Yuejiang Technology WIRELESS2 WIFI Kit User Manual part2
Shenzhen Yuejiang Technology Co., Ltd WIFI Kit part2
Contents
- 1. User manual part1
- 2. User manual part2
User manual part2
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
78
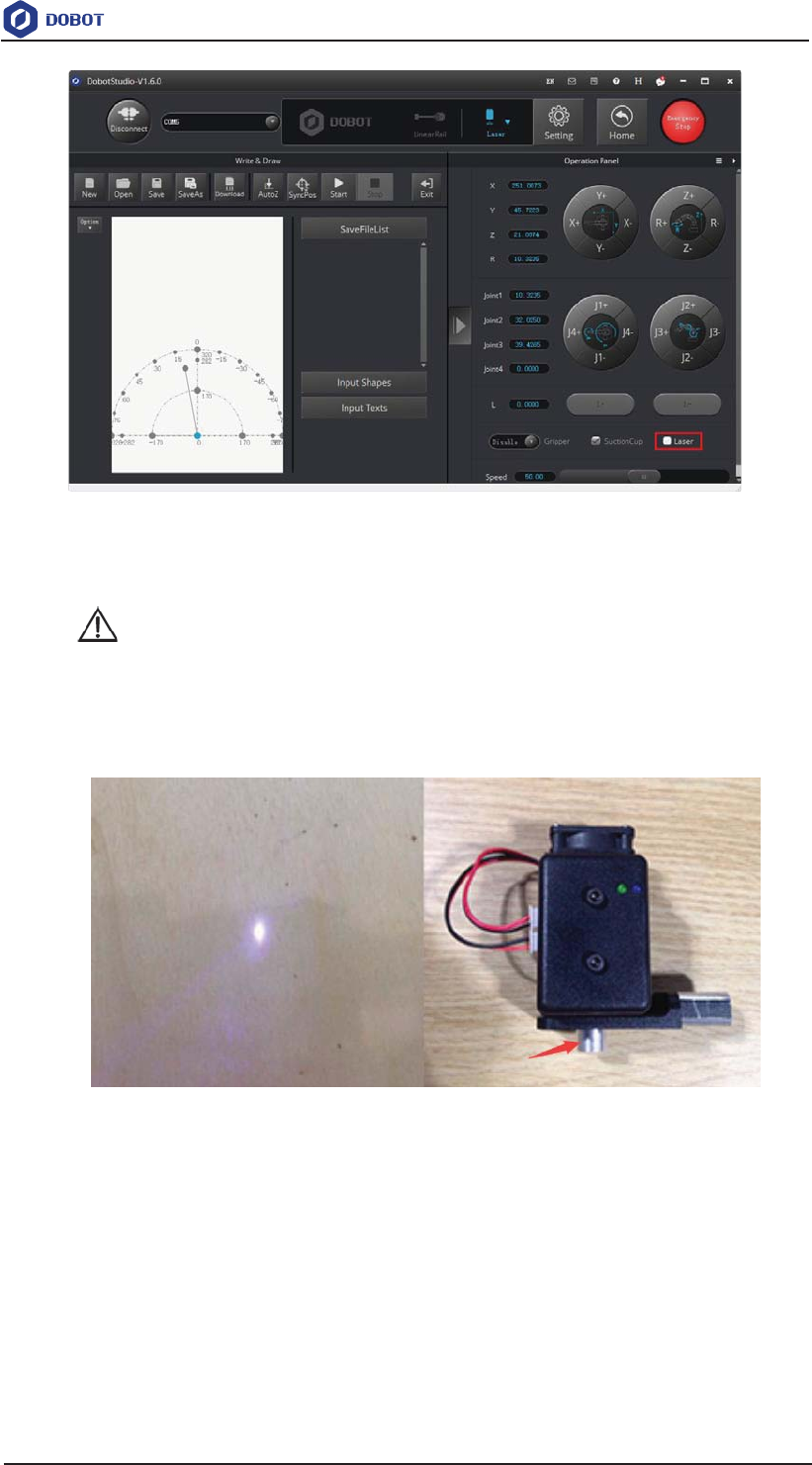
Figure 5.79 Unselect the Laser
NOTICE
y If you cannot set the laser to be at its minimum focus, it’s probably because the
focal length is long. To shorten the focal length, slightly turn the sliver lens screw
(as shown in Figure 5.80) on the bottom of the laser kit.
Figure 5.80 Adjust the laser focus
y The point marked by a red box, as shown in Figure 5.81, corresponds to the
position of the end-effector of the Dobot Magician. This point changes its position
only within the annular area when the robotic arm moves.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
79
Figure 5.81 The point corresponding to the end-effector of the robotic arm
Step 4 Click AutoZ on the Write & Draw page to obtain and save the current value of Z
axis.
Once this step is complete, the next time you start to engrave, directly import a PLT
or SVG image file without adjusting the position of the laser kit, and click
SyncPos, and then click Start to start engraving on the paper, as shown in Figure
5.82.
Figure 5.82 Lock the height of engraving
NOTE
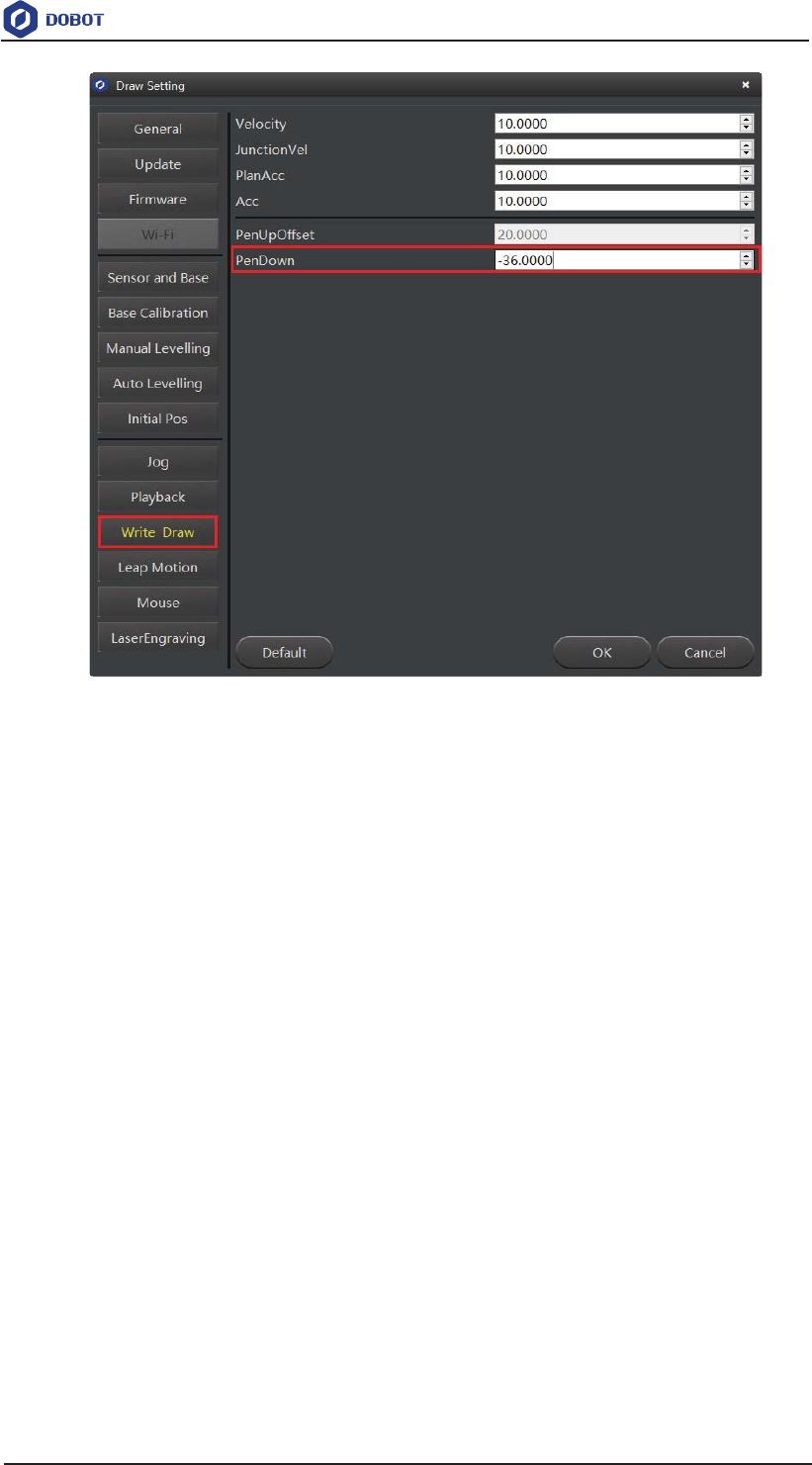
The value of the Z axis is the PenDown parameter. This parameter can be set by
selecting Setting > Write Draw > PenDown on the Write & Draw page, as shown in
Figure 5.83. If the effect of engraving is not satisfactory, slightly raise and lower the
height of the laser kit or directly change the value of PenDown.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
80
Figure 5.83 Set the PenDown parameters
Step 5 Click SyncPos.
The Dobot Magician automatically moves above the position (PenUpOffset) of the
start point of the laser-engraving.
Step 6 Click Start to start engraving on the paper.
When engraving, click Pause to pause the engraving and Stop to halt the
engraving.
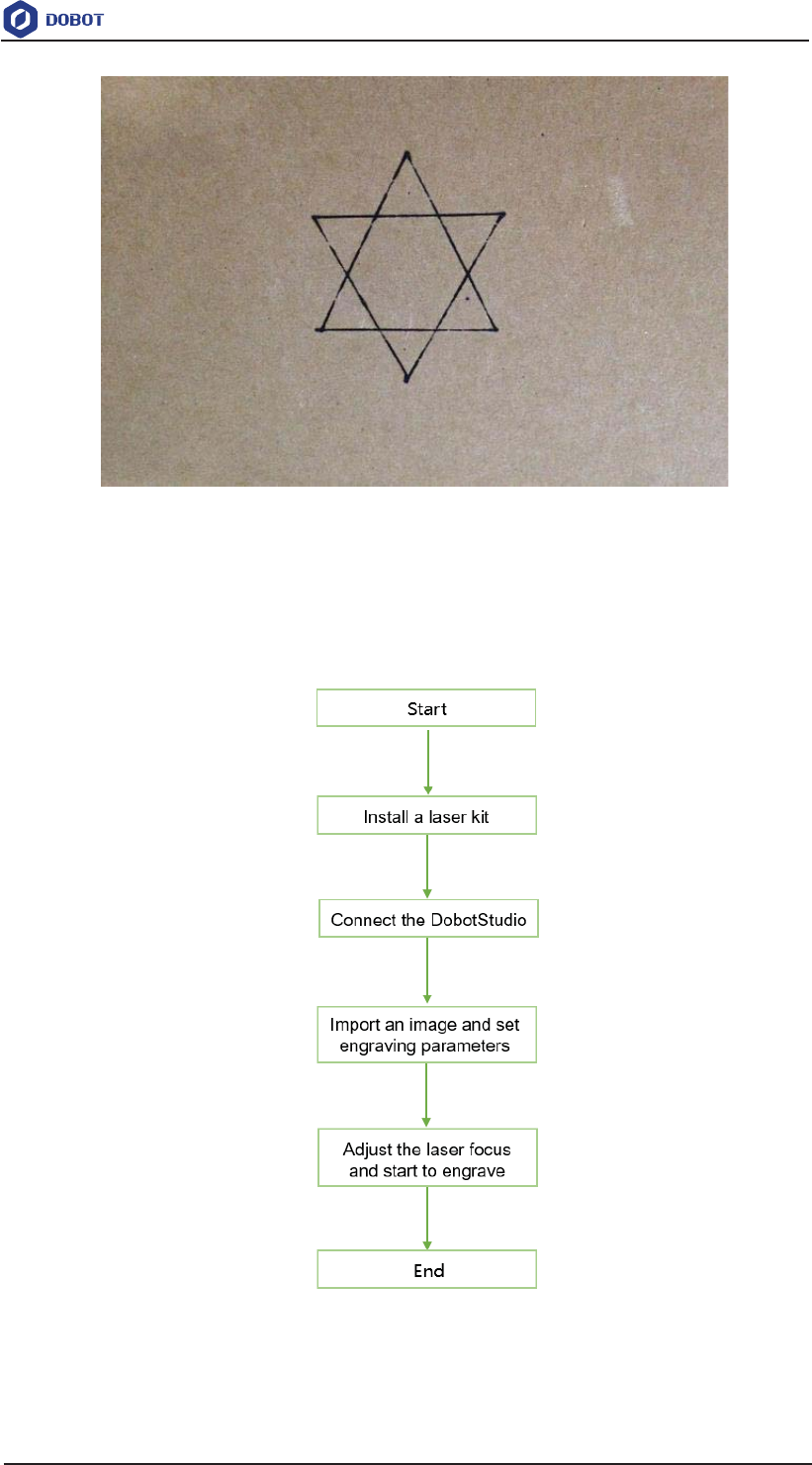
Figure 5.84 shows the effect of the laser-engraving.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
81
Figure 5.84 The effect of the laser-engraving
Engraving a Grayscale Image 5.6
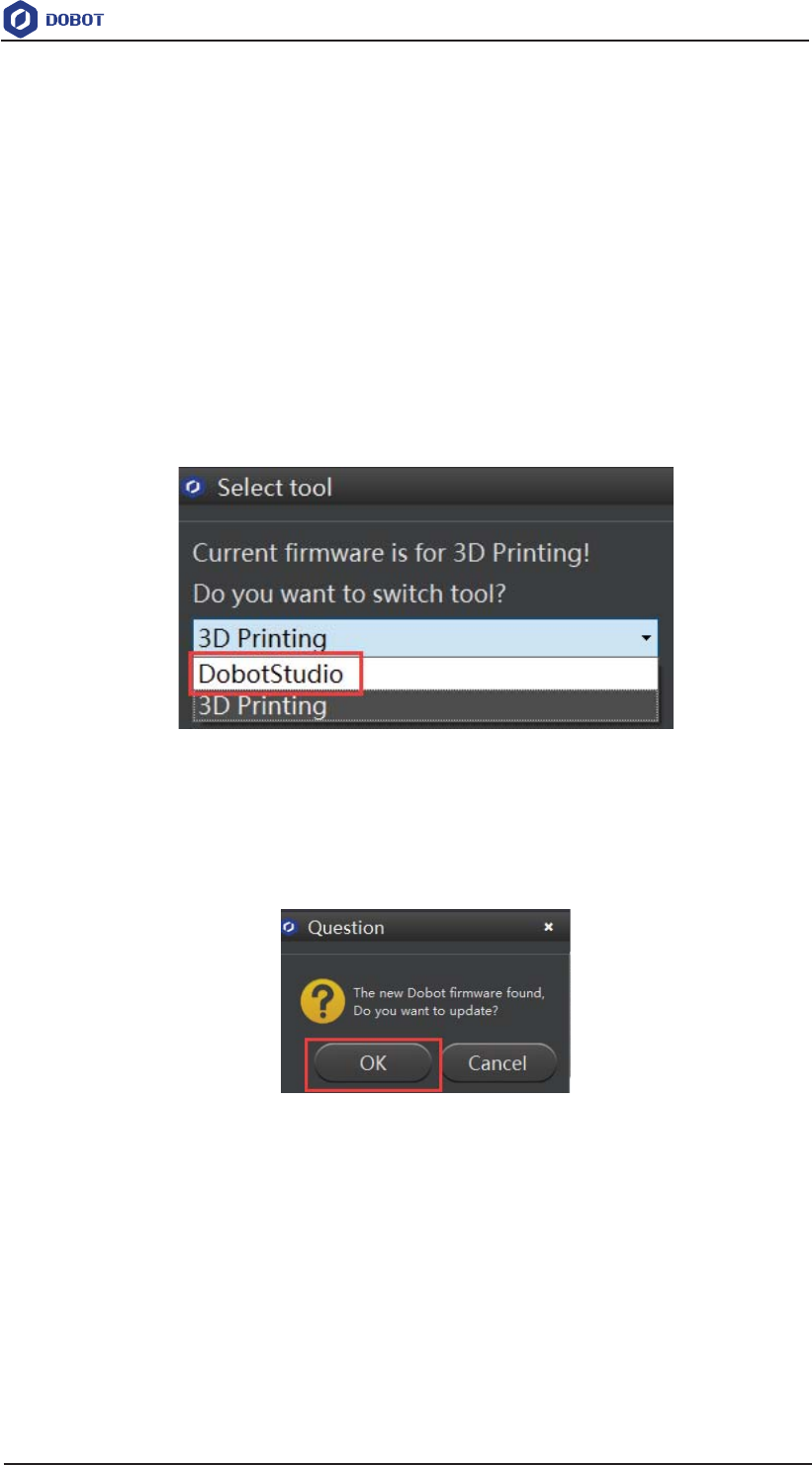
Figure 5.85 shows the process of engraving a grayscale image.
Figure 5.85 The process of engraving a grayscale image
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
82
Installing a Grayscale-engraving Kit 5.6.1
Both grayscale-engraving and laser-engraving use the laser kit as the end-effector. For the
installation method, see 5.5.1 Installing a Laser Kit.
Connecting the DobotStudio 5.6.2
Step 1 Launch the DobotStudio, and select the COM port, and then click Connect.
If the current firmware of the Dobot Magician is the 3D Printing firmware instead
of the Dobot firmware, the Select tool dialog box is displayed, asking if you want
to switch to the Dobot firmware. In this case, perform the following steps to switch
to this firmware.
Select DobotStudio to upgrade the Dobot firmware, as shown in Figure 5.86. 1.
The Question dialog box is displayed.
Figure 5.86 Select the DobotStudio to upgrade the Dobot firmware
Click OK, as shown in Figure 5.87. 2.
The Dobot firmware upgrade window is displayed.
Figure 5.87 Confirm the firmware upgrade
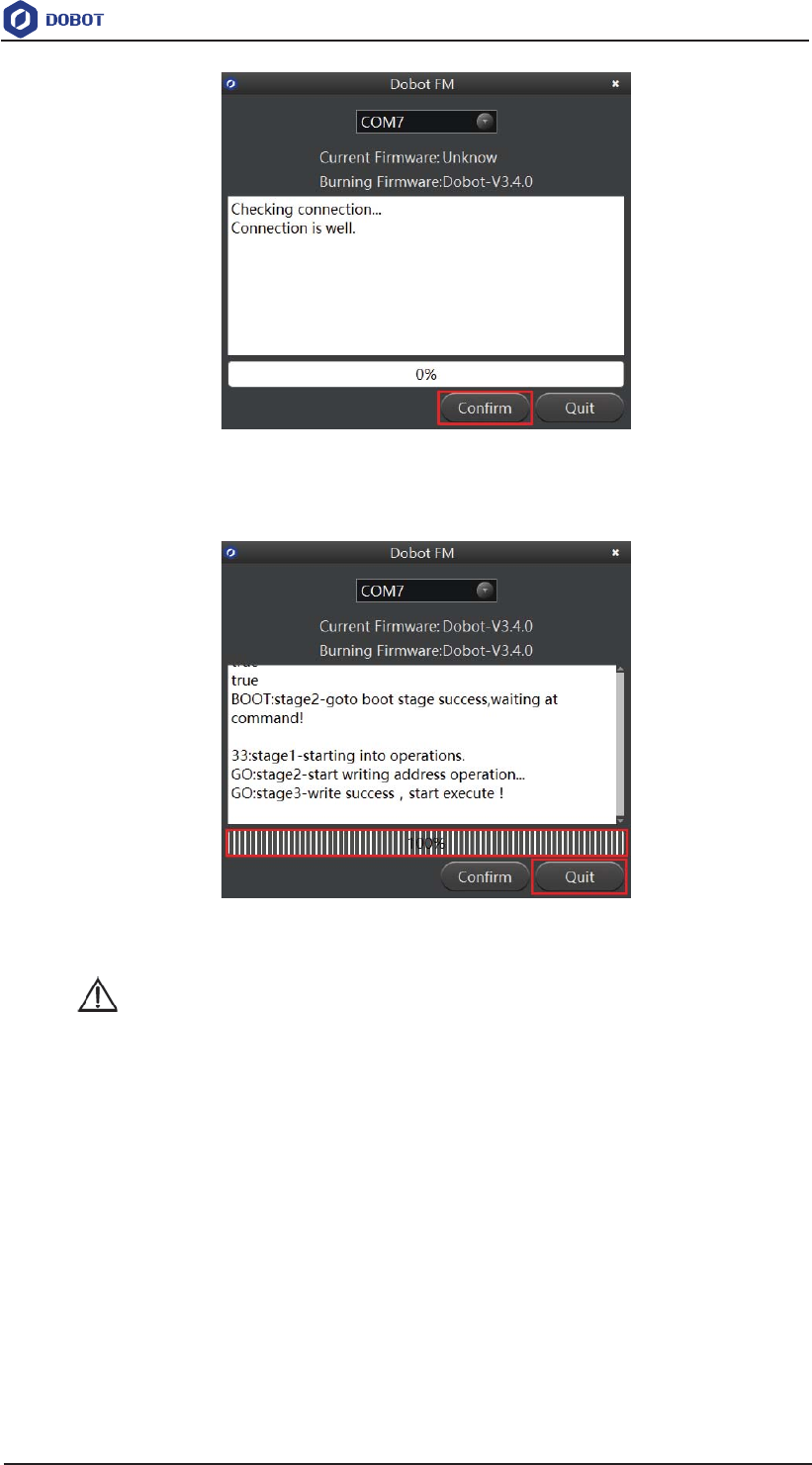
Click Confirm to upgrade the Dobot firmware, as shown in Figure 5.88. When 3.
the upgrade process bar shows 100%, and a short beep sound is heard, it means
that the firmware is upgraded successfully, as shown in Figure 5.89. In this
case, the LED indicator turns from red to green. Then click Quit to exit.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
83
Figure 5.88 Click Confirm
Figure 5.89 The firmware upgrade is successful
WARNING
During the firmware upgrade, do not stop it. Otherwise, errors occur.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
84
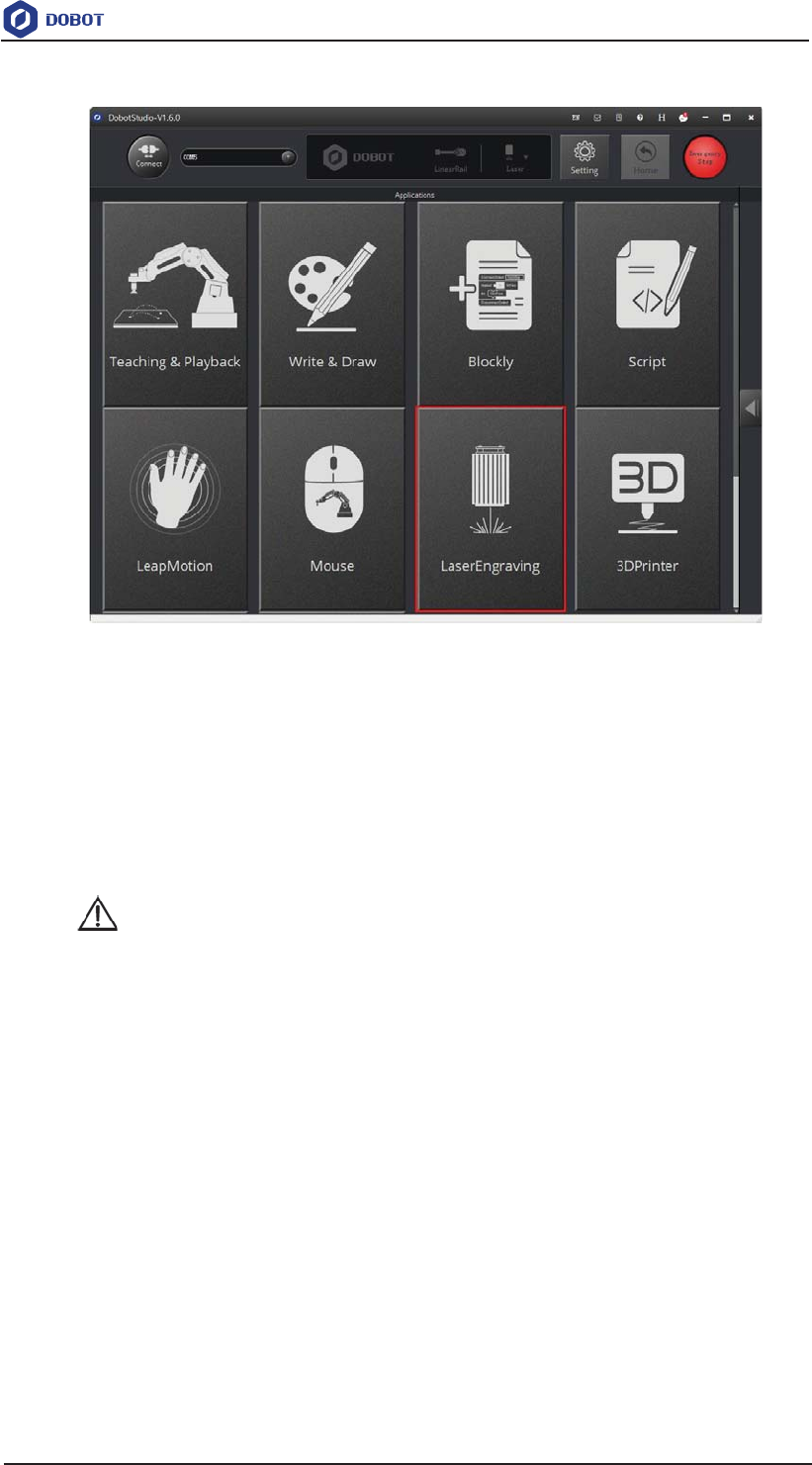
Step 2 Click LaserEngraving, as shown in Figure 5.90.
Figure 5.90 Click LaserEngraving
Importing Image Files and Setting Engraving Parameters 5.6.3
Prerequisites
An image file has been created.
Procedure
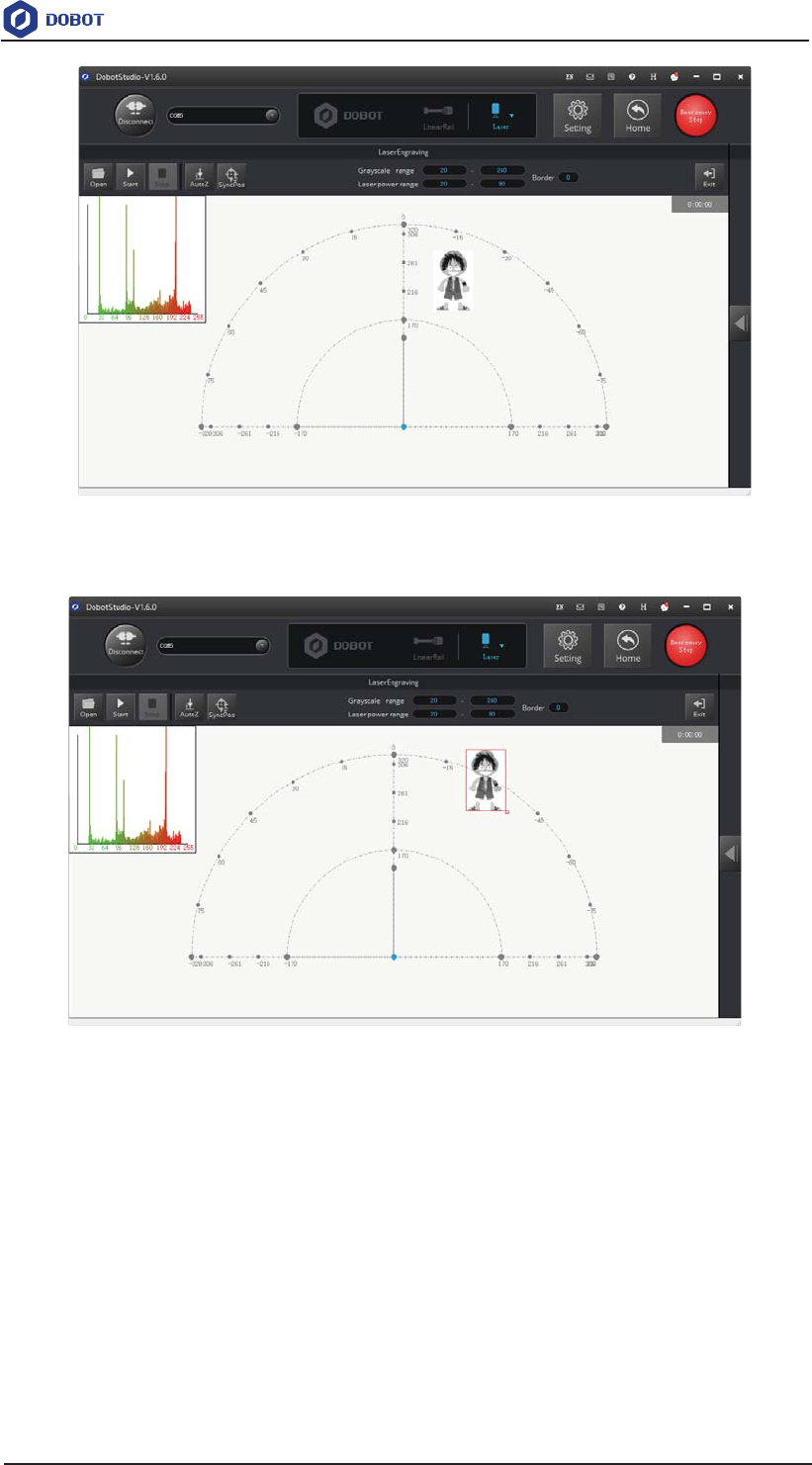
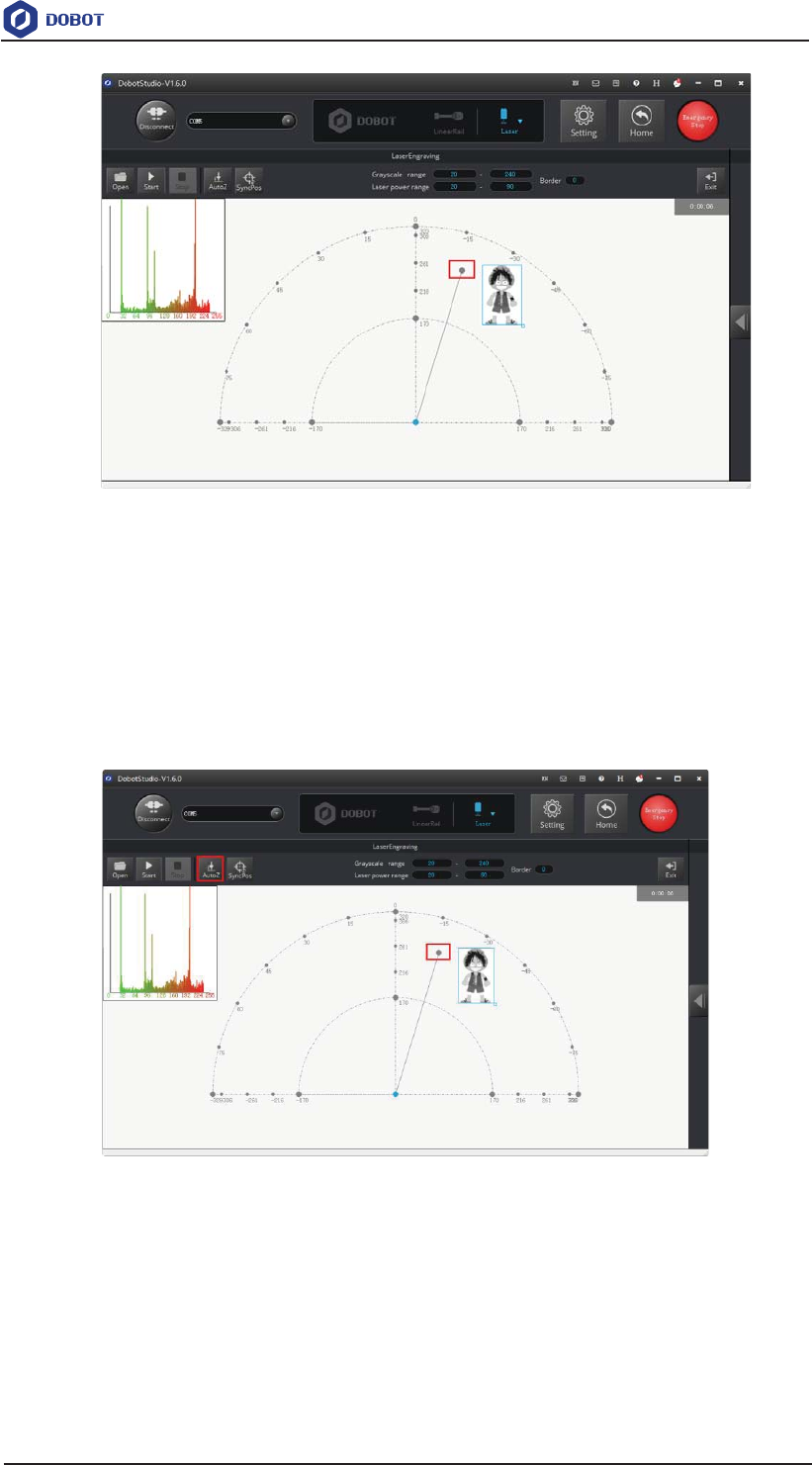
NOTICE
The imported image should be placed within the annular area on the LaserEngraving
page, as shown in Figure 5.91. If not, the robotic arm reaches its limited position and
thus cannot engrave on an object. In this case, the image is highlighted with a red
border, as shown in Figure 5.92.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
85
Figure 5.91 The image file is located within the annular area
Figure 5.92 The image file is located outside the annular area
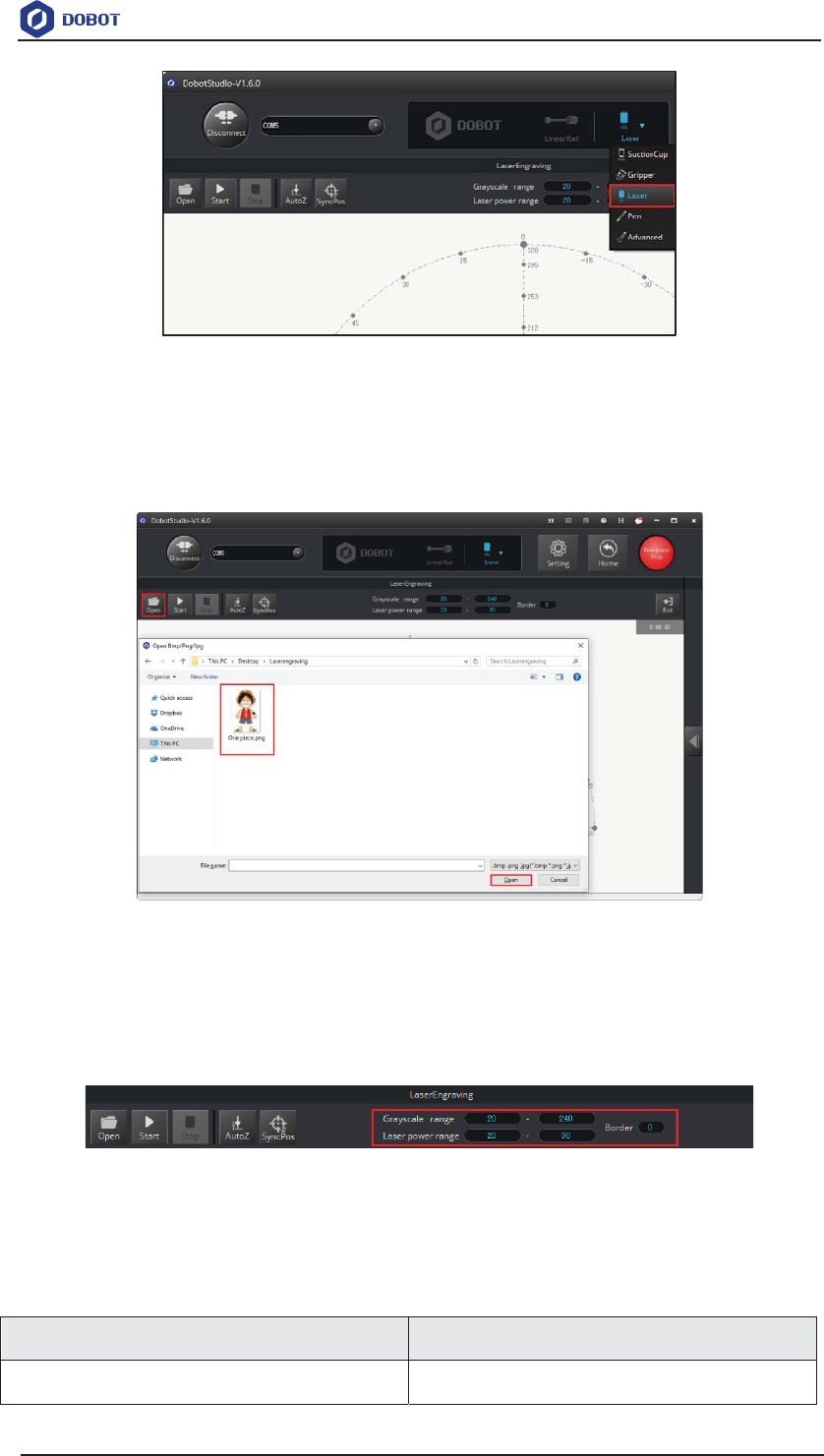
Step 1 Choose Laser as the end-effector on the LaserEngraving page, as shown in Figure
5.93.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
86
Figure 5.93 Choose Laser as the end-effector
Step 2 Click Open to import an image file such as BMP, JPEG, or PNG, as shown in
Figure 5.94.
