461847 001_Extended_i RMX_II.3_Volume_4_System_Utilities_and_Programming_Information_1988 001 Extended I RMX II.3 Volume 4 System Utilities And Programming Information 1988
461847-001_Extended_iRMX_II.3_Volume_4_System_Utilities_and_Programming_Information_1988 461847-001_Extended_iRMX_II.3_Volume_4_System_Utilities_and_Programming_Information_1988
User Manual: 461847-001_Extended_iRMX_II.3_Volume_4_System_Utilities_and_Programming_Information_1988
Open the PDF directly: View PDF ![]() .
.
Page Count: 748 [warning: Documents this large are best viewed by clicking the View PDF Link!]
intef
SYSTEM
PROGRAMMING
EXTENDED
iRMX@II.3
OPERATING SYSTEM
DOCUMENTATION
VOLUME
4
UTILITIES
AND
INFORMATION
Order Number;
461847
001
ntel
Corporation
306 5 Bowers Aven
u e
5anta Clara, Calrforn a 95051
Copyrrght ì988, lnte
Corporatron, All Rights Reserved
In lDcati(rns
outsrde
the Unrted States, obtain rddìtronal rrrpres,rl
lnteì doeumcnlalion by
r,)ntrL(ting
yorrr
local Inteì sales
,rffice.
I'ìrr
yoLrr
conscnrence, Lntefnati,)nal sal{rs,rffice addressr:s
are located
directly beiìrre
the reader repìv tard in rhe back
Il l
he manua I
the inlormation in tb
rs documI ot is sr.tbier t t,r .hanqe
{ rt ho ut rì,,t r(r'
lntel
(',)rforalrl)n
rìrrkos d,)
warrant\',rfrìrìv
krrl wrth
rfjlard l,r thrs ùìat{.rìal. incl(ìding,
bLrl
nr)l
limrted 1o, the inrpìiod
||rrrartìos )l nrfrrha.lrl)rlL!v arrl fitness lìr a particular
purpos€.
Inlel
(1,)rp,)rati,)n rfspi)nsLbrlilr' iì)r rì!ìv frf,rfs rhrl nìrìv
rppear rn lhis d(xLìnrent.
Inl€l
Corporation makes n,r
r,rrrrrnilnreot rr)
Lrpdatp ). t,r
kepp.Lrrrenl
the In{i)rmatir)n contarnod ìn thrs
Inlel ( orp,Jralion assunìrs
n,ì .{rsprìnsrbility fi)r thf use ri irnv
fi.ruilr! orh€r than cLrcuilry
r:mbrxìied in lrn Inlel
l)r,rlLr(l
\,),rl.her.ircuit0ttlenlli.{'rì\psrreirrrplied.
Intel
s.)lìrrn.r
pr)du.ts arf Lopvrrr:htcd
bv an(l
rhall rcmaìn
the pr)perty ,)i
lntel
(,)rporrlr)n.
t'se. dLrplìcalirrn,rr
rlìscl,rsure is subte(t
t,) rrstrìcti,).\ italPd rn Intels,;oftsare lrconsp.,'r ns
rleiìned in ASt)R 7 10,1
9
rr) r9r.
\o part ,)f
thrs do(.unìen1
rnar be f,)pred
0r reprrxluced rn any form or bv anv rneans ,r rl hout pr ror
{ riltfn consent r)l I nte |
(',)r
p,)flrti,)n.
Ìhe flllo$Lng
are tradem?ìrks
,)l
Intpl
( orporîtioÌ1 and rts
affiùates
and may be uscd only L0
rdenlilv Ir)tel
pr,!luf
is:
Ab,rve ,l.lìX
BII II( S
('OY Ypute r rll I)l)K
(lRl'iDiî r\lMX
I)rìta Iìpehne lnsrle
lìfnil's ,n r,,l
T rnrcllìOs
r Intolevisrr)n
f2lCFi ,nreligent ldent,fior
lCFl ,ntelisent i']rr)sranìminq
rCÉlL I nlo llec
iCS Inteìlink
rDtìl' ,OSP
IDIS rPl)S
ì l'Stì
rPS(l
rlìUX
r SII('
rSllX
LSI)U
r
SSII
iSX 11
Lrbrarl \fenrLqer
tf('s
\fega( hassrs
\ft('tìo \f'\ r
\ t RA lll]
\fUI,TIB(,S
\ILI,'TI(]HA\\EI,
\fL;t.l t \fot)( Lu
Open\L L
o\a !l
Illus A Ilubbìe
PIIoMPT
QL:EST
Quex
Rrpplenode
R\f x/80
RUPI
SI,II
LPI
VLS'('!:1.
KE.\*lK, \fS DOS, \fLrltLplan. rnd \ficrosolì are trademarks,rl \licrosoft C,-rrporatLon.
[.
\lK rs
a
trrdenìark
'ri
Bell Lriborrt,rrres Fltherncl
rs a lra(lenrrrk
'rt
Xer|\ (,)rporation.
C('nrr,rnrrs ìs a
Lrademark,rl
(lentron'rs
Datr ( ,)mpuler
(',,rporatLon.
( hassis
Trak rs a lradenÌark
,rl
(Ìeneral
[)evÌces
Conrpanv,
Irìf. \'A\,rod VUS rrf tradenìxrks rf l)rqrtrl tqurpmenr Corporarion_
Snìartmodem i200and llayes
are rrademarks of Ila\'fs \lrcroco|nput('r
l,roducrs,
Inc. IBM is a
rfgrsterpd tradeùrark ,)l
lnlt'rnaÌional llusÌness
\fachrnes. Soft S{.0pe
rs
a regtstered rrnrlernark
of
(li)ncurrent Scrences.
(',)pyriqht!
l9lllì. lntol C,rrporrtion
VOLUME
PREFACE
MANUALS
IN
THIS VOLUME
This volume (Volume 1, Ertended iRMl{'@
II Operating Syltent Lltilitit:s
and prograntniry4
Infonnation) includes
the following
manuals:
Exteruled
IRMXP
II Boorstap Loader Reference
Manual
Extended iRMÀo II Systent
Debug4er
Reference Manuol
Extended iRlll)o II Disk Verilication Lltilitl Reference Manuul
Guide to tlu: Etcntletl IRM}@ II lrtteructive Configuration utiliq,
Ertended iRltl)@ II Prograrntning
Technique.s
Reftrente Mrtttuttl
The Extended iRMA\o
II Bootstrap
Loader Refercncc
Manual tlescril.tes thc use
of the
Bootstrap
Loader and how
to modify
the Bootstritp
Loatler îiles.
The Ertenderl
iRhl)@
II System
Dehugqer
Reference
Manualdescribes
the iRMX@ II
Operating
System's
static debug-eer.
All of thc System Debugge
r commancis are
explained
and an example debug-uing
session
is provided.
The Ertended iRMXo II Dkk Veificatbn lrility Rcferenu Munual rlescrihes
the Disk
verilication
Utility
which
is used
to examine
and rnotlify
thc datlì structures
of iRMXo II
named
and
physical
volumes.
The Guide to the Efiended iRMXo II Interactive
Conf.guration Utlltv'manual describes
the
Interactive
Confi{uration
Utility commands
and menus, and provides
an example system
configuration.
The Extended iL\lÀl@
II Progrurnnting
Techniques
Reference
!úanuul provides programnring
techniques
and examoles.
Itl
iRMX@ II System Utilities and Prograrnming lnformation Volume
VOLUME PREFACE
VOLUME CONTENTS
Manuals are listed
in the order they appear
in the
volumes. For a synopsis of each
manual,
refer to fhe Introductiort
to the Ertended |RMX\ II Operating System.
VOLUME 1. Erk:nried
iRMXo II Introduction, It$tallation,
and Operating Instructions
Introductiort to the Ertended iRMX II Operating System
Exteruled |RMX ll Hardware and SoffA,are Installation Cuide
Operator's Guide to the Extenried |RMX II Human Interface
Master Iruler
VOLUME 2: Extended
iRMXo II Operating System User
Guide.s
Extended iRltlXÒ II Nucleus
U.ser's Guide
Extended iRMXo II Ba.sic I/O Systent User's Guide
Extended
|RIVX@ I I E.rtended I/O Systent U.ser'.s Guide
Extended iRM)P ll Hurnctn Interface User's Guide
Extended iRMXo II Applicatbn Loader User's Guitle
Erteruled iRl'ltX@ ll Universal Development Intefaca U.ser's Cuide
Device Div'cr.s Uscr's Gu' le
VOLUME 3: Ertended iRMXo II Sy*em Calk
Extended iRMXo II Nucleus Systent Calls Referente Manual
Extended iRMÀ@ II Basic I/O System Calls Reference Manual
Extended iRhl}.@ II Ertended I/O System Calls Reference Manual
Ertended |RMX@ ll Applicatiort Loader Systent Calls Reference Manual
Extended iRMXa II Hurnrut Interface Sy-stent Calls Reference Manrutl
Ertended iRlllYù II UDI Sl,stern Calls Reference Martual
VOLUME 4: Ertendad |RMX@ II Operuting
$,stem Utilities
Extended
iRltlX@
II Bootstrup Loadar Reference Manual
Extended iRlt't)@ II S1'stent
Debugger Ret'erence l4anual
Exte nded iRltl)'@ II Di.sk
Verification Utility Ret'ere ce lllanual
Extended |RMXò II Progranuning Techniques Reference Mrutual
Guide to the E.rtundd iRMX@ II Interactive Configuration Utilitl,^
VOLUME 5'.
Ettended íRMXò II Interoctive Configurutbn Utility Reference
Extended iRltlXE II Inteructive Configurution Utility Reference Manual
lv iRl\tX@ ll System Utilities and Programming Information Volume
REV. REVISION IIISTORY DATE
-001 f)riginnll**ur 0l/88

intel
EXTENDED
iRMX@II
BOOTSTRAP
LOADER
REFERENCE
MANUAL
lntel Corporatron
306
5 Bowers Aven
u e
Santa Clara, Californ a 95051
Copyright I988,
Intel
Corporatron, Ail R ghts Reserved

PREFACE
INTRODUCTION
The Bootstrap
Loader enables you
to generate
a system îhat can
bootload from
Intel-
supplied or custom
devices.
A hootable system
gains control
immediately after power-up
or system
reset.
This manual provides
information
that enables you
to configure your
system to boot
from specific
devices, to
include
your
own custom
device drivers
as
part
ol
the system,
and to place
your generated
system
into PROM devices.
READER
LEVEL
The
manual assumes that you
are familiar with
the iRMX
ìl Operating System and
an
editor with which
you
can edit source code
fiÌes. lt may also be
helpful if you are familiar
with
the following:
o SUBMIT
files.
. ASM86
source cocle
files.
MANUAL
OVERVIEW
This
manual is organized
as tbllows:
Chapter
I This chapter provides
an overview of the
Bootstrap Loader
operations.
Chapter
2 This chapter provides
an
operator's
viewpoint
of using the Bootstrap
Loader.
Chapter 3 This chapter
describes how
to configure the
first stage of the Bootstralr
Loa der.
Chapter 4 This
chapter describes
how ro configure
the third srage
of the
Bootstrap
Loader.
Chapter
5 This chapter
describes
how to
write
custom first-stage
drivers.
Chapter 6 This
chapter clescribes
how to
write
custom third-stage
drivers.
Bootstrap [,0ader llt
PREFACE
Chapter 7 This chapter describes
error handling
procedures.
Appendir A This appendir
describes how
to include automatic boot device
rccogn
it ion into
your systcm.
Appendix B This appendix describes how to load
the Bootstrap Loader
and the
monitor into PROM
devices.
CONVENTIONS
The following conventions
are used throughout this manual:
o Information
appearing as UPPERCASE characters
when shown in keyboard
examples must be entered or coded exactly as shown.
You may, however, mix lower
and uppercase characters
when
entering the text.
. Fields appearing as lowercase characters
within angle brackets
(
< >
) when
shown in
keyboard examples indicate
variable
information.
You must enter an appropriate
value
or symbol lbr variable
fields.
. User input appears in one of the following forms:
as bolded text nithln a screen
. The term
"iRMX
If'refers to the Extended iRMX ll.3 Operating System.
. The term'iRMX
I'refers
to the iRMX I (iRMX
86) Operating System.
. All numbers, unless otherwise stated, are assumed to be decimal. Hexadecimal
numbers
include the "H" radix character
(for
example,
OFF
H
).
tv Bootstrap l,oadcr
CONTENTS
CHAPTER 1
OVERVIEW
OF
BOOTSTRAP
LOADER
OPERATIONS PAGE
CHAPTER 2
USING
THE
BOOTSTRAP LOADER PAGE
CHAPTER 3
CONFIGURING THE FIRST
STAGE PAGE
Bootstrap [,oader
CONTENTS
CHAPTER
3 (continued) PAGE
CHAPTER
4
CONFIGURING
THE THIRD
STAGE PAGE
vl Brntstrap Inader
CONTENTS
CHAPTER 4
(continued) PAGE
CHAPTER 5
WRITING
A
CUSTOM
FIRST.STAGE
DBIVER PAGE
5.1 Introduction ..............................5-1
5.2 Device Initialize Procedure........... .......................5-2
5.3 Device
Read Procedure.... ............................. 5-3
5.4 Supplying
Configuration Information
to the First-Stage Driver...............................5-4
5.4.1 Hard-Cocìing
the Configuration
Information .......................5-4
5.4.2 Providing a Configuration
Fiìe...................... ..........................5-5
5.5 Using the MULTIBUS@
Il Transport
Protocol .............................5-8
5.5.1
Message Passing Controller
Initialization.. ...........................5-9
5.5.2 Message Tlpes .................. ..........,..............5-10
5.5.3 Request/
Response
Transaction ModeI......... .......................
5-
10
5.5.4 Send and Receive
Transaction
Models ................................ 5- l5
5.5.5 Message
Broadcasting...... ......................... 5-20
5.5.6 Transmission
Modes........... ......................5-22
5.5.7 Interconnect
Space .......5-22
5.5.8 Driver Code Considerat
ions...................... .............................
5-30
5.6 Changing BSl.A86
or BS1M82.,486 to Include
the New First-Stage Driver........ 5-33
-5.7 Generating a New
First Stage Containing
the Custom Device Driver ..................
5-34
CHAPTER 6
WRITING
A CUSTOM THIRD-STAGE
ORIVER PAGE
6.1 Introduction ..................,...........6-1
tr.2 What
a Third-Stage Device
Driver Must Contain..... ........,...........6-1
6.3
Device Initialization
Procedure........... ................ 6-3
6.4
Device Read Procedure ..........6-4
6.5
Protected Mode Considerations
.................... ...................................6-ó
6.(r Supplying
Configuration
lnformation to the Third-Stage Driver .............. ...............6-1
ó.7 Using
MULTIBUS@ II Transport
Protocol .............. ......................6-8
6.8 Changing
BS3.A86 to Include the New Third-Stage
Driver............................-..........6-8
fi.9
Generating a New Third Stage
Containing the Custom Driver................. ...............6-9
Bootstrap Loader vtl
CONTENTS
CHAPTEB
7 PAGE
ERROR
HANDLING
7.1
Introduction ..............................7-1
7.2
Analyzing Bootstrap Loader Failures. ...............l
-l
7.2.1
Actions Taken by the Bootstrap Loader After an 8rror...,..........
.....................7
-1
7 .2.2 AnalyzingBrrors With Displayed Error Messages . .............7
-2
7.2.3
Analyzing Errors
Without
Displayed Error Messages.......................................7-5
7.2.4 lnitialization
Errors.............. ........................7
-7
APPENDIX A PAGE
AUTOMATIC
BOOT DEVICE RECOGNITION
4.1 Introduction........................... ...............................A-1
A.2 How Automatic Boot Devìce Recognition Works........... ............ A-1
A.3 How to Include Automatic
Boot Device Recognition....... ......... A-2
A.4 How to Exclude Automatic Boot Device
Recosnition ............................................. A-5
APPENDIX B PAGE
PROMMING
THE BOOTSTRAP
LOADER AND THE ISDM" MONITOR
B.l Introduction .............................B-1
8.2 Incorporating
the iSDM" Monitor.............. ....................................8-l
vltt Brxrtstrap l{)ader
CONTENTS
TABLES
TABLE PAGE
l-1 Intel-Supplied
Bootstrap
Loader
Drivers. ......................................
1-8
2-1 Supplied
Third Stage
Files..................... ..............2-7
3- l Procedure Names
for Intel-Supplied
First Stage
Drivers ...............,........................
3-25
3-2 5.25-lnch
Diskettes
Supported
by iSBC@ 20tl and
MSC-specific
Drivers............. 3-26
3-3
8-Inch Diskettes
Supported
by iSBC@
208 and
MSC-Specific Drivers..................3-2ó
4-l Names
for Intel-Supplied
Third
Stage Drivers ................ ..............4-7
4-2 Memory
Locations
Used by the
Bootstrap Loader...................................................4-
lfi
7-
I Postmortem
Analysis
of Bootstrap
Loader Failure
.. ....................7
-6
FIGURES
FIGURE PAGE
LX
B(x)tstrap Lr|ader

CHAPTER 1
OVERVIEW OF
BOOTSTRAP
LOADER OPERATIONS
1.1 INTRODUCTION
The Bootstrap Loader is a
program that is not part of any particular Operating
System.
Rather, it is a program that loads an application
system into RAM from
secondary storage
so that it can begin running.
This process is called bootstrap
loadìng or booting. Booting
can occur
when
the system is turned on,
when
the
system is reset, or under
operator
control
when
the monitor is active.
The Bootstrap Loader eliminates
the need to place complete
applications into PROM
devices. Instead,
you
can
place
the Bootstrap
Loader--ir relatively
small
program--into
PROM devices
and store your application system on
a mass storage device.
The Bootslrap
Loader can
then be used to load the application
program into RAM.
The Bootstrap Loader consists
of three stages.
The first
stage resides in PROM devices. It determines the name
of the file to load,
loads
part of the second stage, and
passes control to that
part. Intel System 300
Series
Microcomputers
are delivered
with
the
first stage of the
Bootstrap Loader
and the iSDM
monitor already
placed in PROM devices.
Intel Modules
Development Platforms
are
delivered similarly
except
with
the D-MON386
monitor.
If you are huilding
your own
computer
systems,
you
can use
the information in
this manual to
configure a first
stage and
place it into PROM
devices.
The second
stage resides on
track 0 of every iRMX-formattcd
nrmed
volume.
That
is,
whenever you
use
the Human Interlàce FORMAT
command
to format
a
volume, the
second stage
is copied to that
volume.
When
invoked,
the second
stage finishes
loading
itself into
memory
and then loads a file from
the same
volume and
passes control
to it.
The
contents of
this load file depend
on the kind of
system
you are loading. If you are
loading an
iRMX I system, the
file loaded by
the second
stage contains
the application
system itself.
Ifyou are loading
an iRMX II system, the file
loaded
by the second stage
contains the third
stage of the Bootstrap
Loader,
which finishes the
loading
process.
Bootstrap Loader l-l
OVERVIEW OF BOOTSTRAP LOADER OPERATIONS
Thc third
stage is necessary for loading iRMX ll applications, because these applications
require the 80286
processor
to be running in
protected
mode and because they
use the
OMF-2tì6 object module format. The OMF-28fi format is different from the OMF-86
format and therefore cannot be handled b1'the second stage. The third stage
places
the
processor
in
protected
mode, loads the iRMX II application system, and transfers control
to that application system.
The
third stage
resides in a
named
file on the same
volume as
the second stage. Your Bootstrap Loader package contains a configured third stage that
can load applications from selected devices. The instructions in this manual can help
you
configure your own third stage to add support for other dcr iees.
The bootstrap
loading
process
cannot
be
completed
without
a device driver. The device
driver is a small program that providcs the interface between the Bootstrap
Loader
and a
hardware device
(or
a controller for the device). When you configure
the Bootstrap
Loader
(a
task that is independent of operating system configuration), you specifo the
device drivers that the Bootstrap Loader
rcquires. During the course of configuration,
these device drivers
(which
are usually distinct from the drìvers
needetJ by the application
system) are linked to
the Bootstrap Loader automatically.
1.2 THE
STAGES
OF
THE BOOTSTRAP
LOADER
The Bootstrap Loader has a number of staqes
that control the loacling of
the applicatior.
system. iRMX I applications load
u'ith
a two-stage process.
iRMX II applications use
these
two stages but also require a third stage.
1.2.1
First Stage
The Bootstrap
Loader's first stage consists
of two parts. One part is the code for the first
stage, and the other part is a set of minimal device
drivers used by
the first and second
stages to initialize
and read from the device
that contains the system
to be booted.
The Bootstrap
Loader package contains
device drivers for many
common Intel devices. To
support
other devices,
you can write your own drivers and
configure them into the first
slage.
To use
the Bootstrap Loader,
the first stage
must be in one of two places.
The natural
place
fbr the first stage
is in PROM devices, either
as a standalone product
or combined
with
a monitor. f ntel System 310 and
380 Series Microcomputers
are delivered with
the
Bootstrap Loatler's
first stage, the iSDM monitor, anrJ the
System Conficlence
Test
(SCT)
in the PROM devices.
Intel System
320 Series Microcomputers
are delivered
with the
Bootstrap Loader's
first stage, the iSDM monitor, the
D-MON3tì(r monitor,
and the SCT in
the PROM devices.
Intel Mociules
Development Platforms
are delivcred with
the
Bootstrap Loaclcr's
first stage, the D-MON386
monitor,
and the SCT in the PROM
devices.
t-2 Brxrtstrap [-oader
OVERVIEW
OF
BOOTSTRAP
LOADER
OPERATIONS
lf you
have a system
that includes
the iSDM
monitor and you are aclding your
own device
driver to the Bootstrap
Loader's
first stage, you might
find it useful to load the
first stage
into the target system's
RAM using
a development
system iSDM kracìer
and activate thc
first stage
under iSDM control
from the
development systcm.
After activating the first
stage, you
could then
debug driver
code. If
your
system
includes the D-MON38(r monitor,
however, you must perform all driver debugging
from the target system.
You cannot
download the first stage from a development system into the
target
system
and then use D-
MON38ó
to initiate program
execution. When debugging
under these latter
circumstances,
you
may
wish
to either debug within
the
PROM devices or perhaps use a working
Bootstrap Loader to bootload
the Bootstrap
Loader that contains the new
driver.
When
the first stage begins
running, it
first identifies the bootstrap device and the name
of
the
file to boot, either by accepting
that
information from a command line enterecl ut the
monitor
or by using default
characteristics establishcd whcn
the first
stage was
configuretì.
The Bootstrap
Loader next calls
its internal device driver for the clevice, which initializes
the device
and reatis the first portion of the second sttìge into memory. (The second stage
always resides on track
0 and block 0 of the named
volume,
so it can be accessed easily by
the
first stage.) After calling
the internal device driver, the îirst stage passes
control
to the
second stage.
Because the first stage works
on both lt0tl6/ lllfi- ancl 802t16/31.ì(r-basccl computers,
it
operates in real address
mode
when
running in an tl02tl6/386-based systcm.
This
means
that any device drivers you write for the first stage must also opcrate in real
address mode.
1.2.2
Second Stage
Unlike the first stage, the second stage of the Bootstrap Loadcr is not configurable. Its slze
is always the same
(less
than fìK bytes),
and it does not
depend on the application in any
way.
The cotìe for the second stage
resides on all
volurnes
forrrattcd
with the
iRMX I or
iRMX II Human lnterface
FORMAT commands. Thercfìrre, the
second stagc is always
available
for loading applications residing on random access tlevices.
When the second stage receives
control, it finishes loading
itsclf into memory and then
loads the file determined by the
first stage. When loading
the file, it uses the same
device
driver used by the first stage. In iRMX I systems, the load file is the
application systcm
itself. In iRMX II systems, this file is the thirtl stage of the Bootstrap
Loader.
Bmtstrap LOader l-3
OVERVIEW
OF BOOTSTRAP
LOADER
OPERATIONS
NOTE
You cannot
bootstrap load
the iRMX IL 1, 11.2,
II.3 Operating
System from
a
volume
that
was formatted using
the iRMX 1.6
or I.7
(iRMX 86 Release 6 or 7)
FORMAT command.
However,
you
can make the
volume bootable
without
reformatting
the entire
volume and losing
the data stored
on it. To be able
to
boot
both the iRMX I and iRMX II Operating
Systems
from the same
volume,
invoke
the iRMX II.3 FORMAT command
and specify
the BOOTSTRAP
control.
With
BOOTSTRAP
specified, FORMAT
just
replaces
the second
stage on track 0 of the
volume
while
leaving
the remaining data untouched.
When
the FORMAT command
finishes,
you
can bootstrap
load both the
iRMX
I and iRMX II Operating Systems
from the same
volume.
1.2.3 Third Stage
The third
stage of the Bootstrap Loader
is used for loading
iRMX Il-based applications
into memory. The third
stage resides in a named
file on the bootstrap device.
Both the
third stage and the application
system to be loaded
must reside in the same directory
on
the
volume.
There are two
types of third stages:
a generic third stage and a device-specific
third
stage.
The type needed
for your system depends
on the size of the application
system you intend
to load.
1 .2.3.1
Generic
Third
Stage
The generic third stage is so named because it can load
application systems from any
device
that
the first
stage
recognizes.
This stage contains no device driver
of its own.
Instead, it uses the same device driver used by the first
and second stages. This means that
you won't need to
write
a separate device driver to
work in protected mode, but it also
means that the
generic
third stage runs in
real address mode. In real address mode,
addressability is restricted to the first
(lowest)
megabyte of memory. Therefore,
the
generic third stage can load only those application systems that are smaller than
840K
bytes. The remaining space is used by the Bootstrap Loader, the monitor and the
SCT. To
load larger applications, you must use a device-specific third stage.
When the generic third stage receives control, it uses the device driver supplied in the first
stage to load the application system. Then it switches the
processor
into
protected virtual
address mode and
passes
control to
the
application.
l-4 Bo()tstrap lrader
OYERYIEW OF BOOTSTRAP LOADER OPERATIONS
1.2.3.2 Devicespecilic Third
Stage
The device-specific third stage switches the processor to protected
virtual address mode
before loading the application system. This enables
this stage to load into memory
addresses higher than one megabyte. However, because this
stage switches the
processor
into
protected
mode, it cannot use the first stage's
device drivers
(which
operate only
in
real mode). Instead, it must contain its own device driver, operating
in protected mode,
to
control the device from which the application system is loaded.
The device-specific third
stage supplied in your Bootstrap Loader
package supports the
following devices:
. iSBC 21SG/iSBX
2l8A winchester
and diskette controller
combination
or the
iSBC 214
controller
. iSBC 264 bubble memory controller
. iSBC
186/224A multi-peripheral controller
o SCSI
(Small
Computer Systems lnterface)
an<l SASI
(Shugart Associates Systems
Interface)
peripheral bus controllers having
iSBC 2861100A
CPU board as
the host.
If you want to boot from any other device,
you must
write a protected mode device
driver
for the device and link
the driver in when
you
configure
the device
specific third
stage
(see
Chapter ó).
When the device-specific
third stage receives
control, it
performs the
same operations
as
the
generic
third stage. However,
before invoking
the device driver
to load the
application
system, it switches the
processor into protected
mode. This enables
the third
stage to load
applications
that reside outside
the first megabyte.
1.2.3.3 Naming
the Third stage
Both the
generic and the
device-specific third
stages are stored
as executable
files. The
base
portion of
this file's name
--
the filename
minus any
extension
'- must be the
same as
the base
portion of
the file containing
the applìcation
system to
be loaded. Because
the
name
of the third
stage and the name
of the application
system
must match,
you must
provide
a separate
third stage fi-le for each
bootable
system on
the
volume. To
provide
additional third
stage files, simply make
a copy of the
third stage
file
you are currently
using. Name
the copy so that it matches the application
system
you intend to
load.
1.2.4 Load File
The load
file is a file
containing the
application
system
you are trying
to boot.
The load
file
shoulcl be on
an iRMX I- or iRMX ll-formatted
named
volume. This
volume
must have
been formatted
by the Human
Interface FORMAT
command.
lf the load
file is an
iRMX
II application,
the
volume
must
also have a
file containing
the
third stage
of the Bootstrap
Loader.
Bootstrap
Loader 1.5
O!'ERVIEW OF
IÌOOTSTRAP
LOADER OPERATIONS
If
your
load file is an
iRMX II application, the name of that file must correspond to the
nanre of the
Bootstrap Loatler third stage, as fbllows:
. The base
portion
of the loarl file's
name
(the
filename minus the extension) must be
the same as that of the file containing
the third stage.
o The extension portion of
the loacl file's name must consist of the characters
".286".
The lbllowing are examples ofvalicl
and invalid third stage/Ìoad
file comhinations:
Valicl
Combinations
Third stage
--
Load file
--
Th ird stagc
--
l-oad file
--
Inva lid Comhinations
Third stage
--
Load file
--
Third stage
--
Load file
--
MYSYS
MYSYS.286
SYS I.3RD
SYS
l.2tì6
MYSYS
YOURSYS.2I.ì6
MYSYS.]RD
MYSYS.LOD
When you
configure the
first stage of the
Bootstrap
Loader,
you
can
choose the file name
that
will
be used
if the operator
doesn't specify
a filenamc when
invoking the Bootstrap
Loader. By ciefault,
the file name
is
/SYSTEM/RMX86
for iRMX
I load files. For
iRMX
II systems,
/SYSTEM/RMX[J6
is the
default name of
the Bootsrrap
Loader's third stage
and
/SYSTEM/RMX86.2E6
is the clefault
name of
rhe iRMX II load
file.
NOTE
Because
of the way
the
Bootstrap Loader
interprets
filenames, the
only pcriod
(.)
allowed in
the entire pathname
for the load
file is the one that prececles
the
extension
28(r.
For example.
the pathname
/SYSTEM
I
/MYSYS.286
is invalirl
because it contains
more than one
neriod.
l-6 Bootstrap
lnader
OVERVIEW
OF BOOTSTRAP LOADER
OPERATIONS
1.3 DEVICE
DRIVERS
When the Bootstrap Loader
starts running, there is
no sofiware
in place
to enable the
processor
to communicate
with the
device from which
you want to load the system. Part of
the task of the Bootstrap
Loader is to establish communications with the boot device. To
communicate with devices,
the Bootstrap Loader must include programs,
called device
drivers,
for the devices from which you want
to boot. When configurìng the Bootstrap
Loader, you specify the
device drivers you want to include. The configuration
process
links
the drivers to the Bootstrap Loader code.
Both the first stage and
the device-specific third stage
require
their own
drivers. The first-
stage drivers operate in real address
mode and are used to load iRMX I applications and
the third stage of the Bootstrap
Loader. The generic third stage also uses the first-stage
drivers to load iRMX II applications.
The thir<J-stage
drivers operate in protected virtual aticlress mode ancl
are used
by thc
device-specific
third stage
to load iRMX II applications into the full 16 megatryte address
space.
The first stage must include a real mode
device driver for each device from which you want
to boot. The generic third stage
includes no drivers of its own, but the device-specific third
stage must include a protected mode
driver for each of the boot devices. Intel includes
several real and protected mode drivers
in the Bootstrap Loader
package,
as listed in
Table
l-1. AlÌ the reaÌ mode drivers
can be used
with
the first
stage
and
with
the
generic third
stage. All the
protected
mode drivers
can
be
used
with the
device-specific third stage.
lf you
want
to boot from a device not supported by these device drivers, you can
write your
own device driver. See Chapter 5 for information on
writing a new device driver.
Bootstrap l,oader t-7
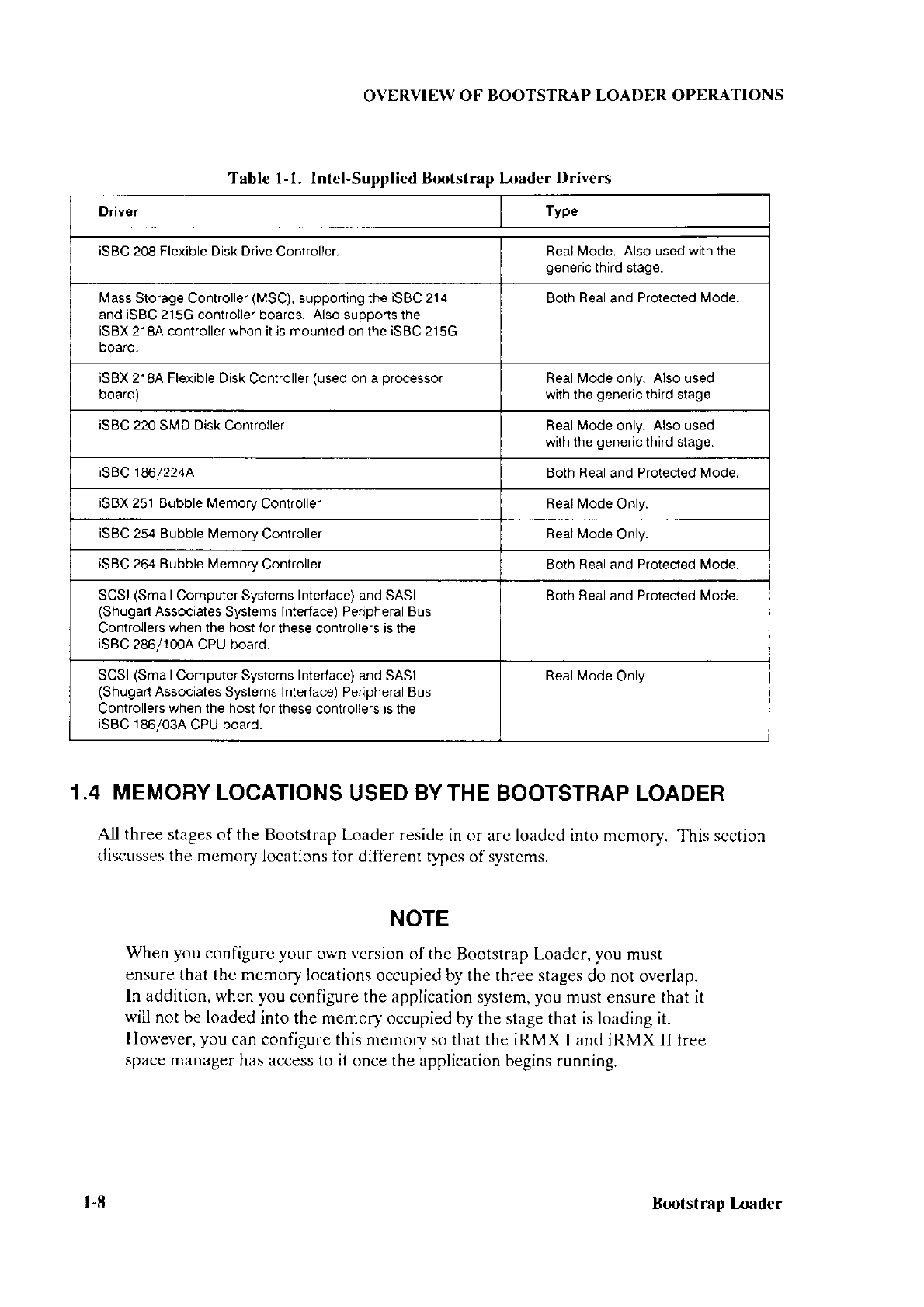
Table l-1. Intel-Supplied Bfi)tstrap lnader
Drivers
Driver îyp"
iSBC 208 Flexible Disk Drive
Controller. Real Mode.
Also
used
with the
generic
third stage.
Mass Storage Controller
(MSC),
supporting the
iSBC
214
and iSBC 215G controller
boards.
Also
suooorts the
|SBX 218A controller when it is mounied on the iSBC 215G
ooafo_
Both
Real
and Protected Mode.
ìSBX 218A Flexible Disk
Controller
(used
on a processor
board) Real Mode only. Also used
wiîh the
generic
third stage.
iSBC 220
SMD
Disk
Controller Real Mode only. Also used
wiîh the
generic
third stage.
isBc 186/224A Both Real and Protected Mode.
iSBX 251 Bubble Memory
Controller Real Mode
Only.
iSBC
254 Bubble Memory
Controller Real Mode
Only.
iSBC 264 Bubble Memorv
Controller Both Real and Prot€cted Mode.
SCSI
(Small
Computer Systems
Interface) and
SASI
(Shugart
Associates
Systems
lnterface) Peripheral Bus
Controllers
when the host for
these controllers is the
iSBC
286/100A CPU board.
Both
Real
and
Protected
Mode.
SCSI
(Small
Computer
Systems
Intelace) and
SASI
(Shugart
Associates
Systems Interface) Peripheral Bus
Controllers
when the host for
these controllers ìs the
iSBC 186/03A
CPU
board.
Real Mode
Only.
OVERVIEW OF BOOTSTRAP LOADER OPERATIONS
1.4 MEMORY
LOCATIONS
USED
BYTHE
BOOTSTRAP LOADER
All three stages of the
Bootstrap Loader reside
in or are loaded into memory.
This sectron
discusses the memory
locations for different tnres
of systems.
NOTE
When you
configure your
own
version
of the
Bootstrap Loader, you
must
ensure
that the memory
locations occupied by the three stages
do not overlap.
ln addition, when you
configure the application
system,
you
must ensure that it
will
not be loaded
into the memory
occupied by the stage that is loading
it.
However, you
can configure this
memory so that the iRMX I and iRMX II free
space manager
has access to it once the application begins running.
l-8 Bu)tstrap lrrader
OVERVIEW OF BOOTSTRAP LOADER
OPERATIONS
The code for the first stage is normally located in
PROM devices in
the upper part of the
memory address space. The first stage data and
stack are located
by in conjunction
with
the
second stage code at address 088000H. The
second stage uses the
same data and stack
as
the first stage. The first stage data and stack
plus
the
second stage code require
8K
bytes of memory.
You can change the locations of
the first stage data and
stack, and the
second stage code
by selecting a different address for the second stage
when you invoke the
SUBMTT
file, BS1.CSD, to configure the first
stage. Chapter 3 describes
the BSl.CSD file.
The device-specific third stage is
located by default at address
0BC000H. lt requires
16K
byes of memory, and it uses
its own stack and data segments.
You can change
the locatton
of the device-specific
third stage by using the BS3.CSD
SUBMIT file
to generate
your own
version.
Chapter
4 describes the BS3.CSD file.
The generic third stage is located
by default at address
0BC000H.
Unlike the device-
specific third stage,
it uses the data and
stack of the first stage
(because
it uses the first-
stage device drivers). You can
change the location of
the generic
third stage by using
the
BG3.CSD
SUBMIT file to
senerate vour
own
version of it. Chapter
4 describes
the
BG3.CSD
file.
When
you
use the second
stage and
generic
third
stage loaded into
memory
at their
default
addresses
(088000H
and 0BC000H), blocks
of memory
beginning
at these two
addresses
are used to load
the application. The
generic third stage
uses 16K
bytes of memory.
Thus,
ifyour application
were
to
occupy memory between
0B8000H
and OBFFFFH,
the
generrc
third stage
would fail to load the application.
1.5 CONFIGURING
YOUR OWN BOOTSTRAP
LOADER
If you
intend
to create
your own
version
of
the Bootstrap
Loader,
you must
use the
Bootstrap Loader
configuration
and generation
files supplietl
by Intel. In iRMX I systems'
these files reside
by default in
the directory
/RMX86/BOOT. In iRMX II systems,
the
files reside in the
directory
/RMX286/BOOT. Information
about
configuring
the first
and
third stages is available
in Chapters 3
and 4, and information
on
writing new
device
drivers
is available in Charrters
5 and 6.
Bootstrap l-oader 1-9

USING THE CHAPTER 2
BOOTSTRAP LOADER
2.1 INTRODUCTION
The procedure for
using the Bootstrap Loader depends on where you
locate the first stage,
and for iRMX II users,
which
third stage you choose.
This chapter
explains
the operator's
role, methods of defining
the first stage, and options to consider
when
choosing a third
stage.
2.2 OPERATOR'S
ROLE
IN BOOTSTRAP LOADING
The operator's princìpal role in the
bootstrap loading
process
is to
specify
the
pathname of
the
file that is to be loaded. For iRMX I systems, this is the pathname of the application
system. For iRMX II systems,
this is the
pathname
of the Bootstrap Loader's
third stage.
If the operator is using the lntel-supplied
first stage, the load
file specifications can be
entered
in one of the following
ways:
. By specifying neither the device
name nor the file name
. By specifying both the
device name and the file name
. By specifying the device name only
. By specifying the file name only
In
addition, ifyou have the iSDM monitor, the operator can
also use the Debug option to
specily that control should pass to the monitor atier loading is complete.
(The
D-MON386
monitor does not support a debug option.)
2.2.1 Specifying
the Load File
An operator can speci! a load file:
. When the monitor has
issued
a prompt. In this case, the operator
can enter the
rnonitor's B (bootstrap) command, followed by the
name of the load file (include
the
name
within
single
quotes
if
you
are using
the D-MON3tìfi monitor).
For this to
work,
the Bootstrap
option
must
have been configured into
the monitor. Refer to the
|SDM
Systen Dehug
Monitor User's Gufule and th'e D-MON39ó
Dehug Monitor
for the 80386
User's Guide for informatìon on confisurins monitors.
B0otstrap l,oader 2-l
USING
THE BOOTSTRAP
LOADER
. When the first stage of the Bootstrap
Loader has issued an asterisk
(
*) prompt.
When
this
prompt appears, the first
stage
waits
for an operator
to enter the name
of the load
file.
The
method used to determine
which
file
to load depends on the configuration
of the
Bootstrap Loader's
first stage. Refer to Chapter 3
for more information about
first stage
configuration.
When
entering
the monitor's B command or responding to
the Bootstrap Loader's asterisk
prompt, the operator must specifo the
load file. One
way
to do this is to
simply press
Carriage Return. This causes
the Bootstrap Loader to search for a default
file on the
default device
(these
defaults are
set up when you configure the first stage). The
Intel-
supplied first stage uses the following
pathname as its default
/SYSTEM/RMX86
If you were using the default first stage and you
wanted
to load the file called
/SYSTEM/RMX86
from the default
device, you could simply type the B command
with
no
parameters (ifyou boot from the monitor) and
press
Carriage Return, or type
a Carriage
Return only
(if the Bootstrap Loader displays its own
prompt).
Ifyou need to speci! a load file that is
different from the default one,
use
the following
format
for the
specification:
:device:pathname (iSDM)
':device:pathname' (D-MON386)
Where:
:device: This is the name ofthe secondary storage device that contains the load
file. Ifyou omit the device name, the default device is used (as
established during first stage configuration).
pathname When loading iRMX I applications, this
is the full
pathname
of the file
you want to load. When
loading iRMX II applications, this is the full
pathname of the Bootstrap
Loader's third stage. For iRMX II systems,
the file to be loaded is assumed to have the same pathname
as the third
stage
except
for
the filename extension,
which
is assumed
to be
.286.
If you omit this name,
the Bootstrap Loader attempts to load the
default file (always
/SYSTEM/RMX86).
To invoke
the Bootstrap Loader
with
the monitor's
B command, the processor must be
running in real
address mode. Ifyour processor
is
running in real address mode,
you
can
simolv break
to the monitor and issue the boot command.
2-2 Bootstrap Lader
USING THE
BOOTSTRAP LOADER
However,
if the processor is running in
protected
virtual
address
mode
(as
it is
when the
iRMX II Operating System is in control),
you
cannot
boot another
system by breaking
to
the monitor and issuing a boot command.
You must first reset the
system. After resetting
the system,
you
can invoke
the Bootstrap Loader at the monitor
prompt.
Example 1: Assume
that an iRMX I application
system resides in the
file
/SYSTEM/MY86SYS on drive :WFO:. You can
boot this system
by issuing the following
command at the
iSDM monitor
prompt:
Example 2: Assume
that an iRMX II system resides
in the file
/SYSTEM/MYSYS.286
on
drive :WF0:, and that
the third stage of the Bootstrap
Loader resides
in the fiÌe
/SYSTEM/MYSYS.
If the
processor
is in real
address mode,
you
can boot
this system
by
issuing the following
command at the D-MON386
monitor
prompt:
2.2.2 DebugOption
Assuming
that the iSDM monitor is
present in the system,
the operator can
include a
debug
option
when
specifying a load
file
(the
D-MON386
monitor
does not support
a
debug
option). This option instructs
the Bootstrap
Loader
to do the following
immediately
after loading is complete:
. Set a breakpoint
at the first instruction
to be executed
by the application system.
For
iRMX I systems, the breakpoint
will be set in the
load file. For iRMX Il systems,
the
load
file (the third stage) will be loaded as
always and
it will load
the application
system. The breakpoint
will then be
set in the application
system.
o Pass control
to the iSDM monitor,
which displays an
"Interrupt
3
at <>ooo<:pm<>"
message at the
terminal, issues its
prompt (a single
period for real-mode
iRMX I
systems,
fwo
periods for protected-mode iRMX II systems),
and
waits for a command
from the
terminal. At this
point the operator
can invoke any
of the iSDM
monitor
commands
that are
appropriate for real
or protected mode.
(To
continue running
the
loaded
program, enter G
<cr >.)
One advantage
of the Debug
switch is that
the monitor's
interrupt
message tells
you
that
the loacling
process was successful.
If a system
you are booting
fails,
you
might
not
otherwise
be able to
tell
whether the bootstrap load
itself
was unsuccessful,
or
whether the
system
loaded
successfully and
then failed
during initialization. The presence or absence
of
the interrupt
message
when you
use
the Debug
option clarifies
whether the loading
was
successful.
Bootstrap
l-oader , -'l
USING
THE BOOTSTRAP LOADER
Because the Debug option leaves you in the monitor, you can alter the contents of specific
memory locations and
perform
other monitor actions
(such
as <Jebugging) before
you
start
your system running with the
monitor's
G command.
To use the Debug option when you are invoking the Bootstrap
Loader from
the iSDM
monitor, include the letter D in the command line immediately after the B (boot)
command. Speci! any
load file
pathname
after lhe B and D characters.
For example, any of the following command
Iines invoke the Bootstrap Loader
(from
the
iSDM monitor)
with
the Debug option:
Notice
that the "D" and any pathname
must be separated by at least one space.
You can also use the Debug option on systcms in which
the Bootstrap Loader is configured
to request the load file name; that is, on systems
that issue the Bootstrap
Loader's first
stage asterisk
(.) prompt. On these systems,
place
the "D" in the command line before the
load
file specification (separated by
at least one space).
Examples of this are:
2.3 PLACING
THE
BOOTSTRAP LOADER
INTO MEMORY
Before you
can invoke the
Bootstrap Loader, you
must
place
it into
memory. Several
rvays
exist to place
the Bootstrap
Loader into memory:
l. Place the
first stage, configured
for standalone operation,
in PROM devices.
In thts
case, îhe first
stage begins to
run on
power-up
or reset. Depending
on its
configuration,
the standalone
Bootstrap Loader
may issue an asterisk prompt so
that
you
can enter the
name of the
load file. To configure
the first stage for standalone
operation, refer
to Chapter 3.
2-4 Brxrtstrap Loader
USING THE BOOTSTRAP
LOADER
2. Configure
the monitor to include
the Bootstrap option,
reconfigure the first stage of
the Bootstrap
Loader to include the
first stage device driver(s)
needed for bootstrap
loading as not all
of the device
drivers supplied with the
Bootstrap Loader will fit
into the
memory range provided
by the
monitor. Then
program
new PROM
devices
with
the combination
of
the monitor and the
first stage of the Bootstrap
Loader.
With this
method,
you
initiate bootstrap loading via
the monitor's
'B'
(boot)
command. To use
this method,
refer to chapter 3 for configuration
information.
Refer to the Guide to the Extended i.RMX
II Interactive Configuration Utility for
information
on
programming
a monitor and the
Bootstrap Loader into the same set
of PROM devices.
3. Place the first stage in secondary
storage.
Then, using the iSDM monitor or ICE in-
circuit emulator, invoke
the first stage.
This
procedure
is
particularly
useful
when
you
are adding a new
device driver to the
first stage and
you
need to debug the code.
To
configure the first stage
for standalone operation where
loading is to be
performed with
the iSDM
monitor or ICE in-circuit emulator,
refer to Chapter 3.
NOTE
If your system
includes the D-MON38ó
monitor,
you
cannot download
the first stage
from one system to another and
then invoke it using
D-MON386 as
described above. The
previous
description
applies only
to a system configured with
the iSDM monitor or ICE in-circuit
emulator.
4. Place the first stage in secondary storage,
and then load it programmatically.
This
applies only to iRMX I systems. Because the iRMX Il Operating System cannot
switch back to
real mode from
protected
mode, it cannot load the
first
stage, which
runs in real mode.
(These
systems
can load the first stage in real mode only.)
The rest
of this section
gives
instructions
for using the fourth method.
Although bootstrap
loading
is usually
performed
in response to an external event
(such
as a
system reset or a
monitor command),
it can be initiated by an executing
program.
Such a
program
can load another system by
calling the PUBLIC symbol BOOTSTRAP ENTRY.
To prepare
for
such
a call, do the following:
l. Define BOOTSTRAP ENTRY as an
EXTERNAL
svmbol in the code of the
invoking program. -
2. Place a call to BOOTSTRAP ENTRY
in
the code of the invoking program. The
form of the call is
CALL BOOTSTRAP ENTRY(@filename)
Bootstrap hader t_<
USING THE BOOTSTRAP LOADER
where:
filename An ASCII
string containing either the
pathname of the
target
file followed by a CARRIAGE RETURN, or a
CARRIAGE RETURN only. If the
string contains a
pathname, the named file is loaded. If the
string
contains a CARRIAGE RETURN only, the default
file,
as defined by the %DEFAULTFILE macro in the
BS1.A86 or BS1MB2.A86 configuration file, is loaded,
(The
BS1.A86 and BS1MB2.A86 files
are
discussed
in
Chapter 3.)
The call must follow the PL/M-8ó I-ARGE model of segmentation.
(Even
though
this
is a call, rather than a
jump,
it does not return.)
3. Link the calling
program
to a
version
of the first stage of the Bootstrap Loader. You
can do this by using the BSl.CSD file as a model and making the
following
changes:
. Add the calling
program
to the list of modules that are linked in BS1.CSD.
r "Comment
out" the locate sequence ifyou want
to use any code other than absolute
code. For more details on absolute code, refer to the LAPX 8ó, 88 Family Utilitíes
Guide.
More information on the
BS'l.CSD file
is available
in Chaoter 3.
2.4 CHOOSING ATHIRD
STAGE
Ifyou plan
to load iRMX II applications, you must
include a
version
of the Bootstrap
I-oader's third
stage on the secondary storage device from which you are
loading
your
applìcation. You can
use the following kinds of third stages, depending on the type of
system
you
are loading.
o A generic third
stage
. A default device-specific third stage
. Your own configuration ofthe device-specific third stage containing
customized
device
drivers.
The rest of this section
should help you decide which
third stage best suits your needs.
The important factors
to consider
when
choosing a third stage
are the size of
your
system,
the tlpe of
mass storage devices you are using
to boot
your
system, and the
CPU
board you
are usrng.
If you plan
to load
your
system
from any of the Intel-supplied
devices,
you
can use the
default device-specific
third stage regardless of the
size of your system or a default
generic
third stage
for systems up to 840K
bytes. Both third stages are supplied
for 80286 and
80386
CPU boards.
2-6 Bmtstrap hader
USING THE BOOTSTRAP
LOADER
If you plan
to load your system
from a custom device, the size
of
the system
determines
which
third stage
)'ou
should
use.
. For
systems that are not
expected to exceed
tt40K bytes, use the generic third stage. In
this case, you do not
need to supply a custom
device driver for the thirtl stage. You will
already be supplying
a custom
first stage driver; the generic third stage will
use that
same driver
to access the
custom device.
. If your
application exceeds
840K bytes, you must
use
the
device-specific third stage,
because
it switches the processor
into protected mode before
loading the application.
This enables the third
stage to load
into the entire l6 megabyte address space
supported
by
protected
mode.
However, to Ìoad applications from your custom
device,
you must write
a third stage clevice
driver for
your
device. This driver can be a
modification
of your first stage
driver that runs in thc iì02fì6 proccssrtr's protccted
mode. For information
on
writing
a third stage
driver, refer to Chapter 6.
NOTE
The 840K byte
limit on systems loaded by the generic third stage applies
to the boot file only.
Once the boot fiÌe is loaded and has control, the
entire lfr megabytes
of memory address space
is
available for the
system
(both
the free space
managcr and the Application Loader).
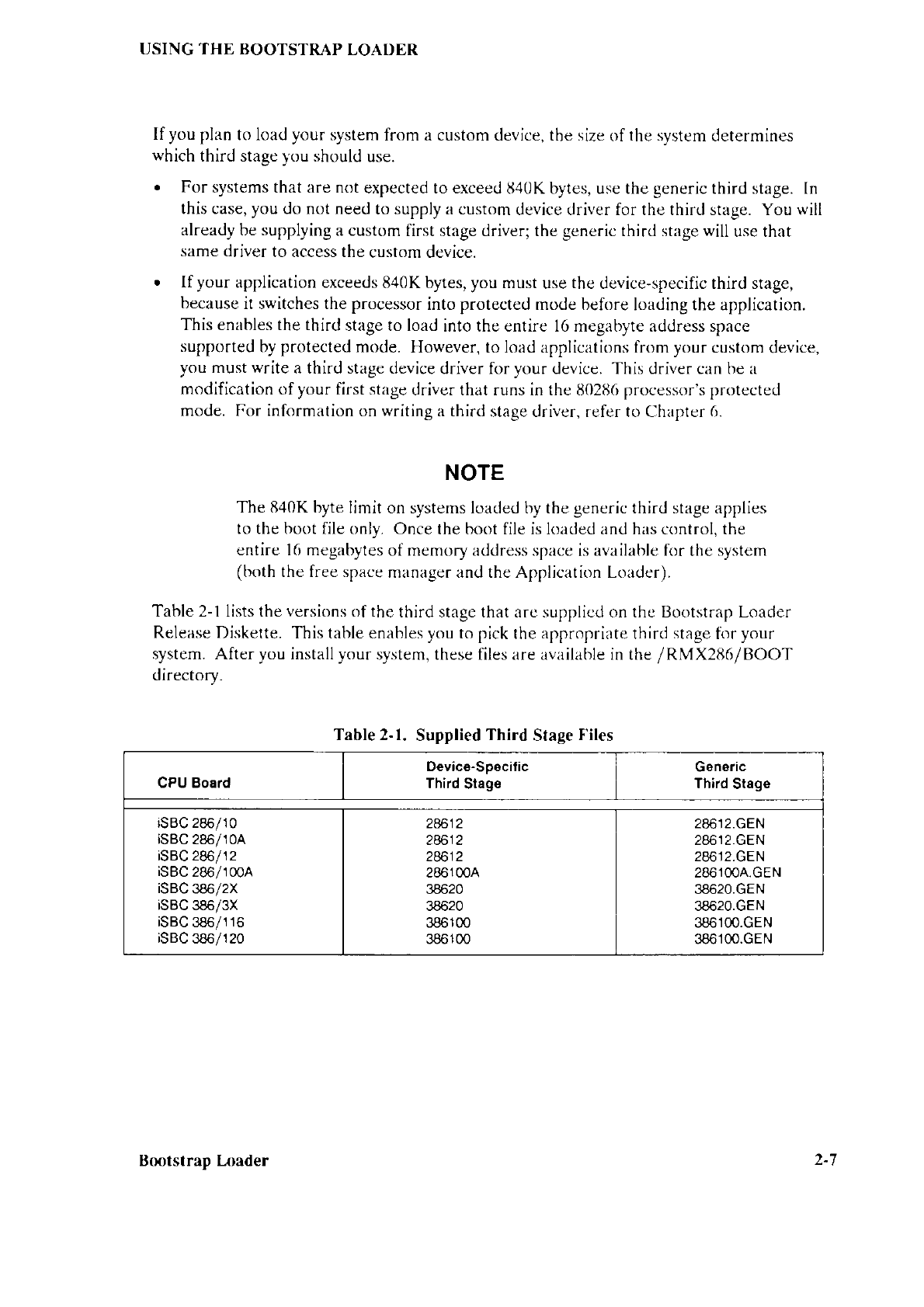
Table 2-l lists the versions of the
third stage that arr: supplicd on the Bootstrap Loader
Release Diskette.
This table enables you to pick
the
appropriate
thircl
stage
firr
your
system. After you install your system, these files are available in the /RMX286/BOOT
directory.
Table 2-1.
Supplied
Third
Slage
Files
CPU Bosrd Devico-Spscilic
Third
Stag€
Gonsric
Third
Stage
isBc 286/10
isBc
286/10A
isBc 286/12
isBc
286/100A
isBc 386/2X
isBc 386/3X
isBc
386/116
isBc
386/120
2fú12
28612
28612
2861mA
38520
38620
386100
386100
28612.G8N
28612.GEN
28612.
GE
N
2861OOA. G E
N
38620.GEN
38620.GEN
3861@.GEN
386100.GEN
Bff)tstrap k)ader

CONFIGURING CHAPTER 3
THE
FIRST STAGE
3.1
INTRODUCTION
There are three stages to the Bootstrap Loader, anrJ
two of these
stages (the first stage and
the third stage)
can be configured
to m:rtch your application
system. The second st:rge is
constant and
does not need to be configured.
This chaptor tlescribes how to configure the
first stage.
Configuring
the first stage of the BoÒtstrap Loacler
involves
the
tollowing operations:
. Editing three
or more assembly
language source files to inclicatc the configurable
options and
device drivers
to include in the first stage
. lnvoking
a SUBMIT file to assemble
the sourcc files, link thcm togcthcr with
the code
for the fìrst stage,
and assign absolute
addresses to the code in preparation
for placing
it into PROM devices.
Default versions
of the assembly language
source files ancl the SUBMIT filc arc placed
rn
the
/RMX86/BOOT or
/RMX286/BOOT directory during installation.
These files
include the following:
BSl.AlJ() This assembly language source
file contains nlacros that speciry
information
about the processor
and the bus, how the boot device
and load file are selected.
and
which
devices can bc booted
from.
You should use
this file if your system is a MULTIBUS I system.
This assembly language
source file contains macros that speciry
information
about the processor
and
the bus,
how the boot devicc
and
load file are selected, and which tlevices can be booted
from.
You should use
this file if
your
system is a MULTIBUS II system.
This assembly language source lile contains macros that tell the
Bootstrap Loader
what
to do if errors occur during bootstrap
loadins.
BS1M82.A86
BSERR,A86
Brxrtstrap l,oader -1-
I
CONFIGURING
THE FIRST STAGE
B208.486
BMSC,A86
8218A.A8ó
82244.A86
B251.A86
B254.486
8264.486
BSCSI.A86
BSl.CSD
These
assembly language
source
files
contain configuration
information about the first
stage device drivers. Each file
describes
one device
driver. For each device driver
that
you want
to include
in the first stage, you must
set up the appropriate file
and link it to
the rest
of the first staqe.
This SUBM
IT file contains the commands
needed to assemble the
preceding source files, link
the
resulting
modules
(and
any others
that
you supply), and locate the resulting
object module containing
the configurecl first
stage.
As shipped on the release diskettes,
these files are set up to generate the default
version
of
the Bootstrap Loader's
first stage. If you decide to configure
your
own
version of the first
stage,
you will
most likely edit
either the BS 1.,A86 or BS I MB2.A86 configuration file
(depending upon
your
system), the BSERR.A86 configuratìon
file, and the BSl.CSD
submit file. Make changes in the device driver configuration files only if
you want to
change the Intel-supplied defaults in those files.
The following sections describe how to modifu all the configuration files to tailor
the first
stage
of
the Bootstrap
Loader
to meet your specifications
NOTE
It's important that the BSl.,486 or BS1M82.A86 configuration file and the
BSI.CSD
SUBMIT file agree as to the device drivers
that
are included in the
first stage. Whenever you
change the device driver specifications in one of
these files, be sure to check the other file as well. Specific
areas that
you
should
check are discussed
in
descriotions
of the files.
3.2
BS1.A86 AND BS1MB2.A86
CONFIGURATION FILES
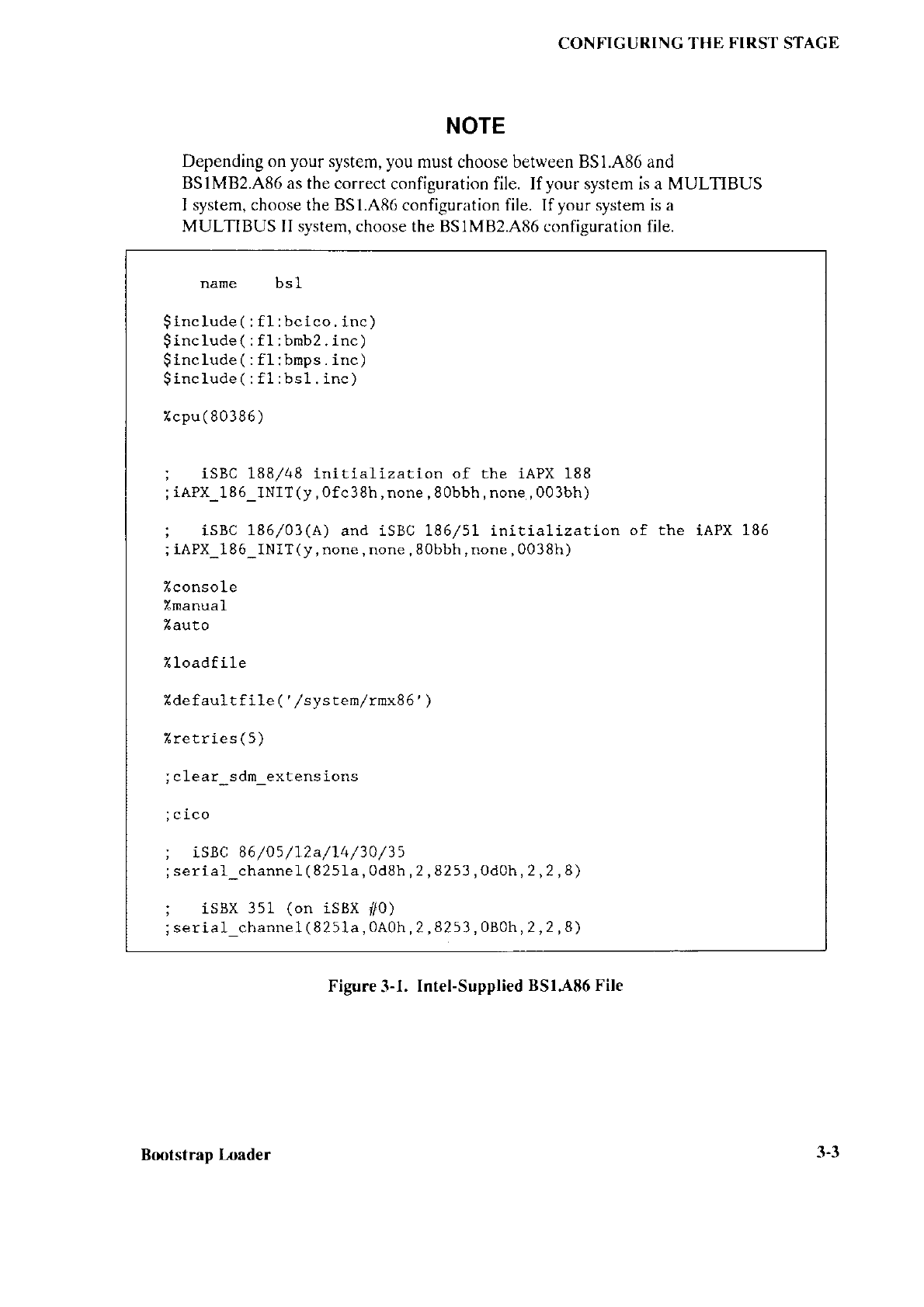
Figures 3-1 and 3-2 show the BSl.,4lì6
and BS1MB2.A86 files as they are delivered from
Intel. These files consist of four
INCLUDE statements and several macros. The
definitions of the
macros that can appear in these files are contained
in the INCLUDE file
BS 1.INC. The macros themselves are discussed
in the next few sections.
ì-7 Bmtstrap l-oader
CONFIGURING THE
FIRST
STAGE
NOTE
Depending on your system, you
must choose between BS1.,486 and
BS1MB2.A86 as the correct
configuration file. If your
system is a MULTIBUS
I system, choose the BS1.A8tr configuration file. Ifyour system is a
MULTIBUS II system, choose the BS1M82.A86 configuration file.
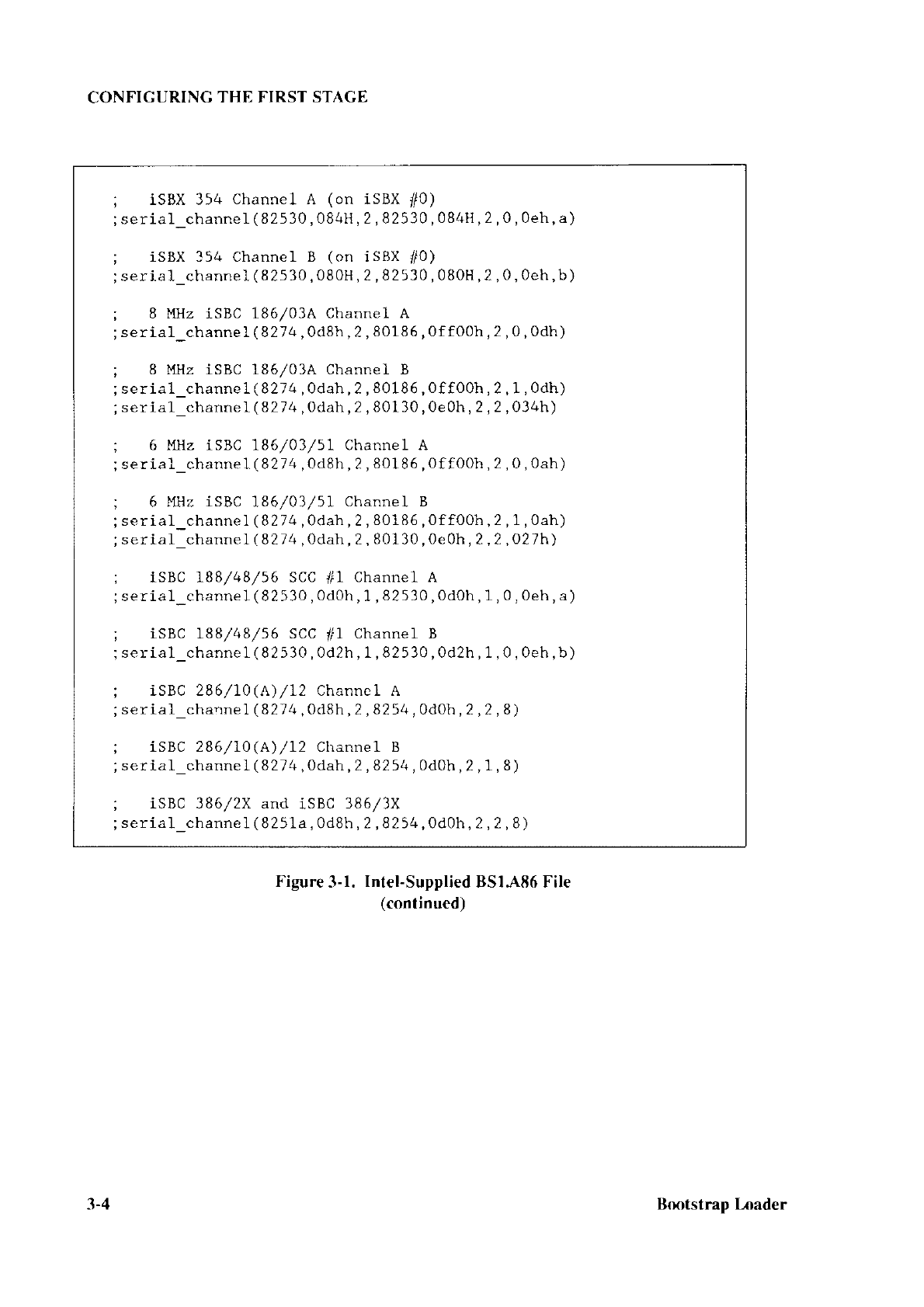
Figure
3-1.
Intel-Supplied
BSI-486 File
nane bs1
$
include
(
: f1 :bcico. inc
)
$
include
(
:fl:bmb2.
inc
)
$
inc lude
(
: fI : bmps . inc )
u cpu
(
80386
)
íSBC 188/48 initialization of the iAPX 188
iAPX_186_INIT
(y, Ofc3 8h, none, 8Obbh, none, 003bh
)
isBc 186//03(A)
and iSBC 186/51 initÍalization of the iAPX
186
1APX_186_INIT(y, none, none
,
8Obbh, none
,0038h)
%console
Zmanual
Zauto
%loadfile
Xde
faul t fi le ( '
/sys tern/rmx8
6
' )
% re rrie s
(5)
c
l-ear_s dm_extens ions
c ico
ísBc 86
/05 /I2a/I4/30 /35
ser ial_channel (
825Ia, 0d8h, 2, 8253, O dA}l, 2, 2,
8)
isBX 3s1 (on isBX
/10)
serial channel
(
825la,
0A0h,
2,
8253, 0B0h,
2,
2, 8)
Boolstrap
[,oader 3-3
CONFIGURING
THE FIRST STAGE
1SBX 354 Channel A (on iSBX /10)
serial_channef
(
82530,084H, 2
,82530 ,084H,2,0 ,
Oeh, a)
iSBX 354 Channel B (on iSBX
il0)
serial_channel
(82530,
080H, 2, 82530, 080H, 2,
0, Oeh, b)
8 MHz 1SBC 186/03A Channel A
se r ia l_channe t
(
8274,0d8h,2,80186,0ff00h,2
,
0
,0dh)
8 t4Hz iSBC 186//03A Channel B
serial_channel
(8274
,0dah,2 ,
80186
,0ffO0h,
2
,
1
,0dh)
serial_channe l (827
4, Odah, 2, 801 30, 0e0h, 2, 2, 034h)
6 MHz iSBC 186/03/51 Channel A
s er ial_channe I
(
8274
,0d8h,
2
,80186,0ff00h,
2
,0,0ah)
6 MHz
iSBC I86/03/5L ChanneL B
serial_channel
(
82 74
,
0dah
,
2
,80186 ,0ff0Oh,
2
,1 ,0ah)
se r ial_channe l (
8274
,
0dah
,
2,80130,0e0h, 2,2
,O21h)
i-SBC 188/48/56 SCC
#1 Channel A
serial_channel
(
82530,
0dOh,
1,
82530, 0dOh, 1, 0, 0eh, a)
1.SBC 188/48/56 SCC
/11
Channel B
s er ial_channe L
(
82 530,0d2h, 1,82530,0d2h,1
,0,0eh,
b)
iSBC 286110(A)/12 Channel A
se r ial_channe
I
(8214,0d8h,2,8254,0d0h,
2,2
,8 )
íSBC 286110(A)/12 Channel B
s er ial_channe l
(8274,0dah,2,8254,0dOh,
2,1,8
)
isBc 386/2X and ISBC
386/3X
seríal channel
(
8251a, 0d8h
,
2
,8254 ,0d0h,2 ,2 ,8)
Figure
3-1.
Intel-Supplied
BSI;\86 File
lcontinued )
3-4 Bfi)tstrap Loader
CONFIGURING
THE FIRST STAGE
Multibus I devices :
0, devÍceinit208gen, devi c e
re ad2
08gen
)
l, devicè init208gen, deviceread2 08gen)
0, deviceinitmscgen, devicereadmscgen)
1, devicè ini tmscgen, devicereadmscgen)
8, device ini tnsc gen, devicereadmscgen)
9, device initmscgèn, devicereadrns
cgen)
%device
(
af0
ldevice (afl
%device
(w0
,
Zdevice ($rl ,
ldevíce (wf0
itdevice (wf 1
%device(s0, 0, deviceinitscsi, devicereadscsi)
Z device
(
sx1410a0
, 0, deviceinitscsi, devicereadscsí, sasi_x1410a)
l device
(
sx1410b0, 0, devieeinÍtscsÍ, deviceteadscsi, sasi_x1410br
ldevicè(snf0,2, devlceinitsesi, devicereadscsi, s as i_x14 20mf
)
%device(prnf0, 0, deviceinit2l8A, deviceread2LSA)
Tdevice(pbO, 0, deviceinit25l, deviceread25l)
Zdevice(b0,
0, deviceiniL254, deviceread254)
%device(baO, 0, devicèinit264, devíceread264)
Zend
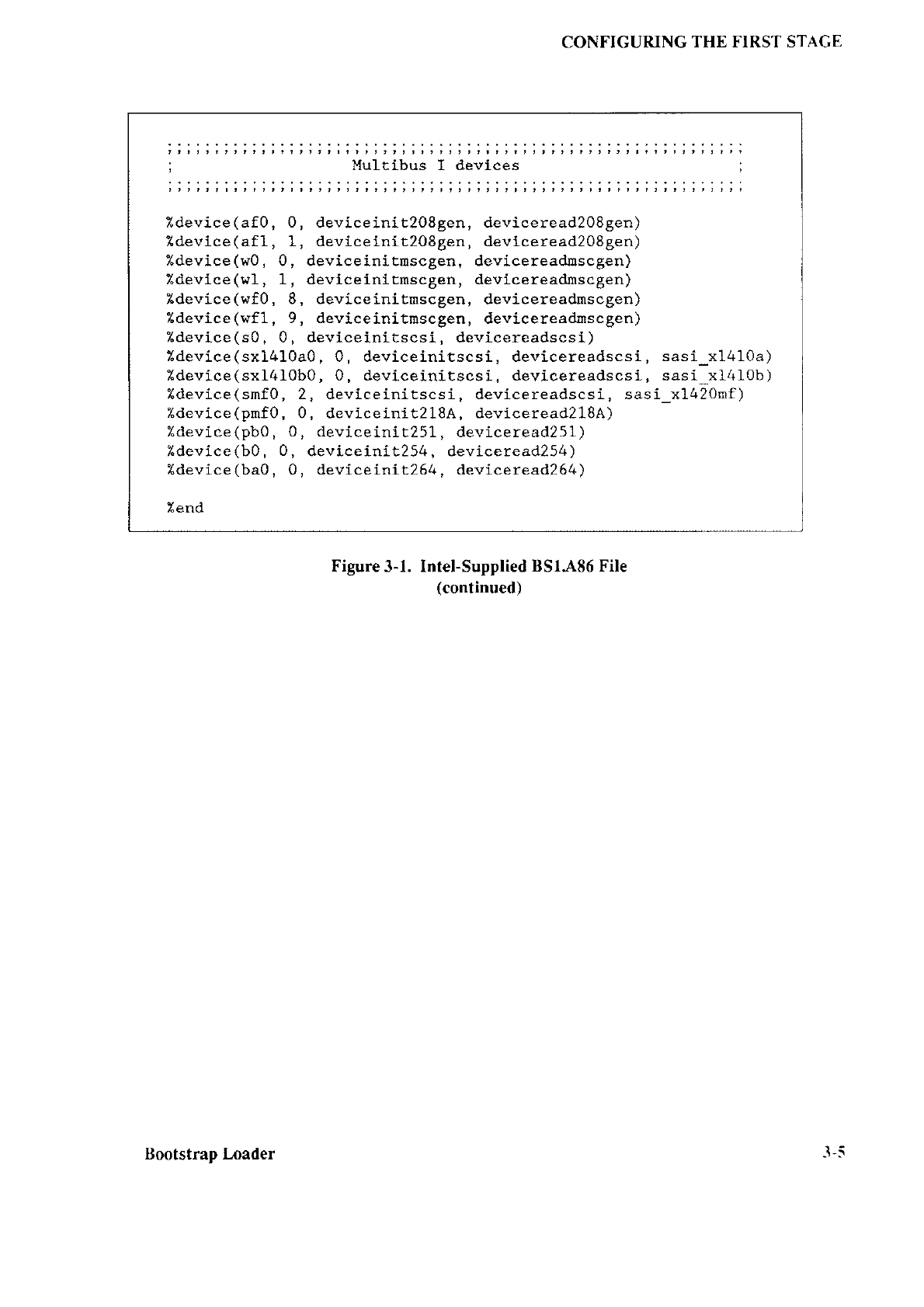
Figure
3-1. Intel-Supplied
tsSr.4,86 File
(continued)
-t-s
Bootstrap Loader
CONFIGIIRING THE FI RST
STACE
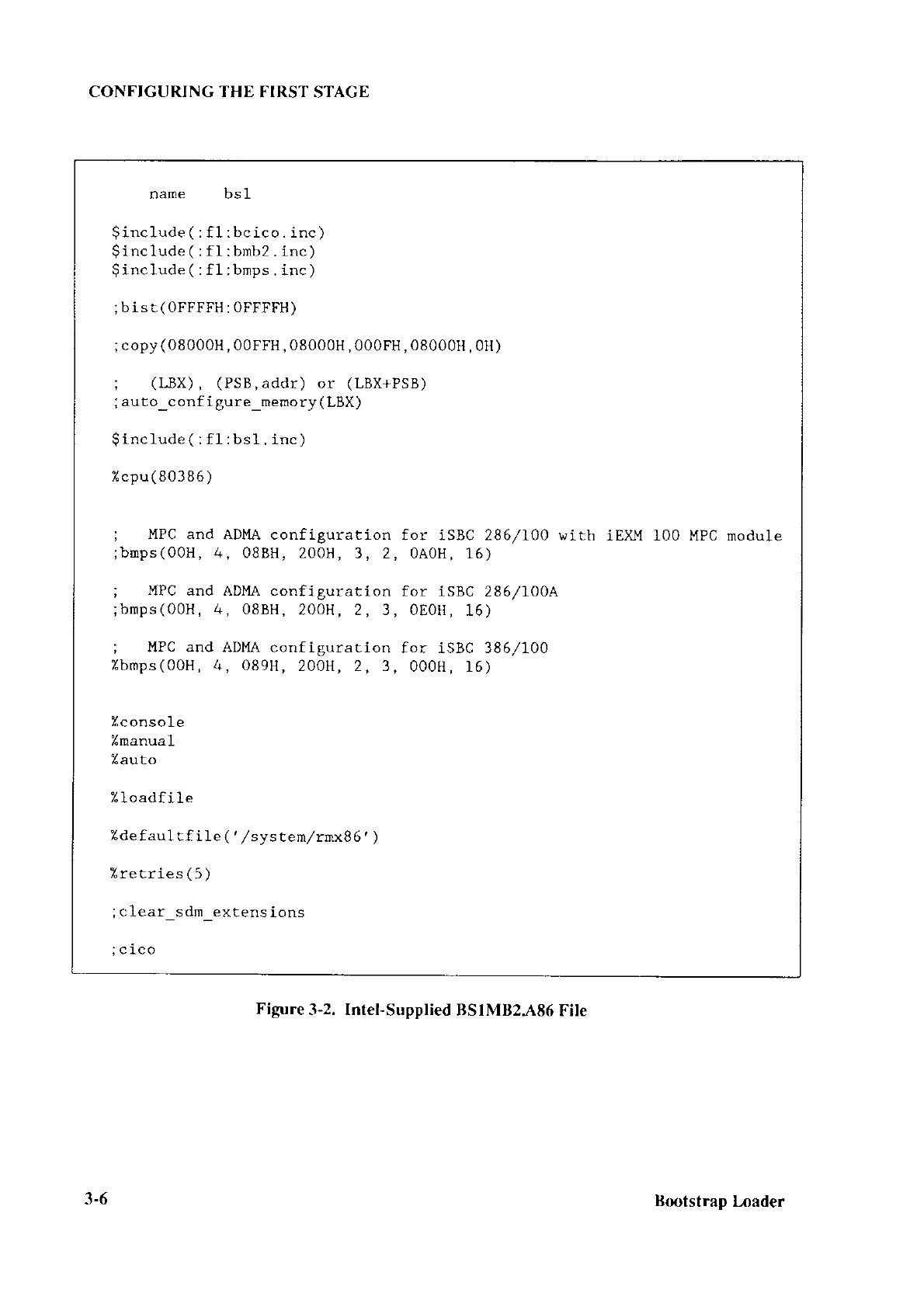
Figure
3-2. Intel-Supplied
BSIMB2-486
File
name bsl
$include (
: fl :bcico. inc)
9include (
:
fl :brnb2.
inc)
$include
(
: fl :bmps. inc)
;bist(0FFFFH:0FFFFH)
;
copy(08000H, 00FFH, 08000H,
000FH,
08000H,
0H)
; (LBX), (PSB,addr) or (LBX+PSB)
;
auto_c onf i gure_memory (
LBX)
lrncruoe(:r1:DsLlncJ
%cpu(80386)
; MPC and AD|{A configuration for 1SBC 286/L00 with iElW 100 MPC module
;bnps(00H,
4, 088H, 200H, 3, 2, 0A0H, 16)
; MPC and ADI4A configuratíon for íSBC 286/700A
;bmps(00H,
4, 08BH,
200H, 2, 3, 0EOH,
16)
; MPC and ADMA
configuration for 1SBC 386/100
Zbmps(00H,4,089H,
2O0H, 2, 3, 000H, 16)
Zconsole
%manual
%auto
%loadfile
%defaul-tf
ile (' /system/rnx86' )
Xretries(5)
;
c lear_s dm_extens
ions
;ci-co
3-6 Brxrtstrap
l,oader

1SBX
351 (on iSBX
/10)
serial_channel
(
825Ia,
0A0h, 2,
8253, 080h, 2, 2, 8)
iSBX 354 Channel A (on iSBX
/10) for 1SBC
serial_channel
(
82530,
084H, 2, 82530, 084H,
2, 0,
iSBX 354 Channel B (on iSBX
/10) for iSBC
serial_channel
(
82530, 080H,
2, 82530, 080H,
2, 0,
386
/r00
0eh,a)
3 8 6/100
Oeh,b)
iSBC 286lf00A Channel A
serial_channel
(82530,
0dch, 2,
82530, 0dch, 2, O, Oeh, a)
iSBC 28611004
Channel B
serial_channel-
(
82530,
0d8h, 2, 82530,
0d8h, 2, 0, Oeh, b)
Mult íbus devices
ldevícels0, 0, deviceini
tscsi. devicereadscsí
)
Zdevice(sx1410a0,
0, deviceinitscsi, devicereadscsi, sasi_x1410a)
Zdevice
(
sx1410b0
, 0, deviceinitscsi, devicereadscsi, sasi_xl410b)
Zdevice(smf0, 2, devíceinitscsi, devlcereadscsi, sasi_x142Ornf)
Zdevice(pmf0,0, deviceinit2l84, devicere ad2l SA
)
Tdevice
(w0, 0, device_ini x_224a
, devlce_read_2 24a
)
%device(w1
, I, device_iní t_224a
, device_read_224a)
Tdevice
(wfo, 4, device_ini t:._224a, device_read_2
2+a
2
Zdevice(wfl , 5, devic e_ini t_224a, device_read_2
24a
)
%end
CONFIGURING THE FIRST
STAGE
Figure
3-2. Intel-Supplied
IlSlM82"{8ó File
(continued)
To configure your
own
version
of the Bootstrap
Loader
first
stage,
edit either the BS1.A86
or BS1MB2.A86 file
if
you
need to include
or exclude macros.
A percent
sign
(%)
preceding
the macro name
includes
(invokes)
the macro, and
a
semicolon (;) preceding
the
macro name excÌudes
the macro.
treatins it as a comment.
NOTE
When you
exclude a macro, you
must replace the
percent
sign with a semicolon.
Do not simply add a semicolon
in front of the
percent
sign.
The order
in
which
the macros should appear
is the
same
order
that they are listed in the
BS1.A86 or BS
1M82.A86
file.
tsfi)tstrap l,oader J-/
CONFIGURING
THE FIRST STAGE
The following
sections describe the macros that
can appear in the BS1.,4lì6
and
BSlMB2.A8ó
files. Because the
Bootstrap Loader supports
both iRMX I and iRMX II
Operating Systems,
some of these macros apply to one Operating
System and not the
other. In such cases, the
section heading notes the operating system to
which
the
macro
applìes.
When
no operating
system designation appears, the macro is
valid
for both
the
iRMX I and iRMX Il Operating Systems. The
macros are described in the order
they are
listed in
the BS1.A86 and BS1MB2.A86 files.
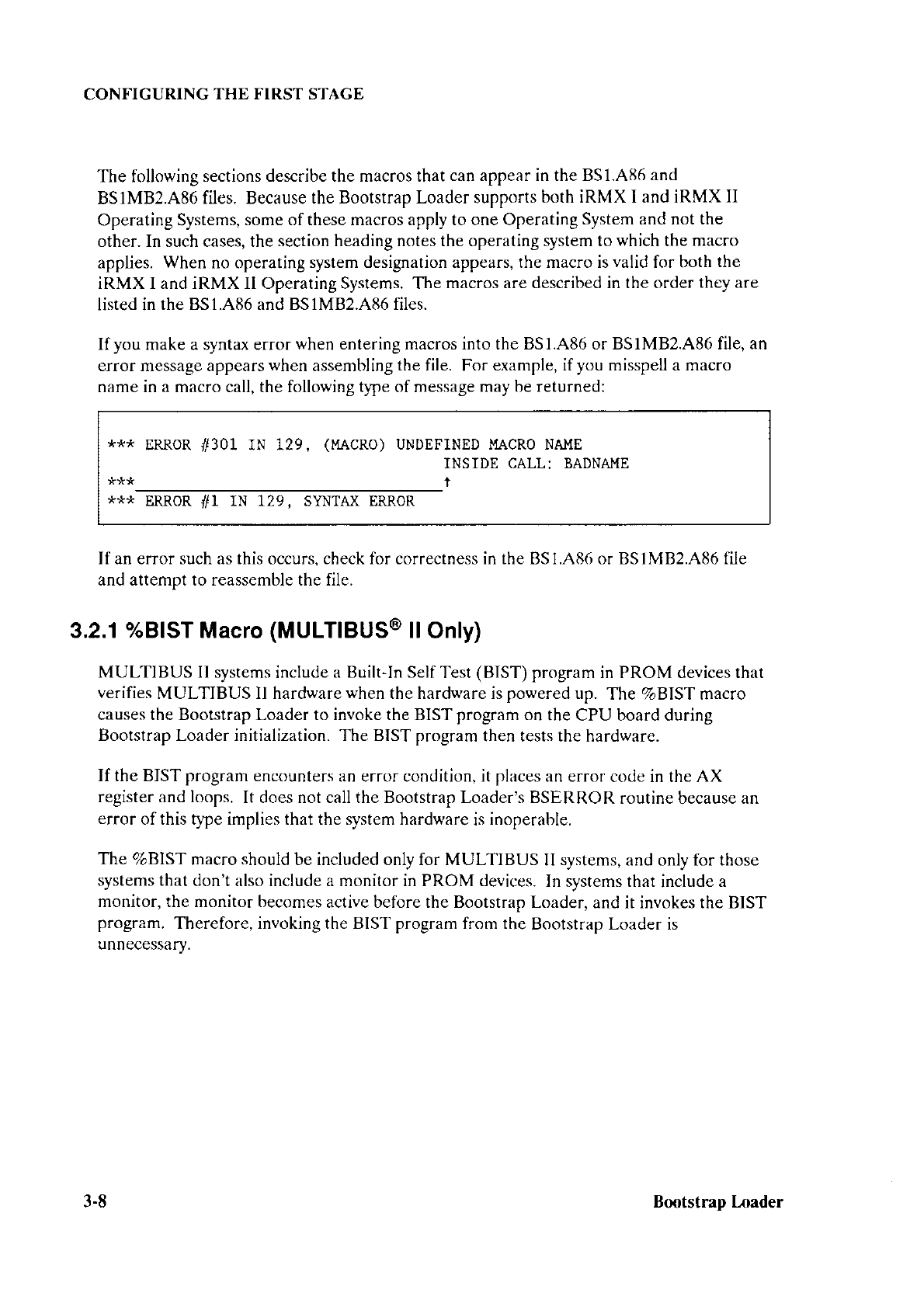
If you
make a syntax error
when entering macros into the BS 1.A86 or BS1MB2.A86 fiìe, an
error message appears
when
assembling
the
file. For
example, if you misspell a macro
name in a macro call, the following type of message
may be returned:
*** ERROR
#301 IN 129, (MACRO)
UNDEFINED MACRO NA.|.{E
INSIDE CALL: BADNAME
*** ERITOR
/I1 TN 129, SYNTAX ERROR
If an error such as this occurs. check for correctness in the BSl.Atì6 or BSlM82.A86 file
and attemDt to reassemble the file.
3.2.1 %BIST Macro
(MULTIBUS@
llOnly)
MULTIBUS Il systems
include
a Built-In Self
Test
(BfSD program
in PROM devices that
verifies
MULTIBUS Il hardware
when
the hardware is
powered
up. The ToBIST macro
causes the Bootstrap Loader to invoke the BIST program on
the CPU board during
Bootstrap Loader initialization. The BIST program
then tests the hardware.
If the BIST program encounters
an error condition, it places
an error
code in the AX
register and loops.
It does not call the Bootstrap Loader's BSERROR
routine because an
error
of this tlpe implies that the system hardware
is
inoperable.
The
%BIST macro
should
be included only for MULTIBUS
II systems, and only for those
systems that
don't also include a monitor in PROM devices.
In systems that
include
a
monitor, the monitor becomes
active before the Bootstrap Loader,
and it invokes the BIST
program.
Therefore, invoking the BIST program from the
Bootstrap Loader is
unnecessary.
3-8 Bootstrap l-oader
CONFICURINC THE FIRST STAGE
The
syntax
of the macro is
%BIST (address)
where:
address Address
of the CPU board's BIST program.
This
parameter
must be
entered
in the form
BASE:OFFSET
(for
example, 1234:5678). To
determine
the address
ofyour CPU board's BIST program, refer to the
hardware reference
manual for that board.
3.2.2.
o/"COPY
Macro
(MULTIBUS@
llOnly)
T'he
ToCOPY macro isusedwith 386l116-
and 386/120-based systems. Ifyour system is
not of this t)?e, do not
include the
o/oCOPY
macro in the BSlM82.,486
file.
Both
3tl6/ 1 16- and 386/120-based systems
locate EPROM memory at the top of the 4
gigabyte
address space supported by
the E0386 upon reset. However, the first stage of the
Bootstrap
Loader must execute
within
the
first megabyte of address
space (real
mode).
Because the
first
stage
must be repositioned within
memory,
you must
use the
o/oCOPY
macro for any application where
the EPROM memory is mapped outside of the first
megabyte of address space
upon reset.
In
contrast, the 386/2X and 38ó/3X
systems locate EPROM memory at the top of the first
megabyte of memory space
upon reset. Thus, the
ToCOPY
macro is unnecessary.
This macro copies the first
stage of the Bootstrap Loader from EPROM devices to the low
megabyte of RAM. You should only specifo this macro
if
you do not have a monitor
installed and the Bootstrap
loader executes first upon system reset.
The syntax of the
o/eCOPY
macro is as follows:
ToCOPY(src_lo,
src_hi,
dest_lo, dest_hi, count_Ìo, count_hi)
where:
src lo
r.Jhi
dest_lo
dest_hi
count lo
count
hi
The low
word
of the 24-bit
physical
source address.
The high byte of the 24-bit
physical
source address.
The low word of the 24-bit physical destination address.
The high byte of the 24-bit
physical
destination address.
The low
word of
the number
of bytes in the first stage.
The high byte of the number
of bytes in the first stage.
Bootstrap l,oader 3-9
CONFIGURING
THE FIRST
STACE
3.2.3.
"/'AUTO
CONFIGURE
MEMORY Macro
(MULTIBUS@
ll
Only)
This macro causes the Bootstrap
Loader to automatically configure
the starting and ending
addresses of all iLBX and/or iPSB memory boarcls
available to MULTIBUS II systems.
Configuration begins
with
the memory board
in the lowest numbered slot and
progresses
through the memory board in the highest numbered
slot.
Configuration
occurs differently
depending upon how you invoke the macro.
You should include the %AUTO CONFIGURE MEMORY macro only for MULTIBUS
ll systems. and only for those sysGms in
which
the Bootstrap Loatler
is invoked upon
system reset (as opposed to under program control). In systems that include the
monitor
in PROM devices, the monitor becomes active before the Bootstrap Loader,
and it should
invoke its own
%AUTO CONFIGURE MEMORY macro. Therefore. invokins the
macro from the Bot-rtstrap Loader is unnia"a.ory.
The
syntax
of the macro is
%AUTO_CONFIGURE_MEMoRY(interface_type
[,start_address]
)
where:
interface_$pe
start address
A string representing the bus interface
of
the memory
board(s) to be configured.
Valid
strings are LBX, PSB,
or LBX
+
PSB.
The starting 64K page of memory when
PSB
memory is
hcino cnnfim r red
Three
pcssible
configuration options exist: iLBX only, iPSB
only, or iLBX and iPSB. You
must speci! the required parameters
using one of the following three methods:
a/oAUTO_CONFIGURE_MEM
O RY (LBX)
This option configures
memory boards accessible to the
processor
via
the iLBX bus.
Using
this configuration option, the macro assigns sequential
consecutive addresses
beginning with
zero for the start and stop addresses
of each iLBX memory board.
Board configuration proceeds
from the board occupying the lowest slot
number
to
the
board
occupying the
highest
slot
number.
%AUTO_CONFIGURE_MEMORY (PSB,
start address)
This option configures
memory boards accessible to the CPU via
the iPSB
bus. Using
this configuration
option, the macro assigns sequential consecutive
addresses for the
starî
and stop addresses of each iPSB memory board.
The assigned addresses begin
with
the supplied starting address. Board configuration
proceeds from the board
occupying the lowest slot number to the board
occupying the highest slot number.
3-10 Bmtstrap l-oader
CONFIGURING THE
FIRST
STAGE
ToAUTO_CONFIGU
RE_MEMORY
(LBX+
PSB)
This option configures memory in the same manner as the first
option,
with
one
additional configuration. All boards on the iLBX bus that also have iPSB interfaces
have the same
starting
and ending addresses
for both interiaces.
The following
syntax errors can occur if you enter incorrect parameters
or incorrect
combinations of
parameters.
ERROR
- <type>, inval-id interface type
ERROR
- invalid Daraneter cornbination
3.2.4
"/"CPU
Macro
The %CPU
macro identifies the type of CPU that
performs the bootstrap loading
operation. You must include
this
macro
in the BS1.A86 or BSlM82..486
file once
(and
only once).
The syntax of
the CPU macro rs
%CPU(cpu_type)
where:
cpu_type The type of CPU
performing
the
bootstrap operation.
Valid types are:
Typ"
8086
8088
8018ó
801llti
80286
80386
Description
8[ì86
processor (iRMX I only)
8088 processor
(iRMX I only)
8018ó
processor (iRMX I only)
lì0ltllì processor
(iRMX I only)
80286 processor (iRMX I
and iRMX II)
80386 processor
(iRMX I and iRMX II)
3.2.5
"/"BMPS
Macro
(MULTIBUS@
llOnly)
The
%BMPS
macro configures the message
passing system used
during bootstrap loading.
This macro identifies
the base address of the Message Passing
Coprocessor
(MPC),
address distance between
MPC
ports,
and information
that defines how
direct memory
access
(DMA) transfers occur. If you
have a MULTIBUS
II system that
bootloads from
a
device
whose
driver
uses MULTIBUS II transport
protocol (i.e. the
186/224A driver),
you
must use this macro.
lf you
have a MULTIBUS
I s)'stem or a
system that bootloads
from a
device
whose driver does not use MULTIBUS II transport
protocol, you
must not
use this
macro.
Bootstrap
lnader 3-ll
CONFIGURING THE FIRST STAGE
The syntax of the
%BMPS
macro ls
%BMPS
(mpc$base$addr, port$sep,
duty$rycle, dma$base$addr,
dma$in, dma$out,
dma$trans, data$width)
where:
mpc$base$addr
port$sep
duty$rycle
dma$base$addr
dma$in
dma$out
The base I/O port
address
of the
MPC. Refer to the
appropriate single board computer user's guide for this
address.
The number of addresses separating individual MPC
ports.
For example, if the mpc$base$addr is 0000H and
the next three I/O port addresses are 0004H, 0008H,
and 000CH, respectively, the port$sep is 4H. Refer to
the appropriate single board computer user's guide for
the l/O port address map.
The MPC duty
cycle for the local bus.
(The
rate at
which
data
packets
are
generated.)
For information on
how to calculate
a duty cycle suitable for the local bus,
refer to the MPC User's Manual. For duty cycles suitable
for Intel single board computers, refer to the appropriate
single board computer
user's
guide.
The base I/O port
address for the
Advanced
Direct
Memory Access (ADMA) controller. Refer to the
appropriate single board computer
user's
guide
for this
address.
The channel used to receive (input)
DMA message
passing
transfers. Refer to the appropriate single
board
computer user's guide
for this channel number.
The channel used
to send
(output)
DMA message
passing.
Refer
to the appropriate single board computer
user's guide
for thìs channel
number.
The
l/O port
address used for DMA data transfers.
Reier to the appropriate single
board computer user's
guide
for this address.
The data
width
in bits of the
local bus. This
value
must
be either l6
or 32
ldecimall. If
thewidth
is set to 32 bits
on a 386/116- or 386/120-based board,
flyby
(one
cycle)
DMA mode is enabled.
dma$trans
data$width
The
%BMPS macro
can
qenerate
errors if the
local bus
width
is not l6 or 32 bits
wide.
3-t2 Bmtstrap l-oader
CONFIGURING THE FIRST
STAGE
3.2.6 %IAPX 186 lNlT
Macro
(!RMX
I
MULTIBUS@
| Systems
Only)
T\e o/oIAPX_186_INIT
macro specifies the
initial chip select and mode values
for 8018ó
and
80188 CPUs.
Include this macro
only for systems that use the 80186
or 80188
processor
and do not
include a monitor
in PROM devices.
In
systems
that include the
iSDM monitor, the
monitor becomes active
before the Bootstrap
Loader, and the monitor
must initialize the
CPU. An iSDM configuration
macro is available
for this
purpose.
See
the iSDM System Debug
Monitor Reference
Manual for more information.
The syntax of the iAPX_186_INIT
macro is
ToiAPX_186_INIT(rmx,
umcs, lmcs,
mmcs, mpcs, pacs)
where:
rmx The
initial mode of the 80186
Programmable Interrupt Controller
(PIC). Acceptable values
are as follows:
Value
v
Description
The 8018ó PIC is initialized in iRMX compatibility
mode.
umcs
lmcs
mmcs
mpcs
pacs
n The 80186 PIC is initialized in default mode.
Initial value
for the upper-memory chip-select control register.
Initial value
for the lower-memory chip-select
control register
Initial
value
for the
midrange-memory chip-select control register.
Initial
value
for the
memory-peripheral chip-select control register.
Initial value
for the
peripheral-address
chip-select control register.
In all parameters except the
first one
(rmx),
NONE is also an acceptable
value,
implying
that no initialization
value
should
be placed in the corresponding register. For information
on the
chip-select control registers,
and the
values
to
place
in them, see the data sheets for
the 80186 and 8018t1 processors.
All the
default
parameter
values for this
macro
(in
the Intel-supplied BSl.Alt6
file shown in
Figure 3-1) are appropriate to initialize
the CPUs on the iSBC 186/03(A), iSBC
186/51
and iSBC 188 /48 /56 boards.
The iRMX I Operating System
does not allow
you
to move the
80186
relocation
register to
I/O addresses other than 0FF00H,
its
default
register.
Bootstrap l-oader 3-13
CONFIGURING
THE FIRST
STAGE
3.2.7
%CONSOLE, %MANUAL,
and
%AUTO Macros
The CONSOLE, MANUAL, and AUTO macros specify how the first stage identifies the
file that the second stage will load (either the load file or the third stage) and the device on
which the
file is found.
The syntax of the
a/oCONSOLE, o/oMANUAL,
and
%AUTO macros is
TaCONSOLE
TaMANUAL
ToAUîO
There are no parameters
associated
with
any of these macros.
Depending on the action you want
the Bootstrap Loader to take, you
can include none,
any,
or all of these macros, and the
combination
you
choose defines the
set of actions
taken. Because the
ToMANUAL macro automatically
includes both the
%CONSOLE
and
%AUTO macros, five functionally-distinct
combinations are
possible.
Each of these
combinations
requires that the
device list at the end of the BS1.A86
or BS1MB2.A86 file
be set up
in a certain
way.
For more information
on the device
list, see the discussion of
the ToDEYICE macro later in this
chapter. The following paragraphs
list the
possible
macro combinations,
the device requirements, and the
actions that the Bootstrap Loader
takes when
each combination
is invoked.
No (Requires
that
the device list defined with
ToDEVICE macros have
o/oCONSOLE, only
one entry.)
%MANUAL.
or TaAU'f O
macro
o The
Bootstrap Loader
tries once to load from the
active
device.
. The
Bootstrap Loader tries
once to load the
file
with
the default
pathname (the
one you define with
the
%DEFAULTFILE macro).
3-14 Bo0tstrap lrader
CONFIGURING
THE FIRST
STAGE
ToCONSOLE (Requires
that the device list have only
one entry.)
oruy
. The Bootstran
Loader
tries
once
to load from the device in the device
list.
r The Bootstrap Loader issues an
asterisk (*) prompt at the console
terminal and waits for an operator to cnter the
pathname
of
the file to
load. It tries once to load the file
the operator specifies.
-- If the operator enters a pathname, the Bootstrap Loader
loads
the file
with
that
pathname.
-- If the operator enters a CARRIAGE RETURN only, the lile
with the default pathname is loaded.
%MANUAI (Requires
a
device list with at least one entry.)
only
. The Bootstrap Loader issues an asterisk
(*) prompt for
a pathname at
the console terminal.
. The Bootstrap Loader chooses
a device depending
on the operator's
response.
-- lf a device name is entered, the Bootstrap
Loader loads
from
that device. It tries to load until the
device becomes ready
or
until
no more
tries are allowed
(as
limited
by the optional
%RETRIES
macro).
-- If only CARRLq.GE RETURN
is entered, the Bootstrap
Loader
looks for a ready
device by searching through the
list of devices
(in
the order the ToDEVICE
macros are listed
in the BSl.,486
or BS I MB2.A86
file). The search continues
until a ready device
is found or
until no more tries are allowed
(as
limited by the
optional
%RETRIES
macro).
If the Bootstrap Loader
finds a
ready device, it loads from that
device.
. The Bootstrap Loader chooses
a file depending
on the operator's
response.
-- If a pathname is entered, it tries
once to load the file
with that
pathname.
-- If no file
name is entered, it tries
once to load
the file
with
the
default
pathname.
Bmtstrap [-oader 3-15
CONFIGURING THE FIRST STAGE
%AUTO (Requires
a
device
list
with at
least
one entry.)
. The Bootstrap Loader looks for a ready device by searching through
the
list of devices
(in
the order the %DEVICE macros are listed
in the
BSl.A86 or BSlM82.A86 file). The search continues until a ready
device is found or until no more tries are allowed las limited bv the
optional
%
RETRIES macro).
. If the Bootstrap Loader finds
a
ready device,
it tries
once to load
the
file
with
the default file name.
o/oAUTO, (Requires a clevice list with at
least one entry.)
ToMANUAL,
and
o/aCONSOLE
. The Bootstrap Loader issues an asterisk (*) prompt
for a
pathname at
the console.
. If the operator responds
with
a
pathname
that contains no device name,
the Bootstrap Loader looks for a ready device by searching through the
list of devices
(in
the order the
%DEVICE
macros are listed in the
BSl.A86 or BSlMB2.A86 file).
The
search
continues until a ready
device is found or until no more
tries are allowed las limited bv the
optional
ToRETRIES macro).
. lf the Bootstrap
Loader finds a ready device
or the operator responds
with
a
pathname
containing
a device name, the Bootstrap
Loader tries
.,"':..
l;:::l;il:l:'::',:"?
::::T:::
;:T;':.,,^",
lathname.
-- If only CARRIAGE RETURN is entered,
it tries to
load the file
with
the default
pathname.
Whenever
the Bootstrap
Loader's asterisk prompt
appears, the operator
can include a
Debug Switch along with
a device and/or
filename specification.
The Debug Switch is
clescribed
in Chapter 2.
3.2.8
o/"LO
ADFI LE Macro
The
%LOADFILE macro
causes the Bootstrap
Loader to display the
pathname of the file
itloads.
If
you
are loa<Jing
an iRM X I system,
this will bethepathnameof
the load
file. If
you
are loading
an iRMX II system,
the
pathname
of the Bootstrap
Loader's third stage
will
be displayed.
The
macro displays the pathname
at the console
after loading
the
second
stage
but before
loading the
load file
(or
third
stage).
3-
ló Bootstrap
l,oader
CONFIGURING
TIIE
FIRST STACE
If you
include
the
ToLOADFILE macro,
you
must also include either the
o/cCONSOLE
or
%MANUAL macros
to enable the
Bootstrap Loader to acr:ess
the console.
The syntax of the
%LOADFI
LE macro is
EALOADFILE
There
are no parameters
associated with
this macro.
3.2.9
./'DEFAU
LTFI
LE Macro
The
%DEFAULTFILE macro
specifies the complete pathname
of the default file. The
default
file is the
file that the second stage
loads
whenever
no othcr
file is specified.
The syntax of
the TaDEFAULTFILE
macro is
7o DEFAULTFI LE('pathna
me'
)
where:
pathname Hierarchical pathname
of the default file, starting
at the root directory.
The pathname
must be enclosed in single quotes.
For example, the
name'/BOOT/RMX286l2'
mighr he used.
lf
you
omit this macro from the
BS1.A86 or BSlMB2.Atló
file, a NULL
pathname
is
assumed by the Bootstrap
Loader
first stage. In this case, the second stage
assumes the
default name is
/SYSTEM/RMX86.
The Intel-supplied BSl.A86 and BSlMB2.A8ó
files
include a ToDEFAULTFILE
macro and assigns
/SYSTEM/RMX86
as the default file.
3.2.10 %RETRIES
Macro
The
%RETRIES macro,
when
included with
the
%AUTO or %MANUAL macros. limits
the
number of times that the
first stage searches the device
list for a ready device.
NOTE
If you omit the
o/aRETRIES
macro
when
including the
%AUTO or
%MANUAL macros and no
device in the list is ready, then the
search
lbr a
ready device continues indefinitely.
Bootstrap [,oader 3-
r7
CONFIGURING
THE FIRST
STAGE
The syntax of the
%RETRIES macro
is
%RETRIESlnumber)
where:
number Maximum number of times the first stage checks each device for a ready
condition. You can speci$ any number
in the range of 1 through
OFFEH.
3.2.11
./"CLEAR
SDM EXTENSIONS Macro
The
ToCLEAR SDM EXTENSIONS macro causes the Bootstrap
Loader to clear the
iSDM
monitor iorn-ind extensions (the U, V, antl W commands). Once cleared, a
monitor extension,
such as the iRMX I or iRMX II System Debugger (SDB)
or the System
300 System Confidence Test
(SCT),
must
be reinitialized before it can be used again.
This macro is usefuI when
adding monitor-level clebugging
command extensions. It
prevents
you from inadvertently
attempting to invoke a monitor
extension that
was
loaded
in a
previous
debugging session
and overwriting application or Operating System code.
The syntax of
this macro is
A/O
CLEA R-S D M_E
XTE NS IO NS
The Intel-supplied versions
of the
BS1.A86 and
BS1M82.A86 files do not
invoke this
macro.
This macro
must not be invoked if you are
configuring a standalone
Bootstrap
Loader.
3.2.12 %CICO
Macro
The
CICO macro specifies
that console input
and output are to be performed
by
standalone Cl and
CO routines; that
is, routines that are
not
part
of the
monitor. Ifyou
include the CICO
macro, you
must
perform
some
other operations
as
well,
depending on
whether
the CI and
CO rourines
you
want
to use iìre
your
own or those supplied by Intel.
If you
use
the Intel-supplied standalone
CI and
CO routines:
1. Change
the line in the
BSl.CSD file (Figure
3-3) that reads
to
: fl :bcico. obj , &
2. Include exactly
one instance of the
ToSERIAL
CHANNEL macro (described
in the
next se('tion)
in the
BSI.AEó or
BSlMB2.ASo
-fiIe.
3-18 Bootstrap Loader
CONFIGURTNG THE FIRST
STAGE
If you supply your
own
standalone
CI and CO
routines:
1. Change the line
in the BSI.CSD
file (Figure
3-3) rhat reads
& :fl:bcico.obj,
&
to
:f1 :myc ico . obj
, &
where:
mycico.obj An object file that you supply
containing procedures
named CI, CO, and
CINIT. CINIT must perform
initialization
functions
required to prepare the console
for input and output
operations.
2. Do not include the
ToSERIAL
CI:IANNEL macro
in the BS1.A86 or BStMB2.A86
file.
The syntlx
of the
oiCICO
macro is
VoCICO
There
are no parameters
associated with
this macro. The CICO
macro is not invoked
in
the
Intel-supplied
BSl..{86 or BSlMB2.A86
file. This macro musr be
invoked if you are
configuring
a standalone
Bootstrap
Loader
which
prompts
for the load file pathname.
3.2.13 %SERIAL_CHANNEL
Macro
The
ToSERIAL CLLA.NNEL
macro identifies the
type and characteristics
of the serial
channel usecl
to communicate with your
system console.
You
must omit this macro
if any of the following
conditions are true:
o Your system includes
a monitor.
o Your system
does not use a terminal
during bootstrap
loading.
. You supply your
own CI and
CO routines.
NOTE
You
cannot use the
%SERIAI- CHANNEL macro unless the serial device
is
local to the CPU board.
Also, the
%SERIAL CFIANNEL macro does not
support the on-board
diagnostic serial pn.t
on the |SBC -186/100 boarcl.
Bootstrap l-oader 3-19
CONFIGURING
TIIE
FIRST
STAGE
You must include
this macro
if you are configuring
a standalone
Bootstrap
Loader
to use
the Intel-supplied
Cl and CO routines
(see
the
description
of the
o/cCICO
macro
in
the
previous section). In
this case, use
the
%SERIAL_CHANNEL
macro to describe
the
serial controller device
that handles
the communication
to and from
the terminal
accessed
by the
Bootstrap Loader.
The Bootstrap
Loader
permits serial
communication
via an 8251A USART,
an 8274 Multi-
Protocol
Serial Controller. or an 82530 Serial
Communications
Controller. The
Intel-
supplied
BS1.A86 and BS1M82.486
files list
appropriate invocations
of the
ToSE,RIAL
CHANNEL macro
for each of these
serial channel controllers.
To
choose one
of these
veÉions of the macro,
replace the semicolon
on the appropriate
line
with a
percent sign. lncluding more
than one
o/oSERIAL_CHANNEL
macro causes
an assembly
error in BSl.Allfi or BSlMB2.AU6.
The
syntax of the
o/aSERIAL_CHANNEL
macro
is as follows:
o/aSERIAL_CHANNEL
(serial_type, serial_baselort,
serialjort_delta,
counter_type,
counter_baselort,
counterjort_delta,
baud counter, count, flags)
where:
serial_type
serial_base_port
Serial
Channel
82514
8274 Channel A
8274 Channel B
tt2530 Channel A
82,530 Channel B
The
serial controller device
you are using.
Valid values
are 8251A,8274, and 82530.
The l6-bit port address
of the base port used by
the
serial channel. This
port varies according to
the tlpe of
serial controller device
and,
if applicable, the
channel
used on the device. To
determine îhe port
whose
address you should specifo here, look
at the left column
of the following
list. Pick the item that corresponds
to
the
serial device on
your
CPU board and the
channel
through which the CPU communicates
with your
terminal. Then specify
the port address of the
corresponding
port
listed in
the right column. The
hardware
reference manual for
your
CPU
board lists the
port
acldresses for these seriaÌ devices.
Base Port
Data
Register Port
Channel A Data Register Port
Channel
B
Data
Register Port
Channel A Command Register
Port
Channel B Command
Register
l'o ft
l-20 Bootstrap Loader
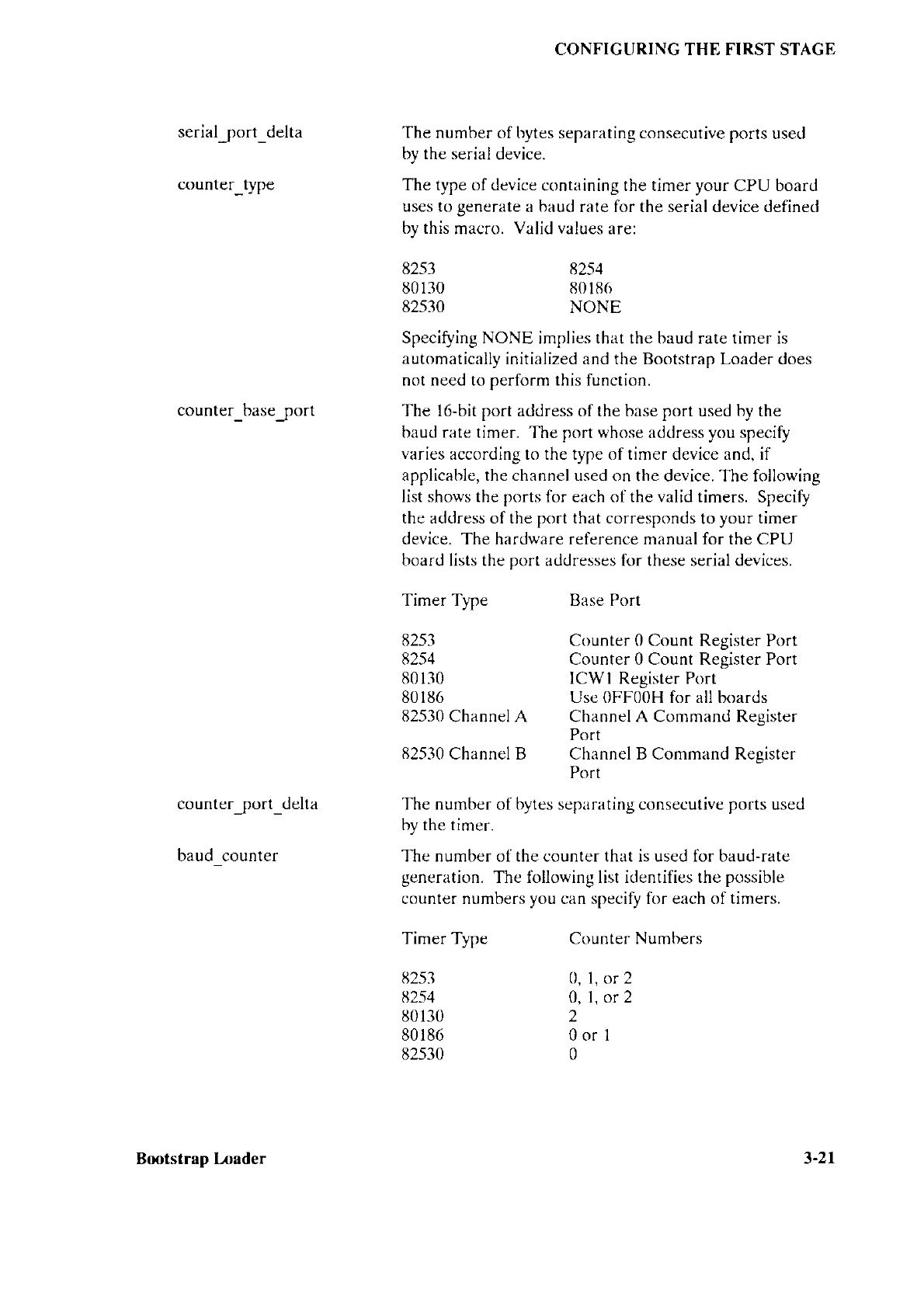
serialJrort_delta
counter_type
counter_baseJort
counterjort_delta
baud counter
8253
80130
82530
Timer Type
8253
8254
80 r30
80186
82530
Channel A
CONFIGURING THE FIRST STAGE
The
number of bytes separating consecutive ports
used
by the serial
device.
The type of device
containing the timer your CPU board
uses to generate
a
baud
rate for the serial device defineci
by this
macro.
Valid values
are:
8254
80186
NONE
Specifing NONE
implies that the baud rate timer is
automatically
initialized and the Bootstrap Loader does
not need to perform this function.
The 1ó-bit port address of the base port used by the
baud rate timer-
The
portwhose
addressyou specify
varies
according to the type of timer device and, if
applicable, the channel used
on the device. The following
list shows the ports for each of the valid
timers. Specify
the address of the port that corresponds
to
your timer
device. The hardware reference manual for the CPU
board lists the oort addresses for these serial devices.
Base Port
Counter 0 Count
Register Port
Counter 0 Count Register Port
ICW I Register Port
Use 0FF00H for all boards
Channel A Commantl Register
Port
82530
Channel B Channel B Command Register
Port
The number of bytes separating consecutive ports used
by the timer.
The number of the counter that is used fbr baud-rate
generation.
The lblÌowing list identifies the
possible
counter numbers
you
can specify for each of timers.
Timer Type
8253
8254
80130
80186
82530
Counter Numbers
0, l,or2
0, l,or2
2
0orl
0
Bootstrap l,oader 3-21
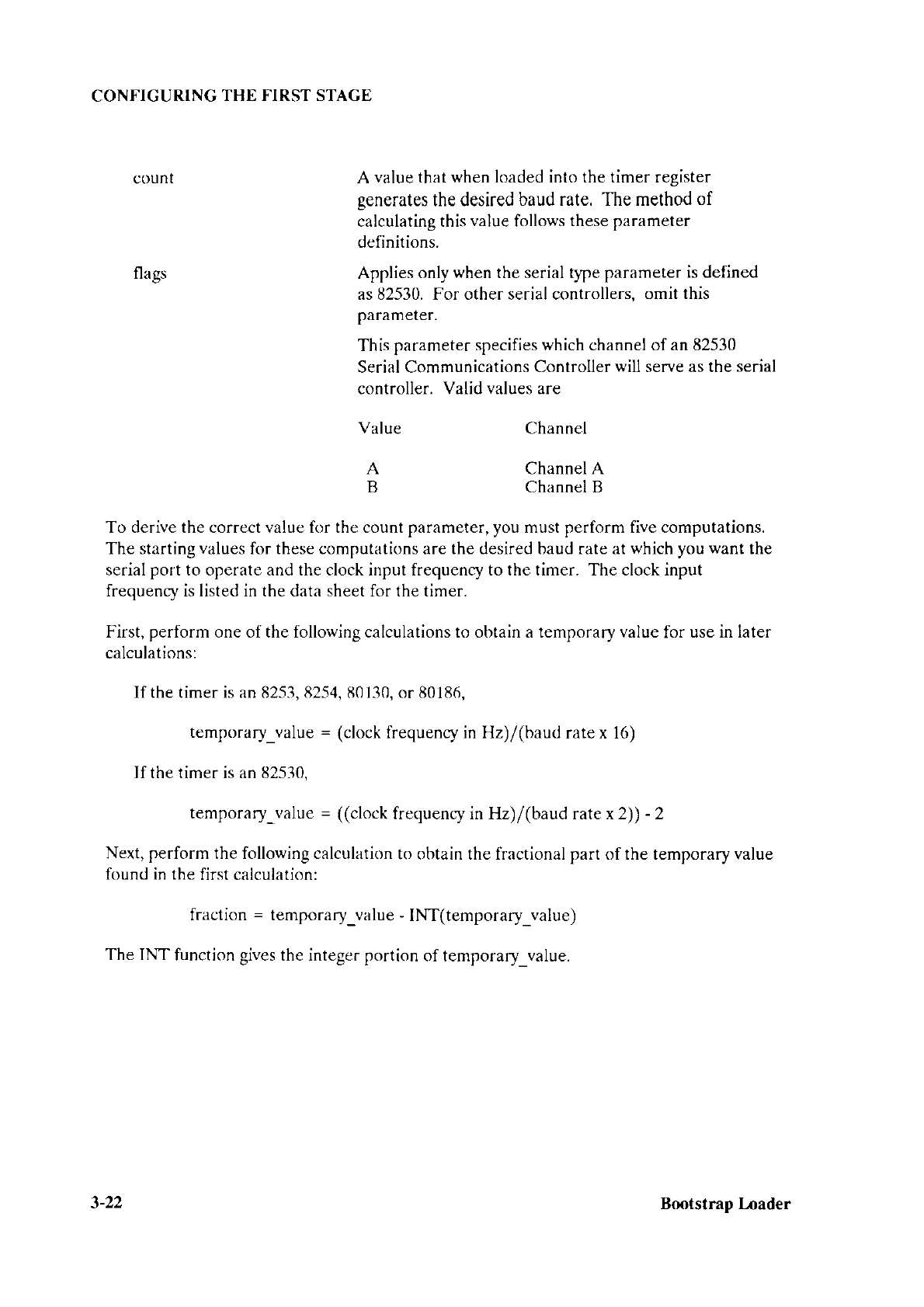
CONFIGURING
THE FIRST STAGE
count A
value that when loaded into the timer register
generates
the desired
baud rate. The method
of
calculating this
value
follows
these parameter
definitions.
flags Applies
only when the serial t)?e
parameter is defined
as 82530. For other serial controllers.
omit this
parameter.
This
parameter specifies which channel of an 82530
Serial Communications
Controller
will
serve as the
serial
controller. Valid
values
are
Value Channel
Channel A
Channel B
To derive the correct value for the count parameter, you must perform five computations.
The starting
values
for these computations are the desired baud rate at
which
you
want
the
serial
port
to operate and the clock input frequency to the timer. The clock input
frequency is listed in the data sheet for the timer.
First,
perform
one of the following calculations to obtain a temporary value
for
use in later
calculations:
If the timer is an 8253,82-54, lì0130,
or 80186,
temporary_value
= (clock
frequency in
Hz)/(baud rate x 16)
If the timer is an 82530,
temporary_value
= ((clock
frequency in Hz)/(baud ralex2)) - 2
Next,
perform
the following calculation
to obtain the fractional part of the temporary value
found in the
first calculation:
fraction
= temporary_value
- INT(temporary_value)
The INT function gives the integer portion
of temporary_value.
B
1,-)) Brmtstrap l-oader
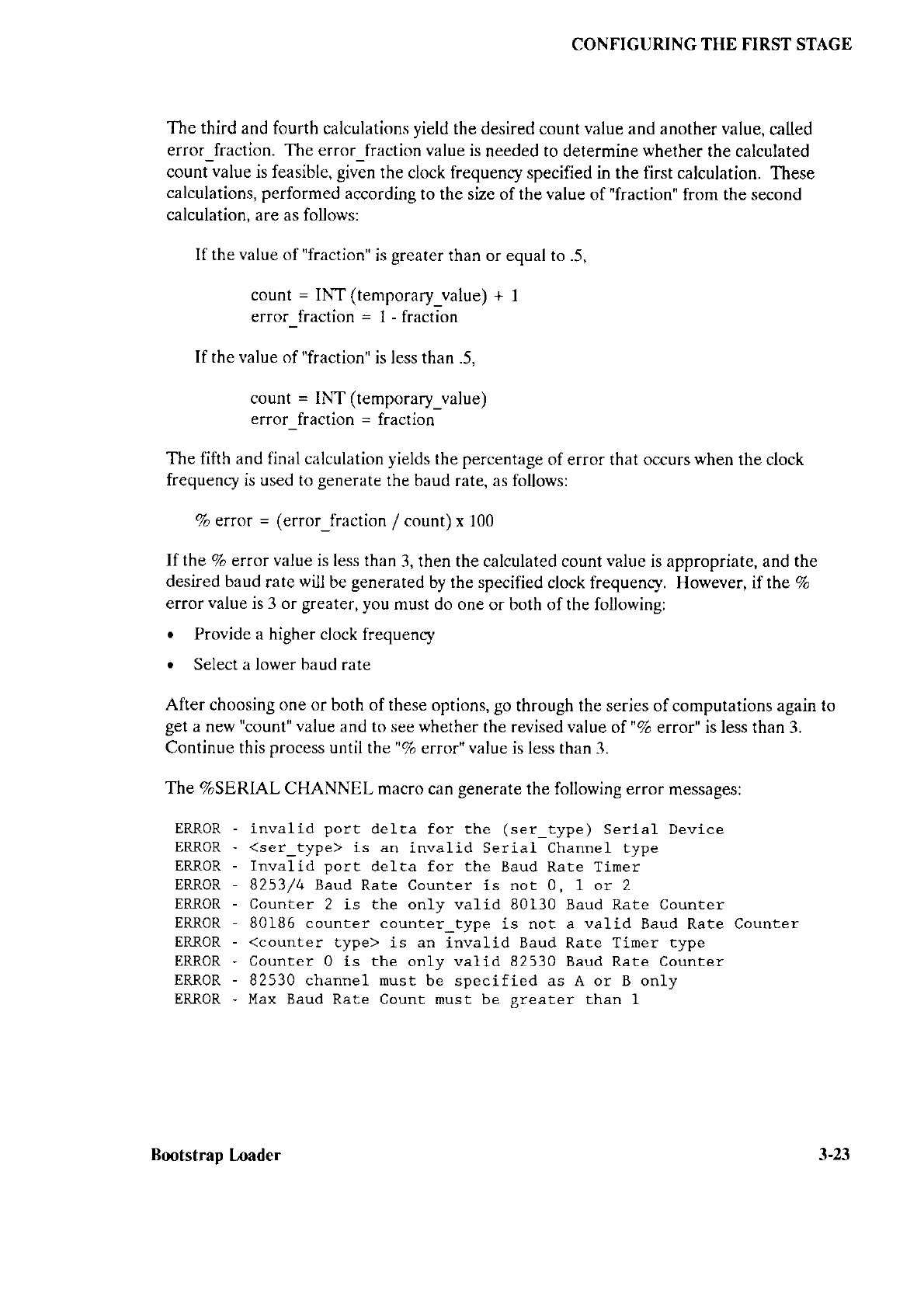
CONFIGURING THE FIRST STAGE
The
third and fourth calculations yield
the desired count value and another value,
called
error fraction. The error fraction
value
is
needed to determine
whether
the calculated
count
value
is feasible, givèn
the clock frequenry
specifiecl in the first calculation.
These
calculations, performed
according
to the size of the value
of
"fraction"
from the second
calculation,
are as folìows:
If the
value
of "fraction"
is
greater
than or equal to .5,
count
= INT (temporary value) + 1
error_fraction
= 1
- fraction
If the value of "fraction"
is less than .5,
count
= INT (temporary_value)
error_fraction
= fraction
The fifth and final calculation yields
the percentage
of error that occurs
when
the clock
frequenry is used to
generate
the baud rate, as follows:
EÒ error
= (error_fraction
/ count)
x 100
lÎ the
7o error
value
is less than
3, then the calculated count
value
is appropriate, and the
desired baud
rate
will be
generated
by the specified
clock frequenry. However, if the 7o
error
value
is 3 or greater, you
must do one
or both of the folJowing:
. Provide a higher
clock frequency
. Select a lower baud
rate
After choosing one
or both of these options, go
through the series of computations again to
get
a new
"count" value
and to
see
whether
the revised value
of
"lo error" is less than 3.
Continue this process until the "7o
errorn
value
is less than 3.
The
%SERIAL CHANNEL macro can
generate
the following error
messages:
ERROR
- invalid port delta for the (ser_type) Serial Device
ERROR
- <ser_type> is an lnvalid Serial Channel type
ERROR
- Invalid port delta for the Baud Rate Timer
ERROR
- 8253/4 Baud Rate Counter is not 0, 1or 2
ERROR
- Counter 2 is the only valid 80130 Baud Rate Counter
ERROR
- 80186 counter counter,type is not a valid Baud Rate Counter
ERROR
- <counter type> is an invalid Baud Rate Tirner cype
ERROR
- Counter 0 is the only valid 82530 Baud Rate Counter
IIRROR
- 825J0 channel must be specified as A or B only
ERROR
- Max Baud Rate Count must be sreater than 1
Bootstrap
lnader 3-23
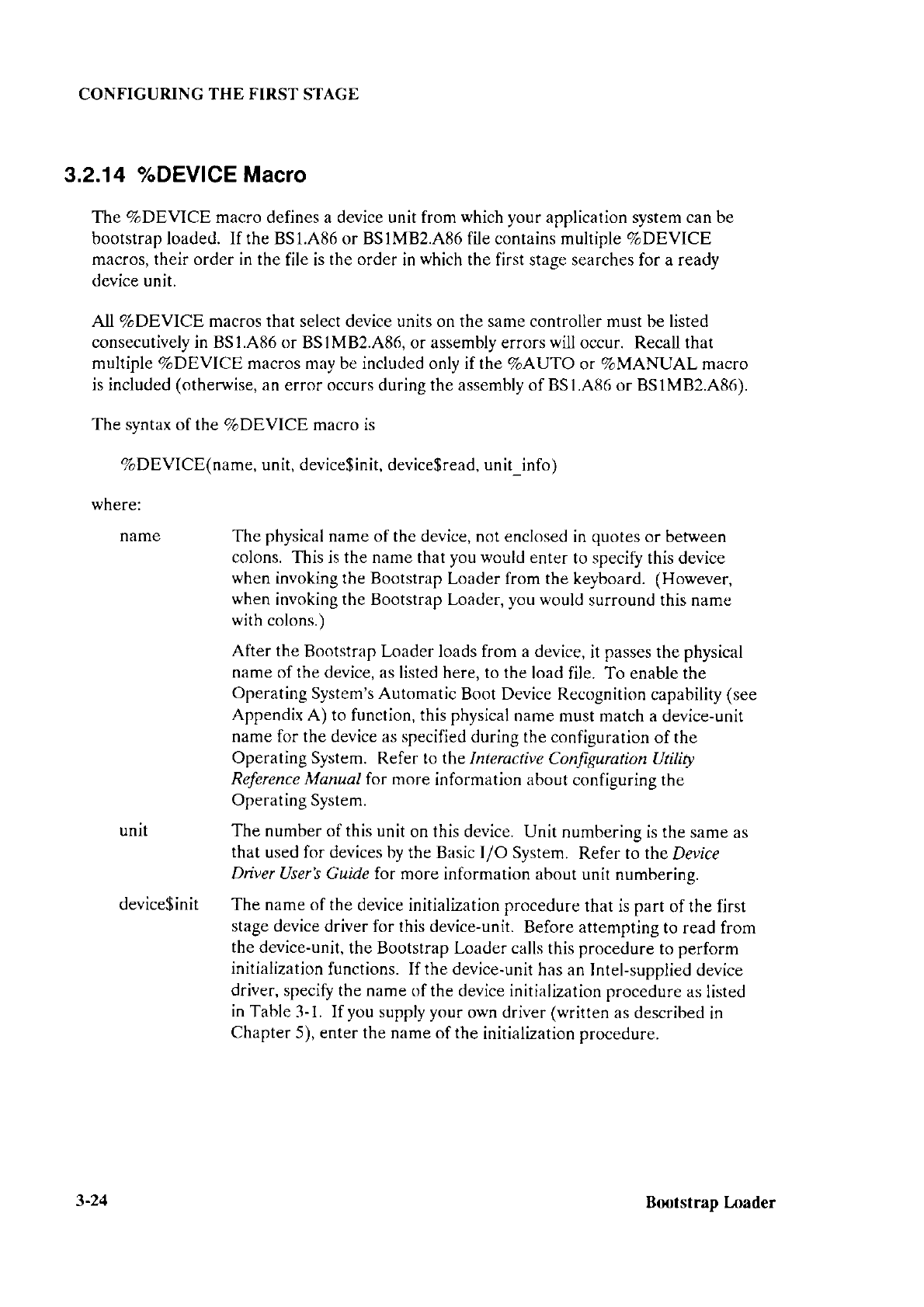
CONFIGURING THE FIRST STAGE
3.2.14 %DEVICE Macro
The VoDEYICE macro defines a device unit from
which
your appÌication system can be
bootstrap loaded. If the BS1.A86 or BS1MB2.A86 file contains multiple
ToDEYICE
macros, their order in the
file is
the order
in
which
the first stage searches for a ready
device unit.
All, ToDEYICE macros that select device units on the same controller must be listed
consecutively in BS1.A86
or BSlMB2.A86, or assembly errors
will
occur. Recall that
multiple
%DEVICE
macros may be included only if the
VoAUTO or ToMANUAL macro
is included (otherwise, an
error occurs during the assembly of BS 1.,486 or 8S1MB2.A86.1.
The syntax
of the
ToDEVICE
macro is
ToDEVICE(name, unit, device$init, device$read, unit info)
where:
name The
physical
name of the device, not enclosed
in
quotes
or between
colons. This is the name that you would enter
to speciry this device
when
invoking the Bootstrap
Loader from the keyboard.
(However,
when
invoking the Bootstrap Loader, you would
surround this name
with
colons.)
After the
Bootsîrap Loader loads from a device,
it
passes
the physical
name of îhe device,
as listed here, to the
load file. To enable the
Operating
System's Automatic
Boot Device Recognition
capability (see
Appendix
A) to function, this physical
name must match a
device-unir
name for the device as specified
during the confìguration
of the
Operating System.
Refer to the Interúctive
Configuration Utílity
Reference Manual for
more information about
configuring the
Operating System.
The number of this unit
on this device. Unit numbering is the same
as
that used for devices by
the Basic I/O System.
Refer to the
Device
Diver User's Guide îor
more information about
unit numbering.
The name of the
device initialization procedure
thar is part
of the first
stage device
driver for this device-unit.
Before attempting
to read from
the device-unit,
the Bootstrap Loader calls
this
proce<.lure
to
perform
initialization
functions. If the device-unit
has an
Intel-supplied device
driver,
specify the name
of the device initialization
procedure as
listed
in
Table 3-1. Ifyou supply your
own driver
(written
as described
in
Chapter
5), enter the name of the
initialization procedure.
unrt
device$init
3-24 Bootstrap lr}ader
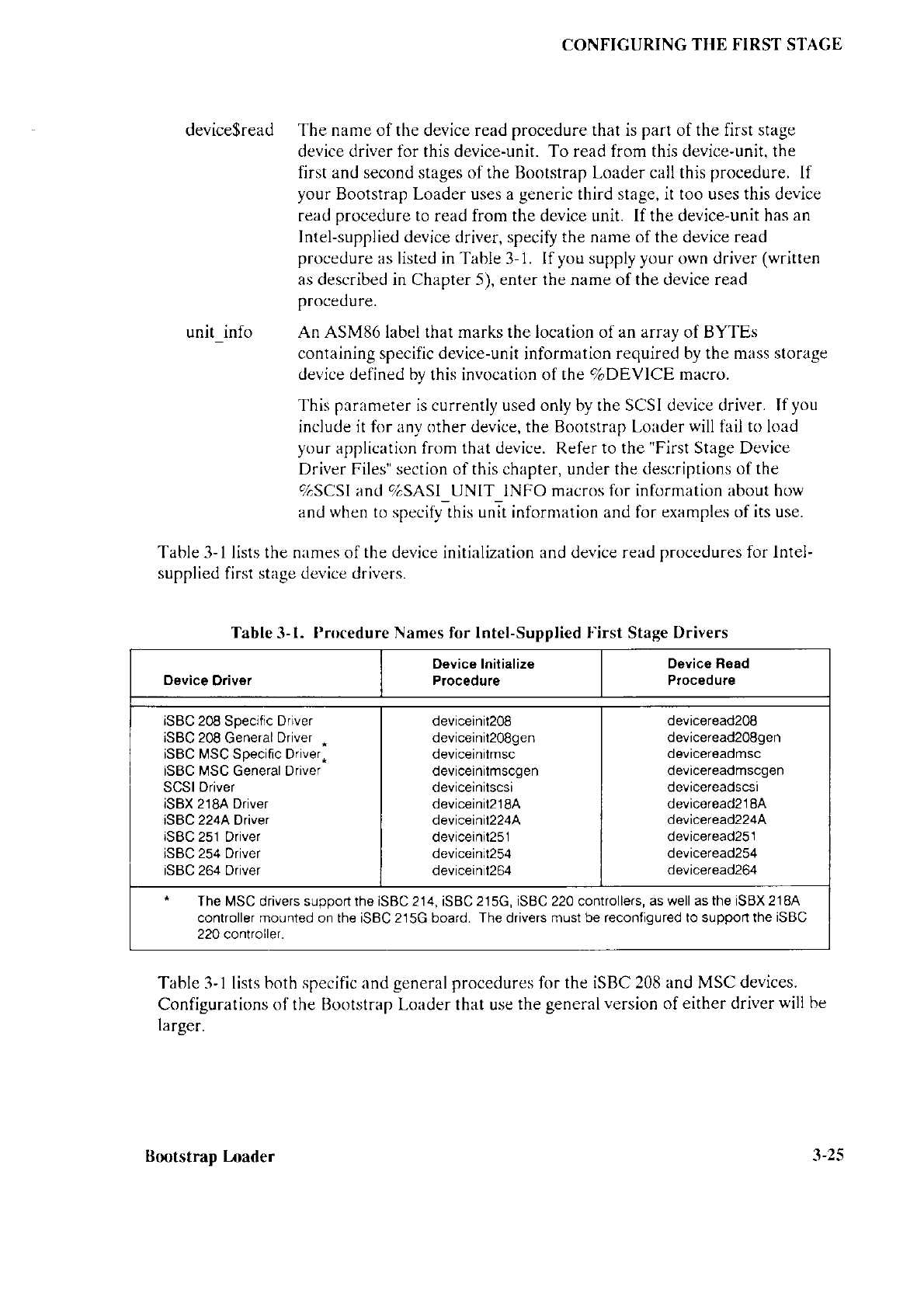
device$read
unit info
TabÌe 3- l lists the names of the device initialization and device read
procedures
for Intel-
supplied
first
stage device drivers.
Table 3-1 lists hoth
specific
and
general procedures for the iSBC 208 and MSC
devices.
Configurations of the Bootstrap Loader that use
the general
version
of
either driver
will be
larser.
CONFIGURING
TIIE FIRST SI'ACE
The name of the device read procedure that is
part
of the first stage
device driver lbr this device-unit. To read from this device-unit. the
first and second stages of the Bootstrap Loader call this
procedure.
lf
your
Bootstrap Loader uses a
generic
third stage, it too uses this device
read
procedure
to read liom the device unit. If the device-unit has
an
Intel-supplied device
driver, specify
the name of the device read
procedure
as listed in
Table 3-
1. If you supply your own driver
(written
as described in Chapter 5), enter the name of the device read
procedure.
An ASM8ó label that marks the location of an array of BYTEs
containing specific device-unit
information
required by the mass storage
device defined by
this invocation of
the
ToDEVICE
macro.
This
parameter
is currently used only by the SCSI device driver. Ifyou
include it for any other device, the Bootstrap Loader
will
fail to load
your application from that device. Refer to the
"First
Stage Device
Driver Files" section of this chapter, under the
clescriptions of the
ToSCSI
and
9iSASl UNIT INF'O macros
for information about how
ancl
when
to specify this unTt information and for
examples of its use.
Table
3-1. I'rocedure Names for Intel-Supplied l'irst Stage
Drivers
Dsvice
Drivor Device lnilialize
Procedure Device Read
Procedure
iSBC
208
Specifìc
Driver
iSBC 208
General
Driver
*
|SBC MSC Specific Dr
ver.
iSBC MSC General Driver
SCSI
Driver
iSBX 218A Driver
iSBC 224A Driver
iSBC
251 Driver
iSBC 254 Driver
iSBC 264 Driver
deviceinit20S
deviceinit20Bgen
deviceinitmsc
deviceinitmscgen
deviceinitscsi
deviceinil2lSA
deviceini1224A
deviceinit25l
deviceinlt254
deviceinlt264
deviceread20S
deviceread20Sgen
devicereadmsc
devicereadmscgen
devicereadscsi
deviceread2'18A
deviceread224A
deviceread25l
deviceread254
deviceread264
The MSC drivers support the iSBC 214, iSBC 215G, |SBC 220 controllers,
as well as the iSBX 218A
controller
mounted
on the iSBC 215G board. The drivers
must be reconfigured to support the
iSBC
220 controller.
Bootstrap l-oader 3-25
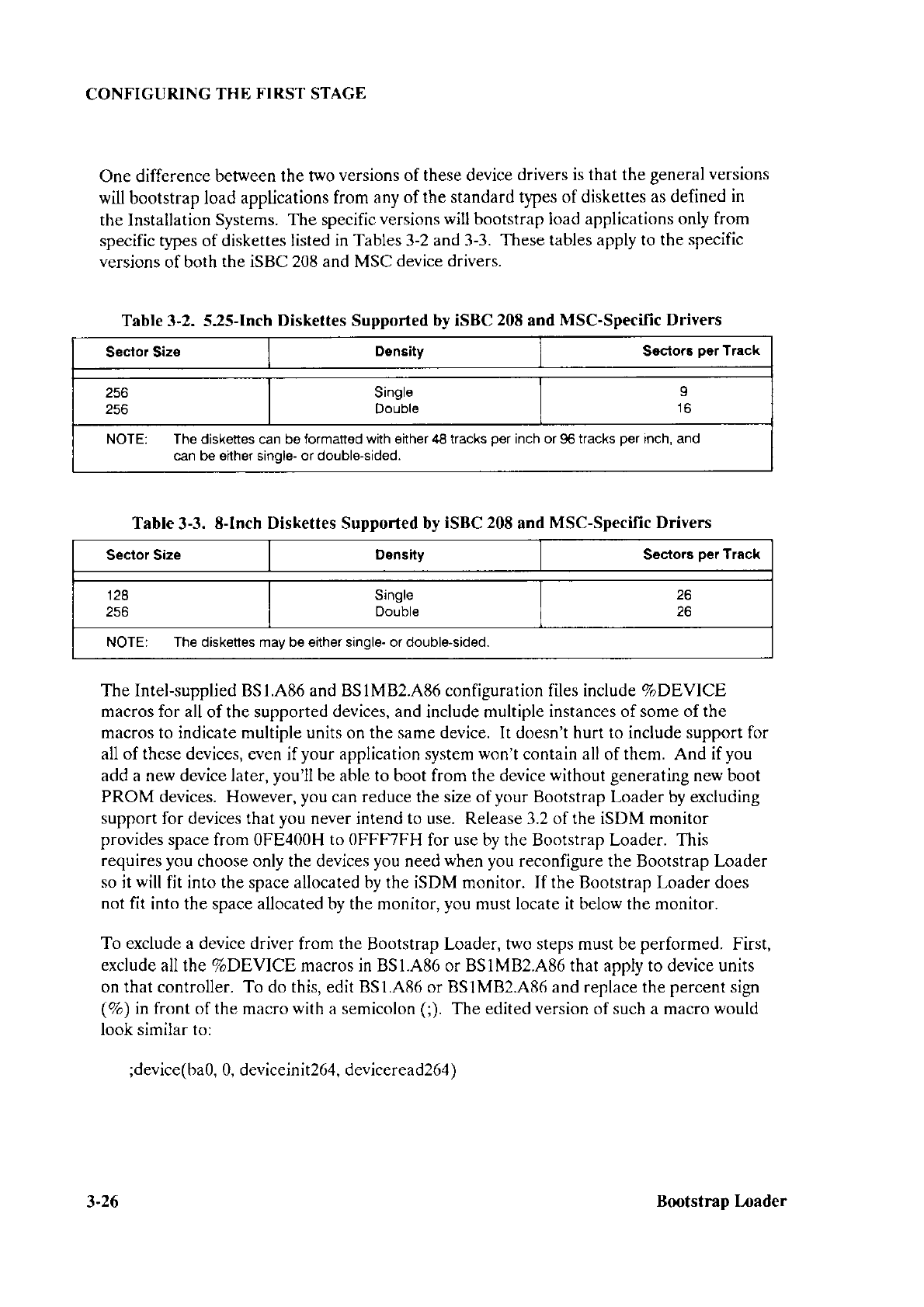
CONFIGURING
THE
FIRST
STAGE
One difference
between the two
versions of these device
drivers is that the
general
versions
will bootstrap load applications
from any
of the standard types of diskettes
as defined
in
the Installation Systems.
The specific
versions
will
bootstrap load applications
only from
specific types of diskettes listed
in Tables 3-2 and 3-3.
These tables apply to the
specific
versions
of both
the iSBC 208 and MSC
device drivers.
The Intel-supplied BSl.A86 and BS1M82.A8ó configuration files include
%DEVICE
macros for all
of the supported
devices, and
include multiple
instances of some of the
macros to indicate multiple units on the same device. It doesn't hurt to include support for
all of these devices,
even if
your application
system
won't
contain
all
of them. And if you
add a new device later, you'll be able to boot from the device
without
generating new boot
PROM devices. However, you can reduce the size ofyour Bootstrap Loader by excluding
support for devices that
you
never intend to use. Release 3.2 of the iSDM monitor
provides space
from 0FE400H
to OFFFTFH
for use by the Bootstrap Loader. This
requires you
choose only the devices
you
need
when you
reconfigure the Bootstrap Loader
so
it
will
fit into the space allocated by the iSDM monitor. If the Bootstrap Loader does
not fit into the space allocated by the monitor,
you
must locate it below the monitor.
To exclude a device driver
from
the
Bootstrap Loader, two steps must be
performed.
First,
exclude
all the
ToDEYICE
macros in BS1.A86 or BS1M82.A86 that apply to device units
on that controller. To do this, edit BS1.A86 or BS1MB2.A86 and replace the percent sign
(7o)
in îr<tnt of the
macro
with
a semicolon
(;). The edited
version
of such a macro
would
look similar to:
;device(ba0,
0, deviceinit264, deviceread264)
Table 3-2. 525-Inch
Diskettes
Supported
by iSBC
208
and
MSC-Specilìc Drivers
Seclor Size Density Seclors Der
Track
256
256 Singl€
Double
I
NOTE: The diskettes can be formatted
with
either
48 tracks
p€r
inch or
96
tracks
per
inch, and
can b€ either single- or doubl€-sided.
Table
3-3.
8-lnch Diskettes Supported by
iSBC 20E
and
MsC-Specific Drivers
Sector Size Density Seclors o€r
Treck
128
2s6 Singl€
Double 26
26
NOTE: lhe diskettes may be either single- or double-sided.
3-26 Bu)tstrap l-oader
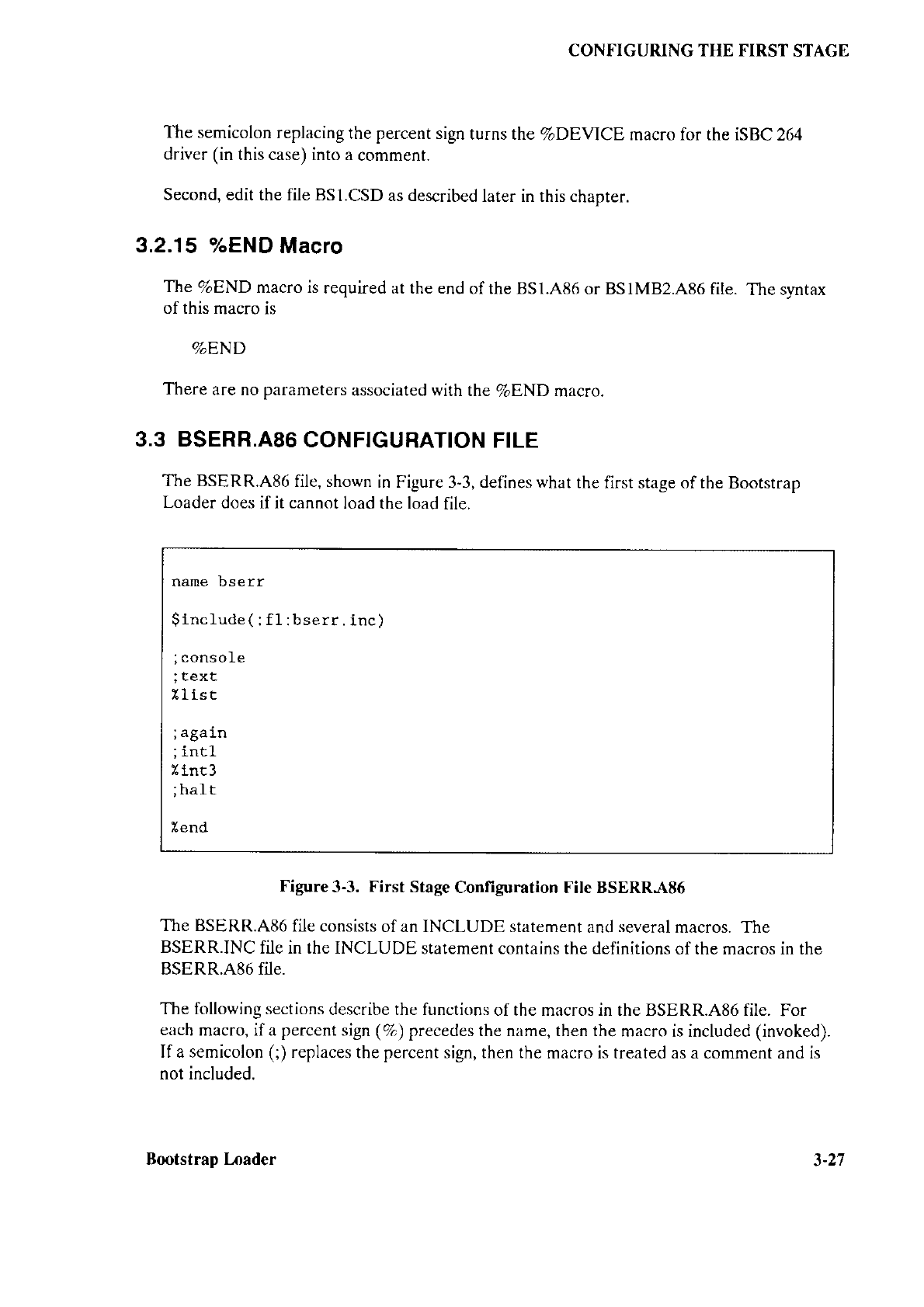
CONFIGURING THE FIRST
STAGE
The semicolon
replacing
the percent sign
turns the
EIDEWCE macro for the iSBC
264
driver
(in
this caseì into a
comment.
Second,
edit the file BSl.CSD
as described
later in this chapter.
3.2.15 %END
Macro
The
%END macro is
required at the end
of the 851.A86
or BS1MB2.A86 file. The syntax
of this
macro is
%END
There
are no parameters
associated with
the
ToEND macro.
3.3 BSERR.A86
CONFIGURATION
FILE
The BSERR.A86
file, shown
in Figure 3-3, defines what
the first stage of
the Bootstrap
Loader does if it cannot
load the load
file.
name bserr
ìlncluoe (
:
tI:bserr.lnc)
;console
;
rexr
Ílist
;agaln
;
intl
Z
lnt3
;halt
lend
Figure
3-3. First Stage
Configuration File BSERR.A8ó
The BSERR.A86
file consists
of an INCLUDE statement
and
several
macros. The
BSERR.INC
file in the INCLUDE statement contains the definitions
of the macros in the
BSERR.A86 lile.
The following sections
describe the functions
of the macros in the BSERR.A86 file. For
each
macro, ifa percent sign
(7a) precedes the name, then the
macro is included
(invoked).
If a semicolon (;) replaces
the percent sign, then the
macro is treated as a comment and is
not included.
Bootstrap Inader t_r1
CONFIGURING
THE
FIRST
STAGE
The
first three macros, ToCONSOLE,
ToTEXT,
and
a/oLIST,
determine
what the Bootstrap
Loader displays at the console
whenever a bootstrap
loading error occurs.
The other
four
macros,
%AGAIN, 7olNT1, %INT3,
and ToHAIJT,
determine
what recovery steps,
if any,
the Bootstrap Loader
takes
whenever
a
bootstrap loading error
occurs. Only one
of the
latter
three macros can be included
in the BSERR.Afì6
file.
3.3.1
%CONSOLE Macro
The
%CONSOLE
macro
causes the Bootstrap Loader
to display a brief message
at the
console
whenever a bootstrap loading
error occurs. The message indicates
the nature
of
the error
(see
Chapter 7 for the
message list).
The syntax of the
%CONSOLE
macro
is
ToCONSOLE
There are no
parameters
associated
with
this
macro.
This ToCONSOLE
macro is completely unrelated to
the
%CONSOLE
macro used in the
BS1.A86 or BS1MB2.A86 file. Be careful not
to confuse them.
3.3.2
"/"TEY[
Macro
T\e VoTEXT
macro is similar to the %CONSOLE
macro in that it causes the Bootstrap
Loader to display a message at
the console whenever a bootstrap loading error occurs.
The
advantage of the
%TEXT
macro is that its messages are longer and more descriptive.
The
disadvantage of the
%TEXT
macro is that it
generates
more code
and
makes
the first stage
of the Bootstrap Loader larger.
The syntax of thr 4TEXT macro is
o/o'IEXT
There are no parameters associated with this macro. Ifyou include the
ToTEXT
macro,
the
%CONSOLE
macro
is automaticallv included-
3.3.3 %LIST Macro
The
ToLIST
macro causes the Bootstrap Loader to display a list of the ready device-units
at the console whenever the onerator enters an invalid device-unit name. You can include
this macro only if you includeìhe
TaMANUAL
macro in the BSl.,486 or BS1MB2.A86 file,
as
dercribed earlier in this chaoîer.
3-28 Bo0tstrap l-oader
CONFICURING
THE FIRST
STAGE
The
syntax of
the
%LIST macro
is
ToLlST
There
are
no
parameters
associated
with
this
macro.
If you
inclucle
the
%LIST macro,
the
T"CONSOLE
and
a/oTEXT
macros
are automaticallv
included.
3.3.4
%AGAIN
Macro
The
%AGAIN macro causes
the bootstrap
loading
sequence
to return
to the
beginning
of
the first
stage whenever
a
bootstrap
loading
error occurs.
You should
incluile
this
macro iî
you
include
the
TocoNSoLE
macro
in the
BSERR.A86
file,
either directly
or by
inclutling
the
VoTEXT or o/aLIST
macro.
The
syntax
of the
a/oAGAIN
macro is
o/oAGAIN
Exactly
one
of the
ToAGAIN,
%INTI, 7oINT3, and
o/oHALT
macros
must be
included. or
an
error
will
occur when
BSERR.A86
is assembled.
3.3.5 o/"lNTl
Macro
The
o/aINTl
macro
ciìuses
the
Bootstrap
Loader
îo execute an
INT I (software
interrupt)
instruction whenever
a bootstrap
loading
error occurs.
This macro
useful for passing
control
to the
D-MON386
monitor.
The iSDM
monitor
does not support
this
macro.
The syntax
of the 4lNTl mlcro is
TaINTl
There are
no
parameters
associated
with
this macro.
Exactly
one of the
a/oAGAIN,
%lNT1,
7olNT3, and
%HALT macros
must be
included. or
an error will
occur when
BSERR.A86
is assembled.
The
%INTI macro,
as well
as the
7aINT3 ancl
VoHAL^l
macros described
next, are
reasonable
choices
if none of
the
TaCoNSoLE,
E TEXT,
or ToLIST macros
are include<l
in the BSERR.A86
file.
Bu)tslrap
Loader 3-29
CONFIGURING
THE FIRST STAGE
3.3.6
"/"lNT3
Macro
The %INT3
macro causes
the Bootstrap Loader
to execute an INT 3 (software interrupt)
instruction
whenever a bootstrap loading
error occurs.
Ifyou are using the iSDM
monitor,
the INT 3
instruction passes control
to the monitor. Otherwise,
the INT 3 instruction
has
no effect unless
you have placed the address
of your custom
interrupt handler in
position
3
of the interrupt
vector
table.
The syntax
of the %lNT3
macro is
%INT3
There
are no parameters associated
with this macro.
Exactly
one of the
%AGAIN, %INTI, 7oINT3,
and
ToHALT
macros must
be included, or
an error
will occur when BSERR.A86 is assembled.
The %INT3
macro, as well as the 7oINT1 and %HALT macros, are reasonable choices
if
none of the
a/oCONSOLE,
To'lEX'1,
or ToLIST
macros are included
in the BSERR.A86
file.
3.3.7
%HALT Macro
The
a/oFIALT
macro causes
the Bootstrap Loader to execute a halt instruction
whenever
a
bootstrap loading error occurs.
The synt:u
of the
%HALT macro is
TOÍIALT
There are no parameters associated
with
this macro.
Exactly
one
of
the
TaAGAIN, %lNTl, %INT3,
and
ToHALT
macros must be included,
or
an error
will
occur
when
BSERR.A86 is assembled.
The %HALT macro, as
well
as the %lNT1 and 7aINT3 macros, are reasonable
choices if
none of the
ToCONSOLE, ToTEXT,
or ToLIST
macros are included in the BSERR.A86
file.
3-30 Bootstrap l-oader
CONFIGURING TIIE FIRST
STAGE
3.3.8
o/oEND
Macro
The
%END macro is required
at the end of the
BSERR.Af,ìó
file.
The
syntax of this
macro is
%END
There are
no
parameters
associated with
the
TaEND macro.
3.4 DEVICE
DRIVER
CONFIGURATION
FILES
A separate
configuration
file is
included
for each device driver provided with
the
Bootstrap
Loader. These
files are named
8208.A86,
BMSC.A8ó,
8218A.A86, 8224A.A86,
B251.A86,
8254.A86, 8264.A86,
and BSCSI.A86.
Each consists ofan include statement and
a macro
call.
The source
file always
has the form
$
include( :f
1 :hno<.inc)
Tabno<(
parameters
)
where:
)oo( Either
208, MSC,
218A, 224A,251,254,261,
or SCSI, depending
on the
device
driver.
The
number and type ofparameters
that are included with
the macro
depend on the device
driver.
The parameters
for each macro
are discussed
in the following sections.
Additionally, when
a SASI
controller
board is used with
the SCSI device
driver, it requires
another
macro.
Refer to the
"ToBSCS|
Macro" and
'oloSASI
UNIT INFO Macro" sections
for details
and for invocation
examples.
The <lefault parameìer
vrhies
for the macros in
these sections
are compatible
with
the default parameter values
of the
Installation Systems.
You
should prepare
one of these
files for
each tvpe of device you want
the first stage
of the
Bootstrap
Loader to support.
In most cases,
you can use the Intel-supplied
files. The
following
sections describe
the individual
macros so that you
can make changes to them, if
necessarv.
Bootstrap l-oader J-3r
CONFIGT]RING
THE FIRST STAGE
3.4.1 "/oB2O8
Macro
T\e o/o8208
macro has the form
%B20tl(io_base)
where:
io-base I/O port acldress selected
(umpered) on the iSBC 208
controller board.
The
default invocation of this
macro in the 8208.,486
file rs
o/oB208l
l80Hl
3.4.2
%BMSC
and0/"8,220
Macros
The BMSC.A86 file contains
two macros, %BMSC and
o/o8220.
However,
you can use
only one. lf you
have one
of the drivers listed at the bottom
of
Table 3-
1, you should
use
the
o/oBMSC
macro. If you have the iSBC
220, you should use the /o8220
macro. Both
macros have îhe form
o/oBxxx
(wakeup, cylinders, fixed_heads, removable_heads,
sectors,
dev_gran, alternates)
where:
xxx Either MSC
or
220.
wakeup Base address of the controller's
wakeup port.
The remaining
parameters are used to speci! the characteristics of the disk drives. If
the
ToDEVICE
macro
you
used for MSC or iSBC
220 devices in the BSl.,486 or
BS 1M B2.Atl6
file
has
deviceinitmsc (rather than deviceinitmscgen) as its third
parameter,
then all MSC or iSBC 220 drives used by the Bootstrap Loader
must have
the
characteristics listecl in
the
following
parameters. That is, they must have the same
number of
rylinders
per platter,
fixed heads, removable heads, sectors
per track, bytes
per
sector, and alternate cylinders. However, if the TaDEVICE macro specifies
deviceinitmscgen, these restrictions do not apply and the following piìrameters are not
used by the Bootstrap Loader.
cylinders Number of
cylinders
on the disk drive or drives.
fixed_heads Number
of hearls on fixed
platters.
removable_heads Number of heads on removable
platters.
sectors Number of sectors oer track.
3-32 Btlotstrap
lrader

CONFIGURINC THE FIRST STACE
dev_gran Number
of bytes per sector.
alîernates Number
of cylinders set aside as backups
for cylinders
having imperfections.
In the BMSC.A86
file, the
default invocation
of the
%BMSC
macro
is
ToBMSC( 100H,
256,2,0,9,
1024, 5)
and the
default form of
the uninvoked
7o8220 macro is
;8220(
100H, 256,
Z, 0,
9,
1024, 5)
3.4.3 "/oB218A
Macro
The
7oB218A macro has the
form
7oB2 1 8A(base;rort_address,
motor_fl ag)
where:
base_port_address The base port
address of this device unit, as selected
on
the iSBX
2l8A controller board.
motor_flag A value
indicating
whether
rhe
motor of a 5 l/4" flexible
diskette drive should
be turned off after bootstrap
loading. Valid values
are:
Value Description
0FFH The drive
will
be turned
off after
bootstrap
loading. Specify this value
only
if this device is not to become the
system
device.
Turning off the drive slows slows
bootstrap
loading.
00H The drive
will
not be turned off after
bootstrap
loading.
The default invocation of this
macro in the 8218A.Atì6
file is
7"82l8A(80H,00H)
This allows you
to mount the iSBX
2l8A module in the SBX I socket ofyour CPU board.
Bootstrap Lader 3-33
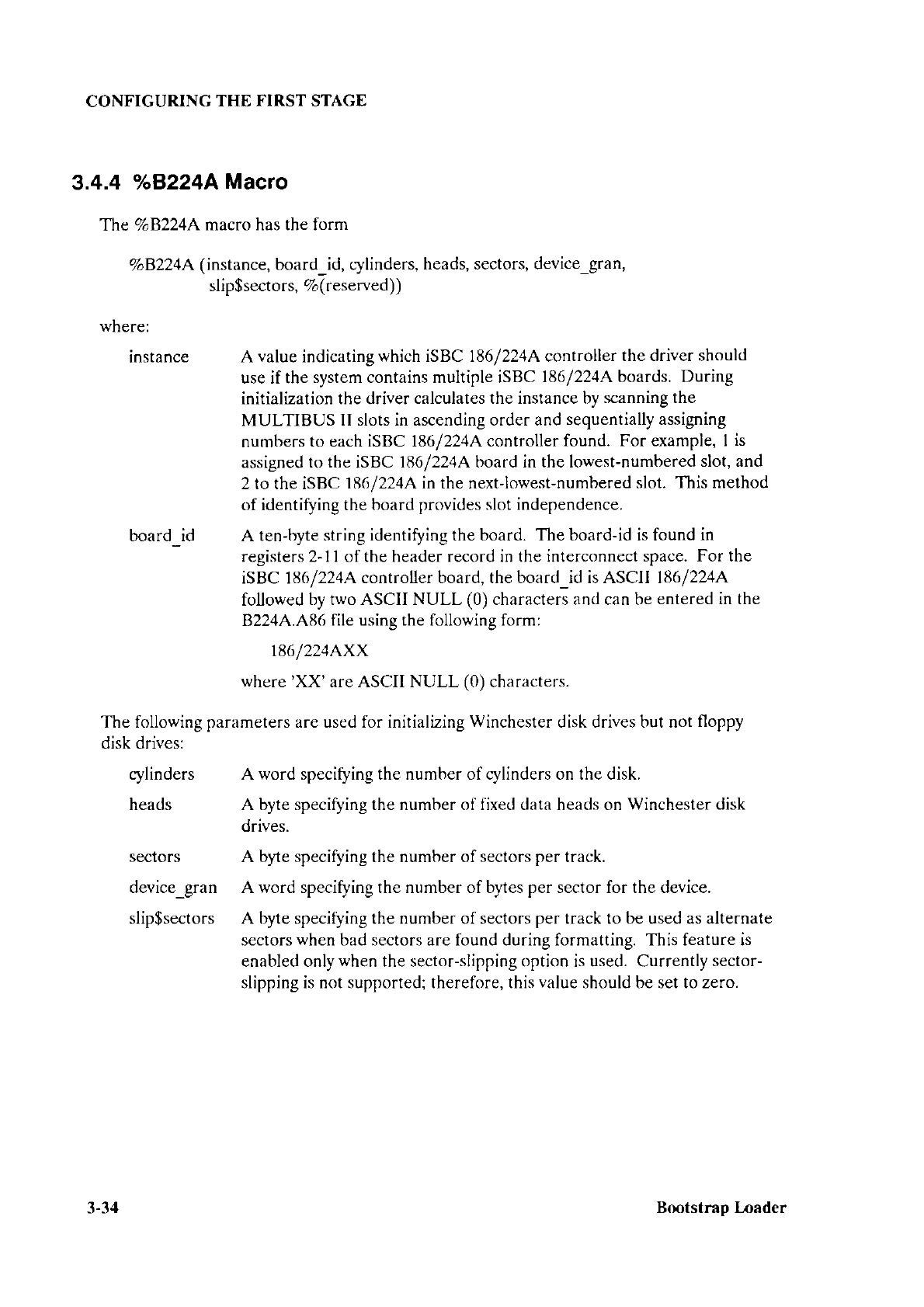
CONFIGURING
THE FIRST
STAGE
3.4.4 "/oB224A
Macro
'Íhe 7oB224A
macro has the form
board id
heads
sectors
o/oB224A
(instance, board_id, cylinders,
heads, sectors, device_gran,
slip$sectors, 7a(reserved))
where:
instance A value
indicating
which iSBC 1861224A controller
the driver should
use if the
system contains multiple iSBC
186/2244 boards. During
initialization the driver
calculates the instance by
rcanning the
MULTIBUS II slots in ascending order and
sequentially assigning
numbers
to each iSBC 186/224A controller
found. For example, I is
assigned to
the
iSBC
186/224A board in the lowest-numbered
slot, and
2 to the iSBC
1861224A in the next-lowest-numbered
slot. This method
of identifying the board
provides slot independence.
A ten-byte
string identifring the board. The board-id is found
in
registers 2-1'l of the header record in the interconnect
space. For the
ISBC 1861224A
controller board, the board_id is ASCII 186/224A
followed
by two ASCII NULL (0) characters and can be
entered in the
8224A.A86
file using the following form:
186/224AXX
where
'XX' are ASCII NULL (0)
characters.
The following parameters are used for initializing
Winchester
disk drives but not
floppy
disk drives:
rylinders A word speciffing the number of cylinders on the disk.
A byte specifying the number of fixed data heads on
Winchester disk
drives.
A byte specifying the number of sectors
per
track.
device_gran A word specifying the number of bytes per sector for the device.
slip$sectors A byte specifying the number of sectors per track to be used as alternate
sectors
when
bad sectors are found during formatting. This feature is
enabled only
when
the sector-slipping option is used. Currently
sector-
slipping is not supported; therefore, this
value
should be set to zero.
3-34 Bmtstrap hader
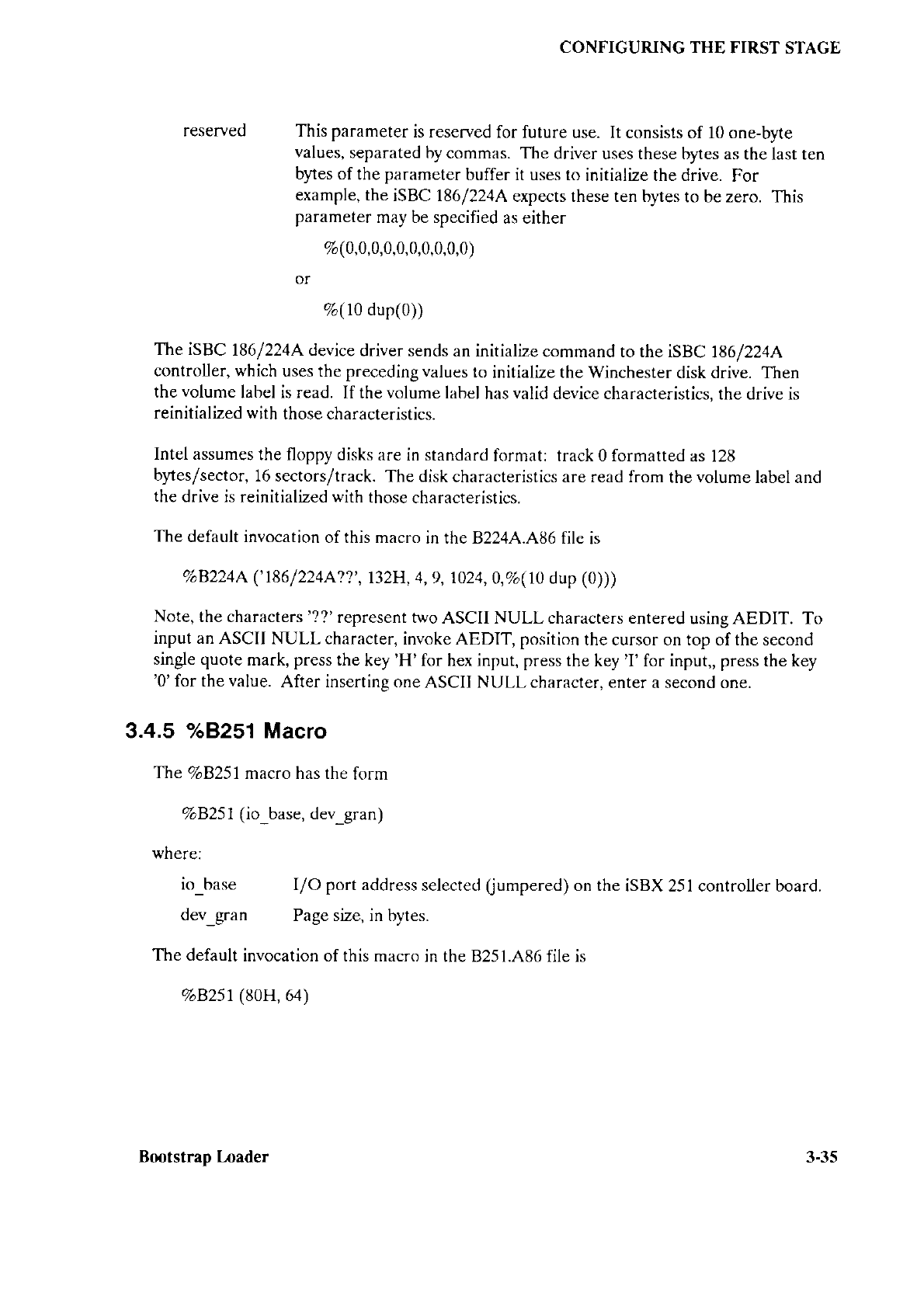
CONFIGURING THE
FIRST STAGE
reserved This
parameter
is reserved
for future use. It consists of 10 one-byte
values,
separated by
commas. The
driver uses these bytes
as the last ten
bytes of
the
parameter
buffer it uses to initialize the drive.
For
example, the
iSBC 186/224A
expects rhese ten bytes
to be zero. This
parameter
may be specified
as either
%(0,0,0,0,0,0,0,0,0,0)
or
a/o(10
dup(0))
The iSBC
186
/224A
device
driver sends
an initialize
command to the ISBC
186/ZZ4A
controlìer, which
uses the preceding values
to initialize the Winchester
disk drive. Then
the
volume
label is read.
If the
volume
label
has
valid
device characteristics,
the drive is
reinitialized with
those characteristics.
Intel assumes
the floppy disks
are in standard
format: track 0 formatted
as 128
bltes/sector,
1ó sectors/track.
The disk
characteristics are read from
the
volume
label and
the
drive is
reinitialized
with
those
characteristics.
The
default invocation
of this macro
in the 8224A.A86 file is
voB224A
('186/224A??"
132H, 4,9, 1024,0,0/Ò(10
dup (O)))
Note,
the characters
'??'
represent two
ASCII NULL characters entered
using AEDIT. To
input an
ASCII NULL character,
invoke AEDIT, position
the cursor on top of the second
single quote
mark,
press
the
key'H'for hex input, press
the key'I'for input,, press the key
'0'
for the value.
After inserting one
ASCII NULLcharacter, enter
a second one.
3.4.5 "/oB.251
Macro
T\e 7oB251macro has the
form
VoB251
(io
_base,
dev_gran)
where:
io_base I/O port address
selected
fiumpered)
on the
iSBX 251 controller board.
dev_gran Page size, in bytes.
The default
invocation of this macro
in the B251.A86 file rs
7oB251
(80H,64)
Bootstrap l-oader 3-35
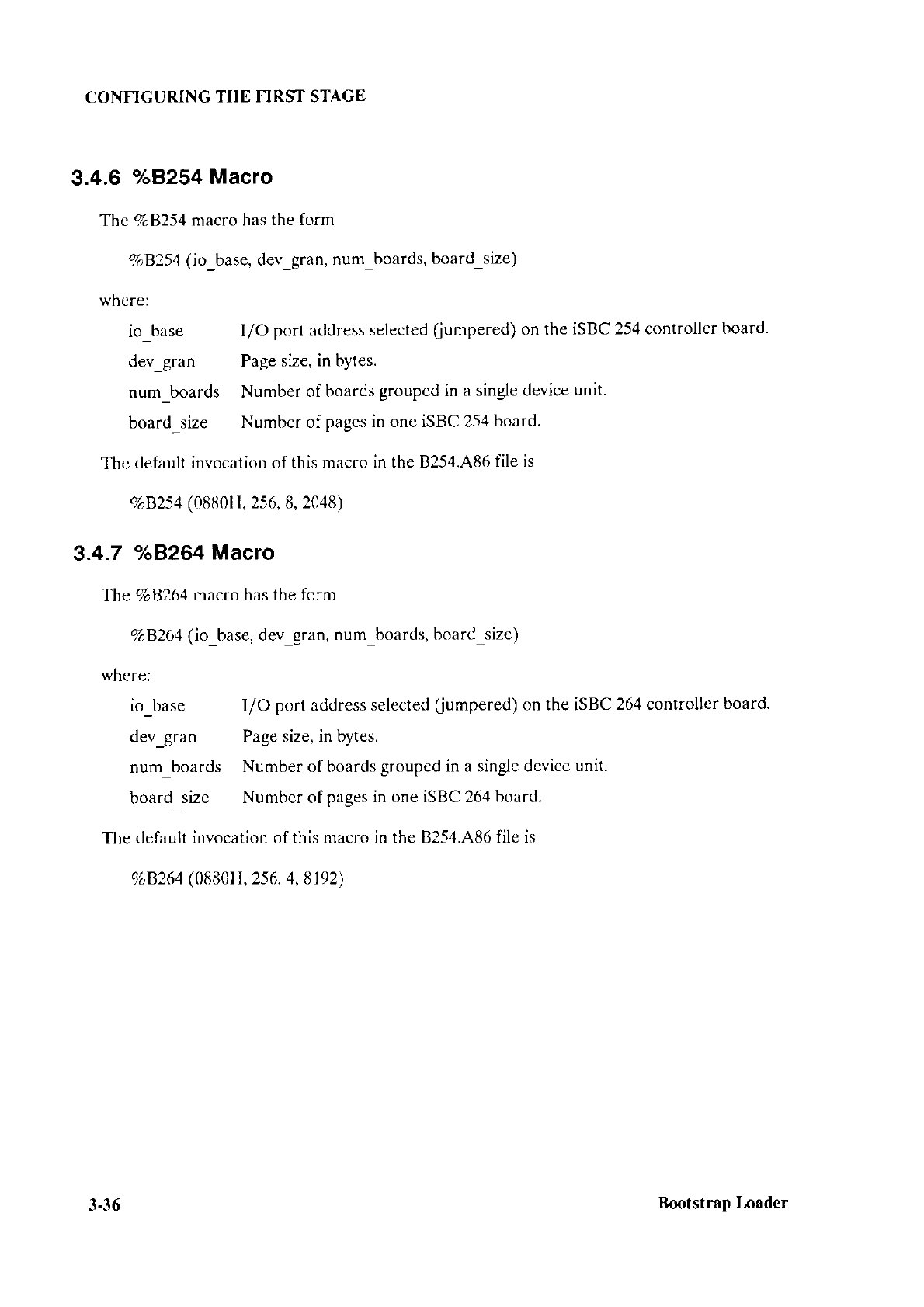
CONFIGURING
THE FIRST STAGE
3.4.6 o/"B.254
Macro
The %B.254
macro has
the form
VoB254
(io
_base,
dev_gran,
num_boards,
board-size)
where:
io_base I/O port address
selected
fiumpered)
on the iSBC 254 controller
board.
dev_gran Page
size, in bytes.
num_boards Number
of boards
grouped in
a single
device unit.
board_size Number of
pages in one iSBC 254
board.
The
default invocation
of this macro in
the 8254.A86
file is
%8254
(0880H, 256, 8, 204t1)
3.4.7 "/o8.264
Macro
The %R.264
macro has the form
VoB264
(io
_base,
dev_gran,
num_boards, board_size)
where:
io_base I/O port address selected
(jumpered)
on the iSBC
264 controller
board-
dev_gran Page size, in bytes.
num_boards Number ofboards
grouped in a single device
unit.
board_size Number ofpages
in one iSBC 264 board.
The
default invocation of this macro
in the 8254..48ó file is
%8264
(0880H,
256, 4,8192)
3--r6 Bootstrap Lóader
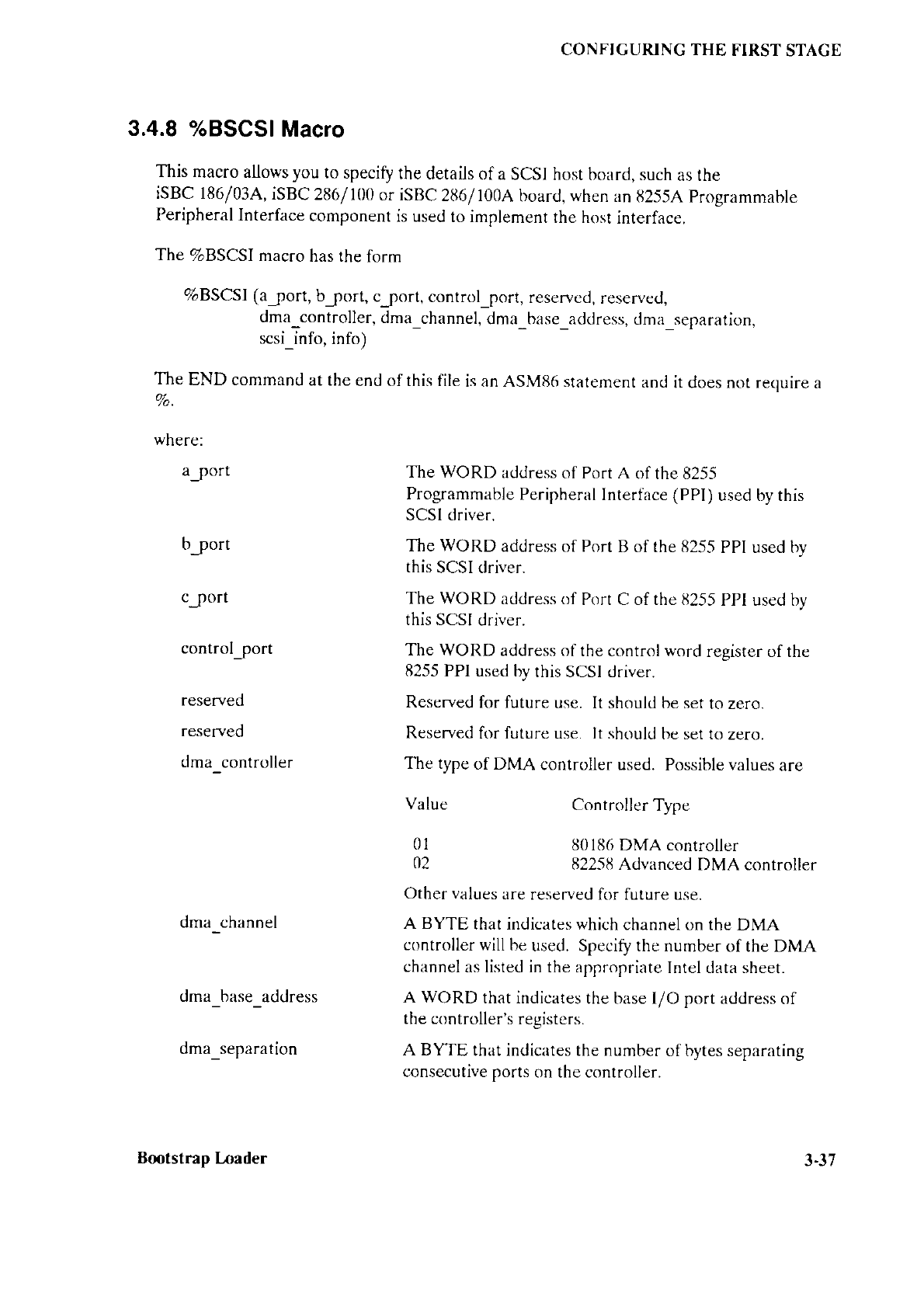
CONFIGURING THE
FIRST
STAGE
3.4.8
%BSCSIMacro
This
macro allows you
to
specify
the details
of a SCSI
host board, such
as the
iSBC 186/03A,
iSBC
28ól100
or iSBC
286/100A
board,
when
an
82554
programmable
Peripheral
Interface
component
is used
to implement
the host
interface.
The
ToBSCSI macro
has the
form
ToBSCSl (a_port,
b_port,
cJlort,
control_port,
reservcrl,
reserved,
dma_controller,
dma_channel,
dma_base_address,
dma_separation,
scsi_info,
info)
The
END command
at the
end of this file
is an ASM86 statement
and
it does nor require
a
where:
ajort The WORD address
of Port A of the 8255
Programmable
Peripheral
Interface
(PPI)
used by this
SCSI driver.
b-_port The WORD
address of Port
B of the 825-5
PPI used by
this
SCSI driver.
cJort The WORD
address of Port C of the lì255
PPI used by
this SCSI
driver.
control_port The WORD
address of
the control word
register of the
8255
PPI used by
this SCSI driver.
reserved Reserved
for future
use. It should he set
to zero.
reserved Reserved
fitr future use. lt shoultl
be set to
zero.
dma_controller The type
of DMA controller used.
possible
values
are
Value Controller
Type
01 80186 DMA controller
02 822-5[Ì Advanced
DMA controller
Other values
are
reserved for future use.
dma_channel A BYTE
that indicates which
channel on rhe
DMA
controller will
be
used. Specify the number
of the DMA
channel
as listed in the appropriate
Intel data sheet.
dma_base_address A WORD
that indicates
the base I/O port address
of
the cont
roller's registcrs.
dma_separation A BYTE
that intlicates the number
ofbytes separating
consecutive ports
on the controller.
Bootstrap
I,()ader 5-S I
CONFIGURING
THE FTRST STAGE
scsi_info This
parameter
is iSBC-board-specific;
it does not
depend
on the
SCSI driver's
requirements.
This
parameter is a
BYTE
which has the following
meaning:
Value Meaning
o Indicates
that no additional
information
is needed
to
configure
the BootstraP
Loader
for
the iSBC board
vou
are usinq.
I Indicates
this configuration
of the
Bootstran Loader
is used
on the
isBC 28r;/
lo0A board.
2-255 Reserved for future
use.
info Varies depending
on the
value of scsi_info.
If scsi_info is 0, then
no other information
is needed and
info is left blank.
lf scsi_info
is 1, then ìnfo
is a single WORD that
specifies the
port
address
of the iSBC 286/ 100
or
iSBC 286/100A
port used for
multiplexing DMA sources
into
the on-board 82258 DMA component.
The SCSI driver can be used
to bootstrap load from any random-access
device on
the SCSI
bus. The
SCSI driver can also be used to bootstrap
load from specific random-access
devices on the SASI bus.
When
using
the SASI bus,
you
must select a
specific device,
because the SASI devices require
unitlue initialization information.
Do this by specifying
unique unit information
for each device on the SASI bus
(the
%SASI
UNIT INFO macro
is used for this purpose).
The
ToBSCSI
macro can be invoked only once in
the
BSCSI.A86
configuration file. The
%SASI_UNIT_INFO
macro
(described in the next section) can be invoked multiple
times
to allow specification of the units on the SASI bus. Refer
to the description of the
TaSASI_UNIT_INFO macro
to see how to speci! unique unit information for devices
on
the SASI bus.
In the BSCSLA86 file, the default
versions
of the
%BSCSI
macro are
o/oBSCSI(0C8H,
OCAH, 0CCH, 0CEH, 0, 0, 1, 0, 0FFCOH, 2,
0)
;BSCSI(0C8H,
OCAH, OCCH, OCEH, 0, 0,
2,
0, 0200H, 2, l, 0DlH)
The SCSI host board interface defined by the first instance
(which
is invoked) is
the
iSBC 186/03A
board and uses the 80186
DMA controller.
-ì-38 Bfi)tstrap [,oader
CONFIGURING THE FIRST STAGE
The SCSI host board interface defined
by the second instance
(which
is not invoked) is the
iSBC
286/100 or iSBC 286/100A MULTIBUS
II board
and uses the on-board 82258
Advanced DMA controller. If you
want
to invoke this board, replace the
";" with
a
"Vo",
and
replace the "To" with a
";"
to comment out the
interface defined
by
the first instance
(iSBC
186/03A board using the
80186 DMA controller).
An important feature
to note about devices that use an SCSI controller is the configuration
information
is device-independent. That is, only the
host
board interface to
the controller
needs
to be specified in the configuration
file. The configuration
values
contain no
information about the device(s) actually
being used.
3.4.9
%SASI_UNIT_INFO
Macro
The SCSI device driver provides an
interface to mass
storage devices through either SASI
or SCSI
controllers, If using devices controlled by a SASI controller, you must speci$ a
sequence of initialization bytes for the controller.
This information
is
not required
by SCSI
controllers. The initialization sequence
identifies the type of device
you
have assigned
to
the
particular
unit of the SASI controller.
The
sequence will be different depending on the
manufacturer and model of the
hard disk or flexible diskette drive. and the manufacturer
and
model of the SASI controller board itself.
This
macro
enables you
to define the initialization sequences required by
your
devices on
the SASI bus.
For each instance of the
ToDEVICE
macro (in the BSl.,486 or
BS1MB2.A86 file) that defines a device
on the SASI bus,
you
must also include
the
%SASI UNIT INFO macro
(in
the
%BSCSI.A86 file) to define
that device's initialization
r.qr"nJ". The label specified
for
the
unit info field of the
%DEVICE
macro must
match
the label
field of the corresponding
%SASI_UNIT_INFO
field.
The information supplied by an occurrence of
the
%SASI
UNIT INFO macro
is not used
by devices on the SCSI
bus. Therefore in the 851.A86 o. SStlr4g2.aaO file,
ToDEY\CE
macros for devices controlled
by the SCSI bus should never speciff a
value
for the unit info
parameter.
Note that there is only one pair of device
initialization/device
read procedures
for the
SCSI driver regardless of
whether
the controller is SCSI or SASI.
The
%SASI
UNIT INFO macro
can be included only in the SCSI/SASI
driver
conficuration
file. BSCSI.A86. The macro has the form
%SASI_UNIT_INFO
( label, init_command, init_count, init_data
)
Bootstrap l-oader 3-J9
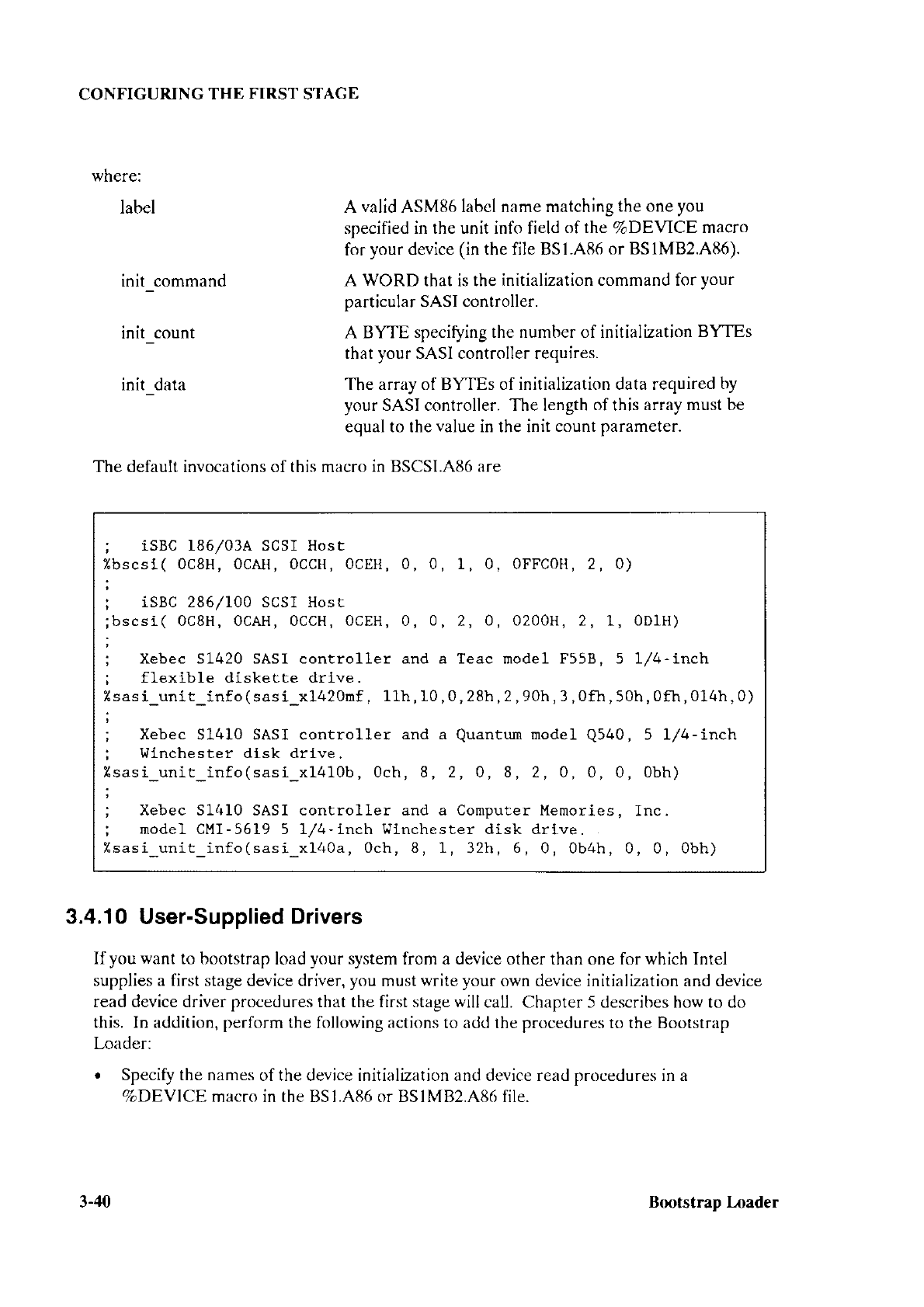
CONFIGURING
THE FIRST
STAGE
where:
label
init_command
init_count
init data
The default invocations of this macro
in
BSCSI.AIì6
are
A valid
ASM86
labcl name matching
the one
you
specified in the unit info field
of the
%DEWCE macro
for
your device (in the file BS1,A86
or BSlMB2.A86).
A WORD
that is the
initialization command for
vour
particular SASI controller.
A BYTE
specifing the number of initialization
BYTEs
that your SASI controller requires.
The array of BYTEs of initialization data required
by
your SASI controller. The length
of
this
array must be
equal to the
value
in the init
count parameter.
: iSBC L86/03A SCSI Host
Zbscsl( 0c8H, 0cAH
, 0ccH
, 0c8H
, 0
, 0
, 1, 0, OFFCOH, 2, 0)
i
i iSBC 286/100 SCSI Host
;bscsi( 0C8H, oCAH, 0CCH, OCEH, 0, 0, 2, 0, 0200H,
2, 1, ODlH)
; Xebec Sl-420 SASI controller and e Teac rnodel F558, 5 1/4-inch
; flexlble dlskecte drlve.
lsasi unit info(sasi x142Ornf
, l1h, 10, 0,
28h,
2, 90h, 3, 0fh,
50h,
Ofh, 014h, 0)
; Xebec 51,410 SASI controller and a Quantum
rnodel
Q540, 5 1-/4-inch
i l,linches ter disk drlve.
Zsasi_unit_info(sasi_x1410b, Och, 8, 2, 0, 8, 2, 0, 0, 0, 0bh)
;
; Xebec S1410 SASI controller and a Computer Memories, Inc.
; model CMI-5619 5 1/4-inch Wlnchester
disk drlve.
lsasi_unit_info(sasí_x140a,Och,8, 1, 32h, 6, 0, 0b4h, 0, 0, Obh)
3.4.1 0 User-Supplied
Drivers
Ifyou want
to bootstrap
load
your system
from a device other than one for which Intel
supplies a first stage device driver, you
must
write your
own device initialization and device
read device driver procedures that the first stage will
call. Chapter 5 describes how to do
this. In addition, perform the
following
actions
to add the procedures îo the Bootstrap
Loader:
. Specify the names
of the device initialization and device re:rd procedures in a
ToDEYICE macro in the BSl.,486 or BSlMB2.A8ó file.
3-40 Bq)tstrap l-oader
CONFIGURING
THE FIRST STACE
. If there are configurable parameters
associated
with your
device
(such
as base
addresses or
wakeup
ports), you
might
want
to create
your
own configuration macro
and
include it in a special configuration
file,
just
like the Intel devices do. Chapter 5
describes
how to set up a macro.
. Assemble
your
device initialization procedure, your
device read
procedure, and your
configuration file
(if you
have one),
and link the resulting object code to the rest of the
Bootstrap Loader object files and
libraries.
3.5 GENERATING THE FIRST
STAGE
The submit
file BSl.CSD
performs
the
assembly, linkage, and location of the first
stage of
the
Bootstrap Loader. Often it
will
need
to be modified to
generate the particular
configuration of the Bootstrap
Loader
you
specified in BS l.A8ó or BS 1MB2.A86. Figure
3-4 shows commands in the Intel-suonlied
BS 1.CSD file.
Burtstrap llader 3-41
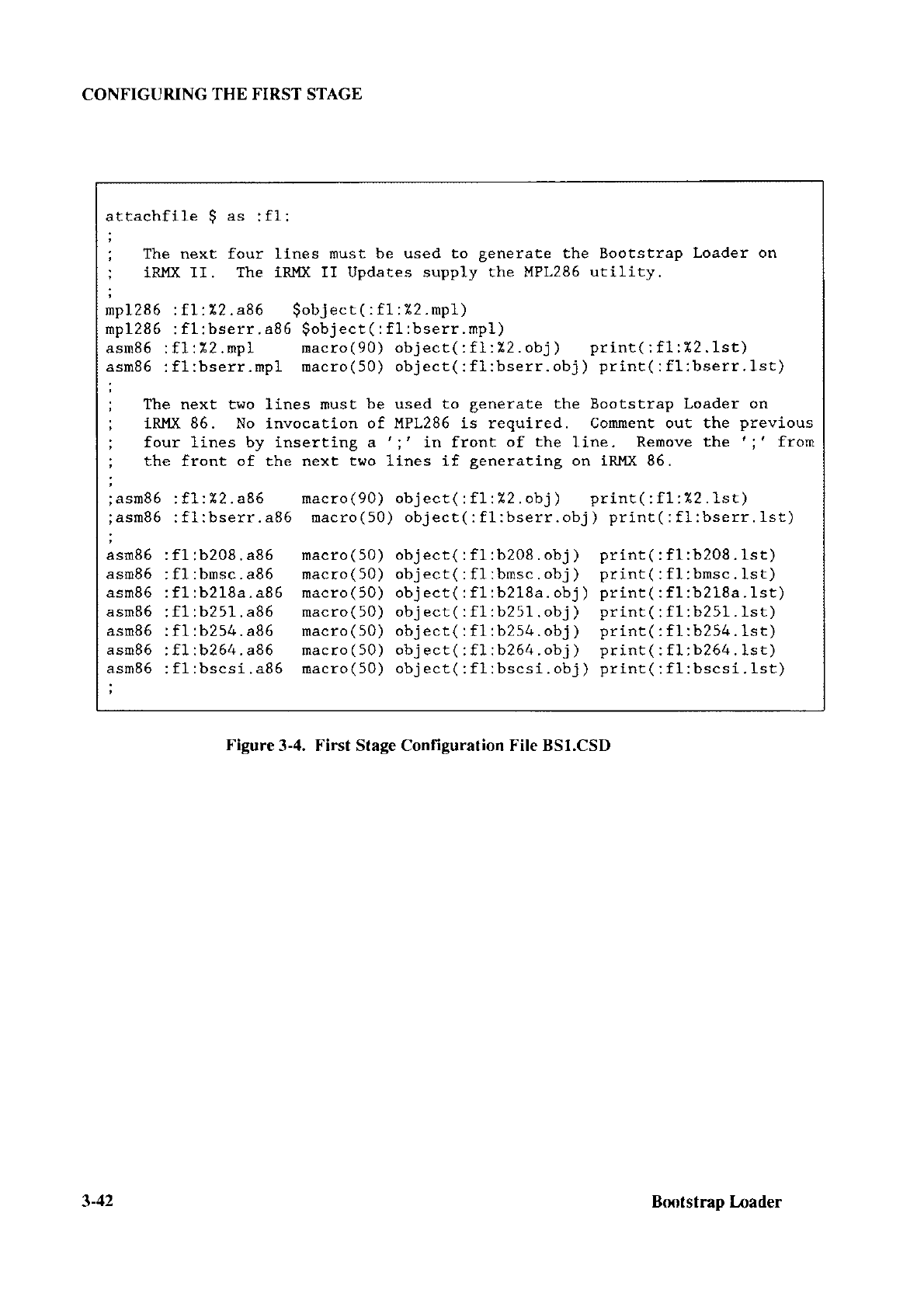
CONFIGURING
THE FIRST STAGE
attachflle $ as :fl :
The next four lfnes rnust
be used to generate the Bootstrap Loadèr on
iRMX lI. The tRìO( 11 Updates supply the MPL286
utility.
npl286 : fl:12. a86 $obJect(:f1
:l2.mp1)
mp1286
:
fl :bserr.
a86
$object(:fI:bserr.mpl)
asn86 :f1 :f2.mp1 rnacro(90)
object(:fl :X2.obj) print(:f1 :U2.lst)
asm86
:
fl:bserr.mpl rnacro(50) object(:f1:bserr.obj) print(:fl:bserr.lst)
The
iRMX
four
the
next tr^Ìo lines must be used to generate the Bootscrap Loader on
86. No invocation of MPL286 is required. Comment ouc the previous
lines by insertlng a';' in front of the line. Renove the ';' frorn
front of the nexÈ tr.ro lines if generating on iRl'D( 86.
;asn86
:fl:12.a86 macro(90)
object(:f1
:Z2.obj) prÍnt(:f1 :12.lst)
;asn86
:f1:bserr.a86 nacro(50) object(:f1:bserr.obj) prinr(:fI:bserr.lst)
asm86
asm86
asm86
asm86
asn86
asm86
asm86
fl :b208 .
a86
fl :brnsc . a86
fl :b218a.
a86
f1
:b251 .
a86
fI:b254 . a86
f1 :b264 . a86
fl :bscsi.a86
macro
(
50)
macro
(
50)
macro
(
50)
maero
(
50
)
rnacro
(
50)
macro
(
50)
nacro
(
50)
object(
object(
object(
obj ect (
obj ect (
obj ect (
object(
fl:b208.lst)
fl :
bmsc
. ls t)
fl :b218a.Ist)
f1 .|.aql r -+\
LL.WLJL.LJL)
rÌ.uZJ+.1-5L,,
f1:b264.1st)
f1 :b208 .
obj
) print (
f1 :brnsc .
obj
) print (
fl :b218a. obj
) print(
f1 'h?51 nhi \ nYínr-i/
f1 :b2 54 . obj
) princ(
f1 : b264 .
obj
) print (
f1 hcnci nhi \ nrintt/
3-42
Figure
3-4. First Stage Confìgurat
ion
File BS I.CSD
Bmtstrap Loader
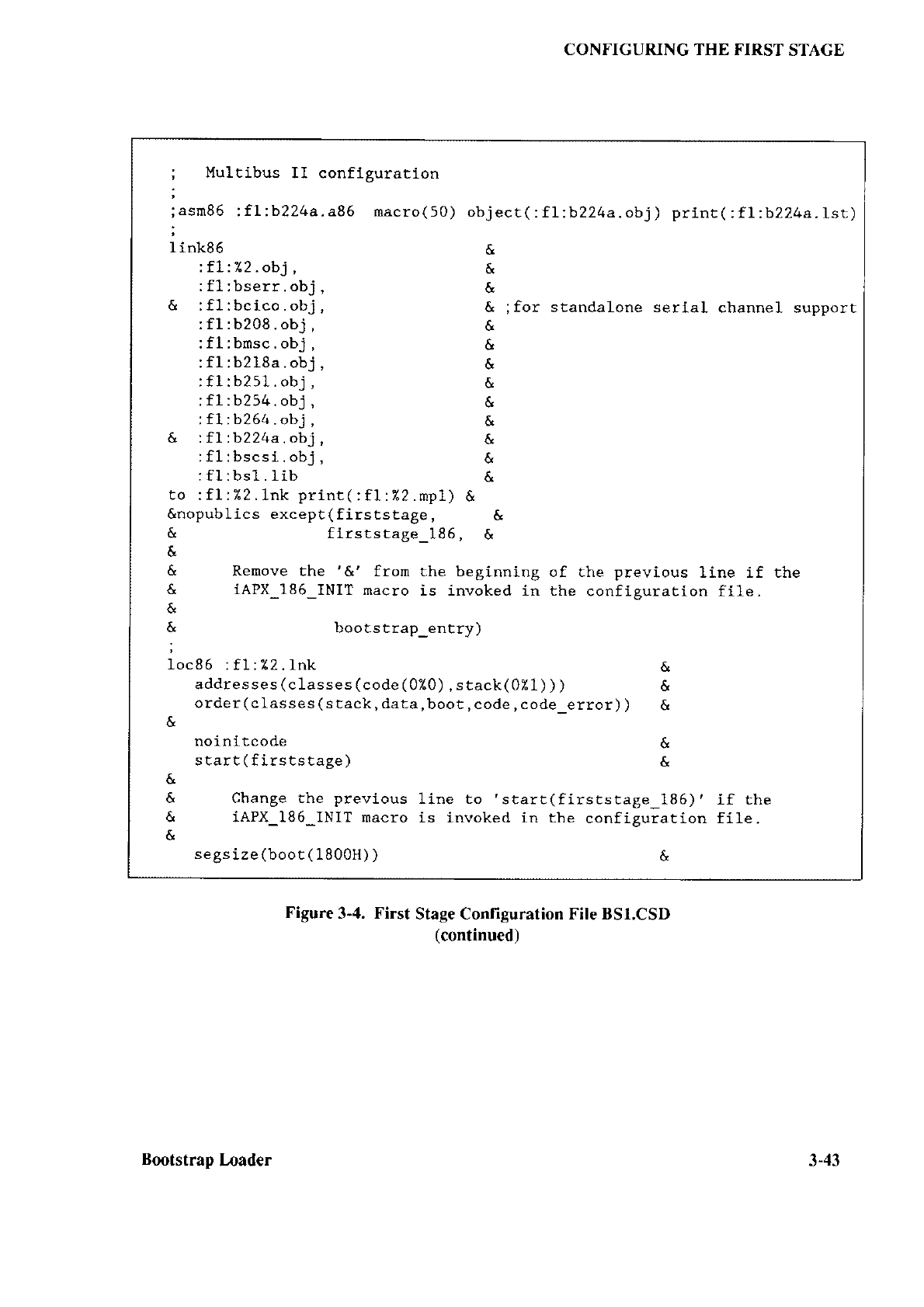
CONFIGURING THE FIRST
STAGE
; l,îultibus II conflgurarÍon
;
;asn86:fl:b224a.a86 rnacro
(
50)
link86
fL:7"2.obj
,
f1 :
bserr .
obj ,
f1 :bcico. obj,
fl :b208
.
obj ,
fl :bmsc . obj ,
f1
:b2l8a.obj,
fl .hts1 ^hì
f1 :
b264
. obj ,
f7:b224a
.
obl
,
f1 :bscsi. obJ
,
f1 :bs1.1ib
to :
lI:22.
1nk
print(:fl:u2.mp1)
&
&nopublics except(firststage, &
firststage_l86, &
Renove the 'ó' from the beginning of
iAPX 186 INIT macro is invoked in the
boots trap_entry )
no ini tcode
^È--rtC:
rL4!!\rr&>u5LdÉY,
&
& Change the previous
& iAPX_186_INIT rnacro
&segs
iz e
(boot (
1800H
) )
obj
ect(: fl: b224a. obj
) print(:f1:b224a.1sÈ)
&
&
&
& ;for standalone serial channel support
&
&
&
&
&
&
&
&
&
&
&
&
&
&
&
the previous line if
configuration fi1e. the
loc86 : fl :22 .
lnk
addresses(classes (code (0%0),
stack(021) ) )
order(classes (stack, data,boot, code, code error) )
&
&
&
&
&
&
line to 'start(firststage_186)' if the
is invoked in the configuration fí1e.
Figure
3-4. First
Stage Configuration File BSI.CSD
(continued)
3-43
Bootstrap
lrader
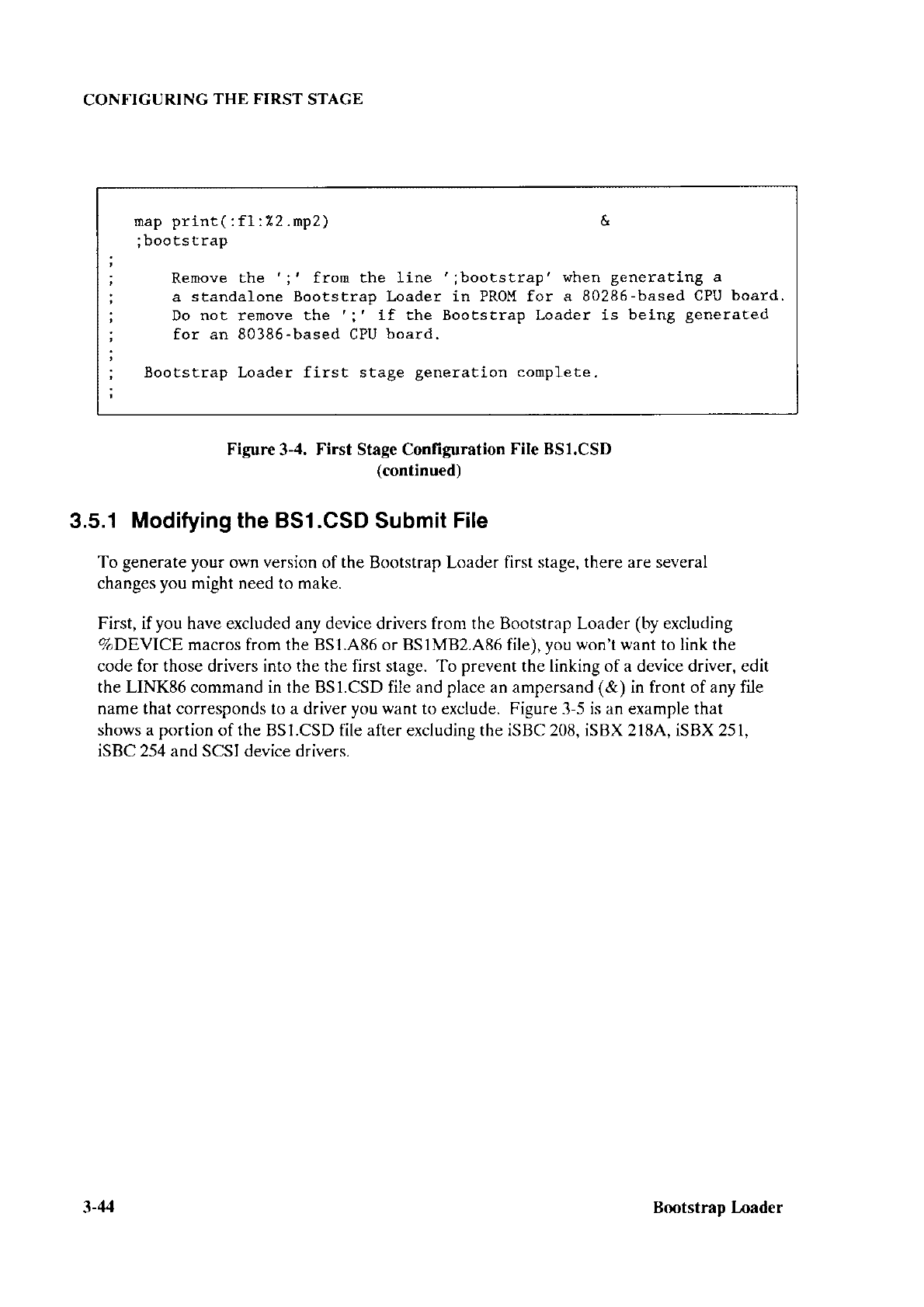
CONFIGURING
THE FIRST
STAGE
map
princ(:
fl:12.mp2) &
;bootstrap
Remove Lhe';' froru the line ':bootstrap' when generating a
a standalone Bootstrap Loadèr ín PROM for a 80286-based
CPU
board.
Do not rernove the ' ;' if uhe BooEstrap Loader ls beÍng generated
for an 80386-based CPU
board.
Bootstrap Loader fÍrst stage generation conplete.
Figure
3-4. First Stage Configuration
File BSI.CSD
(continued)
3.5.1
Moditying the BSl.CSD
Submit
File
To generate your own version
of
the
Bootstrap Loader first
stage, there are several
changes you might need to make.
First, ifyou have excluded any device drivers from the Bootstrap Loader
(by
excluding
TaDEYICE macros from the BSl.A86 or BS'lMB2.A86 file), you
won't
ìvant to link the
code for those drivers into the the first stage. To prevent the linking of a device driver, edit
the LINKSó command in the BSI.CSD file and place an ampersand (&) in front of any file
name that corresponds to a driver you want to exclude. Figure 3-5 is an example that
shows a portion
of the BSl.CSD file after excluding the iSBC 208, iSBX 218A, iSBX 251,
iSBC 254 and SCSI device drivers.
3-44 Bmtstrap l-oader
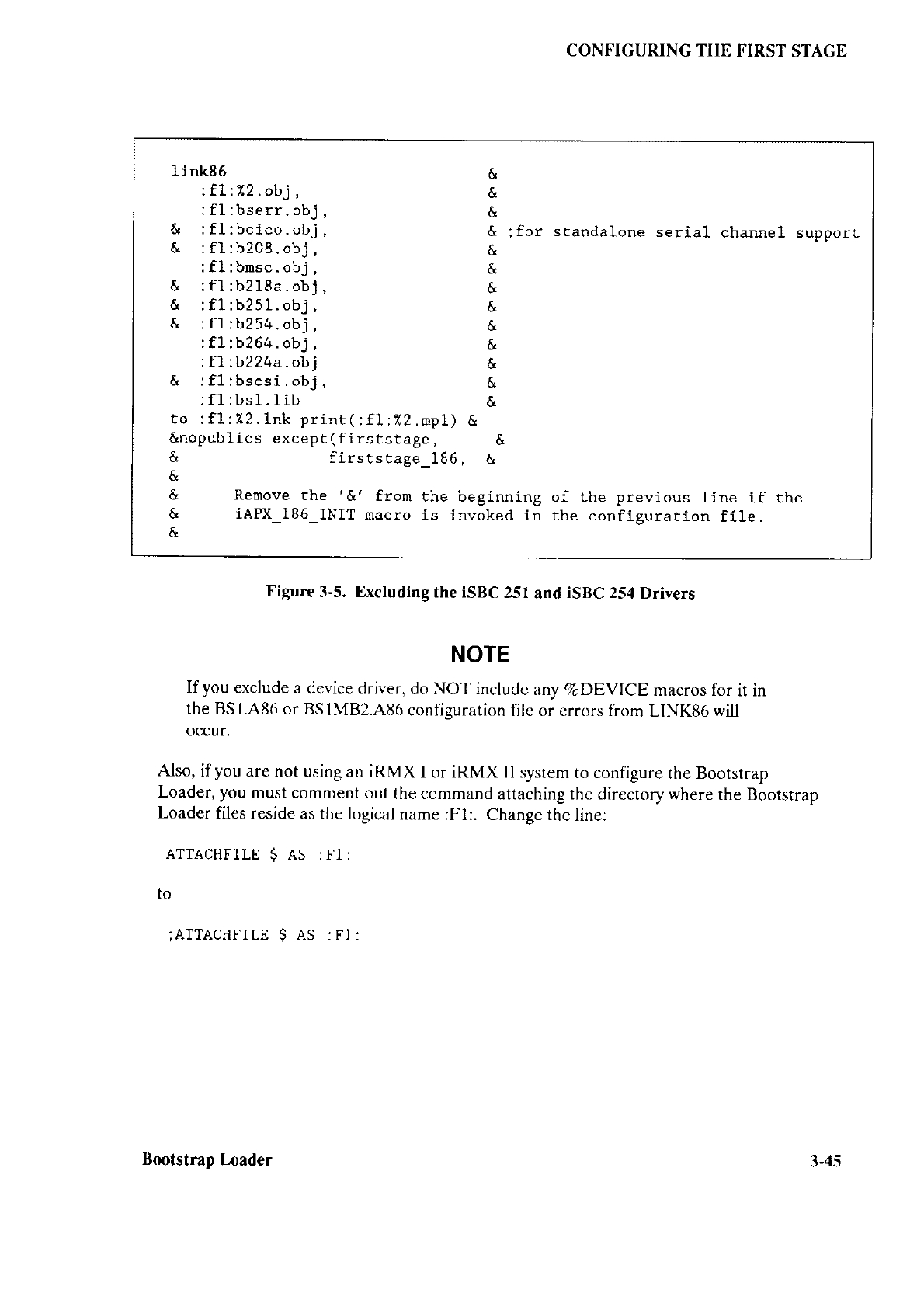
CONFIGURJNG THE FIRST
STAGE
Figure
3-5. Excluding
the iSBC
251
and
iSBC 254
Drivers
NOTE
If you
exclude a
dcvice driver,
do NOT include
any
%DEVICE macros for
it in
the BSl.A86
or BS
I lt{82.A86
configuration
file or errors from
LINK86
will
occur.
Also,
if
you
are not using
an iRMX I or iRMX II system
to configure
the Bootstrap
Loader, you
must comment
out
the command
attaching the directory where
the Bootstrap
Loader
files reside
as the logical
name :F1:.
Change the
line:
ATTACHFILE
$ AS :Fl :
to
;ATTACHFILE
$ AS :F1 :
3-45
1ink86
f1 :12.obj,
fl :bserr. obJ
,
f1 :bcico.obj,
f1 : b208
.
obj ,
f1 :bnsc
.
obj ,
fl :b218a
.
obJ
,
fl :b25l.obj,
fl : b254
.
obj ,
fl :
b264.
obj ,
f7:b224a
. obj
f1
:bscsi. obj,
fl :bs1.1ib
fl: l2.lnk print (:
fl: 22 . urpl) &
&
&
&
& ;
for s tandalone
&
&
&
&
&
&
&
&
&
&
serial channel support
&
&
&
&
&
&
to
&nopublics except
(f irststage,
firststage_l86, &
Renove the '&' from the beginning of the previous line if Èhe
iAPX_186_INIT
rnacro
is invoked in rhe configurarion file.
&
&
&
&
Bootstrap
l,oader
CONFIGURING THE FIRST STAGE
3.5.2
Invoking the
BSl.CSD Submit
File
After
you
have modified
the BSl.CSD file
to correspond
to your configuration,
invoke
the
submit
file to assemble
the Bootstrap
Loader files, link
them together,
and assiglt
absolute
addresses. The format
for invokins
the submit file is
as follows:
ATTACHFILE /RMX286/BOOT
SUBMIT BSl(first-stage_address,
second-stage-address.
Iirst-stage-fi1e)
where:
first_stage_address The starting address
of the first stage
of the Bootstràp
Loader. This can be
a RAM address ifyou intend to run
the Bootstrap Loader from
RAM, or it can be
a PROM
devices address if
you
intend to
place
the Bootstrap
Loader
into PROM devices.
The address
you
specif
should be a full 20-bit address.
Do not use the
base:offset form
to indicate the address.
The iSDM
Release 3.2 monitor
allocates the address range
from
0FE400H to 0FFFTFH
to the Bootstrap Loader.
Ifyour
configuration
of the Bootstrap Loader
will not fit in this
space,
locate it at a lower address than FF8000H.
The
address in RAM where the second stage of the
Bootstrap Loader
will
be loaded. The data
area for the
first
and second stages is also located here.
The size of
this second
stage area consists of less than 8K
contiguous
bytes. The
default address for the second stage
is
0B8000H. This address has been chosen to
be
compatible
with
the default address
of the third stage
which is 0BC000H.
The first-stage configuration file to use. lfyour system is
a MULTIBUS I system, set this parameter equal
to the
string'bs1'. Setting this
parameter
to
'bs1'causes
the
located Bootstrap Loader file to be named'bs1'.
Ifyour
system is a MULTIBUS II system, set this
parameter
equal to the string'bslmb2'. Setting this
parameter to
'bs1mb2'causes
the located Bootstrap Loader
file to be
named'bs1mb2'.
second_stage_address
first_stage_file
3-46 B(x)tstrap
l-oader
To invoke
the
BSl.cSD
SUBMIT
file with
the default
addresses
for combining with
the
iSDM
monitor,
type one
of the two
sets
of commands
below:
3.6 MEMORY
LOCATIONS
OF THE FIRST
AND
SECOND
STAGES
when you
invoke the
BSl.csD file, you
assign
memory locations
to the
first and secon<l
stages.
It is important
that
îhe addresses you
assign do not
cause the stages
to overlap,
either with
themselves
or with
the files
they load.
Chapter 4
discusses
the memory
locations
of all
three stages
of the
Bootstrap
Loader
and the
stcps to take
to ensure that
they
don't
overlap.
Also
inspect
the map
file, BSl.Mp2,
to
ensure the segments
are
properly
laid out. If too
many device
drivers
have been
confìgured
into the Bootstrap
Loader, some
segments
will
be located
in
low memory
starting at
200H.
This is
unacceptable
and
you
must remove
some
more device
drivers from
vour
confisuration.
CONFIGURING
THE FIRST
STAGE
Bootstrap bader 3-17

CONFIGURING CHAPTER
4
THE
THIRD
STAGE
4.1 INTRODUCTION
The third
stage
of the Bootstrap
Loader is used
only
for loading iRMX lI sysrems.
Ir
provides
the
capability
of loading
modules
that usc
the 80286 object
motJule
formar (such
as
those produced
using
BND286
an<J
BLD2[ì6)
and those that
require the processor's
protected
virtual
address
mode. This
chapter
describes
how to configure
the third
stage.
There
are two different
tipes
of third
stages that
can be used
to load iRMX ll files:
the
generic
third stage
and the device-specific
third stage.
Both load
OMF-28ó
modules, but
the generic
third
stage leaves
the processor
in
real address
mode
while
it loads. This
permits
it to use the
first-stage
device drivers
to access
the storage devices.
The
device-
specific
third stage
switches
the processor
into
protected
mode before
calling the device
driver.
Although
this permits
the device
driver
to load into
the entire
l6 megabyte arJdress
space,
special
device drivers
that work
in
protected
mode
must be included
in the third
stage.
configuration
of
the third stage
differs
slightly
depending
on
whether
you
configure the
generic
or device-specifìc
third
stage.
However,
the differences
are small
enough that both
will
be described
together
throughout
most of
this chapter.
The next two sections
pnrvitle
overviews
of
configuring
each
type of third
stage.
The rest of the chapter
provides
thc
details
of third-stage
configuration,
noting
any options rhat
apply specifically
to one
type of
third
stage.
4.2 OVERVIEW
OF THIRD
STAGE
CONFIGURATION
configuring
the third stage
(either
the generic
or device-specific
third
stage) is very
similar
to configuring
the first stage.
It involves the
following
operations:
Ì. Editing an assembly
language
source
file
to intiicate
which
CPU board to
run on ancì
what
to do
if errors
occur during
bootstrap
loading.
If you
are using the
<ìevice-
specific third
stage, you
must also
indicate which
devices the
third stage supports.
Invoking a
SUBMIT
file to assemble
one or more assembly language
source files,
link them with
code
for the third
stage, and
assign absolute addresses
to the code,
This executable
module
remains
in a file to be loaded by
the second stage.
Bootstrap
l,oader 4-t
CONFIGURING
THE THIRD STAGE
Like
the iìrst stage,
the device-specific
third
stage requires
its own
device drivers.
l'herefore,
you
might
expect
to modiff, assemble,
and link
configuration
fi-les for each
of
the
devices,
just
as you do for the
first stage.
Actually, the
SUBMIT file
does assemble
and
link the device
configuration
files, but
you don't need to
do any additional
work on these
files. Because
device-specific
information
(such as the I/O port address, the
number of
cylinders,
etc.)
is the same regardless
of
which stage accesses
the device,
the SUBMIT
file
uses the
same device configuration
files
used for first-stage
configuration.
The
generic third stage
uses the
first-stage device
drivers to communicate
with
mass
storage
devices. Therefore
there
is no need to
supply configuration
information
about
devices to
the generic third
stage.
Default
versions of the assembly
language source
files and the SUBMIT
file are
placed in
the
/RM)086/BOOT directory during
installation. These
files include the
following:
853.A86 These
assembly language
source files contain
macros that
specify
BS3MB2.A86 the devices
supported by
the third stage
(for
device-specific
third
BG3.A86 stage
only), identify
the CPU board, and
indicate
what
to
do if
errors
occur during bootstrap
loading. The 853.,486
file applies
to
the device-specific
third
stage for MULTIBUS
I systems, the
BS3M82.A86 file
applies to the device-specific
third stage for
MULTIBUS Il systems,
and the BG3.Alì6 fiìe applies
to the
generic
third
stage on either
MULTIBUS I or MULTIBUS
II systems.
These
assembly language source
files apply
just
to the
device-
specific third
stage. They contain configuration
information
about
the
devices
in
your
system. These
are the same files that
were used
during the configuration
of the first stage. You
do not need to
modify them for
the device-specific third
stage.
These
SUBMIT files contain
the commands needed to assemble
the
source files,
link the resulting moduÌes
(and
any other
you supply)
with the code for the third stage, and locate
the resulting object
module. The BS3.CSD
file applies to the device-specific
third stage,
while
the BG3.CSD file
applies to the generic third stage.
BMSC.A86
B264.Atì6
BS3.CSD
BG3.CSD
As shipped on the release diskettes,
these files are set up to
generate
the default
versions
of the Bootstrap Loader's device-specific
and
generic
third stages.
4.3 8S3.A86, BS3M82.A86,
AND BG3.A86
CONFIGURATION
FILES
Figures 4- 1, 4-2, and 4-3 list the assembly
language configuration files for the
device-
specific third stage files BS3.A86 and BS3M B2.AlÌ(r
and the generic third stage file
BG3.A86. Each of these files consists
of an INCLUDE statement and several macros.
The
definitions of the macros that can
appear in these files are contained in the INCLUDE file
(BS3CNF.INC). These macros
are similar to the macros that can appear in the
first stage
confisuration file.
4-2 Brntstrap l,oader
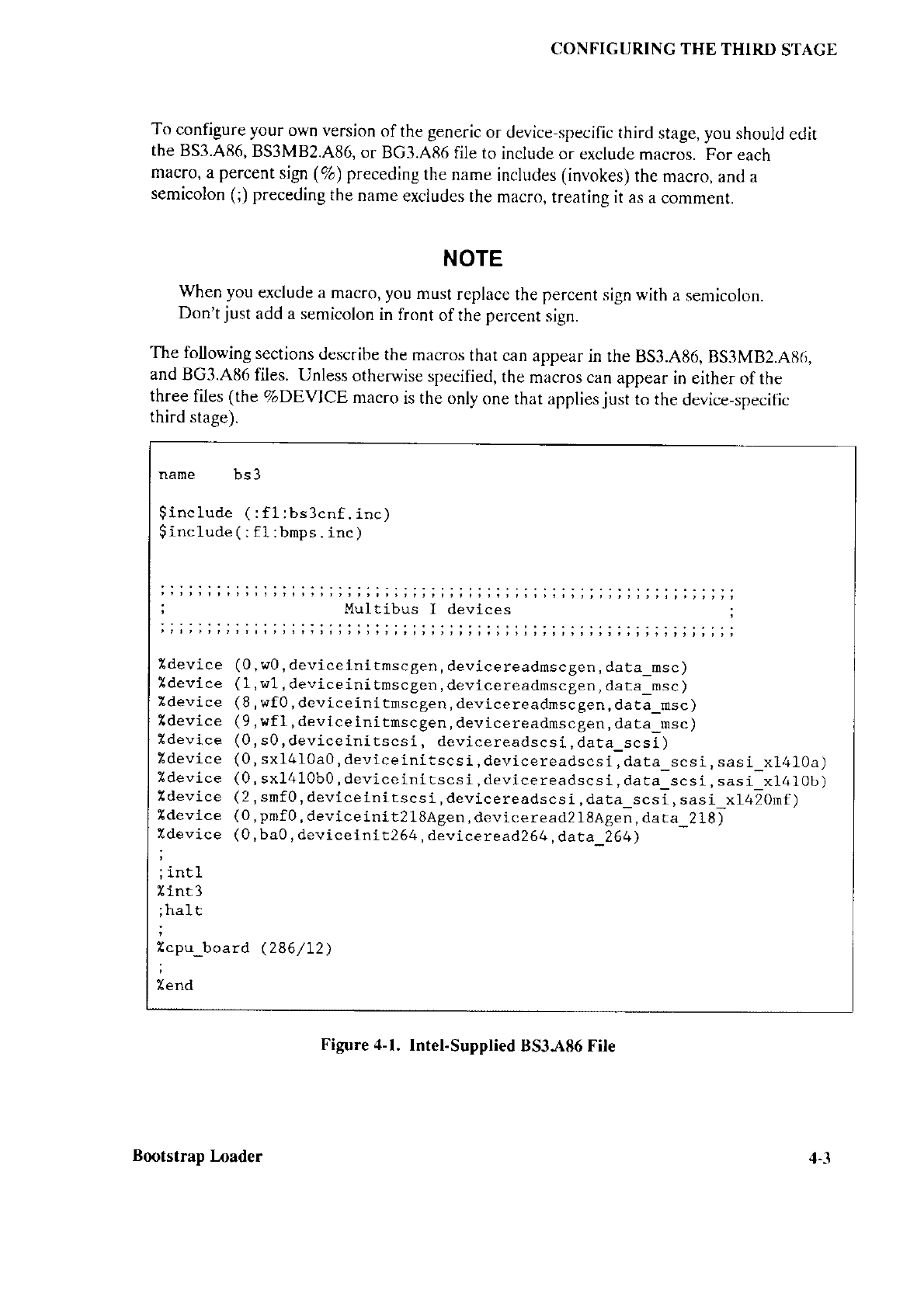
CONFIGURING THE THIRD
STAGE
To
configure your
own version
of the generic
or
device-specific
third
stage,
you
should
etlit
the
BS3.Atl6,
BS3MB2.A86,
or BG3.A86
file to include or exclude macros.
For each
macro,
a
percent
sign (7o) preceding
the name
includes
(invokes)
the
macro, ancl a
semicolon
(;)
preceding
the
name
excludes the
macro,
treatinc it as
a comment.
NOTE
When
you
exclude a
macro, you
must
replace
the
percent
sign with
a
semicolon.
Don't
just
add a semicolon
in front
of the percent
sign.
The following
sections
describe
the
macros
thar can
appear in the
853.A86, BS3MB2.A|ìó,
and
BG3.A86
files. Unless
otherwise
specified,
the macros can
appear
in either of the
three
files
(the
%DEVICE
macro
is the only
one that applies
just
to the
device-specific
third
stage).
Figure 4-1.
Intel-Supplied
B53..486 File
bs3
V
rnc
lude (
:il:bslcnf. inc)
lrncluoe (
:
tI : rrmps. tnc)
ldevice (
0
,
w0
,
device lni tms
c
gen,
device readmsc gen
,
data_ms
c
)
Xdevice (1,w1 ,
device ini tms cgen
,
device readms
c gen, data_rnsc
)
Zdevice (
8
,
wfO
,
device íni trns cgen, devicere adrns c
gen,
da ta_rnsc
)
ldevice (9, wfl, device initnscgen, devicereadmscgen, data_nsc)
ldevlce (0,s0,devicelnitscsi, devicereadscs
i ,
data_sc s
i )
Zdevice (0,sx14l0a0,deviceinitscsi,devicereadscsi,data_scsi,sasi_x14t0a)
ldevice (0,sx14l0b0,deviceinitscsi,devicereadscsi,data_scsi,sasi_xl410b)
U device (2, srnf0, deviceinitscsi, devic e readsc s i, data_scs i ,
sasi_xL42Ornf)
Ídevice (
0
,
prnfO
,
devÍce ini t218Agen, deviceread2lSAgen, da ta_218 )
Zdevice (0,ba0,deviceinit264, deviceread264,data 264)
;intl
U int3
;halt
Scpu*board (286
/12)
Xena
Multibus I devic e s
Bootstrap
Loader 4-.1

CONFIGURING THE THIRD STAGE
name bs3
$
include (
:f1 :bs3cnf.
inc)
;
; MPC and ADMA confíguratíon for isBC 286/100 wlth iEXM 100 MPC
module
;brnps
(00H, 4, 08BH, 200H,
3, 2, 0A0H, 16)
;
; MPC and ADMA
configuration for iSBC 2861100A
;brnps(00H,
4, 088H, 200H,
2, 3, 0E0H, 16)
; UfC rna AD!4A conflguration for iSBC 386/100
Tbmps(00H,4,089H, 200H, 2, 3, 000H, 16)
ldevice (0
Zdevice (0
%device (0
iidevice (2
%device
(0,
% devi ce
(
I ,
% device (
2
,
%
device (
3
,
i
;int1
% int3
;halt
%cpu_board
(386/100)
% end
;;;;;;;;;;;;; ;;;;;;;;;;;;;
;;; ;;;iiiiii;i;i;i;;;;,,,
Multibus II devices
',
; i , ,
i ,
i ; ; ;
:
:
;
:
; ;
:
;
:
:
:
; ;
:
;
:
:
:
;
; ; ;
; :
:
:
;
i
;
: :
;
: :
i;;;;;
s0,devÍceinitscsí . devícereadscsi,data_scsi)
sx1410a0
,
devicei-nitscs i, devicereadscsi, data_scsi, s as i_x
1410a
)
sx1410b0
,
deviceinitscs i, dev i ce readsc s i ,
data_scsi, s as i_x1410b
)
smf0, devíceinitscs i, devicereadscsi, data_scs i, sasi_x142Ornf
)
w0, device_in it_224a , dev ice_read_2 24a
, data_bs_drivers)
,,1 .1-,,i^^ i^it ))/,- è,ò.'i-^ -^.A 1at,- .1.1- h- .ìrirrorcì
wfO, device_inix_224a , devi c e_read_2
24a
, data-bs_drivers)
,,€r ,^,,i-^ í-iÈ îra^ À^,.i-^ r^-.1 11/,- .r-r. h. àrirrarc\
Figure 4-2. Intel-Supplied BS3MB2.Atl6
File
4-1 Bootstrap
[-oader
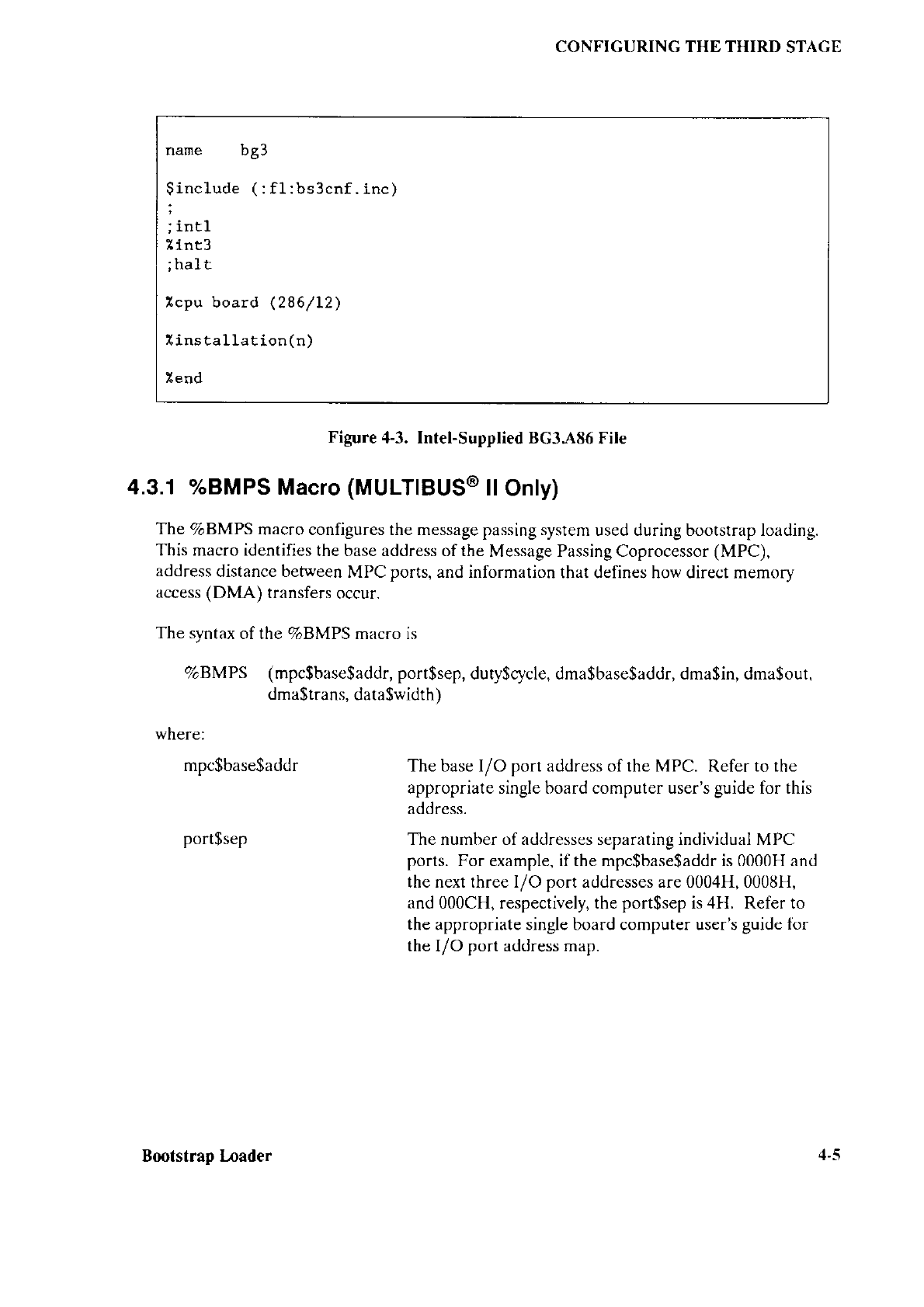
CONFIGURING THE THIRD STAGE
name bg3
$include (:
fl :bs3cnf.
inc)
;
lntl
U
ínt3
;halt
Xcpu board 1286/12)
9:-^!^t ! ^!: ^- /- \
ò
! !r> rd r r d L ru rr
\ r r./
lend
Figure
4-3. Intel-Supplied BG3"{8ó
File
4.3.1
o/"BMPS
Macro
(MULT|BUS@
il Onty)
The
ToBMPS macro configures the message passing system
used during bootstrap loading.
This macro identifies
the base address of the
Message Passing Coprocessor
(MPC),
address
distance between
MPC
ports,
and information
that defines how direct memory
access (DMA) transfers
occur.
The syntax
of the ToBMPS macro ls
%BMPS (mpc$base$addr,
port$sep,
duty$cycle, dma$base$addr, dma$in, dma$out,
dmagtrans,
datagwidth)
where:
mpc$base$addr The base I/O port address of the MPC. Refer
to the
appropriate single board computer user's guide for this
address.
port$sep The number of addresses separating individual MPC
ports.
For example, if the mpc$base$addr is 0000H and
the next three l/O port
addresses are 0004H, 0008H,
and 000CH, respectively, the
port$sep
is 4H. Refer to
the appropriate single board computer user's
guide fbr
the
I/O port address map.
Bootstrap [.oader ,l-5
CONFIGURING
THE
THIRD
STAGE
duty$cycle The MPC
duty cycle for
the local bus.
(The rate at
which data packets
are
generated.)
For information
on
how
to calculate a duty
cycle suitable for
the local
bus,
refer
to the MPC
User's Manual. For duty
cycles
suitable for Intel
singie board computers,
refer
to the
appropriate
single board computer
user's
guide.
dma$base$addr The base I/O port
address for the Advanced
Direct
Memory Access
(ADMA) controller.
Refer to the
appropriate
sing.le board computer
user's
guide
for
this
address.
dma$in The channel used to
receive
(input)
DMA message
passing
transfers. Refer
to the appropriate
single board
computer user's
guide for this channel number.
dma$out The channel
used to send
(output) DMA message
passing
transfers. Refer
to the appropriate
single board
computer
user's guide for this channel
number.
dma$trans The I/O port
address used for DMA data transfers.
Refer to ihe approprint.
single board computer
user's
guide
for
this address.
data$width The
data width in bits of the local
bus. This
value
must
be eìther l6 or 32
(decimal). If the
width
is
set to 32 bits
on a 386/116- or 386/
120-basetJ board, flyby
(one cycle)
mode is enabled.
The
ToBMPS
macro can
generate errors
if
the local bus width is not l6 or 32 bits
wide.
4.3.2 %OEVICE
Macro
(853.A86
and
BS3M82.A86
Only)
T\e /oDEYICE
macro applies only to the device-specific third stage
(BS3.A86 and
BS3MB2.A86
files).
It associates a device with a particular third stage device driver.
The
syntajK of the ToDEYICE macro is as follows:
ToDEYICE
(unit, name, device$init, device$read, device$da
ta.u
n it_in fo
)
where:
unit The unit number of this device. Unit numbering
should be the same as
that used in the BS1.A86 or BS1MB2.A86 file described in Chapter 3
name The name of the device. You should always specifu the
same name that
you
used for the device in the BSl.A86 or BSlMB2.A86
file.
4-6 Bootstrap LOader
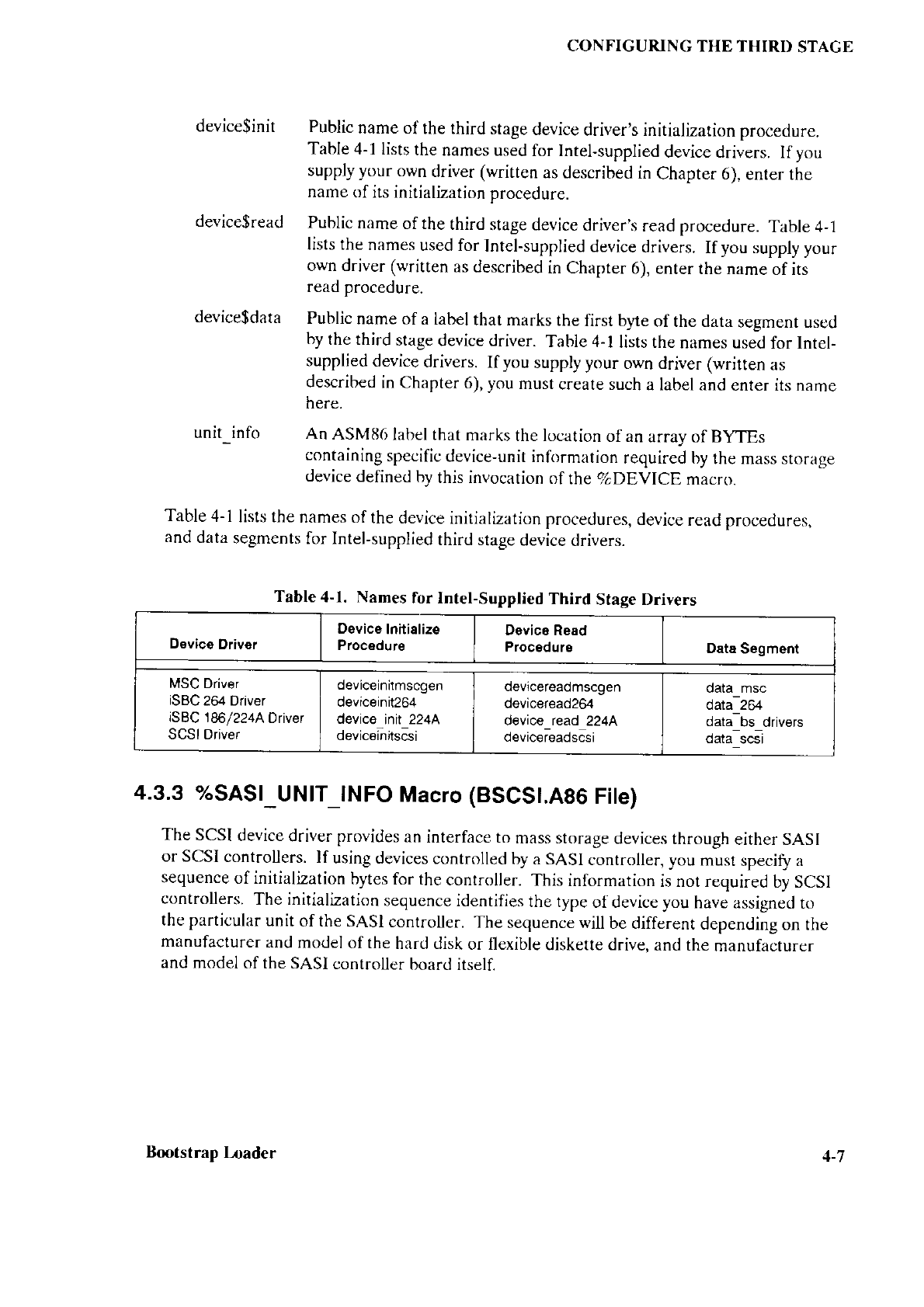
CONFIGURJNG
THE THIRD
STAGE
device$init Public
name oî
the third
stage
device
driver,s initialization
procedure.
Table
4-1 lists
the
names used
for lntel-supplied
device drivers.
lfyou
supply your
own
driver (written
as described
in Chapter 6),
enter the
name
of its initialization
procedure.
device$read Public
name
ofthe third
stage device
driver's
read procedure.
Table 4-1
lists the names
used for
Intel-supplied
device
drivers.
If you
supply your
own driver
(written
as
described
in Chapter
6), enter
the name
of its
read procedure.
device$data Public
name of
a label
that marks
the
first byte
of the data
segment used
by
the third
stage
device driver.
Table 4-l lists the
names used
for Intel-
supplied
device
drivers.
Ifyou supply your
own driver (written
as
described
in Chapter
6),
you
must
create such
a label and
enter its name
here.
unit info An ASM86
label that
marks
the location
of an
array of ByTEs
containing
specific
device-unit
information
required hy
the mass srorage
device
defined
by
this invocation
of
the
%DEVICE macro.
Table
4-1
lists the
names of
the device
initialization
procedures,
device
read procedures,
and
data
segments
for Intel-supplied
third stage
device
drivers.
4.3.3
"/"SASl_UNIT_INFO
Macro (BSCSl.A86
Fite)
The
SCSI
device
driver provides
an
interface to
mass storage
devices
through
either SASI
or SCSI
controllers.
ìf using devices
controlled
by a SASI
controller, you
must
specifo a
sequence
of initialization
bytes
for the
controller.
This
information
is not required
by SCSI
controllers.
The initialization
sequence
identifies
the type
of iìevice you
have assigned
to
the particular
unit
of the SASI
controlìer.
The
sequence will
be clifferent
depending
on the
manufacturer
and
model
of the
hard disk
or flexible
diskette drive.
and the
manufacturer
and model
of the SASI
controller
board
itsell
Table
4-1. Names
for Intel-Supplied
Third Stage Drivers
Devico
Driver Oevice
Inhislize
Procedur€ Devica Read
Proc6dure Dsta
569ment
MSC Driver
iSBC
264 Driver
iSBC
186/224A
Driver
SCSI Driver
deviceiniîmscgen
deviceinit264
device init 2244
deviceinltscsi
d€vicereadmscgen
deviceread264
deYicelead 2244
devicereadscsi
data msc
aaazu
data bs drivers
oala scsl
Bootstrap
Loader 1-7
CONFIGURING
THE
THIRD STAGE
This macro
enables
you
to define
the
initialization
sequences
required
by your
devices
on
the SASI
bus. For each instance
of the ToDEVICE
macro
(in
the 851.A86
or
BS1MB2.A86
file) that defines
a device
on the
SASI bus,
you must also
include
the
ToSASI_UMT_INFO
macro
(in the
%BSCSI.A86
file) to
define that
device's initialization
sequence.
The label
specified for
the unit info
field of the %DEVICE
macro
must
match
the
label field of the
corresponding %SASI_UNIT-INFO
field.
The information
supplied
by an occurrence
of the %SASI-UNIT-INFO
macro
is not used
by
devices on the
SCSI bus. Therefore
in the BS1.A86
or BSIMB2.A86
file, VoDEYICE
macros
for devices
controlled by the
SCSI bus
should never specif a
value
for
the unit info
parameter. Note
that there is only
one
pair
of device
initialization/device
read
procedures
for the
SCSI driver regardless
of
whether the controller
is SCSI or SASI.
The %SASI_UNIT_INFO
macro
can be included
only in the
SCSI/SASI
driver
confisuration file.
BSCSÌ.A86.
The macro has the
form
%SASI-UNIT
where:
label
init_command
init_count
init data
_INFO(
label, init_command,
init_count,
init_data
)
A valid ASM86 label name
matching the one
you
specified in
the unit info field of the ToDEVICE
macro
for
your
device
(in
the file
BS1.,{86 or BSlM82.,486).
A WORD that is the initialization
command for
your
particular SASI
controller.
A BYTE specifying
the number of initialization
BYTEs
that
your
SASI
controller requires.
The array of BYTEs of initialization
data required
by
your SASI controller. The
length of this array must
be
equal to the
value in the init count parameter.
4-8 Bootstrap
Inader
CONFIGURING THE THIRD
STAGE
The
default invocations
of this macro
in BSCSLA86 are
; j.SBC
786/03A SCSI Host
lbscsi( 0C8H
, OCAH,
OCCH, OCEH
, 0
, 0
, 1,0,OFFCOH,2,0)
; iSBc 286/700 SCSI
Hosc
bscsi( 0C8H,
0cAH,
0CCH, 0CEH,
0,0,2,0, 0200H, 2, l, 0D1H)
; Xebec 51420 SASI controller and a Teac model F558. 5 L/4-ínch
; flexible di skette drive.
X s as
i_uni t_fnfo
(sasi_x1420mf,
1lh,10,0,28h,2,90h,3,0fh,50h,0fh,014h,0)
i
; Xebec 51410 SASI conÈroller and a Quantum
roodel
Q540, 5 L/4-lnch
; l,linchester dÍsk drive.
Zsasi_unit_info(sasi_x1410b,
Och, 8, 2, 0, 8, 2, 0, 0, 0, Obh)
;
; Xebec S1410 SASI controller and a Computer Memories, Inc.
; rnodel CMI-5619
5 1/4-inch l,Jinchester disk drive.
Zsasi_unit_info(sasi_x140a, Och, 8, 1, 32h, 6, 0, 0b4h, 0, 0, Obh)
4.3.4
o/"lNTl
Macro
The
ToINTl macro causes the
third stage to
execute an INT 1 (soliware interrupt)
instruction whcnever
a bootstrap
loading error occurs.
This enables
you
to pass control to
a
user-written program
if loading fails.
However, to pass control to
another
program, you
must place the
address of that program
in
position
1 of the interrupt vector
table. This
macro
is supported by only
the D-MON3Só
monitor. The iSDM monitor does
nor support
this
macro.
The svntax of the
%lNTl maero is
a/ol
NTI
There are no parameters
associated with this
macro.
Exactly
one of the
%lNTl, %lNT3,
and
%HALT macros
must
be
included, or an error
will
occur when
BS3.Alì6,
BS3MB2.A[ìó, or BG3.A8ó are
assembled.
Bootstrap Loader 4-9
CONFIGURING
THE THIRD STAGE
4.3.5 %lNT3
Macro
The %INT3
macro causes
the third stage
to execute an INT 3 (sofrware interrupt)
instruction
whenever a bootstrap
loading error
occurs. Ifyou are using
the iSDM
monitor,
the INT 3 instruction
passes control
to the monitor. Otherwise,
the INT 3 instruction
has
no effect unless
you have placed the address
of your custom interrupt
handler in
position 3
of the interrupt
vector
table.
The
syntax of the
aol
NT3 macro
is
7aINT3
There are no
parameters
associated
with
this macro.
Exactly one of the %lNT1, %lNT3,
and
TaHALT
macros
must be included, or an error
will
occur
when
8S3.A86, BS3MB2.A86,
or BG3.A86 are assembled.
4.3.6
%HALT Maero
'Íhe ToHAIJT
macro causes the third stage to execute a halt instruction
whenever a
bootstrap
loading
error occurs.
The syntax of the VoÍIALT macro is as follows:
ToHAlT
There are no
parameters
associated
with this macro.
Exactly one of the ToINTl, %INT3,
and
ToHALT
macros must be included, or an error
will
occur
when
BS3.A86, B53MB2.A86,
or BG3.A86 are assembled.
4.3.7 a/oCPU
BOARD Macro
The
ToCPU
BOARD macro specifies the type of processor board in your system. The
third stage needs this information
so that it can properly
initialize
the
board
when
switching into
protected virtual
address mode. The syntax of the
%CPU BOARD macro
is as follows:
TaCPU_BOARD (type)
4-10 Bootstrap
Loader
CONFIGURING
THE THIRD
STAGE
where:
type The tlpe of processor
board in your system.
The following are the valid
values:
Value Processor
Board
286/12 iSBC
286/10 board
286/|Z iSBC 2861104 board
286112 iSBC 28ól12
board
2861100A iSBC
2861100.4 board
386/20 iSBC 386/2X board
or iSBC 386/3X Board
386/100 iSBC
386/116 board or
iSBC 386/120 Board
4.3.8
%INSTALLATION
Macro
(8G3.A86
Only)
The TaINSTALI-ATION
macro specifies whether the generic third stage will
enter the
monitor after loading the application
system or not. The syntax of the
%INSTALLATION
macro ls:
ToINSTALI-ATION (monitor_entry)
where:
monltor_entry The type of action the
Bootstrap Loader is to take upon
loading the application system. If monitor entry is
'n'
the
system
is loaded and then executed
with
no monitor
entry
inbetween. If it is'y', the monitor is entered after
the system is loaded. You must
rype
in the monitor GO
command to continue.
When
the monitor is entered,
as a result of specifying
'y'
for the monitor_entry
parameter,
the Bootstrap
Loader
prints
the following
message to the terminal:
Insert the Start-uD Svsten Cornmands
Dlskette and tvDe "G<RETURN>"
NOTE
If your system has
the D-MON386 monitor rather
than the
iSDM monitor, type
''GO<
RETURN>".
Bootstrap
Loader 4-t I
CONFIGUR-ING
THE
THIRD
STAGE
This macro
is used to
generate the
generic
third
stage used to
boot the Operating
System
from diskettes. The %INSTALT
ATION macro allows one diskette,
which
contains
only
the Operating
System boot file and
the third stage to be usetl
to load the system
from
diskette into memory.
In entering the monitor,
it allows a second
diskette,
which contains
the necessary system
commands, to be used as
the system device
when
the
system is
initialized.
4.3.9 %END
Macro
The
ToEND
macro is required
at the end of the 853.A86,
BS3MB2.A8ó, and BG3.A86
files. The syntax of this macro
is as follows:
ToEND
There are no
parameters
associated
with
the
ToEND
macro.
4.3.1
0 User-Supplied
Drivers
If you want
to use the device-specific third
stage to
load
your system from a device other
than one
for
which
Intel
supplies a third-stage driver, you must write
your
own device
driver
procedures
that the third stage
will
call. Chapter
fr
describes how to
do this. In
addition,
perform the
following
actions to add the procedures to the Bootstrap Loader:
Speci! the
names of the device initialization
procedure, the device read
procedure,
and the driver's data
segment in a ToDEYICE macro in
the
853..4[ì6 file.
If there are configurable parameters associated with your device
(such
as base
addresses or
wakeup
ports), you might want to create your own configuration macro
and include
it in
a special
configuration file,
just
like the Intel devices do. Chapter
5
describes how to set up a macro. You
will probably
use the same configuration file for
both the first- and third-stage drivers.
Assemble your
device initialization
procedure,
your device read procedure, and
your
configuration file (ifyou have one), and link the resulting object code to the rest of the
BootstraD Loader
obiect files
and
libraries.
4-12 Bfi)tstrap hader
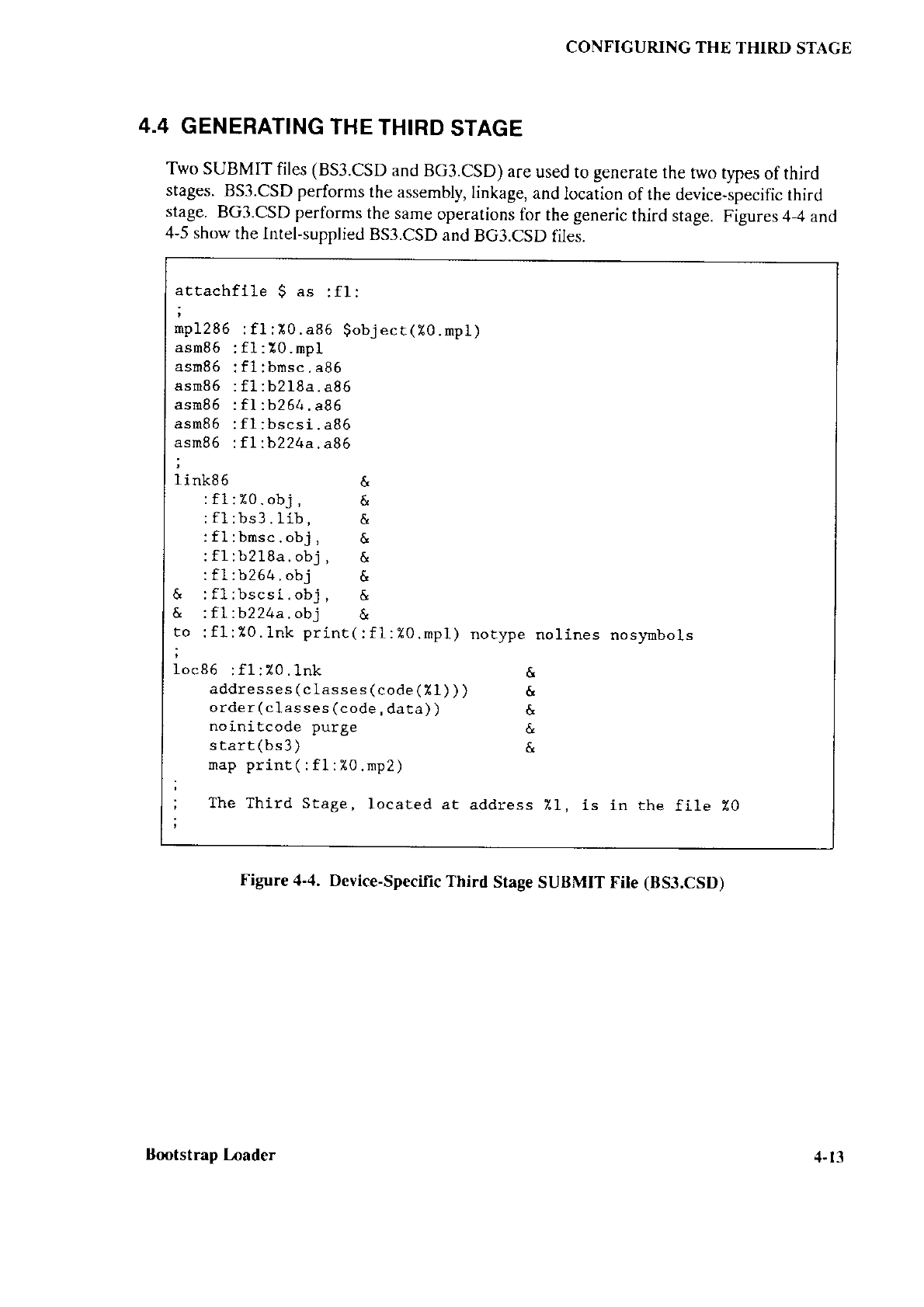
4.4
GENERATING
THE
THIRD
STAGE
Two SUBMIT
files
(BS3.cSD
and
BG3.csD)
are
used
to
generate
the
two types
of third
stages.
B53.cSD
performs
the
assembly,
linkage,
and
location ofthe
device-specific
third
stage.
BG3.GSD
performs
the same
operations
for
the
generic
third stage.
Figures 4-4
and
4-5 show
the Intel-supplied
B53.CSD
and
BG3.CSD
files.
CONFIGURING THE
THIRD
STAGE
attachfile $ as :fl:
;
rnp1286
asn86
asn86
asrn86
asm86
asn86
asm86
;
link86
&
&
co
;
1oc86 :fl: Z0
. lnk
addresses
(classes
(code
(11
) ) )
order(classes
(code,
data)
)
noinitcode purge
s taft (bs
3
)
map print (
:
f1 : %0. np2
)
The Third Stage, locared ar
:f1
:
Í0. a86 $object(%0.rnp1)
fl:f0.rnpl
f1
:bmsc.
a86
f1 :b2l8a
. a86
fL:b264 . a86
f1
: bscsi. a86
fI:b224a . a86
&
f1 20.
obj
, &
f1
:bs3.lib, &
f1 :brnsc
.
obj , &
fl :b218a. obj
, &
fl : b264
.
obj &
f1
:bscsi.obj, &
fl:b224a.obj &
fl:10.lnk print(:f1 :Z0.mp1)
notype nolines nosynbols
&
&
&
&
&
address
11, is in the file 10
Figure 4-4.
Device-Specific
Third
Stage
SUAMIT File
(B53.CSD)
Bootstrap
Inader ,:t-
13
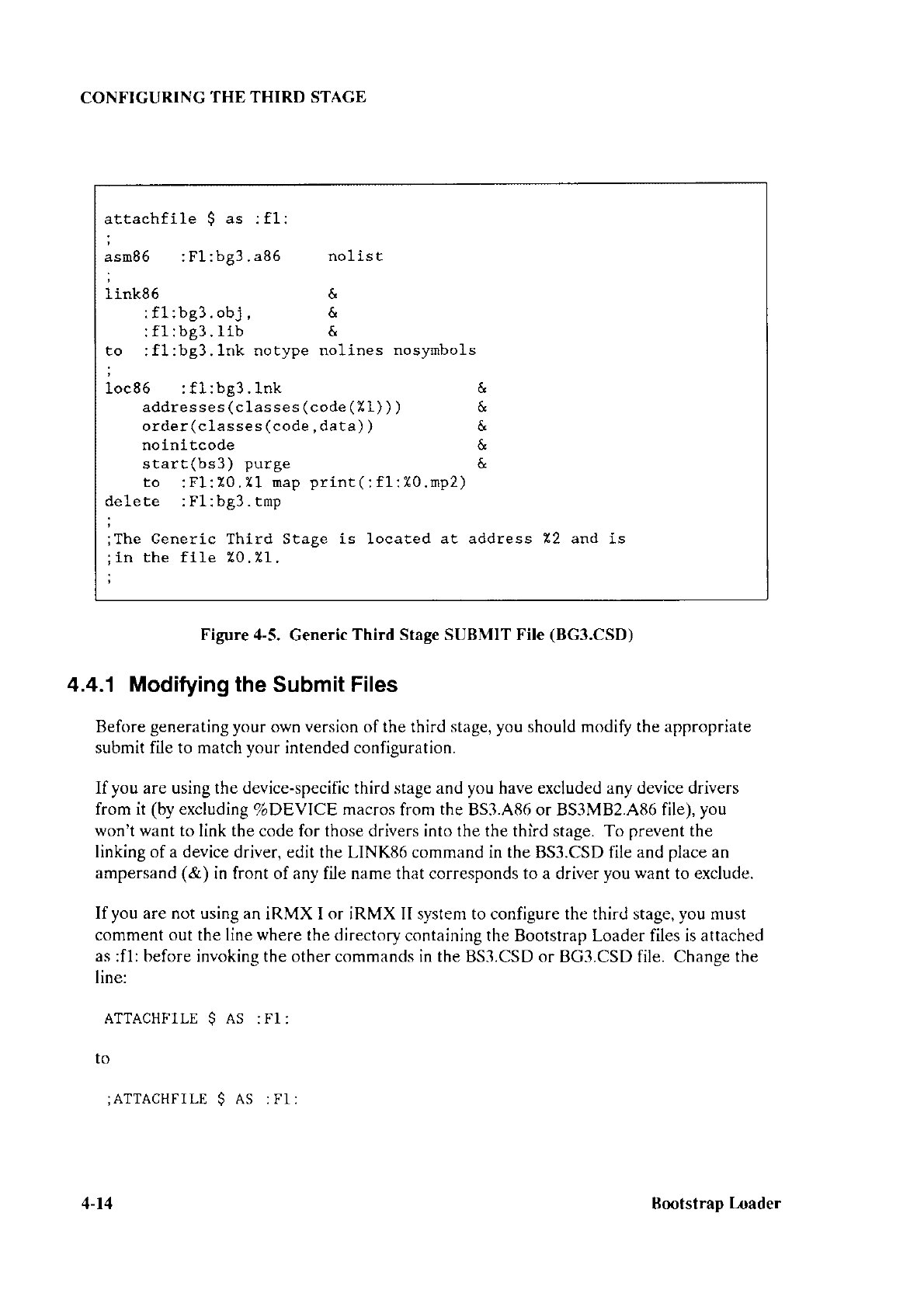
atfacnîlIè I as : f r:
;
asm86 : Fl:
bg3
.
a86 nolisr
;
link86 &
:f1 :bg3.obJ, &
.!i-.uBJ.r!u ù
to :
fl :bg3.1nk notype nolines nosyurbols
1oc86 : fl : bg3 . lnk &
addresses
(classes (code (Zl)
) ) &
order(classes
(code,
data)
) &
nolnitcode &
&
èLd! L\urJ./ Pu!óc
to :Fl:20.11
nap
print(:fl :ifO.mp2)
The Generic Third Stage is located at address Z2 and is
in the file Z0 . 11-
CONFIGURING
THE THIRI) STAGE
Figure 4-5.
Generic
Third Stage SUBMIT File
(BG3.CSD)
4.4.1 Modifying the
Submit Files
Before
generating your
own
version
of the third
stage, you
should modify
the appropriate
submit file to match your intended configuration.
If you are using the device-specific third stage and you have excluded any device drivers
from it (by excluding
o/oDEYICE
macros
from
the
853.A86 or BS3MB2.A86 file),
you
won't want
to link the code for those drivers into the the third stage. To prevent
the
linking of
a
device
driver, edit the LINK86 command in the BS3.CSD file and
place
an
ampersand (&) in front of any file name that corresponds to a driver
you want
to exclude.
If you are not using an
iRMX I or iRMX II system to configure the third stage, you must
comment out the line where the directory
containing the Bootstrap Loader files is attached
as :fl: before invoking the other commands in the
BS3.CSD or BG3.CSD file. Change
the
line:
ATTACHFILE
$ AS :Fl :
to
:ATTACHFII-E S AS :F1 :
4-14 Burtstrap [-oader
CONFIGURING
TIIE THIRD
STAGE
4.4.2 Invoking
the
Submit File
After you
have
modified
either
the BS3.CSD
or BG3.CSD
file to
correspond to
your
configuration,
invoke
the
appropriate
SUBMIT
file to assemble
the third
stage files,
link
them
together,
and assign
absolute
addresses.
The
format for invoking
either SUBMIT
file
is as
follows:
Device-soecific
third stage
SUBMIT
B53 (filename,
third_stage_addr)
Generic
third stage
SUBMIT
BG3 (filename,
extension,
third_stage_addr)
where:
filename The
name of the
file in
which
to store
the
senerated
rhird
stage. Also,
the name
of
the
third-stage
configuration
file
you
are using (BS3.A8ó
for
MULTTBUS
I systems and BS3MB2.A86
for
MULTIBUS
II systems).
The generic
third stage
appends
the next parameter (extension)
to the lìÌename.
The extension
the
generic
third stage is to have.
This
does not apply
to the device
specilìc third stage.
Normal
generic
third
stages usually
have the extension
'GEN'.
Generic
third stages
used lbr Operating
System
installation
should
use the extension
'INS'.
The address
in RAM where
the third stage will
be
loaded.
The address you
specify should be
a full 20-bit
address.
Do not use the base:offset
form to
indicate the
address.
If you
have
no special requirements
for loading the
third
stage, speci$ a value
of 0BC000H
for this parameter.
extenslon
third_stage_addr
Bootstrap hader 4-r5
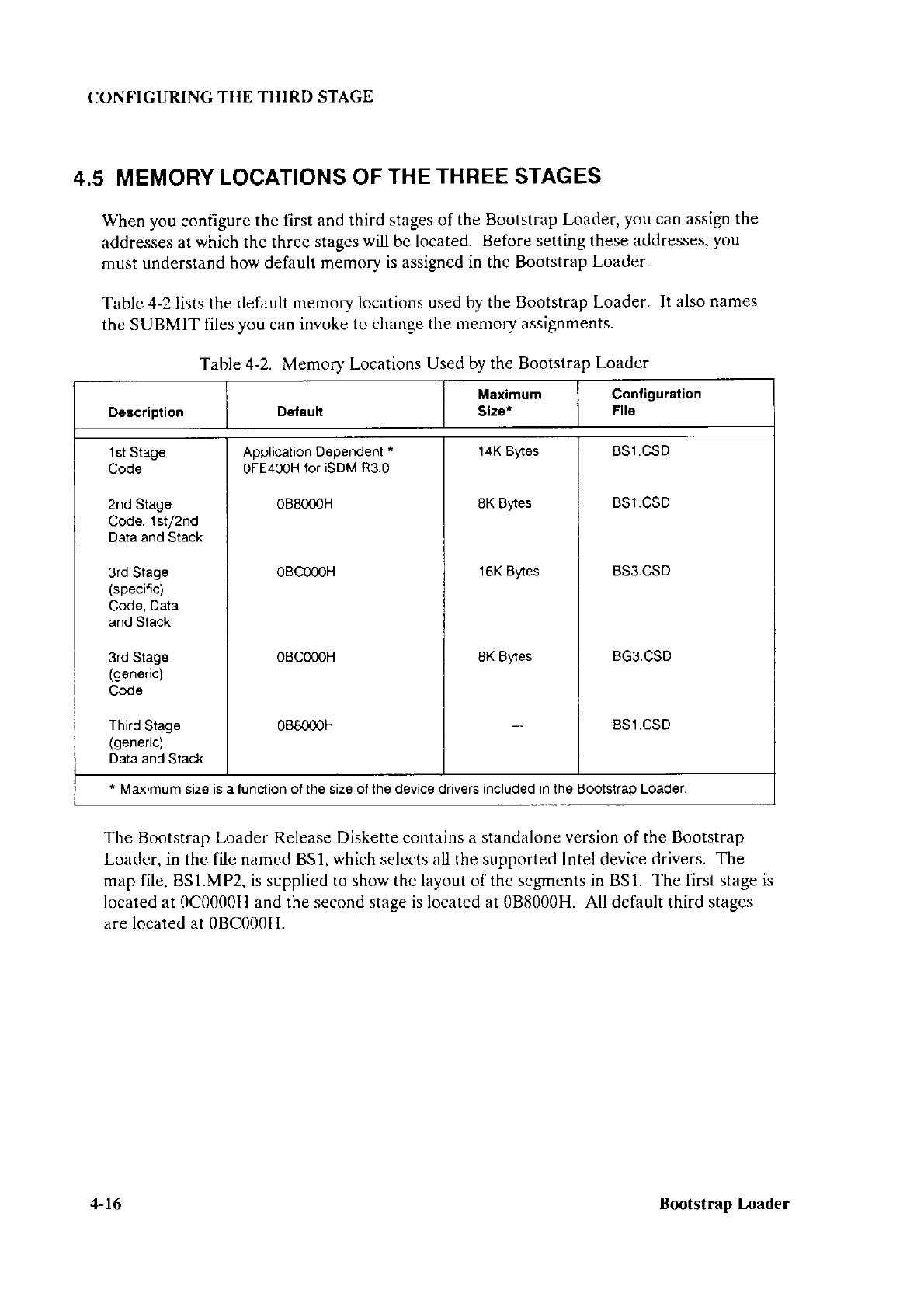
CONFIGURING
THE
THIRD STAGE
4.5 MEMORY
LOCATIONS OF
THE
THREE
STAGES
When you
configure
the first and
third stages of the
Bootstrap Loader,
you can assign
the
addresses
at which the three stages
will
be located.
Before setting these
addresses,
you
must understand
how default memory
is assigned in the Bootstrap
Loader.
Table 4-2 lists the
default memory locations
used by the Bootstrap
Loader- It also names
the SUBMIT files
you
can
invoke to
change the memory assignments.
Table
4-2.
Memory
Locations
Used bv the Bootstrap
Loader
The Bootstrap Loader Release Diskette contains
a standalone version of the Bootstrap
Loader, in the file named BS1,
which
selects all the supported lntel device
drivers. The
map file, BS1.MP2, is supplied to show the layout of the segments in BS1. The first
stage is
located
at 0C0000H and the second stase is located at 0B8000H. All default third stases
are located at 0BC000H.
Deacription D€fauh
Marimum
Size'
Configuration
File
1st Stage
Code
2nd Stage
Code, I st/2nd
Data
and Stack
3rd Stage
(specifìc)
Cod€,
Data
and
Stack
3rd Stage
(gen€ric)
Code
Third
Stage
(generic)
Data and
Stack
Applicatìon Dependent
*
0FE40OH
for
iSDM R3.0
088000H
0Bc000H
0Bc000H
0880@H
14K Bytes
8K Bytes
16K Bltes
8K Byîes
BSl,CSD
BSl.CSD
BS3.CSD
BG3,CSD
BSl,CSD
* Maximum siz€
is
a function ol the
size of the device drivers included in the Bootsfap Load€r,
1-16 Bootstrap Iîader
WRITING
A
CUSTOMCHAPTER
5
FIRST.STAGE
DRIVER
5.1 INTRODUCTION
You
can configure
the Bootstrap
Loader
to run with
many kinds of
devices. If you plan
to
use
one of the
devices for which
Intel supplies
a device
driver, you
can skip this chapter.
If you want
to use
the Bootstrap
Loader with
a device other
than those supported
by Intel,
you
must
write
your
own first-stage
device driver. (lf you
want
to load iRMX II
applications
past the first
megabyte
of address space, you
must also write
a custom third-
stage
driver.
Chapter 6 describes
how
to
write
thirtJ-stage
drivers.) This
chapter
provides
you
with guidelines
for
writing
a custom first-stage
driver.
You
must include two procedures
in every first-stage
device driver: a device
initialize
procedure
and a device read
procedure.
The device
initialize procedure
must initialize the
bootstrap
device. The device
read procedure
must load
information from
the device into
RAM.
The
rest of this chapter
refers
to the two procedures
as DEVICE$INIT
and
DEVICE$READ. However,
you
can
give
them
any names you want, provided
no
other
first-stage
driver procedure
uses the chosen
names.
To check the names
of the Intel-
supplied
first-stage procedures,
use LI886
to Iist the modules
in the object
library
/RMX286/BooT/BS
1.
I-lB or
/RMX86/BooT/BS
1.LIB.
You
must
write
both
procedures
in an
t1086 language
(either
PL/M-ll6
or ASM86) and
conform
to the
I-ARGE model
of segmentation
of the
PL/M-86
programming
language.
This
means that you
must declare
the two procedures
as FAR (not
NEAR) an<J all
pointers
must
be 32 bits
long. You must
adhere to
the interfacing and
referencing conventions
of
the
PL/M-8ó IARGE model
even if you write
the
procedures
in assembly
language.
If your
driver
code is
going
to
operate in the
MULTIBUS II environment,
two adclitional
driver
code constraints
exist. First, you
must follow
the MULTIBUS II transport protocol
for communication
between
the driver
and the device
controller
you
bootstrap load
tiom
You can au:omplish
this by
using Bootstrap
Loader Communìcation System
utiÌity calls
within
your
driver code.
Second, you
must organize your driver code
so that it belongs to
the BSL-Drivers
COMPACT sub-system.
This last
requirement is necessary because rhe
Bootstrap Loader
Communication
System utilities are all NEAR calls.
Bmtstrap lîader 5-l
WRITING
A CUSTOM
FIRST-STAGE
DRryER
The next
two sections
describe
the interface
these two
procedures
must
present to
the first-
stage Bootstrap
Loader code.
Subsequent
sections describe
how to
supply configuration
information
to the
driver, how to
use Bootstrap
Loader Communication
System utilities
in
your driver code,
and how to
generate first-stage
Bootstrap Loader
code that
includes the
new
driver.
5.2 DEVTCE
INITIALIZE PROCEDURE
The device
initialize
procedure must
present the following
PL/M-86 interface
to the
Bootstrap
Loader:
device$init: PROCEDURE
(unit) WORD PUBLIC;
DECI-ARE
unit WORD:
. (Typical code)
END
devices ini t :
where:
device$init The name
of the device initialize
procedure. You can
choose any
name
you
wish for this
procedure, as long as it does not conflict
with the
names
of any other first-stage
procedure.
unit The device
unit number, as defined
during Bootstrap Loader
configuration.
The
WORD value returned by the
procedure must be the device
granularity (in bytes) if
the device is ready, or zero if the
device is not ready.
To be compatible
with the Bootstrap Loader, the device
initialize
procedure
must
perlbrm
the following
steps:
1. Test to see if the device is
present.
If not, return
the
value
zero.
2. lnitializ.e the device for reading.
This operation is device-dependent. For guidance
in initializing the device, refer to the hardware reference
manual for the device.
3. Test to see if device initialization is successful. If not.
return the value zero.
4. Obtain
the device granularity. For some devices, only one granularity is
possible,
while for other devices several
granularities
are
possible. The hardware reference
manual for
your device explains this device-dependent issue.
5. Return the device
granulariry.
5-2 Bmtslrap
Loader
WRITING A CUSTOM
FIRST-STAGE DRIVER
NOTE
In addition to the above
five steps, the procedure
must follow N4ULTIBUS
ll
transport protocol
and belong
to the BSL-Drivers
COMPACT sub-system if the
driver
functions in a MULTIBUS
II environment. Refer to
Section 5.5 for
more
information on these
two requirements.
5.3 DEVICE READ
PROCEDURE
The device read procedure
must present
the following PL/M-86 interface
to the Bootstrap
I-oader:
device$read: PROCEDURE
(unit, blk$nun, buf$ptr) PUBLIC;
DECIARE unit WORD,
b1k$num DWORD,
buf$ptr POÌNTER;
. (Typical code
)
END
deviceSread:
where:
device$read The
name of the device read procedure.
You
can
choose any name
you
wish
for this procedure,
as long as it does not conflict
with
the names of
any other first-stage procedure.
unit The device unit
number, as defined during Bootstrap Loader
configurat
ion.
blk$num A 32-bit number specifying
the block number the Bootstrap Loader
wants
the
procedure
to read.
The size of each block equals the device
granularity,
with
the first block on
the device being block number 0.
buf$ptr A 32-bit POINTER
to the buffer in
which
the device read procedure
must copy the information
it reads
from the
secondary storage
device.
The
device read
procedure
does
not return a value to the caller.
To be
compatible
with
the Bootstrap Loader,
the device read
procedure
must
perform
thc
following steps:
1. Read the block specified by blk$num
from the bootstrap device specified
by unit into
the memory location specified by buf$ptr.
Bootstrap l-oader 5-J
WRITING A CUSTOM
FIRST-STAGE
DRIVER
Check
for I/O errors. [f none occur, return
to the caller. Otherwise,
combine
the
device code, if any, for the device
with
0l (in
the form <
device code
>
01),
push
the
resultingworcl
value onto the stack, and
call the BSERROR
procedure. For example,
if the device code is 0B3H,
push B301H onto the stack,
and call BSERROR.
If no
device code exists. use
00.
Adding the following statements
aocomplish this in PL/M-86:
DECI.ARE
BSERROR EXTERNAL,
DECI^A.RE
IO-ERROR LITERALLY'OB3O1H'
CALL BSERROR(ÌO_ERROR)
;
lf you call the BSERROR
procedure
from
assembly language, note that BSERROR
follows the PL/M-86
TARGE model of segmentation;
that is, declare BSERROR
as
extrn BSERROR:far
NOTE
In
adclition to the above two steps, the procedure must follow MULTIBUS II
transport
protocol
and belong to the BSl-Drivers COMPACT
sub-system if the
driver functions in a MULTIBUS II environment.
Refer to Section 5.5 for
more information on these lwo requircments.
5.4 SUPPLYING CONFIGURATION
INFORMATION TO THE
FIRST.STAGE DRIVER
Any custom device driver you
write
needs some configuration information about the devrce
it supports, such as
the address of
the device wakeup port. (To
determine
what device-
specific information your driver needs, consult the hardware reference manual for the
device.) You can provide this information to the custom device driver one of two
ways:
. Place the information
directly into
the driver (hard-coding)
. Create a configuration file similar to those provided
with
the Intel-supplied drivers.
5.4.1 Hard-Coding the
Configuration
lnformation
One way to supply configuration
information to a custom device driver is to
place it
directly into the code. This method
works,
but if any of the configuration information
changes, or if you
want
to support a similar device that has a slightly different
configuration, you must
change the ciriver ancì reassemble it. Fortunately, first-stage devrce
drivers are usually small enough so that the amount of time required to
reassemble
them is
negligible.
5-4 Brxtlstrap lrtader
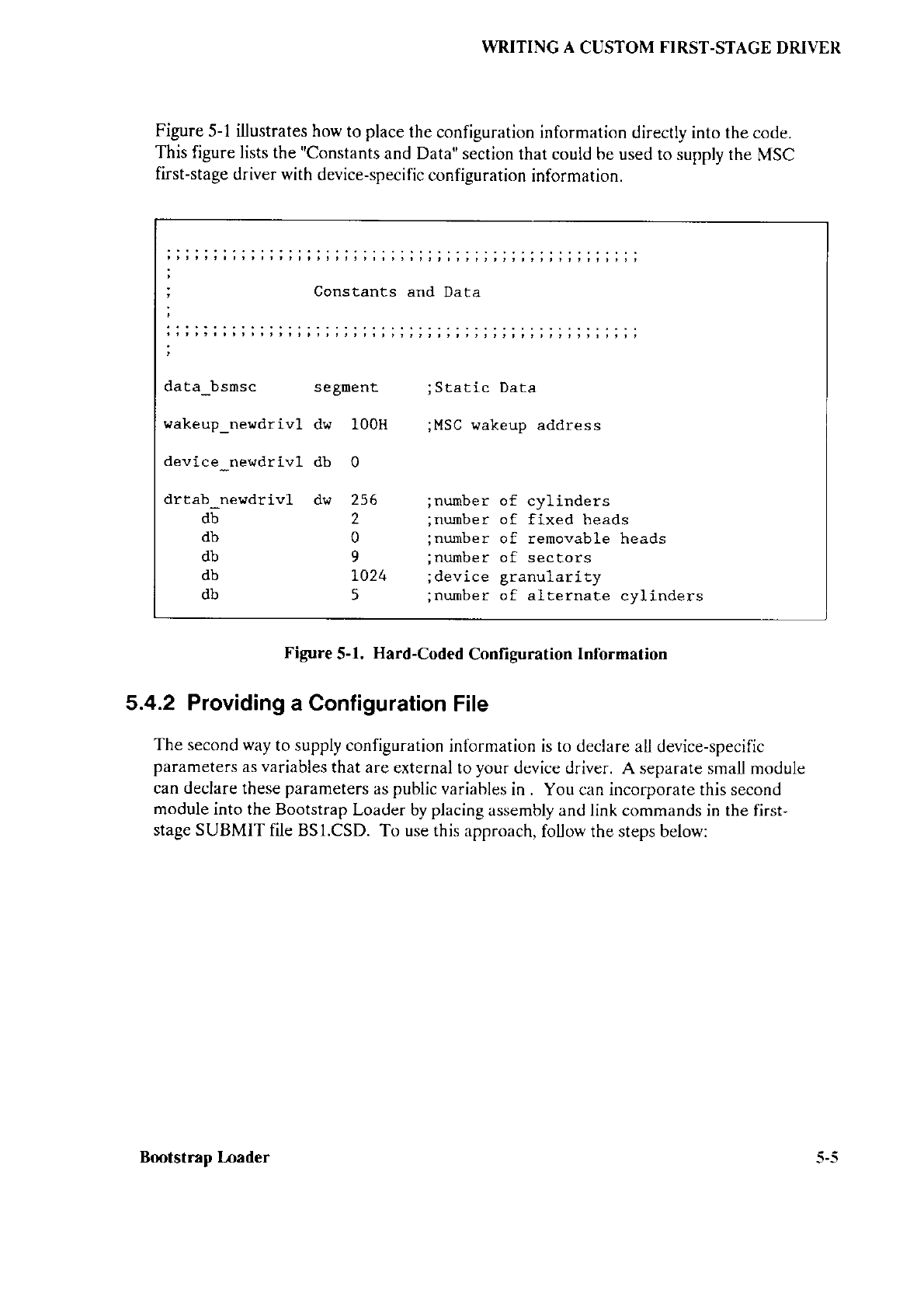
WRITING A CUSTOM
FIRST-STAGE
DRIVER
Figure
5-t illustrates how
to
place
the
configuration information
directly into the code.
This figure lists
the
"Constants
and Data" section
that could be
used to supply the
MSC
first-stage
driver with
device-specific
configuration
information.
Figure
5-1. Hard-Coded
Confìguration
Information
5.4.2 Providing
a Configuration
File
The second way
to supply configuration
inlbrmation is to declare
all device-specifìc
parameters
as variables
that are
external to
your
device
driver. A separate small module
can declare
these
parameters
as
public
variables
in . You can incorporate this second
module into the Bootstrap
Loader by
placing
assembly and link commands in the first-
stage SUBMIT
file BS1.CSD.
To use this approach,
follow the steps below:
Constants and Data
data_bsmsc segnent ;
Static Data
wakeup_newdrivl dw 100H ;MSC
wakeup address
device_newdrlvl db 0
drtab_ne\,Jdr
ivl d\r 256 ;number of cylinders
db 2 ;nuruber of fixed heads
db 0 ;nurnber of rernovable heads
db 9 ;number
of sectors
db L024 :
device granularicy
db 5 ;nurnber
of alternaÈe cylinders
Bootstrap l-oader 5-5
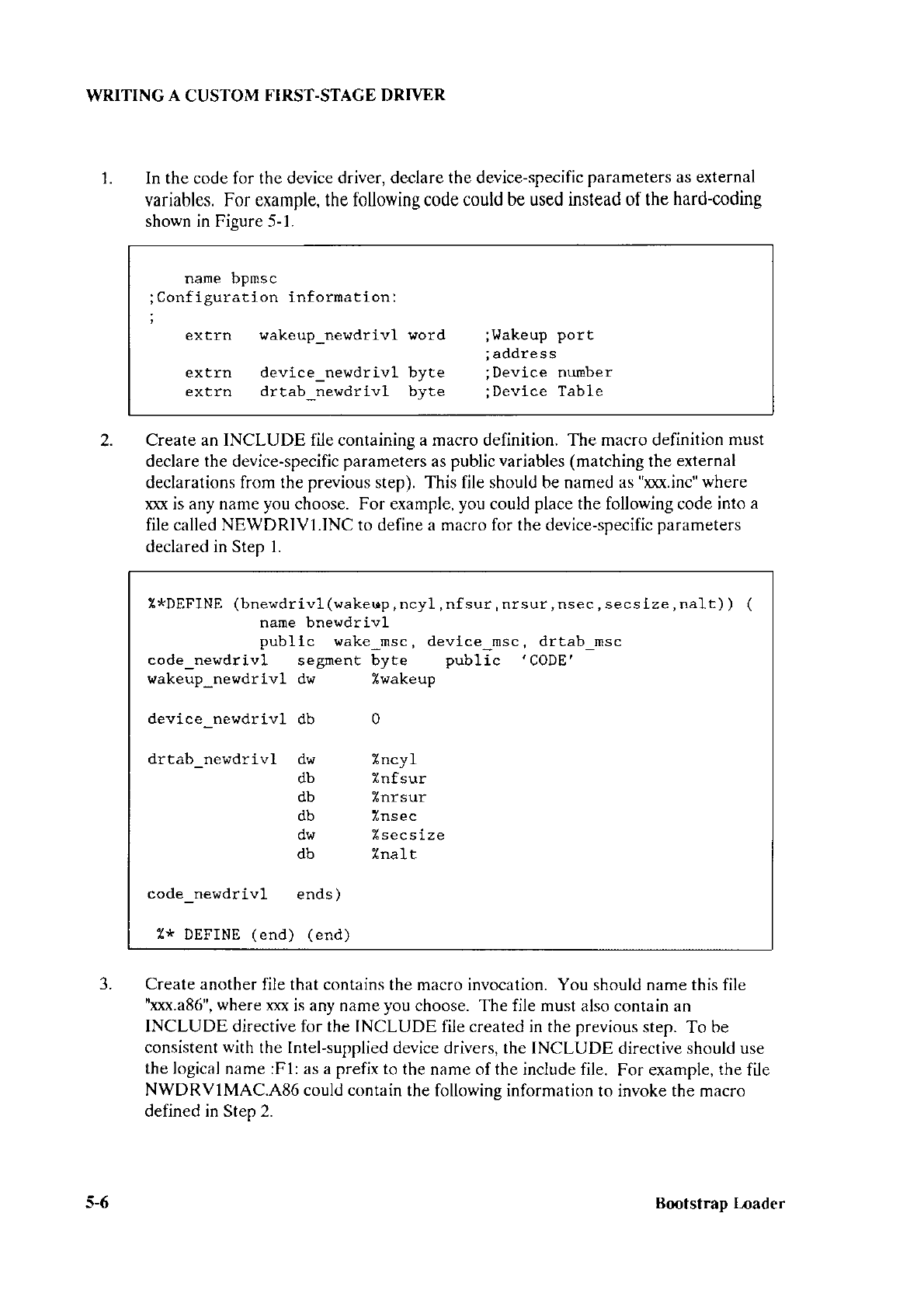
WRITING
A CUSTOM
FIRST-STAGE DRTVER
1. In the code for the device
driver, declare the device-specific
parameters as external
variables. For example, the following code could
be used instead of the
hard-coding
shown in Fisure 5- l.
narne bpmsc
;
Conf lguration information:
extrn r^rakeup_newdrivl
extrn device_ne\rdrivl
extrn drÈab newdrivl
word
byce
byte
;l,Iakeup
port
;Devlce nurnber
;Device Table
Create an INCLUDE file containing a macro definition. The macro definition
must
declare the device-specific parameters as public
variables (matching
the
external
declarations from the previous step). This file should be named as
"roo<.inc" where
no< is any name you choose. For example, you could
place
the following code into
a
file called NEWDRIVI.INC to define a macro for the device-soecific
Darameters
declared in Sten 1.
U
*DEFINE
(bnewdrivl (wakeup
,
ncyl
,nfsur,nrsur,nsec,secslze,nalt)) (
nane bnewdrivl
publlc wake_rnsc,
devlce_msc, drtab_msc
code_newdrivl segment byte public 'CODE'
wakeup-newdrlvl dw lwakeup
device_newdrivl db 0
drtab_newdrivl dw lncy1
db nfsur
db %nrsur
db Zns ec
drr %secsize
db lnalt
code_newdrivl ends
)
Z* DEFINE
(end) (
end)
3. Create
another file that contains
the macro invocation. You should name this fìle
"roo<.a86",
where
xxx
is any name
you
choose. The file must
also contain an
INCLUDE directive for the INCLUDE file created in the previous
step. To be
consistent
with
the Intel-supplied
device drivers, the INCLUDE directive should use
the
logical name :F1: as a prefix to
the name of the include file. For example,
the
fiìe
NWDRV1MAC.A86 could contain
the followins information
to invoke the macro
defined in Step 2.
5-6 Bootstrap l-oader
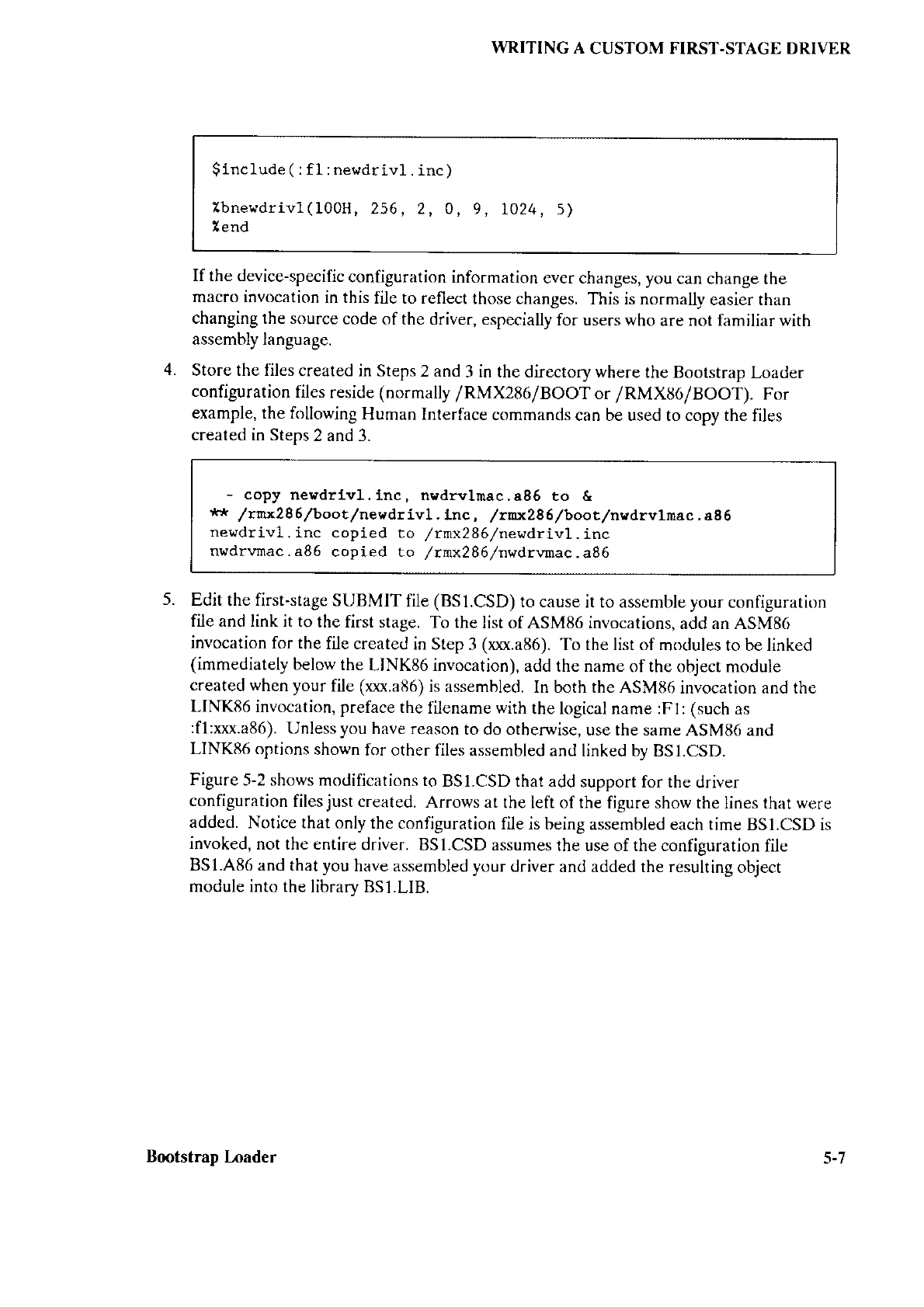
WRITING A CUSTOM FIRST.STAGE DRIITR
$lnc1ude
(: f1 :newdrlvl .
inc)
Ibnewdr iv1(
100H,
256, 2, 0,
fend 9
, 1024
,
If the device-specific
configuration
information
ever changes, you
can change
the
macro invocation
in this
file to reflect
those changes.
This is normally
easier than
changing the source
code
of the driver, especially
for users who
are not familiar with
assembly language.
Store the files
created in Steps
2 and
3 in the directory where
the Bootstrap
Loader
configuration
files
reside (normally
/RMX286/800T or /RMX86/BOOT). For
example, the following
Human Interface
commands
can be used to copy the
files
created in Stens
2 and 3.
- copy nevdrfvl.lnc, nsdrvlmac.aS6 to &
x* /xrrx286 /boot/newdr lvl .
lnc , /rnx286/boot/nsdrvlmac. a86
newdrivl .
inc copied to / rnx286
/newdr ivl . inc
nwdn..mac . a86 copied to /rmx2
8 6/nvdrvmac . a8 6
5. Edit the first-stage
SUBMIT
file (BSI.CSD)
to cause
it to assemble your configurarion
file and link it to
the first stage.
To the
list of ASM86 invocations,
add an ASM86
invocation for the
file created
in Step
3
(>oo<.a86).
To the list of modules to be linked
(immediately
below
the
LINK86 invocation),
add the name
of the object module
created when
your
file
(no<.a86)
is assembled.
In both the ASMIJ6
invocation and the
LINK86
invocation, preface
the
filename with
the logical name :Fl: (such
as
:f1:nc<.a86).
Unless you
have reason
to do otherwise,
use the same
ASM86 and
LINK86 options
shown
for other files assembled
and
linked by BSI.CSD.
Figure
5-2 shows
modifications to
BSl.CSD that add
support for the
driver
configuration
files
just
created.
Arrows ar
the left of the
figure show the lines that were
added.
Notice that only
the configuration
file is being
assembled each time
BSl.CSD is
invoked,
not the entire
driver.
BSl.CSD assumes
the use of the configuration
file
BS1.A86 and that you
have assembled
your driver
and added the resulting
object
module into the
library BSl.LIB.
Bootstrap
l.oader f,-/
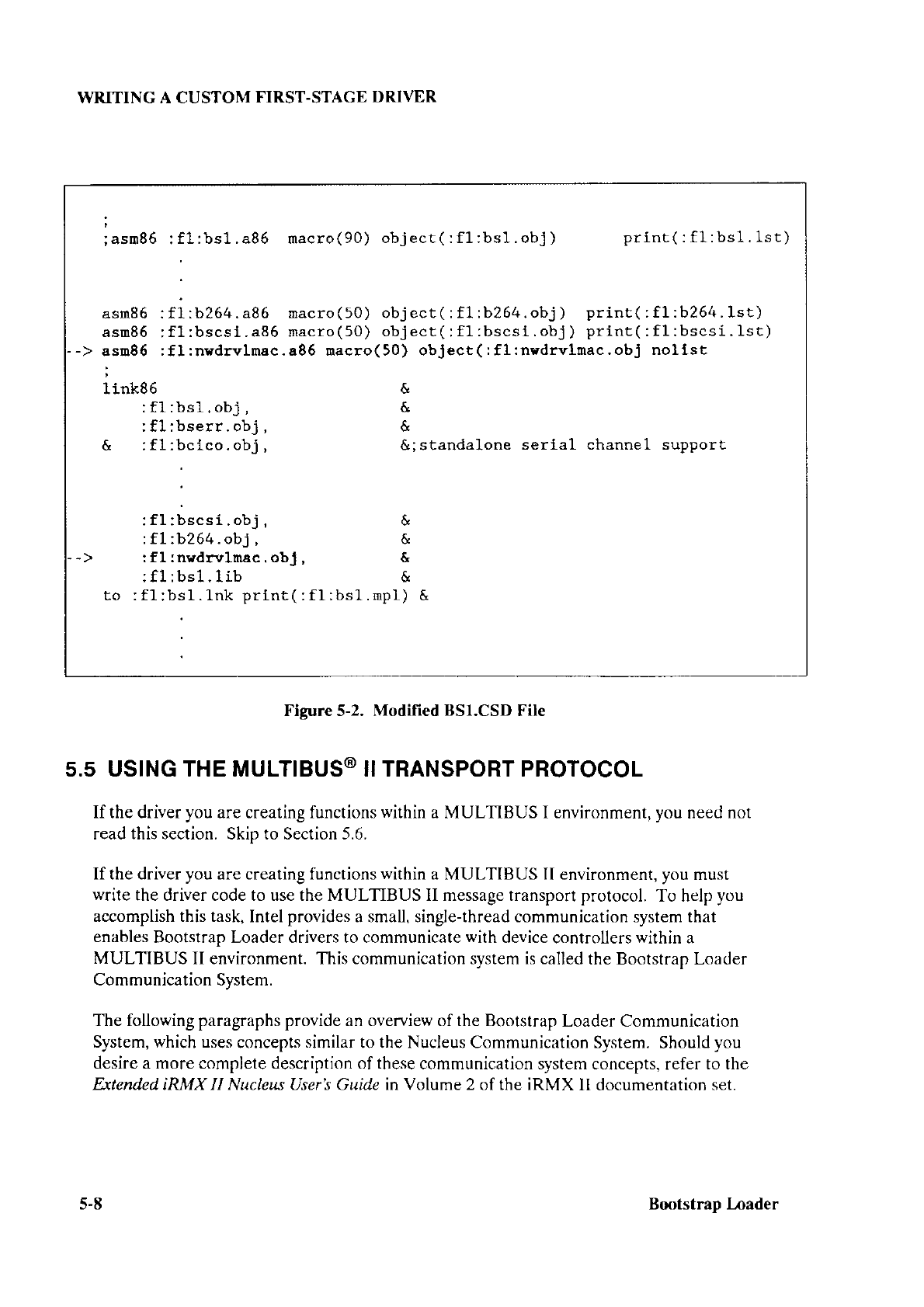
WRITING A CUSTOM
FIRST-STAGE
DRIVER
Figure 5-2.
Modified BSI.CSD
File
5.5 USING THE MULTIBUS@ IITRANSPORT PROTOCOL
If the driver
you
are creating functions
within
a MULTIBUS I environment, you
need
not
read this section. Skip to Section 5.6.
If the driver
you
are creating functions
within
a MULTIBUS II environment,
you
must
write
the driver code to use the MULTIBUS II message transport protocol.
To help
you
accomplish this task,
Intel
provides
a small, single-thread communication system that
enables
Bootstrap Loader drivers to communicate
with
device
controllers
within
a
MULTIBUS
II environment. This communication system is called
the Bootstrap Loader
Communication System.
The following paragraphs provide an overview of the Bootstrap
Loader Communication
System, which uses
concepts
similar
to the Nucleus Communication System.
Should
you
desire a more complete description of these
communication system concepts,
refer
to the
Extended |RMX II Nucleus User's Guirie in Volume 2 of the iRMX ll documentation set.
;
;asrn86
:f1:bs1.a86 rnacro(90)
objecc(:f1-:bs1.obJ) Prínr (
: fl:bs1 .
lst)
asrn86 :fl:b264.a86 nacro(50) object(:f1 :b264.obj
) print(:f1 :b264.1st)
asn86 :f1 :bscsl.a86 macro(50)
object(:fl:bscst.obJ) p
r i n t
(
:
f l : b s c s i . l s t
)
-> asn86 :
fl :nvdrvlnac.aS6 nacro(50) object( :
fl :nvdrwlnac.obj nollsÈ
;
l lnKób
'f1 'hcprr nhì
& :f1:bcico.obj,
&
&
&
&;standaÌonè
serlal channèl support
fl hcnci nhi
fl:b264. obJ
,
fl : nrdrvlnac .
obj ,
&
&
&
rl:Ds_t.llD
to : f1
:bs1.lnk prlnt(: fl:bs1.npl) &
5-E Bootstrap [.oader
WRITING
A CUSTOM FIRST-STAGE DR-IVER
The Bootstrap
Loader Communication
System
can be thought of as
a subset of the Nucleus
Communication
System.
It fully conforms
to the
MULTIBUS II transport protocol
suitable
for a limited
bootloading environment.
Unlike the Nucleus Communication
System,
the Bootstrap
Loader
Communication
system is designed
to handle bootstrap
loading
only. Consequently,
the system
is synchronous
in nature. In other words,
procedures
execute
to completion
one after
the other; no multitasking
or need to handle
asynchronous
events
exists,
MULTIBUS II transport protocol
functions supported
by the Bootstrap
Loader
Communication
System include
control and data
message tlpes, a subset
of the
request/response
transaction
model, send
and receive transaction
models, message
broadcasting,
and access to device
interconnect space.
To support these
functions, lntel supplies
a set of system utilities grouped
together in a
Bootstrap
Loader
Message Passing System
Module. As a programmer, you
have access to
these utilities
through system
calls
you
place in your
driver code. The remainder
of this
section explains
the supported
functions in the
Bootstrap Loader Communications System
and shows you
how to
use each of the utilities.
5.5.1 Message Passing
Controller Initialization
Before any
Bootstrap Loader
Communication System calls
can be made, you must
initialize certain parts
of the hardware
in preparation for message passing.
You
accomplish
this initialization
through the
BS$MPS$INIT utility. You must make this call
from
your
driver's initialization procedure
before
making any other Bootstrap Loader
Communication
utility calls. The following
utility description presents
BS$MPS$INIT:
CALL BS$MPS$INIT
INPUT PARAMETERS
This utility
has no input parameters.
OUTPUT PARAMETERS
This utility
has no output parameters.
DESCRIPTION
The BS$MPS$INIT
utility provides
hardware initialization for the Message Passing
Controller
(MPC)
and
the Advanced Direct
Memory Access
(ADMA) devices.
You must
perform
a call to this utility before attempting
any other Bootstrap Loader Communication
Svstem
utilitv calls.
Bootstrap Loader 5-9
WRITING A CUSTOM
FIRST-STAGE
DRI!'ER
CONDITION
CODES
This utility has
no condition codes.
5.5.2
Message
Types
The Bootstrap
Loader Communication
System
supports two types
of messages: control
messages and
data messages.
Control messages consist
of only a control
portion.
These messages
occur between
the
sender and
receiver requiring
no explicit buffer resource
allocation.
The reason
for no
buffer allocation
is because a control
message has no data
part. The maximum
length of
a
control
message is 20 bytes. Also,
a one-to-one correspondence
exists
between control
messages and MULTIBUS
II unsolicited messages
(all unsolicited
messages are control
messages).
Data messages
consist of both a l6-byte
control portion and a
variable length data
portion.
These
messages do require explicit
buffer allocation between
the sender and receiver.
The
reason buffer allocation
is required is because this
type of message contains
a variable
amount
ofdata. The maximum length of
the data portion is 64K-l
bytes.
5.5.3
Request/Response
Transaction Model
The Bootstrap Loader Communication
System supports a
subset of the re<1uest/response
transaction model that the Nucleus
Communication Svstem
uses. This subset has the
folìowing characteristics:
o Because the Bootstrap Loader Communication
System functions
within
a bootloading
environment, request messages
originate only from the host CPU board. The
specific
device controllers then
match responses to requests on a one-to-one
basis.
. No support exists for multiple
outstanding requests.
. Fragmentation and transmission
of response messages into specific application
buffers
can occur. Because this fragmentation
is completely transparent to the user, the
fragmented response is considered
as a single
response
to a single request.
o The Bootstrap Loader Communication
System
receives
messages in the order in
which
they are sent.
Communication
between the CPU host board executing the driver and lhe bootable
device
controller uses the basic transmission model of send and receive. The driver sends
a
request to the device controller
and then receives a response back. When the driver
initiates the message, an internal
transaction ID is generated that logically associates
the
request
with
the response.
This ID remains valid until the device controller responds,
thus
completing the transaction.
5-10 Bootstrap l-oader
WRITING A CUSTOM FIRST-STAGE DRIVER
For messages that
require data as
part
of the response, the driver can initiate the allocation
of an
rsvp data message buffer in which
to receive the response data. The data can then
arrive either whole
or fragmented. Regardless of fragmentation, the
host CPU
board views
the
response message as one message.
If the request message requires no data as a
response, the response
must be a control message.
The utility the Bootstrap
Loader Communication System uses to support the
request/response transaction
model is BS$SEND$RSVP. The following utiliry description
presents
BS$SEND$RSVP:
CALL BS$SEND$RSVP(socket,control$ptr,data$adr,data$length,
rsrp$control$p,rsrp$data$adr,rsvp$data$length,
flags,exception$ptr)
INPUT PARAMETERS
socket
control$ptr
data$adr
data$length
rsrp$control$p
rsrp$data$adr
A DWORD of the form host$id:port$id identif
ing the
remote destination.
A POINTER to a control message. If data$adr
=
NULL
(0) or data$length
=
0, then the control message is 20
bytes long. Otherwise, the control message is 16 bytes
long.
A DWORD containing the absolute
address of a data
message. If data$adr is NULL (0),
then a control
message is sent. Otherwise, data$adr points to a
contiguous
buffer.
A WORD defining the length of the data message. If
data$length is equal to zero, the control message
length
is assumed to be 20
bytes.
A POINTER to the received control message. If
rsvp$data$adr
=
NULL (0) or rsrp$data$length
=
0, then
the
control message
is 20 bytes long. Otherwise, the
control message is 16 bytes long.
A DWORD containing the absolute address
of a data
message buffer for the return
response that is expected.
If rsrp$data$adr is NULL (0),
then
a control message is
expected as a reply.
Otherwise, rsw$data$adr
points to
a contiguous
buffer in which the data message
arrives.
Bootstrap Loader 5-ll
WRITINC
A
CUSTOM
FIRST.STAGE
DRI!'ER
rslp$data$length A WORD
defining
the length of the rsrp data
buffer.
flags WORD reserved
for future use. Aithough
this
parameter is ignored,
you
must
supply a "0"
value
as a
placeholder.
OUTPUT
PARAMETER
exception$ptr A POINTER to a
WORD to which the Operating
System returns the exception code
generated by this
Bootstrap Loader Communication
System call.
DESCRIPTION
The BS$SEND$RSVP utility
sends a message from a port to a remote socket
with
an
explicit request for a return response. This call is synchronous
with respect
to both the
request and the response.
5-12 Bootstrap l-oader

