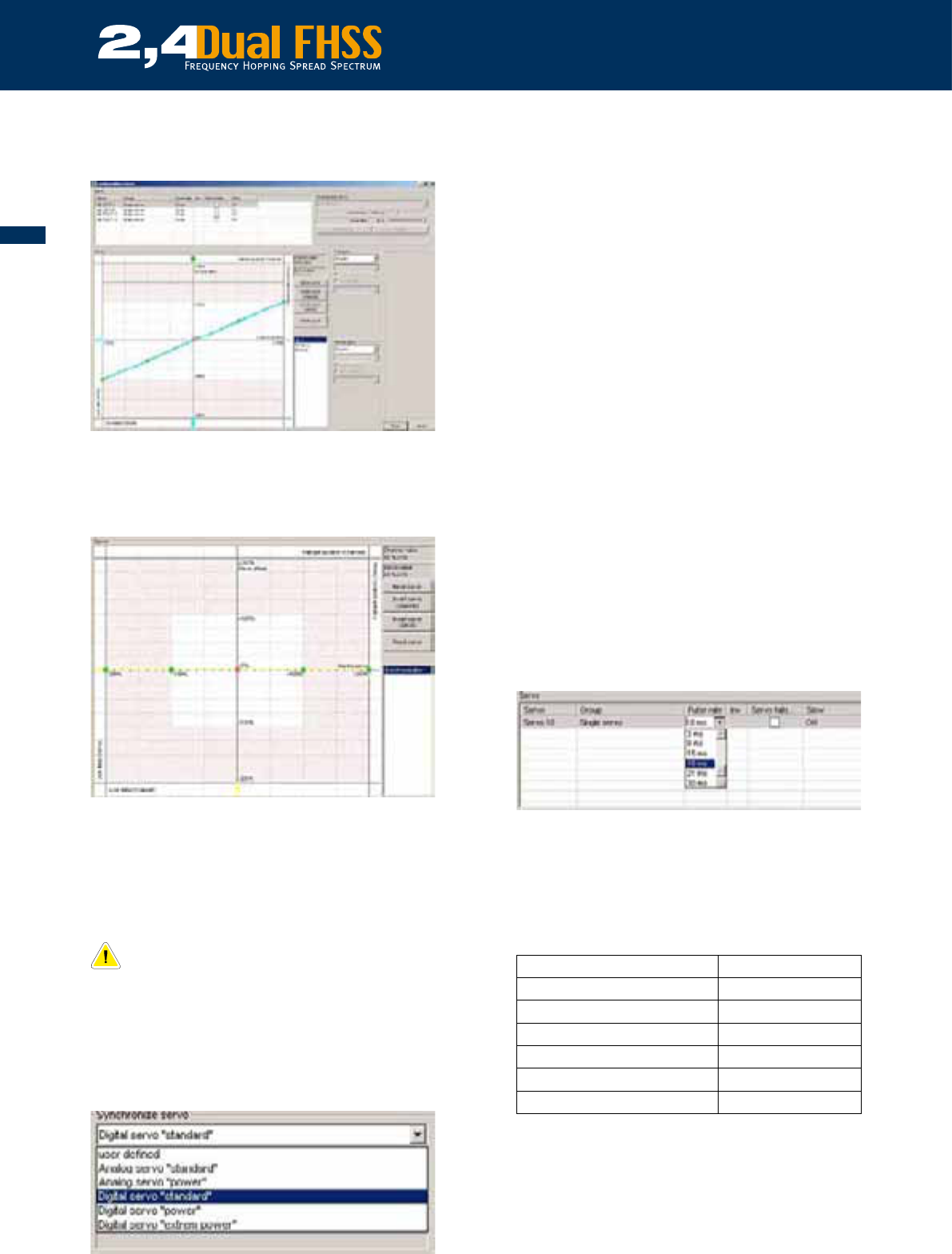
34
Use the servo curve to set the end points, please refer to Para.
11.3.4.5.
Now the middle point of the slave servos should be set as follows:
Click the individual servos in the window shown above and the
following will be displayed:
The horizontal line shows the correct relationship between the
slave and the master.
Click on the button “Move curve“and move the red points up or
down until the slave servo follows the master servo exactly. The
mouse can also be used to move the curve. The same procedure
must be followed for all of the slave servos.
The servos can now be connected together mecha-
nically.
A variety of parameters can be set to match your chosen servos
and to make synchronising groups easier.
To begin accessing these parameters you have to first click onto
the master servo in the upper left field. Directly below the heading
‘Synchronise servo’ you will see a field with the label ‘user defined’.
By opening the field the following choices will be displayed:
Select the correct type of servo from the list. The field labelled
“Current limit” will show a value in mA and the “Travel limit” as a
percentage. By clicking the “Synchronise” button the servos in the
group will be synchronised and the progress will be indicated by a
blue bar. This process can take up to 1 minute.
It is also possible to set the values for “Current limit“ and the „Tra-
vel limit“ manually. To do this, ‘User defined’ must be selected as
the servo type and the Current draw can be set to between 0 and
5000 mAs. The Travel limit range is from 0 to 25%. If a stiff linkage
or blow back is experienced these values will prevent damage to
the servos and should be adjusted accordingly if the synchronisati-
on process brings disappointing results.