Figure 5.94 Import an image file
Step 3 Set the Grayscale range, Laser power range, and Border, as shown in Figure
5.95. For details, see Table 5.11.
Figure 5.95 Set the grayscale range, laser power range, and border
Table 5.11 Laser engraving parameters
Items
Description
G
rayscale range
Set the grayscale range
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
87
Items
Description
Range: 0 - 255
Default value: 20
- 240
Laser power range
Set
the laser power range
Range: 2
- 100
Default value: 20
- 90
Border
Set the border
width.
Unit: pixel
Range: 0
- 50
Default value: 4
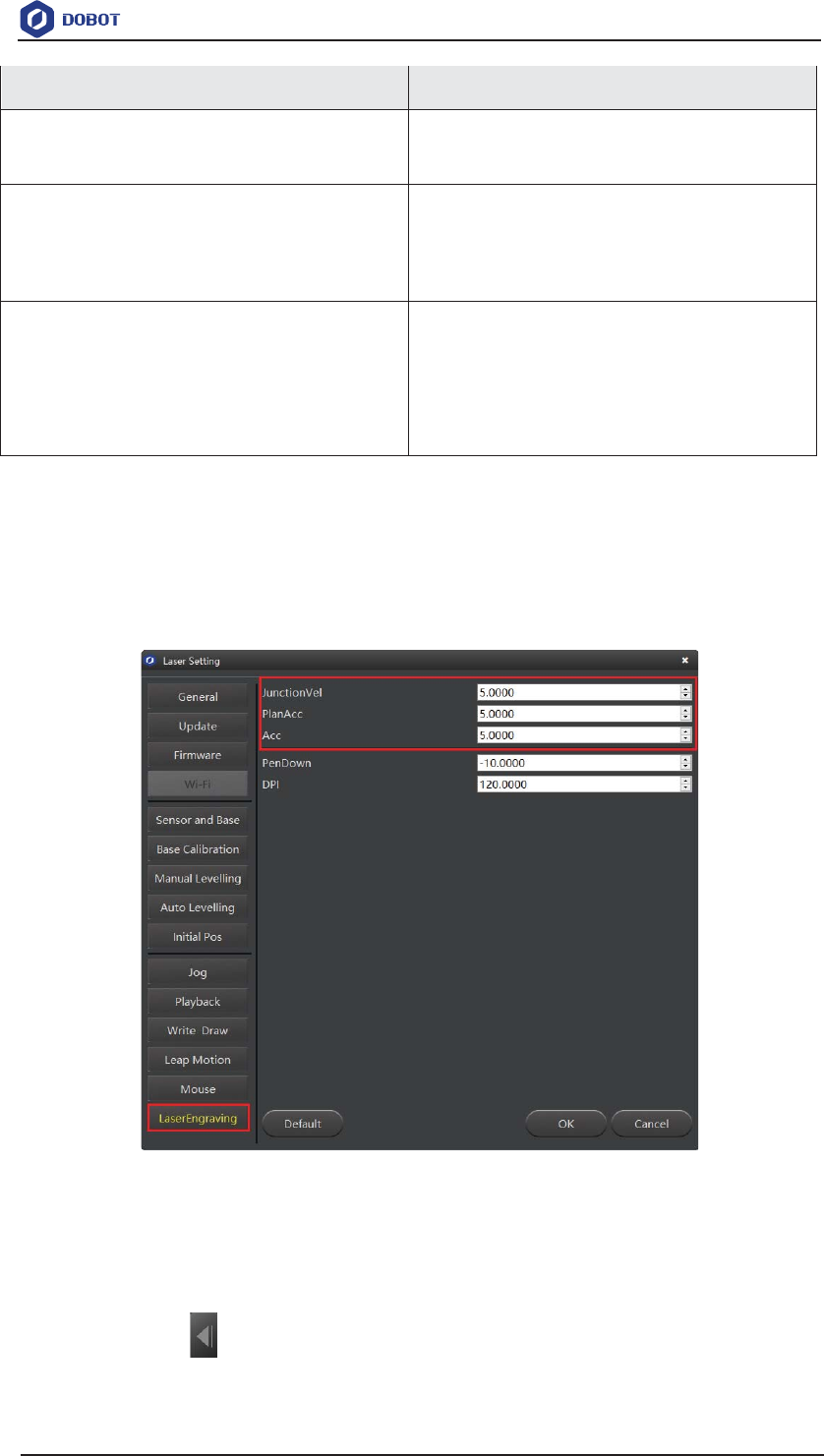
Step 4 Set the laser-engraving parameters.
Click Setting on the LaserEngraving page. 1.
Set the JunctionVel (junction velocity), PlanAcc (linear acceleration), and Acc 2.
(acceleration), for example, set all to 5, as shown in Figure 5.96.
Figure 5.96 Set the parameters of laser engraving
Adjust the Laser Focus and Start to Engrave 5.6.4
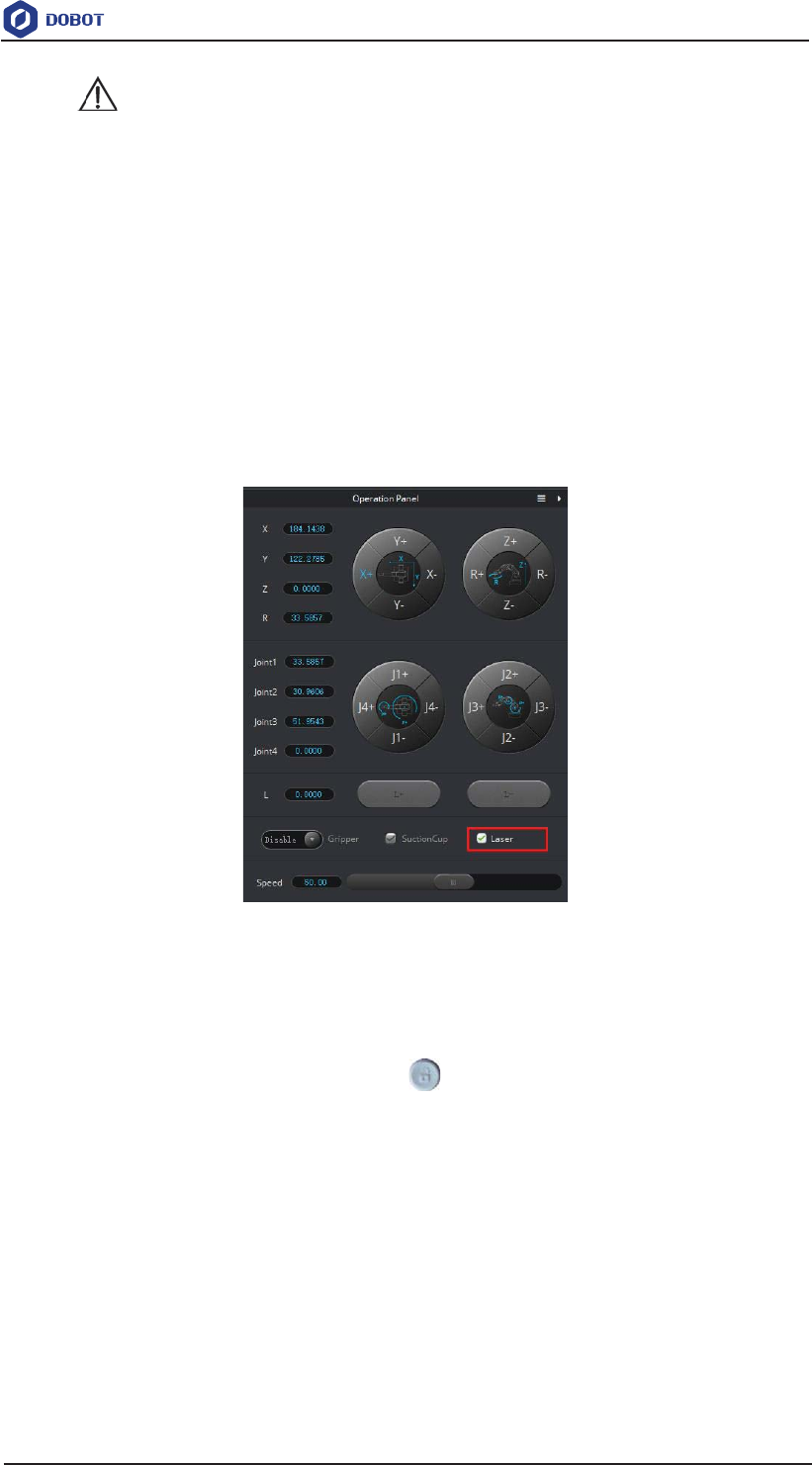
Step 1 Click to display the Operation Panel, and then select Laser to turn on the
laser, as shown in Figure 5.97. In this case, the laser gives out a laser beam.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
88
Danger
y When using a laser, wear lasing protective eyeglass.
y Never aim the laser at a person’s eye and clothes or stare at the laser from
within the beam.
y In the central laser focus, a high-temperature heat is created and can burn
materials such as papers and wooden boards.
y Never aim the laser at a person and their clothes.
y Do not allow the children to play with the Dobot Magician. Monitor the
robotic arm while it is running and power off it once the movement is
complete.
Figure 5.97 Select the Laser
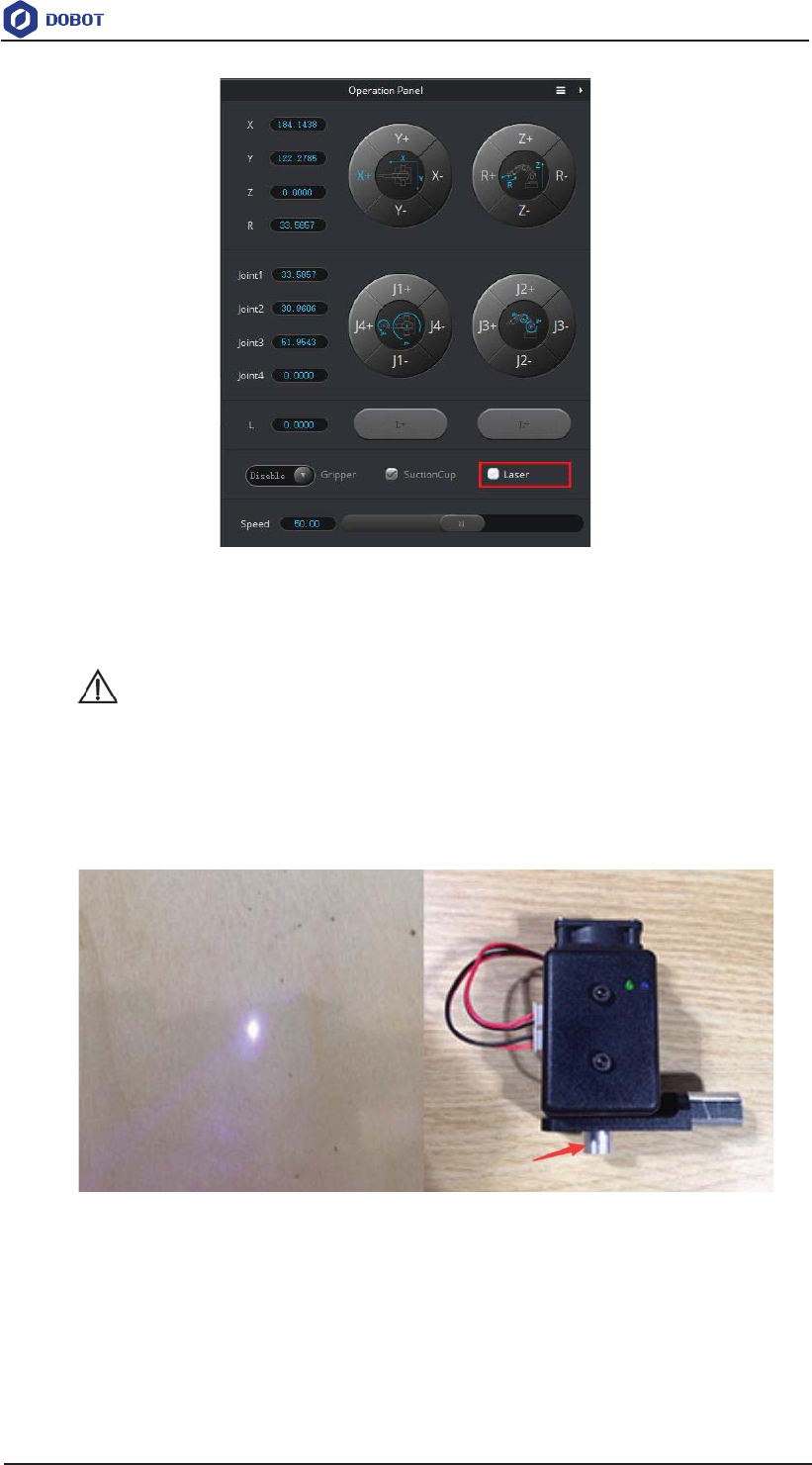
Step 2 Adjust the laser focus.
Press and hold the unlock button on the Forearm to move the robotic arm to
raise and lower the height of the laser kit until the laser is the brightest with a
smallest possible spot size. When the laser power level is high enough, the laser
beam can burn and cut the paper. After getting a pretty good focus, unselect Laser
on the Operation Panel page to turn off the laser, as shown in Figure 5.98.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
89
Figure 5.98 Unselect the Laser
NOTICE
y If you cannot set the laser to be at its minimum focus, it’s probably because the
focal length is long. To shorten the focal length, slightly turn the sliver lens screw
(as shown in Figure 5.99) on the bottom of the laser kit.
Figure 5.99 Adjust the focus
y The point marked by a red box, as shown in Figure 5.100, corresponds to the
position of the laser kit of the Dobot Magician. This point changes its position only
within the annular area when the robotic arm moves.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
90
Figure 5.100 The point corresponding to the laser kit of the robotic arm
Step 3 Click AutoZ on the LaserEngraving page to obtain and save the current value of
the Z axis.
Once this step is complete, the next time you start to engrave, directly import an
image file without adjusting the position of the laser kit, and click SyncPos, and
then click Start to start engraving on the paper, as shown in Figure 5.101.
Figure 5.101 Lock the height of engraving
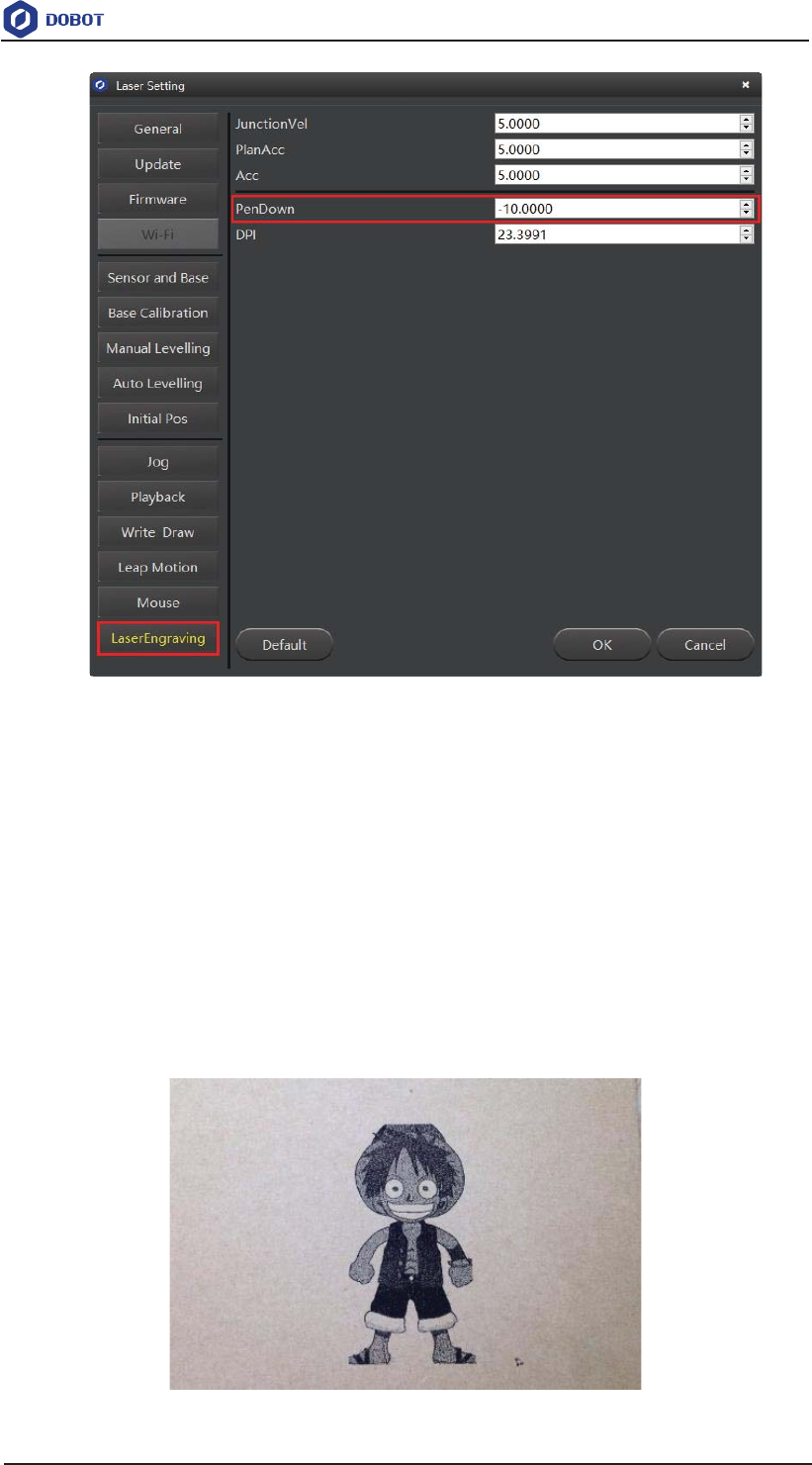
NOTE
The value of Z axis is the PenDown parameter. This parameter can be set by selecting
Setting > LaserEngraving > PenDown, as shown in Figure 5.102. If the effect of
engraving is not satisfactory, slightly raise and lower the height of the laser kit or
directly change the value of PenDown.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
91
Figure 5.102 Set the PenDown parameters
Step 4 Click SyncPos.
The Dobot Magician automatically moves above the position of the start point of
the laser-engraving.
Step 5 Click Start to start engraving on the paper.
When engraving, click Pause to pause the engraving and Stop to halt the
engraving.
Figure 5.103 shows the effect of the laser-engraving.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
92
Figure 5.103 The effect of laser-engraving
Controlling with your Hand Gesture 5.7
You can use the LeapMotion function module of the DobotStudio to perform tasks, for
example, grab or suck an object with your hand gesture.
Installing a Leap Motion Controller 5.7.1
Prerequisites
x The Leap Motion controller (a hand gesture controller) has been obtained.
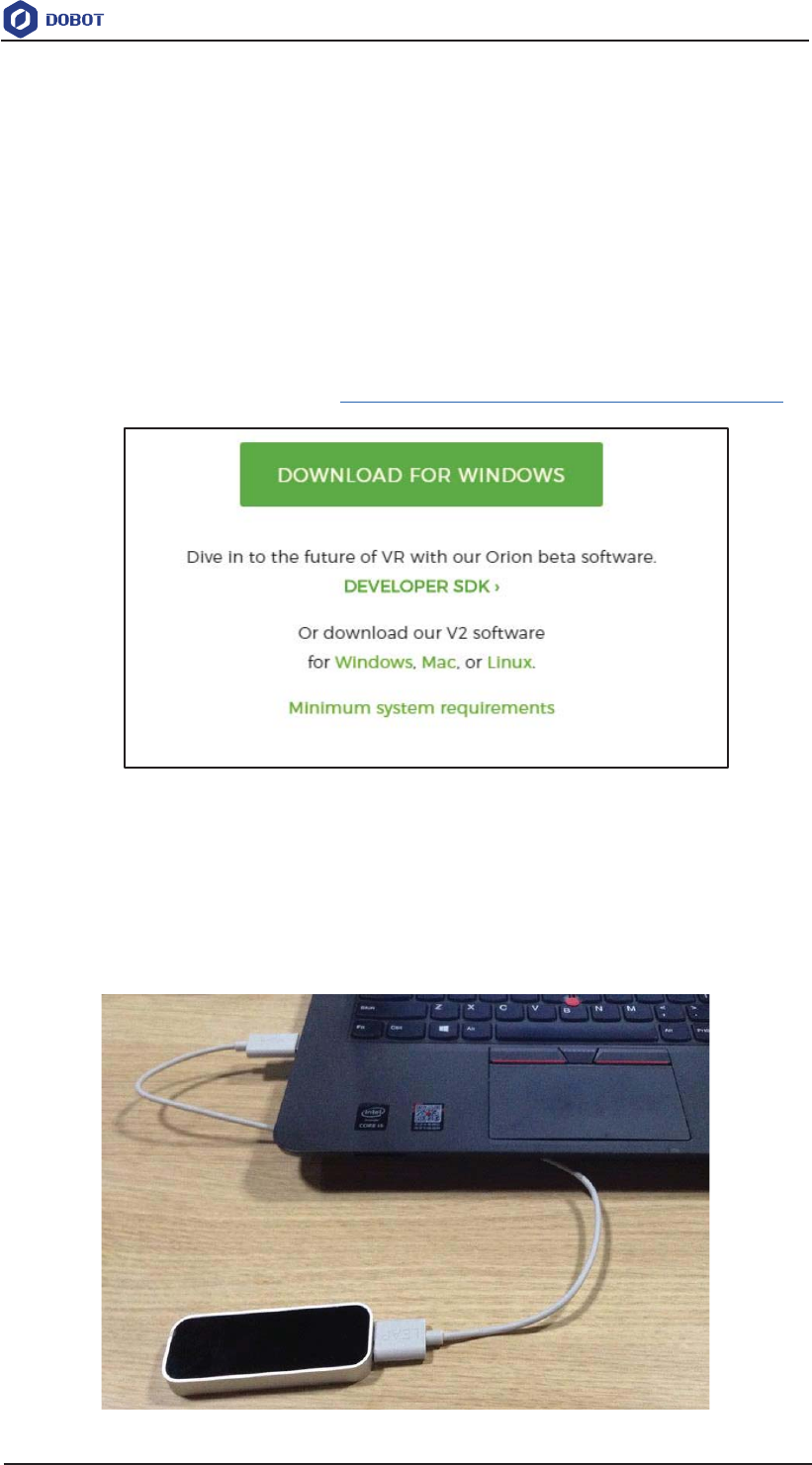
x The Leap Motion driver software has been obtained. Download the Windows version, as
shown in Figure 5.104, from the https://www.leapmotion.com/setup/desktop/windows.
Figure 5.104 Download the Leap Motion driver software for Windows
Procedure
Step 1 Connect a Leap Motion controller to your computer with a USB cable, and put it on
the work surface with its face up, as shown in Figure 5.105.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
93
Figure 5.105 Connect the Leap Motion controller to your computer
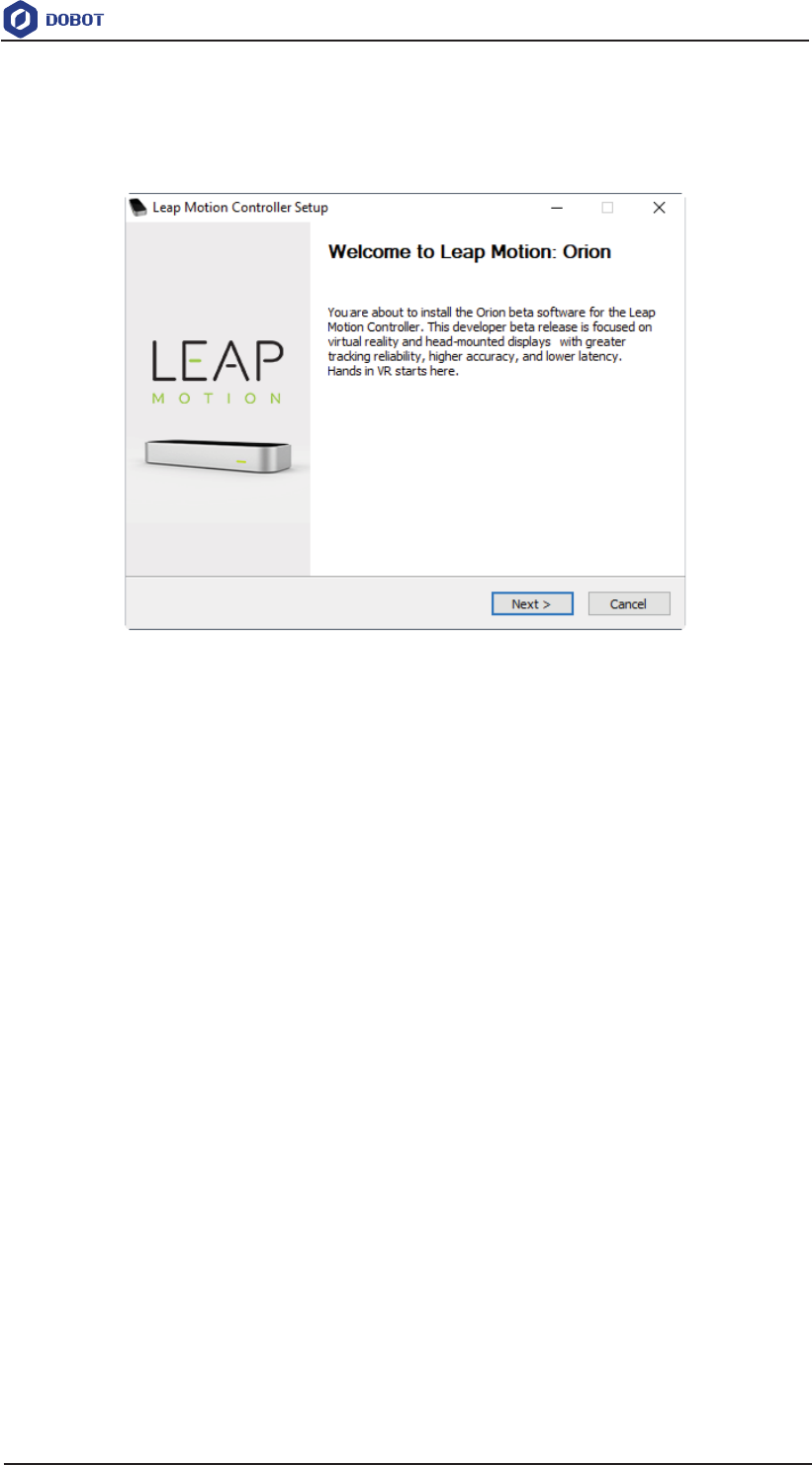
Step 2 Install the Leap Motion driver software by following the on-screen instructions, as
shown in Figure 5.106.
Figure 5.106 The Leap Motion Installation Interface
Leap Motion Demo 5.7.2
You can move or sort an object with the LeapMotion function. This topic introduces how to
move a small cube with a hand gesture.
Prerequisites
y The Dobot Magician is powered on and connected to your computer.
y The suction cup kit has been installed. For details, see 5.2.1 Installing a Suction Cup Kit.
Procedure
Step 1 Launch the DobotStudio, and click Connect to connect to the Dobot Magician.
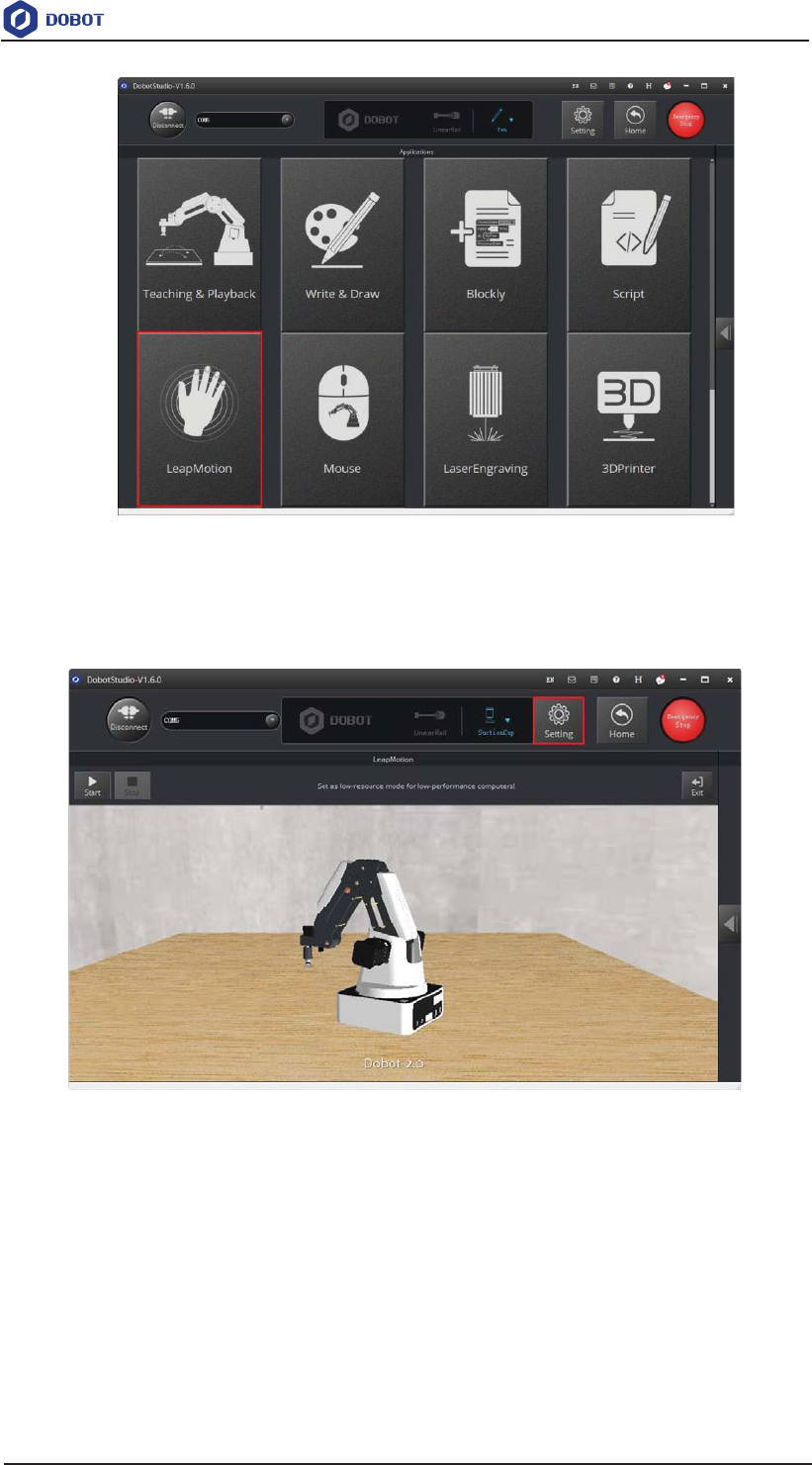
Step 2 Click LeapMotion, as shown in Figure 5.107.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
94
Figure 5.107 Click LeapMotion
Step 3 Click Setting on the DobtStudio page, as shown in Figure 5.108.
Figure 5.108 Click Setting
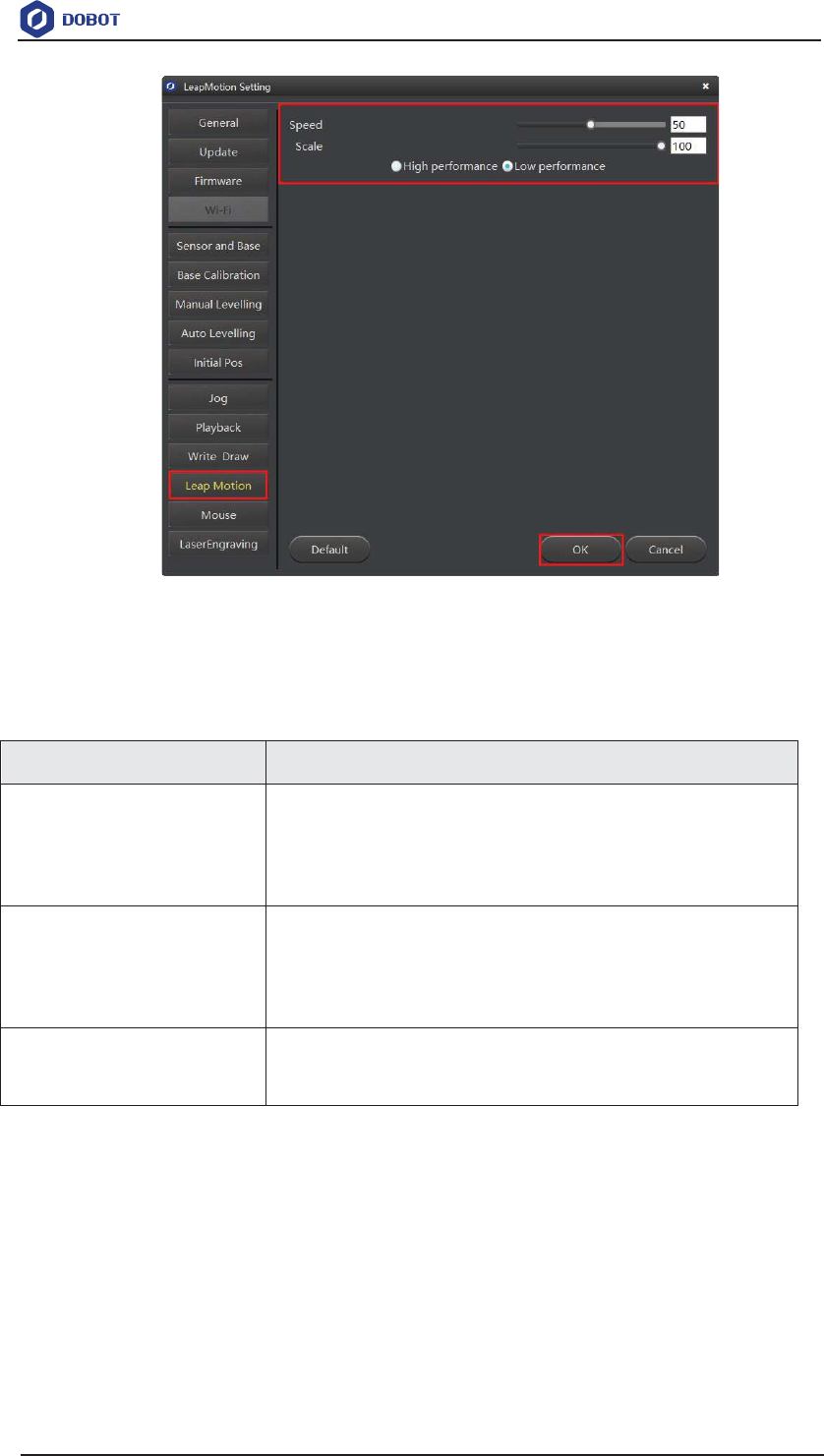
Step 4 Click Leap Motion, as shown in Figure 5.109. Set the parameters, as shown in
Table 5.12, and click OK.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
95
Figure 5.109 Set the parameters of the Leap Motion function
Table 5.12 Set the parameters of the Leap Motion function
Items
D
escription
S
peed
T
he velocity percentage of the Dobot Magician:
Unit: %
Value range: 1
- 100
Default value: 50
S
cale
The scale of the Dobot
Magician:
Unit: %
Value range: 1
- 100
Default value: 100
H
igh performance/Low
performance
Choose a performance mode suitable for your computer. Select the Low
performance (default) for the low configuration computer to prevent
video delay
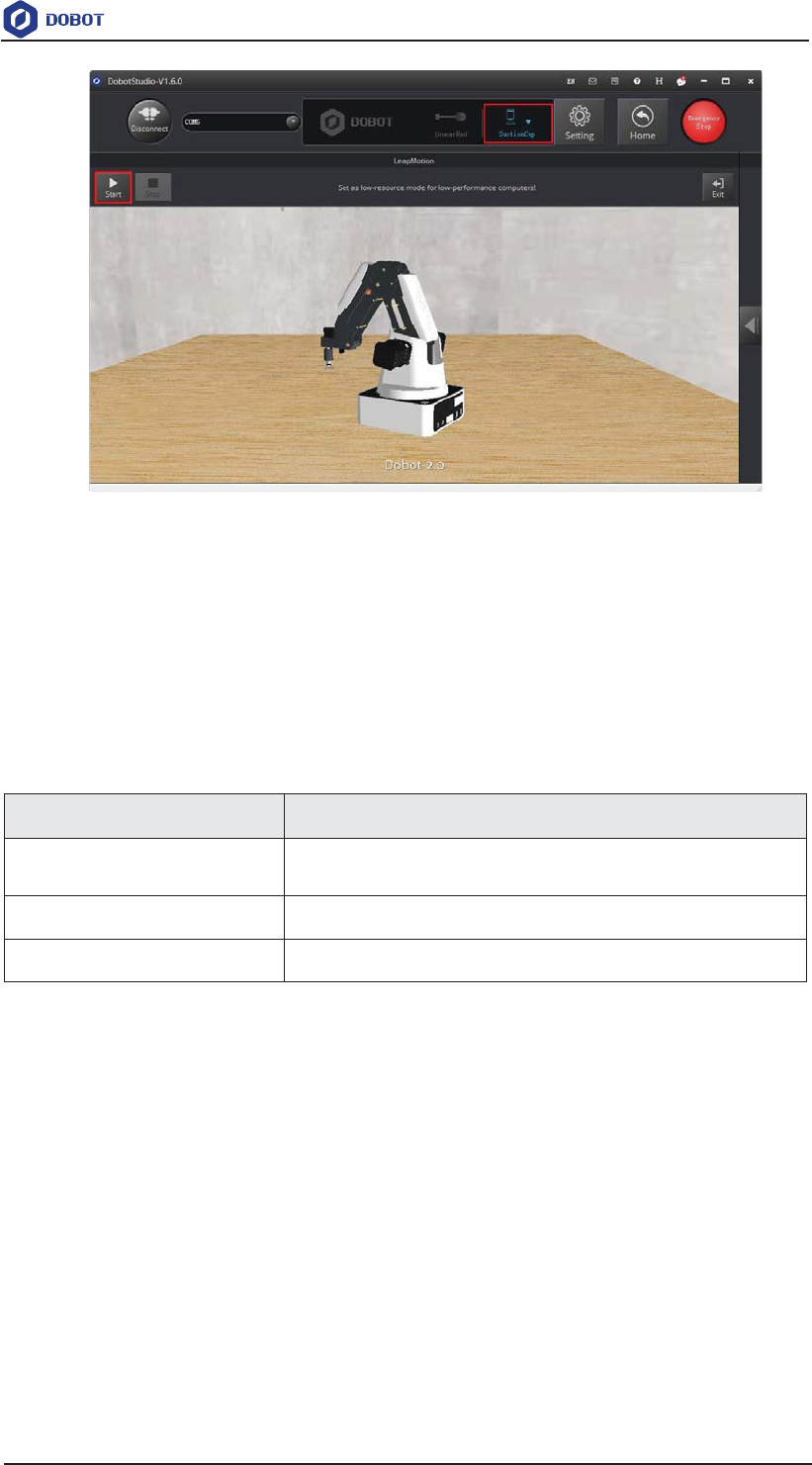
Step 5 Choose SuctionCup as the end-effector on the DobotStudio page, and click Start
to control the Dobot Magician with your hand gesture, as shown in Figure 5.110.