WRITING A CUSTOM FIRST.STAGE
DRIVER
EXAMPLE
This
example illustrates
the
fundamentals
of the
request/response
transaction
model
between
the
host CPU
board and
bootable
device controller
board.
This examole
is
written
in PL/M-Só code
and is intended
to
be
generic
in
nature.
//************************************************************
* îhis exanple sends a 20,byte control nessage to the *
* bootable device controller board located ln slot 1 *
* at port 500 of the MULTIBUS II systen. This nessage *
* sollcits data from the device as DarÈ of the *
* ra <nan c a
*
The control message sent is contained in the 2o-byte
data array p$couurand$ursg (Peripheral Comrnand
Message). The controL rnessage received is captured
ln the 20-byte data array p$sratusgrnsg (Perlpheral
Status Me s sage
) .
The solicited data is received from the device vÍa
an rsvp buffer. Note that the address polnting to
che rsq buffer rnust be an absolute address before
it is passed ro BS$SEND$RSVP.
Thus, rhe need for
calling a conversion routÍne. In this exarnple, a
routine (not shown) ca1led CONVERT ADDRESS
handles
the address conversion. It is up to the prograrnroer
to supply the converslon routlne.
* Setting data$length and data$adr to NULL
(0) *
* Índicates that only a control nessage is being sent *
* froro the host CPU board to the controller board. *
************************************************************ /
Bootstrap
Loader 5-r3
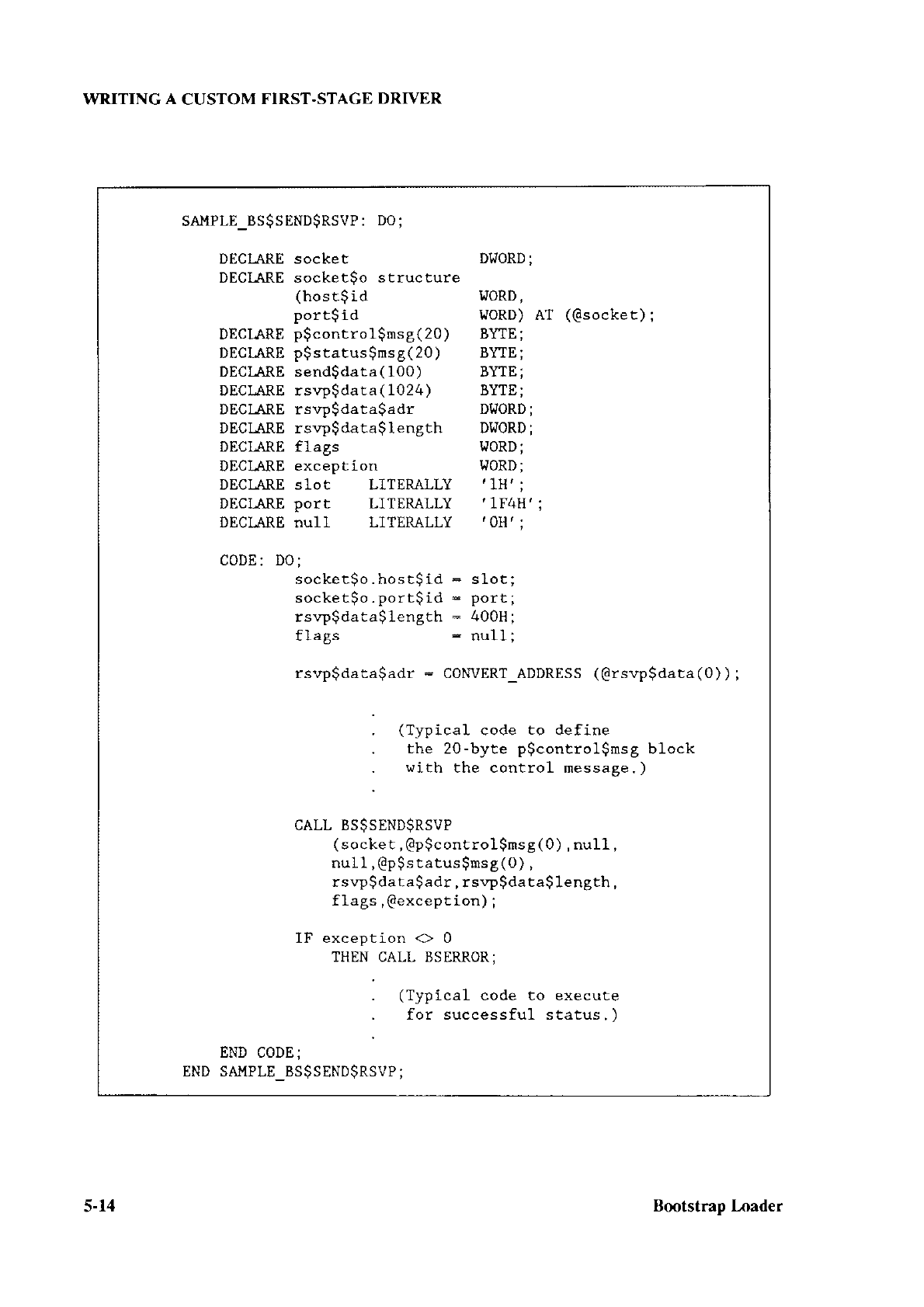
WRITING A CUSTOM
FIRST-STAGE
DRIVER
SAMPLE_BS
$
S ENDSRSVP : Do;
DECÌ-ARE socket DWoRD;
DECIARE socket$o s t ruc Eure
(host$id llORD,
port$id I.IORD)
AT (Gsocket);
DECLARE
p$control$msg(20) BYTE:
DECIAREp$status$msg(20) BYTE;
DECLARE send$data(100) BYTE;
DEOI"ARE rswp$data(1024) BYTE;
DECIARE rsvp$data$adr Df.lORD;
DECI,A,RE rsrp$ data$ l ength DI,I0RD;
DECI,ARE flags WORD;
DECÌARE
exception WoRD;
DECIARE slot LITERALLY '1H';
DECLARE
port LITERALLY ' LF4H'
;
DECI,ARE null LITERALLY '0H' ;
CoDE: DO;
^^^1,^ + C ^ t-^- FC i I
è vw Nc uv v . rrv r e
v ru
cnrlzot(n nnrt(i À
rsrp$data$ 1-ength
flags
rc\mqÀr'-.q./r =
- slot;
- port;
- 400H;
: null;
CoNVERT_ADDRESS
(@rsrp$data (0
) ) ;
. (Typical code to define
. the 20-byte p$control$msg block
. with the control nessage.
)
CALL BS$SEND$RSVP
(socket,
@p$control$msg(0),
null,
null, @pgstatusgrnsg(0),
rsrp$data$adr, rsrp$data$1ength,
flags , @exception) ;
IF exception <> 0
THEN CALL BSERROR;
. (Typical code to execuLe
. lor successful status. )
END CODE;
sAÌ,fPLE_BS
I SEND9RSVP
;
5-r4 Bootstrap [-{)ader
WRITINC
A
CUSTOM
FIRST-STAGE
I)RtVER
CONDITION
CODES
E$OK 0000H No exceptional
conditions.
BS$E$BUFFER$SIZE 0082H The
rsvp buffer posted
is too
small.
BS$E$TRANSMISSION 00ElI{ An error occurretl while
transmitting a
MULTIBUS II
message.
5.5.4
Send
and Receive
Transaction
Models
In addition
to the request/response
transaction
model, the Bootstrap
Lolder
Communication
System supports scnd
and
receive transaction
models. Normally,
communication
between a
driver and a
device in a bootloading
environment
uses the
request/response
or send
models. However,
ifyour host
CPU board can capitalize
on a
receive
transaction
model initiated
liom the
driver, the utility
is available.
You
can make calls to
the send and
receive utilities,
respectively when
you
neetl the driver
to simply send
a message with
no request
for a response,
or
when
you need the
driver to
wait
lbr spontaneous
communication
from
a specific device
controller.
The two
utilities available
to
you
that support
the send
and receive transaction
models are
BS$SEND and
BS$RECEIVE.
The following
utility descriptions present
BS$SEND
and
BS$RECEIVE:
CALL BS$SEND (socket,control$ptr,data$adr,data$length,
flags,exceptiongptr)
INPUT
PARAMETERS
socket A DWORD of the form hostgid:portgid
identifying the
remote destination.
control$ptr A POIN'IER
to a control message. lf datagadr
=
NULL
(0)
or data$length
=
0, then the control message is 20
bytes
long. Otherwise, the control
message is l6 bytes
long.
data$adr A DWORD containing the absolute address
of a data
message. If data$adr
is NULL (0),
then a control
message is sent. Otherwise, data$adr
points
to a
contiguous
buffer.
B{ntstrap l-oader 5-t-s
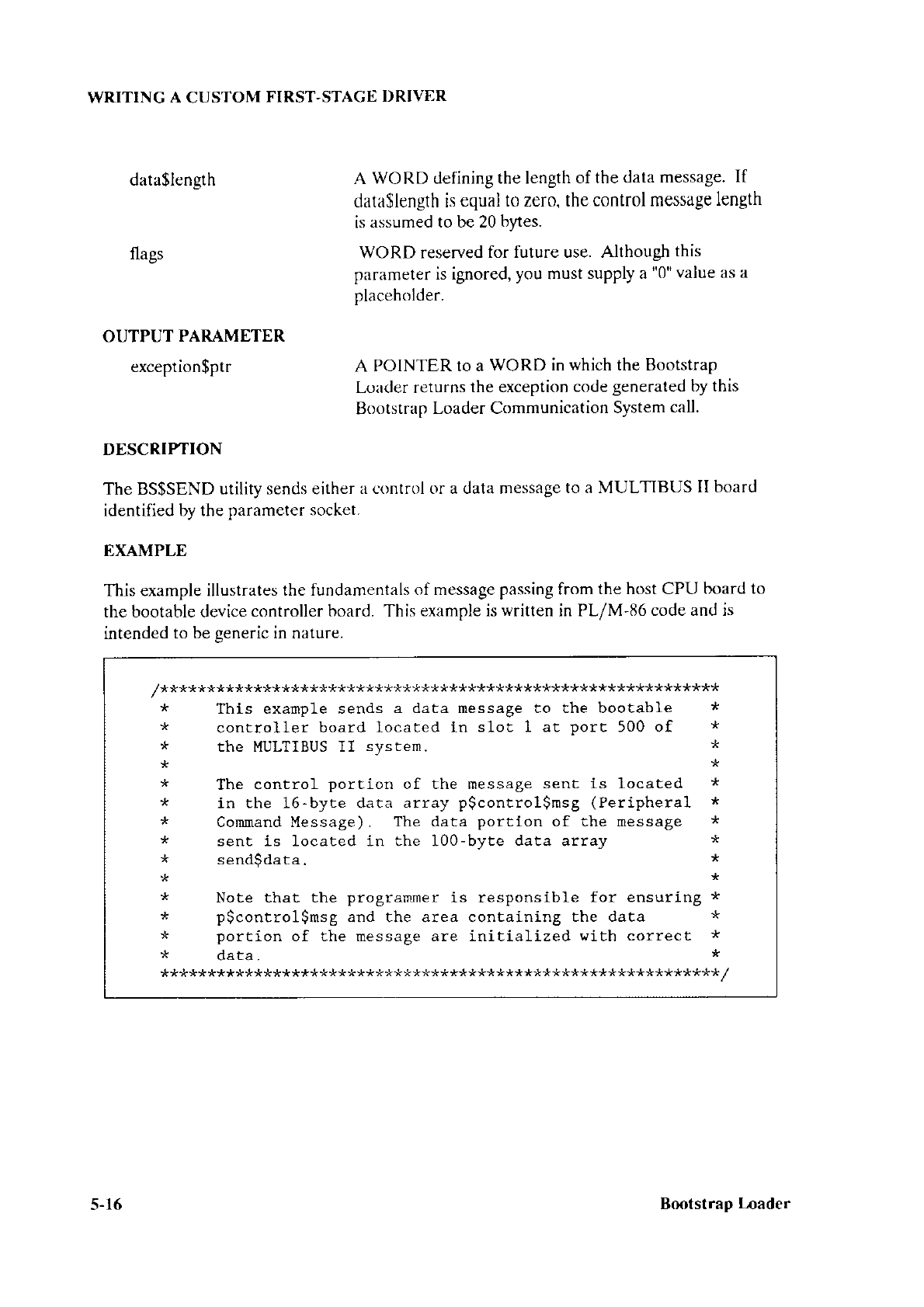
WRITING A CUSTOM FIRST-STAGE
DRIVER
data$length A WORD defining the length
of the
data message.
If
data$length is
equal to zero, the
control message
length
is
assumed to be 20
bltes.
flags WORD reserved
for future use. Although
this
panrmetcr
is ignored,
you must supply a
"0"
value as a
placeholder.
OUTPUT
PARAMETER
exception$ptr A POINTER
to a
WORD in which the Bootstrap
Loader returns
the exception
code
generated by this
Bootstrap
Loader Communication
System
call.
DESCRIP'TION
The BS$SEND
utility sends either
a contrttl or a data message
to a MULTIBUS II board
identified by the
parameter socket.
EXAMPLE
This example illustrates
the fundamentals
of message passing from
the host CPU
board to
the bootable device
controller board. This
example is
written
in PL/M-Só
code and is
intended
to be
qeneric
in nature.
/**********************************:t*******:******************
* This exaurple sends a data nessagè to the bootable
* controller board located in slot 1 at port 500 of
* the MULTIBUS II systern.
The control portion of the message
sent is located *
i.n the 16-byte data array p$control$rnsg (Peripheral *
Conmand Message). The data portion of the nessage *
sent is located in the 100-bvÈe
data arrav *
send$data. *
Note that the progranmer is responsible for ".".r.irrg i
p$control$msg and the area containing the data *
portion of the rnessage are initialized lrith correct *
************************************************************/
5-ló Bfi)tstrap l-oader
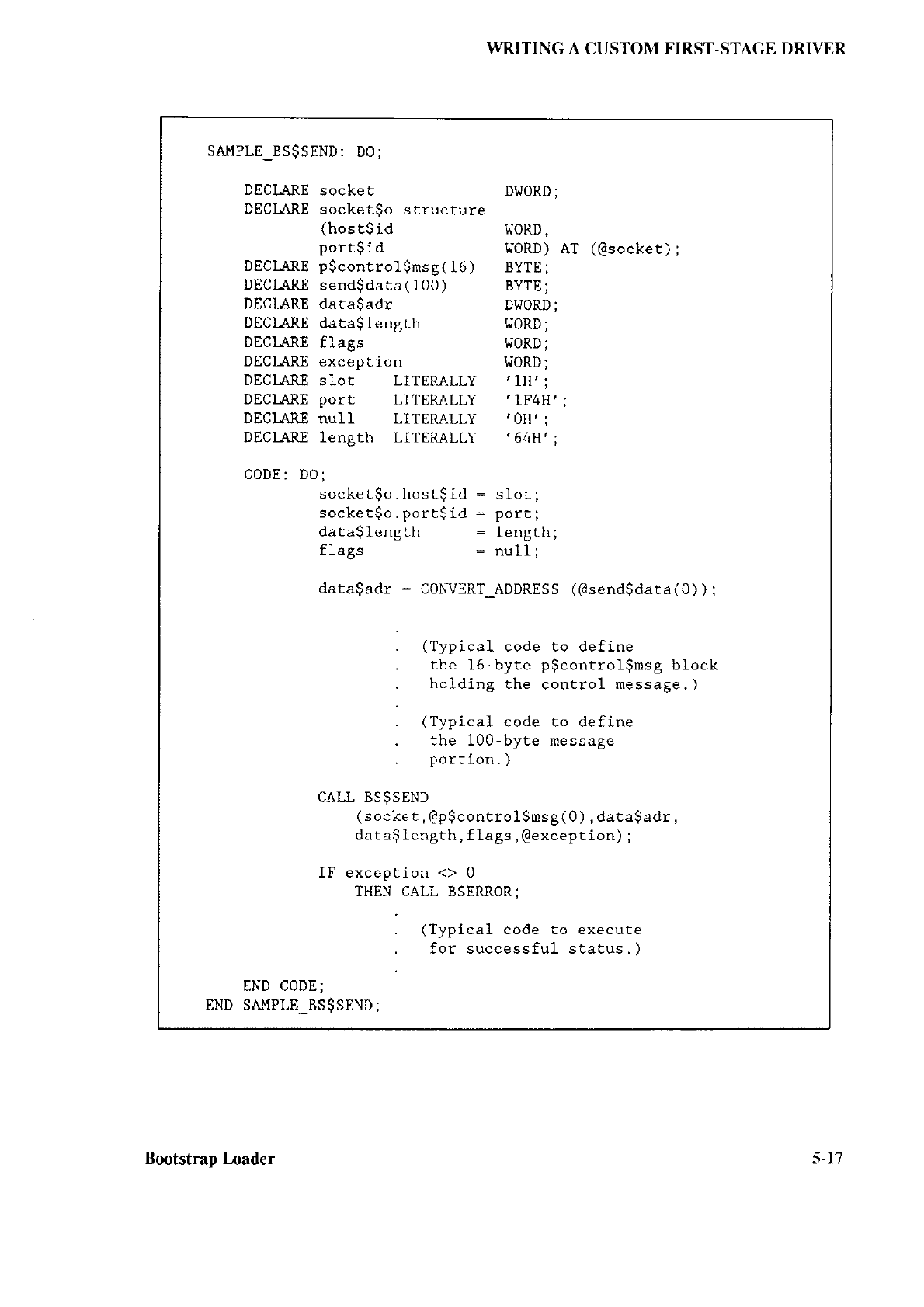
SAIPLE_BS$SEND:
D0;
DECI,ARE
s ocke
t
DECIARE socket$o s truc ture
(ho
s E$ id
Porr$
id
DECI^ARE
pgcontrol gms
g
(
l6 )
DECIARE
send$data( 100)
DECIARE data$adr
DECIARE data$ len8th
DECIARE
fl ags
DECIARE exception
DECTARE
sIoC LITEMLLY
DECI-ARE
port I-ITERALLY
DECIARE nul-l LITEMLLY
DECIARE length LITERALLY
CODE:
DO;
socket$o.host$ld:
socket$o
.
port$
id :
data$lengrh
fl ags
data$adr : coNvERT
DWORD
;
WORD
,
WORD)
AT (@socket);
BYTE;
BYTE
;
DWORD
;
WORD
;
WORD
;
WORD
;
,lH'
;
,1F4H'
;
'0H';
,
64H,
1
slot;
pórt;
length;
null;
ADDRESS
(Gsend$dara (0
) ) ;
. (Typical code to define
. the 16-byte p$control$msg btock
. holding the control message.
)
. (Typi-caÌ code to define
. the 100-byce message
. por
C ion. )
CALL BS
9
SEND
(socket, @p$concrol$msg(0),
datagadr,
data$
Lengt h, f [ags,@except ion) ;
IF exception <> 0
THEN CALL BSERROR;
. (Typical code to execute
. for success.ful sLaLus.
)
END CODE;
SMPLE_BS$SEND;
WRITING A CUSTOM
FIRST-STAGE
DRIVER
Bootstrap l,oader 5-17
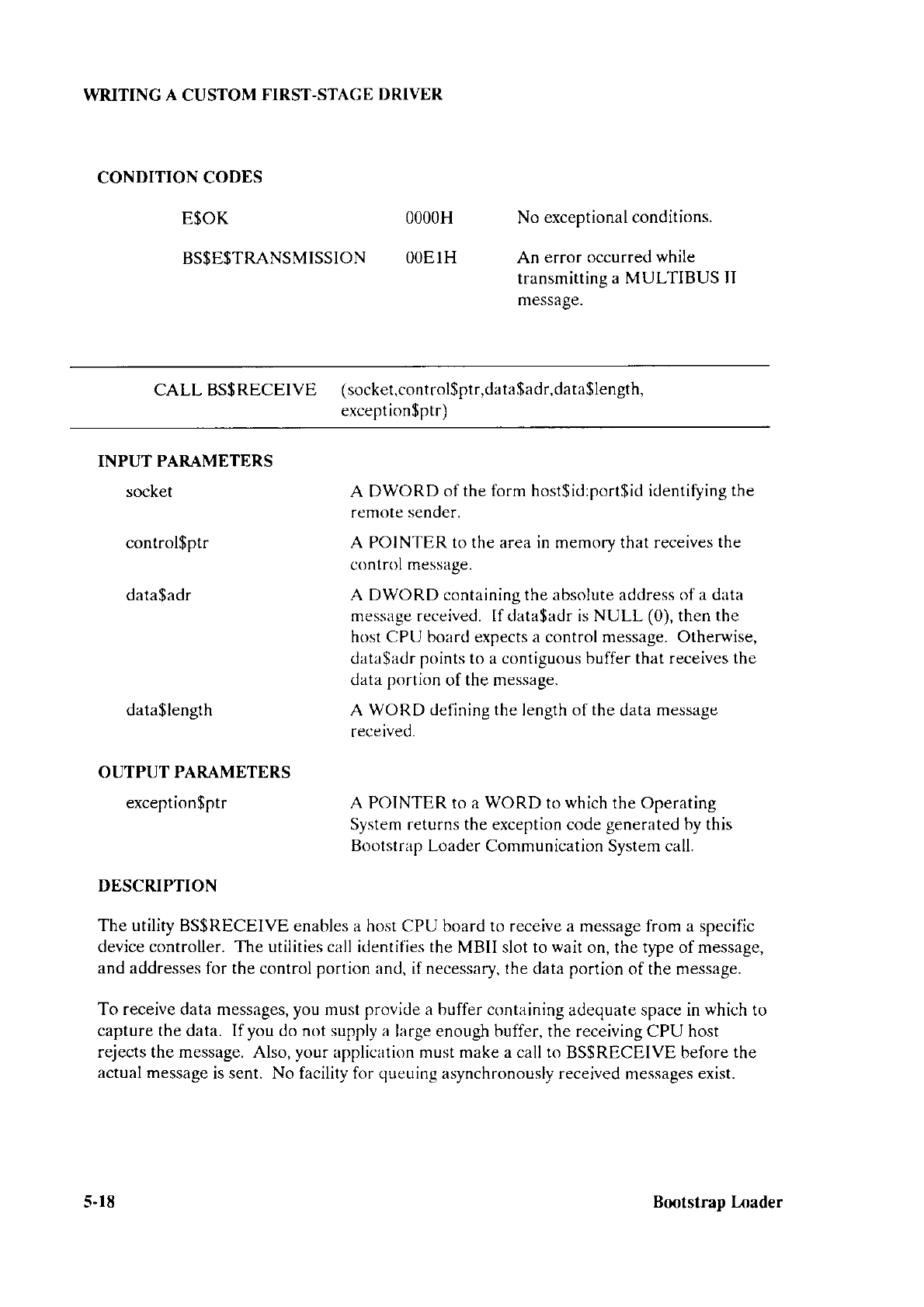
WRITING A CUSTOM
FIRST-STAGE
DRIVER
CONDITION CODES
E$OK
BS$E$TRANSMISSION
No
exceptional conditions.
An error occurred
while
transmitting a
MULTIBUS II
message.
0000H
OOEIH
CALL BS$RECEIVE (socket,control$ptr,data$adr,data$length,
exception$ptr)
INPUT PARAMETERS
socket
control$ptr
data$adr
A DWORD of the form host$id:port$id identi$ing
the
remote sender.
A POINTER to the area in memory that receives
the
control message.
A DV/ORD containing the absolute address
of a d:rta
messrìge received. If data$adr is NULL (0), then the
host CPU board expects a control message. Otherwise,
data$adr
points
to a
contiguous buffer that receives the
data
portion of the message.
A WO
RD defining the
length of the
data message
received.
data$length
OUTPUT PARAMETERS
exception$ptr A POINTER to a
WORD
to
which
the Operating
System returns the exception code generated by this
Bootstrap Loader
Communication System call.
DESCRIPTION
The utility BS$RECEI\E,
enables a host CPU board to receive a message from a specific
device controller. The utilities call identifies the
MBII slot to
wait
on, the tlpe of message,
and addresses
for the control
portion
and, if necessary, the data portion
of the message.
To receive data messages, you must provide a buffer containing
adequate space in
which
to
capture the data. Ifyou do not supply a
large enough buffer, the receiving CPU host
rejects the message. Also, your application must make a call to
BS$RECEIVE before the
actual message
is sent. No facility for
queuing
asynchronously received
messages
exist.
5-18 Bootstrap LOader
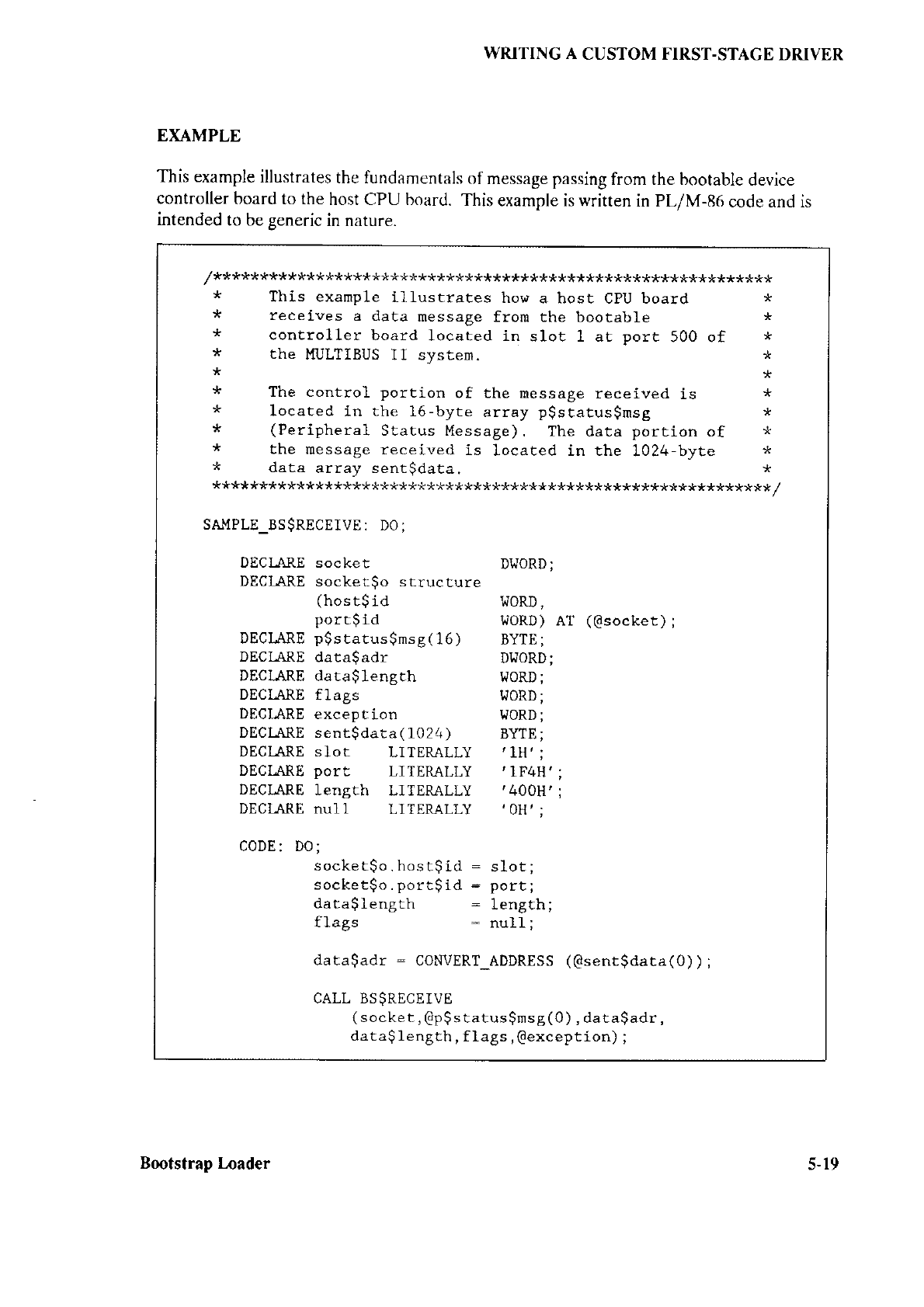
WRITING A CUSTOM FIRST-STAGE
DRIVER
EXAMPLE
This example
illustrates
the fundamentals
of
message passing
from the hootable
device
controller
board to the
host CPU board.
This
example is written
in PL/M-86
code and is
intended
to be
seneric in nature.
/************************************************************
* This example illustrates how a host CPU board *
* receives a data message
from the bootable *
* controller board located in slot 1 at port 500 of *
* the MULTIBUS
II system. *
* The controf portion of the message
rèceivèd is *
* located in the 16-byte array p$sCatus$msg *
* (Peripheral Starus Message)
. The data portion of *
* the nessage received is located in the 1024-byte *
* data array sent$data. *
***********************************************************)t /
SAHPLE
BSSRECEIVE:
DO:
DECIARE
DECI*ARE
DECI.ARE
DECIARE
DECIARE
DECl-ARE
DECIARE
DECIARE
DECLARE
DECIARE
DECISRE
DECIAREnu11
socke t
socket$o s truc ture
(host$id
porr$id
p$
s tatus $msg
(
16
)
data$adr
data$length
flags
exception
s enr$
dara
(
1024)
Slot LITERALLY
POTI LITEMLLY
length LITEMLLY
DWORD
;
WORD
,
I.JORD)
AT (GsÒcket);
BYTE
;
DWORD
;
WORD
;
IIORD
;
WORD
;
BYTE
;
'lH';
,1F4H'
;
,
400H'
;
,OH';
Ll TEMLLY
CODE: DO;
socket$o. host$id : slot;
cnnl.ot(n ^^rt-( i À : port;
dara$length - lenglh;
fÌags : null;
dara$adr : CoNVERT_ADDRESS
(@sent$dara(0)
);
CALL BS
$RECEIVE
(socket, @p$status$nsg(0) ,
data$adr
,
.l^+^Cl^-^.r-
udL dv, r, '6t ", I I dés ,
\:cÀuFp L I u'r/ ,
Bootstrap Loader 5-r9
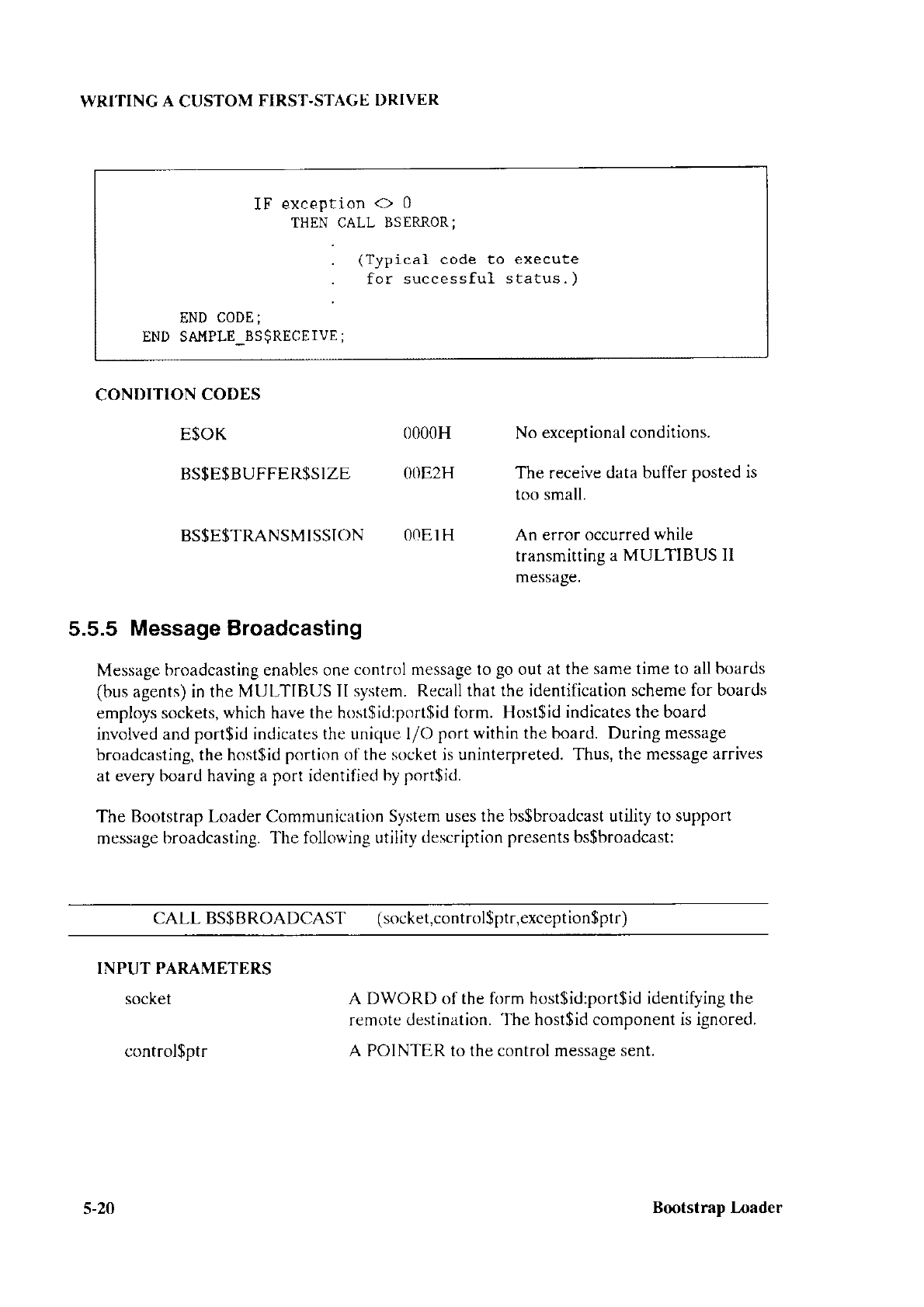
]F exception <> 0
THEN CALL BSERROR;
(Typical code to execute
for successful status. )
END
CODE;
SAMPLE_BS
$RECE
IVE
;
WRITINC
A CUSTOM
FIRST.STAGE
DRIVER
CONDITION
CODES
E$OK 0000H No
exceptional conditìons.
BS$E$BUFFER$SIZE 0082H The receive
clata buffer
posted is
too small.
BS$E$TRANSMISSION 00ElH An
error occurred
while
transmitting a
MULTIBUS II
message.
5.5.5
Message Broadcasting
Message
broadcasting enables one
control message to
go
out at the
same time to all
boards
(bus
agents) in the MULTIBUS
ll system.
Recall that the identification scheme
for boards
employs sockets,
which
have the
host$id:port$id form. Host$id
indicates the board
involved and
port$id indicates the unique I/O port within the board. During message
broadcasting, the host$id
portion of the socket is uninterpreted. Thus,
the message arrives
at
every board having a port identifieci
by port$id.
The
Bootstrap Loader Communication
System uses the bs$broadcast utility to support
message
broadcasting. The following utility
description presents bs$broadcast:
CALL BS$BROADCAST (socket,control$ptr,exception$ptr)
INPUT PARAMETERS
socket A DWORD of the form
host$id:port$id identifying the
remote destination.
The host$id component is ignored.
control$ptr A POINTER to the control message sent.
5-20 Bootstrap hader
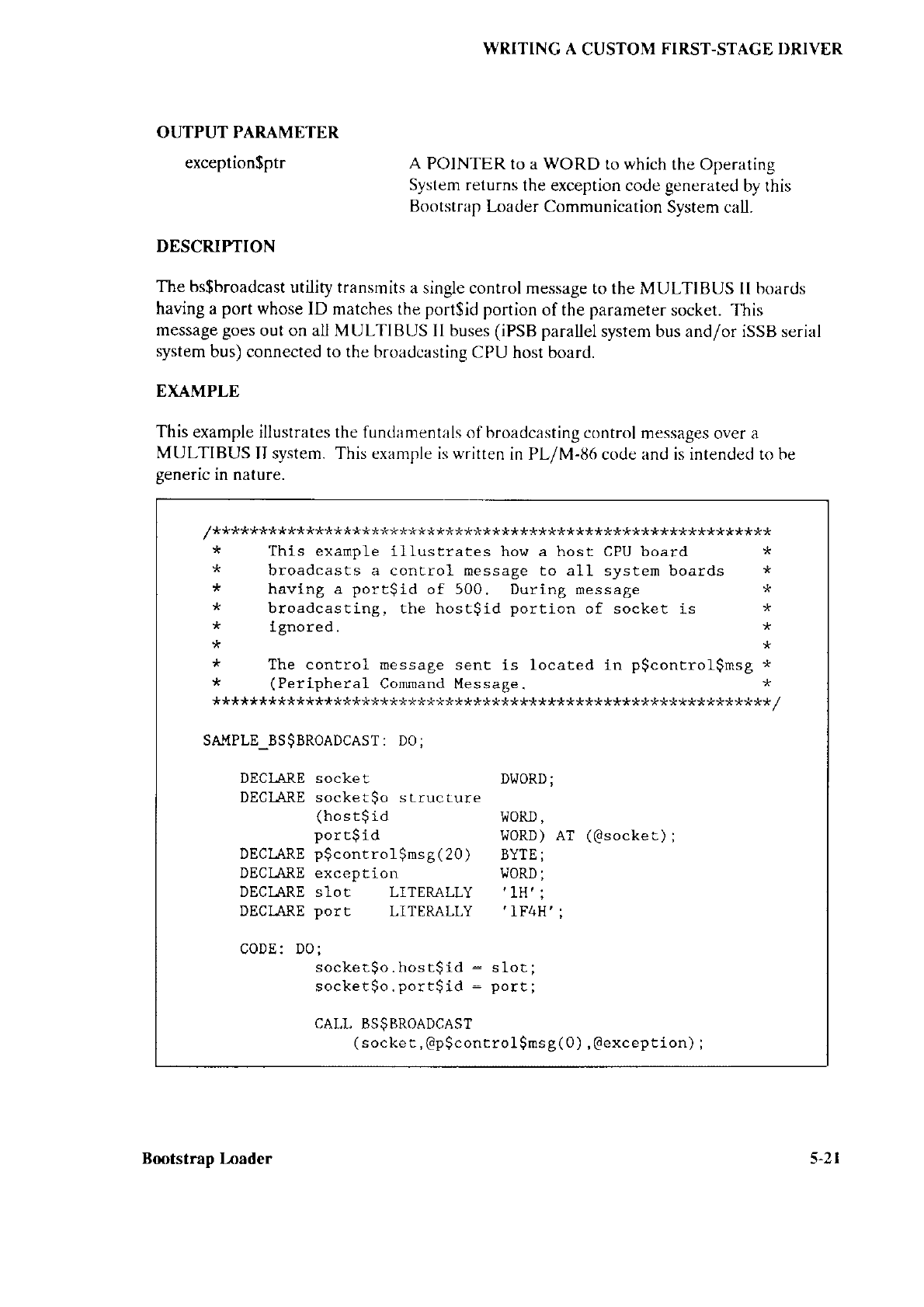
WRITING A CUSTOM
FIRST.STAGE DRIYER
OUTPUT PARAMETER
exception$ptr A POINTER to a WORD to
which
the Operating
System returns
the exception code generated
by this
Bootstrap
Loader Communication
System call.
DESCR]PTION
The bs$broadcast
utiliry transmits
a single control
message to the MULTIBUS ll boards
having
a
port whose
ID matches the port$id
portion
of the
parameter
socket. This
message goes
out on all MULTIBUS
Il buses (iPSB parallel
system bus and/or iSSB serial
system
bus) connected to
the broadcastìng CPU
host board.
EXAMPLE
This
example illustrates the fundrrmentals
of broadcasting control
messages over a
MULTIBUS II system. This example is written
in PL/M-tì(r code and is inten<led to be
seneric in nature.
/************************************************************
* This exarnple
illustrates ho\t a host CPU board *
* broadcasts a control message
to all systen boards *
* having a port$id of 500. During message *
* broadcascing. the host$id portion of socket is *
* ignored.
* The conirol Féss,?oe senE is
* (Peripheral Command Message.
located in p$control$msg *
****************************************************)t*******/
SAMPLF._BS
$BROADCAST
: D0;
DECIARE
DECIARE
DECIARE
DECI^ARE
DECIARE
DECI.ARE
socke
t
socket$o s L
ruc Lure
(host$id
porr$id
pgcontro
l grns
g
(
20
)
exceplion
slot LITEMLLY
POTI LITEMLLY
DWORD
;
I,JORD
,
WORD) AT (Gsocket);
AVTF.
WORD
;
,1H,.
,1F4H'
;
CODE: DO;
socket$o. host$ id * slot;
cò.Lai-q^ nnrt( i à : n^ri-'
CALL BS$BROADCAST
(
socket,
Gp$control$rnsg(0), @exception)
Bootstrap l-oader 5-21
IF èxception <> 0
THEN
CALL BS ERROR;
END
. (Typical code to execute
. for successfuÌ status .
)
END CODE;
SAMPLE-BS
9BROADCAST ;
WRITING A CUSTOM
FIRST-STACE
I)RIVER
CONDITION CODES
E$OK 000011 No exceptional conditions.
BSSESTRANSMISSION 00E
lH An error occurred
while
transmitting a MULTIBUS
II
message.
5.5.6
Transmission Modes
Data message transmissions are synchronous in that the sender of the message
waits for
the receiver of the message to rcturn a transmission status
value.
This
value
indicates
whether
or not the receiver successfully acquired the message. Control messages, however,
are
not
synchronous
in this manner. There is no indication to the sender that a
control
message has been received. Also, related to each tlT)e of message transmission is a
transaction ID value. The communication system
uses this
value
internally to match
requests with responses
and to indicate
whether
the message is an rsrp message or a
nonrsvp message. lf the message
sent
is not an rsvp message, the associated transaction ID
value
is zero. If the message sent is an rsvp message, the associated
transaction
ID value is
a nonzero
value
matched
to both the recìuest and the resoonse.
5.5.7
Interconnect
Space
The Bootstrap Loader Communication System
supports access to board interconnect
space. This access enables the driver to determine
critical device status information. The
Bootstrap Loader
Communication System provides
interconnect
space
access through two
system utilities:
BS$GET$INTERCONNECT and
BS$SET$INTERCONNECT.
When
you
use these calls within your
driver code,
you
must verify the value
read or
written
from
or to the interconnect
space is
u'hat you
expect. The Bootstrap
Loader code does not know
what
"correct"
values
should be
<-) ) Bfi)tstrap Loader
WRITING A CUSTOM
FIRST.STAGE
DRIVER
The following utility
description presents
BS$GEfiINTERCONNECT:
value
= BS$GET$INTERCONNECT (slot$number,reg$number,
exception$ptr)
INPUT
PARAMETERS
slot$number A BYTE
that specifies the MBII slot whose
interconnect
space is to be read.
You must speciry this
value
as
lbllows:
Value Meaning
0-19 specifies iPSB slot
numbers
0-19
20-23 illegal values
24-29 specifies iLBX slot numbers 0-5
30 illegal
3l specifies the iPSB slot ofthe CPU
that the calling software
is
executing on, regardless of the
actual iPSB slot number of the
CPU
32-255 illegal
values
reg$number A WORD
identifoing the interconnect register to be
read. This value
must be in the range of 0000H to
0l
FFH (the
interconnect space definition).
OUTPUT PARAMETERS
value A BYTE containing the
contents of the interconnect
register
read.
exception$ptr A POINTER
to a
WORD
in
which
the Bootstrap
Luader
returns the exception code generated by this
Bootstrap
Loader Communication System call.
DESCRIFIION
The utility BS$GET$INTERCONNECT
reads the contents of the interconnect register
specified
by reg$number from the board specified
by slot$number and returns the contents
in the parameter value.
Bootstrap Loader 5-23
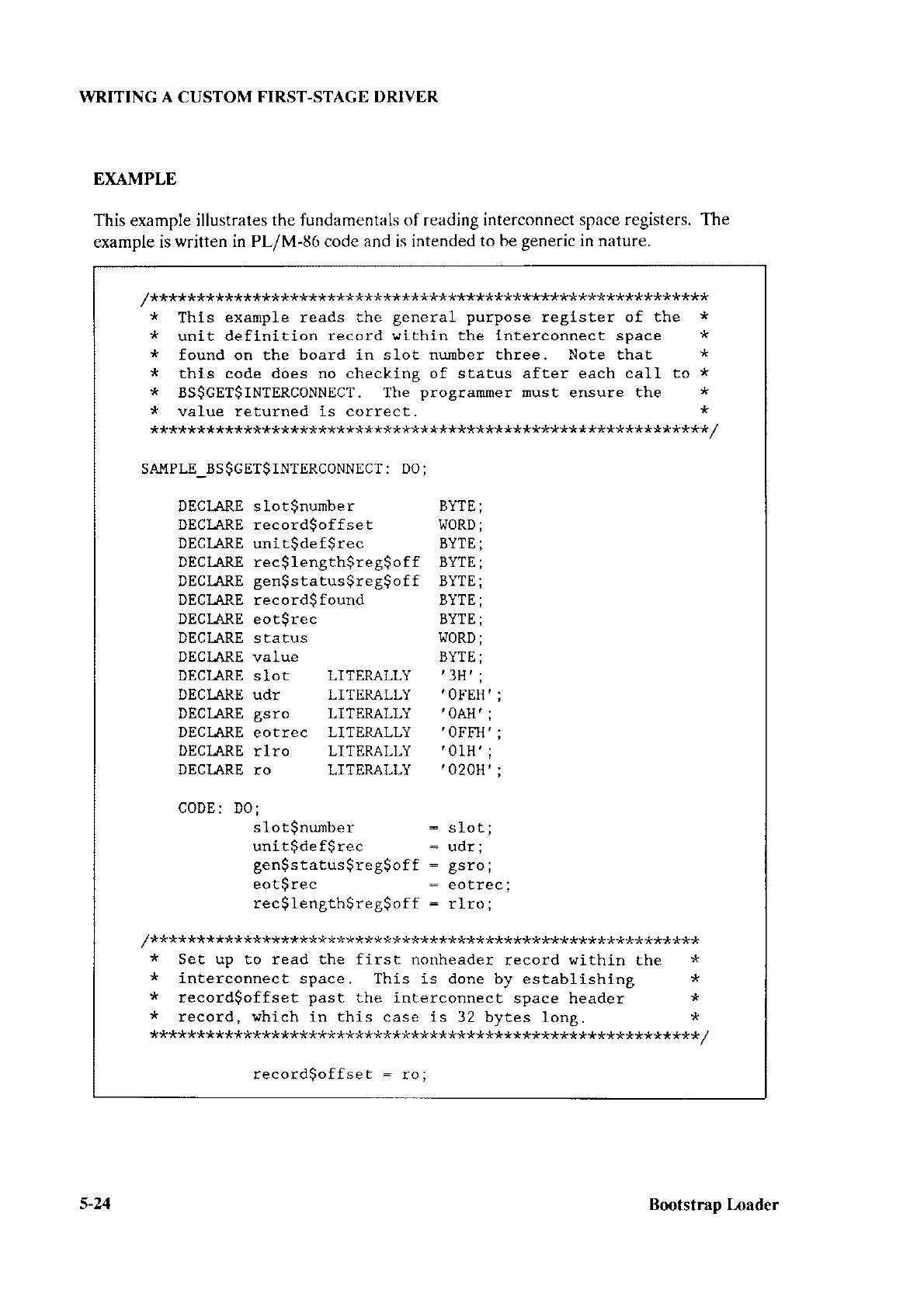
WRITING
A CUSTOM
FIRST-STAGE DRIVER
EXAMPLE
This example illustrates
the fundamentals of reading interconnect
space registers. The
example is
written in PL/M-86 code and is intended
to be generic in nature.
/************************************************************
* This exarnple reads the general purpose reglster of che *
* unit deflnition record vithin the interconnect spacè *
* found on the board in slot nunber three. Note that *
* this code dóès no checking of stalus after each call to *
* BS$CET$
INTERCONNECT. The programmer Erust ensure the *
* value returned is correct. *
************************************************************ /
SA.I,fPLE_BS$GET$INTERCONNECT
: DO
;
DECIARE slot$nurnber BYTE;
DECI-ARE record$offset IíORD;
DECIARE unit$def$rec BYTE;
DECIAR-E rec$length$reg$off BYTE;
DECTARE
gen$staÈus$reg$off BYTE;
DECLARE record$found BYTE;
DECIÀRE eoE$rec BYTE;
DECI,ARE stacus woRD;
DECTARE value BYTE;
DECI-ARE
slot LITERALLY '3H' ;
DECIARE udr LITERALLY '0FEH'
DECIARE gsro LITERALLY 'OAH'
;
DECIARE eotrec LITERALLY '0FFH'
DECI,ARE rlro LITERALLY '01H' ;
DECLARE ro LITERALLY '020H'
CODE: D0;
slot$nurnber - slot;
unit$def$rec - udr;
gen$statusSreg$off
- gsro;
eot$rec - eotrec;
rec$ length$ reg$ o ff : rlro ;
/***********************************************************
* Set up to read the first nonheader record within the *
* intèrconnect space. This is done by establishing *
* record$offset past the interconnect space header *
* record, which in this case is 32 bytes long. *
*******************************************>r***************/
record$offset : ro;
5-24 Boolstrap LOader

WRITING
A
CUSTOM
FIRST.STACE
DR]VER
/***********************************************************
* Read the record type register (the firsE register *
* wlthin a record) of the first nonheader record into *
* the variable recordSfound. *
***********************************************************,/
record$f ound = BS$CEîgIMERCONNECT
(
s lotSnumber ,
recordSoffset,
Gstatus ) i
/***************************:t***********************:t***rt****
* Decerminè if this first record is the record we r^tant to *
* read from. If so, bypass the D0 IiHILE loop and get *
* right to reading the specifíc regiscer. lf noc, *
* and the record is not the EOT (End Of Tenplate) record, *
* execute the DO hTllLE loop to get at thè next rècórd. *
***************rk*******:&************************************/
D0 WHILE
(record$found o unit$def$rec) AND
(record$found <> eot$rec) ;
/************************************************************
* Position record$offset to read lhe next sequential *
* record. This ís done by calllng BS
9CET$
INTERCONNECT *
* to read the aurrent record length, adding 2 (for the *
* tl^io
bytes used for the record type and record length *
* registers), and finally adding the current :r
* recordSoffset value. Note that record$offset + *
* rec
$
length$re g$o ff yields the interconnect register *
* that holds the current record length. *
**********************)t*************************************/
record$offset - record$offset + 2 +
BS
$G
ET$ 1NÎERCONNECT
(slot$nurnber,
record$offset +
re c
$
1e
ngt
h$ re
g$o f
f ,
Gs
tatus ) ;
/***********************************************************
* Read the next record-type regi,ster into the variable *
* record$found. *
************************************************:t**********/
Bootstrap L0ader <-?
q
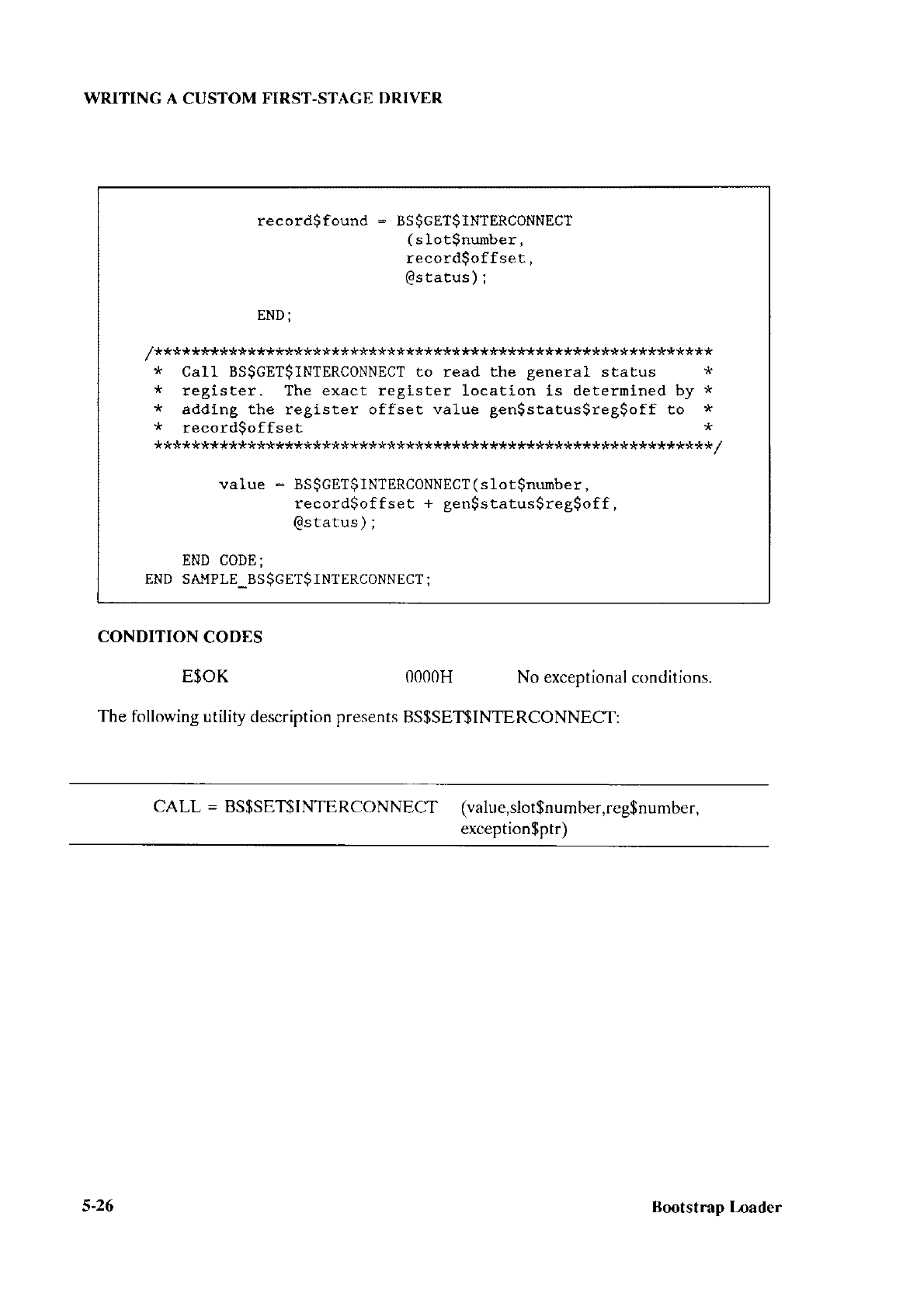
WRITINC A
CUSTOM
FIRST-STACE I)RIVER
CONDITION
CODES
E$OK 0000H No exceptional conditions.
The following
utility description presenrs
BS$SEfi INTERCONNECT:
record$found = BS
$cET$
INTERCONNECT
(slotSnunber,
recordSoffset,
Gstacus);
END
;
/******************************************************:P*****
* Ca11 BS
$GET$
INTERCONNECT to read the general status *
* register. The exact register location is deterurined by *
* adding the règister offset valuè gen$
s tatus $reg$o
ff to *
* record$offset *
************************************************************ /
value - BS
$GET$
INTERCONNECT
(
slot$nurnber,
record$offset + gen$status$reg$off ,
Gstatus).
END CODE:
END SA}fPLE-BS$GET$INTERCONNECT
;
CALL = BS$SET$INTERCONNECT (value,slot$number,reg$number,
exception$ptr)
s-26 Bootstrap Loader
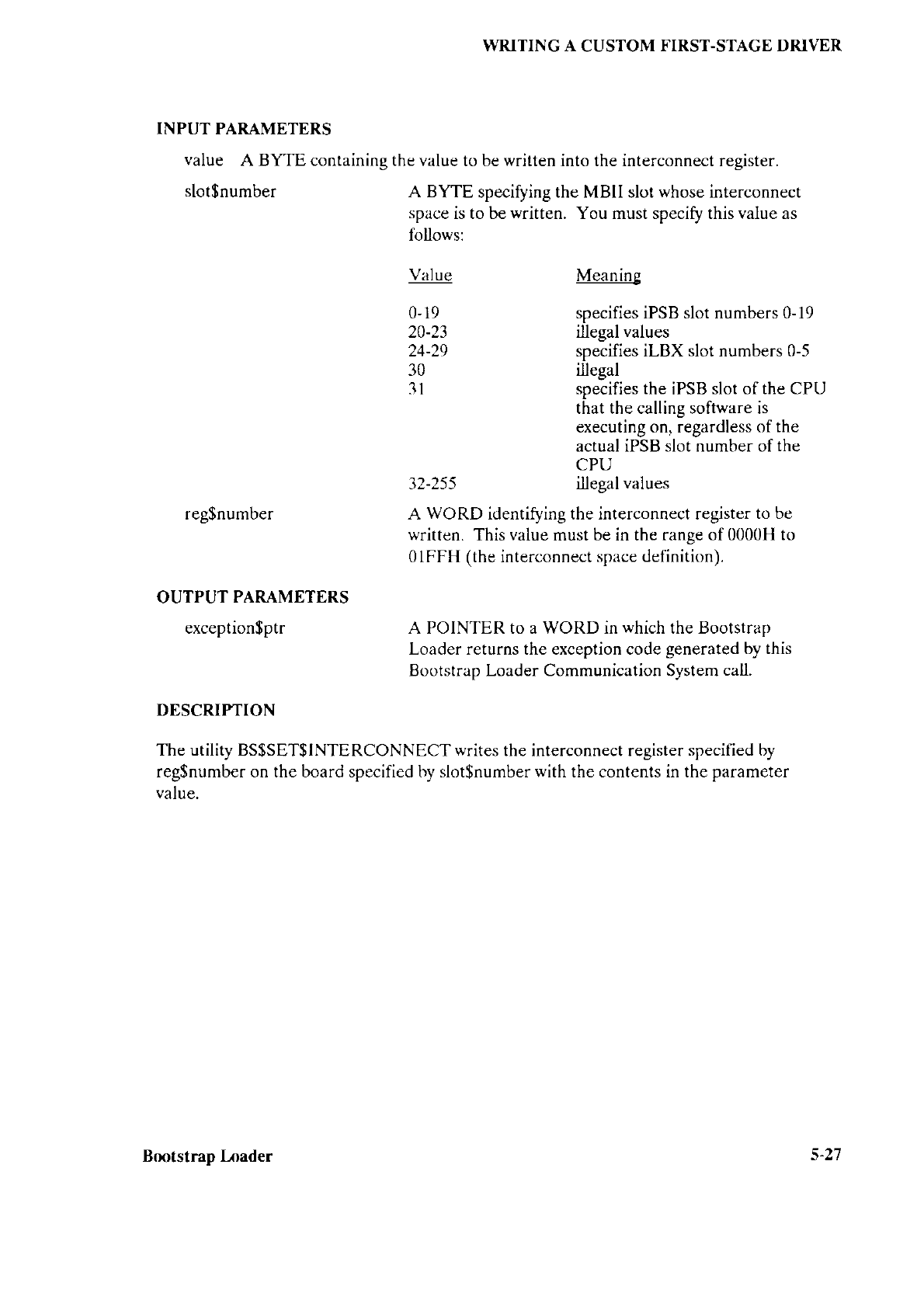
WRITING A CUSTOM
FIRST-STAGE DRIVER
INPUT
PARAMETERS
value A BYTE containing the value
to be
written
into the interconnect register.
slot$number A BYTE
specirying the MBll slot
whose
interconnect
space
is to be
written.
You must specify this value as
follows:
Value
0- 19
20-23
24-29
30
3t
32-255
Meaning
specifies iPSB slot numbers 0-19
illegal
values
specifies iLBX slot numbers 0-5
illegal
specifies
the
iPSB
slot of the CPU
that the calling software is
executing on, regardless
of the
actual iPSB slot number of
the
CPU
illegal
values
reg$number
OUTPUT
PARAMETERS
exception$ptr
A WORD
identifuing the interconnect register
to be
written.
This
value
must be in the range
of 0000H to
0lFFH (the interconnect
space definition).
A POINTER to a WORD in
which
the Bootstrap
Loader returns the exception code
generated
by this
Bootstrap Loader Communication System
call.
DESCRIPTION
The utility
BS$SET$INTERCONNECT
writes
the interconnect register
specified by
reg$number on the board specified by slot$number with the contents in the parameter
value.
Bootstrap Loader 5-27
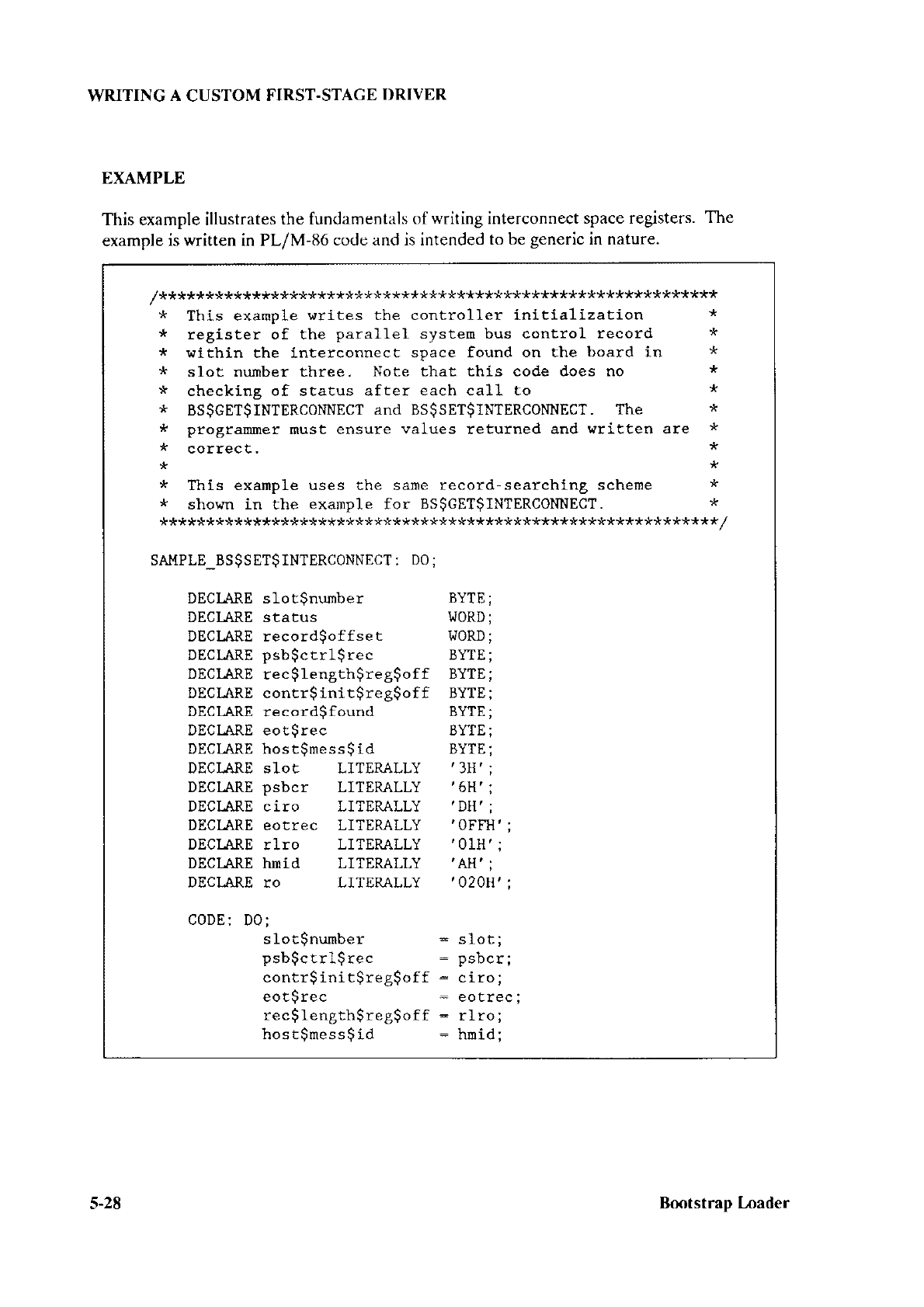
WRITING
A CUSTOM
FIRST.STAGE
DRIVER
EXAMPLE
This example illustrates
the fundamentals
of
writing
interconnect
space registers.
The
example
is written in PL/M-86
code and is intended
to be
generic
in nature.
/************************************************************
* This exarnple writes the conÈroller initÍalization *
* register of the parallel systen bus control record *
* within the interconnect space found on the board in *
* slot nunber three. Note that this code does no *
* checkinp of scatus after each call to *
* BS$GET$ INTERCoNNECî
and BS
$
s ET$ INTERCONNECT . Thè
* prograumer rnust ensure values returned and writcen are
* correct.
* This exarnple uses the sane record -
s earching scheme *
* shown ln the exanple for BS
$GET$
INTERCONNECT. *
************************************************************,/
SAI{PLE_BS
$
S ET$ INTERCONNECT : D0
;
DECI^ARE slot$nurnber BYTE;
DECLARE status \'ORD;
DECLARE record$offset WORD;
DECI-ARE
psb$ctrl$rec BYTE;
DECLARE
rec $
length$ re g$off BYTE;
DECIARE contr$ init$ reg$off BYTE;
DECI-ARE
record$found BYTE;
DECIARE eot$rec BYîE;
DECIARE host$mess$ id BYTE;
DECIARE sloÈ LITEMLLY ' 3H' ;
DECI,ARE
psbcr LITERALLY '6H' ;
DECLARE ciro LITERALLY 'DH';
DECLARE eotrec LITERALLY 'OFFH'
DECIARE
rlro LITEMLLY ' 01H' ;
DECIARE hnid LITERALLY 'AH';
DECIARE ro LITERALLY '020H'
CoDE:
DQ;
slot$number : slot;
psb$ctrl$rec : psbcr;
contr$init$reg$off - c iro;
eot$rec - eoLrec;
-^^C l --^fhC-^.C^FF - rlyò.
r cLY r c"ór "v ' ct1.?u.
host$mess$id - hnid;
5-28 B(ntstrap [,0ader
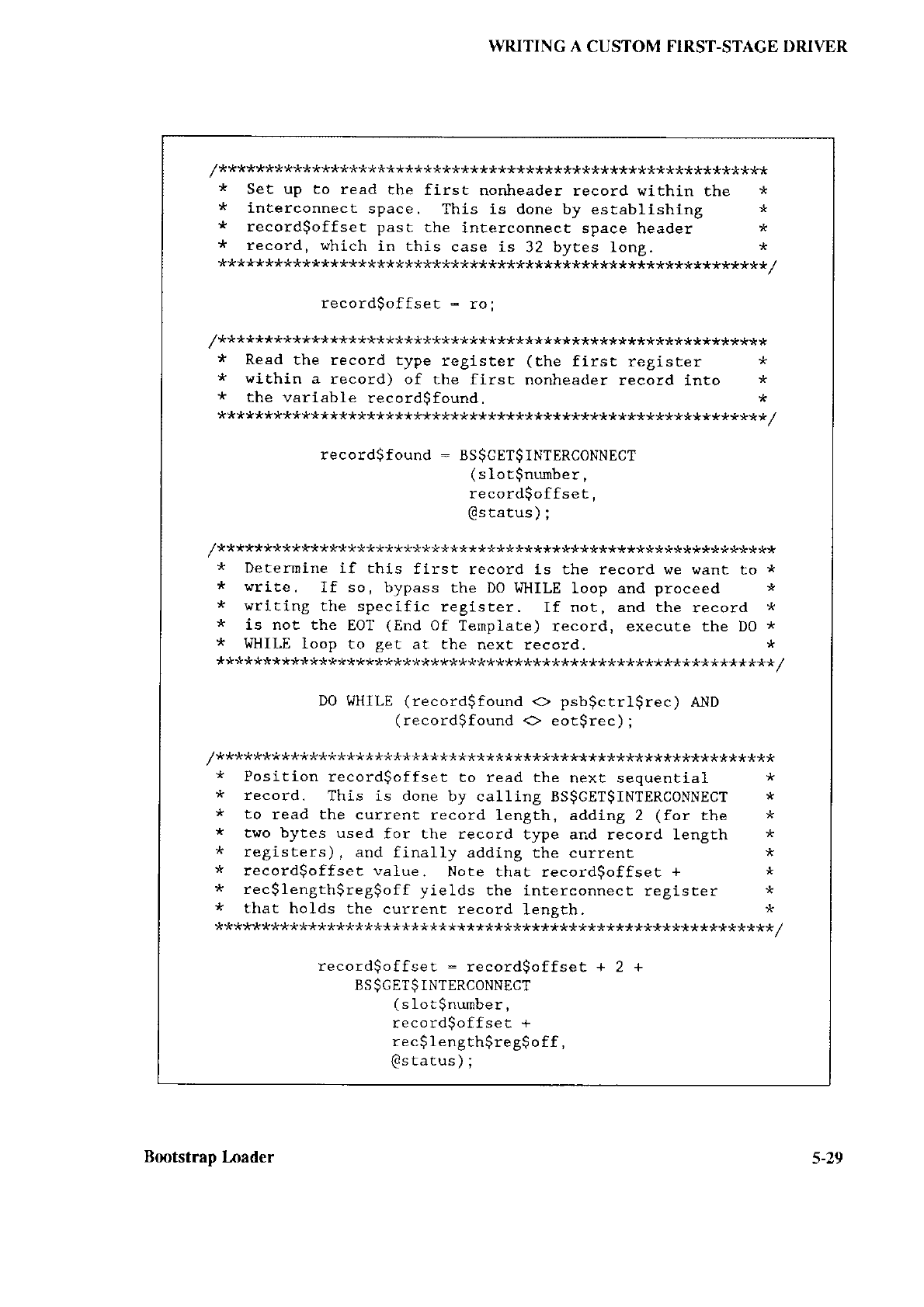
WRITING A CUSTOM FIRST-STAGE DRIVER
/***********************************************************
* Set up to read the first nonheader record wíthin the *
* intèrcónnect space. This is done by establishing *
* record$offset past the interconnect space header *
* record, which in this case is 32 bytes lóng. *
*********************************************************** /
record$offset - ro;
//**************x********************************************
* Read the record type register (thè first register *
* within a record) of the first nonheader record into *
* the variable record$found. *
*********************************************************** /
record$found - BS
$cET$
INTERCONNECT
(s1ot$nurnber,
record$offset,
Gstatus);
/************************************************************
* Deterrnine if chís first record is the record we wanc to *
* write. If so, bypass the D0 l+rHlLE
loop and proceed *
* 'rrítins the sne.ific repísrcr If n.lt end the record *
* is not the EOT (End Of Template) record, executè the DO
*
* I.IHILE loop to get at the next record. )t
************************************************************/
DO WHILE
(record$found o psb$ctr1$rec) AND
(record$found O eot$rec) ;
/************************************************************
* Position record9offset to read the next sequential *
* record. This is done
by calling BS$GET$ INTERCONNECT *
* to read the current record length, addíng 2 (for the *
* Èwo
bytes used for the record type and record length *
* registers), and finally adding the currenc *
* record$offset value. Note that record$offset + *
* rec9length$reg$off yields the interconnect regisrer *
* that holds the current record lengÈh. :*
************************************************************/
record$o[[set : record$offset + 2 +
BS
9GET$
INTERCONNECT
(
s lor$number
,
record$offset +
recglengthgreggoff ,
@status);
Bootstrap
l,oader 5-29
WRITING
A CUSTOM
FIRST.STAGE
DRIVER
CONDITION CODES
E$OK 0000H No exceptional conditions.
5.5.8
Driver
Code Considerations
When writing
the first-stage driver,
you
must
provide
two
procedures
to the Bootstrap
Loader: a device
initialization
prrredure
and a device read
procedure.
To be
compatible
with
the Bootstrap Loader, these procedures must perform the same steps as the
initialization and
read
procedures
listed in Sections 5.2 and 5.3.
An additional requirement for driver code used in a MULTIBUS
II environment stipulates
that code using any of the utilities shown in Sections 5.5.2 through 5.5.6 belong to the
Bootstrap Loader Drivers COMPACT sub-system. The reason for this requirement is
because all the utilities
are arcessible as NEAR calls.
/***********************************************************
* Read the nexÈ record-type register into the variable *
* record$found. *
***********************************************************/
record$found - BS
$GET$
INTERCONNECT
(slot$nurnber,
record$offset,
Gs
La tus
) ;
END
:
/******************************************************)k*****
* call BsS SETS INTERCONNECT
to write the controller *
* initialization register. The exact register locatíon *
* is deternined by adding the register offset value *
* contr$ inl t$ reg$o
ff to record$offsèt. *
************************************************************ /
CALL BS
$SET$
INTERCONNECT
(hos
t$mess$ id, s
lot$number,
record$offset + contr$init$reg$off, @s
tatus
)
;
END CODE;
END SAMPLE-BS
$
S ET$INTERCONNECT
;
5-30 Bfi)tstrap k)ader
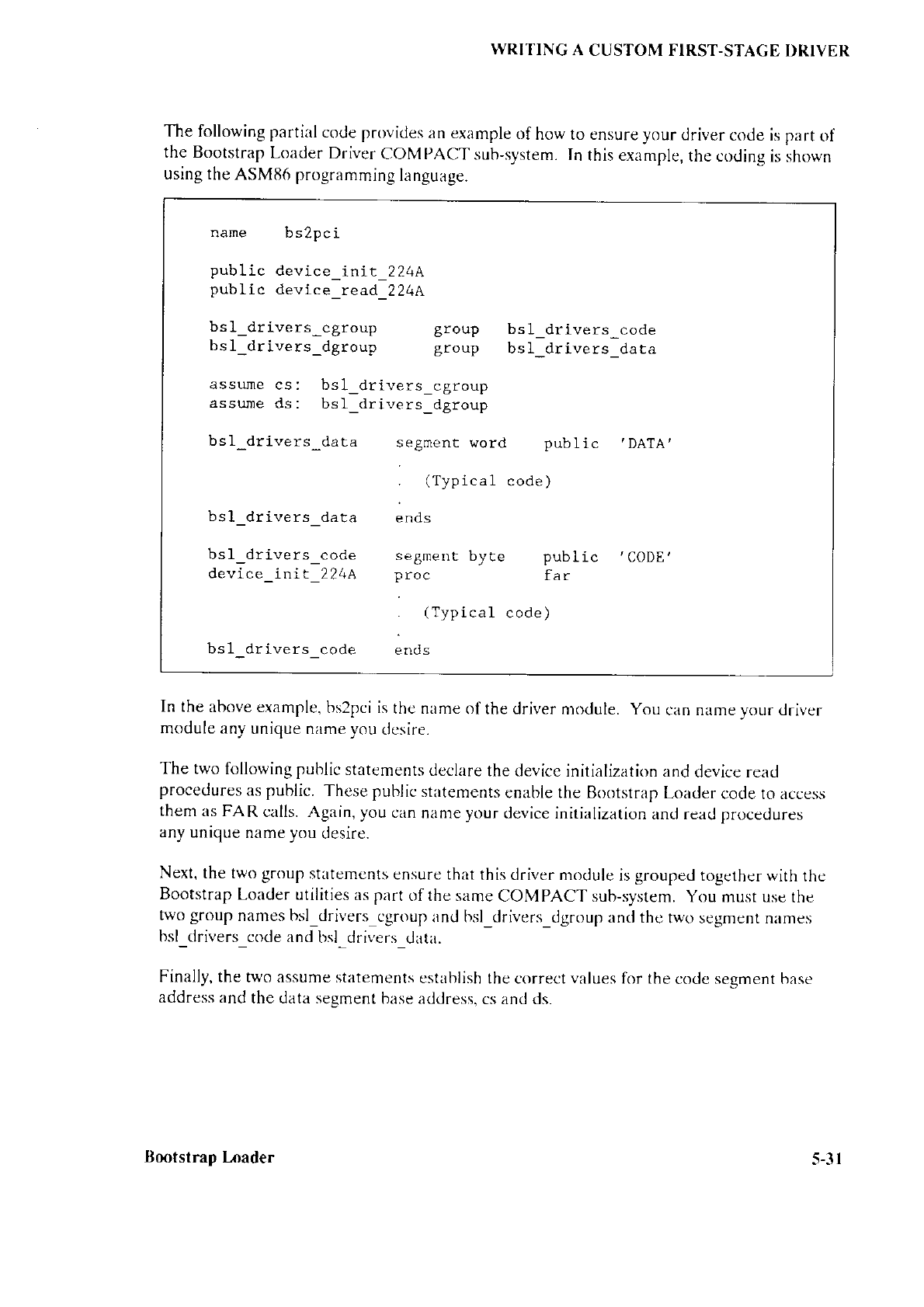
WRITING
A
CUSTOM FIRST.STAGE
DRIVER
In the
above example,
bs2pci is
the name
of the driver
ntodule. You
can name
your
driver
module any
unique name you
desire.
The two
following public
statements
declare
the devicc
initialization and
device read
procedures
as public.
These public
statements
enable the Bootstrap
Loader
code to access
them
as FAR
calls. Again, you
can
nante
your
device initialization
and reatl
procedures
any unique
name you
desire.
Next,
the two group
statements
cnsure that
this driver module
is
grouped
together with
the
Bootstrap
Loader utilities
as part
of the same
COMPACT sub-system.
You must usc
tlìc
two
group
names bsl_drivers
cgroup
irncl bsl_cirivers_dgroup
ancl the
two segment names
hsl clrivers
code and
bsl drivers
data.
FinaÌÌy, the
two assume statements
establish
the correct
values
for the
code seqment base
address and
the data segment
hase address,
cs and ds.
The following partial
code
provides
ln example
of
how to ensure your
driver
code is part
of
the Bootstrap
Loader
Driver
coMPACT sub-system.
In this example,
the cocling
is shown
using the
ASM86 programming
Ianguage.
name bs2pci
public device_ini t_2 24A
public devic
e
_read_Z24tt
bs
l_dr ive rs_cgroup group
b
s l_dr ive rs_dgroup group
assume
cs: bs
l_dr ive
rs_c
group
assune ds: bs Ì_dr ive rs_dgroup
bs l_dr ive rs_data segment word
b s
1_dr ive rs*code
bsI drivers data
. (Typical
ends
segment byte
p
roc
pubÌ ic 'DATA'
code
)
b
s l_dr ive rs_data
bs l_dr ive r s_c ode
device inir 224A pubLic 'CODE'
far
bs1 drivers code
. (
Typical code)
ends
tsootstrap
l,Oader 5--t
I
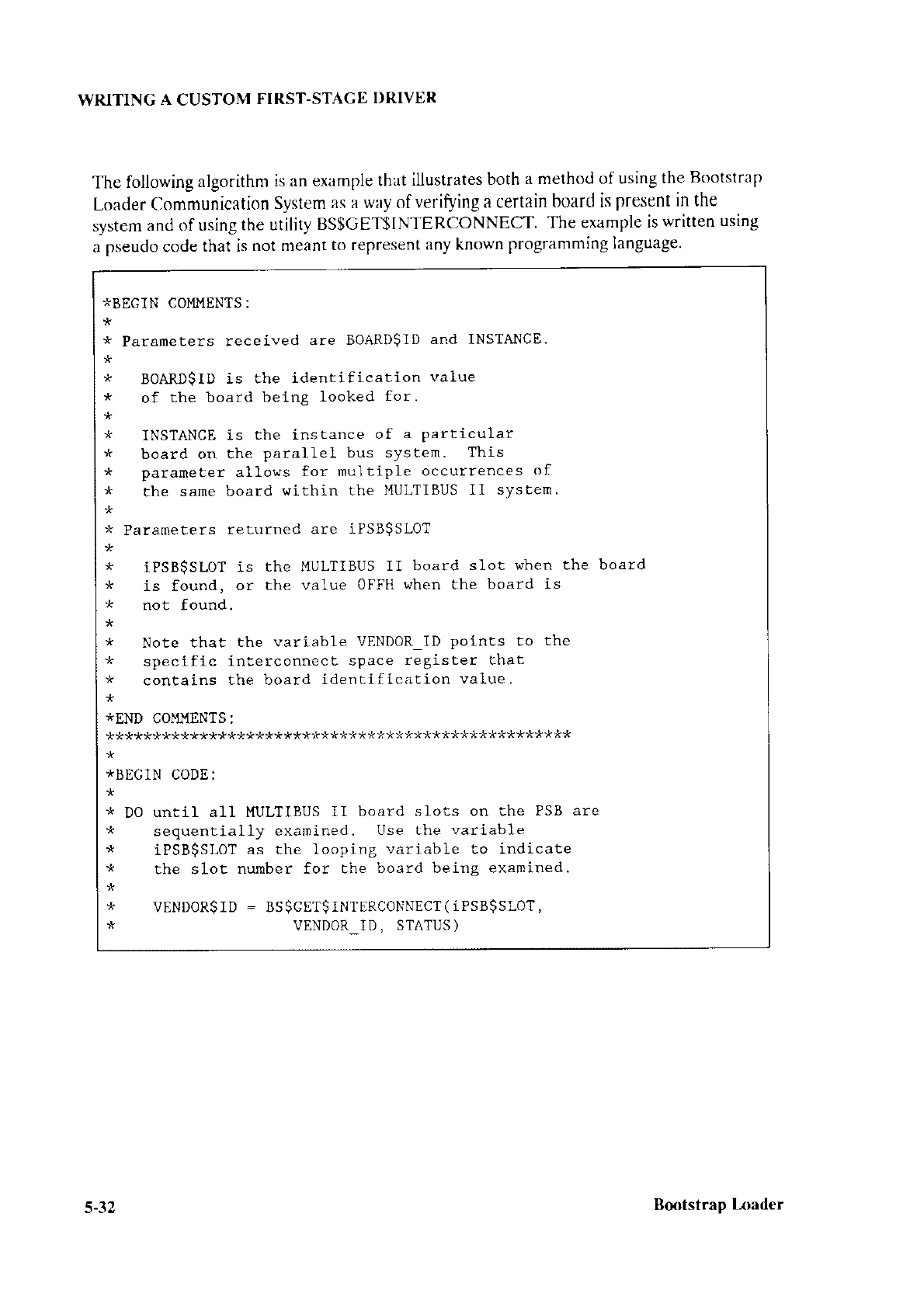
WRITING
A CUSTONI
FIRST-STAGE
I)RIVER
The following
algorithm
is an example
that
illustrates
both
a method
of using
the
Bootstrap
Loader
Communication
System
es a way of
verifuing a certain
board is
present
in the
system
anrl of using
the utility
BS$GET$INTE,RCONNECT.
The example
is
written
using
a
pseudo
code
that is
not meant
to represent
any known
programming
language.
*BEGIN COMMENTS:
* Paraneters received are BOARD$ID
and INSTANCE.
* BOARD$ID
is the identificatlon value
* Òf fhe troard beins looked for.
* INSTANCE
Ís the instance of a particular
* troard on the parallel bus system. This
* parameter allows for multiple occurrences of
* the sarne board within the MULTIBUS II systern
* Parameters returned are iPSB$SLOT
* iPsB$sLoT is the MULTIBUS
II board slot when the board
* is found, or the value OFFH when Lhe board is
* not found.
* Note that the variable VENDOR_ID
poínts to the
* cnoní fi. ínl"ar.nnnpr.l- sna.p rèpister fhat
* concains the board identification value.
*END COMMENTS:
**********************************-x***************
*BECIN
CODE:
* DO
until all MULTIBUS
II board slots on the PSB are
* sequentially examined. Use the variabÌe
* iPSB$SLOT
as the looping variable to indicate
* the slor nunber for che board being examined.
* VENDOR$ID
: BS
$GET$
INTERCONNECT
(
iPSB$SLOT,
* VENDOR ID, STATUS)
5-32 Bù)tstrap [,oader
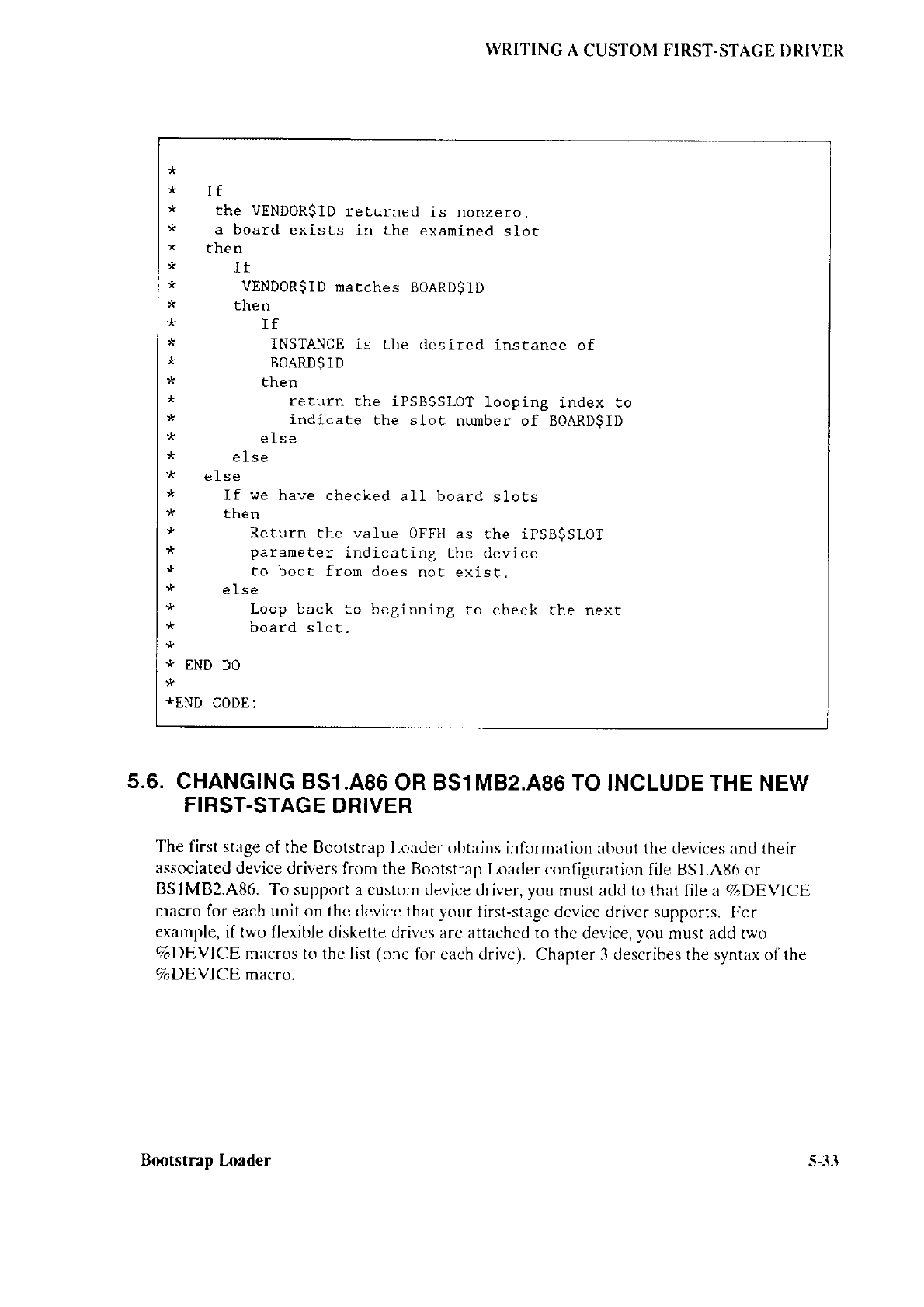
WRITING
A
CUSTOM
FIRST-STAGE
I)RIVER
* rf
* the VENDOR$ID
returned is nonzero,
* a board exi-sts in the examined slot
* then
x Ìt
* VENDOR$ÌD
rnarche
s BoARDgtD
* then
* lf
* INSTANCE
is the desired Ínstance of
* BOARD
$
ID
* then
)t return lhe iPSBSSLOT
looping index to
* indicace the sl-oc number of BOARD$ID
* else
* else
* else
* If we have checked all board slots
* then
* Return the value OFFtt
as the ipSB$SLOT
* parameter indicating t-he
device
n to boot from does not exist.
* else
* Loop back to beginning to check the next
* board slot.
* END DO
*END CODE:
5.6.
CHANGING BS1.A86
OR BS1MB2.A86 TO
INCLUDE THE NEW
FIRST.STAGE
DRIVER
The first stage
of the Bootstrap
Loader obtains
information about the devices antl
their
associated
device
drivers from the Bootstrap
Loader configuration
file BS LA86 or
BS1MB2.A86.
To support
a custom device
driver,
you musr add to that file a TTDEVICE
macro
for each unit on the device thît your first-stage device driver supports.
For
example,
if tr.vo flexihle diskette drives
are attached to the
device,
you must add two
ToDEYICE macros to the list
(one
for each clrive).
Chapter 3 describes the syntax ol thc
%DEVICE macro.
Brntstrap hader 5-33
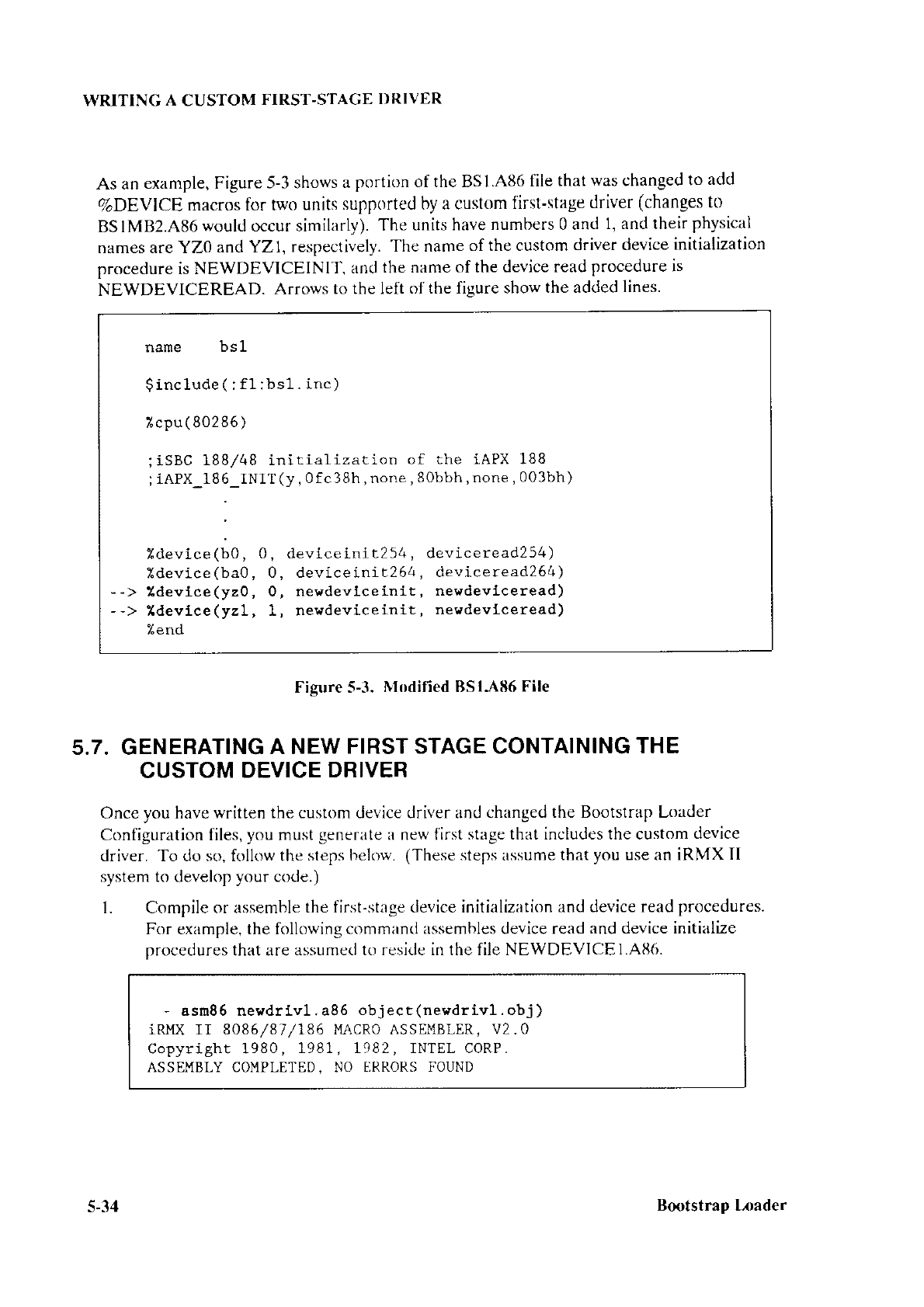
WRITING
A CUSTOM
FIRST-STAGE
I)RIVER
As an
example, Figure
5-3 shows
a
portion of the BSl.A86
file
that
was
changed
to
add
%DEVICE
macros for two
units
supported by a custom
first-stage
driver
(changes
to
BS lMB2.A86
would occur similarly).
The
units have
numbers 0 and
1, and their
physical
names are YZ\ and YZ1,
respectively.
The name
of the custom
driver device
initialization
procedure is NEWDEVICEINIT,
and
the name of the
device read
procedure is
NEWDEVICEREAD. Arrows
to the left
of the fisure show
the added
lines.
bs 1
$include
(
:
f1
:bs1.
inc)
fcpu(80286)
;iSBC
188/48 initialization of the iAPX 188
;
iAPX_186_INIT
(y
,
0fc38h
,
none
,
BObbh
,
none
,
003bh)
Zdevlce (b0
,
Zdevice (bao
,
- -> ldevlce(y20,
--> ldevlce (yzI,
Tend
Ò rlorrinaini t?5ú
Ò ..lorrinaini r?6ú
0, nesdevlceinit,
l, newdeviceinit,
deviceread254)
devic e re
ad2 64
)
newdevlceread)
newdeviceread)
Figure 5-3.
Nftrdilìed BSl.Att6
File
5.7. GENERATING
A NEW
FIRST STAGE CONTAINING
THE
CUSTOM
DEVICE
DRIVER
Once you have
written the custom clevice driver and changed
the Bootstrap Loader
Configuration files,
you must
generate ir new first stage that includes the custom
device
driver. To do so, follow the
steps below. (These steps
ilssume
that you use an iRMX II
system
to develop your cocle.)
l. Compìle or assemble
the first-stage clevice initialization
and device read
procedures.
For example, the following
command assembles device read
and device initialize
nroceclures that iìre
assumc(l to reside in the file NEWDEVICE l.Al'tfr.
- asm86 newdrivl .a86 object(newdrlvl .obj)
iRMX rr 8086/87/186 MACRO ASSEMBLER,
V2.0
Copyright 1980, 1981, 1982, INTEL CORP.
ASSEMBLY COMPLETED, NO É]RRORS
IOUND
5-34 Bo0tstrap l,{)ader
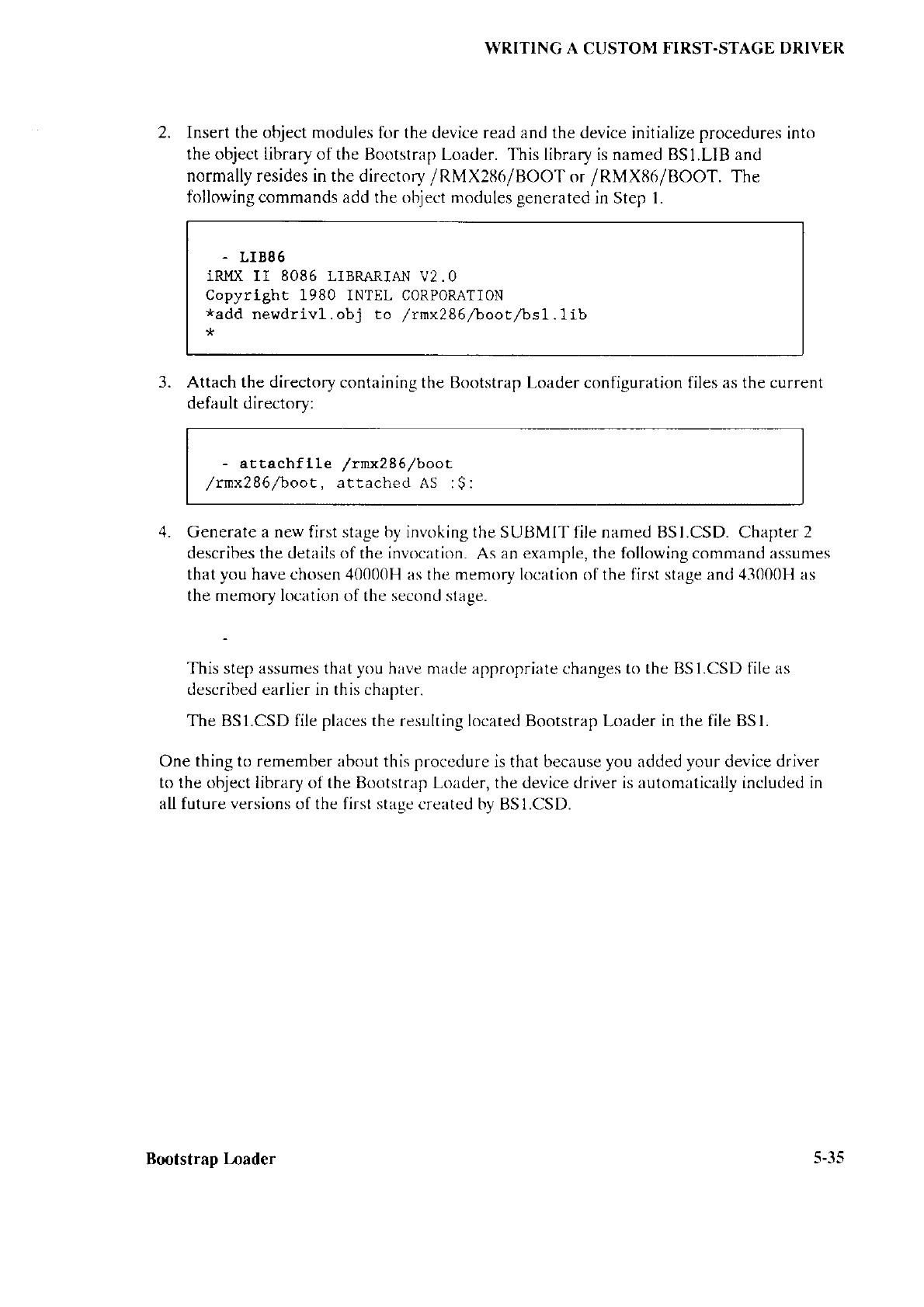
WRITINC
A
CUSTOM
FIRST-STAGE I)RIVER
2. Insert the object modules
for the device read and the device
initialize
procedures
into
the object library of the
Bootstrap Loader. This library is named BS
1 .LIB
and
normally resides in the directory
/RMX2tlfr/BOOT
or /RMX86/BOOT. The
following
commands add the object modules generated
ìn Step l.
. LIB86
iRMX II 8086 LIBRARIAN
V2.O
Copyrlght 1980 INTEL CORPOMTION
*add newdrivl .obj to /rnx286/boot/bs1.1ib
3. Attach the directorv
containing the Bootstrap Loader configuration files as the current
default directorv:
- at tachf 11e
/rnx286 /boor ,
/tntx296 /boot
-tsF^^l ^.1 ^c è.
o! LdLL'Eu nJ ,V.
4. Generate a new first stage by invoking
the SUtsMIl'file named BSI.CSD. Chapter
2
describes the details of the invocation.
As
an erample, the following command assumes
that you have chosen 40000H as the memory location of the first stage antl 43000H as
the memory location of the seconcl stage.
This step assumes that you have made
appropriate changes to
the BSI.CSD file as
described earlier in this chapter.
The BSl.CSD file places the resulting located
Bootstrap Loader
in the file BSl.
One thing to remember about
this
procedure
is that because
you
added
your
device
driver
to the
object library of the Bootstnìp Loader, the device driver is automatically inclucled in
all future versions of the first stage
created bv BS 1.CSD.
B0otstrap lr'ader 5--t:

WRITING A
CUSTOM CHAPTER 6
THIRD.STAGE
DRIVER
6.1 INTRODUCTION
Ifyou plan to use
the Bootstrap Loatler to
load iRMX ll applications from a device for
which
no Intel-supplied
third-stage driver exists, you
can make one of two choices
dependent upon the
size ofyour loadlile:
. For
loadfiles smal-ter than i3.lt)K bytcs.
use the
generic
third stage.
'I'he
generic
third
stage uses the first-stage
delice cirivers
you
have already supplied. Since the loadlile
fits in the I megabyte aclclress space
supported in real mode, and first-stage device
drivers are
able to place the loadfile, no need
for
you
to create new device drivers exists
for the third stage.
. For loadfiles larger
than 840K bytes, use the device-specifìc
third
stage.
The device-
specific third stage uses new clevice drivers
that
you
must supply. These device drivers
run in
protected virtual
address
mode enabling the loadfile to be
placed
using the full
16 megabyte range of addresses.
This
chapter outlines the
procedure
lirr writing
a thirtl-stage tlriver needed lbr the device-
specific thir<J stage. To
assist
you
in
writing
your own tlrivers, the iRMX II package
contains the source code fbr a wor king
third stage driver. After installing
your
iRMX II
system, you
can find the sourcc corlc ìn the file
/RMX286/BOOT/BPMSC.A86.
6.2
WHAT A THIRD-STAGE
DEVICE DRIVER MUST
CONTAIN
The third stage device drìver, likc thc lirst stage, must contain a tlevice initialization and a
device read procedure. For the nrost p:rrt,
these
procedures
are
similar to their first-sta,'.,
counterparts.
However, two diflèrences exist.
. Both procedures must
reside
in the same
coLle segment.
. You must also create a PUUI-l(l sl,mbol that contains a pointer to the device driver
data segment. The third stage neerls this information so that it can create a descriptor
for the data segment, enabling the driver to access the segment in
protected morJe.
Bff)tsf rap Loader ó-l
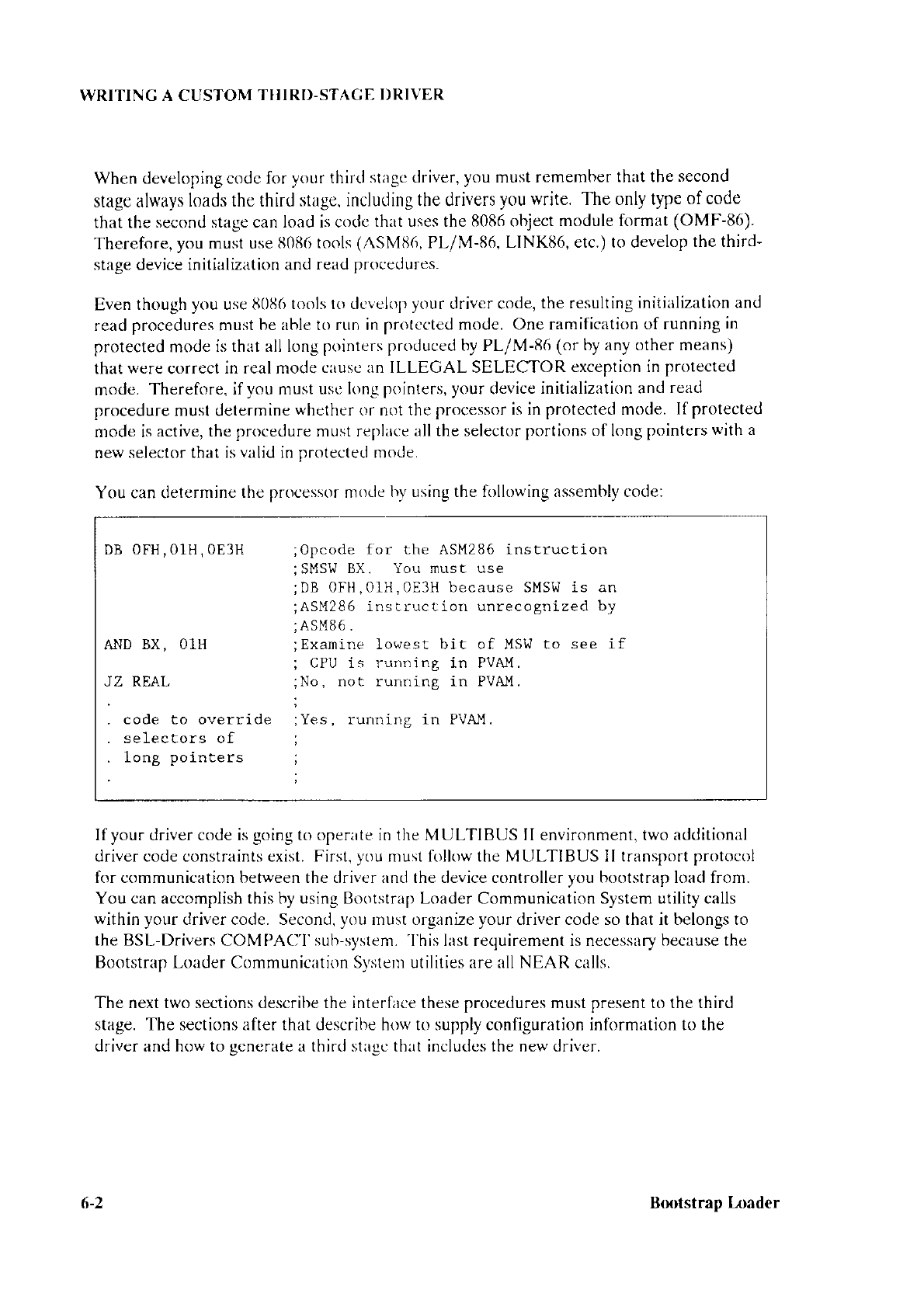
WRITING A CUSTOM
TIIIRI)-STACE
I)RIVER
When developing codc for
your third
stlgc driver, you must remember
that the
second
stage always
loads the third stage. including
the
drivers
you
write. The only type
ofcode
that the second
stage can Ìoad is cocle
thrìt uses the 8086 object
module format (OMF-86),
Therefore,
you
must use t1086
tools
(ASM86,
Pl-/M-86,
LINK|6, etc.) to develop
the third-
stage device initialization and
read
procedures.
Even
though
you
use ll0lJf)
tools to delelop
your
driver code,
the resulting initialization
and
read
procedures
must
be able to run in
protccted mode. One ramification
of running
in
protected
mode is
thlt all long
pointers protluced by PL/M-86
(or by any other means)
that
were
correct
in real mode
ciìusc rn ILLECAL SELECTOR exception in protected
mocie.
Therefore, ifyou must
use lon{
pointers, your
clevice
initialization and
read
procedure must determine
whether
or not the
processor is ìn protected mode. If protected
mode is
active, the prrredure must replrce
all the selector
portions of
long
pointers
with a
new
selecîor that is
valid
in
protected
mode.
You can cietermine
the processor nrode
l.rv using the following assembly code:
DB oFH,01H,0E3H ;Opcode
for the ASM286 instruction
;SMSW
BX. You must use
;DB 0Fll,01H,0E3H because SMSW 1s an
;ASl"l286
ir'cr r'uct ion unrecognized by
;ASM86
.
AND BX, 01H ;Examine Lo\rest bit of MSll to see if
;CPU is running in PVM.
JZ REAL ;No, not running in PVAl'f.
. code to override ;Yes, running in PVAJ'I.
. selectors of i
. long pointers ;
.;
If your driver code is going to operate in the MULTIBUS II environment, two
additional
driver code constraints exist. First, vou must follow the MULTIBUS II transport
protocol
for communication between the ciriver and the device controller you bootstrap load from.
You can accomplish this by using Bootstrap Loader Communication System utility calls
within your
driver code. Second,
you
n.rust
urganize your
driver code so that it belongs to
the BSL-Drivers
COM PACI'I
sub-systen.
'l
h is llst requirement is necessary because the
Bootstrap Loader Communication St'stenr utilities are all NEAR calls.
The next two sections describe the interlrrce these procedures must present to the third
stage. The sections after that describe how to supply configuration information to the
driver and how to
qenerate
a thircl strge thut inclucles the new driver.
6-2 Brxfstrap
l-oader
WRITING A CUSTOM THIRD.STAGE I)RIVER
5.3 DEVICE INITIALIZATION
PROCEDURE
The device initialization
procedure must present
the following PL/M-86 interface to
the
third stage:
device$init: PROCEDURE
(unit) WORD PUBLIC:
DECURE unir WORD:
.
END deviceSinit:
where:
device$init The name of the
device initialization
procedure.
You can choose any
name
you wish
for this procedure,
as long as it does not conflict
with the
names of other third-stage procedures.
unit The device unit number as defined during Bootstrap
Loader
con[igur:ì t ion.
The WORD value
returned by the
procedure
must be the device
granularity,
in bytes, if the
device is ready, or zero
if the
dcvicc is not ready.
The third-stage device driver initialization procedure, (like the first-stage device
initialization procetlure)
must
perform
the following operations:
1. Test to see if the
device is
present.
If the device is not
present,
return the
value zero.
2. InitiaÌize the device
fbr reading. This is a device-dependent operation. For
guidance
in initializing
the
device, relèr to the hardware reference manual for the device.
3. Test to see if device
initialization
was
successful. If it
was
not, return the
value zero.
4. Read the device volume label to
to obtain the device
granularity. (For information
on the location anci organization
of the
volume
label, see the
|RMX
86 Disk
Ve
ijì cat i o n U t i li
r\ n n nua L)
5. If the attempt to obtain the device
granularity was
successful, return the device
granularity. Otherwise,
return the
value
zero.
NOTE
In addition to the above five steps, the
procedure
must follow
MULTIBUS II
transport
protocol
and belong to the BSL-Drivers COMPACT
sub-system if the
driver functions in a MULTIBUS II environment. Refer
to Section 5.5 for
more information
on these t\yo requirements.
Bootstrap lnader 6-3
WRITING A CUSTOM
THIRD-STAGE I)RIVER
Notice that the functions
of the first-stage and
the third-stage device initialization
procedures
are identical.
Therefore,
you
can
take two courses of action
to
provide
a devlce
initialization
procedure for the third-stage
custom driver.
1. You
can allow the first-stage custom
driver and the third-stage custom
driver to
share the same
data segment. In this case, the third-stage
device initialization
procedure
is redundant
because the device
was
initialized by
the first stage and any
data in
the data segment remains
valid.
Because
the third stage calls the device initialization
procedure
regardless
of
your
intentions,
you
must supply a third-stage driver device initialization
procedure
even
if it is redundant. However,
thc device initialization
procedure
can
be
an
empty
routine whose only function is to return the device
granularity read from the
common data segment.
2. You can require the first-stage
and third-stage drivers to use different data
segments.
In this case, the first-stage
and third-stage initialization
procedures
must
independently initialize their respective data segments.
With
this arrangement,
you
must
provide
two complete device initialization routines. However, because
their
functions are identical (except for assigning a
value
for the data segment),
you
can
use the same code for both nrocedures.
6.4
DEVICE READ PROCEDURE
The device read procedure must present the following PL/M-86 interface to the third
stage:
device$read: PROCEDURE
(unit, blk$num, buf$ptr) PUBLIC;
DECI^ARE unit WORD;
DECI-ARE blk$nurn DWORD
;
DECLARE buf$prr POINTER;
. (
code
)
END device$read;
where:
device$read The name of the device read procedure.
You can choose any name you
wish
for this procedure,
as long as it does not
conflict
with
the names of
any other third-stage procedure.
unit The device unit number as specified
during Bootstrap Loader
configuration.
6-4 Bootst rap hader
WRITING
A CUSTOM
THIRD-STAGE DRIl'ER
blk$num A 32-bit
value
specifying the number of the block that the Bootstrap
Loader
wants
the procedure to read. Each block is of device granularity
size,
with
the first hlock on
the device being bÌock 0.
buf$ptr A 32-bit pointer to the buffer in which
the device reacl
procedure
must
copy the
information it reads from
the
secondary storage device.
The device read
procedure
does not
return a
value
to the caller. lt simply reads data from
the bootstrap
device and
places
it in the memory location specified by the buf$ptr
parameter.
The third-stage and first-stage device read procedures perform similar
functions.
Therefore,
you
may
want
to create the third-stage read procedure by performing
modifications on the first-stage
read
procedure (if,
for instance, it has already been
written
and resides in PROM). lf the first-stage read procedure does not
yet
exist, you can
write
the third-stage read procedure first and then
modify it to create the first-stage procedure.
Unlike the Bootstrap Loader first stage, the third stage has no built-in facilities for
reporting I/O errors. That is, the cievice driver cannot call BS$ERROR. Therefore, ifyou
require I/O error reportìng, you must write a complete custom error-checking mechanism
and include it in the device read procedure. (For an
explanation
of BS$ERROR, refer to
Chapter
3.)
To be
compatible
with
the Bu)tstrap Loader, the device read
procedure
must
perform the
following steps:
l. Save the third stage DS
(the
data segment selector of the calling routine),
and then
copy the driver data segment selector from the AX register into the DS register.
(When calling the device read procedure, the third stage puts the driver data
segment selector
in
the
AX register.)
The
device
read
procedure must perform this
function immediately.
Because
register
manipulation
is not possible with
high-level languages
(such as
PL/M-8ó),
you must write
this
portion
of the device read
procedure in assembly
language
(ASM86).
2. Check whether the processor is in real or protected mode. lf the processor is
in
protected mode, you may want to initialize other selectors to appropriate
values
(buf$ptr for example).
Assuming
Step
I has already been accomplished,
you need
not initialize the code
(CS),
clata
(DS),
ancì stack
(SS)
registers. These registers
will
already be set correctly.
3. Read
the block (specified by the blk$num parameter) from the
bootstrap device
(specified
by
the
unit
paramcter) and place the data in the memory
location
specified by the buf$ptr
parameter.
4. Restore the third stage data segment selector to
the DS register. As
with Step l,
you
must write this code in assemblv language, because it involves
register manipulation.
Bmtstrap I-0ader o-5
WRITING
A CUSTOM
THIRD-STAGE
DRIVER
NOTE
In addition to the above
steps, the procetlure must follow MULTIBUS II
transport
protocol
and
belong to the BSL-Drivers COMPACT sub-system if the
driver functions in a MULTIBUS ll environment. Refer to Section
5.-5 for
more information
on these two reauirements.
6.5
PROTECTED MODE CONSIDERATIONS
Because
you develop your driver
proceclures
using 80tì6
tools and run the
procedures in
protected mode, you should keep
several items in mind:
o When
the third
stage
calls
the device read procedure, it puts
the driver data segment
selector in the AX register. When first called, the device read
procedure
must
save the
DS used by the caller (the third stage data segment selector), and then copy
the driver
data segment selector from the AX register into the DS register. Before exiting,
the
procedure
must restore
the original contents of the DS register. If you are
writing
in
assembly language,
you can perform this operation as follows:
THE$DEVICE$READ
PROC
PUSH
BP
MOV BP, SP
PUSH DS
Mov Ds, Ax
POP DS
POP BP
RET 8
THE$DEVICEgREAD
ENDP
FAR
:ue
L l1qor essao.LMy Lo
;arguments
'Gét Irl.rl datn ceornent
;Perforrn the device read
;functions
'RPql rrrc thi r.l qt:oc DS
;Restore
BP
;Return
If you
are
writing
code in a high-level language (such as PL/M-86), you
still must code this
function in assembly language.
The reason for this restriction is because higher level
languages do not allow
you
to manipulate registers directly.
You can, however, combine
assembly language
with
your high-level language by writing
an assembly language
"shell"
that handles the register manipulation ancl
then calls a PL/M-86 procedure to perform the
other
device read functions. For instance,
the following example saves the third stage DS,
calls a high-level
language routine to do the device
read, and restores the third stage DS
register before
returning.
6-6 Bu)tstrap l-oader
WRITING A CUSTOM
THIRD.STAGE DRIVER
THE$DEVTCE$READ PROC FAR
PUSH
BP ;Cet Addressability to
;argunents
MOV
BP, SP
PUSH DS :Save third stage DS
MoV DS, AX ;Get local data segnent
CALL PLù{READ ;Call a PLM
procedure Eo
;perforn the
.,1-.'i ^- F"--ríanc
POP OS ;Restore third stage DS
POP BP ;Restore BP
RET 8 ;Return
THE$DEVICE$READ
ENDP
Be careful
when
changing DS, SS, CS, or ES registers
while
in
protected mode. They
point to
valid
entries in the
g.lobal
descriptor table
(GDT) that
were prepared for your
driver
by the third stage. If you change any of these registers,
the new value must be a
valid GDT entry or an ILLEGAL SELECTOR or
a GENERAL PROTECTION
exception
will occur.
Do nclt link your code to PLM8r,.LlB,
bec:ruse the compiler issues long calls
to
procedures in that
library.
These long calls cause exceptions
when
the calls
are
attempted in
protected
mode.
The buf$ptr parameter the third stage
passes to the device read
procedure is a valid
pointer in real mode only. You can pass this
value
to the device
as a physical address,
but do not try
to
use it as a
pointer
in
protected mode. lfyou require a
pointer, replace
the buff$ptr selector
with
the third stage DS
value. This DS
value
is intact
when the
device read
procedure
is calletl.
6.6 SUPPLYING
CONFIGURATION lNFORMATION
TO THE
THIRD-STAGE DRIVEB
Like a first-stage device driver, all third-stage
drivers require configuration
information
about the devices they support. You can
provide this information either
by hard-coding it
into the driver or hy
creating
a special configuration file for the
device. Both of these
techniques
are the same for the lìrst and third
stages. Refer to the section
in Chapter 5
entitled "Supplying Configuration Information
to the First Stage" for
descriptions of
these
techniques.
Bmtstrap lrader 6-7
WRITING
A CUSTOM THIRD.STAGE I)RIVER
If you
decide to create configuration files for
your
first-stage and third-stage drivers,
you
should
probably
use a single configuration file for each device and
link it to
both the first-
stage and third-stage
drivers. The device-specific information is the same for both drivers,
and keeping the
information in
a single
file
prevents you
from
giving
conflicting
information
to the two drivers. You can include the configuration file by editing BS3.CSD
to assemble and
link the configuration file to the third stage. Refer to Section 5.4.2 for an
example that shows
the similar first-stage
process.
6.7 USING MULTIBUS@
IITRANSPORT PROTOCOL
If the driver
you
are creating functions
within
a MULTIBUS
I environment,
you
need not
read this section. Skip
to Section 6.[ì,
If the driver you
are creating functions within
a MULTIBUS Il environment, you must
write
the driver code
to use the MULTIBUS II message transport protocol.
To help
you
accomplish
this task, Intel provides
a
snrall, single-thread
communication system
that
enables
Bootstrap Loader
drivers to communicate with device
controllers
within
a
MULTIBUS ll environment. This
system is called the Bootstrap
Loader Communication
System,
and is a subset of the
Nucleus Communication System.
Concerning adherence
to the MULTIBUS II transport protocol,
requirements
for
third-
stage device
drivers and first-stage
device tlrivers
are identical. Thus, you should refer to
Section
5.5 for an overview of the
Bootstrap Loader
Communication System, the availabte
Bootstrap Loader
Communication System
utilities, and guidance
in
writing
the device
initialization and
device read
proceclures.
Should
you
desire
a more complete clescription
of Bootstrap
Loader Communication
System concepts
similar to Nucleus Contmunication
System concepts,
reîer to the Extended
|RMX II Nucleus User's
Guide in
Volume
2 of
the iRMX II documentation
set.
6.8
CHANGING 853.A86 TO
INCLUDE
THE NEW
THIRD.STAGE
DRIVER
The device-specific
third
stage ohtains information
about the
device and its associated
device driver
from the
Bootstrap Loatler configuration
file 853.A86.
To support a custom
device
driver, you
must add to that
file a cZDEVICE
macro for each
unit on the device that
your
first-stage device
driver supports.
For example,
if two flexible diskette
drives are
attached
to the
device, you must add
two
oZDEVICE
macros to the
list
(one
for each
drive).
Chapter 4 describes
the syntax of the 9óDEVICE
macro.
6-8 Booastrap l.oader
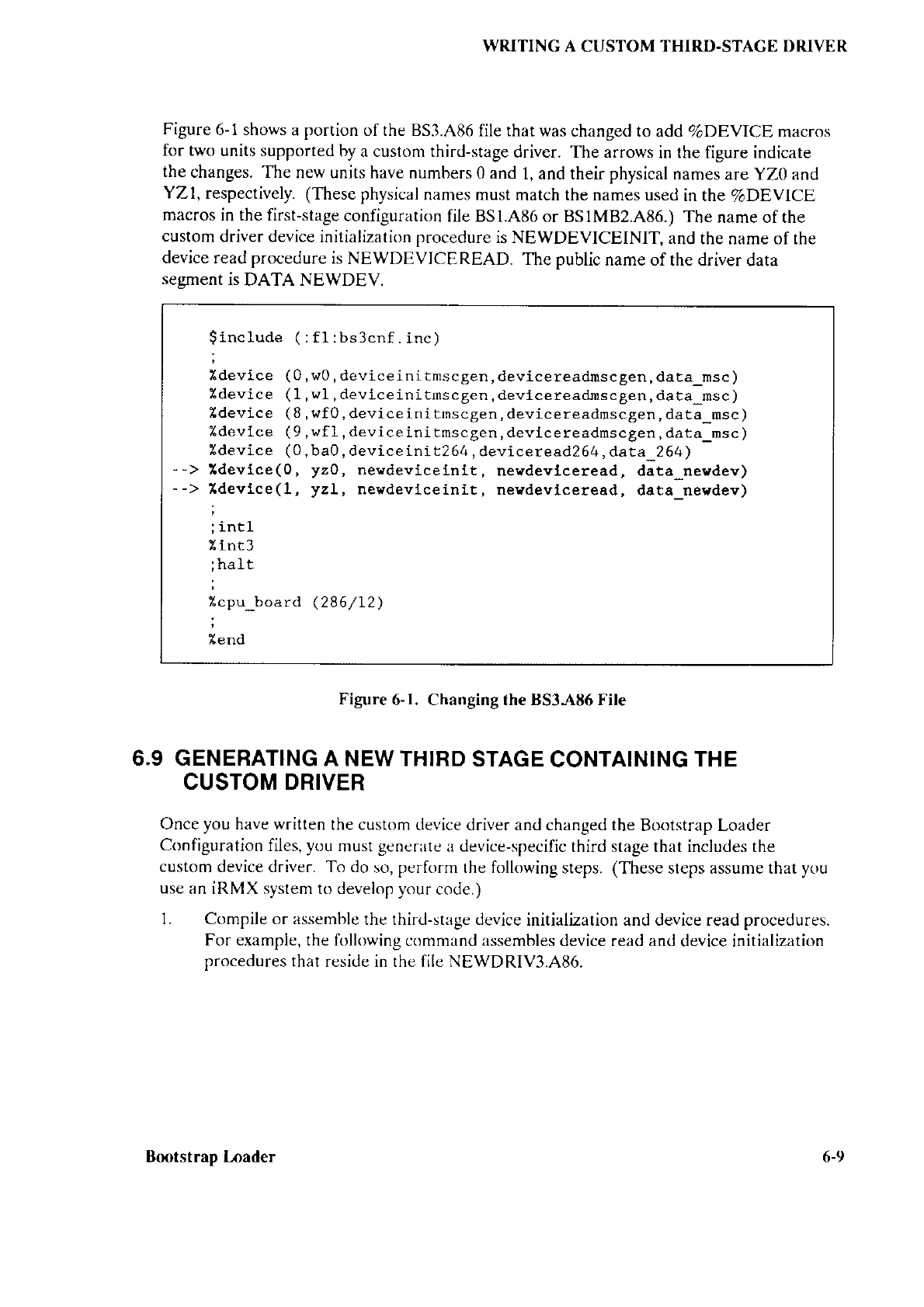
WRITING A CUSTOM
THIRD.STACE DRIVER
Figure
6-1 shows
a
portion
of the 853.A86
file that was
changed to add
%DEVICE macros
for two
units supported
by a custom third-stage
driver. The arrows
in the figure indicate
the
changes. The
new units have numhers
0 and
1, and their physical names
are YZ\ and
YZl, respectively. (These
physical
names must
match the names used
in the
VoDEYICE
macros
in the first-stage
configuration
file BSl.,{86
or BS1MB2.A86.) The
name of the
custom
driver device
initialization procedure
is NEWDEVICEINIT,
and
the name of the
device
read
procedure
is
NEWDEVICEREAD.
The
public
name of the driver
data
seqment
is
DATA NEWDEV.
ginclude (
:fl:bs3enf. inc
)
Ídevice (0,w0, device ini tmsc gen,
devicereadnsc gen,
data_msc)
fdevice (1,w1 ,
devlce in i tms cgen, devicereadns c gen,
data_rnsc
)
ldevice (
8
,
wfO
,
devic e ini rnsc gen,
devic ereadnscgen, data_msc
)
ldevlce (9,wfl,deviceinitmscgen,devlcereadmscgen,data_nsc)
ldevice (0, ba0, deviceinit264, devi ce
read264 ,
data_264)
--> Idevlce(0, yz0, newdevicelnlt, newdeviceread, data_newdev)
--> ldevice(1, yzl, newdevicelnft, nevdevlceread, data neudev)
;
;int1
Z lnt 3
;halt
%cpu_board (286/12)
i
lend
Figure
6-
l. Changing the tsS3.A8ó File
6.9 GENERATING
A NEW THIRD
STAGE
CONTAINING
THE
CUSTOM DRIVER
Once you have written the custom
device driver and changed the Bodstrap Loader
Configuration
files, you must
genenrte
a device-specific
third stage that includes the
custom
device driver. To do so, perform the following
steps. (These steps assume that you
use
an iRMX system to develop your
code.)
l. Compiìe or assemble
the third-stage device
initialization and device read procedures.
For example, the following
command assembles device read and
device initialization
procedures
that reside in the file NEWDRIV3.A86.
Bootstrap [íader ó-9
WRITING
A
CUSTOM
THIRD-STAGE T)RIVER
- asn86 newdrív3. a86 obj ect
(nesdrlv3 . obj
)
iRlD{ rr 8086/87/L86 MACR0 ASSEMBLER, V2.0
copyrighr 1980, r981, 1982, INTEL CoRP.
ASSEMBLY COMPLETED, NO ERRORS FOUND
Insert the object modules for the device read and the devìce initialize procedures
into the Bootstrap Loader object library. This library is named BS3.LIB and
normally resides in the directory
/RMX8ó/BOOT or /RMX286/BOOT. The
following commands add the object modules
generated
in Step l.
- LIBS 6
iRMX II 8086 LIBMRIAN V2.O
Copyright 1980 INTEL
CORPORATÍON
*add newdriv3. obj to /rnx2B6/boot/bs3.1ib
3. Attach the directory
containing the Bootstrap Loader configuration files as the
current
default directon .
- attachflle
/rnx286 /t>oot ,
/rnx286 /boot
.fl-,.}la; Aq q
Generate
a new third sta_qe by invoking the
SUBMIT file named
BS3.CSD.
Chapter
3 describes the
details of invoking BS3.CSD.
As an example, the
following
command
names the new third stage "NEW3STG,"
and
locates it at memory location 08C000H.
This step
assumes that you
have macle any appropriate
changes to the BS3.CSD file
that are required
to support trny configuration
files
you
might
have designed.
z.
A
6-
10 B(x)tstrap
k)ader
CHAPTER
7
ERROR
HANDLING
7.1 INTRODUCTION
If the
bootstrap
loading
process
is unsuccessful,
the
Bootstrap
[-oader ìnitiates
error-
handling
procedures.
Notification
ol lailures
occurring
during the
loading process
clepends
on
the configuration
of
the first rrnrl
thirri stl,qes.
This
chupter
describes the
Bootstralt
Loader's error
handling
fncilities.
7.2
ANALYZING
BOOTSTRAP
LOADER
FAILURES
The
Bootstrap
Loader
can disp|rl
ntess:tges
at the termin.l when
bootstriìp
loacìing
is
unsuccessful.
As discusscd
in Cìhaptcr l. rhc
.I.CONSOLh,
.;T'EXT.
and
_cÉLIST macros
in the
BSERR.AE(I
filc
dcterminc *hcthcr or
not nìcssiìges
irre riispllyerJ when
crrors
occur
during the
first and secolrd
stlr-sts.
how detirilcd
the ntessages
are, and under what
circumstances
thev
are displayed.
As Cìhlpter
-l
explains.
the third stlqe
automaticllly
determines
if a
monitor is prescnt.
:rncl
il so.
displavs crror
messages
at the terminal
regardÌess
of the
first stage
coniigunttion.
The following
sections
describe whrrt
h;rp;rcns u
hen a bocttstrap
loutlinq
error occurs ancì
how to analyze the
errclr. Therc arc two situations
described: error anulvsis
when
nlessu_lllcs
are displayed,
and error
analvsis when
no
rnessaqcs are
displayccl.
7.2.1
Actions
Taken
by the
Bootstrap
Loader
After
an Error
After responding
to an
error hy pushing
a word
onto the stirck
and optionally
displaying a
message, the
Bootstrap
Loadcr cithcr
tries again, passcs
control
to a monitor,
or halts. lf
the
error ìs detected
in the
first or sccond
stlrqe,
the action
taken depends on whether
vour
BSERR.Atì6
file contains
an
fiA(lAIN. .;lNTl, .-;lN'fl, or _ciHALT
macro. If rhe errcl
is detected
ìn the third
stage, rhe acrion
r:rken
depends on whether your
BS3.A8ó
or
BC3.A8ó
file
contains an
cllN'f I, cilN'l']. or c.,iHALT
macro.
The only diffèrcnce
between the
clcvicc-spccilic
and
generic
third stagcs
is that the generie
third stage
never generates
the crror
codc "Dcvicc
Not Supported"
(rcler
to error code J.l
later
in this chapter),
becausc the
qeneric
third
stage supports
all the devices supported
lry
the
first stage.
If
you
invoke
the tsoorstrtrp
Loader
with
a device name that is not
supported by the
first staqe,
the
gcncric
third stage will
never
even
get
Ìoaded into memory.
Brxrtstrap
l-oader 7-l
ERROR HANDLING
7.2.2 Analyzing
Errors With
Displayed
Error Messages
If your
BSERR.A86
file contains
the
o/cCONSOLE,
ToTEXÎ,
or a/oLIST
macro, then
the
Bootstrap Loader
displays
an error message
at the terminal
whenever a failure occurs
in
the
bootstrap loading
process. The
message consists
of one or two parts. The
first
part,
which
is
always displayed,
is a numerical error
code. The second
part is a short description
of the error. Although
the second
part is always displayed
for third stage errors,
it is
displayed for first
and second stage
errors only if the T,ITEXT
or ToLIST
macro
is included.
Each numerical
error code has
two digits.
'l'he
first digit indicates, if possible, the stage
of
the bootstrap
loading process in
which the error occurred.
The second digit distinguishes
the types
of errors that can
occur in a
particular stage. There are four
possible values for
the first disit.
First Digit Stage
Can't tell
First
Second
Th
irtl
The error
codes, their abbreviated cìisplay
messages, and their causes and meanings
are as
folìows.
Error Code: 0l
Description: I/O error
An I/O error occurred
iìt some undetcrmined time during
the bootstrap loading
process.
If the ToCONSOLE
macro is inclucled. the Bootstrap [.oader
places a code in the high-
order byte of the
word
it pushes onto the stack, so that
you
can further diagnose
the
problem. This byte identifies the drivcr lìrr the device that produced the error,
as
follows:
0
I
2
3
Code
08H
l5H
18H
25H
5lH
54H
()EOH
other
(in
range A0H-DFtl)
Driver
20tì
MSC
(with or
without
2l8A)
218A on CPU
board
1861224A
25r
254 or 264
SCSI
driver for
your custom
11 Brntstrap Lrader
ERROR
TIANI)LING
Note that
this device
code
is oven'ritten
when
the
description
is printerJ
if the
o/r'l'EXT
or ToLIST
macro is
included.
The last
entry
in the
list of
device c.des
assumes
that you
have written
:r
device driver
for your
device
and
have identified
the driver
by some
c.de in
the inclicated
range
--
other values
are
reserved
for Intel
drivers.
For
information
about
how to incorporirtc
this
code
into the
driver,
see
Cihapter
5.
Error
Code:
Description:
Error
Code:
Description:
Error Code:
Description:
Error
Code:
Description:
'fhe specific
device
designatet{
for bootstrap
loatJing
is not reatly.
This error occurs
only when
your
BSERR.AIJíT
f ile does
not
contain the
fTAUTO macro.
Thcrcforc.
either
the operator
has specified
a particular
device
or only
one dcvice
is in thc
Bootstrap
Loader's
tlevice
list,:rntl
the device
is
not rearjv.
11
Device
not readv.
12
Device
does
not exist. (lf BSERR.AIJ6
cuntuins
the
TcLIST nracro,
the display
then shows
the list of known devices.)
13
No devicc
rcu dv.
2l
File not
founrl.
The device
name
entered
at thc console
has no cntry
in the Bootstrap
Loader's
devicc
list.
This error
occurs
only
when
I'our
tìSERR.A8(r
lile contains
thc
gIMANUAL
macro and you
enter
a device
name,
but the
device
name
you
enter
is not
known to thc
Bootstrap
Loader.
After
displaying
rhe
message,
the Bootstrap
Loader
tlispÌays the
names
of the clevices
in its
tlcvice
list.
None
of the devices
in the
l]ootstrup
l,oader's
device list are
readv.
This error occurs
only when
your
BSERR.A8(r
lile contains
the
9óAUTO or
oZMANUAL
macro and
vou
do not
enter a
device
name at
the console.
The
Bootstrap
Loader
could not
find the indicuterl
file
on the dcsignlrted
bootstriì[l
device.
This is the
default file
if no p:ìthname was
entered at the
console . Othenlise,
it
is the
file
whose
pathname
rlas
entered.
In iRMX II syste
ms, the
Bootstrap
Loacìer
could
not find
the third staqc.
Brntstrap
hader
ERROR HANI)LING
Error Code: 22
Description: Bad checksum.
While trying
to load
the target file
(the
application
system
for iRMX I systems,
or the
third stage for
iRMX II systems),
the Bootstrap
Loader
encountered
a checksum
error.
Each file consists
of several
records.
Associatetl
with each record
is a
checksum
value
that
specifies the
numerical
sum
(ignoring overflows)
of the bytes
in the record When
the
Bootstrap
Loader loacls
a file, it
computes a checksum
value for each record
and
compares
that
value to the recorded
checksum
value.
If there is a discrepancy
for
any
recorcl
in the
file, it usually
mcans
thrtt one or more
bytes of the file
have been
corrupted,
so the Bootstrap
Loirder
returns this message
instead of
continuing
the
loading
process.
Error
Code: 23
Description: Premature
end of lile.
The
Bootstrap Loader
did not fintl
the required
encl-of-file records at
the end
of the
target
file
(the
application
system
1i)r iRMX I
systems, or the third
stage for iRMX ll
systems).
Error Code: 24
Description: No start
address tìruncl
in input file.
The Bootstrap
Loader successlully
loaded thc target
file but
was
unable
to transler
control to the
file, because initiirl
CS itnd IP
values were not present.
Error Code: 3l
Description: File not
found.
The
third stage
was
unable to
finrl the turqet file on the
designated bootstrap device.
Regardless
of the way you invokecl
the Bootstrap Loader, the target file is
expected to
have a .286 extension.
Error Code: 32
Description: Bad checksu m.
The third
stage encountered a checksum error
while
trying
to load the target file.
Error Cotle: 33
Description: Premature end of file.
The third
stage reached end-of-file ea rlier
than expected
while
attempting to load
the
target file.
7-4 Boolstrap hadcr
ERROR IIANI)LING
Error Code: 34
Description: Device
not
supportetJ.
The specifietl device
is not supported
by the device-specific third stage.
That is,
there
is no
%DEVICE macro invocation
for this device in the BS3.Auó file.
Error
Code: 35
Description: Invalitl file t1,pe.
The
target file is not an 8028ó bootloadable
file
(usually produced
by BLD2lt6).
7.2.3
Analyzing Errors Without Displayed
Error Messages
In most cases, you
can determìne the cause of
a Bootstrap Loader failure by obsen ing the
behavior of the
Bootstrap Loader
whcn
it fails
to load the application successlully. You
can then take steps to correct the
frriìure.
'l'able
4-1 Ìists some common behaviors and
possible
causes for failure. The table
iìssunles that the Bootstrap Loader is set up to halt if
it detects :ìn error. Before haÌting. the Bootstrap Loader places the error code into the CX
reglsler.
Another
possible
cause oî îailure. the eltècts of
which
are unpredictlble, is that the device
controller block
(as
determined
by the device's
wake-up
atldress) can be corrupted. To
avoid this kind of failure, ensure thiìt
neither the Bootstrap Loader nor the target fiJe
overlans
the device controller block 1ìrr the device.
Brxrtstrap Inader 7-5
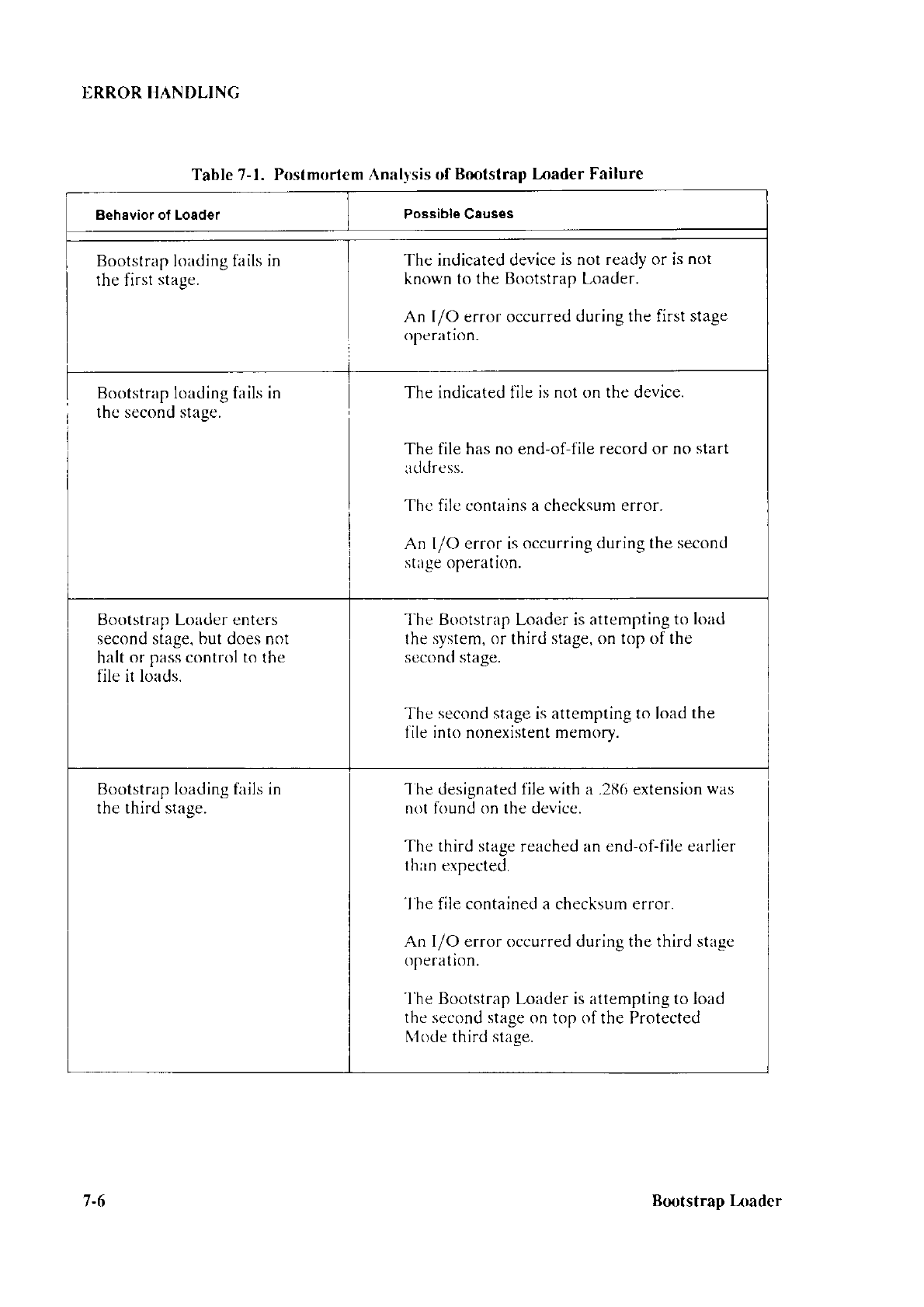
ERROR IIANDLING
Table 7-t. Postmolem
Anallsis of
Bootstrap Inader Failure
Behavior of Loader Possible Ceuses
Bootstrap Ìoading
fa ils ìn
the first
stage. The indicated device
is not ready or is
not
known lo
thc B(ìoî\trap Loader
An I/O error occurred during
the first stage
<lrcrat ion.
Bootstrap loading fails in
the second stage. The indicated file is not on the device.
The file has no end-of-file
record or no start
irdtlress.
The file contains a checksum error.
An I/O error is occurring
during the second
stiìue
operat r()n.
Bo()tstrap Loader enters
second stage, but does not
h:rlt
or pass control trl
the
file it loads.
1'he Bootstrap Loader is attempting
to load
the
svstem,
or third
stage, on top of the
second stage.
The
second
stage is attempting to load
the
lile into
nonexistent
memory.
Bootstrap loading fìils in
the third stage. t he designated file with a .2lJ(r extension
was
not found on the device.
The third stage reached an end-of-file earÌier
t hun erpected.
'l
he fiìe contained a checksum error.
An I/O error occurred during the third stagc
opera t io n.
'l
he Bootstrap Loader is attempting to load
the second stage
on top of the Protected
Nlode th ird
stage.
l -tr Btxrtstrap Loader
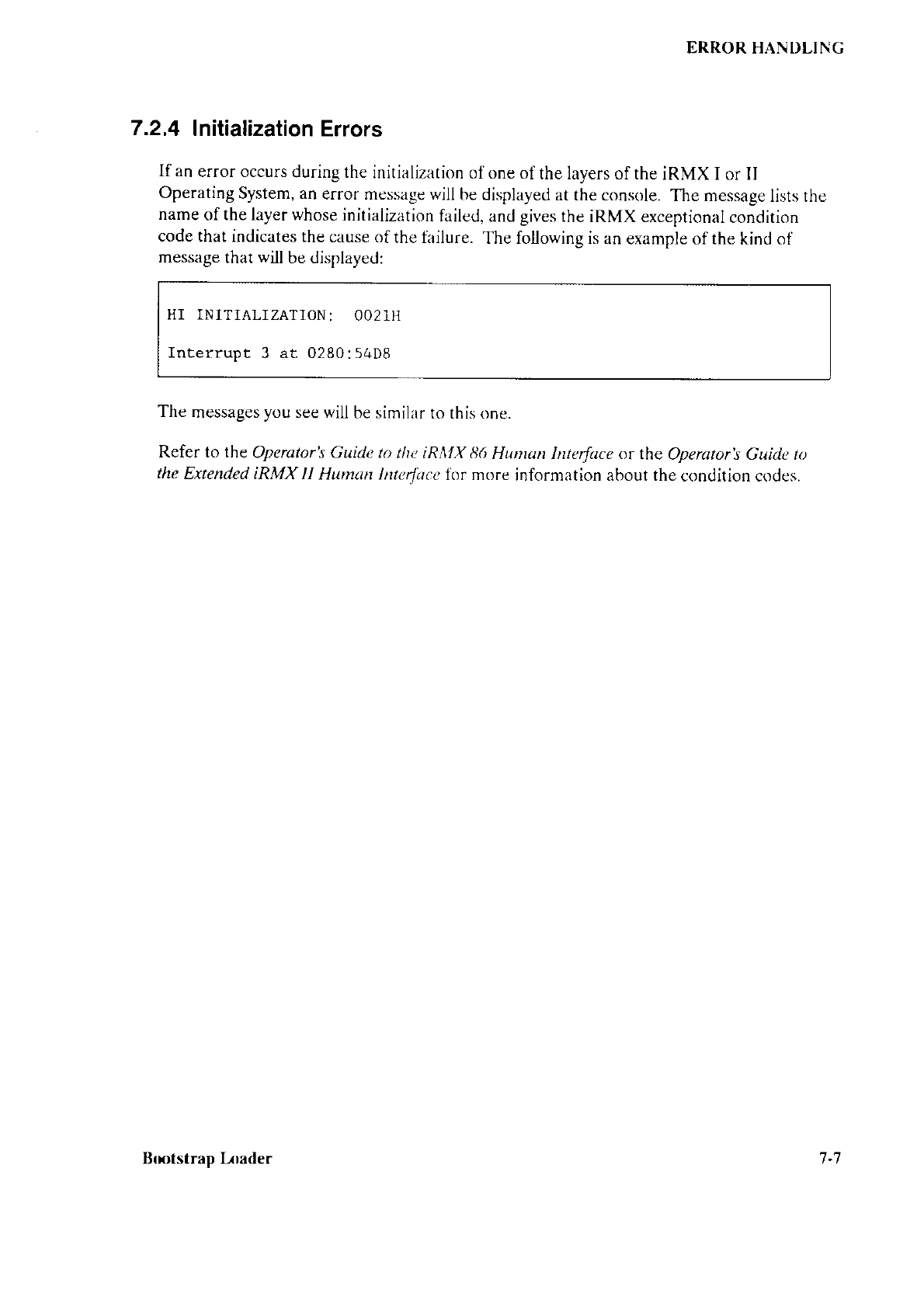
ERROR IIANDLINC
7.2.4 lnitiahzation
Errors
If an
error occurs
during the
initialization
of one of
the layers of the
iRMX I or II
Operating
System, an
error message will
be displayed
at the console.
The message
lists the
name
of the layer whose
initialization
failed,
and gives the
iRMX exceptional
condition
code
that indicates the
cause of
the taìlure.
The following
is an example of the
kind of
message
that
will
be displayed:
HI INITIALIZATION: 0021H
Incerrupt 3 at 02 80
:
54D8
The messages
you see will be similar
to this one.
Refer to the Operator's Guirle to tltc iR!+íX 86 Hunum lnterftrce or the Operator's Guida to
the
Ex.tended |RMX II Humctn Inte rlìtce
for more information about the
condition codes.
Brxrtstrap Loader

APPENDIX A
AUTOMATIC
BOOT DEVICE
RECOGNITION
4.1 INTRODUCTION
Automatic Boot Device
Rccognition (ABDR) allows
the iRMX I or iRMX II Operating
System
to recognize
the device from which
it was
bootstrap
loaded and to assign a logicat
name
(normally:SD:)
to represent thiìt
clevice.
If you
use this feature.
you
can
confirurc versions
of the Operating System that are device
independent, that is,
versions you
can
load and run from any device your system supports.
This
section describes
the ABDR teature
in tletail. It consolidates information
lirund in
other
iRMX I manuals
and answcrs the
following
questions:
. How does
Automatic Boot
Devìce Recognition work?
. How do
you
configure
a
version
of the Operating System
that includes this featurc'/
4.2 HOW AUTOMATIC BOOT
DEVICE RECOGNITION
WORKS
The
Nucleus, the Extended I/O System.
and the
Bootstrap Loader combine to
provide
the
Automatic Boot Device
Recognition ltature,
as lbllcws:
l. The Bootstrap Loader, aftcr
loliding the Operating
System,
places
a
pointer
in thc
Dl:SI register pair. This pointer
froints
to a
string containing the name of the devrce
from
which
the system
was
lorrcled.
The name it uses is the
one supplied as a
parameter in the
9óDEVICE macro when
the l3ootstrap Loader
was
configured.
2. The
Bootstrap Loader sets the
CX and DX registers to the
value
1234H. This value
signifies
that the
pointer
containetl ìn the DI:SI register pair is valid.
3. The root
job
checks
CX ancl DX and thcn, if both contain
12341{, uses the
pointer
in
DI:SI to obtain the device
nitnte.
'l'he
Root Job sets a Boolean variable to indicate
whether
it found
the nume of the boot device.
If CX contains 1234H and DX
contains
l235ll, the iRMX root
job
will
execute an INT3 instruction befbre any
other
code in the Openrting
Svstent is executed.
B{rctstrap
l,oader A-l
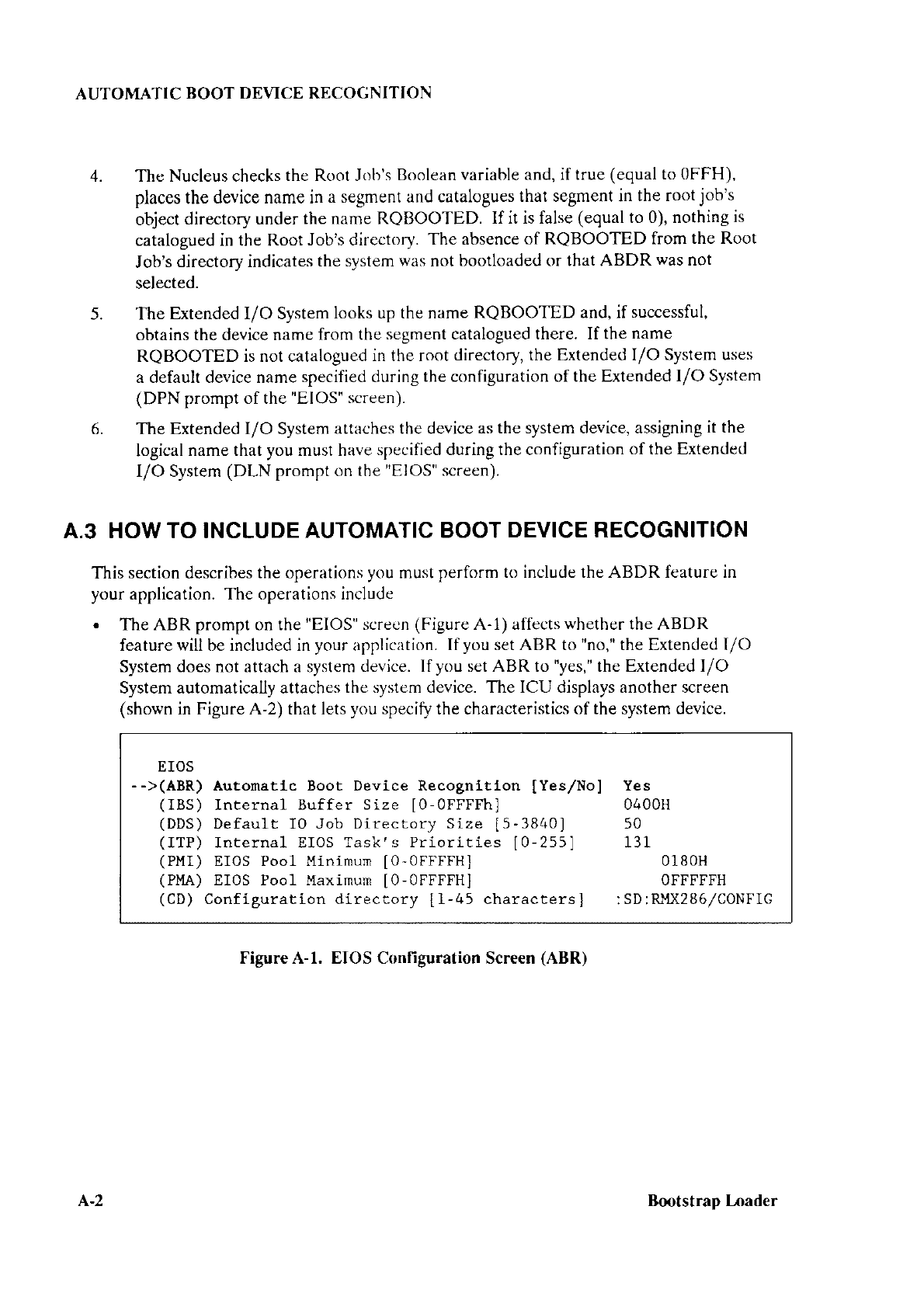
AUTOMATIC
BOOT DEVICE RECOGNITION
A
5.
6.
The Nucleus checks
the Root Jol;'s
Boolean
variable and, if true
(equal to 0FFH),
places
the
device name in
a segment and
catalogues
that segment in the root
job's
object
directory under
the name RQBOOTED.
If it is false
(equal to 0), nothing
is
catalogued in the Root
Job's directory.
The absence
of RQBOOTED from
the Root
Job's
directory indicates
the system
was
not
bootloaded or that ABDR was
not
selected.
The
Extended I/O System
looks up the name
RQBOOTED and, if successful,
obtains the device name
from the
segment catalogued there. If the
name
RQBOOTED is not catalogued
in the root
directory, the Extended I/O System uses
a default device name
specified during
the configuration of the Extended
I/O System
(DPN prompt of the "EIOS"
screen).
The Extended I/O System
attaches the device
as the system device, assigning
it the
logical
name that you must have
specified during the configuration
of the Extended
I/O System
(DLN prompt on the "EIOS"
screen).
A.3 HOW TO INCLUDE
AUTOMATIC BOOT
DEVICE RECOGNITION
This section describes
the operations
you
must
perform to include the ABDR feature in
your application. The operations include
. The ABR prompt
on the
"EIoS"
screcn
(Figure
A-1) affects
whether
the ABDR
feature will be included in
your
application.
If you
set ABR to "no," the Extended I/O
System does not attach a system
clevice. If you
set ABR to "yes," the Extended I/O
System automatically attaches
the system device. The ICU displays another screen
(shown
in Figure A-2) that lets
you
specify the characteristics
of
the system
device.
EIOS
-->(ABR) Autornatfc Boot Devlce Recognltlon IYes/No] Yes
(IBS) Incernal Buffer Size [O-OFFFFh] 0400H
(DDS)
Default lO Job Dírectory size [5-3840] 50
(ITP) Internal EIOS
Task's Priorities l0-2551 131
(PMI) EIOS Pool Mlnimum
IO-OFFFFHI 0180H
(PMA)
EIOS Pool Maxirnum
[0-0FFFFH] OFFFFFH
(CD) Configuration directory lL-45 charactersl :SD:RMX286/C0NFIC
Figure A-1. EIOS Confîguration Screen
(ABR)
A-2 Bootstrap l,0ad€r
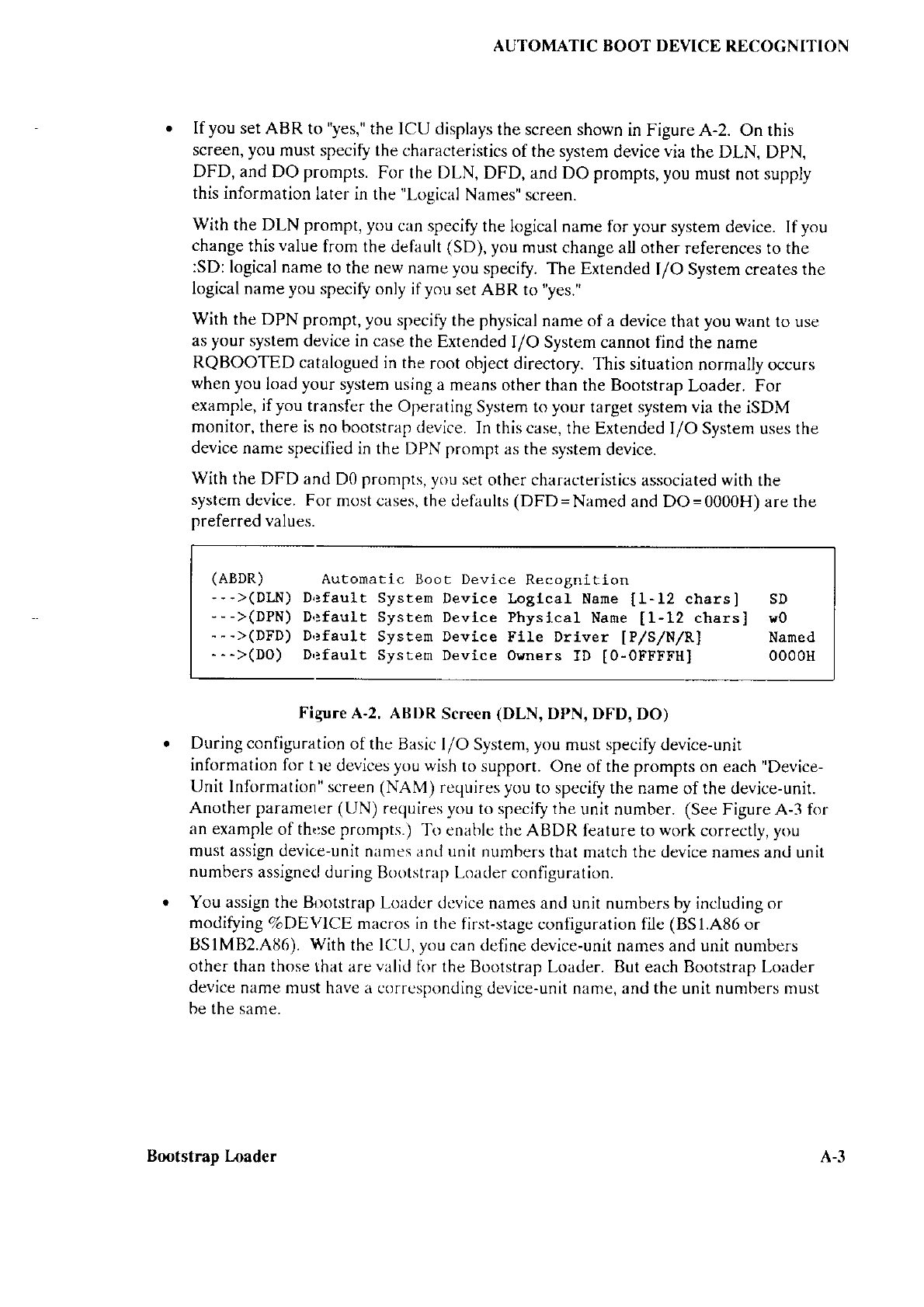
AUTOMATIC BOOT DEVICE
RECOGNITION
. If you set
ABR to "yes,"
the ICU displays
the screen shown
in Figure A-2. On
this
screen, you
must speciry the
characteristics
of the system
device
via
the DLN, DPN,
DFD, and
DO prompts.
For the DLN,
DFD, and DO prompts, you
must
not supply
this information
later in the "Logical
Names" screen.
With
the DLN prompt, you
can specifo
the logical name for your
system device.
If you
change
this
value
from the default (SD),
you
must change all other
references to the
:SD:
logical name
to the new name you
speciff.
The Extended
I/O System creates the
logical name you
speci! only if you
set ABR to
"yes."
With
the DPN prompt,
you
specifo the physical
name of a device
that
you want
to use
as your system
device in case
the Extended
I/O System cannot find
the name
RQBOOTED
catalogued in the
root ohject directory.
This situation
normaÌly occurs
when
you
load
your
system using
a means other
than the Bootstrap
Loader. For
example, if you
transfer the Operating
System
to
your
target system via
the iSDM
monitor, there
is no bootstrap cievice.
In this case,
the Extended I/O System
uses the
device name specified
in the
DPN
prompt
as the system
devrce.
With
the DFD and
D0
prompts,
you set
other characreristics
associated
with
the
system
device. For
most cases, the
defaults (DFD=Named
and DO=0000H) are the
nreferred
values.
(ABDR) Automatic Boot Device Recognitlon
-- ->(DLN) D,rfault Systen Device Logfcal Nane Il-12 chars] SD
-- ->(DPN)
D,:fault Systen Devlce Physlcal Nane [1-12 chars] rr0
--->(DFD) D,:fault Systen Device Flle Driver \P/S/N/R) Named
--->(DO) D,rfault Syster0
Devlce Osners ID [0-oFFFFH] 0000H
Figure
A-2. ABI)R
Screen
(DLN,
DPN,
DFD, DO)
. During configuration
of the Basic
I/O System, you
must specify device-unit
information for t
re devices you wish
to support.
One of the prompts on each "Device-
Unit lnformatior
"
screen (NAM) requires you
to specify the name
of the device-unit.
Another parameLer (UN) requires you
to specify the
unit number. (See Figure A-3 for
an example
of thr:se prompts.)
To enable the
ABDR lèature to
work
correctly, you
must assign device-unit
nantes and unit
numbers that match the device
names and unit
numbers
assignecl during
Bootstrap Loacler configuration.
. You assign the Br)dstrap
Loadcr dcvice
names and unit numbers by including or
motJifying
o/oDE\rICE
macros in the
first-stage configuration file
(BSl.A8ó
or
BS1MB2.Atl6). With
the lCU, you can
define device-unit names and unit numbers
other than those
that are
valid
tìrr the
Bootstrap Loadcr. But each Bootstrap Loader
device
name must have a
corresponding device-unit name, and the
unit numbers
must
be
the same.
Bootstrap Loader A-3
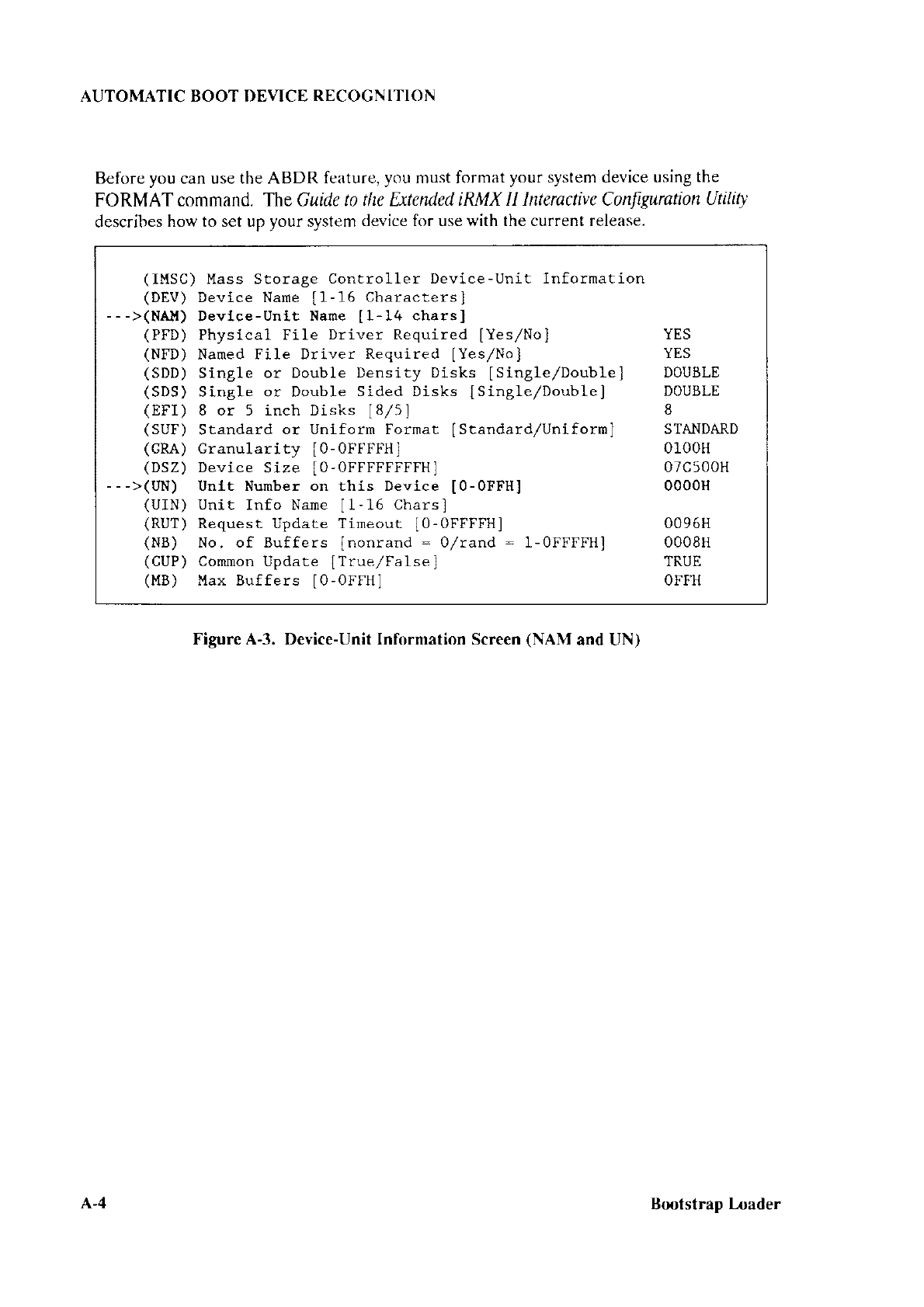
AUTOMATIC BOOT DEVICE
RECOGNITION
Before
you
can use the ABDR
feature,
you
must format
your system device using
the
FORMAT command.
The Guide to the Extended
|RMX Il lnteractive Configuratton
Utilirt^
describes
how to set up
your
system
device for use with the current release.
Figure A-3. Device-Unit Information Screen
(NAM
and UN)
(IMSC)
Mass Storage Controller Device-Unit lnformation
(DEV)
Device Name
[1-16 Characters]
--->(NAìl) Devlce-Unit Name
[1-14 chars]
(PFD) Physical File Driver Required IYesrzNo]
(NFD)
Named File Dríver Required lYes/Nol
(SDD)
Singlè or Double Density Disks ISingle/Double]
(SDS) Single or DoubIe Sided Disks ISingle/Double]
(EFI) 8 or 5 inch Disks l8l51
(SUF) Standard or Uniform Fornat lS
candard/Uni form
l
(GRA)
Cranularity [0
-
OFFFFH
]
(DSZ) Device Size [0
-
OFFFFFFFFH
]
- -->(UN) Unlt Number on this Devtce [O-OFFH]
(UIN) Unit Info Narne
lL-16 Charsl
(RUT)
Request Update Timeout l0-OFFFFHI
(NB) No. of Buffers Inonrarid : O/rand : 1-0FFFFH]
(CUP)
Comrnon Update lTrue/Fa
1s e
l
(MB) Max Buffers [0
-
OFFH
]
YES
YES
DOUBLE
DOUBLE
8
STANDARD
0100H
07c500H
0000H
0096H
0008H
TRUE
OFFH
A-4 Burtstrap Loader
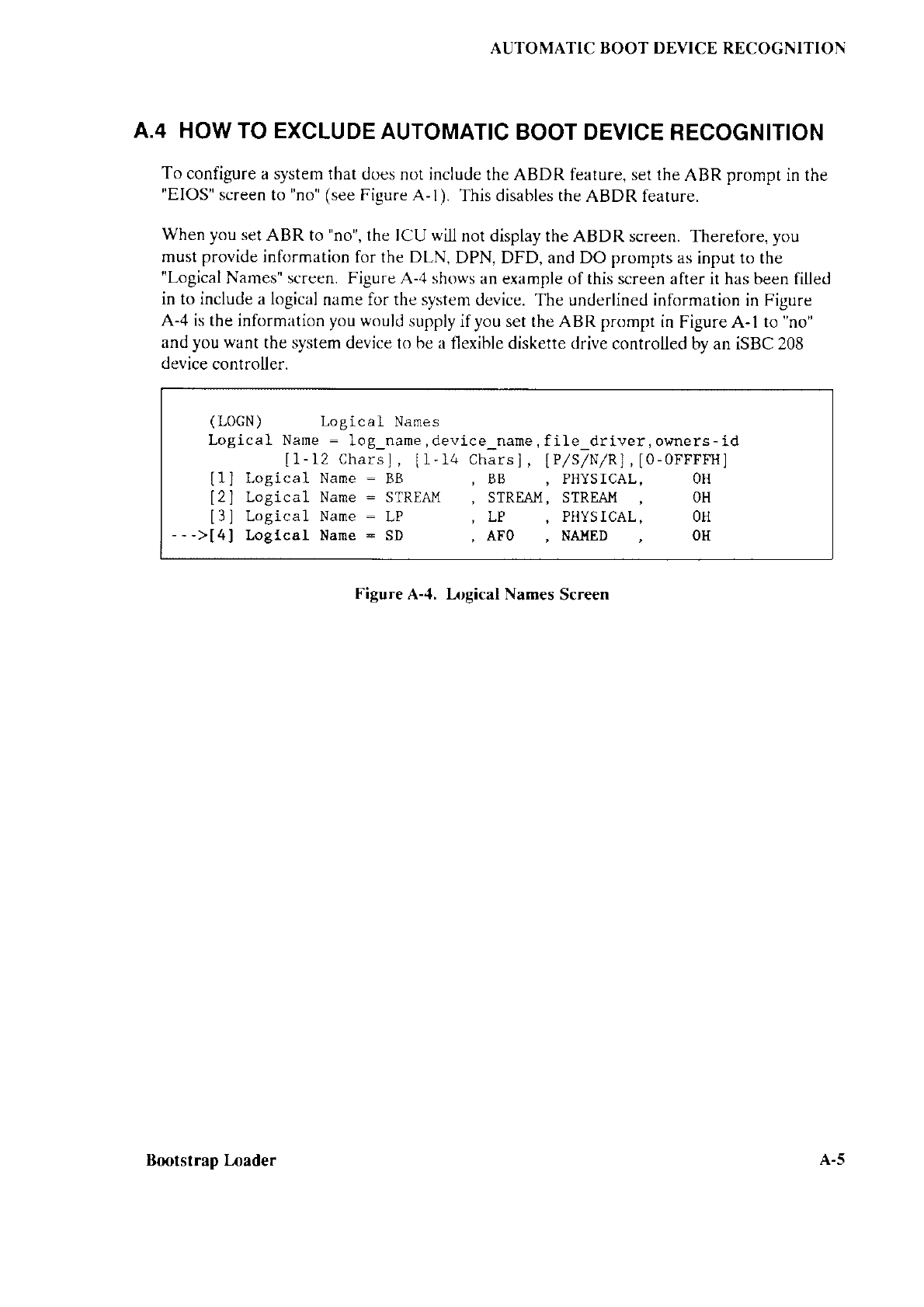
AUTOMATIC BOOT DEVICE
RECOGNITIO\
4.4 HOW TO EXCLUDE
AUTOMATIC
BOOT DEVICE
RECOGNITION
To
configure a system that
does not include
the ABDR feature, set rhe
ABR prompt
in the
"EIOS" screen
to
"no" (see
Figure A-
1). This disables the
ABDR fèature.
When
you set
ABR to
"no",
the ICU will
not display
the ABDR screen. Therelbre,
you
must provide information
for the DLN,
DPN, DFD, and DO prompts as
input to the
"Logical
Names" screen. Figure A-4 shows
an example
of this screen after it has been filled
in to include a logical
name for the system
device. The underlined information
in
Figurc
A-4 is
the information you would
supply if you set the ABR prompt
in FigureA-l to
"no"
and you want
the system device
to be a flexible diskette drive
controlled by an iSBC 208
device
controller.
(LOCN) Logical Narnes
Logical Narne
: Iog_narne, devlce_narne,
fiÌe_driver, owners-id
[1-12 chars], [1-14 Chars], ÍP/S/N/R], [0-OFFFFH]
[1] Logical Name
: BB , BB , PHYSICAL, 0H
[2] Logical Name : STREAM , STREAI"f
, STREAM , 0H
[3] Logical Name
: LP , LP , PHYSICAL, 0H
--->[4] Logical Nane = SD , AFO , NAXED , 0H
Figure
A-,1. Logical Names
Screen
Bootstrap
[-oader A-5

APPENDIX
B
PROMMING
THE
BOOTSTRAP
LOADER
AND
THE
|SDM"
MONITOR
8.1 INTRODUCTION
chapter
2 stated
that one
of the ways
to prepare
the Bootstrap
Loader
for use is t'
combine
it with
one
of the Intel
monitor packages
and
burn the
combined
code into
PRoM. This appendir
suppÌies
intbrmation
about
combining
the Bootstrap
Loader and
the |SDM monitor. The iSDM
S;ver
n Debug
Monitor
lJser's
Guide also contains
information
about
this process.
8.2 INCORPORATING
THE
|SDM
MONITOR
This
section gives
the instructions
required
to place
the first stage
and
the iSDM monitor
into nvo
27128 EPROM
devices.
You
can modify
this example
to suit your
own purposes,
oryou
can follow
it exactly.
Refer
to the iPPS
PROM
PROGRAMMING
SOF|WARE
USER'S
GUIDE for detailed
inlìrrmation
about the commands.
The
step-by-step
procedure
is as follows:
1. Enter the
name
of the
(version
1.4 or later) software
used
with
the
iUpp Universal
PROM
Proerammer:
2. Specifo
that
the PROMs
irrc
2712R EPROM
devices:
3. Respond with
the
numbe r oî
the ciesired work
file drive:
1
This says
that drive :fl : * ill be usecl for creating temporary
IPPS workfiles.
4. lnitialize the file type
to be loacled:
This says that the
load file is an
li0lló Object
Module Format file (which the first
stage and the
iSDM monitor are).
Bff)tstrap k)ader B-l
PROMMING
THE BOOTSTRAP
LOADI]R ANI)
TTIE iSD]\I' MONITOR
5. Specify that
the even-numbcred
bytes of the BS
I (lirst stage) file
are to
go into
EPROM
0 and the odd-numbered
hytes
are to
go
into EPROM l. (The
address
FE400H is
an example
value
which
is compatible
with most configurations
of
the
iSDM R3.2 monitor.
The upper bound
of the format range is
OFFF7FH,
the highest
memory location the Bootstrap
Loader
can use when combining it
with
the iSDM
monitor. The upper
bound also applies
to all previous
versions of the iSDM
86 or
iSDM 286 monitors.
Always check
the monitor and Bootstrap
Loader memory
maps
before
burning the addresses
into the PROM devices.
Also, be sure that
the
addresses
you
use
do not collide. l'he numbers
3, 2, and I match IPPS
prompts
for
defining the information.)
6. Tell the software to
progriìm onc EPROM with even-addressetl bytes. Use
the
following
formula to determine the adilress to use:
a<ldress
= ((address of first stage)
- (start
address
of EPROM
ptk))12
Therefore:
address
= (FE400H-Fti000Il)/2
= 32001{
The IPPS command is as lbllows:
7. Do the same for the odd-numbered bvtes.
8. Exit the IPPS
program.
As a further example for step number sir above, the formula below determines the address
to speciff
when
using 27512 EPROM devices:
address
= (FE400H-0E0000H)/2
= 0F2000H
B-2 Btx)tstrap Iîader
INDEX
VoAgaín 3-27,29
VÒAufo 3-14
TaAuto_configure_memory
3- I 0
VoB208 3-32
7o8215 3-32
VoB218A 3-33
VoB220
3-32
VoB251 3-35
o/a8254
3-36
%B264 3-36
%BIST 3-8
%BMPS 3-11,4-5
TaBSCSI 3-37
o/oBSERR.A86
3-27
o/cClCO
3- 18
%Clear_SDM_extensions
3-18
TaConsole 3-14,
27, 28, 7
-1,,
2
EaCPU 3-rt, 4-5, 10
VoDefaukfile 3-17
VoDev tce 3
-24,
4
-6,
5-34, 6-8
VoEnd 3-27,31, 4-5, 12
%H^lt 3-27,30,4-5, l0
EA\APX 186 INIT 3-13
%lnstallition 4-5, t t
%lNTt 3-27,29,4-5,9
o/olN'î3
3-27, 30, 4-5, 10
ToLtst 3-27,28,7
-1,2
%Loadfl.e 3-16
VoManual 3-14
EÒR.etries 3-17
%SASl_unit_info 3-39, 4-7
%Serial_channel 3- 19
VaText 3-27,28,7-1,2
Bootstrap l,oader Index-l
INDEX
A
Actions taken
by the
Bootstrap
Loader after an error 7- I
Automatic
boot device recognition A- l, 2, 5
Automatically configuring memory 3- 10
B
8208.48ó 3-2,3l
82l5.A8ó 3-2,31,4-2
82l84.A86 3-2,31
B251.486 3-2,3l
8254.A86 3-2,31
8264.A86 3-2,3r,
4-2
BG3.A86 4-2
Default file 4--5
Editing
4-3
Excluding macros 4-3
BG3.CSD 4-2
Dethult file 4- 14
Invocation
4- 15
Modification 4-
14
Board-scan algorithm 5-32
Boot device recognition
A-1
Booting iRMXo
I and iRMX@ II Operating Systems from the same volume
1-4
Bootstrap
Loader communication system 5-8,
(r-lì
Bootstrap
Loader driver COMPACT sub-system 5-3I
Bootstrap Loader failures 7-1. fi
BS$BROADCAST
.5-20,21
BS$GET$INTERCONNECT .5-22,
23
BS$RECEIVE 5.IIì
BS$SEND
5.15, 16
BS$SEND$RSVP
5-1I. 12
BS$SET$INTERCONNECT
5-22, 26, 21
BSl.A86 3-1, 2, 5-33
Custom drivers
5-33
Editing
3-7
BSI.CSD 3-2,41
Default file 3-42
Invocation 3-4(r
Mo<lification
3-44
BS3.Atì6 4-2, 6-8
Editing 4-3
Excluding
macros 4-3
Modification 6-8
Index-2 Bu)tstrap l-{)ader
BS3.CSD
4.2, 13
Default file 4- 13
Invocation
4-
l-5
Modification
4- 14
BSCSI.A86
3.2, 3I
BSERR.A86
3-I,7-I
Built-ln
Self Test (BIST)
3-8
c
Chip
mode
configuration
3- l3
Choosing
a third
stage
2-ó
CI routines
3- lll, l9
Clearing
iSDM
monitor
command
extensions
3-llJ
CO
routines
3- 18, l9
Condition
codes
BS$BROADCAST
5-22
BS$GET$
INTERCONNECT
5-2Ó
BS$RECEIVE
.5-20
BS$SEND
5.1I.ì
BS$SEND$RSVP
5-I5
BS$SET$INTERCONNECT
5-30
Configuration
3-1,4-1
CPU board 4-
l0
Files
3-31
Files for cuslom
driver:
-5-5
Firsl stage
3-
l
Memory
3- 1t)
Message
passing syste
m 3-
| l, ,l--5
Processor
board type .1-
10
Third stage
4-l
Controlling
error
message displav
3-28
Conventions
iv
CPU board
configuration
4-l(l
CPU type
3-11,4-10
CS register
integrity fi-7
INI)EX
B(x)tsl rap l/)ader lndcx--ì
INDEX
Custom
drivers
5-1,6-7
BS1.A8ó
alterations
5-33
BS3.A8ó
alterations
6-li
Configuration
files
-5-5
Determining
processing
mode
(r-2
Device
initialize
5-2,
G3
Device
read 5-3, 6-4
First stage
configuration
5-4
First stage
considerations
5-30
First
stage requirements
5-1
Generating
the first
stage
5-34
Generating
the third
stage
6-9
Hard-coded
configuration
5-4
MULTIBUS@
II transport
protocol 5-8.6-tl
Protected
mode
6-fi
Third stage configuration
6-7
Third
stage requirements
ó-2
D
Debug
option 2-3
Default
BG3.All6 file 4-5
Default
BG3.csd file 4- l4
Default BS I.CSD 3-42
Default
BS3.CSD file
4- 13
Default
BSERR.A86
file 3-27
Default load
file 3- 17
Defining
bootable devices
First stage
3-24
Third
stage 4-(r
Defining
SASI bus initialization
sequences
l-39, 1-8
Device
driver I
-2,
7, 8
Code
considerations -5-3t)
Configuration
files 3-3 I
First stage 3-25
Device initialization
Requirements,
first stage
5-2
Requirements, thircì
stage
6-3
Procedure 5- l, 2,
ó-l,3
Device
read
Procedure 5- 1, 3,
6-1,.1
Requirements,
first stage 5-J
Requirements, third
stage 6-5
Dev
i.'e-specif ie third
strgv l-5
lndex-.1 Burtstrap Loader
Displayed error messages 7-2
Displaying error messages 3-26
Displaying
the load file
pathname
3- ló
Drivers, custom 5-l
E
Editing BSl.,486 3-7, 5-33
Errors
Analyzing 7-2, 5
Bootloading 3-27
Code 0l 7-2
Code I I 7-3
L,OOe tl /- 1
Code 13 7-3
LOOeZI /--t
Code 22 7-4
Code 23 7-4
CorJe
24 7
-4
Code 3 1 7-4
Co<le 32 7
-4
Code
33 7-4
Code 34 7-5
Code
35 7-5
Controlling message d isplay
ì-2ll
Handling 7- I
Initializatìon 7-7
Message display 3-28
Procedures 3-1, 8, 27, 1
-l
ES register integrity 6-7
Examples
Boa rd-scl n iìlgorithm 5-.1:
BS$BROADCAST 5-21
BS$GET$INTERCONNECl' 5-2.}
BS$RECEIVE -5.19
BS$SEND 5-I6
BS$SEND$RSVP 5-13
BS$SET$INTERCONNECT
5-2II
Maintaining DS register inte-urity
6-o
Modified BSl.A8fi file 5-l'l
Excluding a device
driver 3-26,45
Excluding automatic boot device
recognition A-5
Excluding BS 1.A86 macros 3-7
INI)EX
Bootstrap [,oader Indcx-5
INI)F],X
F
Failures 7-l
First stage l-1,2
BSI.CSD fíle 3-42
BSERR.A86
file 3-27
Configuration 3-1
Custom drivers 5- l, 3(l
Defining a hootable rlevice l-2,1
Device driver configuration
liles l-2
Device drivers 1-7
Device initialization 5-
1, 2
Device read 5- 1, 3
Error procedures 7- l
Fa ilure 7-(r
Generation 3-41
Generation for custonì drivers 5-3.1
Halting the boot 3-30
I nitialization re qu
ireme nts 5-2
iSDM' monitor inclusion B- |
Location l-2, fì,9, 3-17, 1-|ó
Placing in memory
2-4
Read requirements
5-3
Seconcl stage identilìcation
3- 1.1
Size l
-2
Steps when supplying your
own tlrivcrs 3-,10
Supported device drivers J-25
User-supplicd drivers
3-40
G
Generaîion
First stage containing a
custont devicc driver
-5-3.1
Third stage 4-
l3
Third stage
(custom
device
cìrir.cr)
6-9
Generic th ird
stage l-4
H
Halting the Bootstrap
l-oader durinq errors
First stage
3-30
Third stage 4-
l0
I{ard-coding custom
driver configuration information 5-.1
How to configure
the first stage l- I
How
to configure the
third stage
,l-1
How to define a device
to boot from. first sttrge
3-24
Index-6 B0otstrap L{rader
How to display
the load
fìle parhname
3-ló
How
to exclude
automatic boot
device
recognition
A-5
How to
include automatic
boot clevice
recognition
A-2
How to indicate
a default
load file 3-17
I
Identifying
the serial
channel
J- lt)
Including
automatic
boot device
recognition
A-2
Incorporating
the iSDM"
monitor B-
I
lnitialization
errors 7-7
Intel-supplied
BG3.A86 file 4-5
Intel-supplied
Bootstrap
Loader
cievice clrivers
l-tl
Intel-supplied
device
drivers 3-3
|
Intel-supplied
first
stage drivers
3-l-5
Intel-supplied
third stage
drivers
,1-7
Intel-supplied
third stage
files 2-7
lnterconnect
space 5-22
Interrupt
INTI 3-29, 4-9
INT3
3-30,4-10
Invocation
from the
iSDM monitor
2-2
Invoking
the BG3.CSD
submit files
4- 1-s
Invoking
the
BS I.CSD submit
file 3-4(r
Invoking
the BS3.CSD
submit
f ilcs
.1-
l5
iSBCo
208 Driver 3-25
iSBC@
215 Driver 3-25.
4-7
iSBCo
251 Driver 3-2-5
iSBC@
254 Driver 3-25
iSBC@
2ó4 Driver 3-25, 4-7
iSBX@ 218A
Driver 3-25
iSDM*
monitor B-
I
iSDM"
monitor
command extensions,
clearing 3-l13
L
Load
file l
-5
Device
3- 14
Pathname
specification
2- I
Loading
the Bootstrap
Loader into
memory 2-.1
Location of
first stage 1-2
Location of second
stage l-3
INI)EX
Bootstrap
I-rnder Index-7
I\I)EX
M
Manual
oven'iew
iii
Memory
locations usecl
by the
BootstrlìP l-oacler
l-8, 3-47,
'1-
ló
Message
broadcasting
5-20
Message
passing system contigurrition
l- I l, 4-5
Message
types
5- l0
Modifying
the BG3.CSD
subrrit
fii,:s {- l1
Modifying
the BSl.CSD
submit file l--1.1
Modifying
the BS3.CSD
submit f ilcs
.l-
l.l
Monitor
entry after
third stagc
-1
|
I
MULTIBUS@
II environntent
5-i0.
6-]
MULTIBUS@
II trlnsport
protocol 5- l.
8, 6-2, ll
N
Naming
the Ìoad f
ile 1-5
Naming
the third
stage
1-5
o
Operator's role
2- l
P
Placing
the Boot:itrap Lolcjer
into mcnrorv l-.1
Product oven'iew iii, l-1
Program
matically loading the first
stagc 2--5
Promming the Bootstrap
l-oader uncl thc iSDM' monitor B- l
Protected mode
considerations
o-o
R
Reader level iii
Receive transaction model 5- l-5
Request/response
tnrnsaction model 5- 10
Retries
for ready devices 3-17
S
SASI
bus initializatìon sequence definition
l-39,4-u
SASI
controller 3-39, 4-7
SCSI controller
3-39, 4-7
SCSI
driver 3-25
Searchìng for a ready
device 3- l7
Index-8 Brxrlstrap Loadcr
Second stage 1-1,3
Error
procedures 7-
I
Failure
7-ó
Location 1-3, 8, 9, 3-47, 4-lrr
Size 1-3
Send transaction model 5- 15
Serial channel identification 3- 19
Serial communication
Base
port 3-20
Baud counter 3-21
Counter base
port 3-21
Counter
type 3-21
Flags 3-22
Serial communication 3-20
Error messages 3-23
Serial controller device 3-20
Software interrupt
(lNT1)
3-29,
,1-9
Software interrupt
(lNT3)
3-30,
4- 10
SS register integrity 6-7
Stages
1-2
Supplying con figu rat ion inform;rt ion
First stage driver 5-4
Third
stage
driver 6-7
Supplyingyour
own
device
driver
3-,10,4-l2
Supported 5.25-inch
diskettes 3-2ó
Supported
ll-inch diskettes 3-2(r
Supported tlevice drivers 3-2-5, J I
Supported
devices 1-8
T
Third stage l-2, 4
BG3.CSD file 4- 1,1
BS3.CSD file 4-
l3
Choosing 2-(r
Configuration
files
.1-2
Custom
drivers fi- 1, fi-tì
Defining
a bootable devìce
.1-6
Device drivers l
-7
Device
initialization 6-3
Device
read 6-,1
Device-specific
l-5, 4- I
Error
procedures 7- l
rallure /-o
Generation 4- l3
INI)EX
Brxltstrap
l,oader Index-9
INDEX
Third stage
(cont.)
Generation for custom drivers 6-9
Generic 1-4, 4- 1
Halting the boot 4-10
lnitialization requirements 6-3
Intel-supplied 2-7
Location l-4, 8, 9, 4-16
Naming l-5
Read requirements 6-5
Steps for supplying your won drivers 4- 12
User-supplied
drivers 4- l2
Transaction ID value
5-22
Transmission
Modes
5-22
Status
5-22
U
User-supplied
drivers 3-40, 4- l2
Using
the Bootstrap Loader
2- I
Using the
iSDM debug option 2-,1
w
Writing a custom
first stage driver -5- I
Writing a custom
third stage clriver 6-
I
Index-10 Bff)tstrap l,oader
intel
EXTENDED
iRMX@II
SYSTEM
DEBUGGER
REFERENCE
MANUAL
lntel
Corporatlon
3065
Bowers Aven
u e
5anta Clara, Ca1 fornra 95051
1988, Intel
Corporation, A I Rights ReservedCopyright

PREFACE
INTRODUCTION
The iRMX II System Debugger
is a memory-resident extension
of the iSDM'r System
Debug
Monitor and the D-MON3li6 Monitor.
The System Debugger
gives you a
strìtic
debugging
tool that can recognize and display
all iRMX II objects. It enables
you
to
examine
your
iRMX II system interactively so
you can find and correct errors.
READER
LEVEL
This manual is intended
for applicatìon engineers familiar
with
the concepts
and
terminolory introduced in the E.ttended |RMX II Nuclcus
User's Guide
and system
programmers implementing clevice
tlrivers, olrject ntanagers,
and operating
systent
ext ensr ons.
MANUAL OVERVIEW
This manual consists of the followins
chanters:
Chapter I INTRODUCTTON--This
chapter describes the features
of the
System Dehugger, illustrates
how the System
Debugger relates
to EPROM-based clebugging
tools, and
explains how to use
the
System Debugger.
Read this chapter
if
you
are
going
through
the manual lbr thc first
time.
SYSTE,M DEBTJGG
ER COMMANDS--This
chapter contains
detailed descriptions
of the System Debugger
commands,
presented
in
alphabetical order.
When debugging
your system,
refèr to this chapter
for specific inlbrmation
about
the fìrrmat
and narameters of
the commands.
Chapter 2
l
System
Debugger
Chapter 3
Appendix A
Appendix B
CONVENTIONS
This manual uses
the follou'ing format conventions:
. User input
appears in one of the lbllowing forms:
lv
iRMX@ II SYSTEM
DEBUCGER
OVERVIEW
SAMPLE DEBUG
SESSION--This chapter shows in a step-by-
step
1ìshion how to use System Debugger feetures. The
chapter
contains a sample debugging session clemonstrating how to use
iSDM monitor and System Debugger cclmmands to lociìte an
application-code error, correct it, and test the change. Discrete
examples showing
additional debugging techniques are also
included.
Use this chapter as a hands-on introduction to the
System Debugger.
iSDM MONITOR COMMANDS--This appendix brielly
describes the function of all basic iSDM monitor
commands.
Use this appendix as a quick
reference to the iSDM monitor.
For more information see the
iSDM Si.rtern Debu7 Monitor
User's Guide.
D-MON386 MONITOR COMMANDS--This
appendix briefly
describes the function
of all basic D-MOr..*3iìfi
monitor
commands. For more information.
refer to the D-MON-18ó
Dehup lvlonitor
for
the 80.18ó User's
Guùlc.
as bolded text withln a screen
The
text
<
CR
> appears where
you
must enter a carriage
return. When pressing
the
carriage return
key, the text
<
CR
> does not
appeîr on the console.
Although
all syntax
diugrams show uppercase
Ìerters (e.g., VR), you
can also use
lowercase
letters.
The
manual refers
to the iRMX II Operating System
as the opcrlting
syslem.
All numbers
unless otherwise
stated
are assumed to be decimal.
Hcxaclecimal
numbcrs
include
the "H" radix
chlracter (for
example, OFFH).
Darker shaded
text appelrring
over shaded
text within figures
or screen
displays does
not actually
appear on the screen.
The
text
within
the darker
bor supplies
information
that is
helpful in
understancling
the figure or screen
displav.
System Debugger
CONTENTS
CHAPTER
1
iRMX@
II
SYSTEM
DEBUGGER
OVERVIEW
CHAPTER 2
SYSTEM
DEBUGGER
COMMANDS
PAGE
PAGE
System Debugger
CONTENTS
CHAPTER
3
SAMPLE
DEBUG SESSION
APPENDIX
A
ISDM"
MONITOR COMMANDS
APPENDIX B
D.MON386 COMMANDS
PAGE
PAGE
PAGE
vl System
I)cbugger
CONTENTS
APPENDIX
B
(continued) PAGE
FIGURES
FIGURE
a1
aa
1À
z-)
System Debugger vll
CONTENTS
FIGURE
2-7
2-8
2-9
2-10
2-11
2-t2
2-13
2-14
2-16
2-ltì
2-19
2-20
2-21
2-22
2-26
2-28
2-29
2-30
2-ll
l--)I
2-34
2-35
3-1
3-2
3-3
PAGE
Format
of
VJ Output
................ .......... ... . .2-
lu
iRMX@ Il
Job Tree............. ..
............-..
.. .2-20
........,..............
:-
:z
F-ormat
of
VO Output
................ ........ ....
.2-24
Format
of
VR Output................. .-.........
. ..2-28
Format
of
VS Output ................ ..'. ..
... .....2-32
Format of
VT Output:
Job Display.........,...... .......
...............2-37
Format
of
V
f Output:
Non-lnterrupt
Task........ ................2-39
Format of
VT Output:
Intcrrupt
Task ................ .. ..... . . ..2-39
Format
of
VT
Output:
Miìill)ox
with
No
Qucue.. -- ...... ... .2-42
Format
of
VT Output:
Mailbox
with Task
Queue
... .. .. .......
- -----.. ................2-42
Format
of VT Output:
Mailbox
with Ohjcct
Queue.......
.. .. .. .. . ....
..... . ...2-43
Format
of VT Output:
!f irillxrr
riith
Data
\'lcssirte
Queue..
. ..
.. .. . . ..
....l-13
Format
of
VT
Output:
Se nrrrlthttre
u'ith No
QucLre
.... .. .. ........
. . .. .. . .. .
..2-'11
Format
of
VT Output:
Sennphore
* ith
Tlsk
Queuc...
.. . . . ..
. .. .. .. .. .. . 2-.l-5
Format
of
V'f Output: Region
u'ith
No
Que
ue.. ....... . .... 2-1-5
Format
of VT Output:
Rcqion
with Task
Queue.................
---.... .... .......
.......2'46
Format of
VT Output: Exte
nsion
()trject.................. ...... ..
.2-17
Format
of
V'f
Output:
Scgmcnt............................ ..... .. .. .. .2-'16
Format of
VT
(lutpLrt:
Compositc
Otrject Othe
r Than 8IOS.......
.. .. . . .....2-11Ì
Format
of VT Output:
fillOS LJscr Oltjcct
Compc1site.............................
. 2-'19
Format of
VT
Output:
BIOS Physical
File Conncction...................
.. .... . ...2-19
Format of
VT Output: IìlOS
Stream File C-Ìtnnection..................
.. . .. .. ..,...2--51
Format
of
VT
Output:
13lOS Nunretj
frile Connection
...........................
... .. 2--5'1
Format
of
VT
Output:
IìlOS Rcnrote
[ìile Connectitln.............................
.. .2-56
Format of
VT
Output:
Sign:rl Prolocol
Port .....................................................2-51
Format of
VT
Output:
Diìtir
'l'ransport
Prtttctcol
Port ......................-.............2-5ft
Format
of VT Output:
Data lntnsport Pr(}tocol
Port ....................................2-5lJ
Format of
V'f Output: Bufler Pool....................
. .................2-60
Format of
VLJ Output ................ ................2-63
Exampf
e PL/M-286 Applicltion
(lnit).................... ................3'2
Example
PL/M-286 Applic:rtron
(Alphonse)......... ................3-5
Example
PL.IM-286 Application
(Claston)............. ......,,........3-7
MOVW in Gaston
(ìrdc..... . .
. . . . . . . . . . . . . . . . . . . . . l
-
12
Ylll System
l)ebugger
IRMX@
II
SYSTEM
CHAPTER
1
DEBUGGER
OVERVIEW
1.1
INTRODUCING
THE
|RMX@
II
SYSTEM
DEBUGGER
When
you
develop
application
svstems, you
need debugging
capabilities
on your
development
system.
In addition
to the
iSDM
System Debug
Monitor
or the D-MoN3Err
Monitor,
Intel provides
rhe iRMX
II
System
Debugger
(SDB)
îor
debugging your
iRMX
I I-based
application
system.
NOTE
The remainder
of this
manual
uses
thc term',monitor',
to reler to
both the
iSDM System
Debug
Moniror
and
rhe
D-MON3lì(r
Monrror.
The System
Debugger
is
a memory-resident
extension
of the
monitor;
thereforc,
vou must
have the monitor if you have thc Systent
Debugger
confi{ured into
your system.
The
monitor provides
code
disassembly,
execution
breakpoinrs,
memory cJisplay,
and pro_qran.l
download
capahiÌities.
The
Systen
Debuqqer
extends
the monitor's
disassembly
funitions
by interpreting
iRMX II calls,
data
structurcs,
and
stacks.
Monitor
and
System
Debugger
conrmands
are
entcreci
in rcsponse
to
the isDM Monitor's
protected-mode
prompr
(..)
or rhe
D-MONl8(r
Moniror's prompt
(> ). When you
invoke
the
m.nitor,
both
the operating
systcm
and
y.ur applicati.n svstem
are li.zen. As vou
use
monltor
commands
to set ltreakpoints
while
the
application
code is executed,
you
can
inspect
system
objects,
change
systcm
call
parameters
and
regisrers,
and test chrrnees.
Refer
to
Appendix
A for
more information
on
iSDM M.nit.r commands
and
Appcndix
B
tor D-MON3tì6
Monitor
cornmanos.
System Debugger l-I
iRI\TX@
II SYSTEI\Í
I)EBTJGGER
OVERVIEW
1.2 SUPPORTING
THE
SYSTEM
DEBUGGER
To use the
System Debugger,
you must
have one of
the following
hardware
configurations
with all the required
support
hardware:
o An Intel MicrocomPuter
ctlnnected
to an
8021ì6- or 386-based
board
. A terminal connected
directly
to lrn
802iì(r- or 386-bltscd
lrortrtl
. An Intellec@
Development
Svstenì
connected
to an
E1)21ì(r- or 386-based
lxlard
In adclition
to the above
hardware, vou
must
have both
of the following:
o The
E,PROM
portion o1
the iSDM
System Debug
Monitor or
the D-MON3fì6
Monitor
. At least
the minimal
confisuration
of the
iRMX II Nucleus
1.3 CONFIGURING
THE SYSTEM
DEBUGGER
You
cannot use
the System Debuqqer
until ytttt inclutle
it in
vour s1'stem through
the
Interactive
Configuration
Utiliti,(ICLJ).
'fo include
the System Debugger,
begin
by
invoking
the ICU. Next,
provide
the following inlbrmation
the I(ìtJ
requires to
configure
the System Debuggcr:
1. In
the ICU's
"Sub-Systems"
screcn, respond
"yes" to the SDB
prompt.
2. In the ICU's
"System Debuqqer"
screcn,
set the interrupt
lcvel
vou
want
to use
to
invoke
the monitor
manually
(bv pressinq a hardware
interrupt button).
To use the
Non-Maskable Interrupt
(NMI) for debug-qing
tlevice drivers,
see the
Ertended |RMX II Hardn'are and Softv'are lrtstalloliott CLtitle.
For detailed information
on configurint
thc System Dehuggcr,
consult the Extenfud
iRlvIX II Interactive Confrguration
l.ltilif Rtftrotcc ltlartuttl.
1.4 INVOKING
THE
SYSTEM
DEBUGGER
You must enter the monitor
to use the Svstem Debu[qer.
You can invoke the
monitor in
tnree
ways:
l. Use a hardware switch
physically
connected to the
interrupt lcvel
you
specified
during
configuration. Activating
this su'itch halts the rrpplication
svstem, saves the
system's
contents, antl passes control
to thc nronitor.
2. Use the Human lntcrlìrcc
DEtsUG commrtnd. DEBUC loatls
y'our
specified
application
progriìm
into
main memorv and triìnslcrs
colìtrol to the monitor.
l-2 System
I)cbugger
iRMX@ II SYSTE]\Í DEBUGGER
O!'ERVIElV
3. Use
the Bootstrap Loader
DEtsLJG switch. When
you specify rhis switch,
the monitor
comes
up after the system
is loucled but
befìtre the system starts
running. Thc CS:lP
points
to the
first instruction
of the application
system. At this point
the system hus not
been initialized;
therefctre, you
can run only
monitrtr cctmmands.
Using the MAP2IJ(I
output, you
can identily where
vou
want
to
insert breakpoints. (For
more infitlnlttion
on BIND,
MAP, and OVL,
sec the
AI,X 286 Utilities
U.ser's Guitle
fttr
|RMX l/.$urlnr.r).
Use the break
address parameter
in
the monitor's
CO
(G)
command to set breakpoints
in the application
systcm
cocle. When you
enter "G
<CR>",
thc system starts anLi is
initialized. The monitor
is invoked when
the CS:lP
reaches the breakpoints.
Iìor more
information on booting with
DE,BUG,
consult rhe
Extended |RMX II Bootstntp Loudcr
Reference Manual.
When you
invoke the
monitor, the
application system stops
running itnd all systerl activir\
freezes.
The appropriate
prompt
itppears
(the
".."
for the iSDM Monitor or thc "
>
"
for the
D-MON3tl6
Monitor), anci
you
cun bcqin entering
Systent Debuggcr and
moniror
commands
to exirmine
system objccts.
1.5
USING THE
SYSTEM DEBUGGER
The
System Debugger
uscs ntonitor
Jlrocedurcs
to parse
the command lino and to outltut
lo the console;
therefore, you
run both System
Debuggcr untl monitor comm:rncls
fì-orn the
monitor. The syntax for System Debugter
communds is a "V" or "v"
followed bv another
letter, an optional space,
und un optionirl
panìmeter.
The twelve System
Debueeer commirnds (described
in Chaptcr 2) fall into three cirteqorics:
. Eight commands extend
thc nronitor
mcmory display functions
by displaying ilìMX ll
data structures and
ot!ccts.
. Three commands extcnd
thc ntonitrtr
disasscmbly functions bv
rccognizing and
displaying iRMX II cals.
. A help command provides
a short description
of all the conìrnancls.
All commands cither display
inlìrrmation
as hexadecimal numbers or
try to intcrl)ret tlìe
information.
If the
System Debuucr clìnnot
interpret the information, it dìsplays
the
actual heradecimal value,
followed
by tu,o question
marks.
iRMX II provides
two features that e nable
vou to leave the monitor
without
rijsctting your
system: warm-start
and Cl-l-restart.
The
\ìarm-start
leature reinitialìzes the systent and
returns control to the
Human Intcrface.
The Cl-l-restart feature deletes the current
jotr
then returns control
to the flommlrntl [-ine
Interpreter. Refer to Chapter 2 for ntore
information on these
tèatures.
System
Debugger l --l
iRMX@ II SYSTENI
I)EBUGGER OVERVIEIV
1.6
RETURNING
TO
YOUR
APPLICATION
When
you
have
finished
debugging
your application
system
with
the
System Debugger,
or if
you want to test the
changes
you made to
the apPlication
code, use
the monitor's
GO
command
(G)
to resume
execution
of the
application.
l-4 System
l)ebugger
SYSTEM
DEBUGGER
CHAPTER
2
COMMANDS
2.1
INTRODUCTION
This
chapter
contains
detailed descrìptions
of the iRMX II System
Debugger contnlrnds.
Commands
appear
in alphabetical
orclcr, with
the îirst rrcurrence
of
euch command
appearing
in at the top
oI the page.
A directory
of the commands,
divicletl
into
lunctional groups,
precedes
the commrnd
descriptions.
This ehapter
uses
the [ollouin-[
\.(,n\(.nti(ìn\:
. "CS:lP"
is the Code
Segmcnt:lnstruct
ion Pointer--Thc
pointcr
to the instruction
thlt
would
be executed
next iî thc rrpplication
svstenì \r'cre
running.
If
vouspecifvirn Ip
value (one
fbur-digit
hexirciecirrrrl
number)
but not
iì CS
vlrlue,
the
Systenì Debuq,qcr
uses
the current CS
as thc delìtult
base.
o "SS:SP"
is the Stack
Segment:slrrck
Pointer--'['he pointer
to the
current stack
location.
. Entering zero (0)
as a
valuc
lirr an optional pirritnìetcr
is the sanre
as omitting the
parameter;
the defìrult vaÌuc
o1 thc pirrirmeter
is
uscd.
. All terminal
examples
assunle thrìt
the iSDM System
Debuq Monitor
is beinq usecl.
Thus, example
input
line s shou, rhe
iSDlvl monitor prompr (..).
2.2 CHECKING VALIDITY
OF TOKENS
Manv
System Debug-{er
communds
usc iRNIX
II tokcns îs plrameters
or display tokens
irs
part
of
the command output.
The
ilLMX II Operating Svstent
mirintains toke ns in rloublv
Ìinked
lists.
When
you enter
u token
its u plrulmeter,
the Svstem
Dcbugger chccks the
validity
of
the token by looking
at the tìrruarci
rnd backward
links of the token.
If one
of the links is bad,
thc Svstenr
l)ebuggcr genenìtes
Íìn error message along with the
standard command
output.
The token
vou
enter
as a
paranletcr
alw;rys
appcars lts the
center
value
in
each line of
the tokcn tlisplal'.
The displays for fìrru,arcl- and blckuald-link
erroÍs are as
lbllows:
Forward
link ERROR: .1
I I l--
>.lF.E5 .1ll
I
<
--.+trlJ-5--
>
4 155 'IFFFF<--,ll-s5
tsackward
lìnk E,RROR:
4lll-->110F'l 4 I I I
<
--4E85--
>
4 l5-5 4El.ì-5<--.1155
System
Debugger
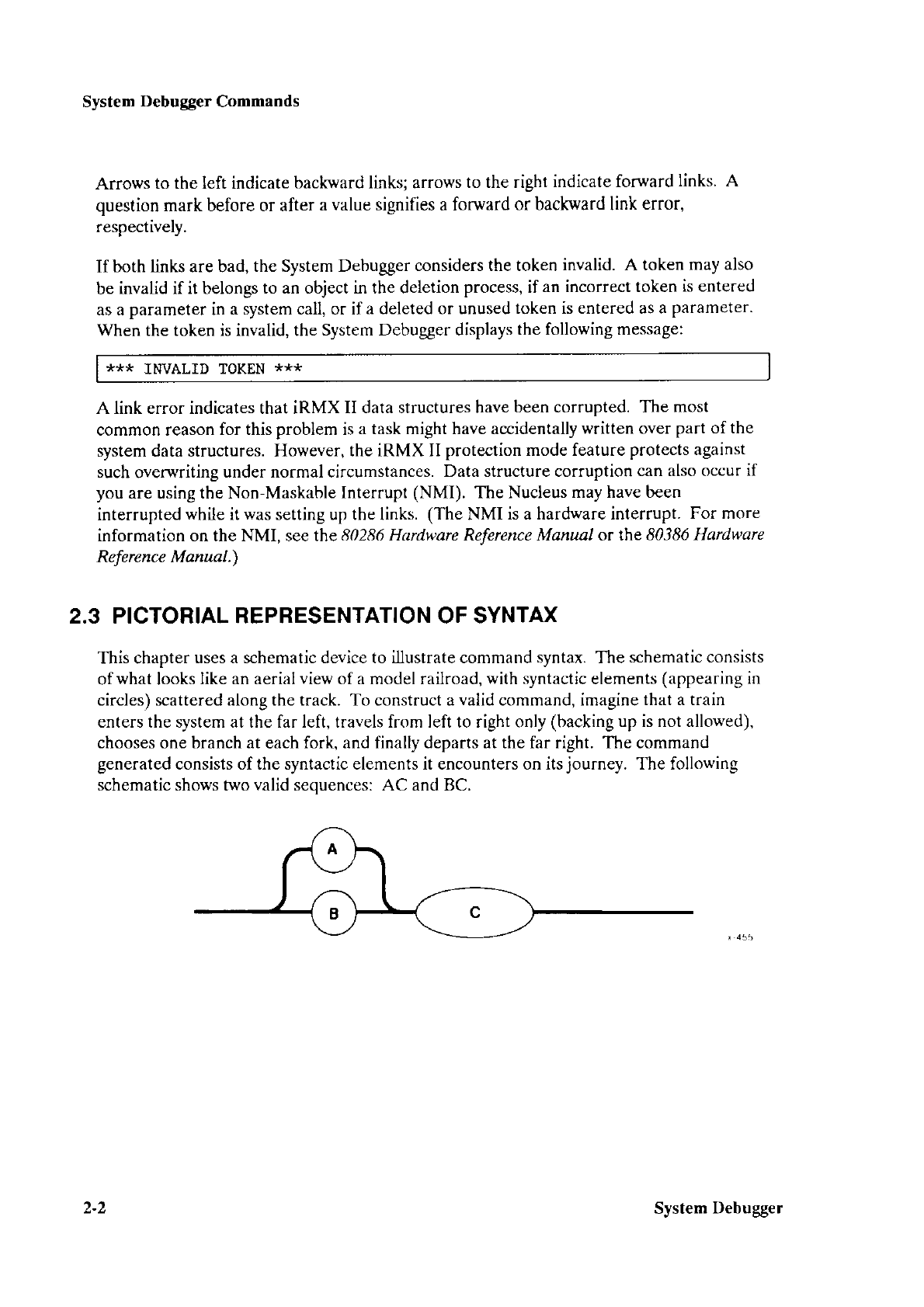
System
Debugger
Commands
Arrows to the left indicate
backward links; arrows
to the right indicate forward
links. A
question
mark before or after
a value signifies a forward
or backward link
error,
respectively.
Ifboth links are bad,
the System Debugger
considers the token
invalid. A token
may also
be invalid if it belongs
to an object in the deletion
process, if an incorrect token
is entered
as a
parameter
in a system call, or if a deleted or unused
token is entered as a
parameter.
When the token is invalid, the
System Debugger displays
the following message:
*** lNvALlD ToKEN ***
A link error indicates that iRMX II data structures have
been corrupted. The
most
common reason
for this problem is
a task might have accidentally
written over
part of the
system data structures. However,
the iRMX II protection mode feature
protects against
such overwriting
under normal circumstances.
Data structure corruption
can also occur
if
you
are using the Non-Maskable
Interrupt
(NMI). The Nucleus
may have been
interrupted
while
it
was
setting up the links.
(The
NMI is a hardware interrupt.
For more
information on the NMI, see the
80286 Hardware Reference Manual or the 8038ó Hardware
Reference Manual.)
2.3 PICTORIAL REPRESENTATION OF SYNTAX
This chapter
uses a schematic device to illustrate command syntax. The
schematic consists
ofwhat looks
like an aerial
view
of a model raiìroad,
with syntactic
elements
(appearing in
circles) scattered along the track. To construct a
valid
command, imagine
that a train
enters the system at the far left, travels from left to right only
(backing up is not allowed),
chooses one branch at
each
fork, and finally departs at the far right. The command
generated
consists of the syntactic elements it encounters on its
journey.
The following
schematic shows two valid seouences: AC and BC.
2-2 System
Debugger
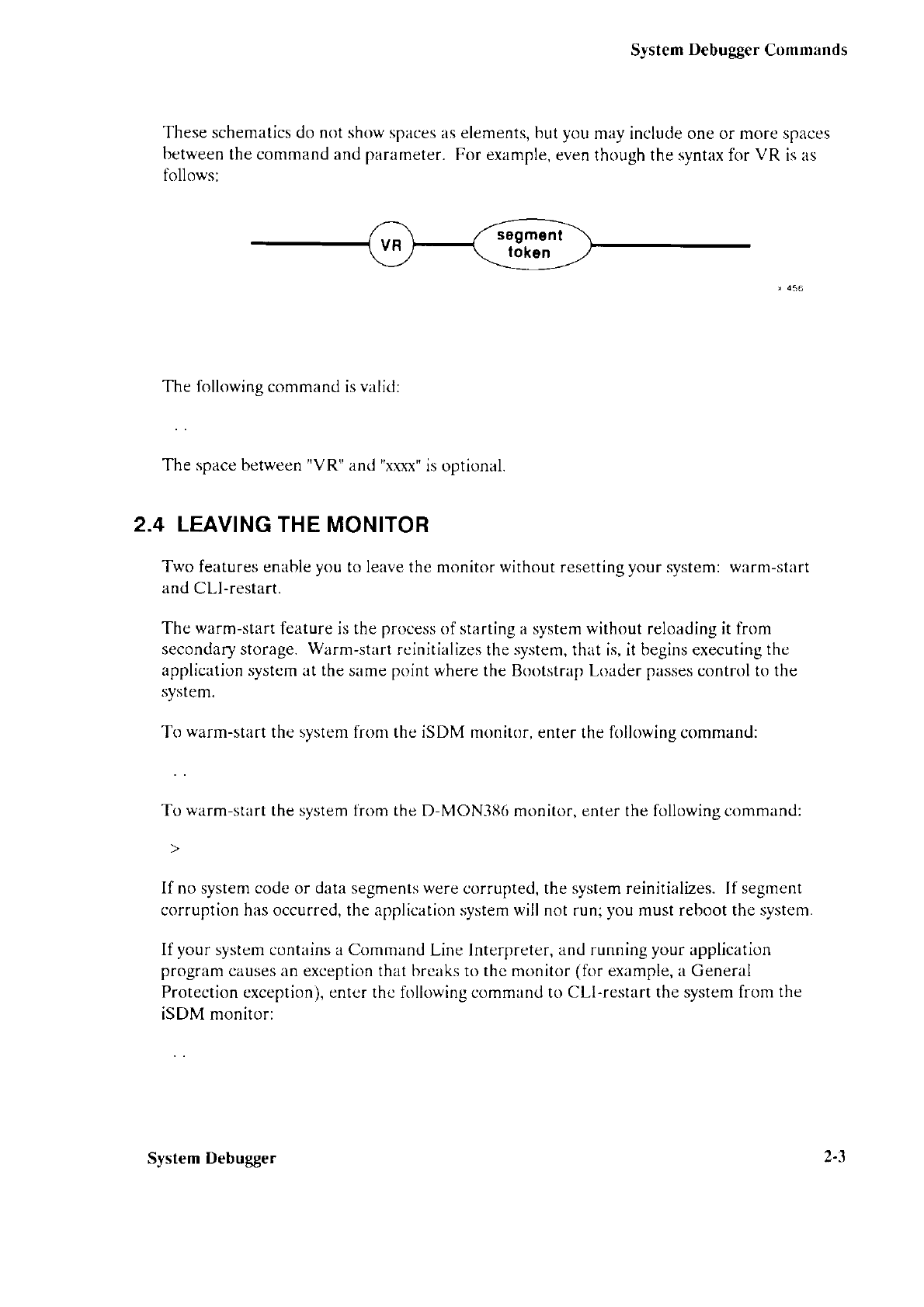
System
Debugger
Commands
These schematics do not show
spaces as elements, but you
may include one or more spaces
between
the command and parameter.
For example,
even though the syntax for VR is as
follows:
The following
command is
valicl:
The
space
between "VR" and "xxxx"
is optional.
2.4 LEAVING
THE MONITOR
Two features enable you
to leave the monitor
without
resetting your system:
wrrm-strrrt
and
CLI-restart.
The warm-start
feature is the
process
of starting a systcm without reloading it from
secondary storage.
Warm-start
rcinitializes
the
system,
that is, it begins executing
the
application system
at the same
point
whcre the Bootstrap Loader passes control to the
system.
To
warm-start
the system from the iSDM monitor, enter
the following command:
To warm-start the system from the
D-MON3lì6 monitor, enter the following commancl:
If no system code or data segments were
corrupted, the system reiniîializes. If segment
corruption has occurred, the application system will not run; you must reboot the system.
If
your
system contains a Command
Line Interpreter,
and running
your
application
program
causes an exception that brcaks to tht: monitor
(for
example, a General
Protection
exception), enter the following commlìnd to
CLI-restart the system from
the
iSDM monitor:
sagmenl
token
System Debugger 2-3
Systern
Debugger
Commands
Enter the following
command to CLI-restart
the system from the D-MON3lì6 monittlr:
These commands
causes the system to attempt
to delete the
job tree of the running task. If
the running task is
part of the
application's
job (not a subsystem
task running on behalf of
thejob) control returns to the Command
Line Interpreter. Otherwise,
you must reboot
the
system.
2.5
COMMAND
DIRECTORY
Command
DISPI-AYING iRMX II DATA STRUCTURES
VB--Display DUIB lnformation. . . .
VD--Display a Job's Object Directorv.
VF--Display Nunber of Free Slots
VJ
- -Display Job Hierarchy
VK--Display Ready and Sleeping Tasks..
VO--Display Objects in a Job.
VR-
-Display 1/O Request/Result Segment
VT-
-Display iRMX II Object.
RECOGNIZING
AND DISPLAYING iRMX II SYSTEM CALTS
VC-
-Display Systern Call Information.
VS--Display
Stack and System CalI Information.......
W- -Display System Calls in a Task's Stack. .
OTHER COMMANDS
VH-
-Display Help lnformation. . . .
Page
.2
-12
.2-14
.2- r8
.2-22
.2-24
.2-21
.2-36
..2-9
.2-62
.2-16
2-4 System
Debugger
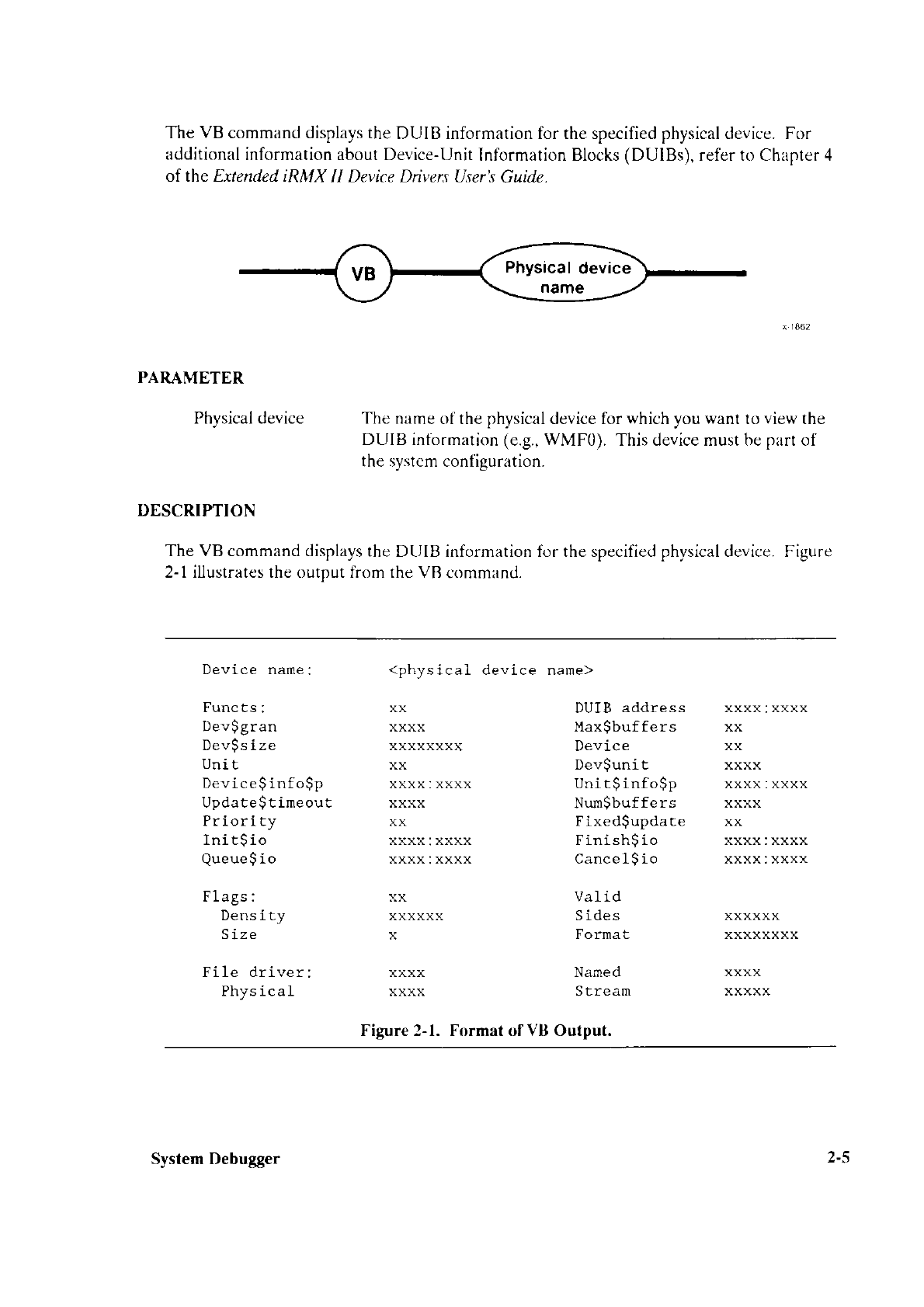
The
VB command displays the
DUIB information for the specified physical device. For
additional
information about Device-Unit
Information Blocks
(DUlBs),
refer to Chapter
of the Extended iRMX II Device Divers User's
GuùIe.
PARAMETER
Physical device The name
of the
physical
device for
which you want
to
view
the
DUIB intbrmation (e.g., WMF0).
This device must be
part
ot
the svstcm confisuration.
DESCRIPTION
The VB command displays
the DLJIB information fbr the specified physical device. Figure
2- 1 illustrates the outnut from the VB command.
Device name:
Func ts :
Dev$gran
Dev$ s ize
Uni t
Device$info$p
UpdateStimeout
Priority
Init$io
Queue$io
Flags:
Dens i ty
Size
File driver:
Physical
(phys ical dev i ce
xx
XXXX
XXXXXXXX
XXXX : XXXX
XXXX
XX
xxxx :
xxxx
xxxx :
xxxx
xx
XXXXXX
X
xxxx
XXXX
name>
DUIB addre s s
MewAhlffar<
Device
Dev$unit
N"m(h"f€arc
F ixe d$upda te
F ini sh$ io
Canc e 1$ io
Valid
S ide s
Format
Named
Stream
XXXX ;
XXXX
xx
XX
XXXX
XXXX : XXXX
XXXX
xx
XXXX : XXXX
XXXX : XXXX
xxxxxx
xxxxxxxx
xxxx
XXXXX
Figure 2-1. Fr)rmal trf
VB
Output.
System Debugger 7-1
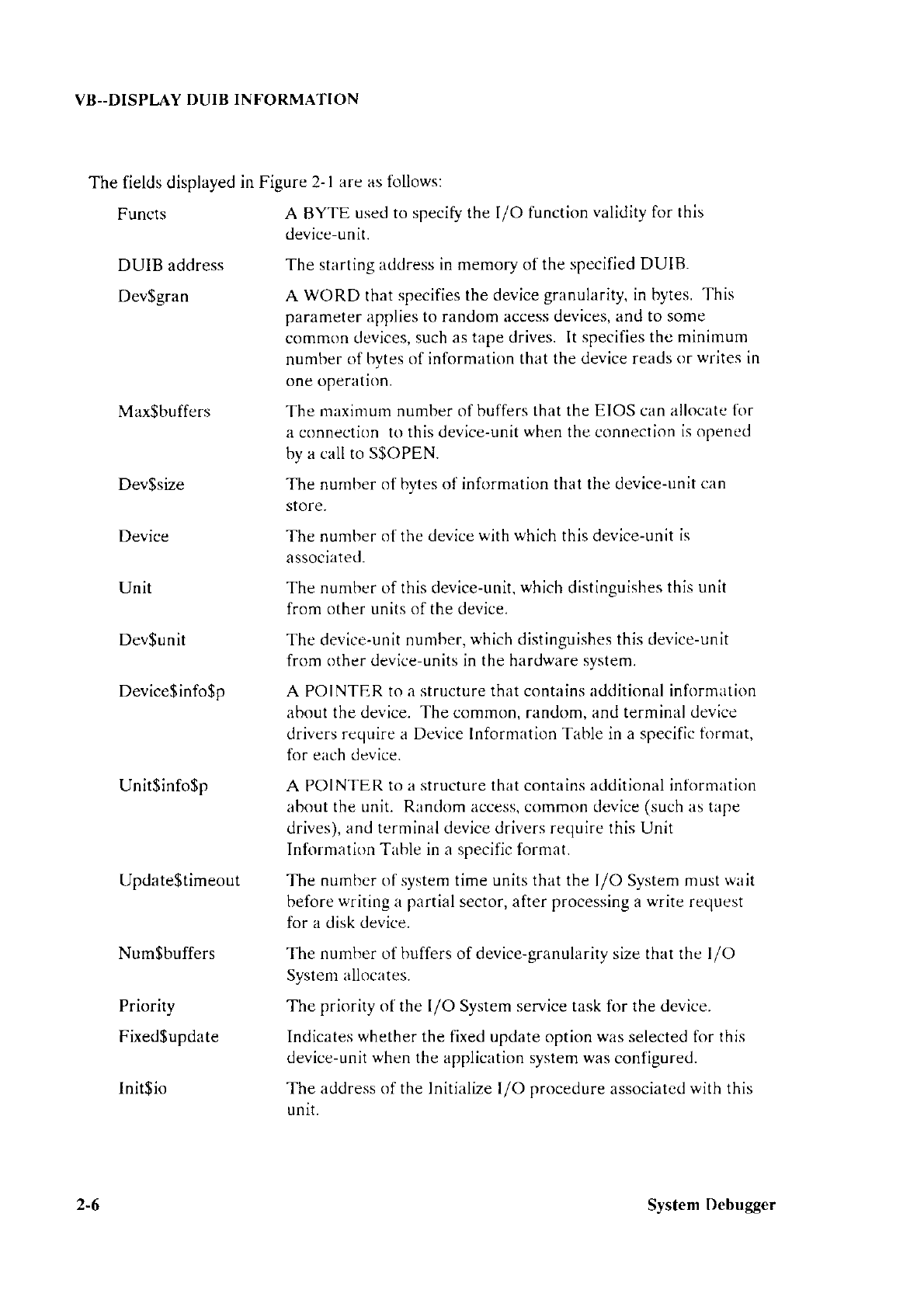
VB--DISPLAY
DUIB INFORMATION
The fields displayed
in Figure 2-
I are as lbllows:
Functs A BYTE used to specify the [/O function
validity for this
devrce-unrt.
DUIB address The starting
address in memory of the
specified DUIB.
Dev$gran A wORD that
specifies the device
granularity, in bytes. This
parameter applies to random access devices,
and to some
common
devices, such as
tape drives. It specifies
tht: minimum
numtrer
of bytes of information
that the device reads
or writes
in
onc OPcI ill i(
ìn.
Max$buffers The muxinrum number of buffers
that the EIOS can allocate
fìrr
a connection to this device-unit
when
the connection
is opened
by a call to S$OPE,N.
Dev$size The number of bytes
of information that the device-unit
can
store.
Device The number
of the
device
with which
this device-unit
is
associated.
Unit The number of this device-unit,
which
distinguishes
this unit
from other units of the device,
Dev$unit The device-unit number,
which distinguishes this clevice-unit
from other device-units in the hardware
system.
Device$info$p A POINTER
to a structure thît contains additional information
ahout the device. The common, random, and terminal
devicc
drivers recluire a Device lnformation Table in a specific
tormat,
for each device.
Unit$info$p A POINTE.R
to a structure that contains adtlitìonal information
about
the unit. R:rnrlom access, common rlevice
(such
as tape
tJrives), anci terminal clevice drivers rerluire this Unit
Inlbrmation Table in a specific lbrmat.
Update$timeout The
numtrer of system time units that the
I/O System
must
writ
before
writing l partial sector, after processing a wriîe request
for a disk device.
Num$buffers The number of buffers of device-granula rity size that the I/O
Systenì alÌocates.
Priority The priority of the I/O System service task
for the device.
Fixed$update Indicates
whether the
fixed update option
was
selected for this
device-unit
when
the application system was
configured.
Init$io The address of the Initialize I/O procedure
associatcd
with this
unrt
2-6 Systen
I)ebugger
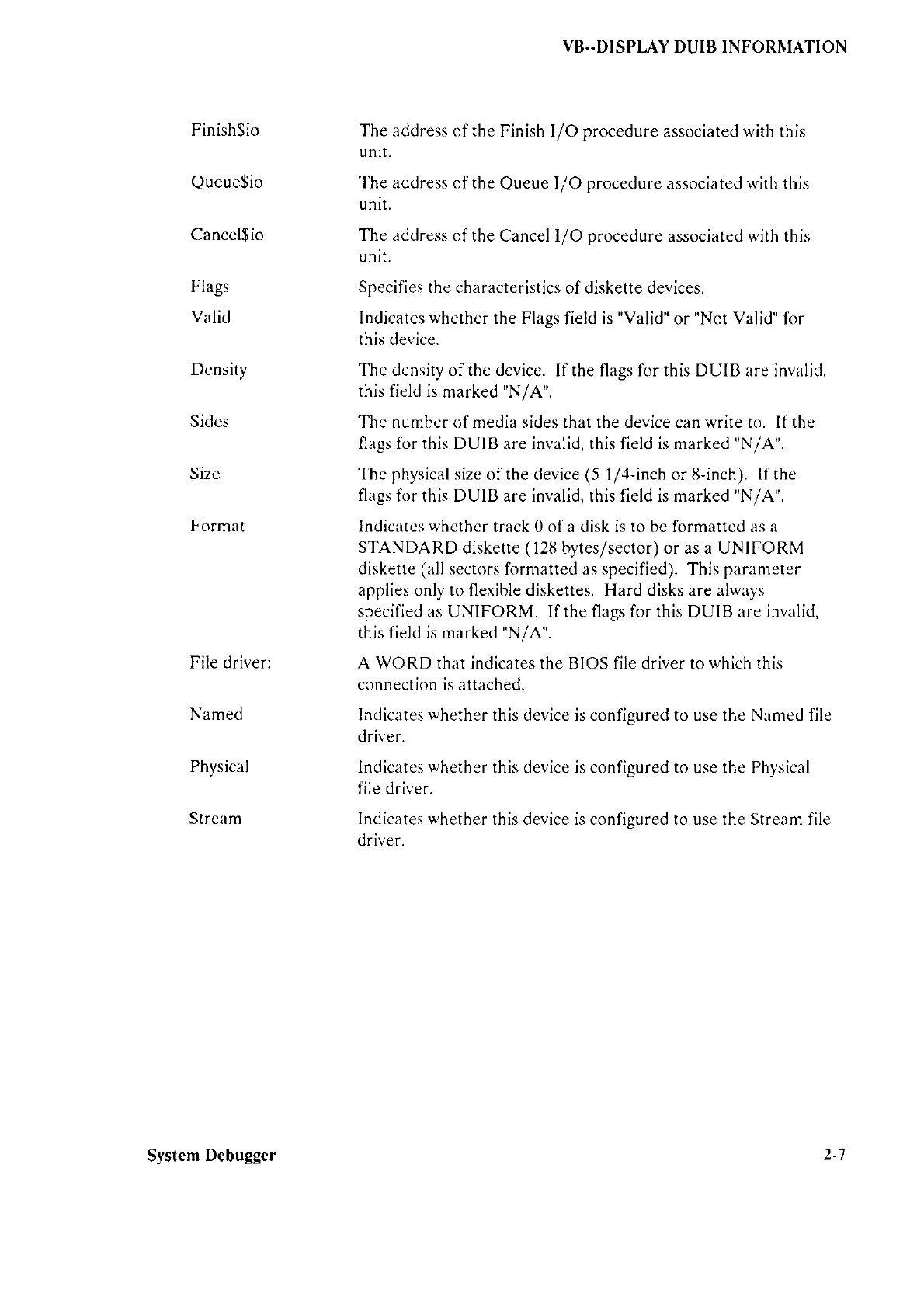
vB--DI
SPL\Y DUIB In*FORNIATI ON
Finish$io The address of the
Finish I/O procedure
associated with this
unit.
Queue$io The address of the
Queue
I/O procedure
associatetl
with
this
unit.
Cancel$io The adciress of
the Cancel I/O procedure
associated with
this
unlt.
Flags Specifies
the characteristics
of diskette devices.
Valid Indicates
whether
the Flags
field is
"Valid"
or
"Not Valid"
for
t his tler iee.
Density The density of the device.
If the flags for this DUIB are invalicl,
this field
is marked
"N/A".
Sides The n umber of media sides that the device can write to. Ifthe
flags lor thìs DUIB are invalid, this field is marked
"N/A".
Size 'l'he
physical
size
of
the
clevice
(-5
l/4-inch or
S-inch). If the
flags
for this DUIB are invalid, this lìeld is marked
"N/A",
Format Indicates whether
track 0 of a disk is to be formatted as a
STANDARD
diskette
(
12tt bytes/sector) or as a UNTFORM
diskette
(all
sectors
formatted as
specified).
This
parameter
applies only to flexible
diskettes. Hard disks
are alwrys
speciiied as UNIFORM.
lf the
flags
for this
DUIB
are invalid,
this field is marked
"N/A".
File driver: A WORD
that indicates the BIOS file driver to
which
this
connection is attached.
Named Indicates
whether
this device is configured to use the Named file
driver.
Physical lndicates
whether
this device is configured to use the Physical
file driver.
Stream Indicates whether
this device is configured to use the Stream file
driver.
System
Debugger )-1
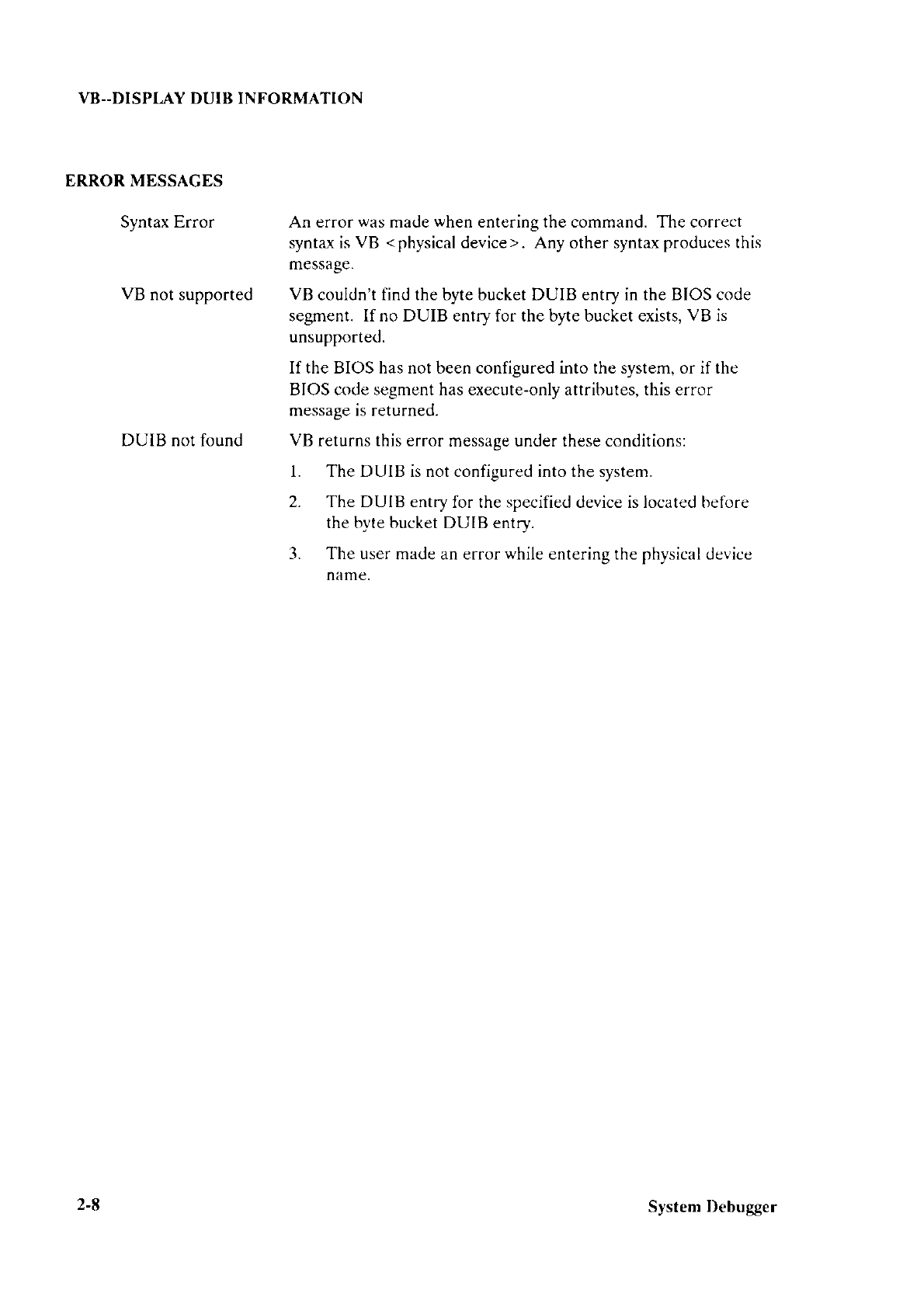
VB--DISPÍAY
DUIB INFORMATION
ERROR MESSAGES
Syntax Error An error
was
made
when
entering the command. The correct
syntax is
VB <physical
device>. Any other syntax
produces
this
messaSe.
VB not supported VB couldn't find the byte bucket DUIB entry in the BIOS code
segment. If no DUIB entry for the byte bucket exists,
VB ìs
unsupported.
If the BIOS has not been configured into the system, or if the
BIOS code segment has execute-only attributes, this error
message is returned.
DUIB not found VB returns this error
message under these conditions:
1. The DUIB is not configured into the system.
2. The DUIB entry
for the
specified
device is located betbre
the b)'te bucket DUIB entry.
3. The user
made an error
while
entering the physical device
name.
2-8 System
I)ebugger
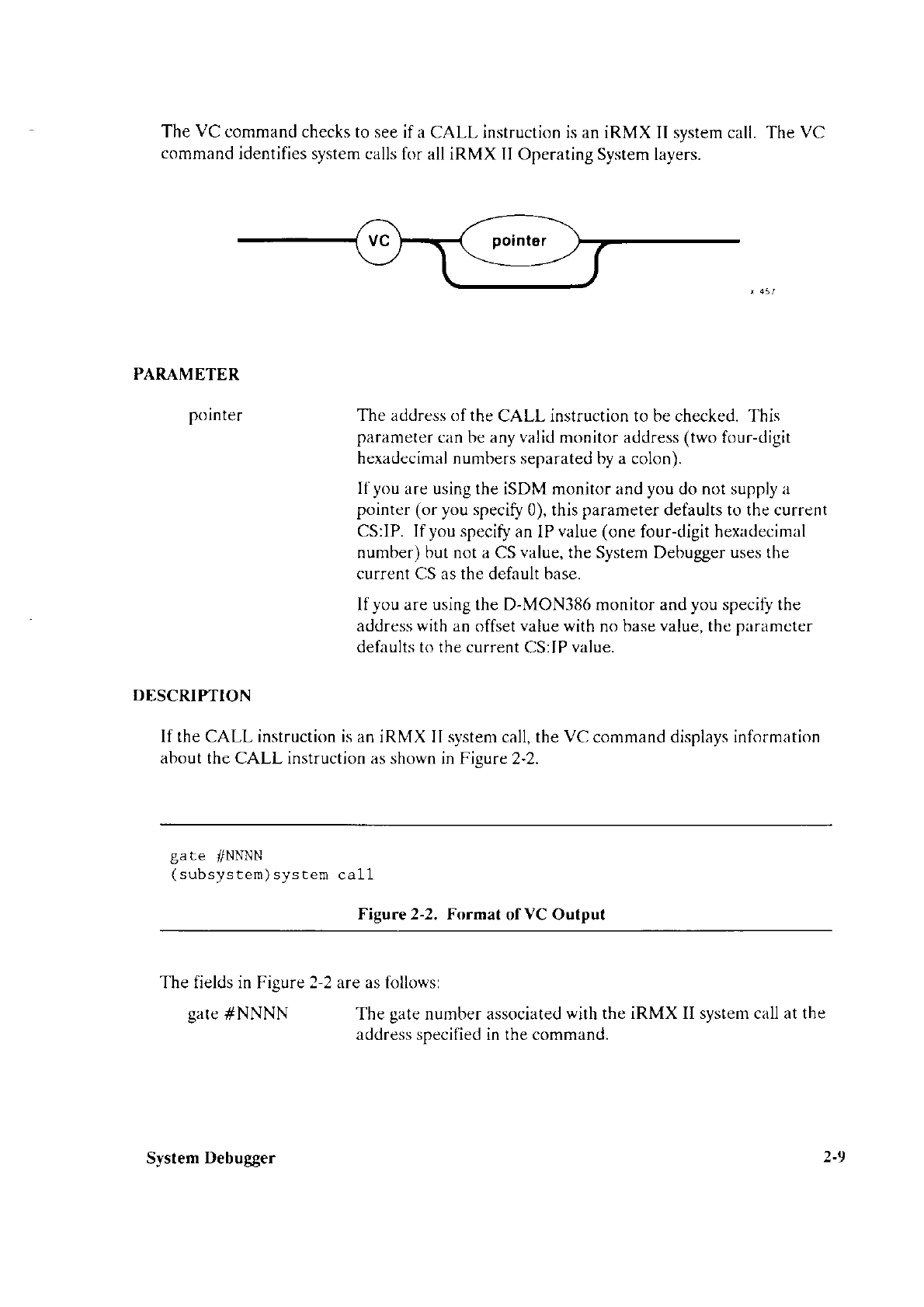
The
VC command checks
to see if a CALL instruction is
an iRMX II system call. The
VC
command
identifies system calls
for all iRMX II Operating
System layers.
PARAMETER
polnrer The address of the
CALL instruction to be checked. This
parameter
can tre any
valid
monitor address (two
four-digit
hexadecimal numbers separated
hy a colon).
If you
are using the iSDM monitor and you do not supply a
pointer (or you specifo
0), this
parameter
defaults to the current
CS:lP. If you specify
an IP
value (one
four-digit hexadecimal
number) but not a CS
value,
the System Debugger uses the
current CS as the default base.
lf you
are using the D-MON38ó monitor and you specily the
address with an
offset
value with
no base
value,
the
parameter
defaults to the current
CS:lP
value.
DESCRIPTION
lf the CALL instruction is an
iRMX II system call, the
VC
command displays information
about
the CALL instruction as shown in
Fieure 2-2.
gate /INNNN
(subsysten) system call
Figure 2-2. Formaf
of
VC
Oulput
The fields in Figure 2-2 are as lbllows:
gate
#NNNN The
gate
number associated
with the iRMX II system call at the
address specified in the command.
System
Debugger 2-9
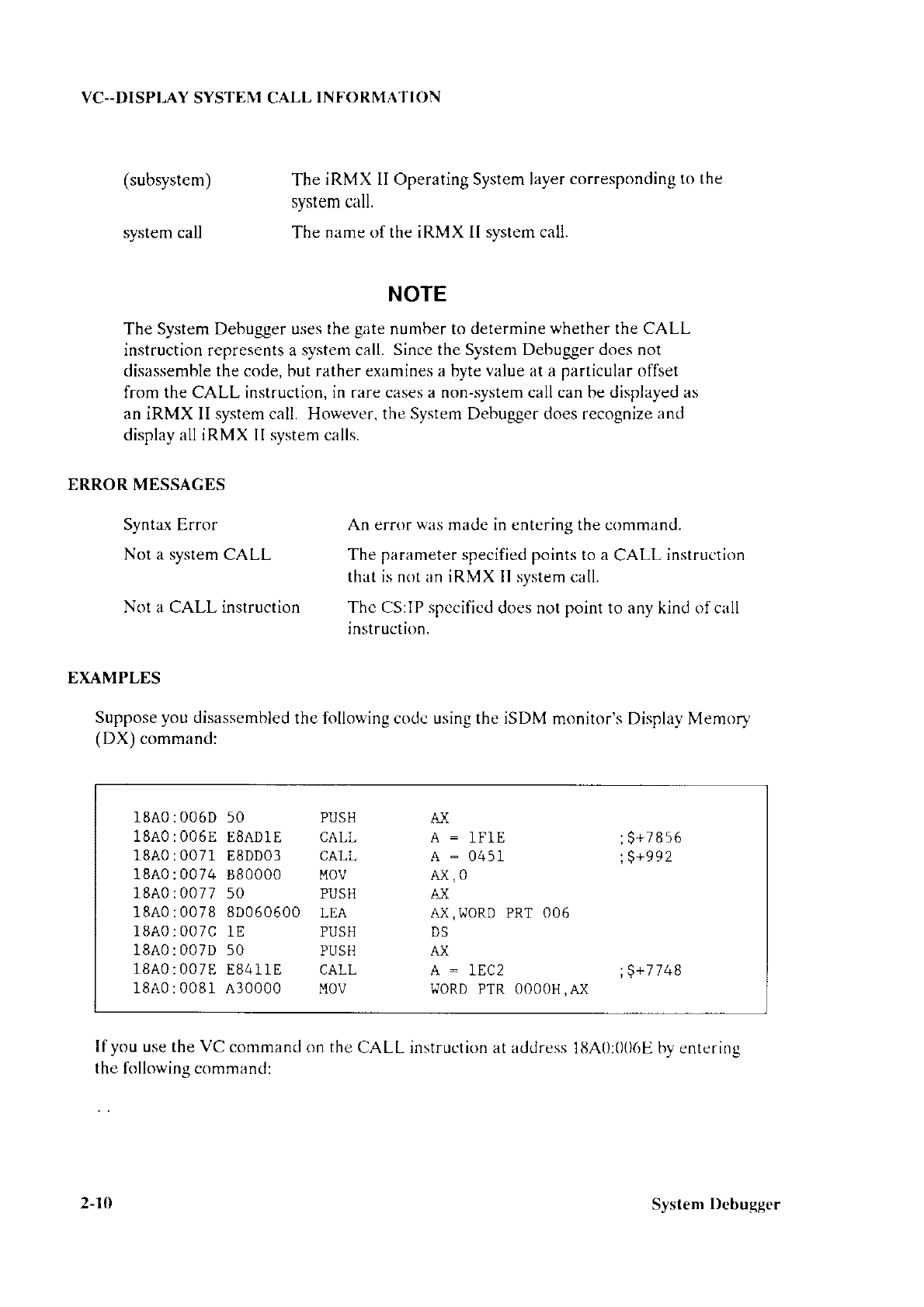
VC--DISPI,AY SYSTE]\Í CALL INFORMATION
(subsystem) The
iRMX ll Operating System layer
corresponding
to the
system call.
system call The
name of the iRMX II system call.
NOTE
The System Debugger uses the
gate
number to determine whether the CALL
instruction represents a system
call. Since the System Debugger does not
disassemble
the code, but rather examines a byte value at a particular offset
from the CALL instruction,
in rare cases a non-system call can be displayed as
an iRMX II system call. However, the System Debugger does recognize
and
display all iRMX II system calls.
ERROR MESSAGES
Syntax Error An erftrr
was
made in ente ring the command.
Not a system
CALL The
parameter
specified points to a
CALL instructior.
that is not an iRMX II system
call.
Not a CALL instruction The CS:lP specified
does not
point
to any kìnd of call
instruction.
EXAMPLES
Suppose
you
disassembled
the following code using the iSDM
monitor's Display Memory
(DX)
command:
18A0:006D 50 PUSH AX
18A0:0068
ESADIE CALL A : lFlE ;$+7856
18A0:0071 E8DD03 CALL A : 0451 1$+992
18A0:0074 880000 MOV AX,O
18A0:0077
50 PUSH A-\
18A0:0078 8D060600 LEA A-\,lnoRD
PRT
006
18A0:007C
1E PUSH DS
18A0:007D 50 PUSH Ax
18A0:007E
E841lE CALL A - LEC2 ;$+7748
18A0:0081 A30000 Mov woRD PTR
0000H,Ax
If you use
the
VC
command on the
CALL instruction at address
1tìA0:0t)(rE by entering
the following command:
2-r0 Systenr
I)ebugger
VC..DISPI.AY
SYSTEM CALL
INFORMATION
The
System Debugger displays
the following
inlbrmation:
gate 110468
(Nucleus) set exception handlèr
Gate number 0468
corresponds
to an RQ$SET$EXCEPTION$HANDLER
system call,
which
is a Nucleus call.
Now, suppose you want
to see
if the CALL instruction at 18A0:0071
is a system call. Enter
the
followins command:
The System Debugger
responds with
the following:
Not a systen CALL
Finally, ifyou use the VC command on the instruction
at l840:0074, the System Debugger
responds with the following:
Not a CALL
instruction
System Debugger 2-tl
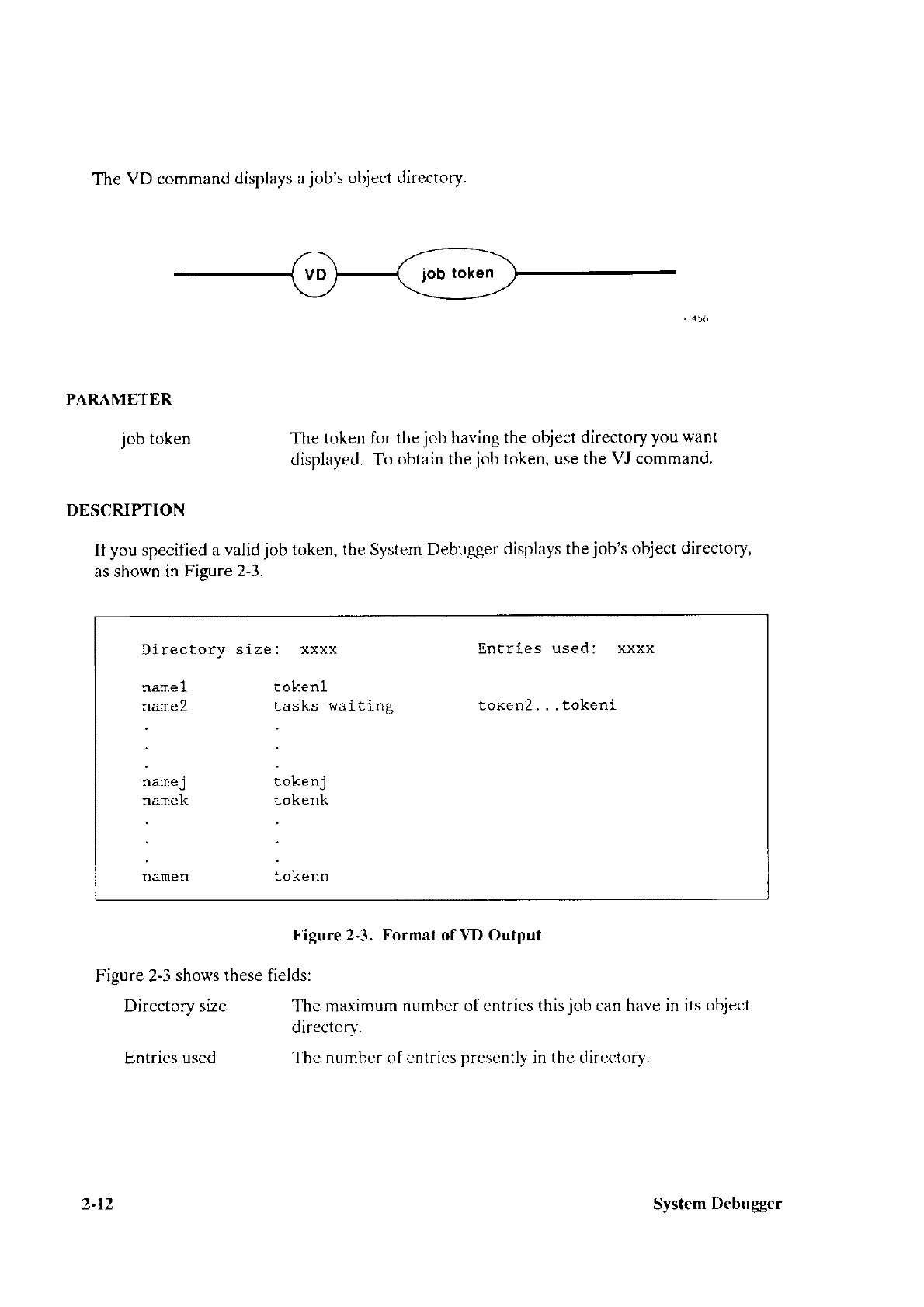
The
VD command
displays a
job's
object directory.
PARAMETER
job
token The token for
the
job
having the
object dìrectory
you
want
displayed. To
obtain the
job
token,
use the
VJ
command.
DESCRIPTION
If you
specified a
valid
job
token, the System Debugger
displays the
job's
object directory,
as shown in Fisure
2-3.
Directory
narnel
narne2
.
namek
namen
s\ze: xxxx
tokenl
:^^l-- ..-{*i--
LdJ^r !drLIiÈt
iok.r,i
tokenk
cokunat
Entries used:
token2...tokeni
Figure 2-3. Format of YD Output
Figure 2-3
shows these
fields:
Directory size
Entries
used
The maximum
number of entries this
job
can have in its
object
directory.
The number of entries
presently
in the directory.
2-12 System
Debugger
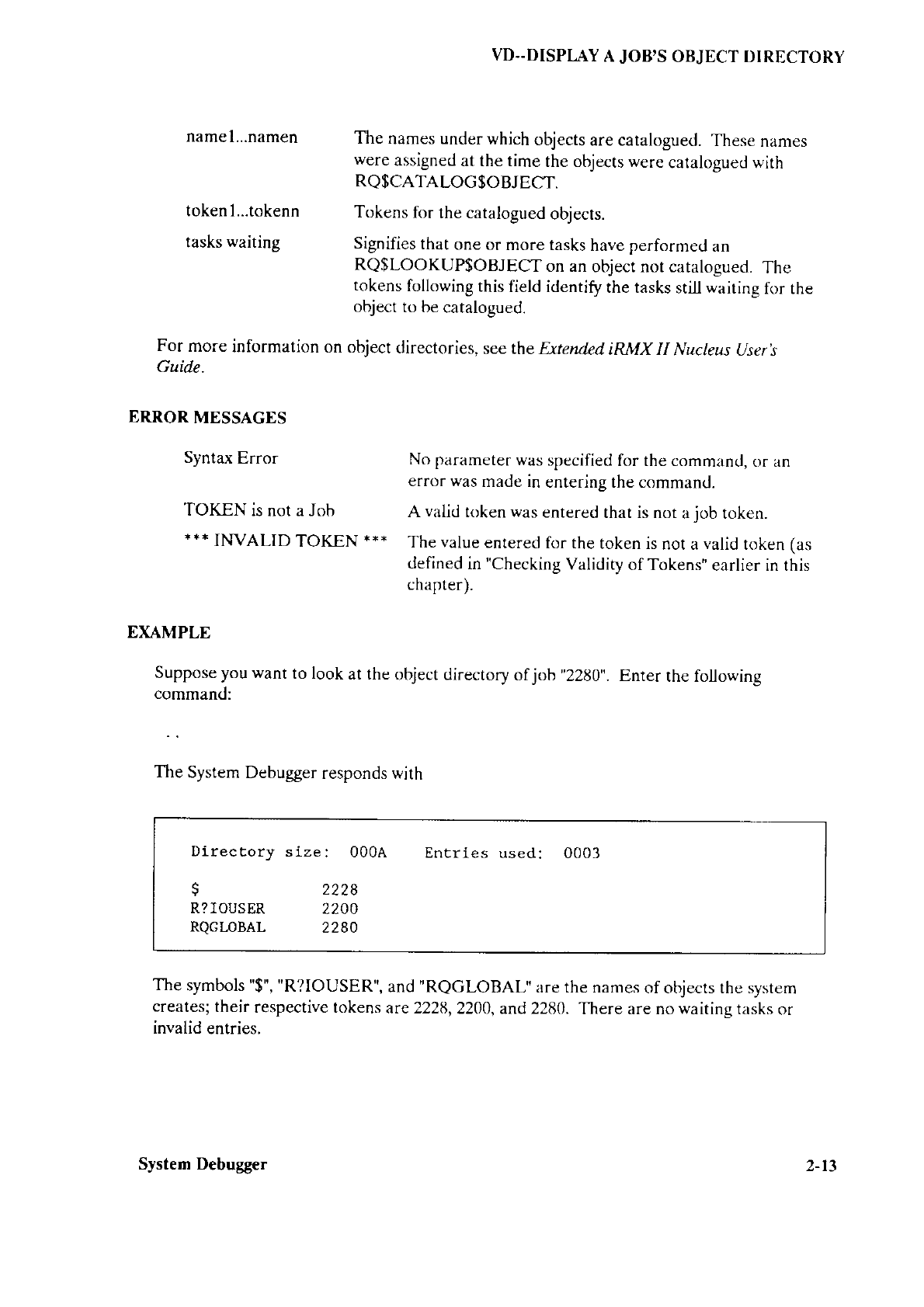
VD..DISPLAY
A
JOB'S
OBJECT DIRECTORY
namel...namen The
names under
which
objects
are catalogued.
These
names
were
assìgned
at the time
the objects were
catalogued wìth
RQ$CATALOG$OBJECI.
tokenl...tokenn Tokens
for
the catalogued
objects.
tasks
waiting Signifies
that
one or more tasks
have
performed
an
RQ$LOOKUP$OBJECT
on an
object not catalogued.
The
tokens
following
this
field identify
the tasks
still
waiting
for rhe
object
to be
catalogued.
For more
information
on object
directories,
see
the Extendtd
\RMX I I Nucletts lLser's
Guide.
ERROR
MESSAGES
Syntax
Error No parameter
was
specified
for the command,
or an
error was
made in
entering the command.
TOKEN is not a Joh A valid
token was
entered
that is not
ajob token.
... IIWALID TOKFN *** The value
entered
for the
token is
not a
valid
token (as
defined
in "Checking
Validity
of Tokens"
earlier in this
cnapter).
EXAMPLE
Suppose you want
to look
at the object
directory
ofjob "2280".
Enter
the following
command:
The
System
Debugger
responds with
DirecÈory slze: 000A
S 2228
R?IOUSER 2?OO
RQGLoBAL 2280
Entries used: 0003
The
symbols
'$", 'R?IOUSER",
and "RQGLOBAL"
are the names
of objects rhc sysrem
creates;
their
respective tokens
are 2228,2200,
and 2280.
There are no
waiting
tasks
or
invalid
entries.
System Debugger 2-13
The VF command
displays the
number
of free Global
Descriptor
Table
slots
available
to
the user.
PARAMETERS
The
VF command
has no parameters.
DESCRIFIION
The VF command displays
the number of free Global Descriptor
Table (GDT) slots
available
to the user, in the format shown in Figure2-4.
Number of free slots : xxxxxxxx
Figure 2-4. Format oflT Output.
2-14 System
Debugger