11.3.4.3 Setting the servo input pulse
Weatronic receivers have been designed to work with all makes
and type of servos. Many analogue servos which were designed
to operate with narrow band PPM or PCM modulation systems
often used a slower pulse rate to realise their full potential than
modern digital servos. A high speed Tail Rotor servo for example
will use a very high pulse rate of 3 msec. For all values except for
3 msec. the servo neutral point will be set at 1.5 msec. and for
the 3 msec. setting it will be 0.7 msec. which is needed for a fast
tail rotor servo. The weatronic GigaControl gives you the option to
choose a value between 3 and 30 msec. and the default setting
is 18 msec. On clicking on the drop down box, the following field
will be displayed:
If you are unsure of the correct setting, please refer to the manuf-
actures instructions for the correct value. It may be necessary to
contact the manufacturer or importer to obtain this information
and if the value which you are given is in Hertz (Hz) the table below
can be used for converting to msec:
Hertz – Msec. conversion table:
Milliseconds (msec) Hertz (Hz)
3 333
9 111
15 67
18 56
21 48
30 33
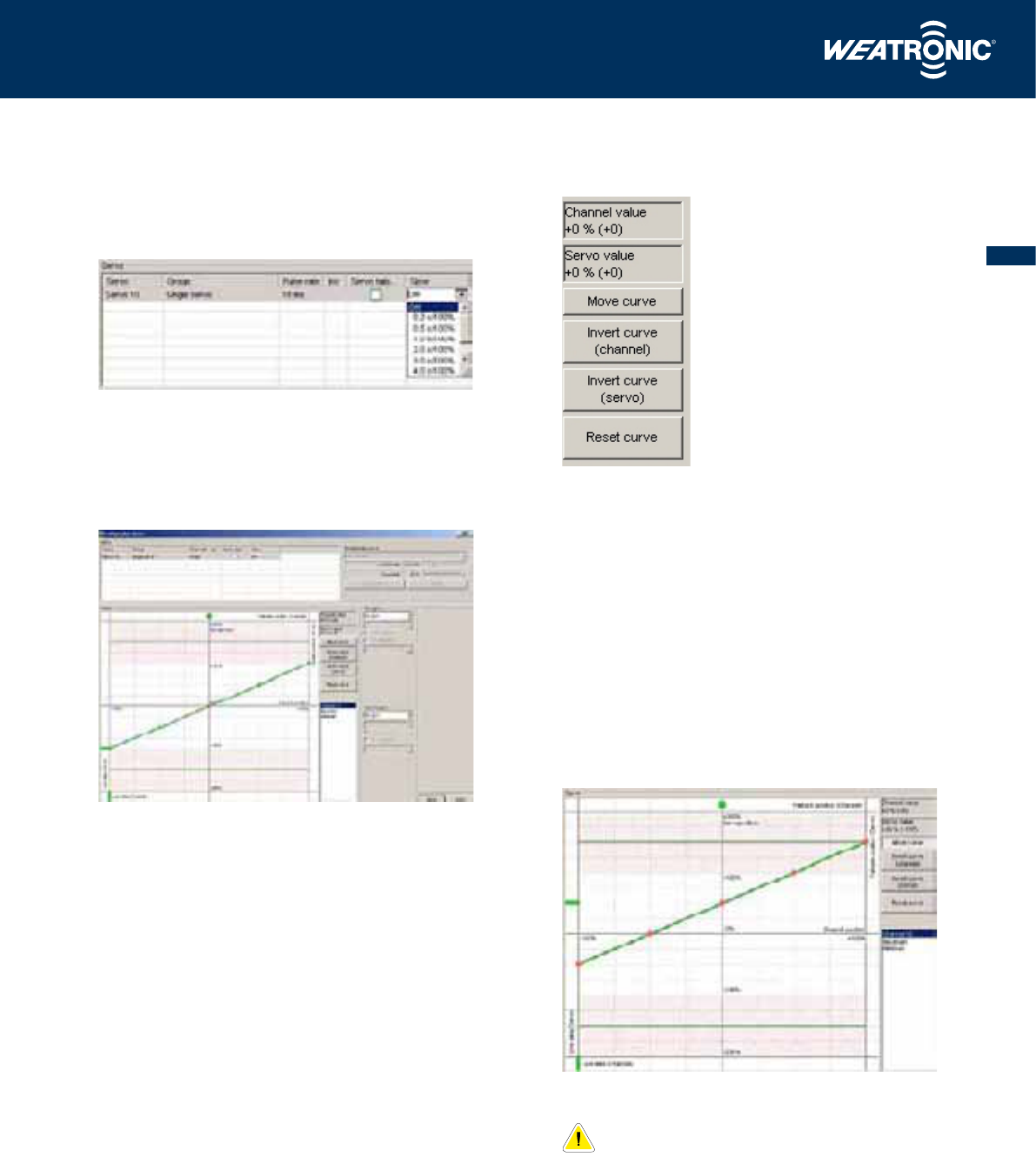
35
INSTRUCTION MANUAL
11.3.4.4 Slow function
Within the same window the servo speed can be altered. The value
which can be set is between 0.5 and 8 seconds for full throw.
This function will be particularly useful when setting up functions
like retracting undercarriages, flaps and undercarriage doors.
11.3.4.5 Configuring servo curves
Use the right mouse button to select the output which you wish to
configure to access the curve window
The servo curve is represented in the diagram shown in the lower
part of the window which is pictured above. Initially the servo
curve will be a flat line, shown here as a green line, and if the
transmitter function has been highlighted with a colour (see Para
11.2.3) it will be displayed in that colour.
The green bar below the servo curve represents the transmitter
function position and will follow the stick, switch or slider as it
is moved. The green bar to the left of the servo curve represents
the actual servo position as it moves. To ease the identification of
which function/servo is being viewed, both of these bars will be in
the same colour which was set in the servo mapping screen, if any
(if no colour has been set, the bars will default to green).
To the right of the servo curve there are buttons, labelled, for exa-
mple, “Move curve“, and
“Invert curve (channel)“etc. which will aid you in adjusting the
servo curve.
“Move curve“:
Under normal circumstances the servo travel will be lineal with
the neutral point in the centre and represented by a flat line as
illustrated above. The white area represents 100% of servo throw
and the upper and lower red areas are the values which a servo
can theoretically set to up to 200%. Once you have activated the
“Move curve“ button using the mouse the whole curve can be rai-
sed or lowered by clicking on one of the red points, holding down
the mouse button and moving the curve (line) upwards or down-
wards. The same effect can be achieved by clicking onto the curve
(line) and by using the keyboard’s arrow keys to move it ¥£¢¤.
In moving the curve you can adjust the middle (neutral) point for
each servo. This option will be partially useful to accurately set-up
any function which is driven by two or more separate servos, for
example, flaps, airbrakes ailerons or elevators.
Servo neutral (middle) position adjusted by moving the curve.