To maintain the Dobot Magician in a stable state, move your hand into the
workspace of the Leap Motion controller while keeping your palm upward. And
turn your palm down, and then move your hand above this area to control the
Dobot Magician.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
96
Figure 5.110 Click Start
NOTE
Move your hand in the workspace of the Leap Motion controller to control the Dobot
Magician to perform a particular task, as shown in Table 5.13.
Table 5.13 The robotic arm’s movement created with your hand gesture
H
and gesture
Robotic arm’s movement
M
ove your pal
m up, down, front,
back, right, or left
The robotic arm moves accordingly
Clench your fist
C
ontrol the air pump to suck air
U
nclench your fist
Turn off the air pump
Step 6 Put a small cube on the work surface in the workspace of the Dobot Magician, such
as point A, and use the hand gesture to move robotic arm above the cube until it’s
close to the cube.
Step 7 Clench your fist to control the air pump to suck the small cube, and move your fist
to make Dobot Magician take the cube to another position while clenching your
fist, such as position B, and then unclench your fist to turn off the air pump to drop
the cube.
Step 8 Turn your palm upward and click Stop to stop the hand control.
Controlling with your Mouse 5.8
You can use the Mouse function module of the DobotStudio to perform tasks, for example,
grab or suck an object with your mouse. This topic introduces how to move a small cube with
a mouse.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
97
Prerequisites
y The Dobot Magician is powered on and connected to your computer.
y The suction cup kit has been installed. For details, see 5.2.1 Installing a Suction Cup Kit.
Procedure
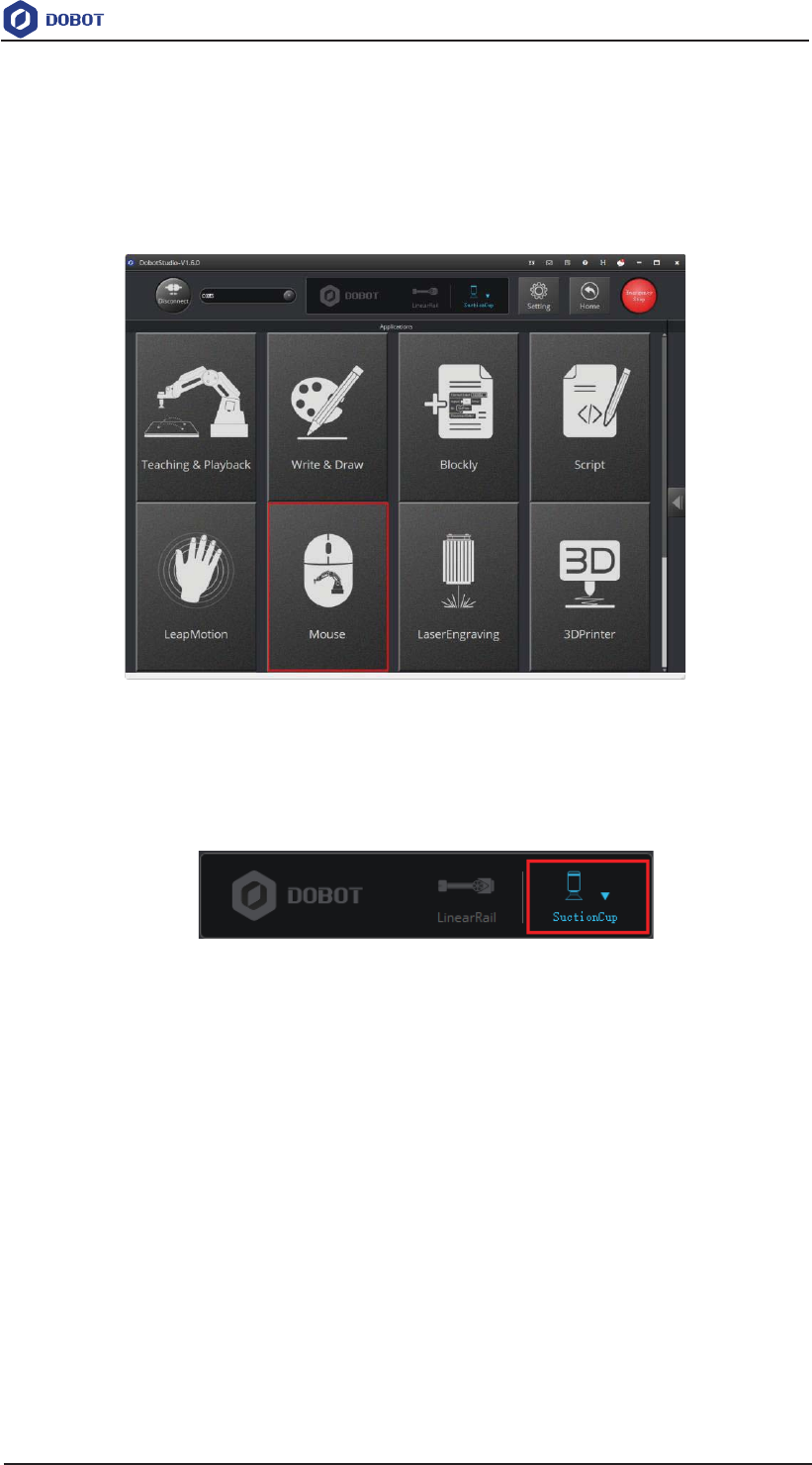
Step 1 Click Mouse, as shown in Figure 5.111.
Figure 5.111 Click Mouse
Step 2 Choose SuctionCup as the end-effector on the DobotStudio page, as shown in
Figure 5.112.
Figure 5.112 Choose SuctionCup as the end-effector
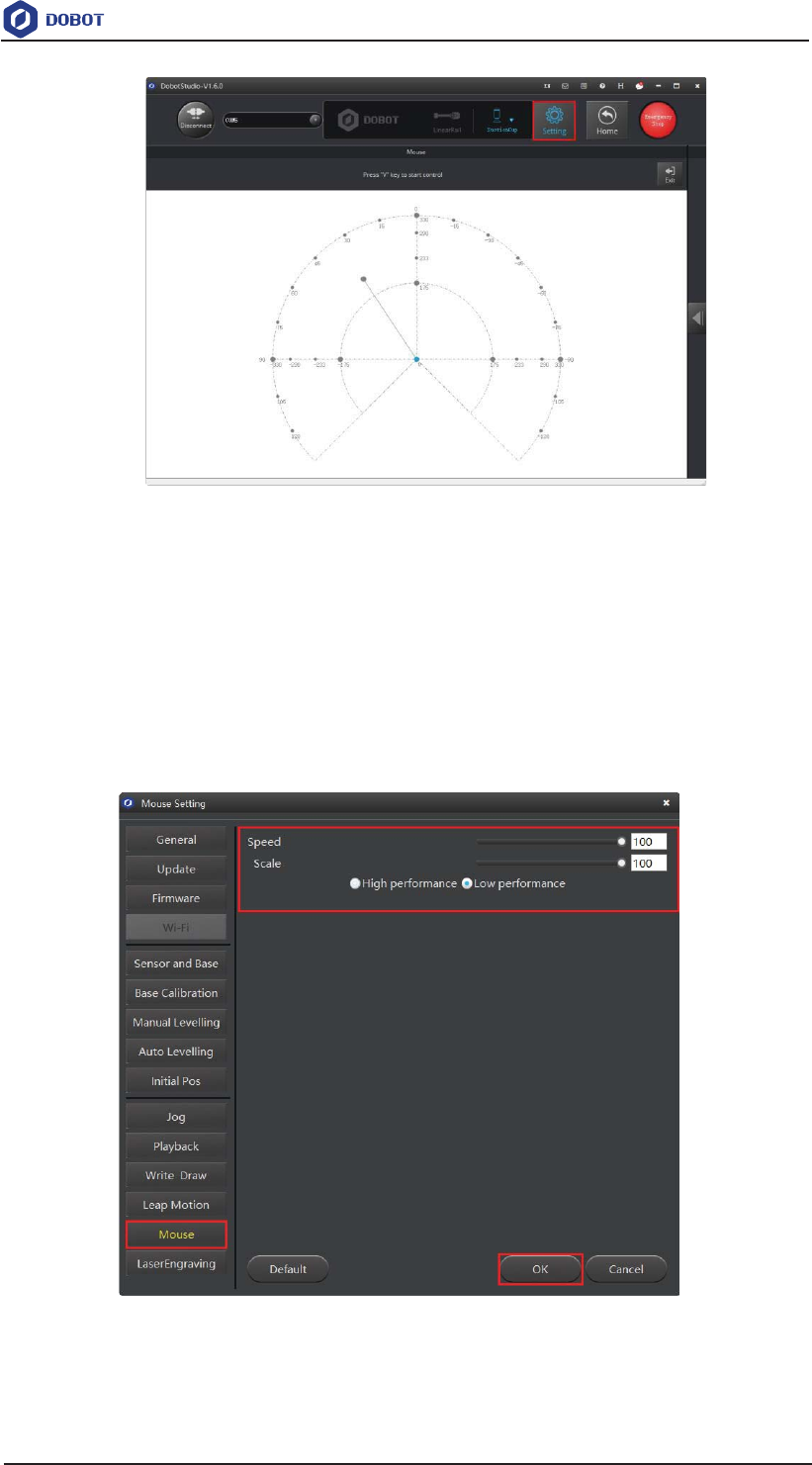
Step 3 Click Setting, as shown in Figure 5.113.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
98
Figure 5.113 Click Setting
Click Mouse, as shown in Figure 5.114. Set the parameters, as shown in
Table 5.14, and click OK.
Figure 5.114 Set the parameters of mouse control
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
99
Table 5.14 Set the parameters of mouse control
Parameters
Description
S
peed
T
he velocity percentage of the Dobot Magician:
Unit: %
Value range: 1
- 100
Default value: 50
S
cale
The scale of the Dobot
Magician:
Unit: %
Value range: 1
- 100
Default value: 100
H
igh
performance/Low
performance
Choose a performance mode suitable for your computer. Select
Low
performance
(default) for the low configuration
computer to prevent video delay
Step 1 Put a small cube on the work surface in the workspace of the Dobot Magician, such
as point A.
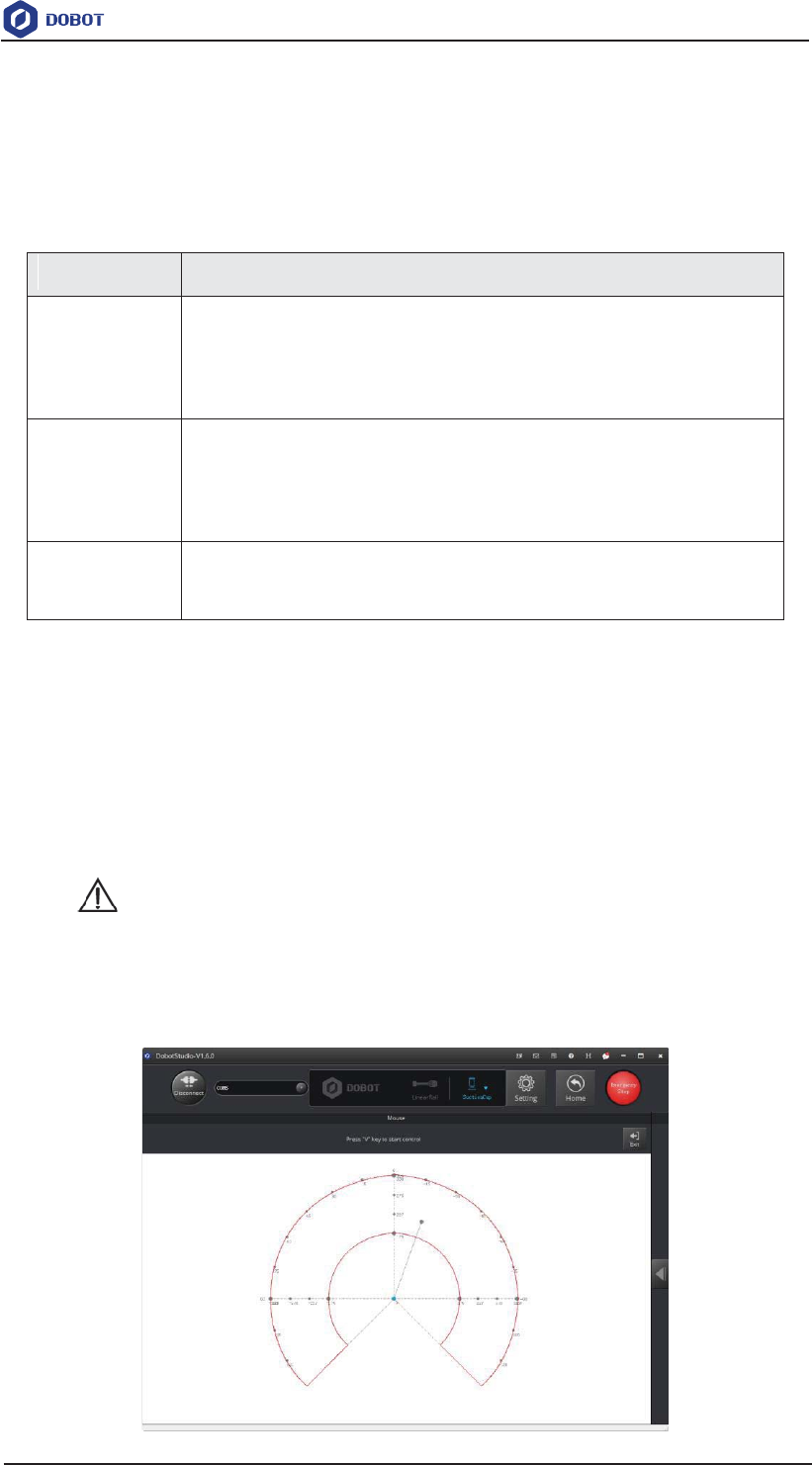
Step 2 Press V to enable the mouse control of the Dobot Magician. Press and hold the left
mouse button to drag the mouse within the red annular area to move the robotic
arm, as shown in Figure 5.115.
NOTICE
Do not move the mouse outside the red annular area. If not, the robotic arm reaches its
limited position. In this case, drag the mouse to into the annular area.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
100
Figure 5.115 Move the robotic arm in the red annular area
Step 3 Move the Dobot Magician above the cube by dragging the mouse and then place it
close to the cube.
NOTE
For details on how to use the mouse to control the robotic arm on the Mouse page, see
Table 5.15.
Table 5.15 The robotic arm’s movement created with your mouse
Mouse
action
Robotic arm’s m
ovement
Move your mouse front,
back, right, or left
The robotic arm moves accordingly
S
croll
the mouse wheel
up or down
The robotic arm moves accordingly
P
ress
and hold the left
mouse button
Suction cup:
the air pump sucks air in
G
ripper: increase holding force
Release the left mouse
button
Suction cup:
the air pump is powered off
G
ripper: open
Right
-
click the mouse
button
G
ripper: close
Step 4 Press and hold the left mouse button to control the air pump to suck air to move the
mouse to drag the robotic arm to take the cube to another position, such as point B,
and release the left mouse button, and the air pump stops working to drop the cube
here.
Step 5 Press V or ESC to disable the mouse control.
Operating 3D Printing 5.9
After installing 3D printing kit, you can import 3D module into the 3D printing software for
3D printing. Figure 5.116 shows the 3D printing process.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
101
Figure 5.116 3D printing process
During 3D printing, the 3D printing control software is required. You can use Repetier Host
or Cura software for 3D printing.
y Reptier-Host: Reptier-Host can slice with the third party slicing (such as
CuraEngine, Slic3r, etc), check and modify G-Code, control 3D printing manually.
More parameter settings make Reptier-Host very flexible.
y Cure: The slicing of Cura is fast and stable. It has strong inclusiveness to 3D
model structure and less parameter settings.
NOTICE
This section uses Windows as an example to describe how to perform 3D printing with
Repetier Host and Cura. For Mac OS, only Cura is supported.
Installing 3D Printing Kit 5.9.1
3D printing kit contains extruder, hot end, motor cable, filament, and filament holder as
shown in Figure 5.117.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
102
Figure 5.117 3D printing kit
Procedure
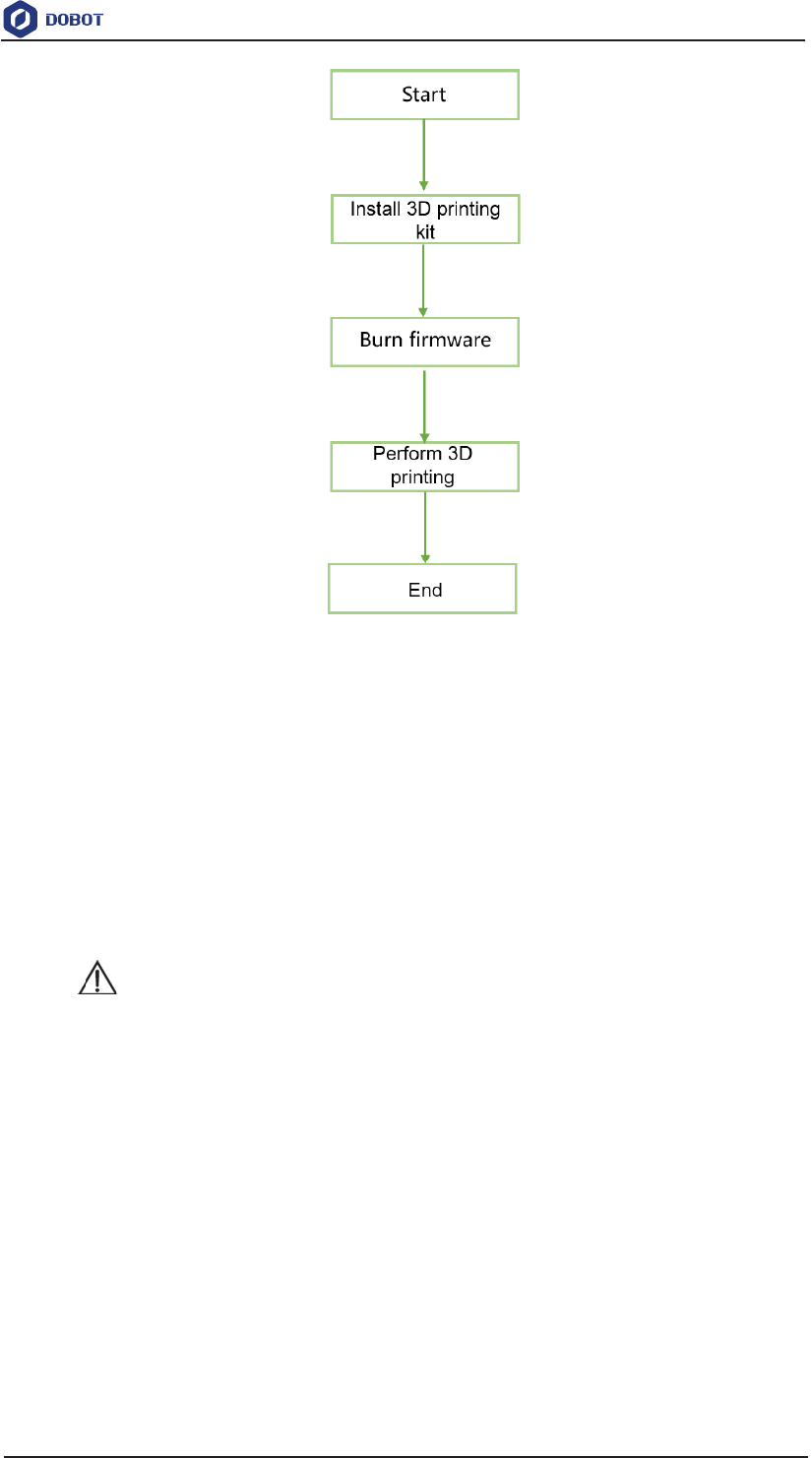
Step 1 Press down the lever on the extruder, and push down the filament to the bottom of
the hole via the pulley, as shown in Figure 5.118.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
103
Figure 5.118 Push down the filament
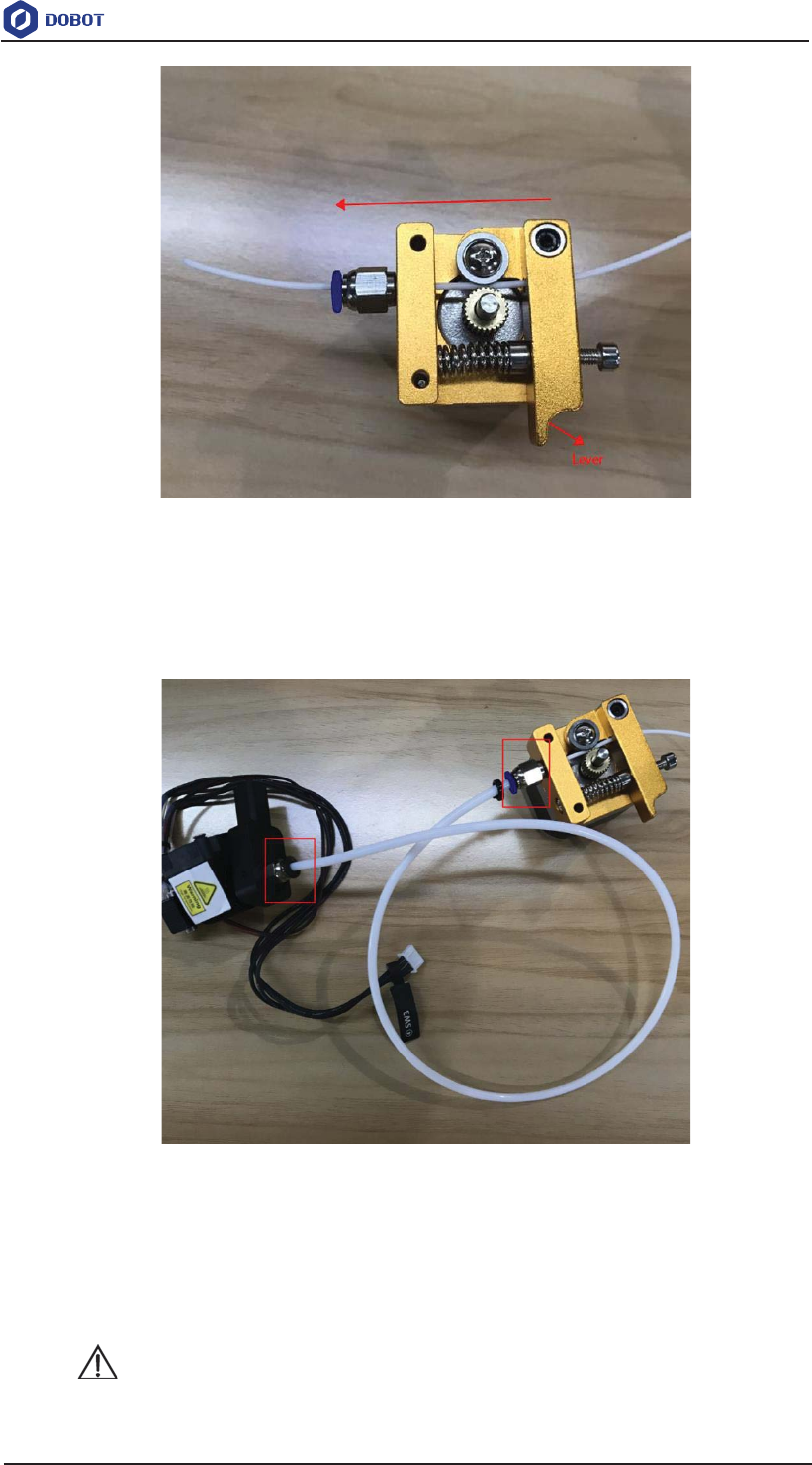
Step 2 Connec the end of the PTFE tube to the hot end and push it down to the bottom of
the hot end, and connect the other end to the extruder, as shown in
Figure 5.119 Connect extruder and hot end
Step 3 Insert the filament into the PTFE tube and push it down to the bottom of the hot
end.
NOTICE
Please make sure that the PTFE tube has been pushed down to the bottom of the hot

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
104
end. Otherwise, it will cause abnormal discharge.
Step 4 Fix the hot end on the Dobot Magician with butterfly nut, as shown in Figure
5.120.
Figure 5.120 Fix hot end
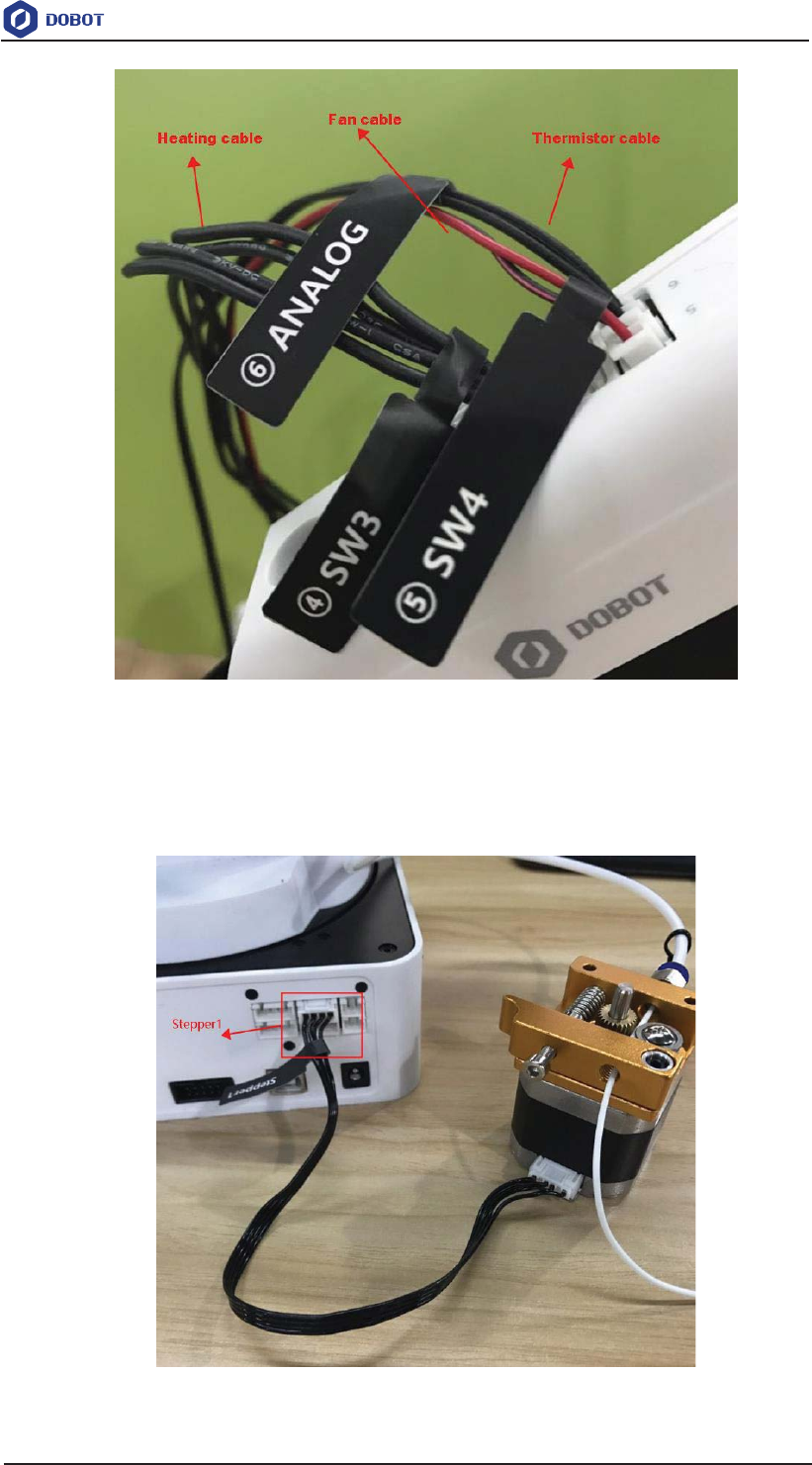
Step 5 Insert the heating cable to the interface 4 on the Forearm, the fan cable to the
interface 5 and the thermistor cable to the interface 6, as shown in Figure 5.121.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
105
Figure 5.121 Connect hot end to the Forearm
Step 6 Connect the extruder to the Stepper1 interface on the back of the base with motor
cable, as shown in Figure 5.122.
Figure 5.122 Connect with extruder
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
106
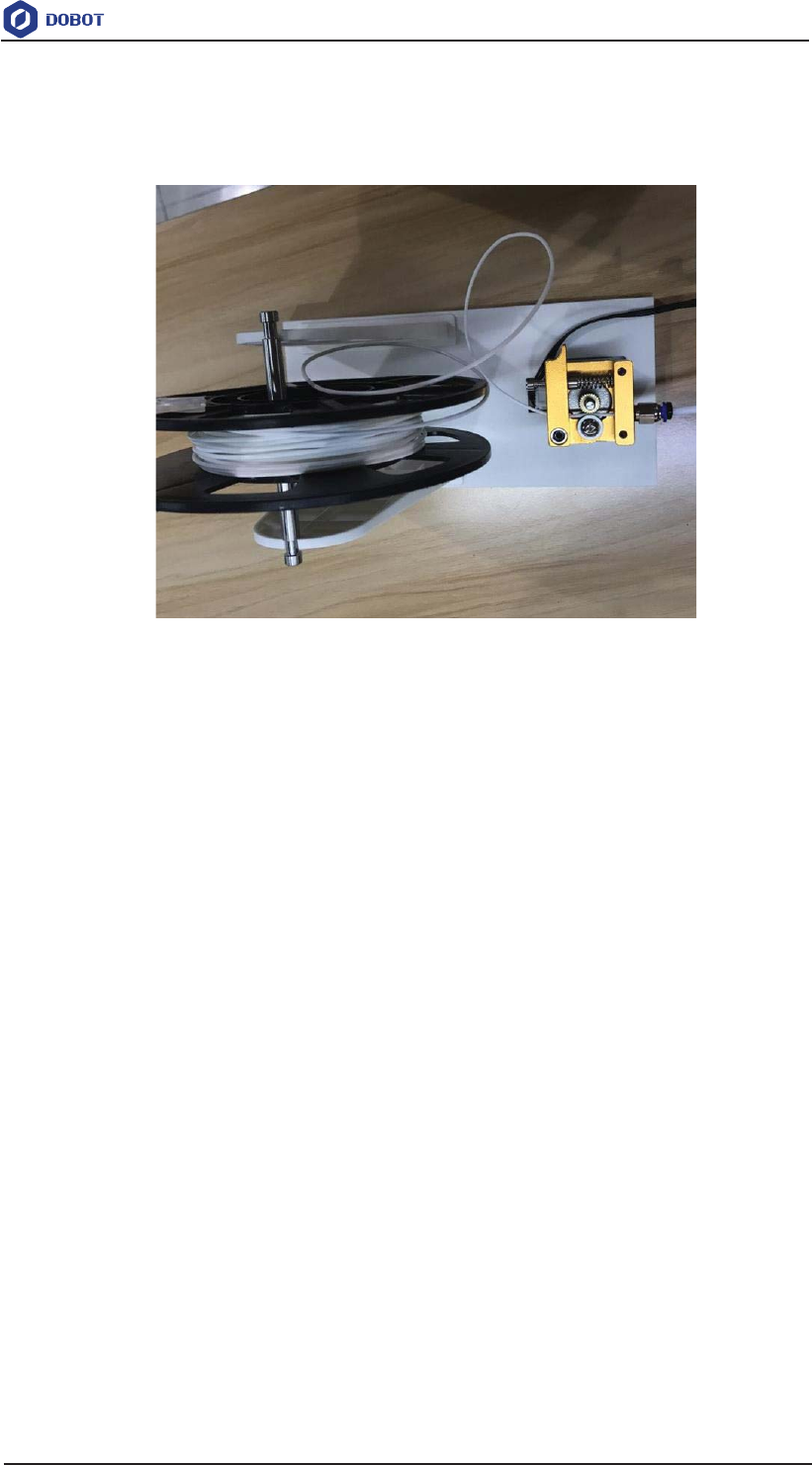
Step 7 Place the filament and the extruder to the filament holder, as shown in Figure
5.123.
Figure 5.123 Place filament and extruder to the Filament holder
Operating Repetier Host 5.9.2
Repeiter Host has been built into DobotStudio. After burning 3D printing firmware, the
Repetier Host page will be displayed automatically.
Prerequisites
y The 3D printing model has been prepared.
y The printing platform has been prepared and please place it in the workspace of the
Dobot Magician.
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully (Only USB
connection is supported).
y The 3D printing kit has been installed.