!T'..DISPI,AY NUMBER OF FREE
SLOTS
ERROR
MESSAGES
Syntax Error An
error was made
in entering
the command.
2-15
System
Debugger
The
VH command
displays and
briefly describes
the twelve
System
Debugger
commrrnds.
PARAMETERS
This command
has no
parameters.
DESCRIPTION
The VH command
lists all of the
System Debugger commands,
along
with their
parameters
and descriptions.
ERROR
MESSAGE
Syntax
Error An error
was
made
in entering the
command.
EXAMPLE
If you
enter
the following command:
2-16 System
Debugger
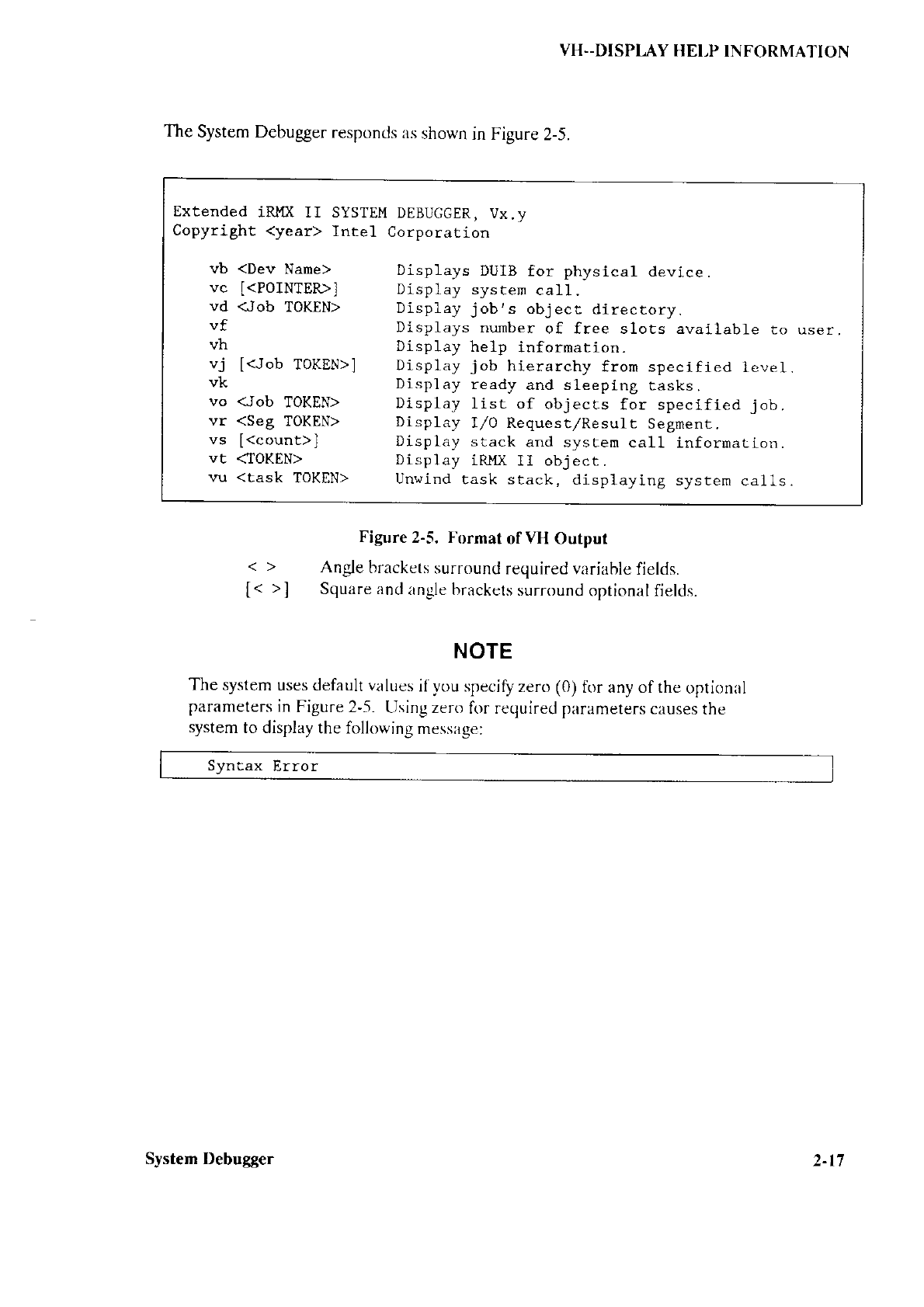
VH--DISPLAY
HEI.P
IN FORMAI]ON
The
System
Debugger responds
as
shown
in Figure
2-5.
Extended iRllx II SYSTEM
DEBUGGER,
Vx.y
Copyright <year) lntel CorporatiÒn
vb <Dev
Narne> Displays DùlB for physical device.
vc [<POINTER>] Display sysrern
call.
vd <Job TOKEN> Display job,s objècr direcrÒry.
vf Dispì-ays
number
of free slots available ro user.
vh Display help inforrnation.
vj [<Job TOKEN>] Display job hierarchy from specified 1evel.
vk Display ready and sleeping rasks.
vo <Job
TQKEN> Display list of objects for specified job.
vr <Seg
TOKEN> Display I/0 RequestlResulr Segmènr.
vs [(count)] Display stack and syscem
caLl informaLion.
vt <TOKEN> Display iRMX
tl object.
a'u <task TOKEN> Unwind task stack, displaying system calls.
Figure
2-5. I'ormat
of
VH
Output
Angle
brackets
surround
required variable
fields.
Square and
an_ule brackets
surround
optional fields.
NOTE
The system
uses default values
if
vou
speci|r
zero (0)
for any of the
optional
parameters
in
Figure 2-5.
LJsing zero
for requirecl
parameters causes
the
system
to display
the following
messrìge:
System Debugger 2-t7
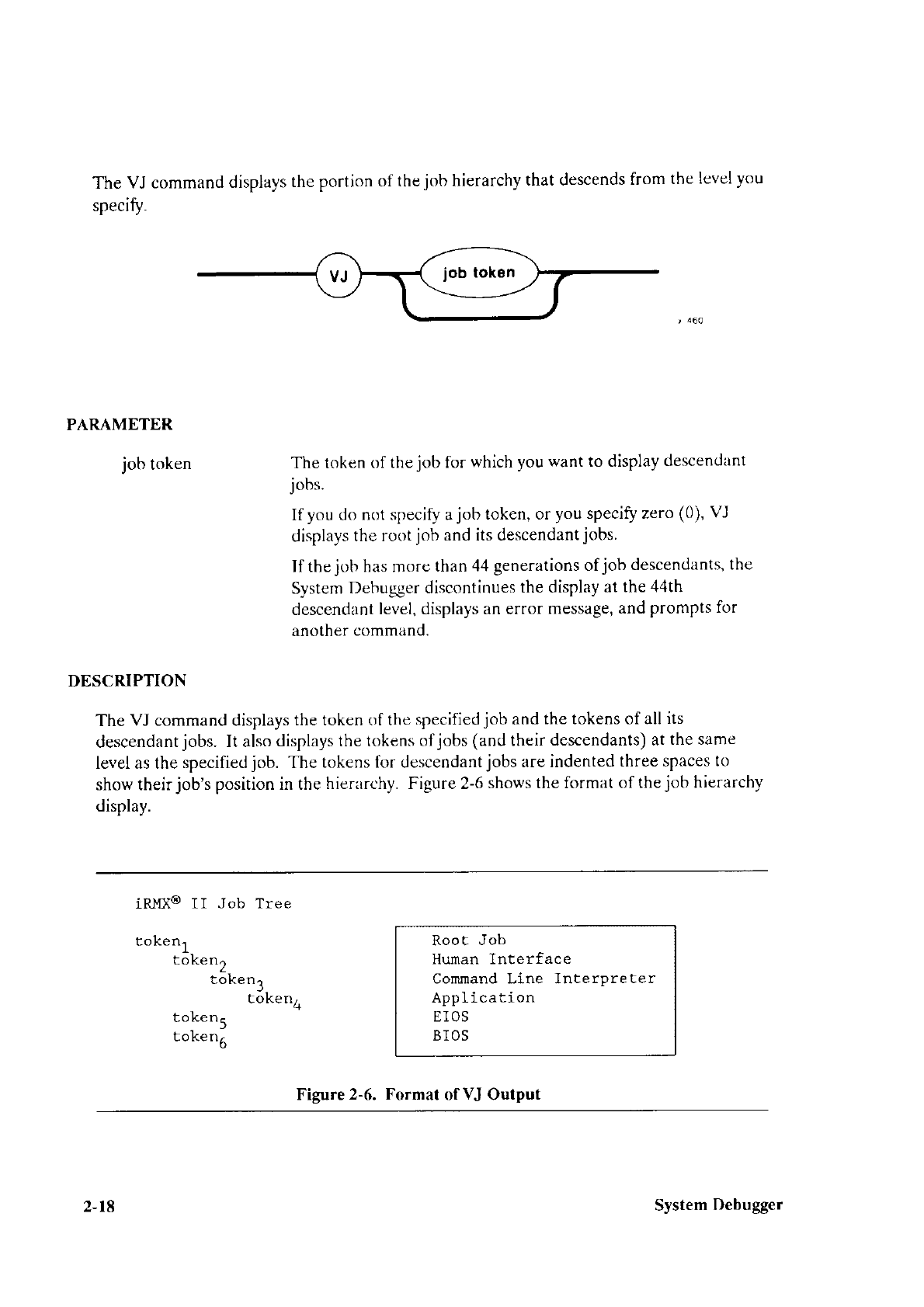
The
VJ command
displays
the portion
of the
job
hierarchy
that descends
from
the
level
you
sDecifu.
PARAMETER
job
token The token
of the
job
for
which
you want to display
descendant
jobs.
If you
do
not specify a
job
token, or
you specifu zero
(0), VJ
displays
the root
job
and its descendant
jobs.
If
the
job
has more
than 44
generations ofjob
descendants,
the
System Debugger
disconîinues
the display
at the 44th
descendant
level, displays an error
message,
and prompts
for
another
command.
DESCRIPTION
The
VJ command displays
the token of the
specified
job
and
the tokens of all
its
descendant
jobs.
It also
displays the tokens
ofjobs
(and
their
descendants) at
the same
level as the
specified
job. The
tokens lbr descendant
jobs
are indented
three spaces
to
show their
job's
position
in the
hierarchy. Figure 2-6
shows the format
of the
job
hierarchy
disolav.
iRMx@ Il Job Tre e
tokenl
token2
token3
token4
tokent
token,
o
Rooc
Job
Hurnan I ntè rface
Command Line Inte rpre ter
App I lca
tí on
EIOS
BIOS
2- l8
Figure
2-6. Formal of VJ Oulput
Sysfem
Debugger
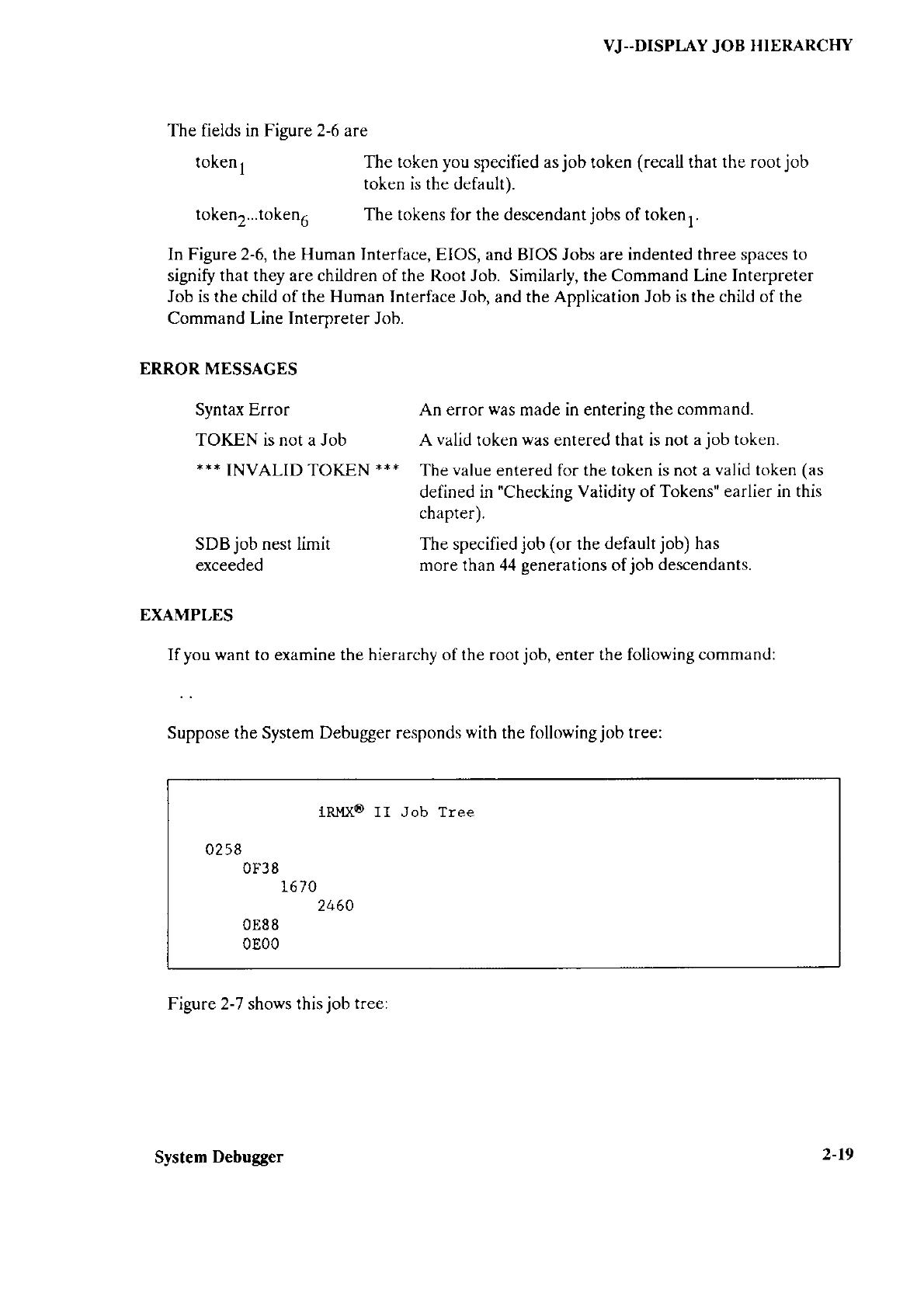
VJ-.DISPI-AY
JOB IIIERARCTIY
The fields in Figure 2-6 are
tokenl The token you
specified as
job
token
(recall that the rootjob
token is the default).
token2...token6 The tokens for the descendant
jobs
of token
1.
In Figure 2-6, the Human Interface,
EIOS, and BIOS Jobs are indented
three spaces to
signify that they are children of the Root Job. Similarly, the Command Line Interpreter
Job is the child of the Human Interface Job,
and
the Application Job is the child of the
Command
Line
Interpreter
Job.
ERROR MESSAGES
Syntax Error An error
was
made in entering the
command.
TOKEN is not a Job A valid
token
was
entered that is not
ajob token.
TOKEN *** The
value
entered for the token is not a
valid token
(as
defined in
"Checking
Validity of Tokens" earlier in this
chapter).
SDB
job
nest limit The specified
job
(or
the
default
job)
has
exceeded more than 44
generations
ofjob descendants.
EXAMPLES
Ifyou want to examine the hierarchy of the root
job,
enter the following
command:
Suppose the System Debugger responds
with
the following
job
tree:
lRMx@ II Job Tree
0258
0F38
1670
2460
088 8
0E00
Figure 2-7 shows this
joh
tree:
System
Debugger 2-19
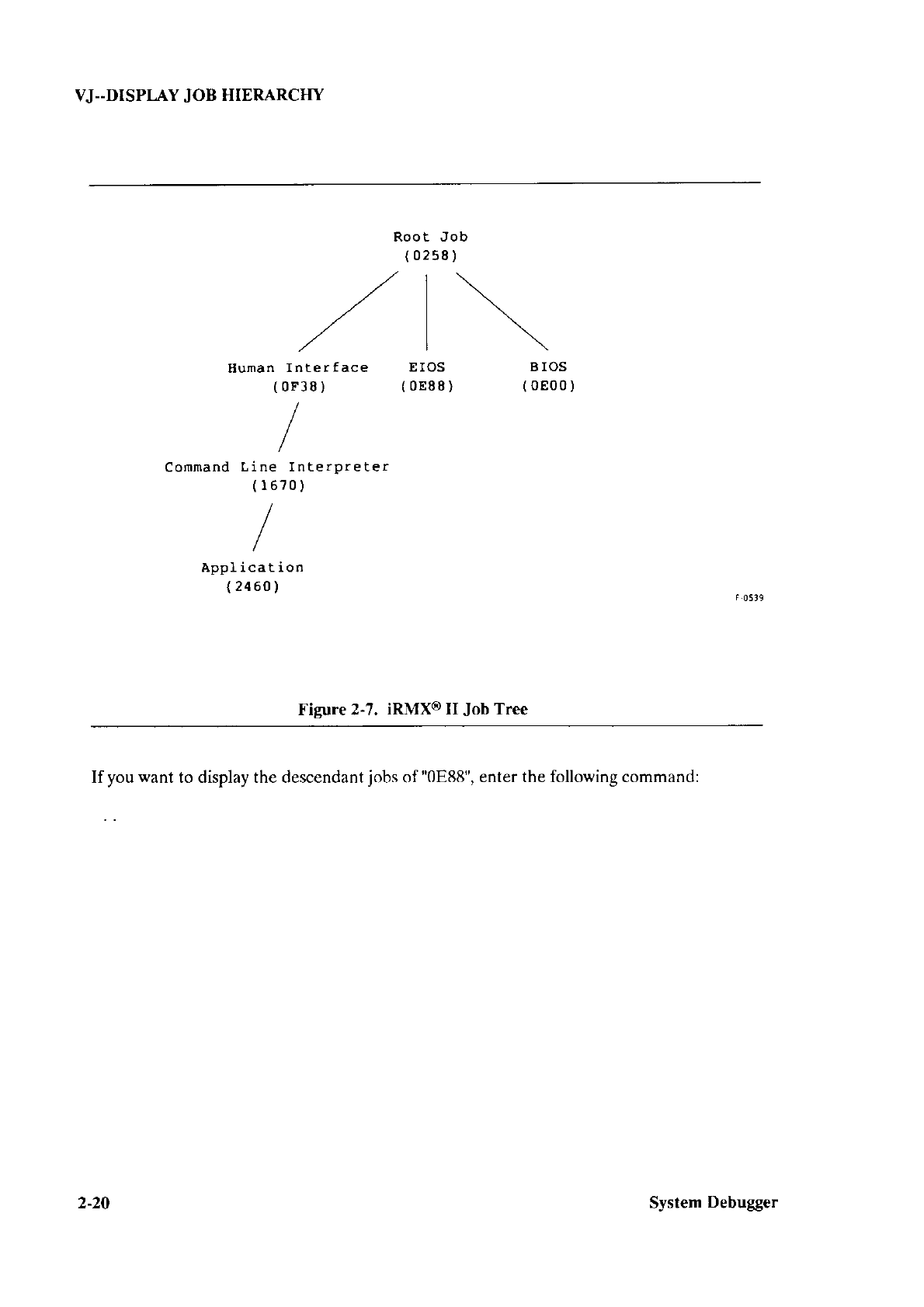
VJ--DISPL{Y
JOB
HIERARCHY
Root Job
(
0258
)
lluma
n Interface
(
0F38
)
/
/
/
C ornnand
Line Interpreter
(1610)
E IOS
(
0888
)
Figure
2-7. iRMXo ll Job
Tree
AppI icat ion
(2460)
If you
want
to display the descendant
jobs
of
"0E88", enter the following command:
2-20 System
Debugger
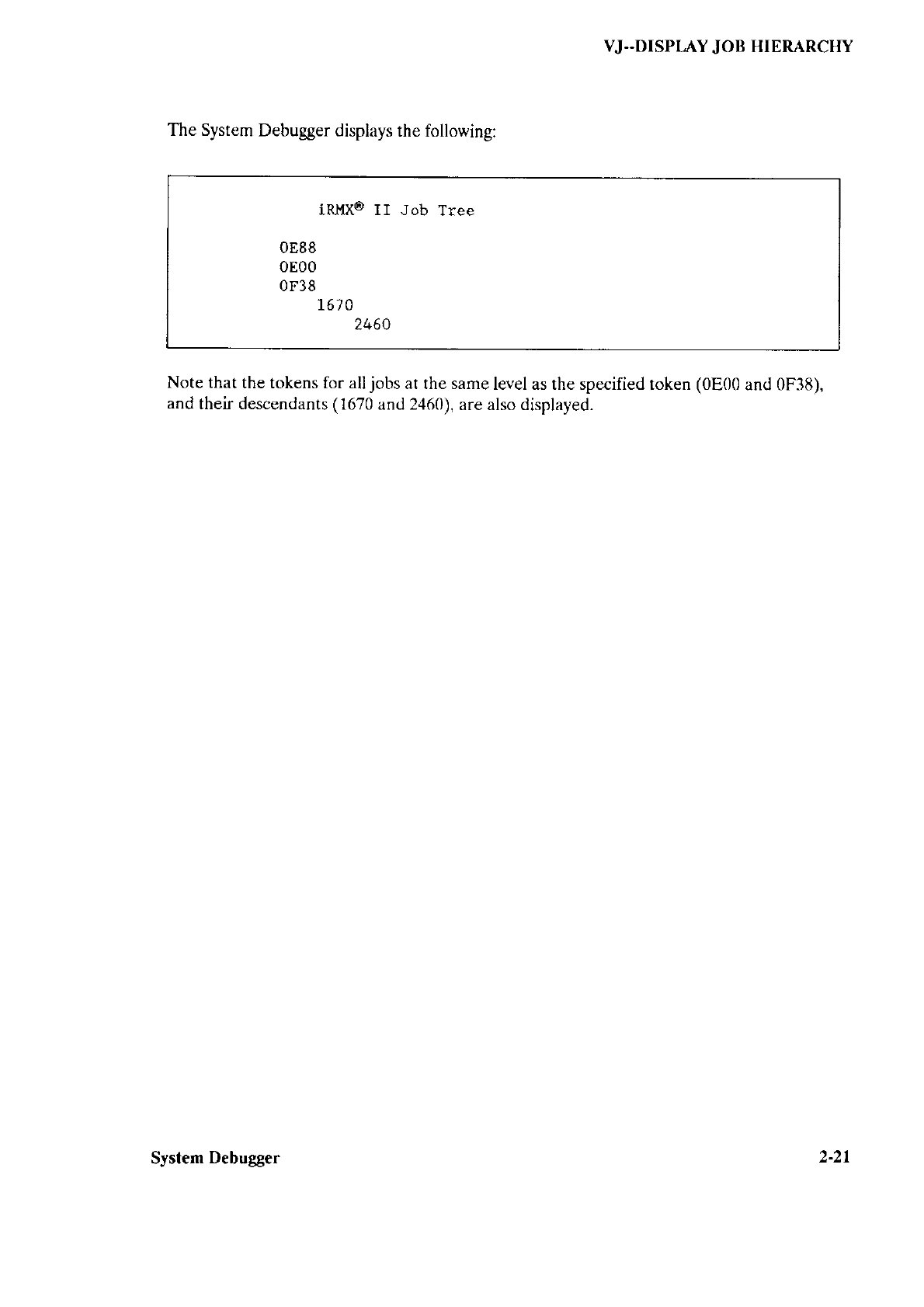
VJ..DISPT.4,Y
JOB HIERARCTIY
The System
Debugger displays
the following:
Note that
the tokens for alljobs
at the same
level as the specified token
(0E00
and 0F38),
and
their descendants (1ó70
antJ 2460),
are also displayed.
2-21
ÍR-ì{XO II JOb
0E88
0E00
0F38
1670
2460
Tree
System
Debugger
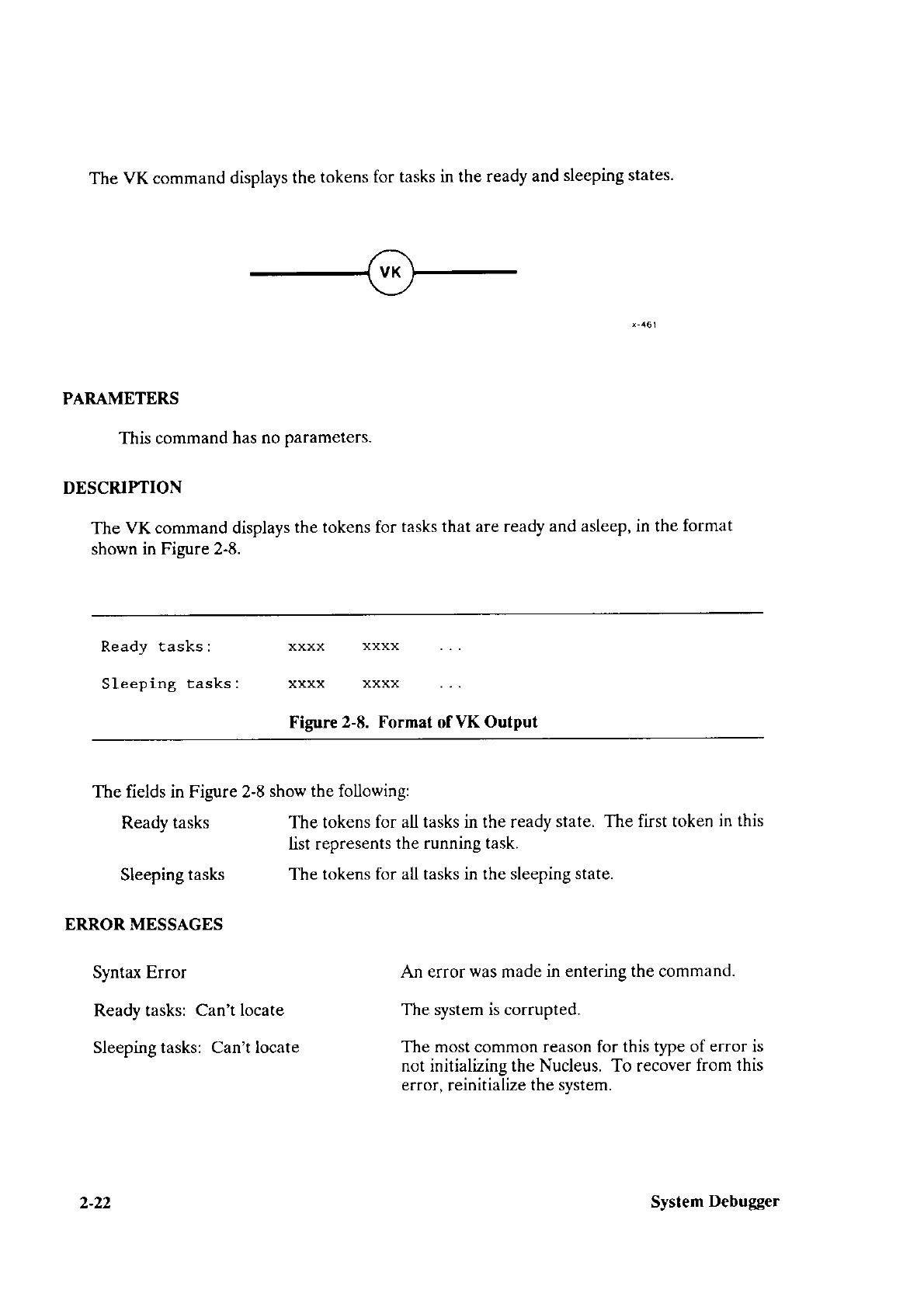
The VK command displays
the
tokens for tasks
in the ready
and
sleeping states.
PARAMETERS
This command
has no
parameters-
DESCRIPTION
The VK command displays
the tokens for tasks that are ready
and asleep, in the
format
shown
in Figure 2-8.
Ready casks: xxxx xxxx
Sleeping tasks: xxxx xxxx
Figure 2-8. Format ofVK Output
The fields in Figure 2-8
show the following:
Ready
tasks The tokens
for all tasks in the ready
state. The first token
in this
lìst represents
the running task
Sleeping
tasks The
tokens for all tasks in the sleeping
state.
ERROR MESSAGES
Syntax Error An error
was
made
in entering the command.
Ready tasks: Can't
locate The system is corrupted.
Sleeping tasks: Can't locate The most common reason for
this type of
error
ts
not initializing the Nucleus. To recover
from this
error,
reinitialize
the system.
2-22 System
Debugger
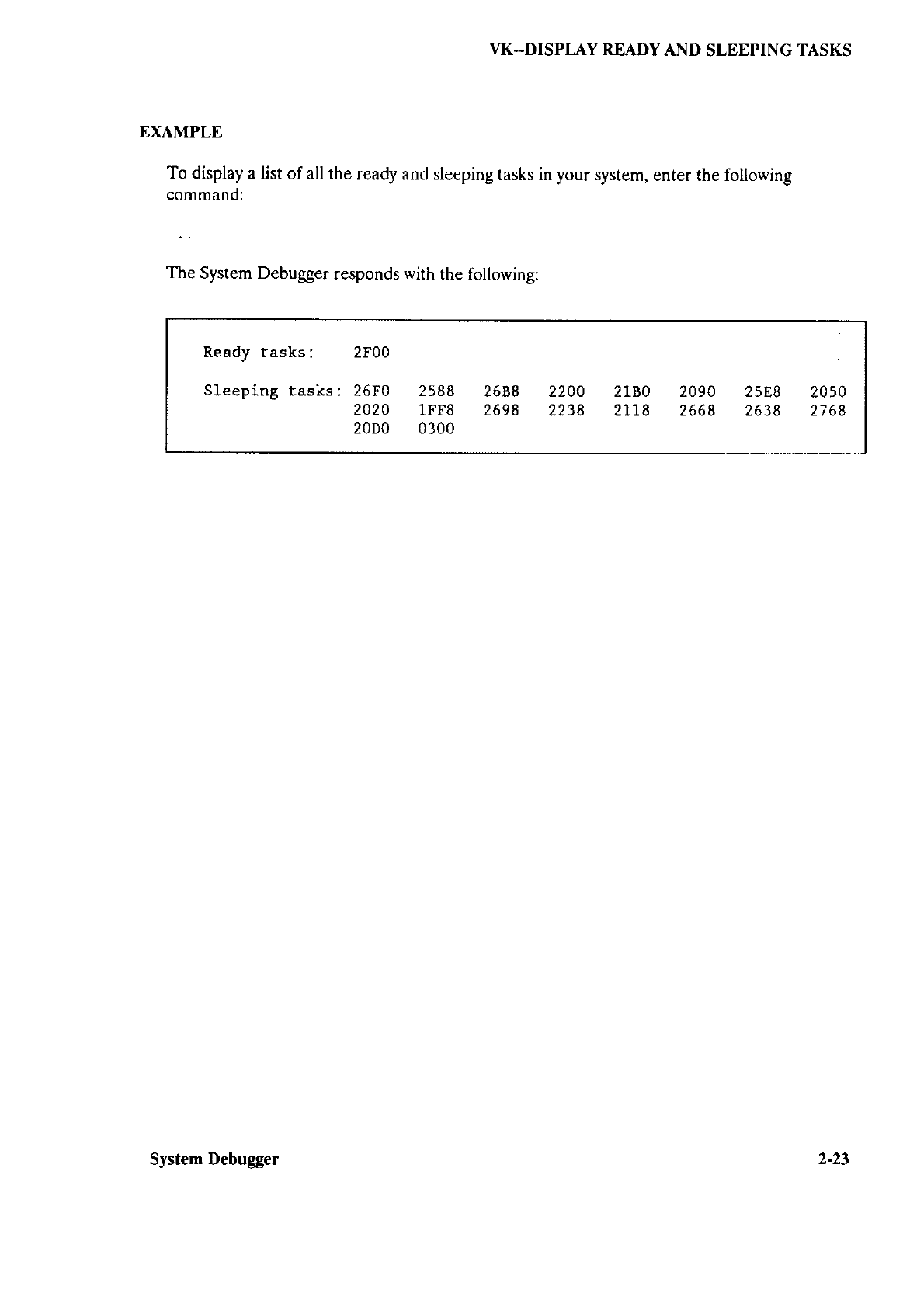
VK..DISPI-AY READY
AND SLEEPING TASKS
EXAMPLE
To display
a iist of all the
ready and sleeping
tasks in your
system,
enter the following
command:
The System Debugger
responds
with the following:
2-2i
Ready tasks:
Sleeping taeks:
2F00
26F0
2020
20D0
2588
1FF8
0300
2688
2698 2200
2238 2180
2118 2090
2668 2588 2050
2638 27 68
System Debugger
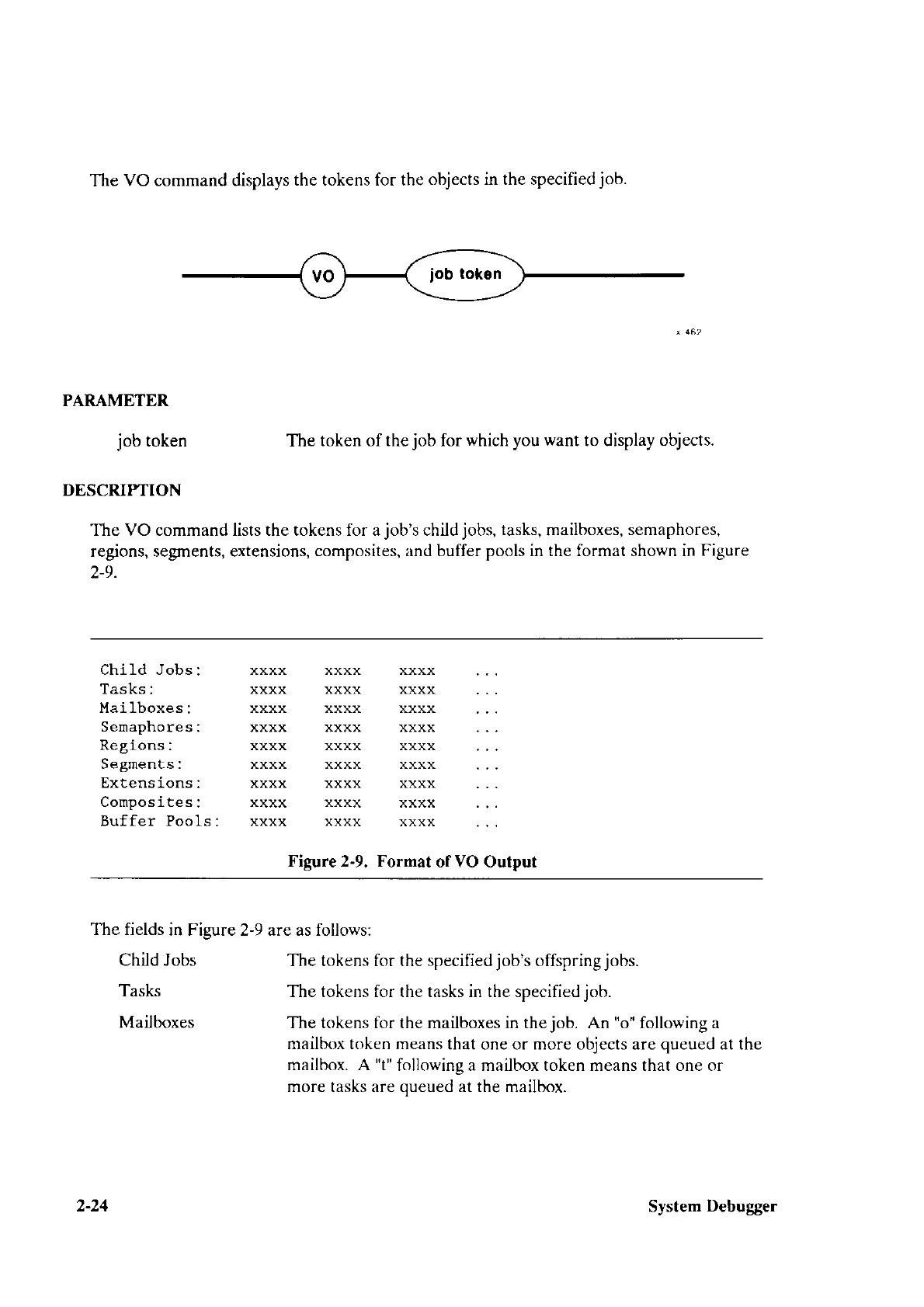
The
VO command displays
the tokens for the
objects in the specified
job.
PARAMETER
job
token The
token of the
job
for
which you want
to display
objects.
DESCRIFTION
The VO command lists the tokens for a
job's
child
jobs,
tasks,
mailboxes,
semaphores,
regions, segrnents, extensions,
composites, and buffer pools in the format shown in
Figure
t_o
Child Jobs
Tasks :
Mailboxes:
S ernaphores
Segnents:
Extens ions
Cornposites
Buffer Pools:
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
XXXX
xxxx
XXXX
xxxx
XXXX
XXXX
xxxx
XXXX
XXXX
XXXX
XXXX
xxxx
xxxx
XXXX
XXXX
XXXX
Figure 2-9. Format
of VO Output
The fields
in Fizure 2-9 are as follows:
Chiìd Jobs
Tasks
Mailboxes
The tokens for the specified
job's
offspring
jobs.
The tokens for the tasks in the specified
job.
The tokens for the mailboxes in the
job. An "o" following a
mailbox token means
that one or more objects are
queued
at the
maìlbox. A "t"
following a mailbox token means that one or
more tasks are queued at the mailbox.
2-24 System
Debugger
VO..DISPLAY
OBJECTS
IN A
JOB
Semaphores The tokens
for the semaphores
in the specified
job. A "t,'
following
a semaphore
token
means that
one or more tasks
are
queued
at the
semaphore.
Regions The tokens
for
the regions in the
specified
job. A,'b"
(busy)
following
a region
token means
that a task has
access to
information
guarded
by rhe region.
Segments The tokens
for the
segments in the specified
job.
Extensions The tokens
for the extensions
in the specified
job.
Composites The tokens
for the
composites in the specified
job. A ,'s,'
following
a composite
sigrifies a port with a signal
waiting. An
"m"
signifies
a
port
with
a message waiting.
A "t" signifies
a
port
with
a task waiting.
Buffer Pools The rokens
for the buffer pools
in the specified
job.
ERROR MESSAGES
Svntax Error I:J.T:Tff:Jff:ffil?',lTJ*command
or an
TOKEN
is not a Job A valid
token wa,
.nt"."dlho*"uer, it is not a
job
token.
... INVALID TOKEN *** The value
entered
for the token is not
a
valid
token
(as
defined.in
"Checking
Validity
of Tokens" earlier
in this
cnaDter
ì.
System Debugger ,-)<
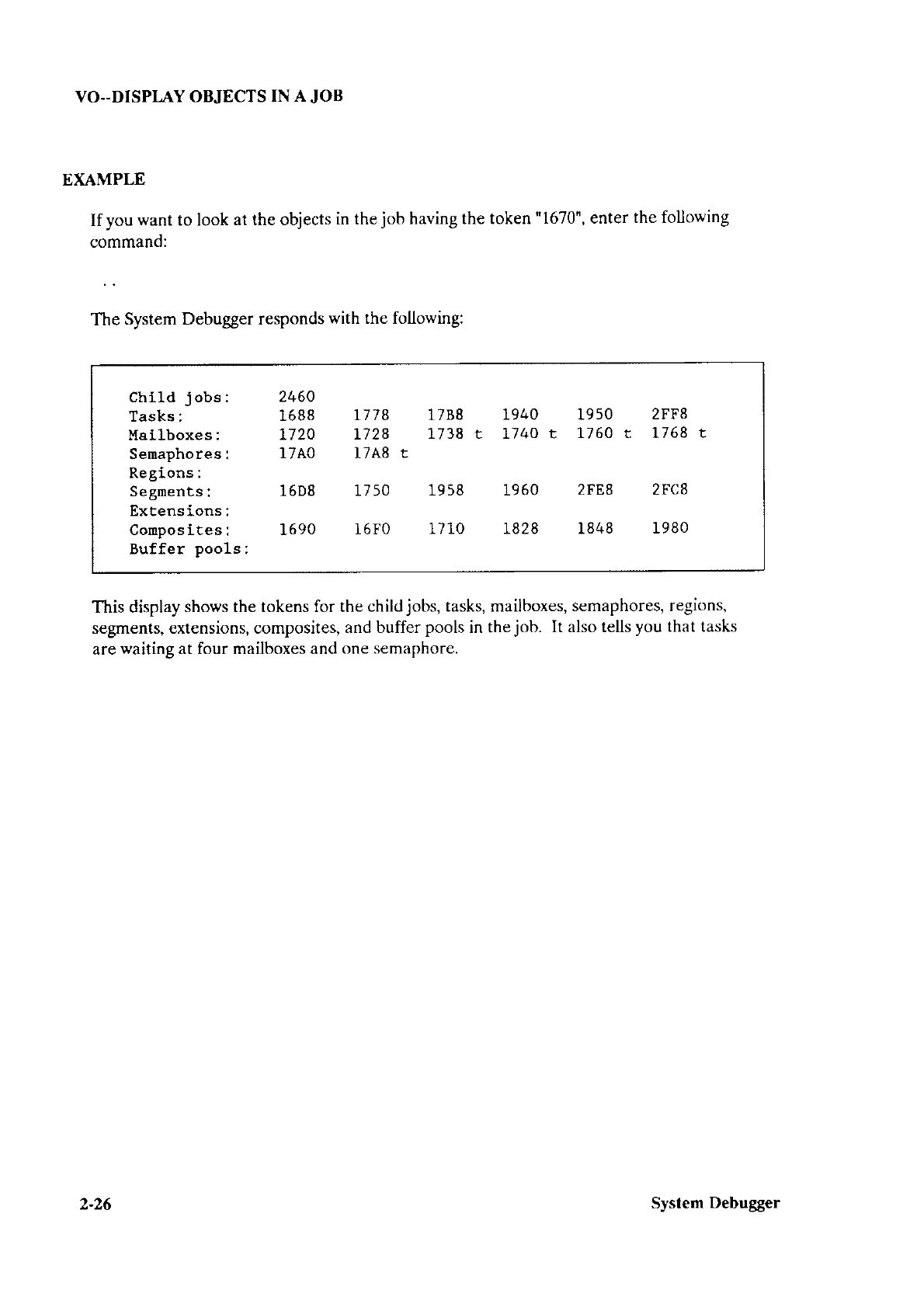
VO.-DISPI-AY
OBJECTS
IN A JOB
EXAMPLE
If you
want
to look
at the objects
in the
job
having
the token
"1670", enter
the following
command:
The System Debugger responds
with the following:
This display
shows the tokens for the
childjobs, tasks, mailboxes,
semaphores, regions,
segments, extensions, composites,
and buffer
pools
in thejob. It also tells
you that tasks
are
waitins at four mailboxes and
one semaphore.
Child j obs
Tasks :
Mailboxes:
Sermphores
RegÍons:
Sègnents:
Extens ions
Conposites
Buffer pools:
2460
1688 t178 1788 1940 1950 2FF8
L720 1128 1738 r 1740 r 1760 r 1768 r
17A0 17A8 r
16D8 1750 1958 1960 2FE8 2Fc8
1690 16F0 1710 1828 1848 1980
2-26 System
Debugger
The
VR command
displays
information
about
the iRMX ll Basic I/O System I/O
Request/Result
Segment (IORS)
that
corresponds
to
the segment
token
you
enter.
PARAMETER
Segment
token The token
for a segment
containing
the IORS you want
to
display.
If this segment
is not
an IORS, the VR
command
returns
invalid
information.
To obtain
a list of the segment
tokens in
a
iob.
use
the
VO command.
DESCRIPTION
The VR command
displays
the
names and values
for
the fields of a specific
IORS.
The
contents
of the IORS reflect
the
most recent
I/O operation
in which
this IORS was
usec.
Except
for ensuring
the specified
segment
is between
45 and 65 bytes
long, the
System
Debugger
cannot determine
whether
the segment
contains
a
valid
IORS, so you
must
ensure
that it does.
If the parameter
is
a
valid
segment
token for a segment
contain
ing an
IORS,
the System
Debugger
displays informarion
about
rhe IORS as shown
in Figure
2-10.
For more
information
on l/O Request/Result
Segments,
see the Extended |RMX
II Basic
I/O System
User's Guide.
For
more detailed
information
about the
IORS contents,
see the
Extended |RMX II Device
Diven User's Guide.
System Debugger 2-27
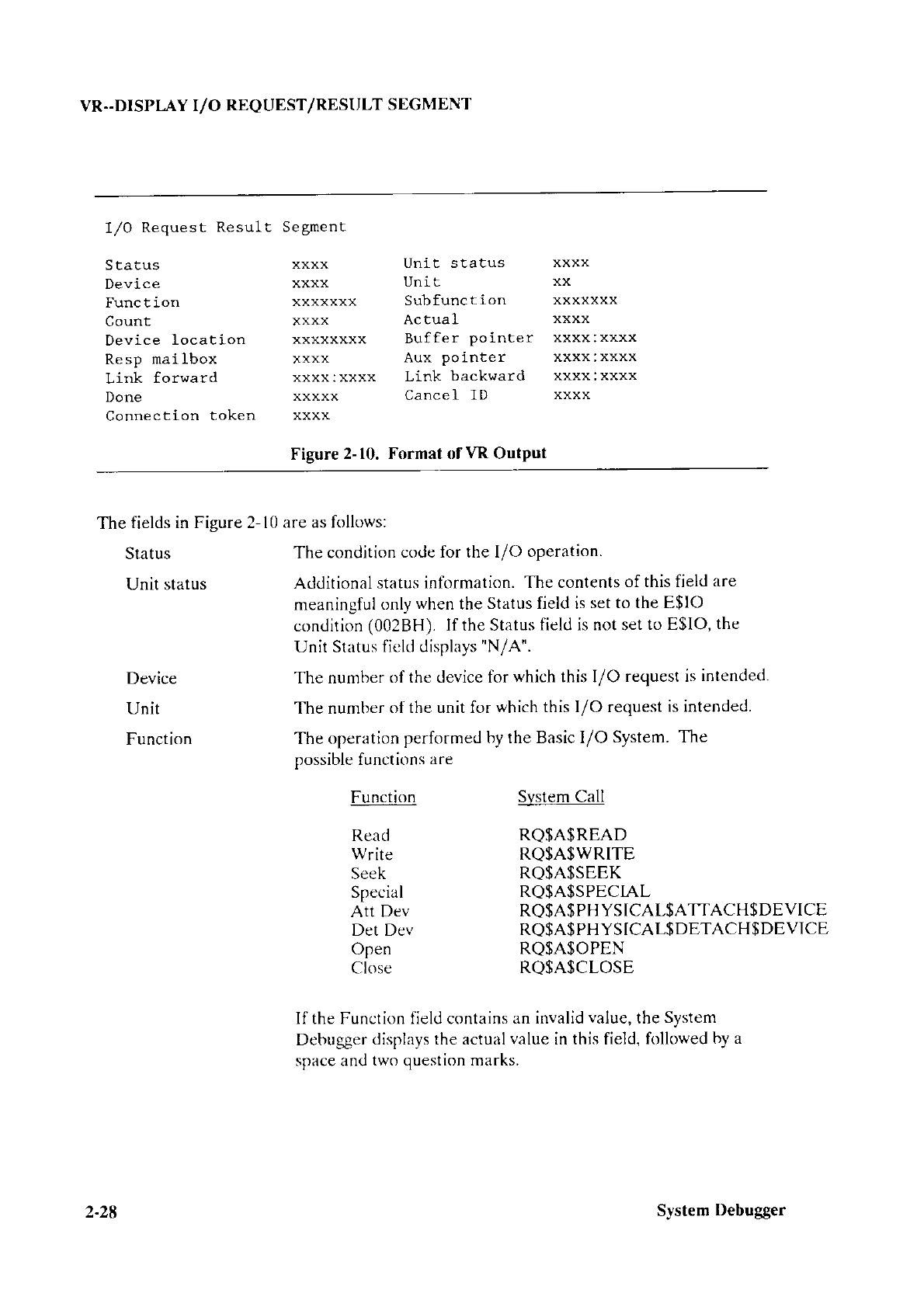
VR..DISPT-AY
I/O REQUEST/REST]LT
SEGMENT
l/O Request Result Segment
Status xxxx Unit status xxxx
Device xxxx Unit xx
Function xxxxxxx Subfunction xxxxxxx
count xxxx Actual xxxx
Device location xxxxxxxx Buffer pointer xxxx:xxxx
Resp mailbox xxxx Aux pointer xxxx:xxxx
Link forward xxxx:xxxx Link backward xxxx:xxxx
Done xxxxx Cancel ID xxxx
Connection token xxxx
Figure
2-l{ì. Format of
VR
Output
The
fields in Fisure 2- l0 are as follows:
Status The
condition
ctrtF for the l/O operation.
Unit status Additional status
information.
The contents
of this field
are
meaningful
only
when
the
Status field is
set to the E$lO
condition
(0028H). lf the Status
field is not set
to E$lO,
the
Unit Status
field displays
"N/A"
The number
of the device for
which this I/O request is
intended.
The number
of the unit for
which this l/O request
is intended.
The operation
performed by the Basic I/O System. The
possible functions
are
Device
Unit
Function
Function
Reaci
Write
Seek
Special
Att Dev
Det Dev
Open
Close
Svstem Call
RQ$A$READ
RQ$A$WRITE
RQ$A$SEEK
RQ$A$SPECIAL
RQ$A$
PH YSICAL$ATTACH$DEVICE
RQ$A$ PHYSICAL$DETACH$DEVICE
RQ$A$OPEN
RQ$A$CLOSE
If the Function field contains
an invalid
value,
the
System
Debugger
displays the actual
value
in this field,
followed
by a
space and
two question marks.
2-28 System
Debugger
VR.-DISPI-AY I/O REQUEST/RESULT SEGMENT
Subfunction A further specification
of the function
that applies only when the
Function field contains
"Special"
from
the BIOS
RQ$A$SPECIAL
system call. Possible
subfunctions lnci their
descript ions are
Subfunction Description
For/Que Format
or Query
Satis! Stream file satisfy function
Notify Notify funct ion
Device char Device characteristics
Get Term
Attr Get
terminal attributes
Set Term Attr Set terminal attributes
S ignl l Signal function
Rewind Rewind tape
Read File Mark Read file
mark on tape
Write
File Mark Write
file mark on taoe
Retention Trpe Take up slack on tlpi
Set Font Set character font
Set Bad
Info Set
bad track/sector information
Get Bad Info Get bad track/sector
information
If the Function field doesn't contain
"Special,"
thcn thc
Subfunction field contains "N/A." If the Subfunction field
contains an invalid value, the System Debugger displays the
valuc
of the field followed by a space and two
question marks.
Count The number of bytes of data called for in the I/O request.
Actual The number of bytes of data transferred in response
to the
requ(st.
Device location The eight-riigit hexadecimal address of the byte or logical block
where
the I/O operation began on the specified device.
Buffer pointer The adclress
of
the
buffer
the
Basic
I/O System read frcm, or
wr(ìtc
t(ì. in response to the request.
Resp mailbox A token for the response mailbox to
which
the device
sent thc
IORS after the operation.
Aux pointer The
pointer
to the location of auxiliary
data, if any. This field is
significant only
when
the Function field
contains
"Special."
Link
forward The adclress of the next IORS in the
queue
where
the IORS
waited
to be
processed.
Link
backward The address of the
previous
IORS
in the
queue where the IORS
waited
to be orocessed.
Systern
Debugger 2-29
VR--DISPT-AY I/O REQUEST/RESULT SECMENT
Done This field is always
present but applies only to IORSs
for I/O
operations
on random-access devices.
When
applicable,
it
indicates
whether
the I/O operation has been
completed. The
possible values are TRUE (0FFH)
and FAI-SE
(00H).
Cancel ID A word used by device
drivers
to identi! I/O requests
that need
to be canceled. A value
of zero
(0)
indicates
a request that
cannot
be canceled.
Connection token The token for the file connection used to issue the request
for
the I/O ooeration.
ERROR
MESSAGES
Syntax Error No
parameter
was specified for the command or an
error
was
made in entering the command.
TOKEN is not a SEGMENT The token entered is
valid
but not a segment token.
*** INVALID TOKEN *** The
value
entered for the token is not a
valid
token
(as
defined in
"Checking Validity
of Tokens" earlier in this
chapter).
SECMENT wrong
size
- The specified segment is not berween 45 and
not an IORS 65 bytes long, so it is not an I/O Request/Result
Sesment.
2-30 System
Debugger
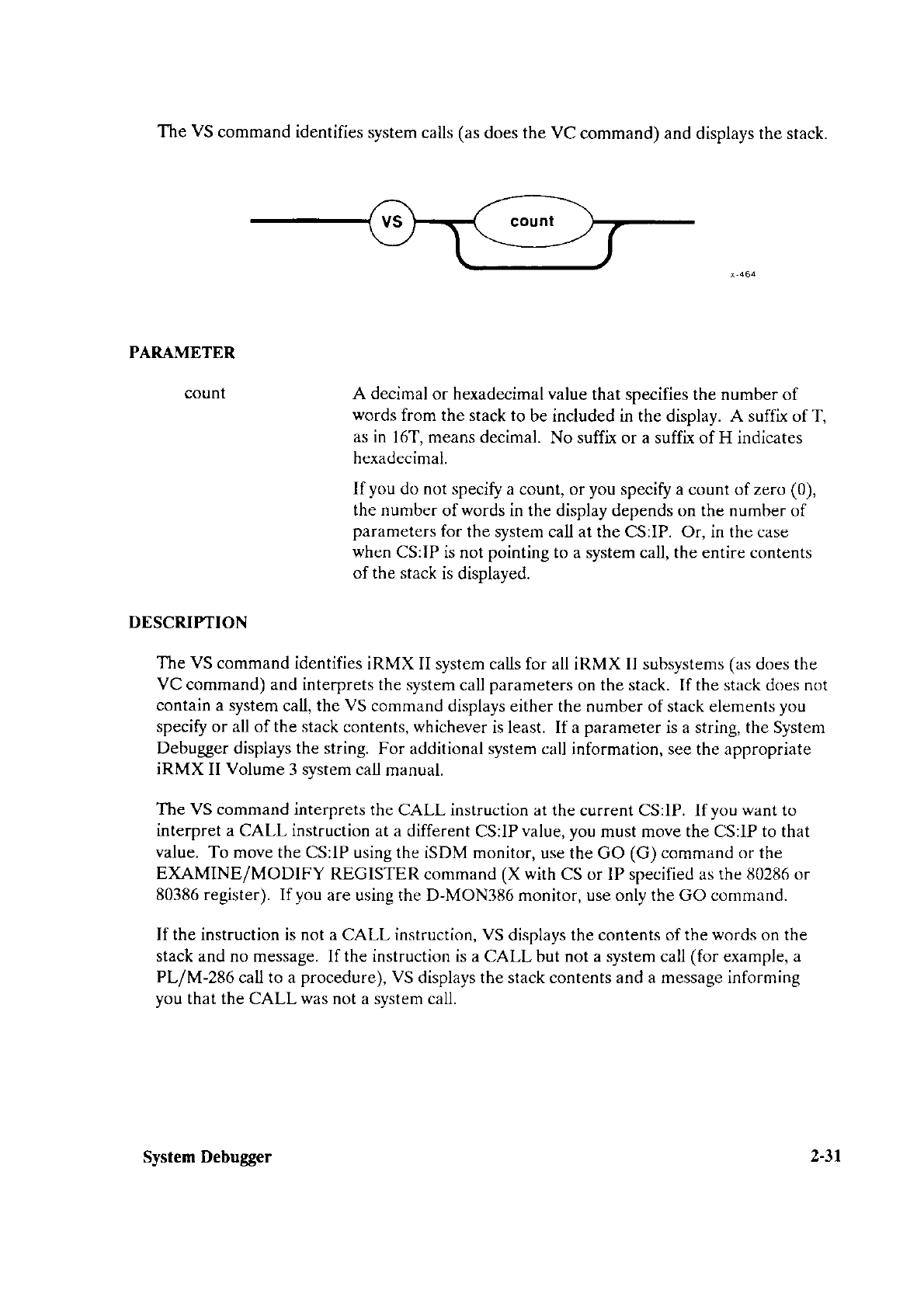
The
VS
command identifies
system calls
(as does the VC
command) and displays the stack.
PARAMETER
A decimal
or hexadecimal value
that specifies the number of
words
from the stack to be included in the display. A suffix of T,
as in l6T, means decimal.
No suffix or a suffir of H indicates
hexadecimal.
If you
do not specify
a count, or you specify a count of zero (Lr,
the number
ofwords in the display depends on the number of
parameters
for
the system call at the CS:IP. Or, in the case
when CS:IP
is not
pointing
to a system call, the entire contents
of the stack
is disolaved.
DESCRIFTION
The
VS
command identifies
iRMX II system calls for all
iRMX II subsystems
(as
does
the
VC command) and interprets the system
call
parameters
on the stack. If the stack does not
contain
a
system
call, the
VS
command
displays either the number of stack elements
you
specifu or all of the stack
contents,
whichever
is least. If a
parameter
is a string, the System
Debugger displays the string.
For additional system call
information, see the appropriate
iRMX II Volume
3 system call
manual.
The VS command interprets
the CALL instruction
at the current CS:IP. If you want
to
interpret a CALL instruction
at a different
CS:IP
value, you
must move the CS:IP to that
value.
To move the
CS:lP using the iSDM monitor,
use the GO (G) command or the
EXAMINE/MODIFY REGISTER command (X with
CS or lP specified as
the
80286
or
80386 register). If you
are using the D-MON386 monitor, use only the GO command.
If the instruction is not a CALL instruction, VS
displays the contents
of the words on the
stack and no message. If the instruction is a CALL but
not a system call
(for
example, a
PLIM-286
call to a
procedure), VS
displays the stack contents and a message informing
you
that the CALL was
not a system call.
System Debugger 2-31
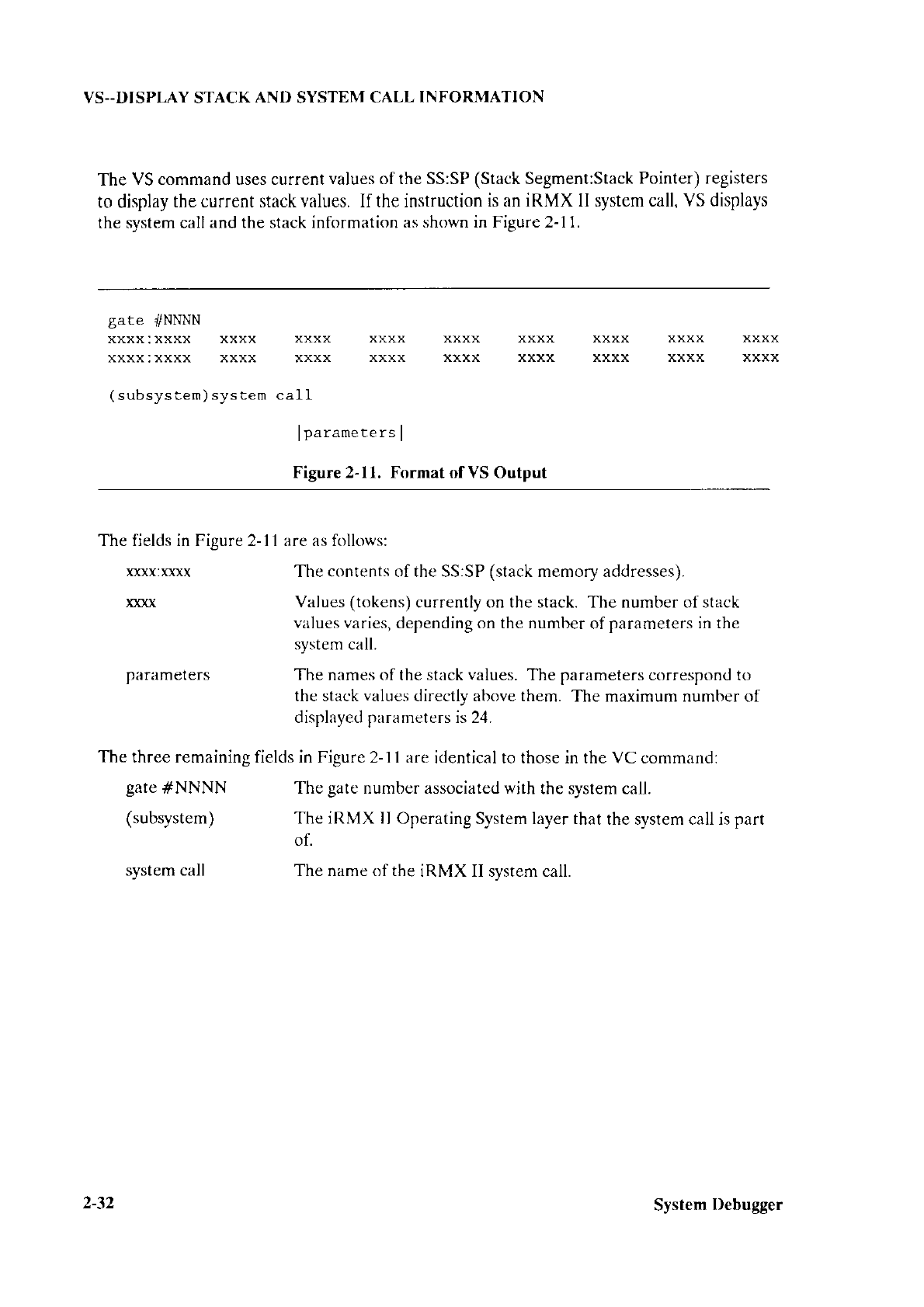
VS..DISPT.AY STACK AND SYSTE]IT
CALL INFORMATION
The
VS command uses current
values of the SS:SP
(Stack
Segment:Stack
Pointer) registers
to display
the current stack values. If the instruction
is an iRMX ll system call,
VS displays
the system call
and the stack information
as shown in Figure 2-11.
gare /INNNN
xxxx:xxxx xxxx xxxx xxxx xxxx xxxx xxxx xxxx xxxx
XXXX:XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
(
subsys tem)
system call
lparameters I
Figure 2-ll. Format of VS Output
The fields in Figure 2-l l are as folÌows:
xxxx:xxxx The contents of the SS:SP
(stack
memory addresses).
)oofi Values (tokens)
currently on the stack. The number of stack
values varies,
depending on the number
of
parameters in the
system call.
parameters The names of the stack
vaìues.
The parameters correspond to
the stack
values
directly above them.
The maximum number of
displayed para meters is 24.
The
three remaining fields in Figure 2-11 are
identical to those in the VC command:
gate
#NNNN The
gate
number associated with
the system call.
(subsystem) The iRMX ll Operating System layer that
the system call is
part
of.
system call The name of the
iRMX II system call.
) -7) System
I)€bugger
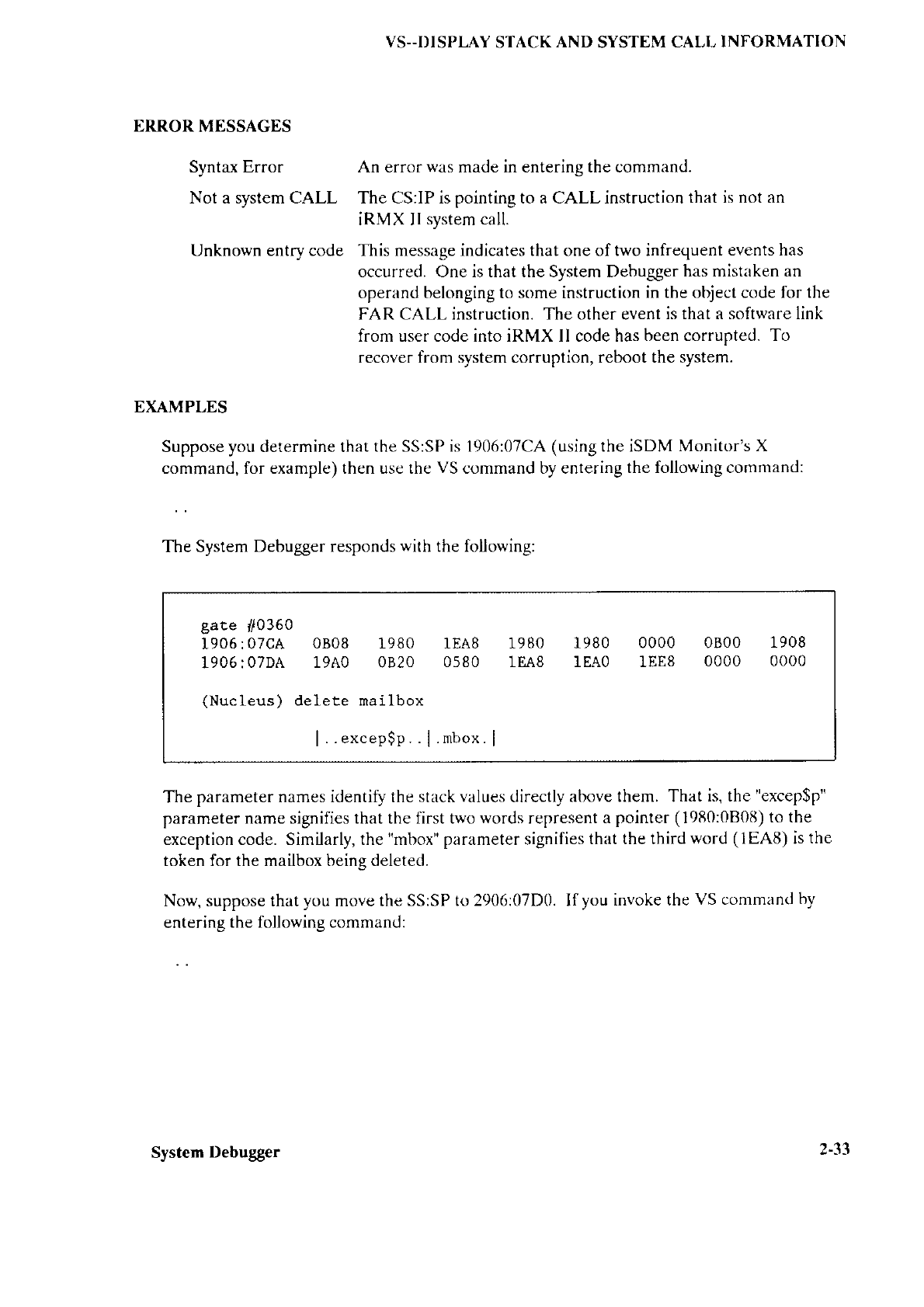
VS--I)ISPLAY
STACK
AND
SYSTEM
CALL INFORMATION
ERROR
MESSAGES
Syntax Error An error
was
made in entering the command.
Not a system CALL The CS:IP is pointing to a CALL instruction
that is not an
iRMX II
system call.
Unknown entry code This message indicates that one of two infrequent
events has
occurred. One is that the System Debugger
has mistaken an
operand belonging to some instruction
in the object code for the
FAR CALL instruction. The other event
is that a software link
from user code into iRMX ll code has
been corrupted. To
recover from system corruption, reboot the system.
EXAMPLES
Suppose you determine that
the SS:SP is
'1906:07CA
(using the iSDM Monitor's X
command, for example) then use the
VS
command by entering
the following command:
The System Debugger
responds
with
the following:
gate /10360
1906:07cA 0808 1980 1EA8 1980 1980 0000 0800 1908
1906:07DA 19A0 0820 0s80 1EA8 1EA0 1EE8 0000 0000
(Nucleus) delete mailbox
|
. .excep$p. .
|
.rnbox.
I
The
parameter names identifo the stack
values
directly
above them. That
is, the
"excep$p"
parameter name signifies that the first two
words
represent
a
pointer (1980:0808) to the
exception code. Similarly, the
"mbox"
parameter
signifies
that the third
word
(18A8)
is
the
token for the mailbox being deleted.
Now, suppose that
you
move the
SS:SP to 2906:07D0. If you invoke the
VS command
by
entering
the following command:
System
Debugger 2--l-l
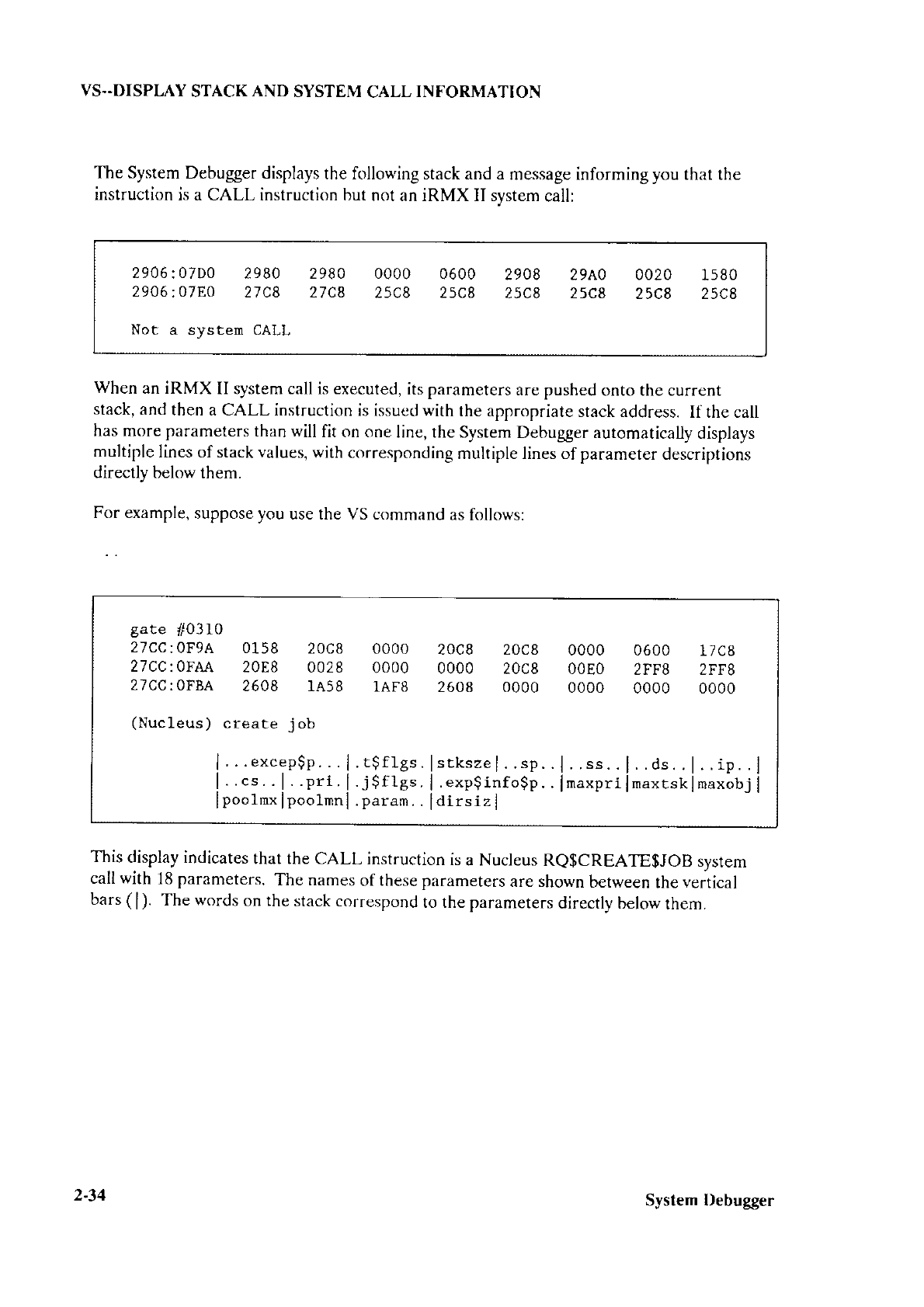
VS.-DISPLAY
STACK
AND
SYSTEM
CALL
INFORMATION
The System
Debugger displays
the following stack and a
message informing you that the
instruction
is a CALL instruction but
not an iRMX II system
call:
When
an iRMX II system call is executed,
its parameters
are pushed
onto the current
stack, and
then a CALL instruction
is issued with
the appropriate
stack address.
If the call
has more parameters
than will
fit on one
line, the System
Debugger automatically
displays
multiple
lines of stack values,
with corresponding
multiple lines of parameter
descriptions
directly below
them.
For example,
suppose
you
use the VS command
as
follows:
This
display indicates
thar the CALL instruction
is
a Nucleus
Re$CREATE$JOB
system
call with
18 parameters.
The names
of these parameters
are shown
between
the
vertical
bars (
| ). The words
on the
stack correspond
to the
Darameters
directlv below
them.
2906:07D0 2980
2906:0780 27 C8
Not a systen CALL
2980
27 C8 0000
25C8 0600
25C8 2908
25C8 29 A0
25C8 0020 1s80
25C8 25C8
gate i10310
zlcc:QF9A 015
8 2 0C8
27cc:OFAA 20E8 0028
27CC:0FBA 2608 tA58
(Nucleus) create job
0000
0000
1AF8
20c8 20c8
0000 20C8
2608 0000
0000 0600 l1c8
OOEO 2FF8 2FF8
0000 0000 0000
l...excepgp...
I
l..cs..l..pri.
I
lpoolm-x
lpoolrnn
I
.
t$ flgs .
.
param.
.
stkszel..sp.
. exp$
info$p .
olrs 1z
I
.
1
. .
""
. .
l
. . ds
. .
l
. .
ip
. .
I
.
I
maxpri
Inaxtsk I
maxobj
I
2-34 System I)ebugger
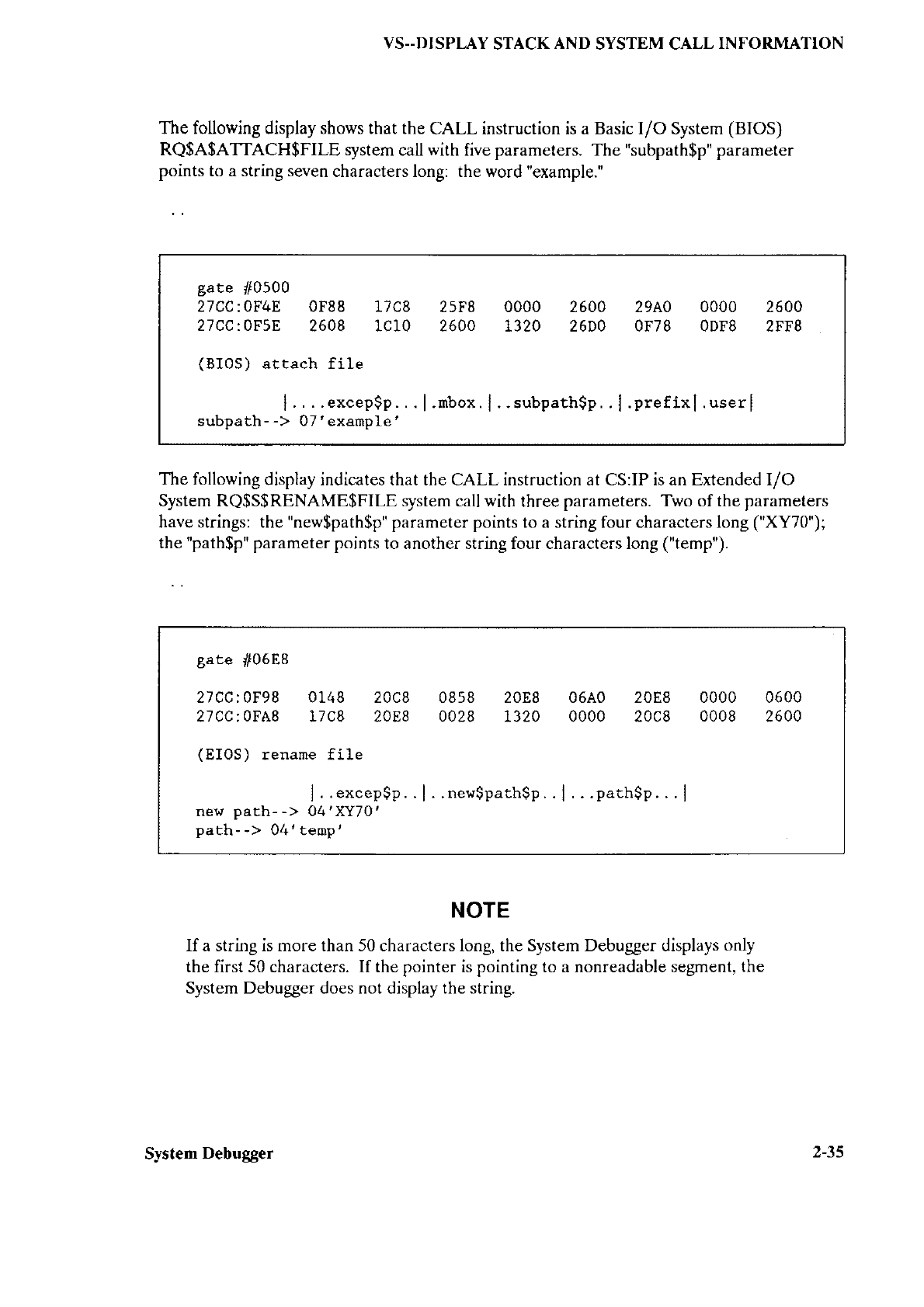
VS--DISPI-AY
STACK
AND SYSTEM CALL INFORMATION
The following display shows that the
CALL instruction is a Basic I/O System
(BIOS)
RQ$A$ATTACH$FILE system
call
with
five parameters. The
"subpath$p"
parameter
points to a string seven
characters long: the word "example."
gate /10500
27CC|0F4E 0F88 17c8 25F8 0000 2600 29AO 0000 2600
27CC:0F5E 2608 1C10 2600 1320 26D0 0F78 0DF8 2FF8
(BIos) aÈtach fi 1e
l....excep$p...
l.rnbox. l..subpath$p.. l.prefixl.userl
subpath-
-) 07' exarnple'
The following
display indicates that the CALL instruction at CS:IP is an Extended I/O
System RQ$S$RENAME$FILE system call with
three
parameters. Two of the parameters
have strings: the
"new$path$p"
parameter points to a string
four
characters long
("XY70");
the "path$p" parameter points
to another string four characters long
("temp").
gate /f
06E8
27AC:0F98 0148 20c8 0858 20E8 0640 2088 0000 0600
27CC:0F48 17c8 2088 0028 1320 0000 20c8 0008 2600
l . . excepgp . . l . .
newgpathgp
. . l . . .
path$p
. . .
I
new
path-
-> 04
'XY70 '
paEh
- -> 04' teurp
'
NOTE
If a string is more than 50 characters long, the System Debugger displays
only
the first 50 characters. If the pointer is pointing to a nonreadable segment,
the
System Debugger does not display the string.
System
Debugger 2-35
The
VT command displays information
about the iRMX II object associated
with the token
you
enter.
PARAMETER
token The
token of the object for
which
you want to display
information.
DESCRIPIION
The VT command determines the type of iRMX II object represented by the token and
displays information about that object. Both the information and the
format
in which the
System Debugger displays the information depend on the type of object.
The following sections are divided into display groups illustrating the
display
format for
these iRMX II objects:
. Jobs . Segments
. Tasks o Extensions
. Mailboxes . Composite objects (six types)
r Semaphores . Buffer Pools
. Regions
ERROR MESSAGES
Svntax Error }:ffixTil::Jtr:i:;il:1i"JJ*comman'lr
or an
*** INVALID TOKEN +** The value entered
for the token is not a valid token
(as
defined in "Checkins Validitv
of Tokens" earlier in this
chapter
).
2-36 System
Debugger
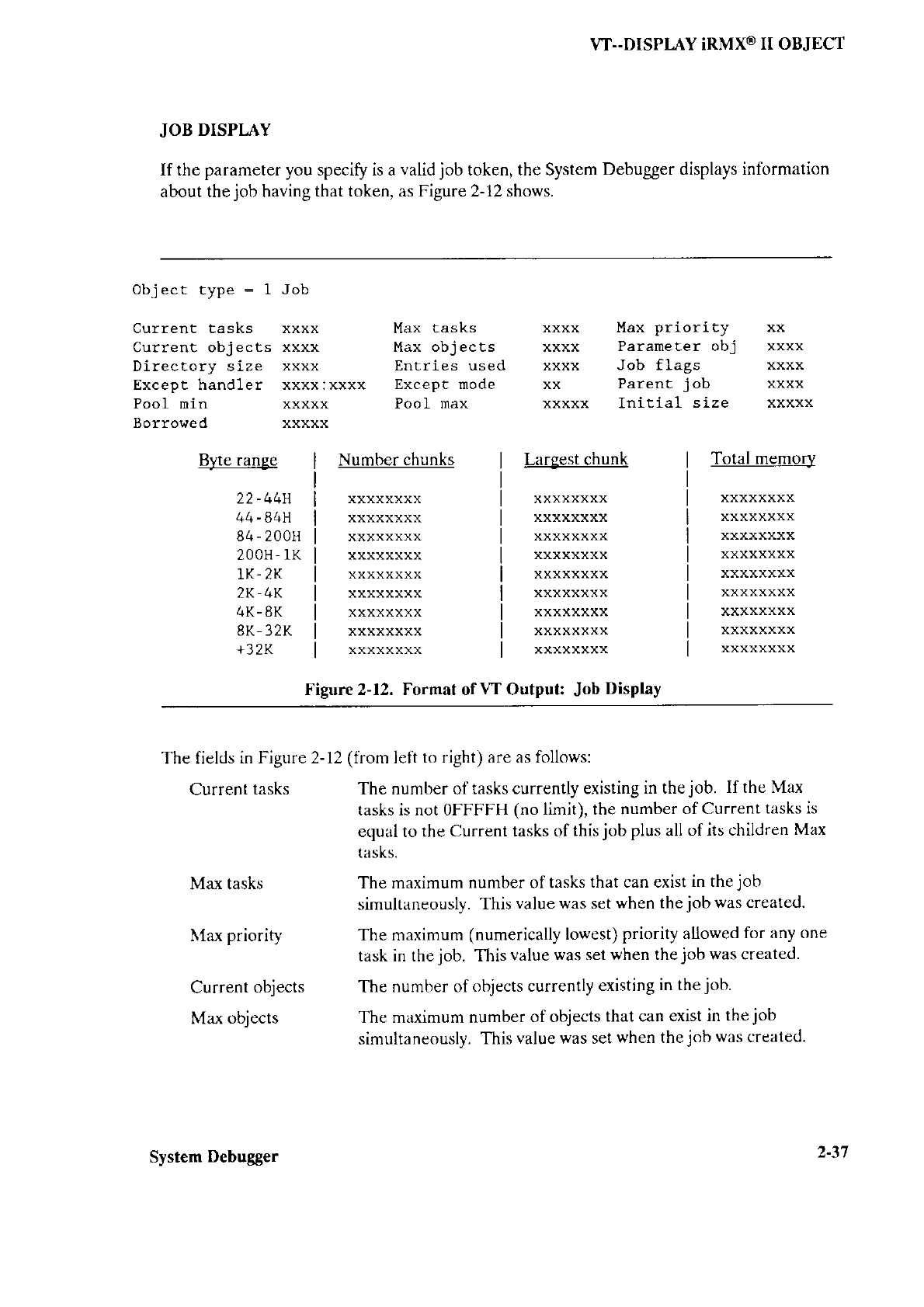
VT--DISPI,AY
iRMX@
II OBJECT
JOB
DISPI,AY
If the parameter you specify is a
valid
job
token, the System
Debugger displays information
about the
job
having
that token, as Figure 2-12 shows.
Objecttype:1Job
Current tasks
Current obj ects
Directory s ize
Except handler
Pool min
Borro!.red
XXXX
XXXX
XXXX
xxxx : xxxx
XXXXX
XXXXX
Max tasks
Max obj ects
Entries used
Except rnode
PooI max
xxxx Max priority xx
xxxx Paraneter obj xxxx
xxxx Job flags xxxx
xx Parent job xxxx
xxxxx Initial size xxxxx
Bvte
ranse
22
-
44H
44
-
81-!H
84
-
200H
200H-
1K
1K- 2K
2K-4K
4K- 8K
8K- 32K
+3
2K
Number chunks
xxxxxxxx
XXXXXXXX
xxxxxxxx
XXXXXXXX
XXXXXXXX
XXXXXXXX
xxxxxxxx
xxxxxxxx
xxxxxxxx
Largest chunk
XXXXXXXX
xxxxxxxx
xxxxxxxx
XXXXXXXX
XXXXXXXX
xxxxxxxx
xxxxxxxx
xxxxxxxx
xxxxxxxx
Total memory
XXXXXXXX
xxxxxxxx
xxxxxxxx
XXXXXXXX
xxxxxxxx
xxxxxxxx
XXXXXXXX
xxxxxxxx
xxxxxxxx
Figure 2-12. Format ofVT Output: Job
Display
The fields
in Figure 2-12 (from Ieli
to right) are as follows:
Current
tasks The number of
tasks currently existing
in the
job. If the Max
tasks is not 0FFFFH
(no limit), the number
of Current
tasks is
equal to the
Current tasks of
this
job
plus all
of its children
Max
tasks.
The maximum
number of tasks
that can exist
in the
job
simultaneously.
This
value was set
when the
job
was created.
The maximum
(numerically lowest)
priority allowed
for any one
task in the
job. This
value
was set when the
job
was created.
The
number of
objects currently
existing
in the
job.
The maximum number
of objects
that can
exist in the
job
simultaneously.
This
value was set
when thejob
was
created.
Max tasks
l\{a-r
priority
Current
objects
Max
objects
System
Debugger 2-37
W..DISPI,AY iRMX@ II OBJECT
Parameter
obj The token for
the object that the parentjob passed
to this
job.
This
value
was
set
when
the
job
was
created.
Directory
size The maximum
number of entries the
job can have in its object
directory. This value was
specified by
the first parameter when
the
job
was
created with the Nucleus
RQ$CREATE$JOB
system call
or the RQE$CREATE$JOB
system call.
Entries used The number of objects
currently catalogued
in the
job's object
directory.
Job flags The
job
flags
parameter
specified when
the
job
was created.
It
contains information
the Nucleus
needs to create and maintain
the
job.
Except handler The start
address of thejob's
exception handler. This address
was
set
when
the
job
was
created.
Except mode The value
that indicates when
control is
to be
passed
to the new
job's
exception
handler. This value was
set when
the
job
was
created.
Parent
job The token for the specified
job's
parent.
Pool min The minimum size (in 16-byte paragraphs)
of the
joh,s
memory
pool.
This
value
was
set
when
the
job
was
created.
Pool max The
maximum size (in 16-byte
paragraphs)
of the
job's
memory
pool.
This value was
set when
thejob was
created.
Initial
size The initial
size
(in 16-byte paragraphs)
ofthejob,s
memory
pool.
Borrowed The current
amount (in 16-byte paragraphs)
of
memory that the
job
has borrowed
from
its ancestor(s).
Free
Space All free memory
in a
job's
pool is accounted for, via several
double-linked
lists. Each
list contains
a range of
chunk sizes.
A
chunk is a piece
of contiguous
memory.
Column one
of the free
space table
shows the
size ranges
for the list. Column two shows
the
number ofchunks
on each
list. Column three disnlavs
the
largest
chunk on
each iist. Column four
shows the toial
amount
of
memory on each
list.
2-38 System
Debugger
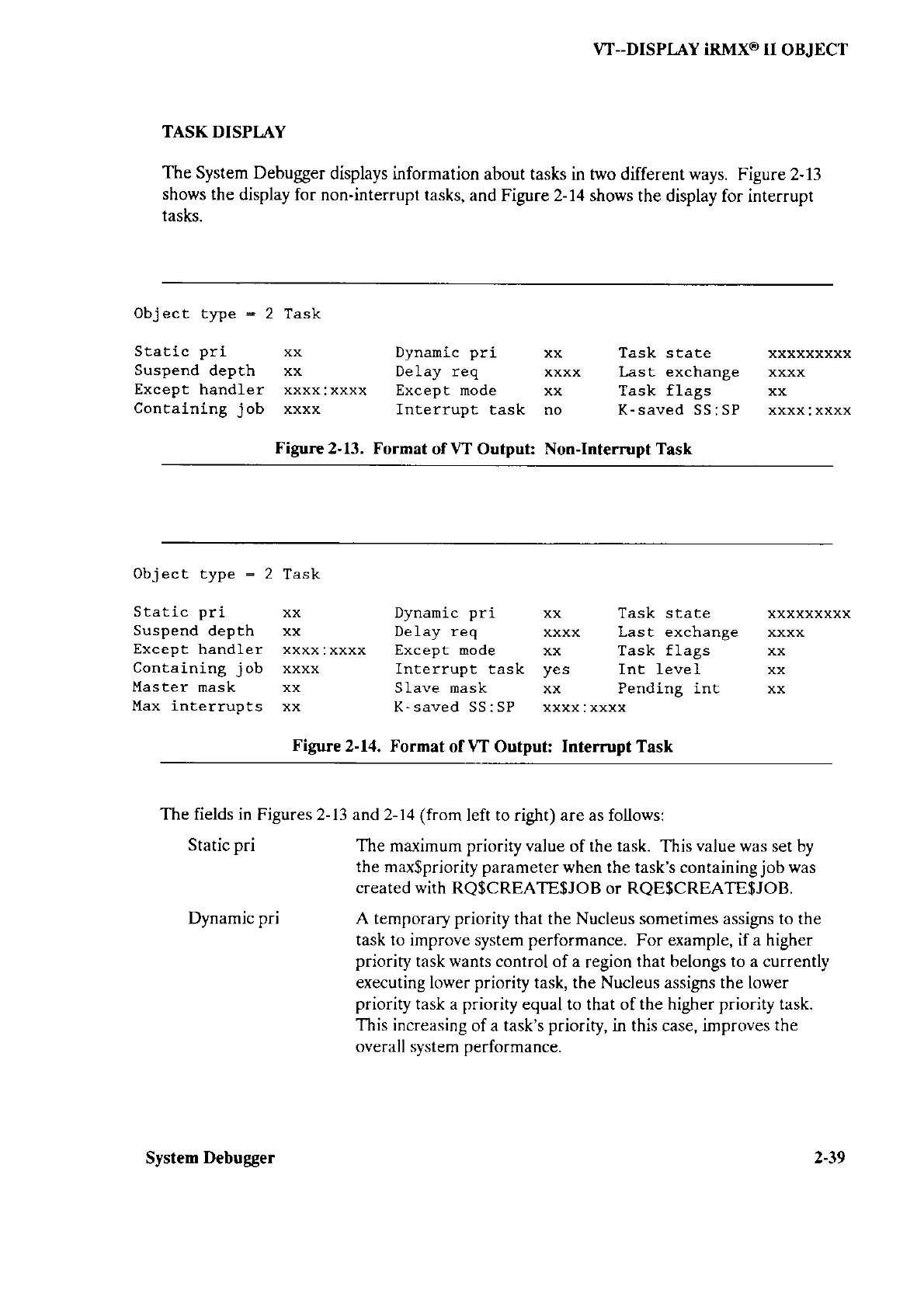
VT--DISPT.AY iRMX@ II OBJECT
TASK
DISPI"AY
The
System Debugger
displays information
about tasks
in two different
ways.
Figure 2- 13
shows
the display
for non-interrupt tasks,
and Figtre 2-14 shows
the display for interrupt
tasks.
Objecttype-2Task
CÈ-Èi^ --t
r La Lre P!r
Suspend depth xx
Except handler xxxx: xxxx
Concalning job xxxx
Dynamic pri xx
Delay req xxxx
Except mode xx
Interrupt task no
Last exchange
Task flags
K-saved SS:SP
xxxx
XX
xxxx :
xxxx
Figure
2-13. Format
ofVT Output: Non-Interrupt Task
Objecttype-2Task
Suspend depth
Except handler
Containing job
Master nask
Max interrupts
xx
xx
xxxx : xxxx
XXXX
XX
xx
XXXXXXXXX
xxxx
xx
XX
XX
n,,-^-i ^ --i 'r^^1. ^r^,^
ujl rrdu' r L Pr r
Delay req xxxx Last exchange
ExcepL mode xx Task flags
InLerrupt task yes Int level
Slave rnask xx Pending int
K-saved SS: SP xxxx: xxxx
Figure
2-14. Format
of VT Output: Intemrpt Task
The fields in Figures 2-13 and2-14 (from left to right) are as follows:
Static
pri
Dynamic pri
The maximum prioriry value
of the
task.
This
value was
set by
the max$priority parameter
when the task's containing
job
was
created
with
RQ$CREATE$JOB
or RQE$CREATE$JOB.
A temporary priority that the Nucleus sometimes assigns to the
task to improve system performance. For example, if a higher
priority
task wants control of a
region
that belongs to a currently
executing lower priority task, the Nucleus assigns the lower
priority task a priority
equal to that of
the higher priority task.
This increasing
of a task's
priority,
in this case, improves
the
overall svstem
oerformance.
System
Debugger 2-39
vT--DISPLAY iRMX@ II OBJECT
Task state
Suspend depth
Delay req
Last exchange
Except handler
The state of the task. The twelve
oossible
states. as
thev are
displayed,
are
Descriotion
task is ready for
execution
task is asleep
task is
suspended
task
is
both asleep and
suspended
task is being deleted
task is
waiting at an
exchange
task is asleep
waiting
at an exchange
task
is
asleep and
suspended
waiting
at
an exchange
task
is
queued
at
a port
task is asleep
waiting
at
a
port
task is queued at a port
on transaction
queue
task is asleep and
queued
at
port
on
transaction queue
If this
field contains an invalid value,
the System Debugger
displays
the
value
followed
by a space and two question marks.
The number
of RQ$SUSPEND$TASK
system calls that have
been applied to this
task
without
corresponding
RQ$RESUME$TASK
system calls.
The number
of sleep units the
task requesîed when it last
specified a delay
at a mailbox
or semaphore, or
when
it last
called RQ$SLEEP.
lf the task
has not done
any of these, this
field contains
zeros.
The token for the
mailbox, region,
or semaphore at
which
the
task most recentìy
began to wait.
The start address
of the
job's
default exception
handler. This
value was
set
either
when
the task was
created
with
RQ$CREATE$TASK
RQ$CREATE$J
OB,
RQE$CREATE$JOB,
or later
with
RQ$SET$EXCEPTION$FIANDLE
R.
State
rea<Jy
asleep
susp
asrp/susp
deleted
on exch
Q
aslp/exch
sl/xc/susp
on port Q
aslp/port
on trans
Q
aslp/trans
2-40 Syslem
Debugger
VT..DISPI-AY
iRMX@
II OBJECT
Except
mode The value that indicates
the exceptional
conditions
under
which
control is to be
passed to the
new task's
exception
handler. This
value was set either
when the task
was created
with
RQ$CREATE$TASK RQ$CREATE$JOB,
RQE$CREATE$JOB,
or later
with
RQ$SET$EXCEPTION$HANDLER
Task flags The task flags
parameter used
when the task
was created
with
RQ$CREATE$TASK.
It contains
information
the Nucleus
needs
to create and maintain
the
job's
initial
task
Containing
job The
token of the
job
that this task
belongs
to.
Interrupt
task Indicates
whether this task is
an interrupt
task "No" signifies
that the task is not
an interrupt
task. In this case,
only the K-
saved
field folÌows in
the display.
(See Figure
2-13.)
"Yes"
signifies
that the task is
an interrupt
task ln this case,
additional
fields
appear in the
display.
(See
Figure
2-14.)
K-saved SS:SP The contents
of the SS:SP registers
when the task
last left
the
ready
state.
Int level The
level that the
interrupt task
services.
This level
was set
when this task called
RQ$SET$INTERRUPT.
Master
mask The
value associated
with the interrupt
mask
for the
master
interrupt controller.
This
value represents
the
master interrupt
levels disabled
by the
interrupt level
that the
task services
For example, if the task services
master interrupt
level 68H,
then master levels
6 and 7
are disabled,
so the master
mask
field
is 110000008
(=0C0H) For
more information
about
interrupt
levels. see
the Exterukd
|RMX II Nucleus
User's Guide.
Slave mask The
value
associated
with
the
interrupt
mask for
a slave
interrupt
controller.
This
value represents
the slave
interrupt
levels disabled
by the level
that the
task services.
For example,
if the task
services
slave interrupt
level
62H, then
slave levels
2 through
7 are disabled,
so
the slave
level field
is
I I 1 1 I 100B
(
=
OFCH).
For more
information
about interrupt
levels.
see the Extended
|RMX II Nucleus
User's
Guide
Pencling
int The number
of RQ$SIGNAL$INTERRUPT
calls
pending
for
the Int
level.
Ma-\ interrupts The marimum
number
of RQ$SICNAIJINTERRUPT
calls
that
can be pending
for the
Int level.
System
Debugger 2-41
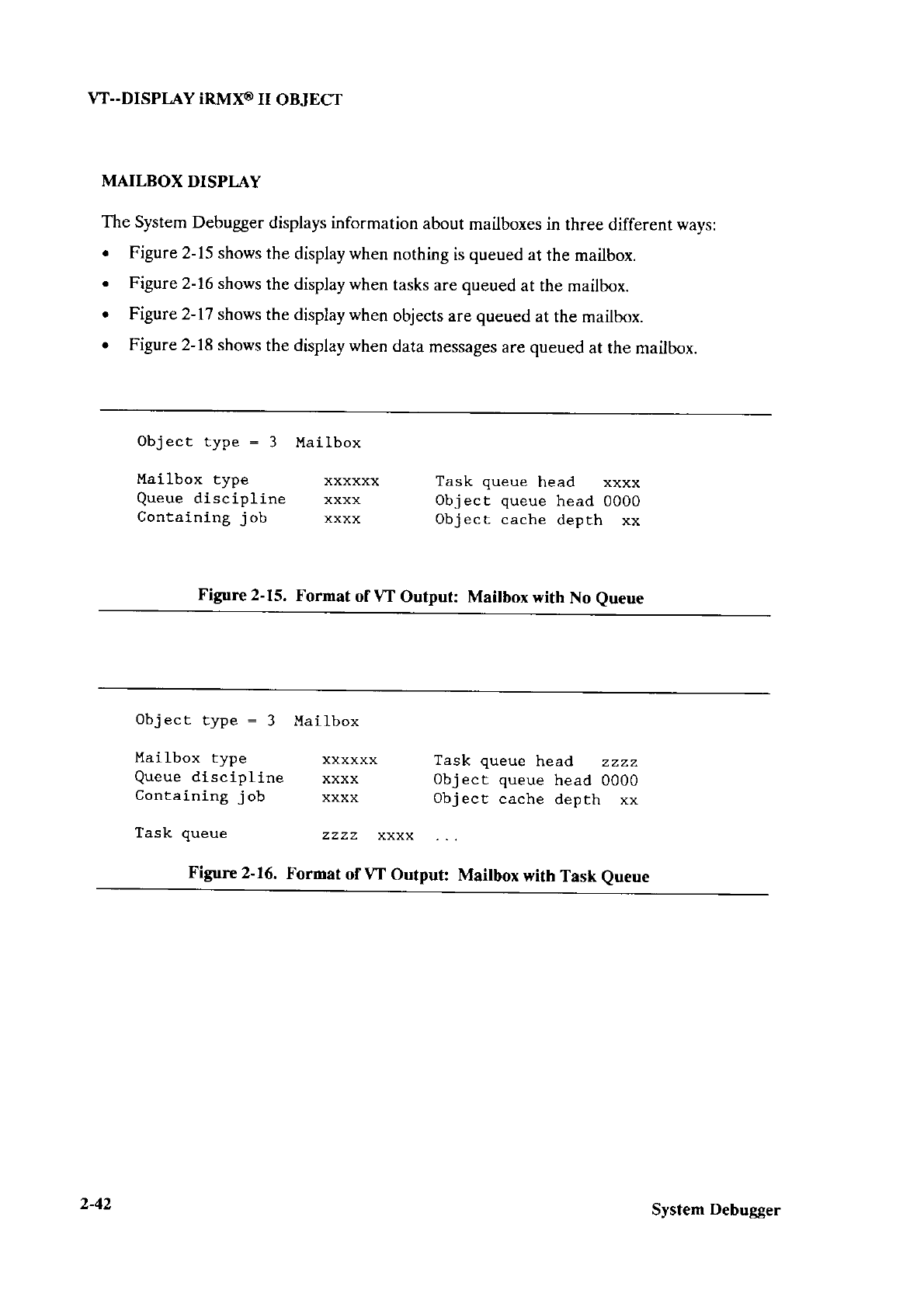
W..DISPI.AY iRMXO
II OBJECT
MAILBOX DISPI,AY
The System
Debugger
displays information
about
mailboxes in three different ways:
. Figure
2-15 shows the
display when
nothing
is
queued
at
the mailbox.
. Figure
2-16 shows
the display when
tasks
are queued
at the
mailbox.
. Figpre 2-17
shows the display when
objects are queued
at the mailbox.
. Figure 2-18 shows
the display when
data
messages
are queued
at the
mailbox.
Obj ect type - 3
Mailbox type
Queue di sc
ip I ine
Containing job
Mailbox
xxxxxx
XXXX
xxxx
Task queue head xxxx
Obj ect queue
head 0000
Obj ec t cache depth xx
Figure
2-15. Format
of VT Output: Mailbox
with No eueue
Object type:3 Mailbox
Mailbox type
Queue di sc ip l ine
Containing job
Task queue
xxxxxx Task queue head zzzz
xxxx Object queue head 0000
xxxx Object cache depth xx
zzzz xxxx
Figure
2-16. Format
of VT Output: Mailbox
with Task
eueue
2-42 System
Debugger
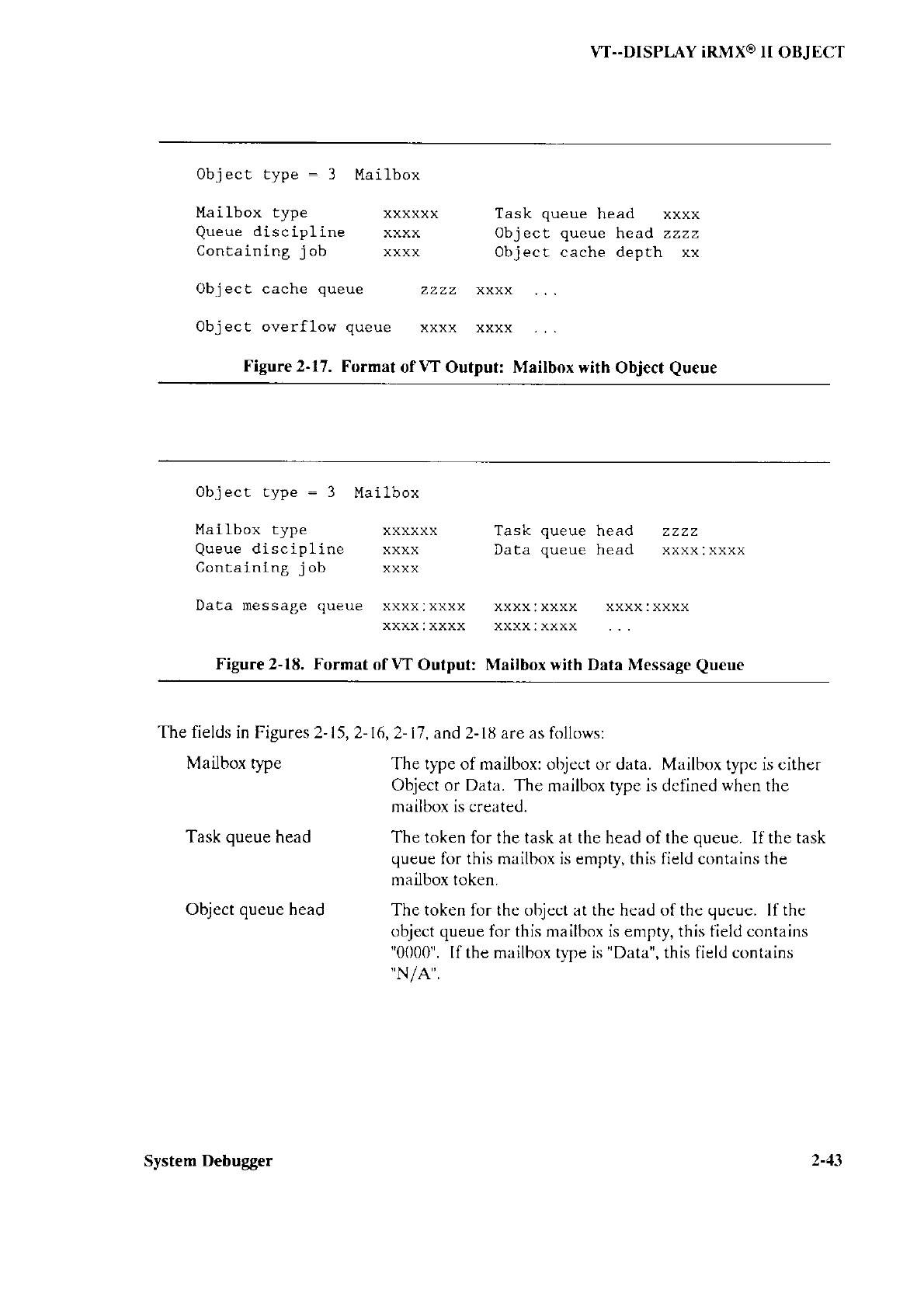
yT--DISPT-AY
iRMX@ II OBJEC'T
Object type:3 Mailbox
Mailbox type xxxxxx Task queue
head xxxx
Queue
discipline xxxx Object queue head zzzz
Containing job xxxx Object cache depth xx
Object cache
queue zzzz xxxx
Object overflo!, queue xxxx xxxx
Figure 2-17.
Format
of
VT
Output: Mailbox with
Object
Queue
Object type:3 Mailbox
Mailbox type xxxxxx Task queue head zzzz
Queue
discipline xxxx Data queue
head xxxx:xxxx
Data message queue xxxx:xxxx xxxx:xxxx xxxx:xxxx
XXXX:XXXX XXXX:XXXX
Figure 2-18. Format
of VT
Output: Mailbox with Data Message
Queue
The fields
in Figures 2-15,2-16,2-17,
and 2-18 are as follows:
Maiìbox type The type of mailbox: object or data.
Mailbox type is either
Object or Data.
The mailbox type is dclìned
when
the
mailbox is created.
Task
queue
head The token
for the task at the head ol the
queue.
If the task
queue
for this mailbox is empty, this field
contains
the
mailbox token.
Object queue head The token for the object at the hcad of the clueue. If the
object queue for this mailbox is empty, this field contains
"0000". If the
mailbox
type
is
"Data", this
field
contains
'N/A'.
System
Debugger 2-43
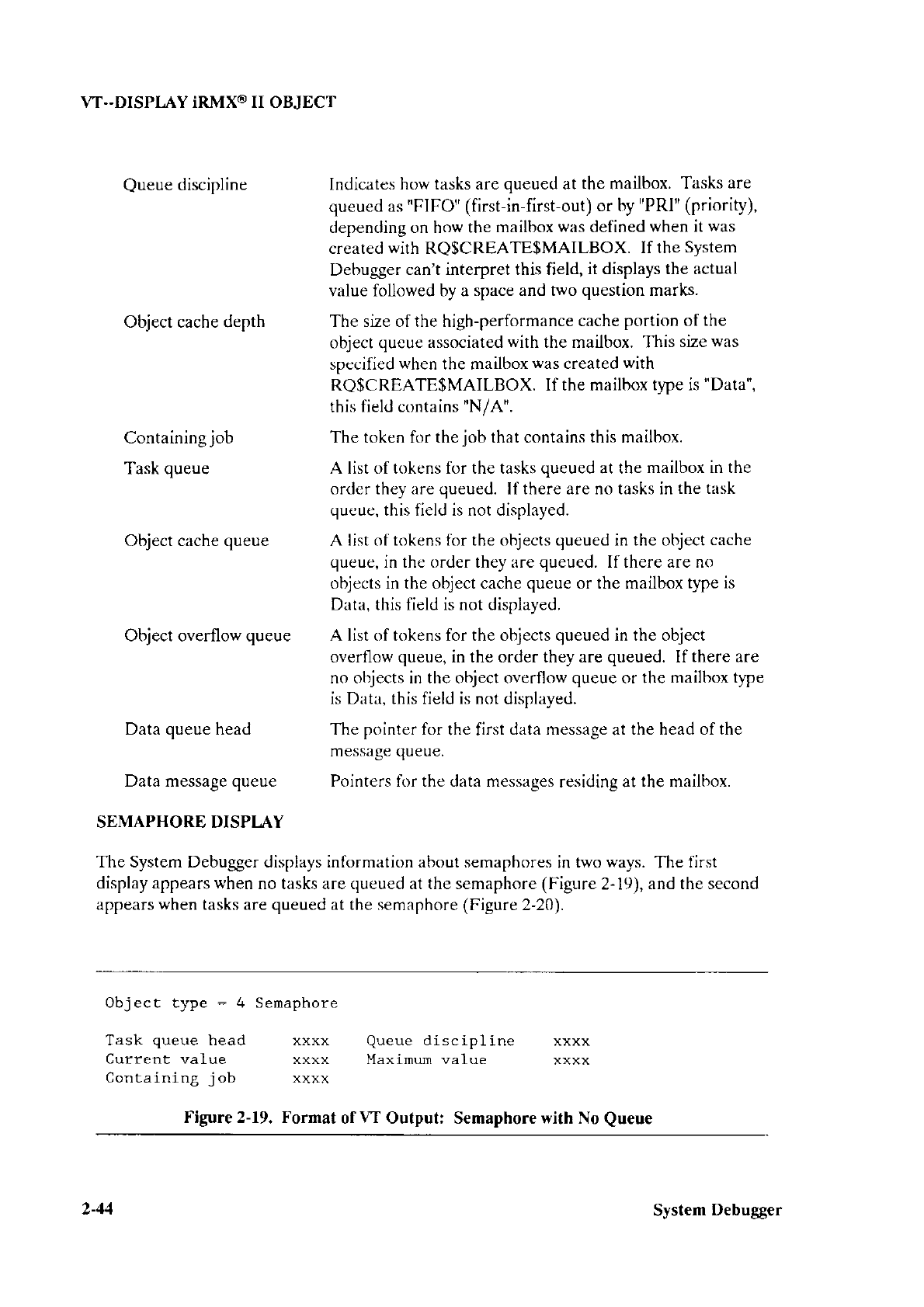
VT--DISPI-AY iRMX@ II OBJECT
Queue
discipline Indicates
how tasks are
queued
at
the
mailbox.
Tasks
are
queued as
"FIFO"
(first-in-first-out) or by
'PRI"
(priority),
depending on how the
mailbox
was
defined
when it was
created
with
RQ$CREATE$MAILBOX.
If the
System
Debugger
can't interpret this field,
it displays the actual
value followed by a
space and two
question
marks.
Object cache depth The sìze of the high-performance
cache
portion of the
object
queue associated
with
the mailbox. This
size
was
specified
when
the mailbox
was
created
with
RQ$CREATE$MAILBOX. If the mailbox
tlpe is
"Data",
this
field contains
"N/A".
Containingjob The token for the
job
that contains this mailbox.
Task
queue A list of tokens for the tasks
queued
at the
mailbox in the
orcler
they are queued. If there are no tasks in
the task
queue,
this field is not displayed.
Object cache
queue A list of tokens lbr the objects queued in the object
cache
queue,
in the order they are
queued.
If there are no
objects in the object cache
queue
or the mailbox
type is
Data, this field is not displayed.
Object overflow
queue A list of tokens for the objects queued in the object
overllow
queue,
in the order they are
queued.
If there are
no objects in the object overflow
queue
or the
mailbox type
is Data, this field is not displayed.
Data queue head The pointer for
the first
diìta message
at
the head of the
message
queue.
Data message queue Pointers for the tlata messages
residing at
the
mailbox.
SEMAPHORE DISPI-AY
The System Debugger displays inlbrmation about semaphores
in two
ways.
The first
display appears when
no tasks are
queued
at the semaphore (Figure
2-19),
and the second
appears
when
tasks are queued at the semaphore (Figure
2-20).
object type : 4 Senaphore
Task queue head xxxx Queue discipline xxxx
Current value xxxx Maxirnum value xxxx
Cnnrr i ni no iah
Figure 2-19. Format
of
VT Output: Semaphore with No Queue
System
Debugger
2-44
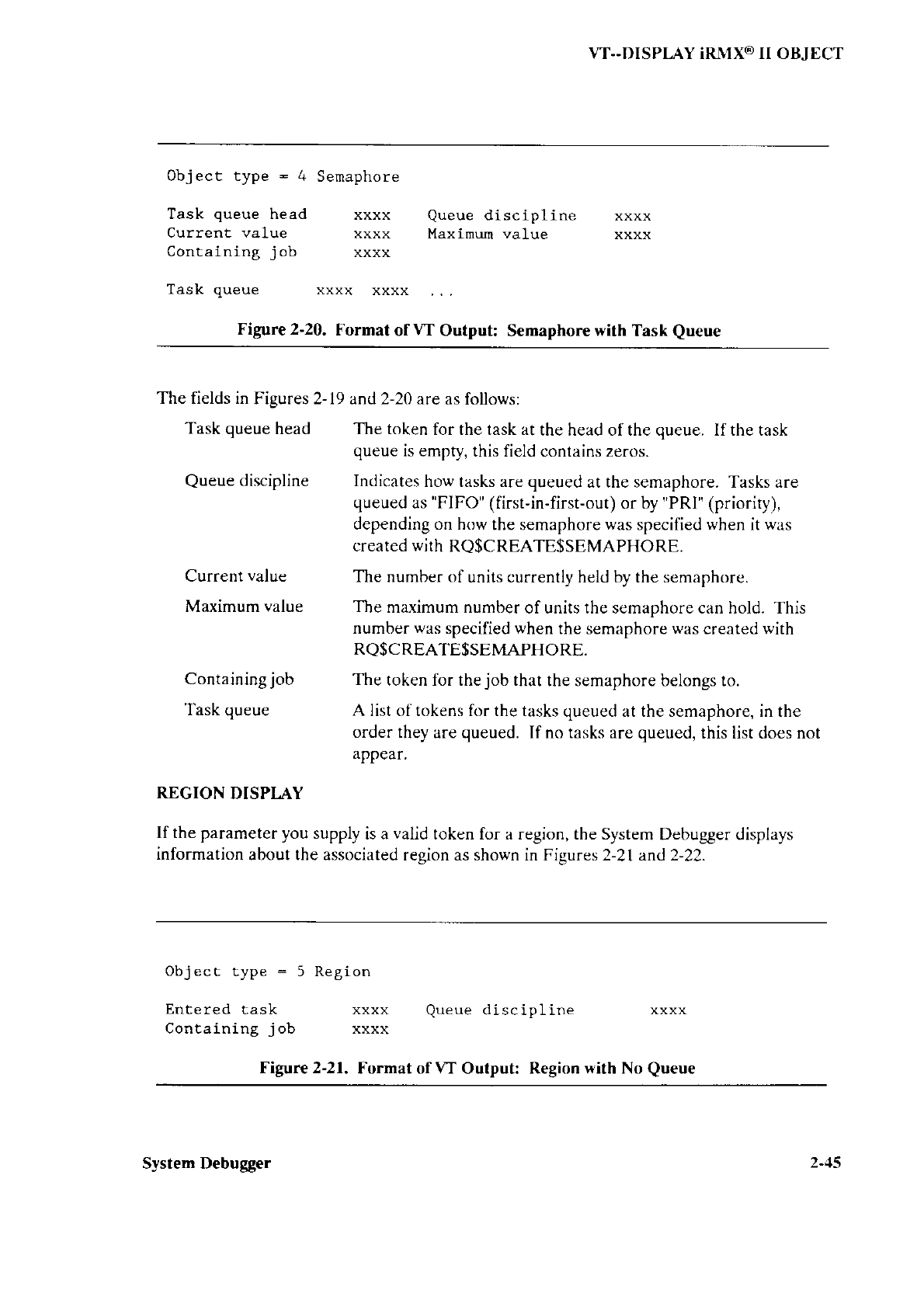
VT..DISPLAY iR,NIX@ II OBJECT
object type - 4 Semaphore
Task queue head xxxx Queue discipline xxxx
Current value xxxx Maxinum value xxxx
wv Ldr,'r'r6 J
uu
'r
^ ^ì. ^..^..^
raSK queue xxxx xxxx
Figure 2-20. Format
of VT Output: Semaphore with Task
Queue
The fields in
Figures 2-19 and 2-20 are
as folìows:
Task queue
head The token
for the task at
the head of the
queue.
If the task
queue
is empty,
this field contains zeros.
Queue
discipline Indicates
how tasks are queued
at the semaphore. Tasks are
queued
as
"FIFO"
(first-in-first-out)
or by "PRI" (priority),
depending on how
the semaphore
was
specified
when
it was
created with
RQ$CREATE$SEMAPHORE.
Current
value The number
of units currently held by the semaphore.
Maximum
value The
m:ximum number
of units the semaphore can hold. This
number was
specified
when
the semaphore
was
created with
RQ$CREATE$SEMAPHORE.
Containingjob The
token for thejob that
the semaphore belongs to.
Task queue A list of tokens for the tasks
<lueued at the semaphore, in the
order they
are
queued.
If no tasks are queued,
this list does not
appear.
REGION DISPI-AY
If the parameter you
supply
is a
valid
token for a region, the System
Debugger displays
information
about the associated
region as shown in Fieures 2-21 antl2-22.
Objecctype:5Region
Entered task xxxx Queue discipline xxxx
Containing job xxxx
Figure 2-21,
Forrnat of VT
Output: Region with No
Queue
2-15
System Debugger
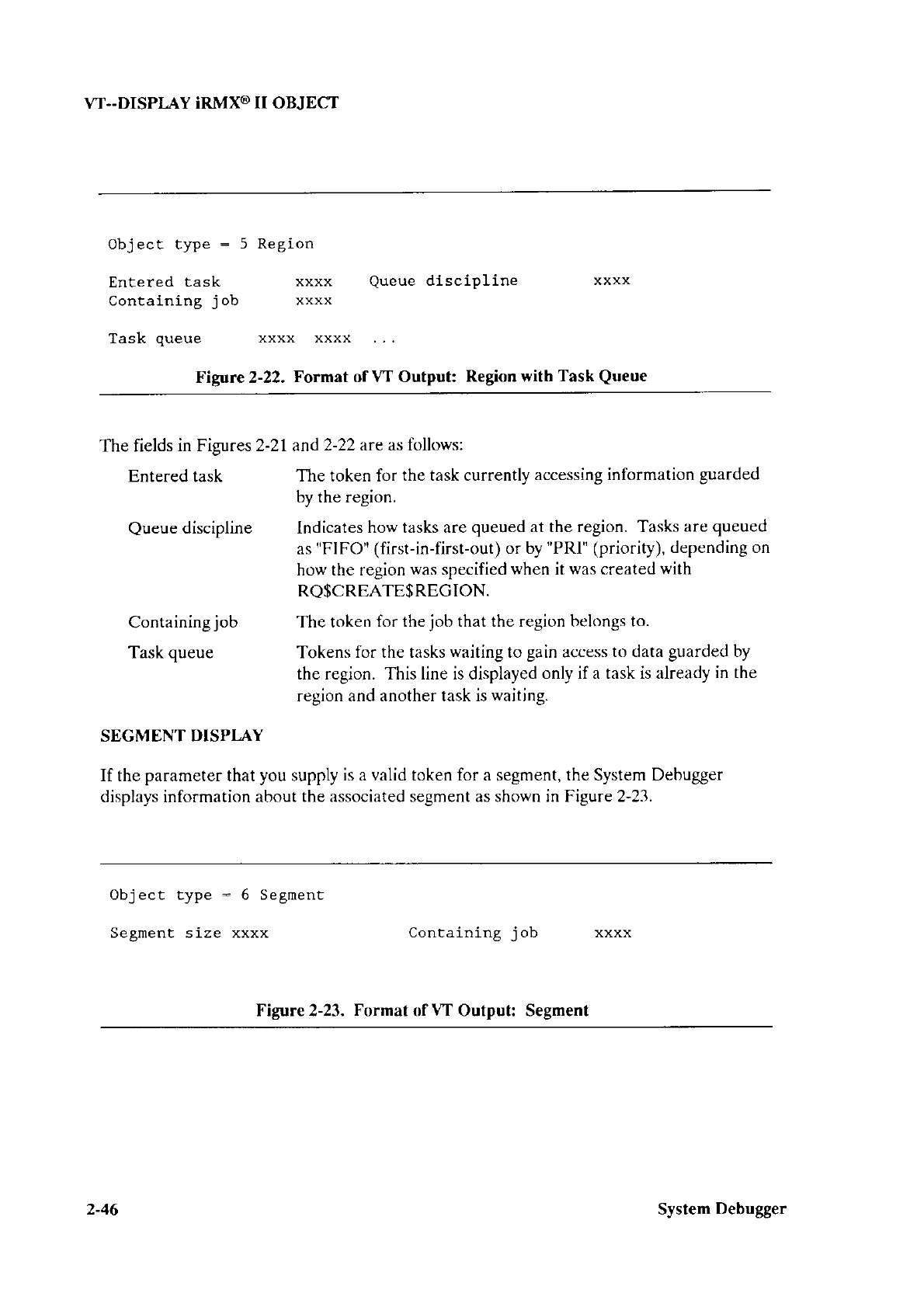
W..DISPI.AY iRMX@
II OBJECT
Objecctype:5Region
Encered task xxxx Queue
discipline xxxx
Containing job xxxx
Task queue xxxx xxxx
Figlre 2-22. Format ofVT Output: Region with Task Queue
The fields
in Figures 2-21 and
2-22 are as follows:
Entered task The token for
the task currently
accessing information
guarded
by the region.
Queue
discipline lndicates
how tasks are queued
at the region. Tasks
are queued
as
"FIFO"
(first-in-first-out)
or by "PRI"
(priority), depending on
how the region
was specified
when
it
was
created
with
RQ$CREATE$REGION.
Containing
job The token
for the
job
that the region belongs to.
Task queue Tokens
for the tasks
waiting
to
gain
access
to data guarded by
the region. This line is displayed
only if a task is already
in the
region
and another task is
waiting.
SEGMENT DISPI-AY
If the
parameter
that
you
supply
is a valid token for a segment, the System Debugger
displays information about
the associated segment as shown in Figure 2-23.
Objecttype-6Segrnent
Segment size xxxx Containing job xxxx
Figure 2-2.1.
Formal of
VT
Outpul: Segment
2-46 System
Debugger
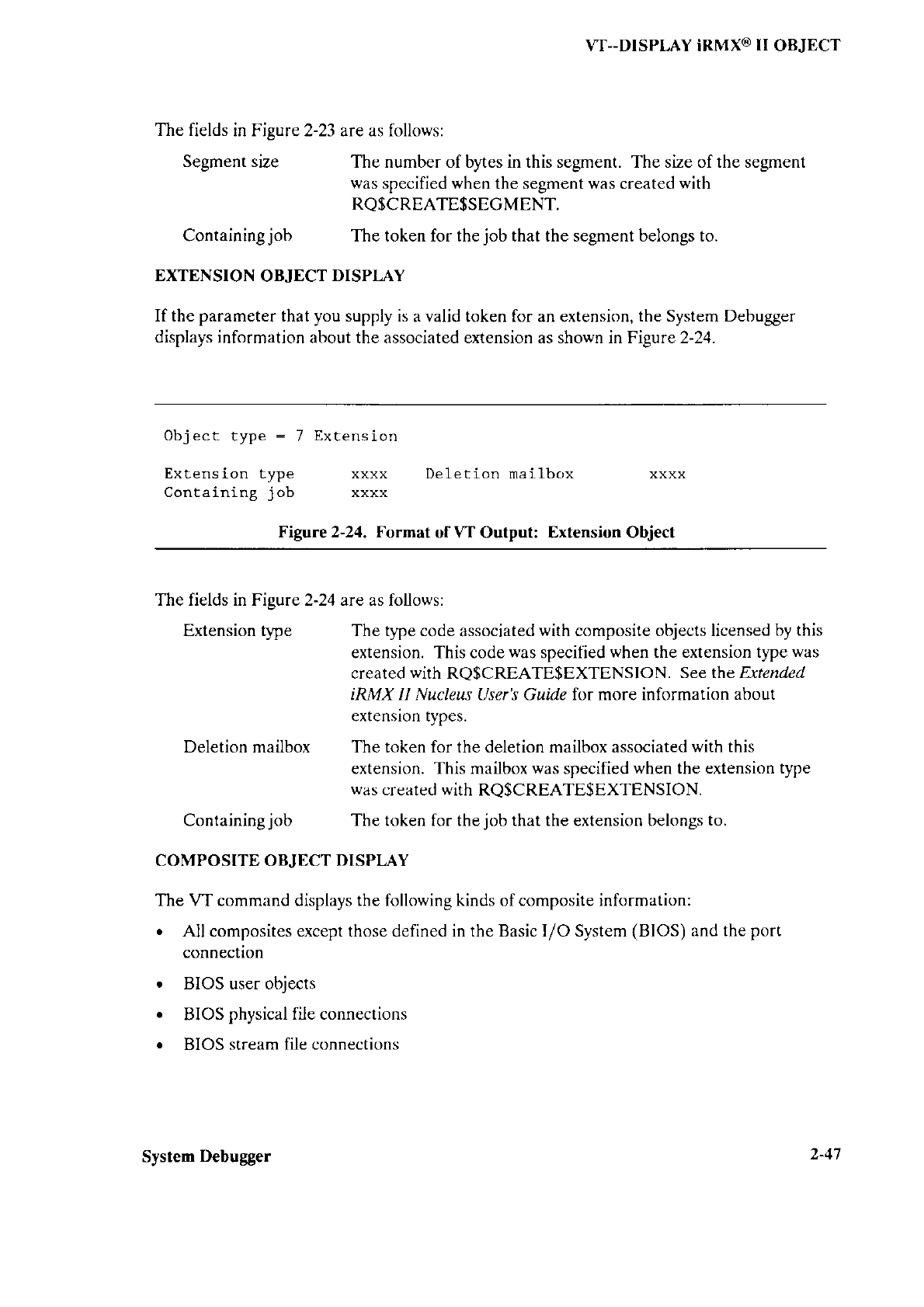
VT--DISPI.AY iRMX@
II OBJECT
The fields
in Figure 2-23 are as follows:
Segment size The number of bytes in this segment. The size of the segment
was
specified when the segment was created with
RQ$CREATE$SECMENT.
Containing
job The token for thejob that the segment belongs to.
EXTENSION
OBJECT
DISPI-AY
If the parameter that you supply is
a
valid
token for an extension,
the System Debugger
displays information
about the associated extension as shown in Figure 2-24.
object type : 7 Extension
Extension type xxxx Deletion mailbox xxxx
Containing job xxxx
Figure 2-24. Format of VT Output: Extension Object
The fields in Figure 2-24 are as follows:
Extension
R?e The type code
associated
with composite objects licensed
by this
extension. This code
was
specified
when the extension t]?e was
created
with RQ$CREATE$EXTENSION. See the Ertended
|RMX II Nucleus User's Guide for more information
about
extenslon types.
Deletion mailbox The token for the deletion mailbox associated
with this
extension. This maiìbox
was
specified
when
the extension
type
was
created with
RQ$CREATE$EXTENSION.
Containingjob The token for the
job
that the extension belongs
to.
COMPOSITE OBJECT DISPI.AY
The VT command displays the following kinds of composite information:
. All composites except those defined in the Basic I/O System
(BIOS) and the
port
connection
. BIOS user objects
. BIOS
physical file connections
. BIOS
stream file connections
System
Debugger 2-47
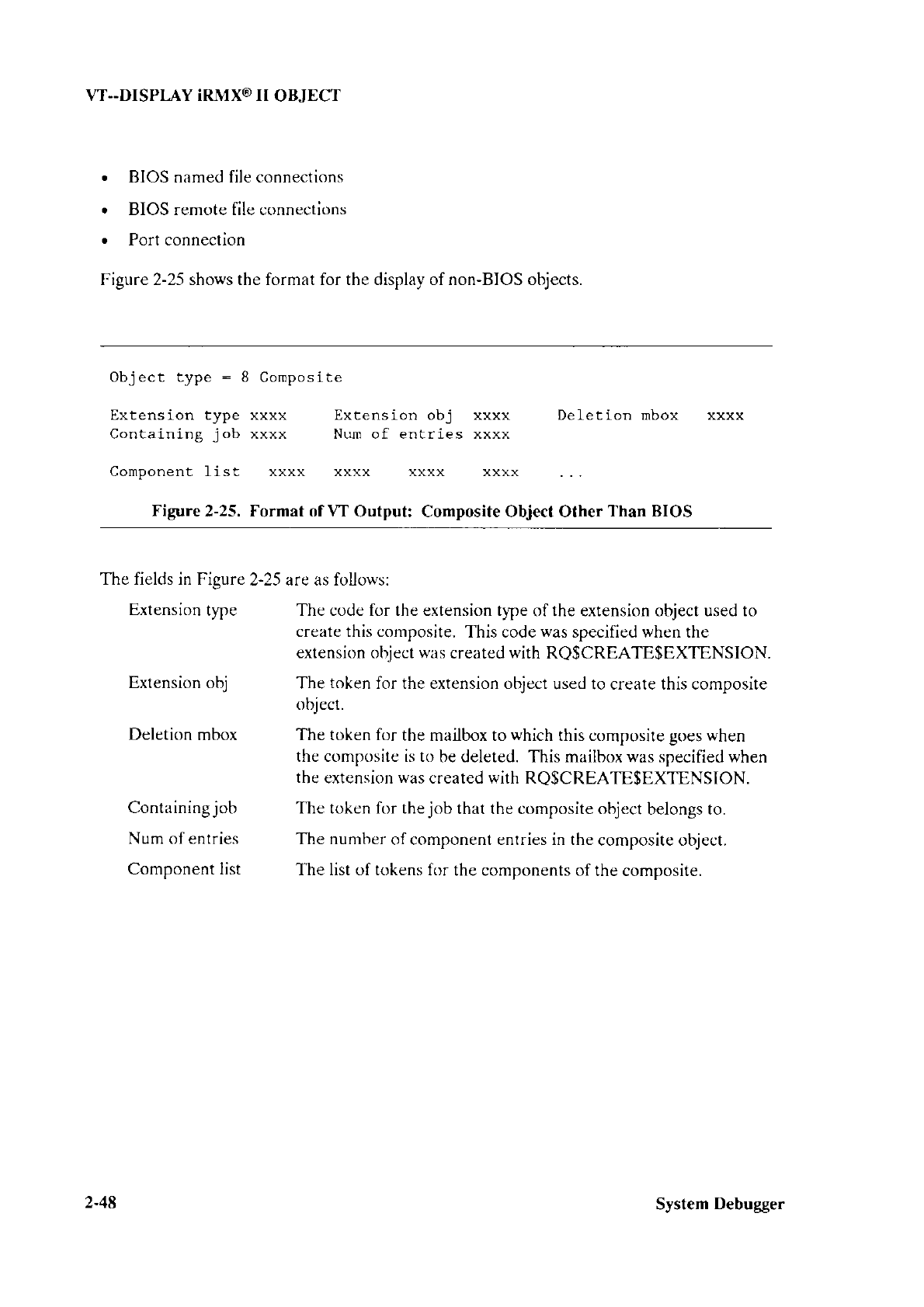
W--DISPI-AY iRMX@ II OBJECT
. BIOS named file connections
. BIOS remote file connections
. Port connection
Figure 2-25 shows the format for the display of non-BIOS objects.
Obj ect type : 8 Composite
Extension type xxxx Extension obj xxxx Deletion rnbox xxxx
N Lun o.f enI ries xxxxwu'rudf"!uÉ luu ^À À^
Comnonpnt I i st vwYw xxxx xxxx xxxx
Figure
2-25. Format of VT
Output: Composite Object Other
Than BIOS
The fields in Figure
2-25 are as follows:
Extension
type The code for the extension type
of the extension object used to
create this composite.
This code
was
specified when the
extension olrject was
created
with RQ$CREATE$EXTENSION.
Extension obj The token
for the extension otrject
used to create this composite
object.
Deletion
mbox The token for the mailbox to which
this composite goes when
the composite is to be deleted. This mailbox was specified when
the
extension
was
created with RQ$CREATE$EXTENSION.
Containingjob The token for the
job that the composìte object
belongs to.
Num of entries The number
of component entries in the
composite object.
Component list The list of tokens
for the components of the composite.
2-48 System
Debugger
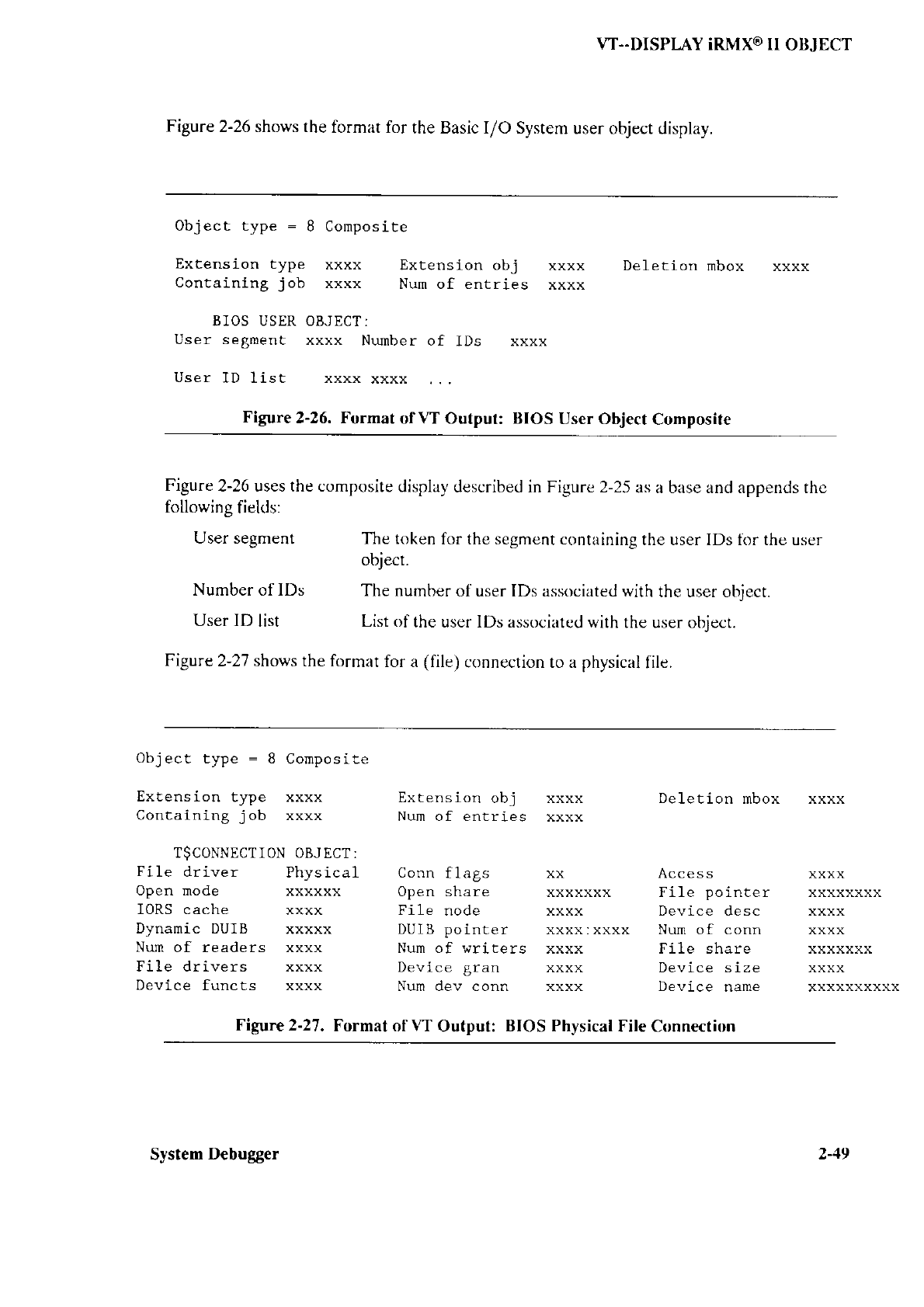
VT.-DISPL{Y
iRMX@ II OBJECT
Figure
2-26 shows the
format for
the Basic I/O System
user object display.
Object type : 8 Composite
Excension type xxxx Extension obj xxxx Deletion mbox xxxx
Containing job xxxx Num of entries xxxx
BIOS USER OBJECT:
User segnent xxxx Nr.unbe r of IDs xxxx
User ID list xxxx xxxx
Figure
2-26. Format
of VT Output: BIOS
User Object
Cornposite
Figure
2-26 uses the composite
display
described in Figure 2-25
as a base and appends ths
following
fields:
User segment The token
for the segment containing
the user IDs tbr the user
object.
Number of lDs The number
of user IDs associated with
the user ohject.
User lD list List of
the user lDs associated with
the user object.
Figrtre
2-27 shows the format
for a
(file)
connection to a physical
file.
Obj
ect type : 8 Cornposite
Extension type xxxx Extension obj xxxx Deletion mbox xxxx
Containing job xxxx Num of enrrips xxxx
T$CONNECTION OBJ
ECT :
FiIe driver Physical Conn flags xx Access xxxx
Open mode xxxxxx Open shere xxxxxxx Fíle pointer xxxxxxxx
IORS cache xxxx File node xxxx Device desc xxxx
Dynamic DUIB xxxxx DUIB pointer xxxx:xxxx Num of conn xxxx
Num of readers xxxx Num of writers xxxx Fíle share xxxxxxx
File drivers xxxx Devíce gran xxxx Device size xxxx
Device functs xxxx Num dev conn xxxx Device name xxxxxxxxxx
Figure 2-27.
Format ofVT Output: BIOS Physical
File Connection
System
Debugger 2-19
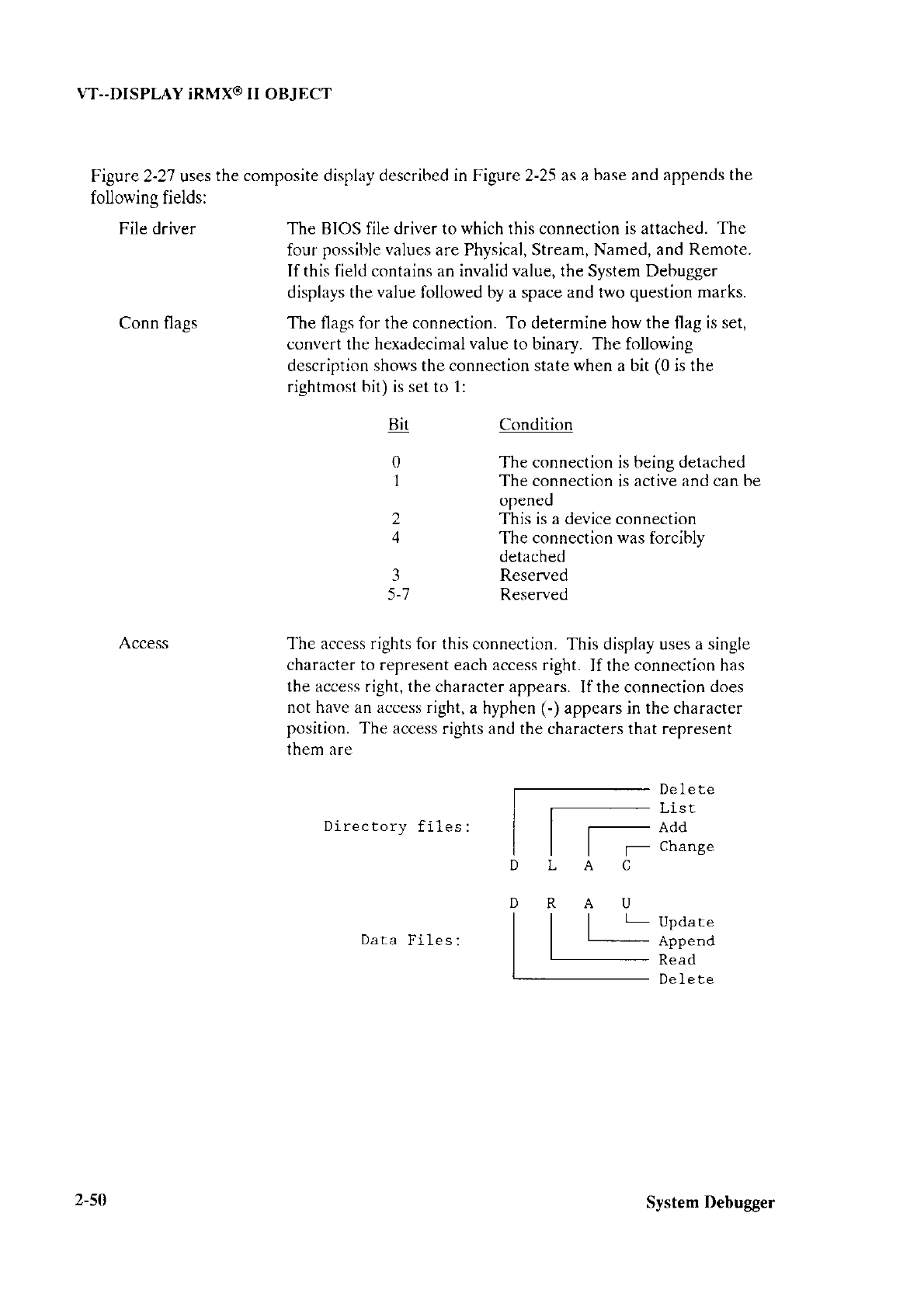
M-.DISPLAY iRMX@ II OBJECT
Figure 2-27 uses
the composite display described in Figure 2-25 as a
base and appends the
followine fields:
File driver The BIOS file driver to which this connection is attached.
The
four
possible values
are Physical, Stream, Named,
and Remote.
If this field contains an invalid
value,
the System Debugger
displays the
value
followed by a space and fwo
question
marks.
The flags for the connection. To determine how
the
flag
is set,
convert the hexadecimal
value
to binary. The following
description shows the connection state
when
a bit
(0
is the
rightmost hit) is set to 1:
Conn flags
Bit Condition
0 The connection is being
detached
I The connection
is
active and can be
opened
: This is a dcvice conneetion
4 The connection
was
forcibly
deta ched
Reserved
Reserved
Access The access rights for this
connection. This display uses a single
character to represent each access right. If the connection has
the access
ríght, the character appears.
If the
connection
does
not have an access right,
a hyphen
(-) appears in the character
positìon. The access
rights and the characters that represent
them are
3
<t
Delete
ni ror r^r- fi 1 -. .- Ldd
| - L, nange
Data Files:
Update
Append
Read
Delete
2-50 System Debugger
Open
mode
Open share
File pointer
IORS cache
File node
W-.DISPLAY iRMX@ II OBJECT
The mode established when
this connection
was
onened. The
nossible modes are
Descrintion
Connection is closed
Connection is open for
reading
Connection is open for
writing
Connection is open for
reading and
writing
If this field contains an invalid
value,
the System Debugger
displays the value,
followed by a space and two
question marks.
If this
value
is Read,
Write,
or R/W, this
value was
specified
when
the connection was opened.
The sharing status established for this connection when it
was
opened. The sharing status for a connection is a subset of the
sharing status of the file (see the File share field). The
possible
modes are
Description
File cannot be shared
File can
be shared
wìth
readers
File
can be shared with
writers
File can be shared
with
all
USCTS
0 Connection is not open
If this field contains an
invalid
value, the System Debugger
displays the
value,
followed by a space and two question marks.
This
probably
indicates that the connection data structure has
been
corrupted.
The current location of the file pointer for this connection.
The token for the segment at the head of the BIOS list
of used
IORSs. These IORSs are being saved for the RQ$WAIT$IO
system call to use again. This list is empty
if zeros
appear in this
field.
The token for a segment that the operating
system uses to
maintain information about the connection.
The information in
this segment appears in the next
two fields.
Open
Mode
Closed
Read
Write
R/w
Share Mode
Private
Readers
Writers
ALL
System
Debugger 2-51
VT--DISPI-AY iRMX@ II OBJECT
Device desc
Dynamic DUIB
DUIB pointer
Num of conn
Num of readers
Num of writers
File
share
File drivers
The token for the
segment that contains the device
descriptor
The device descriptor
is used by the operating
system to
maintain
information about connections to a
device.
Indicates
whether a Device Unit Information Block
(DUIB) was
created dynamically
when the device associated
with this
connection
was attached.
The address
of the DUIB for the device unit containing the file.
See the Ertended
iRMX II Device Divers User's GuLle for more
information about DUlBs.
The number of connections to the file.
The number of connections currently
open for reading.
The number of connections currently open for
writing.
The
share
mode
of the file. This parameter defines how other
connections to the file can
be
opened. The share mode of a file
is a
superset of the sharing status of each of
the
connections to
the file
(see
the Open share field description). The
possible
modes
are
Share
Mode
Private
Readers
Writers
All
Description
File cannot be shared
File can be shared with readers
File can be
shared
with writers
File can be shared with all users
If this field contains an
invalid
value,
the System Debugger
displays the value,
followed by a space and two question marks.
This probably means that
the internal data structure for the
file
or the fnode for the file has been corrupted. See the Lrtended
|RMX II Basic I/O System User's Guide
for more information
about sharing modes for
files and connections.
The file drivers that connect the file. lf the file can be connected
to a given file driver, then the
bit in the display is set to l. Bit 0
is
the rishtmost
bit.
Driver
Physical file
Stream
file
Reserved
Named file
Remote
file
Bir
0
I
2
3
4
2-52 System
Debugger
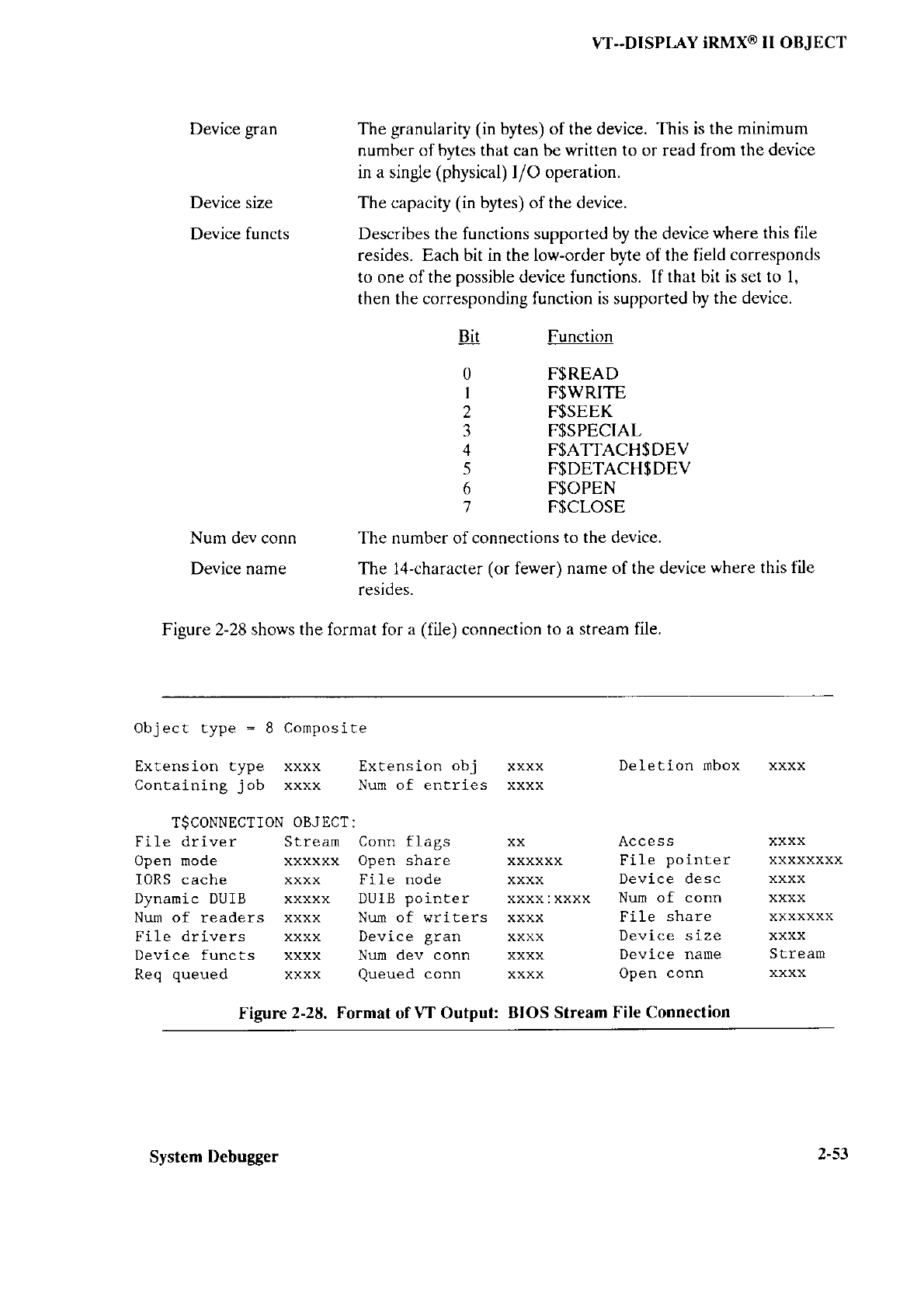
Device gran
Device size
Device
functs
Num dev conn
Device name
W..DISPI-AY iRMX@ II OBJECT
The granularity (in bytes) of the device. This is
the minimum
number of bytes that can be written to or read from the device
in a single
(physical)
I/O operation.
The capacity
(in
bytes) of the device.
Describes the
functions
supported by the device
where this file
resides. Each bit in the low-order byte of the field
corresponds
to one of the
possible
device functions. If that bit is set to 1,
then the corresponding function is supported
by the device.
Bit
0
I
2
3
4
5
o
7
Function
F$READ
F$WRITE
F$SEEK
F$SPECIAL
F$ATTACH$DEV
F$DETACH$DEV
F$OPEN
F$CLOSE
The number of connections
to the device.
The l4-character
(or
fewer) name
of the device
where this file
resides.
Fisure 2-28 shows the format for a
lfile)
connection
to a stream file.
Object type : 8 Composice
ExtensÍon Lype xxxx Extension obj xxxx
Containing job xxxx Num of entries xxxx
T$CONNECTION
OBJECT:
File driver Stream Conn flags xx
Ònon mnrl a Onén ch.rè
IORS
cache xxxx FiÌe node xxxx
Dynamic DUIB xxxxx DUIB
pointer xxxx:xxxx
Nun of readers xxxx Num of writers xxxx
File drivers xxxx Device gran xxxx
Devicè functs xxxx Nun dev conn xxxx
Req queued xxxx Queued conn xxxx
Figure
2-28. Format
ofVT Output: BIOS Stream
Deletion mbox
Acce
s s
File pointer
Device desc
Num of conn
File share
Device size
Device name
Open conn
File Connection
xxxx
xxxxxxxx
xxxx
XXXX
xxxxxxx
xxxx
strearn
XXXX
System
Debugger 2-53
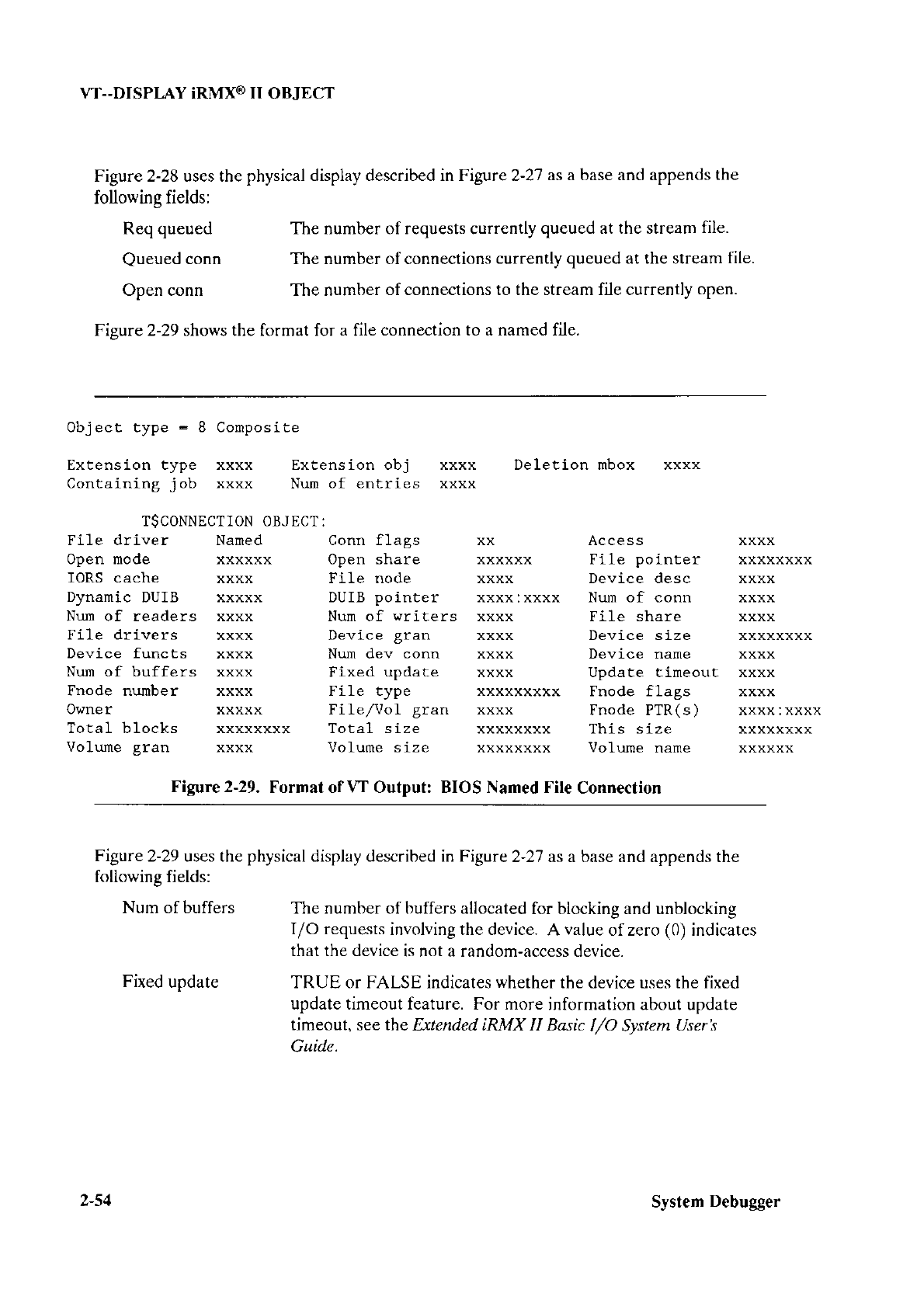
VT-_DISPLAY iRMX@ II OBJECT
Figure 2-28 uses the
physical display described in Figure 2-27
as a base and appends
the
followins fields:
Req queued
Queued
conn
Open conn
The number of requests currently
queued at the stream
file.
The number of connections
currently queued at the stream
file.
The number
of connections to the stream file currentlv
onen.
Fisure 2-29 shows the format for a file connection to a named file.
Object type : 8 Composite
Extension type
Containing job
File driver
Open rnode
IORS cache
Dynamic DUIB
O!,me r
Total- blocks
Volurne gran
xxxx
xxxx
Named
xxxxxx
XXXX
XXXXX
XXXXX
XXXXXXXX
XXXX
Extens ion obj
Nurn
of entries
Deletion mboxXXXX
xxxx
T$CONNECTlON OBJECT:
Nurn of readers xxxx
File drivers xxxx
Device functs xxxx
Nun of buffers xxxx
Fnode number xxxx
FiIe node
DUIB po
inter
Num of writers
Nr.1ln dev conn
Fixed update
Fi le type
File/Vol gran
Total s ize
Volume size
XX
XXXXXX
XXXX
XXXX :
XXXX
xxxx
xxxx
XXXX
XXXX
xxxxxxxxx
xxxx
XXXXXXXX
xxxxxxxx
Access
EiIa n^intar
Device desc
Nurn of conn
File share
Device size
Device name
Update timeout
Fnode flags
Fnode PTR(s
)
This size
Volume name
XXXX
xxxxxxxx
XXXX
XXXX
XXXX
XXXXXXXX
xxxx
XXXX
xxxx
xxxx : xxxx
xxxxxxxx
XXXXXX
Figure 2-29.
Format of VT Output: BIOS Named File
Connection
Figtre
2-29 uses the
physical
display described in Figure
2-27 as a base and appends the
followins fields:
Num of buffers The number of buffers allocated
for blocking and unblocking
I/O requests
involving the device.
A value
ofzero
(0)
indicates
that the device
is not a random-access device.
TRUE or FALSE indicates
whether
the device uses the fixed
update timeout feature. For more
information about update
timeout, see the
Extended ikMX II Basic
I
/O System
User's
Guide.
Fixed
update
2-54 System
Debugger
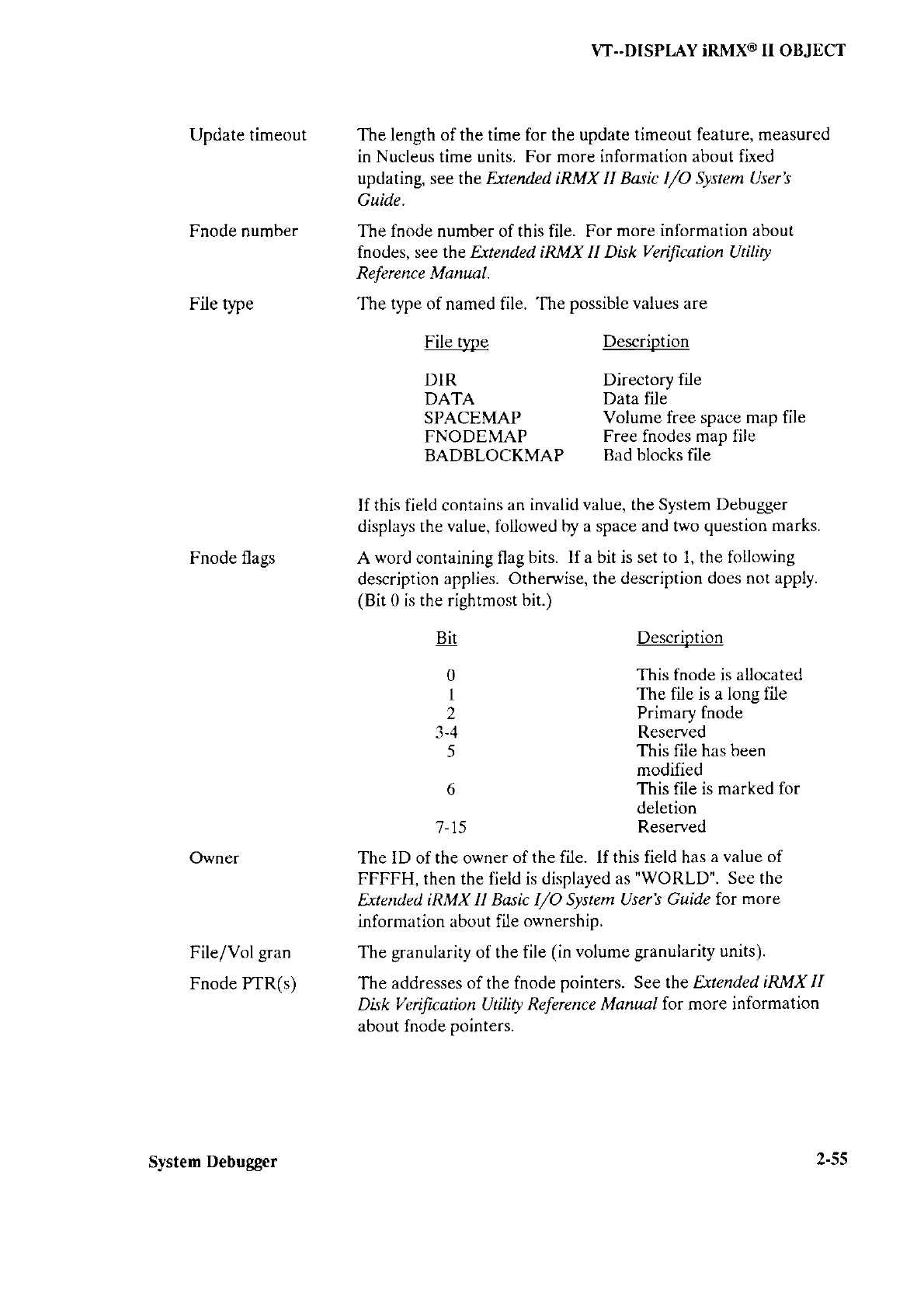
Update timeout
Fnode number
File type
Fnode flags
Owner
File/Vol
gran
Fnode PTR(s)
File tyoe
DIR
DATA
Description
Directory
file
Data file
W.-DISPLAY iRMX@ II OBJECT
The length of the time for the update
timeout feature, measured
in Nucleus time units. For more
information about fired
updating, see the Erteruled |RMX II Basic I/O System
User's
Guide.
The fnode number of this file. For
more information about
fnodes, see the Ertended |RMX II Disk Verification Utility
Reference Manual.
The type of named file. The
possible values are
SPACEMAP Volume free space map file
FNODEMAP Free fnodes map file
BADBLOCKMAP Bad blocks file
If this field contains
an invalid
value,
the System
Debugger
displays the
value,
followed
by a space and two
question marks.
A word
containing flag
bits. lf a bit is set to 1, the following
description applies.
Otherwise, the description
does not apply.
(Bit
0 is the rightmost
bit.)
6
'7 1<
The ID of the owner
of the file. If this field has
a value of
FFFFH, then the field is displayed
as
"WORLD". See the
Extended
|RMX II Basic I/O System User's
Guide for more
information about fiie
ownership.
The granularity of the file
(in volume
granularity units).
The addresses of the fnode
pointers. See the Extended
iRMX II
Disk
Veification
Utility
Ret'erence Manutl for more information
about fnode oointers.
Bit
0
I
2
5
Description
This fnode is allocated
The file is a long file
Primary
fnode
Reserved
This file has been
modified
This file is marked
for
deletion
Reserved
System
Debugger 2-55
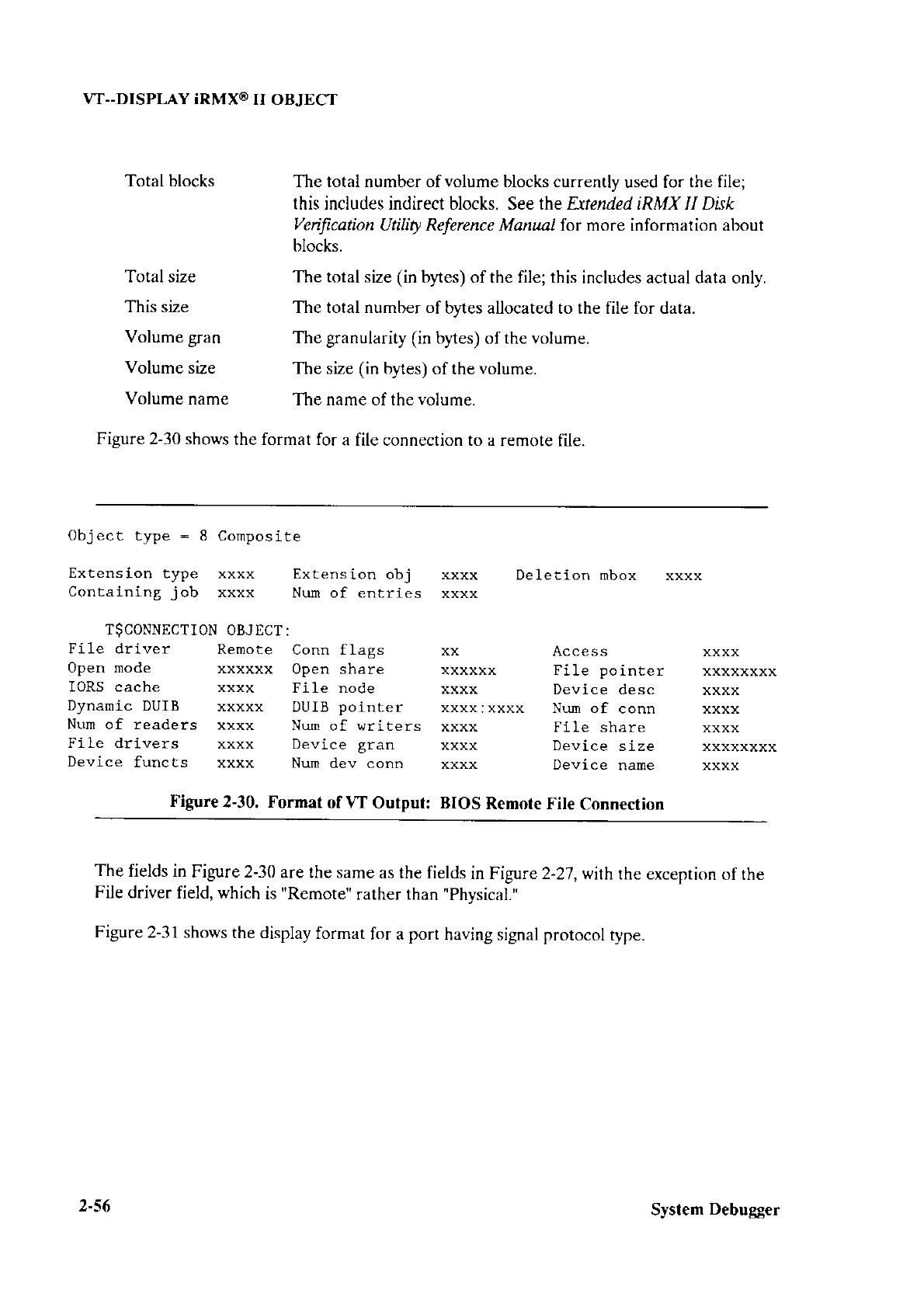
VT--DISPT-AY
iRMX@
II OBJECT
Total blocks The total number ofvolume blocks currently
used for
the file;
this includes indirect blocks. See the Ertended |RMX II DLsk
Veifcation Utility Reference Manual for more information about
blocks.
Total size The
total
size
(in
byes) of the file; this
includes actual data only.
This size The total number of bltes allocated to the file for data.
Volume gran The granularity (in
bytes) of the volume.
Volume
size The size (in bytes)
of the
volume.
Volume
name The name of the volume.
Figure 2-30 shows
the format for
a file connection to a
remote file.
Object type : 8 Conposite
Extension type xxxx Extension obj xxxx Deletion mbox xxxx
Containing job xxxx Num of entries xxxx
T9CONNECTION
OBJECT:
FÍl-e driver Rernote Conn flags xx Access xxxx
Open rnode xxxxxx Open share xxxxxx File pointer xxxxxxxx
IORS cache xxxx File node xxxx Devlce desc xxxx
Dynanic DUIB xxxxx DUIB pointer xxxx:xxxx Num of conn xxxx
Num of readers xxxx Num of writers xxxx File share xxxx
File drivers xxxx Device gran xxxx Devlce size xxxxxxxx
Device functs xxxx Nurn
dev conn xxxx Device name xxxx
Figure
2-30, Format
of VT Output: BIOS
Remote File Connection
The
fields in Figure 2-30
are the same
as the fields
in Figre 2-27
,
with
the exception
of the
File
driver
field, which
is
"Remote"
rather than "Physical."
Figure
2-31 shows
the display
format
for a
port
having signal protocol
type.
2-56 System
Debugger
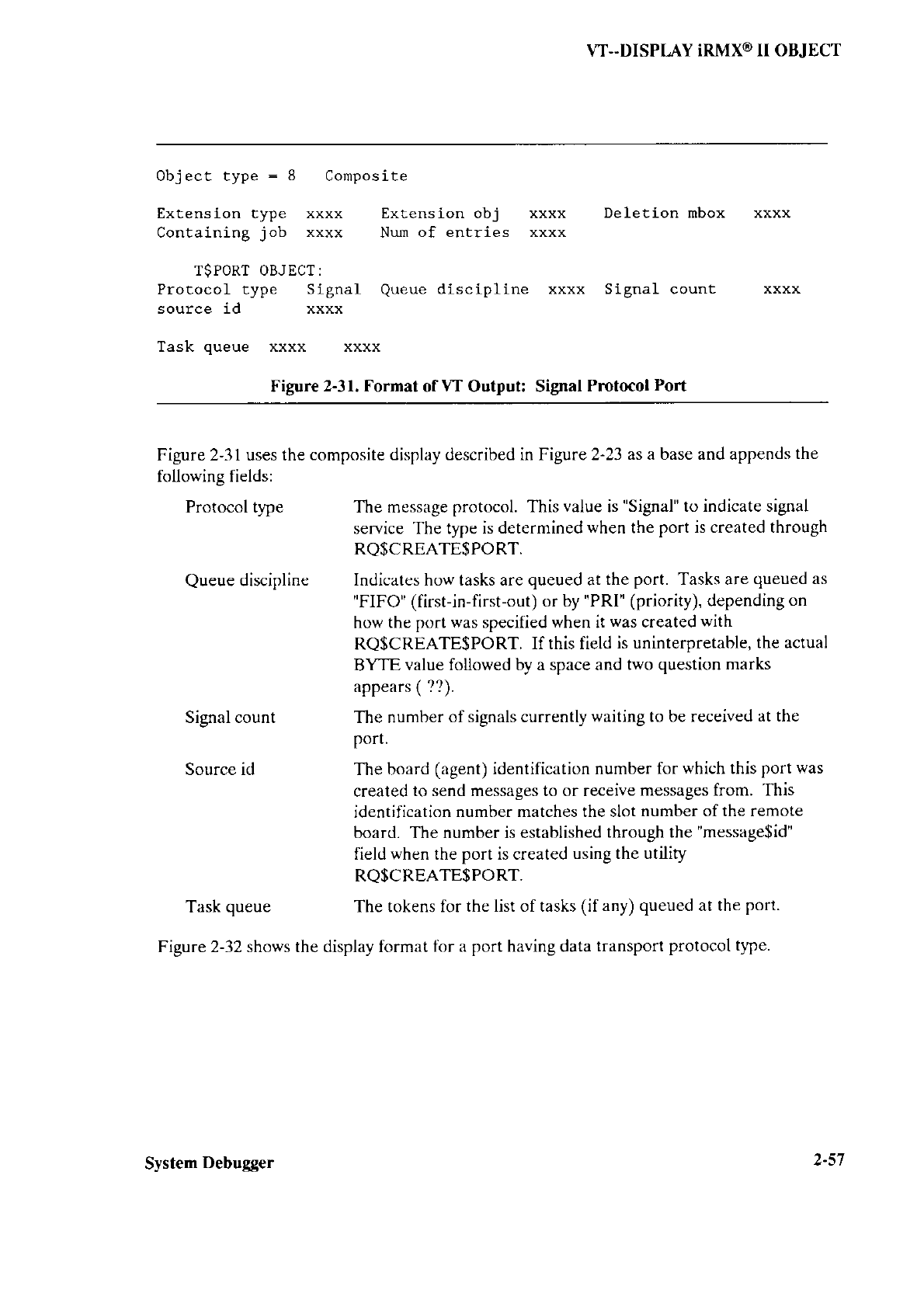
VT-.DISPLAY
iRMX@ II OBJECT
object type : 8 Cornposite
Extension type xxxx Extension obj xxxx Deletion mbox xxxx
Containing job xxxx Num
of entries xxxx
T$PORT OBJ ECT :
Prococol type Signal Queue
discipline xxxx Signal count xxxx
source id xxxx
Task queue xxxx xxxx
Figure
2-31. Format
of VT Output: Signal
Pmtocol
Port
Figure 2-31 uses the
composite display described in Figure 2-23
as a base and appends
the
following fields:
Protocol type The message
protocol. This
value
is
"Signal" to indicate signal
service The type is
determined
when
the
port is created through
RQ$CREATE$PORT.
Queue
discipline Indicates how tasks are
queued
at
the
port. Tasks are
queued as
"FIFO"
(first-in-first-out)
or by "PRI"
(priority),
depending
on
how
the port was specified
when
it
was
created
with
RQ$CREATE$PORT.
If this field
is uninterpretable,
the actual
BYTE value followed by a space and
two question
marks
appears ( ? ?).
Signal count The number
of signals currently
waiting to be received
at the
port.
Source id The
board (agent) identification number
for
which
this
port was
created
to send messages to or receive
messages from. This
identification
number matches the slot
number of the remote
board. The number is established
through the
"message$id"
field when the port is created
using the utility
RQ$CREATE$PORT.
Task
queue The tokens for
the list of tasks
(if any) queued at the
port.
Frgure 2-32 shows the display format
fbr a port having data
transport
protocol type.
System
Debugger 2-57
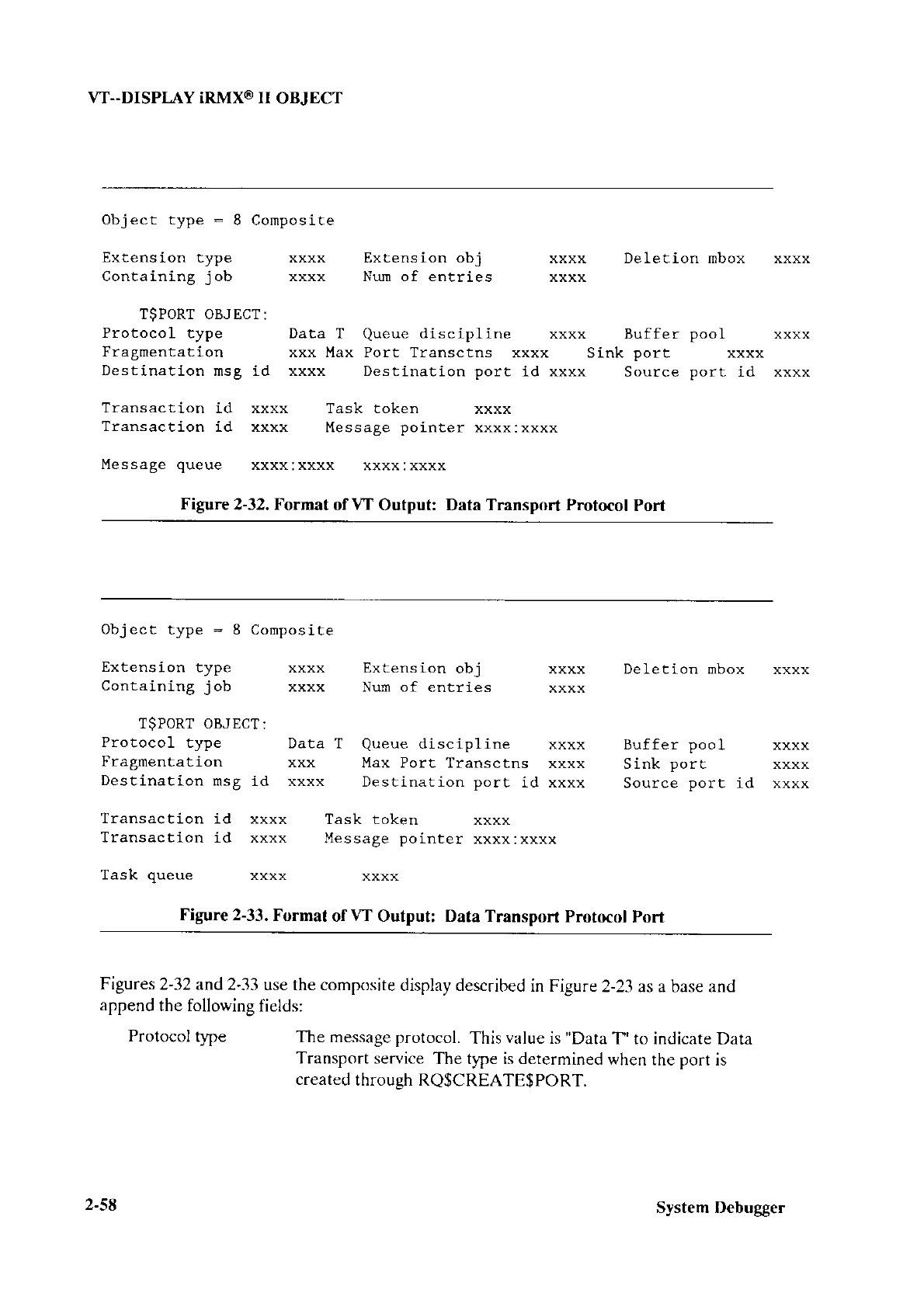
VT..DISPI-AY iRMX@ II OBJECT
Object type : 8 Composite
Extension cype xxxx Extension obj xxxx DeLetion mbox xxxx
Containing job xxxx Num of entries xxxx
T$PORT OBJ ECT
:
Protocol type Data T Queue
discipl ine xxxx Buffer pool xxxx
Frepmpnf-^tion vr.v l.fax Port Transctns xxxx Sink oort xxxx
DesLinaLion msg id xxxx Deslination port id xxxx Source porL id xxxx
Transaction id xxxx Task token xxxx
Transaction id xxxx Message pointer xxxx:xxxx
Message queue xxxx:xxxx xxxx:xxxx
Figure
2-32. Format
of
VT Output: Data Transport Protocol
Port
Object type : 8 Composite
Extensíon type xxxx Extension obj xxxx Deletion mbox xxxx
Containing job xxxx NuIn of entries xxxx
T$PORT OBJECT:
Protocol type Data T Queue discipline xxxx Buffer pool xxxx
Fragmentation xxx Max Port Transctns xxxx Sink port xxxx
DescinaLion rnsg
id xxxx Dest-ination porL íd xxxx Source port íd xxxx
Transaction id xxxx Task token xxxx
Transaction id xxxx Message pointer xxxx:xxxx
Task queue xxxx xxxx
Figure 2-33.
Format
of VT Output: Data Transporî
Protocol
Port
Figures
2-32 and
2-33 use the composite
display described
in Figure
2-23 as a base and
append
the following
fields:
Protocol
tlpe The message protocol.
This
value
is "Data
T'to indicate
Data
Transport service
The tlpe is determined
when
the
port
is
created
through RQ$CREATE$pORT.
2-58 System Debugger
W--DISPLAY
iRMX@ II OBJECT
Queue
discipline lndicates how tasks are
queue<J at the
port. Tasks
are
queued as
"FIFO"
(first-in-first-out)
or by
"PRl"
(priority),
<Jepending
on
how the
port was specified
when
it
was created
with
RQ$CREATE$PORT.
Buffer
pool The token of the attached buffer
pool (ifany). The utility
RQ$ATTACH$BUFFER$PooL
attaches a
buffer
pool
to a
port.
Fragmentation The fragmentation
protocol. This
value is either "Yes" if the
port can handle message fragmcntation,
or "No" if
the port does
not handle
message fragmentation.
Port fragmentation
protocol
is defined
through the utility RQ$CREATE$PORT.
Max Port Transctns The maximum number of
simultaneous
outstanding
transactitlns
for the port. This limitation
is defined
when the
Port
is created
using
RQ$CREATE$PORT.
Sink
port The token
of the sink
port (if any) associated
with
the
port.
Sink
ports are connectetl to
ports through
the
RQ$ATTACH$PORT
utilìtY.
Destination msg id The
host$id portion
of the socket
identifying
the renlote
Port
that this
port is connected.
This
vaÌue is established
through the
RQ$CONNECT
utilitY.
Destination
port id The port$id
portion of the socket
identi$'ing
the remote
port
that this
port is connected. This
value
is established
through
the
RQ$CONNECT
utilitY
Source
port id The board (agent) identific:ttion
number
for
which this port
was
createcl to send messages
ttt or receive
messages from. The
number is established
through the
"port$icl" field
when the
port
is created using
the utility RQ$CREATE$PORT.
Transaction
id Outstanding
transaction identification
numbers
at this
po|1.
Task
token The
token(s) of the task
or tasks
with outstanding
transactions
at this
port.
Message
pointer The pointer of the
message(s)
with outstanding
transactions
at
this port.
Message
queue The list of
pointers representing
the mess:rges
queued at this
port. This field appears
only if the
port has
queued mess:rges.
System
Debugger 2-59
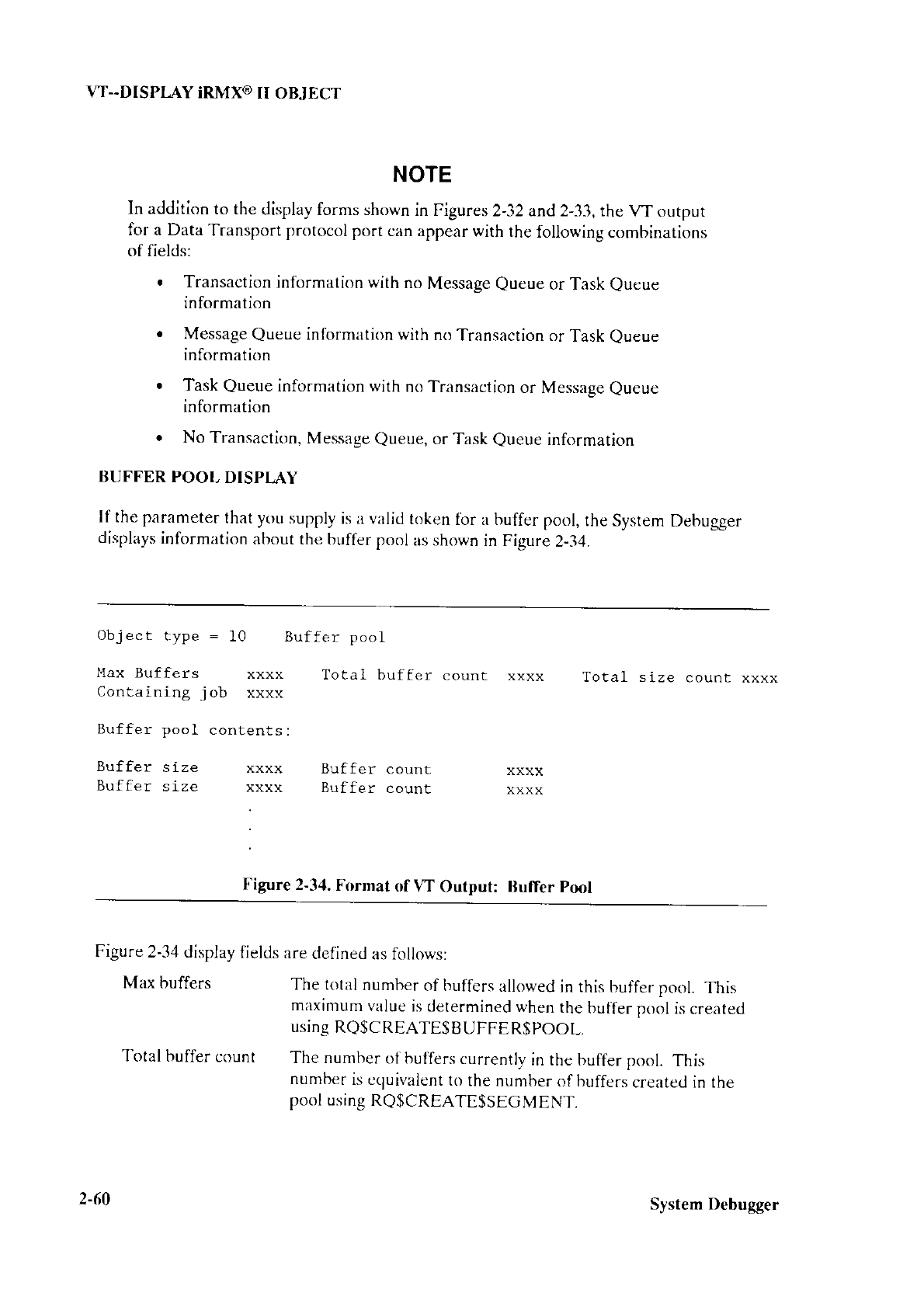
W-.DISPI-AY
iRMX@
II OBJECT
NOTE
In addition
to the
display forms shown
in Figures
2-32 and 2-33, the VT ourput
lbr a Data
Transport protocol port
can appear
with the
following combinations
of fields:
r Transaction
information with
no
Message
Queue
or Task
eueue
informatìon
. Message
Queue
information with
no
Transaction or
Task
eueue
information
. Task
Queue
information with
no Transaction
or Message
eueue
information
o No Transaction,
Message
Queue,
or Task
Queue
information
tsUFFER
POOL
DISPT.AY
If the parameter
that you supply
is a valid
token
lbr a buffer
pool,
the System
Debug,ger
displays
information
about the
buffer pool
as shown
in Figure
2-34.
Object type : 10 Buffer pool
Max Buffers xxxx Total buffer count xxxx Total size count xxxx
Containing job xxxx
Buffer pool contents:
Buffer size xxxx Buffer count xxxx
Buffer size xxxx Buffer count xxxx
Figure
2-34.
Format
of VT
Output: Iìuffer
Pml
Figure
2-34 display
fields
are
defined
as follows:
Max buffers The toral
number
of buffers
allowed
in this
buffer pool.
Thi-s
maximum vrrluc
is determined
when
the
bufîer pool
is created
using
RQ$CREATE$BUFFER$pOOL.
Total buffer
count The number
of bulfers
currentlv
in the buffer
pool.
This
number
is equivalent
to
the number
of buffers
created in the
pool using
RQ$CREATE$SEG
MENT.
2-60 System Debugger
VT.-DISPI,AY iRMX@ II OBJECT
Total size count The number of different buffer sizes in the buffer
pool.
The
mil\lmum
number of different
buffer sizes is eight.
Containing
job The token for the
job
that created this buflèr pool.
Buffer size The avaiÌable
buffer
sizes
for
this buffer pool. These sizes are
determined when
the individual
buffers are created throush
RQ$CREATE$SEGMENT.
Buffer count The number of buffers that are of the buffer size disnlaved
in
the field directly to
the
left.
System
Debugger 2-61
The
VU command displays
(unwinds)
the iRMX II system calls in the stack of the task
having
the token
you
enter.
PARAMETER
token The token for the task
having the stack to be searched for
svstem
calls.
I)ESCRIPTION
The VU command
accepts a token for a
task and then searches the
task's stack for
iRMX II system
calls, starting at the top of
the stack. For each system
call it finds in the
stack, it displays
. The return address
for the call. This is the address
of the next instruction
to be
executed
on behalf of
the task after the system
call has finished running.
. The VS
display with two lines
of stack values (or
more if required
for
parameters
of the
system call), as
if the CALL instruction
for the system call were
in the
CS:IP register
and
the displayed
stack
values were
at the top of the stack.
This command
requires that the task
stack reside
inside an iRMX II segment.
The
VU command
uses internal
iRMX ll data structures
to
get
some
of its information.
The
data structures are
updated immediately
after the system
call at the
top of the task,s
stack runs to
completion. Since
the monitor
interrupt might
come after
the system call is
completed,
but before the
data structures
are updated, some
of the
information the
VU
command
uses may be
obsolete. Therefore,
the first system
call the VU command displays
may not be valid.
Figure
2-35 illustrates
the format of
one system call
display hy the VU command. System
calls can be
nested,
with
one calling another,
so some invocations
of the VU command
produce
multiple displays
of the type shown
in the figure.
If the stack of
the indicated task
has no system
calls, the
VU command
displays the
following
message:
2-62 System
Debugger
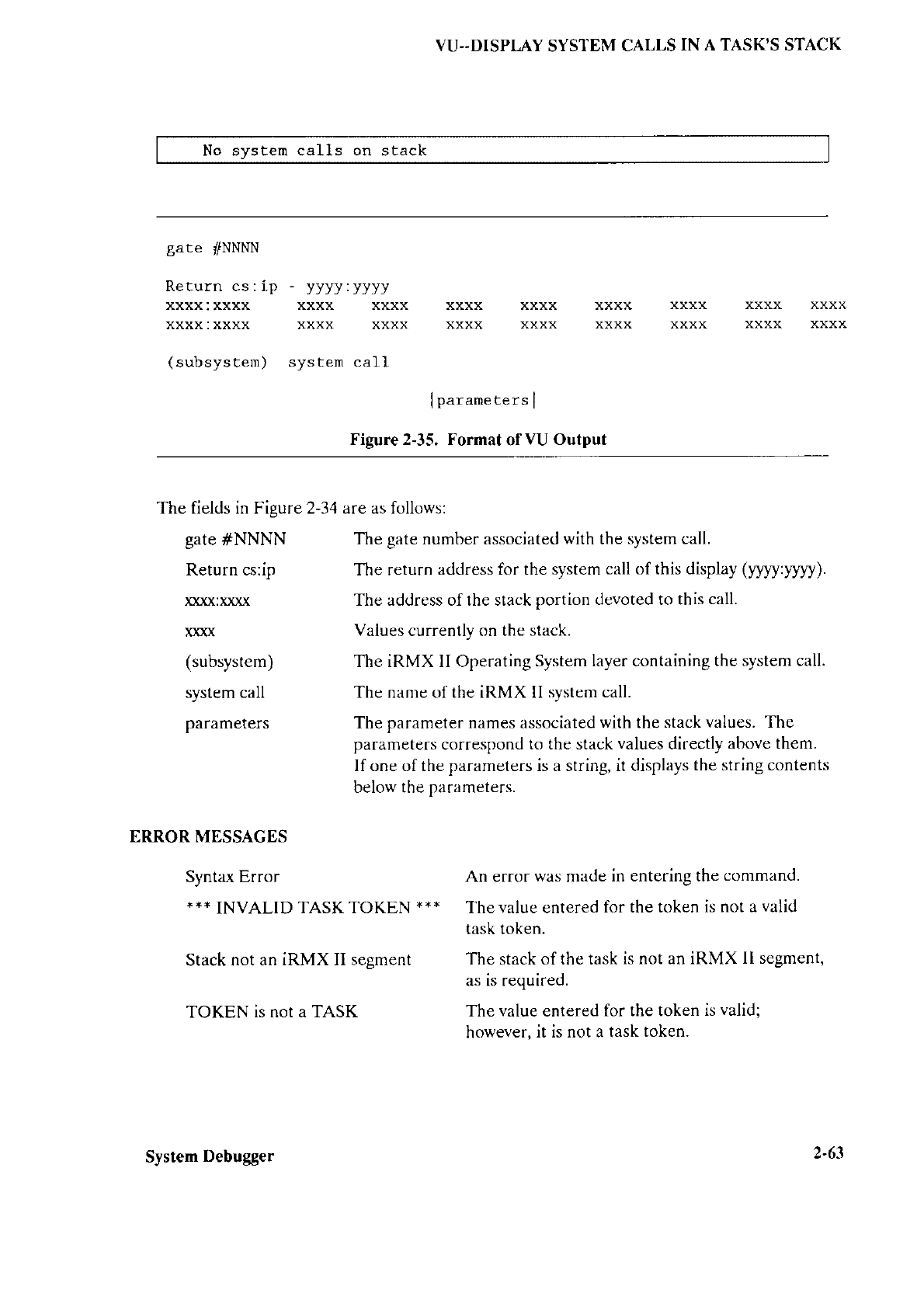
VU..DISPI.AY
SYSTEM
CALLS
IN A TASK'S STACK
No system cal1s on stack
gate IINNNN
Return cs: ip - yyyy:yyyy
XXXX:XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
XXXX:XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
(subsyscen) system cal l
lparameters I
Figure 2-35. Format of VU Output
The fields in Figure 2-34 are as follows:
gate
#NNNN The gate number associated
with
the
system call.
Return cs:ip The return
address for the system
call of this display (y11y:ypy).
xxxx:xxxx The address of the stack
Dortion
devoted to this
call.
)ooo( Values
currently on the
stack.
(subsystem) The iRMX II Operating
System layer containing
the system call.
system
call The name of the iRMX II system call.
parameters The parameter
names associated
with
the
stack values. The
parameters
correspond
to the stack
values
directly
above them.
If one of the parameters is a string, it displays
the string contents
below the
parameters.
ERROR MESSAGES
Syntai{ Error An error
was
macle
in entering the
command.
*** INVALID TASK TOKEN ++* The value entered
for the
token is not a
valid
tasK tol(en.
Stack not
an iRMX II segment The stack of the task
is not an iRMX ll segment,
as is required.
TOKEN is not a TASK The
value
entered
for the token
is
valid;
however,
it is not a task
token.
System
Debugger 2-63
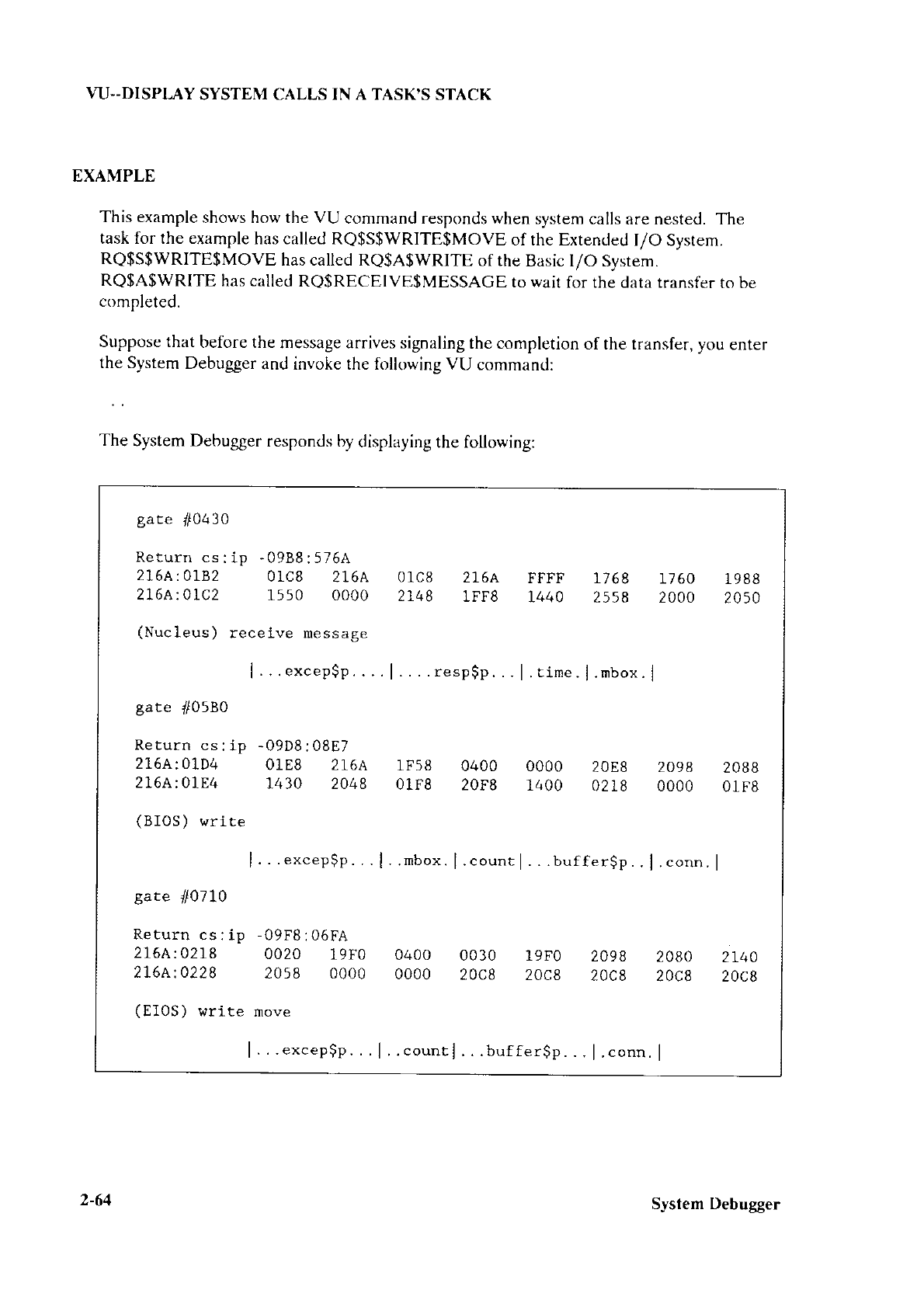
W--DISPI.AY
SYSTEM CALLS IN A TASK'S
STACK
EXAMPLE
This example
shows how the VU command responds when
system
calls are nested. The
task for the example
has called RQ$S$WRITE$MOVE
of the Extended
I/O System.
RQ$S$WRITE$MOVE
has called RQ$A$WRITE
of the
Basic l/O System.
RQ$A$WRITE
has called
RQ$RECEIVE$MESSAGE
to wait
for the data transfer
ro be
completed.
Suppose that
before the
message arrives signaling
the completion
of the transfer,
you
enter
the System
Debugger
and invoke the following VU command:
The
System Debugger
responds by
displaying
the following:
gate il04
3 0
Return
cs:ip -0988:576A
216A:0182 01C8 216A 01c8 216A FFFF Lt68 1760 1988
2L6A:QIC2 1s50 0000 2148 1FF8 1440 2558 2000 2050
(Nucleus
) receive message
l...excepgp....
1....respgp...
|.time.
I.rnbox.
I
gate il05B0
Return cs:
ip -09D8:0887
216A:01D4 0188 216A 1Fs8 0400 0000 2088 2osT 2088
216A:01E4 1430 2048 01F8 20F8 1400 0218 0000 0tF8
(BIOS
) write
l...excepgp...
l..rnbox.
l.counrl...buffergp..
l.conn. I
gate /10710
Return cs: ip -09F8:06FA
2164:0218 0020 19F0 0400 0030 19F0 2OgB 2080 Zt4O
2L6A:0228 2058 0000 0000 20c8 zOcB 20cB 20c8 20cB
(
EIOS
) write nove
l...excepgp...
l..countl...buffergp...
|.conn.
I
2-64 System Debugger
CHAPTER
3
SAMPLE
DEBUG
SESSION
3.1 INTRODUCTION
This chapter
provides
a sample
PLIM-2s6
program
thar was
developetl
on an Intel
3l[)
system
running
on an iSB@
2lÌ6/10
processor
board
with
the iRMX II.3
Operating
System.
The terminal
was
a Hazeltine
1510. The
code has compiled
without
errors;
however,
it does
not run. The step-by-step
process
for using
iSDM monitor
and System
Debugger
commands
to locate
and fir the
bug, then
to test the correctetl
code is
clcscribed
in section
3.2. A scenario
examining
debugging
techniques
and adclitional
comrrirnds
is
provided
in section 3.3.
3.2 SAMPLE
PROGRAM
This
program
includes three
tasks:
an initialization
task
(called
Init) that creates
the other
two tasks
and a mailbox,
and two
tasks (called
Alphonse and
Gaston) that
exchange
messages via mailboxes.
The source
cocle
is listed in Figures
3- l, 3-2, and
3-3. For
information
on compiling
and bincìing
this code
, see
the Extended
|RMX II programming
Techniques
Reference Manuttl. The lìrllowing clescription
explains
how the program is
supposed
to work.
The application
code runs as
a Human lnterfhce
program;
therefore,
the <
name of the
oBJECT file specified in BND2u6
> is entered
at the Hl prompt. rhe task
calletl lnit runs
first,
creating a mailbox
it catalogs
in the rod directory under
the name,'master.',
lt
creates
the tasks
Alphonse and
Ga:itorì then
suspencls
itself.
When Gaston
receives contftrl,
it gets
the token
for the mailbox
created by Init (by
looking
up the
name "master"
in the root
job's
object
directory). It then creatcs
a segment
(in
which it will place a message)
and a response
mailbox (to which
Alphonse will send a
reply). Next it goes
into a loop in which
ìt places
a message
in the segment
(after
displaying
it on the screen),
sends
the segment to the
master mailbox,
then
waits
at the
response
mailbox for a repÌy.
When Alphonse
receives contrctl,
it also
sets
the
token lbr the mailbox
created by Init (by
looking
up the name in the root
job's
objcct
clirectory). It rhen goes
into a loop in which
it
waits
at the maiìbox for a messagc
and checks to see
if the token it received
is a segment.
If it is a segment,
Aìphonse places
its own
message in the segment
(alier displaying it on
the screen),
then sends
the
segment
to the
response mailhox. If it isn't a segment,
Alphonse drops out of the
loop anri deletes
itself.
System Debugger 3-l
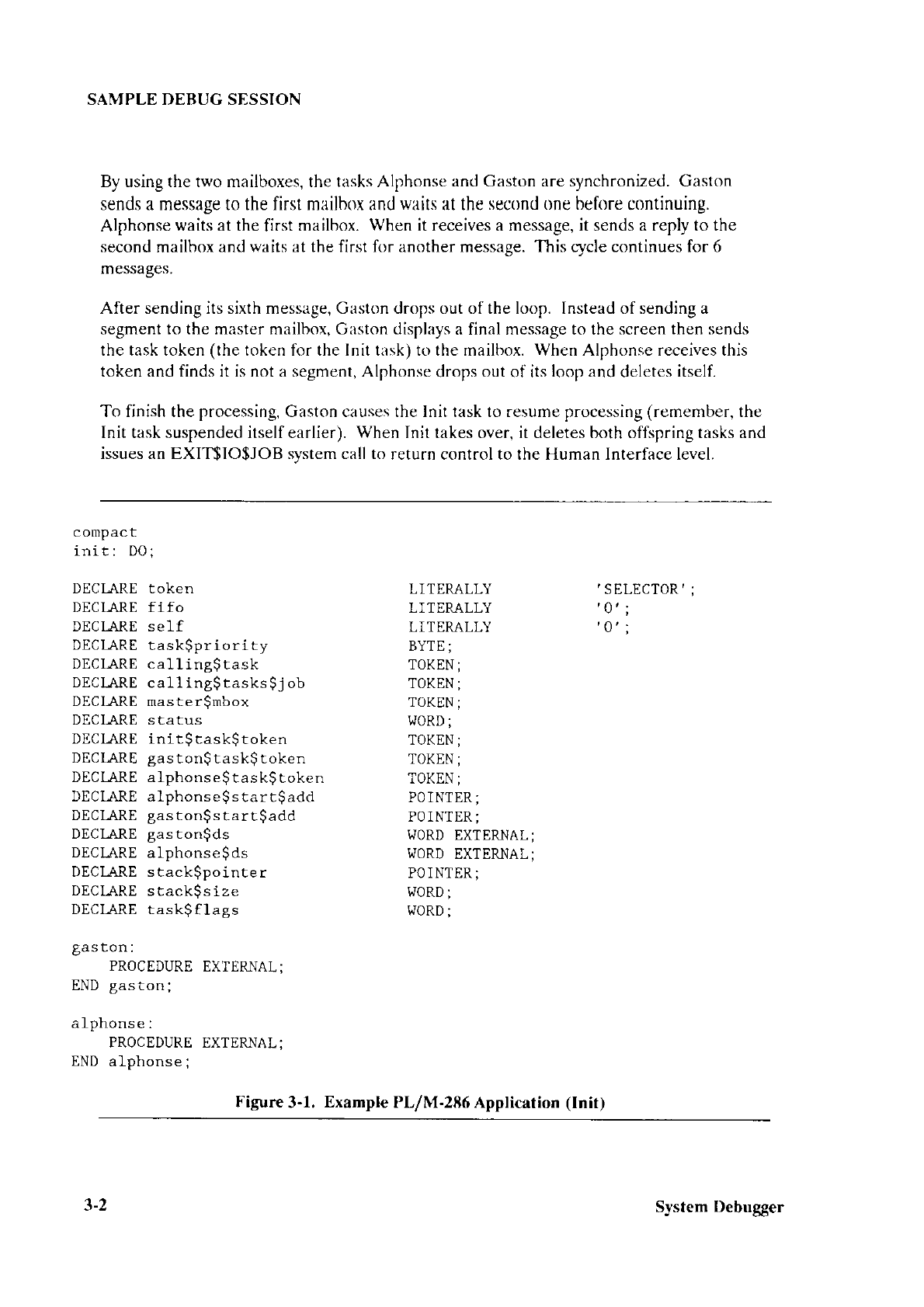
SAMPLE I)EBUG SESSION
By using the two mailboxes, the tasks Alphonse
and Gaston are synchronized. Gaston
sends a message to the first mailbox and
waits
at the
second one before
continuing.
Alphonse
waits at the
first
mailbox. When it receives a message, it sends a reply to the
second mailbox
and waits at the first for another message. This cycle continues for 6
messages.
After sending its sixth message, Gaston drops out of the loop. Instead of sending a
segment to the m:ìster mailbox, Gaston displays
a final message to the
screen then sends
the task token
(the
token for the Init trìsk) to the mailbox. When Alphonse receives this
token and finds it is not a segment, Alphonse
drops
out
of its
loop and
deletes
itself.
To finish the
processing,
Gaston causes the Init task to resume processìng
(remember,
the
Init task suspended itself earlier).
When
Init takes over, it deletes both offspring tasks and
issues an EXIT$IO$JOB svstem call to
return control to the Human ìnterface level.
compacf
init: DO;
DECI-ARE token
DECI,ARE fifo
DECI-ARE seÌf
DECIARE
task$priority
DECI^ARE c a11ing$ task
DECIARE
c a11ing$ tasks $j ob
DECI-{RE master$mbox
DECI,ARE status
DECI^ARE ini t$ task$ t oken
DECIARE gas
ton$ task$ token
LITEMLLY
LITEMLLY
LITEMLLY
BYTE;
TOKEN;
,SELECTOR'
;
'0'
;
,0,;
TOKEN
TOKEN
WORD
;
TOKEN
TOKEN
DECI-ARE alphons e
$
tas k$ token TOKEN
DECIARE aÌphonse$start$add
DECI-{RE gas tonq s
tar tSadd
DECLARE ga s ton$ds
DECI"{RE alphons e
$
ds
DECLARE s tack$po inte r
DECI-{RE
stack$size
DECLARE task$ fl ags
gas ton :
PROCEDURE
EXTERNAL;
END
gaston;
alphonse:
PROCEDURE EXTERNAL;
END
alphonse;
POINTER;
POINTER;
WORD
EXTERNAL;
WORD
EXTERNAL;
PO I NTER
;
WORD
;
T.IORD
;
3-2
Figure
3-1,
Example
PL/M-286 Application
(Init)
System Debugger

SAMPLE
DEBUG SESSION
$
include (/rmx2
86/inc/nuclus .
ext
)
$
include (/rmx286
/ inc / eio s . ext)
calling$tasks$job: S ELECToR$OF
(
NIL) i ,/* Directory obj cataloged in */
calling$task : SELECToR$OF(NIL); /* îask whose
priority vill */
/* be gotter' */
gas ton$ s tar t$add : @gaston; /* Set up scart addresses for *,/
alphonse
$
s tart$add : @alphonse; /* Lasks */
stack$pointer : NIL; ,/* Values for creating tasks */
stack$size : 500;
task$f1ags : 0;
init$task$token : RQ$GET$TASK$T0KENS
( ,/* Get token for init task */
self ,
Gstatus ) ;
CALL RQ$ 0ATALoG$oBJ ECT ( /* catalog task token in */
calling$tasks$job, /* directory of calling x/
inic$task$token, /* task's job */
@(4,'init'),
@s
ratus ) ;
naster$nbox : RQ$CREATE$MAILBOX
( /* Create mailbox tasks use */
fifo, /* to Pass
messages x/
Gstatus
) ;
CALL RQ$ CATALOC$OBJ
ECT
( /* Catalog mailbox in */
calling$tasks$job, /* directory of calling */
master$mbox, ,/* task's job */
@(6,'master'),
@s
catus
) ;
task$prlority : RQ$GET$PRIORITY
( ./* Get priority of calling */
calling$task, /* xask */
@s
tatus ) ;
taskSnrioritv: task$príority
I Ii /x Pick
lower
prioriry for */
,/* ne!{ tasks *
/
Figure
3-1. Example
PL/M-286 Application (Init) (continued)
System
Debugger 3-3
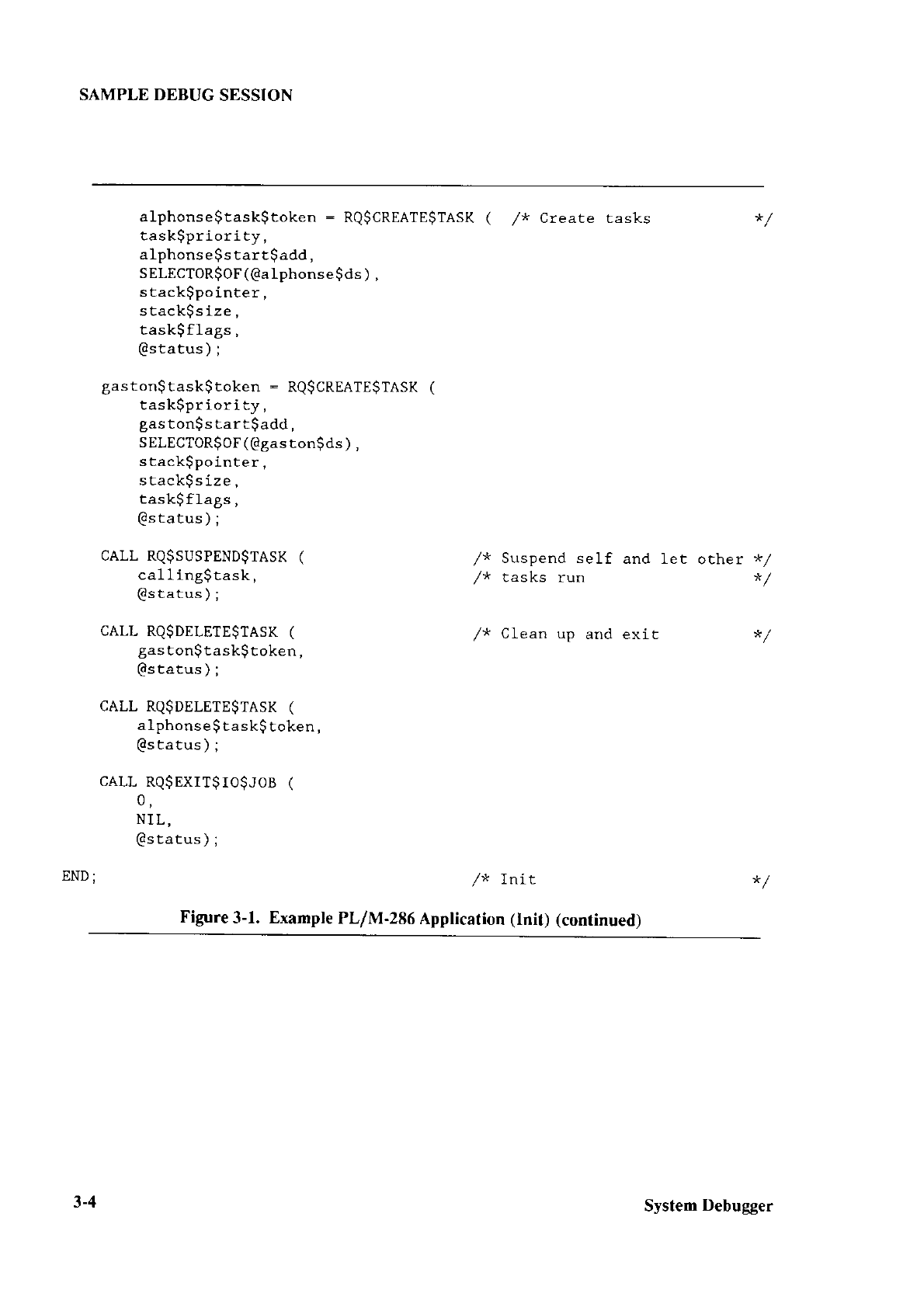
SAMPLE DEBUG
SESSION
alphons e
$
task$ token : RQ$CREATE$TASK
( /* create rasks */
r. clzQ-Fi ^ri r"
aÌphonse$start$add,
SELECTOR$OF
(Ga
Iphonse$ds ),
<f2^Lqn^i nfar
stack$size,
task$ f J-ags
,
@status);
gas ton$
task$ roken - RQ$CREATE$TASK
(
task$priority,
gas
t on$ s Lar t
$
add
SELECTOR$oF
(Ggas
ton$ds
),
stack$pointer,
scack$size,
task$
flags ,
Gs
tatus ) ;
CALL RQ$SUSPEND$TASK
( /* Suspend self and let orher *,/
calling$task, /* tasks run
@s
tatus ) ;
CALL RQ$DELETE$TASK
( /* clean up and exir
gas
ton$ task$
token
,
@status ) ;
CALL RQ$DELETE$TASK
(
alphonse
$
task$
token
,
Gstatus);
CALL
RQSEX]T$IO$JOB (
0,
NI
L,
Gs
tatus ) ;
END; /* Init */
Figure
3-1. Example
PL/M-286 Application
(lnit) (conrinued)
3-4 System
Debugger
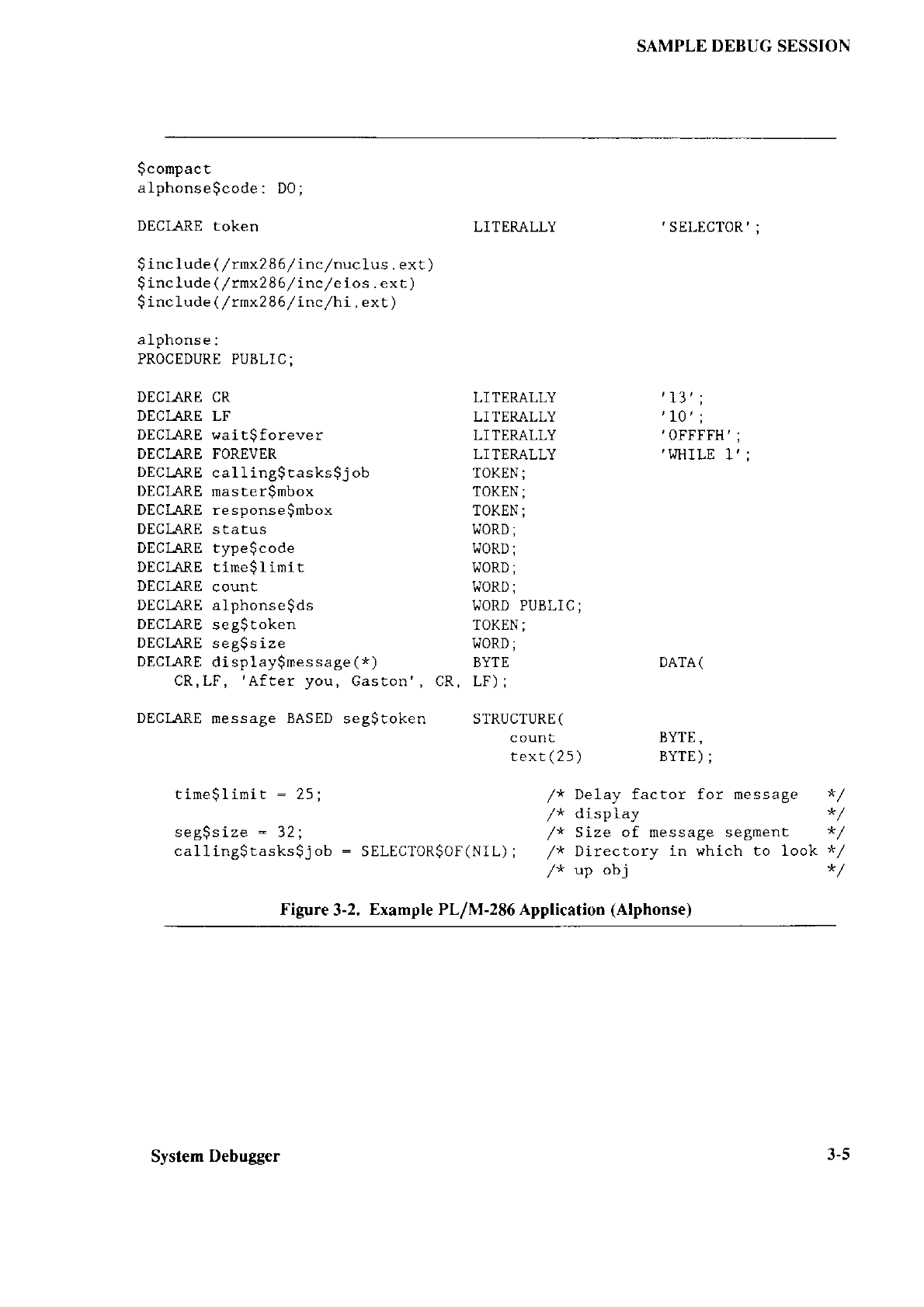
SAMPLE
DEBUG SESSION
$conpact
alphonse$code:
D0;
DECI-ARE token LITEMLLY 'SELECTOR'
;
$
inelude (/rmx286/inc/nuclus . ext)
$
inc lude
(
/rmx2
8 6/ inc/e ios .
ex t
)
$
inc lude (
/rmx286 / i-r'c
/hí .
ext)
alphonse:
PROCEDURE
PUBLIC;
DECIARE CR LTTER-A.LLY ' 13' ;
DECI.ARE LF LITERALLY '10' ;
DECIARE wait$forever LITERALLY 'OFFFFH'
;
DECIARE FOREVER LITEMLLY 'I^IHILE
1
' ;
DECIARE
cal l ing$ tasks
$j
ob TOKEN;
DECI-ARE
rnaster$mbox TOKEN;
DECIARE response$mbox TOKEN;
DECI,ARE status WoRD;
DECLARE type$code WORD;
DECIARE time$Iirnit WORD;
DECI,ARE
count IIORD;
DECIARE alphonse$ds WORD PUBLIC;
DECI-ARE
seg$coken TOKEN;
DECTARE
seg$s ize WORD;
DECI-ARE
display$nessage
(*) BYTE DATA(
CR,LF,
'After you, Gaston', CR, LF);
DECIARE
nessage BASED
seg$token STRUCTURE(
count BYTE,
text(25) BYTE);
time$lirìit : 25; /* Delay factor for message x/
,/* display *
/
seg$size
: 32; /* Size of message segment x/
calllng$tasks$job : SELECTOR$OF(NIL)
i ,/* Directory in which to look *,/
/* up obj */
Figure
3-2. Example PL/M-28ó Application (Alphonse)
System
Debugger 3-5
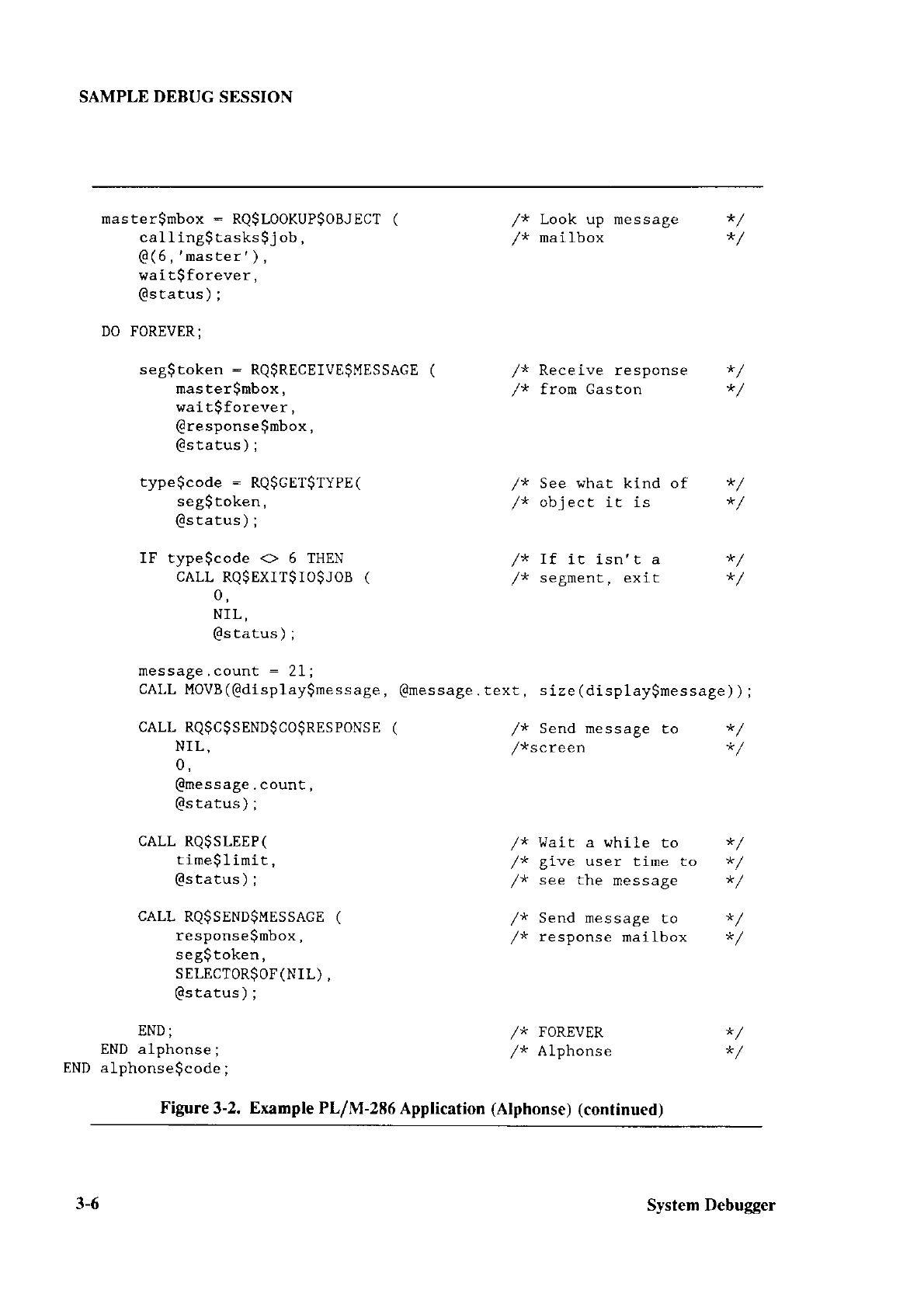
SAMPLE
DEBUG
SESSION
rnaster$nbox - RQ$LoOKUP$oBJ ECT (
cal l ing$ tasks
$j
ob,
@(6,'master'),
wait$forever,
Gstatus ) ;
DO FOREVER;
seg$token : RQ$RECEIVE$MES SAGE
(
na < t ar(mhnv
wait$forever,
Qresponse $rnbox
,
@s
taÈus
) ;
type$code - RQ$GET$TYPE
(
seg$token,
Gstatus ) ;
IFtype$codeo6THEN
CALL
RQgEXIT$IO$JOB
(
0,
NIL,
@status ) ;
nalnt : ?1'
NIL,
0,
r)-^^^-^^ ^^..-c
lqxrc> s dÉr . uuu L ,
Gs
tatus ) ;
CALL RQ$SLEEP
(
tirne$1irnit,
Gstatus ) ;
CALL RQ9SEND$MESSACE
(
response$mbox,
seg$token,
s ELECT0R$0F
(
Nt L)
Gstatus ) ;
END
;
END alphonse;
alphonse$code;
/* Rer-c i vc rrcnnncp x
/
/* from Gaston */
/x If it isn'L a x/
/* segment, exi t */
,/* Look up
,/* nai lbox
/* See what kind of
,/* object it is
,/* FOREVER
,/* Alphonse
CALL
MOVB(Gdisplay$rnessage,
@message.
text, size
(display$message)
) ;
CALL RQ$C$SEND$C0$RESPONSE
( /* Send rnessage
to */
/* tJait a while to x/
,/* give user time Lo x/
/* see the message */
,/* Send message Lo */
/* response rna i lbox */
Figure
3-2.
Example PL/M-286
Application
(Alphonse)
(continued)
3-6 System Debugger
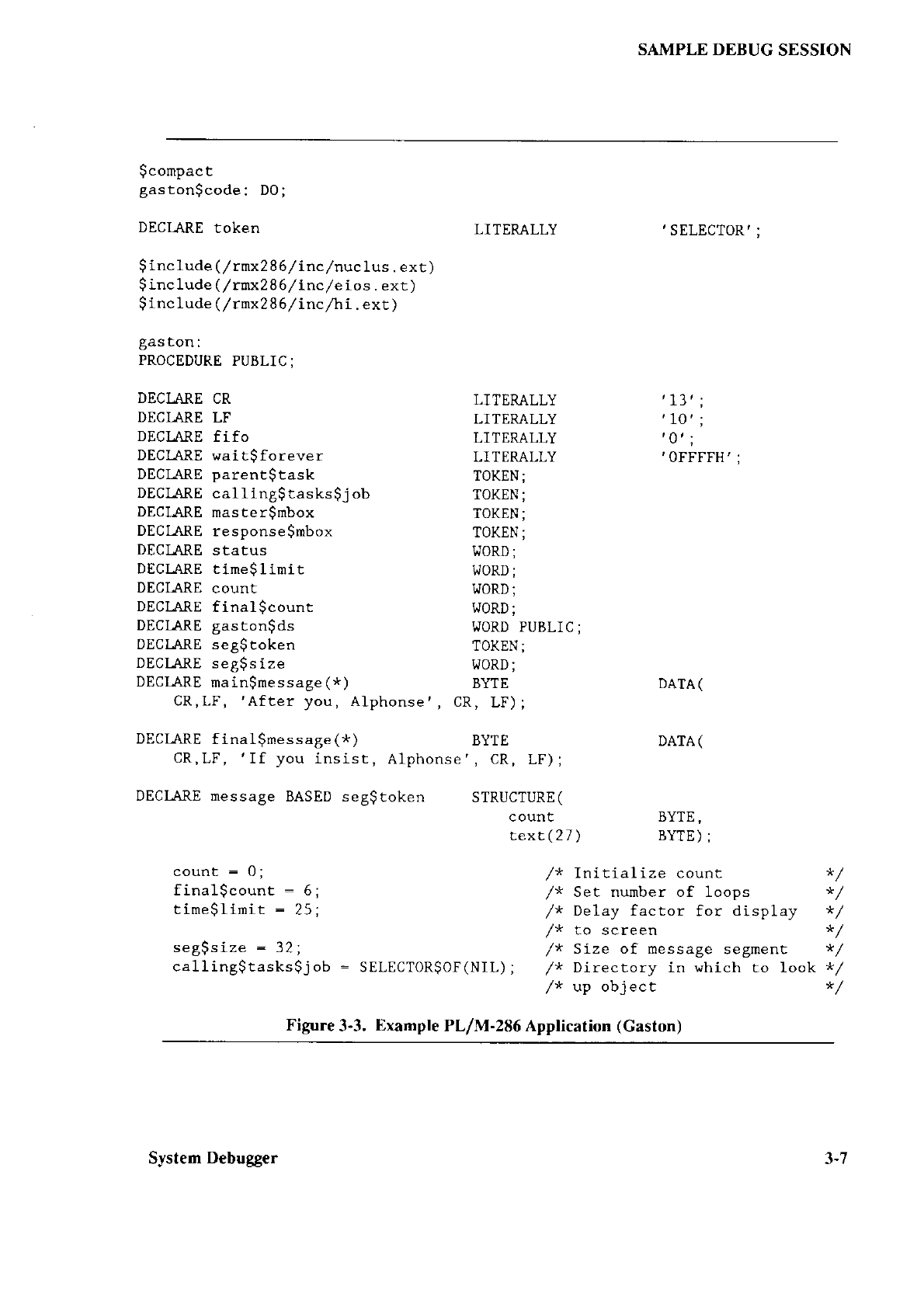
SAMPLE DEBUG
SESSION
9compact
oacr-^nq^^.la' nn'
DECI-ARE
token LITEMLLY ,SELECTOR,
;
$
include (/rmx2
86/inc/nuc lus .
ext
)
$
include (
/rrnx286 / inc / e io s . ext)
$
include (
/rmx286 / íne
/hi . ext)
gas
con
:
PROCEDURE
PUBLIC;
DECIARE
CR LITERALLY 'I3':
DECI-ARE
LF LITEMLLY ' 10
' ;
DECLARE
fifo LITERALLY '0, ;
DECI"ARE wait$forever LITERALLY ,OFFFFH,
;
DECIARE
parent$task TOKEN;
DECIARE
cal l ing$ tasks $j ob TOKEN;
DECIARE
master$mbox TOKEN;
DECIARE
response$mbox TOKEN;
DECLARE
status ITORD;
DECI"ARE time$linit IIORD;
DECI-ARE
count WORD;
DECIARE
final$count WORD;
DECIARE
gaston$ds latORD PUBLIC;
DECI"ARE seg$token TOKEN;
DECI-ARE
seg$s
ize WORD;
DECIARE
rnain$message
(*) BYTE DATA(
CR,LF, 'After you, Alphonse', CR,
LF);
DECIARE
final$message(*) BYTE DATA(
CR,LF,
'If you insist, Alphonse', CR,
LF);
DECI^ARE rnessage
BASED seg$token STRUCTURE(
count BYTE,
rexr(27) BYTE);
count : 0; ,/* Initialize count */
flnal$count : 6; ,/* Set nurnber of loops */
time$linit : 25; /* Delay facror for display
/* to screen */
seg$size : 32; /* Size of message
segment */
calling$tasks$job : SELECTOR$OF(NIL)
j ,/* Directory in which to look *,/
/* up obj ect x/
Figure 3-3. Example PL/M-286 Application (Gaston)
Systern
Debugger J-l
SAMPLE DEBUG SESSION
rnaster$rnbox : RQ$LOOKUP$OBJ ECT ( ,/* Look up message mailbox */
cal l ing$ tasks $j ob,
@(6,'master'),
wait$forever,
Gs
tatus ) ;
response$mbox : RQ$CREATE$MAI
LBOX ( /* Create response rnailbox */
fifo,
@status ) ;
seg$token - RQ$CREATE$ S EGMENT
( /* Create message segment */
seg$ s ize ,
Qs
tatus ) ;
DO
WHILE count < final$count;
nessage.count:23;
CALL MOW(@main$rnessage,
@message.
text, SIZE(main$message)
)
;
CALL RQ$C$SEND$C0$RESPONSE
( /* Send rnessage to screen */
NIL,
0,
Arîa(<,oa ^^'1nf
@status ) :
CALL RQ$SLEEP( /* ilair a while ro give user */
time$l-init, ,/* time Lo see the messa€le x/
Gstatus ) ;
CALL RQ$SEND$MESSAGE
( /* Send message to mailbox */
naster$mbox,
seg$ token,
rp<nancaQ-h^-
Gs
tatus ) ;
seg$token : RQ$RECEIVE$MES
SAGE
( ,/* Receive response from x/
response$mbox, /* Alphonse x/
wait$forever,
NIL,
@status);
count : Count + 1;
END; /* WIILE */
. ^,,n r_ : ,7 .
CALL MOVB
(Gf
inal$message, Gmes
sage
.
rext, S I ZE
(
f ína1$rnessage
) ) ;
Figure
3-3.
Example
PL/M-286 Application
(Gaston) (continued)
-3-8 System
Debugger
SAMPLE DEBUG SESSION
CALL RQ$ C9 S END$CO$RES
PONS E (
NIL,
0,
a-^^^-^^ ^^..-è
rYx,crrdÉr. LUU L '
@s
tatus ) ;
CALL
RQ$SEND$MESSAGE
(
masterSmbox,
master$mbox,
SELECToR$OF(NrL),
Gs
tatus ) ;
parent$task : RQ$LOOKUP$OBJ
ECT
(
ca
l l ing$ tasks
$j
ob,
@(4,'init'),
wait$forever,
@s
tatus ) ;
CALL RQ$RESUME$TASK
(
parent$
task ,
Gs
tatus ) ;
END gas ton;
gaston$code;
/* Send final messa8e to */
/* screen */
/* Send coken for mailbox *,/
/* to rnailbox. This .'ti)-l */
,/* c r^n ^iLìar r,clz
/* Look up token for
/* ..11 i no r,<L
END
,/* Resurne cal l ing
/* Fnr n 1aan"n
/* cas ton
Figure
3-3.
Example
PL/M-286 Application
(Gaston) (continued)
3.3 DEBUGGING
THE PROGRAM
Although it's a good idea to include error checking
when
developing programs, we did not
include
any in our sample program so that we
could demonstrate more features of the
System
Debugger. The sample program
contains one error. We will show two approaches
to finding
and correcting it using the System Debugger.
The addresses
and token
values
appearing in the following examples are those the system
assigned
in this
debugging session. Most of these values will change from session to
session.
It's helpful to keep paper and pencil
handy to note the
various addresses and
tokens.
System Debugger 3-9
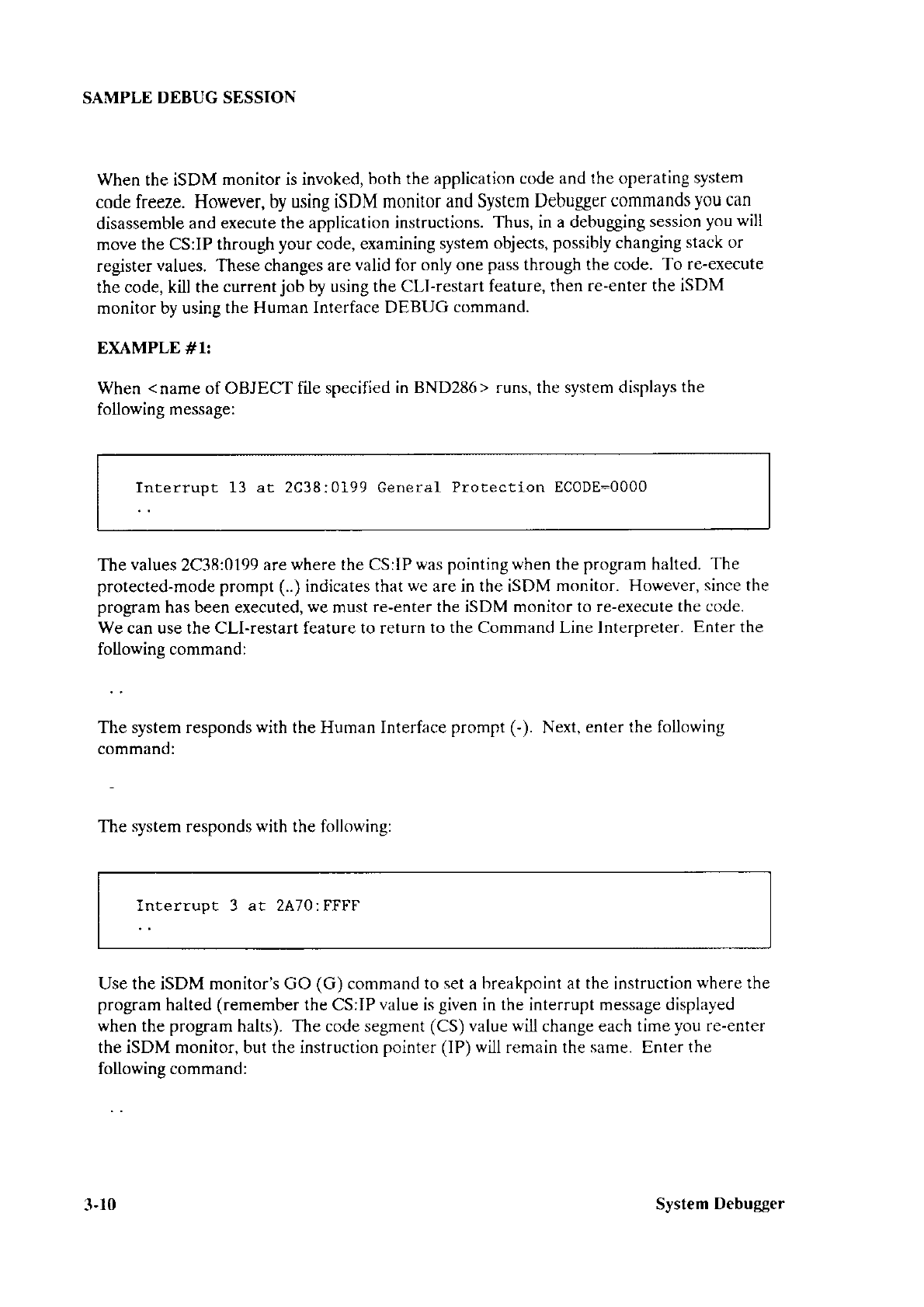
SAMPLE
DEBUG SESSION
When the iSDM
monitor is invoked,
both the application
code and the operating
system
code freeze. However, by
using iSDM monitor
and System Debugger
commands
you
can
disassemble and
execute the application
instructions.
Thus, in a debugging
session
you will
move
the CS:IP through
your code, examining system
objects,
possihly changing
stack or
register
values.
These
changes are
valid
for
only one
pass
through
the code. To re-execute
the code, kill the
current
job
by using the Cll-restart
feature, then
re-enter the iSDM
monitor by using the Human
Interface DEBUG
command.
EXAMPLE #1:
When
<
name
of OBJECT fiìe specified
in BND286
> runs, the system displays
the
following message:
Interrupt 13 at 2C38:0199 General Protection EC0DE:0000
The
values
2C38:0199
are where the CS:IP
was pointing when the program halted.
The
protected-mode prompt (..)
indicates
that
we
are in the iSDM
monitor. However, since the
program
has been executed,
we
must
re-enter the iSDM monitor to re-execute
the code.
We can use the Cll-restart feature to return
to the Command Line Interoreter.
Enter the
followins command:
The system responds
with
the Human Interface
prompt (-). Next,
enter the following
command:
The
system
responds
with
the following:
Interrupt 3 at 2A70: FFFF
Use the iSDM monitor's GO (G) command to
set
a
breakpoint
at
the
instruction
where
the
program
halted
(remember
the CS:IP
value
is
given
in
the
interrupt message
displayed
when
the program halts). The code segment
(CS) value will
change each time
you re-enter
the iSDM monitor, but the instruction
pointer (IP) will
remain the same. Enter
the
followins command:
-ì-10 System
Debugger
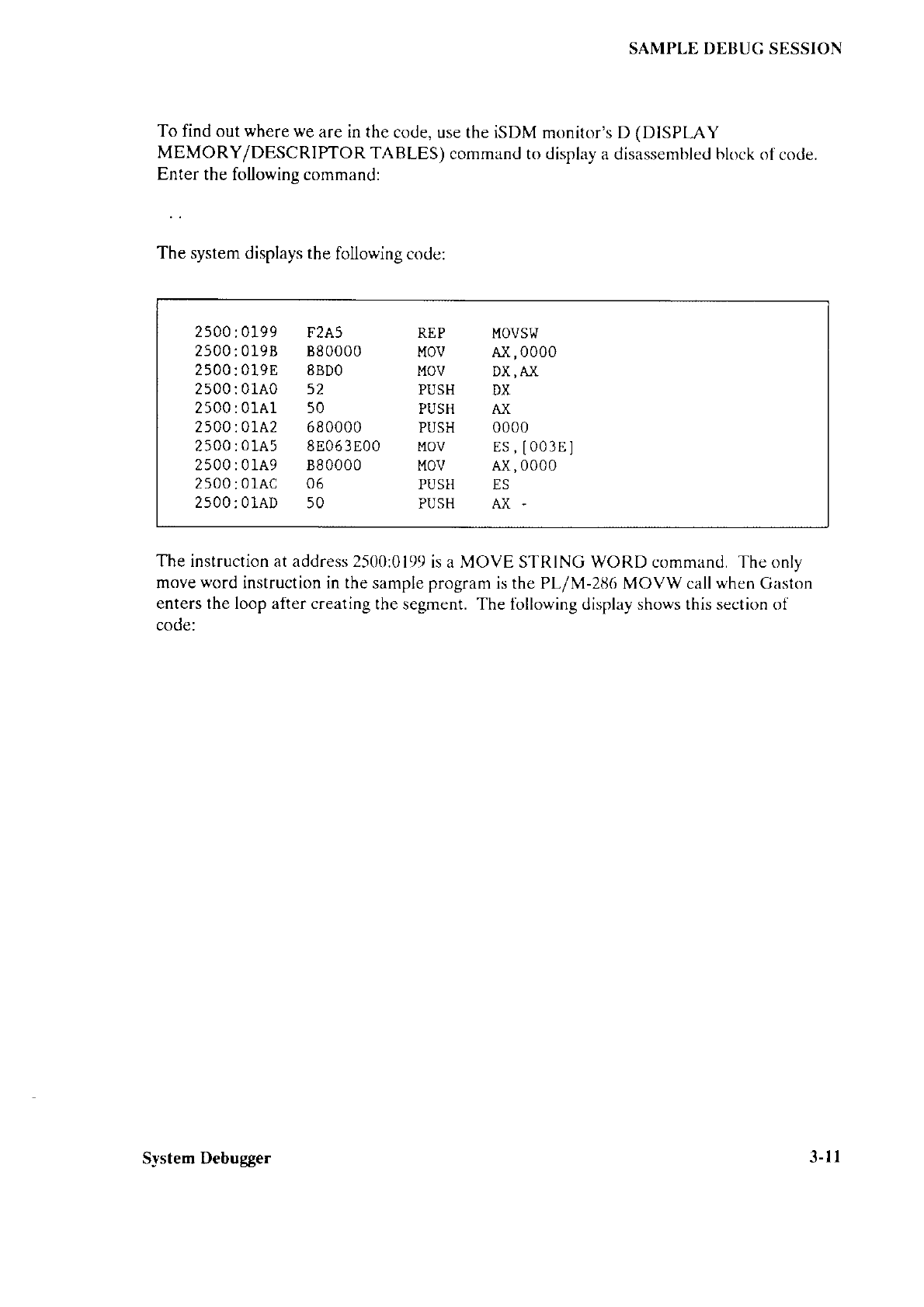
SAMPLE DEBUC
SESSION
To find out where we
are in the
code, use the iSDM
monitor's D (DISPIAY
MEMORY/DESCRIPTOR
TABLES)
command to display
a disassembled block of
code.
Enter
the following command:
The system displays the
following code:
The instruction at address 2-500:0199
is a MOVE STRING WORD command. The only
move
word
instruction in the
sample
program
is the PL/M-2t16 MOVW call
when
Caston
enters the loop after creating
the segment. The lbllowing display shows this section of
code:
2 500
:
0199
2500:0198
2
500 :
019E
2 500
:
01A0
F2A5
880000
SBDO
52
50
680000
8E063800
880000
06
50
REP
MOV
MOV
PUSH
PUSH
PUSH
MOV
M0v
PUSH
PUSH
MOVSW
AX, 0000
DX,AX
DX
AX
0000
ES,
[0038 ]
AX, 0000
ES
AX.
2 500 : 01Al
2500:01A2
2500:01A5
2 500 : 0IA9
2500:01AC
2 500
;
0lAD
System Debugger 3-l
I
SAMPLE
DEBUG
SESSION
responseSmbor
= RQSCREATE$UAILBOX
( /. Create response mailbox */
fifo,
Gstatus);
SEgS IOKEN = RQ
SC
REATE
9
SEGMENT
(
seg9 s i ze.
!astatus);
DO wHILE count IinalScount;
.^,'^r = ?ì.
/i Create message
segment
r/
CÈIL r|Ottx(
enal n$nessage, 0nessage.tert, SIZE(nain$rcssagè] I i
CALL RQSCSSEND$COSRESPONSE
(
NIL,
0,
ry'Irs54Ys.LUurrLt
0status
) ;
,/t Send message
to screen r/
Figure 3-,1.
MO!'W in Gaston Code
lf displaying the instruction doesn't provide enough information about why the program
halted, we can look at the surrounding code by displaying for-ward or backward from the
CS:IP. The comma we specified in the DX command enables us to enter
just a comma
(,)
now to display forward another ten instructions from the current CS:lP. (Displaying
backward from the CS:IP is shown in Example
#2.)
However, since
the instruction
where
the exception occurred is traceable to the sample
code,
we know
where
the program fails. To ex:rmine what
happenswhen the system tries
to move the message,
we'll return to the protected-mode prompt (by
entering a carriage
return <CR> ) and examine register contents before and alìer MOVSW is executed.
Enter the following command:
3-12 System
l)ebugger
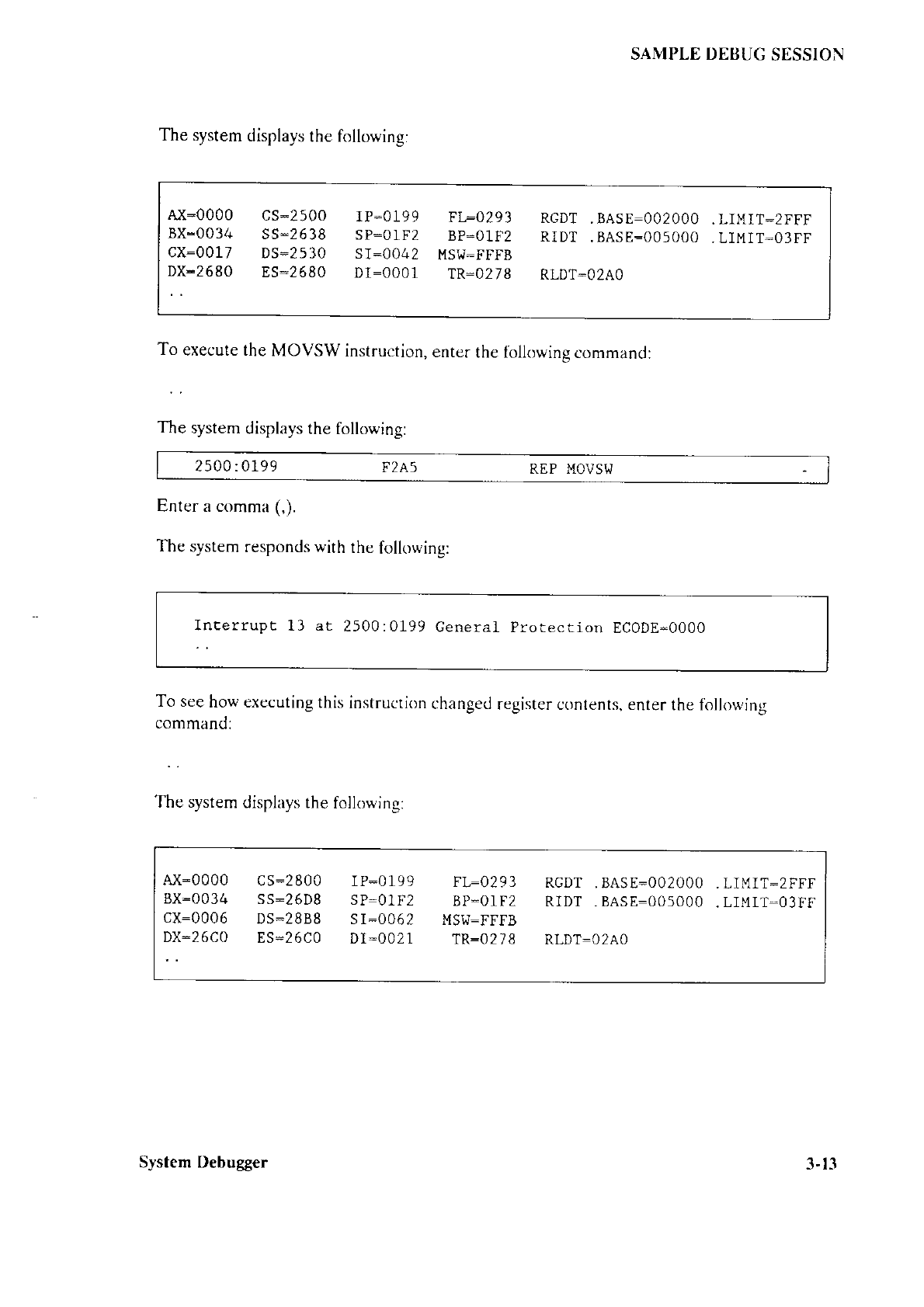
SAMPLE DEBUC
SESSION
The system
displays
the following:
AX-OOOO CS_2500 IP-0199 FI.FO293 RGDT
.BASE:OO2OOO
.LIMIT:2FFF
BX*0034 SS:2638 SP:01F2 BP:O1F2 RfDT .BASE:OO5OOO
.LIMIT:O3FF
cx-0017 Ds:2530 sI-0042 MSW:FFFB
DX:2680 ES:2680 Dr:0001 TR=0278 RLDT:02A0
To execute the
MOVSW
instruction,
enter
the lblkrwing
commancl:
The
system
displays the
folltrwing:
Enter a comma
(,).
The
system
responds with
the
following:
Incerrupt 1l at 2500:0199
General
Prorecrion ECODE*Oo00
To see
how executing
this
instruction
changed
register contents, enter
the fbllowing
command:
The system
displays the
folÌowing:
AX-OOOO CS-2800 IP_0I99 FI,:O293 RGDT
.BASE:OO2OOO
.LIMIT:2FFF
BX:0034 SS:26D8 SP:01F2 BP:01F2 RIDT .BASE:OO5OOO
.LIMIT-O3FF
CX:OOO6 DS:2888 S I:0062 MSW:FFFB
DX:26C0 ES:26C0 Dl=0021 TR:0278 RLDT:02A0
System Debugger 3- t3
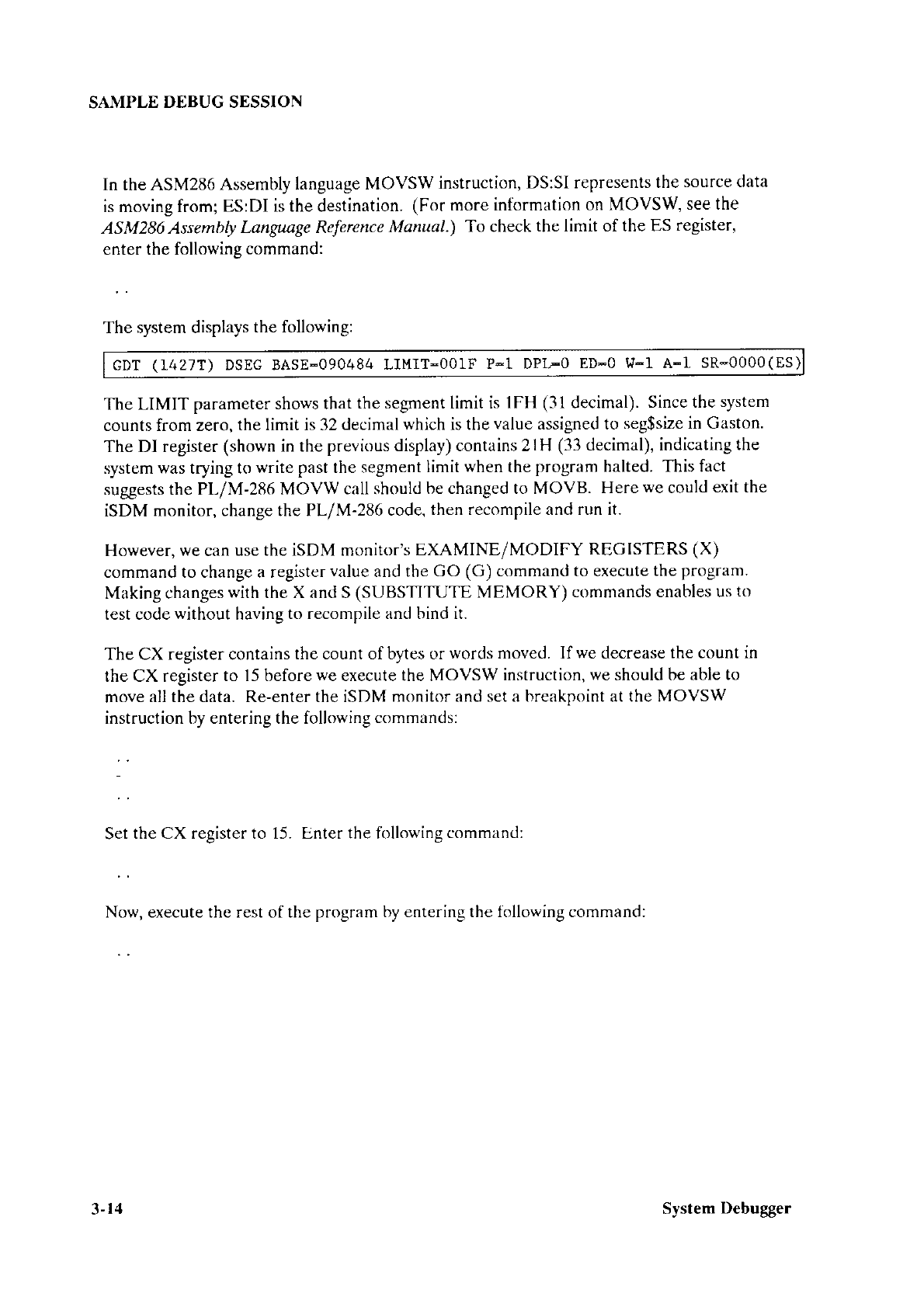
SAMPLE
DEBUG SESSION
In the ASM286
Assembly language
MOVSW
instruction,
DS:SI represents
the
source data
is moving from;
ES:DI is the destination.
(For more intbrmation
on MOVSW,
see the
ASM286 Assemhly
Language Reference
Manual.) To check
the limit of the ES
register,
enter the following
command:
The system displays
the following:
cDT (1427T) DSEG BASE:090484
Lltfrr:oolF P*l DPIFO
ED:O ll-1 A:1 sR*0000(Es)
The LIMIT parameter shows that
the segment limit is
1FH
(31
decimal).
Since the
system
counts from zero,
the limit is 32
decimal which is the
value assigned to
seg$size in Gaston.
The DI register
(shown in the
previous display) contains 2lH (33 decimal), indicating
the
system was trying to
write past the segment
limit when the
program halted. This fact
suggests the PL/M-286 MOVW call should
be changed to MOVB. Here
we
could
exit the
iSDM
monitor, change the PLIM-286
code,
then recompile and run it.
However,
we
can
use the iSDM monitor's
EXAMINE/MODIFY REGISTERS
(X)
command to change a register
v:rlue
and the
GO (G) command to execute
the
program.
Making changes
with
the X and S
(SUBSTITUTE MEMORY) commands enables us
ttr
test code
without
having
to recompile and bind it.
The CX register contains
the count ofbytes or
words moved. If we
decrease
the count in
the CX register
to l5 before
\rye
execute the MOVSW
instruction,
we
should be
able to
move
all the data. Re-enter the iSDM
monitor and set a breakpoint at the MOVSW
instruction by entering the following
commands:
Set
the CX register to 15. E,nter the fbllowing
command:
Now, execute the rest of the
program by entering the following command:
3-
l4 System
Debugger
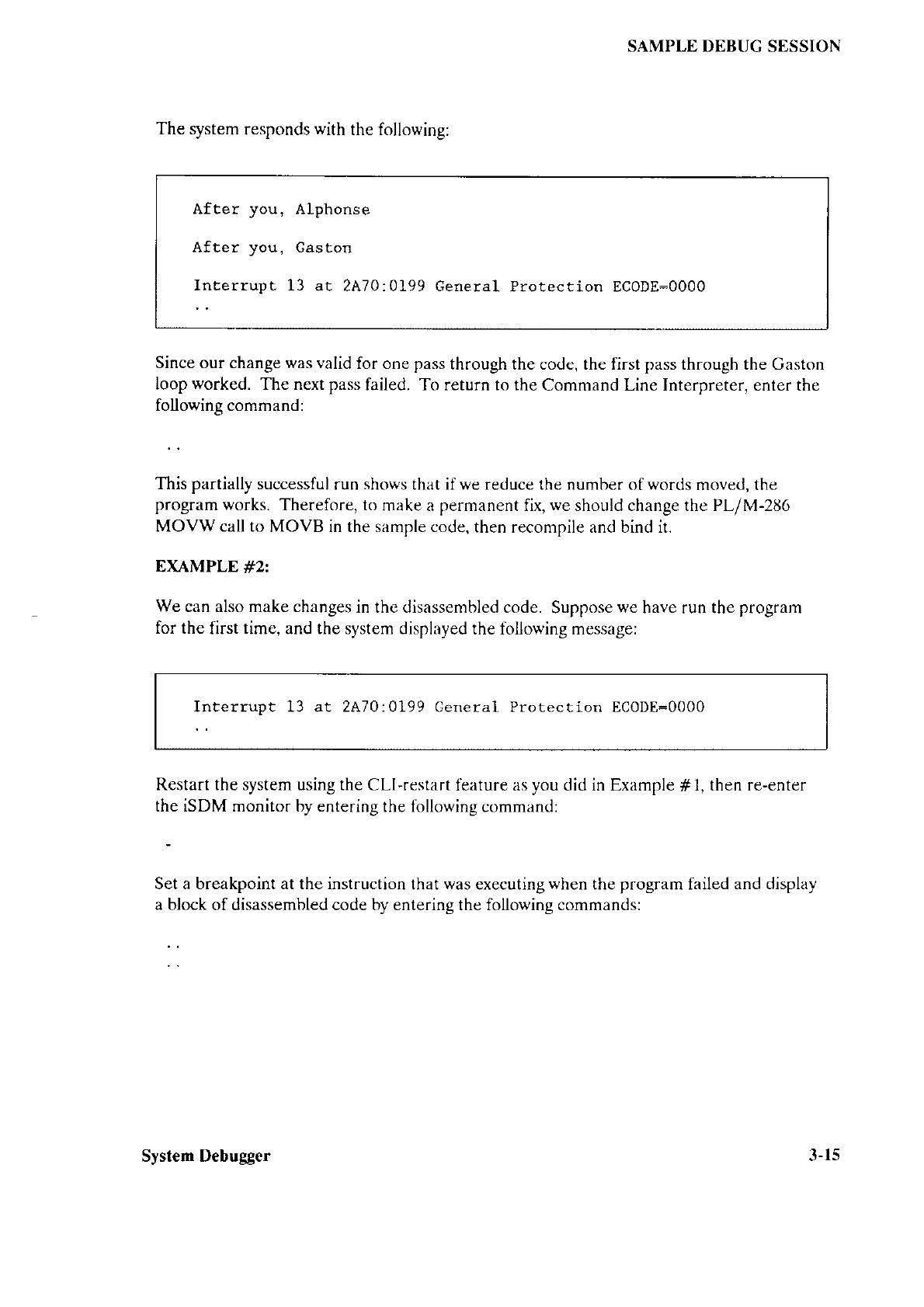
SAMPLE DEBUG
SESSION
The system
responds
with
the following:
Since our change was valid
for one
pass
through the code, the first
pass
through the Gaston
loop
worked.
The next pass
failed. To return to the
Command Line Interpreter, enter the
following command:
This partially successful
run
shclws
that if we reduce the number ofwords
moved, the
program works.
Therefore, to
make a permanent fix,
we
should change the PLIM-286
MOVW call to
MOVB in the sample code.
then recomnile and bind it.
EXAMPLE
#2:
We
can also make changes
in the disassembled code.
Suppose
we
have run the
program
for the
first time, and the system displayed
the following message:
Interrupt 13 at 2A70:0199 General Protection EC0DE-0000
Restart the system using the CLI-restart
lèature as you did in Example
#1,
then re-enter
the iSDM monitor by entering
the lbllowing command:
Set a breakpoint at the instruction
that
was
executing
when
the
program
failed
and display
a block
of disassembled code by entering the following commands:
..
After you,
AfÈer you,
Interrupt
Gaston
13
at 2470:0199General Protection ECODE-0000
System Debugger 3-15
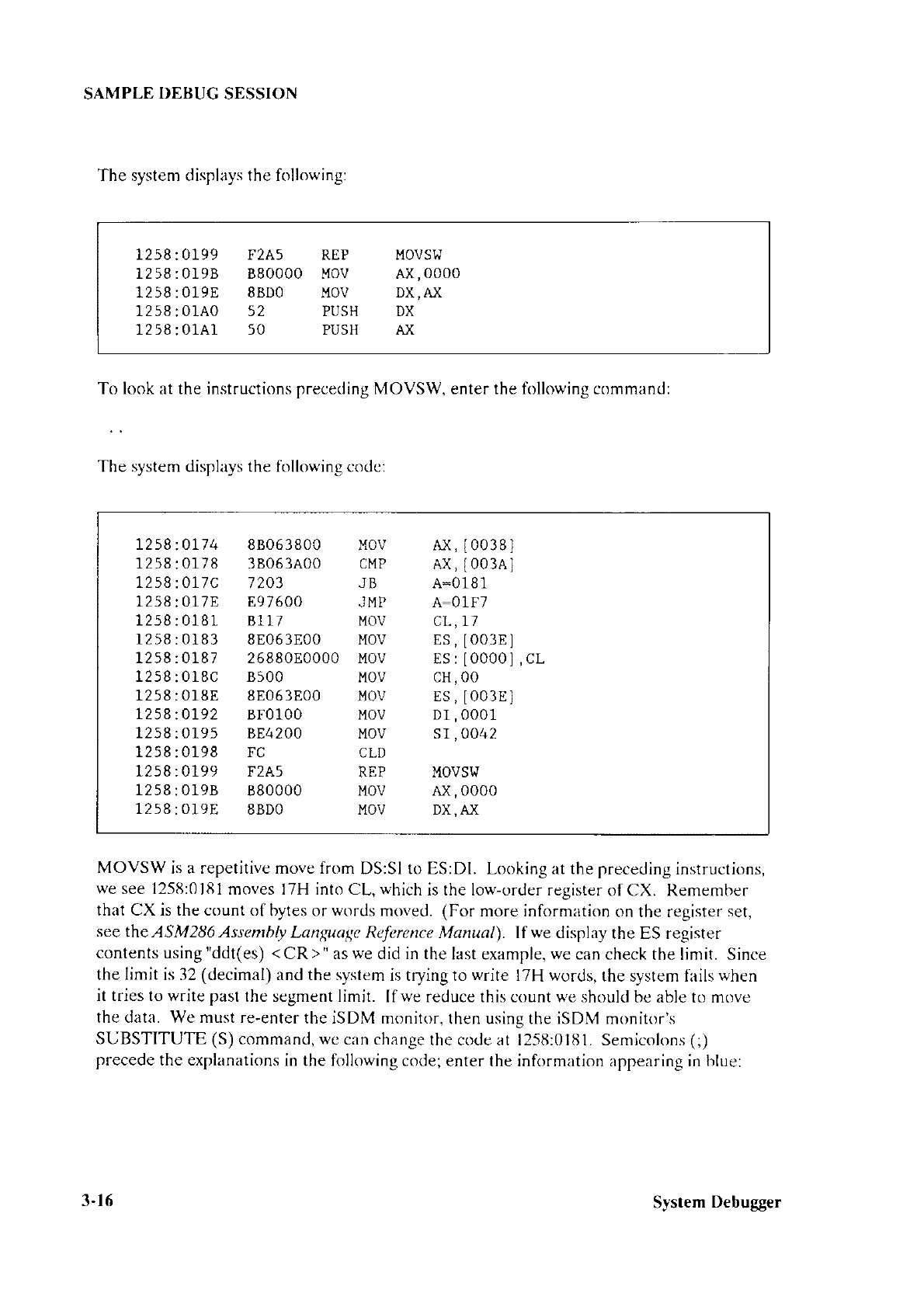
SAMPLE
DEBUC
SESSION
The system displays the following:
To look at the instructions preceding MOVSW, enter the following command:
The system displays the following coclc:
MOVSW is a repetìtive move from DS:SI to ES:Dl. Looking at the precedìng
instructions,
we
see 1251J:0181
moves 17H into CL, which
is the low-order register
of CX. Remember
that CX is the count of bytes or wortls
moved. (For more information
on the register
set,
see
the ASM286 Assentbly
Language Rat'erence
Manual). lf we display the ES register
contents using "ddt(es)
<CR>" as we did in the
last example,
we
can check
the limit. Since
the limìt is 32
(decimal)
and the system
is trying to write l7H words,
rhe system lirils
when
it tries to write past
the segment limit. f f we reduce this count we shouÌd
be abÌe to move
the data. We must re-enter
the iSDM monitor,
then using the iSDM monitor's
SUBSTITUTE (S)
command,
we
crn change
the code at l25tl:0181. Semicolons (;)
precede
the explanations
in the following cocle;
enter the information appearing in blue:
1258:0199
1258:0I9B
1258:019E
1258:01A0
1258: O1A1
F2A5
880000
SBDO
52
50
REP
MOV
MOV
PUSH
PUSH
MOVSW
Ax,
0000
DX,AX
DX
AX
L258
7258
1258
12s8
t2s8
1258
t258
r258
12s8
1258
L258
1258
t258
t258
1258
oll 4
017 8
017
C
017 E
0181
018
3
018 7
018 C
018 E
0r92
019
5
019 8
019 9
0198
019
E
88063800
3 80 6 3A00
7 203
897600
81l7
8E063E00
26880E0000
8500
8E063800
8F0100
BE4200
FC
F2A5
880000
SBDO
MOV
CMP
JB
JMP
MOV
MOV
MOV
MOV
MOV
MOV
MOV
CLD
REP
MOV
MOV
Ax,I00381
Ax,1003Al
A=0181
A:O 1F 7
CL,Il
ES,
[003E ]
Es:[0000],cL
cH,00
ES,
[0038 ]
DI
,
0001
sr
,
0042
MOVSW
Ax, 0000
DX,AX
-l-t6 System
Debugger
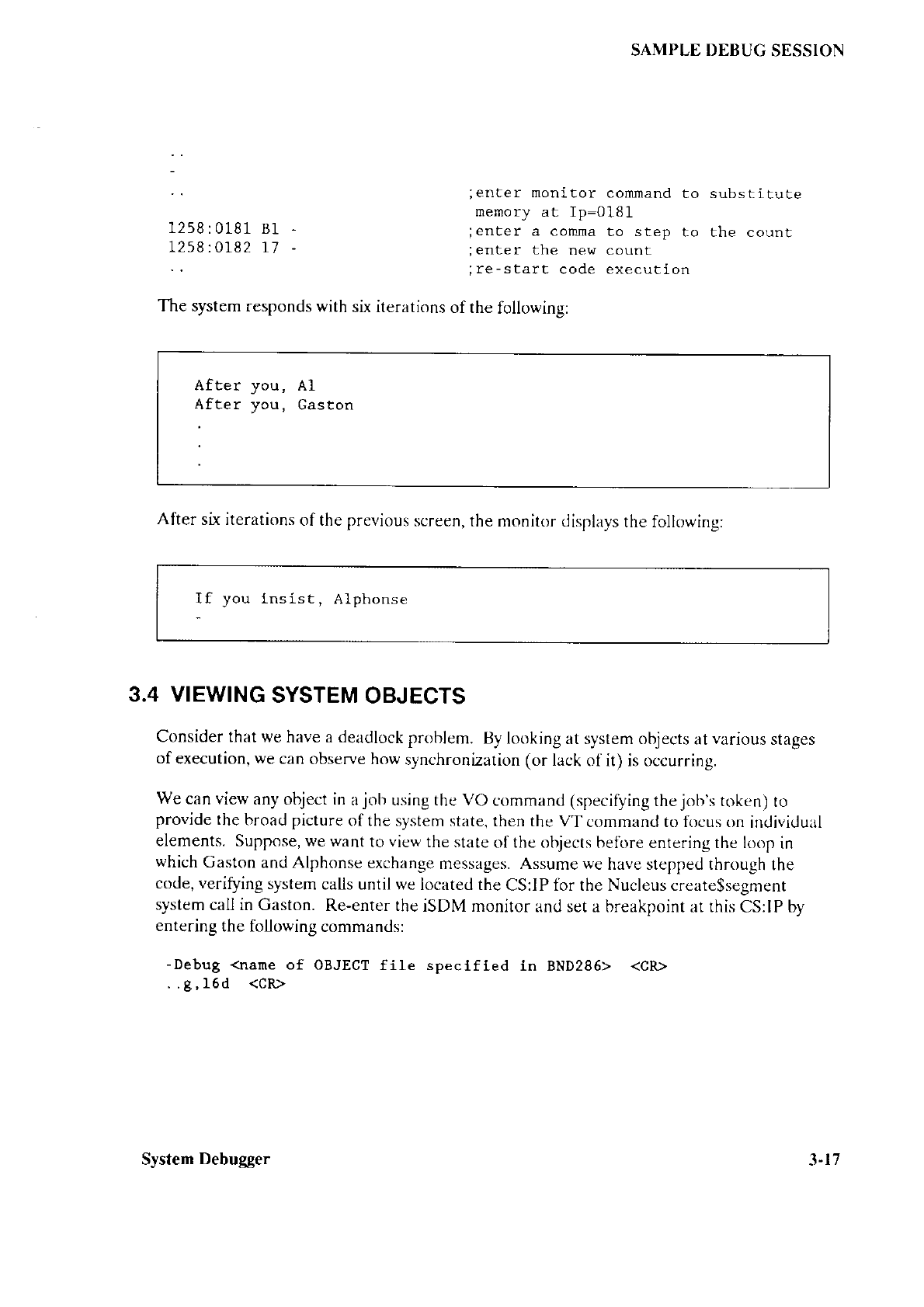
SAMPLE I)EBUG
SESSION
;enter monitor conunand
to substitute
menory at lp:0181
1258:0181 81 - ;enter a conma
ro srep to the counÈ
1258:0182 17 - ;enter the neù counr
;re-start code execution
The system responds
with
six iterations
of the
following:
After you, A1
After you, Gaston
After
six iterations
of the previous
screen,
the monitor displays
the following:
If you lnsist, Alphonse
3.4 VIEWING
SYSTEM
OBJECTS
Consider that we have a deadlock
problem. tsy looking
at system objects
at
various
stages
of execution,
we can
observe how
synchronization
(or lack
of it) is occurring.
We can view
any object in a
job using
the
VO command (specifying
the
job's token) to
provide
the
broad
picture
of the system state,
then the VT command to focus on individual
elements. Suppose, we want
to view
the state
of thc olrjects
belbre entering the loop in
which
Gaston
and Alphonse
exchange
messages. Assume we have stepped through
the
code, verifying
system
calls until we located the
CS:lP lbr the Nucleus creategsegment
system
call in Gaston. Re-enter the
iSDM monitor and set a breakpoint at this
CS:lP by
entering
the fol-lowing
commands:
-Debug
<nane of OBJECT file speclfied 1n BND286> <CR>
.
.9,16d <CR>
System
Debugger 3-t7
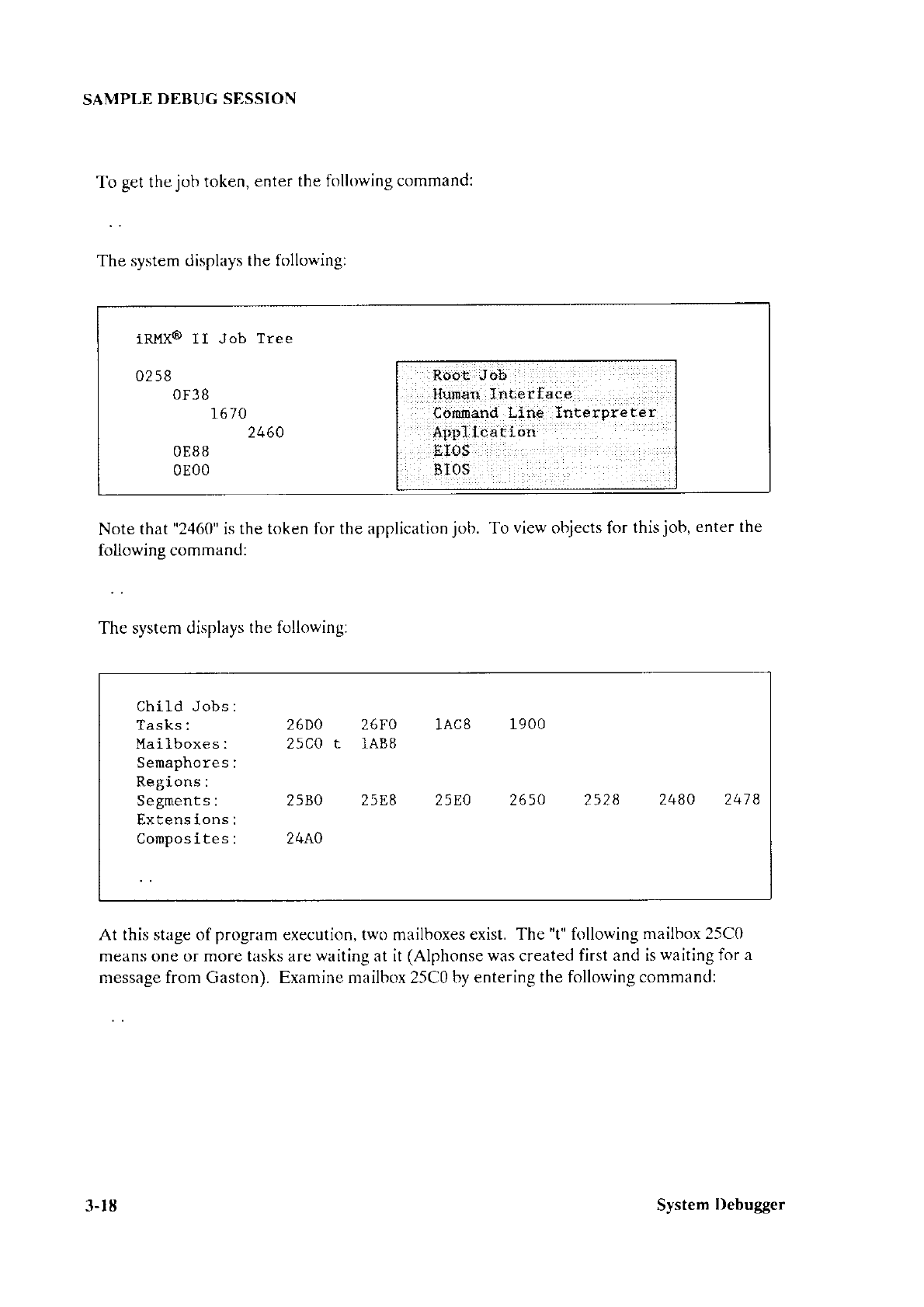
SAMPLE
DEBUG SESSION
'I'o
get the
job
token, enter
the following
command:
The
system clisplays the frrlltrwing:
iRMX@ ll Job Tre e
0258
0F38
1670
2460
0E88
0E00
Note that "2460" is
the token for the application
job. To view
objects for this
job, enter the
following command:
The systrm displays
the following:
At this stage of program
execution, two mailboxes
exist. The "t" following
mailbox 25C0
means one or more tasks are waiting at it
(AÌphonse was
created
first and is
waiting
for
a
message from Gaston). Examine mailbox 25C0 by entering
the follorving command:
Child Jobs
Tasks:
Mailboxes:
Semaphores
Segments:
Extens ions
Conpos i te
s
26D0 26F0 1AC8 19 00
25C0
t 1AB8
2580 25E8 25E0 2650 2528 2480 2418
24A0
3-18 Syst€m
I)ebugger
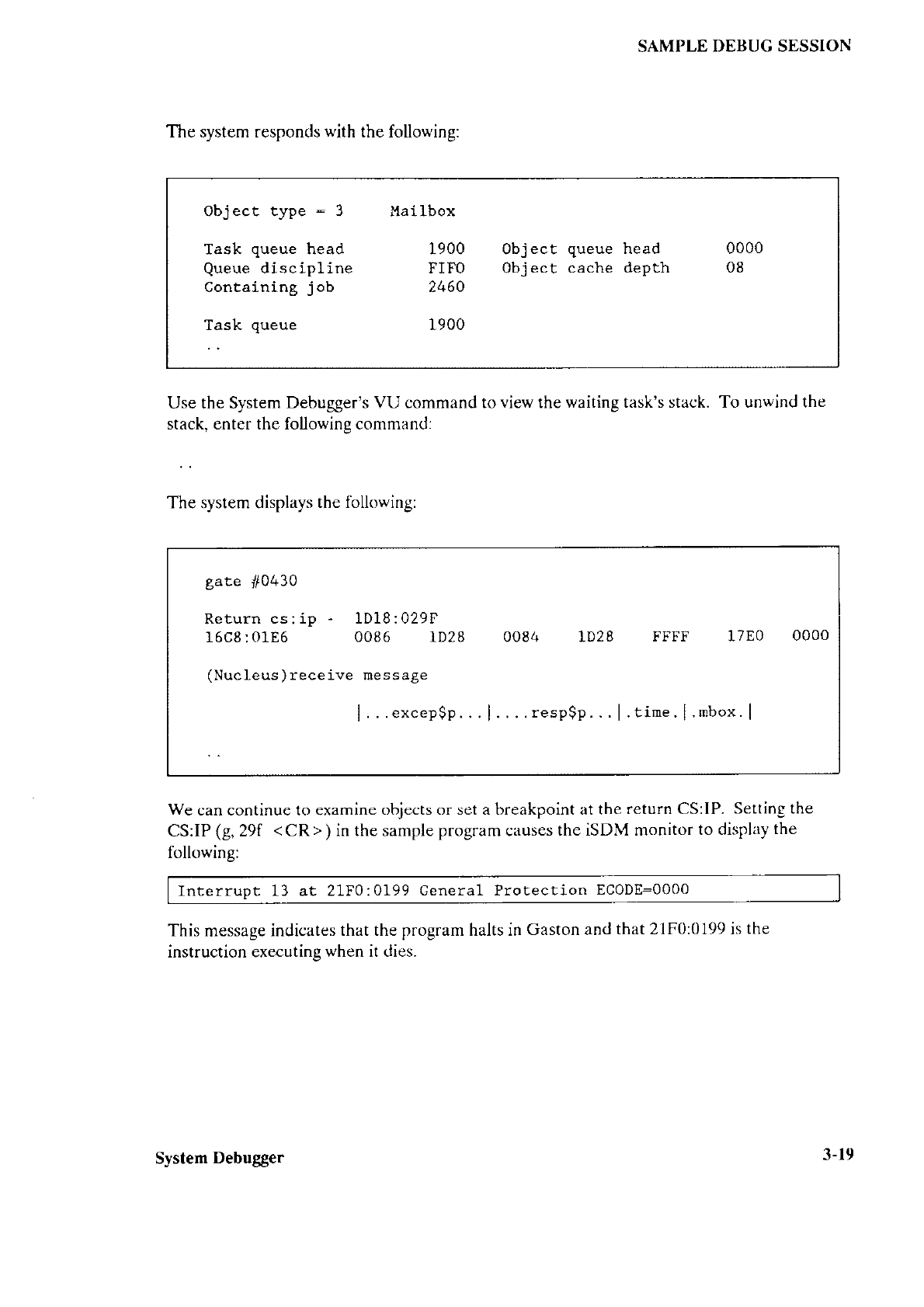
SAMPLE DEBUG SESSION
The system responds
with
the following:
Use the System
Debugger's VU command to
view
the
waiting task's stack. To unwind the
stack, enter the following command:
The system displays
the folkrwing:
gate /104
30
Rpr,,rn.q ín - lnlR'OzqF
16C8:01E6 0086 1D28 0084 1D28 FFFF 17E0 0000
(Nucleus )
receive message
l
. . .excep$p. . .
l
. . . .resp$p-
. .
l
.time.
I
.rnbox.
I
We
can continue to examine
objects or set a breakpoint at the
return CS:lP.
Setting the
CS:IP
(g,
29f <
CR
>
) in the sample
program
causes
the iSDM monitor
to display
the
followins:
lnterrupt L3 at 21F0:0199
Ceneral Protecîrion ECODE:0000
This
message
indicates
that the program halts in
Gaston and
that 21F0:0199 is
the
instruction executins
when it drcs.
object Èype - 3
Task queue head
Queue di sc ipl ine
ContaÍning job
Mal]box
1900
FIFO
2460
1900
Obj
ect queue
obj
ect cache
head
depth
0000
08
System
Debugger l-19
SAMPLE
DEBUG
SESSION
This chapter
has
shown
two
ways
to find an error and two ways
to make temporary fixes
from the System
Debugger. The message
clisplayed
when
the
program
halts contains the
CS:IP of the last instruction
executing. If setting the CS:IP at this instruction
and
displaying the surrounding
code doesn't give you
enough information about where this
point
is in
your
application
code,
you
can use combinations of VJ, VO, VT, VU, and
VS
to
Iocate the running task.
Then set the breakpoint at the CS:IP
of the last executing
instruction
and display code,
objects, and registers to determine
how the system is
executins that
instruction.
J-20 System
Debugger
iSDM"MONITOR
APPENDIX A
COMMANDS
4.1 INTRODUCTION
This appendir briefly describes the iSDM
System Debug Monitor commands in
alphabetical order. A command directory
listing the functional
groups
and
page
references
precedes
lhe command descriptions. For examples
and more detailed informaîion about
the
commands, see the ISDM Sy,stem Debug Monitor User's Guide.
A.2
COMMAND
DIRECTORY
This section provides a brief summ:rry of all iSDM monitor comm:rnds listed by functions.
Each entry in the following summary contains along
with the command name a
brief
description of the command
and
a page
reference
where you can find more information on
the command.
Command Function Performed Pa,qe
PROGRAM LOADING AND EXECUTION
dP rwúu d' ÈJrr sli s(r'u 5
secondary storage jnto tlre Larget system's memory.... A-3
C Beein P"èrrt ine ennr
: ^^' . . A-5' r.EJ
qPr/
' P'uÉ,d,,,........
L* Load an 8086 absolute object fiLe or an 80286
object file from a development system into
rsrvry. A- 6
N Execute one or more instfuctions at a time A 6
R* Load and execute an 8086 absolute object file or an
80286absolute object file in target system nemory... A-8
iSDM" Syslem
Debugger A-l
iSDM" MONITOR
COMMANDS
Command Function
Performed Page
I/O PORT INPUTAND OUTPUT COMMANDS
I Input and display a byte or word from the specified
porc... A-5
O Output a byte or word to the specified port.......... A-1
BLOCK MANIPUI-A,TION
C Conpare the contents of one block of memory t^'ith
that of another block.. A-4
F Search the specified block of memory for a sequence
of hexadecirnal digits A-5
M Copy che content of a block of memory to another
hlnnlr nf mprnnrv .. A-6
MEMORY/REGISTER
DISPIAY AND MODIFICATION
D Display the contents of mernory and descriptor table
entries. A-4
S Display and (optionally) modify nemory locations and
descripLor tabl e entri es A- 8
X Display and/or modify CPU/NPX register or rask state
segment contenls. A-
9
L-2 iSDM" System
Debugger
iSDM" MONITOR COMMANDS
Command Function Performed Page
MISCELI-ANEOUS COMMANDS
E* Exit the loader program. Return control to the
developnent sys tem. .. A-4
K* Echo al1 console outDut to a fi1e. A-5
P DÍsplay che base and offset portion of an address
or an expression.... A'-1
Q Enable Protected Virtual Address Mode (protected
mode). . A-1
Y* Display and define symbol inforrnation. . A-9
* Command requires an attached development system.
A.3 COMMAND
DESCRIPTIONS
This section
provides
brief descriptions for iSDM monitor commands
in an easily
referenced
alphabetical order. For more information
on command
parameters,
syntax, and
options, refer to the
iSDM
tstem Debug Monitor User's
Guùúe.
A.3.1 B-Bootstrap Load
The B command
passes control to the bootstrap
loader to load absolute
object code
from
secondary storage into your target
system memory. The Bootstrap
Loader loads
the file
into the target system at the memory
address specified in the
file. After the
bootstrap
loader finishes
loading the file, the code begins
executing. To use
the B command
correctly,
you
must
be operating in real mode.
If either the file
you specified or the default file does
not exist, the
bootstrap loader
halts
and takes
action according to how it is configured.
iSDM" System
Debugger A.3
iSDM. MONITOR COMMANDS
A.3.2 C-Compare
The C command
compares the contents of one block of memory defined
by a
range
with
the contents of another block of memory that begins at a destination address. The iSDM
monitor expects the blocks to be equal in length.
If the iSDM monitor
encounters
any
mismatched bytes, it displays them in the folìowing formaL.
aaaa:bbbb xx yy aaaa:bbbb
where "aaaa:bbbb" are the addresses of the bytes that do not match and "xx" and "yy" are
the bytes
themselves.
4.3.3 D-Display Memory/Descriptor
Tables/Disassembled
lnstructions
The D command is actually three commands
in one. You can use it to
display
the
contents
of a specifie<.I block
of memory, the contents of
an 80286/80386 descriptor table, or the
contents of a specified
block of memory in disassembled
form. Ifyou are operating in
reat
mode, you
cannot display descriptor table
entries. However, ifyou are
operating in
protected
mode, you
can use both functions of this
command.
A.3.4 E-Exit
The E command
enables you to
exit the loader program by
returning control from the
loader program
to the development
operating system.
Upon return, the
iSDM monitor
loses all symbol
information.
When
using the
E command, you
must use it on a line by
itself; do not use multiple
commands on a
line
with
the E command.
Also,
your
system
must include an attachetl
development
system
before
you
can use this command.
When you
reinvoke the
iSDM monitor
after exiting the loader program,
one of two things
happens:
. The iSDM monitor prints
either a single
or double prompt
depending upon whether
you were
operating
in real or
protected
mode when
you
exited.
. The iSDM
monitor prints
its usualsign-on
message and re-initializes
itself if you reset
your
target
system between
the time you exited
the loader and
the time
you
reinvoked
the iSDM
monitor.
A-4 iSDM" System
I)ebugger
iSDM" MONITOR
COMMANDS
4.3.5 F-Find
The
F command searches the block
of memory
you
specified to determine if it contains the
sequence of hexadecimal
digits
you
chose
in the data
parameter.
Each time the iSDM
monitor finds a match,
it displays the address of
the first matching byte.
A.3.6
G-Go
The G command instructs the iSDM
monitor to begin executing
your
application
program.
In response to the G command, the iSDM monitor single steps the
first
instruction, then
executes all succeeding
instructions at full speed.
Your application
program
must have at least
12 bytes of stack available for
lhe
iSDM
monitor to use. If you
are operating in protected mode, each task in your program must
contain at least 12 bytes of stack at privilege
level 0 for the iSDM monitor to use.
With
80286
and 80386
boards, a special situation arises when
you
execute the G command
and you
speci! a breakpoint address but not a starting address. If the breakpoint is in an
interrupt handler and the
current CS:IP is at a software interrupt instruction
(INT x,
INTO, BOUND), the iSDM monitor
single steps the interrupt instruction,
executing the
interrupt handler at full speed and bypassing
the
breakpoint you set. To get arountl this
8028ó/8038ó operational anomaly, make sure that the CS:IP is pointing to the (or any)
instruction
preceding
the software interrupt instruction before
you
execute the
G command.
A.3.7 l-Port lnput
The I command
retrieves and displays a byte or
word
from the
port you
specify. Byte and
word formats are different. (See
the ISDM System Debug Monítor User's Guide for byte and
word
format descriptions).
4.3.8 K-Echo File
The K command
copies
all console output to a development system
file you specify.
Repeating the K command without speciling a file causes the iSDM monitor to stop
copying console output.
Your system must include an
attached development system
in
order
to use this
command
iSDM" Systen
Debugger A-5
iSDM" MONTTOR
COMMANDS
A.3.9 L-Load
Absolute Object
File
The L command
loads absolute 8086 or
80286 object files into target
system memory. The
iSDM monitor loads
the data from the file into the
memory location that
you
specified
when
you
used the LOC86 or BLD286
commands.
When
loading
the data, the iSDM
monitor discards
all previously loaded symbol information
and loads the new
symbol
information,
but it retains all user-defined
symbols. If the file contains a register
initialization record,
the iSDM monitor sets the appropriate registers
to the
values the file
specifies. Your system must include
an attached development system in order
to use this
command.
The L command cannot load relocatable modules. Ifyou are operating in
real mode,
you
can load only 808ó absolute object files. Ifyou are operating in
protected
mode,
you can
load only 80286 absolute object files.
When you
load an
80286
object file,
the iSDM monitor initializes the first 40
global
descriptor table
(GDT)
entries for its own use. In addition,
the
iSDM monitor
initializes
any uninitialized interrupt descriptor table
(lDT) entries. If the access byte is equal
to
zero, the iSDM monitor assumes that the descriptor table entry is not initialized.
Refer to
Intel's Microprocessor and Peipheral Handhook, Microststem
Components Handbook, or
IAPX 286 Operating System
Witer's Guide
for more
information about the descriptor tahles.
4.3.10 M-Move
The M command copies the contents of a block of memory to a memory address you
specif .
4.3.1 I N-Execute
Single
Instructions
The N command displays and executes one or more disassembled instructions at a time.
Going through
your
application line-by-line is called
"single-stepping."
SingJe-stepping
allows you to begin at a CS:IP you specify
and check
your
application for
problems
in
an
instruction-by-instruction
manner.
Your application program
must have at least 12 bytes of stack available for the iSDM
monitor to use. Ifyou are operaîing in
protected
mode, each task in your program must
contain
at least 12 bytes of stack at privilege level 0 for the iSDM monitor to use.
When
you are single-stepping
instructions,
you
should be aware of some special
considerations. See the ISDM S1,sîem Dehug
Monitor User's Guide îor more information
about these special
considerations
when
using the N command.
A-6 iSDM" Sysfem
l)ebugger
iSDM" MONITOR
CONI]!IANI)S
4.3.12
O-Port
Output
The
o command
allows
you to
enter data
(a byte
or
word)
at
the console and
send
it to a
port
you
select.
4.3.13
P-Print
The P
command allows
you to
display
either the value
of an
expression or the value
of the
base (or
selector)
and offset portions
of an address.
The values
are tJisplayed
on
your
console
terminal screen.
The
iSDM monitor
always
displays an address
in hexaclecimal
form. Ifyou enter "P" plus
an expression,
the iSDM monitor prints
the value
in
hexadecimal.
If
you
enter
"Pl-'or
"PS"
plus
an expression,
the iSDM monitor
prints
the
value
in decimal
or signed
decimal form,
respectively.
In this
command, the
comma
acting as a separator
also causes the iSDM
nronit.r to add
a
space between
the
addresses or
exltressions
it displays.
4.3.14
Q-Enable
Protection
(80286/80386
Onty)
The Q command
changes the
[ì02tlfi- or 803iJ6-based
system
from real ntode
to protected
mode. The iSDM monitor displays
the lbllowing
mcssage when you use rhe
e command:
Now in Protected Mode
When you
invoke
this command,
the iSDM
monitor
initializes the
entries it needs
in the
GDTandthelDT. The iSDM mon
iror then
places itself
at
privilege
level
zero. Ifyou are
already
operating in protected
mode when
you
invoke this command,
the iSDM
monitor
re-initializes
the GDT and
IDT entries.
The only way you
can
return to real mocle
is
to
reset the
80286 or 80386
hardwarc.
iSDM" System Debugger A-7
iSDM* MONITOR COMMANDS
A.3.15 R-Load and
Go
The R command
is a combination
of the Load command
(L) and the Go command
(G)
This command
loads an absolute object file
from a develrrpment
system into target
system
memory
then executes this
program. This command causes
the iSDM monitor
to discard
all previously loaded
symbol information and load new
symlxrl information; however,
the
iSDM monitor
retains all user-defined
symbols. Your system must include
an attached
development
system in order
to use this command.
The iSDM monitor
loads the data from
the file into the memory localion
that you specified
when you used the LOC86
or BLD2ttfi commands. If the file contains a register
initialization record, the iSDM
monitor sets the appropriate
registers to the
values the file
specifies.
The R command
cannot load rekrcatable modules. If
you are operating in real-addressing
mode,
you
can load
only f1086 absolute object files. Ifyou
are operating in protected mocle,
you
can load only 80286 bootloadable
(ahsolute)
files.
When you
load an 80286
object file, the iSDM monitor initializes
the
first
40 global
descriptor table (GDT) entries
for its own use. In addition, the iSDM monitor initializes
any uninitialized interrupt
descriptor table (lDT) entries. Relèr Ío Intel's Microproces.sor
and Peipheral Handhook, Microsy.îtem
Components Handhook, or APX 286 Operatíng
System
Witer's
Guide for
more information about the 80286 component's descriptor tahles.
After the iSDM monitor loads the file and sets the appropriate registers
to the
values
the
file specifies, it begins to execute the
program
at the location
specified by the CS and IP
regrsters.
Your application program
must
have at lcast l2 bytes of stack available for the iSDM
monitor to use. Ifyou are operating in
protected
mode, each task in
your program must
contain
at least l2
bytes
of
stack at privilege level 0
for
the iSDM monitor
to
use.
A.3.16
S-Substitute
Memory/Descriptor Table Entry
The S command is actually two commands in one. You can use it to display and
(optionally)
modifo either the contents of memory or the contents of descriptor
table
entries. If you are operaîing in real mode,
vou
cannot display and modi! descriptor tabÌe
entries. However, ìf
yclu
are operating in protected mode, you can use both functions of
this command.
A-8 iSDM" System
Debugger
iSI)M* I\f
ONITOR CONII\'IANI)S
If
you
enter the S command without
an equal sign (
=
),
the |SDM monitor displays a
special hyphen (-)
prompt.
Then, it
waits
for
you
to enter either
o A continuation comma
instructing
the iSDM
monitor to tlisplay the next mcnìory
location.
. A single expression or a list of expressions
separated by slashes
(/). By entering an
expression (or
expressions), you
instruct the iSDM
monitor to substitute these values in
place of those already
in the memory
location you specified.
The iSDM monitor continues
to issue
hyphen
prompts
until
you
enter î carriage
return.
4.3.1
7 X-Examine/Modify
Registers
The X command allows you
to examine and
(optionally)
rrodify the contents of
your
system's
NPX antl microprtress,tr
rcgislcrs.
If
you
use the
X command
with
no parametcrs, the
iSDM ntonitor displays all ol the 8(Ìbo,
286, and 386 registers.
If you
use
both
the register name and
an expression,
(for
exrmple, CS
= XXXX), the value
you
entered
(XXXX) is placed
in the specified register.
You can
use the X command to set the tl0tl6
family and NPX registers lnd the task state
segment
contents to any
value.
lfyou used any invalitl
values.
the iSDM monitor reports
them when you
execute the application program.
4.3.18
Y-Symbols (80286
or 80386 Only)
The Y command allows you
to rJisplay and
define
symbol
information
generated
by 8028tr
translators.
If
you
use the Y command with
no parameters, the iSDM monitor displays all
the symbols stored
in the current domain module or
in
all
modules if
you
set
no domuin.
You
can also choose to have the iSDM
monitor display the
symbols
and their
values
in a
particular
module or
you
can use this
command to define
your
own
symbols.
To use this
command, you
must be operating in protected
mode,
with
an attached development
system.
iSDM" System Debugger A-9

