AquaCheck ACROVER OEM Data logger module and transceiver for Aquacheck soil moisture probes User Manual
AquaCheck (Pty) Ltd OEM Data logger module and transceiver for Aquacheck soil moisture probes Users Manual
UserManual.wiki
>
AquaCheck
>
ACROVER User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
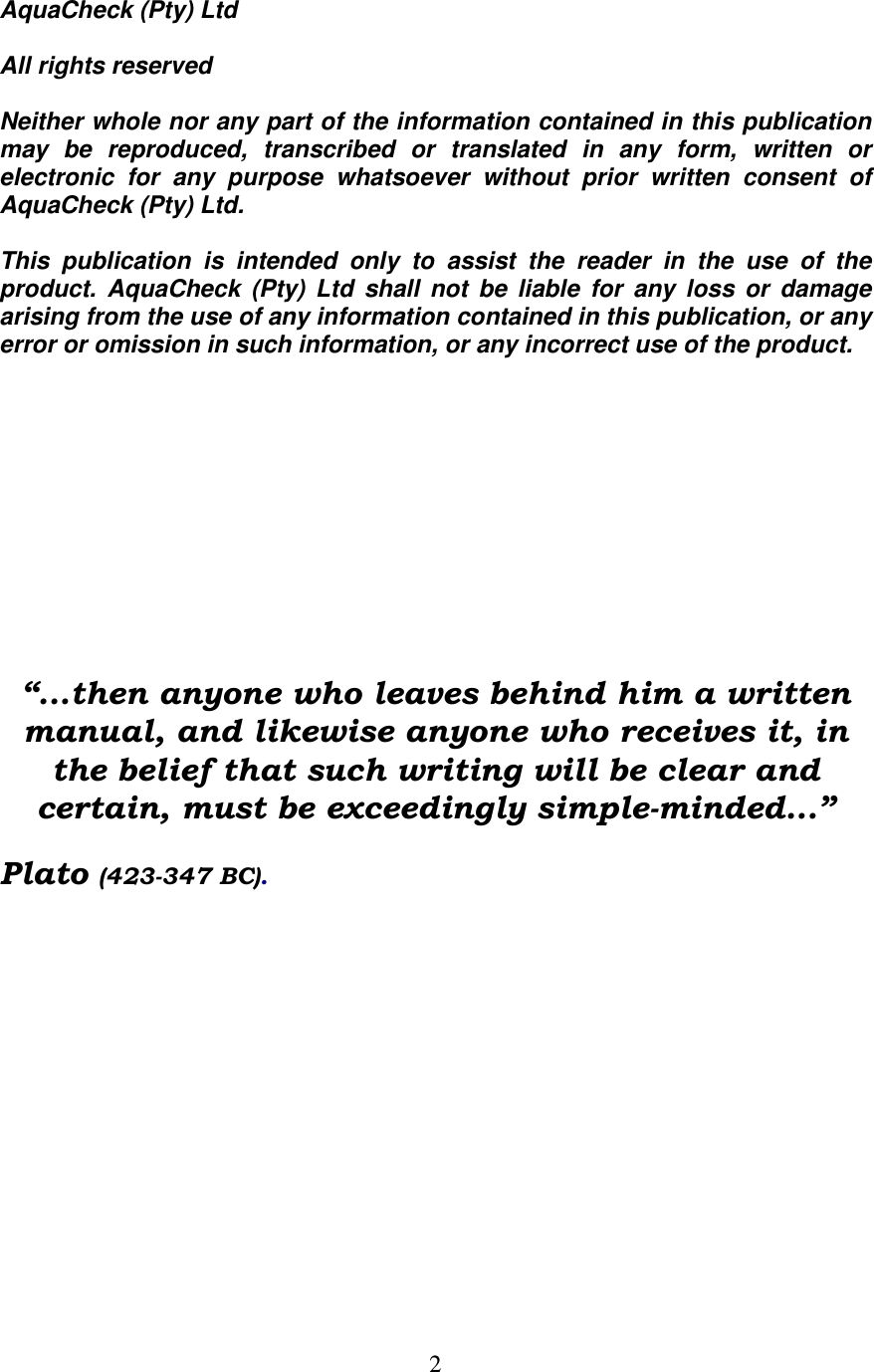
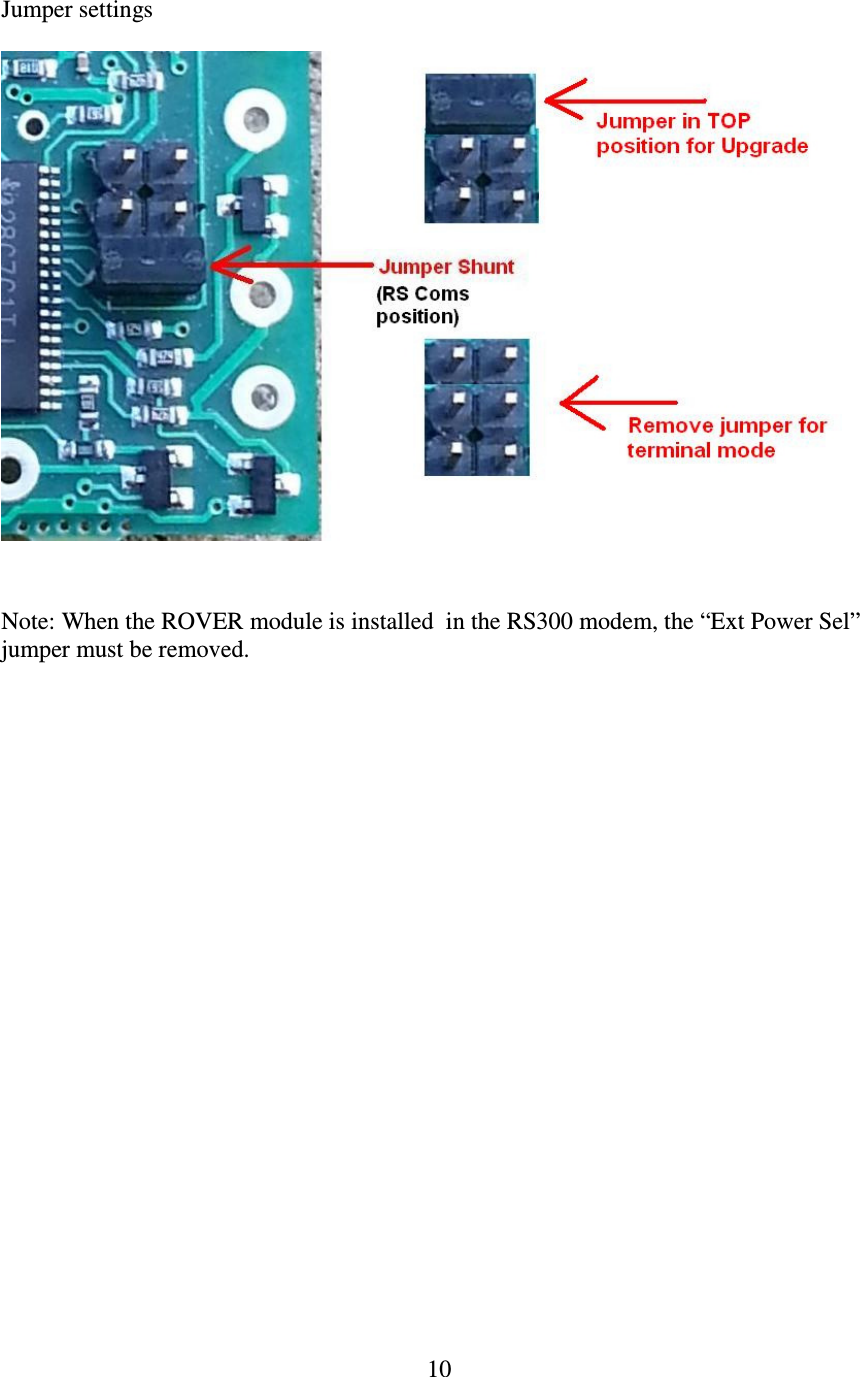
![12 Data Command (or DATA H Command) Syntax DATA [<records>] or DATA H [<records>] Example: DATA 10 Description Transmits a specified number of data records from the Rover module memory to the host. The specified number of <records> will determine the number of DATA Records to be returned. If less records than requested are available, only the number of available records will be returned. If no number is supplied the Rover returns ONE record. The DATA H command is only used for diagnostic purposes. The DAT H will return previously DELETED data. The number of records requested at a time will need to be optimized by the host, requesting say one record per digest will increase the time to load the data. A larger number of records in the request may improve efficiency, but may also lead to inefficiency should the host need to reload the data due to errors (eg checksum did not work out) The reply from the Rover as the following form: <I-record> { <A0-record> } { <AD-record> } { <An-records> } <EOF-record/checksum > Each record is formatted as follows: I-record: Defines the reference time stamp for this data digest: I,<reftimestamp> Where: <reftimestamp> is the absolute time in seconds since 00:00:00 on January 1st 1980. This is the current clock time of the Rover’s internal clock. A0-record: Defines the information specific to the logged data record: A0,<index>,<Serial Number>,<timestamp>,<volts>,<Analogue value>,<count1>, <count2> Where: <index> is a number from 1 to 13 corresponding to the probe position in the list of probes in the Rover. This can be used as an alternate unique identifier in combination with the Host ID, rather than using the probes serial number. <Serial Number> is the serial number of the probe.](https://usermanual.wiki/AquaCheck/ACROVER/User-Guide-2418240-Page-12.png)