HOWEVER! Every servo is different in as much as
how far it can rotate before it will damage itself.
IMPORTANT! Always be careful when adjusting the
servo curve, in particular when the values are
within the red fields. Connect a servo to the recei-
ver when adjusting the curve and always observe
the manufacturers recommendations regarding the
maximum permissible throw.
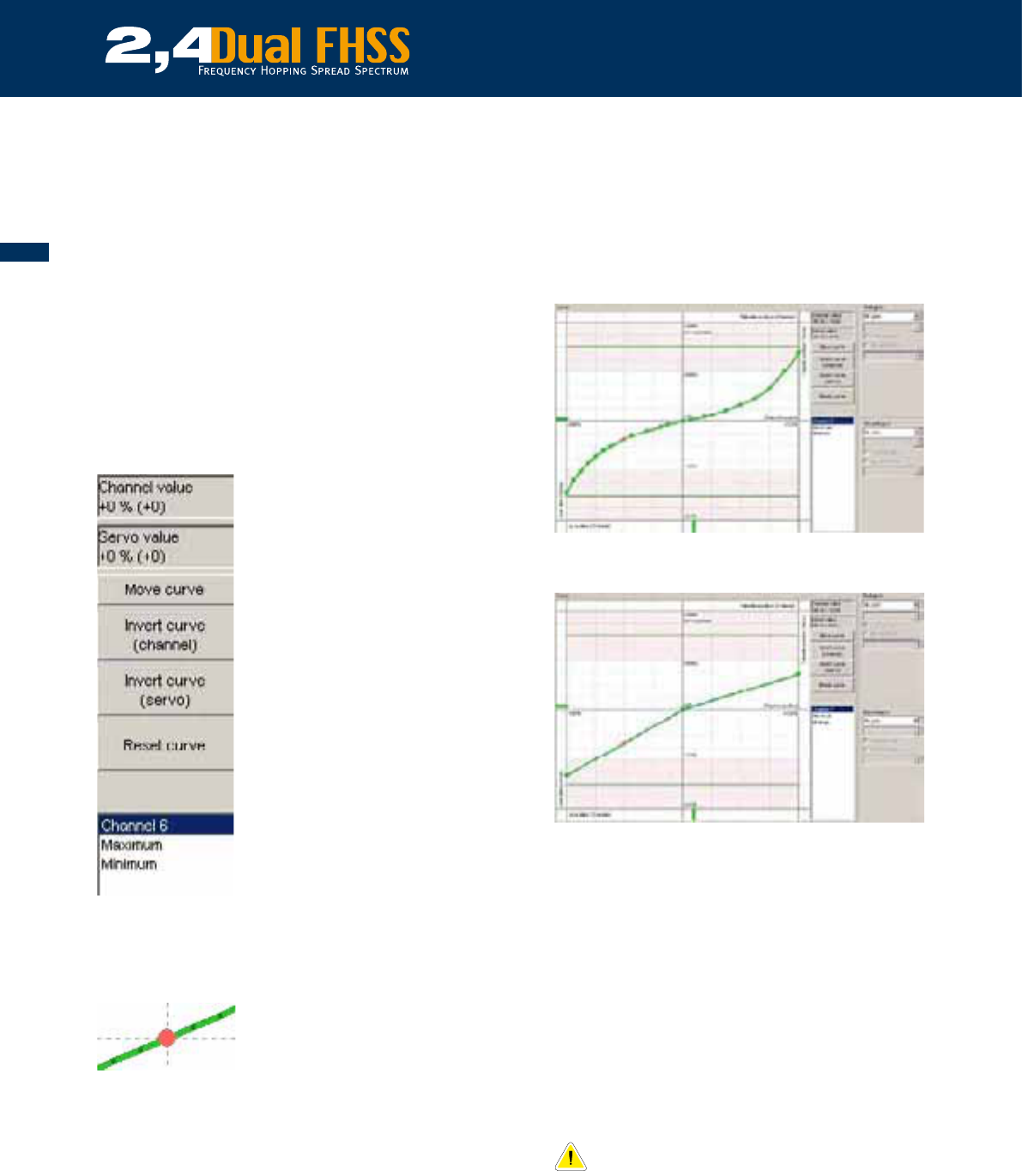
36
“Invert curve (channel)“:
By clicking on this button the transmitter function will be reversed,
i.e. left stick will produce a right stick reaction from the receiver
and the function will be reversed.
“Invert curve (servo)”:
By clicking this button the direction of rotation of the servo will be
reversed, and each servo can have its direction changed indepen-
dently. This function is useful when more than one servo is grouped
together to ensure that the linkages can be fitted to the correct
side of the servo.
“Reset curve“:
This button will return the curve to the default settings.
The limit lines “Minimum” and “Maximum” are fully explained in
the sections “Mixer Special” and “Giro Special”.
The default settings for the servo curves allocates them 5 points
which are indicated by the dots
Servo curve adjustment points
The green dots are the points at which the servo curve can be
altered by simply clicking onto them (left mouse button) which
will cause them to turn red (active) and they can then be moved
by dragging them up or down. You can also use the arrow keys to
move them ¥£¢¤. In addition to the 5 fixed points, each servo
curve for the Master servo of a group or a single servo can have up
to 31 adjustment points added to them.
To add an adjustment point, use the right mouse button to click
onto one of the smaller dark dots which will ‘active’ it, it will then
become an adjustment point which can be tailored as explained in
the paragraph above. If you want to reverse the selection, use the
right mouse button once again to click onto the Point and it will
revert to a small dark dot.
Each ‘active ‘point can now be moved as required which will allow
you to tailor the curve to create, for example, an exponential func-
tion to ‘fine tune’ the control response of your model as illustrated
below.
Example of a servo curve which will create an exponential move-
ment of the servo
A servo curve which has been tailored to create differential mo-
ment which be useful if, for example, you want your ailerons to
have move movement up than down to prevent adverse drag.
11.3.4.6 Failsafe settings
Your weatronic R/C system will ignore any Failsafe signals trans-
mitted by your transmitter, this is because we have incorporated
our own user-friendly multi-function Failsafe system. Firstly, please
refer to Para. 11.3.2 to learn how to set the Failsafe time out value
which can be set between 100 milliseconds and 1 second.