D-MON386
APPENDIX
B
COMMANDS
8.1 INTRODUCTION
This
appendix
briefly
describes
rhe 80386
Debug
Monitor
(D-MoN3tì6)
commancls
in
alphabetical
order.
A command
directory
listing the
functional
groups
and page
references
precedes
the
command
dev:riptions.
For
examples
and more
detailed
information
about
the commands,
see
the
D-MONJ86
Debug
Monitor
for the 8038ó llser's
Guide.
8.2 ENTERING
COMMANDS
To enter
D-MON386
commands,
follow
the gui<Jelines
below:
o Terminate
a
command
line by pressing
rhe
ENTER key
or the
RETURN
(
<
CR
>
)
key.
A command
line can
consist
of one or more
commands.
. Separate
multìple
commands
on a single
line using
a semicolon
(;).
o Continue
commands
from one
line to
another by
entering the
slash
(/) just
before
terminating
the line with
rhe
ENTER key
or RETURN
key.
. Enter
commands
using
upper or
lower case
characters.
o Use
CTRL-C (pressing
the control
key down while
at the same
time pressing
the C
key)
to abort a command
being constructed
on the
command line.
D-MON3Eó
System Debugger B-l
I)-MON386
COMMANDS
8.3 COMMAND
DIRECTORY
This
section provides
a brief
summary of all
D-MON386
commands
listed by
functions.
Each
entry in
thc following
summary
contains along
with the
command name
a brief
description
of the command
and
a page reference
where you can find more
information
on
the commantl.
Command Function
Performed Page
BI-OCK
COUNT/ENDCOUNT
Provides molìitor command
control
structures. These structures enabÌe you
to enLer and repeat execution of several
nonitor cornmands B-5
CONTROL
VARIABLES
BASE Display or set the base nurnber system to
to either binary, octal, decimal , or
hexadecirnal B-5
N0-N9 Display or set scratch registers zero
through
nine... B-B
$ Display or set the current execution point.. B-5
EXPRESSION
DISPLAY
EVAL EvaLuates an expressíon and dispì-ays the
resul
ts 8-6
EXECUTION
ENVIRONMENT
G0 Controls high-1evel execution environment. . . B-1
ISTEP EnabLes single step execution. B-8
SWBREAK Displays and sets software cocle
breaks...... B-9
ShREMOVE Removes software code breaks. B-10
B-2 D-MON3116 System
Debugger
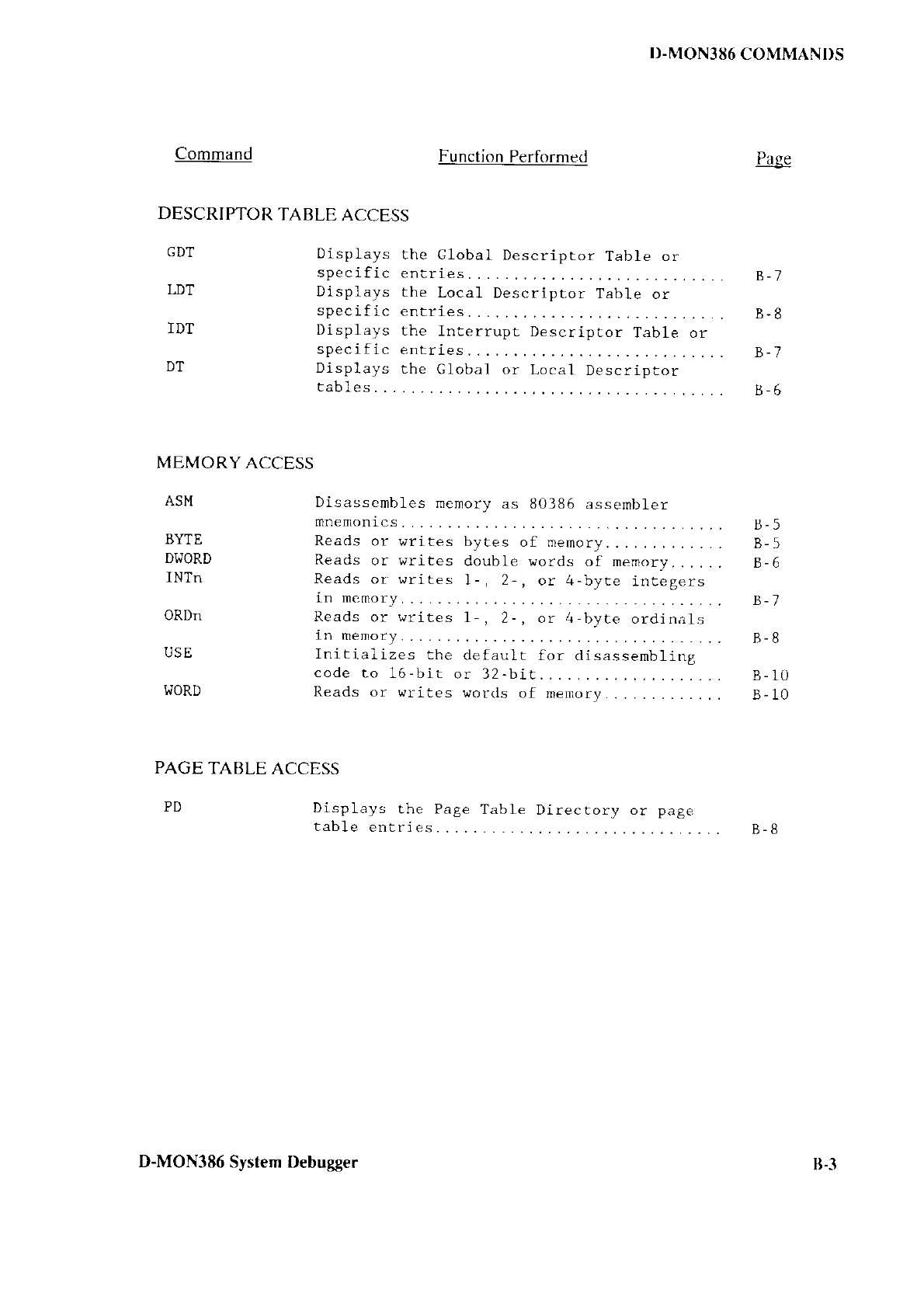
I)-MON3II6
COMMANI)S
Command Fu
nction
Performcd Page
DESCRIPTOR
TABLE ACCESS
GDT Displays the clobal Descriptor Table or
specific entries B_1
LDT Displays the Local Descriptor Table or
specific entries. B-g
IDT Displays the Interrupt Descriptor Table or
specific entries B_7
DT Displays the Global or Local Descripror
tabÌes. ts_6
MEMORY
ACCESS
ASM Disassembles memory
as 80386 assembler
mnemonrcs B
_
5
BYTE Reads or writes bytes of memory. B-5
DWORD Reads or writes double words of menory. .. 8-6
INTn Reads or writes 1-
, 2,, ot 4-byte integers
in memorl/. . B_
7
ORDn Reads or \rrites 1 , 2-, or 4 byte ordinaÌs
in memory. .. B_g
USE Initializes the default for disassembling
code ro L6-bir or 32-bit. B-10
WORD Reads or writes rvorcls
of nemory. B-10
PAGE
TABLE ACCESS
PD Displays the Page Table Directory or page
table entri es B_g
D-MON.l8ó
System Debugger Ir-3
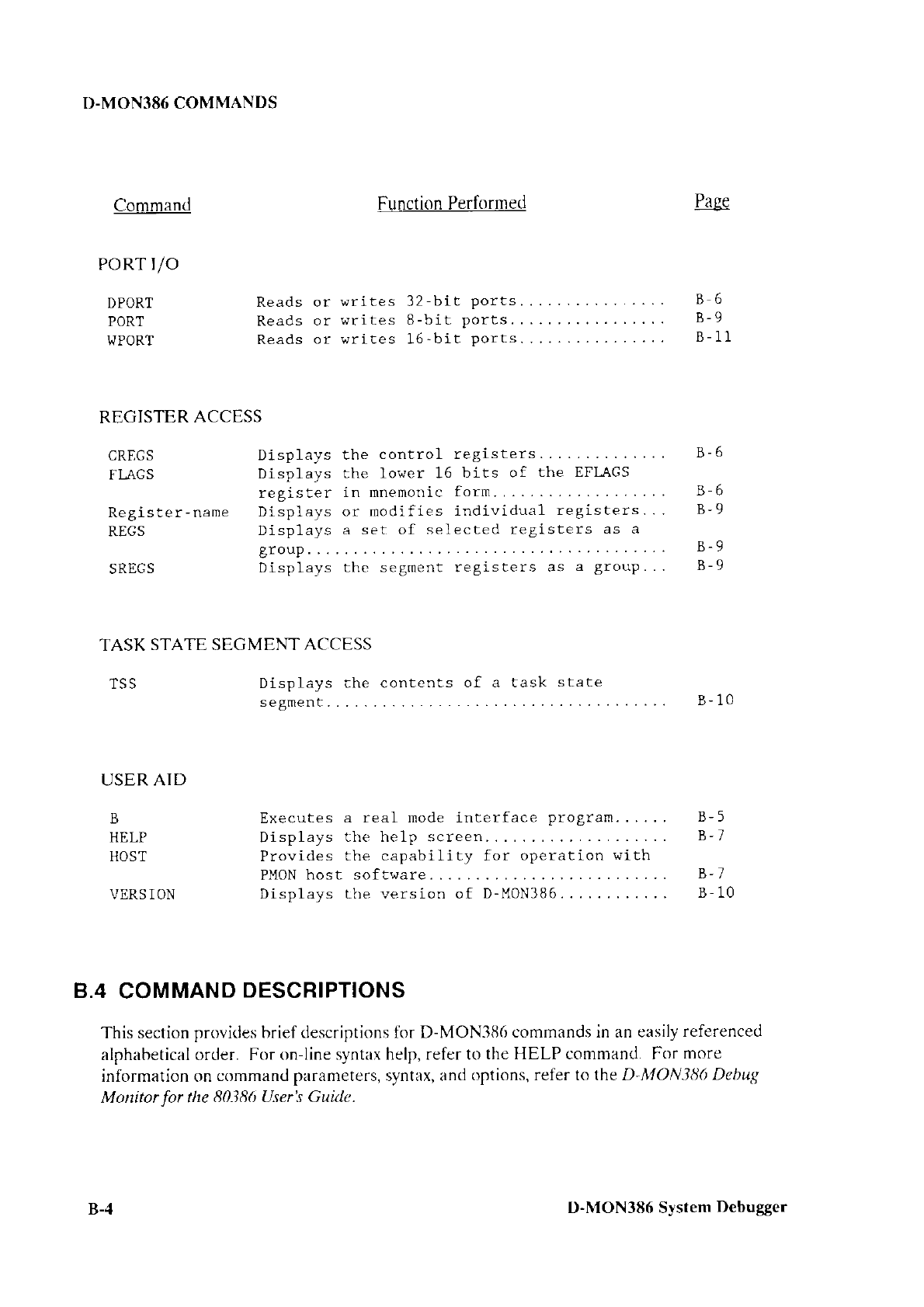
D-MON38ó COMMANDS
Commancl
PoRT r/O
DPORT
PORT
WPORT
USER AID
B
HELP
HOST
Function Performed
Reads or wrítes 32-bit ports.. B 6
Reads
or \trites 8-bit ports.. B-9
Reads
or writes 16-bit ports. . B-11
Page
REGISTER
ACCESS
CRECS Disptays the control registers 8-6
FLAGS Displays the lower 16 bits of the EFI-A.GS
register in nnemonic
form.,. B 6
Register-name Displays or modifies lndividual registers. . . B-9
RECS Displays a set of selected registers as a
group. . B-9
SRECS Displays the segmerìt registers as a group... B-9
TASK
STATE SEGMENT
ACCESS
TSS Disptays the contenls of a task state
segment. B- 10
Executes
a real mode incerface program...... B-5
Displays the help screen. B-l
Provides
the capabiliLy for operation
wiLh
PMON
host software. B-l
VERSION DisDlavs Lhe version of D-MON386 B-10
8.4 COMMAND
DESCRIPTIONS
This section
provicles brief cìescriptions for D-MON3fifi
commands in an easily
referenced
alphabetical order. For
on-line syntax help, refer to
the HE,LP command. For
more
information on
command parameters, syntax, and
options, refer to the D-,ttON-18ó
Dehug
Mottitor
for tlrc 8038(t User's Guitle.
B-rl D-MON3tl6 System
Debugger
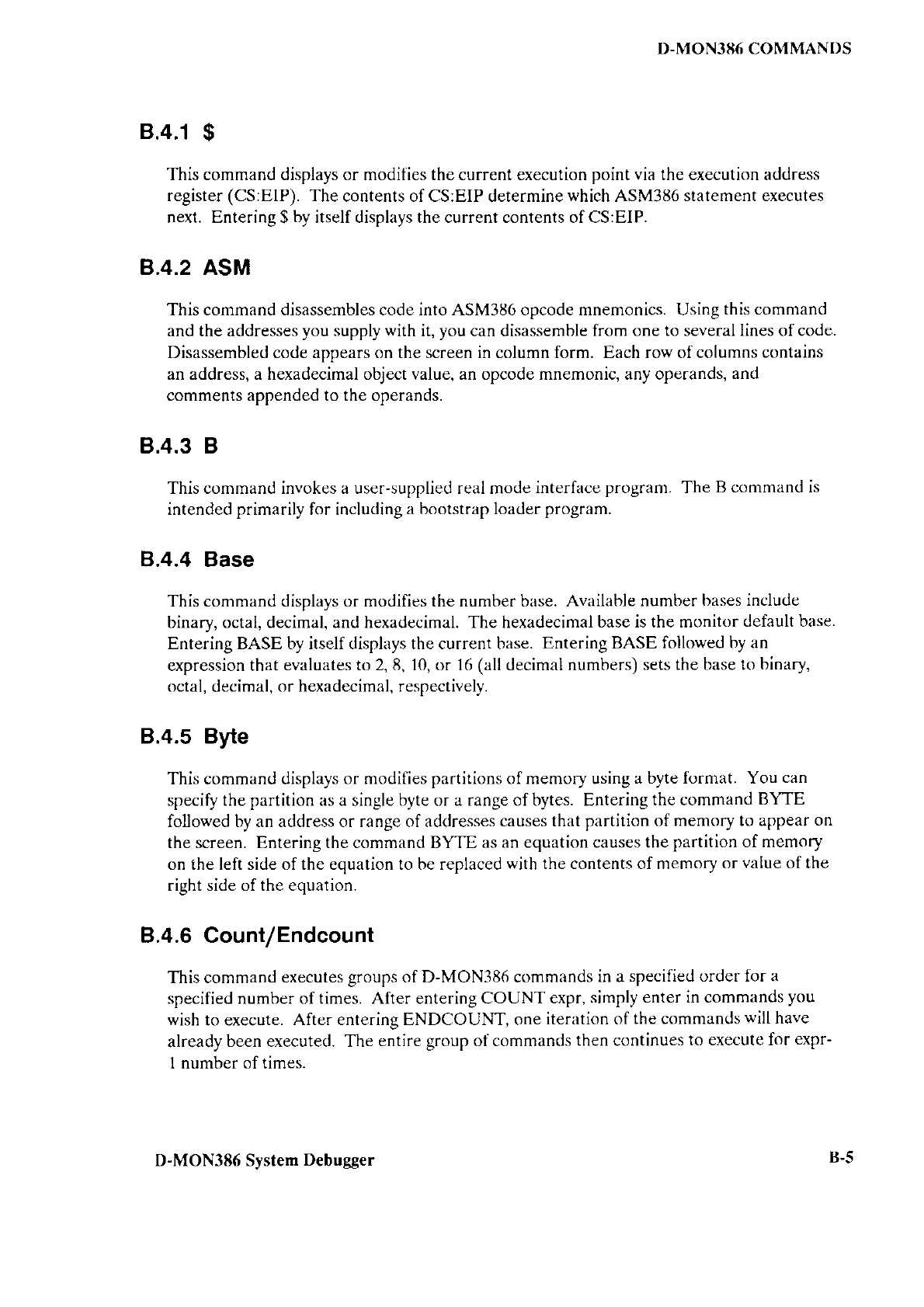
D-MON3116 COMMANI)S
8.4.1
$
This command displays or modifies the current execution
point via
the execution address
register (CS:ElP). The
contents of CS:EIP determine
which
ASM3tì6
statement executes
next. Entering
$
by
itself displays the current contents of CS:EIP.
8.4.2 ASM
This command disassembles code into ASM386 opcode mnemonics. Using
this command
and the addresses
you supply with
it,
you
can disassemble from
one to several lines of code.
Disassembled code appears on the screen in column form. Each row of columns
contains
an address, a hexadecimal object value, an opcode mnemonic, any operands,
and
comments appended to the operands.
8.4.3 B
This command invokes a user-supplied real mode
interface
program.
The
B command is
intended
primarily
for including
a bootstrap loatJer
program.
8.4.4 Base
This command displays or modifies the number base. Available
number
bases include
binary, octal, decimal, and hexadecimal. The hexadecimal
base is the monitor
default base.
Entering BASE by itself displays the current base.
Entering BASE followed
by an
expression that
evaluates to 2, 8, 10, or 16 (all tlecimal numbers)
sets the base to
binary,
octal,
decimal,
or hexadecimal, respectively.
8.4.6 Count/Endcount
This command
executes groups of D-MON386 commands
in a
specified order for a
specified number of times. After entering COUNT
expr,
simply enter in commands
you
wish
to execute.
After entering ENDCOUNT, one
iteration of
the commands
will have
already
been executed. The
entire group of commands
then continues
to execute for
expr-
1 number of times.
B.4.5 Byte
This command displays
or modifies partitions of memory using
a byte format. You
can
specify the partition as a single byte or a range of bytes. Entering
the command
BYTE
followed by an address or range of addresses
causes that partition
of memory to appear
on
the screen. Entering the command BYTE as
an equation causes the
partition of memory
on the left side of the equation to be replaced
with the contents of memory
or value of the
right side of the equation.
D-MON386 System
Debugger B-5
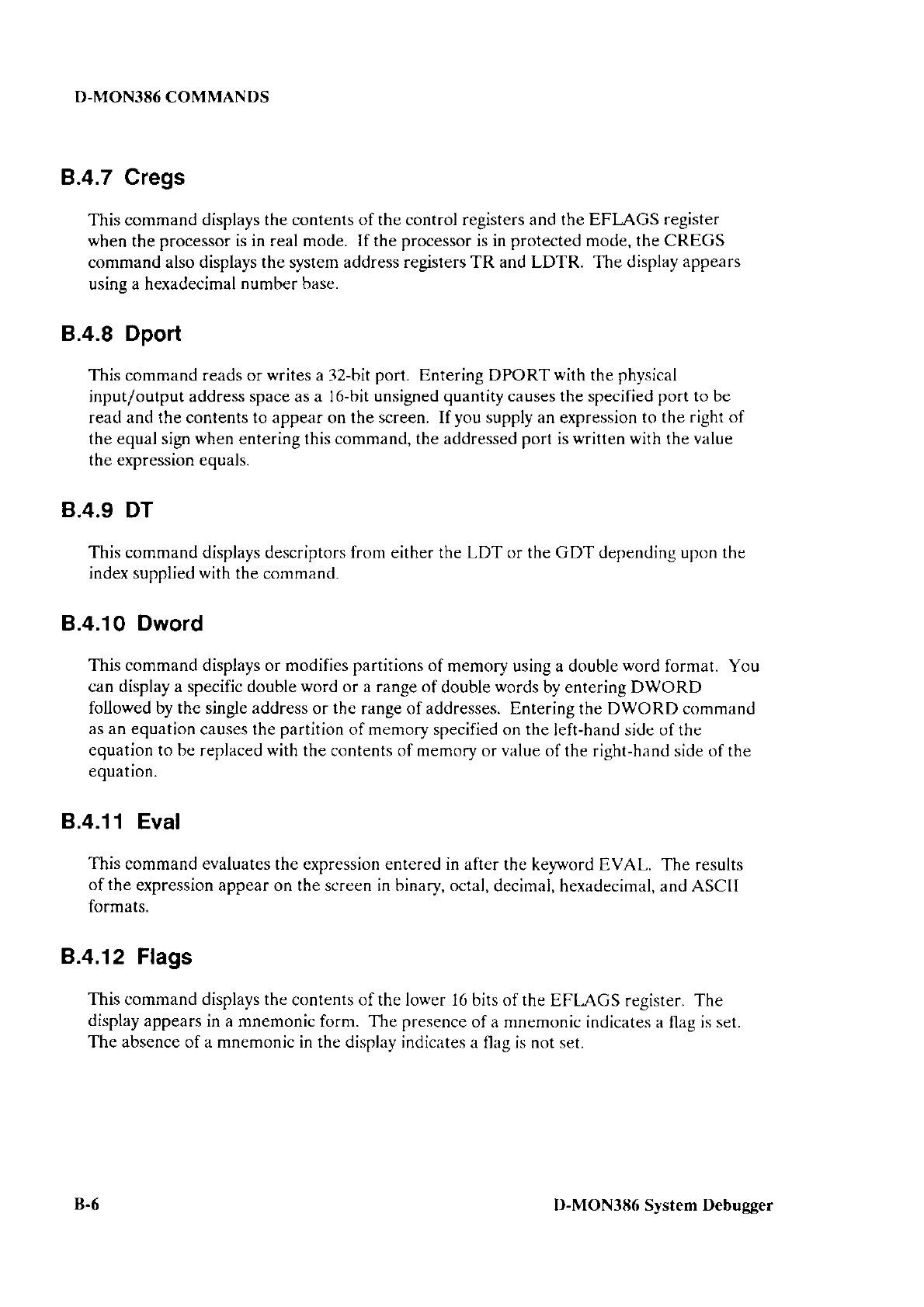
D.MON38ó
COMMANDS
8.4.7 Cregs
This command
displays the contents of the control registers and the EFI-AGS register
when
the
processor is in real mode. lf the processor is in
protected
mode, the CREGS
command also displays the system address registers TR and LDTR. The display
appears
usine a hexadecimal
number base.
8.4.8 Dport
This command reads or writes a 32-bit
port. Entering DPORT
with
the
physical
input/output address space as a l6-bit
unsigned quantity causes the specified port to be
read and the contents to appear on the screen. If you
supply an expression to the
right of
the equal sign
when
entering this command, the addressed port is
written with
the
value
the expression equals.
8.4.9
DT
This command displays descriptors from either the LDT or the GDT depending upon the
index supplied
with
îhe commanct.
B.4.10 Dword
This command displays or modifies partitions of
memory using a double
word
format. You
can display a specific double
word
or a range of
double
words
by entering DWORD
followed by the single address
or
the
range of addresses. Entering the DWORD command
as an equation
causes the
partition
of memory specified on the
left-hand side of the
equation to be
replaced
with
the contents of memory or value of
the right-hand side of the
equation.
8.4.11
Eval
This
command evaluates the expression entered in after
the kepvord EVAL. The
results
of the
expression appear on the screen in binary, octal,
decimal, hexadecimal, and ASCII
formats.
8.4.12
Flags
This command displays the
contents of the lower 1ó bits of the
EFI-AGS register. The
display
appears in a mnemonic form. The presence
of a mnemonic indicates
a flag is
set.
The absence of a mnemonic in the disnlav indicates
a flaq is not set.
B-6 I)-MON3lt6 System Debugger
D.MON]116
COMMANDS
8.4.13
GDT
This command
displays the entire Global Descriptor Table
(GDT) or individual
GDT
descriptors. Entering
the key"lvord GDT by itself causes the entire
GDT to appear.
Entering GDT followed by an index expression causes
a specific descriptor to
appear.
8.4.14 Go
This command supplies
high-level execution control. Use
of the GO command
enables
you
to begin and end program
executìon using specific points in the
application. You can
also
clear and specify break conditions
using the GO command.
8.4.15 Help
This command
displays the major D-MON3lì6
commands along
with their
general syntax.
For examples and
more detailed information about
the commands,
see the D-MON38ó
Debug Monitor
for the 80386 User's Guide.
8.4.16 Host
This command
provides
the
capability for operation
with PMON host
software.
When
entering this command,
be sure to press only the E,NTER
key or a carriage return
<CR>
immediately after HOST.
8.4.17 IDT
This command displays
the entire Interrupt Descriptor
Table
(lDT) or individual
IDT
descriptors.
Entering the kepvord IDT causes
the entire ìDT to appear. Entering
IDT
followed
by an index causes a specific descriptor
from the IDT to appear.
8.4.18 lNTn
This command
displays or modifies
partitions of memory using
an integer
f ormat.
When
entering the command,
you can substitute the numbers
1,2, or
4 for n. Thus,
the integer
type(s) referenced in memory
are either 1-,2-,
or 4-byte integers.
You can
specify the
partition as a single
INTn value or a range
of INTn
values. Entering
the command
INTn
follo'xed
by an address or range of addresses causes
that
partition of memory
to appear
on
the screen. Entering
the command INTn as
an equation
causes the
partition of
memory on
the left side
of the equation to be
replaced
with
the
contents
of memory or
value of
the
right side of the
equation.
D-MON3E6 System
Debugger B-7
D-MON386 COMMANDS
8.4.18 lstep
This command performs single-step execution. You can use this command to single-step
through
the executable code from
one
to 255 executable
statements.
ISTEP
also provides
the capability to begin execution from a
point
other than the current execution
point.
B.4.19 LDT
This command displays the entire Local Descriptor
Table
(LDT) or individual LDT
descriptors. Entering the keyrvord LD f causes
the entire
LDT to
appear. Entering LDT
followed by an
index causes a specific descriptor from the LDT to appear.
8.4.20 N0-N9
This command displays or alters scratch
registers zero through nine. Entering Nn
(where
n
is a number 0
through 9) by itself causes the
value
of the appropriate register to appeur
on
the screen.
You can enter
Nn
followed by an equal
sign and an expression to alter the
contents
of the appropriate scratch register.
8.4.21
ORDn
This command displays
or modilìes
partitions
of memory using
an ordinal format.
When
entering
the command,
you
can substitute
the numbers 1,2, or 4 for n. Thus, the ordinal
type(s)
referenced in memory are either
l-, 2-, or 4-byte ordinals.
You can specify the
partition
as a single ORDn value
or a range of ORDn values.
Entering the command
ORDn followed
by an address or range
of addresses causes that partition of
memory
to
appear on the screen.
Entering the command
ORDn as an equation causes the partition
of
memory on the left side
of the equation to
be replaced
with
the contents of memory
or
value
of the right side of the
equation.
8.4.22 PD
This command
examines the Page
Table Directory
and
page
tables. When paging
is
enabled,
the 80386 uses two levels of
tables to translate
a linear address into a physical
address:
the Page Table
Directory and the page
tables themselves.
Entering the PD
command by itself
causes the entire 4K
Page Table Directory to scroll
to the screen. You
can,
however, supply an
index
with
the PD
command to
view
a particular
directory entry
within
the Page Table
Directory. Also, you
can use the additional ,PT
option
with
an index
to
view
a particular page
tahle entry.
B-8 D-MON-1t|6
Sysf em
Debugger
D.MON38ó
COMMANDS
8.4.23 Port
This command reads or writes
a 8-bit port. Entering
PORTwith the physical input/output
address space as a 16-bit
unsigned quantity
causes the specified
port
to be read and the
contents to appear on the screen.
Ifyou supply an expression to the right of the equal sign
when
entering this command, the addressed port
is
written with
the
value
the expression
eouals.
8.4.24
Register-name
D-MON386 enables
you
to display or alter the
contents
of 80386 registers. To
gain
register
access, enter the name of the register Entering the name of the register onÌy causes the
contents of the register to appear on the screen. Entering the name of the register
followed by an equal sign and
a
valid
expression causes the contents
of the register to be
written with
the
value
of the expression. For a complete list of register names, refer to the
u-MON386 Debug Monitor
for the 80386 User's Guide.
NOTE
Register
modification
is dependent on the current
processor
protection
model.
You
cannot modify protected
registers.
8.4.25 Regs
This command displays the contents of a set of registers as a group. The register
set
depends on
which mode the processor
is currently
operating under (real or protected).
The display is always
in hexadecimal,
and it
provides less detail for the segment and control
registers
than the command that are specifically designed for those
groups of registers, that
is SREGS and CREGS, respectively.
8.4.26
Sregs
This command displays, in hexadecimal, the contents of the
segment registers (CS, DS, SS,
ES, FS, and GS).
8.4.27
Swbreak
This command displays or sets code
patch
breaks.
Entering SWBREAK
by itself causes all
current
software break definitions to appear. If you
enter
SWBREAK folÌowed
by an
equal sign and one or more addresses,
the command sets a software
break at the specified
address or addresses.
D-MON3Eó
Syslem
Debugger B-9
D-MON386 COMMANDS
NOTE
When specifying software break
addresses, the address must be able to be
written, present in physical memory, and on an
instruction boundary. A
maximum of 16 software
breaks mav be in effect at one time.
8.4.28
Swremove
This command removes all or
selected
code
patch breaks. Entering this command followed
by ALL removes all current software breaks. If you
supply one or more addresses
with
the
command. the software breaks at those addresses alone are removed.
8.4.29
TSS
This command displays the contents of a task
state segment.
TSS
supports
both
80386 and
80286 task state segments. Task state segments appear using the component names.
8.4.30 Use
This command specifies the default (16-bit or
32-bit code) for disassembling code
from
physical
or linear addresses. When entering the command, the expression to the right of
the
equal sign must evaluate to either l6 or 32
(decimal).
8.4.31 Version
This command displays the version
number of the D-MON386 software you are using.
8.4.32 Word
This command displays or modifies partitions
of memory using a
word
format. You can
specify the
partition
as a single word or a
range of
words.
Entering the command
WORD
followed by an address or range of addresses
causes that
partition
of memory to appear on
the screen.
Entering the command
WORD
as an equation
causes the
partition
of memrtry
on the left side of the equation to
be replaced
with
the contents of
memory
or
value
of the
risht side of the equation.
B-10 D-MON-ì86
System
Debugger
D-MON386
COMN{ANDS
8.4.33
Wport
This command
reads or
writes
a 16-bit port. Entering
WPORT with
the
physical
input/output address
space as a l6-bit
unsigned quantity
causes the specified port to be
read and the contents to
appear on the screen.
Ifyou supply an expression
to the right of
the
equal sign
when
entering
this command,
the addressed
port
is written with
the
value
the expression equals.
D-MON3tì6
System
Debugger B-t I

INDEX
A
Altering descriptor table entries A-8
Altering memory contents A-[t, B-5, 6, 7,
8, 10
Altering register contents
3-1,1, A-9, B-8,
9
B
Bootloading from the monitor A-3, B-5
Bootstrap Loader DEBUG switch l-3
Breakpoints 1-3,
3-
10, B-9,
10
c
Changing current instruction pointer B-5
Changing disassembled code 3-15, 16
Changing descriptor table entry contents A-8
Changing memory contents A-8, B-5, 6, 7, 8, 10
Changing modes A-7
Changing register contents 3-14, A-9, B-8,9
Cl-l-restart
1-3, 2-3, 3-10
Code blocks, displaying 3-12, ló
Commands
D-MON386 B-l
Directory 2-4
iSDM" A-1
Overview 1-3
Synta\ for debugger l-3
Token
validity 2-l
vB 2-5
vc 2-9
vD 2-12
vF 2-14
vH 2-16
vJ 2-18,3-18
YK 2-22
YO 2-24,3-t7,
t8
vR 2-27
System
Debugger lndex-.1
INDEX
Commands
(cont.)
vs 2.31
w 2-36,3-17,18
vu 2-62,3-19
Comparing blocks of memory A-4
Configuration
1-2
Contents of the stack 2-31
Conventions
iv,2-1
Copying blocks
of memory A-6
Current instruction, displaying 3-11, B-5
D
D-MON386 monitor
command directory B-2
D-MON386 monitor command overview B-1, 5
D-MON386 monitor commands
$ B-5
Asm B-5
B B-5
Base B-5
Byte B-5
Count/Endcount B-5
Cregs 8-6
Dport 8-6
DT 8-6
Dword 8-6
Eval 8-6
Flags 8-6
GDT B-7
Go B-7
Help B-7
Host B-7
IDT B.7
INTn B-7
Istep B-8
LDT B-8
N0-N9 B-8
ORDn B-8
PD 8.8
Port B-9
Register name
B-9
Regs B-9
Sregs
B-9
Swbreak B-9
Index.2 System
Debugger
D-MON386 monitor commands (cont.)
Swremove B-10
Syntax
B-l
TSS B.1O
Use B-10
Version
B-10
Word B- l0
Wport B- 1 1
Deadlock 3- 17
DEBUG command 1-2,3-10
Debug session, sample
3- 1
Descriptor tables, displaying A-4, 8-6, 7,8
Determining the base and offset of an address A-7
Disassembled
code, displaying
3-15, A-4,
B-5, l0
Displaying blocks of code 3-12, A-4
Displaying symbol information A-9
Displaying the number base B-5
DUIB information, displaying 2-5
E
Echoing console
output
A-5
ES register limit, checking 3-14
Examining a mailbox 3- 18
Examining
page
table directory and tables using D-MON3[ì6
B-fì
Examining register contents 3-12, 13, 8-6,
9
Examining stack contents 3-19
Example debug session 3-l
Executing
a program 3-14, 15, A-5, 8, B-7
Executing a sing.le line of code 3- 13, A-ó, B-8
Exiting the
monitor A-4
Expression evaluation A-7, 8-6
F
Finding
text A-5
G
GDT slots, displaying free amount 2- 14
Getting help 2-16, B-7
H
Hardware/Software
requirements
1-2
Help 2-16, B-7
INDEX
System
Debugger lndex-3
INDEX
I
I/O Result
Segment
(IORS) 2-27
Identifuing system
call parameters on the
stack 2-31
Interpreting system call
parameters on the stack 2-31
Invocation 1-2,3-10
IORS,
displaying 2-27
ISDM* monitor command
directory A-1
ISDM' monitor command
overview A- 1
ISDM" monitor commands
B -
bootstrap load A-3
C - compare
A-4
D -
Display 3-11, A-4
E - exit A-4
F - find A-5
G
-
go 3-10,
14, 15, A-5
I - port input A-5
K - echo file A-5
L - load A-6
M - move A-ó
N - single instruction execution 3-13, A-ó
O - port output A-7
P
- print A-7
Q - enable protection A-7
R - load
and go A-8
S
- substitute A-8
X - examine/modify
3-12, 13,
14, A-9
Y - symbols A-9
J
Job and descendent
job
tokens, displaying 2-18
L
Loading object files A-6, 8
Locating running tasks 3-20
Looping
within
D-MON386 B-5
M
Mailbox examination 3- 18
Manual Overview iii
Modi$ring
the number base B-5
Mode changìng A-7
Monitor 1- 1
Index-4 System
Debugger
INDEX
Monitor commands
iSDM" A.1
D-MON386 B-1
Moving blocks of memory A-6
o
Object directory, displaying 2- 12
Objects, displaying 2-24, 3
-18
P
Ports
Displaying data A-5, 8-6, 9, 11
Entering data A-7, 8-6, 9, 1l
Product overview iii, l-1
Program code execution 3- l3
o
Quitting
the debugger l-4, A-4
R
Re-entering the iSDM" monitor 3- 10, l5
Reader level iii
Redirecting console output A-5
Removing Breakpoints with D-MON3U6 B- 10
Register contents, examining 3-12, 13
Returning to your application l-4
s
Sample debug session 3-l
Searching for text A-5
Setting breakpoints l-3, 3-10, B-9
Single-step execution A-6, B-8
Stack contents 2-31, 3-19
Starting the debugger
1-2
Strings,
display limitations 2-35
Support 1-2
Symbol information,
displaying A-9
Syntax for D-MON38(r
commands B- I
System
Debugger Index-5
INDEX
Syntax for debugger
commands 1-3,2-2
System
call information,
displaying 2-9
System call
parameters on the stack,
clisplaying 2-31
System requirements
1-2
T
Task system calls, displaying
2-62
Task
tokens, displaying 2-22
Tokens,
displaying 2-36, 3-1tl
U
Using PMON host
software with D-MON386 B-7
Using the debugger l-3,3-9
v
VB command 2-5
VC command 2-9
VD command 2-12
Version
number of D-MON386, displaying B- lt)
VF commanti 2-'14
VH command 2- l6
VJ
command 2- 18
VK command 2-22
VO
command 2-24,3-17
VR command 2-27
VS
command 2-31
VT command
Buffer
pool
display 2-60
Composite object display 2-47
Extension object display 2-47
Job display
2-37
Mailbox display 2-42, 3- 1Íl
Region display 2-45
Segment display
2-46
Semaphore display 2-44
Task display 2-39
VT command 2-36
VU command
2-62
w
Warm-start
1-3, 2-3
Index-6 System
Debugger
EXTENDED iRMX@II
DISK VERIFICATION
UTILITY
REFERENCE MANUAL
Intel
Corporation
306 5
Bowers Avenue
5a
nta clara, ca liforn
ra
95051
Copyright
'' 1988, lntel
Corporatron,
All Rrghts
Reserved
PREFACE
INTRODUCTION
The iRMX II Disk
Verification
Utility
is a software tool
that runs
as a Human Interface
command
verifying and modifying
the datiì structures
of iRMX named and
physical
volumes.
This manual
describes the
utility invocation
and contains
cìetailed descriptions
of
all utility
commands.
It also documents
the iRMX Il capability of
backing up
and restoring
volume
file descriptor
nodes
(fnodes).
In addition. the
manual describes
the structure
of iRMX
named
volumes as users
must
be
familiar
with
volume
structure
to use the
full capabilities
of the
Disk
Verification Utility.
READER
LEVEL
This manual
is intendetl
for programnrers
whtt
have
an understanding
of the operating
system,
and particularly
the Basic l/O System and Human
Interface
layers.
To use
this
manual
effectively,
programmers
shoulcl be familiar
with iRMX volume structure.
Appendix
A provides a brief revicw
of iRMX named
volume structure.
However,
this is
intended
as a reference
ancl
not as a tuttlrial.
MANUAL
OVERVIEW
This manual
Chapter
I
is organized
as follows:
This chapter
describes
two
ways of invoking
the
Utility: sing.l€-
command mode
or interactive
mode. It explains single-command
mode and how
to interpret
output and error messages
from the
single-command
verification. lt also describes
the invocation
in
interactive
mocle
and the interactive
mocle
error messages.
Commands
for the
interactive
mode
are
explained in
Chapter
2.
Disk Verification |ll
PREFACE
Chapter
2 This chapter contains
detailed descriptions of the
Disk Verification
Utility
commands. The commands are
discussed in alphabetical
order.
When
verifying
ancl modifying
volumes,
vou
should refer to
this chapter for specific
information about the format and
parameters of the commands.
Chapter 3 This chapter explains the fnode
backup and restore feature in
detail. This feature
provides
a limited mechanism for
attempting
to recover data
when
the
volume label or the fnode file has been
damaged.
Appendix A This
appendix provides information on the format of iRMX named
volumes. lt includes
details of the volume label and fnode file,
differences
between
long and
short files, and
format information
specific to diskettes. Programmers should be familiar
with this
information before attempting to modify a volume.
CONVENTIONS
This manual uses the
following conventions:
. Information appearing as UPPERCASE characters
when
shown
in keyboard
examples must be entered or
coded exactly as shown. You may, however, mix lower
and uppercase characters
when
entering the text.
. Fields appearing as lowercase characters within angle brackets (
< >
) when
shown in
keyboard
examples indicate
variable
information. You
must enter an appropriate
value
or symbol tbr variable
fields.
. User input appears
in one of the following forms:
as bolded text \ríthin a screen
. text is used
to indicate the first occurrence of
each command described in
Chapter 2; subsequent
occurrences are printed in
black ink.
. The terms
"iRMX II. and "Operating
System" refer to
the Extended iRMX II
Operating
System.
. The term
"ìRMX I'refers
to the iRMX I Operating
System (ìRMX 86 Operating
System).
. All numbers unless
otherwise stated are assumed
to be decimal.
Hexadecimal
numbers
include the "H"
radix character
(for
example, OFFIì).
lv Disk Verification
CONTENTS
CHAPTER 1
INVOKING
OISKVERIFY
CHAPTER
2
DISKVERIRY COMMANDS
PAGE
PAGE
Disk
Verilication
CONTENTS
CHAPTER 2 (continued) PAGE
CHAPTEF 3 PAGE
APPENDIX
APAGE
vl Disk Verification
CONTENTS
APPENDIX A (continued) PAGE
TABLES
TABLE
A-1
FIGURE
ai
aa
l-t
2-4
t<
A-t
A-2
PAGE
8-lnch Diskette
Characteristics... .............4-21
5 1/4-lnch Diskette Characteristics ........4-22
FIGURES
Disk Verification Yll

INVOKING
CHAPTER
1
DISKVERIFY
1.1 INTRODUCTION
When
using an iRMX lI application
system, you will need
to store data on secondary
storage
devices.
Unfortunately,
occasional power
irregularities or accidental reset
may
destroy the
index to the data on
these devices,
making the information inaccessible
to the
system.
In some cases,
losing evcn
a small amount of data can
render an entire
volume
useless.
You need
a tool to examine and
fix the damaged volume.
This tool should enable
you
to
determine
how much of the
data
was
damaged and
help
you
recreate file structures on the
damaged volume.
The
iRMX II Disk Verification
Utility
(DISKVERIFY)
is a tool that
enables you
to
verify
the consistency
and recover
damaged data on iRMX volumes.
The Disk
Verification
Utility inspects, verifies,
and corrects the data structures
of iRMX
named volumes.
It can also verifo
an iRMX physical volume.
The Disk
Verification
Utility can reconstruct the
fnode file, the volume
label, the file descriptor nodes (fnodes)
map, the
volume
free space
map, and the
bad blocks map of the
volume.
In addition,
with
DISKVERIFY you can
manipulate
fnodes, bad track information, and
the actual data on
the volumes.
The Disk Verification
Utility
also supports auto-volume recognition which
means
you
can veri! any iRMX named
volume
without detaching and
attaching the
device
with
the correct
DUIB.
You can use DISKVERIFY
in one of
two
ways:
o As a single command
that
verifies
the structures
of a
volume
and returns control to
the Human Interfàce
o As an interactive program
that enables you
to check and modify data on the volume
by entering disk verification
commands
To take full advantage
of this utility,
you
must
be familiar
with
the structure of iRMX
(either
iRMX I or iRMX II as the
volume
structure is almost the same
for both) named
volumes.
Appendix A contains
detailed information about
volume
structure. If you
are
unfamiliar with
the iRMX lI volume
structure, you
should avoid using the DISKVERIFY
commands. Some
commands, if not used correctly,
can render
your volumes
unusable.
However, even ifyou know nothing about iRMX volume structures, you can still use the
Disk
Verification
Utility as
a
single
command to
verify
that the data structures on an
iRMX volume
are
valid.
Disk Verification l-l
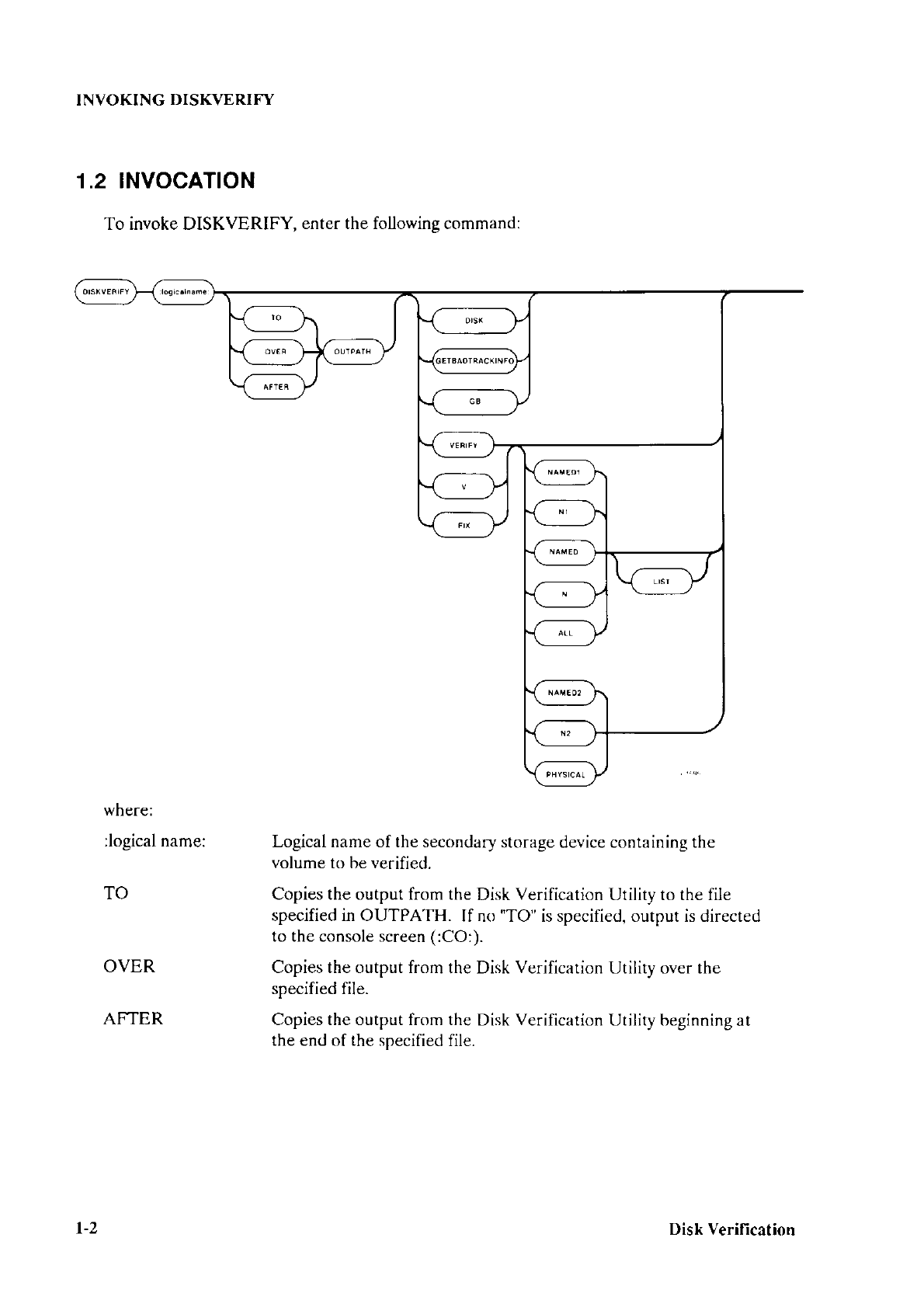
INVOKING
DISKVERIFY
1.2 TNVOCATTON
To invoke DISKVERIFY,
enter the following command:
where:
:logical name:
TO
OVER
AF'TER
Logical name of the secondary
storage device containing the
volume to be verified.
Copies the output from the
Disk
Verification
Utility to the file
specified in OUTPATH. If no
"TO"
is specified, output is directed
to the console screen (:CO:).
Copies the output from
the Disk
Verification
Utility over the
specified file.
Copies the output from the
Disk
Verification
Utility beginning
at
the en<l of the snecified
file.
t-2 Disk Verification
INVOKING
DISKVERIFY
OUTPATTI Pathname
of the
file to receive
the
output from
the
Disk
Verification Utility. If you omit this
parameter
and
no preposition
is specified,
output is
directed
to the console
screen
(:CO:) by
default.
You cannot
direct the
output
to a file
on the
volume being
verified. If you
attempt
this,
the utility
returns
an
E$ALREADY_ATTACHED error message.
Following
is a list of
the DISKVERIFY
options.
lf you invoke
DISKVERIFY
without
specifying
one of these
options,
you enter the
interactive
mode.
In thiscase, the
utility
displays
a hea<ler
message and
the utility
prompt
(.). You
can then
enter
any of the
DISKVERIFY
commands
listed
in Chapter
2.
DISK Displays
the attributes
of
the
volume
being
verified. lf you
specify this
option, the
utility
performs
the function
and
returns
control to
you
at
the Human
lnterface
level You
can
then enter
any Human
Interface
command,
provided
that the
device
verified is not
the
system devicc Any
parameter
after
this
one is ignored.
Refer
to the
description
of the
DISK
command
in Chapter
2 for
more information.
GETBADTRACKINFO Reads
the
bad track information
from
the
volume and
or GB displays
it. Bad
track information
that is
redirected
to a file
can be
used as input
to the
FORMAT command
by removing
the header
information.
Chapter 2
providcs
a complete
exPlanation
of this command
vERIFY or
V Verifies the
volume. This
function
and
the assocìated
options
are described
in detail under
"VERIFY"
in Chapter
2' Ifyou
specify only
this option'
the
utiìity
performs the NAMED
verification function
and returns
control
to
you
at
the Human
Interface
level.
You
can then
enter
any
Human
Interface
command,
provided
the device
verified is
not the
system
device.
Disk Verification l-l
INVOKING DISKVERIFY
NAMEDI
or N1
NAMED2 or N2
NAMED or N
FIX Performs the same
functions as
VERIFY. In addition,
it tries to
fix
several t)?es of
problems
on the
volume
after
performing
the
verification.
You should
be careful
when
using FIX as
it
changes
the data on the
disk
(which
may prove dangerous).
For example,
during NAMED
I verification,
FIX corrects
the checksums on
fnodes
with
bad checksums.
I{owever, an fnode
with
a bad
checksum
may indicate another problem with
the fnode
which
should not be ignored.
As a result, it is recommended
that
you
use
FIX only after performing
the following
steps.
1. Use
DISKVERIFY with the VERIFY
option.
2. Examine
the output and the problems
on the
volume
to
determine the type of "fix"
needed.
3. If the
problems
can be fixed using DISKVERIFY,
run
DISKVERIFY with
the FIX option to
correct
the problems.
VERIFY
or FIX option
that applies to
named
volumes
only.
This
option checks
the fnodes
of the
volume
to
ensure that they
match
the directories
in terms
of file type and
file hierarchy.
This oprion
also checks
the information
in each lìode to ensure consistency.
When
used with FIX,
the NAMED
I option corrects
bad
checksums and attaches
orphan
fnodes to their parcnts.
Refer
to
the dev:ription
of the VERIFY
and FIX
commands
in Chapter 2
for more
inlbrmation.
VERIFY
or FIX option
that applies
to named volumes
only. This
option
checks
the allocation
of fnodes
and space on
the
volume,
constructs
the
space antl
fnode bit
maps to reflect îhe
current
contents
of the
volume,
and verifies
that
the fnodes point
to the
correct
locati{)ns
on the
volume.
When
used
with
the
FIX option,
NAMED2 saves
the correct
bit maps,
that
were
constructed during
the verification
phase,
on the volume.
It also removes
fnodes
with
multiple
references
from their
illegal
parents.
Refer
to the
description
of the VERIFY and FIX commands
in
Chapter 2 for
more information.
VERIFY
or FIX
option that performs
both the
NAMEDI antl
NAMED2 verification
functions
on a named
volume.
If
you
speci!
VERIFY
or FIX with
no option,
the
svstem assumes
NAMED (default).
t-4 Disk Verification
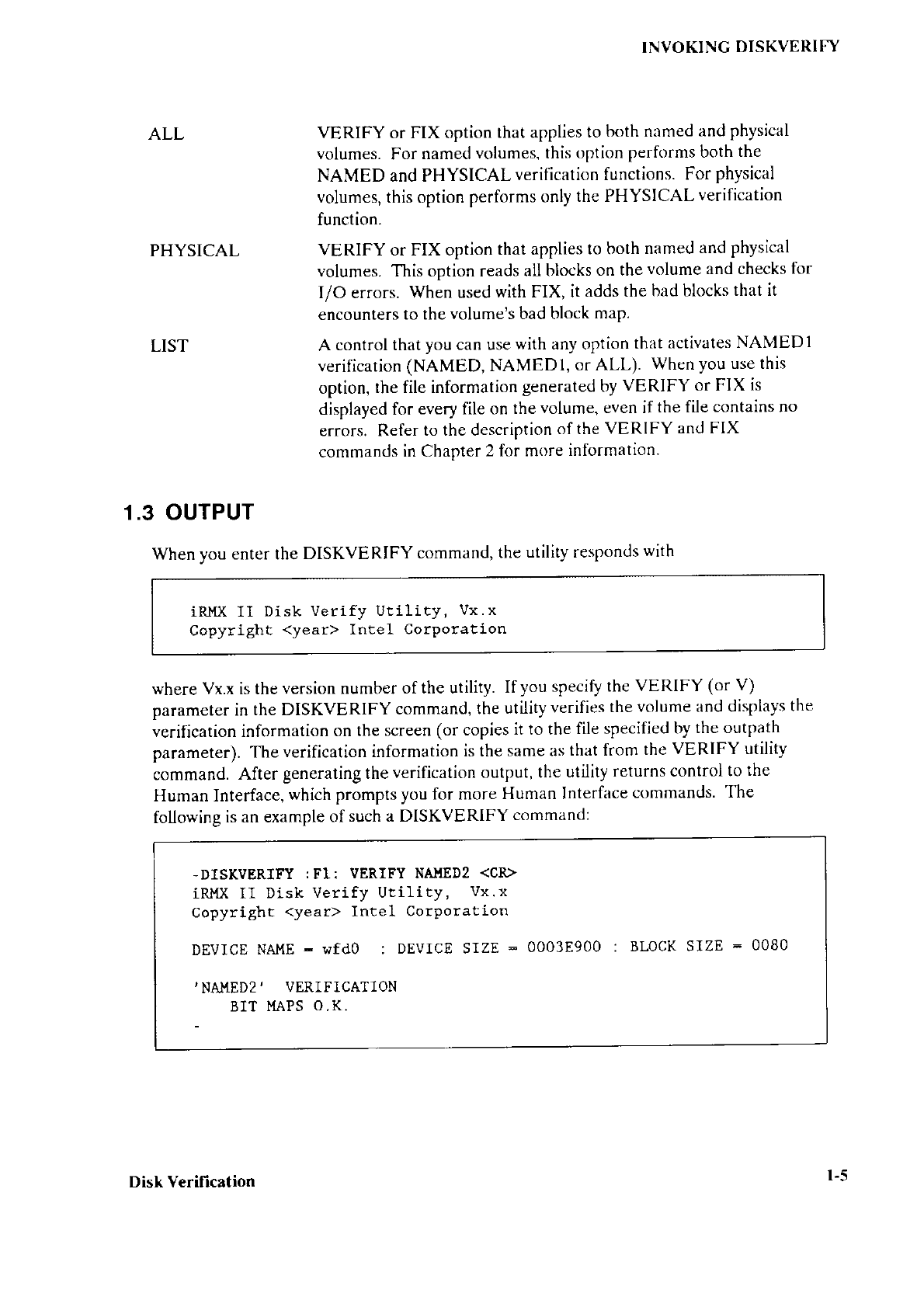
INVOKING
DISKVERIFY
ALL VERIFY or FIX option
that applies
to
both nrmed
and
physical
volumes.
For
named
volumes, this
option
performs both
the
NAMED and PHYSICAL
verification functions.
For
physical
volumes, this option
performs only
the PHYSICAL
verification
function.
VERIFY or FIX option
that applies
to both
named
and physical
volumes. This option reads
all blocks
on the
volume and checks
for
I/O errors.
When used
with FIX, it adds the
bad blocks
that it
encounters
to the
volume's bad block
map.
A control that
you
can use
with any option
that
activates
NAMEDI
verification
(NAMED, NAMEDl, or ALL). When
you use this
option,
the file information
generated by
VERIFY or FIX is
displayed for
every file on
the
volume, even if the file
contains no
errors. Refer
to the description
of the
VERIFY and FIX
commands
in Chapter
2 for more
information.
PHYSICAL
1.3 OUTPUT
When
you
enter the
DISKVERIFY
command,
the
utility responds
with
i RMX II Disk Veri fy Utility, Vx.x
Copyright <year) Intel CorporaÈion
where Vx.x is the
version number
of the utility.
If you specify
the
VERIFY (or
V)
parameter in
the DISKVERIFY
command,
the
utility
verifies
the
volume and displays
the
verification information
on the
screen
(or
copies
it to the
file specified
by
the outpath
parameter).
The
verification information
is the
same as
that from
the
VERIFY utility
command.
After
generating the
verification
output, the
utility
returns control
to
the
Human Interface,
which prompts
you for more
Human Interface
commands.
The
following
is an example
of
such a DISKVERIFY
command:
-DISKVERIFY :Fl: VERIFY NAI{EDz
<CR>
1RMX II Disk Verify UtiÌity, Vx.x
Copyright <year) Intel Corporation
DEVICE
NA}{E
- wfdO : DEVICE SIZE : 00038900 : BLoCK SIZE - 0080
,NA},ÍED2' VERIFICATION
BIT MAPS
O, K.
LIST
Disk Verification l-5
INVOKING DISKVERIFY
lf you
omit the
DISK or VERIFY parameter
from the DISKVERIFY command, the
utility does not return
control to the Human
Interface. Instead, it issues an asterisk
(*)
prompt
and
waits
for you to enter
DISKVERIFY commands. The
following is an
examnle:
-DISKVERIPY
: Fl: <GR)
iRl'tx 11 Dlsk Verify Utility, Vx.x
CopyrighÈ <year> Intel Corporation
At the asterisk
prompt, you can
enter any of the
DISKVERIFY
commands listed in the
DISKVERIFY
COMMANDS chapter
of this manual.
If you
enter anything
else, the
utility will display an
error message.
NOTE
Although you
can
use DISKVERIFY
to
veriff
the system device
(:sd:),
note that all
connections to this
device are
deleted by the operating
system.
After exiting, you
must reboot
the system
or use the warm
start feature
(see
the Extended
|RMX II System
Debugger
Ret'erence Manual).
1.4 INVOCATION
ERROR
MESSAGES
The following
is a
list of error
messages you
might encounter when
invoking the
Disk
Verification Utility.
argument
error The
option specified
is not valid.
<logical
name>, invalid
logical The
logical
name does
not exist; was
name. longer
than
12 characters;
contained
invalid
characters;
or was
missing a
matching colon.
0045
: E$LOG NAME NEXIST A nonexistent
<losical
name>
was
or <logical
name>.logical
name specified
in eitherihe:logical
name:
or
does not
exist outpath parameter.
<outpath>
0038
: The
output was
directed
to a file on
the
E$ALREADY_ATTACHED volume
being verified.
command
syntax error A syntax
error was
made when
entering
the
command
l-6 Disk Verilication
<
logical name
>, outstanding
connections
to the device have
been deleted.
<
log.ical
name
> or <
outpath
>
.
invalid
wildcard
specification
<
logical
name
>
,
can't attach
device
device size inconsistent
size in
volume label
= <valuel > :
computed
size
= <
value2
>
not a named
disk
<
partial logical
name
>,
0081: E$STRING_BUFFER
<
logical
name
>
,
device
does not
belong
to you
<
logical
name
>
, device
size is
zeÍo
INVOKING DISKVERIFY
This
warning is not fatal
and wilì occur
every time you try to verifu
the system
device
or any other
volume on
which
files
have
been attached.
The logical name
or output pathname
contained a
wildcard character
The device cannot
be attached
and read.
When
the Disk
Verification
Utility
computed the size
of the
volume, the size
it computed did
not match the
information
recorded
in the iRMX II
volume label.
The volume label
may
contain
invalid or
corrupted information.
This is
not a latal crrttr,
hut it is an
indication
that further
error conditions
may result
during
the verification session.
You may
have to reformat
the
volume or
use the Disk
Verification Utility to
restore the
volume label.
A NAMED, NAMEDl, or NAMED2
verification
was requested for
a physical
volume.
The logical name
was
longer than
14
characters
in length,
not including colons.
An attempt
was
made
to
verify
a device
that
was
attached
by another
user. For
example,
the system
device is :SD:
and
USER
is not the
super user.
The
logical name
entered does
not deline
a mass storage
device. For
example,
you
cannot
perform DISKVERIFY
on a
line
printer.
Disk Verification r-7

DISKVERIFY
CHAPTER 2
COMMANDS
2.1 INTRODUCTION
When
the Disk
Verification
Utility issues the asterisk
(*) prompt, you can enter
DISKVERIFY commands to examine or change file
structure infurmation on the volume.
This process usually involves reacling a portion of the
volume
into a buffer, modirying
that
buffer,
and
u'riting the information back to the volume. This chlpter describes the
commands
that
enable
vou
to perfbrm thesc
operations.
The commands ìn this chapter are presentcrl in alphabetical order regardless of their
function. The onÌy exception is
when
two commancis are similar,
such as DISPIAYBYTE
and DISPLAYWORD. In
this
case,
the lirst commantl is explained in its alphabetical
order,
and
the second comnrancl follows it with only the differences described.
The first occurrence of each command n:rme is printed in blue ink and appears
on the
outsitle upper corner of the page; subsequent occurrences are
printed
in
black ink. Blue
or bolded text is also
used
to indicate an entry
vou
make
from
vour
terminaÌ.
Before describing
the individual commancls, this chapter discusses command
syntax,
command names,
parameters,
input radices. ancl error
messages. It also
provides
a
command dictionary that
gives
a hrief description of each
commund and the page number
on
which
the commancl is founcl.
2.2 COMMAND
SYNTAX
The syntax for each
commancl clescribeci in this chapter is
presented
in a "railroad
track'
schematic,
with syntiìctic
elemeilts
scattered along the track. Your entrance to any
given
schematic is always
from lcfì to right,
beginning
with the command
name entry.
Elements
shown in uppercase churacters must tre typed in a comnrand line exactly as
shown in the schematic, however,
you
mry enter
thcm in eìther
uPl)ercasc or lowercase.
Syntactic elements shown in lowercase
arc
qe
neric terms,
which means
you must
supply
the specific item,
such
as
the pathnanre ol a file.
Disk Verifìcation 2-l
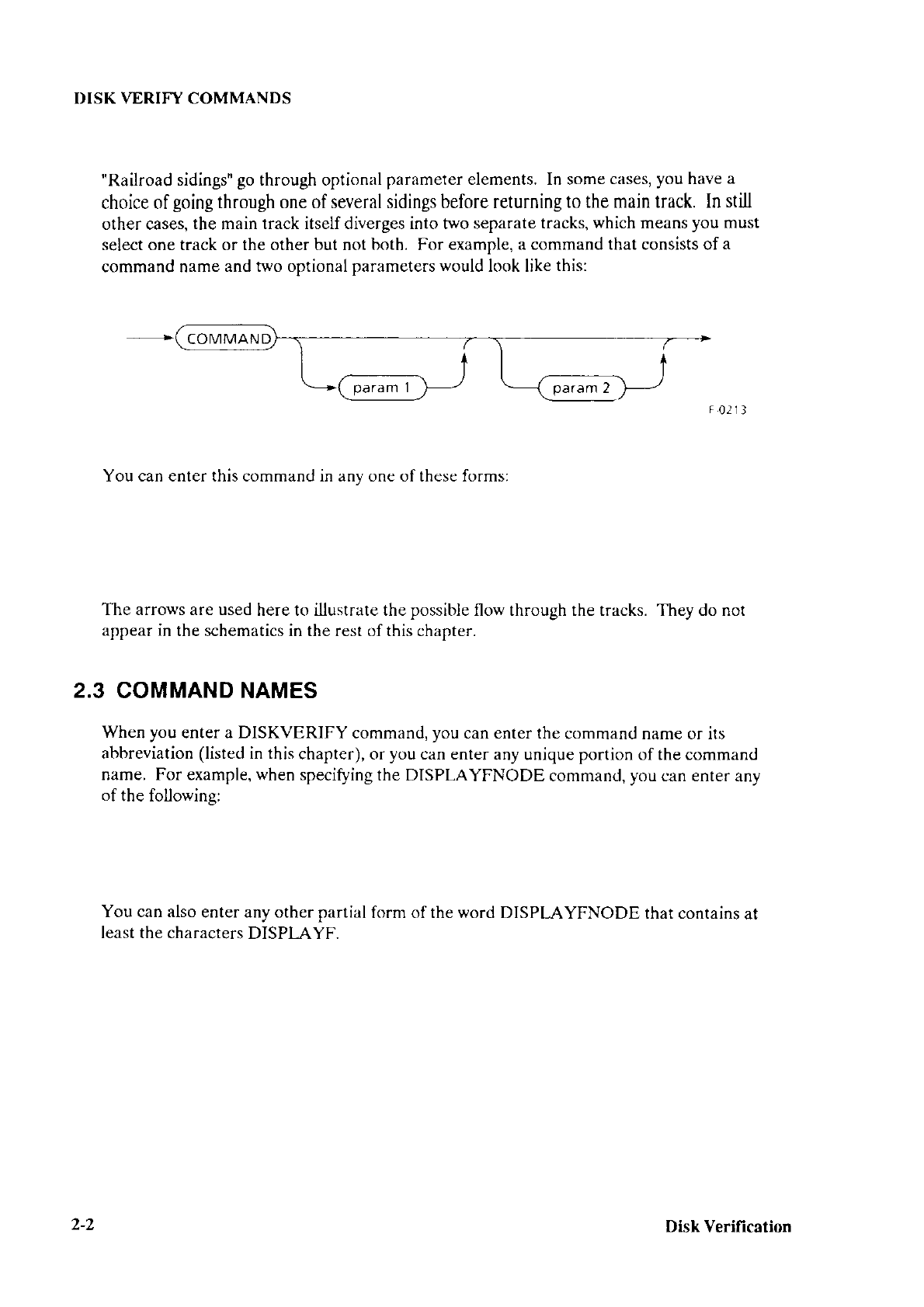
DISK VERIFY COMMANDS
"Railroad sidings"
go
through optional
parameter elements. In some
cases,
you
have
a
choice of
going
through one of several sidings before returning to
the main track. In
still
other cases,
the
main
track itself diverges into two separate
tracks, which means
you must
select one track or the other but not both. For
example, a command that consists of
a
command name
and two ontional
narameters
would
look like
this:
F0213
You can enter this command in any one of these forms:
The arrows are used
here to illustrate the
possible
flow through the tracks. They do not
appear in
the schematics in the rest of this chapter.
2.3
COMMAND NAMES
When you
enter a DISKVERIFY
command,
you
can enter the
command name or its
abbreviation
(listed
in this
chapter), or
you
can enter
any unique portion of the command
name. For example, when
specifying the DISPLAYFNODE
command, you can enter
any
of
the followins:
You can also
enter any other partial
form of the word DISPLAYFNODE
that contains
at
least the characters
DISPIAYF.
COM
MAN D
param
l
4,. Disk Verification
DISKVERIFT COMMANDS
2.4 PARAMETERS
Several DISKVERIFY commands have
oarameters
described
as beine in this form:
You can also enter these
Darameters
in this form:
For example, both of these speci! a FREE command:
2.5 INPUT RADICES
DISKVERIFY always
produces
numerical
output in hexadecimal format.
You can
provide input to DISKVERIFY in any one of the following
three radices by including
a
radix character immediately after the number. The
valid radix characters are
radix character example
hexadecimal horH 16h,7CH
decimal t or T 23t, 1007
octal o, O, q, or
Q 27o,33Q
If you
omit the radix character,
DISKVERIFY assumes the number is hexadecimal.
Disk Verification 2-3
DISKVERIFY
COMMANDS
2.6 ABORTING DISI(\/ERIFY
COMMANDS
You can abort the following DISKVERIFY
commands
by entering a CONTROL-C,
which terminates the
command
and returns control to the
Disk
Verification Utilitv
lnot
the Human Interface command levell.
DISK
DISPT-AYBYTE
DISPI-AYDIRECTORY
DISPI.A,YFNODE
DISPT-AYNEXTBLOCK
DISPI-A,YPRE\'IOUSBLOCK
DISPI-A,YWORD
EDITFNODE
EDITSAVEFNODE
FIX
GETBADTRACKINFO
LISTBADBLOCKS
SUBSTITUTEBYTE
SUBSTITUTEWORD
VERIFY
2.7 DISKVERIFY
ERROR MESSAGES
Each DISKVERIFY
command can generate
a number of error
messages, which
indicatc
errors in the way the
command
was
specified
or
problems
with
the
volume
itself.
The
following messages
can be
generated
by
many of the commands
(each
command
description
lists the error
messages
generated
by the particular
command):
block
I/O error The utility
attempted to read
or
write
a block
on the
volume
and found that
the block was physically
damaged and therefore,
could not complete
the
requested
command. Or, an attempt was
made
to
write a
block to a disk volume
that is write
protected.
The error
message states
whether read
or write was performed
and the number
of the
hlock causing the
error.
command syntax error A syntax error wiìs
made in a
command.
illegal command The
command specified
is not a
valid
DISKVERIFY command.
2-4 Disk Verification
fnode file/space map
file inconsistent
argument error
not a named disk
seek error
Command
ALLOCATE
BACKUPFNODES
BF
2.8 COMMAND
DICTIONARY
The command dictionary below lists the DISKVERIFY commands in alphabetical order
and
provides
a brief functional
description of
each command. Following each command
name is its unique abbreviation, if any. For
quick reference,
you
can locate thecommand
using the
page
headers remaining in this chapter.
DISK !'ERIFY COMMANI)S
One of the files, R?SAVE or R$FNODEMAP, is
damaged
and DISKVERIFY
cannot perform
further
verification.
The command was missing an argument, or the
argument was illegally specified.
The device is not a named volume
(a
tape, for
example) or the iRMX volume label, obtained
when
DISKVERIFY begins
processing, contains invalitJ
information. If the label contains invalìd
information, the utiliry (in some cases) can assume
that a named
volume
is a
physical volume. In this
case, the commands that apply to named
volumes
onÌy
(such
as DISPTAYFNODE,
DISPTAYDIRECTORY, and
VERIFY
NAMED)
issue this message. If you are sure the
volume
is a
named
volume,
this message
may indicate that the
iRMX II volume label is corrupted.
(If the file
was
formatted
with
the RESERVE
option of the
FORMAT command,
DISKVERIFY issues this
message only if both volume labels are corrupted.
When
only the
volume
label
is invalid, the duplicate
in the
save
area is used.)
The utility unsuccessfully attempted
to seek to a
location on the
voÌume.
This error normally
results
from invalid information in the
iRMX II volume
label or in the fnodes. Or. a new
volume was
inserted after DISKVERIFY
was
invoked.
Synopsis
Marks
a
particular
fnode or
volume block
as allocated
Copies current
fnode file into
a backup
file named R?SAVE
Disk Verification t-<
DISK VERIFY COMMANDS
Command Synopsis
DISK Displavs the attributes
of the
volume
being
verified.
DISPI-A,YBYTE Displays the
working
buffer in byte
DB or D format
DISPI-A.YWORD Displays the
working buffer in word
DW format
DISPI-A,YDIRECTORY Displays directory
contents
DD
DISPI-A,YFNODE Displays the specified fnode information
DF
DISPI.A.YSA\'EFNODE
DSF Displays the fields of a single fnode in the
R?SAVE fiIC
DISPI-AYNEXTBLOCK Displays the "next" volume
block
DNB
or > or <CR>
DISPI-A.YPREVIOUSBLOCK Displaysthe"previous"volumeblock
DPB
or <
EDITFNODE Edits the specified fnode
EF
EDITSAVEFNODE Edits the specified saved
fnode
ESF
EXIT Exits the Disk Verification Utiìiry
E
FIX Verifies the disk
and fixes inconsistencies
FREE Marks a particular
fnode
or volume
block
as free
GETBADTRACKINFO Displays the bad track information
GB
2-6 Disk Verifrcation
DISKYERIFY COMMANDS
Command Synoosis
HELP Lists the DISKVERIFY commands
H
LISTBADBLOCKS
LBB
Miscellaneous
Commands
RESTOREFNODE
RF
Displays all the bad blocks on the
volume
Perform useful arithmetic and conversion
functions; the commands include ADD,
SUB, MUL, DIV, MOD, HEX, DEC,
ADDRESS,and BLOCK
Copies one fnode (or range of fnodes)
from the R?SAVE file to the fnode file
QUIT Exits the Disk Verification
Utility
o
READ Reads a
volume
block into the
working
R buffer
RESTOREVOLUMEI-ABEL Copies the duplicate volume label to the
RVL volume
label
offset on track
0
SAVE Writes
the updated fnode map, free space
map, and bad block
map
to the
volume
SUBSTITUTEBYTE Modifies the contents of the
working
SB
or S buffer in byte format
SUBSTITUTEWORD Modifies the contents of the
working
SW buffer in word format
VERIFY Verifies
the
volume
WRITE Writes the workins buffer to the volume
w
Disk Verilication an
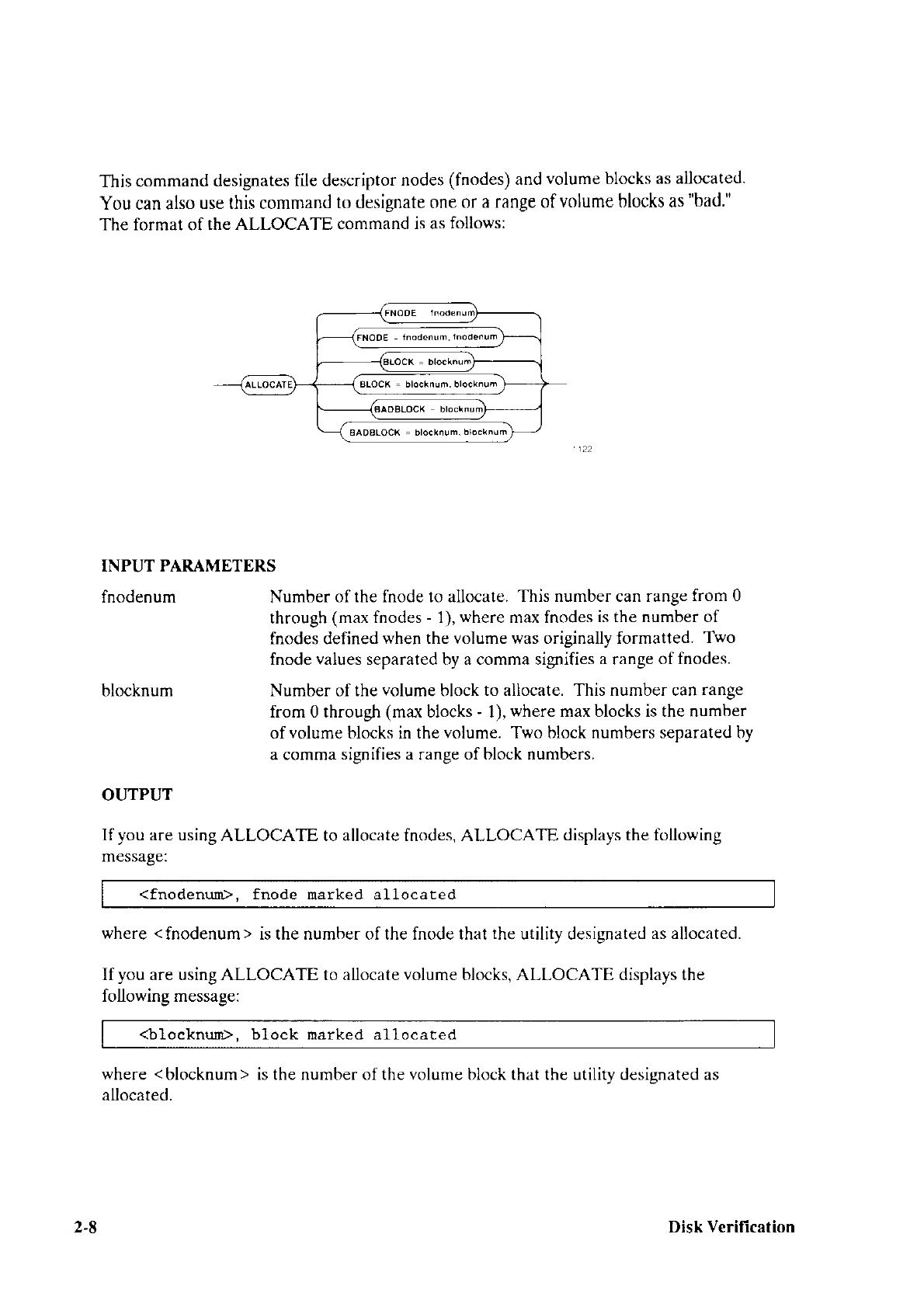
This command
designates
file descriptor
nodes
(fnodes) and
volume blocks as
allocated.
You can also
use this command
to designate one
or a range of
volume blocks as
"bad
"
The format of the ALLOCATE
command is as
follows:
INPUT PARAMETERS
fnodenum
blocknum
Number
of the fnode to allocate.
This number can range
from 0
through
(max fnodes
- 1),
where
max fnodes
is the number of
fnodes defined
when the volume was originally formatted.
Two
fnode values separated by a comma signifies
a
range
of fnodes.
Number of the
volume
block
to allocate. This number can
range
from 0 through
(max
blocks
- 1),
where max blocks is the number
of
volume
blocks in the
volume.
Two
block numbers separated by
a comma
signifies
a range
of block numbers.
OUTPUT
If you are using
ALLOCATE to allocate fnodes, ALLOCATE displays the following
message:
<fnodenurÈ, fnode marked al located
where
<
fnodenum
> is the number of the fnode that
the
utility designated
as allocated.
If you
are using ALLOCATE to allocate
volume
blocks, ALLOCATE displays the
following message:
<blocknuÈ. block marked al l ocate d
where
<blocknum>
is the number of the
volume
block that the utilitv desienated as
allocated.
2-8 Disk Verification
ALLOCATE
If you
are using ALLOCATE to designate one or more volume blocks as
"bad,"
ALLOCATE displays
the following mcssage:
(blocknun>, block narked bad
where
<
blocknum
> is the number of
the
volume
block that the utility desigrrated as
"bad."
If this
block
was
not allocated before you
attempt to designate it as
"bad,"
ALLOCATE
also disolavs
<blocknun>, bLock rnarked aÌlocated
ALLOCATE checks the alìocation status of fnodes or blocks before allocating them.
Therefore, ifyou speci! ALLOCATE for a block or fnode already allocated,
ALLOCATE returns one of the following messages:
<fnodenun>, fnode already marked allocated
<blockntuÈ, block already narked allocated
<blocknurÈ, block already narked bad
DESCRIPIION
Fnodes are data structures on the volume
that describe the files on the
volume.
They are
created when
the
volume
ís formatted.
An albcated
fnode is one
that
represents
an
actual
file. ALLOCATE designates fnodes as allocated by updating the FI-AGS field of
the fnode and free-fnodes-map
file
with
this information.
An allocated volume
block is a block of data storage that
is
part
of a file; it is not available
to be assigned to a new file. ALLOCATE designates
volume
blocks as allocated by
updating the
volume
free-space-map with
this information.
When you
use ALLOCATE to designate
bad blocks, it not only updates the
volume
free-
space-map
but also marks an associated
bit as
"bad"
in the bad blocks file.
Disk Verification 2-9
ALLOCATE
ERROR
MESSAGES
argument error A syntax
error was made in the command
or a nonnumeric
character
was specified
in the blocknum
or fnodenum
Darameter.
<blocknum
>, block out of range The block
number specified
was larger
than the largest block
number in the
volume.
<
fnodenum
>
,
fnode out of range The fnode
number specified
was
larger
than the largest fnode number
in the
volume.
no badblocks file The
volume does not have a bad blocks
file. This message could appear if an
earlier
version
of
the
Human
Interface
FORMAT command
was
used
when the
disk was formatted.
2-to Disk Verification
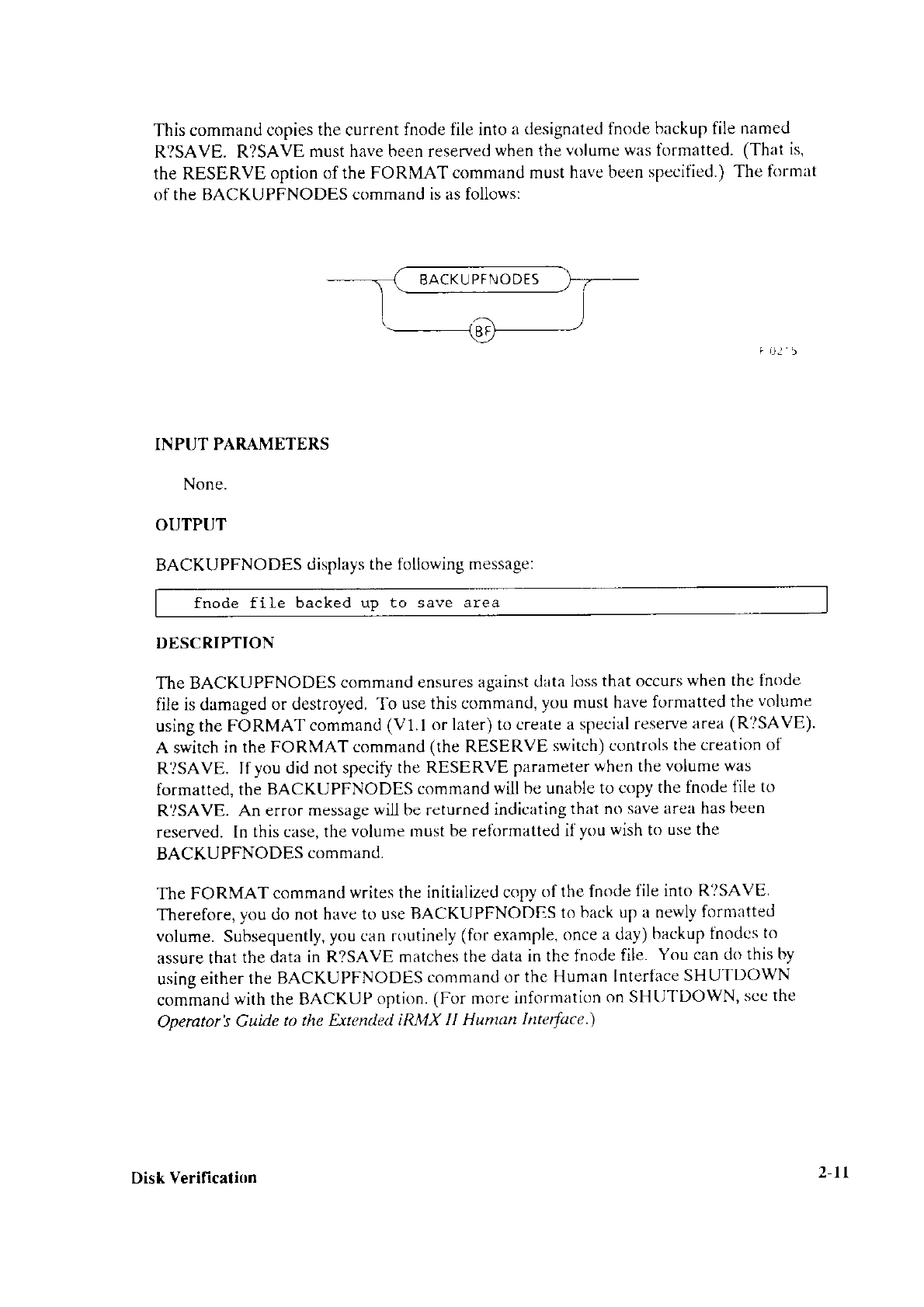
This
command copies the current
fnode file into a
designated fnocle
backup file
named
R?SAVE. R?SAVE
must have been reserved
when
the
volume
was
tbrmatted.
(That
is,
the RESERVE
option of the FORMAT command must have
been
specifietl.) The format
of the BACKUPFNODES
commantl is as follows:
INPUT PARAMETERS
None.
OUTPUT
BACKUPFNODES
displays the following message:
fnode file backed up to save area
DESCRIPTION
The BACKUPFNODE,S
command
ensures
ag:ìinst data
loss
that occurs
when the fnode
file is damaged
or destroyed. To use this command,
you
must have
formatted
the
volume
using
the FORMAT
command
(V1.1 or later) to
create a special
reserve
area
(R?SAVE)
A switch
in the FORMAT command
(the
RESERVE
switch) controls
the creation
of
R?SAVE. If you did not specify
the RESERVE
parameter
whcn the
volume was
formatted, the
BACKUPFNODE.S
command
will he unable to copy
the fnode
f ile to
R?SAVE.
An error
message
will
be returned
indicating
that no
save areil has
been
reserved.
In this case, the
volume must be refìrrmatted
if you wish
to use the
BACKU
PFNODES
ctrmmanti.
The FORMAT command
writes
the
initialized copy
of the fnode
file into R?SAVE
Therefore,
you do not
have to use
BACKUPFNODIIS
to back
up a newly
formatted
volume. Subsequently,
you can routinely
(for
example,
once
a ciay)
backup tiodcs
to
assure that
the data
in R?SAVE matches
the data
in the fnode
file.
You can do
this by
using
either the
BACKUPFNODES
command or
thc Human
Interfice SHUl'DOWN
commantl
with the BACKUP
option.
(For
more
information
on SHI.J-I'DOWN,
see the
Operator's
Guide
to the Extanded
|RMX
II Human
Intarfitce.)
BACKU
PFNODES
Disk Verification 2-tl
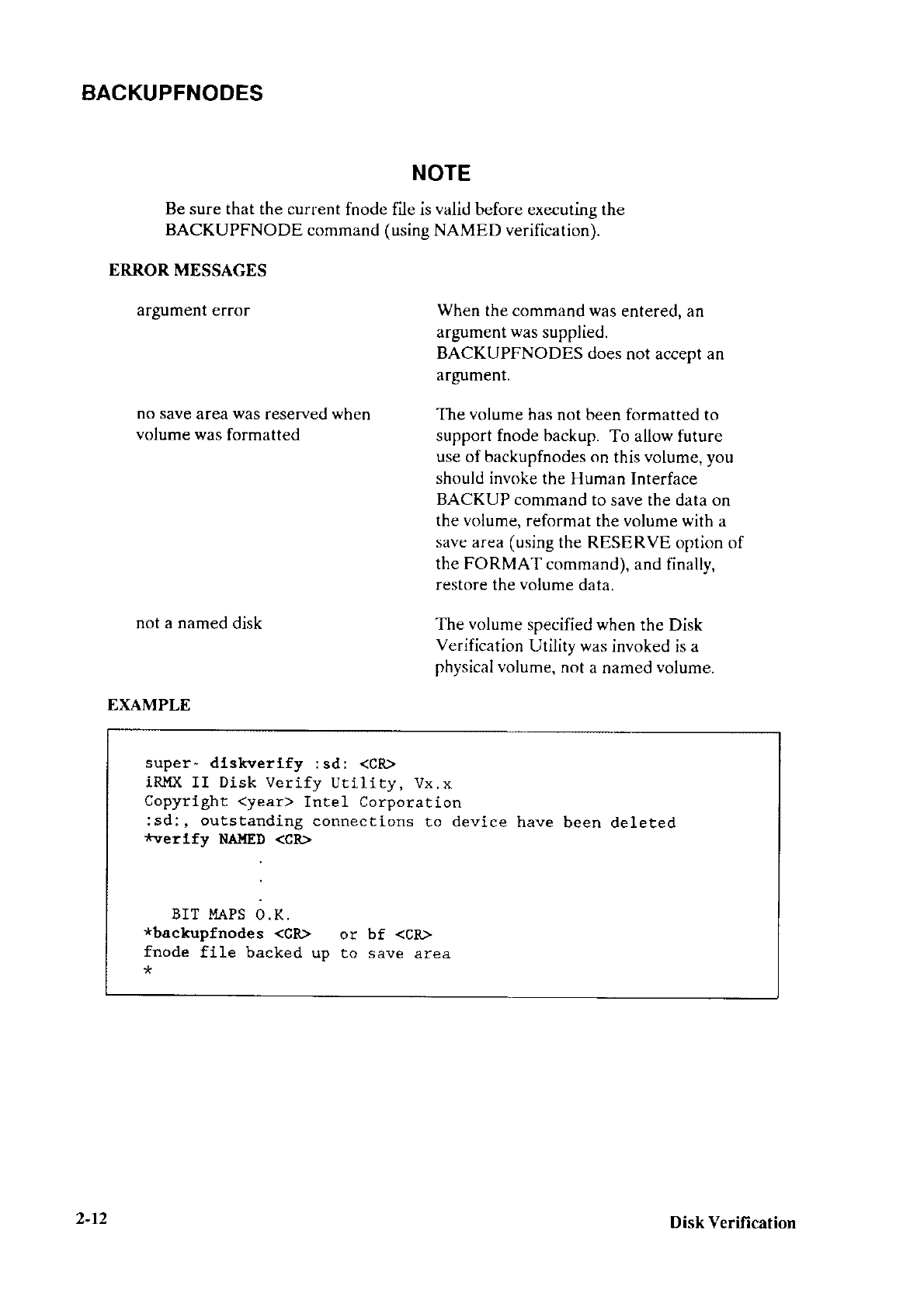
BACKUPFNODES
NOTE
Be sure that the current
fnode file is
valid
before executing the
BACKUPFNODE
command
(using
NAMED verification).
ERROR MESSAGES
argument error When
the command was
entered, an
argument
was
supplied.
BACKUPFNODES does
not accept an
argument.
no save
area
was
reserved when The volume has
not been formatted to
volume was
formatted support fnode backup.
To allow future
use of backupfnodes on
this
volume, you
should
invoke the Human
Interface
BACKUP
command to save the data on
the
volume,
reformat
the
volume with
a
save area (using
the RESERVE
option of
the FORMAT command), and finally,
restore
the
volume
data.
not a named
disk The volume
specified when
the Disk
Verìfication
Utility was
invoked is a
physical volume,
not
a named
volume.
EXAMPLE
super- dlskvertfy : sd: (CR.>
1RMX
II Disk Verify Utj-lity, Vx.x
Copyríght <year> Intel Corporat
i on
:sd:, ouÈstanding connections Èo device have been deleted
ìtsverify NAI{ED
<CR>
BIT MAPS O. K.
*backupfnodes <CR> or bf <cR>
fnode ffle backed up to save area
2-t2 Disk Verilication
This
command displays
the attributes
of the
volume being
verified. You can
abort this
command by typing
a CONTROL-C.
The format
of the DISK
command
is as follows:
INPUT
None.
OUTPUT
The output of the
DISK commantl
depends
on
whether the
volume is formatted
as
a
physical or named
volume.
For
a
physical volume,
the DISK
command
displays
the
following information:
wnere:
<
devname
> Name of
the device containing
the
volume. This is
the
physical
name
of the device,
as specified
in the
ATTACHDEVICE Human
Interface
command.
<devgran> Granularity
of the
device, as
defined
in the Device
Unit
Information
Block
(DUIB) for the
device. Refer
to the
Guide to
the Ertended
.RMX II Interactive
Configuration Utility for more
information
about
DUIBs. For physical
devices,
this is
also the
volume block
size.
<
numblocks
> Number
of
volume blocks
in the
volume.
<
size
> Size
of the
volume, in bYtes.
devfce narne
P'rysrLdr uaDN
devlce granularity
block size
mrnber of blocks
volune s ize
<de!'name>
<devgran>
<devgran>
(numblocks)
<size>
Disk Verification 2-13
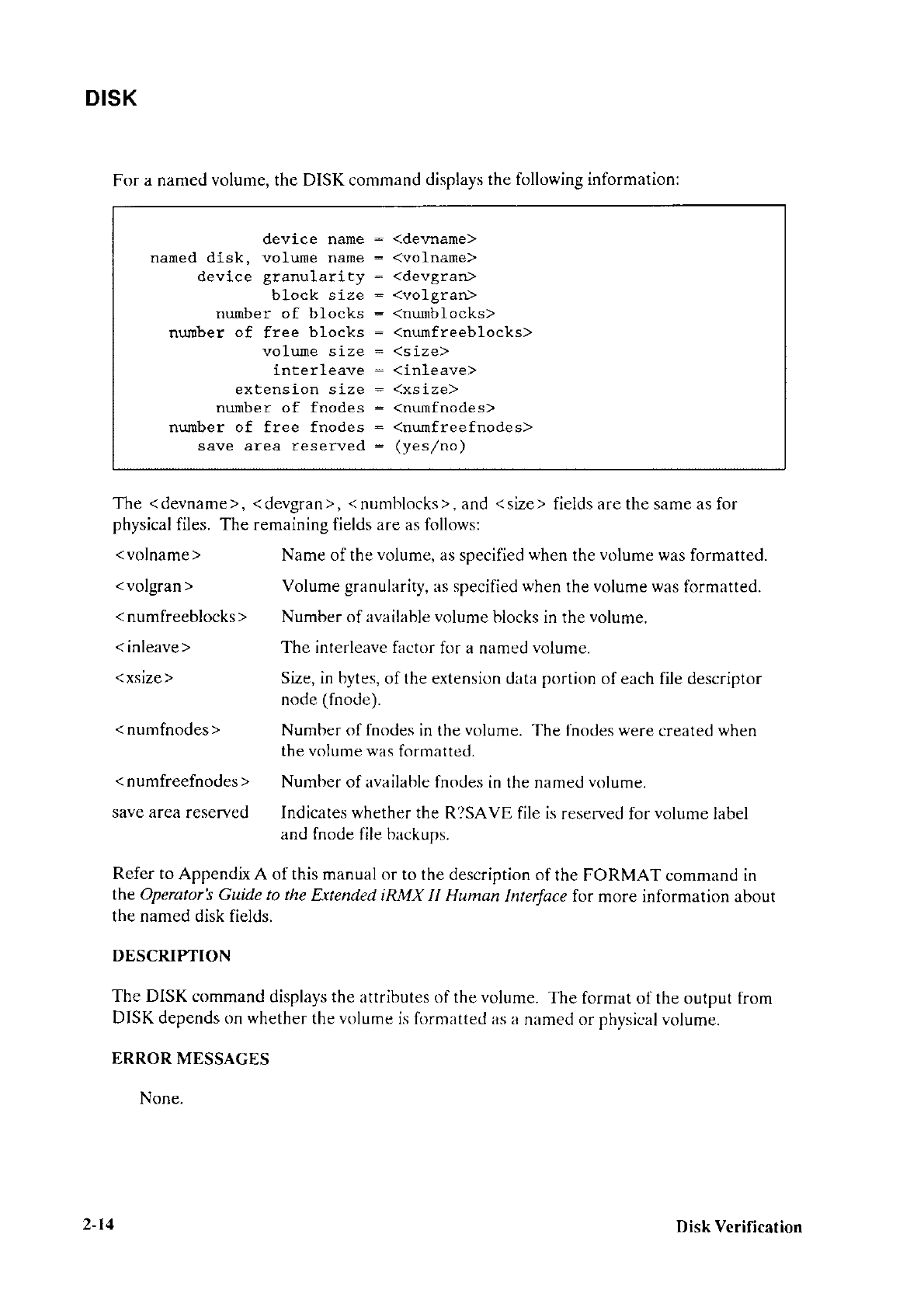
DISK
For
a
nametl
volume, the DISK command
displays the following information:
The
<devname>, <devgran>, <numblocks>,and <size>
fields are the same as for
physical
files. The remaining fields are as follows:
<volname> Name of the
volume,
as specified
when
the
volume
was formatted.
<volgran > Volume granularity, as specified when
the
volume was
formatted.
<
numfreeblocks
> Number of available volume
blocks in the
volume.
<inleave> The interleave factor
for a named
volume.
<xsize> Size,
in bytes, of the extension data portion
of each file descriptor
node
(fnode).
<
numfhodes
> Number of fnodes
in the
volume.
The fnodes were
created
when
the volume was
formatted.
<
numfreefnodes
> Number of availahle fnodes
in the named
volume.
save area
reserved Indicates whether the
R?SAVE file is
reservetl lbr volume
label
and fnode
file
backups.
Refer to
Appendix A of this manual or to the description of
the FORMAT command in
the Operetor's
Guide to the
Ertended |RMX II Human
Interface for more information about
the named disk fields.
DESCRIPTTON
The DISK command
displays the
attributes of the volume.
The
format of the output from
DISK depends on whether
the
volume
is formatted :rs a
named or physical volume.
ERROR MESSAGES
None.
device narne
named disk, volume narne
ucvrrE Ér d,,urdr r LJi
block s ize
nurnber of blocks
nunber of free blocks
volune size
interleavè
extension size
nunber of fnodes
nuxober of free fnodes
save area reserved
<deYname>
<volname>
<devgrar>
<volgrar>
{numblocks)
<numfreeblocks>
<s
ize>
<inleave>
<xs
i ze>
<nurnfnodes>
(nurnfree
fnode s)
(yeslno)
2-11 Disk
Verifìcation
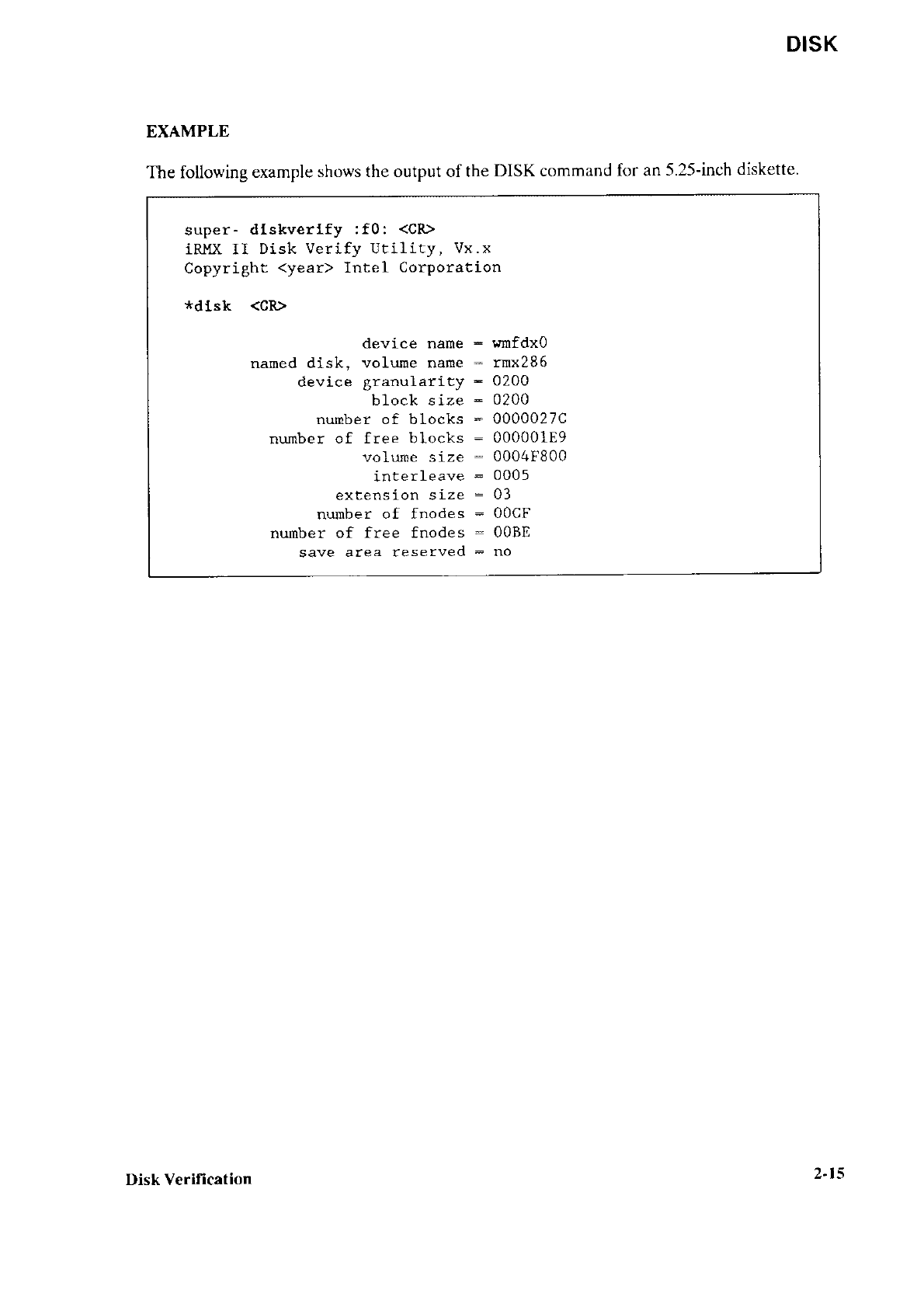
EXAMPLE
The following
example
shows the output of the
DISK command
for an
5.25-inch
diskette.
DISK
super- dlskverlfy :f0: <CR>
iRMx ll Disk
Verify Utility. vx.x
Copyright <year> Intel CorporatÍon
*dfsk <CR>
device name
named disk, volume narne
device granularicy
block s ize
nurnber of b I ocks
numbe r of free blocks
volume s ize
inte r 1e ave
extension size
nurnber of fnodes
nurnbe r of free fnodes
save area re
s e rved
wnfdx0
rmx2 8 6
0200
0200
0000027c
000001E9
0004F800
0005
03
OOCF
008[
no
Disk Verification 2-15
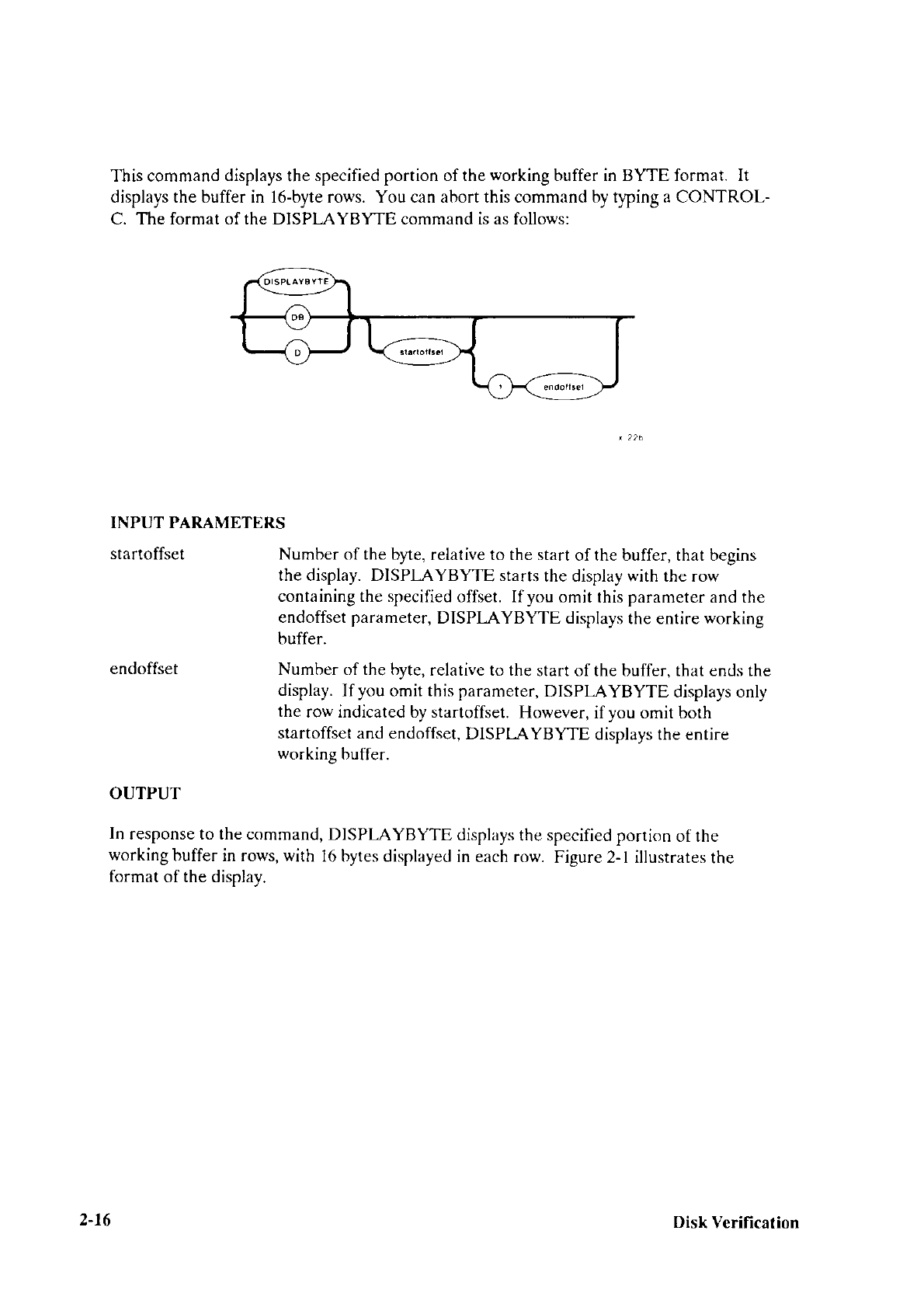
endoffset
This command
displays
the
specified portion of the
working
buffer in BYTE format. It
displays the buffer in 16-byte rows. You can abort this command by typing a CONTROL-
C. The format of the DISPI-AYBYTE command is as folìows:
INPUT PARAMETERS
startoffset Number of the
byte, relative to the start
of the buffer, that begins
the display. DISPI-AYBYTE starts
the display with the row
containing the specified
offset. Ifyou omit this
parameter
and the
endoffset
parameter,
DISPI-A.YBYTE displays
the entire
working
buffer.
Number of the byte,
relative to the
start of the buffer, that ends the
display.
If you
omit this parameter,
DISPII,YBYTE displays only
the
row indicated by startoffset.
However,
ifyou omit both
startoffset and endoffset,
DISPLAYBYTE
displays the entire
workins
buffer.
OUTPUT
In response to the command,
DISPI-AYBYTE
displays
the specified porrion
of the
working
buffer in rows, with 1ó bytes displayed
in each row. Figure 2- l illustrates
the
format
of the disolav.
2-16 Disk
Verification
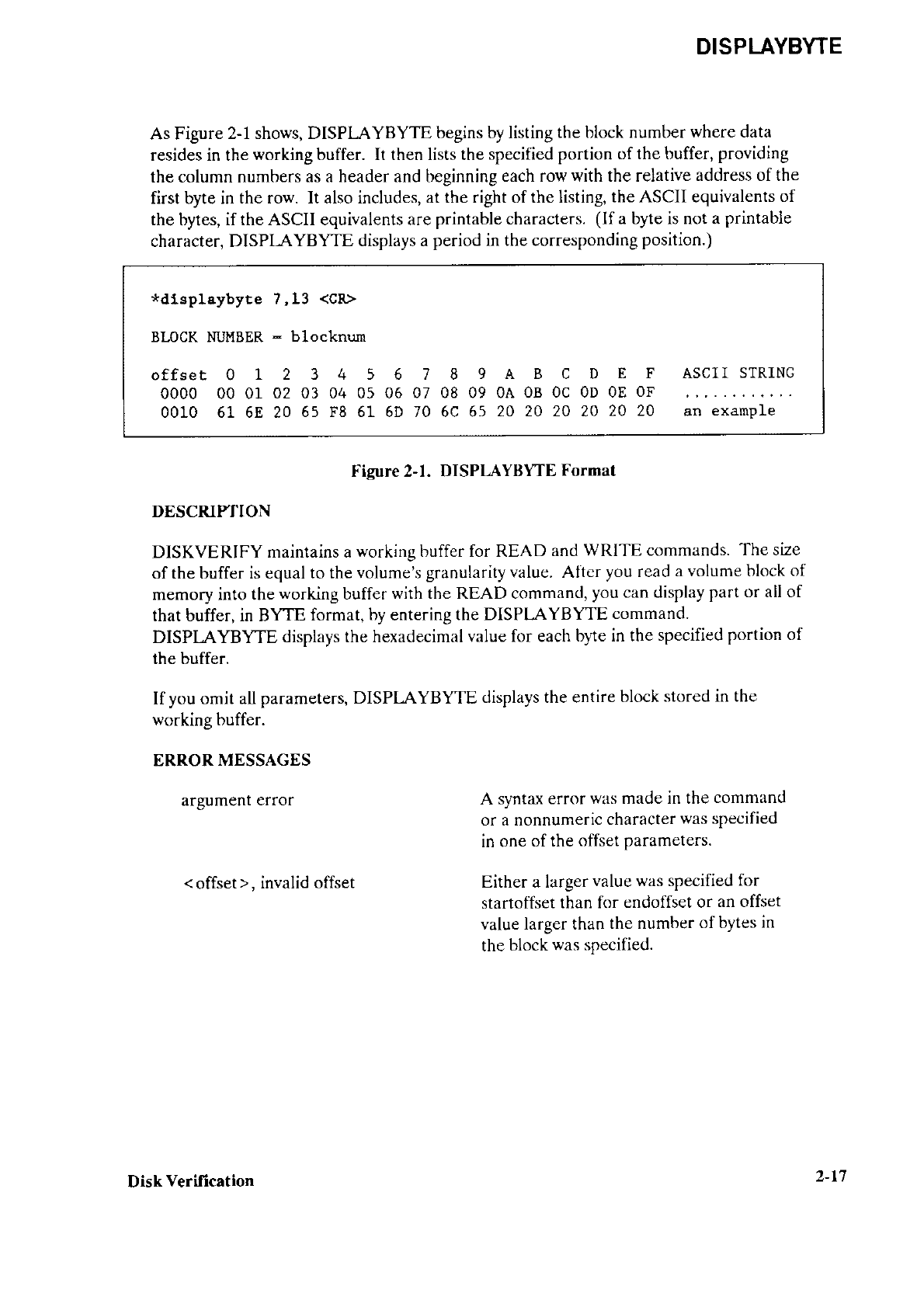
DISPLAYBYTE
As Figure
2-1 shows, DISPT-AYBYTE
begins by listing
the block number
where data
resides in the
working buffer. It then lists the
specified portion of the buffer,
providing
the column numbers
as a header and beginning
each row with the relative
address of the
first blte in
the row. It also includes,
at the right of the listing,
the ASCII equivalents
of
the
bytes,
if the ASCII equivalents are
printable characters.
(lf a byte is not a
printable
character, DISPIAYBYTE displays a
period in the corresponding
position.)
*dlsplaybyÈe 7,13 <cR>
BLOCK NUHBER
- blocknum
offset 0 | 2 3 4 5 6 7 I9 A B c D E F AscII STRING
0000 00 01 02 03 04 05 06 07 08 09 0A 0B 0c 0D 0E 0F
0010 61 6E 20 65 F8 61 6D 70 6C 65 20 20 20 20 20 20 an example
Figure 2-1. DISPLAYBYTE
Format
DESCRIPIION
DISKVERIFY
maintains a
working buffer for READ and
WRITE commands.
The size
of the buffer is equal to the
volume's
granularity value. Alier you read
a volume block
of
memory into the
working
buffer
with the READ command,
you can display
part or all of
that buffer, in BYTE
format,
by
entering
the DISPT-AYBYTE
command.
DISPI-A,YBYTE
displays the hexadecimal
value for each
byte in the
specified
portion of
the buffer.
If you
omit
all
parameters, DISPI-A.YBYTE
displays the entire
block
stored in the
working buffer.
ERROR
MESSAGES
argument
error A syntax
error
was made in the
command
or a nonnumeric
character
was
specified
in one
of the
offset
parameters.
<
offset
>, invalid
offset Either a larger
value was specified
for
startoflset
than for
endoffset or an offset
value larger than
the number
of bytes
in
the
block
was specified.
Disk Verification 2-17
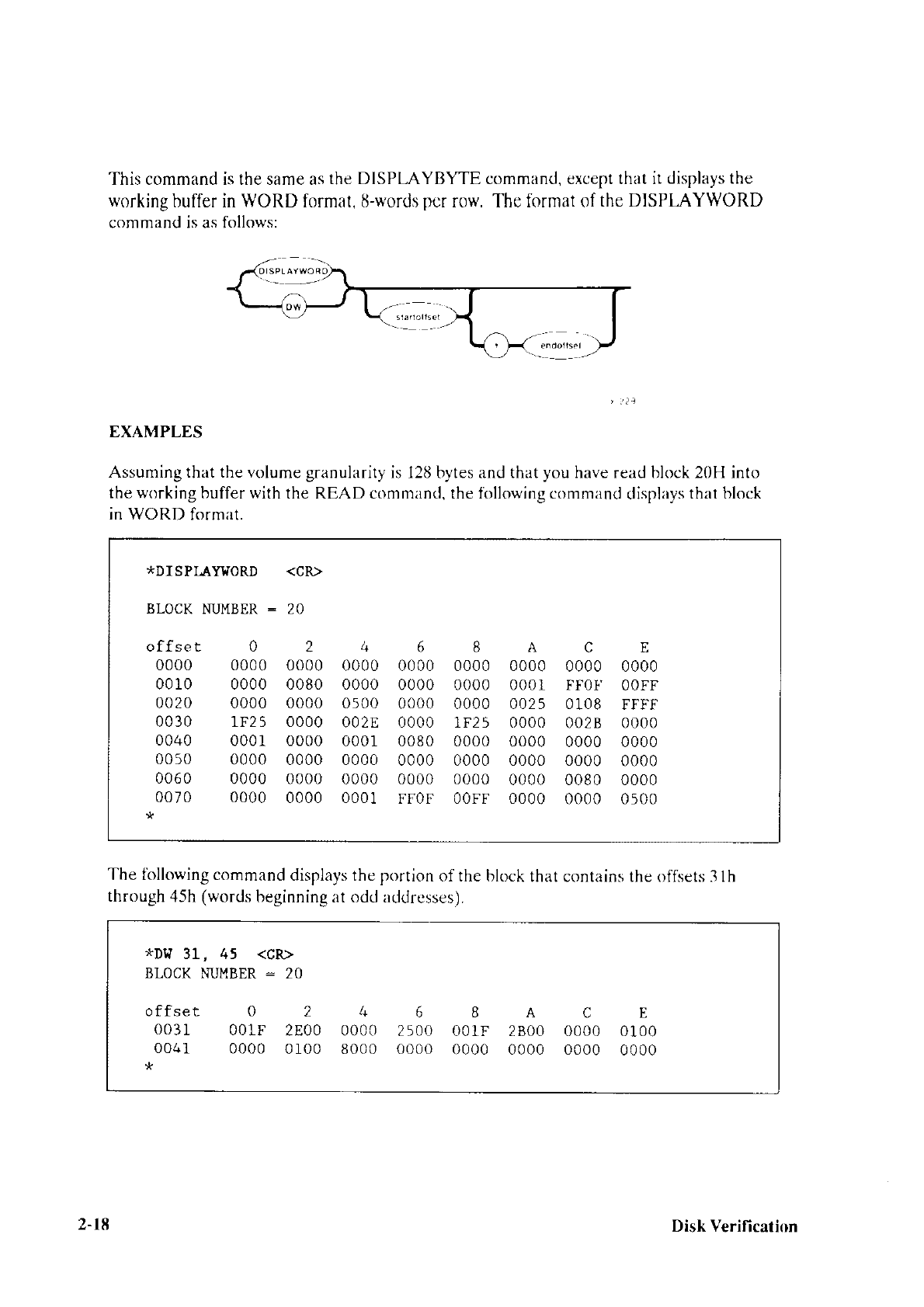
This command is the same as
the DISPL.AYBYTE command, except that it
displays the
working
buffer in WORD format, fì-words
pcr
row, The tbrmat of
the DISPT-AYWORD
command is as follows:
EXAMPLES
Assuming that the volume granularìty
is 128 bytes and that
you
have read block 20H into
the working
buffer
with
the READ commanrl, the ftrllowing commanci
clisplays
that block
in WORD
format.
The ibllowìng command
displays the portion
of the block
that contains the offsets 3 I h
through
45h
(words
beginning
at odd addrcsses).
*DISPIAYTJOR.D <CR>
BLOCK NUHBER
: 20
offset
0000
0010
0020
0030
0040
00s0
0060
0070
o2
0000 0000
0000 00 80
0000 0000
1F2 5 0000
0001 0000
0000 0000
0000 0000
0000 0000
468
0000 0000 0000
0000 0000 0000
0500 0000 0000
002E 0000 1F25
0001 0080 0000
0000 0000 0000
0000 0000 0000
OOOl FFOF OOFF
ACE
0000 0000 0000
0001 FFOt' 00FF
0025 0108 FFFF
0000 002B 0000
0000 0000 0000
0000 0000 0000
0000 0080 0000
0000 0000 0500
*DI{ 31, 45 <CR>
BLOCK NUMBER
: 20
offset O 2
00
31 00lF 2 E00
0041 0000 0100
468
0000 2500 00lF
8000 0000 0000 2800
0000
CE
0000 0100
0000 0000
2-18 Disk VerifÍcalion
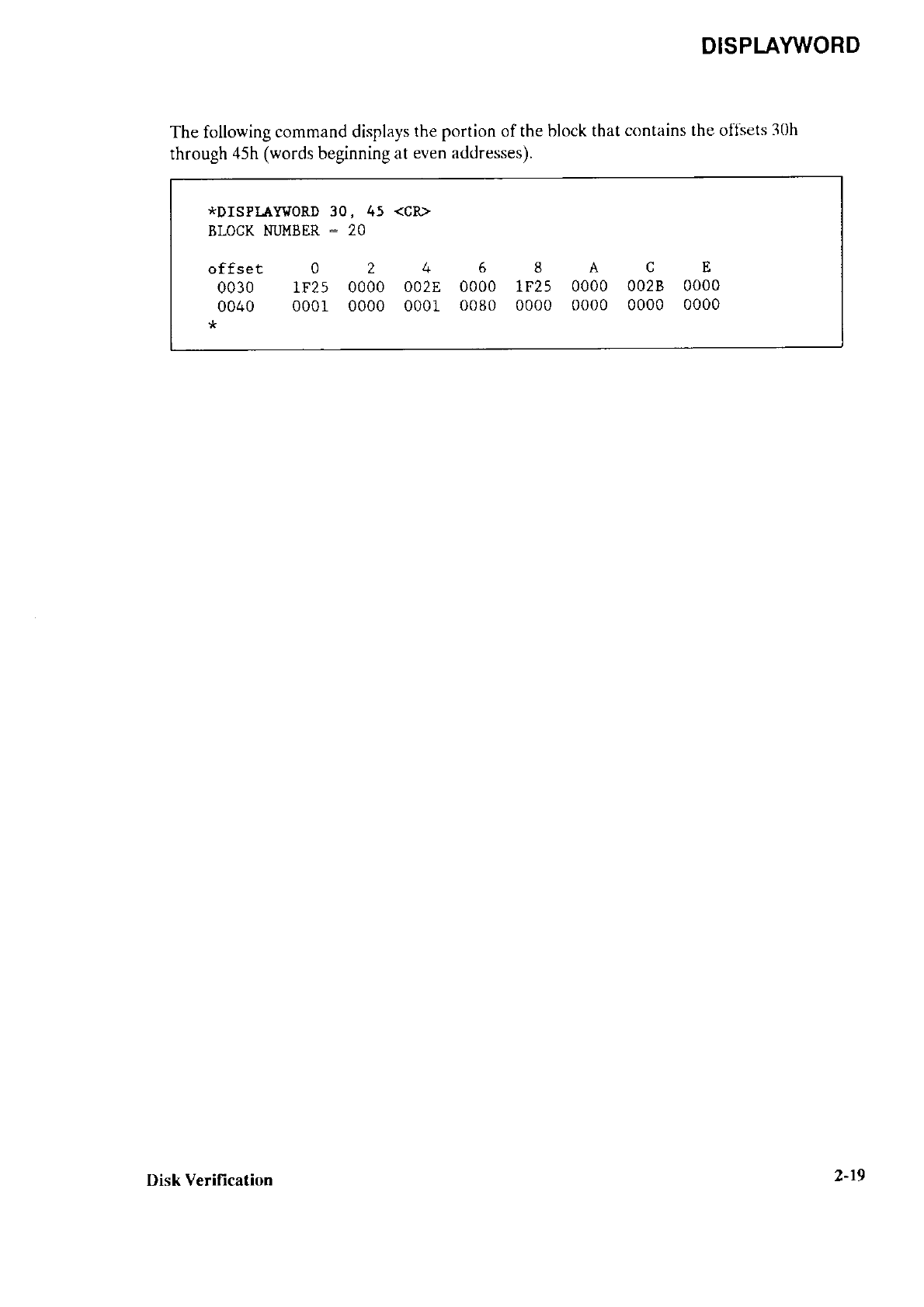
DISPLAYWORD
The following
command displays
the portion of the
block that
contains the ollsets
30h
through
45h (words beginning at
even addresses).
*DIS
PIAYSORD 30, 45
BLOCK
NUMBER
- 20
offset O 2
0030 rF25 0000
0040 0001 0000
<cR>
46
002E 0000
0001 0080
8A
1F25 0000
0000 0000
C
0028
0000
E
0000
0000
Disk Verification 2-r9
This
command lists all the
files contained in a directory. You
can abort this command by
ryping
a
CONTROL-C.
The format of the DISPLq.YDIRECTORY
command
is as
follows:
INPUT PARAMETER
fnodenum Number of the fnode
that corresponds
to a directory
file. This
number can range
from 0 through
(max fnodes
- 1),
where
max
fnodes is the nurnber
of fnodes
defined when
the
volume
was
originally
formaued. DISPI-AYDIRECTORY lists all files or
directories
contained in this
directory.
OUTPUT
In response
to
the command,
DISPI-AYDIRECTORY
lists information
about
all files
contained
in the specified
directory. The format
of this dìsplay
is as follows:
FILE NAME FNODE TYPE FILE NAME
FNODE TYPE
where:
<
filenam
>
<
fnode
>
<filenaÈ (fnode) (type)
(f ilenarn) <fnode> <type>
(filenam) (fnode) (type)
(filenam) (fnode) <type)
FILE NAI"IE
FNODE TYPE
(f ilenarn> <fnode> <type>
<f ilenam> (fnode) <type)
Name of
the file or directory contained
in
the directory.
Number of
the fnode
that describes
the file.
2-20 Disk Verification
type
> Type ofthe file. The <rype> can be
Tlpe of file Descrintion
DISPLAYDIRECTORY
DATA
DIR
SMAP
FMAP
BMAP
VI-A.B
data files
directory
files
volume free space map
free fnodes map
bad blocks
map
volume
label file
DESCRIPTION
DISPI-AYDIRECTORY displays a list of
files contained in the specified directory, along
with
their fnode numbers and tvoes.
You can then use other DISKVERIFY commands
to
examine the individual
files.
ERROR MESSAGES
argument error A nonnumeric character
was
specified in
the fnodenum
parameter.
<
fnodenum
>
,
fnode not The number specified for the fnodenum
allocated parameter
does not correspond to an
allocated fnode. This fnode does
not
represent an actual file.
<fnodenum>,
not a directory The number specified for the
fnodenum
fnode parameter is not an fnode for a directory
file.
<
fnodenum
>
,
fnode
out of range The number specified for the fnodenum
parameter
is larger
than
the
largest fnode
number on the
volume.
Disk Verification 2-21
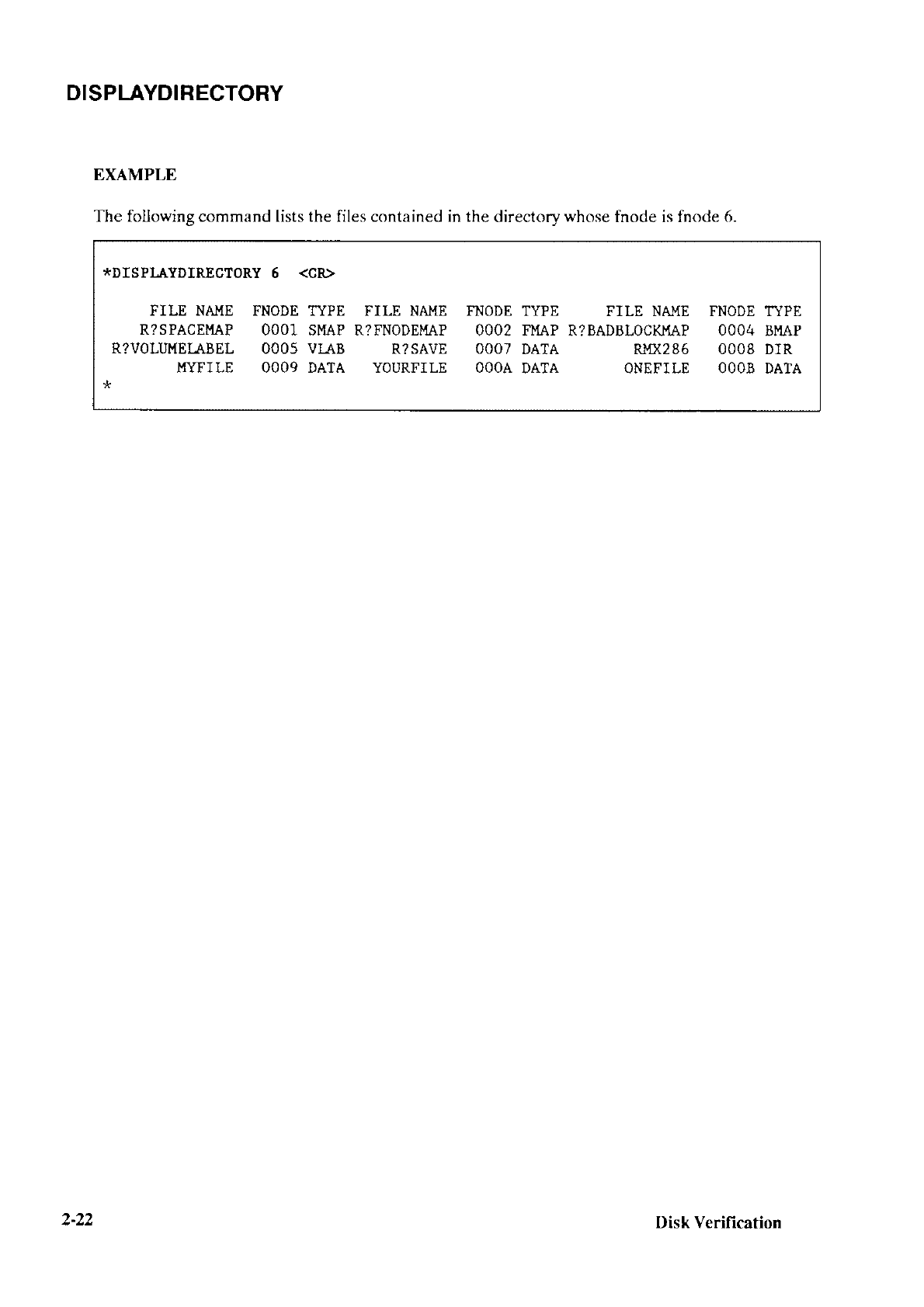
DISPLAYDIRECTORY
EXAMPLE
The following command lists the files contained in the
directorv
whose
fnode is fnode
6.
*DISPIAYDIRICTORY
6 <CR>
FILE NAME FNODE TYPE FILE NAME
R?SPACEMAP OOO1 SMAP R?FNODEMAP
R?VOLUMEU,BEL OOO5 VTAB R? SAVE
M1TILE OOO9 DATA YOURFILE
FNODE
TYPE FILE NAME FNODE TYPE
OOO2 FMAP R?BADBLOCKMAP OOO4 BMAP
0007 DATA Rlfl(286 0008 DIR
OOOA
DATA ONEFILE OOOB DATA
) -)7 Disk Verification
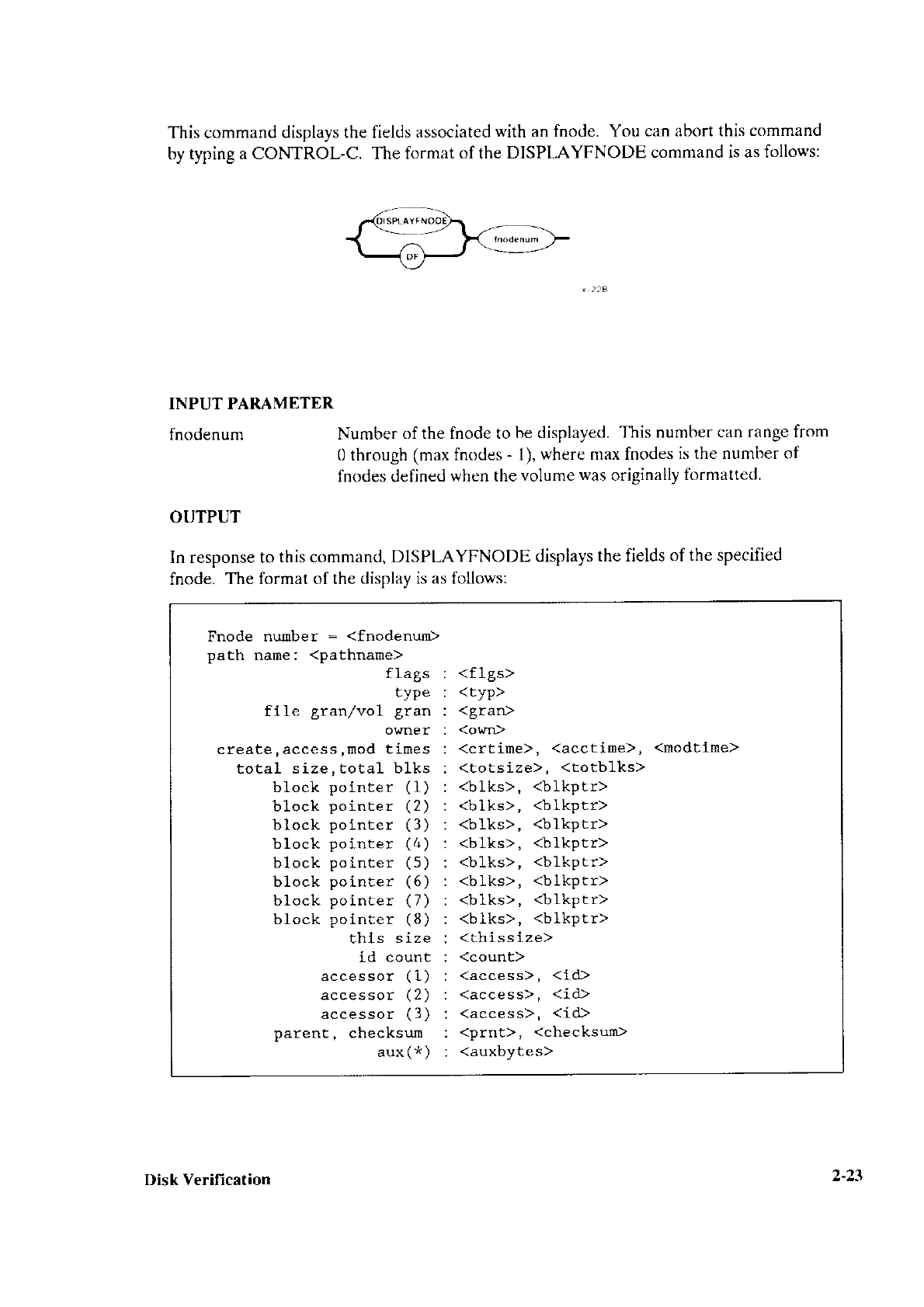
This command
displays the fields
associated
with an fnode. You
can abort this
command
by typing
a CONTROL-C. The format
of the DìSPTAYFNODE
command
is as follows:
INPUT PARAMETER
fnodenum Number
of the fnode to
be displayed.
This numbercan
range from
0 through
(max fnodes
- l), where max fnodes
is the number of
fnodes defined
when the
volume
was
orisinally
formatted.
OUTPUT
In response to
this command, DISPIAYFNODE displays
the fields
of the specified
fnode.
The format of the
display is as follows:
Fnode nuuber - <fnodenurn)
pach nane: <pathnarne>
flags
tYPe
t.. ^ l --^^
LLL- ÉLdtt/
OIJTìE T
create ,
access,mod t imes
t^È^r Ltr.-
bl-ock pointer (1)
block pointer (2)
hl nrlz nnJ nrpr /?\
block pointer (4)
t'l^-L ^^i-r-r /5\
hl nrlz nai ntar l6ì
block pointer (7)
block pointer (8)
this size
id count
accessor (1)
aeeessor (2)
accessor (3)
n..ahÈ rh or lz <r tm
aux (* )
<f1gs>
<tYP>
<gran>
<oLrn>
<crtine>, <acctine>,
<totsize>, <totblks>
<blks>, <blkptr>
<blks>, <bÌkptr>
<blks>, <blkptr>
<b1ks>, <blkptr>
<blks>, <blkptr>
<blks>, <blkptr>
<blks>, <blkptr)
<blks>, <blkptr>
<thisslze>
<count>
<access>, <ld>
<access), (id)
(access), (id)
<prnt>, <checksuÍ>
<auxbytes>
<rnodtime>
Disk Yerification t-t1
DISPLAYFNODE
where:
<
fnodenum
> Number of the fnode being displayed. If the fnode does not
describe an actual
file
(that
is, if it is not allocated), the following
message appears next to this field:
*** AILOCATION STATUS
BIT IN THIS FNODE NOT SET
***
In this case, the fnode
fields are normally set to zero.
<
pathname
> FulÌ
pathname
of the file described
by
the
fnode. This field is not
displayed if the
fnode does not describe a file.
<
flgr
> A word defining the attributes
of the file. Significant birs of
this word are
as follows:
Bit Meaning
0 Allocation status.
This bit
is set to 1 for
allocated fnodes
and 0 for free
fnodes.
1 Long or short file attribute.
This bit is set to 1
for long
files and 0 for short files.
5 Modification
attribure. This bit
is set to 1
whenever
a file is modified.
ó Deletion attribute.
This bit is set ro 1 to
indicate a temporary
file or a file to be deleted.
The DISPLAYFNODE
command displays
a message
nexr to this
field to indicate whether
the file is a long
or short file.
<
typ
> Type
of file. This
field contains
a
value
and
a description
which
is
displayed
next to the value.
The
possible
values
and descriptions
are as follo\À's:
Value Descriptions
00 fnode
file
01 volume
map
file
02 fnode
map file
03 account
file
04 bad block
file
06 directory
file
08 data
file
09 volume
label file
<
gran
>
<own>
File granularity,
specified as a
multiple of the volume granularity.
User ID of the owner
of the
file.
2-24 Disk Verification
DISPLAYFNODE
<crtime> Time and date of file creation, last
access, and
<
acctime
> last modification. These vaiues are expressed
as
<modtime> the time, in seconds, since January 1, 1978.
<
totsize
> Total size,
in bytes, ofthe actual data in the fiìe.
<totblks> Total number of volume
blocks used by the
file, including indirect
block
overhead.
<
blks
>, <
blkptr
> Values
that identify the data blocks of the file. For short files, each
<
blks
> parameter
indicates the number
of volume blocks in the
data block, and each
<blkptr> is the number of the first such
volume
block. For long files, each
<blks> parameter indicates the
number of volume blocks pointed to by an indirect block,
and each
<blkptr > is the block number of the indirect block.
<
thissize
> Size in bytes of the total data space allocated to the
file, minus any
space used
for indirect blocks.
<
count
> Number of user IDs associated
with the file.
<
access
>
, <
id
> Each pair of fields indicates the access
rights for the file and the ID
ofthe user
who
has that access
ID. Bits in the
<access>
field are
set to indicate the following access
rights:
Data File Directory
Bit Ooeration Operation
0 delete delete
1 read list
2 append add entry
3 update change entry
The first ID listed is the owner's
ID.
<prnt > Fnode number of the directory file
that contains the file.
<checksum> Checksum of
the
fnode.
<auxbytes> Auxiliary bytes associated
with the file.
Appendix A contains a more detailed description of the fnode fields.
DESCRIFTION
Fnodes are system data structures on the
volume that describe the files on
the volume.
The fnode structures
are created when the
volume
is formatted. Each
time a file is
created on
the volume, the iRMX II Basic I/O System allocates
an fnode for the
file and
fills in the fnode fields to describe the fiìe. The
DISPI-A.YFNODE command
enables
you
to examine these fnodes
and determine
where
the data for each
file resides.
Disk Verification )-r\
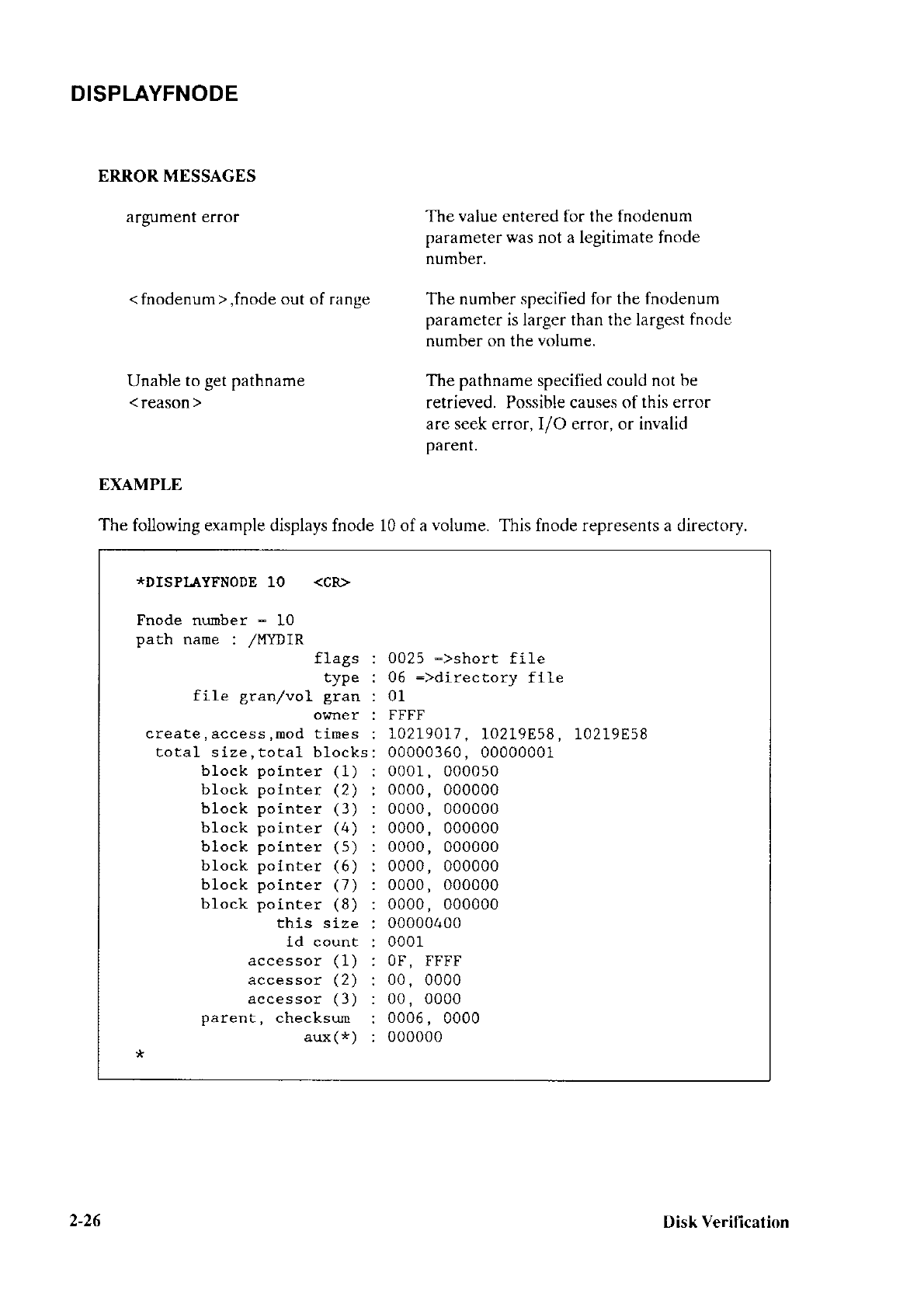
DISPLAYFNODE
ERROR MESSAGES
argument error The value entered for the fnodenum
parameter was not a legitimate fnode
number.
<
fnodenum
>,fnode
out of range The number
specified for the fnodenum
parameter is larger than the largest
fnode
number on the
volume.
The pathname specified could not
be
retrieved. Possible causes of
this error
are seek error, I/O error, or invalid
parent.
Unable
to get pathname
<
reason
>
EXAMPLE
The
following example displays fnode 10 of a
volume.
This fnode represents a directory.
XDISPIAYFNODE 10 <CR>
Fnode number : I0
nr rh n.mo /M\'nTP
flaoc
tyPe
ollTte r
create ,
access,mod times
cotal size, total b locks
hl ^.L n^ínrar / I I
block polnter (2)
hl anlr nni nrar t ìl
Ll^^1. -^i-+^- //,\
9rvL^ P9llrLq! \Y/
h l arlz nni ntar r ( \
h l nalz nnJnrar i'At
hìnnlr nnintar /7\
h1 nnL -^i ^t-r / e\
this s ize
fd count
ecno<<nr / l \
accessof (2)
accessof (3)
n.ranr aha alz c' '-
aux(*)
0025
:>short fi Ie
06:)directory fl le
01
FFFF
I02L9017
, 10219E58,
00000360,
00000001
0001
, 000050
0000,000000
0000,000000
0000,000000
0000,000000
0000,000000
0000,000000
0000,000000
00000400
00 01
OF,
FFFF
00,0000
00,0000
0006,
0000
000000
10219Es8
2-26 Disk Verifìcation
This command is
identical to DISPI-AYFNoDE, except
the DISPLAYSAVEFNoDE
takes
the fnode
information from the R?SAVE file,
and displays the
fnode as saved.
R?SAVE must
have been reserved
when
the
volume was formatted.
(That
is, the
RESERVE option in the FORMAT command
must have been
specified.) The format of
the DISPT-AYSAVEFNODE
command is as follows:
F
0212
ERROR MESSAGES
argument
error
<
fnodenum
>
,
fnode out of range
no save area
was
reservetl
when
volume was formatted
Unable to
get pathname
<
reason
>
When the command
was
entered,
no
argument
was supplied.
DISPTAYSAVEFNODE
requ ires
a
designation of
the fnode number.
The
number specified
for the fnodenum
parameter
is
larger than the largest
fnode
number on the
volume.
The
volume was not formatted
to support
backup fnodes.
This means the
RESERVE option
was
not
specified
when
the
volume
was
formatted.
The
pathname specified
could not
be
retrieved. Possible
causes of
thrs error
are seek error,
I/O error,
or invalid
parent.
fnodenu m
DISPLAYSAVE FNODE
Disk Verífication 2-27
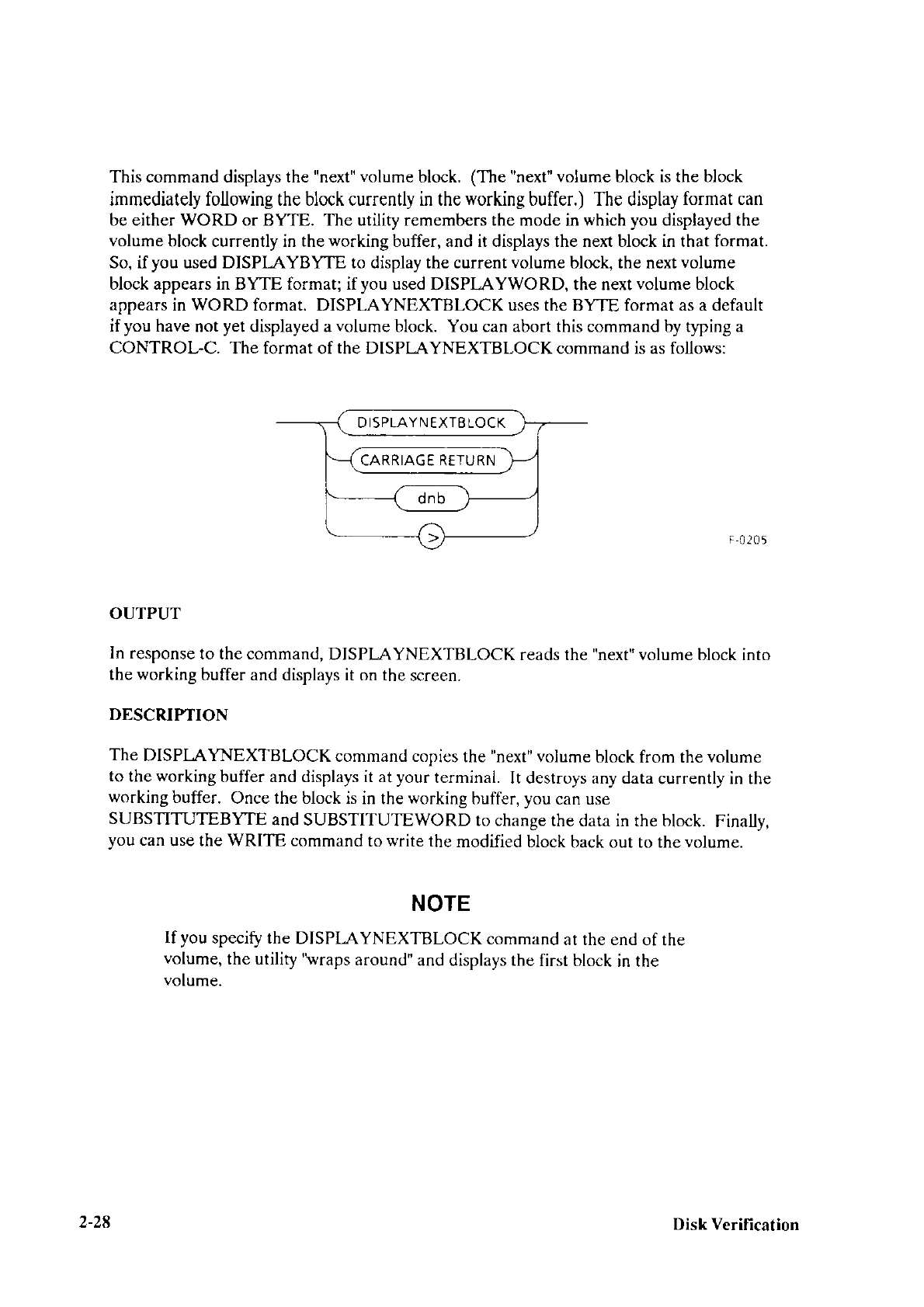
This command displays the
"next"
volume
block.
(The "next" volume block is the block
immediately following the block currently in the
working
buffer.) The display
format can
be either WORD or BYTE. The utility remembers the mode
in which
you
displayed the
volume
block currently in the
working
buffer, and it displays the next block in that format.
So, if you
used DISPI-AYBYTE to display the current
volume
block, the next
volume
block appears in BYTE format; if you used
DISPLAYWORD, the next
volume block
appears
in
WORD
format. DISPLAYNEXTBLOCK uses the BYTE format as a default
ifyou have
not
yet
displayed a
volume
block. You can abort this command by typing a
CONTROL-C. The format of the DISPTAYNEXTBLOCK command is as follows:
F
0.205
OUTPUT
In response
to the command,
DISPI-AYNEXTBLOCK
reads the "next" volume block into
the
working
buffer and displays it on the
screen.
DESCRItrTION
The
DISPI,AYNEXTBLOCK
command copies
the
"next"
volume
block from rhe
volume
to the
working
buffer and displays it at your
terminal.
It destroys any data
currently in the
working
buffer.
Once the block
is in the
working
buffer,
you
can use
SUBSTITUTEBYTE
and SUBSTITUTEWORD
to change
the data in the block.
Finally,
you
can
use the WRITE command
to
write
the
modified block
back out to the
volume.
NOTE
If you
specifo the
DISPI-AYNEXTBLOCK
command
ar rhe end
of the
volume,
the utility'Vraps
around"
and displays the
first block
in the
votume.
D
I5PLAY N
EXTE LOCK
CARRIAGE RE-TU RN
2-28 Disk Verification
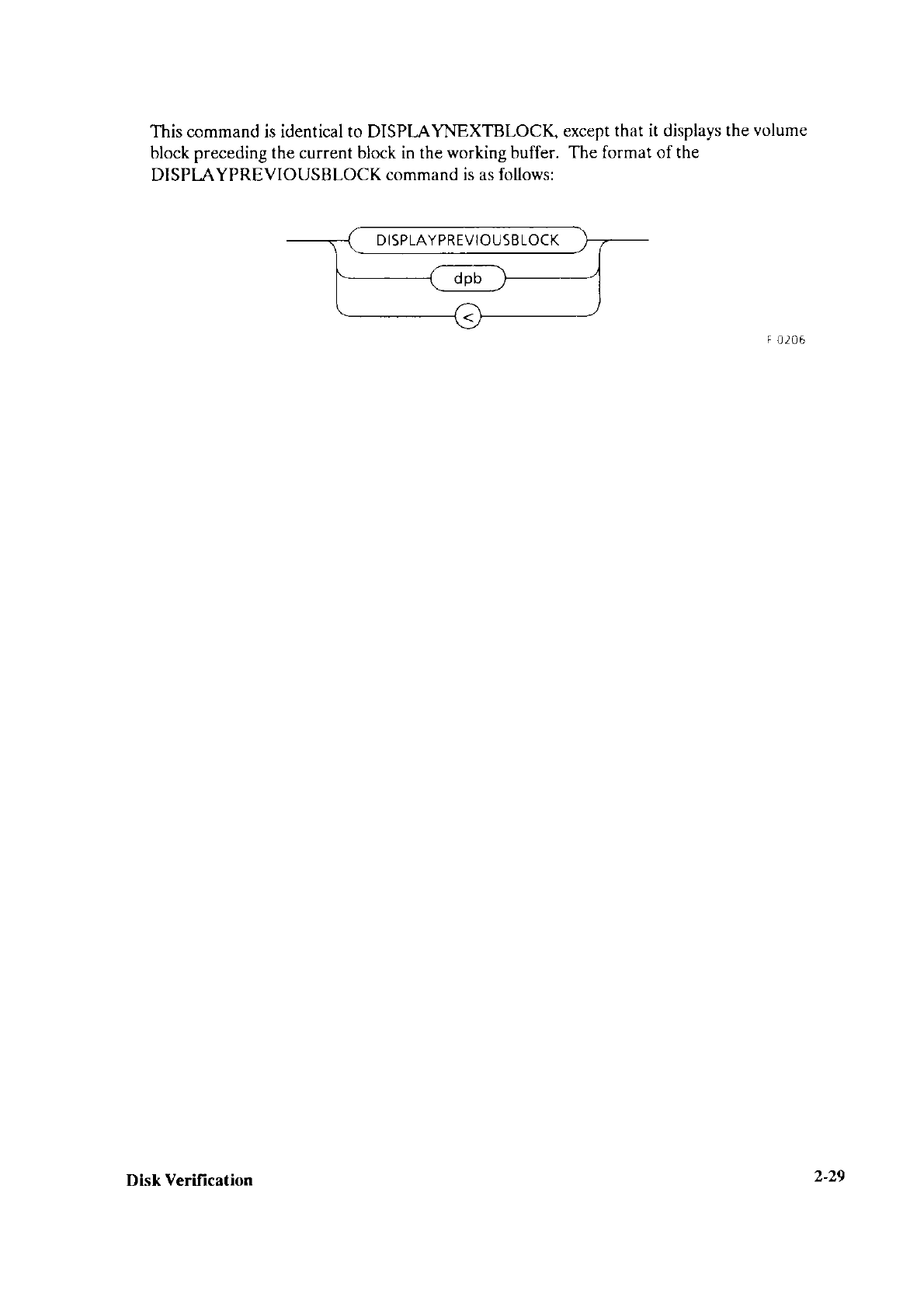
This command is identical to DISPLAYNEXTBLOCK
except
that it displays the
volume
block preceding the current block in the
working
buffer.
The format of the
DISPI-AYPREVIOUSBLOCK
command is as follows:
F
0206
2-29
Disk Verification
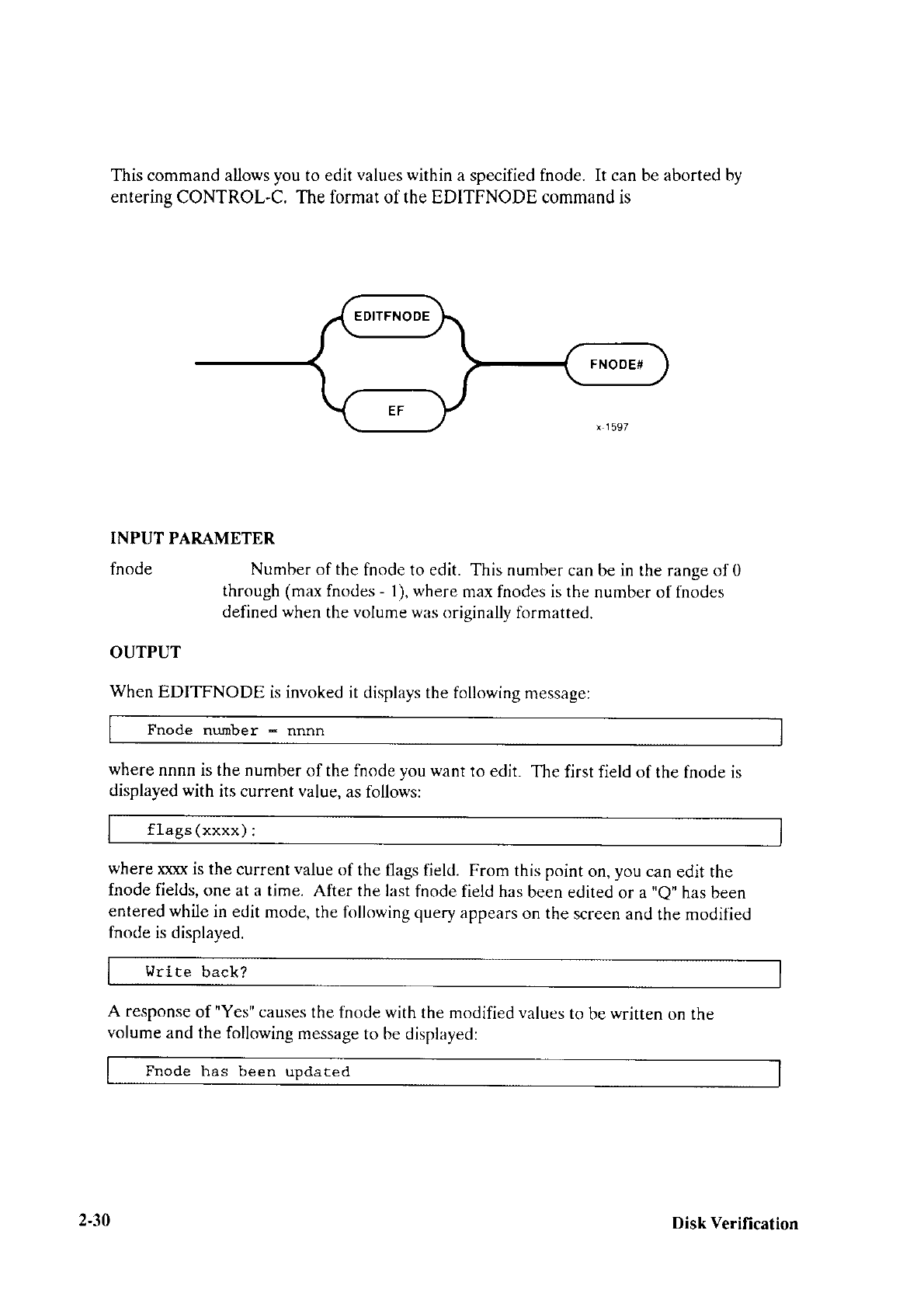
This command allows you to edit
values within
a specilìed fnode. It can be aborted by
enterins
CONTROL-C. The format of the EDITFNODE command is
INPUT PARAMETER
fnode Number of the
fnode to edit. This number
can be in the range of 0
through (max
fnodes
- l), where
max fnodes is the
number of fnodes
defined when
the
volume
was orisinallv
formatted.
OUTPUT
When
EDITFNODE
is invoked it displays the following
message:
Fnode nurnbe r - nnnn
where
nnnn is the number
of the fnode
you
want
îo edit.
The first field of
the fnode is
displayed with
its current value,
as follows:
f lags
(xxxx)
:
where
poo<
is the
current
value
of the flags field.
From this point
on,
you
can
edit the
fnode fields,
one at a time. After the last
fnode field has
been edited
or a',e,'has been
entered while
in edit
mode, the following
query
appears on the
screen and
the modilìed
fnode
is disolaved.
Write back?
A response
of "Yes"
causes
the fnode with the modified values
to be
written on the
volume
and the following
message
to be displayed:
Fnode has been updated
2-30 Disk Verification
EDITFNODE
Any
other response
causes the fnode
to remain unchanged
and
the following
message
to
be displayed:
Fnode not changed
DESCRIPTION
EDITFNODE
is used to change
values within a
specified fnode.
When it is invoked,
it
displays the message
shown above.
Once you receive
the invocation
message,
you can
edit
the fnode, one
field at a time. The
first field, flags,
is displayed
upon invocation
(as shown
above).
The current
value of each field
is displayed
followed by a
colon. EDITFNODE
then
waits for one of
the following responses
from the terminal.
Response Meaning
<
CR
> No modification
to the field.
numerical
value
<
CR
> The new
value to be assigned.
This
value is always
interPreted
as hexadecimal.
Quit
or Q or
c1
<
CR
> Skip
the remaining
fields
and
display
the
query.
Any response,
other than those
listed above,
causes the field
to remain
unchanged,
and
the next field
to be displayed.
Once the fnode
has been updated,
you can
use DISPLAYFNODE
to examine
the
contents of
the fnode and
the changes
you made. Changing
the
contents of
an fnode
causes it to have
a bad checksum.
Use FIX with the NAMED1 option
to correct
it. For
more details,
see
the ex?lanation
of FIX later
in this
chapter.
ERROR MESSAGES
argument
error The option
specified
is not
valid.
<fnode
num>, fnode
out of The fnode
number
specified
was
larger
range than
the largest
fnode
number
on the
volume.
Error
in Input Invalid input
was
entered
while editing
an
entry.
Disk Verification 2-l t
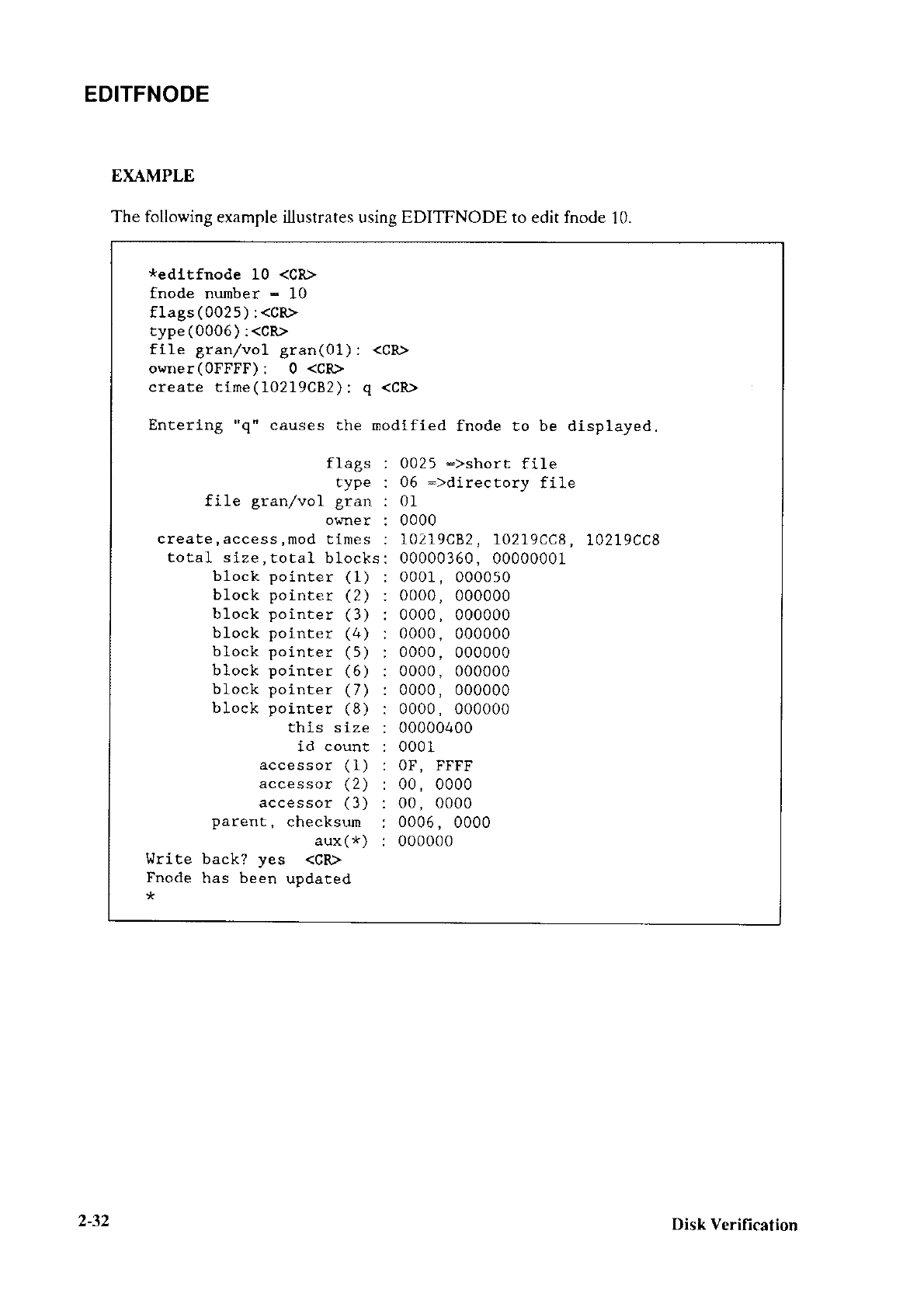
EDITFNODE
EXAMPLE
The following
example illustrates using EDITFNODE to edit fnode
10.
*edltfnode 10 <CR>
fnode nurnber - 10
flags(0025):<CR>
type(0006):<CR>
flle gran/vol gran(01) : <CR>
owner(0FFFF): 0 <CR>
créatè time(1O2I9CR2): q <CR>
Encering "q'r causes the modified fnode to be displayed.
fl ags
tYPe
s.:1^ -,-.^
r r rE ó!drrl vur ÉLdrr
OIJTìE
r
create
,
access,
mod tines
totaL si"ze,
total blocks
block poínter (1)
block pointer (2)
block pointer (3)
block pointer (4)
block pointer (5)
hl oelr nai nror /6 t
block pointer (7)
hl ó.L n^int ar 1R\
this s ize
i.d count
accessor (1)
accessor (2)
accessor (3)
nr rén t_ eha r lz <"-
aux
(
*)
l,lrice back? yes <CR>
Fnode
has been updated
0025 -)short fi Ie
OA:>rlirartnrrr fí1a
01
0000
10219C82,
10219CC8,
10219 CC8
00000360,
00000001
0001, 0000s0
0000, 000000
0000,000000
0000,000000
0000,
000000
0000,
000000
0000,000000
0000, 000000
00000400
0001
OF, FFFF
00, 0000
00, 0000
0006,
0000
000000
2-32 Disk Verification
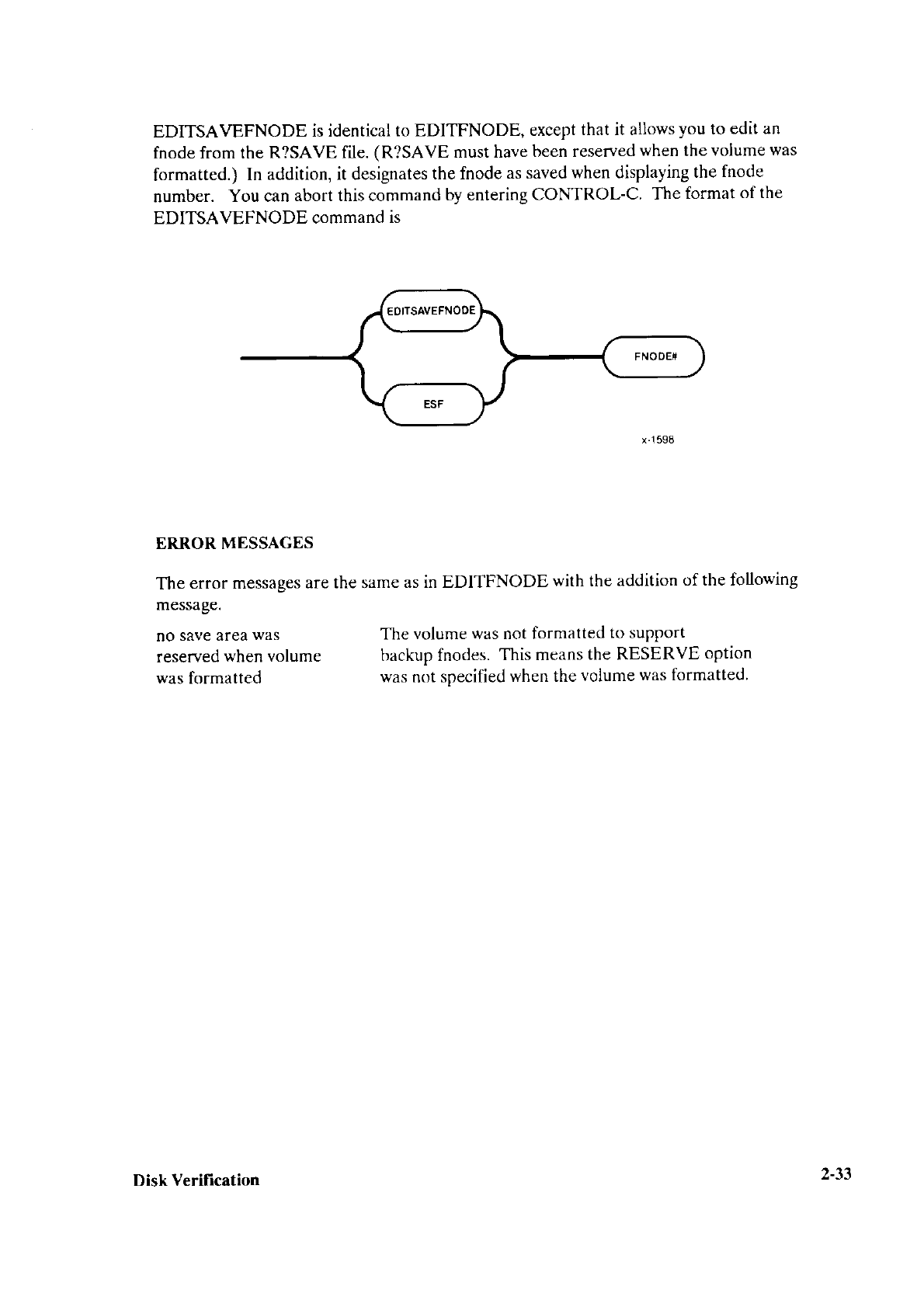
EDITSAVEFNODE
is identical
to EDITFNODE,
except
that it allows
you
to
edit an
fnode from the
R?SAVE file.
(R?SAVE
must have
been reserved
when
the
volume
was
formatted.)
In addition, it designates
the fnode
as saved
when displaying
the
fnode
number. You can
abort this command
by entering
CONTROL-C.
The
format
of the
EDITSAVEFNODE
command
is
ERROR MESSAGES
The
error messages
are the same
as in EDITFNODE
with the
addition
of the following
messaqe.
The
volume was not formatted
to support
backup fnodes.
This means
the RESERVE
option
was
not
soecified
when the
volume
was formatted.
no
save area
was
reseryed
when volume
was
formatted
Disk Verification 2-33
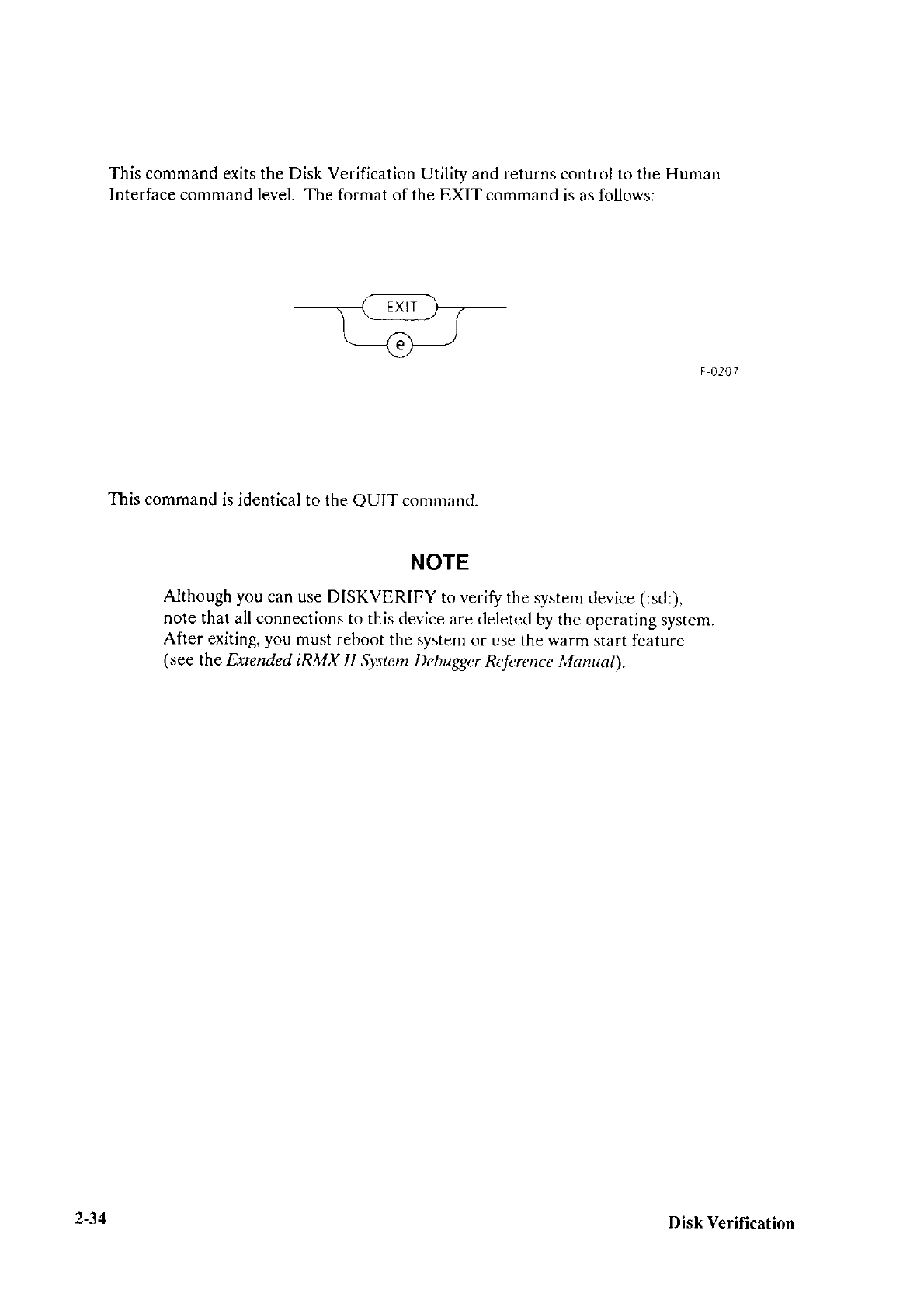
This command exits
the Disk
Verification
Utility and returns control to the Human
Interface command level.
The format of the EXIT command
is as follows:
r o20t
This command
is identical to
the
QUIT command.
NOTE
Although you
can use DISKVERIFY
to
verify
rhe sysrem
device (:sd:),
note that all connections
to this
device are deleted
by the operating
system.
After exiting, you
must reboot
the system
or use the warm start
feature
(see
the Ertended
iRMX II System Debugger
Ret'erence Manual).
2-34 Disk Verification
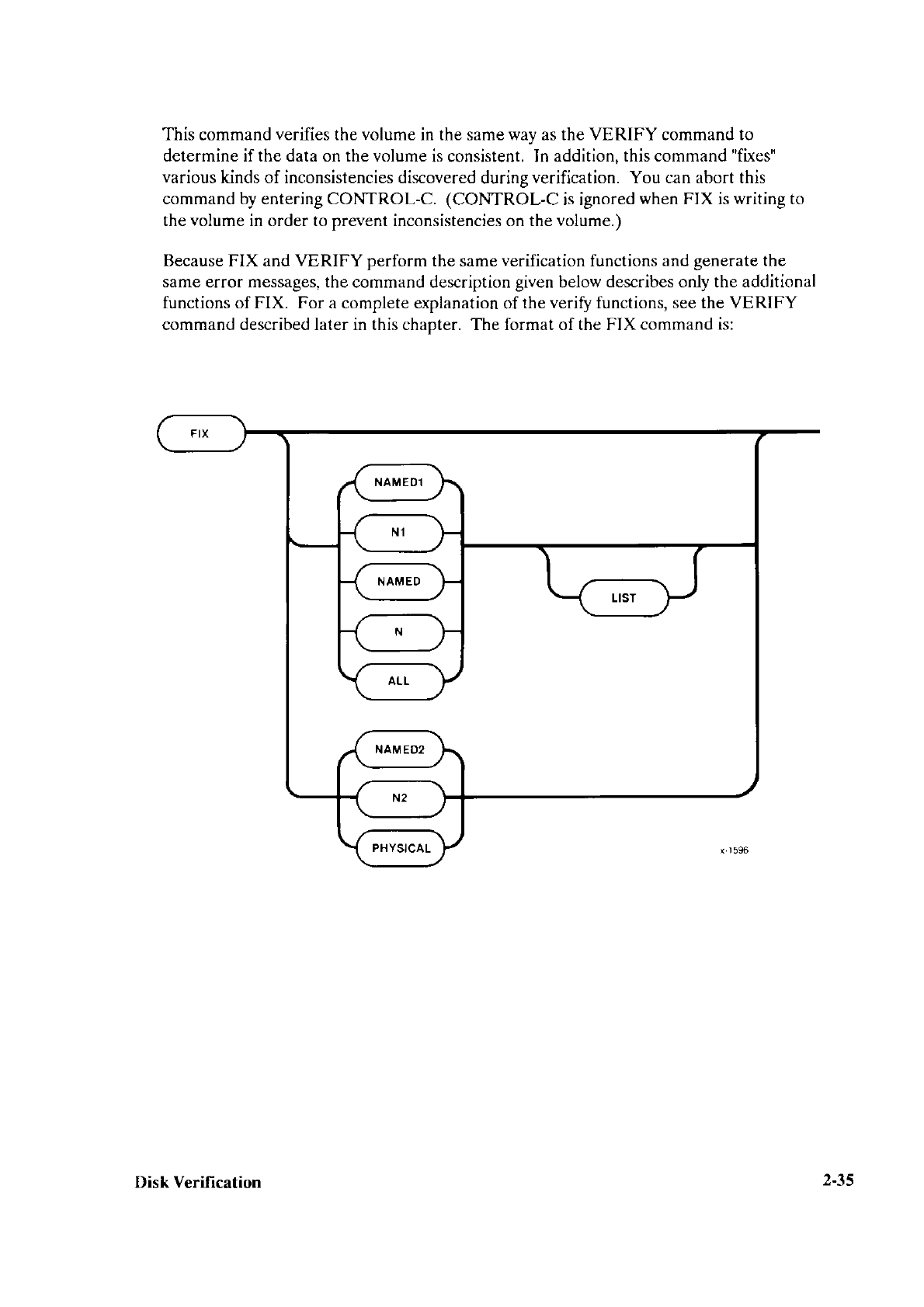
This command
verifies
the volume in the same way as the VERIFY command to
determine if the data on the volume
is consistent. In addition,
this command
"fixes"
various
kinds of inconsistencies discovered
during
verification. You can abort this
command by entering CONTROL-C. (CONTROL-C
is ignored
when FIX is writing to
the
volume
in order to prevent inconsistencies on the volume.)
Because FIX and
VERIFY perform
the same
verification
functions
and generate the
same
error messages, the command description
given
below
describes only the additional
functions of FIX. For a complete explanation
of
the veriff functions, see the
VERIFY
command described later in this chanter. The format of the FIX command is:
Disk Verification 2-35
Ftx
INPUT PARAMETERS
NAMED1 or N1
NAMED2 or N2
NAMED or N
PHYSICAL
LIST
ALL
Performs NAMEDl verification and fixes
the following
inconsistencies:
. Fixes
bad checksums
. Attaches orphan
fnodes to their
parents. An orphan
fnode is
an
fnode contained
within a directory and
whose
parent field
does not
point back to this directory.
If the
parent field of the
specified
fnode points to a second valid directory,
and the
second
directory
also points to the fnode,
no fix is
performed
since the specified
fnode belongs to an existing directory. This
is a case of multiple
references
(discussed in NAMED2).
If the parent field
does not point to a
valid parent, the
parent field
is fixed to point to the directory that
contains this fnode in its
fiìe
list.
Performs NAMED2 verification and fixes the followins
inconsistencies:
. Removes
fnodes from their iilegal parents. If there
is a multiple
reference
to an fnode, the fnode is removed from
the
directories
that it does not
point
to (if FIX was performed
with
NAMEDl, the
fnode
should now point to one
valid parent).
r Saves fnode and block bit maps
on completion of NAMED2.
Performs
both the NAMEDI and NAMED2
verification
functions
on a named volume and fixes the inconsistencies defined for
these
options.
Performs all operations appropriate to the
volume.
For named
volumes,
this
option performs both the NAMED and PHYSICAL
verification functions. For physical
volumes,
this option performs
only the PHYSICAL
verification
function. For both NAMED and
PHYSICAL
volumes,
ALL performs the fixes for the relevant
verifications.
Performs PHYSICAL
verification
and saves the bad block bit man.
Lists the
file information displayed
in Figure 2-3 for any
verification that includes
NAMED l.
2-36 Disk Verilication
FIX
OUTPUT
FIX
produces
the same output as the
VERIFY
command
(see
Figures
2-3, 2-4, and 2-5)
with
additional
messages displayed when an inconsistency is fixed. NAMEDl output
includes these messases.
Checksum Fixed
fnode nnnn was attached to parent nnnn
The first message
appears after a bad checksum is fixed. The
second message is displayed
when
the
parent field of an
fnode
is
modified
to
point
to a
valid parent.
NAMED2 displays
this
message
when an fnode with multiple references
is removed
from
the directory.
fnode rernoved frorn this dlrectory
If an fnode exists on a disk and is marked
allocated, but has not
been referenced,
FIX
issues a
warning
message and asks
if you want to save the bit
maps. This
prevents SAVE
from freeing
this fnode and its blocks and
possibly causing a file to be
lost.
2-37
Disk Verification
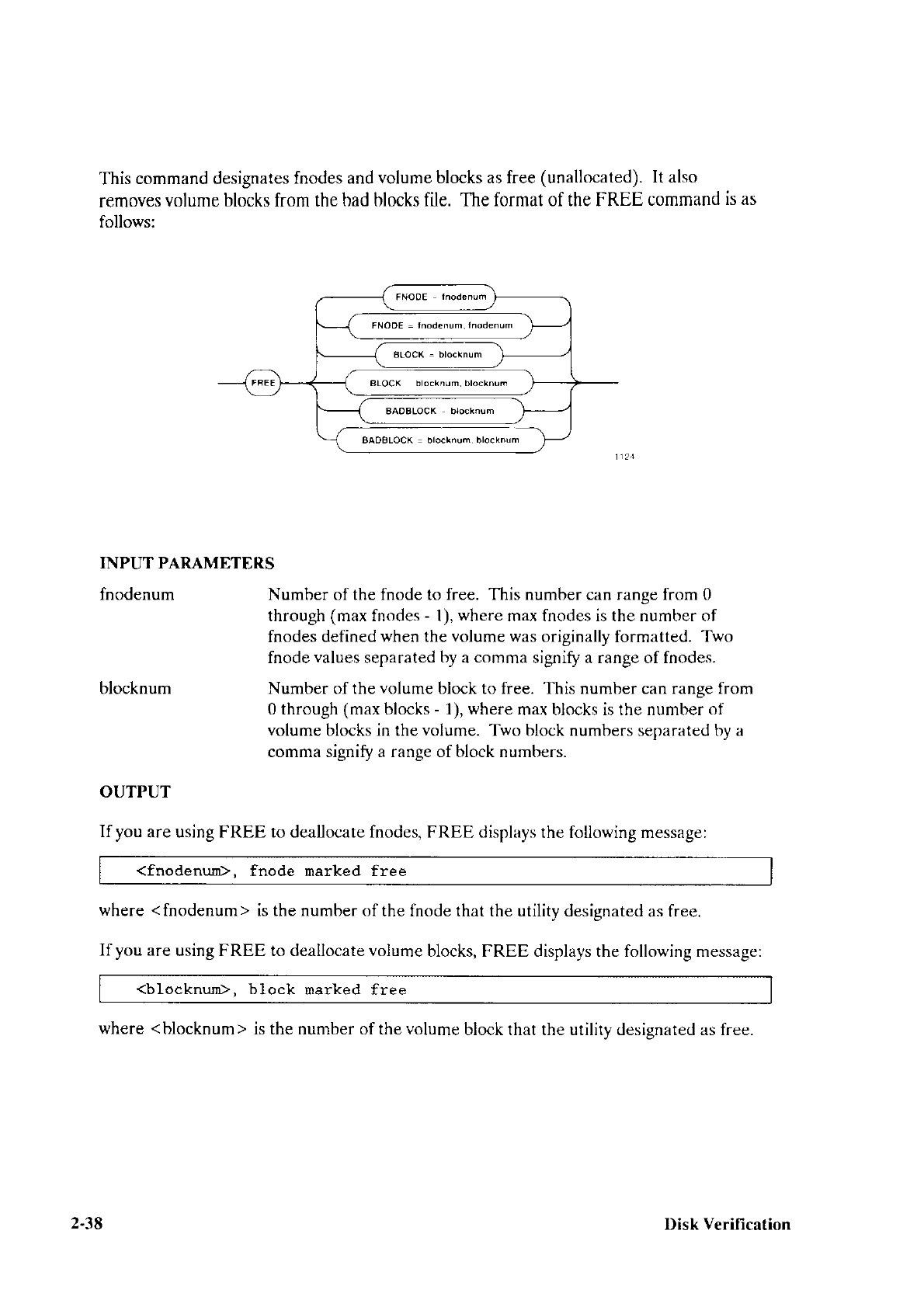
This
command designates
fnodes and
volume blocks as free
(unallocated). It also
removes
volume blocks from the
bad blocks file. The format of the FREE
command
is as
follows:
INPUT PARAMETERS
fnodenum Number of the fnode to free. This number can range from 0
through
(max
fnodes
- l),
where
mar fnodes is the number of
fnodes
defined when the
volume
was originally
formatted.
Two
fnode
values
separated
by
a
comma
signify a range of fnodes.
Number of the
volume
block to free. This number can range from
0 through
(max
blocks
- 1), where
mar blocks is the number
of
volume
blocks in the
volume.
Two block numbers separated by a
comma signif a range of block numbers.
OUTPUT
Ifyou are using FREE to deallocate fnodes, FREE displays
the following message:
blocknum
<fnodenutr>, fnode narked free
where
<fnodenum>
is the number ofthe fnode that the utilitv desisnated
as free.
If you are
using FREE to deallocate volume
blocks, FREE displays the following message:
<blocknun>, block marked free
where
<
blocknum
> is the number of the volume
block that the utilitv desisnated as free.
2-18 Disk Verification
FREE
Ifyou are
using FREE to designate
one or more
"bad"
blocks as
"good,"
FREE displays
the following message:
<blocknun>, block marked good
where
<
blocknum
> is the number of the volume
block that the utilitv desisrated as
"good."
FREE
checks the allocation status of
fnodes or blocks before freeing them. Therefore, if
you
specify FREE for a block
or fnode that is already unallocated, FREE returns one of
the
following messages:
<fnodenuo>, fnode already marked free
(blocknum>, block already marked free
(blocknun>, block already marked good
DESCRIPTION
Free fnodes are fnodes for
which
no actual
files
exist. FREE designates fnodes as free by
updating both
the F[-{GS field of the fnode and the free fnodes map file.
Free
volume blocks
are blocks that are not part of any file; they are available to be
assigned to any new or current file. FREE designates volume blocks as free by updating
the volume free space
map.
When you
use the FREE command
to designate one or more
bad blocks as "good," it
removes the block number
from the bad blocks file. However. FREE BADBLOCK
does
not designate the blocks as free. To update the volume free space map and designate
these blocks as free, use
the FREE BLOCK command.
ERROR MESSAGES
argùment error A syntax error
was
made in the command
or a nonnumeric character
was
specified
in the blocknum
or fnodenum
Darameter.
<
blocknum
>
, block out of range The
block number specified
was
larger
than the largest
block number in the
volume.
<
fnodenum
>
,
fnode out of range The fnode number specified
was
larger
than the largest fnode
number in the
volume.
Disk Verification 2-39
FREE
no badblocks
file The
volume does not have a bad blocks file. This message
could
appear
because an earlier
version
of the
Human Interface
FORMAT command
was used when the disk
was
formatted.
not a named
disk FREE
was performed on a
physical volume.
2-40 Disk Verification
This command displays the volume's bad track information. It can be aborted
by entering
CONTROL-C. The format of GETBADTRACKINFO is
INPUT PARAMETERS
None.
OUTPUT
The
GETBADTRACKINFO command displays
the volume's bad
track information as
written
by
the manufacturer
or
the
Human
Interface FORMAT command.
The output
displayed by the GETBADTRACKINFO command is
compatible
with
the format
required by the Human Interface FORMAT command
when writing bad track
information on the disk. To use the output as input to FORMAT,
remove the first
two
lines, leaving only the actual bad track information
data. The display is as
follows:
Bad track information:
L^-r
L-/ !
cccc hh ss
cccc hh ss
where
cccc is
rylinder
number, hh is the head number
and ss is the sector number
(always
zero for all devices
supported
in
this
release
of the operating System).
x.1599
Disk Verification 2-41
GETBADTRACKINFO
As mentioned
above, the output of
the GETBADTRACKINFO
command
can be used as
input to the FORMAT
command
when
creating the
bad track information
file. The
example
below shows how to use GETBADTRACKINFO this way.
-atÈachdevlce wnfdxo as :v: <CR)
-dlskverlfy : sd: to :v:bad.llsÈ
*getbadtracklnfo <CR>
*exLt <CR>
<cR>
After exiting DISKVERIFY
and rebooting the system, edit :w:bad.lst and remove
the
header lines. The file
can then be used as inDut to the bad track information
file created
by the FORMAT command.
ERROR
MESSAGES
I/O error while trying to read bad An I/O error occurred
while
reading the
track information bad track information.
No valid
bad track info found Bad track information is not valid and
cannot be displayed.
No bad track info found The area designated for bad track
information is emDtv.
2-42 l)isk Verification
This command lists all available Disk Verification Utilify commands and
provides a short
descrintion
of each command.
The format
of the HELP command is
F 0214
OUTPUT
In response to this command, HELP displays the following information:
2-4i
*heIp
aLlocace/free
backup/restore fnodes (bî /r î)
Control C
di sk
display byte/vord (
d, db/dw)
display directory (dd)
display fnode (df )
display next block (>, dnb
)
display previous block (<,dpb)
dlsplay save fnode (dsf)
exÍ t, qui t
list bad blocks (lbb)
read (r)
restore volune label (rvl)
save
substltute byte/word (s, sb/sw)
ver ify
\,Iri te (Lr)
edit fnode (ef)
edi t save fnode (esf)
fix
get bad track info (gb)
nisc connands -
address
b
lock
hex/dec
add,
+, sub, - ,
nul ,
*, div, /, rnod
a1l-ocate/free fnodes, space blocks, bad blocks
backup/restore Inode file to,/from save area
abort the comnand in progress
display disk at tr ibute s
display the buffer in (byte/word format)
display the directory contents
display fnode information
read and display 'next' volune block
read and display 'previous' volume block
display saved fnode information
^..: c r.'^1,..^-:f-,
gur L ursF wE!t!)
list bad blocks on the vol.ume
read a disk block into the buffer
copy volurne 1abel from save area
save free fnodes, free space & bad block naps
rnodify the buffer (byte/word format)
..^-: 8.. ÈL^ r i -1.
,rite to the disk block from the buffer
edit an fnode
edit a saved fnode
perforn varlous fixes on the voluue
get the bad track info on the volume
convert block nurnber co absolute address
convert absolute address to block nurnbe r
display number as hexade c imal/de c imal nurnbe
r
afithmetic operations on unsigned nurnbers
Disk Yerification
This command displays
all the bad
blocks on a named
volume. You can
abort this
command
by tlping a CONTROL-C.
The format
of the LISTBADBLOCKS
command
is
as follows:
F
0208
OUTPUT
In response to
this command, LISTBADBLOCKS displays up to eight columns
of block
numbers that
you specified as
"bad."
Figure 2-2 illustrates the format of
the display.
Badblocks on
<b
I ocknurr>
(b I o cknurn)
<b
locknurn>
<blocknun>
<bLockn!u>
<U locknurn>
Volune: volumenurn
<blocknuÈ <blocknlu) <blocknuD <blocknlrn>
(blocknurn) (blocknr.uÈ (blocknurn) (blocknurn)
(blocknum> <blocknurp <Ul octnum> <blocknum>
Figure 2-2. LISTBADBLOCKS Format
lf none
of the blocks have been marked as "bad", LISTBADBLOCKS
displays
the
following message:
2-44
no badblocks
NOTE
Bad tracks and bad blocks
are different. Bad tracks are handled
by
the
device drivers
in conjunction
with
the hardware, whereas, bad
blocks are
handled by the iRMX II Basic I/O System.
Disk Verification
LISTBADBLOCKS
ERROR MESSAGES
no
badblocks fiÌe The
volume
does not have a bad blocks file. This message could
appear
because an earlier version
of the Human Interface
FORMAT command
was
used when the disk was
formatted or
because the
disk is a
ohvsical
volume.
2-45
Disk Verification
The
following
commands
provide
you
with
the ability
to perform
arithmetic
and
conversion operations
within the Disk
Verification
Utility. The commands
perform
the
operations on unsigned
numbers
only
and do not report
any overflow
conditions.
When
the number is
displayed in
both hexadecimal
and decimal
format, it appears
in
hexa<lecimal
format first,
followed
by the decimal number
in
parentheses. For
example:
13
( 19r)
ADD
This
command adds
two numbers
together. Its format
is
wnere:
arg 1 and arg2 Numbers
the command
q{ds
together. The
value
of each
argument
ll
cannot be
greater
than 2-'4-1.
In response, the
command displays the unsigned
sum of the two numbers in both
hexadecimal
and decimal format.
ADDRESS
All memory in a
volume
is divided into
volume
blocks,
which are areas of memory the
same size as the volume granularity.
Volume
blocks are numbered sequentially
in the
volume,
starting
with
the
block containing the smallest addresses (block 0). The
ADDRESS command converts
a block number into an absolute address
(in
hexadecimal)
on the
volume,
so that
you
don't have to
perform
this conversion by hand.
The format of
this command is
<@tx::*r.rì
2-46 Disk Verification
where:
blocknum
MISCELLANEOUS
COMMANDS
Volume
block number that ADDRESS converts into an absolute
address in hexadecimal.
This
parameter
can range from 0 through
(mar blocks
- 1),
where
max blocks is the number
of
volume blocks
in the
volume.
In response.
ADDRESS displays the following information:
absolute address - <addr>
where:
< addr >Absolute address in hexadecimal that corresponds
to the
speciîied
block number. This address
represents the number of the byte
that
begins
the block and can range from 0 through (volume size
- 1),
where volume
size is the size, in
bytes,
of the volume.
BLOCK
The BLOCK command
is the inverse of the address command. It converts a 32-bit
absolute
address
(in
hexadecimal) into a volume block number, so that you don't have to
perform
this conversion
by hand. The format of this command is
where:
address Absolute address in hexadecimal that BI.OCK converts into a
block number. This parameter
can range
liom 0 through (volume
size
- 1),
where volume
size is the size, in bytes, of the
volume.
In response, BLOCK dispÌays
the following information:
block nunber : <blocknurn>
where:
<
blocknum
>Number of the volume block that contains the specified absolute
address in hexadecimal. The BLOCK command determines
this
value
by dividing the absolute address
by the volume block size and
truncatinq the result.
Disk Verification 2-47
MISCELLANEOUS COMMANDS
DEC
This command
finds the decimal equivalent of a number.
Its format is
<'-y'--'<1:,->
where:
arg Number
for
which
the command finds the decim-al equivalent.
The
value of the argument cannot be greater than2'"-1. The
default
base is in
hexadecìmal.
In response, the command displays the decimal equivalent of the specified number.
DIV
This command divides
one number by another. Its format is
where:
argl and arg2 Numbers on
which
the command operates.
It divides-argl by arg2.
The value of each argument
cannot be
greater
than 2rz- 1.
In response,
the command displays the
unsigned integer
quotient
in both hexadecimal
and
decimal format.
2-48 Disk Verification
M ISCELLAN
EOUS
COMMANDS
HEX
This command
finds
the hexadecimal
equivalent
of a number.
Its format
is
<3>1-r->
where:
arg Number
for
which
the
command finds
the hexadecimal eouivalent.
If you
are speci$ring
a decimal
number, you must
spgify i "f'
The value
ofthe argument
cannot be greater than2)z-1.
In response,
the command
displays the
hexadecimal equivalent
of the specìfietl
number.
MOD
This
command finds
the remainder
of one number
divided by another. Its format
is
uoo ,/--- -e' -.,'1] ! ''c'?
where:
argl and arg2 Numbers
on
which
the command
operates.
It performs
the
operation argl modulo
arg2.
The
value
of each argument
cannot
be greater
than 2-'z-l.
In response,
the command displays
the value
argl modulo arg2
in both hexadecimal
and
decimal
format.
Disk Verification 2-19
MISCELLANEOUS
COMMANDS
MUL
This command
multiplies
two numbers
together. Its
format is
where:
argl and arg2 Numbers the
command multiplies
lo^gether.
The
value of each
argument
cannot be
greater than 2'tz- 1.
where:
argl and arg2 Numbers on
which
the command operates. The command
subtracts arg2 from argl. The value of each argument cannot be
ereater
than 2''z- 1.
In response,
the command displays
the unsigned
product of the two numbers
in both
hexadecimal
and decimal format.
SUB
This command
subtracts one number
from another. Its
li)rmat is
In response,
the command displays the unsigned difference in both hexadecimal and
decimal format.
2-50 Disk Verification
MISCELTANEOUS COMMANDS
ERROR MESSAGES
The following error
messages may be returned by any of the Miscellaneous Commands:
argument error A syntax error
was
made in
the
command,
a nonnumeric value for one of
the arguments
was
specified, or a
value
for a block number
parameter
that
was
not a
valid block number
was
soecified.
<
blocknum
>
,
block out of range lf the command was an ADDRESS
command, the
block number entered
was
greater
than the number
of blocks in the
volume.
<
address
>
,
address not on the If the command
was a BLOCK command,
disk BLOCK converted the address to a
volume block number, but the block
number
was
greater
than the number of
blocks in the
volunrc.
EXAMPLES
*l{ul, 134î, 13î <CR>
6cE ( 7142T)
*+ 8, 4 <CR>
0c ( 12r)
*suB 8884, 256 <CR>
862E
(34350r)
*l{oD
1225, 256T <CR>
25 ( 31r)
*HEx 155T <CR>
9B
*ADDRESS
15 <CR>
absolute address
- 0A80
*BLoCK
2236 <CR>
block nunber
- 44
Disk Verification 2-51
This command exits the
Disk
Verification Utility and
returns control to
the
Human
Interface
command level. The format of the
QUIT command is as follows:
This command is identical
to the EXIT command.
) -<, Disk Verilìcation
This command reads a
volume block from the disk into
the working buffer. The
format of
the READ command is
argument
error
<
blocknum
>
,
block
out of range
FFFFFFFF. block out of
ranee
Number
of the
volume
block to read.
This number
can range from
0 through
(max
blocks
- 1),
where max blocks is
the number of
volume blocks in the
volume.
A nonnumeric characterwas
specified
in
the blocknum
parameter.
The block
number specified
was
larger
than
the largest block
number in the
volume.
No
block number
was
specified
and no
previous
read request
was executed
on
this
volume.
INPUT PARAMETER
blocknum
OUTPUT
ln response to the command,
READ reads the block into
the
working butlèr and displays
the following message:
read block nurnber: <blocknuÍ>
where <blocknum> is the number of the block.
DESCR]PTION
The READ command copies a specified
voÌume block from the
volume to the
working
buffer. It destroys any data currently in the working buffer. Once the block is in the
working buffer, you can use
DISPTAYBYTE and DISPTAYWORD to display the block,
and
you
can use SUBSTITUTEBYTE and SUBSTITUTEWORD to change
the data in
the block. Finally,
you
can
use the WRITE command
to write the modified
block back
to
the
volume
and repair
damaged
volume
data.
ERROR MESSAGES
2-53
Disk Verification
This command copies an fnode
or a range of fnodes from the R?SAVE file to the fnode
file. Before changing the fnode file,
RESTOREFNODE displays the fnode number to be
changed and prompts you to confirm
(by
entering a "y") that the fnode is to be restored.
R?SAVE must have been reserved
(the
RESERVE option of the FORMAT command
must have been specified) when the
volume was
formatted. The format of the
RESTOREFNODE command is as follows:
INPUT PARAMETER
fnodenum The hexadecimal number of
the fnode to be restored. This number
must be greater
than or equal to
zero and less than the m.tximum
number of fnodes defined when
the
volume was
fbrmatted.
The
initial
hexadecimal fnode number
in a range of fnodes to be
restored. This number must
be
greater
than
or equal to zero and
less than or equal
to the final fnode number
in the range
lfnodenum2l.
The final hexadecimal fnode
number in a range of
fnodes to be
restored. This number
must be
greater
than or equal to the initial
fnode
number in the range (fnodenuml)
and
less than the
marimum number
of fnodes defined when
the
volume
was
formatted.
fnodenum I
fnodenum2
OUTPUT
When
the fnode is
restored (the response
to the confirmation
query
is
"Y"
or "y"):
restore fnode
resÈored fnode
(
fnodenurn) ? Y <CR>
nunber : ( fnodenr.un)
fnodenumREsTORÉFNODE
fnodenum
1fnodenum2
2-54 Disk Verification
RESTOREFNODE
When the fnode is not restored
(the response to the
confirmation
query is not
"Y"):
restore fnode (
fnodenur) ? <CF>
DESCRIFTION
The
RESTOREFNODE
command
enables
you
to rebuild
a damaged fnode
file, thereby
re-establishing links to data
that
would
otherwise be
lost. RESTOREFNODE
copies
an
fnode or a range
of fnodes from the R?SAVE
file (the fnode
backup file) to the fnode file.
Before each
of the specified fnodes is copied,
RESTOREFNODE
displays
a
query
prompting
you
to
confirm that the indicated fnode
is to be restored.
You must
reply to
this
query with the letter "Y"
(either "Y" or "y") to restore
the fnode. If you enter any
other response,
RESTOREFNODE
will not restore the
fnotle and
will pass on to the
next
fnode
in the range.
Since RESTOREFNODE
operates on
the R?SAVE file,
you
must have
reserved this
file
when the volume
was
formatted.
(You
reserve R?SAVE
by specifuing
the RESERVE
parameter when you invoke the FORMAT command
to format
the
volume.) lf the
R?SAVE
file
was
not reserved
when the
volume was formatted,
RESTOREFNODE
will
return
an error message.
CAUTION
When using this comrnand, be sure
that any
fnode
you
restore
represents
a file that has not been
modified
since
the last
fnode backup.
RESTOREFNODE overwrites the specified
fnode in the
fnode
file with the
corresponding
fnode
in the
R?SAVE file. Ifthat fnode has
not been
backed
up since the last
file modification, a valid fnode may be
overwritten
with
invalid
data,
Thus, all
links
to the
associated
fìle will be
destroyed,
and YOU WILL LOSE
ALL OF
THE DATA IN THE FILE.
ERROR MESSAGES
argument error When the command
was entered,
no
argument
was supplied. This
command
rctluires
an argument.
no save
area
was
reserved
when The
volume
was not formatted
to support
volume was formatted backup fnodes.
This means
the
RESERVE
option
was
not
specified
when the
volume
was formatted.
Disk Verification 2-55
RESTOREFNODE
not a named disk
<
fnode num
>,
fnode out of
range
allocation
bit not set for saved
fnode
restore fnode <
fnode
num>?
The
volume specified
when
the Disk
Verification Utiiity was
invoked is a
physical volume,
not a named
volume.
The fnode number specified
is not in the
range of 0 to
(maximum
fnodes
- 1).
The fnode
you
specified has not been
backed up in the R?SAVE file. If you
respond to the query with
a
"Y",
THE
DATA IN THE FILE ASSOCIATED
WIT]] THE ORIGINAL FNODE WILL
BE LOST.
EXAMPLE
super- dfskverlfy :
sd: <CR>
iRl{X II Disk Verify Utility, Vx.x
Copyrlght <year) Intel Corporatlon
:sd:, outstanding connections to device h&ve
*resÈorèfnóde 9,08 <CR> or rf 9,0B <CR)
restore fnode 9? Y <CP>
restored fnode number: 9
rescore fnode 0A? Y <Cl>
restored fnode nurnber: 0A
restore fnodè 0B? Y <CR>
rescored fnode number: 0B
been de1èted
2-56 Disk Verification
This command copies the
duplicate
volume
label to the volume label on track 0. The
duplicate
volume
label must have been constructed when
the
volume was
formatted.
(That is, the RESERVE
option of the FORMAT command must have been specified
when
the
volume was
formatted.)
The format of the RESTOREVOLUMEII,BEL
command
is as follows:
F
021 1
INPUT PARAMETERS
None.
OUTPUT
volume
label restored
DESCRIPIION
The RESTOREVOLUMELABEL
command enables
you
to rebuild a damaged
volume
label,
thereby re-establishing
links
to
data that
would
otherwise be lost.
RESTOREVOLUMEI-ABEL
copies the
duplicate
volume
label to the
volume
label offset
on track 0. When you
use the
Human Interface FORMAT command to create the
duplicate
volume
label (by specifying
the RESERVE
parameter),
the
volume
label is
automatically
copied to the end
of the R?SAVE file. Because the contents of the
volume
label
do not change, no other volume label
backup is required.
If a duplicate
volume
label has been reseryed
on
a volume,
the Disk
Verification
Utility
can access that
volume
as a Named volume even
if the
volume label
is damaged.
When
the
original
volume
label is corrupted, the Disk Verification Utility attempts to use the
duplicate volume
label. If the backup label is used, a
"DUPLICATE
VOLUME I-ABEL
USED" message appears
when
the utility is invoked.
If the duplicate volume label was not reserved when the voiume was formatted,
RESTOREVOLUMEI-ABEL will return an error messase.
Disk Verification 2-57
RESTOREVOLUMELABEL
ERROR MESSAGES
argument error
no save area
was
reserved
when
volume lvas formatted
not a named disk
When the command
was
entered,
an
argùment was supplìed. This command
does not accept an argument.
The volume has not been formatted
to
support
volume label backup.
The
volume specified
when
the Disk
Verification
Utility
was
invoked is
a
physical volume,
not
a named volume.
2-58
EXAMPLE
supèr- diskverlfy : sd: <CR>
IRMX Il Dlsk Verify Utility, Vx.x
Copyrlght <yèar> lntel Corporation
:sd:, outstandlng connections to device have been deleted
DUPLI CATE VOLUME
U.BEL USED
*restorevolune labe I <CR> or rvl <CR)
volune 1abe1 rès tored
Disk Verification
This
command
writes
the reconstructed
free fnodes
bit map,
volume
free space bit map,
and
the bad blocks bit map to
the
volume
being verified. (The
NAMED2 and
PHYSICAL options
of the
VERIFY command originally created the
maps.) The format
of the SAVE
command is
OUTPUT
In
response to this command,
SAVE displays the lbllowing
message:
save fnode roap?
Ifyou want
to
write
the
reconstructed free fnodes
map
to
the
volume,
enter Y,
y, or YES.
Otherwise,
enter any other character
or a carriage return.
lf you
enter
YES, SAVE
writes
the free fnodes
map to the
volume
and displays
the following message:
free fnode nap saved
fn any
case. SAVE next tJisplays
the following messagc:
save space rnap ?
Ifyou want
to
write
the reconstructed
free space map to the
volume,
enter Y or YES.
Otherwise, enter any
other character or a carriage
return. Ifyou enter YES, SAVE
writes
the
volume
free
space
map to the volume and
displays the following message:
free space map saved
SAVE displays the
following message if the bad blocks map is reconstructed:
save bad block rnap?
If you want
to
write
the reconstructed bad
blocks map to the
volume,
enter Y,
y, or YES.
Otherwise,
enter any other character or a carriage return. If you
enter YES, SAVE
writes
the
volume
bad blocks map to the volume
and displays the following
message:
bad block map saved
Disk Verification 2-59
SAVE
DESCRIPTION
Whenever you perform a VERIFY function
with
the NAMED2 option
(refer to the
description of the
VERIFY command for more information),
VERIFY creates its own
free fnodes map and
volume
free space map. It does this by examining all directories
and
fnodes on the
volume,
not by copying the maps that
exist on the volume. To create
lhe
free fnodes map, it examines every
directory on the volume to determine
which
fnodes
represent actual files. To create the
volume
free
space
map, it examines
the
POINTER(n) fields of the fnodes to determine
which volume
blocks the files
use.
If the volume has a bad blocks file and
you perform
a
VERIFY function
with
the
PHYSICAL option
(refer
to the description of the
VERIFY command for more
information), VERIFY creates its own bad blocks map. It does this by examining every
block on the volume, not by copying the maps that exist on the votume.
VERIFY then compares the newly created maps
with
the maps that exist on the
volume.
If a discrepancy exists, VERIFY displays a message indicating this.
The SAVE command takes the free fnodes map, the
volume
free space map, and the bad
block
map created during the
VERIFY operation and
writes
them to the
volume,
replacing the maps that currently exist.
ERROR
MESSAGE
nothing to save No bit map
was
constructed prior to
invoking SAVE. (Bit
maps
are constructed by
NAMED2 or PHYSICAL verifications.)
EXAMPLE
The following example
illustrates the format of the
SAVE command after
you
use
VERIFY and the NAMED or NAMED2 ootion.
*VERTFY NAIIED2 <CR>
,NAI4ED2'
VERIFICATION
BIT MAPS O.
K.
*sAvE <cR>
savè fnode map? y <CR>
free fnode map saved
save space nap? y <CR>
free space map saved
2-60 Disk Verification
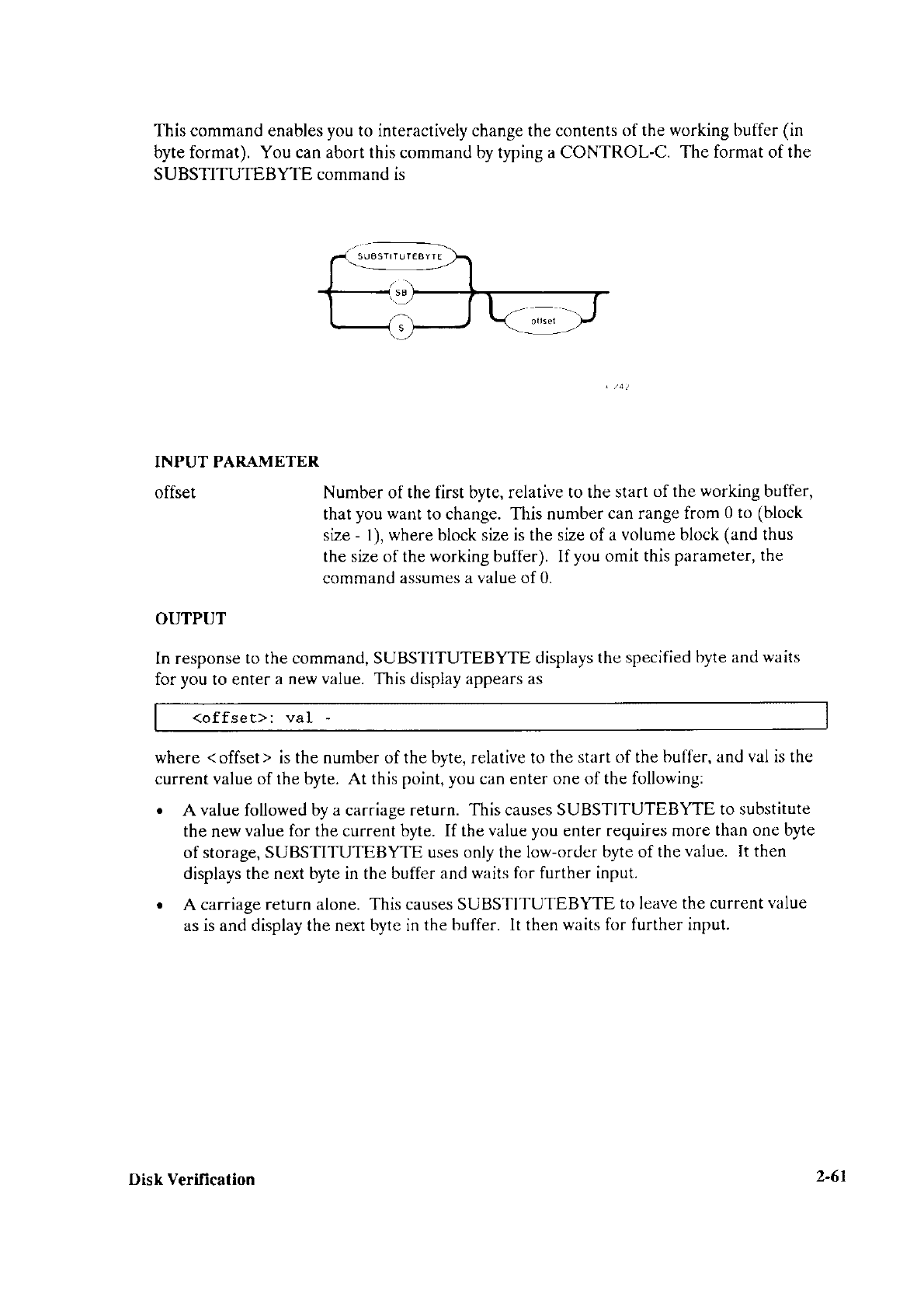
This command enables you to interactively change the contents
of the working buffer (in
byte format). You can abort this command by typing a CONTROL-C.
The format of the
SUBSTTUTEBYTE command is
INPUT PARAMETER
offset Number of the first byte, relative
to the start
of the
working
buffer,
that
you want
to change. This number
can range from
0 to (block
size
- l), where block size is the size of a
volume block
(and
thus
the size of the
working
buffer). If you omit this parameter,
the
command assumes
a value of 0.
OUTPUT
In response
to the command, SUBSTITUTEBYTE displays
the specified
byte and
waits
for
you
to enter
a new
value.
This display appears as
<offset>: val
where
<
offset
> is the number of the byte, relative to
the start of the buffer,
and val is the
current value of the byte. At this point,
you
can
enter one of the following:
. A value
followed by a carriage return.
This causes SUBSTITUTEBYTE
to substitute
the new
value for the current byte. If the
value you enter requires more
than one byte
of storage,
SUBSTITUTEBYTE uses only the low-order
byte of the
value. It then
displays the next byte in the buffer and
waits for further input.
. A carriage
return alone. This causes SUBSTITUTEBYTE
to leave
the current
value
as is and display the next bytc in
the buffer. lt then
waits for further input.
SUASrrÌUl€BYrE
Disk Verifìcation 2-61
SUBSTITUTEBYTE
. A value
followed by a
period
(.) and a carriage return. This causes
SUBSTITUTEBYTE to substitute the new
value
for the current b]'te. It then exits
from the SUBSTITUTEBYTE
command and gives the asterisk
(*) prompt,
enabling
you
to enter
any
DISKVERIFY
command.
. A period (.) followed by a carriage return. This exits the SUBSTITUTEBYTE
command and
gives
the asterisk
(*) prompt,
enabling
you
to enter any DISKVERIFY
command.
DESCRIP'TION
With the
SUBSTITUTEBYTE command
you
can interactively change bytes in the
working
buffer. Once
you
enter the command, SUBSTITUTEBYTE displays the offset
and the value
of
the
first byte. You can change the byte by entering a
new
byte value,
or
you
can leave the byte as is by entering a carriage
return. The command then displays the
next byte in
the
buffer.
In this manner,
you
can consecutively step through
the buffer,
changing
whatever
bytes are
appropriate.
When
you finish changing
the buffer,
you
can
enter a period followed
by a carriage return to exit
the commantl.
The SUBSTITUTEBYTE command considers
the
working
buffer to be a circular buffer.
That is, entering a carriage return when you
are positioned at
the last byte of the buffer
causes SUBSTITUTEBYTE to display the first byte of the buffer.
The SUBSTITUTEBYTE
command changes only the values
in the working buffer.
To
make the changes
in the
volume,
you must enter
the
WRITE
command
to
write
the
working
buffer back
to the
volume.
ERROR
MESSAGES
argument
error A nonnumeric character was
specified in
the offset parameter.
<offsetnum>,
invalid
offset An offset
value
larger than the
number of
bytes
in the block
was
specified.
2-62 Disk Verification
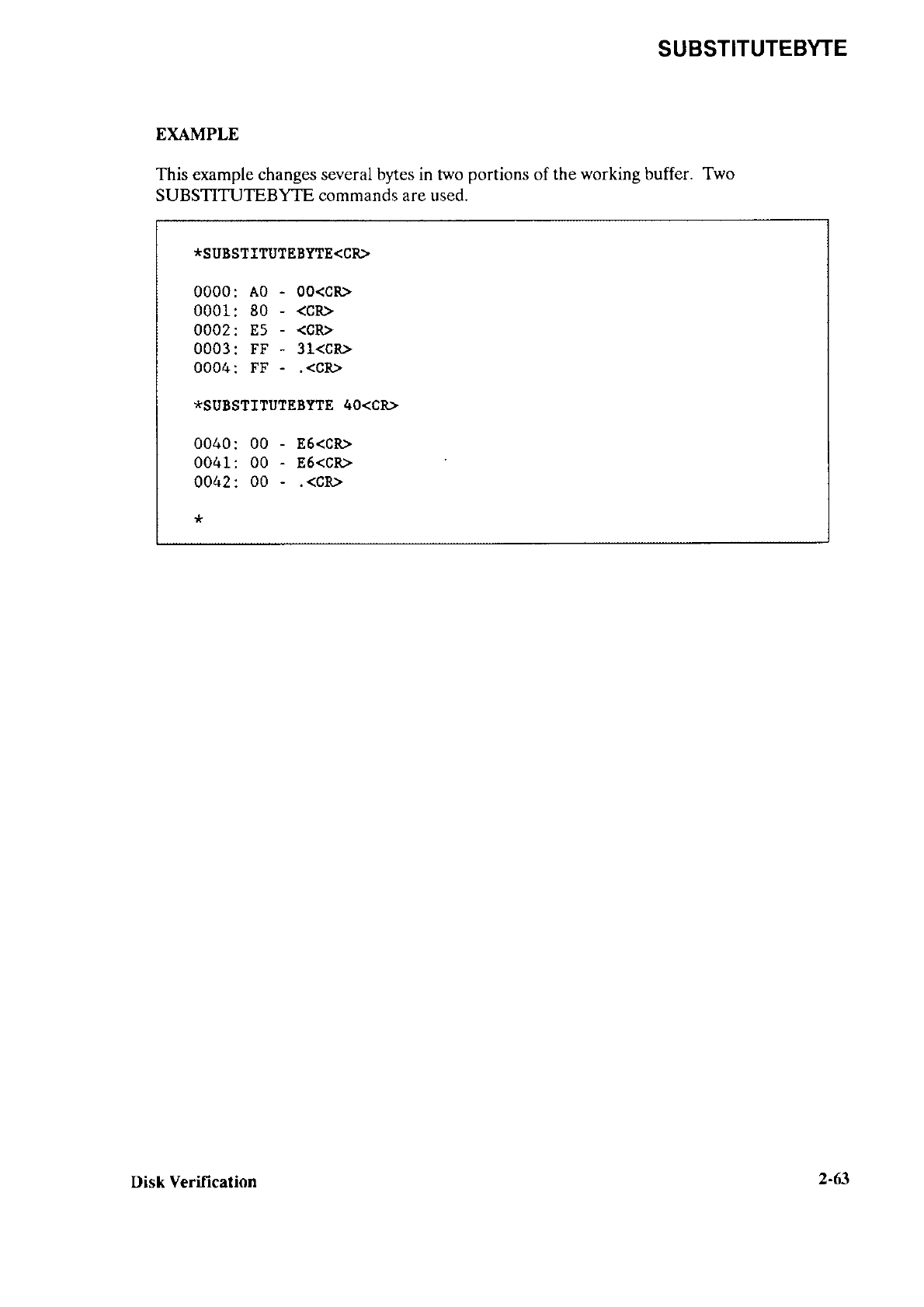
SUBSTITUTEBYTE
EXAMPLE
This example changes several bytes in two
portions
of the working buffer. Two
SUBSTITUTEBYTE commands are used.
*SUBSTITUTEBYTE<CN>
0000: A0 - 00<cR>
0001: 80 - <CR>
0002
: E5 - <CR>
0003
: FF - 31<cR>
0004: FF - .<CR>
*SUBSTITUÎEBYÎE
4O<CR>
0040: 00 - E6<CR>
0041: 0O
- E6<cR>
0042: 00 - . <cR>
Disk Verification 2-63
2-64
This command is identical to SUBSTITUTEBYTE, except that it displays the buffer in
WORD format, and substitutes
word
values in the buffer. The format of the
SUBSTITUTEV/ORD command is
EXAMPLE
This example
changes several bytes in
two areas of the
working
buffer. Two
SUBSTITUTEWORD
commands are
used. In the first command the words
begin on
even addresses,
and in the second commanC,
they begin on odd addresses.
*SUBSTTTUTEgORD<CR>
0000
0002
0004
0006
0008
AOBO
8070
E51t-
FFFF
FFFF
0000<cR>
<cR>
<cR>
3111<CR>
. <cR>
*SUBSTITUTEi{ORD
3 5<CP>
0035: 0000 - E6FF<CR>
0037: 0000 - E6AB<CR>
0039: 0000 - . <CR>
Disk Veriffcation
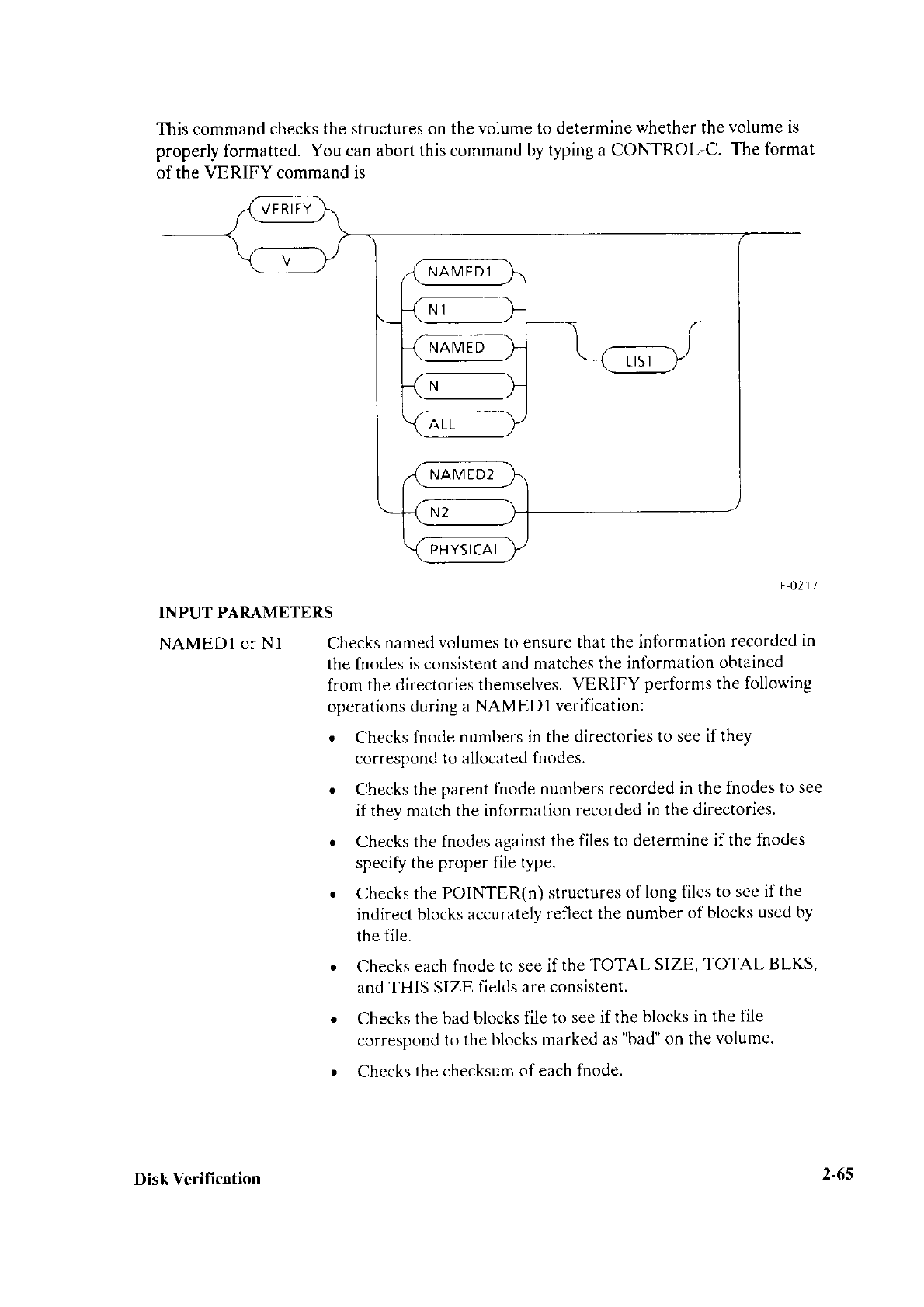
VERIFY
NAMED
PHYSICAL
This command
checks the structures on the
volume to determine
whether
the
volume is
properly
formatted.
You can abort this command
by t)?ing a CONTROL-C.
The
tbrmat
of
the
VERIFY command is
F
0211
INPUT PARAMETERS
NAMEDl or Nl Checks
named
volumes to ensure that
the infìtrmation
recorded
in
the fnodes
is consistent and
matches
the information
obtained
from the
directories themselves.
VERIFY perfbrms the following
operations
during a NAMEDl verification:
. Checks fnode
numbers in the
directories
to see if they
correspond to allocated
fnodes.
. Checks the
parent lhode numbers
recorded
in the thodes
to see
if they match the information
recorded
in the directories.
o Checks the fnodes against
the files
to determine
if the thodes
specif the
proper
file
type.
. Checks rhe
POINTE,R(n)
structures
of long files
to see if the
indirect
blocks accurately
reflect
the number
of blocks
used by
the
file.
. Checks
each fnode
to see if the TOTAL SIZE, TOTAL BLKS,
and THIS SIZE
fields are consistent.
o Checks the bad
blocks file to
see if the
blocks in the
file
correspond to
the blocks marked
as
"bad" on the
volume.
o Checks
the checksum of
each fnode.
Disk Verilication 2-65
VERIFY
NAMED2 or N2 Checks named volumes
to ensure that the information
recorded in
the free fnodes map
and the
volume
free space
map matches the
actual files and
fnodes.
VERIFY performs
the following
operations during a NAMED2 verification:
e Creates
a free fnodes map by
examining every directory in the
volume.
It then compares
that free fnodes map with the one
already on
the
volume.
o Creates
a free space map by examining
the information in the
fnodes. lt then compares
that free space
map
with
the one
already on the volume.
. Checks to see
if the block numbers
recorded in the fnodes
and
the indirect blocks
actually exist.
. Checks
to see if two or more files use
the same volume block.
If so, it lists the files referring
to each block.
e Checks the volume
free space
map for any bad blocks
that are
marked
as "free."
. Checks to see
if two or more
directories reference
the same
fnode. If so, it lists
the directories
referring to each
fnode.
NAMED or N Performs both
the NAMEDI and NAMED2
ooerations on a
named volume.
If you
specify the VERIFY command with
no
option,
NAMED is the default.
ALL Performs all operations
appropriate
to the volume.
For
named
volumes,
this option performs
borh
the NAMED
and
pHySICAL
operations.
For physical volumes,
this
option performs
only the
PHYSICAL
operations.
PHYSICAL Reads all blocks
on rhe volume
and
checks for
I/O errors.
This
parameter
applies
to both
named and physical
volumes.
VERIFY
also creates
a bad blocks
map by examining
every
block
on the
volume.
LIST When you
speci! this option,
the
file information
in Figure
2-3 is
displayed
for every
file on
the
volume,
even if the file contains
no
errors.
You
can use this
option with
all parameters
that,
either
explicitly
or implicitly,
specify
the NAMED
I paramerer.
OUTPUT
VERIFY produces
a
different
kind of output
for each
of the NAMEDl, NAMED2, and
PHYSICAL
options.
The
NAMED and ALL options produce
combinations
of these
three
kinds
of outDut.
2-66 Disk
Verification
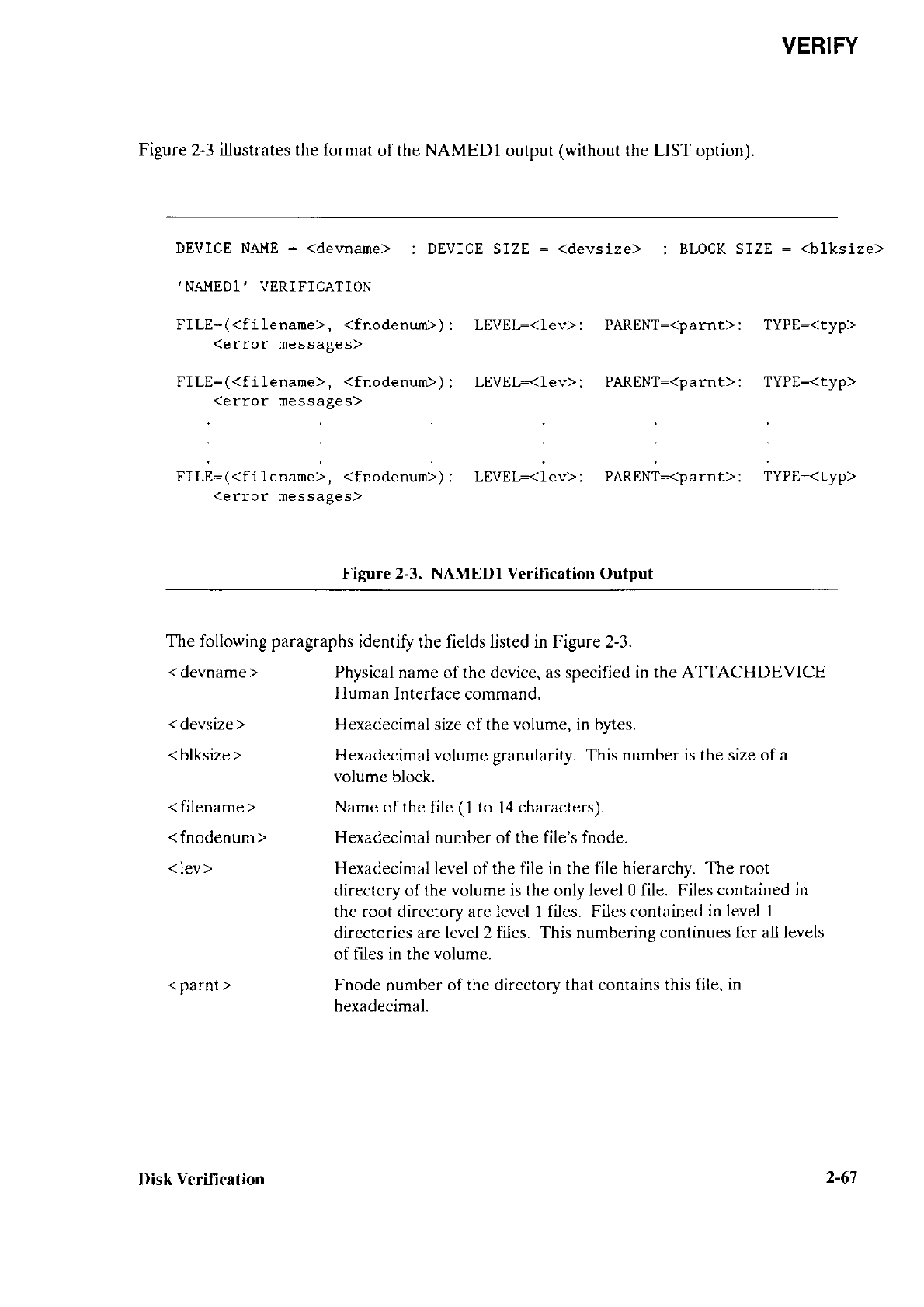
VERIFY
Figure 2-3 illustrates the format
of the NAMEDI output (\ùithout the LIST option).
DEVICE NAI'IE
: <devname) : DEVICE SIZE : (devsize) : BLOCK SIZE : <blksize>
,
NAì"ÍEDI' VERIFlCATION
FILE- (<f i lenarne), (fnodenurn)): LEVEL:<l-ev>: PARENT:<parnt>: TYPE:<typ>
<error messages>
FILE- (<f i lenarne), (fnodenr.un)): LEVEL:<1ev>: PAI{ENT:<parnt>: TYPE:<typ>
<error messases>
ffle- 1<fi tenarne>, <fnoden\rll>r: LEVEI--<1ev>: PARENT-<parnt>: TYPE:<typ>
<error messages>
Figure 2-3. NAMEDI Verification
Output
The following paragraphs
identifo the fields listed in Figure 2-3.
<
devname
> Physical
name of the device, as specified in
the
ATTACHDEVICE
Human
lnterface command.
<
devsize
> Hexadecimal
size of the
volume,
in
bytes.
<
blksize
> Hexadecimal volume
granularity. This
number is the size of a
volume
block.
<filename> Name of the
file
(l to
14
characters).
<
fnodenum
> Hexa<lecimal number of the file's fno<le.
<lev> Hexadecimal level of the file in the file hierarchy. The root
directory of the
volume
is the only level 0 file. Files
contained in
the root directory are level 1 files. Files contained
in level I
directories are level 2 files. This numberins
continues for all levels
of files in the
volume.
<
parnt
> Fnode number
of the directory that contains this file,
in
hexadecimal.
Disk Verification 2-67
VERIFY
<typ> File type, either DATA (data files), DIR (directory files), SMAP
(volume
free
space map), FMAP (free
fnodes
map), BMAP (bad
blocks map),
or VI-AB
(volume
label file). If VERIFY cannot
ascertain
that the file is a directory
or data file, it displays the
characters
r****ù
iÍr this field.
<error
messages> Messages
that indicate the errors associated
with
the
previously-
listed file. The possible error messages
are listed later in this
section.
As
Figure 2-3 shows, the NAMED1 option
(without the LIST option) displays
information about each file that is in error. Ifyou used the LIST option
wjth
the
NAMED I option, the file information in Figure 2-3 is displayed
for every file, even if the
file contains
no errors. The NAMEDl display also contains
error messages that
immediately
follow the list of the affected files.
Figure 2-4 i.llustrates the format
of the NAMED2 output. If VERIFY detects
an error
during NAMED2
verification, it displays one or more error messages in
place of the "BlT
MAPS
O.K.' messase.
DEVICE NAME
: (dermame) : DEVICE SIZE : (devsize> : BLK SIZE : (blksze)
'NA.t.fED2 ' VERI FICATION
BIT MAPS O. K.
Figure 2-4. NAMED2 Verificati{}n Output
The
fields in Figure 2-4 are exactly the same as the corresponding
fields in Figure 2-3.
Figure 2-5 illustrates the format of the PHYSICAL
output.
DEVICE NAl.fE
: <der.marne> : DEVICE SIZE : (devsize> : BLOCK SIZE : <blkslze>
,
PHYSICAL' VERIFICATION
NO ERRORS
2-68
Figure 2-5. PHYSICAL
Verification
Output
Disk Verification
VERIFY
The fields in Figure 2-5 are exactly
the same as the corresponding
fields in Figure
2-3.
If VERIFY detects an error during PHYSICAL
verification, it displays the message:
<blocknurn), error
in place of the "NO ERRORS" message.
lf you
specifu NAMED verification, VERIFY displays both the NAMED
1 and NAMED2
output.
If you specify the ALL verification for a named
volume, VERIFY displays
the
NAMEDl, NAMED2, and PHYSICAL
output. If you specify the ALL verification for
a
physical
volume, VERIFY displays the PHYSICAL
output.
DESCRIFTION
The VERIFY command
checks physical and named
volumes
to
ensure that the
volumes
contain
valid
file
structures and data
areas. VERIFY can
perform three kincls
of
verification: NAMEDl, NAME,D2,
and PHYSICAL. NAMEDI and NAMED2
verifications check the file
structures of named
volumes. They do
not apply to
physical
volumes.
A PHYSICAL
verification checks each data
block of the
volume for I/O errors.
PHYSICAL
verification applies to both named
and
physical volumes.
As
part of the NAMED2
verification, VERIFY creates
a free fnodes
map and a
volume
free space map,
which
it compares
with the corresponding
maps on
the volume. You
can
use the SAVE command
to
write
the
maps produced during
NAMED2
verification
to the
volume, overwriting
the maps on the
volume.
When
you perform a
PHYSICAL
verification on a named
volume,
VERIFY also creates
a
bad blocks map.
You can use the SAVE
command to
write the bad blocks
map
produced during PHYSICAL
verification to the
volume; this destroys
the
bad blocks map
already on the
volume.
ERROR MESSAGES
Four kinds
of error messages
can occur as a result
of entering
the
VERIFY command:
VERIFY command errors, NAMEDl errors,
NAMED2 errors,
and PHYSICAL
errors.
VERIFY Command
Error
argument error The
parameter specified is
not a
valid VERIFY parameter.
Disk Verilìcation 2-69
VERIFY
NAMED I Messases
The following messages can appear in a NAMED1 display, immediately after the file to
which
they refer.
. <blocknum
1
- blocknum
n>, block bad
The block numbers
displayed in this message are marked as
"bad."
. <blocknum
I - blocknum n >. invalid block number recorded in the
fnode/indirect block
One of the POINTER(n) fields in the fnode specifies block numbers larger than the
largest
block number in the
volume.
o directory stack overflow
This message indicates that a directory on the volume
lists, as one of its entries, itself
or one of the
parent
directories in its pathname.
If this happens, the utiliry, when
it
searches through
the directory tree, continually
loops through a portion of the tree,
overflowing an internal
buffer area. In this case, performing
NAMED2
verification
may indicate
the cause of this problem.
. file size inconsistent
total$size
= <totsize>
:this$size
= <thsize>
:data
blocks
= <blks>
The TOTAL SIZE,
THIS SIZE, and TOTAL BLKS fields of the fnode
are
inconsistent.
o <
filetpe >, illegal file type
The file type of a user file, as recorded in the
TYPE field of the
fnode, is not valid.
The valid
file types
and their descriptions are
as follows:
File Fpe Number Descriorion
SMAP 1 volume
free space map
FMAP 2 free fnodes map
BMAP 4 bad blocks map
DIR 6 directory
DATA 8 data
VI-AB 9 volume
label
file
. <fnodenum>,
allocation
status bit in this
fnode not set
The
file is listed in
a directory but the
flags field of
its fnode indicates
that fnode
is
free. The free
fnodes map may
or may not list
the fnode as
allocated.
. <fnodenum>,
fnode out ofrange
The fnode
number is larger
than the largest
fnode number
in the
fnode file.
2-70 Disk Verification
VERIFY
. <fnodenum>,
parent
fnode number does not match
The fi.le represented
by
fnodenum is
contained within a directory
whose
fnode
number
does not match the
parent
field of the file.
e invalid blocknum recorded in the fnode/indirect block
One of the pointers within the fnode or within the indirect block specifies
a block
number that is larger than the largest block number in the
volume.
. insufficient memory to create directory stack
There is not enough dynamic memory
available in the system for the utility to perform
the
verification.
. sum of the blks in the indirect block does not match
block in the fnode
The file is a long file, and the number of blocks
listed in a POINTER(n) field of the
fnode does not agree
with
the number of blocks
listed in the indirect block.
. total-blocks does not reflect the data-blocks correctly
The TOTAL BLKS field of the
fnode
and the number of blocks recorded
in the
POINTERIn)
fields are inconsistent.
. Bad Checksum, checksum is
: <number>
Checksum
should be: <number>
An invalid checksum has been calculated.
NAMED2 Messages
The following messages can appear in a NAMED2 display.
. <
blocknum I - blocknum2>, bad block not allocated
The
volume
free space map indicates that
the blocks are free, but they
are marked as
"bad"
in
the
bad
blocks
file.
. <blocknum>,
block allocated but not referenced
The
volume
free space map lists the specified
volume block as allocated, but no fnode
specifies the block as
part of a file.
r <blocknum>,
block referenced but not
allocated
An fnode indicates
that the specified
volume
block is
part of a file, but the
volume free
space
map lists the block as free.
Disk Verification 2-7 |
VERIFY
. directory stack
overflow
This message can indicate
that a directory on the
volume
lists, as one of its
entries,
itself
or one
of the parent directories in its
pathname.
If this happens, the utility,
when
it searches through the directory tree, continually loops
through a portion of the
tree, overflowing an internal buffer area. The
"Multiple
Reference" message
(explained
below) may help
you
find the cause of this
problem.
o Fnodes map indicates fnodes
> m:u$fnode
The free fnodes map indicates that there are a
greater
number of unallocated fnodes
than the maximum number of fnodes in lhe
volume.
r <fnodenum>,
fnode-map bit marked allocated but not referenced
The free fnodes map lists the specified fnode as allocated, but no
directory
contains a
file
with
the fnode number.
o <fnodenum>,
fnode
referenced but fnode-map bit marked free
The specified fnode
number is listed in a directory, but the free fnodes map lists the
fnode as free.
. Free space map
indicates
Volume
block
> max$Volume$block
The free space
map indicates that there are a greater
number of unallocated blocks
than the
maximum number of blocks in the volume.
. insufficient
memory to create directory
stack
Not enough
dynamic memory is available
in the system for the
utility to perform the
verification.
. insufficient memory to
create fnode and space
maps
During a
NAMED2
verification,
the utility tried to create
a free fnodes map and a
volume
free
space map.
However, not enough dynamic
memory is available
in the
system to create
these maps.
. insufficient
memory
to create bad blocks
map
During a PHYSICAL verification,
the utility tried to create
a bad blocks map.
However, not
enough dynamic
memory is available
in the system to
create the map.
o Multiple reference
to fnode
<fnodenum>
Path
name : <
full path
name
>
referring
fnodes:
<
fnodenum
> Path name:
<
full
path
name
>
<fnodenum>
Path
name:
<full
path
name>
The directories
on the
volume
list more than one
file associated with
this fnode
number.
2-72 Disk
Verification
VERIFY
. Multiple reference to block <
blocknum
>
referring fnodes:
<fnodenum>
Path name:
<full
path
name>
<fnodenum>
Path name:
<
full path name>
More than one fnode specifies
this block as
part
of a file.
PHYSICAL Messages
. <
blocknum
>, error
An I/O error occurred
when VERIFY tried to access the speciîied
volume
block. The
volume is probably flawed.
Miscellaneous Messases
The following messages indicate internal errors in the Disk
Verification
Utility. Under
normal
conditions
these
messages should never
appear. However, if these messages
(or
other undocumented messages) do appear during a NAMEDl or NAMED2
verification,
you
should exit the Disk Verification
Utility
and re-enter the DISKVERIFY command.
directory
stack empty
directory stack error
directory
stack underflow
EXAMPLE
The following command performs
both named and
physical verification on a named
volume.
*VERIFY ALL <CR>
DEVICE NAÌ'IE
: F1 : DEVICE
SIZE : 0003E900 : BLoCK SIZE : 0080
,NAI4EDI' VERIFICATION
,NA.I{ED2'
VERIFICATION
BIT },IAPS O.K.
,
PHYSICAL'
VERIFICATION
NO ERRORS
Disk Verification 2-7t
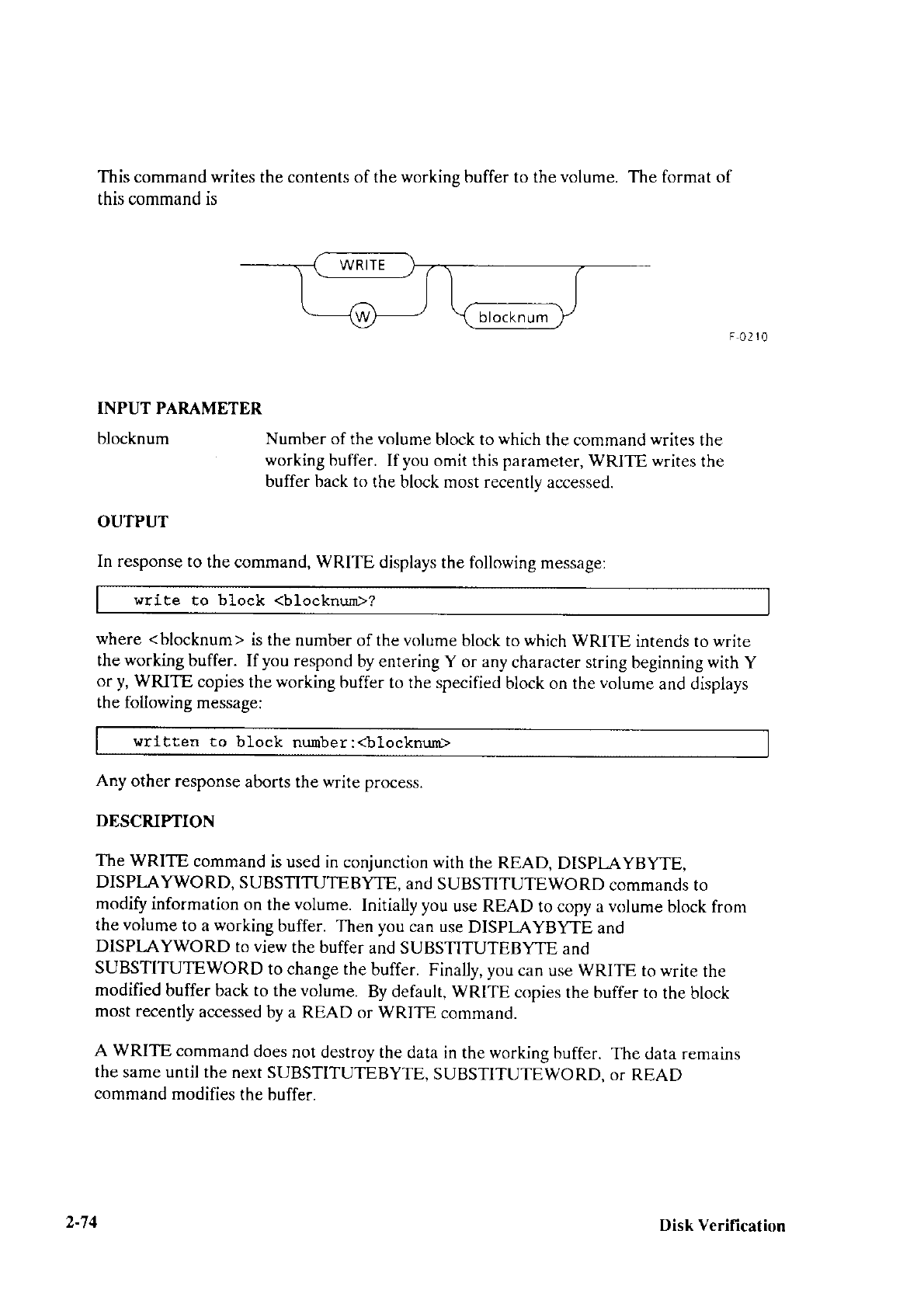
This command writes the contents of the workins buffer to the volume. The format of
this command is
F
0210
INPUT PARAMETER
blocknum Number of the volume
block to
which
the command
writes
the
working buffer.
If you
omit this parameter, WRITE writes
the
buffer back to
the block most recentlv
accessed.
OUTPUT
In response to
the command, WRITE
displays the following
message:
write to block <b
locknur*?
where
<blocknum>
is the
number of the volume
block to which WRITE intends to write
the
working
buffer.
If you
respond
by entering Y or any
character string
beginning
with
y
or y, WRITE
copies
the
working
buffer
to the specified
block on the
volume
and displays
the following
message:
written to block nunber :<blocknun>
Any other response
aborts the write process.
DESCRIPTION
The WRITE
command
is used in
conjunction with
the READ,
DISPT-AYBYTE,
DISPI-AYWORD, SUBSTITUTEBYTE,
and
SUBSTITUTEWORD commands to
modify information
on
the
volume.
Initially you
use READ to copy a volume
block from
the
volume
to a working
buffer. Then you
can use
DISPTAYBYTE
and
DISPI-A,YWORD
to view
the buffer
and SUBSTITUTEBYTE and
SUBSTITUTEWORD
to change the
buffer.
Finally, you can
use
WRITE
to write
the
modified
buffer back to
the
volume.
By default, WRITE
copies
rhe buffer to
the block
most recently
accessed
by a READ or WRITE
command.
A WRITE
command
does
not destroy the
data in
the
working
buffer.
The data remains
the
same until the
next SUBSTITUTEBYTE,
SUBSTITUTEWORD.
or READ
command
modifies
the buffer.
blockn
u
m
2-74 Disk Verification
WRITE
ERROR
MESSAGES
argument
error A syntax error
was
made or nonnumeric
characters were specified
in the
blocknum parameter.
<
blocknum
>
,
block out of range The block number specified was
larger
than the largest block number
in the
volume.
FFFFFFFF,
block out ofrange No blocknum
was
specified and no
previous read request was executed on
this
volume.
EXAMPLE
The following command
copies the working
bullèr to the block from
which
it
was
read.
*I.RITE <CR>
wrire 48? y <cR>
wrltcen to block number: 48
Disk Verification 2-75

BACKING
UP AND CHAPTER
3
RESTORING
FNODES
3.1
INTRODUCTION
To access data on a named volume (such
as a disk), the iRMX Il Operating
System
uses a
mechanism common to virtually
all operating systems: it maintains an
index to
every
file
on the disk. This
index is created
when
the disk is formatted and
remains as a
permanent
structure at
a dedicated location on the clisk.
The index consists of a
system
of
pointers
that
indicate the location of the data
files on the disk. Thus,
when
data must be stored on
or retrieved from the disk, the operating
system can find the exact location of the
appropriate
file by looking
up the file name in the index.
In the operating system,
the index consists of the iRMX ll volume
label and an fnode file.
This
volume
label resides at the same
location in all devices and serues as the initial entry
point
into the device.
The fnode file can reside an).where on the disk
(specified
when the
disk is formatted) and contains
a series of individual structures called file dcscriptor nodes
or "fnodes."
There is one fnode
for each lle on the disk. The lnode contains information
essential
to accessing and maintaining the
respective file.
The iRMX II file structure for a named volume is organizerJ as a hierarchical tree. That
is, there is a root directory with
branches to other directories and ultimately, to files. The
organization
of the fnode file reflects
this hierarchical structure. The iRMX II volume
label contains a pointer
to the fnode of the file structure's
root directory. The root
directory
is always the starting address
for any fiìe or directory on the
volume.
It lists alÌ
the
first level files and directories on the volume.
First level directories point to second
level files and directories,
and so on, down the hierarchical structure.
As
previously
mentioned, each file or directory is represented by an fnode. The fnode,
along with other data describing the
file or directory, contains
pointers
to
blocks
on the
volume. If the fnode describes
a short file, these blocks contain the actual file data. If the
fnode describes a long file, these blocks contain pointcrs to other blocks containing the
actual data. If the fnode describes a
directory, these
blocks contain entries which describe
the contents of the directorv. Each entrv lists the fnode number and name of the
associated
file or directory,
The operating system creates the iRMX Il volume
label and the lìode file when the disk
is formatted.
Disk Verification 3-l
BACKING
UP
AND
RESTORING FNODES
The number
of unallocated
fnodes in the
fnode file is
controlled by the FILES
parameter
of the FORMAT command.
In addition to
the unalìocated fnodes,
seven
(with
an
option
of eight)
allocated fnodes
are established
when the fnode file is created.
These allocated
fnodes represent
. the fnode file
. the
volume label file
- R?VOLUMEIABEL
. the
volume
free
space map file
- R?SPACEMAP
o the free fnodes map
file
- R?FNODEMAP
o the bad blocks file
- R?BADBLOCKMAP
. the root
directory
. the
space
accounting
file,
. Optionally,
the duplicate
volume
label lile
- R?SAVE
For a full description
of these files, see Appendix A "Structure
of A Named
Volume."
Thereafter,
when
files or directories are creiìted
directly subordinate to the root, the
operating system must adjust
a pointer
in
the root fnode to indicate the fnode number of
the new data file or directory file. Subserluently, clirectories subordinate to the root must
also have their
pointers
adjusted
when
they
become parents to a new data file or
directory.
This
method of storing
and
retrieving data on a disk has one major drawback. All access
to files on the disk is through the iRMX II volume
label and the fnode file. If either the
volume label
file
or the
fnode file is
damaged or destroyed,
there is no
practical way to
recover data on the disk.
The backup and restore fnodes feature enables some recovery of data
lost as a result of
damage to the fnode file or the iRMX II volume label. With
this feature,
you
create a
backup version of the volume
label and all the fnodes on the disk. The backup
version
is
stored
in one of the innermost tracks of the disk
where
the chance
of accidental loss of
data is minimal.
(In normal use, the disk
heads do not extend to the innermost tracks.)
To implement this feature,
the Human Interface FORMAT command
has been modified
to include
an optional parameter
--
RESERVE. This version
of the FORMAT command
creates a file named R?SAVE in the
innermost track of the
volume.
A copy of the iRMX
II volume
label is
placed
in the front (that is, the physical
end) of the file and an fnode is
allocated for R?SAVE
in
the fnode
file. (The
fnode for the R?SAVE file is allocated out
of the fnodes reserved through the
FILES
parameter
of the FORMATcommand. Thus,
ifyou specify
"FILES
= 3000" when you
format, only 2999 of those fnodes will remain
available after the R?SAVE fnode has been allocated.)
Finally, FORMAT copies the
fnode file into
R?SAVE.
a-) Disk Verifîcation