5.9.2.1 Burning Firmware
Procedure
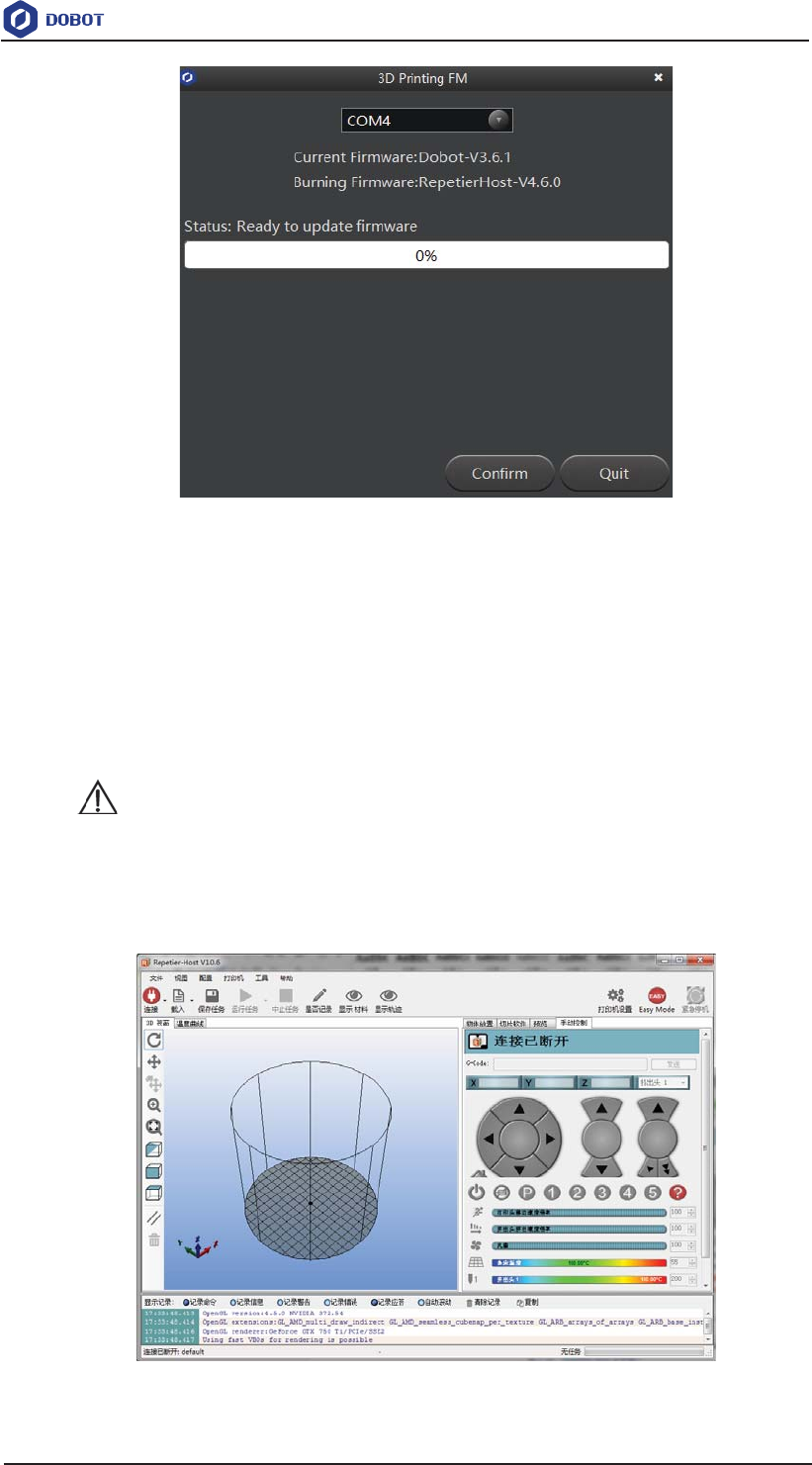
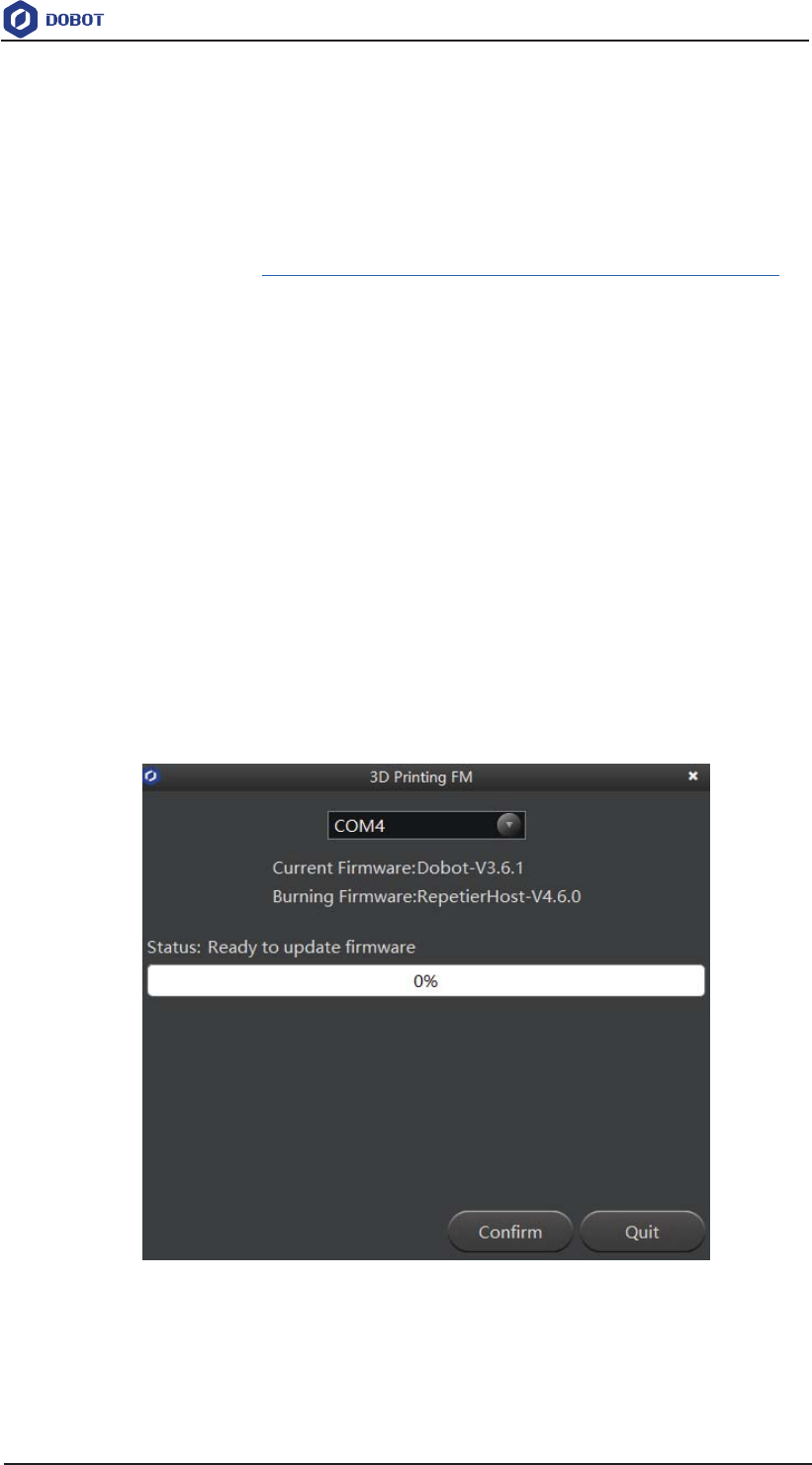
Step 1 Click 3DPrinter on the DobotStudio page.
The 3D Printing FM page is displayed, as shown in Figure 5.124.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
107
Figure 5.124 Burn firmware
Step 2 Click Confirm to start burning 3D printing firmware.
After burning 3D printing firmware, the Repetier Host page is displayed
automatically, as shown in Figure 5.125.
If the LED indicator on the base turns red, it indicates that the connection of the 3D
printing kit is abnormal.
WARNING
Please DO NOT operate or turn off Dobot Magician when burning firmware, to avoid
machine damage.
Figure 5.125 Repetier Host page

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
108
NOTICE
If the current firmware is set for 3D printing when operating 3D printing, you can click
Connect directly on the DobotStudio page. And then Click OK on the Select tool page
to switch to Repetier Host, as shown in Figure 5.126.
Figure 5.126 Switch into 3D printing automatically
5.9.2.2 Performing 3D Printing
Procedure
Step 1 Set printing parameters.
Printing parameters only need to be set for the first time.
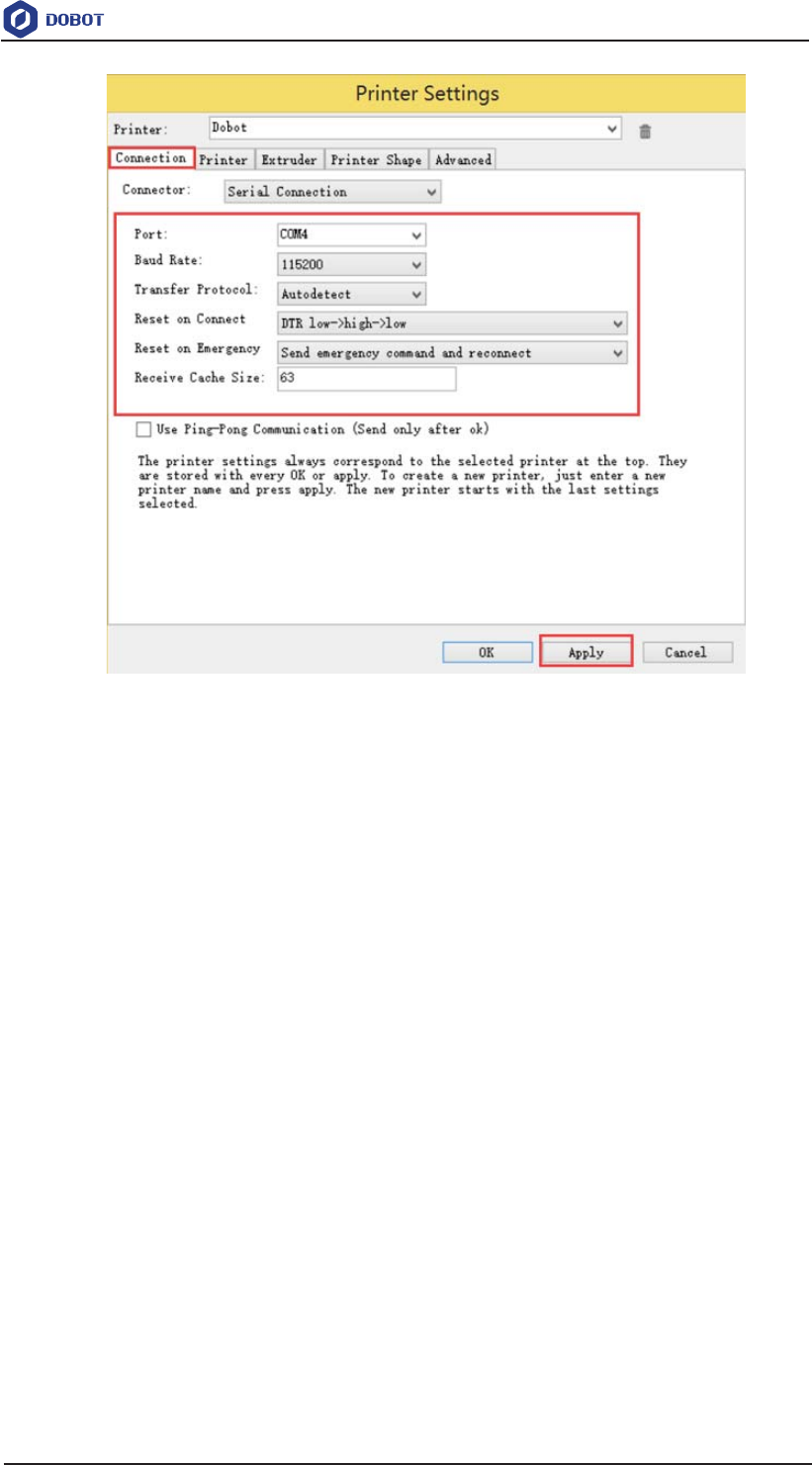
Click Printer Settings on the top right corner of the Pepetier Host page. 1.
The Printer Settings page is displayed.
Set the corresponding parameters on the Connection tab as shown in the red 2.
box of Figure 5.127. The other parameters are set by default.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
109
Figure 5.127 Connection setting
Click Apply. 3.
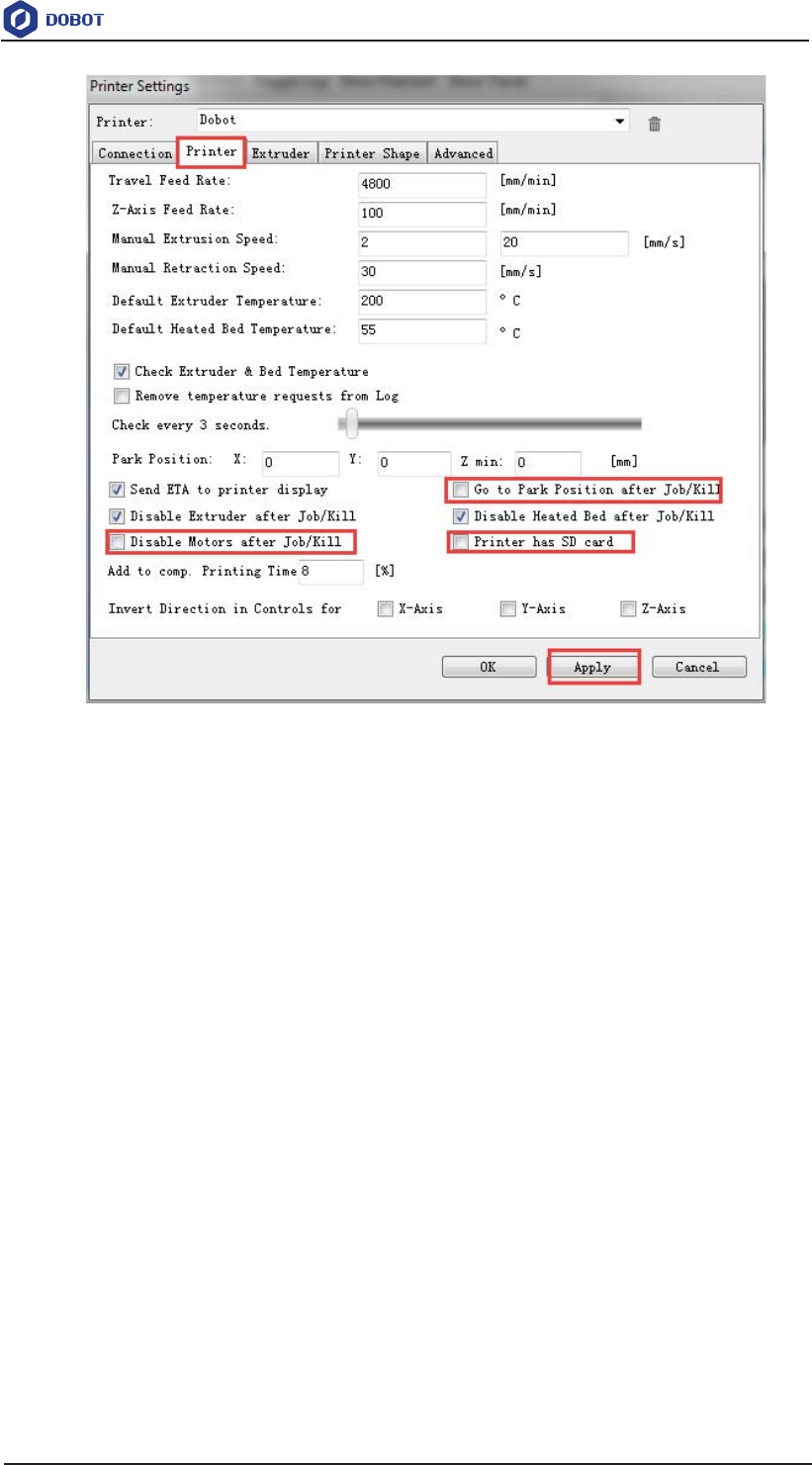
Unselect the corresponding options on the Printer tab as shown in the red box 4.
of, Figure 5.128 and the other parameters are set by default. Then, click Apply.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
110
Figure 5.128 Unselect options
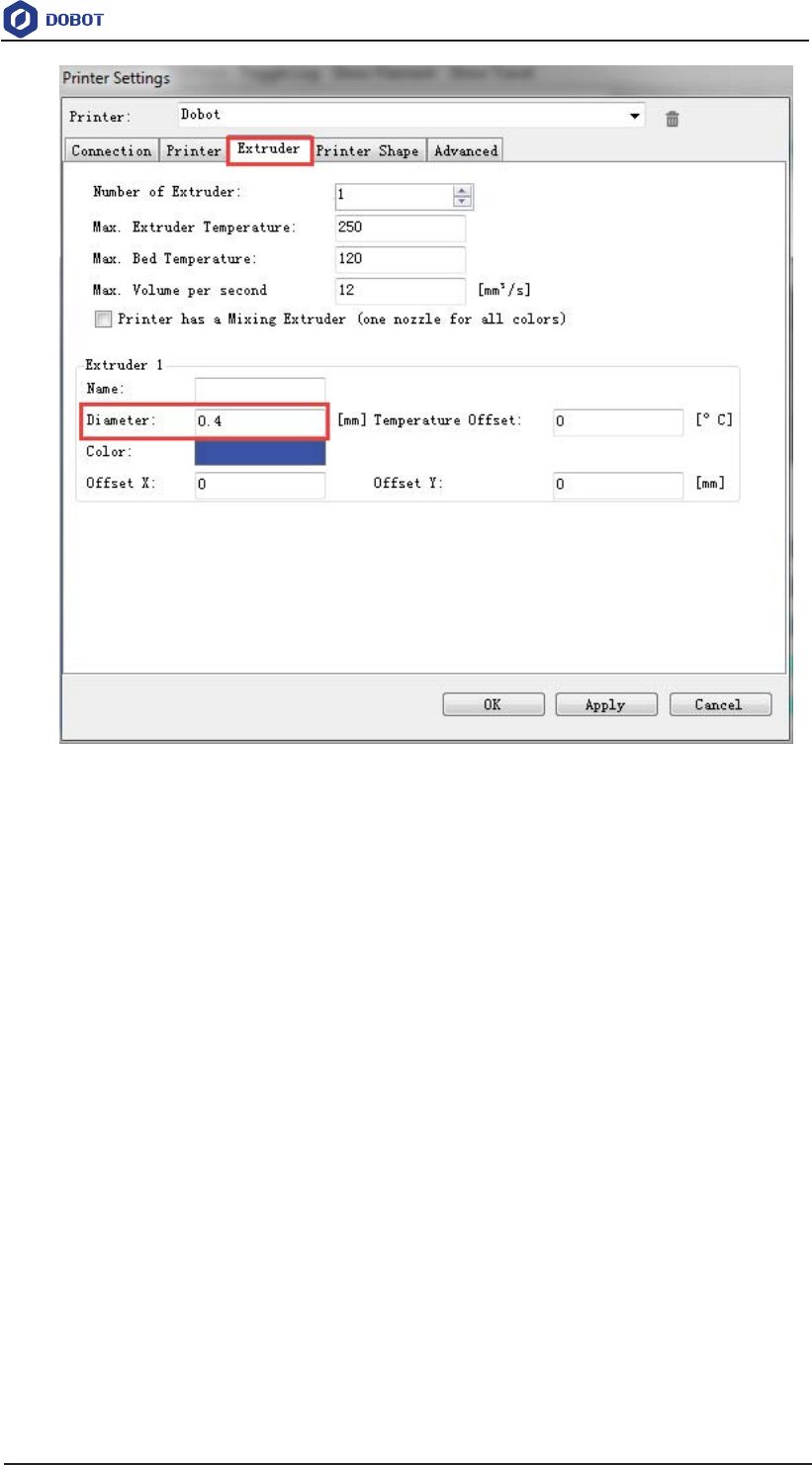
Set the corresponding parameters on the Extruder tab as shown in the red box 5.
of Figure 5.129, the other parameters are set by default. Then, Click Apply.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
111
Figure 5.129 Extruder settings
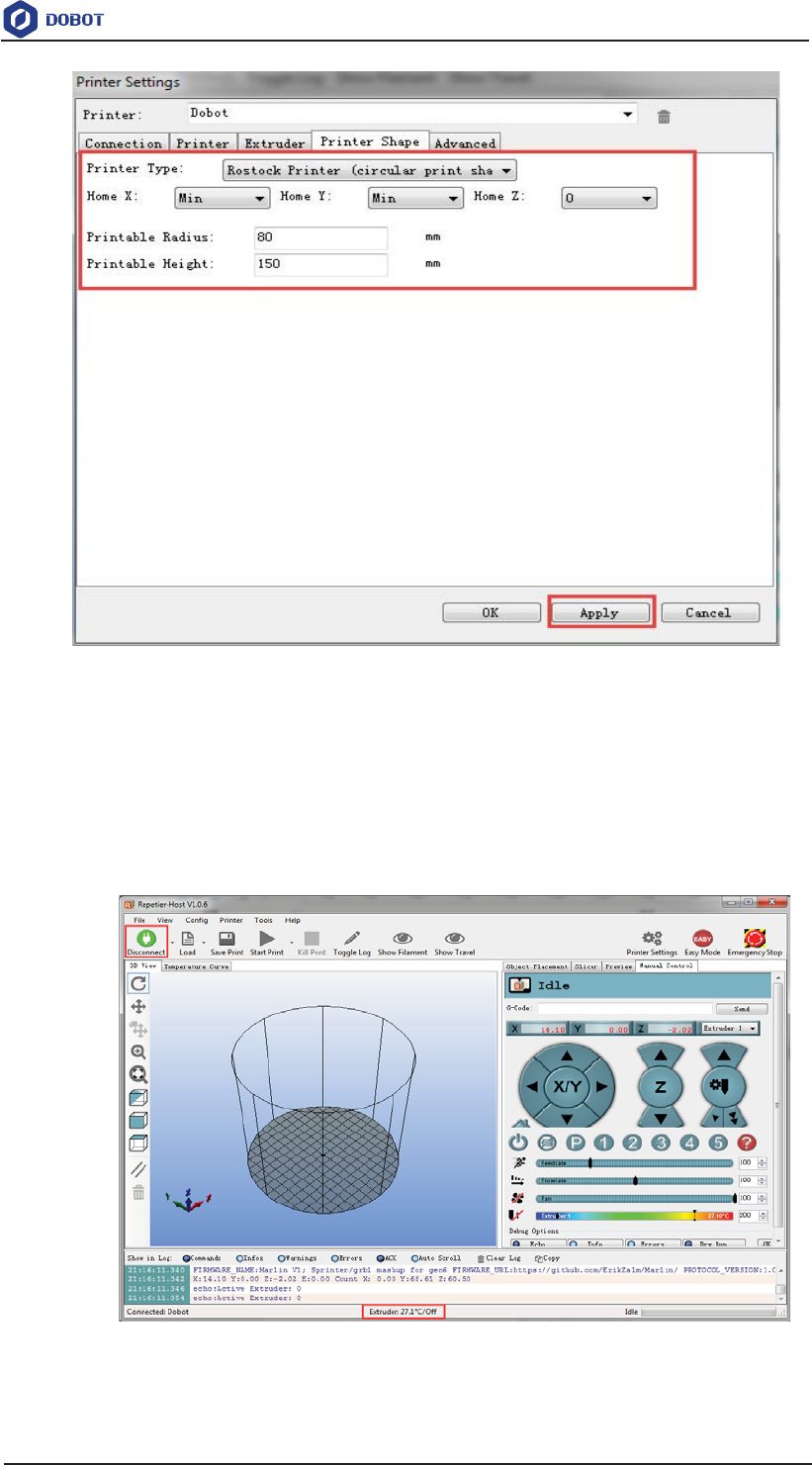
Set the corresponding parameters on the Printer Shape tab as shown in the red 6.
box of Figure 5.130, the other parameters are set by default. Then, Click Apply.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
112
Figure 5.130 Printer shape settings
Click OK 7.
Step 2 Click Connect on the Repetier Host page to connect Dobot Magician.
After the connection is successful, the current heating temperature will be shown
on the below of the Repetier Host page, as shown in Figure 5.131.
Figure 5.131 Connect to Dobot Magician
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
113
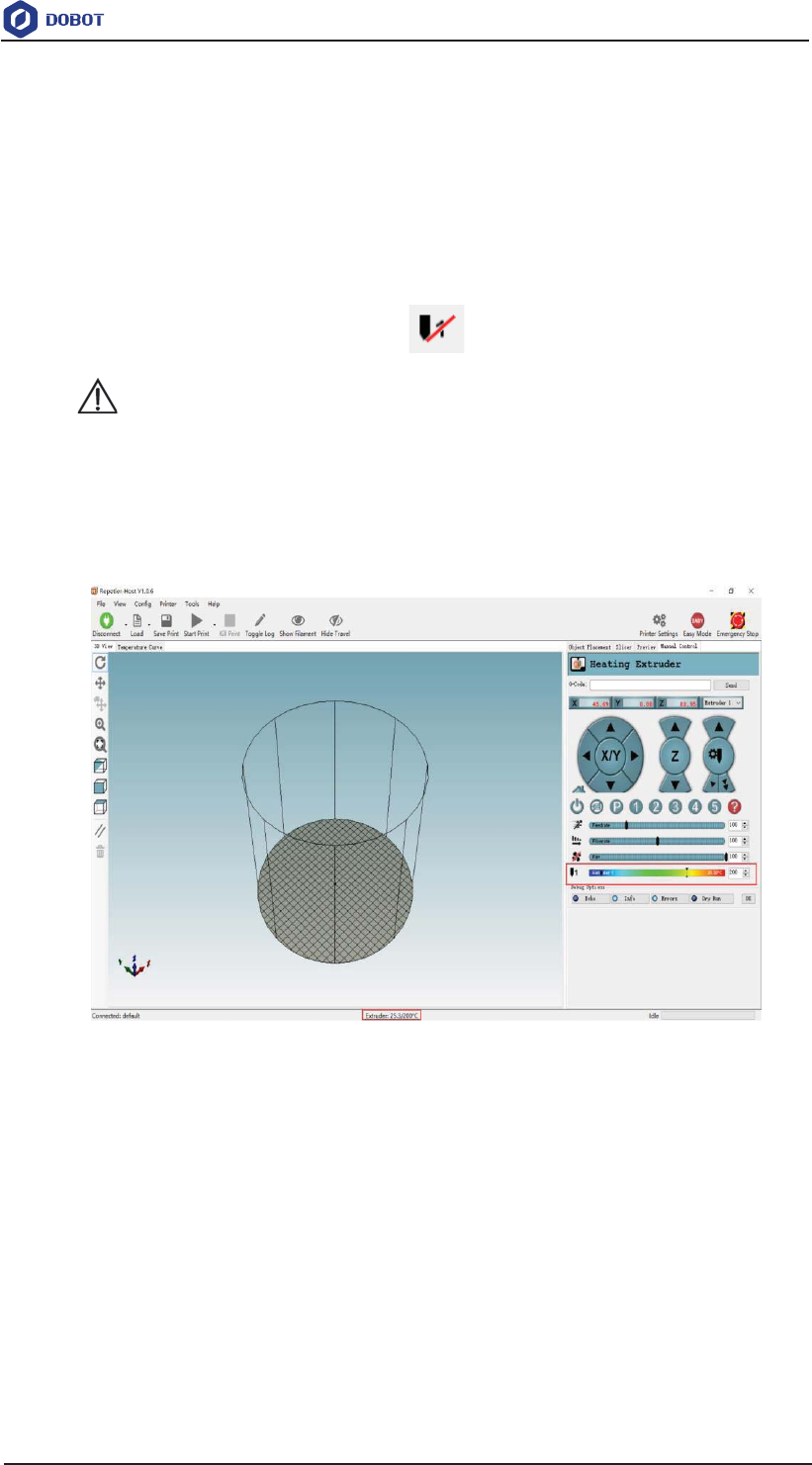
Step 3 Text extruder.
Before printing, you need to test the extruder to check whether the melted filament
flows from the nozzle of the extruder.
The temperature of the extruder should be above 170ć. Dobot Magician will not
start 3D printing until the filament is in the melting state. So you need to heat the
extruder first.
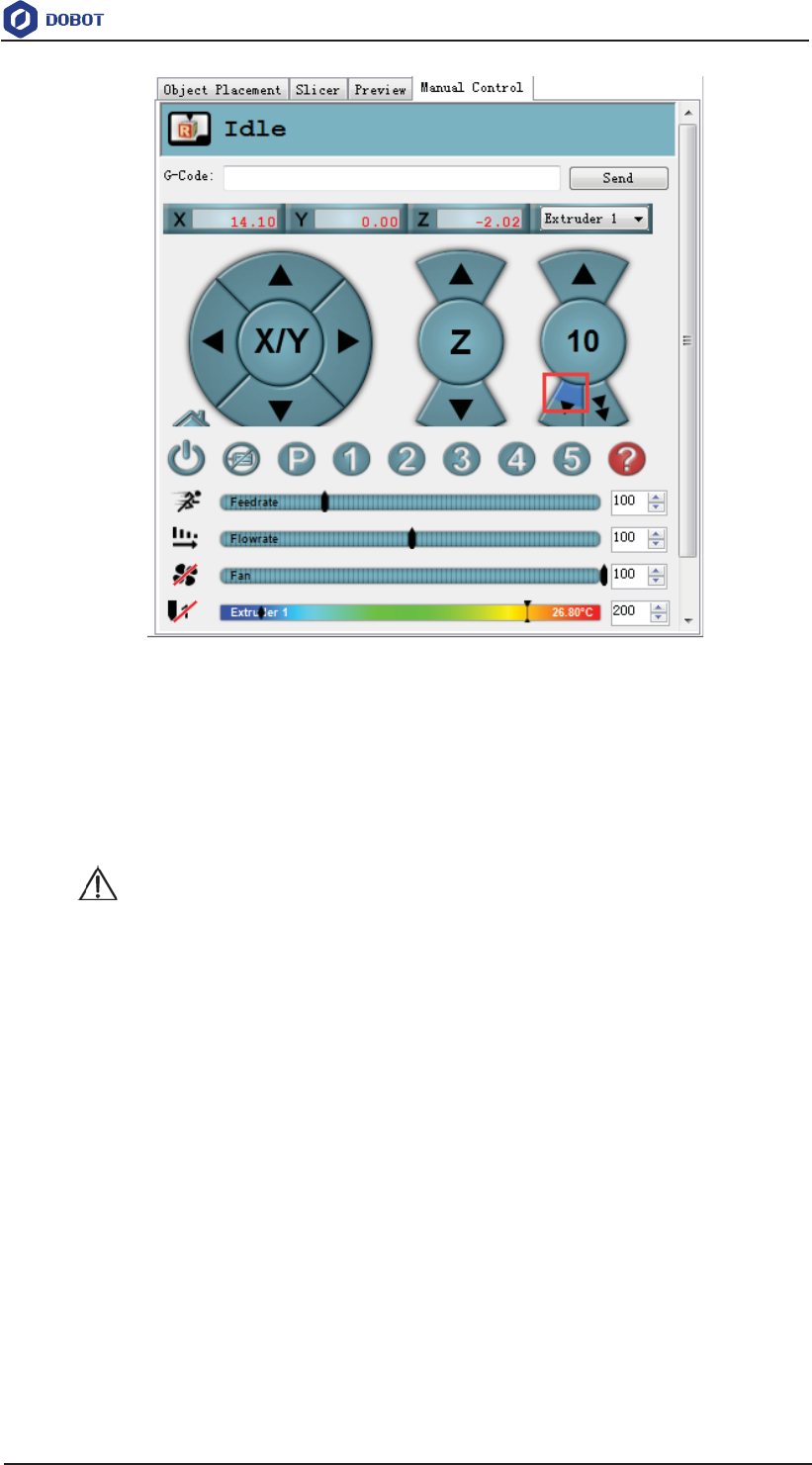
Set the heating temperature to 200ć on the Manual Control tab of the 1.
Repetier Host page and click , as shown in Figure 5.132.
DANGER
The heating rod will produce high temperature up to 250ć, please be careful. Do not
let children play with it alone. The process needs to be monitored when it is running.
After the process is completed, please turn off the equipment promptly.
Figure 5.132 Heat the extruder
Click the extruder feeder when the heating temperature is up to 200ć and feed 2.
up to10mm-30mm, as shown in Figure 5.133.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
114
Figure 5.133 Extrude filament
If the melted filament flows from the nozzle of the extruder, the extruder is
working properly.
NOTICE
If the filament extrusion is in the opposite direction. Please remove the filament, and
turn the extruder around, then re-push down the filament.
Step 4 Adjust the printing space and get the printing coordinates.
NOTE
During printing, if the distance from Dobot Magician to the printing platform is too
large or too small to paste the first layer, it can lead to the nozzle blockage. For
increasing the stickiness of the first layer, placing a masking paper on the platform is
recommended.
Press the Unlock key on the Forearm and drag Dobot Magician to make the 1.
printing head contact the surface of the masking paper (The distance between
the printing head and the surface of the masking paper is the thickness of a
sheet of A4 paper), then release the Unlock key.
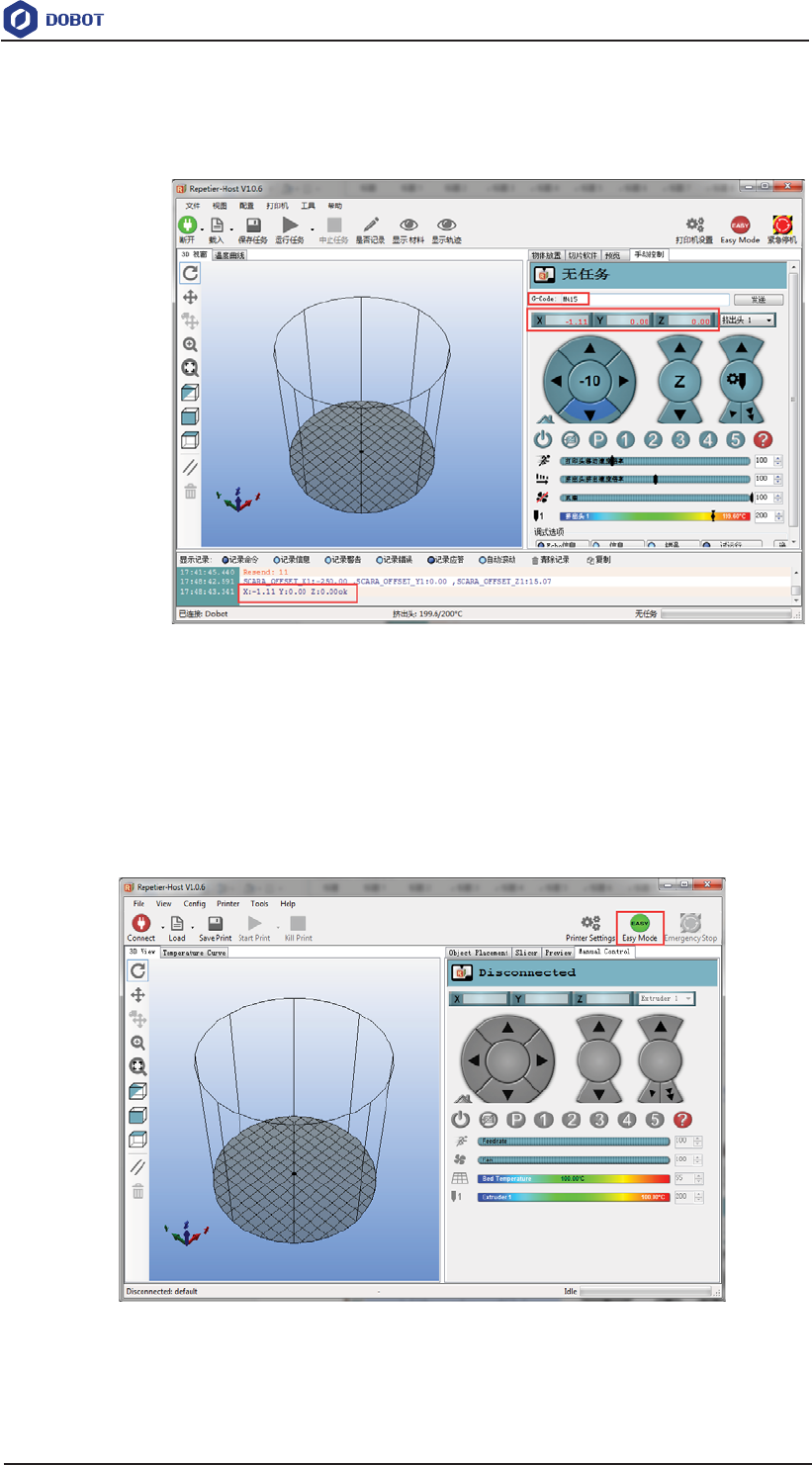
Input command M415 on the G-Code command window and press Enter to 2.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
115
get the current coordinates, as shown in Figure 5.134.
Also, you can press the Key button on the bace of the base to get the current
coordinates.
Figure 5.134 Input M415
NOTE
If you cannot find the G-Code command window, please click EASY to close Easy
Mode, as shown in Figure 5.135.