In the unlikely event that the receiver looses the transmitter signal,
the servos will move to a pre-determined ‘Failsafe’ position or, if no
Failsafe position has been set, they will ‘Hold’ where they are.
If no Failsafe position has been set, the system will
default to the factory setting. The factory setting is
the neutral or middle point for all servos and func-
tions
Weatronic differentiates between ‘Channel Failsafe’ and ‘Servo
Failsafe’. The Channel Failsafe function will apply to all servos
linked to that function and Servo Failsafe allows you to program
individual servos allocated to a channel singularly.
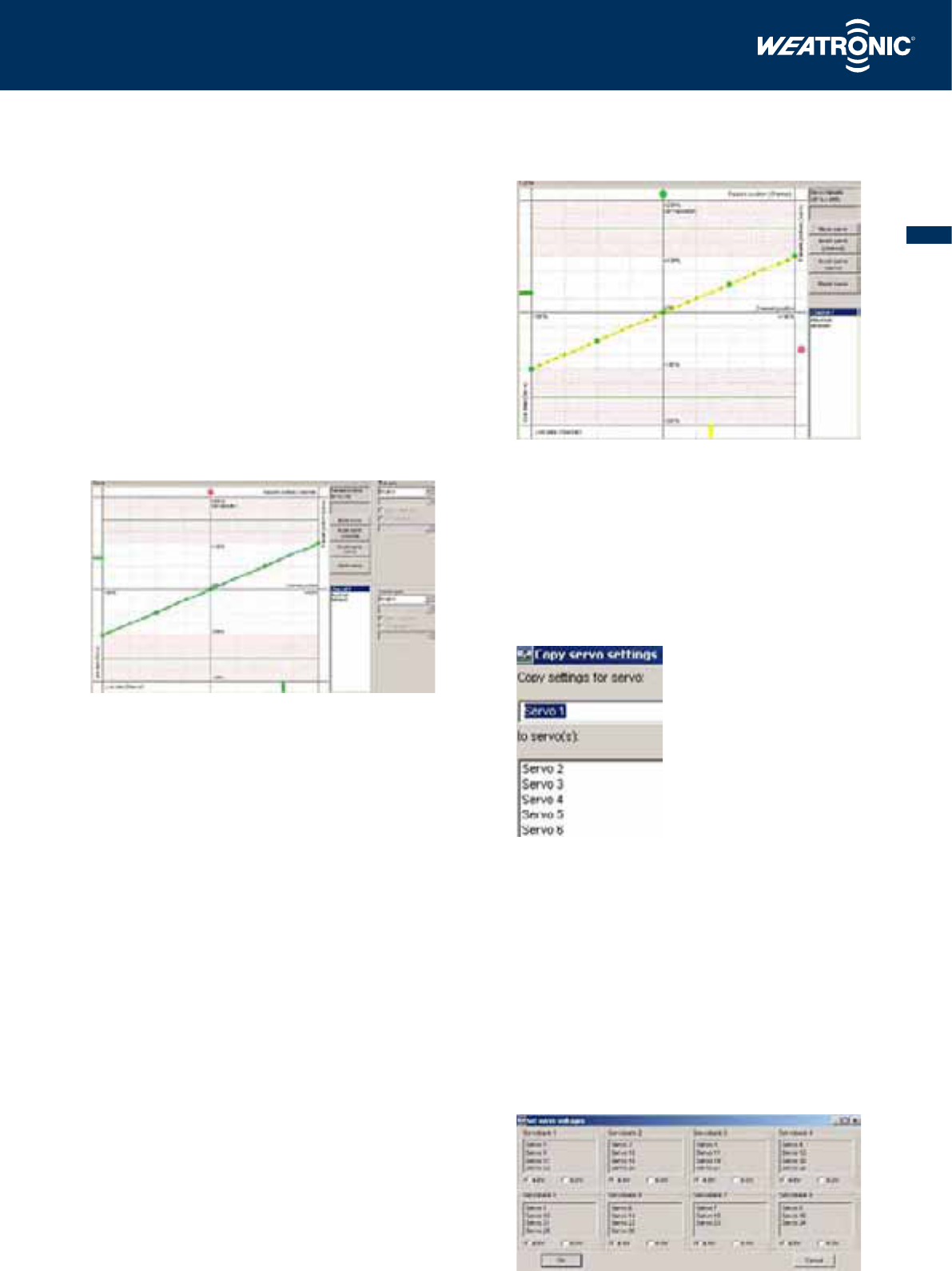
37
INSTRUCTION MANUAL
11.3.4.6.1 Channel Failsafe
You can decide whether you want the servos to hold the positi-
on where the last known good signal was received (‘Hold’), or
to move to a pre-determined point, for example, tick over for the
engine (‘Failsafe’). To choose one of these options the servo map-
ping window has to be opened. Within this window on the right
hand side is a field labelled Failsafe type, in this column are boxes
for each channel. Each box should be set to ‘F’ for ‘Failsafe’ or ‘H’
for ‘Hold’ by clicking it with the left mouse button. If you have
selected ‘F’ for any function click onto that function with the right
mouse to open the Configure servo window. A green dot is visible
in the upper bar and by clicking onto this dot with the left mouse
button and moving it to the left or right the Failsafe position can
be set for that channel and the dot will turn to red to indicate that
it has been set. The position of the dot will be displayed in the box
to the right of the field both as a percentage and in steps (max.
+/- 2048).
The red dot in the upper field shows a Failsafe position of – 13%.
If ‘H’ for hold has been selected, the green dot will not appear as
the last known good signal position will automatically be held.
11.3.4.6.2 Servo Failsafe
If a group of servos or devices have been allocated to one channel
(transmitter function) each individual servo can be independently
programmed. In the example below, servos 7, 8 and 9 have been
linked to channel (transmitter function) 7. By left mouse clicking
the field labelled ‘Servo failsafe’ a tick will appear in the box and
a red dot can be seen in the right hand column (labelled Failsafe
position servo). The desired Failsafe position can now be set by left
mouse clicking the red button and dragging it up or down. This
procedure can be applied to all of the remaining servos
Servo 8 has been set to a Failsafe position of – 65% (the position
of the red dot).