BACKINC
UP
AND RESTORING
FNODES
Notice that
the FORMAT command creates a backup of the fnode file in its initialized
state. R?SAVE is not subsequently updated as files are
written
to or deleted from
the
volume. Therefore,
you will have to use the BACKUPFNODES Disk Verification Utility
command or the BACKUP option of the Human Interface SHUTDOWN command
to
back up the fnode file at regular intervals. If the
volume label or the fnode file become
damaged,
you
can attempt to recover liles on the
volume by using the Disk
Verification
Utility commands
(RESTOREFNODE
and RESTOREVOLUMETABEL)
to rebuild the
index.
To
assist in this process, the DISPI-AYSAVEFNODE Disk
Verification Utility
command enables
you
to
look
at
individual
fnodes stored in the R?SAVE file.
Since the contents
of the iRMX II volume label do not change, the
copy of the
volume
label in R?SAVE is always
valid.
Therefore,
you
can restore the
volume label at any time
regardless of
when
the R?SAVE file
was
last updated.
(When the Disk
Verification
Utility encounters
a damaged volume label, it automatically uses the
backup volume label
if the R?SAVE
file is present, however, it does not restore unless
explicitly instructed.)
CAUTION
One
note
of caution:
The fnode fìle is
changed
each time a
volume is
modified
(that is,
each time a fìle or directory
is created, written to, or
deleted from the volumel. Therefore. valid restoration can be assured
only
for fnodes whose associated files or directories
have not been
changed since the last
backup.
If the fnodes are not backed up after each
modificafion, the structure of
the R?SAVE
file will differ from that of the
fnode file. Some
fnodes in
R?SAVE
may not be assoriated
with the
same files as the corresponding
fnodes in the
fnode file. Attempting to
recover fnodes under these
conditions
is dangerous because the RESTOREFNODE command
will
ovenvrite what may be a valid fnode in the
fnode file.
While the backup and restore fnodes leature is a useful aid in attempting
to recover data
on a
volume, this capability is limited in scope. If you are troubleshooting
your system,
you may
want
to back up the fnodes on the
system disk before taking
any action that may
risk the disk's integrity. You may also decide to
back up the fnodes on
a routine basis
(before
or during each
system shutdown, for instance) so that
the R?SAVE file is always
relatively currcnt.
However, under normal circumstances,
where a
volume
is
accessed and
modified frequently,
backing up the fnodes after each modification
is not
practical. The
most
practical
solution is to back up
the fnode file once a
day using the BACKUP
option
of the SHUTDOWN
command.
Disk Verification J-J
BACKING
LIP ANI) RESTORING FNOI)ES
Note that this feature is not intencled to
provicle
comprehensive
protection from the loss
of data associated
with
damaged
iRMX Il volume
labels or fnode files.
Rather, it offers a
tool that, when properly applied, can be useful in maintaining
volume
integrity in
certain
situations. For comprehensive
protection against
loss
of data use the Human Interface
BACKUP command.
3.2 USING
FNODE BACKUP AND RESTORE
To use the fnode backup and restore feature,
you
must use
Version
L l (or
later) of the
I Iuman Interface FORMAT comnurnd anrl the Version 2.0
(or
later) of the Disk
Verification Utility. Used togethe r, these
versions
of the FORMAT command and the
Disk
Verification
Utility enable
you
to
. format
a
volume
to cre:ìte
the backup
file
(R?SAVE)
. back up the fnories of any fiìcs
written
to the
volume
. examine the contrìnts of thc hlckup
fiìe
(R'ISAVE,)
. restore damaged fnodcs
. restore the
volunie
label
. edit fnodes or save fnodcs
'l his section
describes hou, to perlìrrm each
of thcse operations. A brief overview
of the
openrtion
is followed by onc or nrore
examples of a typical implementation. ln the
exumples, blue or holded
text indicates an entry
you
make from
your
terminal. Standard
type (this
is standard type)
indicates system ourpur ro your rerminal.
3.2.1 Creating the R?SAVE Fnode
Backup File
Ilyou
intend to buckup the volume
lrrbel antl the liodes
on a
volumc',
you must first create
the RISAVE backup
file on the innermost tracks
of the
volume.
To
do so, you
must
invoke Version
2.0 oî the
Human Interface FORMAT
command, specifying the
RESERVE option.
NOTE THAT THE
FORMAT COMMAND OVERWRITES
ALL
OF THE DATA CURRE,NTLY ON
THE DISK. Thereftrre,
make a backup copy of any
îiles
you wish
to save
using the Human
lnterface BACKUP command.
Once the
volume
has been formtttecì, the
R?SAVE file
will
contaìn
a copy of the fnode
file
inclutling the allocated
liodes
(R?SPACE,MAP,
R?FNODEMAP,
erc.). Therefore,
you
need not back up
the lìode file immediately
after formatting
the
volume.
PROCEI)URE
From the Iluman Interface,
invoke the FORMAT
command, specifying
the RESERVE
Darameter.
3-,1 Disk Verification
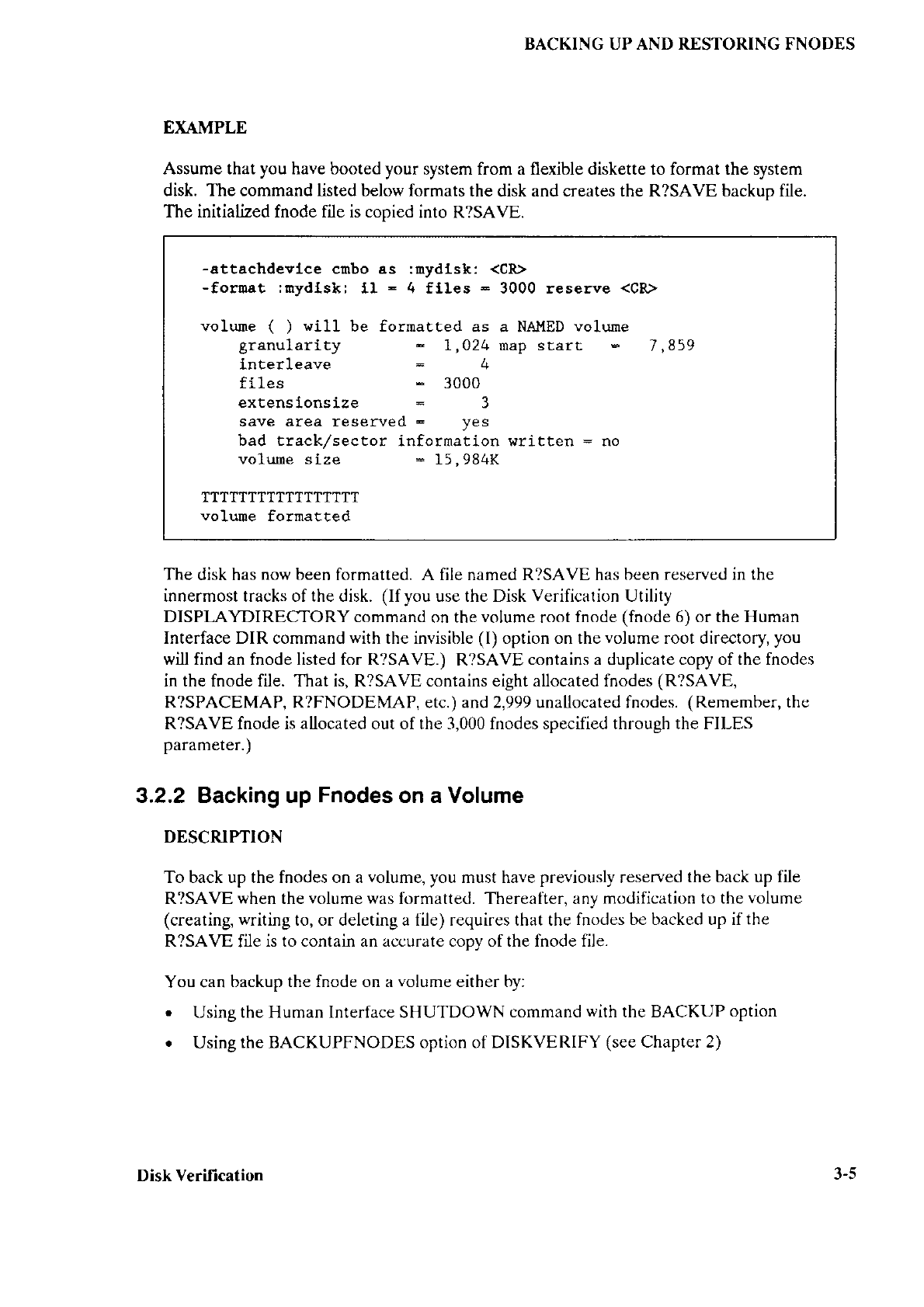
BACKING UP AND RESTORING FNODES
EXAMPLE
Assume that
you
have booted your system from a flexible diskette to format the system
disk. The command listed below formats
the disk and creates the R?SAVE backuo file.
The initialized fnode fiìe is cooied
into R?SAVE.
-attachdevlce carbo as :nydlsk: <CR>
-fornat ;aaydlskr 1l - 4 ftles = 3000 reserve (CR>
volume ( ) will be fornatced as a NAÌ.IED
volurne
granularity - L,O24 nap start - 7,859
lnterleave - 4
files * 3000
extensionsize - 3
save area reserved - yes
bad track/sector Ínformation written - no
volume size : 15
,
984K
1lr t.L I r llr I r-t -L l-t I
vol,u.ne fornalted
The
disk has
now been
formatted. A file named R?SAVE has
been reserved in the
innermost tracks of the disk.
(If you
use the Disk
Verification
Utility
DISPI-AYDIRECTORY command
on the
volume
root
fnode
(fnode
6) or the Human
Interface DIR command
with
the invisible (l) option on the
volume
root directory,
you
will find an fnode listed for R?SAVE.)
R?SAVE
contains a duplicate copy of the fnodes
in the fnode file. That is, R?SAVE contains eight allocated fnodes
(R?SAVE,
R?SPACEMAP, R?FNODEMAP, etc.) and 2,999 unallocated fnodes.
(Remember, the
R?SAVE fnode is allocated out of the 3,000 fnodes specilìed through the FILES
parameter.)
3.2.2 Backing up
Fnodes
on a Volume
DESCRTPTION
To back up the fnodes on a
volume,
you must have
previously
reserved
the back up file
R?SAVE
when
the
volume was
lbrmatted. Thereatìer, any
modification to the
volume
(creating, writing
to, or deleting a file) requires that the
fnodes be backed up if the
R?SAVE
file
is to contain an accurate copy of the fnode file.
You can
backup the fnode on a
volume
either by:
. Using the Human Interface SHUTDOWN
command
wirh
the BACKUP
option
. Using
the BACKUPFNODES option of DISKVERIFY
(see
Chapter 2)
Disk Verification 3-5
BACKING
UP
AND RESTORING FNODES
EXAMPLE I
This example shows how to backup the fnode file using SHUTDOWN with the BACKUP
option. The BACKUP option allows
you
to copy the
volume
fnode file to its duplicate
file, R?SAVE, on any attached
volume.
super-SHUTDoIIN B <CR>
***SYSTN{ I{ILL BE SHUTDOI.N IN 10 MINUTE(S)
:SD:, outstanding connections to device have been deletèd
***sl{uTDoI\rN ooMPLETED ***
R?SAVE now contains a duplicate copy of
all fnodes in the fnode file.
EXAMPLE
2
This example
shows how to use the BACKUPFNODE
command
of DISKVERIFY to
backup the fnode file. Assume that the system disk
is attached as logical device:sd:. The
initial contents of the :sd:
fnode file
were
copied
to R?SAVE by the FORMAT command.
A file
hasjust been
written
to the volume.
An fnode
for this file is entered in the fnode
file; however,
no corresponding entry
has been made in R?SAVE. The following
sequence
of commands will
copy all fnocles in
the fnode file into the
R?SAVE file.
super- dlskverlfy :
sd: <CR>
iRMX I1 Disk Verify Utility, Vx.x
Copyright <year> Intel Corporation
:sd:, outstanding connections to device
*backupfnodes <CR> or bf <CR>
fnode flle backed up to save area
have been de leted
R?SAVE now contains
a duplicate copy
of all fnodes (allocated
and unallocated)
in the
fnode
file.
Note that in both cases you must reboot the
system after
backing up the
fnodes on the
volume,
3.2.3 Backing
up
the
Volume
Label
The
volume
label is initially
copied
to R?SAVE when
rhe
volume
is formatted.
Since the
contents
of the volume
label do
not change,
no other
volume
label backup procedures
are
reouired.
3-6 Disk Verification
BACKING UP
AND RESTORING
FNODES
3.2.4
Restoring Fnodes
DESCRIPTION
To restore fnodes on a
volume, you
must have
previously reserved the
backup file
R?SAVE
when the
volume was
formatted. If damage has
occurred to the fnode
fiìe,
you
can attempt to rebuild
the file (or portions of it) by using the Disk
Verification Utility
RESTOREFNODE
command.
RESTOREFNODE
enables
you
to restore a single
fnode or a range of
fnodes. You
designate the
fnodes to be restored by
entering the fnode numbers.
The specified
fnodes
in R?SAVE
are copied into the corresponding
fnodes in the
fnode file.
Before
restoring each fnode, RESTOREFNODE
prompts you
with
the message
"restore
fnode
<
fnode
number
>
?". To restore
the fnode,
you
must enter
"yes" or the letter
"Y"
(either
Y or
y). Ifyou enter any
other response, the fnocle
will not be restored.
When restoring fnodes,
you must be very careful to ensure
that
you
are not
overwriting
a
valid
fnode
in the fnode file
with
an invalid
fnode from R?SAVE.
Be sure the
volume has
not been modified
since the fnodes
were
last backed
up.
PROCEDURE
1. Invoke
the Disk
Verification
Utility,
using the logical
device name of
the volume
to
be backed
up.
2. When
you
receive
the Disk
Verification
Utility
prompt
(*), enter the appropriate
Disk
Verification Utiìity commands
(VERIFY, DISPI-AYFNODE,
etc.) to
examrne
the fnodes
file and determine
which fnode must
be restored.
3. Invoke
the Disk
Verification Utility RESTOREFNODE
command
to replace
the
damaged
fnodes. The Disk
Verification Utility
prompts you to confirm
that the
proper fnode is
being restored. Make sure
you have specified
the correct
hexadecimal
number
for the fnode,
then enter the letter
"Y" in response
to the
prompr.
4. RESTOREFNODE
returns the message
"restored fnode
< fnode
number
>" after
the fnode in
the R?SAVE file
has been
written
over
the corresponding
fnode
in the
fnode
file.
Disk Verification 3-7
BACKING
UP
AND RESTORING FNODES
EXAMPLE I
Assume
that a disk
drive is
attached as
logical device :sd:. The
volume
:sd: contains
the
R?SAVE fnode backup
file. You have not modified the disk since
the fnodes
were last
backed up. You suspect the fnode file has been damaged, so
you
use the Disk
Verification
Utiliry to confirm
your
suspicions:
super- diskvetlfy : sd: <CR>
iRl,fx II Disk Verify Utility, Vx.
x
Copyrlght <year) Intel Corporation
:sd:, outsÈanding connections to device have been deLeted
*verffy
After using
the Disk
Verification
Utility
to
examine
the structure of
the disk, you find that
fnodes 9 through
0C have probably been destroyed.
You then use rhe
RESTOREFNODE
command
to recover these fnodes.
Fnodes
09 through
0C in the R?SAVE
file have been
copied
into fnode 09
through 0C
in
the fnode
file. Since the
disk has not been
modified since
the last
fnode backup,
restoring
the
damaged
fnodes should now
enable you to
recover the
data on
the disk.
*restorefnode
restore fnode
resÈored fnode
restore fnode
rescored fnode
restore fnode
restored fnode
restore fnode
restored fnode
9, 0C <CR> or
9? Y <CR>
nunbe r : 9
OA? Y <CR>
nurnber: 0A
OB? Y <CR>
nurnber: 0B
QC? Y <CR>
number: 0C
rf 9, 0C <CR>
3-8 Disk Verification
BACKING
UP
AND RESTORING
FNODES
EXAMPLE
2
Assume
the same initial conditions as Example
1 with the following exception:
two files
have been modified
since
the last
time the fnodes
were
backed
up. ln the fnode file, the
new files are represented by fnodes 0D and
0E. Again,
you
suspect
that the fnode file has
been damaged, so
you
use the Disk
Verification Utility to check
the condition of data
on
the disk:
super- dfskvellfy :
sd: <cR>
iRf.fx I1 Disk Verify Utility, Vx.x
Copyright <year> Intel Corpora!íon
:sd:, outstanding connections to device have been deleted
Jcverlfy
After using
the Disk
Verification Utility to examine the
structure of
the disk,
you
find
that
fnodes 9 through 10
have probably been destroyed. You
decide
to use the
RESTOREFNODE command
to recover these fnodes.
You do not
wish to restore fnodes
0D and 0E
because they
were
not backed up. Since the data
fields of fnodes
0D and 0E
in
R?SAVE contain all zeros,
you would be destroying
possibly useful data in
the
corresponding fnodes. You then use
RESTOREFNODE
to restore a range
of fnodes
that
includes 0D and 08. However,
you intend to pass over
the restoration
of these two
fnodes
by responding to the
confirmation prompt
with
some
character
other than
"Y."
*restorefnode
restore fnode
restored fnode
restore fnode
restored fnode
restore fnode
restored fnode
resÈore fnode
resÈored fnode
allocation bit
restore fnode
allocation bit
restore fnode
festore fnode
restored fnode
restore fnode
restored fnode
9,10 <CR> or rf 9,10
9? Y <CR>
nunber: 9
OA? Y <CR>
nunber: 0A
OB? Y <CR>
nurnber: 0B
0c? Y <cR>
number: 0C
not sec for saved fnode
0D? <cR>
not set for saved fnode
0E? n (CR)
OF? Y <CR>
nunber: 0F
10? Y <CR>
number: 10
Disk Verification l-9
BACKING
UP AND RESTORING FNODES
Notice that because fnodes 0D and 0E
were
not allocated
when
they were backed up,
those
fnodes in R?SAVE are unallocated. Therefore, the Disk
Verification
Utility
returns the
"allocation
bit not set for saved fnode"
message. Since
you
do not
wish
to
restore this fnode, you
respond to the confirmation
prompt with
a character other than
The R?SAVE fnodes 09 through 0C and
fnodes
0F
through l0 have been copied over the
corresponding
fnodes in the fnode file. Fnodes 0D and 0E were not restored.
3.2.5 Restoring the Volume
Label
DESCRIPTION
To
restore the
volume
label, you
must have
previously
reserved
the backup file R?SAVE
when
you
formatted the
volume.
If the volume
contains the R?SAVE
file, a backup copy
of the
volume
label already exists. The
FORMAT command automatically
places a copy
of
the volume
label
into R?SAVE when the file
is created. Thereafter,
the contents of the
volume
label do not change
and
you
can restore the
label
without
fear
of destroying data
in the existing
label.
To restore the volume
label, you must invoke
the Disk Verification
Utility using the
logical device
name of the appropriate volume.
If the
volume
label
is corrupted, the Disk
Verification
Utility attempts to
use the backup copy
of the
volume
label
in R?SAVE.
When
the backup label
is used, the Disk Verification
Utility
issues a message that
reads
"duplicate volume
label used." If this message appears when
the
Disk
Verification
Utility
is activated,
then the volume
label is damaged.
To restore the volume
label, enter
the
Disk Verification
Utility RESTOREVOLUMELABEL
command.
The current volume
label will
be overwritten with
the volume
label conv from
R?SAVE.
PROCEDURE
1. Invoke
the Disk Verification
Utility,
using the logical
device nante
of the volume
to
be backed
up.
2. If the "duplicate
volume
label used" message
appears,
the
volume
label must be
restored.
Enter the
Disk
Verification
Utiliry RESTOREVOLUMEI-ABEL
command.
3. When
the volume
label has been
restored,
the Disk Verification
Utility returns the
messape
"volume label restored."
3-10 Disk Verification
BACKING UPAND RESTORING
FNODES
EXAMPLE
Assume that a
disk drive is attached as logical device :sd:. The
volume :sd: contains
the
R?SAVE fnode
backup file. When you attempt to aocess files
on :sd:, the system returns
an
E$ILLEGAL_VOLUME
message. You
suspect that the
volume
label may
be
damaged. You
decide to check
your
suspicions using the
Disk Verification Utility.
super- dlskverlfy : sd: <CR>
iRMx I1 Disk Verífy Utility, vx.x
Copyright <year> lntel Corporatlon
:sd:, outstanding connecÈions to device have been deleted
duplicate volune label used
The
"duplicate
volume label used" message confirms
that the
volume label has been
damaged.
You restore the
volume
label
usìng the RESTOREVOLUMEI-ABEL
command.
*re s torevohime labè I <cR>
volune labeI restored or rvl- <CR>
The original
volume label has been overwritten
with the duplicate
copy from the
R?SAVE
file. Attempts
to access files on volume :sd: should now
be successful.
3.2.6
Displaying
R?SAVE Fnodes
DESCRIPTION
Any fnode
(both allocated and unallocated)
in the R?SAVE
file can be examined
by using
the Disk
Verification Utility DISPIAYSAVEFNoDE command.
The Disk
Verification
Utility
wiÌl display
vital
information abouî the
fnode (total blocks,
total size, block
pointers,
parent node, etc.). The fnode is
displayed in the same
fbrmat used
by the
DISPIAYFNODE command.
To display an R?SAVE thode,
enter the DISPI-AYSAVEFNODE
command and
specify
the hexadecimal
number of
the fnode to be disnlaved.
Disk Verilication 3-11
tsACKING
UP AND RESTORING FNODES
PROCEDURE
1. Invoke the Disk Verification
Utility using the logical device name of the
appropriate volume.
2. When you
receive the Disk Verification
Utility
prompt
(*), enter
the Disk
Verification
Utility DISPI-AYSAVEFNODE command. Speci! the hexadecimal
number of
the fnode to be displayed.
3. The Disk Verification
Utility will return with an
fnode display.
EXAMPLE
Assume
that
you
cannot access
a file on a disk
attached as :sd:. You suspect
that the
fnode
file may be damaged.
By entering the Disk Verification
Utility and
displaying the
file's directory, you
find that the file you were
unable to access is represented by
fnode
3C8.
You use DISPT
AYFNODE to display
fnode 3C8, but you
are not confident of the
data
you
see.
Since the fnode
for the file has been
backed up since the
file was
last
modified,
you
decide to
use data in the R?SAVE
fnode to examine
the fnode file. The
following command
displays the
data for fnode 3C8
in R?SAVE.
3-12 Disk Verification
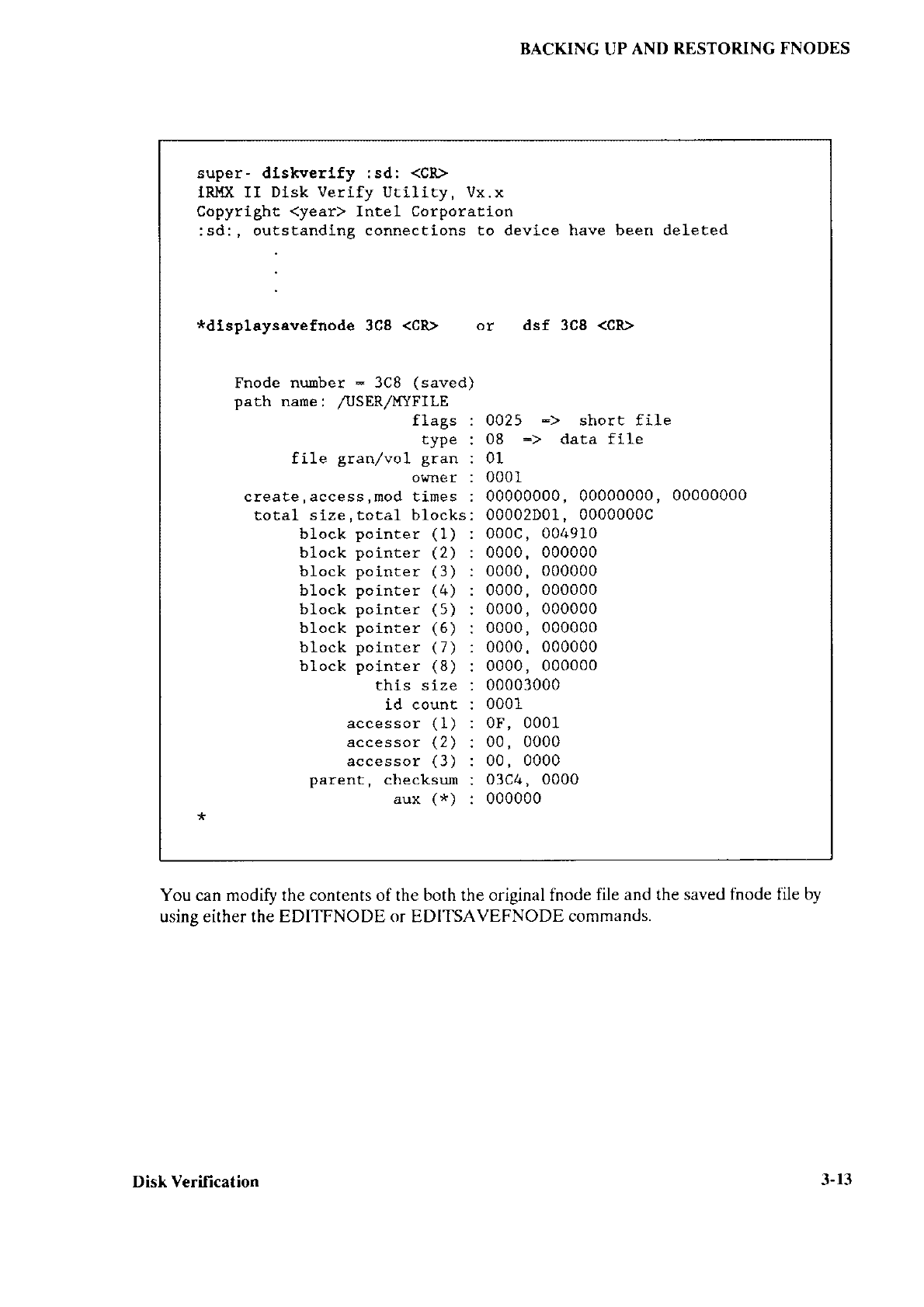
super- dlskverlfy : sd: <Cn>
iRHX II Disk Verify UEility, Vx.x
Copyrtghc <year> Intel CÒrporation
:sd:, outstandlng connections to devlce have been deleted
*displaysavefnode 3CB
<CR> or dsf 3C8 <CR>
Fnode nurobe r - 3C8 (saved)
path narnè: ^SER/I{YFILE
flags
cype
aí I ^ ^-^^ /-.^1 ---^
r r rE Ér d!,/
owîer
create ,
access
,
nod tixnes
total slze, total- blocks
hl nnlr nni nto r /1\
h ì anlr nninror /?\
}l I anlt naintpr 11\
uruLK PUrrrLr r \
+,,
block pointer (5)
hìnnL nninror l6l
hl.).k n.línrér l7l
hl oelr nai nrar lfl\
this size
id count
aecessor (L)
accessor (2)
accessor (3)
n4róht nha n1z <, rm
aux (*)
002 5
08 -> dara f1lè
01
0001
00000000, 00000000,
00000000
00002D01,0000000c
000c,004910
0000, 000000
0000,
000000
0000,000000
0000,000000
0000,000000
0000,000000
0000,000000
00003000
0001
0F, 0001
00, 0000
00, 0000
03c4,0000
000000
BACKING
UP
AND
RESTORINC FNODES
You can modify the contents of the both the original fnode
file and the saved
fnode iile by
usins either the EDITFNODE or EDITSAVEFNODE
commands.
Disk Verification 3-r3

STRUCTURE
OF A APPENDIX A
NAMED
V-OL_UME
A.1 INTRODUCTION
This
appendix describes the structure
of an iRMX II volume that contains named
1iles. It
is
provided
as reference
information to help you
interpret output from the DISKVERIFY
commands or to help you
create
your
own formatting
utility
programs.
This appendix is for programmers u'ith
experience
in reacling and
writing
ircturrl
volume
information. It does
not attempt to teach these functions.
4.2 VOLUME
STRUCTURE
This appendix
discusses the structure
of named file
volumes
in cletail. It covers the
structure of
directory files and the concepts
of long and short lilcs. It also includes
information on
o ISO Volume
Lahel
. iRMX VoÌume l-abel
. fnode file
r volume
free space
map file
r free fnodes map file
. bad blocks
map file
o root directory
The blocks reserved for
the Bootstrap Loader
(Figure
A- I
) are not tiiscussed. Bootstrîp
Loader blocks are automatically
included on a new
volume when you
format a
volume
with
the FORMAT command. Refer to the FORMA'| command for a clescription of the
bootstrap option.
Figure A- 1 illustrates the general structure
of a named lile
volume.
Disk Verilication A-l
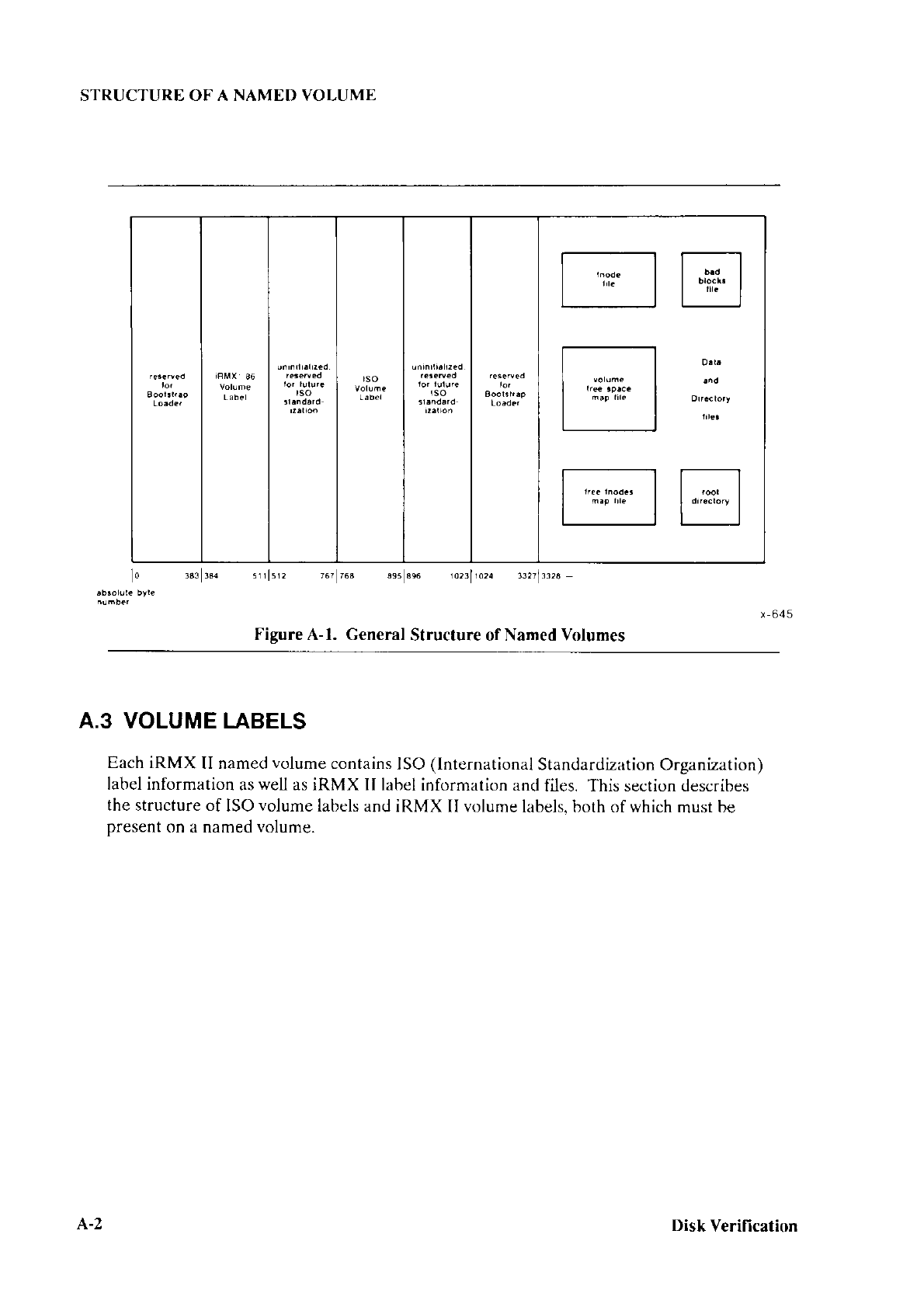
STRUCTURE OFA NAMED VOLUME
lso
lo rer reo srlsr, ,-.1,-. rsrrJrrra
x ti45
Figure A- l. General
Structure of Named Volumes
A.3 VOLUME LABELS
Each iRMX II named
volume
contains
ISO
(International
Standardization Organization)
label information
as
well
as iRMX II label
information and
files. This section describes
the structure of ISO
volume
labels and
iRMX II volume
labels. both of which must be
Dresent
on a named
volume.
A-2 Disk
Verifìcation
STRUCTURE OF A NA]\IED VOLUI\TE
4.3.1 ISO Volume
Labe!
The ISO
volume
label is recorded in
absolute byte
positions
761Ì through
895 of the
volume (for
example, sector
07 of a single-density
flexible diskette). The structure of thrs
volume
label
(in
PL/M notation) is:
DECI.ARE
1SO$VOL$TABEL
STRUCTURE(
T.ABEL$ID(3) BYTE,
RESERVED$A BYTE,
VOL$NAI"ÍE(6) BYTE,
VOL$STRUC BYTE,
RESERVED$B
(
6O
) BYTE,
REC$SIDE BYTE,
RESERVED$C
(4) BYTE,
I LEAVE
(
2
) BYTE,
RESERVED$D BYTE,
ISO$VLRSION BYTE,
RESERVED$E
(48
) BYTE);
Where:
IABEUID(3) Label identifier. For
named file
volumes, this
f ield
contains the
ASCII characters "VOL".
RESERVED$A Reserved field containing the ASCII character
"
1".
VOL$NAME(6) Volume
name.
This field can contain up to
six printable
ASCII
characters, left
justified
and space filled.
A vaÌue
of
all spaces
implies
that the
volume
name is recorded in the iRMX II Volume
Label
(absolute
byte
positions
3lt4-393),
VOII$STRUC For named file volumes, this
f ield contains
the
ASCII character
"N",
indicatìng that this volume has a non-ISO file structure.
RESERVED$B(60) Reserved field containing 60 bytes
of ASCII
spaccs.
REC$SIDE For named file
volumes,
this field contains the ASCII character "l"
to indicate that only one side of the volume is to be recorded.
RESERVED$C(4) Reserved field containing four bytes of ASCII spaces.
ILEAVE(2) Two ASCII digits
indicating
the interleave fìrctor for the
volume,
in
decimal. ASCII digits consist of the numbers 0 through
9. When
formatting named
volumes, you should set this
field
to the sanìe
interleave factor that you use when physically formatting the
volume.
RESERVED$D Reserved field containing an ASCII space.
Disk Verification A-.1
STRUCTURE OF
A NAMED VOLUME
ISO$VERSION For
named file
volumes, this field contains
the ASCII
character
"l",
which indicates ISO
version number one.
RESERVED$E(48) Reserved
field containing
48 ASCII spaces.
A.3.2 IRMX@ llVolume
Label
The iRMX II Volume
Label
is recorded in absolute
byte
positions
384 through
5l I of the
volume
(sector
04 of a sing.le density tìexible
diskette). The sîructure
of thìs volume label
is
as
follows:
DECI-ARE
RMX9VOLUME9INFORMATION
STRUCTURE(
vOL$NA-Ì"IE
(
10
)
FI"AGS
FILE$DRIVER
VOL$CRAN
VOL$ S I ZE
MA.\$FNODE
FNODE$ START
FNODE$ S I ZE
ROOT$FNODE
DEV9CRAN
INTERLEAVE
TRACK$ SKEW
SYSTEM$ I D
SYSTEM$NA]'JE( l2 )
DEVTCE$SPECTAL(8)
BYTE
,
BYTE
,
BYTE
,
WORD
,
DWORD
,
WORD
,
DWORD
,
WORD
,
WORD
,
WORD
,
WORD
,
WORD
,
WORD
,
BYTE,
BYTE);
where:
voL$NAME(10)
FLAGS
Volume
name in
printable
ASCI I characters, left
justified
and zero
filled.
BYTE that lists the device charrcteristics for automatic devic"
recognition.
The individual bits in this BYTE indicate the
following characteristics (bit 0 is rightmost
bit):
Bit Meaninc
0 VF$AUTO
flag. When set
to one, this bit indicates
that the FI-AGS byte contains valid data for
automatic device recognition. When
set to zero, it
indicates that the remaining flags contain
meaningless data.
A-4 Disk Verification
STRUCTURE OF
A NAMED VOI,UME
1 VF$DENSITY
flas. This bit inclicates the
recording density òfthe
volume. When
set to one,
it indicates
modified frequency modulation
(MFM)
or tlouble-density recording.
When
set to zero, it
indicates frequency modulation
(FM) or single-
density recording.
2 VF$SIDES
flas. This bit indicates the number of
recorcJing sides
on the
volume. When set
to one,
it
indicates a double-sided volume. When set to zero,
it indicates a single-sided
volume.
3 VF$MINI
flau. This bit indicates the size of the
recording meAia.
When
set to one, it indicates
a
5 I
/4-inch
volume. When set to
zero,
it indicates an
8-inch volume.
4 VF$NOT$FLOPPY. This bit indicates the type of
disk you are using. When this and Bit 0 are set to l,
it indicates a
Winchester
disk.
5-7 Reserved
FILE$DRIVER Number of the file driver used
with
this
volume.
For named file
volumes.
this field is set to four.
VOLIGRAN Volumo granularity,
specilìed in bytes. This
value
must
be a
multiple of the device granularity.
It sets the size of a logical
device block, also calÌed a
volume
block.
VOII$SIZE Size of the entire volume, in bytes.
MAX$FNODE Number of fnodes in the fnode file. (Refer
to the next section for a
description of fnodes.)
FNODE$START A 32-bit value that represents the number of the first byte in the
fnode file (byte 0
is the first byte of
the volume).
FNODE$SIZE Size of an fnode, in bytes.
ROOT$FNODE Number of the fnode describing the root directory. (Refer to the
next section for further information.)
DEV$GRAN Device
granularity
of all tracks except track zero
(which contains
the
volume
label). This field is important only
when the system
requ
ires a
utomatic device recognition.
INTERLEAVE Block interleave factor for this
volume. This
value
indicates the
physical distance, in blocks, between consecutively-numbered
blocks on the
volume.
A value of one indicates that consecutively-
numbered blocks are adjacent. A value
ofzero indicates
an
unknown or undefined interleave factor.
Disk Verification A-5
STRUCTURE
OF
A NAMED
VOLT]ME
TRACK$SKEW
SYSTEM$ID
SYSTEM$NAME(12)
Character
F
U
Offset, in bytes,
between the
first block on one
track and
the
first block on
the next track. A value of zero indicates
that all
tracks
are identical.
Numerical
code identifying
the operating
system that formatted
the
volume. The followìng
codes are reserved
for Intel
operating
systems:
Operating Svstem
iRMX
I, II
iRMX lt{i
iNDX
Currently, the iRMX
II Operating System
places a zero in this
field.
Name of the operating
system that formatted the
volume, in
printable ASCI I characters, left
justified
and space filled.
Zeros
(ASCIl
nulls) indicate
that the operating system
is
unknown. The iRMX Il Operating
System currently places
several
pieces
of information
into this field, as follows:
. The leltmost eight bytes of this field
contain the ASCII
chrìriìcters
"iRMX IL3' to identify the operating
system.
The iRMX IL I Operating System filled
this field
with
zeros.
. The next byte is an ASCII character
that
identifies
the
program that formatted the volume. The following
characters appÌy:
Formatting Program
Human Interlhce FORMAT command
iRMX I Files Utility
(used
prior to
iRMX r.7)
If the formatting
program
is unable to
provide
this information,
it places
an ASCII space in this field.
. The
Human Interlace FORMAT command that is
part
of
iRMX Il.3
places
the characters
"03 "
in the Ìast 3 bytes of
this field.
Code
0-(lFh
10h
-
lFh
20h
-
2Fh
A-6 Disk Verification
STRUCTURE OF
A NAMED
VOLU]\IE
DEVICE$SPECIAL(II) Reserved
for special device-specific information. When
no
device-specific information exists,
this field must contain zeros.
For example,
if the device is a
Winchester
disk
with
an iSBC
214
/215G
controller,
the iRMX lI Operating System imposes a
structure on
this field and supplies the following information:
SPECIAL STRUCTURE
(
CYLINDERS WORD,
FIXED BYTE,
REMOVABLE BYTE,
SECTORS BYTE,
SECTOR SIZE WORD,
ALTERNATES
BYTE);
where:
CYLINDE,RS Total number of cylinders on the disk
drive.
FIXED Number of heads on the fixed disk or
Winchester
disk.
REMOVABLE Number of heads
on the removable disk
cartridge.
SECTORS Number
of sectors
in a track.
SECTOR SIZE Sector size, in bytes.
ALTERNATES Number of alternate
cylinders
or spare
sectors on a track.
The remainder of the Volume Label
(bytes
440 through 5 I I
) is reserved and must be set
to zero.
Disk Verification A-7
STRTICTURE OF A NAMEI) VOT,T]ME
4.4 INITIAL FILES
Any mechanism
that
formats iRMX II named
volumes
must
place seven
files,
with the
option of an eighth file, on the
volume
during the format
process.
These files are
File
fnode
fiìe
volume
label file
volume
free space map file
free fnodes map file
bad blocks file
root directory
space accounting file,
Optionally, duplicate volume label
file
File Name
R?VOLUMELABEL
R?SPACEMAP
R?FNODEMAP
R?BADBLOCKMAP
R?SAVE
The first of these
fiìes, the fnode file, contains information about
all of the files on îhe
volume.
The
general
structure of the fnode
file is discussed first. Then all of the files are
cliscussed in terms of their fnode entries
and their functions.
A.4.1 Fnode
File
A data structure called
a file descriptor
node
(fnode)
describes each
file in a named file
volume.
AII the fnodes
for the entire
volume
are
grouped
together in
a file called the
înode file. When the
I/O System accesses
a file on a named volume,
it examines the
iRMX II Volume
Label (described
in the previous section)
to determine the
location of
the
fnode file, ancl then
examines the appropriate
fnode to determine
the actual location
of the fiÌe.
When
a volume
is formatted,
the fnode file
contains seven
allocated fnodes and any
number of unallocated
fnodes. The
original number
of unallocated fnodes
depends on the
FILES parameter
of the FORMAT command. These
allocated fnodes
represent the
fnode file,
the
volume
label
file, the
volume
free space
map file, the
free fnodes map file,
the
bad blocks file, the
root directory, and
the space accounting
file. (Later
sections
of
this appendix
describe
these lìles.) The size of
the fnode fiÌe is determined
by the number
of fnodes
that it contains.
The number of
fnodes in the fnode
file also determines the
number
of files that
can be created on
the
volume.
The
number of files is set when
vou
format the st.orage
mcdium
A-8 Disk Verification
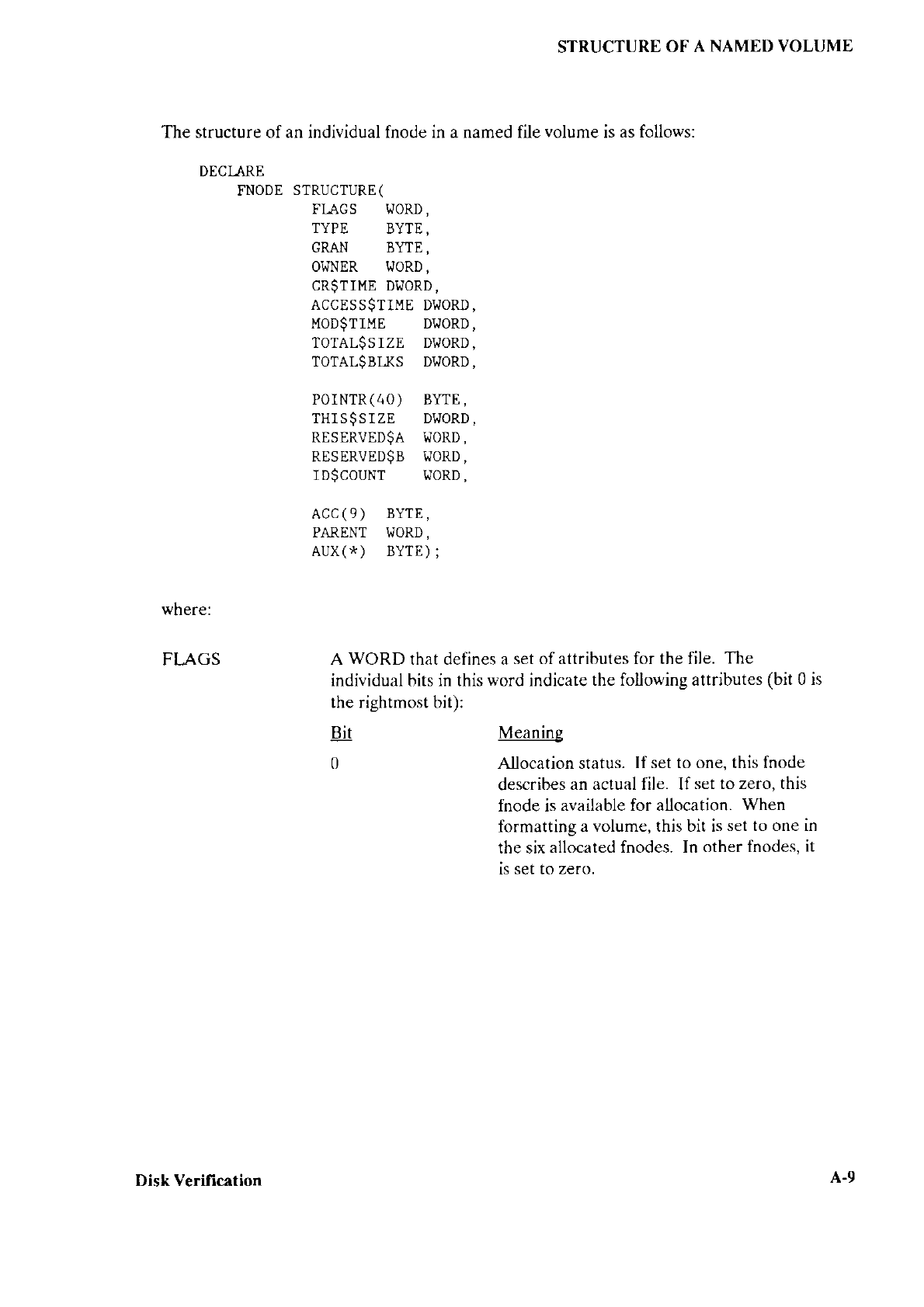
The structure of an individual fnode in a named file volume
is
as follows:
DECIARE
FNODE
STRUCTURE
(
FIAGS WORD,
TYPE BYTE,
GRAN BYTE,
OWNER \IORD,
CR$TIME DitORD,
ACCESS$TIME
DWORD,
MOD$TIME DWORD,
TOTAL$SIZE DWORD,
TOTAL$BLKS DI,/ORD,
POINTR(40) BYTE,
THIS$SIZE DLIORD,
RESERVED$A WORD,
RESERVED$B
WORD,
rD$couNT \,roRD,
ACC(9) BYTE,
PARENT WORD,
AUX(*) BYTE);
where:
STRUCTURE
OF A
NAMED VOLUME
A WORD
that defines a
set of attributes for the file. The
individual bits in this
word
indicate
the followins attributes
(bit
0 is
the rightmost bit):
Meaning
Alìocation status.
If set to one, this fnode
describes
an actual file. If set to zero, this
fnode is
available for allocation.
When
formatting
a volumc. this bit is
set to one in
the six
allocated fnodes. In other fnodes,
it
is set to
zero.
FT-AGS
Bit
0
Disk Verilication A-9
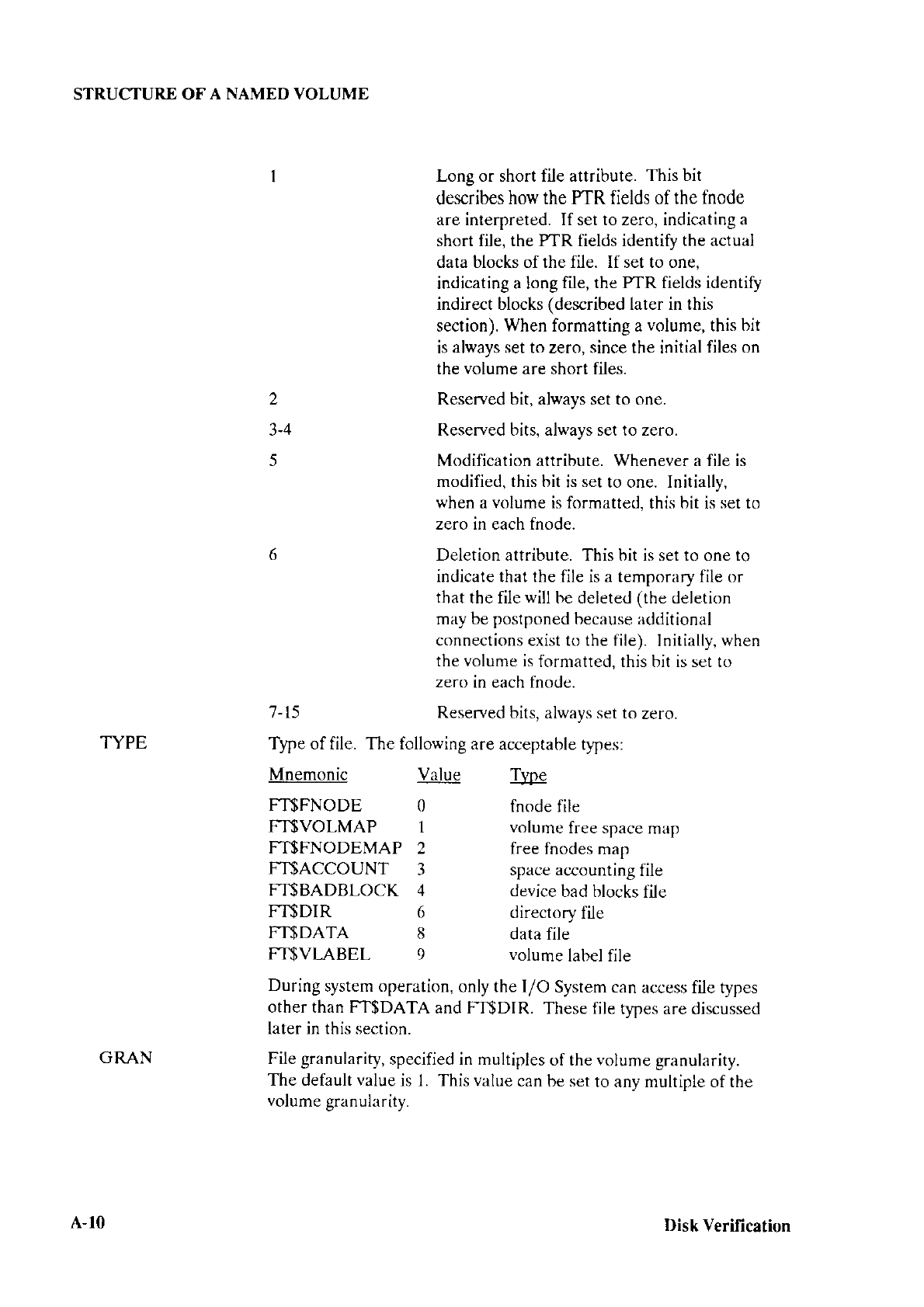
STRUCTURE OF
A NAMED VOLUME
7-r5
TYPE
Long or short file attribute.
This bit
describes
how the PTR fields of the
fnode
are interpreted. If set to zero, indicating a
short file, the PTR fields identi$
the actual
data blocks of the file. If set to one,
indicating a long
file, the PTR fields identify
indirect blocks (described later in this
section). When formatting a
volume,
this
bit
is
always set
to zero, since the initial
files on
the
volume
are short files.
Reserved bit, always set to one
Reserved bits, always set to zero.
Modification attribute. Whenever a file is
modified, this bit
is
set
to one. Initially,
when a volume is formatted,
this
bit
is
set
to
zero in each fnode.
Deletion attribute. This bit is set to one to
indicate that the file is a temporary file or
that
the file
will
be deleted (the deletion
may be
postponed
because additional
connections exist to the file). lnitially,
when
the
volumc
is
f ormatted, this
hit
is srr rtl
zero
in each fnode.
Reserved
bits, always set to
zero.
Type of file. The following
are acceptable
qpes:
Tlpe
fnode file
volume
free space
map
free
fnodes map
space accounting
file
device
bad blocks
fle
directory
file
data file
voÌume
label file
During
system operation,
only the
I/O System can
aocess file types
other than F|$DATA and F-|$DIR.
These file
tvnes are discussed
later in this section.
Fiìe granularity,
specifìed in multiples
of the volume
granularity.
The default value
is L This value
can be ser
to anv multiole of the
volume
sranularitv.
2
3-4
5
Mnemonic Value
FT$FNODE O
F-T$VOLMAP 1
FT$FNODEMAP 2
FI$ACCOUNT 3
FT$BADBLOCK 4
FT$DIR 6
F-T$DATA 8
F'T$VLI,BEL 9
GRAN
A-r0 Disk
Verilìcation
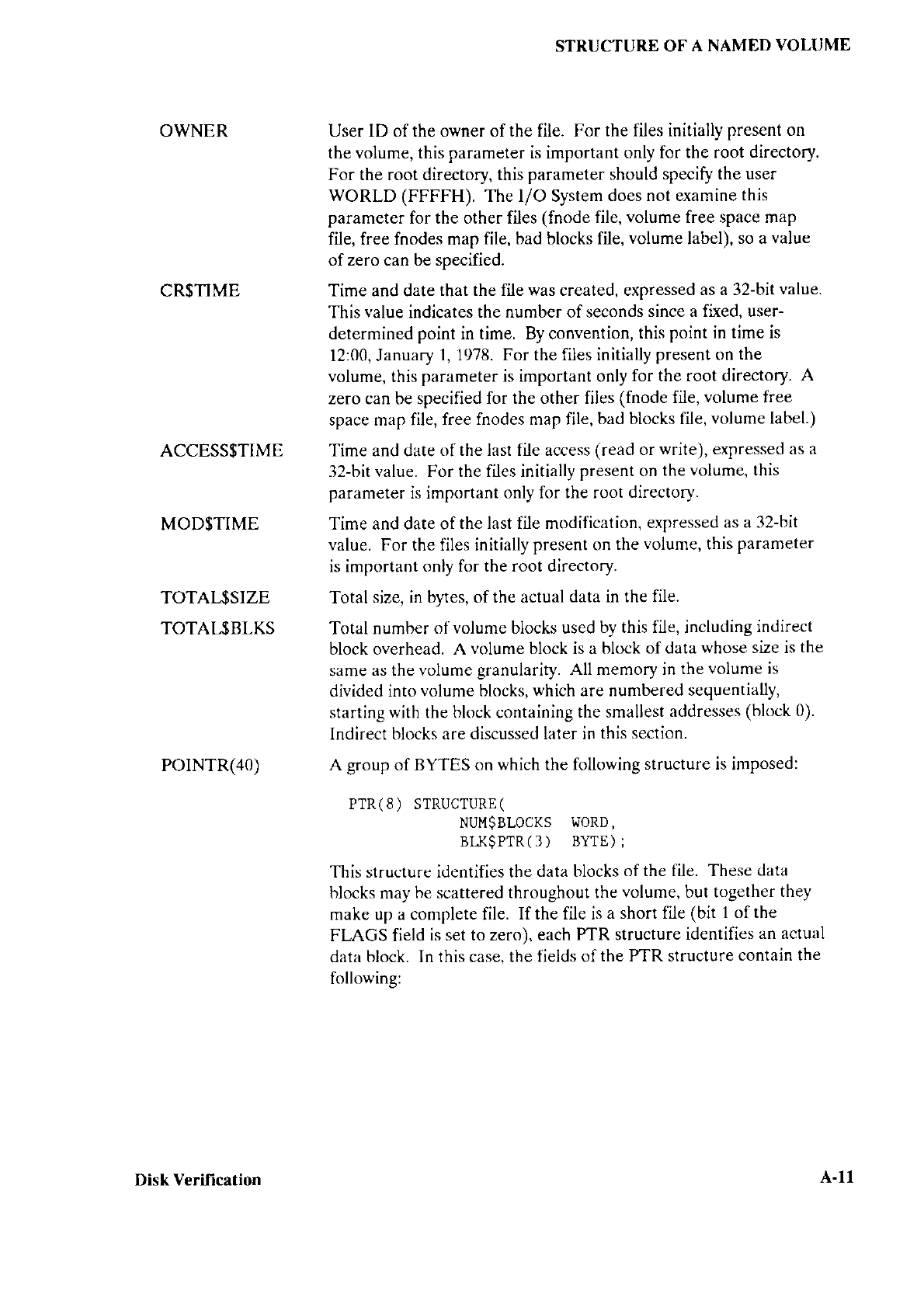
STRUCTURE OF
A NAMED
VOLUME
OWNER User lD of the owner of the file. For
the files initially
present
on
the volume, this parameter is important
only for the root
directory.
For the root directory, this
parameter should specify
the user
WORLD (FFFFH). The l/O System
does not examine
this
parameter
for the other files
(fnode file, volume free space map
file, free fnodes map
file, bad blocks file,
volume
label),
so a
value
of zero can be specified.
CR$TIME Time and date
that the file was created, expressed
as a 32-bit
value.
This
value
indicates
the number of seconds
since a fixed, user-
determined
point
in time. By convention,
this
point in time is
12:00, January
l, 1978. For the files initially
present
on
the
volume,
this
parameter is important only
for the root directory.
A
zero can be specified
for the other files
(fnode file,
volume
free
space map file,
free fnodes map file,
bad blocks file,
volume label.)
ACCESS$TIME Time and date
of the last fi-le access
(read
or
wrìte), expressed as a
32-bit value. For the files initially
present on
the volume, this
parameter
is important
only for the root
directory.
MOD$TIME Time and date of
the last file modification,
expressed
as a 32-bit
value.
For the files initiatly
present on
the
volume,
this
parameter
is important only
for the root directory.
TOTAL$SIZE Total
size, in bytes, of the actual
data in the file.
TOTAII$BLKS Total number
of volume blocks used
by this file, including
indirect
block overhead. A volume block is a block
of data
whose size is
the
same
as
the
volume
granularity. All memory in
the
volume is
divided into
volume blocks, which are numbered
sequentially,
starting
with
the block containing
the smallest
addresses (block
0).
Indirect blocks are
discussed later in
this section.
POINTR(4O) A group of BYTES on
which the following
structure is imposed:
PTR(8) STRUCTURE
(
NUMSBLOCKS
WORD
BLK$PTR(3)
BYTE);
This structure identifies the
data blocks
of the fììe. These
data
blocks may
be
scattered
throughout the
volume, but together
they
make up a complete file. Ifthe file is
a short file
(bit 1 ofthe
FTAGS field
is set to zero),
each PTR structure
identifies
an actual
data bÌock. In this case. the
fields of
the PTR structure
contain the
followins:
Disk Verification A-ll
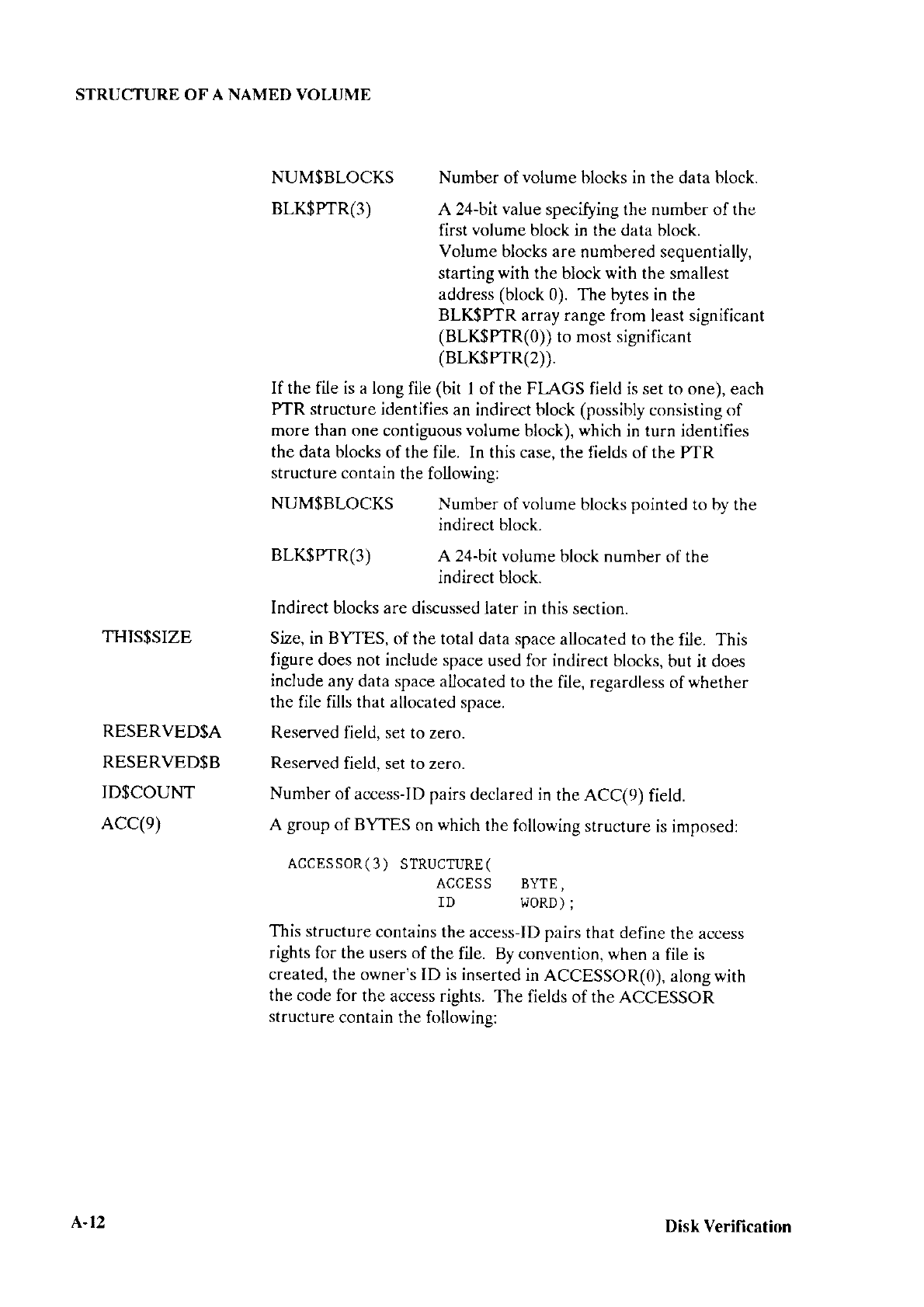
STRUCTURE OF A
NAMED
VOLUME
THIS$SIZE
RESERVED$A
RESERVED$B
ID$COUNT
ACC(e)
NUM$BLOCKS Number of
volume
blocks in the data block.
BLK$PrR(3) A 24-bit
value
specifying the number of the
first
volume
block in the data block.
Volume blocks are
numbered sequentially,
starting with the block with the smallest
address
(block
0). The bytes in the
BLK$trtR array range
from least
significant
(BLK$mR(0)) to most significant
(BLK$PrR(2)).
If the file is a long
file
(bit I of the FIAGS field is set
to
one),
each
PTR structure identifies
an indirect block (possibly consisting of
more than one
contiguous
volume
block), which
in turn identifies
the data blocks
of the file. In this case. the fields
of the PTR
structure conta in the
following:
NUM$BLOCKS Number of volume
blocks
pointed
to by
the
indirect block.
BLK$FrR(3) A 24-bit volume
block number
of the
indirect block.
Indirect blocks are discussed
later in this
section.
Size, in BYTES, of the total data space
allocated
to the file. This
figure does not include space
used for indirect
blocks,
but it does
include
any data space
allocated to the
file, regardless
of whether
the file fills that allocated space.
Reserved field, set
to zero.
Reserved
field. set to zero.
Number
of access-ID pairs
declared in the ACC(9) field.
A group
of BYTES on
which
the
following structure
is imposed:
ACCESSOR(3)
STRUCTURE(
ACCESS BYTE,
ID WORD):
This structure
contains the
access-ID pairs
that define
the access
rights
for the users of the file. By convention,
when
a file is
created, the owner's ID is inserted
in ACCESSOR(O),
along
with
the code for the access rights. The fields
of the ACCESSOR
st ructu
rc conta in the folkrwing.
A-12 Disk Verifìcation
STRUCTURE
OF
A NAMED
VOLUME
ACCESS Encoded
access rights for the file. The
settings of the individual
bits in this field
grant (if set to one)
or deny (if set to zero)
permission for
the corresponding operation.
Bit
0 is the rightmost
bit.
Data File Directory
Bit Oneration Onerat ion
0 delete delete
I read list
2 append add entry
3 update change entry
4-7 reserved
(must
be 0)
PARENT
ID ID of the user
who gains the corresponding
access
perm ission.
Fnode number
of directory file
that lists this
file. For files initially
present on the
volume,
this
parameter is
important only fbr
the
root
directory. For the
root directory, this
parameter
should
specify the
number of the root
directory's
own fnode. For
other
files
(fnode
file,
volume free space
map file, free
fnodes map file,
bad blocks
file, volume label) the
t/O System
<loes not examine
this
field.
Auxiliary BYTES associated
with
the
file. The named
lile driver
does not interpret
this field, but the
user can access
it by making
GET$EXTENSION$DATA
and SET$EXTENSION$DATA
system calls.
The size of this field
is determined
by the size of the
fnode, specified
in the iRMX II Volume Label. If you use the
Human lnterface FORMAT command
or create
your own utility
to
format a
volume, you can make this field
as large as
you wish;
however,
a larger AUX field implies
slower file
access.
AUX(-)
Certain fnodes
designate special files
that appear on the
volume. The following sections
discuss
these fnodes and the associated
files.
Disk Verincation A-13
STRUCTURE
OF A NAMED
VOLUME
4.4.2 Fnode
0 (Fnode
File)
The first fnode structure
in the fnode file
describes
the
fnode file itself. This file contains
all
the fnode structures for the entire volume.
It must
reside
in contisuous locations in the
volume.
The fields of
fnode 0 must be set as follows:
. The bits in the FIAGS field
are set to the following (bir 0 is the rightmost bit):
Bit Value Descrintion
0 1 Allocated file
1 0 Short file
2 1. Primary
fnode
3-4 0 Reserved bits
5 0 Initial
status is unmodified
6 0 File
will
not be deleted
7-15 0 Reserved bits
. The TYPE field
is set to FT$FNODE.
. The
GRAN field
is set to l.
r The OWNER
field is set to
the ID of the
user
who
formatted
it.
. The
CR$TIME,
ACCESS$TIME,
and MOD$TIME
fields
are set to the
time the
system
was
formatted.
. Since the
iRMX II Volume
Label specifies
the
size of an
individual
fnode structure
and the number
of
fnodes in the
fnode file, the value
specified
in the TOTAL$SIZE
field of
fnode 0
must equal the product
of the values
in the FNODE$SIZE
and
MAX$FNODE
fields
of the iRMX II Volume
Label.
. The TOTAL$BLOCKS
field specifies
enough volume
blocks
to accounr
for the
memory
listed
in the TOTAI-I$SIZE
field. The product
of
the
value
in the
TOTAL$BLOCKS
field and
the
volume
granularity
equals the value
of the
THIS$SIZE
field, since
the fnode
file is a
short file.
. Since
the fnode
file must
reside in
contiguous
locations
in the volume,
only one
pTR
structure
describes
the
location
of the file. The
value
in the NUM$BLoGKS
field of
that
PTR structure
equals the value
in the
TOTALSBLOCKS
field. The BLK$pTR
field
indicates
the number
of the
first block of
the fnode
file.
. The ID$COUNT
field is set to
one.
A-14 Disk Verification
STRUCTURE
OF A
NAMED VOLUME
A.4.3 Fnode 1
(Volume
Free
Space
Map
File)
The second fnode, fnode 1, describes the
volume
free
space map file. The TYPE field for
fnode I is set to FT$VOLMAP to designate the file as
such.
The
volume free space map file keeps track of all the space on the
volume. It is a bit map
of the volume, in
which
each bit represents
one volume block
(a
block of
space whose size
is the same as the
volume granularity). If a bit in the map is set to one,
the corresponding
volume block is free to be allocated
to any file. If a bit in the map is
set to zero, the
corresponding
volume
block is
already allocated to a file. The bits
of the map correspond
to
volume blocks such that bit n of byte m
represents volume block
(8
. m) + n. The
bits
in the remaining
space
allocated
to the map file
(those that do not correspond
to actual
blocks of memory) must be
set to zero.
When the
volume
is formatted,
the
volume
free space map
file indicates that
the first 3328
bytes of the
volume (the label and bootstrap information)
plus any files initially
placed on
the
volume (fnode file, volume free space map file,
free fnodes map
file, bad blocks file)
are allocated.
A.4.4 Fnode 2 (Free
Fnodes Map File)
The third fnode, fnode 2,
describes the free fnodes map file. The TYPE field of fnode 2 is
set to FI$FNODEMAP to designate the lile as such.
The free fnodes map file keeps
track of all the fnodes in the fnodes
file. It is
a bit map in
which
each bit
represents an fnode. If a bit in
the map is set to one,
the corresponding
fnode is not
in use and does not represent an actual
file. If a bit in
the map is set
to zero,
the corresponding
fnode already describes an existing file. The bits in the
map
correspond
to fnodes such that bit n of byte m represents fnode
number
(8
* m) + n. The
bits in the remaining
space allocated to the map file (those
that do not correspond
to
actual fnode structures) must be set to zero.
When
the
volume
is formatted, the free fnodes
map file indicates
that fnodes 0, 1, 2, 3,4,
5, and
6 are in use. If other files are initially
placed
on
the
volume,
the free
fnodes map
file must be set to indicate this as
well.
A.4.5 Fnode 3 (Accounting
File)
When
a
volume
is
formatted, fnode 3 is set up representing
a file
of type FT$ACCOUNT
The fnode is
set up as allocated, and of the indicated
type, but it does
not assign any
actual snace for
the file.
Disk Verification A-15
STRUCTURE
OFA NAMED VOLUME
A.4.6 Fnode 4 (Bad
Blocks Map File)
The fifth fnode, fnode 4, contains a map of all the bad blocks on the
volume.
The TYPE
field of fnode
4 is
set
to FfiBADBLOCK to indicate this.
The bad block map file keeps track of all the bad blocks on the volume. It is a bit map of
the volume,
in
which
each bit represents one
volume
block
(a
block of space
whose
size is
the same as
the
volume granularity).
If a bit in the map is set to zero, the corresponding
volume
block has no bad blocks and may
be allocated to any file. If a bit in the map is set
to
one, the corresponding
volume
block is bad. If a block
is marked "bad", it must also be
marked allocated in the volume free space file. The bits of the map correspond to
volume
blocks such
that bit n of byte m represenîs volume block (8
* m) + n.
A.4.7 Fnode
5 (Volume
Label File)
This fnode contains
the first 3328 bytes of any volume.
The inlbrmation in this file
defines the volume
as a
whole.
The TYPE field of this
fnode is set to FTSVIABEL. You
cannot write
to this fnode.
4.4.8 Fnode
6 (Root
Directory)
The root directory
is a special directory
file. It is the root of the named
file hierarchy for
the volume.
The iRMX II Volume
Label specifies the fnode
number of the root directory.
The root directory
is its own parent.
That is, the PA RE NT field of its fnode specifies its
own
fnode number.
The root
directory (and
all directory files) associates
file names with
fnode numbers. It
consists of a
number of entries
that have the followins
structure:
DECI^ARE
DIR$ENTRY STRUCTURE
(
FNODE WORD,
coMPoNENT(14)
BYTE);
where:
FNODE Fnode number
of a file listed in the directory.
COMPONENT(
14) A string
of ASCII characters
that is the
final component of the
path
name identifying
the file. This
string is left
justified
and
null
padded
to 14 characters.
When
a file
is deleted, its
fnode number in the
directorv entry
is ser ro zero.
A-r6 Disk Verification
STRUCTURE OFA NAMED VOLUME
4.4.9 Fnode 7 (R?SAVE)
The R?SAVE is a
file
which
may
be optionalìy created by
the RESERVE option of the
FORMAT command. The
FORMAT command
creates a file named R?SAVE, which
contains
the duplicate volume
label, in the
innermost track of the
volume.
A copy of the
iRMX II volume
label
is placed in
the front (that is, the physical end)
of the file and an
fnode is allocated for R?SAVE in the
fnode file. (The
fnode for the R?SAVE
file is
allocated
out of the fnodes
reserved through the
FILES
parameter
of the FORMAT
command.)
The FORMAT command
creates a backup
of the fnode file in its initialized state.
R?SAVE is not subsequently
updated as files are written
to or deleted from the
volume.
Therefore, you will
have to
use the BACKUPFNODES
Disk
Verification
Utility
command
or the BACKUP option
of the Human Interface SHUTDOV/N
command to
back up the fnode
file at regular intervals.
4.4.10
Other Fnodes
When
formatting a volume,
no other fnodes
in the fnode file represent actual files. The
remaining fnodes must
have bit zero
(allocation
status) set to zero.
4.5 LONG AND
SHORT FILES
A file on a volume is not
necessariìy one contiguous string of bytes. In
many cases,
it
consists of several
contiguous blocks of data scattered
throughout the
volume.
The fnode
for the file indicates the locations and
sizes of these blocks in one of two ways, as short
files
or as long files.
4.5.1
Short Files
lf the file consists of eight or
less distinct blocks of data, its
fnode
can specify
it as
a
short
file. The fnode for a short file has
bit 1 of the FLAGS field ser ro zero. This indicates to
the I/O Systern that
the PTR structures of the fnode identify the actual data
blocks
that
make up the file. Figure A-2 illustrates an
fnode for a short file. Decimal numbers are
used
in the figure for clarity.
Disk Verilication A.-17
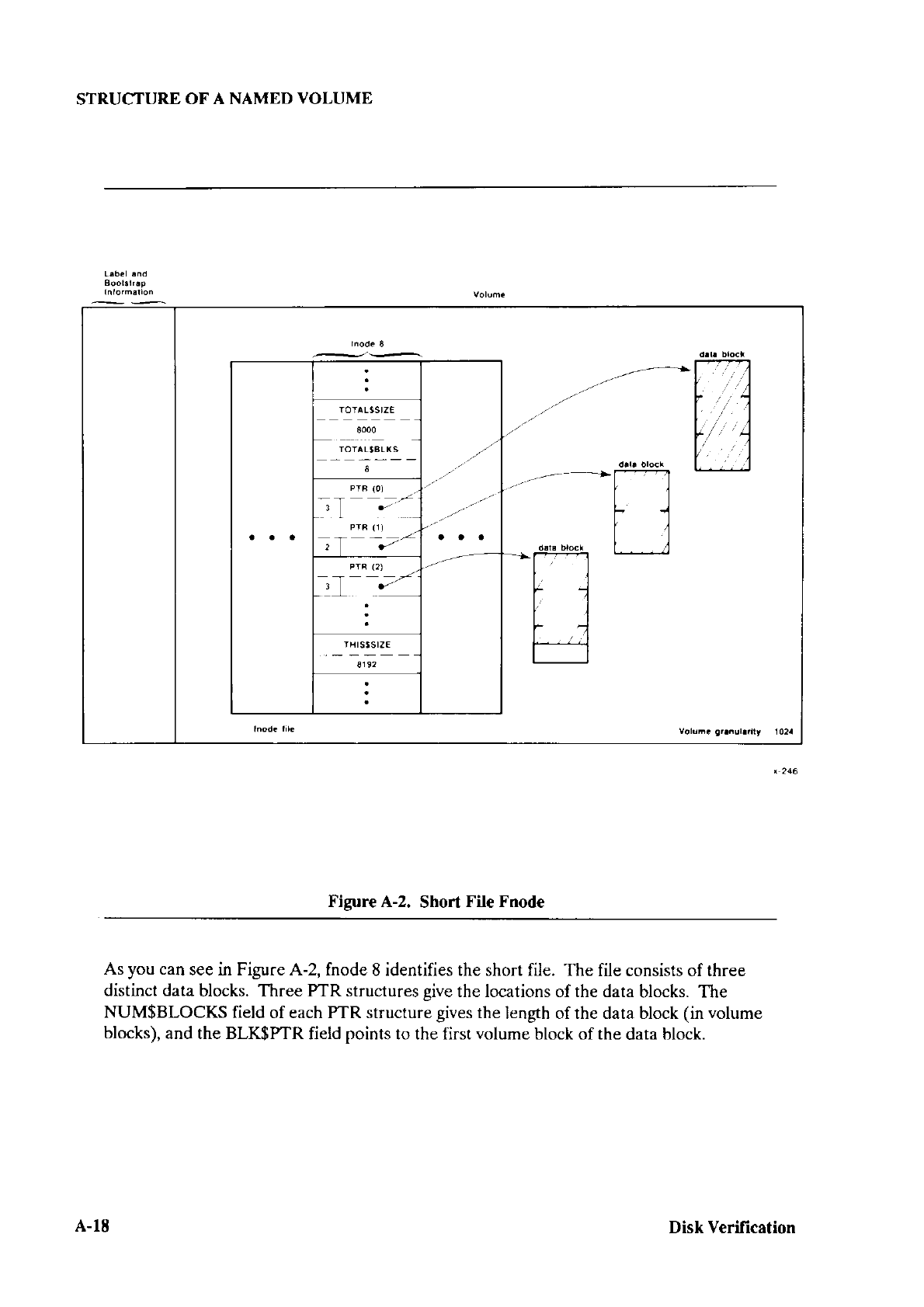
STRUCTURE
OF A NAMED VOLUME
tofaLlstzÉ
-l--l
t1
d!,!b,oc\t]
l-t
lt
IJ
3
P-rR (0)
-T ;-
LPrR
(rt
f--
:
'fxrsisrzE
Figure A-2. Shof File Fnode
As you can
see in Figure A-2, fnode 8 identifies the short file. The file consists of three
distinct data
blocks. Three PTR structures give
the locations of the data
blocks. The
NUM$BLOCKS field of each PTR structure gives the
length of the data block
(in volume
blocks),
and the BLK$PTR field points
to the first volume
block of the
data block.
A-18 Disk Verification
STRUCTURE
OF A NAMED VOLUME
The
other fields shown in Figure
A-2 include TOTAII|BLKS, THIS$SIZE, and
TOTAUSIZE. The TOTAT$BLKS
field specifies the number of volume blocks
allocated
to the
file,
which
in this case
is eight. This equals the sum of NUM$BLOCKS values (3 +
2 + 3), since
short files use all
allocated space as data space.
The THIS$SIZE field specifies the number
of bytes of data space allocated to the file.
This is the
sum of the NUM$BLOCKS values
(3 + 2 + 3) multiolied bv
the
volume
granularity (1024)
and equals 8192.
The TOTAI-i|SIZE field specifies the number of byes of data
space
that the file occupies
(designated
in Figure
A-2 by the shaded area).
As
you
can see, the file does not occupy
all the space allocated for it, so
the TOTAL|$SIZE
value
(tì000) is not as large as the
THIS$SIZE
value.
4.5.2 Long Files
where:
NBLOCKS
BLK$FTfR
If the
file consists of more than eight
distinct blocks of data, its fnode must specify it as a
long file. The fnode for a
long file has bit 1 of the FTAGS fieltl set to one. This tells the
I/O System that the PTR structures
of the fnode identify indirect blocks. The indirect
blocks identiîy the actual
data blocks that make up the file.
Each indirect block contains
a number of indirect pointers, which
are structures
similar to
the PTR structures.
However, an indirect block
can contain more
than
eight structures
and thus can point to
more than eight data blocks. In fact,
an indirect block
can consist of
more than one volume
block; however, all volume blocks of an indirect block must be
contiguous.
The structure of each indirect pointer
is as follows:
DECI.ARE
IND$PTR STRUCTURE
(
NBLOCKS BYTE,
BLK$PTR BLOCK$NUM);
Number of volume
blocks in the data block.
A 24-bit
volume
block number of the first
volume
block in the data
block. Volume
blocks are numbered sequentially throughout the
volume,
starting
with
the block
with
the smalìest address
(block
0).
The Operating System determines
how many indirect
pointers there are
in
an indirect
block by comparing the NBLOCKS fields
of the
indirect pointers
with
the
NUM$BLOCKS
field of
the
fnode. It assumes that the indirect
block contains as many
pointers
as necessary for the sum of the NBLOCKS fields to equal the NUM$BLOCKS
field.
Disk Verification A-19
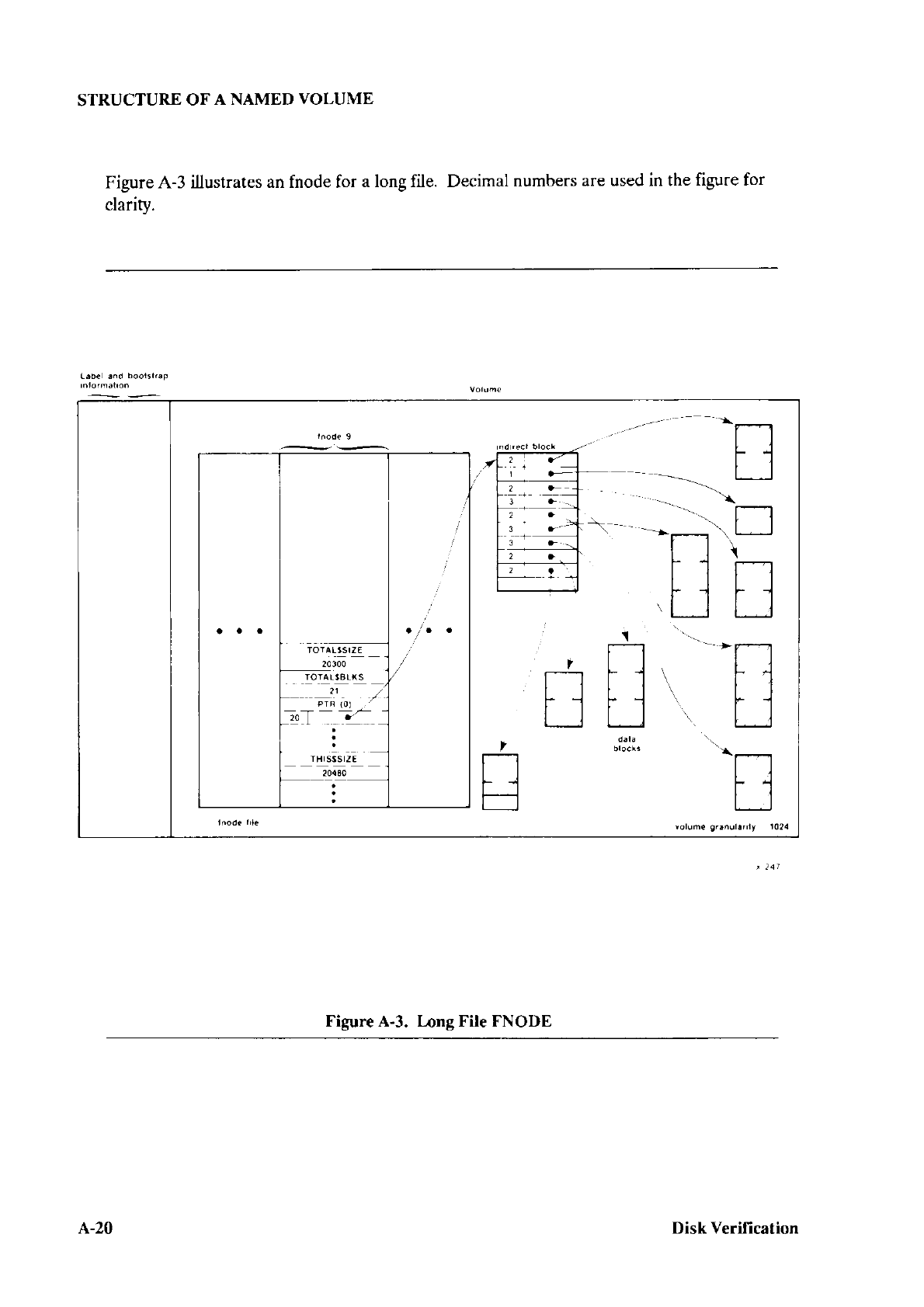
STRUCTURE OF A NAMED VOLUME
Figure A-3 illustrates
an fnode for a long file. Decimal
numbers
are used in the
figure for
clarity.
Figure A-3. I-ong File FNODE
t
-.=>
F'1
LJ
i\[__l
tt
r.1
tt
rolume 9'!^ul!"ir i0?4
I
, l-l
r-r tl
L__l L_l
t '[",;i.
t-,1
loraLtsrzE
roraLSaLxs
21
pri ror
. :'
zol
rHrsssrzE
41ry
A-20 Disk Verification
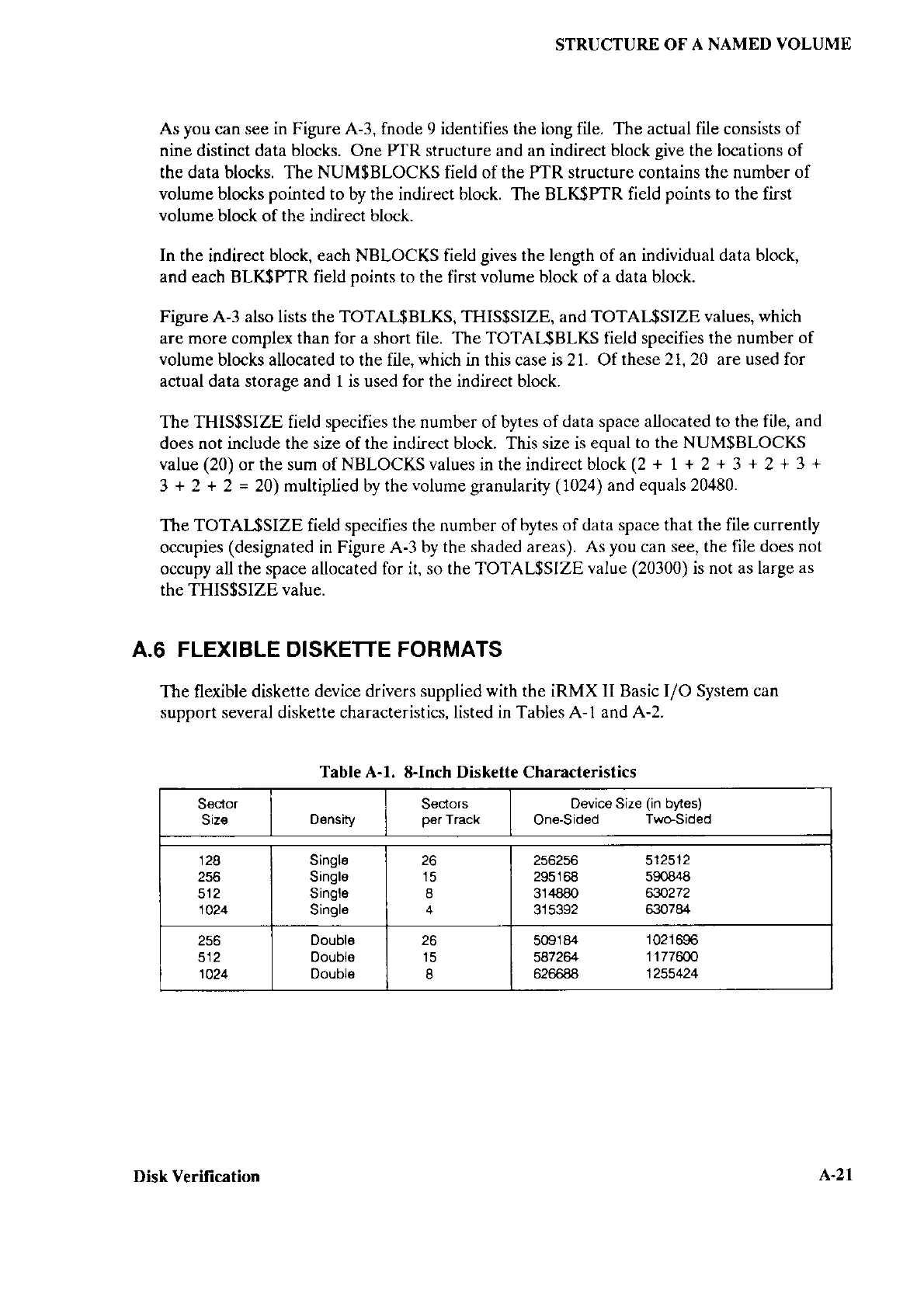
STRUCTURE
OF A NAMED VOLUME
As you can see in Figure A-3, fnode 9 identifies the long file. The actual file consists of
nine distinct data blocks. One PTR structure and an indirect block
give
the locations of
the data blocks. The NUM$BLOCKS field of the PTR structure contains the number
of
volume blocks pointed
to by the indirect block. The BLK$PTR field points to the first
volume
block of the indirect block.
In the indirect
block, each
NBLOCKS field gives the length of an individual data block,
and
each BLK$PTR
field points to
the first
volume block of a data block.
Figure A-3 also lists the TOTAI-||BLKS, THIS$SIZE, and TOTAL$SIZE values,
which
are more complex than for a short file. The TOTAT$BLKS field specifies the number
of
volume
blocks allocated to the file,
which
in this case is 21. Of these 21, 20 are used for
actual data storage and 1 is used for the indirect block.
The THIS$SIZE field specifies the number of bytes
of data space allocated to the file,
and
does not include the size of the indirect block. This size is equal
to the NUM$BLOCKS
value
(20)
or the sum of NBLOCKS
values
in the indirect
block
(2 + | + 2 + 3 + 2 + 3 +
3 + 2 + 2 = 20) multiplied by the
volume granularity (1024) and equals 20480.
The TOTATJSIZE field specifies the number of bytes of data space that the file currently
occupies (designated in Figure A-3 by
the shaded areas). As you can see, the file
does not
occupy all the space allocated for it, so the TOTALJSIZE
value (20300) is not as large
as
the THIS$SIZE value.
4.6 FLEXIBLE DISKETTE FORMATS
The flexible diskette
device drivers supplied with the iRMX II Basic I/O System
can
support several diskette characteristics, listed in Tables A-1 and A-2.
Table A-1. 8-Inch Diskette Characteristics
S€ctor
Siz€ D€nsity Sectors
per
Track Devic€ Size
(in
bytes)
On€-Sided Two-Sid€d
128
256
5'12
1024
Single
Single
Single
Singl€
15
I
256256 512512
295168 s90848
314880 6n272
315392 630784
512
1024
Doubl6
Doubl€
Double
26
15
I
5@184 '10216€6
587264 ',l ',177600
626688 1255424
Disk Verilication A-21
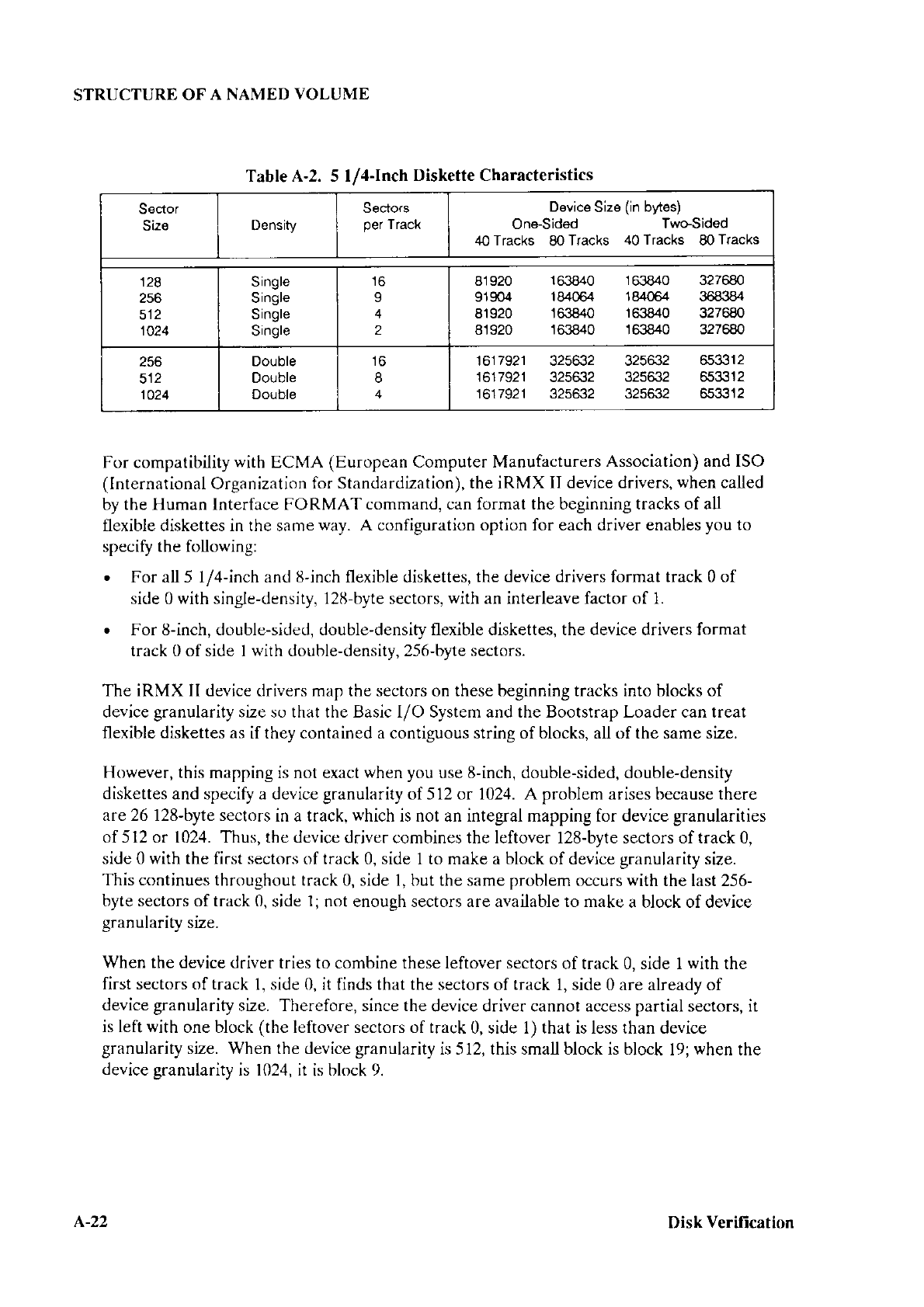
STRUCTURE OF
A NAMED
VOLUME
For compatibility
with
ECMA (European Computer Manufacturers
Association) and ISO
(fnternational
Organization
for Standardization), the iRMX II device drivers,
when
called
by the Human Interface FORMAT
command, can format the beginning tracks of all
llexible diskettes in the same
way. A configuration option for each driver enables
you to
specify the following:
. For all 5 l/4-inch and 8-inch flexible diskettes,
the device drivers format track 0 of
side 0
with
single-density,
12fì-byte sectors,
with
an interleave factor of 1.
. For 8-inch, double-sided, double-density flexible diskettes, the device drivers format
track 0 of side I with
double-density, 256-byte
sectors.
The iRMX II device clrivers map the sectors on these beginning tracks into blocks of
device
granularity
size so that the Basic I/O System and the Bootstrap Loader can treat
ilexible diskettes as
if they contained a contiguous string of blocks, all of the same size.
However, this
mapping is not exact
when you
use 8-inch, double-sided, double-density
diskettes
and specify a device granularity of 512 or 1024. A problem arises
because
there
are 26 128-byte sectors
in a track,
which
is not an integral mapping for device granularities
of 512 or 1024. Thus, the device
driver combines the leftover 128-byte sectors of track 0,
side 0 with the first sectors
of track 0, side 1 to make a block of device granularity size.
This continues
throughout track 0, side l, but the same
problem
occurs with
the last 256-
byte sectors of track 0,
side
1;
not enough sectors are available to make
a block of device
granularity
size.
When the
device driver tries to combine these leftover sectors
of track 0, side 1
with
the
first sectors of
track l, side 0, it finds that the sectors
of
track
1, side 0 are already of
device granularity
size. Therefore, since the
device driver cannot access
partial
sectors, it
is left with
one block
(the
leltover sectors of track
0, side l) that is less than device
granularity
size. When the device granularity
is 512, this small block is block
l9;
when
the
device granularity
is 1024, it is
block 9.
Table A-2. 5 l/4-Inch Diskette Characteristics
Soctor
Size Density Seclors
per
Track
Device
Size
(in
by,tes)
One-Sided Two-Sided
40 Tracks 80 Tracks 40 Tracks 80 Tracks
128
2s6
1024
Single
Single
S
ingle
Single
I
2
81920 163840 163840 327680
91904 1840Ar 1840&1 3683&1
81920 163840 163840 3276€0
81920 163840 163840 3276É0
256
512
1024
Double
Double
Double
to
I
4
1617921 325632 325632 &53312
161792't 325632 325632 653312
1617921 325632 325632 653312
A-22 Disk Verification
STRUCTURE OF A NAMED VOLUME
If nothing is
done to exclude this smaller-than-normal
block from use, the device driver
will treat this block as a normal block, assuming it is of device
granularity
size. Thus, if
you try to write information to that
block, the driver will attempt to write an entire device
granularity block
of information into a block
that is much smaller, thereby losing
data.
To prevent
this situation, the Human Interface FORMAT command automatically
declares this smaller-than-normal
block as allocated
in the
volume
free space map when it
formats
the
volume. This prevents
the Basic I/O System from ever writing information
into this block. If you
wite your
own formatting utility, you
should also declare this block
as allocated.
Disk Verificotion L-23

< command 2-6, 29
<CR> command 2-6
> command
2-6,
28
5 ll4-inch diskette characteristics
A-22
8-inch diskette characteristics
A-21
A
Aborting commands 2-4
Add command 2-46
Address command
2-46
Allocate command 2-5, 8
Argument error 2-5
Automatic device recogrition A-4, 5
B
Backing up the
volume
label 3-6
Backupfnodes command 2-5, I I
Bad blocks 2-8,44,3-2
Bad blocks map file 2-9, 59, 60, 65, 66, 69,72,
, A-8,
Bad track information, displaying 1-3
BF command 2-5,
1 I
Block allocation
2-8
Block command 2-47
Block I/O error 2-4
Bootstrap Loader blocks A-l
c
Checksums 1-4, 2-31, 36, 65
Command options
All 1-5
Disk 1-3
Fix 1-4
Getbadtrackinfo
1-3
List 1-5
1ó
Disk Verification Indcx-l
INDEX
Command options
(cont.)
Named 1-4
Namedl 1-4
Named2 l-4
Physical 1-5
Veriff l-3
Commands
< 2-6,29
<cR> 2-ó
> 2-6,28
Aborting 2-4
Allocate 2-5
Backupfnodes
2-5
BF 2-5, 11
D 2-6, 16
DB 2-ó, 16
DD 2-6,20
DF 2-6,23
Disk 2-6, 13
Displaybyte 2-6, 16
Displaydirectory
2-6, 20
Displafnode 2-6, 23
Displaynextblock
2-ó, 28
Displaypreviousblock
2-6, 29
Displaysavefnode
2-6, 27
Displayword
2-6, 18
DNB 2-ó,28
DPB 2-6,29
DSF 2.ó
DSF command
2-27
DW 2-6, 18
E 2-6,34
Editfnode
2-6,30
Editsavefnode
2-6,33
EF 2-6,30
Error messages
2-4
ESF
2-6,33
Er/.J.r
2-6,34
Fíx 2-6,35
Free
2-6,38
GB 2-6,4r
Getbadtrackinfo
2-6, 41
H 2-7,43
Index-2 Disk Verification
Commands
(cont.)
Help 2-7,43
LBB 2-7,44
Listbadblocks
2-7, 44
Miscellaneous 2-7,
46
Names,
entering 2-2
Parameters
2-3
Q
2-7,s2
Quit 2-'7,
52
R 2-7,53
Radices 2-3
Read 2-7,53
Restorefnode
2-7,54
Restorevolumelabel
2-7, 57
RF 2-7,54
P.VL 2-7,57
s 2-7,61
Save 2-7,59
sB 2-7,61
Substitutebyte
2-7,61
Substituteword
2-7,64
Summary
2-5
sw 2-7,64
Syntax
2-1
v 2-7,65
Yerlîy 2-7,65
w 2-7,74
Write 2-7,74
Conventions
iv
D
D command 2-6,
1ó
DB command 2-6, 16
DD command
2-ó, 20
Dec command 2-48
DF command
2-6, 23
Directing output 1-2
Directories,
displaying 2-20
Disk command
2-6, 13
Displaybyte
command 2-6,
16
Displaydirectory
command 2-6,
20
Displayfnode command 2-6, 23
Displaying R?SAVE 3- 1
1
Displaynextblock
command 2-6, 28
INDEX
Disk VerilÍcation Index-3
INDEX
Displayprevious block command 2-29
Displaypreviousblock command 2-6
Displaysavefnod
e command 2-6,27
Displayword command 2-6,
18
Div command 2-48
DNB command 2-6, 28
DPB command
2-6, 29
DSF command 2-6, 27
Duplicate volume
label file 3-2,
A-8,
17
DW command 2-ó, 18
E
E command 2-6, 34
Editfnode
command 2-6, 30
Editsavefnode command 2-6, 33
EF command
2-6, 30
Error Messages 1-6, 2-4
Add 2-51
Address
2-51
Allocate 2-10
Backupfnodes
2-12
BF 2-12
Block
2-51
D 2-77
DB 2-17
DD 2-21
Den 2-51
DF 2-26
Displaybyte
2-17
Displaydirectory
2-21
Displayfnode
2-26
Displaysavefnode
2-27
Div 2-51
DSF 2.2'7
Editfnode
2-31
Editsavefnode
2-33
EF 2-3r
ESF 2-33
Free 2-39
GB 2-42
Getbadtrackinfo
2-42
Hex 2-51
Index-4 Disk Verification
Error Messages
(cont.)
LBB 2.45
Listbadblocks 2-45
Miscellaneous commands
2-51
Mod 2-51
Mul 2-51
R 2-53
Read 2-53
Restorefnode 2-55
Restorevolumelabel
2-58
RF 2-55
RvL 2-58
s 2-62
Save 2-ó0
sB 2-62
Sub 2-51
Substitutebyte 2-62
v 2-69
VeriS 2-69
w 2-75
Write 2-75
ESF command 2-6, 33
Examples
Add 2-51
Address 2-51
Backupfnodes 2- 12
BF 2-12
Block 2-51
D 2-17
DB 2-17
DD 2-22
Dec 2-51
DF 2-26
Disk 2-15
Displaybyte 2-17
Displaydirectory 2-22
Displayfnode
2-26
Displaysavefnode 3- 12
Displaying R?SAVE 3-12
Displayvord 2- 18
Div
2-51
DSF 3-12
DW 2-18
INDEX
Disk Verification Index-5
INDEX
Examples (cont.)
Editfnode
2-32
EF 2-32
H 2-43
Help 2-43
Hex 2-51
LBB 2.44
Listbadblocks
2-44
Miscellaneous
commands
2-51
Mod 2-51
Mul 2-51
Restorefnode
2-56
Restorevolumelabel
2-58
Restoring
fnodes 3-4, 8
Restoring the volume
label 3- 11
RF 2-56
RvL 2-58,3-11
s 2-63
Save
2-60
sB 2-63
Sub
2-51
Substitute word 2-64
Subsritutebyte
2-63
sw 2-64
v 2-73
Yertfy 2-73
w 2-75
Write
2-75
Exit command 2-6, 34
F
FiÌe descriptor
node (fnode) A-8
File sizes A-19,21
Fix command 2-ó, 35
Fixing
bad checksums
2-36
Flexible
diskette
formats A-21
Flexible
diskette
track
0 abnormalities
A-22
Fnode
Access
ID A-12
Altering 2-30
Auxiliary
byes A-13
Backing
up on a
volume 3-5
Index-ó Disk Verilication
Fnode
(cont.)
Creation time A-11
data block identification
A-11
Displaying 2-23
Flags 2-9, A-9
Freeing 2-38
Granularity A- 10
last file access A- 11
last modification A-11
Overview A-8
Owner A-11
Parent 2-65, A-13
Restoring 2-54,3-1,7
size
(byes) actual data A- 1 1
size (byes) data space
A-12
Structure A-9
Type A-10
Volume
blocks A-11
Fnode allocation 2-8
Fnode file 3-1, 2, A-14
Fnode file/space
map
file inconsistent 2-5
Free command 2-6, 38
Free fnodes map file 2-9, 39, 59, ó0, 66, 69,72,3-2, A-15
Free space A-15
Free space map frle 2-72
G
GB command
2-6,
41
Getbadtrackinfo
command 2-6, 41
H
H command 2-7,
43
Help
command
2-7, 43
Hex command 2-49
I
Illegal command error 2-4
Initial files A-8
Invocation 1-2
Error messages 1-6
Example 1-5
Interactive 1-6
Single command mode I
-5
INDEX
Disk Verlfication Index-7
INDEX
IRMXo II volume labels A-4
ISO
volume
label A-3
L
LBB command 2-7, 44
Listbadblocks cornmand 2-7, 44
Location of files 3-1, A-18, 19
l,ong files 2-65,3-1, A-'19
M
Manual overview iii
Marking bad blocks 2-8
Miscellaneous
commands 2-7, 46
Add 2-46
Address
2-46
Block 2-47
Dec 2-48
Div 2-48
}lex 2-49
Mod 2-49
Mul 2-50
Sub
2-50
Mod command
2- 49
Modes of operation
1-1, 2-1
Mul command
2-50
N
Named volume
structure
A-1
Named volumes 1-4
Not a named
disk error 2-5
o
Operational
modes
1-1, 2-1
Orphan fnodes
l-4,2-36
P
Parameters
2-3
Product
overview iii, 1-1
Index-8 Disk Verification
o
Q command 2-7, 52
Quit
command 2-7, 52
R
R command 2-7, 53
R?SAVE 2-t7, 14, 27, 33, 54, 55, 57,3-2,5, 11, A-17
Radices 2-3
Read command 2-7, 53
Reader kvel iii
Reading
volume
blocks 2-53
Restorefnode command 2-7, 54
Restorevolumelabel
command
2-7,
57
Restoring fnodes 3-1
Restoring the
volume
label 3-10
RF command 2-7, 54
Root directory A- 16
RVL command 2-7,
57
s
S command 2-7, 6l
Save command 2-7,59
SB command 2-7,
61
Seek error 2-5
Short files 3-1, A-17
Size of files 2-65, A- 19, 2l
Space accounting
file 3-2, A-15, A-8
Structure of a named
volume
A- I
Sub command 2-50
Substitutebf e command 2-7,
61
Substituteword command 2-7,
64
SW command 2-64
Syntax error 2-4
T
Track 0 Abnormalities.
flexible diskettes A-22
INDEX
Disk Verilication Index-9
INDEX
v
V command 2-7, 65
Verifo
command 2-65
Volume
attributes, displaying 1-3, 2- 13
Volume blocks, freeing 2-38
Volume
free space map file 2-9, 39, 59, 60, 66, 69,3-2, A-8, 1-5
Volume label
backing up 3-6
iRMXO
II A.4
ISO A-3
Restoring
3-10
Volume
label frle 2-57,3-1,2, A-8, l6
Volume
structure
Named A-2
w
W command 2-7, 74
Working
buffer,
changing contents 2-62
Write
command 2-7, 74
Index-10 Disk Verification
intel
GUIDE
TO TH
E
EXTENDED iRMX@II
INTERACTIVE
CON
FIG
U RATION
UTILITY
lntel
Corporation
306 5
Bowers Aven u e
5a
nta
Cla
ra,
Ca
lrfornia
95051
Copyrìght 1988,
lntel
Corporatlon, All R
ghts
Reserved

PREFACE
INTRODUCTION
This manual
describes the Interactive Configuration
Utility
(ICU) and explains its use. It
does
not explain each screen displayed by the
ICU. For a description of the ICU screens
and
their parameters,
refer to the
Extended |RMX II Interactive Configuration Utility
Reference Manual.
READER
LEVEL
The manual assumes that you are
familiar
with
the monitor and
keyboard
from
which you
run the
ICU. It is also helpful if
you
are familiar
with
the tbllowing:
. The Extended iRMX II Operating System
. PL/M-286
r BND286 and
BLD286
MANUAL
OVERVIEW
This manual is organized as follows:
Chapter 1 This chapter provides introductory material
to
configuring
an
iRMX I I system using the Interactive Configuration Utility
(ICU).
Chapter 2 T)1is chapter describes
how
to generate a system.
Chapter 3 This
chapter describes how to
prepare application
jobs.
Chapter 4 This chapter
provides
overuiew infbrmation
on how to add users to
your
system. For detailed information on adding users,
ref-er to the
Extended iR'UX Operator's Guide to tlrc Human Interface.
Chapter 5 This chapter describes how to load and test
the system.
ICU
Useds
Cuide ul
PREFACE
Appendix A 'l-his
appendix
lists files created by the ICU.
Appendir B This appendix
shows an examplc configuration session.
Appendix C This appendix describes how to
program
a
generated
28(r-based
system into PROM devices.
Appendix
D This appendix describes how to
program
a 386/100-based
system
into PROM devices.
CONVENTIONS
This manual uses the following conventions:
. Information appearing as UPPERCASE characters when shown
in
keyboard
examples must be entered or coded exactly as shown. You may, however, mix lower
and uppercase characters
when
entering the text.
. Fields appearing as krwercase characters within angle lrrackets (< >
) when shown
in
keyboard examples
indicate
variable
information. You must entcr an appropriate
value
or symbol for
variable
fields.
o lJser
input appears in one of the following forms:
as bolded text wlthln a screen
. The term "iRMX ll' ref ers to the Extended iRMX Il.3 Operating System.
. The
term
"iRMX I'rclers to the
iRMX I (iRMX 86) Operating
System.
. All numbers unless othcrwise
stated are assumed to be decimal. Hexadecimal
numbers include the
" " radix character
(for
example,0FFH).
lv ICU User's
Guide
CONTENTS
CHAPTER 1 PAGE
ICU
Usefs
Guide
CONTENTS
CHAPTEB
1 (continued) PAGE
CHAPTER 2 PAGE
CHAPTER
3PAGE
CHAPTER 4 PAGE
YI ICU Use/s
Guide
CONTENTS
CHAPTER 5 PAGE
APPENDIX A
FILES
CREATED
BY THE ICU PAGE
APPENDIX B
EXAMPLE
SYSTEM
CONFIGURATION PAGE
APPENDIX
C
PROGRAMMING
A 2SSBASED
SYSTEM
INTO PROM
DEVICES PAGE
C.l Introduction ............................
C-l
C.2 Requirements
.........................- .............................
C-1
C.3 Configuring a ROM-Based System................ ................................C-2
C.4 Generating/Building
the System................. ....................................
C-9
C.4.1 Including the iSDM" Monitor and the Bootstrap
Loader
in the PROM
Devices............... .................. C-10
C.4.l.l Setting up the iUP 201 PROM
Programmer
........................................
C- 11
C.4.1.2
Formatting the Operating
System PROM
File ......C-12
C.4.1.3 Programming
the Operating System
into PROM
Devices...........,.....
C-14
C.4.1.4
Programming the
iSDM* Monitor
into PROM Devices.................-..
C'16
C.4.1.5
Programming the Bootstrap
Loader into
PROM Devices.
..........-.....
C-17
C.4.1.6
Starting the Operating
System in ROM
from the iSDM"
Monitor.. C-17
C.4.2
Creating a System
that is activated on Power-up....... ......
C-18
C.4.2.1
Formatting
the Operating System
PROM File .. ... C-19
C.4.2.2 Programming
the Operating
System lnto
the PROM Devices
.. .. .. C-20
C.4.2.3
Starting the Operating
System in PROM... ........'.'..C-23
C.4 Hardware
Jumper Modificatrons..................... .........-...................C-24
ICU
Use/s
Guide Ylr
CONTENTS
APPENDIX D
PROGBAMMING
A 386/lOO.BASED SYSTEM INTO PROM DEVICES PAGE
TABLES
TABLE
tî
l-3
Ylll ICU
Use/s
Guide
CONTENTS
FIGURES
FIGURE
1-1
'ta
].-4
1-5
1-6
J-l
B-1
B-2
B-3
B-4
B-5
B-6
B-7
B-8
B-9
B-10
B-11
B-12
B- l3
B-14
B-15
B- 16
B-17
B- 18
B-19
B-20
B-2"t
B-22
B-23
B-24
B-25
B-26
B-27
B-28
B-29
B-30
lx
ICU
User's
Guide
CONTENTS
FIGURE
B-31
B-32
D-JJ
B-34
B-35
B-36
B-37
B-38
B-39
B-40
B-41
B-42
B-43
B-44
B-45
B-46
B-47
B-48
B-49
B-50
B-51
B-52
B-53
B-54
tl--))
B-56
B-57
B-58
B-59
B-60
B-61
B-62
B-63
ICU Usefs Guide
INTRODUCTION CHAPTER 1
TO CONFIGURATION
1.1 INTRODUCTION
The iRMX II Operating System is modular in structure, enabling
you
to include
or omit
subsystems according to
your
needs. It is also compatible
with a variety of peripheral
boards. The Interactive Configuration Utility
(ICU) is designed
to help you take
advantage of this flexibility.
This chapter
provides
an overview of the ICU. It explains
the configuration
process,
configuration
environment, ICU files, ICU commands, error messages,
the utilities that
comprise the ICU, and more. The chapter
is very comprehensive and includes
many
important
details
for
using the ICU. lntel recommends that
you
read
this chapter
carefully before
attempting to configure your system.
1.2 WHAT IS CONFIGURATION?
Configuration
is the process of selecting your application's hardware
and operating system
layers and then binding and building the entire operating
system. The tool used for
configuration is the Interactive Configuration
Utility
(lCU). The ICU is a menu-driven
utility
which presents
a
series
of
screens that
prompt you
lbr intbrmation.
The
information is stored in a definition file that is then used
to
senerate
the new
system.
The objective of running the ICU is to build
a definition file that contains
all of the
configuration information. This file contains
two kinds of information:
. Initializationparameters
o A set of
variables specirying which operating system layers
and device drivers are to
be bound together
with your
application software
Intel
provides six definition files you can use as a starting
point. If you
run
the UPDEF
Utility
supplied
with
this release,
you
can also use a
definition file from iRMX II.l. (It is
not necessary to run UPDEF if
you are using a definition
file from iRMX IL2.) As
you
perform
the configuration
process,
you
alter the
chosen definition file
to match your
target
system.
ICU
Uset's Guide l-l
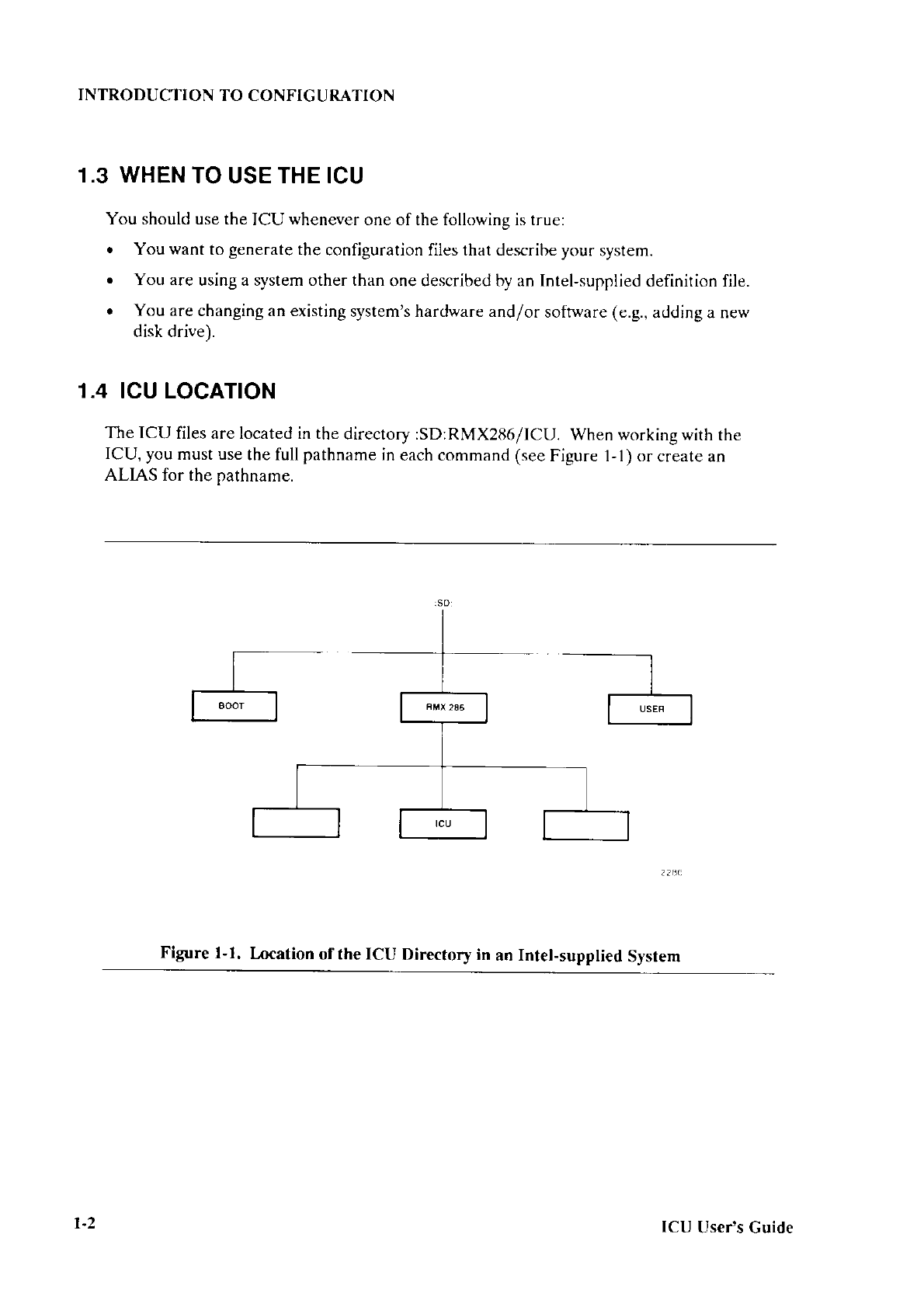
INTRODUCTION
TO CONFIGURATION
1.3 WHEN
TO USE THE ICU
You should use the
ICU whenever
one of the following is true:
. You
want
to
generate
the
configuration files that describe your
system.
. You are
using a system other than
one described by an Intel-supplied
definition file.
o You
are changing an existing
system's hardware and/or
soffware
(e.g.,
adding a new
disk drive).
1.4
tCU LOCATTON
The ICU files are located in the
directory :SD:RMX286/ICU.
When working with
the
ICU, you
must use
the full
pathname
in
each command (see
Figure l-l) or
create an
ALIAS for the pathname.
Figure
1-1.
klcation
ofthe ICU Directory in an Intel-supplied
System
t-2 ICU
User's Guide

INTRODUCTION TO CONFIGURATION
1.5
THE
GENERAL
PROCESS
OF USING THE ICU
You configure a system
in three steps:
1. Intefactively modify a definition
file
(see
Figure 1-2). To do this, invoke the
ICU
and then supply information
to filì in screens that the
ICU presents. (This
step can
be omitted ifyour system
matches one ofthe Intel-supplied definition files.)
2. When you
finish configuring the operating system,
use
the
ICU to
generate
new
configuration files as defined in your
modified definition file
(see
Figure l-3). The
end
product
is a
group
of files that
define the system.
3. Exit from
the
ICU, and at the Human Interface level, execute the submit file
created by the ICU during the generate
step (see Step 2). This creates
the
new
version of
the operating system which can then be loaded and executed.
Figure l-2. First
Step:
Editing
a
Definition
File
QU€STTONS
Ntw
DrscRrPfroN
FILT
DEFAULT OR OIHER
OLD
DtSCRtPION
FIL E
ICU
User's Guide l-J
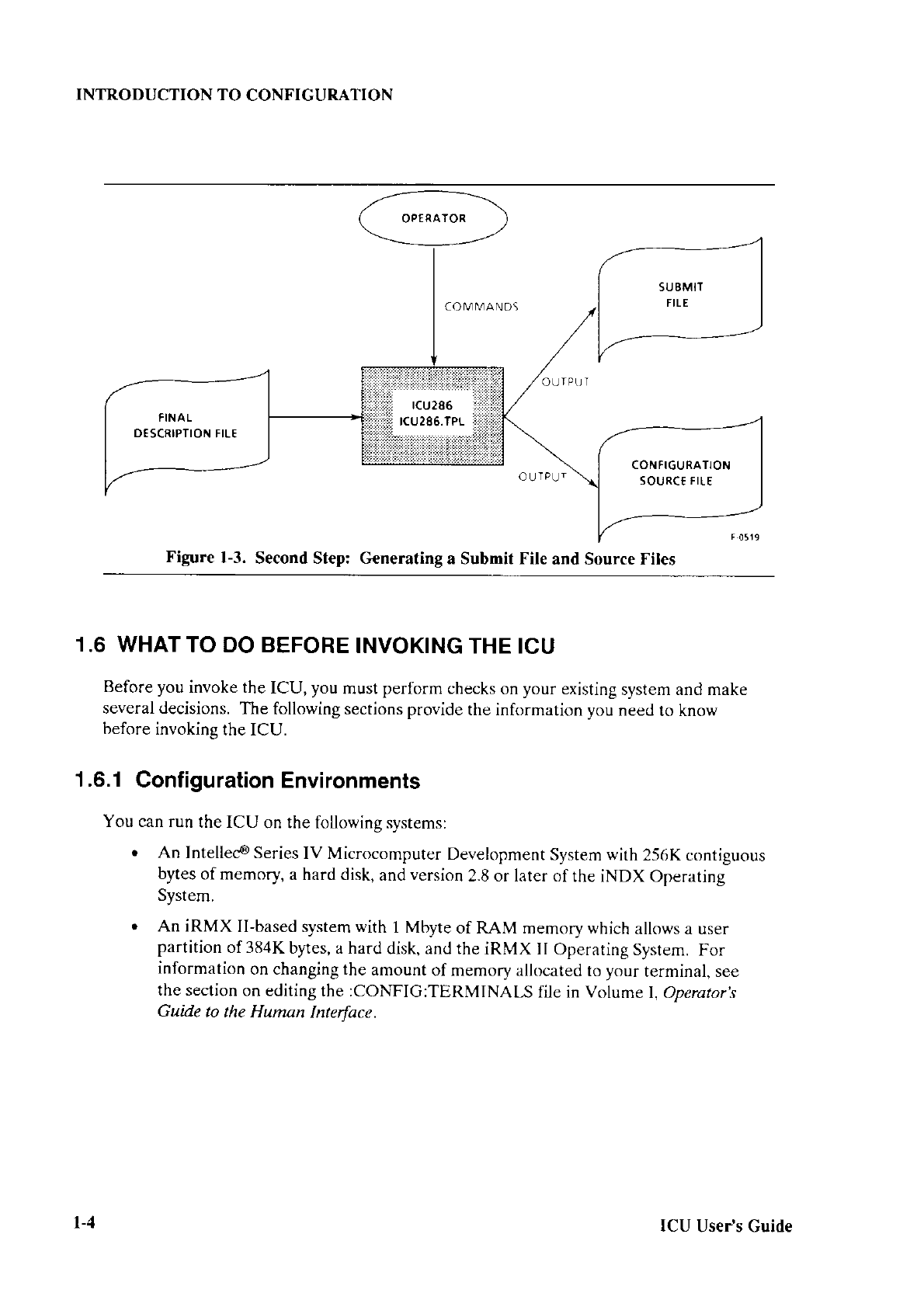
INTRODUCTION
TO
CONFIGURATION
COMMANDS
Figure l-3. Second Step: Generating
a Subrnit File and Source Files
fINAL
DTSCRIPfION
FILE
CONFIGURAfION
SOURCE FILE
1.6
WHAT
TO DO BEFORE
INVOKING
THE ICU
Before you
invoke the
ICU, you
must
perform
checks
on
your
existing
system and make
several decisions.
The
following sections provide
the information you
need
to know
before
invoking
the ICU.
1.6.1
Configuration
Environments
You can run
the ICU on the followins svstems:
o An Intelle@ Series
IV Microcomputer
Development
System with
256K contiguous
bytes
of memory,
a hard disk,
and
version
2-8 or later of
the iNDX Operating
System.
r An iRMX Il-based system with
1 Mbyte
of RAM memory which
allows a user
partition
of 384K
bytes, a hard
disk, and the
iRMX I I Operaring System.
For
information
on changing the
amount
of memory allocated
to
your
terminal, see
the section
on editing
the :CONFIG:TERMINALS
file in Volume
l, Operator's
Guide to the Human Interface.
l-4 ICU
Usefs Guide
I n-TRODUCTI ON
TO
CONFI
CU
RATION
1.6.2 Ensuring
the ICU Files
are on
Your Hard
Disk
Contained
on the iRMX II Operating System release
diskettes or tape are
the files to run
the ICU. These
files must be on the hard disk before
you
can
invoke the lCU. Follow
the
instructions
in fhe Ertended |RMX II Hardware and Software
Installatiotl Guide
to copy
these files
to your system.
Table 1-1 lists all of
the
files
required to run the Interactive
Configuration Utility
for
iRMX II systems and for iNDX systems.
Check that
your
hard
disk contains all
of the
files required by
your system. If your hard disk does
not contain the
required files, return
to the instructions in the
Extended
|RMX II Hardware
and Soflware Installation
Guide.
Following
the directions in that manual
will place
all
the iRMX II files
into the standard
directorv structure.
ICU
Useds
Guide l-5
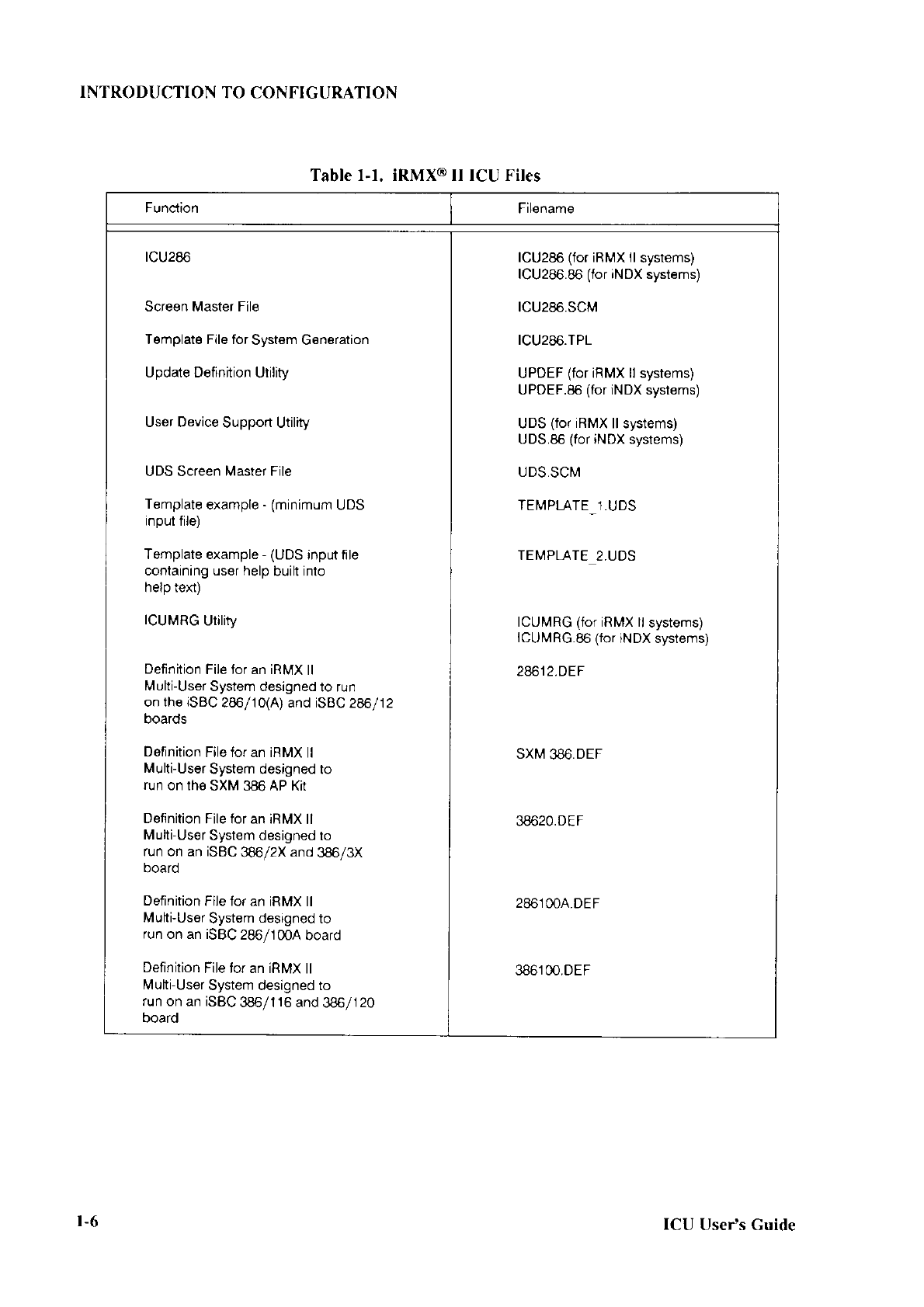
INTRODT]CTION
TO CONFIGURATION
Table I-1. |RMX@ ll ICU Files
Function Filename
tcu286
Scre€n Master File
f€mplate File for
System Gen€ration
Update D€finition
Utility
Usor Device
Support Utility
UDS Screen
Master
File
Template
example
-
(minimum
UDS
input file)
Template example
-
(UDS
input fÌle
containing user help
built into
help text)
ICUMRG
Utilily
Definition
File for an iRMX
ll
Multi-User
System designed
to run
on the ìSBC
286/10(A) and iSBC
286/12
froards
Definition
File lor an iRMX
ll
Multi-User
System designed to
run
on th6
SXM 386 AP Kir
Definition
File for an iRMX
ll
Muhi-Us6r
System designed to
run on an |SBC
386
/2X aîdM/3X
ooaro
Definition
File lor an
iRMX ll
Multi'User
System
designed
to
run on an iSBC
286/100A
board
Definition
File for an iRMX
ll
Mutti-User
System designed to
run on an |SBC
386/116 and
386/120
board
lCU286 (for iRMX ll
systems)
1CU286.86
(for
iNDX systems)
rcu286.scM
ICU286.TPL
UPDEF
(for
iRMX ll systems)
UPDEF.86
(for
iNDX systems)
UDS
(for
iRMX
ll systems)
UDS.86
(for
iNDX systems)
UDS.SCM
TEMPLATE-1,UDS
TEMPLATE
2,UDS
ICUMRG
(for
|RMX ll
systems)
lCUMRG.86 (for
iNDX systems)
28612,DEF
SXM
386.DEF
38620.
D
E
F
2861004.
D E F
3861m.DEF
l-6 ICU User's Guide
INTRODT]CTION
TO CONFIGT]RATION
1.6.3
Choosing
Your Definition
File
lf you have
never configured an iRMX-based system before,
you should
choose
one of the
Intel-supplied,
multi-user definition files
(listed
in Table 1-l) as input into the ICU. You
can build a definition
file
screen
by v:reen, but
you will
save time by starting
with a
standard
definition file. Details on the standard definition files are
qiven
in the Extended
iRMX II Hardware and Software Insnllation Guide.
If you
created
a definition
file using an iRMX II.l version
of
the ICU,
you
can use this file
as
input to iRMX II.3 of the ICU only after running the UPDEF Utility. Once
you create
a iRMX II.3 definition file, you cannot use it rs input
into
iRMX IL I of the ICU.
The Intel-supplied definition files define 80286- or 80386-based MULTIBUS
I and
MULTIBUS II systems.
These systems are fully configured
multi-user iRMX II
Operating Systems. Each layer implements all its system calls and most
of the features
and drivers provided by the iRMX ll Operating System. Multiple users can
communicate
with
the operating system interactively through a terminal or
via
an application
program,
and can access secondary storage. The definition files include UDI so that
you ciìn run
languages, such as PL/M-2t16, PASCAL, and FORTRAN.
To define your own system, modify the definition file that comes closest
to your needs.
To see the contents of a dcfinition filo, use thc LIST
command
(described
later
in this
chapter). Details of board configuration and interrupt
levels are
given
ìn the Extended
|RMX
II Hardware
and
Software Inslallatbn Guide.
1.6.4
Checking
Access Rights to Definition Files
Ifyou use the ICU on an iRMX II-based system, the operating
system makes sure
you
have the proper access to both the definition files and their rcspective
directories. This
check is performed in two instances:
when you invoke
the ICU and
when
vou enter the G
(generate)
command
(discussed
in a later section). If you do not have
proper access, onc
or more of the following:ituations
can occur:
. The ICU will be unable to read the input definition
file.
. The ICU will be unable to save
the
changes
you make tJuring the ICU session.
. The ICU will be unable to create the
generation files necessary
to complete the
configuration
process.
Following the
installation instructions in the Extendcd |RMX II Ilurdu'are
artd Software
Installation Galde ensures
that the user
WORLD can
senerate
a new
version of the
operating system.
ICU User's Guide t-7
INTRODUCTION
TO
CONFIGURATION
To check your access
rights to directories and files contained
in directories, use the DIR
command
folÌowed
by the E[xtended] or
Llong] options,
For example,
you
can check
your
access
rights to the :SD:RMX286/lCU
directory and the 28612.DEF
file by using the
following commands:
DIR :SD:RMX286
E[xtended]
DIR :SD:
RMX286/ICU E[xtended]
For more information
on using
the Human Interface
commands, see the Operator's
Gui"de
to the futended |RMX II Human Interface.
The access rights
needed to use the ICU successfully vary
according
to the operations
to
be
performed.
In
all cases
where
the G (generate)
command
is to be used,
you
must
have
Add Entry
access to the directory
containing the definition
file and to the
directories
you
specify in the'Generate
File Names" screen.
In other cases,
the access
required depends
on the
kind of file (new or existing) and
whether
it is an input or output file. The
following paragraphs
describe
the access rights
required in different
circumstances.
. Ifyou specify
an existing <Jefinition
file as an input
file,
you
must have Read access to
the
definition file.
. If you
specifu an
existing definition
file as an output
file, you must
have Delete and
Write access
to the definition
file. You
must also have
Add Entry access
to the
directory
containing the
definition file.
. Ifyou specify
an existing definition
file as
the only definition
fiìe
on the command line,
the file serves as
both an input
and an output
file. In this
caser
you
must
have
Read/Write and Delete
access to the
definition file. (Refer to the Extended íRMX II
Interactive
Configuration
Utility
Reference
Manual fr>r more
information
about the
"Generate
File Names" screen.)
. If you
specify
a new file
as the only
file on the command
line, the
file serves as both
an
input file and
an output
file. In this
case, you
must have Add
Entry access to
the
directory
containing
the new
file.
Ifyou do not
have the correct
access
rights, the
ICU returns
the following
message:
0026: E$FILE_ACCESS,
while loadlng command
Additional information
about access
rights can
be found in the
\RMX II Extended I/O
System User's
Guide.
t-8 ICU
Usefs
Guide
INTRODUCTION
TO CONFIGURATION
EXAMPLES:
To use the G command
without causing an error,
you
must have Add/Delete
Entry access
to the directory in which you
are
working. This section
describes the
various ways
of
invoking the ICU and the access rights required.
- /RMX286/ICU /
ICU286 :HOME:NEW.DEF
where
:HOME:NEW.DEF Pathname of
a
new
definition file. The
ICU uses this file
as
both the input file
and the output file.
You must have
Add Entry access to
the directory
containing NEW.DEF
(:HOME:). If you
do
not have Add
Entry access, the ICU returns
the following message:
*** T,/n Frr^r in file HOME:NEI,J.DEF
0026: E$FILE_AccEsS
If the
directory does not exist,
the ICU returns
the
following message:
*** I/0 Error in file: :HoME:NEl,].DEF
0021: ESFILE
NoT EXIST
-
/RMX286/rcu
ltcu286
DIRi
oLD.DEF
where
DIR/OLD.DEF Pathname
of an existing
definition
file. The
ICU uses this
file as both an input
and an
output file. It can be
a new or
existing file.
You must
have Read/Write
and Delete
access
to save
changes
to OLD.DEF.
- /RMX286/ICU
I LCUZ86
/ RMX286
I
I3UIINPUT.DEF to
DIR/OUTPUT.DEF
ICU Usefs
Guide t-9
INTRODUCTION
TO CONFIGURATION
wnerc
/RMX286/lCU/INPUT.DEF Pathname of a standard definition file. The
ICU uses
this file as the input file
DIR/OUTPUT.DEF Pathname of the output definition
file. This file can be
a new or existing
file.
You must
have Add Entry access to the directory
containing
OUTPUT.DEF
(DIR). ln addition, if
OUTPUT.DEF is an existing
file,
you
must have Delete
access to lt.
1.7 DISTINGUISHING
ICU-GENERATED
FILES
Each time you generate
your system, the
ICU generates
a set of ICU files. To help
you
distinguish your generation
files from each other
and to determine which
input definition
fìle generated
the ICU files, you
can use one of these
options:
. Create a new directory
to contain
your
definition
file.
. Use the prefix
option supplied
by the ICU.
The followins
sections describe each
method in more
detail.
1.7.1
Creating Directories
for iRMX@
ll-Based
Systems
Intel
recommends that you
maintain the
default tlirectory
structure by placing
any new
system definition
files in a
new directory nested
in
your
:HOME:
directory. Before
invoking
the ICU, you
should creaîe
a copy of the
input definìtion
file in your working
directory
to avoid corrupting
the original
file. The
following example
illustrates how to do
this using the
28612.DEF
file as the starting
definition file:
Once
you
attach
the new directory (28612)
as
the
working
directory, you
will
need to use
the full pathname
to invoke
the ICU. For example
You may
wish
to creiìte an
ALIAS for the
complete
pathname
used
to invoke the lCU. A
convenient
convention
to use is to create
the
working
directory with the same
name as the
definition
file (without the .DEF extension).
The operating system produced
should
have
the same
name as the
definition
file (with a .286 extensionì.
l- l0 lCtl User's Guide
INTRODUCTION
TO
CONFIGURATION
1.7.2 Using
the Prefix
Option
A second method
to distinguish
your
ICU generated files from
each other is to
use the
prefix
option
supplied by
the
ICU. You can select the
prefix option
when entering the
Generate
(G)
command.
The ICU then displays a
prompt
(see
Chapter 2 for the actual
screen) asking
you
for the
prefix letter you wish to assign
to the files created
by the lCU.
For
example, if
you
choose the
letter "Q" as
your prefix
option,
a "Q"
will precede all the
files
generated
when you enter the Generate command
on the menu screen.
In this case
the files
generated for the Nucleus
will be
QNTABL.A2S
QNUCDA.A2S
QNJOBC.A2S
The files created
for all other subsystems
will also be preceded
by the letter
"Q" as in the
example
above. Ifyou want to generate configuration
files for more
than one system,
choose a different
prelìx option each time. Intel
also recommends
that
your
input
definition file
start
with
the same
prefix letter you assign
to the generatetj
files. This
allows
you
to easily determine
which definition files
created each
set of output files-
If
you create a file
with a prefix that already
exists, the ICU over-writes the
previous file.
If you
do not
want to use the
prefix option, enter a carriage
return
when
you
are
prompted for the
prefix. This causes the ICU to generate
the output files
without a
prefir
(see
Appendix
A for
a complete list of the
ICU generate<J
files).
1.8 INVOKING
THE
ICU
This section lists
the syntax necessary
to invoke the ICU. When invoking
the ICU,
be sure
that
the ICU286.SCM
file and the ÌCU286.TPL
file reside in
the same directory
as the
ICU286 file that
you
are invoking.
The syntax
for invoking
the ICU is as follows
(brackets indicate
optional items):
lCU286
[input-file-name
TO] output-file-name
where
input-file-name Name of the definition
file from
which the
ICU obtains
configuration
information.
This
is typicaUy
an lntel-supplied
definition fiÌe
or a delìnition
file from
a
previous use of the
ICU.
output-file-name Name
of the definition
file to
which the ICU writes
updated
conficuration
information.
ICU User's Guide l-lI
INTRODUCTION
TO
CONFIGURATION
The following guidelines
must be
followed
when
specifying
input and output
files:
input-file-name:
If both an
input-file-name and
an output-file-name
are specified,
the
input-file-name
must represent
an existing definition
file created by the ICU.
output-file-name
only: If the input-file-name
is omitted, you
enter only the output-
file-name, the ICU uses the output-file-name
as both
the input and output
definition
file. When
the ICU session is complete,
the ICU writes
the updated
configuration
intbrmation back
to the output-file-name.
The output-file-name
entered can
represent a new
or an existing
definition file. If
the output-file-name
specified
does not exist,
the ICU searches
the directory
containing
ICU for a file named
ICU286.DEF.
If ICU286.DEF
exists, rhe ICU uses
it as the input
fiJe. In any
case
where
an input
file does
not exisr, the ICU displays
the
following message
among the
main screen display:
NEW
CONFICURATION
FILE
and the session
starts with
the ICU default values.
After saving
or exiting, the
edited file
is stored in
the named outnut
file.
1.8.1
Invocation
Error
Messages
when issuing
the invocation previously
described,
a number
of error
messages can occur.
These
error
messages
are described
in the following
paragraphs.
Invoking
the
ICU with
no parameters
or invalid parameters
causes
the following
message
to be disolaved:
*** twALID INVoCATION
***
USACE: ICU286 [
input -
fí 1e T0l output -
fi 1e
Invoking
the
ICU with
a corrupted
definition
file,
or a lìle rhat
is not
a definition
file.
causes
the following
message
to be
displayed:
On invocation
the ICU validates
the file version
numbers.
ICU286.SCM,
ICU236.TpL,
and
each definition
file
have an
Intel Version
Number,
an UDdate
Version
Number.
and a
user Version
Numher.
The
Intel
version
numher
changes
*Leneuer
Intel upgrades
the
ICU to support
new
release.
The Update version
number changes whenever
the
ICU is
upgraded,
using the
ICUMRC utility,
to support
an update;
and
the User version
number
changes whenever
a user
device
is atlded (using
the
UDS
and ICUMRG utilities).
l-12 ICU
Usel,s
Guide
INTRODUCTION
TO CONFIGURATION
The ICU checks the
version
numbers
when
it is invoked.
If there is an inconsistenry in
the version
numbers of
either ICU286.SCM
or ICU286.TPL, the
ICU displays the
following
error message and
returns control
to the operating system:
*** ERROR
. INCONSISTENCY
IN THE VERSION
OF THE INTERNAL lCU FILES
Versions: lntel Update User
ICU286.SCM <Intel> + <rpdate> <User verslori>
ICU286.TPL <lntel + UDdate> <User versiorì>
If the inconsistenry is in
the definition file, the ICU displays the following
warning
message and asks for permission
to upgrade
the file or restore from the file. (The
upgrade process
is a simpler, faster
operation than restore and requires no additional
user
input.)
lf the
ICU needs to restore from a
file in order to use it,
you
will
be
prompted
as follows:
Do you lrant to restore frorn the fíl.e? y/lnl
A response of
"No"
causes the ICU to stop executing. A "Yes" response
means the ICU
will
restore the backup information stored in the
definition file
(discussed
later in this
chapter). If the Update version number
is higher than the ICU version
number, you are
probably
using the
wrong version
of the
ICU. In this case, the ICU displays this
warning
before
the restore
DromDt:
*** WAINING
- The DefiniCion File version is NEIIER
However,
if the ICU is able to use the file without restoring, it prompts with
Do you want to updace the flle? y/ln]
A response of "No" causes the
ICU to stop exccuting. A "Yes"
response causes
the ICU to
update the
file. Since the
ICU
processes
delìnition files
with
inconsistent
version
numbers,
you
can use all of the Intel-supplied definition fles as input for
your
own tailor-
made ICU.
*** WAIìNING. DEFINITION
FILE
ITS VERSION
IS:
VERSION EXPECTED:
VERSION
IS NOT CORRECT.
<the incons is tency>
<correct vers ior>
ICU Usefs Guide l-13
INTRODUCTION TO CONFIGURATION
The ICU issues
the restore
prompt if it discovers any
of the following in the
definition
file:
. Inconsistency
in the Intel
version number.
o Inconsistency
in the User
version
number, if the file contains user devices
a<lded
with
UDS and ICUMRG.
. Inconsistency
in the Update
version number, if the fi.le
version number is higher
(newer)
than the ICU version number.
The ICU prompts for permission to use the file
without restoring in the following cases:
. Inconsistency in the User
version number, if the file does not contain
user devices.
. Inconsistency in the Update
version
number, if the file
version number is smaller than
the ICU version
number.
1.9 WHAT TO DO AFTER INVOKING THE ICU
After
you
invoke the ICU, the main menu screen is displayed as follows:
iRMX I1 Interactive Configuratlon Uttlity For Extended iRMX lI,<v>
Copyrlght <years> lntel Corporat
ion
For general help ln any screen enter H <CR>.
The following cornmands are available
Change
Cenerate
List
S ave
qui È
Exit
Replace
Detail-Leve1
Backup
ENTER COMMAND :
In the screen shown
above is the main ICU menu, whenever
you see this screen you are in
command mode. The string
<v> represents the ICU version
number. The
string
<years>
represents the copyrighted years of the product.
t-14 ICU User's Guide
INTRODUCTION TO CONFIGURATION
Whenever you
are in command mode,
you
must enter one of the commands listed or an
"H"
for help. All ofyour responses should be
followed by a carriage return.
The ICU
regards all invalid input as a response of "H <
CR
>
" and displays the "Help" screen until a
valid
response is entered.
The following sections
describe the choices on the menu screen.
1.9.1 Help Command
ENTER COI4ì.1AND : H <CR>
ICU
Use/s
Guide l-15
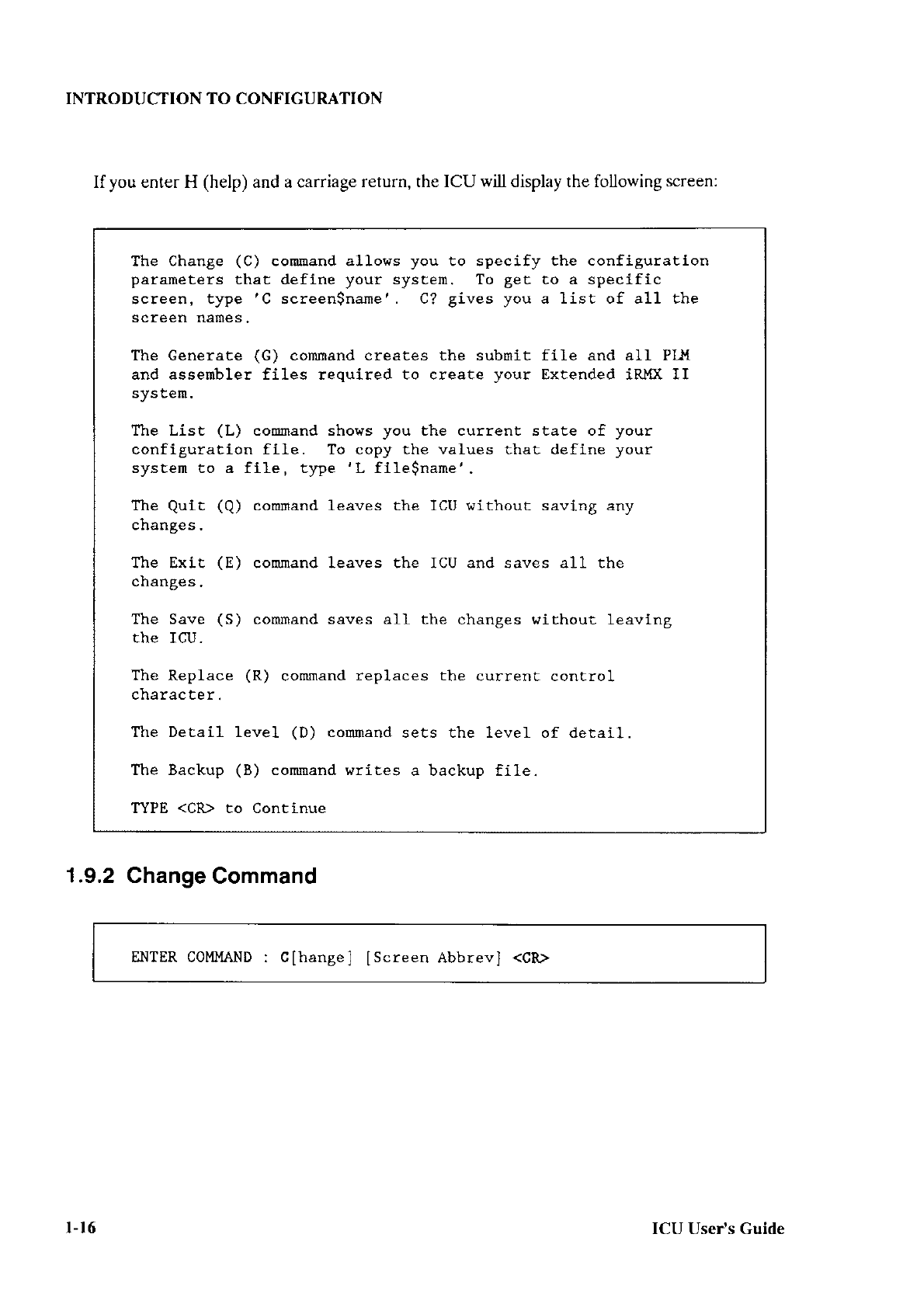
INTRODUCTION TO CONFIGURATION
Ifyou enter H (help)
and a carriage
return, the ICU will display the following
screen:
The Change (C) comnand allows you to specify the configuratlon
paraméters that define your syscen. To get to a specific
screen, Èype 'C screen$nanne'. C? gives you a list of all the
screen nanes
.
The Generate (G) connand creates the submit file and all Pl,!{
and assembler files required to create your Extended iRì,fX II
system.
The List (L) comnand shows you the current state of yóur
configuration flle. To copy the values thac define your
systen to a file, t)?e 'L file$name'.
Thè Quit (Q) comnand leaves the ICU wíthout saving any
changes.
The Exit (E) comnand leaves the ICU and saves all the
changes.
The Savè (S) comrnand saves all the changes lrithout leaving
the ICU.
The Replace (R) comrnand
replaces the current control
chatacter.
The Detail level (D) cornrnand
sets the leveÌ of detail.
The Backup (B) comrnand writes a backup fÍle.
TYPE
<CR> to Cont inue
1.9.2 Change
Command
ENTER COMMAND : G[hange] lScreen Abbrev] <CB>
l-16 ICU Usefs Guide
INTRODUCTION TO CONFIGURATION
The Change command enables
you to begin editing
the definition file. The syntax of the
Change command is as
follows
(the
elements inside the brackets are optional):
C[hange] [screen
abbrev]
C?
where
C or Change Starts editing the definition
file from the first
screen (the
"Hardware"
rcreen). The first time
you
run the ICU you
should
use this option.
screen abbrev Begins editing at
a
specific screen.
For
example,
ifyou enter "C", a
space, the abbreviation of
an
existing screen, antl a carriage return,
the
ICU enables
you
to start editing
your
definition file from
that
particular
screen.
If you
enter a screen abbreviation incorrectly, the ICU displays a
screen containing all the screen names and abbreviations (see
Table l-2). The abbreviation enclosed in parentheses
indicates
what
must be entered for each screen.
? Causes the ICU to display a screen with all the screen names and
abbreviations.
Table 1-2 lists all the
possible
screen names. The screens are displayed in order from left
to right, that is the
"Interrupts"
screen is displayed after the
"Hardware"
screen. Device
drivers are listed at the end
of the table.
Ifyou did not invoke the ICU with
the name of an existing
definition file, you should start
your edit
with
the
"Hardware"
screen.
If you did invoke the ICU with
the name of an
existing definition file,
you
can start your edit with the name of any screen that the input
definition file has already defined.
lfyou enter
a valid screen name but that screen is not
configured into
your
definition file, the ICU displays the next "main" screen followed
by
this warnins:
***ltarning - The screen requested cannot be displayed
The ICU progresses from screen to screen in a logical orcler.
Refer to Figure 1-4 for
the
losical flow of the ICU.
ICU UseCs Guide l-17
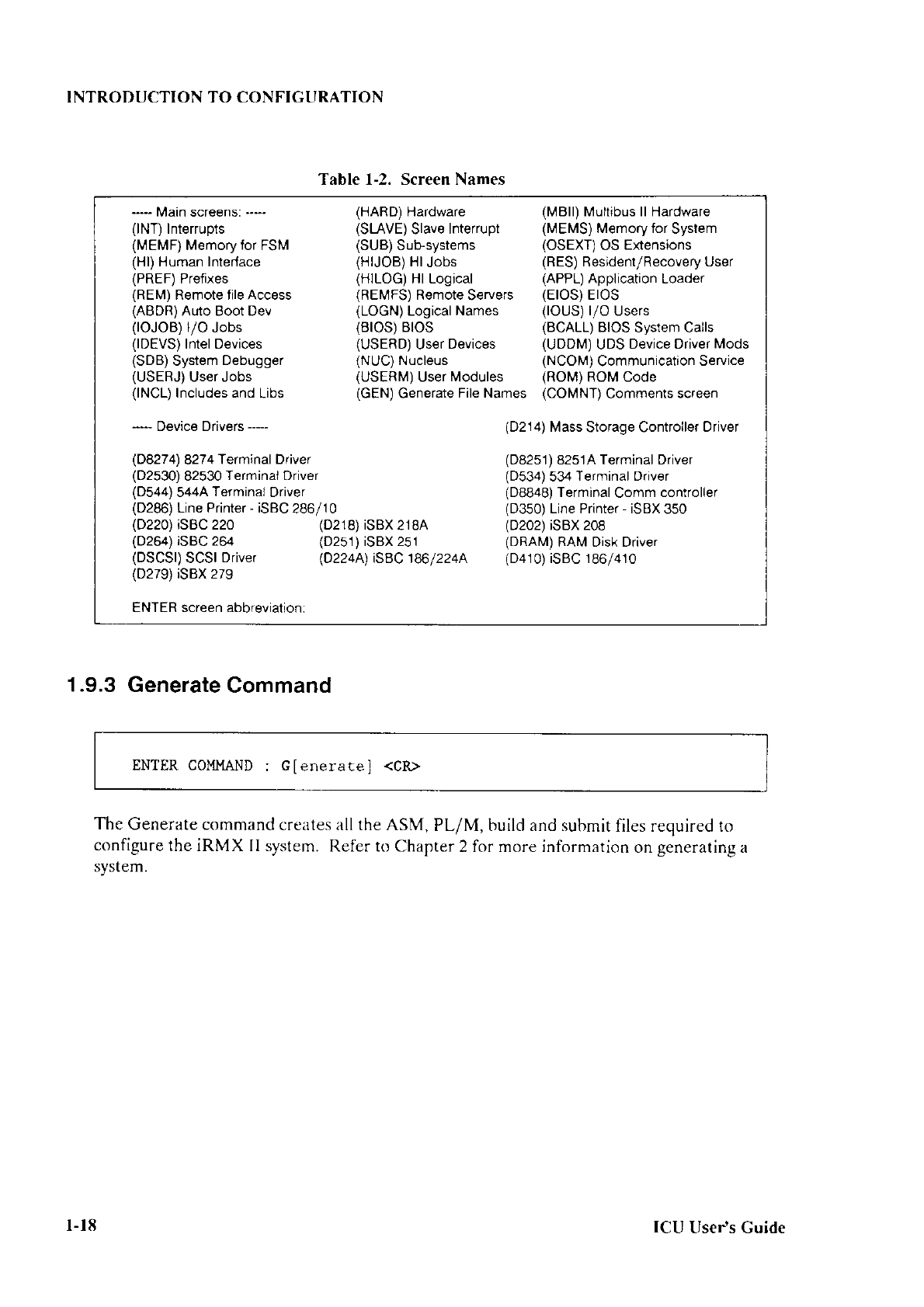
INTRODUCTION TO CONFIGTIRATION
1.9.3
Generate
Command
ENTER CoMMAND
: G[enerate] <CR>
The
Generate command
creates all the ASM,
PL/M, build and submit
files required to
configure
the iRMX II system.
Refer to Chapter
2 for more information
on
generating
a
system.
Table l-2. Screen Names
--- Main screens:
--- (HARD)
Hardware (MBll)
Multìbus ll Hardware
(lNT)
Interupts (SLAVE)
Slave
Interrupt (MEMS)
Memory for
System
(MEMF)
Memory
for
FSM (SUB)
Sub-systems (OSEXT)
OS
Extensions
(Hl)
Human Interface (HUOB)
Hl
Jobs (RES)
Resident/Recovery User
(PREF)
Prefìxes (HILOG)
Hl Logical (APPL)
Application Loader
(REM)
Remote file Access (REMFS)
Remote
Servers (EIOS)
EIOS
(ABDR)
Auto Boot Dev iLOGN)
Logical
Names (IOUS) l/O Users
(IOJOB)
l/O Jobs (BIOS)
BIOS (BCALL)
BIOS
System Calls
(IDEVS)
Intel Devices (USERD)
User
Devices (UDDM)
UDS
Device Driver
Mods
(SDB)
System
Debugger (NUC) Nucleus (NCOM)
Communication
Service
(USERJ)
User Jobs (USERM)
User
À4odules (ROM)
ROM Code
(INCL)
Includes and
Libs (GEN)
Generate
File Names (COMNT)
Comments
screen
-*- Device Drivers
--- (D214)
Mass
Storage Controller
Driver
(D8274)
8274
Terminal Driver (D8251)
8251A Terminal Driver
(D253O)
82530
Terminal Driver (D534)
534
Terminal Driver
(D544)
5444
Terminal
Driver (D8848)
Terminal
Comm
controller
(D286)
Line Printer
-
|SBC
286/10 (D350)
Line Printer
-
|SBX
350
(D220)
|SBC 220 (D218)
|SBX
21BA (D202)
|SBX 208
(D264)
iSBC 264 (D2s1)
|SBX 251 (DRAM)
RAM Disk Driver
(DSCSI)
SCSI
Driver (0224A)
|SBC 18f.1224A (D410)
|SBC 186/410
(D279)
iSBX 279
ENTER screen abbreviation:
l-18 ICU
Usefs Guide
INTRODUCTION
TO CONFIGURATION
1.9.4
List
Command
ENTER
CoMMAND
: L[ist] fname] <CR>
The
List command enables you
to list
the contents ofyour
definition file to a file or to a
device.
This command lists
the contents
of those screens that you
selected to define
your
system.
The
syntax
of the
List command is
as follows
(the
elements
inside the brackets
are
optional):
L[ist] [name]
where
L or List Lists the contents
of your screens.
name Specifies
an iNDX or iRMX II device
or file. If you
omit the name, the
terminal
(:CO:)
is assumed.
You should list the
definition file to a file
name rather than
to the terminal since
the display scrolls rapidly. If you
want
to
use your terminal
to review your definition file,
use the Change
command to view
just
those screens you want.
After the ICU has
listed the definition
file to the specified
filename, it notifies you that
the definition
file has been
listed and
returns to command mode. For
example, if
you
listed
the ICU screens
to a file called ICU286.I-ST,
the ICU would
display
The Definition File has been listed to file: ICU286.LST
followed by the
main menu screen.
1.9.5
Save
Command
ENTER
COMMAND : SIavel lname] <CR>
The Save command updates your
definition
file
with
all of the changes
you
entered during
the
current ICU session. The
syntax of the Save command is as
follows
(the
elements
inside the brackets are optional):
S[ave]
[pathname]
ICU
UsePs Guide l-19
INTRODUCTION
TO
CONFIGURATION
where
S or Save
pathname
Saves
all the changes made
in this session.
Pathname
of a file to use instead
of the default output-file-name
to
save chanses
to the definition file.
When
the Save
command is entered
(followed
by a carriage return), the
ICU updates the
file
you specified as the output-file-name. After
the ICU updates the definition
file, it
notifies
you
that the
specified file has been updated and returns
to command mode.
For
example,
if you invoked the ICU using 28612.D8F as
the output-file-name, the ICU
would display this message followed
by the menu screen:
The Definicion Flle has been
written to fil-e: 28612.DEF
To
be sure
you
are updating the right file, use the List
command before you save
your
definition
file. The List command displays the name of the output definition
file at the
top of each ICU screen.
1.9.6
Quit
Command
ENTER COMMAND
: Qluitl <CR>
The
Quit
command
enables
you to stop your current ICU session without updating the
definition
file. The synta-r of the
Quit
command is as follows
(the
elements inside
the
brackets are optional):
Qluitl
After you enter the
Quit
command
(followed
by a carriage return), the ICU may display
the
prompt
"Do
you
want to quit without
saving
your
changes?
y/[n]"
to ensure that
you
did
not accidentally enter the
Quit
command. Your response to this prompt should be
either
"Yes"
or "No".
The ICU only displays this prompt
if
you
use the
Quit
command
after
making changes to an existing definition file or creating a
new
definition
file. If no
changes were made to the
definition file before the
Quit
command
was
entered, no
prompt is displayed.
l-20 ICU Use/s Guide
INTRODUCTION TO CONFIGURATION
1.9.7 Exit Command
ENTER CoMI{AND : EIxit] lpathnarne I <CR)
The Exit command exits the ICU and updates
the definition file
with
all of the
changes
from the current
ICU session. The syntax ofthe Exit command
is as follows
(the
elements
inside the brackets are optional):
E[xit]
[pathname]
where
E or Exit Exits the ICU saving
all the changes made
in this session.
pathname Pathname
of a file to use instead of the output-fiìe-name
to save
changes made
to the definition file.
You should always use either the Exit
or Save command after
using the Generate
command.
1.9.8 Replace Command
ENTER COMMAND : RIeplace] <CR>
The
Replace
command enables
you
to change
the control character
that the ICU uses in
the special editing commands.
The control character
precedes special editing
commands,
the default character is the caret
(^). lfyour terminal does
not support this character,
or
you prefer
a different
character, use R[eplace]
to change it to any
character of
your
choice. The syntax of the Replace
command is as follows
(the
elements inside
the
brackets are optional):
RIeplace]
ICU User's Guide 1-21
INTRODUCTION
TO
CONFIGURATION
After you
enter the Replace
command
(followed
by a
carriage return), the ICU displays
the followins screen:
ENTER COMMAND
: R{eplace} <CR>
Input new control character :
Enter the
new control character you
select, followed by a
carriage return.
1.9.9
Detail-Level
Command
ENTER COMì,ÍAND
: DIetail-Level] <CR>
The Detail-Level
command
enables you
to set the level
of detail you want
in displaying
the
ICU screens. Thiscommand
provides
the option
of selective
v:reen displays.
Rather
than viewing
all the
screens, you
can elect to see
only screens
of a partìcular
t)?e. There
are four possible
levels you
may request:
All Shows all the
screens
Devices Shows only device
screens
Operating
System Shows all non-hardware
related
screens
Jobs Shows only
the
job
screens (such
as User,
ì/O and User
Modules
screen)
The syntax
of the
Detail-Level
command
is as follows (the
elements
insitle the
brackets
are
optional):
DIetail-Level]
l-22 ICU
Usefs Guide
INTRODUCTION TO
CONFIGURATION
After
you
enter the Detail-Level
command (followed
by a carriage return), the ICU
displays
the following screen:
If you
enter an invalid response, the ICU reclisplays
this
screen until it receives a valid
response.
1.9.10
Backup Command
ENTER COMMAND
: Blackupl fÍìe.name <CR>
The Backup command
writes
an ASCII backup file containing
a list oî all the
parameter
abbreviations and their current values.
The backup fi.le is used as
input to
the
ICU during
the restore
process (discussed
later in this chapter). Remember, the informaîion
in the
backup file is
part
of the definition
file. The advantage of creating a
backup file is that it
is in
ASCII
which
is easier and safer to use
with
other utilities or electronic mail.
The syntax of the Backup command
is
as
follows
(the elements insitle the brackets are
optional):
B[ackup] filename
where
B or Backup Writes
a backup file.
filename Name of the file that
wìll contain the backuo information.
The follorving levels
All
Devices
0perating- Sys ten
Jobs
EMER LeveÌ of Detail
of detaiÌ are available:
ICU
Useds
Guide r-23
INTRODUCTION TO
CONFIGURATION
When
the
backup command has completed, the ICU displays a message that
the filename
specified has been backed-up. It then returns
to command mode. For example, ifyou
backed-up
your definition file to a file named UPDATE.BCK,
the following screen
would
be disnlaved.
The Definition File has been backed-up to file: UPDATE.BCK
For general help ln any screen enter H (CR).
The following commands
are avallable
Change
Generate
Lls t
Save
Qui
t
Exi t
Replace
Detail -
Level
Backup
ENTER COMMAND
:
1.9.11 Aborting
ICU
Commands
The ICU enables
you
to abort an ICU process,
without
losing any information, by
entering CONTROL-C. If you enter CONTROL-C during
the execution of an ICU
command (Generate, List, etc.) the ICU stops
executing the current command, and
returns to the
main menu screen. The ICU handles CONTROL-C
differentlv for each
command.
. lf entered in command mode, or during
SAVE,
QUIT,
EXIT or BACKUP, it is
ignored.
e If entered during CFIANGE, it displays the
following message:
C Lo EXTT to the Main-Henu'
o If entered during GENERATE,
the ICU finishes
writing
the file being generated,
disnlavs
'**1t Process ABORTED.
'
and
returns to command mode
l-24 ICU Usef s Guide
INTRODUCTION TO
CONFIGURATION
If entered during
LIST, the ICU displays the Process ABORTED message, writes the
message to the file or
device specified in
the List command, and returns to command
mode.
[f entered during REPTACE or DETAIL-LEVE,L, the ICU returns
to command
mode.
If entered
while
restoring,
the ICU displays the following messiìge
and returns control
to the operating system.
'*** Process ABORTED
- The Definltion Flle rtras
not resl-ored.'
1.10
CHANGING
A DEFINITION
FILE
It is
possible
to change a definition
file by entering the
"Change"
command on the menu
screen.
The ICU then shows one screen of information
at
a time. Each screen pertains to
a specific
area of configuration. The information displayed on the screen consists of a
series of prompts and default values.
Any of the default
values
can
be
changed.
However,
the changes you make are
not immediately displayed on the screen. They are displayed
only when you
reshow the screen
using the editing command
^R (or R), discussed later in
this chapter, or
just
a carriage return.
Entering another carriage return alìer using one to
reshow
a screen causes you to proceed
to the next screen.
The changes are recorded in the definition file
when you
exit the ICU
using the "E" command or when you
enter the
"S"
command
while still in the ICU.
ICU
Usefs
Guide t-25
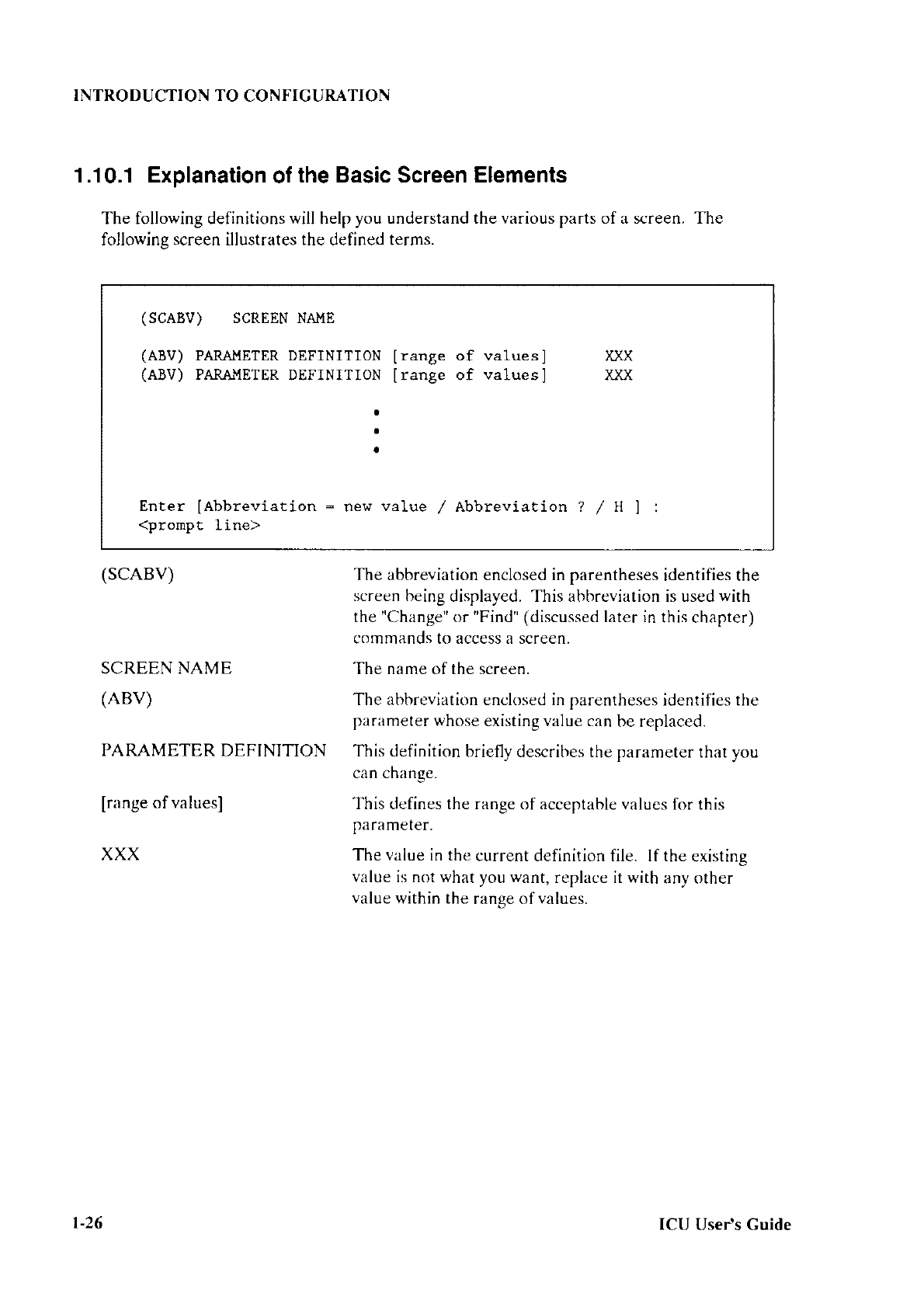
INTRODUCTION TO
CONFICURATION
1 .10.1 Explanation
of
the Basic Screen Elements
The following definitions
will
help
you understand the various parts of :r sc'reen. The
followins screen illustrates the defined terms.
(SCABV) The abbreviation enclosed in parentheses
identifies the
screen being
displayed. This abbreviation is used
with
the "Change" or "Find"
(discussed
later in
this chapter)
commands to access a screen.
SCREEN NAME The name of the screen.
(ABV) The abbreviation enckrsed in parentheses
identifies the
parameter whose
existing value can
be replaced.
PARAMETER DEFINITION This tjefinition
briefly describes the parameter
thar you
can cnange.
[range
ofvalues] This defines the range
of acceptable
values
for this
parameter.
XXX The value in the
current definition file. If the
existing
value
is not what you want,
replace it with
any other
value
within the
range of
values.
(SCABV) SCREEN NAME
(ABV) PAXAì,IETER DEFINITION [range of values] XXX
(ABV) PARAI'IETER DEFINITION Irange of values] XXX
Enter lAbbreviatíon - new
value / AbbreviatÍon ? / H ) :
<prornpt l ine>
t-26 ICU Usefs Guide
INTRODUCTION TO
CONFIGURATION
<prompt
line> This line
is
where
you enter changes
to the screen. The
cursor is located at the
begìnning of this line ready for you
to enter
one of the following:
. An abbreviation, an equal sign (
=
) and a new value
. An abbreviation
and a
"?",
if you
need
an explanation of
the
parameter
. A ^H (H), ifyou need general
help in understanding
the screen
types or editing commands
. A "?",
if
you
need an explanation
of the specific screen
Data you enter
on the
prompt
line should be
followed by a
carriage
return (. CR>
).
The following screen
ìs the first screen
displayed
when
entering
Change mode
with
a new
definition
file. All of the
features described
above are displayed. The screen
abbreviation
ìs (HARD) and the screen
name is "Hardware".
There are nine
(9)
parameter
lines
and a
prompt
line. Each par:rmeter
line includes a
range of legal
values which
may be entered if
the default value
does not meet your system
requirements. The bolded entries on the
following screen
illustratc how you would
use the prompt line to make changes to
two
narameter lines.
ICU
User's
Guide 1-27