Figure 5.135 Easy mode
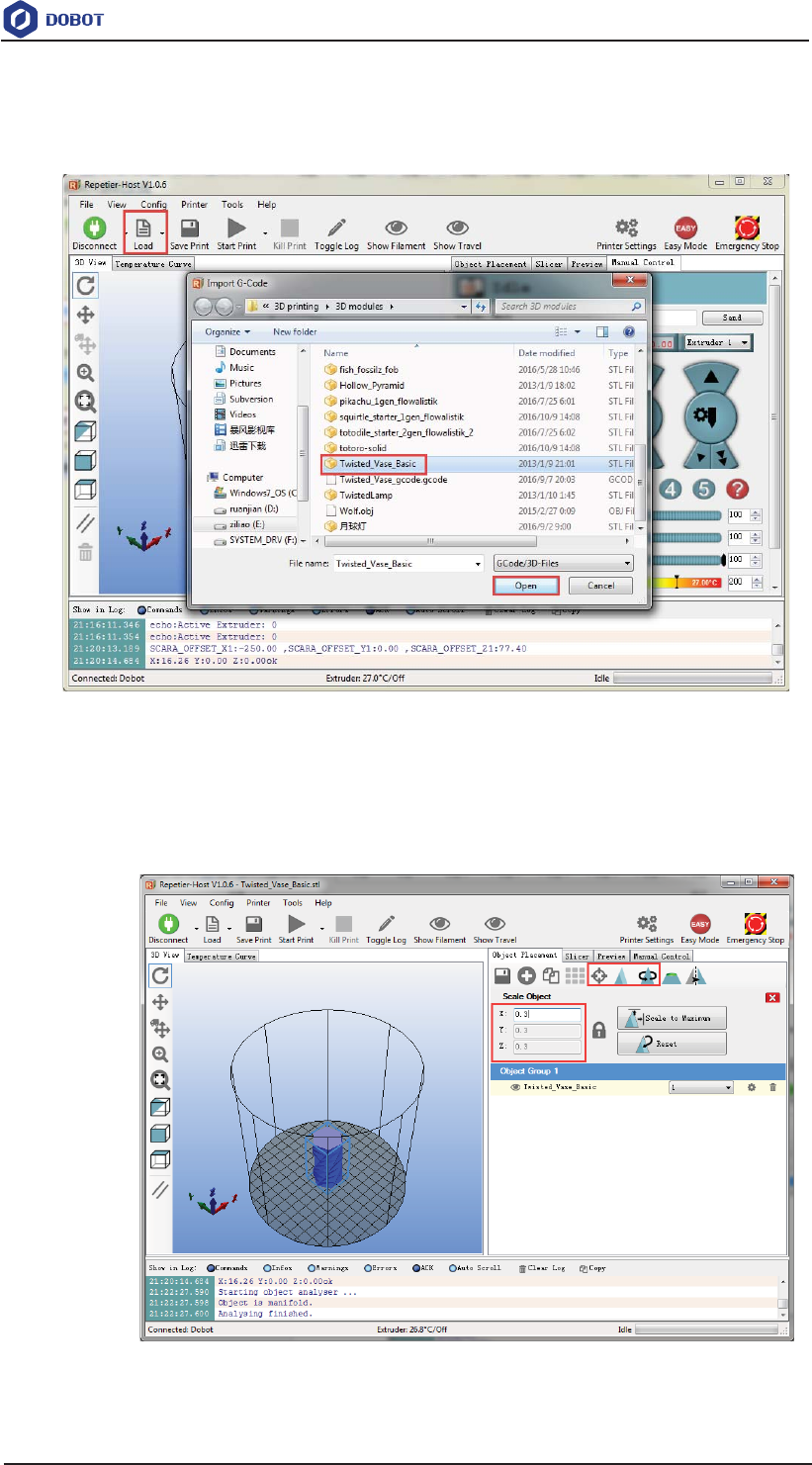
Step 5 Click Load to import the prepared 3D printing model, as shown in Figure 5.136.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
116
The format of 3D model is STL. You can design 3D model and transform it into
STL format.
Figure 5.136 Import 3D printing Model
After importing the model, you can center, zoom, or rotate the model on the
Object Placement page, as shown in Figure 5.137.
Figure 5.137 Model operation
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
117
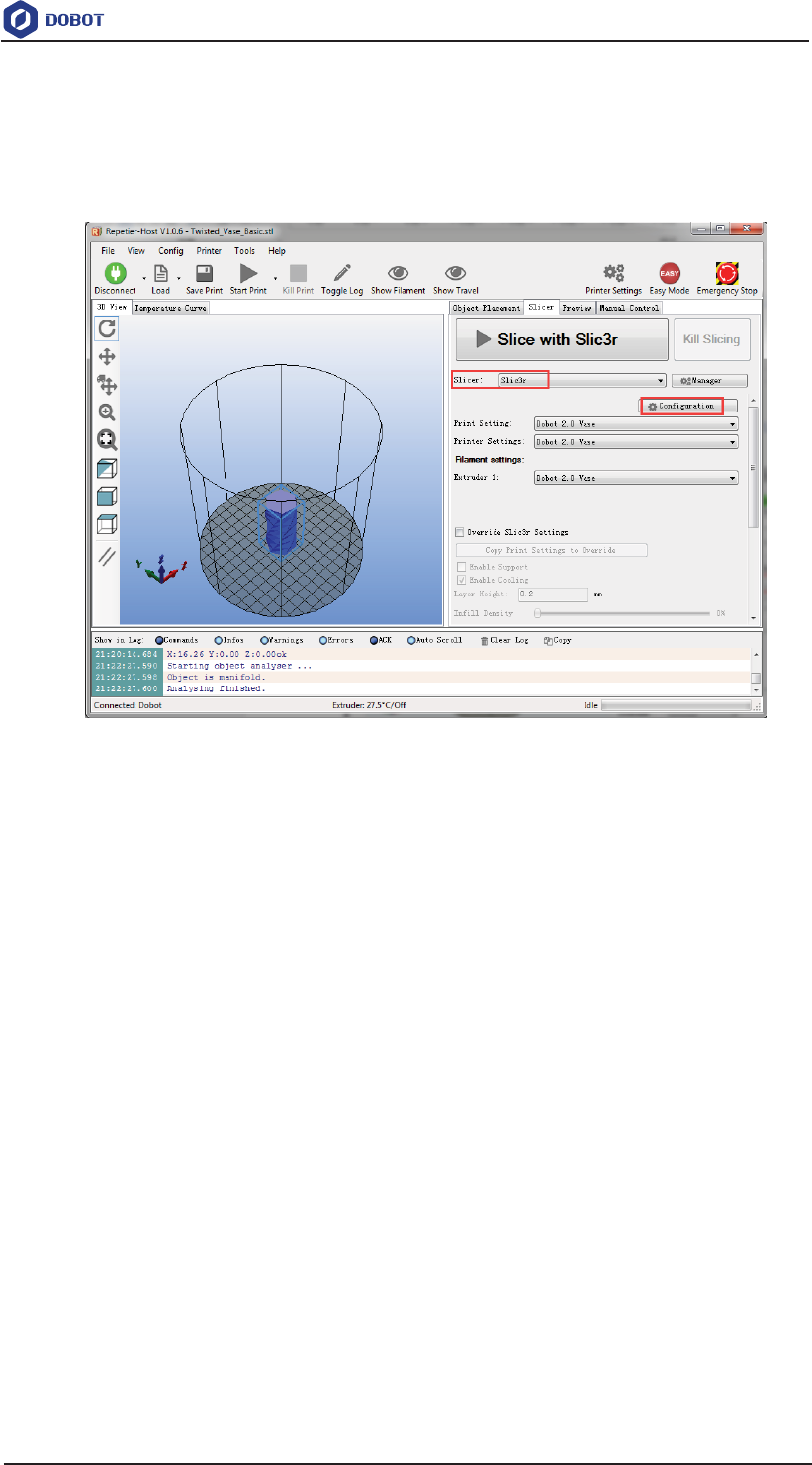
Step 6 Set slicing parameters and slice up.
You need to set the slicing parameters before first printing.
Select Slic3r from Slicer on the Slicer tab of the Repetier Host page, and click 3.
Configuration, as shown in Figure 5.138.
Figure 5.138 Select slicer
The Slic3r page is displayed, as shown in Figure 5.139.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
118
Figure 5.139 Slic3r page
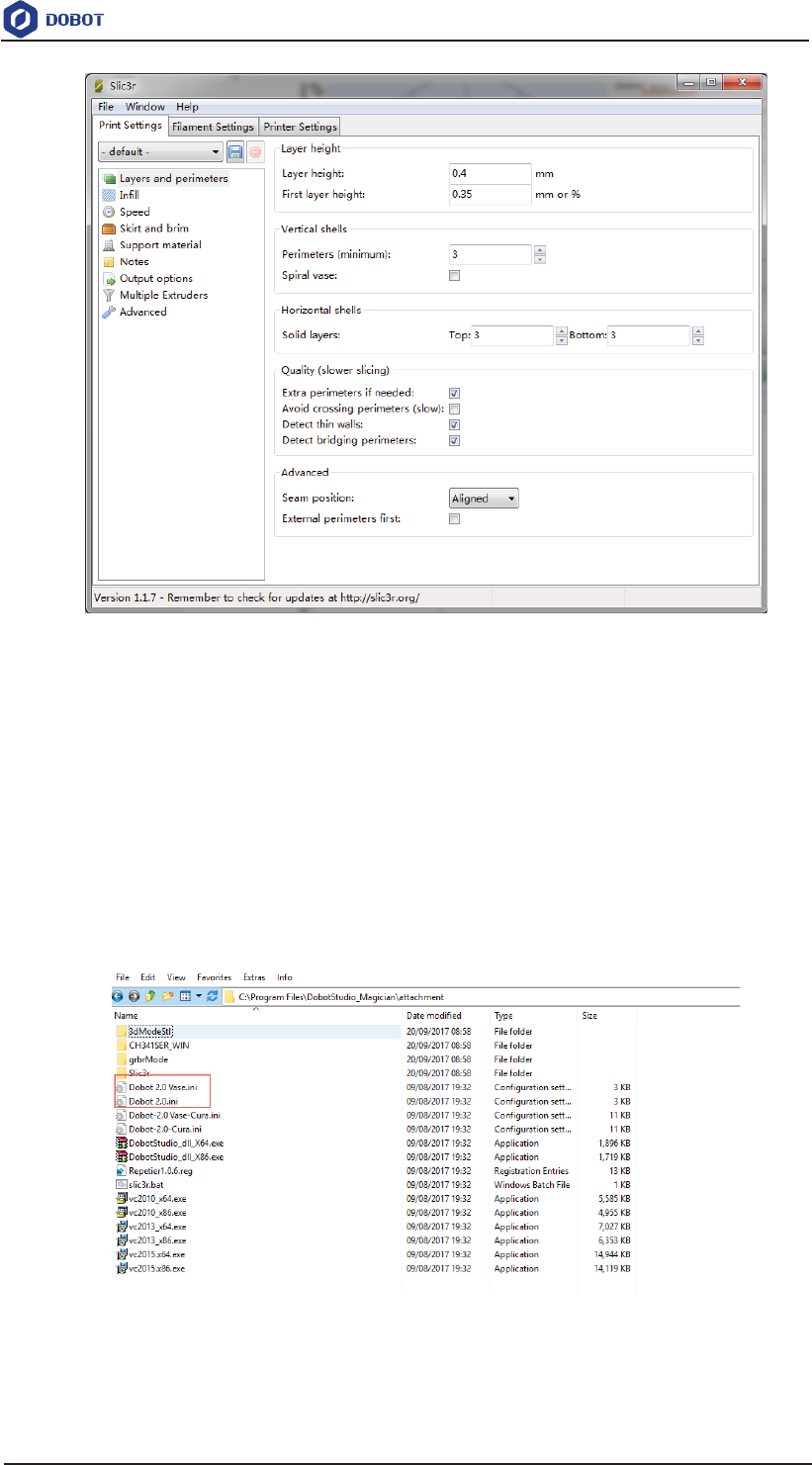
Set the slicing parameters on the Slic3r page. 4.
The 3D printing effect depends on the slice parameters. This topic provides a
configuration sample, you can select File > Load Config on the Slic3r page to
import it directly for printing.
The path of the configuration sample is Installation
directory\DobotStudio\attachment, as shown in Figure 5.140.
Figure 5.140 Configuration sample
Dobot-2.0-Vase.ini is used for printing a thin-walled vase, while Dobot-2.0-ini
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
119
is used for the filling, the filling rate is 20%.
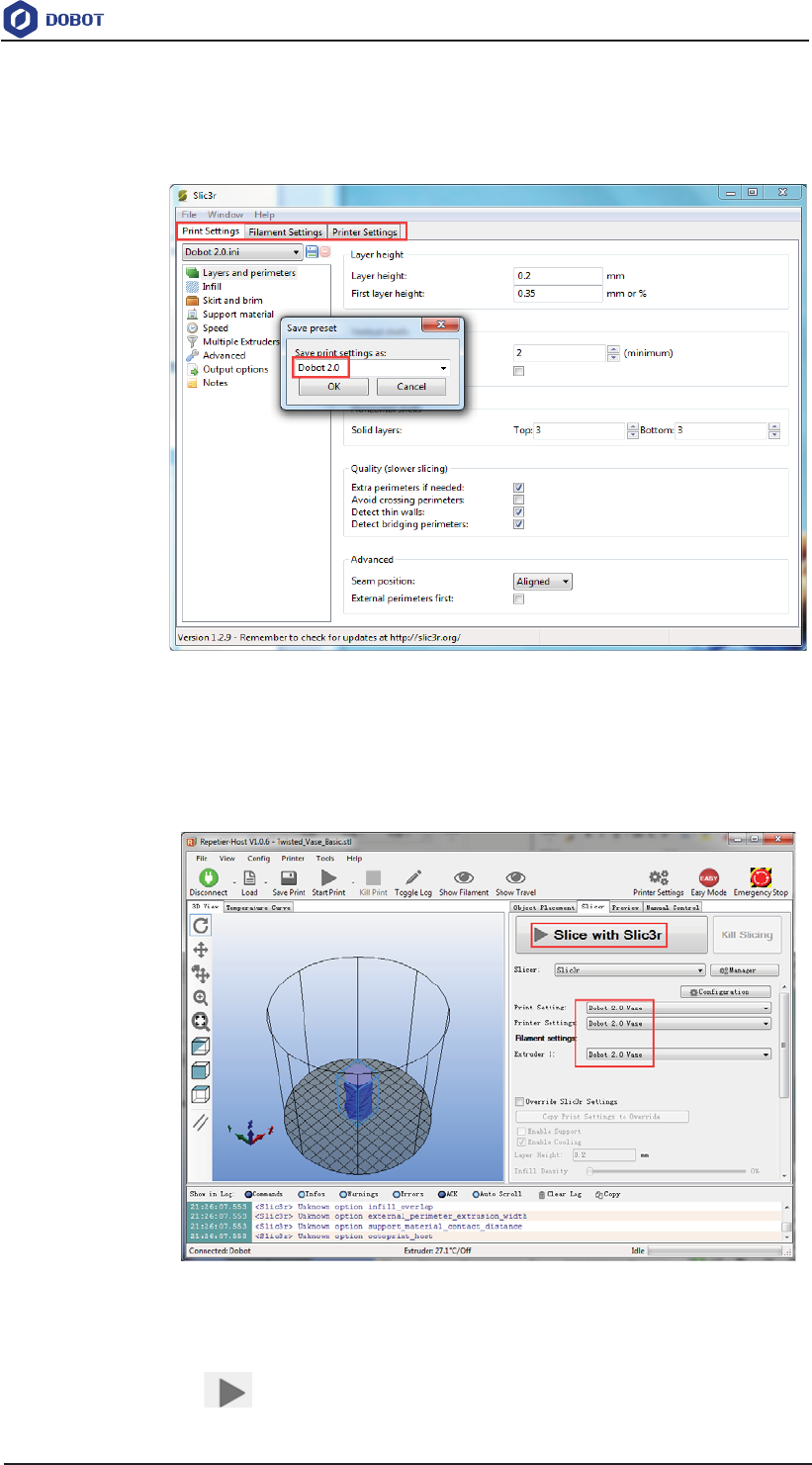
Save the Printing Settings, Filament Settings and Printer Settings tabs 5.
respectively after importing configuration sample, as shown in Figure 5.141.
Figure 5.141 Save configuration file
Click Slici with Slic3r on the Slicer tab of the Repetier Host page, as shown in 6.
Figure 5.142.
Figure 5.142 Start to slice
Click on the top left corner of the Repetier Host page to print. 7.
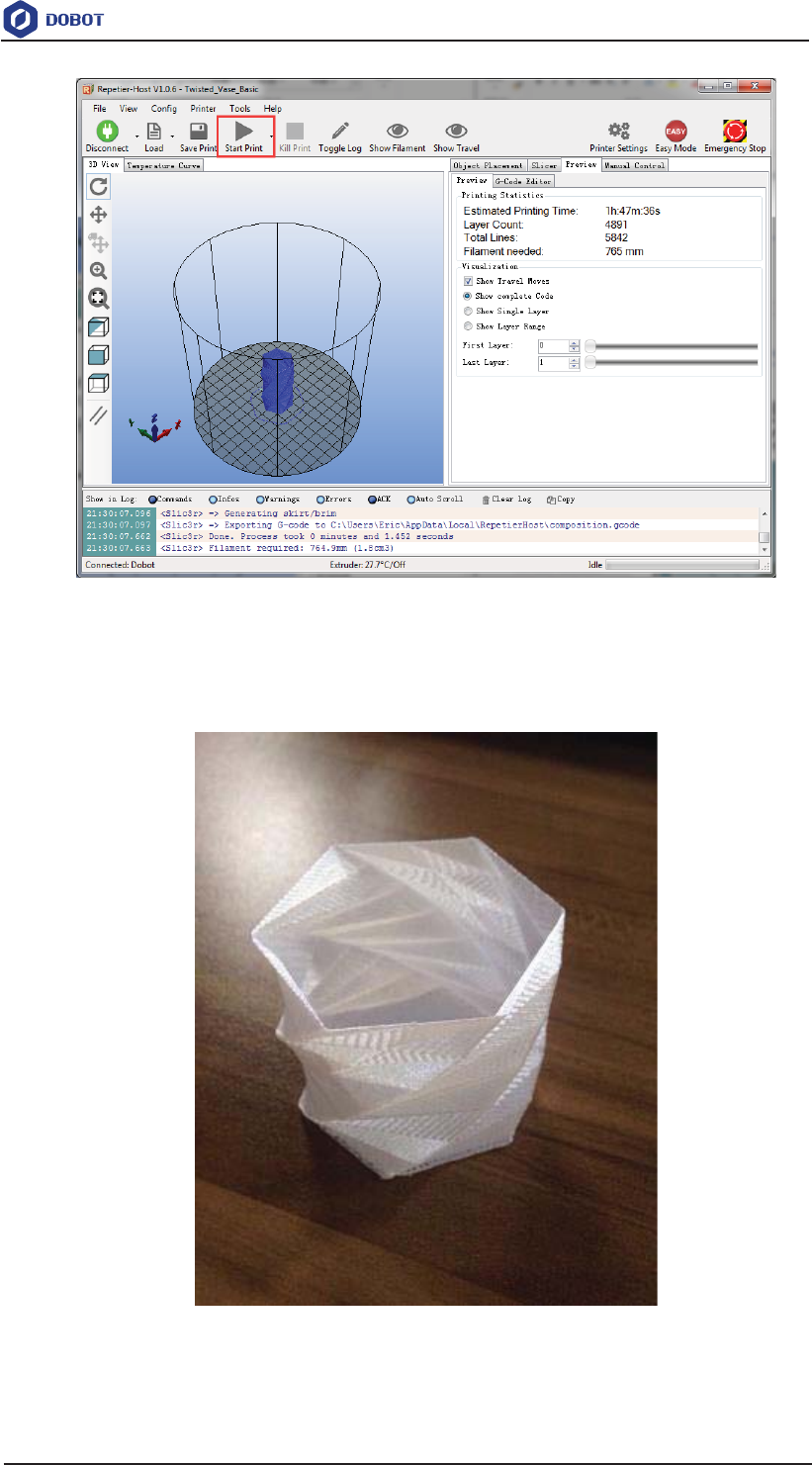
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
120
Figure 5.143 Start printing
Here we choose vase mode to print, and the product after printing as shown in Figure 5.144.
Figure 5.144 The product of printing
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
121
Operating Cura 5.9.3
If you need to use Cura software for 3D printing, please launch the Cura software after
burning firmware.
Prerequisites
y Slice software Cura has been installed.
The download path is https://ultimaker.com/en/products/ultimaker-cura-software/list.
Please download the recommended version V14.07. The way how to install and use is
not descripted in this topic.
y The 3D printing model has been prepared.
y The printing platform has been prepared and please place it in the workspace of
Dobot Magician.
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully (Only USB connection
is supported).
y The 3D printing kit has been installed.
5.9.3.1 Burning Firmware
Procedure
Step 1 Click 3DPrinter on the DobotStudio page.
The 3D Printing FM page is displayed, as shown in Figure 5.145.
Figure 5.145 Burn firmware
Step 2 Click Confirm to start burning 3D printing firmware.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
122
After burning 3D printing firmware, if the LED indicator on the base turns red, it
indicates that the connection of the 3D printing kit is abnormal..
WARNING
Please DO NOT operate or turn off Dobot Magician when burning firmware, to avoid
machine damage.
5.9.3.2 Performing 3D Printing
Procedure
Step 1 Launch Cura software.
Step 2 Set slicing parameters.
Select Machine > settings on the Cura page. 1.
The Machine settings page is displayed.
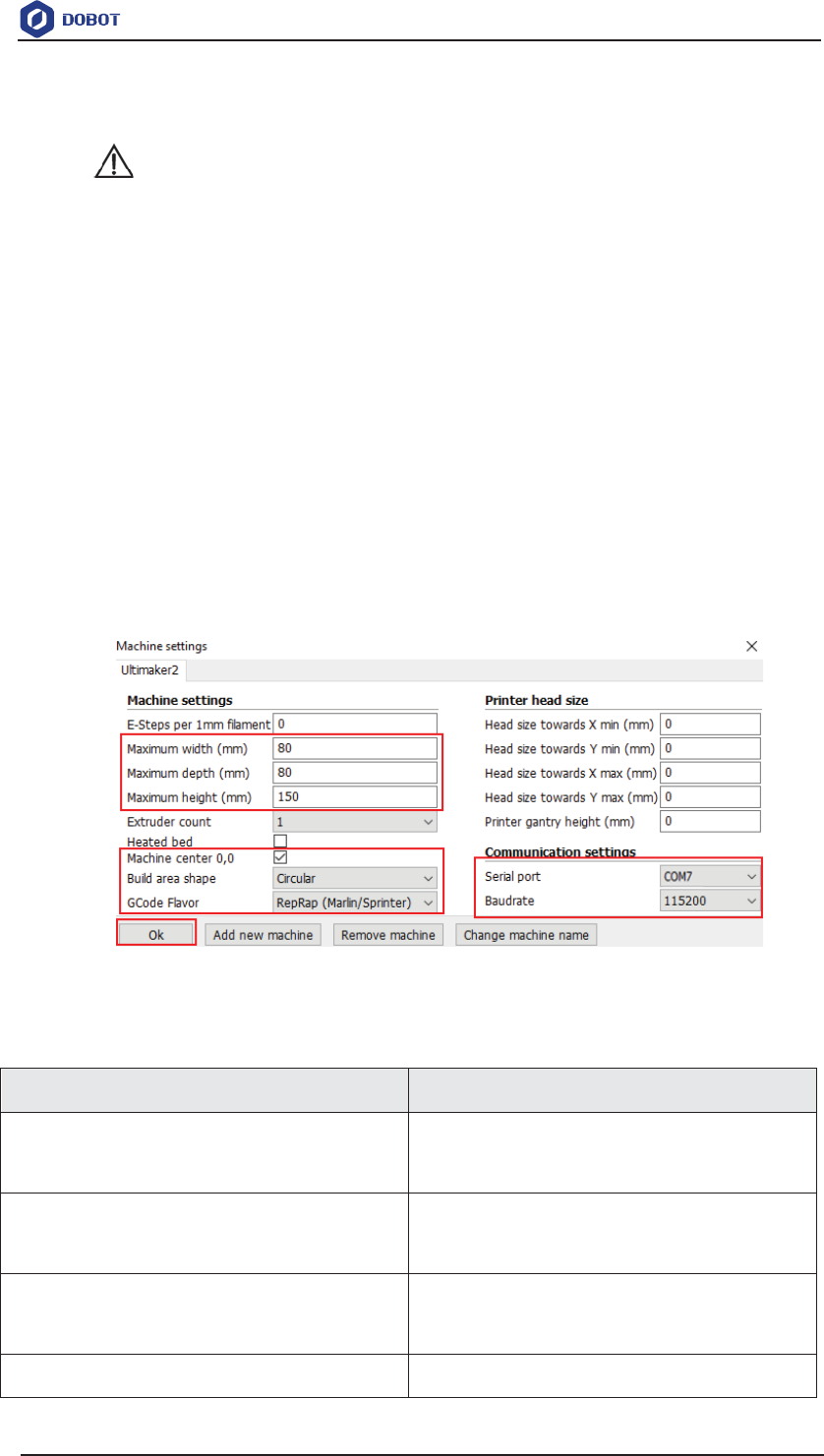
Set the corresponding parameters on the Machine settings and click OK, as 2.
shown in Figure 5.146. Table 5.16 lists the values of the parameters that need to
be set. The other parameters are set by default.
Figure 5.146 Parameters setting
Table 5.16 3D printing parameters description
Parameter
Description
Maximum
width
The
maximum width
please set to 80mm
Maximum
depth
The maximum with
please set to 80mm
Maximum
height
The maximum height
Please
set to 150mm
Machine
center 0,0
Machine center, please select it
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
123
Parameter
Description
GCode
Flavor
The style of GCode
Please
select RepRap Marlin/Sprinter
B
uild area shape
Build
the area shape
Please select
Circular
S
erial port
Serial
port
Please select the corresponding
serial port
B
audrate
Baud
rate
Please set to 115200
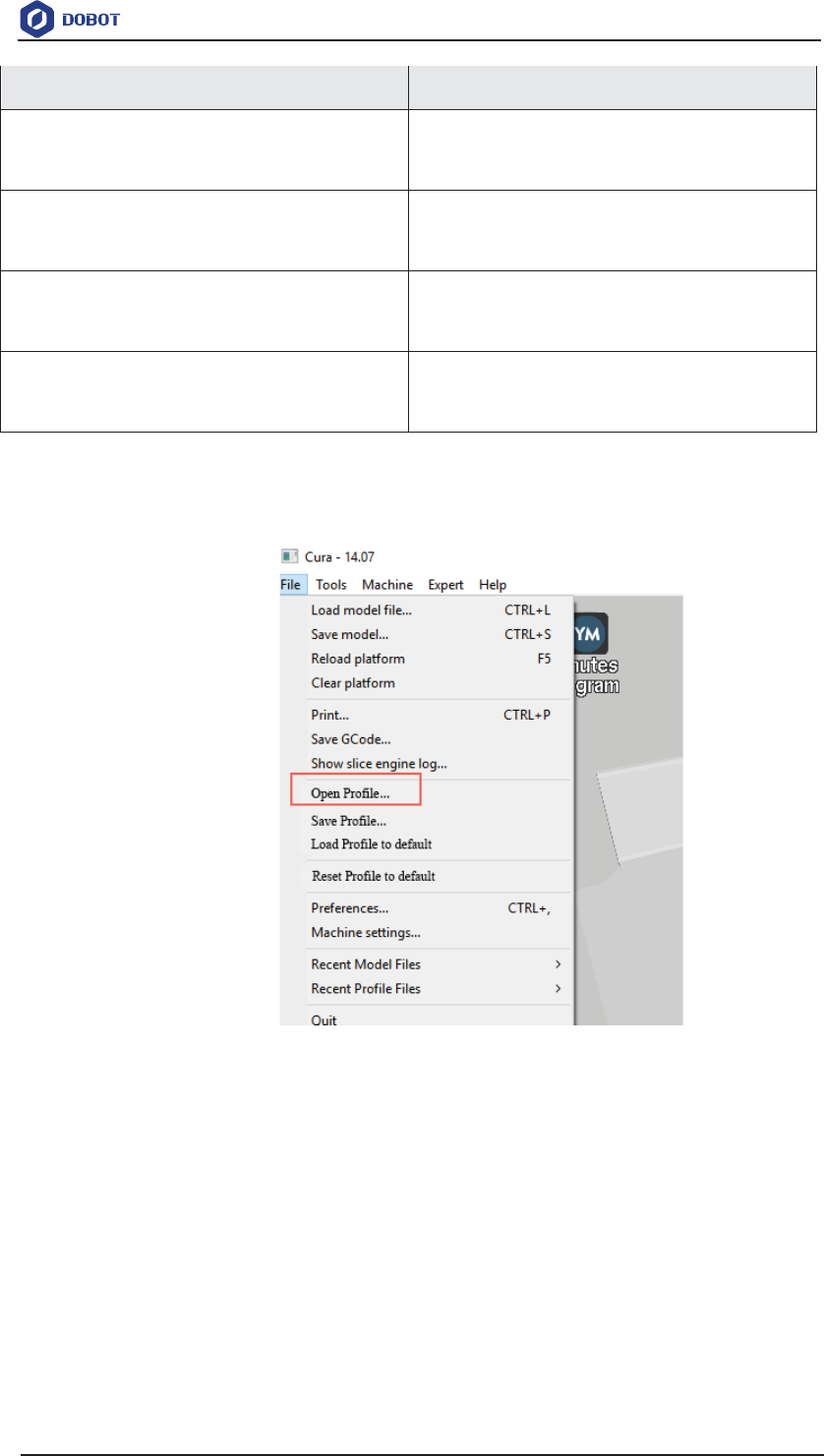
Set slice parameters, and select File > Open Profile to import these parameters, 3.
as shown in Figure 5.147.
Figure 5.147 Import slice parameters
The 3D printing effect depends on the slice parameters. This topic provides a
configuration sample, you can import it directly for printing.
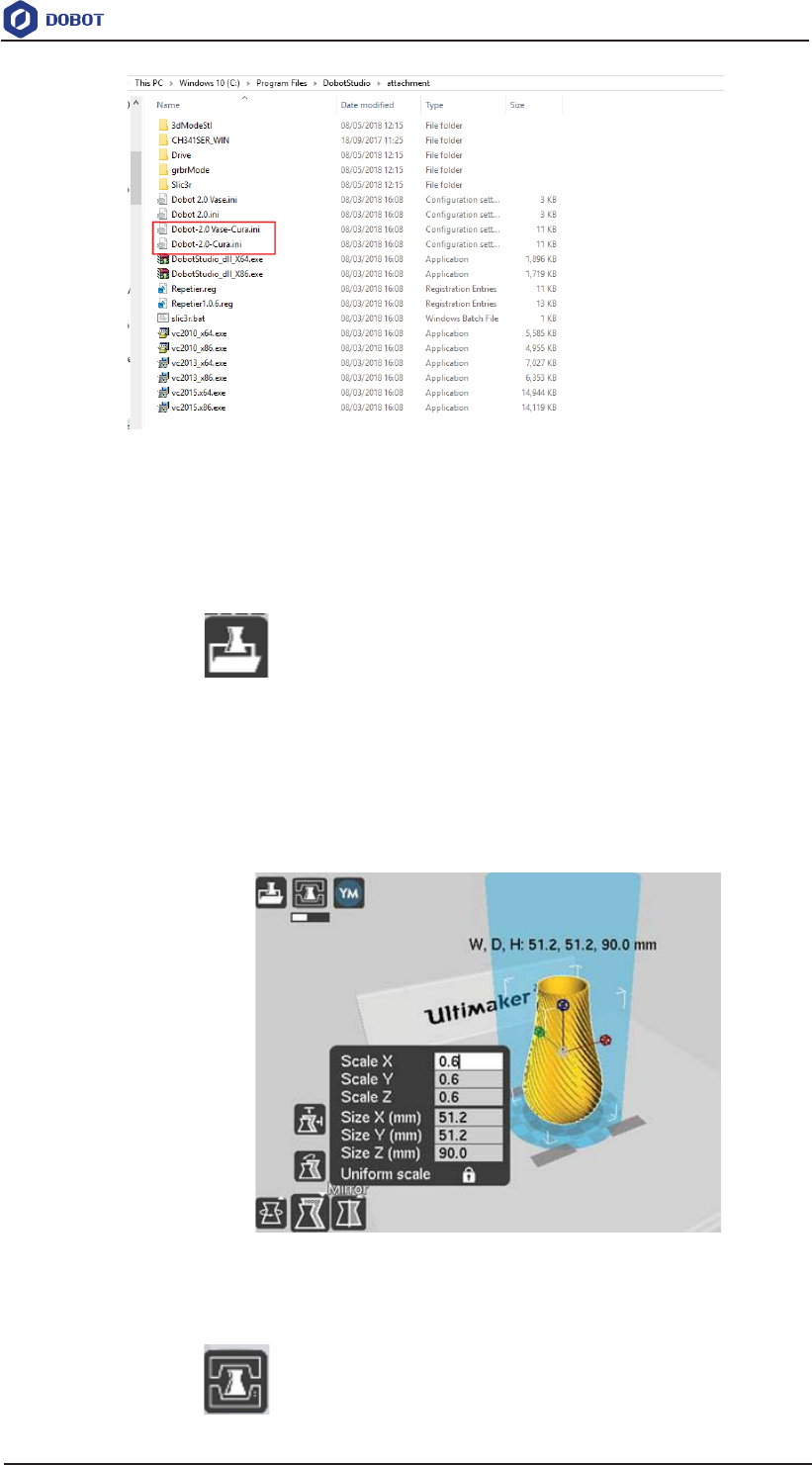
The path of the configuration sample is Installation directory\DobotStudio
\attachment\, as shown in Figure 5.148.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
124
Figure 5.148 Configuration sample
Dobot-2.0-Vase-Cura.ini is used for printing a thin-walled vase, while
Dobot-2.0-Cura.ini is used for the filling, the filling rate is 20%.
Click , the Open 3D model page is displayed, and select the 3D
4.
printing model prepared.
The format of 3D model is STL. You can design 3D model and transform it
into STL format.
After importing the model, click the model itself, you can center, zoom or
rotate, and so on, as shown in Figure 5.149.
Figure 5.149 Zoom and rotate
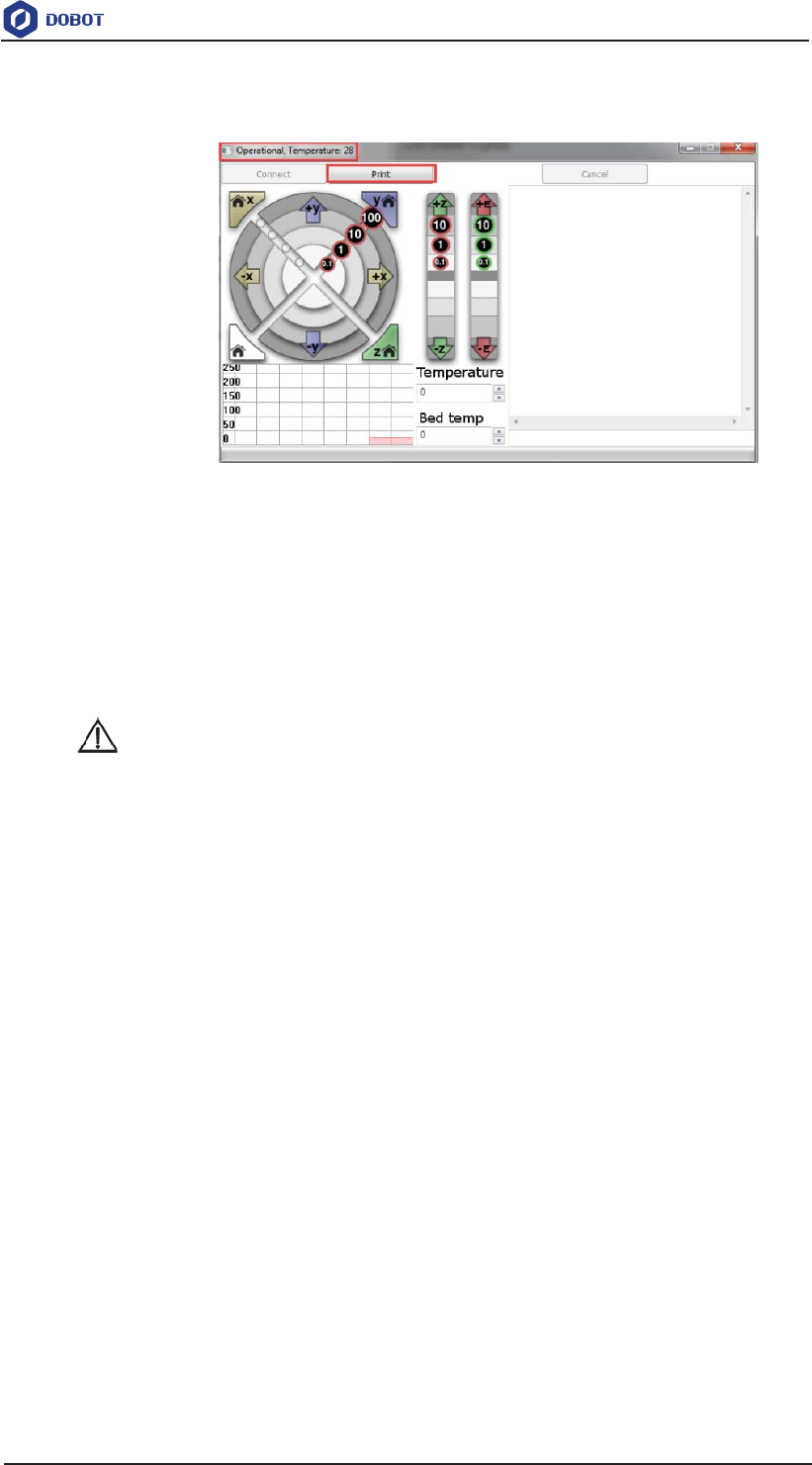
Click to connect with Dobot Magician. 5.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
125
The printing window is displayed and the current printing temperature is
shown on the top corner of the window, as shown in Figure 5.150.