11.3.4.7 Copying servo settings
Once you have found the correct setting for one servo, these values
can be copied to another servo by using the ‘Copy servo settings’
function. To access this function click on the button located at the
bottom of the ‘Servo mapping’ window.
In the upper field you can select the servo setting which you want
to copy and in the lower field is a list of the servos which the
settings can be copied to.
Once you have selected the ‘from’ and the ‘to’ servos in the rele-
vant boxes, click ‘OK’ to copy the settings.
11.3.4.8 Setting the servo voltage
The 2.4 Dual FHSS 12 – 22 R series of receivers are fitted with 8
separate regulated circuits to power the servos and the voltage
for each circuit can be set to 4.8 or 6.0 Volts. The voltage for each
circuit can be set by accessing the ‘Servo voltages’ function. To do
this click on the button which is located on the bottom right of the
‘Servo mapping’ window:
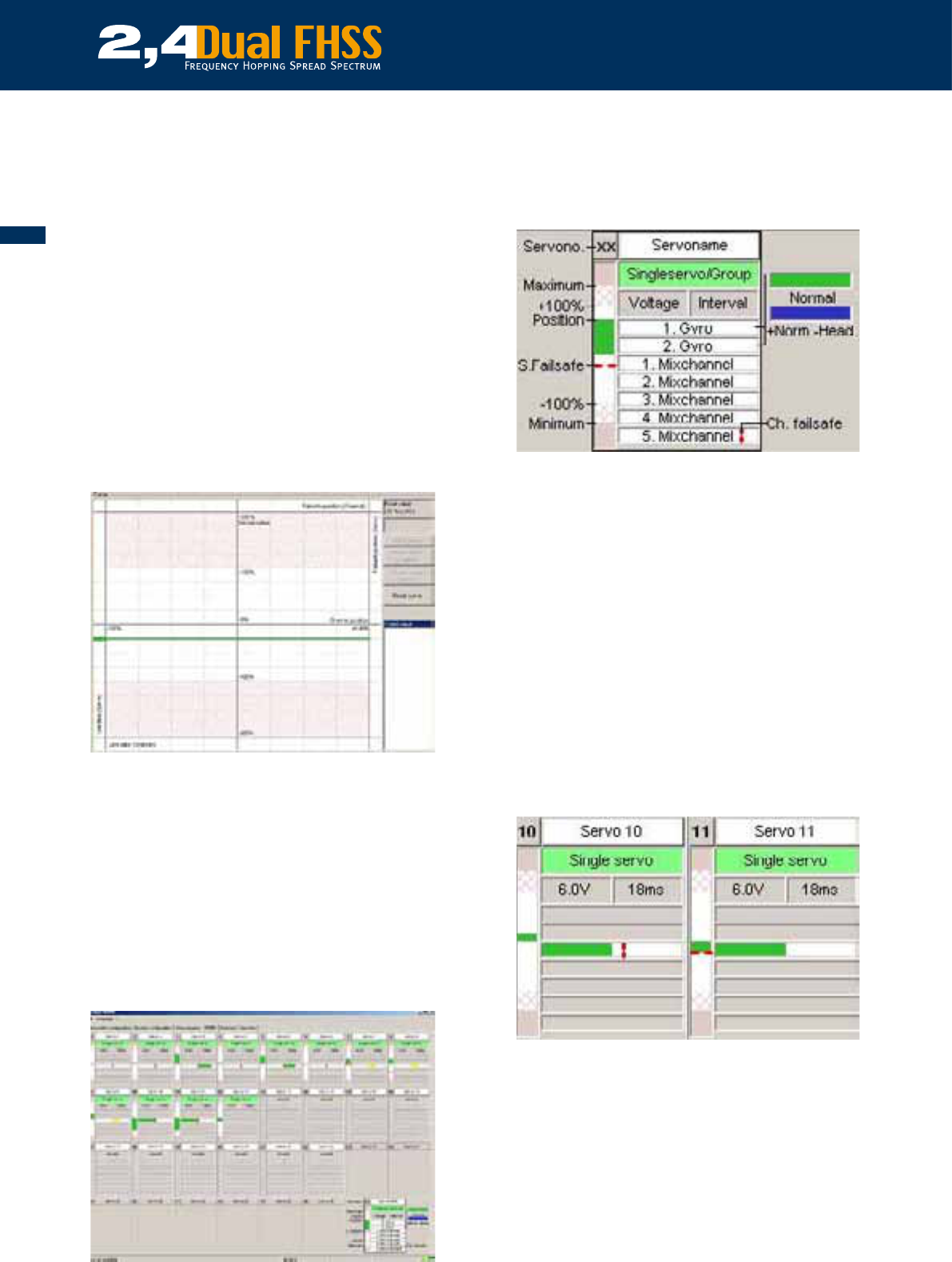
38
In this field the voltage for each servo circuit, and therefore the
servos which have been allocated to that circuit, can be set by
clicking on the desire value. Select either 4.8 or 6.0 Volts for each
circuit and then click ‘OK’ to store the values.
11.3.4.9 Fixed values
If you require a servo or function to hold a set position and not
to move proportionally with the transmitter function (i.e. for Gyro
sensitivity) ‘Fixed value’ must be selected in the ‘Servo mapping’
window. This option is at the bottom of the window and if it is click
the field will turn to green. If this green field is then clicked with
the right mouse button a window will open which is similar to the
‘Configuration servo’ window. Please refer to the Gyro handbook
for more details.
A servo curve with a fixed value of -26%.
11.4 Monitor
To simplify setting up your model we have incorporated a func-
tion called ‚Monitor’. If this window is opened you will be able
to see a graphic illustration of all of the transmitter functions and
servos. All of the relevant information, for example the pulse rate,
voltage, Gyro function and Failsafe position will be displayed and
by moving your transmitter sticks you will be able to see exactly
how each servo will react. Clicking onto the window ‘Monitor’ will
open a matrix with 22 to 30 fields which represent the outputs or
your 2.4 Dual FHSS 12 – 22 R series receiver.
Each field shows how a receiver output has been programmed. The
order in which they appear follows the same order as the receiver
outputs and in the lower right hand field is an explanation of the
information which is displayed.
Explanation of the information displayed in the ‘Monitor’ window.
The following information is displayed, from top to bottom:
• The servo name
• Single servo or servo group (master A or B, slave A or B)
• Voltage for this servo (4.8 or 6.0 Volts)
• The pulse rate with which this servo is driven
• The nominated gyro channel for this servo (Axis 1)
• The nominated gyro channel for this servo (Axis 2)
• The mixer rate for up to 5 channels
The details regarding the mixing rates and the gyro functions (Nor-
mal mode, Heading Hold mode and Combined) can be found in
the handbooks ‘Handbook Special Gyro’ and ‘Handbook Special
Mixer’ respectively.
The green bar which can be seen in left hand column (see illus-
tration below) shows the actual servo position from – 100% to
+ 100% to the red shaded area. If the transmitter stick or control
is moved the green bar will sink or rise to indicate the movement
of the servo.
Failsafe marker
Servo 10 has a red bar in the horizontal field which shows the
Failsafe position (Channel Failsafe). Servo 11 has a red bar in the
vertical field which shows the Failsafe position (Servo Failsafe)
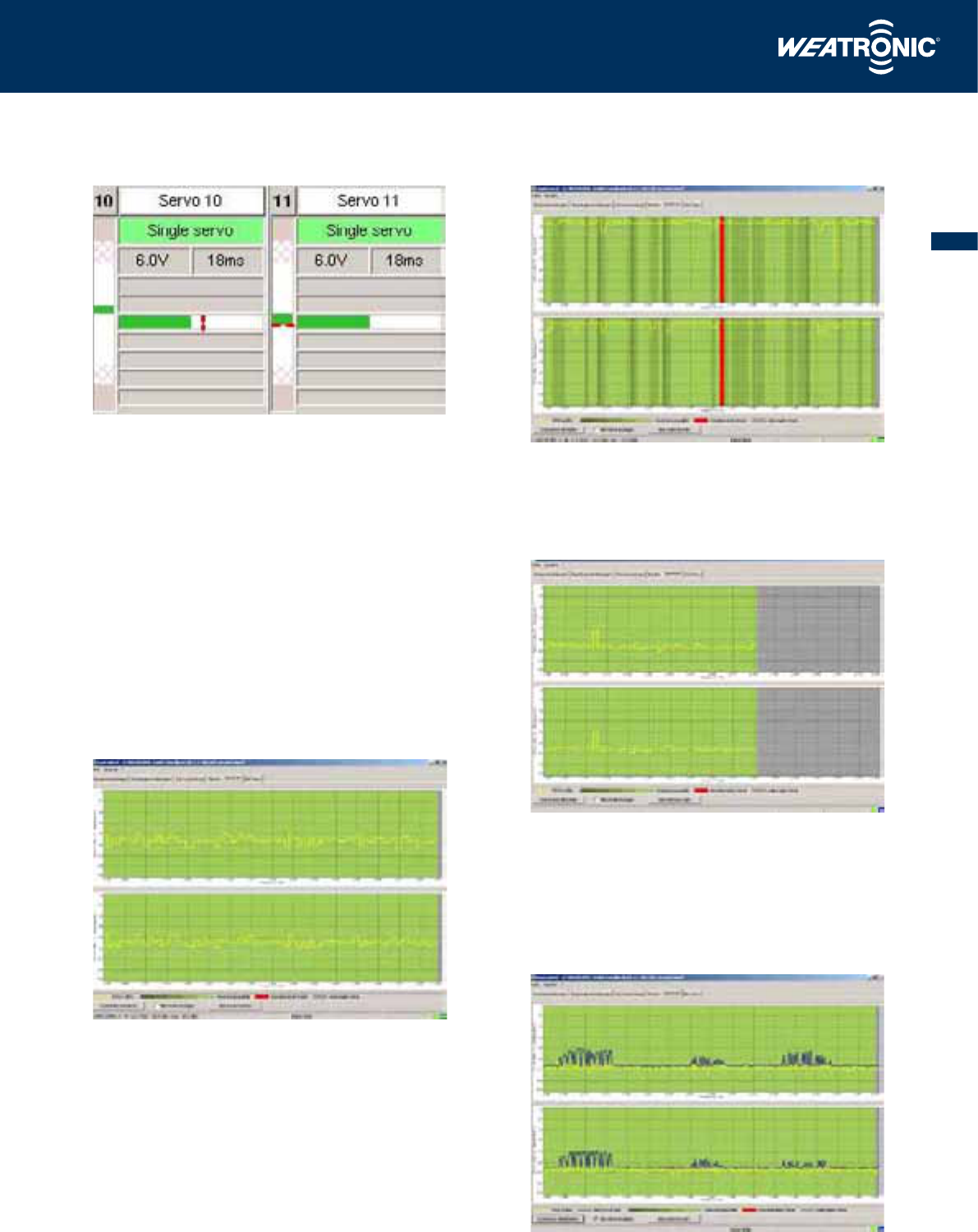
39
INSTRUCTION MANUAL
On this illustration a red bar can be seen on one channel. This is
because the Weatronic Adaptive Frequency Hopping System has
detected that another system is using this channel and therefore it
has temporarily blocked the channel. The dark green bars indicate
channels with a poor signal strength.
In this illustration the France has been selected in the ‘Country
setting’ and as such only a part of the band is utilised.
If the ‘Activate scanmode’ button is clicked (located in the bottom
left hand corner) the Spectrum Analyser will scan the whole 2.4
GHz band, and will show any other devises currently operating on
sections of the band.
Scanmode detecting 3 active WLAN systems.
Channel/servo positions.
The horizontal bar (default colour, green) shows the channel po-
sition and the vertical bar (green) the servo position. If the back-
ground colour has been changed to ease in identifying the chan-
nels/servos in the ‘Servo mapping’ window, these (green) bars will
assume that colour.