INTRODUCTION
TO
CONFIGURATION
The hardware
screen chapter
of. the Ertended
iRMX II Interactive
Confrguration
Utility
Reference Manual
explains how to respond
to the specific
prompts
shown in
this screen.
The
purpose of this section
is to explain how
to make entries on
this and other
types of
screens.
(HARD) Hardware
(DUS) System Bus Type [1 * t'lBI / 2 ^ llBÎÎi
(TP) 8254 Ttmer Port [0-0FFFFH]
(CIL) Clock Interrupt Level l0-71
(CN) Tiner Counter Number
[0,1,2]
(CIN) Clock Interval [0-65535
msec]
(CF) Clock Frequency
[0-65535
khz]
(TPS) Tiner Port separation [0-OFFH]
(NPX)
Nureric Processor Extenslon lYes/Nol
(If) Initialize On-board Functíons
[1.2,3,4,2No]
(BIP) Board lnitialization Procedure
l1-45 Charsl
Encer IAbbreviatlon : ner^' value / Abbrevlation ? / H
:
cll-4 <CR>
:
npx=no<CR>
<cR>
1
ODOH
0
0
10
L229
02H
YES
1
l:
t-28 ICU Usef s Cuide
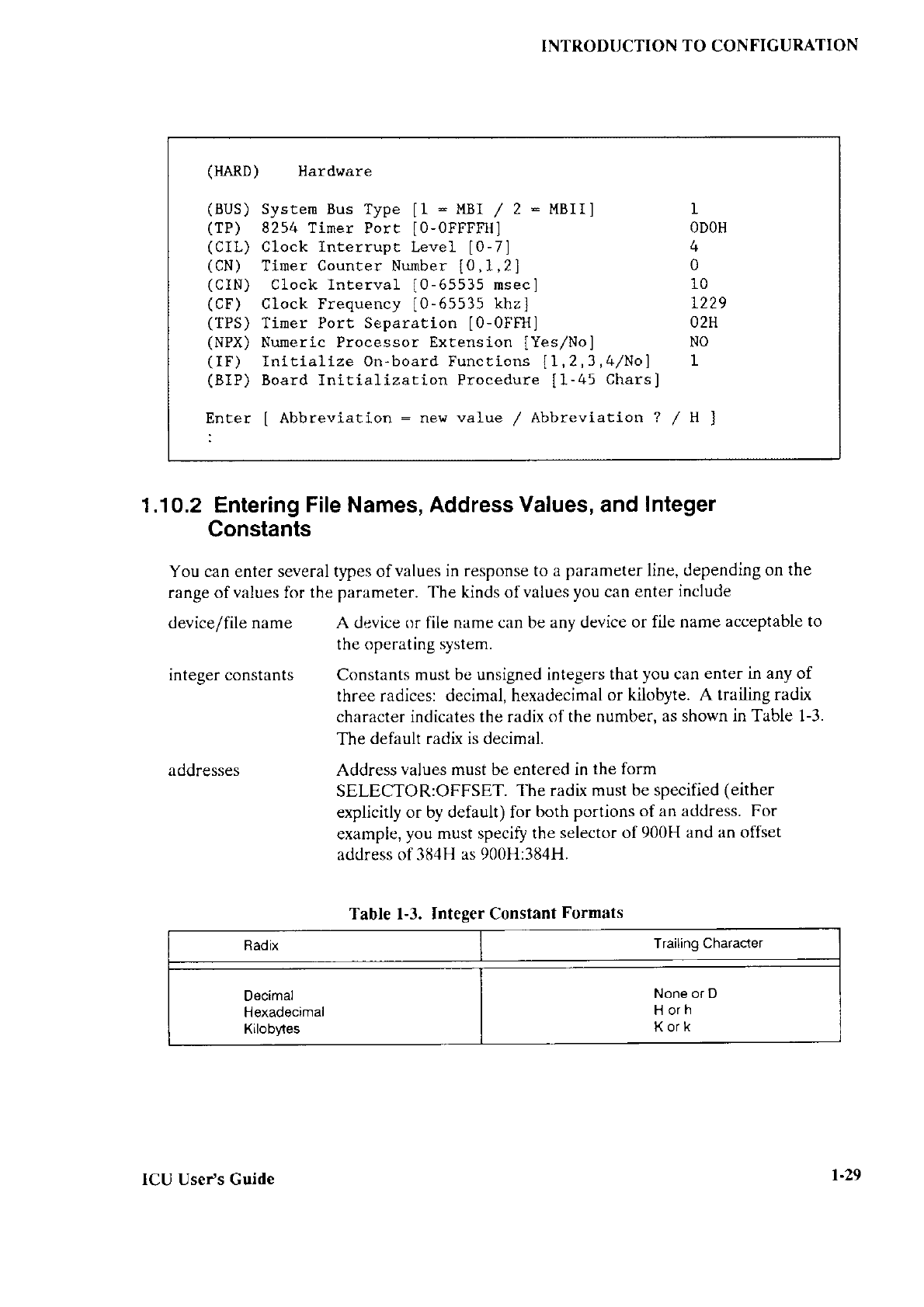
INTRODUCTION
TO CONFIGURATION
1.10.2 Entering
File Names, Address
Values,
and
Integer
Constants
You can enter several types ofvalues
in response to a
parameter line, depending
on the
range of
values
for the parameter. The kinds of
values you can enter
include
device/file name A device
or
file
name can be any device
or file name
acceptable to
the operating
system.
integer constants Constants must
be unsigned integers
that
you
can
enter in any of
three radices:
decimal, hexadecimal
or kilobyte. A trailing radix
character indicates the radix
of the number,
as shown in Table l-3.
The
default radix is decimal.
addresses Address
values must be entered in
the form
SELECTOR:OFFSET.
1'he radix
must be speciiìed
(either
explicitly or by default) for
both portions
of an address. For
example,
you must specify the
selector of
900H and an offset
address of 384H
as 900H:384H.
(llARD) Hardware
(BUS) System Bus îype [1 - M-BI
/ 2 - yIBIf-)
(TP) 8254 Timer PorE [0-0FFFFH]
(CIL) Clock lnterrupt Level [0-7]
(CN) Tixoer Counter Number
10,1,21
(CIN) Clock lnterval I0-65535
nsecl
(cF) Clock Frequency
l0-65535
khzl
(TPS) Timer Port Separation [0-OFF]Il
(NPX)
Nuueric Processor Extension IYes/No]
(IF) Initiallze On-board Functions [1,2,3,4/No]
(BIP) Board Initíalization Procedure Il-45 Chars]
I
ODOH
4
0
10
1229
02H
NO
I
Enter I Abbreviation : ne!, value / Abbreviation ? / H )
:
Table l-3. Integer Constant
Formats
Rad ix TraiLng Character
D6cimal
Hexadecimal
Kilobyîes
None or D
Horh
Kork
ICU Usefs Guide l-29
INTRODUCTION
TO
CONFICURATION
1.10.3 Help Messages
The ICU provides three
types of help messages to supply
information and save you time
as you are defining your
definition files.
. For HELP about parameters,
enter the parameter abbreviation
followed by a "?".
. For
HELP about the screen being
displayed, enter a ?
. For HELP about editing
screens, enter
^H or H.
After reading
the help messages,
enter a carriage return to
return to the screen you were
editing.
1.10.4
Screen Formats
Three basic
tlpes of screen
formats are used in the
ICU: the fixed screen,
the repetitive
screen,
and the
repetitive-fixed
screen. These screen
formats have
similar features.
1 .'l0.4.1 Fixed
Screen Formats
The
fixed screen format
enables you
to make changes by
entering the
two- or three-letter
abbreviation,
the equal sign (
=;, the new
value,
and a carriage
return. The "Hardware,,
screen shown
earlier in this
chapter is a fixed format
screen.
1.1
0.4.2 Repetitive
Screen Formats
Most screens
use the fixed
format to display
information.
However,
a screen
such as the
"Prefixes"
screen,
shown
below, uses a repetitive
screen
format. In a repetitive screen
format,
the same prompt
is repeated many times.
Each time
you
enter
information on
the
screen, you
define
new system
information. In the
example
below, each
time you enter
a
line of information,
you
define a logical
name for
a directory.
As you
can see from
the
example,
identifoing
numbers precede
each line
of intbrmation.
To make changes to
this
screen,
you should
enter
the line number,
the equal sign (
=
),
the
new value,
and a
carriage
return.
After
entering the
change, the
screen is
redisplayed.
l-30 ICU
Useds Guide
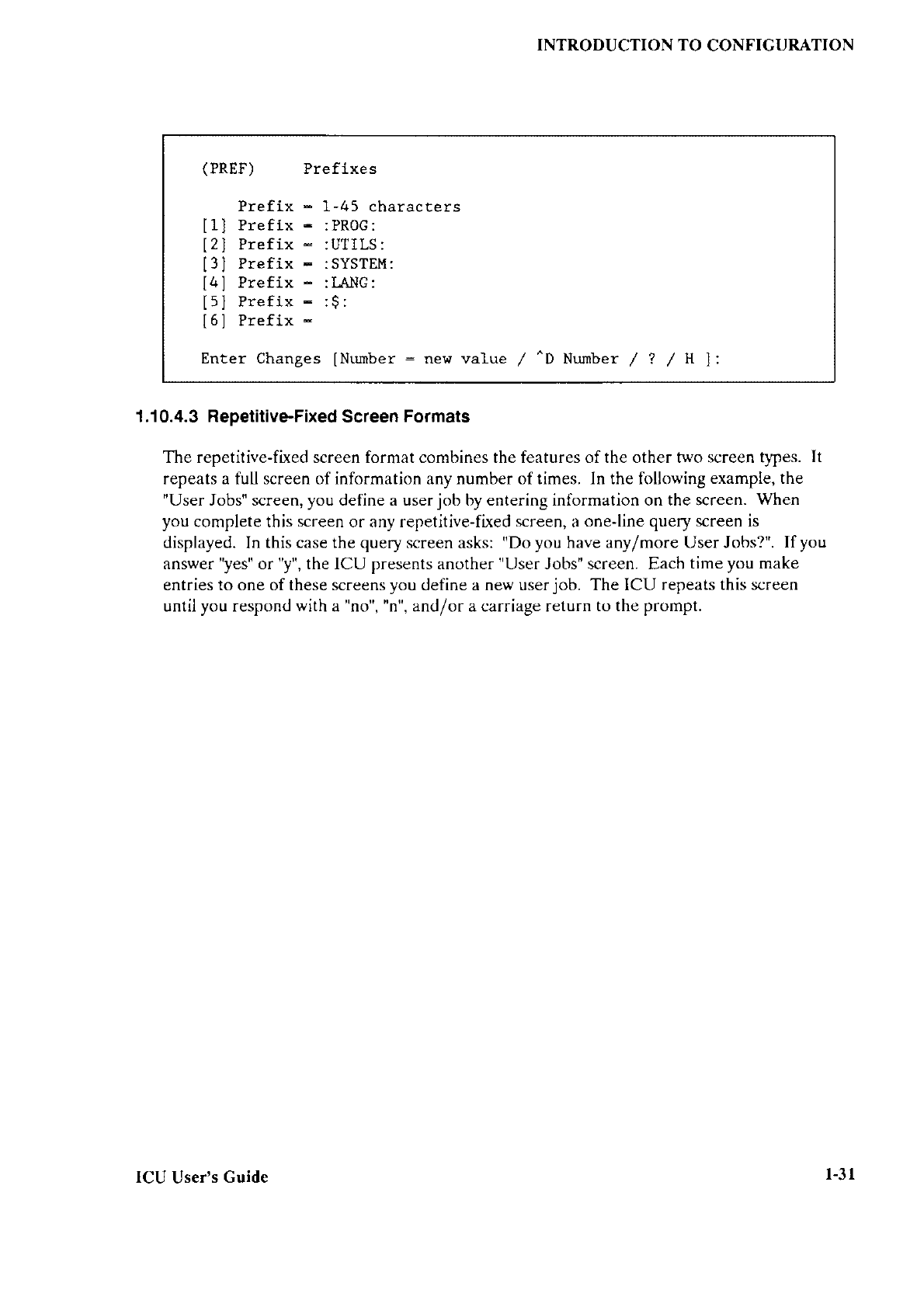
(
PREF)
Prefix
[2] Prefix
[3] Prefix
[4] Prefix
[5] Prefix
Prefixes
1-45 characrers
: PRoG :
: UTILS :
: SYSTEM:
:
I.ANG :
[Number : new valueEnter Changes ,/ "D Nunber / ? / 11
\l
INTRODUCTION TO
CONFICURATION
1 .10.4.3 Repetitive-Fixed
Screen
Formats
The repetitive-fired screen format combines the features of the other two screen types.
It
repeats a full screen of information any number of times. In the following
example, the
"User
Jobs" screen, you define a userjob by entering inforrnation on the screen.
When
you
complete this
screen
or any repetitive-fired
screen,
a
one-line query screen is
displayed.
In this case the query screen
asks:
"Do
you have any/more User Jobs?".
If you
answer "yes" or "y", the ICU presents another "User Jobs" screen. Each
time you make
entries to one of these screens
you
define a new user
job. The ICU repeats this screen
until
you
respond
with
a
"no", "n",
and/or a carriage return
to the prompt.
ICU
User's
Guide l-31
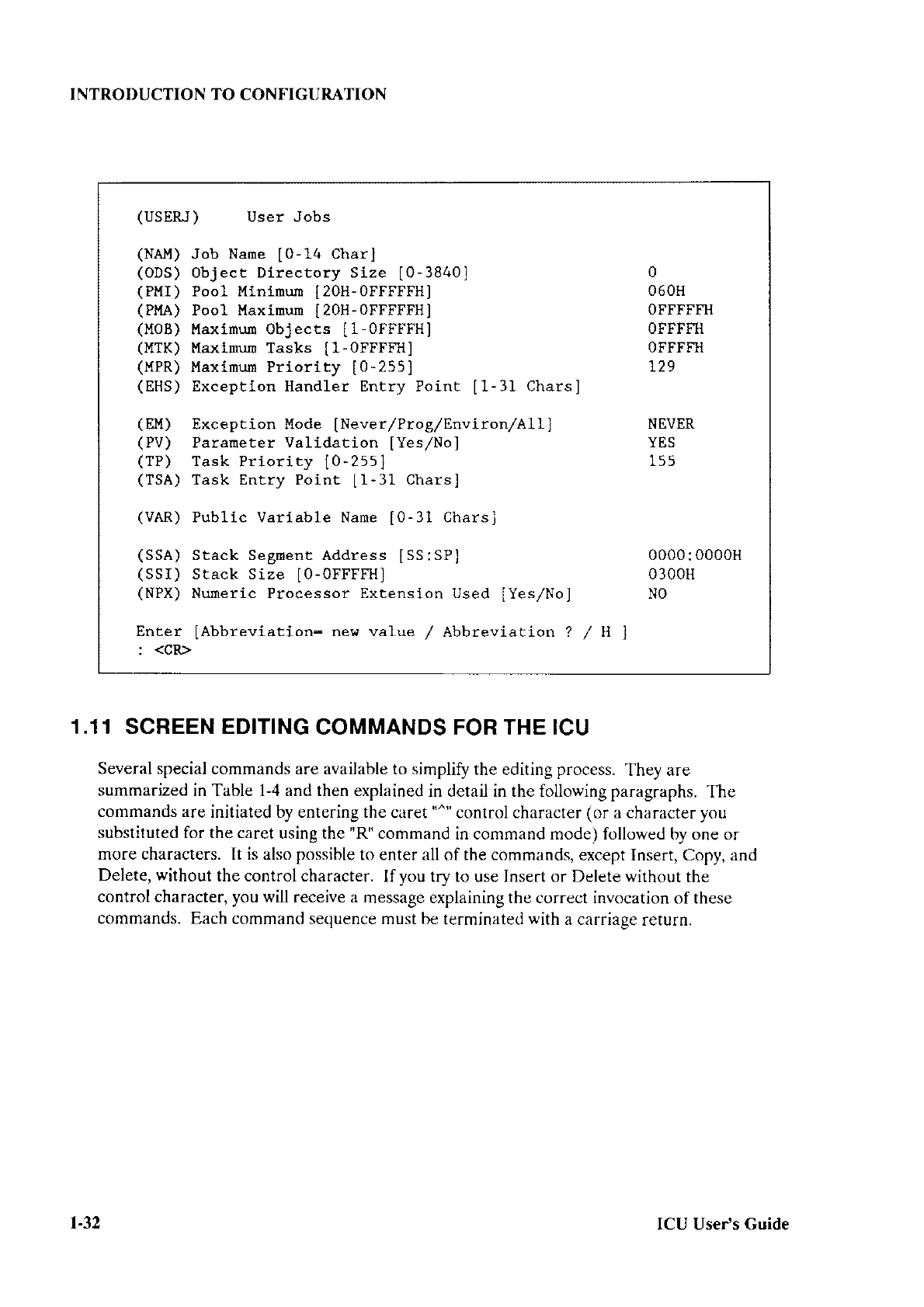
INTRODUCTION TO
CONFIGURATION
(USERJ) User Jobs
(NA.l.t)
Job Narne [
0
-
14 Char ]
(ODS)
Object Directory Size [0-3840]
(PMI) Pool Mlnimrtln [20H-
OFFFFFH
]
(Pì,fA)
Pool Maxinuu [20H-OFFFFFH]
(UoB) tlaxinun objects [
1- OFFFFH
]
(MTK) Maxlnun Tasks (
1-
0FFFFH
l
([PR) l.laximuxn Priority [0-255]
(EHS) Exceptlon Handler Entry Poinc [1-31 Chars]
(
EM) Exception Mode INever/Prog/Envi ron/All ]
(PV) Parameter Valldation IYe
srzNo
]
(TP) Task Pri.ority [0-255]
(TSA) Task EnLry Point Il-31- Chars]
(VAR)
PublÍc Variable Name
[0-31 Chars]
(SSA)
Stack Segnènt Address ISS:SPl
(ssl) stack size [0-OFFFFH]
(NPX)
Nuneric Processor ExtensiÒn Used [Yes/No]
Enter lAbbreviation- new value / Abbreviation ? / H ]
: <CR>
0
0 60H
OFFFFFH
OFFFF1I
OFFFFH
r29
NEVER
YES
155
0000
:
0000H
0300H
NO
1.11 SCREEN EDITING
COMMANDS FOR THE ICU
Several special
commands are available to simplifu
the editing
process.
They are
summarized
in Table 1-4 and then explained
in detail in the following paragraphs.
The
commands are
initiated by entering the
caret
"^"
control character (or a character you
substituted for the
caret using the "R" command
in command mode) followed by one or
more characters. It is also possihle
to enter all of the commands,
except Insert, Copy, and
Delete,
without
the control character.
Ifyou try to use lnsert or Delete without
the
control character,
you will receive a
message explaining the correct invocation
of these
commands. Each
command sequence must be
terminated
with
a carriage
return.
l-32 ICU Usefs Guide
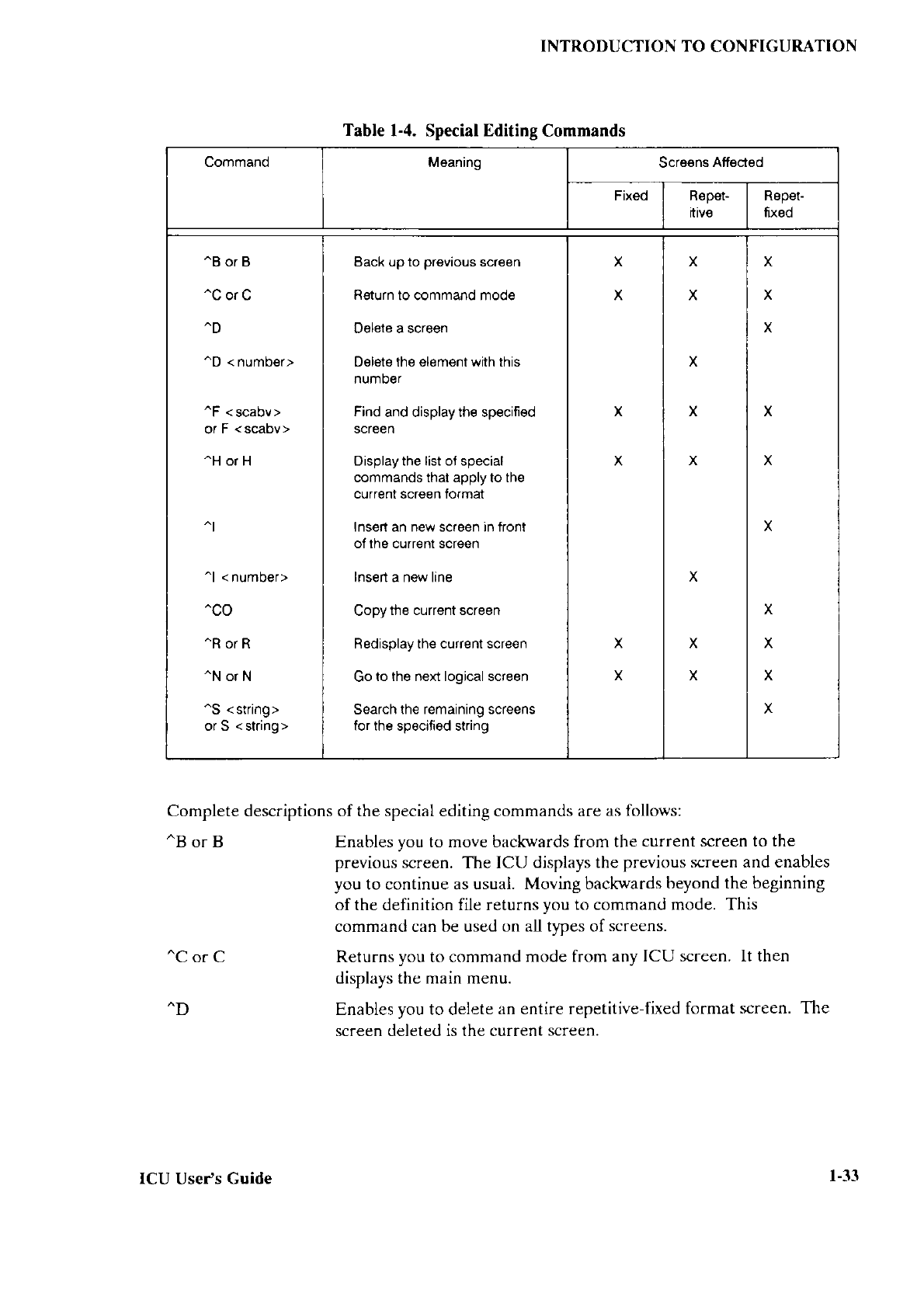
INTRODUCTION TO
CONFIGURATION
Complete descriptions of the special editing commands are
as follows:
^B or B Enables you to move backwards from the
current screen to the
previous
screen. The ICU displays the
previous screen and enables
you to continue as usual. Moving backwards
beyond the beginning
of the definition file returns
you to command mode. This
command can be used
on all types of screens.
^C or C Returns
you
to command
mode from any
ICU rcreen. lt then
displays the main menu.
Enables
you
to delete
an entire repetitive-fixed
format screen. The
screen deleted is the current
screen.
Table
l-4. Special Editing
Commands
Command M6aning Scre€ns
Affected
Fix€d R€p€t-
rtrv€ Rep€t-
fixed
^BorB
^CorC
^D
^D <
numb€r>
^F <scabv>
or
F <scabv>
^HorH
^l <
number>
^RorR
^NorN
^S
<string>
or S <
sîring>
Eack up to
previous
screen
R€turn
to command mode
Delete a screen
D€l6te th€ €lem€nt with this
number
Find
and display the specifred
screen
Display the list of special
commands that apply to the
current screen format
lns€rt an new screen in front
of the current scre€n
lnsert a new line
Copy
the curent screen
Redisplay the curent screen
Go
to the next logical screen
Search
the remaining scr€ens
for the specified string
X
X
X
x
X
X
X
X
X
X
X
X
X
X
X
x
X
X
x
X
X
X
X
X
ICU Use/s
Guide I --l-1
INTRODUCTION TO
CONFIGTIRATION
^D <
number
>
^F <
scabv
>
or F <
scabv
>
^HorH
^I
^I <number>
=
or <number>
=
^co
^RorR
^NorN
Enables
you to delete a specific item in
a repetitive
screen. The
numbcr
you
cntcr identifies the cntry to be deletcd.
Finds and displays the screen indicated by the screen
abbreviation.
The syntax ofthe ^F
command is
^F
lor F) screen-ahhreviat ion
where
the screen-abbreviation can be any
abbreviation listed rn
Table 1-2. This command
enables
you
tojump from one screen to
another. Ifyou specify a screen name
not
previously
defined, this
command
jumps
to
the next available screen, and displays this
warning
message:
*** WAI{NING
- The screen requested cannot be disol
Ifyou do not speciry a screen abbreviation,
the list of screen names
and abbreviations is displayed (see
Tahle 1-2) and you
are
prompted
for a screen abbreviation.
Ifyou want
to exit this
command
without
entering
an abbreviation, press the
carriage
return and continue to the
next logical screen.
Figure l-4 shows a
flowchart of
how
you
proceed from one
screen to the next ifyou
simply
enter a carriage return.
Displays the list of special
editing commands.
Enables you
to insert an additional
repetitive-fixed screen
in front
of the current screen.
Otherwise, the
command
^l has no effect.
Enables
you
to add a
new line to a repetitive
screen.
The
^I is optional.
Only the line
number and an equal sign
are
required.
Enables you
to insert an identical
copy of the
current screen in
front of the present
screen. This
command can
be used only
with
a
repetitive-fixed
screen.
Redisplays the
current screen, showing
any changes
made.
Entering
^R is the
same as
entering a null carriage
return.
The
default
or previously
entered
responses are displayed
until
you
enter the
^R
command (or <
CR
>
) to show
the changes y<tu have
made to this screen.
Ifyou
are in a help screen,
the command
^R
returns
you
to the
last non-help screen
you were
on.
DispÌays
the next
logical screen.
For example,
if
you
are entering
data
on a unit-information
screen
and enter
^N.
the first DUIB
screen for that
driver is displayed.
If you enter
^N again, the first
screen
of the nexî driver
is displayed,
and so on. If you
enter
^N in
the
last screen. the
ICU returns
to command mode.
l-34 ICU Useds
Guide
^S
<
string>
or S
<
string>
INTRODUCTION
TO CONFIGU
RATION
Searches
repetitive-fixed
screens
of the same
logical
tlpe for the specified
string. When
this command
is entered,
the
search
begins
in the
next screen
of that logical
type and
searches all
fields wìth
a character
range (for
example,
1-31 characters).
The
search
continues
until a match is
found. If no
match is found, the
cursor remains
at its
current position
and the
ICU displays the
following
message:
No next rnatch found
The syntax
for this
command is
^S
(or
S)
<string>
The following
example
shows how to use
the
^S
command.
Assume you
have 20 DUIB screens for the
iSBC 214 driver
and
you want
to find
the screen that
defines the device
name as w0.
First, you would
get to the
first
"(I214)"
screen.
Then you would
enter
The ICU
searches all the
iSBC 214 DUIB screens
until it finos
"w0".
It then
displays that
screen.
1.1
1.1 Deleting
Data
on a Repetitive
Screen Format
To delete
information
from a repetitive
screen,
you
must
use the
^D <number>
command, where <number>
is the
number of the line
to be deleted. After
the line is
deleted,
the remaining
lines are renumbered
and the screen
is displayed again.
The ICU
does not allow you
to delete
a line that is
not displayed. To replace
a line
you
must first
delete the existing
line, and
then insert the
new line.
An example
of how to delete
data on a
repetitive screen follows.
Assume the "prefix"
screen
is defined as shown
below. The
cursor is positioned
under the
word
"Enter". Ifyou
wish
to delete line 6,
you
would
do so
as shown here.
ICU
Useds Guide 1-35
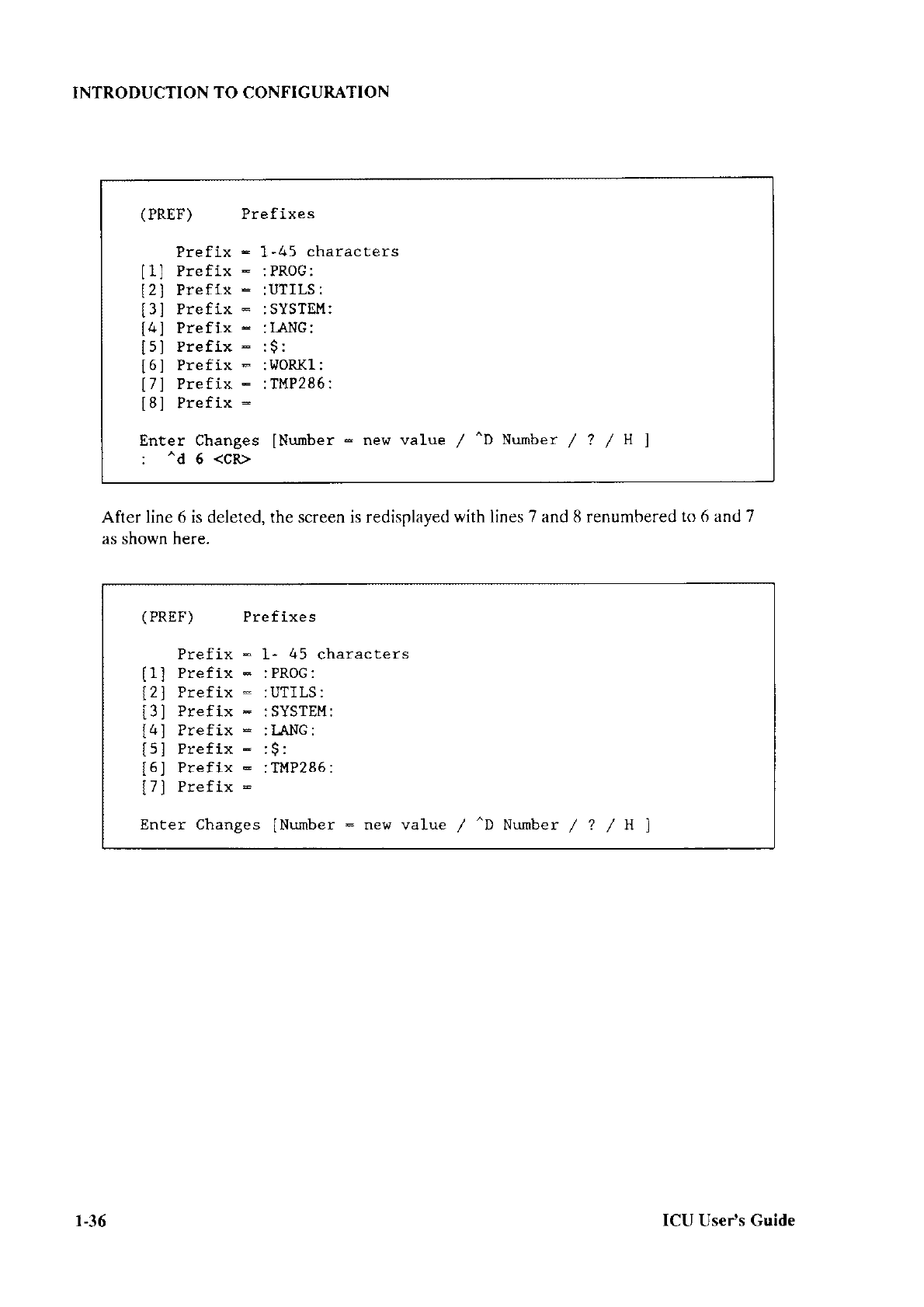
INTRODUCTION TO CONFIGURATION
(PREF) Prefixes
Prefix - 1-45 characters
[1] Preftx - : PROG:
[2] Prèfíx - :UTILS:
[3] Prefix - :SYSTEH:
[4] Preflx : :
IANG:
[5] Prefix - :$:
[6
] Pref ix - :l.toRKl:
[7] Prefix - :TMP286:
[8] Prefix -
Enter Changes [Nurnber
* ne\t value / ^D Nunber / ? / H ]
: ^d 6 <CR>
After line ó is deleted, the screen is redisplayed
with lines 7 and 8 renumbered
to 6 and 7
as shown here.
(PREF) Pre fixe s
Prefix - l- 45 characters
[1] Prefix * : PROG:
l2l Prefix - :UîILS:
[3] Prefix - :SYSTEM:
I4l Prefix : : I,ANG:
[5] Prefix * :9:
[6] Preftx * :TMP286:
[7] Prefix -
Enter Changes [Number - new value / ^D Nurnber
/ ? / H ]
r-36 ICU
User's
Guide
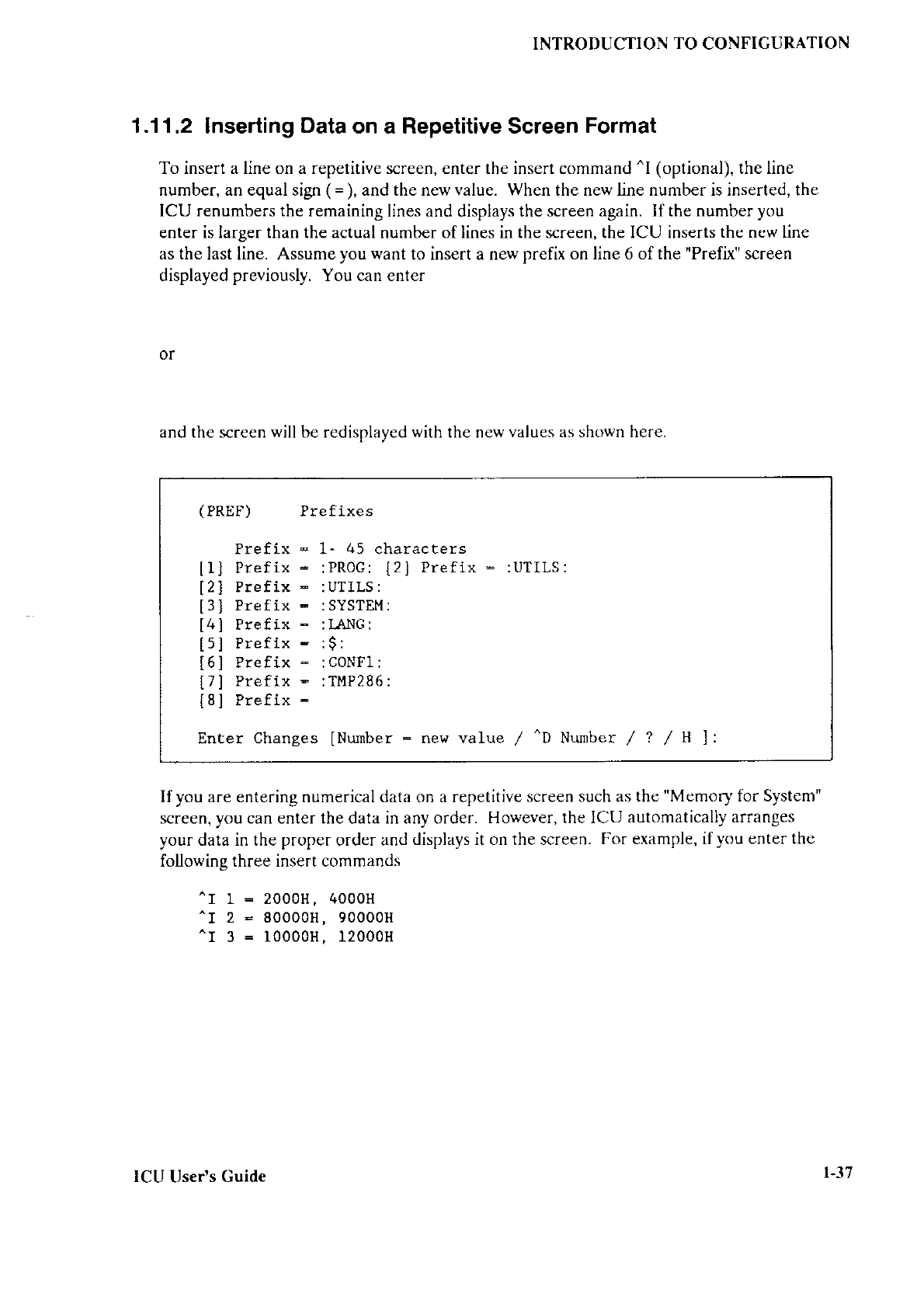
INTRODUCTION
TO
CONFIGURATION
1.11.2
Inserting
Data
on a Repetitive Screen
Format
To insert a line on a repetitive screen, enter the insert command
^l (optional), the line
number, an equal sigr
(
=
),
and the new value. When the new line number is inserted, the
ICU renumbers the
remaining lines and displays the screen
again. If the number you
enter is larger than the actual number of lines in the screen, the ICU inserts
the new line
as the
last line. Assume
you want
to insert a new
prefix on line 6 of the
"Prefix"
screen
displayed
previously.
You can enter
and the screen
will
be redisnlaved
with
the new
values as shown here.
Ifyou are entering numerical data on a repetitive
screen such as the
"Memory lbr System"
screen, you can enter the data in any order.
However, the ICU automatically arranges
your
data in the
proper
order and
displays it on the screen.
For example, if
you
enter the
following three insert commands
^rL-2oooH,4oooH
^r2=SooooH.gooooH
^r 3 = looooH, l2oooH
Prefix
[2
] Prefix
Prefixes
l- 45 characters
:PRoC:
{21 Prefix : :UTILS:
: UTILS :
: SYSTEM :
: IANG :
:l:
:
CONFI
:
:
TMP2 86 :
[Nurnber
- new value / "D Nunber
Enter Changes /
?
/H
ICU User's
Guide r-37
INTRODUCTION TO
CONFIGURATION
on the
"Memory
for System" screen (see fhe Extended |RMX II Interactive Confguration
Utility Reference Manual), the ICU sorts the data
in ascending order
and
redisplays the
lines
as follows:
2*
3-
2000H,
4000H
10000H, 12000H
80000H,90000H
1 .11.3 Deleting
a Repetitive-Fixed
Screen
The
^D command enables
you
to delete information
for an entire repetitive-fixed screen;
you delete the
current screen. You can use this command
to delete I/O Jobs, User Jobs,
OS Extensions,
and Remote File Servers, as well
as Intel and user devices. Ifyou want to
delete a device driver,
it is only necessary to delete the
Driver
screen
for that device. The
ICU automatically
deletes all the Unit and DUIB screens associated with it (see
the
Extended |RMX II Interactive
Configuration Utility Ret'erence Manual for more
information).
r-38 ICU
User's Guide
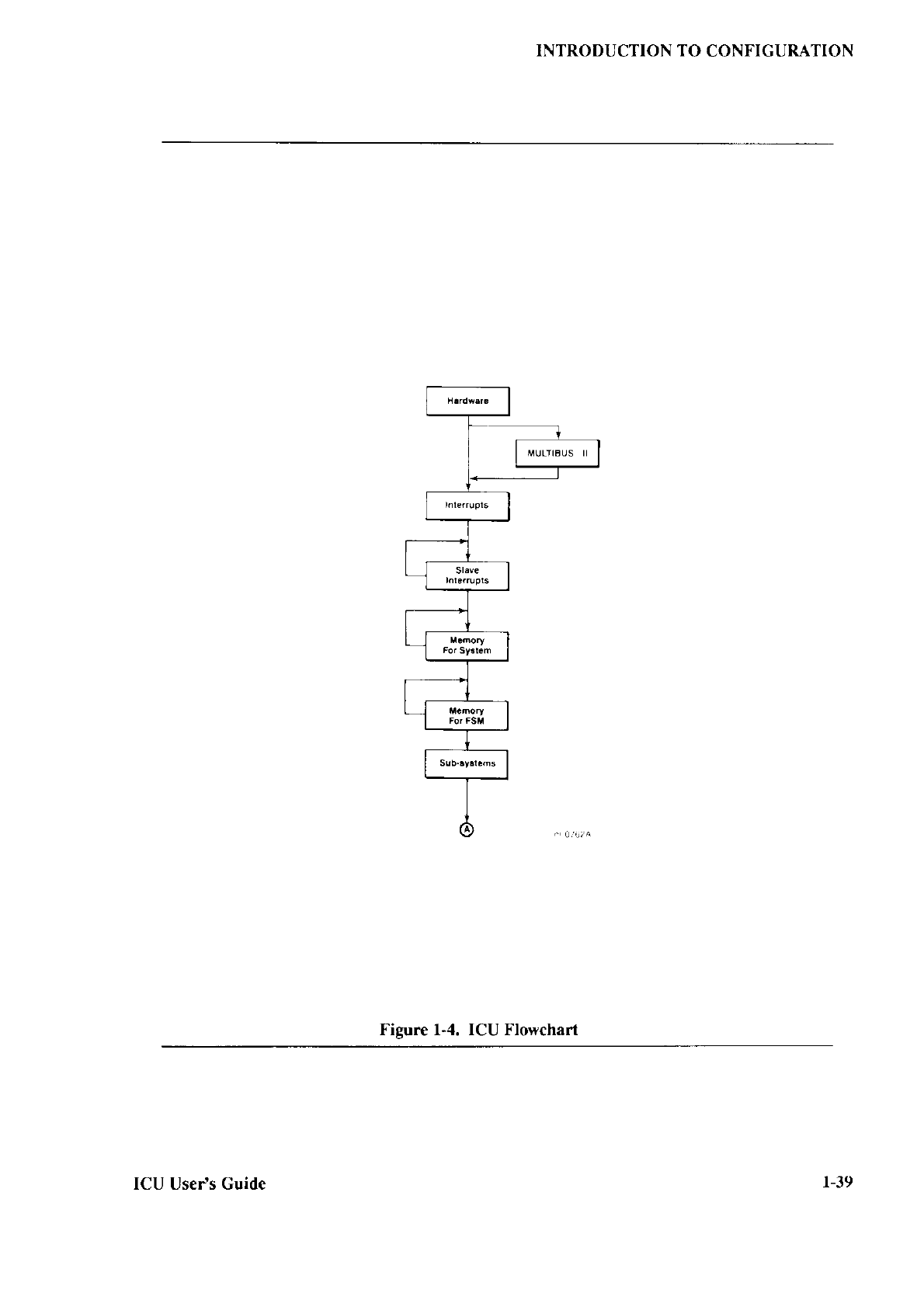
INTRODUCTION TO
CONFIGURATION
Figure 1-4. ICU Flowchart
l-39
ICU Usefs Guide
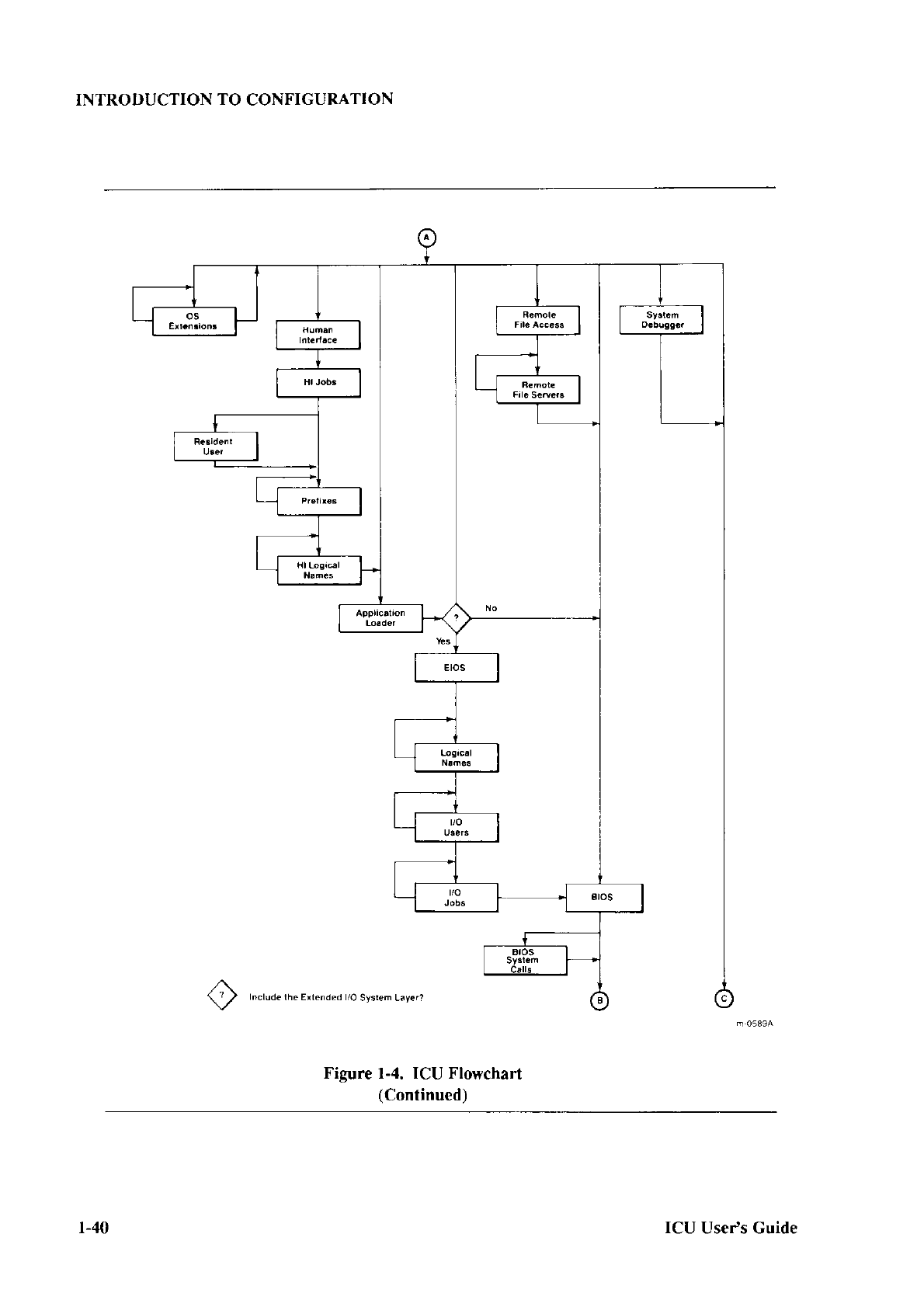
INTRODUCTION
TO
CONFIGURATION
Q '.",,0" ,n" .,,""0ed r/o
sysrem Layé.?
l-4. ICU Flowchaf
(Continued)
l-40
Figure
ICU
Usefs Guide
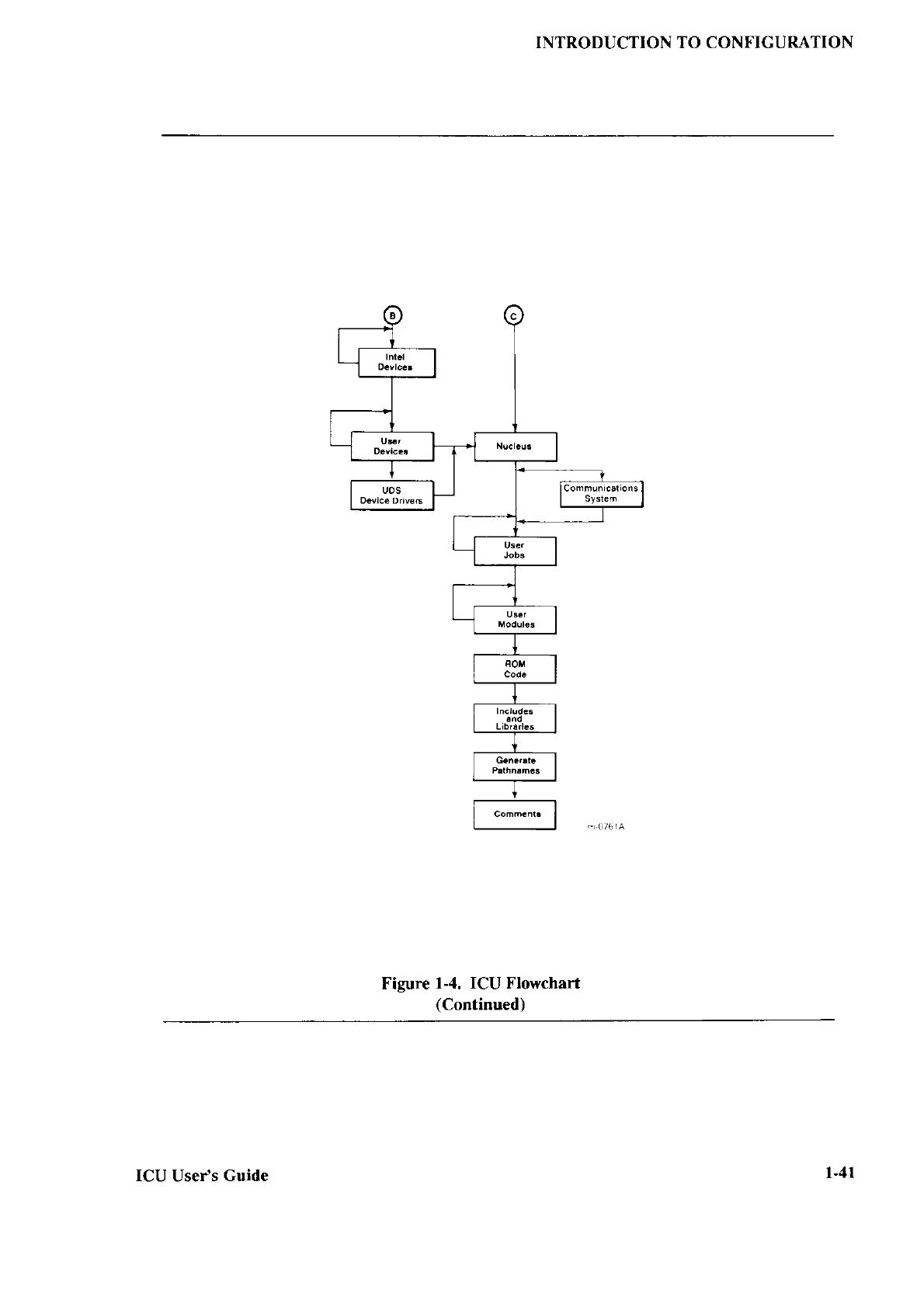
INTRODUCTION TO CONFICURATION
Figure
l-4. ICU Flowchaf
lContinued)
ICU
Usefs
Guide l-41
INTRODUCTf
ON
TO
CONFIGURATION
1.11.4 Inserting a Repetitive-Fixed Screen
The
^l command
enables you
to insert
an additional screen of information between two
existing screens.
(This
can be used only
with
the repetitive-fired screen format.) Use this
command
on the screen you wish to precede. For example, ifyou have three User Jobs
and
wish
to insert a fourth
job
between the second and third
job,
use the
^I command on
lhe screen for the third
job.
The
copy command (^CO)
can
also be
used to insert an additional repetitive-fixed
screen.
The copy command inserts a copy of the current screen in
front
of itself.
The
only
difference between the insert command and the copy command is that the copy command
uses the current screen values rather than
the default
values.
1.12 ICU
ERROR MESSAGES
During the interactive portion of the
ICU process, two types of error messages can occur:
. interactive error
messages
r internal ICU errors
The interactive
messages are the most
frequently encountered, and are self-explanatory.
The ICU internal error messages should
not occur. The following sections explain
these
errors
in more detail.
1 .12.1 lnteractive
Error Messages
The
ICU accepts data that you
enter only
if it lies
within
the range of
aoceptable
values.
Usually,
the range of acceptable values
for
a
given prompt
appears in
brackets
"[]"
on the
prompt line. If you
speci! a
value
outside the range
of acceptable
values,
the ICU
displays
one of the following
messages, depending
on the kind of value
it requires (all of
these messages
are
preceded
by
**r ERROR
-):
. number
expected or number
too large
. number is not within
its
ranse
. address expected
o the selector
is not
within
its range
o offset in address
is not a number
. string
too long
. a prefix
of a legal string
expected
. "Yes
or No" expected
. the field is "Req";
cannot be changed
ta ICU
Use/s Guide
INTRODUCTION TO CONFIGURATION
. erroneous
delimiter
. the
line entered overlaps
When
an error occurs, the
ICU does not
change the current value
of the
parameter.
If
the
values
you speciff
lie within the
range of au:eptable values,
the ICU aocepts them
without
checking their reasonableness.
Therefore,
ifyou enter values
that cause the ICU
to generate
a nonfunctional version
of
the operating system,
neither the interactive phase
nor
the generation phase
ofthe ICU wili
flag these values
as errors.
When
the ICU leaves the change phase
and returns
to the initial menu screen, it performs
a number
of logical tests,
such as checking
that the memory locations
reserved for the
system
and the Free Space
Manager do not overlap.
If it detects a logical error, the ICU
issues a self-explanatory
error message.
You must then make the necessary corrections to
your
definition file or you will
not be able to generate
a
working
system.
1.12.2 Internal
ICU Errors
If during execution
the ICU encounters
an internal error such as the Screen
Master File
or the Template
file being corrupted, it displays
the following message:
*** ICU Internal Error - <number[.sl>
where
<
number[,s]
> can be either one number
or two numbers separated by a comma.
The numbers represent an
internal code for the ICU and are
not meaningful for the user.
Internal
ICU errors rarely occur, but
if
you
should receive this error message,
lbllow
these
guidelines.
1. First, assume
your
definition
file has become corrupted, and try running the
ICU
again
with
a new definition
file.
2. If Step I is not the solution, try
running the ICU with
a new Screen Master File and
a new Template
file. Default versions
of these files are kept in the directory
:CONFIG:default.
3. If neither of the above
solve the
problem.
contact
vour
local Intel sales office.
1.13
UPGRADING DEFINITION FILES
There
are three reasons
you
may have to upgrade definition files.
. To make iRMX II.1 definition files compatible with iRMX II.3.
. To add Intel-supplied changes
. To add user device drivcrs
ICU UseI,s Guide l-43
INTRODUCTION TO
CONFIGURATION
To upgrade definition
files created by iRMX II.l of the iRMX Il Operating
System,
use
the UPDEF Utility.
To upgrade
your iRMX II.3 definition files
to include Intel-supplied changes
or user
devices, invoke the ICU with
the definition
file
you want
upgraded
as input. iRMX II.3
definition files can have
two formats:
. ICU standard format
with
a
specific version number
o Backup format
(ASCII)
used by difl-erent
versions
The ICU checks the
version
numbers
(see section, "lnvocation Error Messages', earlier in
this chapter) and decides how
to proceed. If it is possible to upgrade the definition
file
without restoring the backup information, the ICU prompts
Do you want to update the fi le? y/[n]
A response of "Yes" causes the ICU to upgrade the file as
you
input it. You can
then
proceed with the ICU as usual.
If the ICU must
restore to upgrade
the
definition file
(for
example, if the ICU is invoked
with
a backup file or a definition file
whose
Intel
version
number differs from the ICU
version number), it invokes the restore process and prompts you as follows:
Do you want to restore from the file? y/[n]
A response of "No" causes the ICU to stop
executing. A "Yes" response means the ICU
should
restore the backup information contained in the
file,
and
create a new
version
of
the definition file.
Ifyou enter
"Yes"
and the input
file is the same as the output file, you are prompted
Enter new outDut file narne:
If the output file exists,
the ICU displays this message:
File <ourpur_f i1e> exlsrs . oVERi,tRlTE? y
/ l-r.,1
i
While
restore is operating,
the ICU displays a series of
asterisks
(*) on the screen. If the
restore
operation reaches completion with
no loss of data, the ICU displays
the main
menu and you proceed
as usual. However,
if an error is encountered, the
ICU displays
the folJowing
message and exits.
l-44 ICU User's Guide
INTRODUCTION TO CONFIGUMTION
*** Ezu{oR vhile restoring
The Definition File has been restored to file: <file-name>.def
lnspect the log file: <file-name>.1og
The ICU writes
the backup information that
was
not
restored to a log-file.
The log-file
lists each
screen name followed by any errors that occurred
while restoring that screen.
It
also lists abbreviations of fields
which were
not restored. The
log-file has the same name
as the output file but
with
a
".log"
extension.
The log-file makes it easy to compare
the
backup definition file and the restored file to see
which values were not restored. You
should then run the ICU correcting the fields in
error. After that
you
can
proceed as
usual.
Assume that
while
restoring from file
upO.def, the ICU was not able
to restore the
"CF'
parameter on the
"Hardware"
screen. The
log file would look like
this:
lCU286 <version number) Restorine from file : upO.def <date> <tirne>
Screen:HARD
nr.!Ìber expe c
te d
Screen:INT
In field : CF
The error messages
in the log-fiìe are the same as
the ICU interactive
error messages.
This example shows only
a portion of the log-file. Ilowever,
the actual file
lists all the
screen names. The
version number, date, and time in the
heading
are variables.
1.14 THE
ICUMRG
UTILIW
The
ICUMRG Utility supplied
with the ICU provides
the ability
to include configuration
support for new
drivers. The ICUMRG Utility allows you to
. Integrate new [ntel
device drivers
with
a
previous version of
the operating system
. Integrate user-written device
drivers into
the operating system
The
ICUMRG Utility combines
the main Screen
Master File
(ICU286.SCM)
and the
main Template File
for System Generation
(lCU286.TPL)
with the Screen
Master File
(SCM)
and Template
Files
(TPL)
for
the new driver.
ICU Uset's
Guide r-45
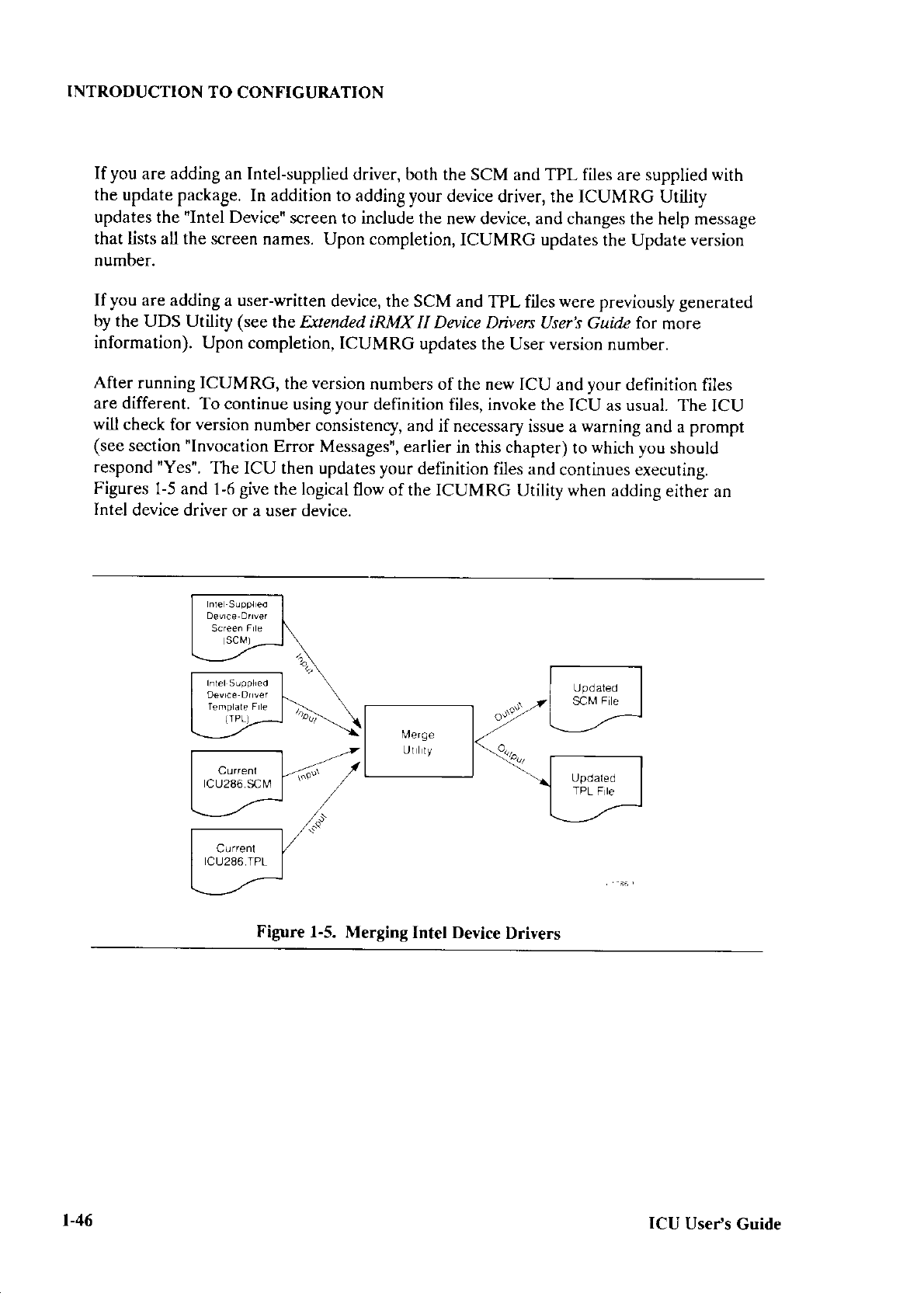
INTRODUCTION
TO
CONFIGURATION
Ifyou are adding an Intel-supplied
driver, both
the SCM and TPL files are
supplied
with
the update
package. In addition to
adding
your
device
driver, the ICUMRG Utility
updates the
'Intel
Device"
screen to include the
new device, and changes
the help message
that lists all the screen
names. Upon completion,
ICUMRG updates
the Update
version
number.
If you are
adding a user-written
device, the SCM and
TPL files
were
previously generated
by the UDS Utility (see
the Extended íRMX II Device Divers User's Guide for more
information). Upon
completion, ICUMRG updates the
User
version
number.
After
running ICUMRG,
the version
numbers of the new ICU and
your
definition
files
are different.
To continue
using
your
definition
files, invoke the
ICU as usual. The
ICU
will check
for version
number consistency, and
if necessary
issue a
warning
and
a
prompt
(see section
"Invocation
Error Messages", earlier
in this chapter)
to
which you
should
respond
"Yes".
The ICU then
updates your definition
fiìes and
continues executing.
Figures
1-5 and
1-6
give
the logical
flow of the ICUMRG Utility when
adding
either an
Intel
device driver
or a user device.
Figure 1-5. Merging
Intel Device
Drivers
t-46 ICU User's
Guide
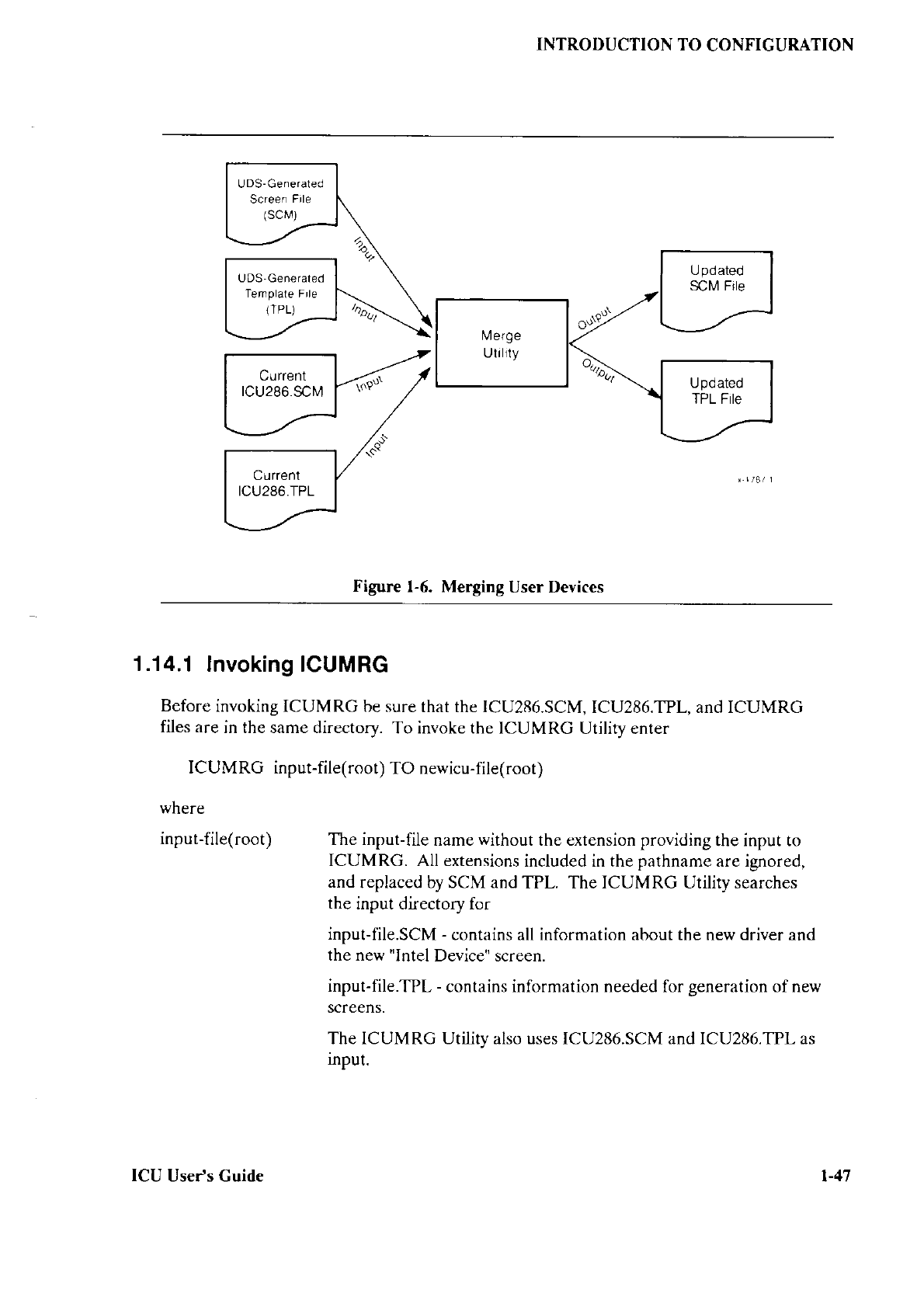
INTRODUCTION
TO
CONFIGURATION
Figure
l-6. Merging
User Devices
1.14.1
Invoking ICUMRG
Before
invoking ICUMRG be sure
that the ICU286.SCM,
ICU286.TPL, and ICUMRG
fiìes are
in the same directory.
To invoke the
ICUMRC Utility enter
ICUMRG input-file(root)
TO newicu-file(root)
where
input-file(root) The input-file
name
without
the extension providing
the input to
ICUMRG. AIÌ extensions
included in the
pathname
are ignored,
and
replaced by SCM and
TPL. The ICUMRG Utilìty searches
the
input directory for
input-file.SCM
-
contains all information about the new driver and
the new "lntel
Device" screen.
input-file.TPL
-
contains information needed for
generation
of new
screens.
The ICUMRG Utility also uses ICU286.SCM and ICU286.TPL as
rnDut.
ICU User's Guide t-47
INTRODUCTION TO
CONFIGURATION
newicu-file(root) The
name of the wo updated files,
without
their extensions,
created
by the ICUMRG Utility. All extensions
included in the
pathname are ignored, and replaced
by
SCM
and TPL. ICUMRG
creates
newicu-file.SCM
-
contains the ICU Screen Master
File updated
with the new device driver.
newicu-file.TPL
-
contains the ICU Template File updated
with
the
new
device driver.
Be aware that the ICUMRG utility
always merges your .SCM and .TPL files
with the ICU
files ICU286.SCM and ICU286.TPL. If you plan
to add support for
several drivers to the
ICU, make sure that the ICU286.SCM and ICU286.TPL
files contain the latest
version of
your
merged
ICU files.
Otherwise,
ICUMRG will
merge
your
driver information
with
outdated ICU fiÌes.
NOTE
Before changing the name of any ICUMRG output fiìes to ICU286.SCM
and ICU286.TPL, save the original files
by copying them to other files
(such
as ICU286OLD.SCM and ICU286OLD.TPL). Although ICUMRG
allows
you
to add support for new drivers, once
you
add that support, there
is no
way
to remove it. If the device driver
you
added contains an error,
you
must revert back to the original
.SCM and
.TPL files.
1.14.2 ICUMRG
Example
The following example shows
how to add
a device
- D219.
The input
files
are ICU286.SCM AND ICU286.TPL
(located
in same
directory as ICUMRG)
D2l9.SCM and D219.TPL
The output files
are ICUNEW.SCM and ICUNEW.TPL
Upon completion the system prompt is displayed. You are
then ready to run the ICU and
generale your
system.
1-48 ICU UseCs Guide
INTRODUCTION TO CONFIGURATION
1.14.3 ICUMRG
Error Messages
The ICUMRG utility generates
an error message if one of the following occurs:
. it is not invoked correctly
. an I/O error occurs
o the
version
numbers are inconsistent
. either
the SCM or TPL files are not valid
Invalid invocation of
ICUMRG causes one of the following self-explanatory error
messages to
be displayed.
. paraneters required
USAGE: I CUMRG infile TO outfil-e
o nissing "To out fi le "
USAGE: ICUMRG infile To outfile
o nissing "TO"
USAGE: ICUMRG infile TO outfile
o nissing "outfile"
USAGE: I CUMRG infile T0 outfile
. coo many Pa
rame te rs
USAGE: ICUMRG infile TO outfile
In addition to the invocation error messages, ICUMRG issues the error messages [sted
below.
. *** UDI Error - <exception-code>,
(mnemonic)
An error
was
detected by the UDI. The mnemonic explains the cause
of the error.
For example,
you
can receive this error message if ICUMRG cannot successfully
change
the
extension.
. *** Error - input fi le same as output file
The input and output files cannot be the same.
. *** l/o Error ín file: <file narne)
<excep-code>, <mnemonic>
An I/O error occurred. For example, the ICUMRG utility
was
not able to create,
open, read,
write
or seek one of the specified files.
. *** Error - <fi1e narne> is not a valid SCM file
The data in
the SCM
file is
not valid.
. *** Error - <file name> is not a valid TPL file
The
data in the TPL file is not
valid.
ICU
Usefs Guide r-49
INTRODUCTION
TO
CONFIGURATION
. *** Error - inconsistency in the version of the internal ICU files
Versions: INTEL UPDATE USER
ICU286.SCM <Intel> + <Update> <User
Version>
ICU286.TPL <Intel>
+ <Update> <User
Version>
There
is an inconsistenry
in the
version
numbers ofthe ICU286 SCM and
ICU286
TPL files.
. *** Error - inconsistency in the version of the internal ICU files
Versions: INTEL UPDATE USER
Input
Scm Fiìe <
Intel
> + <
Update
> <
User Version
>
Input Tpl File <
Intel
> + <
Update
> <
User Version
>
There is an
inconsistency
in the
version
numbers
of the input
SCM and TPL files.
. *** Error - (screen-abbr>
screen already exists in ICU286.SCM
Duplicate screen
names are
not allowed.
You are probably
merging the wrong
SCM
and TPL
files, thus
causing a duplicate
name to
be created.
. *** Error - unexpected
end of TPL file <file name>
An unexpected
end of file in
the TPL file was
encountered.
1-50 ICU
Usefs
Guide
GENERATING CHAPTER 2
YOUR
SYSTEM
2.1
INTRODUCTION
The
process
of generating
your
configured
system consists
of the following steps:
o Generating
configuration
files.
o Executing
a SUBMIT
file that compiles,
assembles,
binds, and builds all necessary
fi.les.
2.2
GENERATING
CONFIGURATION
FILES
By using the
ICU, you can define
the operating
system that best meets your
individual
needs. This
process takes
place
while
you are editing
your definition file. When you
have
completely
defined your
system, return
to command mode to
generate your configured
system as
follows:
1. Use the List command
to create a
file that records your system
configuration.
2. Use
the Generate command
to generate your
configuration files.
3. Use Exit to save your
changes
and exit the ICU.
The following screen
shows the results
of having used the
G[enerate] command to
generate
all the required configuration
files (assuming
the definition file used was
nen'file.del).
ICU
Usefs Guide 2-l
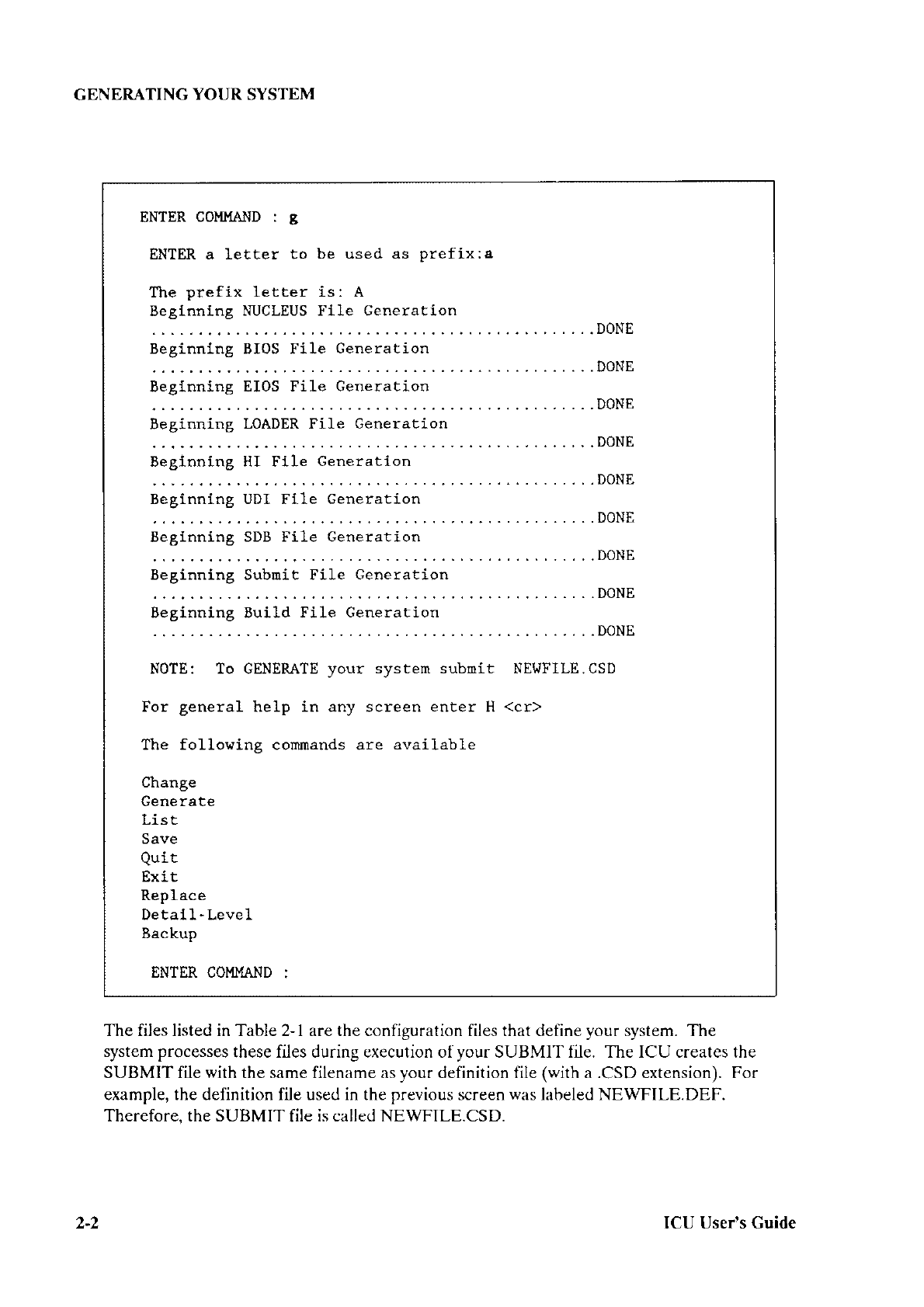
ENTER
COMMAND : I
ENTER a Ìetter tÒ be used as prefix:a
The prefix lettèr is: A
Beginning NUCLEUS Flle Generation
Beginnlng BI0S File Ceneratíon
Eeglnnlng EIOS File Generation
BegÍnning LOADER File Generation
Beglnning HI File GeneraLion
Beginning UDI Fil.e Generation
Beginníng SDB File Cenerat ion
Beginning Subnit FiIe Generati.on
Beginning Build File Generation
NoTE: îo GENERATE
your system submit NEI,IFILE.CSD
For general help in any screen enter H <cr>
The following cornrnands are available
Change
Cenerate
Lis t
Save
Quit
Exit
Replacè
DetalL
-
Level
Backup
ENTER COM},IAND
:
DONE
DONE
DONE
DONE
DONE
DONE
DONE
GENERATING
YOUR SYSTEM
The files listed in Table 2-l are the configuration files that define
your
system. The
system processes
these files during execution ofyour SUBMIT lile. The ICU creates the
SUBMIT file with the same filename as
your
definition file
(with
a .CSD extension). For
example, the definition file used in the previous screen
was
labeled NEWFILE.DEF.
Therefore. the SUBMIT
file
is called NEWFILE.CSD.
2-2 ICU User's Guide
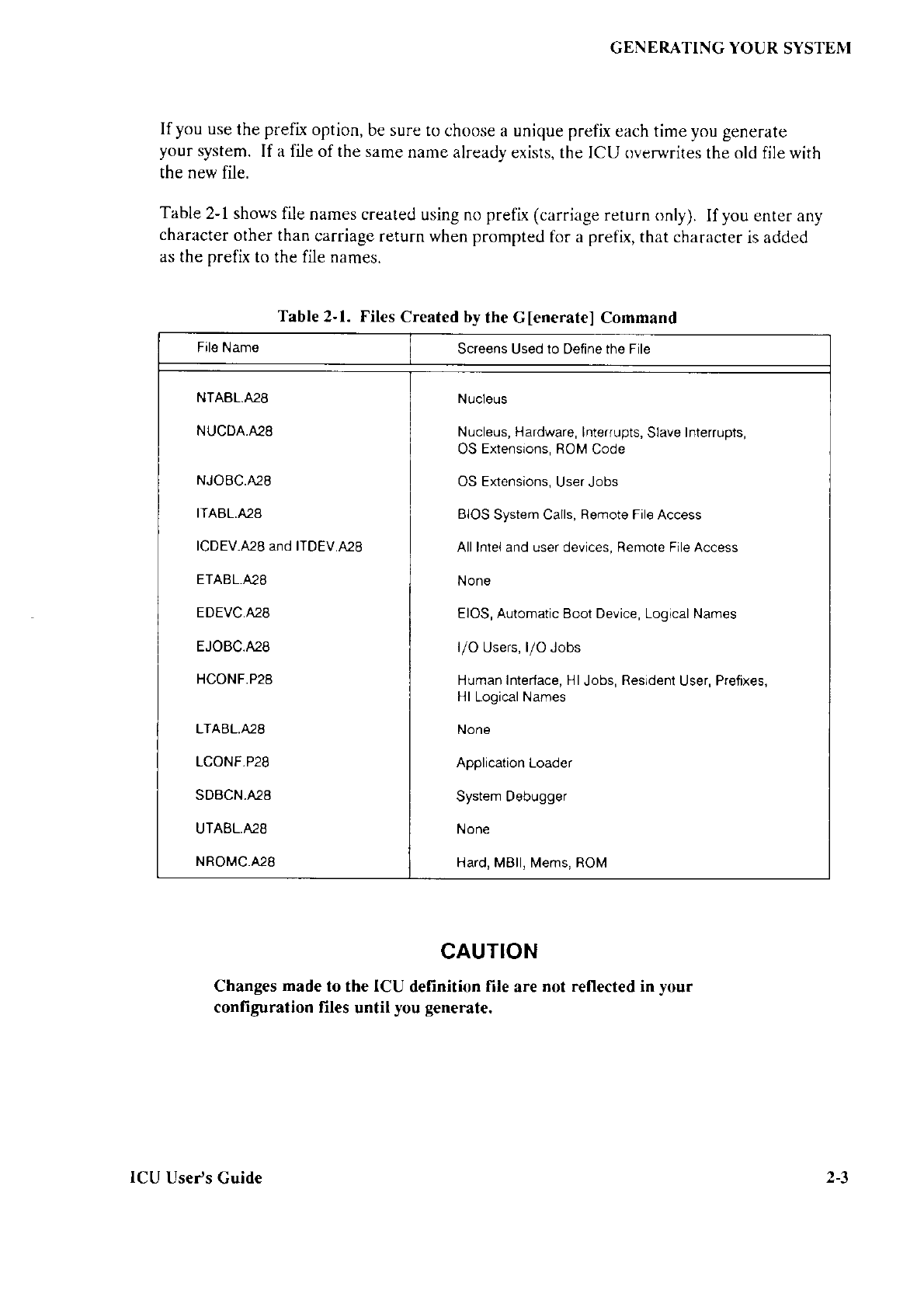
GENERATING YOUR
SYSTENI
If you use
the prefix option,
be sure
to choose a unique prefir
each time you generate
your
system.
If a file of the same
name already
exists, the ICU overwrites
the old file with
the new
file.
Table
2- 1 shows
file names created
using no prefix (carriage
return only).
If you
enter any
character
other than
carriage return when
prompted
for a
prefix,
that character
is added
as the
nrefix
to the file names.
CAUTION
Changes
made
to the ICU definition file are
not reflected in your
configuration hles until you generate.
Table
2-1. Files
Crealed by
the Cleneratel Command
File Name Screens Used to D€fine th€ File
NTA8L.428
NUCDA-M8
NJOBC,A2S
IfABL.A2S
ICDEV.A2S and
ETABL.A2S
EDEVC.A2S
EJOBC.42B
HCONF.P28
LTABL,42S
tcoNF.P28
SDBCN.A28
UTABL.A2S
NROMC.A28
ITDEV.A2S
Nucleus
Nucleus, Hardware,
Interrupts,
Slave
Interupts,
OS
Extensions, ROM
Code
OS Extensions,
User Jobs
BIOS
System Calls, Remote File Access
All Intel and user devices, Remote Fie Access
None
EIOS, Automatic Boot Device, Logical Names
l/O Users,
l/O Jobs
Human Interface, HlJobs, Resident
User, Preflxes,
Hl
Logical Names
None
Applicalion
Loader
System Debugger
None
Hard, MBll, Mems, ROM
ICU
UsePs Guide )_t
GENERATING
YOUR SYSTEM
2.3 EXECUTING
THE SUBMIT
FILE
After
you
exit
the ICU, execute lhe STJBMIT
file and
wait
for
your system to be
generated.
The SUBMIT file
assembles or compiles
any configuration fiÌes
generated by the ICU and
binds the object files
with any needed libraries
used by a subsystem. It then
builds the
system. The syntax for invoking
the SUBMIT file is
SUBMIT output-file[.CsD]
[to
filename]
[echo]
where:
output-file The name of
your
definition file.
filename A file that the system creates to contain the output
of the SUBMIT
command.
e[cho] Sends a copy of
the clata reacl to the screen.
For more information on the SUBMIT command, see fhe Operaîor's Guide
to tlte
Ertended |RMX Il Hunnn lnterftrce.
2.3.1 Assembling the Configuration Files
The SUBMIT file
generated
by the ICU identilìes the configuration files that must be
assembled
or compiled lbr each
of your subsystems. The
number
of
files assembled
varies
from system to system and depends upon the features that you choose. No errors should
be encountered during
this
phase.
Figure 8-36, in Appendix B,
gives
an example of
the
SUBMIT file output during this phase of the configuration
process.
2.3.2 Binding the
Individual Subsystems
As soon as ASM2ll6 generates
the object files lbr a
given
subsystem, the SUBMIT file
initiates BND286 to bind these object files together with any
libraries needed by
the
subsystem.
Any
warnings generated
during this phase should be ìgnored.
Explanations
of
the
various warnings
appear at the
en.i of this section. Figure B-3ó, in Appendix B, shows
some of
the output
generiìte(l
durin{r this phase
of the configuration
pnrcess.
2-1 ICU
User's Cuide
GENERÀTINC YOT]R
SYS'TEM
2.3.3
Warning
Messages
When
you
invoke the system
generation
SUBMIT
file,
a number of
warning
messages
may be issued
by BND286.
These
are normal
messages and
are not critical.
r IIARNING
151: UNRESOLVED
EXTERNAL SI'Ì'ÍBOLS
This
warning
is the
most
common. It indicates
that BND2l.l6
did not resolve all
the
external symbols
declared.
You may ignore
this
warning
since
the missing symbols are
resolved
only at build
time. It may appear when
binding the Nucleus
or after the first
phase
of binding
either
the Basic I/O Sysrem or the
Extendcd I/O System. It may
also appear
after the second
phase
of the EIOS,
if
you
are binding a
first-level I/O
job.
o WARNING
133: SEGMENT
LIMIT DECREASED DUE TO
SEGSIZE VALUE
This
warning
is expected in the Nucleus.
I t indicates that the size of the segment
named
is being decreased
because
of a SEGSIZE specification.
2.3.4 Building
the
System
After the
SUBMIT file
has completed
the assembling
and binding of each of the
subsystems,
it builds the system
by invoking
rhe BLD286 utility. The invocation
lbr
BLD286
is contained within
the SUtsMIT
fiJe. An cxample
of this can be seen in Figure
B-36.
Entering the Generate
command produces
a build
file
with
the s:tmc namc as
thc
definition file but with
the extension
BLD. This serves
as the inpur filc
to BLD286. 1'he
output
file created by BLD286
is the file
you
define in the
"Ceneratc
File Name" screen
(see
the
Extended iRMX II Interactive Conf.guration
lJtility Reference
Manual). No errors
should ocrur
during this phase
of the ICU. However, you
can expect one warning which
can be
ignored. The
warning
is
***WAI{NINC
269 (Line-number>, NIIAR
'CLI_DATA', SEGMllNT
SIZE REDUCED
This warning
appears after
the following
line of code in the build lile:
cli_code
(dp1:0), c1i_data(
limit:0, dpì:0)
ICU UsePs Guide 2-5
GENERATING
YOUR SYSTEM
2.3.5 Error
Messages
In addition to
warning messages, the
language utilities can return
error messages. Error
messages are not normal and
you should not ignore them.
They indicate serious
problems
that
prevent
the successful
generation
ofyour system.
The following error messages
can
appear.
o 0021: E$FILE_NOT_EXI
ST
8042: E$NOT_CONNECTION
, command aborted by EH
One of these messages might appear
if you enter an invalid
pathname as input to the
ICU.
r 0026: E$FILE_ACCESS
This message may appear
if there
is no read access to the input file, no add entry
access to the directory, or no
write access to the output file.
. ERROR I18: INPUT SEGMENTS EXCEED TARCET MEMORY
The memory blocks
you declared in the "Memory for System"
screen are not large
enough for the system
you
delìned. ln this case, enter
the ICU again, increase the
system
memory,
and decrease the Free Space Manager memory. This error message
may result from installing an update
which
increases the size of the operating
system.
2-6 ICU
User's Guide
PREPARING CHAPTER
3
APPLICATION
JOBS
3.1 INTRODUCTION
Once you
have
prepared
your
application
jobs,
you
should locate your first system
in
RAM to facilitate testing
and debugging ofyour programs.
It is much
easier to test and
debug your
programs in RAM than it is to reburn
your
PROM
devices
when you
detect
errors. After debugging
in RAM, you
can locate the final system in
PROM/RAM or copy
it to a secondary
storage device
and load it with the
Bootstrap Loader.
Putting together a RAM-based system
consists of the following steps:
1. Using the ICU to define your
system
2. Preparing your
application
code
3
. Compiling
and binding the
application
jobs
4. Using the ICU to generate
the system
with
your application (not
needed if the
Application Loader loads your
application)
5. Loading and testing the system
This chapter describes how
to
prepare
your application
code, compile and bind it, and
build
a system
with your
application
jobs
(steps
2 through 4 above).
Both loading and
testing your system are described
in Chapter
5 of this manual.
3.2
PREPARING
APPLICATION
CODE
You
can
write
the code for your application
tasks in any language supported by
the
iRMX II Operating System.
This manual assumes that you are using
PL/M-286. In order
to use assembly language, you
must adhere to the PL/M-286 calling conventions
described
in the
ASM28ó Macro Assemhler Operating
Instrucrions manual. T\e Extended
|RMX II Programrning
Techniques manual also contains information to help you write your
application
code, especially assembly
language applications.
When writing your
application code there are additional instructions you should
follow
in
order to use all the features
of the iRMX lI Operating System. The following
sections
nrovide this information.
ICU Use/s Guide 3-l
PREPARING APPLICATION
JOBS
3.2.1
Language
Requirements
Adhere
to the following
language requirements
when writing
your
task
code:
. Make
certain any utilities
you
use are linked
to the Extended
iRMX Il UDI libraries
. In
general,
you should designate
all of your tasks
as procedures. Designation
of initial
tasks
is the only
exception to this recommendation.
Refer
tct Ertended
|RMX II
Application Loader
User's Guide Îor
details about main
modules and
procedures.
. If
you
are compiling
your PL/M-21ì6 code using
any model other
than tARGE,
specify the ROM compiler control. This
causes the compiler
to place the CONST
segment in the CODE
class, where it can be more
easily loaded into
PROM. You do
not need to
specify the ROM control for those
programs
compiled
using the LARGE
model.
The compiler does this
automatically for the
TARGE model.
. Use the DATA and INITIAL PLIM-286 statements
with
care. The
DATA statement
is
valid only if
you
use the PL/M-21'ì(r
TARGE mociel
of segmentation or if
you specify
the ROM compiler control.
The INITIAL statement
cannot be used in a
procedure if
you put that procedure in PROM. [t clin be used, however,
if
vou
use the Bootstrap
Loader
or Application Loader
to load the procedure into
memory.
3.2.2
Include Files
A number of files must be
prtsent t n your microettmputer system to compile
your
application software ancl to
configure your operating system. The
"Includes
and Libraries"
screen, discussed
in the Extended iRll,lX II Interactive Configuration Utility Reference
Manual, selects files that must be
present
to configure
your
operating system.
This
section discusses the files needed
to compile
your
application software.
Any
program containing
iRMX II system calls must include an external declaration
of the
system
calls. The iRMX II Operating
System
provides
the declaration of the
system calls
for FORTRAN, PASCAL, and PL/M-286 in files called INCLUDE files.
When you
install the system as described in the Extended
iRMX I I Hardware and Software Installation
Guide, these fiÌes are located in directory
/RMX286/lNC. FORTRAN
system calls are rn
file RMXFTN.EXT,
PASCAL
system caìls are in RMXPAS.EXT, and PL/M-286 system
calls are in RMXPLM.EXT.
o
3-2 ICU
User's Guide
PREPARING
APPLICATION
JOBS
However, if
you
are programming
in PL/M and your system
does not include all the
subsystems, or if you
are trying to save
memory,
you
may want to use
a PL/M INCLUDE
file that contains system
calls only
for a particular
layer. These files are
Subsystem File Name
Nucleus NUCLUS.EXT
BIOS BIOS.EXT
EIOS EIOS.EXT
Application Loader LOADER.EXT
Human
Interface HI.EXT
UDI UDI.EXT
3.3
DETERMINING
MEMORY
LOCATIONS
An iRMX II system
must be located
either entirely in ROM or entirely in RAM. Intel
recommends
that you put your
system in RAM until you have completed
the testing and
debugging stages.
To determinc your
application's memory requirements, you should add
the
size of
your
application code to
the amount of memory required by the system. After
calculating your system's
memory requirements, you
must determine its
physical
location
in memory and enter
the starting and ending addresses on
the
"Memory
tbr System"
screen,
Some additional factors should be taken
into consideration
when
determining the physical
address of
your
system. AÌì systems have a m in
imum address at
which
they can start
depending on the elements comprising
the system. All systems must take the following
memory
locations into consideration:
. 088000H-0BFFFFH,
default addresses required by the second
and third stages of the
Bootstrap
Loader.
o the
top 32K bytes, if the system
includes the iSDM monitor and the first stage of the
Bootstrap
Loader
(the
top 25(rK bytes, if the system is a System 300 Series
Microcomputer).
In addition, ifyour system
includes either a RAM disk driver
or a
communication board,
you
must be careful not to include the board's
dual-port memory in
the
memory
you
declare for your system.
For example, if
your
system includes an MSC driver, you must
reserve 68 bytes of memory in
the lower megabyte
(in
an Intel-supplied system, the first
2000H bytes are reserved for such
data). After
you
have reserved
room
for
all the data
requiring fired locations, you can locate your application anpvhere within the l6M byte
memory of the iRMX II Operating System. For more inlbrmation on calculating the
exact
memory locations,
see
Chapter 2 of the Ertended
|RMX II Interactive Confguration
Utilin Reference Manual.
ICU User's Guide J-J
PRF],PARING APPLICATION
JOBS
Use the memory
screens to define the memory for the
system and the Free Space
Manager. Intel recommends
that first
you pad
the memory locations to
leave room for
any device drivers that may
be added or changes that may be made during development
After running BLD286,
you
can reduce
the memory to the actual size necessary by
re-
invoking the ICU and editing the memory
rcreens (see section "Minimizing the Memory
Address
Space", later
in
this chapter).
3.4
BINDING AND BUILDING YOUR APPLICATION
JOBS
Application
jobs
are include<l in the system by using BND286 and BLD286. You must
bìnd each application
job
with its offspring
jobs
and the interface libraries discussed later
in
this
section. The following sections describe the binding and buiìding
process, and
the
interface libraries in more detail.
3.4.1 BND286
The BND286 command
is
used as
shown below to bind
your
firstlevel application
jobs.
This command is described in detail in the LAPX
286 Utilities User's Guùle. 'îhe followinu
invocatìon of BND28ó applies to both
the iRMX ll and Series lV systems.
BND286 &
appjob.obj, &
interface.lib &
OBJECT(appjob.1nk) NoLoAD &
NOPUBLICS
EXCEPT(start_address,
public_variable, exc_handle r_addre s s
)
where:
appjob.obj Pathname of the file
containing the object
code for
your
application
job. You do not need
to
provide
this code in one file;
you
can bind
jn
several files or libraries
at this point.
Pathname of
the file containing
the interface libraries
for
the
system calls included
in
your
jobs.
These
interface libraries are
described in later paragraphs
of this section,
Pathname
of the file in which
BND286
places
the module
containing your bound
application code. [Jse
this file as the input
file when
configuring
your application
job
on
the "User Modules"
screen.
The starting
address of your
application. The
Nucleus uses this
name to obtain
the selector and offset
ofthe initial
task. This must
be the same name you
entered as the
Task Start
Address on the
"User
Jobs" screen.
interface.lib
appjob.lnk
start address
l-4 ICU User's
Guide
exc handler address
PREPARINC APPLICATION
JOBS
The starting address ofyour
exception handler. You must enter
this
value
if the starting address
is not zero. The Nucleus uses this
name to obtain
the selector and offset of the exception handler.
This must be the same
name
you
entered as the Exception Handler
Start Address
on the
"User
Jobs" screen.
The PUBLIC name of
a
variable
in your data segment. The
Nucleus uses this name to
obtain the data selector number. This
must be the same name you
entered as the Public Variable Name
on the
"User
Jobs" screen. lf there is no data segment or the
application initializes
its own data segment, it is not necessary to
specifo this
parameter.
public_variable
You should be aware
of the following requirements when bindìng an application
job.
. Use the NOLOAD option
of BND286. This causes the System Builder (BLD286) to
combine
your
application
with
the sysrem
lo create a bootloadable file.
r Ensure that the output of BND286 includes
three PUBLIC names, one for the start
address, one for a
variable
in the
initial data segment of your application
job,
and one
for the exception handler (the
data segment and exception handler are optional).
These
names must be same as the names you
specified on
the "User
Jobs"
screen.
These public
names allow the system to create a
job
and start iÌs execution at the
correct
address
with
the corresponding data
segment intact.
o Bind the
appropriate interîace libraries to your application
job,
if you use any
iRMX2tl6 system
calls. The interface libraries contain routines that satisfo external
references to system calls. The name
of the library that
you
must bind in
with
your
application
code depends on
which
model of PL/M-286
segmentation
the
jobs
were
compiled under. Table 3- I shows the correlation between models
of
segmentation
and interface libraries. Specifu these libraries
as the last modules
in the
BND286
input list so that they can satisfy references from all bound modules. Notice that no
library exists for the SMALL model of PL/M-286 segmentation; except for Universal
Development lnterface (UDI) level applications, the iRMX II Operating System does
not support applications compiled in SMALL.
Table
3-1.
Interface Libraries
as a
Function
of
PL/M-286
Models
Subsystem SMALL COMPACT TARGE oT MEDIUM
All subsystems,
except
uDl
UDI UDIIFS.LIB
RMXIFC.LIB
UDIIFC.LIB
RMXIFL.LIB
U
DIIFL, LIB
ICU
Usefs Guide J-J
PREPARING APPLICATION
JOBS
After
you have bound your object
code using BND286 with the NOLOAD
option, you
should
1. Invoke the ICU. You may
want
to use
the Level of Detail option and
select Jobs
from the displayed menu
to see all the
job
screens that require changing.
2. Enter
the application
job
onto the "User Job" screen.
3. Enter the
pathname
of the object file, created
by compiling and binding the code,
onto the
"User
Module" screen.
4. Ensure
that
you
have
enough memory for the system, including
your
application
jobs.
5. Generate the system by entering the "G" command and submitting the output-
file.CSD.
(lnvoking
the ICU system
generation submit
file activates BLD2fló.)
The iRMX II Operating System does not allow
you
to build
your
application system in
separate bootload files. With BLD286 you build the system as a unit. Figure 3-l
illustrates the bind
and build
orocedure.
3.4.2 Minimizing the Memory Address
Size
When you
originally located your application
jobs,
you
may have included extra memory
to accommodate
changes during development. However, in the
final system, after binding
and building, you
can eLiminate some of the extra space. BLD28(r
creates a map file
with
the same
name as the system, but with the extension MP2,
as
part
of its output. By
looking at the MP2 file, you can find the exact starting
addresses of the clescriptor
tables,
the monitor,
and all the other constants in your system.
To tighten up memory,
change
the system
memory definition and generate your system
again using the
ICU.
3-6 ICU User's
Guide
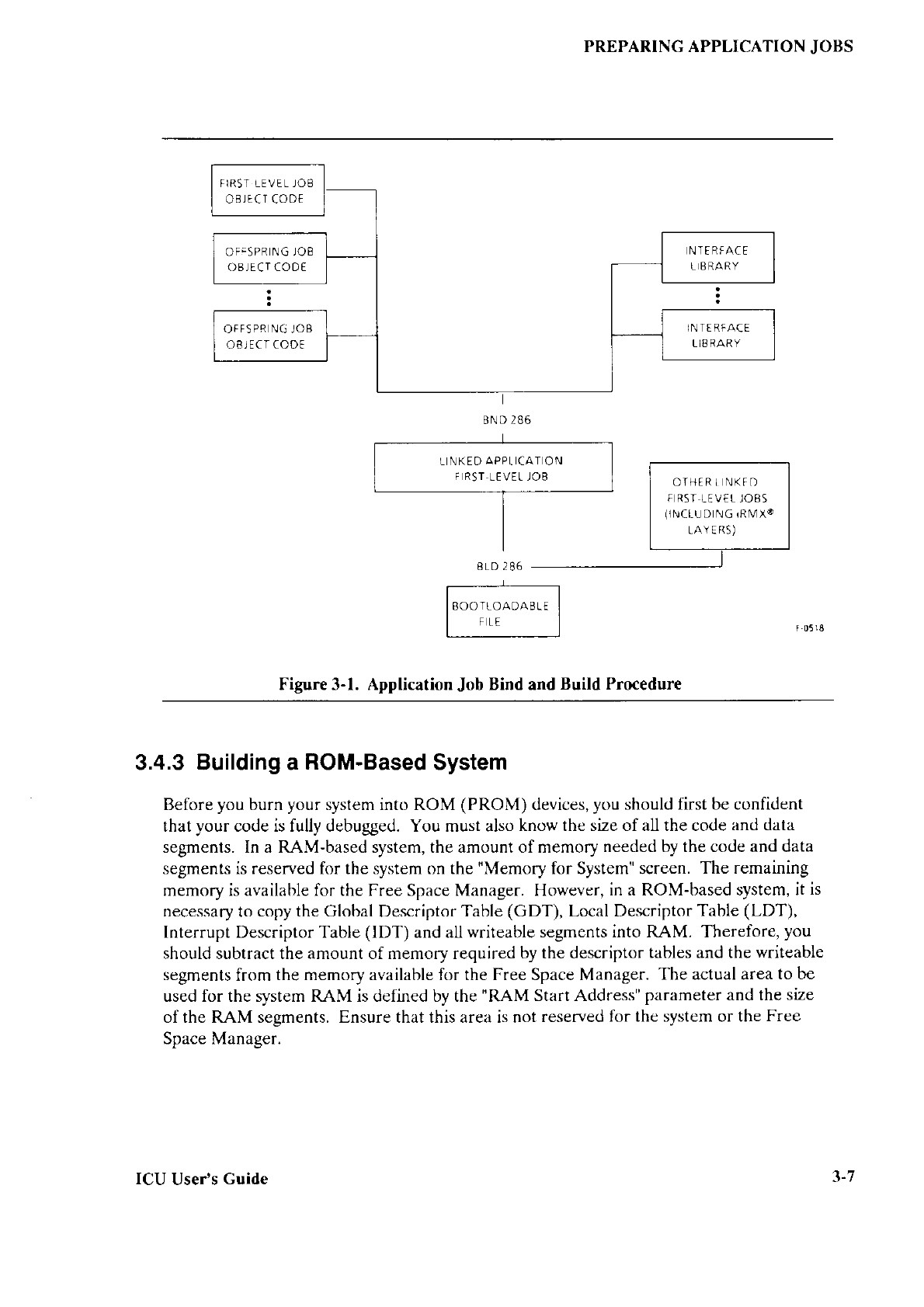
PREPARING APPLICATION
JOBS
F ìRS I LEVEL ]O8
OB]
EC'I
COD€
N
IE RFACE
L BRARY
OF;SPR
NG
JO8
OB] ECI CODE
IN TE RFACE
L SRARY
OFF5PR
N6
]OB
OB] ECI CODE
BND 286
L NKED
APPI
CAT ON
É R5T
LEVET ]O8
8LD 286
EOOILOADABLE
F
tE
Figure 3-1. Application
Job
Bind and
Build Procedure
f 05r8
3.4.3
Building
a
ROM-Based
System
Before
you
burn
your
system into ROM (PROM)
devices,
you should first be confident
that
your
code is fully debugged. You must also
know the size of all the code
and data
segments. In a RAM-based system, the amount of memory
needed by the code and data
segments is reserved for the system on the
"Memory
for System" screen.
The remaining
memory is available ior the Free Space Manager. However,
in a ROM-based system, it is
necessary
to
copy the Global
Descriptor
Table
(GDT),
Local Dercriptor
Table
(LDT),
Interrupt Descriptor Table
(IDT) and all
writeable segments into RAM. Therefore,
you
should subtract the amount of memory required
by the descriptor
tables and the
writeable
segments
from
the memory available for the Free Space Manager.
The actual area
to be
used for the system RAM is defined by the
"RAM Start Address"
parameter and the
size
of the RAM segments. Ensure that this area is not
reserved
for the system or the
Free
Space Manager.
ICU
Use/s
Guide
PREPARING
APPLICATION
JOBS
To determine the size ofyour
code and data segments, follow these
guidelines.
1. Bind
your
application using BND286.
2. Run the ICU to create
the generation SUBMIT file.
3. Invoke the
SUBMIT file.
4. Read the memory
map
(.MP2
file) created during the build
phase
to find the start
address for the GDT in ROM, the amount of ROM
your
system uses,
and the
amount
of RAM your system requires. Calculate the RAM memory required by
adding
the size of the IDT,
the
final GDT (the
number of GDT entries
multiplied
by 8), the final LDT, which is the same as the final GDT, and the sum of all the data
segments
with
the WRITEABLE attribute. To this number add 2700 bytes
which
are used as a
work
area during system startup.
5. Invoke the ICU and remove the size of the memory calculated in step 4 from the
memory defined on the "Memory for System" screen.
6. Rerun the ICU to generate
the final
SUBMIT
file.
7. Invoke this
system SUBMIT file.
The final file generated
after rerunning the ICU with
the correct parameters does not
include the start address
ofyour
system,
that is the initial JMP
at address 0FFFFF0H.
You must burn that
into ROM separately.
Ifyou specìfied
that the initialization code
resides
somewhere in the top 64K bytes (not
below address 0FF0000H),
then
you
can
burn a short
jump
to that address. Otherwise,
you
need a
FAR
jump,
which
may cause a
problem.
The tì02tì6 processor
resets the high 4 address
bits. This means
you
can only
jump
to the lowest
megabyte, but
your
ROM is usualìy
in the high megabyte. Boards such
as the iSBC 2tì6/ 12,
iSBC 386/2X, and iSBC 31ì6/3X
solve this problem by setting the 4
address
bits to one until a specific OUT command is
issued. This allows
you
to
perform
a
FAR
jump
to anyvhere
in
the
high megabyte.
The initialization
routine
resides in the segment NUCDAT.CODE_ROM,
and its entry
point
is at offset
12H. To obtain the entry point
address, add the entry
routine offset
(12H)
to
the address
of NUCDAT.CODE_ROM (which you
specified tJuring
ICU
configuration).
For
example, if the address of
NUCDAT.CODE_ROM
is 0FC0000H, the
address of the
ROM-initialization routine would
be 0FCO0l2H.
At location 0FFFFF0H
in
your
PROMs
burn a FAR
jump
to the address you
derived
for the ROM-initialization
routine.
Appendix
C provides
an example of how to place your
code
into PROM. It lists both the
hardware
and software
necessary to do this. Refer
to this appendix for
further
information.
3-8 ICU Useds Guide
ADDING
USERS CHAPTER 4
TO YOUR
SYSTEM
4.1
INTRODUCTION
To function correctly, a system configured with
the I{uman Interface requires information
about all users
(operators)
and terminals that
intend to access the system
via
the Human
Interface. Two t)?es of users
exist for
your
system: a resident user and non-resident
users.
4.2
THE RESIDENT
USER
The resident user becomes part ofyour
final
system
antl resides in memory along
with the
rest of the Operating System
(thus,
the term "resident user").
'l
wo
types of resident users
exist: a recovery resident user
and a non-recovery resident user. The recovery resident
user gains control only
if an initialization error occurs during initialization of the Human
Interface. Regardless of the
type, the resident user occupies one of the system terminals
and
is created before non-resident users.
The
Operating
System
can contain
information
about only one resident
user.
Including a resident
user tlpe in
your
system is called
resident
user configuration.
Resident user configuration
is accomplished by supplying information to the Human
Interface (HI) screen
during ICU configuration of the
Human
lnterface. Refer to the
Ertended |RMX II Interactive
Conftguration Reference Manual for tletailed information
needed
for resident user conficuration.
4.3 NON-RESIDENT
USERS
Non-resident users are users that
can
access
the
system using the Human Interface logon
procedure. Ifyour system is to
be a multiple-user
system, you need to define to the
Human Interface all the non-resident users that can access the system. Configuration for
non-resident users occurs
through the Human
[nterface PASSWORD command and
possible editing of several user definition files. These files define user names, limitations,
passwords, terminals,
and tcrminal charactcristics
to the system.
The process of adding non-resident users to your system ìs called
non-resident user
configuration. The files involved are called non-resident
configuration files.
ICU Usefs
Guide 4-l
ADDING
USERS TO YOUR SYSTEM
The system manager (who has user ID 0) can modify these files to add users or terminals,
delete
users or
terminals,
or change characteristics of users or terminals. Depending
on
the tlpe
of modifications made, the changes take effect either the next time the affected
user logs onto the system
or the next time the
system
is initialized. To
prevent
unauthorized
users from changing the system configuration, the system manager should
be the only user with change
access
to these files.
Refer to the
Operator's Guide
to the Ertended |RMX II Human Interface for detailed
information
on non-resident user confisuration.
4-2 ICU
Useds Guide
LOADING
AND TESTINGCHAPTER
5
THE
SYSTEM
5.1 INTRODUCTION
After you
run the SUBMIT file generated
by the
ICU,
you
are ready to load the system
into RAM and test it. The system RAM code is conrained in the file
that
you
specified
while
running the ICU. There are several
diflerent ways in
which
you can
load
your
system into
RAM.
5.2 LOADING
YOUR
SYSTEM INTO
RAM
If you
are using a Series
lV development system,
use the iSDM System Debug Monitor to
load
your
system
from disk into RAM. The iSDM monitor is described in the rSDM
Systetn Debug
Monitor Reference Manual. Shctukl, you have a system that uses D-MON386,
you
load the system into RAM using
the D-MON3Iì6 B command (Bootstrap
Loader
command).
If you
are usingyour
System 300 Series
Microcomputer or a MULTIBUS II system as a
development
tool, use the
Bootstrap Loader to load your system into RAM. The
procedures
for using the
Bootstrap Loader are described
ín
the
Extended iRMX II
Bootstrap
Loader Reference Manual.
5.3 INITIALIZING
YOUR
SYSTEM
Aller you load your
system, you
must initialize it. Ifyou are using the Bootstrap
Loader
this process
takes
place
automatically.
lf you
did
not load
your
system using the Bootstrap
Loader,
refer to the appropriate
manual for instructions on how to initialize
your
systern
by starting execution
from the beginning
of the Root Job.
5.3.1 Initialization
An iRMX ll Operating System can be configured to include
your own code as a
first-level
job
or as a
first-level I/O job. When
created, such a
job
contains only a single task. That
single task creates or starts the creation
of all other objects required by the first-leveljob.
Thus it is referred to as the
initialization task lbr its
job,
even though it may
perform
other
functions as
well. You should synchronize
the operation of
each
initialization
task with
that of the root task to ensure proper
functioning of
your
applcation system.
ICU User's Guide 5-l
LOADING
AND TESTING THE SYSTEM
The root task is
structured so that it creates the first-leveljobs one at a time. It contains a
programming
loop that in general performs
the following:
Repeac for each first-level job
Create first- 1eve1 job
Suspend root task (until resurned by a first-1eve1 job)
Untll finished
End
Each time the root task creates a firstJeveljob, the root task suspends itself
to
allow the
initialization
task in the new
job
to
perform
synchronous initialization. Synchronous
initialization consists of functions that must be performed
immediately, before some other
firstJeveljob
is created. Typically, this requires creating objects
or making resources
available
that tasks in first-level
jobs,
not yet created, expect
to be available
when
they
themselves are created. (For
example, the initialization task in
the Extended I/O System
job
must
create the entire Extended I/O System belbre it can allow the root task to create
other first-level
jobs
that might make use
of Extended l/O System functíons.)
When the
initialization task finishes its synchronous
inìtialization, it must
inform the root
task that it is finished, so
that the root task can resume
execution and create another first-
level
job. The
initialization task must always inform
the root task that it has completed
its
synchronous
initialization process by
making the following
procedure
call:
CALL
RQ$ END$ IN IT$TASK;
This procedure
call requires
no
parameters.
When you
calÌ this procedure,
the root task
resumes
execution, allowing
it to create the
next first-leveljob.
You must include a call to
RQ$END$INIT$TASK
in the
initialization task of each
of
your
first-level
jobs,
even if the
jobs
require
no synchronous
initialization. If one of
the firstlevel tasks
does not include
this call, the root
job
remains suspended
and cannot create any
of the remaining first-level
jobs.
The amount of synchronous
initialization
that an initialization
task must do
depends on
your
job
structure.
You may
require some of
your
initialization tasks
to create all of the
offspring
jobs
and a
number of other
objects before calling
RQ$END$INIT$TASK.
Some
others
may have to perform
only
one or two functions,
call RQ$END$INIT$TASK
and
then
resume the process
of initialization
asynchronously.
Still other
initialization tasks
may
not have any
synchronous initialization
requirements
and so can c:rll
RQ$END$INIT$TASK
before performing
any initialization.
You must determine
how
the
pieces
ofyour system interact,
and how they
must be synchronized.
5-2 ICU
Usefs Guide
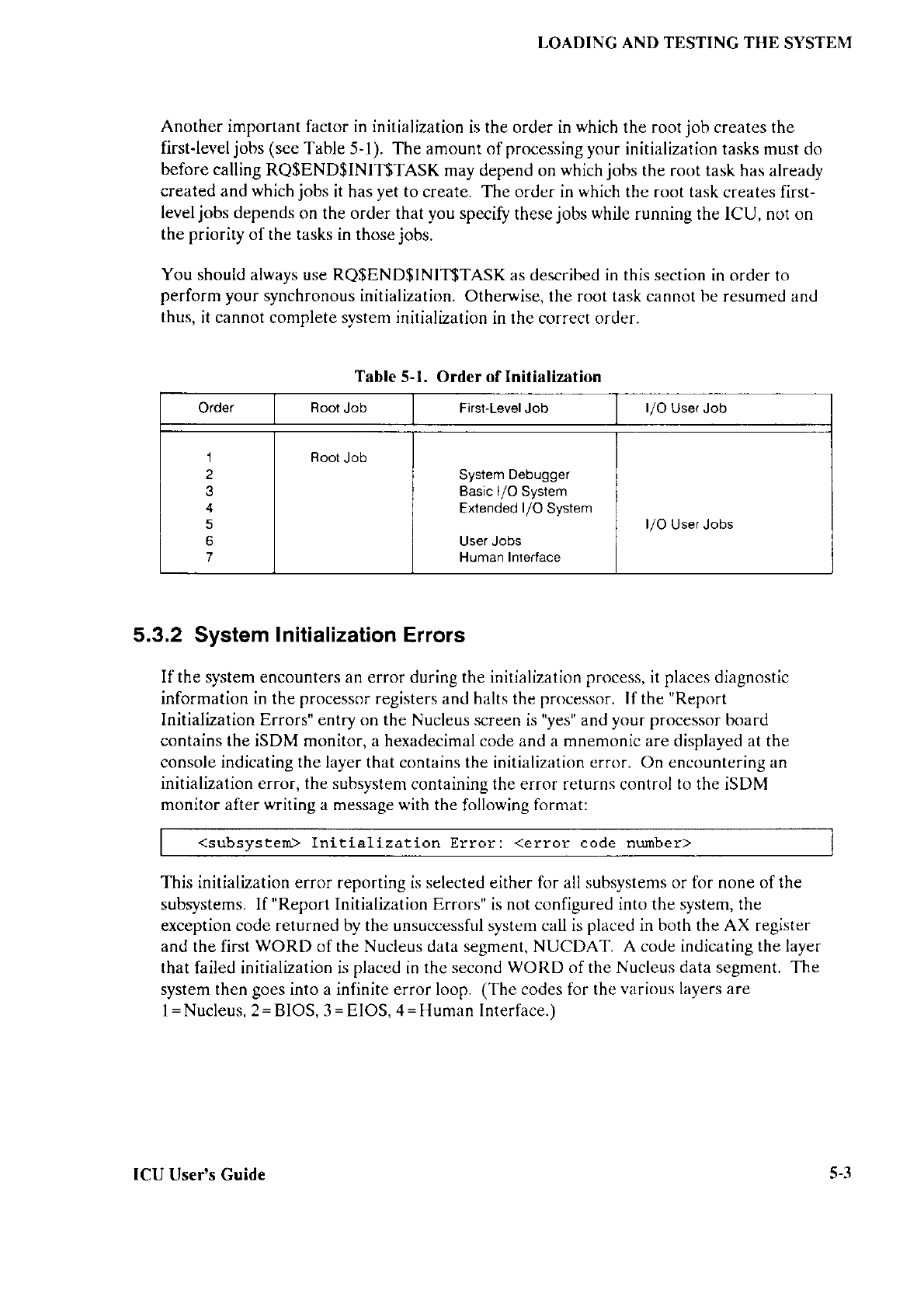
LOADING AND TESTING THE SYSTEM
Another important factor in initialization
is the order in
which
the root
job
creates the
first-leveljobs (see
Table 5-l). The amount
of
processing your
initialization tasks must do
before calling
RQ$END$INIT$TASK
may depend on
which
jobs
the root rask has
already
created and
which
jobs
it has
yet
to create. The order in which the root
task creates first-
level
jobs
depends
on the order that you specify
thesejobs
while
running the ICU, not on
the priority
of the tasks in those
jobs.
You should always use RQ$END$INIT$TASK
as described in this section
in order to
perform your
synchronous initialization.
Otherwise, the root task cannot be resumed and
thus.
it cannot comnlete svstem initialization
in the correct order.
5.3.2
System
Initialization
Errors
If the system encounters an error during the initialization process, it places diagnostic
information in the processor registers and halts the processor. lf the "Report
Initialization Errors" entry on
the Nucleus
screen
is
"yes"
and
your processor
board
contains
the iSDM monitor, a hexadecimal code and a mnemonic are displayed at the
console indicating the layer that contains the
initialization
error. On encountering an
initialization error, the subsystem
containing the error returns control to the iSDM
monitor after
writing
a message with the
following
format:
<subsysteÈ lnitialization Error: (error code number>
This initialization error reporting is selected either for all subsystems or for none of the
subsystems. If "Report
Initia[zation Errors" is not configured into the system, the
exception code returned by the unsuocessful system call is
placed
in both the AX register
and the first
WORD
of the Nucleus data segment, NUCDAT. A code indicating the layer
that failed initialization is
placed
in the
second WORD of the Nucleus data segment. The
system then goes into a infinite error loop. (The codes lbr the
various layers are
1=Nucleus. 2=BIOS. 3=EIOS. 4=Human Interface.l
Table
5-1, Order of Initialization
Order Root
Job First-L€v€lJob l/O User Job
1
2
3
5
6
7
Root
Job System Debugger
Basic
l/O System
Enended
l/O System
User Jobs
Human lnterface
l/O
User Jobs
ICU
User's Guide 5-3
LOADINC AND
TESTING THE SYSTEM
The only subsystem that handles an initialization
error slightly different is the Human
Interface. In addition to the initialization
error described above, the Human
Interface
may issue the following
warning if it does not have enough memory to fill the
user's
recuest.
In such a case, the user is assigned whatever memory is available at the time.
5.3.3 Completing Initialization
Once initialization is complete, users can create and attach files on the
devices
specified
with the ICU. lf the
devices are olTline, an exceptional condition code
is
returned. If one
of these devices is switched from on-line to oifJine,
the Extended I/O System
automatically detaches the device, and aÌl
file connections on that device are marked
invalid
by the BIOS.
When
the unit is switched back on-line, the
Extended I/O System
automatically attaches
it the first time a user tries to create or attach
a file on the device.
The Extended I/O System performs
this service only for devices that
it attaches.
5.4 TESTING
YOUR
SYSTEM
The
normal development cycle
is to load your system, test it and
correct any errors, then
reassemble or recompiìe any appropriate program
code. Next, redefine
and regenerate
your
system using
the ICU, and load the system
again. You can
c<lntinue this
procedure
until
you
have created your
target system.
Once
you
have created your
final system,
minimize the
memory locations
allocated for the system by
editing the
"Memory
for
System"
rcreen
(see
Chapter
3). You can then copy your
final system to
PROM or use
the Bootstrap
Loader to load
it from secondary storage.
If you
are
going
to use the
Bootstrap Loader to
load
your
system, refer fo
Ertended iRMX
II Bootstrap
Loader Reference Manaal
for confìguration
information.
i *** WAIU{INC: THE SYSTEM
DID NoT HAVE YoUR MINIMUM
MEMORY REQUIREMENTS
I you wrLL coME
up wrrH ALL THE ì,rEMoRy rIIAT ts AVAI
TABLE rN THE
I sYsTEM, CONTACT THE SYSTEM MANAGER.
5-4 ICU Use/s Guide
LOADING AND TESTING THE SYSTEM
5.4.1 Using the Debugging
Tools
The development of every system
requires debugging
ancl^testing. To aid
you
in the
development of iRMX II-based application
systems, the IzICE In-Circuit Emulator, the
iRMX II System Debugger with
either the iSDM System
Debug Monitor or the
D-MON38ó
Monitor are available
from Intel. The System
Debugger extends the
capabilities
of the iSDM Monitor
and the D-MON386 Monitor. In addition
to
the
sysrem
debugging
tools, Intel has Soft-Scope
286/ to debug user programs loaded by the
Application
Loader. The following sections
describe the advantages of these debugging
tools.
5.4.1.1
Advantages
ol the iRMXo ll System Debugger
You can extend the capabilities of
the iSDM Monitor or the D-MON386 Monitor by
including
the System Debugger as part
ofyour operating system. In addition to retaining
the
features of the monitors, the System
Debugger
. Identifies and interprets iRMX II system calls,
. Displays iRMX II objects.
. Allows the user
to
examine the stack
of a task to determine
which
iRMX Il svstem
calls
it has made recently.
5.4.1.2 Advantages
of Soft-Scopeo 286
Soft-Scope is an interactive, source-level debugging tool designetJ to aid
in
the debugging
of user
programs
loaded by the Application Loader. It provides the following debugging
features:
. Source code interface and on-line
listings
o Access to program variables,
including arrays and structures
. High-levelbreakpoints
. Access to asscmbly level debugging
. iRMX II multitasking support
. iRMX II exception handling
o Access to iRMX Il objects such as mailboxes and tasks
. Abilitv to susnend and resume tasks
ICU
Usefs Guide 5-5
LOADING AND TESTING THE SYSTEM
5.4.1.3
Advantages ol the l2lCE" In-Circuit Emulator
The IzICE emulator
provides in-circuit emulation
for 80286 and 80386 microprocessor-
based systems, meaning that it
"stands
in" for the these microprocessors in
your target
iRMX II- or Distributed iRMX Ill-based
system. The in-circuit emulator allows
you to
. Get closer to the hardware level
by examining the contents of input pins and input
ports.
. Change the
values
at output
ports.
. Examine
individual
components rather than an entire board.
o Look at the most recent 80 to 150 assembly language instructions executed.
. Protect memory areas from being altered and trap on attempted access.
5.4.2 Debugging Application Jobs
While
you
are creating
your
application
jobs,
you will probably
use the following iterative
procedure
to remove bugs from
your
code:
1. Configure
your
system.
2. Generate
your
system using ICU generated
command fiÌes.
3. Test the system to find bugs.
4. If any bugs are
found,
modify the
application code to eliminate
the
bugs and go to
Step 2.
Once
you
have
performed
the entire configuration process, you
are ready to
load
the
system.
5-ó ICU
Use/s Guide
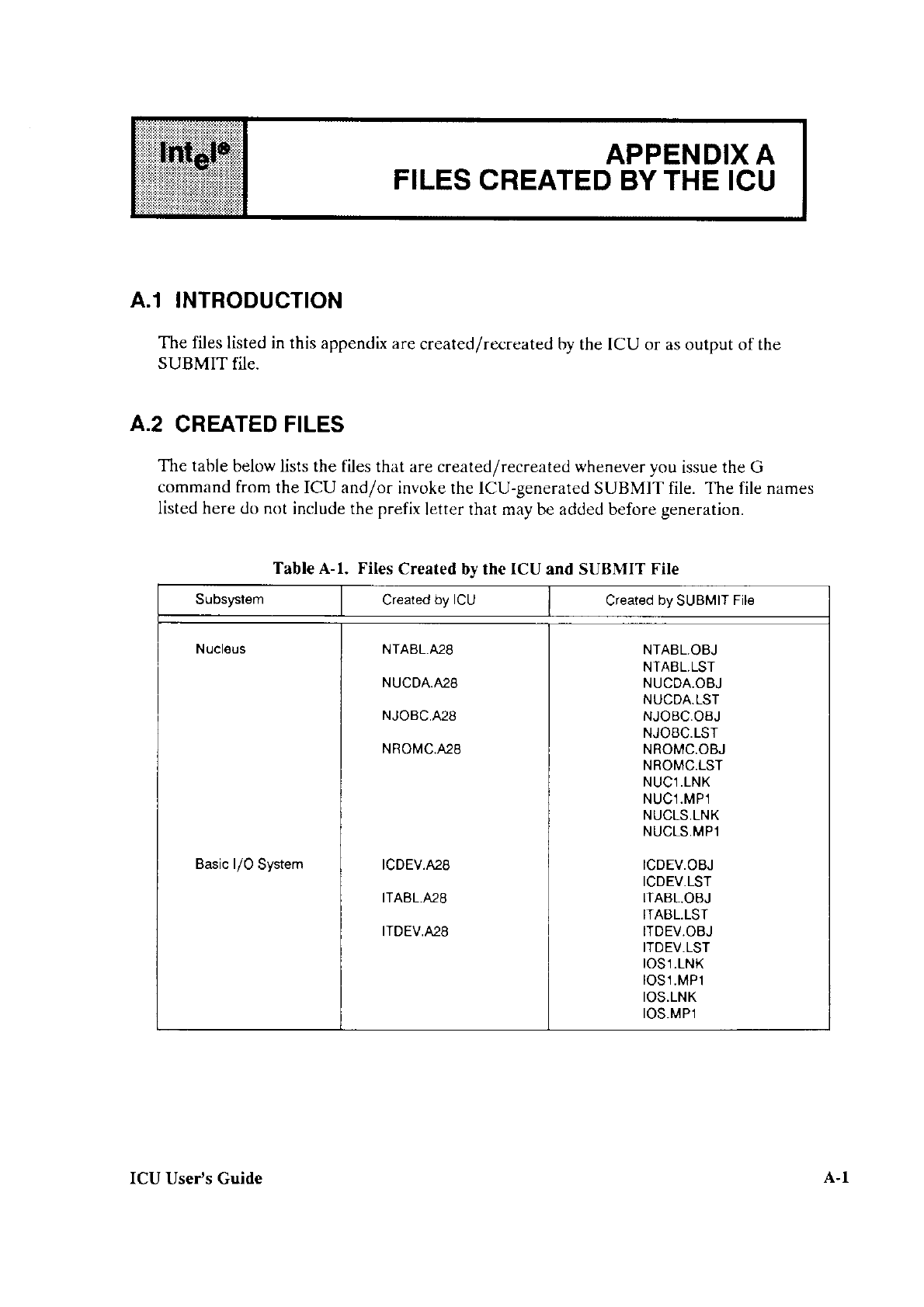
APPENDIX
A
FILES
CREATED
BY THE ICU
4.1 INTRODUCTION
The files listed in
this appendix are
created/recreated by
the ICU or as output of the
SUBMIT fiìe.
4.2 CREATED FILES
The table
below lists the
files that are created/recreated whenever you
issue the G
command from
the ICU and/or
invoke the lCU-generated SUBMIT file. The file
names
Iisted here do not
include the prefix
letter that may be added before generation.
Table A-1. Files
Created
by the
ICU
and SUBMIT
File
Subsystem Created
by ICU Created
by
SUBMIT
File
Nucl€us
Basic l/O System
NTABL.A2S
NUCDA.A2S
NJOBC,A2S
NROMC.428
ICDEV.428
ITABL.A2S
IIDEV,A2S
NTABL,OBJ
NIABL,LST
NUCOA.OBJ
NUCDA.LST
NJOBC.OEJ
NJOBC.LST
NROMC.OBJ
NROMC.LST
NUCl,LNK
NUC1.MPl
NUCLS.LNK
NUCLS.MPl
ICDEV.OBJ
ICDEV.LST
IfABL.OBJ
ITABL.LSf
ITDEV,OBJ
ITDEV.LST
IOSl.LNK
tosl.MP
l
IOS.LNK
IOS.MPl
ICU
Usefs Guide A-l
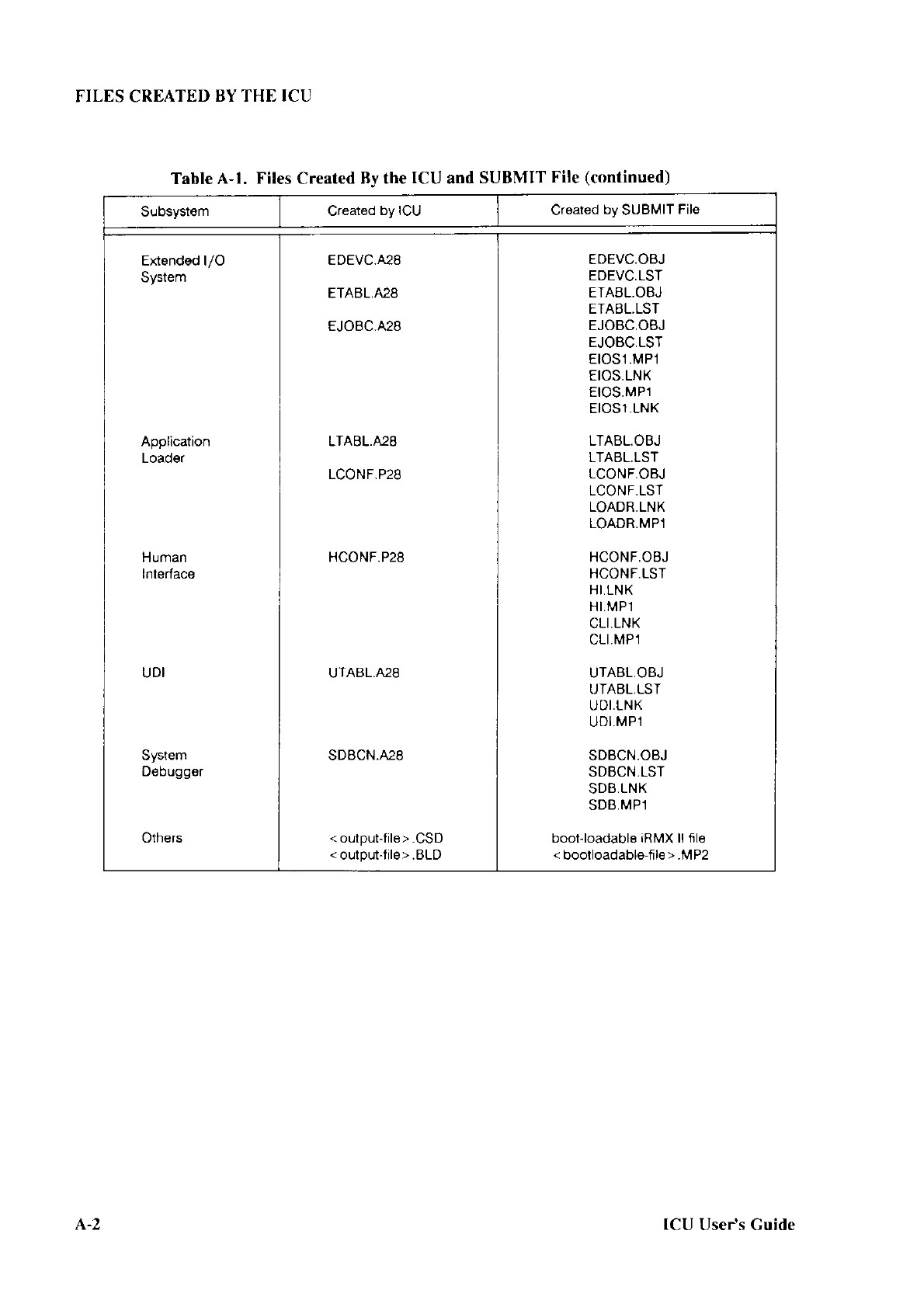
Table A-1.
Files
Created
By the
ICU
and
SUBMIT
File
(continued)
Subsystem Created
by ICU Created
bv
SUBMIT
File
E),lendsd l/O
System
Appllcation
LOaO€t
Human
lnterfac€
UDI
System
Debugger
Others
EDEVC.A28
ETABL,42S
EJOBC,A2s
LTABL-428
LCONF.P28
HCONF.P28
UTABL.A2S
SDBCN.428
<
output-file
>.CSD
<
outputjile
>.BLD
EDEVC.OBJ
EDEVC.LST
ETABL.OBJ
EIABL.LST
EJOBC,OBJ
EJOBC,LST
Etos1.MP1
EIOS,LNK
Elos.MPl
EIOSl.LNK
LTABL,OBJ
LTABL,LST
LCONF,OBJ
LCONF,LSf
LOADR.LNK
LOADR,MPl
HCONF,OBJ
HCONF.LSI
HI.LNK
HI.MP1
CLI.LNK
CLI.MPl
UTABL.OBJ
UTABL,LST
UDI.LNK
UDI.MPl
SDBCN.OBJ
SDBCN.LST
SDB.LNK
SDB.MPl
boofloadable iRMX ll file
<
bootloadable-fi le>.MP2
FILES CREATED
8Y THE ICU
A-2 ICU
Use/s Guide
EXAMPLE
SYSTEM APPENDIX
B
CONFIGURATION
8.1 INTRODUCTION
This appendix contains
an example
illustrating
how to use the ICU to
modifo an Intel-
supplied
definition file. This example contains
the following
descriprions:
. The
configuration defined
by the lntel-supplied
definition file
(28612.de|).
r The target system,
focusing
on the differences
between it and
the supplied
configuration.
o The ICU changes
required to
convert the existing
definition lìle to one
corresponding
to the
target system.
8.2
THE INTEL.SUPPLIED
DEFINITION
FILE
The existing definition
file, named
28612.D8F, defines
the 80286-based mulrluser system.
This particular
system
configuration
has the following
charaeteristics:
. The CPU board is an
iSBC 286/10(A)
or an iSBC 286/12 board.
. Interrupt
levels are
assigned as
fbllows:
Level 0-SystemClock
Level I - System
Debugger
Level2 - Available
Level 3
- Used by the
Terminal
Communicarions
Controller
Level
4 - Available
Level 5
-
An MSC
controller
Level 6
-
An 8274
Terminal
Driver
Level 7
-
An 82594
slave
PfC
. Up to 8M bytes
of RAM, at addresses
20t)0lI through 07FFFFFH. Of these,
addresses
05A000H through OTFFFFFH
are allocateci to the Free
Space Manager.
. The system device
is :SD:.
. The
supplied, ready-to-bootstrap-load
file is
/BOOT/2t1612.286.
ICU
Uset's Guide B-l
EXAMPLE SYSTEM
CONFIGT]RATION
B.3
DIFFERENCES
BETWEEN
THE TARGET
AND START-UP
SYSTEMS
The differences
between the target
system and the 80286-based
multi-user system
dictate
how
you will
use
the ICU to alter
the definition file. These
systems differ in
the following
ways:
. Change
the reserved memory
address of the MSC driver to
prevent an address
conflict with the iSBC 220
,Jriver.
. An iSBC
220 SMD controller for
an 87M byte disk is an
addition to the 80286-baseo
multi-user system. This
controller uses interrupt level2,IlO address 120H.
. An iSBC 208 flexible
disk controller added to support
8-inch flexible disks. As
our
target system
will
not include
iRMX-NET, the iSBC 208
witl
be
placed on interrupt
level four and
will
use slave
I/O address 180H.
o A RAM driver is an addition to the 80286-hased
multi-user system.
. The
target system defines 4M bytes of RAM,3M bytes
are used by the system and the
Free Space Manager and
lM byte is used by the RAM disk.
. The target system resides in a bootloadable file named
/BOOT/SAM286.286.
The name of the new definition file for
the target system is SAM2ll6.DEF. Figure B-1
shows memory maps of the layout
of both systems: the 2tìfil2.def layout is on the left and
the target system layout
is
on the right.
8.4 STEPS PERFORMED TO
CREATE
THE TARGET
SYSTEM
The steps needed to modi! an existing definition
file to meet the target system needs are
outlined below.
. Add the iSBC 220 SMD Driver
. Add the iSBC 208 Flexible Disk Controller
Driver
. Add the
RAM Driver
. Change
the memory for the system and Free Space Manager to reflect the amount of
memory needed for operation of the
new devices.
As you proceed
through this example refer to the
Ertended
|RMX II Inleructive
Confguration
Utility Referent'e manual for more information about configuring each of the
above drivers.
B-2 ICU
User's Guide
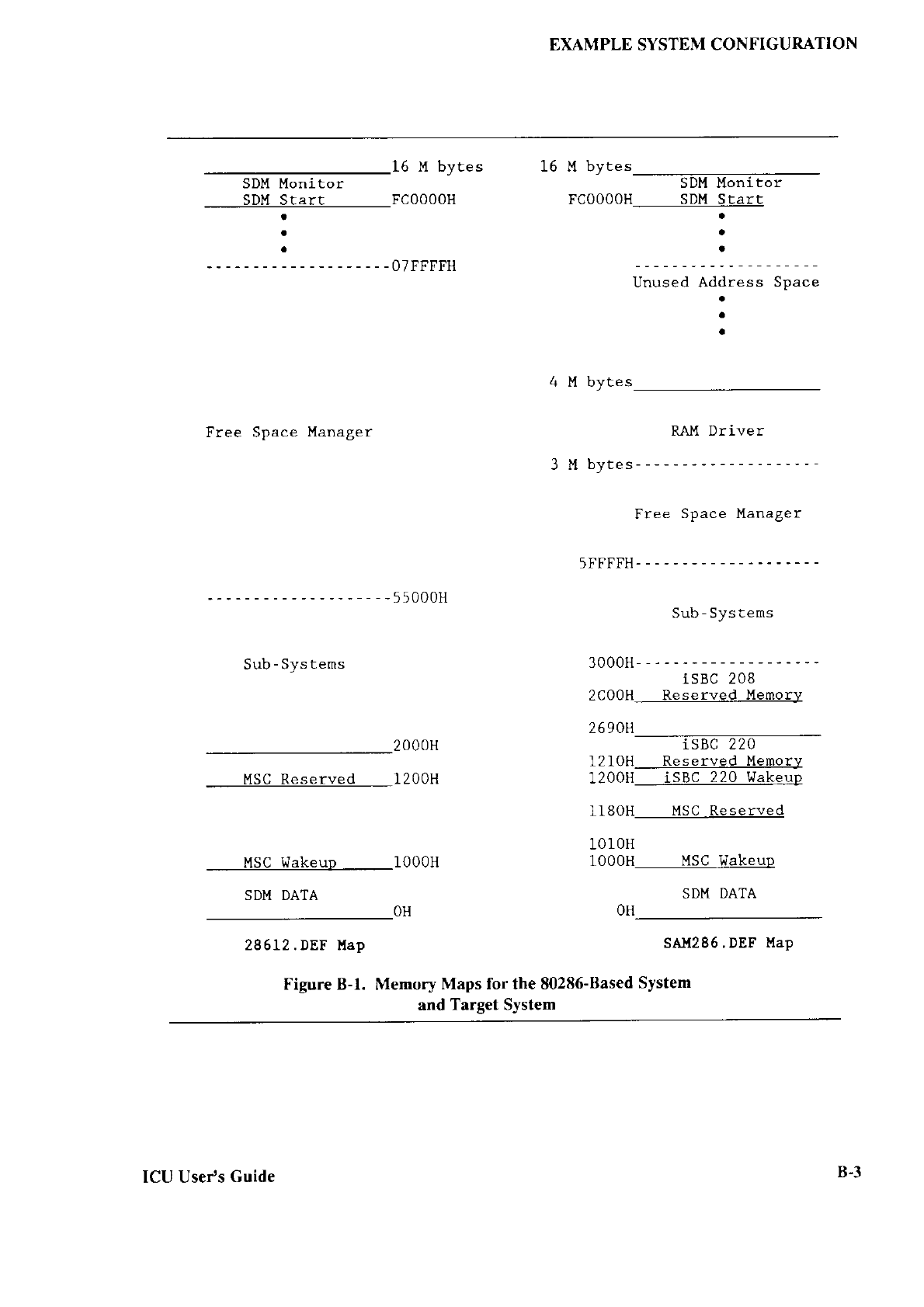
EXAMPLE SYSTEM
CONFIGURATION
16 M bytes 16 M bytes
SDM Monitor
SDM Start Fc0000H
------O7FFFFH
Free Space Manager
- -
5 5000H
Sub
-
Sys
tems
RAM Drlver
3 M
bytes
-
SDM Monitor
FC0000H sDM S tart
a
a
Unused Address Space
4 M bytes
Free Space Manager
5FFFFH
-
Sub
-
Systems
I000H
- -
isBc 208
2C00H Reserved Memory
2690H
-=isBa]?I-
1210H Reserved Hemory
1200H iSBC 220 Wakeup
1180H MSC Reserved
1010H
1000H MSC Wakeup
SDM DATA
SA.ì{2 8 6 . DEF l,faD
2000H
MSC Reserved 12 00H
MSC \.Jakeuo 1000H
SDM DATA OH
OH
28 612 . DEF Uap
Figure B-1. Memory
Maps for the 802tì6-Based
Systern
and
Target System
ICU Usef s
Guide B-3
EXAMPLE
SYSTEM CONFIGURATION
8.5 USING THE ICU TO DEFINE THE TARGET
SYSTEM
This section describes a dialogue between a user and the ICU. This dialogue
demonstrates the steps
needed
to
define the target system described in the previous
section. In the dialogue, user input is shown in either blue or bolded
text, followed by a
carriage return (
. CR
>
). Shoultl you
make an error in entering information as you
proceed
through this example, you can
re-type the information ifyou are currently
vìewing
the screen
in
which
the error
was
entered. If not, you
can use either the Backup
(b)
or Find
(l) command to access the screen you want
to change, then re-tlpe
the correct
information. If you
are new to the iRMX II ICU and do not want
to use these commands,
you
can delete the SAM286.DEF
file in the SAM286
directory and start over by entering
the last line of the command
sequence listed below.
Invoke the
ICU,
giving
the name
of the default file and the
desired name
of the modified
definition
file, as follows:
This
produces
the
display shown in Figure B-2. This
is the first screen
you
see each time
you
invoke
the ICU.
B-4 ICU
Userrs Guide
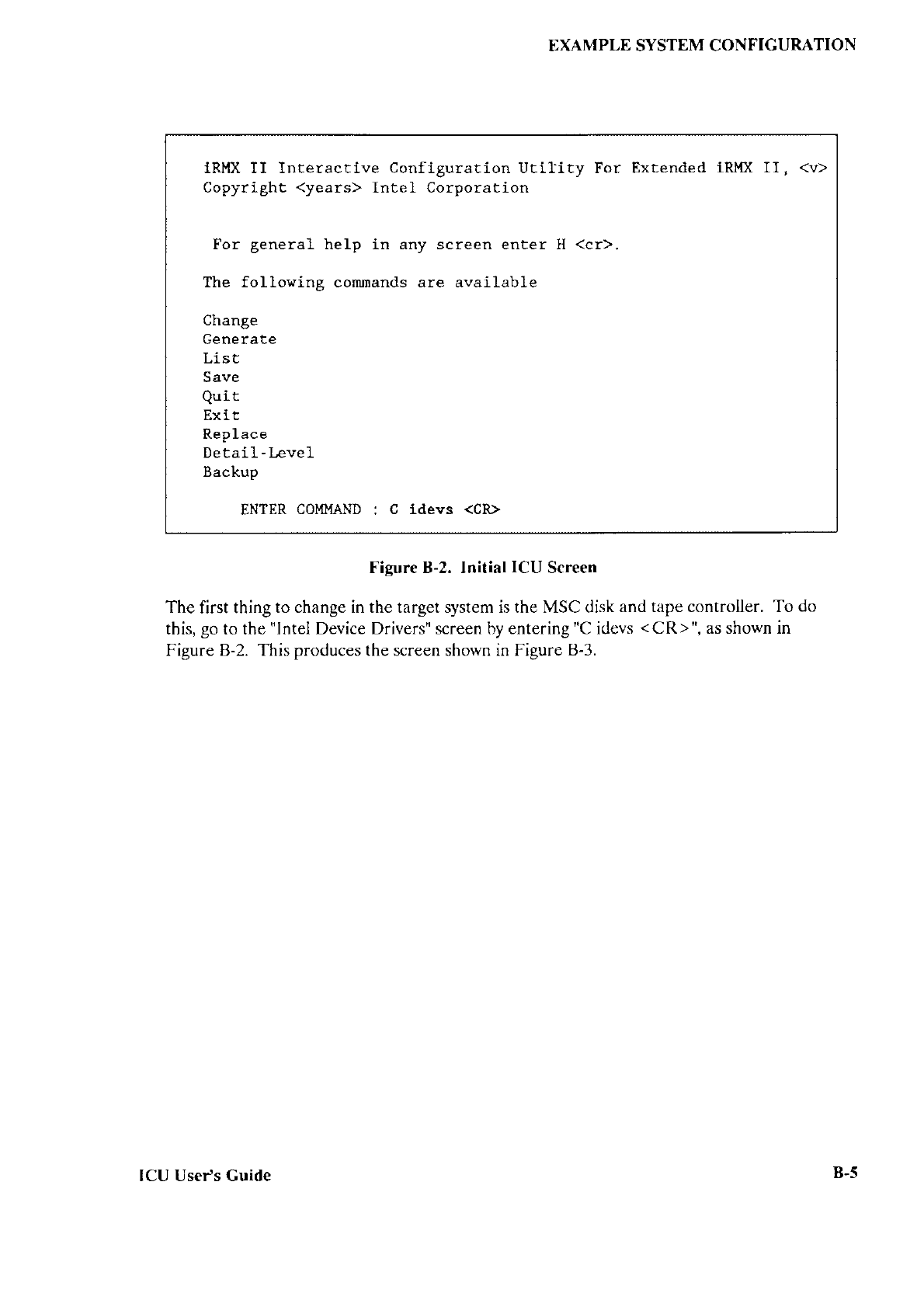
EXAMPLE SYSTEM CONFIGURATION
Figure B-2. Initial
ICU
Screen
The
first thing
to change in the target system is the MSC disk
and tape controller. To
do
th is,
go
to the
"l
ntel
Device Drivers" screen by entering
"C
idevs
<
C R
>
", as shown in
Figure B-2. This
produces
the screen shown in Figure
ts-3.
lRl4X I1 Interactive Configuration Urility For Extènded
Copyrighc <years> Intel Corporation
For general help in any screen entèr H <cr>.
The following cofiìnands are available
Change
Generate
List
Save
Qul
t
Exl t
Replace
De tai l -
Leve 1
Backup
ENTER
CoMMAND
: C ldevs <CR>
iRlO( II, <v>
ICU Usef s Guide B-5
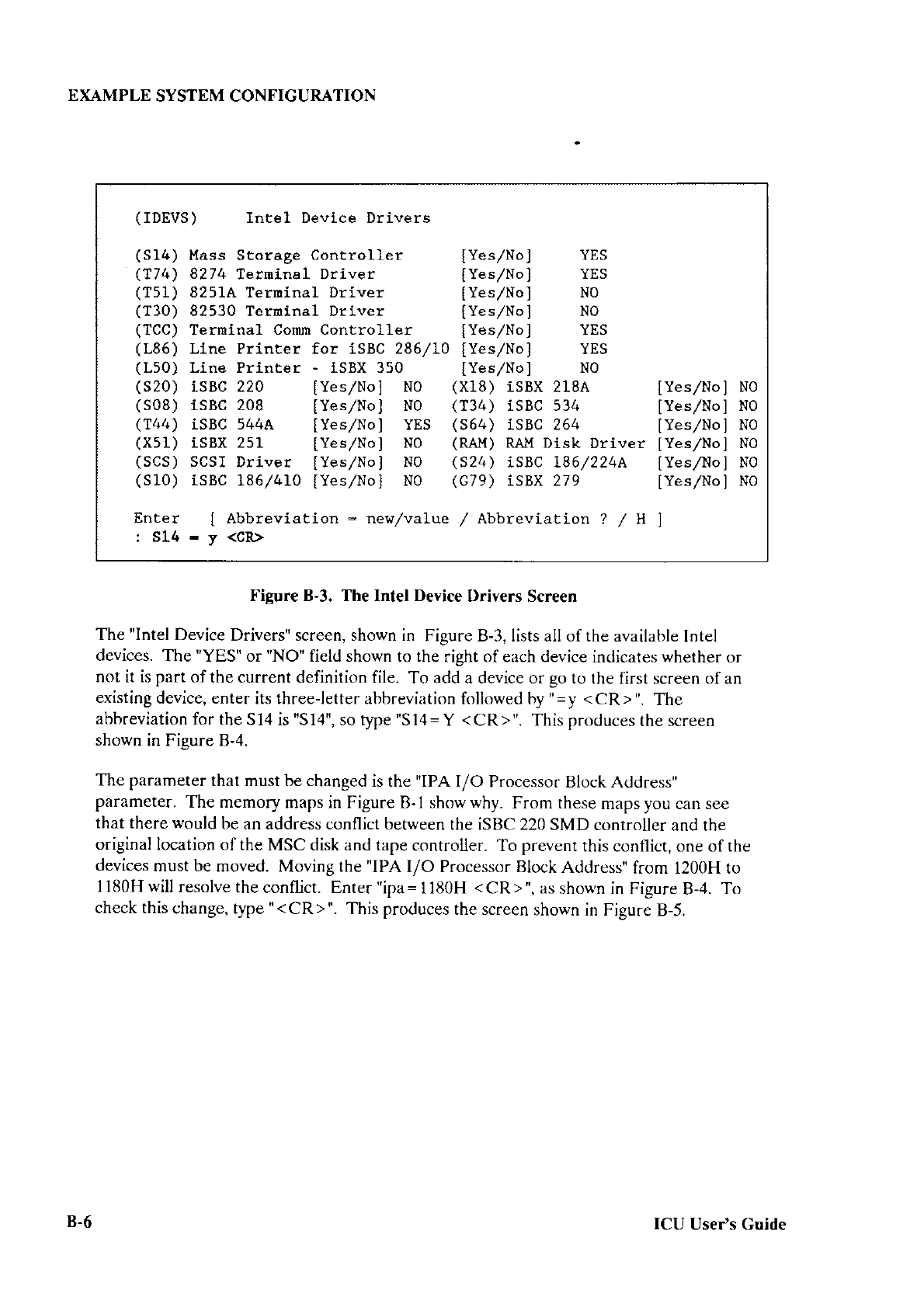
EXAMPLE SYSTEM CONFIGURATION
(IDEVS) lntel Device Drivers
(S14) Mass Storage Controller [Yes/No] YES
(î74) 8274 Terninal Driver [YeslNo] YES
(T51) 8251A Terninal Driver [YesrzNo] NO
(T30) 82530 Terninal Driver [Yes/No] NO
(TCC) Termtnal Comm Controller [Yes/No] YES
(L86) Lfne Printer for 1SBC 286/fO lYes/No) YES
(L50) Ltne Prlntèr - iSBX 350 [Yes,zNo] NO
(s20) isBc 220 [Yes/No] N0 (X18) isBX 218A [Yes/No] N0
(s08) lsBc 208 [Yes/No] N0 (T34) lSBc 534 [Yes,zNo]
N0
(T44) iSBC 5444 [YeslNo] YEs (s64) lsBc 264 [Yes/No] N0
(X5I) iSBX 251 [Yes,zNo] NO (RAM)
RAM Disk Driver [Yes/No] N0
(scs) scsl Driver [Yes/No] N0 (s24) isBc L86/224A [YeslNo] N0
(s10) isBc 1,86/4LO
[Yes/No] N0 (c79) isBX 279 [Yes,zNo]
No
Enter I Abbreviation - nevvalue / Abbreviation ? /Hl
: Sl4 - y <CR)
Figure B-3. The Intel Device
Drivers
Screen
The
"Intel
Device
Drivers" screen, shown in Figure B-3, lists all of the
available Intel
devices.
The "YES" or "NO' field shown to
the right of each device
indicates
whether
or
not it is part of
the current definition file. To add a device or go
to the first screen of an
existing
device, enter
its three-letter abbreviation
followed by "
=
y <
CR
>
". The
abbreviation
for the
S14 is
"S14",
so
rype
"S14=Y
<CR>". This produces
the screen
shown
in Figure B-4.
The parameter
that must be changed
is the'IPA I/O Processor Block
Address"
parameter.
The memory
maps in Figure B-1 showwhy.
From these
mapsyou can see
that
there
would
be an address conflict
between the iSBC 220
SMD controller
and the
original
location of the
MSC disk and tape
controller. To
prevent
this conflict, one of the
devices
must be
moved. Moving the "IPA
I/O Processor Block
Address"
from 1200H to
1180H will
resolve
the conflict. Enter "ipa=
1180H
<CR>", as
shown in Figure
B-4.
To
check this
change, type "<CR>r'. This produces
the screen
shown in Figure
B-5.
B-ó ICU
Uset's Guide
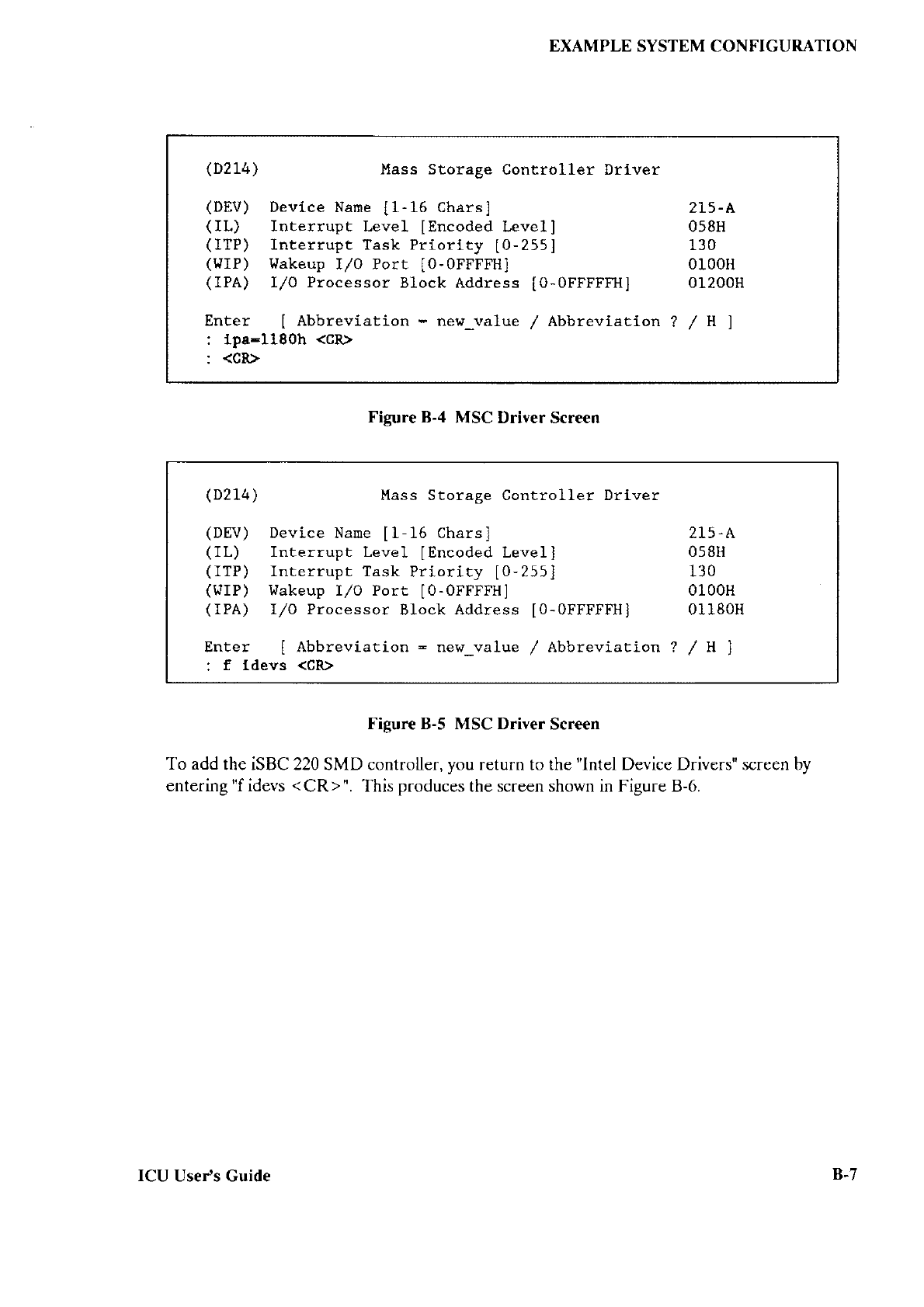
(D214) Mass Storage Controller Driver
(DEV) Device Name
[1-16 Chars]
(IL) Incerrupt Level IEncoded
Level]
(ITP) lnterrupt Task Priority [0-255]
(wlP) Wakeup
I/0 Port [0-OFFFFH]
(IPA) I/O Processor Block Address [0-OFFFFFH]
EnÈèr I Abbreviation - neu_value / Abbreviation
: lpa-1180h <cR>
: <CR>
215-A
058H
130
0100H
01200H
?
/H)
EXAMPLE SYSTEM CONFIGURATION
Figure B-4 MSC Driver Screen
Figure B-5 MSC Driver Screen
To add
the iSBC 220 SMD controller, you return to the
"Intel
Device Drivers" screen by
entering
"f
idevs
<CR>". This
produces
the screen shown in Figure 8-6.
(D2L4) Mass Storase Controller Driver
(DEV) Device Naue [1-16 Chars]
(TL) Tnterrupt Level IEncoded
Levell
(ITP) Interrupt Task PrÍority [0-255]
(l.tIP) Wakeup I/O Port [0-oFFFFH]
(IPA) I/O Processor Block Address [0-OFFFFFH]
Enter I Abbreviacion: new_value
/ Abbreviacion
: f fdevs <CR>
215
-A
058H
130
0100H
01180H
?
/H1
ICU
Use/s Guide B-7
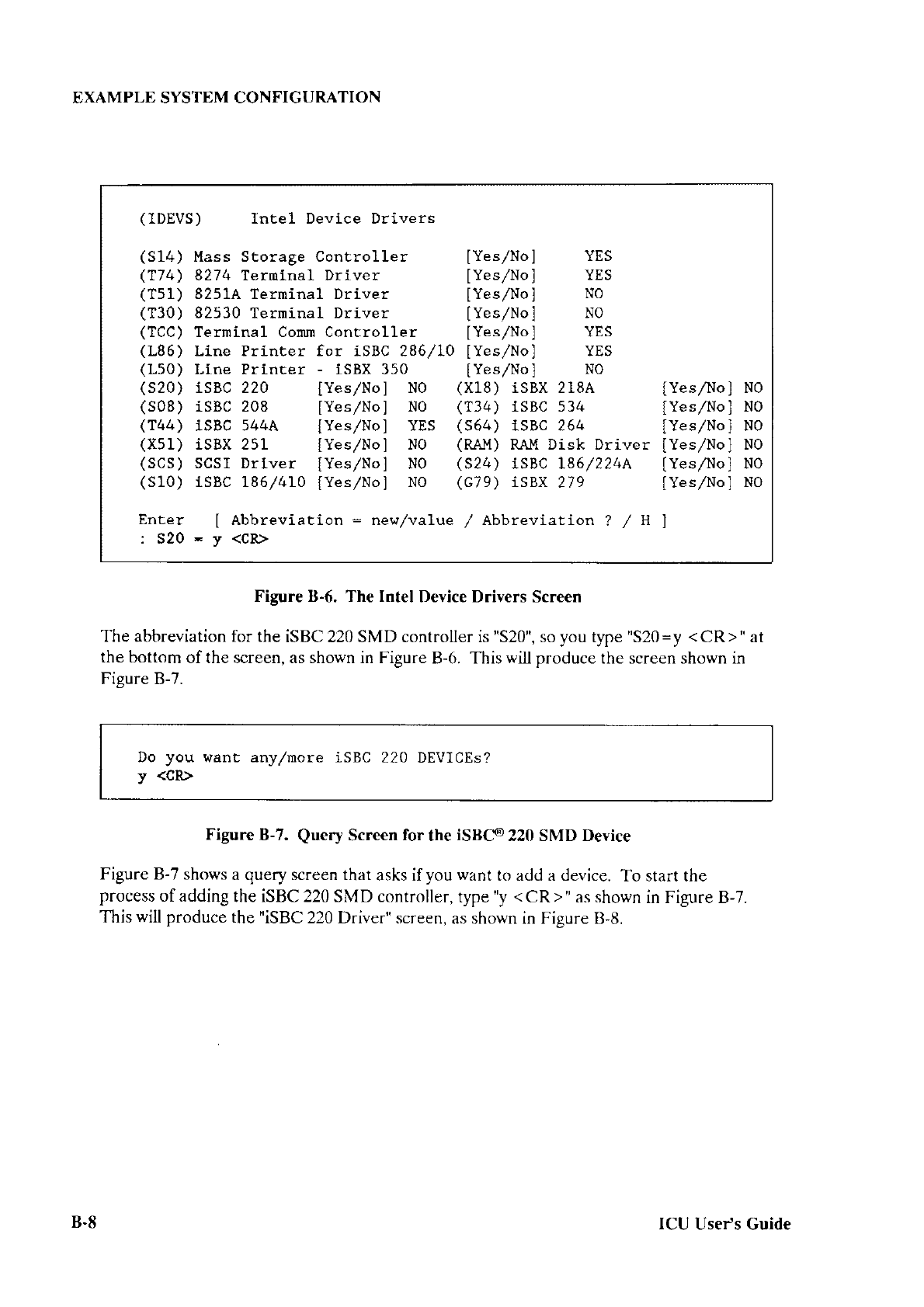
EXAMPLE SYSTEM CONFIGURATION
(IDEVS) Intel Devlce Drivers
(S14) Mass Storage Cóntroller [Yes/No] YES
('174) 8274 Terrninal Driver [Yes/No] YES
(T51) 8251A Tèrninal Driver [Yes/No] No
(T30) 82530 TernÍnal DrÍver [Yes/No] NO
(TCC)
Terminal Conm Concroller [Yes/No] YES
(L86) Llne Printer for íSBC 286110 [YeslNo] YES
(L50) Line Printer - tSBx 350 [Yes,zNo] No
(s20) lsBc 220 [Yes/No] N0 (xl-8) isBX 2l8A [Yes/No] N0
(s08) isBc 208 [YeslNo] N0 (T34) isBc s34 [YèslNo] N0
(T44) iSBC 5444 {YeslNol YEs (s64) lsBc 264 [Yes/No] N0
(X51) iSBX 251 [Yes,zNo] N0 (
RAr'f
) RAM Disk Driver [Yes/No] NO
(SCS)
SCSI Drlver IYes/No] N0 (S24) lSBC 186/224A IYes/No] N0
(S10) ÍSBC 186/410 [Yes/No] No (c79) isBX 279 [YeslNo] No
Enter I Abbreviacion : ne*/value / Abbreviation ? /H]
: S20 - v <CR>
Figure 8-6. The Intel
Device Drivers Screen
The abbreviation for the
iSBC 220 SMD controller is
"S20",
so you type "S20=y
<CR>" at
the bottom
of the screen, as sho\,rr'n in Figure
8-6. This
will produce
the screen shown in
Fisure B-7.
Do you want any
/mo
re
y <cR> iSBC 220 DEVI CEs ?
Figure
B-7. Query
Screen
for the iSBCo
220 SMD Device
Figure B-7 shows
a
query
screen that
asks ifyou
want
to add a tievice.
To start the
process
of adding
the iSBC 220 SMD controller,
type
"y <CR>" as shown
in Figure B-7.
This
will produce
the
"iSBC
220 Driver" screen,
as shown in Figure B-8,
B-8 ICU
Uset, s Guide
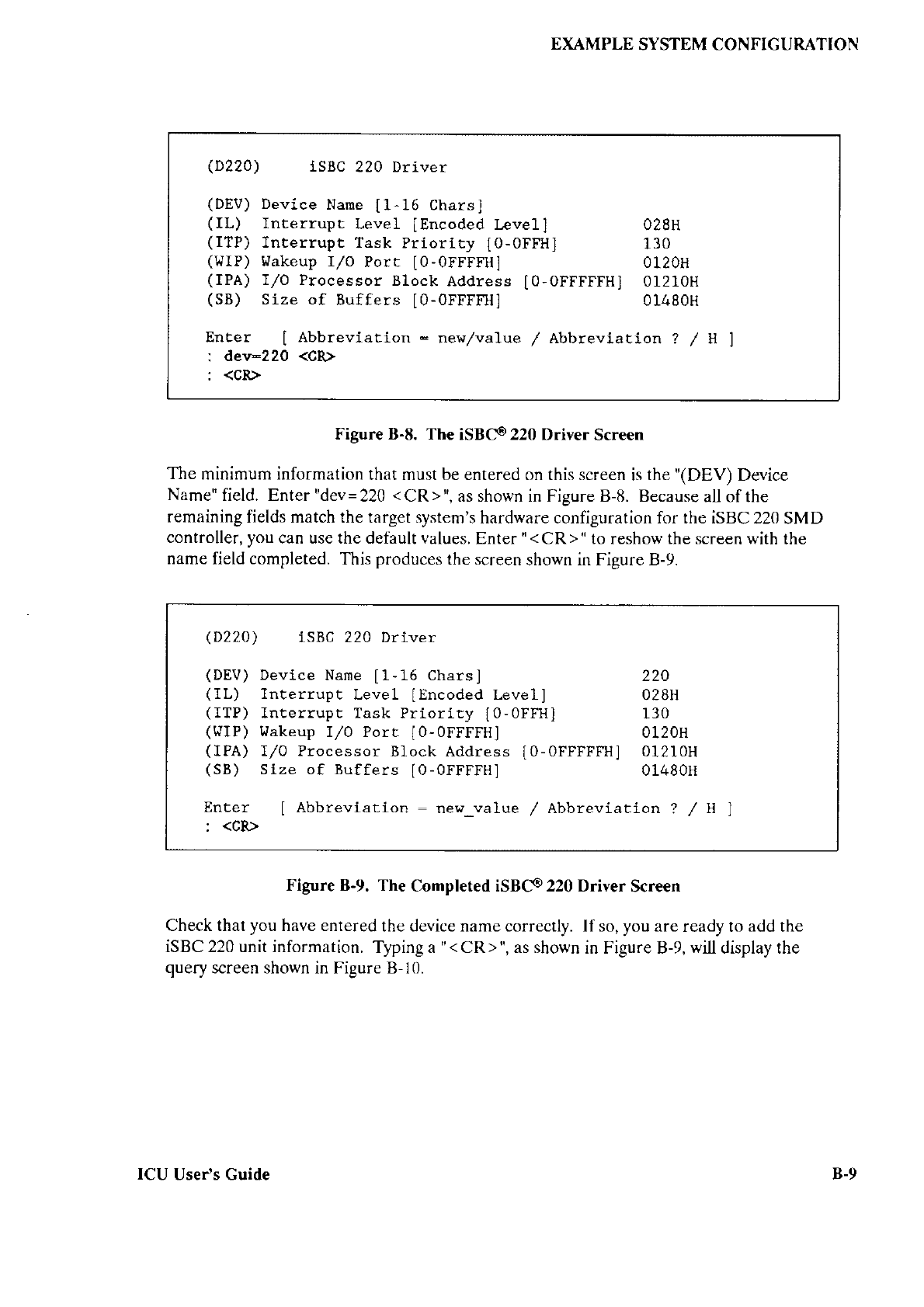
EXAMPLE
SYSTEM CONFIGURATION
(D22O) ISBC 220 Driver
(DEV)
Device Name
[1-16 Chars]
(IL) Interrupt Level lEncoded
Levell 028H
(ITP) lnterrupt Task PrÍorlty [0-0FFH] 130
(wIP) Wakeup I/o Port [O-0FFFFH] 0120H
(IPA) I/O Processor Block Address [0,0FFFFFH] 01210H
(SB) Size of Buffers [O-0FrrrH] 01480H
EnEer I AbbrevÍation * new/va1ue
/ Abbreviatioa ? /H]
: dev-220 <CR>
: <cR>
Figure B-8. The
iSB@ 220 Driver Screen
The
minimum information
that must be entered on this screen
is
the "(DEV)
Device
Name"
field. Enter
"dev=220
<CR>", as shown in Figure B-8. Because
all of the
remaining
fields match the target system's
hardware configuration for the iSBC
220 SMD
controller, you
can use the default values.
Enter "<CR>" to reshow the screen with
the
name field completed.
This
produces
the screen
shown in Figure B-9.
(D22O) íSBC 220 Driver
(DEV)
Device Nane [1-16 Chars] 220
(IL) lnterrupt Level lEncoded
Levell 028H
(ITP) Interrupt Task Priority Io-0fFHl 130
(l.llP) Wakeup
I/O Port IO-OFFFFHI 0120H
(IPA) I/0 Processor Block Address [0-OFFFFFH] 01210H
(SB) Size of Buffers [0-OFFFFH] 01480H
Enter I Abbreviation : new_value / Abbreviatlon ? /H
: <cR>
Figure B-9. The
Completed iSBC@ 220 Driver Screen
Check that
you
have entered
the device name correctly. lf so, you are
ready to
add
the
iSBC 220 unit information.
Typing a "<CR>", as shown
in Figure B-9,
will
display the
query
screen shown in Figure B- 10.
ICU Uset's Guide B-9
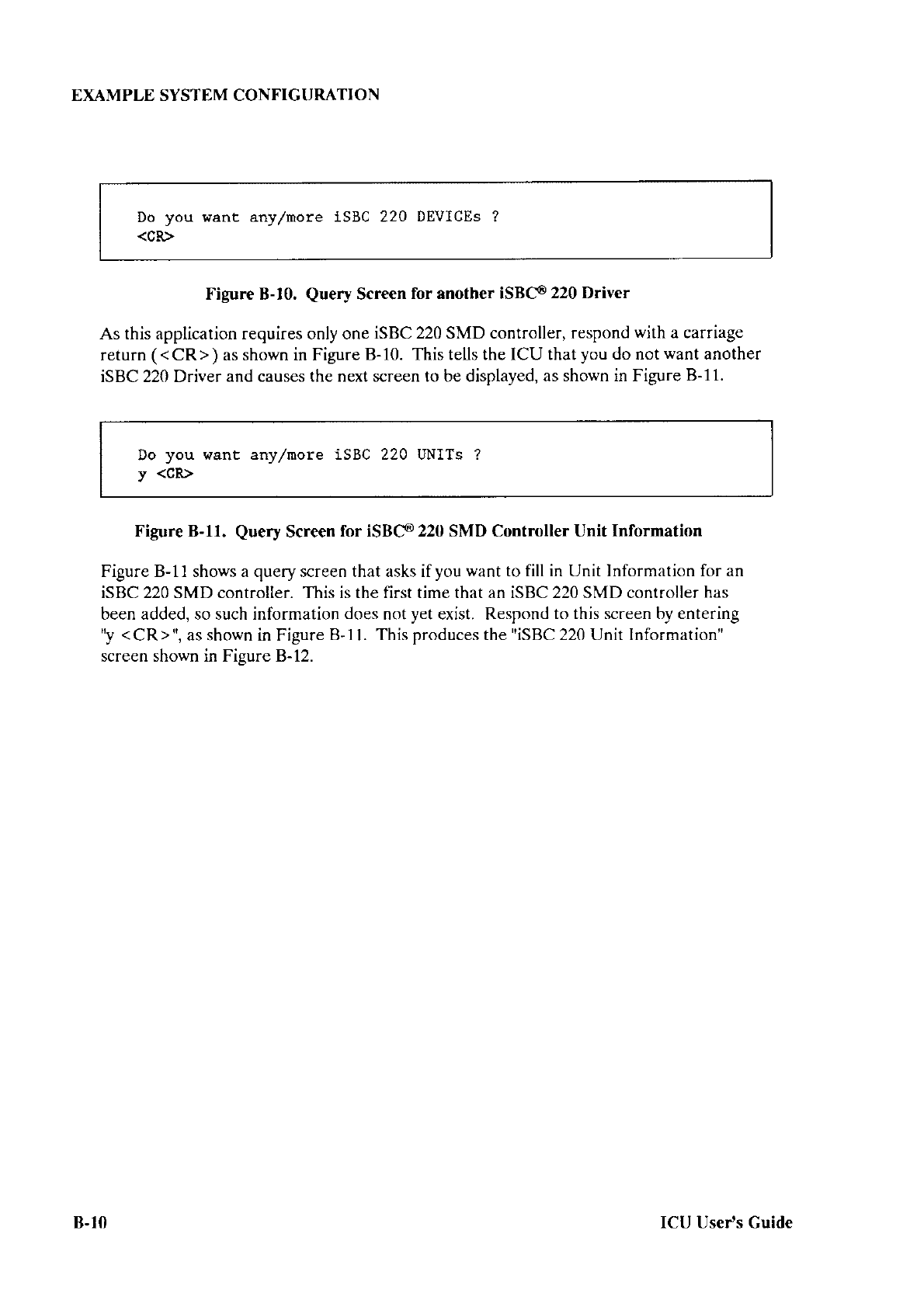
EXAMPLE SYSTEM CONFIGURATION
Do you
<cP> want any/more 1SBC 220 DEVICES ?
Figure B-10. Query
Screen
for another iSBC€
220 Driver
As this application requires only one
iSBC 220 SMD controller, respond
with
a carriage
return
(<CR>) as shown in Figure
B-10. This tells the ICU that
you do not
want
another
iSBC 220 Driver
and causes the next screen to be displayed,
as shown in Figure
B-11.
Do you want ar,y
/mote
y <cR> iSBC 220 UNITS ?
Figure B-ll. Query
Screen
for iSB@ 220 SMD Controller Unit Information
Figure B-11 shows a query screen that asks ifyou
want to fill in Unit ìnformation for an
iSBC 220 SMD controller. This is the first time that an iSBC 220 SMD controller
has
been added, so such information
does
not
yet
exist. Respond
to this screen by entering
"y <CR>", as shown in Figure
B-l
l. This produces the
"iSBC
220 Unit Information"
screen shown in Fisure B-12.
B-10 ICU Usefs Guide
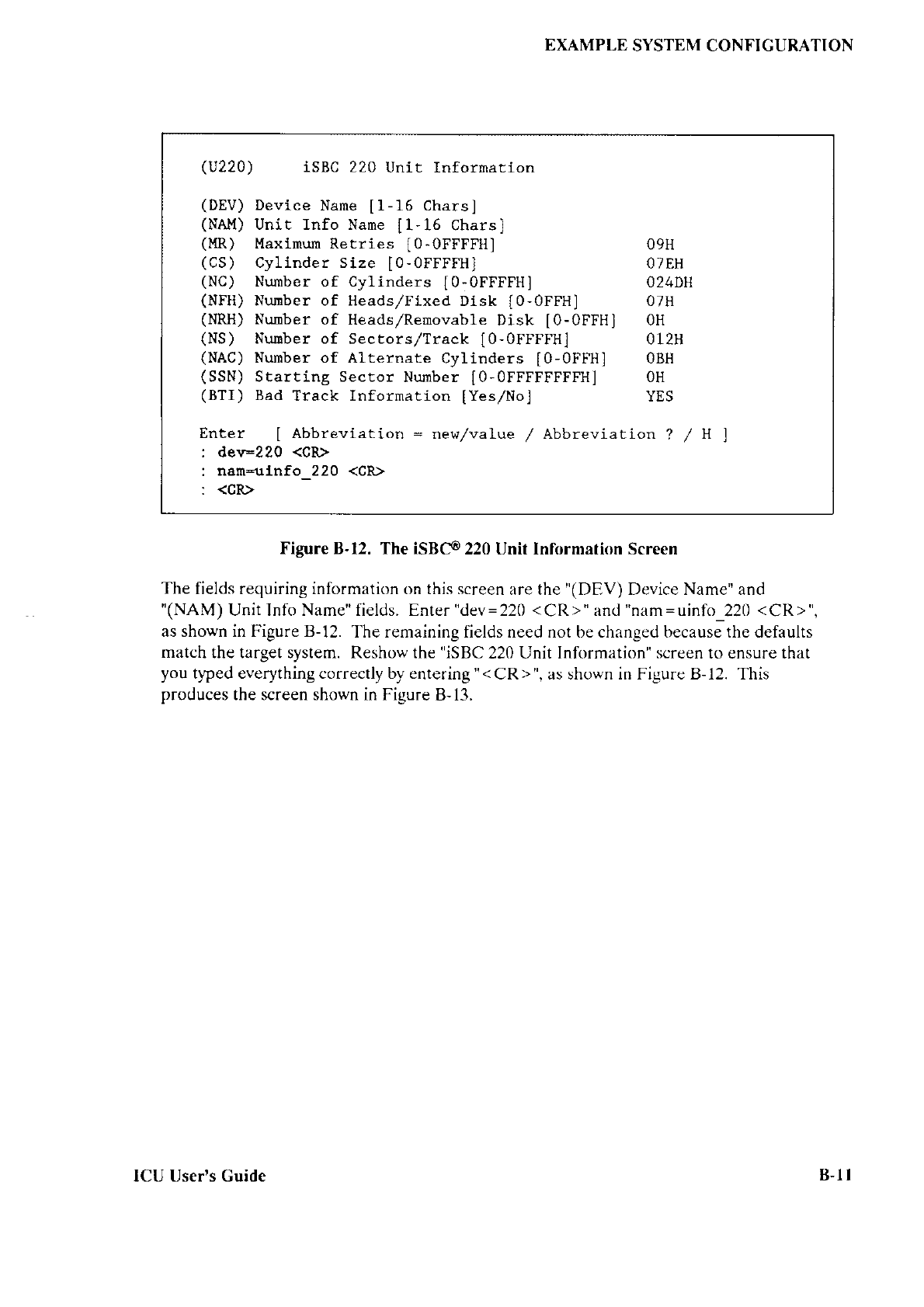
(V220) ISBC 220 Unit Information
(DEV)
Device Nane [1-16 Chars]
(
NAl,f
) Unit Info Name
[1-16 Chars]
(l'tR) Maxlmum Retries l0-0FFFFHI
(CS) Cylinder Size [0-OFFFFH]
(NC) Nunber of Cylinders [0-0FFFFH]
(NFH)
Nunber of Heads/Fixed Dlsk [0-OFFH]
(NRH)
Nunber of Heads/Rexlovab le Disk [0-OFFH]
(NS) Nurober of Sectors/Track [0-OFFFFH]
(NAC)
Nunber of Alternate Cylinders [0-0FFH]
(SSN) Starting Sector Nunber [0-0FFFFFFFFH]
(BTI) Bad Track InformatíÒn IYes/No]
09H
OTEH
O24DH
07H
OH
012H
OBH
OH
YES
Enter I Abbreviation : new/value
/ Abbreviatlon ? /Hl
: dèr:220 <CR>
: nan-ulnfo_22o <CR>
: <cR>
EXAMPLE
SYSTEM CONFIGURATION
Figure B-12. The iSBCo
220 Unit Information Screen
The
fields requiring information on this screen
are the
"(DEV) Device Name" and
"(NAM)
Unit Info Name" fields. Enter "dev=220
<CR>"
and
"nam=uinfo_220 <CR>",
as shown in Figure B-12.
The remaining fields need not be changed because the defaults
match
the target system. Reshow the "iSBC
220 Unit Inlbrmation"
screen
to ensure that
you
typed everything correctly by entering
"
<
CR
>
", as shown in Figure B- 12. This
produces
the screen shown in Figure
B- 13.
ICU User's Guide B-ll
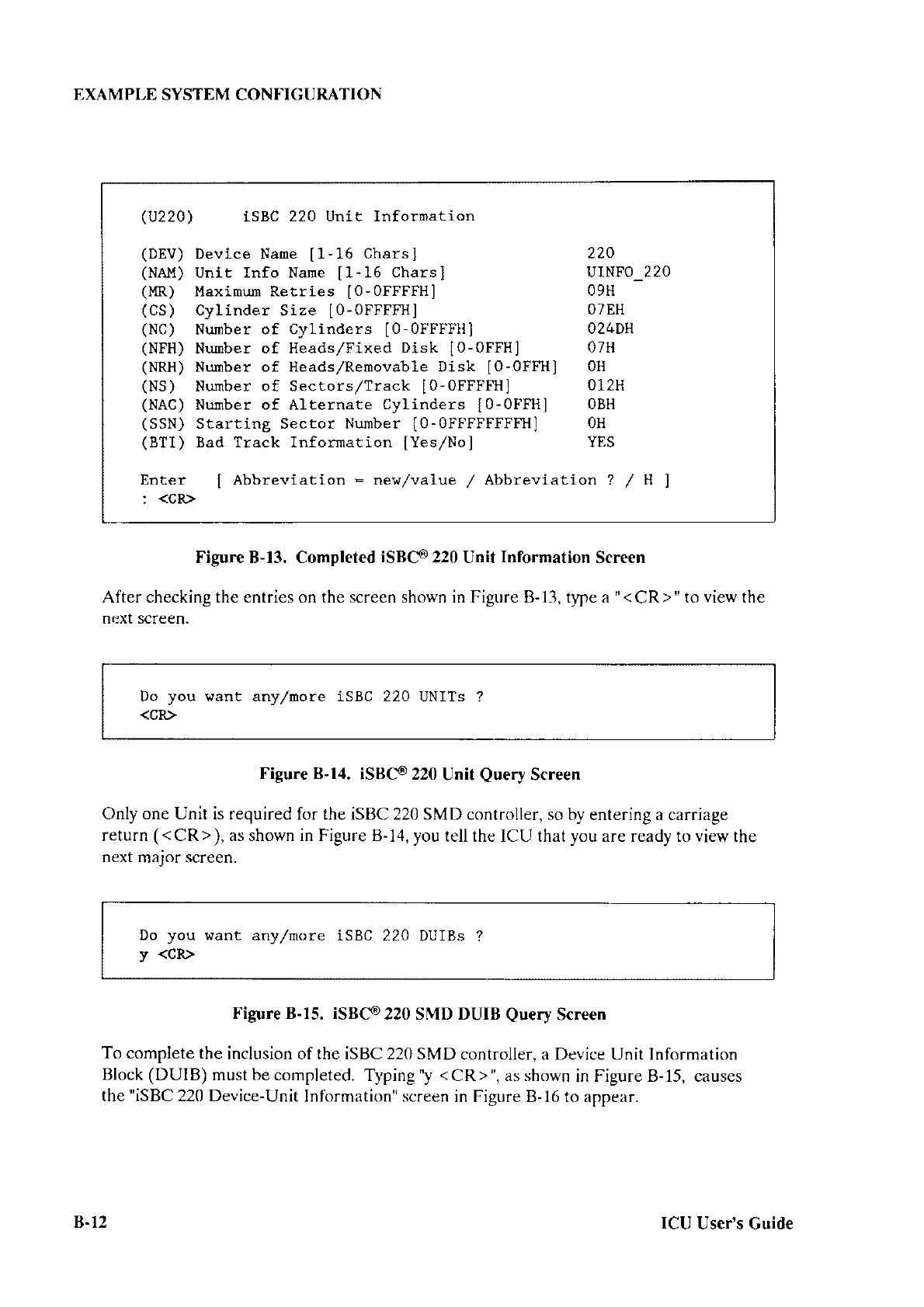
EXAMPLE
SYSTEM CONFIGURATION
(U220) ISBC
220 Unit lnformÉtion
(DEV)
Devlcè Nane [1-16 Chars] 22O
(NAM)
Unit Info Narne
[1-16 Chars] UINFO_220
(MR) Haximu:r
Rerríes [o-oFFFFH] 09H
(CS) CylÍnder Size [0-0FFFFH] 07EH
(NC) Nurnbe r of Cylinders IO-OFFFFH] 024DH
(NFH)
Nr:nber
of Heads/Fixed Disk l0-OFFHl 07H
(NRH)
Nunber of Heads/Renovable Disk [0-ofFH] 0H
(NS) Number of Seccors/Track [0-0FFFFH] 012H
(NAC) Nutrrber of Alternate Cylinders l0-OFFHl OBH
(ssN) starting sector Number
[0-OFFFFFFFFTI] 0H
(BTI) Bad Track Information [YeslNo] YES
Enter I Abbreviation - new/va1ue
/ Abbrèviation ? / H )
: <CR>
Figure B-13. Completed
iSBC€
220 Unit
Information
Scre€n
After checking the entries on the screen shown in Figure B-13, type a "<CR>" to
view
the
next screen.
Do you want
<cB> any/nore iSBC ?20 UN'fTs ?
Figure B-14.
iSBC€ 220
Unit
Query
Screen
Only one Unit is required for the iSBC 220 SMD controller,
so by entering a carriage
return (<CR>), as shown in Figure B-14, you
tell the ICU that
you
are ready to view
the
next
major screen.
Do you want any
/mote
y <cR> iSBC
220 DUIBs ?
Figure B-15. iSBC@
220 SMD DUIB
Query
Screen
To complete the
inclusion of the iSBC 220 SMD
controller, a Device Unit lnformation
Block (DUIB) must be completed.
Typing "y <CR>", as shown
in Figure B-15, causes
the "iSBC 220 Device-Unit
Information" screen
in Fìgure B-16 to appear.
B-12 ICU
User's Guide
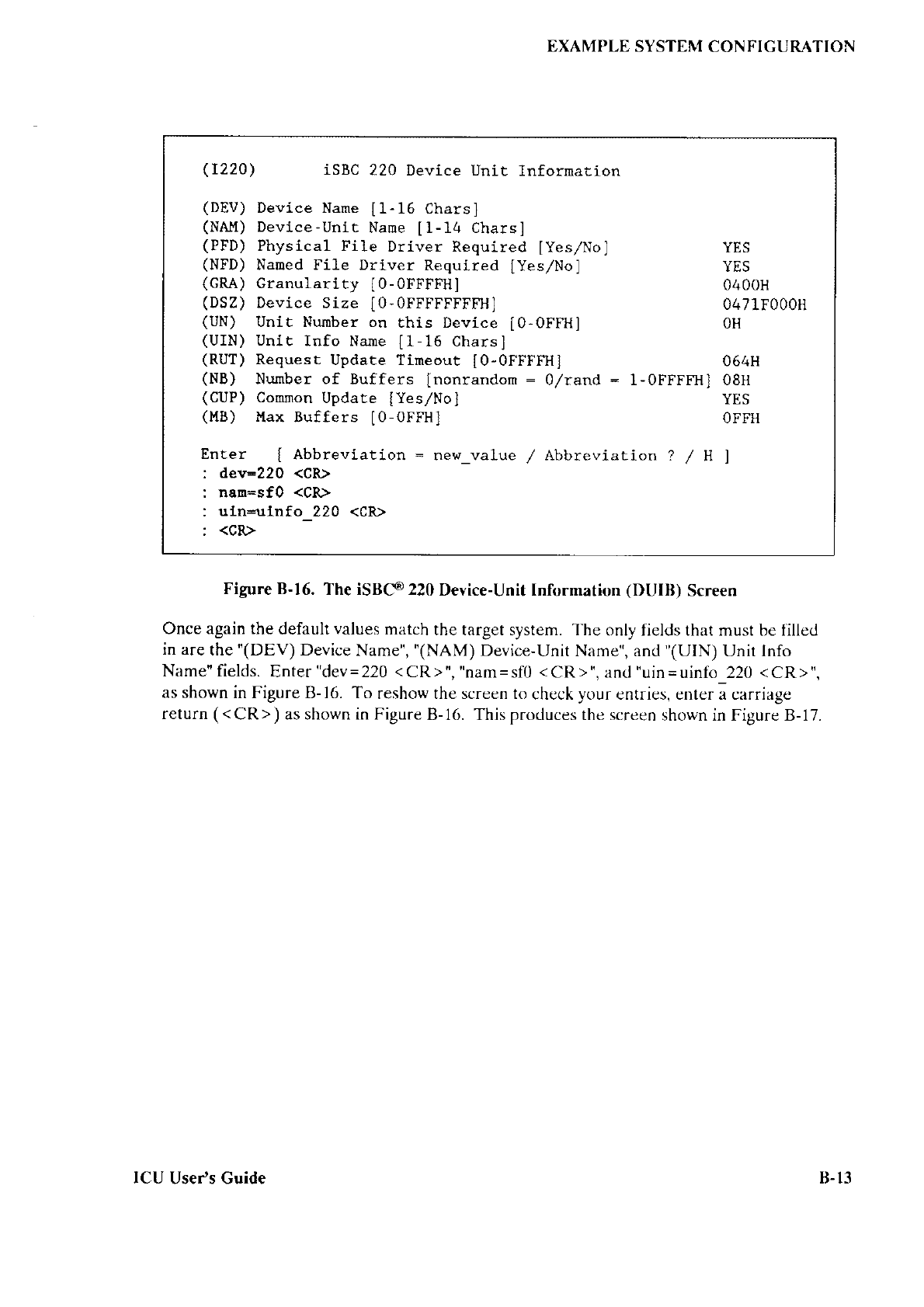
EXAMPLE
SYSTEM CONFIGURATION
Figure B-16.
The iSB@ 220
Device-Unit Informatkrn
(DUIIì)
Screen
Once again the
default
values
match
the target system.
'I-he
only fieÌds that must be filled
in are
the "(DEV) Device
Name", "(NAM) Device-Unit
Name", and "(UlN) Unit Info
Name'fields.
Enter
"dev=220 <CR>",
"nam=sfO
<
CR
>
", and "uin
=
uinfo_220
<CR>",
as shown
in Figure B- 16. To reshow the screen to
check
your
cntrics, ctìtcr a carriage
return (<CR>) as shown in Figure
B-16. This produces the screen
shown in Figure B- 17.
(1220) iSBC 220 Devlcè UniÈ Information
(DEV)
Device Nane [1-16 Chars]
(
NAÌ,f
) DevÍce-Unic Name
[1-14 Chars]
(PFD) Phystcal File Driver Required [Yes/No] YES
(NFD)
Naned Filè Driver Required [Yes/No] YES
(GM) Granularity [0
-
OFFFFH
]
(DSZ) Device Size [0-0FFFFFFFFH]
(UN) Unlt Number on this Dèvíce [0-0FFH]
(UIN) UnlÈ Info Narne
[1-16 Chars]
(RUT)
Request Update Tineout [0-OFFFFH]
0400H
0471F000H
OH
064H
(NB) Number of Buffers [nonrandom : 0/rand - I-0FFFF]II 08H
(CUP) Comnon
Updatè [Yes/No ]
(UB) Max Buffers [0-
0FFH
]
Enter I Abbreviation = new_value
/ Abbreviation ? /H)
dev=220 <CR>
nan=sf0 <CR>
uln=ulnfo_220 <CR>
<c8>
YES
OFFH
ICU
Use/s Guide B-13
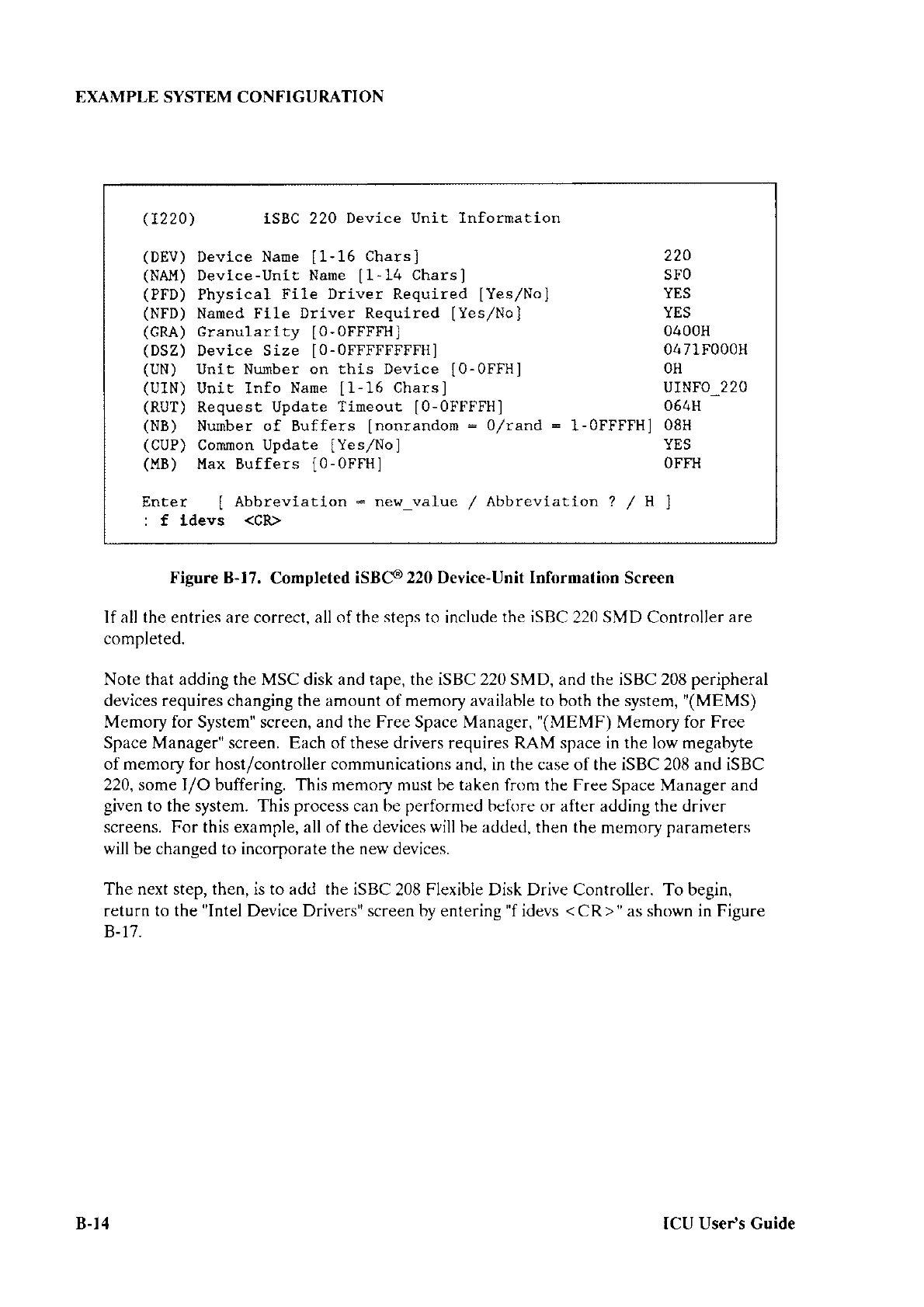
EXAMPLE SYSTEM CONFIGURATION
Figure B-17. Completed
iStsC€ 220 Device-Unit Information Screen
ìf all the entries are correct, all of the
steps to
include
the iSBC
220 SMD Controller
are
completed.
Note that adding the MSC disk and tape, the iSBC 220 SMD, and the iSBC 208 peripheral
devices requires changing the amount of memory available to both the system,
"(MEMS)
Memory for System" screen, and the Free Space Manager, "(MEMF) Memory for Free
Space Manager" screen. Each of these drivers requires RAM space in the
low
megabyte
of memory for
host/controller
communications
and, in the case of the iSBC 208 and iSBC
220, some I/O buffering. This memory
must
be taken
from the Free Space Manager and
given
to the system. This process can be performed before or after adding the driver
screens. For this example, all of the devices will be added, then the
memory
parameters
will
be changed to incorporate the new devices.
The next step, then, is to add the iSBC
20[Ì Flexible Disk Drive Controller. To begin,
return
to the "Intel
Device Drivers" screen by entering
"f
idevs
<CR>" as shown in Figure
B-17.
(î220) 1SBC 220 Device
Unit Informacion
(DEV)
Devlce Name
[1-16 Chars] 220
(NAl'f)
Devlce-UnÍt Nane [1-14 Chars] SFO
(PFD) Physícal File Driver Required [Yes,zNo] YES
(NFD)
Named File Driver Required [Yes/No] YES
(CRA)
cranulartty [O-OFFFFH] 0400H
(DSZ) Device Size [0-0FFFFFFFFH] 0471F000H
(UN) Unit Nunber on this Device [0-0FFH] 0H
(UIN) Unit Info Name
[1-16 Chars] UINFO_220
(RUT)
Requesc Update Timeout IO-OFFFFH] 064H
(NB) Number of Buffers [nonrandom
- O/ranó - 1-OFFFFH]
08H
(CUP)
Comnon Updace lYes/Nol YEs
(MB) Max Buffers l0-OFFHl OFFH
EnÈer I Abbreviation * new_value / Abbreviation ? /H]
: f ldevs <CR>
B-14 ICU Usefs Guide
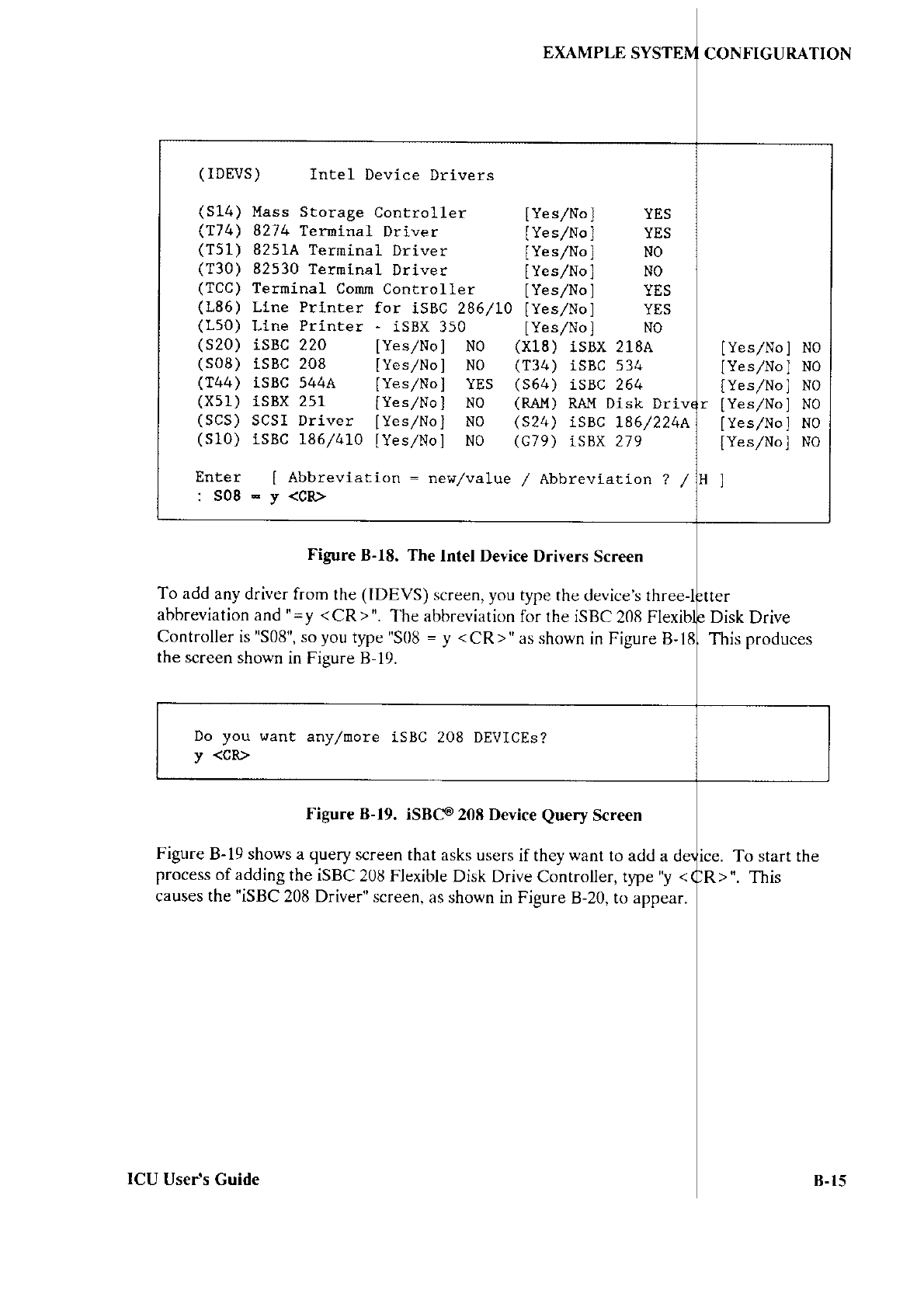
EXAMPLE CONFIGURATI
(
rDEVS
)Intel Device
Drivers
(
S1-4
) Hass Storagè Controller
(T7
4) 8274 TerminaL Driver
(
T51) 8251A Terrainal Driver
(T30) 82530 Terninal Driver
(TCC)
Terrnínal Conm
Conrroller
(L86) Line Printer for 1SBC 286110
(L50) Llne Prínter - iSBX 350
(s20) isBc 220 [YeslNo] N0
(s08) isBc 208 [Yes/No] N0
(T44) lsBc 544A lYes/Nol YES
(X51) ísBX 251 [Yes/No] No
(SCS)
SCSI Driver IYes/No] No
(s10) tsBc L86/4I0 [YeslNo] N0
Enter I Abbreviation : new/value
. g0g - y <cR>
lYes/Nol YES
[YeslNo] YES
[Yes/No] No
[YeslNo] N0
IYes,zNo ] YES
IYes/No] YES
lYes/Nol NO
(x18
) isBx 218A
(T34)
iSBC s34
(s64) isBC
264
(RAX)
RAM Disk Driv
(s24) isBC
L86/224A
(c79) isBX
279
/ Abbreviation ? /
IYeslNo
]
IYeslNo ]
IYeslNo
]
IYes/No ]
IYesrzNo ]
IYeslNo]
l
NO
NO
NO
NO
NO
NO
Figure
B-18. The
Intel Device
Drivers Screen
To add
any driver from
the
(IDEVS)
screen, you type
the device's three-
abbreviation
on6 "=y <cR>,,. The abbreviation
for rhe iSBC
209 Flexit
Controller
is
"S08",
so
you
type "S08
= y <CR>" as shown
in Figure
B-li
the
screen shown
in Fisure B-19.
Disk
Drive
This produces
Do
vyou want any/nore
<cR> iSBC 208 DEVICEs?
Figure B-19. iSBCo
208 Device
Query
Screen
Figure
B-19 shows a query
screen
that asks users
if they
want
to add
a dr
process of adding
the iSBC
208 Flexible
Disk
Drive Controller, tlpe "y <
causes the
'iSBC
208 Driver"
screen,
as shown in Figure
B-20, to appear.
Usefs Guide
. To start the
>
". This
B-
ON
ICU l5
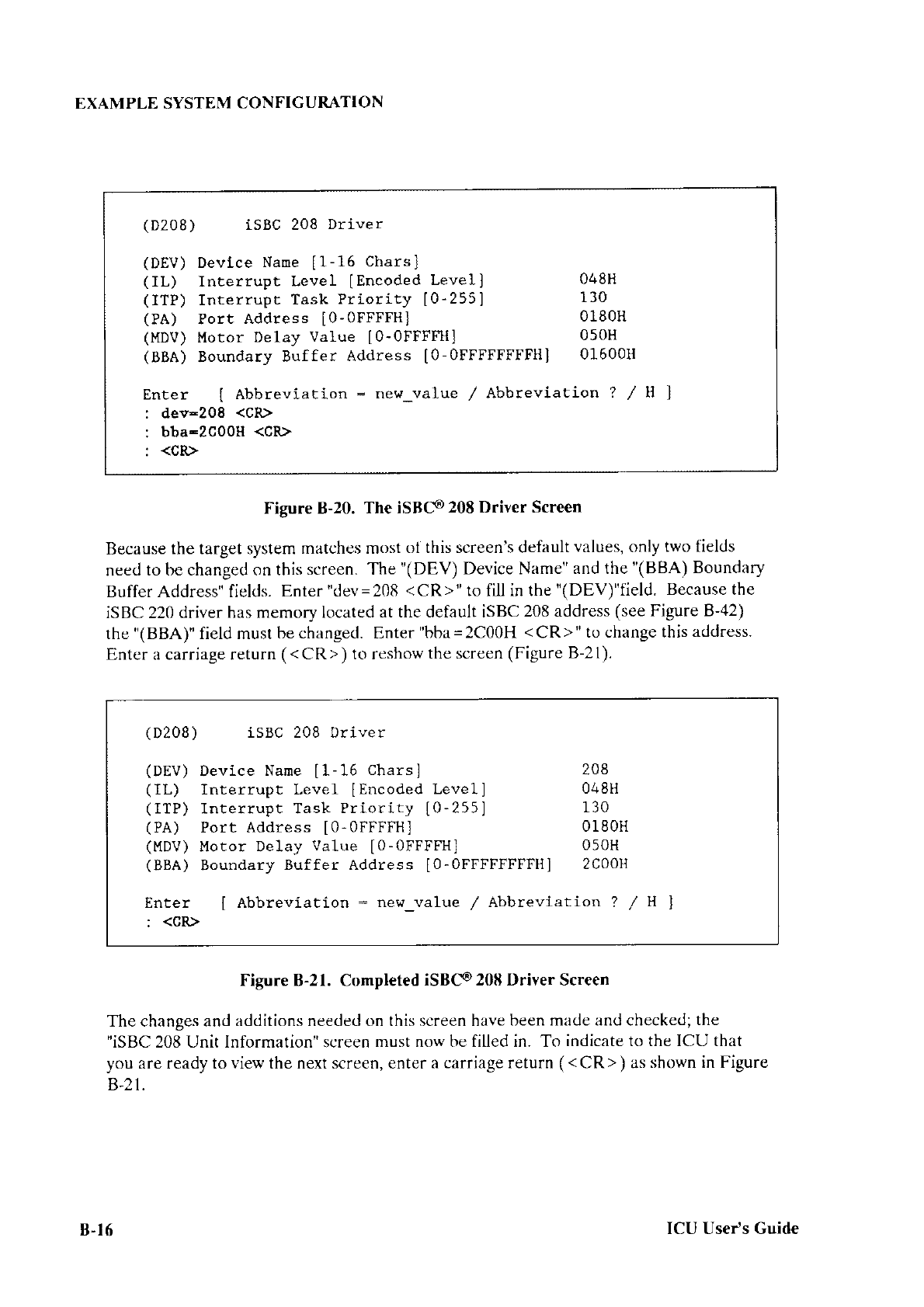
EXAMPLE SYSTEM
CONFIGURATION
(D208
) iSBC 208 Driver
(DEV)
Devlce Nane
[1-16 Chars]
(IL) InÈerrupt Level [Encoded
Level] 048H
(ITP) Interrupt Task Priority [0-255] 130
(PA) Port Address [0-OFFFFH] 0180H
(MDV)
Motor Delay Value IO-OFFFFU] 050H
(BBA) Boundary Buffer Address [0-OFFFFFFFFH] 01600H
Enter I Abbreviation - ner^'-value
/ Abbrevi-atiol ? /H]
: dev=208 <CR>
: bba-2c00H <CR>
: <cR>
Figure B-20.
The iSB@208
Driver Screen
Because
the target system
matches most
ol this screen's default
values,
only
two fields
need
to be changed on this
screen. The
"(DEV) Device Name"
and the
"(BBA) Boundary
Buffer Address" fields.
Enter "dev
=
208
<
CR
>
"
to fill in the
"(DEV)"Íìeld.
Because the
iSBC 220 driver
has memory located
at the default iSBC
208 address
(see Figure B-42)
the "(BBA)" field must
be changed. Enter
"bba=2C00H
<CR>"
to change this
address.
Enter a carriage return
(
<
CR
>
) to reshow
the screen
(Figure B-2 1).
Figure B-21. Completed
iSBC-@ 20tl Driver Screen
The changes and
additions needed on this screen have
been made and checked;
the
"iSBC 208 Unit Information" screen
must now be filled in. To indicate to the ICU that
you are ready to
view
the next screen, enter
a carriage return
(
<
CR
>
) as
shown in Figure
B-21.
(
D208
)iSBc 208 Dr ive r
(DEV)
Device Narne
[1-16 Chars]
(IL) Interrupt Level lEncoded
Levell
(ITP) Interrupt Task Priority [0-255]
(PA) Port Address [0
-
OFFFFH
]
(MDV)
Motor Delay Value [0-0FFFFH]
(BBA)
Boundary
Buffer Address l0-OFFFFFFFFHI
208
048H
130
0180H
0
50H
2C00H
Enter I Abbreviation : new_value / Abbreviatioi ? /H]
: <cR>
B-16 ICU User's Guide
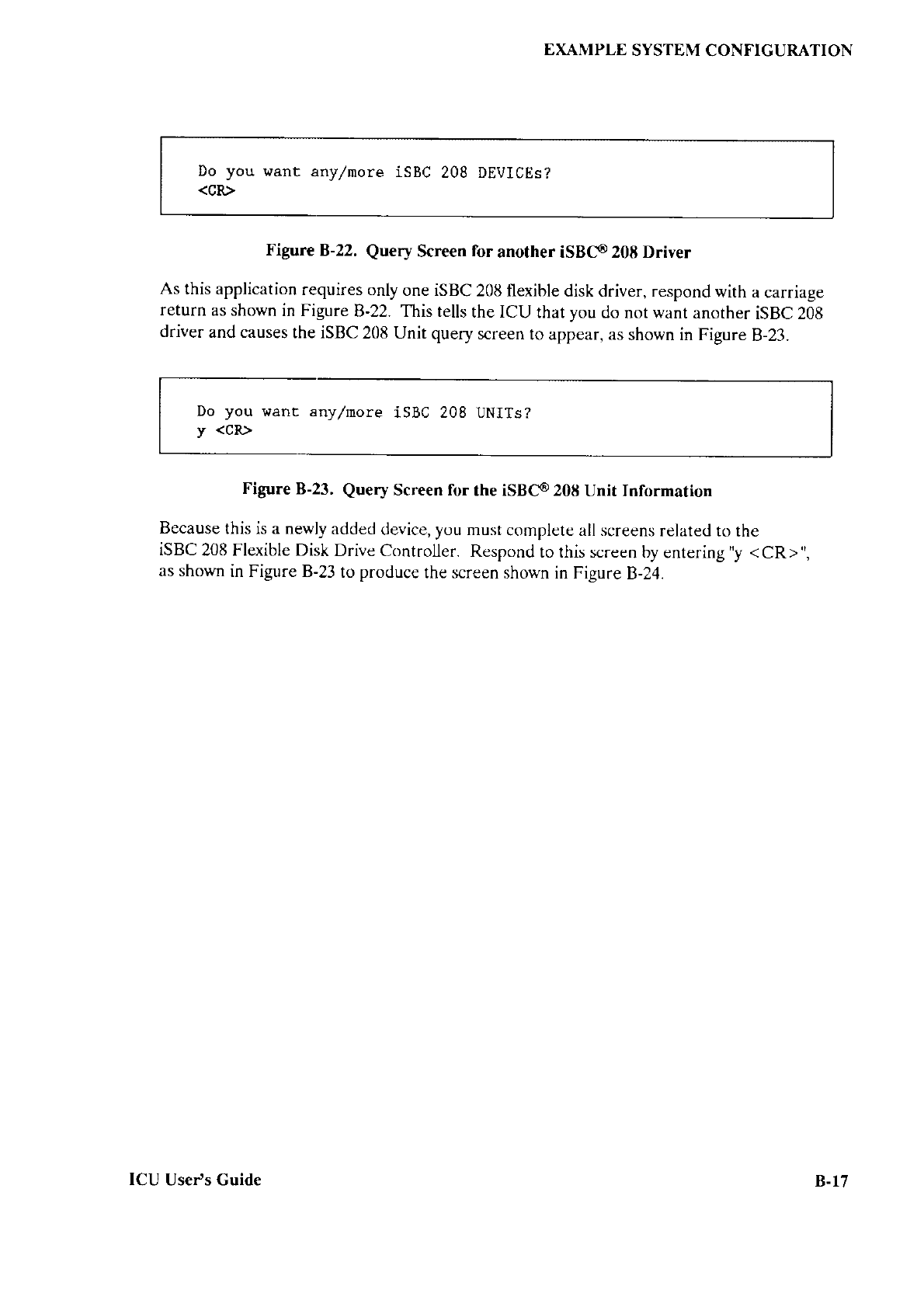
EXAMPLE
SYSTEM
CONFIGURATION
Do you
<cR> want any/nore iSBC 208 DEVICEs?
Figure
B-22. Query
Screen
for another iSBCo 20E Driver
As
this application
requires only
one iSBC
208 flexible
disk driver, respond
with
a carriage
return as shown
in Figure
B-22. This tells
the ICU that
you
do not want
another
iSBC 208
driver
and causes
the iSBC
208 Unit query
screen
to appear, as
shown in Figure
B-23.
Do you
y <cR> L'ant any/more iSBC 208 UNITS?
Figure
B-23, Query
Screen for the iSB@ 208
Unit Information
Because
this is a newly
added
device, you must
complete all screens
related
to the
iSBC
208 Flexible Disk
Drive Controller.
Respond
ro rhis screen
by entering "y <CR>",
as shown
in Figure B-23
to
produce
the screen
shown in Figure
B-24.
ICU Use/s Guide B-17
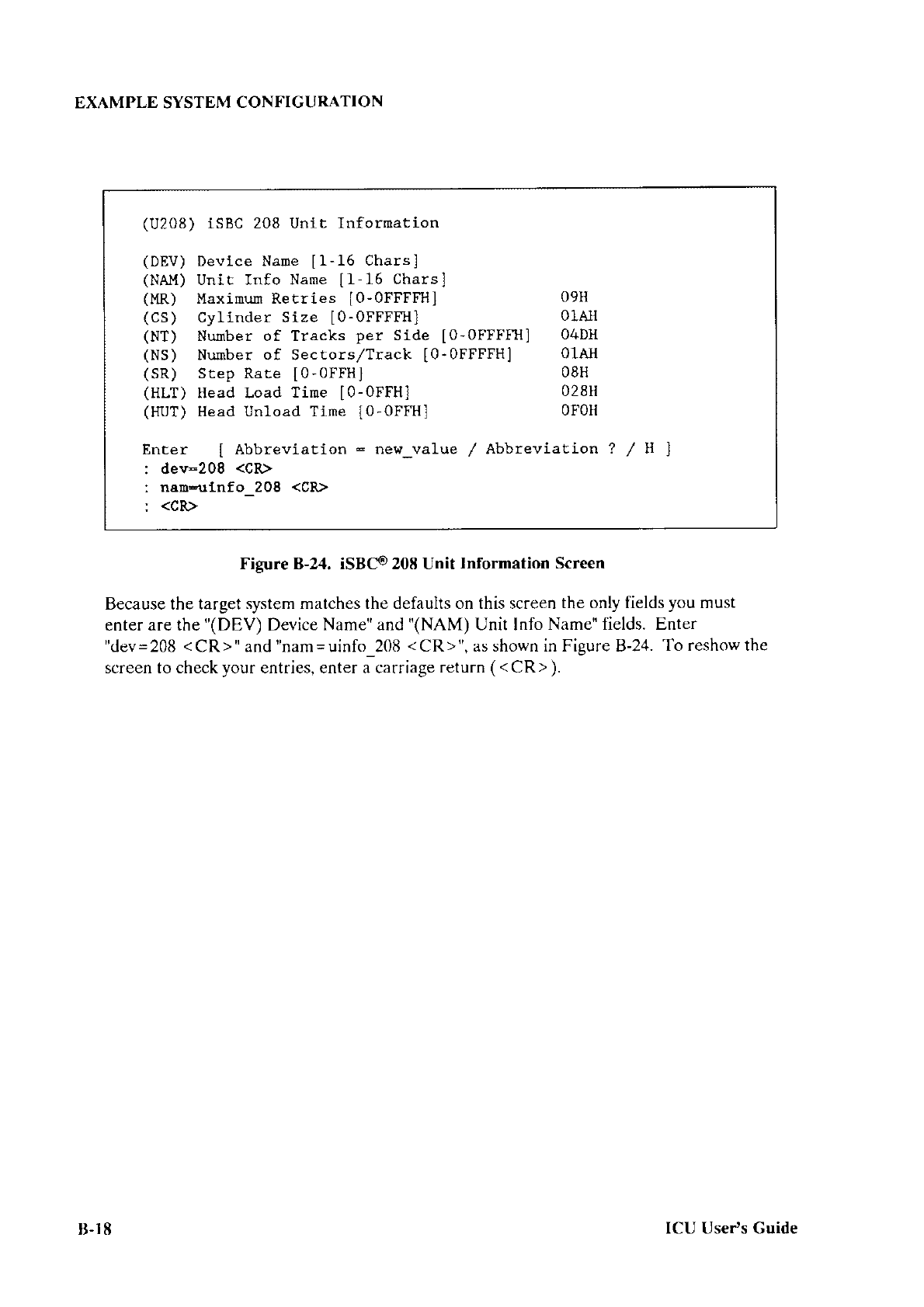
EXAMPLE SYSTEM
CONFIGURATION
(U208) iSBC 208 Unit lnformation
(DEV)
Device Nane [1-16 Chars]
(NAM)
Unit Info Name
[1-16 Chars]
(MR) Maximun Rerries I0-OFFFFH] 09H
(cS) Cylinder Size [O-OFFFI1I1 0fA]t
(NT) Nurnber of Tracks per Side [o-oFFFFH] 04DH
(NS) Nurnber of Sectors/Track IO-OFFFFH] 01AH
(SR) Step Ratè [0-0FFH] 08H
(HLT) Head Load Tirne [0-0FfH] 028H
(HUT)
Head Unload Tirne l0-0fFHl 0F0H
Enter I Abbreviation : new_value
/ Abbreviation ? /H]
: dev-208 <CR>
: nan=ufnfo_2O8 <CR>
: <CR>
Figure B-24. iSBC@208 Unit
Information Screen
Because the target
system matches the defaults on this screen
the only fields
you
must
enter are the
"(DEV) Device
Name" and
"(NAM) Unit Info
Name" fields. Enter
"dev=208
<CR>"
and
"nam=uinfo_208
<CR>",
as shown in Figure B-24.
To reshow the
screen to check
your
entries, enter a carriage
return
(
<
CR
>
)
u-r8 ICU User's Guide
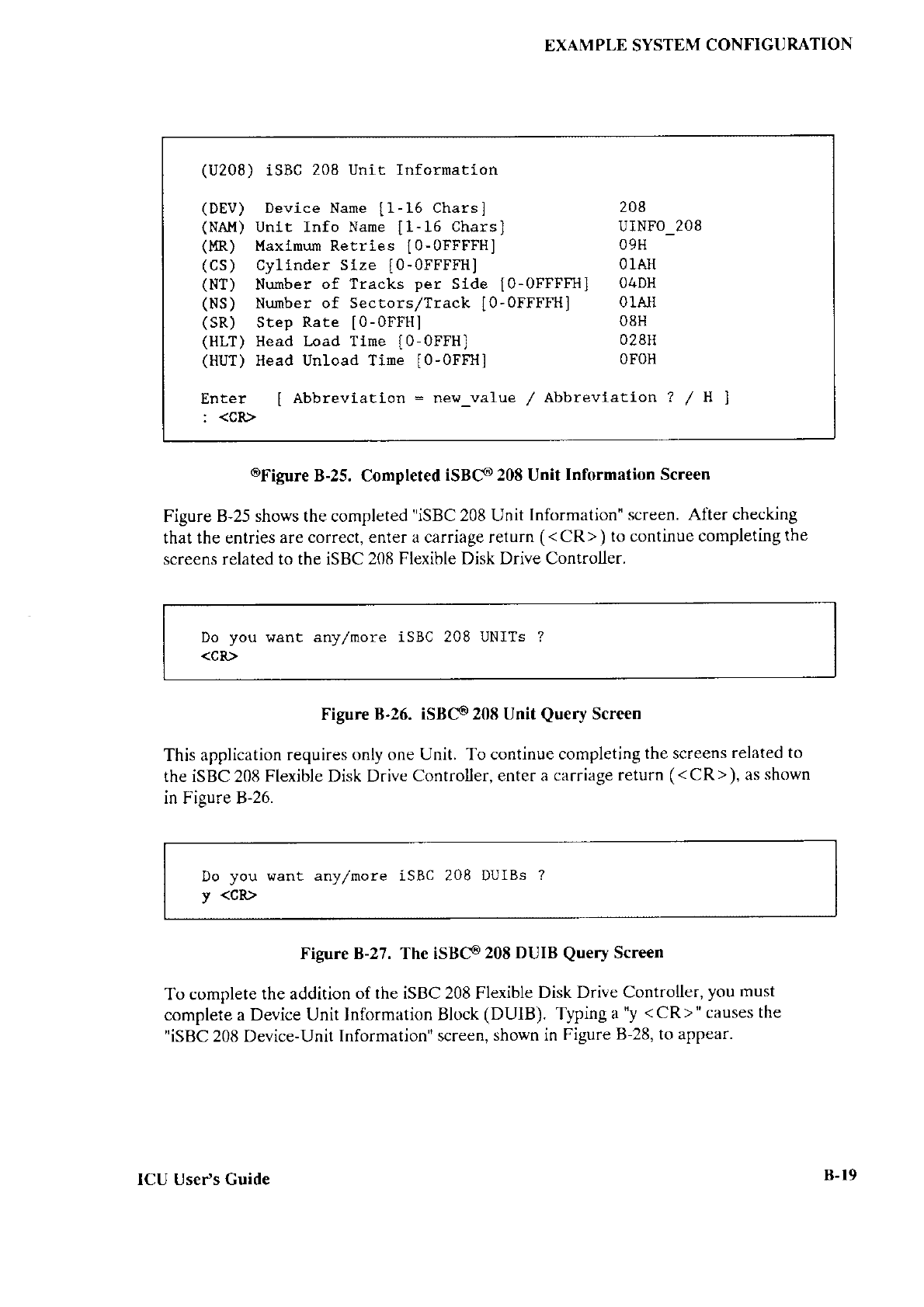
EXAMPLE SYSTEM
CONFIGURATION
@Figure
B-25. Completed
iSBC@208 Unit
Information Screen
Figure
B-25 shows the completed
"iSBC 208 Unit Information" screen.
Aller checking
that the entries are
correct, enter a carriage return
(
<
CR
>
) to continue completing
the
screens related to the iSBC 208
Flexible Disk Drive Controller.
Do you want
<cR> anylrnore iSBC 208 UNITs ?
Figure
8-26. iSBC€208 Unit
Query
Screen
This application
requires
only one Unit. To continue
completing
the screens
related to
the iSBC 208
Flexible Disk Drive
ControlÌer, enter a carriage
return
(<CR>), as
shown
in Fisure 8-26.
Do you
y <cR> want any/more iSBC 208 DUIBs ?
Figure B-27. The iSBC€
20E DUIB Query
Screen
To complete
the addition
of the iSBC 208 Flexible
Disk Drive
Controller,
you must
complete a Device Unit Information
Block
(DUIB). Typing
a
"y <CR>" causes
the
"iSBC 208 Device-Unit
Information" screen,
shown in Figure
B-28, to appear.
(U208) isBc 208 Unit InformatÍon
(DEV) Device Name
11-16 Charsl 2OB
(NAM)
Unit Info Nane [1-16 Chars] UINFo-
(l,R) Maxlmum Rerries I0-oFFFFHI 09H
(Cs) Cyllnder Size [O-0FFFFH] 01AH
(NT) Numbet
of Tracks per Sfde [0-0FFFFH] 04DH
(NS) Nurnber of Sectors/Track |0-0FFFFHI 0l-AH
(sR) Step Rate [0-0rFH] 08H
(HLT) Head Load Time lO-0FFHl 028H
(HUT)
Head Unload Tine [0-0FFH] 0F0H
Entèr I Abbreviation = nev_value / AbbreviatÍon ?
: <CR>
208
/H)
ICU User's Cuide B-r9
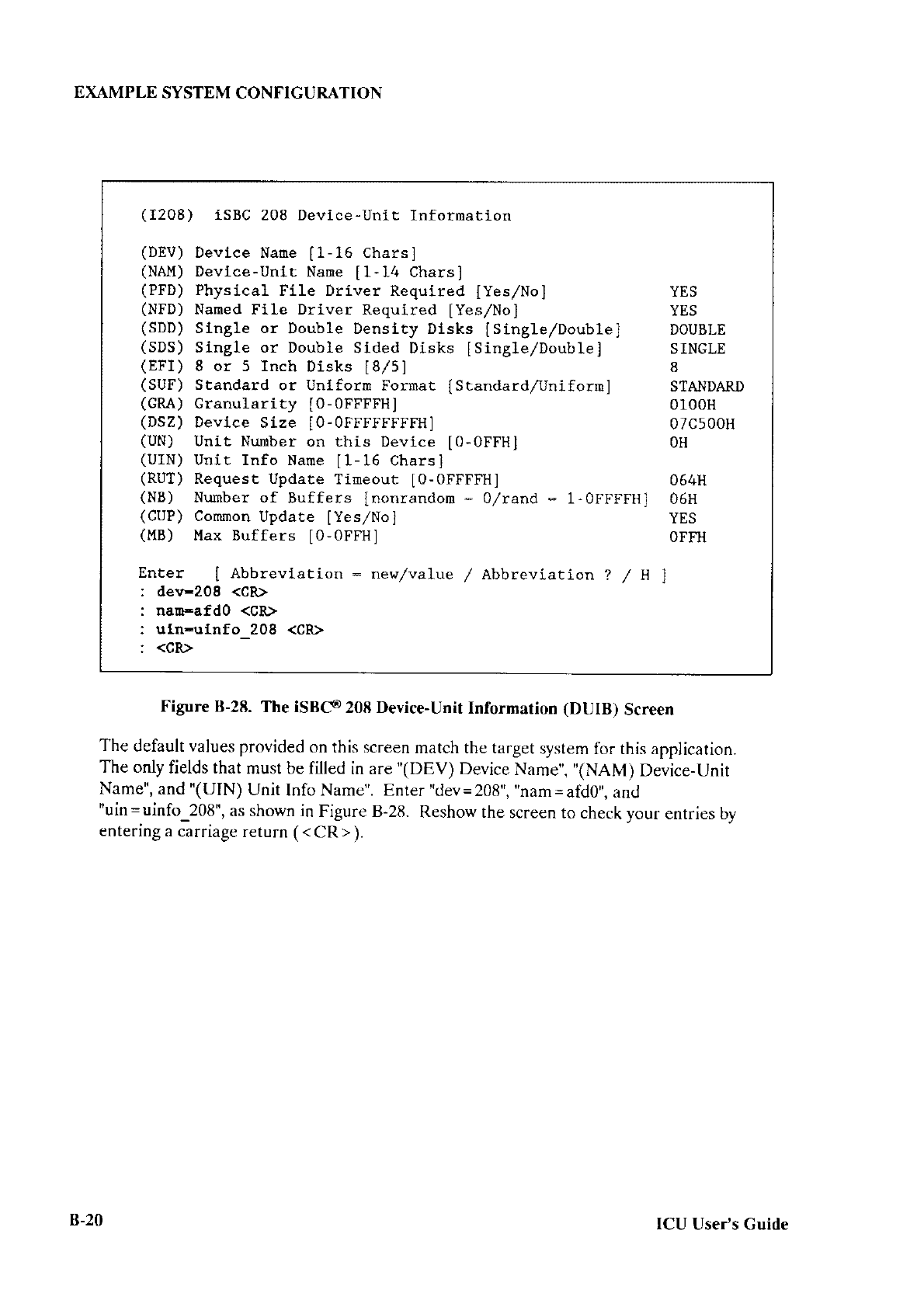
EXAMPLE
SYSTEM
CONFICURATION
Figure B-28.
The iSB@208
Device-Unit
Information
(DUIB)
Screen
The
default values
provided
on this rcreen
match the target
system
for this application.
The only
fields that
must be filled
in are
"(DEV)
Device
Name",
"(NAM) Device-Unit
Name",
and "(UIN) Unit
Info Name". Enter
"dev=208",
"nam
=
atdO,', and
"uin
=
uinfo_208",
as shown in
Figure B-28.
Reshow the
screen to
check your
entries by
enteringa
carriage return (<CRr).
(1208) 1SBC 208 Device-Unic lnformation
(DEV)
Devlce Naúe [1-16 Chars]
(NAì,f)
Device-Unic Narne
[1-14 Chars]
(PFD) Physical FíIe Driver Required [Yesr/No]
(NFD)
Named Flle Drlver Requlred IYes/No]
(SDD)
Stngle or Double Density Dlsks I
S
ingle,zDouble
]
(SDS)
Single or Double Slded Disks ISingle/Double]
(EFI) 8 or 5 lnch Disks [8/5]
(SUF) Standard or Unlform Format {
S tandard/Uni forru
l
(GRA) Cranularity [0
-
OFFFFH
]
(DSZ) Devlce Size l0
-
OFFTFFFFFH
l
(UN) Unit Nu.nber
on this Device [0-0FFH]
(UIN) Unit Info Name
[1-16 Chars]
(RUT)
Request Updatè Tirnèour [0-OFFFFH]
(NB) Number of Buffers fnonrandon * O/îand - 1-OFFFFH]
(CUP) Comrnon
Update [YeslNo ]
(MB) Max Buffers [0
-
OFFH
]
Enter I Abbreviation - new/value
/ Abbreviation ? /Hl
dev-208 <CR>
nan-afdo <CR>
uln-ulnfo_2O8 <CR>
<cR>
YES
YES
DOUBLE
SINGLE
8
STANDARD
0100H
07c500H
OH
064H
06H
YES
OFFH
B-20 ICU
User's Guide
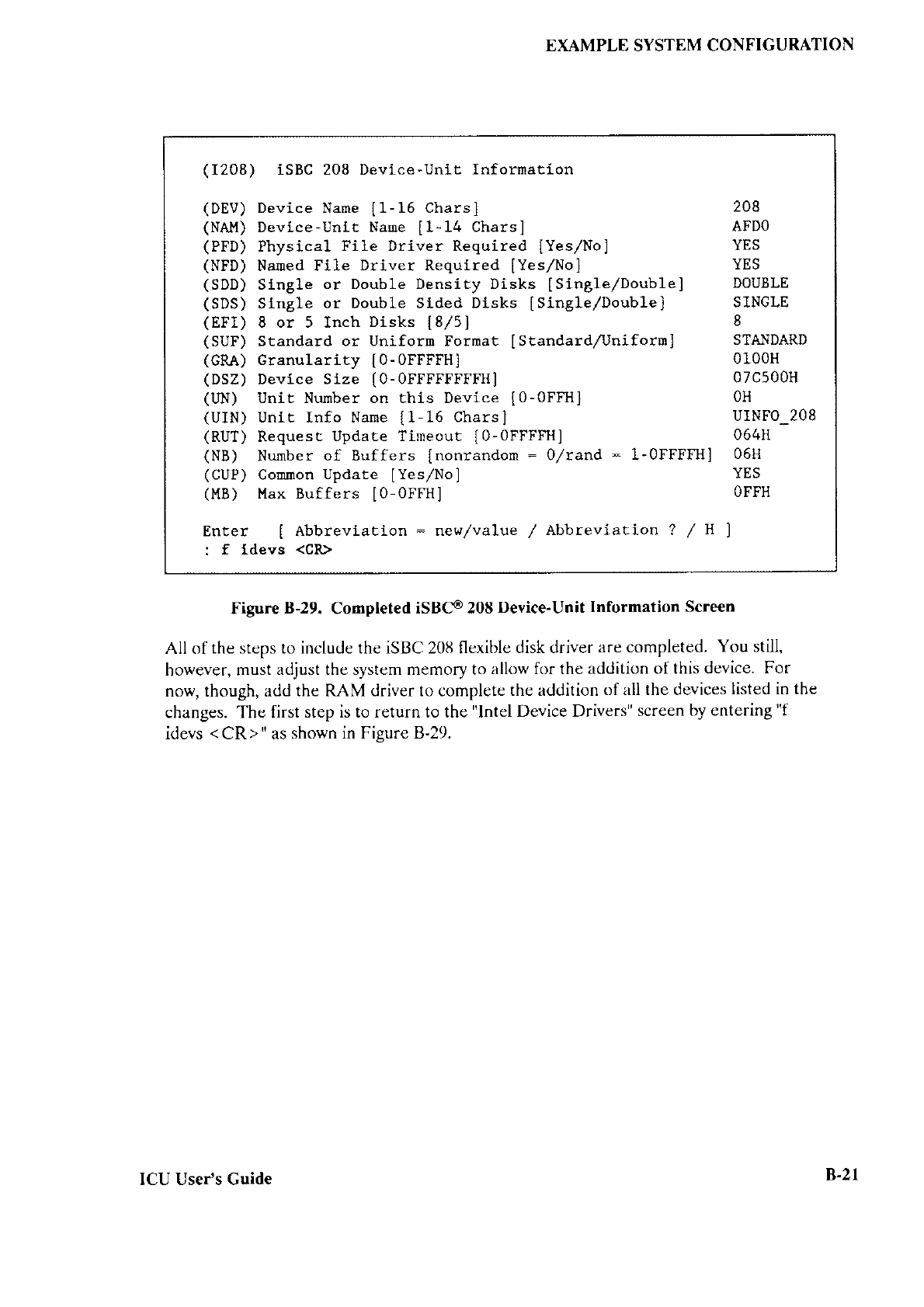
EXAMPLE SYSTEM CONFIGURATION
Figure
B-29.
Completed
iSBCo208
Device-Unit
Information Screen
All of
the steps to include the iSBC 201ì flexible
disk driver
are completed.
You still,
however, must
adjust the system memory to
allow for the addition
of this device.
For
now, though, add
the RAM driver to complete
the addition
of all the devices
listed in the
changes. The first
step is to return to the
"lntel Device Drivers"
screen
by entering "f
idevs
<
CR
>
" as
shown in Figure B-29.
(1208) 1SBC 208 Device-Unit Information
(DEV)
Device Name
l1-16 Charsl
(NAM)
Device-Unlt Naroe
[-14 Chars]
(PFD) PhysicaL Filè Driver Required [YeslNo]
(NFD)
Naued File Driver Required [Yes/No]
(SDD)
Stngle or Double Dènsity Disks ISingle/Double]
(SDS) Slngle or Double Sided Disks lSlngle/Doublel
(EFI) I or 5 Inch Disks [8/5]
(SUF) Standard or Uniforn Fornat I
S tandard/Uni form ]
(cRA) cranularity [0 -
OFFFFH]
(DSZ) Devíce Stze [0
-
OFFFFFFFFH
]
(uN) Unit Nu.rnber on this Device [0-0FFH]
(UIN) Unit Info Name
{1-16 Charsl
(RUT)
Request UpdaLe Timeóut I0-0FFFlîll
(NB) Nurnber
of Buffers lnonrandom
- 0/rand: I-0FFFFHI
(CUP) Coúnon Update IYeslNo ]
(MB) Max Buffers [0
-
0FFH
]
Enter I Abbreviation : new/va1ue
/ Abbreviacion ? /H
: f ldevs <CR>
208
AFDO
YES
YES
DOUBLE
SINGLE
I
S
TANDARD
0100H
0 7c500H
OH
UINFO-208
064H
06H
YES
OFFH
ICU Usefs Guide B-21
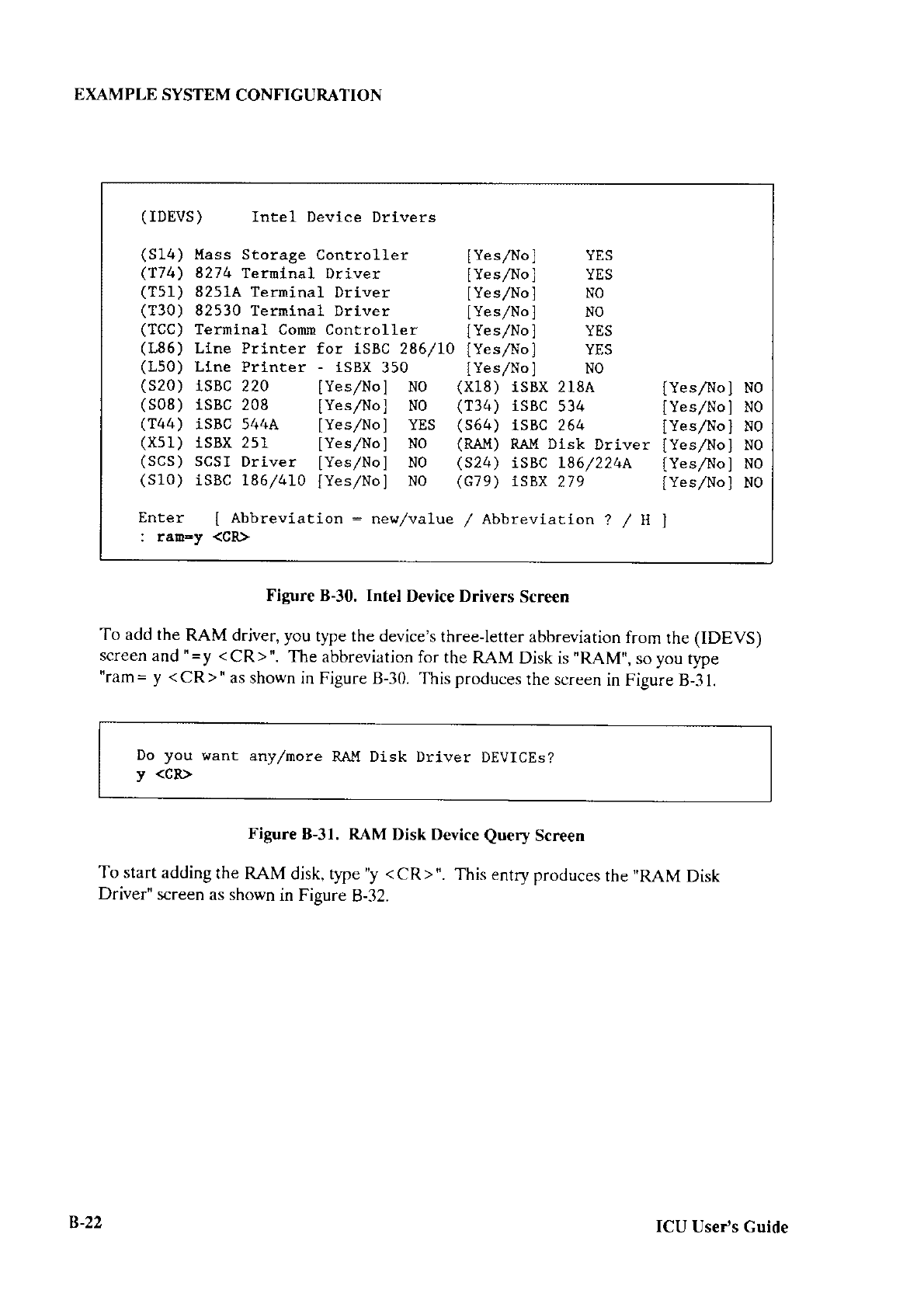
EXAMPLE SYSTEM
CONFIGURATION
(IDEVS) lntel Dèvice Drivers
(S14) Mass Storage Cóntrol1er [Yes/No] YES
(T74) 8274 Terninal Driver [YeslNo] YES
(T51) 8251A Ternínal Driver [Yes,uNo] NO
(T30) 82530 Terrninal Driver [YeslNo] NO
(TCC) Terrninal Comm Controller [Yes/No] YES
(L86) Llne Printer for iSBC 286110 [YeslNo] YES
(L50) Line Prlntèr - ISBX 350 [Yès//No] NO
(s20) iSBc 220 [Yes/No] No (X18) isBX 218A [Yes/No] No
(S08) ISBC
208 [Yes/No] N0 (T34) tsBc 534 [Yes//No]
NO
(T44) iSBc 5444 [YeslNo] YES (s64) lsBc 264 [Yes/Nol N0
(X51) ISBX 251 [Yes/No] N0 (RAM)
RAtl Dlsk Driver [Yes/No] NO
(SCS)
SCSI Driver [Yes/No] No (s24) isBc 186/224A [Yes/No] No
(s10) isBc 186/410 [Yes/No] N0 (c79) isBX 279 lyeslNo] No
Enter I Abbreviation - nelvalue / Abbreviarion ? /H]
: raro=v <CR>
Figure B-30. Intel Device Drivers
Screen
To add the
RAM driver, you
type the device's
threeletter
abbreviation
from
the
(IDEVS)
screen
and "=y <CR>". The
abbreviation for
the RAM Disk is "RAM',,
so
you
t)?e
"ram=
y <CR>" as shown
in Figure B-30. This produces
the screen
in Figure
B-31.
Do you I'ant any
/more
y <cR> RAl,l Disk Driver DEVI
CEs ?
Figure
B-31. RAM Disk Device
Query
Screen
To start
adding
the RAM disk, tlpe "y <CR>". This entry produces
rhe',RAM
Disk
Driver"
screen
as shown
in Fisure
B-32.
B-22 ICU
Use/s Guide
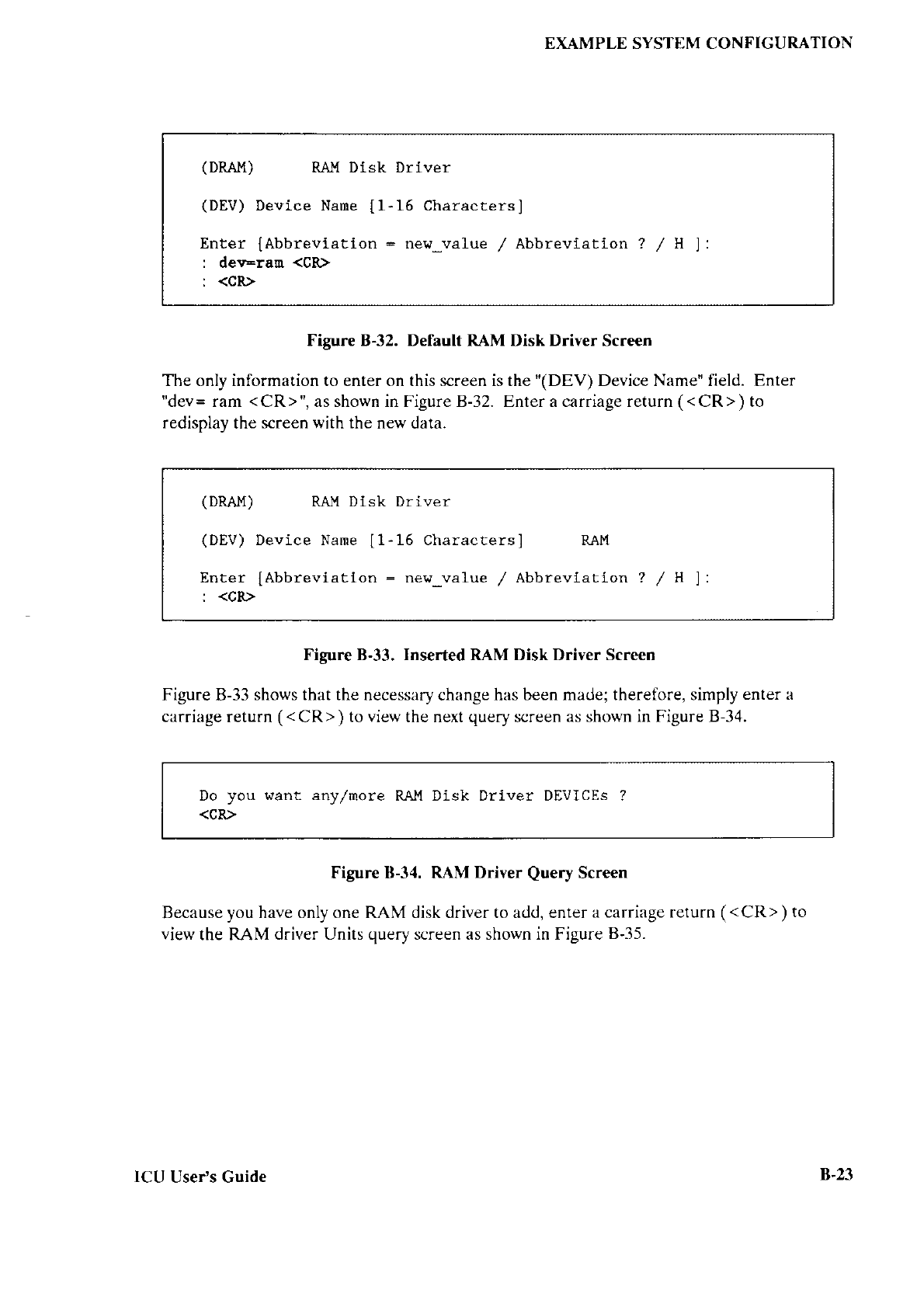
EXAMPLE SYSTEM CONFIGURATION
(DRAM) RAI{ Disk Dríver
(DEV)
Device Name
[1-16 Characters]
Enter lAbbreviation = new_value
/ Abbreviation ? / H ]:
: dev-ran <CR>
: <cR>
Figure B-32. Default RAM Disk Driver Screen
The only information to enter on this screen is the "(DEV) Device Name" field. Enter
"dev= ram <CR>", as shown in Figure B-32. Enter a carriage return
(<CR>) to
redisolav
the
screen with the
new data.
(DRAì4) RAM Disk Driver
(DEV)
Device Narne
11-16 Charactersl RAI1
Enter [Abbreviation: new_va1ue
/ Abbreviation ? / H ]:
: <CR>
Figure B-33. Inserted RAM Disk Driver Screen
Figure B-33
shows that the
necessary change has
been made; therefore, simply
enter a
carriage return
(
<
CR
>
) to
view
the next
query
screen
as shown in Figure B-34.
Do you want
<c8> anv/more RAI'Í Disk Driver DEVICES ?
Figure B-34. RAM Driver Query
Screen
Because
you have only one RAM disk driver to add, enter
a carriage return (
<
CR
>
) to
view
the RAM driver Units query screen as shown in Figure
B-35.
ICU User's Guide B-23
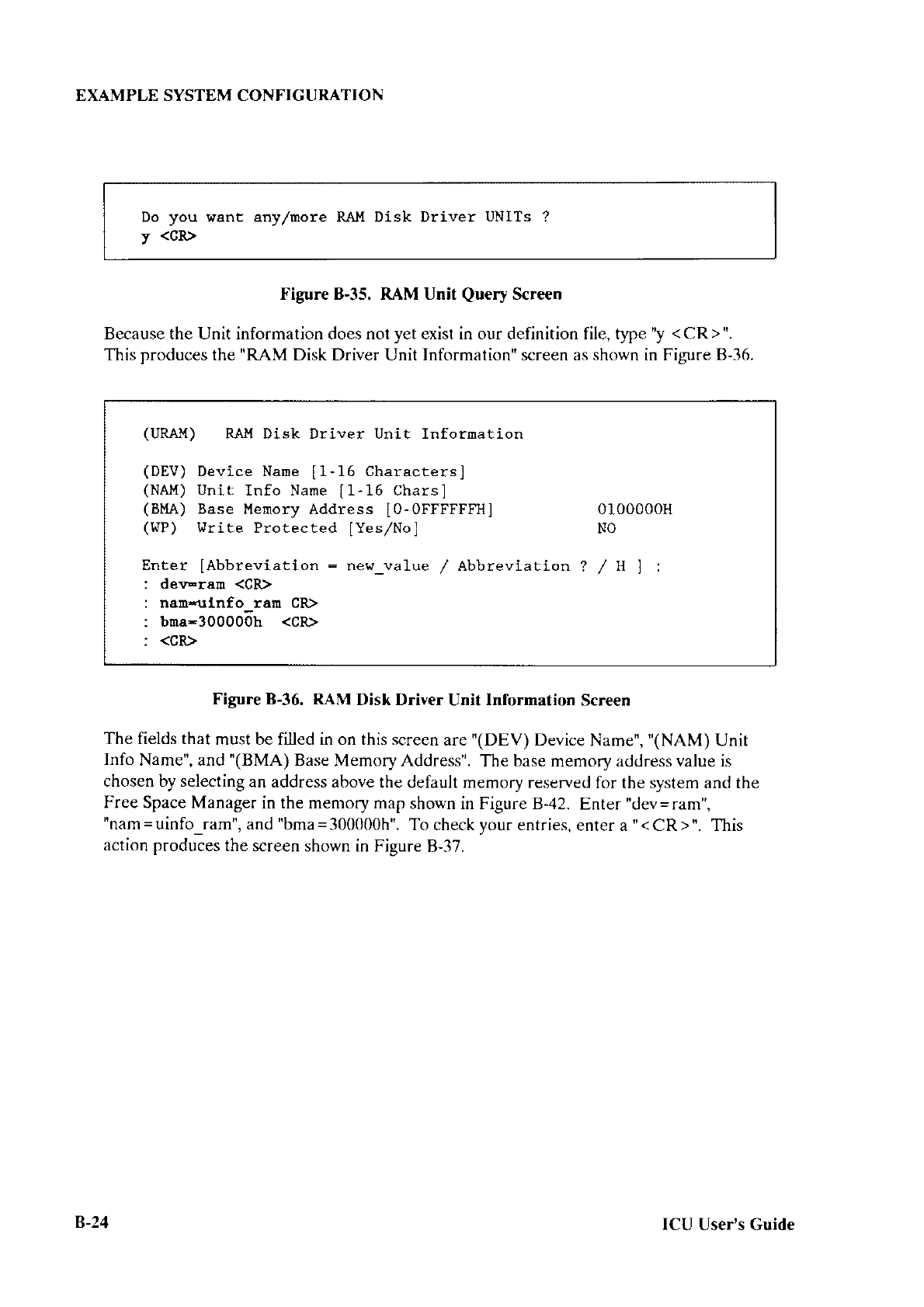
EXAMPLE SYSTEM CONFIGURATION
Do you want any/nore
y <cll> RAl,t Disk Driver UNITs ?
Figure B-35. RAM Unit Query
Screen
Because the Unit information does not
yet
exist in our definition file, type
"y <CR>".
This
produces
the
"RAM Disk Driver Unit Information' screen as shown in Figure 8-36.
Figure 8-36. RAM Disk Driver Unit Information Screen
The fields that
must be filled in on this screen
are "(DEV) Device
Name", "(NAM) Unit
Info
Name", and "(BMA) Base
Memory Address".
The base memory address value is
chosen by selecting
an address above
the default memory reseryed
for the system and the
Free Space Manager
in the memory map
shown in Figure B-42.
Enter
"dev=ram",
"nam
=
uinfo_ram", and
"bma
=
300000h".
To check your entries,
enter a "
<
CR
>
". This
action produces
the
screen shown in Figure
B-37.
(URAI{) Ml'f Disk Dri.ver Unit Infornation
(DEV) Device Name
[1-16 Characters]
(NAM) Unit Info Name [1-16 Chars]
(BMA) Base Memory Address l0-OFFFFFPHI
(WP) Write Protected IYes/No ]
0100000H
NO
Enter lAbbreviatlon: ner^r_value
/ Abbrevlation ? / H I :
dev-ran <CR)
nan*ulnfo_ram cP>
bna-300000h <cR>
<cR>
B-24 ICU
User's Guide
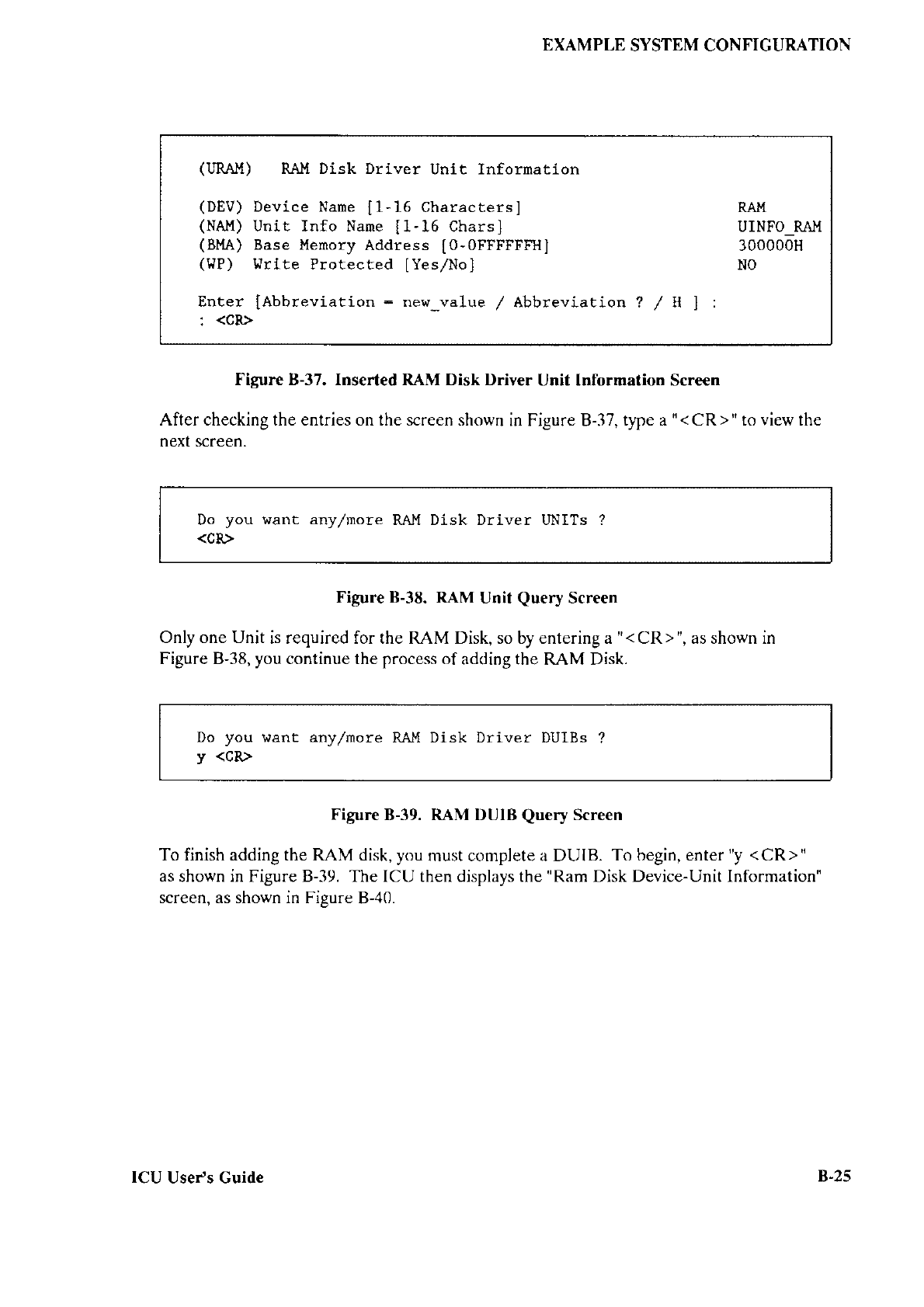
EXAMPLE
SYSTEM CONFIGURATION
(UR-AX) RAM Disk Drj.ver Unit Infornation
(DEV)
Device Name
[1-16 Characters] RAM
(NAì4)
UniÈ Info Nane [1-16 Chars] UINFO_RA.I{
(
Bl'lA) Base Memory
Address IO-oFFFFFFH] 300000H
(IJP) lJrite Protected [Yes/No] NO
Enter [Abbreviation - new_va1ue / Abbreviation ? / H | :
: <cR>
Figure B-37. Inserted RAM Disk Driver Unit Information Screen
After checking the entries on the screen shown
in Figure B-37,
ty?e a
"<CR>" to view the
next screen.
Do you want
<cR> anvlnore RA-t,f Disk Driver UNITs ?
Figure B-38. RAM Unit Query
Screen
Only one Unit is required for the RAM Disk, so by entering a
"<CR>", as shown in
Figure B-38,
you
continue the
process
of
adding the RAM Disk.
Do you want any/mo]ie
y <CI{>
RA.|4 Disk Driver DUIBS ?
Figure
B-39. RAM DUIB
Query
Screen
To finish adding the RAM disk, you
must complete a DUIB. To begin, enter "y <CR>"
as shown in Figure B-39. The ICU then displays the "Ram Disk Device-Unit Information"
screen. as shown in Fisure
B-40.
ICU
Use/s Guide B-25
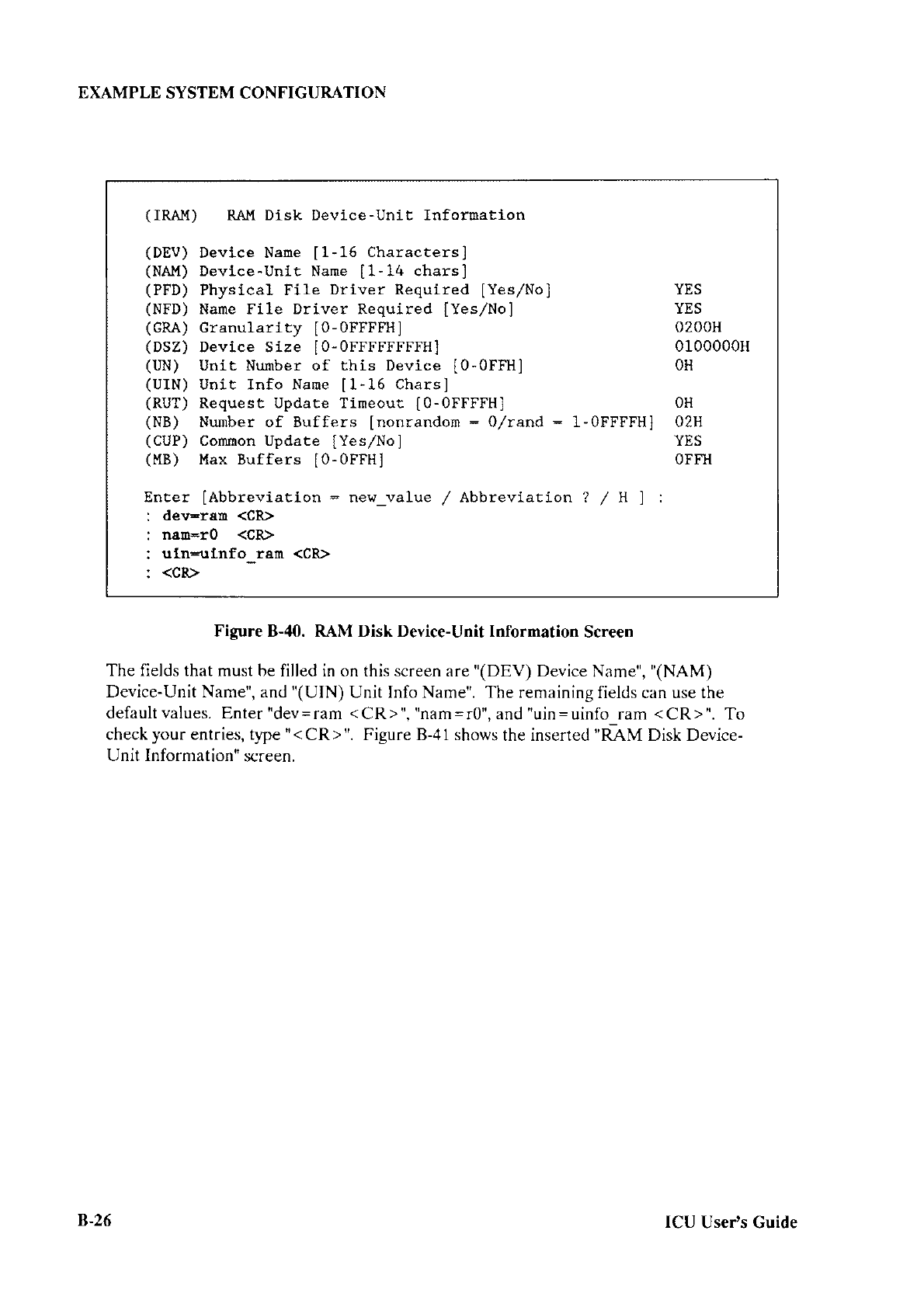
EXAMPLE
SYSTEM CONFIGURATION
Figure B-40. RAM Disk Device-Unit Information Screen
The fields that must be
filled in on this screen are "(DEV) Device
Name",
"(NAM)
Device-Unit Name", and
"(UIN) Unit Info Name". The remaining
fields can use the
default values.
Enter
"dev=ram
<
CR
>
", "nam
=
r0", and
"uin
=
uinfo ram <CR>". To
check
your
entries, type Figure B-41 shows
the inserted
"RAM Disk Device-
Unit Information"
screen.
(
IRAI4) RAM Disk Device-Uni! Infornation
(DEV)
Device Nane [1-16 CharacÈers]
(NAl'f)
Devlce-Unit Narne
l1-14 charsl
(PFD) Physical Fí1e Driver Rèquired [Yes,zNo] YES
(NFD)
Narne File Driver Required [Yes/No] YES
(GM) Granularíty |0-OFFFFHI 0200H
(DSZ) Devlce Size |O-OFFFFFFFFHI 0100000H
(UN) Unit Ntrnbèr of this Device [0-0FFH] 0H
(UlN) Unit Info Narue
Il'16 Chars]
(RUT)
Request Update Timeout IO-OFFFFH] 0H
(NB) Nr.ruber of Buffers [nonrandom - O/rand - 1-OFFFFH] 02H
(CUP)
Conmon Update [Yes/No] YES
(MB) Max Buffers |O-OFFH] OFFH
Enter lAbbreviation - new_value / Abbreviation ? / H ) :
dev-ran <CR>
nan=ro <CR>
uln*uinfo_ran <CR>
<cR>
B-26 ICU
User's Guide
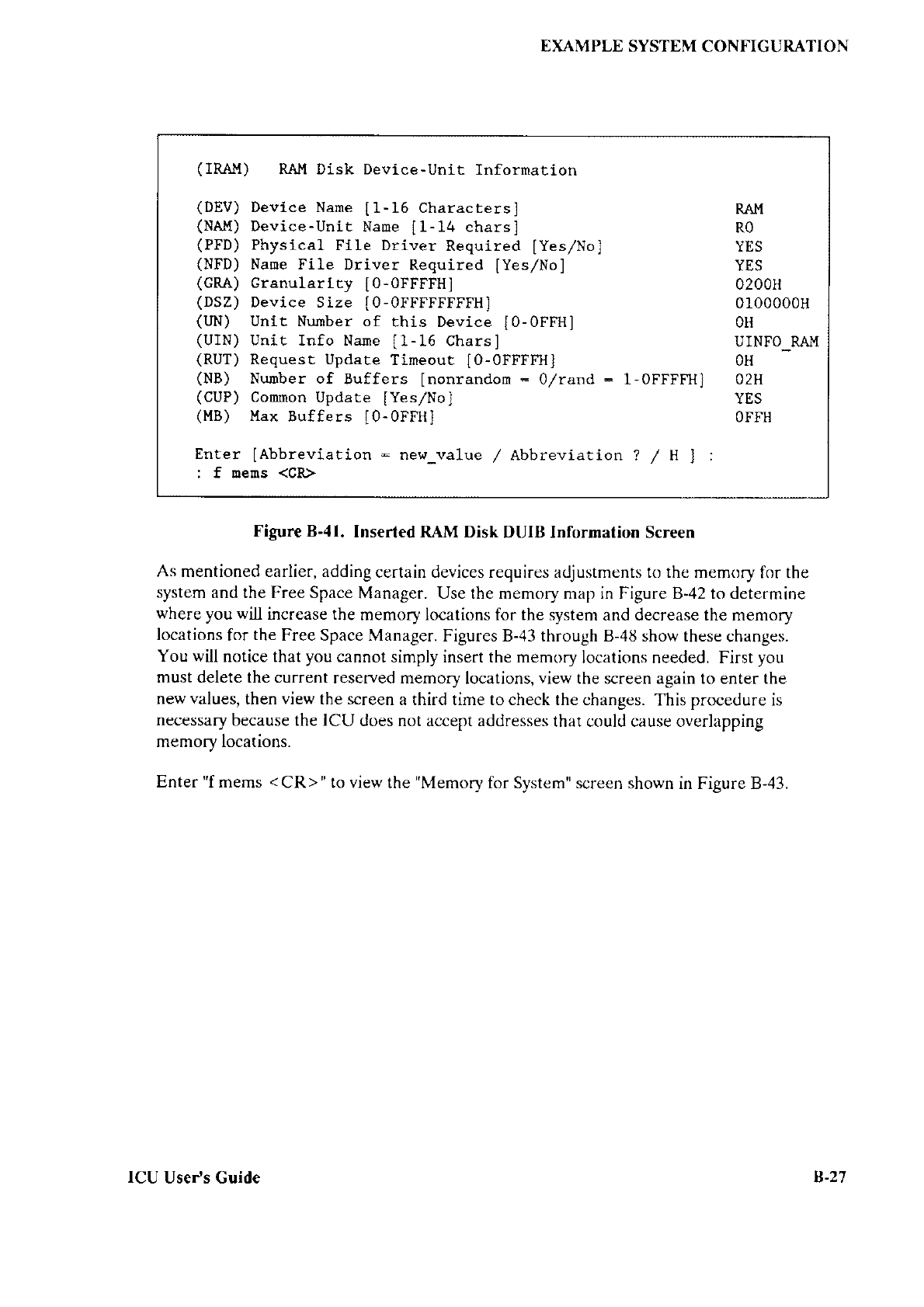
EXAMPLE SYSTEM
CONFIGURATION
Figure B-41.
Inserted RAM Disk
DUIB Information
Screen
As mentioned earlier, adding
certain devices requires adjustments to the memory
for the
system
and the Free Space
Manager. Use the memory map in Figure B-42 to determine
where you will
increase the
memory locations for the system
and decrease the memory
locations
for
the
Free Space Manager.
Figures B-43 through B-4tì show these
changes.
You will
notice that
you
cannot simply insert the memory
locations nee<Jed. First
you
must delete the current
reserved memory
locations,
view
the screen again to enter the
new values,
then
view
the screen
a third time to check the
changes. This
procedure
is
necessary
because the ICU does not accept addresses
that could cause overlapping
memory locations.
Enter "f
mems
<
CR
>
"
to view
the
"Memory
for System" screen
shown in Figure B-43.
(
IRA.I'!
) RAÌ.t Disk Device-Unit Informarion
(DEV)
Device Narne
[1-16 Characters]
(NAl,f)
Device-Unit Name
l1-14 charsl
(PFD) Physlcal File Driver Required IYeslNo]
(NFD)
Nane FiIe Driver Required [YesruNo]
(GM) Cranulartcy [0
-
OFFFFH
]
(DSZ) Device S ize [0-0FFFFFFFI1I]
(UN) Unit Nunber of this Device lO-0FFHl
(UlN) Unít Info Narne
(1-1-6
Charsl
(RUT)
Request Update Timeout [0-0FFFF!]
(NB) Nunber of Buffers [nonrandom : O/rand - ],-0FFFFHI
(CUP) Common
Update [Yes/No ]
(MB) Max Buffers [0
-
OFFH
]
Enter [Abbreviation - new_value / Abbreviation ? / H ]
: f nens <CR>
RAM
RO
YES
YES
0200H
0100000H
OH
UINFO-RAI'I
OH
02H
YES
OFFH
ICU
UseIJs Guide B-27
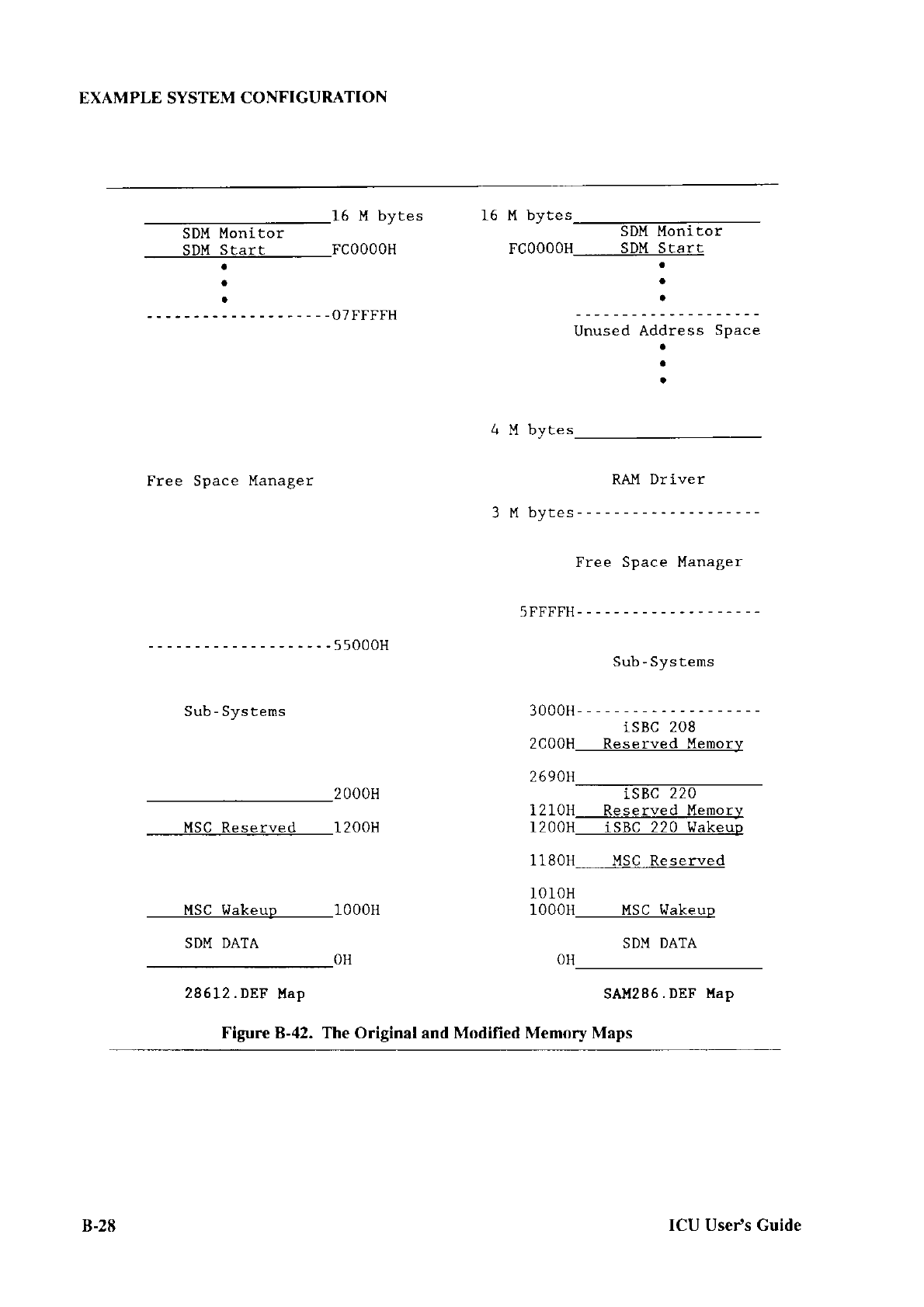
EXAMPLE SYSTEM
CONFIGURATION
16 M bytes 16 M bytes
SDM Monitor
SDM
Start Fc0000H
- - -
OTFFFFH
Free Space Manager
----55000H
Sub
-
Sys terns
2000H
MSC Reserved 1200H
CnM M^6 i r^r
FC0000H SDM S tart
Unused
Address Space
4 M bytes
RAI'f Dr iver
I M bytes -
I'rao Qnenp M,n.oèr
5FFFFH-
Sub
-
Sys tems
I000H
- -
isBc 208
2C00H Reserved Memory
2690H
-------I3Ba-f7-
1210H Reserved Memory
1200H iSBC 220 l,,takeup
1180H MSC Re served
1010H
1000H MSC l.Iakeup
SDM DATA
SAUz86. DEF
XaD
MSC tJakeuo 1000H
SDM DATA OHOH
28612 . DEF
Map
Figure B-42. The Original and Modified Memory Maps
B-28 ICU Usefs Guide
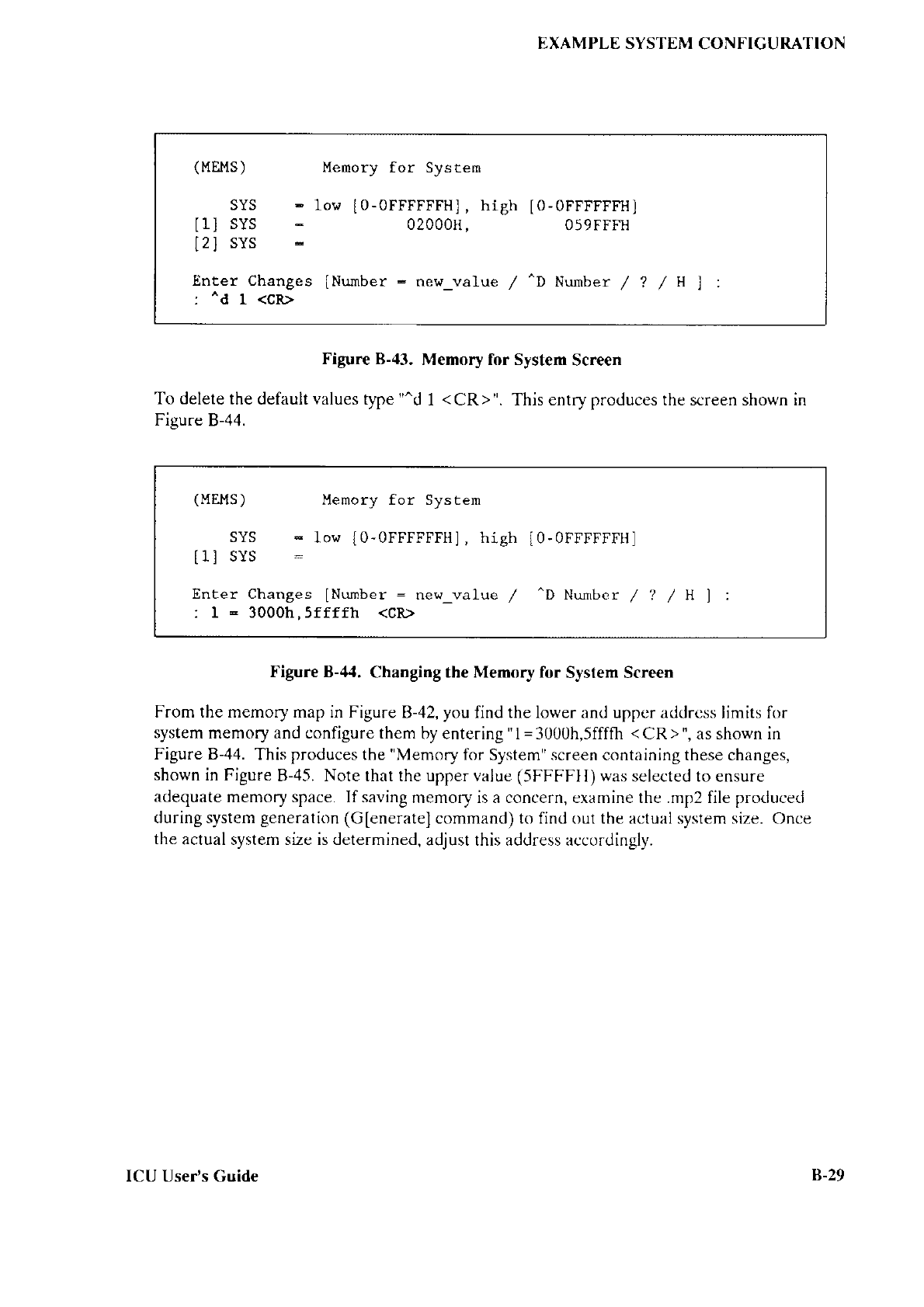
EXAMPLE SYSTEM
CONFIGURATION
(MEMS) Menory for Sys tem
sYs - ìow l0-OFFFFFFHI,
high [0-OFFFFFFH]
[1] sYS - 02000H, 059FFFH
[2 ] sYs
Enter Changes [Nurnber
: new_value / ^D Number / ? / H ) :
: ^d I <cR>
Figure B-43. Memory for System
Screen
To delete
the default
values
rype
"^d
1 <CR>". This entry produces the screen shown in
Fisure
B-44.
(MEMS) Memory for Sys t em
sYs * low {0-OFFFFFFHI,
hÍgh l0-OFrFFrFHl
[1] sYS
Enter Changes lNumber
: nevr_value
/ ^D Nltnber / ? /H]:
: I - 3000h,5ffffh <CR>
Figure B-4.1.
Changing the Memory for System Screen
From the memory map in Figure
B-42,
you
find the lower and upper addrcss
limits for
system
memory and configure them
by entering'l
=
3000h,5ffffh
<CR>", as shown in
Figure B-44.
This
produces
the
"Memory
for
System"
screen
containing these changes,
shown in Fìgure
B-45. Note that the upper value (5FFFFII)was
selected to ensure
adequate
memory space. If saving
memory is a concern, cxamine the .mp2 file producecl
during system
generation
(G[enerate]
command) to find out the actual system size. Once
the
actual system size is determined,
adjust this address accordingly.
ICU User's Guide B-29
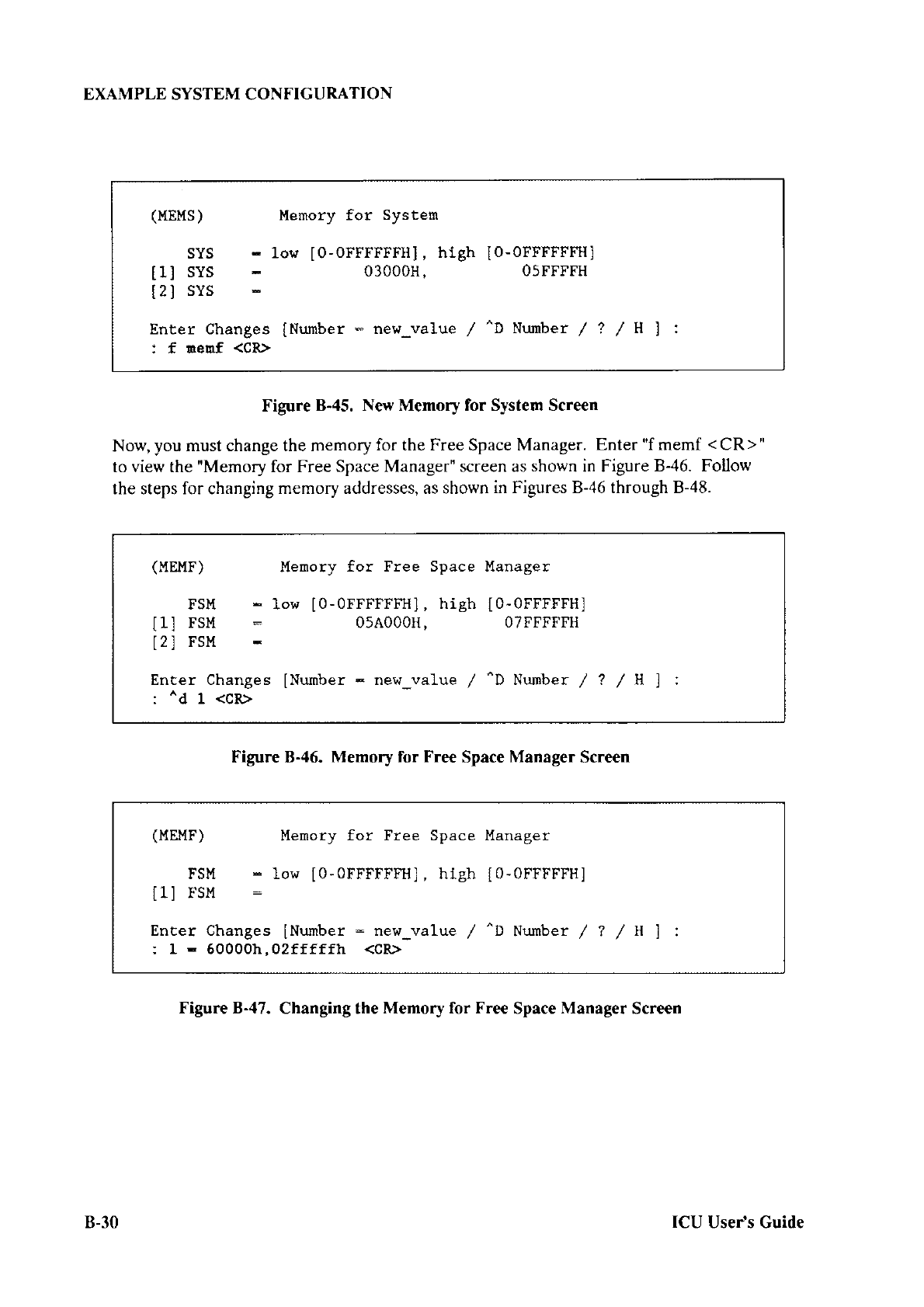
EXAMPLE SYSTEM CONFIGURATION
(MEMS) Menory for systèn
SYS - 1ow IO-oFFFFFFH],
hlgh Io-oFFFFFFH]
[r] sYs - 03000H, o5FFFFH
[2] sYs
Enter Changès [Number * ner,r_value / ^D Nunber / ? / H I :
: f nenf <CR>
Figure
B-45. New Memory for System Screen
Now,
you must change the memory
for the Free Space Manager.
Enter "f memf
<
CR
>
"
to view the
"Memory
for Free
Space Manager" screen as
shown
in Figure
8-46. Follow
the steps for changing
memory addresses, as shown
in Figures 8-46 through B-48.
(MEMF) Menory for Free Space Manager
Fsu - low [0-OFFFFFFH],
high IO-OFFFFFH]
[1] FsM : 05A000H, O7FFFFzu
[2 ] FsM
Enter Changes
[Nurnber
* ne\{_va1ue
/ ^D
Nunber
/? /H):
: ^d 1 <cP>
Figure 8-46. Memory for Free
Space
Manager
Screen
(MEMF) Memory for Free Space Manager
rsll - 1ow
[0-OFFFrFrH],
high lO-0rrFFFHl
[
1
] rs],f
Enter Changes
[Number
: new_va1ue
/ ^D
Nunber
/? /Hl:
: I - 600O0h,02fffffh <CR>
Figure B-47. Changing the
Memory for Free
Space
Manager
Screen
B-30 ICU
Usefs Guide
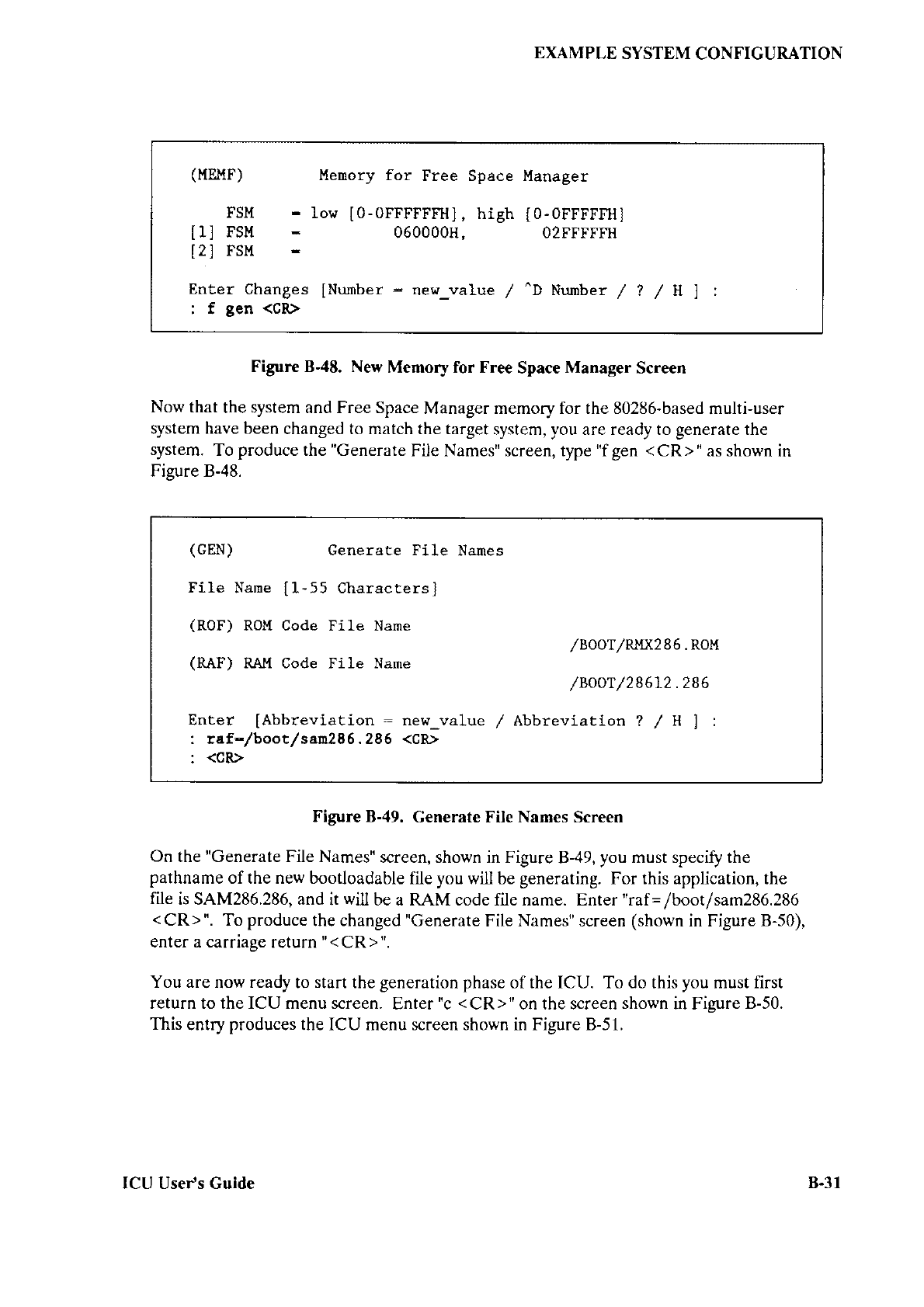
EXAMPLE
SYSTEM
CONFIGURATION
(MEilf) Menory for Free Space Manager
FsM - low [0-0FFFFFFH],
high [0-OFFFFI1{]
[1] FSr.f - 060000H, o2FFFFrir
[2] FsM
Enter Changes
[Number
: new_value
/ ^D
Nurnber
/? /H]:
: f gen <CR>
Figure B-48. New
Memory for Free
Space
Manager
Screen
Now that
the system and Free Space
Manager memory for the 80286-based
multi-user
system have been
changed to match the target
system, you are ready to generate the
system.
To
produce
the "Generate
File Names" screen, type "f gen
<CR>" as shown
in
Fisure B-48.
(CEN) cenerate File Nanes
File Narne
[1^-55
Characters]
(ROF) ROM Code File Nane
/BoOT/RMX2
86
.
Rol,r
(RAF) RAl,f Code File Narne
/Boor /28612
.286
Enter fAbbrevlation: new_vaLue
/ Abbreviatlon ? / H ] :
' wf-/boot/ saxo28 6 . 28 ó <cR>
: <CR>
Figure B-49. Generate File Names Screen
On the
"Generate
FiÌe Names"
screen, sho\ryn in Figure
B-49,
you must specify the
pathname
of the new bootloadable
file you will be generating. For this application, the
file
is SAM286.286, and
it
will
be a RAM code file name. Enter "raf
=
/boot/sam28ó.286
<CR>". To
produce
the changed "Generate
File Names" screen
(shown
in Figure
B-50),
enter
a carriage return
"<CR>"
You are
now
ready
to
start
the
generation phase
of the ICU. To do this
you
must first
return to the ICU menu screen.
Enter
"c
<CR>" on the screen
shown
in Figure
B-50.
This
entry
produces
the ICU menu screen shown in Figure B-51.
ICU Usefs Guide B-31
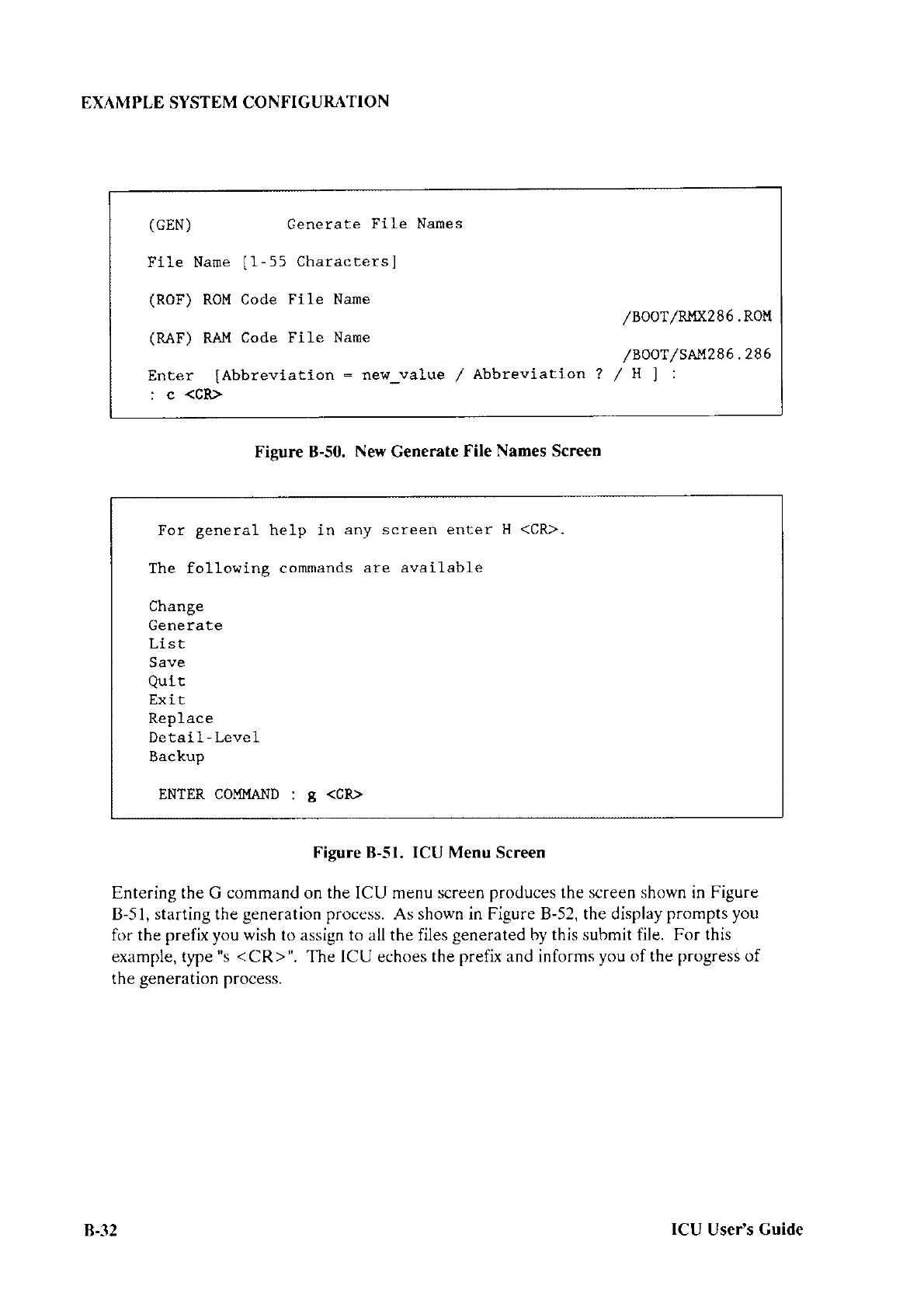
EXAMPLE SYSTEM CONFIGURATION
(CEN) Cenerate File Names
File Narue
[1-55 Characters]
(ROf) ROM Code File Name /Bo0T/RMX286
. Ror.r
(RAF) RAM Code File Name /Roor/sM286.286
Enter lAbbreviatíon: new_value / Abbreviation ? / H ) :
: c <cB>
Figure B-50, New
Generate
File Names
Screen
For general help in any screen enter H <cR>.
The following commands
are available
Change
Generate
LisÈ
Save
Qul
t
Exit
Replacè
Detail-Level
Backup
ENTER
COMMAND
: g <CR>
Figure B-51. ICU Menu
Screen
Entering the G command on the ICU menu screen
produces
the screen shown in Figure
B-51, starting the
generation process.
As
shown in Figure B-52, the display
prompts you
for the prefix you
wish
to assign to all the files
generated by this submit file. For this
example, type
"s
<
CR
>
". The ICU echoes
the prefix and informs
you of the progress of
the
generation process.
B--ì2 ICU Usefs Guide
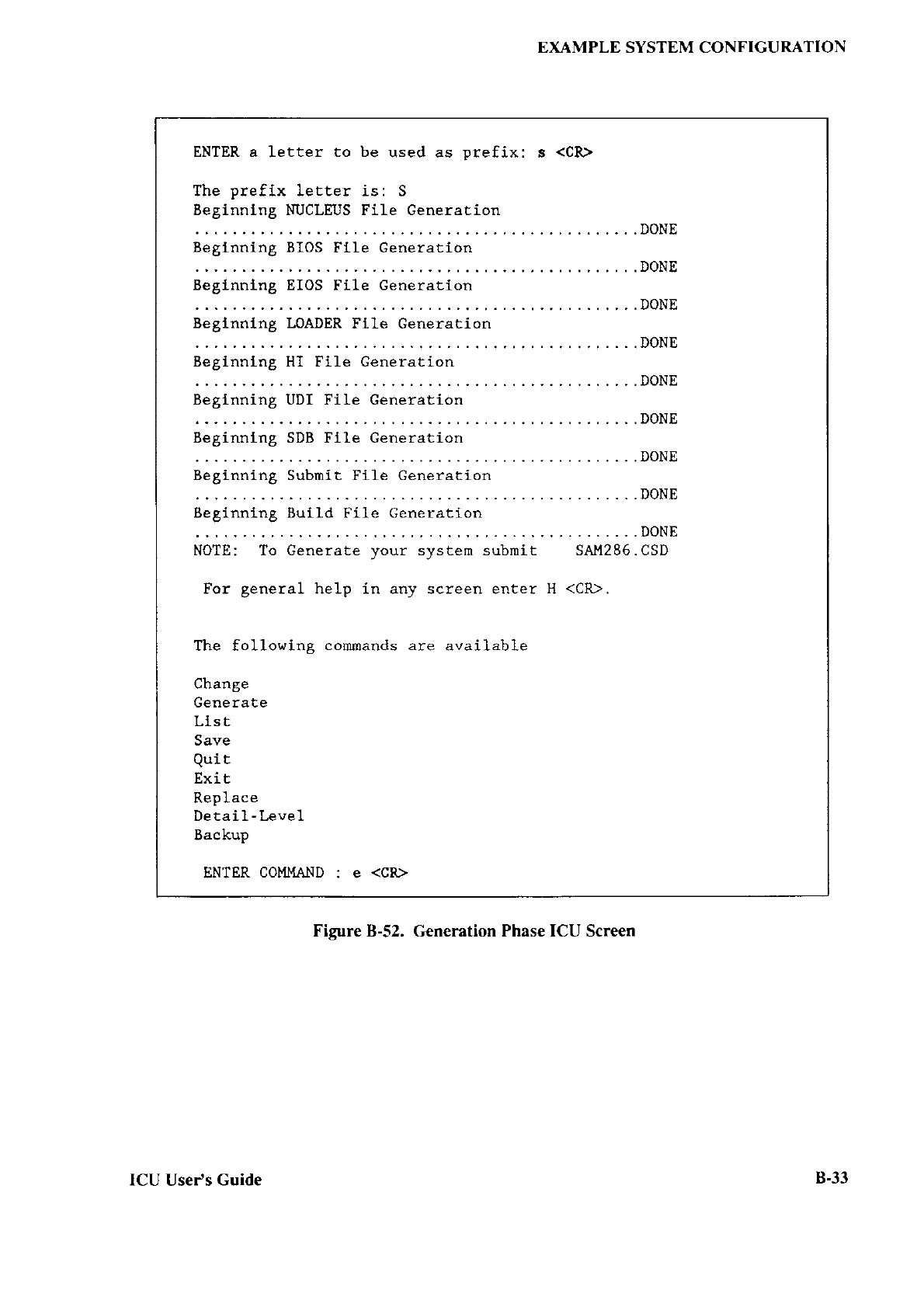
EXAMPLE SYSTEM CON
FIGU RATION
ENTER a letter to be used as prefix: s <CR>
The preffx letter is: S
Beginnlng NUCLEUS File Ceneration
.....,..DONE
Beginning BIOS file GeneratiÒn
;;;i;;i;;';ióirii.c""..";i;; "'" D.NE
........DONE
Beglnning LOADER
flle Generation
;;;i;;i;;';i iii" c"""."iion " "D.NE
:
'
'
:
" :
" ..::
'
:: :
' ^ "' ''' DoNE
Beginning UDI FiIe Genera t ion
;;;i;;i;;';;; Fii; ó;;;;;;i;; ' "' D'NE
:'': ': ''^.'': -:-"^ ""' DoNE
Beginning Subní t Fi 1e Cenerati on
Beginning Build Fíle ceneration ........DONE
NOTE: To Generate your systern subnit SAM286.CSD
For general help in any screen enter H <CR>.
The following comrnands are available
Change
Gènerate
Llst
S ave
QuiÈ
Exi t
Replace
Deta i I -Leve1
Backup
ENTER
COMMAND
: e <cR>
Figure B-52. Generation Phase ICU Screen
ICU
Usef s
Guide B-33
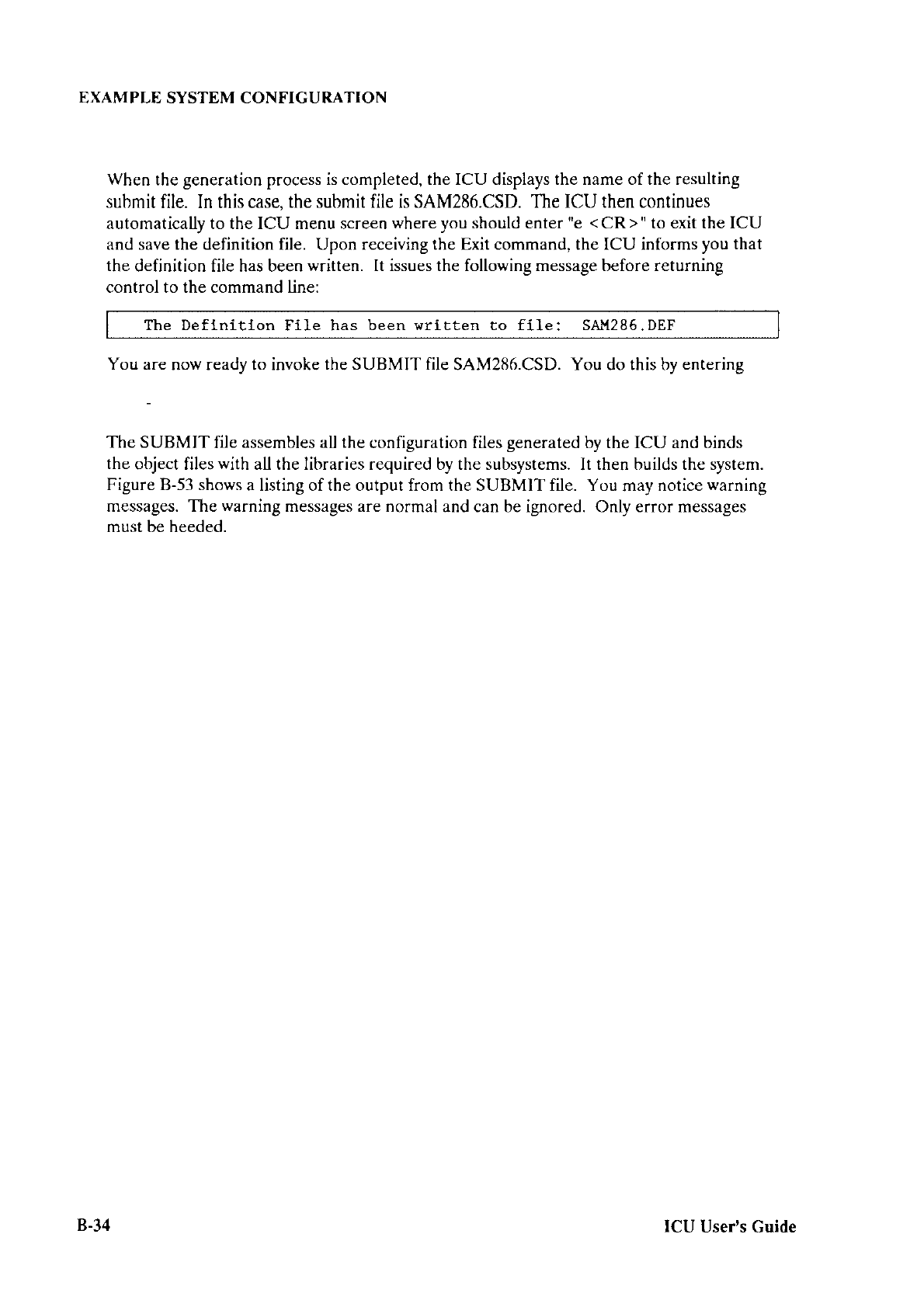
EXAMPLE SYSTEM CONFIGURATION
When
the
generation process is completed, the ICU displays the name of the resulting
submit file. In this case,
the submit file is SAM286.CSD. The ICU then continues
automatically to the ICU menu screen
where you should enter "e <CR>" to exit the ICU
antl save the definition file. Upon receiving the Exit command, the ICU informs
you that
the
definition file has been
written. It issues the following message before returning
control to the command lìne:
The Deflnition File has been written to file: SAM286.DEF
You are
now ready
to
invoke
the SUBMIT file
SAM286.CSD. You do this by
entering
The SUBMIT
file
assembles
all
the
configuration files
generated
by the ICU and binds
the
object files
with
all the libraries required by the subsystems.
It then builds the system.
Figure B-53 shows
a listing of the output from the SUBMIT file. You
may
notice
warning
messages. The
warning
messages are normal
and can be ignored. Only error messages
must be heeded.
B-34 ICU
User's Guide
Figure B-53. Output of Submit
File for SAM28ó.CSD
EXAMPLE SYSTEM CONFIGURATION
NUCLEUS
- :IANG:ASM286 SNTABL. A2I
TRI'ÍX
II iAPX286 MACRO ASSEMBLER,
V1
.3
Copyright 1982 lnte1 Corporation
AS SEI.ÍBLY
COM?LETE, NO I.'ARNINCS
, NO ERRORS
- : IANG: ASM286 SNUCDA.A2E
iRMX II IAPX286 MACRO ASSEMBLER,
Vl ,3
copyrighÈ 1982 Incel Corporation
ASSEMBLY
COMPLETE, NO WARNINGS, NO ERRORS
- :IANC:ASM286
SNJOBC . A28
IRMX II IAPX286 MACRO ASSEMBLER, Vl .3
Copyrlght 198 2 Intel Corpóration
ASSEMBLY COMPLETE, NO WARNTNGS, NO ERRORS
- :IANG:BND286
&
**OBJECTiSNUCI.LNK)
NODEBUC
NOTYPE SEGSIZE(STACK(2OO)
) &
** NoLOAD NoPUBLICS EXCEPT
(RQ_ni1_os_ext , &
iRMX II iOPXZEE
BINDER, V3,2
Copyright 1982, 1985 Intel Corporation
PROCOSSING
COMPLETED, 2 WARNINGS, O ERRORS
- :I-ANG:
BND286 &
:
**OBJ
ECT
(
SNUCLS .
LNK) NODEBUG NOTYPE &
** NoLOAD
SECS rZE
(
STACK( 200
) )
iRMX
II IAPX286 BINDER,
V3.2
copyright 1982, 1985
Intel corporation
PROCESSING
COMPLETED. 1 WARNING, O ERRORS
ICU UseCs Guide B-35
nînc
.;
- :IANG:ASM286
SITABL. A28
1RMX II 1APX286 MACRO ÀSSE},IBLER, V1.3
Copyrtght 1982 Intel CorporaÈlon
ASSEI,ÍBLY COMPLETE, NO IIARNINGS, NO ERRORS
- :IANG:ASU286 SICDEV. 428
iR}D( II iAPX286 MACRO ASSEMBLER, V1.3
Copyright 1982 Intel Corporaîrlon
ASSEMBLY
COMPLETE, NO WARNINGS, NO EPAORS
- :I-ANG:AS[286 SITDEV.A2S
iRMX II iAPX286 MACRO
ASSEHELER,
V1.3
Copyright 1982 Intè1 Córporation
ASS
EI,IBLY COMPLETE, NO Í.IARNINCS
, NO ERRORS
- :LANG:bnd286
&
**OBJECT (SIOSI.LNK) NODEBUG NOTYPE &
** NOLOAD
NOPUBLICS
EXCEPT
(rqaiosinittask , &
iRMx rr iepxzeo
BTNDER,
v3.2
CopyrighÈ 1982, 1985 Intel Corporarion
PROCESSING
COMPLETED, 1 I.IARNING, O ERRORS
- :IANG:bnd286
&
**OBJECT
(STSC.LITK)
NODEBUG NOTYPE
SECSIZE(STACK(O)) &
** NOLOAD
NOPUBLICS
EXCEPT( TSCINITIO, &
iR},lX II iETXZSO
BINDER, V3.2
Copyrlght 1982, 1985 Incel Corporarion
PROCESSING
COMPLETED. O IIARNINCS, O ERRORS
EXAMPLE SYSTEM
CONFIGURATION
Figure B-53.
Output
of Submit File for
SAM286.CSD
(continued)
B-36 ICU UseIJs
Guide
- :LANG:bnd286
&
**OBJECT
(SIOS.LNK) NODEBUG
NOTYPE SECSIZE(STACK(O)
) &
** N0L0A! NoPUBLICS EXCEPT
(rqaiosinittask , &
1RMX
II iEPXZEE
BINDER, V3.2
Copyright 1982, i985 rnLeI corporation
PROCESSING
COMPLETED. O I.JARNINGS, O ERRORS
- : EIOS
- :I-ANG:
ASM2 86 SETABL.A2S
tRIO( I1 1APX286
MACRO ASSEI"IBLER,
V1
.3
Copyright 1982 Intel Corporation
ASSEMBLY
COMPLETE, NO WARNINGS, NO ERRORS
- :LANG:ASM286
SEDEVC .
A2 8
iRMX II 1APX286 MACRO
ASSEì'IBLER,
V1 ,3
Copyrlght 1982 Intel Corporation
ASSEMBLY
COMPLETE, NO IIARNINCS, NO
ERRORS
- :IANG:ASM286
SEJOBC .428
iRMX
II iAPX286
MACRO ASSEMBLER,
V1
.3
Copyrlght 1982 Intel Corporation
ASSEMBLY
COMPLETE, NO
WARNINCS, NO ERRORS
- : LANG:BND286
&
**OBJECT(
SEIOSl.LNK)
NOLOAD NODEBUG
SEGSIZE(STACK(O))
&
** NOPUBLICS
ExcEPT(rqeiosinittask , &
íRMX II iAPX286
BINDER,
V3.2
Copyright 1982, I985 Intel Corporation
PROCESSING
COMPLEîED. 1 WARNING, O ERRORS
EXAMPLE SYSTEM
CONFIGURATION
Figure B-53. Output
of Submit
File
for SAM2116.CSD
(continùed)
ICU
Uset's
Guide B-37
EXAMPLE
SYSTEM
CONFIGURATION
- :IANG:BND286
6
**OBJECT( SEIOS.LNK) NOLOAD NODEBUG
SEGSIZE(STACK(O)
)
iRMX II 1APX286
BINDER, V3.2
Copyright 1982, L985 Intel Corporarlon
PROCESSING COI{PLETED. O I.IARNINGS, O ERRORS
- ; I,OADER
- :lANc:ASl'f286 SLTABL.A2S
iR!.o(
II 1ApX286 MACRO
ASSEUBIER, V1
.3
Copyrlght 1982 Intel Corporarlon
AS SEI'TBLY
COMPLETE, NO WARNINGS, NO ERRORS
- :I,ANG: PLtl286 SLCONF.
P28
1RMX II PL/N-286 COUP1LER
V2.5
Copyright Intel Corporarlon 1982, 1983, 1984, 1985
PL/t4-286 CoMPIIATTON
CoMPLETE. 0 ITARNTNCS, 0 ERRORS
. :I,ANG:BND286
&
,
**oBJECT (SLOADR.
LNK) NOLoAD
NODEBUC
SEGSTZE(STACK(0)
) &
** NOPUBLICS
EXCEPT
(asynchload, &
tRMx
rr iarxzas
BTNDER, v3.2
Copyrighr 1982, l-985 lnrel Corporation
PROCESSINC
COMPLETED. O WARNINGS, O ERRORS
I.T T
- irolrc,
pr-Mzee
sHcoNF.
p28
íRlo( II PL/tt-286 CoMPILER V2.5
Copyrlght Intel Corporarion
1982, 1983, 1994, 1985
PL/\I-286 CoMPITATIoN
CoMPLETE. 1 WARNTNC, 0 ERRORS
Figure
B-53. Output of Submit File for SAM2E6.CSD
(continued)
B-38 ICU
Use/s Guide
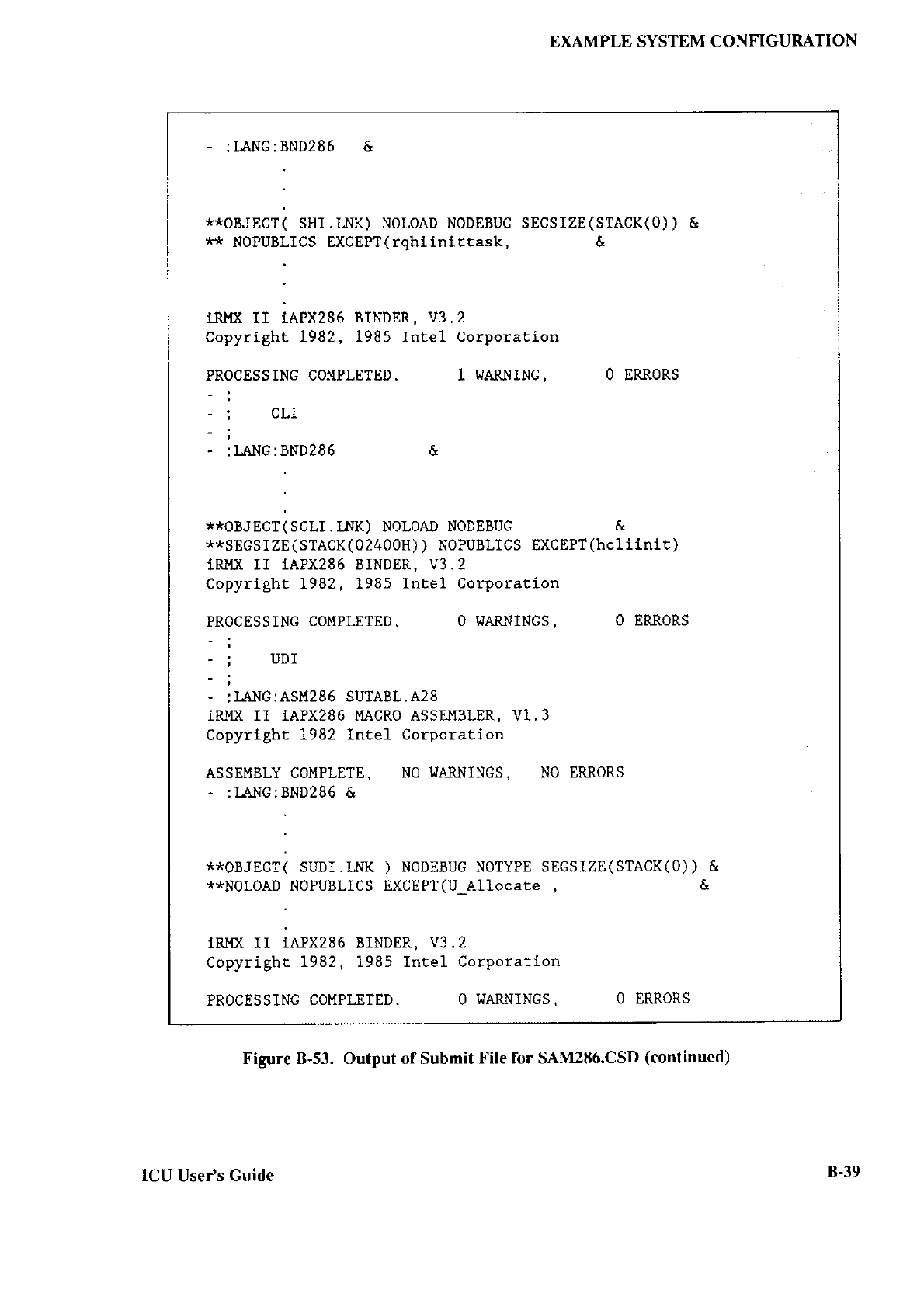
- :l3NG:BND286 &
**OBJECT( SHI .II.IK) NOLOAD NODEBUG SEGSIZE(STACK(O)
) &
** NoPUBLICS EXCEPT
(
rqhÍ lni ttask, &
rRlo( rr iepxzee
BTNDER, v3.2
Copyright 1982, 1985 Intel corporation
PROCESSINC COMPLETED. 1 WARNING, O ERRORS
CLI
IANG:BND286 &
**OBJECT(SCLI
.LNK) NOLOAD NODEBUG &
**SEGSIZE
(sTAcK(02400H)
) NoPUBLICS EXcEPT
(hcl iinit)
1RMX II íAPX286 BINDER, V3.2
Copyrlght 1982, 1985
lnlel Corporacion
PROCESSINC
COMPLETED. O WARNINCS, O ERRORS
-i UDI
- ;
IANG: ASI'Í286 SUTABL.A2S
IR},IX II 1APX286 I.IACRO ASSE},ÍBLER, VI , 3
Copyrtght 1982 lntel CorporaÈion
ASSEMBLY COI'IPLETE, NO LIARNINGS, NO ERRORS
- :IANG:BND286 &
**OBJECTi SUDI . LNK ) NODEBUG NOTYPE
SEGSIZE(STACK(O)
) &
**NoLOAD
.
NoPUBLIC S EXCEPT
(U_Allocete , &
IRMX II iAPX286 BINDER,
V3.2
Copyright 1982, 1985 Intel Gorporation
PROCESSINC
COMPLETED. O WARNINGS, O ERRORS
EXAMPLE SYSTEM CONFIGURATION
Figure B-53. Output of Submit
File for SAM286.CSD
(continued)
ICU Useds
Guide B-39
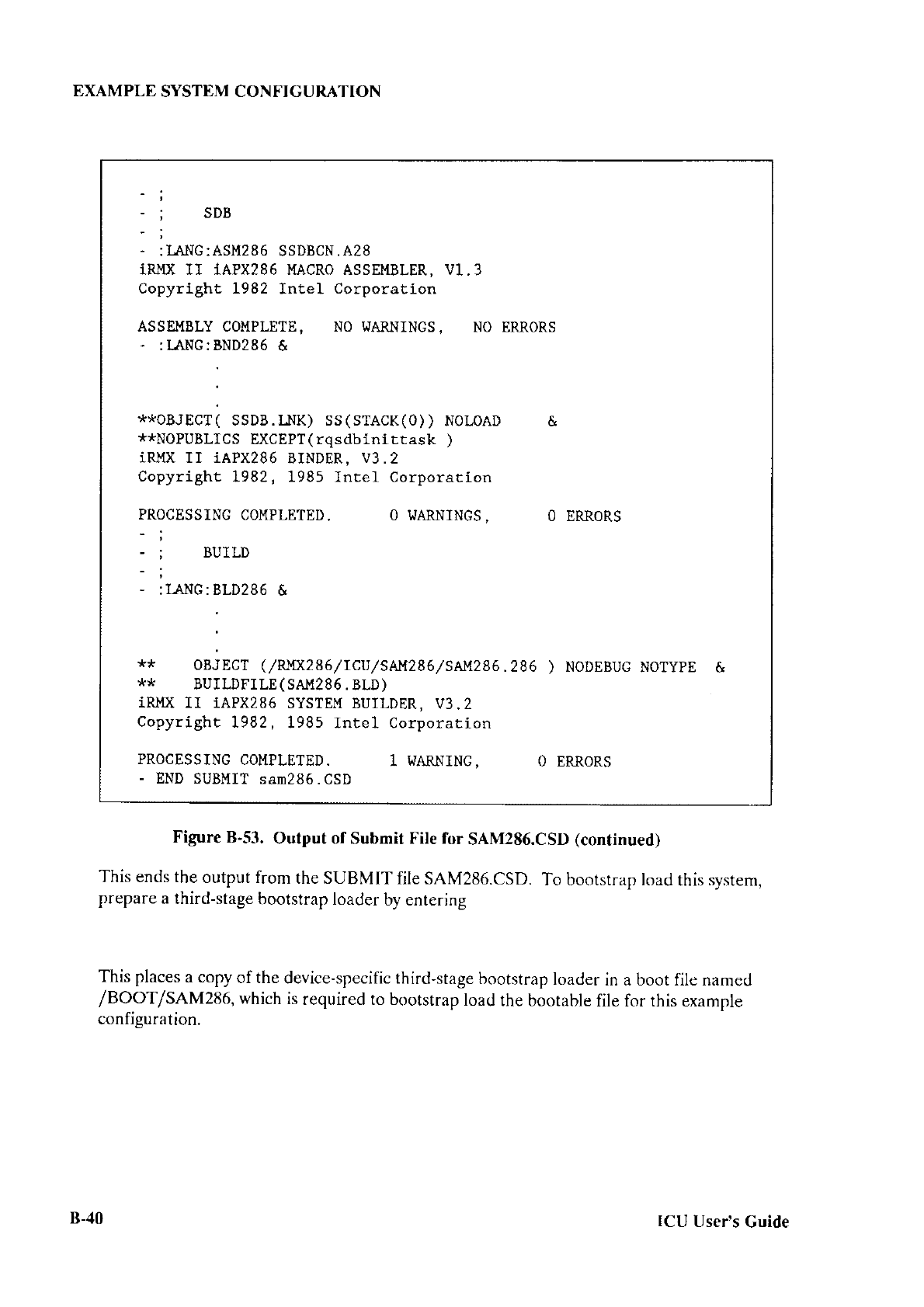
EXAMPLE
SYSTEM CONFIGURATION
'i
-i sDB
- :I,ANG:ASMz86 SSDBCN.
A28
iRMX 1I iAPX286 MACRO ASSEMBLER, Vl.3
Copyright 1982 Incel Corporatlon
ASSEMBLY COMPLETE, NO WARNINGS, NO ERRORS
. : I.ANG: BND286
&
**oBJECTi SSDB. r,Ì.rK) ss(STACK(0)
) NOI,OAD &
**NOPUBLICS
EXCEPT
(
rqsdb ini ttask )
iRMX II íAPX286
BINDER,
V3.2
Copyright 1982, 1985 lnrel Corporaríon
PROCESSING
COMPLETED. O I.'ARNINGS, O ERRORS
- ; BUILD
- :IANG:BLD286
&
ì** orincr 17ru,rxz
B6/rcu/sùi2f,6
/ s$'r286
.286 ) NoDEBUG
NorypE &
** BUI LDFILE
(
SA.I{2
86 . BLD)
iRMX
11 iAPX286
SYSTEM BUILDER,
V3.2
CopyrÍght 1982, 1985 Intel Corporarion
PROCESSING
COMPLETED. 1 WARN]NG, O ERRORS
- END SUBMIT
sam286.
CSD
Figure B-53.
Output of Subrnit File for
SAM286.CSD
(continued)
This ends the
output from
the SUBMIT
file SAM286.CSD.
To bootstrap load
this
system,
prepare
a third-stage
bootstrap loader
by entering
This places
a copy
of the
device-specific third-stage
bootstrap
loader
in a boot file named
/BOOT/SAM286,
which
is
required ro bootstrap
load
the bootable
file for this example
confisuration.
B-40 ICU
User's
Guide
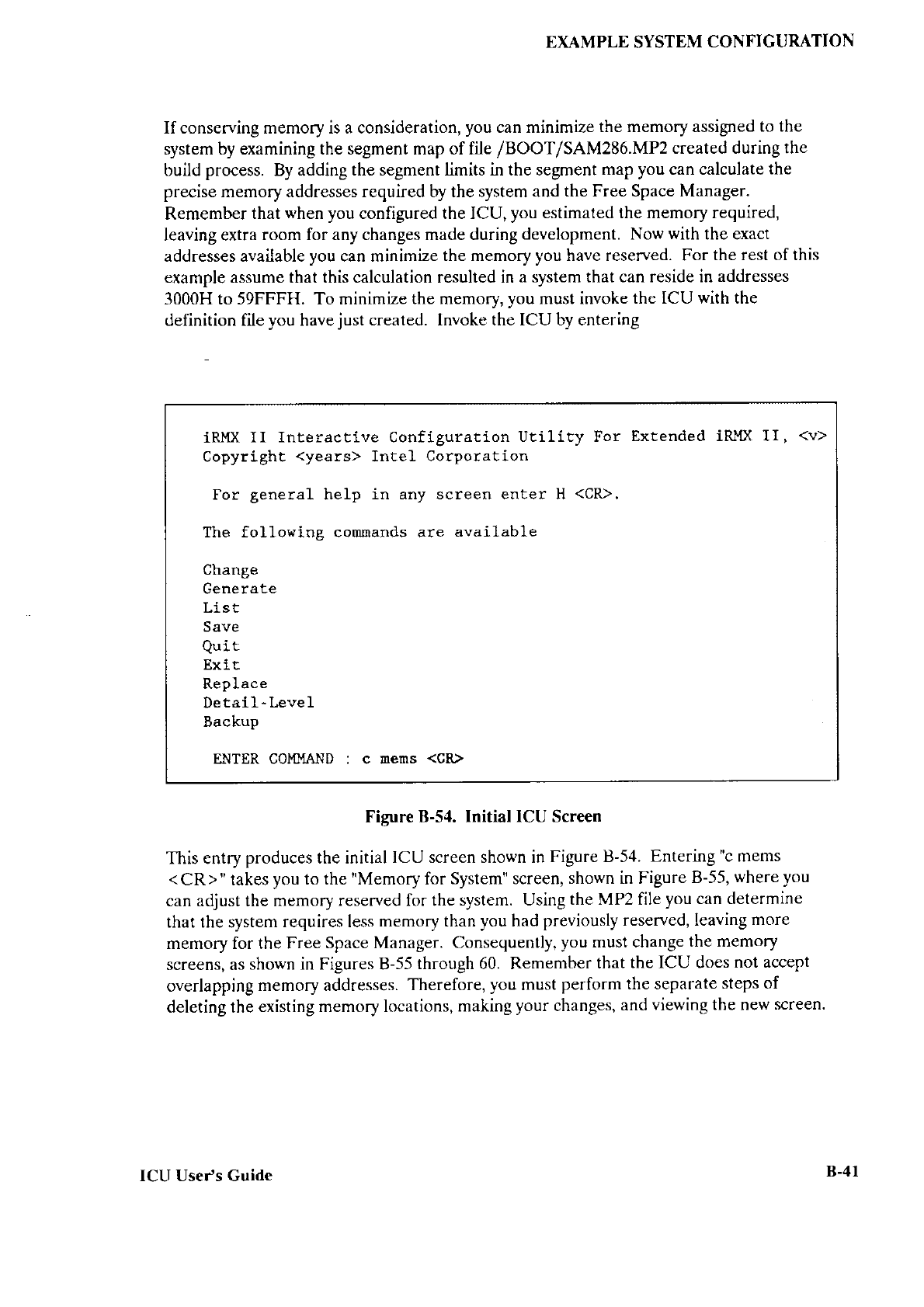
EXAMPLE SYSTEM
CONFIGURATION
If conserving memory is a consideration,
you
can minimize
the memory assigned
to the
system by examining the segment map of file /BOOT/SAM28ó.MP2 created during the
build process.
By adding
the segment limits in the segment
map you can calculate
the
precise memory addresses required by the system and
the Free Space Manager.
Remember
that
when you
configured the ICU, you estimated the memory required,
leaving extra
room for any changes made during
development. Now
with
the exact
addresses available
you
can minimize
the memory you have reserved. For
the rest of this
example assume that this calculation resulted in
a system that can reside in
addresses
3000H to 59FFFH. To minimize
the memory,
you
must invoke
the ICU with the
definition file you havejust
created. Invoke the ICU by entering
iRMX
II Inreractive Configuration Utility FÒr Extended iRMX 1I, <v>
CopyrlghÈ <years> Intel Corporation
For general help in any screen enter H <CR>.
The fol-lowlng conrnands are availabl.e
Change
Generate
Llst
Save
Quit
Exl t
Replace
Detell -
LeveI
Backup
ENTER
COMI'ÍAND : c nems <cR>
Figure B-54.
Initial ICU Screen
This entry
produces the initial
ICU screen shown in Figure B-54.
Entering
"c
mems
<CR>" takes
you to the
"Memory
for
System" screen,
shown in Figure
B-55,
where you
can adjust the memory
reserved for the
system. Using
the MP2 file
you can determine
that the system
requires less
memory than you had
previously
reserved, leaving
more
memory for the Free
Space Manager.
Consequently,
you must change
the memory
screens, as
shown in Figures B-55
through 60. Remember
that
the ICU does
not accept
overlapping
memory addresses.
Therefore,
you
must
perform the separate
steps of
deleting the
existing memory locations,
making
your
changes,
and
viewing the new
screen.
ICU Usefs Guide B-41
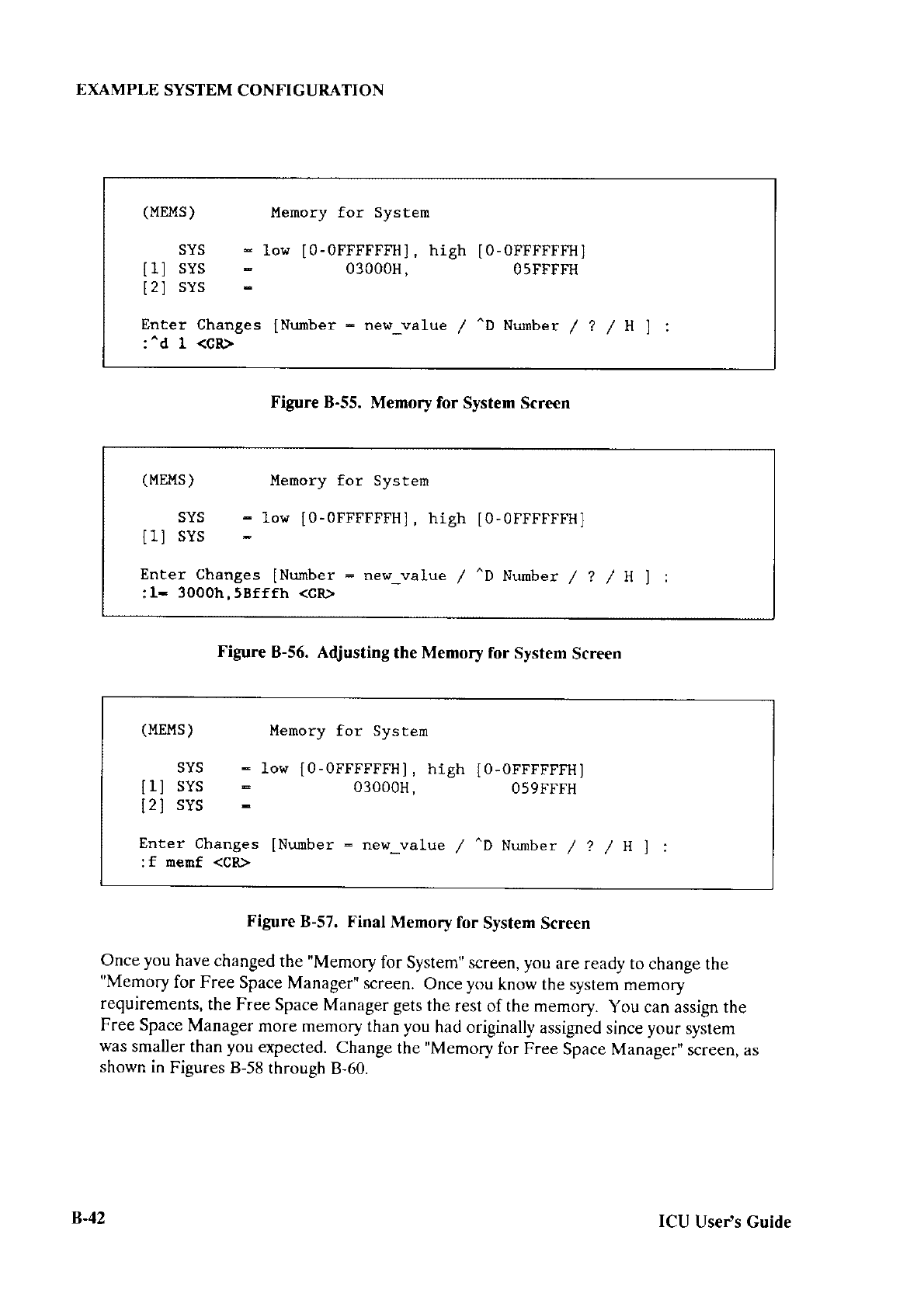
EXAMPLE SYSTEM
CONFIGURATION
(MEMS) Memory for systèm
sYs : 1ow [0-0FFFFFFH],
high [o-OFFFFFFH]
[1] sYs - 03000H, 05FrFFH
[2] sYs
Enter Changès [Nurnber
: new_value / ^D Nunber / ? / H ] :
:^d I <GR>
Figure B-55. Memory for System Screen
(MEMS) Mènory for System
sYs - 1ow [O-0FFFFFFH],
high I0-OFFFFFFH]
[
1] sYS
Enter Changes [Number - new_value / "D Nurnber
/ ? / H ] :
;l- 3000h,5Bfffh <cR>
Figure
B-56. Adjusting
the Memory for System
Screen
(MEMS) Menory for System
SYS : Lolr I0-OFFFFFFH],
high IO-0FFFFFFH]
lrl sYs - 03000H, 059FFFH
[2] sYs
Enter Changes [Nurnber
: ner{r_value
/ ^D Nurnber
/ ? / H ] :
:f nenf <CR>
Figure
B-57. Final Memory
for System Screen
Once you
have
changed the "Memory
for System"
screen, you
are ready to
change the
"Memory
for Free
Space Manager"
screen.
Once you
know the
system memory
requirements,
the Free
Space Manager gets
the
rest of the
memory.
you can assign the
Free Space
Manager
more memory than
you
had originally
assigned since your
system
was
smalìer than you
expected.
Change
the "Memory
for Free
Space Manager',
screen, as
shown in Figures B-58
through
8-60.
B-42 ICU Usefs Guide
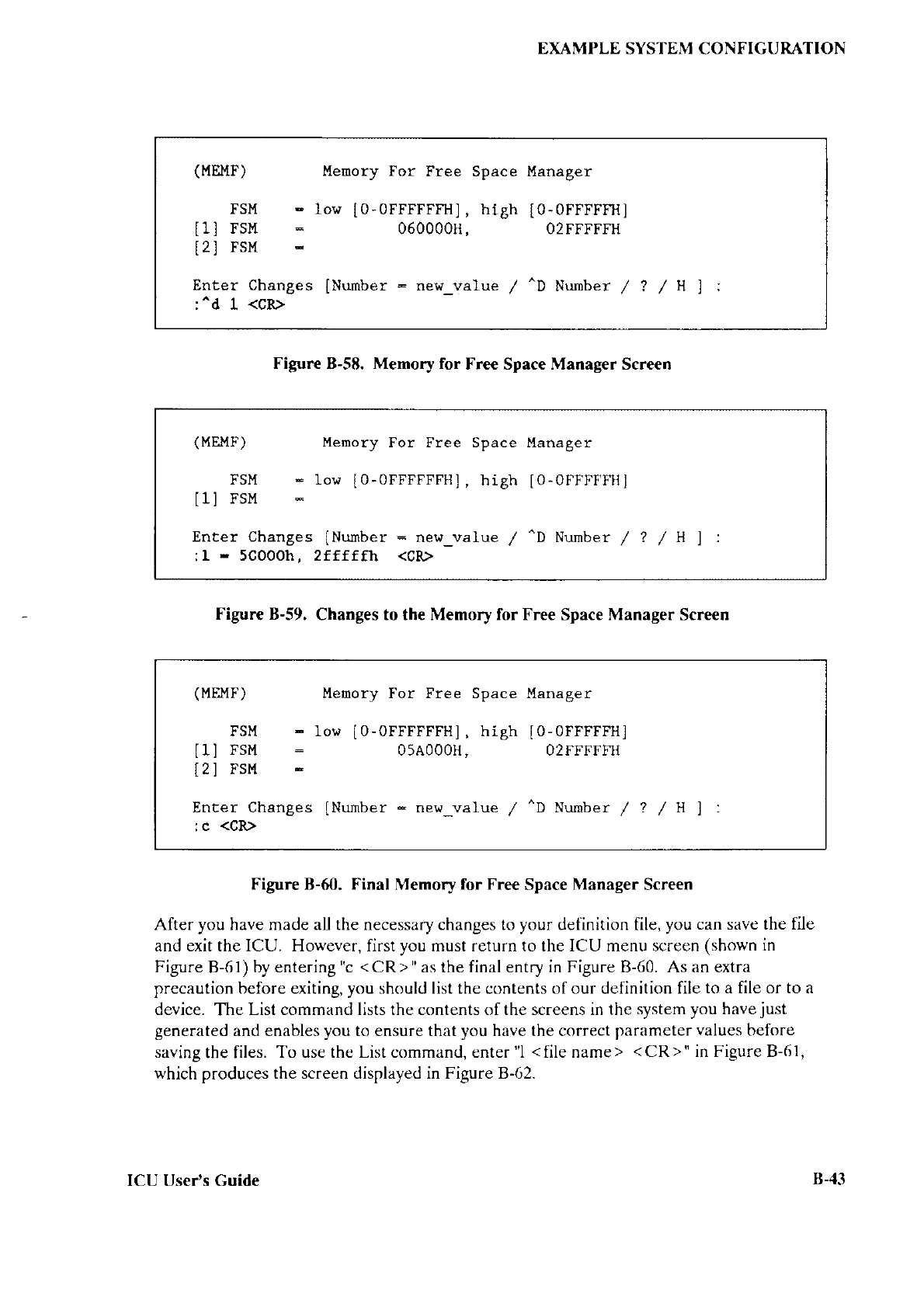
EXAMPLE
SYSTEM CONFIGURATION
(MEUF) Memory For Free Space Manager
FsM - low [0-OFFFFFFH],
high [O-OFFrrm]
[1] rsu * 060000H, o2FFFFFH
[2 ] FsM
Enter Changes [Nurnber
: nelr_value / ^D Nurnber
/ ? / H ] :
:
^d I <cR>
Figure B-58. Memory for Free Space Manager Screen
(MEMF) Memory
For Free Space Manager
FSM - low lO-OFFFFFFHI,
high IO-0FFFFru]
[1] FsM
Enter Changes lNurnber
- neu_value / ^D Nlunber
/ ? / H ) :
:l - 5C00Oh, 2fffffh <CR>
Figure B-59. Changes to the Memory for Free Space Manager Screen
(MEì,fF) Menory For Free Space Manager
FSM - low [0-0FFFFFFHI,
high [0-0FFFFFH]
[1] FsM : 05A000H, O2FFFFFT
[2 ] rsM
Enter Changes [Nunber - new_value / "D Nunber / ? / H ) :
:
c <cI>
Figure 8-60. Final Memory for Free
Space
Manager
Screen
After you have made all the necessary changes to your definition file,
you can save the file
and exit the lCU. However, first you must return to the ICU menu screen
(shown in
Figure
8-61)
by entering "c
<CR>"
as the final entry in Figure 8-60. As an extra
precaution before exiting, you should list the contents of our definition file
to a file or to a
device.
The
List command lists the contents of the screens in the
system you have
just
generated
and enables
you
to ensure that
you
have the correct
parameter
values
before
saving
the files.
To use the List command, enter "l <file
name>
<CR>"
in Figure 8-61,
which produces the screen displayed in Figure B-62.
B-43
ICU User's Guide
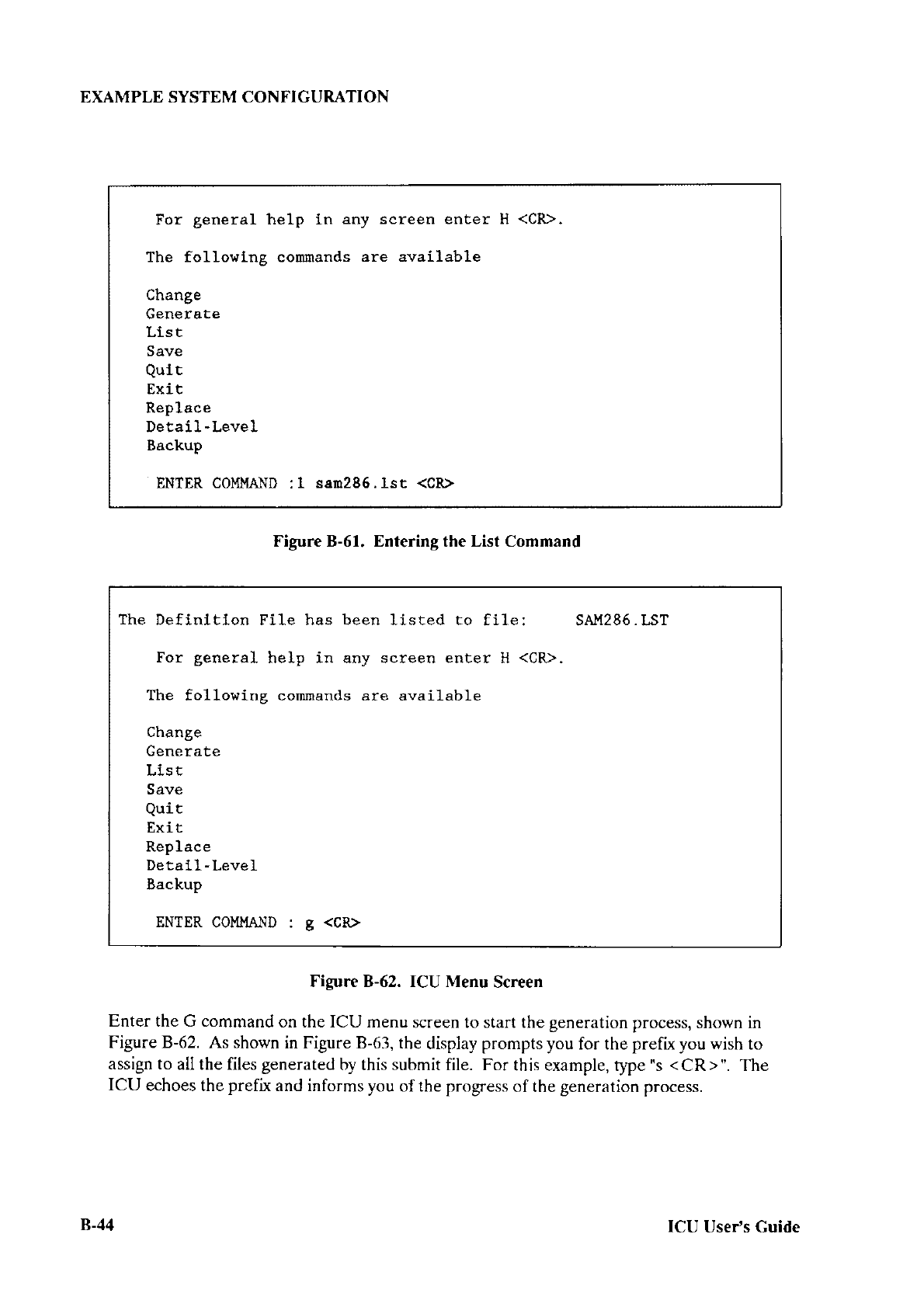
EXAMPLE SYSTEM CONFIGURATION
For general help in any screen enter H <CR>.
The follor.llng commands
are available
Change
Generate
Lis t
S ave
QuiÈ
Exi t
Rèplace
Detail -Level
Backup
ENTER COMMLND
:l san286.lst <CR>
Figure 8-61. Entering the List Command
îhe Definltlon File has been listed to file:
For general help in any screen enÈer H <CR>.
The following commands are available
Change
Generate
Lls È
Save
Quit
l!,x 1c
Rep Iace
Detall-Leve1
Backup
ENTER
COMÌ,IAND : g <CR>
SAM286
.
LST
Figure 8-62. ICU Menu
Screen
Enter the G command
on the ICU menu
screen to start the generation process,
shown in
Figure 8-62.
As
shown
in Figure 8-63, the
display prompts you
for the
prefix you wish
to
assign to
all the files generated
by this submit file. For
this example, type "s
<CR>". The
ICU echoes the
prefix
and informs you
of the progress
of the
generation
process.
B-44 ICU
Use/s Guide
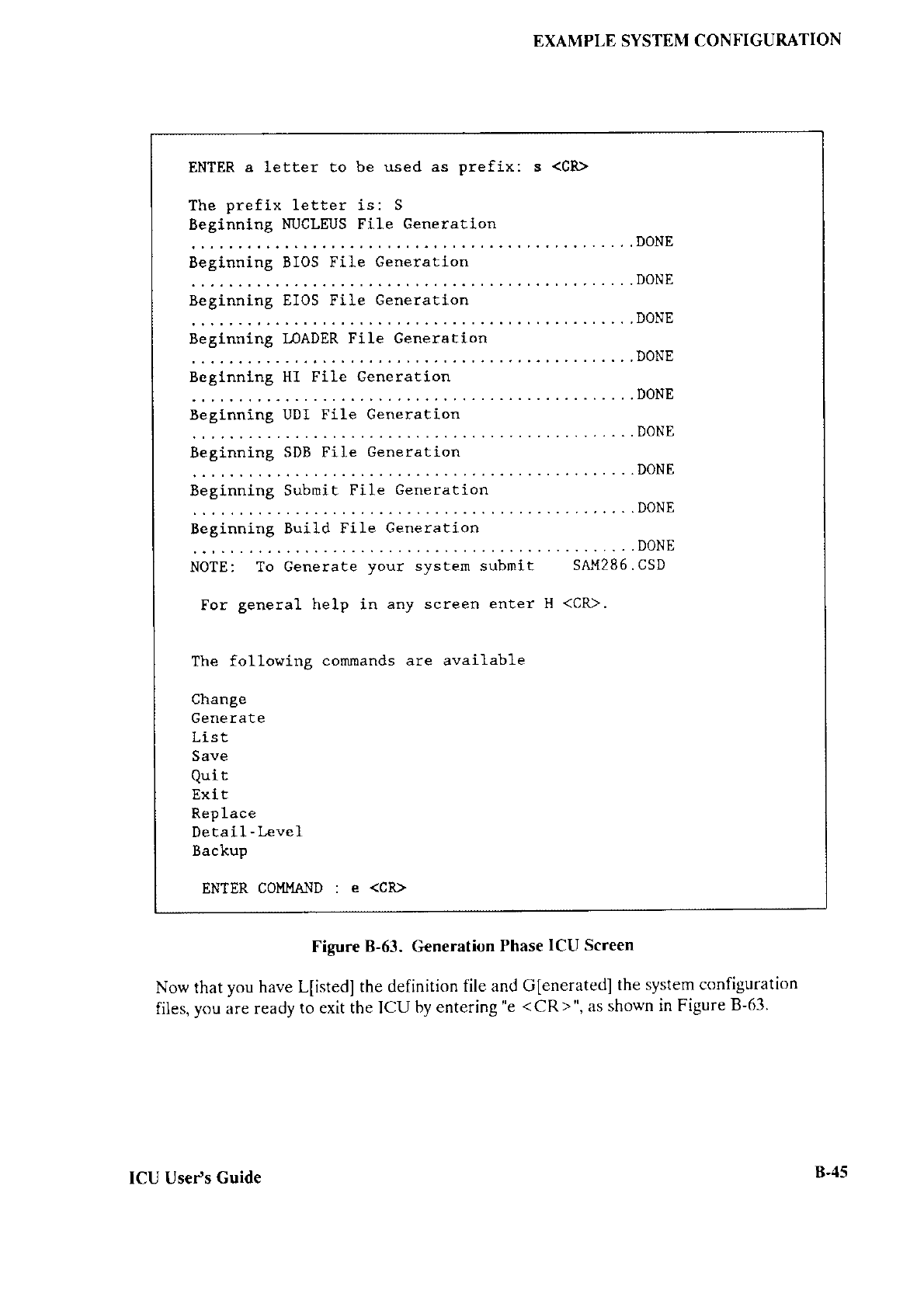
EXAMPI-E SYSTEM
CONFIGURATION
Figure
8-63. Generation
Phase
ICU Screen
Now that
you
have L[isted]
the definition
file and G[enerated]
the system
configuration
files,
you
are ready
to exit the ICU by entering
"e
<CR>", as shown
in Figure
8-63
B-45
ENTER
a letter to be used as prefix: s (CR)
The
prefix letter is: S
Beginnlng NUCLzuS File Generation ........DONE
Beginning BIOS
File Generation
,"ói""i"e eiói nii" ò"""i';i;; " 'D.NE
nnÀtP
Beginning L0ADER
Fi.le Generation ........DONE
Beglnning HI Ftle GeneratÍon
Beglnning UDI File CeneraÈlon
" "" DONE
Beginning SDB File Generation
;;;i;;i;;';;-i; Fii; ;;;;;;i;" "' D.NE
''"" DONE
Beginning BuÍ1d File Ceneration
"ói;; i; ;;;"r.."
y"",
"y;;;'
;;;i; i*rà;.::it
For general help in any screen enler H <CR>.
The following cornmands are available
Change
Generate
List
Save
Qui t
Exi t
Replace
Detal1-l,eve1
Backup
ENTERCoMMAND:e(CR)
ICU User's
Guide
EXAMPLE SYSTEM CONFIGURATION
When
the ICU has successfully saved
the definition file, it exits after issuing the following
messaqe:
The Deflnfrlon File has beén eritten to file: SAU286.DEF
You are now ready to invoke the SUBMIT file SAM286.CSD.
Do this by
entering
The SUBMIT file assembles all the configuration
files generated
by the ICU and binds
the object files with all the libraries
required by the subsystems.
It then builds the system.
Refer
again to Figure
B-53 for a listing of the
output from the
SUBMIT file. You may
notice warning
messages.
The
warning
messages
are normal and
can be ignored. Only
error
messages must be
heeded.
When
the SUBMIT
file is completed your
entire system
has been
built.
The bootfile named
/BOOT/SAM286.286
contains
the entire svstem.
You are now readv
to bootload your
new executable
system.
B-46 ICU User's
Guide
APPENDIX C
PROGRAMMING A 286.BASED
SYSTEM INTO
PROM DEVICES
C.1 INTRODUCTION
This appendix
provides
examples of the
procedures
used to
place
the iRMX II Operating
System
into ROM of a 286-based system. All software
generation
described assumes
you
are using an Intel System 300 Series Microcomputer. In this appendix,
one version of the
operating system is created, but two examples of how to
proglam
it into ROM exist.
The
first
example
places the iSDM monitor and the iRMX II Bootstrap Loader
in ROM
along
with
the generated operating system. A system such
as this executes the iSDM
monitor code during the initial
power-up
sequence. This
example includes the iSDM
monitor and iRMX II Bootstrap Loader for several
reasons. First,
while you
develop
the
ROM-based system,
you
can bootstrap load RAM-based
versions of the operating system
rather
than having
to switch PROM devices if you are using
one processor board. Second,
the
iSDM monitor,
while not allowing breakpoints in PROM DEVICEs, does allow
you to
disassemble
and examine memory in both ROM and RAM. You can use this feature
to
determine correct code is in correct locations.
The second example eliminates
the iSDM monitor and the Bootstrap Loader
from the
PROM devices. A stand-alone system such as this allows the operating
system to be 32
Kbytes larger than in
the first example. In this example, the operating
system receives
control during initial
power-up
or reset.
C.2 REQUIREMENTS
To use the procedures outlined in this appendix,
you must have the
following hardware
and software:
. A system defined during configuration as residing in RoM.
. The iRMX IL3 and iPPS
V1.4
lor newer)
software. The
iPPS software runs
on an
Series-IV
Development System.
ICU Usefs
Guide c-1
PROGRAMMING
A 286-BASED SYSTEM INTO PROM DEVICES
. A 286-based system and a Series-lV Development
System connected
via
the iSDM
monitor.
o An iUP-200/201 Universal
Programmer
with
a
'FAST
27/K' module with
27512
support.
. Four 27512 EPROM devrces.
C.3 CONFIGURING A ROM.BASED
SYSTEM
Before you
can
program
your system into
PROM DEVICEs, you
must modify a number
of
parameters
in
your
definition file. These examples assume that you
start
with
the Intel-
supplied
definition file 286l2.DEF
locared in directory
/RMX28ó/ICU.
To begin the example, you
should make
a copy of the definition
file in a separate
directory.
To do this,
create a new directory
in
which
to do the
system
generation.
The
definition
file should
have a .DEF extension,
the boot-loadable
system should have
a .286
extension, and
the system
to be loaded into ROM
should have
a .ROM
extension.
Entering the
three following
commands creates
a new directory
calted ROMSYS, attaches
you to
that directory,
and invokes the
ICU
placing
a copy
of the definition file
28612.D8F
into
the new directory.
(This example
assumes
your :HOME: directory
is
your
current
default directorv.l
As
part
of the
configuration process,
you must perform
the following three
things in order
to
fit the iRMX II system developed
in these
examples into
ROM:
. Delete the System
Debugger
from the system.
. Replace
the iRMX
II.3 CLI with
the iRMX II.l CLL
. Delete all Intel
device
drivers except the
8274 MPSC
and MSC device
drivers.
Having invoked
the
ICU,
you
now can
begin to
make the necessary
configuration
changes.
Start by
modifying
the memory screens
to define
the ROM
memory locations
the system
requires.
Do this
by first selecting
the
"Memory for System"
screen with
the following
command:
c-2 ICU
Use/s Guide
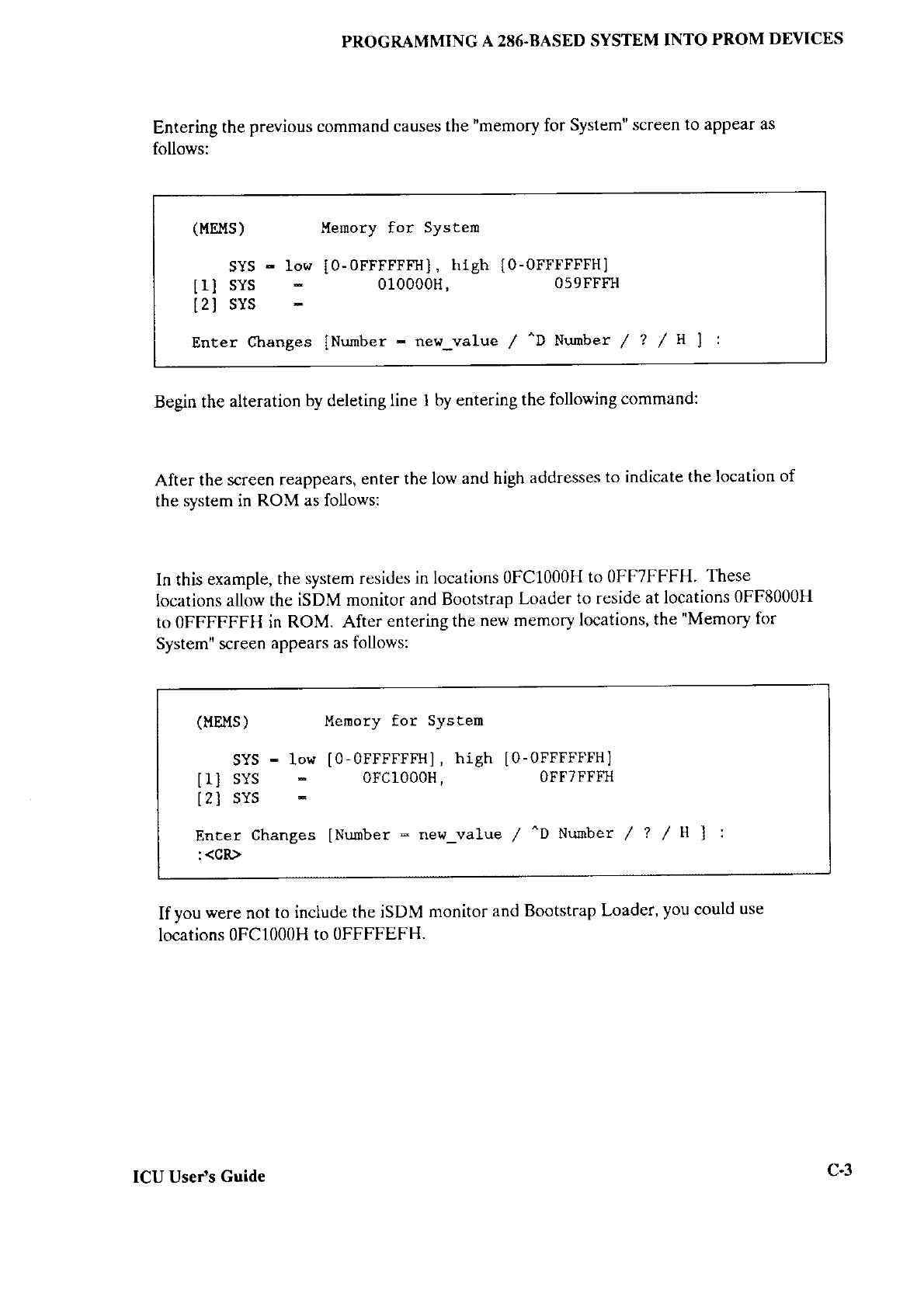
PROGRAMMING
A 286.BASED
SYSTEM
INTO PROM DEVICES
Entering
the
previous command
causes the
"memory
for
System"
screen to appear
as
follows:
(MEMS) Menory for Syscen
SYS
- los IO-OFFFFFFH],
hrgh IO-0FFFFFFH]
[rl sYs - 010000H, 059FFFH
[2] sYs
Enter Changes lNurnber - new-value / "D Nurnber / ? / \ I I
Begin the alteration
by deleting line I by entering
the following
command:
After the screen reappears,
enter the low
and high
addresses
to indicate
the location
of
the system in ROM as follows:
In this example,
the
system resides
in locations
0FC1000H
to 0FF7FFFH.
These
locations
allow the iSDM
monitor and
Bootstrap
Loader
to reside
at locations
0FF8000H
to OFFFFFFH in ROM. After
entering the
new memory
locations,
the
"Memory
for
System" screen
appears
as follows:
(MEUS) MerDory
for SysEen
SYS
- low [0-0FFFFFFH]
, high [O-0FFFFFFH]
[1] sYS - 0Fc1000H, 0FFTFFTH
[2 ] sYs
Enter Changes [Nurnber
* new-value / "D Nwrber / ? / H 1 :
:
<cR>
Ifyou were
not
to include
the iSDM
monitor
and Bootstrap
Loader,
you could
use
locations
0FC1000H
to
0FFFFEFH.
ICU Use/s
Guide c-3
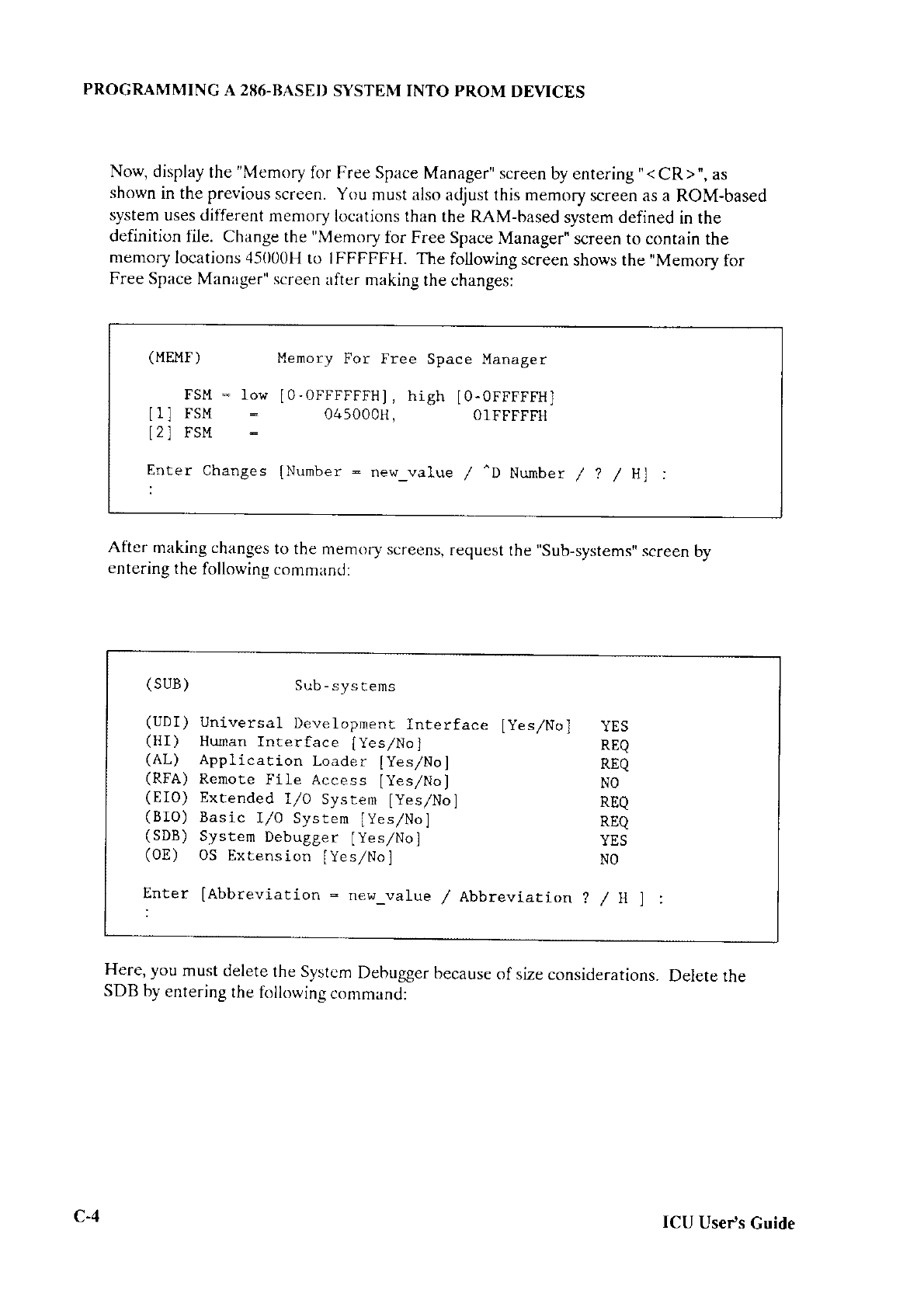
PROGRAMMING
A 2Iì6-BASEI)
SYSTEM INTO PROM
DE\TCES
Now, display
the "Memory
for Free Space
Manager" screen
by entering "<CR>', as
shown
in the previous
screen. You
must also
adjust this memory
screen as a ROM-based
system
uses different
memory
locations than
the RAM-based
system defined
in the
definition
lile. Change
the "Memory
lbr Free Space
Manager"
screen to contain
the
memory
locations 45000H
ro IFFFFFH. The
following screen
shows the
"Memory
for
Free Space
Manager" screen
after
making the changes:
After making changes
to the memory
screens,
request
the
"Sub-systems',
screen
by
entering
the
following
commlrnd:
Here,
you
must
delete
the Systcm
Debugger
because
of
size considerations.
Derete the
SDB
by
entering
the
following
command:
(MEMF)
FSM
: Iow
[1] FSM
[2
] FsM
Enter Changes
:
Memory For Free Space Manager
[0-0FFFFFFH], high [0
-
0FFFFFH
]
O45OOOH, O1FFFFFH
fNurnber
- new_value
/ ^D Number
/? /H):
(suB) Sub
-
sys
tems
(UDI) Universal Developmenr
Interface Iyes/No]
(HI
) Human
Inrerface Iyes/No]
(AL) Application Loader IYes/No
]
(RFA) Renore File Access lyes/Nol
(EIo) Exrended l/0 System [yes/No]
(BIO) Basic I/0 System
Iyes/No]
(SDB)
System
Debugger IYes/No]
(OE) OS
Extension IYes/No]
YES
REQ
REQ
NO
REQ
REQ
YES
NO
Enter fAbbreviation : new_value
/ Abbreviation ? /H ] :
:
c-4 ICU
Use/s
Guide
PROGRAMMING
A 28ó.BASED
SYSTEM INTO PROM
DE\TCES
Next,
request
the
"Human
Interface"
screen by enteríng
the following
command:
Change
the resident
initial program
(CLI) by
entering the
following command:
Both
the iRMX II.3
CLI and the iRMX II.2 CLI are
considerably larger
than the iRMX
II.1 CLI and
cannot be used
in this example
due to size restrictions.
Next,
request the "Intel
Device
Driver" screen by
entering the following
command:
Delete
all device
drivers except the 8274 and
MSC drivers by entering
the following
commands:
Do you want any/more iSBC 544A DEVICEs?
Do you ltant any/more Terninal Corununications Controller Devices?
Do you want any/more Line Printer for iSBC 286/10 DEVICEs
Now,
request the
"Nucleus"
screen by entering
the following command:
You must define
the number
of Global Descriptor
Table
(GDT) entries
your
ROM-based
system
needs. Because
ROM space
is limited, the
numberyou enter should
be the
minimum
number. Enter
the number
oî real GDT entries
required
when
the system is
copied
and expanded
in RAM using
the
"ROM
Code" screen.
Also, because the System
Debugger was previously
deleted
from the configuration, you
must change the
Default
Exception Handler parameter
to something
other than SDB.
ICU
UsePs Guide c-5
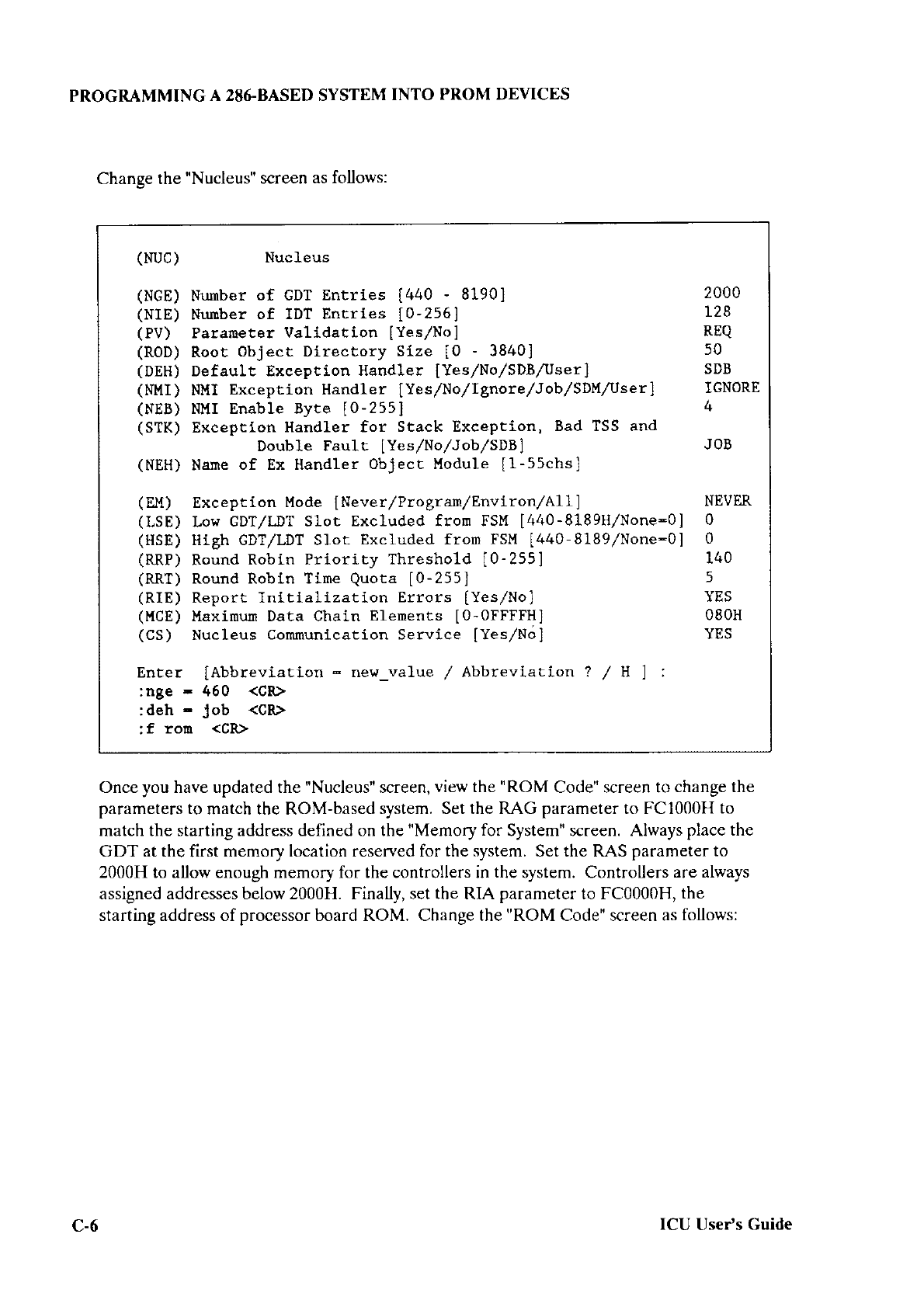
PROGRAMMING
A 2E6-BASED SYSTEM
INTO PROM DEVICES
Chanse the
"Nucleus"
screen
as follows:
Once you have updated the "Nucleus" screen,
view the "ROM
Code" screen to
change the
parameters to
match the ROM-based
system. Set the RAG
parameter
to FC1000H
to
match the starting address defined on the
"Memory for System" screen. Always
place the
GDT at the
first
memory location reserved for the
system.
Set the RAS
parameter to
2000H to allow enough memory for the controllers in
the
system. Controllers
are always
assigned addresses below 2000H. Finally, set the RIA parameter
to FC0000H,
the
starting address of
processor
board ROM. Change the
"ROM Code" screen as
follows:
(MJc
)Nucleus
(NGE) Nr.[nber
of GDT
Entries [4a0 - 8190]
(NIE) Nunber of lDT Entries 10-256)
(PV) Parametar Validation IYesr/No ]
(RoD) Root objéct Dítéctory Size f0 38401
(DEH) Default Exception Handler [Yes/No/SDB/User
]
(NMI
) Nl.f l Exception Handler I
Yes/No/I gnore
/ J ob
/ SDIIN
seî I
(NEB)
NHI Enable Byte [0-255]
(STK) Exception Handler for stack Exception, Bad TSS and
Double Faulc [Yes/No/JoblsDB ]
(NEH)
Nane
of Ex Handler ObJect Module [1-55chs]
(EM) Excèptión Mode INever/Program/Environ/Al l ]
(LSE) Los GDT/LDT Slot Excluded from FSM
[440-8189H/None:0]
(HSE)
High CDT/LDT Slot Excluded fron FSM
1440-8189/None-01
(RRP)
Round
Robin Priority Threshold l0-2551
(RRT)
Round Robln Time Quota [0-255]
(RIE) Report Inltlalization Errors IYeslNo]
(MCE)
Maxinuxn Data Chain Elenents [0-OFFFFH]
(CS) Nucleus CoÍununicatíon
Service [Yes/No]
Enter [Abbreviacion - new_value
/ Abbreviation ? /H):
460 <CR>
Job <CR>
<cR>
2000
128
REQ
50
SDB
ICNORE
4
JOB
NEVER
0
0
140
5
YES
080H
YES
:nge -
:deh
-
:
f rorn
c-6 ICU
Uset's
Guide
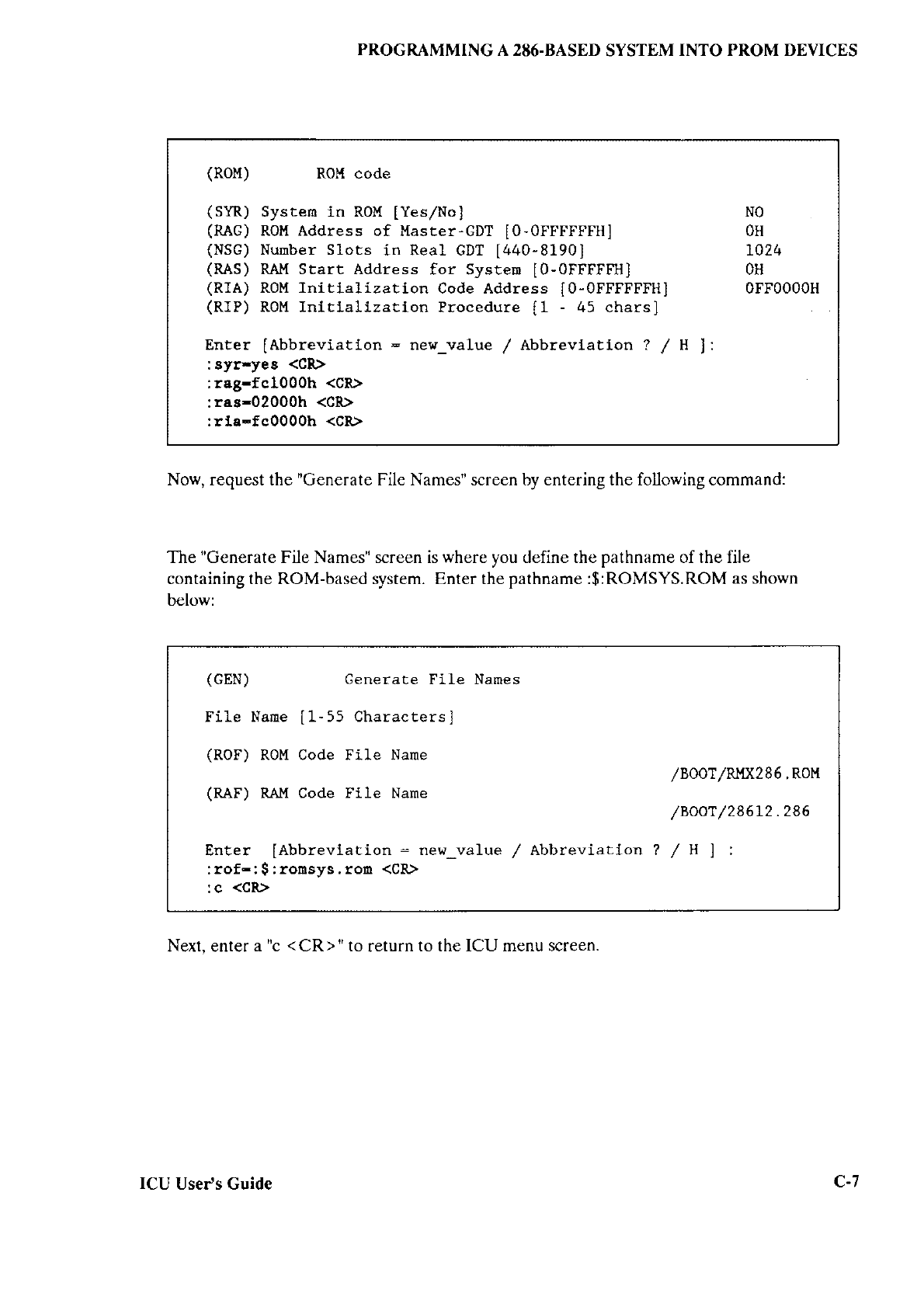
PROGRAMMING
A 2E6-BASED
SYSTEM
INTO PROM DEVICES
(R0ì,1) R0!{ code
(SYR) System ln ROM
[Yes/No] N0
(MG) ROM Address of Master-GDT
I0-OFFFFFFH] 0H
(NSG)
Nunber Slots in Real CDT
[440-81901 7024
(RAS)
RAtf Start Address for Systen IO-OFFFFFH] 0H
(RIA) RoM lnítializatlon Code Address [0-OFFFFFFH] 0FF0000H
(RIP) RoM Inítlalizaclon Procedure IL - 45 chars]
Enter [Àbbreviatlon - nes_value / Abbrevlatlot ? / H ):
: syr-yes <CR>
: rag:fcloooh <cR>
: ras-02000h <CR>
:rla-fc0000h <CR>
Now, request the
"Generate
File Names" screen by entering the following command:
The "Generate
File Names" screen is where
you
define the
pathname
of the file
containing the ROM-based system. Enter the pathname :$:ROMSYS.ROM
as shown
below:
Next, enter
a
"c
<CR>" to
return
to the ICU menu screen.
(cEN
)Generate File Names
File Name
Il- 55 Characters]
(ROF) RoM Code File Name
(RAF) RAM Code File Narne /Boor/RMX286
.
RoM
/Booî/28612.286
Enter [Abbrevlation: new*value / Abbreviatlon ? / H ) :
:
rof-: $:
ronsys,ron <CR>
: c <cIì>
ICU
Uset's Guide c-7
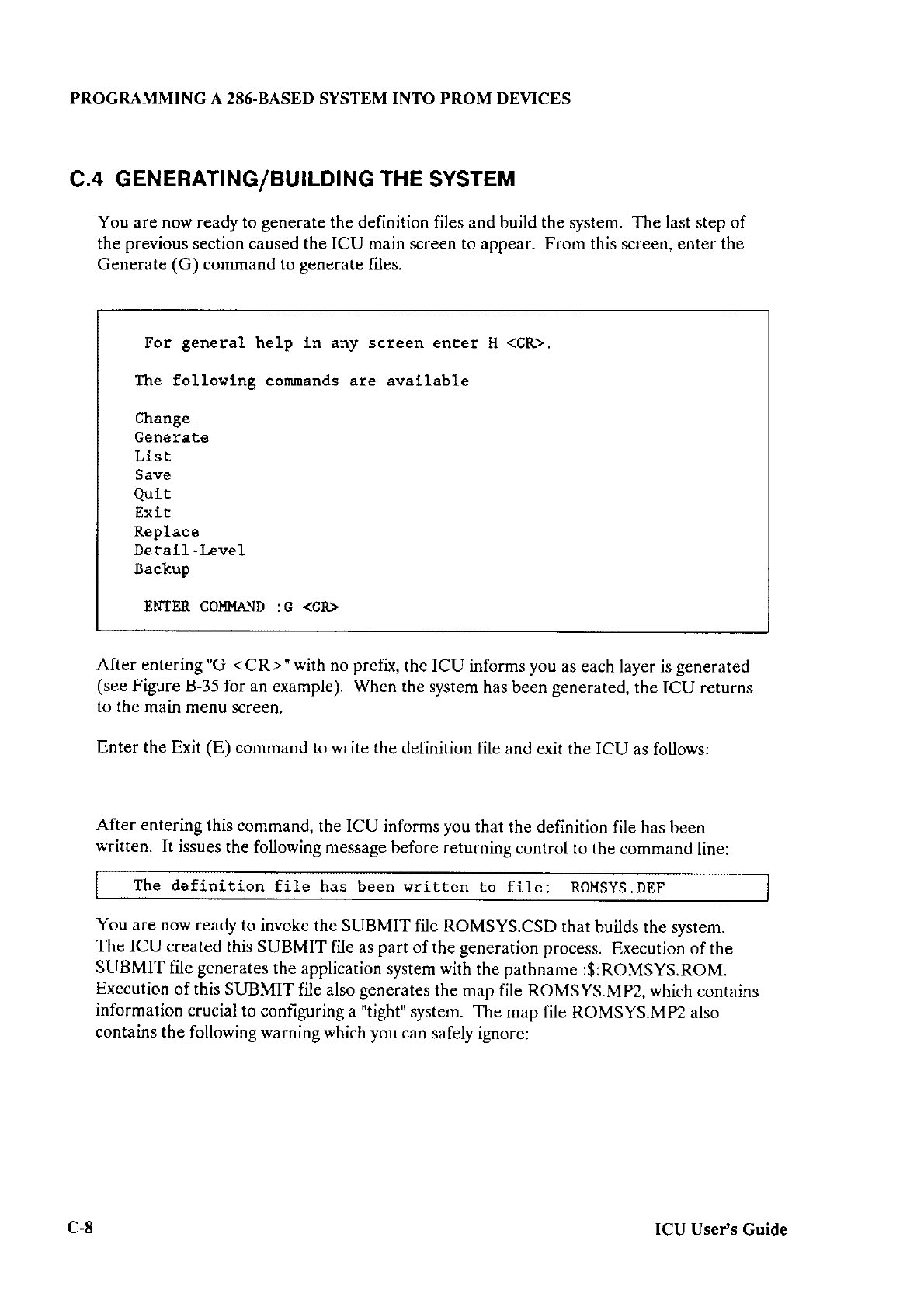
PROGRAMMING
A 286-BASED SYSTEM TNTO PROM DEVICES
c.4 GENERATTNG/BU|LD|NG
THE
SYSTEM
You are now ready to generate the definition files and build the system. The last step oî
the previous
section caused the ICU main screen to appear. From this screen, enter the
Generate
(G)
command to
generate
files.
For general help ln any scteen enter H (CR).
The followlng commands are avallable
Change
Generate
List
Save
Qul
t
ExiE
Replace
Detail-Level
Backup
ENTER
COMMAND
:C <CR>
After entering
"G <CR>" with
no
prefix,
the ICU informs
you
as each layer is generated
(see
Figure B-35 for an
example). When the system
has been generated,
the ICU returns
to the
main menu screen.
Enter the Exit
(E)
command to write the
definition file and
exit the ICU as follows:
After entering
this command,
the ICU informs you
that
the definition
file has been
written. It issues
the following
message before returning
control to the
command
line:
The dafinítion file has been \rritten to file: ROMSYS.DEF
You are
now ready
to invoke the SUBMIT
file ROMSYS.CSD
that
builds the system.
The ICU created
this SUBMIT
file as
part
of the generation process.
Execution
of the
SUBMIT
file generates
the application
system
with
the pathname
:$:ROMSYS.ROM.
Execution
of this SUBMIT
file also generates
the map
file ROMSYS.MP2, which
conrains
information
crucial
to configuring
a
"tight"
system.
The map file
ROMSYS.MP2 also
contains
the following warning which
you can
safely ignore:
c-8 ICU Uset's
Guide
I,IARNINC
119:
LOW ADDRESS:
HIGH
ADDRESS:
SEGMENTS
OVERTAP
00Fc0000H
00Fc0E04H
PROGRAMMING
A 286-BASED
SYSTEM INTO PROM DEVICES
After the
submit file completes
execution,
use the
DOWNCOPY command
to copy
the
resulting
file ROMSYS.ROM
to the file
:Fl:ROMSYS.ROM
on the
hard disk of the
Series-IV Development
System. This
assumes
you
have used the LNAME command on
the
Series-IV
system to define
the logical
name :Fl for rhe
directory into which you will
copy the file.
Now that the
system
has been generated, you
can either
program
the
PROM devices to
include only the
operating
system by itself (stand-alone)
or
you
can include the
iSDM
monitor.
The next sections
describe
these
different Drocesses.
C.4.1
Including the
|SDM"
Monitor
and the Bootstrap
Loader in
the
PROM Devices
This
section explains
how to
include
the iSDM monitor
and iRMX ll Bootstrap Loader as
part
of the operating
system that
resides in ROM. With this
type of system, the
iSDM
monitor code
executes
when
the system
is powered
up. In order to create
a system that
includes
the iSDM
monitor and
the Bootstrap
Loader you must prepare
two files; one
file
for each
piece
of software.
First you
must generate
a version
of the
iSDM monitor
for the iSBC
286/10(A) board.
The iSDM
monitor is normally
installed
on iRMX lI systems in the directory
/SDM.
Since
the Bootstrap
Loader is to
be included
in the PROM devices
along
with
the iSDM
monitor,
be sure
you
invoke
the BOOTSTRAP
macro
as follows when you
configure the
iSDM
monitor:
The iRMX II.3 iSDM monitor
is always
located at address 0FF8000H.
The iSDM
monitor places values
into the
reset
vector
and receives control
on
power-up
or reset.
Refer to the iSDM Systetn
Debug Mottitor
User's Guide
for more information
on
generating
the iSDM
monitor.
Next, generate a version
of the iRMX Bootstrap
Loader first stage. Assign your
current
default
directory to be the
Bootstrap
Loader directory by entering
the following
command:
ICU
User's Guide c-9
PROGRAMMING
A 286.BASED
SYSTEM
INTO
PROM
DEVICES
Due to the
limited
amount
of space
left over for
the Bootstrap
l-oader,
you can not
leave
all
available devices
selected
within BS1.A8ó.
Consequently,
you
must
edit
the
first stage
configuration
file,
BS1.A86
to contain
only the
driver included
in the
ROM system, the
MSC
device
driver. You
do not
need îo change
any other
parameters
in BS
1.A86. You
must
also edit
the first stage
configuration
SUBMIT
file
(BSl.CSD) to link
in only
the
MSC
file.
Execute
the Bootstrap
Loader
SUBMIT file
by entering
the following
command:
Complete
details on these
actions are available
in the Extended
|RMX II Bootstmp
Loader
Reference Manual.
At this
point, the files for
the iSDM monitor
and the Bootstrap
Loader
are generated.
Copy the resulting
files, BSI
and 28610A, to the files:F1:BSl
and
:F1:286l0A of
the hard
disk of the
Series-IV Development
System using
the DOWNCOPY
command. This
example assumes
you have used
the LNAME command
on the Series-IV
system to
define
the logical name
:F1: as the
directory into which
you will copy the files.
The following
commands move the two files:
The next
six sections describe how to program the PROM devices.
C.4.1.1
Setting Up
the iUP 201 PROM Programmer
Perform the following three
steps to set up the iUP 201 PROM Programmer:
1. Make sure that the RS-232A
line is connected from the iUP 201
programmer to the
Series-IV
system.
2. Insert the'FAST 27K'module into the iUP 201
28-pin socket and turn on the
power
to the iUP 201 Universal Programmer.
3 Press the ONLINE button
on the iUP 201 front
oanel.
WARNING
While
following the steps outlined in this section,
you
must
closely adhere
to any
warnings
or cautions given in the iUP-200/201 Universal Programmer
User's Gukle.
c-10 ICU
Uset's
Guide
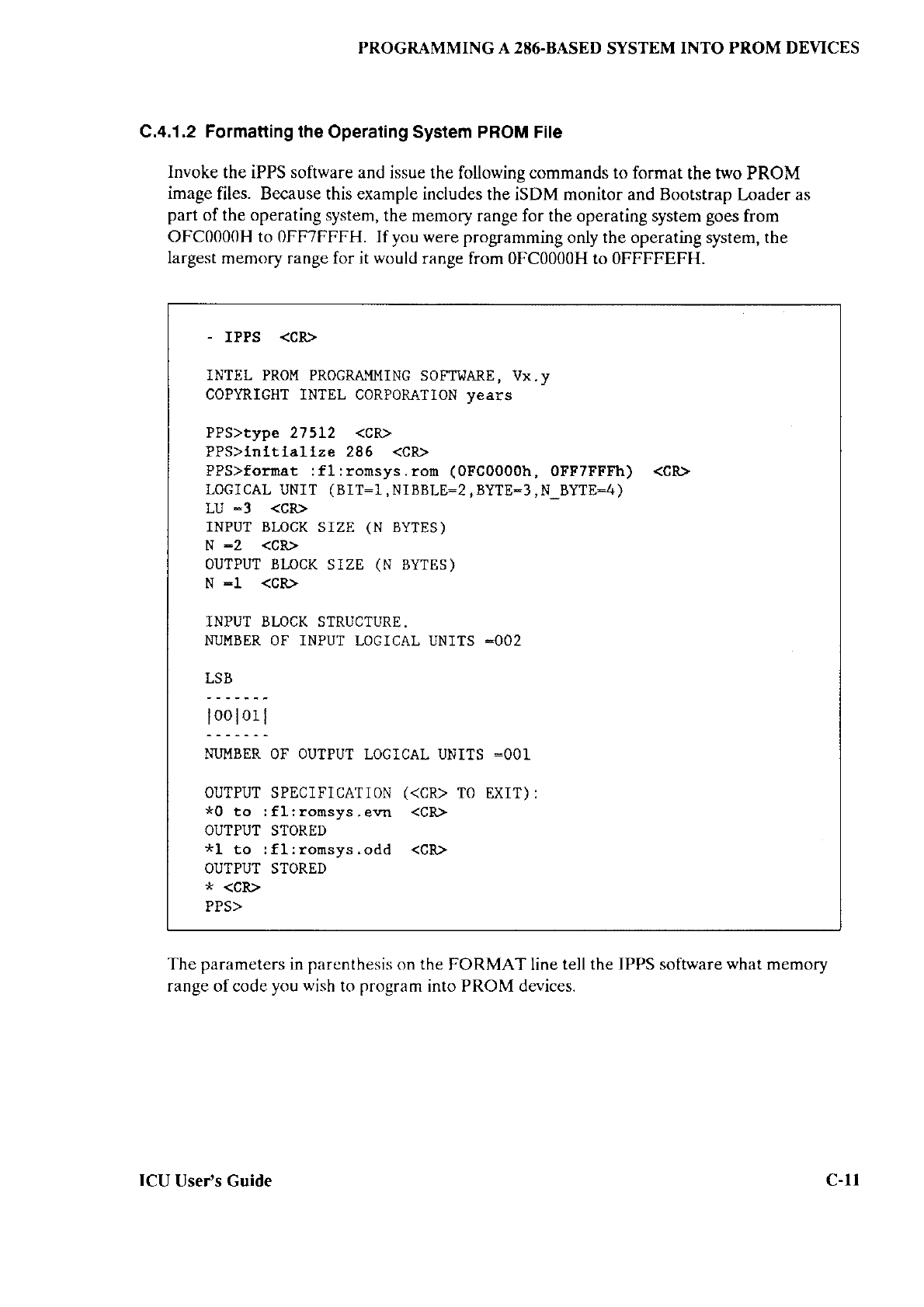
PROGRAMMING A 286.BASED
SYSTEM
INTO PROM DEVICES
C.4.1.2 Formatting the Operating System PROM File
Invoke
the iPPS software and issue
the following commands to format the two PROM
image
files. Because this example includes
the iSDM monitor and Bootstrap
l,oader
as
part of the operating system,
the memory range for the operating system
goes
from
OFC0000H to 0FF7FFFH.
lf you were programming
only the operating system, the
largest
memory range for it would
range
from 0FC0000H to OFFFFEFH.
. IPPS <CR>
INTEL PROM PROGRAM},IING
SOFTI,JARE, VX.
Y
COPYRIGHT INTEL CORPOMTION
years
PPS>type 27512 <CR>
PPS>lnltlallze 286 <CR>
PPs>format :fl:romsys.ron (0FC0000h,
0FFTFFFh) <CR>
LOGICAL
UNIT (
BIT:1 ,
NIBBLE:2
,
BYTE-3
,
N*BYTE-4)
LU -3 <CR>
INPUT
BLOCK SIZE (N BYTES)
N :2 <CR>
OUTPUT BLOCK
SIZE (N BYTES)
N -1 <CR>.
INPUT BLOCK STRUCTURE.
NUMBER OF INPUT LOGICAL UNITS :OO2
LSB
loo l01 |
**ri*-ot ourPUT LocrcAL
uNrrs
:ool
OUTPUT SPECIFICATION
(<CR>
TO EXIT):
*0 to ; fl: romsys
, evn <CR>
OUTPUT STORED
*L to : fl: ronsys .
odd <CR>
OUTPUT STORED
* <cR>
PPS>
The parameters in parcnthesis on the
FORMAT line
tell the IPPS software
what
memory
range of code
you wish
to
program
into PROM devices.
ICU
Use/s Guide c-ll
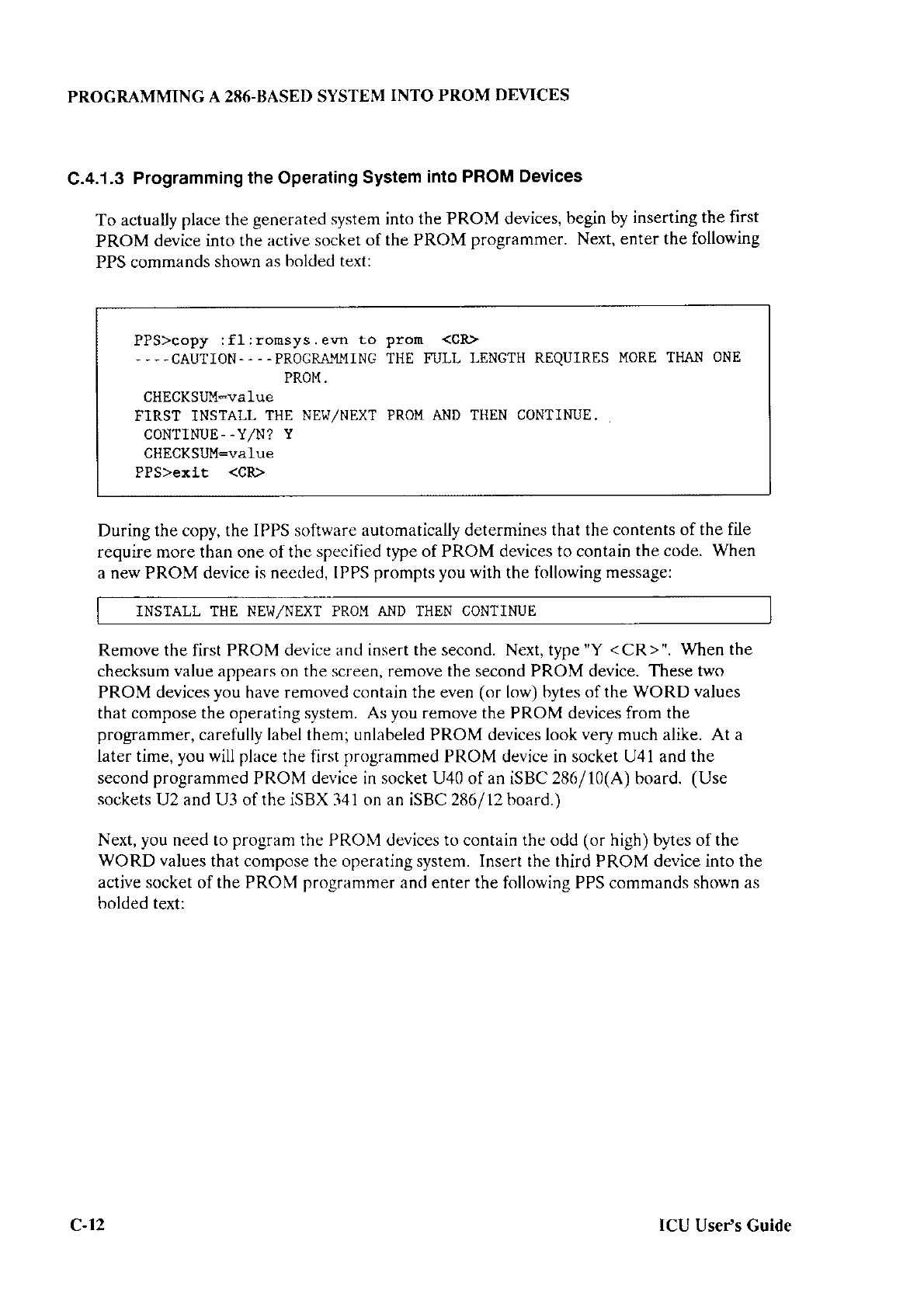
PROGRAMMING
A 2II6-BASED SYSTEM
INTO PROM DEITCES
C.4.1.3
Programming
the Operating
System
into PBOM
Devices
To actuaUy
place the
generated system into
the PROM devices,
begin by
inserting the first
PROM
device into the
active socket
of the PROM
programmer. Next,
enter the following
PPS commands
shown as
bolded text:
PPS>copy
:fl:ronsys.evn to Ptom <CR>
..,.CAUTION.. - -
PROGRAMI"IING
THE TULL LENGTH
REQUIRES
MORE THAN
ONE
PROM.
CHECKSUM*va1ue
FIRST INSTALL
THE NEW/NEXT PRO}4 AND
THEN CONTINUE.
coNTtNr.rE
- -YlN? Y
CHECXSUM:value
PPS>ex!È <CR>
During the copy, the IPPS software
automatically determines that the contents
of the file
require more than one of the
specified type of PROM devices to contain
the code. When
a new PROM device
is needed, IPPS
prompts you with
the following
message:
INSTALL THE NE\N/NEXT PROM AND THEN CONTINUE
Remove the first PROM device
ancl insert the second. Next, type "Y <CR>". When
the
checksum value appears on the screen, remove the second PROM device. These two
PROM devices
you
have removed contain the even
(or
low)
bytes
of
the WORD values
that compose the operating system. As you remove the PROM devices from the
programmer,
carefully label them; unlabeled PROM devices look
very
much alike. At a
later time, you will place
the first
programmed
PROM device in socket U41 and
the
second programmed
PROM
device
in socket U40 of an iSBC 286/10(A) board.
(Use
sockets
U2 and U3 of the iSBX 341 on an iSBC 286/12 board.)
Next,
you
need to
program
the PROM devices to contain the odd (or high) bytes of the
WORD values
that compose the operating system. Insert the third PROM device into the
active socket of the PROM
programmer
and enter the
following PPS commands
shown as
bolded text:
c-12 ICU
Useds Guide
PROGRAMMING
A 286.8A5ED
SYSTEM
INTO PROM DEVICES
PPS>copy :fl:ronsys.odd to prom <CR>
. . . . CAUTION
- . . . PROCRAì,IMING
THE TULL LENGTH
REQUIRES MORE T}IAN ONE
PROM .
CHECKSUM:value
FIRST INSTALL
THE NELT/NEXT
PROM AND THEN CONTINÙE.
coNTIN'rJE
- -YlN? Y
CHECKSUM:value
PPS>
Again, when
IPPS determines
it needs another PROM
device, it prompts you with
the
following
message:
INSTALL THE NEII/NEXT PROI,I
THEN CONTINUE
Remove the
third PROM device and
insert the fourth. Next, type "Y <CR>". When
the
checksum value appears
on the screen,
remove the fourth PROM device. These two
PROM devices contain the
odd
(or
high)
bytes of the
WORD values
that compose
the
system. As you
remove the PROM
devices from the programmer, carefully
label them;
unlabeled
PROM devices look very
much alike..
At a later time,
you will place
the third
programmed
PROM
device in socket U76
and the fourth
programmed
PROM device
in
socket U75 of an
iSBC 286/ l0(A) board.
(Use
sockets U5 and U6 of the iSBX
341 on an
iSBC 286/12 board.) The
next step
programs
the
iSDM monitor and the
iRMX Bootstrap Loader into
the fourth PROM device so do not install
it now.
C.4.1.4 Programming the
|SDM Monitor into
PROM Devices
This section describes how to program
the
iSDM monitor into the second and fourth
PROM
devices. To do this, insert
the second PROM clevice
and enter the followins
commands shown as boldetl text:
ICU User's Guide c-r3
PROGRAMMING
A 286-BASED SYSTEM
INTO
PROM DEVICES
PPs>forrnet :fl:28610a (0FF8000h, oFFFFFFh) <CR>
LOGICAL
UNIT (BIT-1, NIBBLE_2,
BYTE:3, N_BYTE-4
)
LU *3 <CR>
INPUT BLOCK SIZE (N BYTES
)
N :2 <CR>
OUTPUT
BLOCK SIZE (N BYTES)
N -l <cR>
OUTPUT SPECIFICATION
(<Cb TO EXIT):
*0 to :fl:286l0a.evn <cR>
OUTPUT STORED
*l to :fl:28610a.odd <CR>
OUTPUT STORED
<cP>
PPS>
PPS>copy
:fl:28610a.ewn to prom(0c000H) <CR>
CHECKSUM-va1ue
When
the
IPPS software prompts you
with
the following message, remove
the second
PROM device, insert the fourth, and enter the following command:
PPS>copy
:
fl:286Loa. odd to prom(0o000H)
CHEcKSUM:value <cR>
C.4.1.5
Programming the Bootstrap Loader into PROM Devices
This section describes
how
to program
the Bootstrap Loader into the second and fourth
PROM devices. To begin, insert
the second PROM device and enter the commands
shown as bolded text:
c-14 ICU UseCs Guide
PPs>lnltlallze 86 <cR>
PPs>format :fl: BSI (0FE400h, 0FFFTFh)
LOCICAL
UNIT
(BIT-I.NIBBLE:2,BYTE:3,N_
LU -3 <C8>
INPUT BLOCK SIZE (N BYTES)
N -2 <CR>
OUTPUT BLOCK
SIZE (N BYTES)
N :1 <CR>
OUTPUT SPECIFICATION
(<CR>
TO EXIT):
*0 to :fl:bsl.evn <CR>
OUTPUT STORED
*l to:fl:bsl.odd <CR>
OUTPUT STORED
<cR>
PPS>
PPS>copy : fl:bsl. evn to pron(0F200H)
CHECKSUM:va1ue
<cR>
BYTE:4
)
PROGRAMMING A 286.BASED
SYSTEM
INTO PROM DEVICES
When
the IPPS software displays the following prompt,
remove
the second PROM device,
insert the fourth
PROM device, and enter the following command:
PPS>copy
:
f1: bs1.
odd to prorn(0F200H)
CHECKSùM:value
PPS>exlt <CR>
<cR>
C,4,'1,6 Starting the Operating
Syslem
in ROM from the iSDM" Monitor
The four PROM devices now contain
the operating system, the iSDM monitor, and the
Bootstrap
Loader. Perform the following steps to slart the system:
1. Place the first programmed PROM device
in socket U4l of the iSBC 286/10(,4)
board.
,|
2.
3.
Place the second programmed
PROM device in socket
U40 of the iSBC 286/10(A)
board.
Place the third
programmed
PROM
device in socket
U76 of the iSBC 286/10(A)
board.
Place the fourth programmed
PROM device in socket
U75 of the iSBC 286/10(A)
board.
ICU User's Guide c-15
PROGRAMMING
A 286-BASED SYSTEM
INTO PROM
DEVICES
5.
6.
Insert the iSBC 286/10(A)
board into the
system chassis and apply
power to
the
hardware.
Enter the following
command from
the
iSDM
monitor to activate
the iRMX ll
svstem:
The
code executed by entering the command
in step 6 above is the ROM initialization
procedure whose address
was
specified in
the ICU as 0FC0000H. The offset
ofthe
beginning instruction of this
procedure is 12H. The reason 0C000:12 is used
instead of
0FC000:12 is that, in real address mode,
the 80286 can only access up to 1 megab]'te
of
memory. Also,
in real address mode,
the
memory
decoding of the 286/10(A) board,
when
jumpered
for 2'7512 EPROM devices, places the memory addresses of the PROM devices
at
0C000:0 to 0FFFF:F. This addressing scheme results in execution of
the code at
0C000: 12 to occur first. The code at 0C000: l2 is the first
instruction of the ROM
initialization code.
C.4.2 Creating a System That is
Activated
on Power-Up
The
previous
section explained how to
program
a system that included the operating
system, the iSDM monitor, and the Bootstrap Loader into PROM devices.
With
this type
of a system, the iSDM monitor receives control during the initial
power-on (or
reset)
sequence and is signed on. This requires that
you give
a command to the iSDM monitor
to start the operating system. This section explains how to program
only the operating
system
into
the
PROM devices. To create a PROM-based iRMX II system
which receives
control at
power-on,
you need to take certain steps. Before the following section
describes these steps, you should be made aware of the following:
. Most PROM-based systems are already "debugged" and have no need of the iSDM
monitor or the iRMX II System Debugger (SDB).
o The iSDM monitor has limited use in a PROM-based
svstem because it can't set
breakpoints
in code that executes from ROM.
. The ROM initialization code of the iRMX II Nucleus currently has no means of fully
initializing the iSDM monitor. Initialization code
can only inform the iSDM monitor
(if it is present and has been previously
initialized) that the 80286 CPU has been
s$,itched
to Protected Mode.
. Virtually
all PROM-based
iRMX II systems require that the system be initialized
immediatelv uoon Power Un.
c-16 ICU
Usefs Guide
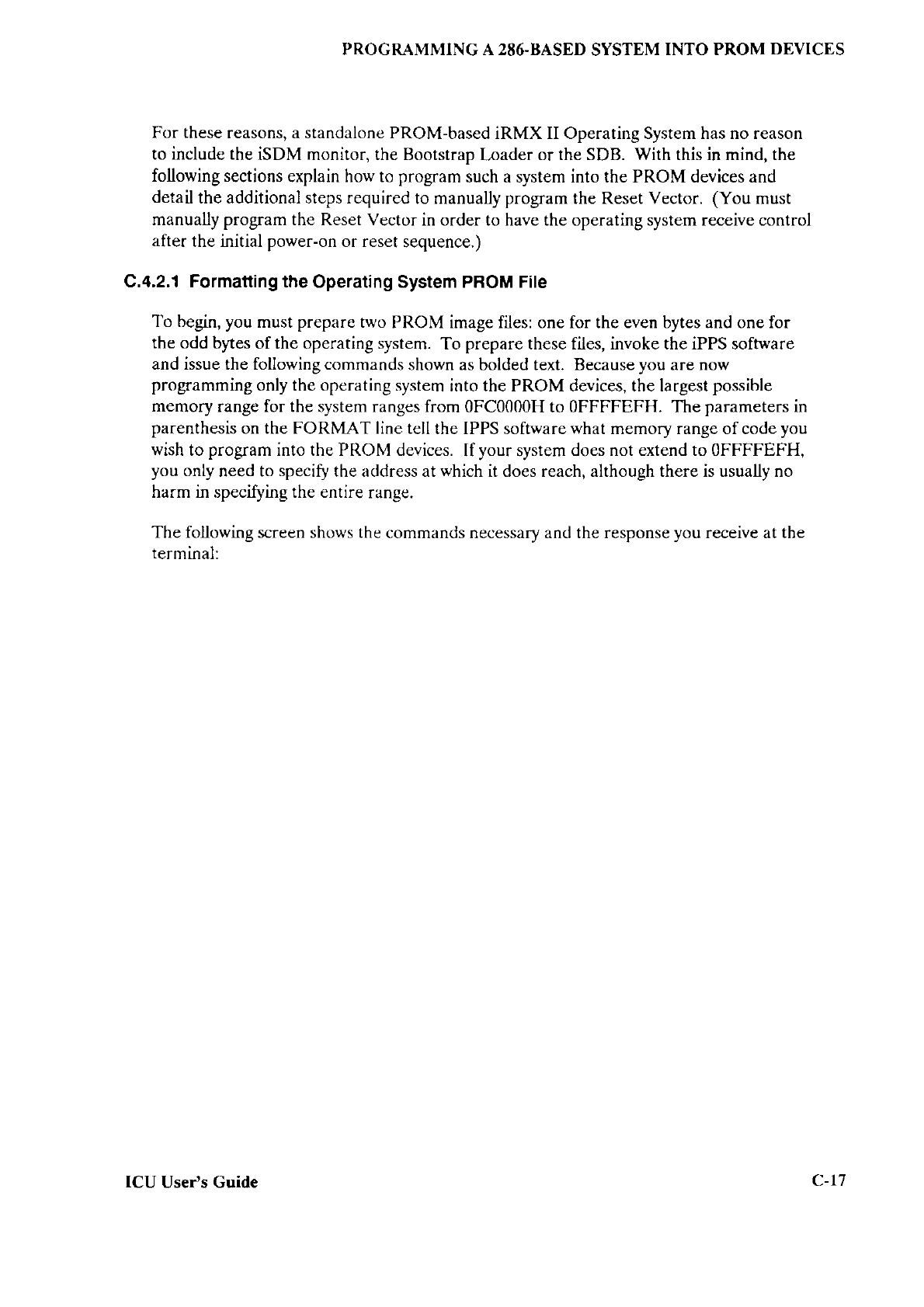
PROGRAMMING A 286-BASED
SYSTEM
INTO PROM
DEVICES
For these
reasons, a standalone PROM-based
iRMX II Operating System has no reason
to include the
iSDM monitor, the Bootstrap
l.oader
or the SDB. With this in mind, the
following sections
explain how to program
such a system into the PROM devices and
detail
the additional steps required
to manually
program
the Reset Vector. (You must
manually program the Reset Vector
in order to have the operating system receive control
after
the initial power-on or reset
sequence.)
C.4.2.1 Formatting
the Operating System PROM File
To begin, you
must
prepare
twÒ
PROM image files: one for the even bytes and one for
the odd
bytes of the operating system.
To prepare
these files, invoke the iPPS software
and issue the following commands
shown as bolded text. Because you are now
programming
only the operating system
into the PROM devices, the largest
possible
memory
range for the system ranges from 0FC0000H to 0FFFFEFH. The
parameters in
parenthesis
on the FORMAT line tell
the IPPS software
what
memory range of code
you
wish
to
program
into the PROM devices.
Ifyour system
does not extend to 0FFFFEFH,
you
only
need to
specify
the address at
which
it does reach, although there is usually no
harm in specilying the entire
range.
The foÌlowing screen shows the
commands necessary and the response
you
receive at the
terminal:
ICU Uset's Guide c-r7
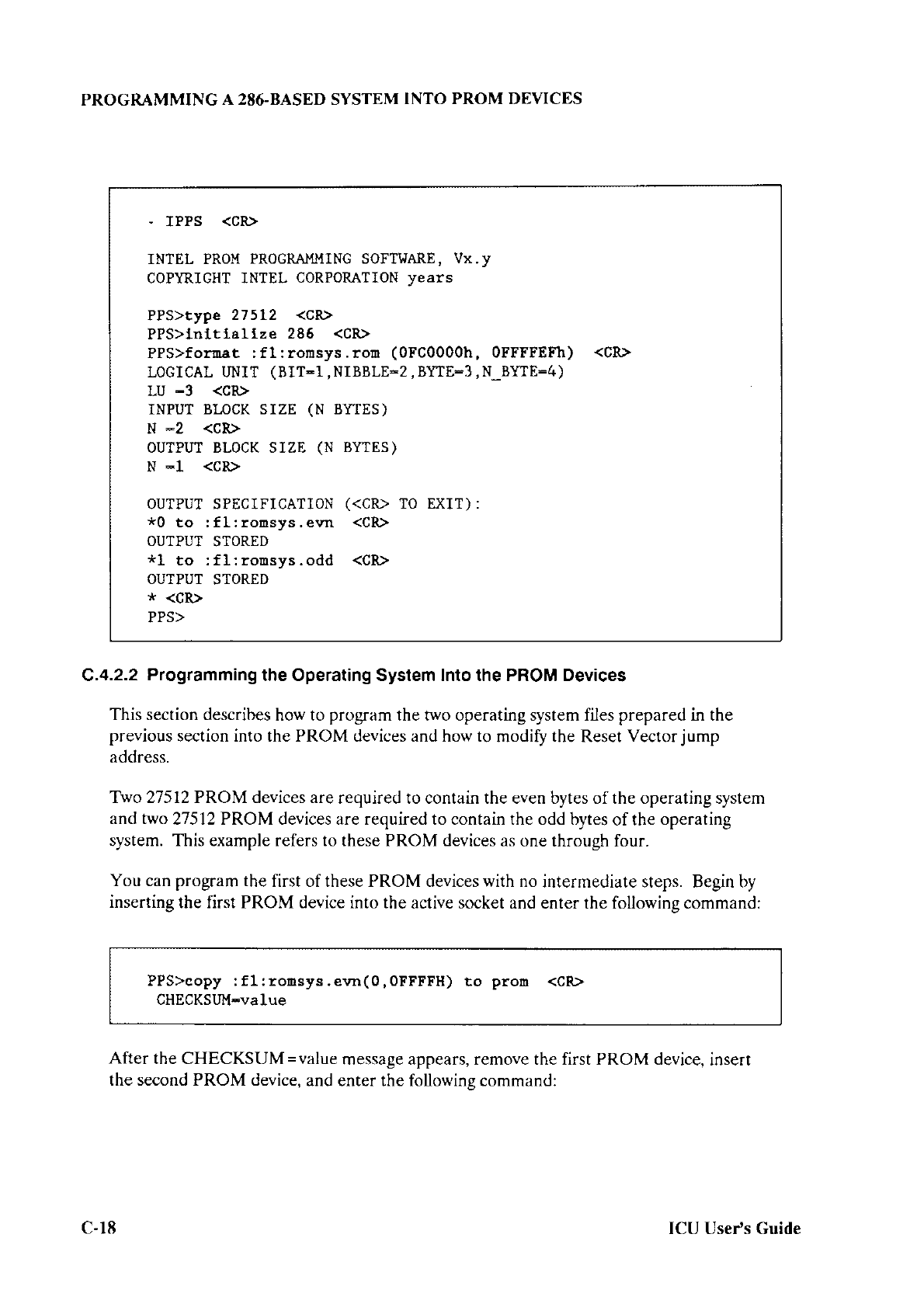
PROGRAMMING
A 286-BASED SYSTEM
INTO PROM DEVICES
- IPPS <CR>
INTEL PROM
PRoGRA.tfì,tING SOFTIIARE,
Vx. y
COPYRIGHT INTEL CORPORATION
years
PPS>type 27512 <CR>
PPs>lnltlaLlze 286 <CB>
PPs>fornat :fl:ronsys.ron (0Fc0000h, 0rFFFEFh) <CR>
LOGICAL UNIT (BIT:1, NIBBLE:2
,
BYTE:3, N-BYîE-4)
LU -3 <CB>
INPUT BLOCK SIZE (N BYTES)
N -2 <CR>
OUTPUT BLOCK SIZE (N BYTES
)
N -1 <CR>
OUTPUT SPECIFICATION
(<CR>
TO EXIT):
*0 to : fl: roEsys, evn <CR>
OUTPUT
STORED
*1 to : fl: ronsys . odd <€R>
OUTPUT
STORED
* <cR>
PPS>
C.4.2.2
Ptogtamming
the Operating System Into the PROM Devices
This section describes
how to program
the two operating system files prepared in the
previous
section into the PROM devices and how to
modify
the
Reset
Vector
jump
address.
^fwo
27512 PROM devices are
required to contain the even bytes of the operating system
and two
27512 PROM devices are required to contain the odd bytes
of the
operating
system. This example refers to these PROM devices
as one through four.
You can program the
first ofthese PROM devices with no
intermediate steps. Begin by
inserting
the first PROM device into the
active socket and enter the following command:
PPS>copy : fl :ronsys.ewn(0, oFFFFH)
CHECKSUM-value to Pron <cR>
After
the CHECKSUM
=
value
message appears, remove the first PROM device,
insert
the second PROM device.
and enter the followins command:
c-18 ICU User's Guide
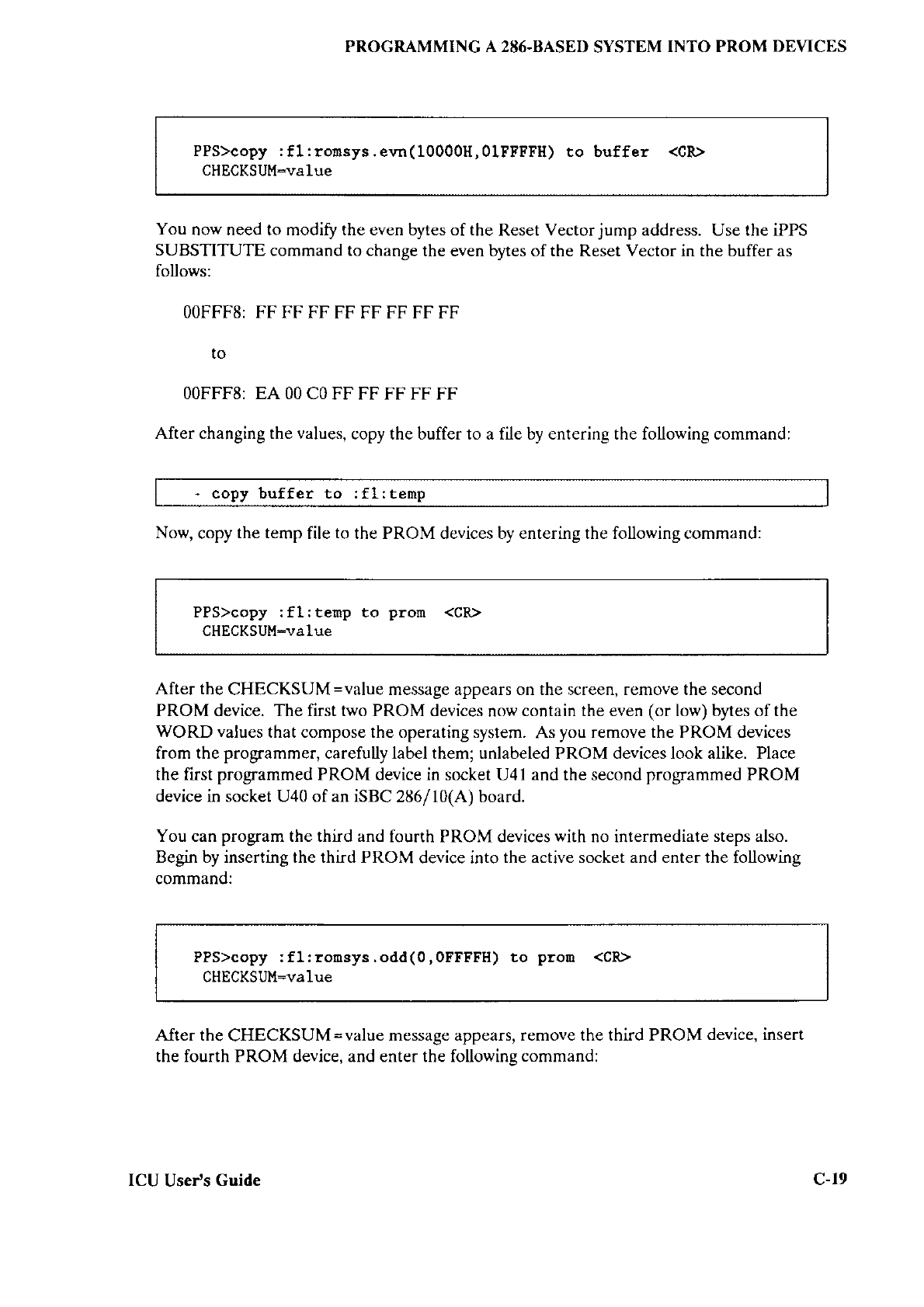
PROGRAMMING A 28ó.BASED
SYSTEM
INTO PROM
DE\TCES
PPS>copy ifl:ronsys.evn(10000H,OIFFFFH)
to buffer <CR>
CHECKSUM:value
You
now need to modi$ the even bytes of the
Reset
Vector
jump
address. Use the iPPS
SUBSTITUTE command to change
the even bytes of the Reset Vector in the buffer as
follows:
OOFFFS: FF FF FF
FF FF FF FF FF
lo
00FFF8: EA 00 C0
FF FF FF FF FF
After changing the values,
copy the buffer to a file by entering the following command:
copy buffer to : fl: temp
Now,
copy
the temp
file
to
the PROM devices by entering the following command:
PPS>copy : fl: tenp to pron
CHECKSUM:value <c8>
After the
CHECKSUM=value message appears on the screen, remove the second
PROM device. The first two PROM devices
now
contain the even
(or
low) bytes of the
WORD values
that compose the operating system.
As
you remove the PROM devices
from the programmer, carefully label them; unlabeled PROM devices look alike. Place
the first programmed PROM device in socket U41 and
the
second programmed PROM
device in socket U40 of an iSBC
286/ 10(A) board.
You can program the third and
fourth PROM devices
with
no intermediate
steps also.
Begrn by inserting the third PROM device into the active socket and enter the following
command:
PPS>copy :fl ;ronsys,odd(O, 0FFFFII)
CHECKSUM-vaIue
to pron <CR>
Aîter the
CHECKSUM
=value
message appears, remove the third PROM
device, insert
the fourth PROM device, and enter the following
command:
ICU
Usefs
Guide c-19
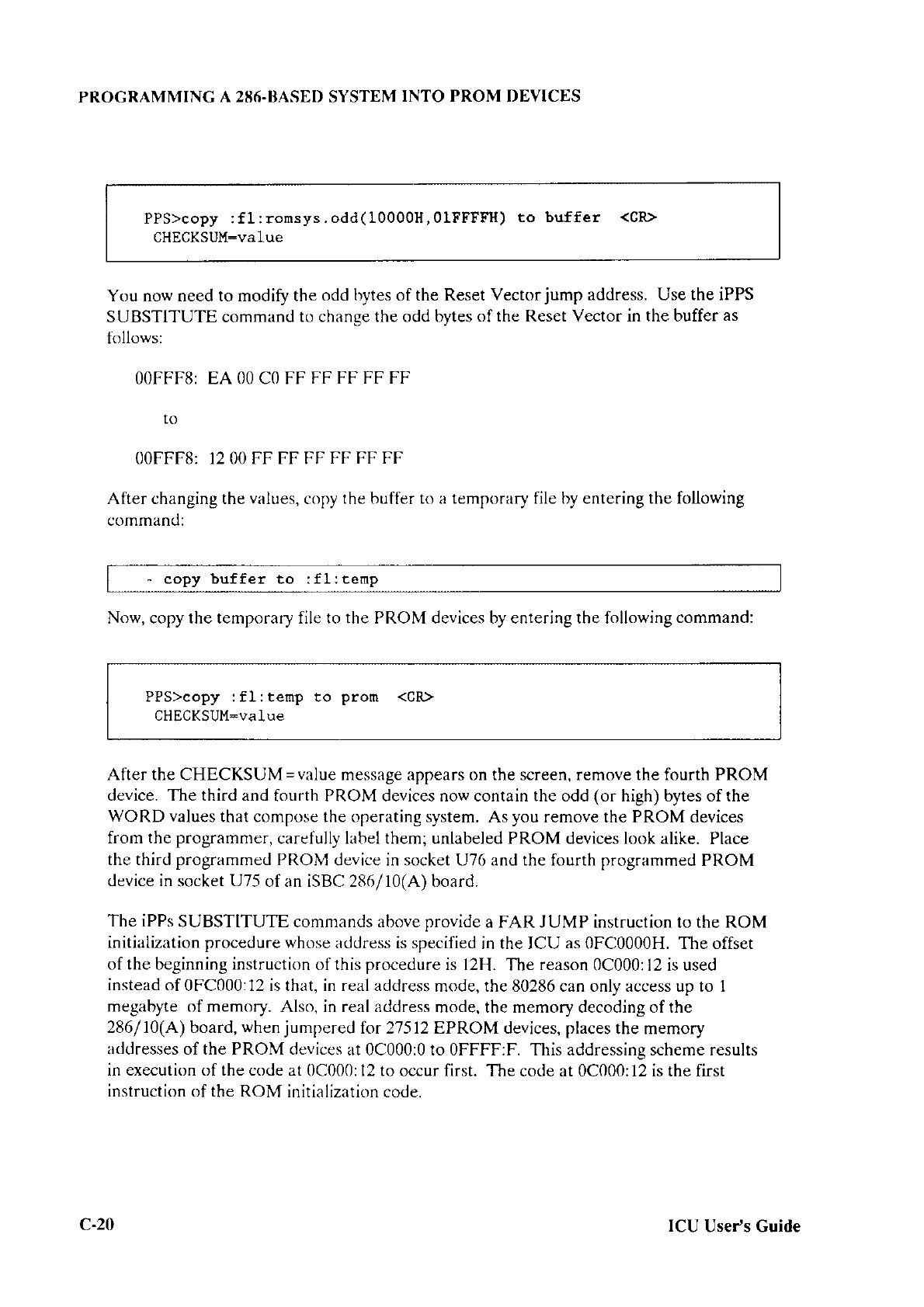
PROGRAMMING
A 2tt6.BASED SYSTEM
INTO PROM DEVICES
PPS>copy :fL:ronsys.odd(10000H,0IFFFFH) to bìlffet <CR>
CHECKSUM-value
You now need to modifu the
odd bytes of the Reset
Vector
jump
address. Use the iPPS
SUBSTITUTE command
to chanse the odd bytes
of the Reset Vector in the buffer
as
fbllows:
00FFF8: EA 00 C0 FF
FF FF FF FF
to
00FFF8: 12 00 FF FF FF
FF FF FF
After changing the
values,
copy
the
bufler
to a temporary file by entering the following
command:
copy buffer to : f1: tenp
Now, copy the temporary file to the PROM devices by entering the following
command:
PPS>copy :fl;tenp to prom
CHECKSUM:value <cR>
Afier the CHECKSUM=value message appears on the screen, remove the fourth PROM
device. The third and
fourth PROM devices now contain the odd
(or
high) bytes of the
WORD values
that compose the operating system.
As
you
remove the PROM devices
from the programmer!
carefully label them; unlabeled PROM devices look alike.
Place
the third programmed PROM
device in socket U76 and the fourth programmed
PROM
device in
socket
U75
of an iSBC 286/ l0(A) board.
The iPPs
SUBSTITUTE commands above provide
a FAR JUMP instruction to the ROM
ìnitialization procedure whose
address is specified
in the ICU as
0FC0000H. The offset
of the beginning instruction
of this
procedure
is l2H. The
reason
0C000: l2 is used
instead of
0FC000:12 is that, in real adclress
mode, the 80286 can only access up to 1
megabyte of
memory. Also, in real address
mode, the memory decoding of the
286/10(A) board,
when
jumpered
for 27512 EPROM devices, places
the memory
addresses of the PROM devices
at 0C000:0 to 0FFFF:F. This addressing scheme results
in execution of the code
at 0C000:12 to occur first.
The code at 0C000: 12 is the first
instruction of the ROM
initialization code.
c-20 ICU
Use/s Guide
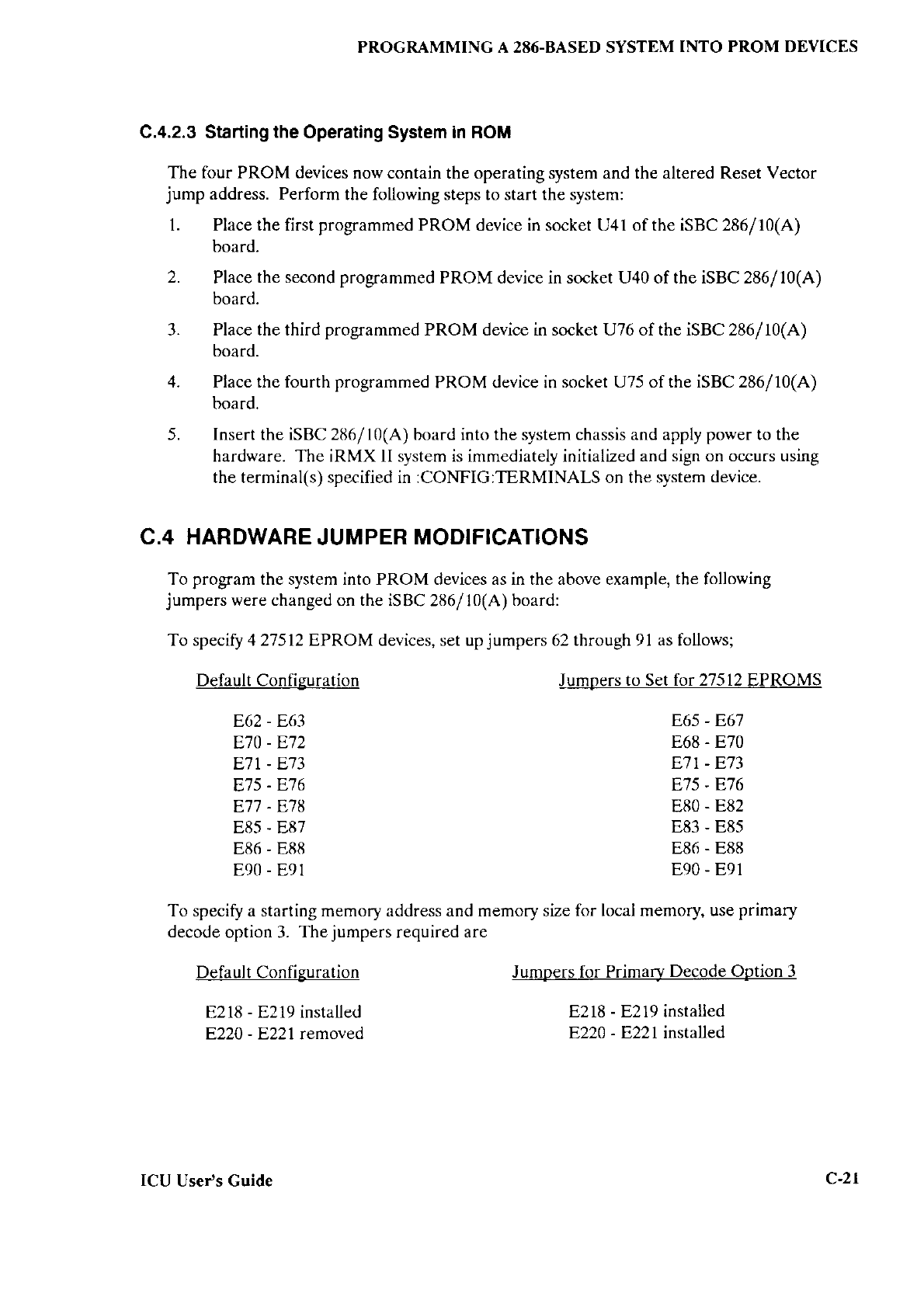
PROGRAMMING A 286-BASED SYSTEM
INTO PROM DEVTCES
C.4.2.3 Starting
the
Operating System in ROM
The four PROM devices
now contain the operating system and the altered Reset Vector
jump
address. Perform
the following steps to start the system:
1. Place the first programmed PROM device in socket U41 of the iSBC 286/10(4.)
board.
3.
Place
the second programmed
PROM device in socket U40 of the iSBC 286/10(A)
board.
Place the third
programmed
PROM device in socket U76 of the iSBC 286/10(A)
board.
Place the fourth programmed
PROM device in
socket U75 of the iSBC 28ó/10(A)
board.
Insert the iSBC 2U6/10(A) board into the system chassis and apply power to the
hardware. The iRMX ll system is immediately initialized and
sign on occurs using
the terminal(s) specified in :CONFIG:TERMINALS on the system
device.
C.4 HARDWARE
JUMPER
MODIFICATIONS
To
program
the system into PROM devices as in the above example, the following
jumpers
were changed on the
iSBC 2tl6/10(A)
board:
To specifu 4 27512 EPROM devices, set upjumpers 62 through 9l as follows;
5.
Default Configuration
E62
- E63
870
- E72
E71
-
873
F.75
-
E76
Lt I
-
r:tó
E85
-
E87
886
-
888
E90
-
E91
Jumpers
to Set for 27512 EPROMS
E65
- 867
E68
- E70
E71
- E73
875
-
876
E80
-
882
E83
-
E85
E86
-
E88
E90
-
E91
To specify a starting memory address and memory size
for local memory, use
primary
decode
option 3. Thejumpers
required
are
Default Configuration
E2l8 - E2l9 installed
8220
- E221 removed
Jumoers for Primary
Decode Option 3
EZIS
- E219 installed
8220
- E22l installed
ICU
Uset's Guide c-21
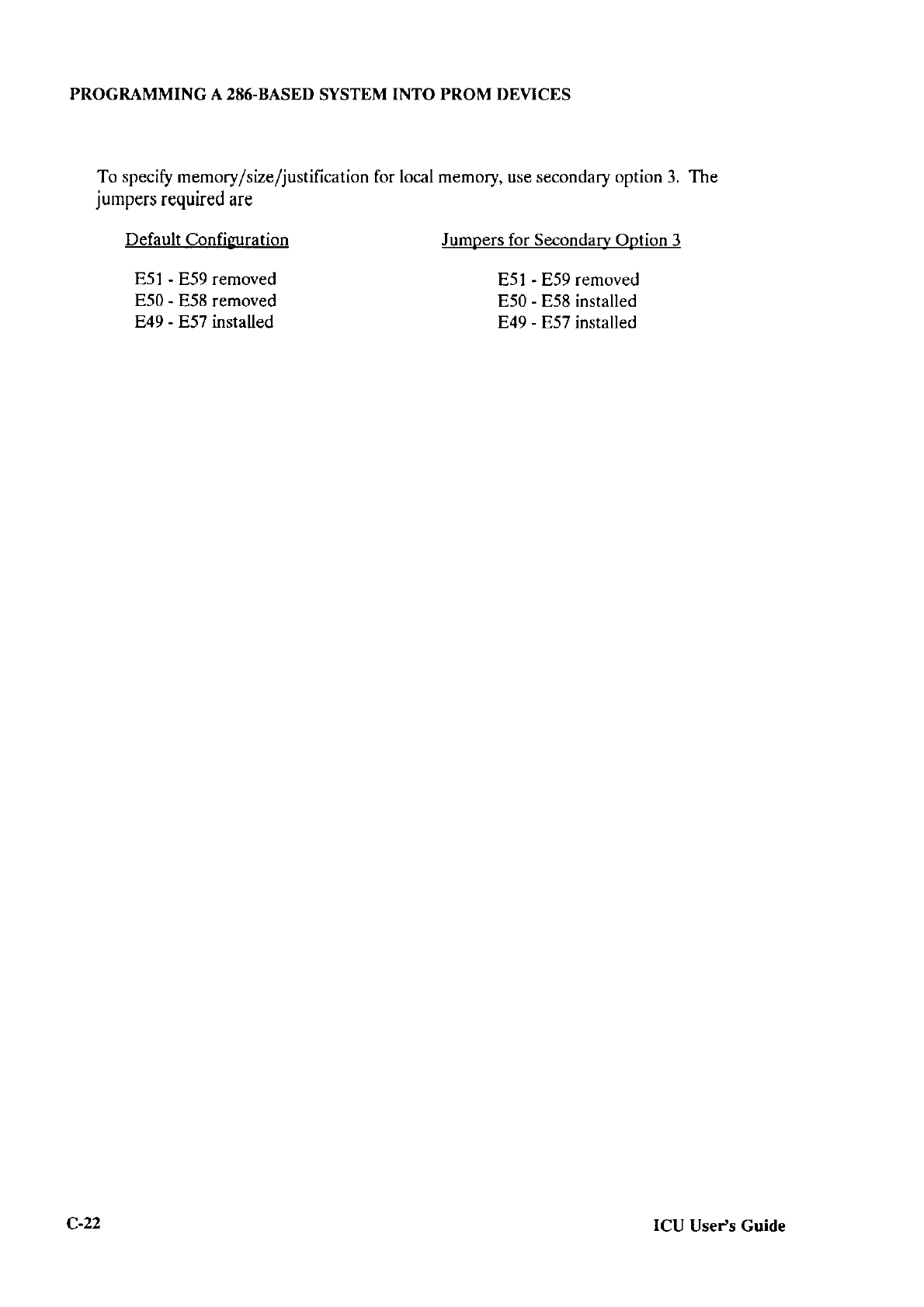
PROGRAMMING A 286-BASED
SYSTEM
INTO PROM DEVICES
To
specify
memory/size/justification for local memory, use secondary option 3. The
jumpers
required are
Default Configuration
E5t - 859 removed
E50
- 858 removed
E49
- E57 installed
Jumpers
for Secondary
Option 3
851
- E59 removed
E50
- E58 installed
E49
- 857 installed
c-22 ICU UsePs Guide
APPENDIX D
PROGRAMMTNG
A 386/1 oo-BASED
SYSTEM INTO PROM DEVICES
D.l INTRODUCTION
This appendix
provides an
example of the
procedures used to place the iRMX II
Operating System into ROM for a 386/ 100-based system. All software
generation
described assumes you are using an Intel System 300 Series Microcomputer. In addition,
because
a Series-IV
Development System
is
required to run the PROM
programmer, the
iSDM monitor is
used
to
provide the serial link between the iRMX system and the Series-
IV system. In
this example,
one
version of the operating system is created.
The example consists of three
processes:
configuring
a ROM-based system,
generation/building of the system, and actually placing the system
into ROM. In this
example, the iSDM monitor and
Bootstrap Loader are not included
as part of the
generated system. This allows the operating
system to be 32 Kbytes larger. For
a system
generated in this manner, the operating system receives control
on power-on or reset.
The last section of this appendir describes the
configuration differences
existing when
programming a 386/ 100-based system and a 386/20-based
system into PROM
devices.
D.2 REQUIREMENTS
To
use the procedures outlined in this appendir, you must
have the following hardware
and software:
. A system defined during configuration
as residing in RoM.
. The iRMX II.3 and iPPS
Vl.4 (or
newer)
software.
]'he iPPS
software runs on an
Series-IV Development System.
. A 386/100-based system and a Series-lV
Development System
connected
via
the
iSDM monitor.
r An iUP-200/201
Universal Programmer
with
a'GUPI 27010'module.
o Two 27010 EPROM devrces.
ICU
Usefs
Guide D-l
PROGRAMMING
A 3E6/1OO.BASED SYSTEM
INTO PROM DEVICES
D.3
CONFIGURING
A ROM.BASED
SYSTEM
Before you can program your system into ROM, you must modi$ a number of
parameters
in your definition file. These examples assume that you start with the Intel-
supplied definition
file 386100.DEF located in directory
/RMX286/ICU.
To begin
the example,
you
should make a copy ofthe definition file in a separate
directory. To do this, create a new directory
in which
to do the generation.
Give the
directory
the same name as the definition file and the
output system. The definition file
should have a .DEF extension,
the boot-loadable system should
have a.28ó extension and
the system
to be loaded into PROM devices should
have a . ROM extension. Entering the
three following commands
creates a new directory
called ROMSYS, attaches
you
to that
directory,
and invokes
the ICU placing
a copy ofthe definition file 386100.DEF into the
new
directory. (This
example assumes
your :HOME: directory
is
your
current default
directorv.l
As part of the
configuration process, you
must perform the
following two things
in order
to fit the
iRMX II system
developed in this example
into PROM
devices.
. Delete
the System Debugger
and UDI from the
system.
. Replace the iRMX IL3 CLI with the
iRMX II.1 CLI.
Having
invoked the ICU, you
now can begin to make the necessary
configuration
changes.
Start by
modifying the
memory screens to define the ROM memory locations
the system
requires. Do this by
first selecting the "Memory
for System"
screen with the following
command:
D-2 ICU Usefs Guide
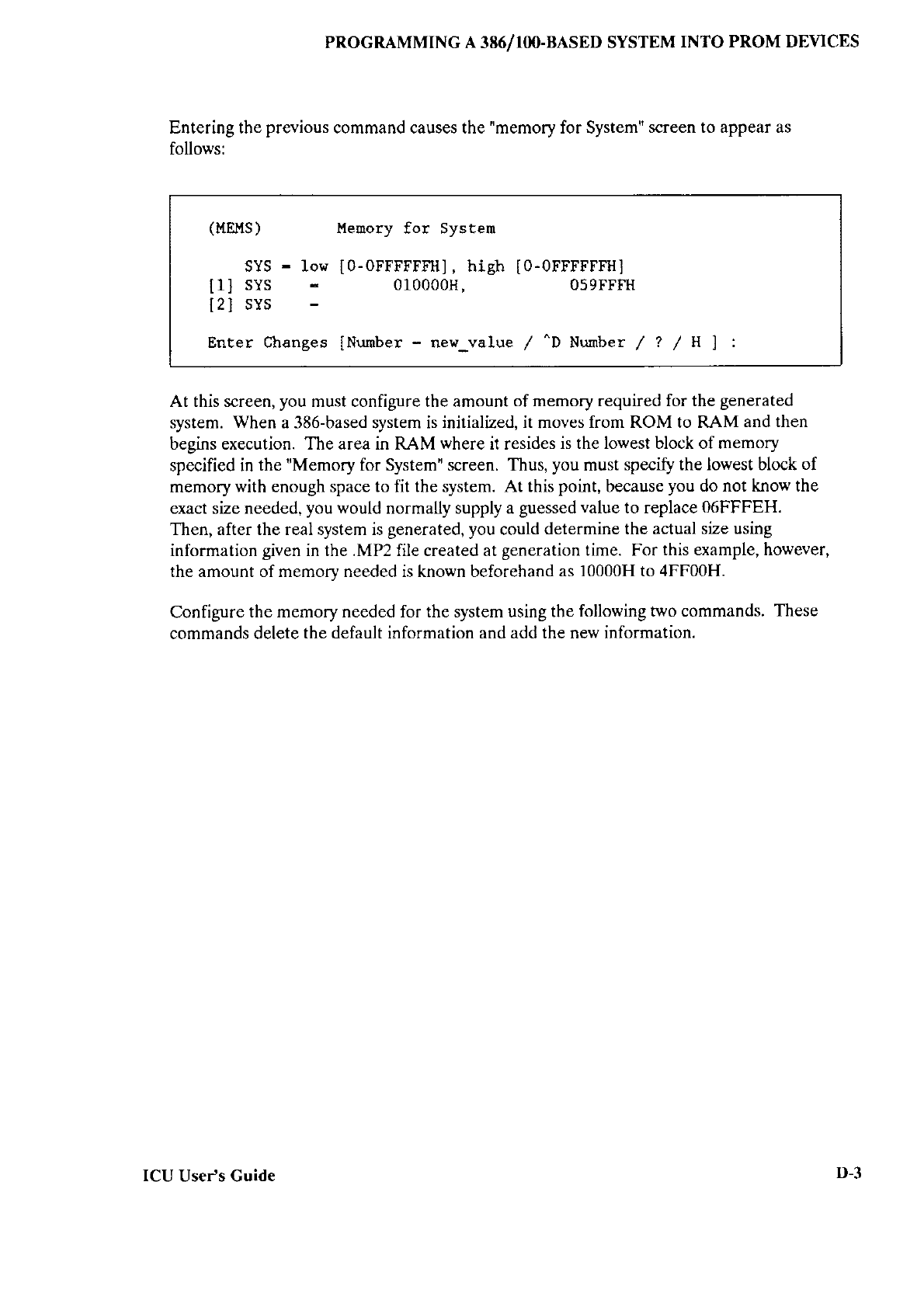
PROGRAMMING A 386/IOO-BASED SYSTEM
INTO PROM DEVICES
Entering the
previous
command causes the
"memory
for System"
screen to appear as
follows:
(tfEMS) Henory for System
SYS
- low I0-OFFFFFFH],
high IO-0FFFFFFH]
lr] sYs = 010000H, 059FFFH
[2 ] sYs
Enter Changes fNumber - new_va]-ue / ^D Nr,nber / ? / H ) |
At this screen,
you
must configure the amount
of memory required for the
generated
system.
When
a 386-based system is
initialized, it moves
from ROM to RAM and then
begins execution. The area in RAM where
it resides
is the lowest block of memory
specified in the
"Memory
for System" screen. Thus,
you
must
speciry the lowest block
of
memory
with enough
space to fit the system. At this
point,
because
you
do not know the
exact size needed,
you would
normally supply a guessed
value
to replace
06FFFEH.
Then, after the real system is
generated, you
could
determine the actual
size using
information
given
in the.MP2 file created at
generation time. For
this example, however,
the amount of memory needed is known beforehand
as 10000H to 4FF00H.
Configure
the memory needed for the system using the
following two commands.
These
commands delete
the default
information
and add the new information.
ICU
Use/s Guide D-3
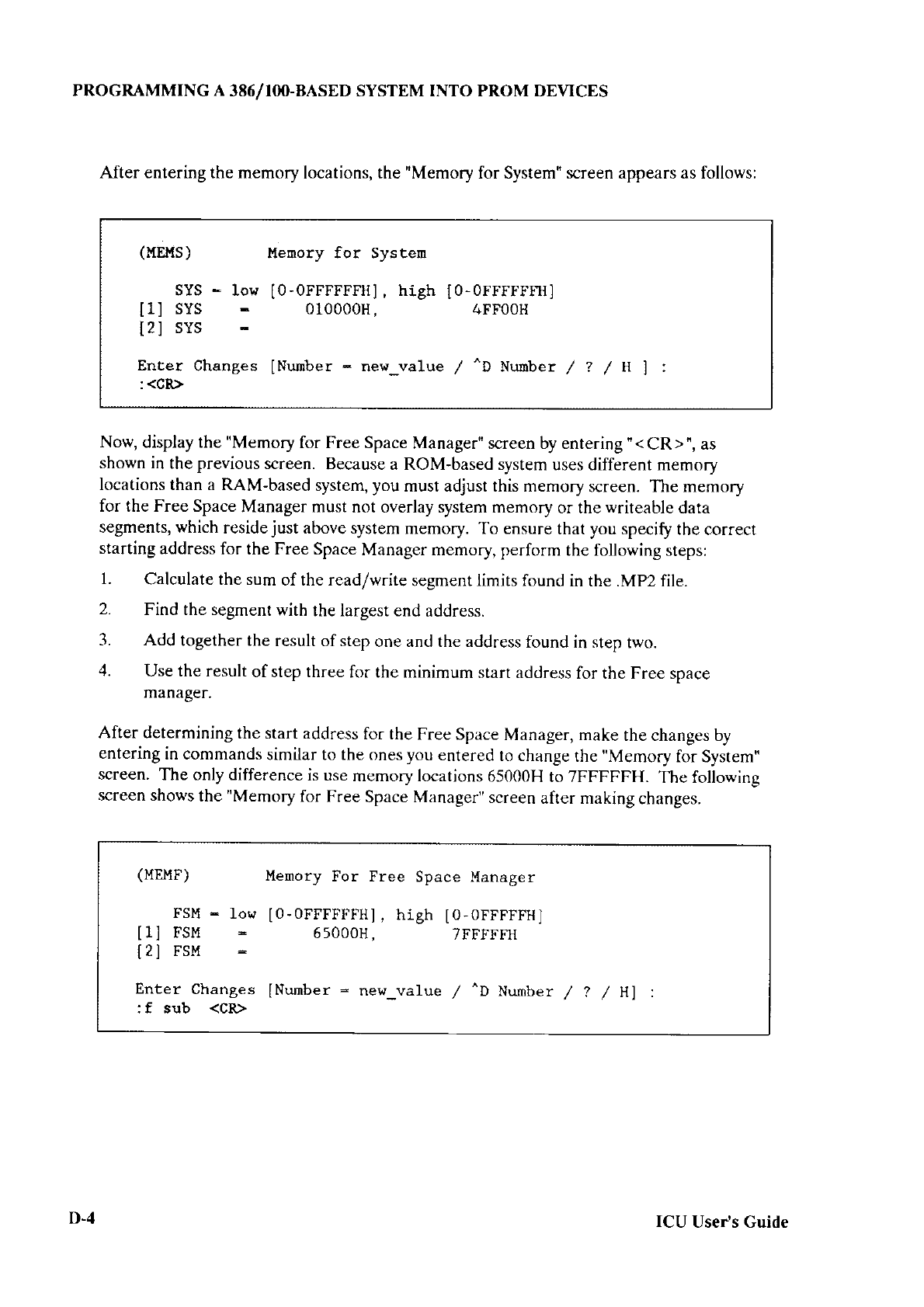
PROGRAMMING A 386/IOO.BASED SYSTEM INTO PROM DEVICES
After entering the memory
locations, the
"Memory
for System" screen appears as follows:
(MElfS) llenory for Systen
SYS
- low |0-OFFFFFFIII
, high |0-OFFFFFFHI
[1] SYS - 010000H, 4FF00H
[2] sYS
Enter Changes [Ntrrrber - new_value / ^D Nurnber / ? / H ) :
:
<Cn>
Now,
display the
"Memory
for Free Space
Manager" screen by entering'<CR>",
as
shown in
the
previous
screen.
Because a ROM-based system
uses different
memory
locations than a RAM-based
system, you
must adjust this memory
screen. The memory
for the Free Space
Manager must
not overlay system memory
or the
writeable
data
segments, which
reside
just above
system memory. To ensure
that you speci! the correct
starting
address
for the Free Space
Manager memory, perform
the following
steps:
1. Calculate the sum
of the read/write
segment iimits found
in the .MP2 file.
2. Find the segment
with
the largest end
address.
3. Add together the
result of step
one and the address
found in step
two.
4. Use the result
of step three
for the minimum
start address
for the Free space
manager.
After determining
the start address
for the
Free Space
Manager, make
the changes by
entering
in commands
similar to the ones you
entered
to change
the',Memory
for System,'
screen.
The only difference
is use
memory locations
65000H
to TFFFFFH.
The following
screen shows
the "Memory
for Free
Space Manager"
screen
after making
changes.
(MEl{f) Menory For Free Spacè Manager
FSl,l
: lor.r [0-oFFFFFFH] , high [0-0FFFFFH]
[1] rsM : 6s000H, TFFFFFH
[2] FsM
Enter Changes [Nurnber
- new_value / ^D Number / ? / H] :
;f sub <CR>
D-4 ICU
Usefs Guide
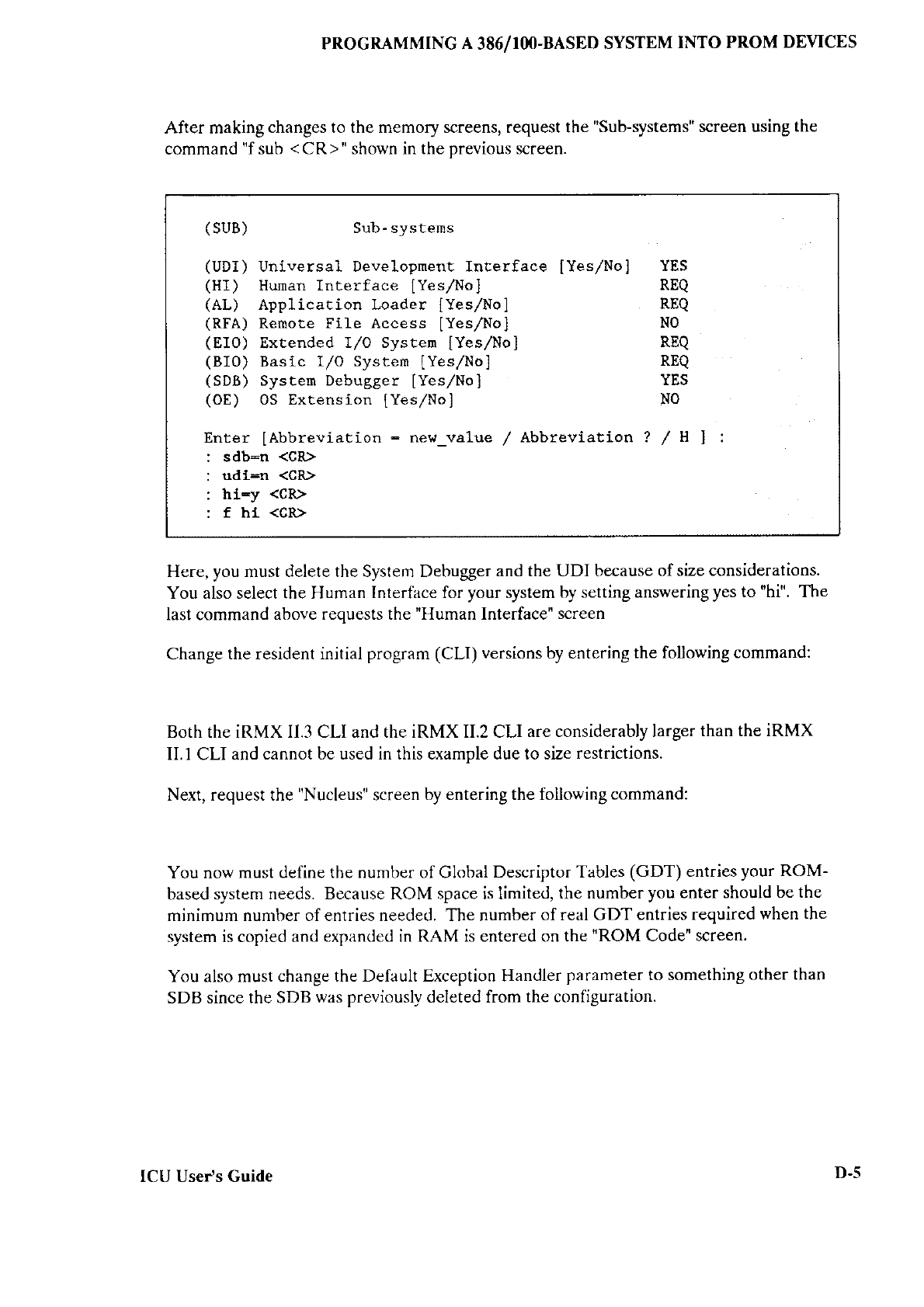
PROGRAMMING
A
386/I()O-BASED
SYSTEM
INTO PROM
DEVICES
After making
changes to the memory screens, request the
"Sub-systems" screen using
the
command
"f sub
<
CR
>
" shown in the
orevious
screen.
(SUB) Sub
-
systems
(UDI) Universal Development Interface IYes/No] YES
(HI) Hurnan Interface [Yes/No] REQ
(AL) Application Loader [Yes/No] REQ
(RFA) Rèmote Filè Accèss [Yes/No] NO
(EIO) Extended I/O Sysrern [Yes/No] REQ
(BI0) Basic l/O Systen [Yes/No] REQ
(SDB) Sysren Debugger [YeslNo] YES
(OE) 0S Excension [Yes/No] NO
Enter lAbbreviation: ner.r-value
/ Abbreviation ? / H ] :
: s
db-n <CR>
: udl:n <CR>
, 11_y <CR>
: f hl <CR>
Here, you must delete the System Debugger
and the UDI because
of size considerations.
You also select the Human
Interface for your
system
by setting ans\trering
yes to "hi". The
last command
above requests the
"Human
Interface"
screen
Change the resident initial
program (CLI) versions by entering
the following command:
Both the iRMX tl.3 CLI and the iRMX II.2 CLI are considerably larger
than the iRMX
II.1 CLI and
cannot be used in this example due to size
restrictions.
Next, request the
"Nucleus"
screen
by entering the following
command:
You now
must define the numtrer of Global
Descriptor Tables
(GDT) entries
your ROM-
based system
needs. Because ROM space is limited,
the number
you enter should
be the
minimum number of entries needed. The number
of real GDT entries required
when
the
system is copied and
expanded in RAM is entered on the
"ROM Code" screen.
You also must
change the Default Exception Handler
parameter to something
other than
SDB since the SDB
was
nreviouslv
deleted from
the confisuration.
ICU Usef s Guide D-5
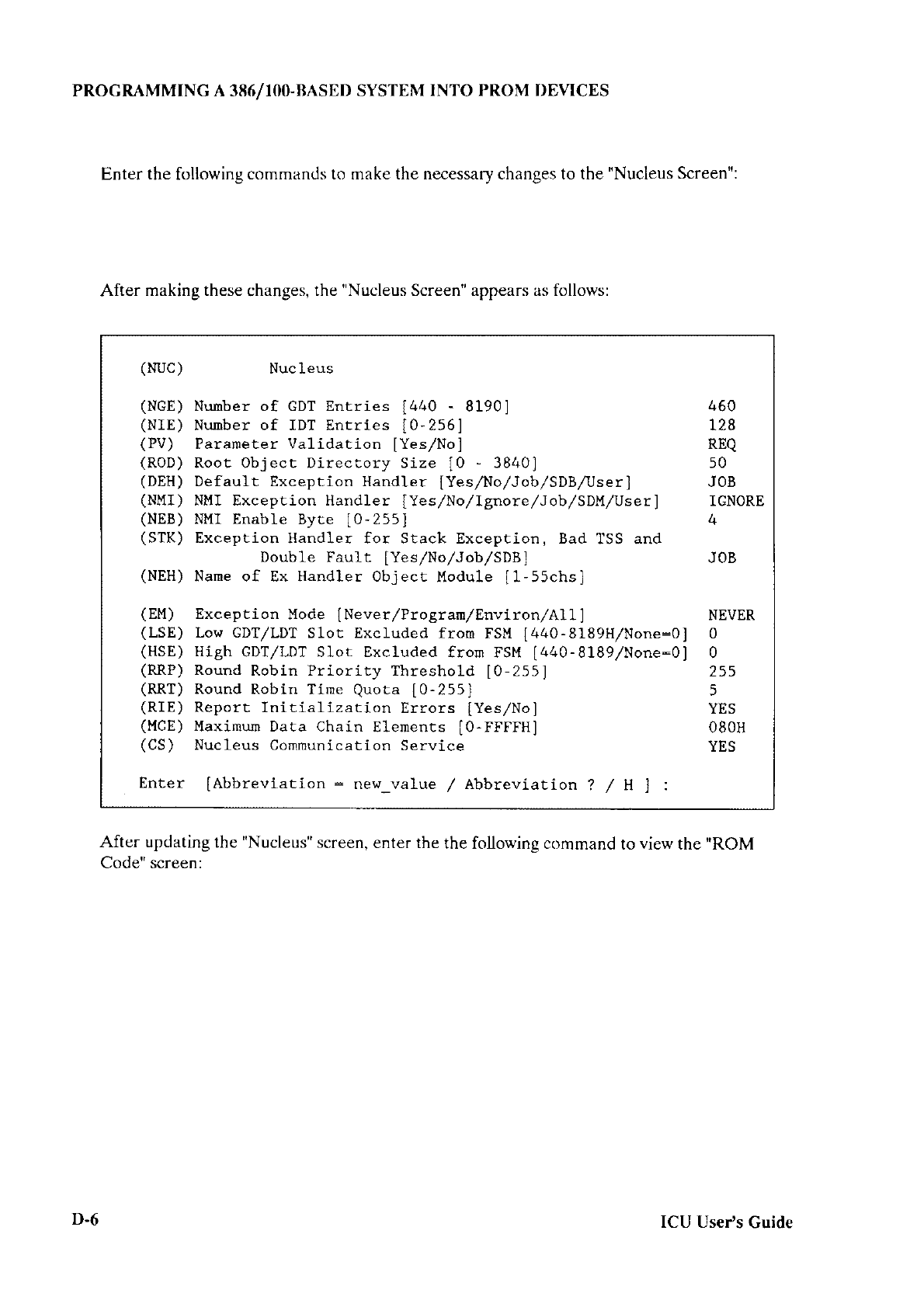
PROGRAMMING A 386/IOO.BASED SYSTEM
INTO PROM I)EVICES
Enter
the
followins
commands to make the necessarv chances to the
"Nucleus Screen":
After making these
changes,
the "Nucleus Screen" appears as follows:
After updating
the "Nucleus"
screen, enter the
the following command
to
view
the "ROM
Code" screen:
(Mrc) Nuc leus
(NGE)
Nunbér of cDT Entries l4zr0 - 81901
(NIE) Nurnber of IDT Entries [0-256]
(PV) Paranèter Validation IYes/No ]
(RoD)
Root object Directory Size l0 38401
(DEH)
Default Exception Handler IYesrî.lolJob/SDB/Use
r ]
(NflI) NMI Exception Handler IYes/No/I gnore/J ob/SDM/User
]
(NEB)
NMI Enable Byte l0-2551
(STK) Exception Handler for Stack Exception, Bad TSS and
Double Fault IYe
s/No/Job/SDB
]
(NEH)
Name of Ex Handler Object Module [1-55chs]
(EM) Exeeption Mode lNever/Prograrn/Envi. ron/Al1 l
(LSE) Low GDT/LDî
Slot Excluded from FSM
1440-8189H/None:01
(HSE)
High CDT/LDT Slot Excluded frorn FSM
[440-8189/None-0]
(RRP)
Round
Robin Priority Threshold [0-255J
(RRT)
Round
Robin Time Quota [0-255]
(RIE) Report lnitíalization Errors lYes/Nol
(MCE)
Maxirnun Data Chain Elernents [0-FFFFH]
(CS
) Nucleus Communication
Service
Enter [Abbreviatíon: new_value / Abbreviatioa ? / H ] :
460
r28
REQ
50
JOB
IGNORE
4
JOB
NEVER
0
0
255
5
YES
080H
YES
D-6 ICU User's
Guide
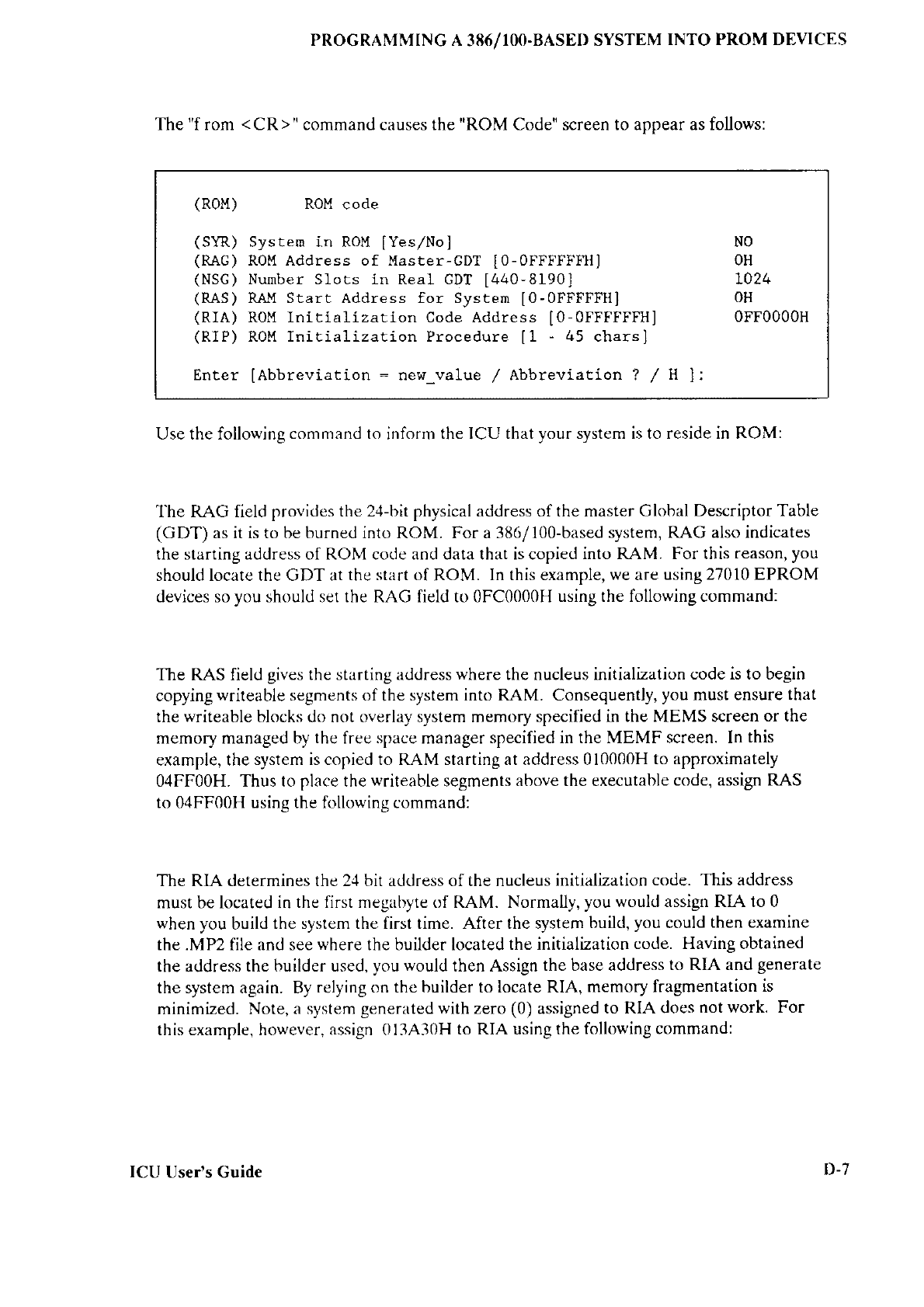
PROGRA]\,IMING A
38ó/1OO-BASED
SYSTEM
INTO PROM DEVICES
The
"f
rom <CR>" command causes the
"ROM
Code" screen to appear as follows:
(ROM) ROM
code
(SYR) Systern in ROM
[Yes/No] N0
(RAC)
ROM Address of Mastèr-cDT [0-OFFFFF!!] 0H
(NSG)
Number Slots in Real GDT
[440-8190] L024
(RAS)
RAM Start Address for Systern
IO-OFFFFFH] 0H
(RIA) ROM InitialÍzation Code Address [0-0FFFFFFH] 0FF0000H
(RIP) ROM lnitializatíon Procedure
[1 - 45 chars]
Enter [Abbreviation : new_value
/ Abbreviation ? /H):
Use the followinq
command to inform the ICU that
vour system is to reside in ROM:
I'he RAG field
provides the 2.1-bit physical a<ldress of the master
Global Descriptor Table
(GDT) as it is to be burned into ROM. For a 386/100-based
system, RAG also indicates
the starting address of ROM code and data that is copied
into RAM. For this
reason, you
should locate the GDT at
the start of ROM. ln this example,
we
are
using 27010 EPROM
devices so
you
should set the RAG field to 0FC0000H
using the following command:
The RAS field
gives
the starting address
where
the nucleus initialization
code is to begin
copying
writeable segments of
the
system into RAM. Consequently,
you must ensure that
the
writeable
blocks do not overlay system memory
specified in thc MEMS screen
or the
memory managed by
the
free
space
manager
specified in the MEMF screen. In this
example, the
system is copìed to RAM starting at address 010000H
to approximately
04FF00H. Thus to
place
the
writeable
segments
above the executable
code, assign RAS
to 04FF00H using the following command:
The RIA determines the 2,1 bit address of the nucleus
initialization
code. This address
must be located in
the first megabyte of RAM. Normally,
you would assign RIA to 0
when
you
build
the system the first time. After the system
buiìd,
you
could
then examine
the .MP2 file and see
where
the builder located
the initialization
code. Having obtained
the address
the builder used,
you would
then Assign
the base address
to RIA and
generate
the system again. By
relying on the builder to locate RIA,
memory fragmentation
is
minimized. Note, a
system generated with zero
(0)
assigned
to RIA does
not work. For
this example, however, assign 0l3A30H
to RIA using the
following command:
ICU
User's Guide D-7
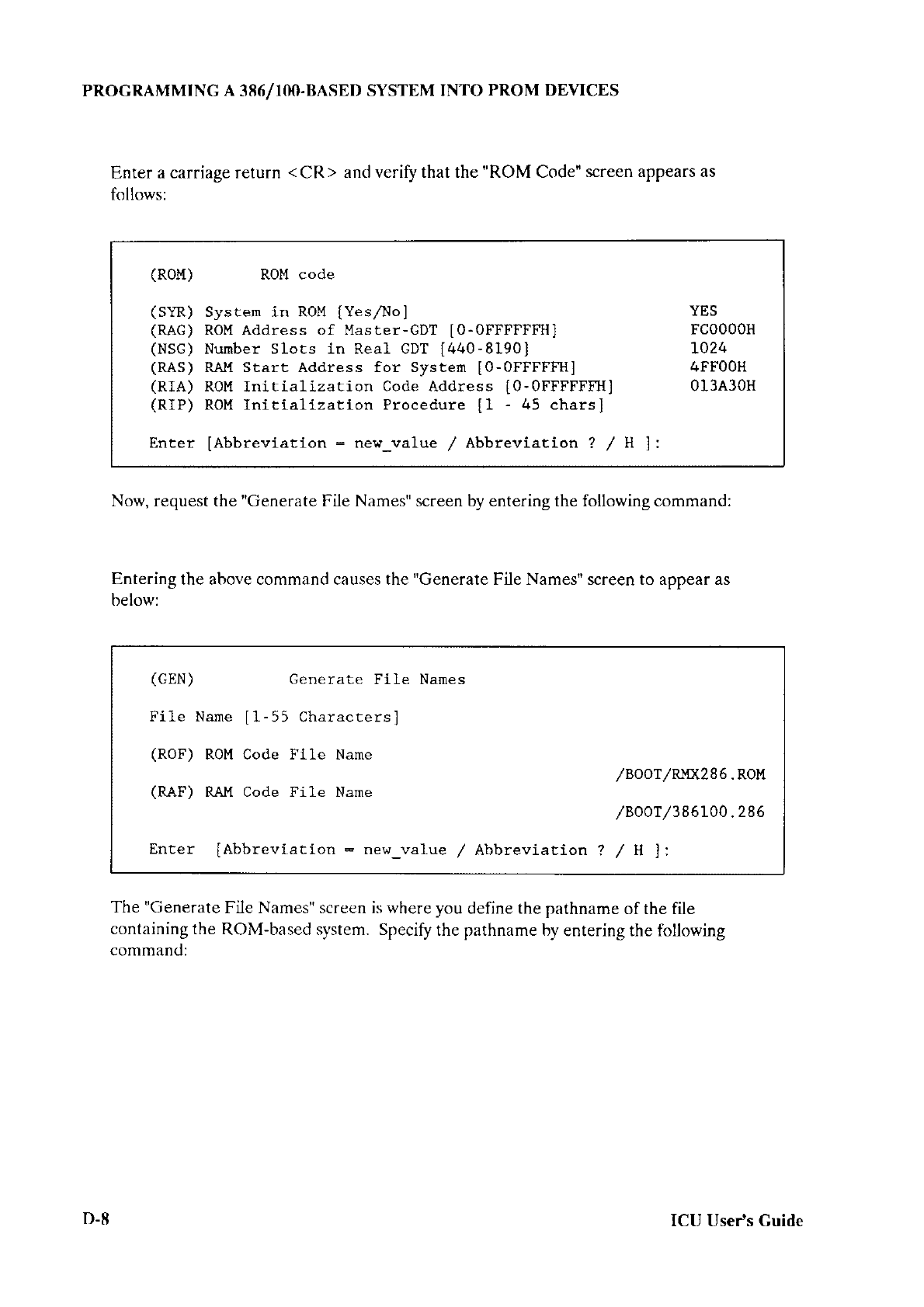
PROGRAMMING
A
386/IOO.BASED
SYSTEM INTO
PROM DEVICES
Enter
a carriage return
<CR> and verify that the
"ROM Code"
screen appears as
follows:
(ROl'f
) ROM code
(SYR) Systen in ROM
(Yes,rNol YES
(RAC)
ROM Address of Master-CDT IO-0FFFFFFH] FC0000H
(NSG)
Nurnber
Slots in Real cDT [440-8190] LO24
(RAS) RAl{ Start Address for Sysien [0-0FFFFI1i] 4FF00H
(RIA) ROM Initializacion Code Address I0-oFFFFFFH] 0l3A30H
(RlP) ROM lnitialízation Procedure [1 - 45 chars]
Enter [Abbrevíation: new_va1ue
/ Abbrevlation ? / H l:
Now, request the "Generate File Names" screen by entering the following command:
Entering
the above command causes the "Generate File Names" screen to appear as
below:
(GEN) cenerate Flle Names
File Narne
[1-55 Characters]
(ROF) ROM Code Flle Narne
/Boor/Rro(286
. Rou
(RAF) RAM Code File Nane
/ROOî/386100.286
Enter [Abbreviation - new_value ,/ Abbreviation ? / H ]:
The "Generate
File Names" screen is where you
define the pathname
of the file
containing the
ROM-based system. Specify
the pathname by
entering the following
command:
D-8 ICU UseCs Guide
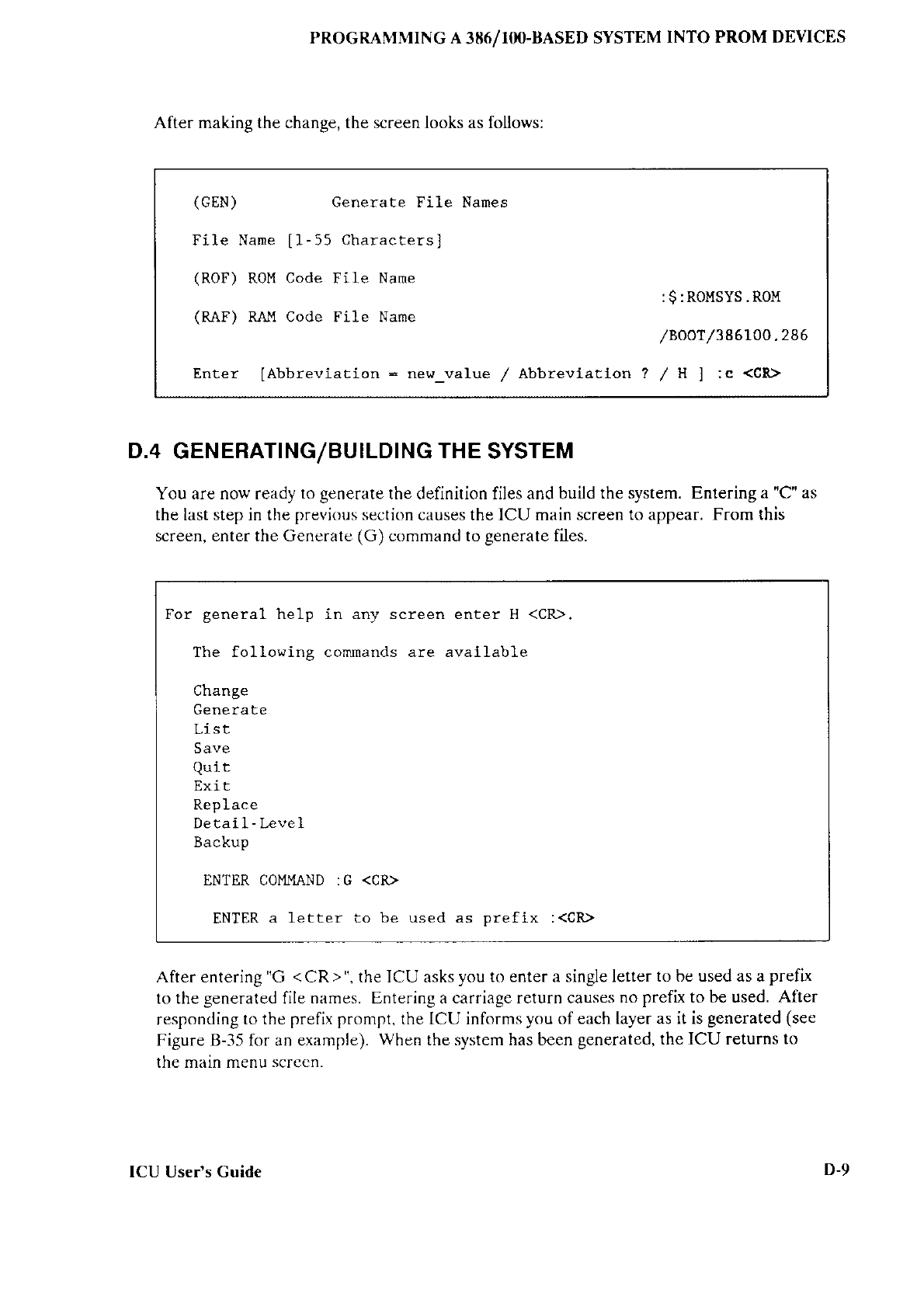
PROGRAMMING A
3Iì6/TM-BASED
SYSTEM
INTO PROM DEVICES
After making the change, the screen looks as follows:
(GEN) Generate File Narnes
Fíle Narne
[1-55 Characters]
(ROF)
ROM Code FiLe Name :$:Rol,tSYS.RoM
(RAF) RAI'! Code File Name
/Roo"t/386100
.286
Enter [Abbreviatíon: new_value / Abbreviacion ? / H ] :c <CR>
D.4
GENERATING/BUILDING
THE
SYSTEM
You are now ready
to generate
the definition files and build
the system. Entering a'C" as
the last step in the
previous section
causes the ICU main
screen to appear. From this
screen, enter the Generate
(G)
command to generate files.
For general help in any screen
The following commands are
Change
Generate
Save
Qul
t
Exi t
Replace
Detail-Level
Backup
ENTER CoMMAND :G <CR>
ENTER
a Ìetter to be used
enter H <CR>.
avallable
as preflx :(CR)
After enterìng "G <CR>", the ICU asks
you to enter a single letter
to be used as a
prefix
to the
generated
file
names.
Entering
a carriage reîurn causes
no prefix to be used.
After
responding
to the
prefix prompt,
the ICU informs
you of each layer as it is
generated (see
Figure B-35 for an example).
When the system has been
generated, the ICU returns
to
the main menu
scrce n.
ICU
User's
Guide D-9
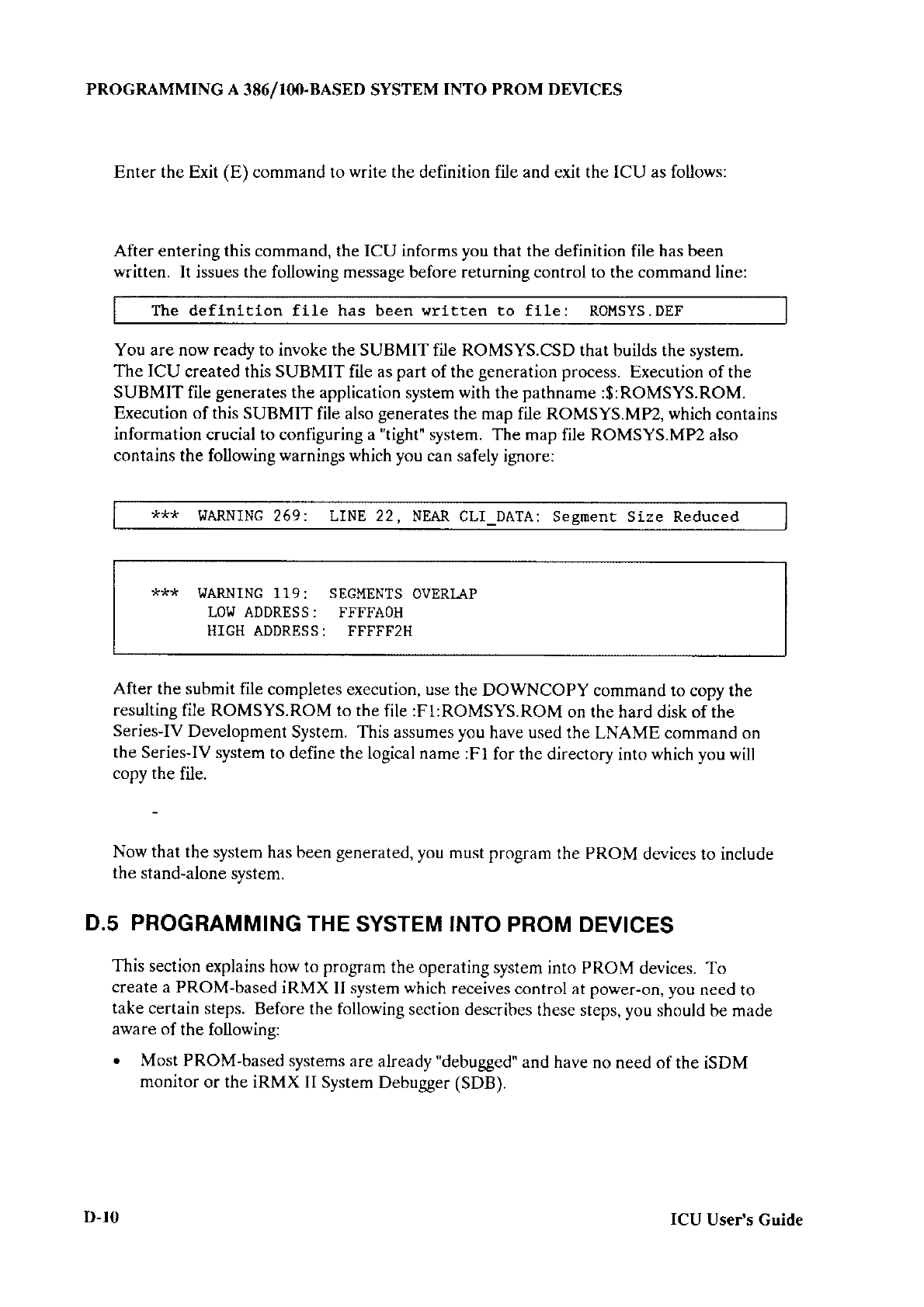
PROGRAMMING A 386/1OO.BASED SYSTEM
INTO PROM DEVICES
Enter the Exit
(E)
command to
write
the definition file and exit the ICU as follows:
After entering this command, the ICU informs you that the definition
file has been
written. It issues the following message before returning control to the command line:
The deflnltlon flle has been wrltten to flle; ROI,ISYS.DEF
You are now ready to invoke the SUBMIT
file ROMSYS.CSD that builds the system.
The ICU created this SUBMIT file as
part
of the
generation process.
Execution
of
the
SUBMIT file
generates
the application
system
with
the
pathname
:$:ROMSYS.ROM.
Execution of this
SUBMIT file also
generates
the map file ROMSYS.MP2, which
contains
information
crucial to configuring a "tight" system. The
map file ROMSYS.MP2 also
contains the following
warnings
which you can
safely ignore:
*** IIAIINING 269: LINE 22, NEAR CLI DATA: Sesnent Size Reduced
LIARNING 119:
LOW ADDRESS
:
HIGH ADDRESS
:
SEGMENTS
OVERI^AP
FFT'FAOH
FFFFF2H
After
the submit file
completes execution, use
the DOWNCOPY
command to copy the
resulting
file ROMSYS.ROM to the
file :F1:ROMSYS.ROM
on the hard disk of the
Series-IV
Development
System. This assumes you
have used the
LNAME command on
the
Series-IV system
to define the logical name
:Fi for the directory
into
which you
will
copy the
file.
Now that the
system has been generated,
you must program
the PROM
devices to include
the
stand-alone system.
D.5 PROGRAMMING
THE
SYSTEM
INTO
PROM DEVICES
This
section explains
how to
pro$am
the operating
system into PROM
devices. To
create a PROM-based
iRMX II system which receives
control at power-on, you
need
to
take
certain steps.
Before the following
section describes
these steps, you
should be made
aware
of the following:
. Most PROM-based
systems
are already "debugged"
and have
no need of the
iSDM
monitor
or the iRMX II System Debugger (SDB).
D-IO ICU
User's Guide
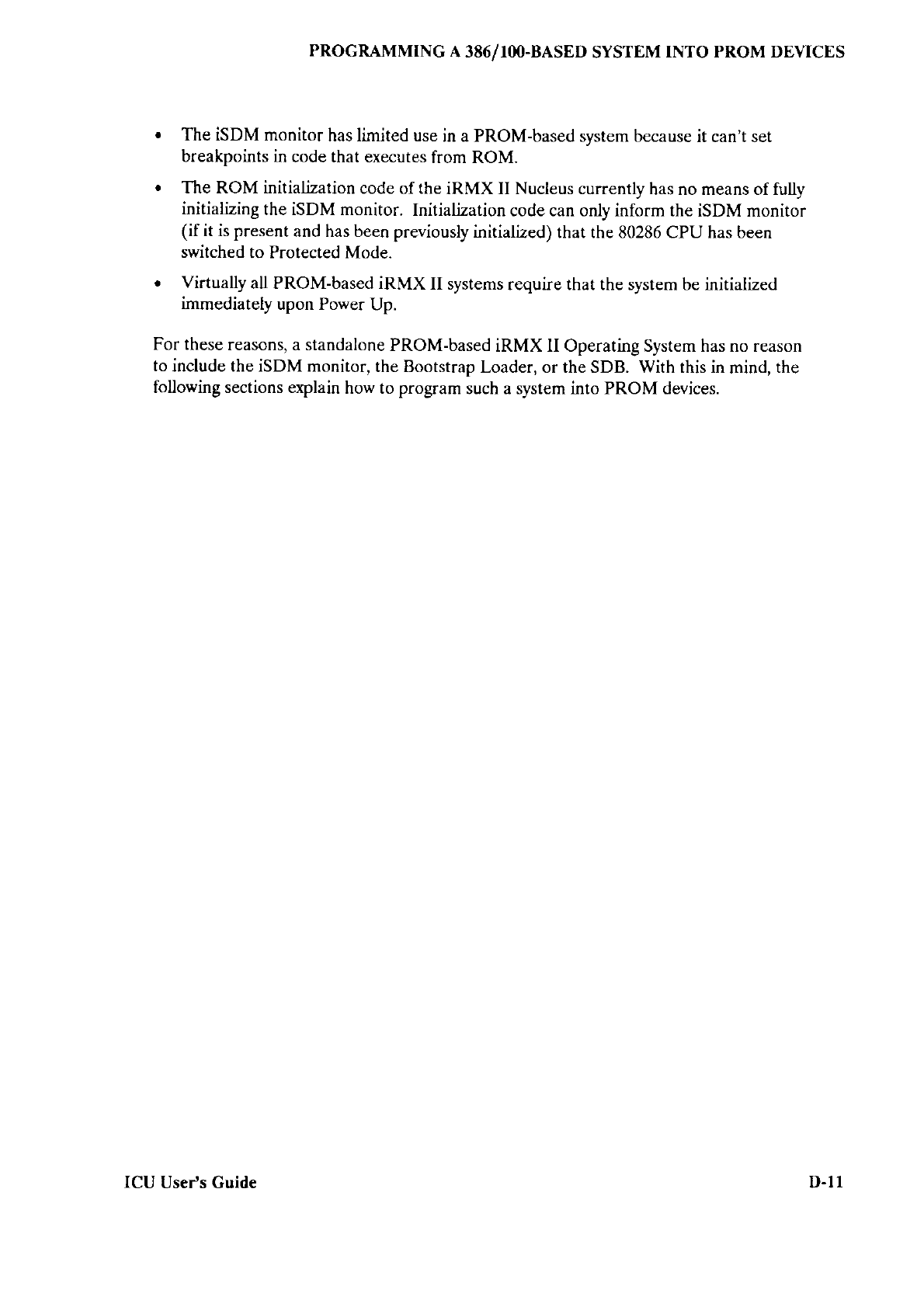
PROGR.ÀMMING
A 38ó/TOO-BASED
SYSTEM
INTO PROM DEVICES
. The iSDM monitor
has limited use
in a PROM-based system because
it can't set
breakpoints in
code that executes
from ROM.
. The ROM initialization
code of the
iRMX II Nucleus currently
has no means of fully
initializing
the iSDM monitor.
Initialization
code can only inform the
iSDM monitor
(if it is present
and has been
previously initialized)
rhat the 80286 CPU has been
switched
to Protected Mode.
o Virtually all PROM-based iRMX II systems
require that the system be initialized
immediately
upon Power
Up.
For these
reasons, a standalone
PROM-based
iRMX lI Operating System has no reason
to
include the iSDM monitor,
the Bootstrap
Loader, or the SDB. With this in
mind,
the
following sections explain
how to program
such a system into PROM devices.
ICU
Usefs Guide D-I1
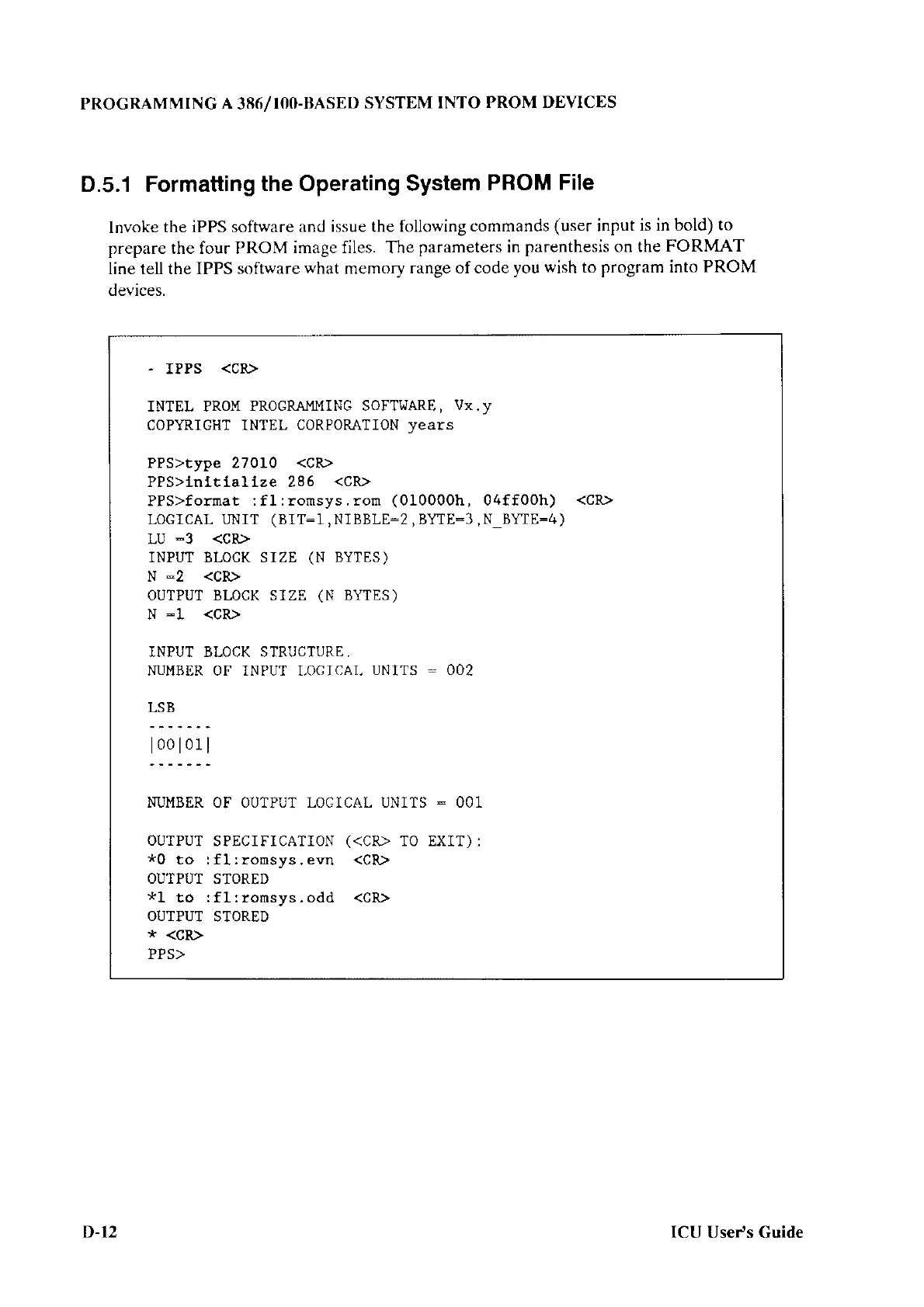
PROGRAMMING
A
386/IOO-IìASED
SYSTEM
INTO
PROM DEVICES
D.5.1 Formatting
the Operating System
PROM
File
lnvoke
the iPPS software
and issue the folÌowing
commands
(user
input
is in bold)
to
prepare
the four PROM
image files. The
parameters
in
parenthesis on the
FORMAT
line tell the IPPS
software
what
memory
range of code
you wish to program into
PROM
devices.
. IPPS <CR>
INTEL PROM
PROGRAI"IMING SOFTWARE,
Vx.y
COPYRIGHT INTEL CoRPORATION
years
PPS>type 27010 <CR>
PPs>lnltiallze 286 <cR>
PPs>fornat : fl :
ronsys
. ron (010000h, 04ff00h) <cR>
LOGICAL UNIT (BIT:1,NIBBLE:2,
BYTE:3,N_B\"IE:4)
LU -3 <CR>
INPUT BLOCK SIZE (N BYTES)
N *2 <CR>
OUTPUT BLOCK SIZE (N BYTES)
N :l <cR>
INPUT BLOCK STRUCTURE.
N'IÌHBER OF INPUT I,OC]CAI,
UN1TS: OO2
LSB
loo lol l
NUMBER OF OUTPUT
LOGICAL
UNITS : OO1
OUTPUT
SPECIFICATION
(<CR>
TO EXIT):
*0 to :fl: romsys. evn <CR>
OUTPUT STORED
*l- to : fl: ronsys. odd <cR>
OUTPUT
STORED
* <cR>
PPS>
D-12 ICU
Use/s Guide
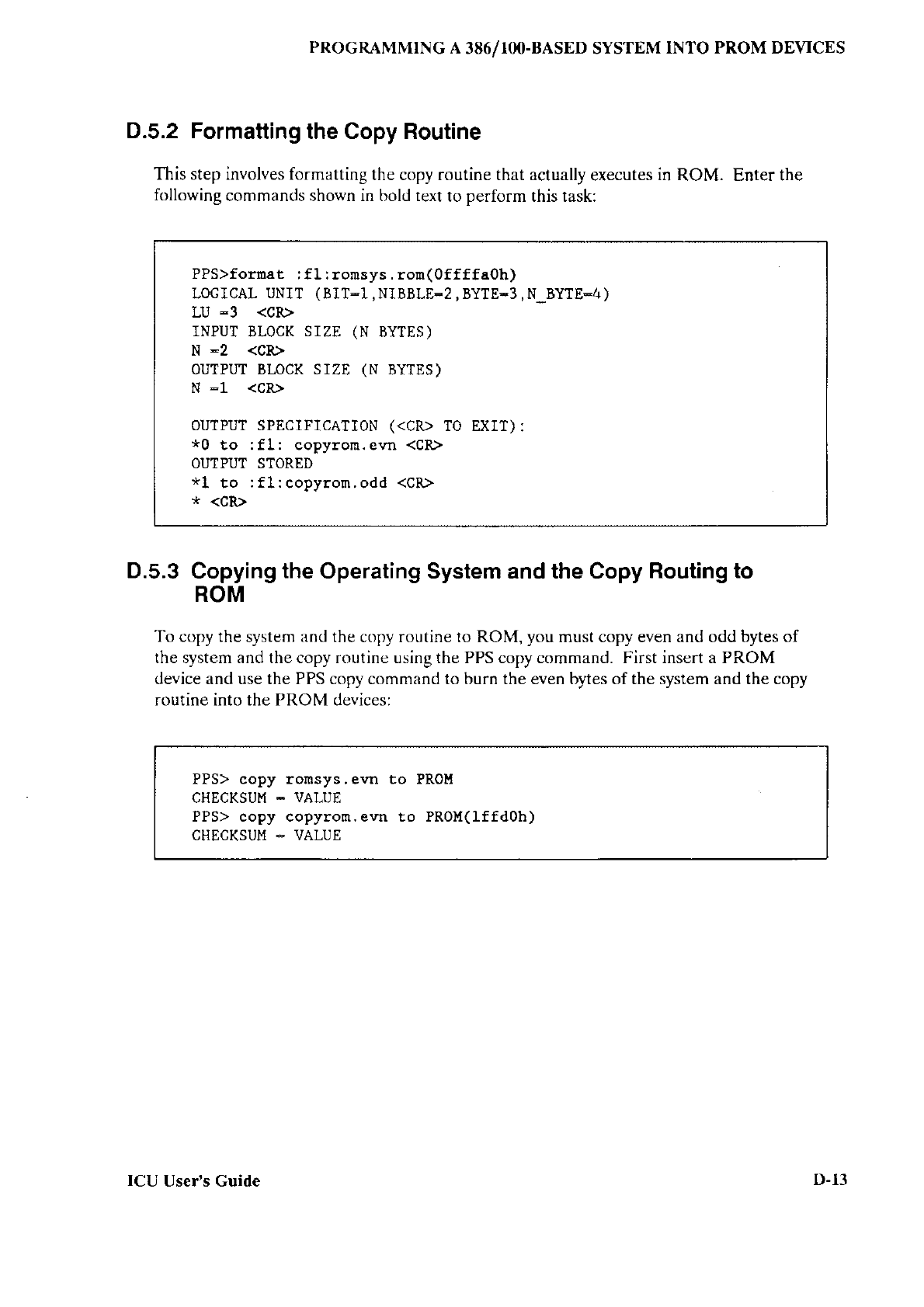
PROGRAMMING
A
386/TOO-BASED SYSTEM
INTO PROM DEVICES
D.5.2 Formatting
the Copy Routine
This step involves formatting
the copy routine that actually
executes
in ROM. Enter the
following
commands shown in bold text
to
perform
this task:
PPs>fornat : f I : romsys. ron(0ffffaoh)
LOG]CAL
UN]T (
BIT:1 ,
NIBBLE-2
,
BYTE-3
,
N-BYTE:4
)
LU -3 <CR>
INPUT
BLOCK
SIZE (N BYTES)
N :2 <CR>
OUTPUT BLOCK SIZE (N BYTES)
N -1 <CR>
ouTPùT SPECÌFICATIoN
(<CR>
TO EXIî):
*0 to :fl: copyron.evn <cR>
OUTPUT STORED
*1 to :
fl: copyron. odd <CR>
* <cR>
D.5.3
Copying
the
Operating System and the Copy
Routing to
ROM
To copy the
system
and the
copy routine to ROM,
you
must copy even and odd bytes of
the system and the copy routine using the PPS copy command. First insert a PROM
device and use the PPS copy command to burn the even bytes of the system and the copy
routine into the PROM devices:
PPS> copy romsys.evn to PROU
CHECKSUM
_ VALUE
PPS> copy copyron. evn to PROU(lffdOh)
CHECKSUM
_ VALUE
ICU Uset's Guide D.I]
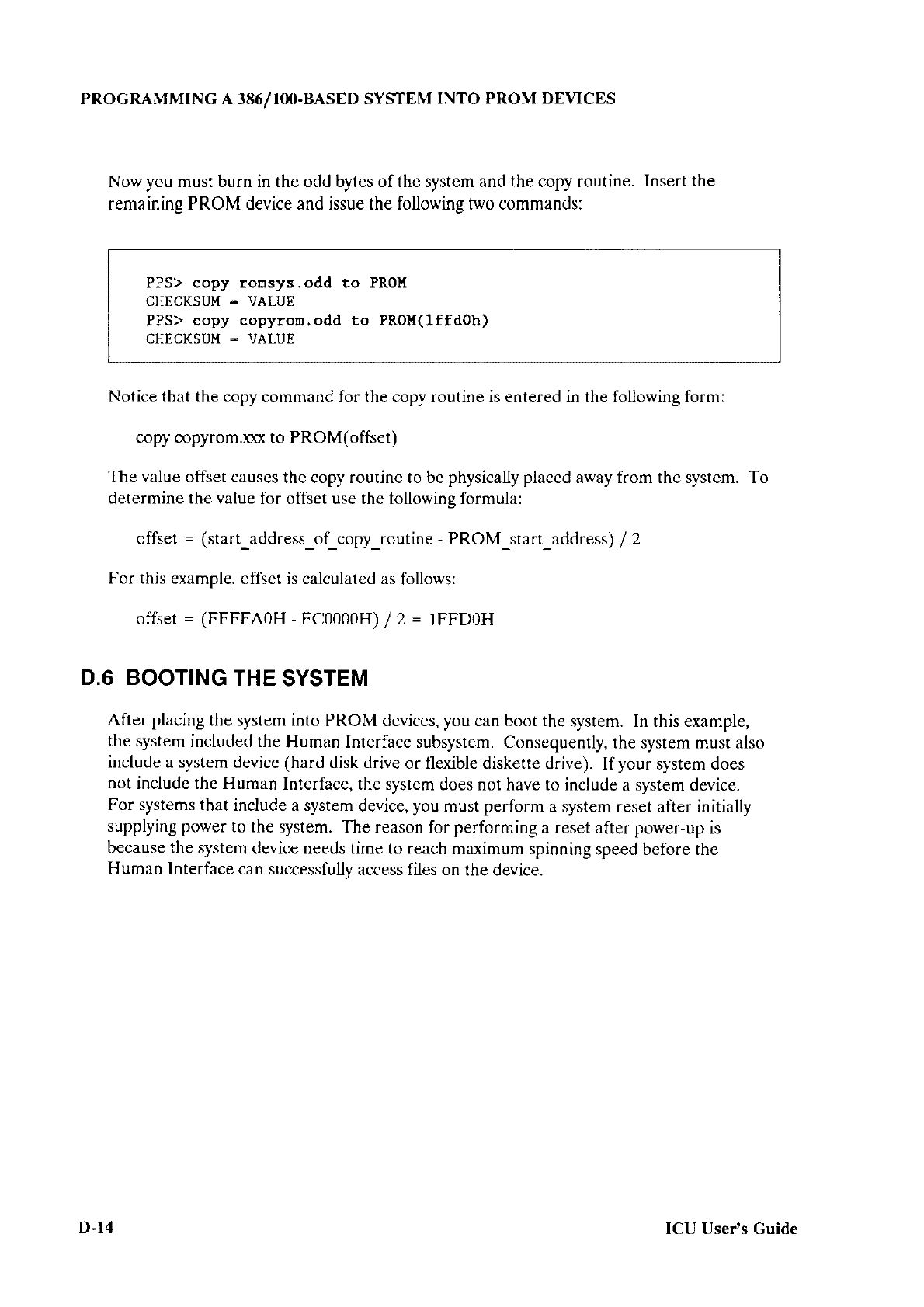
PROGRAMMING A 3116/I(n.BASED SYSTEM
INTO PROM DEYICES
Now
you
must burn in the odd bytes of the system and the copy routine.
Insert the
remainins PROM device and issue the folìowins two commands:
PPS> copy ronsys.odd to PRoX
CHECKSUM
' VALUE
PPS> copy copyrou, odd ro PRolr(l,ffd0h)
CHECKSUM
- VALUE
Notice that the copy
command for the copy routine is entered in the following form:
copy copyrom.)oo( to PROM(offset)
The value offset causes
the copy routine to be
physically placed
away from the system. To
determine the value
for offset use the following formula:
offset
= (start_address_of_copy_routine
- PROM_start_address)
/ 2
For this
example, offset is calculated as
follows:
offset
= (FFFFAOH
- FC0000H)
/ 2 = IFFD0H
D.6 BOOTING
THE
SYSTEM
After placing
the system into
PROM devices, you can boot the
system. In this example,
the system
included the
Human Interface subsystem. Consequently,
the system must also
include a system
device
(hard
disk drive
or llexible diskette drive).
If your
system does
not
include the Human
Interface, the system
does not have to include
a system device.
For systems that
include a system
device, you must perform
a system reset after initially
supplying power
to the system.
The reason for performing
a reset after power-up
is
because
the system
device needs time to reach
maximum spinning
speed before the
Human Interface
can successfullv
access files on the device.
D-14 ICU Use/s Guide
PROGRAMMTNG
A 38ó/lOO-BASED SYSTEM
INTO PROM DE!'ICES
D.7
CONSIDERATTONS FOR A
386/20-BASED
SYSTEM
If the system
you
are building is going
to run on a 38ó/20-based machine,
some
configuration differences exist.
The following list summarizes these differences:
. Because ROM is mapped to the lower megabyte of memory
when
the system is in real
mode,
you
must supply a different ROM address for the master Global Descriptor
Table in the
"ROM Code" screen. Assuming
your
system uses 27010 EPROM devices,
supply a
value
of 0C0000H for the RAG field in the
"ROM Code" screen during
configuration. This
value
causes the GDT to be
placed
at the start of ROM.
o You must configure the Initialize
On-board Functions
(IF) field in the "Hardware"
screen to 3 rather than 4. The
value
3 indicates the
board beins initialized is an iSBC
386/20
board.
ICU Uset's Guide D-r5