Figure 5.150 Printing window
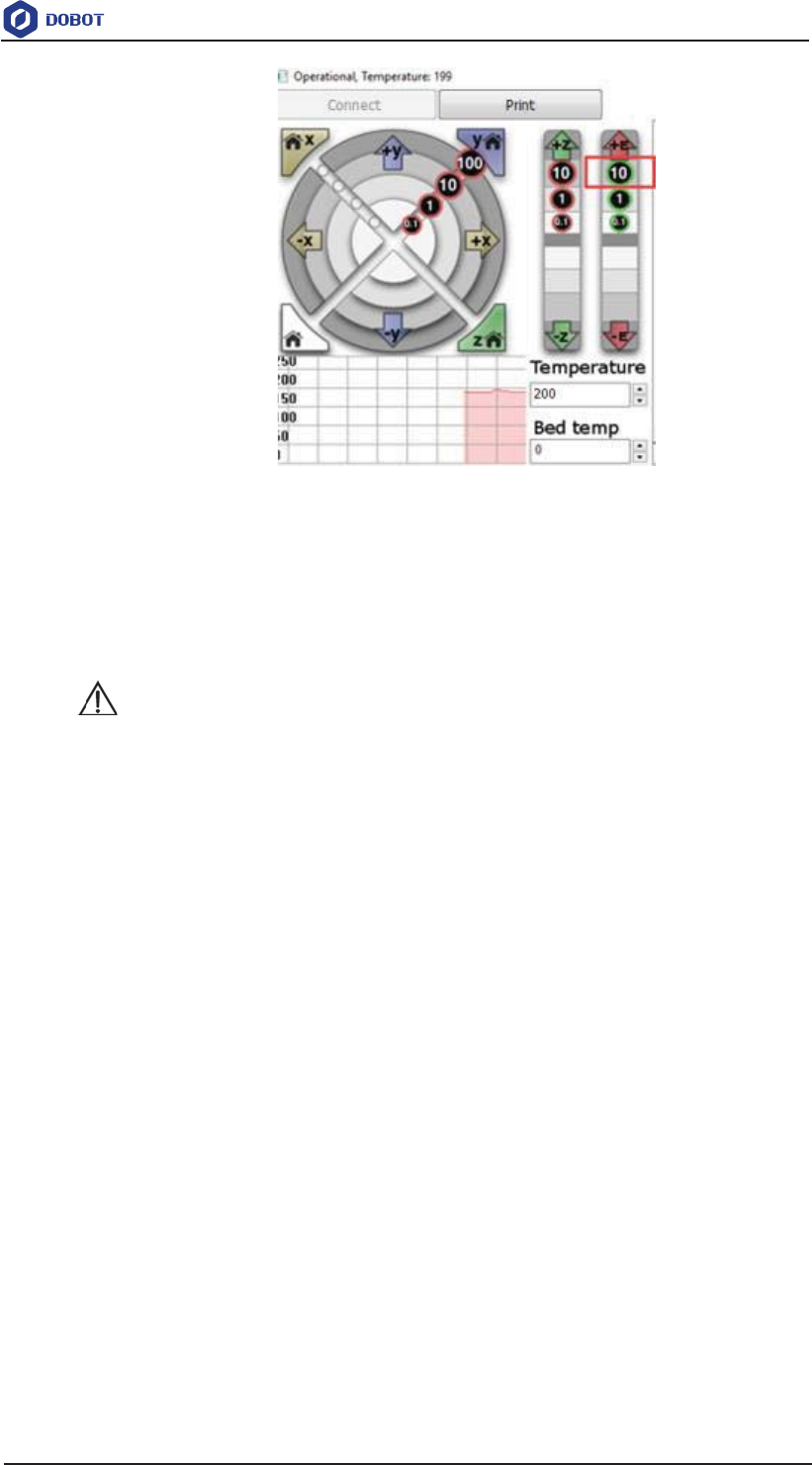
Set Temperature to 200 and press down Enter to heat the extruder. 6.
The temperature of the extruder should be above 170ć. Dobot Maigicain will
not start 3D printing until the filament is in the melting state. So you need to
heat the extruder first.
DANGER
The heating rod will produce high temperature up to 250ć, please be careful. Do not
let children play with it alone. The process needs to be monitored when it is running.
After the process is completed, please turn off the equipment promptly.
Step 3 Test the extruder.
Before printing, you need to test the extruder to check whether the melted filament
flows from the nozzle of the extruder.
Click the feedstock extruder or click the given stepper, such as 10, 1, 0.1 (10 is
recommended) on the Operational page and feed up to 10mm-30mm, as shown in
Figure 5.151.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
126
Figure 5.151 Click feedstock extruder
If the melted filament flows from the nozzle of the extruder, the extruder is
working properly.
NOTICE
If the filament extrusion is in the opposite direction, please remove the filament, and
turn the extruder around, then re-push down the filament.
Step 4 Adjust the printing space and get printing coordinates.
NOTE
During printing, if the distance from Dobot Magician to the printing platform is too
large or too small to paste the first layer, it can lead to the nozzle blockage. For
increasing the stickiness of the first layer, placing a masking paper on the platform is
recommende.
Press the Unlock key on the Forearm and drag Dobot Magician to make the 1.
printing head contact the surface of the masking paper(The distance between
the printing head and the surface of the masking paper is the thickness of a
sheet of A4 paper), then release the Unlock key.
Input command M415 on the lower right of the Operational page to get the 2.
current coordinates, as shown in Figure 5.152.
Also, you can press the Key button on the bace of the base to get the current
coordinates.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
127
Figure 5.152 Input command M415
Step 5 Click Print, Dobot Magician moves to the printing origin (System setting) and
starts printing.
Calibration 5.10
Base Calibration 5.10.1
The base Encoder has been calibrated before being shipped out. Generally, the J1-coordinate
is 0° after homing, where the homing point is the system default. Namely, the Forearm is located
at the middle in front of the base.
If the J1-coordinate is not 0° (error range: 1e-3e) after homing, you need to re-calibrate the
base Encoder.
Prerequisites
y The writing and drawing kit has been installed. For details, please see 5.4.1
Installing a Writing and drawing kit.
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
y The sensor calibration board has been prepared.
Procedure
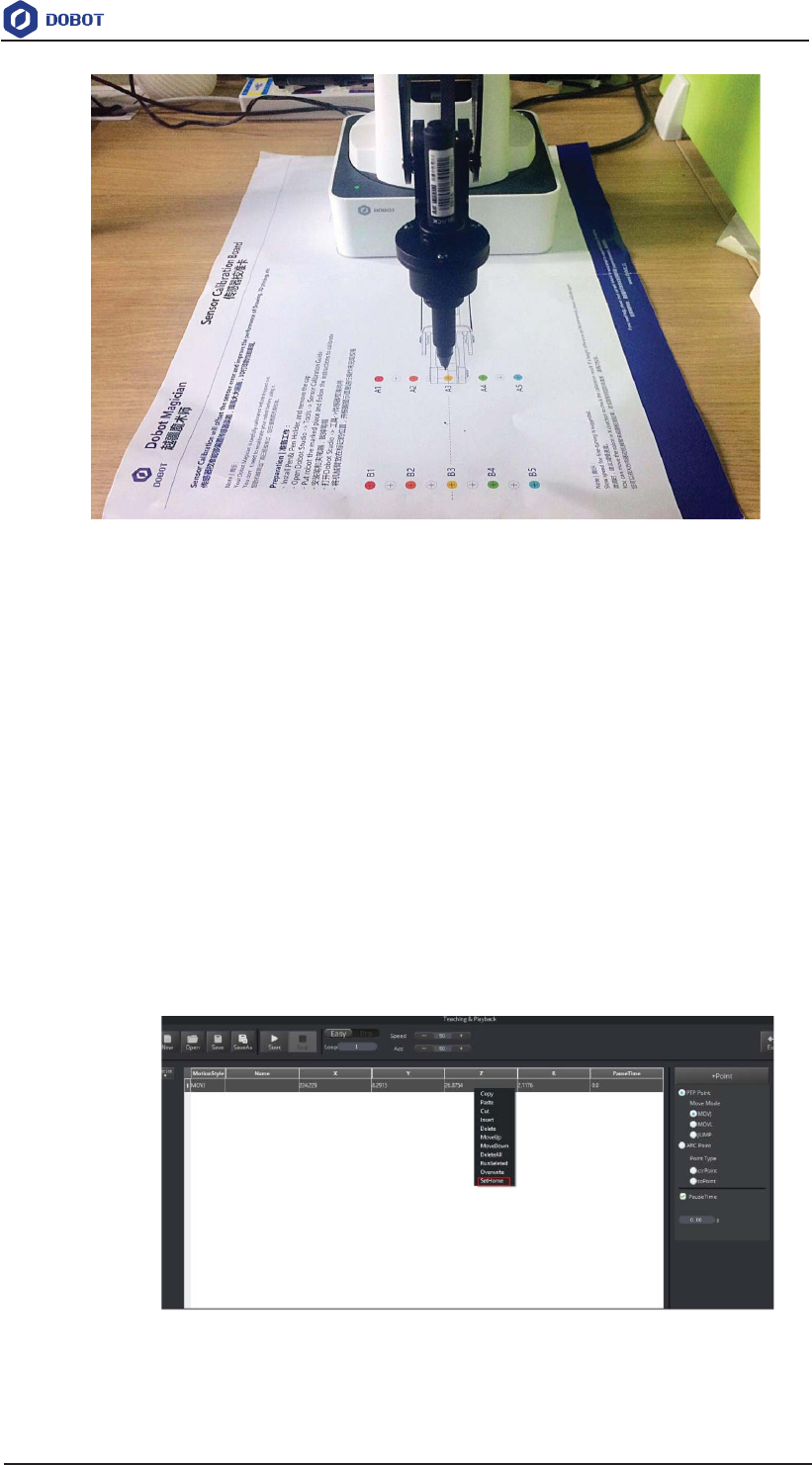
Step 1 Place the Dobot Magician at the right position on the sensor calibration board, as
shown in Figure 5.153.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
128
Figure 5.153 Location of Dobot Magician
Step 2 (Optional) Set the homing point and make the nib contact the surface of the
calibration board.
This step is used for observing the nib position on the calibration board when
moving J1-axis in Step 5, to improve calibration accuracy.
Click Teaching&Playback on the DobotStudio page. 1.
The Teaching&Playback page is displayed.
Press the Unlock key on the Forearm and drag Dobot Magician to make the nib 2.
contact the surface of the calibration board, then release the Unlock key.
The coordinates of this point will be displayed on the Teaching&Playback
page.
Select this point and right-click SetHome, as shown in Figure 5.154. 3.
Figure 5.154 Set homing position
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
129
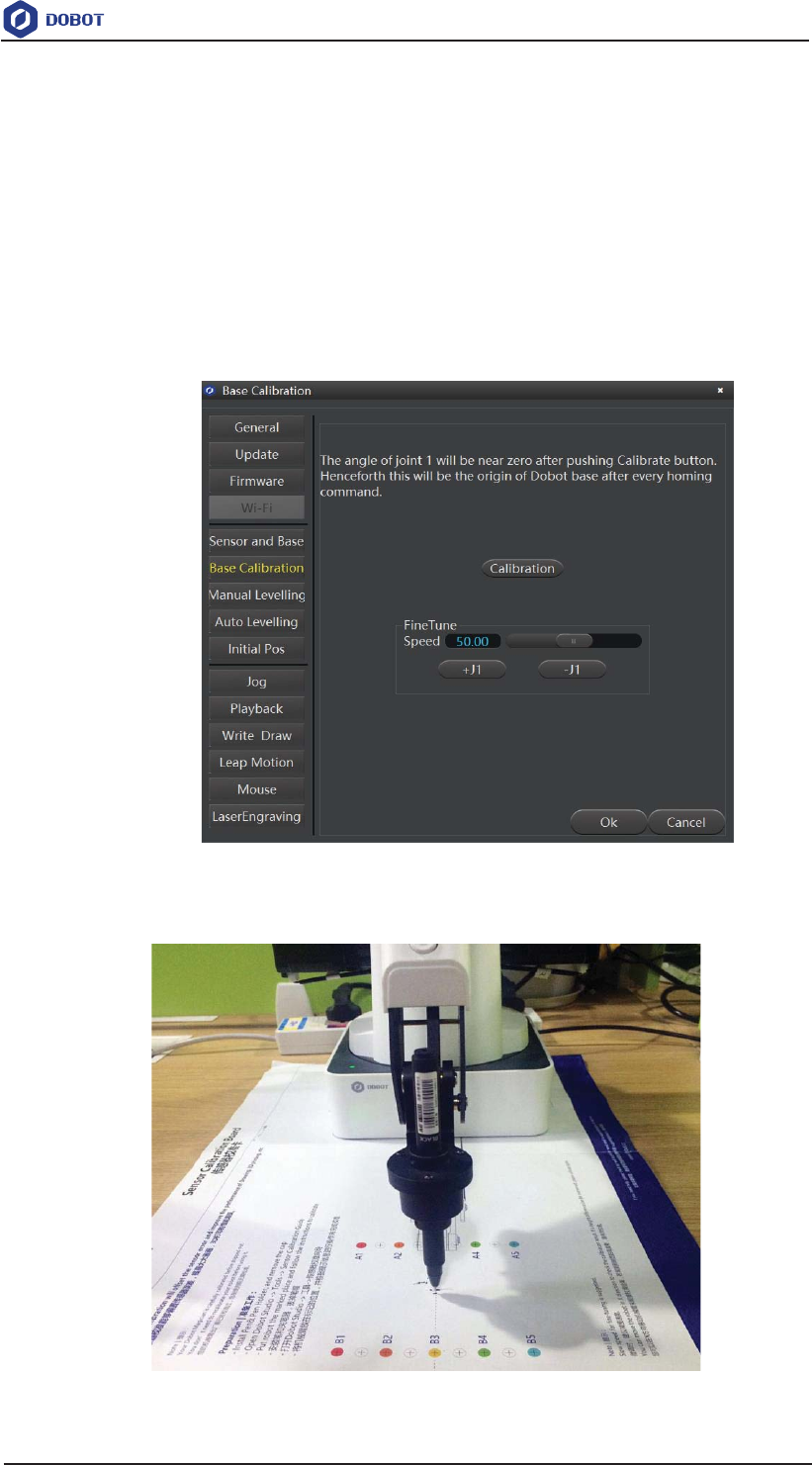
Step 3 Click Setting > Base Calibration on the DobotStudio page.
The Base Calibration page is displayed.
Step 4 Click Next on the Base Calibration page.
Dobot will start homing. Please ensure that there are no obstacles in the workspace
during homing.
Step 5 Click +J1 or -J1 to make the nib at a point on the line between A3 and B3 on the
calibration board, as shown in Figure 5.155 and Figure 5.156.
If the speed is too fast when moving J1-axis, you can drag Speed slider to adjust
speed.
Figure 5.155 Move J1-axis
Figure 5.156 Nib position

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
130
Step 6 Click Calibration to start calibrating the base Encoder.
You can check the J1-coordinate on the Operation Panel page, as shown in Figure
5.157.
Figure 5.157 J1-coordinate
Sensor Calibration 5.10.2
The angle sensors of the Forearm and Rear Arm have been calibrated before being shipped
out. Generally, the Z-coordinate will remain the same when moving Dobot Magician in the same
horizontal plane. If changed, you need to recalibrate the angle sensors by manual levelling or auto
levelling to improve the positioning accuracy.
y Manual Levelling: It is more accurate to calibrate manually with DobotStudio,
sensor calibration board, and writing and drawing kit, which is suitable for the
application scenarios with high requirements for absolute positioning accuracy.
y Auto Levelling: It is simple and quick to calibrate automatically with DobotStudio
and auto-levelling tool, which is suitable for the application scenarios without high

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
131
requirements for absolute positioning accuracy, such as writing and drawing, 3D
printing.
5.10.2.1 Manual Levelling
Prerequisites
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
y The sensor calibration board has been prepared.
Procedure
Step 1 Place the Dobot Magician at the right position on the sensor calibration board, as
shown in Figure 5.158.
Figure 5.158 Location of Dobot Magician
Step 2 Click Setting > Manual Levelling on the DobotStudio page.
The Manual Levelling page is displayed.
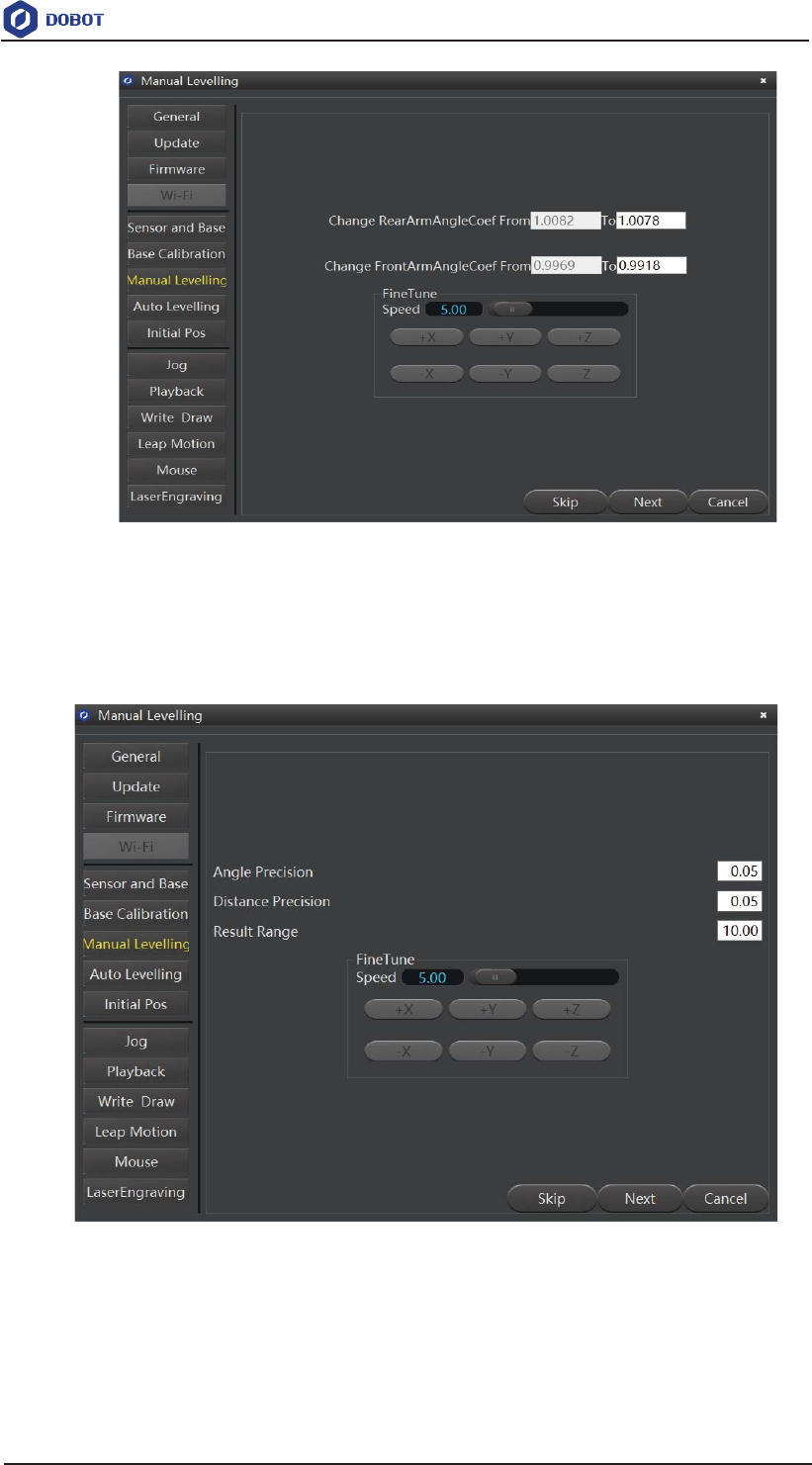
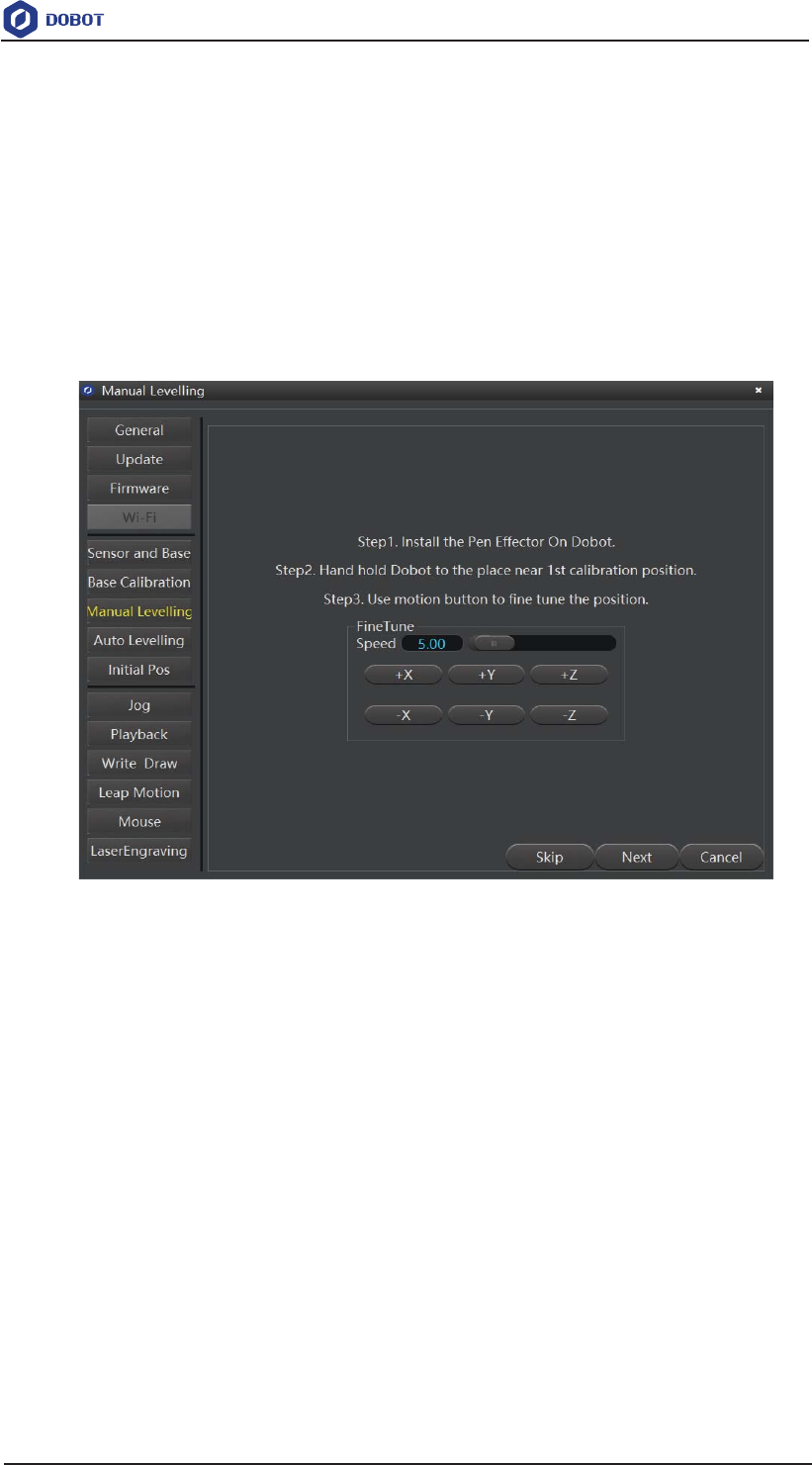
Step 3 Click Next on the Manual Levelling page.
Dobot Magician will finish the auto-compensation of the angle senor coefficients of
the Forearm and Rear Arm move according to the system settings. The result is as
shown in Figure 5.159.
NOTICE
Please remove all end-effectors from Dobot Magician before calibrating
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
132
Figure 5.159 Get the angle sensor coefficients
Step 4 Click Next and set Angle Precision, Distance Precision, Result Range.
In this step, please keep the default values, as shown in Figure 5.160.
Figure 5.160 Set precisions
Step 5 Click Next and follow the instructions on the Manual Levelling page to move
Dobot Magician to the first calibrated point. If the calibrated point is A3 on the
Calibration board.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
133
Install the writing and drawing kit. For details, please see 5.4.1 Installing a 1.
Writing and drawing kit.
Press the Unlock key on the Forearm and drag Dobot Magician to make the nib 2.
near the A3 point on the calibration board, then release the Unlock key.
Click coordinate buttons on the Manual Levelling page (as shown in Figure
3.
5.161) to make the nib align to the center of A3 point on the calibration board,
as shown in Figure 5.162.
If the speed is too fast when clicking coordinate buttons, you can drag Speed
slider to adjust speed.
Figure 5.161 Fine-tune page

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
134
Figure 5.162 Nib position
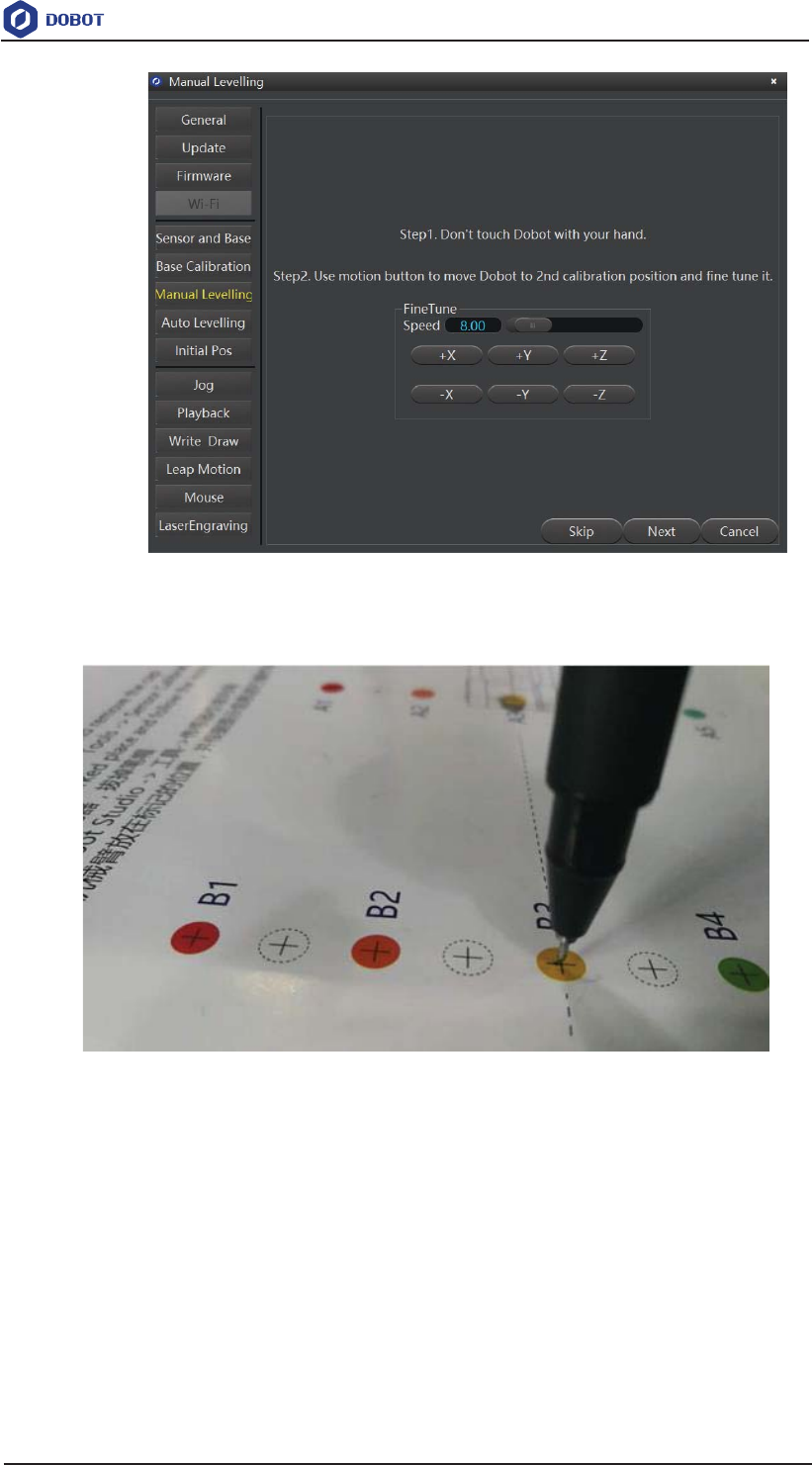
Step 6 Click Next and follow the instructions on the Manual Levelling page (as shown in
Figure 5.163) to move Dobot Magician to make the nib in the center of the second
calibrated point. If the calibrated point is B3 on the calibration board, as shown in
Figure 5.164.
NOTICE
Please DO NOT drag Dobot Magician in this step, to avoid manual levelling failure. If
the speed is too fast when clicking coordinate buttons, you can drag Speed slider to
adjust speed.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
135
Figure 5.163 Fine-tune page
Figure 5.164 Nib position on the second calibrated point
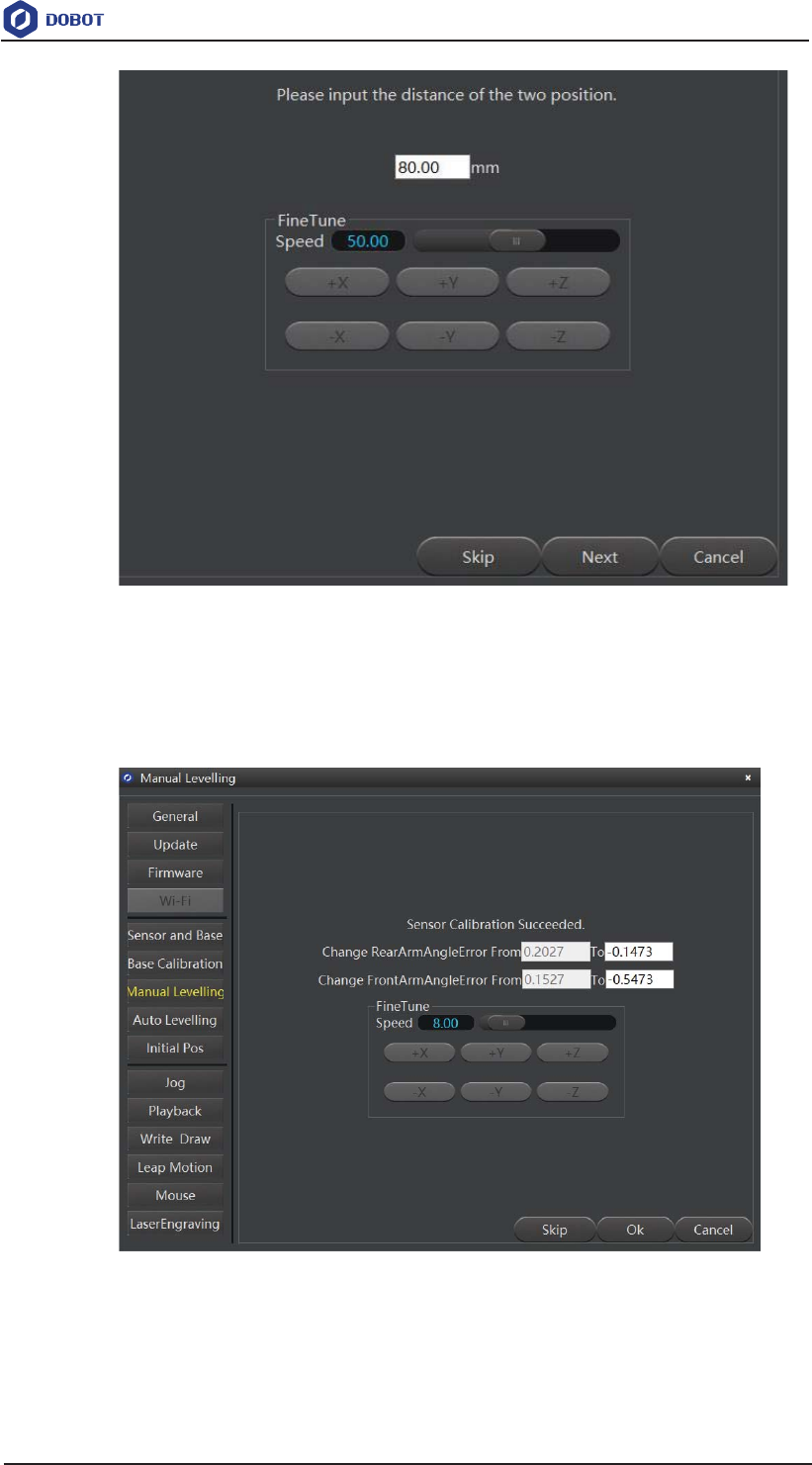
Step 7 Click Next and set the distance between the two calibrated points, as shown in
Figure 5.165.
The distance between the two calibrated points on the Calibration board is 80mm,
so please keep the default value in this step.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
136
Figure 5.165 Set the distance between the two calibrated points
Step 8 Click Next to start calibrating.
The result is shown as Figure 5.166.
Figure 5.166 Calibrating result
5.10.2.2 Auto Levelling
Prerequisites
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
137
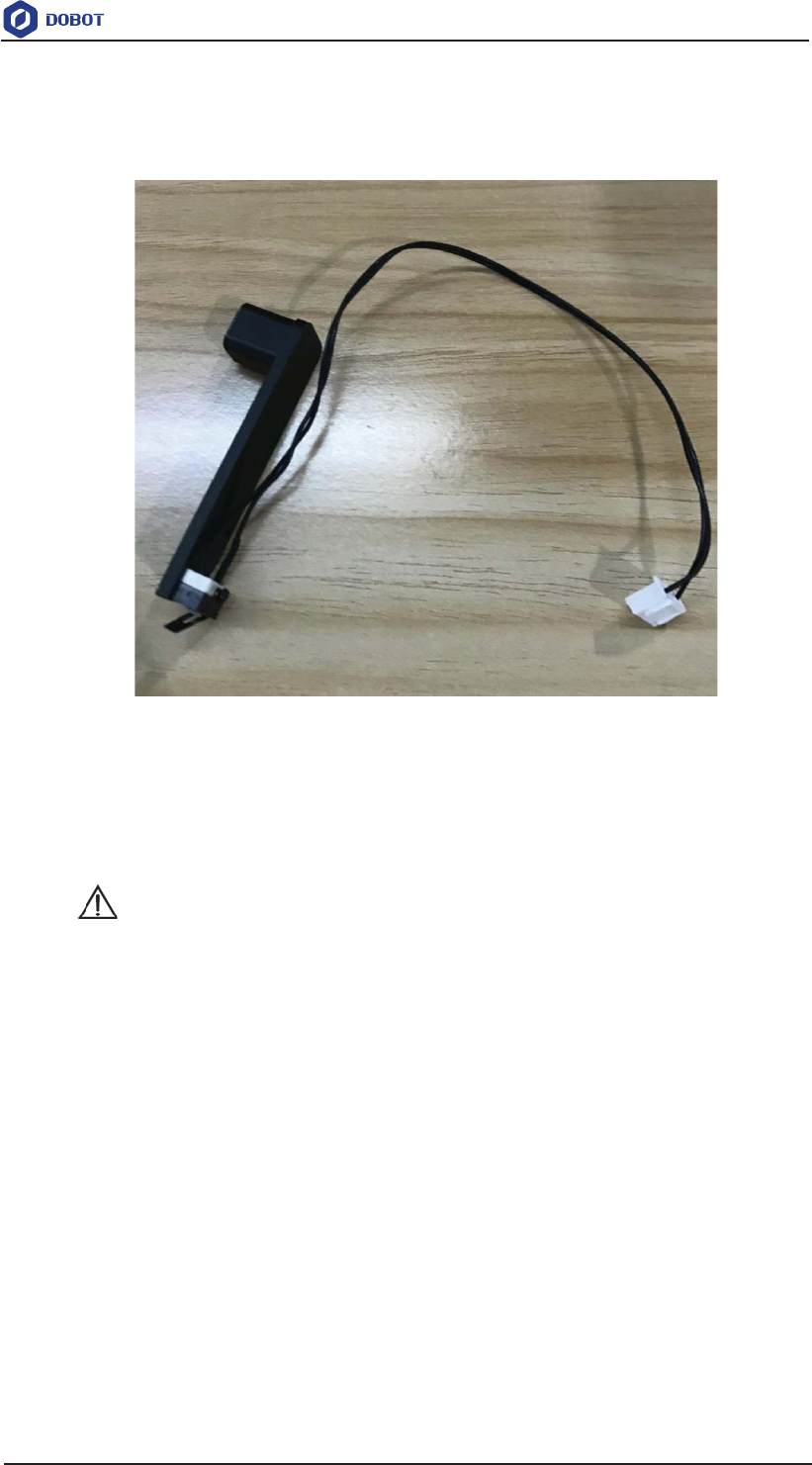
y Dobot Magician has been connected to a PC via USB cable.
y Dobot Magician has been connected to the power adapter.
y The auto-levelling tool has been obtained, as shown in Figure 5.167.