11.5 Spectrum analyser
By opening the window labelled spectrum you will have access
to another useful tool which we have incorporated into the Giga-
Control software, a spectrum analyser. The analyser shows hat is
currently being received by both of the transmitters patch anten-
nas. If a weatronic receiver is connected and switched on the soft-
ware will show which channels within the band are being utilised
by the Frequency Hopping System. The signal strength (RSSI) will
be shown in dBm (Decibel Milliwatts).
This is example of how the Spectrum analyser will appear if a weat-
ronic R/C system is active using all 81 channels of the 2.4 GHz
band.
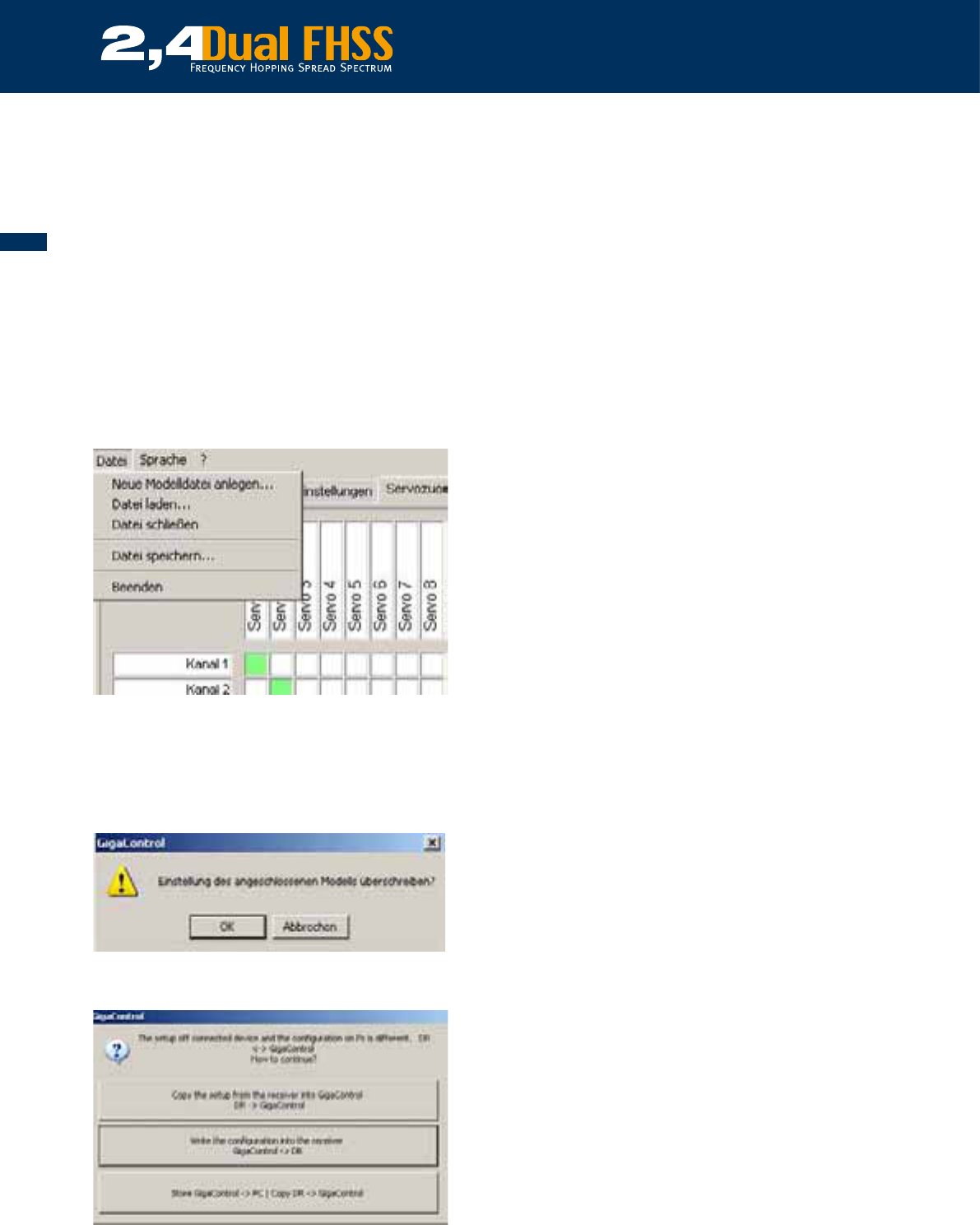
40
11.6 Configuring the Store/Charge/
Off-Line and On-Line modes
The GigaControl software has the ability to store model configu-
rations on your computer which can then be directly copied into a
Weatronic R/C system. There are two methods:
• Offline programming, with this option a weatronic
system does not have to be connected to the computer.
• Online programming, when a weatronic system is con-
nected to the computer. Using this option will write the
settings directly to the transmitter and receiver.
Under the option ‘File’, a ‘New model file’ can be created, a con-
figuration can be loaded from the PC (‘File load’) or the current
setting can be stored (‘File save’).
If the GigaControl software contains a configuration you will recei-
ve a warning asking you if you want to over-write the setting or to
abort and retain the current values.
Warning if no weatronic transmitter module is connected. (Off-
Line mode)
This warning message will appear if a weatronic R/C system is
connected to the computer and switched on.
12 Indemnity Statement/Com-
pensation-Warranty Claims
As the company weatronic GmbH has no influence over the use,
installation, maintenance or conditions under which any of its
products will operate, we accept no responsibility for any damage
caused be it of a physical, financial or theoretical nature. Weatro-
nic GmbH will accept no claim against it which results directly or
indirectly from the operation or use of its products.
Your statutory rights apply, any claim made against us will be
based solely on the retail price of the product and limited to our
(weatronic GmbH) products only.
41
INSTRUCTION MANUAL
Appendix 1 -
technical specifications
1.1 Transmitter module 2.4 Dual FHSS
12 channels
Transmission: adaptive frequency hopping spread spectrum
Frequency range: 2,401 – 2,4835 GHz
Power output: 20 dBm (100 mW)
Functions (channels): 12
Frequencies: 81, France: 52
Intervall: 10 ms
Modulation: Quadrature Phaseshift keying
Back channel for telemetry and sensor data
Real time data via earplug, LED or via PC (GIGAControl)
Receive sensitivity: -84 dBm
Temperature range: -10°C to +60 °C
Voltage: 5 - 10 Volt
Current consumption: 200 mA
Range: > 3000 m
Resolution of channels: 4096 steps
Data storing: Micro SD card
Software: GIGAControl
Firmware update: Micro SD card
Antennas: 2 patch areals
Polarisation: circular
Dimensions : 95 x 65 x 18 mm
Weight: 60 g
1.2 Dual Receiver 2.4 Dual FHSS micro
8/10/12
Double receiver circuit
Transmission: adaptive frequency hopping spread spectrum
Frequency range: 2,401 – 2,4835 GHz
Power output: 20 dBm (100 mW)
Functions (channels): 12
Frequencies: 81, France: 52
Intervall: 10 ms
Modulation: Quadrature Phaseshift keying
Back channel for telemetry and sensor data
Receive sensitivity: -100 dBm
Temperature range: -10°C to +60 °C
Frequency range: 2,401 – 2,4835 GHz
Power output: 20 dBm (100 mW)
Functions (channels): 12
Frequencies: 81, France: 52
Interval: 10 ms
Modulation: QPSK*
Back channel for telemetry and sensor data
Real time data via earplug, LED or via PC (GIGAControl)
Receive sensitivity: -84 dBm
Current consumption: 130 mA
Resolution of channels: 4096 steps
Firmware update: USB adapter
Antennas: 2 λ/4 wires
Polarisation: linear
Antenna length: 200 mm
Antenna length in operation: 29 mm
Dimensions: 55 x 33 x19 mm
Weight: 30 g
* Quadrature Phaseshift keying
1.3 Dual Receiver 2.4 Dual FHSS 12-22 R
Two separate receivers
Transmission: adaptive frequency hopping spread spectrum
(adaptive FHSS)
Frequency range: 2,401 - 2,4835 GHz
Transmitting power: 20 dBm (100 mW)
Functions (channels): 12
Frequencies: 81, France: 52
Intervall: 10 ms
channels width: >= 1 MHz
Modulation: QPSK*
Reverse channel for telemetry and sensor data
Free allocation of 22/30 servo exits to 12 (16) channels
Free programming of servo exits
Servo failsafe
Channel failsafe
Servoline: max. 31 points
Mixing function - five mixers per servo exit
Sequencer function
Slow function
Automatic Servo synchronisation - max 8 servos per channel
Temperature range: -10°C to +60 °C
Operation voltage: 5 - 10 Volt
Power consumption: 200 mA
Range: > 3000 m
Resolution: 4096 steps
Data storing: Micro SD card
Operation software: GigaControl
Servoa exits: 22, max. 8 servos per channel
Electronic switch board , battery testing function
Data storage: Micro SD card
Double power supply: two six cells NiMH batteries (min SUB
C-Größe) or two two cells Lithium-Polymer batteries or two
three cells A123 batteries
2 λ/4 radiators
Polarisation: linear
Antenna total length: 200 mm, operational length: 29 mm
Dimensions: 143 x 84 x 26 mm
Weight: 272 g, switch board with cable 34 g, areals: each 4 g
* Quadrature Phase shift keying
1.4 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro II
like above plus:
SMM gyros on X and Y axis, normal mode and heading lock mode
adjustable
1.5 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III
like above plus:
SMM gyros on X, Y and Z axis, normal mode and heading lock
mode adjustable
1.6 Dual Receiver 2.4 Dual FHSS 12-22 R Gyro III + GPS
like above plus:
GPS data logging
1.7 Dual Receiver 2.4 Dual FHSS 12-30 R Gyro III + GPS
like above plus:
30 exits for servos/actuators
42
Appendix 2 - Flash codes Dual Receiver 12-22 R series
2.1 Flash codes Dual Receiver 12-22 R series
Flash codes on switch board:
Status - green LED:
Flash code: Function:
- Switch on (0,5 s on) Function test
- Blinking (0,5 s on – 0,5 s off) Binding
- Double blinking (0,2 s on – 0,1 off – 0,2 s on - 0,5 s off) Threshold value reception
- 3 times blinking (0,2 s on – 0,1 off – 0,2 s on - 0,1 s off –
0,2 s on - 0,5 s off)
Threshold value temperature
- Fast blinking (0,25 s on – 0,25 s off) Calibration gyro (max.10 s)
- Steady green with short interruption (0,9 s on - 0,1 s off) Reception + GPS reception
- Steady green (on) Data reception
2.2 Flash codes Dual Receiver 12-22 R series
Flash codes on switch board:
Battery – red LED:
Flash code: Function:
- Switch on (0,5 s on) Function test
- Hektic blinking (0,2 s on – 0,1 off) Bad battery
- Double blinking (0,2 s on – 0,1 off – 0,2 s on - 0,5 s off) Threshold value battery voltage
- Fast blinking (0,25 s on – 0,25 off) Backup battery was used
- Blinking (0,5 s on – 0,5 s off) Normal operation with main battery
2.3 Flash codes Dual Receiver 12-22 R series
Flash codes on case:
Log – yellow LED: (only on case)
Flash code: Function:
- Blinking (0,5 s on – 0,5 s off) Logging on SD card
- Fast blinking max 10 s (0,25 s on – 0,25 s off) Calibration of internal gyros
- Fast blinking (0,25 s on – 0,25 s off) Mistake – no calibration of gyros

43
INSTRUCTION MANUAL
Appendix 3
3.1 Certification 2.4 GHz systems
44
45
INSTRUCTION MANUAL
www.weatronic.com
weatronic GmbH
Seidenstraße 57
70174 Stuttgart - Germany
Tel.: +49 -711 -253 92 74
Fax: +49 -711 -870 30 994
E-Mail: info@weatronic.com
Double safety has a name!