INDEX
A
Abbreviated screen
names l- 1o
Aborting ICU commands
l-24
Access rights to definition
files 1-7
Adding a RAM driver B-21
Adding an Intel-device driver B-15
Adding an Intel-supplied controller 8-6
Adding new device drivers
1-45,
46, 47
Adding
unit information B-10, 18
Adding users to your
system 4-l
Application code 3- I
Application
jobs 3-l
ASCII
backup files 1-23
Assembling configuration
files 2-4, B-34, D- 10
B
Backup
command l-23
Binding application
jobs 3-4, 7
Binding the subsystems 2-4,8-34. C-8, D-10
BND286 3-4
Bootstrap loading a system B-4[]
Bootstrap Loader inclusion C-v
Build files 1- 18
Building application
jobs 3-4, 7
Building the system 2-5, B-34, C-8, D- 10
c
Change
command 1-16, 25, B-41, C-2, D-2
Changing definition files l-17,
29
Changing the editing control
character 1-21
Changing system memory
B-29, C-2, D-2
Choosing a definition file 1-7
Code segment
size 3-8
Command mode 1- 14
ICIJ
Usefs
Guide Index-l
INDEX
Commands
Backup 1-23
Change 1- 16, B-41, C-2, D-2
Detail-level l-22
Exit l-27,2-1,B-34
Generate 1-18,2-1, B-32,44, C-8, D-9
Help 1- 15
List 1-19,2-l,B-44
Quit 1-20
Replace
1-21
Save 1-19,2-1
Communication board
3-3
Configuration
Environments 1-4
Files 2-2,
3, A-l
Generating fiìes 2-1
Configuring users into your system 4-l
Control-C
1-24
Conventions
iv
Copy routine D-13
Copying the
current screen 1-33,34
Creating build and submit
files 1- 18
Creating directories for your systems
1- 10, C-2, D-2
Creating systems
that activate on power-up
C- 16
D
Data segnent
size 3-8
Debugging
application
jobs 5-6
Definition file 1-1,7,
B-1, C-8, D-10
Deleting
a repetitive-fixed
screen 1-38
Deleting
a screen 1-33,
38
Deleting
an element 1-33,34,
35
Deleting
data on a repetitive screen format 1-35
Determining memory
locations 3-3, 6
Displaying
the next screen 1-33, 34
Displaying
the previous
screen 1-33
E
Editing
a screen
1-29, 32,8-6,7
Editing
control character
1-21
Editing
definition files 1-17, 25
Elements
of a screen 1-26
Eliminating excess
space 3-6, B-41
Index-2 ICU
Uset's Guide
Ending an ICU session
1-20, 21
Errors
Assembling the configuration
files 2-6
Binding
the system 2-6
Building the system
2-6
ICUMRG I-49
Insufficient access rights
for the definition file 1-8
Interactive 1-42
Internal 1-43
Invocation 1-12
System initialization 5-3
Type of 1-42
Examples
Adding a RAM driver B-21
Adding an Intel-device driver
B-15
Adding
an Intel-supplied controller
B-6
Adding unit information
B-10, 18
Assembling configuration
files B-34
Binding the subsystems
B-34
Bootloading a system B-40
Building the system
B-34
Changing system
memory B-29,
C-2,D-2
Configuration C-2,
D-2
Deleting a
repetitive fixed screen
1-38
Deleting data on a
repetitive screen format 1-3ó
Deleting the System Debugger
from the system C-4, D-5
Deleting the UDI from the system
D-5
Editing a screen 8-6, 7
Formatting the copy
routine D-13
Formatting the operating system
PROM file C-11, 17, D-12
Generate 2-2, B-32,44,
C-8, D-9
ICUMRG 1.48
Inserting a repetitive-fixed
screen
1-42
Inserting data on a repetitive
screen format 1-37
Invoking the ICU 1-9, 10,
B-4
List command B-44
Loading a system into
RAM B-40
Memory adjustments
to include the Bootstrap Loader C-3
Memory adjustments
to include the iSDM" monitor C-3
Memory
for Free Space Manager Adjustments C-4, D-4
Memory map for 80286-based
system A-3, B-28
Programming a 286-based system
into PROM devices C-1
Programming a 386/100-based system into PROM devices D-l
INDEX
ICU
Use/s Guide Index-3
INDEX
Examples
(cont.)
Programming a 386/20-based
system into PROM devices D-15
Programming
PROM devices C-10, D-10
Programming
the Bootstrap Loader
into PROM devices C-14
Programming the iSDM" monitor into PROM devices
C-13
Programming the
operating system into PROM
devices C-12, lu, D-13
Removing
device drivers C-5
Starting the operating system in ROM C-21
Starting the operating system in ROM from
the iSDMa* monitor C-15
System configuration B-l
Exit command 7-25,2-1, B-34
F
File locations 1-2
File version numbers
1-12,44,46
Files of the ICU l-2, 5, 6, 2-3, A-1
Finding a screen 1-33, 34
Fixed screen formats
1-30
Formatting the copy
routine D- 13
Formatting the
operating
system
PROM file C-11, 17,D-12
Formats of screens 1-30
G
General ICU use 1-3
Generate command
1-18, 2-1,B-32,44, C-8, D-9
Generated files 2-3, A- 1
Generating
configuration fiìes 2-1, C-8, D-9
Generating the system
2-1, B-31
Getting
help l-15, 30, 33, 34
H
Hardware
requirements l-4
Hardware
screen 1-28
Help command
1- 15, 30
Help
for special editing commands
1-33, 34
How to choose
a definition
file l-7
I
I2ICE" In-Circuit Emulator
5-ó
ICU flowchart
1-39
ICUMRG Utiliry 1-45
Include
files 3-2
Index-4 ICU User's
Guide
Including
the Bootstrap
L,oader C-9
Including the iSDM" monitor C-9
Initialization routine
3-8
Initializing your
system
5-1
Inserting a new line 1-33,34,37
Inserting a
new screen 7-33,34,42
Inserting
a repetitive-fixed screen 1-42
Inserting
data on a repetitive screen
format 1-37
Intel-supplied definition files 1-7
Interactive errors 1-42
Interface libraries 3-5
Internal errors 1-43
Invocation errors 1-12
Invoking the ICU 1-9,
10, 11, B-4
ISDM* monitor
inclusion C-9
L
Language requirements when
writing application
cocle 3-2
Level of detail for screens
1-22
List command 1-19,2-1,
B-44
Listing
a definition file 1-19
I-oading
the system into RAM 5-1, B-40
Location of ICU files 1-2
l-og-file 1-45
l,ogical
flow of the ICU 1-39
M
Main menu screen 1-14,
B-5
Manual overview iii
Memory locations 3-3, 6,
B-29
Minimizing memory address size
3-6, B-41
N
Naming ICU-generated files l-1I
Non-resident
users 4-1
P
Parts
of
a screen 1-26
Pre-configuration requirements 1-4
Prefix option 1-11,2-3
Preparing a RAM-based system 3- 1
Preparing application code 3-l
INDEX
ICU Uset's Guide lndex-5
INDEX
Product overview 1- 1
Programming PROM devices
C-1, 10, D-10
Programming the Bootstrap
I-oader into PROM devices C-14
Programming the iSDM" monitor
into PROM devices C-13
Programming the
operating system into PROM devices C-18, 12, D-13
o
Quit
command 1-20
R
RAM disk driver 3-3
RAM-based systems 3-1
Reader level iii
Redisplaying the current screen 1-33,34
Repetitive
screen formats 1- 30
Repetitive-fixed screen formats 1-31
Replace command
1-21
Resident user 4-1
Restoring from af e 113,23,44
Returning to command mode 1-33, C-7,
D-9
ROM-based systems
3-7, C-1, D-1
S
Save
command l-19, 25,
2-1
Saving an
edited definition file 1-19, 21, 25
Screen editing 1-29
Screen editing
commands 1-32, 33
Screen
elements l-26
Screen formats 1-30
Screen names 1- 18
Searching
for a string
within
a screen
1-33, 35
Soft-Scope 2860 5-5
Software requirements
1-4
Special
editing commands
1-33
Start address of a system
3-8
Starting the
operating system in ROM C-21
Starting
the operating system
in ROM from the iSDM" monitor C- 15
Submit files 1-18,2-2,4,B-34,46,
C-8, D-10
Synchronous
initialization 5-2
System debugger
5-5
Index-6 ICU User's Guide
T
Testing
the system
5-1, 4
U
Unit information,
adding
B-10, 18
UPDEF
Utiliry
l-1,7,44
Upgrading
definition
files 1-43
Using
the ICU 1-3, 39
v
Version
numbers, files 1-12,44,46
w
When
to use the
ICU 1-2
Writing
Application
code
3- 1
INDEX
ICU
UsePs Guide Index-7

intel
EXTENDED
iRMX@II
PROGRAM
MtNG
TECHNTQU
ES
REFERENCE
MANUAL
lnte Corporation
306 5 Bowers Aven
u e
5anta Clara, Californ a 95051
CopyrLght
I 1988, Intel
Corporat on,
A Rrghts Reserved

PREFACE
INTRODUCTION
This manual summarizes
techniques
that will be useful to you as you produce
an
applìcation system
based on the Extended iRMX II Operating
System. A typical
development process goes
through these
stages:
. Dividing the application
into
jobs
and
tasks
o Writing the code for tasks
r Writing
interrupt handlers
. Configuring
and starting up the
system
. Debugging
an application
Use this manual
as a reference guide when
developing your application system.
The
techniques
described here will
help you save time and
avoid
problems
during the
development process.
Information has been
added to this manual
to reilect changes in the use of external
declaration INCLUDE files. Use of individual
files, hints for efficiency, and tables of the
Nucleus,
Basic I/O System, Extended
l/O System, Human Interface,
Application Loader,
and Universal Development
Interface system
calls
with
their corresponding
external
declaration
file names appear in
Chapter 2.
READER
LEVEL
This manual assumes
that you are
familiar with the following:
o the
PL/M-286 programming
language
. PL/M-286 segmentation
models
. iRMX II jobs,
tasks, mailboxes, physical
files or named files, stream files, type
managers and composite
objects, system calls, and segments
. the
System Debugger
Programming Techniques l
PREf'ACE
. object
module
linking
o object libraries
. programming in the
iRMX II environment
using
PL/M-286
MANUAL OVERVIEW
This manual
is organized
in the lbllowing
manner:
Chapter 1 This chapter
provides information
on PL/M-286
segnentation
models.
Chapter
2 This
chapter describes
how to invoke iRMX II system calls
from
your source code.
Chapter 3 This
chapter describes how communication
occurs
between iRMX
II
jobs.
Chapter 4 This chapter
presents guidelines for stack
sizes.
Chapter 5 This chapter describes
how to convert iRMX I (IRMX 86)
applications to iRMX II applications. This
chapter also describes
how to improve the
performance of
your application.
Appendix A This appendir
lists and describes
sample iRMX II applications.
CONVENTIONS
The following conventions
are used throughout this manual:
. User input
appears in one of the following forms:
as bolded text irirh!n a screen
o The term
"iRMX II" refers
to the
Extended
iRMX II.3 Operating System.
r The term'iRMX I" refers to the iRMX I (iRMX 86) Operating System.
. All numbers, unless otherwise stated, are assumed to be decimal. Hexadecimal
numbers include the
"lI" radix character
(for
example,
0FFH).
tv Programming
Techniques
CONTENTS
CHAPTER
1PAGE
CHAPTER 2
USING
|RMXO II
SYSTEM CALLS PAGE
CHAPTER 3
COMMUNICATION
BETWEEN iRMX@
JOBS PAGE
CHAPTER
4
GUIDELINES
FOR STACK SIZES PAGE
Programming
Techniques
CONTENTS
CHAPTER
4 (continued) PAGE
APPENDIXA
EXAMPLE PROGRAMS PAGE
vl Programming Techniques
CONTENTS
APPENDIX
A (continued) PAGE
TABLES
TABLE
A-1
A-2
A-3
A-4
PAGE
iRMX@ II External Declaration
INCLUDE Files.....................
..........................2-5
Interface Libraries
and iRMXo II Layers................. ............2-11
Stack Requirements for Interrupts and System Ca11s.........-........-. ....-.-..-..-..-..-..4-4
Literal Files Helpful With Nucleus System CaIIs................................................A-5
Literal Files Helpful With
BIOS System Calls...............................................-....A-6
Literal Files Helpful With
EIOS System Calls....................................................A-6
Literal Files
Helpful
With
Human Interface System CaIÌs...............................A-6
Programming Techniques Ytl
CONTENTS
FIGURES
FIGURE
A-1
A-3
A-4
A-5
A-6
A-7
A-8
A-9
A-10
A-11
v|ll Pmgrarnming Techniques
CHAPTER
1
SELECTTNG
A PLIM-286
SEGMENTATION
If/IODEL
1.1 INTRODUCTION
Read this
chapter only if you will be programming iRMX II tasks using PL/M-286. You
should already be familiar
with the following concepts:
. The PL/M-286
programming
language
c PL/M-2t16
segmentation models
. iRMX II jobs,
tasks, and segments
When
you
invoke
the PLIM-286 compiler,
you
must specify
(either explicitly or by
default) the segmentation model
(SMALL,
COMPACT,
MEDIUM, or t-qRGE) that
your program will
use. The segmentation model
affects the amount
of memory required
to store
your
application's object
code and the perfbrmance of
the application.
With
operating
systems that run on lJ0[J6 processors
(or
on
til0286 and tì0386
processors n
real address
mode), choosing the appropriate segmentation
model is important for
reducing the amount of memory
that an application uses. Memory
use is important
because the 8086
processor
is limited
to I megabyte of memory address
space. The
operating system, on the other hand, uses
the 80286 and 80386 processors
in protected
virtual
address mode
(PVAM). ìn PVAM,
the processor can
access the full memory
address range that is
available. Thus, program size becomes less imporlant.
However, loading a segment register in PVAM takes longer than ìoading
other kinds of
instructions. If you
can minimize
the number of times the
processor must switch
segments,
application
performance will
improve. Because
the segmentation
model
determines how code and data are stored, choosing
the
proper
model
minimizes the
number of segment
switches, and increases
perlbrmance.
The following sections explain
which segmentation model
will attain the highest
performance,
while
still satisfying
system requirements.
Programming
Techniques l-l
SELECTING
A PL/M-286 SEGMENTATION
MODEL
1.2 WHAT ARE THE
SEGMENTATION
MODELS?
The four segrnentation
models supported by PL/M-286 are SMALL, COMPACT,
MEDIUM, and
[,ARGE. T\e PL/M-286 User's Guidc
for ikMX 286 Systems describes
each of these
models in detai.l. This
section
qives
a brief overview of each.
Code sections from all linked modules are
placed
in the same code
segment,
which
is addressed by CS. Data
and stack sections
are
placed in the same data segment, which
is
addressed
by
both
DS
and SS.
Code sections from
all linked modules are olaced in the same code
segment,
which
is addressed by
CS.
Data
sections are
placed
into a
single data segnrent,
which
is addressed by DS. Likewise, stack
sections are placed
into a stack segment,
which
is addressed by SS.
The code section from each
compiled module is placed in its own
code segrnent, enabling the
total amount of code to be
more than
64K bytes. Data and stack
sections from all finked modules
are
placed
into a sing.le data segment, which
is addressed
by both DS
and SS.
During program
execution, the CS register
is updated whenever
a
PUBLIC or EXTERNAL procedure
is activated.
Code and data sections
from each compiled
module are placed
into
their own code and
data segments, enabling
the total amount of
code and data to be more
than 64K bytes.
Stack sections are
placed
into a sing.le stack segment, which
is addressed by SS.
In I-ARGE model,
code and data segments
are paired.
During
program
execution, both the
CS and DS are updated whenever
a
PUBLIC or EXTERNAL nrocedure
is activated.
SMALL
COMPACT
MEDIUM
TARGE
Specifying
the
ROM or RAM compiler controls
determines whether
the
constants
you
define in your prog'ams
are placed
in the code or data areas.
This
provides
additional
control on the size
of those segments.
1.3 RESTRICTIONS
The fewer
times
your application
must
load the segrnent
registers,
the better it performs.
To improve performance,
choose
the segmentation
model
that uses
the fewest segments
but still supports
the required
amount of
code or data.
This practice
means starting
with
the SMALL model and working
up to the TARGE
model,
using the first
model that can
handle the
amount of
code or data in your application.
However,
some models
place
restrictions
on iRMX II ooerations.
t-2 Pmgramming
Techniques
SELECTING A PLIM-286 SEGMENTATION
MODEL
1.3.1
Small
Model Restrictions
When you compile programs using the PL/M-286
SMALL control, all POINTER
values
are 16 bits long. This introduces some restrictions,
including
inability to address the
contents ofan iRMX II segment received from another
job. Because ofthese restrictions,
the only applications
that can use SMALL model are
those that invoke UDI system calls
only.
Applications
that invoke other iRMX II system calls cannot use the SMALL
seprnentation model.
1.3.2
Compact
Model Restrictions
You cannot compile exception handlers in the COMPACT model
and link them
with
other COMPACT prcrcedures,
because the operating
system always makes a far call to an
exception handler. To include exception handlers, compile
them using the l-A.RGE size
control.
1.3.3 Medium
Model Restrictions
When
using
PLIM-286 MEDIUM model, you lose the option
of having the Operating
System dynamically
allocate stacks
for
tasks that are created dynamically. Anticipate
each
task's stack requirements, and explicitly reserve memory for
each stack during
configuration.
1.3.4
Using
Large Model
There are no restrictions
with
the
PL/M-286 [-A.RGE model. If your application is too
large for the other models, or
you wish
to avoid restrictions,
use the I-ARGE
model.
1.4
CHOOSING
A
SEGMENTATION
MODEL
For best performance, use the following
guidelines
when choosing
a segmentation model:
. If your
code and data can each fit into a
64K-byte segment, use the COMPACT
model.
. If your
application is too large for COMPACT,
consider using COMPACT
subsystems. This
enables you to set up your application in
pieces (subsystems), each
of
which
adheres to the COM
PACT model. With COMPACT
subsystems, segment
registers are changed only
when you
call
procedures or access
variables that reside in
one
of the other subsystems. However, creating
COMPACT subsystems requires
more
technical knowledge than the
other alternatives and
it requires changes
to the
source code. Refer to the PL,/M-286
User's Guide
for |RMX 286Systems
for more
information.
Programming
Techniques l-3
SELECTING A PL/M-286 SEGMENTATTON
MODEL
. If you decide not to use COMPACT subsystems, MEDIUM offers the next
best
performance. MEDIUM, however, requires that all data
and stack fit into a
single
64K segment.
. If all else
fails,
use
l-ARGE
model. There are no size or iRMX II restrictions
with
I-ARGE, but
this
model results
in the largest number of segment register switches.
To determine
whether your
application can fit into the COMPACT model, try compiling
and binding it under the COMPACT model. If the application is too large for
COMPACT, BND286 will return an error message. At that point,
you
can decide
whether
to use MEDIUM, [-A,RGE,
or recode your application
for COMPACT
subsystems.
If your
application
will
be loaded into RAM,
you
may be able to use the ROM or RAM
controls to adjust segment sizes so that your application fits into the
COMPACT
or
MEDIUM models. These controls speciS where your program's
constants
will
reside.
For example, ifyour application's data is slightly larger than 64K
bytes, specifying
the
ROM control (which places
the constants in the code segment)
might alÌow the remaining
data to fit in a 64K segment.
This could make your code eligible for
the COMPACT or
MEDIUM models.
l-4 Programming Techniques
USING |RMX@ II CHAPTER 2
SYSTEM CALLS
2.1 INTRODUCTION
Read this chapter if you write programs
that use iRMX Il system calls. You should
already be familiar with the
foÌlowing concepts:
o System calls
. Object module linking
. Object libraries
. PL/M-286 segmentation
models
This chapter explains
how to include iRMX II system calls in
your programs,
and how
to
bind your code with
the necessary iRMX II libraries.
2.2 CODING
THE
SYSTEM CALLS
The first step in invoking
iRMX II system calls is
placing
source statements in your code.
The following sections
discuss how to place
system calls in your PL/M-286 and ASM286
source code.
2.2.1 Invoking
System Calls From PL/M-286
The iRMX II system call
reference manuals use the PL/M-286 syntax when listing the
iRMX II system calls. When writing
code, use the synt:rx listed in
the system call
reference
manuals.
2.2.2 lnvoking System
Calls
From Assembly Language
Programs communicate with the operating system calling inîerface
procedures
designed
for use with
programs
written in PL/M-286. To invoke system calls from assembly
language
programs,
the assembly language
programs
must obey the
procedure-calling
protocol used by PL/M-286. For example, ifyour ASM286 program uses the
SEND$MESSAGE system call, then
you
must call the rq$send$message
interface
procedure
from
your
assembly language code.
Pmgramming Techniques 2-l
USING iRMX@ II SYSTEM
CALLS
FROM I-ANGUAGES
The technique for calling
PL/M-286 procedures
from assembly language is
described in
the ASM28ó Macro Assembler
Operating Instructions
for \RMX 28ó Sysfems. This section
presents an overview of the technique.
In general, to call a PL/M-286 procedure, first push all the parameters onto the stack and
then call
the procedure. Push the parameters in the order they
are listed in the system
call reference
manuals; that is, starting with the leftmost
parameter.
Long
pointers
(complete
addresses
consisting of a selector and an offset) should be
pushed as two
words:
the selector first, then the offset.
The CALL instruction also
places the return address ofyour calling
procedure
onto the
stack.
This enables
control to return to your program after the system call completes.
Some system calls return
values.
In assembly language, the returned
values
are available
in registers,
as follows:
Type Register
BYTE AL
WORD AX
DWORD DX:AX
INTEGER AX
POINTER ES:BX
SELECTOR AX
When writing assembly language
routines that call PLIM-286 interface
procedures, you
must adhere to a segmentation model (COMPACT,
MEDIUM, or I,ARGE)
because
conventions for making
calls depend on the segmentation model.
Ifyour application
is
written entirely in assembly
language,
you
can arbitrariìy select an
interface
library
(COMPACT
or l-ARGE)
based on
whether
your application
makes near
or far calls. Size and performance
advantages can be gained
by using the COMPACT
interface procedures,
because their procedure
calls are all NEAR. The IARGE interface,
which
has procedures
that require FAR procedure
calls, is advantageous only ifyour
application code is larger than 64K b1tes.
However, if some
of your
application
code is written in PL/M-286, your assembly
language
code should use the same
interface
procedures
as those
used by
your
PL/M-286
code.
7-) Pmgramming
Techniques
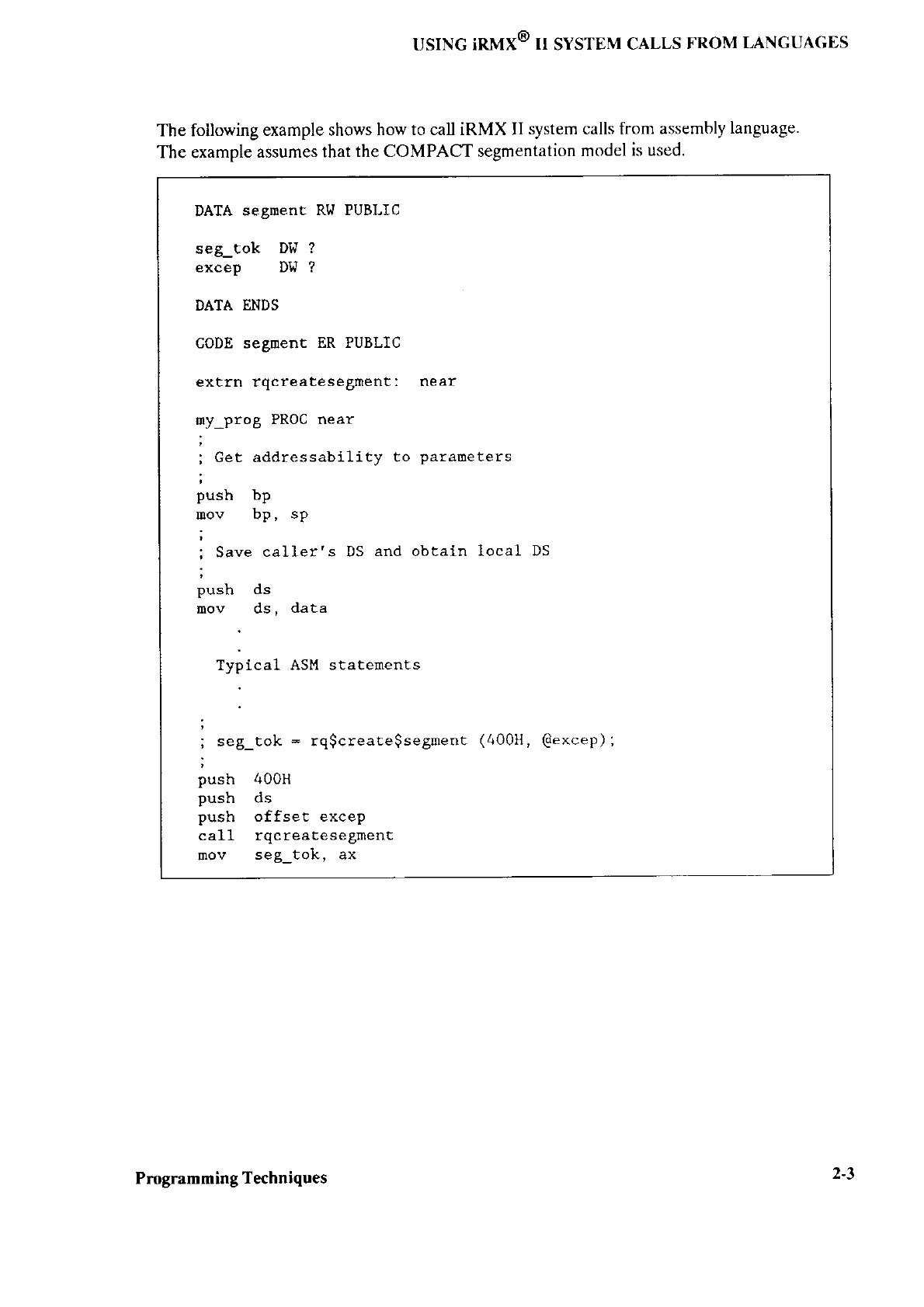
USING
iRMX@
II SYSTEM
CALLS
FROM
LANCUAGES
The following
example shows
how to call iRMX II system calls from
assembly
language.
The examole
assumes that
the COMPACT seqmentation
model
is used.
DATA
segnent RW FUBLIC
seg_tok Dl1l ?
excèp Dl.l ?
DAÎA ENDS
coDE segnent ER PUBLIC
extrn rqc
reate s ègment : near
ny_prog PROC near
; Gec addressability to parameters
push bp
uìov bp, sp
;
; Save caller's DS
and obtain local DS
push ds
mov
.
ds, daÈa
Typical ASM
statemenEs
:
i
; seg_tok - rq$ create
$
segrnenc
(400H, @excep);
;
push 400H
push ds
push offset excep
call rqcreatesegment
uÌov seg_tok, ax
Pmgramming
Techniques t_1
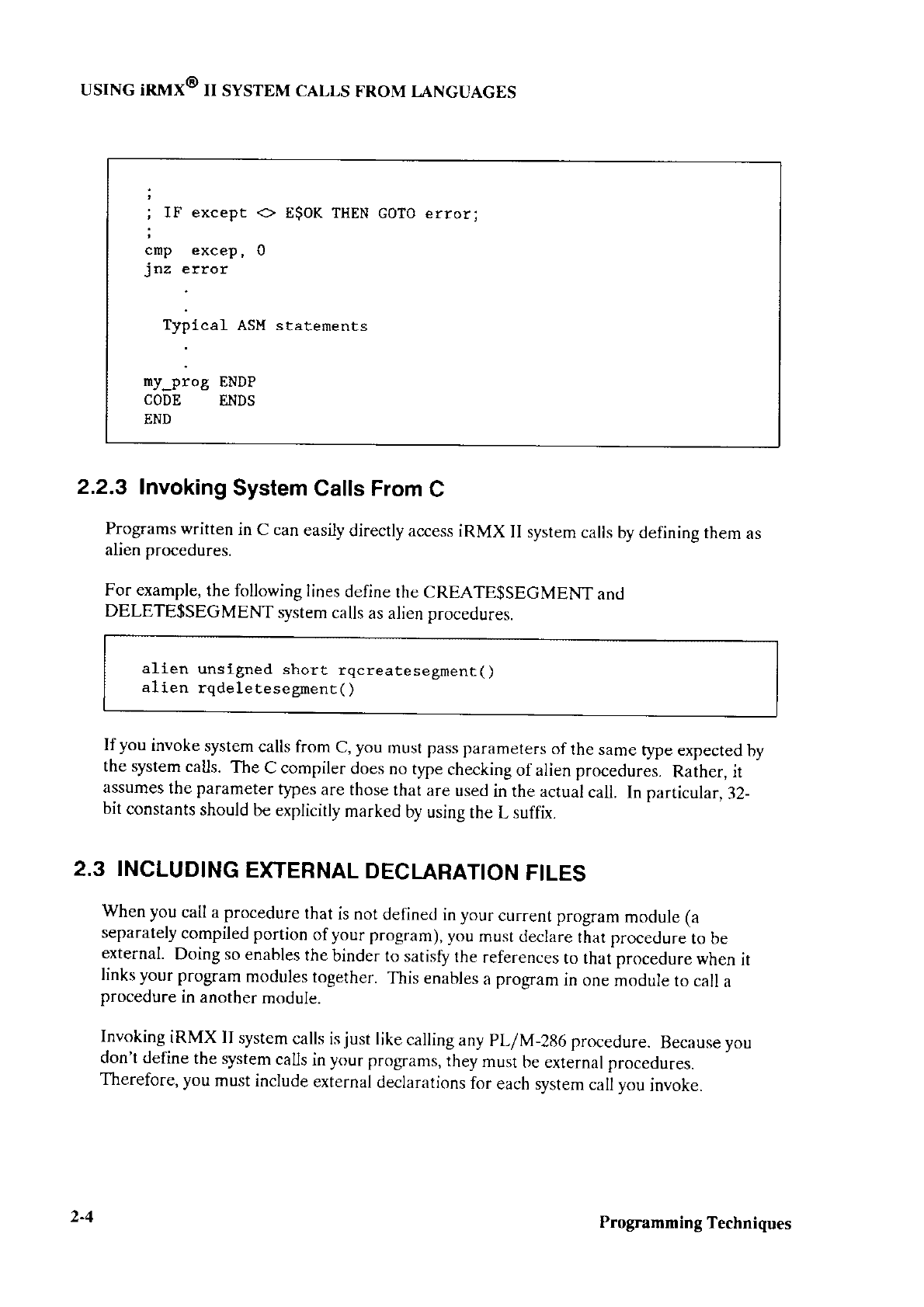
USING iRMX@
II SYSTEM CALLS
I.'ROM I-ANGUAGES
; IF except o E$OK THEN
GOTO
cmp excep, 0
:
Typical ASM staLenents
rny_prog ENDP
CODE ENDS
END
error;
2.2.3
lnvoking
System
Calls From
C
Programs written
in c can
easily
directly access
iRMX II system
calls
by defining them
as
alien procedures.
For example,
the
following Iines
define
the CREATE$SEGMENT
and
DELETE$SEGMENT
system
calls
as alien procedures.
alien unslgnèd short rqcreatesegment (
)
alien rqdele tesegrnent
(
)
Ifyou invoke
system
calls from
C,
you
must pass parameters
ofthe same
type expected
by
the system
cal.ls.
The
c compiler
does
no tlpe
checking
of arien
procedurei.
Raiher, it
assumes
the parameter
t)?es
are those
that are
used
in the actual
call.
In
oarticular. 32.
bit
constants
should
be explicitly
marked
by using
the
L suffix.
2.3 INCLUDING
EXTERNAL
DECLARATION
FILES
When
you
call
a
procedure
that
is not
defined
in your
current program
mo<lule (a
separately
compiled portion
ofyour program),
you
must
declare
that procedure
to be
external.
Doing so
enables
the
binder to
satisù/
the
references
to thaiprocedure
when
it
links your
program
modules
together.
This enables
a
program
in one module
to call
a
procedure
in another
module.
Invoking
iRMX II system
calls
is
just
like
calling
any
pLlly',-zgí
procedure.
Because you
don't define
the system
calÌs
in your programs,
they
must
be external
procerJures.
Therefore,
you
must
include
external
declarations
for
each svstem
call
vou invoke.
2-4 Programming
Techniques
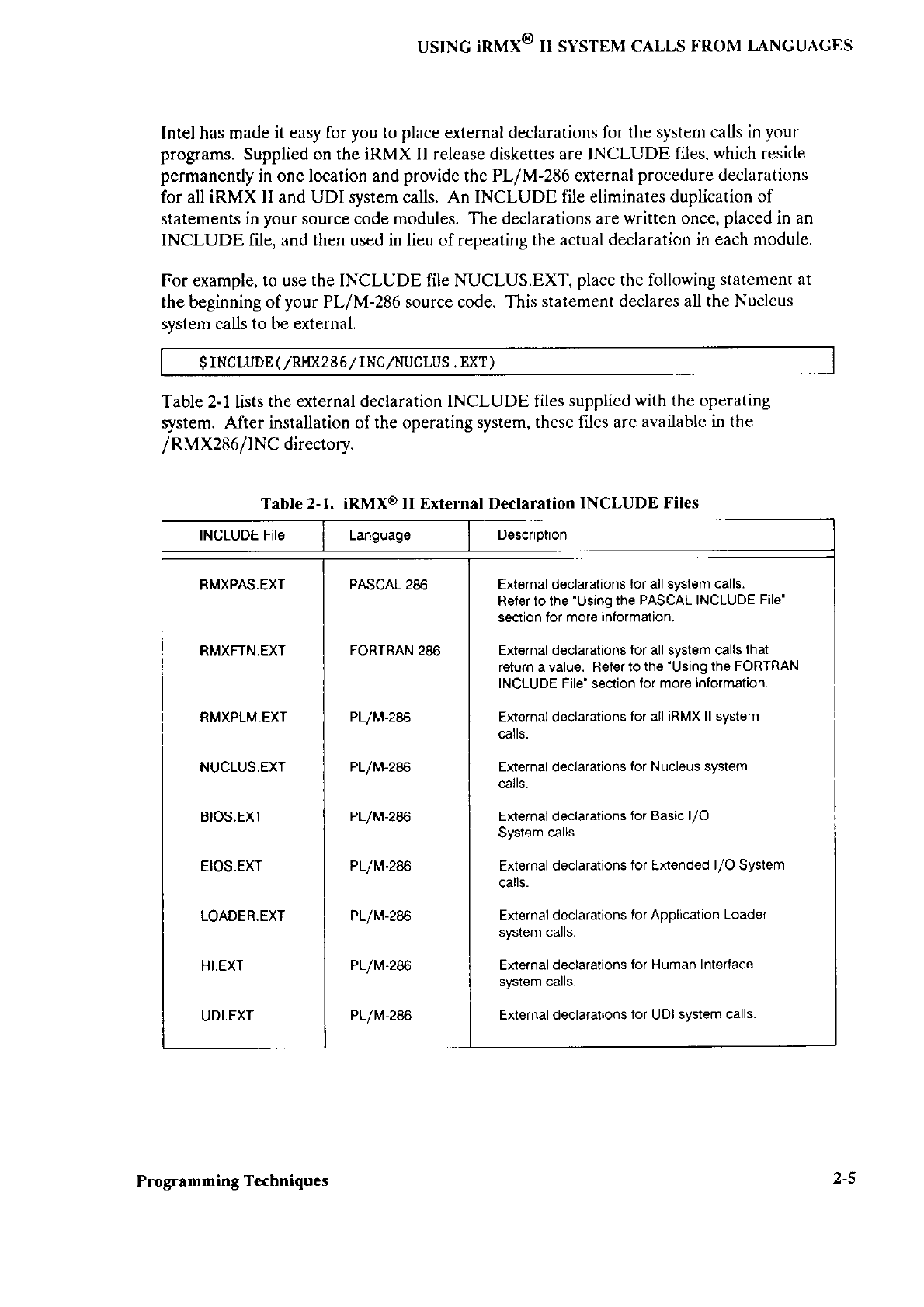
USINC
iRMX@ II SYSTEM CALLS
FROM
IANGUAGES
Intel has made
it easy for
you
to place external declarations for
the system calls in
your
programs. Supplied on the iRMX II release diskettes are INCLUDE files,
which
reside
permanently
in one location and
provide
the PL/M-286 external
procedure
declarations
for all iRMX II and UDI system calls. An INCLUDE file eliminates
duplication of
statements in
your
source
code modules. The
declarations are
written
once,
placed in an
INCLUDE file, and then used in lieu of repeating the
actual declaration in each
module.
For example, to use the INCLUDE file NUCLUS.EXT,
place the following
statement at
the beginning ofyour PL/M-286 source code. This
statement declares all the Nucleus
system calls to be external.
$
TNcLUDE
(,,/Rr0(2
8 6,/ r NC/NLlC LUS
.
EXT
)
Table 2-1 lists
the external declaration INCLUDE files
supplied
with
the
operating
system. After installation ofthe operating
system, these files are
available in the
/RMX286/INC directory.
Table 2-I. iRMXo
ll External Declaralion
INCLUDE Files
INCLUOE Fil€ Languag€ D€scription
RMXPAS.EXT
RMXFTN,EXT
RMXPLM.EXT
NUCLUS,EXT
BIOS.EXT
EIOS.EXT
LOADER.EXI
HI.EXT
UDI.EXf
PASCAL-286
FORIRAN-286
PLlM-285
PLlM-286
PLlM-286
PLlM-286
PL/M-286
PLlM-286
PLlM-2e6
External
declarations for all system
calls.
Refer to the
'Using
the PASCAL INCLUDE
File'
section for more information.
External d€clarations
for all system calls
that
return a valu€. R€l€r to the 'Using
the FORTRAN
INCLUDE File' s€cîion
for mor€ information.
Ext€rnal declarations
for all iRMX ll system
ca s.
External declarations
for Nucleus system
cafls.
External declarations
for Basic l/O
System
calls.
External declaratìons
for Extend€d
l/O System
calls.
External declarations
for Application
Loader
system calls.
Ext€rnal
declarations
for Human Interface
system calls.
External
declarations
lor
UDI
system calls.
Pmgramming Techniques t-<
USING iRMX@ II SYSTEM CALLS T-ROM I-ANGUAGDS
Because each INCLUDE file contains external declaratíons for many
system calls
(either
all iRMX II system calls or
all system calls in a
particular
subsystem), including
a
particular
file
will probably
result in external declarations for
several system calls
your
program does not invoke. Although having extra external declarations
poses
no
problems
for the compilers and causes no error conditions,
you can improve
compilation
speed by
copyingjust the external declarations
your program
needs into
a separate
INCLUDE file
and specifying
that file in the INCLUDE statement.
2.3.1 Using the PASCAL-286 Include File
When
using PASCAL-286 to write an application, you must include
the RMXPAS.EXT
INCLUDE file
with your
PASCAL-28ó source program. To do this, enter this statement
ln
your
source program:
$
lNCLUDE
(
/RMX2
86lrNC/RMXPAS
.
EXT
)
This statement inserts
the contents of RMXPAS.EXT into your
PASCAL-286 program.
This file contains external declarations
for all the iRMX II system
calls. However, it uses
names that are slightly different
from the system call names shown
in the reference
manuals. Because PASCAL
does not allow dollar signs ($)
in
procedure
names, the
system
calls are declared
without
the
$
characters. To make the
names recognizable, the
INCLUDE file
mixes uppercase and lowercase
letters in the names.
You can use this
convention
in
your
programs also.
Because of data-type
checking that the PASCAL-286
compiler performs,
the INCLUDE
file
may require editing
before
your
program will
compile correctly.
Four Nucleus and
two
EIOS system calls
are affected:
Nucleus
System Calls EIOS System Calls
RQCreateJob
RQECreateJob
RQCreateTask
RQSignalException
RQCreatelOJob
RQECreatelOJob
These
six system calls
enable you to specifo
an absolute value
(0)
or a POINTER
(such
as
@stacktop)
as the STACK R parameter.
No single PASCAL-28ó
data type
can be used
to declare
both types of values
RMXPAS.EXT
contains
a declaration for speci$ing pointers.
This declaration enables
you to speciff
a stack
location by supplying
a
pointer
to the stack.
You
may
want
to use
the
vaìue
0, which
indicates that the
operating system
is to
provide
the appìication's
stack location,
for the STACKPTR
paramerer.
2-6 Pmgramming
Techniques
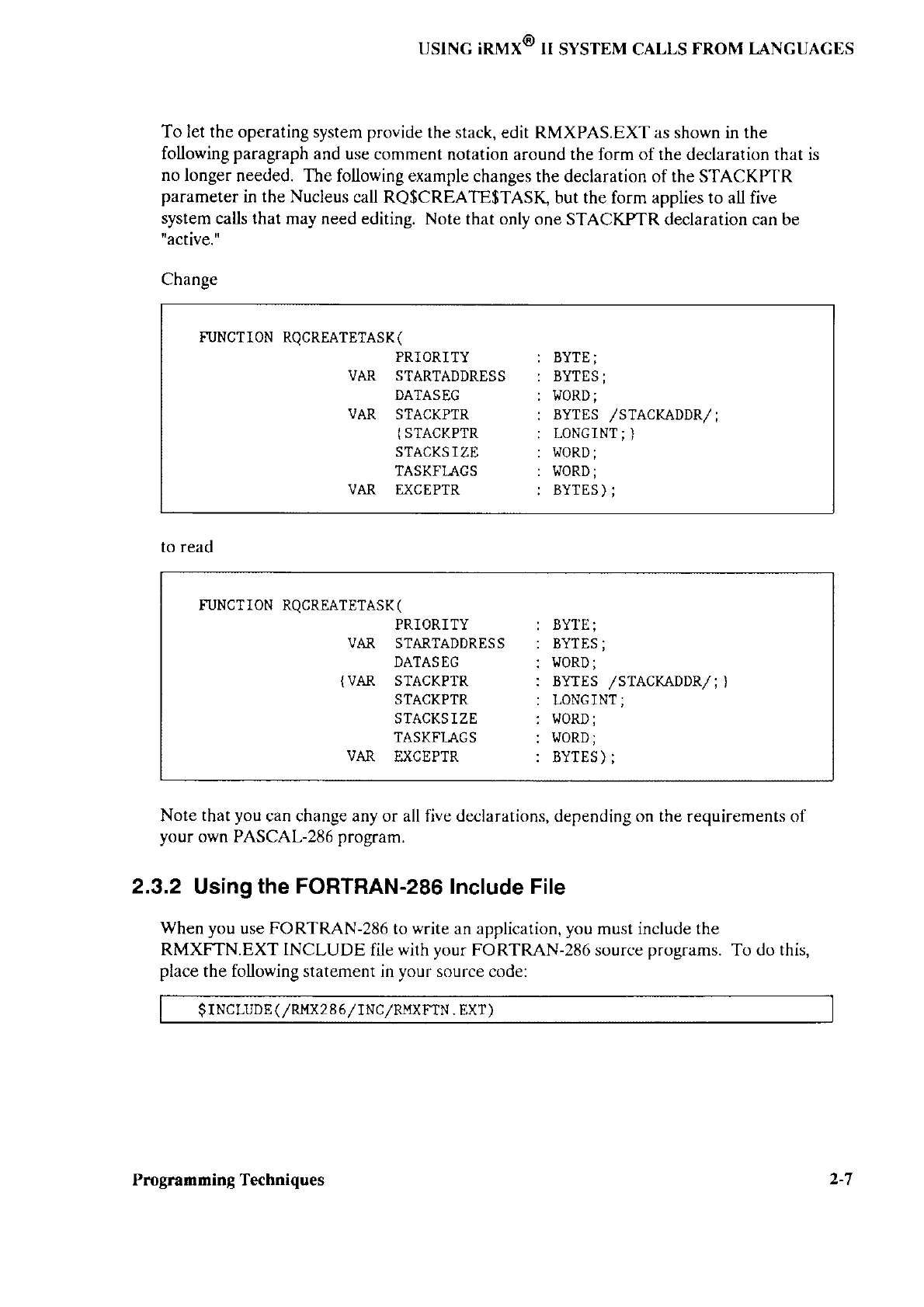
USING iRMX@ II SYSTEM CALLS
FROM I,ANGUAGES
To let the operating system
provide rhe stack,
edit RMXPAS.EXT as shown in the
following paragraph and
use comment
notation around the form of the declaration that is
no longer
needed. The following example
changes the declaration of the STACKPTR
parameter
in the Nucleus
call RQ$CREATE$TASK but the form applies to all five
system
calls that may need editing. Note that only
one STACKPTR declaration can be
"active."
Change
to read
T'IJNCTlON RQCREATETASK(
VAR
{VAR
PRIORITY
STARTADDRESS
DATASEG
STACKPTR
STACKPTR
STACKS IZE
TASKFIACS
EXCEPTR
BYTE
;
BYTES;
WORD
;
BYTES
/STACKADDR/;
)
LONGINT;
ITORD
;
WORD
;
BYTES
) ;
VAR
Note
that
you
can change any or all five declarations,
depending
on the
requirements of
your ovr'n PASCAL-286 program.
2.3.2
Using
the FORTRAN-286
Include File
When
you use FORTRAN-286
to
write
an application,
you
must include the
RMXF|N.EXT INCLUDE file
with
your FORTRAN-28ó source
programs.
To do this,
place
the following statement in your source code:
$INCLUDE
(
/RMx2
86lINCIRMXFTN.
EXT)
FIJNCTION RQCREATETASK(
VAR
VAR
PRIORITY
STARTADDRESS
DATASEG
STACKPTR
{STACKPTR
STACKS IZE
TASKFI.AC
S
EXCEPTR
BYTE
;
BYTES
;
WORD
;
BYTES
/STACKADDR/;
LONGINT
;
Ì
WORD
;
I,IORD
;
BYTES
) ;
VAR
Programming Techniques 'r
-7
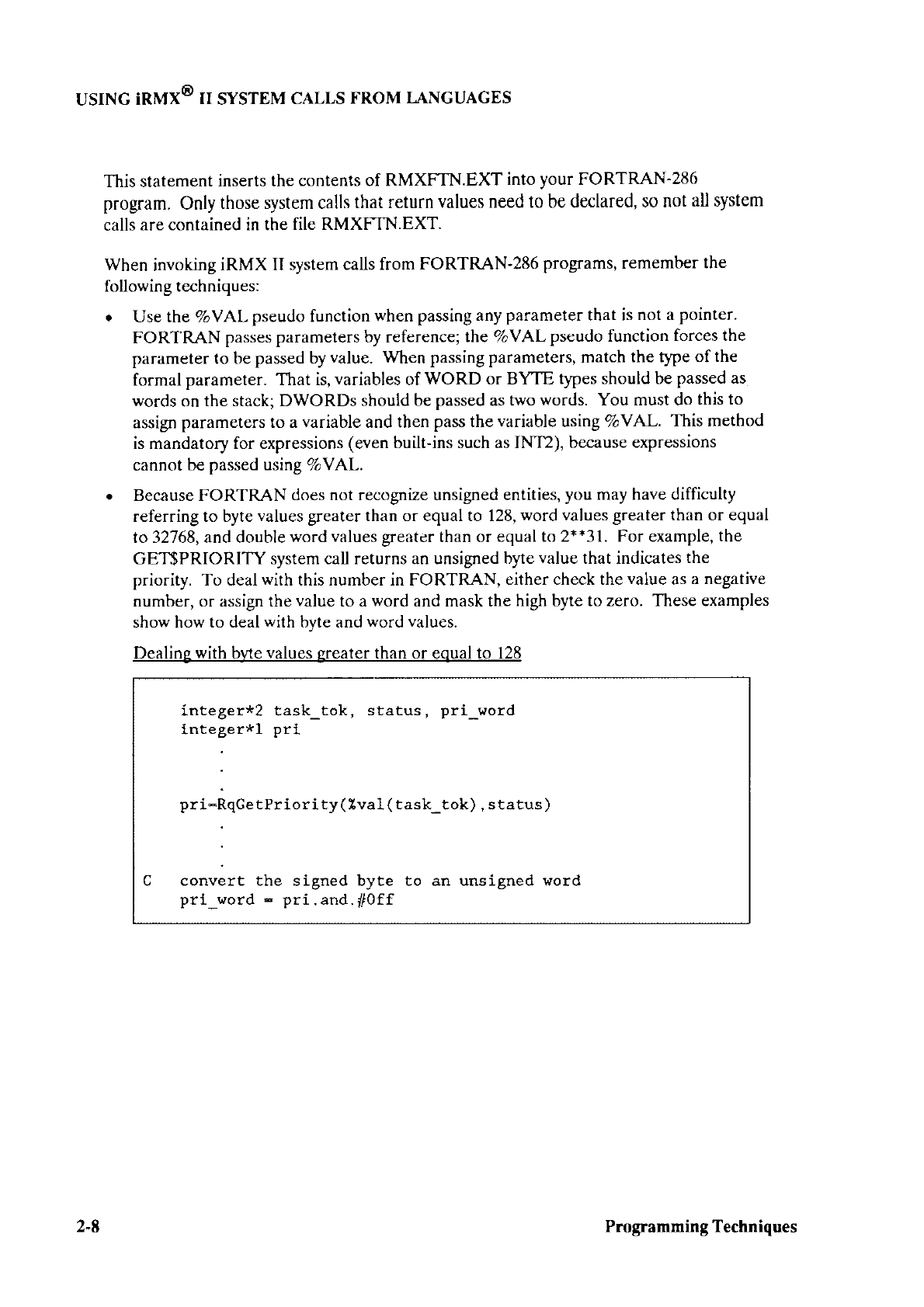
USING
iRMX@
II SYSTEM
CALLS
FROM
I.A,NGUAGES
This statement
inserts the
contents of RMXFIN.EXT into
your
FORTRAN-286
program.
Only
those system calls
that return
values need to be declared,
so not
all system
calls
are contained in the
file RMXFTN.EXT.
When
invoking
iRMX II system calls from FORTRAN'28ó programs, remember
the
following techniques:
e Use the %VAL pseudo
function
when
passing any
parameter
that is
not a
pointer.
FORTRAN
passes parameters by reference;
the TcVAL
pseudo function
forces the
parameter to be
passed by
value. When passing parameters, match
the tJpe
of the
formal
parameter. That is,
variables
of
WORD or BYTE
types should be
passed as
words
on
the stack; DWORDs
should be passed as two
words. You must do
this to
assign
parameters to a
variable
and then
pass the
variable
using 7oVAI. This method
is mandatory for expressions
(even built-ins such as INT2), because expressions
cannot be
passed using
7oVAL.
o Because FORTRAN
does not recognize unsigned entities,
you may have difficulty
referring to byte
values greater than or equal to 128,
word values greater than or equal
to 32768, and double
word
values
greater than or equal
to2**37. For example,
the
GET$PRIORITY system call returns an unsigned
byte
value
that indicates
the
priority. To deal
with
this number in FORTRAN,
either check the
value
as
a negative
number, or assign the
value
to a
word
and mask the
high byte to zero. These examples
show how
to deal
with
byte and
word values.
Dealing
with
bvte
values
greater than or equal to 128
integer*2 task_tok, status, pri _\.rord
í nl-éoèr*l nÌ"1
pr i*Rqce tPr ior i ty (
lval (
task-tok) ,
status )
.or,rràra the stgned byre to an unsigned word
prl_word - pri .
and.
/l0ff
2-8 Progranming Techniques
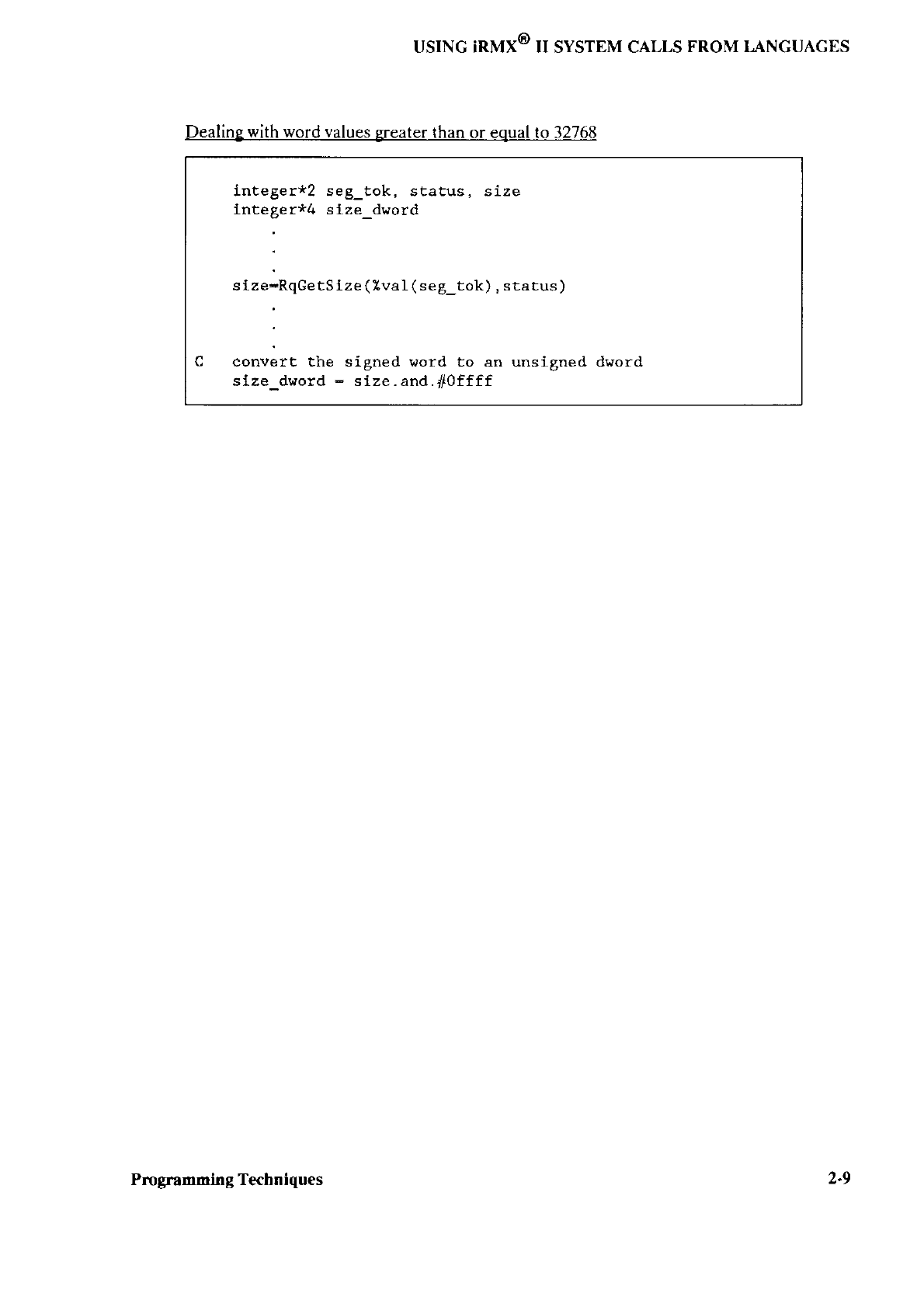
USING |RMX@ II SYSTEM CALLS
FROM T.ANGUAGES
Dealing
with word values
greater than or equal to 327ó8
lnteger*2 se8_tok, scatus, size
integèr*4 s ize_dlrord
slze=RqGetSize
(lval (
seg_tok), stacus)
converE the sígned word to an unsigned dr.rord
slze_dword - slze. and.
/l0ffff
Programming Techniques 2.9
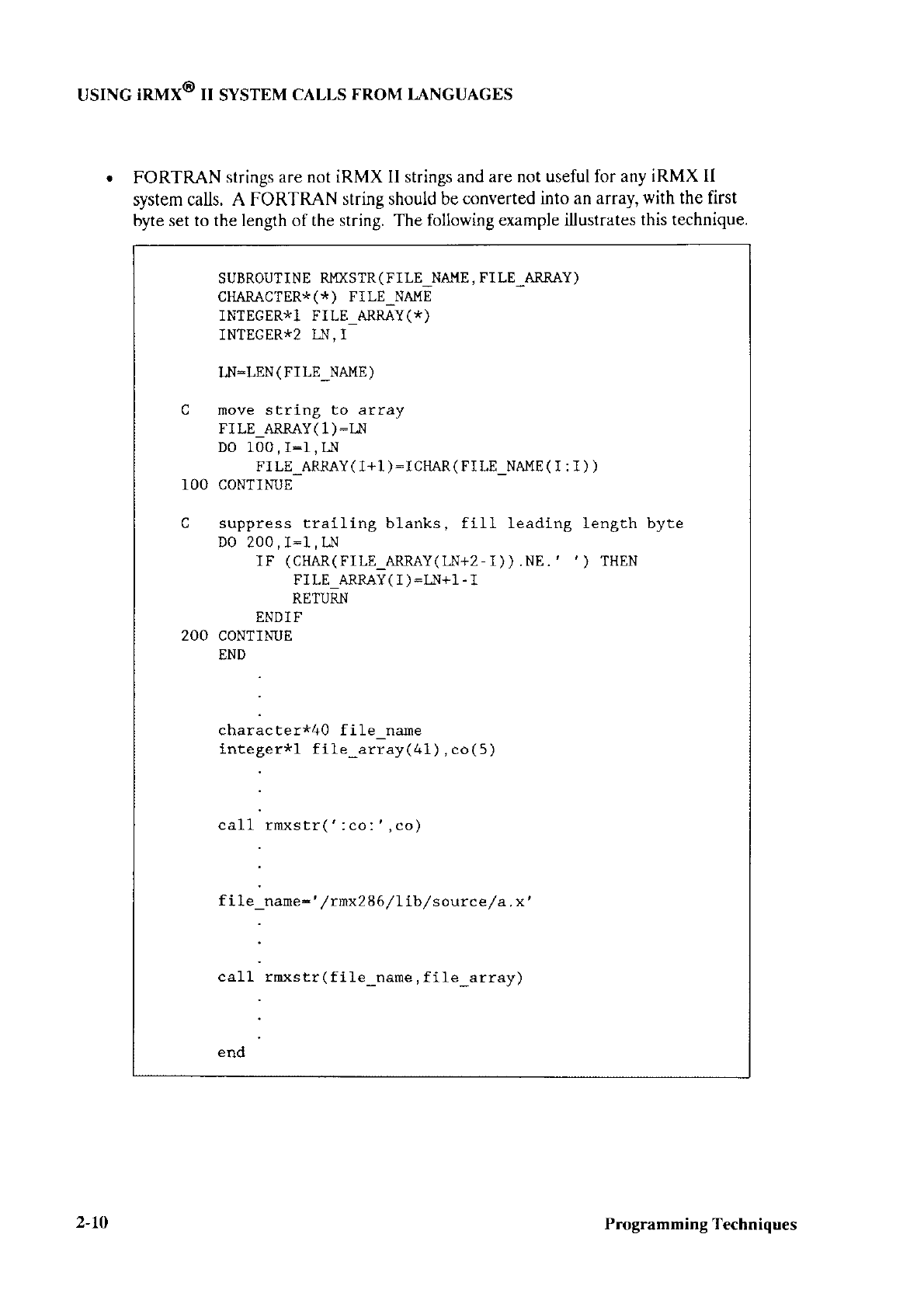
USING
iRMX@ II SYSTEM
CALLS
FROM IANGUAGES
FORTRAN
strings are not iRMX lI strings and
are not useful for any
iRMX II
system calls. A FORTRAN
string should be
converted into an array,
with the first
byte set to the length of the string. The
following example illustrates
this technique.
SUBROUTINE Rru'(STR
(
FILE-NAME,
FI LE-ARRAY)
CHAMCTER*(*) FILE-NAME
INTEGER*I FILE_ARRAY(*)
TNTECER*2
LN,I
UI:LEN
(FILE-NAME)
C move string to array
FILE_ARMY(1)-LN
D0 100
,
r-1, LN
FILE-ARMY( I+1 ):ICHAR(
FILE-NAME
(
I : I ) )
100 CONTlN'IJE
C suppress trailing blanks, fiLl leading length byte
D0 200, I-1 ,LN
rF (CHAR(FILE_ARRAY(LN+2-r)).NE.''
) THEN
FI LE_ARRAY
( I )
-LN+1.I
RETURN
ENDIF
200 coNTlN'ItE
END
character*40 f i 1e-naure
integer*1 file_array(41), co(5)
call rmxs tr (
' : co :
' ,
co
)
file'name-, ,/r
nx286
/Llb/ sotstce/ a.x,
.
call rrnxstr(file_name, file_array)
end
2-lo Programming Techniques
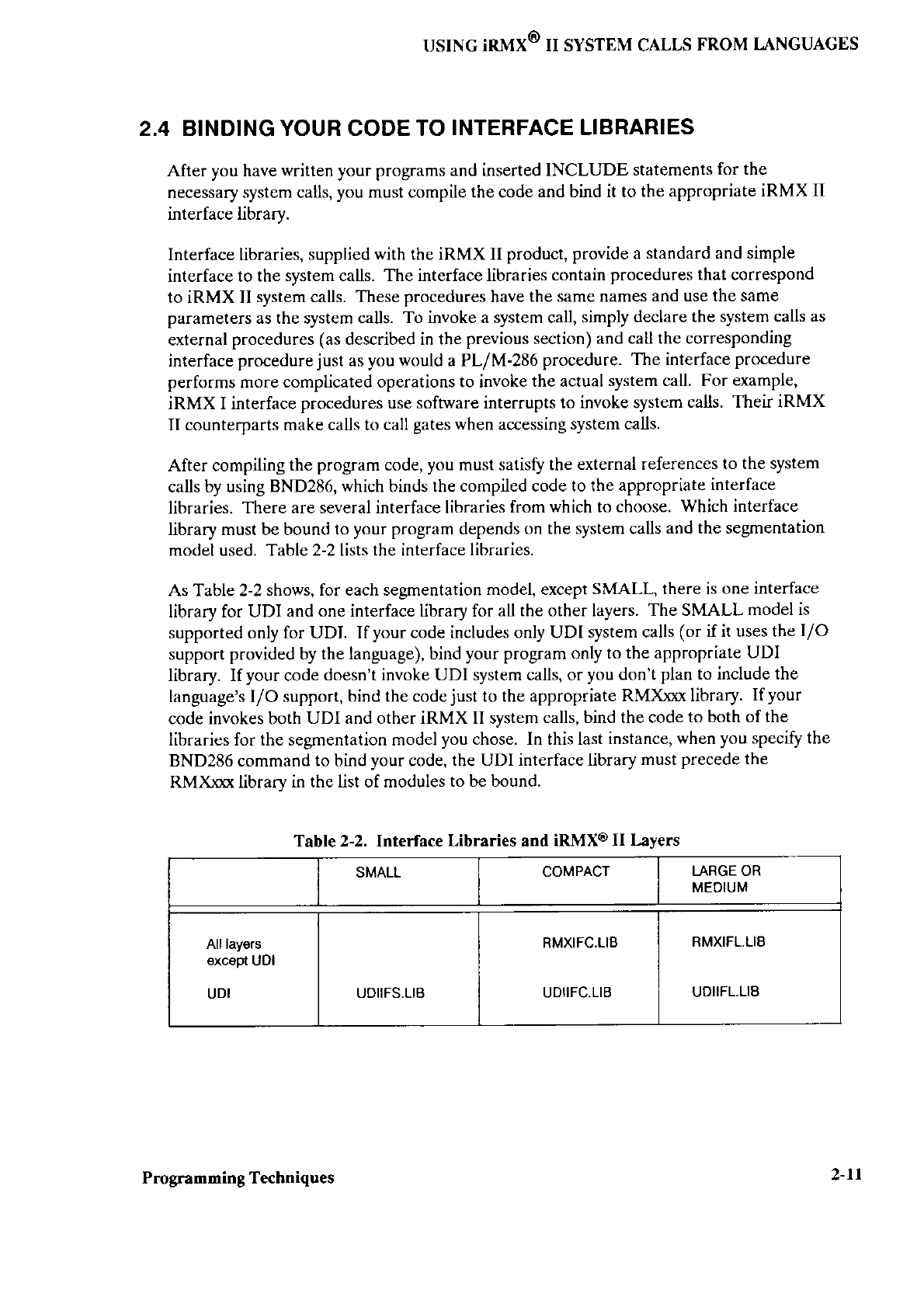
USING
iRMX@ II SYSTEM CALLS
FROM
LANGUAGES
2.4 BINDING YOUR CODE TO
INTERFACE LIBRARIES
After you have
written your programs and inserted INCLUDE statements
for the
necessary
system calls, you must compile the code
and bind it to the
appropriate iRMX II
interface library.
Interface lìbraries,
supplied with the iRMX II product, provide a
standard and simple
interface to the
system calls. The interface libraries
contain
procedures that correspond
to iRMX II system calls. These procedures have
the same names
and use the same
parameters as the system calls.
To invoke a system call,
simply declare
the system calls
as
external
procedures
(as
described in the
previous section)
and call the corresponding
interface
procedure
just as you
would
a PL/M-286 procedure.
The interface
procedure
performs
more
complicated operations to invoke
the actual
system call. For example,
iRMX I interface
procedures use soffware interrupts to invoke system
calls. Their iRMX
II counterparts make calls to call
gates when accessing
system cal.ls.
After compiling
the
program
code,
you must satisfy the
external references
to the system
calls by using
BND286,
which
binds the
compiled code to the
appropriate
interface
libraries. There
are several interface libraries
from
which
to
choose.
Which interface
library must be bound
to your program depends on
the system calls
and the segmentation
model used.
-îable
2-2lists the interface
libraries.
As Table 2-2
shows, for each segmentation
model, except
SMALL, there is
one interface
library for UDI and one interface library for all the other layers.
The SMALL model is
supported only for UDI. Ifyour code includes only UDI system calls
(or if it uses the
I/O
support provided by
the language), bind your program only
to the appropriate
UDI
library. Ifyour code
doesn't invoke UDI system calls, or
you don't
plan to include the
language's I/O support,
bind the code
just
to the appropriate
RMX;oo< library.
If your
code invokes both
UDI and other iRMX II system
calls, bind the code
to both of the
libraries for the segmentation model
you
chose. In this last
instance,
when you specify the
BND286 command
to bind
your
code, the
UDI interface library
must
precede the
RMXrco< library in the list of modules
to be bound.
Table 2-2. Interface
Libraries and
iRMX@
II Layers
SMALL COMPACT LARGE OR
MEDIUM
All lay€rs
€xcspt
UOI
UDI UDIIFS.LIB
RMXIFC.LIB
UDIIFC.LIE
RMXIFL.LIB
UDIIFL.LIE
Pmgramming Techniques 2-tl
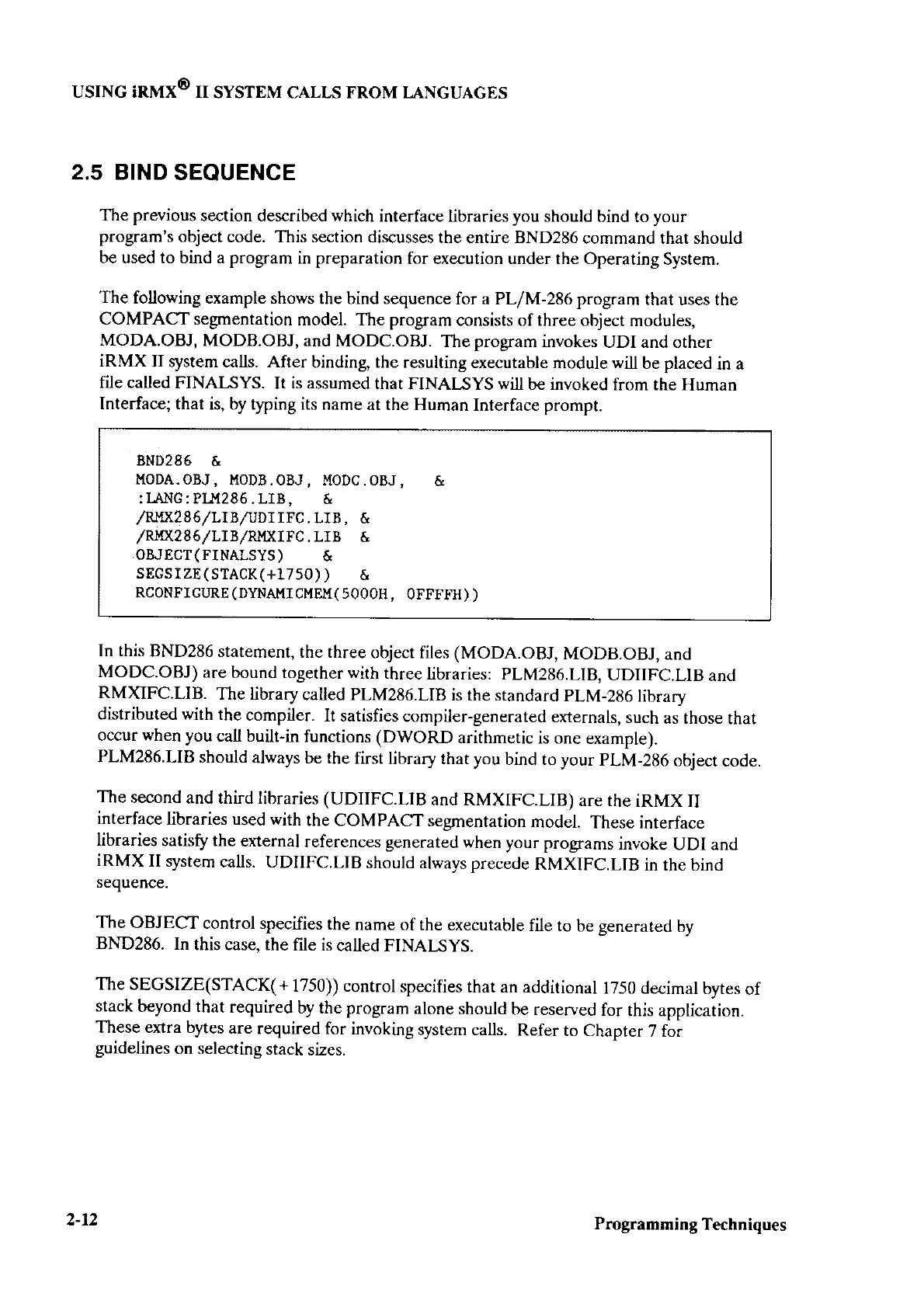
USING iRMXO II SYSTEM CALLS FROM I.ANGUAGES
2.5 BIND
SEOUENCE
The previous
section described which
interface libraries you should
bind to your
program's
object code. This section discusses
the entire BND286
command that should
be used to bind a program
in preparation
for execution under the Operating
System.
The following example shows
the bind sequence
for a PL/M-286 program
that uses the
COMPACT segmentation
model. The program
consists of three object
modules,
MODA.OBJ, MODB.OBJ,
and MODC.OBJ. The
program
invokes
UDI and other
iRMX II system calls.
After binding the resulting
executable
module
will be
placed
in a
file called
FINAI-SYS. It is assumed
that FINAISYS will be invoked
from the
Human
Interface; that
is, by tlping its name
at the Human
Interface prompt.
BND286 &
MODA.OBJ,
MoDB.O&],
!{oDC. OBJ, &
:
LANG:
PLM286.LIB, &
/Nrx286 /LfBnDr r Fc
. LrB, &
/î,to/.286 /LLB/P$LXIFC.
LrB &
OBJECT(FINÀLSYS) &
SEGSTZE(STACK(+L750))
&
RCoNFIGURE(DYNAMTCMEM(5000H,
oFFFTH)
)
In this
BND286 statement,
the three
object files (MODA.OBJ,
MODB.OBJ,
and
MODC.OBJ)
are
bound together with
three
lbraries: PLM286.LIB,
UDIIFC.LIB and
RMXIFC.LIB. The library
called PLM286.LIB
is the standard
pLM-286
library
distributed with the
compiler. It satisfies
compiler-generated
externals,
such
as those
that
occur when you
call built-in
functions
(DWORD arithmetic
is one
example).
PLM286.LIB
should
always be the
first library that you
bind to your pLM-286 object
code.
The
second
and third libraries
(UDIIFC.LIB
and RMXIFC.LIB)
are the
iRMX II
interface
lìbraries used with the COMPACT segmentation
model. These interface
libraries
satisry the
external
references generated
when
your programs
invoke
UDI and
iRMX II system
calls. UDIIFC.LIB
should always
precede
RMXIFC.LIB
in the bin<l
sequence.
The OBJECT
control specifies
the
name of the executable
file to be generated
bv
BND286. In this case, the
file is
called FINAI-SYS.
The SEGSIZE(srACK(+
1750)) control
specifies
that an additional
1750 decimal
byres
of
stack
beyond
that required
by the program
alone
should
be reserved
for this application.
These extra bytes
are
required
for invoking
system calls. Refer
to Chapter
7 for
guidelines
on selecting
stack
sizes.
2-12 Pmgramming
Techniques
USING
iRMXO
II SYSTEM
CALLS
FROM
I.ANGUAGES
The RCONFIGURE(DYNAMICMEM(5000H,
0FFFFH)) control
directs BND286
to
produce a single+ask loadable
(STL) module, to assign
a minimum of5000H
bytes of
dynamic memory to the
module, and to limit the amount of memory
it can borrow
from
its parent to OFFFFH byes. All iRMX II tasks
to be loaded by the Application
Loader
must be STL modules
(and programs invoked at the Human
Interface level
are ìoaded by
the Application
Loader). Therefore,
your BND286
command should
always include
the
RCONFIGURE control.
Programming
Techniques 2-13

CHAPTER 3
COMMUNICATION
BETWEEN
|RMX@ il JOBS
3.1 INTRODUCTION
Read this
chapter
if you want
to
pass
information from one iRMX II job
to another. You
should already be familiar with the following concepts:
. iRMX Il jobs,
including the
root
job
and object directories
. iRMX II tasks
. iRMX II segments
. iRMX Il mailboxes
. iRMX II physical
files or named files
. iRMX II stream files
o iRMX II qpe managers and
composite objects
In multiprogramming systems, where each of several applìcations is implemented as a
distinct
iRMX II job,
information must occasionally pass from one
job
to another. This
chapter describes several
techniques you can use to accomplish this.
The techniques are divided
into two
groups:
passing data between
jobs,
and passing iRMX
II obiects.
NOTE
Many of the techniques in this chapter involve sending tokens or pointers
to other
jobs.
If the sending
job
is
deleted, these entities become invalid.
If the receiving
job
uses the entities later, the results are unpredictable
(usually
a
general protection
error). It is the programmer's responsibility
to avoid these situations.
Progremming
Techniques 3-l
COMMUNICATION
BETWEEN iRMX@ II
JOBS
3.2 PASSING DATA BETWEEN JOBS
Data can be sent from one
job to another in several ways:
1. You can use the SEND$DATA and RECEIVE$DATA system
calls
to exchange the
information. SEND$DATA and RECEIVE$DATA use a mailbox to exchange up
to 128 bytes of information. To use this method, the task that creates the mailbox
must
catalog
it in the root object directory, so that the other task can access it. Thrs
procedure
is described later in this chapter.
The advantages of this technique
are
o Because this technique requires only the Nucleus, you can use it in systems that
do
not use other iRMX II layers.
. Althou€ù the Operating system copies the information
from one
place
to
another, it copies the information very quickly.
o It is the quickest
method of
passing
small amounts
of data.
. It can be used to exchange
larger amounts of data by
passing
the
pointer
to
that
data as data itself in the SEND$DATA system call. The receiving
job can then
use the pointer
to refer to the
relevant data. This method of exchanging
data rs
faster than
using SEND$MESSAGE because it does
not require the overhead
of creating a segment.
The disadvantages
of this technique
are
. Only 128 bytes
of information can be
exchanged
with the SEND$DATA and
RECEM$DATA system calls.
2. You
can create
an iRMX II segment
and
place
the information
in the segment.
Then,
using one of the techniques discussed
below for passing
objects between
jobs,
you
can deliver
the segment.
The advantages
of this technique
are
. Because this
technique requires
only the Nucleus, you
can use it in systems that
do
not use other
iRMX II layers.
. The Operating
system does
not copy the
information from
one
place
to another.
The disadvantages
of this technique
are
o The segrnent
occupies memory
until it is deleted,
either explicitly (by
means of
the DELETE$SEGMENT
system call),
or implicitly (when
the
job that created
the
segment is deleted).
Until the
segment is deleted,
a substantial
amount of
memory
is unavailable
for use elsewhere
in the system.
. The application
code may have
to copy the information
into the
segment or
from it.
t-2 Programrning
Techniques
COMMUNICATION
BETWEEN iRMX@ II JOBS
3. You can use an iRMX II stream
file.
The advantages
of this technique are
. You can
use I/O System calls to pass
information directly between tasks,
without slowing
down the transfer
by temporarily
placing
the data on a
secondary storage
device.
o This technique
can easily be changed to Technique
4 (below).
The
disadvantages
of this technique
are
r You must configure
one or both I/O systems into
your application system.
. There is a 4K byte
limit on the amount of data you can pass via a stream
file.
o Writing data to and reading
data from a stream file is much slower than any of
the
previous
methods.
As a last resort, you
can use the Basic I/O System, the Extended I/O System, or the
Universal
Development Interface to write the information onto a mass
storage
device, from which the
job needing the information can read it.
The advantages of this
technique are
. Many
jobs
can
read the information.
. This technique can easily
be changed to Technique 3
(above).
The disadvantages
of this technique are
. You must incorporate one or
both I/O systems
(and possibly
UDI) into
your
application system,
e Device I/O is slower than reading
and
writing to a stream file, making this the
slowest of the
four methods.
3.3 PASSING
OBJECTS
BETWEEN
JOBS
Jobs can also communicate with
each other by sending objects across
job
boundaries. You
can use
any of several techniques
to accomplish this. In the following discussions
you
will
see how to pass objects
by using object directories,
mailboxes,
and parameter objects.
Although you
can
pass
any object from onejob
to another, there is a restriction
pertaining
to connection
objects.
When
a file connection created
in one
job (Job
A) is
passed to a
second
job (Job
B), Job
B cannot successfully use the object to perform I/O. Instead, Job
B must create another connection to the same
file. It does this by invoking
the Basic I/O
System's
A$ATTACH$FILE system call, using the connection obtained from Job A as the
prefix
parameter. No subpath parameter needs to be specified. A$ATTACH$FILE
returns
a new connection to the same file,
which
Job B can use to
perform
I/O. This
restriction about connections is discussed in the Extended |RMX II Basic I/O System User's
Guide and in the |RMX II Extended I/O Svstem
User's
Guide
.
Programming
Techniques 3-3
COMMUNICATION BETWEEN iRMX@ II JOBS
3.3.1
Passing
Objects
Through Object
Directories
Consider
a
hypothetical
system in
which tasks in separate
jobs
must communicate
with
each other. Task B in Job
B must not begin, or resume running, until Task A in Job A
grants permission.
One way to perform
this synchronization is
to use a semaphore. Task B can repeatedly
wait at the semaphore until it receives a unit, and Task
A can send a unit to the
semaphore
whenever
it wishes to grant permission for Task B to run. If Tasks
A and B
were within the same
job, this would be a straightforward use of a semaphore.
But the
two tasks are in different
jobs,
and this causes
some complications.
Specifically, how do Tasks A and B access the same
semaphore?
For instance,
Task A can
create the semaphore and access it, but how can Task A provide
Task B with a token
for
the semaphore? The solution is to use the object directory of the root
job.
In
the
following explanation, each of the two tasks must
perform
half of a
protocol. The
process of creating and
cataloging
the semaphore
is one half, and the
process of looking
up the semaphore is the other.
For this
protocol
to succeed, the programmers of the two tasks
must agree on
a name for
the semaphore,
and they must agree
which
task performs which half of the protocol. In
this example, the semaphore
is named PERMIT_SEM. And, because Task B must
wait
until Task A grants
permission, Task A will create
and catalog the semaphore, and Task B
will look it up.
Task A performs
the creating and
cataloging as follows:
1. Task A creates a semaphore with no
units by calling the CREATE$SEMAPHORE
system
call. This provides Task A with a token
for the semaphore.
2. Task A calls
the GET$TASK$TOKENS system call to
obtain a token for the root
job.
3. Task A calls the
CATALOG$OBJECT system call to place
a token for the
semaphore
in the object directory of the
root
job
under the name PERMIT_SEM.
4. Task
A continues processing, eventually
becomes ready to grant permission, and
sends a unit to PERMIT SEM.
3-4 Programm ing Techniques
COMMUNICATION BETWEEN iRMX@ II JOBS
Task B performs
the look-up protocol
as
follows:
1. Task B calls the
GET$TASK$TOKENS
system call
to obtain a token for the
root
job.
2. Task B calls the LOOKUP$OBJECT
system
call to obtain a token
fbr the object
named PERMIT_SEM.
If the name
has not
yet
been cataloged,
Task B
waits
until
It ls.
3. Task B calls the RECEIVE$UMTS
system
call to request a unit
from the
semaphore. If the
unit is not avaiìable,
Task A has not yet granted permission
and
Task B waits. When
a unit is
available, Task
A has
granted permission
and Task B
becomes ready.
You should be aware
of several aspects
of this technique:
o In the example, the
object directory technique was
used to
pass
a semaphore. You
can use the same technique
to
pass
any type of iRMX II object.
. The semaphore
was
passed via
the object directory
of the root
job. The root
job's
object directory
is unique because
it is the only object directory to which alljobs in the
system
can
gain
access. This accessibility
allows onejob to "broadcast"
an
object to
anyjob that knows the
name under
which
the
object is cataloged.
. The object directory
of the root
job
must be
large enough to accommodate the names
of
all the objects
passed
in this
manner. If it is not, it will become full and
the
Operating system wi.ll
return an exception
code
when
attempts are made to catalog
additional
objects.
. Ifyou use this technique to pass
many objects,
you
could have
problems
ensuring
unique names.
To avoid this, use an
object directory other than the root object
directory for different
sets ofjobs. For example, have
one
of
the
jobs
catalog its token
in
the root
job's
object directory
under a previously set name.
Any other
jobs
can then
look
up the token of the
cataloged
job
in the root
job's
directory, and
use its object
directory
rather than that
of the root
job.
e In the example, the object-passing protocol
was
divided into two halves: the create-
and-catalog
half and the look-up
half. The
protocol works
correctly regardless of
which
half runs first.
Programming
Techniques J-f,
COMMUNICATION BETWEEN iRMX@ II JOBS
3.3.2
Passing Objects
Through
Mailboxes
You can also send objects from onejob to another
by using a mailbox. This is a two-step
process; the two
jobs
using the
mailbox must first use
the object directory
technique to
obtain
mutual access to the mailbox,
and then use
the mailbox to pass
additional
objects.
There
are two ways to transmit information
via a mailbox. If the mailbox is set up to
transfer data, the tasks can use
SEND$DATA and RECEIVE$DATA to send and
receive
128-byte data. With these calls,
tasks can transfer strings,
arrays, and even tokens for
objects, as
long as the information
is 128 bytes or less.
If the mailbox is
set up to transfer objects, the
tasks can use SEND$MESSAGE
and
RECEIVE$MESSAGE
to send and receive iRMX II objects. With these calls,
only the
object tokens are sent and received.
Whenever rwo
jobs
send data
via
mailboxes, the sending and
receiving task must
perform
handshaking to ensure that they
are finished using the segment containing the data.
If the
segment is deleted and the
receiving task attempts to access the now nonexistent segment,
a general protection error occurs.
3.3.3 Passing Parameter Objects
One of the
parameters
of the CREATE$JOB system call is a
parameter
object. This
parameter
allows a task in the
parent
job
to
pass
an object to the newly created
job. Once
the tasks
in the new
job
begin running,
they
can obtain
a token
for the
parameter object
by calling GET$TASK$TOKENS. This technique is illustrated in the
following
example.
Suppose that Task I in Job I is responsible for spawning a new
job (Job
2). Suppose also
that Task 1 maintains an array needed by Job 2. Task I can
pass
the array to Job 2 by
putting the array into
an iRMX II segment and
designating the segment as the
parameter
object in the CREATE$JOB system call. Then the tasks of Job 2 can calÌ the
GET$TASK$TOKENS system call to obtain a token for the segment.
ln the example, the parameter object is a segment.
However,
you
can use this technique
to pass any
kind of iRMX II object.
3.3.4 Restrictions
As mentioned earlier, there is a restriction concerning the passing
of connection objects
between
jobs.
When a
file connection created in onejob is
passed
to a second
job,
the
second
job
cannot use
the object to
perform
I/O. Instead, the second
job
must create
another connection to the same
file. This restriction is discussed in the Extended |RMX II
Basic
I/O Svstem User's Guide and in the r'RMX Extended I/O Svstem
User's Guide.
3-6 Programming Techniques
COMMUNICATION BETWEEN
iRMX@ II JOBS
3.3.5 Comparison
of Object-Passing
Techniques
Consider
these
guidelines
when
deciding
how to pass
an object berween
jobs:
. Ifyou are
passing
only one object
from a parentjob
to a child
job,
use the
parameter
object when
the parent
creates the
child.
. Ifyou are
passing
only
one object
but not from parent
to child, use the object
directory
technique. It is simpler
than
using a mailbox.
. If two
jobs
frequently pass
objects between
each other, the mailbox
technique is the
fastest
and easiest
method.
. Ifyou need to pass
more than one object
at a time, use any ofthe following
techníques:
- If the tokens fit in a 128-byte array,
create a mailbox and use
SEND$DATA and
RECEIVE$DATA
to transfer
the array.
-- Assign an order to the
objects and send
them one by one to a mailbox
(using
either SEND$DATA
or SEND$MESSAGE) where
the receiving
job
can
pick
them up in order.
-- Give each
object a name
and use an object
directory.
- Write a simple
type manager
that
packs
and unpacks a set
of objects. Then pass
the set of objects
as one composite
object.
Programming Techn
iques J- /

GUIDELINES CHAPTER 4
FOR
STACK SIZES
4.1 INTRODUCTION
This chapter
is for three kinds
of readers:
. readers who vr'rite tasks
that create
iRMX II jobs
or tasks
. readers who write
interrupt
handlers
o readers who write
tasks to be
loaded by the Application Loader or tasks
to be invoked
by the Human Interface
You should
already be familiar with
the iRMX II System Debugger, and you
should know
which
system calls are provided
by the various
layers of the Operating System. You also
should
know the difference
between maskable and nonmaskable interrupts.
This chapter
will
help you
compute the amount of
stack
you
must specify for a system call
that creates
a
job
or task. Ifyou are writing
an interrupt handler, this
chapter tells
you
about stack
size limitations that you
must adhere to. If you are writing
a task to be loaded
by the Application Loader
or invoked by the
Human Interface, this chapter tells you how
much stack to reserve during
the binding
process.
4.2 STACK SIZE LIMITATION
FOR INTERRUPT
HANDLERS
Many Operating system tasks are
subject to two kinds
of interrupts: maskable and
nonmaskable. When
these interrupts
occur, the associated
interrupt handlers use the
stack ofthe interrupted
task. Consequently, you
must know how
much ofyour task's stack
to reserve for these interrupt handlers.
The
operating system assumes
that all interrupt handlers require no more
than 128
(decinal) bytes of stack, even
if a task is interrupted by both a maskable and a
nonmaskable
interrupt. Ifyou fail to adhere to this limitation when writing an interrupt
handler, you risk stack
overflow in your
system.
Programming Techniques 4-l
GUIDELTNES FOR STACK SIZES
To stay
within the 128
(decimal) byte limitation, restrict
the number of local
variables that
the interrupt handler
stores on the
stack. For interrupt handlers
serving maskable
interrupts,
you can use as
many as 20
(decimal)
byes
of stack for local
variables. For
handlers
serving nonmaskable
interrupts, use
no more than 10
(decimal) bytes. The
balance
of the 128 bytes is
consumed by the SIGNAI$INTERRUPT system call and by
storing
the registers on
the stack.
For more information
about interrupt
handlers. refer to the Ertended
|RMX II Nucleus
User's Guide.
4.3 STACK GUIDELINES
FOR CREATING
TASKS AND JOBS
When
you
create
a task by invoking a system call,
you must specify the size of the
task's
stack. And,
since every
new
job
has an initial task created
simultaneously
with
thejob,
you must also designate a stack size
when you create a
job.
Be careful
when specifing a task's stack size. Specifying
a stack size that is too small,
could
cause the task to overflow its stack. If the stack overflows, the hardware
will detect
the error and cause the Nucleus to invoke an exception handler,
which could delete the
offending task or activate the iSDM monitor.
Specifing a stack size that is too large
wastes
memory. Ideally, you should specify a stack size that is only slightly larger
(500-
1000 bytes) than v/hat is actually required.
This chapter illustrates two techniques for estimating a task's stack size: arithmetic
and
empirical. For best results, start
with
the arithmetic technique and then use the empirical
technique to tune
your
original estimate.
If your
programs are recursive, do not rely solely on either of these techniques. Stack
usage in recursive
routines
varies
because of run-time
events, and should be computed
carefully.
To minimize problems, pad the results ofyour computations by 500 to 1000 bytes to allow
for situations that you might not have experienced in your tests.
4.4 STACK GUIDELINES
FOR TASKS TO BE LOADED
OR
INVOKED
Ifyou are creating a task to be loaded by the Application Loader or invoked by the
Human Interface,
you
must specify the size of the task's stack during the bind process.
The
following
techniques
will
help
you
estimate stack size requirements.
4-2 Prograrnming
Techniques
GUIDELINES FOR
STACK SIZES
4.5
ARITHMETIC TECHNIQUE
This technique slightly
overestimates
a task's stack size.
After you use this technique to
obtain
an estimate, use the
empirical technique
described later in this chapter
to refine
the estimate.
The arithmetic technique
is based on these factors,
which
affect a task's
stack:
. Interrupts
o iRMX II system calls
r Requirements
of the task's code (for
example, the stack used to pass parameters
to
procedures or to hold local variables
in reentrant procedures)
Estimate the size of a
task's stack by adding
the amount of memory required to
accommodate these factors.
The following sections
explain how to compute these
values.
4.5.1
Stack Requirements
for Interrupts
When
an interrupt occurs while a task
is running, the interrupt handler
uses the task's
stack
while
it services
the interrupt. Consequently, you must
ensure that a task's stack is
large
enough to accommodate the
needs of rwo interrupt handlers: one for
maskable
interrupts and one for nonmaskable interrupts. Refer to the
earlier section
"Stack
Size
Limitation for Interrupt Handlers" for more
information.
4.5.2 Stack Requirements
for System
Calls
When a task invokes an
iRMX II system call, the processing
associated
with the call uses
some of the task's stack.
The amount of stack
required depends on
which
system calls you
use.
Table 4-1 shows how
many bytes of stack a task requires to support the system calls of
each layer. Included in these figures
are the 128 bytes required by the interrupt
handlers.
To find out how much
stack
you
must allocate
for system calls, determine which layers of
the operating system your
task uses. Scan Table 4-
1 to find which
of those layers requires
the most stack.
By allocating
enough stack
to satisfy the requirements of the
most
demanding layer,
you
can satisfy the
requirements of all system calls used by
your
task.
Progranming Techniques 4-3
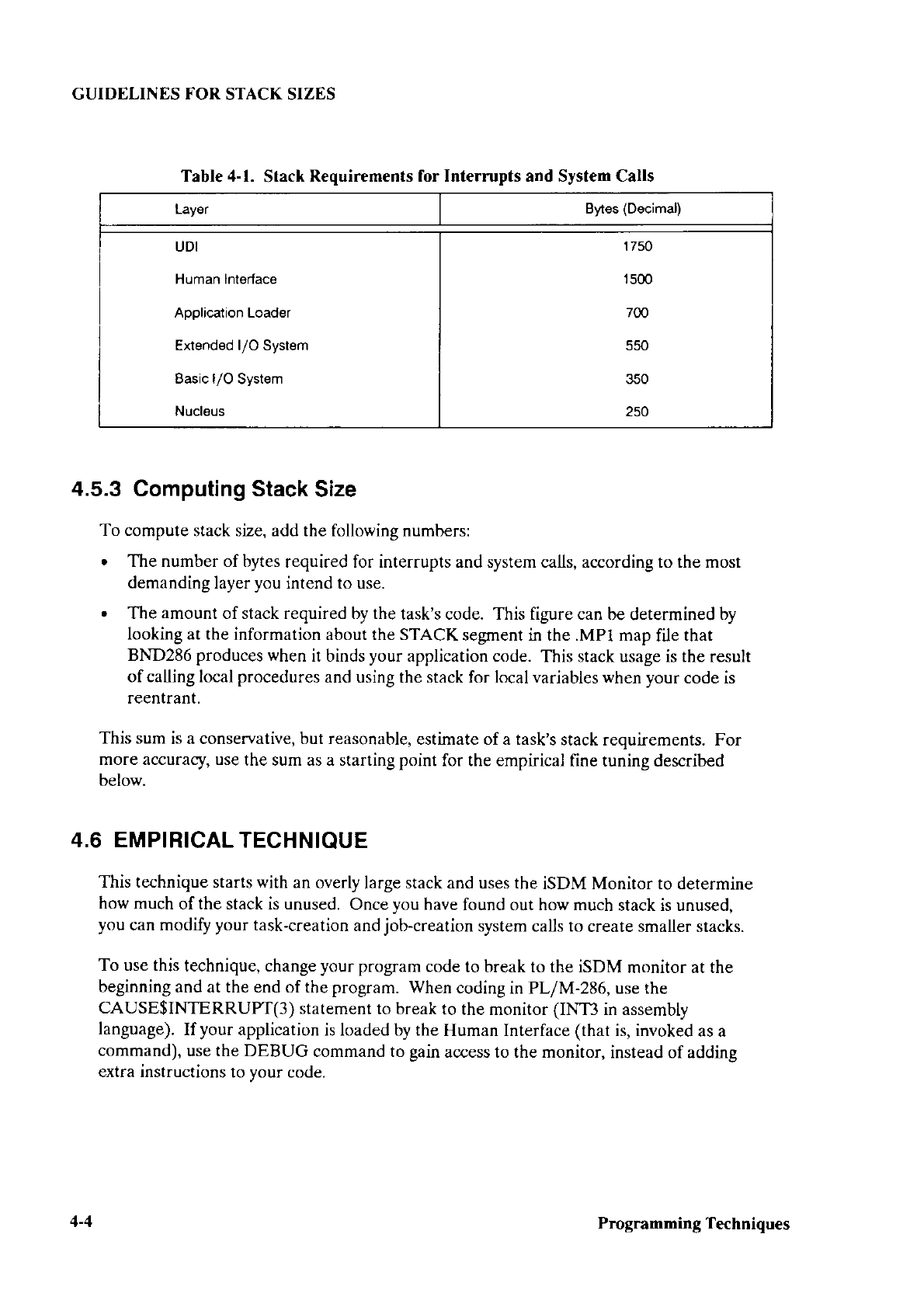
GUIDELINES
FOR
STACK SIZES
Table 4-1.
Stack
Requirements for Interrupts and System Calls
Layer BYes
(Decimal)
UDI
Human lnterface
Application Loader
Enended l/O System
Basic l/O System
Nucl€us
1750
1500
7@
550
350
2s0
4.5.3
Computing Stack
Size
To compute
stack size, add the following numbers:
. The number of bytes
required for interrupts and system calls, according to the most
demanding
layer
you
intend to use.
. The
amount
of stack required by the
task's code. This figure can
be determined by
looking at the
information about the STACK
segment in the .MPl map
file
that
BND286 produces when
it binds
your
application code.
This stack usage is the result
of calling local procedures
and using the stack for local variables when
your code is
reentrant.
This sum
is a conservative, but reasonable,
estimate of a task's
stack requirements. For
more accuracy, use
the sum as a starting point for the empirical
fine tuning described
below.
4.6 EMPIRICAL
TECHNIQUE
This technique starts with
an overly
large stack and uses the
iSDM Monitor to determine
how much
of the stack
is
unused.
Once you have
found out how much
stack is unused,
you
can modify your task-creation
and
job-creation
system calls to
create smaller stacks.
To use this
technique, change your program
code
to break to the iSDM
monitor at the
beginning
and at the end of the program.
When
coding in PL/M-286, use the
CAUSE$INTERRUm(3)
statement
to break
to the monitor (INT3 in assembly
language).
Ifyour application
is loaded by the
Human Interface
(that
is, invoked
as a
command),
use the DEBUG
command to gain
access to the monitor,
instead of adding
extra instructions
to your code.
4-4 Programming Techniques
GUIDELINES
FOR
STACK SIZES
When
the iSDM monitor first receives control, fill the unused
portion of the stack
with a
value
that would
not normally appear
there. For example, use the monitor's S command
to fill the remaining
stack
with a
value
of OAAH.
Continue
running the program. When
the iSDM monitor receives control at the end of
the program,
examine the stack and
see how much of it still contains the value
you
filled in
earlier. That portion was
unused throughout
the entire execution of the program.
Use this technique
to determine stack usage,
but do not assume that the
value
you obtain
is an exact number. The
value you
determine
usually
won't
be exact because a typical run
of the program probably will not take the
deepest
path (using
the most stack) through the
program. Also, a tlpical run might not encounter interrupts on the deepest paths through
the program.
Programming Techniques 4-5


CONVERTING |RMX@
AND IMPROVING
CHAPTER 5
IAPPLICATIONS
PERFORMANCE
5.1
INTRODUCTION
When
moving an iRMX I application to the iRMX II Operating System,
your
fist
concern is usually making the application work. After you realize that the upv/ard
compatibility provided by
the iRMX II Operating
System makes the change easy,
you will
want
to get
optimum
performance
from the 80286 and 80386
processors.
This
chapter
helps
you
do that, by
providing
instructions that
will
enable
you to design applications
with
optimum performance.
5.2 EFFECTS OF SEGMENTATION
Segmentation is
one
of the most important
performance areas in which the iRMX I and
iRMX II Operating Systems differ. When using the 8086 processor, and the
80286/38ó
processors
in real-address mode, changing a segment register is as fast as changing any
other register, making it one of the fastest operations to perform. However,
with the
80286 and 80386 processors in protected virtual address mode, changing a
segment
register involves looking up four words
in the global or local descriptor
tables (GDT or
LDTI. Therefore. it is a slower oneration.
5.2.1
Causes
of Program
Slowdown
When
the processor is in protected virtual address mode (as it is
when
the operating
system
runs), it is
possible
to spend unnecessary time on segment
register changes
because of the way PLIM-286 works. The default
model of segrnentation under
which
PL/M-286 compiles
your
code is I-ARGE. Under the LARGE model, the following items
apply:
. Every
procedure
has its own code segment
and its own data segment.
Programming Techniques 5-l
COI{I'ERTINC iRMX@ I APPLICATIONS AND IMPROVING PERFORMANCE
. Every reference
to a nonlocal variable causes the processor to set up the ES register
to access the
variable's
segnent, an operation requiring 17 clock cycles.
. Every procedure
call
to an external procedure or to a public internal procedure is a
long call,
which
changes the CS register and costs 26 clock cycles
(as
compared to 7
rycles
for a short call and 13
rycles
for a long call in real-address mode). The long call
is followed by a MOV to DS to establsh a new data segment. This costs an additional
17 clock cycles (as compared to 2 cycles in real-address mode).
The net result of this additional overhead
is
a significant slowdown when
compared to the
same instruction
running in real-address mode. The overall
slowdown of the application
depends of course on how often such
instructions are used.
5.2.2 Avoiding
Slowdown
To help avoid the slowdown
caused by changing a segment
register, read the
"PL/M-286
Extended
Segmentation" chapter
in the PL/M-286 manual. In addition,
use the
COMPACT model of
PL/M-286
when
possible.
Use the MEDIUM model when you
cannot use
COMPACT, and use COMPACT subsystems when you
need more speed than
MEDIUM can give you. Resulting code
will have
fewer segment register changes
and
will
run faster.
A side benefit of this technique
is that it requires
fewer objects (the operating
system
has an
upper limit of 8000 objects).
In addition, you
can reduce slowdown by
using the OPTIMIZE(3) compiler
control
when
compiling
code. T\e PL/M-286 User's Guíde
describes the requiremenrs
for including this
control.
Use the OPTIMIZE(3)
control cautiously.
If you aren't
sure whether your code
meets the
requirements
for OPTIMIZE(3), use
OPTIMIZE(2)
instead.
s.3 PLIM-286
BASED
VARTABLES
Accessing
a PLIM-286 varíable
that is
BASED on a POINTER or a SELECTOR requires
that the ES register
be loaded
first. It is therefore
a slower operation
in protected
mode
(relative
to
real mode).
To avoid making
numerous
references to members
of a BASED
structure
or array, you
might want
to try the
following approach:
. Declare a
non-BASED copy
ofthe structure
or array.
o Use
MOVIV to copy from the original
BASED structure ro the
non-BASED
copy.
. Continue
accessing
only the copy.
To see
if this technique
helps,
place
SCODE
and
$NOCODE
controls
around the
areas of
code in which potential
slowdown occurs.
This causes
the compiier
to generate
assembly
language
listings of these areas. With the listings, you
can determine
how
often segment
registers
are loaded
and
whether
this
optimization
technique
is necessary.
<-t Programming
Techniques
CONVERTING
iRMX@ I APPLICATIONS
AND IMPROVING PERFORMANCE
5.4 OPTIMIZING
NUCLEUS PERFORMANCE
After you increase
your application's speed, try to optimize
the use of Nucleus system
calls. To do this,
you
must understand that under the operating
system,
fast Nucleus
system calls
get
faster and slow
system calls
get
slower,
when
compared
to the iRMX I
Nucleus
running on a real-mode
80286
processor. Therefore,
use the
fast system calls
(such as sending and receiving
messages) as
much as
possible, and use the
slower system
calls
(creating and deleting)
as little as
possible.
One
way to avoid creating
and deleting objects
is by reusing
segments. Instead
of creating
a segment each time
you need one and deleting
it each time
you finish, keep
the segment
for later use. If the segment size
is appropriate,
you
can
use it again
without incurring
the
overhead of creating
a new segment.
s.s
oPTrMrzrNG
SEQUENTIAL
l/O
Ifyour programs
use primarily sequential
I/O (as opposed
to random
I/O) you
can
increase performance
when using the Ext€nded
I/O System,
by assigning larger
buffers
than
you
used under the iRMX I Operating System.
5.6 MAILBOX
TUNING
When
creating
a mailbox,
you
can specif the number
of messages
that can be
waiting in
the mailbox's high-performance
queue. When
this
queue
overflows,
the
operating system
creates an additional
segment
to contain 100 more
messages.
This overflow
queue is
slower
than the high-performance
queue
only for the initial overflow,
because
at that time
the operating
system must create a new
segment to serve
as the overflow
queue (recall
that creating a segment is a
relatively slow operation).
After the
overflow
queue
is
created, that queue
isjust as fast as the high-performance
queue.
The overflow
queue is
not deleted
until the entire mailbox is
empty (both queues).
Because
ofthe mechanism
used to create and delete
overflow
queues,
when you create a
mailbox give it a
queue large enough to handle
all the messages
you
expect to be
waiting
at the
queue. However, if an overflow
is possible, you
might
want
to
prevent the
queue
from
emptying, so
that the operating system
won't delete
the overflow
queue and then
be
forced to create
it again
when another overflow
oocurs.
5.7 RECYCLING
BUFFERS
Because creating
and deleting segments
are slow operations,
applications
that
use many
buffers
can benefit
from reusing buffers
from a previously
created Buffer Pool instead
of
creatine buffers
and deleting them
as needed.
Programming Techniques 5-3
COIIVERTING iRMX@ I APPLICATIONS AND IMPROVING PERFORJVIANCE
You can recycle buffers by creating a Buffer
Pool
with a sufficient number of buffers
during
the application's initialization. When
you
create the Buffer Pool,
you
have
complete control (within
limits) over the number and size ofthe buffers available.
When a buffer is needed a task can invoke the REQUEST$BUFFER
system call to
receive the token of one
of the
buffers from the Buffer Pool. This is
faster than creating a
segment. When
the buffer is not needed
any more, the task can invoke
RELEASE$BUFFER to return the buffer
to the Buffer Pool (this is faster than deleting
a
segment).
5.8 CONSERVING LIMITED RESOURCES
With the iRMX I Operating
System,
programmers
must
often
pay
special attention
to the
amount of memory
in the system.
Because the 8086
processor
can access only one
megabyte of memory,
memory is usually
the scarcest resource
in the system.
Under the
iRMX II Operating
System, programmers
must still pay attention
to the
amount of memory in the system.
But, memory
is no longer a scarce
resource, because
the 80286
and 80386 processors
can each
access up to their full address range of memory
locations.
Instead,
the most limited
resource is the number
of entries in the global
descriptor table, which
serve as tokens
for iRMX II objects.
In an iRMX I environment, programs
often veri! memory problems
by examining
the
condition
code returned
by each system
call and looking
for E$MEM conditions.
In an
iRMX II environment,
programs should
check for both
E$MEM and
E$SLOT conditions.
The E$SLOT
code is returned
if there aren't
enoush GDT slots
to comnlete the
requested
system
call.
Build your iRMX II systems with
as many
GDT slots
as
possible.
For
systems
with
over
2MB of physical
memory,
allocating
full-size GDT slots
(8K slots that
consume 128K bytes
of
memory) seems a
reasonable cost
for the
problems
that the extra
GDT slots can
eliminate.
5-4 Pmgramming
Techniques
4.1 INTRODUCTION
This appendix contains complete programming
examples
that use iRMX II system calls.
You can
compile,
bind, and run these programs
from the Human Interface
yourself,
or
you
can use them
purely
as examples,
to see hovr' to perform certain operaîions under the
operating system
You can also use the EXAMPLE 1 files as a starting
point in developing
your application
code. Using different
parts
of these files saves you
from initially having to create the
source module, adding
include statements, re-writing
code
that attaches
the console, etc.
4.2 EXAMPLE 1
-
SYSTEM PROGRAMMING
CONCEPTS
Example 1 demonstrates
some iRMX programming
concepts by
printing prompts
to the
console screen
and accepting input from the user. To accomplish this, the
program
uses
two tasks: the main program
code the a second task called TASK2. The main
program
code
is the
initial task and creates the second task
TASK2.
The function of the main program
code is the following:
. set up the programming
environment by creating objects, the second task, etc.
o prompt the user for and capture
keyboard input
. pass
the captured input to TASK2
. exit
with an error after
receiving three user-supplied keystrokes.
The function of TASK2 is to receive user-supplied
keystrokes
from the main program
code
and
process
them. The
processing
consists of printing the received keystroke to the
screen once every second.
Because thejob uses two tasks, each task can perform its function separately from the
other task. Communication and data passing
between the
main program code and
TASK2 is handled
using
some basic iRMX programming
techniques.
Programming Techniques A-l
EXAMPLE PROGRAMS
The following sections show you where to locate
the actual code in the iRMX file
structure, explain basic iRMX programming
concepts used in the example, show how to
build the program, and
show how to run it.
A.2.1 Program
Source Code
The
program
source
code and supporting files can
be found in the Intel-supplied iRMX
file structure. The complete pathname
for the source code files and
related files is the
following:
/ rmx28 6
/ deno
/p 1m/ intro
Before attempting to understand
this example,
you
should produce
hard copies of the
source code
files or have easy access to view
them from a console screen.
Getting
and Setting
Terminal
Attributes
Creating
Tasks
Cataloging
Objects
A.2.2
Concepts
This example illustrates
nine common iRMX programming
concepts.
The following list
briefly describes
each of these
concepts:
In-Line Exception Processing The processing
of all errors resulting
from iRMX System
Calls in your
application
code rather
than using the
default
exception handler, which
deletes
tasks that get
errors.
Using separate
files that contain
PL/M-
286 data structure
definitions and
literal
definitions needed
to make
system calls.
Providing separate
literal files, such as
these, relieves you
from repeating data
structure
and literal definitions
throughout modules.
Using
iRMX System
Calls to
get
the
current terminal
attrihutes.
After getting
and
altering the attributes, you
can use
another iRMX System Call
to set them.
Using
an iRMX System
Call to create
additional
tasks from
an existing task.
Describing
to the system
where key
objects the
job
uses reside.
Tasks can
easily share cataloged
objects.
Using Literal Files
A-2 Prograrnming
Techniques
Using Response Pointers During
Inter-Task Communication
Using
Buffer Pools
Performing Screen Input/Output
Performing Simultaneous
Input/Output
EXAMPLE
PROGRAMS
Instructing serving tasks
where
to
respond with
information
that signals the
completion of a requesting task.
Response Pointers allow serving tasks to
keep track of which
requesting tasks they
are responding to.
Creating areas of memory for a
job
that
tasks can use as a common memory
resource. Once a buffer pool and its
buffers have been created, a[ì
the system
has
to do
in
order to use the memory is to
request and release buffers.
Reading and
writing
data to the
physical
terminal screen.
Tasks
performing I/O operations
independent of one another. For
example, one task may wait for terminal
input
whiìe
another
task processes data
and
writes
it to the terminal.
4.2.2.1 In-Line Exception Processing
Inline exception
processing provides
a way
for
your
application
to handle errors
generated
from system
calls. The flexibility of the iRMX Operating System allows
you
to
determine how to process exceptions: processing them in-line or using the default
exception
handler. This example demonstrates a method that lets you provide your own
exception processing. In order
for
you
to
provide your
own exeeptiÒn
processing, you
must do
two things: cause the system to pass control to your exception handler routine
instead of built-in exception handler
routines, and create
your
own
exception
handler
routine.
To get the operating system to pass
control to
your
routine instead
of a
built-in
routine
involves resetting the
value
of the current task's
exception
mode and coding your tasks to
call
your
exception handler routine.
This example uses a
procedure
called SET$EXCEF |ION in the file EXCEPT.P28 to
reset the exception mode to a
value
ofzero. A value
ofzero telìs the operating
system to
never pass control to built-in exception
handler routines.
lf you examine the beginning of
both
the main
program code
and TASK2,
you will see that the
very
first executable
statement is a call to the SET$EXCEPTION
orocedure
as follows:
Prograrnming Techniques A-3
EXAMPLE PROGRAMS
CALL se !$except lon( N0$EXCEPTIONS
) ;
This call passes a zero value parameter
(NO$EXCEPTIONS supplied
from a literal file)
to the
procedure. When
SET$EXCEPTION
executes, it calls
GET$EXCEPTION$HANDLER,
which returns exception handler information to
the
data structure addressed by except$info. The
procedure
then replaces
the exception
mode
with
zero usins the followins
statement:
except$
lnfo .
mode
= except$mode;
The
procedure then
calls SEfiEXCEPTION$HANDLER
to reset the exception handler
information with the
altered
data addressed by except$info.
By
supplying
a zero
value for
mode in the data structure that describes exception information, you tell the system to
never pass control to the built-in exception handler routine (refer to the Extended |RMX II
Nuclew Systems Calls Manual for detailed information on these system calls)
Now that you have got
the operating system not to call built-in exception handler routines,
you
must code your tasks to either check for individual expected errors
or to call
your own
exception handler routine. This example uses a procedure called
ERROR$CHECK in
the file EXCEPT.P28 as the exception handler
routine. Notice that in the source code for
the main program
code and TASK2, a call to ERROR$CHECK
follows every system call.
The following code illustrates
an example:
CALL
rq$s$open (co$conn, LTRITE$ONLY,
0, @status).
CALL etror$check(510,status) ;
nail$box - rq$lookup
$
obj
ec t (
CALLER,
G(3,
'MBX'), INFINITE$I.IAIT,
@s
tatus ) ;
CALL
error$check(520,status) ;
pool$tkn: rq$ lookup$ obj ec t (
CALLER,
@(6,'BUFFER'), INFINITE$I4ÌAIT,
Gstatus);
CALL error$check(530,status) ;
The above code
is from TASK2. Each time a system
call is matle, a subsequent call is
made to
ERROR$CHECK passing it a line number and a word containing
the
status
from
the
previous
system
call. The routine ERROR$CHECK
tests the value of status and
returns to the
calling task if it is zero (no
error occurred). lf the value of status is not
zero
(an error
occurred), then
ERROR$CHECK builds an error
message,
prints
it to the
screen,
and exits the
job.
A-4 Programming Techniques
EXAMPLE PROGRAMS
NOTE
The line numbers passed as the first parameter in calls to
ERROR$CHECK
have no implicit meaning. These numbers are simply
arbitrary numbers that can be associated
with a system
call. This
technique, allows
you
to easily find a system call
that generates an error.
4.2.2.2 Use of Literal Files
Within the iRMX directory structure,
you will find intelsupplied
literal files. These files
are located in the directory
/RMX286/INC and have a file extension
of .LIT. Literal files
provide
many
data structure definitions used by iRMX System Calls
and some extremely
useful lìteral definitions for PL/M-286 code. Including
the appropriate literal files in your
program
modules
saves you the trouble of having to repeatedly enter
the data structure
definitions manually in
your
source code and keeps
your code independent
of changes to
these structures between iRMX releases. Because
the names used in literal definitions
are descriptive,
your
code becomes easier to understand.
It is
good programming
practice
to
get
in the habit of using Intel-supplied literal
files.
This example uses include statements to include
various literal files in every
source code
file. The following
PL/M-286 statements are from the main
program code in the
file
DEMO.P28.
These statements show how to include six
literal files.
$
lnc lude
(/rrnx286linc/e rror. I it )
$
include (
r/rrnx2
86/inc/eornrnon.
11t )
$
incLude (/rmx2 86l1nclns texh . l ic )
$
lnclude
(/rmx286lt
ncltscrn. lit)
$include
(/rmx286linc/iaiors. lit)
$include (/rnx286 / inc / Io. IiL)
Tables A-1 through A-4 show
which
Intel-supplied
literal files are
useful for
which
types
of
system calls-
Table
A-t Literal Files Helpful Wilh Nucleus Syslem
Calls
Nucleus System Call Literal File
CREAfE$JO8 NSfEXH.LIT
GET$EXCEPTION$HANDLER NSTEXH.LIT
GET$IASK$TOKENS NGTTOK.LIT
GET$TYPE NGfTYP.LIT
SETSEXCEPTIONSHANDLER NSTEXH.LIT
Programming
Techniques A-5
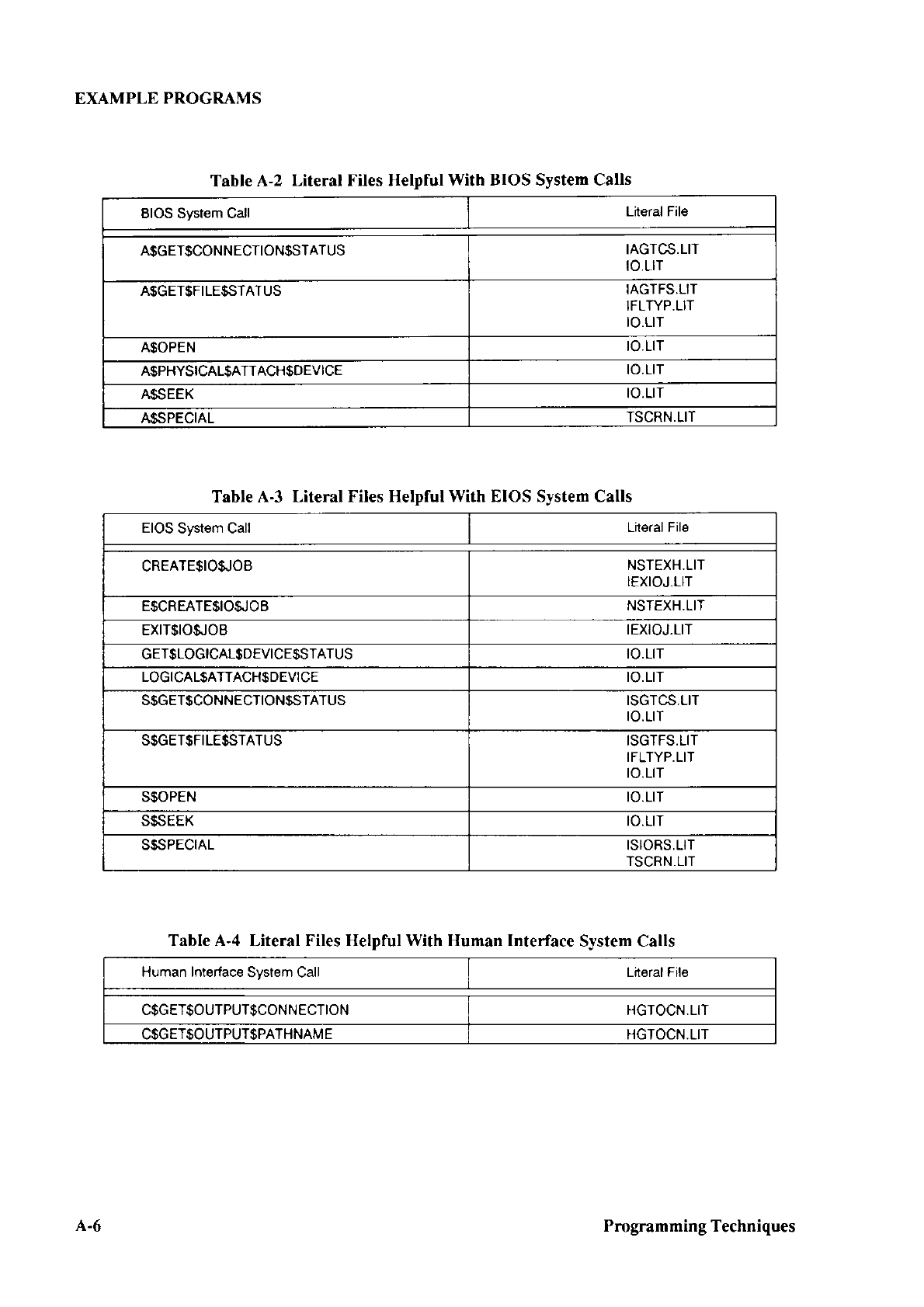
Table A-2 Literal Files Helpful With BIOS System Calls
BIOS Syst€m Call Literal Fil€
A$GETSCONNECTION$STAf US IAGTCS.LII
to.Lrr
A$GET$FILE$STAfUS IAGTFS.LIT
IFLTYP.LIT
to.LtT
A$OPEN ro.LtT
A$PHYSICAL$ATTACH$DEVICE to.LrT
A$SEEK to.LrT
A$SPECIAL TSCRN.LIT
EXAMPLE
PROGRAMS
Table A-3 Literal Files Helpful With EIOS System Calls
EIOS
Syst€m Call Lit€ral Fil€
CREATE$IO$JOB NSTEXH.LIT
IEXIOJ.LIT
E$CREATESIOSJOB NSIEXH.TIT
EXIT$IO9JOB IEXIOJ.LIT
GET$LOGICAL$DEVICE$SIATUS to.LtT
LOGICAL$ATTACHSDEVI
CE to.LtT
S$GET$CONNECTION$STATUS ISGTCS.LIT
ro.L|l
S$GET$FILE$STATUS ISGTFS.LIT
IFLryP.LIT
to.LtT
S$OPEN ro.Lrf
S$SEEK to.LtT
S$SPECIAL ISIORS,LIT
TSCRN.LIT
Table A-4 Literal Files Helpful With Human Interface
System Calls
Human Intertace
System Call Lrteral File
C$GEI$OUTPUT$CONNECTION HGTOCN.LIT
C$GET$OUTPUT$PATHNAME HGTOCN.LIT
A-6 Programrning Techniques
EXAMPLE
PROGRAMS
Aside from the literal files shown in Tables A-1 through A-4, two
other important literal
files exist: COMMON.LIT and IAIORS.LIT. COMMON.LIT contains many literal
declarations commonly used in PL/M-286
programming.
You should include this file in
all
your
PL/M-286
programs.
IAIORS.LIT contains the structure for the I/O Result
Segment (IORS) returned in most BIOS System Calls. You should include this file in all
your
PL/M-286
programs that
make BIOS System Calls.
4.2.2.3 Gening and Setting
Terminal Atlributes
Many new users have difficulty understanding how to set the desired attributes for a
terminal. Before
you
set the terminal attributes,
you
must first
get
the current
attributes
by invoking the A$SPECIAL
(BIOS)
System Call or the S$SPECIAL
(EIOS) System Call
with
the spec$func
parameter
set to f$get$mode. The main
program code illustrates both
these calls. The only
visible
difference between the two calls is the
structure of the I/O
Return Segment used.
Refer to the main
progtam
code in the iile DEMO.P28.
To set terminal attributes,
this
code first sets
the current terminal attributes bv callins A$SPECIAL as follows:
CALL rq$a$special (ci$conn, SPECIAL$GET$TERM$DATA,
€cern$atts,
read$mbx,
Gstatus);
In this
call,
the literal SPECIAL$GET$TERM$DATA specifies that
we
are
getting
current terminal attributes. The
pointer
@term$atts
tells what data structure to
place the
attribute data into. The token read$mbx indicates the mailbox to
which
the IORS
arrives.
The code then
waits
indefinitely until the I/O Result Segment arrives. The
following
statement
illustrates
how the code waits:
lors$tkn - rq$receive$nessage (read$mbx, INFINITE$WAIT, NIL,
Gstatus
) ;
The main code then checks to make sure that terminal data
did in fact arrive by checking
the status ofthe I/O Result Segrnent. A zero indicates that the I/O operation was
successful.
Because
A$SPECIAL
and not S$SPECIAL was used to
get
the
terminal information,
we
must specifically delete the I/O Result Segment.
It is okay to delete the I/O Result
Segment at this point because the current
tcrminal data now resides in the
data structure
term$atts. Deleting the I/O Result
Segment frees that memory
for other uses.
Programm
ing Techn iques A-7
EXAMPLE PROGRAMS
The main
program code next modifies
two terminal attributes
to cause no line
editing and
no echoing
of keystrokes to the
screen, The code modifies
these
attributes using the
followins code:
terD$atts . connec
tion$ flags - ( (
tern$atts. connect ion$ flags
(Nor C$MASK$LINE$EDÌT)
) oR 1)
csMAsK$ECHO;
AND
OR
This long assignment statement
effectively uses AND and OR logic to alter the
least-significant three bits of the 16-bit
connection$flags element
of the term$atts data
structure. The literals C$MASK$LINE$EDIT
and C$MASK$ECHO
are equal to 3 and
4, respectively. Refer to the Extended |RMX II BIOS System Call Manual for detatled
information about A$SPECIAL
and the data structure term$atts.
The use of the Iiterals, C$MASK$LINE$EDIT
and C$MASKI$ECHO,
defined in the
literal file TSCRN.LIT, facilitate
the setting of the attributes by sparing
you
from having
to type in the correct 16-bit binary sequences. It also makes
your program much easier to
understand, especially at a future date
when
you are trying to remember exactly
which
attributes you were trying to set when you wrote the program.
The main
program
code uses
the S$SPECIAL system call as shown below to
write
the
modified terminal attributes back to the file
ci$conn (the physical terminal connection).
CALL rq$s$special (ci$conn, S PEcIAL$s ET$TERM$ DATA,
eterxo$atts, NIL,
Gsratus ) ;
Notice that with the S$SPECIAL call, it is not necessary to specifically
delete the I/O
Result Segment. The operating system handles the task synchronization
(the
RQ$RECEIVE$MESSAGE)
and the IORS deletion for
you.
In summary, to change terminal attributes, you must first get them using
A$SPECIAL or
S$SPECIAL, alter them, and then set them again
using
either A$SPECIAL
or
S$SPECIAL.
If you
use A$SPECIAL, you must delete the IORS resulting from the I/O
operation. Ifyou use S$SPECIAL, the operating system takes care of IORS
deletion
for
you.
NOTE
Although, this example uses both versions
of
the special
call
(A$SPECLA.L
and S$SPECIAL), no reason exists that you could not use one version
alone.
A-8 Pnrgramming
Techniques
EXAMPLE
PROGRAMS
4.2.2.4 Crealing Tasks
When writing an application, you
will normally find that it takes several tasks to
accomplish thejob. Normally, you
code separate tasks in
separate files (modules) to ease
the maintenance of the tasks. Then, from the main
program, you
use iRMX System Calls
to create task objects for the individual modules the applìcation requires.
In this example, only two tasks exist: the main program code (in the file DEMO.P28) an<J
TASK2 (in the file TASK2.P28). Thus, in the main program code, TASK2 is created and
given
a
priority
lower than that of the creating task
(the
main
program
code).
Regardless
of the number of tasks
your particular
job
may have, the
principles
for task creation
remain the same.
The following code shows how the
main
program code creates and assigns a priority to
TASK2:
task - rq$create$task ( (rq$get$priority (
0ALLER,
@s
ta tus
) - l),
@task2,
selector$of(NIL), NIL, 1024,
0, Gs
catus
) ;
CALL error$check(270, status ) ;
Imbedded in the CREATE$TASK System Call is
the
GET$PRIORITY
System Call. The
GET$PRIORITY System Call
gives the
new
task a priority one level lower than that of
the task creating it (the
higher
the numeric value the lower the
priority).
It is also
possible to assign an absolute priority if you so desire.
The data segment
parameter of the CREATE$TASK call is set to SELECTOR$OF(NIL),
which
indicates
that the task sets up its own data segment.
The stack pointer
parameter
is set to NIL, which indicates automatic stack
allocation.
Automatic
stack allocation means that the NUCLEUS dynamically creates the
stack for
the new task. The stack size of the new task has been set to 1024
bytes
(the
next
parameter),
which
is a fairly arbitrary number. If a task
will
be making
NUCLEUS
System
Calls,
the stack size should be at least 300 bytes. If you
assign
a stack size which is
too small, the operating system informs you
with
a General Protection
fault during the
task's execution.
Finally,
the task
flags
parameter has been set to zero,
which
designates
that the new task
has no floating-point
instructions.
For
detailed information on the system calls described
in this section, refer to
the
Extended LRMX II Nucleus System
Calls Reference Marutal.
Pmgrammlng
Techniques A-9
EXAMPLE PROGRAMS
A.2.2.5 Cataloging Objects
It is
possible
to catalog the key objects of a
job. By cataloging objects,
you
allow other
tasks the ability to look up the objects they need for processing
at run time. Also,
you grve
modules a higher degree of independence
from
other
modules. Another useful
reason to
catalog the key objects is to provide you with a helpful debugging tool. Ifyou are using
Soft-Scope 286 or the System Debugger to debug your programs, the advantage of having
your
objects cataloged is that
you
have a way to correlate TOKEN values with the names
you have assigned
in your program. The VIEW DIRECTORY command displays all
cataloged objects and their respective character strings.
A-10 Programming
Techniques
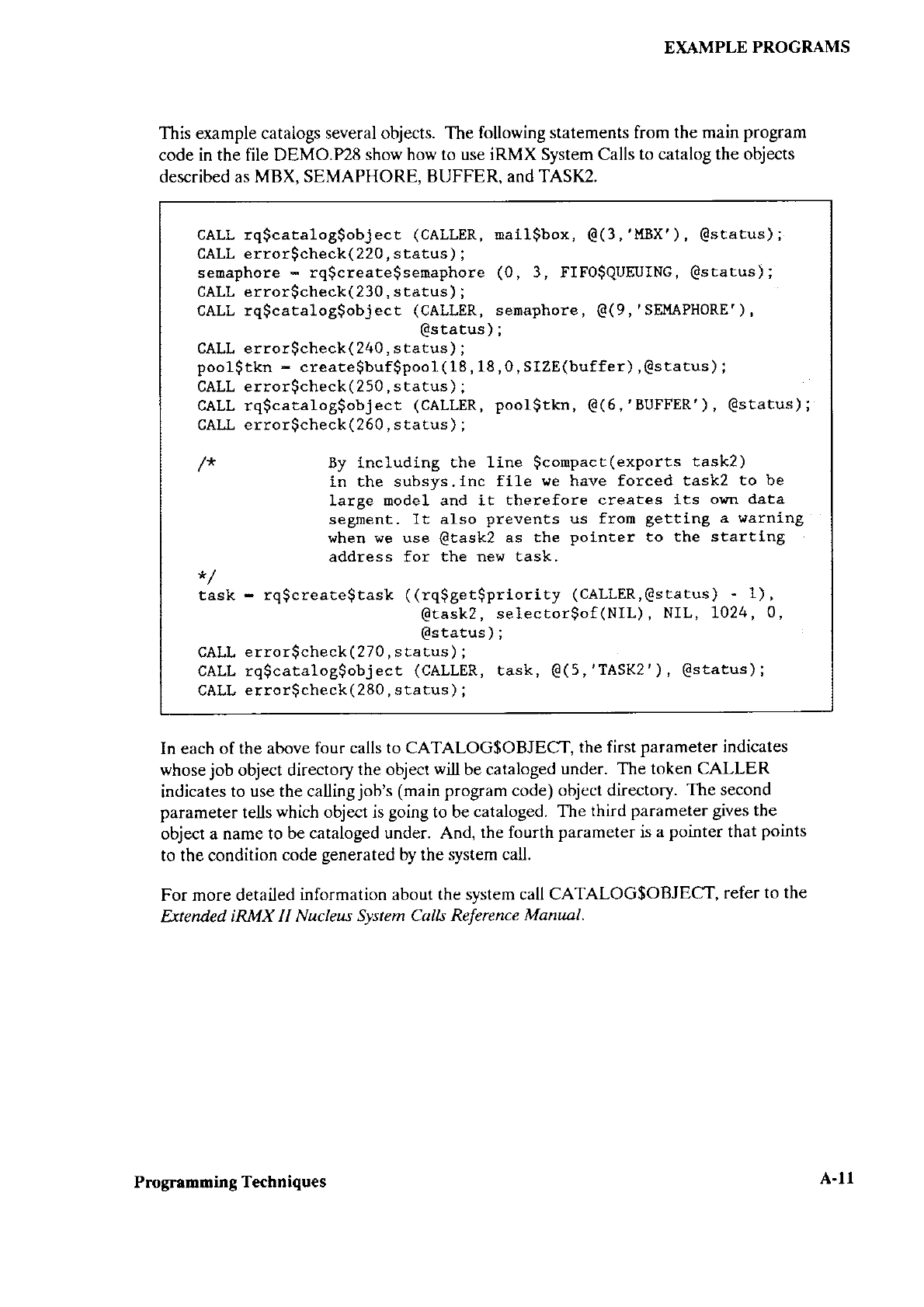
EXAMPLE PROGRAMS
This example catalogs several objects. The
following statements from the main
program
code in the file DEMO.P28
show how to use iRMX System Calls
to catalog the objects
described as MBX,
SEMAPHORE, BUFFER, and TASK2.
CALL rq$catalog9obj ect (CALLER,
uall$box, €(3,'l'fBX'), @status);
CALL error$check(220, status ) ;
senaphore - rq$create
$
s emaphore
(0, 3, FIFo$QUEUING,
@staLus);
CALL error$check (
2 30
,
s catus ) ;
CALL rq$caÈalog$obj ect (CALLER, sernaphore, @(9,
'SEMAPHORE'
) ,
Gstatus);
CALL error$check( 240, sratus);
pool$tkn' create$buf$pool(18,
18,0,SIZE(buffer),Gstatus)
I
CALL error$check(250,scacus) ;
CALL rq$caralog$obj ec t (CALLER,
pool$rkn, G(6,',BUFFER'),
estaÈus);
CALL error$check(260, status) ;
/* By including Èhe llne $compac
t (
expo rts task2)
ln che subsys.lnc file r,re
have forced cask2 tó be
large nodel and it therefore creates its o\.n daLa
segnent. lt also prèvènts us frón gettlng a warning
when we use @task2 as the Polnter to the starllng
address for the new task.
task - rq$create$task ( (
rq$get$priori ty (CALLER,Gstatus)
- 1),
@task2,
selector$of(NIL), NIL, 1024, 0,
@status ) ;
CALL
error$check(270, status) ;
CALL rq$catalog$
obj ec t (CALLER,
task, Q(5,'TASK2'), Gstatus);
CALL
error$check(280, status) ;
In each
of the above four
calls to CATALOG$OBJECT,
the first parameter
indicates
whose
job object directory
the object
will be cataloged
under. The token
CALLER
indicates
to use the calling
job's
(main program code)
object directory.
The second
parameter tells
which object is going
to be
cataloged. The third parameter gives the
object a name to
be cataloged under. And,
the fourth
parameter
is
a
pointer
that
points
to the condition
code
generated
by the
system call.
For more detailed
information about
the system call CATALOG$OBJECI, refer to the
Extended
LRMX II Nucleus System
Calls Reference
Maruul.
Programming
Techniques A-l r
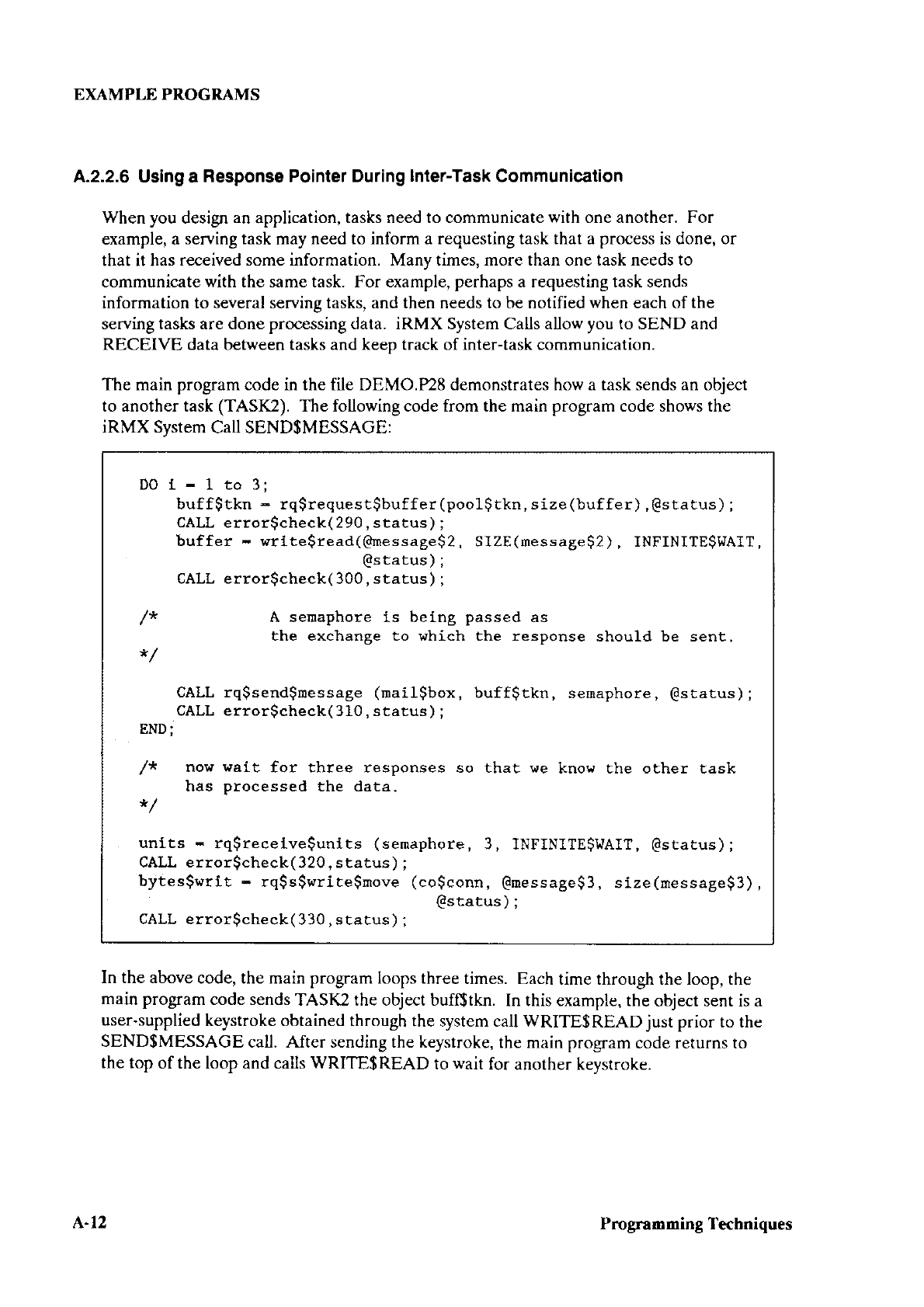
EXAMPLE PROGRAMS
A.2.2.6 Using a Response Pointer During
lnter-Task
Communication
When you
design
an
application,
tasks need to communicate with one another. For
example, a serving
task
may
need to inform a requesting task that a process is done, or
that it has
received some information. Many times, more than one task needs to
communicate with the same task. For example,
perhaps
a requesting task sends
information to several serving tasks, and then needs to be notified
when
each of
the
serving tasks are done processing data. iRMX System Calls allow you to SEND and
RECEIVE data between tasks and keep track of inter-task communication.
The main program code in the file DEMO.P28 demonstrates how a task sends an object
to another task (TASK2). The following code from the main program code shows the
iRMX Svstem
Call SEND$MESSAGE:
D0 t - 1 to 3;
buff$tkn - rq$request$buffer(pool$tkn,sÍze(buffer),Gstatus) ;
CAII, error$check (
2 90
,
status) ;
buf fer - wri.te$read(@message$2,
SIZE
(message$2
), INFINITESÍ./AIT,
@status);
CALL error$check( 300, starus) I
/* A semaphore is belng passed as
thè exchange to lrhich the response should be sent,
CAII rq$send$nessage
(rnall$box, buff$tkn, semaphore,
@status) ;
CALL error$check (
310
,
stacus) ;
END :
/* now waiÈ for thlee responses so thaÈ we know che other task
has processed thè data.
unlÈs - rq$rece ive$uni ts (sernaphore,
3, INFINITE$WAIT,
@srarus);
CALL error$check(320,status) ;
bytes$writ * rq$s$wrlte$nove (co$conn, @message$3,
size(rnessage$3),
Gsratus) ;
CALL error$check(330,status) ;
In the above
code, the main program loops three
times. Each
time through the loop, the
main program
code sends
TASK2 the object buff$tkn. In this example, the
object sent is a
user-supplied
keystroke obtained through
the system call WRITE$READ
just
prior to the
SEND$MESSAGE
call. After sending the keystroke,
the main program
code returns to
the top
of the loop and calls WRITE$READ
to
wait
for another keysrroke.
A-12 Programming Techniques
EXAMPLE
PROGRAMS
Every time TASK2 receives
an object sent from the
main
program
code, it responds
by
sending a unit to the object SEMAPHORE. TASK2 knows exactly
where to send the unit
because when the main
progam code issued the SEND$MESSAGE
call, it passed
the
token for SEMAPHORE to the mailbox. Thus,
when
TASK2 does
the
RECEIVE$MESSAGE call, the token for SEMAPHORE can be kept in TASK2's
version
of the
variable
SEMAPHORE (SEMAPHORE is not a global
variable). This technique
makes use ofthe response and response$ptr
parameters
for the
SEND$MESSAGE and
RECEM$MESSAGE calls, respectively. By speciling where
TASK2 is to respond, the
main
program code ensures that TASK2 responds to the
correct task. In applications
where
more
than two tasks exist, this request/response technique
is critical.
Pmgramming Techniques A-13
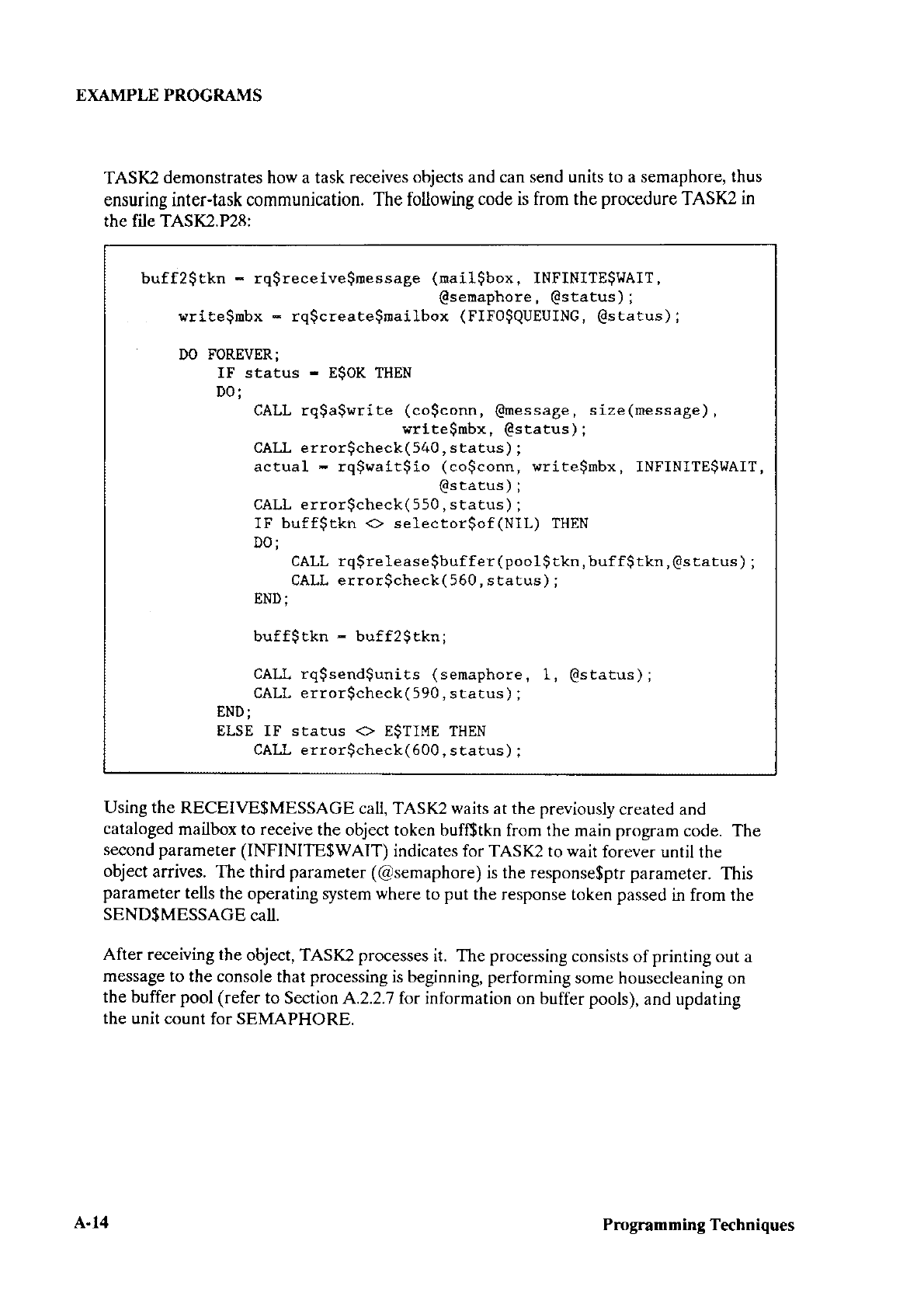
EXAMPLE PROGRAMS
TASK2 demonstrates how a task receives
objects and can send units to a semaphore,
thus
ensuring inter-task communication.
The following
code is from the
procedure
TASK2
in
the file TASK2.P28:
Using the
RECEIVE$MESSAGE
call, TASK2 waits at the previously
created and
cataloged
mailbox to receive
the object token buff$tkn
from the main program
code. The
second parameter
(INFINITE$WAIT) indicates for TASK2 to wait forever until the
object
arrives. The third parameter
(@semaphore)
is the response$ptr parameter.
This
parameter
telÌs
the operating system where
to put the
response token passed
in from the
SEND$MESSAGE
call.
After receiving the
object, TASK2 processes
it. The processing
consists
of printing out a
message to the console
that processing
is beginning, performing
some housecleaning on
the buffer pool
(refer
to Section A.2.2.7 for information
on buffer pools),
and updating
the unit count
for SEMAPHORE.
buff2$tkn - rq$recefve$message
(nail$box, INFINITE$WAIT,
@senaphore, Gstatus ) ;
r.rrlce$nbx
* rq$creace$nailbox (FIFO9QUEUING,
@status)
;
D0 FOREVER
i
IF status - E$OK THEN
DO; CALL rq$a$wríte (co$conn, @nessage,
size(nessage),
vrlte$mbx, Gstatus);
CALL errorgcheck(540,status) ;
actual - rq$walt$io (co$conn, wríte$mbx, INFINITE$WAIT,
Gs
tatus ) ;
CALL
error$check( 550,status)
;
IF buff$tkn o selec tor$of (NIL) THEN
DO; CALL rq$release$buf fer (poo1$
tkn, buf f
$tkn, @s
tatus ) ;
CAII error$check (
560
,
s tatus ) ;
END
;
buff$rkn - buff2$tkn,
CALL rqgsend$units (senaphore, l, @status);
CALL error$check(590,status) ;
END
;
ELSE
IF status o E$TIl,tE THEN
CALL error$check(600, status) ;
A.l4 Pmgramming Techniques
EXAMPLE PROGRAMS
Updating the
unit count for SEMAPHORE is accomplished
through
the system call
SEND$UMTS. In this
call, TASK2 sends one unit to the object
pointed
to by the local
variable semaphore. Recall
that the local variable semaphore
contains the token
for the
object SEMAPHORE created in the main program code. After updating the
unit count,
TASK2 begins to print the keystroke repeatedly
to the screen,
waiting for another
object
to be received
from the main
program code.
When
the main
program code sends the third and final keystroke
to TASK2, it examines
the number
of units in the object
SEMAPHORE. The
followirg statement
performs
this:
unlts - rq$rece ive$uni te (
semaphore
,
3
,
INFINITE$WAIT
, gsÈatus);
The call to RECEIVE$UNITS waits infinitely until three
units have
arrived at the object
SEMAPHORE. When TASK2 has sent
over the third unit usins SEND$UMTS, the
main
program code conlinues
processing.
In this example,
the
processing is immediate ancl simple.
The inter-task
communication
technique
shown here
would
be
very valuable in complex
processing such as
when one set
of data sent to a second
task takes longer to
process than a second
set.
In summary,
the system calls SEND$MESSAGE,
RECEM$MESSAGE,
SEND$UMTS,
and RECEIVE$UNITS
can be used
to pass data and
provide needed
synchronization
between tasks. In applications
where more than
two tasks exist,
you can
use the response
parameter of SEND$MESSAGE
and the response$ptr
parameter of
RECEIVE$MESSAGE
to ensure
that tasks respond to
correct requesting
tasks.
A.2.2.7 Using
Buffer
Pools
Buffer Pools
provide your
system
with an available shared
resource
of fixedlength
segments
of memory that can
be used, as needed,
by any task in
your
job
without having
to repeatedly
create or delete
memory segments.
These buffers
can be used
within a task,
passed
between
tasks, and returned to the Buffer
Pool
when processing is
complete,
so as
to be available for
the next task that needs
the memory. Because
the allocation
of
memory is a
very slow process relative to other system
calls, it is
good programming
practice to create
your Buffer Pools at the beginning
ofyourjob. Once the Buffer
Pool is
created, it is
simply a matter of requesting
and releasing buffers
within
the
Buffer Pool to
make use
of the memory.
Both the main
program code and TASK2
make use of Buffer
Pools. The
main
program
code initially
creates the
the Buffer Pool and requests
buffers.
TASK2 releases
buffers
back to the Buffer
Pool. The relationship
illustrated between
the main
program code
and
TASK2
is one of a
supplier task and a consumer
task. The
main program
code is
requesting the
buffers
(supplying) from the Buffer Pool,
while TASK2
is releasing
(consuming) buffers back
to the Buffer Pool.
Programming
Techniques A-r5
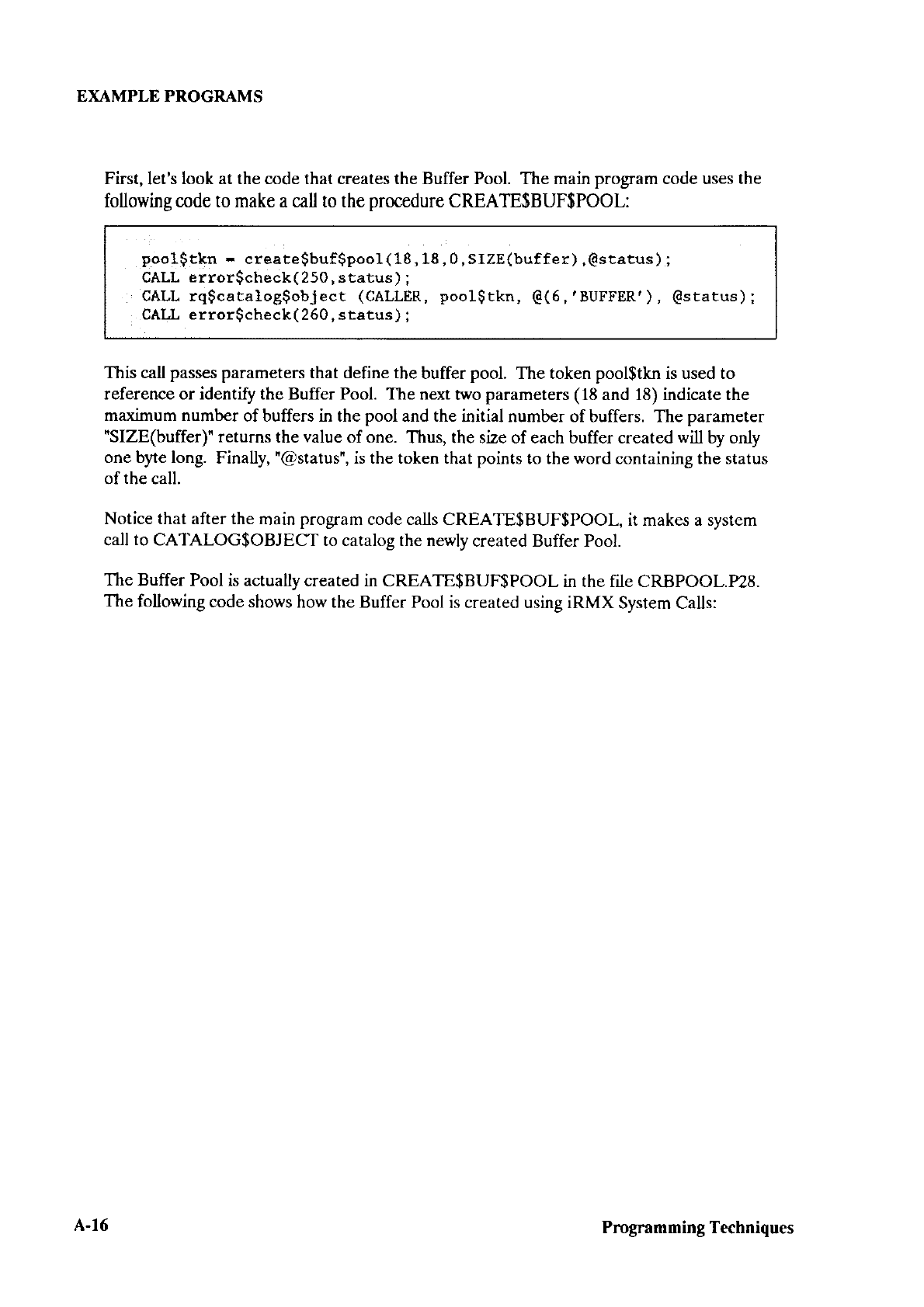
EXAMPLE PROGRAMS
First,
let's
look at the code that creates the Buffer Pool. The main program code uses the
following code to make a call to the
procedure
CREATE$BUF$POOL:
pool$tkn - creaÈe$buf$pool
(
18, 18, 0, SIZE(buf fer), @status)
;
CALL ètror$check (
250, status ) ;
CALL rq$catalog$obJect (CALLER,
pool$tkn, €(6,'BUFFER'), @status) ;
CALL error$check( 260, status) ;
This call
passes parameters
that define the
buffer
pool. The token pool$tkn is used to
reference or identif the Buffer Pool. The
next two
parameters (18
and 18) indicate the
maximum number
of buffers in the pool and the
initial number of buffers. The
parameter
"SlZE(buffer)"
returns
the
value
of one. Thus, the size of each buffer created
will by only
one byte long. Finalìy,
"@status',
is the token that points
to the
word containing the status
of
the
call.
Notice that after the
main
program
code calls CREATE$BUF$POOL,
it makes a system
call
to CATALOG$OBJECT to catalog the newly
created Buffer Pool.
The
Buffer Pool is actually
created in CREATE$BUF$POOL
in the file CRBPOOL.P28.
The following code shows
how the Buffer Pool
is created using iRMX System Calls:
A-16 Pmgramming Techniques
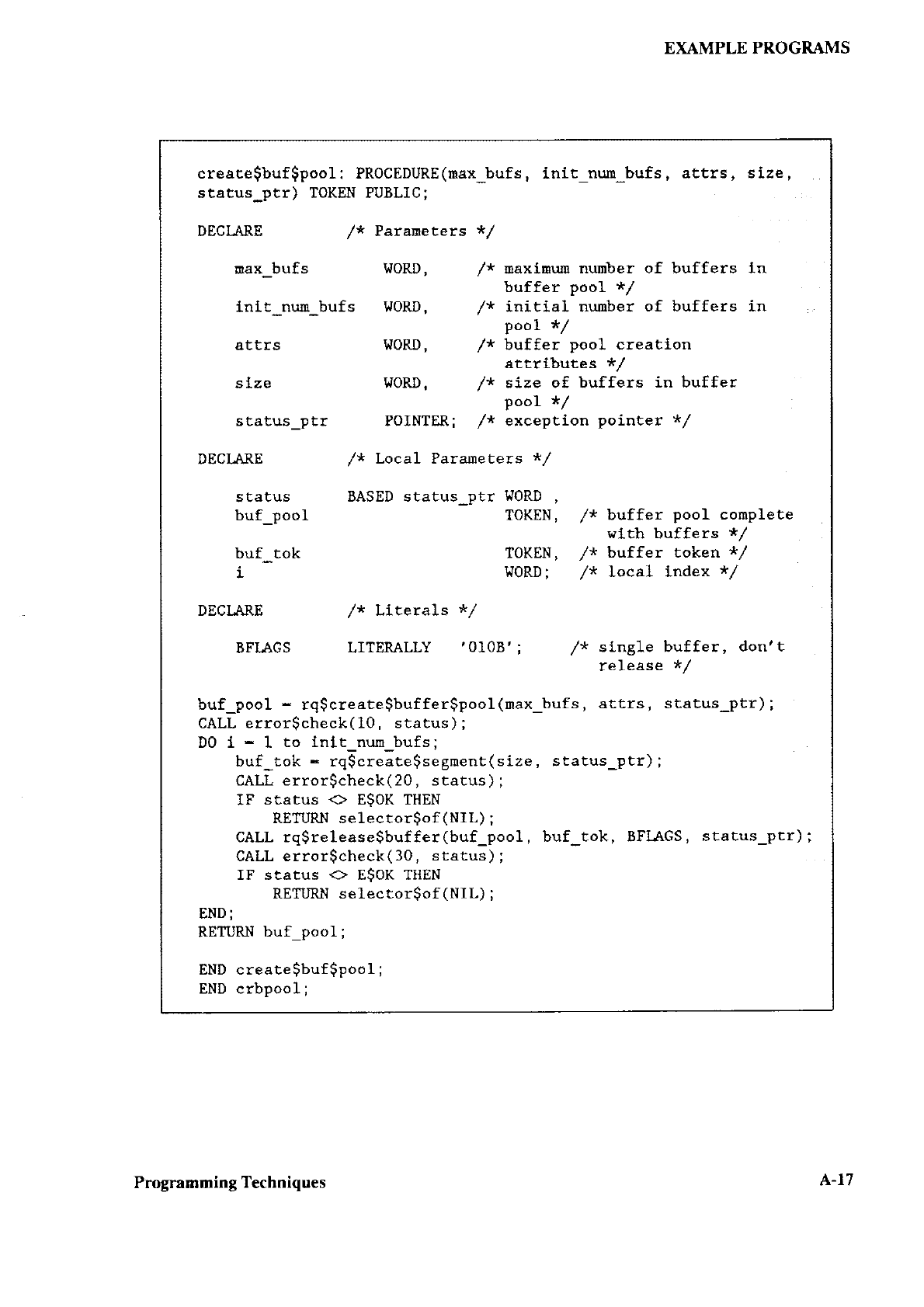
EXAMPLE PROGRAMS
create$buf$pool : PR0C EDURE
(nax_bufs , init_nun_bufs, attrs, sizè,
sÈatus_ptr) TOKEN PUBLIC
;
DECIARE ,/* Paraneters *,/
nax_bufs I.IORD, /* naxlnun mlnbe r of buffers ln
buffer Pool */
init_num_bufs WORD, /* inÍtlal nurnbe r of buffers in
pÓol */
attrs !IoRD, /* buffer pool creation
attÍibutès */
slze woRD, /* síze of buffers in buffer
PooL */
status_pÈr POINTER
i /* exceptlon pointer */
DECIARE /* Local Pararìeters */
scatus BASED status Dtr l,loRD
buf_poo1
buf_tok
ToKEN, /* buffer pool cornplete
wlth buffers */
ToKEN, /* buffer token *,/
llORD; /* locaL lndex */
DECLARE l* L|terals */
BFTAGS LITERALLY '0108'; /* single buffer, don't
release */
buf_pool - rq$ create$buffer$pool (nax_bufs
, attrs, status-Ptr);
CALL
error$check( 10, status ) ;
D0 1- I to lnit_mln_bufs;
buf_tok : rq$creaÈe$segment(size, staÈus_ptr) ;
CALL error$check(20, status ) ;
IF status o E$oK THEN
RETURN sel-ector$of
(NIL) ;
CALL rq$re leas e$buffer (buf_pool , buf_tok, BFIAGS, status-ptr);
CALL error$check( 30, s tatus ) ;
IF status o E$oK THEN
RETURN selector$of (NlL) ;
END
;
RETURN
buf_poo1 ;
END create$buf$pool;
END crbpool;
Programming
Techniques a-17
EXAMPLE PROGRAMS
In order for the
procedure CREATE$BUF$POOL to create the Buffer Pool,
several
sysrem calls are used. First, a call to cREATE$BUFFER$POOL
is made. This call
creates a Buffer Pool in which 18 buffers are allowed and no data chaining between
the
buffers can occur. Next, the routine loops 18 times
(one
for each buffer allowed in the
Buffer Pool). Each time through the loop,
system calls are made to
CREATE$SEGMENT and RELEASE$BUFFER. Each time these calls are made, a
one-bye memory segment is created and released for use to the Buffer Pool. When
the
loop finishes, 18 individual one-bye buffers reside in the Buffer Pool ready for use by any
task.
In order to use buffers from the Buffer Pool, the main program code and TASK2 must
request and release buffers. Recall that when the main program code was involved in its
loop
to
send user-supplied keystrokes to TASK2, that the object being sent was a buffer.
Let's look at that code again to see how it requests a buffer from the Buffer Pool and
waits
for data to arrive in it.
DO f - 1 to 3;
buff$tkn * rq$ reques
t$buffer (pool
$
tkn, slze(buffer) ,@status) ;
CALL error9check (
290
,
stacus) ;
buffer - wrlte$read (@rnessage$2,
SIZE(message$2),
INFINITE$I.IAIT
, Gs
tatus ) ;
CALL
error$check(300,status) ;
/* A semaphore ls belng passed as
Èhe exchange co which the response should be senÈ.
CALL
rq$ s end$rne s sage (rnail$box, buff$tkn, semaphore,
Gstatus);
6ALL error$check (
310
,
status) ;
END :
The
first statement in the
loop makes a system call
to REQUEST$BUFFER to return
token
for the buffer. The program
then
waits
indefinitely
for the user to enter a keystroke
using the WRITE$READ system
call. When a key is pressed,
the character goes
into
buffer, which
is a variable
BASED on buff$tkn. Thus, the character
is captured in the first
available buffer from the Buffer Pool. The main
program
code
can now proceed to send it
to TASK2 throush the
mailbox MBX.
A-18 Programming Techniques
EXAMPLE PROGRAMS
After TASK2 receives the buffer,
it releases the buffer so
it is not sitting idle. The code
below
shows how TASK2 releases
buffers from the
Buffer Pool:
DO; CALL rq$a$write (co$conn, Gmessage,
size(xnessage), lrritegmbx,
Gs
tatus ) ;
CALL error$check(540,stetus) ;
acEual - rq$walt$io (co$conn, wrÍte$nbx, IN!'INITE$WAIT,
@srarus
) ;
CALL error$check( 550
,
status ) ;
IF buff$tkn o sè lec rÒr$of
(
NIL) THEN
DO; CALL rq$release$buf
f er
(poo1$
rkn, buf
f
$rkn,
0,
@s
rarus
) ;
CALL
error$ check
(
560
,
status) ;
END
;
buff$rkn - buff2 $
tkn ,
CALL rq$send$units (senaphore, 1, Gstatus);
CALL error$check( 590, status ) ;
END
;
At this point, TASK2
has already received the
buffer at the mailbox. The loop above is
performed
every time the
main program code sends over
a keystroke. The first time
through the
loop, the
variable
bufflitkn is
equal to selector$of(Ml-),
which
is zero. Thus,
TASK2 skips around the
code that releases the buffer
back to the Buffer Pool. The
reason this code is skipped
is because the character
needed is still in the the buffer and
TASK2
must
get
it. The statement "buff$tkn
= buff2$tkn" captures the
data from the
buffer
into another area of memory
local to this task.
TASK2 is now free to later release
the buffer since it is really
no longer of any use.
TASK2 continues
processing
the
keystroke until another
keystroke is received.
The
second and third times through
the loop, TASK2 releases the buffer used during the
previous
trip through the loop by calling
RELEASE$BUFFER. The code releases the
buffer before capturing
the currently received keystroke.
The
parameter
buff$tkn
contains the token that indicates which
buffer to release
(the
same buffer
requested
by
the main
program
code for the previous
loop
pass).
After releasing the buffer, buff$tkn
can then be set
equal to buff2$tkn, the token
of the buffer containing newly arrived
keystroke.
In summary, it is the responsibility
of the calling task to create and set up Buffer Pools
used between tasks that share data. Once the
Buffer
Pool has been established. the
calling task must request a buffer, get
data into it, and
pass
the buffer
to
the serving
task.
After receiving the buffer, the
serving task must secure the data
and release the buffer
back to the Buffer Pool for
possible
use bv other tasks.
Pmgramming Techniques A-19
EXAMPLE PROGRAMS
For detailed
information
on the system
calls used
with Buffer Pools, refer
lo the Extended
\RMX II Nucletu Syuem
Calls Reference
Marunl.
A.2.2.8 Methods
ol Screen
Input/Output
During an application
that involves
keyboards
and terminal
screens,
you
will probably
find
it necessary
to be able to read
and
write information
to and from the console
screen.
This
example
shows two of three
methods
that
you can use to perform this type
of I/O.
A very simple type
of I/O is
demonstrated
through
a Human Interface
System
Call. Thrs
call is
shown in the file DEMO.P28
in the
procedure CLEAR$SCREEN. The following
code shows
the
orocedure:
clear$screen: PRocEDURE;
DECISRE i IIORD
,
cr$lf$str(*) BYTE DATA
(2,cR,LF);
DOi-1ro25;
CALL rq$c$send$eo$response
(NIL, 0, @cr$lf$str, Gstatus);
END
;
END
clear$screen;
In the above
procedure, the
call to C$SEND$EO$RESPONSE
is used to
clear the screen.
This
procedure
calls
C$SEND$EO$RESPONSE
25 times.
Each time the call
is made, the
system sends a
carriage return and line
feed to the terminal.
The parameter ML
indicates that
no response is expected
back from the user.
Thus, the screen is
cleared.
This method of I/O is simple and
quick. Using this call,
you
can also
cause
your program
to
wait
and receive
a response from the terminal.
To receive a response,
provide
appropriate
values for the first two call
parameters.
Refer to the Extended
|RMX Human Inteface Svstem
Calls Manual for more information
on this
system call.
A-20 Programming
Techniques
EXAMPLE PROGRAMS
The second and third
methods of terminal
I/O involve
using BIOS System Calls.
Borh
methods
also require that you
establish
connections that can be
used to
write
to and
read
from
the terminal.
The following statements
from the
main
program
code in the
file
DEMO.P28
show how
to establish
these connections:
The above code
creates a new physical
file and its connection
ibr terminal output :CO:
and
creates a connection
to the existing
terminal input file
:Cl:. After creating the
connections,
the
program
then opens the :CO:
file as
WRITE$ONLY
and
the:CI: file as
READ$ONLY. Now,
whenever
the application needs ro perform
terminal output, it
writes
to
co$conn. And,
whenever
the applìcation wants
to read from the terminal, it
reads
from ci$conn.
A second method of
I/O that this example
shows is demonstrated
using the following
code
from the
procedure
WRITE$READ
in the file DEMO.P28:
CALL
rq$a$wriEe (co$conn, msg$ptr, rnsg$size, wrire$nbx, Gstatus);
CALL
error$check(2000,status) ;
ac tual-rq$wai t$
io (co$conn, write$rnbx, INFINITE$WAIT,
@sratus);
CALL error$check(2010, s tatus ) ;
The
above code
writes
a
message to the terminal. The call
to A$WRITE sends the
message addressed by msg$ptr
to the screen. After the I/O is
performed,
the system
returns
an I/O Result Segment (IORS)
to the mailbox write$mbx. The
IORS contains
information
about the
previous
I/O call. Next, a call to WAIT$lO is made.
This call
returns
the actual number
of bytes
written
in the previous
A$WRITE call. Notice that the
time specified to wait
for
WAIT$IO
to
return data is indefinite. Thus,
when
data does
arrive, the
procedure
knows
that the I/O operation has completed. The call WAIT$IO
also performs one other convenient
operation for the
programmer
--
it recycles the IORS
for
A$READ, A$WRITE, and A$SEEK
calls and deletes the IORS for all other BIOS
calls.
The user
does
not have to specifically perform the deletion.
co$conn-rq$s
$create$
fi le (@(4,':C0:'),
CALL error$check( 100
,
status ) ;
c i
$conn-rq$
s
$aÈtachg
fi.le (G(4,':CI:'),
CALL èrror$check(110, status ) ;
CALL
rq$s$open (co$conn, WRITE$ONLY,
0,
CALL error$check( 120
,
status);
CALL rq$s$open (ci$conn, READ$ONLY,
0,
CALL error$chèck
(
130
,
status) ;
Gs
tatus ) ;
Gstatus ) ;
Programming
Techniques A-21
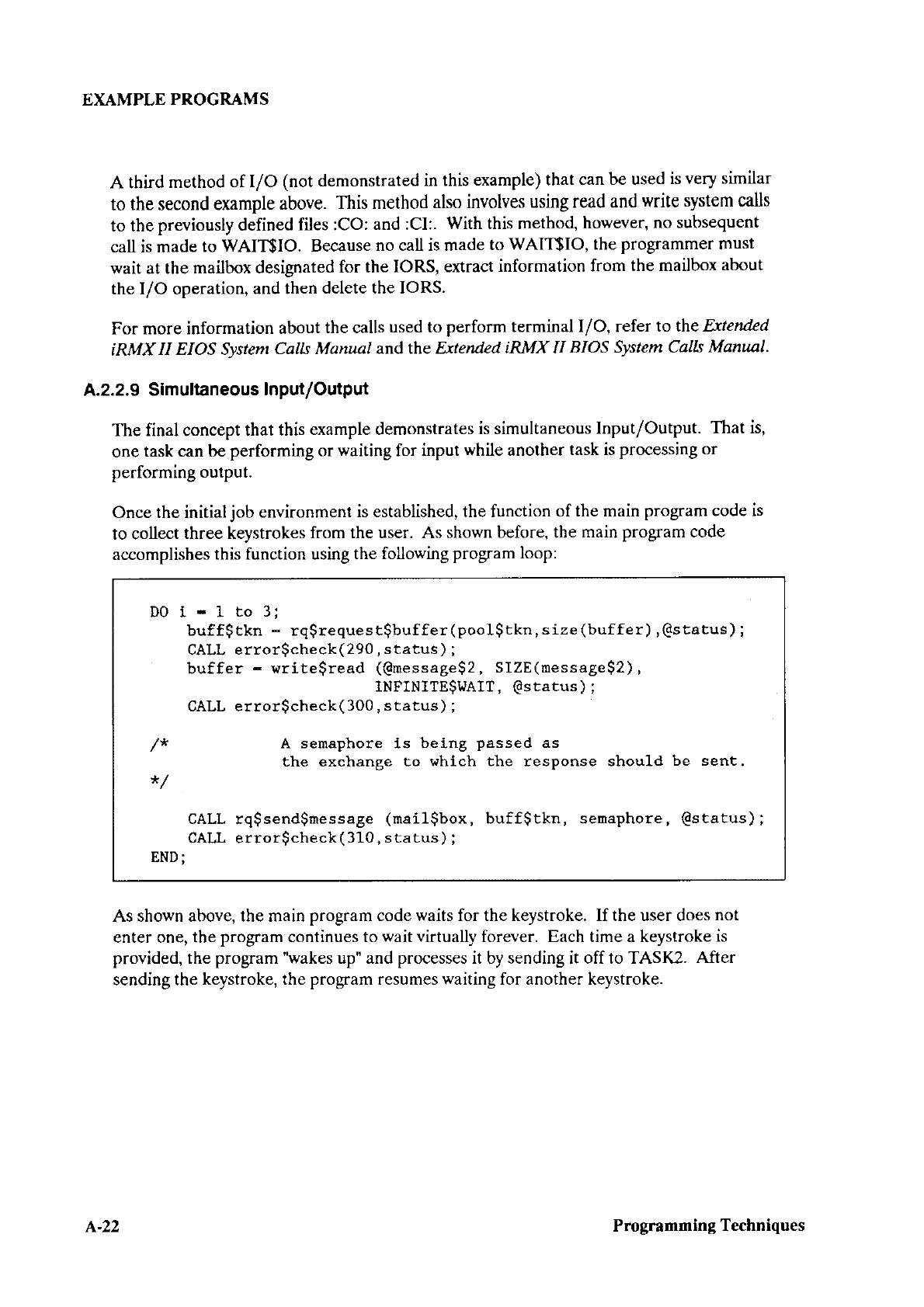
EXAMPLE PROGRAMS
A third method
of I/O (not demonstrated
in this
example) that
can be used
is
very similar
to the second example
above.
This method
also involves
using read and
write system calls
to the
previously defined
files :CO:
and :CI:. With this method,
however,
no subsequent
call is made
to WAIT$IO. Because
no call is made
to WAIT$IO, the
programmer must
wait at the mailbox
designated
for the
IORS, extract
information from the mailbox
about
the I/O operation,
and then
delete the IORS.
For more information
about
the calls
used to perform
terminal I/O, refer
fo the Extended
.RMX II EIOS System
Calk Manual aÍd rhe Extended
|RMX II BIOS System Calls
Marutal.
A.2.2.9 Simultaneous
Input/Output
The final concept
that thís
example demonstrates
is simultaneous
Input/Output.
That is,
one
task can be
performing or waiting
for input while another
task is
processing or
performing
output.
Once the initial
job
environment
is established, the function
ofthe main
program code is
to collect
three keystrokes
from the user. As shown before, the main program code
accomplishes
this function using the
following
program loop:
D0 l - 1 to 3;
buf f
$
ckn - rq$request$buf
fer (pool$tkn, size (buffer), QsLatus ) ;
CALL error$check (
290
,
status) ;
buffer - write$read (Gmessage$2,
SIZE(nessage92),
INFINITE$I^IAIT,
es
tatus ) ;
CALL error$check (
300
,
status) ;
/* A senaphore is being passed as
the exchange to whlch the response should be sent.
CALL rq$send$message
(nai1$box, buff$tkn, senaphore, €stetus);
CALL
error$check
(
310, status);
END
;
As shown above, the main
program code waits for the keystroke. If the user does
not
enter one, the
program continues to
wait virtually
forever. Each time a keystroke
is
provided, the program "wakes up" and processes it by sending it off to TASK2. After
sending the
keystroke, the program resumes waiting for another keystroke.
A-22 Pmgramming
Techniques
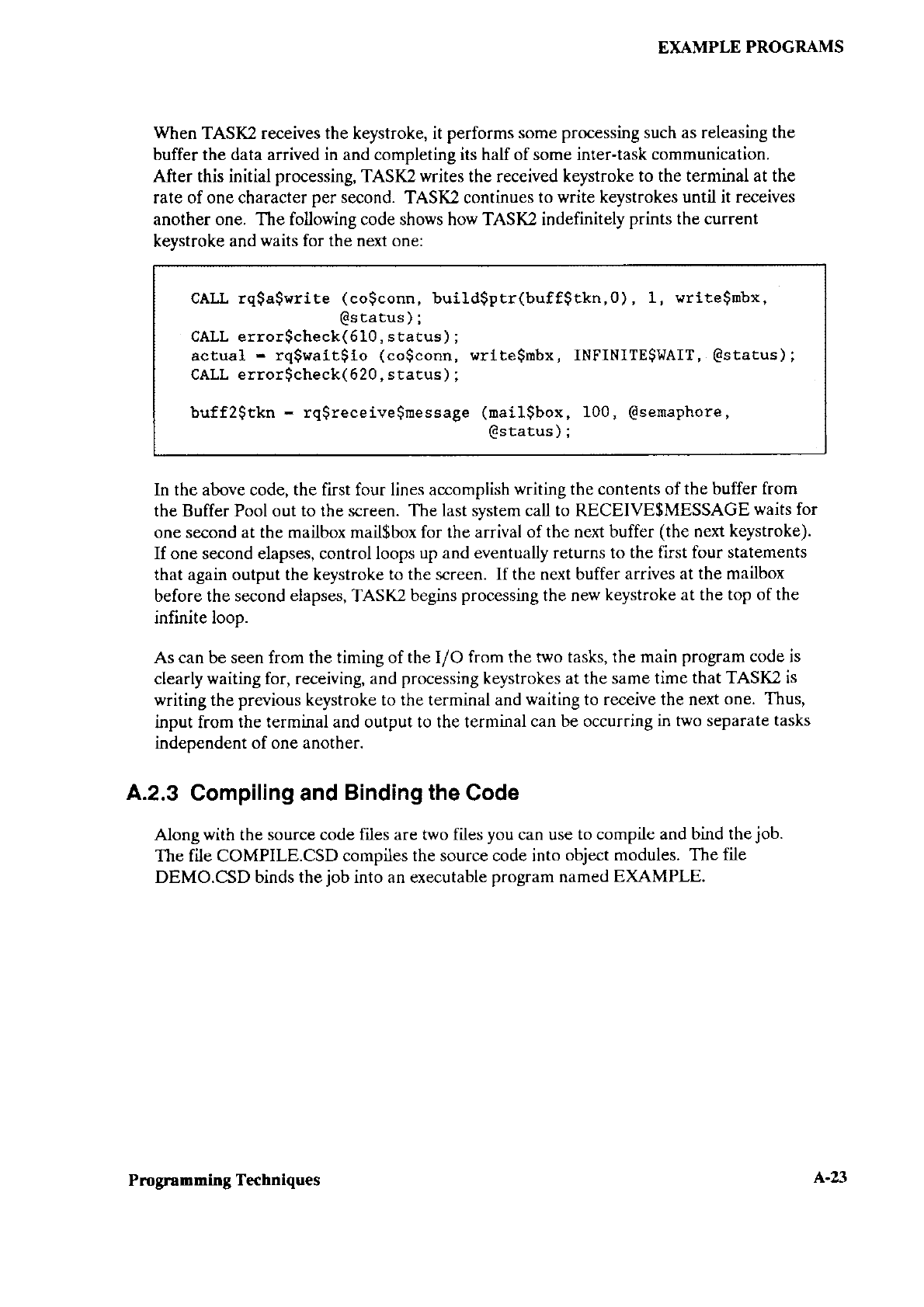
EXAMPLE PROGRA,MS
When
TASK2 receives the keystroke, it performs some processing such as releasing
the
buffer the data arrived in and completing its half of some inter-task
communication.
After this initial processing,
TASK2
writes
the received keystroke
to the terminal at the
rate of one character
per second. TASK2 continues
to write keystrokes until it receives
another one. The following code shows how TASK2 indefinitely
prints
the current
keystroke and
waits for the next one:
CALL rq$a$write (eo$conn, build$ptr(buff$ckn,0), 1, write$mbx,
@status
) ;
CALL error$check
(
610
,
status) ;
actual - rq$wait$lo (co$conn, wrlte$rnbx, INFINITE$I,JAIT,
@status) i
CALL error$check( 6 20
,
status) ;
buff2$tkn - rq$rece ive
$ne
s sage (nail$box, 100, @senaphore,
Gs
tatus ) ;
In the above code, the first four lines aocomplish
writing the contents ofthe buffer from
the Buffer Pool out to the screen.
The last system call to RECEIVE$MESSAGE
waits for
one
second at the mailbox mail$box for the arrival
of the next buffer (the next
keystroke).
If one second elapses, control loops
up and eventually returns to the first four statements
that again output the keystroke
to the screen. If the next buffer
arrives at the mailbox
before the second
elapses,
TASK2
begins
processing
the new
keystroke at the
top of the
infinite loop.
As can be seen from the timing of the I/O from the two tasks, the main
program code is
clearly waiting for, receiving, and
processing keystrokes at the same time
that TASK2 is
writing
the
previous keystroke to the terminal and
waiting to receive the next
one. Thus,
input from the terminal and output to the terminal
can be occurring
in two separate
tasks
independent of one another.
A.2.3
Compiling and
Binding the
Code
Along with the source code files are t$r'o files you can use to compile and bind the job.
The file COMPILE.CSD compiles the source code into object modules. The file
DEMO.CSD binds the job into an executable
program named EXAMPLE.
Programming
Technlques L-23
EXAMPLE PROGRAMS
To compile the
example, enter
the Human Interface
command SUPER
and supply
the
appropriate
password.
Running
under SUPER
gives
you
all the needed
file access
rights
to run
the example. Next, enter
the following command from
the directory
that contains
the example's files:
This command executes
the submit file COMPILE.CSD.
This file initiates the
compilation
of all the
jobs
source code files. After compilation,
you should have one
object file for each
source code file in the
job.
To
bind the example, enter the following
command:
This
command executes the submit file DEMO.CSD. This
file binds the example and
places
the executable
program
in the file EXAMPLE in the current default directory.
NOTE
Ifyou wish to generate the example as another user, create new directory,
copy the example's files to the new directory, move to that directory,
submit COMPILE.CSD, and submit DEMO.CSD. Generating the
example from another directory allows
you
to alter source code,
while
keeping the
original
version
intact.
4.2.4 Running the
Example
You should now have a file called EXAMPLE that
you
can execute. To run the example,
tvDe its name as follows:
A-24 Pmgramming
Techniques
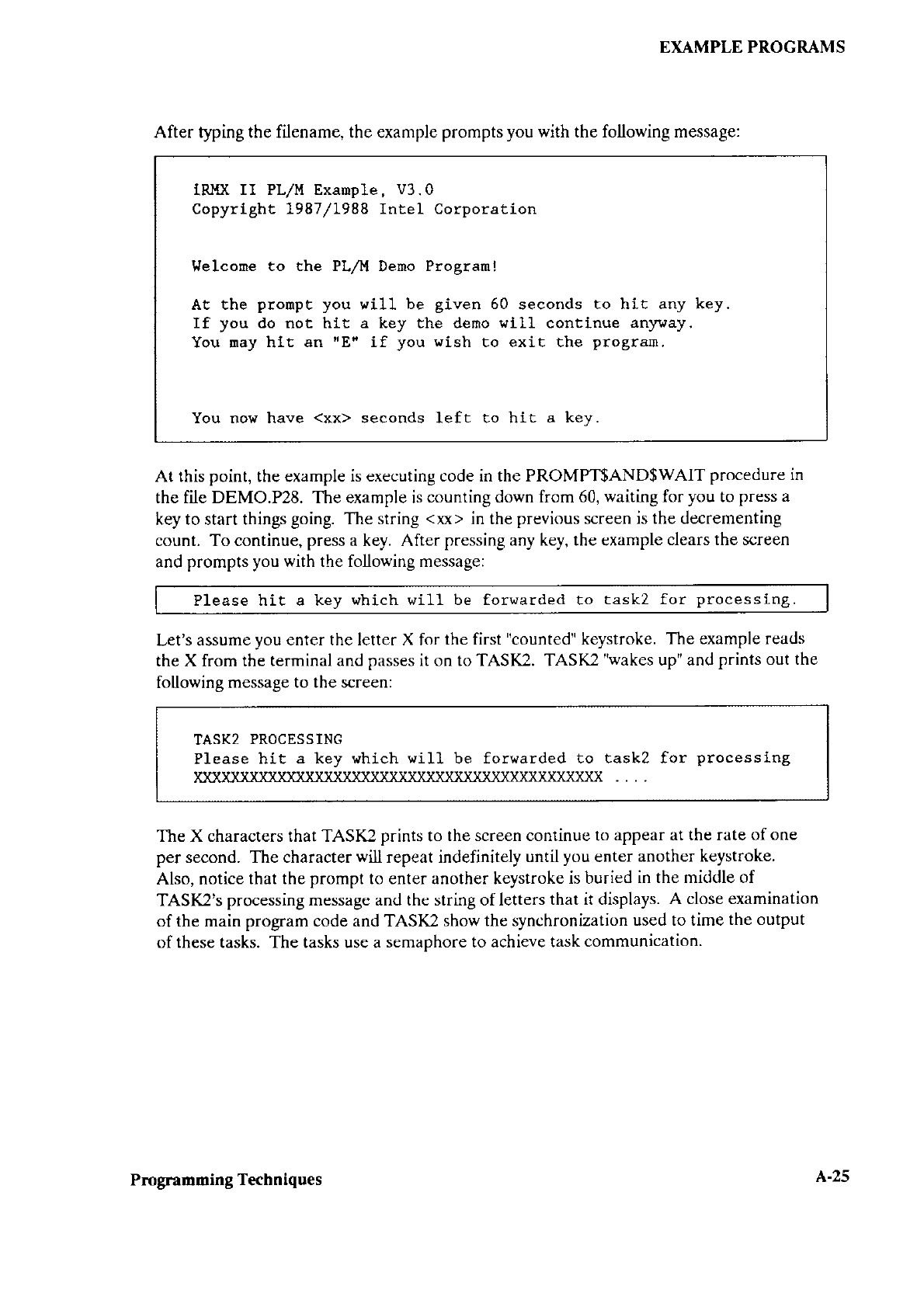
EXAMPLE PROGRAMS
After typing the filename, the example
prompts you with the following message:
At this
point,
the example
is executing code in the PROMPT$AND$WAIT
procedure in
the file DEMO.P28. The example is
counting down from 60,
waiting for you to
press a
key to start things
going. The string
<lm>
in the
previous screen is the decrementing
count. To continue,
press
a key. After
pressing any key, the example
clears the screen
and
prompts you
with
the following message:
Please hit a key which will be forlrarded to task2 for processing.
Let's assume
you enter the letter X for
the first
"counted"
keystroke.
The example reads
the X from the
terminal and passes it on to TASK2. TASK2
"wakes up" and
prints out the
following message
to the screen:
TASK2
PROCESSING
Please hit a key which will be forwarded to cask2 for processing
'..
The X characters that TASK2
prints
to
the screen continue to
appear at the rate
ofone
per second. The character
will repeat indefinitely
until you
enter
another keystroke.
Also, notice
that the
prompt
to enter another keystroke
is buried
in the middle of
TASK2's
processing message and the string of letters
that it displays.
A close examination
of the main program code and TASK2
show the synchronization
used to time
the output
of these tasks. The tasks use a
semaDhore to achieve task
communication.
1RMX
II PLIH Exanple, V3.0
Copyright 7981/L988 Intel Corporation
Welcorne
to the PL/,! Demo
Program!
At the prompt you will be given 60 seeonds to hit any key.
If yÒu do not hlt a key thè demo
vlll continue anway.
You nay hlt an "E" if you wish to exiÈ Èhe prograu.
You now have (xx) seconds left to hic a key.
Pmgramming
Techniques A,-25
EXAMPLE PROGRAMS
Entering the next two keystrokes
conclude the example. The following
output assumes
you
enter the
characters
Y and Z:
TASK2 PROCESSING
Y
Please hlt a key which wlll be forwarded to task2 for processlng
....
îASK2 PROCESSINC Z
Thls concludes the PL/M Demo Program.
This vould be a good time to exanine the program code to see hov
these features work.
l.le wiII no',r exit by generacíng an error.
INTERNAL ERROR AT il 340 STATUS
: QQ23: E$SUPPORT
After
you
enter the final keystroke, the main program
code recognizes that
you
have
entered
three characters. This fact signals
the code to end the
program.
Notice that the
main program code
ends the
program
before TASK2 can begin printing
the third
character to
the
console
screen.
4.3 EXAMPLE 2
.
TASK
COMMUNICATION
The second
example is a simple one
that shows one method that two
tasks can use to
communicate with
each other.
The example is written
in PLIM-286 and can be invoked
by the operator
from the
Human Interface level.
A.3.1
Program
Source Code
Figures
A-1, A-2, and A-3
list the source code of
this example. This
example includes
three tasks:
an initialization
task
(called
INIT) that creates
the other two tasks and a
mailbox, and two
tasks
(called
ALPHONSE and GASTON)
that exchange messages via
mailboxes.
The next few paragraphs
discuss how
these tasks operate.
The example runs when
invoked at the
Human Interface
level from the keyboard.
The
task called
IMT runs first, creating
a mailbox that
it catalogs in the root directory
under
the
name
"master.'
It creates the tasks
GASTON and ALPHONSE.
and then susDends
itself.
A,-26 Pmgramming
Techniques
EXAMPLE PROGRAMS
When
GASTON receives control, it gets the token
for the mailbox
created
by INIT (by
looking up the name
"master"
in the root
job's
object directory). It then creates a segment
(in which
it will place
a message)
and a response mailbox
(to which
ALPHONSE will send
a reply). Next it goes into a loop in which
it places
a message in the segment (after
displaying it on the screen), sends
the segment to the master mailbox, and waits at the
response mailbox for a reply.
When
ALPHONSE receives control, it too gets the token for the mailbox created
by IMT
(again,
by looking up the name in the
root
job's
object directory). It then
goes
into a loop
in which
it waits
at the mailbox for a message, checks to see if the token it received is a
segment, and if it is, places its own
message in the segrnent
(after displaying it on the
screen),
and sends the segrnent to the response
mailbox.
By using
the two mailboxes, the tasks ALPHONSE and GASTON are synchronized.
GASTON sends a message to the first mailbox and waits
at
the second
one
before
continuing.
ALPHONSE
waits
at the first mailbox. When it receives a
message,
it sends
a
reply to the second mailbox and waits
at the first for another message. This
cycle
continues for 15 messages.
After sending its fifteenth message,
GASTON drops
out of the loop. lnstead of sending a
segment
to the master mailbox, GASTON tJisplays a final message to the screen and sends
the token for a task
(the
token for the INIT task)
to the mailbox.
When
ALPHONSE
receives this token and finds it is not a sesment, ALPHONSE drops out of its loop and
deletes itself.
To
finish the processing, GASTON causes the INIT task to resume processing
(remember, the INIT task suspended
itself earlier).
When
INIT takes over, it deletes
both offspring tasks and issues an EXIT$IO$JOB system call to return control to the
Human Interface level.
In this example, each of the three tasks are
contained in separate
files. The procedures
for compiÌing
and linking assume that source files are called INIT.P28
(shown
in Figure
A-1), ALPHONSE.P2S
(shown
in Figure A-2), and GASTON.P28
(shown
in Figure A-3).
a-27
Pmgramming Techniques
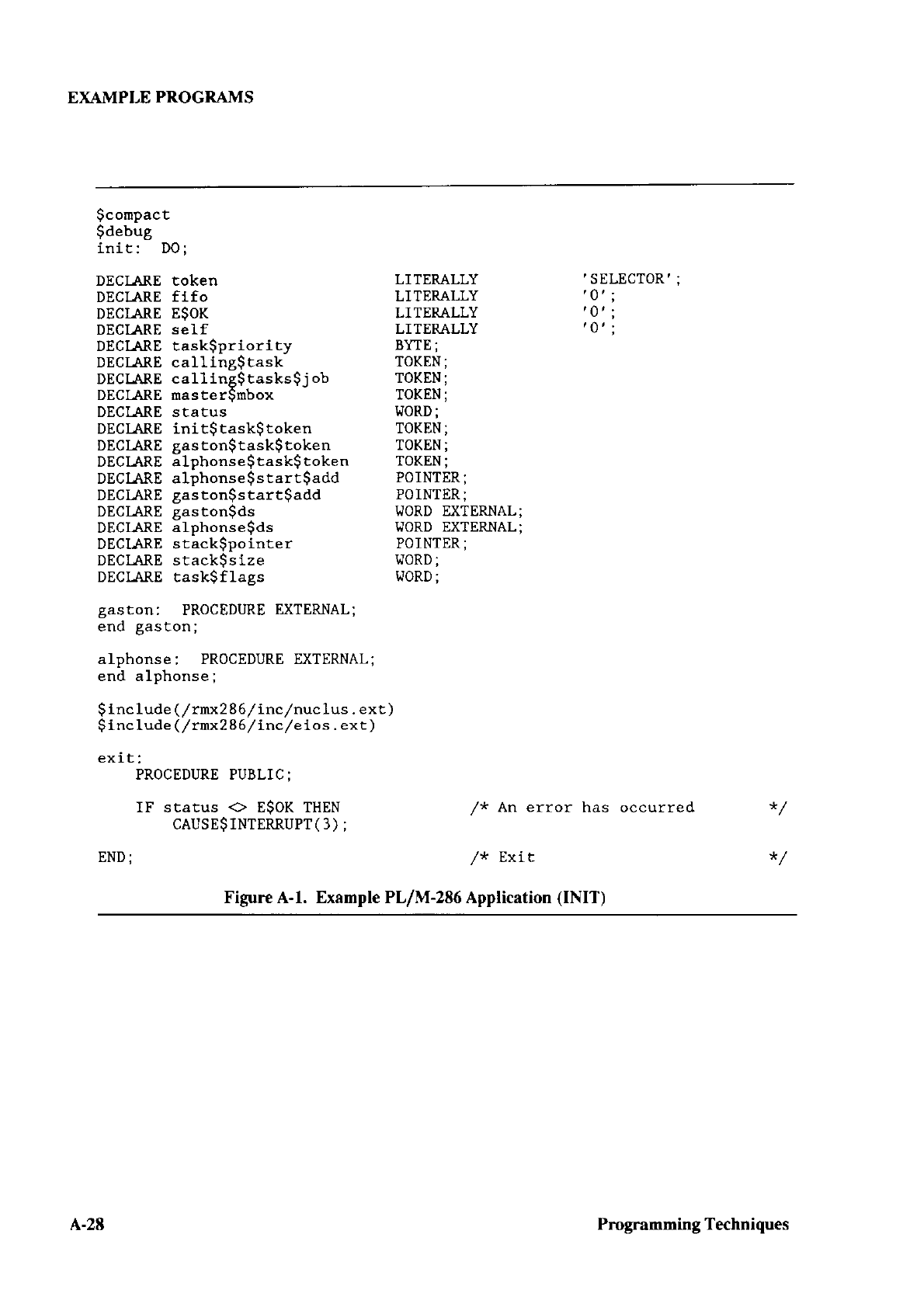
EXAMPLE PROGRAMS
$compact
$debug
init: DO;
DECIARE token
DECIARE
fi fo
DECIARE
E$OK
DECIARE
self
DECIARE task$priority
DECIARE call lng$task
LITERALLY
LITERALLY
LITERALLY
LITERALLY
BYTE
;
TOKEN
;
TOKEN
;
TOKEN
;
WORD
;
TOKEN
;
TOKEN
;
TOKEN
;
POINTER;
POINTER;
WORD EXTERNAL;
WORD EXTERNAL;
POINTER;
I,IORD
;
WORD
;
,SELECTOR'
;
,0,;
,0,;
/* An error has occurred
/* Exi t
Figurc A-1. Example PLIM-286 Application
(INIT)
DECTARE
ca l l ing$ tasks $j ob
DECIARE nastersrnbox
DECIARE status
DECIARE init$Èask$token
DECI-ARE gas Èon$ task$ token
DECIARE alphonse$
task$ token
DECIARE alphonse$
s tart$add
DECIARE
gas ton$ start$add
DECI^ARE gaston$ds
DECIARE
alphonse$ds
DECIARE stack$po inter
DECLARE s tack$s 1z e
DECIARE task$flags
gASTON: PROCEDURE
EXTERNAL;
end gaston;
alphonse: PRoCEDURE EXTERNAL;
Y U drPrrur'5c,
$
inc lude
(/rrnx286/inc/nuclus. ext)
$
i nclude
(/rux286
/ inc
/ eios. ext)
exit:PROCEDURE PUBLIC;
lF status o E$OK THEN
CAUSE$INTERRUPT(3);
END
;
A-28 Pmgramming Techniques
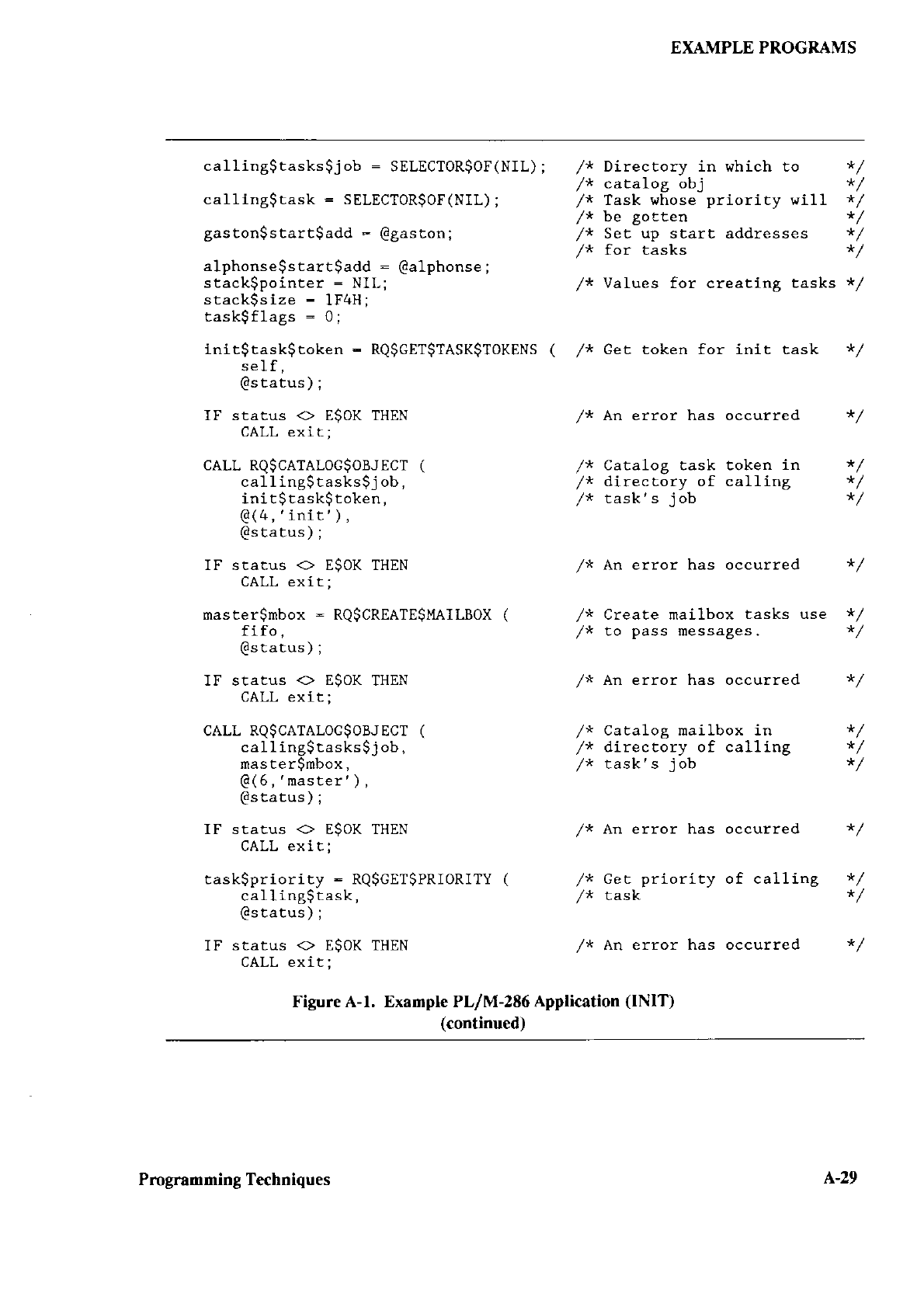
EXAMPLE PROGRAMS
calling$tasks$j ob : S ELECToR$oF
(
NIL) i ,/* Directory in which to x/
/* catalog obj */.
calling$task : SELECT0R$0F(NIL); /* Task whose
priority will */
,/* be Sotten *
/
gas
ton9 s tart9 add - @gaston; /* SeC up start addresses */
,/* for tasks *
/
alphonse$ s tart$ add - @alphonse;
stack$pointer : NIL; ,/* Values for creating tasks *,/
SEaCKìSIZe - lt4H;
task$flags - 0;
initgtask$coken - RQ$GET$TASK$TOKENS
( /* Cet token for init task */
self,
Gs
tatus ) ;
IF status o E$OK THEN /* An erroî has occurred */
CALL exit;
CALL RQ$ CATALOC$OBJ ECT ( /* Catalog task token in */
callingStasks$job. /* direclory of calling */
init$task$token, ,/* task's job */
@(4,'init'),
@s
tatus ) ;
IF scaÈus
o E$oK THEN /* An error has occurred */
CALL exit;
master$mbox - RQ$ CREATE$MAILBoX
( /* Create mailbox tasks use */
fifo, ,/* to pass messages. */
@status
) ;
lF status o E9OK
THEN /* An error has occurred */
CALL exit;
CALL RQ$ CATALOG$OBJ ECT ( /* Catalog mailbox in */
calling$tasks$job, /* direcxory of callÍng */
masCer$mbox, /* task's job */
G(6,'master'),
@status ) ;
IF status o E$oK THEN /* An error has occurred */
CALL exit;
task$priority - RQ$GET$PRIORITY
( ,/* Cet prioríty of calling */
calling$task, /* task */
Gs
tatus ) ;
IF status o E$OK THEN /* An error has occurred */
CALL exit:
Figure A-1. Example PL/M-286 Application (INIT)
(continued)
Pmgramming Techniques A-29
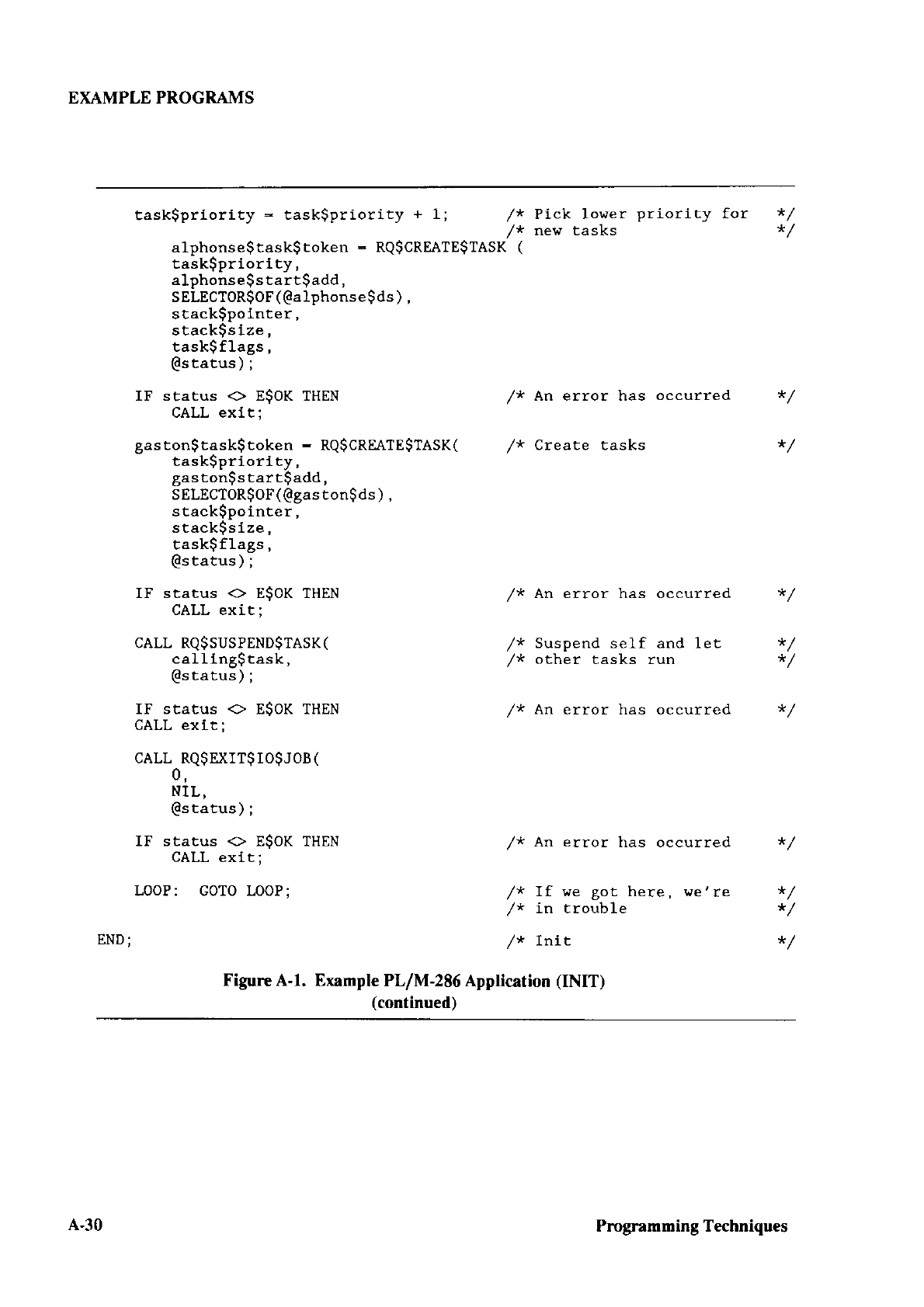
EXAMPLE PROGRAMS
task$priority - task9Priority + 1; j:
alphonse$ task$ token : RQ$CREATE$TASK
(
task$prlorlÈy,
alphonse$ s tart$add ,
SELECTOR$0F
(@alphonse$ds
),
stack$pointer,
stack$s1ze,
task$fl-ags,
Gstacus
) ;
IF status o E$OK THEN /*
CALL exit;
gas ton$ task$ token - RQ$CREATE$TASK( /*
task$priority,
gas ton$ s tart$add ,
SELECToR$oF(Ggas ton$ds
),
stack$pointer,
stack$slze,
task$f1ags,
Gstatus);
IF status o E$oK îHEN
CALL exit;
CALL RQ$SUSPENDgTASK
(
calllng$task,
@status);
IF status o E90K THEN
CALL exlt;
CALL RQ$EXIT$IO$JOB
(
0,
NIL,
Gstatus);
IF status o E$OK THEN
CALL exit;
LoOP: GoTO LOOP;
/* An error has occurred */
Pick lower
new tasks prioricy for */
*/
,/* Suspend self and let
,/* other tasks run
^^.i'rra.l * /
An error has
Create tasks
END
;
,/* An error has occurred */
,/* An error has nnnrrrrarl * /
If we got here, we're
in trouble
lnit
Figure A-1.
Example PLIM-286 Apprication
(INIT)
(continued)
A-30 Pmgramming Techniques
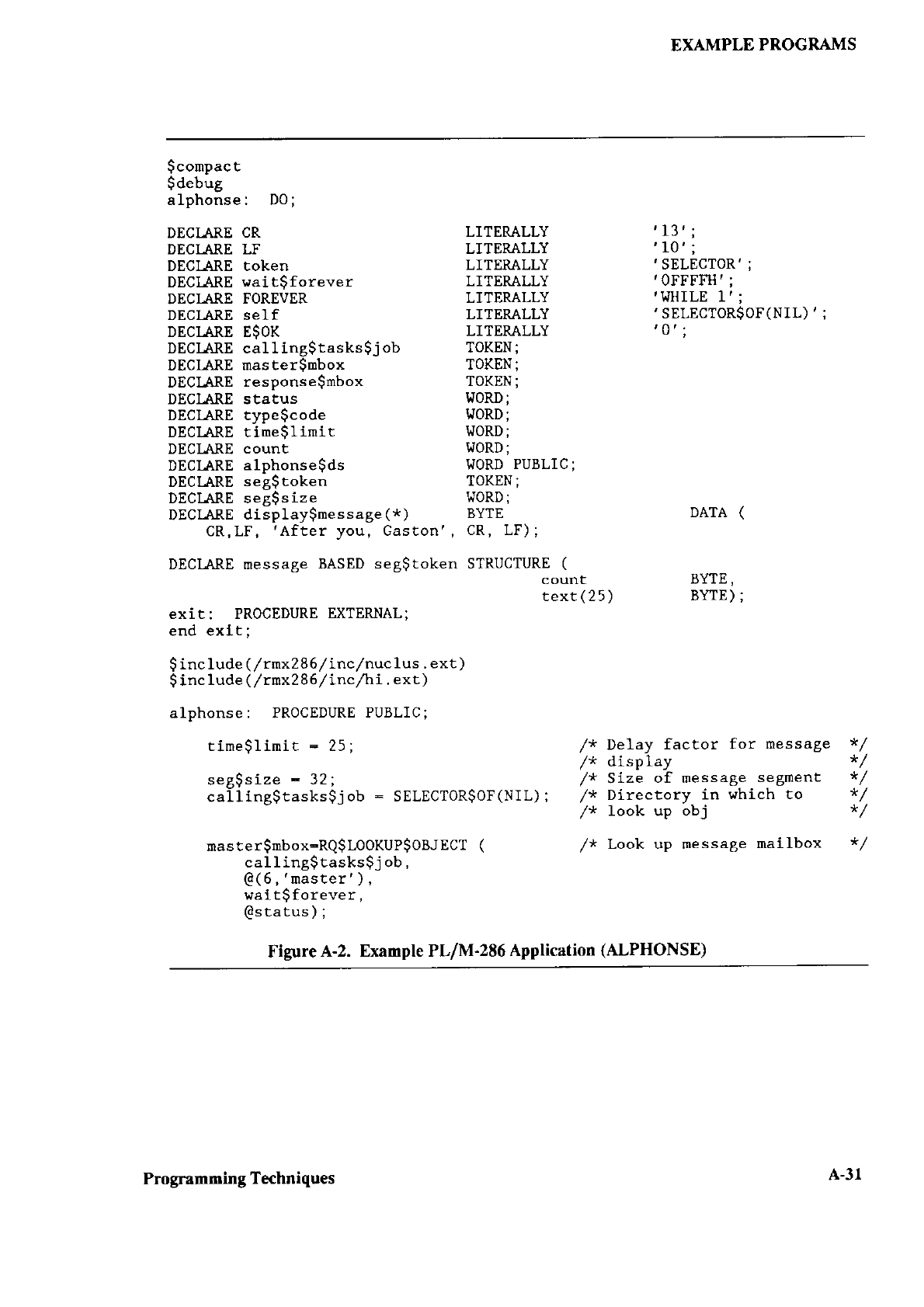
EXAMPLE PROGRAMS
$conpacc
$debug
alphonse: D0;
DECIARE
CR
DECIARE LF
DECIARE token
DECIARE
vait$forever
DECIARE
FOREVER
DECIARE self
DECIARE E$OK
DEoIARE cal l lng$ tasks $j ob
DECIARE
rnas ter$nbox
DECIARE
respons
e
$rnbox
DECIARE status
DECIARE type$code
DECIARE t ime$
l imi t
DECIARE
count
DECIARE
alphonse$ds
DECIARE
seg$token
DECIARE seg$
s iz e
DECI-ARE
di sp lay$rnes
s age
(
* )
CR,LF, 'After you, Gaston',
LITEMLLY
LITERALLY
LITEMLLY
LITERALLY
LITERALLY
LITERALLY
LITERALLY
TOKEN
;
TOKEN
;
TOKEN
;
WORD;
WORD
;
ifORD
;
I.IORD
:
WORD
PUBLIC;
TOKEN
;
WORD
;
BYTE
CR, LF);
'13';
'10';
,SELECTOR';
,
oF['Fr ' .
,
LTHILE 1
' ;
,
s ELECTOR$oF
(Nr
L) ',
;
DECI^A,RE message BASED seg$token STRUCTURE
(
count
rext(25)
exit: PRoCEDURE
EXTERNAL;
end exlt;
$
include (
/rmx286/inc/nuclus .
ext)
$include (/rrnx286
/ Lncl\i .
exx)
alphonse: PROCEDURE
PUBLIC;
tlme$lirnlt - 25;
seg$size
- 32;
cal1lng$ tasks
$j
ob - SELECTOR$OF(NIL);
rnas te r$nbox:RQ$LooKUP$OBJECT
(
cal l ing$ casks
$j
ob,
G(6,
'rnaster'
) ,
wait$forever,
Gstatus);
Figure
A-2. Example PL/M-2Eó
Application
(ALPHONSE)
DATA (
BYÎE ,
BYTE)
;
/* Delay factor for message */
/* display */
/* size of nessage segnent */
/* Directory in which to */
/* look up obj */
/* Look up nessage rnailbox */
Progranming Techniques A-3r
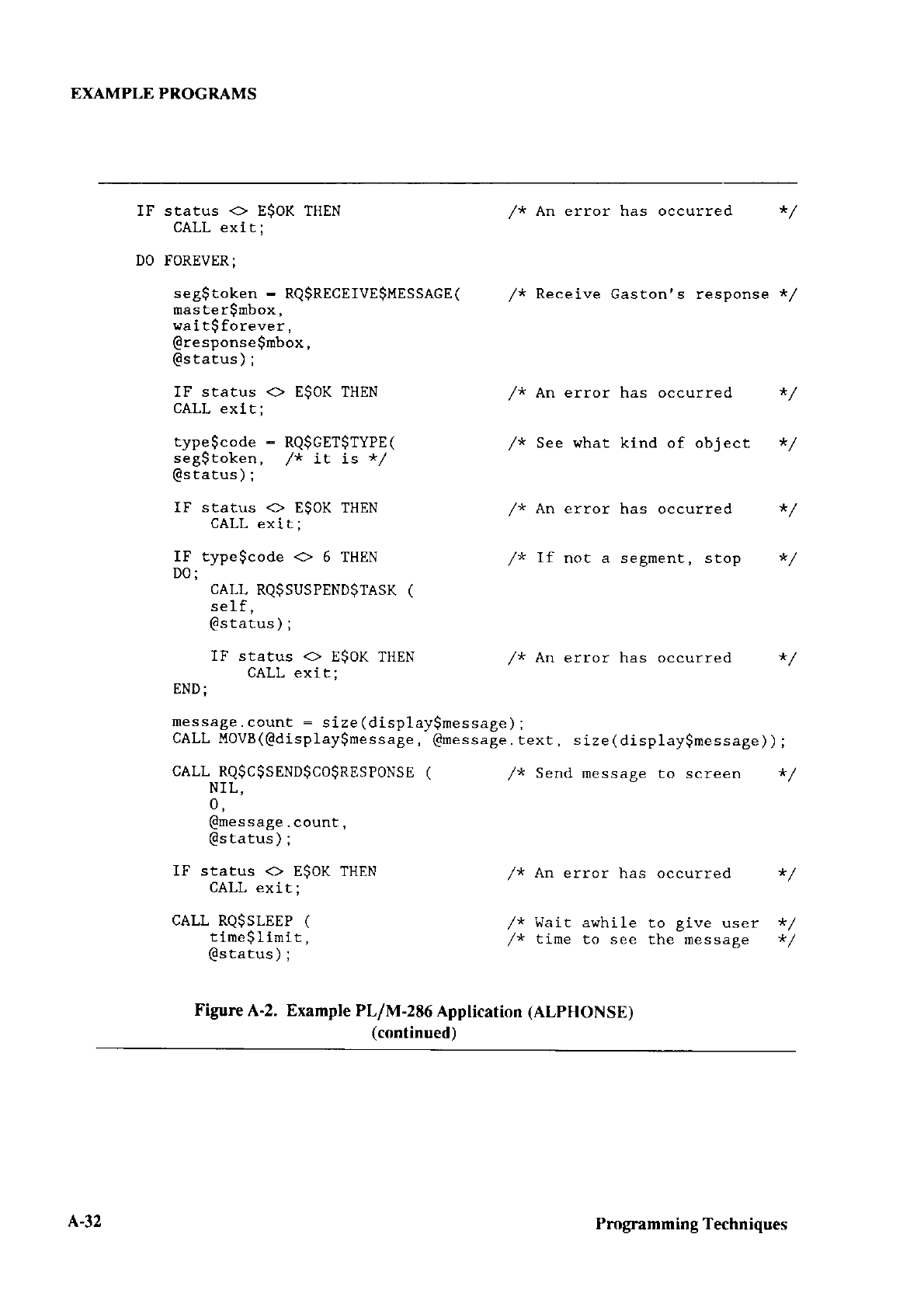
EXAMPLE PROGRAMS
IF status o E$OR THEN /* An error has occurred */
CALL exit;
DO FOREVER;
seg$token - RQ$RECEIVE$MESSAGE
( /* Receive Gaston's response */
nrcrarqmh^Y
walt$forever,
@response$rnbox ,
Qstacus
) ;
IF status O E$oK THEN ,/* An error has occurred */
CALL
exlt;
tyPe$code
: RQSGET$TYPE( /* See what kind of object */
seg$token, /* íL is */
Gs
tatus ) ;
IF status o E$OK THEN /* An error has occurred */
CALL exit;
IF type$code o 6 THEN ,/* If not a segnent, stop x/
DO;CALL
RQ$SUSPEND$TASK
(
se 1f
,
@starus);
IF stacus o E$OK THEN /* An error has occurred */
CALL exit;
END
;
nessage
. count : size(display$rnessage);
CALL MOVB
(Gdi
sp lay$me
s sage
, Gnessage.
rexr , size (displaygmessage)
) ;
CALL
RQ$C$ S END$CO$RES
PONS E ( /x Send
nessage to screen */
NIL,
0,
Gmessage.
count
,
Gs
tatus ) ;
IF status O E$OK THEN /* An error has occurred */
CALL exit;
CALL RQSSLEEP
( /* Wait awhile ro give user */
tine$linit, ,/* time to see the nessage */
Gstatus ) ;
Figure
A-2. Example PL/M-2E6
Application
(ALPHONSE)
(continued)
A-32 Programrnin
g
Techniques
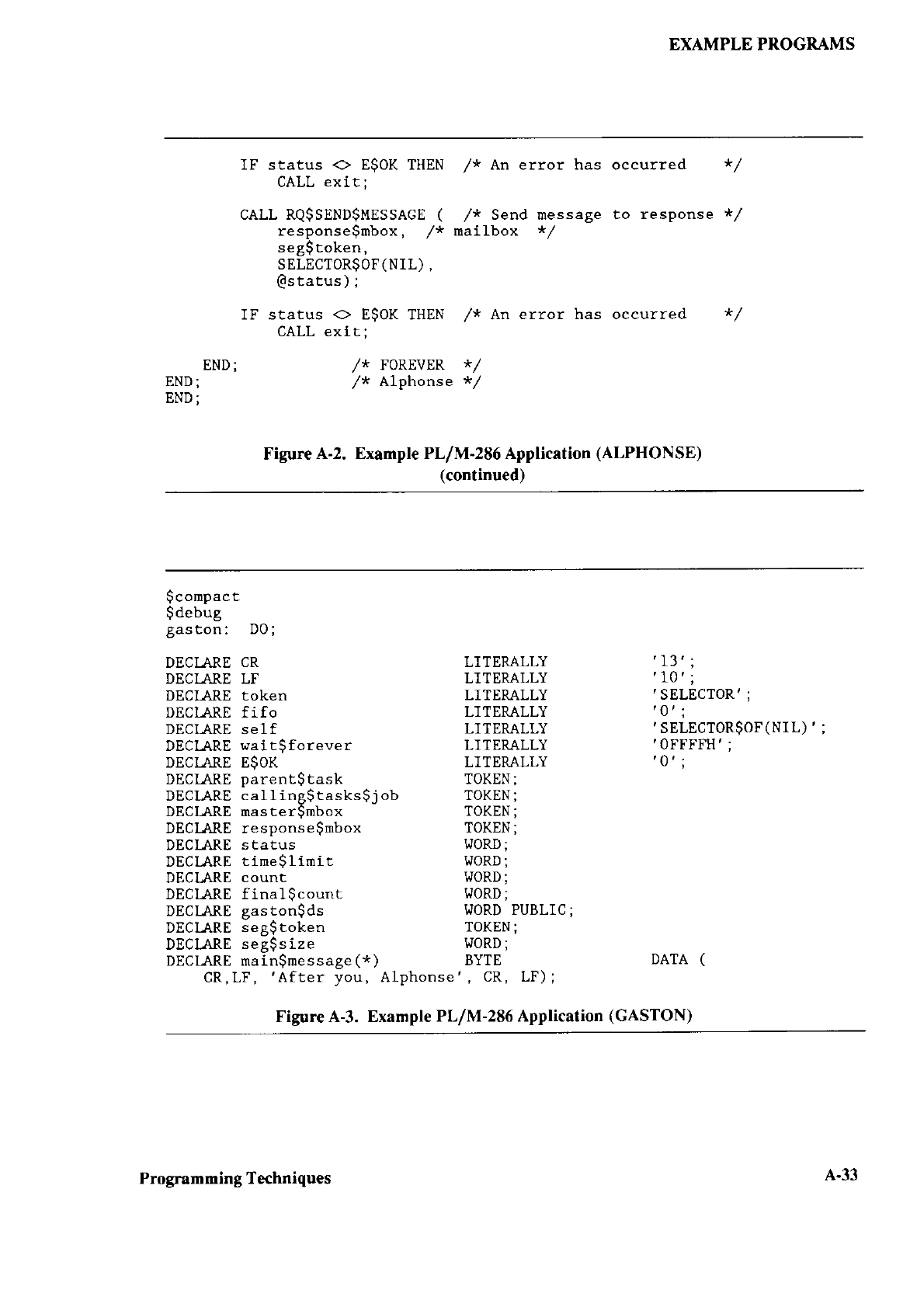
EXAMPLE PROGRAMS
IF status o E$OK THEN /* An error has occurred */
CALL exit;
CALL RQ$SEND$MESSAGE
( /* Send nessage to response */
response$mbox
, /* ma ilbox *
/
seg$token,
SELECT0R$0F(NrL),
Qstatus);
IF scatus o E$oK THEN /* An error has occurred */
CALL exlt;
END; /* FOREVER
*/
END; ,/* Alphonse */
END
;
Figure
A-2. Example PL/M-286 Application
(ALPHONSE)
(continued)
$conpact
$debug
gaston: D0;
DECI^ARE
CR
DECIARE LF
DECIARE toKen
DECIARE fi fo
DECI-ARE self
DECIARE
lrait$forever
DECIARE E$OK
DECL{RE
parent$task
LITEMLLY
LITERALLY
LITEMLLY
LITEMLLY
LlTERALLY
LITEMLLY
LITERALLY
TOKEN
;
TOKEN
;
WORD
;
WORD
;
WORD
;
WORD
;
WORD PUBLIC;
,10,;
,SELECTOR';
'0'
:
,
SELECTOR$OF
(
NIL) ' ;
,OFFFFH'
;
,0,;
DATA (
DECIARE
cal l ing$ tasks $j ob TOKEN:
DECI-ARE naster$nbox TOKEN;
DECIARE re sponse
$rnbox
DECIARE
s tatus
DECTARE
tirne$linit
DECLARE
counc
DECIARE final$count
DECI-ARE gas
ton$ ds
DECIARE
seg$token ToKEN;
DECIARE
seg$size tioRD;
DECIARE ma in$rnes sage
(*) BYTE
CR,LF,
'After you, Alphonse',
CR, LF);
Figure A-3. Example
PL/M-2E6 Application
(GASTON)
Programming Techniques A-33
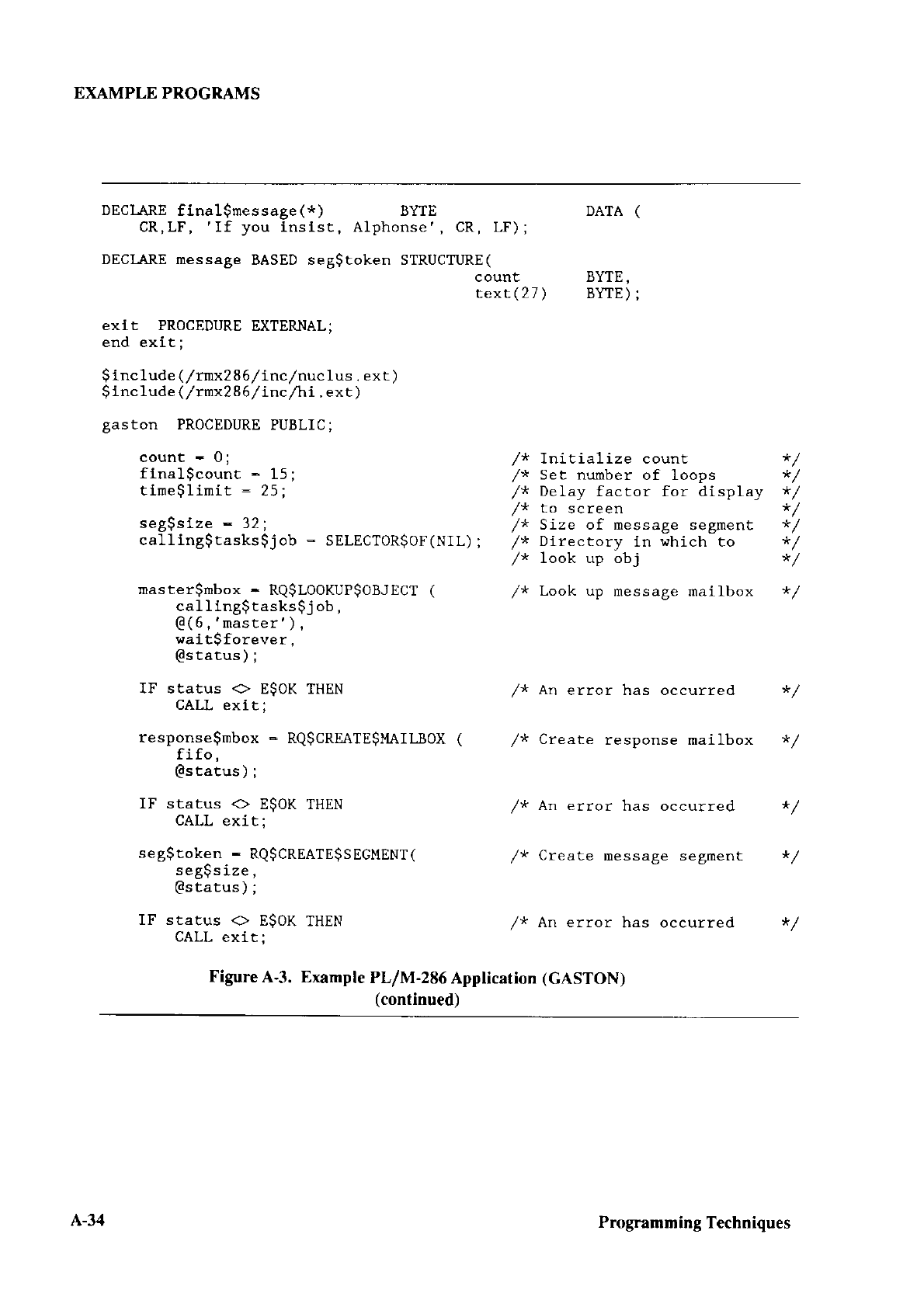
EXAMPLE PROGRAMS
DECI-ARE
flnal$rnes sage
(
* ) BYîE DATA
(
CR,LF, 'If you inslst, Alphonse', CR, LF);
DECIARE nessage BASED seg$token STRUCTURE
(
count BYTE,
text(27) BYTE);
exlt PROCEDURE
EXTERNAL;
end exlt;
$
include (
/rmx2 8 6/inc/nuc lus .
ext )
$
include (/rrnx286
/ ír,c
/hi .
ext)
gaston PROCEDURE
PUBLIC;
count - 0; /* lniCialize count */
flnalScount - 15: ,/* Set number
of loops */
tlrne$linit : 25; /* DeLay
factor for display */
/* to screen */
seg$size : 32; /* Size of rnessage
segnent */
calllng$tasks$job : SELECTOR$OF
(
NI L) i ,/* Directory in which to */
/x ì-ook up obj */
naster$nbox - RQ$LOOKUP$OBJ ECT ( /* Look up message rnailbox */
cal l ing$ tasks
$j
ob,
@(6,'rnaster'),
wait$forever,
Gs
tacus
) ;
IF status O E$OK THEN /* An error has occurred */
CALL
exÍr;
response$rnbox
: RQ$CREATE$MAILBoX
( /* Create response mailbox */
fifo,
@status ) ;
IF status O E$OK THEN /* An error has occurred */
CALL
exít;
seg$coken
- RQ$ CREATE$ S
EGMENT
( /* create lnessage segnenr */
seg$size,
@status);
IF status O E$oK
THEN /* An error has occurred */
CALL
exit;
Figure A-3. Example PL/M-286 Application (GASTON)
(continued)
A-34 Programm
ing Techniques