Figure 5.167 Auto-levelling tool
Procedure
Step 1 Place Dobot Magician on the flat platform.
NOTICE
Please ensure that the platform is flat. Or, the auto levelling will be failed.
Step 2 Fix the auto-levelling tool on the Dobot Magician with butterfly nut, as shown in
Figure 5.168.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
138
Figure 5.168 Fix auto-levelling tool
Step 3 Insert the cable of the auto-levelling tool to the interface 2 on the Forearm, as
shown in Figure 5.169.
Figure 5.169 Insert the cable of the auto-levelling
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
139
Step 4 Power on Dobot Magician and connect it to DobotStudio.
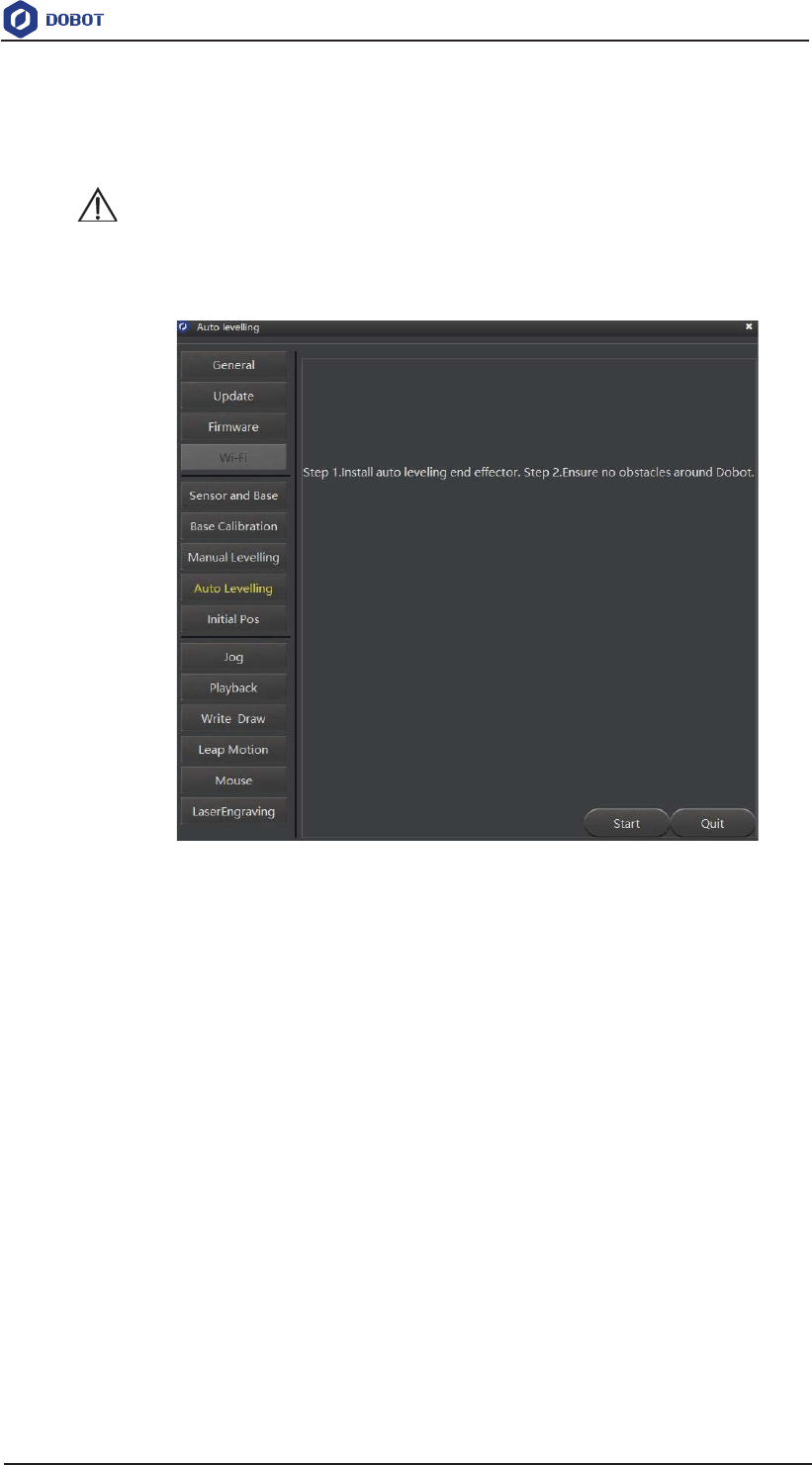
Step 5 Click Setting > Auto Levelling on the DobotStudio page.
The Auto Levelling page is displayed, as shown in Figure 5.170.
NOTICE
Please ensure that there are no obstacles in the workspace during auto levelling.
Figure 5.170 Auto levelling page
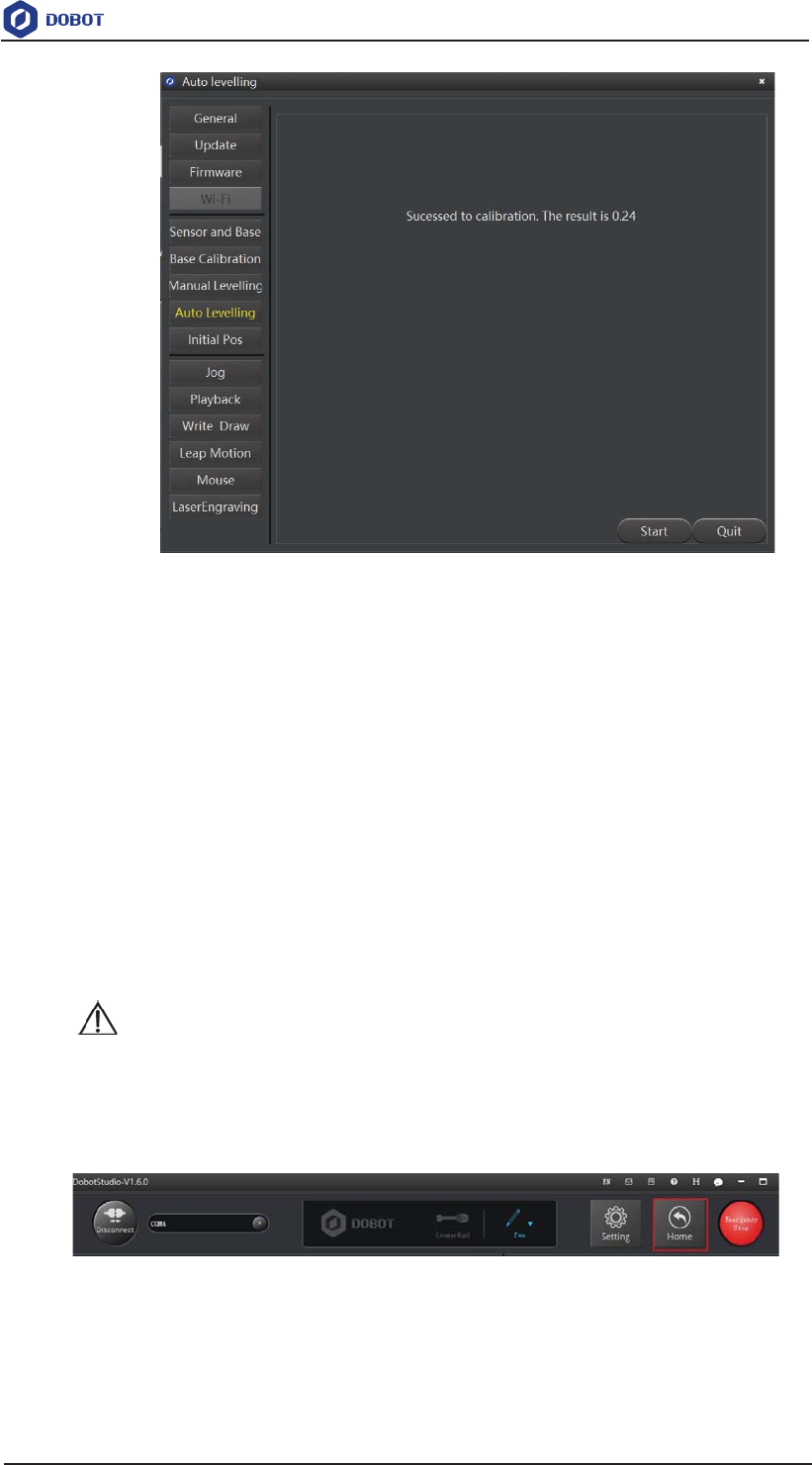
Step 6 Click Start on the Auto Levelling page.
Dobot Magician starts auto levelling. The levelling process will takes about 2
minutes. The result is shown as Figure 5.171.
NOTE
If the auto levelling is failed, please check if the platform is flat and try again.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
140
Figure 5.171 Auto levelling result
Homing
5.10.3
Dobot Magician has been calibrated before being shipped out. If the Dobot Magician has
been hit or the motor has lost step, leading data abnormal, you need to operate homing to improve
the positioning accuracy.
Prerequisites
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
Procedure
Click Home on the DobotStudio page, as shown in Figure 5.172.
NOTICE
y Please remove the end-effector from the Dobot Magician before homing.
y Please ensure that there are no obstacles in the workspace during homing.
Figure 5.172 Operate homing
Dobot Magician will rotate clockwise to the limited position and then return to the default
homing point automatically and the LED indicator on the base turns blue and is blinking. After the

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
141
homing is successful, there is a beep sound and the LED indicator turns green.
Also, the homing point can be use-defined, you can select a saved point on the
Teachong&Playback page and right-click SetHome to set this saved point as the homing point,
as shown in Figure 5.173.
Figure 5.173 Set homing point
Connecting with WIFI Kit 5.11
You can connect Dobot Magician to a PC via WIFI kit without USB cable, making Dobot
Magician and PC in the same WLAN. Figure 5.174 shows the WIFI kit.
Figure 5.174 WIFI kit
Prerequisites
y Dobot Magician has been connected to a PC via USB cable.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
142
y Dobot Magician has been connected to the power adapter.
y The WIFI name and password have been obtained and must be the same as that of
PC.
Procedure
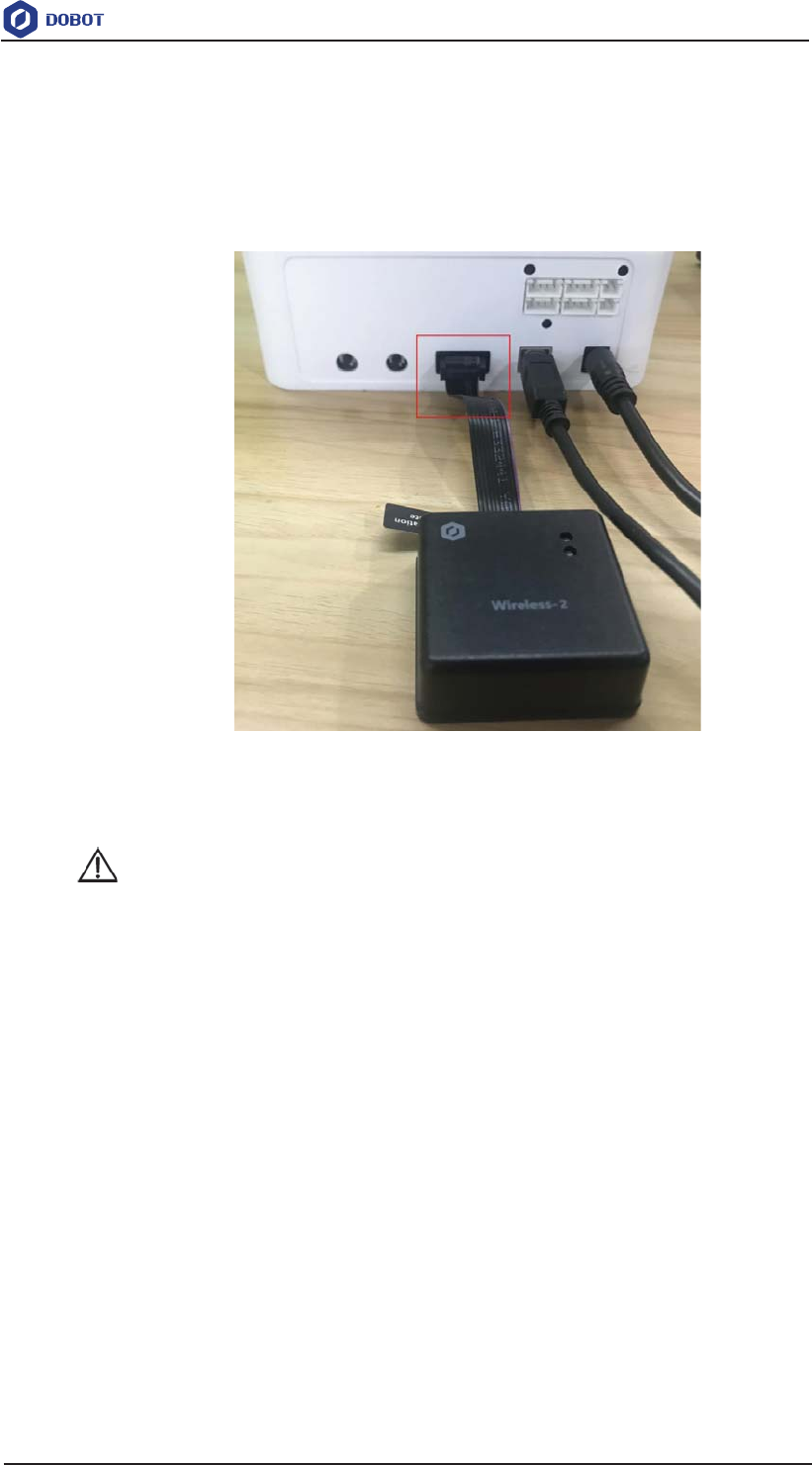
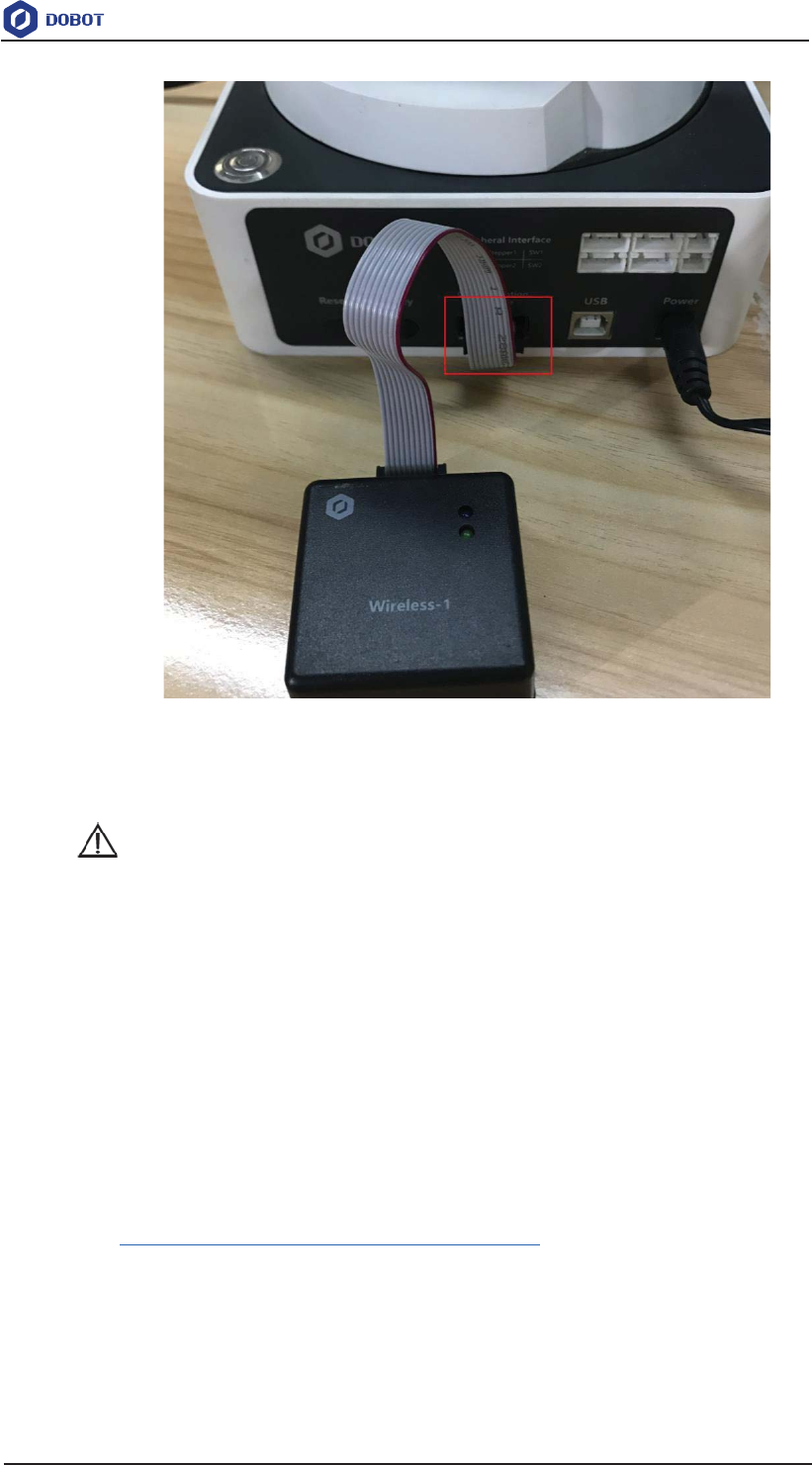
Step 1 Connect the WIFI kit to the UART interface on the base, as shown in Figure 5.175.
Figure 5.175 Connect with WIFI kit
NOTICE
Please turn off the Dobot Magician completely first before connecting or disconnecting
external equipment. Or, it causes serious damage to your device
Step 2 Press down the power button to turn on the Dobot Magician.
After turning on, there are two short beep sounds and the blue LED indicator on the
WIFI module is on.
Step 3 Select the corresponding serial port from the serial drop-down list, and click
Connect.
Step 4 Click Setting > Wi-Fi.
The Set Dobot Wi-Fi page is displayed.
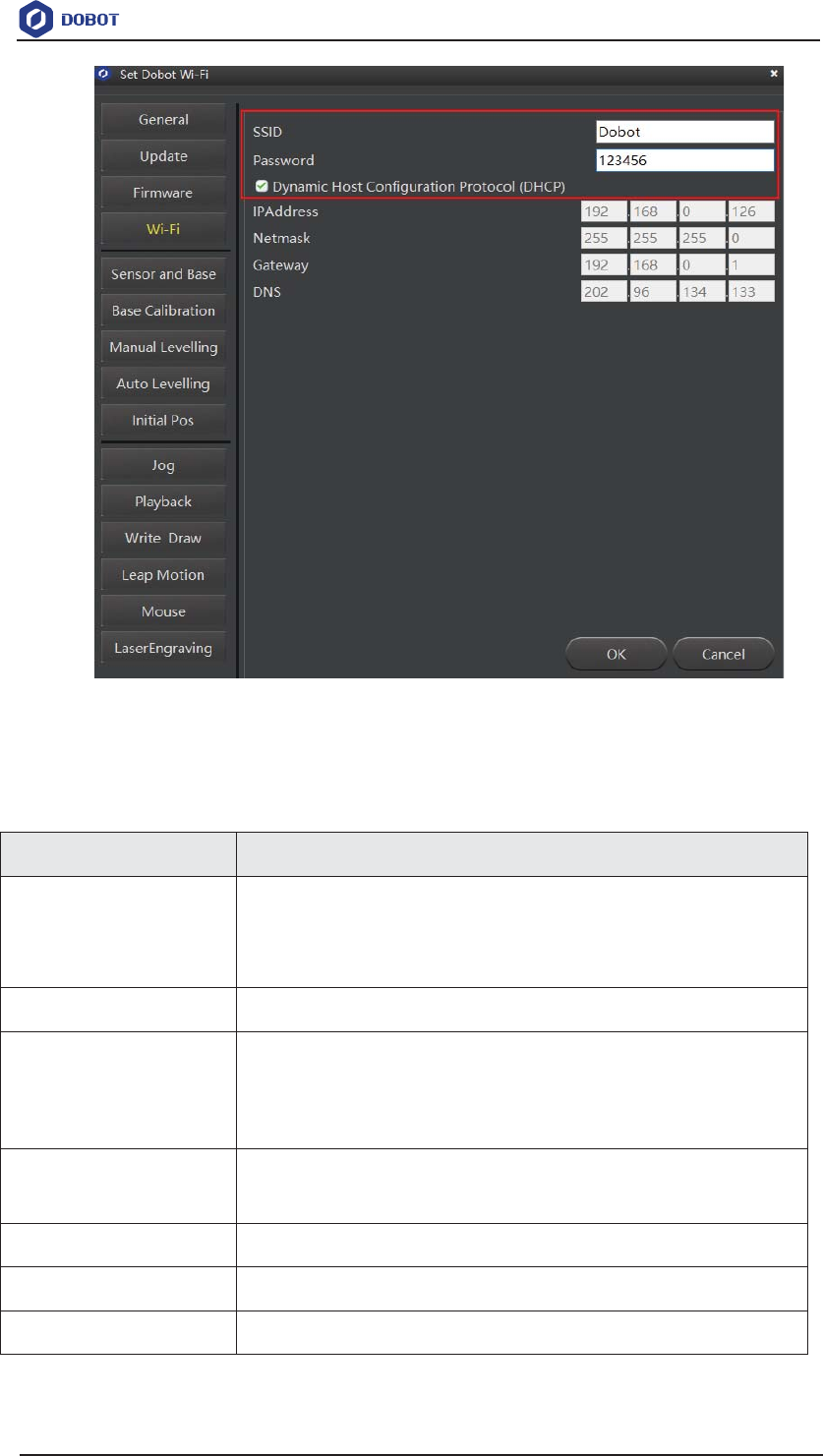
Step 5 Set the related parameters on the Set Dobot Wi-Fi page.
In this topic, please select Dynamic Host Configuration Protocol (DHCP) and
set SSID and Password to obtain the IP address of Dobot Magician, as shown in
Figure 5.176.
If you unselect Dynamic Host Configuration Protocol (DHCP), you need to set
IP address, Netmask, Gateway. For details, please see Table 5.17.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
143
Figure 5.176 Set WIFI
Table 5.17 Parameter description
Parameter
Description
SSID
Set
WIFI name
The
WIFI name and password have been obtained
and must be the same as
that of PC
Password
Set
WIFI password
Dynamic Host Configuration
Protocol
(DHCP)
W
hether to select DHCP
Y
es: Only set SSID and Password
No
: Only set IPAddress, Netmask and Gateway
IPAddress
Set
the IP address of Dobot Magician. The IP address of Dobot Magician and
the PC must be in the same WLAN without conflict.
Netmask
Set subnet mask
Gateway
Set gateway
DNS
Set DNS
Step 6 Click OK.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
144
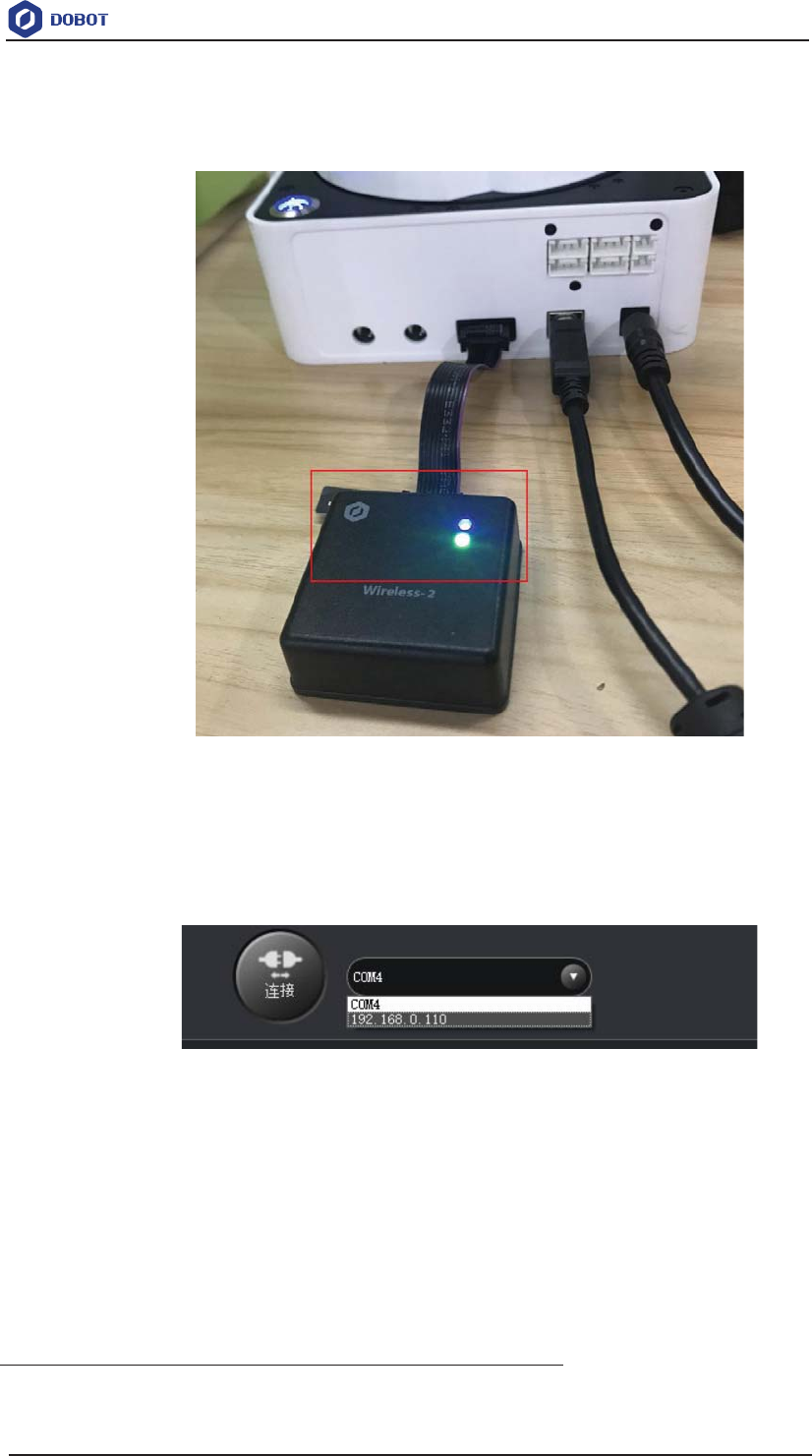
About 5 seconds later, the green LED indicator on the WIFI module is on,
indicating that the Dobot Magician has been connected with WLAN, as shown in
Figure 5.177.
Figure 5.177 Status of LED indicator
Step 7 Click Disconnect on the left pane of the DobotStudio page.
Step 8 After 2 seconds later, select the IP address from the drop-down list on the upper left
pane of the DobotStudio page and click Connect, as shown in Figure 5.178.
Figure 5.178 IP address of Dobot Magician
After the connection is successful, you can control Dobot Magician without USB
cable.
Connecting with Bluetooth Kit 5.12
Dobot Magician can be connected to smart phone with Bluetooth. Figure 5.179 shows the
Bluetooth kit. Please download the matched DobotStudio APP from the website
https://cn.dobot.cc/downloadcenter.html?sub_cat=69#sub-download.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
145
Figure 5.179 Bluetooth kit
Prerequisites
y Dobot Magician has been connected to the power adapter.
y The DobotStudio APP has been downloaded.
Procedure
Step 1 Connect the Bluetooth kit to the UART interface on the base, as shown in Figure
5.180.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
146
Figure 5.180 Connect with Bluetooth kit
NOTICE
Please turn off the Dobot Magician completely first before connecting or disconnecting
external equipment. Or, it causes serious damage to your device.
Step 2 Press down the power button to turn on the Dobot Magician.
After turning on, there are three short beep sounds and the blue LED indicator on
the Bluetooth module is on and the green one is blinking.
Turn on the Bluetooth and launch DobotStudio APP on your phone. And click
Connect to connect with Dobot Magician.
This topic only describes how to connect Bluetooth kit. For details how to operate
Dobot Magician with DobotStudio APP, please see
https://www.youtube.com/watch?v=kyeXwuf17IY.
Operating Blockly 5.13
Blockly is a programming platform based on Google Blockly. You can program through the
puzzle format, which is straightforward and easy to understand.
Prerequisites
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
147
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
Procedure
Step 1 Click Blockly on the DobotStudio page.
The Blockly page is displayed.
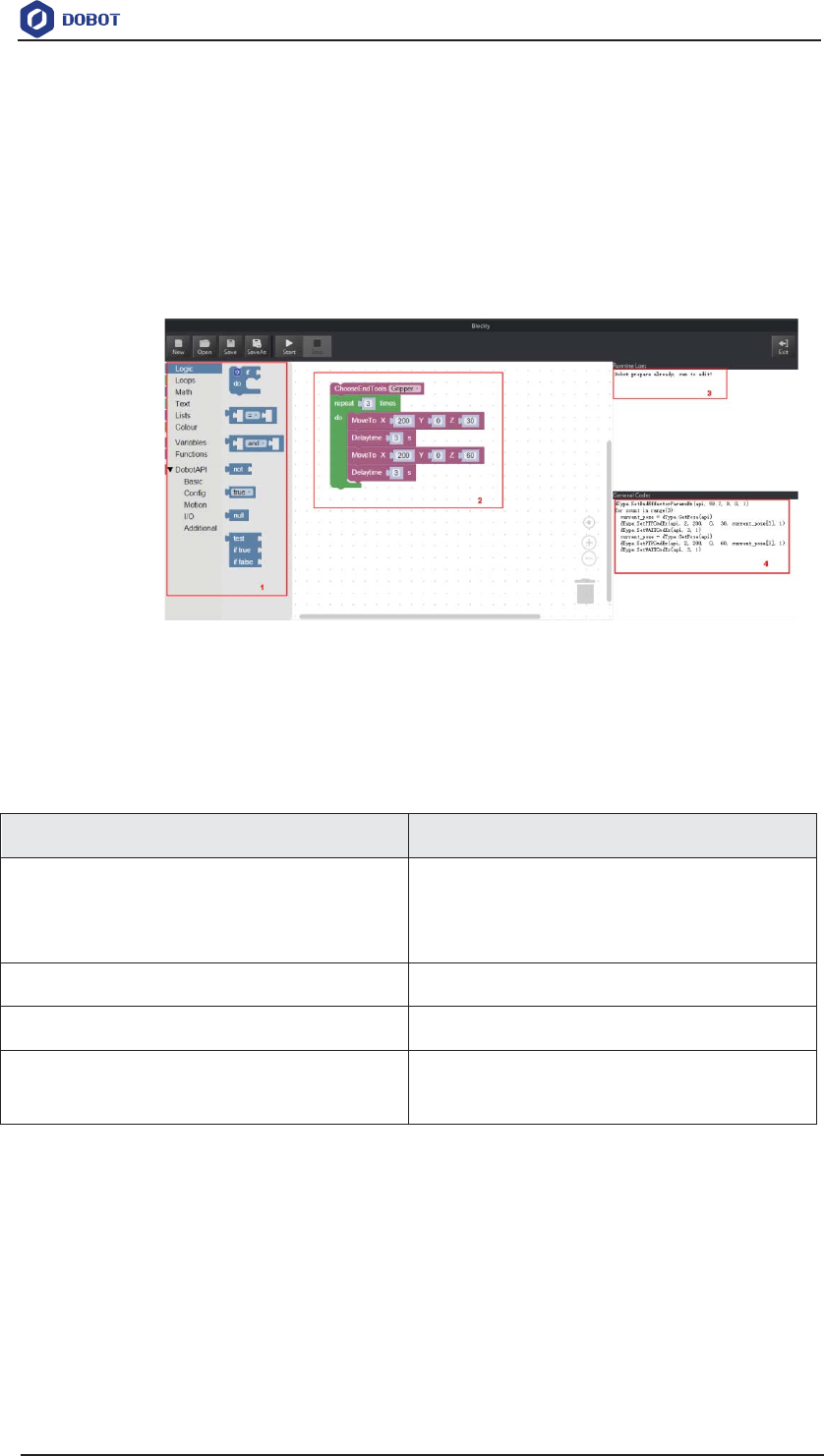
Step 2 Drag the blockly module on the left pane of the Blockly page to program, as shown
in Figure 5.181.
Figure 5.181 Blockly graphic programming
Table 5.18 lists the description of blockly module.
Table 5.18 Blockly description
No.
Description
1
The selection
area of blockly module, including
logistic, loop, math, and Dobot API. You can program
by dragging them to the window.
2
The window of blockly programming
3
The running log of Dobot M
agician
4
The corresponding codes of the blockly module on the
programming window
The demo in Figure 5.181 is described as follows.
Set the end-effector as Gripper. 1.
Set the loop number as 3 and make the Z-axis move back and forth 3 times. 2.
Set the pause time as 3. 3.
Step 3 Click Save on the Blockly page.
The Saving Blockly file page is displayed.
Step 4 Input the use-defined name and the saving path, and click Save. The default path of
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
148
the programing file is Installation directory/DobotStudio/config/bystore. Please
replace the path based on site requirements.
Step 5 Click Start on the Blockly page, and Dobot Magician will move according to the
program.
Scripting 5.14
You can control Dobot Magician over scripting. Dobot Magician supports various API, such
as velocity/acceleration setting, motion mode setting, and I/O configuration, which uses Python
language for secondary development. For details about the Dotob Magician API interface and
function description, please see Dobot Magician API Description.
The download path is
https://www.dobot.cc/downloadcenter.html?sub_cat=72#sub-download.
Prerequisites
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
Procedure
Step 1 Click Script on the DobotStudio page.
The Script page is displayed.
Step 2 Write a script.
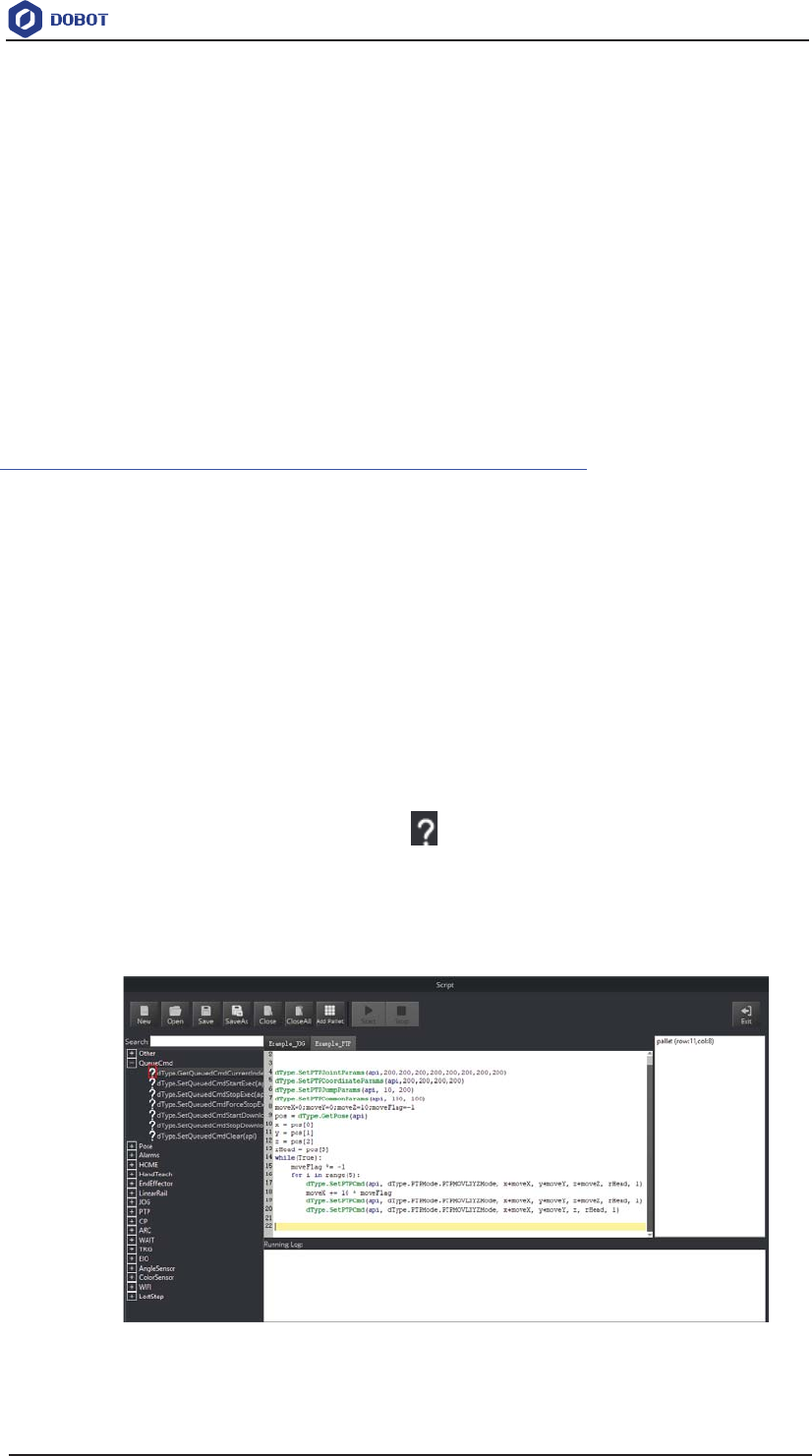
You can call the interface by double-clicking on the left pane of the Script page,
the corresponding interface will be displayed on the middle pane, as shown in
Figure 5.182. You can also click icon of the corresponding interface to view
the way how to set the parameters. The scripting examples (including Jog, PTP, and
Pallet) can refer to Installation directory/DobotStudio/config/ststore/.