EXAMPLE PROGRAMS
DO l,v'}tl
LE count < f inal$count;
message.
counL
- s i ze
(ma
i n$message
)
;
CALL
MoVB
(@ma
in$me
s sage
, @message.
text, SIZE(nain$message)
) ;
CALL RQ$ C$ S END$CO$RES
PONS E ( /* Send message
to screen */
NIL,
0,
/)*^^^^^^ ^^..-*
Yxrr
s s dÉE . LvurrL,
Gs
tatus ) ;
IF scatus O E$oK THEN /* An error has occurred */
CALL exit;
CALL RQSSLEEP
( /* tlait awhile to give user */
tineglinit, /* time to see the message */
Gs
tatus ) ;
IF status O E$OK
THEN /* An error has occurred */
CALL exit;
CALL RQ$SEND$MESSAGE
( /* Send message to rnaílbox */
naster$mbox,
seg$token,
response$mbox,
@status ) ;
IF status o E$OK THEN /* An error has occurred */
CALL exit;
seg9token : RQ$RECEM$MESSACE
( /* Receive response from */
response$nbox , /* Alphonse */
wait$forever,
NIL,
Gs
tatus ) ;
IF status O E$OK
THEN /* An error has occurred */
CALL exit;
count - count+1 ;
END
; /* l,IHtLE x
/
rnessage
. count : size(final$message);
CALL MOVB(Gfinal$message,@message.
text,SlZE(finaI$message) ) ;
CALL RQ$ C$ S END$CO$RES
PONS
E ( /* Send final message to */
NlL, /* screen */
0,
@message
.
count ,
Gstatus ) ;
Figure A-3. Example PL/M-286
Application
(cASTON)
(continued)
A-35
Programmin g
Techniques
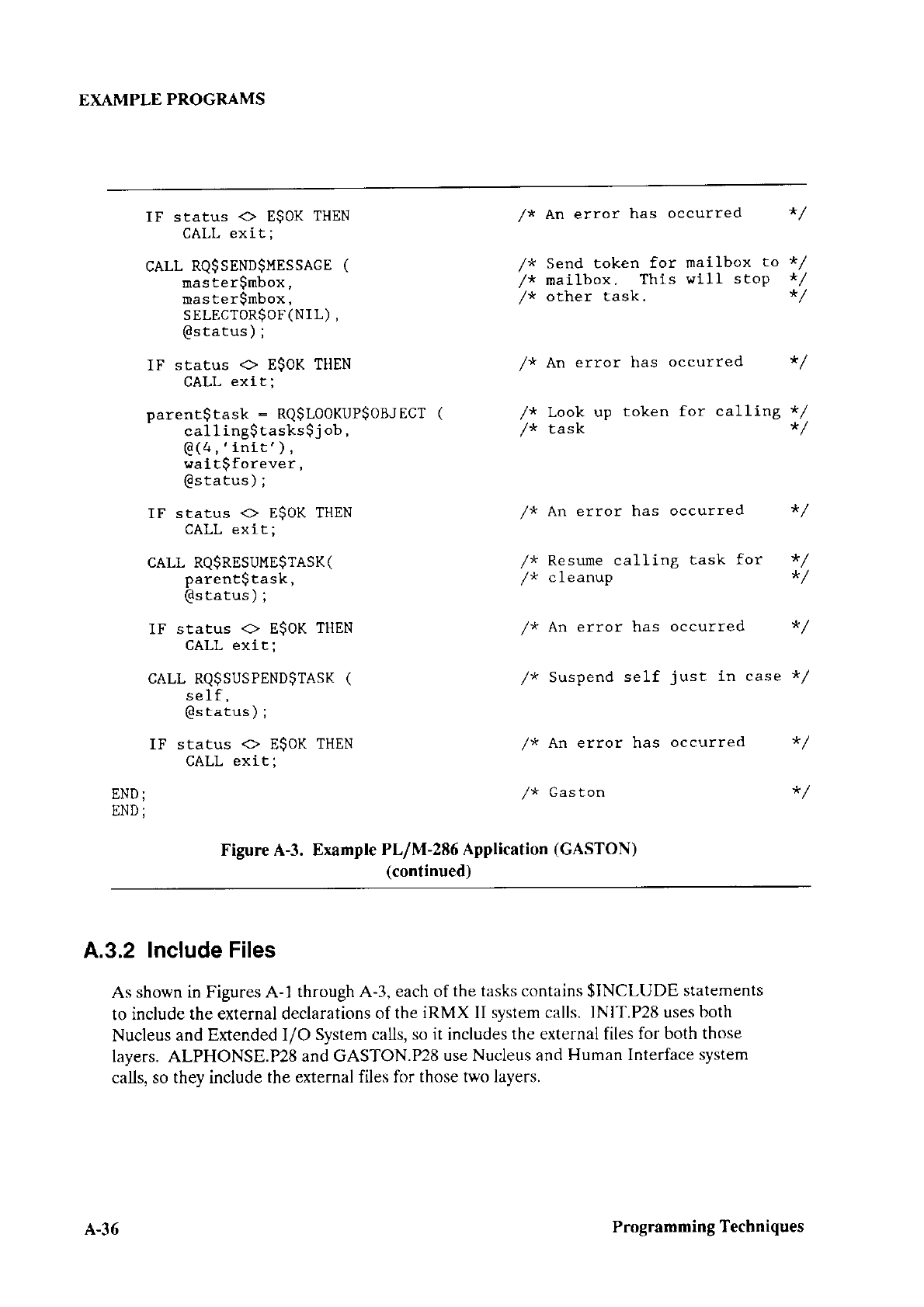
EXAMPLE PROGRAMS
IF status o ESOK
THEN ,/* An error has occurred */
CALL
exit;
CALL RQSSEND$MESSAGE
( /* send token for rnailbox to */
rnaster$mbox, ,/* mailbox. This wiJ-l stop */
rnaster$rnbox, /* other task. */
sFI Fcrnp qnF
/ N-t T.)
Gstatus);
IF status o E$OK THEN ,/* An error has occurred */
CALL
exit;
parent$task - RQ$ LOOKUP$OBJ
ECT ( /* Look uP token for calling */
' calling$tasks$job, /* task */
@(4,'init'),
vait$forever,
€status ) ;
rF status o E$oK THEN /* An error has occurred */
CALL
exit;
CALL RQ$RESUME$TASK( ,/* Resurne calling task for */
parent$task, /* cleanuP */
Qstatus
) ;
rF status o E$oK
THEN /* An error has occurred */
CALL exit;
CALL RQ$SUSPEND$TASK
( /* Suspend
self just in case */
self,
Gstatus);
IF stacus o E$oK
THEN ,/* An error has occurred */
CALL
exit;
END; /* Gaston */
END
;
Figure A-3. Example
PL/M-286 Application
(GASTON)
(continued)
A.3.2 lnclude
Files
As
shown in Figures A-l through A-3, each of
the tasks contains
$INCLUDE
statements
to include
the external declarations
of the
iRMX II system calls.
INIT.P28 uses
both
Nucleus
and Extended I/O System calls, so
it includes
the external files
for both those
layers. ALPHONSE.P28
and GASTON.P2S
use Nucleus and
Human Interface
system
calls, so they include
the external files for those two layers.
A-36 Programming
Techniques
EXAMPLE PROGRAMS
Each task
contains its own
set of include
files because
each is a separately
compiled
module.
If the tasks were
all
contained in
the same program
module, only one set
of
$INCLUDE
statements would
be needed.
4.3.3
Compiling
and Binding
the
Code
The following
command
is used to compile
the three
files of PL/M-286
source statements:
The PLM286
commands do
not include
controls for
selecting the model of segmentation
(SMALL,
COMPACT,
MEDIUM, or I-ARGE)
because the
$COMPACT
control
was
already
included in the source
files.
The compiler
produces
three files
of object code.
Because the PLM2tl6
command did not
speci! names
for the
object code files,
the files are given
the names INIT.OBJ,
ALPHONSE.OBJ,
and
GASTON.OBJ
by default.
After compiling,
the object files
must be bound
together and bound with
the iRMX ll
interface
libraries. The BND286
statement
used to do this is
as follows:
ln this BND286 statement,
the three
object lìles
(INIT.OBJ,
GASTON.OBJ,
and
ALPHONSE.OBJ)
are
bound together with
two libraries:
PLM286.LIB and
RMXIFC.LIB. PLM286.LIB
is the standard
PLIM-286library distributed with
the
compiler. RMXIFC.LIB
is
the COMPACT version
of rhe iRMX II interface library.
The OBJECT
control specifies
the name of the
executable file generated
by BND286. In
this case, the
file is called SAMPLE.
The
SEGSIZE(STACK( +
1500)) control specifies
that 1500 bytes of stack should
be
reseryed
in addition to the amount
required by the program.
As listed in Chapter 4, this
amount
represents the amount
required by iRMX II applications that include the Human
Interface.
The RCONFIGURE(DYNAMICMEM(5000H))
control directs BND286 to
produce
an
STL (single-task
loadable) module and
îo assign a minimum of 5000H bytes of dynamic
memory to the module.
Pmgramming
Techniques A-37
EXAMPLE PROCRAMS
A.3.4
Running
the ExamPle
The BND286
command
produces
an executable
file called
SAMPLE. To run the example,
at
the Human Interface
prompt type
the name
of the file.
A.4 EXAMPLE 3
-
CONTROL.C
HANDLER
This
section shows an
example
of a CONTROL-C
handler.
It is
written in PL/M-286
and
uses UDI calls
exclusively.
lt can be invoked
from
the Human Interface
level.
A.4.1 Source
Code
Figure A-4
contains the
source code
for the CONTROL-C
example
(a file called
ECHO.P28).
The main
program echoes
to the screen
any line entered
at the terminal.
However,
before starting
this infinite
loop, the
program installs
a CONTROL-C
handler
and opens
a connection
to the terminal.
The CONTROL-C
handler
(a
procedure called
CC$TRAP) is invoked
when the operator enters
a CONTROL-C
at the keyboard.
It
resets the CONTROL-C
handler.
issues
a message to
the terminal, and exits
to the
Human Interface.
A-38 Prograrnming
Techniques
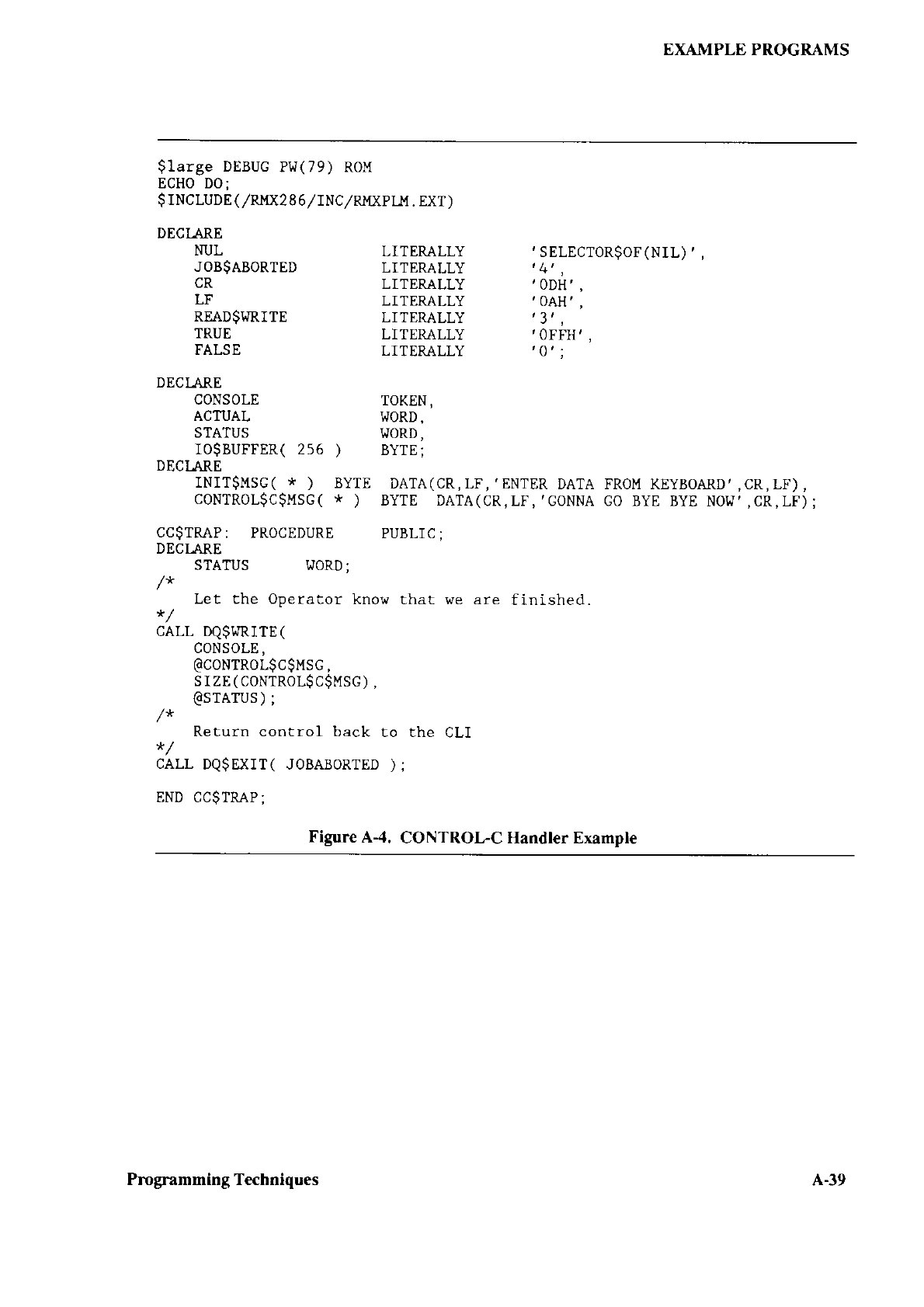
EXAMPLE PROGRAMS
$large DEBUG
Pt.l(79) RoM
ECHO DO;
$
TNcLUDE
(
/RMX2
8 6/rNC/RMXPLM.
EXr
)
DECI.ARE
NUL LITERALLY 'SELECTOR$OF(NIL)
' ,
JOB$ABORTED LITERALLY
CR LITEMLLY ' ODH'
,
LF LITERI.LLY 'OAH'
,
READ$WRITE LITERALLY '3' ,
TRUE LITEMLLY 'OFFH'
,
FALSE LITEMLLY 'O' ;
DECI-ARE
CONSOLE TOKEN,
ACTUAL WORD,
STATUS WORD,
IO$BUFFER( 256 ) BYTE;
DEClARE
INIT$MSG( * ) BYTE DATA
(
CR, LF, ' DNTER
DATA FROM KEYBOARD'
,
CR, LF) ,
CONTROL$CSMSG(
* ) BYTE DATA
(
CR, LF
,
'
GONNA GO BYE BYE
NOW"CR,LF);
CC$TRAP: PROCEDURE PUBLIC;
DECIARE
STATUS 'WORD;
Let the Oneral-or know
thaL we are finished.
CALL DQ$hT.ITE
(
CONSOLE,
@coNTROL$C$MSG,
srzE(coNrRoL$c$Msc),
GSTATUS ) ;
Return control back to the CLI
CALL
DQ$EXIT( JOBABORTED
);
END CC$TRAP;
Figure
A-4. CONTROLC Handler Example
Pmgramming Techniques A-39
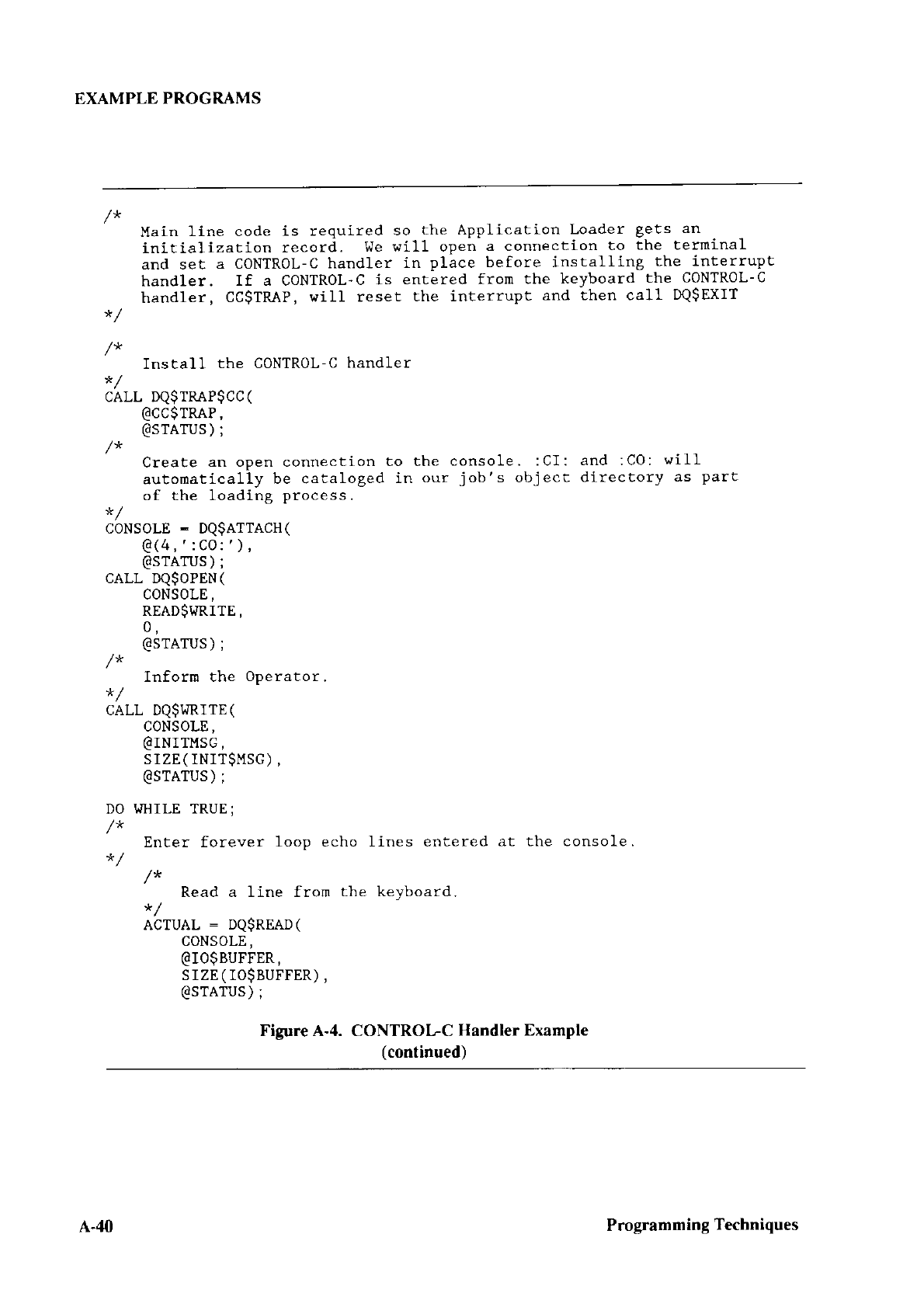
EXAMPLE
PROGRAMS
Main line code is required so the APplication Loader gets an
initialization record. We vill open a connection to the terninal
and seÈ a CONTROL-C
handler in place before installing the interrupt
handler. lf a CONTROL-C
is entered frorn the keyboard the CONTROL-C
handler, CC$TRAP,
will reset the interruPt and then call DQ$EXIT
Install the CoNTRoL-C
handler
CALL DQ$TRAP$CC
(
GCC$TRAP,
@STATUS
) ;
Create an open connection to the console. :CI: and :CO:
will
autonatically be cataloged in our job's object directory as Part
of the loading process.
coNsoLE - DQ$ATTACH
(
G(4,':CO:'),
@STATUS
) ;
CALL DQ$OPEN
(
c0Ns0LE,
READ$I.IRITE,
0,
€STATUS
) ;
r-.t^-* Fl-^
CALL DQ$WRITE
(
CONSOLE,
GINITMSG,
SIZE(INIT$MSG),
GSTATUS
) ;
DO
Ii},IILE TRUE;
tr'ntpr forewpr loon echo lines entered at the console.
Read a line frorn the keyboard.
ACTUAL : DQ$READ
(
CONSOLE,
@IO$BUFFER,
SIZE
(
IO$BUFFER)
,
@STATUS ) ;
Figure A-4. CONTROLC
Handler Example
lcontinued)
A-40 Programming
Techniques
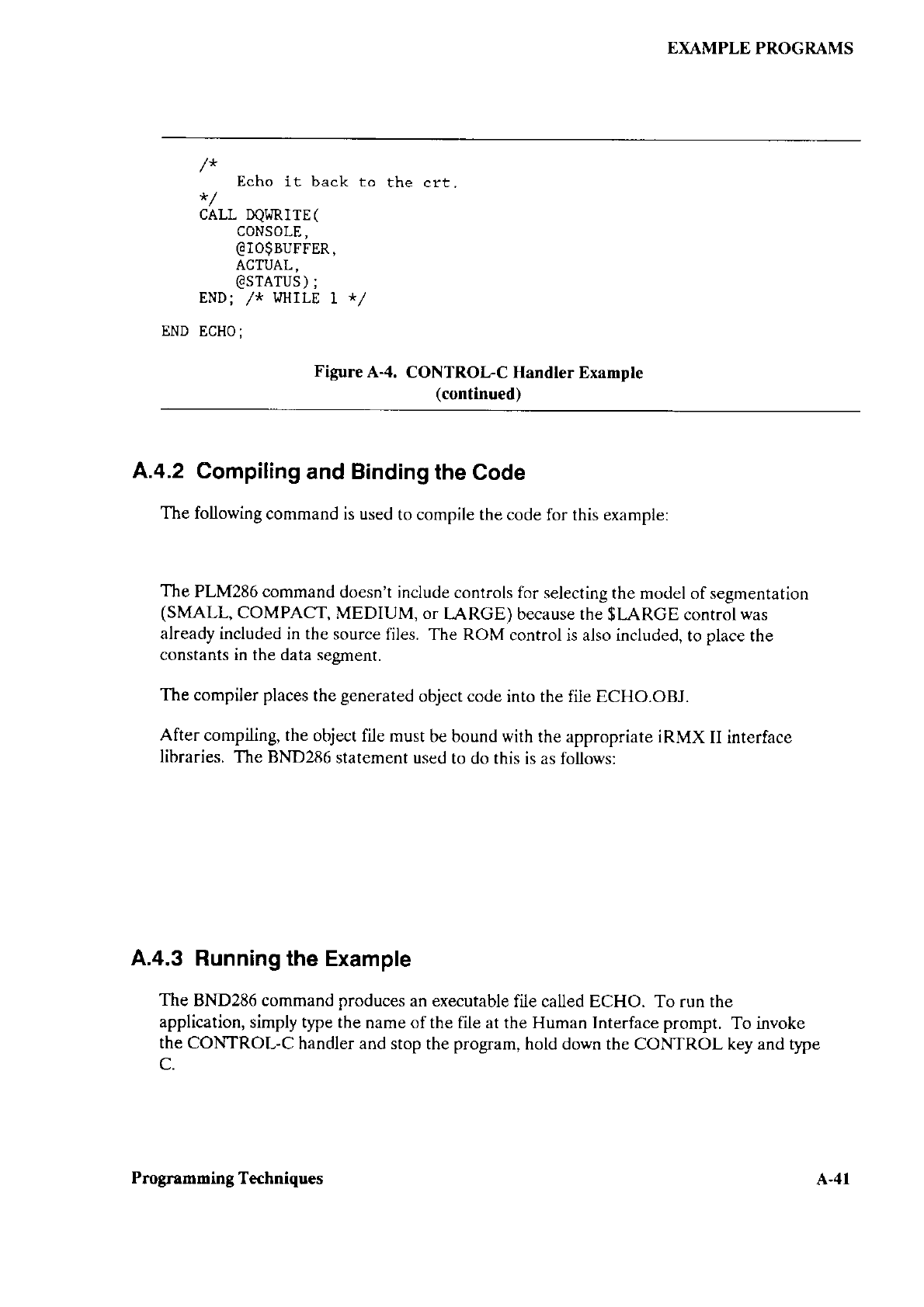
EXAMPLE PROGRAMS
Echo it back to the crt.
CALL DQL'RITE
(
coNsoLE,
@IO$BUFFER,
ACTUAL,
GSTATUS ) ;
END
; /* I,IHI LE I */
END
ECHO;
Figure
A-4. CONTROLC Handler
Example
(continued)
4.4.2
Compiling
and Binding
the
Code
The following
command is used
to compile the code
for this example:
The
PLM286 command
doesn't
include controls for
selecting the model of segmentation
(SMALL,
COMPACT,
MEDIUM, or LARGE) because the
$LARGE
control
was
already included
in the source
files. The ROM
control is also included,
to
place
the
constants in the data segment.
The compiler places
the
generated
object code
into the file ECHO.OBJ.
After compiling, the
object file must
be bound with
the appropriate iRMX II interface
libraries.
The BND286
statement used
to do this
is as follows:
4.4.3 Running the
Example
The BND286 command produces
an executable
file called ECHO. To run the
application,
simply type the
name of the file at the Human Interface prompt. To invoke
the CONTROL-C
handler and stop
the
progam,
hold down the CONTROL key and type
Programming
Techniques A-41
EXAMPLE PROGRAMS
A.5 HARDWARE
REQUIREMENTS
FOR
REMAINING
EXAMPLES
Sections
A.6 and A.7
show examples
of interrupt
handlers.
Both of these
examples
require hardware
that might
not be available
on all iRMX II systems.
This hardware
includes
an iSBX
350 parallel MULTIMODULE board and
an iCS 920
digital signal
termination
panel. The examples
were developed
using the
iSBX 350 module
mounted
on
an iSBC
286/ 10A
processor board.
Before running
the examples in
sections A.6
and A.7, you should
configure
the hardware
as follows:
iSBX
350 configuration
. Add
jumper
E5-86,
placing
+5V on Jl pin 50
. Remove
jumper
El-E2 and addjumper
E2-83. This
configures Port A for input.
o Remove
jumper
E13-El4
and add
jumper
El3-E'18.
This configures
the Port A
interrupt
to MlNTR0.
o Install
the iSBC 901 terminator
packs in sockets XU3,
XU5, and XU6.
o Install the 7438
buffer in socket XU4.
iCS 920 configuration
o Connect
jumper
E2-83, enabling the
+5V from
the iSBX 350 to
power the iCS 90
board.
o For
wirewrap matrices J1 through J24, install
jumper
1-2, enabling the LED
indicators. Also install
jumper
3-4
to
wire
the iSBX signals to the
plus connectors on
the terminal strip. Finally, install
jumper
5-6 to place the
ground
to
the connectors on
the terminal strip.
Cable configuration
o Connect the iSBX 350
board to the iCS 920 board
with a 50-pin ribbon cable
(3M
33ó5-50 or equivalent).
When fabricating the ribbon, note
that the iCS 920 connector
J25 is
wired the opposite of the iSBX 350
pins.
o Connect the cable to the iSBX 350 board
using a connector equivalent
to one of the
following:
3M
3415-0000
AMP 88083-1
ANSLEY
6Oq.5OI5
SAE SD6750 Series
L-42 Programming
Techniques
EXAMPLE PROGRAMS
. Connect the cable to the iCS 920 board
using a connector equivalent
to one of the
following:
3M 3425-7050
ANSLEY 609.5001M
Switches
. Pull-up resistors are provided to +5V on both the iCS
920 and iSBX
350
boards.
Single-pole, single-throw switches will be
adequate for data inputs 0 through 7. The
interrupt switch should
be a momentary-contact switch.
o Switches 0 through 7 should be wired to terminals A0 through A7 respectively. The
momentary-contact switch should be wired to terminal C4.
NOTE
Because timed interrupt waits
are available
with the Operating System,
testing can proceed without
the interrupt circuit in
place.
iSBC
286/ l0A configuration
. Install the iSBX 350 module in the J5 connector of the iSBC
28ól10A board.
4.6 EXAMPLE 4..INTERRUPT TASK
This example shows an interrupt task that
works with
the
hardware described in the
previous
section. In this example, the interrupt task echoes
the Port
A switches
to the
Port B lights whenever the interrupt switch
is
togg.led.
This example is invoked from the Human Interface level.
For the example to
work,
the
user must have a marimum task priority of 126 or higher (numerically lower). The
example also includes a CONTROL-C handler, enabling
you to cancel the program and
return to the Human Interface level bv enterins a CONTROL-C.
4.6.1
Source Code
Figure A-5 contains the source code for the interrupt
task example (a file called
INTRTSK.P2S). The program consists of an interrupt
handler, a CONTROL-C
handler,
and
a main
program.
The interrupt handler
(SBXj50$IN1$HNDLR) receives control
whenever the interrupt
switch is toggled. It informs the interrupt task
(the
main
program) of the interrupt
by
issuing the SIGNAT$INTERRUPT
system call. It performs no other operations.
Progryamming Techniques A-43
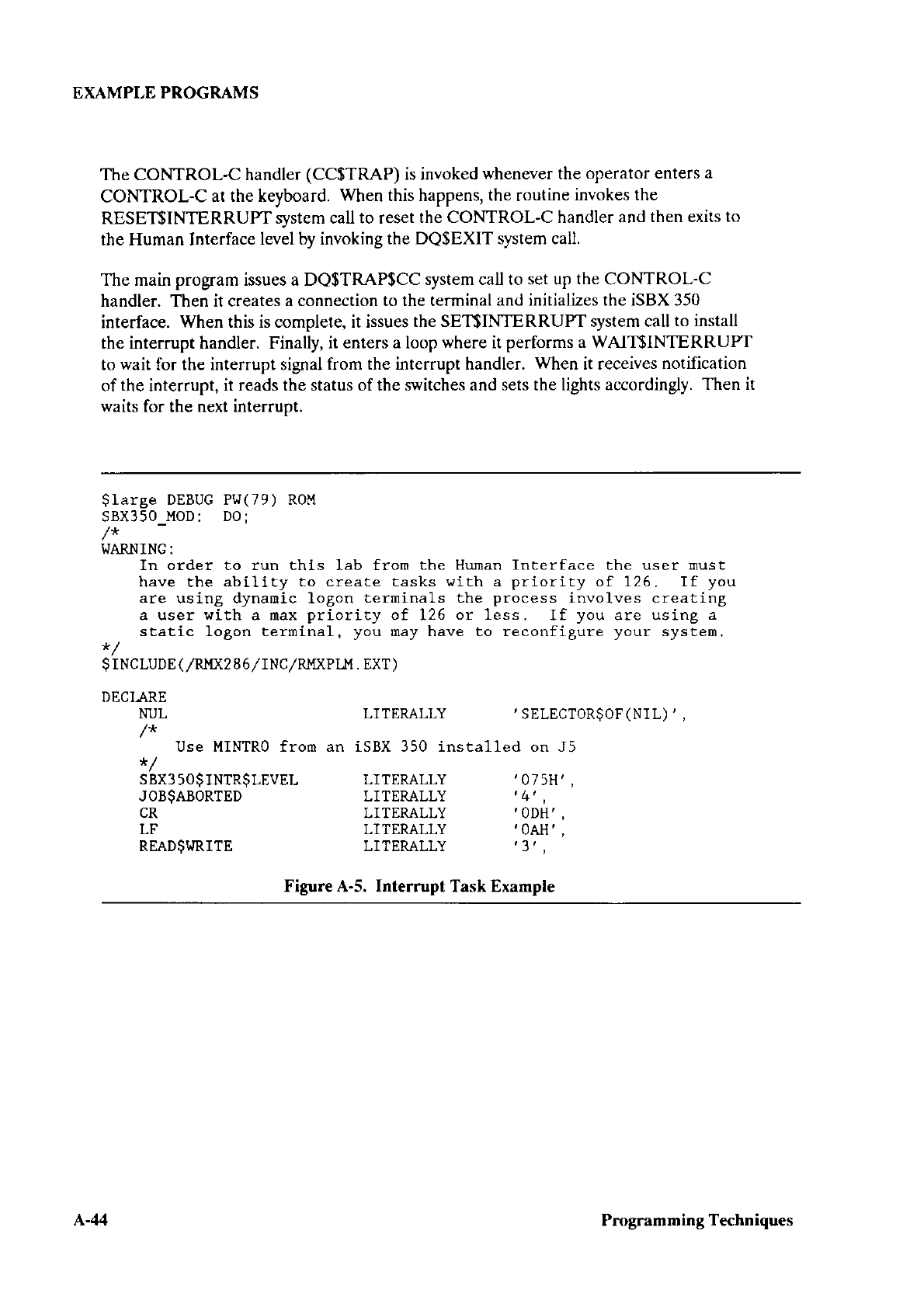
EXAMPLE PROGRAMS
The CONTROL-C handler
(CC$TRAP)
is invoked
whenever the
operator enters
a
CONTROL-C at the keyboard.
When this happens, the routine
invokes the
RESET$INTERRUPT
system call to reset
the CONTROL-C handler and
then exits
to
the Human Interface
level by invoking
the DQ$EXIT system call.
The main program issues a DQ$TRAP$CC
system call to set up the
CONTROL-C
handler. Then it creates
a connection to the terminal
and initializes the iSBX 350
interface.
When this is complete, it issues
the SET$INTERRUFI system call
to install
the interrupt handler. Finally,
it enters a loop
where
it performs a WAIfiINTERRUPT
to wait for the interrupt signal
from the interrupt handler. When
it receives
notification
of
the
interrupt,
it reads the status of the switches and
sets the lights accordingly.
Then it
waits for the next interruDt.
$Iarge DEBUG Pt.I(79) ROM
SBX350_MOD:
DO;
WARNING:
In order to run this 1ab from the Hurnan Interface the user must
have the abillÈy to create tasks with a priority of 126. If you
are using dynamic logon terminals the process involves creating
a user with a rnax
priority of 126
or 'less. lf you are usÍng a
static logon terninal, you rnay have to reconfigure your systen.
$
TNcLUDE
(
/R-r,fX2
8 6/rNC/RMXPi,r'f . EXT
)
DECIARE
NUL LITEMLLY 'SELECTOR$OF(NIL)'
,
Use MINTRO from an iSBX 350 installed on J5
SBX3
50
$
INTR$LEVEL LITERALLY '075H"
JOB$ABORTED LITERALLY '4' ,
CR LITERALLY '
ODH'
,
LF LITERALLY 'OAH'
READ$WRITE LITERALLY '3' ,
Figure A-5. Internrpt Task Example
A-44 Pmgrarnming
Techniques
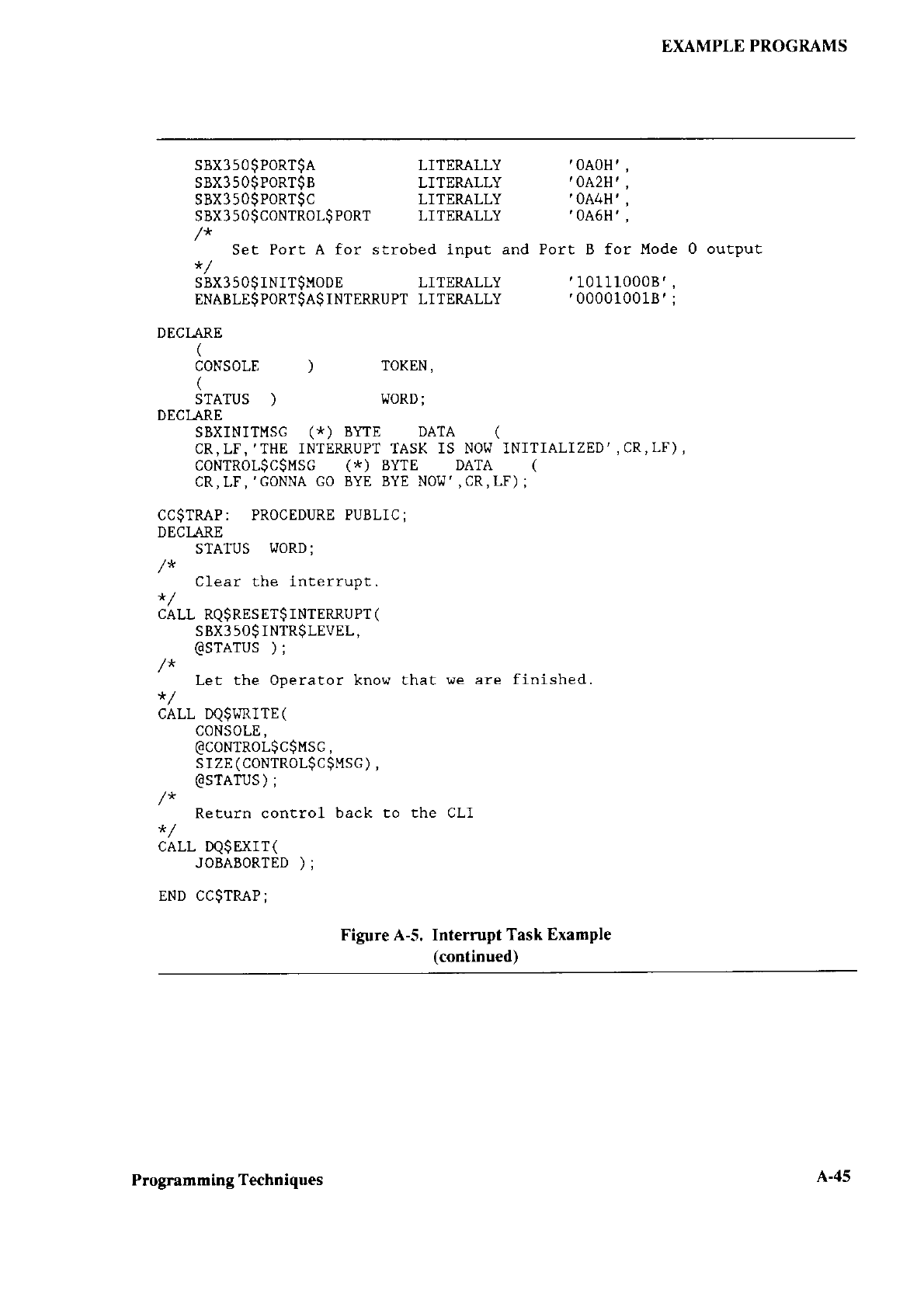
EXAMPLE PROGRAMS
SBX3509P0RT$A LTTERALLY ',OAoH',
,
SBX35O$PoRT$B LTTERALLY ',OA2H',
,
SBX350$P0RT$C LTTEMLLY ',OA4H',
,
S BX3 5
O$CONTROL$ PORT LITERALLY 'OA6H"
Set Port A for strobed input and Port B for Mode
0 output
s Bx3 5 0$ rNIT$MODE LTTERALLY ',10111000B',
,
ENABLE$PORT$A$
INTERRUPT LITEMLLY ' OOOO1OO1B'
;
DECI-ARE
(
CONSOLE ) TOKEN,
(
STATUS ) WORD;
DECIARE
SBXINITMSC
(*) BYTE DATA (
CR,LF,'THE
INTERRUPT TASK IS NOW INITIALIZED',CR,LF),
CONTROL$C$MSG
(*) BYTE DATA (
CR,LF,'CONNA
GO BYE BYE NOIJ"CR,LF);
CC$TRAP: PROCEDURE
PUBLIC;
DECI.ARE
STATUS WORD;
fìlaer rha iht-èrr,'nl-
CALL
RQ9RESET$
INTERRUPT
(
sBx3 50
$
INTR$LEVEL,
GSTATUS
);
Let the Operator know that r,re are finished.
CALL DQ$\,'RITE
(
c0NsoLE
,
GcoNîRoL$c$Msc,
sIZE(CONTROL$C$MSc),
@STATUS
) ;
Return concrol back to the CLI
CALL DQ$EXIT
(
JOBABORTED
);
END CC$TRAP
;
Figure A-5. Interrupt
Task Example
(continued)
A-45
Programming
Techniques
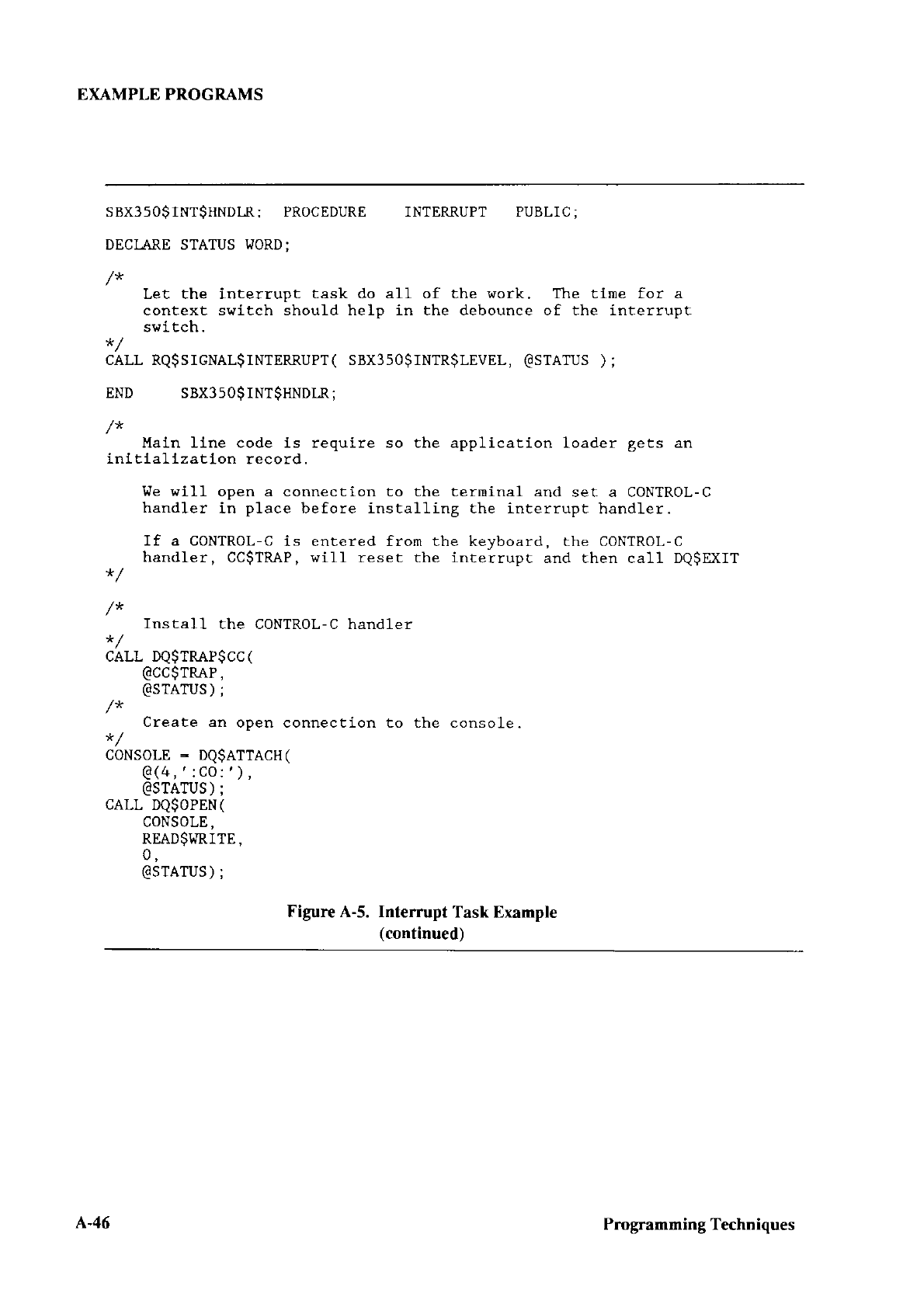
EXAMPLE PROGRAMS
SBX35O$INT$HNDLR: PROCEDURE INTERRUPT PUBLIC;
DECIARE STATUS WORD
;
l.pl. thp intcrrunt task do all of the work. The time for a
context slrítch should help in the debounce of the ínterrupc
sr^'i Èch .
CALL RQ$ S ICNAL$ INTERRUPT
( SBX3 50
$
INTR$LEVEL, @STATUS );
END SBX350$INT$HNDLR;
Maln llne code is require so the application loader gets an
initlallzatlon record.
We will open a connection to the terrninal and set a CONTROL-C
handler in place before installing the interrupt handler.
If a CONTROL-C
is entered from the keyboard, the CONTROL-C
handler, CC$TRAP, will reset the interrupt and then call DQ$EXIT
lns tal l- the CONTROL-C handler
CALL DQ$TRAP$CC
(
GCC$TRAP,
GSTATUS ) ;
Create an open connection to the console.
CONSOLE
- DQ$ATTACH
(
G(4,':co:'),
GSTATUS ) ;
CALL
DQ$OPEN
(
coNs0LE,
READ$L'RITE,
0,
@STATUS ) ;
Figure A-5. Interrupt Task
Example
(continued)
A-46 Pmgramming Techniques
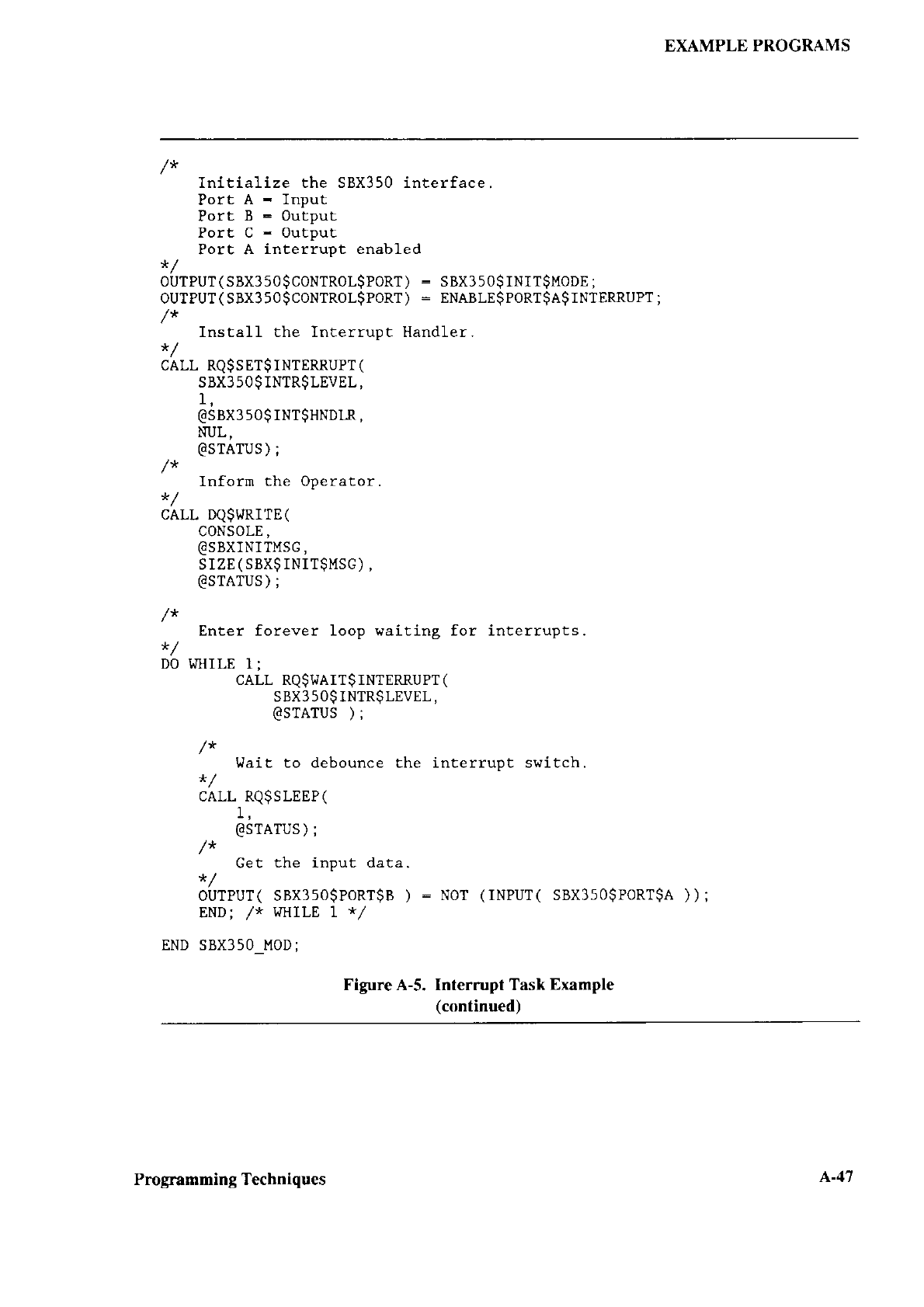
EXAMPLE PROGRAMS
Initialize the SBX3 50 interface.
Port A - Input
Port B - output
Port C - Output
Port A interrupt enabled
oUTPUT(SBX350SCoNTROL$PoRT)
: SBX350$rNrT$MoDE;
OUTPUT
(
SBX3 50
$
CONTROL$PORT
) : ENABLE$PORT$A$ INTERRUPT
;
-"--t Handler .Lrrc auee!!uP
CALL RQ$S ET$ INTERRUPT
(
sBX3 50$ TNTR$LEvEL,
1,
GSBX3
s0$ TNT9HNDLR
,
NUL,
GSTATUS ) ;
lh€^rh Èha nnÀ r. r ^?
CALL DQ$I./RITE
(
coNs0LE,
GSBXINlTMSG,
srzE(sBX$rNrr$MsG),
GSTATUS
) ;
Enter forever loop waiting for interrupts.
DO WHILE 1;
CALL RQ$WAIT$INTERRUPT
(
sBX3 5 0$ rNTR$LEVEL
,
GSTATUS );
l,lait Lo debounce the inlerrupt swÍtch.
CALL RQ$SLEEP
(
I,
GSTATUS
) ;
Crl the innìrl d.eta.
OUTPUT( SBX35O$PORT$B
) : NOT
(INPUT( SBX35O$PORT$A
));
END;
/* WHILE I */
END SBX35O_MOD;
Figure A-5. Interrupt Task Example
(continued)
Programming Techniques A-47
EXAMPLE PROGRAMS
A.6.2 Compiling and
Binding the
Code
The following command is used to compile the code for this
example:
The PLM286 command doesn't include controls for selecting the model of
segmentation
(SMALL, COMPACT, MEDIUM, or I-ARGE) because
the
$LARGE control was
already include<j in the source files. The ROM control is also included, to place the
constants in the data segment.
The compiler places the generated object code into the file INTRTSK.OBJ.
After compiling, the object file must be bound with the appropriate iRMX II interface
libraries. The
BND286
statement
used to do this is as follows:
A.6.3 Running
the Example
The BND286
command
produces
an executable
file called INTRTSK.
To run the
applications,
type the name of the
file at the Human Interface prompt.
To invoke the
CONTROL-C
handler and stop the program,
hold down the
CONTROL key and type C.
4.7 EXAMPLE
5..FIRST-LEVEL
JOB
This section
contains a larger, more
complicated example that
is typical of a real-world
application.
It is a multitasking,
data acquisition application
configure<J
as a firstJeveljob.
Each time
an interrupt
occurs from the iCS 920
board, the application
reads the iCS 920
switches via
the iSBX
350 board installed on the
iSBC 286110A board.
After a number of
interrupts,
the application
calculates the mean,
median, and mode of the
inputs and and
displays
this information at the terminal.
The application
also accepts input from the
terminal
to indicate how
many samples to take
before calculating the
results.
The application
is divided into two
jobs:
a firstJevel
job
that handles all the data
acquisition
and formats
messages for the terminal,
and a terminal
job
that handles all I/O
with
the terminal.
The terminal
job
is an offspring
of the firstlevel
job.
A-48 Programming Techniques
EXAMPLE PROGRAMS
Within the first-level
job are three tasks: an initialization task
(IMTTSK), an interrupt
task
(SBX350TSK),
and a
process
task
(PROCESSTSK).
The
initialization task creates
the other tasks in thejob and also creates the offspringjob.
The interrupt task
collects the
data
from the
iSBX350 board and passes it on to the
process task. The process task
receives instructions
from the I/O job and sends formatted information
to the I/O job.
The terminal
job also contains three
tasks: an initialization task
(TERMIMTTSK), a
terminal input
task
(TERMINTSK),
and a terminal output
task (TERMOUTTSK).
The
initialization task creates the other tasks in thejob and establishes a connection
to the
terminal. The terminal input task reads input from
the terminal. The terminal
output
task sends output to the terminal.
The tasks in this
application communicate
via mailboxes.
The interrupt task creates
and
catalogs a mailbox
called SBX35OMBX
where
it will receive data from the
process task. It
also looks up the name of
the process task's mailbox,
which it uses to send information
to
the
process task. Likewise, the
process
task creates
a mailbox called PROCIOMBX
and
looks up the
name of the interrupt task's mailbox.
In addition,
the process task looks up
the names of the mailboxes
created by the terminal input
and terminal output
tasks so
that it can
send data to and receive data from the terminal. These
mailboxes,
called
TERMINMBX and TERMOUTMBX are created by
the terminal input
and terminal
output tasks
when they start running.
A.7.1 Source Code
The source code
for this example is divided into five
separate files. INITTSK.P2S
contains the initialization
task for the first-level
job
(INITTSK). It is listed in Figure
A-6.
INITTSK performs the following operations:
. Creates
the interrupt task SBX35OTSK
o Creates the
process
task PROCESSTSK
. Creates the terminal
job
TERM.P28
contains all the tasks in the
terminal
job
(TERMINITTSK TERMINTSK
and TERMOUTTSK). It is listed in Figure A-7.
TERMINITTSK
performs the folìowing
operations:
o Creates a connection
to the terminal and catalogs
it as CONSOLE
o Creates
the terminal input and
output tasks
TERMINTSK
performs the following
operations:
. Looks up
the connection for CoNSOLE
. Creates
the mailbox for
terminal input
and catalogs it as TERMINMBX
Programming
Techniques A-49
EXAMPLE
PROGRAMS
. Starts an infinite loop in
which it
waits
at the TERMINMBX mailbox for an input
request, reads a line of input, and
sends
the
input data to the response
mailbox
specified
TERMOUTTSK performs the following operations:
. l,ooks up the
connection for CONSOLE
o Creates
the mailbox for terminal output and catalogs it as
TERMOUTMBX
. Starts an infinite loop
in which it waits at the TERMOUTMBX mailbox for an output
message, formats
the message and sends it to the console, and deletes
the message
S8X350.P28 contains the code for the interrupt task (SBX35OTSK) and the interrupt
handler
(SBX350INTHNDLR).
This file is listed in Figure A-8,
SBX350TSK
performs
the following operations:
o Creates and catalogs the mailbox SBX350MBX.
. Initializes the
iSBX 350
board.
r Sets the
SBX350INTHNDLR
procedure
as the interrupt handler associated with this
task.
. Looks
up the TERMOUTMBX mailbox and sends an initialization
message
there.
. Looks up the PROCIOMBX mailbox
and sends initialization data there.
. Begins an
infinite loop in
which
it
waits
at the SBX35OMBX
mai.lbox for a message
indicating the number of samples to
take. For each sample, it
waits
for an interrupt,
obtains
the sample from the iSBX 350 board,
stores the data in an array, and clears
the interrupt. When
it has obtained all the
samples, it sends the data to the
PROCIOMBX.
SBX35OINTHNDLR
simply invokes
the SIcNAIJINTERRUPT system
call. This
passes
control to the
SBX350TSK interrupt task, which
actualìy handles the interrupt.
PROCIO.P2S
contains the code
for the process task (PROCESSTSK).
This file is listed
in Figure
A-9.
PROCESSTSK performs
the following
operations:
. Looks up the
TERMINMBX, TERMOUTMBX,
and SBX35()MBX
mailboxes.
. Creates a mailbox
for communication with
SBX35OTSK and catalogs it as
PROCIOMBX. It waits
at the maiÌbox
to synchronize with
SBX350TSK.
. Sends
a
parameter
request
message to TERMOUTMBX,
sends an input request
message to TERMINMBX, waits
at the response
mailbox for the terminal input, and
verifies
the input
as
valid.
PROCESSTSK
continues to perform this step
until it
receives valid
input. Then it sends the valid
message to the SBX350MBX
mailbox.
A-50 Pnlgramming Techniques
EXAMPLE PROGRAMS
. Begins an infinite loop in which
the following operations are performed:
- Waits
at the PROCIOMBX for data from the interrupt task.
- Formats the data and sends
it to the TERMOUTMBX mailbox.
- If no input request is pending,
sends a message to the
TERMINMBX mailbox
requesting
input.
- Checks the
response mailbox without waiting
to see if the operator has responded
with an input request.
- If there is an input request, valìdates
it and passes it to the interrupt task via the
SBX350MBX mailbox.
Then deletes the segment containing the data.
UTIIS.P28 contains
utility procedures used by the various
tasks. The
procedures
include
STRLEN to return the
length of a null-terminated string, BTOA to take a byte value and
convert it to ASCII, ATOB to convert
an ASCII string to a byte
value,
CALC$MEAN to
calculate
the mean, CALC$MEDIAN to calculate the
median,
and CALC$MODE to
calculate the mode. This file
is listed in Fisure A-10.
Programmlng Techniques A-51
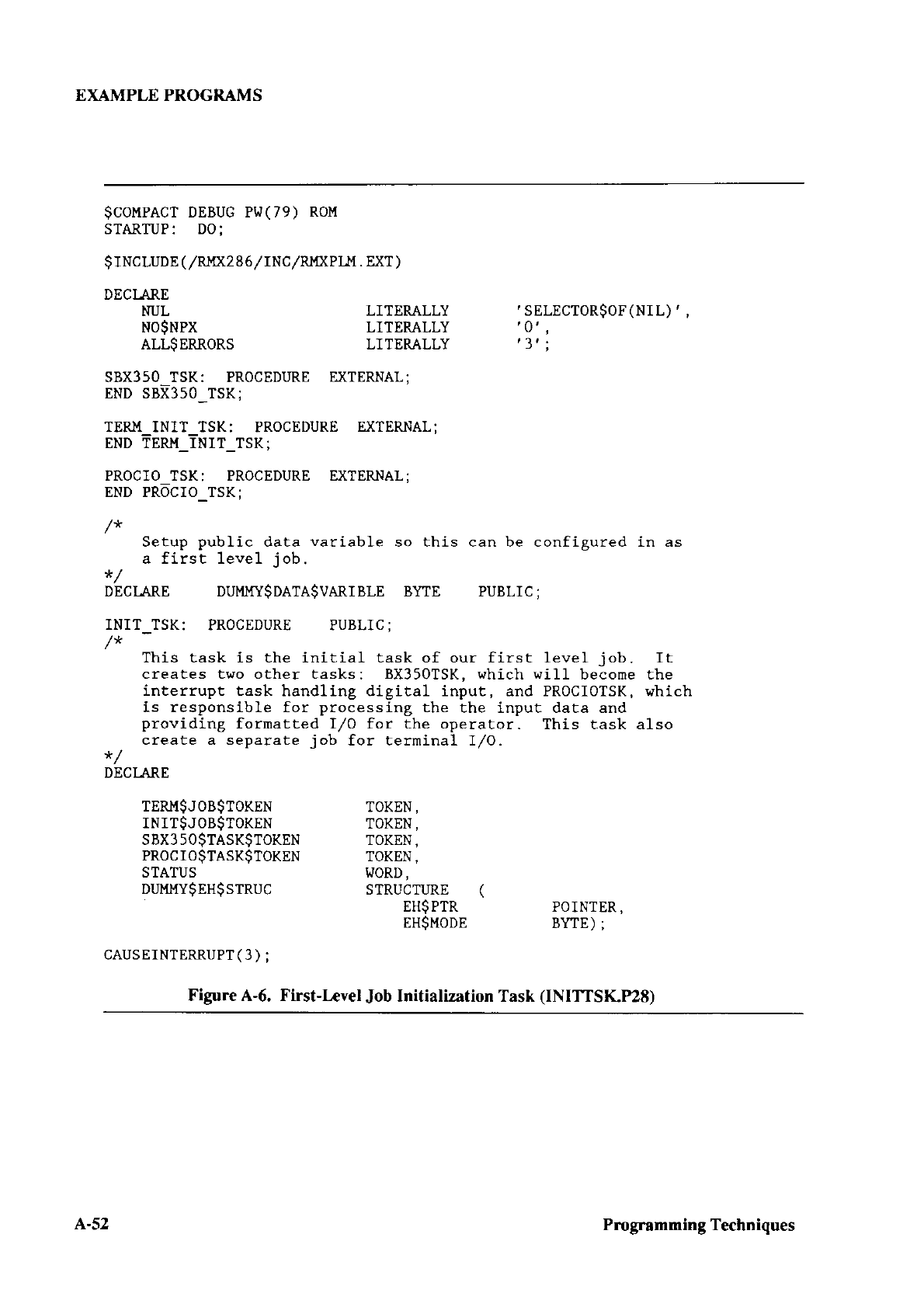
EXAMPLE PROGRAMS
$CoMPACT
DEBUG PW(79) ROM
STARTUP: DOi
$TNcLUDE
(
/RMX2
86lrNC/RrO(PLM. EXT)
DECIARE
NUL LITERALLY 'SELECTOR$OF(NIL) ' ,
NO$NPX LITERALLY 'O' ,
ALL$ERRORS LITERALLY '3' ,,
SBX35O TSK: PROCEDURE
EXTERNAL;
END SBX35O_TSK;
TERI,Í INIT TSK: PROCEDURE
EXTERNAL;
END TERX-TNIT-TSK;
PROCIO TSK: PROCEDURE EXTERNAL;
rnn ppÀarn rctz.
Setup public data variable so this can be configured in as
r fi rct l orrol i nh
DECI.A,RE DUMMY$DATA$VARI BLE BYTE PUBLIC;
INIT-TSK: PROCEDURE PUBLIC;
This task ls the initial task of our first level job. It
creates t\^ro other tasks: BX350TSK, which will become the
interrupt task handling digital input, and PRoCIOTSK, which
is responsible for processing the the input data and
providing formatted I/O for the operator. This task also
create a separate job for Lerminal I/O.
DECI.ARE
TERM$JOB$TOKEN TOKEN,
INIT$JOB$TOKEN TOKEN,
sBx3 5o$TASK$TOKEN roKEN,
PROC IO$TASK$TOKEN TOKEN,
STATUS I.'ORD,
DUMMY$EH$STRUC STRUCTURE (
EH$PTR POINTER,
EHSMODE BYTE);
CAUSEINTERRUPT(3);
Figure A-6. First-l-evel
Job
Initialization Task
(INITTSICP2S)
A-52 Pmgrarnming Techniques
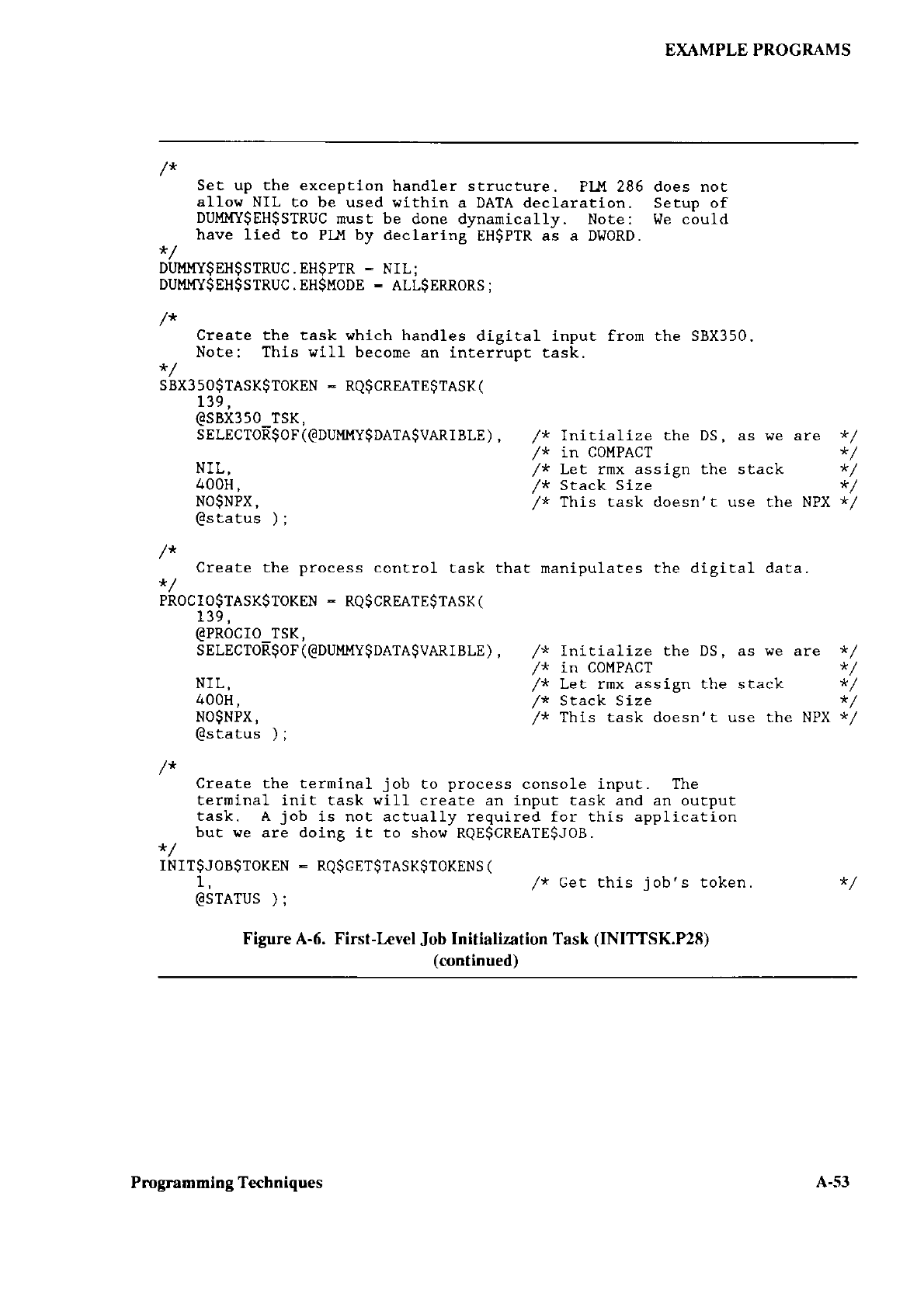
EXAMPLE PROGRAMS
SeÈ up che exception handler structure. PLM 286 does not
allow NIL to be used within a DATA declaration. SetuD of
DUMMY$EH$STRUC
nust be done dynarnically. Nore: We còuld
have lied to PLM by declaring EH$PTR ai a DWORD.
DUMMY$ EH9STRUC
. EH$PTR
- NIL;
DUMI'îY$
EH$STRUC . EH$MODE
- ALLSERRORS;
CreaÈe the task which handles digital input from the SBX350.
Note: This wíll become an interruDt Èask.
sBx350$TASK$ToKEN
- RQ$CREArE$rASK(
139,
GSBX350 TSK.
ÈEr.ncroEgor(GDUMMygDATAgvARTBLE),
,/* Initialize rhe DS, as we are */
/* in CoMPACT
,/* Let rmx assign the stack */
NIL,
400H
,
NO$NPX,
@status );
,/* Stack Size
/* This Lask doesn't use the NPX
*/
/* in COMPACT
/* Let rmx assÍgn the stack */
/* etrrlz (iza
/* This Lask doesn't use the NPX
*/
Create the process control task that manipulates the digital data.
PROCIO$TASK$TOKEN
: RQSCREATE$TASK(
139,
appnaTrr Tcv
SELECTOR$OF(GDUMMY$DATA$VARIBLE),
/* Inítíalize the DS, as we are */
NfL,
400H
,
NO9NPX,
@status );
Create the terninal job to process console input. The
terminal init task will create an input task and an ourput
task. A job Ís noL actually required for this appl ication
but we are doing it to show
RQE$CREATESJoB.
INIT$JOB$TOKEN
: RQSCET$TASK$TOKENS(
t, ,/* cet thÍs j ob's token. x/
GSTATUS );
Figure A-6. First-I*vel Job Initialization Task (INITTSK.P28)
(continued)
Programming Techniques A--53
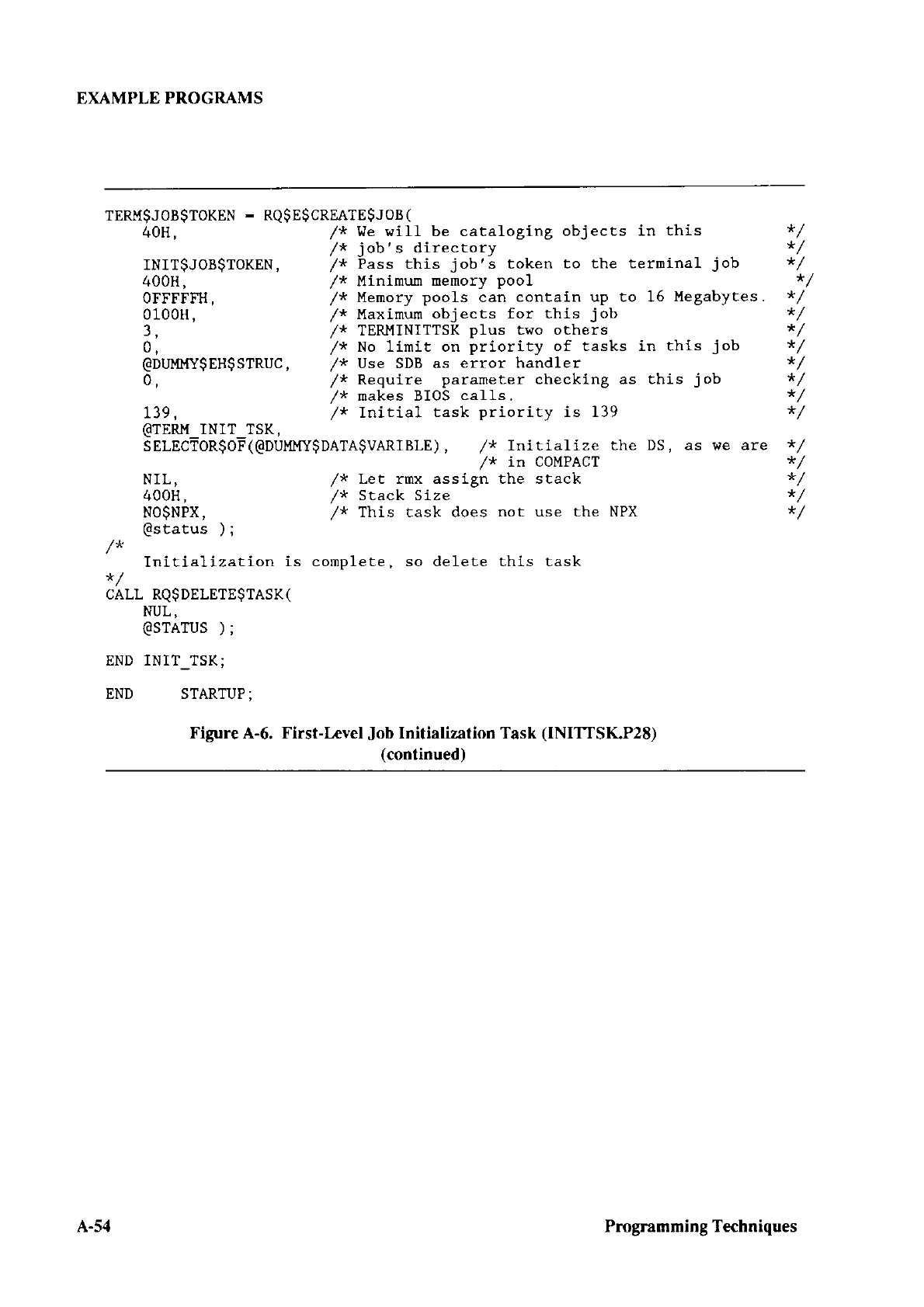
EXAMPLE PROGRAMS
TERM$JOB$TOKEN
- RQ$E$CREATE$JOB(
40H, /* We will be cataloging objects in this */
rNrrgJoBgroKEN,
l: i::"".Îl:'i5iTl ."u." ro the rerninar
job */
400H, ,/* Minirmrur
memory
pool */
oFFFFFH, ,/* Mernory
pools can contain up co 16 Megabyces. */
0100H, ,/* Max írnum
objects for this job */
3, /* TERMINITTSK
plus two ochers */
0, /* No lirnit on priority of tasks in this job */
GDUMMY$EH$
STRUC
, ,/* Use SDB as error handler */
0, ,/* Require paraneter checking as this job */
/* nakes BI0S calls. */
139, /* Initial task priority is 139 */
@TERM INIT TSK.
Àer-ncîon$oF(GDÙMMygDATA$vARtBLE),
,/* rnitialize rhe DS, as we are */
/* in COMPACT */
NIL, /* Let rrnx assign the stack */
400H, /* Stack Size */
NO$NPX, /* This task does not use the NPX */
@status );
Inicialization is conDlete. so delete this task
CALL RQSDELETE$TASK(
NUL
,
GSTATUS
);
END INIT-TSK;
END STARTUP;
Figure A-6. First-Level Job Initialization Task (INITTSICP2E)
(continuedl
A-54 Pmgramming Techniques
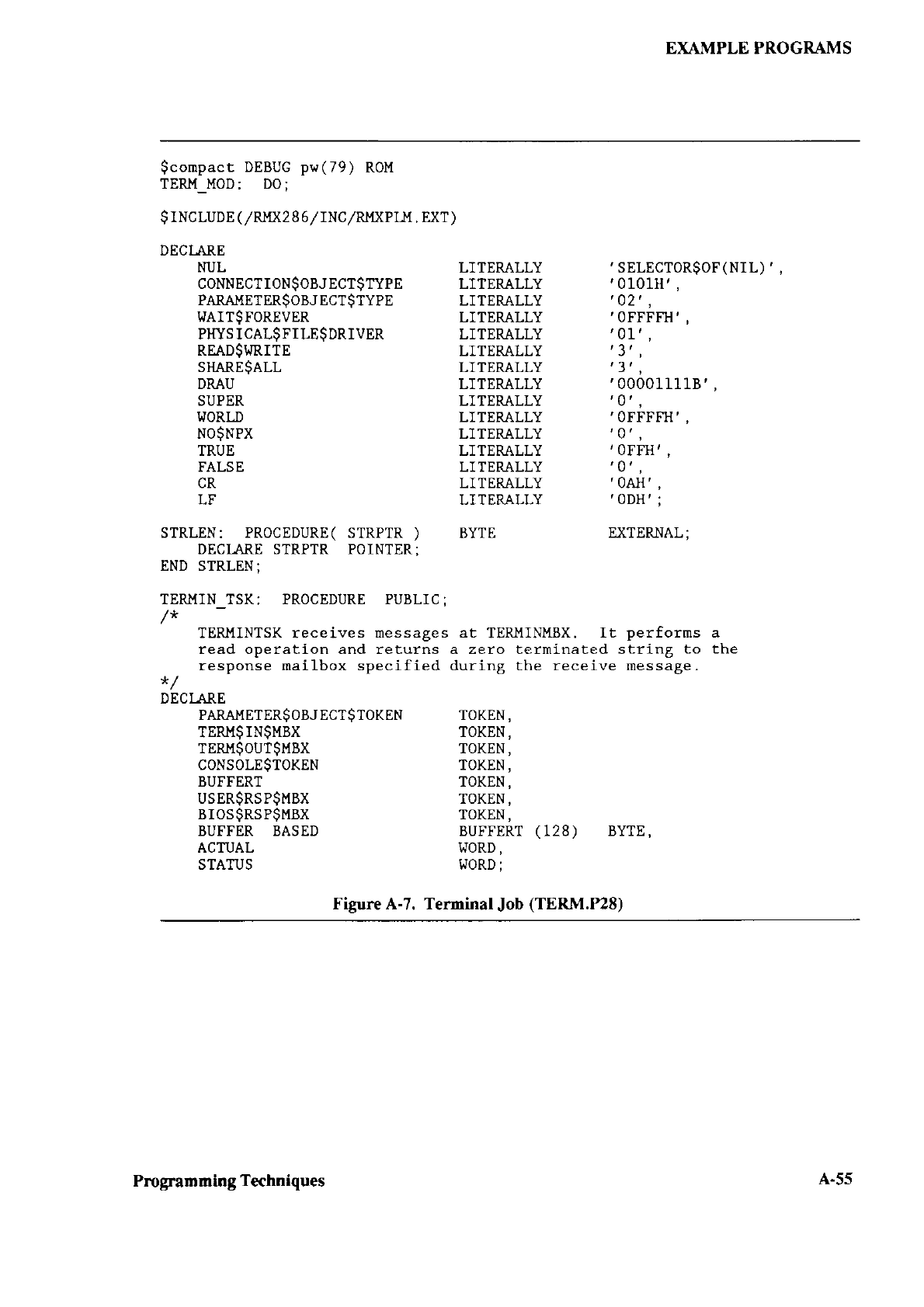
EXAMPLE PROGRAMS
$
cornpac t DEBUG
pw(79) ROM
TERM_MOD: DO;
$INcLUDE
(
/RMx2
8 6/rNc/RMXPLM. Exr
)
DECIARE
NUL LITEMLLY ' SELECTOR$OF
(
NIL) ' ,
CONNECTION$OBJ ECT$TYPE LITERALLY 'OlOlH' ,
PARAMETER$OBJ ECT$TYPE LITERALLY '02',
IIAIT$FOREVER LITEMLLY 'OFFFFH'
,
PHYS ICAL$
FILE$
DRIVER LITEMLLY '01',
READ$WRITE LITERALLY '3' ,
S}IARE$ALL LITEMLLY '3' ,
DRAU LITERALLY 'OOOO1I11B'
,
SUPER LITEMLLY 'O' ,
WORLD LITERALLY 'OFFFFH'
,
NO$NPX LITEMLLY '0"
TRUE LITEMLLY ' OFFH'
,
FALSE LITEMLLY 'O' ,
CR LITEMLLY 'OAII' ,
LF LITERALLY 'ODH'
;
STRLEN: PROCEDURE( STRPTR
) BYTE EXTERNAL;
DECIARE
STRPTR POINTER;
END STRLEN;
TERMIN TSK: PROCEDURE PUBLIC;
TERMINTSK receives nessages at TERMINMBX.
It performs a
read operation and returns a zero terminated string to the
response mailbox specified during the receive message.
DECIARE
PARA.I.IETER$OBJ ECT9TOKEN TOKEN
,
TERM$IN$MBX TOKEN,
TERM$OUT$MBX TOKEN,
CONSOLE$TOKEN TOKEN,
BUFFERT TOKEN,
USER$RSP$MBX TOKEN,
BIOS$RSP$MBX TOKEN,
BUFFER BASED BUFFERT
(128) BYTE,
ACTUAL WORD,
STATUS I.'ORD
;
Figure A-7. Terminal
Job
(TERM.P28)
Programning Techniques A-55
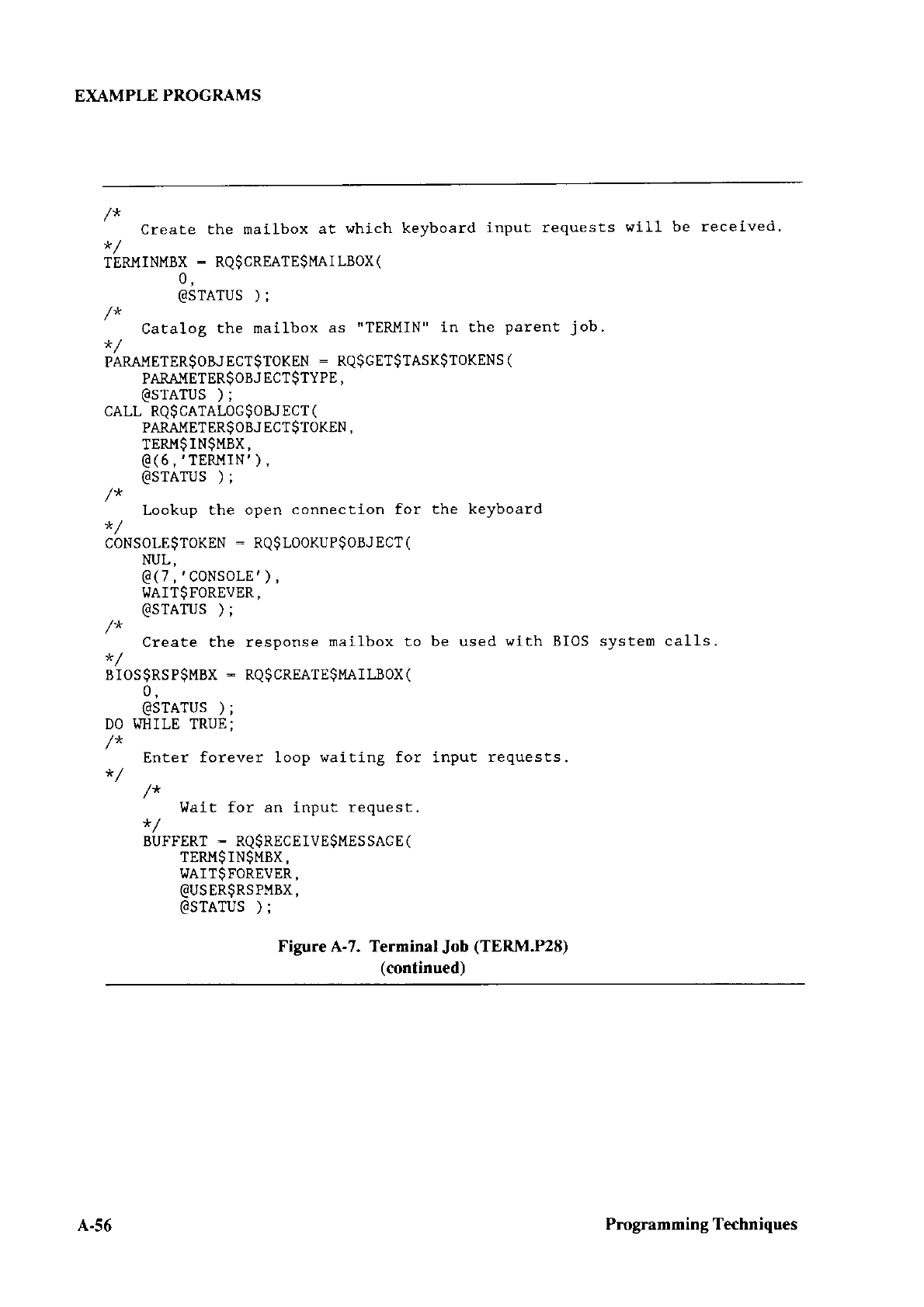
EXAMPLE PROGRAMS
Create the mailbox at which keyboard input requests will be received
*/
TERMINMBX
- RQ$
CREATE9MAI
LBOX
(
0,
@STATUS
);
Catalog the mailbox as "TERMIN"
in the parent job.
PAXA.I'Í
ETER$OBJ ECT$TOKEN
: RQ$GET$TASK$TOKENS
(
PARAMETER9OBJ
ECT$TYPE,
GSTAÎUS
);
CALL RQ$
CATALOG$OBJ ECT
(
PARAMETER$OBJECT$TOKEN,
TERM$IN9MBX,
@(6,',TERMrN',),
GSTATUS
);
Lookup the open connection for the keyboard
cONsoLE$ToKEN
: RQ$LOoKUP$OBJ
ECT
(
NUL,
G(7,',CoNsoLE',),
WAIT9FOREVER,
GSTATUS
);
Create the response
rnailbox to be used
with BIOS system calls,
BIOS$RSP$MBX
- RQ$
CREATE$MAI LBOX
(
0,
@sTATUs
);
DO I*iILE TRUE;
Enter forever loop waiting for input requests.
It^i+ F^- ^- i^-.,
warL Lo! a rrrPLlc
requesf.
BUFFERT
- RQ$RECEIVE9MES SAGE
(
TERM$ IN9MBX
,
WAIT$FOREVER,
@usER$RSPMBX,
@sTATUs );
Figure A-7. Terminal
Job (TERM.P28)
lcontinued)
A-56 Pmgranrming Techniques
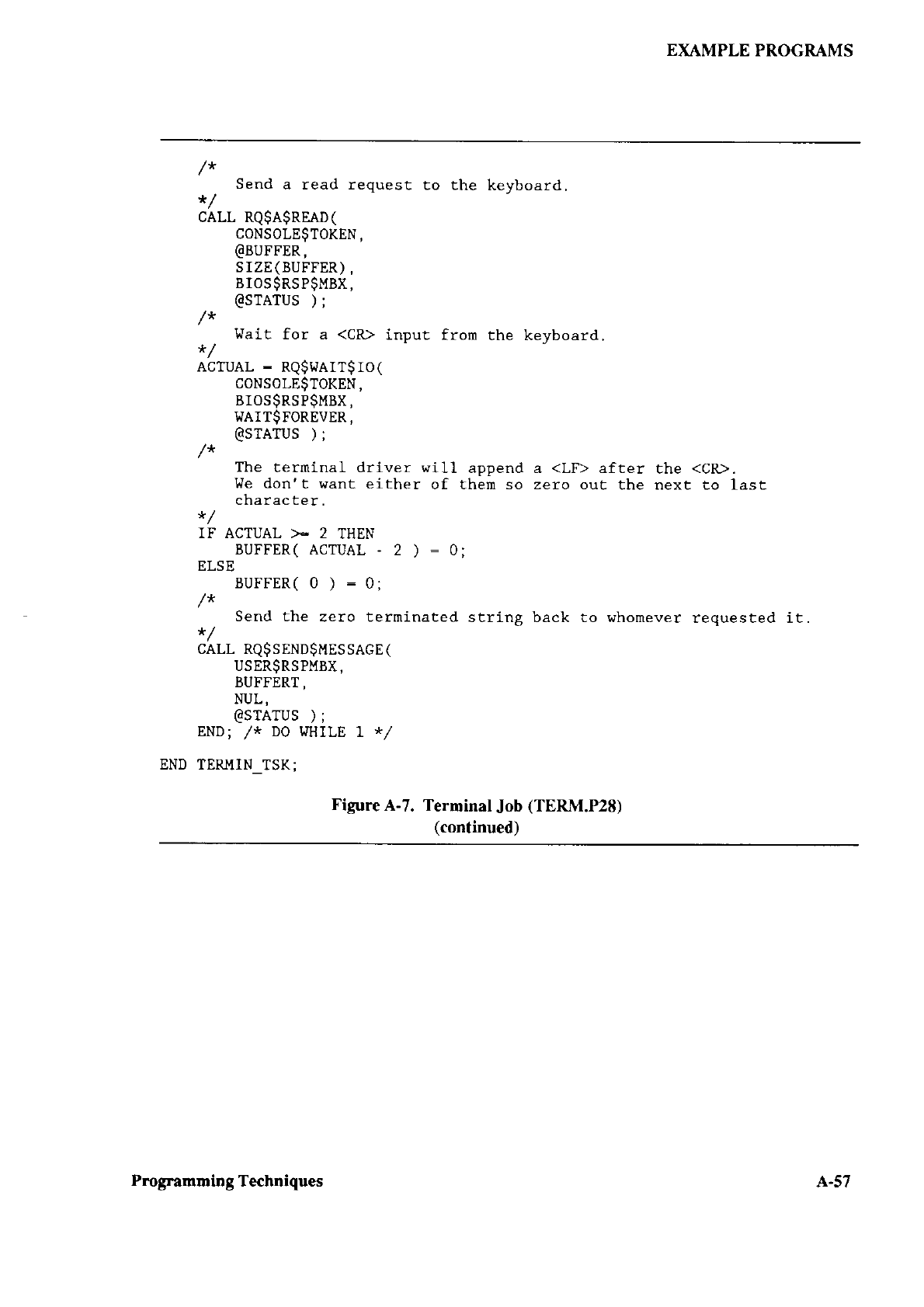
EXAMPLE PROGRAMS
Send a read request to the keyboard.
CALL RQ$A$REA-D
(
coNs0LE$ToKEN,
@BUFFER ,
SIZE(BUFFER),
Br0s$RsP$MBX,
GSTATUS );
Wait for a <CR> input fron the keyboard.
ACTUAL
- RQ$WAIT$ IO
(
coNsoLE9TOKEN,
Bros$RsP$MBX,
wAl rìruKÉvt K,
@STATUS
);
The terminal- driver will append a <LF> afrer the <CR>.
We don't want either of thern so zeÍo out the next to last
character.
IF ACTUAL >: 2 THEN
BUFFER(ACTUAL.2):O;
ELSE
BUFFER(O):O;
Send the zero terminated strÍng back to whomever
requested it.
CALL RQ$ S END$MES
SAGE
(
USER$RSPMBX,
BUFFERT
,
NUL,
GSTATUS );
END; /* DO I.IHILE
1 */
END TERUIN_TSK;
Figure
A-7. Terminal
Job
(TERM.P28)
(continued)
A-57
Programming
Techniques
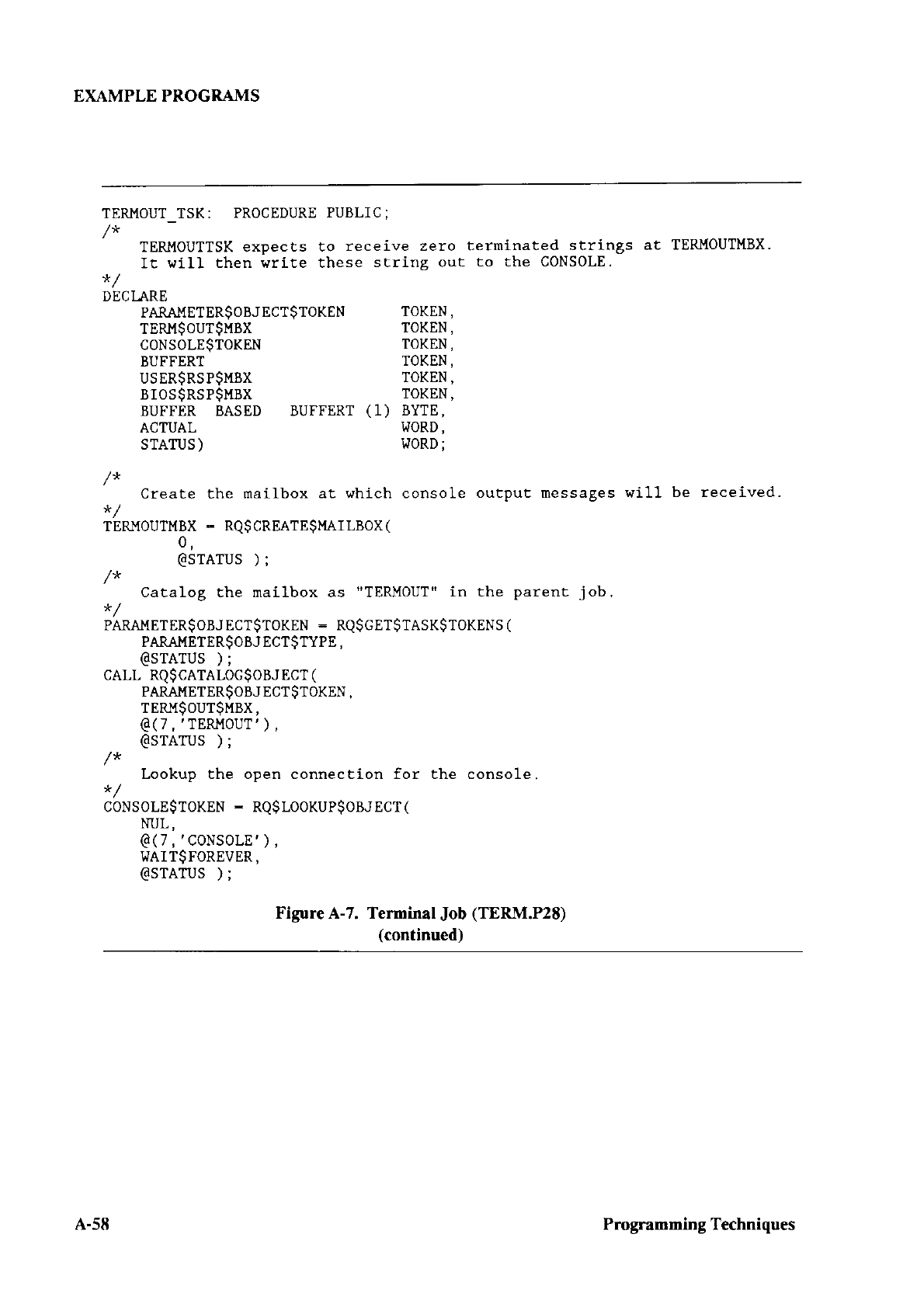
EXAMPLE PROGRAMS
TERMOUT TSK: PROCEDURE
PUBLTC;
TERMOUTTSK expects to receive zero terninated strings at TERMOUTMBX.
Ic will then write these string ouc to the CoNSOLE.
DECIARE
PARAMETER$OBJ
ECT$TOKEN TOKEN,
TERM$OUT$MBX TOKEN,
CONSOLE$TOKEN TOKEN,
BUFFERT TOKEN,
USER$RSPgMBX TOKEN,
BIOS$RSP9MBX TOKEN,
BUFFER BASED BUFFERT
(1) BYTE,
ACTUAL WORD,
STATUS) WoRD;
Create the mailbox at whích console output rnessages wil-l be received,
TERMOUTMBX
- RQ$ CREATE$MAILBOX
(
0,
GSTATUS
);
Catalog the maílbox as "TERMOUT"
in the parent job.
PARAMETER$OBJECT$TOKEN
: RQ$GET$TASK$TOKENS
(
PARAMETER$OBJECT$TYPE,
@sTATnS );
CALL RQ$CATALOG$oBJECT
(
PARAMETER$OBJ ECTSTOKEN,
TERM$OUT$MBX,
@(7,'TERMoUT',),
@srATUs );
Lookup the open connection for the console.
CoNSOLE$ToKEN
- RQ$LOoKUP$oBJ ECT
(
NUL
,
@(7,',coNsoLE'),
I'AIT9FOREVER,
GSTATUS );
Figure A-7. Terminal
Job (TERM.EZE)
(continued)
A-58 Programming Techniques
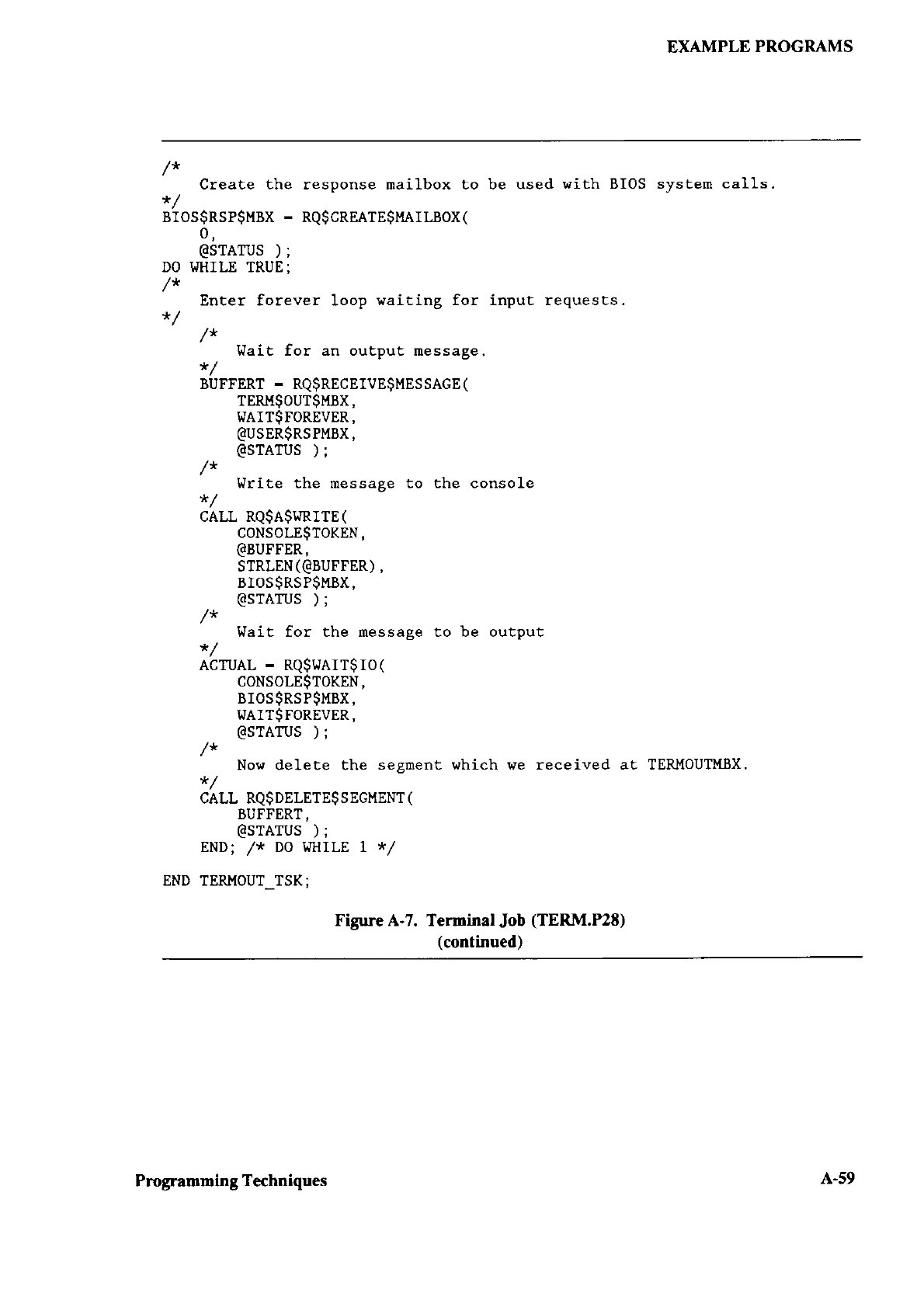
EXAMPLE PROGRAMS
Create the response nailbox Èo be used with BIOS system calls.
BIOS$RSP$MBX
- RQ$CREATE$MAILBOX(
0,
GSTATUS
);
D0 trrHlLE TRUE;
Enter forever loop waiting for input requests.
Yr-|È f^-
warL ro! an ouLput nessage,
BUFFERT
. RQ$RECEIVE$MES SAGE
(
TERM$OUTSMBX,
LTAIT$FOREVER,
@usER$RSPr{8X,
GSTATUS
);
Write the nessage to the console
CALL RQSA$L'RITE
(
coNsoLE$ToKEN,
@BUTFER,
STRLEN(GBUFFER),
BrossRsP$M8x,
csrATUs
);
WaÍt for the nessage to be output
ACTTJAL
- RQ$WArT$rO
(
coNSoLE9TOKEN,
F.lnq(psp(MRY
i.tAlT9FoREVER,
GSTATUS ) i
Nolr deLece the segnent which we received ac TERMOUTMIX.
CALL RQ$DELETE$SEGMENT
(
BUFFERT
,
GSTATUS
);
END; /* DO IIHILE 1 */
END TERMOUT-TSK;
Figure A-7. Terminal
Job (TERM.P28)
(continucd)
Pmgramming
Techniques A-59
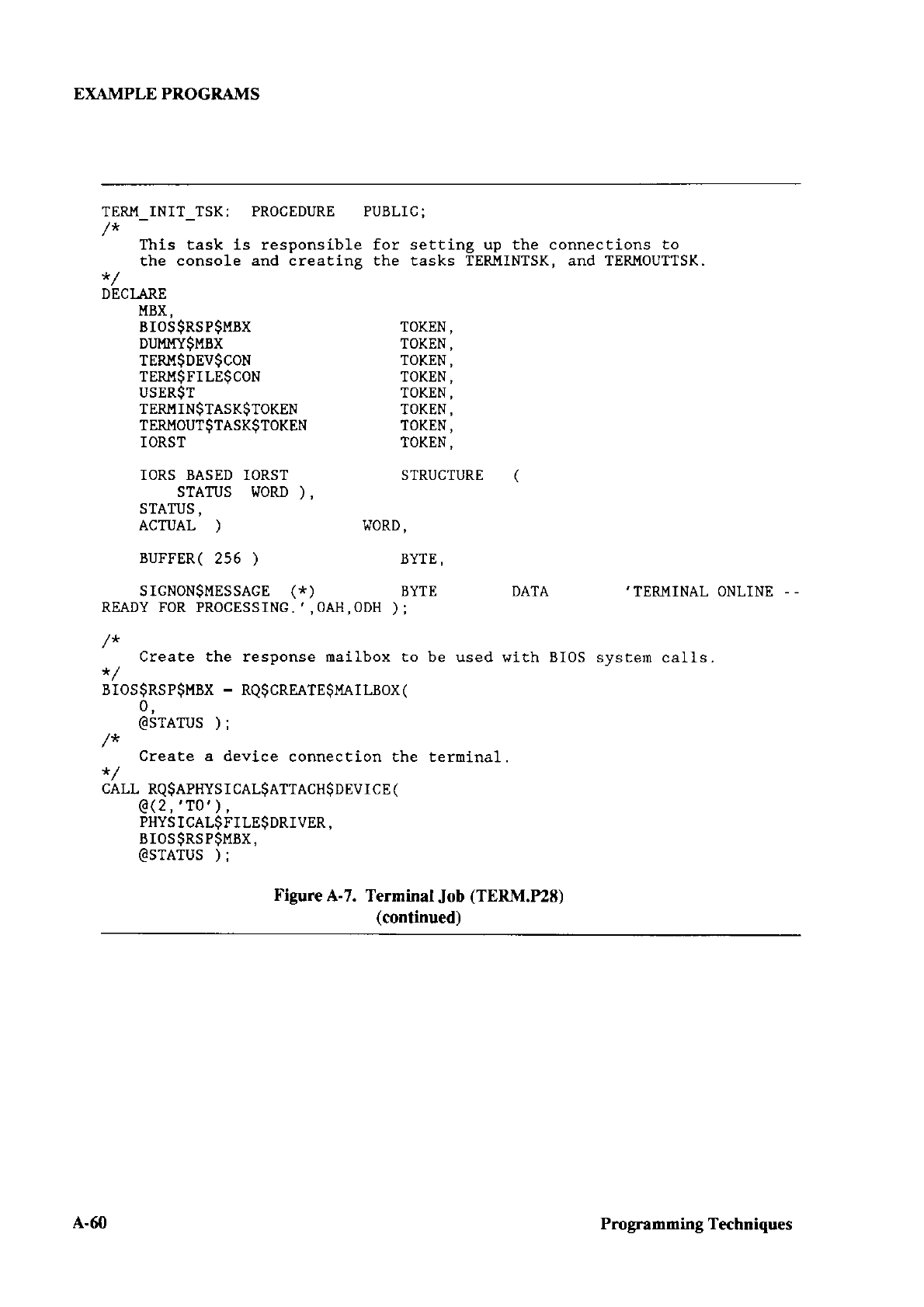
EXAMPLE PROGRAMS
TERM-INIT-TSK: PROCEDURE PUBLIC;
Thls task ls responsible for setting up the connections to
the console and creatíng the tasks TERMINTSK, and TERMOUTTSK.
DECI.ARE
MBX,
Bros9RsP$trBX ToKEN,
DIJI,ÍMY$MBX TOKEN
,
TERÌÍ$DEV$CON TOKEN,
TERM$FILE$CON TOKEN,
USERST TOKEN,
TERI'ÍIN$TASK$TOKEN TOKEN,
TERMOUT$TASK$TOKEN TOKEN,
IORST TOKEN,
IORS BASED IORST STRUCTURE (
STATUS WORD
),
STATUS,
ACTUAL ) LIORD,
BUFFER(
256 ) BYTE,
SICNON$MESSAGE
(*) BYTE DATA 'TERMINAL
ONLINE
.-
READY FOR PROCESSING.',OAH,ODH
);
Create the response rnailbox to be used with BIOS systen cal1s,
BIOS$RSP$MBX
- RQ$CREATE$MAILBOX(
0,
@srArus );
Create a device connection the terninal-.
CALL RQ$APHYS I CAL$ATTACH$DEVICE
(
€(2,
',r0,
) ,
PHYS
I CAL$FILE$DRIVER
,
Bros$RsP$MBX,
@STATUS );
Figure
A-7. Terminal
Job (TERM.P28)
(continued)
A-60 Programming Techniques
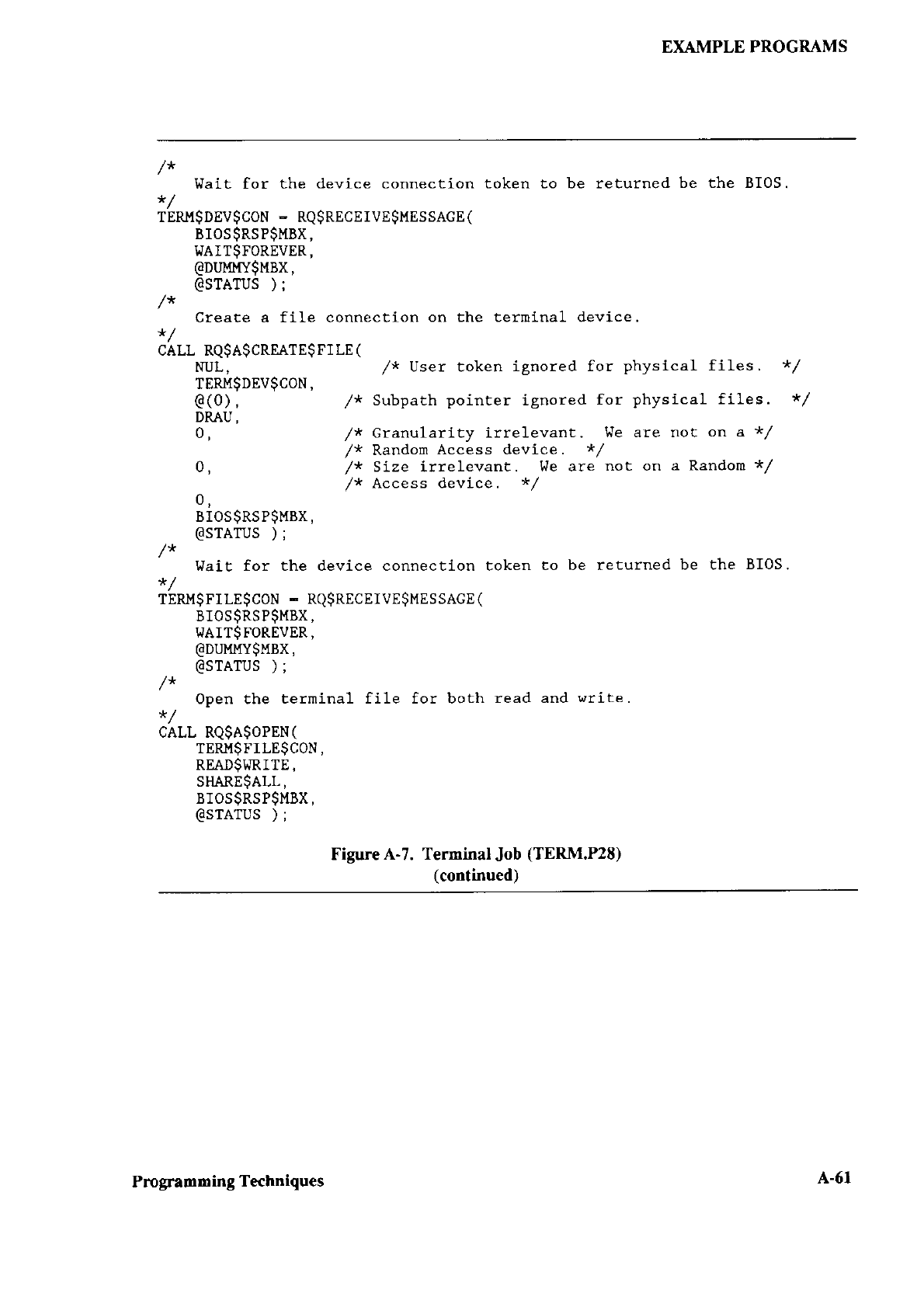
EXAMPLE PROGRAMS
Wait for the device connection token to be returned be the BIOS.
TERM$DEV$CON
: RQ$RECEIVE$MES
SAGE
(
Br0s$RsP$MBX,
WAIT$FOREVER,
GDUMMY$MBX ,
GSTATUS
):
Create a file connection on the terminal device.
CALL RQ$A$CREATE$
FI LE
(
NUL,
TERM$DEV9CON,
G(0),
DRAU
,
0,
0,
0,
Bros$RsP$MBX,
GSTATUS );
wait for the device connectíon token to be returned be the BI0S.
TERM$FILE$CON
- RQ$RECEIVE$MES SACE
(
BIOS9RSP$MBX,
WAIT$FOREVER,
GDUMMY$MBX
,
GSTATUS
);
onan ihF t-erminrl File for both read and l,rrite.
CALL RQ$ASOPEN
(
TERM$FILE9CON,
READSL'RITE,
S}IARE$ALL,
BrossRsP$MBX,
GSTATUS
);
Figure
A-7. Terminal
Job (TERM.P2E)
lcontinued)
/* lJser token ignored for physical fi1es. */
/* Subpath pointer ignored for physical fi1es. */
/* Cranularity irrelevant. We are not on a */
,/* Randorn
Access device. */
/* Size irrelevant. lle are not on a Random */
./* Aî^òcc Àaf i îa * /
Programming
Techniques A-61
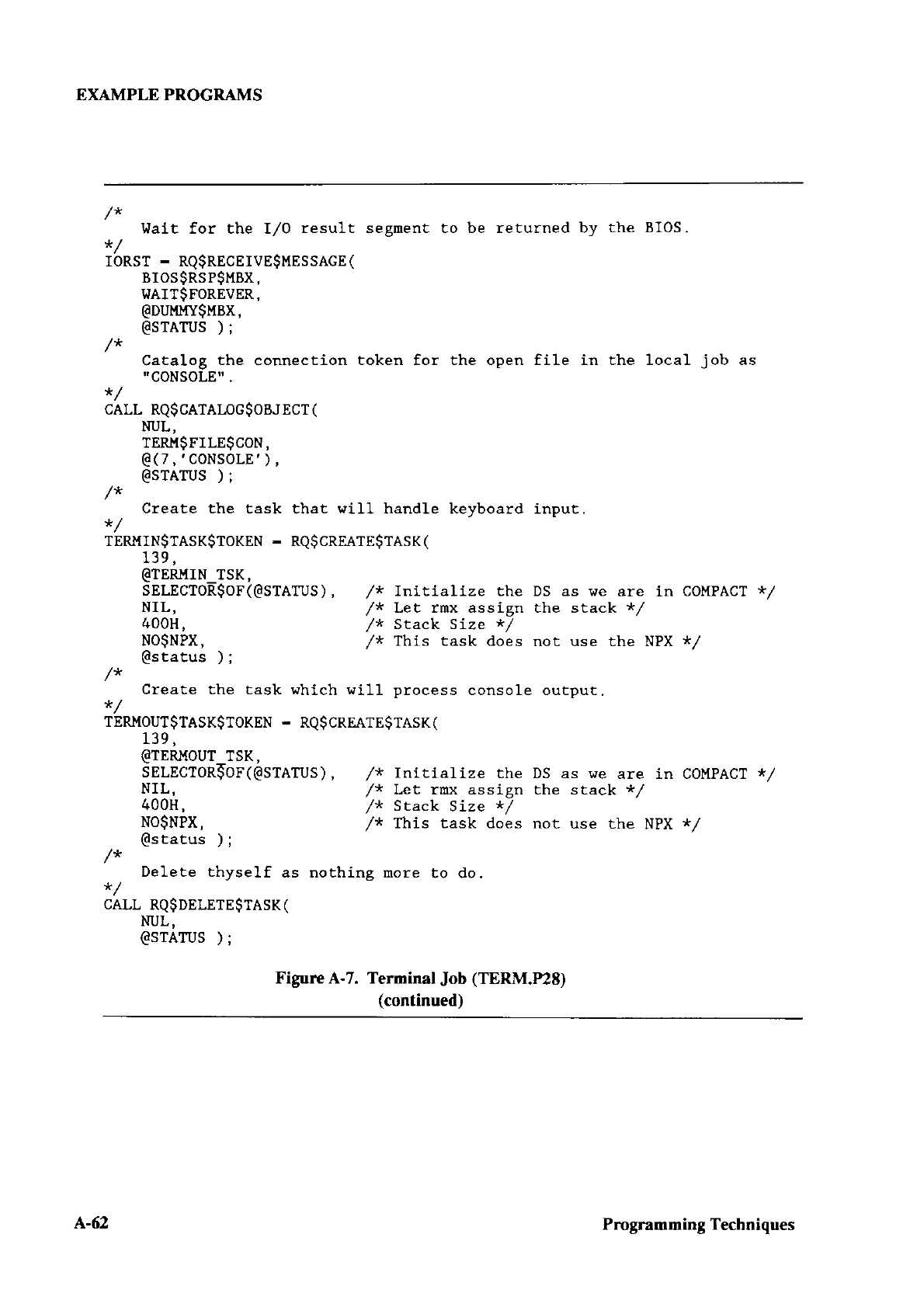
EXAMPLE PROGRAMS
i.talt for the I/O result segnent to be returned by the 81OS.
roRsr - RQ$RECETVE$IÍES
SAGE
(
Bros9RsP9MBX,
wAtT$FOREVER,
ANIIMMV<MP.Y
GSTATUS );
Catalog the connection token for the open
"coNsoLE".
CALL RQ$CATAI,OG$OBJ ECT
(
NUL,
TERIr$FILE9CON,
G(7,
,CONSOLE'
) ,
GSTATUS );
Create the task that will handle keyboard
TERMIN$TASK$TOKEN
- RQ$CREATE$TASK(
file in the local job as
inpuc .
11q
GTERMIN-TSK,
SELECTOR$oF
(@STATUS
) ,
NIL,
400H
,
N0$NPX,
Gstatus );
Create the task which will process console output.
TERMOUT$TASK$TOKEN
. RQ9CREATE$TASK(
139,
GTERMOUT-TSK,
sELECîOR$0F(QSTATUS),
NIL,
400H,
No$NPX,
Gstatus );
Delete thyself as nothing more to do.
CALL
RQ$DELETE$TASK(
NUL,
GSTATUS
);
Figure A-7. Terminal
Job (TERM.P28)
(continued)
/* Initialize the
/* Let rnx ass ign
/* <fAîV 9iza */
/* This task does
/* Tniii.l izo r}:.a
/* Let rrnx as s ign
/* ql-r^L 9iza */
/* this task does
DS as we are in COMPACT
the stack *,/
not use the NPX */
DS as we are in COMPACT
the stack */
not use the NPX
*/
A-62 Pmgramming Techniques
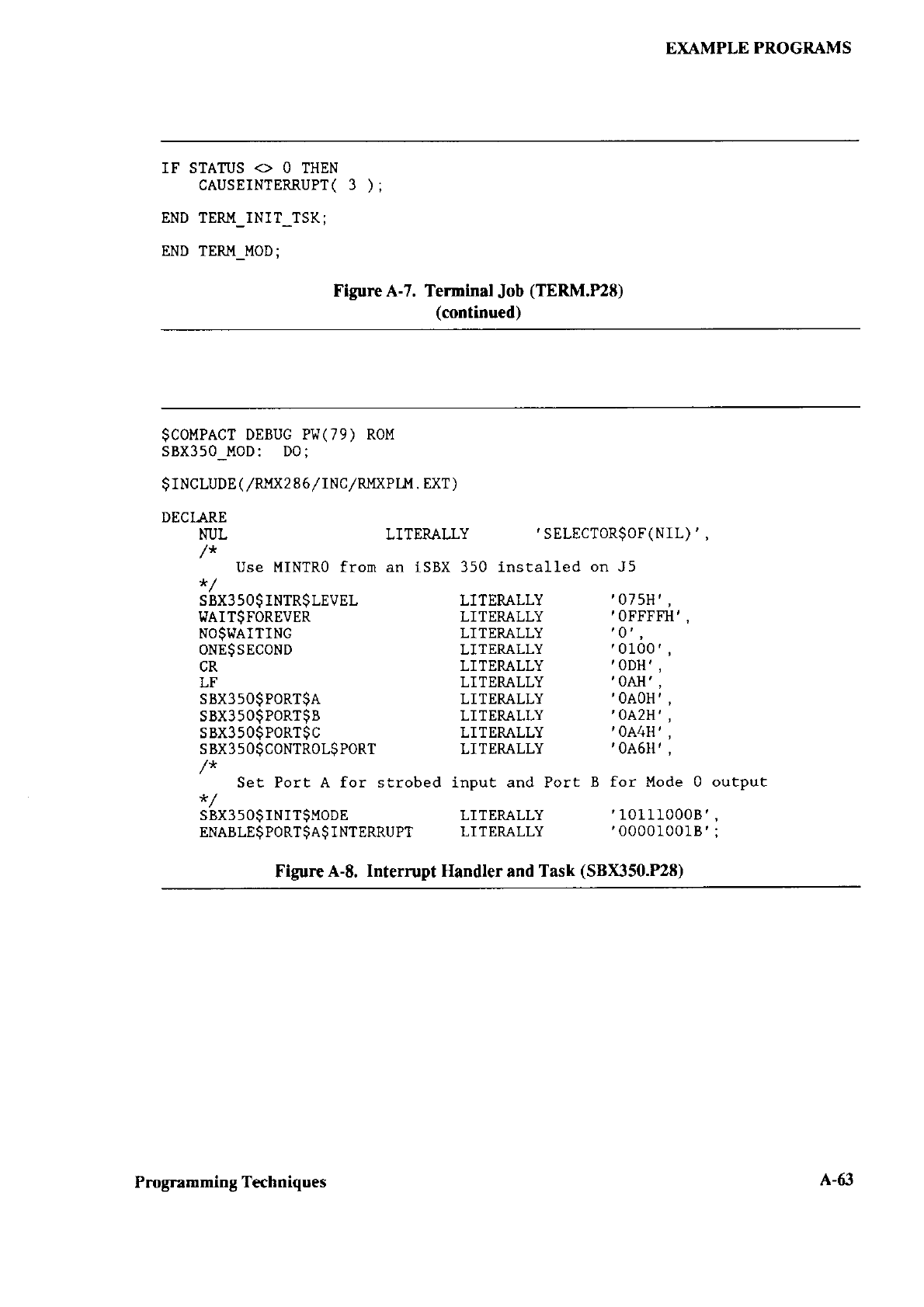
EXAMPLE PROGRAMS
IFSTATUSOOTHEN
CAUSEINTERRUPT(
3 );
END TERM_INIT_TSK;
END TERM-MOD;
Figure A-7. Terminal
Job
(TERM.HZ8)
(cnntinued)
$COMPACT
DEBUG
PI,J(79) ROM
SBx350_MoD: D0;
$
TNCLUDE
(
/RMx2
8 6/rNC/RMXPLM
.
EXr
)
DECIARE
NUL LITERALLY 'SELECTOR$OF(NIL)'
,
Use MINTRO from an isBX 350 installed on J5
sbx35o
$
INTRSLEVEL LITERALLY ,075H, ,
WAIT$FOREVER LITEMLLY 'OFFFFH',
NO$LIAITING LITERALLY 'O' ,
ONESSECOND LITERALLY ' OIOO'
,
CR LITERALLY ' ODH'
,
LF LITEMLLY 'OAH'
,
SBX35OSPORT$A LITEMLLY 'OAOH'
,
sBx35OsPoRTsB LTTERALLY '0A2H"
SBX35O$PORT$C LITEMLLY 'OA4H"
S BX3 5 OSCONTROLS PORT LITERALLY 'OA6H',
Set Port A for strobed input and Port B for Mode 0 output
SBX3 5 O$ INIT$MODE LITERALLY '1O111OOOB'
,
ENABLE$PORT$A$ INTERRUPT LITERALLY 'OOOO1OO1B'
;
Figure
A-8. Interrupt Handler
and
Task (SB)350.P28)
Programming
Techniques A-63
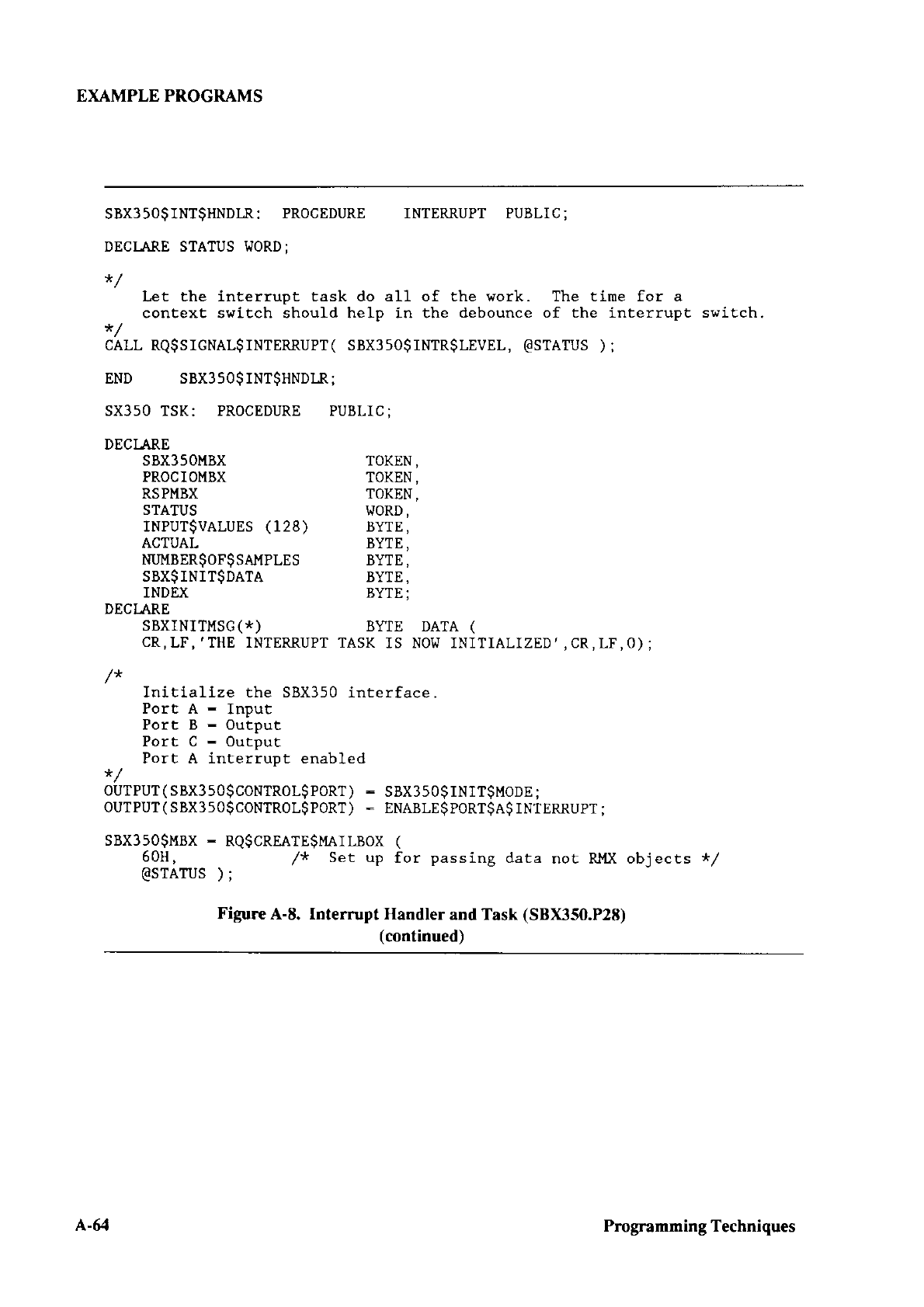
EXAMPLE PROGRAMS
SBX3 5O$ INT$HNDLR: PROCEDURE INTERRUPT PUBLIC;
DECIARE STATUS WORD
;
Let the interrupt task do all of the work. The tirne for a
context swlcch should help in the debounce of the interrupt s!,/itch.
CALL RQ$ S IGNAL$ INTERRUPT
( SBX3 50$ INTR$LEVEL,
GSTATUS );
END SBX3 5OS INT$HNDLR:
SX350 TSK: PROCEDURE PUBLIC;
DECIARE
SBX35OMBX TOKEN,
PROCIOMBX TOKEN,
RSPMBX TOKEN,
STATUS WORD,
INPUT$VALUES
(128) BYTE,
ACTUAL BYTE,
NIJMBER$OF$
SAMPLES BYTE,
SBX$INIT$DATA BYTE,
INDEX BYTE;
DECIARE
SBXINITMSC(*) BYTE DATA
(
CR,LF,'THE
INTERRUPT TASK
IS NOI' INITIALIZED
' ,
CR, LF, O
) :
InÍtlallze the SBX350 i nterface
.
Port A - Input
Port B - Output
Port C - Outpuc
Port A interrupt enabled
oUTPUT
(
SBX3
5O$CONTROL$
poRT
) - SBX3 50$ rNrT$MoDE;
OUTPUT
(
SBX3 5O$CONTROL$
PORT
) - ENABLE$PORT$A$
INTERRUPT
;
sBx35o$MBX
- RQ$CREATE$MAr LBox (
60H
,
@STATUS ); /* Set up for passing data not RMX objects */
Figurr A-E. Interrupt Handler
and Task (SBX350.P2E)
(continued)
A-M Programming Techniques
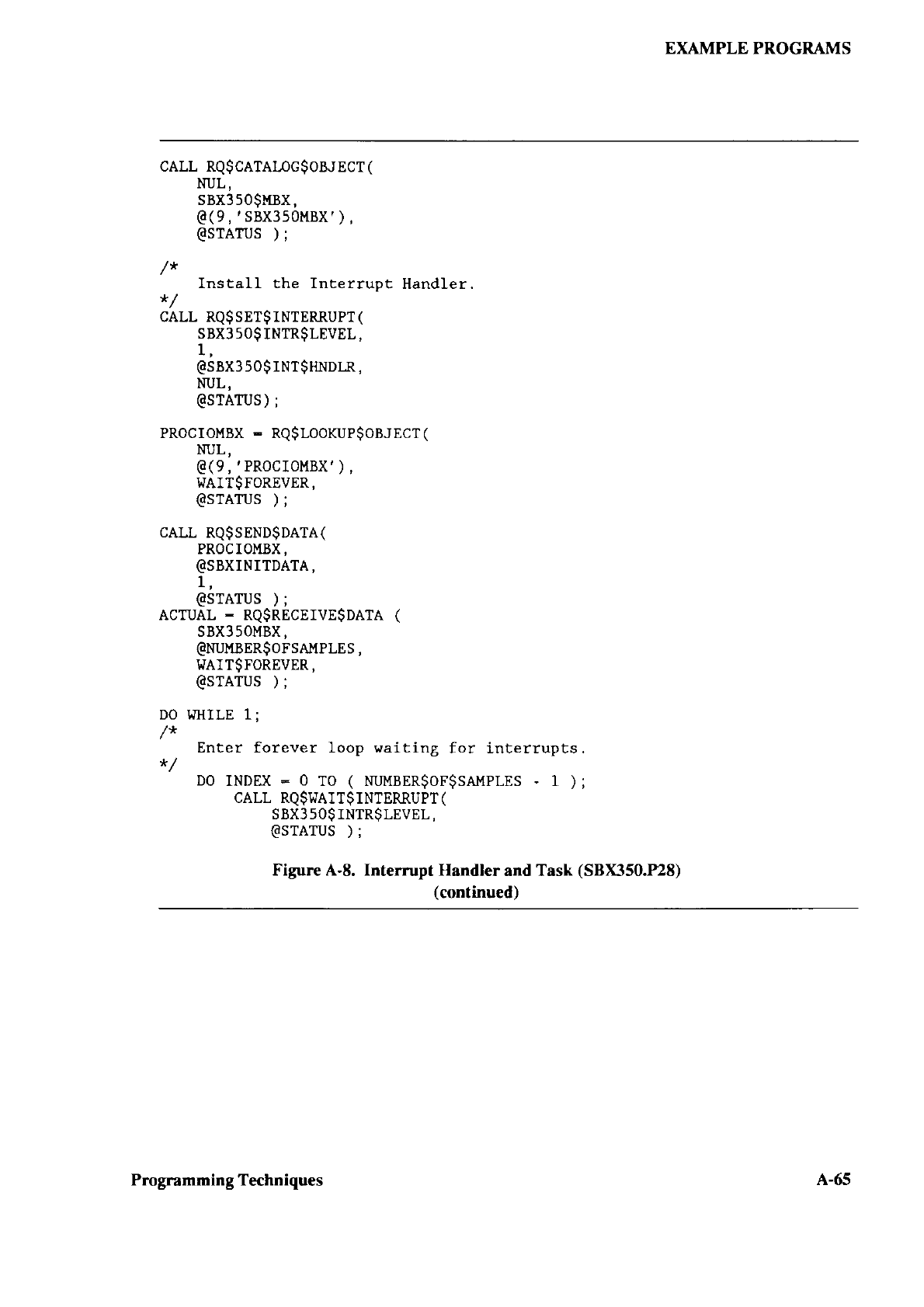
EXAMPLE PROGRAMS
CALL RQ$CATAT,OG$OBJ
ECT
(
NUL,
sBx350$MBX,
G(9, '
SBX35O|.ÍBX')
,
GSTAÎUS );
Install che Interrupt Handler.
CALL RQ$ SET$ INTERRUPÎ
(
sBx3 50$
INTR$LEVEL,
1,
@s8x3
50$ TNTSHNDLR,
NUL,
@STATUS
) ;
PROCTOMBX
- RQ$LOoKTJP$OBJ ECT
(
NUL,
G(9,
'PRocroMBX',
) ,
WAIT$FOREVER,
@STAÎUS );
CALL RQ$SEND9DATA(
PROCIOMBX,
@SBXINITDATA,
1,
GSTATUS );
ACTUAL
- RQ$RECEIVE$DATA
(
SBX35OMBX,
GNUI,IBER$OFSAMPLES ,
IiIAtT$FOREVER,
GSTATUS
);
DO I+IHI
LE 1
;
Enter forever loop waiting for interrupts.
D0 INDEX
- 0 T0 ( NUMBER$OF$SAMPLES
- I );
CALL RQ$I{AIT$
INTERRUPT
(
sBX3 50$ rNTR$LEVEL
,
GSTATUS );
Figure A-E, Interrupt Handler
and Task (SBX350.H!8)
(continued)
Prograrnming Techniques A-65
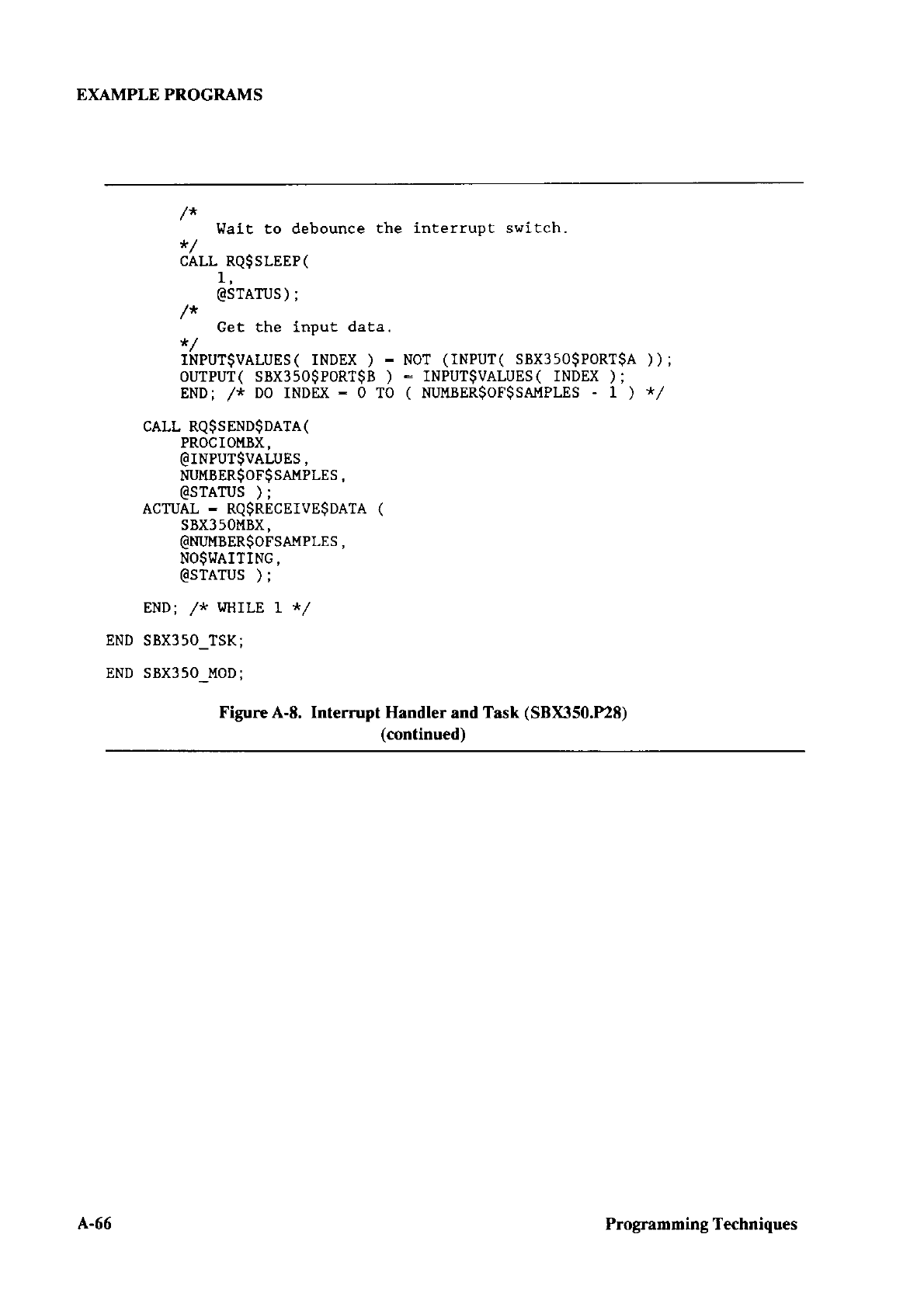
EXAMPLE PROGRAMS
WalÈ to debounce the interrupt sr,titch.
CALL RQ$SLEEP
(
1,
GSTATUS
) ;
Cet the lnput data.
INPUT$VALUES
( rNDEX
) - NOT
(TNPUT(
SBX35O$PORT$A
));
oUTPUT( SBX350$P0RT$B
) - INPUT$VALUES
( rNDEX
);
END; /* DO INDEX
- O TO ( NUMBER$OF$SAMPLES
. 1) */
CALL RQ$SEND$DATA(
PROC I OMBX
,
@INPUT$VALUES,
NUr.fSER$OF$
SAT.ÍPLES,
@STATUS );
ACTUAL
- RQ9RECEIVE$DATA
(
SBX3 5OMBX,
@NUMBERSOFSAMPLES
,
N0$r{AITING,
GSTATUS );
END; /* l,lHILE I *,/
END
SBX35O-TSK;
END SBX35O-MOD;
Figure A-E. Interrupt Handler
and
Task (S8X350.P28)
(continued)
A-6ó Progranming Techniques
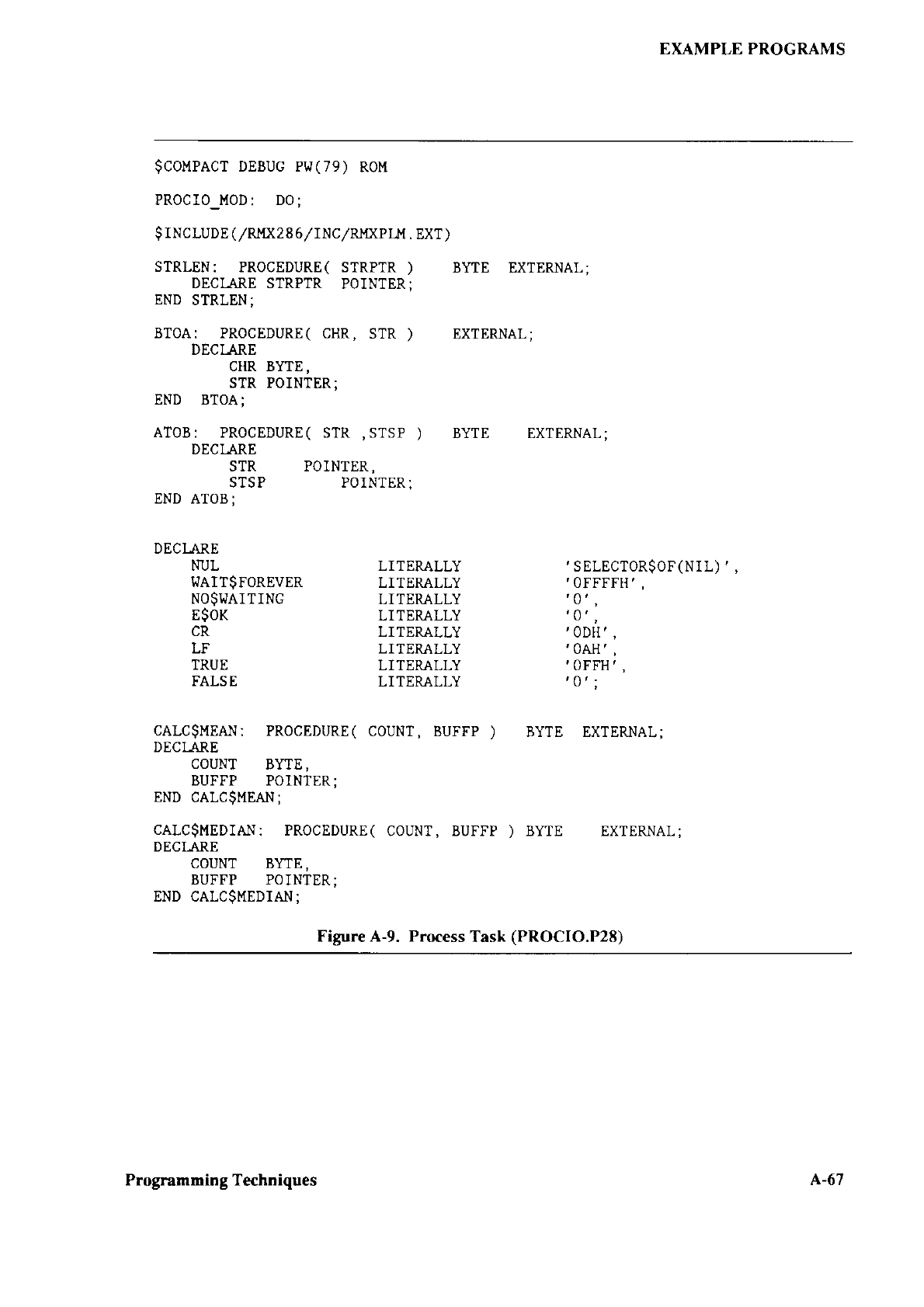
EXAMPLE PROGRAMS
$CoMPACT
DEBUG Pl,J(79)
RoM
PROCIO_MOD: Do;
9INcLUDE
(
/RMX2
8 6/rNc/RMxpLM.
EXT)
STRLEN: PROCEDURE( STRPTR
) BYTE EXTERNAL;
DECI.ARE STRPTR POINTER;
END
STRLEN;
BTOA: PROCEDURE( CHR, STR ) EXTERNAL;
DECIARE
CHR BYTE,
STR POINTER;
END BTOA;
ATOB: PROCEDURE( STR
,STSP ) BYTE EXTERNAL;
DECIARE
STR POINTER,
STSP POINTER;
END ATOB;
DECIARE
NUL LITERALLY
I'AIT$FOREVER LITEMLLY
'SELECToR$oF(NIL)'
,
'OFFFFH'
,
'0'
,
'0,'
,ODH'
,
,
OAH
"
,
OFFH
' ,
,0';
NO$WAITINC
E$OK
CR
LF
TRUE
FALSE
LITERALLY
LITEMLLY
LITERALLY
LITERALLY
LITERALLY
LITEMLLY
CALC$MEAN: PROCEDURE
( CoUNT, BUFFP
) BYTE EXTERNAL;
DECIARE
COUNT BYTE,
BUFFP POINTER;
END CALC$MEAN;
CALC$MEDIAN:
PROCEDURE(
CoUNT, BUFFP
) BYTE EXTERNAL;
DECIARE
COUNT BYTE,
BUFFP POINTER;
END CALC$MEDIAN;
Figure A-9. Process
Task
(PROCIO.P28)
Programming Techniques A-67
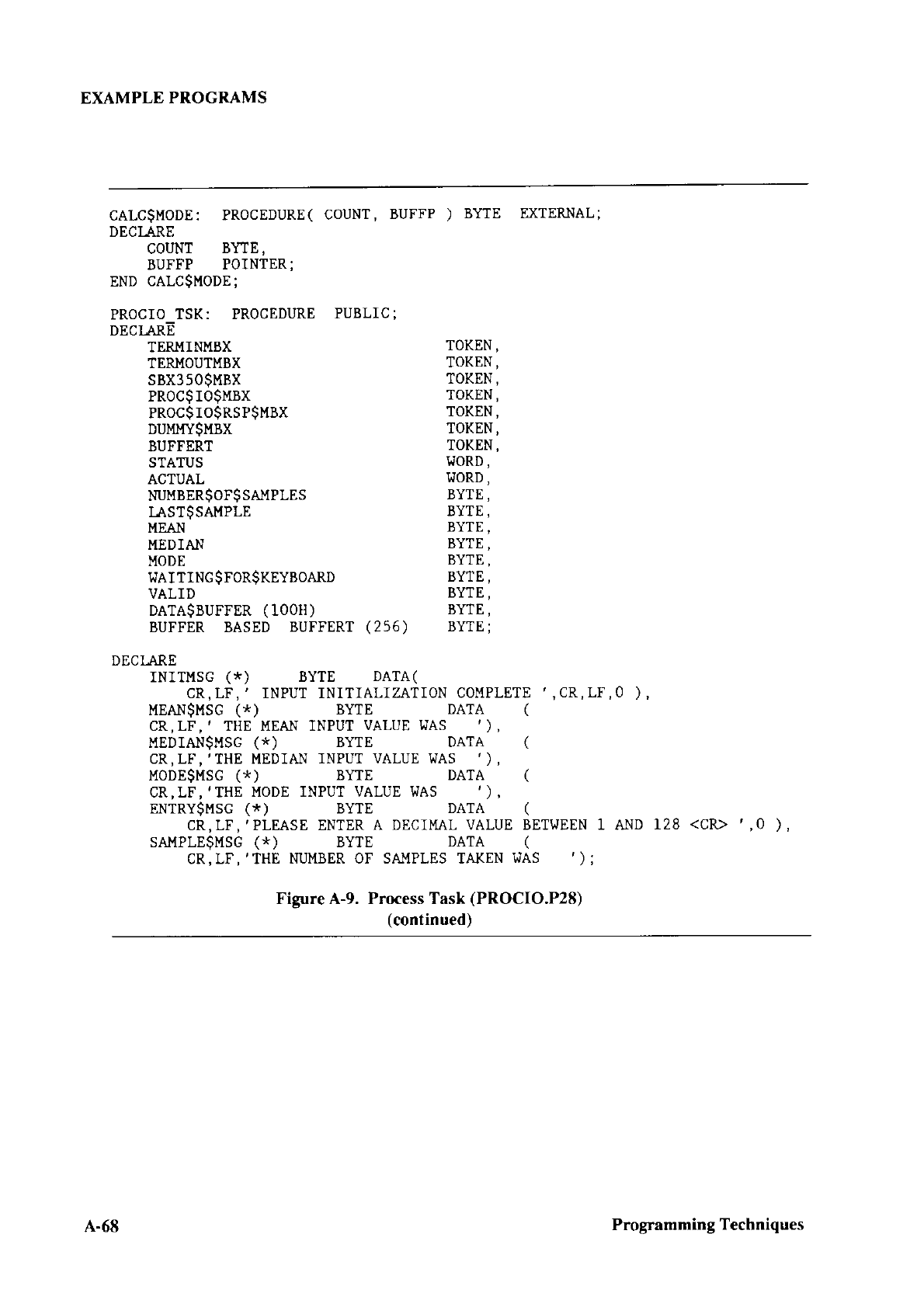
EXAMPLE PROGRAMS
CALC$MODE:
PROCEDURE(
COUNT,
BUFFP
) BYTE EXTERNAL;
DECI^ARE
COUNT BYTE,
BUFFP POINTER;
END
CALC$MODE;
PROCIO
TSK: PROCEDURE
PUBLIC;
DECIÀRE
TERMINMBX TOKEN,
ÎERMOUTMBX TOKEN,
SBX35o$MBX ToKEN,
PRoC$ro$MBX ToKEN,
PROCgIO$RSP$MBX TOKEN,
DUMMY$MBX TOKEN,
BUFFERT TOKEN,
STATUS T.TORD,
ACTUAL WORD,
NUMBER$OT$
SAMPLES BYTE,
rAST$SAMPLE BYTE,
MEAN BYTE,
MEDIAN BYTE,
MODE BYTE,
I'AITINC$ FOR$KEYBOARD BYîE,
VALID BYTE,
DATA$BUFFER
(IOOH) BYTE,
BUFFER BASED BUFFERT
(256) BYTE;
DECI^A,RE
INITMSG
(*) BYTE DATA(
CR,LF,' INPUT INITIALIZATION
COMPLETE
' ,CR,LF,O
),
MEAN$MSG
(*) BYTE DATA (
CR,LF,' THE MEAN INPUT
VALUE I,JAS '),
MEDIAN$MSC
(*) BYTE DATA (
CR,LF,'THE MEDIAN
INPUT VALUE WAS '),
MODE$MSG
(*) BYTE DATA (
CR,LF,'THE
MODE TNPUT VALUE IIAS '),
ENTRY$MSG
(*) BYTE DATA (
CR,LF,'PLEASE ENTER
A DECIMAL VALUE BETWEEN l AND
128 <CR>
"O
),
SMPLE$MSG
(*) BYTE DATA (
CR,LF,'THE
NUMBER OF SAMPLES TAKEN
WAS ');
Figure A-9. Process Task
(PROCIO.P28)
lcontinued)
A-68 Programming
Techniques
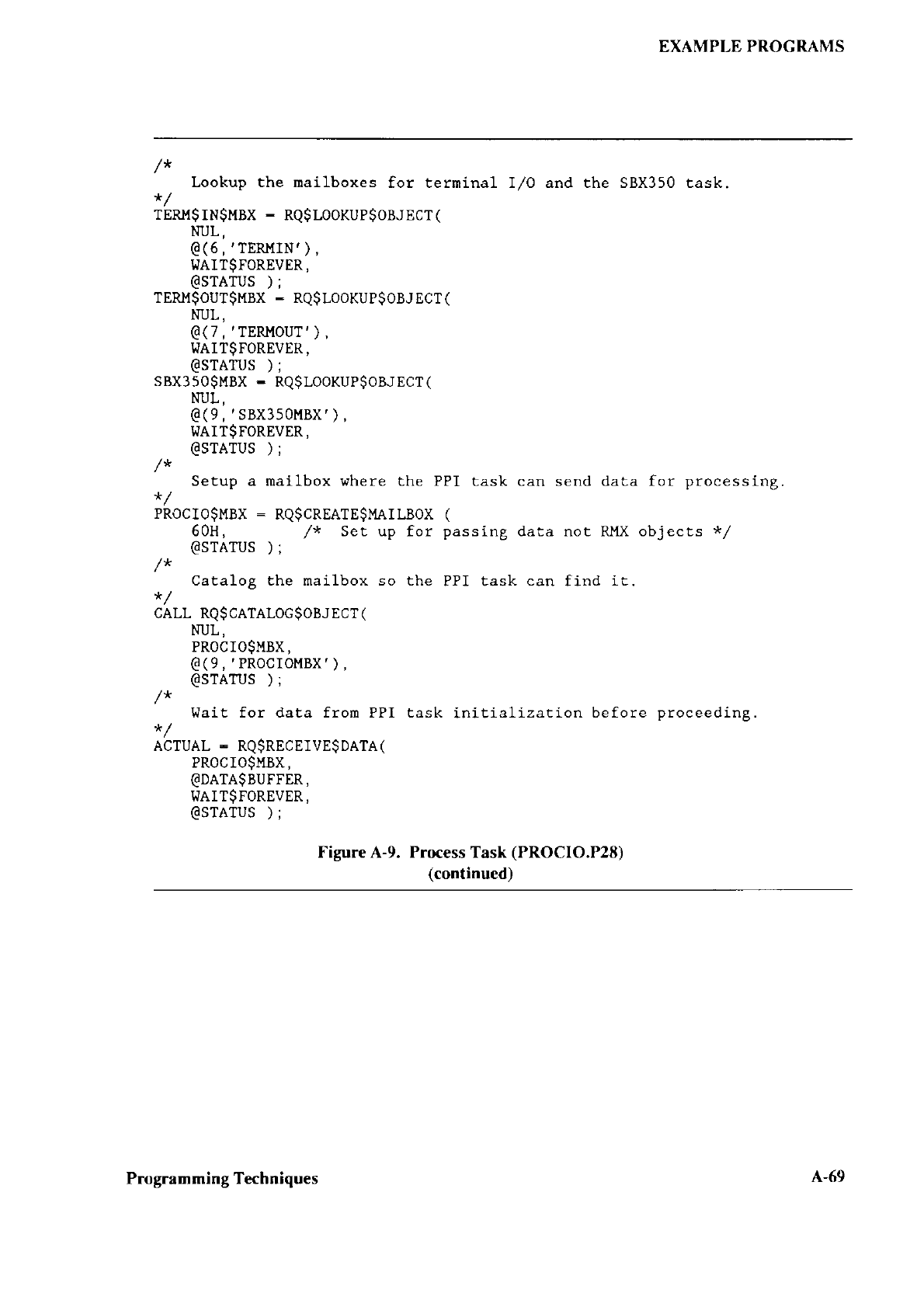
EXAMPLE PROGRAMS
Lookup the mailboxes for terrninal l/0 and the SBX350 task.
TERM$IN$MBX
- RQ$LOOKUP$OBJ ECT
(
NUL,
@(6,'TERMTN'),
T.TAIT9FoREVER,
GSTATUS );
TERM$OUT$MBX
- RQ$LOOKUP$OBJ
ECT
(
NUL,
@(7,',TERMOUT',),
WAIT$FOREVER,
@sTArus );
sBX350$MBX
- RQ$LOOKUP$OBJ ECT
(
NUL
,
@(9,
',
sBX3soMBX'
) ,
WAIT$FOREVER,
GSTATUS );
Setup a rnailbox where the PPI task can send data for processing.
PROCIO$MBX
: RQ$CREATE$MAI LBOX
(
60H, /* set up for passing data not RMx objects */
GSTATUS );
Catalog the mailbox so the PPI task can find it.
CALL RQ$ CATALOG$OBJ ECT
(
NUL
,
PR0Ct0$MBX,
G(9,
'
PROCTOMBX'
) ,
GSTATUS
);
Wait for data fron PPI task iniÈialization before proceeding.
ACTUAL
_ RQ$RECEIVE$DATA
(
PROCIO$MBX,
GDATA$BUFFER,
WAIT9FOREVER,
GSTATUS );
Figure A-9. Process Task
(PROCIO.P28)
lcontinued)
Programming Techniques A-ó9
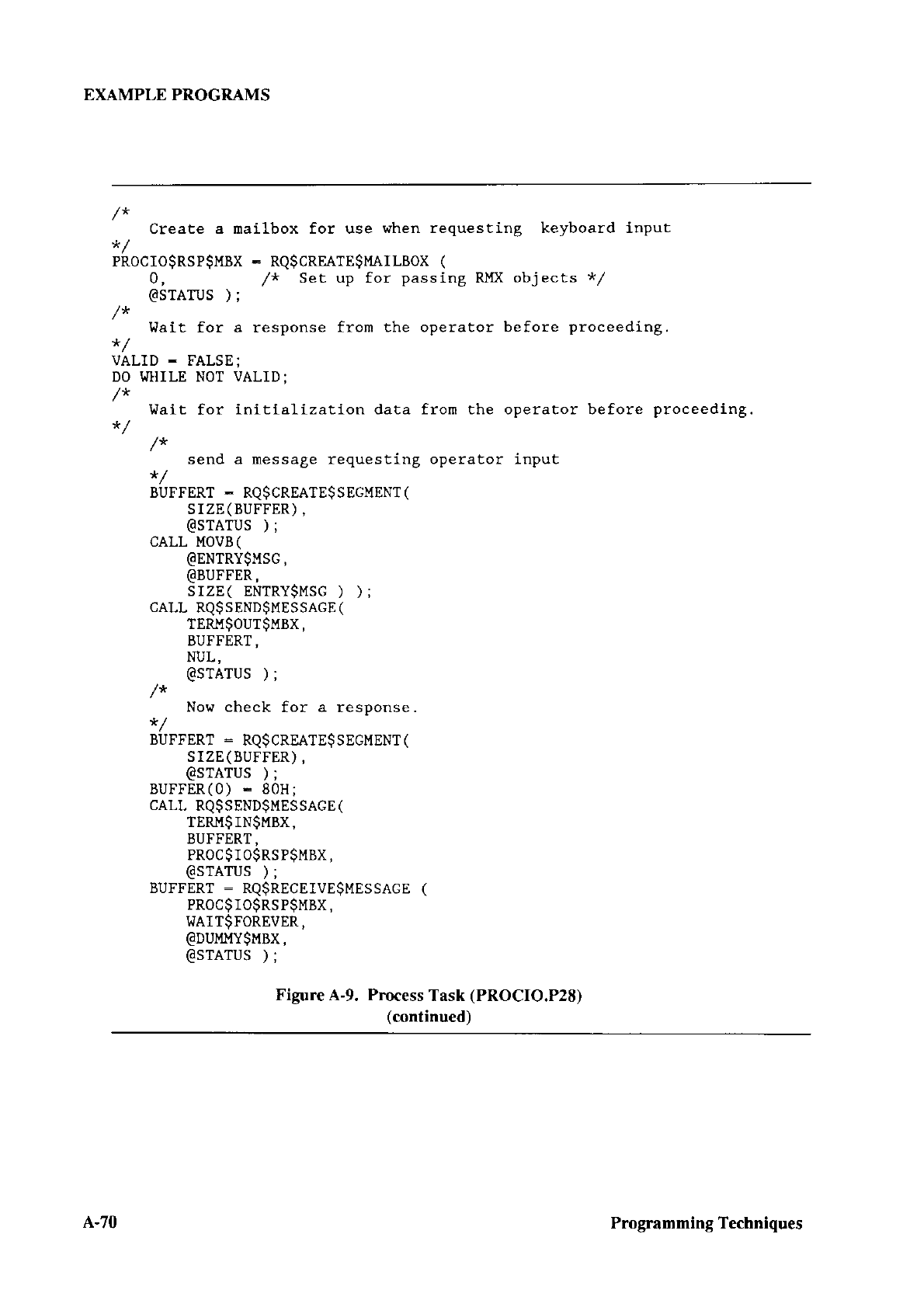
EXAMPLE PROGRAMS
Create a nailbox for use when requesting keyboard input
pRoclo$RsP$MBX
- RQ$CREATE$MATLBOX
(
0, /* set up for passing RMX
objects */
GSTATUS );
l.lalt for a response from the operator before proceeding.
VALID - FALSE;
DO I,IHILE NOT
VALID;
waiE for initialization data from the operator before proceeding.
send a rnessage requesting operator input
BUFFERT
. RQ$CREATEg S ECMENT
(
S I ZE
(
BUFFER
) ,
GSTATUS ) i
CALL MOVB
(
GENTRY$MSG ,
GBUFFER
,
SIZE( ENTRY$MSG
) );
CALL RQ$SEND$MESSAGE
(
TERM9OUT$MBX,
BUFFERT
,
NUL,
@sTArus
);
Now check for a response.
BUFFERT
- RQ9CREATE$ S EG},IENT
(
slzE(BUFFER),
@srArus );
BUFFER(O)
- 80H;
CALL
RQ$S END9MES SAGE
(
TERM$ IN$MBX,
BUFFERT
,
PRoC$r0$RSP$MBX,
GSTATUS
);
Rt lFFFp,r _ D^(D F.F r\rF$MES
SAG E (
PROC$ 10$RS
P$MBX
,
t{A.L I ì f Ut(ÉV EK ,
GDUMMY$MBX ,
@STATUS ) j
Figure A-9. Prccess
Task (PROCIO.P28)
lcontinued)
A-70 Programming Techniques
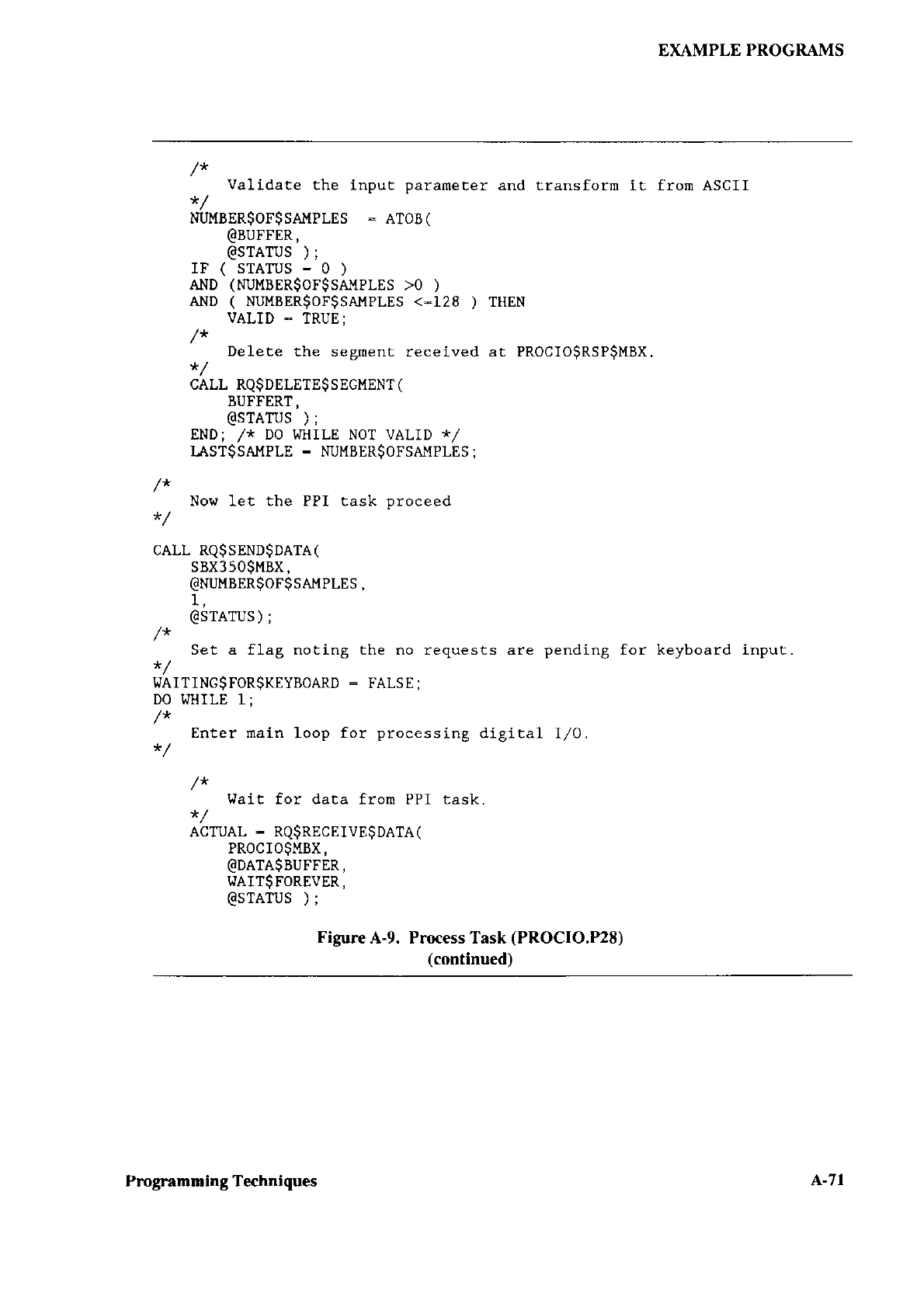
EXAMPLE PROGRAMS
Valldace che input parameter and cransforn it fron ASCII
NUMBER$OF$ SAMPLES
- ATOB
(
@BUFFER ,
€STATUS );
rF(STATUS-0)
AND (NWBER$OF$SAMPLES
>O )
AND ( NUMBER$OF$
SAMPLES
<:128 ) THEN
VALID - TRUE;
Delete the segment received at PROCIO$RSP$MBX.
CALL RQ$DELETE$ S EGMENT
(
BUFFERT
,
GSTATLS );
END; /* DO LIHILE NOT VALID */
LAST$SA.I,fPLE
- NUMBER$OFSMPLES
;
Now let the PPI task proceed
CALL RQ$SEND9DATA
(
sBX350$MBX,
GNUMBER$OF$SAMPLES,
1,
@STATUS ) ;
Set a flag noting the no requests are pending for keyboard input.
I,IAITINC$
FOR$KEYBOARD
: FALSE;
DO I,IHILE 1;
Enter nain loop for processing digital I/O.
Wait for data .from PPI task.
ACTUAL
- RQ$RECE
I
VE$
DATA
(
PROCIo$MBX,
ANATA
(RIIFFFP
wAl r
lruKÉv È.K
!
GSTATUS
);
Figure
A-9. Process Task
(PROCIO.P28)
(continuedl
Programming Techniques A-71
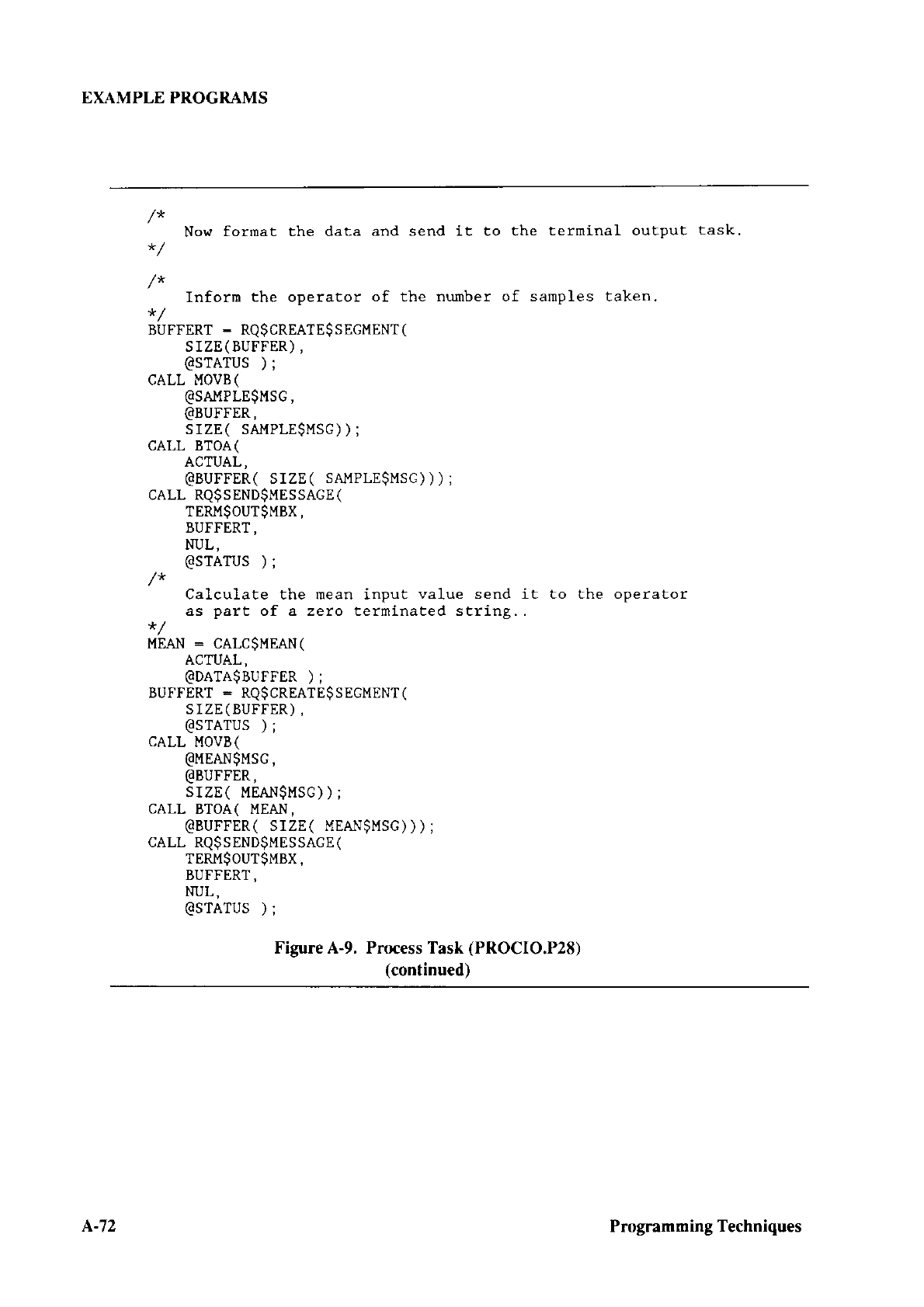
EXAMPLE PROGRAMS
Now
fornat the data and send it to the terminal output task.
Inform the operacor of the number of sarnples taken.
BUFFERT
- RQ$CREATE$
S EGMENT
(
S I ZE
(
BUFFER
) ,
GSTATUS );
CALL MoVB
(
GSAMPLE9MSG,
GBUFFER ,
clTF/ qaMr)IFCMqcì\.
CALL BTOA
(
ACTUAL,
GBUFFER(
SIZE( SAMPLE$MSC)
) ) ;
CALL RQ$ SEND$MES SAGE
(
TERM$OUT9MBX,
BUFFERT
,
NUL,
GSTATUS
);
Calculate the nean input value send it to the operator
ds Pdr L sLrrrrÉ..
MEAN
: CALC
SMEAN
(
ACTUAL,
GDATA$BUFFER );
BUFFERT
- RQ$ CREATE$ SEGMENT
(
SIZE(BUFFER),
€STATUS );
CALL MOVB
(
€MEAN$MSG,
@BUFFER ,
srzE( MEAN$MSG
) ) ;
CALL BTOA( MEAN,
GBUFFER(
srzE( MEAN$MSG)
)
) ;
CALL RQ$ S END9MES
SAGE
(
TERM$OUT$MBX,
BUFFERT
,
NUL,
QSTATUS );
Figure A-9. Process Task
(PROCIO.P28)
(continued)
A-72 Prograrnming
Techniques
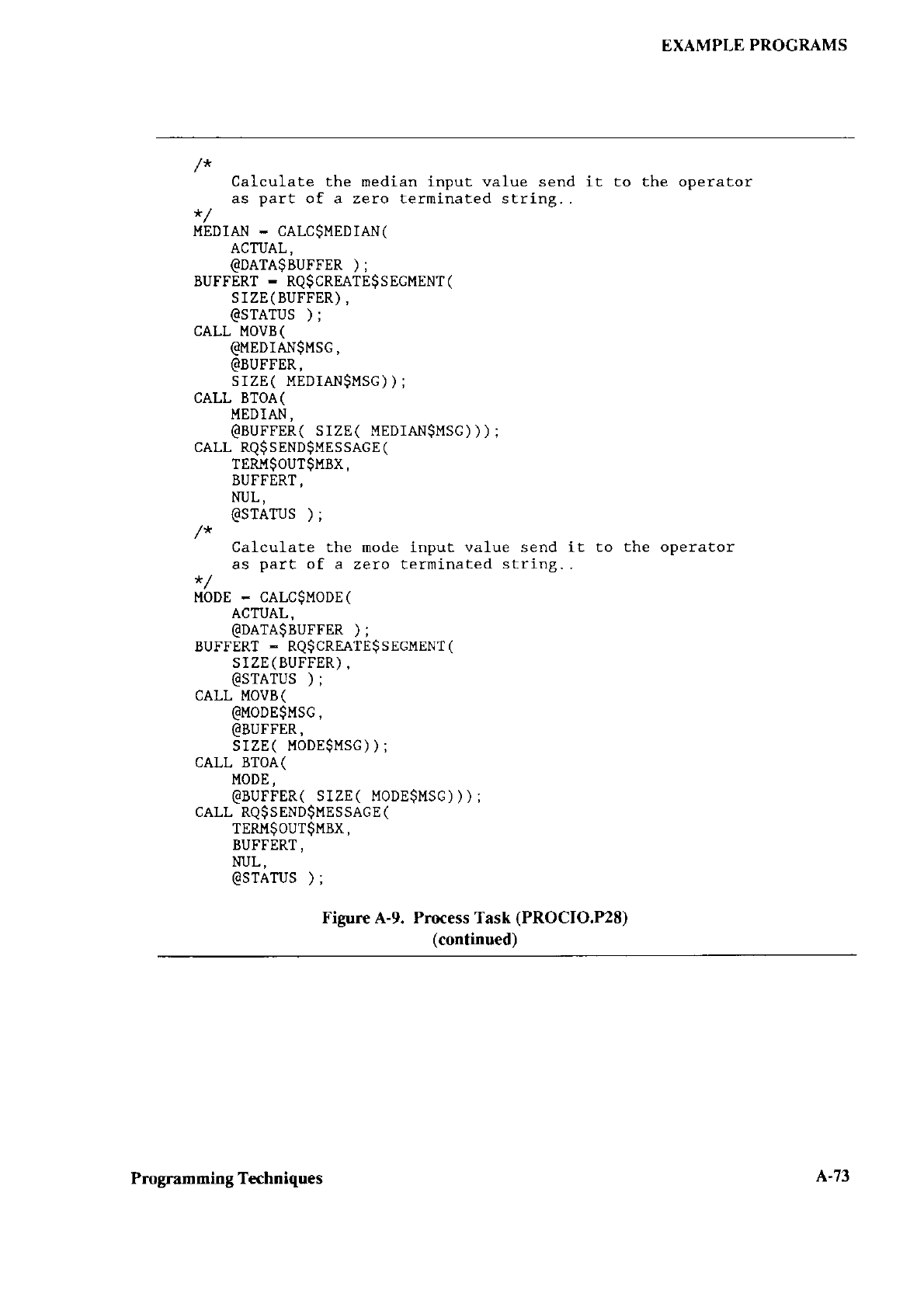
EXAMPLE
PROGRAMS
Calculate the median input value send it to the operator
,c nrrt af a zcro t érhin,tè.1 <trino
MEDIAN
- CALC$MEDIAN
(
ACTUAL
,
GDATA$BUFFER
);
BUFFERT
. RQ$CREATE$ S ECMENT
(
SIZE(BUFFER),
GSTATUS
);
CALL MOVB
(
GMEDIAN9MSG,
GBUFFER,
srzE( MEDTANSMSG
) ) ;
CALL BTOA
(
MEDIAN,
GBUFFER(
SIZE( MEDIAN$MSG)
) ) ;
CALL RQ$SEND$MESSAGE
(
TERM$OUT$MBX,
BUFFERT
,
NUL
,
GSTATUS
);
Calculate the rnode input value send it to the operator
d> Pd! L 5L' "'6..
MODE
- CALC$MoDE
(
ACTUAL,
@DATA$BUFFER );
BUFFERT
- RQ$
CREATE$ S EGMENT
(
srzE(BUFFER),
GSTATUS
);
cALL MOVB
(
GMODE$MSG,
GBUFFER
,
c r 7F r/ MnnF(MC/: r \ .
CALL BTOA(
MODE
,
@BUFFER(
SIZE(
MODE$MSG)
)
) ;
CALL RQ$SEND$MESSAGE
(
TERM$OUT$MBX,
BUFFERT
,
NUL,
@STATUS ):
Figure A-9. Process Task
(PROCIO,P28)
lcontinued)
Pmgramming Techniques A-73
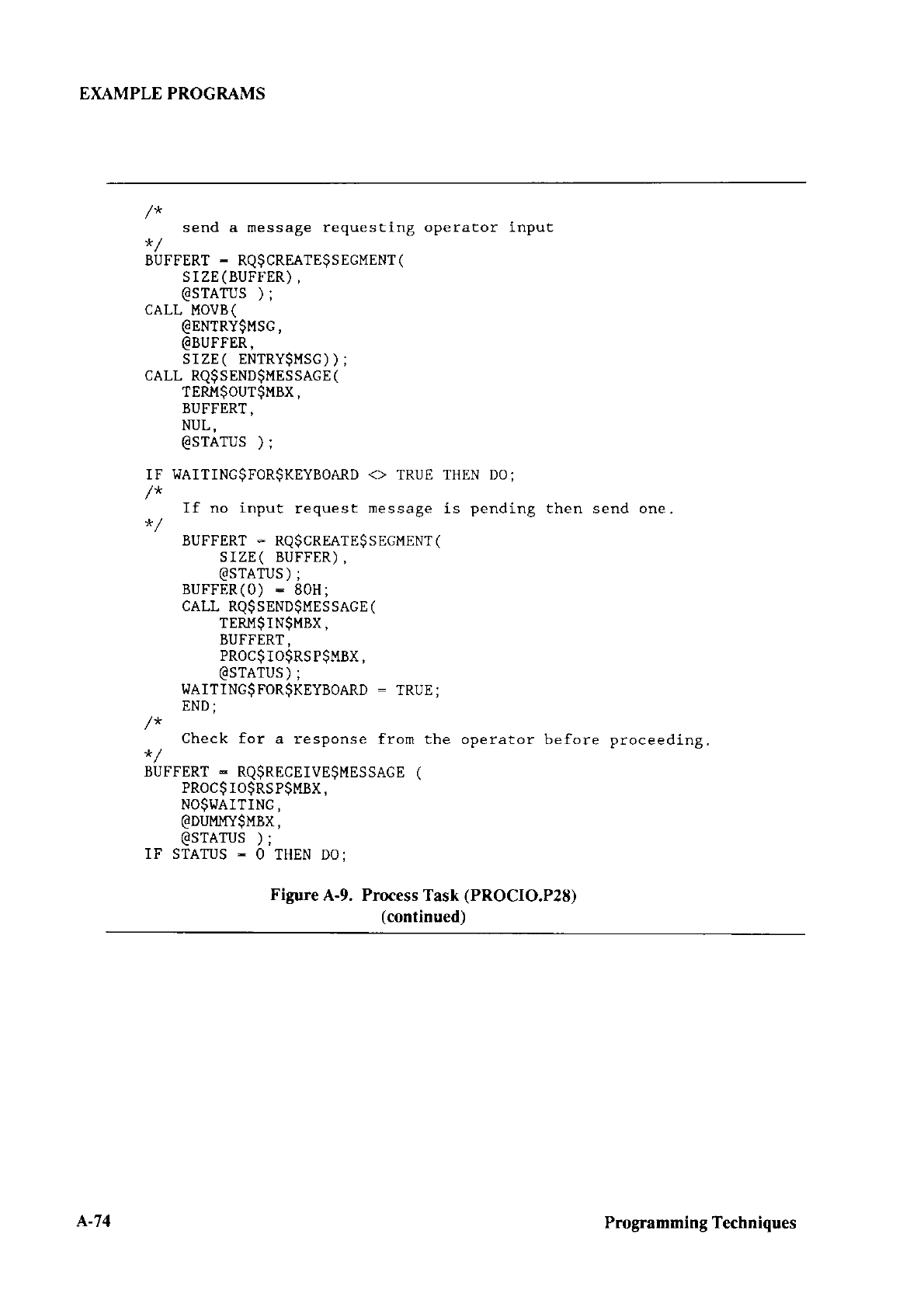
EXAMPLE PROGRAMS
send a rnessage
requesting operator input
BUFFERT
- RQ$ CREATE$
S EGMENT
(
SIZE(BUFFER),
GSTATUS
);
CALL MOVB
(
@ENTRY$MSC,
@BUFFER
,
srzE
( ENTRY$MSG)
) ;
CALL RQ$ SEND$MES SAGE
(
TERM$OUT$MBX
,
BUFFERT
,
NUL,
@STATUS );
IF WAITING$
FOR$KEYBOARD
<> TRUE THEN DO;
lf no input request message
ís pending then send one,
BUFFERT
- RQ$CREATE$ S EGMENT
(
SIZE( BUFFER),
@srATUS ) ;
BUFFER(O)
- 80H;
CALL RQ$SEND$MESSAGE
(
TERM$IN9MBX,
BUFFERT
,
PROC$
IO9RS P$MBX
,
@STATUS ) ;
I'AITING$ FOR$KEYBOARD
: TRUE;
END
;
Check for a response from the operator before proceeding.
BUFFERT
- RQ$RECEIVE9MES
SACE
(
PRoC$ ro9RSP$MBX
,
NO9WAITINC,
GDUMMY$MBX
,
@STATUS );
IF STATUS
- O THEN DO;
Figure
A-9. Process Task
(PROCIO.P28)
lcontinued)
A-74 Programming Techniques
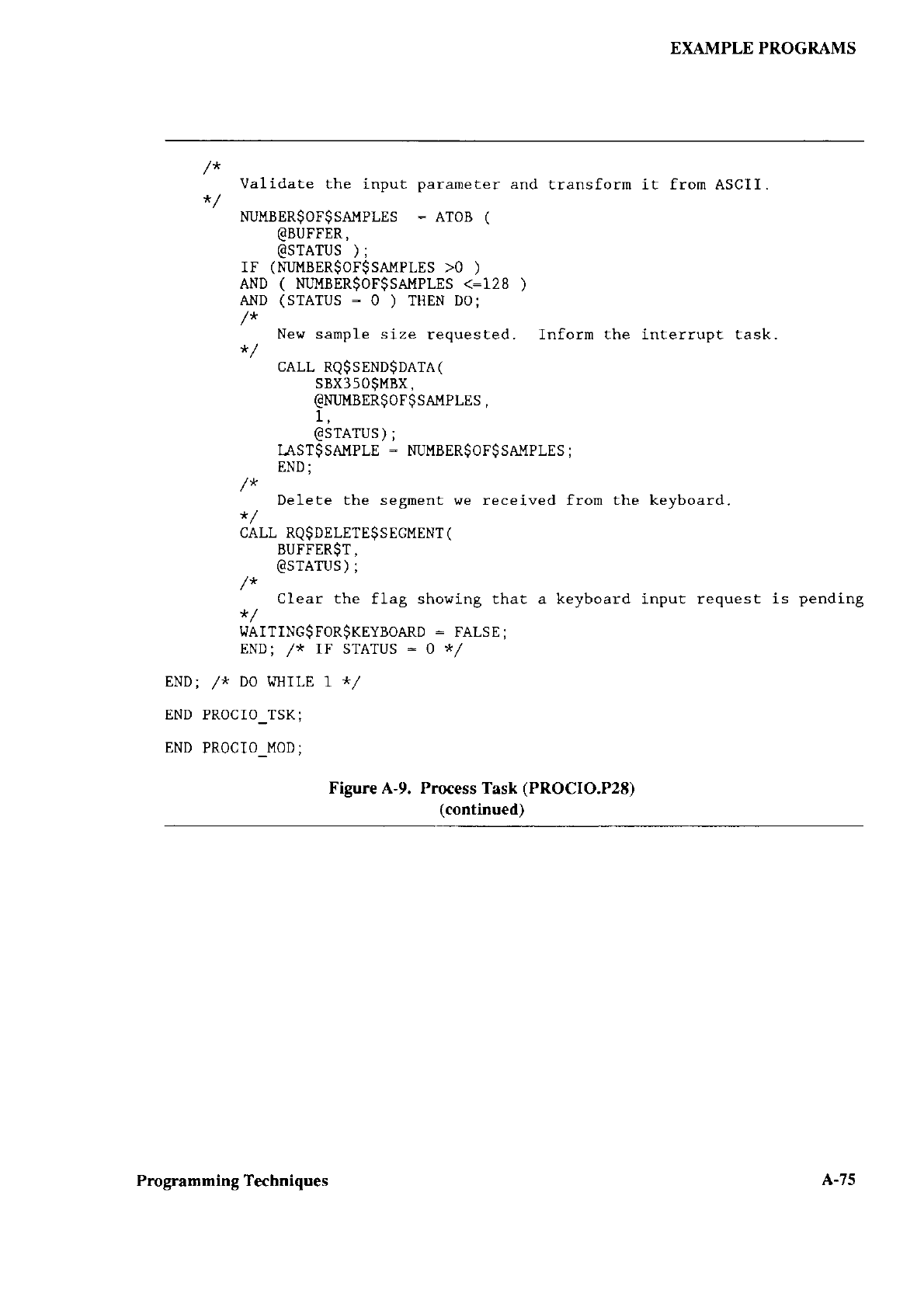
EXAMPLE PROGRAMS
Validate the input parameter and transform it fron ASCII.
NUUBER$OF9 SA]"TPLES
- ATOB (
GBUFFER,
@STATUS
);
rF (
NUMBER$oF$ SAMPLES >0 )
AND ( NI,I.fBER$OF$SAMPLES <:128 )
AND(STATUS-O)THENDO;
New sarnple size requested. Inform the interrupt task.
CALL
RQ$SEND$DATA
(
sBX350gMBX,
GNUMBER$OF$SAI'iPLES,
1,
GSTATUS ) ;
IAST9SAMPLE
- NUMBER$OF$SMPLES
;
END
;
Delete the segment we received frorn the keyboard.
CALL RQ$DELETE$
SEGMENT
(
BUFFER$T,
@STATUS ) ;
Clear the fJ-ag showing that a keyboard input request is pending
I.IAITINC$ FOR$KEYBOARD
: FALSE;
END;
/* IF STATUS
: 0 */
END; /* DO h'IIILE 1 *,/
END PROCIO-TSK;
END
PROCIO-MOD;
Figure A-9, Process Task (PROCIO.P28)
(continued)
Prograrnming Techniques A-75
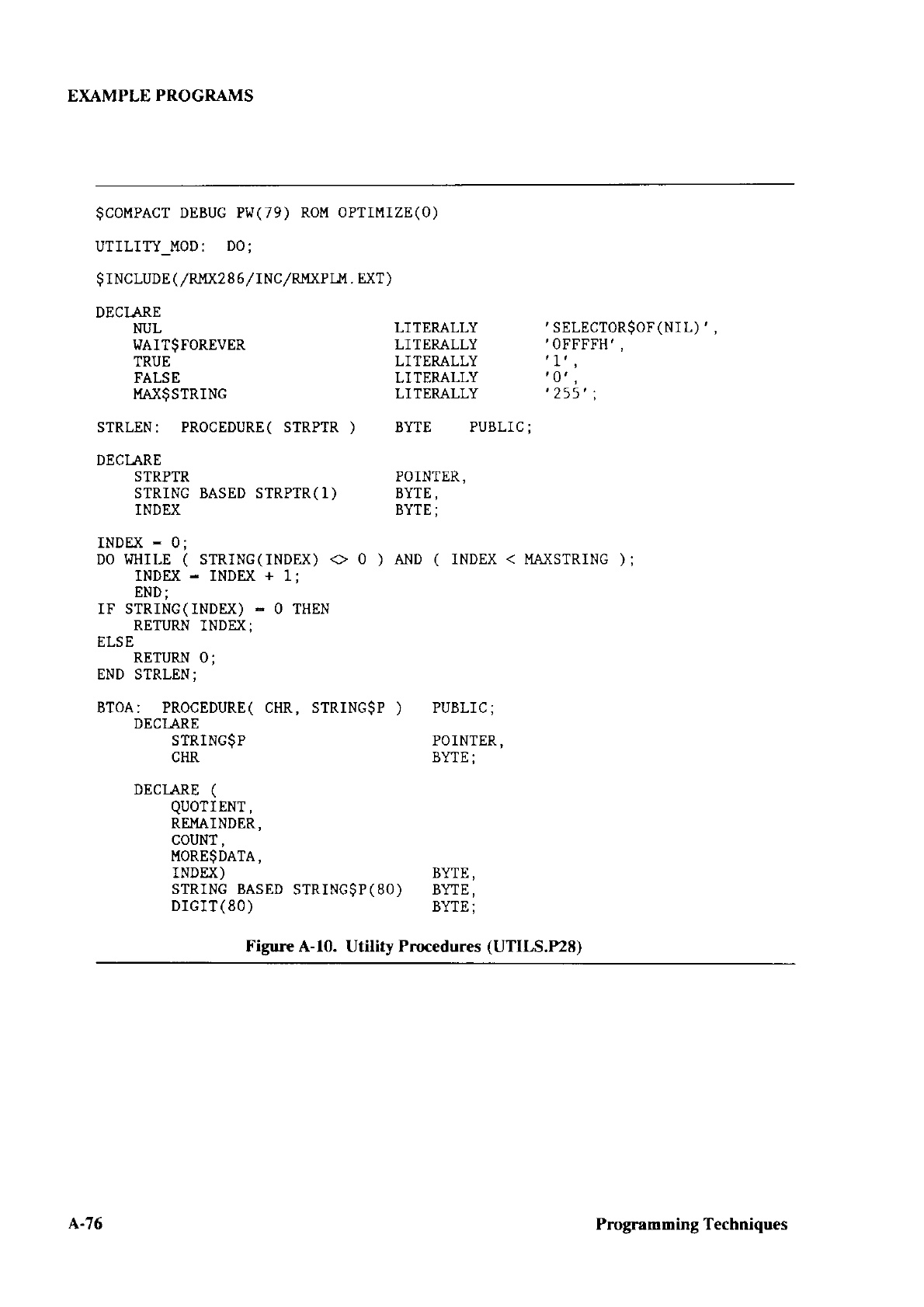
EXAMPLE PROGRAMS
$COMPACT
DEBUG PW(79)
ROM OPTIMIZE(O)
UTILIfi-MOD : DO;
$
TNcLUDE
(
/Rrfi 2
8 6/rNC/RMXPLM. EXT
)
DECIARE
NUL LITEMLLY 'SELECTOR9OF(NIL)'
,
WAIT$FOREVER LITERALLY ' OFFFFH'
,
TRUE LITEMLLY 'T' ,
FALSE LITEMLLY 'O' ,
MAX$STRINC LITERALLY '255' .,
STRLEN: PROCEDURE( STRPTR
) BYTE PUBLIC;
DECIARE
STRPTR POINTER,
STRINC BASED STRPTR(I) BYTE,
INDEX BYTE;
INDEX
- O;
DO
Í,ÍHILE ( STRING(INDEX)
O O ) AND ( INDEX
< MAXSTRING
) ;
INDEX
. INDEX
+ 1;
END
;
IF STRING(INDEX)
: O THEN
RETURN
INDEX:
ELSE
RETURN
O;
END STRLEN;
BTOA: PROCEDURE( CHR, STRINGSP
) PUBLIC;
DECI-ARE
STRING$P POINTER,
CHR BYÎE;
DECIARE (
QUOîr
ENT
,
REMAINDER,
COUNT
,
MORE$DATA,
INDEX) BYTE,
STRINC BASED
STRINC$P(80) BYTE,
DIGIT(8o) BYTE;
Figure A-10. Utility Procedures
(UTILS.P28)
L-76 Programming Techniques
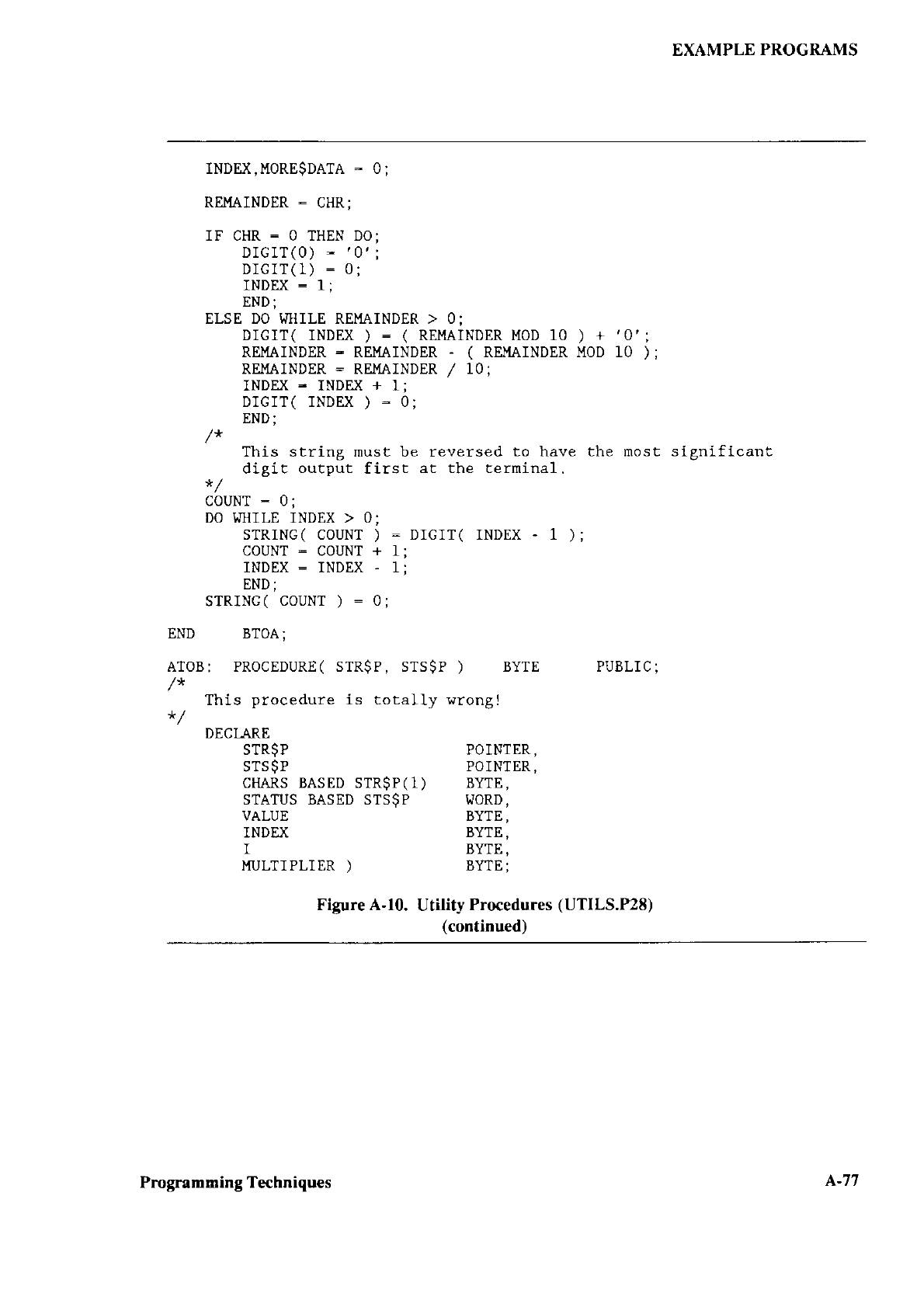
EXAMPLE
PROGRAMS
INDEX,MORE9DATA
- O;
REI,IAINDER
- CHR
;
IF CHR
: O THEN DO;
DrcrT(0)
' '0';
DrGrT(l):0;
INDEX
: 1;
END
;
ELSE DO I.IHILE REMAINDER > O;
DIGIT( INDEX
) : ( REMAINDER MOD 10 ) +,0';
REMAINDER
- REMAINDER
. ( REMAINDER MOD 10 );
REI,ÍAINDER
- REÌ.fAINDER
/ 10;
INDEX
- INDEX
+ 1;
DIGIT(INDEX)-O;
END
;
This string must be reversed to have the most significant
.lioít- ^rri-nrrr- fir9l 31 the termínal.
COUNT
: O;
DO WHILE INDEX > O;
STRING( COUNT
) _ DIGIT( INDEX
. 1 );
COUNT
: COUNT
+ 1;
INDEX
: INDEX
- 1;
END
;
STRINC(COUNT):0;
END BTOA;
ATOB: PROCEDURE
( STR$P, STS$P
) BYTE PUBLIC;
This procedure ís total ly wrong!
DECIARE
STR$P POINTER,
STS$P POINTER,
CHARS BASED STR$P
(
1) BYTE,
STATUS BASED STS$P WORD,
VALUE BYTE,
INDEX BYTE,
I BYTE,
MULTIPLIER
) BYTE:
Figure A-10. Utility Procedures
(UTILS.P28)
(continued)
Program min
g
Techniques A-77
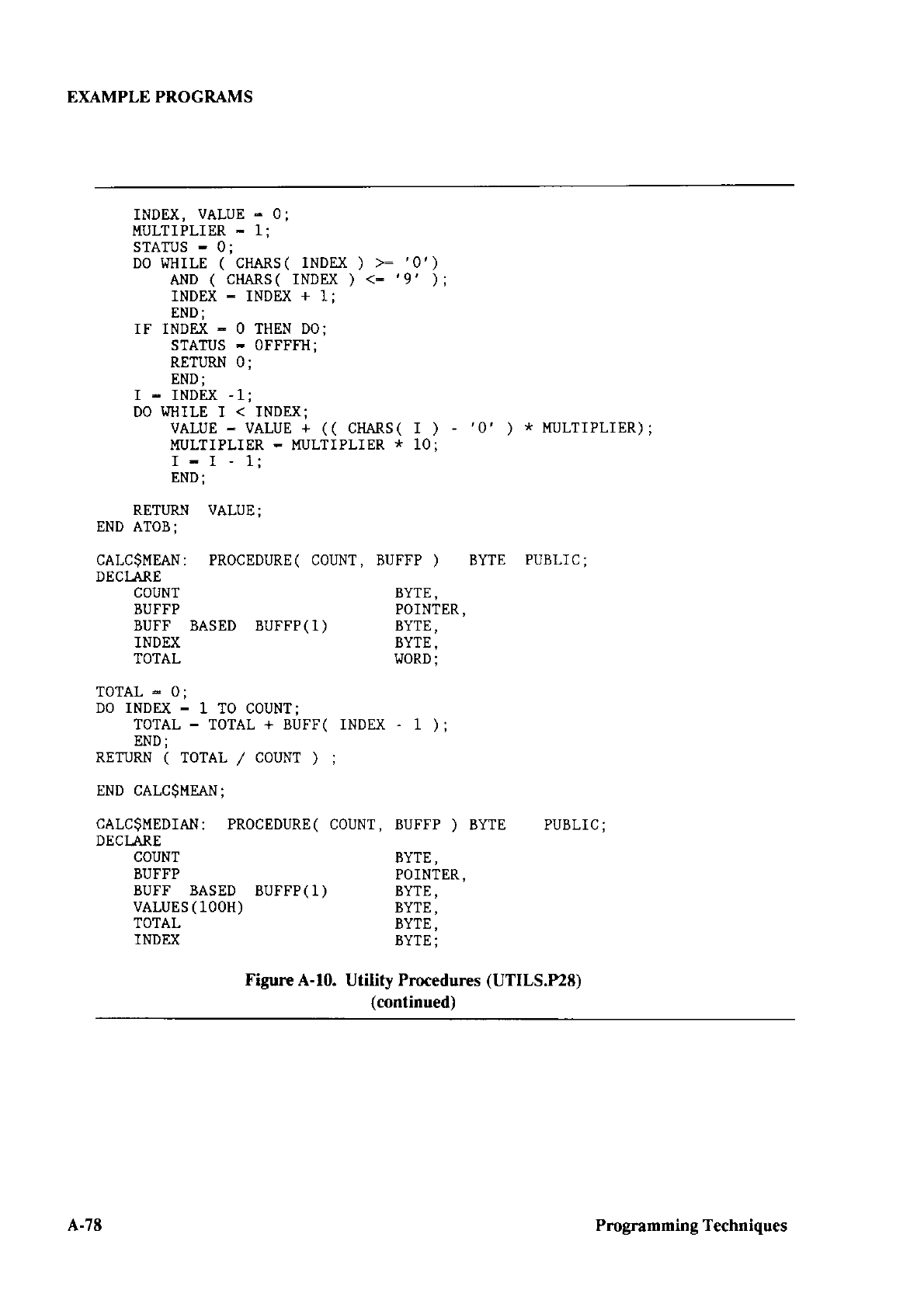
EXAMPLE PROGRAMS
INDEX,
VALUE
. O;
MULTIPLIER
- 1;
STATUS
. O;
DO r,rHrLE
( CHARS
( ÌNDEX ) >: '0',)
AND
( CHARS
( INDEX
) <: ',9' );
INDEX
- INDEX
+ 1;
END
;
IF INDEX
: O THEN DO;
STAÎUS
- OFFFFTI;
RETURN
O;
END
;
I - INDEX
-1;
DOWHILEI<INDEX;
VALUE
- VALUE
+ (( C}IARS( I ) -'O' ) * MULTIPLIER);
MULTIPLIER
. MULTIPLIER
* 10;
END
;
RETURN VALUE;
END ATOB;
CALC$MEAN: PROCEDURE
( CoUNT, BUFFP
) BYTE PUBLIC;
DECIARE
COUNT BYTE,
BUFFP POINTER,
BUFF BASED BUFFP(1) BYTE,
INDEX BYTE,
TOTAL WORD;
TOTAL
- O;
DO INDEX
- 1 TO COUNT;
TOTAL
- TOTAL
+ BUFF( INDEX . 1 );
END
;
RETURN
( TOTAL / COUNT
)
END CALC$MEAN;
CALC$MEDIAN: PROCEDURE( CoUNT, BUFFP
) BYTE PUBLIC;
DECTARE
COUNT BYTE,
BUFFP POINTER,
BUFF BASED BUFFP(I) BYTE,
VALUES(1OOH) BYTE,
TOTAL BYTE,
INDEX BYTE;
Figure A-10. Utilify Procedures
(UTILS.P28)
(continuedl
A-7E Programming Techniques

EXAMPLE
PROGRAMS
CALL
SETB( 0, GVALUES,
SrZE( VALUES
) );
DO INDEX
. 1 TO COUNT;
VALUES(
BUFF( INDEX - 1 ) ) - VALUES( BUFF( INDEX - 1 ) ) + 1;
END
;
TOTAL
. O;
INDEX
- O;
DO r,rHILE TOTAL <- ( COUNr
/ 2
) ;
TOTAL
. TOTAL
+ VALUES
( INDEX );
INDEX
- INDEX
+ 1;
END
;
RETURN
INDEX .1;
END CALC$MEDIAN;
CALC$MODE:
PRoCEDURE( CoUNT, BUFFP
) BYTE PUBLIC:
DECIARE
COUNT BYTE,
BUFFP POINTER,
BUFF BASED BUFFP(T) BYTE,
VALUES(IOOH) BYrE,
(
MAX,
INDEX ) BYTE;
CALL SETB( 0, GVALUES,
SrZE( VALUES
));
DO INDEX
- 1 TO COUNT;
VALUES
( BUFF( INDEX - 1 )) : VALUES
( BUFF( INDEX - 1 )) + 1;
END
;
r{Ax
- 0;
DO INDEX
. O TO IAST(VALUES);
IF VALUES
( INDEX ) > VALUES( MAX
) THEN
MAX
: INDEX;
END
;
RETURN MAX;
END CALC$MODE;
END UTILITY_MOD;
Figure A-10. Utility Procedures
(UTILS.P28)
(continued)
Programming Techniques a-79
EXAMPLE PROGRAMS
A.7.2 Compiling and
Binding the Code
The
following commands are used
to compile the code for this example:
These
PLM286
commands do not include controls for selecting the model
of
segmentation (SMALL, COMPACT, MEDIUM, or l-ARGE) because
the
$COMPACT
control
was
already included in the source files. The ROM control is also included, to
place
the constants in the data
segment.
The compiler
places
the
generated object code into the files INITTSK.OBJ, SBX350.OBJ,
TERM.OBJ,
PROCIO.OBJ,
and UTI[-S.OBJ.
After compiling, the object fi-tes must be bound
with
the appropriate iRMX Il interface
libraries. Because the code
will
be configured into the system
with
the Interactive
Configuration Utility, the BND286 command required is different than the ones used for
the
previous
examples. The BND286 command for this example must include the
NOLOAD and NOPUBLICS EXCEPT controls.
The NOLOAD control
is required because the SUBMIT file created by the ICU will
invoke BLD28ó to further
process
the resulting module. The NOPUBLICS EXCEFI
control is required to limit
the
public symbols
in the output module. The only
public
symbols
in the output module are the entry point
of the initial task and the dummy
variable
identifying the data segment of that task. If all public symbols were
allowed,
the
names of the
iRMX II interface
procedures would
conflict with
the names of the call
gates
used inside the operating system.
Even though the NOPUBLICS EXCEPT control
is required, including that control can
make
debugging somewhat of a chore because the
MAP286
utility will
not be able
to
generate
much
valuable
information. To correct that problem, you can use a three-step
bind
operation that
produces
one output file for use by MAP286 and another output file
that
will
be used as input to the ICU.
To implement this solution, first bind the object code with the
NOLOAD and DEBUG
controls and place the
result in a temporary fiìe. Then use the temporary file as input to
BND286 and include the
LOAD ontion.
This
will
cause the error
NO START ADDRESS FOUND IN OUTPUT MODULE
A-80 Programming Techniques
EXAMPLE PROGRAMS
This error can be ignored. The object module produced from this invocation of BND286
can be used as input to MAP286 to generate
a map of the first-level
job. Finally, run the
temporary
file through
BND286 again, specirying the NOLOAD and NOPUBLICS
EXCEPT controls. The output of this invocation will be combined during configuration
with the rest of the operating system.
The following commands perform
the operations
just mentioned. They create both a
usable map file and the object
module that
will be combined
with the
operating system.
A.7.3
Configuring
the First-Level
Job
To add the first-level
job to the operating system,
you must use the ICU and build a
configuration containing that
job. The easiest
way
to do this is to start with an existing
configuration file and modif it to include the new first-level
job. You
can use any
configuration file that includes the SDB, the Basic I/O System, and supports a
device with
the
name T0. This example assumes that you start
with
the configuration
file 28612.DEF
as supplied
with
the operating system.
Programmin
g
Techn
iques A-81
EXAMPLE PROGRAMS
When you
run the ICU, make
sure to examine the following
screens:
Memory for System
(MEMS)
screen.
Sub-systems (SUB) screen.
Device Drivers.
In many cases,
when you
add
a first-level
job
to the operating system,
you must
allocate more memory for the operating
system. In this instance,
you won't need
to allocate
more memory because
you
will be eliminating some of the layers
of
the operating system from your
configuration (only the Nucleus, SDB,
and BIOS are needed). In fact,
you'll
probably have more than enough memory
allocated for operating system code. If
you were
building an actual
production
system,
you
could find out exactly how
much
you
need by running the ICU twice.
The first time through, allocate a
generous amount of system
memory.
After you
run the SUBMIT file generated
by the ICU, examine the .MP2 file
produced by BLD286 and find out how
much memory
was
actually used. Then
go
back and modifo the MEMS screen
accordingly, and generate the system
again. For this example,
just
leave the
MEMS screen set to its default
value.
This example requires
just
the services
of
the Nucleus, System
Debugger, and Basic
I/O System. Therefore, speciff
NO for
the UDI (UDI =
NO) and YES for the
Basic
I/O System
(BIO=YES).
There are no changes
required to the
BIOS screens,
but only the 8274 driver is
required for this example. To remove the
other drivers,
invoke their driver screens
and enter the
value
^D
to delete them
from the confiquration.
A-82 Programming Techniques
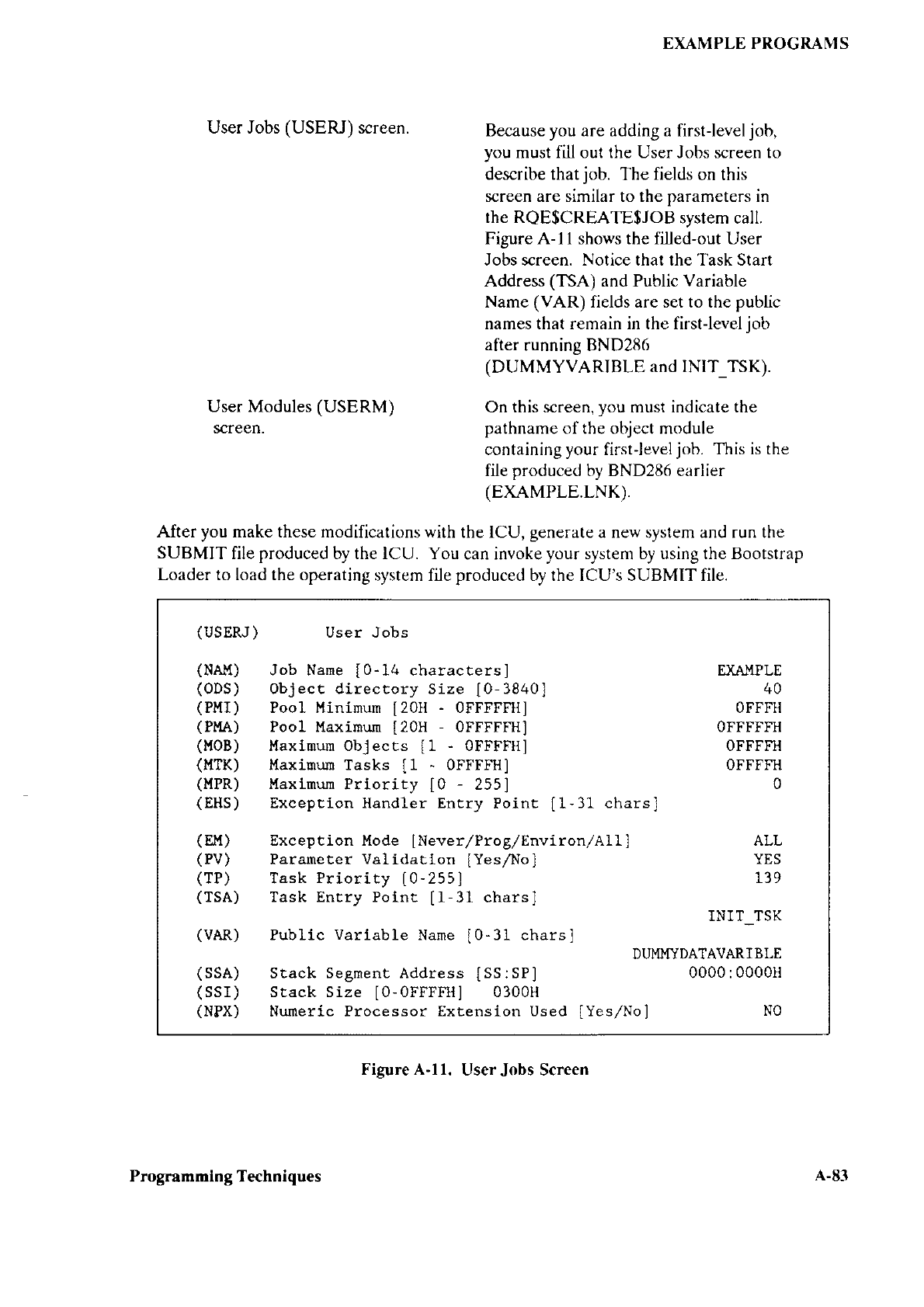
User Jobs
(USERI)
screen.
User Modules (USERM)
screen.
EXAMPLE PROGRAMS
Because you are adding a firstlevel
job,
you
must fill out the User Jobs screen to
describe that
job. The
fields
on this
screen are similar to îhe parameters in
the RQE$CREATE$JOB
system call.
Figure A- 1 I shows the filìed-out User
Jobs screen. Notice that the Task Start
Address
(TSA)
and Public
Variable
Name (VAR) fields are set to the public
names that remain in the first-level iob
after
running BND286
(DUMMYvARIBLE and lNlT_TsK).
On this screen,
you
must indicate the
paîhname
of the ohject module
containing
your
firstJeveljob.
This is the
file
produced
by BND286 earlier
IEXAMPLE.LNK).
After
you
make these modifications with
the lCU,
generate
a new system and run the
SUBMIT
file
produced
by the ICU. You
can invoke
your system by using the Bootstrap
Loader to load the operating
system file
produced
by the ICU's SUBMIT file.
(usERJ
)
( NAì'I)
(oDs)
(
Pr.rr
)
(
PMA)
(MoB
)
(l,fTK)
(MPR)
(EHs)
(
Er'{)
(Pv)
(TP)
(TSA)
(vAR)
(ssA)
(ssr)
(NPX)
EXAI'IPLE
40
OFFFH
OFFFFFH
OFFFFH
OFFFFH
0
ALL
YES
139
INIT TSK
User Jobs
Job Name
[0-14 characters]
ObJecc directory Size [0-
3840
]
PooI Mininun [20H - OFFFFzu]
PooI Maxirm-un
[20H - OFFFFFH]
Maxlnum ObJecrs 11 - oFFFFHI
l,faxirnurn Tasks [1 - OFFFFH]
Maximum
Priority [0 - 255]
Excepcion Handler Entry Point [L-31 chars]
Exception Mode INever/Prog/Envi ronlAl L
]
Parameter Validatlon IYes/No ]
Task Priority [0-255]
Task Entry Polnt [1-31 chars]
Public Varlable Name
l0-31 charsl
Stack Segment Address ISS:SP]
Stack Size [0-OFFFFH] 0300H
Nurneríc Processor Extension Used f
Yes,/Nol
DUMUYDATAVARI
BLE
0000 :
0000H
NO
Programmlng Techniques
Figure A-l l. User
Jobs
Screen
A-83

$SLEEP
A.32,35
A
A$GET$CONNECTION$STATUS A.6
A$GET$FILE$STATUS A.6
A$OPEN
A.ó,61
A$PHYSICALI$ATTACH$DEVICE A-6
A$READ A.21,57
A$SEEK
A.6,21
A$SPECI-AL
A'.6,7,8
A$WRITE A-21,23,59
Assembly
code
Parameter passing
2-3
Using
iRMXo system calls
2- 1
B
Based variables
5-2
Bind sequence
2-12, A-23,37, 41, 48, 8l
Binding code to interface
libraries 2- 1 1
BIOS.EXT 2.5
BND286
2-1t, 12, A-37,41,48, 81
Buffer Pools
Creating
5-3, A- 16
Overview
A-3
Passing buffers A- 15
Releasing buffers A-17,
19
Requesting buffers A-18
Using 5-3, A-15,
l8
c
C code
Parameter passing
2-4
Using
iRMXo system calls 2-4
C$GET$OUTPUT$CONNECTION A-6
C$GET$OUTPUT$PATTINAME A-6
C$SEND$CO$RESPONSE A-32, 35
C$SEND$EO$RESPONSE A-20
CATALOG$OBJECT A-11, 16, 29, 56, 58, 62, 65, 69
Pmgramming Techniques Index-l
INDEX
Cataloging
objects A-2,
10
Coding iRMX@
system calls 2-l
Communication
A-3
Jobs 3-1
Tasks
A- 12, 22
Compact
segmentation model l-2
Compiler controls
RAM 1-2,4
ROM 1-2,4
Compiling code A-23,
37,41, 48, 80
Configuring ajob into the operating
system A-81
Constant locations 1-4
Control-C handler
A-38
Conventions iv
Converting
iRMX@ I applications 5-1
CREATE$BUFFER$POOL A. 17, 18
CREATE$IO$JOB A.6
CREATE$JOB
A-5
CREATE$MAILBOX A-14, 29, 34,
56,58, 59, 60, 64, 69,70
CREATE$SEGMENT
4.17, 18,34,
70, 72,73,74
CREATE$TASK
A-9,
11,30,53,
62
Creating tasks A-2, 9
D
Data
Acquisition
job A-48
Data
passing
between
jobs 3-2
SEND$DATA and
RECEIVE$DATA 3-6
Dynamic stack allocations
1-3
E
E$CREATE$IO$JOB A-6
E$CREATE$JOB A-54
EIOS.EXT 2-5
Example
Binding code A-23, 37,41, 48, 81
BND286 2-12
Buffer
Pools A-15
Cataloging objects A-10
Clearing the
screen
A-20
Compiling code A-23,37,41, 48, ll0
Index-2 Programming Techniques
Example (cont.)
Concepts A-1
Configuring
a
job into the operating
system
A-83
Control-C
handler
A-38
Data acquisition
A-48
Execution
of a
job A-24, 38, 41, 48
First-level
job A-48
FORTRAN-28ó
string conversion
2- 10
In-line exception processing
A-3
Include
files 2-5, 6, 7
Inter-task
communication A-12, 22, 26
Interrupt
handler A-43,49,
63
Job initialization A-52
Literal files A-5
Programming concepts
A-1
Programs A-1
Pushing parameters
onto
the stack
2-3
Response pointer
A-12
Screen I/O A-20, 35, 55
Simultaneous
IIO A-22
System calls from assembly source code 2-3
Task creation A-9
Terminal
attributes
A-7
Exception handlers 1-3, 5-4,
A-4
Execution
ofajob A-24, 38, 41, 48
EXIT$IO$JOB A-6,27,30
External procedures
't-2,2-4,
1l
F
File connection restrictions
3-3, 6
FORTRAN-286
code
Include
file 2-7
Parameter passing
2-8
Restrictions 2-8
String conversion
example
2- 10
Strings 2-10
Using
iRMXo system calls 2-8
INDEX
Programming
Techniques Index-3
INDEX
G
General
protection
error 3-1,
b
GEfiEXCEPTION$HANDLER
A-4,
5
GET$LOGICATJDEVICE$STATUS
4.6
GET$PRIORITY
A-9, II, 29
GET$TASK$TOKENS
A.5, 29,
53, 56, 58
GET$TYPE
A-5,32
Getting
terminal
attributes
A-7
H
HI.EXT 2-5
I
I/O Result
Segnent
(IORS) A-21, 22,
62
Improving
performance (see optimization)
In-line
exception
processing A-2,
3
Include
files
BIOS.EXT 2-5
Description
2-5, A-36
EIOS.EXT
2-5
Example
of use 2-5, 6
Example use
of 2-7
FORTRAN-286
fiÌe 2-7
HI.EXT 2-5
LOADER.EXT 2.5
Location of 2-5
NUCLUS.EXT 2.5
PASCAL-286 file 2-6
RMXFTN.EXT 2-5,7,8
RMXPAS.EXT 2.5,6,7
RMXPLM.EXT 2.5
Types 2-5
UDI.EXT 2.5
Initialization A-52
Inter-task communication A-3,
12, 26
Interface libraries
BND286 restrictions 2-12
Choosing for use 2-11
Function 2- 11
RMXIFC.LIB 2.11, 12
UDIIFC.LIB 2-11, 12
Interrupt handlers
4-1,3, A-43, 49,
63
Interrupts 4-1
)-l
Index-4 Programming
Techniques
L
l-arge
applications
1-2, 3
Literal
files A-2,
5
LOADER.EXT
2-5
l,oading
the stack
2-3
LOGICAI]'ATTACH$DEVICE
A-ó
LOOKUP$OBJECI
A-4, 31,
34, 36,56,
58, 65, 69
M
Mailbox 3-6,A-27,49
Mailbox optimization 5-3
Manual overview
iv
Maskable
interrupts 4-1
Medium segnentation
models
1-2
Multitasking
job A-48
N
Nonmaskable
interrupts
4-1
NUCLUS.EXT
2-5
o
Object catalogin g A-2,
10
Object
directory ofthe rootjob 3-5
Object passing
between
jobs 3-3
Optimization
Based variables
5-2
Compiler
controls 5-2
Mailboxes
5-3
Nucleus
5-3
Overflow queues,
mailboxes
5-3
Seglentation
model
5-2
Sequential I/O 5-3
Based variables
5- 2
P
Parameter passing
Assembly
code 2-3
Between
tasks 3-6
C code
2-4
FORTRAN-286
2.8
INDEX
Pmgramming
Techniques lndex-5
INDEX
PASCAL-286
code
Include
file 2-6
Restrictions
2-6
Stack
allocation 2-7
Passing
buffers between
tasks
A-15
Passing
data
passing bet'ween
jobs
BIOS 3-3
EIOS 3-3
Segments
3-2
SEND$DATA and RECEIVE$DATA 3-2
Stream
files 3-3
UDI 3.3
Passing
objects between
jobs
Guidelines
3-7
Mailboxes
3-6,
7
Object directories
3-4,
7
Overview 3-3
Parameters
3-6,7
Performance
1,-1,2-2,
6, 5-1.,2
PLIM-286
code
Based variables 5-2
Using iRMXo system calls 2-1
Processing exceptions
A-3
Program
conversion 5-1
Programming
examples A-1
Public
procedures l-2,2-2
R
RAM
compiler control
1-2, 4
Reader level iii,
1-1, 2-1, 3-1,
4-1
RECEM$MESSAGE
A-7, 8, 13,
14, 15,23,32,35,
56, 59, 61,62,70,74
RECEIVESUMTS
A.12. 15
RELEASE$BUFFER
A-14, 17,18,
19
Releasing buffers
A-17, 19
REQUEST$BUFFER
A.12,
18, 22
Requesting
buffers A-18
RESET$INTERRUFT
A.44.
45
Response
pointer
A-3, 12
Restrictions
BND286 2-12
Compact
segmentation model
1-3
Connection
objects 3-3, 6
FORTRAN-286
code 2-8
Index-6 Pmgramming
Techniques
Restrictions (cont.)
Ilrge segmentation
model 1-3
Medium segmentation
model 1-3
PASCAL-286 code 2-6
Passing data between
jobs 3-2, 3
Passing objects between
jobs 3-6
Small segmentation model 1-3
Stack size 4-2
RESUME$TASK
A-3ó
RMXF|N.EXT 2.5,7,8
RMXIFC.LIB 2.1I, 12
RMXPAS.EXT
2-5,6,7
RMXPLM.EXT 2.5
ROM compiler control 1-2, 4
Root
job object
directory 3-5
S
S$GET$CONNECTION$STATUS
A.-6
S$GET$FILE$STATUS A-6
S$OPEN A-4,6,21
S$SEEK A-6
S$SPECIAL A-6,7,8
Screen I/O A-3, 20,35, 55
Segnent registers 7-1, 5-1, 2
Segnentation model
Assembly language calling conventions 2-2
Choosing the size 1-3,2-2, 3
Compact 1-2,2-2,3
Default
5-1
Interface libraries 2- I I
l-arge 1-2, 2-2, 5-1
Medíum 1-2,2-2
Small 1-2
Semaphores
Cataloging 3-4
Creations 3-4
Getting units from 3-5, A- 15
Looking up 3-5
Use in synchronization 3-4
SEND$MESSAGE A-12, 13, 14, 15, 18, 22,33,35,36,
57,70,72,73,74
SEND$UNITS
A.14, 15, 19
SET$EXCEPTION$HANDLER A-4, 5
SET$INTERRUM A.44, 47, 65
Setting terminal
attributes A-7
INDEX
Pmgramming Techniques Index-7
INDEX
SIGNAI]$INTERRUPT A.43, 46, 50,
64
Simultaneous
I/O A-3, 22
SLEEP A-47,66
Small applications
1-2, 3
Small segrnentation
model 1-2
Stack
Allocation in PASCAL-286
code 2-7
Computing size using
the arithmetic technique
4-3, 4
Computing
size using the empirical
technique 4-4
Interrupt requirements
4-3
Overflow 4-1, 2
Recursive code 4-2
Size for created
tasks andjobs 4-2
Size
for loaded or invoked tasks 2-12,
4-2, A,-37
Size limitation for
interrupt handlers 4-1, 3
System call requirements 4-3,4
Stream file 3-3
SUSPEND$TASK A-30, 32, 36
Synchronization
Tasks in different
jobs 3-4
Using semaphores 3-4
T
Task creation A-2, 9
Terminal
attributes A-2, 7
Terminal I/O A-20, 35, 55
u
UDI system calls 2-
11
UDI.EXT 2-5
UDIIFC,LIB 2-11, 12
Using iRMX@
system
calls 2- 1
w
WAIT$INTERRUM A-44, 47, 65
WAIT$IO A-2r, 22, 23, s7, s9
Writing code 2-1
Index-8 Progr-amming
Techniques
INTERNATIONAL
SALES
OFFICES
IN'TE
L CORPORAIION .]APAN
3065 Bowers Avenue Intel
Japan K.K
Sanîa Clara,
California
95051 Flower-HillShin-machi
1-23.9,5hrnmachi
EELGIUM Setagaya-ku, Tokyo
j
5
Intel
Corporation
5A
Rue
des Cottages
65 NETIIERLAND5
B-1180 Brussels tntel
Semiconductor
(Netherland
I V.)
Alexanderpoort
8u ild ing
DENMARK Marten Meesweg
93
Intel
Denmark A,/5 3068 Rotterdam
G lentevej
6î
-3rd
Floor
d
k-2400
Copenhagen NORWAY
lntel Norway
A"/5
ENG LAN
D P.O
Box
92
Intel
Corporation
(U
K.)
tID Hvamveien
4
Prper's
Way N-20l3,
Skjetten
Swindon,
Wiltshire
5N3
1RJ
sPAIN
FtN
LAND Inrel
tberia
lntel Finland
OY Calle Zurbaran
28-lZeDA
Ruosilante
2 28010 Madrid
00390
Helsinki
SWEDEN
FRANCE Intel
sweden A.B.
Intel
Paris Dalvaegen
24
1 Rue Edison-BP
303 5-171
36 Sotna
78054
5t.-Quenti n-en-Yvel
i nes
Cedex
5WI-TZERLAN
D
ISRAE L Intel
Semiconductor A.G.
Intel
Semiconductors
LTD. Talackerstrasse
17
Atidim
Industrial Park 8125
Glatrbrugg
Neve sharet CH-8065
Zu rich
P.O Box 43202
'f
el-Aviv 61430 WEsT
GERMANY
lntel
5em
icond
uctor G.
N.
B. H.
ITALY Seidlestrasse
27
Intel
Corporatron S.P.A. D-8000 Munchen
Milandf
iori,
Palazzo
El4
20090 Assago
(Milano)