Figure 5.182 Write a script

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
149
Step 3 Click Save on the Script page.
The Saving Scrip File page is displayed.
Step 4 Input the use-defined name and the saving path, and click Save.
The default path of the script is Installation directory/DobotStudio/config/ststore.
Please replace the path based on site requirements.
Step 5 Click Start, and Dobot Magician will move according to the script file.
The running log will be displayed on the lower pane of the Script page for
checking.
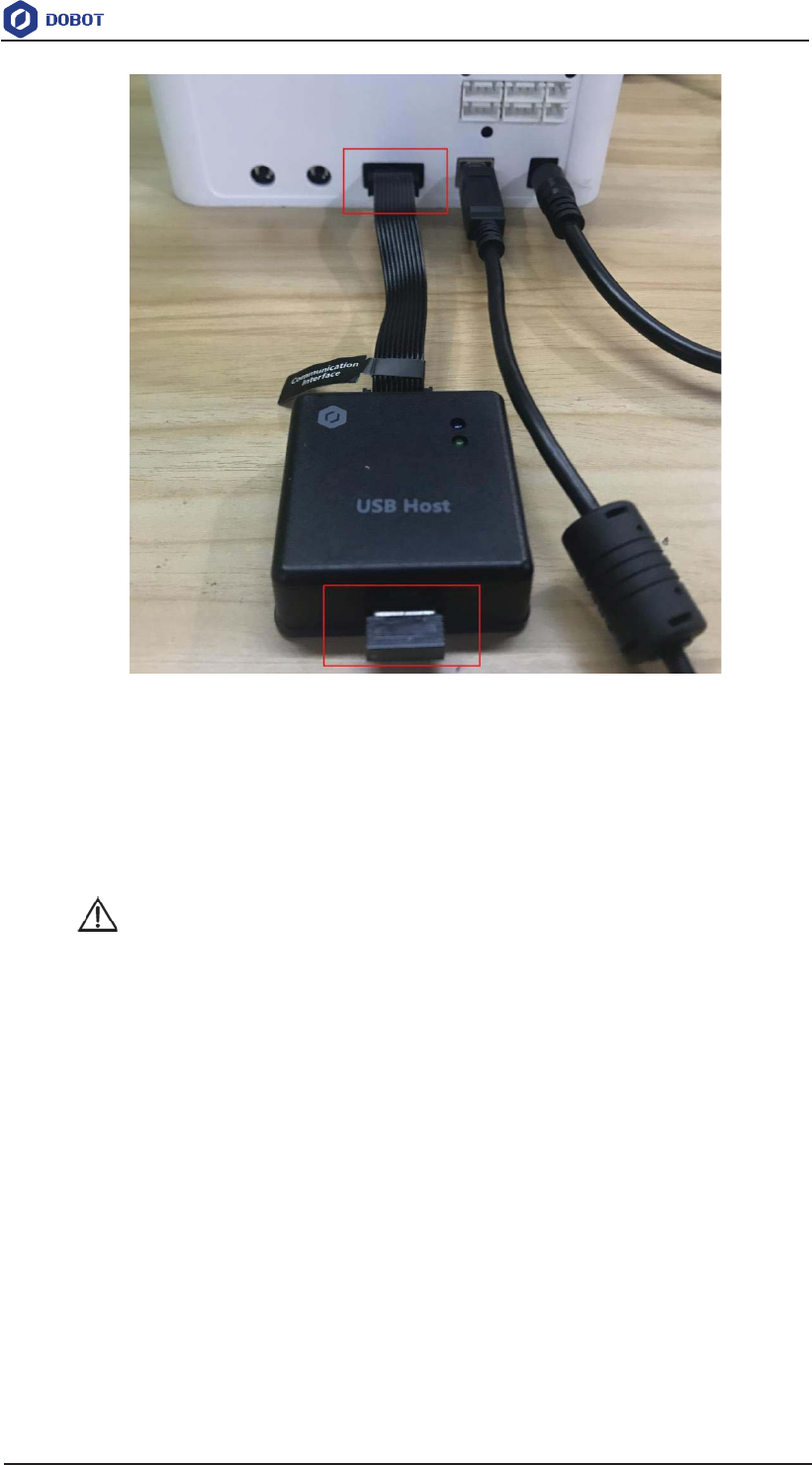
Operating Stick Controller Kit 5.15
Dobot Magician can be controlled by stick controller kit without DobotStudio. Figure 5.183
shows the stick controller kit. From left to right: Stick controller, USB Host module, USB cable
(used for charging stick controller), Transceiver.
Figure 5.183 Stick controller kit
Prerequisites
y Dobot Magician has been connected to a PC over USB cable.
y Dobot Magician has been connected to the power adapter.
Procedure
Step 1 Connect the transceiver to the USB module.
Step 2 Connect the USB Host module to the UART interface on the base, as shown in
Figure 5.184.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
150
Figure 5.184 Connect with USB Host module
Step 3 Press down the power button to turn on the Dobot Magician.
The blue LED indicator on the USB Host module is on. After turning on, there are
four short beep sounds and the green one is on.
NOTICE
Please turn off the Dobot Magician completely first before connecting or disconnecting
external equipment. Or, it causes serious damage to your device.
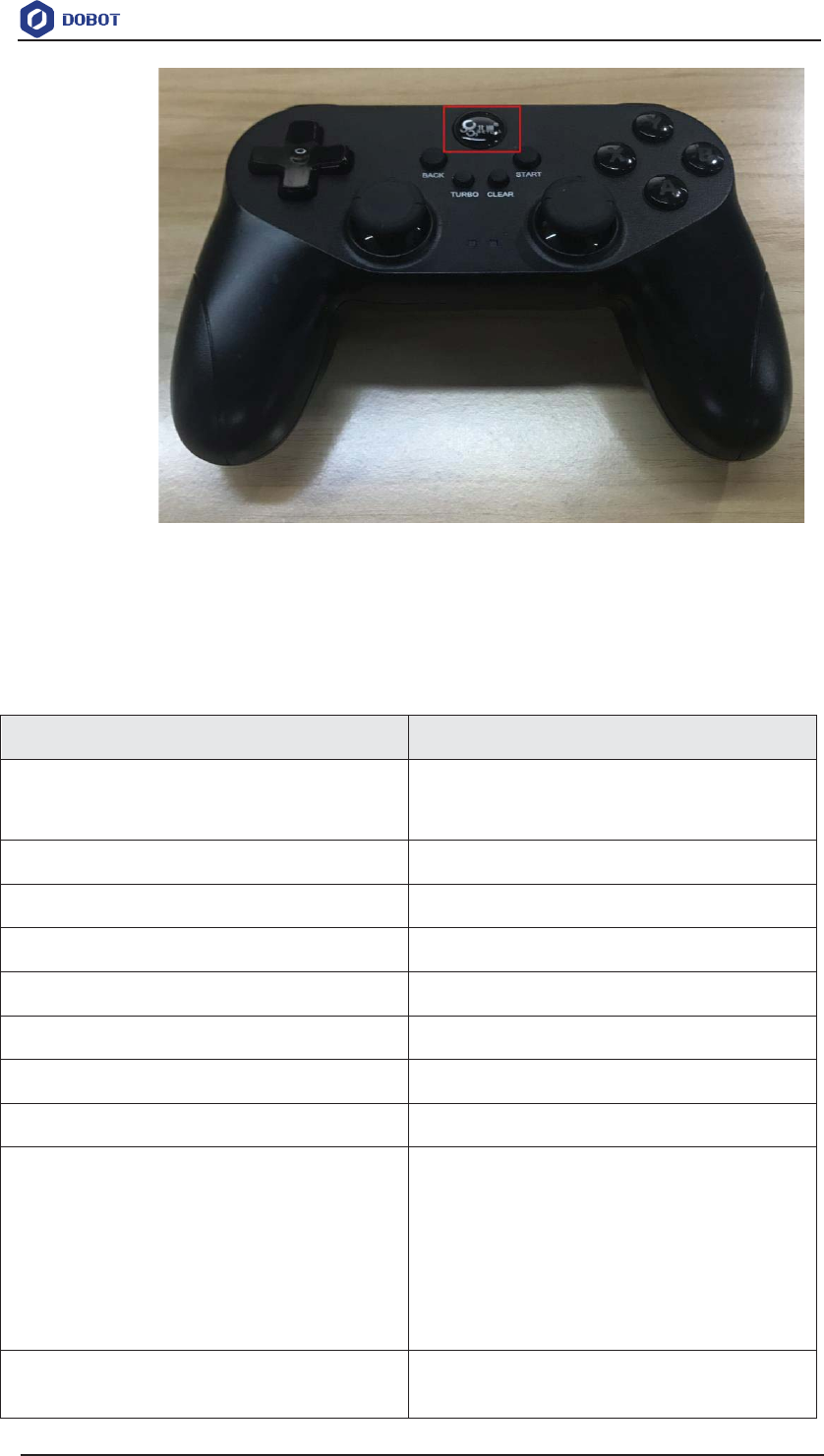
Step 4 Press down the power button on the stick controller, as shown in Figure 5.185.
The red LED indicator on the middle of the stick controller is blinking, indicating
that the Dobot Magician can be controlled by the stick controller.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
151
Figure 5.185 Power button of the stick controller
Table 5.19 lists the functions of buttons on the stick controller.
Table 5.19 Button function
Button
Function
Power
button
Turn on stick controller
The stick controller will turn off automatically
LT
Turn on the
peripheral motor
RT
Turn off th
e peripheral motor off
RB
Switch
to Cartesian coordinate system mode
LB
Switch
to Joint coordinate system mode
X
Control the outtake of the air pump
Y
Control the intake of the air pump
B
Turn off the air pump
Left
stick: Front/back y
Cartesian coordinate system mode: Dobot
Magician moves along X-
axis in the
positive/negative direction
y
Joint coordinate system mode:
Dobot Magician
rotates along J1-
axis in the
positive/negative direction
Left
stick: Left/right
y
Cartesian coordinate system mode: Dobot
Magician moves along Y-axis in the
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
152
Button
Function
positive/negative direction
y
Joint coordinate
system mode: Dobot Magician
rotates along J2-
axis in the
positive/negative direction
Right
stick: Front/back y
Cartesian coordinate system mode: Dobot
Magician moves along Z-
axis in the
positive/negative direction
y
Joint coordinate system mode: Dobot Magician
rotates along J3-
axis in the
positive/negative direction
Right
stick: Left/right y
Cartesian coordinate system mode: Dobot
Magician rotates along R-
axis in the
positive/negative direction
y
Joint coordinate system
mode: Dobot Magician
rotates along J4-
axis in the
positive/negative direction
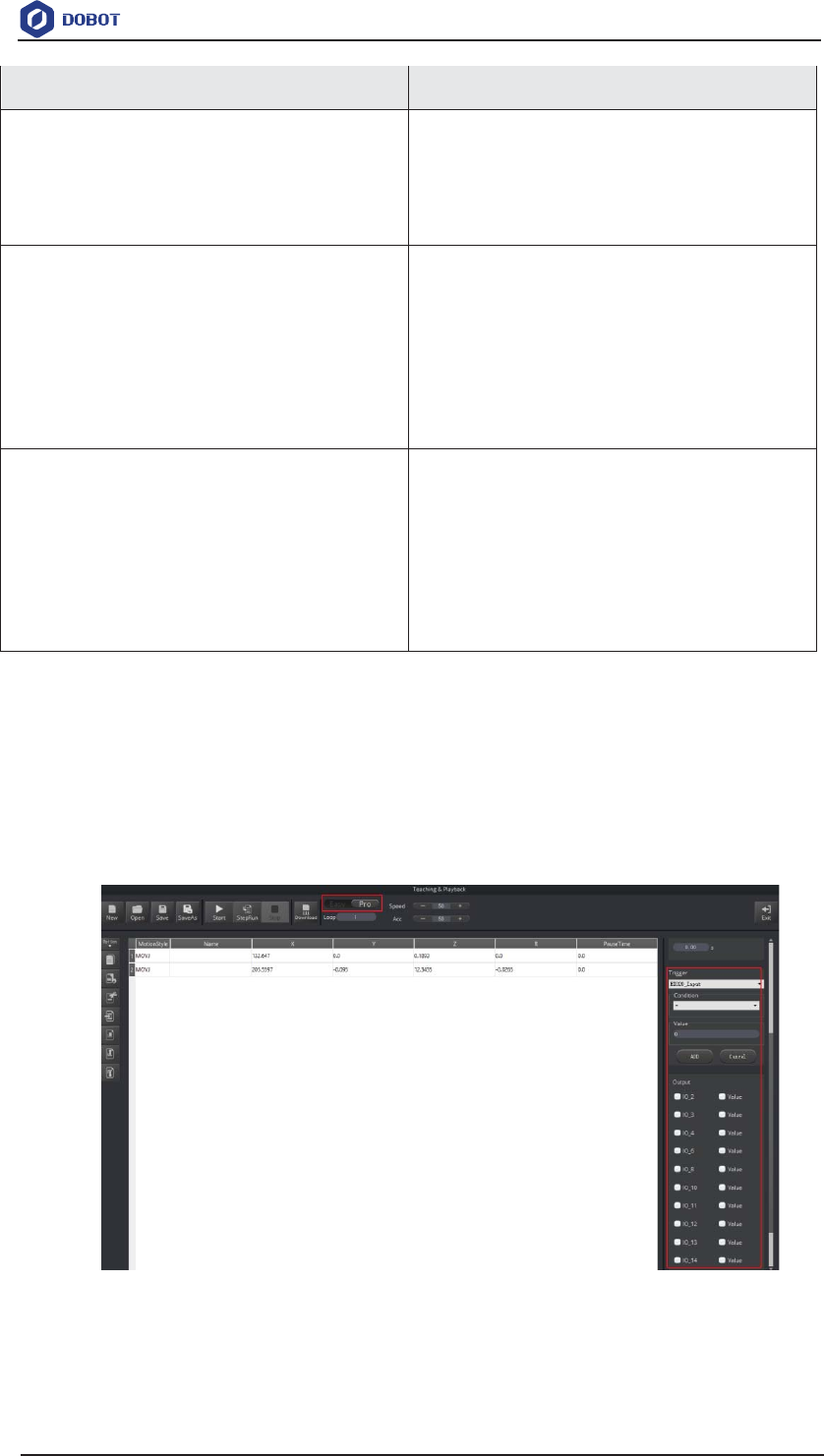
Multiplexed I/O Demo 5.16
The addresses of the I/O interfaces in Dobot Magician are unified. Most of I/O interfaces
have multiple functions. For details, please see 4.3 Multiplexed I/O Interface Description.
You can set I/O interfaces on the advanced Teaching&Playback page to control the
peripheral equipment, as shown in Figure 5.186.
Figure 5.186 I/O setting page
Now, demos of level output, level input, and PWM output are given below.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
153
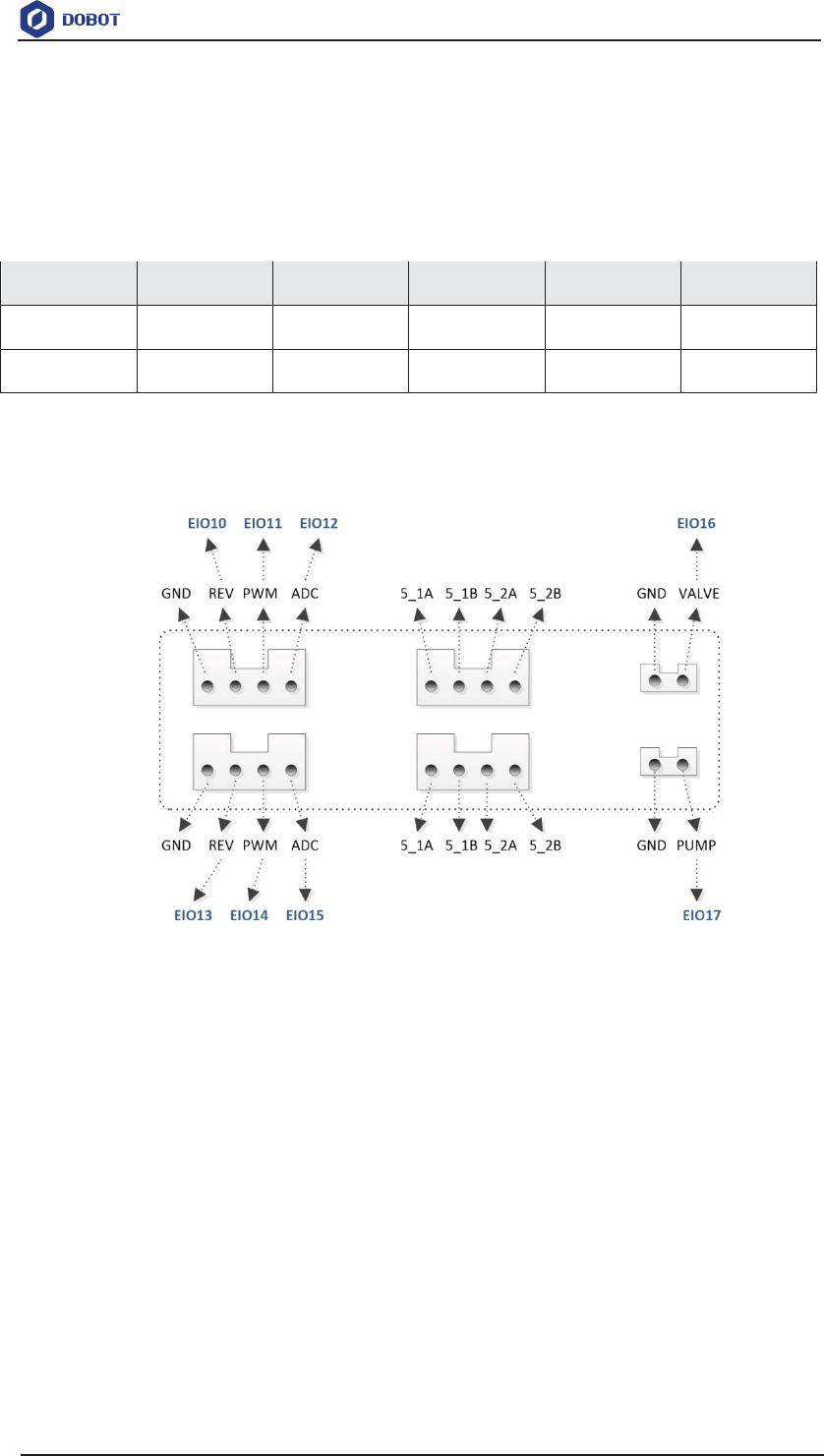
Level Output 5.16.1
Normally, air pump can be controlled by the I/O interfaces. The I/O 11 controls its intake
(High level) and outtake (Low level) and the I/O 16 controls its start-stop. Table 5.20 lists the
multiplexed descriptions of I/O 11 and I/O 16.
Table 5.20 Multiplexed I/O description
I/O addressing
Voltage
Level
Output
P
WM
Level
Input
ADC
11
3.3
V
√
√
-
-
16
12V
√
-
-
-
The I/O 11 and I/O 16 are located at the peripheral interface of the base, as shown in Figure
5.187.
Figure 5.187 Peripheral Interface on the base
Prerequisites
y The air pump has been connected to Dobot Magician. For details, please see 5.2.1
Installing a Suction Cup Kit.
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
Procedure
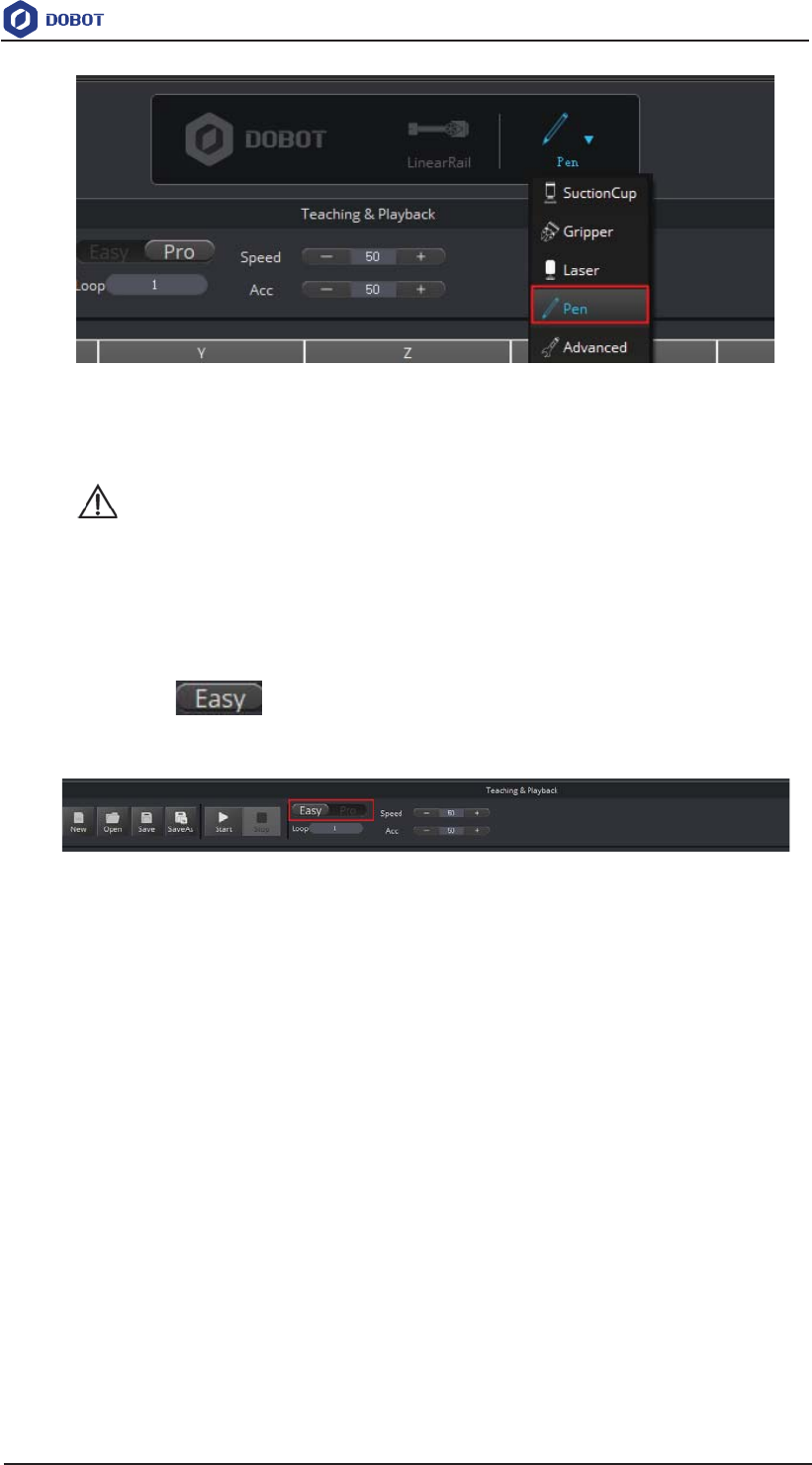
Step 1 Select Pen from the end-effector drop-down list on the DobotStudio page, as
shown in Figure 5.188.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
154
Figure 5.188 Select end-effector
NOTICE
Normally, If SuctionCup or Gripper is selected from the end-effector drop-down list
after the air pump has been connected, the air pump will be controlled by the system. In
this topic, we use I/O interfaces to control the air pump, so SuctionCup and Gripper
cannot be selected, to avoid conflict.
Step 2 Click icon on the Teaching&Playback page, as shown in Figure
5.189.
Figure 5.189 Switch advanced function
Step 3 Select IO_11, IO_16 and their corresponding Va l ue on the Output pane, and click
+Point.
ĀThe saved point is displayed on the Teaching&Playback page, as shown in
Figure 5.190.
NOTE
If the intake is not obvious, please modify PauseTime of this saved point.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
155
Figure 5.190 Saved point
Step 4 Select this point and click StepRun.
The air pump is humming with intake.
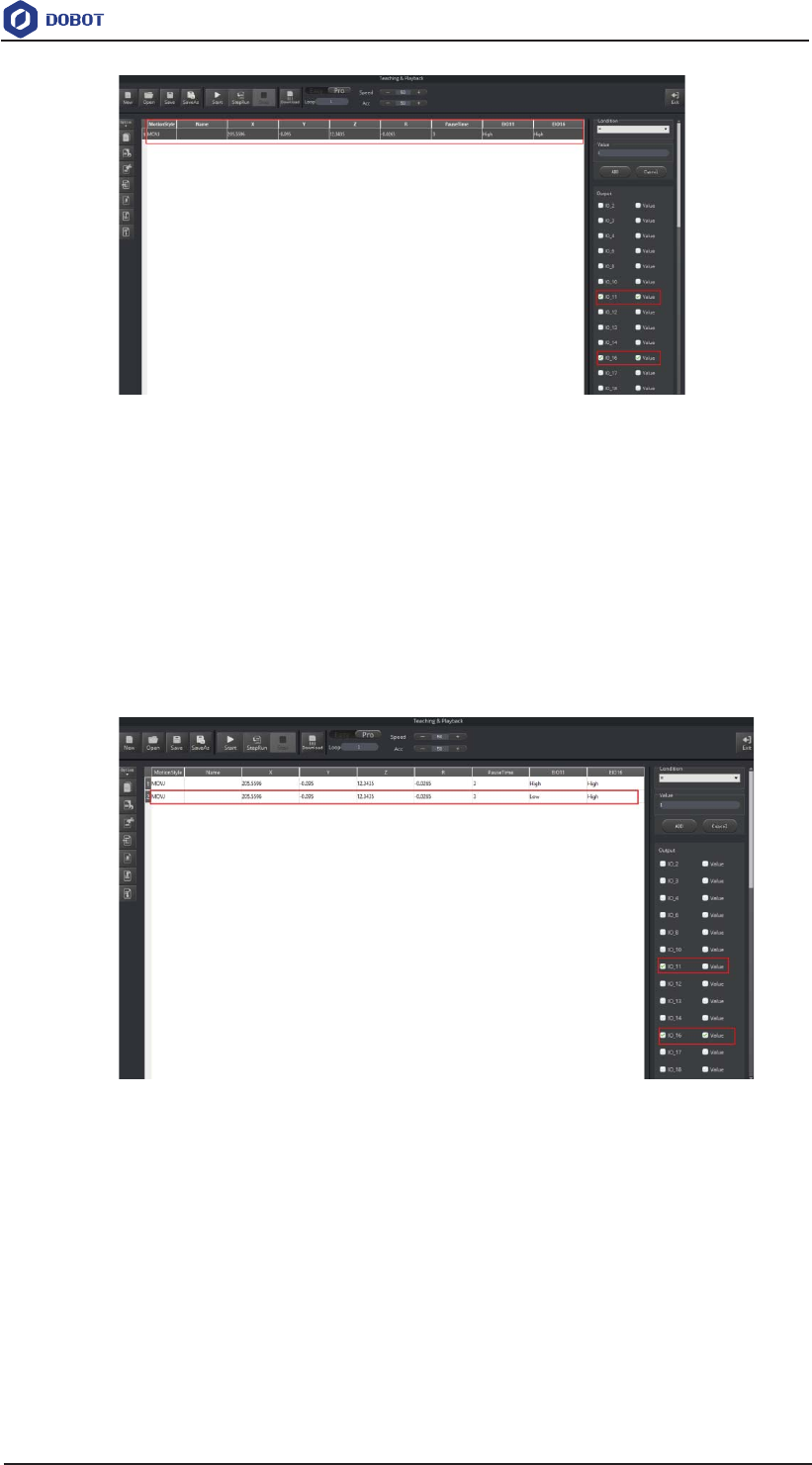
Step 5 Select IO_11, IO_16 and the corresponding Value of IO_16 on the Output pane,
and click +Point.
The saved point is displayed on the Teaching&Playback page, as shown in Figure
5.191.
Figure 5.191 Saved point
Step 6 Select this point and click StepRun.
The air pump is humming with outtake.
Level Input 5.16.2
This topic also takes I/O 12 as an example.
Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
156
Table 5.21 Multiplexed I/O description
I/O addressing
Voltage
Level
Output
P
WM
Level
Input
ADC
12
3.3
V
-
-
√
-
Prerequisites
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
y The saved points list has been existed on the Teaching&Playback page.
Procedure
Step 1 Click icon on the Teaching&Playback page, as shown in Figure
5.192.
Figure 5.192 Switch advanced function
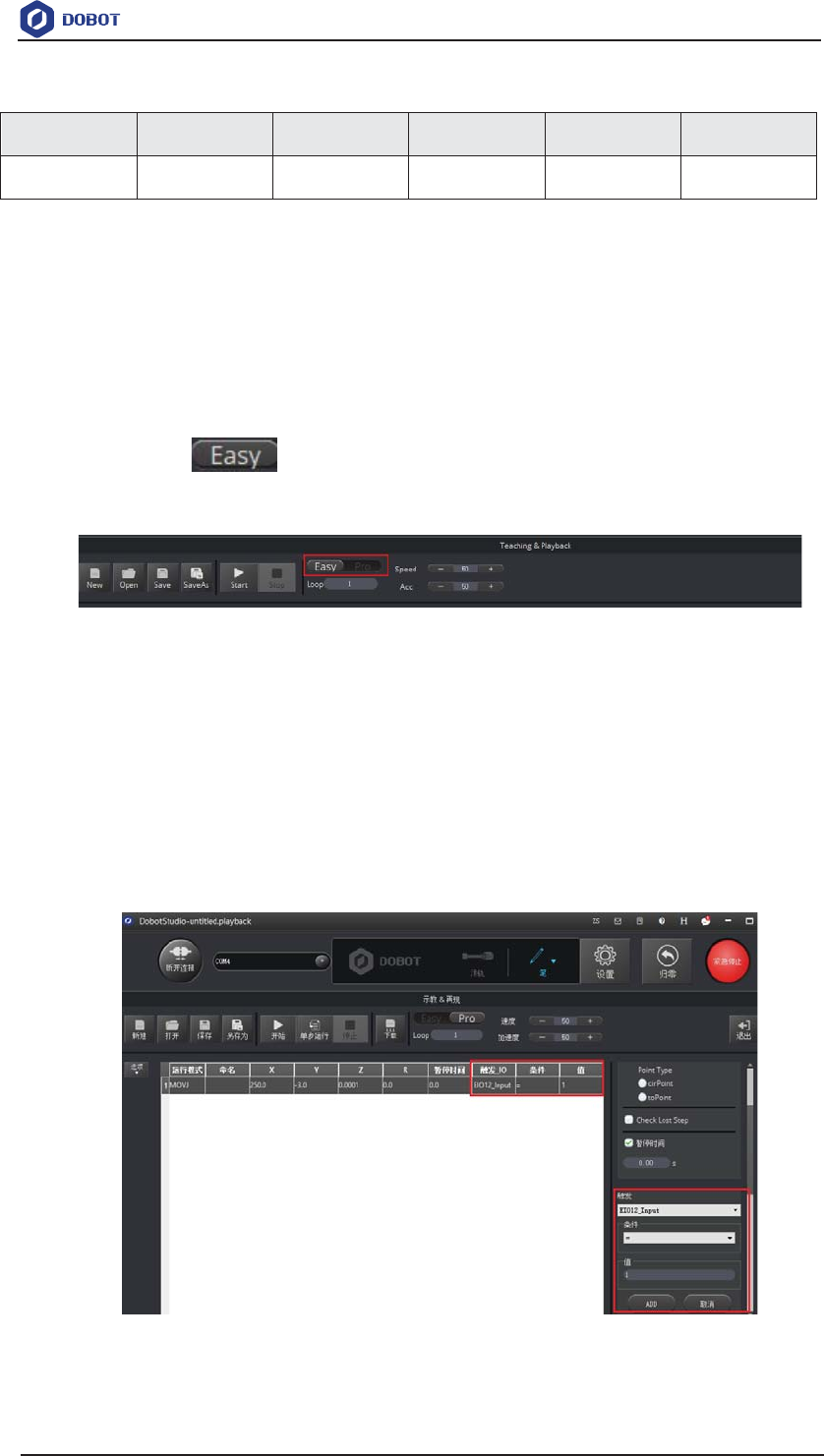
Step 2 Select a saved point on the Teaching&Playback page.
Step 3 Select EIO11_Input on the Tr ig g er pane, and set Condition and its Val ue .
Here, Val ue only can be set to 0 or 1. 1: High level; 0: Low level.
Step 4 Click ADD, as shown in Figure 5.193.
Figure 5.193 Saved point

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
157
PWM OUTPUT 5.16.3
This topic also takes I/O 11 as an example.
Table 5.22 Multiplexed I/O description
I/O addressing
Voltage
Level
Output
P
WM
Level
Input
ADC
11
3.3
V
√
√
-
-
Prerequisites
y Dobot Magician has been powered on.
y Dobot Magician has been connected to DobotStudio successfully.
Procedure
Step 1 Click icon on the Teaching&Playback page, as shown in Figure
5.194.
Figure 5.194 Switch advanced function
Step 2 Select IO_11 on the Output pane, and click +Point, as shown in Figure 5.195.
Figure 5.195 Saved point
Step 3 Double-click EIO11 cell and select … from the drop-down list.
The EIO Setting page is displayed, as shown in Figure 5.196.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
158
Figure 5.196 EIO setting
Step 4 Set Frequency (Unit: KHZ; Value range: 10HZ-1MHZ) and DutyRatio
(0%-100%) on the EIO Setting page.

Dobot Magician User Guide 5 Operation
Issue V1.0 (2018-06-12) User Guide Copyright © Yuejiang Technology Co., Ltd.
158
This device complies with Part 15 of the FCC rules. Operation is subject to the
following two conditions: 1) this device may not cause harmful interference, and 2)
this device must accept any interference received, including interference that may
cause undesired operation.
Note: This equipment has been tested and found to comply with the limits for a Class
B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to
provide reasonable protection against harmful interference in a residential installation.
This equipment generates uses and can radiate radio frequency energy and, if not
installed and used in accordance with the instructions, may cause harmful
interference to radio communications. However, there is no guarantee that
interference will not occur in particular installation. If this equipment does cause
harmful interference to radio or television reception, which can be determined by
turning the equipment off and on, the user is encouraged to try to correct the
interference by one or more of the following measures:
--Reorient or relocate the receiving antenna.
--Increase the separation between the equipment and receiver.
--Connect the equipment into an outlet on a circuit different from that to which the
receiver is connected.
--Consult the dealer or an experienced radio/TV technician for help.
Changes or modifications not expressly approved by the party responsible for
compliance could void the user’s authority to operate the equipment.
FCC Radiation Exposure Statement
This device complies with FCC RF radiation exposure limits set forth for an
uncontrolled environment. This transmitter must not be co-located or operating in
conjunction with any other antenna or transmitter.
This device must operate with a minimum distance of 20 cm between the radiator
and user body.
IC Note:
This device complies with Industry Canada's licence-exempt RSSs. Operation is subject to the
following two conditions:
(1) This device may not cause interference; and
(2) This device must accept any interference, including interference that may cause undesired
operation of the device.
Cet appareil est conforme aux CNR exemptes de licence d'Industrie Canada . Son fonctionnement
est soumis aux deux conditions suivantes :
(1) Ce dispositif ne peut causer d'interférences ; et
(2) Ce dispositif doit accepter toute interférence , y compris les interférences qui peuvent causer
un mauvais fonctionnement de l'appareil.
FCC Statement
IC Note:
FCC Statement
For Bluetooth kit and WIFI kit: