ES / ACS350 User’s Manual ACS350Manual
User Manual: ACS350Manual
Open the PDF directly: View PDF ![]() .
.
Page Count: 326 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Manuales del ACS350
- Seguridad
- Índice
- Acerca de este manual
- Descripción del hardware
- Instalación mecánica
- Planificación de la instalación eléctrica
- Contenido de este capítulo
- Selección del motor
- Conexión de la alimentación de CA
- Dispositivo de desconexión de la fuente de alimentación
- Protección contra cortocircuitos y sobrecarga térmica
- Selección de los cables de potencia
- Protección de los contactos de salida de relé y atenuación de perturbaciones en caso de cargas inductivas
- Compatibilidad con el dispositivo de intensidad residual (RCD)
- Selección de los cables de control
- Conexión de un sensor de temperatura del motor a la E/S del convertidor
- Recorrido de los cables
- Instalación eléctrica
- Lista de comprobación de la instalación
- Puesta en marcha, control a través de la E/S y Marcha de ID
- Paneles de control
- Contenido de este capítulo
- Acerca de los paneles de control
- Compatibilidad
- Panel de control básico
- Panel de control asistente
- Macros de aplicación
- Funciones del programa
- Contenido de este capítulo
- Asistente de arranque
- Control local frente a control externo
- Tipos de referencia y proceso
- Corrección de la referencia
- Entradas analógicas programables
- Salida analógica programable
- Entradas digitales programables
- Salidas de relé programables
- Entrada de frecuencia
- Salida de transistor
- Señales actuales
- Identificación del motor
- Funcionamiento con cortes de la red
- Magnetización por CC
- Desencadenantes de mantenimiento
- Retención por CC
- Paro con compensación de velocidad
- Frenado por flujo
- Optimización de flujo
- Rampas de aceleración y deceleración
- Velocidades críticas
- Velocidades constantes
- Relación U/f personalizada
- Ajuste del regulador de velocidad
- Cifras de rendimiento del control de velocidad
- Cifras de rendimiento del control del par
- Control escalar
- Compensación IR para un convertidor con control escalar
- Funciones de protección programables
- Fallos preprogramados
- Límites de funcionamiento
- Límite de potencia
- Restauraciones automáticas
- Supervisiones
- Bloqueo de parámetros
- Control PID
- Función dormir para el control PID de proceso (PID1)
- Medición de la temperatura del motor a través de la E/S estándar
- Control de un freno mecánico
- Avance lento
- Funciones temporizadas
- Temporizador
- Contador
- Programación de secuencias
- Señales actuales y parámetros
- Contenido de este capítulo
- Términos y abreviaturas
- Direcciones de bus de campo
- Equivalente de bus de campo
- Valores por defecto con diferentes macros
- Señales actuales
- Parámetros - lista de formas cortas
- Parámetros - descripciones completas
- 10 MARCHA/PARO/DIR
- 11 SELEC REFERENCIA
- 12 VELOC CONSTANTES
- 13 ENTRADAS ANALOG
- 14 SALIDAS DE RELE
- 15 SALIDAS ANALOG
- 16 CONTROLES SISTEMA
- 18 ENT FREC Y SAL TRA
- 19 TEMPOR Y CONTADOR
- 20 LIMITES
- 21 MARCHA/PARO
- 22 ACEL/DECEL
- 23 CTRL VELOCIDAD
- 24 CTRL PAR
- 25 VELOC CRITICAS
- 26 CONTROL MOTOR
- 29 DISP MANTENIMIENTO
- 30 FUNCIONES FALLOS
- 31 REARME AUTOMATIC
- 32 SUPERVISION
- 33 INFORMACION
- 34 PANTALLA PANEL
- 35 TEMP MOT MED
- 36 FUNCIONES TEMP
- 40 CONJ PID PROCESO 1
- 41 CONJ PID PROCESO 2
- 42 PID TRIM / EXT
- 43 CONTROL FRENO MEC
- 50 ENCODER
- 51 MOD COMUNIC EXT
- 52 COMUNIC PANEL
- 53 PROTOCOLO BCI
- 54 ENTR DATOS DE ABC
- 55 SAL DATOS DE ABC
- 84 PROG SECUENCIA
- 98 OPCIONES
- 99 DATOS DE PARTIDA
- Control de bus de campo con bus de campo encajado
- Contenido de este capítulo
- Descripción general del sistema
- Configuración de la comunicación a través de un Modbus encajado
- Parámetros de control del convertidor
- La interfase de control por bus de campo
- Referencias del bus de campo
- Correlación Modbus
- Perfiles de comunicación
- Control de bus de campo con adaptador de bus de campo
- Análisis de fallos
- Mantenimiento y diagnóstico del hardware
- Datos técnicos
- Contenido de este capítulo
- Especificaciones
- Tamaño del cable de potencia y fusibles
- Cables de potencia: tamaño de los terminales, diámetros máximos de los cables y pares de apriete
- Dimensiones, pesos y ruido
- Conexión de la alimentación de entrada
- Conexión del motor
- Conexiones de control
- Conexión de la resistencia de frenado
- Rendimiento
- Refrigeración
- Grados de protección
- Condiciones ambientales
- Materiales
- Normas aplicables
- Marcado CE
- Marcado C-Tick
- Marcado RoHS
- Marcado UL
- IEC/EN 61800-3 (2004) Definiciones
- Cumplimiento de la norma IEC/EN61800-3 (2004)
- Protección del producto en EE.UU.
- Resistencias de frenado
- Dimensiones
- Bastidores R0 y R1, IP20 (instalación en armario) / UL abierto
- Bastidores R0 y R1, IP20 / NEMA 1
- Bastidores R2, IP20 (instalación en armario) / UL abierto
- Bastidores R2, IP20 / NEMA 1
- Bastidores R3, IP20 (instalación en armario) / UL abierto
- Bastidores R3, IP20 / NEMA 1
- Bastidores R4, IP20 (instalación en armario) / UL abierto

ACS350
Manual del usuario
Convertidores de frecuencia ACS350
(0,37 a 22 kW, 0,5 a 30 CV)

Manuales del ACS350
MANUALES DE OPCIONES (entregados con el equipo opcional)
FCAN-01 CANopen Adapter Module User’s Manual
3AFE68615500 (EN)
FDNA-01 DeviceNet Adapter Module User’s Manual
3AFE68573360 (EN)
FMBA-01 Modbus Adapter Module User’s Manual
3AFE68586704 (EN)
FPBA-01 PROFIBUS DP Adapter Module User’s Manual
3AFE68573271 (EN)
FRSA-00 RS-485 Adapter Board User’s Manual
3AFE68640300 (EN)
MFDT-01 FlashDrop User’s Manual
3AFE68591074 (EN)
MPOT-01 Potentiometer Module Instructions for Installation and Use
3AFE68591082 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MTAC-01 Pulse Encoder Interface Module User’s Manual
3AFE68591091 (EN)
MUL1-R1 Installation Instructions for ACS150 and ACS350
3AFE68642868 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MUL1-R3 Installation Instructions for ACS150 and ACS350
3AFE68643147 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MANUALES DE MANTENIMIENTO
Guide for Capacitor Reforming in ACS50/150/350/550
3AFE68735190 (EN)

Convertidores de frecuencia ACS350
0,37 a 22 kW
0,5 a 30 CV
Manual del usuario
3AFE68599458 Rev D
ES
EFECTIVO: 30.09.2007
© 2007 ABB Oy. Todos los derechos reservados.
Seguridad
5
Seguridad
Contenido de este capítulo
En este capítulo se presentan las instrucciones de seguridad que deben observarse
durante la instalación, el manejo y el servicio del convertidor. Su incumplimiento
puede ser causa de lesiones físicas y muerte o puede dañar el convertidor de
frecuencia, el motor o la maquinaria accionada. Es importante leer estas
instrucciones antes de iniciar cualquier trabajo en el convertidor.
Uso de los símbolos de advertencia
Existen dos tipos de advertencias de seguridad en este manual:
Tareas de instalación y mantenimiento
Estas advertencias se destinan a todos aquellos que trabajen con el convertidor, el
cable a motor o el motor.
¡ADVERTENCIA! Si no se observan las siguientes instrucciones, pueden
producirse lesiones físicas o la muerte, o daños en el equipo.
Sólo podrá efectuar la instalación y el mantenimiento del convertidor de
frecuencia un electricista cualificado
• No intente trabajar en el convertidor, el cable a motor o el motor cuando está
conectada la alimentación de entrada. Tras desconectar la alimentación de
entrada, espere siempre 5 minutos a que se descarguen los condensadores del
circuito intermedio antes de trabajar en el convertidor de frecuencia, el motor o el
cable a motor.
Con un multímetro (impedancia mínima de 1 Mohmio), verifique siempre que:
1. No haya tensión entre las fases de entrada del convertidor U1, V1 y W1 y
tierra.
2. No haya tensión entre los terminales BRK+ y BRK- y tierra.
• No manipule los cables de control cuando el convertidor o los circuitos de control
externo reciban alimentación. Los circuitos de control alimentados de forma
externa pueden conducir tensión peligrosa incluso con la alimentación del
convertidor desconectada.
• No realice pruebas de aislamiento o de resistencia con el convertidor.
La advertencia Electricidad previene de situaciones en que las altas
tensiones pueden causar lesiones físicas y/o daños al equipo.
La advertencia General previene de situaciones que pueden causar
lesiones físicas y/o daños al equipo por otros medios no eléctricos.
Seguridad
6
• Si se instala un convertidor de frecuencia cuyo filtro EMC no está desconectado
en una red IT (un sistema de alimentación sin conexión a tierra o con conexión a
tierra de alta resistencia -por encima de 30 ohmios), el sistema se conectará al
potencial de tierra a través de los condensadores del filtro EMC del convertidor
de frecuencia. Esto podría entrañar peligro o provocar daños en el convertidor.
• Si se instala un convertidor de frecuencia cuyo filtro EMC no está desconectado
en un sistema TN con conexión a tierra en un vértice, el convertidor resultará
dañado.
Nota:
• Incluso con el motor parado, existe una tensión peligrosa en los terminales del
circuito de potencia U1, V1, W1 y U2, V2, W2 y BRK+ y BRK-.
¡ADVERTENCIA! Si no se observan las siguientes instrucciones, pueden
producirse lesiones físicas o la muerte, o daños en el equipo.
• El convertidor no puede repararse en el emplazamiento. No intente nunca
reparar un convertidor defectuoso; póngase en contacto con su representante
local de ABB o con su Centro de Servicio Autorizado para su sustitución.
• Asegúrese de que el polvo resultante de taladrar orificios no se introduzca en el
convertidor de frecuencia durante la instalación. El polvo conductor de la
electricidad dentro del convertidor de frecuencia puede causar daños o un
funcionamiento incorrecto.
• Procure una refrigeración adecuada.
Funcionamiento y puesta en marcha
Estas advertencias se destinan a los encargados de planificar el uso, poner en
marcha o utilizar el convertidor.
¡ADVERTENCIA! Si no se observan las siguientes instrucciones, pueden
producirse lesiones físicas o la muerte, o daños en el equipo.
• Antes de ajustar el convertidor de frecuencia y ponerlo en servicio, verifique que
el motor y todo el equipo accionado sean idóneos para el funcionamiento en todo
el rango de velocidad proporcionado por el convertidor de frecuencia. El
convertidor de frecuencia puede ajustarse para hacer funcionar el motor a
velocidades por encima y por debajo de la velocidad obtenida al conectarlo
directamente a la red de alimentación.
• No active las funciones de restauración automática de fallos si existe la
posibilidad de que se produzcan situaciones peligrosas. Cuando se activan,
estas funciones restauran el convertidor y reanudan el funcionamiento tras un
fallo.
• No controle el motor con un contactor de CA o un dispositivo de desconexión
(red); en lugar de ello, utilice las teclas de marcha y paro del panel de control,
y , o comandos externos (E/S o bus de campo). El número máximo
permitido de ciclos de carga de los condensadores de CC (es decir, puestas en
marcha al suministrar alimentación) es dos por minuto y el máximo número total
de cargas es de 15.000.

Seguridad
7
Nota:
• Si se selecciona una fuente externa para la orden de marcha y está ACTIVADA,
el convertidor de frecuencia se pondrá en marcha de forma inmediata tras una
interrupción de la tensión de entrada o una restauración de fallos, a menos que
se configure para una marcha/paro de 3 hilos (por pulso).
• Cuando el lugar de control no se ha ajustado en local (no aparece LOC en la
pantalla), la tecla de paro del panel de control no detendrá el convertidor. Para
detenerlo con el panel de control, pulse la tecla LOC/REM y, a continuación,
la tecla de paro .
LOC
REM

Seguridad
8

Índice
9
Índice
Manuales del ACS350 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Seguridad
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Uso de los símbolos de advertencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Tareas de instalación y mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Funcionamiento y puesta en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Índice
Acerca de este manual
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Compatibilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Destinatarios previstos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Categorización según el tamaño de bastidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Consultas relativas a productos y servicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Formación relativa a productos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Cómo opinar acerca de los manuales de convertidores de ABB . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Diagrama de flujo de la instalación y la puesta a punto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Descripción del hardware
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Sinopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Sinopsis: conexiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Código de tipo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Instalación mecánica
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Desembalaje del convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Comprobación a la entrega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Antes de la instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Requisitos del emplazamiento de instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Montaje del convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Monte el convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Atornille las placas de fijación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Añada el módulo de bus de campo opcional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30

Índice
10
Planificación de la instalación eléctrica
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Selección del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Conexión de la alimentación de CA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Dispositivo de desconexión de la fuente de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Protección contra cortocircuitos y sobrecarga térmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Protección contra cortocircuitos en el convertidor o en el cable de suministro . . . . . . . . . . . . . 32
Protección contra cortocircuitos en el motor y en el cable a motor . . . . . . . . . . . . . . . . . . . . . . 33
Protección contra sobrecarga térmica del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Selección de los cables de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Reglas generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Otros tipos de cables de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Pantalla del cable a motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Requisitos EE.UU. adicionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Protección de los contactos de salida de relé y atenuación de perturbaciones
en caso de cargas inductivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Compatibilidad con el dispositivo de intensidad residual (RCD) . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Selección de los cables de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Cable de relé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Cable del panel de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Conexión de un sensor de temperatura del motor a la E/S del convertidor . . . . . . . . . . . . . . . . . . 37
Recorrido de los cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Conductos para cables de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Instalación eléctrica
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Comprobación del aislamiento del conjunto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Cable de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Motor y cable a motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Conexión de los cables de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Diagrama de conexiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Procedimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Conexión de los cables de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Terminales de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Procedimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Lista de comprobación de la instalación
Lista de comprobación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45

Índice
11
Puesta en marcha, control a través de la E/S y Marcha de ID
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Cómo poner en marcha el convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Cómo poner en marcha del convertidor sin panel de control . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Cómo realizar una puesta en marcha limitada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Cómo realizar una puesta en marcha guiada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Cómo controlar el convertidor a través de la interfase de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Realización de una Marcha de ID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Procedimiento para la Marcha de ID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Paneles de control
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Acerca de los paneles de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Compatibilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Panel de control básico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Descripción general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Modo de Salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Modo de Referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Modo de Parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Modo de Copia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Códigos de alarma del panel de control básico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Panel de control asistente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Descripción general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Modo de Salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Modo de Parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Modo de Asistentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Modo de Parámetros modificados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Modo del Registrador de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Modo de Fecha y hora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Modo de Copia de seguridad de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Modo de Ajustes de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Macros de aplicación
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Sinopsis de las macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Resumen de conexiones de E/S de las macros de aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Macro Estándar ABB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Macro de 3 hilos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Macro alterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Macro de potenciómetro del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92

Índice
12
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Macro Manual/Auto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Macro de Control PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Macro de Control de par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Conexiones de E/S por defecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Macros de Usuario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Funciones del programa
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Asistente de arranque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Orden predeterminado de las tareas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Lista de las tareas y los parámetros relevantes del convertidor . . . . . . . . . . . . . . . . . . . . . . . . 98
Contenido de las pantallas del asistente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Control local frente a control externo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Control local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Control externo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Diagrama de bloques: origen de marcha, paro y dirección para EXT1 . . . . . . . . . . . . . . . . . . 101
Diagrama de bloques: origen de referencia para EXT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Tipos de referencia y proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Corrección de la referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Entradas analógicas programables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Salida analógica programable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Entradas digitales programables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Salidas de relé programables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Entrada de frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Salida de transistor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Señales actuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109

Índice
13
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Identificación del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Funcionamiento con cortes de la red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Magnetización por CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Desencadenantes de mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Retención por CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Paro con compensación de velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Frenado por flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Optimización de flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Rampas de aceleración y deceleración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Velocidades críticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Velocidades constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Relación U/f personalizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Ajuste del regulador de velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Cifras de rendimiento del control de velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Cifras de rendimiento del control del par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Control escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Compensación IR para un convertidor con control escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Funciones de protección programables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
EA<Min . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Pérdida del panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Fallo externo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Protección de motor bloqueado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Protección térmica del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Protección de baja carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Protección de fallo a tierra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Cableado incorrecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Pérdida de fase de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Fallos preprogramados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Sobreintensidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Sobretensión de CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Subtensión de CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Temperatura del convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121

Índice
14
Cortocircuito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Fallo interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Límites de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Límite de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Restauraciones automáticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Supervisiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Bloqueo de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Control PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Regulador de proceso PID1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Regulador externo/trim PID2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Diagramas de bloques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Función dormir para el control PID de proceso (PID1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Medición de la temperatura del motor a través de la E/S estándar . . . . . . . . . . . . . . . . . . . . . . . 127
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Control de un freno mecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Esquema del tiempo de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Cambios de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Avance lento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Funciones temporizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Temporizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Contador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Programación de secuencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Ajustes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Diagnósticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141

Índice
15
Señales actuales y parámetros
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Términos y abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Direcciones de bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Equivalente de bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Valores por defecto con diferentes macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Señales actuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
01 DATOS FUNCIONAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
03 SEÑALES ACT BC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
04 HISTORIAL FALLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Parámetros – lista de formas cortas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Parámetros – descripciones completas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
10 MARCHA/PARO/DIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
11 SELEC REFERENCIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
12 VELOC CONSTANTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
13 ENTRADAS ANALOG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
14 SALIDAS DE RELE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
15 SALIDAS ANALOG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
16 CONTROLES SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
18 ENT FREC Y SAL TRA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
19 TEMPOR Y CONTADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
20 LIMITES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
21 MARCHA/PARO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
22 ACEL/DECEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
23 CTRL VELOCIDAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
24 CTRL PAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
25 VELOC CRITICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
26 CONTROL MOTOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
29 DISP MANTENIMIENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
30 FUNCIONES FALLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
31 REARME AUTOMATIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
32 SUPERVISION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
33 INFORMACION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
34 PANTALLA PANEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
35 TEMP MOT MED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
36 FUNCIONES TEMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
40 CONJ PID PROCESO 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
41 CONJ PID PROCESO 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
42 PID TRIM / EXT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
43 CONTROL FRENO MEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
50 ENCODER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
51 MOD COMUNIC EXT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
52 COMUNIC PANEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
53 PROTOCOLO BCI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
54 ENTR DATOS DE ABC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
55 SAL DATOS DE ABC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
84 PROG SECUENCIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
98 OPCIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
99 DATOS DE PARTIDA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251

Índice
16
Control de bus de campo con bus de campo encajado
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
Descripción general del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
Configuración de la comunicación a través de un Modbus encajado . . . . . . . . . . . . . . . . . . . . . 257
Parámetros de control del convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
La interfase de control por bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
Código de control y código de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Valores actuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Referencias del bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Selección y corrección de la referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Escalado de la referencia de bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
Tratamiento de referencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Adaptación a escalado del valor actual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Correlación Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
Correlación de registros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
Códigos de función . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Códigos de excepción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Perfiles de comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
Perfil de comunicación ABB Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
Perfil de comunicación DCU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
Control de bus de campo con adaptador de bus de campo
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Descripción general del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Configuración de la comunicación a través de un módulo adaptador de bus de campo . . . . . . . 280
Parámetros de control del convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
La interfase de control por bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
Perfil de comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
Referencias del bus de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Análisis de fallos
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Indicaciones de alarma y fallo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Método de restauración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Historial de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Mensajes de alarma generados por el convertidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
Alarmas generadas por el Panel de control básico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
Fallos del bus de campo encajado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
Sin dispositivo maestro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
Direcciones de dispositivos iguales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
Cableado incorrecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295

Índice
17
Mantenimiento y diagnóstico del hardware
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Intervalos de mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Ventilador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Sustitución del ventilador (R1 ... R4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Condensadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Reacondicionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Panel de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
Limpieza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
Pila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
Datos técnicos
Contenido de este capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Especificaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Intensidad y potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Símbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Dimensionado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Derrateo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Requisitos del flujo de aire de refrigeración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
Tamaño del cable de potencia y fusibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
Cables de potencia: tamaño de los terminales, diámetros máximos de los cables y
pares de apriete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
Dimensiones, pesos y ruido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
Símbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
Conexión de la alimentación de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
Conexión del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
Conexiones de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Conexión de la resistencia de frenado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Rendimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Refrigeración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Grados de protección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Condiciones ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
Materiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
Marcado CE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Cumplimiento de la Directiva EMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Cumplimiento de la norma EN 61800-3 (2004) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Marcado C-Tick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Cumplimiento de IEC 61800-3 (2004) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Marcado RoHS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Normas aplicables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Marcado UL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
IEC/EN 61800-3 (2004) Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
Cumplimiento de la norma IEC/EN61800-3 (2004) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
Protección del producto en EE.UU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313

Índice
18
Resistencias de frenado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
Selección de la resistencia de frenado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
Instalación y conexión eléctrica de las resistencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
Protección de circuitos obligatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
Configuración de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
Dimensiones
Bastidores R0 y R1, IP20 (instalación en armario) / UL abierto . . . . . . . . . . . . . . . . . . . . . . . . . . 318
Bastidores R0 y R1, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
Bastidores R2, IP20 (instalación en armario) / UL abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
Bastidores R2, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
Bastidores R3, IP20 (instalación en armario) / UL abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
Bastidores R3, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
Bastidores R4, IP20 (instalación en armario) / UL abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
Acerca de este manual
19
Acerca de este manual
Contenido de este capítulo
Este capítulo describe los destinatarios previstos y la compatibilidad de este
manual. Contiene asimismo un diagrama de flujo con los pasos de comprobación de
los elementos entregados, de instalación y de puesta a punto del convertidor de
frecuencia. El diagrama de flujo hace referencia a capítulos/apartados de este
mismo manual.
Compatibilidad
El manual es compatible con la versión de firmware 2.52b o posterior del convertidor
de frecuencia ACS350. Véase el parámetro 3301 VERSION DE FW.
Destinatarios previstos
Este manual se destina a los encargados de planificar la instalación, instalar, poner
a punto, utilizar y realizar el servicio del convertidor de frecuencia. Lea el manual
antes de realizar tareas en el mismo. Se presupone que el lector conoce los
fundamentos relativos a la electricidad, las conexiones eléctricas, los componentes
eléctricos y los símbolos esquemáticos eléctricos.
Este manual se ha redactado para lectores en todo el mundo. Las unidades
utilizadas son las imperiales y las del SI. Se facilitan instrucciones especiales para
USA para la instalación en los Estados Unidos.
Categorización según el tamaño de bastidor
El ACS350 se fabrica en los tamaños de bastidor R0 ... R4. Algunas instrucciones,
datos técnicos y dibujos de dimensiones que conciernen solamente a determinados
tamaños de bastidor se designan con el símbolo del bastidor (R0 ... R4). Para
identificar el tamaño de bastidor de su convertidor, consulte las tablas de
especificaciones en la página 302 del capítulo Datos técnicos.
Consultas relativas a productos y servicios
Dirija cualquier consulta relacionada con el producto a su representante de ABB
local, indicando el tipo de código y el número de serie de la unidad en cuestión.
Puede consultar una lista de contactos de ventas, asistencia y servicio si entra en
www.abb.com/drives y selecciona Drives – Sales, Support and Service network.
Formación relativa a productos
Para obtener información relacionada con cursos de formación de productos ABB,
entre en www.abb.com/drives y seleccione Drives – Training courses.

Acerca de este manual
21
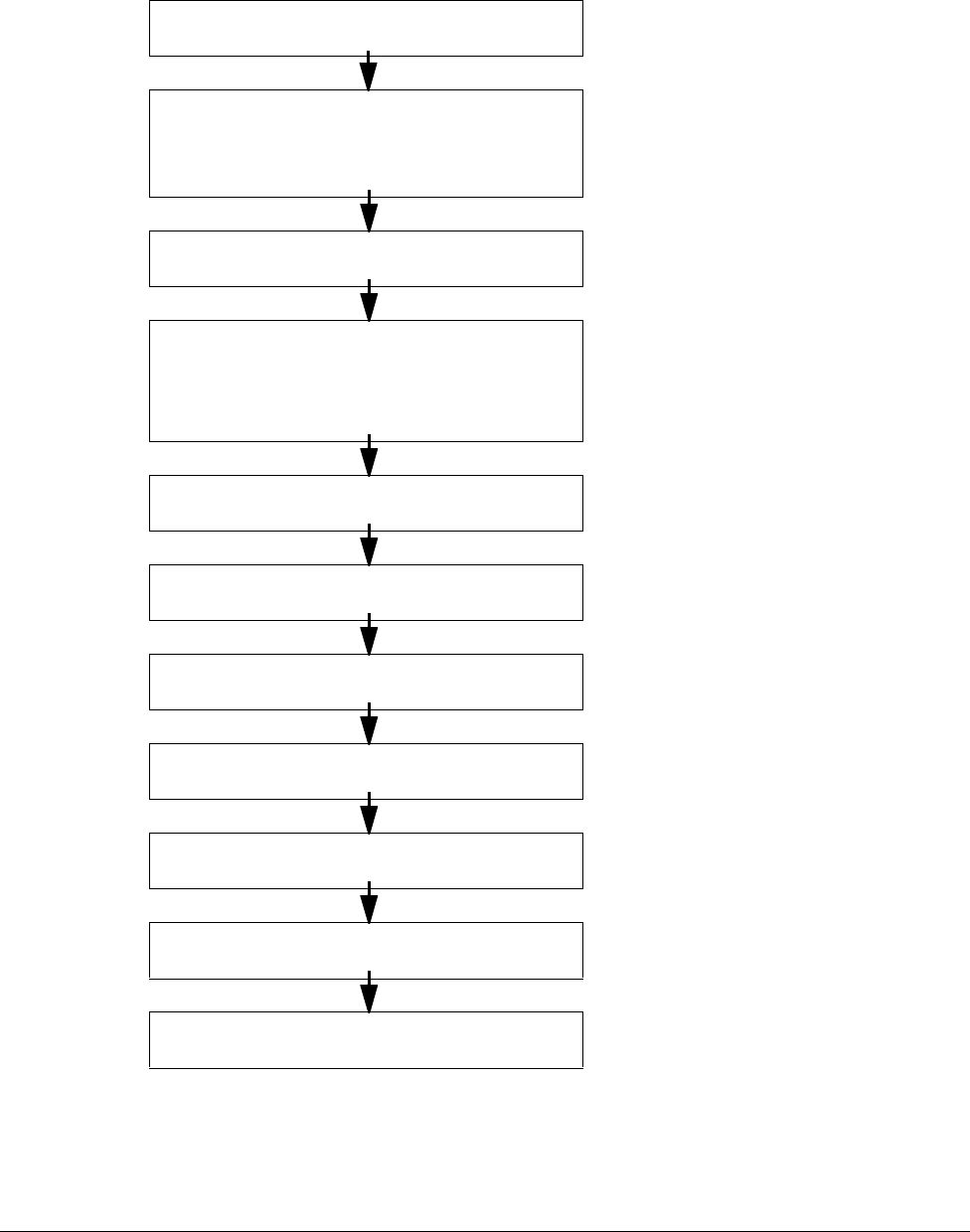
Diagrama de flujo de la instalación y la puesta a punto
Tarea Véase
Identificar el tamaño de bastidor de su convertidor:
R0...R4. Datos técnicos: Especificaciones en la página
302
Planificar la instalación: seleccionar los cables, etc.
Comprobar las condiciones ambientales,
especificaciones y flujo de aire de refrigeración
necesario.
Planificación de la instalación eléctrica en la
página 31
Datos técnicos en la página 302
Desembalar y comprobar el convertidor. Instalación mecánica: Desembalaje del
convertidor en la página 27
Si el convertidor de frecuencia va a conectarse a una
red IT (sin conexión de neutro a tierra) o con un
sistema de conexión a tierra en un vértice,
compruebe que el filtro EMC interno no esté
conectado.
Descripción del hardware: Código de tipo en la
página 25 Instalación eléctrica: Conexión de
los cables de potencia en la página 40
Instalar el convertidor de frecuencia en una pared o
en un armario. Instalación mecánica en la página 27
Disponer los cables. Planificación de la instalación eléctrica:
Recorrido de los cables en la página 37
Comprobar el aislamiento del cable de alimentación y
del motor y el cable a motor. Instalación eléctrica: Comprobación del
aislamiento del conjunto en la página 39
Conectar los cables de potencia. Instalación eléctrica: Conexión de los cables de
potencia en la página 40
Conectar los cables de control. Instalación eléctrica: Conexión de los cables de
control en la página 42
Comprobar la instalación. Lista de comprobación de la instalación en la
página 45
Poner a punto el convertidor. Puesta en marcha, control a través de la E/S y
Marcha de ID en la página 47

Acerca de este manual
22
Descripción del hardware
23
Descripción del hardware
Contenido de este capítulo
Este capítulo describe brevemente la estructura y la información sobre el código de
tipo del convertidor de frecuencia.
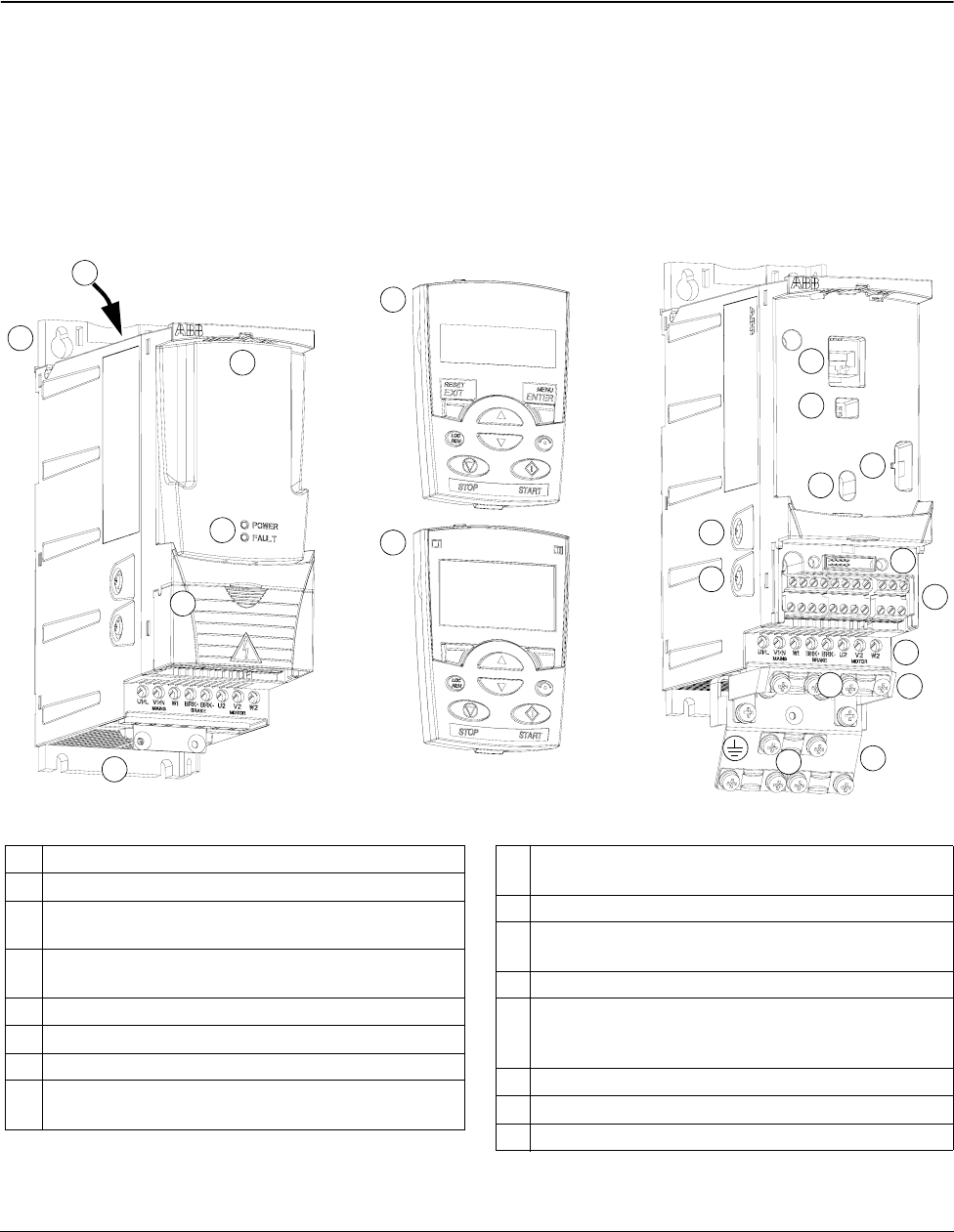
Sinopsis
El ACS350 es un convertidor de frecuencia de montaje en armario o pared para el
control de motores de CA. La estructura de los bastidores R0 a R4 varía ligeramente.
9 Tornillo de conexión a tierra del filtro EMC (EMC).
Nota: El tornillo está en frente del bastidor R4.
10 Tornillo de conexión a tierra del varistor (VAR)
11 Conexión del adaptador de bus de campo (módulo de
comunicación serie)
12 Conexiones de E/S
13 Conexión de la alimentación de entrada (U1, V1,
W1), conexión de la resistencia de frenado (BRK+,
BRK-) y conexión del motor (U2, V2, W2)
14 Placa de fijación de E/S
15 Placa de fijación
16 Abrazaderas
1 Salida de refrigeración por la cubierta superior
2 Orificios de montaje
3 Cubierta del panel (a) / Panel de control básico (b) /
Panel de control asistente (c)
4 Cubierta de terminales (o unidad de potenciómetro
opcional MPOT-01)
5 Conexión del panel
6 Conexión de dispositivos opcionales
7 Conexión FlashDrop
8 LED de POWER (en marcha) y FAULT (fallo) (véase
LED en la página 299)
Sin las cubiertas (R0 y R1)Con las cubiertas (R0 y R1)
1
2
3a
4
5
7
13
12
11
9
3b
3c
8
6
8
10
14
15
16
16
EMC VAR
EMC VAR
2
Descripción del hardware
24
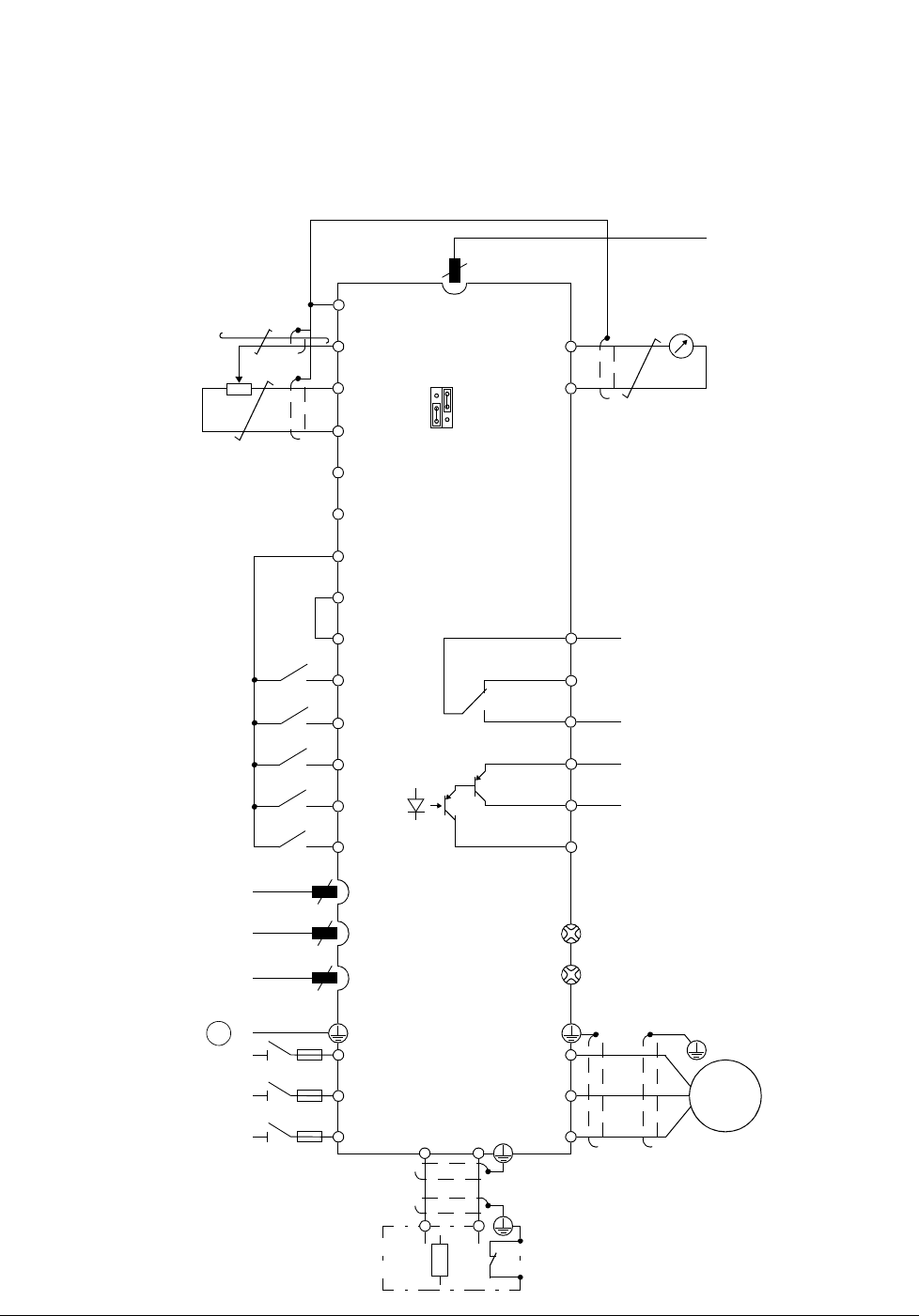
Sinopsis: conexiones
El siguiente diagrama proporciona una visión general de las conexiones. Las
conexiones de E/S son parametrizables.El diagrama presenta las conexiones de E/
S por defecto para la macro estándar ABB. Véase el capítulo Macros de aplicación
para las conexiones de E/S de las diferentes macros y el capítulo Instalación
eléctrica para la instalación en general.
DI1
Marcha/Paro
DI2
Avance/Retroceso
DI3
Selección de
velocidad
DI4
Selección de
velocidad
DI5
Selección de
aceler. y deceler. 1)
Entrada digital común
Salida de tensión auxiliar
común
+24 V
Salida de tensión aux
+24 VCC, máx. 200 mA
DOSRC
GND
DCOM
DOOUT
DOGND
RONO
RONC
Salida digital, tipo transistor
30 VCC, máx. 100 mA
Salida de relé
250 VCA / 30 VCC
V
mA
GND
Circuito de entrada
analógica común
+10VTensión de referencia
+10 VCC, máx 10 mA
AI2
No se utiliza por defecto
GND
Circuito de entrada analógica
común
AI1Frecuencia de salida/Ref.
velocidad, 0…10 V
SCRPantalla
AO
GND
máx. 500 ohm
Frecuencia de salida
0…20 mA
AI1
AI2
FlashDrop
Adaptador de bus de campo
DeviceNet, PROFIBUS DP,
CANopen,
Modbus RTU (RS-485)
U1
V1
W1
L1
L2
L3
Entrada de alimentación
trifásica
U2
V2
W2
Motor de CA
M
3 ~
BRK+ BRK-
t°
Generador de pulsos
Resistencia de frenado
EMC
VAR
Tornillo de conexión a tierra del
filtro EMC
Tornillo de conexión a tierra del
varistor
ROCOM
PE
10
6
6
1…10
kohm Circuito de salida
analógica común
8
PROGRAMMABLE DIGITAL
INPUTS (ABB Standard
macro defaults shown)
chopper de
SALIDAS DE RELÉ
Y DIGITALES
PROGRAMABLES
1) La ED5 también se puede usar
como entrada de frecuencia
Panel de control (RJ-45)
Modbus RTU (RS-232)
Descripción del hardware
25
Código de tipo
El código de tipo contiene información acerca de las especificaciones y la
configuración del convertidor. Puede verlo en la etiqueta de designación de tipo
fijada en el convertidor de frecuencia. Los primeros dígitos, empezando por la
izquierda, indican la configuración básica, por ejemplo ACS350-03E-08A8-4; las
selecciones opcionales se indican a continuación, separadas por signos "+", por
ejemplo +J404. A continuación se describen las selecciones del código de tipo.
ACS350-03E-08A8-4+J404+ ..
.
Serie de producto ACS350
01 = entrada monofásica
03 = entrada trifásica
Monofásico/Trifásico
En el formato xxAy, xx indica la parte entera e y la parte fraccionaria;
p. ej., 08A8 significa 8,8 A. Para más información
véase el apartado Especificaciones en la página 302.
Especificación de intensidad de salida
2 = 200 a 240 V CA
4 = 380 a 480 V CA
Intervalo de tensión de entrada
E = filtro EMC conectado, frecuencia: 50 Hz
U = filtro EMC desconectado, frecuencia: 60 Hz
Configuración
J404 = ACS-CP-C Panel de control básico
J400 = ACS-CP-A Panel de controla asistente (Area 1: permite trabajar con los idiomas siguientes: EN,
EN (AM), DE, IT, ES, PT, NL, FR, DA, FI, SV)
J416 =ACS-CP-LPanel de control asistente (Area 2: permite trabajar con los idiomas siguientes: EN,
DE, RU, PL, TR, CS)
J402 = Potenciómetro MPOT-01
K451 = DeviceNet FDNA-01
K454 = PROFIBUS DP FPBA-01
K457 = CANopen FCAN-01
K458 = Modbus RTU FMBA-01
Opciones

Descripción del hardware
26

Instalación mecánica
27
Instalación mecánica
Contenido de este capítulo
Este capítulo describe el procedimiento de instalación mecánica del convertidor de
frecuencia.
Desembalaje del convertidor
El convertidor de frecuencia (1) se entrega en un embalaje que también contiene los
siguientes elementos (en la figura se muestra el tamaño de bastidor R1):
• bolsa de plástico (2) con la placa de fijación (usada también para los cables de E/
S en los bastidores R3 y R4), la placa de fijación de E/S (para bastidores R0 a
R2), la placa de conexión a tierra opcional de bus de campo, abrazaderas y
tornillos
• cubierta del panel (3)
• plantilla de montaje, integrada en el embalaje (4)
• manual del usuario (5)
• posibles elementos opcionales (bus de campo, potenciómetro y generador de
pulsos, todos con instrucciones, panel de control básico o panel de control
asistente ).
1
2 53
POWER
FAULT
4
Instalación mecánica
28
Comprobación a la entrega
Compruebe que no existan indicios de daños. En caso de detectar componentes
dañados, notifíquelo inmediatamente al transportista.
Antes de intentar efectuar la instalación e iniciar el manejo, compruebe la
información de la etiqueta de designación de tipo para verificar que el convertidor
sea del tipo adecuado. La etiqueta de designación de tipo está situada en el lado
izquierdo del convertidor de frecuencia. A continuación se muestra una etiqueta de
ejemplo con la explicación de su contenido.
Antes de la instalación
El ACS350 se puede instalar en una pared o en un armario. Compruebe los
requisitos de protección por si es necesario usar la opción NEMA 1 en instalaciones
en pared (véase el capítulo Datos técnicos).
El convertidor se puede montar de tres formas distintas, según el tamaño del
bastidor:
a) montaje trasero (todos los tamaños de bastidor),
b) montaje lateral (tamaños de bastidor R0 a R2),
c) montaje sobre guías DIN (todos los tamaños de bastidor).
La unidad debe instalarse en posición vertical. Compruebe el emplazamiento de
instalación de conformidad con los requisitos siguientes. Remítase al capítulo
Dimensiones para obtener detalles del bastidor.
Requisitos del emplazamiento de instalación
Véase el capítulo Datos técnicos acerca de las condiciones de funcionamiento
permitidas para el convertidor de frecuencia.
Pared
La pared debe presentar la máxima verticalidad y uniformidad posibles, ser de
material ignífugo y lo bastante resistente para soportar el peso del convertidor.
Suelo
El suelo/material debajo de la instalación debe ser ignífugo.
$&6($
,38/2SHQW\SH
OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
N:+3 61<::5;;;;
8 a«9
OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
, $
I «+]
8 a«89
, $PLQ5R+6
I
«
+]
Etiqueta de designación de tipo
1
Código de tipo; véase la sección
Código de tipo
en la página
25
.
2
Grado de protección (IP y UL/NEMA).
3
Especificaciones nominales; véase la sección
Especificaciones
en la página
302
.
4
Número de serie en el formato YWWRXXXXWS, donde
Y: 5 a 9, A, ... para 2005 ... 2009, 2010, ...
WW: 01, 02, 03, ... para semana 1, semana 2, semana 3,
...
R: A, B, C, ... para el número de revisión del producto
XXXX: Entero que se inicia cada semana a partir de 0001
5
Código MRP ABB del convertidor.
6
Marca CE y marcas C-Tick y C-UL US y RoHS (la etiqueta de
su convertidor muestra la marca válida en su caso).
2
3
4
5
1
6
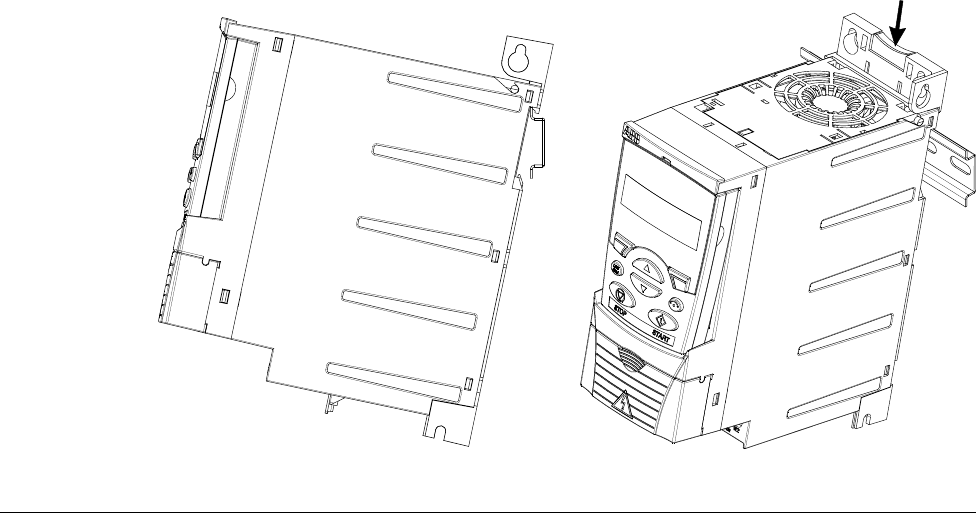
Instalación mecánica
29
Espacio libre alrededor del convertidor
El espacio libre necesario para refrigeración por encima y por debajo del convertidor
es de 75 mm (3 pulgadas). No se requiere espacio libre en los laterales del
convertidor, de manera que pueden montarse uno al lado de otro.
Montaje del convertidor
Monte el convertidor
Nota: Asegúrese de que el polvo resultante de taladrar orificios no se introduzca en
el convertidor de frecuencia durante la instalación.
Con tornillos
1. Señale el emplazamiento de los orificios utilizando, por ejemplo, la plantilla de
montaje recortada del embalaje. El emplazamiento de los orificios también se
muestra en los diagramas del capítulo Dimensiones. El número y emplazamiento
de los orificios utilizados varían en función de cómo se monta el convertidor:
a) montaje trasero (tamaños de bastidor R0 a R4): cuatro orificios
b) montaje lateral (tamaños de bastidor R0 a R2): tres orificios; uno de los
orificios inferiores está situado en la placa de fijación.
2. Fije los tornillos o tuercas en las ubicaciones señaladas.
3. Coloque el convertidor sobre la pared con la ayuda de los tornillos fijados en el
paso anterior.
4. Apriete los tornillos de modo que queden fijados sólidamente a la pared.
Sobre guía DIN
1. Encaje el convertidor en la guía tal como se muestra a continuación en la figura
a. Para soltar el convertidor, presione sobre la palanca de liberación situada en la
parte superior del convertidor, tal como se muestra en la figura b.
ab
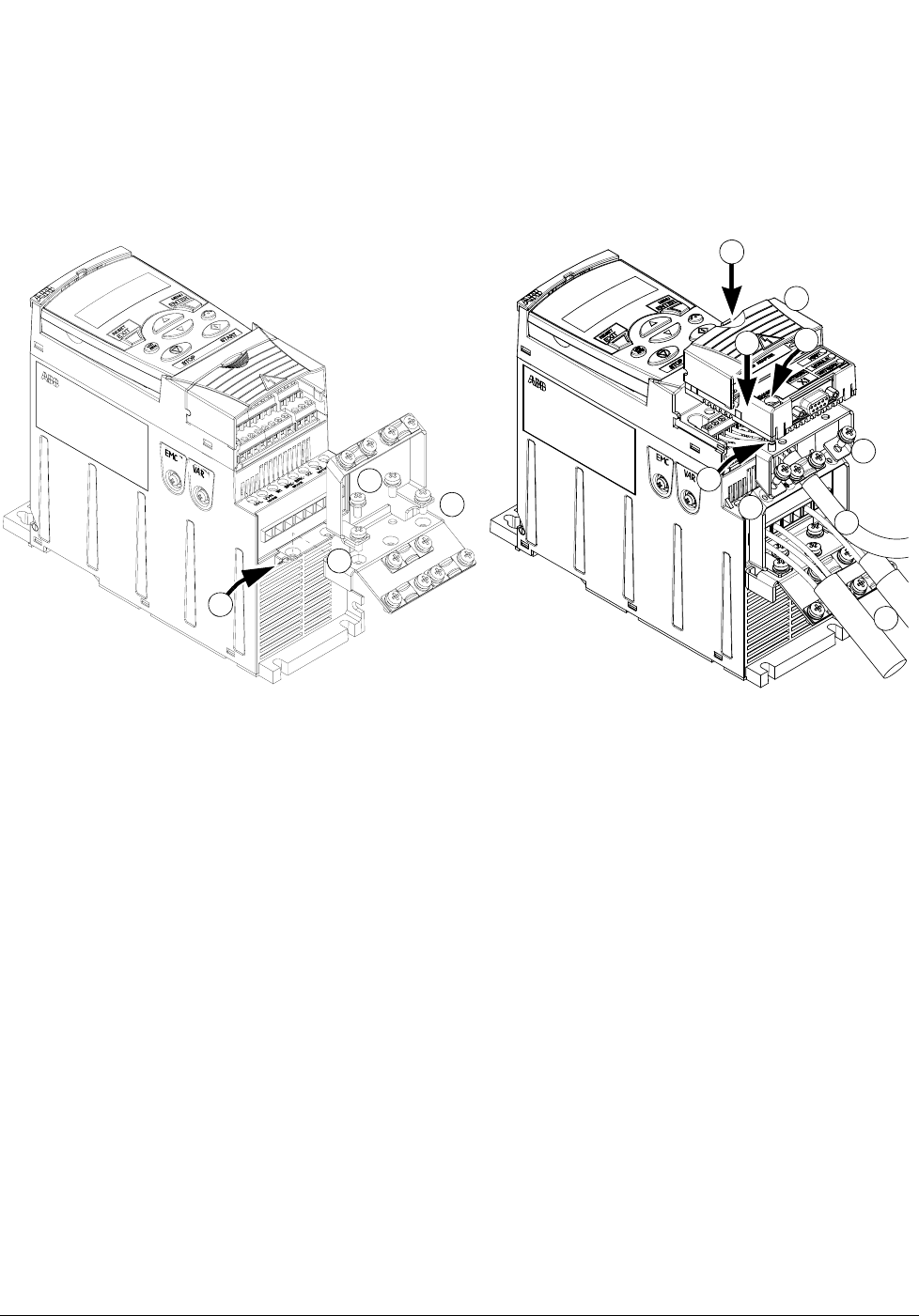
Instalación mecánica
30
Atornille las placas de fijación
Véase la figura a a continuación.
1. Atornille la placa de fijación a la placa situada en la parte inferior del convertidor
de frecuencia con los tornillos suministrados.
2. Atornille la placa de fijación de E/S a la placa de fijación (bastidores R0 a R2) con
los tornillos suministrados.
Añada el módulo de bus de campo opcional
Véase la figura b anterior.
3. Conecte los cables de potencia y de control tal como se describe en el capítulo
Instalación eléctrica.
4. Coloque el módulo de bus de campo sobre la placa de conexión a tierra y apriete
el tornillo de conexión a tierra situado en la esquina izquierda del módulo de bus
de campo. De esta manera el módulo queda fijado a la placa de conexión a tierra
opcional.
5. Si la cubierta de terminales aún no está retirada, presione el hueco de la cubierta
y, simultáneamente, deslícela hasta sacarla del bastidor.
6. Coloque el módulo de bus de campo unido a la placa de conexión a tierra
opcional en posición, de manera que el módulo encaje en la conexión de la parte
frontal del convertidor y los orificios de los tornillos en la placa de conexión a
tierra opcional y la placa de fijación de E/S queden alineados.
7. Fije la placa de conexión a tierra opcional a la placa de fijación de E/S con los
tornillos suministrados.
8. Deslice la cubierta de terminales hasta colocarla de nuevo en su posición.
2
a b
2
3
4
7
8
3
7
6
5
1
4
1
Planificación de la instalación eléctrica
31
Planificación de la instalación eléctrica
Contenido de este capítulo
Este capítulo contiene las instrucciones que debe seguir al seleccionar el motor, los
cables, los dispositivos de protección, el recorrido de los cables y el modo de
funcionamiento del convertidor. Si no se respetan las recomendaciones
proporcionadas por ABB, es posible que el convertidor de frecuencia presente
anomalías que no cubre la garantía.
Nota: La instalación debe diseñarse y efectuarse siempre conforme a las leyes y
normativas locales aplicables. ABB no asume responsabilidad alguna de ningún tipo
por una instalación que incumpla las leyes locales u otras normativas.
Selección del motor
Seleccione el motor de inducción de CA trifásica según la tabla de especificaciones
presentada en la página 302, capítulo Datos técnicos. La tabla indica la potencia
típica del motor para cada tipo de convertidor.
Conexión de la alimentación de CA
Utilice una conexión fija a la red de alimentación de CA.
¡ADVERTENCIA! Como la intensidad de fuga del dispositivo normalmente supera
3,5 mA, es necesaria una instalación fija según IEC 61800-5-1.
Dispositivo de desconexión de la fuente de alimentación
Instale un dispositivo de desconexión de entrada accionado manualmente (red)
entre la fuente de alimentación de CA y el convertidor de frecuencia. El dispositivo
de desconexión debe ser de un tipo que pueda bloquearse en posición abierta para
la instalación y las tareas de mantenimiento.
•Europa: para cumplir las Directivas de la Unión Europea, según la norma
EN 60204-1, Seguridad de la maquinaria, el dispositivo de desconexión debe ser
de uno de los tipos siguientes:
- un interruptor de desconexión con categoría de uso AC-23B (EN 60947-3)
- un desconectador con un contacto auxiliar que, en todos los casos, haga que
los dispositivos de conmutación interrumpan el circuito de carga antes de la
apertura de los contactos principales del desconectador (EN 60947-3)
- un interruptor automático adecuado para el aislamiento según la norma
EN 60947-2
•Otras regiones: el dispositivo de desconexión debe ajustarse a las normas de
seguridad aplicables.
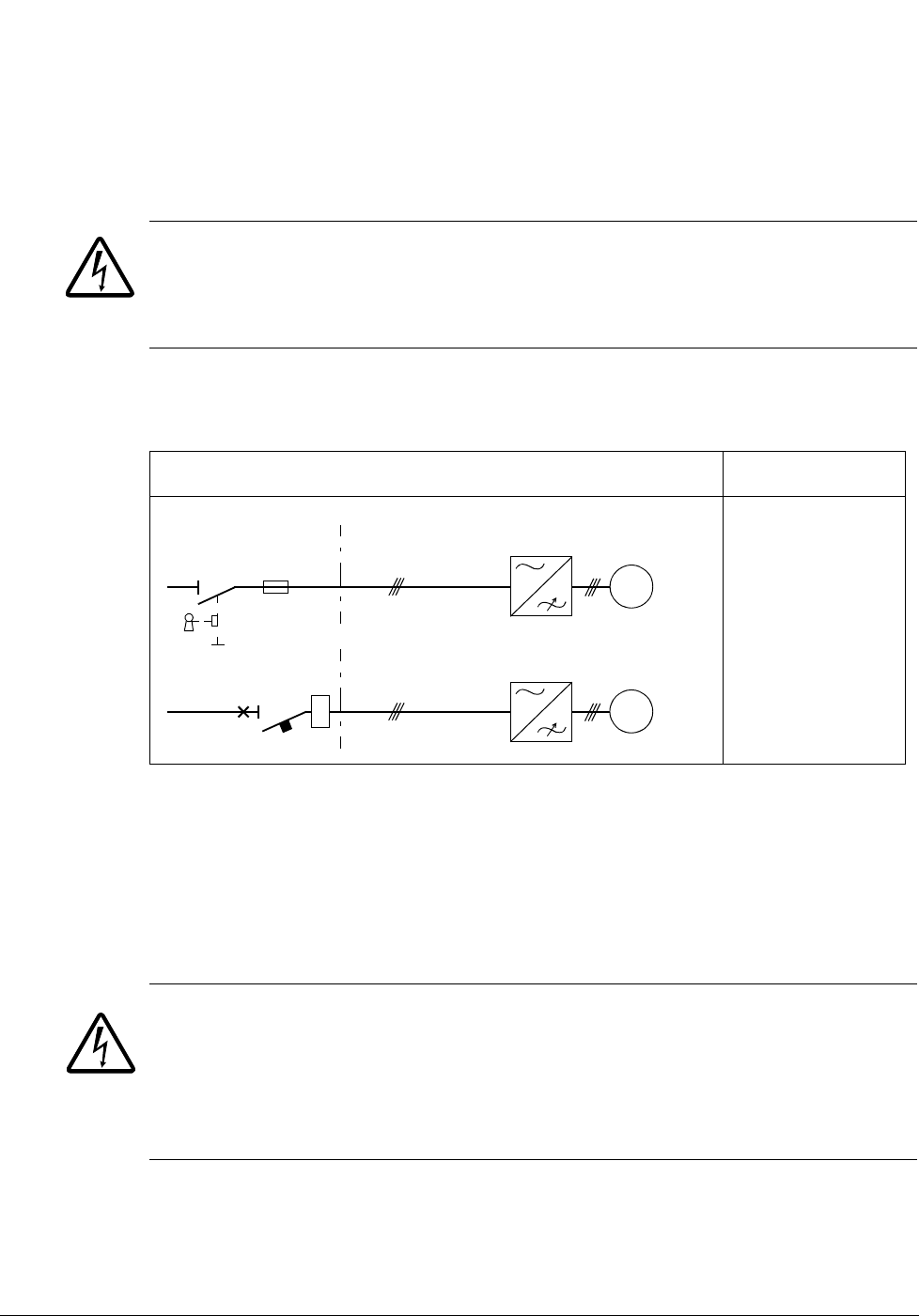
Planificación de la instalación eléctrica
32
Protección contra cortocircuitos y sobrecarga térmica
El convertidor se protege a sí mismo y los cables de entrada y motor contra
sobrecargas térmicas cuando los cables se dimensionan de conformidad con la
intensidad nominal del convertidor de frecuencia. No se requieren dispositivos de
protección térmica adicionales.
¡ADVERTENCIA! Si el convertidor de frecuencia se conecta a varios motores, debe
emplearse un conmutador de sobrecarga térmica o un interruptor automático
independientes para proteger cada cable y motor. Estos dispositivos podrían
requerir un fusible por separado para cortar la intensidad de cortocircuito.
Protección contra cortocircuitos en el convertidor o en el cable de suministro
Prepare la protección según las siguientes directrices.
1) Dimensiones de los fusibles de acuerdo con las instrucciones que aparecen en el capítulo Datos
técnicos. Los fusibles protegerán el cable de alimentación en situaciones de cortocircuito, limitarán los
daños al convertidor y evitarán daños al equipo adyacente en caso de cortocircuito dentro del
convertidor.
2) Con el ACS350 se pueden utilizar los interruptores automáticos probados por ABB. Utilice siempre
los fusibles con otros interruptores automáticos. Póngase en contacto con su representante de ABB
local para información relativa a los tipos de interruptores automáticos aprobados y las características
de la red eléctrica.
¡ADVERTENCIA! Debido al principio de funcionamiento inherente y a la estructura
de los interruptores automáticos, independientemente del fabricante, es posible que
se produzcan escapes de gases calientes ionizados de la carcasa del interruptor en
caso de cortocircuito. Para garantizar un uso seguro, se debe prestar especial
atención a la instalación y montaje de los interruptores. Siga las instrucciones del
fabricante.
Diagrama de circuitos Protección contra
cortocircuito
Proteja el convertidor y
el cable de entrada con
fusibles o un interruptor
automático. Véanse
las notas 1) y 2).
M
3~
Cuadro de
distribución Cable de
entrada
M
3~
Convertidor
1)
2)
I >

Planificación de la instalación eléctrica
33
Protección contra cortocircuitos en el motor y en el cable a motor
El convertidor protege el motor y el cable a motor en situaciones de cortocircuito
cuando el cable a motor se dimensiona de conformidad con la intensidad nominal
del convertidor. No se requieren dispositivos de protección adicionales.
Protección contra sobrecarga térmica del motor
De conformidad con la normativa, el motor debe protegerse frente a la sobrecarga
térmica y la intensidad debe desconectarse si se detecta una sobrecarga. El
convertidor incluye una función de protección térmica del motor que lo protege y
desconecta la intensidad cuando es necesario. También es posible conectar un
medidor de temperatura del motor al convertidor. El usuario puede realizar ajustes
adicionales tanto para la función del modelo térmico como para la función de
medición de temperatura mediante parámetros.
Los sensores de temperatura más comunes son:
• tamaños de motor IEC180…225: interruptor térmico (p. ej. Klixon)
• tamaños de motor IEC200…250 y superiores: PTC o Pt100.
Para obtener más información acerca del modelo térmico, véase el apartado
Protección térmica del motor en la página 119. Para obtener más información
relativa a la función de medición de temperatura, véase el apartado Medición de la
temperatura del motor a través de la E/S estándar en la página 127.
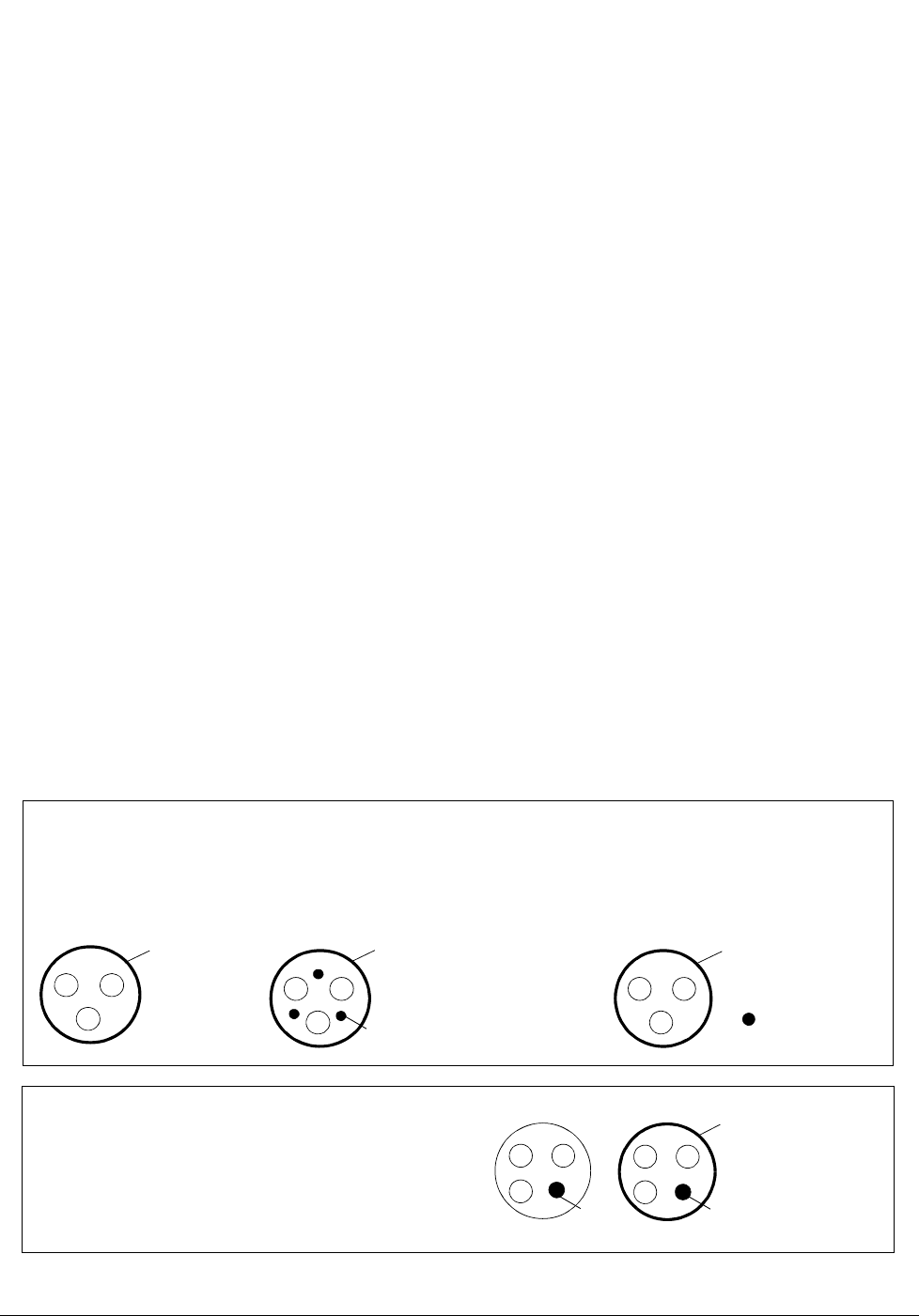
Planificación de la instalación eléctrica
34
Selección de los cables de potencia
Reglas generales
Los cables de potencia de entrada y a motor deben dimensionarse de conformidad
con la normativa local.
• El cable ha de poder transportar la intensidad de carga del convertidor. Véase el
capítulo Datos técnicos para información acerca de las intensidades nominales.
• El cable debe tener una especificación de temperatura permisible máxima del
conductor en uso permanente como mínimo igual a 70 °C. Para los EE.UU.
véase la sección Requisitos EE.UU. adicionales en la página 35.
• La conductividad del conductor PE debe ser igual a la del conductor de fase
(misma sección transversal).
• Se acepta cable de 600 V CA para un máximo de 500 V CA.
• Remítase al capítulo Datos técnicos para los requisitos EMC.
Para cumplir los requisitos EMC del marcado CE y C-tick debe utilizarse un cable a
motor simétrico apantallado (véase la figura inferior).
En los cables de entrada también está permitido usar un sistema de cuatro
conductores, pero se recomienda el uso de cables a motor apantallados simétricos.
En comparación con el sistema de cuatro conductores, el uso de cable apantallado
simétrico reduce la emisión electromagnética de todo el sistema de accionamiento,
así como las corrientes y el desgaste en los cojinetes del motor.
Otros tipos de cables de potencia
A continuación se presentan otros tipos de cable de potencia que pueden usarse
con el convertidor.
Cable apantallado simétrico: tres conductores de fase
con un conductor PE concéntrico o de construcción
simétrica y un apantallamiento.
Cables a motor
(también recomendado para cables de alimentación)
Conductor PE
y
apantallamiento
Pantalla Pantalla
PE PE
Permitidos como cables de alimentación
Sistema de cuatro conductores: tres conductores de
fase y uno de protección
Nota: Se necesita un conductor PE independiente si la
conductividad del apantallamiento del cable no es
suficiente para su objetivo.
Pantalla
PEPE
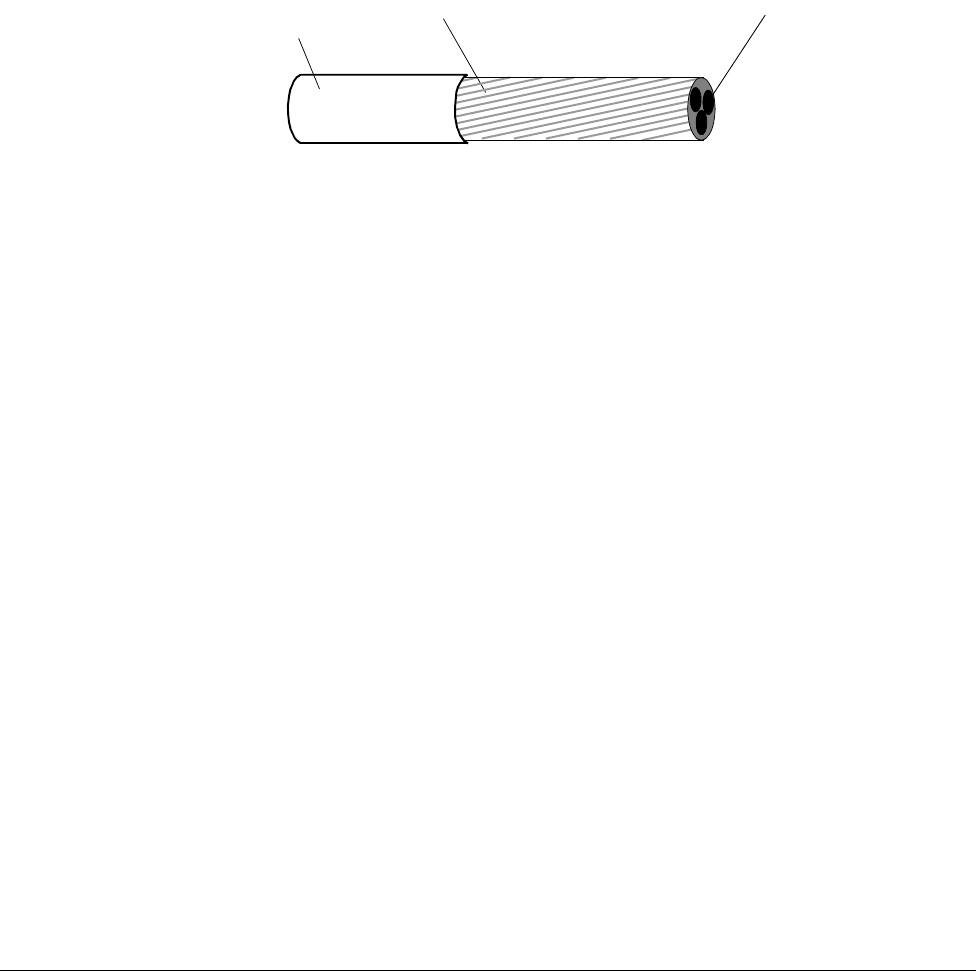
Planificación de la instalación eléctrica
35
Pantalla del cable a motor
Para actuar como conductor de protección, el apantallamiento debe tener la misma
sección transversal que los conductores de fase cuando están hechos del mismo
metal.
Para suprimir las emisiones de radiofrecuencia por radiación y conducción, la
conductividad de la pantalla debe ser como mínimo una décima parte de la
conductividad del conductor de fase. Los requisitos se consiguen fácilmente
utilizando una pantalla de cobre o aluminio. Abajo se indica el mínimo exigido para
la pantalla de cables a motor en el convertidor. Consta de una capa concéntrica de
cables de cobre con una cinta helicoidal abierta de cobre. Cuanto mejor sea la
pantalla y cuanto más cerrada esté, menores serán el nivel de emisiones y las
corrientes de los cojinetes.
Requisitos EE.UU. adicionales
Si no se emplea un conducto metálico, se recomienda el uso de un cable de
potencia apantallado o de un cable con armadura de aluminio ondulado continuo de
tipo MC y con tierras simétricos para los cables a motor.
Los cables de potencia deben estar especificados para 75 °C (167 °F).
Conducto
En los lugares en que deban acoplarse los conductos, cubra el empalme con un
conductor de tierra unido al conducto a cada lado del empalme. Una también los
conductos al armario del convertidor. Utilice conductos independientes para la
alimentación de entrada, el motor, las resistencias de frenado y el cableado de
control. No coloque el cableado a motor procedente de más de un convertidor en el
mismo conducto.
Cable con armadura/cable de potencia apantallado
Los siguientes proveedores (sus nombres comerciales figuran entre paréntesis)
proporcionan cable con armadura de aluminio ondulado continuo de tipo MC y con
tierras simétricos de seis conductores (3 fases y 3 tierras).
• Anixter Wire & Cable (Philsheath)
• BICC General Corp (Philsheath)
• Rockbestos Co. (Gardex)
• Oaknite (CLX).
Belden, LAPPKABEL (ÖLFLEX) y Pirelli facilitan cables de potencia apantallados.
Envoltura de
aislamiento Pantalla de hilo de
cobre
Núcleo del cable
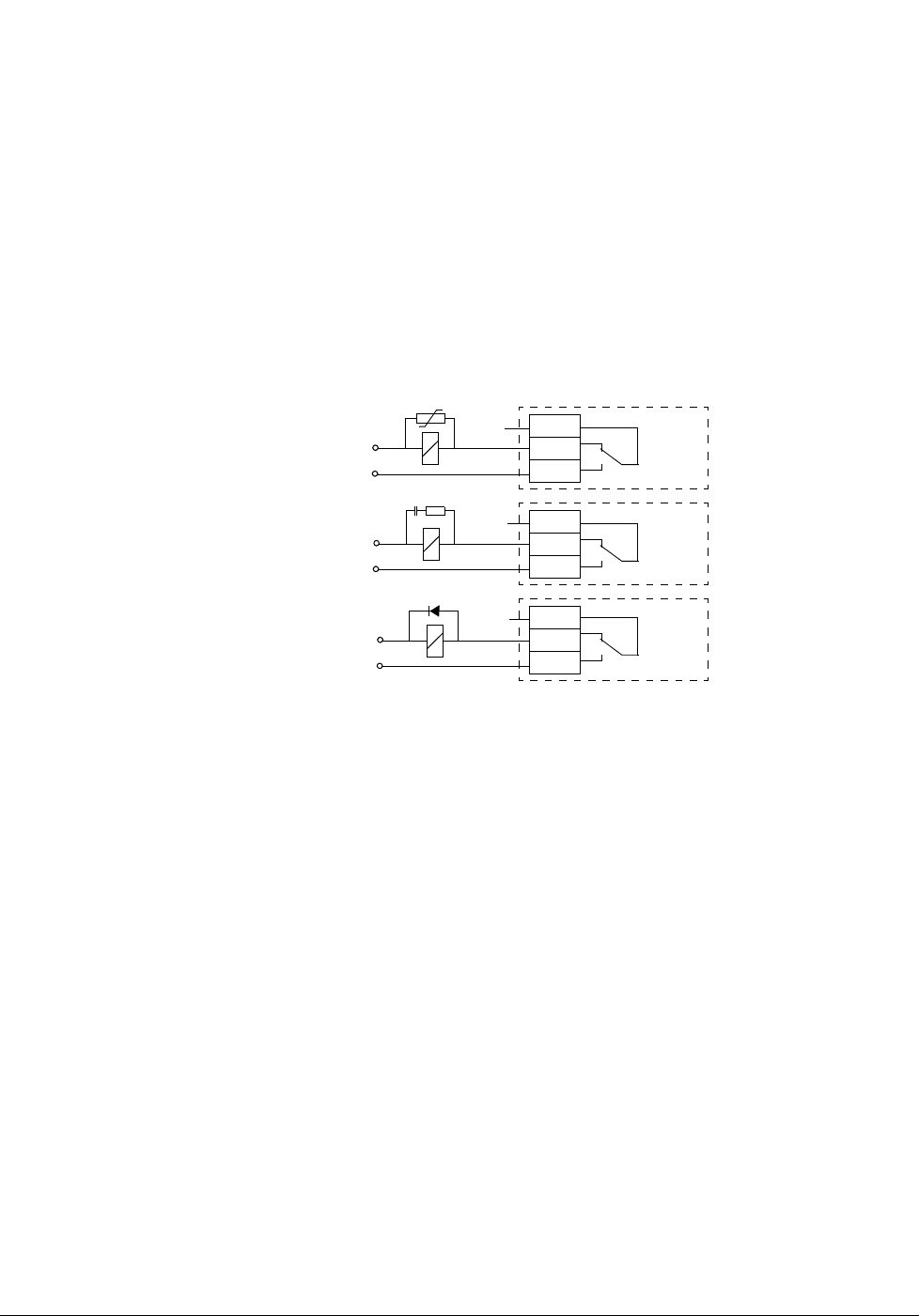
Planificación de la instalación eléctrica
36
Protección de los contactos de salida de relé y atenuación de
perturbaciones en caso de cargas inductivas
Las cargas inductivas (relés, contactores, motores) causan oscilaciones de tensión
cuando se desconectan.
Equipe las cargas inductivas con circuitos de atenuación de ruidos (varistores, filtros
RC [CA] o diodos [CC]) para minimizar las emisiones EMC durante la desconexión.
Si no se eliminan, las perturbaciones pueden conectar de forma capacitiva o
inductiva con otros conductores en el cable de control y ocasionar un riesgo de fallo
en otras partes del sistema.
Instale el componente de protección tan cerca de la carga inductiva como sea
posible. No instale componentes de protección en el bloque de terminales de E/S.
Compatibilidad con el dispositivo de intensidad residual (RCD)
Los convertidores ACS350-01x son adecuados para su uso con dispositivos de
intensidad residual de tipo A y los convertidores ACS350-03x para su uso con
dispositivos de tipo B. En el caso de convertidores ACS350-03x se pueden aplicar
otras medidas de protección en caso de contacto directo o indirecto como, por
ejemplo, la separación del entorno mediante aislamiento doble o reforzado o el
aislamiento del sistema de alimentación mediante un transformador.
Selección de los cables de control
Todos los cables de control analógico, así como el cable utilizado para la entrada de
frecuencia, deben estar apantallados.
Debe utilizarse un cable de par trenzado doblemente apantallado (véase la figura a,
p. ej. JAMAK de NK Cables) para señales analógicas. Utilice un par protegido
individualmente para cada señal. No utilice el retorno combinado para señales
analógicas diferentes.
24 V CC
230 V CA
230 V CA
Diodo
Varistor
Filtro RC
Salida
de relé
del
conver-
tidor
Salida
de relé
del
conver-
tidor
Salida
de relé
del
conver-
tidor

Planificación de la instalación eléctrica
37
La mejor alternativa para las señales digitales de baja tensión es un cable con
pantalla doble, aunque también puede utilizarse cable de varios pares trenzados
con pantalla única o sin apantallar (figura b). Sin embargo, para la entrada de
frecuencia, debe utilizarse siempre un cable apantallado.
Las señales analógicas y digitales deben transmitirse por cables separados.
Las señales controladas por relé pueden transmitirse por el mismo cable que las
señales de entrada digital, siempre que su tensión no sobrepase los 48 V. Se
recomienda que las señales controladas por relé se transmitan a través de un par
trenzado.
Nunca deben mezclarse señales de 24 V CC y de 115/230 V CA en el mismo cable.
Cable de relé
El cable de relé con apantallado metálico trenzado (p. ej. ÖLFLEX de LAPPKABEL)
ha sido probado y ratificado por ABB.
Cable del panel de control
El cable que conecta el panel de control con el convertidor en el funcionamiento a
distancia no debe sobrepasar los 3 m (10 pies). En los kits opcionales del panel de
control se utiliza el tipo de cable probado y ratificado por ABB.
Conexión de un sensor de temperatura del motor a la E/S del convertidor
Remítase a la sección Medición de la temperatura del motor a través de la E/S
estándar en la página 127 para obtener información sobre la conexión de un sensor
de temperatura del motor a la E/S del convertidor de frecuencia.
Recorrido de los cables
El cable a motor debe instalarse apartado de otros recorridos de cables. Con varios
convertidores de frecuencia, los cables a motor pueden tenderse en paralelo, uno
junto a otro. Se recomienda que el cable a motor, el cable de potencia de entrada y
los cables de control se instalen en bandejas separadas. Debe evitarse que el cable
a motor discurra en paralelo a otros cables durante un trayecto largo, para reducir
las interferencias electromagnéticas producidas por los cambios rápidos en la
tensión de salida del convertidor de frecuencia.
En los puntos en que los cables de control deban cruzarse con los cables de
potencia, asegúrese de que lo hacen en un ángulo lo más próximo posible a los 90
grados.
a
Cable de varios pares
trenzados, pantalla doble
b
Cable de varios pares
trenzados, pantalla única
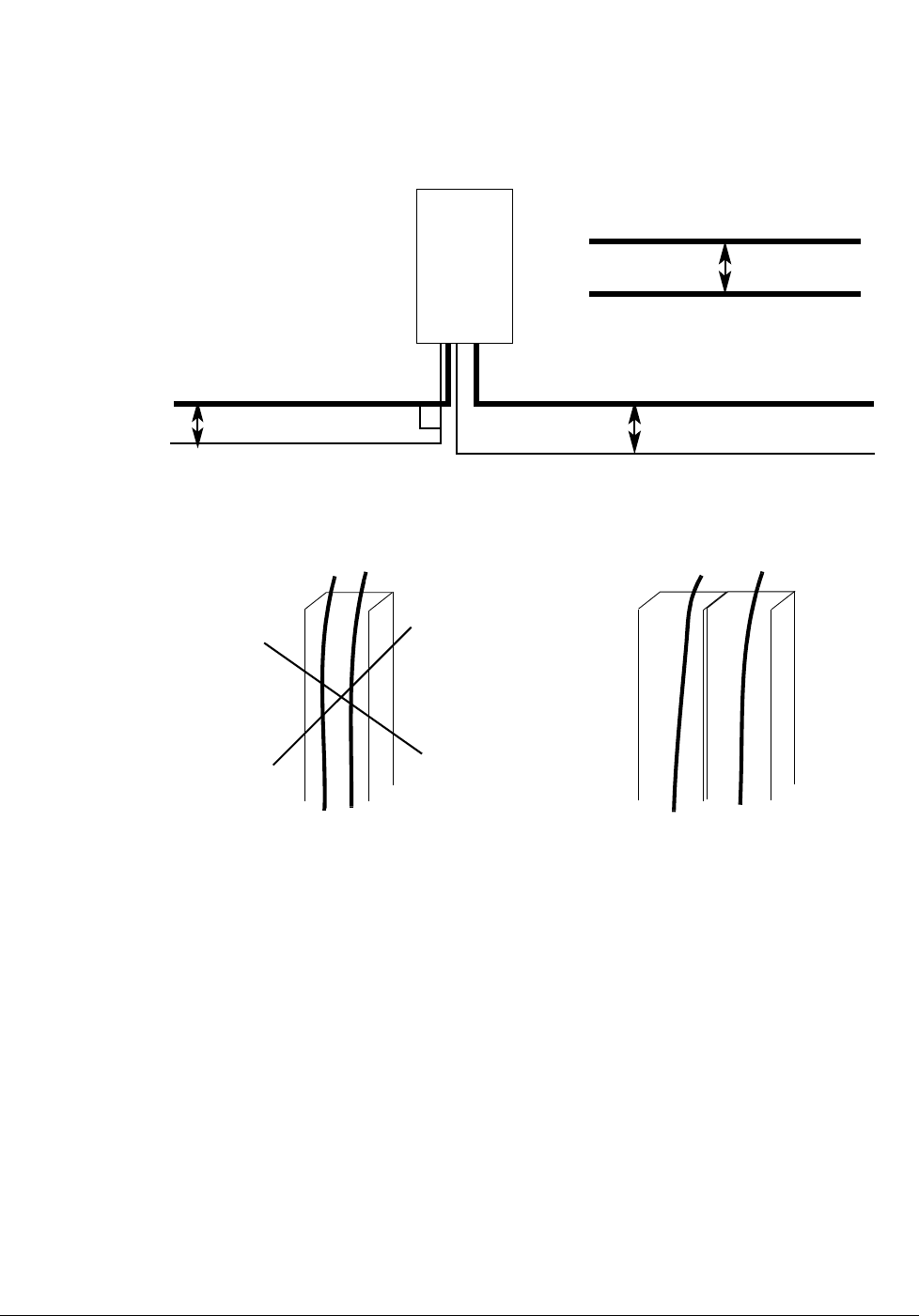
Planificación de la instalación eléctrica
38
Las bandejas de cables deben presentar una buena conexión eléctrica entre sí y
respecto a los electrodos de conexión a tierra. Pueden usarse sistemas con
bandejas de aluminio para nivelar mejor el potencial.
A continuación se muestra un diagrama del recorrido de los cables.
Conductos para cables de control
90 ° mín. 500 mm (20 pulg.)
Cable a motor
Cable de potencia de entrada
Cables de control
mín. 200 mm (8 pulg.)
mín. 300 mm (12 pulg.)
Cable a motor
Cable de
Convertidor
potencia
230 V24 V24 V 230 V
Introduzca los cables de control de 24 V y
230 V por conductos separados en el
armario.
No se permite a menos que el cable de 24 V
esté aislado para 230 V o aislado con un
revestimiento de aislamiento para 230 V.
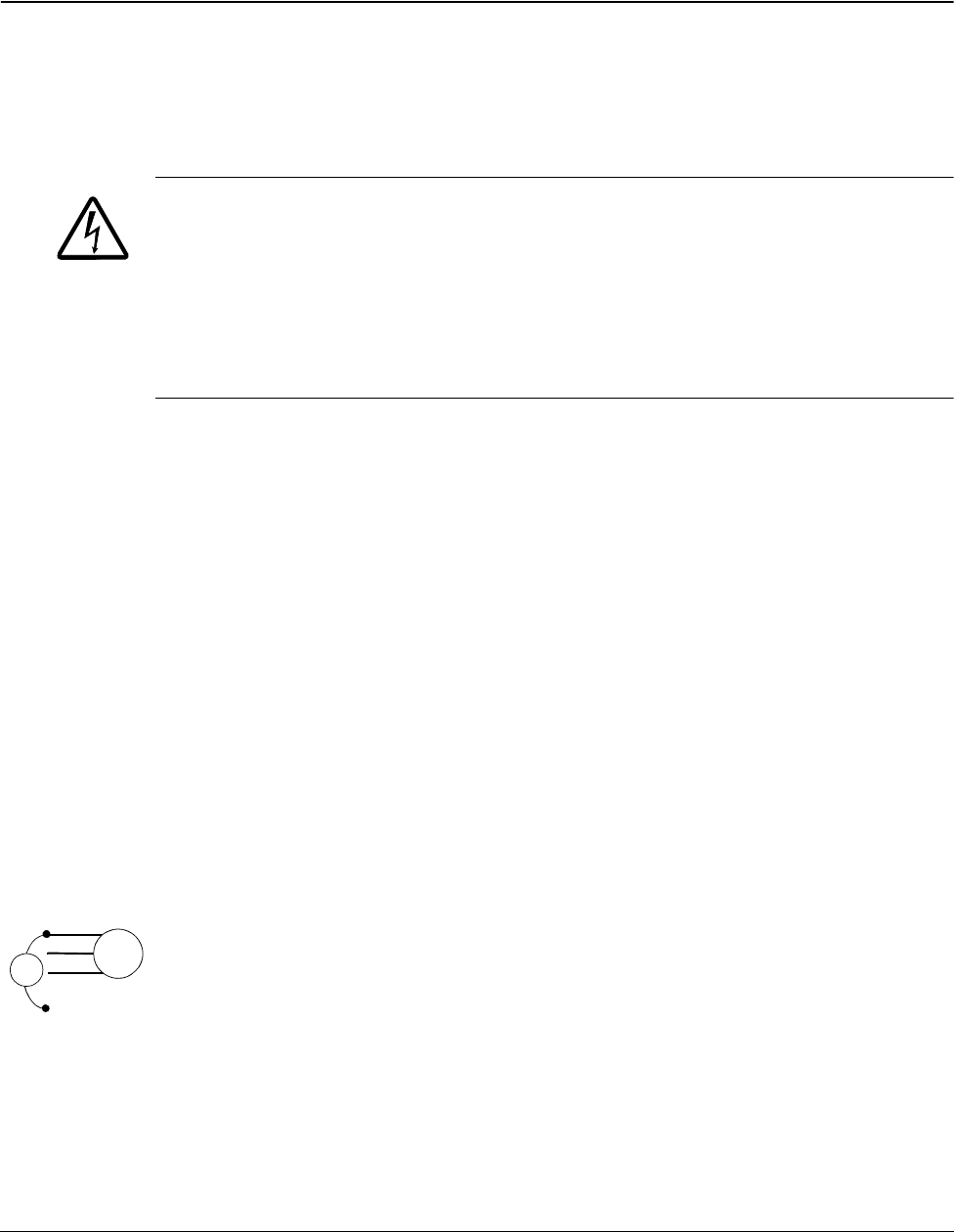
Instalación eléctrica
39
Instalación eléctrica
Contenido de este capítulo
Este capítulo describe el procedimiento de instalación eléctrica del convertidor de
frecuencia.
¡ADVERTENCIA! Las tareas descritas en este capítulo deben ser realizadas
exclusivamente por un electricista cualificado. Deben observarse las instrucciones
que aparecen en el capítulo Seguridad, en la página 5. El incumplimiento de estas
instrucciones puede producir lesiones o la muerte.
Verifique que el convertidor de frecuencia esté desconectado de la
alimentación de entrada durante la instalación. Si el convertidor de frecuencia
ya está conectado a la alimentación, espere durante 5 min tras desconectarla.
Comprobación del aislamiento del conjunto
Convertidor
No realice ninguna prueba de tolerancia a tensión ni de resistencia al aislamiento
(por ejemplo, alto potencial o megaóhmetro) en parte alguna del convertidor de
frecuencia, ya que podría dañar el convertidor. El aislamiento de cada convertidor
se ha comprobado en fábrica entre el circuito de potencia y el chasis. Además,
dentro del convertidor hay circuitos limitadores de tensión que cortan la tensión de
prueba automáticamente.
Cable de entrada
Compruebe que el aislamiento del cable de entrada está de conformidad con la
normativa local antes de conectarlo al convertidor de frecuencia.
Motor y cable a motor
Compruebe el aislamiento del motor y del cable a motor del siguiente modo:
1. Compruebe que el cable a motor esté conectado al motor y desconectado de los
terminales de salida U2, V2 y W2 del convertidor.
2. Mida las resistencias de aislamiento del cable a motor y el motor entre las
distintas fases y el dispositivo de protección de tierra (PE) a una tensión de
medición de 1 kV CC. La resistencia de aislamiento tiene que ser superior a
1Mohmio.
PE
ohm M
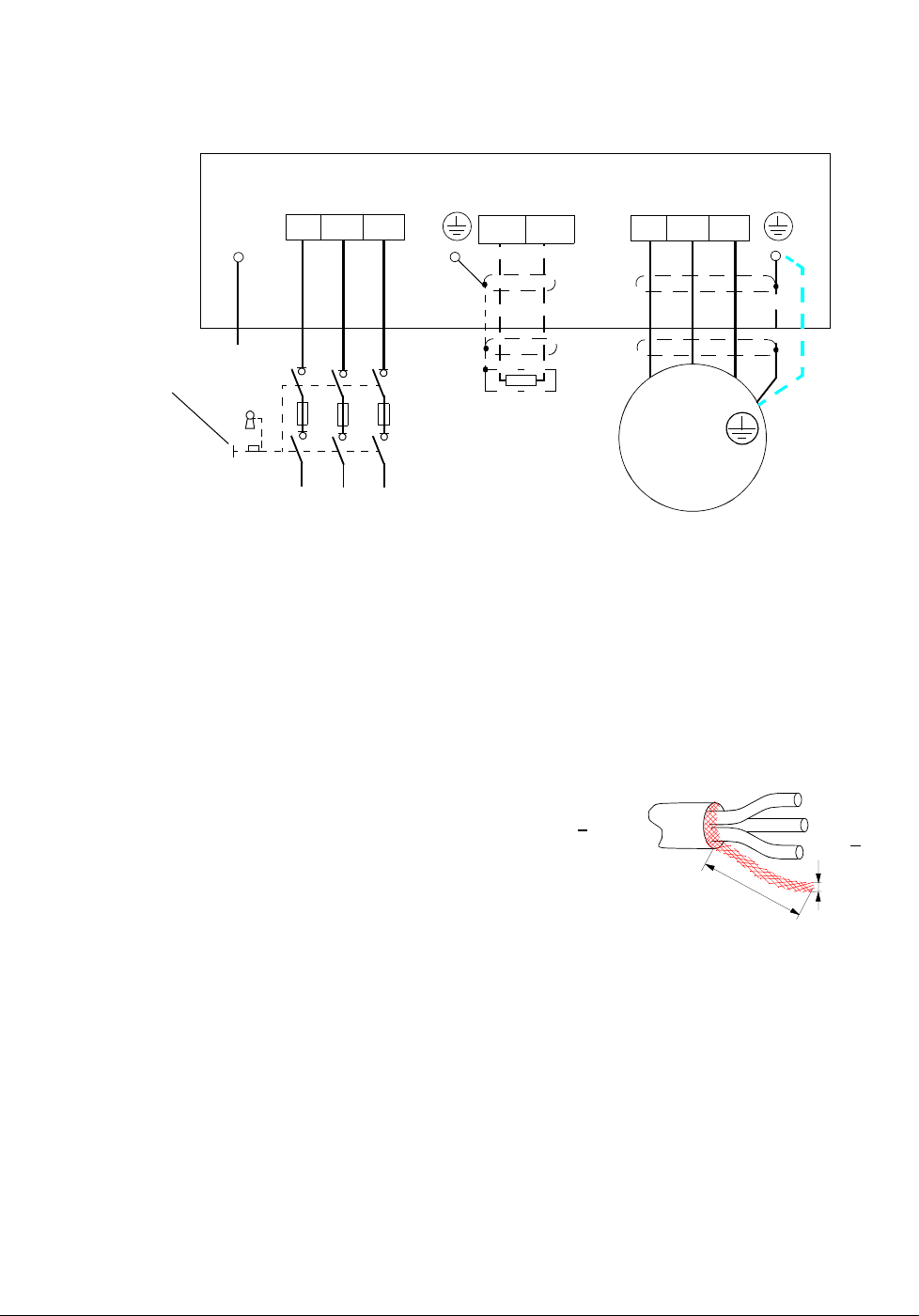
Instalación eléctrica
40
Conexión de los cables de potencia
Diagrama de conexiones
ENTRADA SALIDA
U1 V1 W1
3 ~
Motor
U1 V1 W1
1)
U2 V2 W2
BRK-
L1 L2 L3
PE
Convertidor
PE
Para alternativas,
véase la sección
Dispositivo de
desconexión de la
fuente de alimentación
en la página 31.
Resistencia de
frenado
opcional
1) Conecte a tierra el otro extremo del conductor PE en el cuadro de distribución.
2) Utilice un cable de conexión a tierra por separado si la conductividad de la pantalla del cable es insuficiente (menor que
la conductividad del conductor de fase) y en el cable no existe un conductor de conexión a tierra de estructura simétrica
(véase la sección Selección de los cables de potencia en la página 34).
Nota:
No utilice un cable a motor de estructura asimétrica.
Si existe un conductor de conexión a tierra con estructura simétrica en el cable a motor además de la pantalla conductora,
conecte el conductor de conexión a tierra al terminal de conexión a tierra en los extremos del motor y del convertidor de
frecuencia.
Conexión a tierra de la pantalla del cable a motor en el extremo del motor
Para minimizar las interferencias de radiofrecuencia:
• conecte el cable a tierra trenzando la pantalla del modo siguiente: diámetro > 1/5 ·
longitud,
• o conecte a tierra la pantalla del cable a 360 grados en la placa de acceso al interior
de la caja de terminales del motor. ab
b > 1/5 · a
BRK+
2)
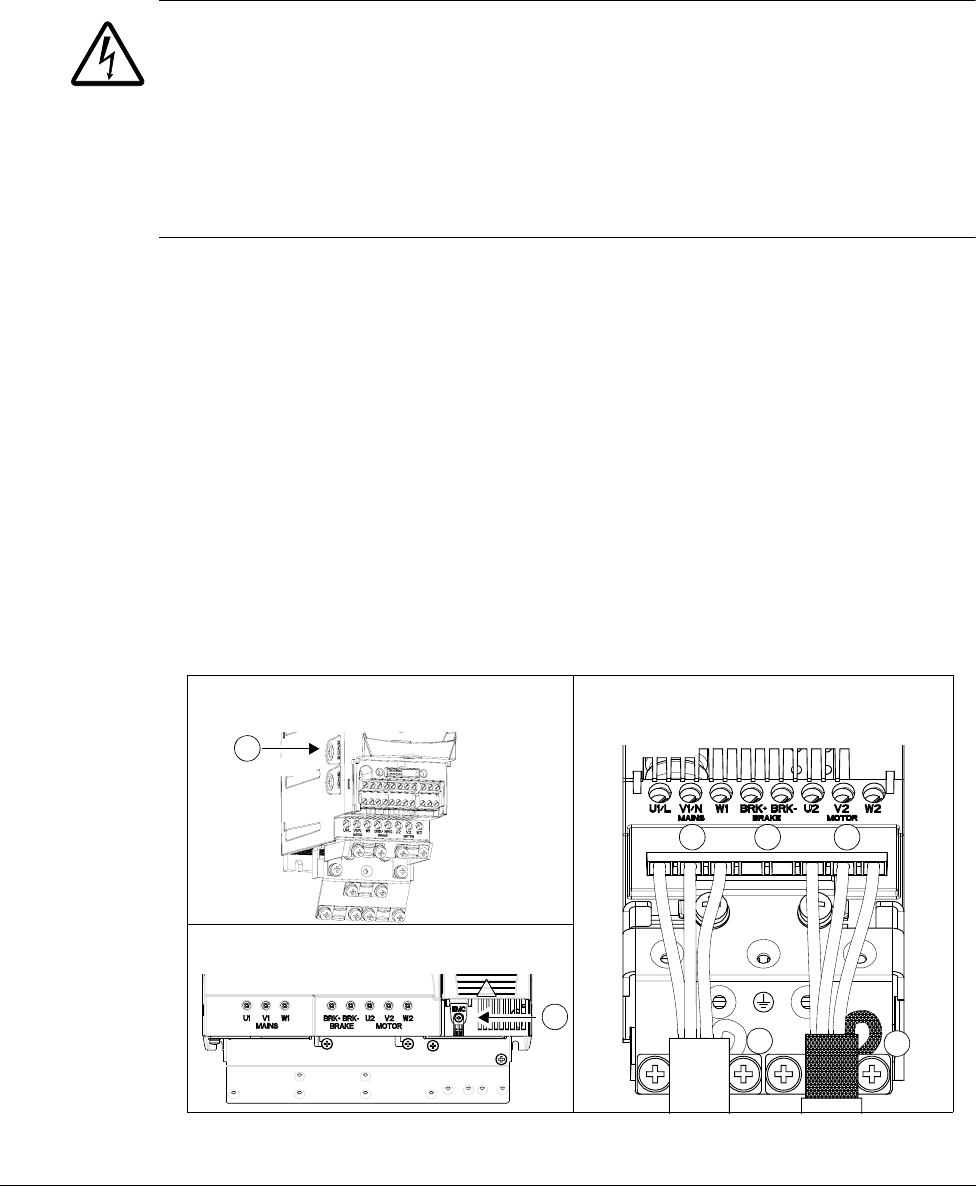
Instalación eléctrica
41
Procedimiento
1. En sistemas IT (sin conexión de neutro a tierra) y sistemas TN con conexión a
tierra en un vértice, desconecte el filtro EMC interno retirando el tornillo de EMC.
Para convertidores trifásicos tipo U (con código de tipo ACS350-03U-), el tornillo
EMC ya está retirado de fábrica y ha sido sustituido por un tornillo de plástico.
¡ADVERTENCIA! Si se instala un convertidor de frecuencia cuyo filtro EMC no está
desconectado en una red IT (un sistema de alimentación sin conexión a tierra o con
conexión a tierra de alta resistencia -por encima de 30 ohmios-), el sistema se
conectará al potencial de tierra a través de los condensadores del filtro EMC del
convertidor de frecuencia. Esto podría entrañar peligro o provocar daños en el
convertidor.
Si se instala un convertidor de frecuencia cuyo filtro EMC no está desconectado en
un sistema TN con conexión a tierra en un vértice, el convertidor resultará dañado.
2. Fije los conductores de tierra (PE) de los cables de potencia de entrada bajo la
grapa de conexión a tierra. Conecte los conductores de fase a los terminales U1,
V1 y W1. Utilice un par de apriete de 0,8 N·m (7 lbf in.) para bastidores R0 a R2,
de 1,7 N·m (15 lbf in.) para bastidores R3 y de 2,5 N·m (22 lbf in.) para bastidores
R4.
3. Pele el cable a motor y trence la pantalla para formar una espiral lo más corta
posible. Fije la pantalla trenzada bajo la grapa de conexión a tierra. Conecte los
conductores de fase a los terminales U2, V2 y W2. Utilice un par de apriete de
0,8 N·m (7 lbf in.) para bastidores R0 a R2, de 1,7 N·m (15 lbf in.) para bastidores
R3 y de 2,5 N·m (22 lbf in.) para bastidores R4.
4. Conecte la resistencia de frenado opcional a los terminales BRK+ y BRK- con un
cable apantallado utilizando el mismo procedimiento que para el cable a motor
descrito en el paso 3.
5. Fije los cables fuera del convertidor de forma mecánica.
2
2
3
34
EMC
EMC
Desconexión del torinllo EMC,
bastidor R4
Desconexión del tornillo EMC,
bastidores R0…R3
1
1
Conexión de los cables de alimentación
y conexión a tierra
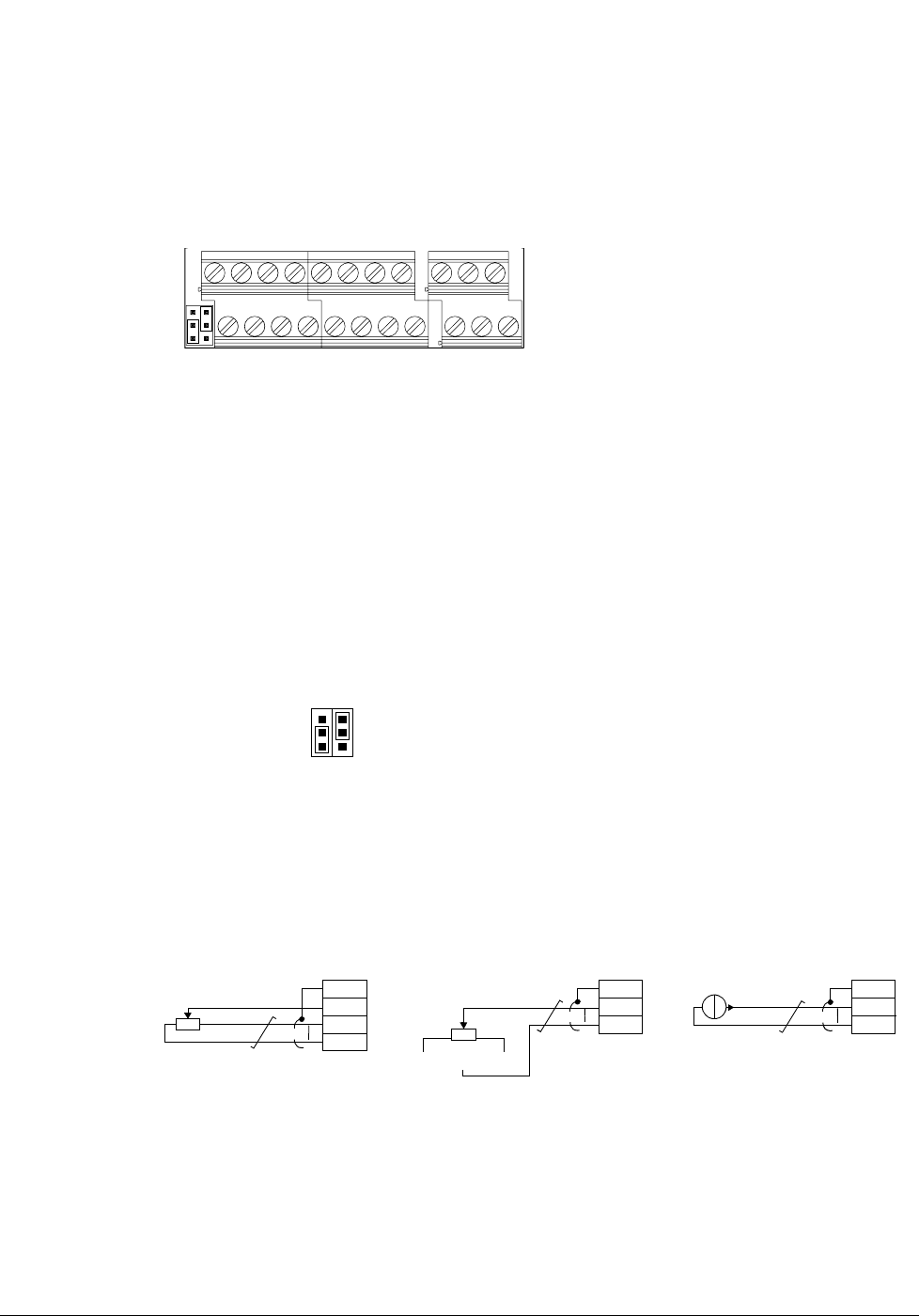
Instalación eléctrica
42
Conexión de los cables de control
Terminales de E/S
La siguiente figura muestra los conectores de E/S. El par de apriete es 0,5 N·m / 4,4
lbf. in.
Conexión por defecto
La conexión por defecto de las señales de control depende de la macro de
aplicación utilizada, que se selecciona con el parámetro 9902. Véase el capítulo
Macros de aplicación para los diagramas de conexión.
Selección de la tensión y la intensidad
El conmutador S1 selecciona la tensión (0 (2) ... 10V / -10...10 V) o la intensidad (0
(4) ... 20mA /-20...20 mA)) como los tipos de señal para las entradas analógicas
EA1 y EA2. Los ajustes de fábrica son la tensión unipolar para la EA1 (0(2)...10 V) y
la intensidad unipolar para la EA2 (0(4)...20 mA), que corresponden al uso por
defecto en las macros de aplicación.
Conexión de la tensión y la intensidad
También es posible usar una tensión bipolar (-10 V a 10 V) y una intensidad bipolar
(-20 mA a 20 mA). Si se utiliza una conexión bipolar en lugar de unipolar, véase la
sección Entradas analógicas programables en la página 104, acerca de cómo
ajustar los parámetros en ese caso.
Entrada de frecuencia
Si se utiliza la ED5 como entrada de frecuencia, véase la sección Entrada de
frecuencia en la página 108, acerca de cómo ajustar los parámetros en ese caso.
X1A: 1: SCR
2: EA1
3: GND
4: +10 V
5: EA2
6: GND
7: SA
8: GND
9: +24 V
10: GND
11: DCOM
12: ED1
13: ED2
14: ED3
15: ED4
16: ED5 entrada digital o de
frecuencia
X1B: 17: SRCOM
18: SRNC
19: SRNO
20: SDSRC
21: SDOUT
22: SDGND
12345678
9 10111213141516 202122
17 18 19
X1BX1A
EA
EA
mA
V
S1
EA1
EA2
Posición inferior: U [0(2) ... 10 V], por defecto para la EA1; ó -10...10 V
Posición superior: I [0(4) ... 20 mA], por defecto para la EA2; ó -20...20 mA
S1
SCR
EA
GND
+10 V GND -10 V
SCR
EA
GND
+10 V
1 ... 10 kohmios
Tensión unipolar Tensión bipolar
SCR
EA
GND
Intensidad unipolar/bipolar
Utilice una fuente de
alimentación externa.
Instalación eléctrica
43
Ejemplo de conexión para un sensor de dos hilos
Manual/Auto y las macros Control del Par y Control PID (véanse las páginas 93, 94
y 95, respectivamente) utilizan la entrada analógica 2 (EA2). Los diagramas de
cableado para estas macros muestran la conexión cuando se emplea un sensor
alimentado independientemente. La figura que se muestra a continuación
proporciona un ejemplo de conexión utilizando un sensor de dos hilos.
Nota: El sensor recibe alimentación a través de su salida de intensidad. Por lo tanto,
la señal de salida debe ser de 4...20 mA.
¡ADVERTENCIA! Todos los circuitos ELV (muy baja tensión) conectados al
convertidor deben usarse dentro de una zona de unión equipotencial, es decir, en
una zona en que todas las piezas conductoras accesibles simultáneamente estén
conectadas eléctricamente para evitar la aparición de tensiones peligrosas entre
ellas. Esto se puede conseguir con una conexión a tierra adecuada de fábrica.
X1A
5 AI2 Medición o referencia del valor actual del proceso,
4…20 mA, Rin = 100 ohm
6GND
…
9 +24V Salida de tensión auxiliar, no aislada,
+24 VCC, max. 200 mA
10 GND
P
I
4…20 mA
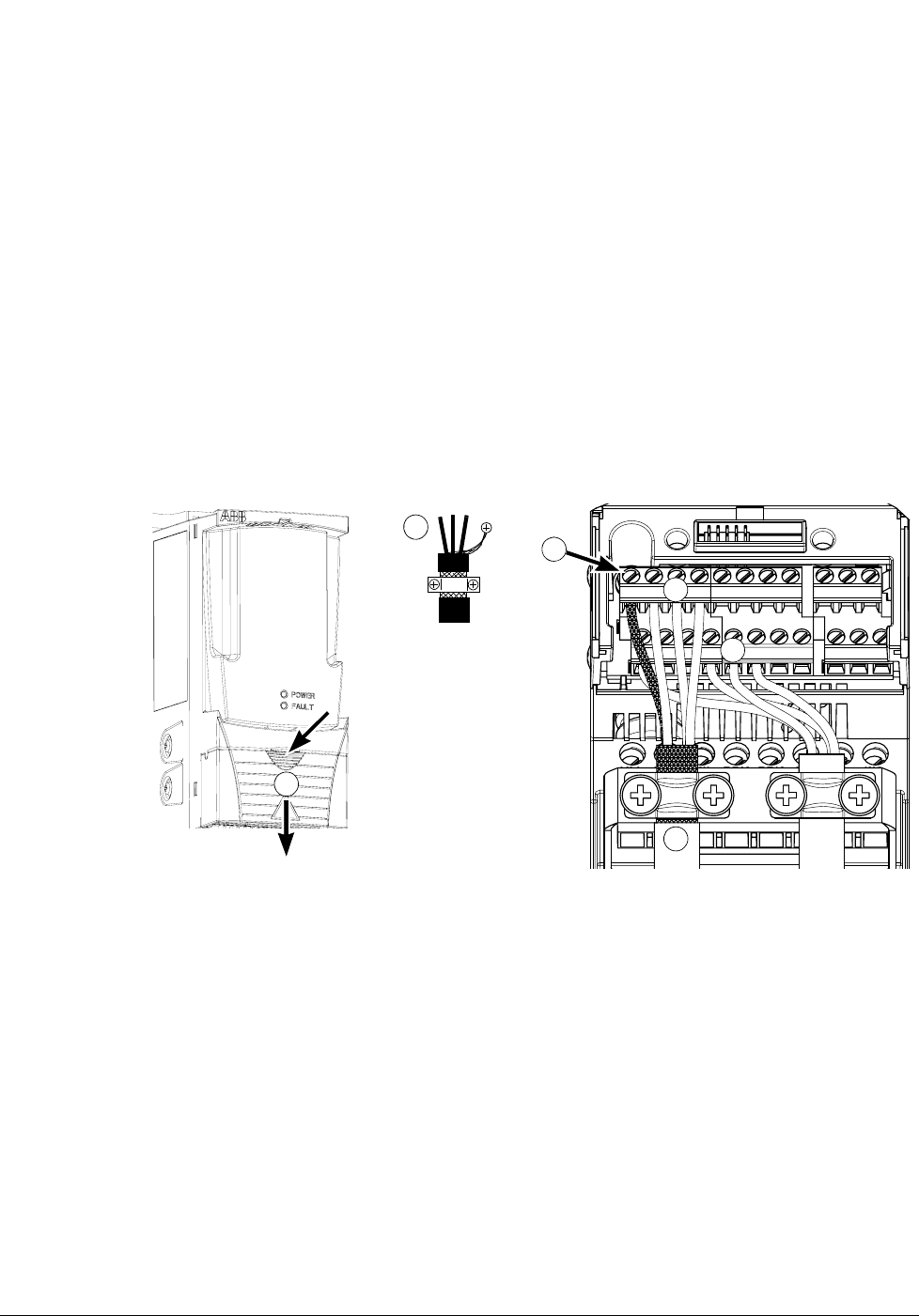
Instalación eléctrica
44
Procedimiento
1. Retire la cubierta de terminales presionando el hueco y, simultáneamente,
deslizando la cubierta hasta sacarla del bastidor.
2. Señales analógicas: pele el aislamiento externo del cable de señal analógica 360
grados y conecte a tierra la pantalla expuesta bajo la grapa.
3. Conecte los conductores a los terminales adecuados.
4. Trence juntos los conductores de conexión a tierra de cada par del cable de señal
analógica y conecte el haz al terminal SCR.
5. Señales digitales: conecte los conductores del cable a los terminales adecuados.
6. Trence los conductores de conexión a tierra y las pantallas (si existen) de los
cables de señal digital en un haz y conéctelo al terminal SCR.
7. Fije todos los cables fuera del convertidor de forma mecánica.
8. A no ser que deba instalar el módulo de bus de campo opcional (véase la página
30), vuelva a deslizar la cubierta de terminales hasta colocarla en su lugar.
2
2
3
4
5
1
EMC VAR
Lista de comprobación de la instalación
45
Lista de comprobación de la instalación
Lista de comprobación
Compruebe la instalación mecánica y eléctrica del convertidor de frecuencia antes
de la puesta en marcha. Repase la lista de comprobación siguiente junto con otra
persona. Lea el capítulo Seguridad en las páginas iniciales de este manual antes de
trabajar con el convertidor.
Compruebe
INSTALACIÓN MECÁNICA
Que las condiciones ambientales de funcionamiento sean las adecuadas. (véase Instalación
mecánica: Requisitos del emplazamiento de instalación en la página 28, Datos técnicos:
Requisitos del flujo de aire de refrigeración en la página 304 y Condiciones ambientales en la
página 310).
Que la unidad esté correctamente instalada en una pared vertical uniforme e ignífuga.
(véase Instalación mecánica).
Que el aire de refrigeración fluya libremente. (véase Instalación mecánica: Espacio libre
alrededor del convertidor en la página 29).
Que el motor y el equipo accionado estén listos para la puesta en marcha. (véase
Planificación de la instalación eléctrica: Selección del motor en la página 31 y Datos
técnicos: Conexión del motor en la página 308).
INSTALACIÓN ELÉCTRICA (véase Planificación de la instalación eléctrica y Instalación eléctrica)
Para sistemas sin conexión a tierra o con conexión en un vértice: que el filtro EMC interno
esté desconectado (tornillo EMC quitado).
Que los condensadores estén reacondicionados si el convertidor ha estado almacenado
más de dos años.
Que el convertidor disponga de la conexión a tierra adecuada.
Que la tensión de alimentación de entrada coincida con la tensión nominal de entrada del
convertidor de frecuencia.
Que las conexiones a la alimentación de entrada de U1, V1 y W1, así como sus pares de
apriete, sean correctos.
Que los fusibles de la alimentación de entrada y el desconectador estén instalados.
Que las conexiones a motor de U2, V2 y W2 y sus pares de apriete sean correctos.
Que el recorrido del cable a motor se mantenga lejos de otros cables.
Que las conexiones de control externo (E/S) sean correctas.
Lista de comprobación de la instalación
46
Que la tensión de alimentación de entrada no pueda alcanzar la salida del convertidor de
frecuencia (con conexión en bypass).
Que la cubierta de terminales y, para NEMA1, la tapa y la caja de conexiones, estén en su
lugar.
Compruebe
Puesta en marcha, control a través de la E/S y Marcha de ID
47
Puesta en marcha, control a través de la E/S y
Marcha de ID
Contenido de este capítulo
El capítulo proporciona instrucciones acerca de cómo:
• efectuar la puesta en marcha
• arrancar, detener, cambiar la dirección de giro y ajustar la velocidad del motor a
través de la interfase de E/S
• efectuar una Marcha de Identificación para el convertidor.
En este capítulo se explica brevemente cómo usar el panel de control para realizar
estas tareas. Para detalles sobre cómo usar el panel de control, remítase al capítulo
Paneles de control que comienza en la página 59.
Cómo poner en marcha el convertidor
El procedimiento de puesta en marcha depende del panel de control disponible, en
caso de haber uno.
•
Si no dispone de panel de control
, siga las instrucciones facilitadas en la sección
Cómo poner en marcha del convertidor sin panel de control
en la página
47
.
•Si dispone de un panel de control básico, siga las instrucciones facilitadas en
la sección Cómo realizar una puesta en marcha limitada en la página 48.
•Si dispone de un panel de control asistente puede ejecutar el Asistente de
arranque (véase la sección Cómo realizar una puesta en marcha guiada en la
página 53) o realizar una puesta en marcha limitada (véase la sección Cómo
realizar una puesta en marcha limitada en la página 48).
El Asistente de arranque, que sólo se incluye en el panel de control asistente, le
guía a través de todos los ajustes imprescindibles que deben realizarse. En la
puesta en marcha limitada, el convertidor no facilita ninguna asistencia; el
usuario efectúa los ajustes más básicos consultando las instrucciones facilitadas
en el manual.
Cómo poner en marcha del convertidor sin panel de control
SEGURIDAD
La puesta en marcha sólo puede ser efectuada por un electricista cualificado.
Durante el procedimiento de puesta en marcha deben seguirse las instrucciones de
seguridad facilitadas en el capítulo Seguridad.
El convertidor se pondrá en marcha automáticamente al suministrar alimentación si el
comando de marcha externa está activado.
Comprobar la instalación. Véase la lista de comprobación en el capítulo Lista de
comprobación de la instalación.
Puesta en marcha, control a través de la E/S y Marcha de ID
48
Cómo realizar una puesta en marcha limitada
Para la puesta en marcha limitada se puede utilizar el panel de control básico o el
panel de control asistente. Las instrucciones que se facilitan a continuación son
válidas para ambos paneles, pero las pantallas mostradas corresponden al panel de
control básico, excepto si la instrucción se aplica exclusivamente al panel de control
asistente.
Antes de empezar, verifique que dispone de los datos de la placa de características
del motor.
Comprobar que la puesta en marcha del motor no supone ningún peligro.
Desacoplar la maquinaria accionada si existe riesgo de daños en caso de una dirección
de giro incorrecta.
ALIMENTACIÓN
Suministre la alimentación de entrada y espere unos instantes.
Compruebe que el LED rojo no esté encendido y que el LED verde esté encendido pero sin
parpadear.
El convertidor ya está listo para su uso.
SEGURIDAD
La puesta en marcha sólo puede ser efectuada por un electricista cualificado.
Durante el procedimiento de puesta en marcha deben seguirse las instrucciones de
seguridad facilitadas en el capítulo Seguridad.
El convertidor se pondrá en marcha automáticamente al suministrar alimentación si el
comando de marcha externa está activado.
Comprobar la instalación. Véase la lista de comprobación en el capítulo Lista de
comprobación de la instalación.
Comprobar que la puesta en marcha del motor no supone ningún peligro.
Desacoplar la maquinaria accionada si:
• existe riesgo de daños en caso de una dirección de giro incorrecta, o
• debe realizarse una Marcha de ID durante la puesta en marcha del convertidor. La Marcha
de ID sólo es imprescindible en aplicaciones que exijan la máxima precisión en el control
del motor.
ALIMENTACIÓN
Suministre alimentación de entrada.
El panel de control básico arranca en Modo de Salida (Output).
El panel de control asistente pregunta si desea ejecutar el
Asistente de arranque. Si pulsa el Asistente de arranque
no se ejecuta y puede continuar con la puesta en marcha
manual, de forma parecida a como se describe más adelante
para el panel de control básico.
REM
Hz
OUTPUT FWD
0.0
.
SALIR
¿Desea
usar el asistente
de arranque?
SI
No
SALIR ACEPTAR00:00
ELECCION
REM
Puesta en marcha, control a través de la E/S y Marcha de ID
49
ENTRADA MANUAL DE LOS DATOS DE ARRANQUE (grupo de parámetros 99)
Si dispone de un panel de control asistente, seleccione el
idioma (el panel de control básico no permite trabajar con otros
idiomas). Véase el parámetro 9901 para los valores de los
idiomas disponibles.
A continuación se describe el procedimiento general de ajuste de parámetros
para el panel de control básico. Puede consultar instrucciones más detalladas
para el panel de control básico en la página 65. Encontrará las instrucciones
para el panel de control asistente en la página 76.
El procedimiento de ajuste de parámetros general:
1. Para ir al menú principal, pulse si la línea inferior muestra OUTPUT;
en caso contrario pulse repetidamente hasta que aparezca MENU en
la parte inferior.
2. Pulse las teclas / hasta que aparezca "PAr" y pulse .
3. Busque el grupo de parámetros pertinente utilizando las teclas /
y pulse .
4. Busque el parámetro correspondiente en el grupo utilizando las teclas
/.
5. Pulse la tecla y manténgala pulsada durante unos dos segundos
hasta que aparezca el valor del parámetro con bajo el valor.
6. Modifique el valor con las teclas /. El valor cambia más
rápidamente si mantiene la tecla pulsada.
7. Guarde el parámetro pulsando .
Seleccionar la macro de aplicación (parámetro 9902). El
procedimiento de ajuste de parámetros general se ha facilitado
con anterioridad.
El valor de fábrica 1 (ESTAND ABB) es adecuado en la mayoría de los casos.
Seleccionar el modo de control del motor (parámetro 9904).
1 (VECTOR:VELOC) es adecuado en la mayoría de casos. 2 (VECTOR:PAR)
es adecuado para aplicaciones de control de par. 3 (ESCALAR:FREC) se
recomienda:
• para convertidores multimotor cuando el número de motores conectados al
convertidor es variable
• cuando la intensidad nominal del motor es inferior al 20 % de la intensidad
nominal del convertidor
• cuando el convertidor se usa con fines de prueba sin un motor conectado
9901 IDIOMA
EDICION PAR
INGLÉS
CANCELA GUARDAR
00:00
[0]
REM
REM
MENU FWD
rEF
REM
PAR FWD
-01-
REM
PAR FWD
2001
REM
PAR FWD
2002
SET
REM
rpm
PAR SET FWD
1500
REM
rpm
PAR SET FWD
1600
REM
PAR FWD
2002
REM
PAR FWD
9902
REM
PAR FWD
9904
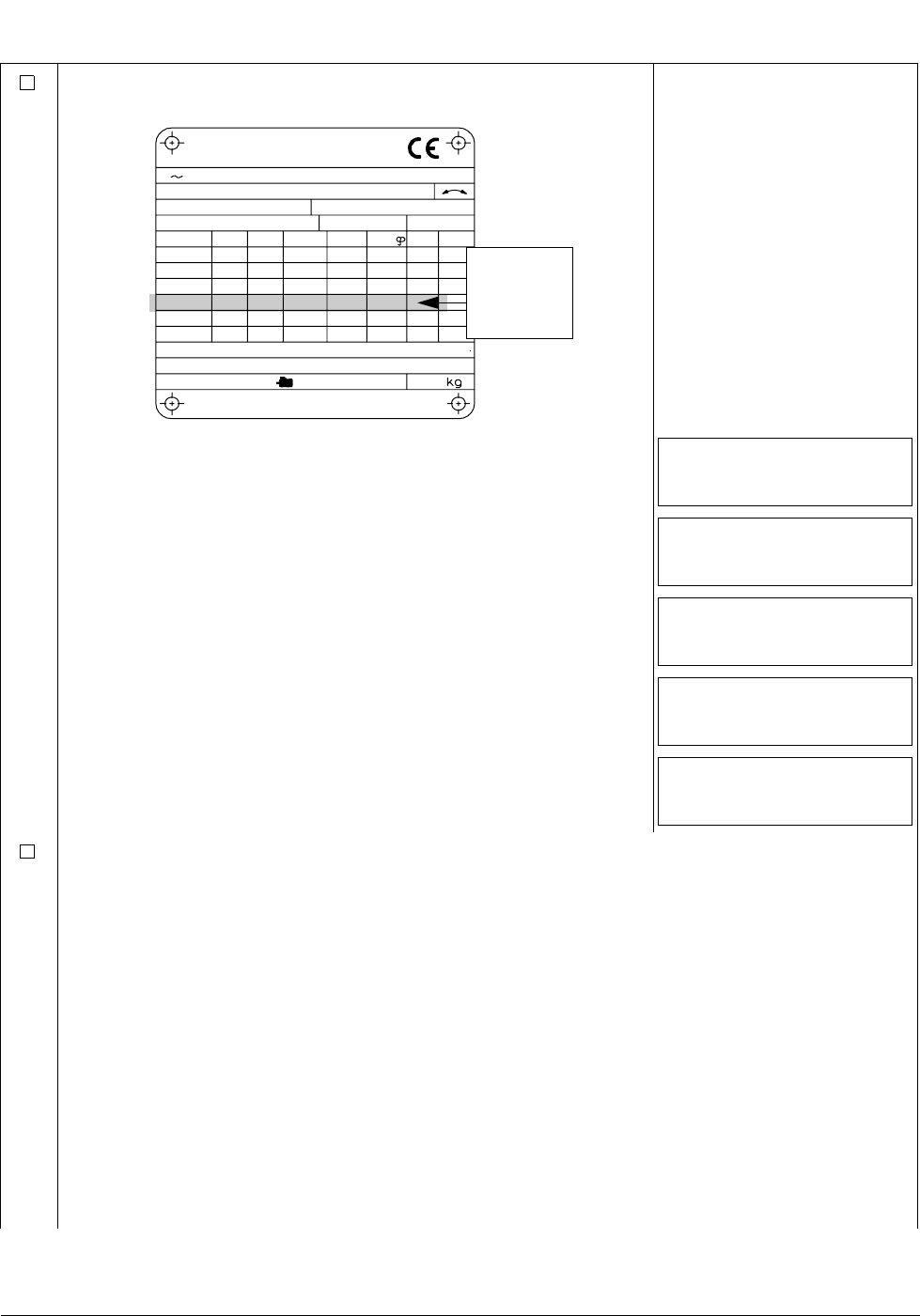
Puesta en marcha, control a través de la E/S y Marcha de ID
50
Introducir los datos del motor que figuran en la placa de
características del motor: Nota: Ajuste los datos del motor
exactamente al mismo valor que
la placa de características del
motor. Por ejemplo, si la
velocidad nominal del motor es
de 1.440 rpm en la placa, el
ajuste del valor del parámetro
9908 VELOC NOM MOTOR a
1.500 rpm da lugar a un
funcionamiento erróneo del
convertidor.
• tensión nominal del motor (parámetro 9905)
• intensidad nominal del motor (parámetro 9906)
Rango permitido: 0,2…2,0 · I2N A
• frecuencia nominal del motor (parámetro 9907)
• velocidad nominal del motor (parámetro 9908)
• potencia nominal del motor (parámetro 9909)
Seleccionar el método de identificación del motor (parámetro 9910).
El valor de fábrica 0 (OFF/IDMAGN) que utiliza la magnetización de identificación es
adecuado para la mayoría de aplicaciones. Se aplica en este procedimiento de puesta en
marcha básica. Sin embargo, hay que remarcar que esto requiere que:
•el parámetro 9904 esté ajustado a 1 (VECTOR:VELOC) o 2 (VECTOR:PAR)
•el parámetro 9904 esté ajustado a 3 (ESCALAR:FREC) y el parámetro 2101 a 3
(FLYSTART ESC) o a 5 (GIRAR+SOBREP).
Si su selección es 0 (OFF/IDMAGN), vaya al paso siguiente.
Se debe seleccionar el valor 1 (SI) si:
- el punto de funcionamiento está cerca de la velocidad cero, y/o
- se requiere el funcionamiento en un rango de par por encima del par motor nominal en un
amplio rango de velocidad y sin que se requiera realimentación de velocidad medida.
Si decide realizar la Marcha de ID (valor 1 [SI]), prosiga siguiendo las instrucciones que se
facilitan en la página 56 en la sección Realización de una Marcha de ID y, a continuación,
vuelva al paso DIRECCIÓN DE GIRO DEL MOTOR en la página 51.
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
VHz kW r/min A cos IA/IN tE/s
Ins.cl. F IP 55
No
IEC 200 M/L 55
3motor
ABB Motors
380 V
Tensión
de
alimentación
REM
PAR FWD
9905
REM
PAR FWD
9906
REM
PAR FWD
9907
REM
PAR FWD
9908
REM
PAR FWD
9909
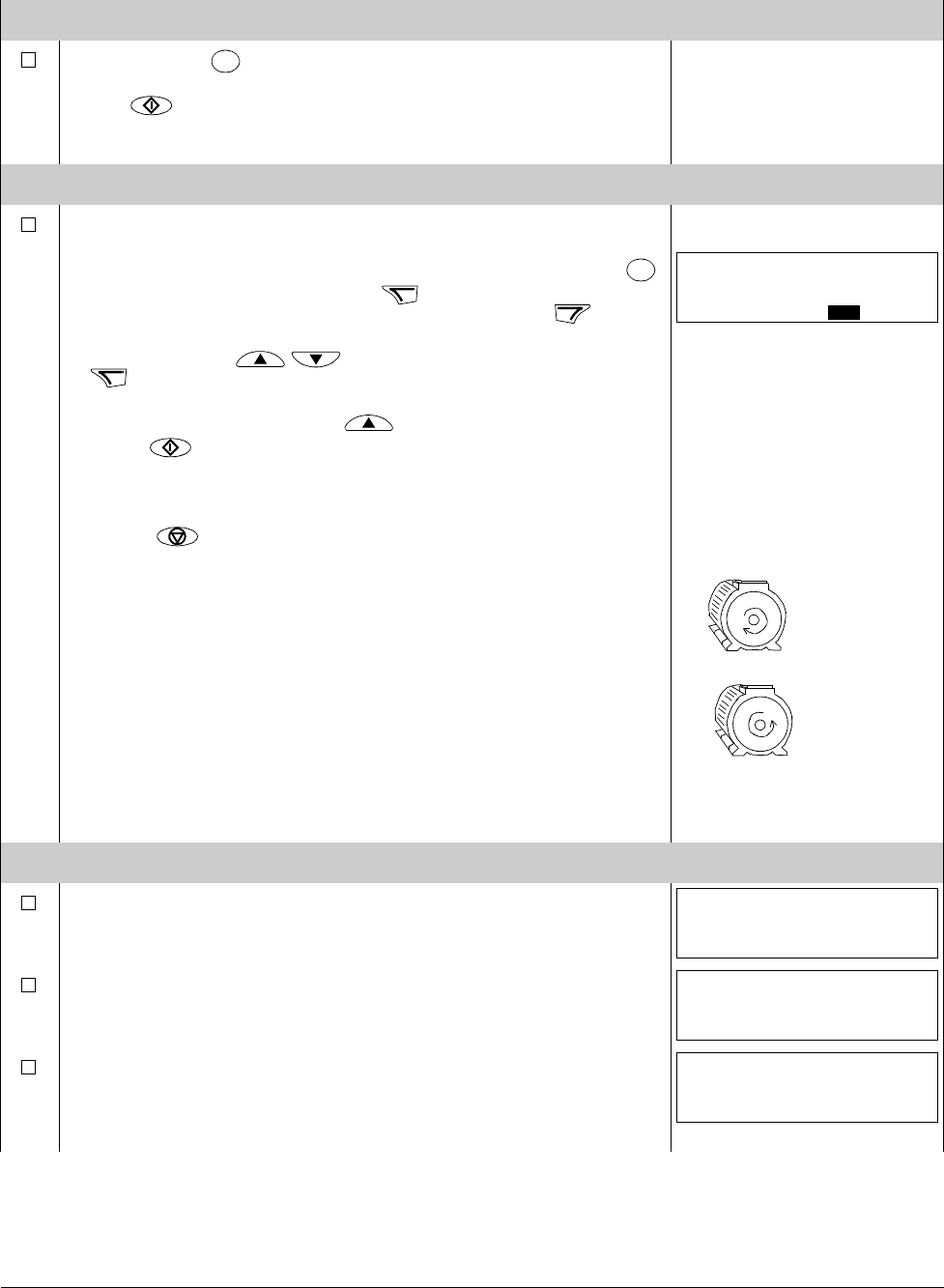
Puesta en marcha, control a través de la E/S y Marcha de ID
51
MAGNETIZACIÓN DE IDENTIFICACIÓN CON SELECCIÓN DE LA MARCHA DE ID A 0 (NO)
Pulsar la tecla para pasar a control local (se muestra LOC
en la parte izquierda).
Pulse para poner en marcha el convertidor. En ese
momento se calcula el modelo del motor magnetizando el
motor durante 10 a 15 s a velocidad cero.
DIRECCIÓN DE GIRO DEL MOTOR
Comprobar la dirección de giro del motor.
• Si el convertidor se encuentra en control remoto (se muestra
REM en el lado izquierdo), pase a control local pulsando .
• Para ir al menú principal, pulse si la línea inferior muestra
OUTPUT; en caso contrario pulse repetidamente hasta
que aparezca MENU en la parte inferior.
• Pulse las teclas / hasta que aparezca "rEF" y pulse
.
• Aumente la referencia de frecuencia desde cero a un valor
pequeño mediante la tecla .
• Pulse para arrancar el motor.
• Comprobar que la dirección actual de giro del motor es la
misma que se indica en la pantalla (FWD significa dirección
de avance y REV dirección inversa).
• Pulsar para detener el motor.
Para cambiar la dirección de giro del motor:
• Desconecte la alimentación de entrada del convertidor y
espere durante 5 minutos a que los condensadores del
circuito intermedio se descarguen. Mida la tensión entre cada
terminal de entrada (U1, V1 y W1) y efectúe la conexión a
tierra con un multímetro para verificar que el convertidor se
haya descargado.
• Intercambie la posición de dos conductores de fase del cable
a motor en los terminales de salida del convertidor o en la
caja de conexiones del motor.
• Verifique su trabajo; para ello suministre alimentación de
entrada y repita la comprobación como se ha descrito
anteriormente.
LÍMITES DE VELOCIDAD Y TIEMPOS DE ACELERACIÓN/DECELERACIÓN
Ajustar la velocidad mínima (parámetro 2001).
Ajustar la velocidad máxima (parámetro 2002).
Ajustar el tiempo de aceleración 1 (parámetro 2202).
Nota: si se van a emplear dos tiempos de aceleración en la
aplicación, compruebe también el tiempo de aceleración 2
(parámetro 2205).
LOC
REM
LOC
REM LOC
Hz
SET FWD
xxx
.
dirección de
avance
dirección
inversa
LOC
PAR FWD
2001
LOC
PAR FWD
2002
LOC
PAR FWD
2202
Puesta en marcha, control a través de la E/S y Marcha de ID
52
Ajustar el tiempo de deceleración 1 (parámetro 2203).
Nota: si se van a emplear dos tiempos de deceleración en la
aplicación, compruebe también el tiempo de deceleración 2
(parámetro 2206).
GUARDAR UNA MACRO DE USUARIO Y COMPROBACIÓN FINAL
En estos momentos la puesta en marcha ya se ha completado.
Sin embargo, en este momento puede resultar útil ajustar los
parámetros requeridos por su aplicación y guardar los ajustes
como una macro de usuario, tal como se explica en la sección
Macros de Usuario en la página 96.
Compruebe que el estado del convertidor sea correcto.
Panel de control básico: Compruebe que en la pantalla no se
muestran fallos ni alarmas. Si desea comprobar los LED en la
parte frontal del convertidor, pase a control remoto (en caso
contrario se genera un fallo) antes de retirar el panel y verificar
que el LED rojo no está encendido y que el LED verde está
encendido pero sin parpadear.
Panel de control asistente: Compruebe que en la pantalla no se
muestran fallos ni alarmas y que el LED del panel está verde y
sin parpadear.
El convertidor ya está listo para su uso.
LOC
PAR FWD
2203
LOC
PAR FWD
9902
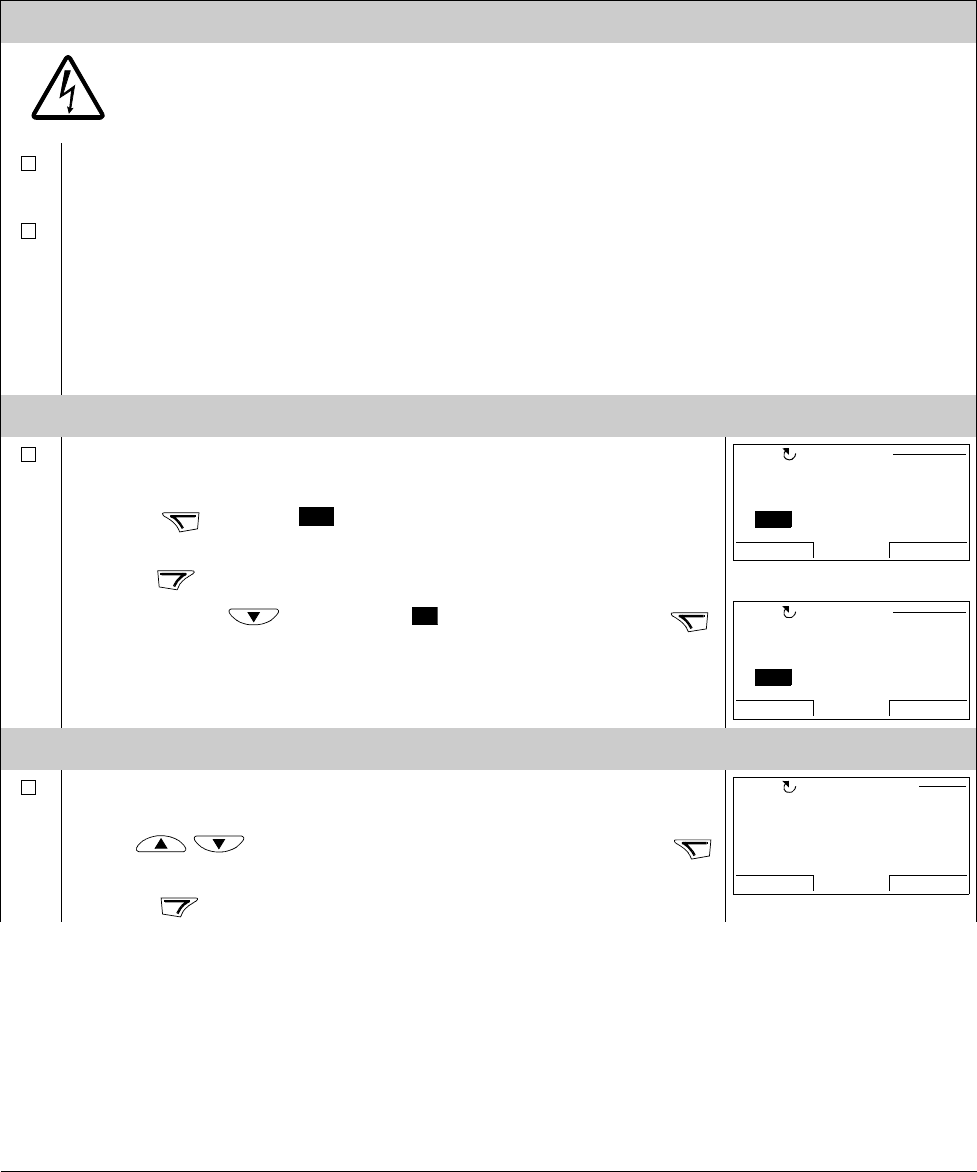
Puesta en marcha, control a través de la E/S y Marcha de ID
53
Cómo realizar una puesta en marcha guiada
Para poder realizar una puesta en marcha guiada es necesario disponer del panel
de control asistente.
Antes de empezar, verifique que dispone de los datos de la placa de características
del motor.
SEGURIDAD
La puesta en marcha sólo puede ser efectuada por un electricista cualificado.
Durante el procedimiento de puesta en marcha deben seguirse las instrucciones de
seguridad facilitadas en el capítulo Seguridad.
Comprobar la instalación. Véase la lista de comprobación en el capítulo Lista de
comprobación de la instalación.
Comprobar que la puesta en marcha del motor no supone ningún peligro.
Desacoplar la maquinaria accionada si:
• existe riesgo de daños en caso de una dirección de giro incorrecta, o
• debe realizarse una Marcha de ID durante la puesta en marcha del convertidor. La Marcha
de ID sólo es imprescindible en aplicaciones que exijan la máxima precisión en el control
del motor.
ALIMENTACIÓN
Suministre alimentación de entrada. El panel de control pregunta si
desea utilizar el Asistente de arranque.
• Pulse (cuando está resaltado) para ejecutar el
Asistente de arranque.
• Pulse si no desea ejecutar el Asistente de arranque.
• Pulse la tecla para resaltar y a continuación pulse
si desea que el panel pregunte (o no) si quiere ejecutar el
Asistente de arranque la próxima vez que encienda el
convertidor.
SELECCIÓN DEL IDIOMA
Si ha decidido ejecutar el Asistente de arranque, en la pantalla se
le pedirá que seleccione el idioma. Desplácese, con ayuda de las
teclas / , hasta encontrar el idioma deseado y pulse
para aceptar.
Si pulsa se detiene el Asistente de arranque.
ACEPTAR Sí
SALIR
¿Desea
usar el Asistente
de arranque?
Sí
No
SALIR ACEPTAR00:00
ELECCION
REM
No ACEPTAR
¿Mostrar Asistente
de arranque
al arrancar?
Sí
No
SALIR ACEPTAR00:00
ELECCION
REM
GUARDA
R
SALIR
9901 IDIOMA
EDICION PAR
INGLÉS
SALIR GUARDAR00:00
[0]
REM
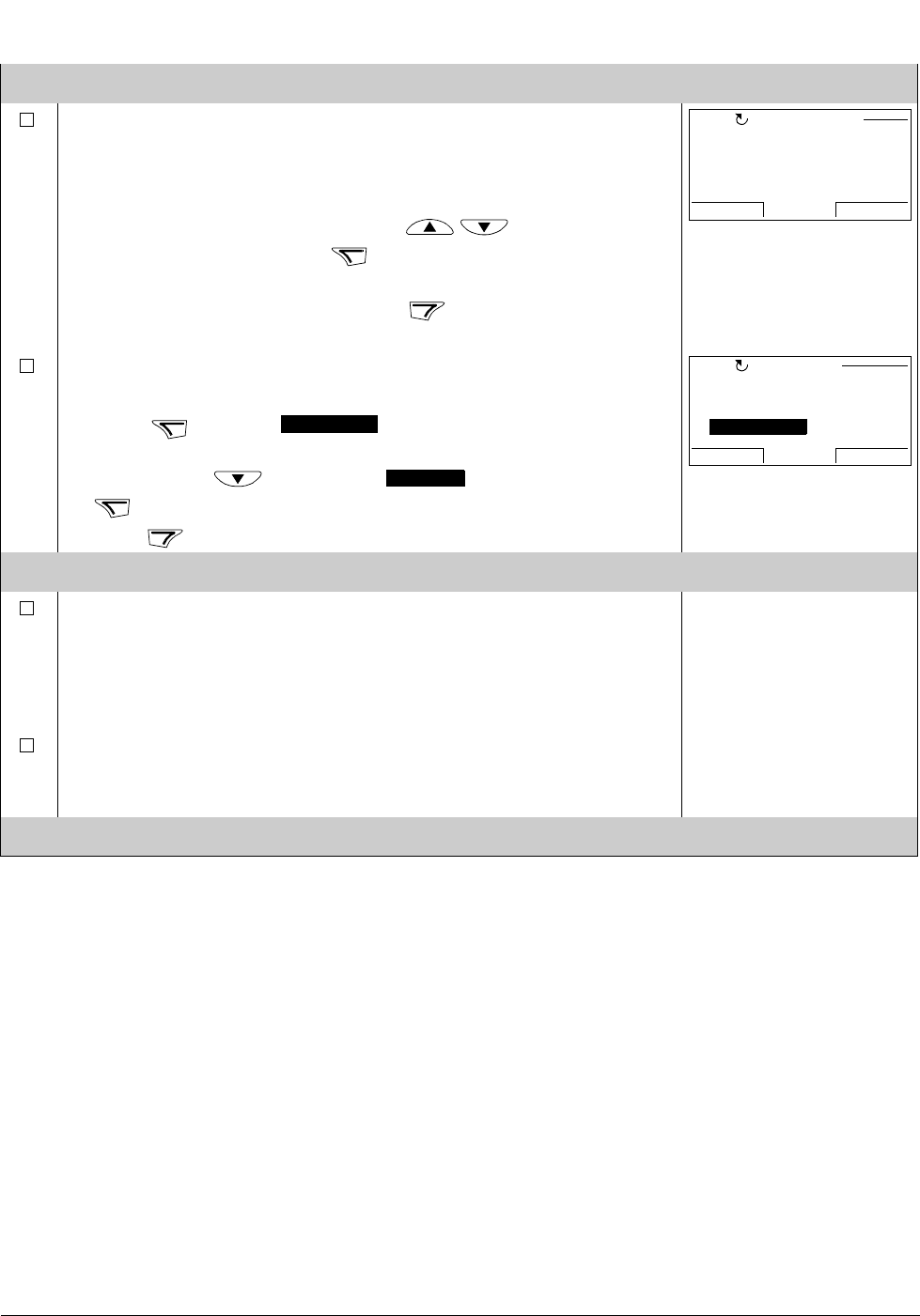
Puesta en marcha, control a través de la E/S y Marcha de ID
54
INICIO DEL AJUSTE GUIADO
El Asistente de arranque le guía a través de las tareas de ajuste,
empezando por el ajuste del motor. Ajuste los datos del motor
exactamente al mismo valor que los indicados en la placa de
características del motor.
Desplácese, con ayuda de las teclas / , hasta el valor del
parámetro deseado y pulse para aceptar y proseguir con el
Asistente de arranque.
Nota: En cualquier instante, si pulsa se detiene el Asistente
de arranque y la pantalla vuelve al modo de Salida.
Tras completar una tarea de ajuste, el Asistente de arranque
pregunta si desea continuar con la siguiente tarea.
• Pulse (cuando está resaltado) para continuar
con la siguiente tarea.
• Pulse la tecla para resaltar y a continuación pulse
para pasar a la siguiente tarea sin realizar la actual.
• Pulse para detener el Asistente de arranque.
GUARDAR UNA MACRO DE USUARIO Y COMPROBACIÓN FINAL
En estos momentos la puesta en marcha ya se ha completado. Sin
embargo, en este momento puede resultar útil ajustar los
parámetros requeridos por su aplicación y guardar los ajustes
como una macro de usuario, tal como se explica en la sección
Macros de Usuario en la página 96.
Después de completar todo el ajuste, compruebe que en la
pantalla no se muestran fallos ni alarmas y que el LED del panel
está verde y sin parpadear.
El convertidor ya está listo para su uso.
GUARDAR
SALIR
9905 TENSION NOM
MOTOR
EDICION PAR
220 V
SALIR GUARDAR
00:00
REM
ACEPTAR Continuar
Saltar
ACEPTA
R
SALIR
¿Desea continuar con
el ajuste de
aplicación?
Continuar
Saltar
SALIR ACEPTAR00:00
ELECCION
REM

Puesta en marcha, control a través de la E/S y Marcha de ID
55
Cómo controlar el convertidor a través de la interfase de E/S
La tabla siguiente facilita información para el manejo del convertidor mediante las
entradas digitales y analógicas, cuando:
• se efectúa la puesta en marcha del motor, y
• los ajustes de parámetros de fábrica son válidos.
Se muestran las pantallas del panel de control básico como ejemplo.
AJUSTES PRELIMINARES
Si tiene que cambiar la dirección de giro, compruebe que el
parámetro 1003 está ajustado a 3 (PETICION).
Verifique que las conexiones de control estén conectadas según el
diagrama de conexiones facilitado para la macro Estándar ABB.
Véase el apartado Macro
Estándar ABB en la página 89.
Asegúrese de que el convertidor se encuentre en control remoto.
Pulse la tecla para cambiar entre control remoto y control local.
En control remoto el panel
muestra el texto REM.
ARRANQUE Y CONTROL DE LA VELOCIDAD DEL MOTOR
Empiece conectando la entrada digital ED1.
Panel de control básico: El texto FWD empieza a parpadear y se
detiene una vez alcanzado el punto de ajuste.
Panel de control asistente: La flecha empieza a girar y se mostrará
punteada hasta alcanzar el punto de ajuste.
Regule la frecuencia de salida del convertidor (velocidad del motor)
ajustando la tensión de la entrada analógica EA1.
CAMBIO DE LA DIRECCIÓN DE GIRO DEL MOTOR
Dirección inversa: Conecte la entrada digital ED2.
Dirección de avance: Desconecte la entrada digital ED2.
PARO DEL MOTOR
Desconecte la entrada digital ED1. El motor se para.
Panel de control básico: El texto FWD empieza a parpadear
lentamente.
Panel de control asistente: La flecha deja de girar.
LOC
REM
REM Hz
OUTPUT FWD
00
.
REM Hz
OUTPUT FWD
500
.
REM Hz
OUTPUT REV
500
.
REM Hz
OUTPUT FWD
500
.
REM Hz
OUTPUT FWD
00
.
Puesta en marcha, control a través de la E/S y Marcha de ID
56
Realización de una Marcha de ID
El convertidor calcula automáticamente las características del motor cuando se
arranca por primera vez y cada vez que se realiza cualquier cambio en los
parámetros del motor (grupo 99 DATOS DE PARTIDA). Esto es válido cuando el
parámetro 9910 MARCHA ID tiene el valor 0 (OFF/IDMAGN).
En la mayoría de aplicaciones no es necesario efectuar una Marcha de ID por
separado. La Marcha de ID debe seleccionarse si:
• si se utiliza el modo de control vectorial [parámetro 9904 = 1 (VECTOR:VELOC)
o 2 (VECTOR:PAR)], y
• el punto de funcionamiento está cerca de la velocidad cero, y/o
• se requiere el funcionamiento en un rango de par por encima del par el motor
nominal en un amplio rango de velocidades y sin que se requiera realimentación
de velocidad medida (p. ej. sin un generador de pulsos).
Nota: Si se cambian los parámetros del motor (grupo 99 DATOS DE PARTIDA) tras
la Marcha de ID, ésta debe repetirse.
Procedimiento para la Marcha de ID
En este apartado no se vuelve a explicar el procedimiento de ajuste de parámetros
general. Para el panel de control básico, véase la página 65; para el panel de control
asistente, véase la página 76 en el capítulo Paneles de control. La Marcha de ID no
se puede realizar sin un panel de control.
COMPROBACIÓN PREVIA
¡ADVERTENCIA! Durante la Marcha de ID, el motor funcionará hasta
aproximadamente un 50 ... 80 % de la velocidad nominal y girará en dirección de
avance. Verifique que sea seguro accionar el motor antes de efectuar la Marcha
de ID.
Desacople el motor del equipo accionado.
Si se cambian valores de parámetros (grupo 01 DATOS FUNCIONAM a grupo 98
OPCIONES) antes de la Marcha de ID, compruebe que los nuevos ajustes satisfagan los
siguientes requisitos:
2001 VELOCIDAD MINIMA < 0 rpm
2002 VELOCIDAD MAXIMA > 80 % de la velocidad nominal del motor
2003 INTENSID MAXIMA > I2N
2017 PAR MAX 1 > 50 % o 2018 PAR MAX 2 > 50 %, según qué límite se está utilizando
en función del parámetro 2014 SEL PAR MAXIMO
Compruebe que la señal de Permiso de Marcha esté activada (parámetro 1601).
Verifique que el panel se encuentre en control local (se muestra LOC a la izquierda/en la
parte superior). Pulse la tecla para cambiar entre control remoto y control local.
LOC
REM
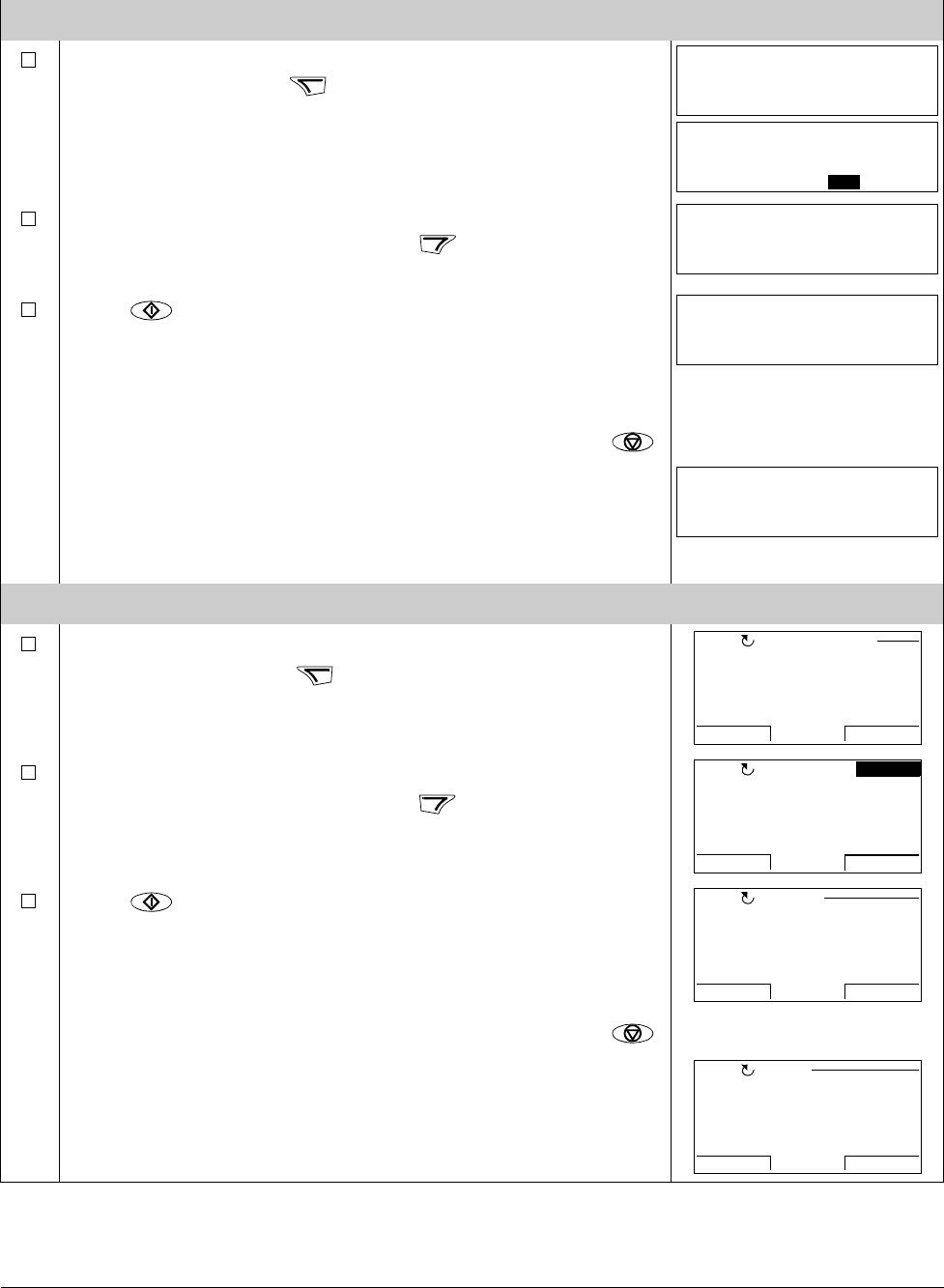
Puesta en marcha, control a través de la E/S y Marcha de ID
57
MARCHA DE ID CON EL PANEL DE CONTROL BÁSICO
Cambie el parámetro 9910 MARCHA ID a 1 (SI). Guarde el
nuevo ajuste pulsando .
Si desea supervisar los valores actuales durante la Marcha de
ID, vaya al Modo de Salida pulsando repetidamente hasta
situarse en dicho modo.
Pulse para iniciar la Marcha de ID. El panel continúa
alternando entre la pantalla mostrada al iniciar la Marcha de ID
y la pantalla de alarma que se muestra a la derecha.
En general, se recomienda no pulsar ninguna de las teclas del
panel de control durante la Marcha de ID. Sin embargo, puede
detener la Marcha de ID en cualquier momento pulsando .
Una vez completada la Marcha de ID, la pantalla de alarma
deja de visualizarse.
Si la Marcha de ID falla, aparece la pantalla de fallo mostrada
a la derecha.
MARCHA DE ID CON EL PANEL DE CONTROL ASISTENTE
Cambie el parámetro 9910 MARCHA ID a 1 (SI). Guarde el
nuevo ajuste pulsando .
Si desea supervisar los valores actuales durante la Marcha de
ID, vaya al Modo de Salida pulsando repetidamente hasta
llegar a dicho modo.
Pulse para iniciar la Marcha de ID. El panel continúa
alternando entre la pantalla mostrada al iniciar la Marcha de ID
y la pantalla de alarma que se muestra a la derecha.
En general, se recomienda no pulsar ninguna de las teclas del
panel de control durante la Marcha de ID. Sin embargo, puede
detener la Marcha de ID en cualquier momento pulsando .
Una vez completada la Marcha de ID, la pantalla de alarma
deja de visualizarse.
Si la Marcha de ID falla, aparece la pantalla de fallo mostrada
a la derecha.
LOC
PAR FWD
9910
LOC
PAR SET FWD
1
LOC
Hz
OUTPUT FWD
00
.
LOC
FWD
A2019
LOC
FWD
F0011
GUARDAR
9910 MARCHA ID
EDICION PAR
SI
CANCELA GUARDAR00:00
[1]
LOC
SALIR
0 A
0 Hz
0 % 0.
0.
0. 50.0HzLOC
DIR MENU
00:00
00:00
Marcha ID
ALARMA
LOC
ALARMA 2019
00:00
ERR MAR ID
FALLOLOC
FALLO 11

Puesta en marcha, control a través de la E/S y Marcha de ID
58

Paneles de control
59
Paneles de control
Contenido de este capítulo
Este capítulo describe las teclas, indicadores LED y campos de visualización de los
paneles de control. También proporciona instrucciones acerca de su uso para
controlar, supervisar y cambiar los ajustes del panel.
Acerca de los paneles de control
Utilice un panel de control para controlar el ACS350, leer datos de estado y ajustar
parámetros. El ACS350 funciona con cualquiera de los dos tipos de panel de
control:
• Panel de control básico – Este panel (descrito más adelante) proporciona
herramientas básicas para la introducción manual de valores de los parámetros.
• Panel de control asistente – Este panel (descrito en la sección Panel de control
asistente en la página 69) incluye asistentes preprogramados para automatizar
las configuraciones de los parámetros más comunes. Este panel permite trabajar
con distintos idiomas. Actualmente está disponible con distintas configuraciones
idiomáticas.
Compatibilidad
Este manual es compatible con las siguientes versiones:
• Panel de control básico: ACS-CP-C Rev. K
• Panel de control asistente (Zona 1): ACS-CP-A Rev. Y
• Panel de control asistente (Zona 2): ACS-CP-L Rev. E
• Panel de control asistente (Asia): ACS-CP-D Rev. M
Remítase a la página 72 para saber cómo puede encontrar la versión de su panel de
control asistente. Véase el parámetro 9901 IDIOMA para ver los idiomas disponibles
en los distintos paneles de control asistente.
Panel de control básico
Características
El panel de control básico tiene las siguientes características:
• panel de control numérico con una pantalla LCD
• función de copia: los parámetros pueden copiarse en la memoria del panel de
control para una transferencia posterior a otros convertidores, o bien para la
copia de seguridad de un sistema concreto.
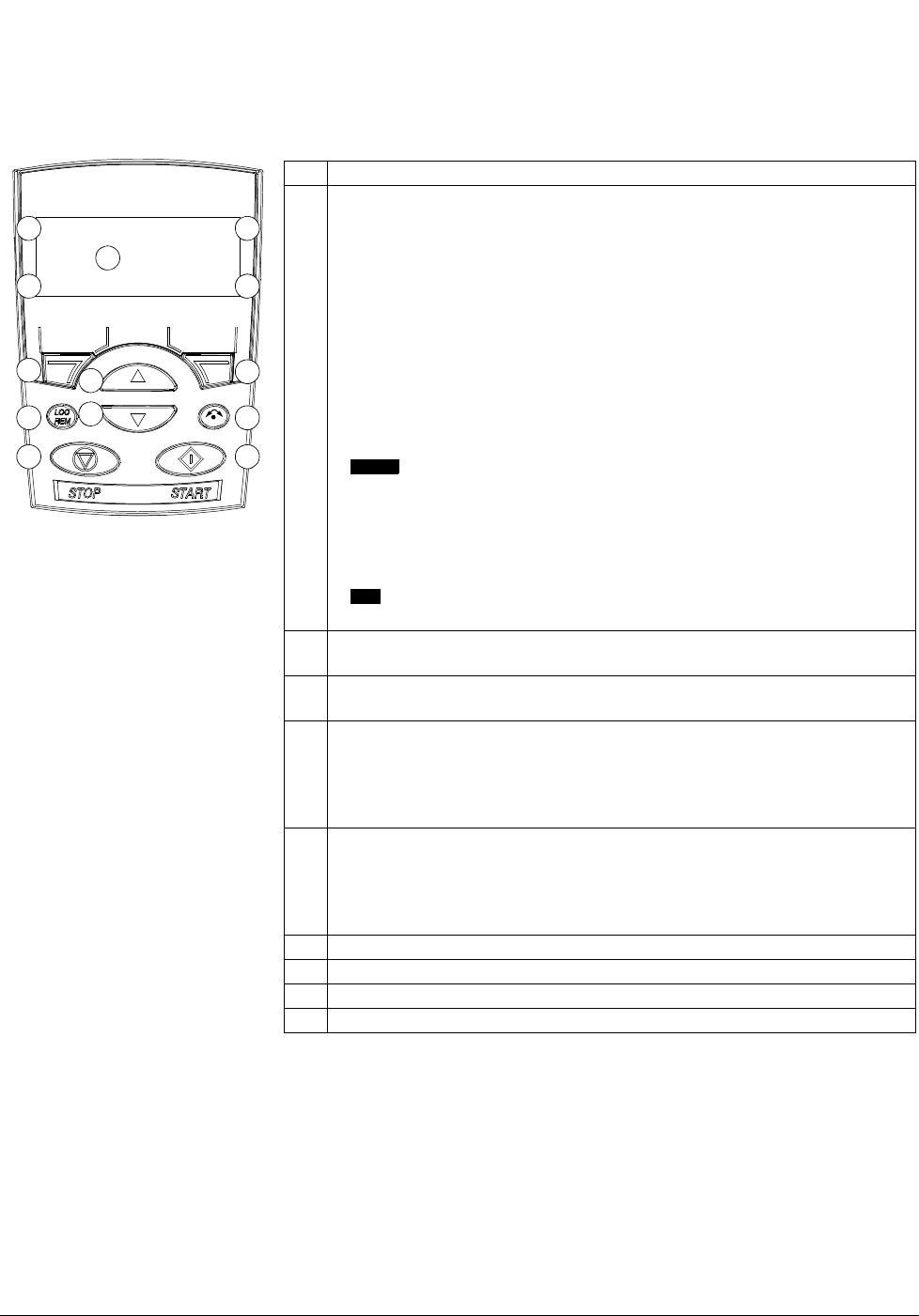
Paneles de control
60
Descripción general
La tabla siguiente resume las funciones de las teclas y las pantallas del panel de
control básico.
N.º Uso
1 Pantalla LCD – Se divide en cinco áreas:
a. Superior izquierda – Lugar de control:
LOC: el control del convertidor es local, es decir, desde el panel de control.
REM: el control del convertidor es remoto, como el bus de campo o la E/S
del convertidor.
b. Superior derecha – Unidad del valor visualizado.
c. Central – Variable, en general muestra valores de parámetros y señales,
menús o listas. También muestra códigos de alarma y fallos.
d. Inferior izquierda y central – Estado de funcionamiento del panel:
OUTPUT: Modo de Salida
PAR: Modo de Parámetros
MENU: Menú principal.
: Modo de fallo.
e. Inferior derecha – Indicadores:
FWD (avance) / REV (inversa): dirección de giro del motor.
Parpadeo lento: parado
Parpadeo rápido: en marcha, no en el punto de consigna
Iluminación constante: en marcha, en el punto de consigna
: El valor visualizado se puede modificar (en los Modos de Parámetros
y de Referencia).
2 REARME/SALIR – Sale al siguiente nivel del menú superior sin guardar los
valores cambiados. Restaura los fallos en los Modos de Salida y de Fallo.
3 MENU/INTRO – Permite profundizar en el nivel del menú. En el Modo de
Parámetros, guarda el valor visualizado como el nuevo ajuste.
4 Arriba –
• Permite desplazarse hacia arriba por un menú o lista.
• Incrementa un valor si se ha seleccionado un parámetro.
• Incrementa el valor de referencia en el Modo de Referencia.
Si la tecla se mantiene pulsada, el valor cambia más rápidamente.
5Abajo –
• Permite desplazarse hacia abajo por un menú o lista.
• Reduce un valor si se ha seleccionado un parámetro.
• Disminuye el valor de referencia en el Modo de Referencia.
Si la tecla se mantiene pulsada, el valor cambia más rápidamente.
6 LOC/REM – Cambia entre control local y remoto del convertidor.
7 DIR – Cambia la dirección de giro del motor.
8 STOP – Detiene el convertidor en control local.
9 START – Arranca el convertidor en control local.
FAULT
SET
LOC
OUTPUT FWD
A
1.1
REARME
SALIR MENU
INTRO
1a
23
4
5
6 7
8 9
1c
1d
1b
1e
Paneles de control
61
Funcionamiento
El panel de control funciona mediante menús y teclas. Las opciones, por ejemplo el
modo de funcionamiento o un parámetro determinado, se seleccionan
desplazándose mediante las teclas de flecha y hasta que la opción
deseada aparezca en pantalla y, a continuación, pulsando la tecla .
Con la tecla se puede volver al nivel de la operación anterior sin guardar los
cambios realizados.
El panel de control básico tiene cinco modos de visualización: Salida (Output),
Referencia, Parámetros, Copia y Fallo. En este capítulo se describe el
funcionamiento de los cuatro primeros modos. Cuando se produce un fallo o una
alarma, el panel se sitúa automáticamente en el Modo de Fallo y muestra el código
de fallo o alarma. El fallo o alarma se puede restaurar en los modos de Salida o de
Fallo (véase el capítulo Análisis de fallos).
Al conectar la alimentación el panel se encuentra en el
Modo de Salida, en el cual se puede arrancar, detener
o cambiar la dirección del motor, cambiar entre el
control local y el remoto y supervisar hasta tres
valores actuales (uno a la vez). Para realizar otras
tareas, se debe ir primero al menú principal y
seleccionar el modo correspondiente.
Cómo realizar tareas habituales
En la tabla que presentamos a continuación se enumeran las tareas habituales, el
modo de funcionamiento en el que se pueden realizar y la página en que se
describen detalladamente los pasos necesarios para su realización.
Tarea Modo Página
Cómo cambiar entre control remoto y control local Cualquiera 62
Cómo poner en marcha y detener el convertidor Cualquiera 62
Cómo cambiar la dirección de giro del motor Cualquiera 62
Cómo desplazarse por las señales supervisadas Salida 63
Cómo ajustar la referencia de velocidad, frecuencia o par Referencia 64
Cómo cambiar el valor de un parámetro Parámetros 65
Cómo seleccionar las señales supervisadas Parámetros 66
Cómo restaurar fallos y alarmas Salida, Fallo 285
Cómo copiar parámetros del convertidor al panel de control Copia 68
Cómo restaurar parámetros del panel de control al convertidor Copia 68
REM Hz
OUTPUT FWD
491
.
REM
MENU FWD
PAr
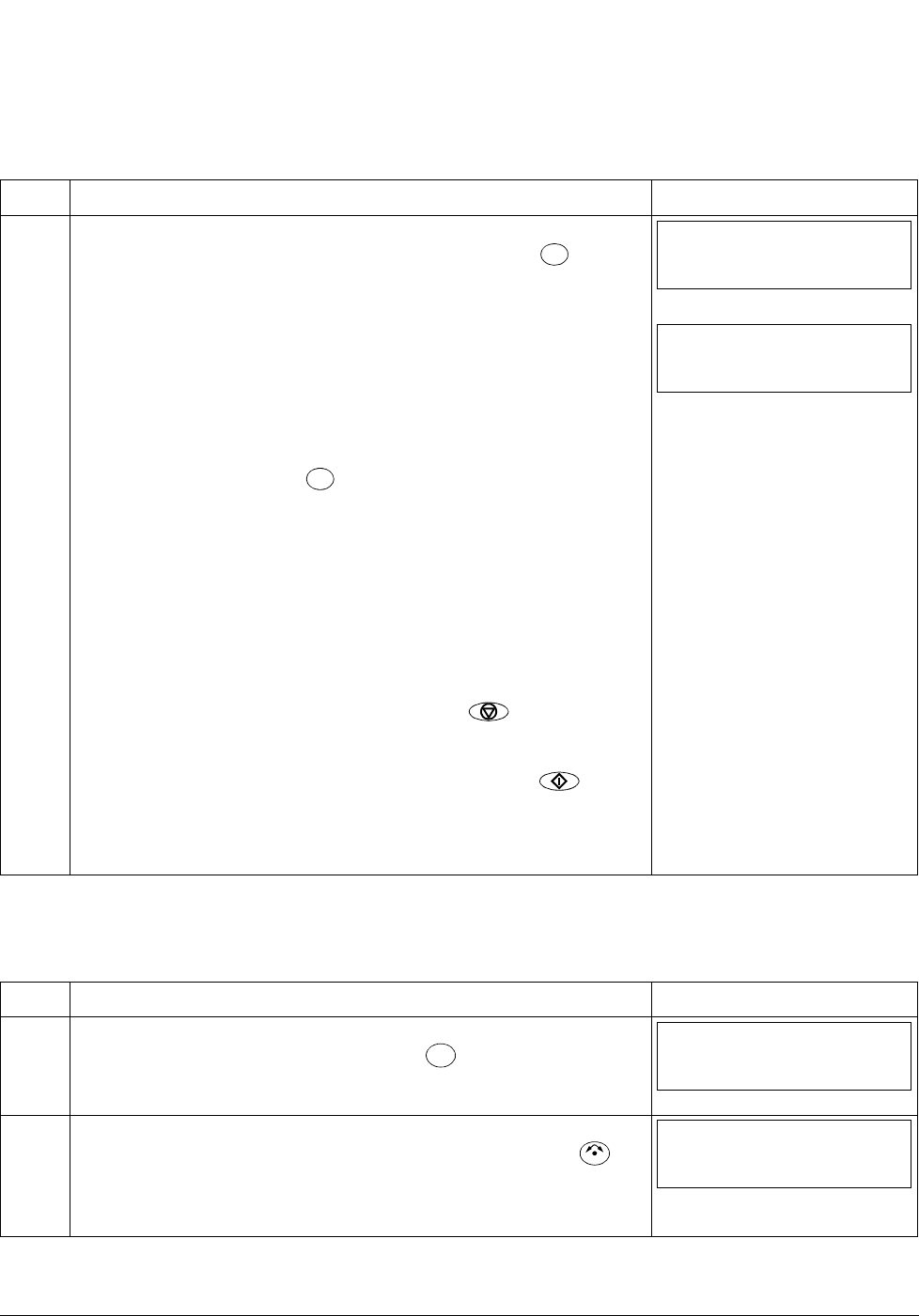
Paneles de control
62
Cómo poner en marcha, detener y cambiar entre control remoto y control local
Se puede poner en marcha, detener y cambiar entre control remoto y control local
en cualquier modo de funcionamiento. Para poder poner en marcha o detener el
convertidor, éste debe hallarse en control local.
Cómo cambiar la dirección de giro del motor
Se puede cambiar la dirección de giro del motor en cualquier modo de
funcionamiento.
Paso Acción Pantalla
1. • Para cambiar entre control remoto (se muestra REM en el lado izquierdo)
y control local (se muestra LOC en el lado izquierdo), pulse .
Nota: El cambio a control local puede desactivarse con el parámetro
1606 BLOQUEO LOCAL.
Tras pulsar la tecla, la pantalla muestra durante unos breves instantes el
mensaje "LoC" o "rE", según lo que corresponda, antes de volver a la
pantalla anterior.
Al encender el convertidor por primera vez, éste se encuentra en control
remoto (REM) y se controla mediante los terminales de E/S del
convertidor. Para cambiar a control local (LOC) y controlar el convertidor
con el panel de control, pulse . El resultado depende del tiempo
durante el que mantenga pulsada la tecla:
• Si la suelta inmediatamente (la pantalla muestra "LoC" parpadeando), el
convertidor se detiene. Ajuste la referencia de control local tal como se
indica en la página 64.
• Si mantiene pulsada la tecla unos 2 segundos (y la suelta cuando la
pantalla cambia de "LoC" a "LoC r"), el convertidor sigue funcionando
como antes. El convertidor copia los valores remotos actuales para el
estado de marcha/paro y la referencia, y los utiliza como los ajustes de
control local iniciales.
• Para detener el convertidor en control local, pulse . En la línea inferior el texto FWD
o REV empieza a parpadear
lentamente.
• Para poner en marcha el convertidor en control local, pulse . En la línea inferior el texto FWD
o REV empieza a parpadear
rápidamente. El parpadeo cesa
cuando el convertidor alcanza el
punto de consigna.
Paso Acción Pantalla
1. Si el convertidor se encuentra en control remoto (se muestra REM en el
lado izquierdo), pase a control local pulsando . La pantalla muestra
durante unos breves instantes el mensaje "LoC" antes de volver a la
pantalla anterior.
2. Para cambiar la dirección de avance (se muestra FWD en la parte inferior)
a inversa (se muestra REV en la parte inferior), o viceversa, pulse .
Nota: El parámetro 1003 DIRECCION debe estar ajustado a 3
(PETICION).
LOC
REM
LOC
Hz
OUTPUT FWD
491
.
LOC
FWD
LoC
LOC
REM
LOC
REM
LOC
Hz
OUTPUT FWD
491
.
LOC
Hz
OUTPUT REV
491
.
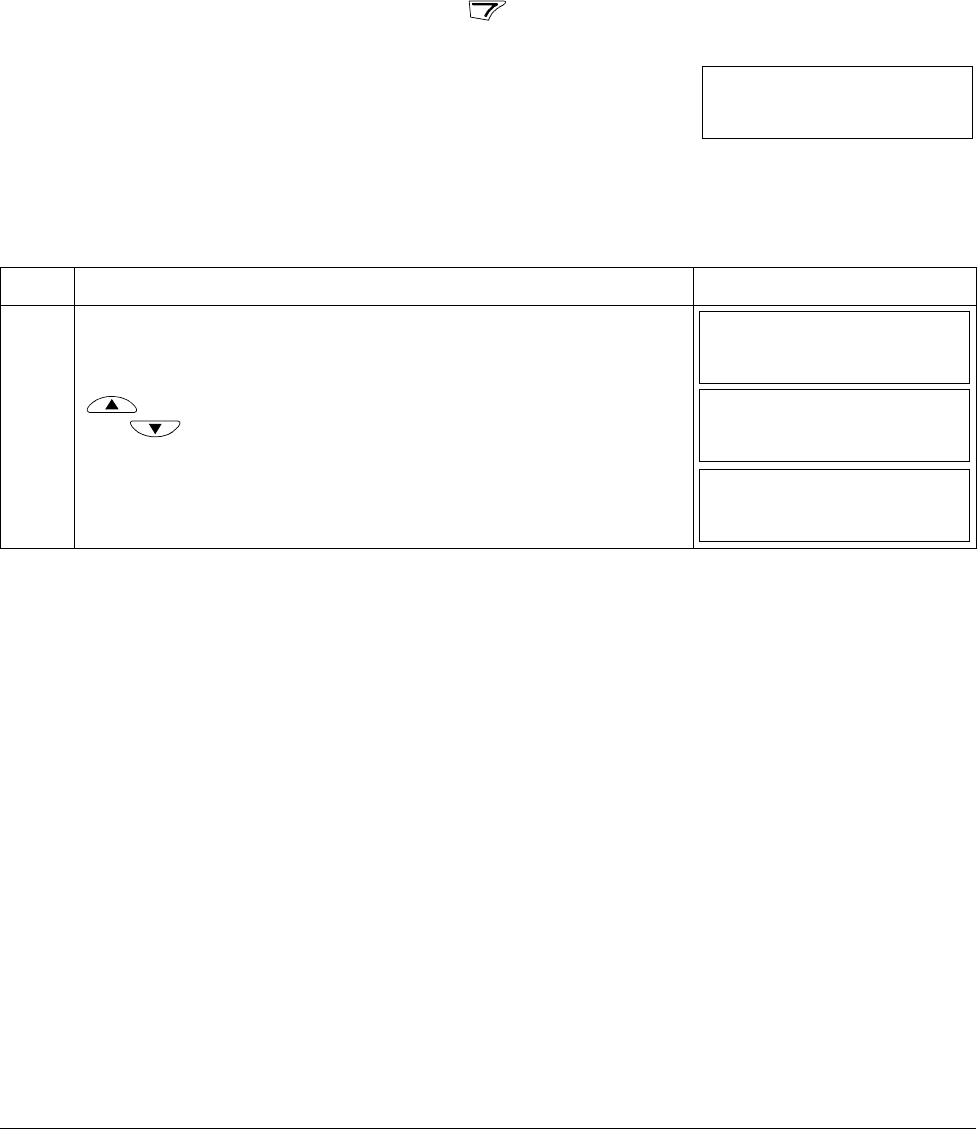
Paneles de control
63
Modo de Salida
En el Modo de Salida, el usuario puede:
• supervisar valores actuales de hasta tres señales del grupo 01 DATOS
FUNCIONAM, una señal a la vez;
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Para ir al Modo de Salida pulse hasta que la pantalla muestre el texto OUTPUT
en la parte inferior.
La pantalla muestra el valor de una señal del grupo 01
DATOS FUNCIONAM. La unidad se muestra a la
derecha. En la página 66 se detalla el procedimiento
para seleccionar hasta tres señales en el Modo de
Salida para su supervisión. La tabla siguiente muestra cómo visualizarlas una por
una.
Cómo desplazarse por las señales supervisadas
Paso Acción Pantalla
1. Si se ha seleccionado más de una señal para ser supervisada (véase la
página 66), es posible desplazarse por ellas en el Modo de Salida.
Para avanzar por las señales hacia adelante, pulse repetidamente la tecla
. Para avanzar por las señales hacia atrás, pulse repetidamente la
tecla .
REM Hz
OUTPUT FWD
491
.
REM Hz
OUTPUT FWD
491
.
A
REM
OUTPUT FWD
05
.
REM %
OUTPUT FWD
107
.
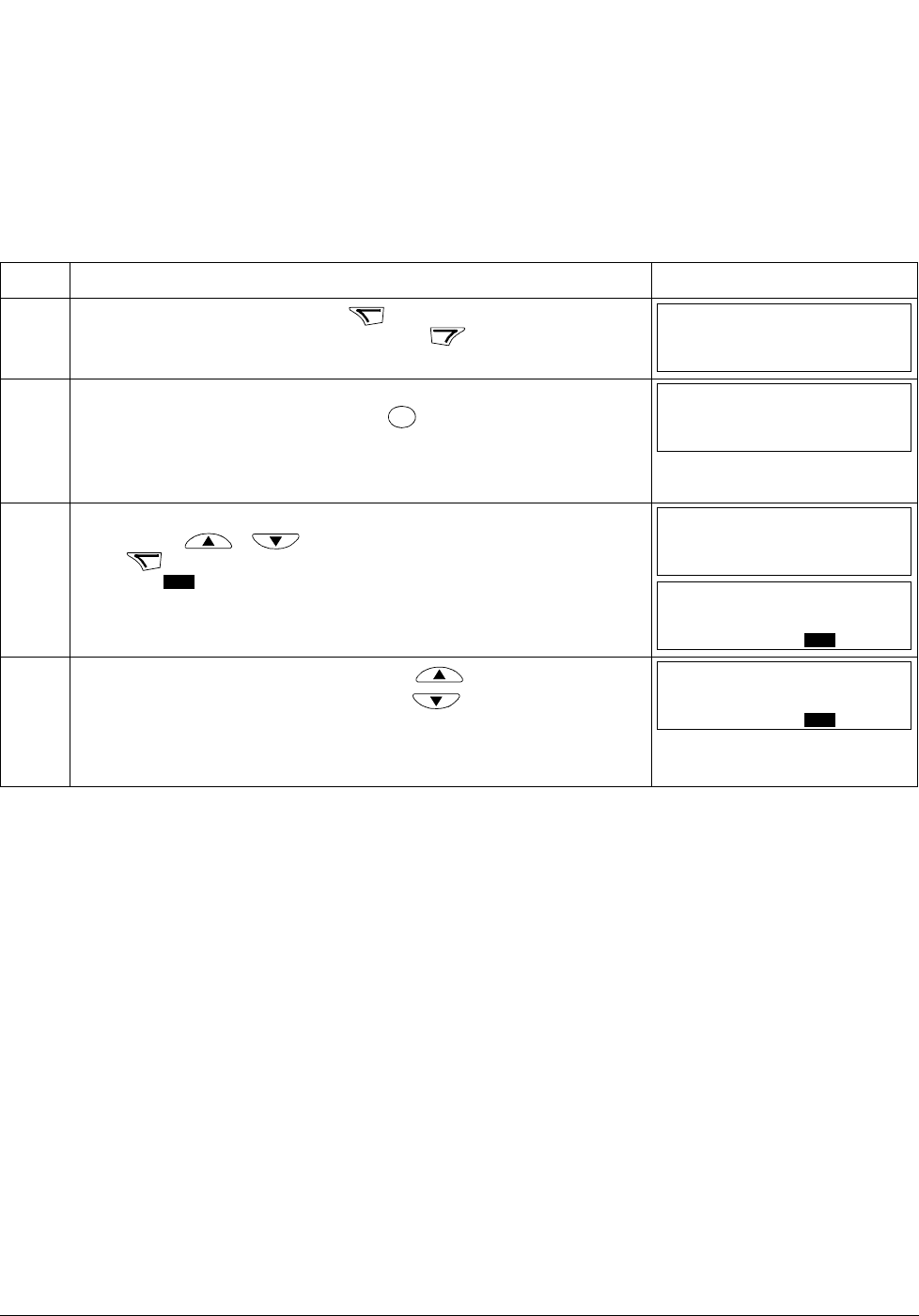
Paneles de control
64
Modo de Referencia
En el Modo de Referencia, el usuario puede:
• ajustar la referencia de velocidad, frecuencia o par;
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo ajustar la referencia de velocidad, frecuencia o par
Paso Acción Pantalla
1. Diríjase al menú principal pulsando si se encuentra en el Modo de
Salida; en caso contrario pulse repetidamente hasta que aparezca
MENU en la parte inferior.
2. Si el convertidor se halla en control remoto (se muestra REM en el lado
izquierdo), pase a control local pulsando . La pantalla muestra durante
unos breves instantes el mensaje "LoC" antes de pasar a control local.
Nota: con el grupo 11 SELEC REFERENCIA se puede permitir la
modificación de las referencias en control remoto (REM).
3. Si el panel no se halla en el Modo de Referencia ("rEF" no está visible),
pulse la tecla o hasta que aparezca "rEF" y, a continuación,
pulse . En estos momentos la pantalla muestra el valor de referencia
actual con bajo el valor.
4. • Para aumentar el valor de referencia pulse .
• Para disminuir el valor de referencia pulse .
El valor cambia inmediatamente al pulsar la tecla, se almacena en la
memoria permanente del convertidor y se restaura automáticamente tras
desconectar la alimentación.
REM
MENU FWD
PAr
LOC
REM
LOC
MENU FWD
PAr
SET
LOC
MENU FWD
rEF
LOC
Hz
SET FWD
491
.
LOC
Hz
SET FWD
500
.
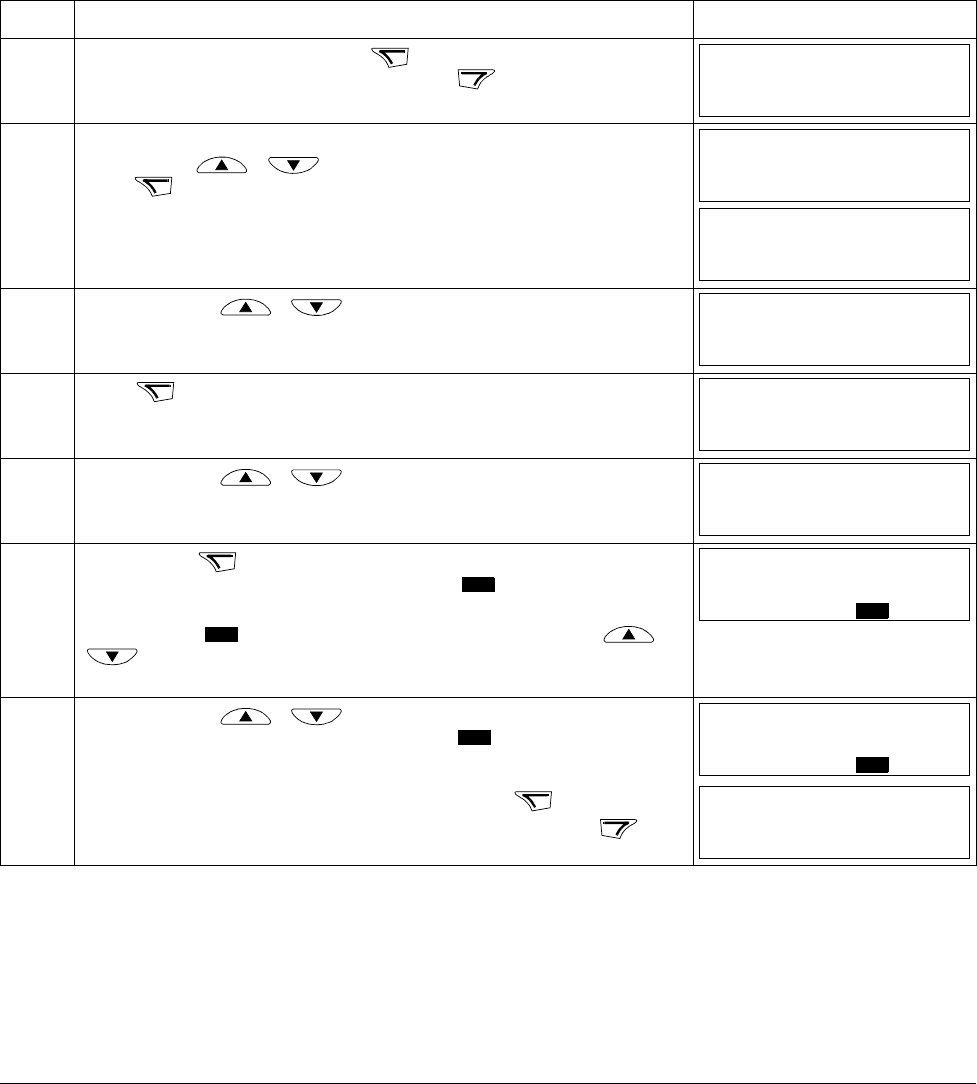
Paneles de control
65
Modo de Parámetros
En el Modo de Parámetros, el usuario puede:
• ver y cambiar los valores de los parámetros;
• seleccionar y modificar las señales mostradas en el Modo de Salida;
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo seleccionar un parámetro y cambiar su valor
Paso Acción Pantalla
1. Diríjase al menú principal pulsando si se encuentra en el Modo de
Salida; en caso contrario pulse repetidamente hasta que aparezca
MENU en la parte inferior.
2. Si el panel no se halla en el Modo de Parámetros ("PAr" no está visible),
pulse la tecla o hasta que aparezca "PAr" y, a continuación,
pulse . La pantalla muestra el número de uno de los grupos de
parámetros.
3. Utilice las teclas y para encontrar el grupo de parámetros
deseado.
4. Pulse . La pantalla muestra uno de los parámetros del grupo
seleccionado.
5. Utilice las teclas y para encontrar el parámetro deseado.
6. Pulse la tecla y manténgala pulsada durante unos dos segundos
hasta que aparezca el valor del parámetro con debajo del mismo, lo
que indica que en estos momentos es posible cambiar su valor.
Nota: Cuando es visible, pulsar simultáneamente las teclas y
hace que cambie el valor mostrado al valor por defecto del
parámetro.
7. Utilice las teclas y para seleccionar el valor del parámetro.
Cuando haya cambiado el valor del parámetro, empezará a parpadear.
• Para guardar el valor del parámetro mostrado pulse .
• Para cancelar el nuevo valor y mantener el valor original pulse .
LOC
MENU FWD
rEF
LOC
MENU FWD
PAr
LOC
PAR FWD
-01-
LOC
PAR FWD
-11-
LOC
PAR FWD
1101
LOC
PAR FWD
1103
SET
SET
LOC
PAR SET FWD
1
SET LOC
PAR SET FWD
2
LOC
PAR FWD
1103
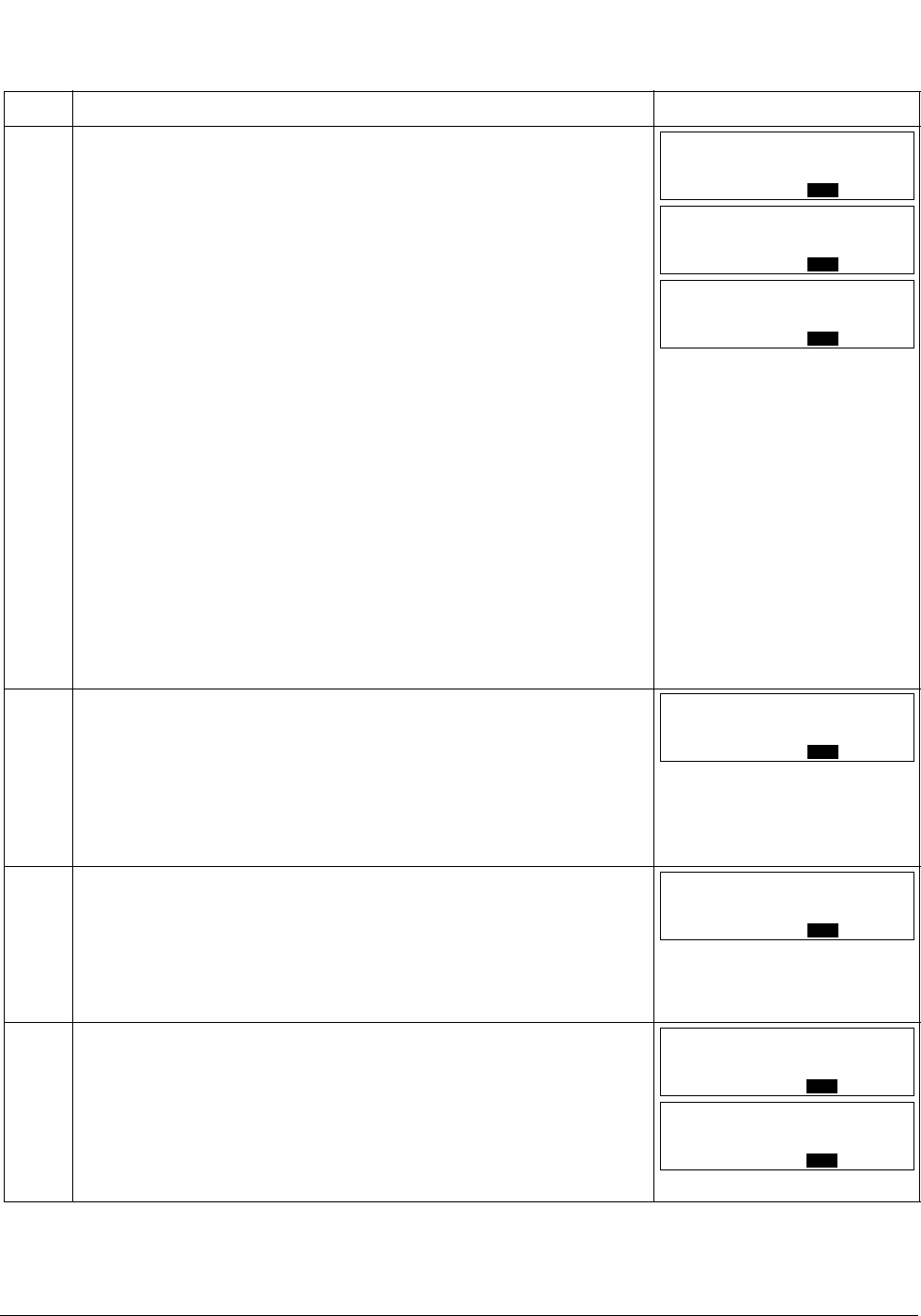
Paneles de control
66
Cómo seleccionar las señales supervisadas
Paso Acción Pantalla
1. Puede seleccionar las señales que se supervisarán en el Modo de Salida y
cómo se visualizarán mediante los parámetros del grupo 34 PANTALLA
PANEL . Véase la página 65 para instrucciones detalladas acerca del
cambio de valores de los parámetros.
Por defecto, se pueden supervisar tres señales navegando por ellas. Las
señales por defecto particulares dependen del valor del parámetro 9902
MACRO DE APLIC: Para las macros, cuyo valor por defecto del parámetro
9904 MODO CTRL MOTOR es 1 (VECTOR:VELOC), el ajuste por defecto
de la señal 1 es 0102 VELOCIDAD, en caso contrario es 0103 FREC
SALIDA. Los ajustes por defecto de las señales 2 y 3 siempre son 0104
INTENSIDAD y 0105 PAR, respectivamente.
Para cambiar las señales por defecto, seleccione hasta tres señales del
grupo 01 DATOS FUNCIONAM para mostrar.
Señal 1: Cambie el valor del parámetro 3401 PARAM SEÑAL1 al índice del
parámetro de señal del grupo 01 DATOS FUNCIONAM (= número del
parámetro sin el cero inicial); p. ej., 105 significa el parámetro 0105 PAR. El
valor 0 significa que no se visualiza ninguna señal.
Repita el procedimiento para las señales 2 (3408 PARAM SEÑAL2) y 3
(3415 PARAM SEÑAL3). Por ejemplo, si 3401 = 0 y 3415 = 0, la
navegación está desactivada y en la pantalla sólo aparece la señal
especificada por 3408. Si los tres parámetros están ajustados a 0, es decir,
no hay ninguna señal seleccionada para supervisión, el panel muestra el
texto "n.A."
2. Especifique la posición de la coma decimal o utilice la posición de la coma
decimal y la unidad de la señal de origen [setting 9 (DIRECTO)]. Los
gráficos de barras no están disponibles en el panel de control básico. Para
obtener detalles, véase el parámetro 3404.
Señal 1: parámetro 3404 FORM DSP SALIDA1.
Señal 2: parámetro 3411 FORM DSP SALIDA2.
Señal 3: parámetro 3418 FORM DSP SALIDA3.
3. Seleccione las unidades en que desea que se visualicen las señales. Esto
no tiene efecto si el parámetro 3404/3411/3418 está ajustado a 9
(DIRECTO). Para obtener detalles, véase el parámetro 3405.
Señal 1: parámetro 3405 UNIDAD SALIDA1.
Señal 2: parámetro 3412 UNIDAD SALIDA2.
Señal 3: parámetro 3419 UNIDAD SALIDA3.
4. Seleccione las escalas para las señales especificando los valores de
visualización máximo y mínimo. Esto no tiene efecto si el parámetro 3404/
3411/3418 está ajustado a 9 (DIRECTO). Para obtener detalles, véanse los
parámetros 3406 y 3407.
Señal 1: parámetros 3406 SALIDA1 MIN y 3407 SALIDA1 MAX.
Señal 2: parámetros 3413 SALIDA2 MIN y 3414 SALIDA2 MAX.
Señal 3: parámetros 3420 SALIDA3 MIN y 3421 SALIDA3 MAX.
LOC
PAR SET FWD
103
LOC
PAR SET FWD
104
LOC
PAR SET FWD
105
LOC
PAR SET FWD
9
LOC
PAR SET FWD
3
LOC
Hz
PAR SET FWD
00
.
LOC
Hz
PAR SET FWD
5000
.

Paneles de control
67
Modo de Copia
El panel de control básico puede almacenar una serie completa de parámetros del
convertidor y hasta tres series de parámetros del usuario en el panel de control. La
memoria del panel de control es permanente.
En el Modo de Copia, el usuario puede:
• Copiar todos los parámetros del convertidor al panel de control (uL – Upload).
Esto incluye todas las series de parámetros definidos por el usuario y parámetros
internos (no ajustables por el usuario) como los creados por la Marcha de ID.
• Restaurar la serie de parámetros completa del panel de control al convertidor (dL
A – Descargar todo). Este proceso guarda en el convertidor todos los
parámetros, incluyendo los parámetros internos del motor no ajustables por el
usuario. No incluye las series de parámetros de usuario.
Nota: Utilice esta función solamente para restaurar un convertidor o para
transferir parámetros a sistemas que sean idénticos al sistema original.
• Copiar una serie de parámetros parcial del panel de control a un convertidor (dL
P – Descargar parcial). La serie parcial no incluye parámetros de usuario,
parámetros internos del motor, los parámetros 9905 ... 9909, 1605, 1607, 5201 ni
ningún parámetro de los grupos 51 MOD COMUNIC EXT y 53 PROTOCOLO
BCI.
Los convertidores origen y destino y sus tamaños de motor no tienen porqué ser
iguales.
• Copiar los parámetros USUARIO S1 del panel de control al convertidor (dL u1 –
DESCARGA USUARIO1). Una serie de usuario incluye parámetros del grupo 99
DATOS DE PARTIDA y los parámetros internos del motor.
La función sólo se muestra en el menú cuando se ha guardado en primer lugar la
Serie de Usuario 1 utilizando el parámetro 9902 MACRO DE APLIC (véase el
apartado Macros de Usuario en la página 96) y después se ha cargado al panel.
• Copiar los parámetros USUARIO S2 del panel de control al convertidor (dL u2 –
Descarga usuario2). Como en el caso anterior dL u1 – DESCARGA USUARIO1.
• Copiar los parámetros USUARIO S3 del panel de control al convertidor (dL u3–
Descarga usuario3). Como en el caso anterior dL u1 – DESCARGA USUARIO1.
• Poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
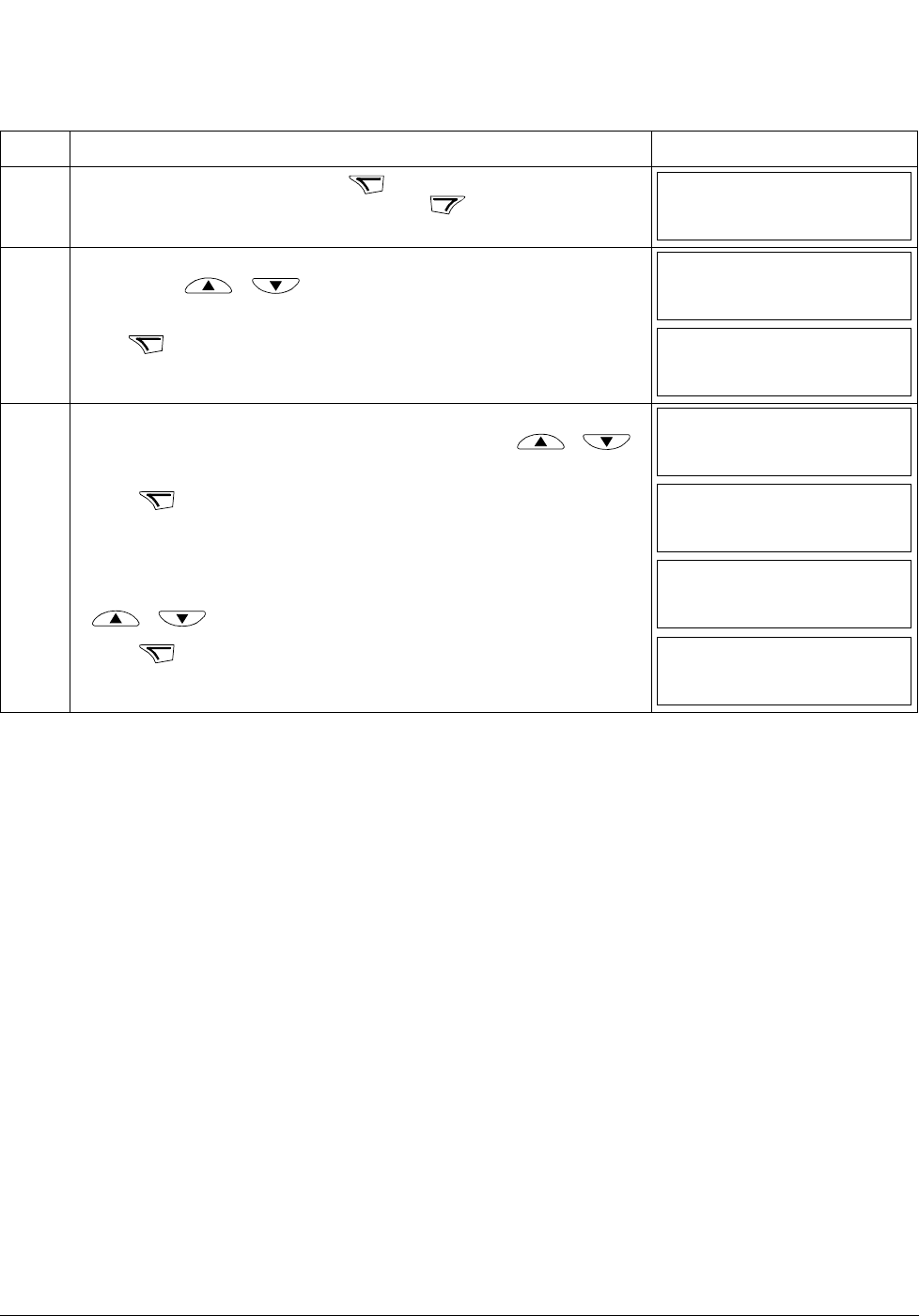
Paneles de control
68
Cómo cargar y descargar parámetros
Para las funciones de carga y descarga disponibles, véase más arriba.
Códigos de alarma del panel de control básico
Además de los fallos y alarmas generados por el convertidor (véase el capítulo
Análisis de fallos), el panel de control básico indica las alarmas del panel con un
código con el formato A5xxx. Véase la sección Alarmas generadas por el Panel de
control básico en la página 288 para obtener una lista de los códigos de alarma y
sus descripciones.
Paso Acción Pantalla
1. Diríjase al menú principal pulsando si se encuentra en el Modo de
Salida; en caso contrario pulse repetidamente hasta que aparezca
MENU en la parte inferior.
2. Si el panel no se encuentra en el Modo de Copia ("CoPY" no está visible),
pulse la tecla o hasta que aparezca "CoPY".
Pulse .
3. • Para cargar todos los parámetros (incluidas las series de usuario) del
convertidor al panel de control pase a "uL" con las teclas y .
Pulse . Durante la transferencia, la pantalla muestra el estado de
transferencia como un porcentaje del total.
• Para realizar descargas, pase a la operación correspondiente (en este
caso se utiliza como ejemplo "dL A", Descargar todo) con las teclas
y .
Pulse . Durante la transferencia, la pantalla muestra el estado de
transferencia como un porcentaje de ejecución.
LOC
MENU FWD
PAr
LOC
MENU FWD
CoPY
LOC
MENU FWD
CoPY
LOC
MENU FWD
uL
LOC
MENU FWD
uL
LOC
MENU FWD
uL
LOC
%
FWD
uL 50
LOC
MENU FWD
dL A
LOC
%
FWD
dL 50
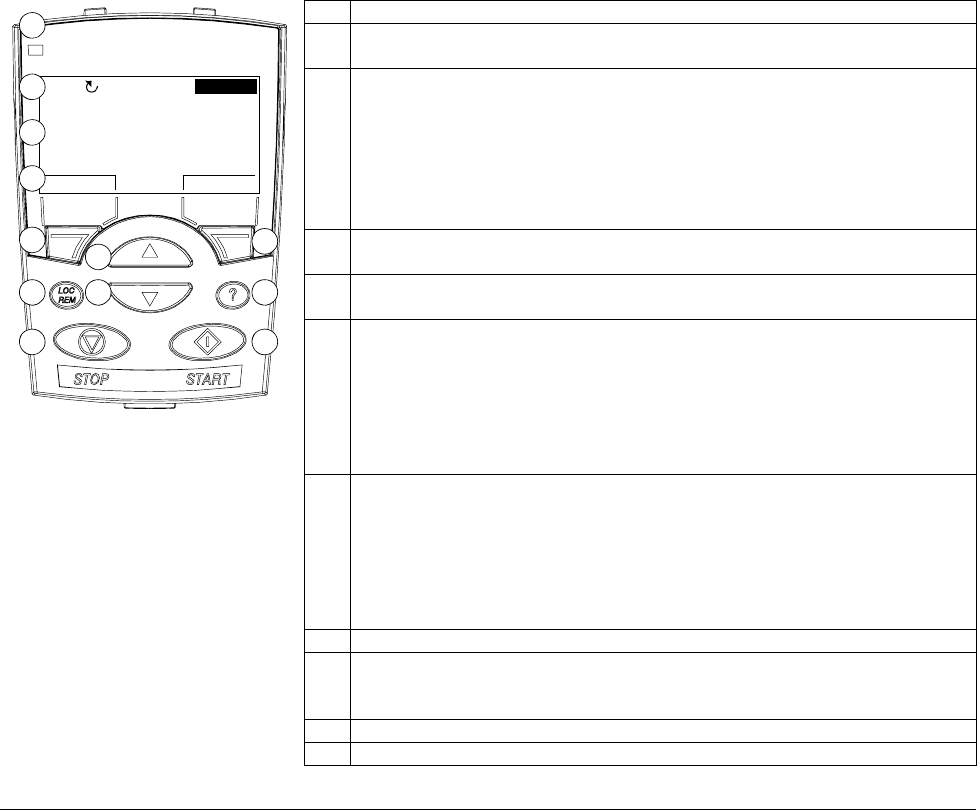
Paneles de control
69
Panel de control asistente
Características
El panel de control asistente tiene las siguientes características:
• panel de control alfanumérico con una pantalla LCD
• selección de idioma para la pantalla
• Asistente de arranque para facilitar la puesta a punto del convertidor
• función de copia: los parámetros pueden copiarse en la memoria del panel de
control para una transferencia posterior a otros convertidores, o bien para la
copia de seguridad de un sistema concreto;
• ayuda contextual
• reloj de tiempo real
Descripción general
La tabla siguiente resume las funciones de las teclas y las pantallas del panel de
control asistente.
LOC
DIR 12:45 MENU
400RPM
1200 RPM
12.4 A
405 dm3/s
34
5
67 8
910
N.º Uso
1 LED de estado – Verde para el funcionamiento normal. Si el LED parpadea o
está en rojo, consulte LED en la página 299.
2 Pantalla LCD – Se divide en tres áreas principales:
a. Línea de estado – Variable, en función del modo de funcionamiento, véase
Línea de estado en la página 70.
b. Central – Variable, en general muestra valores de parámetros y señales,
menús o listas. También muestra códigos de alarma y fallos
c. Línea inferior – Muestra la función actual de las dos teclas multifunción y la
indicación horaria, si se ha activado.
3 Tecla multifunción 1 – La función depende del contexto. El texto en la esquina
inferior izquierda de la pantalla indica la función.
4 Tecla multifunción 2 – La función depende del contexto. El texto en la esquina
inferior derecha de la pantalla indica la función.
5 Arriba –
• Permite el desplazamiento ascendente por un menú o lista visualizada en la
parte central de la pantalla LCD.
• Incrementa un valor si se ha seleccionado un parámetro.
• Incrementa el valor de referencia si está resaltada la esquina superior
derecha.
Si la tecla se mantiene pulsada, el valor cambia más rápidamente.
6Abajo –
• Permite el desplazamiento descendente por un menú o lista visualizada en
la parte central de la pantalla LCD.
• Reduce un valor si se ha seleccionado un parámetro.
• Disminuye el valor de referencia si está resaltada la esquina superior
derecha.
Si la tecla se mantiene pulsada, el valor cambia más rápidamente.
7 LOC/REM – Cambia entre control local y remoto del convertidor.
8 Ayuda – Muestra información contextual al pulsar el botón. La información
visualizada describe el elemento que está resaltado en ese momento en el
área central de la pantalla
9 STOP – Detiene el convertidor en control local.
10 START – Arranca el convertidor en control local.
5 A
1 Hz
7 %10.
0.
49.49.1HzLOC
DIR MENU
00:00
1
2a
2b
2c
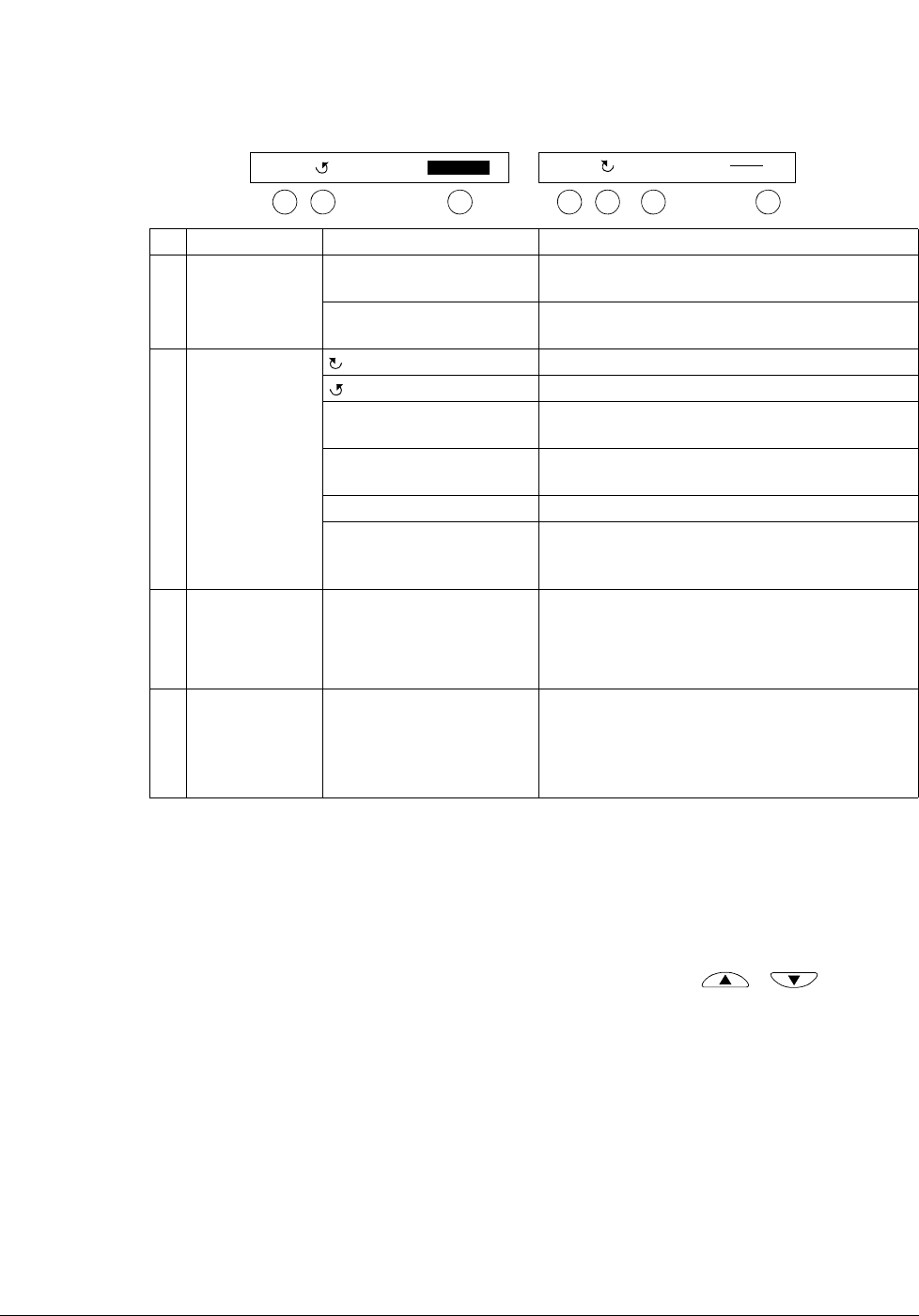
Paneles de control
70
Línea de estado
La línea superior de la pantalla LCD muestra la información de estado básica del
convertidor de frecuencia.
Funcionamiento
El panel de control funciona mediante menús y teclas. Las teclas incluyen dos teclas
multifunción sensibles al contexto, cuya función está indicada con el texto que se
muestra en pantalla encima de cada una de ellas.
Las opciones, por ejemplo el modo de funcionamiento o un parámetro determinado,
se seleccionan desplazándose mediante las teclas de flecha y hasta que
la opción deseada quede resaltada (en vídeo inverso) y, a continuación, pulsando la
tecla multifunción que corresponda. Habitualmente con la tecla multifunción derecha
se entra en un modo determinado, se acepta una opción o se guardan los cambios.
La tecla multifunción izquierda se usa para cancelar los cambios realizados y para
volver al nivel precedente de operación.
El panel de control asistente dispone de nueve modos: Salida, Parámetros,
Asistentes, Parámetros modificados, Registrador de Fallos, Ajuste del reloj, Copia
de seguridad de parámetros, Ajustes de E/S y Fallo. En este capítulo se describe el
funcionamiento de los primeros ocho modos. Cuando se produce un fallo o una
alarma, el panel se sitúa automáticamente en el Modo de Fallo y muestra el fallo o la
alarma. El fallo o alarma se puede restaurar en los Modos de Salida o de Fallo
(véase el capítulo Análisis de fallos).
N.º Campo Alternativas Significado
1 Lugar de control LOC El control del convertidor es local, es decir, desde
el panel de control.
REM El control del convertidor es remoto, como el bus
de campo o la E/S del convertidor.
2 Estado Dirección de avance del eje.
Dirección inversa del eje.
Flecha giratoria El convertidor está funcionando en el punto de
consigna.
Flecha giratoria punteada El convertidor está funcionando pero no en el
punto de consigna.
Flecha estacionaria El convertidor está parado.
Flecha punteada
estacionaria La orden de marcha está presente, pero el motor
no funciona; por ejemplo, porque falta el permiso
de inicio.
3 Modo de
funcionamiento
del panel
• Nombre del modo actual.
• Nombre de la lista o menú mostrado.
• Nombre del estado de funcionamiento; p. ej.
EDICION PAR.
4 Valor de
referencia o
número del
elemento
seleccionado.
• Valor de referencia en el Modo de Salida.
• Número del elemento resaltado; p. ej., el modo,
el grupo de parámetros o el fallo.
49.1HzLOC
1 2 4
LOC MENU PRPAL 1
1 2 3 4
Paneles de control
71
Inicialmente el panel se encuentra en el Modo de Salida,
en el cual se puede poner en marcha, detener o cambiar
la dirección del motor, cambiar entre el control local y el
remoto, modificar el valor de referencia y supervisar hasta
tres valores actuales. Para realizar otras tareas, se debe
ir primero al menú principal y seleccionar el modo
correspondiente. La línea de estado (véase la sección
Línea de estado en la página 70) muestra el nombre del
menú, modo, elemento o estado actual.
Cómo realizar tareas habituales
En la tabla que presentamos a continuación se enumeran las tareas habituales, el
modo de funcionamiento en el que se pueden realizar y la página en que se
describen detalladamente los pasos necesarios para su realización.
Tarea Modo Página
Cómo obtener ayuda Cualquiera 72
Cómo encontrar la versión del panel Cuando se enciende 72
Cómo ajustar el contraste de la pantalla Salida 75
Cómo cambiar entre control remoto y control local Cualquiera 73
Cómo poner en marcha y detener el convertidor Cualquiera 74
Cómo cambiar la dirección de giro del motor Salida 74
Cómo ajustar la referencia de velocidad, frecuencia o par Salida 75
Cómo cambiar el valor de un parámetro Parámetros 76
Cómo seleccionar las señales supervisadas Parámetros 77
Cómo realizar tareas guiadas (especificación de series de
parámetros relacionadas) con los asistentes Asistentes 78
Cómo ver y editar parámetros modificados Parámetros modificados 79
Cómo ver fallos Registrador de Fallos 80
Cómo restaurar fallos y alarmas Salida, Fallo 285
Cómo mostrar/ocultar el reloj, cambiar los formatos de día y
hora, ajustar el reloj y activar/desactivar las transiciones
automáticas del reloj en función de los cambios en el ahorro
diurno.
Fecha y hora 81
Cómo copiar parámetros del convertidor al panel de control Copia de seguridad de
parámetros 84
Cómo restaurar parámetros del panel de control al convertidor Copia de seguridad de
parámetros 84
Cómo ver la información de copia de seguridad Copia de seguridad de
parámetros 85
Cómo editar y cambiar los ajustes de parámetros relacionados
con los terminales de E/S Ajustes de E/S 86
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1
LOC
5 A
1 Hz
7 %10.
0.
49. 49.1Hz
LOC
DIR MENU00:00
Paneles de control
72
Cómo obtener ayuda
Cómo encontrar la versión del panel
Paso Acción Pantalla
1. Pulse para leer la ayuda contextual para el elemento resaltado.
Si existe texto de ayuda para el elemento, se muestra en pantalla.
2. Si no se puede visualizar el texto completo, desplácese por las líneas mediante
la teclas y .
3. Tras leer el texto, regrese a la pantalla anterior pulsando .
Paso Acción Pantalla
1. Si la alimentación está conectada, desconéctela.
2. Mantenga pulsada la tecla mientras vuelve a conectar la alimentación y lea
la información. La pantalla muestra la siguiente información sobre el panel:
Panel FW: versión de firmware del panel
ROM CRC: suma de comprobación de la ROM
Flash Rev: versión de contenido flash
Comentario de contenido flash.
Al soltar la tecla , el panel pasa al Modo de Salida
?
01 DATOS FUNCIONAM
03 SEÑALES ACT BC
04 HISTORIAL FALLOS
10 MARCHA/PARO/DIR
11 SELEC REFERENCIA
GRUPOS PARAM 10
SALIR SEL00:00
LOC
SALIR 00:00
Este grupo define
fuentes externas
(EXT1 y EXT2) para
órdenes que activan
órdenes de marcha,
AYUDA
LOC
SALIR 00:00
fuentes externas
(EXT1 y EXT2) para
órdenes que activan
cambios de marcha,
paro y dirección.
AYUDA
LOC
SALIR
01 DATOS FUNCIONAM
03 SEÑALES ACT BC
04 HISTORIAL FALLOS
10 MARCHA/PARO/DIR
11 SELEC REFERENCIA
GRUPOS PARAM 10
SALIR SEL00:00
LOC
?
?
Panel FW: x.xx
ROM CRC: xxxxxxxxxx
Flash Rev: x.xx
xxxxxxxxxxxxxxxxxxxxx
PANEL VERSION INFO
Paneles de control
73
Cómo poner en marcha, detener y cambiar entre control remoto y control local
Se puede poner en marcha, detener y cambiar entre control remoto y control local
en cualquier modo de funcionamiento. Para poder poner en marcha o detener el
convertidor, éste debe hallarse en control local.
Paso Acción Pantalla
1. • Para cambiar entre control remoto (se muestra REM en la línea de estado) y
control local (se muestra LOC en la línea de estado), pulse .
Nota: El cambio a control local puede desactivarse con el parámetro 1606
BLOQUEO LOCAL.
Al encender el convertidor por primera vez, éste se encuentra en control
remoto (REM) y se controla mediante los terminales de E/S del convertidor.
Para cambiar a control local (LOC) y controlar el convertidor con el panel de
control, pulse . El resultado depende del tiempo durante el que mantenga
pulsada la tecla:
• Si la suelta inmediatamente (la pantalla muestra "Cambiando al modo de
control local" parpadeando), el convertidor se detiene. Ajuste la referencia de
control local tal como se indica en la página 75.
• Si pulsa la tecla durante unos dos segundos, el convertidor sigue como antes.
El convertidor copia los valores remotos actuales para el estado de marcha/
paro y la referencia, y los utiliza como los ajustes de control local iniciales.
• Para detener el convertidor en control local, pulse . La flecha ( o ) en la línea
de estado deja de girar.
• Para poner en marcha el convertidor en control local, pulse . La flecha ( o ) en la línea
de estado empieza a girar y
se mostrará punteada hasta
que el convertidor alcance
el punto de consigna.
LOC
REM
00:00
Cambiando al modo
de control local
MENSAJE
LOC
LOC
REM
Paneles de control
74
Modo de Salida
En el Modo de Salida, el usuario puede:
• supervisar valores actuales, hasta tres señales del grupo 01 DATOS
FUNCIONAM
• cambiar la dirección de giro del motor
• ajustar la referencia de velocidad, frecuencia o par
• ajustar el contraste de la pantalla
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Para llegar al Modo de Salida se debe pulsar repetidamente la tecla .
En la esquina superior derecha
de la pantalla se muestra el
valor de referencia. El área
central se puede configurar
para mostrar hasta tres valores
de señales o gráficos de
barras; véase la página 77 para obtener instrucciones sobre la selección y
modificación de las señales supervisadas.
Cómo cambiar la dirección de giro del motor
Paso Acción Pantalla
1. Si no se encuentra en el Modo de Salida, pulse repetidamente hasta
llegar a dicho modo.
2. Si el convertidor se encuentra en control remoto (se muestra REM en la línea
de estado), pase a control local pulsando . La pantalla muestra durante
unos breves instantes un mensaje sobre el cambio de modo y, a continuación,
regresa al Modo de Salida.
3. Para cambiar la dirección de avance (se muestra en la línea de estado) a
inversa (se muestra en la línea de estado), o viceversa, pulse .
Nota: El parámetro 1003 DIRECCION debe estar ajustado a 3 (PETICION).
SALIR
5 A
1 Hz
7 %10.
0.
49. 49.1HzLOC
DIR MENU
00:00
4 A
4 %24.
0.
5.0HzLOC
DIR MENU
00:00
HZ 50%
SALIR
5 A
1 Hz
7 %10.
0.
49. 49.1Hz
REM
DIR MENU00:00
LOC
REM
5 A
1 Hz
7 %10.
0.
49. 49.1HzLOC
DIR MENU
00:00
DIR
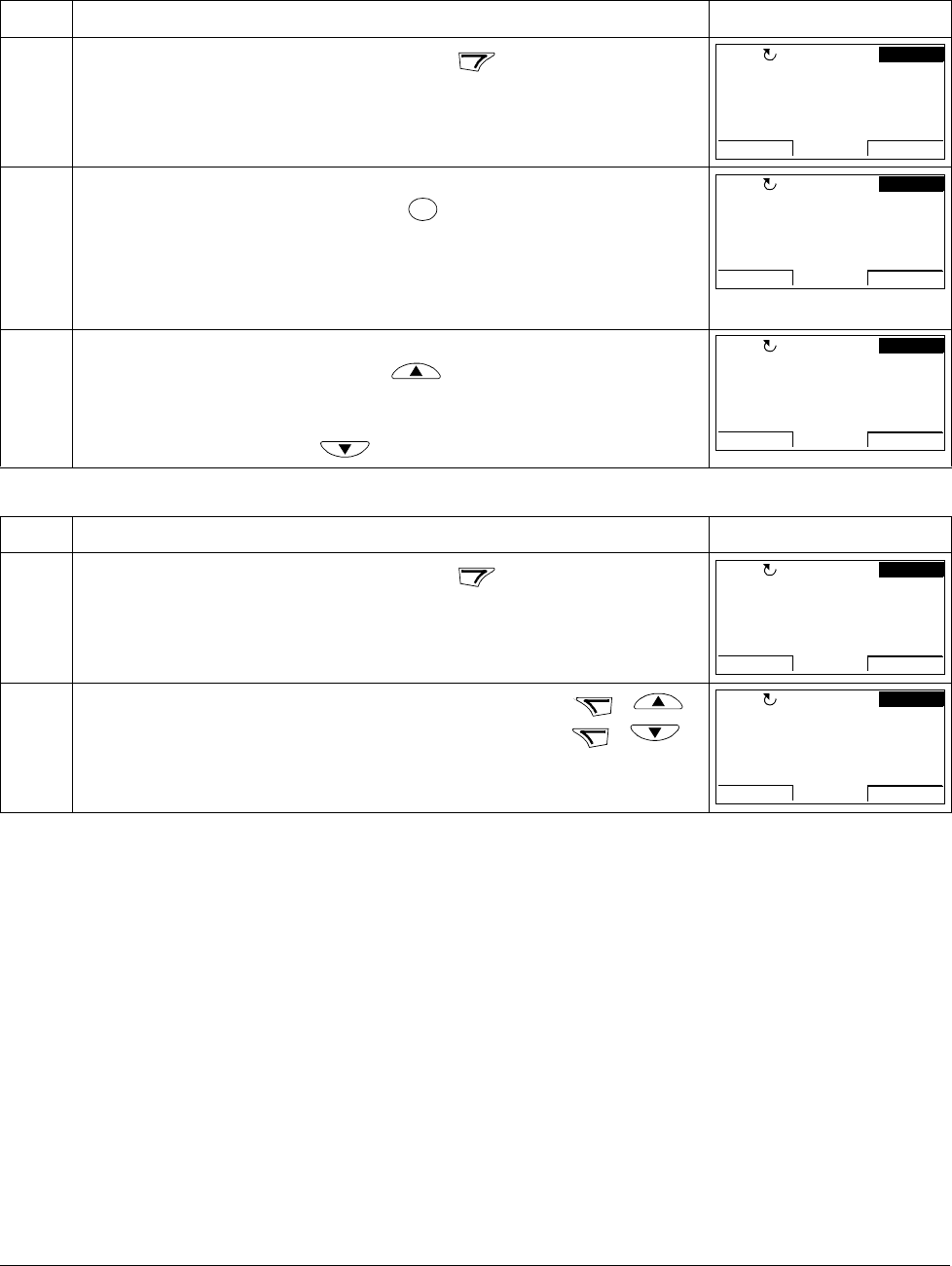
Paneles de control
75
Cómo ajustar la referencia de velocidad, frecuencia o par
Cómo ajustar el contraste de la pantalla
Paso Acción Pantalla
1. Si no se encuentra en el Modo de Salida, pulse repetidamente hasta
llegar a dicho modo.
2. Si el convertidor se encuentra en control remoto (se muestra REM en el la línea
de estado), pase a control local pulsando . La pantalla muestra durante
unos breves instantes un mensaje sobre el cambio de modo y, a continuación,
regresa al Modo de Salida.
Nota: Con el grupo 11 SELEC REFERENCIA se puede permitir la modificación
de las referencias en control remoto.
3. • Para aumentar el valor de referencia resaltado que se muestra en la esquina
superior derecha de la pantalla, pulse . El valor cambia
inmediatamente, se almacena en la memoria permanente del convertidor y se
restaura automáticamente tras desconectar la alimentación.
• Para disminuir el valor pulse .
Paso Acción Pantalla
1. Si no se encuentra en el Modo de Salida, pulse repetidamente hasta
llegar a dicho modo.
2. • Para aumentar el contraste pulse simultáneamente las teclas y .
• Para disminuir el contraste pulse simultáneamente las teclas y .
SALIR
5 A
1 Hz
7 %10.
0.
49. 49.1HzREM
DIR MENU
00:00
LOC
REM
5 A
1 Hz
7 %10.
0.
49. 49.1Hz
LOC
DIR MENU00:00
5 A
0 Hz
7 %10.
0.
50. 50.0Hz
LOC
DIR MENU00:00
SALIR
5 A
1 Hz
7 %10.
0.
49. 49.1Hz
LOC
DIR MENU00:00
MENU
MENU
5 A
1 Hz
7 %10.
0.
49. 49.1Hz
LOC
DIR MENU00:00
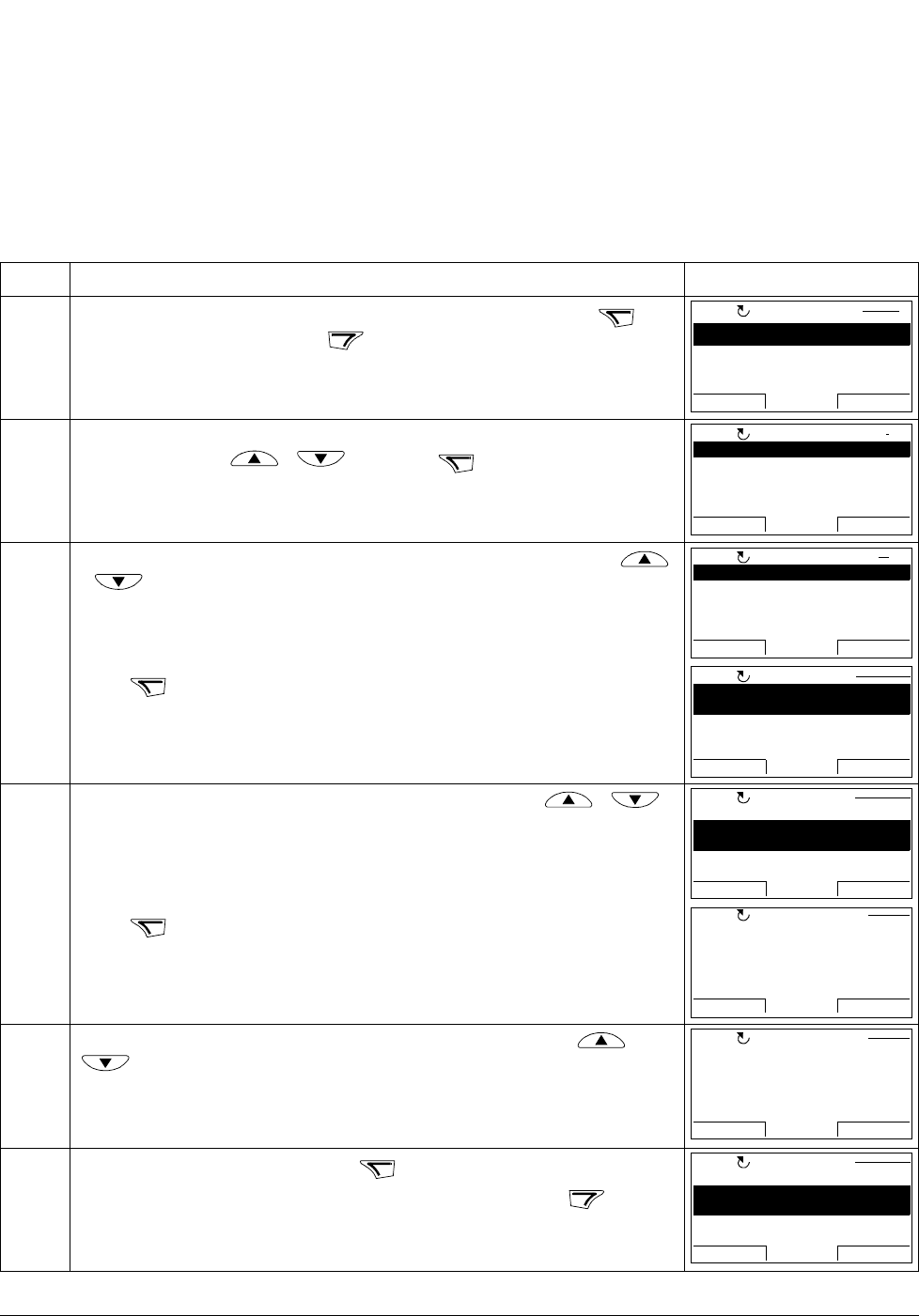
Paneles de control
76
Modo de Parámetros
En el Modo de Parámetros, el usuario puede:
• ver y cambiar los valores de los parámetros
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo seleccionar un parámetro y cambiar su valor
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de parámetros seleccionando PARAMETERS en el menú,
mediante las teclas y y pulsando .
3. Seleccione el grupo de parámetros correspondiente utilizando las teclas
y .
Pulse .
4. Seleccione el parámetro correspondiente utilizando las teclas y .
El valor actual del parámetro se muestra debajo del parámetro seleccionado.
Pulse .
5. Especifique un valor nuevo para el parámetro utilizando las teclas y
.
Pulsando la tecla una vez se aumenta o disminuye su valor. Si la tecla se
mantiene pulsada, el valor cambia más rápidamente. Pulsando ambas teclas
simultáneamente se sustituye el valor mostradopor su valor por defecto.
6. • Para guardar el nuevo valor, pulse .
• Para cancelar el nuevo valor y mantener el valor original pulse .
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
00:00
MENU PRPAL 1LOC
INTRO
01 DATOS FUNCIONAM
03 SEÑALES ACT BC
04 HISTORIAL FALLOS
10 MARCHA/PARO/DIR
11 SELEC REFERENCIA
SALIR SEL
00:00
GROUPOS PARAM 01LOC
99 DATOS DE PARTIDA
01 DATOS FUNCIONAM
03 SEÑALES ACT BC
04 HISTORIAL FALLOS
10 MARCHA/PARO/DIR
SALIR SEL
00:00
GRUPOS PARAM 99
LOC
SEL
9901 IDIOMA
ESPAÑOL
9902 MACRO DE APLIC
9904 MODO CTRL MOTOR
9905 TENSION NOM MOT
PARAMETROS
SALIR EDITAR
00:00
LOC
9901 IDIOMA
9902 MACRO DE APLIC
ESTAND ABB
9904 MODO CTRL MOTOR
9905 TENSION NOM MOT
PARAMETROS
SALIR EDITAR00:00
LOC
EDITA
R
9902 MACRO DE APLIC
EDICION PAR
ESTAND ABB
CANCELA GUARDAR00:00
[1]
LOC
9902 MACRO DE APLIC
EDICION PAR
3-HILOS
CANCELA GUARDAR
00:00
[2]
LOC
GUARDA
R
CANCELA
9901 IDIOMA
9902 MACRO DE APLIC
3-HILOS
9904 MODO CTRL MOTOR
9905 TENSION NOM MOT
PARAMETROS
SALIR EDITAR00:00
LOC
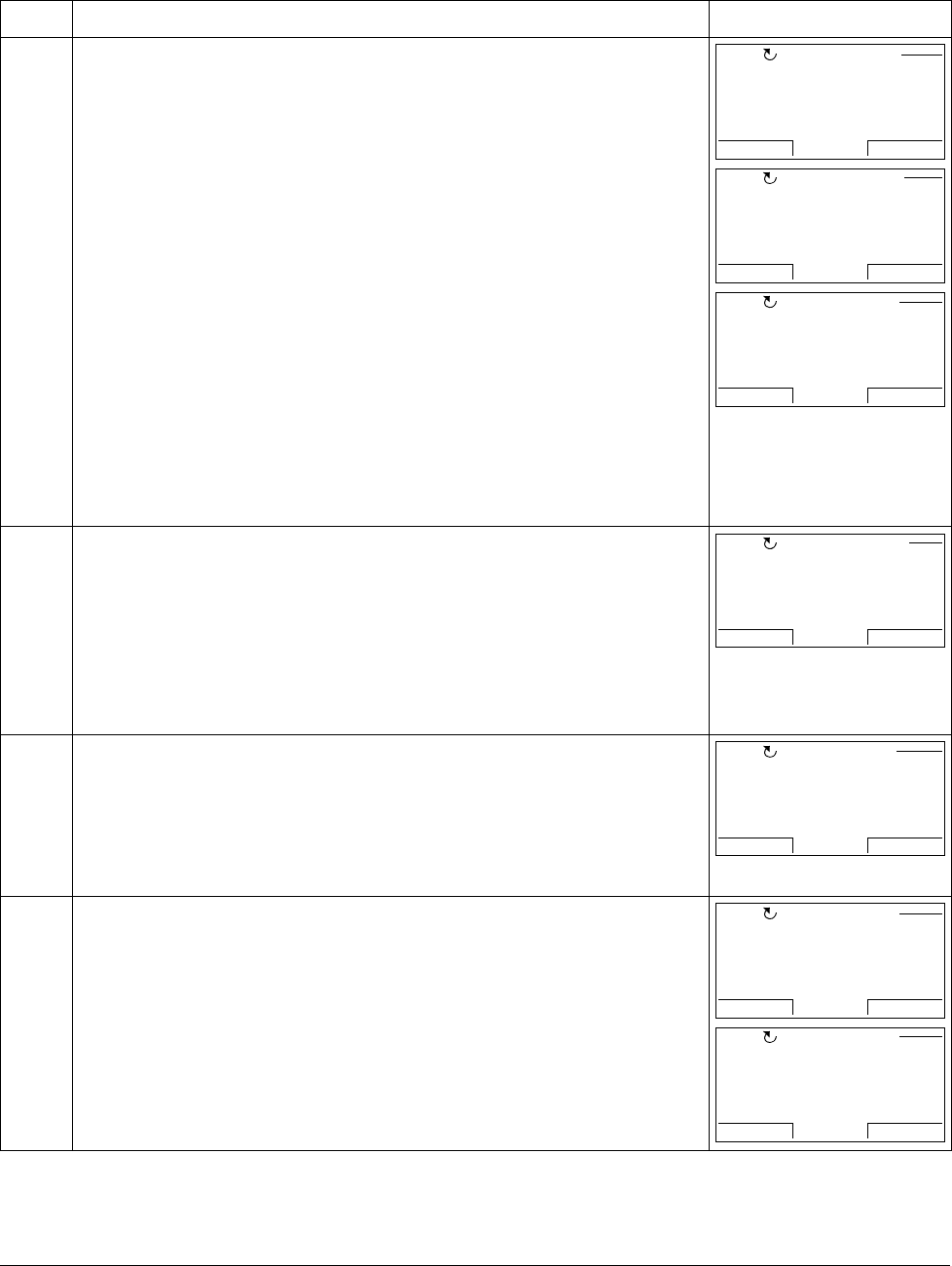
Paneles de control
77
Cómo seleccionar las señales supervisadas
Paso Acción Pantalla
1. Puede seleccionar las señales que se supervisarán en el Modo de Salida y
cómo se visualizarán mediante los parámetros del grupo 34 PANTALLA PANEL
. Véase la página 76 para instrucciones detalladas acerca del cambio de
valores de los parámetros.
Por defecto, la pantalla muestra tres señales. Las señales por defecto
particulares dependen del valor del parámetro 9902 MACRO DE APLIC: para
las macros, cuyo valor por defecto del parámetro 9904 MODO CTRL MOTOR
es 1 (VECTOR:VELOC), el ajuste por defecto de la señal 1 es 0102
VELOCIDAD, en caso contrario es 0103 FREC SALIDA. Los ajustes por
defecto de las señales 2 y 3 siempre son 0104 INTENSIDAD y 0105 PAR,
respectivamente.
Para cambiar las señales por defecto seleccione, del grupo 01 DATOS
FUNCIONAM, hasta tres señales para mostrar.
Señal 1: Cambie el valor del parámetro 3401 PARAM SEÑAL1 al índice del
parámetro de señal en el grupo 01 DATOS FUNCIONAM (= número del
parámetro sin el cero inicial); p. ej., 105 significa el parámetro 0105 PAR. El
valor 0 significa que no se visualiza ninguna señal.
Repita el procedimiento para las señales 2 (3408 PARAM SEÑAL2) y 3 (3415
PARAM SEÑAL3).
2. Seleccione cómo desea que se visualicen las señales: como una cifra decimal
o como un gráfico de barras. En el caso de cifras decimales se puede
expecificar la posición de la coma decimal o utilizar la posición de la coma
decimal y la unidad de la señal de origen [9 (DIRECTO)]. Para obtener detalles,
véase el parámetro 3404.
Señal 1: parámetro 3404 FORM DSP SALIDA1
Señal 2: parámetro 3411 FORM DSP SALIDA2
Señal 3: parámetro 3418 FORM DSP SALIDA3.
3. Seleccione las unidades en que desea que se visualicen las señales. Esto no
tiene efecto si el parámetro 3404/3411/3418 está ajustado a 9 (DIRECTO).
Para obtener detalles, véase el parámetro 3405.
Señal 1: parámetro 3405 UNIDAD SALIDA1.
Señal 2: parámetro 3412 UNIDAD SALIDA2.
Señal 3: parámetro 3419 UNIDAD SALIDA3.
4. Seleccione las escalas para las señales especificando los valores de
visualización máximo y mínimo. Esto no tiene efecto si el parámetro 3404/3411/
3418 está ajustado a 9 (DIRECTO).Para obtener detalles, véanse los
parámetros 3406 y 3407.
Señal 1: parámetros 3406 SALIDA1 MIN y 3407 SALIDA1 MAX.
Señal 2: parámetros 3413 SALIDA2 MIN y 3414 SALIDA2 MAX.
Señal 3: parámetros 3420 SALIDA3 MIN y 3421 SALIDA3 MAX.
3401 PARAM SEÑAL1
EDICION PAR
FREC SALIDA
CANCELA GUARDAR
00:00
[103]
LOC
3408 PARAM SEÑAL2
EDICION PAR
INTENSIDAD
CANCELA GUARDAR00:00
[104]
LOC
3415 PARAM SEÑAL3
EDICION PAR
PAR
CANCELA GUARDAR
00:00
[105]
LOC
3404 FORM DSP SALIDA1
EDICION PAR
DIRECTO
CANCELA GUARDAR00:00
[9]
LOC
3405 UNIDAD SALIDA1
EDICION PAR
Hz
CANCELA GUARDAR00:00
[3]
LOC
3406 SALIDA1 MIN
EDICION PAR
0.0 Hz
CANCELA GUARDAR
00:00
LOC
3407 SALIDA1 MAX
EDICION PAR
500.0 Hz
CANCELA GUARDAR00:00
LOC
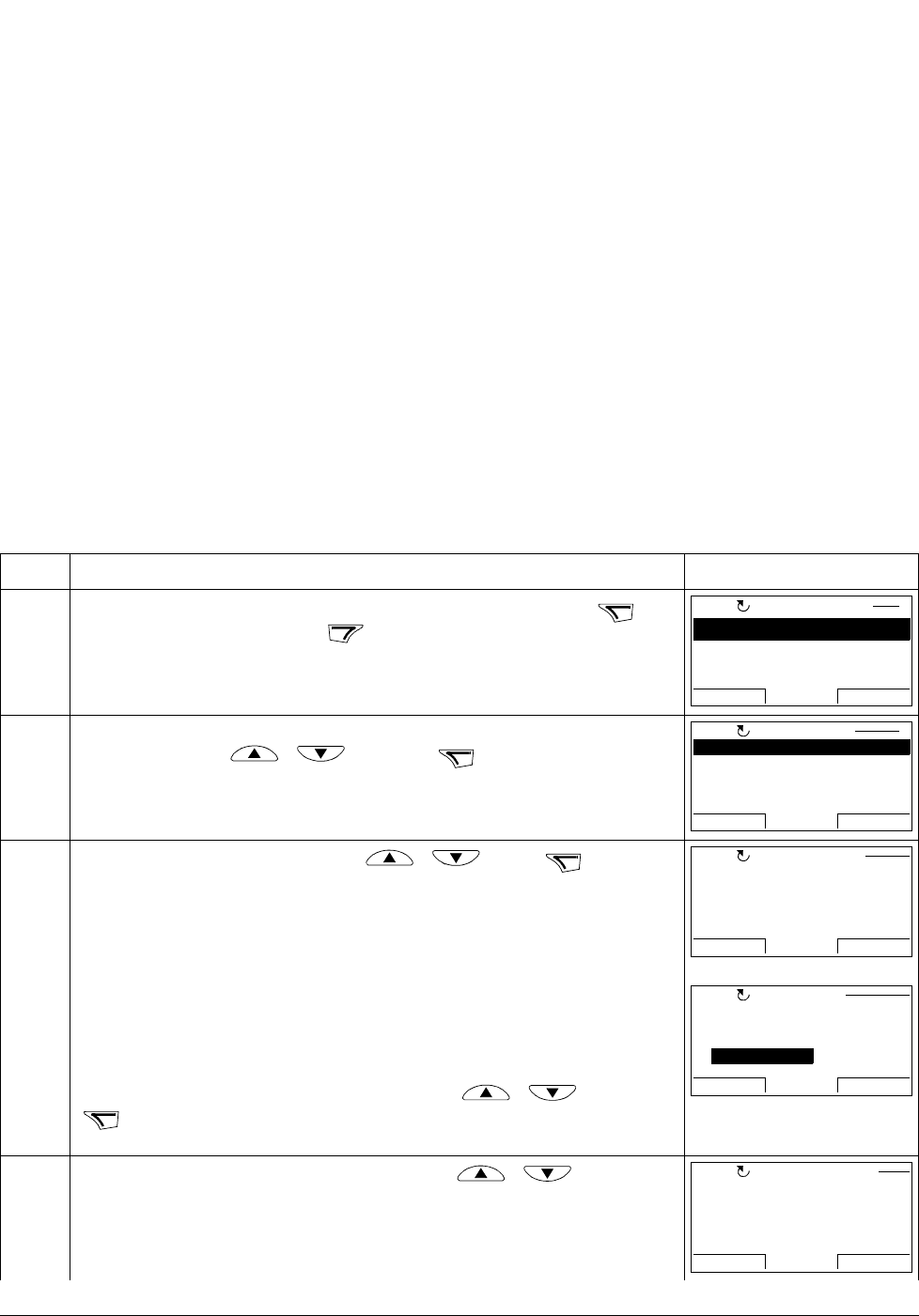
Paneles de control
78
Modo de Asistentes
Al encender por vez primera al convertidor de frecuencia, el Asistente de arranque
le guía en la configuración de los parámetros básicos. El Asistente de arranque está
formado por varios asistentes, cada uno de ellos responsable de la especificación
de una serie de parámetros relacionada como, por ejemplo, el ajuste del motor o el
control PID. El Asistente de arranque activa los diversos asistentes uno tras otro,
aunque los asistentes también se pueden utilizar independientemente. Para más
información acerca de las tareas de los asistentes véase la sección Asistente de
arranque en la página 97.
En el Modo de Asistentes, el usuario puede:
• utilizar asistentes para guiarle a través de la especificación de una serie de
parámetros básicos
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo utilizar un asistente
La tabla siguiente muestra la secuencia de la operación básica que le conduce a
través de los asistentes. Como ejemplo se presenta el Asistente de ajuste del motor.
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de Asistentes seleccionando ASISTENTES en el menú,
mediante las teclas y y pulsando .
3. Seleccione el asistente con las teclas y y pulse .
Si selecciona cualquier asistente que no sea el Asistente de arranque, le guiará
a través de la tarea de especificar su serie de parámetros, tal como se muestra
en los pasos 4. y 5. a continuación. A continuación puede seleccionar otro
asistente en el menú de asistentes o salir del Modo de Asistentes. Como
ejemplo se presenta el Asistente de ajuste del motor.
Si selecciona el Asistente de arranque, éste activa el primer asistente, que le
guía a través de la tarea de especificar su serie de parámetros, tal como se
muestra en los pasos 4. y 5. a continuación. A continuación el Asistente de
arranque le pregunta si desea continuar con el siguiente asistente o saltárselo
– seleccione la respuesta adecuada con las teclas y y pulse
. Si ha decidido saltar, el Asistente de arranque vuelve a realizar la misma
pregunta para el siguiente asistente, y así sucesivamente.
4. • Para especificar un nuevo valor, pulse las teclas y .
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1
LOC
INTRO
Asistente de arranque
marcha
Ajuste de motor
Aplicación
Control veloc. EXT1
SALIR SEL00:00
ASISTENTES 1
LOC
SEL
9905 TENSION NOM
MOTOR
EDICION PAR
220 V
SALIR GUARDAR00:00
LOC
SEL
¿Desea continuar con
el ajuste de
aplicación?
Continuar
Saltar
SALIR ACEPTAR
00:00
ELECCION
LOC
9905 TENSION NOM
MOTOR
EDICION PAR
240 V
SALIR GUARDAR00:00
LOC
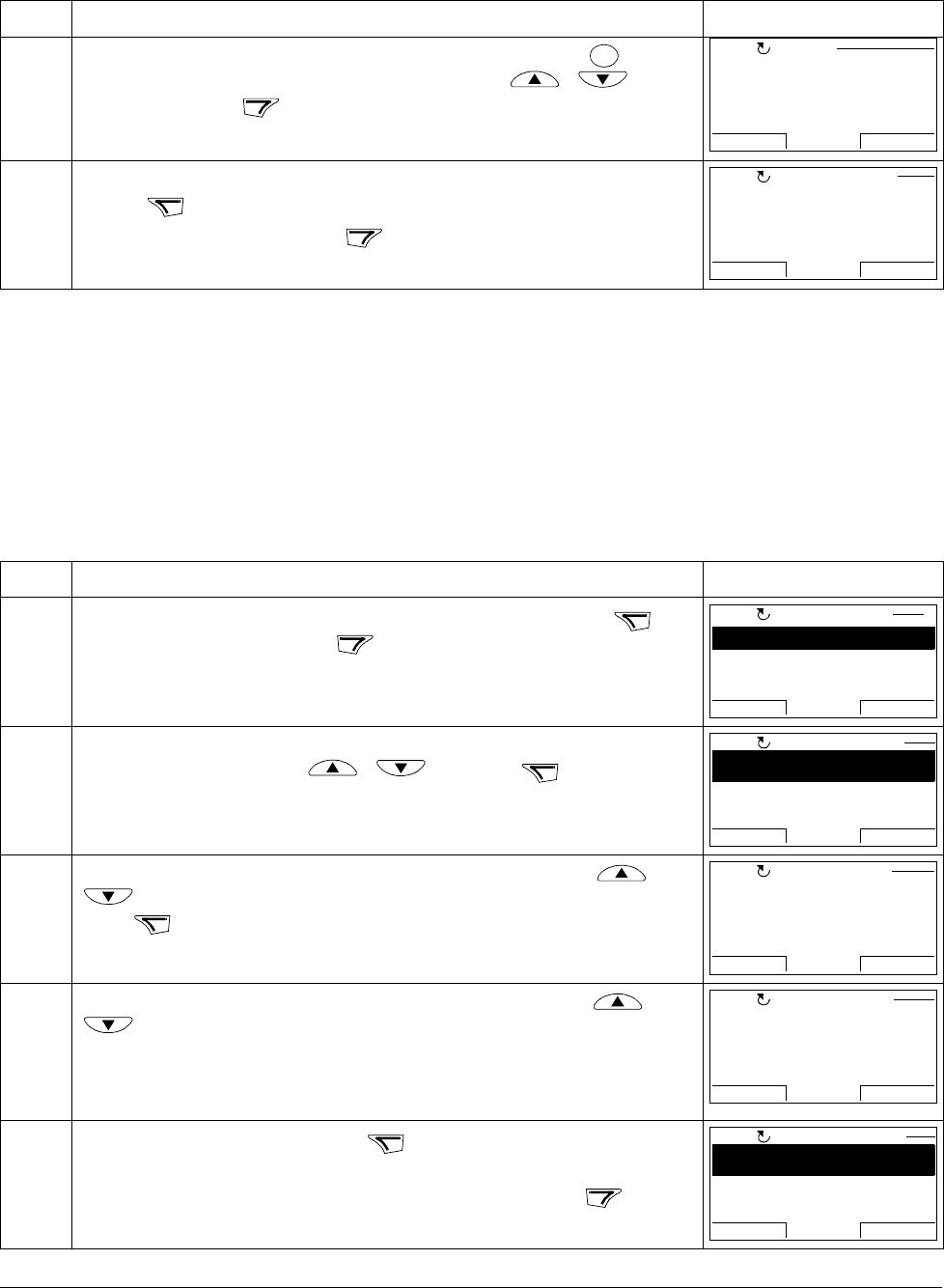
Paneles de control
79
Modo de Parámetros modificados
En el Modo de Parámetros modificados, el usuario puede:
• ver una lista de todos los parámetros que se han modificado respecto a los
valores por defecto de la macro
• cambiar estos parámetros
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo ver y editar parámetros modificados
• Para pedir información acerca del valor solicitado, pulse la tecla .
Desplácese por el texto de ayuda mediante las teclas y . Cierre
la ayuda pulsando .
5. • Para aceptar el nuevo valor y continuar con el ajuste del siguiente parámetro,
pulse .
• Para detener el asistente, pulse .
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de Parámetros modificados seleccionando PAR CAMBIADO en
el menú, mediante las teclas y y pulsando .
3. Seleccione el parámetro modificado de la lista utilizando las teclas y
. El valor del parámetro seleccionado se muestra debajo del mismo.
Pulse para modificarlo.
4. Especifique un valor nuevo para el parámetro utilizando las teclas y
.
Pulsando la tecla una vez se aumenta o disminuye su valor. Si la tecla se
mantiene pulsada, el valor cambia más rápidamente. Pulsando ambas teclas
simultáneamente se sustituye el valor mostrado por su valor por defecto.
5. • Para aceptar el nuevo valor, pulse . Si el nuevo valor es el valor por
defecto, el parámetro se elimina de la lista de parámetros modificados.
• Para cancelar el nuevo valor y mantener el valor original pulse .
Paso Acción Pantalla
?
SALIR
SALIR 00:00
Ajustar exactamente
como indica la placa del
motor. El valor de
tensión debe
corresponder a la
AYUDALOC
GUARDAR
SALIR
9906 INTENS NOM MOT
EDICION PAR
1.2 A
SALIR GUARDAR00:00
LOC
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1
LOC
INTRO
1202 VELOC CONST 1
10.0 Hz
1203 VELOC CONST 2
1204 VELOC CONST 3
9902 MACRO DE APLIC
PAR CAMBIADO
SALIR EDITAR00:00
LOC 2
EDITA
R
1202 VELOC CONST 1
EDICION PAR
10.0 Hz
CANCELA GUARDAR00:00
LOC
1202 VELOC CONST 1
EDICION PAR
15.0 Hz
CANCELA GUARDAR00:00
LOC
GUARDAR
CANCELA
1202 VELOC CONST 1
15.0 Hz
1203 VELOC CONST 2
1204 VELOC CONST 3
9902 MACRO DE APLIC
PAR CAMBIADO
SALIR EDITAR00:00
LOC
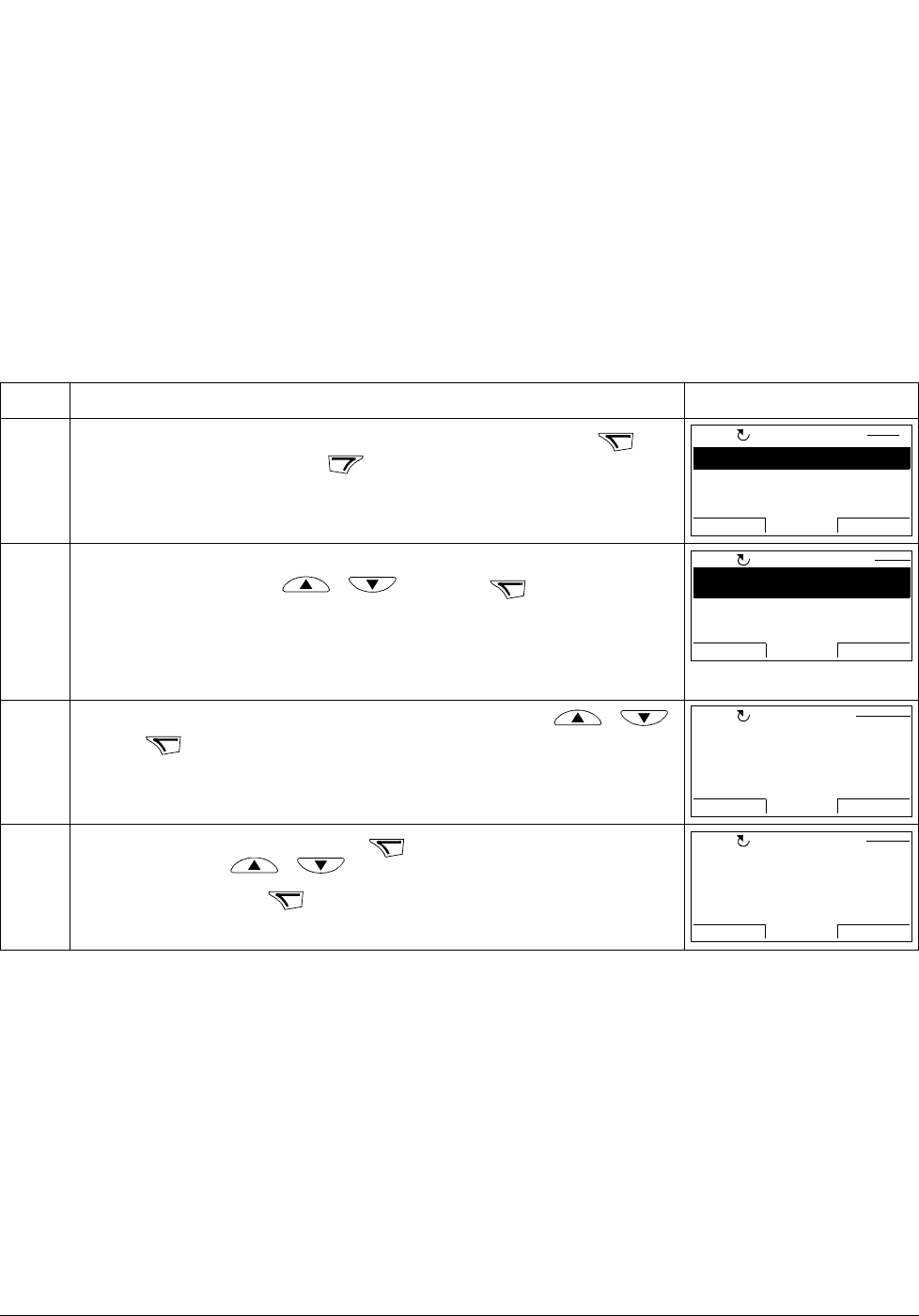
Paneles de control
80
Modo del Registrador de fallos
En el Modo del Registrador de fallos, el usuario puede:
• ver el historial de fallos del convertidor, hasta un máximo de diez fallos (tras una
desconexión sólo se guardan en memoria los tres últimos fallos)
• ver los detalles de los tres últimos fallos (tras una desconexión sólo se guardan
en memoria los detalles del fallo más reciente)
• obtener textos de ayuda sobre el fallo
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo visualizar fallos
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo del Registrador de fallos seleccionando REGISTR FALL en el
menú, mediante las teclas y y pulsando . La pantalla
mostrará el registro de fallos, con el fallo más reciente en primer lugar.
El número que aparece en la fila es el código de fallo, mediante el cual se
pueden localizar las causas y acciones correctivas que se enumeran en el
capítulo Análisis de fallos.
3. Para ver los detalles sobre un fallo, selecciónelo con las teclas y
y pulse .
4. Para mostrar el texto de ayuda, pulse . Desplácese por el texto de ayuda
mediante las teclas y .
Tras leer el texto, pulse para volver a la pantalla anterior.
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
00:00
MENU PRPAL 1
LOC
INTRO
10: PERD PANEL
19.03.05 13:04:57
6: SUBTENS CC
6: FALLO EA1
REGISTR FALL
SALIR DETALLE
00:00
LOC
DETALLE
FALLO
10
TIEM FALLO 1
13:04:57
TIEM FALLO 2
PERD PANEL
SALIR DIAG00:00
LOC
DIAG
ACEPTAR
SALIR ACEPTAR00:00
Comprobar:líneas
y conex. comunic.,
parám 3002,
paráms. en los
grupos 10 y 11.
DIAGNOSTICS
LOC
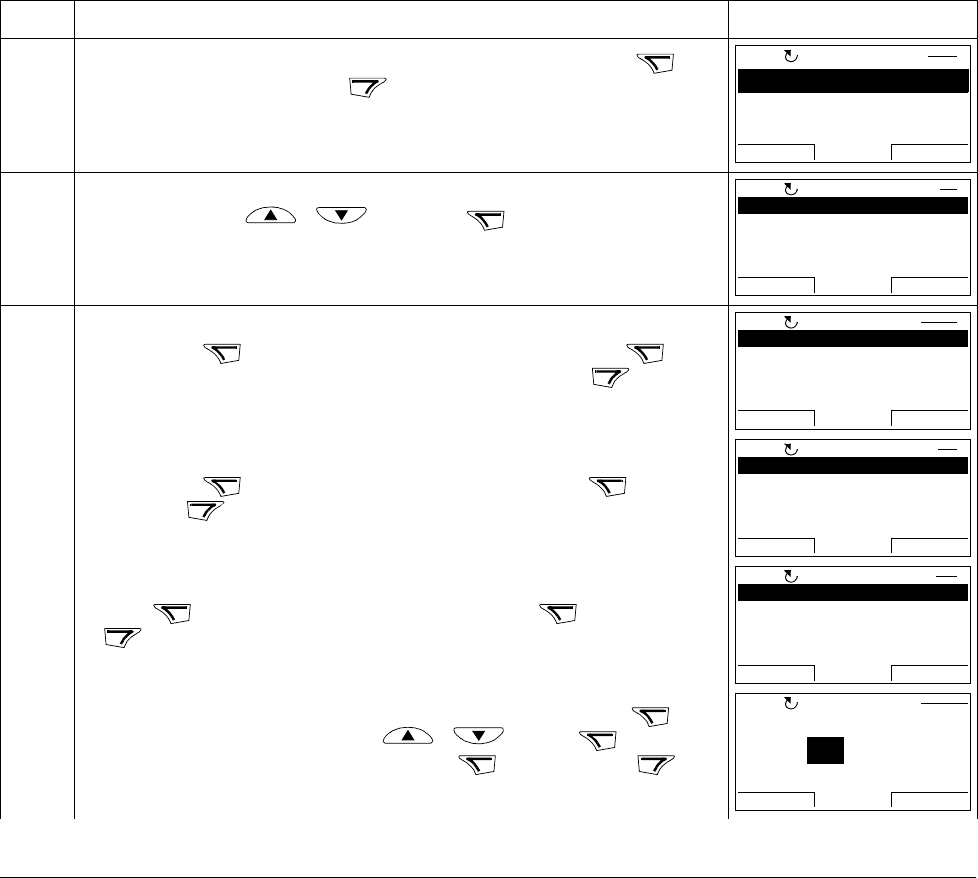
Paneles de control
81
Modo de Fecha y hora
En el Modo de Fecha y hora, el usuario puede:
• mostrar u ocultar el reloj
• cambiar los formatos de visualización fecha y hora
• ajustar la fecha y la hora
• activar o desactivar las transiciones automáticas del reloj en función de los
cambios en el ahorro diurno
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
El panel de control asistente dispone de una pila para garantizar el funcionamiento
del reloj cuando el convertidor no suministra alimentación al panel.
Cómo mostrar u ocultar el reloj, cambiar los formatos de día y hora, ajustar la fecha y la
hora; y activar o desactivar las transiciones automáticas del reloj en función de los
cambios en el ahorro diurno
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de Fecha y hora seleccionando FECHA Y HORA en el menú,
mediante las teclas y y pulsando .
3. • Para mostrar (ocultar) el reloj, seleccione VISIBILIDAD DEL RELOJ en el
menú, pulse , seleccione Mostrar reloj (Ocultar reloj) y pulse o, si
desea volver a la pantalla anterior sin realizar cambios, pulse .
• Para especificar el formato de fecha, seleccione FORMATO FECHA en el
menú, pulse y seleccione un formato adecuado. Pulse para
guardar o para cancelar los cambios.
• Para especificar el formato de hora seleccione FORMATO HORA en el menú,
pulse y seleccione un formato adecuado. Pulse para guardar o
para cancelar los cambios.
• Para ajustar la hora seleccione AJUST HORA en el menú y pulse .
Seleccione las horas con las teclas y y pulse ; a
continuación especifique los minutos. Pulse para guardar o
para cancelar los cambios.
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1
LOC
INTRO
VISIBILIDAD DEL RELOJ
FORMATO DE HORA
FORMATO DE FECHA
AJUSTAR HORA
AJUSTAR FECHA
SALIR SEL00:00
FECHA Y HORA 1
LOC
SEL SEL
SALIR
Mostrar reloj
Ocultar reloj
SALIR SEL00:00
VISIB RELOJ 1
LOC
SEL ACEPTAR
CANCEL
A
dd.mm.aa
mm/dd/aa
dd.mm.aaaa
mm/dd/aaaa
CANCELA ACEPTAR00:00
FORMATO FECH 1
LOC
SEL ACEPTAR
CANCELA
24 horas
12 horas
CANCELA ACEPTAR00:00
FORMATO HORA 1
LOC
SEL
ACEPTAR
ACEPTAR CANCELA
AJUST HORA
CANCELA ACEPTAR
00:00
LOC
15:41
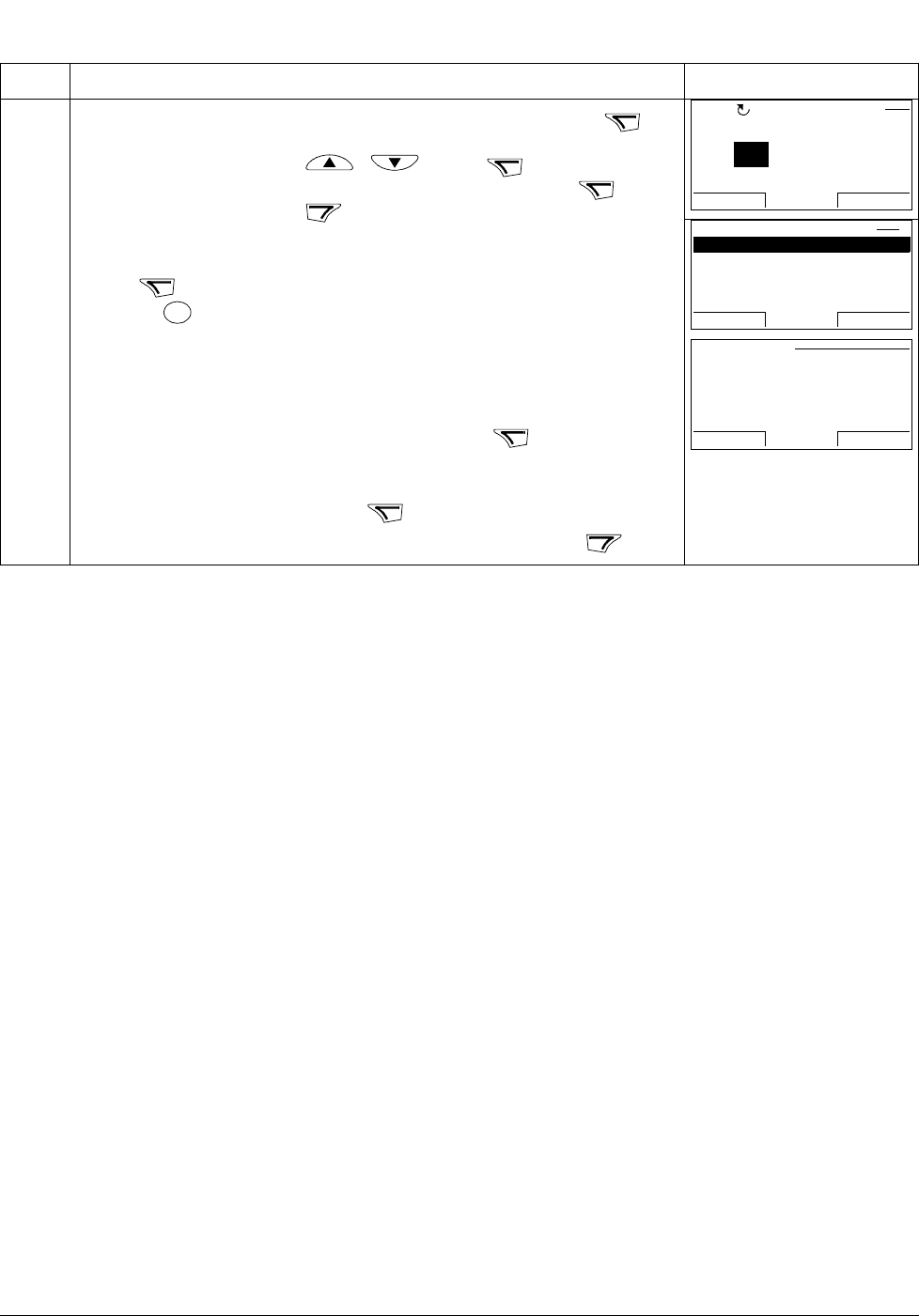
Paneles de control
82
• Para ajustar la fecha seleccione AJUST FECHA en el menú y pulse .
Especifique la primera parte de la fecha (día o mes, según el formato de fecha
seleccionado) con las teclas y y pulse . Repita el proceso
para la segunda parte de la fecha. Tras especificar el año pulse . Para
cancelar los cambios pulse .
• Para activar o desactivar las transiciones automáticas del reloj en función de
los cambios en el ahorro diurno, seleccione AHORRO DIURNO en el menú y
pulse .
Al pulsar , se abre una pantalla de ayuda que muestra las fechas de
comienzo y finalización del período durante el cual se utiliza el ahorro diurno
en cada país o zona cuyos cambios en el ahorro diurno pueden ser
implementados por usted si los selecciona.
• Para desactivar las transiciones automáticas del reloj en función de los
cambios en el ahorro diurno, seleccione Off y pulse .
• Para activar las transiciones automáticas del reloj en función de los cambios
en el ahorro diurno, seleccione el país o zona cuyos cambios en el ahorro
diurno desea implementar y pulse .
• Si desea volver a la pantalla anterior sin realizar cambios, pulse .
Paso Acción Pantalla
SEL
ACEPTAR
ACEPTAR
CANCELA
SEL
?
SEL
SEL
SALIR
AJUST FECHA
CANCELA ACEPTAR00:00
LOC
19.03.05
Off
UE
EEUU
Australia1:NSW,Vict..
Australia2:Tasmania..
SALIR SEL00:00
AHORRO DIURN 1
LOC
SALIR 00:00
UE:
On: Mar último domingo
Off: Oct último domingo
EEUU:
AYUDALOC

Paneles de control
83
Modo de Copia de seguridad de parámetros
El modo de copia de seguridad de parámetros sirve para exportar parámetros de un
convertidor a otro o para hacer una copia de seguridad de los parámetros del
convertidor. Al cargar al panel se guardan todos los parámetros del convertidor en el
Panel de control asistente, incluyendo hasta tres series del usuario. La serie completa
de parámetros, así como series parciales (aplicación) o series del usuario, podrán
entonces descargarse desde el panel de control al mismo convertidor o a otro.
La memoria del panel de control es permanente y no depende de la pila del panel.
En el Modo de Copia de seguridad de parámetros, el usuario puede:
• Copiar todos los parámetros del convertidor al panel de control (CARGAR A PANEL).
Esto incluye todas las series de parámetros definidos
• por el usuario y parámetros internos (no ajustables por el usuario) como los
creados por la Marcha de ID.
• Visualizar la información sobre la copia de seguridad guardada en el panel de
control con CARGAR A PANEL (INFO BACKUP). Ésta incluye, p.ej., el tipo y las
especificaciones del convertidor en el que se guardó la copia de sguridad.
Resulta útil repasar esta información cuando vayan a copiarse los parámetros a
otro convertidor con DESCARG TODO A UNIDAD, ya que debemos asegurarnos
de que ambos convertidores sean compatibles..
• Restaurar la serie de parámetros completa del panel de control al convertidor
(DESCARG TODO A UNIDAD). Este proceso guarda en el convertidor todos los
parámetros, incluyendo los parámetros internos del motor no ajustables por el
usuario. No incluye las series de parámetros de usuario.
Nota:
Utilice esta función solamente para restaurar un convertidor de una copia de
seguridad o para transferir parámetros a sistemas que sean idénticos al sistema original.
• Copiar una serie de parámetros parcial (parte de la serie completa) del panel de
control a un convertidor (DESCARGAR APLICACION) . La serie parcial no
incluye parámetros de usuario, parámetros internos del motor, los parámetros
9905 ... 9909, 1605, 1607, 5201 ni ningún parámetro de los grupos 51 MOD
COMUNIC EXT y 53 PROTOCOLO BCI.
Los convertidores origen y destino y sus tamaños de motor no tienen porqué ser iguales.
• Copiar los parámetros USUARIO S1 del panel de control al convertidor
(DESCARGA USUARIO1). Una serie de usuario incluye parámetros del grupo 99
DATOS DE PARTIDA y los parámetros internos del motor.
La función sólo se muestra en el menú cuando se ha guardado la Serie de
Usuario 1 utilizando el parámetro 9902 MACRO DE APLIC (véase Macros de
Usuario en la página 96) y después se ha cargado al panel de control con
CARGAR A PANEL.
• Copiar los parámetros USUARIO S2 del panel de control al convertidor
(DESCARGA USUARIO2). Es un proceso idéntico al de DESCARGA USUARIO1
descrito antes.
• Copiar los parámetros USUARIO S3 del panel de control al convertidor
(DESCARGA USUARIO3). Es un proceso idéntico al de DESCARGA USUARIO1
descrito antes.
• Poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
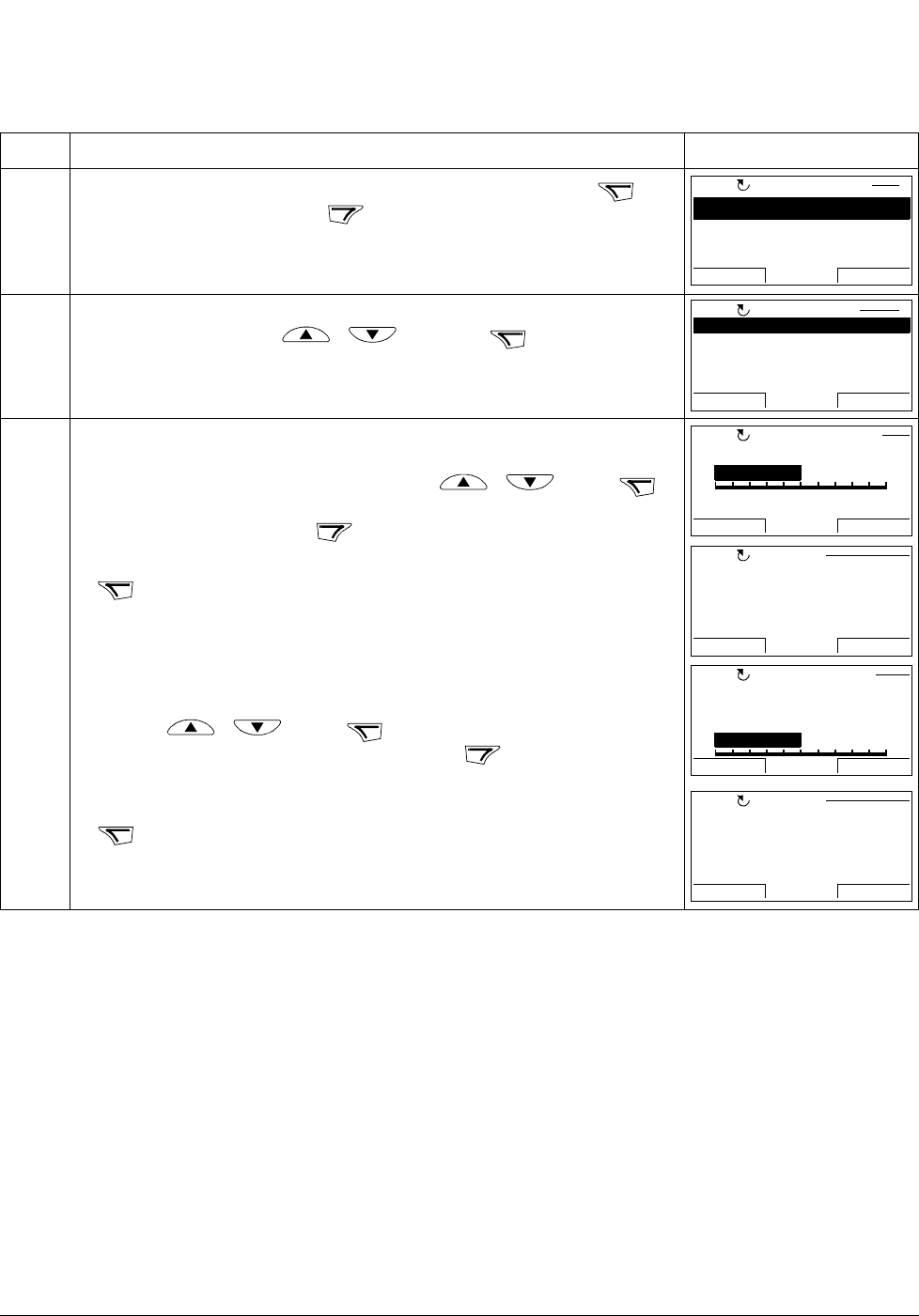
Paneles de control
84
Cómo cargar y descargar parámetros
Para las funciones de carga y descarga disponibles, véase más arriba.
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de Salvar parámetros seleccionando SALVAR PARAM en el
menú, mediante las teclas y y pulsando .
3. • Para copiar todos los parámetros (incluidas las series de usuario y
parámetros internos) del convertidor al panel de control seleccione CARGAR
A PANEL en Salvar parámetros con las teclas y y pulse .
Durante la transferencia, la pantalla muestra el estado de transferencia como
un porcentaje del total. Pulse si desea detener la operación.
Tras completar la carga, la pantalla muestra un mensaje de aviso. Pulse
para volver a Salvar parámetros.
• Para realizar descargas, seleccione la operación adecuada (en este caso se
utiliza como ejemplo DESCARG TODO A UNIDAD) en Salvar parámetros con
las teclas y y pulse. . La pantalla muestra el estado de
transferencia como un porcentaje del total. Pulse si desea detener la
operación.
Tras completar la descarga, la pantalla muestra un mensaje de aviso. Pulse
para volver a Salvar parámetros.
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1
LOC
INTRO
CARGAR A PANEL
INFO BACKUP
DESCARG TODO A UNIDAD
DESCARGAR APLICACION
DESCARGA USUARIO1
SALIR SEL
00:00
MENU COPIA 1LOC
SEL
ANULA
R
ANULAR 00:00
SALVAR PARAM
LOC
50%
Copiando parámetros
A
CEPTAR
ACEPTAR 00:00
Carga de parámetros
completada
MENSAJE
LOC
SEL
ANULA
R
ANULAR 00:00
SALVAR PARAM
LOC
50%
Descargando
parámetros (entero)
ACEPTAR
ACEPTAR 00:00
Descarga de
parámetros finalizada
con éxito.
MENSAJE
LOC
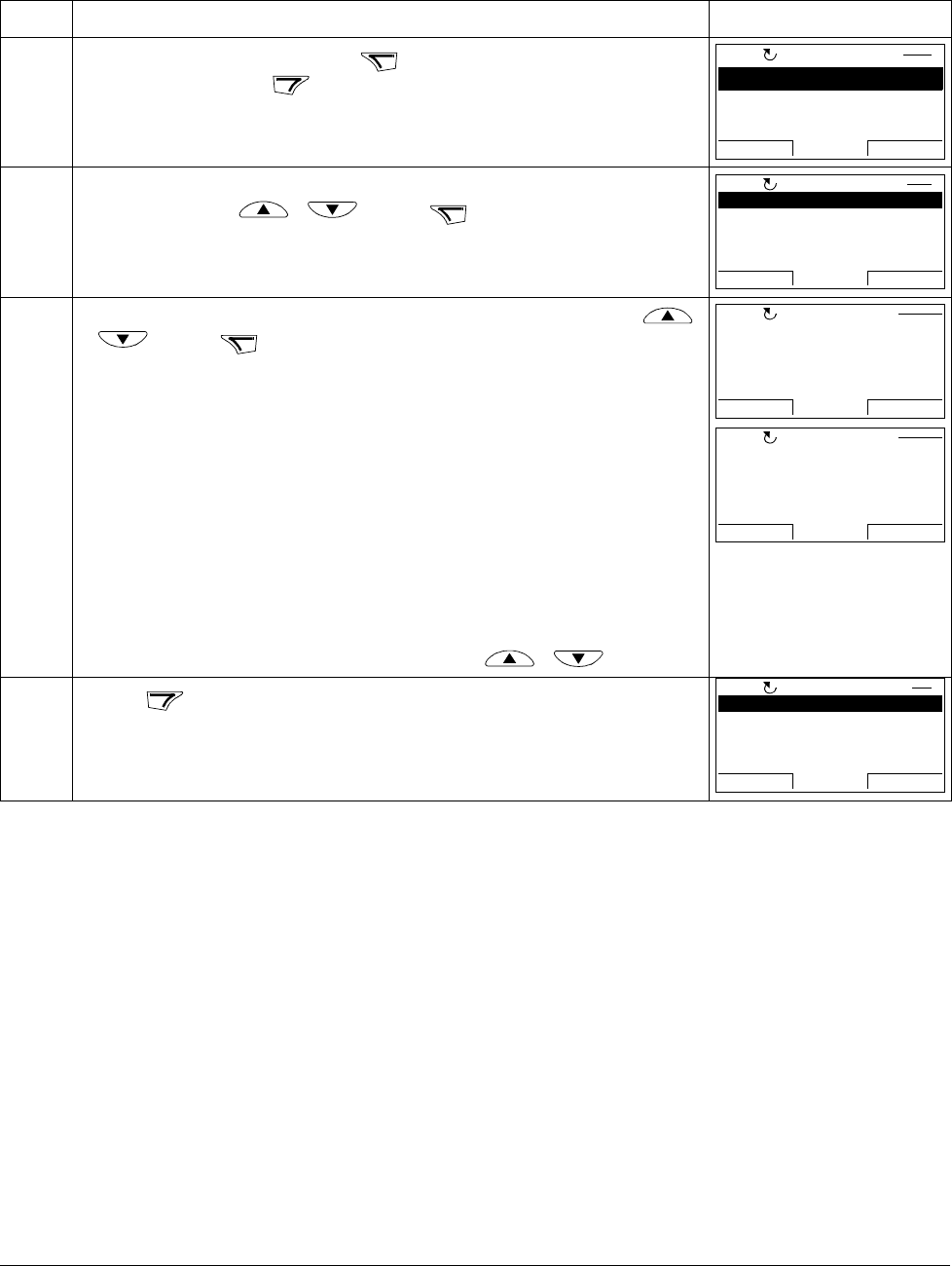
Paneles de control
85
Cómo visualizar la información sobre la copia de seguridad
Paso Acción Pantalla
1. Diríjase al menú principal pulsando si se encuentra en el Modo de Salida,
en caso contrario pulse repetidamente hasta llegar al menú principal.
2. Vaya al Modo de Copia de seguridad seleccionando SALVAR PAR en el menú,
mediante las teclas y , y pulse .
3. Seleccione INFO BACKUP en el menú Salvar parámetros con las teclas
y , y pulse . La pantalla muestra la siguiente información sobre el
convertidor en el que se ha hecho la copia de seguridad:
TIPO DE CONVERTIDOR:tipo de convertidor
ESPECIF UNIDAD: especificaciones del convertidor en formato XXXYz:
XXX: Intensidad nominal del convertidor. Una "A" indica
la coma decimal , p.ej. 4A6 significa 4,6 A.
Y: 2 = 200 V
4 = 400 V
6 = 600 V
z: i = paquete de carga europeo
n = paquete de carga estadounidense
VERSION DE FW: versión de firmware del convertidor.
Puede desplazarse por el texto mediante las teclas y .
4. Pulse para volver a Salvar parámetros.
MENU
EXIT
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO00:00
MENU PRPAL 1LOC
ENTER
CARGAR A PANEL
INFO BACKUP
DESCARG TODO A UNIDAD
DESCARGAR APLICACION
DESCARGA USUARIO1
SALIR SEL00:00
SALVAR PARAM 1
LOC
SEL
SALIR 00:00
TIPO DE CONVERTIDOR
ACS350
3304 ESPECIF UNIDAD
2A41i
3301 VERSIONES DE FW
INFO BACKUP
LOC
SALIR 00:00
ACS350
3304 ESPECIF UNIDAD
2A41i
3301 VERSION DE FW
241A hex
INFO BACKUP
LOC
EXIT
CARGAR A PANEL
INFO BACKUP
DESCARG TODO A UNIDAD
DESCARGA USUARIO1
DESCARGA USUARIO1
EXIT SEL00:00
SALVAR PARAM 1
LOC
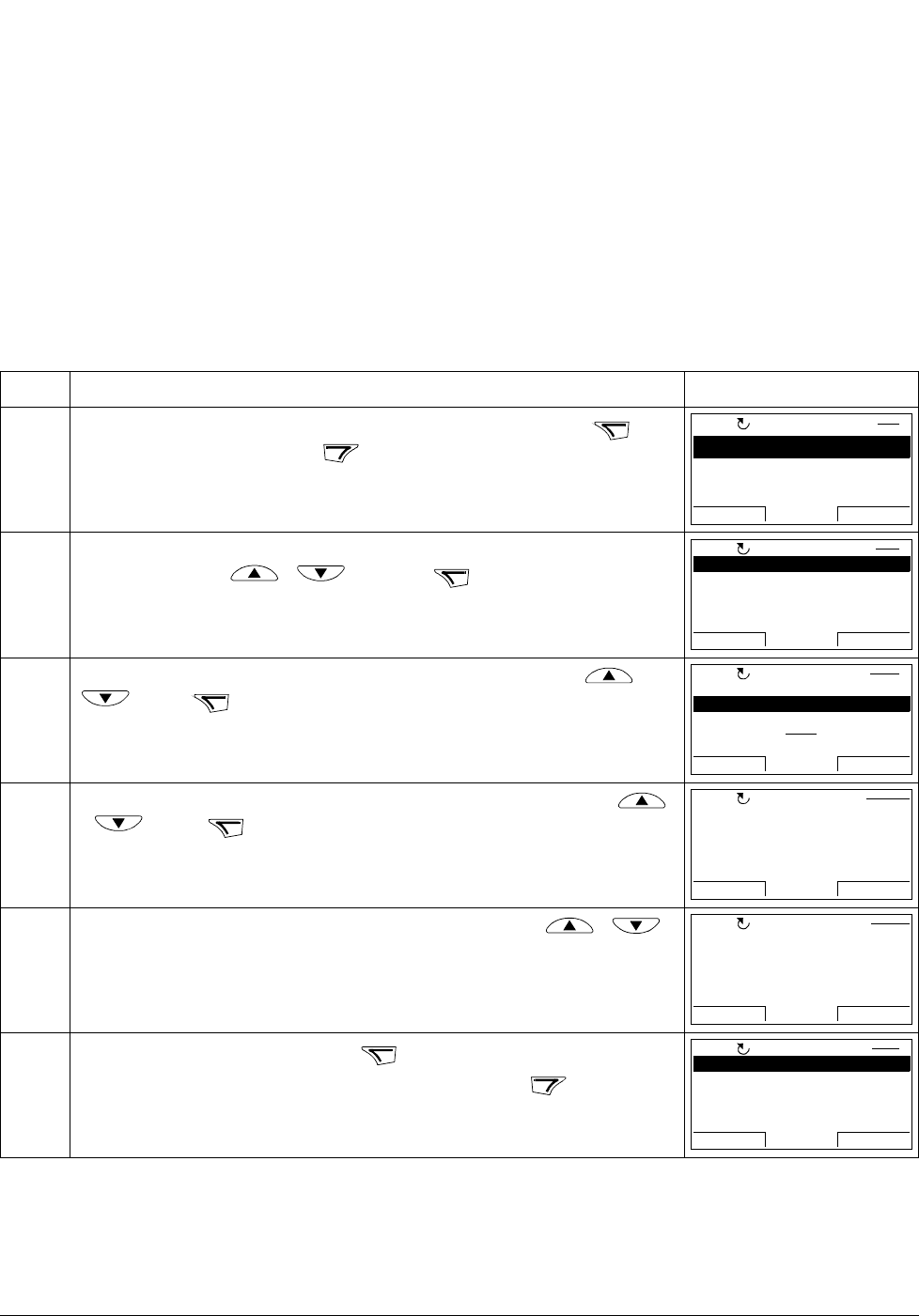
Paneles de control
86
Modo de Ajustes de E/S
En el Modo de Ajustes de E/S, el usuario puede:
• comprobar los ajustes de parámetros asociados a cualquier terminal de E/S
• editar los ajustes de parámetros ,por ejemplo, si "1103: REF1" está listado bajo
Aen1 (entrada analógica 1), es decir, el parámetro 1103 SELEC REF1 tiene el
valor EA1, puede cambiar su valor a EA2. Sin embargo no es posible ajustar el
valor del parámetro 1106 SELEC REF2 a EA1
• poner en marcha, detener, cambiar la dirección y cambiar entre control remoto y
control local.
Cómo editar y cambiar los ajustes de parámetros relacionados con los terminales de E/S
Paso Acción Pantalla
1. Si se halla en el Modo de Salida, diríjase al menú principal pulsando , en
caso contrario, hágalo pulsando repetidamente hasta llegar al menú
principal.
2. Vaya al Modo de Ajustes de E/S seleccionando AJUSTES E/S en el menú,
mediante las teclas y y pulsando .
3. Seleccione el grupo de E/S, p.ej. ENTR DIGITALES, con las teclas y
y pulse . Tras una pausa breve, la pantalla muestra el ajuste actual
para la selección.
4. Seleccione el ajuste (línea con un número de parámetro) con las teclas
y y pulse .
5. Especifique un nuevo valor para el ajuste utilizando las teclas y .
Pulsando la tecla una vez se aumenta o disminuye su valor. Si la tecla se
mantiene pulsada, el valor cambia más rápidamente. Pulsando ambas teclas
simultáneamente se sustituye el valor mostrado por su valor por defecto.
6. • Para guardar el nuevo valor, pulse .
• Para cancelar el nuevo valor y mantener el original pulse .
MENU
SALIR
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
00:00
MENU PRPAL 1
LOC
INTRO
ENTR DIGITALES (ED)
ENTR ANALOGICAS (EA)
SALIDAS RELE (SALR)
SALIDAS ANALOG (SALA)
PANEL
SALIR SEL00:00
AJUSTES E/S 1
LOC
SEL
—ED1—
1001:MARCHA/PARO (E1)
—ED2—
—ED3—
MOSTRAR E/S 1
LOC
SALIR 00:00
EDITAR
1001 COMANDOS EXT1
EDICION PAR
ED1
CANCELA GUARDAR00:00
[1]
LOC
1001 COMANDOS EXT1
EDICION PAR
ED1,2
CANCELA GUARDAR
00:00
[2]
LOC
GUARDAR
CANCELA
—ED1—
1001:MARCHA/PARO (E1)
—ED2—
1001:DIR (E1)
—ED3—
SALIR 00:00
MOSTRAR E/S 1
LOC
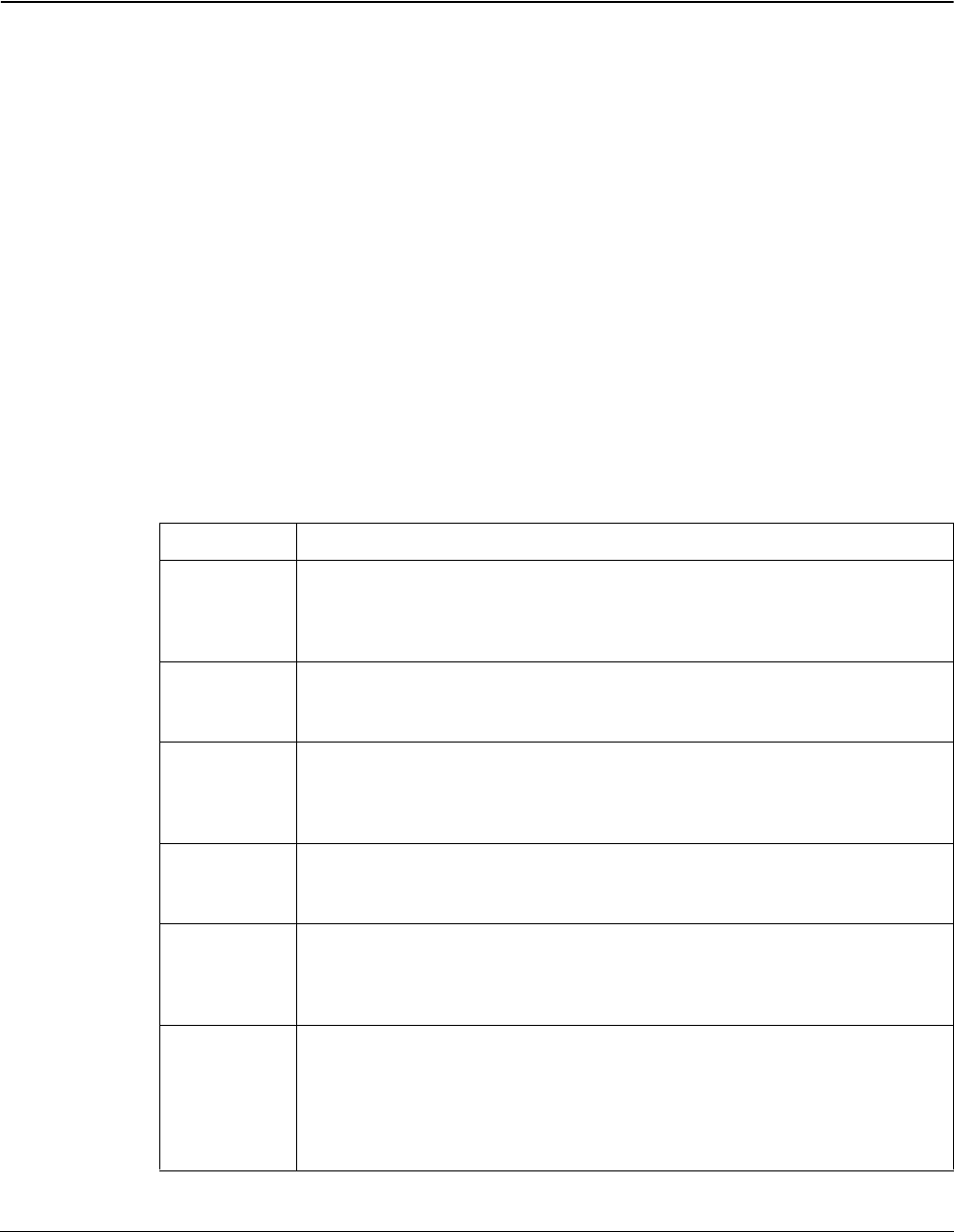
Macros de aplicación
87
Macros de aplicación
Contenido de este capítulo
Este capítulo describe las macros de aplicación. Para cada una se presenta un
diagrama de conexiones que muestra las conexiones de control por defecto (E/S
digitales y analógicas). También se explica cómo guardar una macro de usuario y
cómo recuperarla.
Sinopsis de las macros
Las macros de aplicación son series de parámetros preprogramadas. Al poner en
marcha el convertidor, el usuario acostumbra a seleccionar una de las macros (la
más indicada para el objetivo previsto) con el parámetro 9902 MACRO DE APLIC,
que permite realizar los cambios básicos y guardar el resultado como una macro de
usuario.
El ACS350 dispone de siete macros estándar y tres macros de usuario. La tabla
siguiente contiene un resumen de las macros y describe las aplicaciones
adecuadas.
Macro Aplicaciones adecuadas
Estándar ABB Aplicaciones de control de velocidad ordinarias en las que se utilizan ninguna,
una, dos o tres velocidades constantes. El proceso de marcha/paro se controla
con una entrada digital (marcha y paro nivel). Es posible cambiar entre dos
tiempos de aceleración y desaceleración.
3 hilos Aplicaciones de control de velocidad ordinarias en las que se utilizan ninguna,
una, dos o tres velocidades constantes. El convertidor se pone en marcha y se
detiene con los pulsadores.
Alterna Aplicaciones de control de velocidad en las que se utilizan ninguna, una, dos o
tres velocidades constantes. La marcha, el paro y la dirección se controlan con
dos entradas digitales (la combinación de los estados de entrada determina la
operación).
Potenciómetro
del motor Aplicaciones de control de velocidad en las que se utilizan ninguna o una
velocidad constante. La velocidad se controla con dos entradas digitales
(aumentar / disminuir / mantener).
Manual /
Automático Aplicaciones de control de velocidad en las que se necesite el cambio entre dos
dispositivos de control. Unas terminales de señales de control se reservan para
un dispositivo y el resto para el otro. Una entrada digital selecciona entre los
terminales (dispositivos) en uso.
Control PID Aplicaciones de control de proceso, por ejemplo, sistemas de control de bucle
cerrado diferentes como el control de presión, el control de nivel y el control de
flujo. Es posible cambiar entre el control de velocidad y de proceso: unas
terminales de señales de control se reservan para el control de proceso y las
otras para el control de velocidad. Una entrada digital selecciona entre el control
de proceso y el de velocidad.
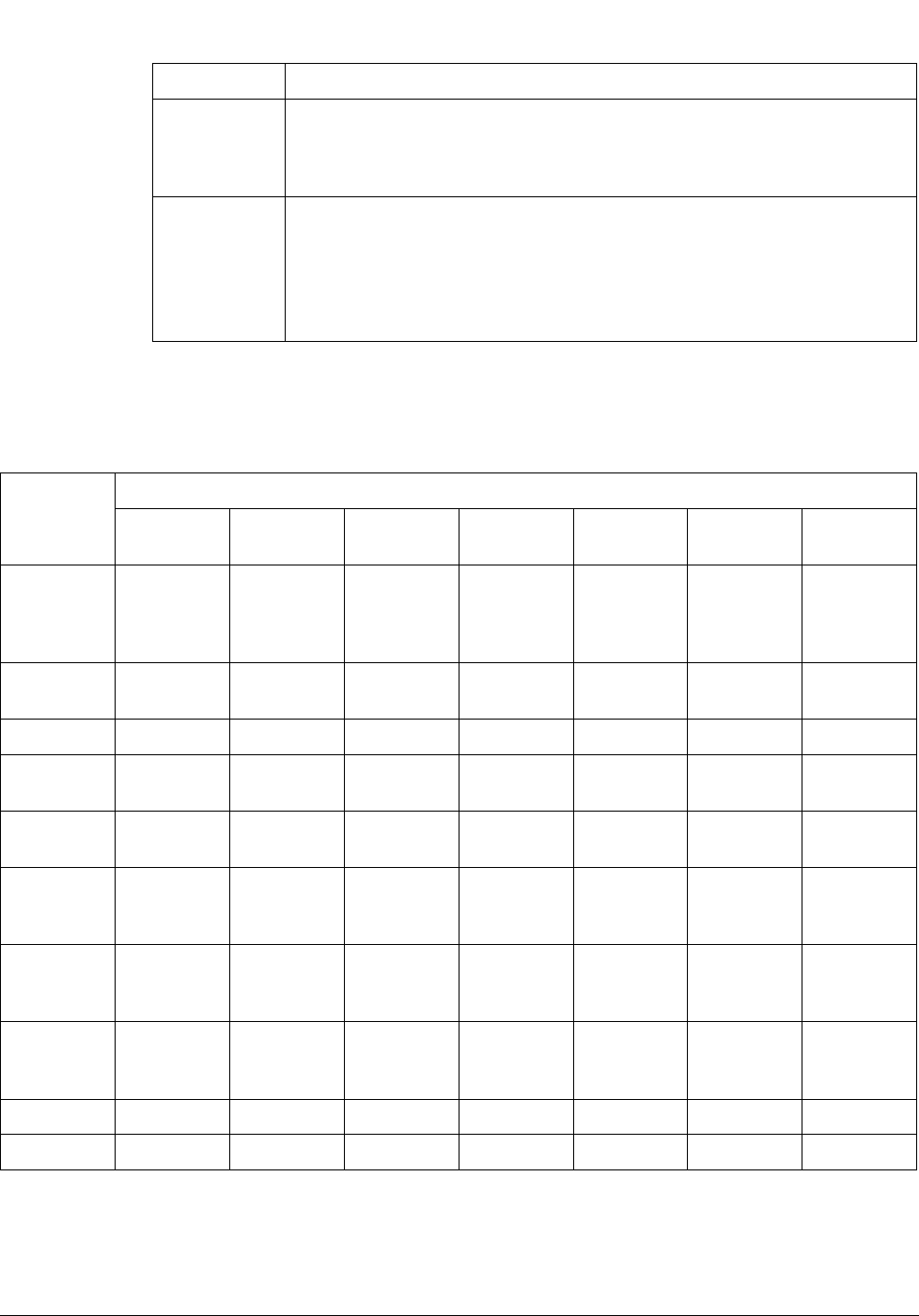
Macros de aplicación
88
Resumen de conexiones de E/S de las macros de aplicación
La tabla siguiente presenta un resumen de las conexiones de E/S por defecto de
todas las macros de aplicación.
Control de par Aplicaciones de control de par. Es posible cambiar entre el control de par y de
velocidad: unas terminales de señales de control se reservan para el control de
par y las otras para el control de velocidad. Una entrada digital selecciona entre el
control de par y el de velocidad.
Usuario El usuario puede guardar la macro estándar personalizada, es decir, los ajustes
de parámetros que incluyen el grupo 99 DATOS DE PARTIDA y los resultados de
la identificación del motor en la memoria permanente, y puede recuperar los
datos posteriormente.
Por ejemplo, se pueden usar tres macros de usuario cuando se requiere cambiar
entre tres motores distintos.
Entrada/
Salida
Macro
Estándar
ABB 3 hilos Alterna Potencióme-
tro del motor Manual /
Automático Control PID Control de
par
EA1
(0 ... 10 V) Ref. de frec. Ref. veloc. Ref. veloc. - Ref. veloc.
(manual) Ref. veloc.
(manual) /
Ref. proc.
(PID)
Ref. veloc.
(velocidad)
EA2 (0 ...
20 mA) ----Ref. veloc.
(auto.) Valor de
proceso Ref. par. (Par)
SA Frec. salida Velocidad Velocidad Velocidad Velocidad Velocidad Velocidad
ED1 Paro/Marcha Marcha
(pulso) Marcha
(avance) Paro/Marcha Marcha/Paro
(Manual) Marcha/Paro
(Manual) Marcha/Paro
(veloc.)
ED2 Avan./Inv. Paro (pulso) Marcha
(inversa) Avan./Inv. Avan./Inv.
(manual) Manual/PID Avan./Inv.
ED3
Entrada veloc.
const. 1
Avan./Inv. Entrada
veloc.
const. 1
Ref. veloc.
aument. Manual/
Automático Veloc.
const. 1 Velocidad/par
ED4 Entrada
veloc.
const. 2
Entrada
veloc.
const. 1
Entrada
veloc.
const. 2
Ref. veloc.
dismin. Avan./Inv.
(auto.) Permiso
marcha Veloc. const 1
ED5 Selección par
de rampa Entrada
veloc.
const. 2
Selección par
de rampa Veloc. const 1 Marcha/Paro
(auto.) Marcha/Paro
(PID) Selección par
de rampa
SR Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1)
SD Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1) Fallo (-1)
Macro Aplicaciones adecuadas
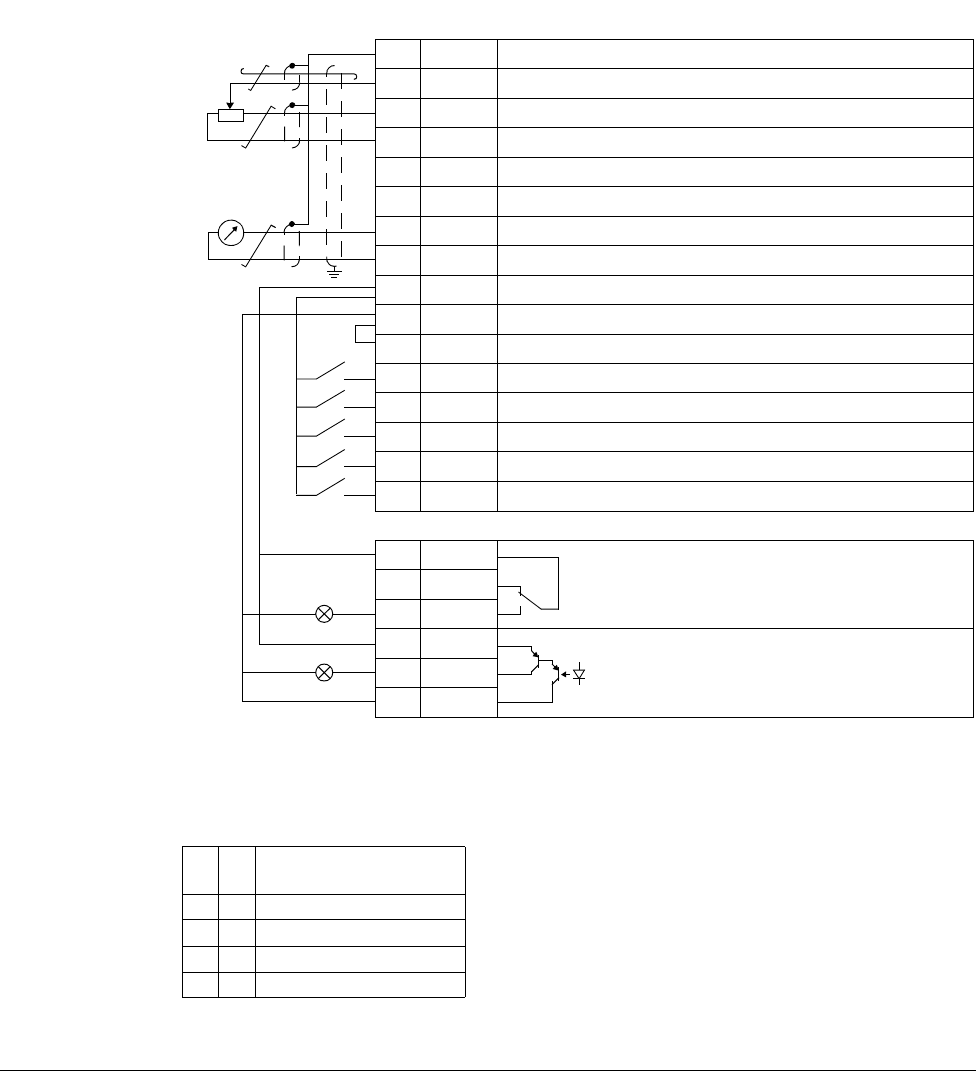
Macros de aplicación
89
Macro Estándar ABB
Es la macro por defecto. Proporciona una configuración de E/S de cometido general
con tres velocidades constantes. Los valores de parámetros son los valores
predeterminados definidos en el capítulo Señales actuales y parámetros, a partir de
la página 146.
Si utiliza unas conexiones diferentes a las conexiones por defecto que se presentan
a continuación, véase la sección Terminales de E/S en la página 42.
Conexiones de E/S por defecto
máx. 500 ohmios
1 a 10 kohmios
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 Referencia de frecuencia externa: 0 ... 10 V 1)
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: 10 V CC, máx. 10 mA
5 EA2 No se utiliza por defecto. 0 ... 10 V
6 GND Circuito de entrada analógica común
7SA Valor de frecuencia externa: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Paro (0) / Marcha (1)
13 ED2 Avance (0) / Inversa (1)
14 ED3 Selección de velocidad constante 2)
15 ED4 Selección de velocidad constante 2)
16 ED5 Selección de aceleración y desaceleración 3)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
4)
1) La EA1 se utiliza como una referencia de
velocidad si se selecciona un modo vectorial.
2) Véase el grupo de parámetros 12 VELOC
CONSTANTES:
3) 0 = tiempos de rampa según los parámetros
2202 y 2203.
1 = tiempos de rampa según los parámetros
2205 y 2206.
4) Conexión a tierra a 360 grados bajo una grapa.
Par de apriete = 0,5 Nm/ 4,4 lbf. in.
ED
3ED
4Funcionamiento
(parámetro)
0 0 Vel. ajustada con EA1
1 0 Velocidad 1 (1202)
0 1 Velocidad 2 (1203)
1 1 Velocidad 3 (1204)
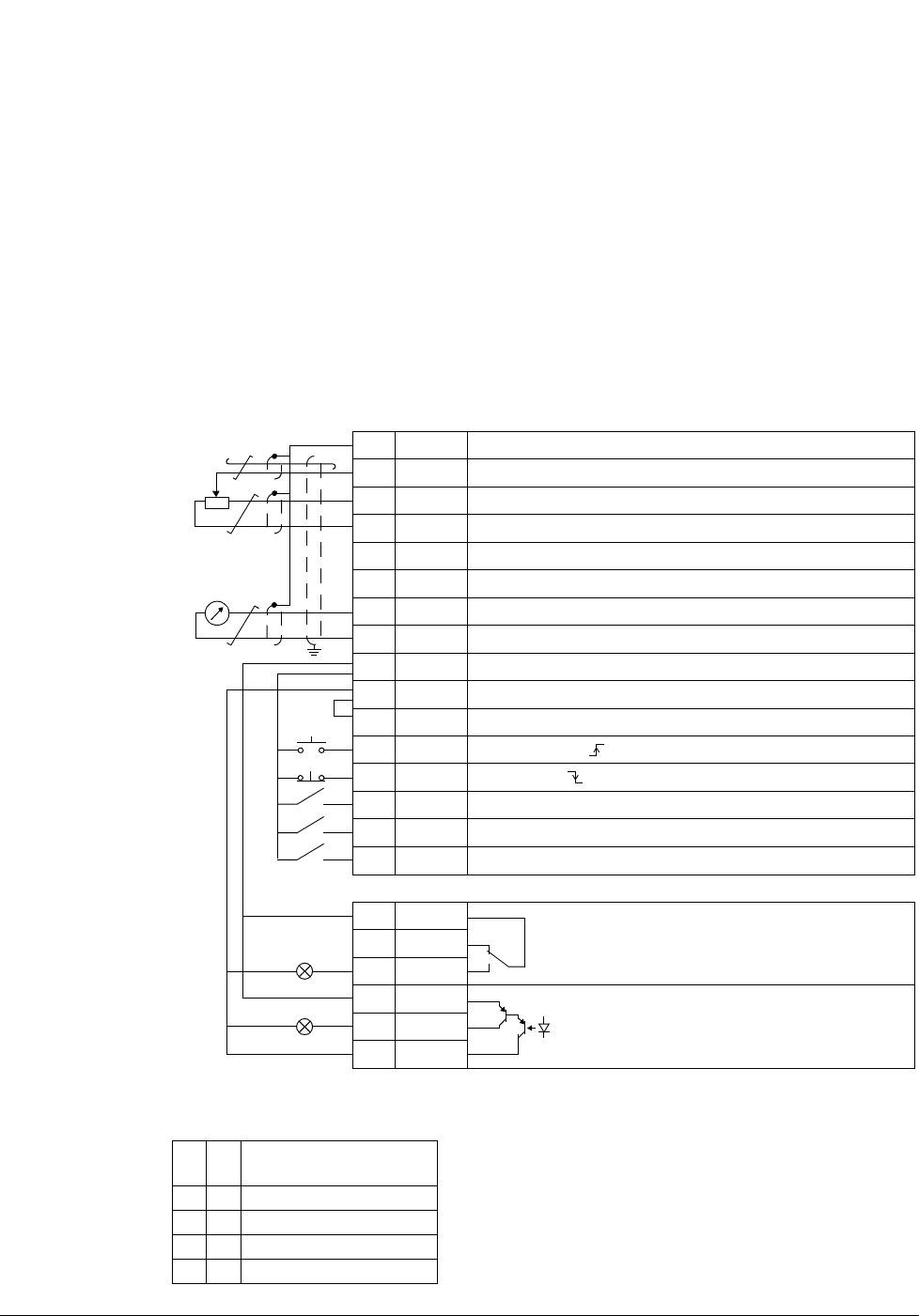
Macros de aplicación
90
Macro de 3 hilos
Esta macro se utiliza cuando el convertidor se controla mediante pulsadores
momentáneos y proporciona tres velocidades constantes. Para habilitarla, ajuste el
valor del parámetro 9902 a 2 (3-HILOS).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Nota: Cuando se desactiva la entrada de paro (sin entrada) (ED2), se inhabilitan los
botones de marcha y paro del panel de control.
Conexiones de E/S por defecto
máx. 500 ohmios
1 ... 10 kohmios
2)
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 Referencia de velocidad del motor: 0 ... 10 V
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: +10 V CC, máx. 10 mA
5 EA2 No se utiliza por defecto. 0 ... 10 V
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Marcha (pulso )
13 ED2 Paro (pulso )
14 ED3 Avance (0) / Inversa (1)
15 ED4 Selección de velocidad constante 1)
16 ED5 Selección de velocidad constante 1)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
1) Véase el grupo de parámetros 12 VELOC
CONSTANTES:
2) Conexión a tierra a 360 grados bajo una grapa.
Par de apriete = 0,5 Nm / 4,4 lbf. in.
ED
3ED
4Funcionamiento
(parámetro)
0 0 Vel. ajustada con EA1
1 0 Velocidad 1 (1202)
0 1 Velocidad 2 (1203)
1 1 Velocidad 3 (1204)
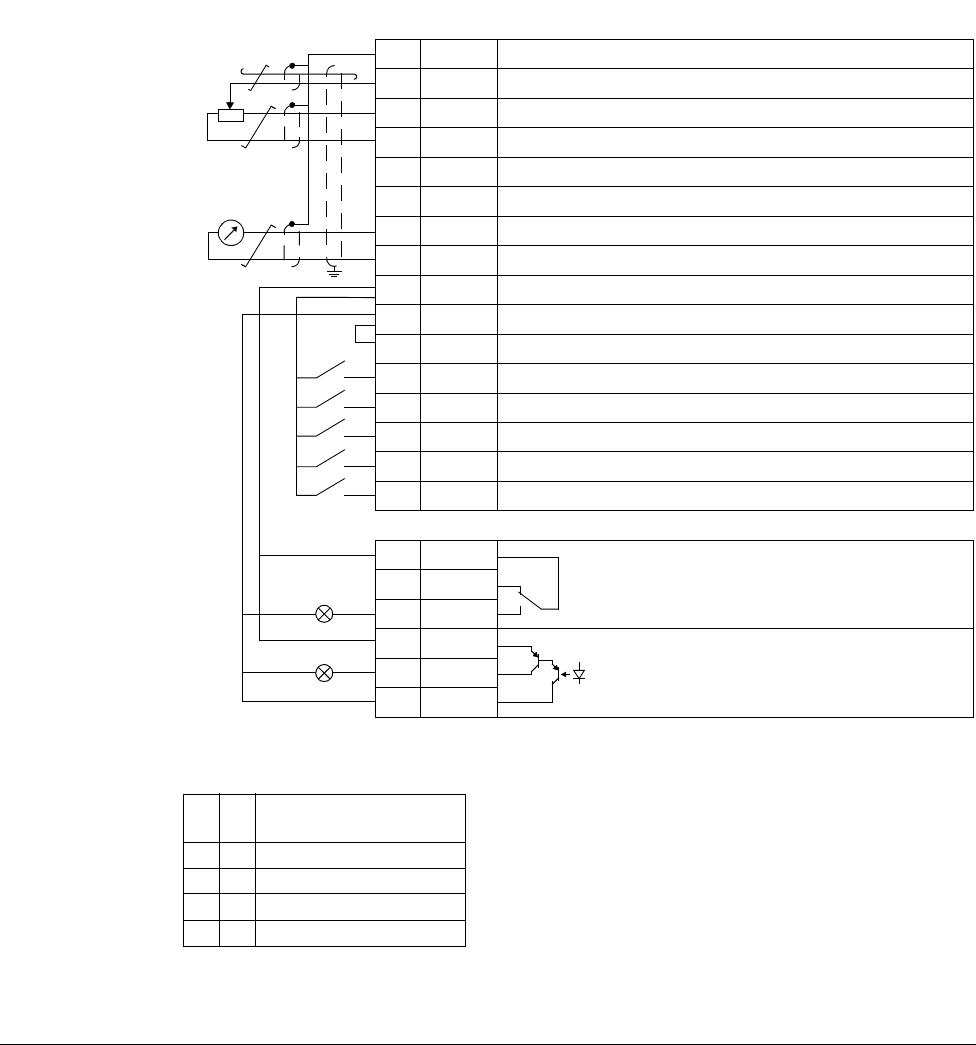
Macros de aplicación
91
Macro alterna
Esta macro ofrece una configuración de E/S adaptada a una secuencia de señales
de control de ED utilizadas cuando se alterna el sentido de rotación de la unidad.
Para habilitarla, ajuste el valor del parámetro 9902 a 3 (ALTERNA).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página 146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Conexiones de E/S por defecto
máx. 500 ohmios
1 ... 10 kohmios
3)
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 Referencia de velocidad del motor: 0 ... 10 V
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: +10 V CC, máx. 10 mA
5 EA2 No se utiliza por defecto. 0 ... 10 V
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1
Marcha
en avance
: si ED1 = ED2 el convertidor se detiene.
13 ED2 Marcha inversa
14 ED3 Selección de velocidad constante 1)
15 ED4 Selección de velocidad constante 1)
16 ED5 Selección de aceleración y desaceleración 2)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
1) Véase el grupo de parámetros 12 VELOC
CONSTANTES:
2) 0 = tiempos de rampa según los parámetros
2202 y 2203.
1 = tiempos de rampa según los parámetros
2205 y 2206.
3) Conexión a tierra a 360 grados bajo una grapa.
Par de apriete = 0,5 Nm / 4,4 lbf. in.
ED
3ED
4Funcionamiento
(parámetro)
0 0 Vel. ajustada con EA1
1 0 Velocidad 1 (1202)
0 1 Velocidad 2 (1203)
1 1 Velocidad 3 (1204)
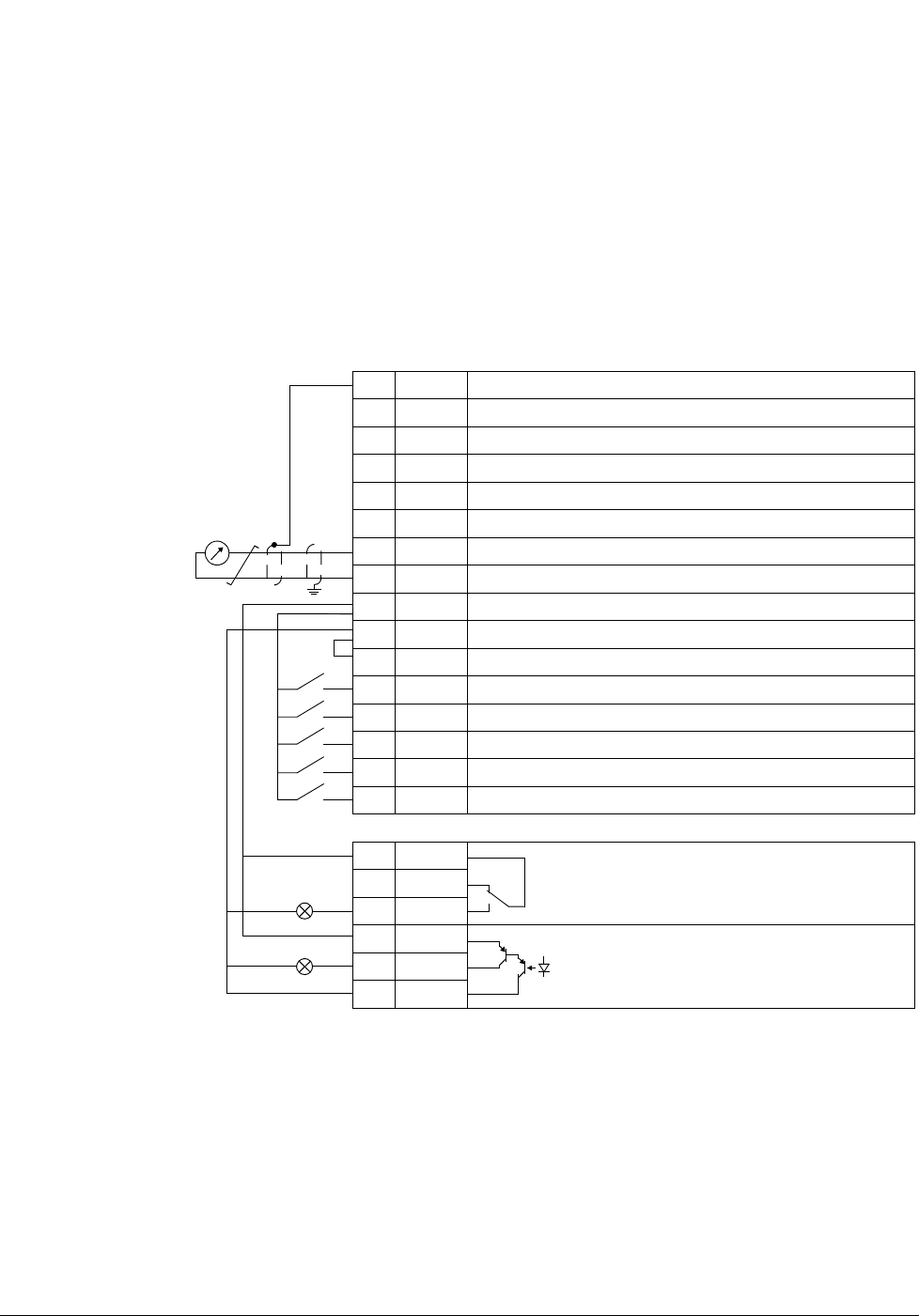
Macros de aplicación
92
Macro de potenciómetro del motor
Esta macro proporciona una interfase rentable para PLC que varíen la velocidad del
convertidor empleando solamente señales digitales. Para habilitarla, ajuste el valor
del parámetro 9902 a 4 (POTENC MOT).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página 146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Conexiones de E/S por defecto
máx. 500 ohmios
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 No se utiliza por defecto. 0 ... 10 V
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia:+ 10 V CC, máx. 10 mA
5 EA2 No se utiliza por defecto. 0 ... 10 V
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Paro (0) / Marcha (1)
13 ED2 Avance (0) / Inversa (1)
14 ED3 Incremento de la velocidad de referencia 1)
15 ED4 Reducción de la velocidad de referencia 1)
16 ED5 Velocidad constante 1: parámetro 1202
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
2)
1) Si la ED3 y la ED4 están ambas activas o
inactivas, la referencia de velocidad no varía.
La referencia de velocidad existente se guarda
durante el paro y la desexcitación.
2) Conexión a tierra a 360 grados bajo una grapa.
Par de apriete = 0,5 N m / 4,4 lbf. in.
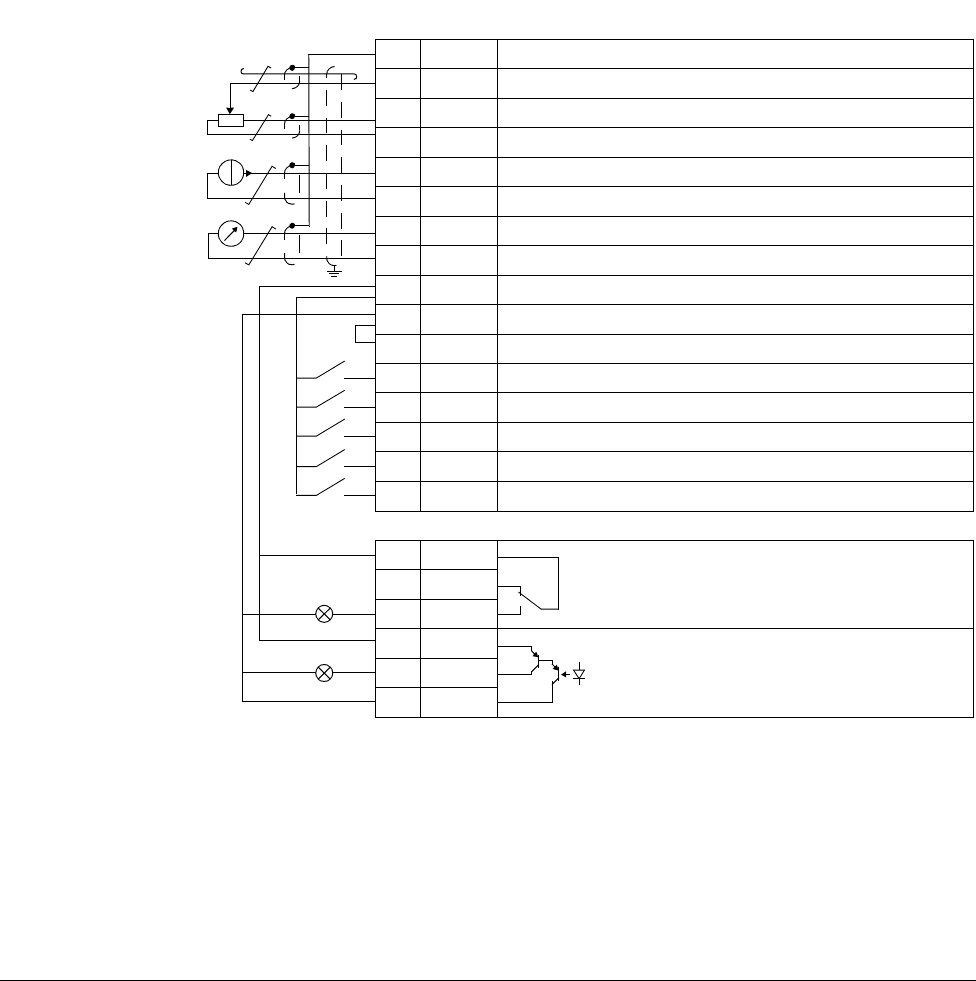
Macros de aplicación
93
Macro Manual/Auto
Esta macro se puede utilizar cuando se necesite el cambio entre dos dispositivos de
control externo. Para habilitarla, ajuste el valor del parámetro 9902 a
5 (MANUAL/AUTO).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página 146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Nota: El parámetro 2108 INHIBIR MARCHA debe permanecer en el ajuste
predeterminado, 0 (NO).
Conexiones de E/S por defecto
1 ... 10 kohmios
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 Referencia de velocidad del motor (manual): 0 ... 10 V
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: +10 V CC, máx. 10 mA
5 EA2
Referencia de velocidad del motor (automático)
: 4 ... 20 mA
2)
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Paro (0) / Marcha (1) (manual)
13 ED2 Avance (0) / Inversa (1) (manual)
14 ED3 Selección de control manual (0) / automático (1)
15 ED4 Avance (0) / Inversa (1) (automático)
16 ED5 Paro (0) / Marcha (1) (automático)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
1)
máx. 500 ohmios
1) Conexión a tierra a 360 grados bajo una grapa 2) La fuente de la señal debe disponer de
una alimentación externa. Véanse las
instrucciones del fabricante. En la página
36 se proporciona un ejemplo de conexión
utilizando un sensor de dos hilos
Par de apriete = 0,5 N m / 4,4 lbf. in.
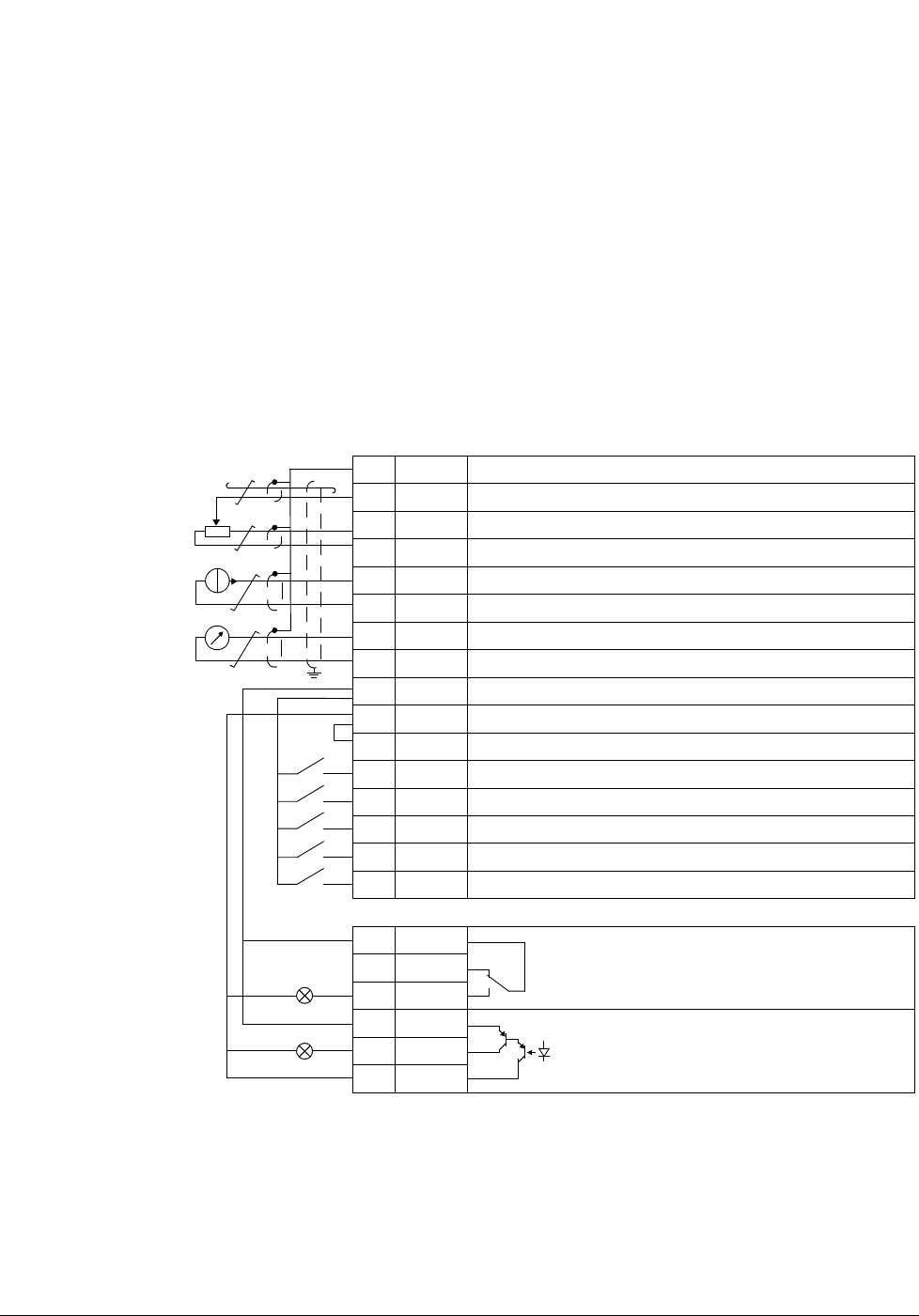
Macros de aplicación
94
Macro de Control PID
Esta macro proporciona ajustes de parámetros para sistemas de control en bucle
cerrado como el control de presión, control de flujo, etc. El control también puede
cambiarse a control de velocidad mediante una entrada digital. Para habilitarla,
ajuste el valor del parámetro 9902 a 6 (CONTROL PID).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página 146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Nota: El parámetro 2108 INHIBIR MARCHA debe permanecer en el ajuste
predeterminado, 0 (NO).
Conexiones de E/S por defecto
1 ... 10 kohmios
2)
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1 Ref. velocidad del motor (manual) / Ref. proceso (PID): 0 ...10 V 1)
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: +10 V CC, máx. 10 mA
5 EA2 Valor actual del proceso: 4 ... 20 mA 3)
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Paro (0) / Marcha (1) (manual)
13 ED2 Selección de control manual (0) / PID (1)
14 ED3 Velocidad constante 1: parámetro 1202
15 ED4 Permiso marcha
16 ED5 Paro (0) / Marcha (1) (PID)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
máx. 500 ohmios
1) Manual: 0 ... 10 V -> referencia de velocidad.
PID: 0 ... 10 V -> 0 ... 100 % punto de
c o n s i g n a P I D .
2) Conexión a tierra a 360º bajo una grapa
3)
La fuente de la señal debe disponer de una
alimentación externa. Véanse las instrucciones
del fabricante. En la página 36 se proporciona
un ejemplo de conexión utilizando un sensor de
dos hilos.
Par de apriete = 0,5 N m / 4,4 lbf. in.
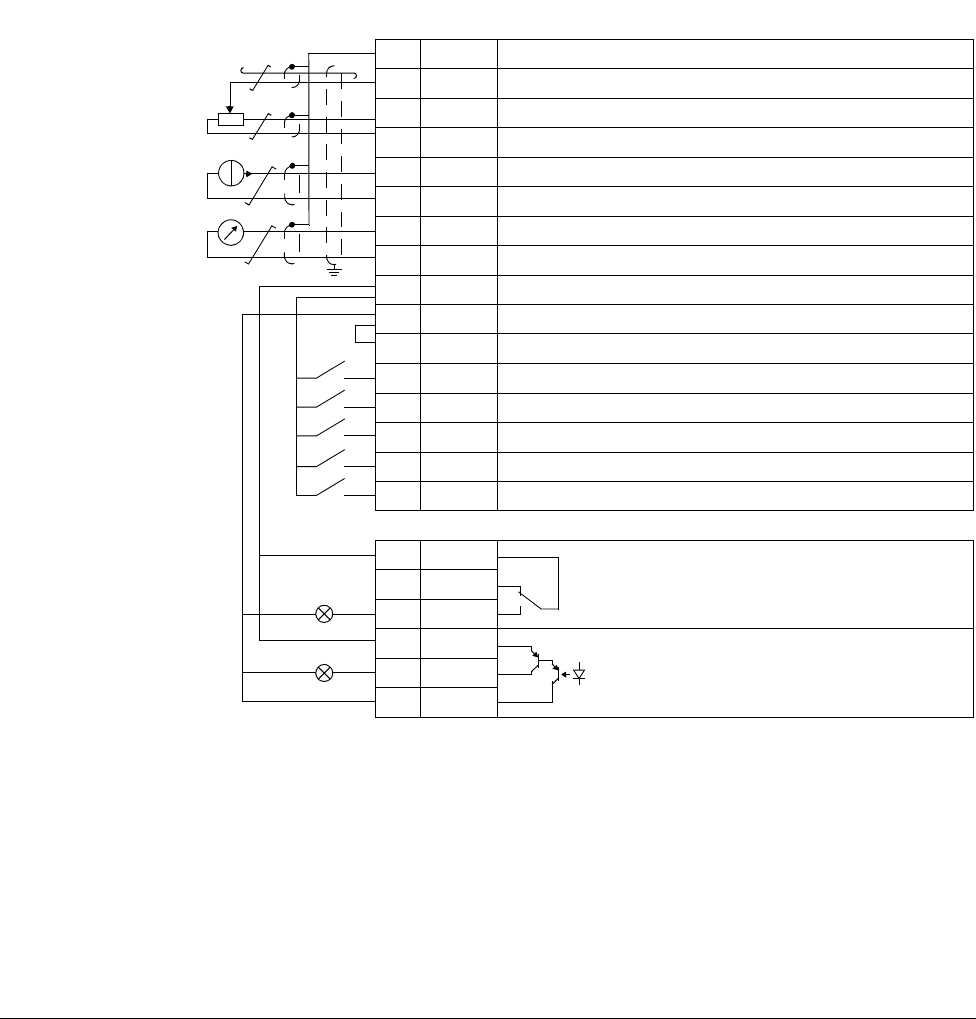
Macros de aplicación
95
Macro de Control de par
Esta macro proporciona ajustes de parámetros para aplicaciones que requieren
control de par del motor. También se puede pasar a control de velocidad mediante
una entrada digital. Para habilitarla, ajuste el valor del parámetro 9902 a 8 (CTRL
PAR).
Para los valores por defecto de los parámetros, véase la sección Valores por
defecto con diferentes macros en la página 146. Si utiliza unas conexiones
diferentes a las conexiones por defecto que se presentan a continuación, véase la
sección Terminales de E/S en la página 42.
Conexiones de E/S por defecto
1 ... 10 kohmios
3)
X1A
1 SCR Pantalla del cable de señal (apantallamiento)
2 EA1
Referencia de velocidad del motor (velocidad)
: 0 ... 10 V
3 GND Circuito de entrada analógica común
4 +10 V Tensión de referencia: 10 V CC, máx. 10 mA
5 EA2 Referencia de par del motor (par): 4 ... 20 mA 4)
6 GND Circuito de entrada analógica común
7SA Valor de velocidad del motor: 0 ... 20 mA
8 GND Circuito de salida analógica común
9 +24 V Salida de tensión auxiliar: +24 V CC, máx. 200 mA
10 GND Salida de tensión auxiliar común
11 DCOM Entrada digital común
12 ED1 Paro (0) / Marcha (1) (velocidad)
13 ED2 Avance (0) / Inversa (1) 1)
14 ED3 Selección de control de velocidad (0) / par (1)
15 ED4 Velocidad constante 1: parámetro 1202
16 ED5 Selección de aceleración y desaceleración 2)
X1B
17 SRCOM Salida de relé
Sin fallos [Fallo (-1)]
18 SRNC
19 SRNO
20 SDSRC Salida digital, máx. 100 mA
Sin fallos [Fallo (-1)]
21 SDOUT
22 SDGND
máx. 500 ohmios
1) Control de velocidad: cambia la dirección de
giro.
Control de par: cambia la dirección de par.
2) 0 = tiempos de rampa según los parámetros
2202 y 2203.
1 = tiempos de rampa según los parámetros
2205 y 2206.
3) Conexión a tierra a 360 grados bajo una grapa.
4) La fuente de la señal debe disponer de una
alimentación externa. Véanse las instrucciones
del fabricante. En la página 36 se proporciona
un ejemplo de conexión utilizando un sensor de
dos hilos.
Par de apriete = 0,5 N m / 4,4 lbf. in.
Macros de aplicación
96
Macros de Usuario
Además de las macros de aplicación estándar, es posible crear tres macros de
usuario. La macro de usuario permite a éste guardar los ajustes de parámetros,
incluyendo el grupo 99 DATOS DE PARTIDA, y los resultados de la identificación del
motor en la memoria permanente y recuperar los datos con posterioridad. La
referencia del panel también se guarda si la macro se guarda y se carga en control
local. El ajuste del control remoto se guarda en la macro de usuario, pero el ajuste
del control local no se guarda.
Los pasos que se presentan a continuación muestran cómo crear y recuperar la
Macro de Usuario 1. El procedimiento para las otras dos macros de usuario es
idéntico y sólo cambian los valores del parámetro 9902.
Para crear la Macro de Usuario 1:
• Ajuste los parámetros. Realice una identificación del motor si es necesario para
la aplicación y aún no se había realizado.
• Guarde los ajustes de parámetros y los resultados de la identificación del motor
en la memoria permanente cambiando el parámetro 9902 a -1 (SAL USUAR S1) .
• Pulse (Panel de control asistente) o (Panel de control básico).
Para recuperar la Macro de Usuario 1:
• Cambie el parámetro 9902 a 0 (CAR USUAR S1).
• Pulse (Panel de control asistente) o (Panel de control básico) para
cargar la macro.
La macro de usuario también puede conmutarse mediante entradas digitales (véase
el parámetro 1605).
Nota: La carga de la macro de usuario también restaura los ajustes del parámetro,
incluido el grupo 99 DATOS DE PARTIDA y los resultados de la identificación del
motor. Compruebe que los ajustes correspondan al motor utilizado.
Sugerencia: El usuario puede, por ejemplo, conmutar el convertidor entre tres
motores sin tener que ajustar los parámetros del motor y repetir su identificación
cada vez que se cambia. El usuario sólo tiene que establecer los ajustes y realizar la
identificación del motor una sola vez para cada motor y, a continuación, guardar los
datos como tres macros de usuario. Cuando se cambia el motor, sólo tiene que
cargarse la macro de usuario correspondiente y el convertidor está listo para
funcionar.
GUARDAR ENTER
MENU
GUARDAR ENTER
MENU
Funciones del programa
97
Funciones del programa
Contenido de este capítulo
El capítulo describe las funciones del programa. Para cada una de ellas, hay una lista
de ajustes de usuario, señales actuales y mensajes de alarma y fallo relacionados.
Asistente de arranque
Introducción
El Asistente de arranque (requiere el panel de control asistente) guía al usuario
durante el procedimiento de puesta en marcha, ayudándole a facilitar los datos
solicitados (valores de parámetros) al convertidor. El Asistente de arranque también
comprueba que los valores que se han introducido sean válidos, es decir, que se
encuentren dentro del intervalo permitido.
El Asistente de arranque llama a otros asistentes, cada uno de los cuales guía al
usuario en la tarea de especificar una serie de parámetros asociada. Durante la
primera puesta en marcha, el convertidor sugiere acceder a la primera tarea, la
Selección de idioma. El usuario puede activar las tareas una tras otra como sugiere
el Asistente de arranque o bien de forma independiente. Asimismo, el usuario puede
ajustar los parámetros del convertidor del modo convencional sin emplear el
asistente en ningún momento.
Véase la sección Modo de Asistentes en la página 78 para obtener información
acerca de cómo iniciar el Asistente de arranque y otros asistentes.
Orden predeterminado de las tareas
En función de la selección efectuada en la tarea Aplicación (parámetro 9902
MACRO DE APLIC), el Asistente de arranque decide qué tareas subsiguientes
sugiere. Las tareas predeterminadas se muestran en la tabla siguiente.
Selección de
aplicación Tareas predeterminadas
ESTAND ABB
Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT1, Control
de velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
3-HILOS
Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT1, Control
de velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
ALTERNA
Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT1, Control
de velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
POTENC MOTOR
Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT1, Control
de velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
MANUAL/AUTO
Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT1, Control
de velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
CONTROL PID Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control PID, Control de
velocidad EXT2, Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
CTRL PAR Selección de idioma, Ajuste del motor, Aplicación, Módulos opcionales, Control de velocidad EXT2,
Control de Marcha/Paro, Funciones temporizadas, Protecciones, Señales de salida
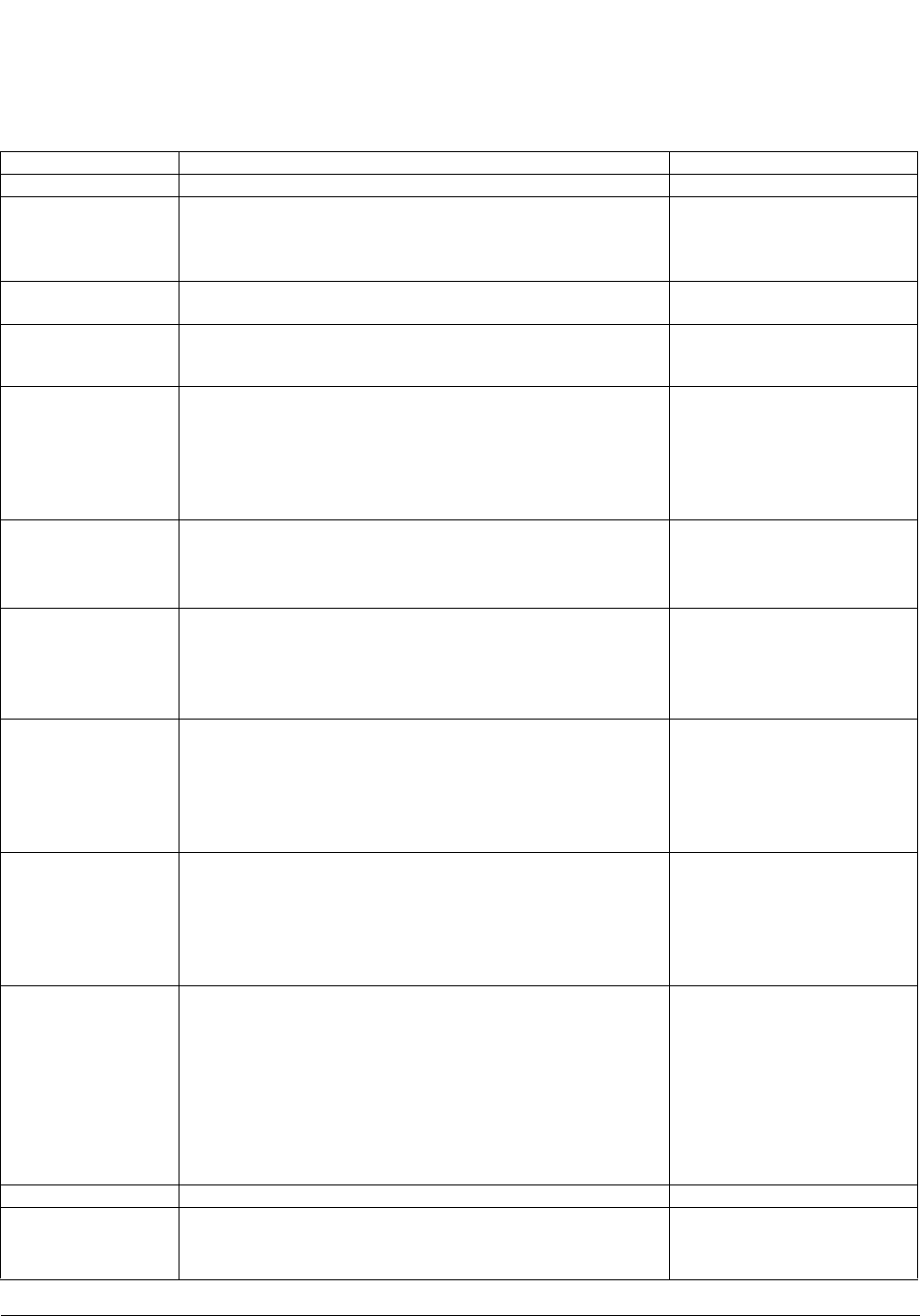
Funciones del programa
98
Lista de las tareas y los parámetros relevantes del convertidor
En función de la selección efectuada en la tarea Aplicación (parámetro 9902
MACRO DE APLIC), el Asistente de arranque decide qué tareas subsiguientes
sugiere.
Nombre Descripción Ajustar parámetros
Selección de idioma Selección del idioma 9901
Ajuste del motor Ajuste de los datos del motor
Realización de la identificación del motor (si los límites de
velocidad no se encuentran dentro del rango permitido: ajuste de
los límites).
9904...9909
9910
Aplicación Selección de la macro de aplicación 9902, parámetros asociados a la
macro
Módulos opcionales Activación de los módulos opcionales Grupo 35 TEMP MOT MED
Grupo 52 COMUNIC PANEL
9802
Control de velocidad
EXT1 Selección del origen de la referencia de velocidad 1103
(si se usa EA1: ajuste de límites, escala e inversión de la entrada
analógica EA1) (1301...1303, 3001)
Ajuste de los límites de referencia 1104, 1105
Ajuste de los límites de velocidad (frecuencia) 2001, 2002, (2007, 2008)
Ajuste de los tiempos de aceleración y deceleración 2202, 2203
Control de velocidad
EXT2 Selección del origen de la referencia de velocidad 1106
(si se usa EA1: ajuste de límites, escala e inversión de la entrada
analógica EA1) (1301...1303, 3001)
Ajuste de los límites de referencia 1107, 1108
Control de par Selección del origen de la referencia de par 1106
(con EA1: ajuste de límites, escala e inversión de la entrada
analógica EA1). (1301...1303, 3001)
Ajuste de los límites de referencia 1107, 1108
Ajuste de los tiempos de aumento y disminución de rampa de par 2401, 2402
Control PID Selección del origen de la referencia de proceso 1106
(si se usa EA1: ajuste de límites, escala e inversión de la entrada
analógica EA1). (1301...1303, 3001)
Ajuste de los límites de referencia 1107, 1108
Ajuste de los límites de velocidad (referencia) 2001, 2002, (2007, 2008)
Ajuste del origen y los límites del valor actual de proceso 4016, 4018, 4019
Control de marcha/
paro Selección del origen de las señales de marcha y paro de los dos
lugares de control externos, EXT1 y EXT2 1001, 1002
Selección entre EXT1 y EXT2 1102
Definición del control de dirección 1003
Definición de los modos de marcha y paro 2101...2103
Selección del uso de la señal de Permiso de marcha 1601
Funciones
temporizadas
Ajuste de las funciones temporizadas 36 FUNCIONES TEMP
Selección del control temporizado de marcha y paro para los dos
lugares de control externo, EXT1 y EXT2 1001, 1002
Selección del control temporizado EXT1/EXT2 1102
Activación de la velocidad constante 1 temporizada 1201
Selección del estado de la función temporizada indicado con la
salida de relé SR 1401
Selección de la serie de parámetros 1/2 del PID1 temporizada 4027
Protecciones Ajuste de los límites de par e intensidad 2003, 2017
Señales de salida Selección de las señales indicadas con la salida de relé SR Grupo 14 SALIDAS DE RELE
Selección de las señales indicadas con la salida analógica SA
Ajuste del mínimo, máximo, escalado e inversión
Grupo 15 SALIDAS ANALOG
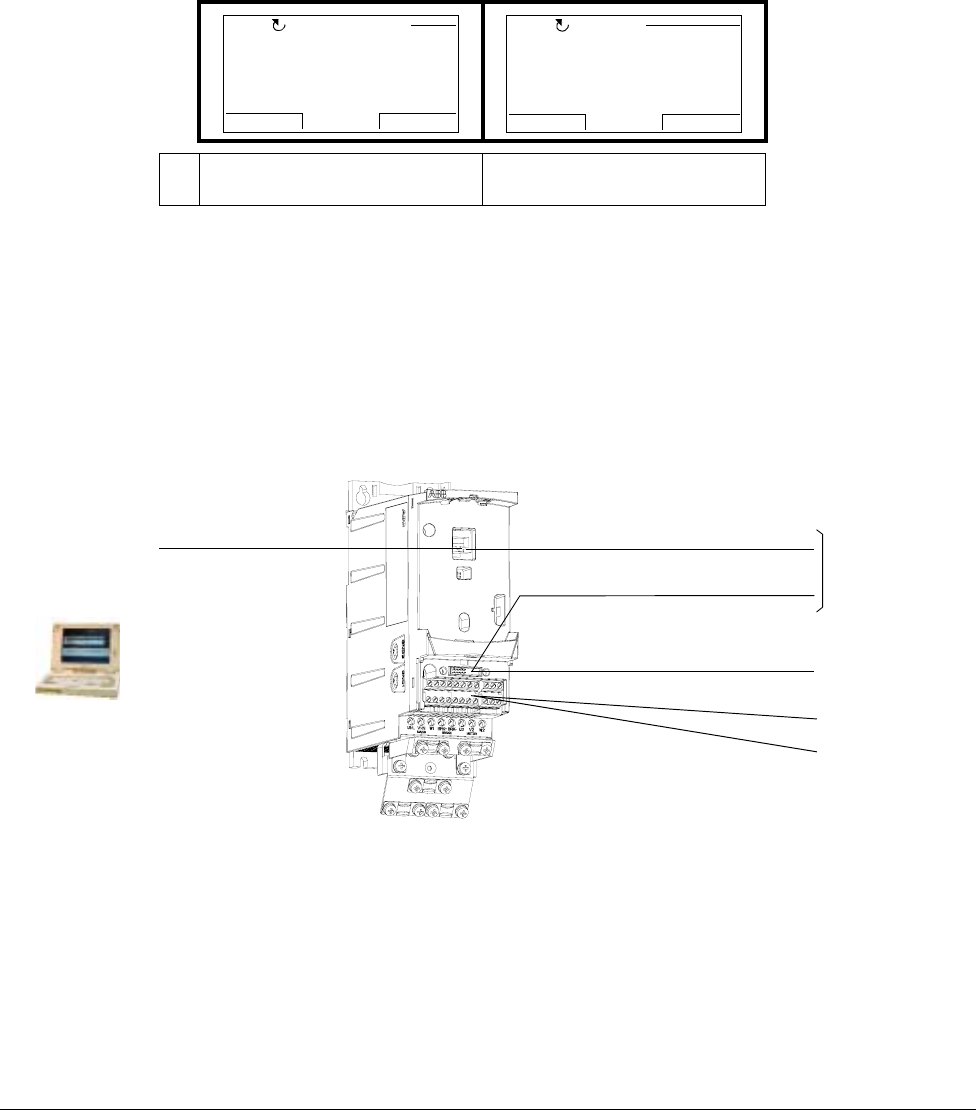
Funciones del programa
99
Contenido de las pantallas del asistente
Existen dos tipos de pantallas en el Asistente de arranque: las pantallas principales
y las pantallas de información. Las primeras instan al usuario a que facilite
información. El asistente avanza por las pantallas principales. Las pantallas de
información contienen textos de ayuda relativos a las pantallas principales. La
siguiente figura muestra un ejemplo típico de ambos tipos de pantallas y explica su
contenido.
Control local frente a control externo
El convertidor puede recibir comandos de marcha, paro y dirección y valores de
referencia del panel de control o a través de entradas analógicas y digitales. Un bus
de campo integrado o un adaptador de bus de campo opcional permite el control a
través de un enlace de bus de campo abierto. Un PC con la herramienta
DriveWindow Light PC también puede controlar el convertidor.
Pantalla principal Pantalla de información
1
2
1 Parámetro Texto de ayuda ...
2 Campo de entrada ... continuación del texto de ayuda
9905 TENSION NOM MOT
EDICION PAR
240 V
SALIR GUARDAR00:00
LOC
SALIR 00:00
Ajustar exactamente como
indica la placa del
motor. En conexión con
varios motores dar la
AYUDA
LOC
ACS350
Panel de
Control externoControl local
E/S estándar
Conexión del panel (X2)
control o
herramienta para PC
Conexión del panel (X2)
Conexión del adaptador de
Potenciómetro
Adaptador FMBA conectado a X3
o
Bus de
campo
integrado
(Modbus)
Adaptador de
bus de
campo
bus de campo (X3)
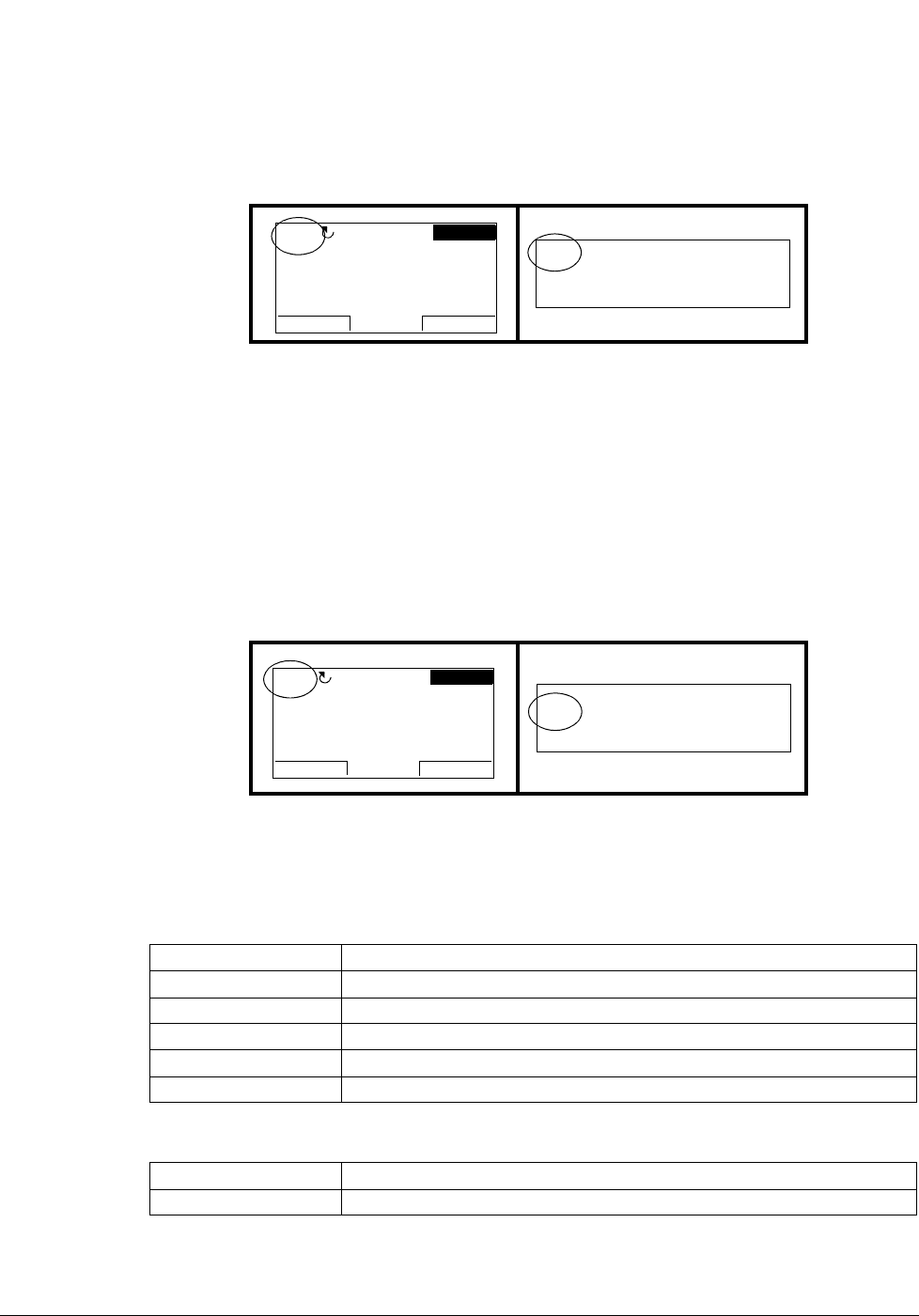
Funciones del programa
100
Control local
Los comandos de control se facilitan desde el teclado del panel de control cuando el
convertidor se halla en control local. LOC indica control local en la pantalla del
panel.
El panel de control siempre tiene preferencia sobre los orígenes de la señal de
control externo cuando se emplea en modo local.
Control externo
Cuando el convertidor se encuentra en control externo, los comandos se facilitan a
través de los terminales de E/S estándar (entradas analógicas y digitales) y/o la
interfase del bus de campo. Además, también es posible ajustar el panel de control
como el origen de control externo.
El control externo se indica mediante REM en la pantalla del panel.
El usuario puede conectar las señales de control a dos lugares de control externo,
EXT1 o EXT2. En función de la selección del usuario, uno de los dos está activo en
un momento determinado. Esta función opera en un nivel de tiempo de 2 ms.
Ajustes
Diagnósticos
Tecla del panel Información adicional
LOC/REM Selección entre control local y externo
Parámetro
1102 Selección entre EXT1 y EXT2
1001/1002 Origen de marcha, paro y dirección para EXT2/EXT2
1103/1106 Origen de la referencia para EXT1/EXT2
Señales actuales Información adicional
0111/0112 Referencia de EXT1/EXT2
Panel asistente Panel básico
5 A
1 Hz
7 %10.
0.
49. 49.1LOC
DIR MENU
00:00
LOC
Hz
OUTPUT FWD
491
.
Panel asistente Panel básico
5 A
1 Hz
7 %10.
0.
49. 49.1
REM
DIR MENU00:00
REM Hz
OUTPUT FWD
491
.
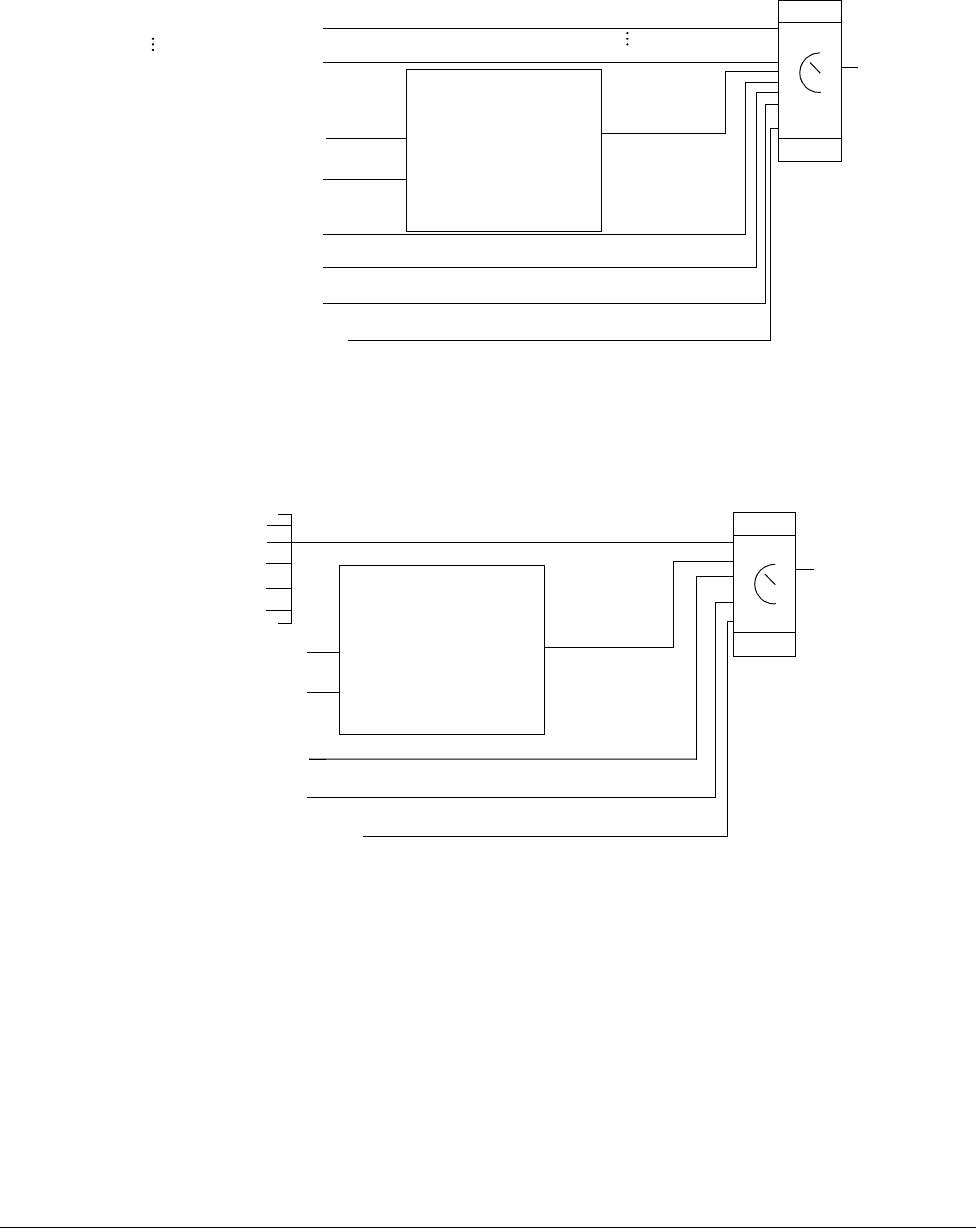
Funciones del programa
101
Diagrama de bloques: origen de marcha, paro y dirección para EXT1
La figura siguiente muestra los parámetros que seleccionan la interfase para la
marcha, el paro y la dirección del lugar de control externo EXT1.
Diagrama de bloques: origen de referencia para EXT1
La figura siguiente muestra los parámetros que seleccionan la interfase para la
referencia de velocidad del lugar de control externo EXT1.
ED1
Adaptador de bus
PANEL
EXT1
ED5
COMUNIC
ED1
ED5
Panel de control
Marcha/paro
dirección
1001
Selecc.
Bus de campo
Selecc. bus de c.
Véanse los capítulos
Control de bus de
campo con bus de
campo encajado y
Control de bus de
campo con adaptador
FUNC TEMP 1...4
Función temporizada
Tempor./Contador MARCHA/PARO
PROG SEC
Programación de secuencias
integrado
de campo
EXT1
EA1
1103
Selecc.
PANEL
Panel de control
EA2
ED3
ED4
EA1, EA2, ED3, ED4, ED5
REF1 (Hz/rpm)
Referencia
ED5
Adaptador de bus
Bus de campo
Selecc. bus de c.
Véanse los capítulos
Control de bus de
campo con bus de
campo encajado y
Control de bus de
campo con adaptador
Entrada de frecuencia
FREC ENTRADA
COMUNIC
PROG SEC
Programación de secuencias
integrado
de campo
Funciones del programa
102
Tipos de referencia y proceso
El convertidor puede aceptar diversas referencias además de la entrada analógica
convencional y las señales del panel de control.
• La referencia del convertidor puede facilitarse con dos entradas digitales: una
entrada digital aumenta la velocidad y la otra la reduce.
• El convertidor puede formar una referencia a partir de dos señales de entrada
analógicas mediante el uso de funciones matemáticas: suma, resta,
multiplicación y división.
• El convertidor puede formar una referencia a partir de una señal de entrada
analógica y una señal recibida a través de una interfase de comunicación serie
mediante el uso de funciones matemáticas: suma y multiplicación.
• La referencia del convertidor puede facilitarse con dos entradas de frecuencia.
• Con el lugar de control externo EXT1/EXT2, el convertidor puede formar una
referencia a partir de una señal de entrada analógica y una señal recibida a
través de una programación de secuencias mediante el uso de funciones
matemáticas: suma.
Es posible escalar la referencia externa de modo que los valores mínimo y máximo
de la señal correspondan a una velocidad distinta de los límites de velocidad mínimo
y máximo.
Ajustes
Diagnósticos
Parámetro Información adicional
Grupo 11 SELEC REFERENCIA Origen de referencia externa, tipo y escalado
Grupo 20 LIMITES Límites de funcionamiento
Grupo 22 ACEL/DECEL Rampas de aceleración y deceleración de la referencia de
velocidad
Grupo 24 CTRL PAR Tiempos de rampa de la referencia de par
Grupo 32 SUPERVISION Supervisión de referencia
Señal actual Información adicional
0111/0112 Referencia externa REF1/REF2
Grupo 03 SEÑALES ACT BC Referencias en distintas etapas de la cadena de proceso de
referencia
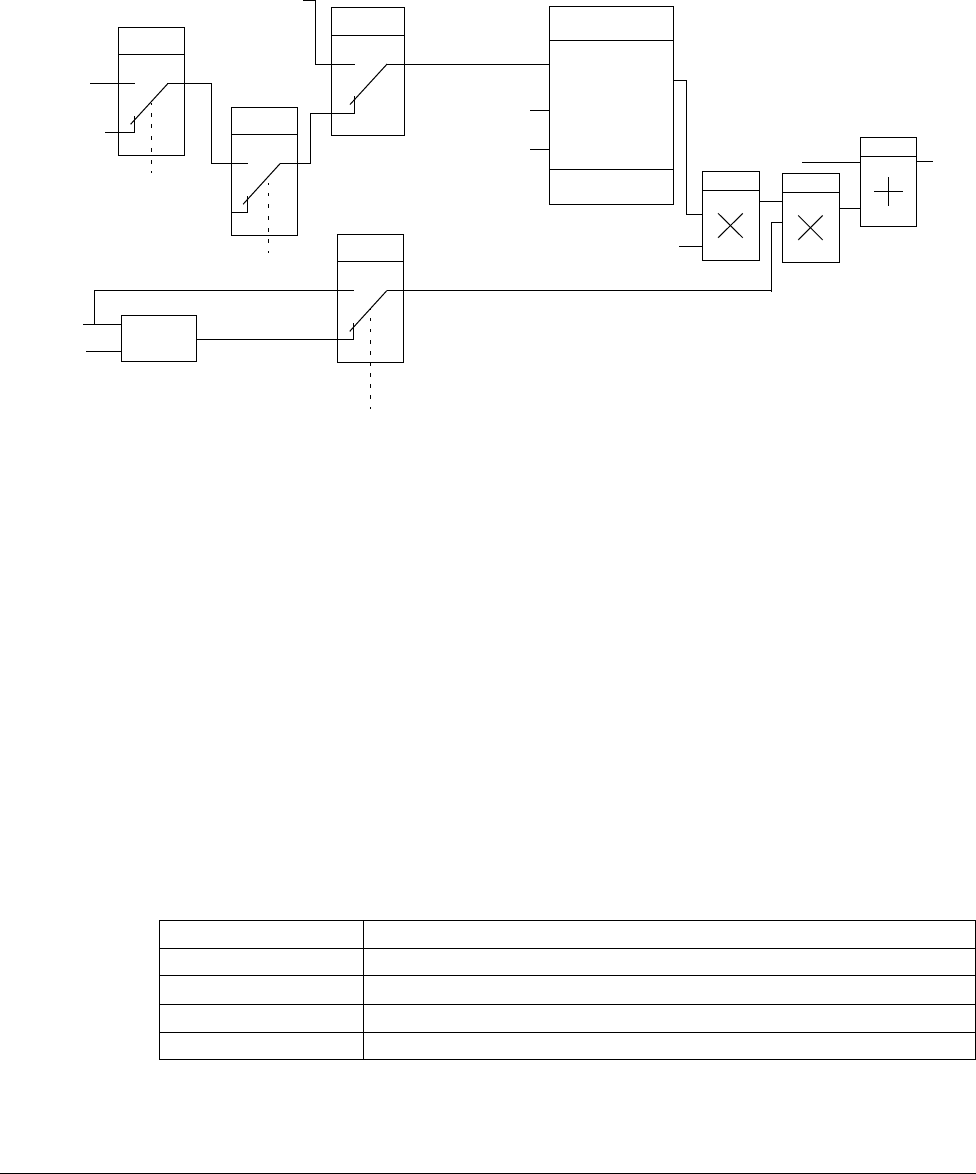
Funciones del programa
103
Corrección de la referencia
En la corrección de la referencia, la referencia externa se corrige en función del
valor medido de una variable de aplicación secundaria. El siguiente diagrama de
bloques ilustra esta función.
Ajustes
Parámetro Información adicional
1102 Selección REF1/2
4230 …4233 Ajustes de la función de corrección
4201 …4229 Ajustes de control PID
Grupo 20 LIMITES Límites de funcionamiento del convertidor
REF’
0
REF1 (Hz/rpm) / REF2 (%) = la referencia del convertidor antes de la corrección
REF’ = la referencia del convertidor tras la corrección
veloc. máx. = par. 2002 (o 2001 si el valor absoluto es mayor)
frec. máx. = par. 2008 (o 2007 si el valor absoluto es mayor)
par máx. = par. 2014 (o 2013 si el valor absoluto es mayor)
Ref. PID2 = par. 4210
Act. PID2 = par. 4214...4221
(1 Nota: La corrección de la referencia de par sólo es para la referencia externa REF2 (%).
(2 REF1 o REF2 según cuál esté activa. Véase el parámetro 1102.
(3Cuando el par. 4232 = REFPID2, la referencia de corrección máxima está definida por el parámetro
1105 cuando REF1 está activa, y por el parámetro 1108 cuando REF2 está activa.
Cuando el par. 4232 = SALIDAPID2, la referencia de corrección máxima está definida por el
parámetro 2002 si el valor del parámetro 9904 es VECTOR:VELOC o VECTOR:PAR, y por el valor
del parámetro 2008 si el valor del parámetro 9904 es ESCALAR:FREC.
veloc. máx.
frec. máx.
par máx.
Ref. PID2
4232 FUENTE DE CORREC
4231 ESCALA TRIM
9904
1105 REF1 MAXIMO / 1108 REF 2 MAXIMO(2
Conmut.
Mult.
Suma
PID2
4230
Selecc.
DIRECTA (2)
PROPOR. (1)
SIN SEL (0) REF1 (Hz/rpm) /
REF2 (%)(2)
REF1 (Hz/rpm) /
REF2 (%)(2
Mult.
4233 (1
Conmut
.
Conmut.
(3
Conmut.
Act. PID2
Salida PID2
Funciones del programa
104
Ejemplo
El convertidor acciona una cinta transportadora. Se controla mediante velocidad,
pero también debe tenerse en cuenta la tensión de la cinta: si la tensión medida
supera el punto de ajuste de tensión, la velocidad se reducirá ligeramente y
viceversa.
Para obtener la corrección de velocidad requerida, el usuario
• activa la función de corrección y le conecta el punto de ajuste de tensión y la
tensión medida;
• ajusta la corrección a un nivel adecuado.
Entradas analógicas programables
El convertidor dispone de dos entradas de tensión/intensidad analógicas
programables. Cada entrada puede invertirse y filtrarse, y los valores máximo y
mínimo pueden ajustarse. El ciclo de actualización de las entradas analógicas es de
8 ms (un ciclo de 12 ms en cada segundo). El tiempo de ciclo es inferior cuando se
transfiere información al programa de aplicación (8 ms -> 2 ms).
Rodillos de accionamiento (arrastre)
Medición de tensión
Cinta transportadora controlada por velocidad
Suma
Medición de
tensión
Ref. de velocidad
Punto de ajuste
de la tensión
Referencia de
velocidad
corregida
Diagrama de bloques simplificado
PID
Funciones del programa
105
Ajustes
Diagnósticos
Salida analógica programable
El convertidor dispone de una salida de intensidad programable (de 0 a 20 mA). La
señal de salida analógica puede invertirse y filtrarse, y los valores máximo y mínimo
pueden ajustarse. Las señales de salida analógica pueden ser proporcionales a la
velocidad del motor, la frecuencia de salida, la intensidad de salida, el par motor, la
potencia del motor, etc. El ciclo de actualización de la salida analógica es de 2 ms.
La salida analógica se puede controlar mediante programación de secuencias.
También es posible escribir un valor en una salida analógica a través de un enlace
de comunicación serie.
Parámetro Información adicional
Grupo 11 SELEC REFERENCIA EA como origen de referencia
Grupo 13 ENTRADAS ANALOG Proceso de entradas analógicas
3001, 3021, 3022, 3107 Supervisión de pérdida de EA
Grupo 35 TEMP MOT MED EA en medición de la temperatura del motor
Grupo 40 CONJ PID PROCESO
1
...42 PID TRIM / EXT
EA como referencia de control de proceso PID u origen de
valores actuales
8420, 8425, 8426
8430, 8435, 8436
...
8490, 8495, 8496
EA como referencia de programación de secuencias o señal de
disparo
Valor actual Información adicional
0120, 0121 Valores de la entrada analógica
1401 Pérdida de señal EA1/EA2
Alarma
FALLO EA1 / FALLO EA2 Señal EA1/EA2 por debajo de EA1/EA2 FALLO LIMIT (3021/
3022)
Fallo
FALLO EA1 / FALLO EA2 Señal EA1/EA2 por debajo del límite EA1/EA2 FALLO LIMIT
(3021/3022)
PAR ESCAL EA Escalado incorrecto de la señal de EA (1302 < 1301 o 1305 <
1304)
Funciones del programa
106
Ajustes
Diagnósticos
Entradas digitales programables
El convertidor dispone de cinco entradas digitales programables. Su tiempo de
actualización es de 2 ms.
Una entrada digital (ED5) se puede programar como entrada de frecuencia. Véase
la sección Entrada de frecuencia en la página 108.
Parámetro Información adicional
Grupo 15 SALIDAS ANALOG Selección y proceso del valor de la SA
Grupo 35 TEMP MOT MED SA en la medición de la temperatura del motor
8423/8433/.../8493 Control de la SA con programación de secuencias
Valor actual Información adicional
0124 Valor de la SA
0170 Valores de control de la SA definidos por la programación de
secuencias
Fallo
PAR ESCALA SA Escalado incorrecto de la señal de SA (1503 < 1502)
Funciones del programa
107
Ajustes
Diagnósticos
Salidas de relé programables
El convertidor dispone de una salida de relé programable. Mediante el ajuste de
parámetros, es posible elegir qué información va a indicarse a través de la salida de
relé: listo, en marcha, fallo alarma, etc. Su tiempo de actualización es de 2 ms.
Es posible escribir un valor en una salida de relé a través de un enlace de
comunicación serie.
Ajustes
Diagnósticos
Parámetro Información adicional
Grupo 10 MARCHA/PARO/DIR ED como marcha, paro, dirección
Grupo 11 SELEC REFERENCIA ED en selección de referencia u origen de referencia
Grupo 12 VELOC CONSTANTES ED en selección de velocidad constante
Grupo 16 CONTROLES
SISTEMA ED como Permiso de Marcha externo, restauración de fallos o
señal de cambio de macro de usuario
Grupo 19 TEMPOR Y
CONTADOR ED como origen de la señal de control de temporizador o contador
2013, 2014 ED como origen de límite de par
2109 ED como origen de orden de paro de emergencia externa
2201 ED como señal de selección de rampa de aceleración y
deceleración
2209 ED como señal de forzar a cero la rampa
3003 ED como origen de fallo externo
Grupo 35 TEMP MOT MED ED en la medición de la temperatura del motor
3601 ED como origen de la señal de permiso de la función temporizada
3622 ED como origen de la señal de activación del reforzador
4010/4110/4210 ED como origen de la señal de referencia del controlador PID
4022/4122 ED como señal de activación de la función dormir en PID1
4027 ED como origen de la señal de selección de la serie de
parámetros PID1 1/2
4228 ED como origen de la señal de activación de la función PID2
externa
Grupo 84 PROG SECUENCIA ED como origen de la señal de control de la programación de
secuencias
Valor actual Información adicional
0160 Estado de la ED
0414 Estado de la ED en el momento en que se produjo el último fallo
Parámetro Información adicional
Grupo 14 SALIDAS DE RELE Selecciones y tiempos de funcionamiento del valor de la SR
8423 Control de la SR con programación de secuencias
Valor actual Información adicional
0134 Código de control de la SR a través del control de bus de campo
0162 Estado de la SR
Funciones del programa
108
Entrada de frecuencia
La entrada digital ED5 se puede programar como entrada de frecuencia. La entrada
de frecuencia (de 0 a 16.000 Hz) se puede utilizar como origen de la señal de
referencia externa. El tiempo de actualización de la entrada de frecuencia es de 50
ms. Este tiempo es inferior cuando se transfiere información al programa de
aplicación (50 ms -> 2 ms).
Ajustes
Diagnósticos
Salida de transistor
El convertidor dispone de una salida de transistor programable. La salida se puede
utilizar como salida digital o como salida de frecuencia (de 0 a 16.000 Hz). El tiempo
de actualización de la salida de transistor/frecuencia es de 2 ms.
Ajustes
Diagnósticos
Parámetro Información adicional
Grupo 18 ENT FREC Y SAL
TRA Filtrado y valores máximo y mínimo de la entrada de frecuencia
1103/1106 Referencia externa REF1/2 a través de la entrada de frecuencia
4010, 4110, 4210 Entrada de frecuencia como origen de la referencia PID
Valor actual Información adicional
0161 Valor de la entrada de frecuencia
Parámetro Información adicional
Grupo 18 ENT FREC Y SAL
TRA Ajustes de la salida de transistor
8423 Control de la salida de transistor en programación de secuencias
Valor actual Información adicional
0163 Estado de la salida de transistor
0164 Frecuencia de la salida de transistor
Funciones del programa
109
Señales actuales
Están disponibles varias señales actuales:
• Intensidad, tensión, potencia y frecuencia de salida del convertidor.
• Velocidad y par del motor.
• Tensión de CC del circuito intermedio.
• Lugar de control activo (LOCAL, EXT1 o EXT2).
• Valores de referencia.
• Temperatura del convertidor.
• Contador de tiempo de funcionamiento (h), contador de kWh.
• Estados de las E/S digital y E/S analógica.
• Valores actuales del regulador PID.
En la pantalla del panel de control asistente se pueden visualizar tres señales
simultáneamente (una señal en la pantalla del panel de control básico). También es
posible leer los valores a través del enlace de comunicación serie o a través de las
salidas analógicas.
Ajustes
Diagnósticos
Identificación del motor
El rendimiento del control vectorial se basa en un modelo preciso del motor
determinado durante la puesta en marcha del mismo.
Se efectúa una Magnetización de Identificación del motor de forma automática la
primera vez que se facilita la orden de marcha. Durante la primera puesta en
marcha, el motor se magnetiza a velocidad cero durante varios segundos para
permitir la creación del modelo del motor. Este método de identificación es
adecuado para la mayoría de las aplicaciones.
En aplicaciones exigentes, puede realizarse una Marcha de identificación (Marcha
de ID) por separado.
Ajustes
Parámetro 9910 MARCHA ID
Parámetro Información adicional
1501 Selección de una señal actual para la SA
1808 Selección de una señal actual para la salida de frecuencia
Grupo 32 SUPERVISION Supervisión de señal actual
Grupo 34 PANTALLA PANEL Selección de las señales actuales que se visualizarán en el panel de
control
Valor actual Información adicional
Grupo 01 DATOS FUNCIONAM
... 04 HISTORIAL FALLOS Listas de señales actuales
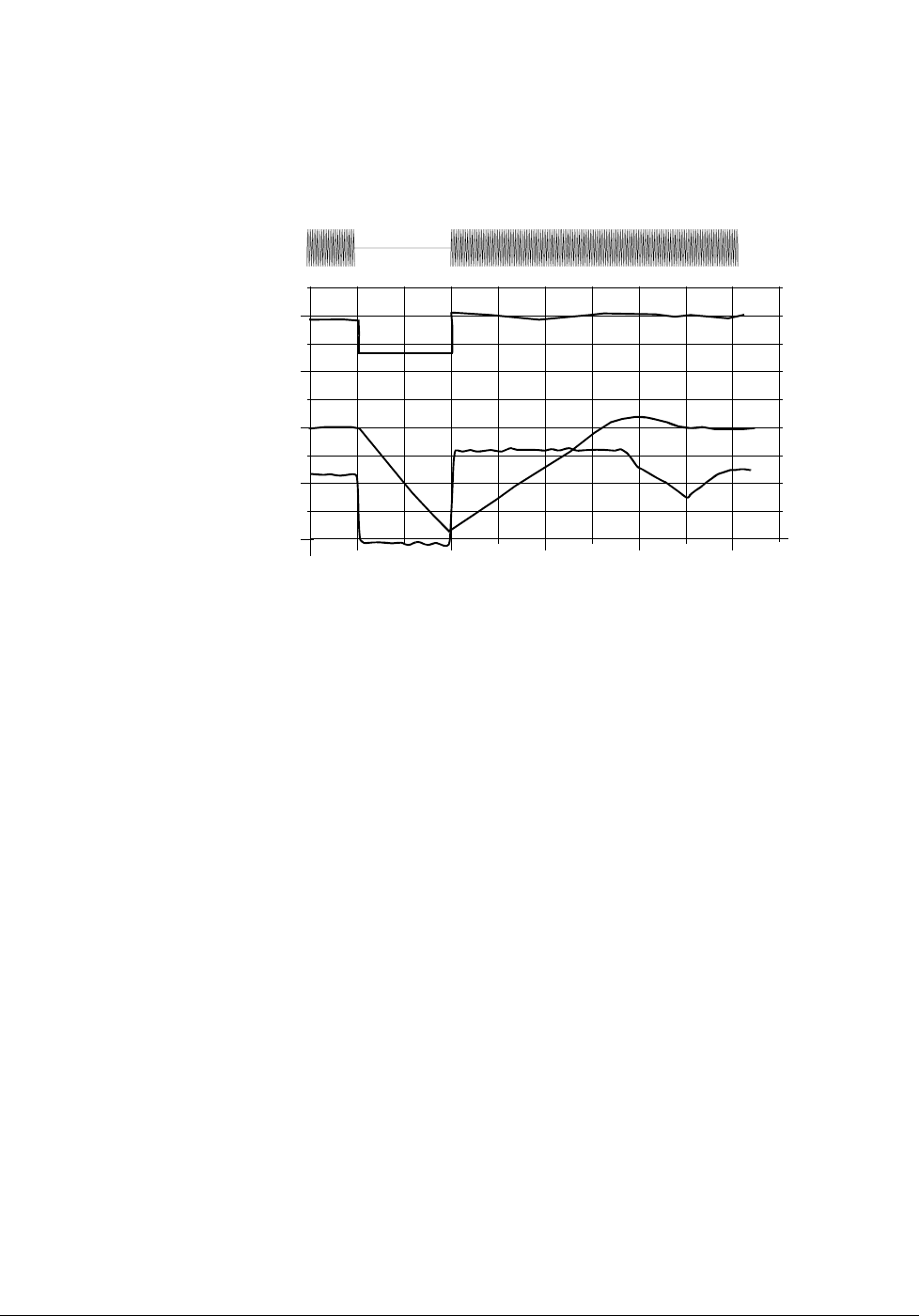
Funciones del programa
110
Funcionamiento con cortes de la red
Si se interrumpe la tensión de alimentación entrante, el convertidor permanecerá
funcionando empleando la energía cinética del motor en giro. El convertidor seguirá
plenamente operativo mientras el motor gire y genere energía para el convertidor. El
convertidor puede seguir funcionando tras la interrupción si el contactor principal
permaneció cerrado.
Ajustes
Parámetro 2006 CTRL SUBTENSION
Magnetización por CC
Cuando se activa la Magnetización por CC, el convertidor magnetiza de forma
automática el motor antes del arranque. Esta función garantiza el mayor par de
arranque posible, hasta el 180% del par nominal del motor. Al ajustar el tiempo de
premagnetización, es posible sincronizar el arranque del motor y, por ejemplo, una
liberación del freno mecánico. La función de arranque automático y la
Magnetización por CC no pueden activarse a la vez.
Ajustes
Parámetros 2101 FUNCION MARCHA y 2103 TIEMPO MAGN CC
Desencadenantes de mantenimiento
Se puede activar un desencadenante de mantenimiento para que muestre un aviso
en la pantalla del panel cuando, por ejemplo, el consumo de potencia del
convertidor supera el punto de disparo definido previamente.
Ajustes
Grupo de parámetros 29 DISP MANTENIMIENTO
130
260
390
520
1,6 4,8 8 11,2 14,4 t (s)
Ucc
fsal
Pm
Ucc = tensión del circuito intermedio del convertidor, fsal = frecuencia de salida del convertidor
Pm = par motor.
Pérdida de la tensión de alimentación con carga nominal (fsal = 40 Hz). La tensión de CC del circuito
intermedio cae hasta el límite mínimo. El regulador mantiene la tensión estable mientras la
alimentación de entrada está desconectada. El convertidor acciona el motor en modo generador. La
velocidad del motor se reduce, pero el convertidor se mantendrá en funcionamiento mientras el motor
tenga la suficiente energía cinética.
Ualimentación entrada
20
40
60
80
40
80
120
160
Pm
(N·m)
fsal
(Hz)
Ucc
(V cc)
00 0
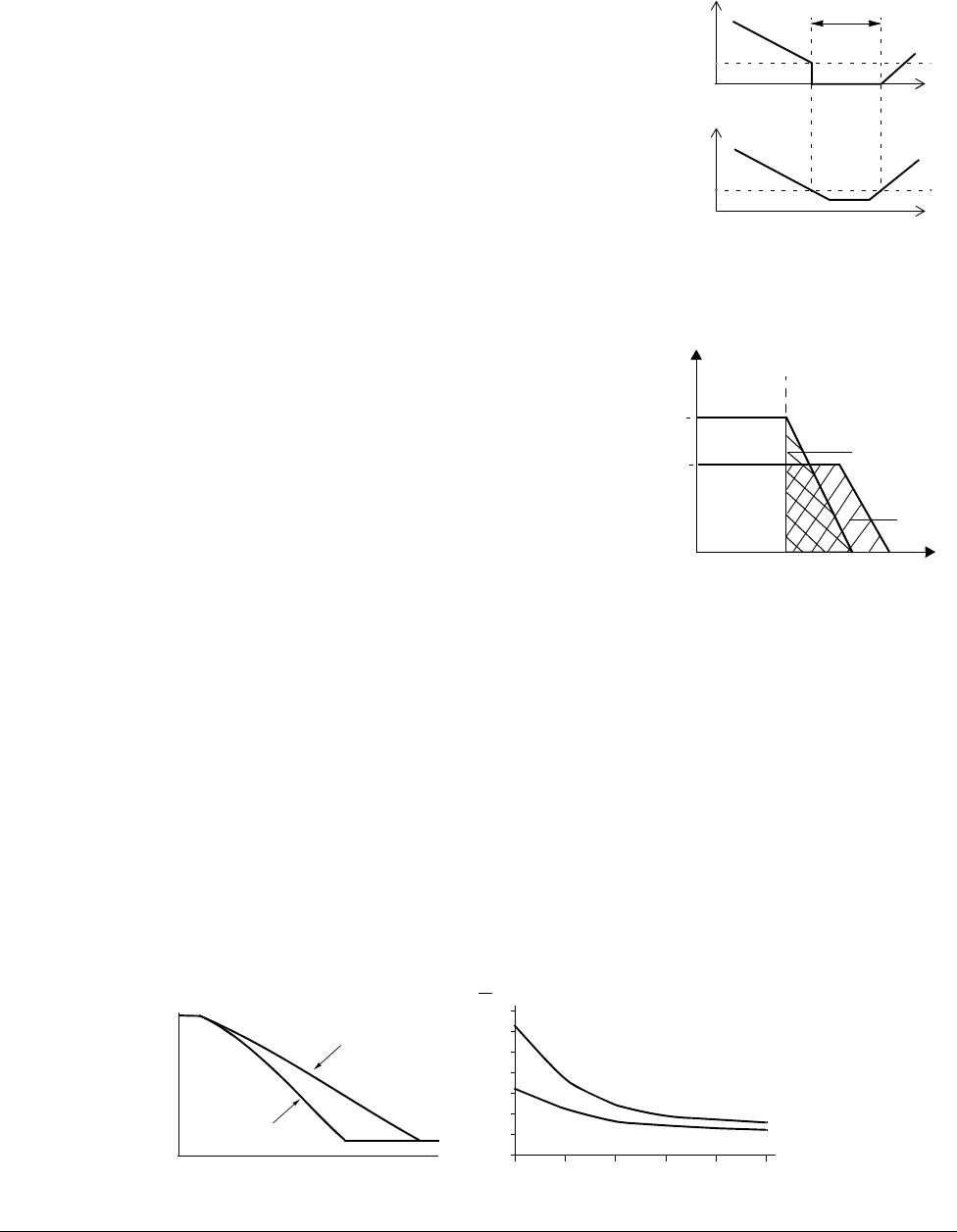
Funciones del programa
111
Retención por CC
Al activar la función de Retención por CC del motor, es
posible bloquear el rotor a velocidad cero. Cuando la
referencia y la velocidad del motor caen por debajo de la
velocidad de retención por CC preajustada, el
convertidor detiene el motor y empieza a suministrar CC
al motor. Cuando la velocidad de referencia vuelve a
superar la velocidad de retención por CC, se reanuda el
funcionamiento normal del convertidor.
Ajustes
Parámetros 2104 ... 2106
Paro con compensación de velocidad
El paro con compensación de velocidad
está disponible, por ejemplo, para
aplicaciones en que una cinta
transportadora deba desplazarse una
determinada distancia tras recibir la orden
de paro. A velocidad máxima el motor se
detiene habitualmente siguiendo la rampa
de desaceleración definida. Por debajo de
la velocidad máxima, el paro se demora
haciendo funcionar el convertidor a la velocidad actual antes de que el motor siga la
rampa hasta pararse. Tal como se muestra en la figura, la distancia recorrida tras la
orden de paro es la misma en ambos casos, es decir, el área A es igual al área B.
Puede restringirse la aplicación de la compensación de velocidad a la dirección de
giro en avance o en retroceso.
Ajustes
Parámetro 2102 FUNCION PARO
Frenado por flujo
El convertidor puede proporcionar una mayor desaceleración aumentando el nivel
de magnetización en el motor. Al incrementar el flujo del motor, la energía generada
por éste durante el frenado puede convertirse en energía térmica del motor.
Velocidad de
t
Velocidad
Retención por CC
retención por CC
Velocidad de
retención t
del motor
velocidad
Referencia de
por CC
t
Velocidad Orden de paro
B
A
área A = área B
Veloc. máx.
Veloc. usada
Frenado por flujo
Sin frenado
t (s)
Velocidad
Frenado por flujo
Sin frenado por flujo
f (Hz)
Pfr
PN
20
40
60
(%)
PN = 100 N·m
Pfr = par de frenado
del motor
50 Hz / 60 Hz
por flujo
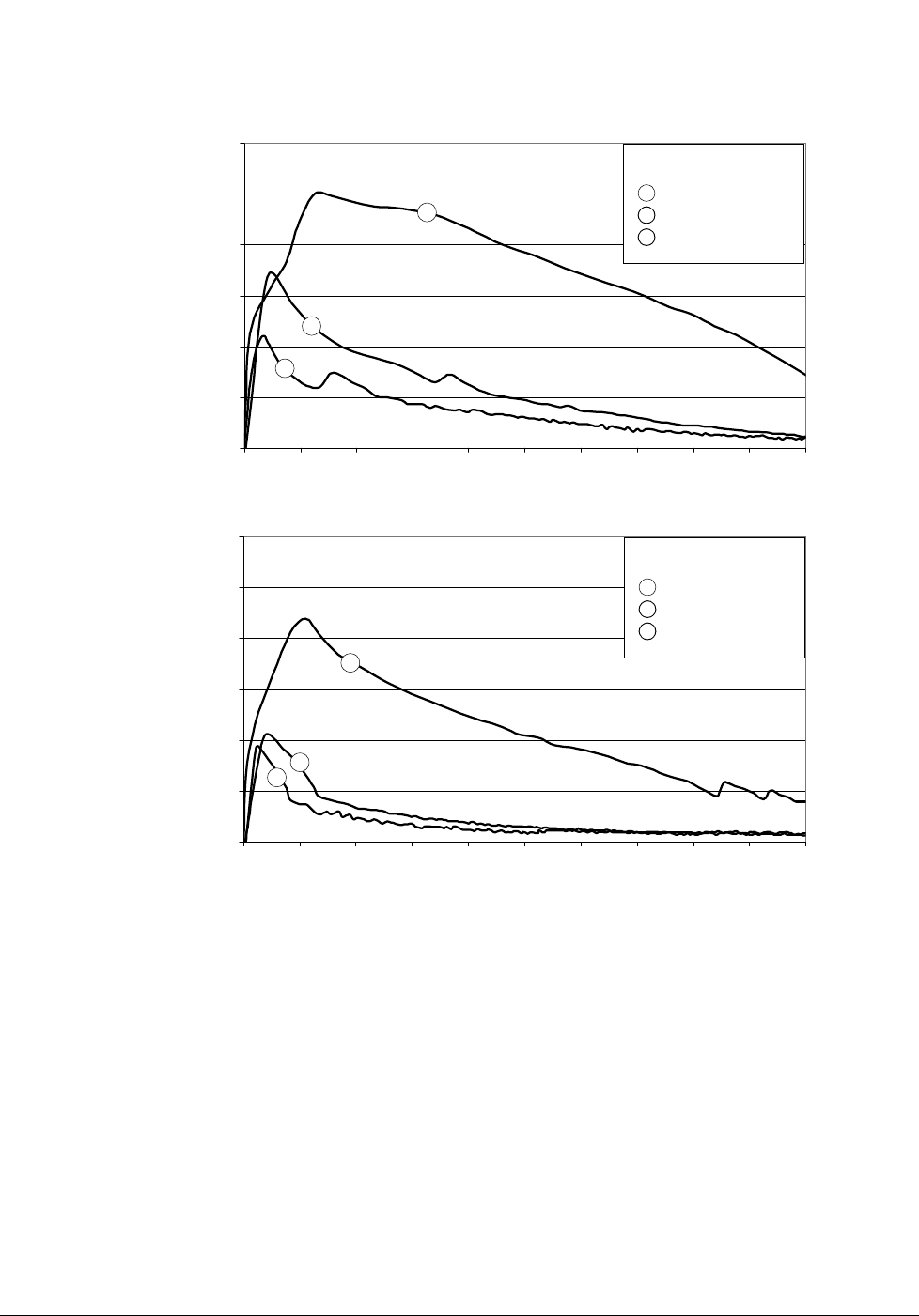
Funciones del programa
112
El convertidor monitoriza el estado del motor de forma continua, también durante el
frenado por flujo. Por lo tanto, el frenado por flujo puede emplearse tanto para
detener el motor como para cambiar la velocidad. Otras ventajas del frenado por
flujo son:
• El frenado empieza inmediatamente después de facilitar un comando de paro. La
función no tiene que esperar a la reducción de flujo antes de que pueda iniciar el
frenado.
• La refrigeración del motor es eficiente. La intensidad del estator del motor
aumenta durante el frenado por flujo, y no la intensidad del rotor. El estator se
refrigera de forma mucho más eficaz que el rotor.
Ajustes
Parámetro 2602 FRENADO FLUJO
0
20
40
60
80
100
120
0 5 10 15 20 25 30 35 40 45 50
Frenado por flujo
1
2
3
0
20
40
60
80
100
120
0 5 10 15 20 25 30 35 40 45 50
1
2
3
f / (Hz)
Par de frenado (%)
f / (Hz)
Par de frenado (%)
1
2
3
7,5 kW
2,2 kW
0,37 kW
Potencia nominal del
1
2
3
7,5 kW
2,2 kW
0,37 kW
Potencia nominal del
Sin frenado por flujo
motor
motor
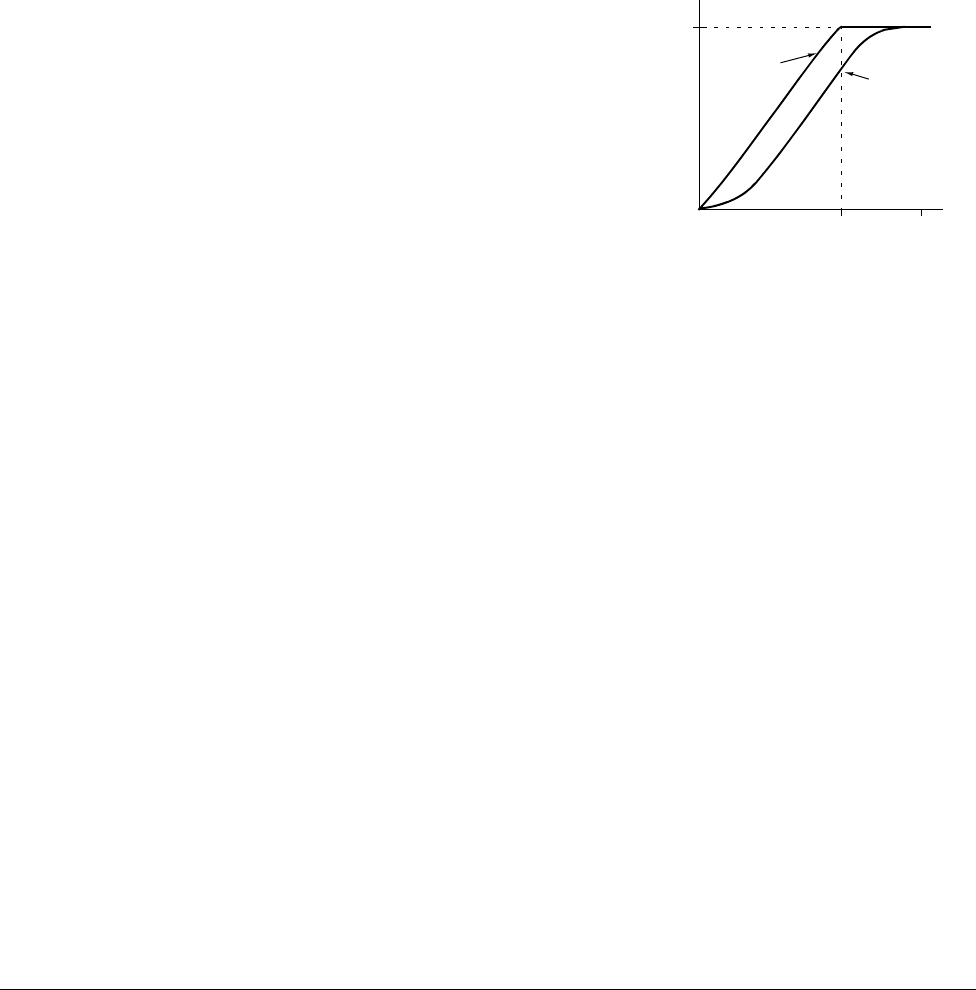
Funciones del programa
113
Optimización de flujo
La optimización de flujo reduce el consumo total de energía y el nivel de ruido del
motor cuando el convertidor opera por debajo de la carga nominal. El rendimiento
total (motor y convertidor) puede aumentarse de un 1 % a un 10 %, en función de la
velocidad y el par de la carga.
Ajustes
Parámetro 2601 OPTIMIZAC FLUJ
Rampas de aceleración y deceleración
Están disponibles dos rampas de aceleración y
deceleración que el usuario puede seleccionar. Es
posible ajustar los tiempos de aceleración y
deceleración y la forma de rampa. El cambio entre
las dos rampas puede controlarse con una
entrada digital o bus de campo.
Las alternativas disponibles para la forma de
rampa son Lineal y Curva S.
Lineal: adecuado para convertidores que
requieran una aceleración/deceleración constante
o lenta.
Curva S: Ideal para cintas que transportan cargas frágiles u otras aplicaciones en
las que se requiere una transición suave al cambiar la velocidad.
Ajustes
Grupo de parámetros 22 ACEL/DECEL
La programación de secuencias ofrece ocho tiempos de rampa adicionales. Véase
la sección Programación de secuencias en la página 137.
Velocidades críticas
Está disponible una función de Velocidades críticas para las aplicaciones en las que
es necesario evitar determinadas velocidades del motor o franjas de velocidad
debido, por ejemplo, a problemas de resonancia mecánica. El usuario puede definir
tres velocidades críticas o franjas de velocidad diferentes.
Ajustes
Grupo de parámetros 25 VELOC CRITICAS
Velocidades constantes
Es posible definir siete velocidades constantes positivas. Estas velocidades se
seleccionan a través de entradas digitales. La activación de la velocidad constante
toma precedencia sobre la referencia de velocidad externa.
Lineal
t (s)
Velocidad del motor
2
Curva S

Funciones del programa
114
Las selecciones de velocidad constante se ignoran en cualquiera de los casos
siguientes:
• el control de par está activo, o
• se sigue la referencia PID, o
• el convertidor está en modo de control local.
Esta función opera en un nivel de tiempo de 2 ms.
Ajustes
Grupo de parámetros 12 VELOC CONSTANTES
La velocidad constante 7 ( 1208 VELOC CONST 7) también se utiliza para las
funciones de fallo. Véase el grupo de parámetros 30 FUNCIONES FALLOS
La velocidad constante 6 ó 7 ( 1207 VELOC CONST 6 / 1208 VELOC CONST 7)
también se utiliza para la función de avance lento. Véase la sección Avance lento en
la página 132.
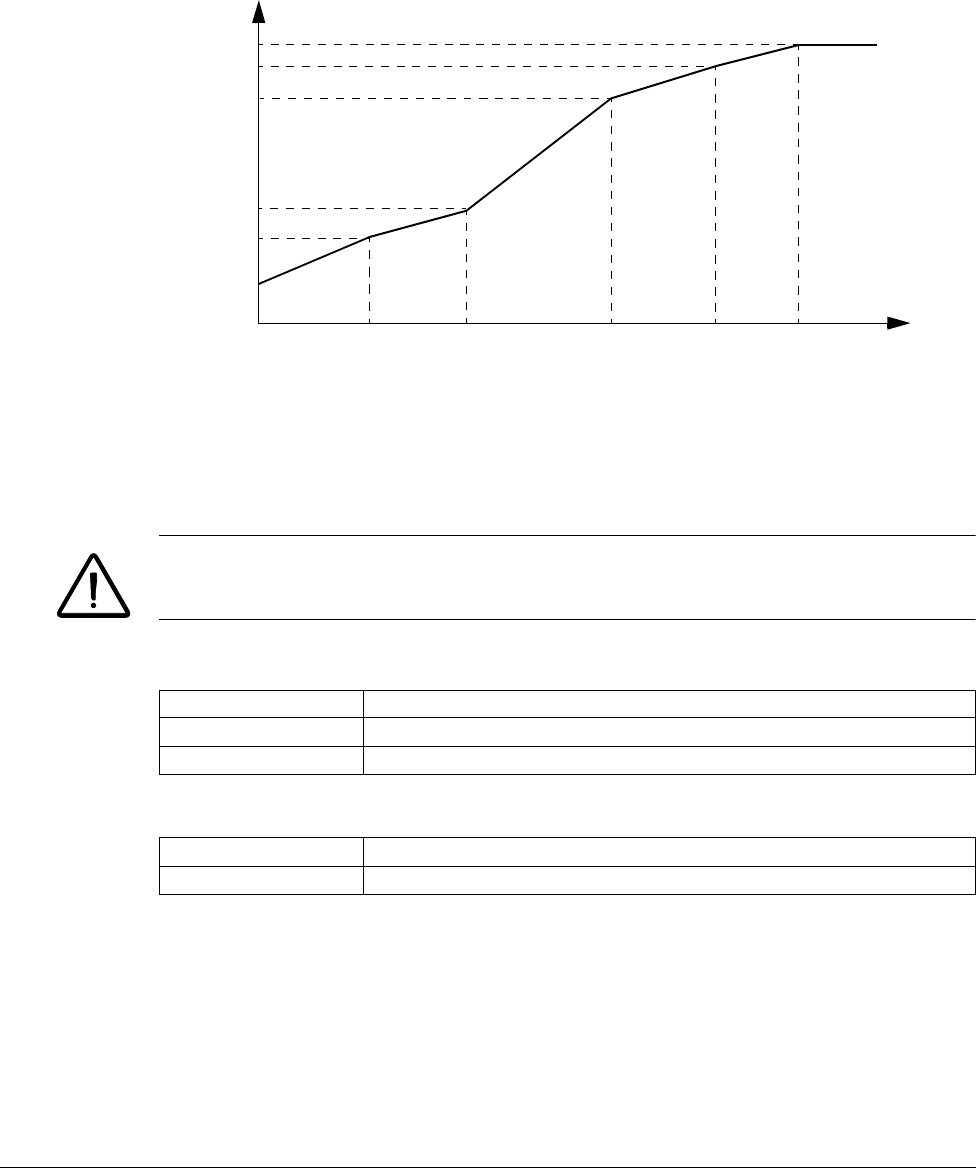
Funciones del programa
115
Relación U/f personalizada
El usuario puede definir una curva U/f (tensión de salida como una función de la
frecuencia). Esta relación personalizada sólo se utiliza en aplicaciones especiales
en que no basta con las relaciones U/f lineales y cuadráticas (p. ej., cuando se
necesita potenciar el par de arranque del motor).
Nota: Los puntos de tensión y de frecuencia de la curva U/f deben cumplir las
condiciones siguientes:
2610 < 2612 < 2614 < 2616 < 2618
y
2611 < 2613 < 2615 < 2617 < 9907
¡ADVERTENCIA! Las altas tensiones a bajas frecuencias pueden dar lugar a un
bajo rendimiento o provocar daños al motor (sobrecalentamiento).
Ajustes
Diagnósticos
Parámetro Información adicional
2605 Activación de la relación U/f personalizada
2610...2618 Ajustes de la relación U/f personalizada
Fallo Información adicional
PAR U/F ADAPTADA Relación U/f incorrecta
f (Hz)
Tensión (V)
par. 2603
par. 2611 par. 2613 par. 2615 par. 2617 par. 9907
par. 2610
par. 2612
par. 2614
par. 2616
par. 2618
Relación U/f personalizada
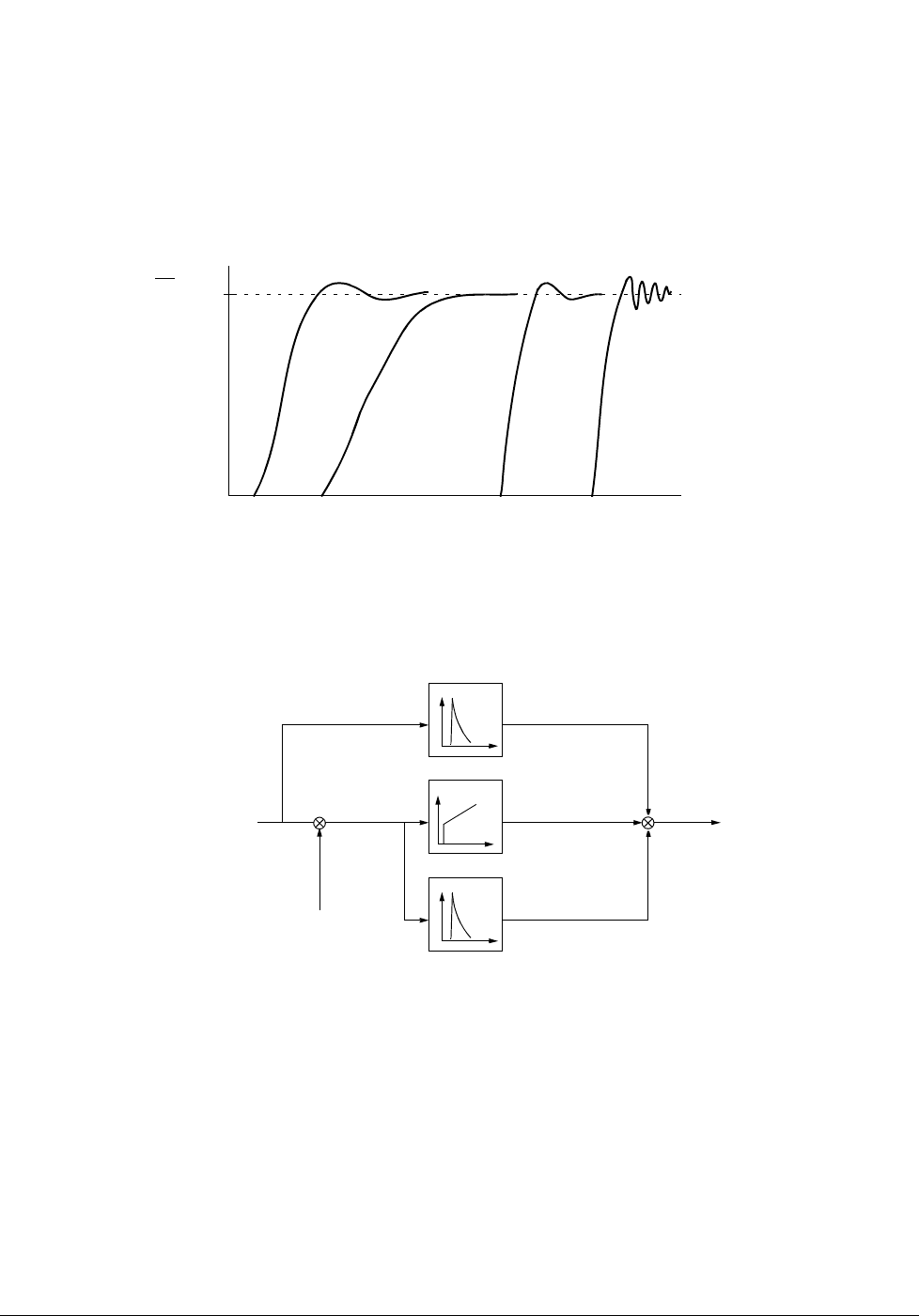
Funciones del programa
116
Ajuste del regulador de velocidad
Es posible ajustar de forma manual la ganancia, el tiempo de integración y el tiempo
de derivación del regulador, o puede dejarse que el convertidor efectúe una Marcha
de autoajuste independiente del regulador de velocidad (parámetro 2305 MARCHA
AUTOAJUST). En esta Marcha, el regulador de velocidad se ajusta basándose en la
carga y la inercia del motor y de la máquina. La siguiente figura muestra respuestas
de velocidad a un escalón de referencia de velocidad (típicamente, del 1 al 20 %).
La figura siguiente es un diagrama de bloques simplificado del regulador de
velocidad. La salida del regulador es la referencia para el regulador de par.
Ajustes
Grupo de parámetros 23 CTRL VELOCIDAD y 20 LIMITES
Diagnósticos
Señal actual 0102 VELOCIDAD
A: Subcompensado.
B: Ajustado normalmente (autoajuste).
C: Ajustado normalmente (manualmente). Mejor rendimiento dinámico que con B.
D: Regulador de velocidad sobrecompensado.
(%)
t
n
C
BD
nN
A
Derivada
Proporcional,
integral
Compensación
aceleración
derivada
Referencia
de par
Referencia
de velocidad
Velocidad actual
calculada
Valor
de error
-
++
++
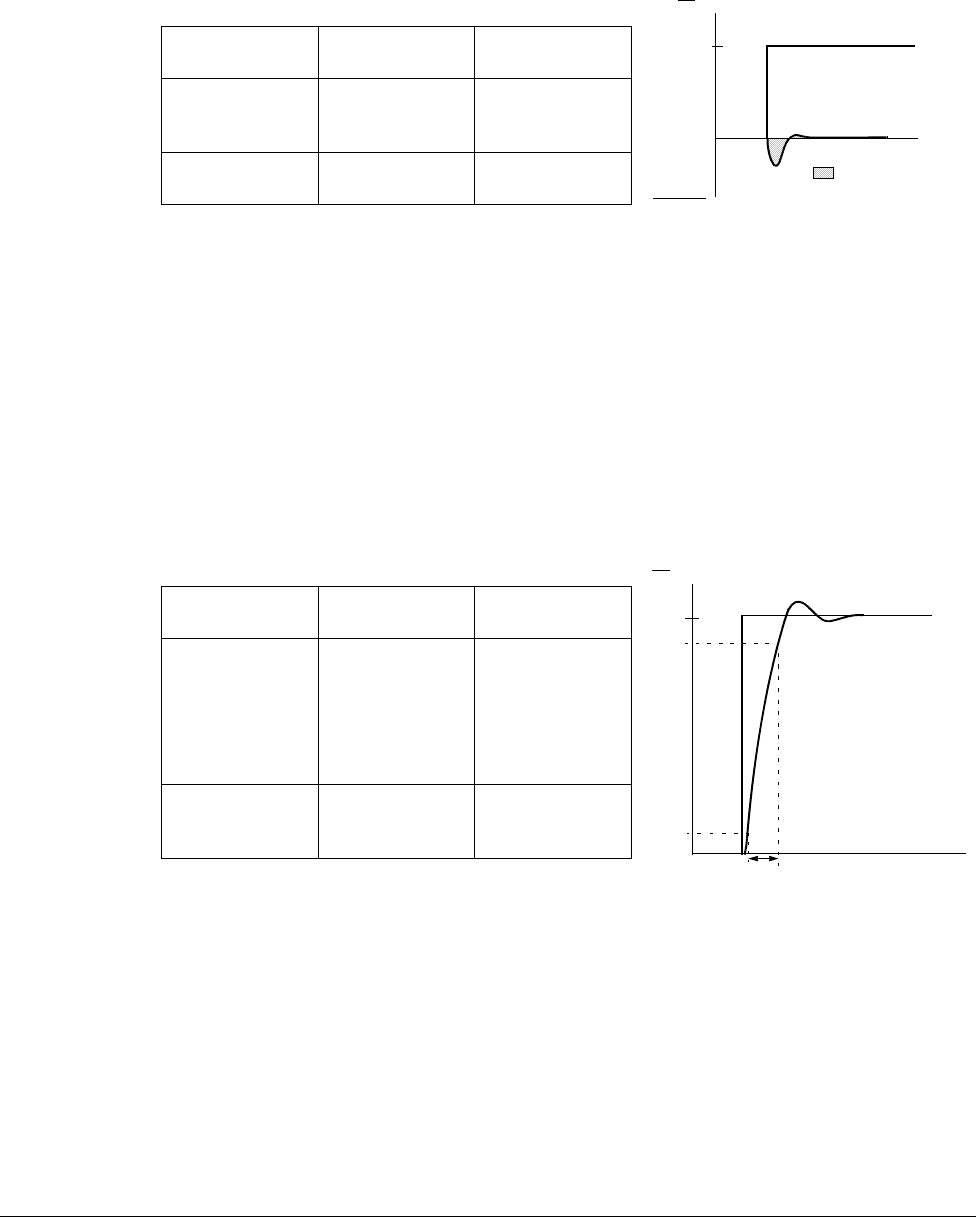
Funciones del programa
117
Cifras de rendimiento del control de velocidad
La tabla siguiente muestra las cifras de rendimiento típicas del control de velocidad..
Cifras de rendimiento del control del par
El convertidor puede llevar a cabo un control preciso del par sin realimentación de
velocidad del eje del motor. La tabla siguiente muestra las cifras de rendimiento
típicas del control de par.
100
t (s)
T
TN
(%)
Tcarga
nact-nref
nN
Area < 1% s
TN = par nominal del motor
nN = velocidad nominal del motor
nact = velocidad actual
nref = velocidad de referencia
Control de
velocidad Sin generador
de pulsos Con generador
de pulsos
Precisión estática 20% del
deslizamiento del
motor nominal
2% del
deslizamiento del
motor nominal
Precisión
dinámica < 1% con escalón
de par del 100% < 1% con escalón
de par del 100%
Control de par Sin generador
de pulsos Con generador
de pulsos
No linealidad ±5% con par
nominal
(± 20% en el
punto de
funcionamiento
más exigente)
±5% con par
nominal
Tiempo de
incremento de
escalón de par
< 10 ms con par
nomina < 10 ms con par
nomina
100
t(s)
T
TN
< 5 ms
90
10
(%)
Tref
Tact
TN = par nominal del motor
Tref = par de referencia
Tact = par actual
Funciones del programa
118
Control escalar
Es posible seleccionar el control escalar como el método de control del motor en
lugar del control vectorial. En el modo de control escalar, el convertidor se controla
con una referencia de frecuencia.
Se recomienda activar el modo de control escalar en las siguientes aplicaciones
especiales:
• En convertidores multimotor: 1) si la carga no se comparte equitativamente entre
los motores, 2) si los motores tienen tamaños distintos, o 3) si los motores van a
cambiarse tras la identificación del motor.
• Si la intensidad nominal del motor es inferior al 20 % de la intensidad de salida
nominal del convertidor.
En el modo de control escalar, algunas funciones estándar no están disponibles.
Ajustes
Parámetro 9904 MODO CTRL MOTOR
Compensación IR para un convertidor con control escalar
La compensación IR está activa sólo cuando el
modo de control del motor es escalar (véase la
sección Cifras de rendimiento del control de
velocidad en la página 117). Cuando se activa la
compensación IR, el convertidor aporta un
sobrepar de tensión al motor a bajas
velocidades. La compensación IR es útil en
aplicaciones que requieren un elevado par de
arranque. En control vectorial, no se admite ni se
necesita compensación IR.
Ajustes
Parámetro 2603 TENS COMP IR
Funciones de protección programables
EA<Min
La función EA<Min define el funcionamiento del convertidor si una señal de entrada
analógica cae por debajo del límite mínimo preajustado.
Ajustes
Parámetros 3001 EA<FUNCION MIN, 3021 EA1 FALLO LIMIT y 3022 EA2 FALLO
LIMIT
f (Hz)
Tensión del motor
Sin compensación
Compensación IR
Funciones del programa
119
Pérdida del panel
La función de Pérdida del panel define el funcionamiento del convertidor cuando el
panel de control seleccionado como lugar de control del convertidor deja de
comunicar.
Ajustes
Parámetro 3002 ERROR COM PANEL
Fallo externo
Los fallos externos (1 y 2) pueden supervisarse definiendo una entrada digital como
origen para una señal de indicación de fallo externo.
Ajustes
Parámetros 3003 FALLO EXTERNO 1 y 3004 FALLO EXTERNO 2
Protección de motor bloqueado
El convertidor protege el motor en una situación de bloqueo. Es posible ajustar los
límites de supervisión (frecuencia, tiempo) y elegir cómo reacciona el convertidor al
estado de bloqueo del motor (indicación de alarma / indicación de fallo y paro del
convertidor / sin reacción).
Ajustes
Parámetros 3010 ... 3012
Protección térmica del motor
Se puede proteger el motor frente a un sobrecalentamiento activando la función de
Protección térmica del motor.
El convertidor calcula la temperatura del motor sobre la base de las siguientes
suposiciones:
1) El motor se encuentra a la temperatura ambiente de 30 °C cuando se suministra
alimentación al convertidor.
2) La temperatura del motor se calcula con la curva de carga del motor y la
constante de tiempo térmica calculadas automáticamente o ajustables por el
usuario (véanse las figuras siguientes). La curva de carga debe ajustarse en caso
de que la temperatura ambiente supere los 30 °C.
Carga
100%
Aumento de
63%
Constante de tiempo térmica del motor
t
t
100%
50
100
150
Carga a velocidad cero
Curva de carga del motor
Punto de ruptura
Intensidad
Velocidad
del motor del motor
(%)
temperatura

Funciones del programa
120
Ajustes
Parámetros 3005 ... 3009
Nota: También es posible utilizar la función de medición de la temperatura del
motor. Véase la sección Medición de la temperatura del motor a través de la E/S
estándar en la página 127.
Protección de baja carga
La pérdida de la carga del motor puede indicar un fallo del proceso. El convertidor
proporciona una función de baja carga para proteger la maquinaria y el proceso en
este tipo de estados de fallo graves. Se pueden elegir los límites de supervisión -
curva de baja carga y tiempo de baja carga-, al igual que la acción adoptada por el
convertidor al darse el estado de baja carga (indicación de alarma / indicación de
fallo y paro del convertidor / sin reacción).
Ajustes
Parámetros 3013 ... 3015
Protección de fallo a tierra
La protección de fallo a tierra detecta los fallos a tierra en el motor o el cable a
motor. La protección sólo está activa durante el arranque.
Un fallo a tierra en la red de alimentación no activa la protección.
Ajustes
Parámetro 3017 FALLO TIERRA
Cableado incorrecto
Define el funcionamiento cuando se detecta una conexión incorrecta del cable de
potencia de entrada.
Ajustes
Parámetro 3023 FALLO CABLE
Pérdida de fase de entrada
Los circuitos de protección de pérdida de fase de entrada supervisan el estado de la
conexión del cable de potencia de entrada mediante la detección del rizado del
circuito intermedio. Si se pierde una fase, el rizado aumenta.
Ajustes
Parámetro 3016 FASE RED

Funciones del programa
121
Fallos preprogramados
Sobreintensidad
El límite de disparo por sobreintensidad del convertidor es el 325 % de su intensidad
nominal.
Sobretensión de CC
El límite de disparo por sobretensión de CC es de 420 V (para convertidores de
200 V) y de 840 V (para convertidores de 400 V).
Subtensión de CC
El límite de disparo por subtensión de CC es de 162 V (para convertidores de 200 V)
y de 308 V (para convertidores de 400 V).
Temperatura del convertidor
El convertidor supervisa la temperatura de los IGBT. Existen dos límites de
supervisión: límite de alarma y límite de disparo por fallo.
Cortocircuito
Si se produce un cortocircuito, el convertidor no se pone en marcha y se indica un
fallo.
Fallo interno
Si el convertidor detecta un fallo interno, se detiene y se indica un fallo.
Límites de funcionamiento
El convertidor dispone de límites ajustables para la velocidad, la intensidad
(máxima), el par (máximo) y la tensión de CC.
Ajustes
Grupo de parámetros 20 LIMITES
Límite de potencia
La limitación de potencia se utiliza para proteger el puente de entrada y el circuito
intermedio de CC. Si se supera la potencia máxima permitida, el par del convertidor
se restringe de forma automática. Los límites de potencia continua y de sobrecarga
máxima dependen del hardware del convertidor. Para valores específicos, véase el
capítulo Datos técnicos.
Restauraciones automáticas
El convertidor puede restaurarse de forma automática tras fallos de
sobreintensidad, sobretensión, subtensión, externos y “entrada analógica por
debajo de un mínimo”. Las Restauraciones automáticas deben ser activadas por el
usuario.
Funciones del programa
122
Ajustes
Supervisiones
El convertidor supervisa si determinadas variables seleccionables por el usuario se
encuentran dentro de los límites definidos por el mismo. El usuario puede ajustar
límites para la velocidad, la intensidad, etc. El estado de la supervisión se puede
indicar mediante salidas digitales o de relé.
Estas funciones operan en un nivel de tiempo de 2 ms.
Ajustes
Grupo de parámetros 32 SUPERVISION
Diagnósticos
Bloqueo de parámetros
El usuario puede evitar el ajuste de parámetros activando el bloqueo de parámetros.
Ajustes
Parámetros 1602 BLOQUEO PARAM y 1603 CODIGO ACCESO
Parámetro Información adicional
31 REARME AUTOMATIC Ajustes de restauración automática
Alarma
REARME AUTOMÁTICO Alarma de restauración automática
Señales actuales Información adicional
1401 Estado de la supervisión mediante SR
1805 Estado de la supervisión mediante SD
8425, 8426 / 8435, 8436 / ... /
8495, 8496 Cambio de estado de programación de secuencias según las
funciones de supervisión
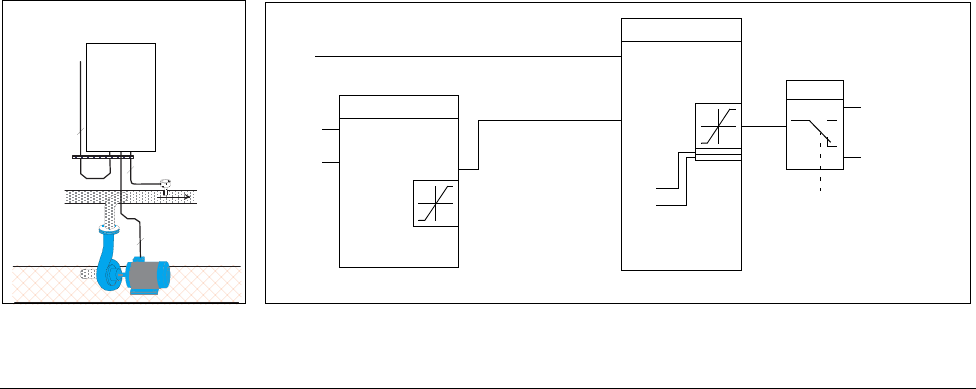
Funciones del programa
123
Control PID
El convertidor dispone de dos reguladores PID integrados:
• PID de proceso (PID1),
• PID externo/trim (PID2).
El regulador PID puede usarse cuando es necesario controlar la velocidad del motor
basándose en variables del proceso, como la presión, el flujo o la temperatura.
Cuando se activa el control PID, se conecta una referencia de proceso (punto de
consigna) al convertidor en lugar de una referencia de velocidad. También se
transmite un valor actual (realimentación de proceso) al convertidor. El convertidor
compara la referencia y los valores actuales y ajusta automáticamente su velocidad
para mantener la cantidad medida del proceso (valor actual) en el valor deseado
(referencia).
El control opera en un nivel de tiempo de 2 ms.
Regulador de proceso PID1
El PID1 tiene dos series de parámetros diferentes (40 CONJ PID PROCESO 1,
41 CONJ PID PROCESO 2). La selección entre la serie 1 y la 2 está definida por un
parámetro.
En la mayoría de casos, cuando sólo hay una señal transductora conectada al
convertidor, sólo se necesita la serie de parámetros 1. Se utilizan dos series de
parámetros (1 y 2), por ejemplo, cuando la carga del motor cambia
considerablemente a lo largo del tiempo.
Regulador externo/trim PID2
El PID2 (42 PID TRIM / EXT) se puede utilizar de dos maneras diferentes:
• Regulador externo: En lugar de utilizar un hardware de regulador PID adicional,
el usuario puede conectar la salida del PID2 a través de la salida analógica del
convertidor o un regulador de bus de campo para controlar un instrumento de
campo, como un amortiguador o una válvula.
• Regulador "trim": El PID2 se puede utilizar para realizar un "trim" o ajuste de
precisión de la referencia del convertidor. Véase la sección Corrección de la
referencia en la página 103.
Diagramas de bloques
La siguiente figura muestra un ejemplo de aplicación: el regulador ajusta la
velocidad de una bomba de carga de presión de conformidad con la presión medida
y la referencia de presión ajustada.
AC T PA R FU N C D R I V E
E N T E R
LO C
RE M
RE S E T REF
A C S 6 0 0
0 . . . 1 0 b a r
4 . . . 2 0 m A
3
3
2
PID
ref
k
ti
td
i
dFiltT
errVInv
oh1
ol1
%ref
4001
4002
4003
40.04
40.05
PIDmáx
PIDmín
Conmut.
Referencia
de
velocidad
Referencia
de
frecuencia
9904 = 0
Ejemplo: Diagrama de bloques del control PID
%ref = 4010
Bomba de carga de presión
ACS350
...
Valores actuales
4014
4021
EA1
EA2
IMOT
.
.
.
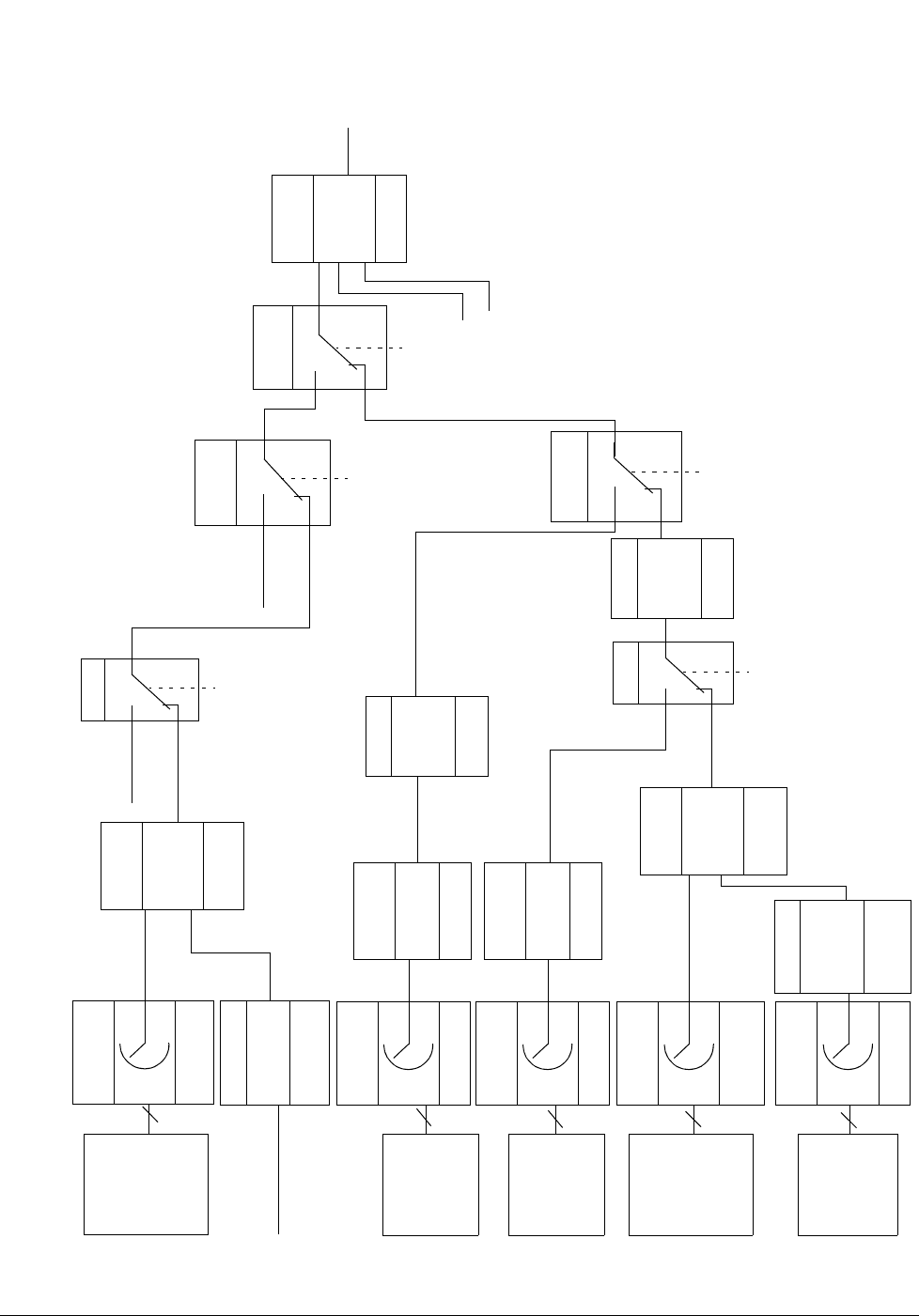
Funciones del programa
124
La figura siguiente muestra el diagrama de bloques del control de velocidad/escalar
para un regulador de proceso PID1.
PID ACT
Sal. PID1
1106
n
1102
Conmut.
EXT1/EXT2
Panel de control
Conmut.
LOC/REM
1101
Conmut.
Ref. local
Panel ref1
Panel ref2
n
Panel ref2
EA
...
PROG SEC.
valor
n
1104
Limitador
PID ACT
valor
Panel ref2
500%
Limitador
-500%
Sal. PID1
Veloc. media
Veloc. const. 7
Ref. de
n
EA
Intensidad
Par
Potencia
COMM ACT
n
EA
Intensidad
Par
Potencia
COMM ACT
4014...4021/
PID act.
selección
1103
Ref. EXT1
selecc.
1106
Ref. EXT2
selecc.
Panel ref2
EA
...
EA2 + SEC.
Panel ref1
EA
...
EA2 + SEC.
4010/4110*
Ref. PID1
selecc.
4014...4021/
PID act.
selección
4012,4013/
Limitador
Grupo 12
Velocidad
const.
Grupo 12
Velocidad
const.
Conmut.
Grupo
PID1
Regulador
1106
Conmut.
1107
Limitador
Grupo 30
Veloc. de
alarma
Grupo
PID1
Regulador
LOC
REM
veloc.
4112,4113*
40/41*
40/41*
4114...4121*
4141...4121*
* El parámetro 4027 permite seleccionar entre la serie de parámetros PID 1 y 2, es decir,
entre el grupo 40 y el 41.
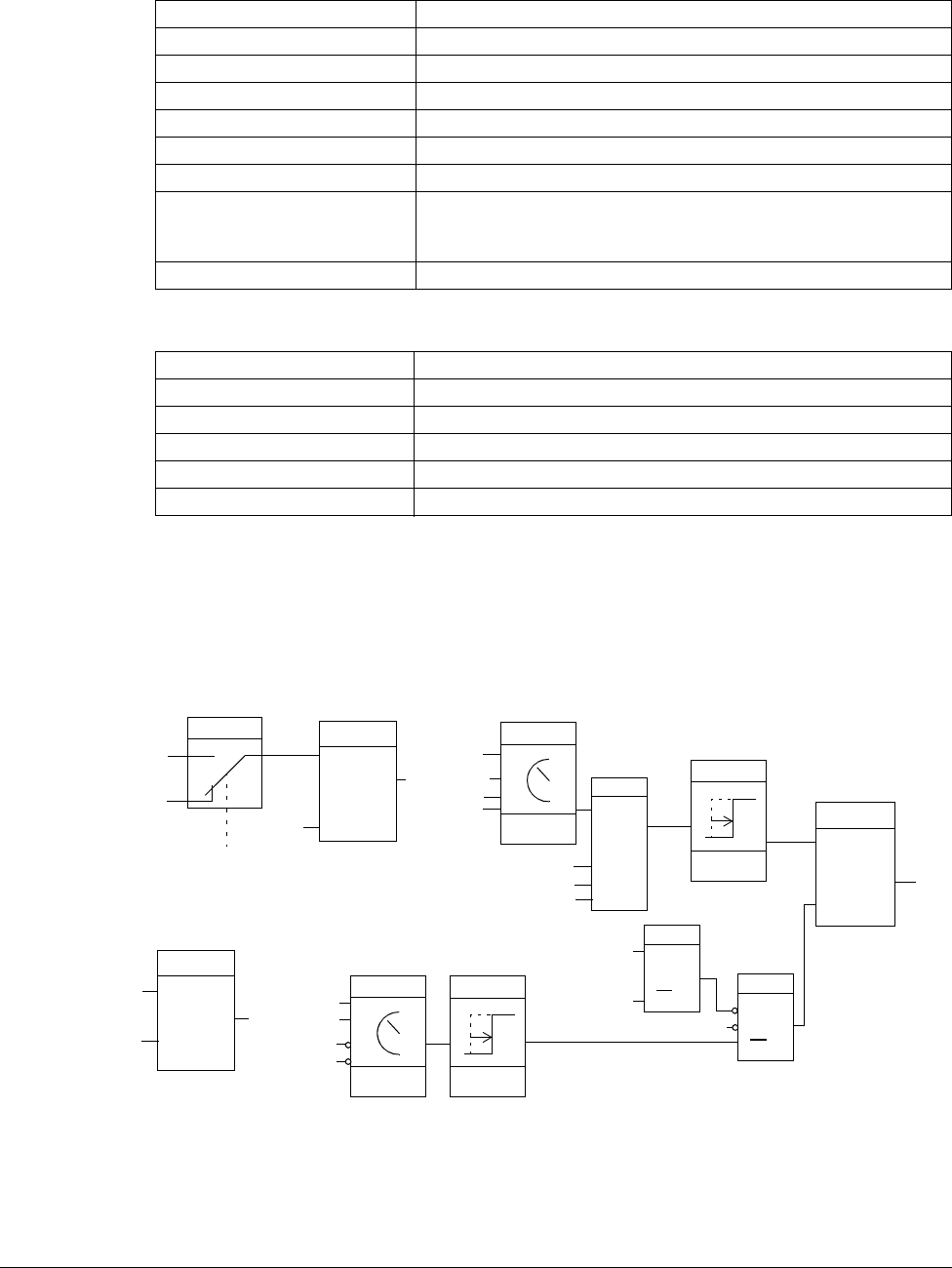
Funciones del programa
125
Ajustes
Diagnósticos
Función dormir para el control PID de proceso (PID1)
La función dormir opera en un nivel de tiempo de 2 ms.
El siguiente diagrama de bloques ilustra la lógica de activación/desactivación de la
función dormir. Esta función sólo puede emplearse cuando el control PID está
activo.
Parámetro Información adicional
1101 Selección del tipo de referencia del modo de control local
1102 Selección EXT1/EXT2
1106 Activación PID1
1107 Límite mínimo de REF2
1501 Conexión de salida del PID2 (regulador externo) a la SA
9902 Selección de la macro de control PID
Grupo 40 CONJ PID
PROCESO 1 ... 41 CONJ PID
PROCESO 2
Ajustes PID1
Grupo 42 PID TRIM / EXT Ajustes PID2
Señales actuales Información adicional
0126/0127 Valor de salida PID 1/2
0128/0129 Valor del punto de consigna PID 1/2
0130/0131 Valor de realimentación PID 1/2
0132/0133 Desviación PID 1/2
0170 Valor de la SA definido por la programación de secuencias
1)
1 = Activar
dormir
0 = Desactivar
dormir
4022
Selecc.
Compar.
1<2
O
<1
4024
Demora
t
1
2
4023
SIN SEL
ED1
Y
&
%refActiva
CtrllPIDActivo
modulando
Aj./Rest.
S
RS/R
SIN SEL
INTERNO
ED1
4026
Demora
t
O
<1
PetMarcha
5320 (B1)
5320 (B2)
1)
INTERNO
4022
Selecc.
Vel. motor: velocidad actual del motor
%refActiva: la referencia en % (REF EXT2) está en uso. Véase el parámetro 1102.
CtrlPIDActivo: 9902 es CTRL PID.
modulando: el control IGBT del inversor está en funcionamiento.
.
.
.
.
.
.
Vel. motor
9904
Conmut.
Frec. salida
Compar.
1>2
0132
4025
1
2
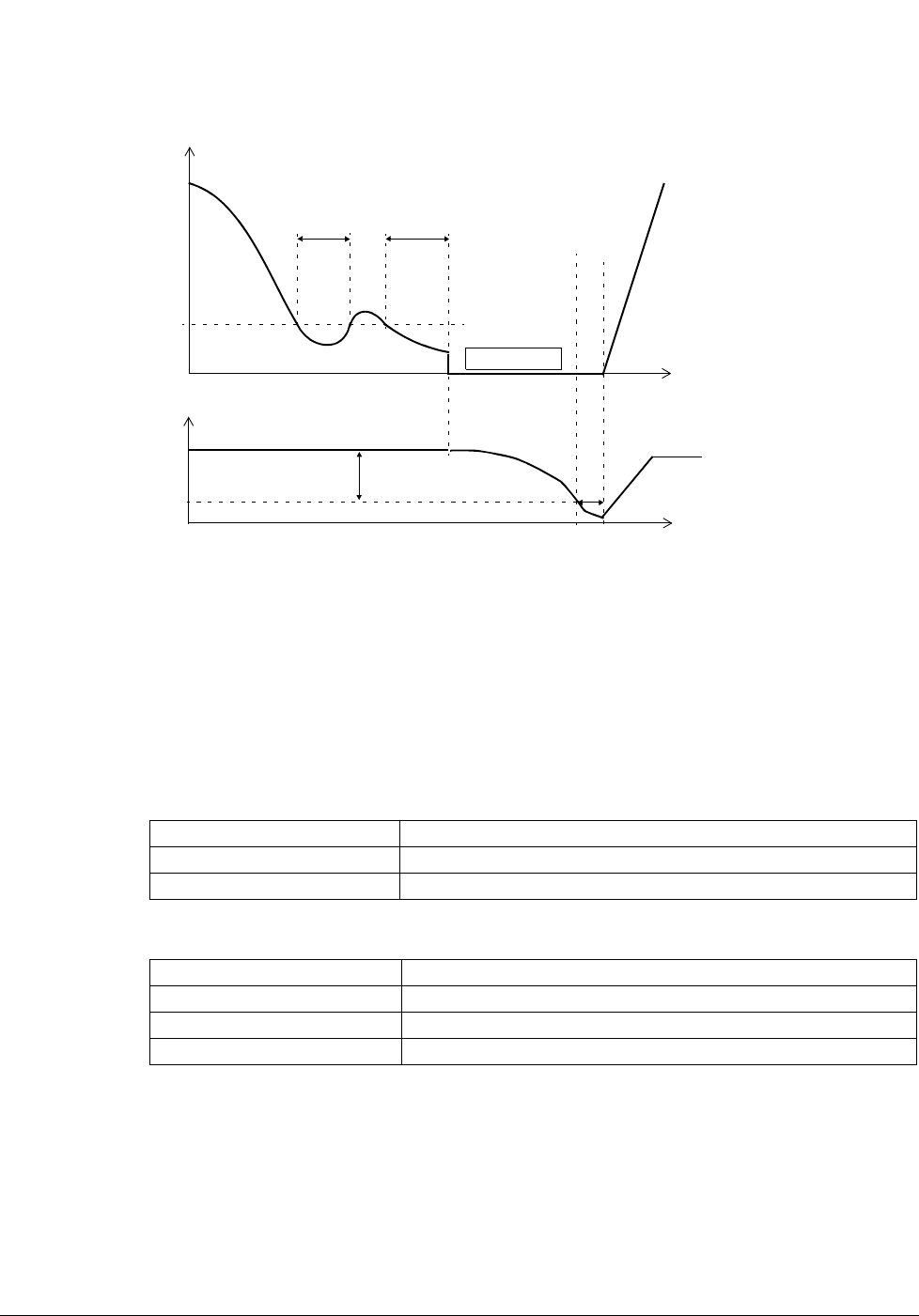
Funciones del programa
126
Ejemplo
El siguiente esquema temporal ilustra el funcionamiento de la función dormir.
Función dormir para una bomba de carga de presión con control PID (cuando el
parámetro 4022 está ajustado a INTERNO): El consumo de agua disminuye por la
noche. Como resultado, el regulador de proceso PID reduce la velocidad del motor.
Sin embargo, debido a las pérdidas naturales en las tuberías y al reducido
rendimiento de la bomba centrífuga a bajas velocidades, el motor no se detiene y
sigue girando. La función dormir detecta el giro lento y detiene el bombeo
innecesario tras haber superado la demora para dormir. El convertidor pasa a modo
dormir y sigue supervisando la presión. El bombeo se reinicia cuando la presión cae
por debajo del nivel mínimo permitido y la demora para despertar ha transcurrido.
Ajustes
Diagnósticos
Parámetro Información adicional
9902 Activación del control PID
4022...4026, 4122...4126 Ajustes de la función dormir
Alarma Información adicional
DORMIR PID Modo dormir
Parámetro Información adicional
1401 Estado de la función dormir PID por SR
Valor actual
Desviación de despertar
par. 4025
Velocidad del motor
Nivel dormir
par. 4023
t
t
ARRANQUE
PARO
t<tdtd
td = Demora en dormir, parámetro 4024
Texto en pantalla
MODO DORMIR
tdes
tdes = Demora en despertar, parámetro 4026
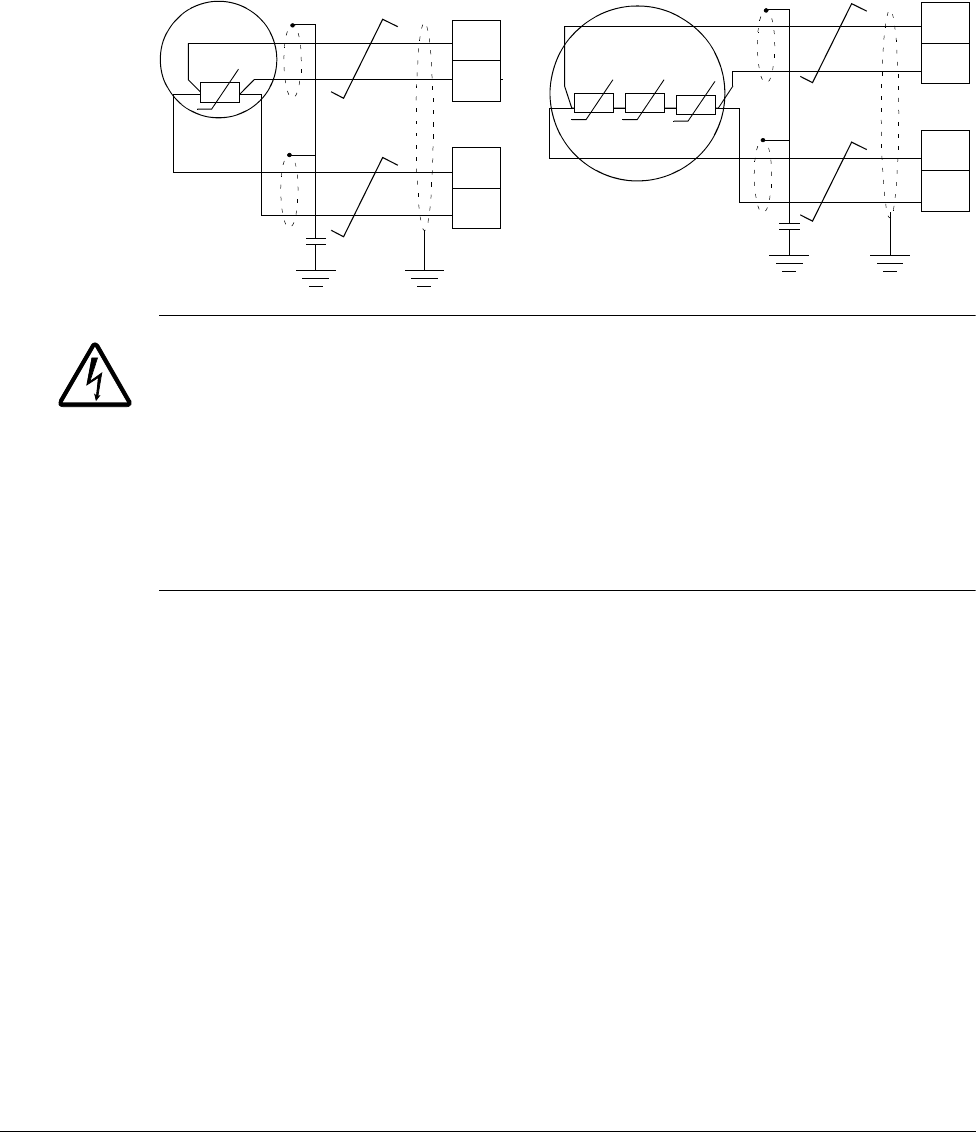
Funciones del programa
127
Medición de la temperatura del motor a través de la E/S estándar
Este apartado describe la medición de la temperatura de un motor cuando se usan
las terminales de E/S del convertidor como interfase de conexión.
La temperatura del motor se puede medir utilizando sensores Pt-100 o PTC
conectados a las salidas y entradas analógicas.
¡ADVERTENCIA! Según IEC 664, la conexión del sensor de temperatura del motor
requiere aislamiento doble o reforzado entre las piezas con corriente del motor y el
sensor. El aislamiento reforzado implica un margen y una distancia de descarga de
8 mm (equipo de 400 / 500 V CA). Si el conjunto no cumple este requisito:
• los terminales de la tarjeta de E/S deben protegerse contra contactos y no
pueden conectarse a otros equipos.
o
• el sensor de temperatura debe estar aislado de los terminales de E/S.
Motor
T
Motor
T
TT
Un sensor Tres sensores
EA1
GND
SA
GND
EA1
GND
SA
GND
10 nF
10 nF
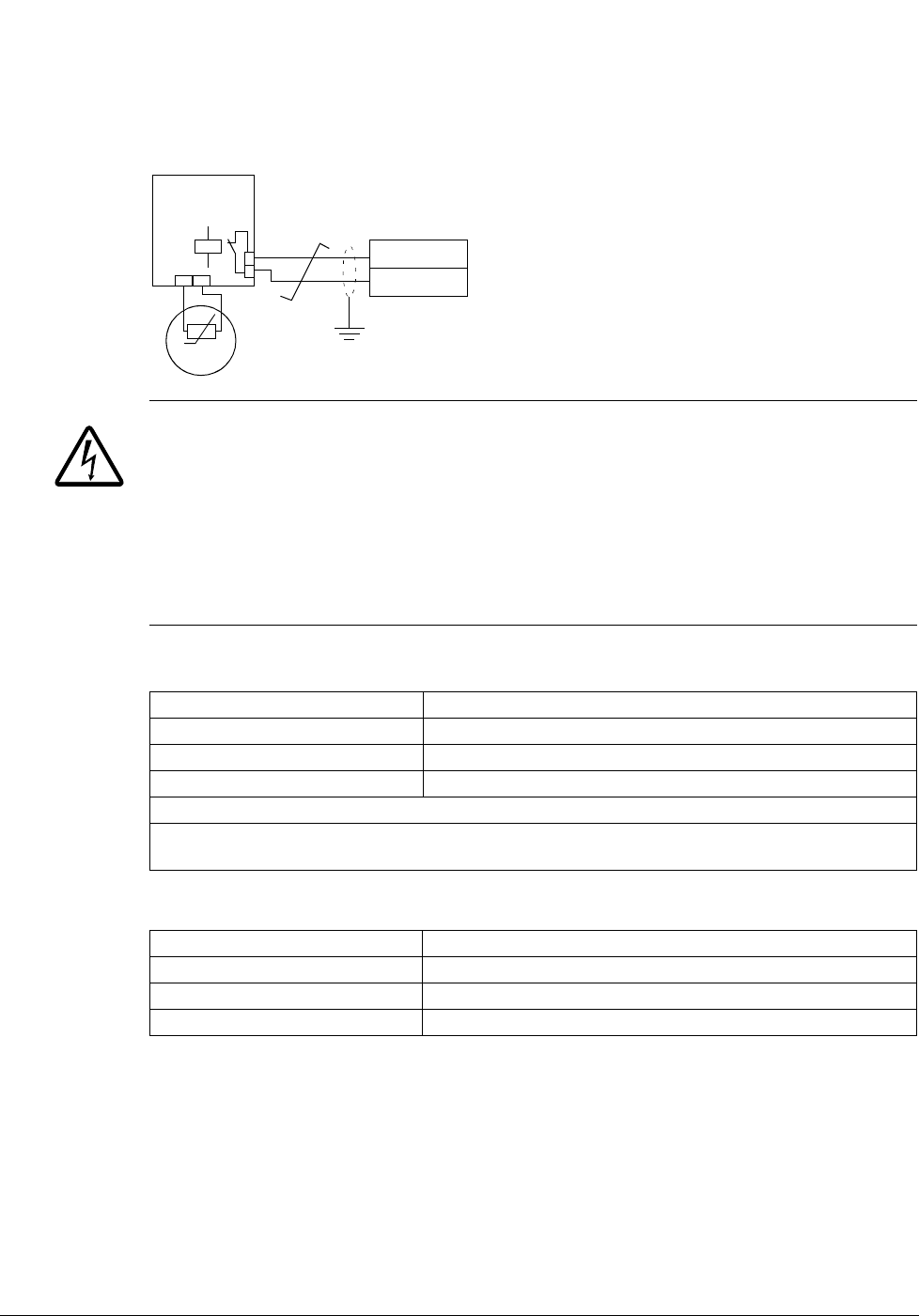
Funciones del programa
128
También es posible medir la temperatura del motor conectando un sensor PTC y un
relé de termistores entre la alimentación de tensión de +24 V CC que ofrece el
convertidor y la entrada digital. La siguiente figura muestra conexiones alternativas.
¡ADVERTENCIA! Según IEC 664, la conexión del termistor de motor a la entrada
digital requiere aislamiento doble o reforzado entre las partes con corriente del
motor y el termistor. El aislamiento reforzado implica un margen y una distancia de
descarga de 8 mm (equipo de 400 / 500 VCA).
Si el conjunto del termistor no cumple el requisito, los otros terminales de E/S del
convertidor deben protegerse contra contactos, o debe emplearse un relé de
termistores para aislar el termistor de la entrada digital.
Ajustes
Diagnósticos
Parámetro Información adicional
13 ENTRADAS ANALOG Ajustes de la entrada analógica
15 SALIDAS ANALOG Ajustes de la salida analógica
35 TEMP MOT MED Ajustes de medición de la temperatura del motor
Otros
En el extremo del motor, el apantallamiento del cable debe conectarse a tierra a través de un
condensador de 10 nF. Si ello no es posible, el apantallamiento debe dejarse sin conectar.
Valores actuales Información adicional
0145 Temperatura del motor
Alarma/fallo Información adicional
TEMP MOTOR/EXC TEMP MOT Temperatura del motor excesiva
Motor
T
Relé de
termistores
ED1 ... 5
+24 V CC
Par. 3501 = TERM(0) o TERM(1)
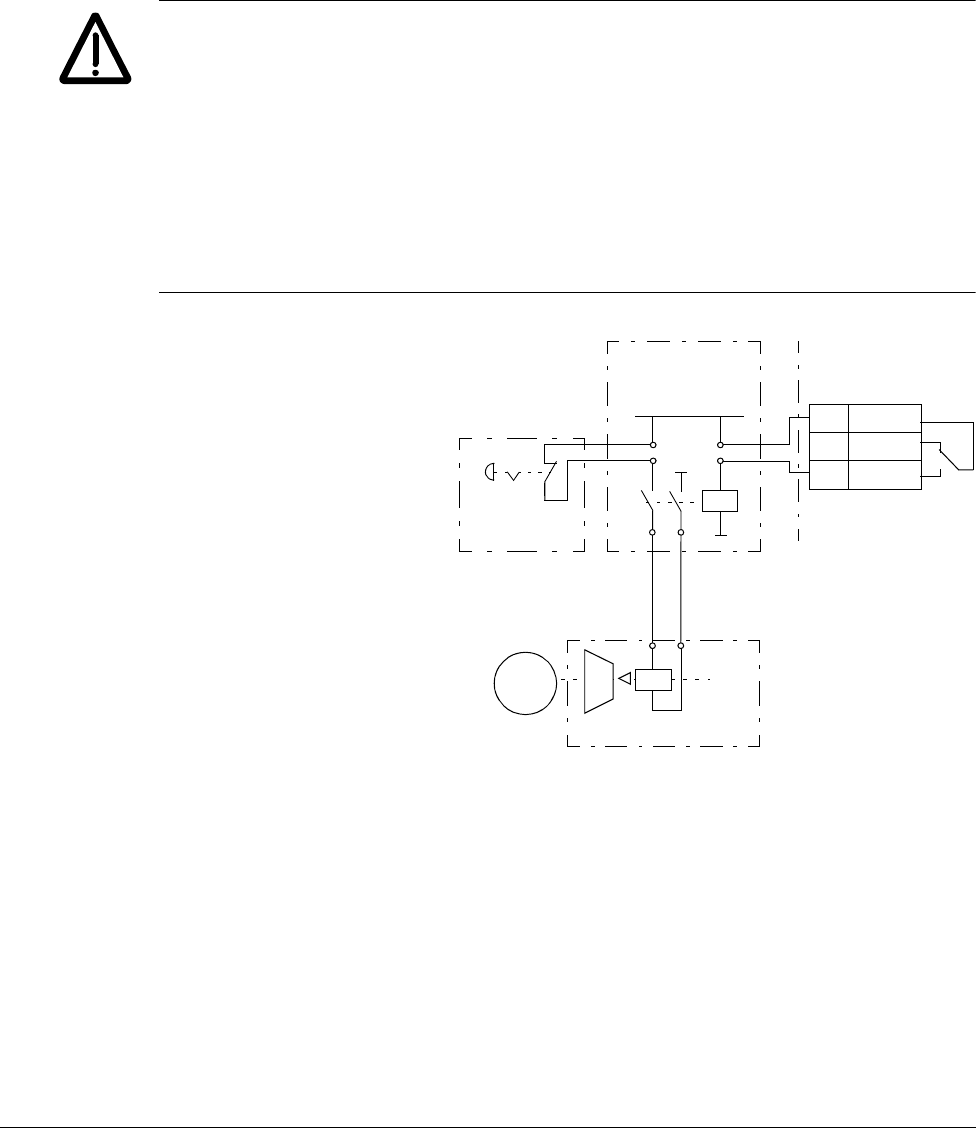
Funciones del programa
129
Control de un freno mecánico
El freno mecánico se emplea para mantener el motor y la maquinaria accionada a
velocidad cero cuando se detiene el convertidor o no está excitado.
Ejemplo
La siguiente figura muestra un ejemplo de aplicación del control de freno.
¡ADVERTENCIA! Asegúrese de que la maquinaria en la que se integra el
convertidor con la función de control de freno cumpla las normas relativas a la
seguridad del personal. Tenga en cuenta que el convertidor de frecuencia (un
Módulo de accionamiento completo o un Módulo de accionamiento básico, como se
define en IEC 61800-2), no se considera un dispositivo de seguridad mencionado en
la Directiva de maquinaria europea y las normas armonizadas relacionadas. Por
ello, la seguridad del personal respecto a toda la maquinaria no debe basarse en
una función específica del convertidor de frecuencia (como la función de control de
freno), sino que tiene que implementarse como se define en las normas específicas
para la aplicación.
Motor
M
230 V CA
Freno mecánico
Fuente de
alimentación
Freno de
emergencia
X1B
17
SRCOM
18 SRNC
19 SRNO
La lógica de control de freno se
integra en el software de
aplicación del convertidor. La
alimentación y las conexiones
eléctricas corren a cuenta del
usuario.
- Control de conexión/desconexión
del freno a través de la salida de
relé SR.
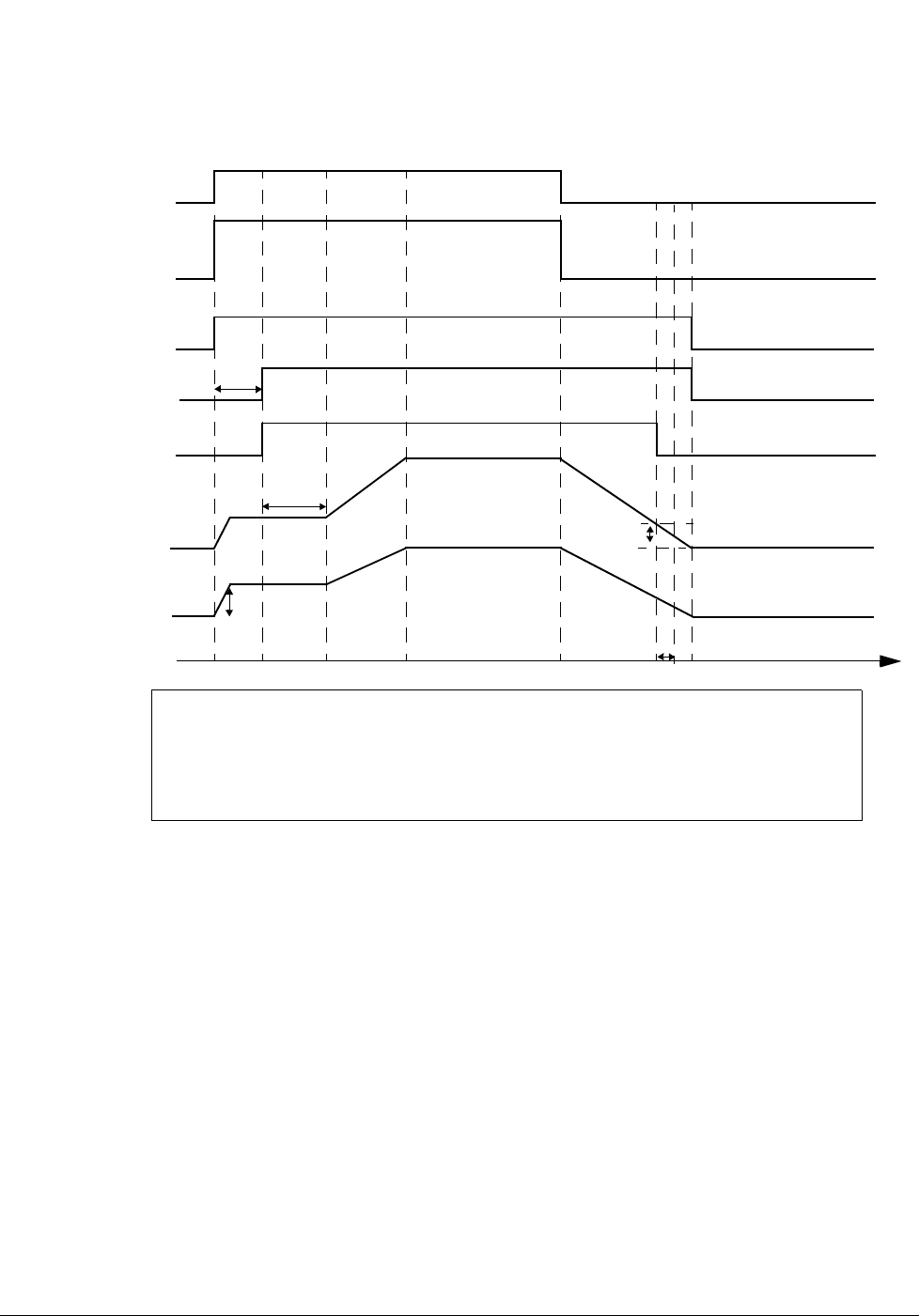
Funciones del programa
130
Esquema del tiempo de funcionamiento
El siguiente esquema temporal ilustra el funcionamiento de la función de control de
freno. Véase también la sección Cambios de estado en la página 131.
Is/TsIntensidad/par de apertura de freno (4302)
tdm Demora de magnetización del motor (parámetro 4305)
tda Demora de apertura del freno (parámetro 4301)
nvc Velocidad de cierre del freno (parámetro 4303)
tdc Demora de cierre del freno mecánico
Orden de marcha
Inversor modulando
Motor magnetizado
Orden de apertura
del freno (SR/SD)
Referencia interna
de velocidad (vel.
actual del motor)
Isalida / Par
t
tda
tdc
nvc
Referencia externa
de velocidad
tdm
1
2
3
4
7
Is/Ps
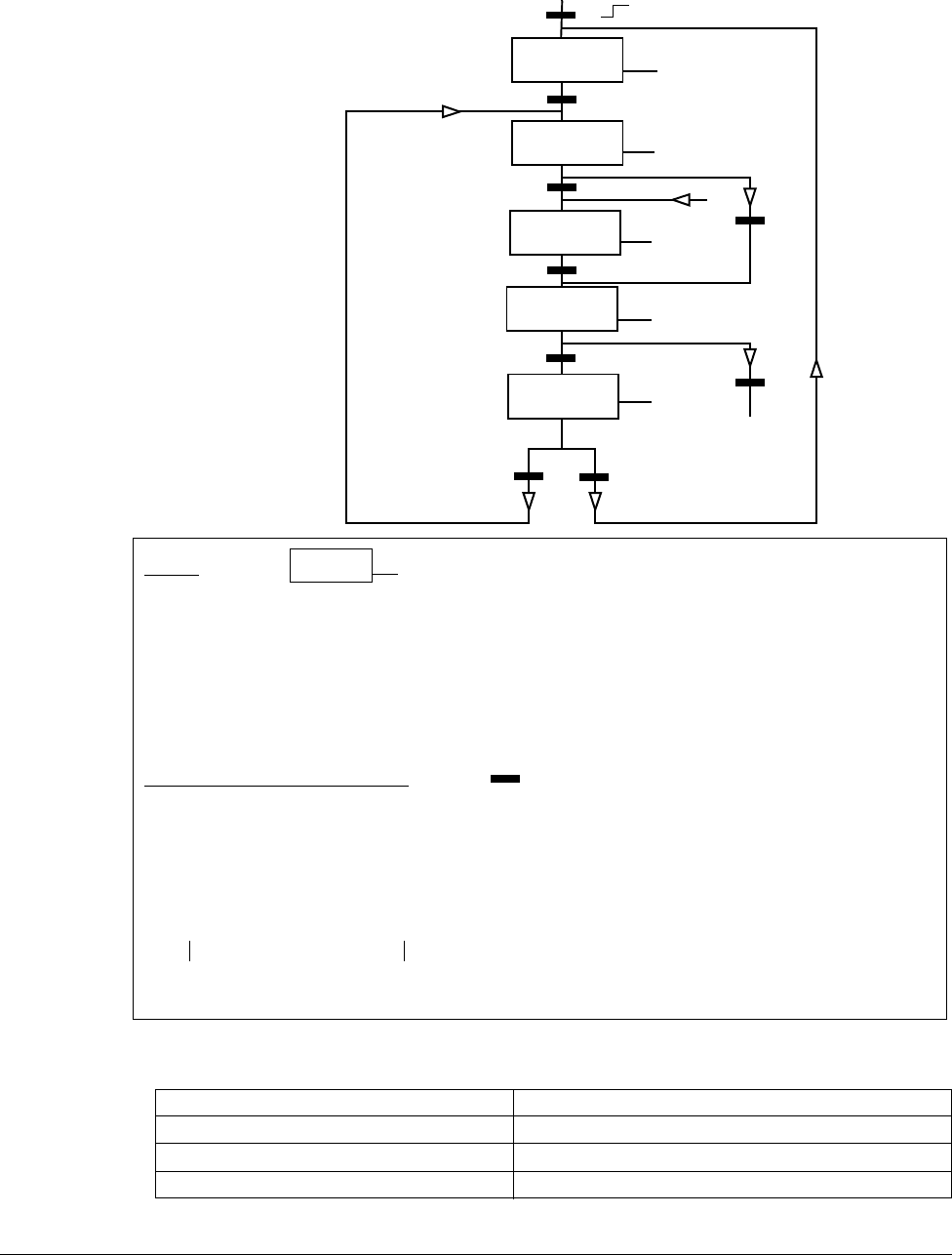
Funciones del programa
131
Cambios de estado
Ajustes
Parámetro Información adicional
1401/1805 Activación del freno mecánico mediante SR/SD
2112 Demora de velocidad cero
Grupo 43 CONTROL FRENO MEC Ajustes de la función de freno
ENTRADA RFG
A CERO
CERRAR
FRENO
ABRIR
FRENO
Desde cualquier estado
1/1/1
0/1/1
1/1/0
1/1/0
1)
2)
ENTRADA
LIBERAR RFG
3)
4)
7)
8)
5)
SIN
MODULACIÓN 0/0/1
9)
6)
A
A
Estado (Símbolo )
- NN: nombre del estado
- X/Y/Z: operaciones/salidas de estado
X = 1 Abrir el freno. Se excita la salida de relé ajustada en control de activación/desactivación del
freno.
Y = 1 Marcha forzada. La función mantiene activada la Marcha interna hasta que se cierra el
freno sin importar el estado de la señal de Marcha externa.
Z = 1 Rampa en cero. Fuerza la referencia de velocidad utilizada (interna) a cero por una rampa.
NN X/Y/Z
Condiciones de cambio de estado (Símbolo )
1) Control de freno activo 0 -> 1 O inversor modulando = 0
2) Motor magnetizado = 1 Y convertidor en marcha = 1
3) Freno abierto Y Demora de apertura de freno transcurrida Y Marcha = 1
4) Marcha = 0
5) Marcha = 0
6) Marcha = 1
7) Velocidad actual del motor < Velocidad de cierre del freno Y Marcha = 0
8) Marcha = 1
9) Freno cerrado Y Demora de cierre de freno transcurrida = 1 Y Marcha = 0
RFG = generador de
función de rampa (Ramp
Function Generator) en el
bucle de control de
velocidad (tratamiento de
referencia).
(flanco ascendente)
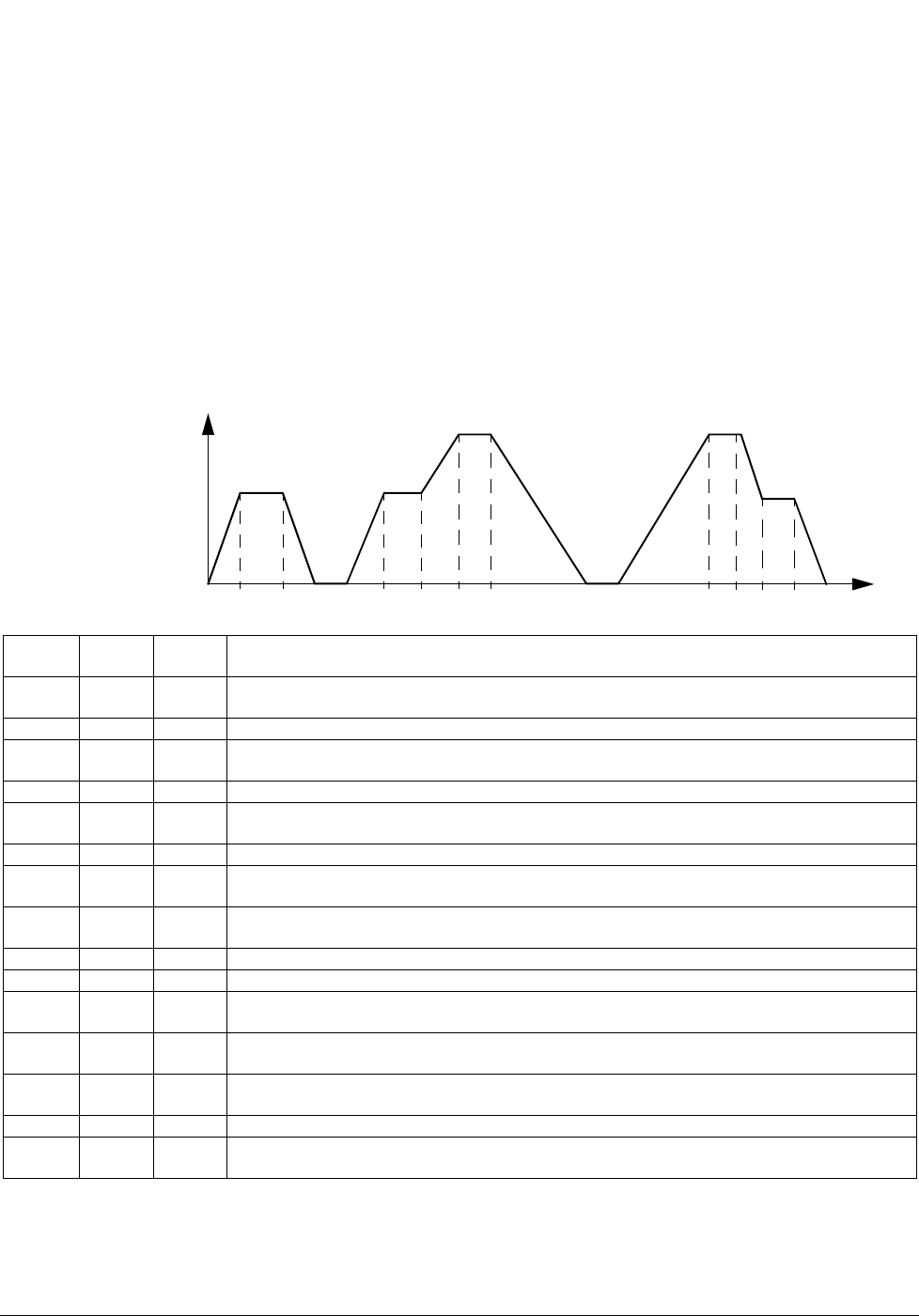
Funciones del programa
132
Avance lento
La función de avance lento se utiliza habitualmente para controlar un movimiento
cíclico de una sección de máquina. Un pulsador controla el convertidor a lo largo del
ciclo completo: cuando está pulsado, el convertidor arranca y acelera a un ritmo
preajustado hasta llegar a una velocidad preajustada; cuando no está pulsado, el
convertidor desacelera a un ritmo preajustado hasta llegar a velocidad cero.
La tabla y la figura siguientes describen el funcionamiento del convertidor. También
representan cómo el convertidor pasa a funcionamiento normal (= avance lento
desactivado) cuando se conecta la orden de arranque del convertidor. Orden jog =
estado de la entrada de avance lento, Orden mar = estado de la orden de arranque
del convertidor.
La función opera en un nivel de tiempo de 2 ms.
x = el estado puede ser 1 o 0.
Nota: El avance lento no es funcional cuando está activada la orden de marcha del
convertidor.
Fase Orden
jog Orden
mar Descripción
1-2 1 0 El convertidor acelera hasta la velocidad de avance lento a lo largo de la rampa de aceleración
de la función de avance lento.
2-3 1 0 El convertidor funciona a la velocidad de avance lento.
3-4 0 0 El convertidor desacelera hasta velocidad cero a lo largo de la rampa de desaceleración de la
función de avance lento.
4-5 0 0 El convertidor está parado.
5-6 1 0 El convertidor acelera hasta la velocidad de avance lento a lo largo de la rampa de aceleración
de la función de avance lento.
6-7 1 0 El convertidor funciona a la velocidad de avance lento.
7-8 x 1 El funcionamiento normal tiene preferencia sobre el avance lento. El convertidor acelera hasta la
velocidad de referencia a lo largo de la rampa de aceleración activa.
8-9 x 1 El funcionamiento normal tiene preferencia sobre el avance lento. El convertidor sigue la
referencia de velocidad.
9-10 0 0 El convertidor desacelera hasta velocidad cero a lo largo de la rampa de desaceleración activa.
10-11 0 0 El convertidor está parado.
11-12 x 1 El funcionamiento normal tiene preferencia sobre el avance lento. El convertidor acelera hasta la
velocidad de referencia a lo largo de la rampa de aceleración activa.
12-13 x 1 El funcionamiento normal tiene preferencia sobre el avance lento. El convertidor sigue la
referencia de velocidad.
13-14 1 0 El convertidor desacelera hasta la velocidad de avance lento a lo largo de la rampa de
desaceleración de la función de avance lento.
14-15 1 0 El convertidor funciona a la velocidad de avance lento.
15-16 0 0 El convertidor desacelera hasta velocidad cero a lo largo de la rampa de desaceleración de la
función de avance lento.
t
Veloc.
12 3456789 1011 1213
14 15 16
Funciones del programa
133
Nota: La velocidad de avance lento tiene preferencia sobre las velocidades constantes.
Nota: El avance lento utiliza el paro de rampa incluso aunque el parámetro 2102
FUNCION PARO sea PARO LIBRE
Nota: El tiempo de la forma de rampa se ajusta a cero durante el avance lento (es decir,
rampa lineal).
La función de avance lento emplea la velocidad constante 7 como velocidad de
avance lento y el par de rampas 2 de aceleración/deceleración.
También es posible activar la función de avance lento 1 ó 2 mediante el bus de
campo. La función de avance lento 1 emplea la velocidad constante 7, mientras que
la 2 emplea la 6. Ambas funciones utilizan el par de rampas 2 de aceleración/
deceleración.
Ajustes
Diagnósticos
Parámetro Información adicional
1010 Activación del avance lento
1208 Velocidad de avance lento
1208 / 1207 Velocidad de avance lento para la función de avance lento 1/2 activada
mediante el bus de campo
2112 Demora de velocidad cero
2205, 2206 Tiempos de aceleración y deceleración.
2207 Tiempo de la forma de rampa de aceleración y deceleración: se ajusta a cero
durante el avance lento (es decir, rampa lineal).
Valores actuales Información adicional
0302 Activación del avance lento mediante bus de campo
1401 Estado de la función de avance lento mediante SR
1805 Estado de la función de avance lento mediante SD
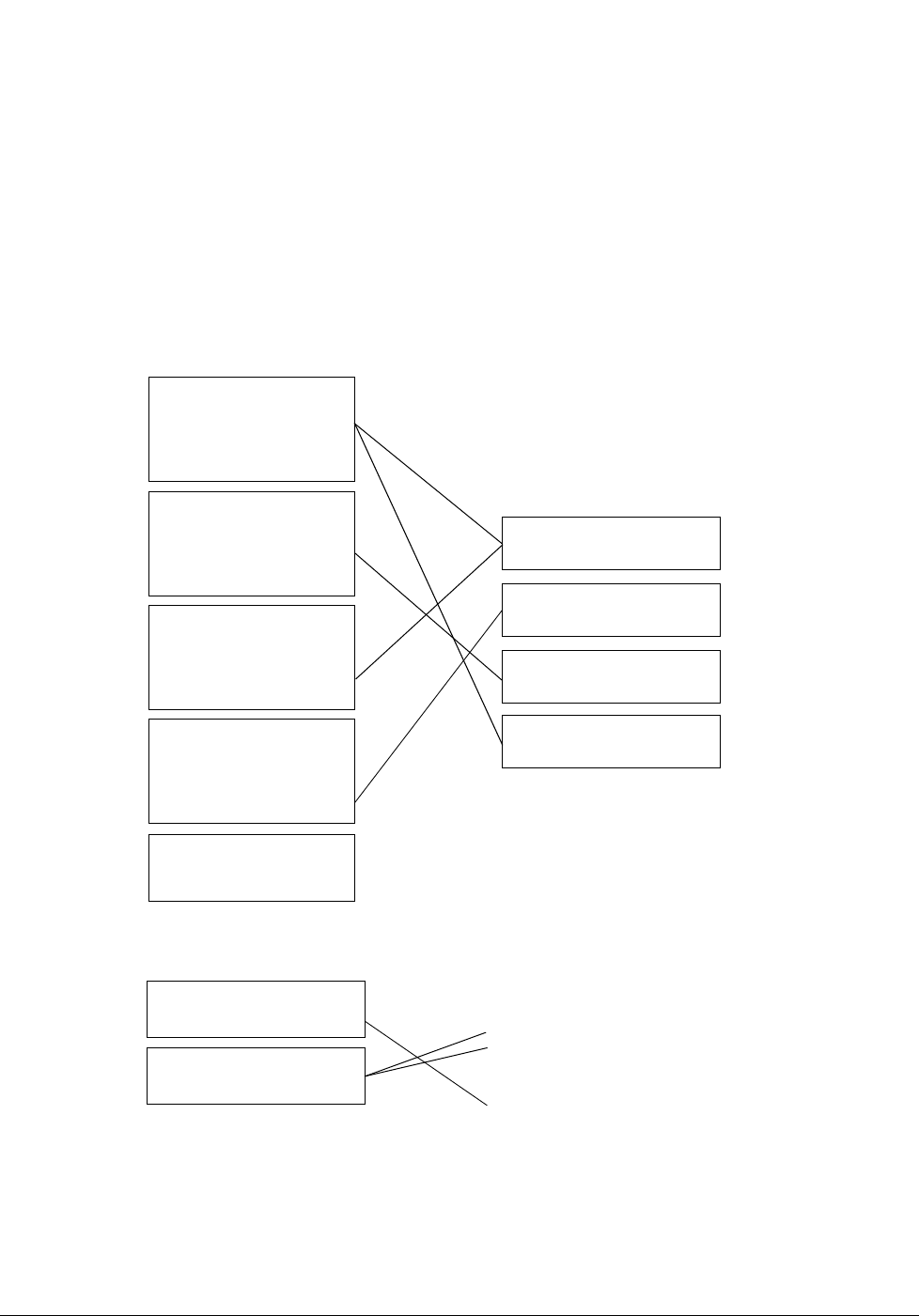
Funciones del programa
134
Funciones temporizadas
Diversas funciones del convertidor pueden programarse en el tiempo, p. ej. el
control EXT1/EXT2 y el control de marcha/paro. El convertidor ofrece:
• cuatro horas de marcha y paro (HORA DE INICIO 1 ... 4, HORA DE PARO 1 ... 4)
• cuatro días de marcha y paro (DIA DE INICIO 1 ... 4, DIA DE PARO 1 ... 4)
• cuatro funciones temporizadas para almacenar conjuntamente los periodos de tiempo
1 ... 4 seleccionados (FUNC TEMP 1 ... 4)
• tiempo de refuerzo (un tiempo de refuerzo adicional conectado a las funciones
programadas)
Un temporizador se puede conectar a varios periodos de tiempo:
Un parámetro disparado por una función programada sólo se puede conectar a una
función temporizada simultáneamente.
PERIODO DE TIEMPO 1
3602 HORA DE INICIO 1
3603 HORA DE PARO 1
3604 DIA DE INICIO 1
3605 DIA DE PARO 1
PERIODO DE TIEMPO 4
3614 HORA DE INICIO 4
3615 HORA DE PARO 4
3616 DIA DE INICIO 4
3617 DIA DE PARO 4
PERIODO DE TIEMPO 3
3610 HORA DE INICIO 3
3611 HORA DE PARO 3
3612 DIA DE INICIO 3
3613 DIA DE PARO 3
PERIODO DE TIEMPO 2
3606 HORA DE INICIO 2
3607 HORA DE PARO 2
3608 DIA DE INICIO 2
3609 DIA DE PARO 2
REFORZADOR
3622 SEL REFORZ
3623 TIEMPO REFORZ
FUNC TEMP 1
3626 FUEN FUNC TEMP 1
FUNC TEMP 2
3627 FUEN FUNC TEMP 2
FUNC TEMP 3
3628 FUEN FUNC TEMP 3
FUNC TEMP 4
3629 FUEN FUNC TEMP 4
FUNC TEMP2
3627 FUEN FUNC TEMP 2
1001 COMANDOS EXT1
1002 COMANDOS EXT2
1102 SELEC EXT1/EXT2
1201 SEL VELOC CONST
1401 SALIDA RELE SR1
4027 SERIE PARAM PID
FUNC TEMP1
3626 FUEN FUNC TEMP 1
4228 ACTIVAR
1209 SEL MODO TEMP
8402 INICIO PROG SEC
8406 VAL LOGICO SEC 1
8425/35/45/55/65/75/85/95 DISP EST1 ... 8 A EST2
8426/36/46/56/66/76/86/96 DISP EST1 ... 8 A ESTN
Funciones del programa
135
Ejemplo
El aire acondicionado está activo los días laborables de 8:00 a 15:30 (de 8 a.m. a
3:30 p.m.) y los domingos de 12:00 a 15:00 (de 12 a 3 p.m.). Pulsando el
conmutador de ampliación de tiempo, el aire condicionado permanece encendido
una hora más.
Ajustes
Parámetro Ajuste
3602 HORA DE INICIO 1 08:00:00
3603 HORA DE PARO 1 15:30:00
3604 DIA DE INICIO 1 LUNES
3605 DIA DE PARO 1 VIERNES
3606 HORA DE INICIO 2 12:00:00
3607 HORA DE PARO 2 15:00:00
3608 DIA DE INICIO 2 DOMINGO
3609 DIA DE PARO 2 DOMINGO
3623 TIEMPO REFORZ 01:00:00
Parámetro Información adicional
36 FUNCIONES TEMP Ajustes de las funciones temporizadas
1001, 1002 Control temporizado de marcha/paro
1102 Selección temporizada EXT1/EXT2
1201 Activación de velocidad constante 1 temporizada
1209 Selección de velocidad temporizada
1401 Estado de la función temporizada indicada con la salida de relé SR
1805 Estado de la función temporizada indicada con la salida digital SD
4027 Selección de la serie de parámetros 1/2 del PID1 temporizada
4228 Activación del PID2 externo temporizada
8402 Activación de la programación de secuencias temporizada
8425 / 8435 / ... / 8495
8426 / 8436 / ... / 8496 Disparo para cambio de estado en programación de secuencias con
función temporizada
Funciones del programa
136
Temporizador
La puesta en marcha y el paro del convertidor se pueden controlar mediante
funciones de temporizador.
Ajustes
Diagnósticos
Contador
El arranque y el paro del convertidor se pueden controlar mediante funciones de
contador. Esta función también se puede utilizar como señal de disparo para el
cambio de estado en programación de secuencias. Véase la sección Programación
de secuencias en la página 137.
Ajustes
Diagnósticos
Parámetro Información adicional
1001, 1002 Origen de la señal de marcha/paro
19 TEMPOR Y CONTADOR Temporizador para la puesta en marcha y el paro
Valor actual Información adicional
0165 Contador de tiempo de control de marcha/paro
Parámetro Información adicional
1001, 1002 Origen de la señal de marcha/paro
19 TEMPOR Y CONTADOR Contador para el arranque y el paro
8425, 8426 / 8435, 8436 / ... /
8495, 8496 Señal de contador como disparo para el cambio de estado en
programación de secuencias
Valor actual Información adicional
0166 Contador de pulsos de control de marcha/paro

Funciones del programa
137
Programación de secuencias
Se puede programar el convertidor para que realice una secuencia en la que el
convertidor pasa, habitualmente, por entre 1 y 8 estados. El usuario define las
reglas de funcionamiento para toda la secuencia y para cada estado. Las reglas de
un estado particular se hacen efectivas cuando el programa de secuencias está
activo y ha llegado al estado en cuestión. Las reglas que deben definirse para cada
estado son:
• Órdenes de marcha, paro y dirección para el convertidor (avance / inversa / paro)
• Tiempo de las rampas de aceleración y deceleración para el convertidor
• Origen del valor de referencia del convertidor
• Duración del estado
• Estados de las SR/SD/SA
• Origen de la señal de disparo para pasar al siguiente estado
• Origen de la señal de disparo para pasar a cualquier estado (1 ... 8)
Cada estado también puede activar salidas del convertidor para proporcionar una
indicación a dispositivos externos.
La programación de secuencias permite transiciones de un estado al siguiente o a
uno seleccionado. El cambio de estado se puede activar, p. ej., mediante funciones
temporizadas, entradas digitales y funciones de supervisión.
La programación de secuencias se puede utilizar en aplicaciones mezcladas
simples así como en aplicaciones transversales más complejas.
La programación se puede realizar con el panel de control o con una utilidad para
PC. El ACS350 acepta la versión 2.50 (o posterior) de la utilidad para PC
DriveWindow Light, que incluye una herramienta gráfica para programación de
secuencias.
Nota: Por defecto, todos los parámetros de la programación de secuencias se
pueden cambiar incluso cuando la programación de secuencias está activa. Se
recomienda que, tras ajustar los parámetros de la programación de secuencias,
éstos se bloqueen con el parámetro 1602 BLOQUEO PARAM.
Funciones del programa
138
Ajustes
Diagnósticos
Parámetro Información adicional
1001/1002 Órdenes de marcha, paro y dirección para EXT2/EXT2
1102 Selección EXT1/EXT2
1106 origen REF2
1201 Desactivación de velocidad constante. La velocidad constante siempre
toma precedencia sobre la referencia de la programación de
secuencias.
1401 Salida de la programación de secuencias por SR
1501 Salida de la programación de secuencias por SA
1601 Activación/desactivación del Permiso de marcha
1805 Salida de la programación de secuencias por SD
19 TEMPOR Y CONTADOR Cambio de estado según el límite del contador
36 FUNCIONES TEMP Cambio de estado programado
2201 ... 2207 Ajustes del tiempo de rampa de aceleración/deceleración
32 SUPERVISION Ajustes de supervisión
4010/4110/4210 Salida de la programación de secuencias como señal de referencia
PID
84 PROG SECUENCIA Ajustes de la programación de secuencias
Valor actual Información adicional
0167 Estado de la programación de secuencias
0168 Estado activo de la programación de secuencias
0169 Contador de tiempo del estado actual
0170 Valores de control de la referencia PID de la salida analógica
0171 Contador de la secuencia ejecutada
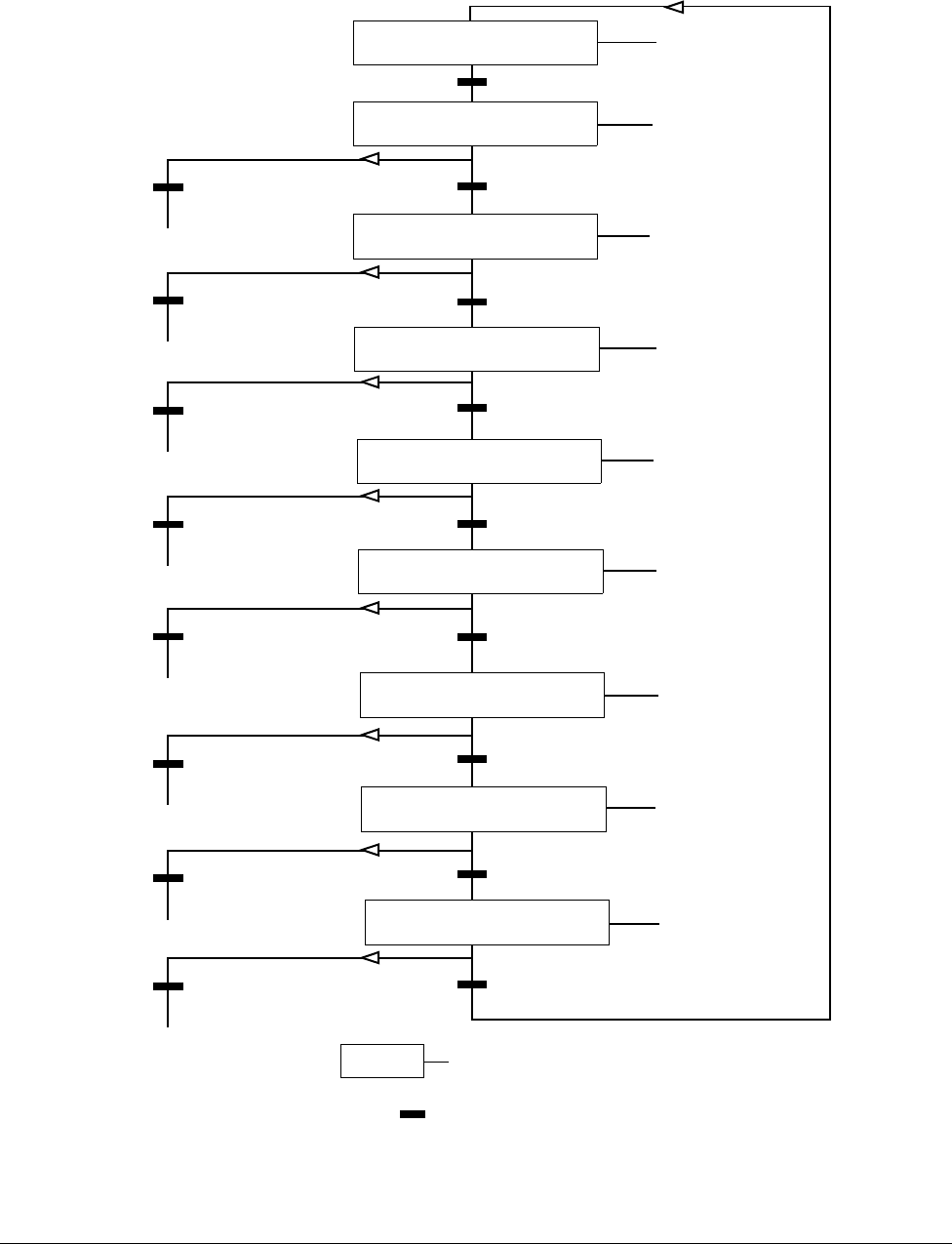
Funciones del programa
139
El diagrama de estado siguiente presenta el cambio de estado en la programación
de secuencias.
Ir al estado 2 (par. 8425)*
0168 = 1 (Estado 1)
Ir al estado N (par. 8426, 8427)*
0168 = 2 (Estado 2)
ESTADO 1
(par. 8420 ... 8424)
Ir al estado 3 (par. 8435)*
Ir al estado N (par. 8436, 8437)*
ESTADO 2
(par. 8430 ... 8434)
Ir al estado 4 (par. 8445)*
Ir al estado N (par. 8446, 8447)*
0168 = 3 (Estado 3)
ESTADO 3
(par. 8440 ... 8444)
Ir al estado 5 (par. 8455)*
Ir al estado N (par. 8456, 8457)*
Ir al estado 6 (par. 8465)*
Ir al estado N (par. 8466, 8467)*
Ir al estado 7 (par. 8475)*
Ir al estado N (par. 8476, 8477)*
0168 = 4 (Estado 4)
0168 = 5 (Estado 5)
0168 = 6 (Estado 6)
ESTADO 4
(par. 8450 ... 8454)
ESTADO 5
(par. 8460 ... 8464)
ESTADO 6
(par. 8470 ... 8474)
Ir al estado 8 (par. 8485)*
Ir al estado N (par. 8486, 8487)*
0168 = 7 (Estado 7)
ESTADO 7
(par. 8480 ... 8484)
Ir al estado 1 (par. 8495)*
Ir al estado N (par. 8496, 8497)*
0168 = 8 (Estado 8)
ESTADO 8
(par. 8490 ... 8494)
0167 bit 0 = 1
Programación de secuencias
ACTIVAR
Estado N
Estado N
Estado N
Estado N
Estado N
Estado N
Estado N
Estado N
NN XNN = Estado
X = Señal actual
Cambio de estado
*
El cambio de estado al estado N tiene mayor prioridad que el cambio de estado
al estado siguiente
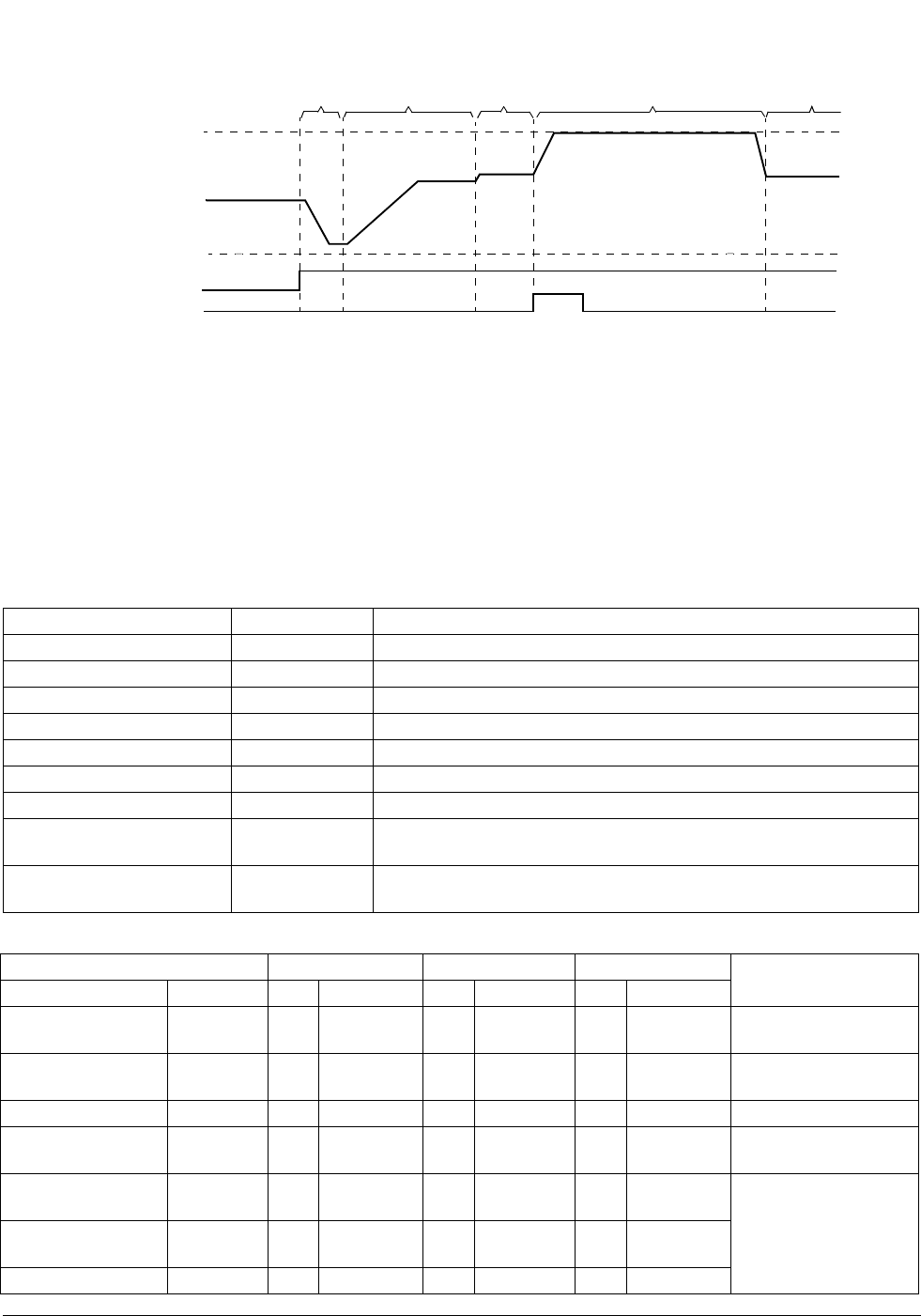
Funciones del programa
140
Ejemplo 1
La programación de secuencias se activa con la entrada digital ED1.
EST 1: El convertidor arranca en dirección inversa con una referencia de -50 Hz y
un tiempo de rampa de 10 s. El Estado 1 es activo durante 40 s.
EST 2: El convertidor acelera a 20 Hz con un tiempo de rampa de 60 s. El Estado 2
es activo durante 120 s.
EST 3: El convertidor acelera a 25 Hz con un tiempo de rampa de 5 s. El estado 3 es
activo hasta que se deshabilite la programación de secuencias o hasta que la ED2
active el arranque de sobrepar.
EST 4: El convertidor acelera a 50 Hz con un tiempo de rampa de 5 s. El Estado 4
es activo durante 200 s y a continuación vuelve al estado 3.
Parámetro Ajuste Información adicional
1002 COMANDOS EXT2 PROG SEC Órdenes de marcha, paro y dirección para EXT2
1102 SELEC EXT 1/EXT2 EXT2 Activación de EXT2
1106 SELEC REF2 PROG SEC Salida de la programación de secuencias como REF2
1601
PERMISO MARCHA
SIN SEL Desactivación del Permiso de marcha
2102 FUNCION PARO RAMPA Paro de rampa
2201 SEL ACE/DEC 1/2 PROG SEC Rampa definida por el parámetro 8422 / ... / 8452
8401
ACTIVAR PROG SEC
ALWAYS Programación de secuencias habilitada
8402 INICIO PROG SEC ED1 Activación de la programación de secuencias a través de la entrada
digital (ED1)
8404 RESET PROG SEC ED1 (INV) Restauración de la programación de secuencias; es decir, restauración
al estado 1 cuando se pierde la señal ED1 (1 -> 0)
EST1 EST2 EST3 EST4 Información adicional
Par. Ajuste Par. Ajuste Par. Ajuste Par. Ajuste
8420 SELEC REF
EST 1 100% 8430 40% 8440 50% 8450 100% Referencia de estado
8421 ST1
COMMANDS MARCHA
INV 8431 MARCHA
AVAN 8441 MARCHA
AVAN 8451 MARCHA
AVAN
Orden de puesta en
marcha, paro y dirección
8422 RAMPA EST 1 10 s 8432 60 s 8442 5 s 8452 5 s Tiempo de rampa
8424 RETAR CAMB
EST 1 40 s 8434 120 s 8444 8454 200 s Demora de cambio de
estado
8425 DISP EST1 A
EST2 RETAR
CAMBIO 8435 RETAR
CAMBIO 8445 ED2 8455
Disparo para cambio
de estado
8426 DISP EST1 A
ESTN SIN SEL 8436 SIN SEL 8446 SIN SEL 8456 RETAR
CAMBIO
8427
ESTADO N EST 1
-8437 -8447 -8457 3
0 Hz
-50 Hz
50 Hz
ED1
ED2 Inicio sec. Disparo para cambio de estado
EST 1 EST 2 EST 3 EST 4 EST
3
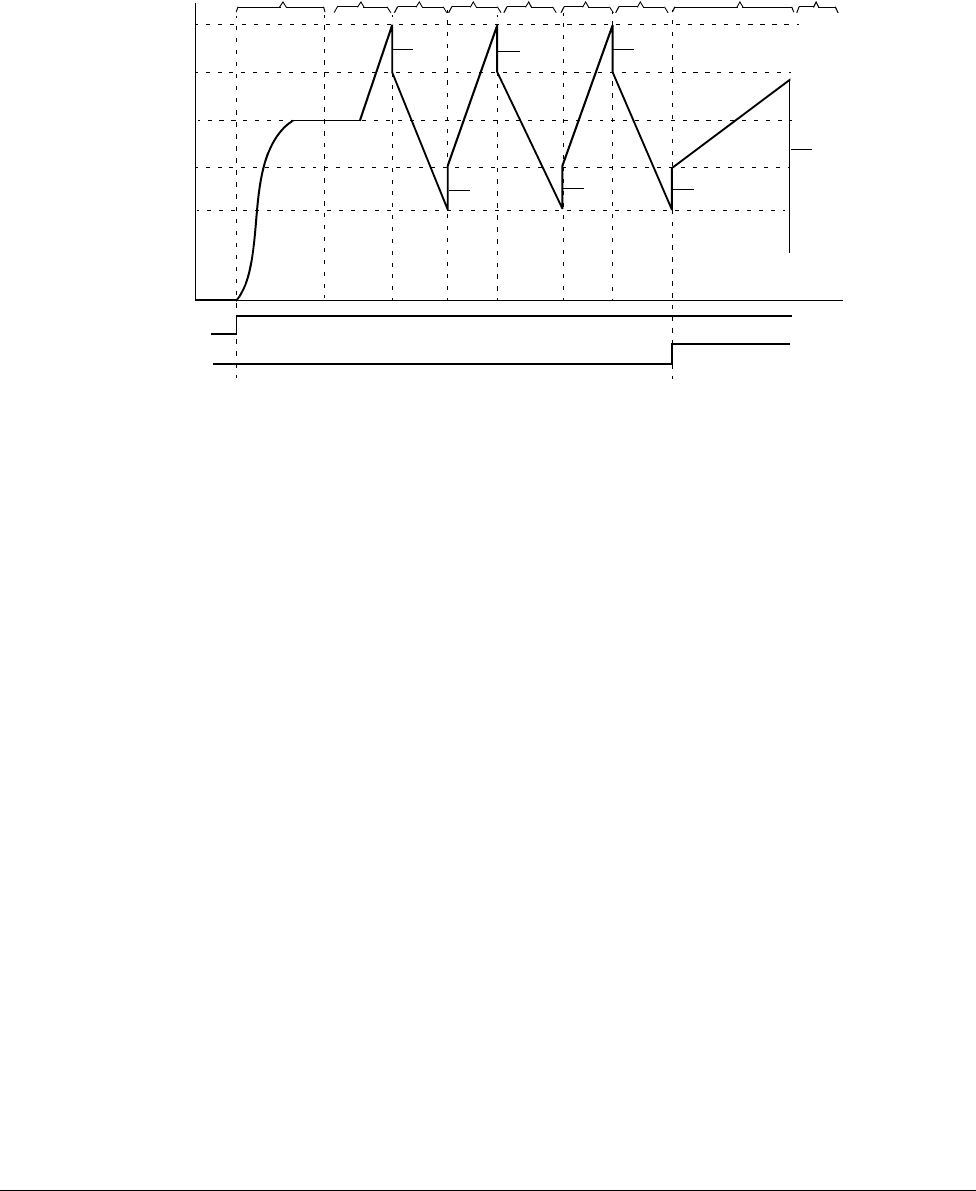
Funciones del programa
141
Ejemplo 2
El convertidor está programado para el control de bobinado en 30 secuencias.
La programación de secuencias se activa con la ED1.
EST 1: el convertidor arranca en dirección de avance con EA1 (EA1 + 50% - 50%)
como referencia y un par de rampa 2. Cuando se alcanza la referencia pasa al
siguiente estado. Todas las salidas de relé y analógicas están libres.
EST 2: El convertidor se acelera con EA1 + 15% (EA1 + 65% - 50%) como
referencia y un tiempo de rampa de 1,5 s. Cuando se alcanza la referencia pasa al
siguiente estado. Si la referencia no se alcanza en 2 s pasa al estado 8 (estado de
error).
EST 3: El convertidor decelera con EA1 +10% (EA1 +60% - 50%) como referencia y
un tiempo de rampa de 0 s (1). Cuando se alcanza la referencia pasa al siguiente
estado. Si la referencia no se alcanza en 0,2 s pasa al estado 8 (estado de error).
EST 4: El convertidor decelera con EA1 -15% (EA1 +35% -50%) como referencia y
un tiempo de rampa de 1,5 s. Cuando se alcanza la referencia pasa al siguiente
estado. Si la referencia no se alcanza en 2 s pasa al estado 8 (estado de error).(2)
EST 5: El convertidor se acelera con EA1 -10% (EA1 +40% -50%) como referencia y
un tiempo de rampa de 0 s (1). Cuando se alcanza la referencia pasa al siguiente
estado. El contador de secuencias incrementa su valor en 1. Si el contador avanza,
el estado cambia al estado 7 (secuencia completada)
EST 6: La referencia y el tiempo de rampa del convertidor coinciden con los del
estado 2. El estado del convertidor pasa inmediatamente al estado 2 (el tiempo de
demora es de 0 s)
EST7 (secuencia completada): El convertidor se detiene con un par de rampa 1.Se
activa la salida digital SD. Si la programación de secuencias se desactiva debido a
un flanco descendente de la entrada digital ED1, se restaura el estado 1 de la
máquina. Puede activarse una nueva orden de marcha mediante la entrada digital
EST2
EST3 EST3
EST5 EST5 EST5
EST8
ERROR
EST1 EST2 EST2 EST2 (error:
aceleración
EST4 EST4 EST4
SR
demasiado lenta)
EST8
EA1 - 10%
EST3
EA1 - 15%
EA1 + 10%
EA1 + 15%
EA1
ED1
Sec. marcha Error
Funciones del programa
142
ED1, o bien mediante las entradas digitales ED4 y ED5 (ambas deben activarse
simultáneamente).
EST 8 (estado de error): El convertidor se detiene con un par de rampa 1.Se activa
la salida de relé SR. Si la programación de secuencias se desactiva debido a un
flanco descendente de la entrada digital ED1, se restaura el estado 1 de la máquina.
Puede activarse una nueva orden de marcha mediante la entrada digital ED1, o bien
mediante las entradas digitales ED4 y ED5 (ambas deben activarse
simultáneamente).
(1) Tiempo de rampa de 0 segundos = el convertidor acelera/decelera lo más
rápidamente posible.
(2) El estado de referencia debe estar entre 0 y 100%, es decir, el valor escalado de
la EA1 debe encontrarse entre 15 y 85%. Si EA1 = 0 referencia = 0% + 35% -50% =
-15% < 0%.
Parámetro Ajuste Información adicional
1002 COMANDOS EXT2 SEC PROG Origen de marcha, paro, dirección para EXT2
1102 SELEC EXT1/EXT2 EXT2 Activación de EXT2
1106 SELEC REF2 EA1+SEC PROG Suma de la entrada analógica EA1 y la salida de programación de
secuencias como REF2
1201 SEL VELOC CONST SIN SEL Desactivación de las velocidades constantes
1401 SALIDA RELE SR1 SEC PROG Control de la salida de relé SR definido por los parámetros 8423/.../8493
1601 PERMISO MARCHA SIN SEL Desactivación del Permiso de marcha
1805 SEÑAL SD SEC PROG Control de la salida digital SD definido por los parámetros 8423/.../8493
2102 FUNCION PARO RAMPA Paro de rampa
2201 SEL ACE/DEC 1/2 SEC PROG Rampa definida por los parámetros 8422/.../8492
2202 TIEMPO ACELER 1 1 s Par de rampas aceleración/deceleración 1
2203 TIEMPO DESAC 1 0 s
2205 TIEMPO ACELER 2 20 s Par de rampas aceleración/deceleración 2
2206 TIEMPO DESAC 2 20 s
2207 TIPO RAMPA 2 5 s Forma de la rampa de aceleración/deceleración 2
3201 PARAM SUPERV 1 171 Supervisión del contador de secuencias (señal 0171 CONT CICLOS
SEC)
3202 LIM SUPER 1 BAJ 30 Límite inferior de supervisión
3203 LIM SUPER 1 ALT 30 Límite superior de supervisión
8401 ACTIVAR PROG
SEC EXT2 Activada la programación de secuencias en EXT2
8402 INICIO PROG SEC ED1 Activación de la programación de secuencias a través de la entrada
digital (ED1)
8404 RESET PROG SEC ED1(INV) Restauración de la programación de secuencias a través de la entrada
digital ED1 invertida (INV)
8406 VAL LOGICO SEC 1 ED4 Valor lógico 1
8407 OPER LOGIC SEC 1 Y Operación entre los valores lógicos 1 y 2
8408 VAL LOGICO SEC 2 ED5 Valor lógico 2
8415 LOC CONT CICLOS EST5 A SIG Activación del contador de secuencias, es decir, el contador incrementa
su valor cada vez que el estado pasa del estado 5 al estado 6.
8416 RESET CONT
CICLO ESTADO 1 Restauración del contador de secuencias durante la transición al estado
1
Funciones del programa
143
EST1 EST2 EST3 EST4 Información adicional
Par. Ajuste Par. Ajuste Par. Ajuste Par. Ajuste
8420 SELEC
REF EST 1. 50% 8430 65% 8440 60% 8450 35% Referencia de estado
8421
ORDENES
EST1
MARCHA
AVAN 8431 MARCHA
AVAN 8441 MARCHA
AVAN 8451 MARCHA
AVAN Orden de puesta en
marcha, paro y
dirección
8422 RAMPA
EST1 -0,2 (par de
rampa 2) 8432 1,5 s 8442 0 s 8452 1,5 s Tiempo de rampa de
aceleración/
desaceleración
8423 CONTR
SAL EST 1 R=0,D=0,
SA=0 8433 SA=0 8443 SA=0 8453 SA=0 Control de la salida
analógica, digital y de
relé
8424 RETAR
CAMB EST 1 0 s 8434 2 s 8444 0,2 s 8454 2 s Demora de cambio de
estado
8425 DISP
EST1 A EST2 ENTR P
CONS 8435 ENTR P
CONS 8445 ENTR P
CONS 8455 ENTR P
CONS
Disparo para cambio
de estado
8426 DISP
EST1 A ESTN SIN SEL 8436 RETAR
CAMB 8446 RETAR
CAMB 8456 RETAR
CAMB
8427 ESTADO
N EST 1 ESTADO 1 8437 ESTADO 8 8447 ESTADO 8 8457 ESTADO 8
EST5 EST6 EST7 EST8 Información adicional
Par. Ajuste Par. Ajuste Par. Ajuste Par. Ajuste
8460 SELEC
REF EST 1 40% 8470 65% 8480 0% 8490 0% Referencia de estado
8461
ORDENES
EST5
MARCHA
AVAN 8471 MARCHA
AVAN 8481 PARO
UNIDAD 8491 PARO
UNIDAD Orden de puesta en
marcha, paro y
dirección
8462 RAMPA
EST5 0 s 8472 1,5 s 8482 -0,1 (par de
rampa 1) 8492 -0,1 (par de
rampa 1) Tiempo de rampa de
aceleración/
desaceleración
8463 CONTR
SAL EST5 SA=0 8473 SA=0 8483 SA=1 8493 SA=1 Control de la salida
analógica, digital y de
relé
8464 RETAR
CAMB EST5 0,2 s 8474 0 s 8484 0 s 8494 0 s Demora de cambio de
estado
8465 DISP
EST5 A EST6 ENTR P
CONS 8475 SIN SEL 8485 SIN SEL 8495 VAL
LOGICO
Disparo para cambio
de estado
8466 DISP
EST5 A EST N SUPRV1
SOBR 8476 RETAR
CAMB 8486 VAL
LOGICO 8496 SIN SEL
8467 ESTADO
N EST5 ESTADO 7 8477 ESTADO 2 8487 ESTADO 1 8497 ESTADO 1

Funciones del programa
144
Señales actuales y parámetros
145
Señales actuales y parámetros
Contenido de este capítulo
El capítulo describe las señales actuales y los parámetros y proporciona los valores
equivalentes de bus de campo para cada señal/parámetro.
Términos y abreviaturas
Direcciones de bus de campo
Para el adaptador Profibus FPBA-01, el adaptador DeviceNet FDNA-01 y el
adaptador CANopen FCAN-01, véase el manual del usuario del bus de campo.
Equivalente de bus de campo
Ejemplo: Si 2017 PAR MAX 1 está ajustado desde un sistema de control externo, un
valor entero de 1 corresponde a un 0,1 %. Todos los valores leídos y enviados están
limitados a 16 bits (-32768 ... 32767).
Período Definición
Señal actual Señal medida o calculada por el convertidor. Puede ser supervisada por el
usuario, pero no es posible el ajuste por parte del mismo. Los Grupos 01 ... 04
contienen señales actuales.
Def Valor por defecto de un parámetro.
Parámetro Una instrucción de funcionamiento del convertidor ajustable por el usuario. Los
Grupos 10 ... 99 contienen parámetros.
Nota: En el panel de control básico las selecciones de los parámetros se
muestran como valores enteros. Por ejemplo, la selección COMUNIC del
parámetro 1001COMANDOS EXT1 se muestra como el valor 10 (que es igual al
equivalente de bus de campo, FbEq).
FbEq Equivalente de bus de campo: el escalado entre el valor y el entero utilizado en
la comunicación serie.
Señales actuales y parámetros
146
Valores por defecto con diferentes macros
Cuando se cambia la macro de aplicación (9902 MACRO DE APLIC), el software
actualiza los valores de los parámetros a sus valores por defecto. La siguiente tabla
incluye los valores por defecto de los parámetros para diferentes macros. Para otros
parámetros, los valores por defecto son los mismos para todas las macros. Véase la
siguiente lista de parámetros.
Índice Nombre/Selección ESTAND
ABB 3-HILOS ALTERNA POTENC
MOT MANUAL/
AUTO CONTROL
PID TORQ
CTRL
1001 COMANDOS EXT1 ED1,2 ED1P,2P,3 ED1F,2R ED1,2 ED1,2 ED1 ED1,2
1002 COMANDOS EXT2 SIN SEL SIN SEL SIN SEL SIN SEL ED5,4 ED5 ED1,2
1003 DIRECCION PETICION PETICION PETICION PETICION PETICION AVANCE PETICION
1102 SELEC EXT1/EXT2 EXT1 EXT1 EXT1 EXT1 ED3 ED2 ED3
1103 SELEC REF1 EA1 EA1 EA1 ED3A,4D
(NC) EA1 EA1 EA1
1106 SELEC REF2 EA2 EA2 EA2 EA2 EA2 SALPID1 EA2
1201 SEL VELOC CONST ED3,4 ED4,5 ED3,4 ED5 SIN SEL ED3 ED4
1304 MINIMO EA2 0 0 0 0 20 20 20
1501 SEL CONTENID
SA1 103 102 102 102 102 102 102
1601 PERMISO MARCHA SIN SEL SIN SEL SIN SEL SIN SEL SIN SEL ED4 SIN SEL
2201 SEL ACE/DEC 1/2 ED5 SIN SEL ED5 SIN SEL SIN SEL SIN SEL ED5
3201 PARAM SUPERV 1 103 102 102 102 102 102 102
3401 PARAM SEÑAL 1 103 102 102 102 102 102 102
9902 MACRO DE APLIC ESTAND ABB 3-HILOS ALTERNA POTENC
MOT MANUAL/
AUTO CTRL PID CTRL PAR
9904 MODO CTRL
MOTOR ESCALAR:
FREC VECTOR:
VELOC VECTOR:
VELOC VECTOR:
VELOC VECTOR:
VELOC VECTOR:
VELOC VECTOR:
PAR
Señales actuales y parámetros
147
Señales actuales
Señales actuales
Nº Nombre/Valor Descripción FbEq
01 DATOS FUNCIONAM Señales básicas para supervisar el convertidor (sólo de lectura).
0101 DIRECCION Y VEL
Velocidad calculada del motor en rpm. Un valor negativo indica dirección inversa.
1 = 1 rpm
0102 VELOCIDAD Velocidad calculada del motor en rpm. 1 = 1 rpm
0103 FREC SALIDA Frecuencia de salida calculada del convertidor, en Hz (se muestra por
defecto en la pantalla del Modo de Salida). 1 = 0,1 Hz
0104 INTENSIDAD Intensidad medida del motor en A (se muestra por defecto en la pantalla
del Modo de Salida). 1 = 0,1 A
0105 PAR Par calculado del motor, en porcentaje del par nominal del motor. 1 = 0,1%
0106 POTENCIA Potencia medida del motor, en kW. 1 = 0,1 kW
0107 TENSION BUS CC Tensión medida del circuito intermedio, en V CC. 1 = 1 V
0109 TENSIÓN SALIDA Tensión calculada del motor, en V CA. 1 = 1 V
0110 TEMP UNIDAD Temperatura medida de los IGBT, en °C. 1 = 0,1°C
0111 REF EXTERNA 1 Referencia externa REF1, en rpm o Hz. La unidad depende del ajuste del
parámetro 9904 MODO CTRL MOTOR. 1 = 0,1 Hz
1 rpm
0112 REF EXTERNA 2 Referencia externa REF2, en porcentaje. En función del uso, 100 % es la
velocidad máxima del motor, el par nominal del motor o la referencia
máxima de proceso.
1 = 0,1%
0113 LUGAR DE CONTROL Lugar de control activo. (0) LOCAL; (1) EXT1; (2) EXT2. Véase la
sección Control local frente a control externo en la página 99.1 = 1
0114 TIEMP MARCH(R) Contador de tiempo transcurrido de funcionamiento del convertidor, en
horas. El contador puede restaurarse pulsando simultáneamente los
botones ARRIBA y ABAJO cuando el panel de control se halla en el
Modo de Parámetros.
1 = 1 h
0115 CONT.kWh(R) Contador de kWh. El contador puede restaurarse pulsando
simultáneamente los botones ARRIBA y ABAJO cuando el panel de
control se halla en el Modo de Parámetros.
1 = 1 kWh
0120 EA1 Valor relativo de la entrada analógica EA1, en porcentaje. 1 = 0,1%
0121 EA2 Valor relativo de la entrada analógica EA2, en porcentaje. 1 = 0,1%
0124 SA1 Valor de la salida analógica SA, en mA. 1 = 0,1 mA
0126 SALIDA PID 1 Valor de salida del regulador de proceso PID1, en porcentaje. 1 = 0,1%
0127 SALIDA PID 2 Valor de salida del regulador de proceso PID2, en porcentaje. 1 = 0,1%
0128 PUNT CONSIG PID1 Señal de punto de consigna (referencia) para el regulador de proceso
PID1. La unidad depende de los ajustes de los parámetros 4006
UNIDADES,4007 ESCALA UNIDADES y 4027 SERIE PARAM PID1.
-
0129 PUNT CONSIG PID2 Señal de punto de consigna (referencia) para el regulador de proceso
PID2. La unidad depende de los ajustes de los parámetros 4106
UNIDADES y 4107 ESCALA UNIDADES.
-
0130 REALIM PID 1 Señal de realimentación para el regulador de proceso PID1. La unidad
depende de los ajustes de los parámetros 4006 UNIDADES,4007
ESCALA UNIDADES y 4027 SERIE PARAM PID1.
-
0131 REALIM PID 2 Señal de realimentación para el regulador de proceso PID2. La unidad
depende de los ajustes de los parámetros 4106 UNIDADES y 4107
ESCALA UNIDADES.
-
Señales actuales y parámetros
148
0132 DESVIACION PID 1 Desviación del regulador de proceso PID1, o sea, la diferencia entre el
valor de referencia y el actual. La unidad depende de los ajustes de los
parámetros 4006 UNIDADES,4007 ESCALA UNIDADES y 4027 SERIE
PARAM PID1.
-
0133 DESVIACION PID 2 Desviación del regulador de proceso PID2, o sea, la diferencia entre el
valor de referencia y el actual. La unidad depende de los ajustes de los
parámetros 4106 UNIDADES y 4107 ESCALA UNIDADES.
-
0134 COD SR COMUNIC Código de control de la salida de relé a través del bus de campo
(decimal). Véase el parámetro 1401 SALIDA RELE SR1. 1 = 1
0135 VALOR COMUNIC 1 Datos recibidos del bus de campo. 1 = 1
0136 VALOR COMUNIC 2 Datos recibidos del bus de campo. 1 = 1
0137 VAR PROCESO 1 Variable de proceso 1, definida por el grupo de parámetros 34
PANTALLA PANEL.-
0138 VAR PROCESO 2 Variable de proceso 2, definida por el grupo de parámetros 34
PANTALLA PANEL.-
0139 VAR PROCESO 3 Variable de proceso 3, definida por el grupo de parámetros 34
PANTALLA PANEL.-
0140 TIEMPO MARCHA Contador de tiempo transcurrido, en miles de horas. Funciona cuando el
convertidor está en marcha. No puede restaurarse. 1 = 0,01 kh
0141 CONT MWh Contador de MWh. No puede restaurarse. 1 = 1 MWh
0142 CTRL REVOLUCION Contador de revoluciones del motor, en millones de revoluciones. El
contador puede restaurarse pulsando simultáneamente los botones
ARRIBA y ABAJO cuando el panel de control se halla en el Modo de
Parámetros.
1 = 1 Mrev
0143 TIEM ON UNI ALT Tiempo de encendido del panel de control del convertidor, en días. No
puede restaurarse. 1 = 1 día
0144 TIEM ON UNI BAJ El tiempo de encendido del panel de control del convertidor, en registros
de 2 segundos (30 registros = 60 segundos). No puede restaurarse.
0145 TEMP MOTOR Temperatura medida del motor. La unidad depende del tipo de sensor,
seleccionado con los parámetros del grupo 35 TEMP MOT MED.1 = 1
0146 ANGULO MECANICO Ángulo mecánico calculado 1 = 1
0147 ATRAS MECANICO Revoluciones mecánicas, es decir, el número de revoluciones del eje
calculado por el generador de pulsos 1 = 1
0148 DETECTADO Z PLS Detector del pulso cero del generador 0 = no detectado, 1 = detectado. 1 = 1
0158 VALOR COM 1 PID Datos recibidos del bus de campo para el control PID (PID1 y PID2). 1 = 1
0159 VALOR COM 2 PID Datos recibidos del bus de campo para el control PID (PID1 y PID2). 1 = 1
0160 ESTADO ED 1-5 Estado de las entradas digitales. Ejemplo: 10.000 = ED1 activada, ED2 ...
ED5 desactivadas.
0161 FREC ENTR PULSO Valor de la entrada de frecuencia, en Hz. 1 = 1 Hz
0162 ESTADO SR Estado de la salida de relé. 1 = SR excitada, 0 = SR desexcitada. 1 = 1
0163 ESTADO ST Estado de la salida de transistor, cuando se utiliza como salida digital. 1 = 1
0164 FRECUENCIA ST Frecuencia de la salida de transistor, cuando se utiliza como salida de
frecuencia. 1 = 1 Hz
0165 VALOR TEMPOR Valor del temporizador para la marcha/paro programada. Véase el grupo
de parámetros 19 TEMPOR Y CONTADOR.1 = 0,01 s
Señales actuales
Nº Nombre/Valor Descripción FbEq
Señales actuales y parámetros
149
0166 VALOR CONTADOR Valor del contador de pulsos de la marcha/paro del contador. Véase el
grupo de parámetros 19 TEMPOR Y CONTADOR.1 = 1
0167 COD EST PROG SEC Código de estado de la programación de secuencias:
Bit 0 = ACTIVADO (1 = activado)
Bit 1 = INICIADO
Bit 2 = EN PAUSA
Bit 3 = VALOR LOGICO (la operación lógica está definida por los
parámetros 8406 ... 8410).
1 = 1
0168 ESTADO PROG SEC Estado activo de la programación de secuencias. 1 ... 8 = estado 1 ... 8. 1 = 1
0169 TEMPOR PROG SEC Contador de tiempo del estado actual de la programación de secuencias.
0170 VAL SA PROG SEC Valores de control de la salida analógica definidos por la programación
de secuencias. Véase el parámetro 8423 CONTR SAL EST 1. 1 = 0,1%
0171 CONT CICLOS SEC Contador de secuencia ejecutada en la programación de secuencias.
Véanse los parámetros 8415 LOC CONT CICLOS y 8416 RESET CONT
CICLO.
1 = 1
0172 PAR ABS Valor absoluto calculado del par motor, en porcentaje del par nominal del
motor 1 = 0,1%
03 SEÑALES ACT BC Códigos de datos para la supervisión de la comunicación del bus de
campo (sólo de lectura). Cada señal es un código de datos de 16 bits.
Los códigos de datos se visualizan en el panel en formato hexadecimal.
0301 COD ORDEN BC 1 Código de datos de 16 bits. Véase el apartado Perfil de comunicación
DCU en la página 274.
0302 COD ORDEN BC 2 Código de datos de 16 bits. Véase la sección Perfil de comunicación
DCU en la página 274.
0303 COD ESTADO BC 1 Código de datos de 16 bits. Véase el apartado Perfil de comunicación
DCU en la página 274.
0304 COD ESTADO BC 2 Código de datos de 16 bits. Véase la sección Perfil de comunicación
DCU en la página 274.
0305 CODIGO FALLO 1 Código de datos de 16 bits. Acerca de las posibles causas y soluciones y
equivalentes de bus de campo, véase el capítulo Análisis de fallos.
Bit 0 = SOBREINTENS.
Bit 1 = SOBRETENS.CC
Bit 2 = EXCES TEMP D
Bit 3 = CORTOCIRCUIT
Bit 4 = Reservado
Bit 5 = SUBTENS.CC
Bit 6 = FALLO EA1
Bit 7 = FALLO EA2
Bit 8 = EXC TEMP MOT
Bit 9 = PERD PANEL
Bit 10 = ERR MAR ID
Bit 11 = MOTOR BLOQ.
Bit 12 = Reservado
Bit 13 = FALLO EXT 1
Señales actuales
Nº Nombre/Valor Descripción FbEq
Señales actuales y parámetros
150
Bit 14 = FALLO EXT 2
Bit 15 = FALLO TIERRA
0306 CODIGO FALLO 2 Código de datos de 16 bits. Acerca de las posibles causas y soluciones y
equivalentes de bus de campo, véase el capítulo Análisis de fallos.
Bit 0 = BAJA CARGA
Bit 1 = FALLO TERM
Bits 2 ... 3 = Reservados
Bit 4 = MED INTENS
Bit 5 = FASE RED
Bit 6 = ENCODER
Bit 7 = SOBREVELOC
Bit 8 = Reservado
Bit 9 = ID UNIDAD
Bit 10 = ARCHIVO CONF
Bit 11 = ERR SERIE 1
Bit 12 = ARCH CON BCI. Error de lectura del archivo de configuración.
Bit 13 = FORZAR DISP.
Bit 14 = FASE MOTOR
Bit 15 = CABLEADO SAL
0307 CODIGO FALLO 3 Código de datos de 16 bits. Acerca de las posibles causas y soluciones y
equivalentes de bus de campo, véase el capítulo Análisis de fallos.
Bits 0 ... 2 = Reservados
Bit 3 = INCOMPATIBLE SW
Bits 4 ... 10 = Reservados
Bit 11 = MMIO ID ERROR
Bit 12 = DSP STACK ERROR
Bit 13 = DSP T1...T3 OVERLOAD
Bit 14 = SERF CORRUPT / SERF MACRO
Bit 15 = PAR PCU 1/2 / PAR HZRPM / PAR ESCAL EA / PAR ESCAL SA
/ PAR FBUS C / PAR U/F ADAPTADA
0308 CODIGO ALARMA 1 Código de datos de 16 bits. Acerca de las posibles causas y soluciones y
equivalentes de bus de campo, véase el capítulo Análisis de fallos.
Se puede restaurar una alarma restaurando todo el código de alarma:
escriba cero en el código.
Bit 0 = SOBREINTENS.
Bit 1 = SOBRETENSION
Bit 2 = SUBTENSION
Bit 3 = DIRLOCK
Bit 4 = IO COMM
Bit 5 = FALLO EA1
Bit 6 = FALLO EA2
Bit 7 = PERD PANEL
Señales actuales
Nº Nombre/Valor Descripción FbEq
Señales actuales y parámetros
151
Bit 8 = EXCES TEMP D
Bit 9 = TEMP MOTOR
Bit 10 = BAJA CARGA
Bit 11 = MOTOR BLOQ.
Bit 12 = AUTORESET
Bits 13 ... 15 = Reservados
0309 CODIGO ALARMA 2 Código de datos de 16 bits. Acerca de las posibles causas y soluciones y
equivalentes de bus de campo, véase el capítulo Análisis de fallos.
Se puede restaurar una alarma restaurando todo el código de alarma:
escriba cero en el código.
Bit 0 = Reservado
Bit 1 = DORMIR PID
Bit 2 = MARCHA ID
Bit 3 = Reservado
Bit 4 = START ENABLE 1 MISSING
Bit 5 = START ENABLE 2 MISSING
Bit 6 = EMERGENCY STOP
Bit 7 = ENCODER
Bit 8 = FIRST START
Bit 9 = INPUT PHASE LOSS
Bits 10 ... 15 = Reservados
04 HISTORIAL FALLOS Historial de fallos (sólo de lectura).
0401 ULTIMO FALLO Código del último fallo. Véase el capítulo Análisis de fallos para obtener
los códigos. 0 = El historial de fallos está vacío (en el panel = NO
RECORD).
1 = 1
0402 TIEM FALLO 1 Día en que se produjo el último fallo.
Formato: Una fecha si funciona el reloj de tiempo real. / El número de
días tras la puesta en marcha si no se utiliza o no se ha ajustado el reloj
de tiempo real.
1 = 1 día
0403 TIEM FALLO 2 Hora en que se produjo el último fallo.
Formato en el panel asistente: Hora real (hh:mm:ss) si el reloj de tiempo
real funciona. / El tiempo tras la puesta en marcha (hh:mm:ss menos los
días indicados por la señal 0402 TIEM FALLO 1) si no se utiliza o no se
ha ajustado el reloj de tiempo real.
Formato en el panel básico: tiempo transcurrido desde el encendido en
registros de 2 segundos (menos los días enteros indicados por la señal
0402 TIEM FALLO 1). 30 registros = 60 segundos. P. ej., el valor 514
equivale a 17 minutos y 8 segundos (= 514/30).
0404 VELOC EN FALLO La velocidad del motor, en rpm, en el momento en que se produjo el
último fallo. 1 = 1 rpm
0405 FREC EN FALLO La frecuencia, en Hz, en el momento en que se produjo el último fallo. 1 = 0,1 Hz
0406 TENSION EN FALLO La tensión del circuito intermedio, en V CC, en el momento en que se
produjo el último fallo. 1 = 0,1 V
0407 INTENS EN FALLO La intensidad del motor, en A, en el momento en que se produjo el último
fallo. 1 = 0,1 A
Señales actuales
Nº Nombre/Valor Descripción FbEq
Señales actuales y parámetros
152
0408 PAR EN FALLO El par del motor, en porcentaje del par nominal del motor, en el momento
en que se produjo el último fallo. 1 = 0,1%
0409 ESTADO EN FALLO Estado del convertidor, en formato hexadecimal, en el momento en que
se produjo el último fallo
0412 FALLO ANTERIOR 1 Código de fallo del segundo último fallo. Véase el capítulo Análisis de
fallos para obtener los códigos. 1 = 1
0413 FALLO ANTERIOR 2 Código de fallo del tercer último fallo. Véase el capítulo Análisis de fallos
para obtener los códigos. 1 = 1
0414 ED 1-5 EN FALLO Estado de las entradas digitales ED1 ... 5 en el momento en que se
produjo el último fallo (binario).
Señales actuales
Nº Nombre/Valor Descripción FbEq
Señales actuales y parámetros
153
Parámetros – lista de formas cortas
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
10 MARCHA/PARO/DIR Los orígenes para el control externo de marcha, paro y
dirección.
1001 COMANDOS EXT1 Define las conexiones y el origen de los comandos de marcha,
paro y dirección para el lugar de control externo 1 (EXT1).
ED1,2
1002 COMANDOS EXT2 Define las conexiones y el origen de los comandos de marcha,
paro y dirección para el lugar de control externo 2 (EXT2).
SIN SEL
1003 DIRECCION Permite el control de la dirección de giro del motor o fija la
dirección.
PETICION
1010 SEL LENTITUD Define la señal que activa la función de avance lento. SIN SEL
11 SELEC REFERENCIA Tipo de referencia de panel, selección del lugar de control
externo y orígenes y límites de referencia externa.
1101 SELEC REF PANEL Selecciona el tipo de la referencia en modo de control local. REF1
1102 SELEC EXT1/EXT2 Define el origen del cual el convertidor lee la señal que
selecciona entre los dos lugares de control externo, EXT1 o
EXT2.
EXT1
1103 SELEC REF1 Selecciona la fuente de la señal para la referencia externa
REF1.
EA1
1104 REF1 MINIMO Define el valor mínimo para la referencia externa REF1. 0
1105 REF1 MAXIMO Define el valor máximo para la referencia externa REF1. Eur.: 50 / USA:
60
1106 SELEC REF2 Selecciona la fuente de la señal para la referencia externa
REF2.
EA2
1107 REF2 MINIMO Define el valor mínimo para la referencia externa REF2. 0
1108 REF2 MAXIMO Define el valor máximo para la referencia externa REF2. 100
12 VELOC CONSTANTES Selección y valores de velocidad constante.
1201 SEL VELOC CONST Activa las velocidades constantes o selecciona la señal de
activación.
ED3,4
1202 VELOC CONST 1 Define la velocidad constante 1 (o la frecuencia de salida del
convertidor).
Eur.: 5 /
USA: 6
1203 VELOC CONST 2 Define la velocidad constante 2 (o la frecuencia de salida del
convertidor).
Eur.: 10 / USA:
12
1204 VELOC CONST 3 Define la velocidad constante 3 (o la frecuencia de salida del
convertidor).
Eur.: 15 / USA:
18
1205 VELOC CONST 4 Define la velocidad constante 4 (o la frecuencia de salida del
convertidor).
Eur.: 20 / USA:
24
1206 VELOC CONST 5 Define la velocidad constante 5 (o la frecuencia de salida del
convertidor).
Eur.: 25 / USA:
30
1207 VELOC CONST 6 Define la velocidad constante 6 (o la frecuencia de salida del
convertidor).
Eur.: 40 / USA:
48
1208 VELOC CONST 7 Define la velocidad constante 7 (o la frecuencia de salida del
convertidor).
Eur.: 50 / USA:
60
1209 SEL MODO TEMP Selecciona una velocidad activada por función temporizada en
uso cuando la selección del parámetro 1201 SEL VELOC
CONST es FUNC TEMP1&2.
VC1/2/3/4
13 ENTRADAS ANALOG Proceso de las señales de entradas analógicas.
1301 MINIMO EA1 Define el % mínimo que corresponde al mínimo de la señal mA/
(V) para la entrada analógica EA1.
0,01
1302 MAXIMO EA1 Define el % máximo que corresponde al máximo de la señal
mA/(V) para la entrada analógica EA1.
100
1303 FILTRO EA1 Define la constante de tiempo de filtro para la entrada analógica
EA1, es decir, el tiempo que se tarda en alcanzar el 63 % de un
cambio en escalón.
0,1
1304 MINIMO EA2 Define el % mínimo que corresponde al mínimo de la señal mA/
(V) para la entrada analógica EA2.
0,01
Señales actuales y parámetros
154
1305 MAXIMO EA2 Define el % máximo que corresponde al máximo de la señal
mA/(V) para la entrada analógica EA2.
100
1306 FILTRO EA2 Define la constante de tiempo de filtro para la entrada analógica
EA2.
0,1
14 SALIDAS DE RELE Información de estado indicada a través de las salidas de relé y
las demoras de funcionamiento del relé.
1401 SALIDA RELE SR1 Selecciona un estado del convertidor indicado a través de la
salida de relé SR.
FALLO (-1)
1404 RETAR ON SR1 Define la demora de funcionamiento para la salida de relé SR. 0
1405 RETAR OFF SR1 Define el retardo de liberación para la salida de relé SR. 0
15 SALIDAS ANALOG Selección de las señales actuales que se indicarán a través de
las salidas analógicas y proceso de las señales de salida.
1501 SEL CONTENID SA1 Conecta una señal del convertidor a la salida analógica SA. 103
1502 CONT SA1 MIN Define el valor mínimo para la señal seleccionada con el
parámetro 1501 SEL CONTENID SA1.
-
1503 CONT SA1 MAX Define el valor máximo para la señal seleccionada con el
parámetro 1501 SEL CONTENID SA1.
-
1504 MINIMO SA1 Define el valor mínimo de la señal de salida analógica SA. 0
1505 MAXIMO SA1 Define el valor máximo para la señal de salida analógica SA. 20
1506 FILTRO SA1 Define la constante de tiempo de filtro para la salida analógica
SA es decir, el tiempo que se tarda en alcanzar el 63% de un
cambio en escalón.
0,1
16 CONTROLES
SISTEMA Permiso de marcha, bloqueo de parámetros, etc.
1601 PERMISO MARCHA Selecciona el origen para la señal externa de Permiso marcha. SIN SEL
1602 BLOQUEO PARAM Selecciona el estado del bloqueo de parámetros. ABIERTO
1603 CODIGO ACCESO Selecciona el código de acceso para el bloqueo de parámetros. 0
1604 SEL REST FALLO Selecciona el origen de la señal de restauración de fallos. PANEL
1605 CAMB AJ PAR USU Activa el cambio de la serie de parámetros de usuario a través
de una entrada digital.
SIN SEL
1606 BLOQUEO LOCAL Inhabilita la entrada en modo de control local o selecciona el
origen para la señal de bloqueo del modo de control local.
SIN SEL
1607 SALVAR PARAM Guarda los valores válidos de los parámetros en la memoria
permanente.
REALIZADO
1608 PERMISO DE INI 1 Selecciona la fuente de la señal de Permiso de inicio 1. SIN SEL
1609 PERMISO DE INI 2 Selecciona la fuente de la señal de Permiso de inicio 2. SIN SEL
1610 ALARMAS PANEL Activa/Desactiva las alarmas. NO
1611 VISTA PARAMETROS Selecciona la vista de parámetros, es decir, qué parámetros se
muestran.
DE DEFECTO
18 ENT FREC Y SAL TRA Procesamiento de la señal de entrada de frecuencia y salida de
transistor.
1801 FREC ENTRADA MIN Define el valor mínimo de entrada cuando se usa ED5 como
entrada de frecuencia.
0
1802 FREC ENTRADA MAX Define el valor máximo de entrada cuando se usa ED5 como
entrada de frecuencia.
1000
1803 ENTR FREC FILTRO Define la constante de tiempo de filtro para la entrada de
frecuencia.
0,1
1804 MODO ST Selecciona el modo de funcionamiento para la salida de
transistor ST.
DIGITAL
1805 SEÑAL SD Selecciona un estado del convertidor indicado a través de la
salida digital SD.
FALLO(-1)
1806 RETAR ON SD Define la demora de funcionamiento para la salida digital SD. 0
1807 RETAR OFF SD Define la demora de liberación para la salida digital SD. 0
1808 SEL CONTENID SF Selecciona una señal del convertidor para conectarla a la salida
de frecuencia SF.
104
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
155
1809 CONT SF MIN Define el valor mínimo de la señal de salida de frecuencia SF. -
1810 CONT SF MAX Define el valor máximo de la señal de salida de frecuencia SF. -
1811 MINIMO SF Define el valor mínimo para la salida de frecuencia SF. 10
1812 MAXIMO SF Define el valor máximo para la salida de frecuencia SF. 1000
1813 FILTRO SF Define la constante de tiempo de filtro para la salida de
frecuencia SF.
0,1
19 TEMPOR Y
CONTADOR Temporizador y contador para el control de la puesta en marcha
y el paro
1901 DEMORA TEMPORIZ Define la demora para el temporizador. 10
1902 INICIO TEMPORIZ Selecciona el origen para la señal de inicio del temporizador. SIN SEL
1903 RESET TEMPORIZ Selecciona el origen para la señal de restauración del
temporizador.
SIN SEL
1904 ACTIVAR CONTADOR Selecciona el origen para la señal de activación del contador.
DESACTIVADO
1905 LIMITE CONTADOR Define el límite del contador. 1000
1906 ENTRADA CONTADOR Selecciona la fuente de la señal para el contador. EN PLS(ED 5)
1907 RESET CONTADOR Selecciona la fuente para la señal de restauración del contador. SIN SEL
1908 VALOR RES CONT Define el valor del contador tras una restauración. 0
1909 DIVISOR CONTADOR Define el divisor para el contador de pulsos. 0
1910 DIRECCION CONT Define el origen para la selección de dirección del contador. ARRIBA
1911 ORDEN M/P CONT Selecciona el origen para la orden de marcha/paro del
convertidor cuando el valor del parámetro 1001 COMANDOS
EXT1 está ajustado a INIC CONTAD / PARO CONTAD.
SIN SEL
20 LIMITES Límites de funcionamiento del convertidor.
2001 VELOCIDAD MINIMA Define la velocidad mínima permitida. 0
2002 VELOCIDAD MAXIMA Defines la velocidad máxima permitida. Eur.: 1500 /
USA: 1800
2003 INTENSID MAXIMA Define la intensidad máxima permitida del motor. 1,8 • I2N
2005 CTRL SOBRETENS Activa o desactiva el control de sobretensión del bus intermedio
de CC.
ACTIVAR
2006 CTRL SUBTENSION Activa o desactiva el control de subtensión del bus de CC
intermedio.
ACT(TIEMPO)
2007 FRECUENCIA MIN Define el límite mínimo de la frecuencia de salida del
convertidor.
0
2008 FRECUENCIA MAX Define el límite máximo para la frecuencia de salida del
convertidor.
Eur.: 50 /
USA: 60
2013 SEL PAR MINIMO Selecciona el límite de par mínimo para el convertidor. PAR MIN 1
2014 SEL PAR MAXIMO Selecciona el límite de par máximo para el convertidor. PAR MAX 1
2015 PAR MIN 1 Define el límite de par mínimo 1 para el convertidor. -300
2016 PAR MIN 2 Define el límite de par mínimo 2 para el convertidor. -300
2017 PAR MAX 1 Define el límite de par máximo 1 para el convertidor. 300
2018 PAR MAX 2 Define el límite de par máximo 2 para el convertidor. 300
2019 CHOPPER FRENADO Parámetro quitado en la versión del software 2.51b y
posteriores.
2020 CHOPPER FRENADO Selecciona el control del chopper de frenado. INTERNO
21 MARCHA/PARO Modos de marcha y paro del motor.
2101 FUNCION MARCHA Selecciona el método de puesta en marcha del motor. AUTO
2102 FUNCION PARO Selecciona la función de paro del motor. PARO LIBRE
2103 TIEMPO MAGN CC Define el tiempo de premagnetización. 0,3
2104 RETENCION POR CC Activa la función de retención por CC o de frenado por CC. SIN SEL
2105 VELOC RETENC CC Define la velocidad de retención por CC. 5
2106 REF INTENS CC Define la intensidad de retención por CC. 30
2107 TIEM FRENADO CC Define el tiempo de frenado por CC. 0
2108 INHIBIR MARCHA Activa la función de inhibición de marcha. NO
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
156
2109 SEL PARO EM Selecciona el origen de la orden de paro de emergencia
externa.
SIN SEL
2110 INTENS SOBREPAR Define la intensidad máxima suministrada durante el sobrepar. 100
2111 RETAR SEÑAL PARO Define la demora de la señal de paro cuando el parámetro 2102
FUNCION PARO está ajustado a COMP VELOC.
0
2112 RETAR VELOC CERO Define la demora para la función Retardo de velocidad cero. 0
22 ACEL/DECEL Tiempos de aceleración y deceleración.
2201 SEL ACE/DEC 1/2 Define el origen del cual el convertidor lee la señal que
selecciona entre las dos parejas de rampas.
ED5
2202 TIEMPO ACELER 1 Define el tiempo de aceleración 1. 5
2203 TIEMPO DESAC 1 Define el tiempo de deceleración 1. 5
2204 TIPO RAMPA 1 Selecciona la forma de la rampa de aceleración/deceleración 1. 0
2205 TIEMPO ACELER 2 Define el tiempo de aceleración 2. 60
2206 TIEMPO DESAC 2 Define el tiempo de deceleración 2. 60
2207 TIPO RAMPA 2 Selecciona la forma de la rampa de aceleración/deceleración 2. 0
2208 TIEMPO DESAC EM Define el tiempo que el convertidor tarda en pararse si se activa
un paro de emergencia.
1
2209 ENTRADA RAMPA 0 Define el origen para forzar la entrada de rampa a cero. SIN SEL
23 CTRL VELOCIDAD Variables del regulador de velocidad.
2301 GANANCIA PROP Define una ganancia relativa para el regulador de velocidad. 10
2302 TIEMP INTEGRAC. Define un tiempo de integración para el regulador de velocidad. 39204
2303 TIEMP DERIVACION Define el tiempo de derivación para el regulador de velocidad. 0
2304 COMPENSACION ACE Define el tiempo de derivación para la compensación de
aceleración/(deceleración).
0
2305 MARCHA AUTOAJUST Iniciar el ajuste automático del regulador de velocidad. NO
24 CTRL PAR Variables de control del par.
2401 AUMENT RAMPA PAR Define el tiempo de aumento de rampa de la referencia de par. 0
2402 DISMIN RAMPA PAR Define el tiempo de disminución de rampa de la referencia de
par.
0
25 VELOC CRITICAS Franjas de velocidad en las que el convertidor no puede
funcionar.
2501 SEL VEL CRITICA Activa/desactiva la función de velocidades críticas. NO
2502 VELOC CRIT 1 BAJ Define el límite mínimo para el intervalo de velocidad/frecuencia
crítica 1.
0
2503 VELOC CRIT 1 ALT Define el límite máximo para el intervalo de velocidad/
frecuencia crítica 1.
0
2504 VELOC CRIT 2 BAJ Véase el parámetro 2502 VELOC CRIT 1 BAJ. 0
2505 VELOC CRIT 2 ALT Véase el parámetro 2503 VELOC CRIT 1 ALT. 0
2506 VELOC CRIT 3 BAJ Véase el parámetro 2502 VELOC CRIT 1 BAJ. 0
2507 VELOC CRIT 3 ALT Véase el parámetro 2503 VELOC CRIT 1 ALT. 0
26 CONTROL MOTOR Variables de control del motor.
2601 OPTIMIZAC FLUJ Activa/desactiva la función de optimización de flujo. NO
2602 FRENADO FLUJO Activa/desactiva la función de frenado por flujo. NO
2603 TENS COMP IR Define el sobrepar de tensión de salida a velocidad cero
(compensación IR).
Varía
2604 FREC COMP IR Define la frecuencia en la que la compensación IR es 0 V. 80
2605 RELACION U/F Selecciona la relación entre tensión y frecuencia (cociente U/f)
por debajo del punto de debilitamiento de campo.
LINEAL
2606 FREC CONMUTACION Define la frecuencia de conmutación del convertidor. 4
2607 CTRL FREC CONMUT Activa el control de la frecuencia de conmutación. SI
2608 RATIO COMP DESL Define la ganancia de deslizamiento para el control de
compensación de deslizamiento del motor.
0
2609 SUAVIZAR RUIDO Activa la función de suavización de ruido. DESACTIVAR
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
157
2610 U1 DEFIN USUAR Define el primer punto de tensión de la curva U/f personalizada
a la frecuencia definida por el parámetro 2611.
F1 DEFIN
USUAR
2611 F1 DEFIN USUAR Define el primer punto de frecuencia de la curva U/f
personalizada.
10
2612 U2 DEFIN USUAR Define el segundo punto de tensión de la curva U/f
personalizada a la frecuencia definida por el parámetro 2613.
F2 DEFIN
USUAR
2613 F2 DEFIN USUAR Define el segundo punto de frecuencia de la curva U/f
personalizada.
20
2614 U3 DEFIN USUAR Define el tercer punto de tensión de la curva U/f personalizada
a la frecuencia definida por el parámetro 2615.
F3 DEFIN
USUAR
2615 F3 DEFIN USUAR Define el tercer punto de frecuencia de la curva U/f
personalizada.
25
2616 U4 DEFIN USUAR Define el cuarto punto de tensión de la curva U/f personalizada
a la frecuencia definida por el parámetro 2617.
F4 DEFIN
USUAR
2617 F4 DEFIN USUAR Define el cuarto punto de frecuencia de la curva U/f
personalizada.
40
2618 TENSION DC Define la tensión de la curva U/f cuando la frecuencia es igual o
superior a la frecuencia nominal del motor (9907 FREC NOM
MOTOR).
95% de UN
29 DISP
MANTENIMIENTO Disparadores de mantenimiento.
2901 DISP VENT REFRIG Define el punto de disparo para el contador de tiempo de
funcionamiento del ventilador de refrigeración.
0
2902 ACT VENT REFRIG Define el valor actual para el contador de tiempo de
funcionamiento del ventilador de refrigeración.
0
2903 DISP REVOLUCION Define el punto de disparo para el contador de revoluciones del
motor.
0
2904 ACT REVOLUCION Define el valor actual del contador de revoluciones del motor. 0
2905 DISP TIEM MARCH Define el punto de disparo para el contador de funcionamiento
del convertidor.
0
2906 ACT TIEM MARCH Define el valor actual para el contador de tiempo de
funcionamiento del convertidor.
0
2907 DISP MWh USUARIO Define el punto de disparo para el contador de consumo de
potencia del convertidor.
0
2908 ACT MWh USUARIO Define el valor actual del contador de consumo de potencia del
convertidor.
0
30 FUNCIONES FALLOS Funciones de protección programables.
3001 EA<FUNCION MIN Selecciona cómo reacciona el convertidor cuando una señal de
entrada analógica cae por debajo del nivel mínimo ajustado.
SIN SEL
3002 ERROR COM PANEL Selecciona cómo reacciona el convertidor a un fallo de
comunicación del panel de control.
FALLO
3003 FALLO EXTERNO 1 Selecciona una interfase para una señal de fallo externo 1. SIN SEL
3004 FALLO EXTERNO 2 Selecciona una interfase para una señal de fallo externo 2. SIN SEL
3005 PROT TERMIC MOT Selecciona cómo reacciona el convertidor cuando se detecta un
sobrecalentamiento del motor.
FALLO
3006 TIEMPO TERM MOT Define la constante de tiempo térmico para el modelo térmico
del motor.
500
3007 CURVA CARGA MOT Define la curva de carga junto con los parámetros 3008 CARGA
VEL CERO y 3009 PUNTO RUPTURA.
100
3008 CARGA VELOC CERO Define la curva de carga junto con los parámetros 3007 CURVA
CARGA MOT y 3009 PUNTO RUPTURA.
70
3009 PUNTO RUPTURA Define la curva de carga junto con los parámetros 3007 CURVA
CARGA MOT y 3008 CARGA VEL CERO.
35
3010 FUNCION BLOQUEO Selecciona cómo reacciona el convertidor a un estado de
bloqueo del motor.
SIN SEL
3011 FREC DE BLOQUEO Define el límite de frecuencia para la función de bloqueo. 20
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
158
3012 TIEMPO BLOQUEO Define el tiempo para la función de bloqueo. 20
3013 FUNC BAJA CARGA Selecciona cómo reacciona el convertidor a la baja carga. SIN SEL
3014 TIEM BAJA CARGA Define el límite de tiempo para la función de baja carga. 20
3015 CURVA SUBCARGA Selecciona la curva de subcarga para la función de baja carga. 1
3016 FASE RED Selecciona cómo reacciona el convertidor ante una pérdida de
fase de la alimentación, es decir, cuando el rizado de tensión
CC es excesivo.
FALLO
3017 FALLO TIERRA Selecciona cómo reacciona el convertidor cuando se detecta un
fallo a tierra en el motor o cable de motor.
ACTIVAR
3018 FUNC FALLO COMUN Selecciona cómo reacciona el convertidor a un fallo de
comunicación del bus de campo.
SIN SEL
3019 TIEM FALLO COMUN Define la demora de tiempo para la supervisión de fallo de
comunicación del bus de campo.
3
3021 EA1 FALLO LIMIT Define un nivel de fallo para la entrada analógica EA1. MINIMO EA1
3022 EA2 FALLO LIMIT Define un nivel de fallo para la entrada analógica EA2. MINIMO EA2
3023 FALLO CABLE Selecciona cómo reacciona el convertidor cuando se detecta
una conexión incorrecta de los cables a motor y de
alimentación.
ACTIVAR
31 REARME AUTOMATIC Restauración automática de fallos.
3101 NUM TENTATIVAS Define el número de restauraciones automáticas de fallos que
efectúa el convertidor dentro del período definido por el
parámetro 3102 TIEM TENTATIVAS.
0
3102 TIEM TENTATIVAS Define el tiempo para la función de restauración de fallos
automática.
30
3103 TIEMPO DEMORA Define el tiempo de espera del convertidor tras un fallo antes de
intentar una restauración automática.
0
3104 SOBREINTENS AR Activa/desactiva la restauración automática para el fallo de
sobreintensidad.
DESACTIVAR
3105 SOBRETENSION AR Activa/desactiva la restauración automática para el fallo de
sobretensión del enlace intermedio.
DESACTIVAR
3106 SUBTENSION AR Activa/desactiva la restauración automática para el fallo de
subtensión del enlace intermedio.
DESACTIVAR
3107 EA AR <MIN Activa/desactiva la restauración automática para el fallo
EA<MIN.
DESACTIVAR
3108 FALLO EXTERNO AR Activa/desactiva la restauración automática para el FALLO
EXTERNO 1/2.
DESACTIVAR
32 SUPERVISION Supervisión de señales. El estado de supervisión se puede
monitorizar con una salida de relé o de transistor.
3201 PARAM SUPERV 1 Selecciona la primera señal supervisada. 103
3202 LIM SUPER 1 BAJ Define el límite inferior para la primera señal supervisada
seleccionada por el parámetro 3201 PARAM SUPERV 1.
-
3203 LIM SUPER 1 ALT Define el límite superior para la primera señal supervisada
seleccionada por el parámetro 3201 PARAM SUPERV 1.
-
3204 PARAM SUPERV 2 Selecciona la segunda señal supervisada. 104
3205 LIM SUPER 2 BAJ Define el límite inferior para la segunda señal supervisada
seleccionada por el parámetro 3204 PARAM SUPERV 2.
-
3206 LIM SUPER 2 ALT Define el límite superior para la segunda señal supervisada
seleccionada por el parámetro 3204 PARAM SUPERV 2.
-
3207 PARAM SUPERV 3 Selecciona la tercera señal supervisada. 105
3208 LIM SUPER 3 BAJ Define el límite inferior para la tercera señal supervisada
seleccionada por el parámetro 3207 PARAM SUPERV 3.
-
3209 LIM SUPER 3 ALT Define el límite superior para la tercera señal supervisada
seleccionada por el parámetro 3207 PARAM SUPERV 3.
-
33 INFORMACION Versión del paquete de firmware, fecha de prueba, etc.
3301 VERSION DE FW Muestra la versión del paquete de firmware.
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
159
3302 PAQUETE DE CARGA Muestra la versión del paquete de carga. Depende del
tipo
3303 FECHA PRUEBA Muestra la fecha de prueba. 00.00
3304 ESPECIF UNIDAD Muestra las especificaciones de tensión e intensidad del
convertidor.
0x0000
3305 TABLA PARAMETROS Muestra la versión de la tabla de parámetros utilizada en el
convertidor.
34 PANTALLA PANEL Selección de las señales actuales que se visualizarán en el
panel.
3401 PARAM SEÑAL 1 Selecciona la primera señal a visualizar en el panel de control
cuando está en Modo de Visualización.
103
3402 SEÑAL1 MIN Define el valor mínimo para la señal seleccionada con el
parámetro 3401 PARAM SEÑAL 1.
-
3403 SEÑAL1 MAX Define el valor máximo para la señal seleccionada con el
parámetro 3401 PARAM SEÑAL 1.
-
3404 FORM DSP SALIDA1 Define el formato para la señal visualizada (seleccionada con el
parámetro 3401 PARAM SEÑAL1).
DIRECTO
3405 UNIDAD SALIDA1 Selecciona la unidad para la señal visualizada, seleccionada
con el parámetro 3401 PARAM SEÑAL1.
Hz
3406 SALIDA1 MIN Ajusta el valor mínimo de visualización para la señal
seleccionada con el parámetro 3401 PARAM SEÑAL 1.
-
3407 SALIDA1 MAX Ajusta el valor máximo de visualización para la señal
seleccionada con el parámetro 3401 PARAM SEÑAL 1.
-
3408 PARAM SEÑAL2 Selecciona la segunda señal a visualizar en el panel de control
cuando está en Modo de Visualización.
104
3409 SEÑAL2 MIN Define el valor mínimo para la señal seleccionada con el
parámetro 3408 PARAM SEÑAL2.
-
3410 SEÑAL2 MAX Define el valor máximo para la señal seleccionada con el
parámetro 3408 PARAM SEÑAL2.
-
3411 FORM DSP SALIDA2 Define el formato para la señal visualizada, seleccionada con el
parámetro 3408 PARAM SEÑAL2.
DIRECTO
3412 UNIDAD SALIDA2 Selecciona la unidad para la señal visualizada, seleccionada
con el parámetro 3408 PARAM SEÑAL2.
-
3413 SALIDA2 MIN Ajusta el valor mínimo de visualización para la señal
seleccionada con el parámetro 3408 PARAM SEÑAL2.
-
3414 SALIDA2 MAX Ajusta el valor máximo de visualización para la señal
seleccionada con el parámetro 3408 PARAM SEÑAL2.
-
3415 PARAM SEÑAL3 Selecciona la tercera señal a visualizar en el panel de control
cuando está en Modo de Visualización.
105
3416 SEÑAL3 MIN Define el valor mínimo para la señal seleccionada con el
parámetro 3415.
-
3417 SEÑAL3 MAX Define el valor máximo para la señal seleccionada con el
parámetro 3415 PARAM SEÑAL3.
-
3418 FORM DSP SALIDA3 Define el formato para la señal visualizada, seleccionada con el
parámetro 3415 PARAM SEÑAL3.
DIRECTO
3419 UNIDAD SALIDA3 Selecciona la unidad para la señal visualizada, seleccionada
con el parámetro 3415 PARAM SEÑAL3.
-
3420 SALIDA3 MIN Ajusta el valor mínimo de visualización para la señal
seleccionada con el parámetro 3415 PARAM SEÑAL3.
-
3421 SALIDA3 MAX Ajusta el valor máximo de visualización para la señal
seleccionada con el parámetro 3415 PARAM SEÑAL3.
-
35 TEMP MOT MED Medición de la temperatura del motor.
3501 TIPO DE SENSOR Activa la función de medición de la temperatura del motor y
selecciona el tipo de sensor.
NINGUNA
3502 SELEC DE ENTRADA Selecciona el origen para la señal de medición de la
temperatura del motor.
EA1
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
160
3503 LIMITE DE ALARMA Define el límite de alarma para la medición de temperatura del
motor.
0
3504 LIMITE DE FALLO Define el límite de disparo por fallo para la medición de
temperatura del motor.
0
3505 EXCITACIÓN AO Activa el suministro de intensidad desde la salida analógica SA. INACTIVO
36 FUNCIONES TEMP Periodos de tiempo 1 a 4 y señal de refuerzo.
3601 HABILITAR TEMPOR Selecciona la fuente para la señal de habilitación de la función
temporizada.
SIN SEL
3602 HORA DE INICIO 1 Define la hora diaria para la puesta en marcha 1. 0
3603 HORA DE PARO 1 Define la hora diaria de paro 1. 0
3604 DIA DE INICIO 1 Define el día de inicio 1. LUNES
3605 DIA DE PARO 1 Define el día de paro 1. LUNES
3606 HORA DE INICIO 2 Véase el parámetro 3602 HORA DE INICIO 1.
3607 HORA DE PARO 2 Véase el parámetro 3603 HORA DE PARO 1.
3608 DIA DE INICIO 2 Véase el parámetro 3604 DIA DE INICIO 1.
3609 DIA DE PARO 2 Véase el parámetro 3605 DIA DE PARO 1.
3610 HORA DE INICIO 3 Véase el parámetro 3602 HORA DE INICIO 1.
3611 HORA DE PARO 3 Véase el parámetro 3603 HORA DE PARO 1.
3612 DIA DE INICIO 3 Véase el parámetro 3604 DIA DE INICIO 1.
3613 DIA DE PARO 3 Véase el parámetro 3605 DIA DE PARO 1.
3614 HORA DE INICIO 4 Véase el parámetro 3602 HORA DE INICIO 1.
3615 HORA DE PARO 4 Véase el parámetro 3603 HORA DE PARO 1.
3616 DIA DE INICIO 4 Véase el parámetro 3604 DIA DE INICIO 1.
3617 DIA DE PARO 4 Véase el parámetro 3605 DIA DE PARO 1.
3622 SEL REFORZ Selecciona el origen de la señal de activación del refuerzo. SIN SEL
3623 TIEMPO REFORZ Define el tiempo en el cual se desactiva el refuerzo tras la
desconexión de la señal de activación del refuerzo.
0
3626 FUEN FUNC TEMP 1 Selecciona los periodos de tiempo para FUEN FUNC TEMP 1. SIN SEL
3627 FUEN FUNC TEMP 2 Véase el parámetro 3626 FUEN FUNC TEMP 1.
3628 FUEN FUNC TEMP 3 Véase el parámetro 3626 FUEN FUNC TEMP 1.
3629 FUEN FUNC TEMP 4 Véase el parámetro 3626 FUEN FUNC TEMP 1.
40 CONJ PID PROCESO 1 La serie 1 de parámetros de control de proceso PID (PID1).
4001 GANANCIA Define la ganancia para el regulador PID de proceso. 1
4002 TIEMP INTEGRAC. Define el tiempo de integración para el regulador PID1 de
proceso.
60
4003 TIEMP DERIVACION Define el tiempo de derivación para el regulador PID de
proceso.
0
4004 FILTRO DERIV PID Define la constante de tiempo de filtro para la parte de derivada
del regulador PID de proceso.
1
4005 INV VALOR ERROR Selecciona la relación entre la señal de realimentación y la
velocidad del convertidor.
NO
4006 UNIDADES Selecciona la unidad para los valores actuales del regulador
PID.
%
4007 ESCALA UNIDADES Define la posición de la coma decimal para el parámetro de
visualización seleccionado con el parámetro 4006 UNIDADES.
1
4008 VALOR 0% Define, junto con el parámetro 4009 VALOR 100%, el escalado
aplicado a los valores actuales del regulador PID.
0
4009 VALOR 100% Define, junto con el parámetro 4008 VALOR 0%, el escalado
aplicado a los valores actuales del regulador PID.
100
4010 SEL PUNTO CONSIG Define el origen para la señal de referencia del regulador PID
de proceso.
EA1
4011 PUNTO CONSIG INT Selecciona un valor constante como referencia del regulador
PID de proceso, cuando el parámetro 4010 SEL PUNTO
CONSIG está ajustado a INTERNO.
40
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
161
4012 PUNTO CONSIG MIN Define el valor mínimo para la fuente de la señal de referencia
PID seleccionada.
0
4013 PUNTO CONSIG MAX Define el valor máximo para la fuente de la señal de referencia
PID seleccionada.
100
4014 SEL REALIM Selecciona el valor actual de proceso (señal de realimentación)
para el regulador PID de proceso.
ACT1
4015 MULTIPLIC REALIM Define un multiplicador extra para el valor definido por el
parámetro 4014 SEL REALIM.
0
4016 ENTRADA ACT1 Define la fuente del valor actual 1 (ACT1). EA2
4017 ENTRADA ACT2 Define la fuente del valor actual ACT2. EA2
4018 ACT1 MINIMO Ajusta el valor mínimo para ACT1. 0
4019 ACT1 MAXIMO Define el valor máximo para la variable ACT1 si se selecciona
una entrada analógica como origen para ACT1.
100
4020 ACT2 MINIMO Véase el parámetro 4018 ACT1 MINIMO. 0
4021 ACT2 MAXIMO Véase el parámetro 4019 ACT1 MAXIMO. 100
4022 SELECCION DORMIR Activa la función dormir y selecciona el origen de la entrada de
activación.
SIN SEL
4023 NIVEL DORM PID Define el límite de inicio para la función dormir. 0
4024 DEMORA DORM PID Define la demora para la función de inicio dormir. 60
4025 NIVEL DESPERTAR Define la desviación de activación para la función dormir. 0
4026 DEMORA DESPERT Define la demora para despertar de la función dormir. 0,5
4027 SERIE PARAM PID1 Define el origen desde el cual el convertidor lee la señal que
selecciona entre las series de parámetros PID 1 y 2.
CONJUNTO 1
41 CONJ PID PROCESO 2 La serie 2 de parámetros de control de proceso PID (PID1).
4101 GANANCIA Véase el parámetro 4001 GANANCIA.
4102 TIEMP INTEGRAC. Véase el parámetro 4002 TIEMP INTEGRAC.
4103 TIEMP DERIVACION Véase el parámetro 4003 TIEMP DERIVACION.
4104 FILTRO DERIV PID Véase el parámetro 4004 FILTRO DERIV PID.
4105 INV VALOR ERROR Véase el parámetro 4005 INV VALOR ERROR.
4106 UNIDADES Véase el parámetro 4006 UNIDADES.
4107 ESCALA UNIDADES Véase el parámetro 4007 ESCALA UNIDADES.
4108 VALOR 0% Véase el parámetro 4008 VALOR 0%.
4109 VALOR 100% Véase el parámetro 4009 VALOR 100%.
4110 SEL PUNTO CONSIG Véase el parámetro 4010 SEL PUNTO CONSIG.
4111 PUNTO CONSIG INT Véase el parámetro 4011 PUNTO CONSIG INT.
4112 PUNTO CONSIG MIN Véase parámetro 4012 PUNTO CONSIG MIN.
4113 PUNTO CONSIG MAX Véase el parámetro 4013 PUNTO CONSIG MAX.
4114 SEL REALIM Véase el parámetro 4014 SEL REALIM.
4115 MULTIPLIC REALIM Véase el parámetro 4015 MULTIPLIC REALIM.
4116 ENTRADA ACT1 Véase el parámetro 4016 ENTRADA ACT1.
4117 ENTRADA ACT2 Véase el parámetro 4017 ENTRADA ACT2.
4118 ACT1 MINIMO Véase el parámetro 4018 ACT1 MINIMO.
4119 ACT1 MAXIMO Véase el parámetro 4019 ACT1 MAXIMO.
4120 ACT2 MINIMO Véase el parámetro 4020 ACT2 MINIMO.
4121 ACT2 MAXIMO Véase el parámetro 4021 ACT2 MAXIMO.
4122 SELECCION DORMIR Véase el parámetro 4022 SELECCION DORMIR.
4123 NIVEL DORM PID Véase el parámetro 4023 NIVEL DORM PID.
4124 DEMORA DORM PID Véase el parámetro 4024 DEMORA DORM PID.
4125 NIVEL DESPERTAR Véase el parámetro 4025 NIVEL DESPERTAR.
4126 DEMORA DESPERT Véase el parámetro 4026 DEMORA DESPERT.
42 PID TRIM / EXT Control PID (PID2) externo/trim.
4201 GANANCIA Véase el parámetro 4001 GANANCIA.
4202 TIEMP INTEGRAC. Véase el parámetro 4002 TIEMP INTEGRAC.
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
162
4203 TIEMP DERIVACION Véase el parámetro 4003 TIEMP DERIVACION.
4204 FILTRO DERIV PID Véase el parámetro 4004 FILTRO DERIV PID.
4205 INV VALOR ERROR Véase el parámetro 4005 INV VALOR ERROR.
4206 UNIDADES Véase el parámetro 4006 UNIDADES.
4207 ESCALA UNIDADES Véase el parámetro 4007 ESCALA UNIDADES.
4208 VALOR 0% Véase el parámetro 4008 VALOR 0%.
4209 VALOR 100% Véase el parámetro 4009 VALOR 100%.
4210 SEL PUNTO CONSIG Véase el parámetro 4010 SEL PUNTO CONSIG.
4211 PUNTO CONSIG INT Véase el parámetro 4011 PUNTO CONSIG INT.
4212 PUNTO CONSIG MIN Véase parámetro 4012 PUNTO CONSIG MIN.
4213 PUNTO CONSIG MAX Véase el parámetro 4013 PUNTO CONSIG MAX.
4214 SEL REALIM Véase el parámetro 4014 SEL REALIM.
4215 MULTIPLIC REALIM Véase el parámetro 4015 MULTIPLIC REALIM.
4216 ENTRADA ACT1 Véase el parámetro 4016 ENTRADA ACT1.
4217 ENTRADA ACT2 Véase el parámetro 4017 ENTRADA ACT2.
4218 ACT1 MINIMO Véase el parámetro 4018 ACT1 MINIMO.
4219 ACT1 MAXIMO Véase el parámetro 4019 ACT1 MAXIMO.
4220 ACT2 MINIMO Véase el parámetro 4020 ACT2 MINIMO.
4221 ACT2 MAXIMO Véase el parámetro 4021 ACT2 MAXIMO.
4228 ACTIVAR Selecciona el origen para la señal externa de activación de la
función PID.
SIN SEL
4229 AJUSTE Define el ajuste para la salida del regulador PID externo. 0
4230 MODO TRIM Activa la función trim y selecciona entre la corrección directa y
la proporcional.
SIN SEL
4231 ESCALA TRIM Define el multiplicador para la función de corrección. 0
4232 FUENTE DE CORREC Selecciona la referencia de corrección. REFPID2
4233 SELECCION TRIM Selecciona si la corrección se usa para corregir la referencia de
velocidad o de par.
VELOC/FREC
43 CONTROL FRENO
MEC Control de un freno mecánico.
4301 RETAR APER FRENO Define la demora en la apertura del freno (la demora entre la
orden interna de apertura de freno y la liberación del control de
velocidad del motor).
0,20
4302 NIVEL APER FRENO Define la intensidad/par inicial del motor en la liberación de
freno.
1
4303 NIVEL CIERR FREN Define la velocidad de cierre del freno. 4,0%
4304 NIV APER FORZADA Define la velocidad en la liberación de freno. 0
4305 RETAR MAGN FRENO Define el tiempo de magnetización del motor. 0
4306 NIVEL FREC MARCH Define la velocidad de cierre del freno. 0
50 ENCODER Conexión del generador de pulsos.
5001 NUM PULSOS Indica el número de pulsos de generador para una revolución. 1024
5002 ACTIVO ENCODER Activa el generador de pulsos. DESACTIVAR
5003 FALLO ENCODER Define el funcionamiento del convertidor si se detecta un fallo
en la comunicación entre el generador de pulsos y el módulo de
interfase del generador, o entre el módulo y el convertidor.
FALLO
5010 ACTIVO Z PLS Activa el pulso cero (Z) del generador de pulsos. El pulso cero
se utiliza para restaurar la posición.
DESACTIVAR
5011 RESET POSICION Activa la restauración de la posición. DESACTIVAR
51 MOD COMUNIC EXT Parámetros del módulo adaptador de bus de campo.
5101 TIPO DE ABC Muestra el tipo de módulo adaptador de bus de campo
conectado.
5102 PAR DE ABC 2 Estos parámetros son específicos del módulo adaptador.
... ....
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
163
5126 PAR DE ABC 26
5127 ACTUALIZ PAR ABC Valida cualquier ajuste modificado de los parámetros de
configuración del módulo adaptador.
52 COMUNIC PANEL Ajustes de comunicación para el puerto del panel de control en
el convertidor.
5201 ID DE ESTACION Define la dirección del convertidor. 1
5202 VEL TRANSM Define la velocidad de transferencia del enlace. 39242
5203 PARIDAD Define el uso de bit(s) de paridad y paro. 8N1
5204 MENSAJES CORRECT Número de mensajes válidos recibidos por el convertidor. 0
5205 ERRORES PARIDAD Número de caracteres con un error de paridad recibidos del
enlace Modbus.
0
5206 ERRORES DE TRAMA Número de caracteres con un error de trama recibidos por el
enlace Modbus.
0
5207 SOBREESC BUFFE Número de caracteres que desbordan el búfer; es decir, el
número de caracteres que superan la longitud máxima de
mensaje, 128 bytes.
0
5208 ERRORES CRC Número de mensajes con un error CRC (comprobación de
redundancia cíclica) recibidos por el convertidor.
0
53 PROTOCOLO BCI Ajustes del enlace de bus de campo encajado.
5302 ID ESTACION BCI Define la dirección del dispositivo. 1
5303 VEL TRANSM BCI Define la velocidad de transferencia del enlace. 39242
5304 PARIDAD BCI Define el uso de bit(s) de paridad y paro y la longitud de los
datos.
8N1
5305 PERFIL CTRL BCI Selecciona el perfil de comunicación. ABB DRV LIM
5306 MENSAJ CORR BCI Número de mensajes válidos recibidos por el convertidor. 0
5307 ERRORES CRC BCI Número de mensajes con un error CRC (comprobación de
redundancia cíclica) recibidos por el convertidor.
0
5310 PAR BCI 10 Selecciona un valor actual para correlacionarlo con el registro
40005 del Modbus.
0
5311 PAR BCI 11 Selecciona un valor actual para correlacionarlo con el registro
40006 del Modbus.
0
5312 PAR BCI 12 Selecciona un valor actual para correlacionarlo con el registro
40007 del Modbus.
0
5313 PAR BCI 13 Selecciona un valor actual para correlacionarlo con el registro
40008 del Modbus.
0
5314 PAR BCI 14 Selecciona un valor actual para correlacionarlo con el registro
40009 del Modbus.
0
5315 PAR BCI 15 Selecciona un valor actual para correlacionarlo con el registro
40010 del Modbus.
0
5316 PAR BCI 16 Selecciona un valor actual para correlacionarlo con el registro
40011 del Modbus.
0
5317 PAR BCI 17 Selecciona un valor actual para correlacionarlo con el registro
40012 del Modbus.
0
5318 PAR BCI 18 Reservado 0
5319 PAR BCI 19 Código de control del perfil ABB Drives (ABB DRV LIM o ABB
DRV FULL). Copia de sólo lectura del Código de control de bus
de campo.
0x0000
5320 PAR BCI 20 Código de estado del perfil ABB Drives (ABB DRV LIM o ABB
DRV FULL). Copia de sólo lectura del Código de estado de bus
de campo.
0x0000
54 ENTR DATOS DE ABC Datos del convertidor al controlador por bus de campo.
5401 ENTR DATOS ABC 1 Selecciona los datos para transferir desde el convertidor al
controlador de bus de campo.
5402 ENTR DATOS ABC 2 Véase 5401 ENTR DATOS ABC 1.
.... ... ...
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
164
5410 ENTR DATOS ABC 10 Véase 5401 ENTR DATOS ABC 1.
55 SAL DATOS DE ABC Datos del controlador por bus de campo al convertidor.
5501 SAL DATOS ABC 1 Selecciona los datos para transferir desde el controlador de bus
de campo al convertidor.
5502 SAL DATOS ABC 2 Véase 5501 SAL DATOS ABC 1.
... ... ...
5510 SAL DATOS ABC 10 Véase 5501 SAL DATOS ABC 1.
84 PROG SECUENCIA Programación de secuencias.
8401 ACTIVAR PROG SEC Activa la programación de secuencias. DESACTIVADO
8402 INICIO PROG SEC Selecciona el origen de la señal de activación de la
programación de secuencias.
SIN SEL
8403 PAUSA PROG SEC Selecciona el origen para la señal de pausa de la programación
de secuencias.
SIN SEL
8404 RESET PROG SEC Selecciona el origen para la señal de restauración de la
programación de secuencias.
SIN SEL
8405 FORZAR EST SEC Fuerza la programación de secuencias para pasar a un estado
seleccionado.
ESTADO 1
8406 VAL LOGICO SEC 1 Define el origen para el valor lógico 1. SIN SEL
8407 OPER LOGIC SEC 1 Selecciona la operación entre los valores lógicos 1 y 2. SIN SEL
8408 VAL LOGICO SEC 2 Véase el parámetro 8406 VAL LOGICO SEC 1. SIN SEL
8409 OPER LOGIC SEC 2 Selecciona la operación entre el valor lógico 3 y el resultado de
la primera operación lógica definida por el parámetro 8407
OPER LOGIC SEC 1.
SIN SEL
8410 VAL LOGICO SEC 3 Véase el parámetro 8406 VAL LOGICO SEC 1. SIN SEL
8411 VAL SEC 1 ALTO Define el límite superior para el cambio de estado cuando el
parámetro 8425 DISP EST1 A EST2 está ajustado, por
ejemplo, a EA 1 ALTA 1.
0
8412 VAL SEC 1 BAJO Define el límite inferior para el cambio de estado cuando el
parámetro 8425 DISP EST1 A EST2 está ajustado, por
ejemplo, a EA 1 BAJA 1.
0
8413 VAL SEC 2 ALTO Define el límite superior para el cambio de estado cuando el
parámetro 8425 DISP EST1 A EST2 está ajustado, por
ejemplo, a EA 2 ALTA 1.
0
8414 VAL SEC 2 BAJO Define el límite inferior para el cambio de estado cuando el
parámetro 8425 DISP EST1 A EST2 está ajustado, por
ejemplo, a EA 2 BAJA 2.
0
8415 LOC CONT CICLOS Activa el contador de ciclos para la programación de
secuencias.
SIN SEL
8416 RESET CONT CICLO Selecciona el origen para la señal de restauración del contador
de ciclos ( 0171 CONT CICLOS SEC).
SIN SEL
8420 SELEC REF EST 1 Selecciona el origen para la referencia del estado 1 de la
programación de secuencias.
0
8421 ORDENES EST 1 Selecciona el inicio, paro y dirección para el estado 1. PARO
UNIDAD
8422 RAMPA EST 1 Selecciona el tiempo de rampa de aceleración/deceleración
para el estado 1 de la programación de secuencias; es decir,
define la velocidad de cambio de la referencia.
0
8423 CONTR SAL EST 1 Selecciona el control de la salida de relé, de transistor y
analógica para el estado 1 de programación de secuencias.
SA=0
8424 RETAR CAMB EST 1 Define la demora para el estado 1. 0
8425 DISP EST1 A EST2 Selecciona el origen para la señal de disparo que cambia el
estado del estado 1 al estado 2.
SIN SEL
8426 DISP EST1 A ESTN Selecciona el origen para la señal de disparo que cambia el
estado del estado 1 al estado N.
SIN SEL
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
165
8427 ESTADO N EST 1 Define el estado N. Véase el parámetro 8426 DISP EST1 A
ESTN.
ESTADO 1
8430 SELEC REF EST 2 Véanse los parámetros 8420 y 8427.
…
8497 ESTADO N EST 8
98 OPCIONES Activación de la comunicación en serie externa.
9802 SEL PROT COM Activa la comunicación en serie externa. SIN SEL
99 DATOS DE PARTIDA Selección de idioma. Definición de los datos de ajuste del
motor.
9901 IDIOMA Selecciona el idioma de visualización. ENGLISH
9902 MACRO DE APLIC Selecciona la macro de aplicación. ESTAND ABB
9904 MODO CTRL MOTOR Selecciona el modo de control del motor. ESCALAR:FR
EC
9905 TENSION NOM MOT Define la tensión nominal del motor. 230, 400 o 460
9906 INTENS NOM MOT Define la intensidad nominal del motor. I2N
9907 FREC NOM MOTOR Define la frecuencia nominal del motor. Eur.: 50 / USA:
60
9908 VELOC NOM MOTOR Define la velocidad nominal del motor. Depende del
tipo
9909 POT NOM MOTOR Define la potencia nominal del motor. PN
9910 MARCHA ID Controla un proceso de autocalibración llamado la Marcha de
identificación del motor.
OFF /IDMAGN
9912 PAR NOM MOTOR Par nominal del motor calculado en Nm. 0
9913 PARES POLOS MOT Número calculado de pares de polos del motor. 0
Parámetros – lista de formas cortas
Índice Nombre/Selección Descripción Def.
Personalización
Señales actuales y parámetros
166
Parámetros – descripciones completas
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
10 MARCHA/PARO/DIR Los orígenes para el control de marcha, paro y dirección.
1001 COMANDOS EXT1 Define las conexiones y el origen de los comandos de marcha, paro y
dirección para el lugar de control externo 1 (EXT1). ED1,2
SIN SEL Sin origen de orden de marcha, paro y dirección. 0
ED1 Marcha y paro a través de la entrada digital ED1. 0 = paro, 1 = marcha. La
dirección se fija según el parámetro 1003 DIRECCION (ajuste PETICION =
AVANCE).
1
ED1,2 Marcha y paro a través de la entrada digital ED1. 0 = paro, 1 = marcha.
Dirección a través de la entrada digital ED2. 0 = avance, 1 = inversa. Para
controlar la dirección, el ajuste del parámetro 1003 DIRECCION debe ser
PETICION.
2
ED1P,2P Marcha por pulsos a través de la entrada digital ED1. 0 -> 1: Marcha. (para
arrancar el convertidor, la entrada digital ED2 debe activarse antes del pulso
a ED1).
Paro por pulsos a través de la entrada digital ED2. 1 -> 0: Paro. La dirección
de giro se fija según el parámetro 1003 DIRECCION (ajuste PETICION =
AVANCE).
3
ED1P,2P,3 Marcha por pulsos a través de la entrada digital ED1. 0 -> 1: Marcha. (para
arrancar el convertidor, la entrada digital ED2 debe activarse antes del pulso
a ED1).
Paro por pulsos a través de la entrada digital ED2. 1 -> 0: Paro. Dirección a
través de la entrada digital ED3. 0 = avance, 1 = inversa. Para controlar la
dirección, el ajuste del parámetro 1003 DIRECCION debe ser PETICION.
4
ED1P,2P,3P Marcha en avance por pulsos a través de la entrada digital ED1. 0 -> 1:
Marcha en avance. Marcha inversa por pulsos a través de la entrada digital
ED2. 0 -> 1: Marcha inversa (para arrancar el convertidor, la entrada digital
ED3 debe activarse antes del pulso a ED1/ED2). Paro por pulsos a través de
la entrada digital ED3. 1 -> 0: Paro. Para controlar la dirección, el ajuste del
parámetro 1003 DIRECCION debe ser PETICION.
5
PANEL Los comandos de marcha, paro y dirección a través del panel de control
cuando EXT1 está activa. Para controlar la dirección, el ajuste del parámetro
1003 DIRECCION debe ser PETICION.
8
ED1F,2R Órdenes de marcha, paro y dirección a través de las entradas digitales ED1
y ED2.
El ajuste del parámetro 1003 DIRECCION debe ser PETICION.
9
COMUNIC Interfase de bus de campo como origen de las órdenes de marcha y paro, es
decir, el código de control 0301 COD ORDEN BC 1, bits 0 ... 1. El regulador
de bus de campo envía el código de control al convertidor a través del
adaptador de bus de campo o el bus de campo encajado (Modbus). Para los
bits del código de control, véase la sección Perfil de comunicación DCU en la
página 274.
10
FUNC TEMP 1 Control temporizado de marcha/paro. Función temporizada 1 activa =
marcha; función temporizada 1 inactiva = paro. Véase el grupo de
parámetros 36 FUNCIONES TEMP.
11
ED1 ED2 Funcionamiento
00Paro
1 0 Marcha en avance
0 1 Marcha inversa
11Paro
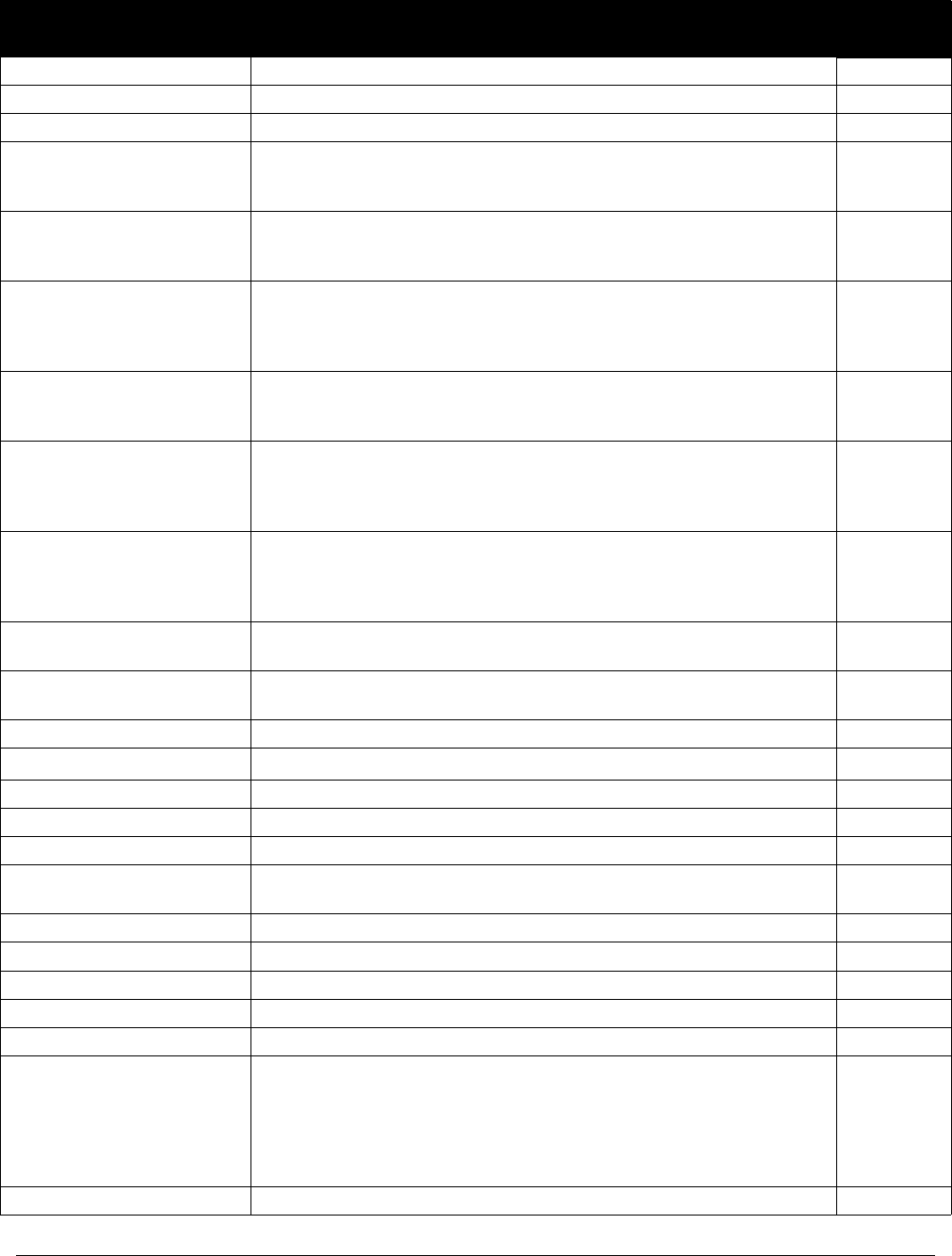
Señales actuales y parámetros
167
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 12
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 13
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 14
ED5 Marcha y paro a través de la entrada digital ED5. 0 = paro, 1 = marcha. La
dirección se fija según el parámetro 1003 DIRECCION (ajuste PETICION =
AVANCE).
20
ED5,4 Marcha y paro a través de la entrada digital ED5. 0 = paro, 1 = marcha.
Dirección a través de la entrada digital ED4. 0 = avance, 1 = inversa. Para
controlar la dirección, el parámetro 1003 DIRECCION debe ser PETICION.
21
PARO TEMPOR Paro cuando se ha superado la demora del temporizador definida por el
parámetro 1901 DEMORA TEMPORIZ. Arranque con la señal de arranque
del temporizador. El origen de la señal se selecciona con el parámetro 1902
INICIO TEMPORIZ.
22
INICIO TEMPOR Arranque cuando se ha superado la demora del temporizador definida por el
parámetro 1901 DEMORA TEMPORIZ. Paro cuando el temporizador se
restaura con el parámetro 1903 RESET TEMPORIZ.
23
PARO CONTAD Paro cuando se ha superado el límite del contador definido por el parámetro
1905 LIMITE CONTADOR. Arranque con la señal de arranque del contador.
El origen de la señal se selecciona con el parámetro 1911 ORDEN M/P
CONT.
24
INIC CONTAD Arranque cuando se ha superado el límite del contador definido por el
parámetro 1905 LIMITE CONTADOR. Paro con la señal de paro del
contador. El origen de la señal se selecciona con el parámetro 1911 ORDEN
M/P CONT.
25
PROG SEC Órdenes de marcha, paro y dirección mediante programación de secuencias.
Véase el grupo de parámetros 84 PROG SECUENCIA.26
1002 COMANDOS EXT2 Define las conexiones y el origen de los comandos de marcha, paro y
dirección para el lugar de control externo 2 (EXT2). SIN SEL
Véase el parámetro 1001 COMANDOS EXT1.
1003 DIRECCION Permite el control de la dirección de giro del motor o fija la dirección. PETICION
AVANCE Fijado en avance. 1
RETROCESO Fijado en retroceso. 2
PETICION Control de la dirección de giro permitido. 3
1010 SEL LENTITUD Define la señal que activa la función de avance lento. Véase el apartado
Avance lento en la página 132.SIN SEL
ED1 Entrada digital ED1. 0 = avance lento inactivo; 1 = avance lento activo. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la activación del avance lento 1
ó 2, es decir, el código de control 0302 FB CMD WORD 2, bits 20 y 21. El
regulador de bus de campo envía el código de control al convertidor a través
del adaptador de bus de campo o el bus de campo encajado (Modbus). Para
los bits del código de control, véase la sección Perfil de comunicación DCU
en la página 274.
6
SIN SEL No seleccionado. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
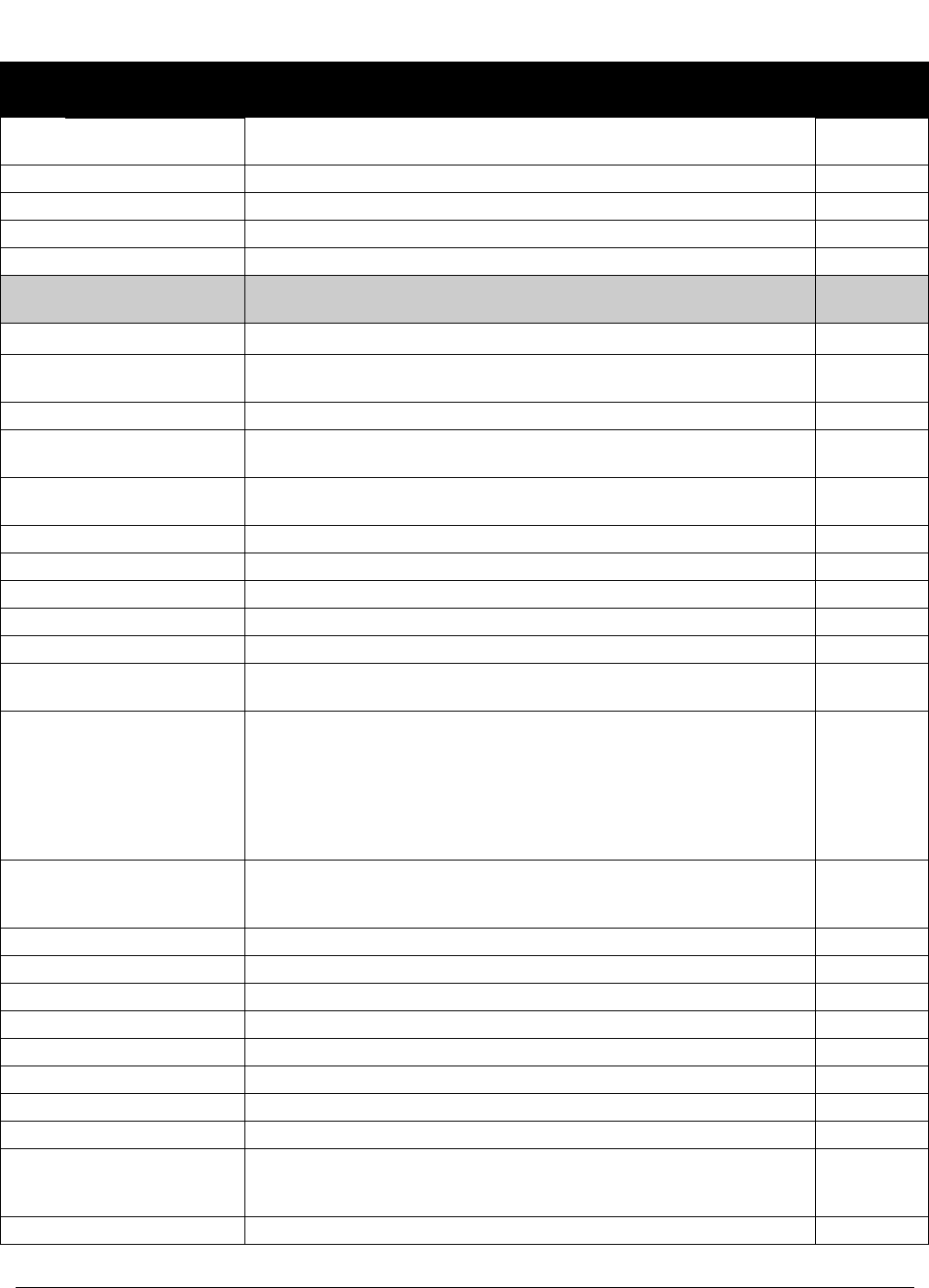
Señales actuales y parámetros
168
ED1(inv) Entrada digital ED1 invertida. 1 = avance lento inactivo; 0 = avance lento
activo. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
11 SELEC REFERENCIA Tipo de referencia de panel, selección del lugar de control externo y orígenes
y límites de referencia externa.
1101 SELEC REF PANEL Selecciona el tipo de la referencia en modo de control local. REF1
REF1(Hz/rpm) Referencia de velocidad, en rpm. Referencia de frecuencia, en Hz, si el
ajuste del parámetro 9904 MODO CTRL MOTOR es ESCALAR:FREC. 1
REF2(%) Referencia en %. 2
1102 SELEC EXT1/EXT2 Define el origen del cual el convertidor lee la señal que selecciona entre los
dos lugares de control externo, EXT1 o EXT2. EXT1
EXT1 EXT1 activa. Los orígenes de las señales de control se definen con los
parámetros 1001 COMANDOS EXT1 y 1103 SELEC REF1. 0
ED1 Entrada digital ED1. 0 = EXT1, 1 = EXT2. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
EXT2 EXT2 activa. Los orígenes de las señales de control se definen con los
parámetros 1002 COMANDOS EXT2 y 1106 SELEC REF2. 7
COMUNIC Interfase de bus de campo como origen para la selección EXT1/EXT2; es
decir, código de control 0301 COD ORDEN BC 1, bit 5 (con perfil ABB Drives
5319 PAR BCI 19, bit 11). El regulador de bus de campo envía el código de
control al convertidor a través del adaptador de bus de campo o el bus de
campo encajado (Modbus). Para los bits del código de control, véanse las
secciones Perfil de comunicación DCU en la página 274 y Perfil de
comunicación ABB Drives en la página 270.
8
FUNC TEMP 1 Selección de control temporizada EXT1/EXT2. Temporizador 1 activo =
EXT2; temporizador 1 inactivo = EXT1. Véase el grupo de parámetros 36
FUNCIONES TEMP.
9
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 10
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 11
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 12
ED1(inv) Entrada digital ED1 invertida. 1 = EXT1, 0 = EXT2. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
1103 SELEC REF1 Selecciona el origen de la señal para la referencia externa REF1. Véase el
apartado Diagrama de bloques: origen de referencia para EXT1 en la página
101.
EA1
PANEL Panel de control 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
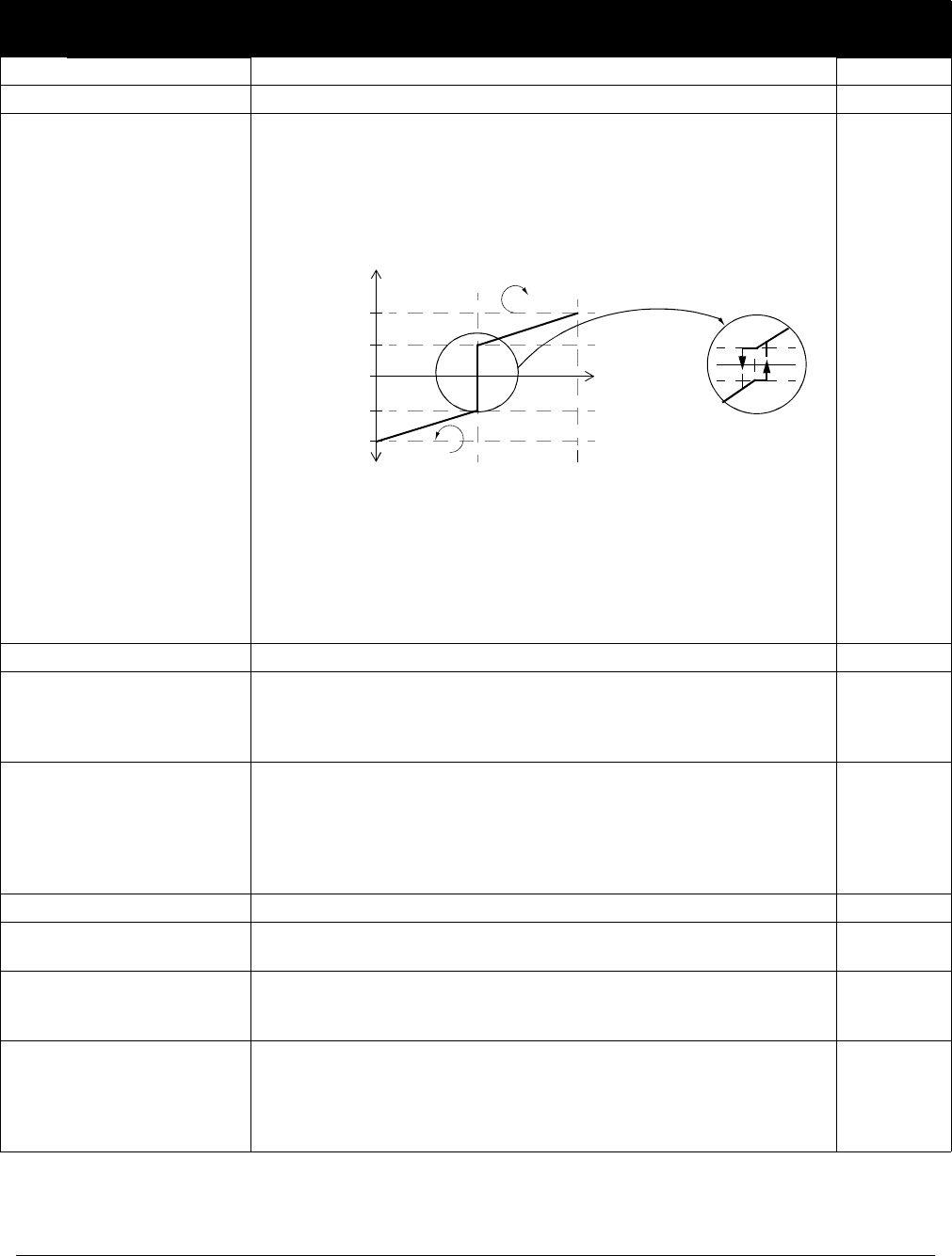
Señales actuales y parámetros
169
EA1 Entrada analógica EA1. 1
EA2 Entrada analógica EA2. 2
EA1/PALANCA Entrada analógica EA1 como palanca. La señal de entrada mínima acciona
el motor a la referencia máxima en dirección inversa, la entrada máxima a la
referencia máxima en dirección de avance. Las referencias mínima y
máxima se definen con los parámetros 1104 REF1 MINIMO y 1105 REF1
MAXIMO.
Nota: El parámetro 1003 DIRECCION debe estar ajustado a PETICION.
¡ADVERTENCIA! Si el parámetro 1301 MINIMO EA1 está ajustado a 0 V y
se pierde la señal de entrada analógica (es decir, 0 V), el giro del motor se
invierte a la referencia máxima. Ajuste los parámetros siguientes para activar
un fallo cuando se pierda la señal de entrada analógica:
Ajuste el parámetro 1301 MINIMO EA1 a 20 % (2 V o 4 mA).
Ajuste el parámetro 3021 EA1 FALLO LIMIT a 5 % o superior.
Ajuste el parámetro 3001 EA<FUNCION MIN a FALLO.
3
EA2/PALANCA Véase la selección de EA1/PALANCA. 4
ED3A,4D(R) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. Un comando de paro restaura la referencia a cero. El
parámetro 2205 TIEMPO ACELER 2 define la velocidad del cambio de
referencia.
5
ED3A,4D Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. El programa almacena la referencia activa de velocidad (no
restaurada por un comando de paro). Cuando el convertidor vuelve a
arrancar, el motor acelera en rampa a la tasa de aceleración seleccionada
hasta la referencia almacenada. El parámetro 2205 TIEMPO ACELER 2
define la velocidad del cambio de referencia.
6
COMUNIC Referencia de bus de campo REF1. 8
COMUNIC+EA1 Suma de la referencia de bus de campo REF1 y la entrada analógica EA.
Véase la sección Selección y corrección de la referencia en la página 260.9
COMUNIC*EA1 Multiplicación de la referencia de bus de campo REF1 y la entrada analógica
EA1. Véase la sección Selección y corrección de la referencia en la página
260.
10
ED3A,4D(RNC) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. Un comando de paro restaura la referencia a cero. La
referencia no se guarda si se cambia el origen de control (de EXT1 a EXT2,
de EXT2 a EXT1 o de LOC a REM). El parámetro 2205 TIEMPO ACELER 2
define la velocidad del cambio de referencia.
11
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
0
10 V / 20 mA
62 V / 4 mA
EA1
Ref. veloc.
1104
-1104
-1105
1105
par. 1301 = 20 %, par. 1302 = 100 %
+2%-2%
Histéresis 4 %
1104
- 1104
(REF1)
de la escala completa
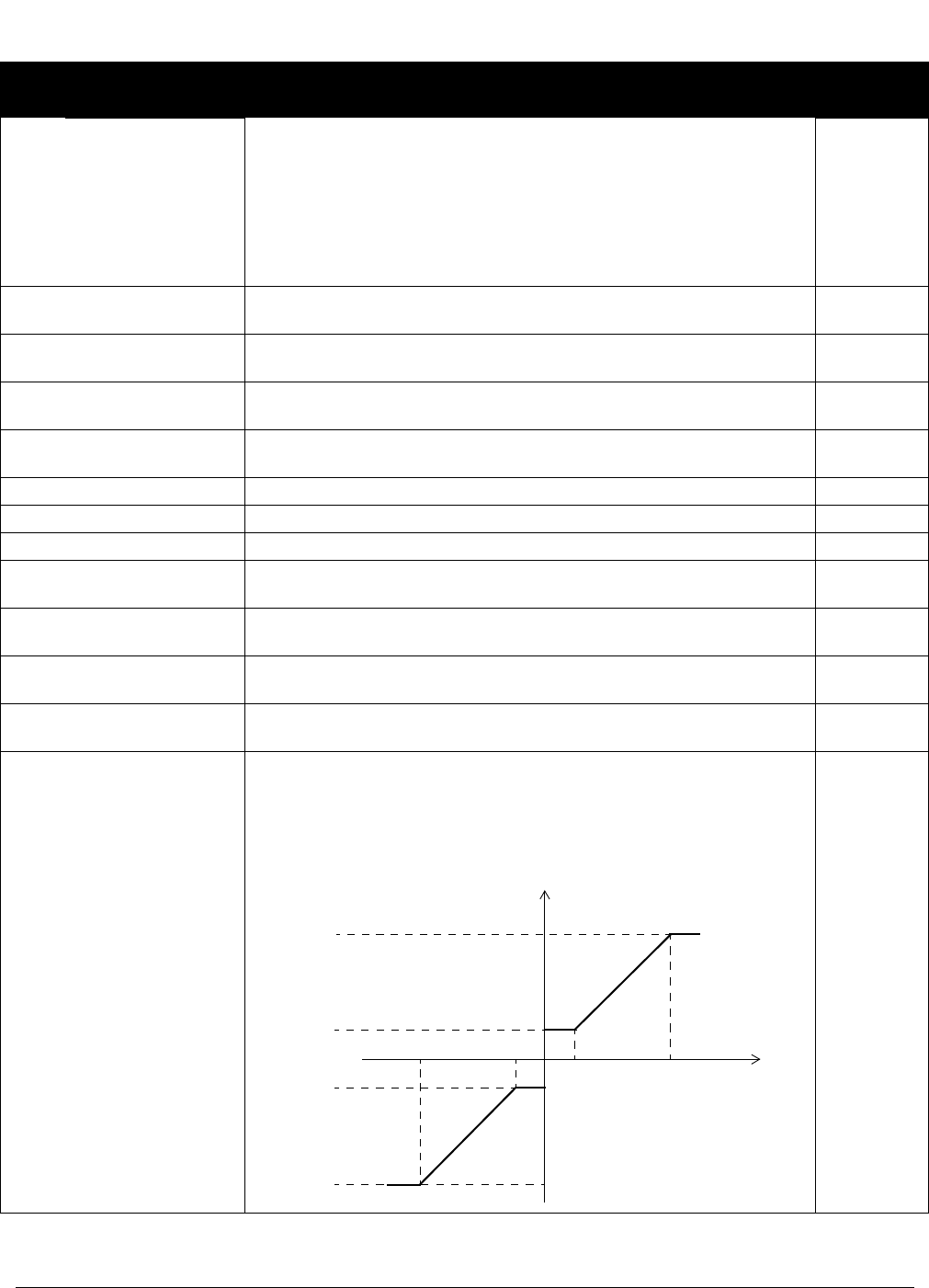
Señales actuales y parámetros
170
ED3A,4D (NC) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. El programa almacena la referencia activa de velocidad (no
restaurada por un comando de paro). La referencia no se guarda si se
cambia el origen de control (de EXT1 a EXT2, de EXT2 a EXT1 o de LOC a
REM). Cuando el convertidor vuelve a arrancar, el motor acelera en rampa a
la tasa de aceleración seleccionada hasta la referencia almacenada. El
parámetro 2205 TIEMPO ACELER 2 define la velocidad del cambio de
referencia.
12
EA1+EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + EA2(%) - 50% 14
EA1*EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA(%) · (EA2(%) / 50%) 15
EA1-EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + 50% - EA2(%) 16
EA1/EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) · (50% / EA2(%)) 17
ED4A,5D Véase la selección ED3A,4D. 30
ED4A,5D(NC) Véase la selección ED3A,4D(NC). 31
FREC ENTRADA Entrada de frecuencia. 32
PROG SEC Salida de programación de secuencias. Véase el parámetro 8420 SELEC
REF EST 1. 33
EA1+PROG SEC Suma de la entrada analógica EA1 y la salida de programación de
secuencias. 34
EA2+PROG SEC Suma de la entrada analógica EA2 y la salida de programación de
secuencias. 35
1104 REF1 MINIMO Define el valor mínimo para la referencia externa REF1. Corresponde al
ajuste mínimo de la señal de origen empleada. 0
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Valor mínimo, en rpm. en Hz si el ajuste del parámetro 9904 MODO CTRL
MOTOR es ESCALAR:FREC.
Ejemplo: La entrada analógica EA1 se selecciona como origen de
referencia (el valor del parámetro 1103 es EA1). El mínimo y máximo de la
referencia corresponden a los ajustes 1301 MINIMO EA1 y 1302 MAXIMO
EA1 de este modo:
1 = 0,1 Hz /
1rpm
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
REF1 MAXIMO
REF1 MINIMO
-REF1 MINIMO
Señal EA1 (%
)
-REF1 MAXIMO
(1105)
(1104)
(-1104)
(-1105)
1301 1302
1301
1302
REF (Hz/rpm)
Señales actuales y parámetros
171
1105 REF1 MAXIMO Define el valor máximo para la referencia externa REF1. Corresponde al
ajuste máximo de la señal de origen empleada. Eur.: 50 /
USA: 60
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Valor máximo, en rpm. en Hz si el ajuste del parámetro 9904 MODO CTRL
MOTOR es ESCALAR:FREC. Véase el ejemplo en el caso del parámetro
1104 REF1 MINIMO.
1 = 0,1 Hz /
1rpm
1106 SELEC REF2 Selecciona el origen de la señal para la referencia externa REF2. EA2
PANEL Véase el parámetro 1103 SELEC REF1. 0
EA1 Véase el parámetro 1103 SELEC REF1. 1
EA2 Véase el parámetro 1103 SELEC REF1. 2
EA1/PALANCA Véase el parámetro 1103 SELEC REF1. 3
EA2/PALANCA Véase el parámetro 1103 SELEC REF1. 4
ED3A,4D(R) Véase el parámetro 1103 SELEC REF1. 5
ED3A,4D Véase el parámetro 1103 SELEC REF1. 6
COMUNIC Véase el parámetro 1103 SELEC REF1. 8
COMUNIC+EA1 Véase el parámetro 1103 SELEC REF1. 9
COMUNIC*EA1 Véase el parámetro 1103 SELEC REF1. 10
ED3A,4D(RNC) Véase el parámetro 1103 SELEC REF1. 11
ED3A,4D (NC) Véase el parámetro 1103 SELEC REF1. 12
EA1+EA2 Véase el parámetro 1103 SELEC REF1. 14
EA1*EA2 Véase el parámetro 1103 SELEC REF1. 15
EA1-EA2 Véase el parámetro 1103 SELEC REF1. 16
EA1/EA2 Véase el parámetro 1103 SELEC REF1. 17
SALPID1 Salida del regulador PID 1. Véanse los grupos de parámetros 40 CONJ PID
PROCESO 1 y 41 CONJ PID PROCESO 2.19
ED4A,5D Véase el parámetro 1103 SELEC REF1. 30
ED4A,5D(NC) Véase el parámetro 1103 SELEC REF1. 31
FREC ENTRADA Véase el parámetro 1103 SELEC REF1. 32
PROG SEC Véase el parámetro 1103 SELEC REF1. 33
EA1+PROG SEC Véase el parámetro 1103 SELEC REF1. 34
EA2+PROG SEC Véase el parámetro 1103 SELEC REF1. 35
1107 REF2 MINIMO Define el valor mínimo para la referencia externa REF2. Corresponde al
ajuste mínimo de la señal de origen empleada. 0
0,0…100,0% Valor en porcentaje de la frecuencia máxima / velocidad máxima / par
nominal. Véase el ejemplo en el caso del parámetro 1104 REF1 MINIMO
para la correspondencia con los límites de la señal de origen.
1 = 0,1%
1108 REF2 MAXIMO Define el valor máximo para la referencia externa REF2. Corresponde al
ajuste máximo de la señal de origen empleada. 100
0,0…100,0% Valor en porcentaje de la frecuencia máxima / velocidad máxima / par
nominal. Véase el ejemplo en el caso del parámetro 1104 REF1 MINIMO
para la correspondencia con los límites de la señal de origen.
1 = 0,1%
12 VELOC
CONSTANTES
Selección y valores de velocidad constante. Véase el apartado Velocidades
constantes en la página 113.
1201 SEL VELOC CONST Activa las velocidades constantes o selecciona la señal de activación. ED3,4
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
172
SIN SEL No hay ninguna velocidad constante en uso. 0
ED1 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED2. 1 = activa, 0 = inactiva. 2
ED3 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED3. 1 = activa, 0 = inactiva. 3
ED4 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED4. 1 = activa, 0 = inactiva. 4
ED5 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED5. 1 = activa, 0 = inactiva. 5
ED1,2 Selección de velocidad constante a través de las entradas digitales ED1 y
ED2. 1 = ED activa, 0 = ED inactiva. 7
ED2,3 Véase la selección ED1,2. 8
ED3,4 Véase la selección ED1,2. 9
ED4,5 Véase la selección ED1,2. 10
ED1,2,3 Selección de velocidad constante a través de las entradas digitales ED1,
ED2 y ED3. 1 = ED activa; 0 = ED inactiva. 12
ED3,4,5 Véase la selección ED1,2,3. 13
FUNC TEMP 1 La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de función temporizada. Función temporizada 1 activa = VELOC
CONST 1. Véase el grupo de parámetros 36 FUNCIONES TEMP.
15
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 16
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 17
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 18
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
ED1 ED2 Funcionamiento
0 0 Sin velocidad constante
1 0 Velocidad definida por el parámetro 1202 VELOC CONST 1.
0 1 Velocidad definida por el parámetro 1203 VELOC CONST 2.
1 1 Velocidad definida por el parámetro 1204 VELOC CONST 3.
ED1 ED2 ED3 Funcionamiento
0 0 0 Sin velocidad constante
1 0 0 Velocidad definida por el parámetro 1202 VELOC
CONST 1.
0 1 0 Velocidad definida por el parámetro 1203 VELOC
CONST 2.
1 1 0 Velocidad definida por el parámetro 1204 VELOC
CONST 3.
0 0 1 Velocidad definida por el parámetro 1205 VELOC
CONST 4.
1 0 1 Velocidad definida por el parámetro 1206 VELOC
CONST 5.
0 1 1 Velocidad definida por el parámetro 1207 VELOC
CONST 6.
1 1 1 Velocidad definida por el parámetro 1208 VELOC
CONST 7.
Señales actuales y parámetros
173
FUNC TEMP1&2 Selección de velocidad con FUNC TEMP 1 y FUNC TEMP 2. Véase el
parámetro 1209 SEL MODO TEMP. 19
ED1(inv) La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED1 invertida. 0 = activa, 1 = inactiva. -1
ED2(inv) La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED2 invertida. 0 = activa, 1 = inactiva. -2
ED3(inv) La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED3 invertida. 0 = activa, 1 = inactiva. -3
ED4(inv) La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED4 invertida. 0 = activa, 1 = inactiva. -4
ED5(inv) La velocidad definida por el parámetro 1202 VELOC CONST 1 se activa a
través de la entrada digital ED5 invertida. 0 = activa, 1 = inactiva. -5
ED1,2(inv) Selección de velocidad constante a través de las entradas digitales ED1 y
ED2 invertidas. 1 = ED activa; 0 = ED inactiva. -7
ED2,3(inv) Véase la selección ED1,2(inv). -8
ED3,4(inv) Véase la selección ED1,2(inv). -9
ED4,5(inv) Véase la selección ED1,2(inv). -10
ED1,2,3(inv) Selección de velocidad constante a través de las entradas digitales ED1,
ED2 y ED3 invertidas. 1 = ED activa; 0 = ED inactiva. -12
ED3,4,5(inv) Véase la selección ED1,2,3(inv). -13
1202 VELOC CONST 1 Define la velocidad constante 1 (o la frecuencia de salida del convertidor). Eur.: 5 / USA:
6
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. 1 = 0,1 Hz /
1rpm
1203 VELOC CONST 2 Define la velocidad constante 2 (o la frecuencia de salida del convertidor). Eur.: 10 /
USA: 12
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. 1 = 0,1 Hz /
1rpm
1204 VELOC CONST 3 Define la velocidad constante 3 (o la frecuencia de salida del convertidor). Eur.: 15 /
USA: 18
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. 1 = 0,1 Hz /
1rpm
1205 VELOC CONST 4 Define la velocidad constante 4 (o la frecuencia de salida del convertidor). Eur.: 20 /
USA: 24
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
ED1 ED2
Funcionamiento
1 1 Sin velocidad constante
0 1 Velocidad definida por el parámetro 1202 VELOC CONST 1.
1 0 Velocidad definida por el parámetro 1203 VELOC CONST 2.
0 0 Velocidad definida por el parámetro 1204 VELOC CONST 3.
ED1 ED2 ED3
Funcionamiento
1 1 1 Sin velocidad constante
0 1 1 Velocidad definida por el parámetro 1202 VELOC CONST 1.
1 0 1 Velocidad definida por el parámetro 1203 VELOC CONST 2.
0 0 1 Velocidad definida por el parámetro 1204 VELOC CONST 3.
1 1 0 Velocidad definida por el parámetro 1205 VELOC CONST 4.
0 1 0 Velocidad definida por el parámetro 1206 VELOC CONST 5.
1 0 0 Velocidad definida por el parámetro 1207 VELOC CONST 6.
0 0 0 Velocidad definida por el parámetro 1208 VELOC CONST 7.
Señales actuales y parámetros
174
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. 1 = 0,1 Hz /
1rpm
1206 VELOC CONST 5 Define la velocidad constante 5 (o la frecuencia de salida del convertidor). Eur.: 25 /
USA: 30
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. 1 = 0,1 Hz /
1rpm
1207 VELOC CONST 6 Define la velocidad constante 6 (o la frecuencia de salida del convertidor). Eur.: 40 /
USA: 48
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. La Velocidad constante 6
también se utiliza como velocidad de avance lento. Véase el apartado
Avance lento en la página 132.
1 = 0,1 Hz /
1rpm
1208 VELOC CONST 7 Define la velocidad constante 7 (o la frecuencia de salida del convertidor).
Esta velocidad también se usa como velocidad en avance lento (véase el
apartado Avance lento en la página 132) o con funciones de fallo (3001
EA<FUNCION MIN y 3002 ERROR COM PANEL).
Eur.: 50 /
USA: 60
0 ... 500 Hz /
0 ... 30.000 rpm Velocidad en rpm. Frecuencia de salida en Hz si el ajuste del parámetro
9904 MODO CTRL MOTOR es ESCALAR:FREC. La Velocidad constante 7
también se utiliza como velocidad de avance lento. Véase el apartado
Avance lento en la página 132.
1 = 0,1 Hz /
1rpm
1209 SEL MODO TEMP Selecciona una velocidad activada por función temporizada en uso cuando
la selección del parámetro 1201 SEL VELOC CONST es FUNC TEMP1&2. VC1/2/3/4
EST/VC1/2/3 Selección de velocidad constante o de referencia de velocidad constante con
FUNC TEMP 1 y FUNC TEMP 2. 1 = función temporizada activa; 0 = función
temporizada inactiva.
1
VC1/2/3/4 Selección de velocidad constante con FUNC TEMP 1 y FUNC TEMP 2. 1
= función temporizada activa; 0 = función temporizada inactiva. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
FUNC
TEMP 1 FUNC
TEMP 2 Funcionamiento
0 0 Referencia externa
1 0 Velocidad definida por el parámetro 1202 VELOC
CONST 1.
0 1 Velocidad definida por el parámetro 1203 VELOC
CONST 2.
1 1 Velocidad definida por el parámetro 1204 VELOC
CONST 3.
FUNC
TEMP 1 FUNC
TEMP 2 Funcionamiento
0 0 Velocidad definida por el parámetro 1202 VELOC
CONST 1.
1 0 Velocidad definida por el parámetro 1203 VELOC
CONST 2.
0 1 Velocidad definida por el parámetro 1204 VELOC
CONST 3.
1 1 Velocidad definida por el parámetro 1205 VELOC
CONST 4.
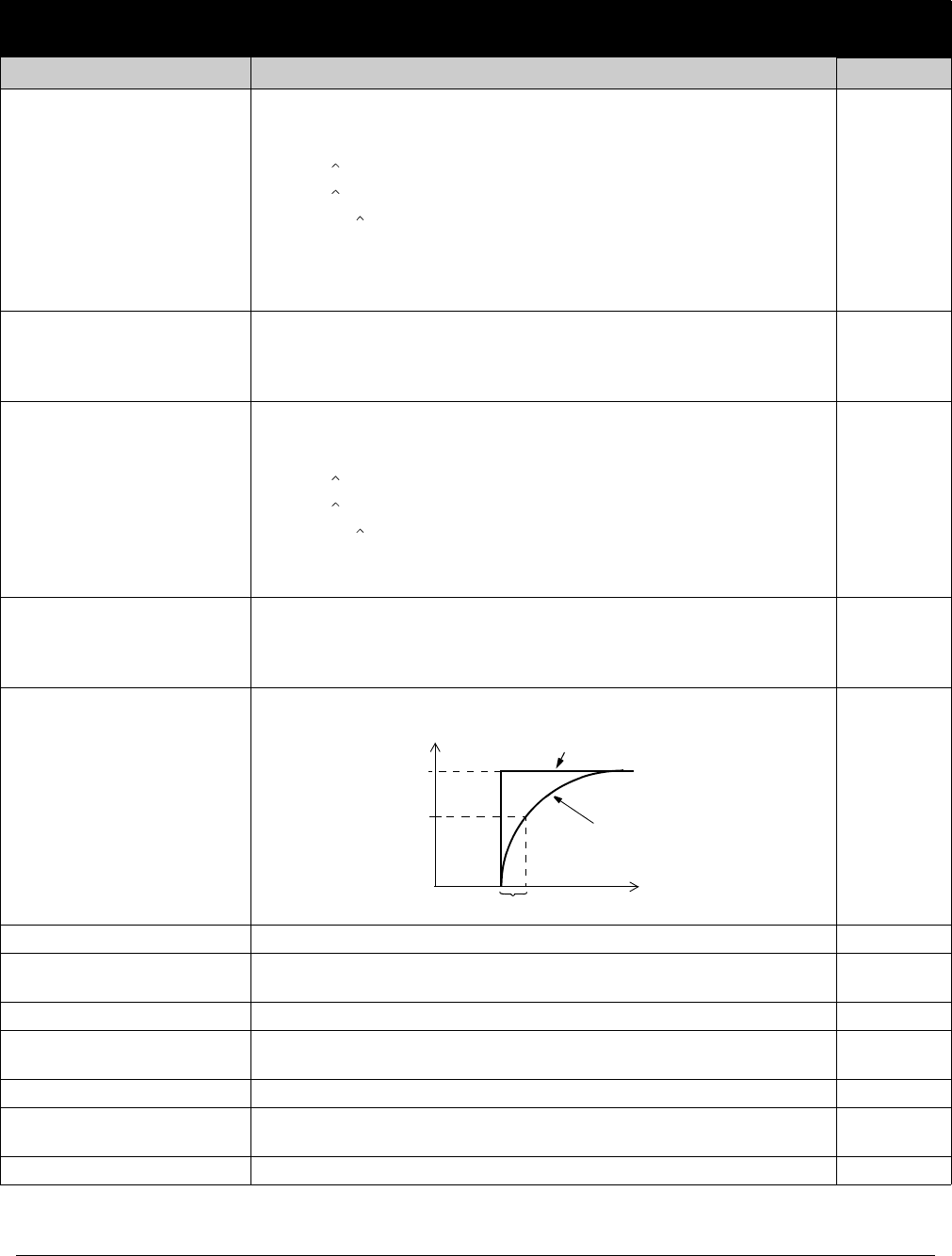
Señales actuales y parámetros
175
13 ENTRADAS ANALOG Proceso de las señales de entradas analógicas.
1301 MINIMO EA1 Define el % mínimo que corresponde al mínimo de la señal mA/(V) para la
entrada analógica EA1. Cuando se utiliza como una referencia, el valor
corresponde al ajuste mínimo de referencia.
0...20 mA 0...100%
4...20 mA 20...100%
-10..0,10 mA -50...50%
Ejemplo: Si se selecciona EA1 como el origen de la referencia externa
REF1, este valor corresponde al valor del parámetro 1104 REF1 MINIMO.
Nota: El valor MINIMO EA no debe superar al valor MAXIMO EA.
1%
-100,0…100,0% Valor en porcentaje del rango completo de la señal. Ejemplo: Si el valor
mínimo de la entrada analógica es 4 mA, el valor porcentual para el intervalo
0 ... 20 mA es:
(4 mA / 20 mA) · 100% = 20%
1 = 0,1%
1302 MAXIMO EA1 Define el % máximo que corresponde al máximo de la señal mA/(V) para la
entrada analógica EA1. Cuando se utiliza como una referencia, el valor
corresponde al ajuste máximo de referencia.
0...20 mA 0...100%
4...20 mA 20...100%
-10..0,10 mA -50...50%
Ejemplo: Si se selecciona EA1 como el origen de la referencia externa
REF1, este valor corresponde al valor del parámetro 1105 REF1 MAXIMO.
100
-100,0…100,0% Valor en porcentaje del rango completo de la señal. Ejemplo: Si el valor
máximo de la entrada analógica es 10 mA, el valor porcentual para el
intervalo 0 ... 20 mA es:
(10 mA / 20 mA) · 100% = 50%
1 = 0,1%
1303 FILTRO EA1 Define la constante de tiempo de filtro para la entrada analógica EA1, es
decir, el tiempo que se tarda en alcanzar el 63 % de un cambio en escalón. 0,1
0,0…10,0 s Constante de tiempo de filtro. 1 = 0,1 s
1304 MINIMO EA2 Define el % mínimo que corresponde al mínimo de la señal mA/(V) para la
entrada analógica EA2. Véase el parámetro 1301 MINIMO EA1. 1%
-100.0…100.0% Véase el parámetro 1301 MINIMO EA1. 1 = 0,1%
1305 MAXIMO EA2 Define el % máximo que corresponde al máximo de la señal mA/(V) para la
entrada analógica EA2. Véase el parámetro 1302 MAXIMO EA1. 100
-100.0…100.0% Véase el parámetro 1302 MAXIMO EA1. 1 = 0,1%
1306 FILTRO EA2 Define la constante de tiempo de filtro para la entrada analógica EA2. Véase
el parámetro 1303 FILTRO EA1. 0.1
0,0…10,0 s Constante de tiempo de filtro. 1 = 0,1 s
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
=
=
=
=
=
=
100
63
%
t
Señal sin filtrar
Señal filtrada
Constante de tiempo
Señales actuales y parámetros
176
14 SALIDAS DE RELE Información de estado indicada a través de las salidas de relé y las demoras
de funcionamiento del relé.
1401 SALIDA RELE SR1 Selecciona un estado del convertidor indicado a través de la salida de relé
SR. El relé se excita cuando el estado coincide con el ajuste. FALLO (-1)
SIN SEL Sin usar 0
LISTO Listo para funcionar: Señal de Permiso de marcha activada, sin fallos,
tensión de alimentación dentro del intervalo aceptable y señal de paro de
emergencia desactivada.
1
EN MARCHA En marcha: señal de Marcha activada, señal de Permiso de Marcha
activada, sin fallos activos. 2
FALLO (-1) Fallo inverso. El relé se desexcita en un disparo por fallo. 3
FALLO Fallo 4
ALARMA Alarma. 5
INVERTIDO El motor gira en dirección inversa. 6
ARRANCADO El convertidor ha recibido la orden de marcha. El relé se excita incluso si la
señal de Permiso de marcha está desactivada. El relé se desexcita cuando
el convertidor recibe un comando de paro o se produce un fallo.
7
SUPERV1 SOBR Estado según los parámetros de supervisión 3201 ... 3203. Véase el grupo
de parámetros 32 SUPERVISION.8
SUPRV1 BAJO Véase la selección de SUPERV1 SOBR. 9
SUPERV2 SOBR Estado según los parámetros de supervisión 3204 ... 3206. Véase el grupo
de parámetros 32 SUPERVISION.10
SUPRV2 BAJO Véase la selección de SUPERV2 SOBR. 11
SUPERV3 SOBR Estado según los parámetros de supervisión 3207 ... 3209. Véase el grupo
de parámetros 32 SUPERVISION.12
SUPRV3 BAJO Véase la selección de SUPERV3 SOBR. 13
VELOC AT La frecuencia de salida es igual a la de referencia. 14
FALLO(RST) Fallo. Restauración automática tras la demora de autorrestauración. Véase
el grupo de parámetros 31 REARME AUTOMATIC.15
FALLO/ALARM Fallo o alarma. 16
CONTROL EXT Convertidor en control externo. 17
SELEC REF 2 Referencia externa REF 2 en uso. 18
FREC CONST Velocidad constante en uso. Véase el grupo de parámetros 12 VELOC
CONSTANTES.19
PERD REF Pérdida del lugar de control activo o de la referencia. 20
SOBREINTENSIDAD Alarma/fallo por la función de protección frente a sobreintensidades. 21
SOBRETENSION Alarma/fallo por la función de protección frente a sobretensiones. 22
TEMP UNIDAD Alarma/fallo por la función de protección frente a temperatura excesiva del
convertidor. 23
SUBTENSION Alarma/fallo por la función de protección frente a subtensiones. 24
FALLO EA1 Pérdida de la señal de la entrada analógica EA1. 25
FALLO EA2 Pérdida de la señal de la entrada analógica EA2. 26
TEMP MOTOR Alarma/fallo por la función de protección frente a temperatura excesiva del
motor. Véase el parámetro 3005 PROT TERMIC MOT. 27
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
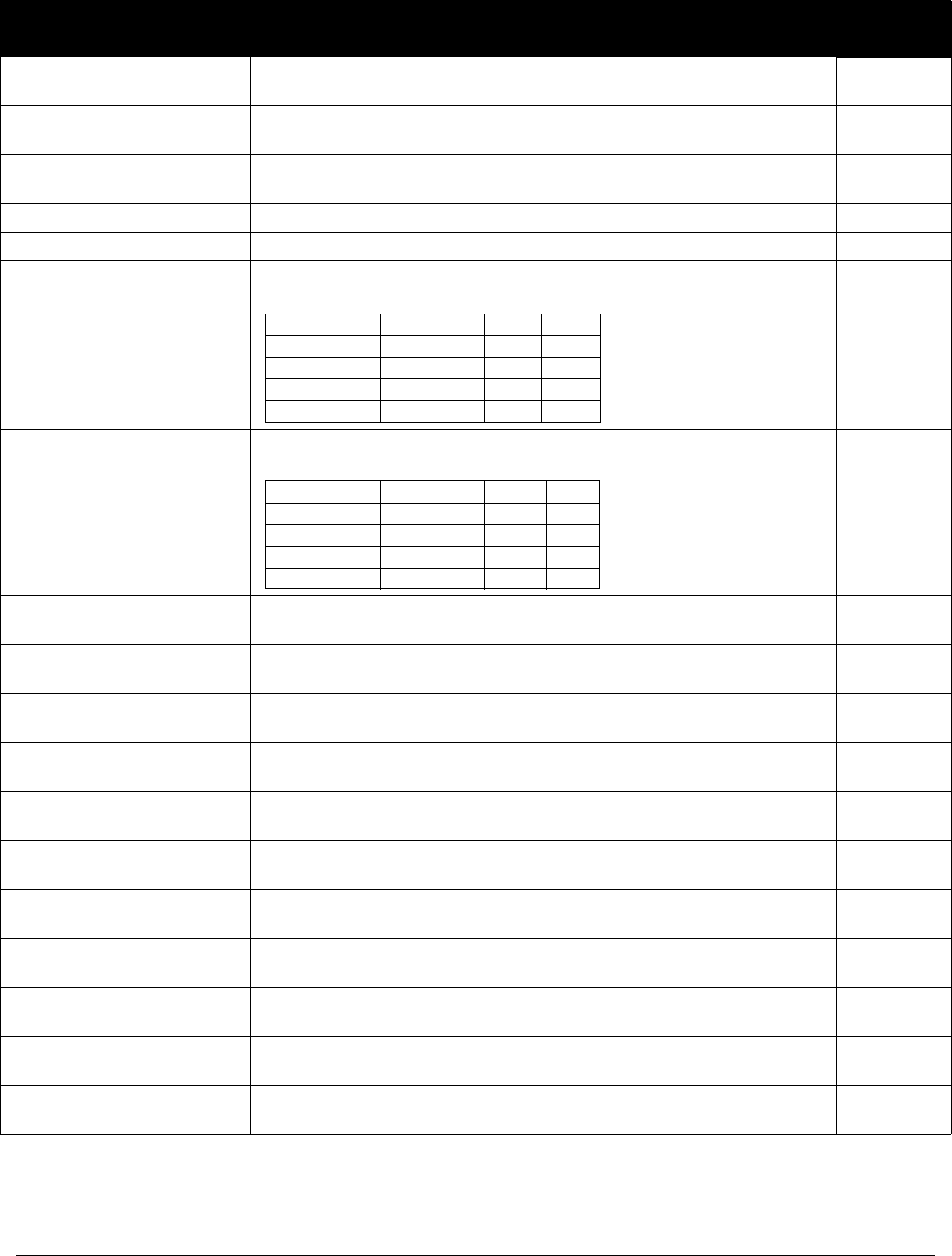
Señales actuales y parámetros
177
BLOQUEO Alarma/fallo por la función de protección frente a bloqueos. Véase el
parámetro 3010 FUNCION BLOQUEO. 28
BAJA CARGA Alarma/fallo por la función de protección frente a bajas cargas. Véase el
parámetro 3013 FUNC BAJA CARGA. 29
DORMIR PID Función dormir PID. Véase el grupo de parámetros 40 CONJ PID
PROCESO 1/41 CONJ PID PROCESO 2.30
FLUJO LISTO El motor está magnetizado y listo para proporcionar el par nominal. 33
MACRO USUA 2 La macro de usuario 2 está activa. 34
COMUNIC Señal de control del bus de campo 0134 COD SR COMUNIC. 0 = desexcitar
salida, 1 = excitar salida. 35
COMUNIC (-1) Señal de control del bus de campo 0134 COD SR COMUNIC. 0 = desexcitar
salida, 1 = excitar salida. 36
FUNC TEMP 1 La función temporizada 1 está activa. Véase el grupo de parámetros 36
FUNCIONES TEMP.37
FUNC TEMP 2 La función temporizada 2 está activa. Véase el grupo de parámetros 36
FUNCIONES TEMP.38
FUNC TEMP 3 La función temporizada 3 está activa. Véase el grupo de parámetros 36
FUNCIONES TEMP.39
FUNC TEMP 4 La función temporizada 4 está activa. Véase el grupo de parámetros 36
FUNCIONES TEMP.40
M DISP VENT Disparado el contador de tiempo de funcionamiento del ventilador de
refrigeración. Véase el grupo de parámetros 29 DISP MANTENIMIENTO.41
M DISP REV Disparado el contador de revoluciones. Véase el grupo de parámetros 29
DISP MANTENIMIENTO.42
M DISP MARC Disparado el contador de tiempo de funcionamiento. Véase el grupo de
parámetros 29 DISP MANTENIMIENTO.43
M DISP MWH Disparado el contador de MWh. Véase el grupo de parámetros 29 DISP
MANTENIMIENTO.44
PROG SEC Control de la salida de relé en programación de secuencias. Véase el
parámetro 8423 CONTR SAL EST 1. 50
FRENO MEC Control de activación/desactivación de un freno mecánico. Véase el grupo
de parámetros 43 CONTROL FRENO MEC.51
JOG ACTIVO La función de avance lento está activa. Véase el parámetro 1010 SEL
LENTITUD. 52
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Valor 0134 Binario SD SR
0 000000 0 0
1 000001 0 1
2 000010 1 0
3 000011 1 1
Valor 0134 Binario SD SR
0 000000 1 1
1 000001 1 0
2 000010 0 1
3 000011 0 0
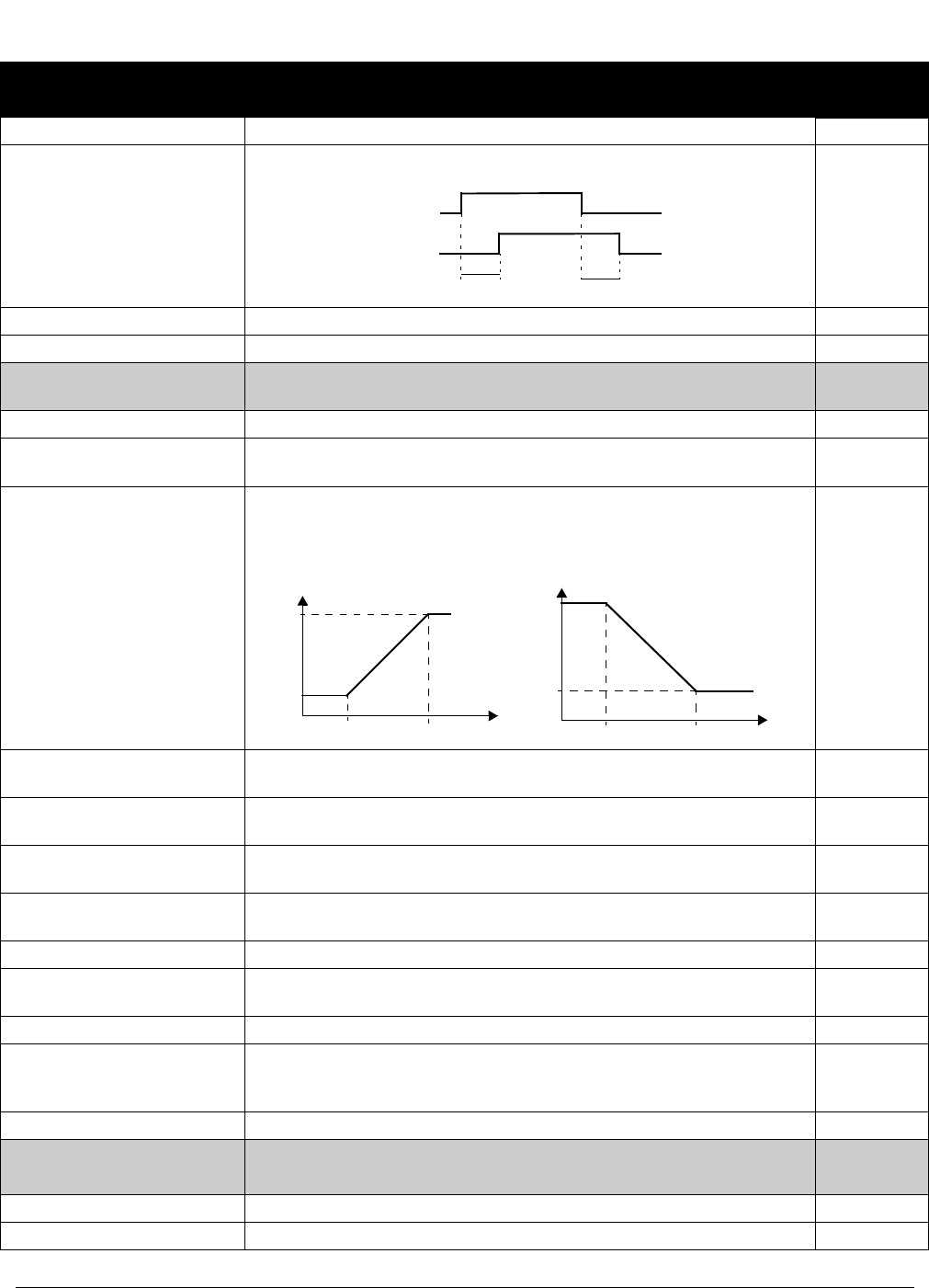
Señales actuales y parámetros
178
1404 RETAR ON SR1 Define la demora de funcionamiento para la salida de relé SR. 0
0,0…3600,0 s Tiempo de demora. La siguiente figura ilustra las demoras de funcionamiento
(activado) y liberación (desactivado) para la salida de relé SR. 1 = 0,1 s
1405 RETAR OFF SR1 Define el retardo de liberación para la salida de relé SR. 0
0,0…3600,0 s Tiempo de demora. Véase la figura en el parámetro 1404 RETAR ON SR1. 1 = 0,1 s
15 SALIDAS ANALOG Selección de las señales actuales que se indicarán a través de las salidas
analógicas y proceso de las señales de salida.
1501 SEL CONTENID SA1 Conecta una señal del convertidor a la salida analógica SA. 103
x ... x Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD.
1502 CONT SA1 MIN Define el valor mínimo para la señal seleccionada con el parámetro 1501
SEL CONTENID SA1.
El mínimo y máximo de la SA corresponden a los ajustes 1504 MINIMO SA1
y 1505 MAXIMO SA1 de este modo:
-
x ... x El rango de ajuste depende del ajuste del parámetro 1501 SEL CONTENID
SA1. -
1503 CONT SA1 MAX Define el valor máximo para la señal seleccionada con el parámetro 1501
SEL CONTENID SA1. Véase la figura en el parámetro 1502 CONT SA1 MIN. -
x ... x El rango de ajuste depende del ajuste del parámetro 1501 SEL CONTENID
SA1. -
1504 MINIMO SA1 Define el valor mínimo de la señal de salida analógica SA. Véase la figura en
el parámetro 1502 CONT SA1 MIN. 0
0,0…20,0 mA Valor mínimo. 1 = 0,1 mA
1505 MAXIMO SA1 Define el valor máximo para la señal de salida analógica SA. Véase la figura
en el parámetro 1502 CONT SA1 MIN. 20
0,0…20,0 mA Valor máximo. 1 = 0,1 mA
1506 FILTRO SA1 Define la constante de tiempo de filtro para la salida analógica SA es decir, el
tiempo que se tarda en alcanzar el 63% de un cambio en escalón. Véase la
figura en el parámetro 1303 FILTRO EA1.
0.1
0,0…10,0 s Constante de tiempo de filtro. 1 = 0,1 s
16 CONTROLES
SISTEMA
Permiso de marcha, bloqueo de parámetros, etc.
1601 PERMISO MARCHA Selecciona el origen para la señal externa de Permiso marcha. SIN SEL
SIN SEL Permite arrancar el convertidor sin una señal externa de Permiso de marcha. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
1404 RETAR ON 1405 RETAR OFF
Evento de control
Estado relé
SA (mA)
Contenido SA
1504
1502 1503
SA (mA)
Contenido SA
1505
1504
1503 1502
1505
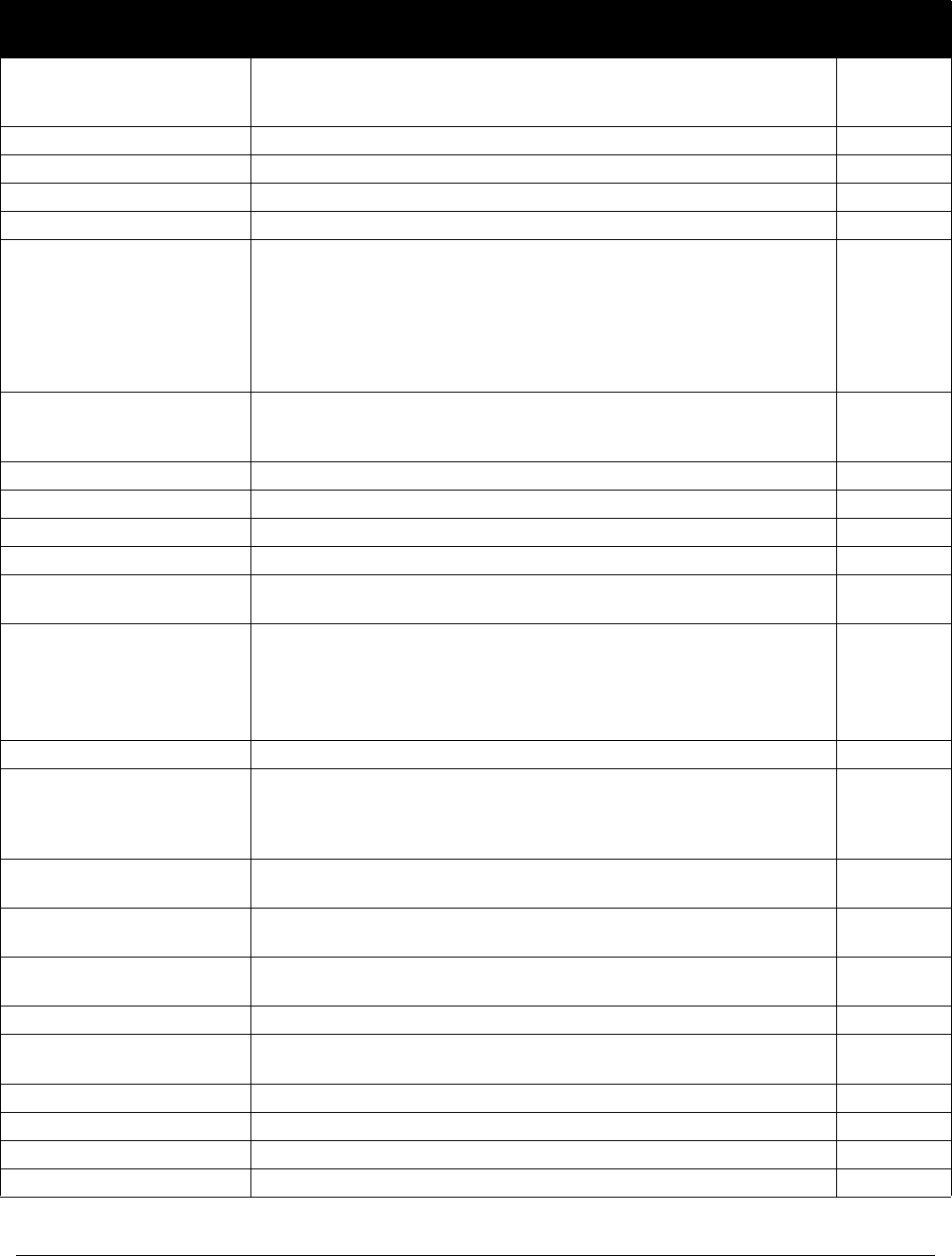
Señales actuales y parámetros
179
ED1 Señal externa requerida a través de la entrada digital ED1. 1 = Permiso de
marcha. Si se desconecta la señal de Permiso de marcha, el convertidor no
se pone en marcha o se detiene si está en marcha.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la señal invertida de Permiso
de marcha (deshabilitación de marcha); es decir, código de control 0301
COD ORDEN BC 1, bit 6 (con perfil ABB Drives 5319 PAR BCI 19, bit 3). El
regulador de bus de campo envía el código de control al convertidor a través
del adaptador de bus de campo o el bus de campo encajado (Modbus). Para
los bits del código de control, véanse las secciones Perfil de comunicación
DCU en la página 274 y Perfil de comunicación ABB Drives en la página 270.
7
ED1(inv) Señal externa requerida a través de la entrada digital ED1 invertida. 0 =
Permiso de marcha. Si se conecta la señal de Permiso de marcha, el
convertidor no se pone en marcha o se detiene si está en marcha.
-1
ED2(inv) Véase la selección ED1(inv). -2
ED3(inv) Véase la selección ED1(inv). -3
ED4(inv) Véase la selección ED1(inv). -4
ED5(inv) Véase la selección ED1(inv). -5
1602 BLOQUEO PARAM Selecciona el estado del bloqueo de parámetros. El bloqueo evita el cambio
de parámetros desde el panel de control. ABIERTO
BLOQUEADO Los valores de los parámetros no pueden cambiarse desde el panel de
control. El bloqueo puede abrirse introduciendo el código válido para el
parámetro 1603 CODIGO ACCESO.
Este bloqueo no impide los cambios de parámetros efectuados mediante
macros o bus de campo.
0
ABIERTO El bloqueo está abierto. Pueden cambiarse los valores de los parámetros. 1
NO GUARDADO Los cambios de parámetros realizados con el panel de control no se
almacenan en la memoria permanente. Para almacenar los valores de los
parámetros cambiados, ajuste el valor del parámetro 1607 SALVAR PARAM
a SAVE.
2
1603 CODIGO ACCESO Selecciona el código de acceso para el bloqueo de parámetros (véase el
parámetro 1602 BLOQUEO PARAM). 0
0…65535 Código de acceso. El ajuste 358 abre el bloqueo. El valor vuelve a 0
automáticamente. 1 = 1
1604 SEL REST FALLO Selecciona el origen de la señal de restauración de fallos. La señal restaura
el convertidor tras un disparo por fallo si la causa del fallo ya no existe. PANEL
PANEL Restauración de fallos sólo desde el panel de control. 0
ED1 Restauración a través de la entrada digital ED1 (restauración por el flanco
ascendente de ED1) o el panel de control. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
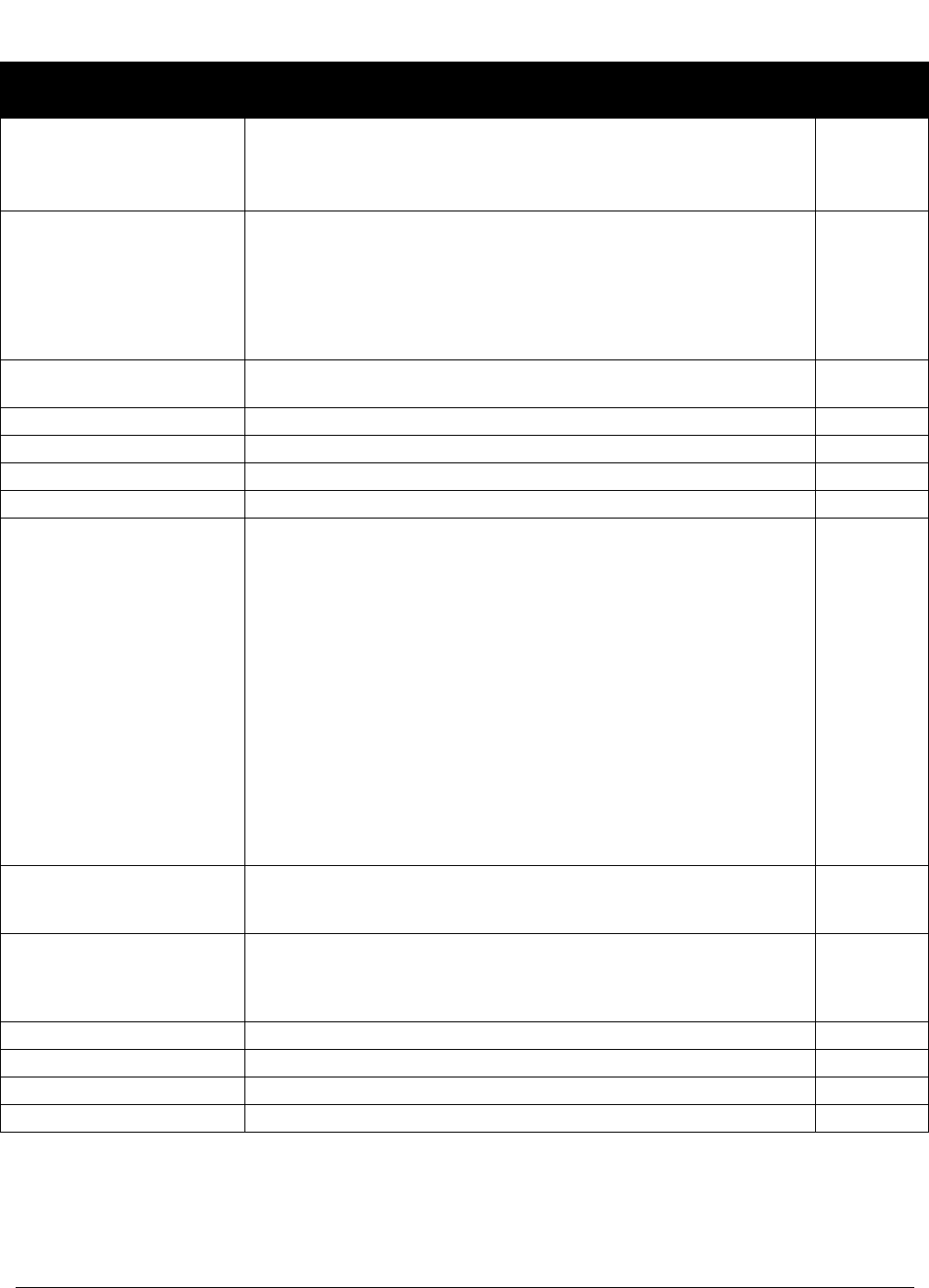
Señales actuales y parámetros
180
MARCHA/PARO Restauración junto con la señal de paro recibida a través de una entrada
digital o por el panel de control.
Nota: No utilice esta opción cuando las órdenes de marcha, paro y dirección
se reciban a través de comunicación de bus de campo.
7
COMUNIC Interfase de bus de campo como origen para la señal de restauración de
fallo; es decir, código de control 0301 COD ORDEN BC 1, bit 4 (con perfil
ABB Drives 5319 PAR BCI 19, bit 7). El regulador de bus de campo envía el
código de control al convertidor a través del adaptador de bus de campo o el
bus de campo encajado (Modbus). Para los bits del código de control,
véanse las secciones Perfil de comunicación DCU en la página 274 y Perfil
de comunicación ABB Drives en la página 270.
8
ED1(inv) Restauración a través de la entrada digital ED1 invertida (restauración por el
flanco descendente de ED1) o el panel de control. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
1605 CAMB AJ PAR USU Permite el cambio de la serie de parámetros de usuario a través de una
entrada digital. Véase el parámetro 9902 MACRO DE APLIC. Sólo se
permite el cambio cuando el convertidor está parado. Durante un cambio, el
convertidor no arrancará.
Nota: Guarde siempre la serie de parámetros de usuario con el parámetro
9902 tras el cambio de cualquier ajuste de parámetros o tras efectuar de
nuevo la identificación del motor. Los últimos ajustes guardados por el
usuario se cargan para su uso cuando se desconecta y conecta de nuevo la
alimentación o se cambia el ajuste del parámetro 9902. Los cambios que no
se guarden se pierden.
Nota: El valor de este parámetro no se incluye en la serie de parámetros de
usuario. Una vez efectuado un ajuste, éste permanece a pesar de que se
cambie la serie de parámetros de usuario.
Nota: La selección de la serie de parámetros de usuario 2 puede
supervisarse mediante la salida de relé SR. Véase el parámetro 1401
SALIDA RELE SR1.
SIN SEL
SIN SEL No es posible realizar el cambio de la serie de parámetros de usuario a
través de una entrada digital. Las series de usuario sólo se pueden cambiar
desde el panel de control.
0
ED1 Control de la serie de parámetros de usuario a través de la entrada digital
ED1. Flanco descendente de la entrada digital ED1: la serie de parámetros
de usuario 1 se carga en uso. Flanco ascendente de la entrada digital ED1:
la serie de parámetros de usuario 2 se carga en uso.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
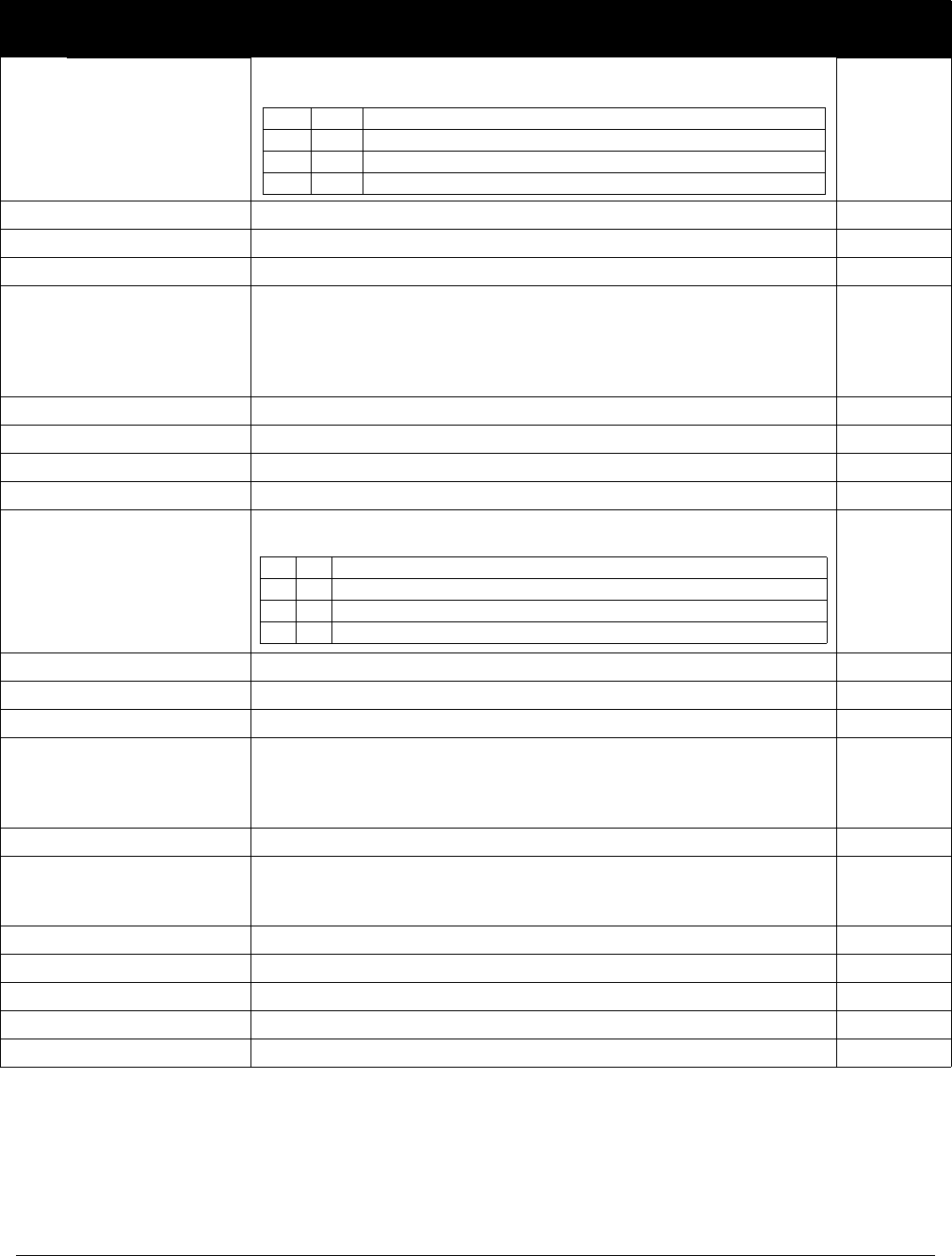
Señales actuales y parámetros
181
ED1,2 Selección de la serie de parámetros de usuario a través de las entradas
digitales ED1 y ED2. 1 = ED activa, 0 = ED inactiva. 7
ED2,3 Véase la selección ED1,2. 8
ED3,4 Véase la selección ED1,2. 9
ED4,5 Véase la selección ED1,2. 10
ED1(inv) Control de la serie de parámetros de usuario a través de la entrada digital
ED1 invertida. Flanco descendente de la entrada digital ED1 invertida: la
serie de parámetros de usuario 2 se carga en uso. Flanco ascendente de la
entrada digital ED1 invertida: la serie de parámetros de usuario 1 se carga
en uso.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
ED1,2(inv) Selección de la serie de parámetros de usuario a través de las entradas
digitales ED1 y ED2 invertidas. 1 = ED inactiva; 0 = ED activa. -7
ED2,3(inv) Véase la selección ED1,2(inv). -8
ED3,4(inv) Véase la selección ED1,2(inv). -9
ED4,5(inv) Véase la selección ED1,2(inv). -10
1606 BLOQUEO LOCAL Inhabilita la entrada en modo de control local o selecciona el origen para la
señal de bloqueo del modo de control local. Cuando el bloqueo local está
activo, la entrada en modo de control local (tecla LOC/REM del panel) está
inhabilitada.
SIN SEL
SIN SEL Control local permitido. 0
ED1 Señal de bloqueo del modo de control local a través de la entrada digital
ED1. Flanco ascendente de la entrada digital ED1: Control local inhabilitado.
Flanco descendente de la entrada digital ED1: Control local permitido.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
SI Control local inhabilitado. 7
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
ED1 ED2 Serie de parámetros de usuario
0 0 Serie de parámetros de usuario 1
1 0 Serie de parámetros de usuario 2
0 1 Serie de parámetros de usuario 3
ED1 ED2
Serie de parámetros de usuario
1 1 Serie de parámetros de usuario 1
0 1 Serie de parámetros de usuario 2
1 0 Serie de parámetros de usuario 3
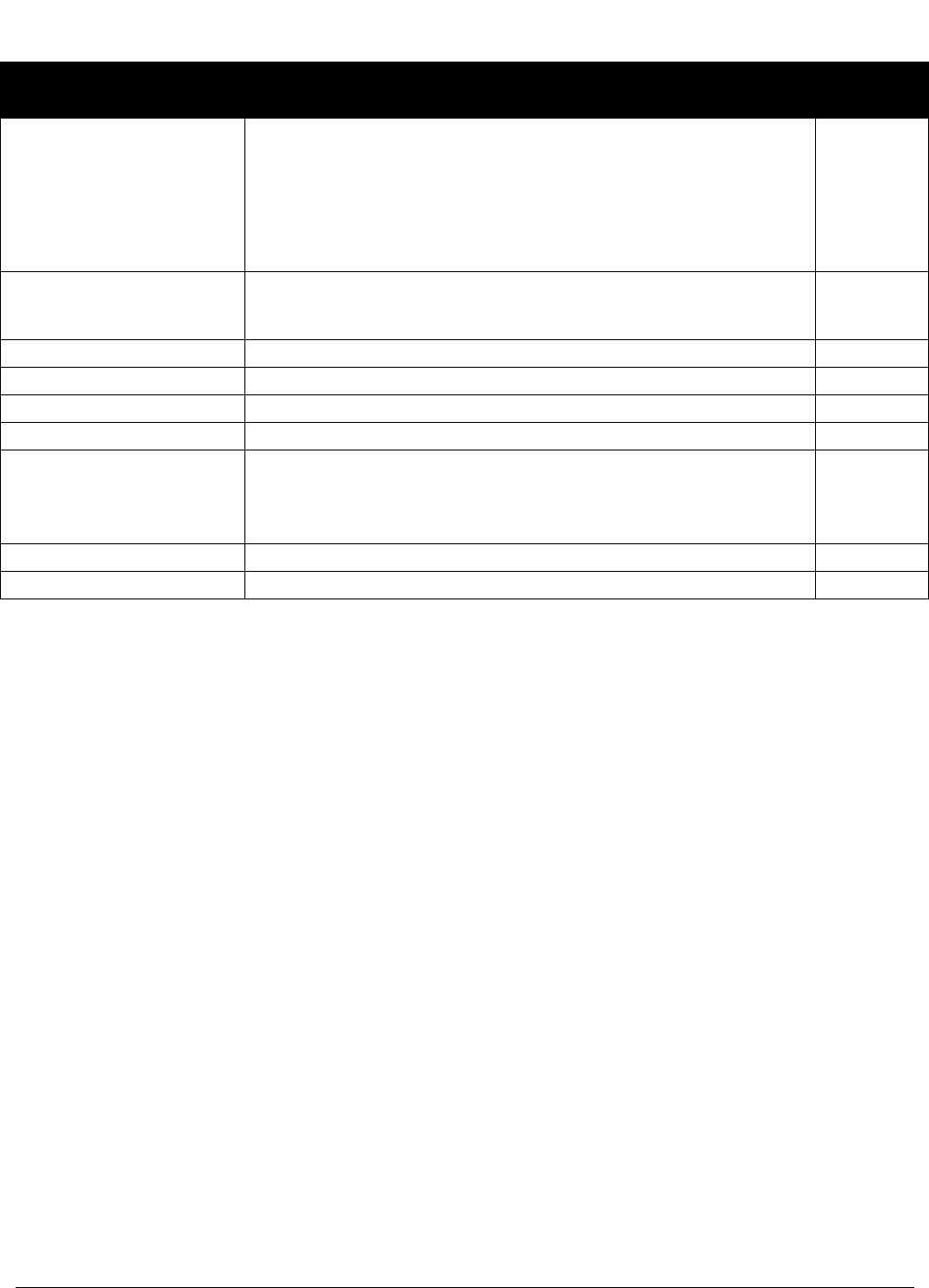
Señales actuales y parámetros
182
COMUNIC Interfase de bus de campo como origen para el bloqueo local, es decir, el
código de control 0301 COD ORDEN BC 1, bit 14. El regulador de bus de
campo envía el código de control al convertidor a través del adaptador de
bus de campo o el bus de campo encajado (Modbus). Para los bits del
código de control, véase la sección Perfil de comunicación DCU en la página
274.
Nota: Este ajuste sólo es aplicable al perfil DCU.
8
ED1(inv) Bloqueo local a través de la entrada digital ED1 invertida. Flanco ascendente
de la entrada digital ED1 invertida: Control local permitido. Flanco
descendente de la entrada digital ED1 invertida: Control local inhabilitado.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
1607 SALVAR PARAM Guarda los valores válidos de los parámetros en la memoria permanente.
Nota: Un nuevo valor de parámetro de la macro estándar se guarda
automáticamente cuando se cambia desde el panel pero no cuando se
modifica a través de una conexión de bus de campo.
REALIZADO
REALIZADO Guardado completado. 0
SALVAR... Se están guardando los datos. 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq

Señales actuales y parámetros
183
1608 PERMISO DE INI 1 Selecciona la fuente de la señal de Permiso de inicio 1.
Nota: La señal de Permiso de inicio funciona de distinto modo que la señal
de Permiso de marcha.
Ejemplo: Aplicación de control de amortiguador externo utilizando Permiso
de inicio y Permiso de marcha. El motor sólo puede arrancar después de que
el amortiguador se haya abierto totalmente.
SIN SEL
SIN SEL Señal de Permiso de inicio activada. 0
ED1 Señal externa requerida a través de la entrada digital ED1. 1 = Permiso de
inicio. Si se desconecta la señal de Permiso de inicio, el convertidor no se
pone en marcha o se detiene si está en marcha y se activa la alarma START
ENABLE 1 MISSING.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la señal invertida de Permiso
de inicio (deshabilitación de inicio); es decir, código de control 0302 COD
ORDEN BC 2, bit 18 (bit 19 para Permiso de inicio 2). El regulador de bus de
campo envía el código de control al convertidor a través del adaptador de
bus de campo o el bus de campo encajado (Modbus). Para los bits del
código de control, véase la sección Perfil de comunicación DCU en la página
274.
Nota: Este ajuste sólo es aplicable al perfil DCU.
7
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Convertidor arrancado Marcha/Paro
marcha/paro
(grupo 10)
(1608 y 1609)
Relé excitado
Relé
desexcitado
Amortiguador abierto
Tiempo de
aceleración
Tiempo de
cierre del
aceleración
Arranque@
estado de salida
(grupo 14)
Tiempo de
amortiguador
Tiempo de
cerrado
Señal de Permiso de marcha
del interruptor del
extremo del amortiguador
cuando éste está
(1601)
Estado del motor
Tiempo de
aceleración (2202) Tiempo de
aceleración (2203)
Señales de
Permiso de inicio
Tiempo de
cerrado
apertura del
Motor
velocidad
completamente abierto.
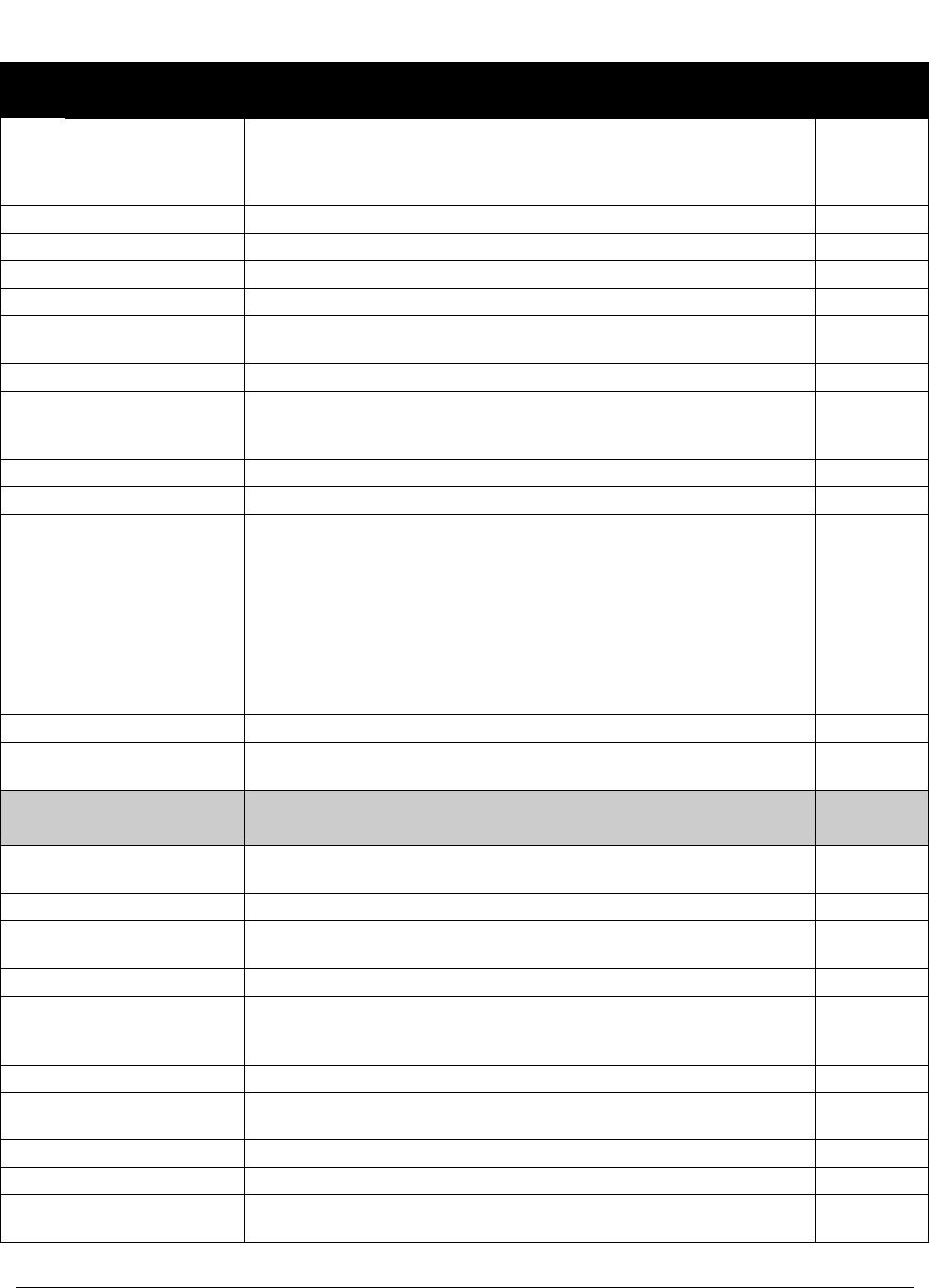
Señales actuales y parámetros
184
ED1(inv) Señal externa requerida a través de la entrada digital ED1 invertida. 0 =
Permiso de inicio. Si se desconecta la señal de Permiso de inicio, el
convertidor no se pone en marcha o se detiene si está en marcha y se activa
la alarma Permiso de inicio 1 no detectado.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
1609 PERMISO DE INI 2 Selecciona la fuente de la señal de Permiso de inicio 2. Véase el parámetro
1608 PERMISO DE INI 1. SIN SEL
Véase el parámetro 1608.
1610 ALARMAS PANEL Activa o desactiva las alarmas SOBREINTENSIDAD (2001),
SOBRETENSION (2002), SUBTENSION (2003) y EXCESO TEMP DISP
(2009). Para más información, véase el capítulo Análisis de fallos.
NO
NO Las alarmas no están activas. 0
SI Las alarmas están activas. 1
1611 VISTA PARAMETROS Selecciona la vista de parámetros, es decir, qué parámetros se muestran.
Nota: Este parámetro sólo es visible cuando se activa a través del
dispositivo FlashDrop opcional. FlashDrop es un dispositivo diseñado para la
copia rápida de parámetros a convertidores desexcitados. Facilita la
personalización de la lista de parámetros, p. ej. es posible ocultar
parámetros seleccionados. Para más información véase el Manual del
Usuario de FlashDrop MFDT-01 [3AFE68591074 (inglés)].
Los valores de parámetros FlashDrop se activan ajustando el parámetro
9902 MACRO DE APLIC a CARGA SET FD.
DE
DEFECTO
DE DEFECTO Listas de parámetros larga y corta completas. 0
FLASHDROP Lista de parámetros FlashDrop. No incluye la lista de parámetros corta. Los
parámetros ocultos por el dispositivo FlashDrop no son visibles. 1
18 ENT FREC Y SAL
TRA
Procesamiento de la señal de entrada de frecuencia y salida de transistor.
1801 FREC ENTRADA MIN Define el valor mínimo de entrada cuando se usa ED5 como entrada de
frecuencia. Véase el apartado Entrada de frecuencia en la página 108.0
0…10000 Hz Frecuencia mínima. 1 = 1 Hz
1802 FREC ENTRADA
MAX Define el valor máximo de entrada cuando se usa ED5 como entrada de
frecuencia. Véase el apartado Entrada de frecuencia en la página 108.1000
0…10000 Hz Frecuencia máxima. 1 = 1 Hz
1803 ENTR FREC FILTRO Define la constante de tiempo de filtro para la entrada de frecuencia, es
decir, el tiempo que se tarda en alcanzar el 63% de un cambio en escalón.
Véase el apartado Entrada de frecuencia en la página 108.
0,1
0,0…10,0 s Constante de tiempo de filtro. 1 = 0,1 s
1804 MODO ST Selecciona el modo de funcionamiento para la salida de transistor ST. Véase
el apartado Salida de transistor en la página 108.DIGITAL
DIGITAL La salida de transistor se utiliza como salida digital SD. 0
FRECUENCIA La salida de transistor se utiliza como salida de frecuencia SF. 1
1805 SEÑAL SD Selecciona un estado del convertidor indicado a través de la salida digital
SD. FALLO(-1)
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
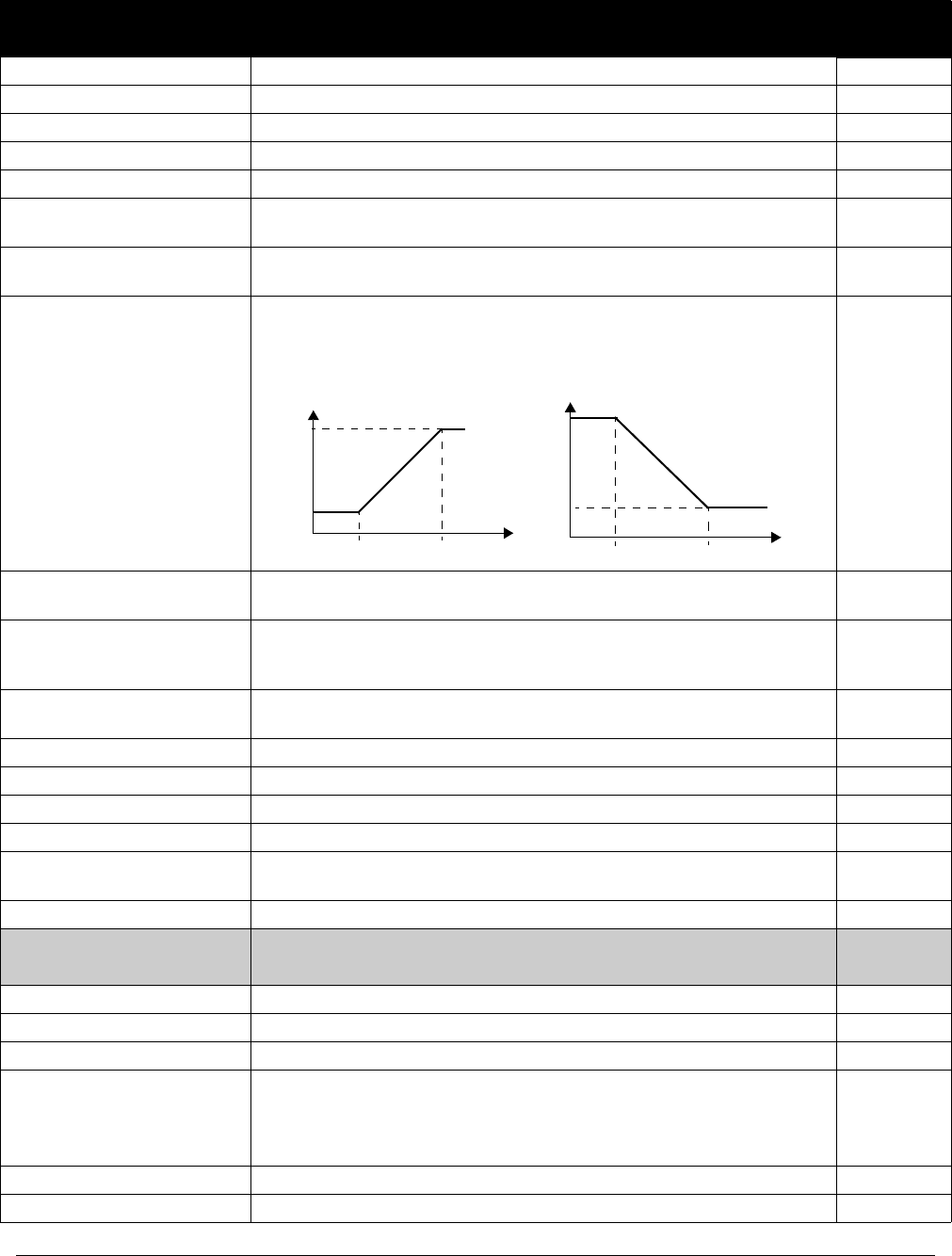
Señales actuales y parámetros
185
Véase el parámetro 1401 SALIDA RELE SR1.
1806 RETAR ON SD Define la demora de funcionamiento para la salida digital SD. 0
0,0…3600,0 s Tiempo de demora. 1 = 0,1 s
1807 RETAR OFF SD Define la demora de liberación para la salida digital SD. 0
0,0…3600,0 s Tiempo de demora. 1 = 0,1 s
1808 SEL CONTENID SF Selecciona una señal del convertidor para conectarla a la salida de
frecuencia SF. 104
x ... x Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD.
1809 CONT SF MIN Define el valor mínimo de la señal de salida de frecuencia SF. La señal se
selecciona con el parámetro 1808 SEL CONTENID SF.
El mínimo y máximo de la SF corresponden a los ajustes 1811 MINIMO SF y
1812 MAXIMO SF de este modo:
-
x ... x El rango de ajuste depende del ajuste del parámetro 1808 SEL CONTENID
SF. -
1810 CONT SF MAX Define el valor máximo de la señal de salida de frecuencia SF. La señal se
selecciona con el parámetro 1808 SEL CONTENID SF. Véase el parámetro
1809CONT SF MIN.
-
x ... x El rango de ajuste depende del ajuste del parámetro 1808 SEL CONTENID
SF. -
1811 MINIMO SF Define el valor mínimo para la salida de frecuencia SF. 10
10…16000 Hz Frecuencia mínima. Véase el parámetro1809 CONT SF MIN. 1 = 1 Hz
1812 MAXIMO SF Define el valor máximo para la salida de frecuencia SF. 1000
10…16000 Hz Frecuencia máxima. Véase el parámetro1809 CONT SF MIN. 1 = 1 Hz
1813 FILTRO SF Define la constante de tiempo de filtro para la salida de frecuencia SF, es
decir, el tiempo que se tarda en alcanzar el 63% de un cambio en escalón. 0,1
0,0…10,0 s Constante de tiempo de filtro. 1 = 0,1 s
19 TEMPOR
Y CONTADOR
Temporizador y contador para el control de la puesta en marcha y el paro
1901 DEMORA TEMPORIZ Define la demora para el temporizador. 10
0,01…120,00 s Tiempo de demora. 1 = 0,01 s
1902 INICIO TEMPORIZ Selecciona el origen para la señal de inicio del temporizador. SIN SEL
ED1(inv) Inicio del temporizador a través de la entrada digital inversa ED1. Inicio del
temporizador por un flanco descendente de la entrada digital ED1.
Nota: El inicio del temporizador no es posible cuando la restauración está
activa (parámetro 1903 RESET TEMPORIZ).
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
SF
Contenido SF
1811
1809 1810
SF
Contenido SF
1812
1811
1809 1810
1812
Señales actuales y parámetros
186
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL No hay señal de inicio. 0
ED1 Inicio del temporizador a través de la entrada digital ED1. Inicio del
temporizador por un flanco ascendente de la entrada digital ED1.
Nota: El inicio del temporizador no es posible cuando la restauración está
activa (parámetro 1903 RESET TEMPORIZ).
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
START Señal externa de inicio; p. ej., señal de inicio a través del bus de campo. 6
1903 RESET TEMPORIZ Selecciona el origen para la señal de restauración del temporizador. SIN SEL
ED1(INV) Restauración del temporizador a través de la entrada digital invertida ED1. 0
= activo, 1 = inactivo. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL Sin señal de restauración. 0
ED1 Restauración del temporizador a través de la entrada digital ED1. 1 = activa,
0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
INICIO Restauración del temporizador al inicio. El origen de la señal de inicio se
selecciona con el parámetro 1902 INICIO TEMPORIZ. 6
INICIO (INV) Restauración del temporizador al inicio (invertido), es decir, el temporizador
se restaura al desactivar la señal de inicio. El origen de la señal de inicio se
selecciona con el parámetro 1902 INICIO TEMPORIZ.
7
RESET Restauración externa, p. ej., a través del bus de campo. 8
1904 ACTIVAR CONTADOR Selecciona el origen para la señal de activación del contador. DESACTIVADO
ED1(INV) Señal de activación del contador a través de la entrada digital ED1 invertida.
0 = activa, 1 = inactiva. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
DESACTIVADO Sin activación del contador. 0
ED1 Señal de activación del contador a través de la entrada digital ED1. 1 =
activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
187
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ACTIVADO Contador activado. 6
1905 LIMITE CONTADOR Define el límite del contador. 1000
0…65535 Valor límite. 1 = 1
1906 ENTRADA
CONTADOR Selecciona el origen de la señal para el contador. EN PLS(ED
5)
EN PLS(ED 5) Pulsos de la entrada digital ED5. Cuando se detecta un pulso el contador
incrementa en 1 su valor. 1
ENC SIN DIR Flancos del generador de pulsos. Cuando se detecta un flanco ascendente o
descendente el contador incrementa en 1 su valor. 2
ENC CON DIR Flancos del generador de pulsos. Se tiene en cuenta la dirección de giro.
Cuando se detecta un flanco ascendente o descendente y la dirección de
giro es hacia delante, el contador incrementa en 1 su valor. Cuando la
dirección de giro es hacia atrás, el contador reduce en 1 su valor.
3
ED5 FILTRADA Pulsos de la entrada digital ED5 filtrada. Cuando se detecta un pulso el
contador incrementa en 1 su valor.
Nota: Debido al filtrado de la señal, la frecuencia máxima de entrada es de
50 Hz.
4
1907 RESET CONTADOR Selecciona el origen para la señal de restauración del contador. SIN SEL
ED1(INV) Restauración del contador a través de la entrada digital ED1 invertida. 0 =
activo, 1 = inactivo. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL Sin señal de restauración. 0
ED1 Restauración del contador a través de la entrada digital ED1. 1 = activa, 0 =
inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
EN LIMITE Restauración en el límite definido por el parámetro 1905 LIMITE
CONTADOR. 6
ORD MAR/PARO Restauración del contador con la orden de marcha/paro. El origen para
marcha/paro se selecciona con el parámetro 1911 ORDEN M/P CONT. 7
ORD M/P(INV) Restauración del contador con la orden de marcha/paro (invertida), es decir,
el contador se restaura al desactivar la orden de marcha/paro. El origen de la
señal de inicio se selecciona con el parámetro 1902 INICIO TEMPORIZ.
8
RESET Restauración activada. 9
1908 VALOR RES CONT Define el valor del contador tras una restauración. 0
0…65535 Valor del contador. 1 = 1
1909 DIVISOR CONTADOR Define el divisor para el contador de pulsos. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
188
0…12 Divisor N del contador de pulsos. Se cuenta un bit de cada 2N.1 = 1
1910 DIRECCION CONT Define el origen para la selección de dirección del contador. ARRIBA
ED1(INV) Selección de dirección del contador a través de la entrada digital ED1
invertida. 1 = incremento, 0 = decremento. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
ARRIBA Incremento. 0
ED1 Selección de dirección del contador a través de la entrada digital ED1. 0 =
incremento, 1 = decremento. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ABAJO Decremento. 6
1911 ORDEN M/P CONT Selecciona el origen para la orden de marcha/paro del convertidor cuando el
valor del parámetro 1001 COMANDOS EXT1 está ajustado a INIC CONTAD
/ PARO CONTAD.
SIN SEL
ED1(INV) Orden de marcha/paro a través de la entrada digital ED1 invertida.
Cuando el valor del par. 1001 es PARO CONTAD: 0 = marcha. Paro cuando
se ha superado el límite del contador definido por el parámetro 1905 LIMITE
CONTADOR.
Cuando el valor del par. 1001 es INIC CONTAD: 0 = paro. Arranque cuando
se ha superado el límite del contador definido por el parámetro 1905.
-1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL Sin origen de orden de marcha/paro. 0
ED1 Orden de marcha/paro a través de la entrada digital ED1.
Cuando el valor del par. 1001 es PARO CONTAD: 1 = marcha. Paro cuando
se ha superado el límite del contador definido por el parámetro 1905 LIMITE
CONTADOR.
Cuando el valor del par. 1001 es INIC CONTAD: 1 = paro. Arranque cuando
se ha superado el límite del contador definido por el parámetro 1905.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ACTIVAR Orden externa de marcha/paro, p. ej., a través del bus de campo. 6
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
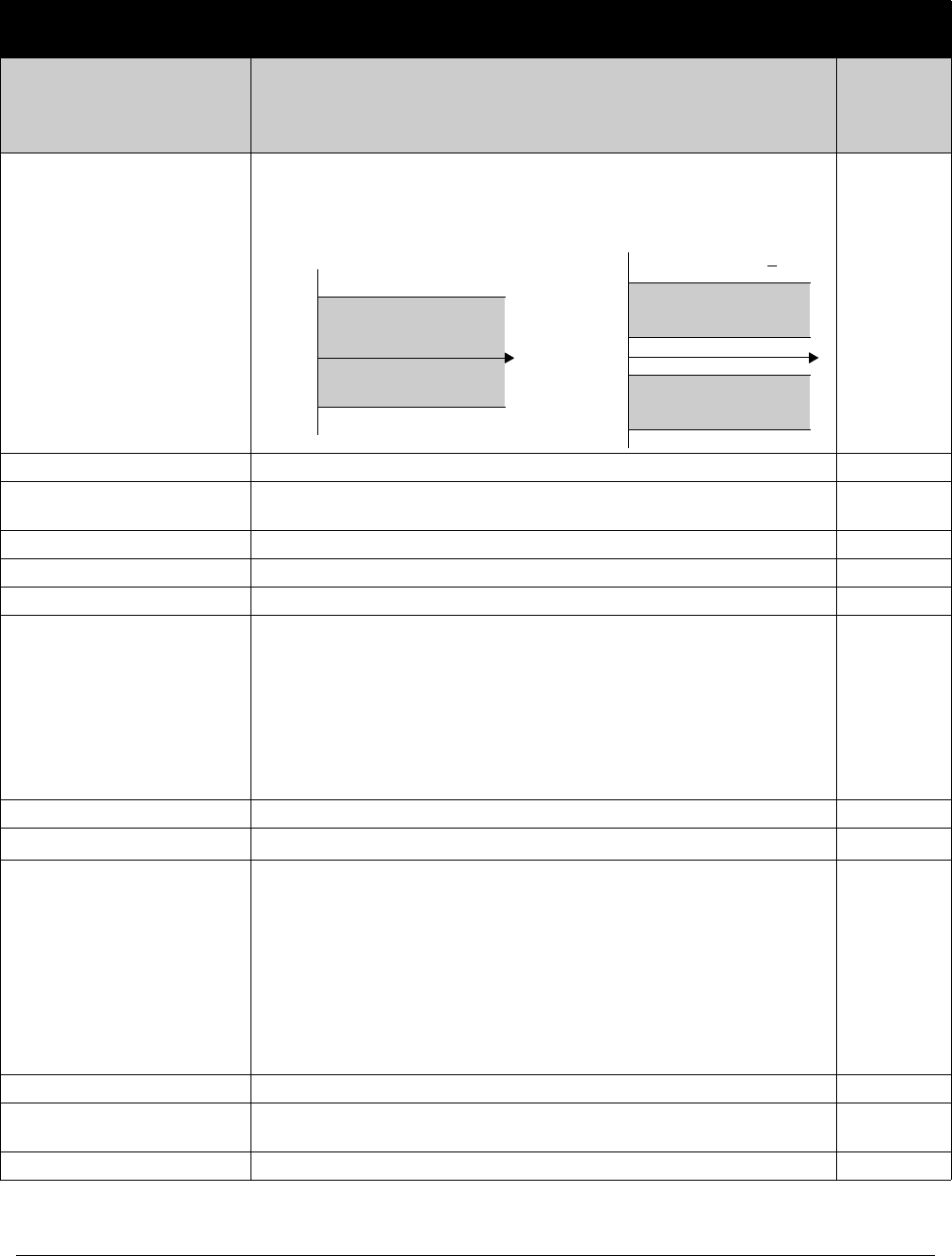
Señales actuales y parámetros
189
20 LIMITES Límites de funcionamiento del convertidor.
Los valores de velocidad se utilizan con control vectorial y los valores de
frecuencia se usan con control escalar. El modo de control del motor se
selecciona con el parámetro 9904 MODO CTRL MOTOR.
2001 VELOCIDAD MINIMA Define la velocidad mínima permitida.
Un valor de velocidad mínima positivo (o cero) define dos rangos, uno
positivo y otro negativo.
Un valor de velocidad mínima negativo define un rango de velocidad.
0
-30000 … 30000 rpm Velocidad mínima. 1 = 1 rpm
2002 VELOCIDAD MAXIMA Defines la velocidad máxima permitida. Véase el parámetro 2001
VELOCIDAD MINIMA. Eur.: 1500 /
USA: 1800
0 … 30000 rpm Velocidad máxima. 1 = 1 rpm
2003 INTENSID MAXIMA Define la intensidad máxima permitida del motor. 1,8 · I2N
0,0…1,8 · I2N A Intensidad 1 = 0,1 A
2005 CTRL SOBRETENS Activa o desactiva el control de sobretensión del bus intermedio de CC.
El frenado rápido de una carga de alta inercia aumenta la tensión hasta el
nivel de control de sobretensión. Para evitar que la tensión de CC exceda el
límite, el regulador de sobretensión reduce el par de frenado
automáticamente.
Nota: Si se han conectado un chopper y una resistencia de frenado al
convertidor, el regulador debe estar desactivado (selección DESACTIVAR)
para permitir el funcionamiento del chopper.
ACTIVAR
DESACTIVAR Control de sobretensión desactivado. 0
ACTIVAR Control de sobretensión activado. 1
2006 CTRL SUBTENSION Activa o desactiva el control de subtensión del bus de CC intermedio. Si la
tensión de CC cae debido a un corte de alimentación de entrada, el
regulador de subtensión reducirá de forma automática la velocidad del motor
para mantener el nivel de tensión por encima del límite inferior. Al reducir la
velocidad del motor, la inercia de la carga causará regeneración hacia el
convertidor, manteniendo el bus de CC cargado y evitando un disparo por
subtensión hasta que el motor se pare por sí solo. Esto actuará como función
de funcionamiento con cortes de la red en sistemas con una alta inercia,
como una centrífuga o un ventilador. Véase el apartado Funcionamiento con
cortes de la red en la página 110.
ACTIVAR
(TIEMPO)
DESACTIVAR Control de subtensión desactivado. 0
ACT(TIEMPO) Control de subtensión activado. El control de subtensión está activo durante
500 ms. 1
ACTIVAR Control de subtensión activado. Sin límite de tiempo de funcionamiento. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
2001
2002
Veloc.
-(2001)
-(2002)
2002
2001
Rango de vel. Rango de vel.
t
Veloc.
t
El valor 2001 es > 0
00
El valor de 2001 es< 0
permitido
Rango de vel.
permitido
permitido
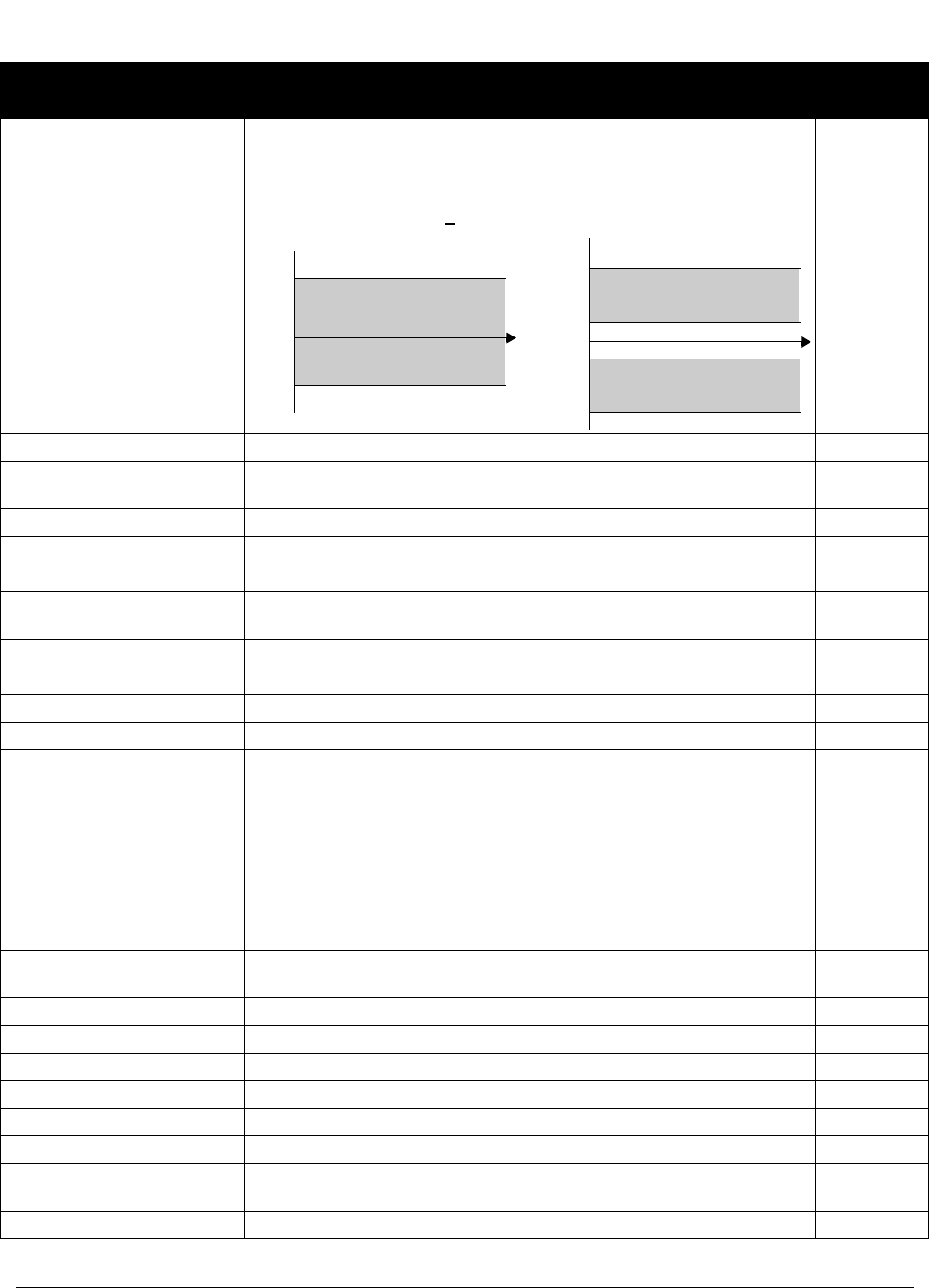
Señales actuales y parámetros
190
2007 FRECUENCIA MIN Define el límite mínimo para la frecuencia de salida del convertidor.
Un valor de frecuencia mínima positivo (o cero) define dos rangos, uno
positivo y otro negativo.
Un valor de frecuencia mínima negativo define un rango de velocidad.
Nota: FRECUENCIA MIN < FRECUENCIA MAX.
0
-500,0…500,0 Hz Frecuencia mínima. 1 = 0,1 Hz
2008 FRECUENCIA MAX Define el límite máximo para la frecuencia de salida del convertidor. Eur.: 50 /
USA: 60
0,0…500,0 Hz Frecuencia máxima. 1 = 0,1 Hz
2013 SEL PAR MINIMO Selecciona el límite de par mínimo para el convertidor. PAR MIN 1
PAR MIN 1 Valor definido por el parámetro 2015 PAR MIN 1. 0
ED1 Entrada digital ED1. 0 = valor del parámetro 2015 PAR MIN 1. 1 = valor del
parámetro 2016 PAR MIN 2. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la selección de límite de par 1/
2, es decir, el código de control 0301 COD ORDEN BC 1, bit 15. El regulador
de bus de campo envía el código de control al convertidor a través del
adaptador de bus de campo o el bus de campo encajado (Modbus). Para los
bits del código de control, véase la sección Perfil de comunicación DCU en la
página 274.
El límite de par mínimo 1 se define con el parámetro 2015 PAR MIN 1 y el
límite de par mínimo 2 se define con el parámetro 2016 PAR MIN 2.
Nota: Este ajuste sólo es aplicable al perfil DCU.
7
ED1(inv) Entrada digital ED1 invertida. 1 = valor del parámetro 2015 PAR MIN 1; 0 =
valor del parámetro 2016 PAR MIN 2. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
2014 SEL PAR MAXIMO Selecciona el límite de par máximo para el convertidor. PAR MAX 1
PAR MAX 1 Valor definido por el parámetro 2017 PAR MAX 1.
ED1 Entrada digital ED1. 0 = valor del parámetro 2017 PAR MAX 1. 1 = valor del
parámetro 2018 PAR MAX 2. 1
ED2 Véase la selección ED1. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
2007
2008
f
-(2007)
-(2008)
2008
2007
Rango de Rango de frecuencias
Rango de frecuencias
t
f
t
El valor 2007 es > 0
00
El valor de 2007 es< 0
frecuencias permitido permitido
permitido
Señales actuales y parámetros
191
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la selección de límite de par 1/
2, es decir, el código de control 0301 COD ORDEN BC 1, bit 15. El regulador
de bus de campo envía el código de control al convertidor a través del
adaptador de bus de campo o el bus de campo encajado (Modbus). Para los
bits del código de control, véase la sección Perfil de comunicación DCU en la
página 274.
El límite de par máximo 1 se define con el parámetro 2017 PAR MAX 1 y el
límite de par máximo 2 se define con el parámetro 2018 PAR MAX 2.
Nota: Este ajuste sólo es aplicable al perfil DCU.
7
ED1(inv) Entrada digital ED1 invertida. 1 = valor del parámetro 2017 PAR MAX 1.
0 = valor del parámetro 2018 PAR MAX 2. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
2015 PAR MIN 1 Define el límite de par mínimo 1 para el convertidor. Véase el parámetro2013
SEL PAR MINIMO. -300
-600,0…0,0% Valor en porcentaje del par nominal del motor. 1 = 0,1%
2016 PAR MIN 2 Define el límite de par mínimo 2 para el convertidor. Véase el parámetro2013
SEL PAR MINIMO. -300
-600,0…0,0% Valor en porcentaje del par nominal del motor. 1 = 0,1%
2017 PAR MAX 1 Define el límite de par máximo 1 para el convertidor. Véase el
parámetro2014 SEL PAR MAXIMO. 300
0,0…600.0% Valor en porcentaje del par nominal del motor. 1 = 0,1%
2018 PAR MAX 2 Define el límite de par máximo 2 para el convertidor. Véase el
parámetro2014 SEL PAR MAXIMO. 300
0,0…600,0% Valor en porcentaje del par nominal del motor. 1 = 0,1%
2019 CHOPPER FRENADO Parámetro antiguo. Parámetro quitado en la versión del software 2.51b y
posteriores. Véase el parámetro 2202.
2020 CHOPPER FRENADO Selecciona el control del chopper de frenado. (Sólo en la versión del
software 2.51b o posteriores). INTERNO
INTERNO Control del chopper de frenado interno.
Nota:Verifique que la(s) resistencia(s) de frenado esté(n) instalada(s) y que
se haya desconectado el control de sobretensión pasando el parámetro 2005
CTRL SOBRETENS a la opción DESACTIVAR.
0
EXTERNO Control del chopper de frenado externo.
Nota: El convertidor sólo es compatible con las unidades de frenado ABB
ACS-BRK-X.
Nota: Verifique que la unidad de frenado esté instalada y que se haya
desconectado el control de sobretensión pasando el parámetro 2005 CTRL
SOBRETENS a la opción DESACTIVAR.
1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
192
21 MARCHA/PARO Modos de marcha y paro del motor.
2101 FUNCION MARCHA Selecciona el método de puesta en marcha del motor. AUTO
AUTO El convertidor arranca el motor instantáneamente desde frecuencia cero, si
el ajuste del parámetro 9904 MODO CTRL MOTOR es ESCALAR:FREC. Si
es necesario el arranque girando, utilice la selección INICIO EXPL.
Si el valor del parámetro 9904 MODO CTRL MOTOR es VECTOR:VELOC /
VECTOR:PAR, el convertidor premagnetiza el motor con una corriente CC
antes del arranque. El tiempo de premagnetización se define con el
parámetro 2103 TIEMPO MAGN CC. Véase la selección MAGN CC.
1
MAGN CC El convertidor premagnetiza el motor con corriente CC antes del arranque. El
tiempo de premagnetización se define con el parámetro 2103 TIEMPO
MAGN CC.
Si el valor del parámetro 9904 MODO CTRL MOTOR es VECTOR:VELOC /
VECTOR:PAR, la magnetización de CC garantiza el mayor par de- arranque
posible cuando la premagnetización es lo bastante larga.
Nota: El arranque para una máquina en giro no es posible cuando MAGN
CC está seleccionado.
¡ADVERTENCIA! El convertidor arrancará tras transcurrir el tiempo de
premagnetización, aunque no se haya completado la magnetización del
motor. En aplicaciones en las que sea esencial un par de arranque pleno,
verifique que el tiempo de magnetización constante sea lo bastante elevado
para permitir la generación de magnetización y par plenos.
2
SOBREPAR Se debe seleccionar el sobrepar si se requiere un elevado par de arranque.
Se usa sólo cuando el ajuste del parámetro 9904 MODO CTRL MOTOR es
ESCALAR:FREC.
El convertidor premagnetiza el motor con corriente CC antes del arranque. El
tiempo de premagnetización se define con el parámetro 2103 TIEMPO
MAGN CC.
El sobrepar se aplica durante el arranque y termina cuando la frecuencia de
salida excede 20 Hz o es igual al valor de referencia. Véase el parámetro
2110 INTENS SOBREPAR.
Nota: El arranque para una máquina en giro no es posible cuando
SOBREPAR está seleccionado.
¡ADVERTENCIA! El convertidor arrancará tras transcurrir el tiempo de
premagnetización, aunque no se haya completado la magnetización del
motor. En aplicaciones en las que sea esencial un par de arranque pleno,
verifique que el tiempo de magnetización constante sea lo bastante elevado
para permitir la generación de magnetización y par plenos.
4
INICIO EXPL Arranque girando con exploración de frecuencia (arranque en una máquina
que ya está girando). Se basa en una exploración de frecuencia (intervalo
2008 FRECUENCIA MAX...2007 FRECUENCIA MIN) para identificar la
frecuencia. Si la identificación de frecuencia falla, se utiliza una
magnetización de CC (véase la selección MAGN CC).
6
EXPL+SOBREP Combina el arranque con exploración (arranque en una máquina que ya está
girando) y el sobrepar. Véanse las selecciones INICIO EXPL y SOBREPAR.
Si falla la identificación de frecuencia, se utiliza el sobrepar.
Se usa sólo cuando el ajuste del parámetro 9904 MODO CTRL MOTOR es
ESCALAR:FREC.
7
2102 FUNCION PARO Selecciona la función de paro del motor. PARO LIBRE
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
193
PARO LIBRE Paro cortando la fuente de alimentación del motor. El motor se para por sí
mismo. 1
RAMPA Paro siguiendo una rampa. Véase el grupo de parámetros 22 ACEL/DECEL.2
COMP VELOC La compensación de velocidad se utiliza para un frenado a distancia
constante. La diferencia de velocidad (entre la velocidad utilizada y la
máxima) se compensa haciendo funcionar el convertidor a la velocidad
actual antes de que el motor siga una rampa hasta pararse. Véase el
apartado Paro con compensación de velocidad en la página 111.
3
SPD COMP DIR La compensación de velocidad se utiliza para un frenado a distancia
constante si la dirección de giro es hacia delante. La diferencia de velocidad
(entre la velocidad utilizada y la máxima) se compensa haciendo funcionar el
convertidor a la velocidad actual antes de que el motor siga una rampa hasta
pararse. Véase el apartado Paro con compensación de velocidad en la
página 111.
Si la dirección de giro es hacia atrás, el convertidor decelera siguiendo una
rampa.
4
SPD COMP REV La compensación de velocidad se utiliza para un frenado a distancia
constante si la dirección de giro es hacia atrás. La diferencia de velocidad
(entre la velocidad utilizada y la máxima) se compensa haciendo funcionar el
convertidor a la velocidad actual antes de que el motor siga una rampa hasta
pararse. Véase el apartado Paro con compensación de velocidad en la
página 111.
Si la dirección de giro es hacia delante, el convertidor decelera siguiendo
una rampa.
5
2103 TIEMPO MAGN CC Define el tiempo de premagnetización. Véase el parámetro 2101 FUNCION
MARCHA. Tras el comando de arranque, el convertidor premagnetiza de
forma automática el motor el tiempo ajustado.
0,3
0,00…10,00 s Tiempo de magnetización. Ajústelo a un valor lo bastante elevado para
permitir una magnetización completa del motor. Un tiempo demasiado
prolongado calienta el motor en exceso.
1 = 0,01 s
2104 RETENCION POR CC Activa la función de retención por CC o de frenado por CC. SIN SEL
SIN SEL Inactivo. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
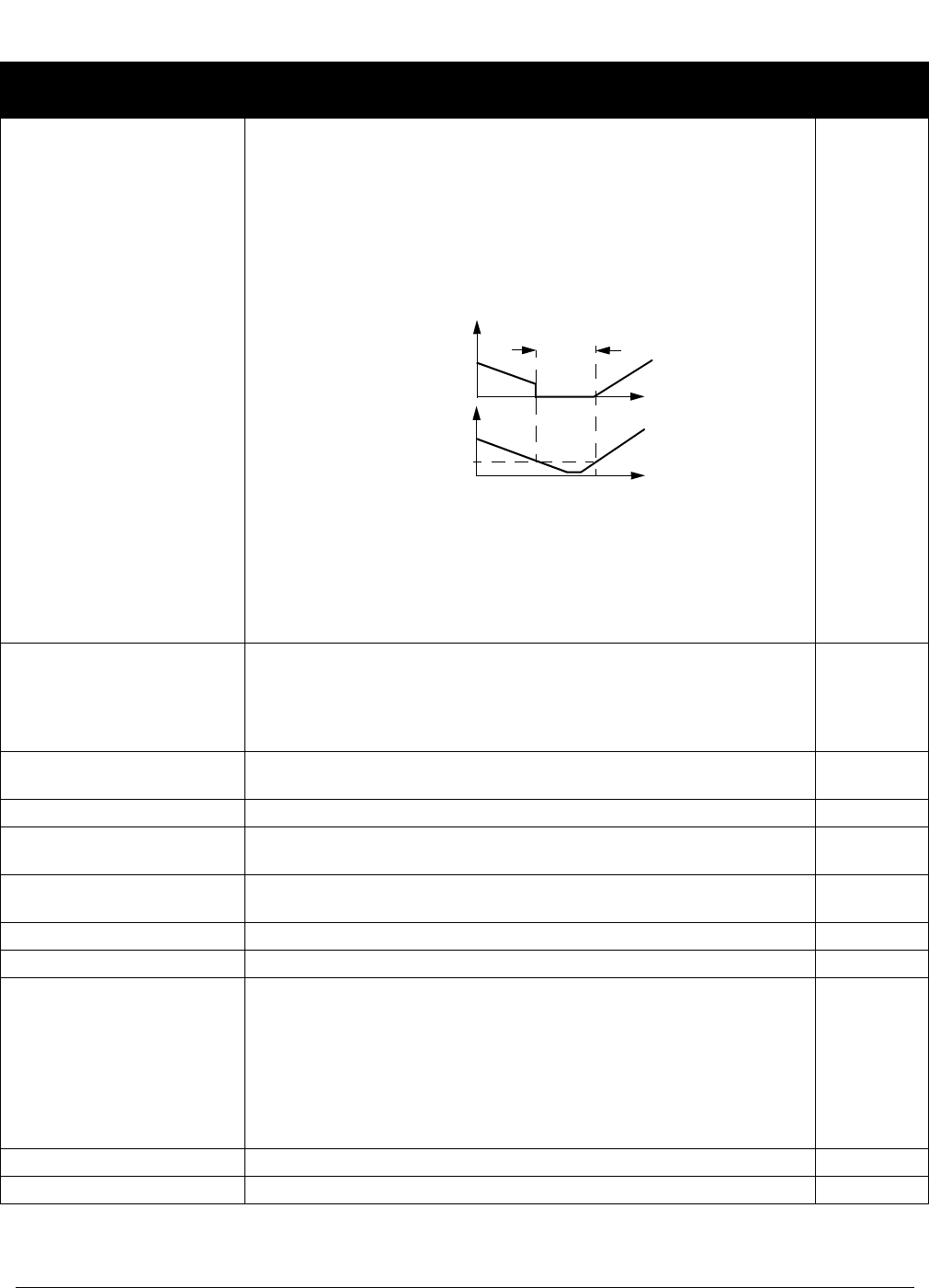
Señales actuales y parámetros
194
RETENER DC La función de retención por CC está activa. La retención por CC no es
posible si el ajuste del parámetro 9904 MODO CTRL MOTOR es
ESCALAR:FREC.
Cuando la velocidad de referencia y la del motor caen ambas por debajo del
valor del parámetro 2105 VELOC RETEN CC, el convertidor dejará de
generar una intensidad sinusoidal y empezará a suministrar CC al motor. La
intensidad se ajusta con el parámetro 2106 REF INTENS CC. Cuando la
velocidad de referencia supera el valor del parámetro 2105, se prosigue con
el funcionamiento normal del convertidor.
Nota: La retención por CC no tiene efecto si se desconecta la señal de
marcha.
Nota: El suministro de intensidad de CC al motor lo calienta. En aplicaciones
en las que se requieran un elevado tiempo de retención por CC, deberían
usarse motores ventilados externamente. Si el período de retención por CC
es elevado, la retención por CC no puede evitar que el eje del motor gire si
se aplica una carga constante al motor.
1
FRENO DC La función de freno por intensidad de CC está activa.
Si el parámetro 2102 FUNCION PARO está ajustado a PARO LIBRE, el
frenado por CC se aplica tras eliminar la orden de marcha.
Si el parámetro 2102 FUNCION PARO está ajustado a RAMPA, el frenado
por CC se aplica tras la rampa.
2
2105 VELOC RETENC CC Define la velocidad de retención por CC. Véase el parámetro 2104
RETENCION POR CC. 5
0 … 360 rpm Veloc. 1 = 1 rpm
2106 REF INTENS CC Define la intensidad de retención por CC. Véase el parámetro 2104
RETENCION POR CC. 30
0…100% Valor en porcentaje de la intensidad nominal del motor (parámetro 9906
INTENS NOM MOT). 1 = 1%
2107 TIEM FRENADO CC Define el tiempo de frenado por CC. 0
0,0…250,0 s Tiempo 1 = 0,1 s
2108 INHIBIR MARCHA Activa la función de inhibición de marcha. El arranque del convertidor se
inhibe si
- se restaura un fallo.
- la señal de Permiso de marcha se activa mientras la orden de marcha está
activa. Véase el parámetro 1601 PERMISO MARCHA.
- el modo de control cambia de local a remoto.
- el modo de control externo pasa de EXT1 a EXT2 o de EXT2 a EXT1.
NO
NO Desactivado. 0
SI Activado 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
t
t
Ref
Retención por CC
Veloc. de ret. por CC
Velocidad del motor
Señales actuales y parámetros
195
2109 SEL PARO EM Selecciona el origen de la orden de paro de emergencia externa.
El convertidor no se puede volver a arrancar antes de que la orden de paro
de emergencia se haya restaurado.
Nota: La instalación debe incluir dispositivos de paro de emergencia y
cualquier otro equipo de seguridad que pueda ser necesario. Si se pulsa
STOP en el panel de control del convertidor:
- NO se genera un paro de emergencia del motor
- NO se aísla el convertidor de un potencial peligroso
SIN SEL
SIN SEL La función de paro de emergencia no está seleccionada. 0
ED1 Entrada digital ED1. 1 = paro siguiendo la rampa de paro de emergencia.
Véase el parámetro 2208 TIEMPO DESAC EM. 0 = restauración de la orden
de paro de emergencia.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ED1(inv) Entrada digital ED1 invertida. 0 = paro siguiendo la rampa de paro de
emergencia. Véase el parámetro 2208 TIEMPO DESAC EM. 1 =
restauración de la orden de paro de emergencia.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
2110 INTENS SOBREPAR Define la intensidad máxima suministrada durante el sobrepar. Véase el
parámetro 2101 FUNCION MARCHA. 100
15…300% Valor en porcentaje. 1 = 1%
2111 RETAR SEÑAL PARO Define la demora de la señal de paro cuando el parámetro 2102 FUNCION
PARO está ajustado a COMP VELOC. 0
0 … 10000 ms Tiempo de demora. 1 = 1 ms
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
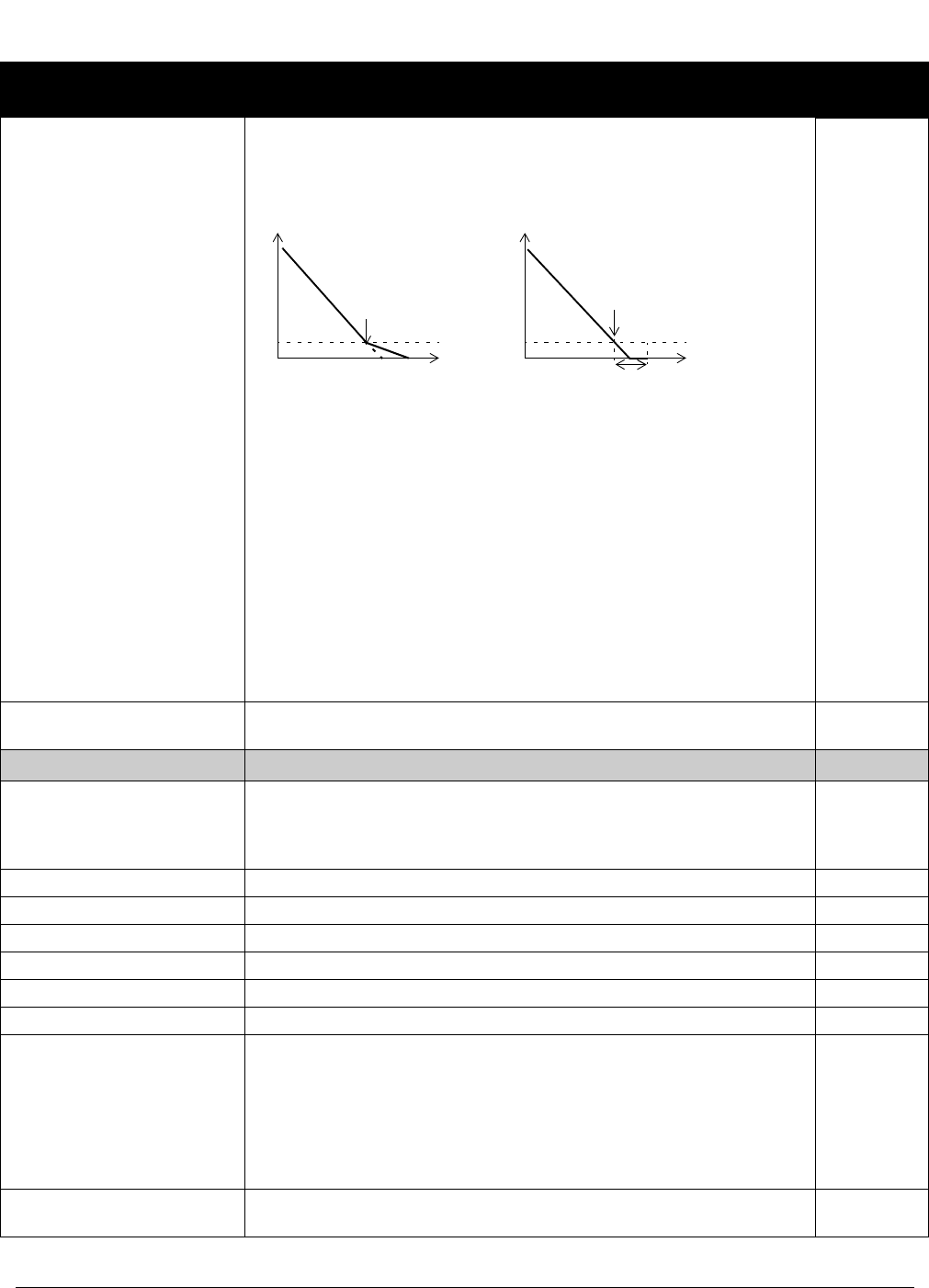
Señales actuales y parámetros
196
2112 RETARDO VEL CERO Define la demora para la función Retardo de velocidad cero. La función es
útil en aplicaciones en que es esencial un rearranque rápido y suave.
Durante la demora el convertidor conoce con precisión la posición del rotor.
Por ejemplo, la demora de velocidad cero puede utilizarse con la función de
avance lento o el freno mecánico.
Sin demora de velocidad cero
El convertidor recibe un comando de paro y decelera por una rampa.
Cuando la velocidad real del motor cae por debajo de un límite interno
(llamado Velocidad cero), el regulador de velocidad se desconecta. Se
detiene la modulación del inversor y el motor se para por sí solo.
Con demora de velocidad cero
El convertidor recibe un comando de paro y decelera por una rampa.
Cuando la velocidad actual del motor cae por debajo de un límite interno
(denominado "velocidad cero"), se activa la función de demora de velocidad
cero. Durante la demora, la función mantiene el regulador de velocidad
activado: el inversor modula, el motor se magnetiza y el convertidor está listo
para un reinicio rápido.
0
0,0…60,0 s Tiempo de demora. Si el valor del parámetro se ajusta a cero, se desactiva la
función de demora de velocidad cero. 1 = 0,1 s
22 ACEL/DECEL Tiempos de aceleración y deceleración.
2201 SEL ACE/DEC 1/2 Define el origen desde el cual el convertidor lee la señal que selecciona
entre los dos pares de rampa: par de aceleración/deceleración 1 y 2.
El par de rampas 1 se define con los parámetros 2202 ... 2204.
El par de rampas 2 se define con los parámetros 2205 ... 2207.
ED5
SIN SEL Se utiliza el par de rampas 1. 0
ED1 Entrada digital ED1. 1 = par de rampas 2, 0 = par de rampas 1. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para la selección del par de rampas
1/2, es decir, el código de control 0301 COD ORDEN BC 1, bit 10. El
regulador de bus de campo envía el código de control al convertidor a través
del adaptador de bus de campo o el bus de campo encajado (Modbus). Para
los bits del código de control, véase la sección Perfil de comunicación DCU
en la página 274.
Nota: Este ajuste sólo es aplicable al perfil DCU.
7
PROG SEC Rampa de programación de secuencias definida por el parámetro 8422
RAMPA EST 1 (o 8432 / ... / 8492). 10
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Veloc.
t
Velocidad cero
Veloc.
t
Velocidad cero
Demora
Sin demora de velocidad cero Con demora de velocidad cero
Regulador de
velocidad
desconectado: El
motor se para por sí
El regulador de velocidad
sigue activado. El motor se
decelera hasta la velocidad 0
real.
Señales actuales y parámetros
197
ED1(inv) Entrada digital ED1 invertida. 0 = par de rampas 2, 1 = par de rampas 1. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
2202 TIEMPO ACELER 1 Define el tiempo de aceleración 1, o sea, el tiempo requerido para que la
velocidad pase de cero a la velocidad definida por el parámetro 2008
FRECUENCIA MAX (con control escalar) / 2002 VELOCIDAD MAXIMA (con
control vectorial). El modo de control del motor se selecciona con el
parámetro 9904 MODO CTRL MOTOR.
- Si la referencia de velocidad aumenta más rápido que la tasa de
aceleración ajustada, la velocidad del motor seguirá el ritmo de aceleración.
- Si la referencia de velocidad aumenta más lentamente que la tasa de
aceleración ajustada, la velocidad del motor seguirá la señal de referencia.
- Si el tiempo de aceleración tiene un ajuste demasiado breve, el convertidor
prolongará automáticamente la aceleración para no superar los límites de
funcionamiento del convertidor.
El tiempo de aceleración actual depende del ajuste del parámetro 2204 TIPO
RAMPA 1.
5
0,0…1800,0 s Tiempo 1 = 0,1 s
2203 TIEMPO DESAC 1 Define el tiempo de desaceleración 1, o sea, el tiempo requerido para que la
velocidad pase de la velocidad definida por el parámetro 2008
FRECUENCIA MAX (con control escalar) / 2002 VELOCIDAD MAXIMA (con
control vectorial) a cero. El modo de control del motor se selecciona con el
parámetro 9904 MODO CTRL MOTOR.
- Si la referencia de velocidad disminuye más lentamente que la tasa de
deceleración ajustada, la velocidad del motor seguirá la señal de referencia.
- Si la referencia de velocidad cambia más rápidamente que la tasa de
deceleración ajustada, la velocidad del motor seguirá la tasa de
deceleración.
- Si el tiempo de deceleración tiene un ajuste demasiado breve, el
convertidor prolongará automáticamente la deceleración para no exceder los
límites de funcionamiento del convertidor.
Si se requiere un tiempo de deceleración breve para una aplicación de
elevada inercia, el convertidor debería equiparse con una resistencia de
frenado.
El tiempo de desaceleración actual depende del ajuste del parámetro 2204
TIPO RAMPA 1.
5
0,0…1800,0 s Tiempo 1 = 0,1 s
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
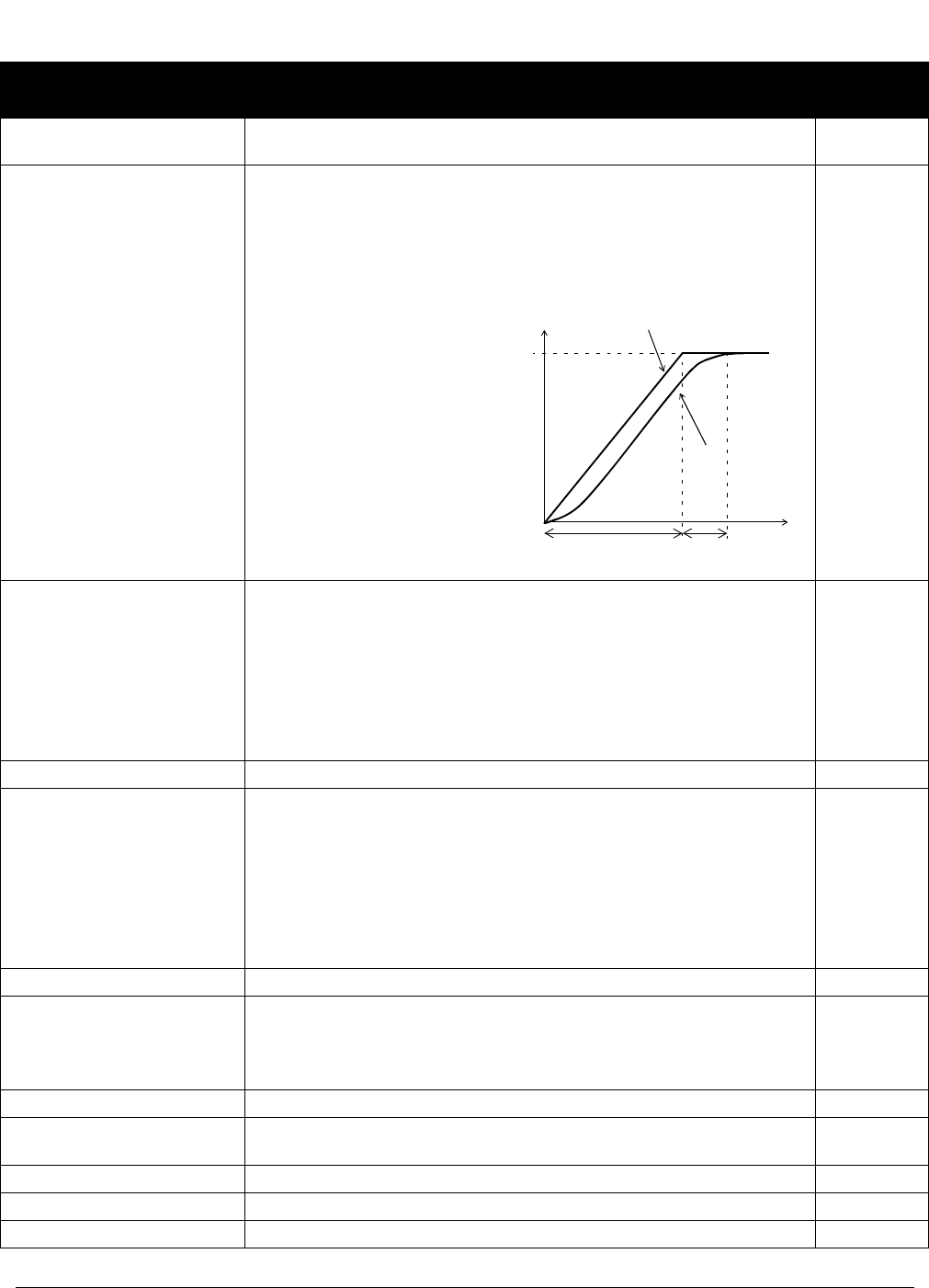
Señales actuales y parámetros
198
2204 TIPO RAMPA 1 Selecciona la forma de la rampa de aceleración/deceleración 1. La función
se desactiva durante un paro de emergencia y durante el avance lento. 0
0,0…1000,0 s 0.00 s: Rampa lineal. Adecuada para una aceleración o deceleración
uniforme y para rampas lentas.
0,01 … 1000.00 s: Rampa de curva S. Estas rampas son ideales para cintas
transportadoras de cargas frágiles u otras aplicaciones que requieran una
transición uniforme al cambiar de velocidad. La curva S consta de curvas
simétricas en ambos extremos de la rampa y una parte lineal intermedia.
1 = 0,1 s
2205 TIEMPO ACELER 2 Define el tiempo de aceleración 2, o sea, el tiempo requerido para que la
velocidad pase de cero a la velocidad definida por el parámetro 2008
FRECUENCIA MAX (con control escalar) / 2002 VELOCIDAD MAXIMA (con
control vectorial). El modo de control del motor se selecciona con el
parámetro 9904 MODO CTRL MOTOR.
Véase el parámetro 2202 TIEMPO ACELER 1.
El tiempo de aceleración 2 también se utiliza como tiempo de aceleración en
avance lento. Véase el parámetro 1010 SEL LENTITUD.
60
0,0…1800,0 s Tiempo 1 = 0,1 s
2206 TIEMPO DESAC 2 Define el tiempo de desaceleración 2, o sea, el tiempo requerido para que la
velocidad pase de la velocidad definida por el parámetro 2008
FRECUENCIA MAX (con control escalar) / 2002 VELOCIDAD MAXIMA (con
control vectorial) a cero. El modo de control del motor se selecciona con el
parámetro 9904 MODO CTRL MOTOR.
Véase el parámetro 2203 TIEMPO DESAC 1.
El tiempo de desaceleración 2 también se utiliza como tiempo de
desaceleración en avance lento. Véase el parámetro 1010 SEL LENTITUD.
60
0,0…1800,0 s Tiempo 1 = 0,1 s
2207 TIPO RAMPA 2 Selecciona la forma de la rampa de aceleración/deceleración 2. La función
se desactiva durante un paro de emergencia.
El valor del parámetro se ajusta a cero durante el avance lento (es decir,
rampa lineal). Véase el parámetro 1010 SEL LENTITUD.
0
0,0…1000,0 s Véase el parámetro 2204 FORMA RAMPA 1. 1 = 0,1 s
2208 TIEMPO DESAC EM Define el tiempo que el convertidor tarda en pararse si se activa un paro de
emergencia. Véase el parámetro 2109 SEL PARO EM. 1
0,0…1800,0 s Tiempo 1 = 0,1 s
2209 ENTRADA RAMPA 0 Define el origen para forzar la entrada de rampa a cero. SIN SEL
SIN SEL No seleccionado. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Rampa lineal: par. 2204 = 0 s
Rampa curva S:
par. 2204 > 0 s
Regla aproximada
Una relación adecuada entre
el tiempo de forma de rampa y
el tiempo de rampa de
aceleración es 1/5.
Veloc.
t
Máx.
Par. 2202 Par. 2204
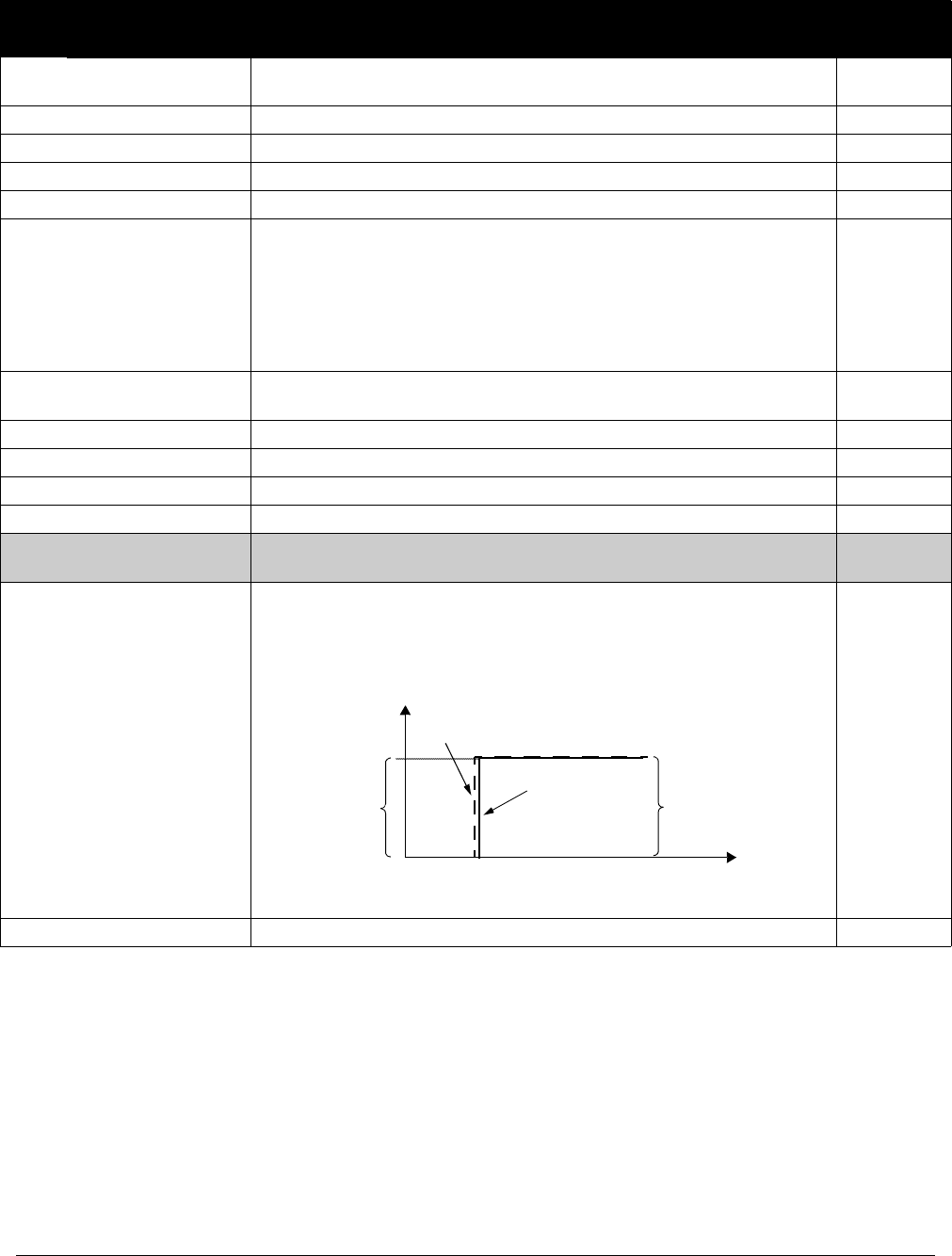
Señales actuales y parámetros
199
ED1 Entrada digital ED1. 1 = la entrada de rampa se fuerza a cero. La salida de
rampa seguirá una rampa a cero según el tiempo de rampa utilizado. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
COMUNIC Interfase de bus de campo como origen para forzar la entrada de rampa a
cero; es decir, código de control 0301 COD ORDEN BC 1, bit 13 (con perfil
ABB Drives 5319 PAR BCI 19, bit 6). El regulador de bus de campo envía el
código de control al convertidor a través del adaptador de bus de campo o el
bus de campo encajado (Modbus). Para los bits del código de control,
véanse las secciones Perfil de comunicación DCU en la página 274 y Perfil
de comunicación ABB Drives en la página 270.
7
ED1(inv) Entrada digital ED1. 0 = la entrada de rampa se fuerza a cero. La salida de
rampa seguirá una rampa a cero según el tiempo de rampa utilizado. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
23 CTRL VELOCIDAD Variables del regulador de velocidad. Véase el apartado Ajuste del regulador
de velocidad en la página 117.
2301 GANANCIA PROP Define una ganancia relativa para el regulador de velocidad. Una ganancia
elevada puede provocar oscilaciones de velocidad.
La figura siguiente muestra la salida del regulador de velocidad tras un
escalón de error cuando el error permanece constante.
Nota: Para un ajuste automático de la ganancia, utilice la marcha de
autoajuste (parámetro 2305 MARCHA AUTOAJUST).
10
0,00…200,00 Ganancia 1 = 0,01
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Ganancia = Kp = 1
TI = Tiem. integración = 0
TD= Tiem. derivación = 0
Modbus
Valor de error
Salida del regulador
t
%
e = Valor de error
regulador =
Kp · e
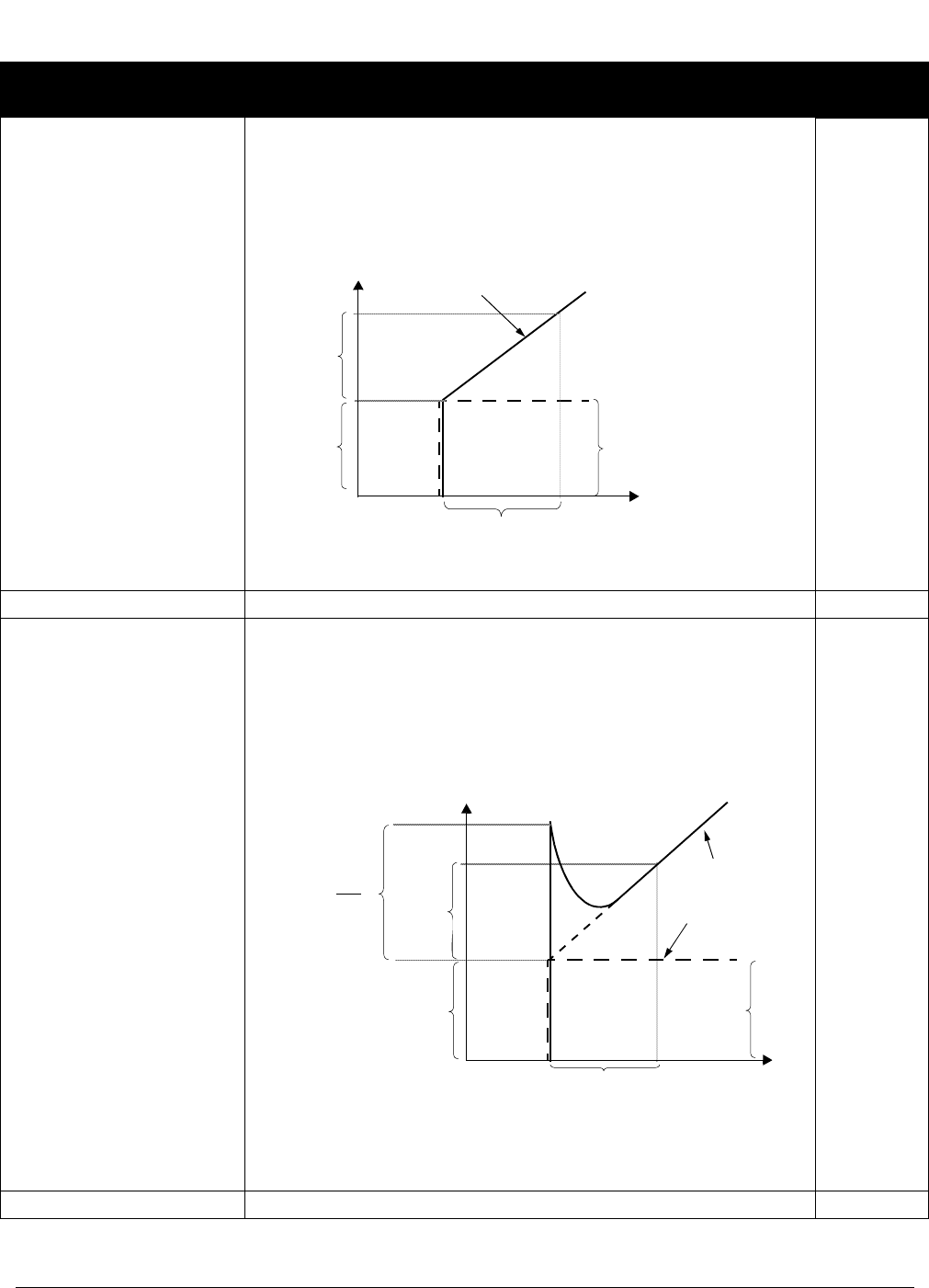
Señales actuales y parámetros
200
2302 TIEMP INTEGRAC. Define un tiempo de integración para el regulador de velocidad. Este tiempo
define la velocidad a la que varía la salida del regulador cuando el valor de
error es constante. Cuanto menor es el tiempo integración, más rápidamente
se corrige el valor de error continuo. Un tiempo de integración demasiado
breve hace que el control sea inestable.
La figura siguiente muestra la salida del regulador de velocidad tras un
escalón de error cuando el error permanece constante.
Nota: Para un ajuste automático del tiempo de integración, utilice la marcha
de autoajuste (parámetro 2305 MARCHA AUTOAJUST).
2.5
0,00…600,00 s Tiempo 1 = 0,01 s
2303 TIEMP DERIVACION Define el tiempo de derivación para el regulador de velocidad. La acción
derivada potencia la salida del regulador si el valor de error cambia. Cuanto
mayor es el tiempo de derivación, más se potencia la salida del regulador de
velocidad durante el cambio. Si el tiempo de derivación se ajusta a cero, el
regulador funciona como un regulador PI, y si no como un regulador PID.
La derivación hace que el control sea más sensible a perturbaciones.
La figura siguiente muestra la salida del regulador de velocidad tras un
escalón de error cuando el error permanece constante.
0
0 ... 10.000 ms Tiempo 1 = 1 ms
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Salida del regulador
t
%
Ganancia = Kp = 1
TI = Tiem. integración > 0
TD= Tiem. derivación = 0
Kp · e
e = Valor de error
Kp · e
TI
Ganancia = Kp = 1
TI = Tiem. integración > 0
TD= Tiem. derivación > 0
Ts= Período de muestreo = 2 ms
Δe = Cambio del valor de error entre dos muestras
TI
Kp
·
e
Salida del regulador
t
%
e = Valor de error
K
p
· T
D
·
Δ
e
T
s
Kp
·
e Valor de error
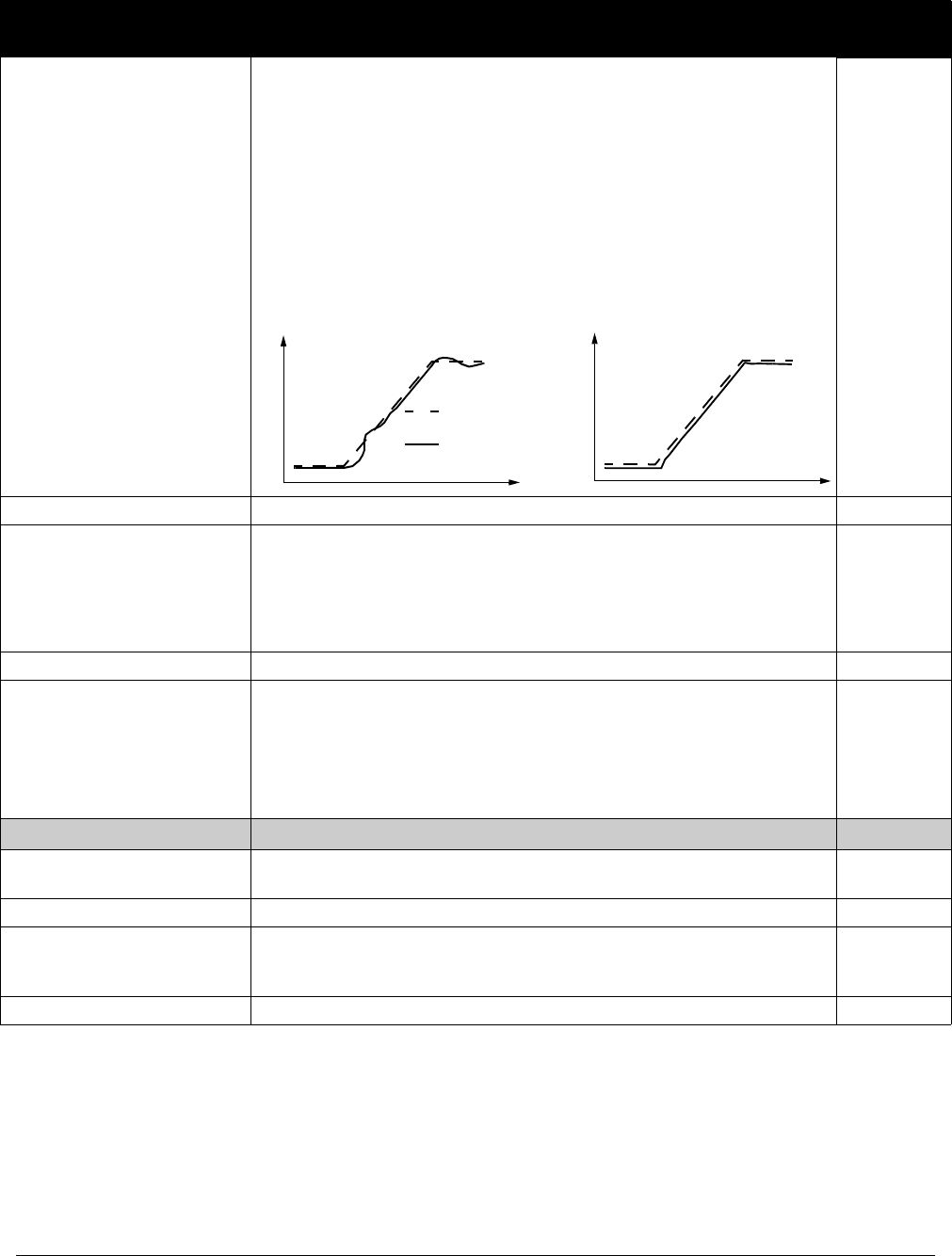
Señales actuales y parámetros
201
2304 COMPENSACION
ACE Define el tiempo de derivación para la compensación de aceleración/
(deceleración). Para compensar la inercia durante la aceleración, se suma
una derivada de la referencia a la salida del regulador de velocidad. Se
describe el principio de una acción derivada para el parámetro 2303 TIEMP
DERIVACION.
Nota: Como regla general, ajuste este parámetro a un valor entre el 50 y el
100 % de la suma de las constantes de tiempo mecánico del motor y la
máquina accionada (la Marcha de autoajuste del regulador de velocidad lo
hace automáticamente, véase el parámetro 2305 MARCHA AUTOAJUST.)
La figura siguiente muestra las respuestas de velocidad cuando se acelera
una carga de alta inercia por una rampa.
0
0,00…600,00 s Tiempo 1 = 0,01 s
2305 MARCHA
AUTOAJUST Inicia el ajuste automático del regulador de velocidad. Instrucciones:
- Haga funcionar el motor a una velocidad constante del 20 al 40 % de la
velocidad nominal.
- Cambie el parámetro de autoajuste 2305 a SI.
Nota: La carga del motor debe estar conectada al motor.
NO
NO Sin autoajuste. 0
SI Activa el autoajuste del regulador de velocidad. El convertidor
- acelera el motor
- calcula valores para la ganancia proporcional, el tiempo de integración y la
compensación de aceleración (valores de los parámetros 2301 GANANCIA
PROP, 2302 TIEMP INTEGRAC. y 2304 COMPENSACION ACE ).
El ajuste vuelve automáticamente a NO.
1
24 CTRL PAR Variables de control del par.
2401 AUMENT RAMPA
PAR Define el tiempo de aumento de rampa de la referencia de par, es decir, el
tiempo mínimo para que la referencia aumente de cero al par motor nominal. 0
0,00…120,00 s Tiempo 1 = 0,01 s
2402 DISMIN RAMPA PAR Define el tiempo de disminución de rampa de la referencia de par, es decir, el
tiempo mínimo para que la referencia disminuya del par motor nominal a
cero.
0
0,00…120,00 s Tiempo 1 = 0,01 s
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Referencia de
Velocidad actual
* Sin compensación de aceleración Compensación de aceleración
t
t
%%
velocidad
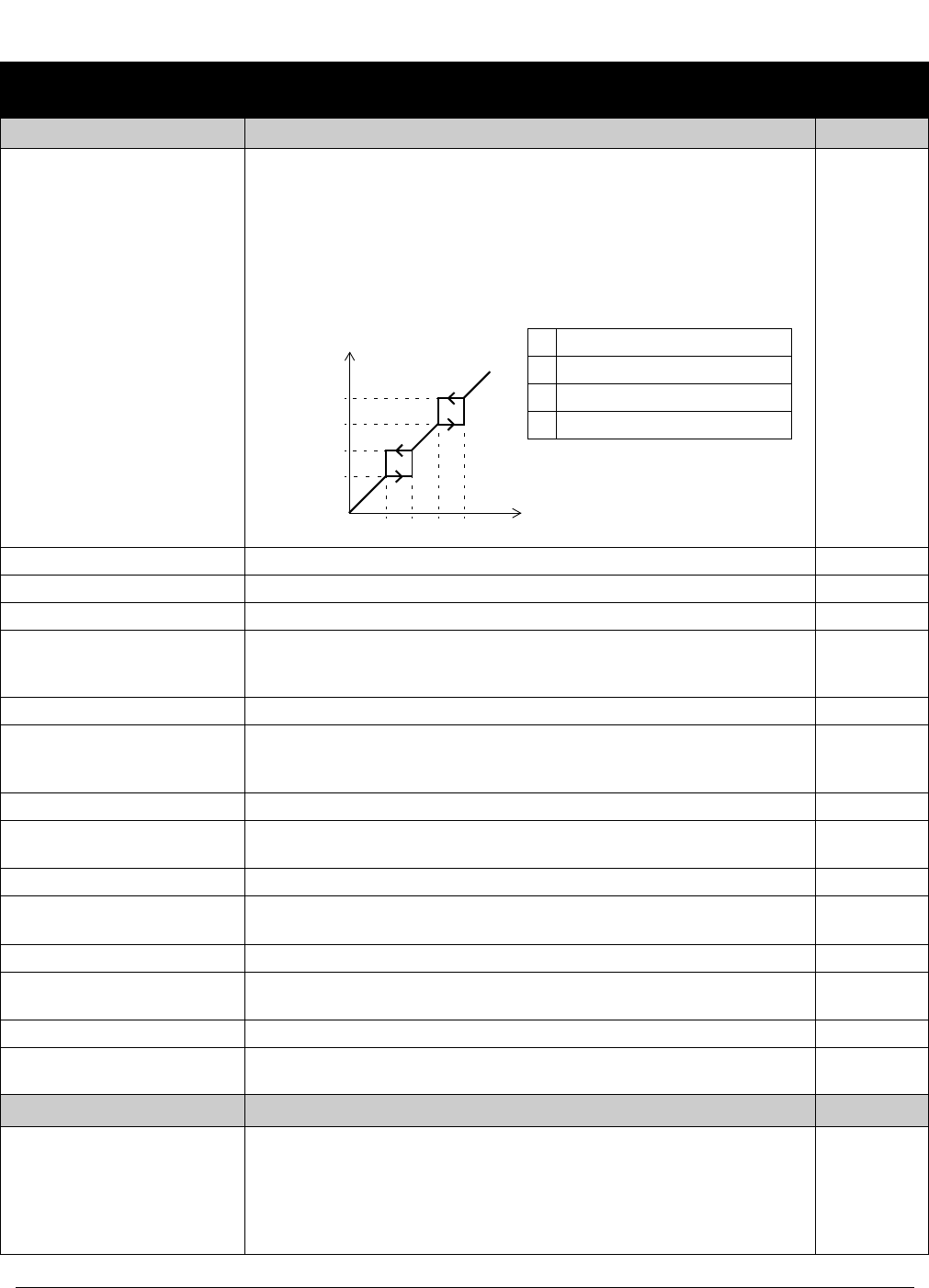
Señales actuales y parámetros
202
25 VELOC CRITICAS Franjas de velocidad en las que el convertidor no puede funcionar.
2501 SEL VEL CRITICA Activa/desactiva la función de velocidades críticas. La función de
velocidades críticas evita rangos de velocidad específicos.
Ejemplo: Un ventilador presenta vibraciones en los intervalos de 18 a 23 Hz
y de 46 a 52 Hz. Para hacer que el convertidor se salte estos intervalos:
- Active la función de velocidades críticas.
- Ajuste los intervalos de velocidades críticas como se indica en la figura
siguiente.
NO
NO Inactivo. 0
SI Activo 1
2502 VELOC CRIT 1 BAJ Define el límite mínimo para el intervalo de velocidad/frecuencia crítica 1. 0
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Límite, en rpm. En Hz si el ajuste del parámetro 9904 MODO CTRL MOTOR
es ESCALAR:FREC. El valor no puede superar el máximo (parámetro 2503
VELOC CRIT 1 ALT).
1 = 0,1 Hz /
1rpm
2503 VELOC CRIT 1 ALT Define el límite máximo para el intervalo de velocidad/frecuencia crítica 1. 0
0,0 ... 500,0 Hz /
0 ... 30.000 rpm Límite, en rpm. En Hz si el ajuste del parámetro 9904 MODO CTRL MOTOR
es ESCALAR:FREC. El valor no puede ser inferior al mínimo (parámetro
2502 VELOC CRIT 1 BAJ).
1 = 0,1 Hz /
1rpm
2504 VELOC CRIT 2 BAJ Véase el parámetro 2502 VELOC CRIT 1 BAJ. 0
0,0 ... 500,0 Hz / 0 ...
30.000 rpm Véase el parámetro 2502. 1 = 0,1 Hz /
1rpm
2505 VELOC CRIT 2 ALT Véase el parámetro 2503 VELOC CRIT 1 ALT. 0
0,0 ... 500,0 Hz / 0 ...
30.000 rpm Véase el parámetro 2503. 1 = 0,1 Hz /
1rpm
2506 VELOC CRIT 3 BAJ Véase el parámetro 2502 VELOC CRIT 1 BAJ. 0
0,0 ... 500,0 Hz / 0 ...
30.000 rpm Véase el parámetro 2502. 1 = 0,1 Hz /
1rpm
2507 VELOC CRIT 3 ALT Véase el parámetro 2503 VELOC CRIT 1 ALT. 0
0,0 ... 500,0 Hz / 0 ...
30.000 rpm Véase el parámetro 2503. 1 = 0,1 Hz /
1rpm
26 CONTROL MOTOR Variables de control del motor.
2601 OPTIMIZAC FLUJ Activa/desactiva la función de optimización de flujo. La optimización de flujo
reduce el consumo total de energía y el nivel de ruido del motor cuando el
convertidor funciona por debajo de la carga nominal. El rendimiento total
(motor y convertidor) puede aumentarse de un 1 % a un 10 %, en función de
la velocidad y el par de la carga. La desventaja de esta función es que el
rendimiento dinámico del convertidor se debilita.
NO
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
freferencia (Hz)
18
23
46
52
fsalida (Hz) 1Par. 2502 = 18 Hz
2Par. 2503 = 23 Hz
3Par. 2504 = 46 Hz
4Par. 2505 = 52 Hz
1234
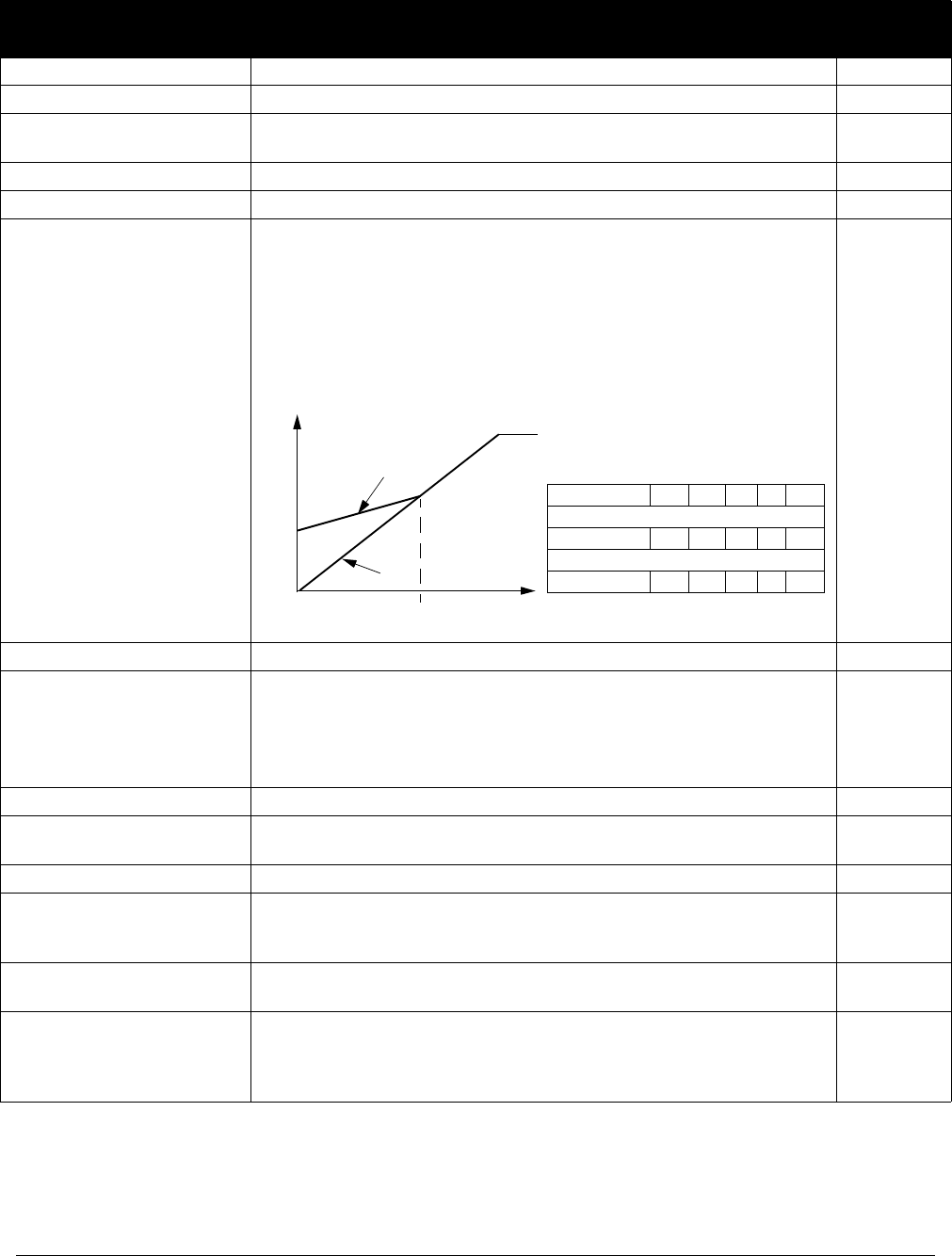
Señales actuales y parámetros
203
NO Inactivo. 0
SI Activo 1
2602 FRENADO FLUJO Activa/desactiva la función de frenado por flujo. Véase la sección Frenado
por flujo en la página111.NO
NO Inactivo. 0
SI Activo 1
2603 TENS COMP IR Define el sobrepar de tensión de salida a velocidad cero (compensación IR).
La función es útil en aplicaciones con un elevado par de arranque cuando no
puede aplicarse control vectorial.
Mantenga la tensión de compensación IR lo más baja posible para evitar un
sobrecalentamiento.
La figura siguiente ilustra la compensación IR.
Nota: La función sólo puede utilizarse cuando el ajuste del parámetro 9904
MODO CTRL MOTOR es ESCALAR:FREC.
Depende del
tipo
0,0…100,0 V Sobrepar de tensión 1 = 0,1 V
2604 FREC COMP IR Define la frecuencia a la cual la compensación IR es de 0 V. Véase la figura
en el parámetro 2603 TENS COMP IR.
Nota: Si el parámetro 2605 RELACION U/F está ajustado a DEFIN USUAR,
este parámetro no es activo. La frecuencia de compensación IR se ajusta
con el parámetro 2610 U1 DEFIN USUAR.
80
0...100% Valor de la frecuencia del motor, en porcentaje. 1 = 1%
2605 RELACION U/F Selecciona la relación entre tensión y frecuencia (cociente U/f) por debajo
del punto de debilitamiento de campo. LINEAL
LINEAL Relación lineal para aplicaciones de par constante. 1
CUADRATICO Relación cuadrática para aplicaciones con bombas centrífugas y
ventiladores. Con una relación U/f cuadrática, el nivel de ruido es menor para
la mayoría de frecuencias de funcionamiento.
2
DEFIN USUAR Relación personalizada definida por el parámetro 2610 ... 2618. Véase el
apartado Relación U/f personalizada en la página 115.3
2606 FREC
CONMUTACION Define la frecuencia de conmutación del convertidor. Una mayor frecuencia
de conmutación da lugar a un menor ruido acústico. Véase también el
parámetro 2607 CTRL FREC CONMUT y Derrateo por frecuencia de
conmutación en la página 303.
4
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Motor
f (Hz)
A
B
ajustable A = Compens. IR
B = Sin compensación
2603
2604
Valores típicos de compensación
PN (kW) 0,37 0,75 2,2 4,0 7,5
200 ... 240 V unidades
Comp IR (V) 8,4 7,7 5,6 8,4 N/D
380 ... 480 V unidades
Comp IR (V) 14 14 5,6 8,4 7
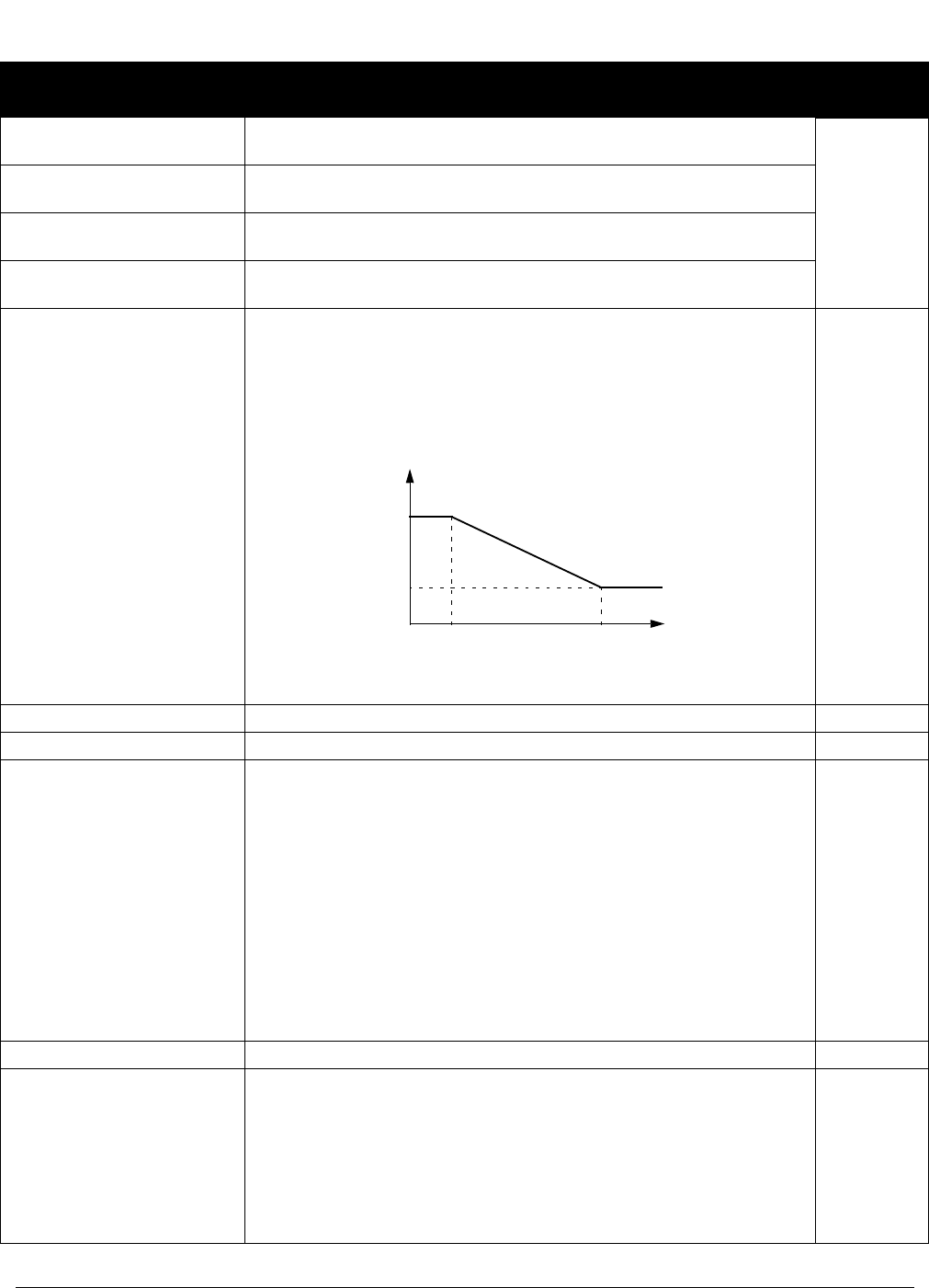
Señales actuales y parámetros
204
4 kHz Se puede usar con control escalar y vectorial. El modo de control del motor
se selecciona con el parámetro 9904 MODO CTRL MOTOR. 1 = 1 kHz
8 kHz Se puede usar con control escalar y vectorial. El modo de control del motor
se selecciona con el parámetro 9904 MODO CTRL MOTOR.
12 kHz Se puede usar con control escalar y vectorial. El modo de control del motor
se selecciona con el parámetro 9904 MODO CTRL MOTOR.
16 kHz Sólo puede utilizarse con control escalar (es decir, cuando el ajuste del
parámetro 9904 MODO CTRL MOTOR es ESCALAR:FREC).
2607 CTRL FREC
CONMUT Activa el control de la frecuencia de conmutación. Cuando está activo, la
selección del parámetro 2606 FREC CONMUTACION queda limitada al
aumentar la temperatura interna del convertidor. Véase la figura siguiente.
Esta función permite el uso de la mayor frecuencia de conmutación posible
en un punto de funcionamiento específico.
Una mayor frecuencia de conmutación da lugar a un menor ruido acústico,
pero esto implica mayores pérdidas internas.
SI
NO Inactivo. 0
SI Activo 1
2608 RATIO COMP DESL Define la ganancia de deslizamiento para el control de compensación de
deslizamiento del motor. El 100 % significa compensación de deslizamiento
plena; el 0 % significa sin compensación. Pueden emplearse otros valores si
se detecta un error de velocidad estática a pesar de la compensación de
deslizamiento plena.
Sólo puede utilizarse con control escalar (es decir, cuando el ajuste del
parámetro 9904 MODO CTRL MOTOR es ESCALAR:FREC).
Ejemplo: Se facilita una referencia de velocidad constante de 35 rpm al
convertidor. A pesar de la compensación de deslizamiento plena (RATIO
COMP DESL = 100 %), una medición con tacómetro manual en el eje del
motor da un valor de velocidad de 34 Hz. El error de velocidad estático es 35
Hz – 34 Hz = 1 Hz. Para compensar el error, debe aumentarse la ganancia
de deslizamiento.
0
0...200% Ganancia de deslizamiento. 1 = 1%
2609 SUAVIZAR RUIDO Activa la función de suavización de ruido. La acción de suavizar el ruido
distribuye el ruido del motor acústico por un rango de frecuencias en lugar de
una sola frecuencia tonal, lo que reduce la intensidad máxima del ruido. El
componente aleatorio tiene un valor medio de 0 Hz y se añade a la
frecuencia de conmutación ajustada por el parámetro 2606FREC
CONMUTACION.
Nota: Este parámetro no tiene efecto si el parámetro 2606 FREC
CONMUTACION está ajustado a 16 kHz.
DESACTI-
VAR
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
80 ... 100°C 100...120°C *
Convertidor
4 kHz
16 kHz
temperatura
fcon
usuario
T
* La temperatura depende de la frecuencia de salida del convertidor.
Señales actuales y parámetros
205
DESACTIVAR Desactivado. 0
ACTIVAR Activado 1
2610 U1 DEFIN USUAR Define el primer punto de tensión de la curva U/f personalizada a la
frecuencia definida por el parámetro 2611 F1 DEFIN USUAR. Véase el
apartado Relación U/f personalizada en la página 115.
19% de UN
0 ... 120 % de UN V Tensión 1 = 1 V
2611 F1 DEFIN USUAR Define el primer punto de frecuencia de la curva U/f personalizada. 10
0,0 ... 500,0 Hz Frecuencia 1 = 0,1 Hz
2612 U2 DEFIN USUAR Define el segundo punto de tensión de la curva U/f personalizada a la
frecuencia definida por el parámetro 2613 F2 DEFIN USUAR. Véase el
apartado Relación U/f personalizada en la página 115.
38 % de UN
0 ... 120 % de UN V Tensión 1 = 1 V
2613 F2 DEFIN USUAR Define el segundo punto de frecuencia de la curva U/f personalizada. 20
0,0 ... 500,0 Hz Frecuencia 1 = 0,1 Hz
2614 U3 DEFIN USUAR Define el tercer punto de tensión de la curva U/f personalizada a la
frecuencia definida por el parámetro 2615 F3 DEFIN USUAR. Véase el
apartado Relación U/f personalizada en la página 115.
47,5% de UN
0 ... 120 % de UN V Tensión 1 = 1 V
2615 F3 DEFIN USUAR Define el tercer punto de frecuencia de la curva U/f personalizada. 25
0,0 ... 500,0 Hz Frecuencia 1 = 0,1 Hz
2616 U4 DEFIN USUAR Define el cuarto punto de tensión de la curva U/f personalizada a la
frecuencia definida por el parámetro 2617 F4 DEFIN USUAR. Véase el
apartado Relación U/f personalizada en la página 115.
76% de UN
0 ... 120 % de UN V Tensión 1 = 1 V
2617 F4 DEFIN USUAR Define el cuarto punto de frecuencia de la curva U/f personalizada. 40
0,0 ... 500,0 Hz Frecuencia 1 = 0,1 Hz
2618 TENSIÓN DC Define la tensión de la curva U/f cuando la frecuencia es igual o superior a la
frecuencia nominal del motor (9907 FREC NOM MOTOR). Véase el
apartado Relación U/f personalizada en la página 115.
95% de UN
0 ... 120 % de UN V Tensión 1 = 1 V
29 DISP
MANTENIMIENTO
Desencadenantes (disparadores) del mantenimiento.
2901 DISP VENT REFRIG Define el punto de disparo para el contador de tiempo de funcionamiento del
ventilador de refrigeración. El valor se compara con el valor del parámetro
2902 ACT VENT REFRIG.
0
0,0 ... 6553,5 kh Tiempo. Si el valor del parámetro se ajusta a cero, se desactiva la función de
disparo. 1 = 0,1 kh
2902 ACT VENT REFRIG Define el valor actual para el contador de tiempo de funcionamiento del
ventilador de refrigeración. Cuando el parámetro 2901 DISP VENT REFRIG
está ajustado a un valor diferente de cero, se inicia el contador. Cuando el
valor actual del contador supera el valor definido por el parámetro 2901 se
visualiza un aviso de mantenimiento en el panel.
0
0,0 ... 6553,5 kh Tiempo. El parámetro se restaura ajustándolo a cero. 1 = 0,1 kh
2903 DISP REVOLUCION Define el punto de disparo para el contador de revoluciones del motor. El
valor se compara con el valor del parámetro 2904 ACT REVOLUCION. 0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
206
0 ... 65535 Mrev Millones de revoluciones. Si el valor del parámetro se ajusta a cero, se
desactiva la función de disparo. 1 = 1 Mrev
2904 ACT REVOLUCION Define el valor actual del contador de revoluciones del motor. Cuando el
parámetro 2903 DISP REVOLUCION está ajustado a un valor diferente de
cero, se inicia el contador. Cuando el valor actual del contador supera el
valor definido por el parámetro 2903 se visualiza un aviso de mantenimiento
en el panel.
0
0 ... 65535 Mrev Millones de revoluciones. El parámetro se restaura ajustándolo a cero. 1 = 1 Mrev
2905 DISP TIEM MARCH Define el punto de disparo para el contador de funcionamiento del
convertidor. El valor se compara con el valor del parámetro 2906 ACT TIEM
MARCH.
0
0,0 ... 6553,5 kh Tiempo. Si el valor del parámetro se ajusta a cero, se desactiva la función de
disparo. 1 = 0,1 kh
2906 ACT TIEM MARCH Define el valor actual para el contador de tiempo de funcionamiento del
convertidor. Cuando el parámetro 2905 DISP TIEM MARCH está ajustado a
un valor diferente de cero, se inicia el contador. Cuando el valor actual del
contador supera el valor definido por el parámetro 2905 se visualiza un aviso
de mantenimiento en el panel.
0
0,0 ... 6553,5 kh Tiempo. El parámetro se restaura ajustándolo a cero. 1 = 0,1 kh
2907 DISP MWh USUARIO Define el punto de disparo para el contador de consumo de potencia del
convertidor. El valor se compara con el valor del parámetro 2908 ACT MWh
USUARIO.
0
0,0 ... 6553,5 MWh Megawatios hora. Si el valor del parámetro se ajusta a cero, se desactiva la
función de disparo. 1 = 0,1 MWh
2908 ACT MWh USUARIO Define el valor actual del contador de consumo de potencia del convertidor.
Cuando el parámetro 2907 DISP MWh USUARIO está ajustado a un valor
diferente de cero, se inicia el contador. Cuando el valor actual del contador
supera el valor definido por el parámetro 2907 se visualiza un aviso de
mantenimiento en el panel.
0
0,0 ... 6553,5 MWh Megawatios hora. El parámetro se restaura ajustándolo a cero. 1 = 0,1 MWh
30 FUNCIONES FALLOS Funciones de protección programables.
3001 EA<FUNCION MIN Selecciona cómo reacciona el convertidor cuando una señal de entrada
analógica cae por debajo del nivel mínimo ajustado. SIN SEL
SIN SEL Protección inactiva. 0
FALLO El convertidor se dispara con un fallo FALLO EA1/EA2 y el motor para por sí
solo. El límite de fallo está definido por el parámetro 3021/3022 EA1/EA2
FALLO LIMIT.
1
VEL CONST 7 El convertidor genera una alarma FALLO EA1/EA2 y ajusta la velocidad al
valor definido por el parámetro 1208 VEL CONST 7. El límite de alarma está
definido por el parámetro 3021/3022 EA1/EA2 FALLO LIMIT.
¡ADVERTENCIA! Verifique que sea seguro proseguir con el
funcionamiento en caso de que se pierda la señal de entrada
analógica.
2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
207
ULTIMA VELOC El convertidor genera una alarma FALLO EA1/EA2 y fija la velocidad al nivel
en el que funcionaba el convertidor. La velocidad se determina con la
velocidad media de los 10 segundos previos. El límite de alarma está
definido por el parámetro 3021/3022 EA1/EA2 FALLO LIMIT.
¡ADVERTENCIA! Verifique que sea seguro proseguir con el
funcionamiento en caso de que se pierda la señal de entrada
analógica.
3
3002 ERROR COM PANEL Selecciona cómo reacciona el convertidor a un fallo de comunicación del
panel de control. FALLO
FALLO El convertidor se dispara con un fallo PERD PANEL y el motor se para por sí
solo. 1
VEL CONST 7 El convertidor genera una alarma PERDIDA DE PANEL y ajusta la velocidad
al valor definido con el parámetro 1208 VELOC CONST 7.
¡ADVERTENCIA! Verifique que sea seguro proseguir con el
funcionamiento en caso de fallo de comunicación del panel.
2
ULTIMA VELOC El convertidor genera una alarma PERDIDA DE PANEL y fija la velocidad al
nivel en el que funcionaba el convertidor. La velocidad se determina con la
velocidad media de los 10 segundos previos.
¡ADVERTENCIA! Verifique que sea seguro proseguir con el
funcionamiento en caso de fallo de comunicación del panel.
3
3003 FALLO EXTERNO 1 Selecciona una interfase para una señal de fallo externa 1. SIN SEL
SIN SEL No seleccionado. 0
ED1 Indicación de fallo externo a través de la entrada digital ED1. 1: Disparo por
fallo (FALLO EXT 1). El motor se para por sí solo. 0: Sin fallo externo. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ED1(inv) Indicación de fallo externo a través de la entrada digital ED1 invertida. 0:
Disparo por fallo (FALLO EXT 1). El motor se para por sí solo. 1: Sin fallo
externo.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
3004 FALLO EXTERNO 2 Selecciona una interfase para una señal de fallo externa 2. SIN SEL
Véase el parámetro 3003 FALLO EXTERNO 1.
3005 PROT TERMIC MOT Selecciona cómo reacciona el convertidor cuando se detecta un
sobrecalentamiento del motor. FALLO
SIN SEL Protección inactiva. 0
FALLO Cuando la temperatura supera los 110 °C el convertidor se dispara con un
fallo EXCESO TEMP MOTOR y el motor se para por sí solo. 1
AVISO Cuando la temperatura del motor supera los 90 °C, el convertidor genera un
aviso TEMP MOT. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
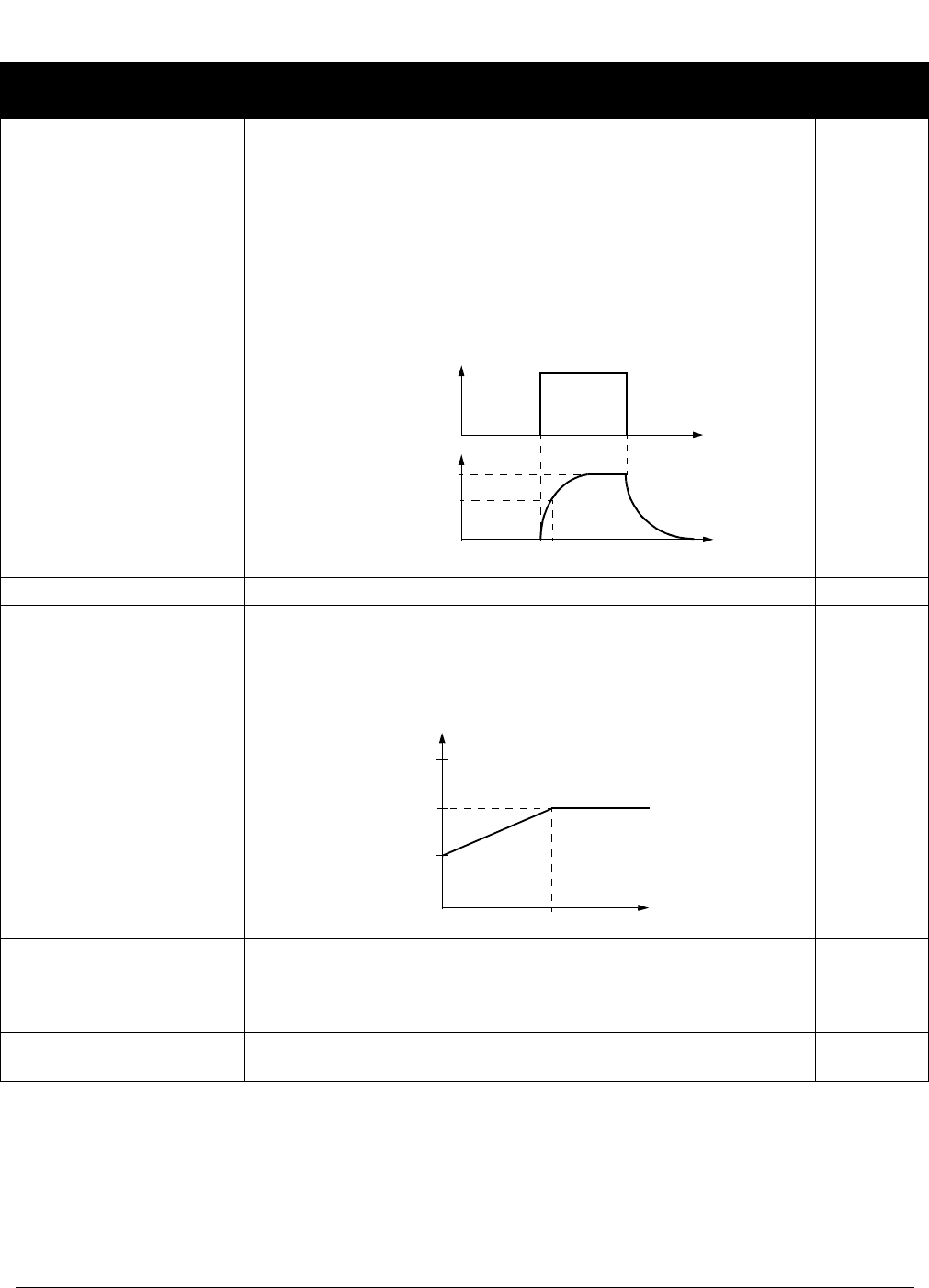
Señales actuales y parámetros
208
3006 TIEMPO TERM MOT Define la constante de tiempo térmica para el modelo térmico del motor; es
decir, el tiempo que ha tardado la temperatura del motor en alcanzar el 63 %
de la temperatura nominal con carga constante.
Para la protección térmica de conformidad con los requisitos de UL para
motores de clase NEMA, utilice la regla general: tiempo térmico del motor =
35 · t6, donde t6 (en segundos) se especifica por el fabricante del motor
como el tiempo que puede funcionar el motor de modo seguro a seis veces
su intensidad nominal.
El tiempo térmico para una curva de disparo de Clase 10 es de 350 s, para
una curva de disparo de Clase 20 de 700 s y para una curva de disparo de
Clase 30 de 1.050 s.
500
256…9999 s Constante de tiempo 1 = 1 s
3007 CURVA CARGA MOT Define la curva de carga junto con los parámetros 3008 CARGA VEL CERO
y 3009 PUNTO RUPTURA. Si el valor se ajusta a 100 %, la carga máxima
permitida es igual al valor del parámetro 9906 INTENS NOM MOT.
Si la temperatura ambiente difiere de la nominal se debe ajustar la curva de
carga.
100
50.…150% Carga continua del motor permitida en porcentaje de la intensidad nominal
del motor. 1 = 1%
3008 CARGA VEL CERO Define la curva de carga junto con los parámetros 3007 CURVA CARGA
MOT y 3009 PUNTO RUPTURA. 70
25.…150% Carga continua del motor permitida con velocidad cero en porcentaje de la
intensidad nominal del motor 1 = 1%
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Aumento temp.
100%
63%
t
t
}
Par. 3006
Carga motor
f
150
100
50
Par. 3009
I = intensidad de salida
IN = intensidad nominal del motor
I/IN
Par. 3008
Par. 3007
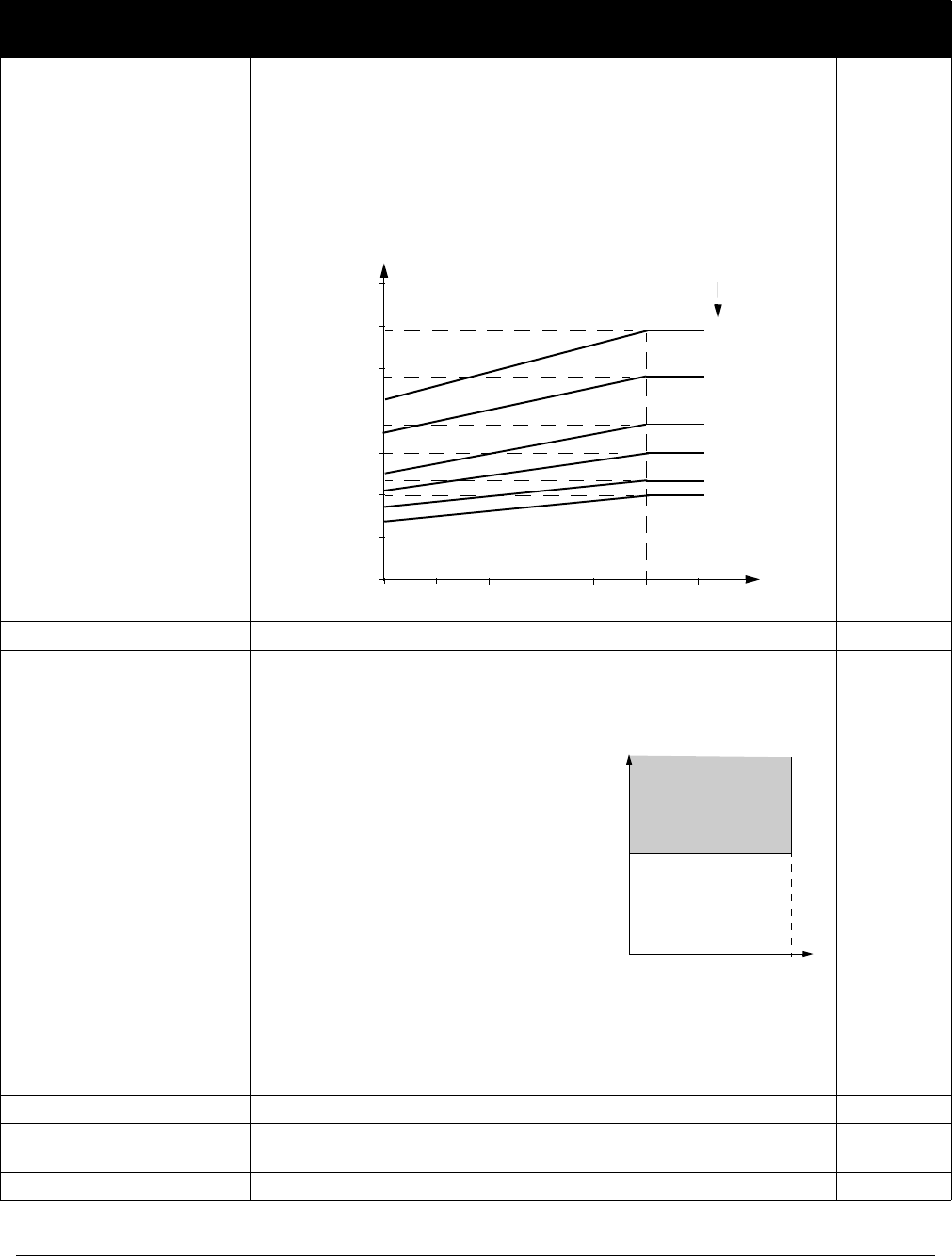
Señales actuales y parámetros
209
3009 PUNTO RUPTURA Define la curva de carga junto con los parámetros 3007 CURVA CARGA
MOT y 3008 CARGA VEL CERO.
Ejemplo: Tiempos de disparo de protección térmica cuando los parámetros
3006 ... 3008 tienen los valores por defecto.
35
1…250 Hz Frecuencia de salida del convertidor con carga del 100 % 1 = 1 Hz
3010 FUNCION BLOQUEO Selecciona cómo reacciona el convertidor a un estado de bloqueo del motor.
Esta protección se activa si el convertidor ha operado en una región de
bloqueo (véase la figura siguiente) durante un tiempo superior al definido por
el parámetro 3012 TIEMPO BLOQUEO.
SIN SEL
SIN SEL Protección inactiva. 0
FALLO El convertidor se dispara con un fallo MOTOR BLOQUEADO y el motor para
por sí solo. 1
AVISO El convertidor genera un aviso MOTOR BLOQUEADO. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
IO = Intensidad de salida
IN = Intensidad nominal del motor
fO = Frecuencia de salida
fBRK = Frecuencia del punto de ruptura
A = Tiempo de disparo
60 s
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0
IO/IN
fO/fBRK
90 s
180 s
300 s
600 s
180 s
A
∞
0 0.2 0.4 0.8 1.0 1.20.6
f
Par (%) /
Par. 3011
Región de bloqueo
0.95
·
límite definido
Con control vectorial,
límite definido por el
usuario =
2017 PAR MAX 1 /
2018 PAR MAX 2 /
(se aplica a pares
positivos y
negativos)
Con control escalar, límite
definido por el usuario =
2003 INTENSID MAXIMA
Intensidad (A)
El modo de control del motor se selecciona con el parámetro 9904
por el usuario
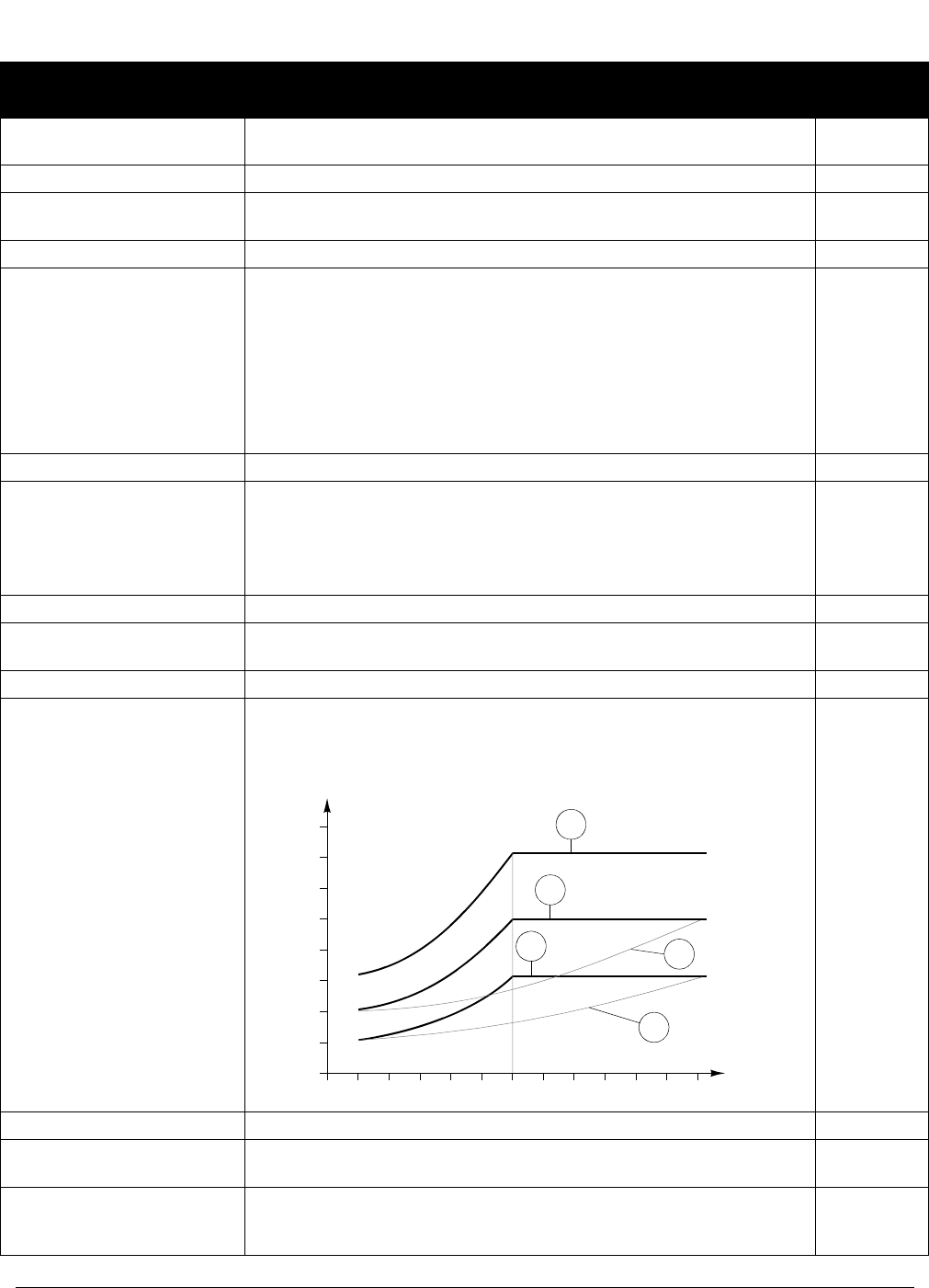
Señales actuales y parámetros
210
3011 FREC DE BLOQUEO Define el límite de frecuencia para la función de bloqueo. Véase el parámetro
3010 FUNCION BLOQUEO. 20
0,5…50,0 Hz Frecuencia 1 = 0,1 Hz
3012 TIEMPO BLOQUEO Define el tiempo para la función de bloqueo. Véase el parámetro 3010
FUNCION BLOQUEO. 20
10…400 s Tiempo 1 = 1 s
3013 FUNC BAJA CARGA Selecciona cómo reacciona el convertidor a la baja carga. La protección se
activa si:
- el par motor cae por debajo de la curva seleccionada con el parámetro
3015 CURVA SUBCARGA,
- la frecuencia de salida es mayor que el 10 % de la frecuencia nominal del
motor y
- las condiciones anteriores han sido válidas durante más tiempo que el
ajustado por el parámetro 3014 TIEM BAJA CARGA.
SIN SEL
SIN SEL Protección inactiva. 0
FALLO El convertidor se dispara con un fallo BAJA CARGA y el motor para por sí
solo.
Nota: Ajuste el valor del parámetro a FALLO sólo tras haber realizado una
Marcha de ID del convertidor. Si se selecciona FALLO, el convertidor puede
generar un fallo BAJA CARGA durante la Marcha de ID.
1
AVISO El convertidor genera una alarma BAJA CARGA. 2
3014 TIEM BAJA CARGA Define el límite de tiempo para la función de baja carga. Véase el parámetro
3013 FUNC BAJA CARGA. 20
10…400 s Límite de tiempo. 1 = 1 s
3015 CURVA SUBCARGA Selecciona la curva de subcarga para la función de baja carga. Véase el
parámetro 3013 FUNC BAJA CARGA. 1
1…5 Número de la curva de carga. 1 = 1
3016 FASE RED Selecciona cómo reacciona el convertidor ante una pérdida de fase de la
alimentación, es decir, cuando el rizado de tensión CC es excesivo. FALLO
FALLO Cuando el rizado de tensión CC exceda el 14 % de la tensión nominal de
CC, el convertidor se dispara por un fallo de FASE RED y el motor se para
por sí solo.
0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
80
60
40
20
0
3
2
15
4
TM
70%
50%
30%
ƒN
(%) Tipos de curva de subcarga
f
Pm = par nominal del motor
ƒN = frecuencia nominal del motor (9907)
2,4
·
ƒN
Señales actuales y parámetros
211
LIMIT/ALARMA Cuando el rizado de tensión CC excede un 14 % de la tensión nominal CC,
se limita la intensidad de salida del convertidor y se genera una alarma
PERDIDA DE FASE DE ENTRADA.
Hay una demora de 10 s entre la activación de la alarma y la limitación de la
intensidad de salida. Se limita la intensidad hasta que el rizado cae por
debajo del límite mínimo, 0,3 · Ihd.
1
ALARMA Cuando el rizado de tensión CC excede un 14 % de la tensión nominal CC,
el convertidor genera una alarma PERDIDA DE FASE DE ENTRADA. 2
3017 FALLO TIERRA Selecciona cómo reacciona el convertidor cuando se detecta un fallo a tierra
en el motor o cable de motor.
Nota: No se recomienda cambiar el ajuste de parámetro.
ACTIVAR
DESACTIVAR No se realiza ninguna acción. 0
ACTIVAR El convertidor se dispara con un fallo FALLO TIERRA. 1
3018 FUNC FALLO
COMUN Selecciona cómo reacciona el convertidor a un fallo de comunicación del bus
de campo. La demora temporal se define con el parámetro 3019 TIEM
FALLO COMUN.
SIN SEL
SIN SEL Protección inactiva. 0
FALLO Protección activa. El convertidor se dispara con un fallo ERR SERIE 1 y el
motor se para por sí solo. 1
VEL CONST 7 Protección activa. El convertidor genera una alarma COMUNICACION ES y
ajusta la velocidad al valor definido por el parámetro 1208 VELOC CONST 7.
¡ADVERTENCIA! Verifique que sea seguro continuar con el
funcionamiento si falla la comunicación.
2
ULTIMA VELOC Protección activa. El convertidor genera una alarma COMUNICACION ES y
fija la velocidad al nivel en el que funcionaba el convertidor. La velocidad se
determina con la velocidad media de los 10 segundos previos.
¡ADVERTENCIA! Verifique que sea seguro continuar con el
funcionamiento si falla la comunicación.
3
3019 TIEM FALLO COMUN Define la demora de tiempo para la supervisión de fallo de comunicación del
bus de campo. Véase el parámetro 3018 FUNC FALLO COMUN. 3
0,0 ... 60,0 s Tiempo de demora. 1 = 0,1 s
3021 EA1 FALLO LIMIT Define un nivel de fallo para la entrada analógica EA1. Si el parámetro 3001
EA<FUNCION MIN se ajusta a FALLO, el convertidor se dispara por un fallo
FALLO EA1 cuando la señal de la entrada analógica cae por debajo del nivel
ajustado.
No ajuste este límite por debajo del valor definido en el parámetro 1301
MINIMO EA1.
0
0,0…100,0% Valor en porcentaje del rango completo de la señal. 1 = 0,1%
3022 EA2 FALLO LIMIT Define un nivel de fallo para la entrada analógica EA2. Si el parámetro 3001
EA<FUNCION MIN se ajusta a FALLO, el convertidor se dispara por un fallo
FALLO EA2 cuando la señal de la entrada analógica cae por debajo del nivel
ajustado.
No ajuste este límite por debajo del valor definido en el parámetro 1304
MINIMO EA2.
0
0,0…100,0% Valor en porcentaje del rango completo de la señal. 1 = 0,1%
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
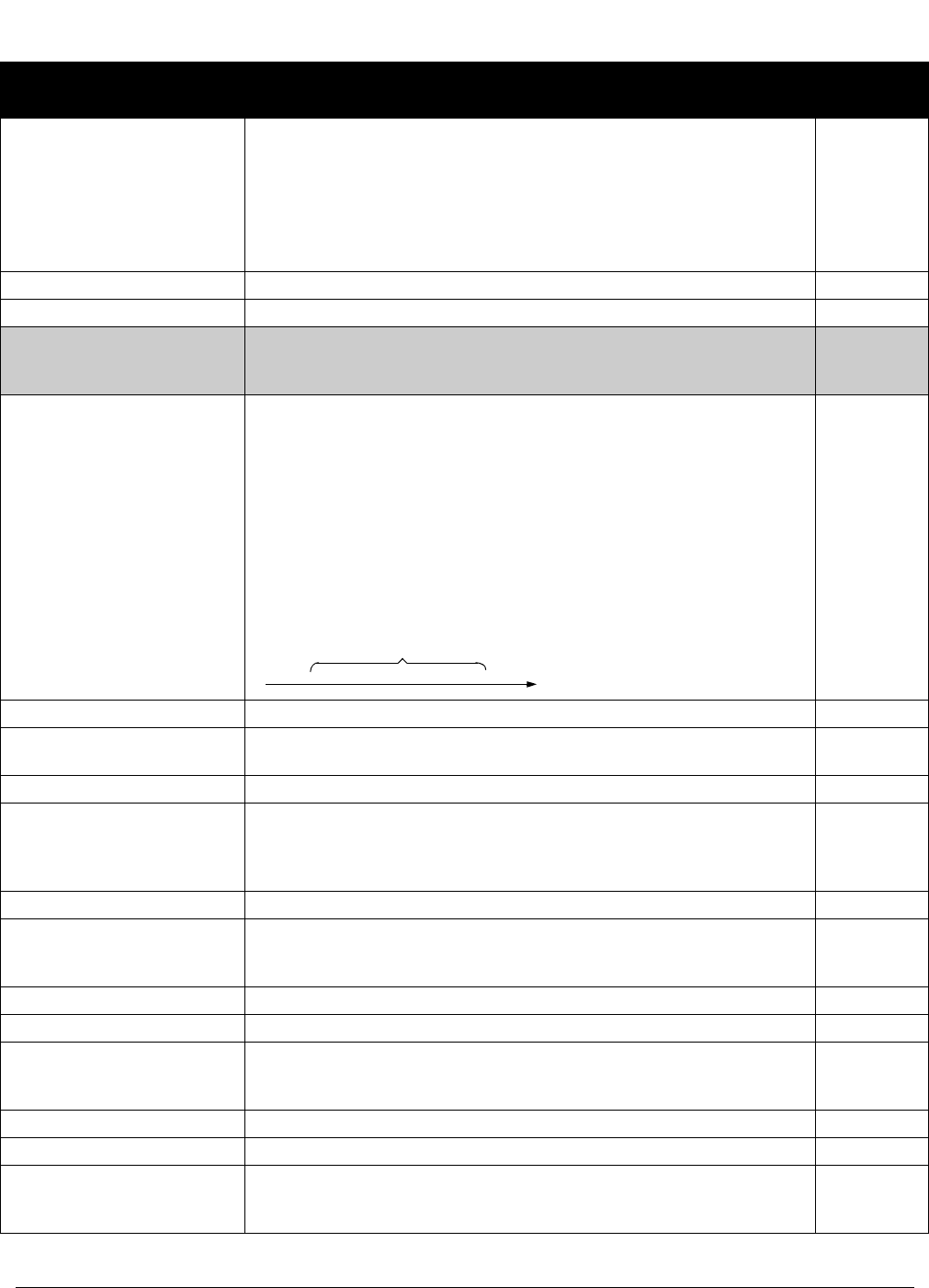
Señales actuales y parámetros
212
3023 FALLO CABLE Selecciona cómo reacciona el convertidor cuando se detecta una conexión
incorrecta de los cables a motor y de alimentación (es decir, el cable de
alimentación está conectado a la conexión del motor del convertidor).
Nota: En funcionamiento normal no se recomienda cambiar el ajuste de este
parámetro. Sólo se debe desactivar la protección con sistemas de
alimentación en triángulo conectados a tierra en un vértice y con cables muy
largos.
ACTIVAR
DESACTIVAR No se realiza ninguna acción. 0
ACTIVAR El convertidor se dispara con un fallo CABLEADO SAL. 1
31 REARME
AUTOMATIC
Restauración automática de fallos. Las restauraciones automáticas sólo son
posibles para ciertos tipos de fallo y cuando la función de restauración
automática se activa para ese tipo de fallo.
3101 NUM TENTATIVAS Define el número de restauraciones automáticas de fallos que efectúa el
convertidor dentro del período definido por el parámetro .3102 TIEM
TENTATIVAS.
Si el número de restauraciones automáticas excede el número ajustado
(dentro del tiempo de tentativas), el convertidor impide restauraciones
automáticas adicionales y permanece en paro. El convertidor se debe
reiniciar desde el panel de control o desde una fuente seleccionada por el
parámetro 1604 SEL REST FALLO.
Ejemplo:Se han producido tres fallos durante el tiempo de tentativas
definido con el parámetro 3102. El último fallo se restaura solamente si el
número definido en el parámetro 3101 es 3 o más.
0
0…5 Número de restauraciones automáticas. 1 = 1
3102 TIEM TENTATIVAS Define el tiempo para la función de restauración de fallos automática. Véase
el parámetro 3101 NUM TENTATIVAS. 30
1,0…600,0 s Tiempo 1 = 0,1 s
3103 TIEMPO DEMORA Define el tiempo de espera del convertidor tras un fallo antes de intentar una
restauración automática. Véase el parámetro 3101 NUM TENTATIVAS. Si
tiempo de demora se ajusta a cero, el convertidor se restaura
inmediatamente.
0
0,0…120,0 s Tiempo 1 = 0,1 s
3104 SOBREINTENS AR Activa/desactiva la restauración automática para el fallo de sobreintensidad.
Restaura el fallo automáticamente (SOBREINTENSIDAD) tras la demora
ajustada por el parámetro 3103 TIEMPO DEMORA.
DESACTI-
VAR
DESACTIVAR Inactivo. 0
ACTIVAR Activo 1
3105 SOBRETENSION AR Activa/desactiva la restauración automática para el fallo de sobretensión del
enlace intermedio. Restaura el fallo automáticamente (SOBRETENSION
CC) tras la demora ajustada por el parámetro 3103 TIEMPO DEMORA.
DESACTI-
VAR
DESACTIVAR Inactivo. 0
ACTIVAR Activo 1
3106 SUBTENSION AR Activa/desactiva la restauración automática para el fallo de subtensión del
enlace intermedio. Restaura el fallo automáticamente (SUBTENSION CC)
tras la demora ajustada por el parámetro 3103 TIEMPO DEMORA.
DESACTI-
VAR
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
XXX
t
Tiem tentativas
x = Rearme automático
Señales actuales y parámetros
213
DESACTIVAR Inactivo. 0
ACTIVAR Activo 1
3107 EA RA <MIN Activa/desactiva la restauración automática para el fallo EA<MIN (señal de
entrada analógica por debajo del nivel mínimo permitido). Restaura el fallo
automáticamente tras la demora ajustada por el parámetro 3103 TIEMPO
DEMORA.
DESACTI-
VAR
DESACTIVAR Inactivo. 0
ACTIVAR Activo
¡ADVERTENCIA! El convertidor puede reiniciarse incluso tras un
paro prolongado si se restaura la señal de entrada analógica.
Verifique que el uso de esta función no entrañe peligro.
1
3108 FALLO EXTERNO AR Activa/desactiva la restauración automática para el FALLO EXT 1/2.
Restaura automáticamente el fallo tras la demora ajustada por el parámetro
3103 TIEMPO DEMORA.
DESACTI-
VAR
DESACTIVAR Inactivo. 0
ACTIVAR Activo 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
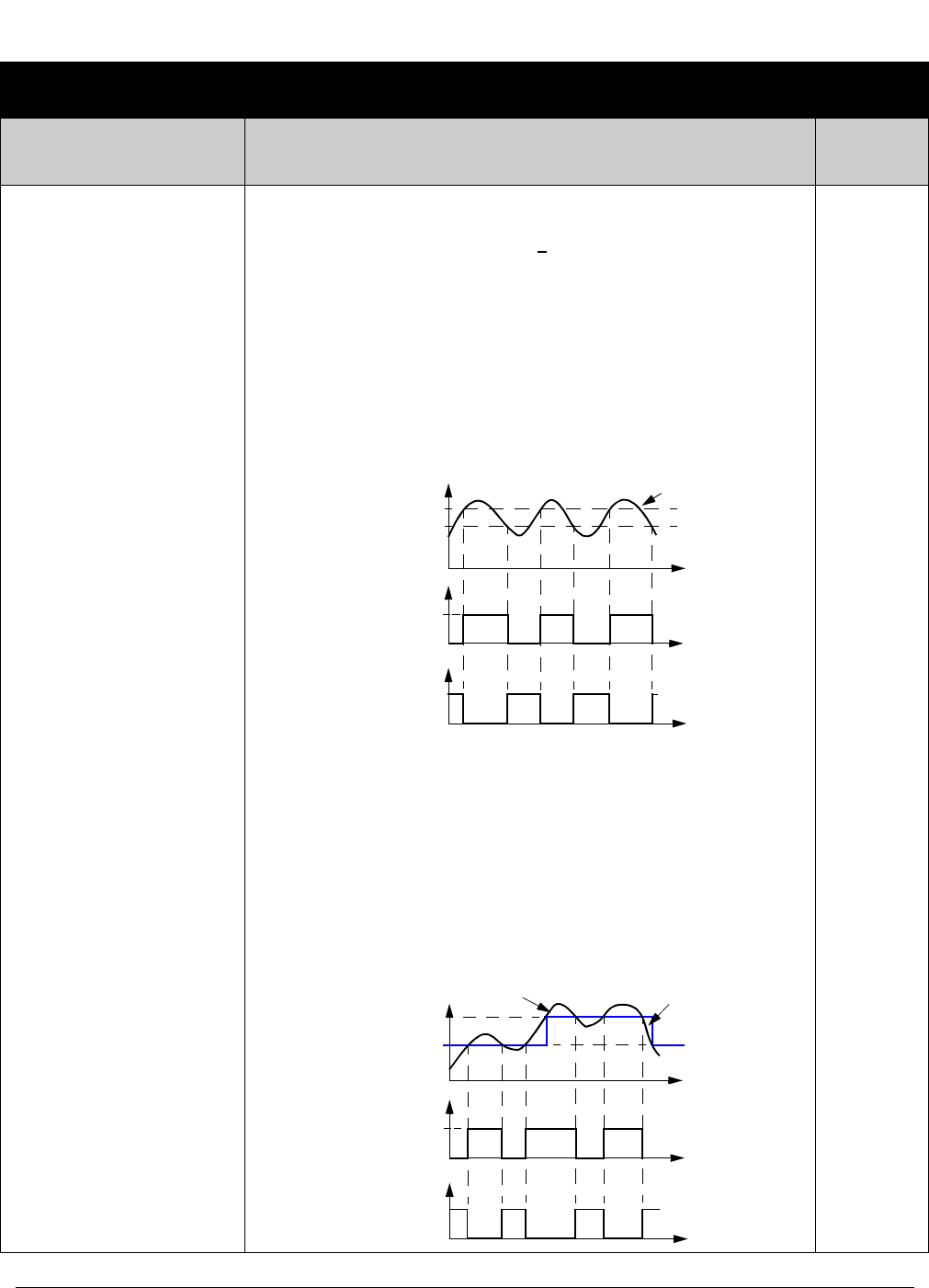
Señales actuales y parámetros
214
32 SUPERVISION Supervisión de señales. El estado de supervisión se puede monitorizar con
una salida de relé o de transistor. Véanse los grupos de parámetros 14
SALIDAS DE RELE y 18 ENT FREC Y SAL TRA.
3201 PARAM SUPERV 1 Selecciona la primera señal supervisada. Supervision limits are defined by
parameters 3202 LIM SUPER 1 BAJ y 3203 LIM SUPER 1 ALT.
Ejemplo 1: Si 3202 LIM SUPER 1 BAJ < 3203 LIM SUPER 1 ALT
Caso A = el valor de 1401 SALIDA RELE SR1 está ajustado a SUPERV1
SOBR. El relé se excita cuando el valor de la señal seleccionada con 3201
PARAM SUPERV 1 supera el límite de supervisión definido con 3203 LIM
SUPER 1 ALT. El relé permanece activo hasta que el valor supervisado
descienda por debajo del límite inferior definido con 3202 LIM SUPER 1 BAJ.
Caso B = el valor de 1401 SALIDA RELE SR1 está ajustado a SUPRV1
BAJO. El relé se excita cuando el valor de la señal seleccionada con 3201
PARAM SUPERV 1 cae por debajo del límite de supervisión definido con
3202 LIM SUPER 1 BAJ. El relé permanece activo hasta que el valor
supervisado supere el límite superior definido con 3203 LIM SUPER 1 ALT.
Ejemplo 2: Si 3202 LIM SUPER 1 BAJ > 3203 LIM SUPER 1 ALT
El límite inferior 3203 LIM SUPER 1 ALT permanece activo hasta que la
señal supervisada supere el límite superior 3202 LIM SUPER 1 BAJ,
convirtiéndolo en el límite activo. El nuevo límite permanece activo hasta que
las señal supervisada caiga por debajo del límite inferior 3203 LIM SUPER 1
ALT, convirtiéndolo en el límite activo.
Caso A
= el valor de
1401
SALIDA RELE SR1 está ajustado a SUPERV1 SOBR.
El relé se excita siempre que la señal supervisada supere el límite activo.
Caso B = el valor de 1401 SALIDA RELE SR1 está ajustado a SUPRV1
BAJO. El relé se desexcita siempre que la señal supervisada descienda por
debajo del límite activo.
103
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Valor del parámetro supervisado
Caso A
0
Excitado (1)
0
ALT (par. 3203)
t
t
t
BAJ (par. 3202)
Caso B
Excitado (1)
BAJ (par. 3202)
t
ALT (par. 3203)
Valor del parámetro supervisado
Caso A
0
Excitado (1)
0
t
t
Caso B
Excitado (1)
Límite activo
Señales actuales y parámetros
215
0, x ... x Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. 0 = No seleccionado. 1 = 1
3202 LIM SUPER 1 BAJ Define el límite inferior para la primera señal supervisada seleccionada por el
parámetro 3201 PARAM SUPERV 1. La supervisión se activa si el valor no
alcanza el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3201.-
3203 LIM SUPER 1 ALT Define el límite superior para la primera señal supervisada seleccionada por
el parámetro 3201 PARAM SUPERV 1. La supervisión se activa si el valor
supera el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3201.-
3204 PARAM SUPERV 2 Selecciona la segunda señal supervisada. Los límites de supervisión se
definen con los parámetros 3205 LIM SUPER 2 BAJ y 3206 LIM SUPER 2
ALT. Véase el parámetro 3201 PARAM SUPERV 1.
104
x ... x Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. 1 = 1
3205 LIM SUPER 2 BAJ Define el límite inferior para la segunda señal supervisada seleccionada por
el parámetro 3204 PARAM SUPERV 2. La supervisión se activa si el valor no
alcanza el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3204.-
3206 LIM SUPER 2 ALT Define el límite superior para la segunda señal supervisada seleccionada por
el parámetro 3204 PARAM SUPERV 2. La supervisión se activa si el valor
supera el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3204.-
3207 PARAM SUPERV 3 Selecciona la tercera señal supervisada. Los límites de supervisión se
definen con los parámetros 3208 LIM SUPER 3 BAJ y 3209 LIM SUPER 3
ALT. Véase el parámetro 3201 PARAM SUPERV 1.
105
x ... x Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. 1 = 1
3208 LIM SUPER 3 BAJ Define el límite inferior para la tercera señal supervisada seleccionada por el
parámetro 3207 PARAM SUPERV 3. La supervisión se activa si el valor no
alcanza el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3207.-
3209 LIM SUPER 3 ALT Define el límite superior para la tercera señal supervisada seleccionada por
el parámetro 3207 PARAM SUPERV 3. La supervisión se activa si el valor
supera el límite.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3207.-
33 INFORMACION Versión del paquete de firmware, fecha de prueba, etc.
3301 VERSION DE FW Muestra la versión del paquete de firmware.
0,0000 ... FFFF (hex) P. ej. 241A
3302 PAQUETE DE CARGA Muestra la versión del paquete de carga. depende del
tipo
0x2001 ... 0x20FF
(hex) 0x2001 = ACS350-0x (Eur GMD)
3303 FECHA PRUEBA Muestra la fecha de prueba. 00.00
Valor de fecha en formato AA.SS (año, semana).
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
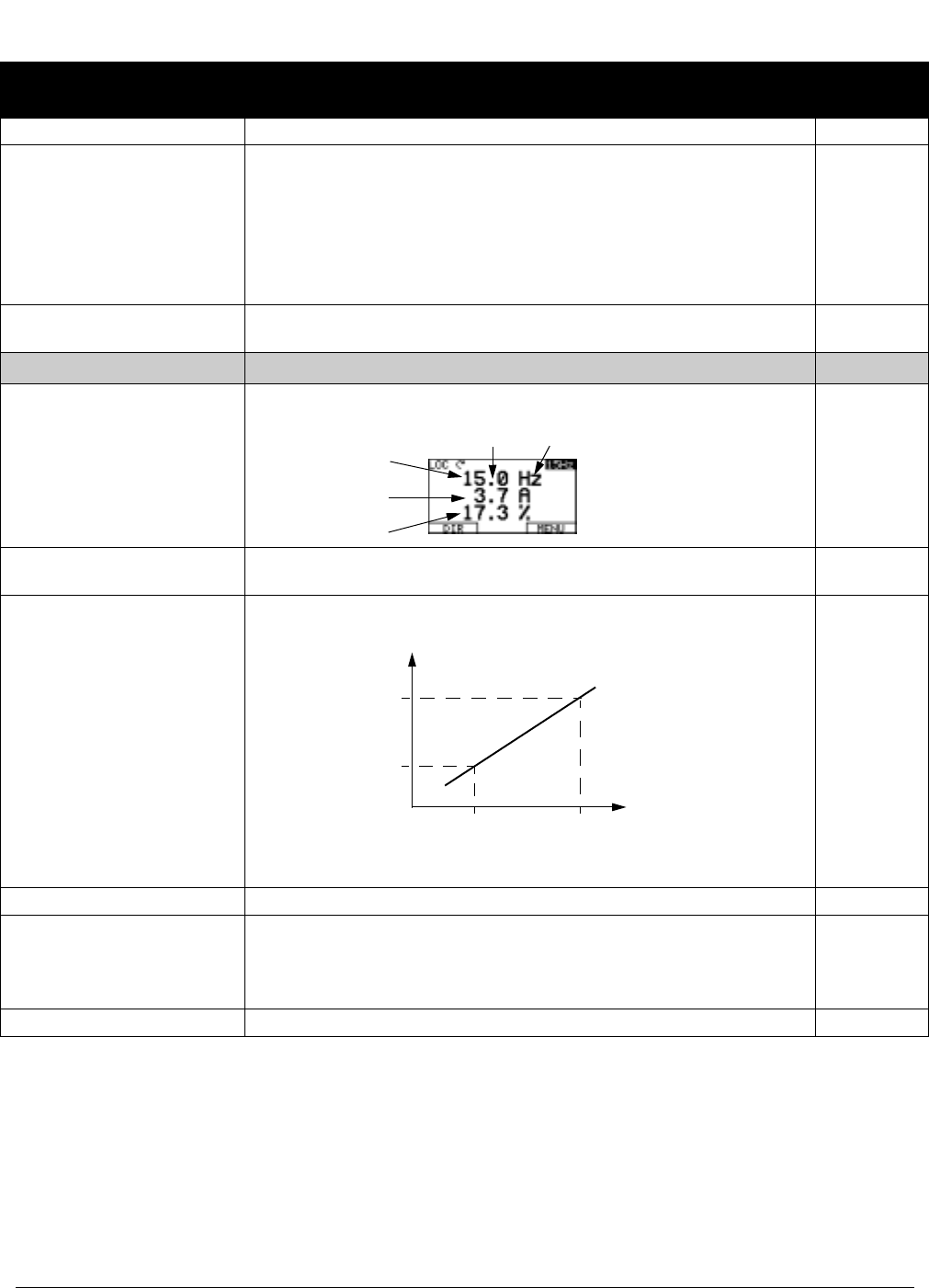
Señales actuales y parámetros
216
3304 ESPECIF UNIDAD Muestra las especificaciones de tensión e intensidad del convertidor. 0x0000
0x0000 ... 0xFFFF
(hex) Valor en formato XXXY:
XXX = Intensidad nominal del convertidor, en amperios. Una "A" indica la
coma decimal. Por ejemplo, si XXX es 8A8 la intensidad nominal es 8,8 A.
Y = Tensión nominal del convertidor:
1 = monofásica 200 ... 240 V
2 = trifásica 200 ... 240 V
4 = trifásica 380 ... 480 V
3305 TABLA
PARAMETROS Muestra la versión de la tabla de parámetros utilizada en el convertidor.
34 PANTALLA PANEL Selección de las señales actuales que se visualizarán en el panel.
3401 PARAM SEÑAL 1 Selecciona la primera señal a visualizar en el panel de control cuando está
en Modo de Visualización. 103
0, 101…172 Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. Si el valor se ajusta a 0 no se selecciona ninguna señal. 1 = 1
3402 SEÑAL1 MIN Define el valor mínimo para la señal seleccionada con el parámetro 3401
PARAM SEÑAL 1.
Nota: El parámetro no es efectivo si el parámetro 3404 FORM DSP
SALIDA1 está ajustado en DIRECTO.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3401.-
3403 SEÑAL1 MAX Define el valor máximo para la señal seleccionada con el parámetro 3401
PARAM SEÑAL1. Véase la figura en el parámetro 3402 SEÑAL1 MIN.
Nota: El parámetro no es efectivo si el parámetro 3404 FORM DSP
SALIDA1 está ajustado en DIRECTO.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3401.-
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
0137
0138
0139
3404 3405
Panel asistente
Valor de origen
3407
3406
3403
3402
Valor
visualiz.
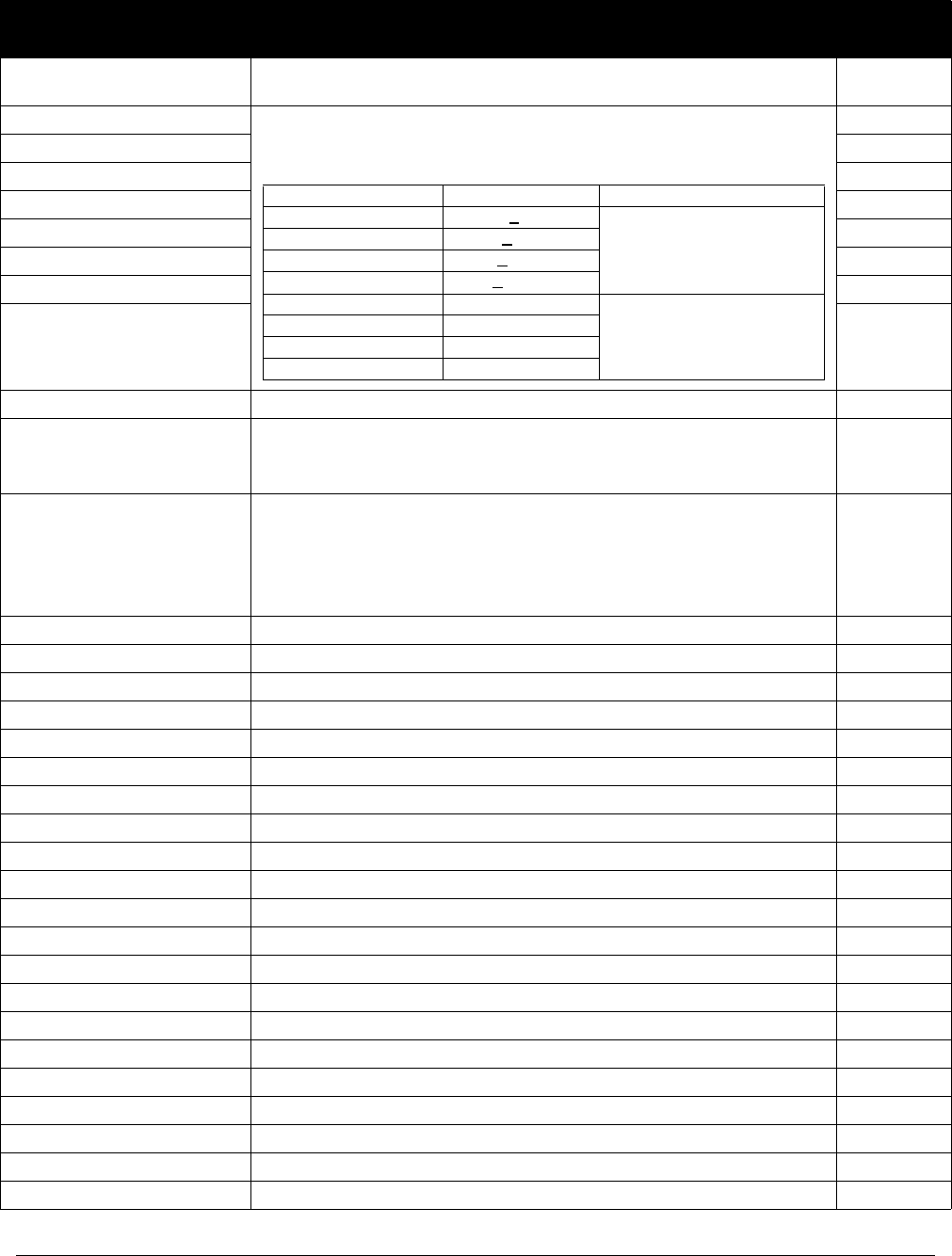
Señales actuales y parámetros
217
3404 FORM DSP SALIDA1 Define el formato para la señal visualizada (seleccionada con el parámetro
3401 PARAM SEÑAL1). DIRECTO
+/-0 Valor con signo/sin signo. La unidad se selecciona con el parámetro 3405
UNIDAD SALIDA1.
Ejemplo: número pi (3,14159):
0
+/-0.0 1
+/-0.00 2
+/-0.000 3
+0 4
+0.0 5
+0.00 6
+0.000 7
BAROMETRO Gráfico de barras. 8
DIRECTO Valor directo. La posición de la coma decimal y las unidades de medida son
iguales a la señal de origen.
Nota: Los parámetros 3402, 3403 y 3405 ... 3407 no son efectivos.
9
3405 UNIDAD SALIDA1 Selecciona la unidad para la señal visualizada, seleccionada con el
parámetro 3401 PARAM SEÑAL1.
Nota: El parámetro no es efectivo si el parámetro 3404 FORM DSP
SALIDA1 está ajustado en DIRECTO.
Nota: La selección de unidades no convierte valores.
Hz
SIN UNIDAD No se selecciona ninguna unidad. 0
A Amperios. 1
VVoltios. 2
Hz Hercios. 3
% Porcentaje. 4
s Segundos. 5
hHoras. 6
rpm Revoluciones por minuto. 7
kh Kilohoras 8
°C Grados Celsius. 9
lb ft Libras pie. 10
mA Miliamperios. 11
mV Milivoltios. 12
kW Kilovatios. 13
WVatios. 14
kWh Kilowatios hora. 15
°F Grados Fahrenheit. 16
CV Caballos de vapor. 17
MWh Megavatios hora. 18
m/s Metros por segundo. 19
m3/h Metros cúbicos por hora. 20
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Valor 3404 Visualización Rango
+/-0 + 3 -32768...+32767
+/-0.0 + 3.1
+/-0.00 + 3.14
+/-0.000 + 3.142
+0 3 0....65535
+0.0 3.1
+0.00 3.14
+0.000 3.142
Señales actuales y parámetros
218
dm3/s Decímetros cúbicos (litros) por segundo. 21
bar bar 22
kPa Kilopascales. 23
GPM Galones por minuto. 24
PSI Libras por pulgada cuadrada. 25
CFM Pies cúbicos por minuto. 26
pies Pies. 27
MGD Millones de galones por día. 28
inHg Pulgadas de mercurio. 29
FPM Pies por minuto. 30
kb/s Kilobytes por segundo. 31
kHz Kilohercios. 32
ohmios ohmios 33
ppm Pulsos por minuto. 34
pps Pulsos por segundo. 35
l/s Litros por segundo. 36
l/min Litros por minuto. 37
l/h Litros por hora. 38
m3/s Metros cúbicos por segundo. 39
m3/m Metros cúbicos por minuto. 40
kg/s Kilogramos por segundo. 41
kg/m Kilogramos por minuto. 42
kg/h Kilogramos por hora. 43
mbar Milibares. 44
Pa Pascales 45
GPS Galones por segundo. 46
gal/s Galones por segundo. 47
gal/m Galones por minuto. 48
gal/h Galones por hora. 49
ft3/s Pies cúbicos por segundo. 50
ft3/m Pies cúbicos por minuto. 51
ft3/h Pies cúbicos por hora. 52
lb/s Libras por segundo. 53
lb/m Libras por minuto. 54
lb/h Libras por hora. 55
FPS Pies por segundo. 56
ft/s Pies por segundo. 57
inH2O Pulgadas de agua. 58
in wg Pulgadas en el medidor de agua. 59
ft wg Pies en el medidor de agua. 60
lbsi Libras por pulgada cuadrada. 61
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
219
ms Milisegundos. 62
Mrev Millones de revoluciones. 63
dDías. 64
inWC Pulgadas de la columna de agua. 65
m/min Metros por minuto. 66
N·m Newton metros 67
%ref Referencia en porcentaje. 117
%act Valor actual en porcentaje. 118
%dev Desviación en porcentaje. 119
% LD Carga en porcentaje. 120
% SP Punto de ajuste en porcentaje. 121
%FBK Realimentación en porcentaje. 122
Isal Intensidad de salida (en porcentaje). 123
Vsal tension salida 124
Fsal Frecuencia de salida 125
Psal Par de salida. 126
Vcc Tensión de CC. 127
3406 SALIDA1 MIN Ajusta el valor mínimo de visualización para la señal seleccionada con el
parámetro 3401 PARAM SEÑAL 1. Véase el parámetro 3402 SEÑAL1 MIN.
Nota: El parámetro no es efectivo si el parámetro 3404 FORM DSP
SALIDA1 está ajustado en DIRECTO.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3401 .-
3407 SALIDA1 MAX Ajusta el valor máximo de visualización para la señal seleccionada con el
parámetro 3401 PARAM SEÑAL1. Véase el parámetro 3402 SEÑAL1 MIN.
Nota: El parámetro no es efectivo si el parámetro 3404 FORM DSP
SALIDA1 está ajustado en DIRECTO.
-
x ... x El ajuste del intervalo depende del ajuste del parámetro 3401.-
3408 PARAM SEÑAL2 Selecciona la segunda señal a visualizar en el panel de control cuando está
en Modo de Visualización. Véase el parámetro 3401 PARAM SEÑAL1. 104
0, 101…172 Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. Si el valor se ajusta a 0 no se selecciona ninguna señal. 1 = 1
3409 SEÑAL2 MIN Define el valor mínimo para la señal seleccionada con el parámetro 3408
PARAM SEÑAL2. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3408.-
3410 SEÑAL2 MAX Define el valor máximo para la señal seleccionada con el parámetro 3408
PARAM SEÑAL2. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3408.-
3411 FORM DSP SALIDA2 Define el formato para la señal visualizada, seleccionada con el parámetro
3408 PARAM SEÑAL2. DIRECTO
Véase el parámetro 3404 FORM DSP SALIDA1. -
3412 UNIDAD SALIDA2 Selecciona la unidad para la señal visualizada, seleccionada con el
parámetro 3408 PARAM SEÑAL2. -
Véase el parámetro 3405 UNIDAD SALIDA1. -
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
220
3413 SALIDA2 MIN Ajusta el valor mínimo de visualización para la señal seleccionada con el
parámetro 3408 PARAM SEÑAL2. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3408.-
3414 SALIDA2 MAX Ajusta el valor máximo de visualización para la señal seleccionada con el
parámetro 3408 PARAM SEÑAL2. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3408.-
3415 PARAM SEÑAL3 Selecciona la tercera señal a visualizar en el panel de control cuando está en
Modo de Visualización. Véase el parámetro 3401 PARAM SEÑAL1. 105
0, 101…172 Índice del parámetro en el grupo 01 DATOS FUNCIONAM. P. ej. 102 = 0102
VELOCIDAD. Si el valor se ajusta a 0 no se selecciona ninguna señal. 1 = 1
3416 SEÑAL3 MIN Define el valor mínimo para la señal seleccionada con el parámetro 3415.
Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3415 PARAM
SEÑAL 3. -
3417 SEÑAL3 MAX Define el valor máximo para la señal seleccionada con el parámetro 3415
PARAM SEÑAL3. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3415 PARAM
SEÑAL3. -
3418 FORM DSP SALIDA3 Define el formato para la señal visualizada, seleccionada con el parámetro
3415 PARAM SEÑAL3. DIRECTO
Véase el parámetro 3404 FORM DSP SALIDA1. -
3419 UNIDAD SALIDA3 Selecciona la unidad para la señal visualizada, seleccionada con el
parámetro 3415 PARAM SEÑAL3. -
Véase el parámetro 3405 UNIDAD SALIDA1. -
3420 SALIDA3 MIN Ajusta el valor mínimo de visualización para la señal seleccionada con el
parámetro 3415 PARAM SEÑAL3. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3415 PARAM
SEÑAL3. -
3421 SALIDA3 MAX Ajusta el valor máximo de visualización para la señal seleccionada con el
parámetro 3415 PARAM SEÑAL3. Véase el parámetro 3402 SEÑAL1 MIN. -
x ... x El ajuste del intervalo depende del ajuste del parámetro 3415.-
35 TEMP MOT MED Medición de la temperatura del motor. Véase el apartado Medición de la
temperatura del motor a través de la E/S estándar en la página 127.
3501 TIPO DE SENSOR Activa la función de medición de la temperatura del motor y selecciona el tipo
de sensor. Véase también el grupo de parámetros 15 SALIDAS ANALOG.NINGUNA
NINGUNA La función está inactiva. 0
1 x PT100 La función está activa. La temperatura se mide con un sensor Pt-100. La
salida analógica SA alimenta intensidad constante a través del sensor. La
resistencia del sensor crece a medida que aumenta la temperatura del
motor, al igual que la tensión en el sensor. La función de medición de
temperatura lee la tensión a través de la entrada analógica EA1/2 y la
convierte a grados centígrados.
1
2 x PT100 La función está activa. La temperatura se mide con dos sensores Pt-100.
Véase apartado 1 x PT100. 2
3 x PT100 La función está activa. La temperatura se mide con tres sensores Pt-100.
Véase apartado 1 x PT100. 3
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
221
PTC La función está activa. La temperatura se supervisa con un sensor PTC. La
salida analógica SA alimenta intensidad constante a través del sensor. La
resistencia del sensor crece de forma acusada a medida que la temperatura
del motor aumenta por encima de la temperatura de referencia PTC (Tref),
igual que la tensión en la resistencia. La función de medición de temperatura
lee la tensión a través de la entrada analógica EA1/2 y la convierte a ohmios.
La figura siguiente muestra los valores de resistencia típicos del sensor PTC
como una función de la temperatura de funcionamiento del motor.
4
TERM(0) La función está activa. La temperatura del motor se supervisa utilizando un
sensor PTC (véase selección PTC) conectado al convertidor a través de un
relé de termistores normalmente cerrado y conectado a una entrada digital. 0
= exceso de temperatura del motor.
5
TERM(1) La función está activa. La temperatura del motor se supervisa utilizando un
sensor PTC (véase selección PTC) conectado al convertidor a través de un
relé de termistores normalmente abierto y conectado a una entrada digital. 1
= exceso de temperatura del motor.
6
3502 SELEC DE ENTRADA Selecciona el origen para la señal de medición de la temperatura del motor. EA1
EA1 Entrada analógica EA1. Se utiliza cuando se selecciona un sensor Pt-100 o
PTC para la medición de temperatura. 1
EA2 Entrada analógica EA2. Se utiliza cuando se selecciona un sensor Pt-100 o
PTC para la medición de temperatura. 2
ED1 Entrada digital ED1. Se utiliza cuando el valor del parámetro 3501 TIPO DE
SENSOR está ajustado a TERM(0)/(1). 3
ED2 Entrada digital ED2. Se utiliza cuando el valor del parámetro 3501 TIPO DE
SENSOR está ajustado a TERM(0)/(1). 4
ED3 Entrada digital ED3. Se utiliza cuando el valor del parámetro 3501 TIPO DE
SENSOR está ajustado a TERM(0)/(1). 5
ED4 Entrada digital ED4. Se utiliza cuando el valor del parámetro 3501 TIPO DE
SENSOR está ajustado a TERM(0)/(1). 6
ED5 Entrada digital ED5. Se utiliza cuando el valor del parámetro 3501 TIPO DE
SENSOR está ajustado a TERM(0)/(1). 7
3503 LIMITE DE ALARMA Define el límite de alarma para la medición de temperatura del motor. Se
facilita la indicación de alarma TEMP MOTOR cuando se excede el límite.
Cuando el valor del parámetro 3501 TIPO DE SENSOR está ajustado a
TERM(0)/(1): 1 = alarma.
0
x ... x Límite de alarma -
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
100
550
1330
4000
ohmios
T
Temperatura Resistencia
Normal 0 ... 1,5 kohmios
Excesiva > 4 kohmios
Señales actuales y parámetros
222
3504 LIMITE DE FALLO Define el límite de disparo por fallo para la medición de temperatura del
motor. El convertidor se dispara con el fallo EXC TEMP MOT cuando se
excede el límite. Cuando el valor del parámetro 3501 TIPO DE SENSOR
está ajustado a TERM(0)/(1): 1 = fallo.
0
x ... x Límite de fallo. -
3505 EXCITACIÓN AO Activa el suministro de intensidad desde la salida analógica SA. El ajuste del
parámetro tiene preferencia sobre los ajustes del grupo de parámetros 15
SALIDAS ANALOG.
Con un sensor PTC la intensidad de salida es de 1,6 mA.
Con un sensor Pt-100 la intensidad de salida es de 9,1 mA.
DESACTI-
VAR
DESACTIVAR Desactivado. 0
ACTIVAR Activado 1
36 FUNCIONES TEMP Periodos de tiempo 1 a 4 y señal de refuerzo. Véase el apartado Funciones
temporizadas en la página 134.
3601 HABILITAR TEMPOR Selecciona la fuente para la señal de habilitación de la función temporizada. SIN SEL
SIN SEL La función temporizada no está seleccionada. 0
ED1 Entrada digital ED. Activación de función temporizada por un flanco
ascendente de la ED1. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ACTIVO La función temporizada siempre está activada. 7
ED1(inv) Entrada digital ED1 invertida. Activación de función temporizada por un
flanco descendiente de la ED1. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
3602 HORA DE INICIO 1 Define la hora de inicio diaria 1. La hora se puede cambiar en intervalos de 2
segundos. 00:00:00
00:00:00…23:59:58 Horas:minutos:segundos. Ejemplo: Si el valor del parámetro es 07:00:00, la
función temporizada se activa a las 7 de la mañana.
3603 HORA DE PARO 1 Define la hora de paro diaria 1. La hora se puede cambiar en intervalos de 2
segundos. 00:00:00
00:00:00…23:59:58 Horas:minutos:segundos. Ejemplo: Si el valor del parámetro es 18:00:00, la
función temporizada se desactiva a las 6 de la tarde.
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
223
3604 DIA DE INICIO 1 Define el día de inicio 1. LUNES
LUNES Ejemplo: Si el valor del parámetro es LUNES, la función temporizada 1 está
activada a partir de la medianoche del lunes (00:00:00).
1
MARTES 2
MIERCOLES 3
JUEVES 4
VIERNES 5
SABADO 6
DOMINGO 7
3605 DIA DE PARO 1 Define el día de paro 1. LUNES
Véase el parámetro
3604.Si el valor del parámetro es VIERNES, la función temporizada 1 se desactiva
en la medianoche del viernes (23:59:58).
3606 HORA DE INICIO 2 Véase el parámetro 3602 HORA DE INICIO 1.
Véase el parámetro 3602 HORA DE INICIO 1.
3607 HORA DE PARO 2 Véase el parámetro 3603 HORA DE PARO 1.
Véase el parámetro 3603 HORA DE PARO 1.
3608 DIA DE INICIO 2 Véase el parámetro 3604 DIA DE INICIO 1.
Véase el parámetro 3604 DIA DE INICIO 1.
3609 DIA DE PARO 2 Véase el parámetro 3605 DIA DE PARO 1.
Véase el parámetro 3605 DIA DE PARO 1.
3610 HORA DE INICIO 3 Véase el parámetro 3602 HORA DE INICIO 1.
Véase el parámetro 3602 HORA DE INICIO 1.
3611 HORA DE PARO 3 Véase el parámetro 3603 HORA DE PARO 1.
Véase el parámetro 3603 HORA DE PARO 1.
3612 DIA DE INICIO 3 Véase el parámetro 3604 DIA DE INICIO 1.
Véase el parámetro 3604 DIA DE INICIO 1.
3613 DIA DE PARO 3 Véase el parámetro 3605 DIA DE PARO 1.
Véase el parámetro 3605 DIA DE PARO 1.
3614 HORA DE INICIO 4 Véase el parámetro 3602 HORA DE INICIO 1.
Véase el parámetro 3602 HORA DE INICIO 1.
3615 HORA DE PARO 4 Véase el parámetro 3603 HORA DE PARO 1.
Véase el parámetro 3603 HORA DE PARO 1.
3616 DIA DE INICIO 4 Véase el parámetro 3604 DIA DE INICIO 1.
Véase el parámetro 3604 DIA DE INICIO 1.
3617 DIA DE PARO 4 Véase el parámetro 3605 DIA DE PARO 1.
Véase el parámetro 3605 DIA DE PARO 1.
3622 SEL REFORZ Selecciona el origen de la señal de activación del refuerzo. SIN SEL
SIN SEL Sin señal de activación del refuerzo. 0
ED1 Entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
224
ED5 Véase la selección ED1. 5
ED1(inv) Entrada digital ED1 invertida. 0 = activo, 1 = inactivo. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
3623 TIEMPO REFORZ Define el tiempo en el cual se desactiva el refuerzo tras la desconexión de la
señal de activación del refuerzo. 00:00:00
00:00:00…23:59:58 Horas:minutos:segundos.
Ejemplo: Si el parámetro 3622 SEL REFORZ está ajustado a ED1 y el 3623
TIEMPO REFORZ está ajustado a 01:30:00, el reforzador está activo
durante 1 hora y 30 minutos tras la desactivación de la entrada digital ED.
3626 FUEN FUNC TEMP 1 Selecciona los periodos de tiempo para FUEN FUNC TEMP 1. La función
programada puede consistir en 0 ... 4 periodos de tiempo y un reforzador. SIN SEL
SIN SEL No se ha seleccionado ningún periodo de tiempo. 0
T1 Período de tiempo 1 1
T2 Período de tiempo 2 2
T1+T2 Períodos de tiempo 1 y 2. 3
T3 Período de tiempo 3 4
T1+T3 Períodos de tiempo 1 y 3. 5
T2+T3 Períodos de tiempo 2 y 3. 6
T1+T2+T3 Períodos de tiempo 1, 2 y 3. 7
T4 Período de tiempo 4 8
T1+T4 Períodos de tiempo 1 y 4. 9
T2+T4 Períodos de tiempo 2 y 4. 10
T1+T2+T4 Períodos de tiempo 1, 2 y 4. 11
T3+T4 Períodos de tiempo 4 y 3. 12
T1+T3+T4 Períodos de tiempo 1, 3 y 4. 13
T2+T3+T4 Períodos de tiempo 2, 3 y 4. 14
T1+T2+T3+T4 Períodos de tiempo 1, 2, 3 y 4. 15
REFORZADOR Reforzador 16
T1+B Reforzador y período de tiempo 1. 17
T2+B Reforzador y período de tiempo 2. 18
T1+T2+B Reforzador y períodos de tiempo 1 y 2. 19
T3+B Reforzador y período de tiempo 3. 20
T1+T3+B Reforzador y períodos de tiempo 1 y 3. 21
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Reforz. activo
ED
Tiempo reforz.
Señales actuales y parámetros
225
T2+T3+B Reforzador y períodos de tiempo 2 y 3. 22
T1+T2+T3+B Reforzador y períodos de tiempo 1, 2 y 3. 23
T4+B Reforzador y período de tiempo 4. 24
T1+T4+B Reforzador y períodos de tiempo 1 y 4. 25
T2+T4+B Reforzador y períodos de tiempo 2 y 4. 26
T1+T2+T4+B Reforzador y períodos de tiempo 1, 2 y 4. 27
T3+T4+B Reforzador y períodos de tiempo 3 y 4. 28
T1+T3+T4+B Reforzador y períodos de tiempo 1, 3 y 4. 29
T2+T3+T4+B Reforzador y períodos de tiempo 2, 3 y 4. 30
T1+2+3+4+B Reforzador y períodos de tiempo 1, 2, 3 y 4. 31
3627 FUEN FUNC TEMP 2 Véase el parámetro 3626 FUEN FUNC TEMP 1.
Véase el parámetro 3626 FUEN FUNC TEMP 1.
3628 FUEN FUNC TEMP 3 Véase el parámetro 3626 FUEN FUNC TEMP 1.
Véase el parámetro 3626 FUEN FUNC TEMP 1.
3629 FUEN FUNC TEMP 4 Véase el parámetro 3626 FUEN FUNC TEMP 1.
Véase el parámetro 3626 FUEN FUNC TEMP 1.
40 CONJ PID PROCESO 1
La serie 1 de parámetros de control de proceso PID (PID1). Véase la sección
Control PID en la página 123.
4001 GANANCIA Define la ganancia para el regulador PID de proceso. Una ganancia elevada
puede provocar oscilaciones de velocidad. 1
0,1…100,0 Ganancia. Cuando el valor se ajusta a 0,1, la salida del regulador PID
cambia una décima parte del valor de error. Cuando el valor se ajusta a 100,
la salida del regulador PID cambia una centésima parte del valor de error.
1 = 0,1
4002 TIEMP INTEGRAC. Define el tiempo de integración para el regulador PID1 de proceso. Este
tiempo define la velocidad a la que varía la salida del regulador cuando el
valor de error es constante. Cuanto menor es el tiempo integración, más
rápidamente se corrige el valor de error continuo. Un tiempo de integración
demasiado breve hace que el control sea inestable.
60
0,0…3600,0 s Tiempo de integración. Si el valor del parámetro se ajusta a cero, se
desactiva la integración (parte I del regulador PID). 1 = 0,1 s
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
t
4002
A
C (4001 = 1)
BA = Error
B = Escalón del valor de error
C = Salida del regulador con
ganancia = 1
D = Salida del regulador con
ganancia = 10
D (4001 = 10)
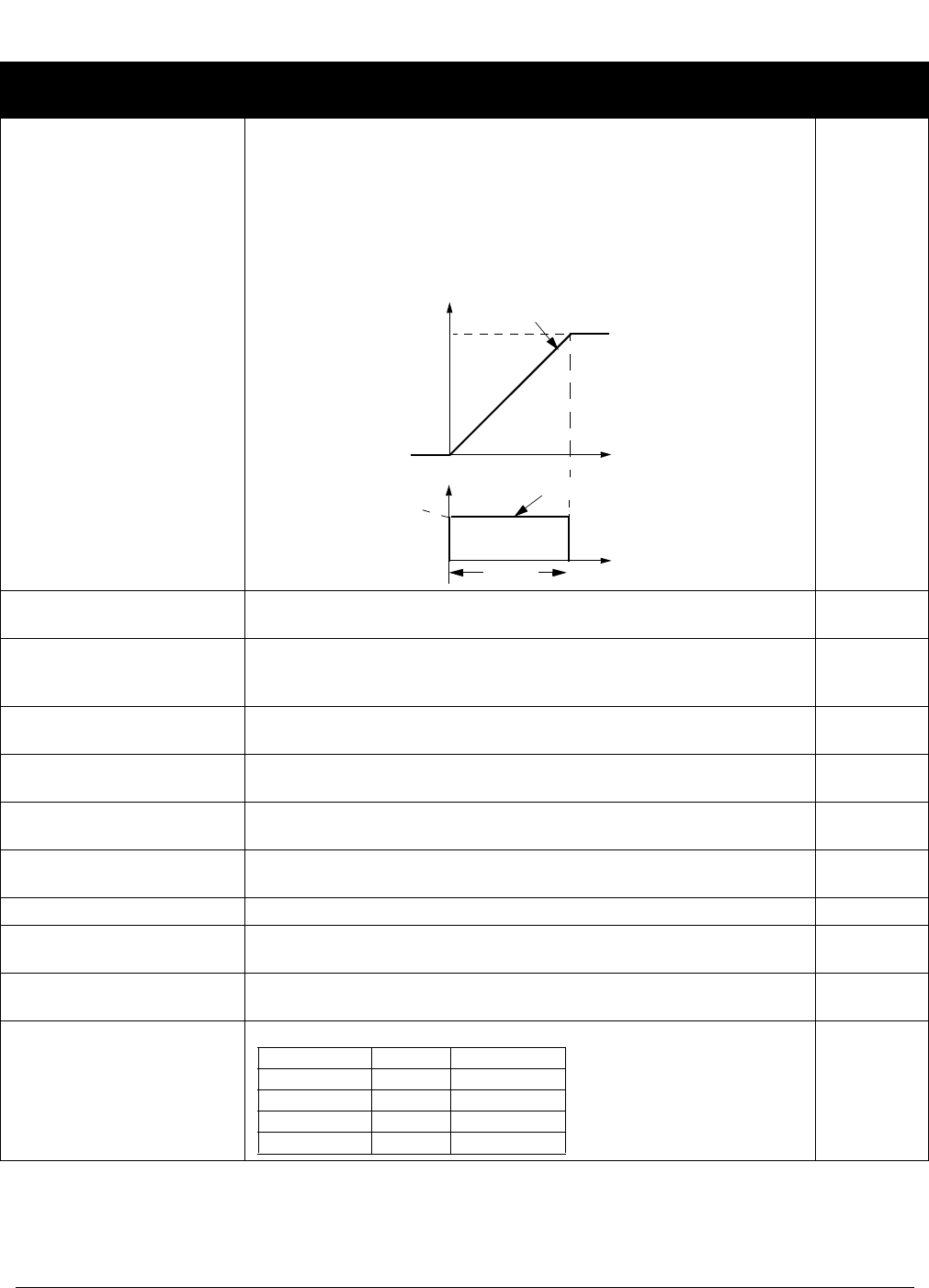
Señales actuales y parámetros
226
4003 TIEMP DERIVACION Define el tiempo de derivación para el regulador PID de proceso. La acción
derivada potencia la salida del regulador si el valor de error cambia. Cuanto
mayor es el tiempo de derivación, más se potencia la salida del regulador de
velocidad durante el cambio. Si el tiempo de derivación se ajusta a cero, el
regulador funciona como un regulador PI, y si no como un regulador PID.
La derivación hace que el control sea más sensible a perturbaciones.
La derivada se filtra con un filtro unipolar. La constante de tiempo de filtro se
define con el parámetro 4004 FILTRO DERIV PID.
0
0,0…10,0 s Tiempo de derivación. Si el valor del parámetro se ajusta a cero, se
desactiva la parte de derivada del regulador PID. 1 = 0,1 s
4004 FILTRO DERIV PID Define la constante de tiempo de filtro para la parte de derivada del regulador
PID de proceso. El incremento del tiempo de filtro suaviza la derivada y
reduce el ruido.
1
0,0…10,0 s Constante de tiempo de filtro. Si el valor del parámetro se ajusta a cero, se
desactiva el filtro de derivada. 1 = 0,1 s
4005 INV VALOR ERROR Selecciona la relación entre la señal de realimentación y la velocidad del
convertidor. NO
NO Normal: una reducción de la señal de realimentación incrementa la velocidad
del convertidor. Error = Ref - Real 0
SI Invertido: una reducción de la señal de realimentación disminuye la
velocidad del convertidor. Error = Real - Ref 1
4006 UNIDADES Selecciona la unidad para los valores actuales del regulador PID. %
Véanse las selecciones SIN UNIDAD ... Mrev del parámetro 3405 UNIDAD
SALIDA1. 0…63
4007 ESCALA UNIDADES Define la posición de la coma decimal para el parámetro de visualización
seleccionado con el parámetro 4006 UNIDADES. 1
0…3 Ejemplo: número pi (3,14159): 1 = 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
t
100%
Ganancia
Valor de error de proceso
4003
Parte D de la salida del regulador
Salida PID
Error
t
0%
4001
Valor 4007 Entrada Visualización
000033
100313,1
203143,14
331423,142
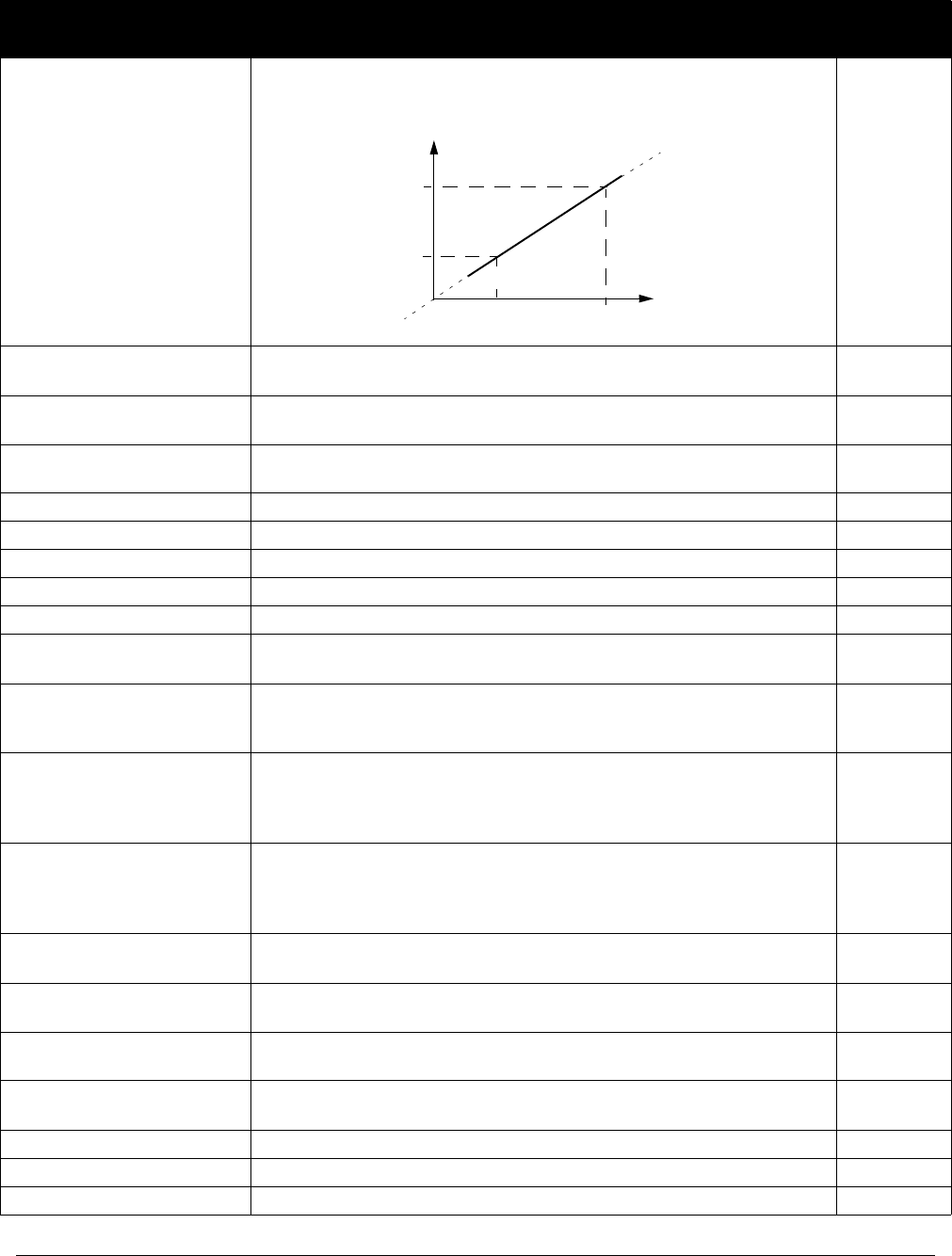
Señales actuales y parámetros
227
4008 VALOR 0% Define, junto con el parámetro 4009 VALOR 100%, el escalado aplicado a
los valores actuales del regulador PID. 0
x ... x La unidad y el intervalo dependen de la unidad y la escala definidas con los
parámetros 4006 UNIDADES y 4007 ESCALA UNIDADES.
4009 VALOR 100% Define, junto con el parámetro 4008 VALOR 0%, el escalado aplicado a los
valores actuales del regulador PID. 100
x ... x La unidad y el intervalo dependen de la unidad y la escala definidas con los
parámetros 4006 UNIDADES y 4007 ESCALA UNIDADES.
4010 SEL PUNTO CONSIG Define el origen para la señal de referencia del regulador PID de proceso. EA1
PANEL Panel de control 0
EA1 Entrada analógica EA1. 1
EA2 Entrada analógica EA2. 2
COMUNIC Referencia de bus de campo REF2. 8
COMUNIC+EA1 Suma de la referencia de bus de campo REF2 y la entrada analógica EA1.
Véase la sección Selección y corrección de la referencia en la página 260.9
COMUNIC*EA1 Multiplicación de la referencia de bus de campo REF2 y la entrada analógica
EA1. Véase la sección Selección y corrección de la referencia en la página
260.
10
ED3A,4D(RNC) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. Un comando de paro restaura la referencia a cero. La
referencia no se guarda si se cambia el origen de control de EXT1 a EXT2,
de EXT2 a EXT1 o de LOC a REM.
11
ED3A,4D (NC) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. El programa almacena la referencia activa (no restaurada
por una orden de paro). La referencia no se guarda si se cambia el origen de
control de EXT1 a EXT2, de EXT2 a EXT1 o de LOC a REM.
12
EA1+EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + EA2(%) - 50% 14
EA1*EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA(%) · (EA2(%) / 50%) 15
EA1-EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + 50% - EA2(%) 16
EA1/EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) · (50% / EA2(%)) 17
INTERNO Valor constante definido por el parámetro 4011 PUNTO CONSIG INT. 19
ED4A,5D(NC) Véase la selección ED3A,4D(NC). 31
FREC ENTRADA Entrada de frecuencia. 32
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Escala interna (%)
4009
4008
100%
0%
Unidades (4006)
Escala (4007)
-1000%
+1000%
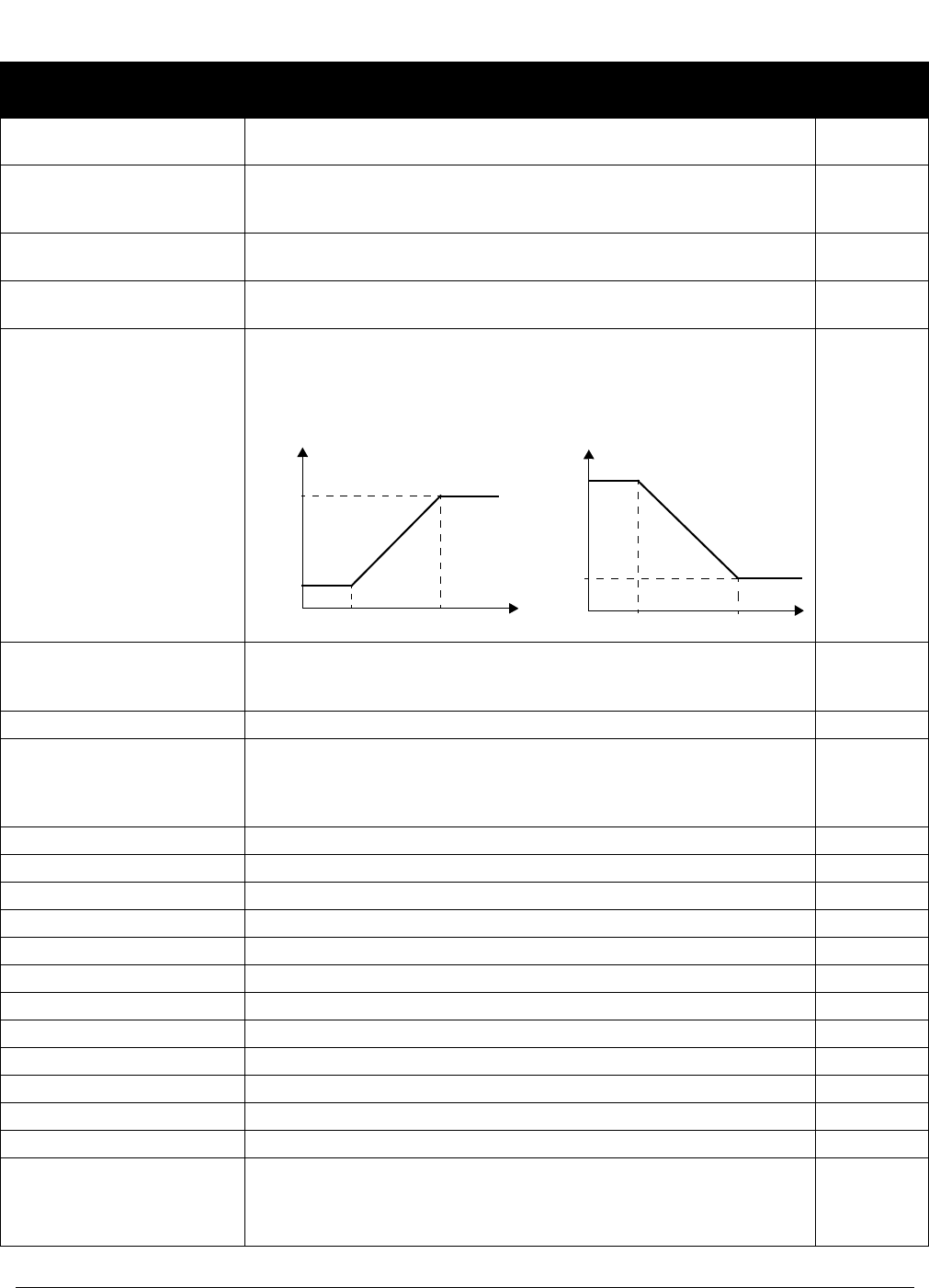
Señales actuales y parámetros
228
SAL PROG SEC Salida de programación de secuencias. Véase el grupo de parámetros 84
PROG SECUENCIA.33
4011 PUNTO CONSIG INT Selecciona un valor constante como referencia del regulador PID de
proceso, cuando el parámetro 4010 SEL PUNTO CONSIG está ajustado a
INTERNO.
40
x ... x La unidad y el intervalo dependen de la unidad y la escala definidas con los
parámetros 4006 UNIDADES y 4007 ESCALA UNIDADES.
4012 PUNTO CONSIG MIN Define el valor mínimo para la fuente de la señal de referencia PID
seleccionada. Véase el parámetro 4010 SEL PUNTO CONSIG. 0
-500,0…500,0% Valor en porcentaje.
Ejemplo: La entrada analógica EA1 se selecciona como origen de
referencia PID (el valor del parámetro 4010 es EA1). El mínimo y máximo de
la referencia corresponden a los ajustes de 1301 MINIMO EA1 y 1302
MAXIMO EA1 de este modo:
1 = 0,1%
4013 PUNTO CONSIG MAX Define el valor máximo para la fuente de la señal de referencia PID
seleccionada. Véanse los parámetros 4010 SEL PUNTO CONSIG y 4012
PUNTO CONSIG MIN.
100
-500,0…500,0% Valor en porcentaje. 1 = 0,1%
4014 SEL REALIM Selecciona el valor actual de proceso (señal de realimentación) para el
regulador PID de proceso: Los orígenes para las variables ACT1 y ACT2 se
definen con más detalle con los parámetros 4016 ENTRADA ACT1 y 4017
ENTRADA ACT2.
ACT1
ACT1 ACT1 1
ACT1 - ACT2 Resta de ACT1 y ACT 2. 2
ACT1+ACT2 Suma de ACT1 y ACT2 3
ACT1*ACT2 Multiplicación de ACT1 y ACT2. 4
ACT1 / ACT2 División de ACT1 y ACT2. 5
MIN(A1,2) Selecciona el mínimo de ACT1 y ACT2. 6
MAX(A1,2) Selecciona el máximo de ACT1 y ACT2. 7
raíz(A1-2) Raíz cuadrada de la resta de ACT1 y ACT2. 8
sqA1+sqA2 Suma de la raíz cuadrada de ACT1 y la raíz cuadrada de ACT2. 9
sqrt(ACT1) Raíz cuadrada de ACT1. 10
FBK 1 COMUN Valor de la señal 0158 VALOR COM 1 PID. 11
FBK 2 COMUN Valor de la señal 0159 VALOR COM 2 PID. 12
4015 MULTIPLIC REALIM Define un multiplicador extra para el valor definido por el parámetro 4014
SEL REALIM. Este parámetro se utiliza principalmente en aplicaciones en
que el valor de realimentación se calcula a partir de otra variable (p. ej., flujo
a partir de la diferencia de presión).
0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Ref
4013
4012
1301 1302
EA1 (%)
1301 1302
Ref
(MAX)
(MIN)
4013
4012
(MAX)
(MIN)
EA1 (%)
MAX > MIN MIN > MAX
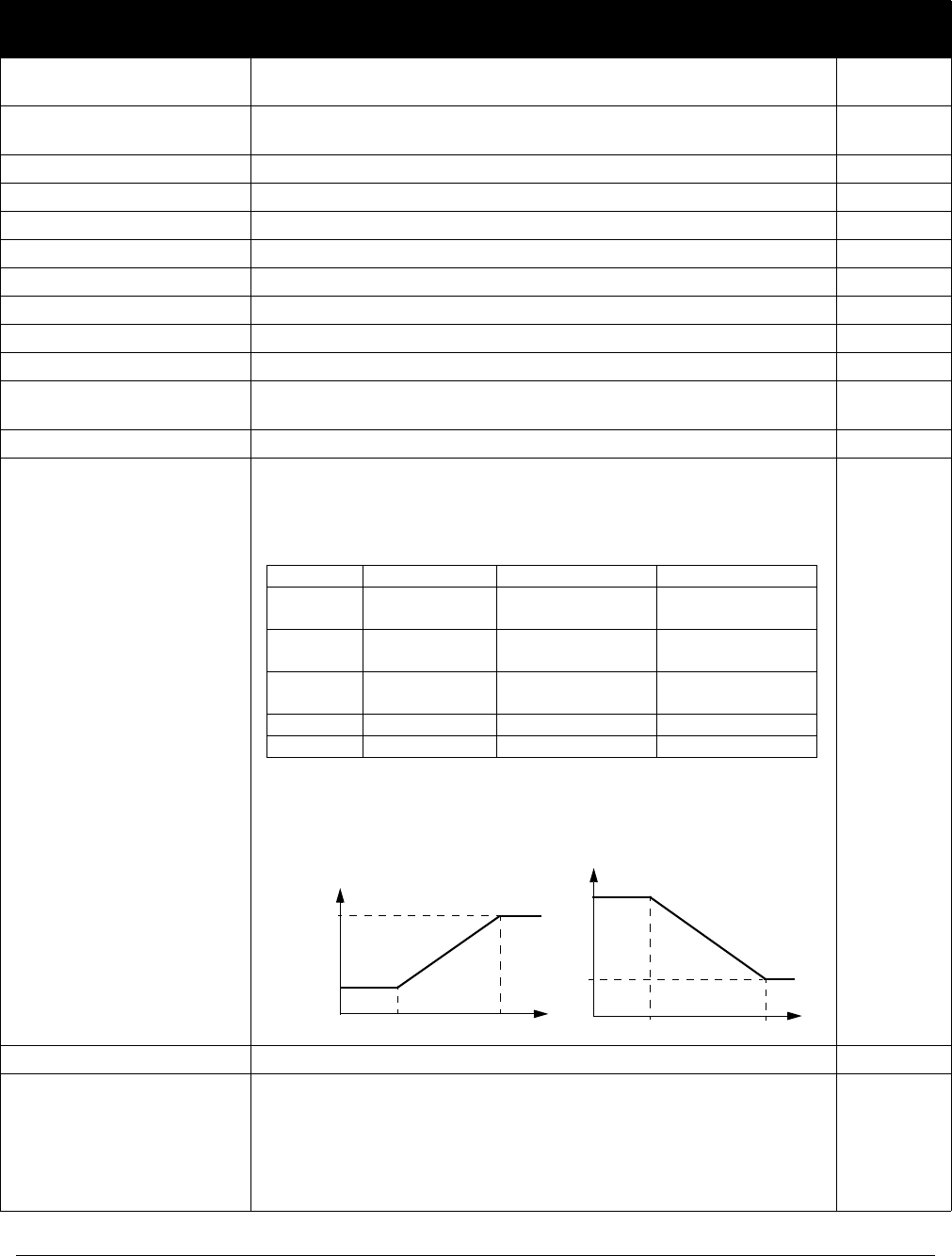
Señales actuales y parámetros
229
-32.768…32.767 Multiplicador. Si el valor del parámetro se ajusta a cero, no se utiliza el
multiplicador. 1 = 0,001
4016 ENTRADA ACT1 Define la fuente para el valor actual 1 (ACT1). Véase el parámetro 4018
ACT1 MINIMO. EA2
EA1 Utiliza la entrada analógica 1 para ACT1. 1
EA2 Utiliza la entrada analógica 2 para ACT2. 2
INTENSIDAD Utiliza la intensidad para ACT1 3
PAR Utiliza el par para ACT1 4
POTENCIA Utiliza la potencia para ACT1 5
ACT 1 COMUN Utiliza el valor de la señal 0158 VALOR COM 1 PID para ACT1 6
ACT 2 COMUN Utiliza el valor de la señal 0159 VALOR COM 2 PID para ACT1 7
FREC ENTRADA Entrada de frecuencia. 8
4017 ENTRADA ACT2 Define el origen para el valor actual ACT2.Véase el parámetro 4020 ACT2
MINIMO. EA2
Véase el parámetro 4016 ENTRADA ACT1.
4018 ACT1 MINIMO Ajusta el valor mínimo para ACT.
Escala la señal de origen utilizada como el valor actual ACT1 (definida por el
parámetro 4016 ENTRADA ACT1). Para los valores 6 (ACT 1 COMUN) y 7
(ACT 2 COMUN) no se realiza escalado.
El mínimo y máximo de ACT corresponden a los ajustes de 1301 MINIMO
EA1 y 1302 MAXIMO EA1 de este modo:
A = Normal; B = Inversión (mínimo ACT1> máximo ACT1)
0
-1000…1000% Valor en porcentaje. 1 = 1%
4019 ACT1 MAXIMO Define el valor máximo para la variable ACT1 si se selecciona una entrada
analógica como origen para ACT1. Véase el parámetro 4016 ENTRADA
ACT1. Los ajustes máximo y mínimo (4018 ACT1 MINIMO) de ACT1 definen
cómo se convierte la señal de tensión/intensidad recibida del dispositivo de
medición a un valor de porcentaje usado por el regulador PID de proceso.
Véase el parámetro 4018 ACT1 MINIMO.
100
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Par 4016 Origen Origen mín. Origen máx.
1 Entrada
analógica 1 1301 MINIMO EA1 1302 MAXIMO EA1
2 Entrada
analógica 2 1304 MINIMO EA2 1305 MAXIMO EA2
3 Intensidad 0 2 · intensidad
nominal
4 Par -2 · par nominal 2 · par nominal
5 Potencia -2 · potencia nominal 2 · potencia nominal
EA (%)
4019
4018
1301 1302 1301 1302
4018
4019
ACT1 (%)
EA (%)
ACT1 (%)
AB
Señales actuales y parámetros
230
-1000…1000% Valor en porcentaje. 1 = 1%
4020 ACT2 MINIMO Véase el parámetro 4018 ACT1 MINIMO. 0
-1000…1000% Véase el parámetro 4018.1 = 1%
4021 ACT2 MAXIMO Véase el parámetro 4019 ACT1 MAXIMO. 100
-1000…1000% Véase el parámetro 4019.1 = 1%
4022 SELECCION DORMIR Activa la función dormir y selecciona el origen de la entrada de activación.
Véase el apartado Función dormir para el control PID de proceso (PID1) en
la página 125.
SIN SEL
SIN SEL Función dormir no seleccionada. 0
ED1 La función se activa/desactiva a través de la entrada digital ED1. 1 =
activación, 0 = desactivación.
Los criterios internos para dormir, ajustados con los parámetros 4023 NIVEL
DORM PID y 4025 NIVEL DESPERTAR, no tienen efecto. Los parámetros
de demora de inicio y paro de la función dormir 4024 DEMORA DORM PID y
4026 DEMORA DESPERT sí tienen efecto.
1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
INTERNO Se activa y se desactiva automáticamente tal como se define con los
parámetros 4023 NIVEL DORM PID y 4025 NIVEL DESPERTAR. 7
ED1(inv) La función se activa/desactiva a través de la entrada digital ED1 invertida.
1 = desactivación, 0 = activación.
Los criterios internos para dormir, ajustados con los parámetros 4023 NIVEL
DORM PID y 4025 NIVEL DESPERTAR, no tienen efecto. Los parámetros
de demora de inicio y paro de la función dormir 4024 DEMORA DORM PID y
4026 DEMORA DESPERT sí tienen efecto.
-1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
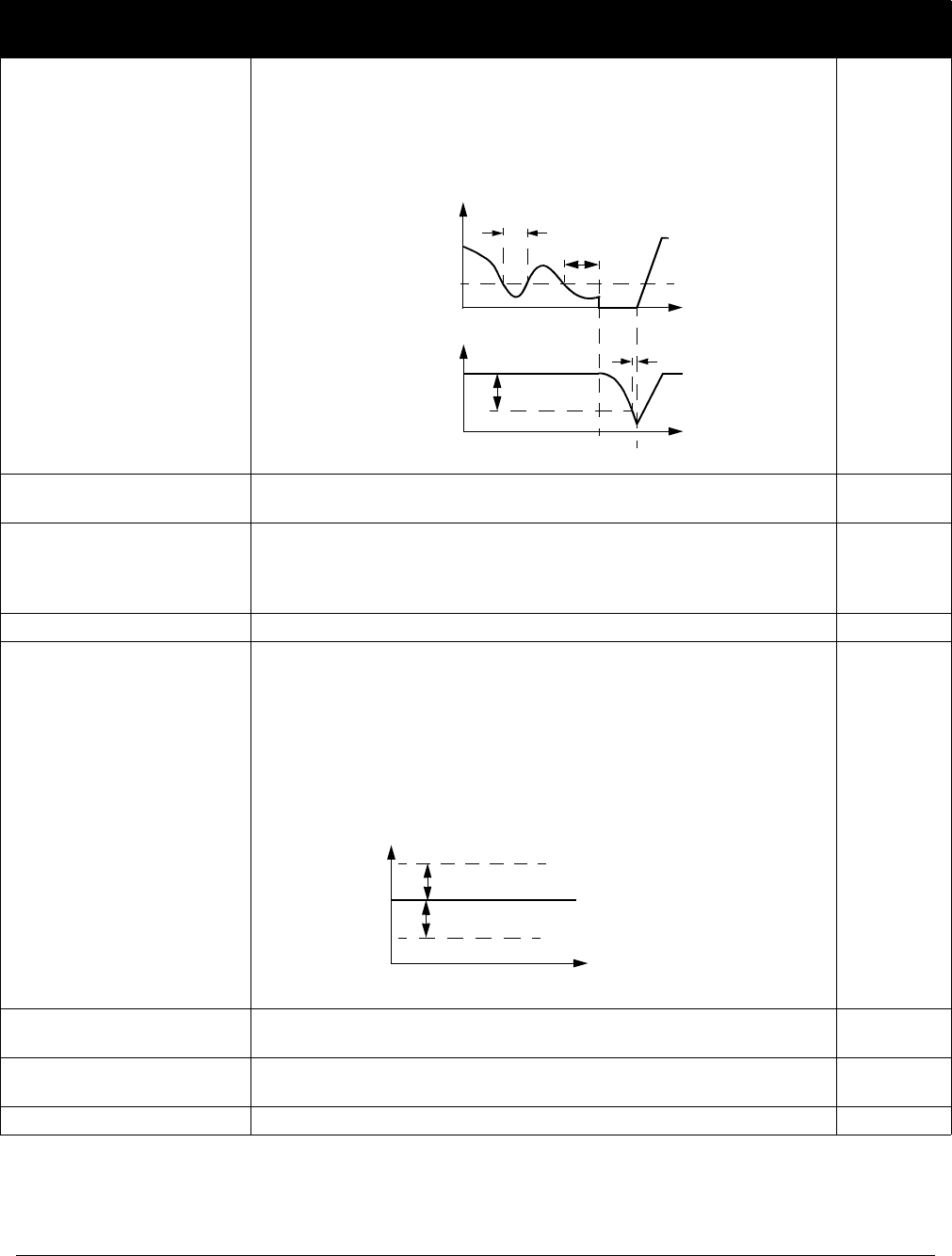
Señales actuales y parámetros
231
4023 NIVEL DORM PID Define el límite de inicio para la función dormir. Si la velocidad del motor está
por debajo de un nivel ajustado (4023) durante más tiempo que la demora
para dormir (4024), el convertidor pasa a modo dormir: el motor se para y el
panel de control muestra el mensaje de alarma DORMIR PID.
El parámetro 4022 SELECCION DORMIR debe ajustarse a INTERNO.
0
0,0 ... 500,0 Hz / 0 ...
30.000 rpm Nivel de inicio de la función dormir. 1 = 0,1 Hz /
1rpm
4024 DEMORA DORM PID Define la demora para la función de inicio dormir. Véase el parámetro 4023
NIVEL DORM PID. Cuando la velocidad del motor cae por debajo del nivel
de dormir, se inicia el contador. Cuando la velocidad del motor supera el nivel
de dormir, el contador se restaura.
60
0,0…3600,0 s Demora de inicio de la función dormir. 1 = 0,1 s
4025 NIVEL DESPERTAR Define la desviación de activación para la función dormir. El convertidor se
activa si la desviación del valor actual de proceso respecto al valor de
referencia PID supera la desviación de activación (4025) durante más tiempo
que la demora para despertar (4026). El nivel de activación depende de los
ajustes del parámetro 4005 INV VALOR ERROR.
Si el parámetro 4005 está ajustado a 0:
Nivel despertar = Referencia PID (4010) - Desviación despertar (4025).
Si el parámetro 4005 está ajustado a 1:
Nivel despertar = Referencia PID (4010) + Desviación despertar (4025).
Véanse también las figuras en el parámetro 4023 NIVEL DORM PID.
0
x ... x La unidad y el intervalo dependen de la unidad y la escala definidas con los
parámetros 4026 DEMORA DESPERT y 4007 ESCALA UNIDADES.
4026 DEMORA DESPERT Define la demora para despertar de la función dormir. Véase el parámetro
4023 NIVEL DORM PID. 0,5
0,00…60,00 s Demora para despertar. 1 = 0,01 s
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Arranque
t < 4024
t
t > 4024
t
Paro
4023
4026
Referencia PID
Nivel de salida PID.
4025
Realimentación de proceso PID
4025
Referencia PID
4025
t
Nivel despertar cuando 4005 = 1
Nivel despertar cuando 4005 = 0
Señales actuales y parámetros
232
4027 SERIE PARAM PID1 Define el origen desde el cual el convertidor lee la señal que selecciona
entre las series de parámetros PID 1 y 2.
La serie de parámetros PID 1 se define con los parámetros 4001 ... 4026.
La serie de parámetros PID 2 se define con los parámetros 4101 ... 4126.
CONJUNTO
1
CONJUNTO 1 La serie de parámetros PID 1 está activa. 0
ED1 Entrada digital ED1. 1 = CONJUNTO PID 2, 0 = CONJUNTO PID 1. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
CONJUNTO 2 La serie de parámetros PID 2 está activa. 7
FUNC TEMP 1 Control temporizado de la serie PID 1/2. Función temporizada 1 inactiva =
CONJUNTO PID 1, función temporizada 1 activada = CONJUNTO PID 2.
Véase el grupo de parámetros 36 FUNCIONES TEMP.
8
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 9
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 10
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 11
ED1(inv) Entrada digital ED1 invertida. 0 = CONJUNTO PID 2, 1 = CONJUNTO PID 1. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
41 CONJ PID PROCESO 2
La serie 2 de parámetros de control de proceso PID (PID1). Véase la sección
Control PID en la página 123.
4101 GANANCIA Véase el parámetro 4001 GANANCIA.
4102 TIEMP INTEGRAC. Véase el parámetro 4002 TIEMP INTEGRAC.
4103 TIEMP DERIVACION Véase el parámetro 4003 TIEMP DERIVACION.
4104 FILTRO DERIV PID Véase el parámetro 4004 FILTRO DERIV PID.
4105 INV VALOR ERROR Véase el parámetro 4005 INV VALOR ERROR.
4106 UNIDADES Véase el parámetro 4006 UNIDADES.
4107 ESCALA UNIDADES Véase el parámetro 4007 ESCALA UNIDADES.
4108 VALOR 0% Véase el parámetro 4008 VALOR 0%.
4109 VALOR 100% Véase el parámetro 4009 VALOR 100%.
4110 SEL PUNTO CONSIG Véase el parámetro 4010 SEL PUNTO CONSIG.
4111 PUNTO CONSIG INT Véase el parámetro 4011 PUNTO CONSIG INT.
4112 PUNTO CONSIG MIN Véase el parámetro 4012 PUNTO CONSIG MIN.
4113 PUNTO CONSIG MAX Véase el parámetro 4013 PUNTO CONSIG MAX.
4114 SEL REALIM Véase el parámetro 4014 SEL REALIM.
4115 MULTIPLIC REALIM Véase el parámetro 4015 MULTIPLIC REALIM.
4116 ENTRADA ACT1 Véase el parámetro 4016 ENTRADA ACT1.
4117 ENTRADA ACT2 Véase el parámetro 4017 ENTRADA ACT2.
4118 ACT1 MINIMO Véase el parámetro 4018 ACT1 MINIMO.
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
233
4119 ACT1 MAXIMO Véase el parámetro 4018 ACT1 MAXIMO.
4120 ACT2 MINIMO Véase el parámetro 4020 ACT2 MINIMO.
4121 ACT2 MAXIMO Véase el parámetro 4021 ACT2 MAXIMO.
4122 SELECCION DORMIR Véase el parámetro 4022 SELECCION DORMIR.
4123 NIVEL DORM PID Véase el parámetro 4023 NIVEL DORM PID.
4124 DEMORA DORM PID Véase el parámetro 4024 DEMORA DORM PID.
4125 NIVEL DESPERTAR Véase el parámetro 4025 NIVEL DESPERTAR.
4126 DEMORA DESPERT Véase el parámetro 4026 DEMORA DESPERT.
42 PID TRIM / EXT Control PID (PID2) externo/trim. Véase el apartado Control PID en la página
123.
4201 GANANCIA Véase el parámetro 4001 GANANCIA.
4202 TIEMP INTEGRAC. Véase el parámetro 4002 TIEMP INTEGRAC.
4203 TIEMP DERIVACION Véase el parámetro 4003 TIEMP DERIVACION.
4204 FILTRO DERIV PID Véase el parámetro 4004 FILTRO DERIV PID.
4205 INV VALOR ERROR Véase el parámetro 4005 INV VALOR ERROR.
4206 UNIDADES Véase el parámetro 4006 UNIDADES.
4207 ESCALA UNIDADES Véase el parámetro 4007 ESCALA UNIDADES.
4208 VALOR 0% Véase el parámetro 4008 VALOR 0%.
4209 VALOR 100% Véase el parámetro 4009 VALOR 100%.
4210 SEL PUNTO CONSIG Véase el parámetro 4010 SEL PUNTO CONSIG.
4211 PUNTO CONSIG INT Véase el parámetro 4011 PUNTO CONSIG INT.
4212 PUNTO CONSIG MIN Véase el parámetro 4012 PUNTO CONSIG MIN.
4213 PUNTO CONSIG MAX Véase el parámetro 4013 PUNTO CONSIG MAX.
4214 SEL REALIM Véase el parámetro 4014 SEL REALIM.
4215 MULTIPLIC REALIM Véase el parámetro 4015 MULTIPLIC REALIM.
4216 ENTRADA ACT1 Véase el parámetro 4016 ENTRADA ACT1.
4217 ENTRADA ACT2 Véase el parámetro 4017 ENTRADA ACT2.
4218 ACT1 MINIMO Véase el parámetro 4018 ACT1 MINIMO.
4219 ACT1 MAXIMO Véase el parámetro 4018 ACT1 MAXIMO.
4220 ACT2 MINIMO Véase el parámetro 4020 ACT2 MINIMO.
4221 ACT2 MAXIMO Véase el parámetro 4021 ACT2 MAXIMO.
4228 ACTIVAR Selecciona el origen para la señal externa de activación de la función PID. El
parámetro 4230 MODO TRIM debe estar ajustado a SIN SEL. SIN SEL
SIN SEL No se ha seleccionado la activación externa del control PID. 0
ED1 Entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
MARCH UNIDAD Activación cuando arranca el convertidor. Arranque (convertidor en marcha)
= activo. 7
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
234
SI Activación cuando se enciende el convertidor. Encendido (convertidor bajo
tensión) = activo. 8
FUNC TEMP 1 Activación por una función temporizada. Función temporizada 1 activada =
control PID activo. Véase el grupo de parámetros 36 FUNCIONES TEMP.9
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 10
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 11
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 12
ED1(inv) Entrada digital ED1 invertida. 0 = activo, 1 = inactivo. -1
ED2(inv) Véase la selección ED1 (inv). -2
ED3(inv) Véase la selección ED1 (inv). -3
ED4(inv) Véase la selección ED1 (inv). -4
ED5(inv) Véase la selección ED1 (inv). -5
4229 AJUSTE
Define el ajuste para la salida del regulador PID externo. Cuando se activa el
regulador PID, la salida del regulador empieza en el valor de ajuste. Cuando se
desactiva el regulador PID, la salida del regulador se restaura al valor de ajuste.
El parámetro 4230 MODO TRIM debe estar ajustado a SIN SEL.
0
0,0…100,0% Valor en porcentaje. 1 = 0,1%
4230 MODO TRIM Activa la función corrección y selecciona entre la corrección directa y la
proporcional. Con la corrección, es posible combinar un factor de corrección
con la referencia del convertidor. Véase el apartado Corrección de la
referencia en la página 103.
SIN SEL
SIN SEL Función trim no seleccionada. 0
PROPORCIONAL Activo. El factor de corrección es proporcional a la referencia de rpm/Hz
antes de la corrección (REF1). 1
DIRECTO
Activo. El factor de corrección está relacionado con un límite máximo fijo usado
en el bucle de control de referencia (par, frecuencia o velocidad máxima).
2
4231 ESCALA TRIM Define el multiplicador para la función de corrección. Véase el apartado
Corrección de la referencia en la página 103.0
-100.0…100.0% Multiplicador. 1 = 0.1%
4232 FUENTE DE
CORREC Selecciona la referencia de corrección. Véase el apartado Corrección de la
referencia en la página 103.REFPID2
REFPID2 Referencia PID2 seleccionada con el parámetro 4210 (es decir, el valor de la
señal 0129 PUNTO CONSIG PID2). 1
SALIDAPID2 Salida de PID2, es decir, el valor de la señal 0127 SALIDA PID 2. 2
4233 SELECCION TRIM Selecciona si la corrección se usa para corregir la referencia de velocidad o
de par. Véase el apartado Corrección de la referencia en la página 103.VELOC/
FREC
VELOC/FREC Corrección de la referencia de velocidad. 0
PAR Corrección de la referencia de par (sólo para REF2 (%). 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
235
43 CONTROL FRENO MEC
Control de un freno mecánico. Véase el apartado Control de un freno
mecánico en la página 129.
4301 RETAR APER FRENO Define la demora en la apertura del freno (la demora entre la orden interna
de apertura de freno y la liberación del control de velocidad del motor). El
contador de demora se inicia cuando la intensidad/par/velocidad del motor
ha alcanzado el nivel requerido en la liberación de freno (parámetro 4302
NIVEL APER FRENO o 4304 NIV APER FORZADA) y se ha magnetizado el
motor. Junto con el inicio del contador, la función de freno excita la salida de
relé que controla el freno y el freno empieza a abrirse.
0,20
0,00…2,50 s Tiempo de demora. 1 = 0,01 s
4302 NIVEL APER FRENO Define la intensidad/par inicial del motor en la liberación de freno. Tras el
arranque el par/intensidad del convertidor se mantiene al valor ajustado
hasta que se magnetice el motor.
100%
0.0…180.0% Valor en porcentaje del par nominal TN (con control vectorial) o intensidad
nominal I2N (con control escalar).
El modo de control del motor se selecciona con el parámetro 9904 MODO
CTRL MOTOR.
1 = 0,1%
4303 NIVEL CIERR FREN Define la velocidad de cierre del freno. Tras el paro, el freno se cierra cuando
la velocidad del convertidor cae por debajo del valor ajustado. 4,0%
0,0…100,0% Valor en porcentaje de la velocidad nominal (con control vectorial) o
frecuencia nominal (con control escalar). El modo de control del motor se
selecciona con el parámetro 9904 MODO CTRL MOTOR.
1 = 0,1%
4304 NIV APER FORZADA Define la velocidad en la liberación de freno. El ajuste de este parámetro
tiene preferencia sobre el ajuste del parámetro 4302 NIVEL APER FRENO.
Tras el arranque la velocidad del convertidor se mantiene al valor ajustado
hasta que se magnetice el motor.
El objetivo de este parámetro es generar un par de arranque suficiente para
evitar que el motor gire en la dirección incorrecta a causa de la carga del
motor.
0
0,0…100% Valor en porcentaje de la frecuencia máxima (con control escalar) o
velocidad máxima (con control vectorial). Si el valor del parámetro se ajusta
a cero, la función se desactiva. El modo de control del motor se selecciona
con el parámetro 9904 MODO CTRL MOTOR.
1 = 0,1%
4305 RETAR MAGN
FRENO Define el tiempo de magnetización del motor. Tras el arranque la intensidad/
par/velocidad del convertidor se mantiene en el valor definido por el
parámetro 4302 NIVEL APER FRENO o 4304 NIV APER FORZADA durante
el tiempo ajustado.
0
0 … 10000 ms Tiempo de magnetización. Si el valor del parámetro se ajusta a cero, la
función se desactiva. 1 = 1 ms
4306 NIVEL FREC MARCH Define la velocidad de cierre del freno. Cuando la frecuencia cae por debajo
del nivel ajustado durante la marcha, el freno se cierra. Se vuelve a abrir
cuando se cumplen los requisitos establecidos con los parámetros 4301 ...
4305.
0
0,0…100,0% Valor en porcentaje de la frecuencia máxima (con control escalar) o
velocidad máxima (con control vectorial). Si el valor del parámetro se ajusta
a cero, la función se desactiva. El modo de control del motor se selecciona
con el parámetro 9904 MODO CTRL MOTOR.
1 = 0,1%
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
236
50 ENCODER Conexión del generador de pulsos.
Para más información, véase el Manual del Usuario del Módulo de interfase
del generador de pulsos MTAC-01[3AFE68591091 (inglés)].
5001 NUM PULSOS Indica el número de pulsos de generador para una revolución. 1024
32...16384 ppr Número de pulso en pulsos por ronda (ppr) 1 = 1
5002 ACTIVO ENCODER Activa el generador de pulsos. DESACTI-
VAR
DESACTIVAR Desactivado. 0
ACTIVAR Activado 1
5003 FALLO ENCODER Define el funcionamiento del convertidor si se detecta un fallo en la
comunicación entre el generador de pulsos y el módulo de interfase del
generador, o entre el módulo y el convertidor.
FALLO
FALLO El convertidor se dispara con un fallo FALLO ENCODER. 1
ALARMA El convertidor genera una alarma FALLO ENCODER. 2
5010 ACTIVO Z PLS Activa el pulso cero (Z) del generador de pulsos. El pulso cero se utiliza para
restaurar la posición. DESACTI-
VAR
DESACTIVAR Desactivado. 0
ACTIVAR Activado 1
5011 RESET POSICION Activa la restauración de la posición. DESACTI-
VAR
DESACTIVAR Desactivado. 0
ACTIVAR Activado 1
51 MOD COMUNIC EXT Los parámetros tienen que ajustarse sólo cuando se ha instalado un módulo
adaptador de bus de campo (opcional) y se ha activado con el parámetro
9802 SEL PROT COM. Para obtener más detalles acerca de los parámetros,
véase el manual del módulo de bus de campo y el capítulo Control de bus de
campo con adaptador de bus de campo. Estos ajustes de parámetros
quedarán inalterados aunque se cambie la macro.
Nota: En el módulo adaptador, el número del grupo de parámetros es 1.
5101 TIPO DE ABC Muestra el tipo de módulo adaptador de bus de campo conectado.
NO DEFINIDO No se encuentra el módulo de bus de campo, está mal conectado o el
parámetro 9802 SEL PROT COM no está ajustado a ABC EXT. 0
PROFIBUS-DP Módulo adaptador Profibus. 1
CANopen Módulo adaptador CANopen. 32
DEVICENET Módulo adaptador DeviceNet. 37
5102 PAR DE ABC 2 Estos parámetros son específicos del módulo adaptador. Para más
información, véase el manual del módulo. Observe que no todos estos
parámetros son forzosamente visibles.
... ....
5126 PAR DE ABC 26
5127 ACTUALIZ PAR ABC Valida cualquier ajuste modificado de los parámetros de configuración del
módulo adaptador. Tras la actualización, el valor vuelve automáticamente a
DONE.
REALIZADO Actualización realizada. 0
REFRESCO Actualizando. 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
237
52 COMUNIC PANEL Ajustes de comunicación para el puerto del panel de control en el
convertidor.
5201 ID DE ESTACION Define la dirección del convertidor. Dos unidades con la misma dirección no
pueden estar en línea. 1
1…247 Dirección 1 = 1
5202 VEL TRANSM Define la velocidad de transferencia del enlace. 9,6
9,6 kbit/s 9,6 kbit/s 1 = 0,1 kbit/s
19,2 kbit/s 19,2 kbit/s
38,4 kbit/s 38,4 kbit/s
57,6 kbit/s 57,6 kbit/s
115,2 kbit/s 115,2 kbit/s
5203 PARIDAD Define el uso de bit(s) de paridad y paro. Debe usarse el mismo ajuste en
todas las estaciones en línea. 8N1
8N1 Sin bit de paridad, un bit de paro. 0
8N2 Sin bit de paridad, dos bits de paro. 1
8E1 Bit de indicación de paridad par, un bit de paro. 2
8O1 Bit de indicación de paridad impar, un bit de paro. 3
5204 MENSAJES
CORRECT Número de mensajes válidos recibidos por el convertidor. Durante el
funcionamiento normal, este número aumenta constantemente. 0
0…65535 Número de mensajes. 1 = 1
5205 ERRORES PARIDAD Número de caracteres con un error de paridad recibidos del enlace Modbus.
Si el número es elevado, compruebe que los ajustes de paridad de los
dispositivos conectados al bus sean iguales.
Nota: Un nivel elevado de ruido electromagnético provoca errores.
0
0…65535 Número de caracteres. 1 = 1
5206 ERRORES DE
TRAMA Número de caracteres con un error de trama recibidos por el enlace Modbus.
Si el número es elevado, compruebe que los ajustes de la velocidad de
comunicación de los dispositivos conectados al bus sean iguales.
Nota: Un nivel elevado de ruido electromagnético provoca errores.
0
0…65535 Número de caracteres. 1 = 1
5207 SOBREESC BUFFE Número de caracteres que desbordan el búfer; es decir, el número de
caracteres que superan la longitud máxima de mensaje, 128 bytes. 0
0…65535 Número de caracteres. 1 = 1
5208 ERRORES CRC Número de mensajes con un error CRC (comprobación de redundancia
cíclica) recibidos por el convertidor. Si el número es elevado compruebe el
cálculo de CRC para detectar posibles errores.
Nota: Un nivel elevado de ruido electromagnético provoca errores.
0
0…65535 Número de mensajes. 1 = 1
53 PROTOCOLO BCI Ajustes del enlace de bus de campo encajado. Véase el capítulo Control de
bus de campo con bus de campo encajado.
5302 ID ESTACION BCI Define la dirección del dispositivo. Dos unidades con la misma dirección no
pueden estar en línea. 1
0...247 Dirección 1 = 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
238
5303 VEL TRANSM BCI Define la velocidad de transferencia del enlace. 9.6
9.6 9,6 kbit/s 1 = 0,1 kbit/s
19.2 19,2 kbit/s
38.4 38,4 kbit/s
57.6 57,6 kbit/s
115.2 115,2 kbit/s
5304 PARIDAD BCI Define el uso de bit(s) de paridad y paro y la longitud de los datos. Debe
usarse el mismo ajuste en todas las estaciones en línea. 8N1
8N1 Sin bit de paridad, un bit de paro, 8 bits de datos. 0
8N2 Sin bit de paridad, dos bits de paro, 8 bits de datos. 1
8E1 Incluso bit de indicación de paridad impar, un bit de paro, 8 bits de datos. 2
8O1 Bit de indicación de paridad impar, un bit de paro, 8 bits de datos. 3
5305 PERFIL CTRL BCI Selecciona el perfil de comunicación. Véase el apartado Perfiles de
comunicación en la página 270.ABB DRV
LIM
ABB DRV LIM Perfil ABB Drives Limited (limitado). 0
DCU PROFILE Perfil DCU 1
ABB DRV FULL Perfil ABB Drives 2
5306 MENSAJ CORR BCI Número de mensajes válidos recibidos por el convertidor. Durante el
funcionamiento normal, este número aumenta constantemente. 0
0...65535 Número de mensajes. 1 = 1
5307 ERRORES CRC BCI Número de mensajes con un error CRC (comprobación de redundancia
cíclica) recibidos por el convertidor. Si el número es elevado compruebe el
cálculo de CRC para detectar posibles errores.
Nota: Un nivel elevado de ruido electromagnético provoca errores.
0
0...65535 Número de mensajes. 1 = 1
5310 PAR BCI 10 Selecciona un valor actual para correlacionarlo con el registro 40005 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5311 PAR BCI 11 Selecciona un valor actual para correlacionarlo con el registro 40006 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5312 PAR BCI 12 Selecciona un valor actual para correlacionarlo con el registro 40007 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5313 PAR BCI 13 Selecciona un valor actual para correlacionarlo con el registro 40008 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5314 PAR BCI 14 Selecciona un valor actual para correlacionarlo con el registro 40009 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5315 PAR BCI 15 Selecciona un valor actual para correlacionarlo con el registro 40010 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
239
5316 PAR BCI 16 Selecciona un valor actual para correlacionarlo con el registro 40011 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5317 PAR BCI 17 Selecciona un valor actual para correlacionarlo con el registro 40012 del
Modbus. 0
0...65535 Índice de parámetro. 1 = 1
5318 PAR BCI 18 Reservado 0
5319 PAR BCI 19 Código de control del perfil ABB Drives (ABB DRV LIM o ABB DRV FULL).
Copia de sólo lectura del Código de control de bus de campo. 0x0000
0x0000 ... 0xFFFF
(hex) Código de control
5320 PAR BCI 20 Código de estado del perfil ABB Drives (ABB DRV LIM o ABB DRV FULL).
Copia de sólo lectura del Código de estado de bus de campo. 0x0000
0x0000 ... 0xFFFF
(hex) Código de estado
54 ENTR DATOS DE
ABC
Datos del convertidor al controlador de bus de campo a través de un
adaptador de bus de campo. Véase el capítulo Control de bus de campo con
adaptador de bus de campo.
Nota: En el módulo adaptador, el número del grupo de parámetros es 3.
5401 ENTR DATOS ABC 1 Selecciona los datos para transferir desde el convertidor al controlador de
bus de campo.
0 No se usa.
1...6 Códigos de datos de control y de estado.
101...9999 Índice de parámetro.
5402 ENTR DATOS ABC 2 Véase 5401 ENTR DATOS ABC 1.
.... ... ...
5410 ENTR DATOS ABC 10 Véase 5401 ENTR DATOS ABC 1.
55 SAL DATOS DE ABC Datos del controlador de bus de campo al convertidor a través de un
adaptador de bus de campo. Véase el capítulo Control de bus de campo con
adaptador de bus de campo.
Nota: En el módulo adaptador, el número del grupo de parámetros es 2.
5501 SAL DATOS ABC 1 Selecciona los datos para transferir desde el controlador de bus de campo al
convertidor.
0 No se usa.
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Ajuste del 5401 Código de datos
1 Código de control
2REF1
3REF2
4 Código de estado
5 Valor actual 1
6 Valor actual 2
Señales actuales y parámetros
240
1...6 Códigos de datos de control y de estado.
101...9999 Parámetro de convertidor
5502 SAL DATOS ABC 2 Véase 5501 SAL DATOS ABC 1.
... ... ...
5510 SAL DATOS ABC 10 Véase 5501 SAL DATOS ABC 1.
84 PROG SECUENCIA Programación de secuencias. Véase el apartado Programación de
secuencias en la página 137.
8401 ACTIVAR PROG SEC Activa la programación de secuencias.
Si se pierde la señal de activación de la programación de secuencias, ésta
se detiene, el estado de la programación de secuencias (0168 ESTADO
PROG SEC) se ajusta a 1 y todos los temporizadores y salidas (SR/ST/SA)
se ajustan a cero.
DESACTIVADO
DESACTIVADO Desactivado. 0
EXT2 Activado en el lugar de control externo 2 (EXT2) 1
EXT1 Activado en el lugar de control externo 1 (EXT1) 2
EXT 1YEXT 2 Activado en los lugares de control externo 1 y 2 (EXT1 y EXT2) 3
SIEMPRE Activado en los lugares de control externo 1 y 2 (EXT1 y EXT2) y en control
local (LOCAL) 4
8402 INICIO PROG SEC Selecciona el origen de la señal de activación de la programación de
secuencias.
Cuando se activa la programación de secuencias, ésta se inicia en el estado
utilizado anteriormente.
Si se pierde la señal de activación de la programación de secuencias, ésta
se detiene y todos los temporizadores y salidas (SR/ST/SA) se ajustan a
cero. El estado de la programación de secuencias (0168 ESTADO PROG
SEC) no cambia.
Si es necesario el inicio desde el primer estado de la programación de
secuencias, ésta debe restaurarse mediante el parámetro 8404 RESET
PROG SEC. Si siempre es necesario el inicio desde el primer estado de la
programación de secuencias, los orígenes de la señal de restauración y de
inicio deben darse a través de la misma entrada digital (8404 y 8402 INICIO
PROG SEC).
Nota: El convertidor no se pondrá en marcha si no se recibe la señal de
Permiso de marcha (1601 PERMISO MARCHA).
SIN SEL
ED1(INV) Activación de la programación de secuencias a través de la entrada digital
ED1 invertida. 0 = activa, 1 = inactiva. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Ajuste del 5501 Código de datos
1 Código de control
2REF1
3REF2
4 Código de estado
5 Valor actual 1
6 Valor actual 2
Señales actuales y parámetros
241
SIN SEL No hay señal de activación de la programación de secuencias. 0
ED1 Activación de la programación de secuencias a través de la entrada digital
ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
INIC UNIDAD Activación de la programación de secuencias cuando arranca el convertidor. 6
FUNC TEMP 1 Programación de secuencias activada por la función temporizada 1. Véase
el grupo de parámetros 36 FUNCIONES TEMP.7
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 8
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 9
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 10
EN MARCHA La programación de secuencias siempre está activa. 11
8403 PAUSA PROG SEC Selecciona el origen para la señal de pausa de la programación de
secuencias. Cuando se activa la pausa de la programación de secuencias,
se detienen todos los temporizadores y salidas (SR/ST/SA). La transición de
estado de la programación de secuencias sólo es posible con el parámetro
8405 FORZAR EST SEC.
SIN SEL
ED1(INV) Señal de pausa a través de la entrada digital ED1 invertida. 0 = activo, 1 =
inactivo. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL Sin señal de pausa. 0
ED1 Señal de pausa a través de la entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
EN PAUSA Activada la pausa de la programación de secuencias. 6
8404 RESET PROG SEC Selecciona el origen para la señal de restauración de la programación de
secuencias. El estado de la programación de secuencias (0168 ESTADO
PROG SEC) se ajusta al primer estado y todos los temporizadores y salidas
(SR/ST/SA) se ajustan a cero.
La restauración sólo es posible cuando la programación de secuencias está
detenida.
SIN SEL
ED1(INV) Restauración a través de la entrada digital ED1 invertida. 0 = activo, 1 =
inactivo. -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
242
SIN SEL Sin señal de restauración. 0
ED1 Restauración a través de la entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
RESET Restauración. Tras la restauración, el valor del parámetro pasa
automáticamente a SIN SEL. 6
8405 FORZAR EST SEC Fuerza la programación de secuencias para pasar a un estado seleccionado.
Nota: El estado se cambia sólo cuando la programación de secuencias está
pausada por el parámetro 8403 PAUSA PROG SEC y éste se ajusta al
estado seleccionado
ESTADO 1
ESTADO 1 Se fuerza el paso al estado 1. 1
ESTADO 2 Se fuerza el paso al estado 2. 2
ESTADO 3 Se fuerza el paso al estado 3. 3
ESTADO 4 Se fuerza el paso al estado 4. 4
ESTADO 5 Se fuerza el paso al estado 5. 5
ESTADO 6 Se fuerza el paso al estado 6. 6
ESTADO 7 Se fuerza el paso al estado 7. 7
ESTADO 8 Se fuerza el paso al estado 8. 8
8406 VAL LOGICO SEC 1 Define el origen para el valor lógico 1. Este valor se compara con el valor
lógico 2 tal como se define en el parámetro 8407 OPER LOGIC SEC 1.
Los valores de las operaciones lógicas se utilizan en las transiciones de
estado. Véase la selección VAL LOGICO del parámetro 8425 DISP EST1 A
EST2 / 8426 DISP EST1 A ESTN.
SIN SEL
ED1(INV) Valor lógico 1 a través de la entrada digital ED1 invertida (INV). -1
ED2(INV) Véase la selección ED1 (INV). -2
ED3(INV) Véase la selección ED1 (INV). -3
ED4(INV) Véase la selección ED1 (INV). -4
ED5(INV) Véase la selección ED1 (INV). -5
SIN SEL Sin valor lógico. 0
ED1 Valor lógico 1 a través de la entrada digital ED1. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
SUPERV1 SOBR Valor lógico según los parámetros de supervisión 3201 ... 3203. Véase el
grupo de parámetros 32 SUPERVISION.6
SUPERV2 SOBR Valor lógico según los parámetros de supervisión 3204 ... 3206. Véase el
grupo de parámetros 32 SUPERVISION.7
SUPERV3 SOBR Valor lógico según los parámetros de supervisión 3207 ... 3209. Véase el
grupo de parámetros 32 SUPERVISION.8
SUPRV1 BAJO Véase la selección SUPERV1 SOBR. 9
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
243
SUPRV2 BAJO Véase la selección SUPERV2 SOBR. 10
SUPRV3 BAJO Véase la selección SUPERV3 SOBR. 11
FUNC TEMP 1 Valor lógico 1 activado por la función programada 1. Véase el grupo de
parámetros 36 FUNCIONES TEMP. 1 = función temporizada activada. 12
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 13
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 14
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 15
8407 OPER LOGIC SEC 1 Selecciona la operación entre el valor lógico 1 y 2. Los valores de las
operaciones lógicas se usan en las transiciones de estados. Véase la
selección VAL LOGICO del parámetro 8425 DISP EST1 A EST2 / 8426 DISP
EST1 A ESTN.
SIN SEL
SIN SEL Valor lógico 1 (sin comparación lógica). 0
AND Función lógica: AND 1
OR Función lógica: OR 2
XOR Función lógica: XOR 3
8408 VAL LOGICO SEC 2 Véase el parámetro 8406 VAL LOGICO SEC 1. SIN SEL
Véase el parámetro 8406.
8409 OPER LOGIC SEC 2 Selecciona la operación entre el valor lógico 3 y el resultado de la primera
operación lógica definida por el parámetro 8407 OPER LOGIC SEC 1. SIN SEL
SIN SEL Valor lógico 2 (sin comparación lógica). 0
AND Función lógica: AND 1
OR Función lógica: OR 2
XOR Función lógica: XOR 3
8410 VAL LOGICO SEC 3 Véase el parámetro 8406 VAL LOGICO SEC 1. SIN SEL
Véase el parámetro 8406.
8411 VAL SEC 1 ALTO Define el límite superior para el cambio de estado cuando el parámetro 8425
DISP EST1 A EST2 está ajustado, por ejemplo, a EA 1 ALTA 1. 0
0.0…100.0% Valor en porcentaje. 1 = 0.1%
8412 VAL SEC 1 BAJO Define el límite inferior para el cambio de estado cuando el parámetro 8425
DISP EST1 A EST2 está ajustado, por ejemplo, a EA 1 BAJA 1. 0
0.0…100.0% Valor en porcentaje. 1 = 0.1%
8413 VAL SEC 2 ALTO Define el límite superior para el cambio de estado cuando el parámetro 8425
DISP EST1 A EST2 está ajustado, por ejemplo, a EA 2 ALTA 1. 0
0.0...100.0% Valor en porcentaje. 1 = 0.1%
8414 VAL SEC 2 BAJO Define el límite inferior para el cambio de estado cuando el parámetro 8425
DISP EST1 A EST2 está ajustado, por ejemplo, a EA 2 BAJA 2. 0
0.0...100.0% Valor en porcentaje. 1 = 0.1%
8415 LOC CONT CICLOS Activa el contador de ciclos para la programación de secuencias.
Ejemplo: Cuando el parámetro se ajusta a EST6 A SIG, el contador de ciclos
(0171 CONT CICLOS SEC) se incrementa cada vez que el estado pasa del
estado 6 al estado 7.
SIN SEL
SIN SEL Desactivado. 0
EST1 A SIG Del estado 1 al estado 2. 1
EST2 A SIG Del estado 2 al estado 3. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
244
EST3 A SIG Del estado 3 al estado 4. 3
EST4 A SIG Del estado 4 al estado 5. 4
EST5 A SIG Del estado 5 al estado 6. 5
EST6 A SIG Del estado 6 al estado 7. 6
EST7 A SIG Del estado 7 al estado 8. 7
EST8 A SIG Del estado 8 al estado 1. 8
EST1 A N Del estado 1 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 9
EST2 A N Del estado 2 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 10
EST3 A N Del estado 3 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 11
EST4 A N Del estado 4 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 12
EST5 A N Del estado 5 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 13
EST6 A N Del estado 6 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 14
EST7 A N Del estado 7 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 15
EST8 A N Del estado 8 al estado N. El estado N se define con el parámetro 8427
ESTADO N EST 1. 16
8416 RESET CONT CICLO Selecciona el origen para la señal de restauración del contador de ciclos
(0171 CONT CICLOS SEC). SIN SEL
ED5(INV) Restauración a través de la entrada digital ED1 invertida (INV). 0 = activo, 1
= inactivo. -5
ED4(INV) Véase la selección ED1 (INV). -4
ED3(INV) Véase la selección ED1 (INV). -3
ED2(INV) Véase la selección ED1 (INV). -2
ED1(INV) Véase la selección ED1 (INV). -1
SIN SEL Sin señal de restauración. 0
ED1 Restauración a través de la entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
ESTADO 1 Restauración durante la transición al estado 1. El contador se restaura
cuando se alcanza el estado. 6
ESTADO 2 Restauración durante la transición al estado 2. El contador se restaura
cuando se alcanza el estado. 7
ESTADO 3 Restauración durante la transición al estado 3. El contador se restaura
cuando se alcanza el estado. 8
ESTADO 4 Restauración durante la transición al estado 4. El contador se restaura
cuando se alcanza el estado. 9
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq

Señales actuales y parámetros
245
ESTADO 5 Restauración durante la transición al estado 5. El contador se restaura
cuando se alcanza el estado. 10
ESTADO 6 Restauración durante la transición al estado 6. El contador se restaura
cuando se alcanza el estado. 11
ESTADO 7 Restauración durante la transición al estado 7. El contador se restaura
cuando se alcanza el estado. 12
ESTADO 8 Restauración durante la transición al estado 8. El contador se restaura
cuando se alcanza el estado. 13
RST PROG SEC Origen de la señal de restauración definida por el parámetro 8404 RESET
PROG SEC. 14
8420 SELEC REF EST 1 Selecciona el origen para la referencia del estado 1 de la programación de
secuencias. Este parámetro se utiliza cuando el parámetro 1103 / 1106
SELEC REF1/2 está ajustado a PROG SEC / EA1+PROG SEC /
EA2+PROG SEC.
Nota: Las velocidades constantes en el grupo 12 VELOC CONSTANTES
sobreescriben la referencia de programación de secuencias seleccionada.
0
COMUNIC 0136 VALOR COMUNIC 2. Para información sobre el escalado, véase
Escalado de la referencia de bus de campo en la página 265.-1.3
EA1/EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) · (50% / EA2(%)) -1.2
EA1-EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + 50% - EA2(%) -1.1
EA1*EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA(%) · (EA2(%) / 50%) -1.0
EA1+EA2 La referencia se calcula mediante la ecuación siguiente:
REF = EA1(%) + EA2(%) - 50% -0.9
ED4A,5D Entrada digital 4: aumento de la referencia. Entrada digital ED5: reducción
de la referencia. -0.8
ED3A,4D Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. -0.7
ED3A4D(R) Entrada digital 3: aumento de la referencia. Entrada digital ED4: reducción
de la referencia. -0.6
EA2 PALANCA Entrada analógica EA2 como palanca. La señal de entrada mínima acciona
el motor a la referencia máxima en dirección inversa, la entrada máxima a la
referencia máxima en dirección de avance. Las referencias mínima y
máxima se definen con los parámetros 1104 REF1 MINIMO y 1105 REF1
MAXIMO. Véase la selección EA2/PALANCA del parámetro 1103 SELEC
REF1 para obtener más información.
-0.5
EA1 PALANCA Véase la selección EA2 PALANCA. -0.4
EA2 Entrada analógica EA2. -0.3
EA1 Entrada analógica EA1. -0.2
PANEL Panel de control -0.1
0.0 …100.0% Velocidad constante
8421 ORDENES EST 1 Selecciona el arranque, paro y dirección para el estado 1. El parámetro 1002
COMANDOS EXT2 debe ajustarse a PROG SEC.
Nota: Si se necesita un cambio en la dirección de giro, el parámetro 1003
DIRECCION debe estar ajustado a PETICION.
PARO
UNIDAD
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
246
PARO UNIDAD El convertidor se para por sí mismo o siguiendo una rampa, según el ajuste
del parámetro 2102 FUNCION PARO. 0
MARCHA AVAN La dirección de giro está fija en avance. Si el convertidor todavía no está en
marcha, se arranca según los ajustes del parámetro 2101 FUNCION
MARCHA.
1
MARCHA INV La dirección de giro está fija en inversa. Si el convertidor todavía no está en
marcha, se arranca según los ajustes del parámetro 2101 FUNCION
MARCHA.
2
8422 RAMPA EST 1 Selecciona el tiempo de rampa de aceleración/deceleración para el estado 1
de la programación de secuencias; es decir, define la velocidad de cambio
de la referencia.
0
-0.2/-0.1/
0,0 ... 1800,0 s Tiempo
Si el valor se ajusta a -0,2 se usa el par de rampas 2. El par de rampas 2 se
define con los parámetros 2205 ... 2207.
Si el valor se ajusta a -0,1 se usa el par de rampas 1. El par de rampas 1 se
define con los parámetros 2202 ... 2204.
Con el par de rampas 1/2, el parámetro 2201 SEL ACE/DEC 1/2 debe
ajustarse a PROG SEC. Véanse también los parámetros 2202 ... 2207.
1 = 0,1 s
8423 CONTR SAL EST 1 Selecciona el control de la salida de relé, de transistor y analógica para el
estado 1 de programación de secuencias.
El control de salida de transistor o de relé se debe activar ajustando el
parámetro 1401 SALIDA RELE SR1 / 1805 SEÑAL SD a PROG SEC. El
control de la salida analógica se debe activar mediante el grupo de
parámetros 15 SALIDAS ANALOG.
Los valores de control de la salida analógica se pueden supervisar con la
señal 0170 VAL SA PROG SEC.
SA=0
R=0,D=1,SA=0 La salida de relé está desexcitada (abierta), la salida de transistor está
excitada y la salida analógica está libre. -0.7
R=1,D=0,SA=0 La salida de relé está excitada (cerrada), la salida de transistor está
desexcitada y la salida analógica está libre. -0.6
R=0,D=0,SA=0 Las salidas de relé y de transistor están desexcitadas (abiertas) y el valor de
la salida analógica está ajustado a 0. -0.5
SR=0,SD=0 Las salidas de relé y de transistor están desexcitadas (abiertas) y el control
de la salida analógica está fijo en el valor ajustado previamente. -0.4
SR=1,SD=1 Las salidas de relé y de transistor están excitadas (cerradas) y el control de
la salida analógica está fijo en el valor ajustado previamente. -0.3
SD=1 La salida de transistor está excitada (cerrada) y la salida de relé desexcitada.
El control de la salida analógica está fijo en el valor ajustado previamente. -0.2
SR=1 La salida de transistor está desexcitada (abierta) y la salida de relé excitada.
El control de la salida analógica está fijo en el valor ajustado previamente. -0.1
SA=0 El valor de la salida analógica está ajustado a cero. Las salidas de relé y de
transistor están fijas en los valores ajustados previamente. 0.0
0.1…100.0% Valor escrito en la señal 0170 VAL SA PROG SEC. El valor puede
conectarse al control de la salida analógica SA ajustando a 170 el valor del
parámetro 1501 SEL CONTENID SA1(es decir, la señal 0170 VAL SA PROG
SEC). El valor de la SA está fijo en este valor hasta que se pase a cero.
8424 RETAR CAMB EST 1 Define la demora para el estado 1. Cuando ha transcurrido el tiempo de
demora se puede producir una transición de estado. Véanse los parámetros
8425 DISP EST1 A EST2 y 8426 DISP EST1 A EST N
0
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
247
0,0…6553,5 s Tiempo de demora. 1 = 0,1 s
8425 DISP EST1 A EST2 Selecciona el origen para la señal de disparo que cambia el estado del
estado 1 al estado 2.
Nota: El cambio de estado al estado N (8426 DISP EST1 A ESTN) tiene una
superioridad mayor que el cambio al siguiente estado (8425 DISP EST1 A
EST2).
SIN SEL
ED5(INV) Disparo a través de la entrada digital ED5 invertida. 0 = activo, 1 = inactivo. -5
ED4(INV) Véase la selección ED5(INV). -4
ED3(INV) Véase la selección ED5(INV). -3
ED2(INV) Véase la selección ED5(INV). -2
ED1(INV) Véase la selección ED5(INV). -1
SIN SEL Sin señal de disparo. Si el ajuste del parámetro 8426 DISP EST1 A ESTN
también es SIN SEL, el estado permanece fijo y sólo puede restaurarse con
el parámetro 8402 INICIO PROG SEC.
0
ED1 Disparo a través de la entrada digital ED1. 1 = activa, 0 = inactiva. 1
ED2 Véase la selección ED1. 2
ED3 Véase la selección ED1. 3
ED4 Véase la selección ED1. 4
ED5 Véase la selección ED1. 5
EA 1 BAJA 1 Cambio de estado cuando el valor de EA1 < valor del par. 8412 VAL SEC 1
BAJO. 6
EA 1 ALTA 1 Cambio de estado cuando el valor de EA1 > valor del par. 8411 VAL SEC 1
ALTO. 7
EA 2 BAJA 1 Cambio de estado cuando el valor de EA2 < valor del par. 8412 VAL SEC 1
BAJO. 8
EA 2 ALTA 1 Cambio de estado cuando el valor de EA2 > valor del par. 8411 VAL SEC 1
ALTO. 9
EA1 O 2 BAJ1 Cambio de estado cuando el valor de EA1 o de EA2 < valor del par. 8412
VAL SEC 1 BAJO. 10
EA1BA1EA2AL1 Cambio de estado cuando el valor de EA1 < valor del par. 8412 VAL SEC 1
BAJO y el valor de EA2 > valor del par. 8411 VAL SEC 1 ALTO. 11
EA1BA1 O ED5 Cambio de estado cuando el valor de EA1 < valor del par. 8412 VAL SEC 1
BAJO o cuando la ED5 está activa. 12
EA2AL1 O ED5 Cambio de estado cuando el valor de EA2 > valor del par. 8411 VAL SEC 1
ALTO o cuando la ED5 está activa. 13
EA 1 BAJA 2 Cambio de estado cuando el valor de EA1 < valor del par. 8414 VAL SEC 2
BAJO. 14
EA 1 ALTA 2 Cambio de estado cuando el valor de EA1 > valor del par. 8413 VAL SEC 2
ALTO. 15
EA 2 BAJA 2 Cambio de estado cuando el valor de EA2 < valor del par. 8414 VAL SEC 2
BAJO. 16
EA 2 ALTA 2 Cambio de estado cuando el valor de EA2 > valor del par. 8413 VAL SEC 2
ALTO. 17
EA1 O 2 BAJ2 Cambio de estado cuando el valor de EA1 o de EA2 < valor del par. 8414
VAL SEC 2 BAJO. 18
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
248
EA1BA2EA2AL2 Cambio de estado cuando el valor de EA1 < valor del par. 8414 VAL SEC 2
BAJO y el valor de EA2 > valor del par. 8413 VAL SEC 2 ALTO. 19
EA1BA2 O ED5 Cambio de estado cuando el valor de EA1 < valor del par. 8414 VAL SEC 2
BAJO o cuando la ED5 está activa. 20
EA2AL2 O ED5 Cambio de estado cuando el valor de EA2 > valor del par. 8413 VAL SEC 2
ALTO o cuando la ED5 está activa. 21
FUNC TEMP 1 Disparo con la función temporizada 1. Véase el grupo de parámetros 36
FUNCIONES TEMP.22
FUNC TEMP 2 Véase la selección FUNC TEMP 1. 23
FUNC TEMP 3 Véase la selección FUNC TEMP 1. 24
FUNC TEMP 4 Véase la selección FUNC TEMP 1. 25
RETAR CAMBIO Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1. 26
ED1 O RETAR Cambio de estado después de la activación de la ED1 o después que haya
transcurrido el tiempo de demora definido con el parámetro 8424 RETAR
CAMB EST 1.
27
ED2 O RETAR Véase la selección ED1 O RETAR. 28
ED3 O RETAR Véase la selección ED1 O RETAR. 29
ED4 O RETAR Véase la selección ED1 O RETAR. 30
ED5 O RETAR Véase la selección ED1 O RETAR. 31
EA1AL1 O RET Cambio de estado cuando EA1 > valor del par 8411 VAL SEC 1 ALTO o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1.
32
EA2BA1 O RET Cambio de estado cuando EA1 < valor del par 8412 VAL SEC 1 BAJO o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1.
33
EA1AL2 O RET Cambio de estado cuando EA1 > valor del par 8413 VAL SEC 2 ALTO o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1.
34
EA2BA2 O RET Cambio de estado cuando EA2 < valor del par 8414 VAL SEC 2 BAJO o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1.
35
SUPERV1 SOBR Valor lógico según los parámetros de supervisión 3201 ... 3203. Véase el
grupo de parámetros 32 SUPERVISION.36
SUPERV2 SOBR Valor lógico según los parámetros de supervisión 3204 ... 3206. Véase el
grupo de parámetros 32 SUPERVISION.37
SUPERV3 SOBR Valor lógico según los parámetros de supervisión 3207 ... 3209. Véase el
grupo de parámetros 32 SUPERVISION.38
SUPRV1 BAJO Véase la selección SUPERV1 SOBR. 39
SUPRV2 BAJO Véase la selección SUPERV2 SOBR. 40
SUPRV3 BAJO Véase la selección SUPERV3 SOBR. 41
SPV1SOORETAR Cambio de estado según los parámetros de supervisión 3201 ... 3203 o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1. Véase el grupo de parámetros 32
SUPERVISION.
42
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
249
SPV2SOORETAR Cambio de estado según los parámetros de supervisión 3204 ... 3206 o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1. Véase el grupo de parámetros 32
SUPERVISION.
43
SPV3SOORETAR Cambio de estado según los parámetros de supervisión 3207 ... 3209 o
después que haya transcurrido el tiempo de demora definido con el
parámetro 8424 RETAR CAMB EST 1. Véase el grupo de parámetros 32
SUPERVISION.
44
SPV1BAORETAR Véase la selección SPV1SOORETAR. 45
SPV2BAORETAR Véase la selección SPV2SOORETAR. 46
SPV3BAORETAR Véase la selección SPV3SOORETAR. 47
CNTR SOBR Cambio de estado cuando el valor del contador supera el límite definido por
el parámetro 1905 LIMITE CONTADOR. Véanse los parámetros 1904 ...
1911.
48
CNTR BAJO Cambio de estado cuando el valor del contador está por debajo del límite
definido por el parámetro 1905 LIMITE CONTADOR. Véanse los parámetros
1904 ... 1911.
49
VAL LOGICO Cambio de estado según la operación lógica definida por los parámetros
8406 ... 8410.50
ENTR P CONS Cambio de estado cuando la velocidad/frecuencia de salida del convertidor
entra en la zona de referencia (es decir, la diferencia es igual o inferior al 4 %
de la referencia máxima).
51
EN P CONSIG Cambio de estado cuando la velocidad/frecuencia de salida del convertidor
iguala al valor de referencia (es decir, se encuentra dentro de los límites de
tolerancia: el error es igual o inferior al 1 % de la referencia máxima).
52
EA1 B1 Y ED5 Cambio de estado cuando el valor de EA1 < valor del par. 8412 VAL SEC 1
BAJO y cuando la ED5 está activa. 53
EA2 B2 Y ED5 Cambio de estado cuando el valor de EA1 < valor del par. 8414 VAL SEC 2
BAJO y cuando la ED5 está activa. 54
EA1 A1 Y ED5 Cambio de estado cuando el valor EA1 > valor del par. 8411 VAL SEC 1
ALTO y cuando la ED5 está activa. 55
EA2 A2 Y ED5 Cambio de estado cuando el valor EA1 > valor del par. 8413 VAL SEC 2
ALTO y cuando la ED5 está activa. 56
EA1 B1 Y ED4 Cambio de estado cuando el valor de EA1 < valor del par. 8412 VAL SEC 1
BAJO y cuando la ED4 está activa. 57
EA2 B2 Y ED4 Cambio de estado cuando el valor de EA1 < valor del par. 8414 VAL SEC 2
BAJO y cuando la ED4 está activa. 58
EA1 A1 Y ED4 Cambio de estado cuando el valor EA1 > valor del par. 8411 VAL SEC 1
ALTO y cuando la ED5 está activa. 59
EA2 A2 Y ED4 Cambio de estado cuando el valor EA1 > valor del par. 8413 VAL SEC 2
ALTO y cuando la ED5 está activa. 60
RETAR Y ED1 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y la ED1 está activa. 61
RETAR Y ED2 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y la ED2 está activa. 62
RETAR Y ED3 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y la ED3 está activa. 63
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Señales actuales y parámetros
250
RETAR Y ED4 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y la ED4 está activa. 64
RETAR Y ED5 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y la ED5 está activa. 65
RET Y EA2 A2 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y el valor de EA2 >
valor del par. 8413 VAL SEC 2 ALTO.
66
RET Y EA2 B2 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y el valor de EA2 <
valor del par. 8414 VAL SEC 2 BAJO.
67
RET Y EA1 A1 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y el valor de EA1 >
valor del par. 8411 VAL SEC 1 ALTO.
68
RET Y EA1 B1 Cambio de estado después que haya transcurrido el tiempo de demora
definido con el parámetro 8424 RETAR CAMB EST 1 y el valor de EA1 <
valor del par. 8412 VAL SEC 1 BAJO.
69
VAL COM 1 N0 0135 VALOR COMUNIC 1, bit 0. 1 = cambio de estado. 70
VAL COM 1 N1 0135 VALOR COMUNIC 1, bit 1. 1 = cambio de estado. 71
VAL COM 1 N2 0135 VALOR COMUNIC 1, bit 2. 1 = cambio de estado. 72
VAL COM 1 N3 0135 VALOR COMUNIC 1, bit 3. 1 = cambio de estado. 73
VAL COM 1 N4 0135 VALOR COMUNIC 1, bit 4. 1 = cambio de estado. 74
VAL COM 1 N5 0135 VALOR COMUNIC 1, bit 5. 1 = cambio de estado. 75
VAL COM 1 N6 0135 VALOR COMUNIC 1, bit 6. 1 = cambio de estado. 76
VAL COM 1 N7 0135 VALOR COMUNIC 1, bit 7. 1 = cambio de estado. 77
AI2H2DI4SV1O Cambio de estado según los parámetros de supervisión 3201...3203 cuando
el valor de EA2 > valor del par. 8413 VAL SEC 2 ALTO o cuando la ED4 está
activa.
78
AI2H2DI5SV1O Cambio de estado según los parámetros de supervisión 3201...3203 cuando
el valor de EA2 > valor del par. 8413 VAL SEC 2 ALTO o cuando la ED5 está
activa.
79
8426 DISP EST1 A ESTN Selecciona el origen para la señal de disparo que cambia el estado del
estado 1 al estado N. El estado N se define con el parámetro 8427 ESTADO
N EST 1.
Nota: El cambio de estado al estado N (8426 DISP EST1 A ESTN) tiene una
superioridad mayor que el cambio al siguiente estado (8425 DISP EST1 A
EST2).
SIN SEL
Véase el parámetro 8425 DISP EST1 A EST2.
8427 ESTADO N EST 1 Define el estado N. Véase el parámetro 8426 DISP EST1 A ESTN. ESTADO 1
ESTADO 1 Estado 1. 1
ESTADO 2 Estado 2. 2
ESTADO 3 Estado 3. 3
ESTADO 4 Estado 4. 4
ESTADO 5 Estado 5. 5
ESTADO 6 Estado 6. 6
ESTADO 7 Estado 7. 7
ESTADO 8 Estado 8. 8
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
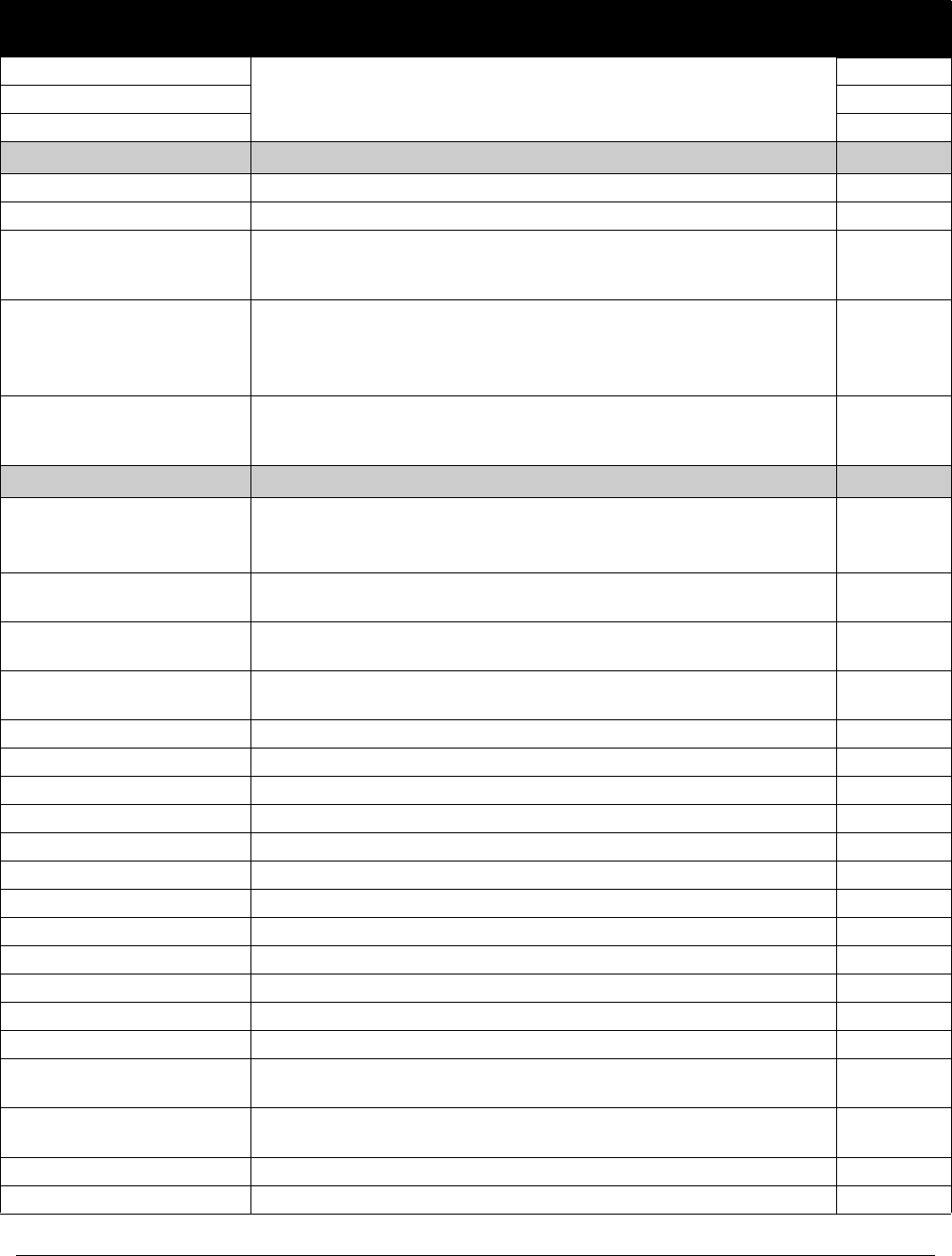
Señales actuales y parámetros
251
8430 SELEC REF EST 2 Véanse los parámetros 8420 .... 8427.
…
8497 ESTADO N EST 8
98 OPCIONES Activación de la comunicación en serie externa.
9802 SEL PROT COM Activa la comunicación serie externa y selecciona la interfase. SIN SEL
SIN SEL No hay comunicación 0
MODBUS EST Bus de campo encajado. Interfase: RS-485 suministrado con el adaptador
Modbus FMBS-01 opcional conectado al terminal X3 del convertidor. Véase
el capítulo Control de bus de campo con bus de campo encajado.
1
ABC EXT El convertidor se comunica a través de un módulo adaptador de bus de
campo conectado al terminal X3 del convertidor. Véase también el grupo de
parámetros 51 MOD COMUNIC EXT.
Véase el capítulo Control de bus de campo con adaptador de bus de campo.
4
MODBUS RS232 Bus de campo encajado. Interfase: RS-232 (es decir, conector del panel de
control). Véase el capítulo Control de bus de campo con bus de campo
encajado.
10
99 DATOS DE PARTIDA Selección de idioma. Definición de los datos de ajuste del motor.
9901 IDIOMA Selecciona el idioma de visualización.
Nota: El panel de control ACS-CP-D tiene disponibles los siguientes
idiomas: inglés(0), chino (1) y coreano (2).
ENGLISH
ENGLISH Inglés británico. Disponible con los paneles de control asistentes ACS-CP-A
y ACS-CP-L. 0
ENGLISH (AM) Inglés americano. Disponible con los paneles de control asistentes ACS-CP-
A. 1
DEUTSCH Alemán. Disponible con los paneles de control asistentes ACS-CP-A y ACS-
CP-L. 2
ITALIANO Italiano. Disponible con los paneles de control asistentes ACS-CP-A. 3
ESPAÑOL Español. Disponible con los paneles de control asistentes ACS-CP-A. 4
PORTUGUES Portugués. Disponible con los paneles de control asistentes ACS-CP-A. 5
NEDERLANDS Holandés. Disponible con los paneles de control asistentes ACS-CP-A. 6
FRANCAIS Francés. Disponible con los paneles de control asistentes ACS-CP-A. 7
DANSK Danés. Disponible con los paneles de control asistentes ACS-CP-A. 8
SUOMI Finés. Disponible con los paneles de control asistentes ACS-CP-A. 9
SVENSKA Sueco. Disponible con los paneles de control asistentes ACS-CP-A. 10
RUSSKI Ruso. Disponible con los paneles de control asistentes ACS-CP-L. 11
POLSKI Polaco. Disponible con los paneles de control asistentes ACS-CP-L. 12
TÜRKÇE Turco Disponible con los paneles de control asistentes ACS-CP-L. 13
CZECH Checo. Disponible con los paneles de control asistentes ACS-CP-L. 14
Magyar Húngaro. Disponible con los paneles de control asistentes ACS-CP-L.
Nota: Esta selección se añadirá posteriormente.
9902 MACRO DE APLIC Selecciona la macro de aplicación. Véase el capítulo Macros de aplicación. ESTAND
ABB
ESTAND ABB Macro estándar para aplicaciones de velocidad constante. 1
3-HILOS Macro de 3 hilos para aplicaciones de velocidad constante. 2
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq

Señales actuales y parámetros
252
ALTERNA Macro alterna para aplicaciones de inicio en avance y en inversa. 3
POTENC MOT Macro de potenciómetro del motor para aplicaciones de control de velocidad
con señal digital. 4
MANUAL/AUTO Macro manual/automática para utilizar cuando se conectan dos dispositivos
de control al convertidor:
- El dispositivo 1 se comunica a través de la interfase definida por el lugar de
control externo EXT1.
- El dispositivo 2 se comunica a través de la interfase definida por el lugar de
control externo EXT2.
EXT1 o EXT2 se activan a la vez. La conmutación entre EXT1 y EXT2 se
realiza a través de la entrada digital.
5
CONTROL PID Control PID. Para aplicaciones en las que el convertidor controla un valor de
proceso, por ejemplo el control de presión por parte del convertidor que
acciona la bomba de carga de presión. La presión medida y la referencia de
presión se conectan al convertidor.
6
CTRL PAR Macro de Control de par. 8
CARGA SET FD Valores de parámetros FlashDrop tal como están definidos en el archivo
FlashDrop. La visualización de parámetros se selecciona con el parámetro
1611 VISTA PARAMETROS.
FlashDrop es un dispositivo opcional para la copia rápida de parámetros a
convertidores desexcitados. FlashDrop facilita la personalización de la lista
de parámetros, p. ej. es posible ocultar parámetros seleccionados. Para más
información véase el Manual del Usuario de FlashDrop MFDT-01
[3AFE68591074 (inglés)].
31
CAR USUAR S1 Macro de usuario 1 cargada para su uso. Antes de la carga, compruebe que
el modelo de motor y los ajustes de parámetros guardados sean adecuados
para la aplicación.
0
SAL USUARIO S1 Guardar macro de usuario 1. Almacena los ajustes de parámetros y el
modelo de motor actuales. -1
CAR USUAR S2 Macro de usuario 2 cargada para su uso. Antes de la carga, compruebe que
el modelo de motor y los ajustes de parámetros guardados sean adecuados
para la aplicación.
-2
SAL USUARIO 2 Guardar macro de usuario 2. Almacena los ajustes de parámetros y el
modelo de motor actuales. -3
CAR USUAR S3 Macro de usuario 3 cargada para su uso. Antes de la carga, compruebe que
el modelo de motor y los ajustes de parámetros guardados sean adecuados
para la aplicación.
-4
SAL USUARIO 3 Guardar macro de usuario 3. Almacena los ajustes de parámetros y el
modelo de motor actuales. -5
9904 MODO CTRL MOTOR Selecciona el modo de control del motor. ESCALAR:
FREC
VECTOR:VELOC Modo de control vectorial sin sensor.
La referencia 1 es la referencia de velocidad en rpm.
La referencia 2 es la referencia de velocidad en porcentaje. El 100 % es la
velocidad máxima absoluta, igual al valor del parámetro 2002 VELOCIDAD
MAXIMA (o 2001 VELOCIDAD MINIMA si el valor absoluto de la velocidad
mínima es mayor que la velocidad máxima).
1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
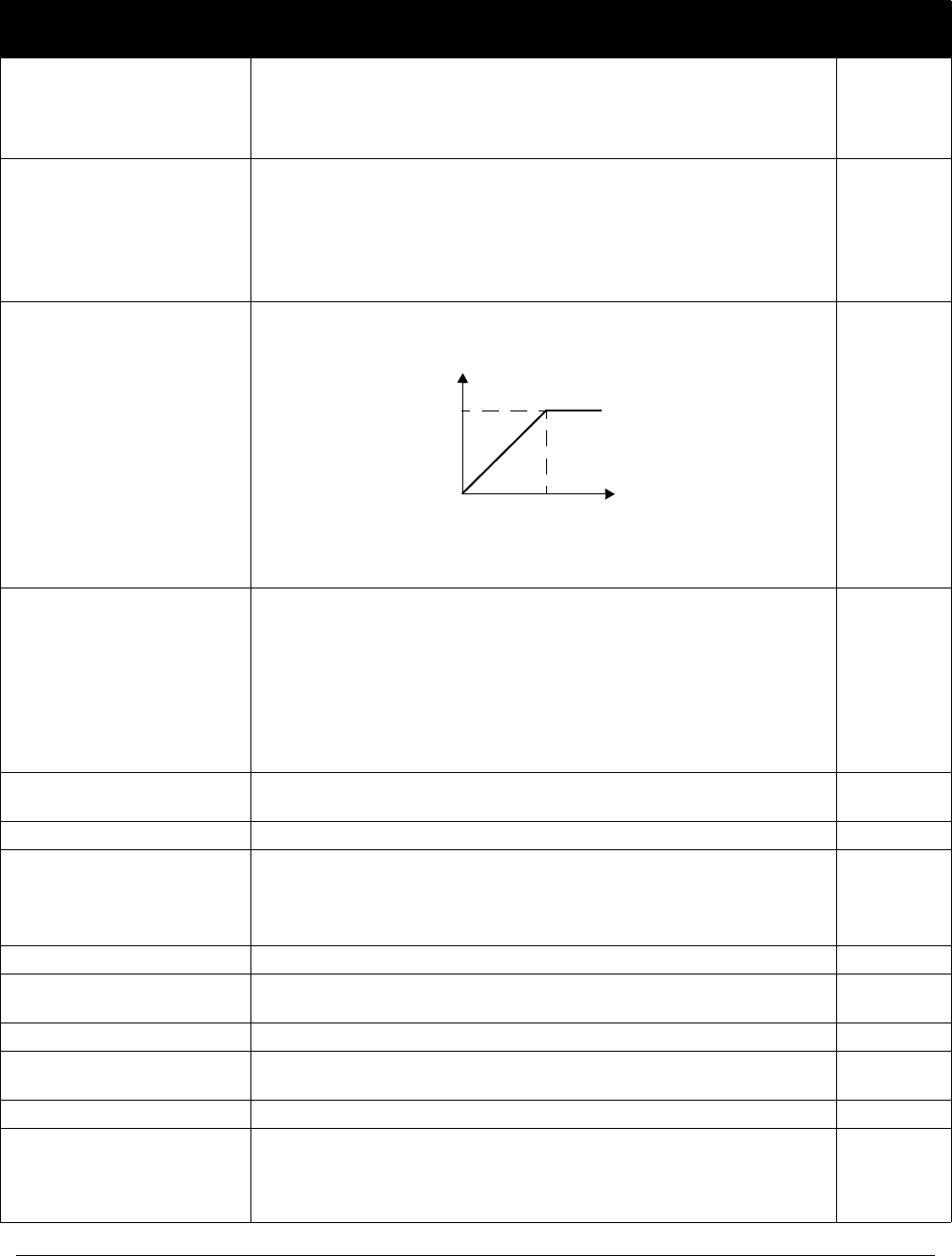
Señales actuales y parámetros
253
VECTOR:PAR Modo de control vectorial.
La referencia 1 es la referencia de velocidad en rpm.
La referencia 2 es la referencia de par en porcentaje. El 100 % equivale al
par nominal.
2
ESCALAR:FREC Modo de control escalar.
La referencia 1 es la referencia de frecuencia en Hz.
La referencia 2 es la referencia de frecuencia en porcentaje. El 100 % es la
frecuencia máxima absoluta, igual al valor del parámetro 2008
FRECUENCIA MAX (o 2007 FRECUENCIA MIN si el valor absoluto de la
velocidad mínima es mayor que la velocidad máxima).
3
9905 TENSION NOM MOT Define la tensión nominal del motor. Debe ser igual al valor indicado en la
placa de características del motor. El convertidor no puede suministrar al
motor una tensión superior a la tensión de alimentación.
¡ADVERTENCIA! No conecte nunca un motor a un convertidor conectado a
alimentación de red que tenga una tensión superior a la tensión nominal del
motor.
230 V
(unidades de
200 V)
400 V
(unidades de
400 V, Eur.)
460 V
(unidades de
400 V, USA)
115 ... 345 V (unidades
de 200 V)
200 ... 600 V
(unidades de 400 V,
Eur.)
230 ... 690 V
(unidades de 400 V,
USA)
Tensión.
Nota: La carga en el aislamiento del motor siempre depende de la tensión de
alimentación del convertidor. Esto también es aplicable en el caso de que la
especificación de tensión del motor sea inferior a la del convertidor y su
alimentación.
1 = 1 V
9906 INTENS NOM MOT Define la intensidad nominal del motor. Debe ser igual al valor indicado en la
placa de características del motor. I2N
0.2…2.0 ·I2N Intensidad 1 = 0,1 A
9907 FREC NOM MOTOR Define la frecuencia nominal del motor, es decir, la frecuencia a la que la
tensión de salida es igual que la tensión nominal del motor:
Punto inicio debil. campo = frecuencia nom. · tensión aliment. / tensión nom.
motor.
Eur.: 50 /
USA: 60
10,0…500,0 Hz Frecuencia 1 = 0,1 Hz
9908 VELOC NOM MOTOR Define la velocidad nominal del motor. Debe ser igual al valor indicado en la
placa de características del motor. Depende del
tipo
50 … 30000 rpm Veloc. 1 = 1 rpm
9909 POT NOM MOTOR Define la potencia nominal del motor. Debe ser igual al valor en la placa de
características del motor. PN
0.2…3.0 ·PN kW Potencia 1 = 0,1 kW/hp
9910 MARCHA ID Este parámetro controla un proceso de autocalibración llamado la Marcha de
identificación del motor. Durante este proceso, el convertidor acciona el
motor y efectúa mediciones para identificar sus características, y crear un
modelo utilizado para cálculos internos.
OFF /
IDMAGN
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq
Tensión de salida
Frecuencia de salida
9907
9905
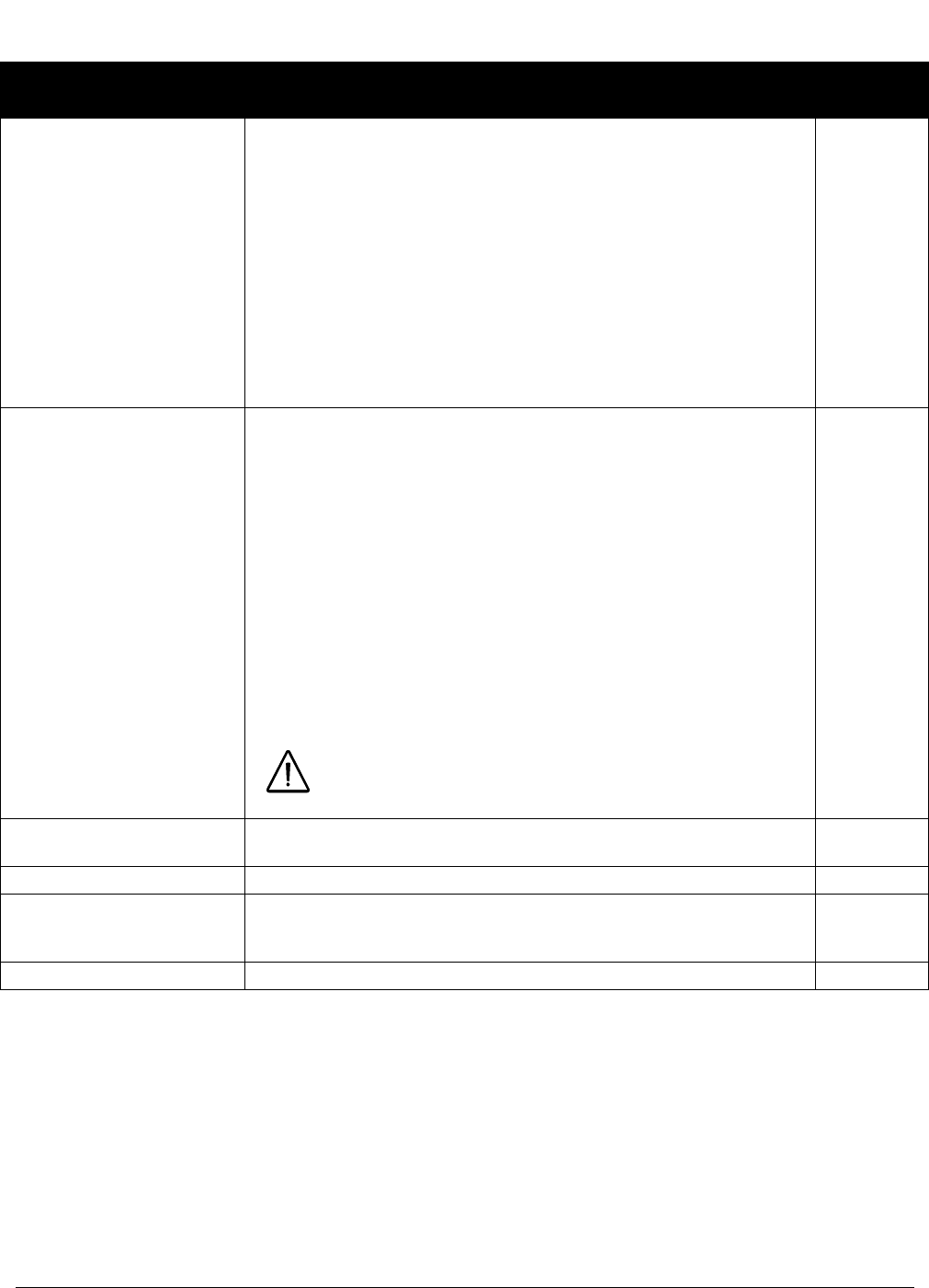
Señales actuales y parámetros
254
OFF /IDMAGN El proceso Marcha ID del motor no se ejecuta. Se efectúa la magnetización
de identificación, en función de los ajustes de los parámetros 9904 y 2101.
En la magnetización de identificación, el modelo del motor se calcula durante
el primer arranque magnetizando el motor de 10 a 15 s a velocidad cero (el
motor no gira). El modelo se recalcula siempre al arrancar tras efectuar
cambios en los parámetros del motor.
- Parámetro 9904 = 1 (VECTOR:VELOC) o 2 (VECTOR:PAR): Se realiza la
magnetización de identificación.
- Parámetro 9904 = 3 (ESCALAR:FREC) y parámetro 2101 = 3 (FLYSTART
ESC) o 5 (GIRAR+SOBREP): Se realiza la magnetización de identificación.
- Parámetro 9904 = 3 (ESCALAR:FREC) y parámetro 2101 tiene otro valor
distinto de 3 (FLYSTART ESC) o 5 (GIRAR+SOBREP): No se realiza la
magnetización de identificación.
0
SI Con Marcha de ID. Garantiza la mejor precisión de control posible. Esta
Marcha de ID toma un minuto aproximadamente. Una Marcha de
identificación es especialmente eficaz cuando:
- se emplea el modo de control vectorial [parámetro 9904 = 1
(VECTOR:VELOC) o 2 (VECTOR:PAR)], y
- el punto de funcionamiento está cerca de la velocidad cero, y/o
- el funcionamiento requiere un rango de par por encima del par motor
nominal, en un amplio rango de velocidades y sin realimentación de
velocidad medida (es decir, sin un generador de pulsos).
Nota:El motor debe desacoplarse del equipo accionado.
Nota: Compruebe la dirección de giro del motor antes de iniciar la Marcha de
ID. Durante la marcha, el motor girará en avance.
Nota: Si los parámetros de motor se cambian después de la Marcha de ID,
ésta debe repetirse.
¡ADVERTENCIA! El motor funcionará hasta aproximadamente un
50…80% de la velocidad nominal durante la Marcha de ID.
VERIFIQUE QUE SEA SEGURO ACCIONAR EL MOTOR ANTES
DE EFECTUAR LA MARCHA DE ID.
1
9912 PAR NOM MOTOR Par nominal del motor calculado, en N·m (el cálculo se basa en los valores
de los parámetros 9909 POT NOM MOTOR y 9908 VELOC NOM MOTOR). 0
- Sólo lectura. 1 = 0,1 N·m
9913 PARES POLOS MOT Número calculado de pares de polos del motor (el cálculo se basa en los
valores de los parámetros 9907 FREC NOM MOTOR y 9908 VELOC NOM
MOTOR).
0
- Sólo lectura. 1 = 1
Parámetros – descripciones completas
Índice Nombre/Selección Descripción Def., FbEq

Control de bus de campo con bus de campo encajado
255
Control de bus de campo con bus de campo encajado
Contenido de este capítulo
El capítulo describe cómo controlar el convertidor a través de dispositivos externos
mediante una red de comunicaciones utilizando un bus de campo encajado.
Descripción general del sistema
El convertidor se puede conectar a un sistema de control externo a través de un
adaptador de bus de campo o un bus de campo encajado. Para información acerca
del control con adaptador de bus de campo véase el capítulo Control de bus de
campo con adaptador de bus de campo.
El bus de campo encajado acepta el protocolo Modbus RTU. Modbus es un
protocolo serie y asíncrono. Las transacciones son de tipo semidúplex
La conexión del bus de campo encajado es una RS-232 (conector X2 del panel de
control) o una RS-485 (terminal X1 del adaptador Modbus FMBA opcional
conectado al terminal X3 del convertidor). La longitud máxima del cable de
comunicación con RS-232 está limitada a 3 metros. Para más información sobre el
módulo adaptador FMBA Modbus, véase el Manual del Usuario de módulos
adaptadores Modbus FMBA-01 [3AFE68586704 (inglés)].
La conexión RS-232 está diseñada para aplicaciones punto por punto (un solo
maestro controla un esclavo). La conexión RS-485 está diseñada para aplicaciones
multipunto (un solo maestro controla uno o más esclavos).
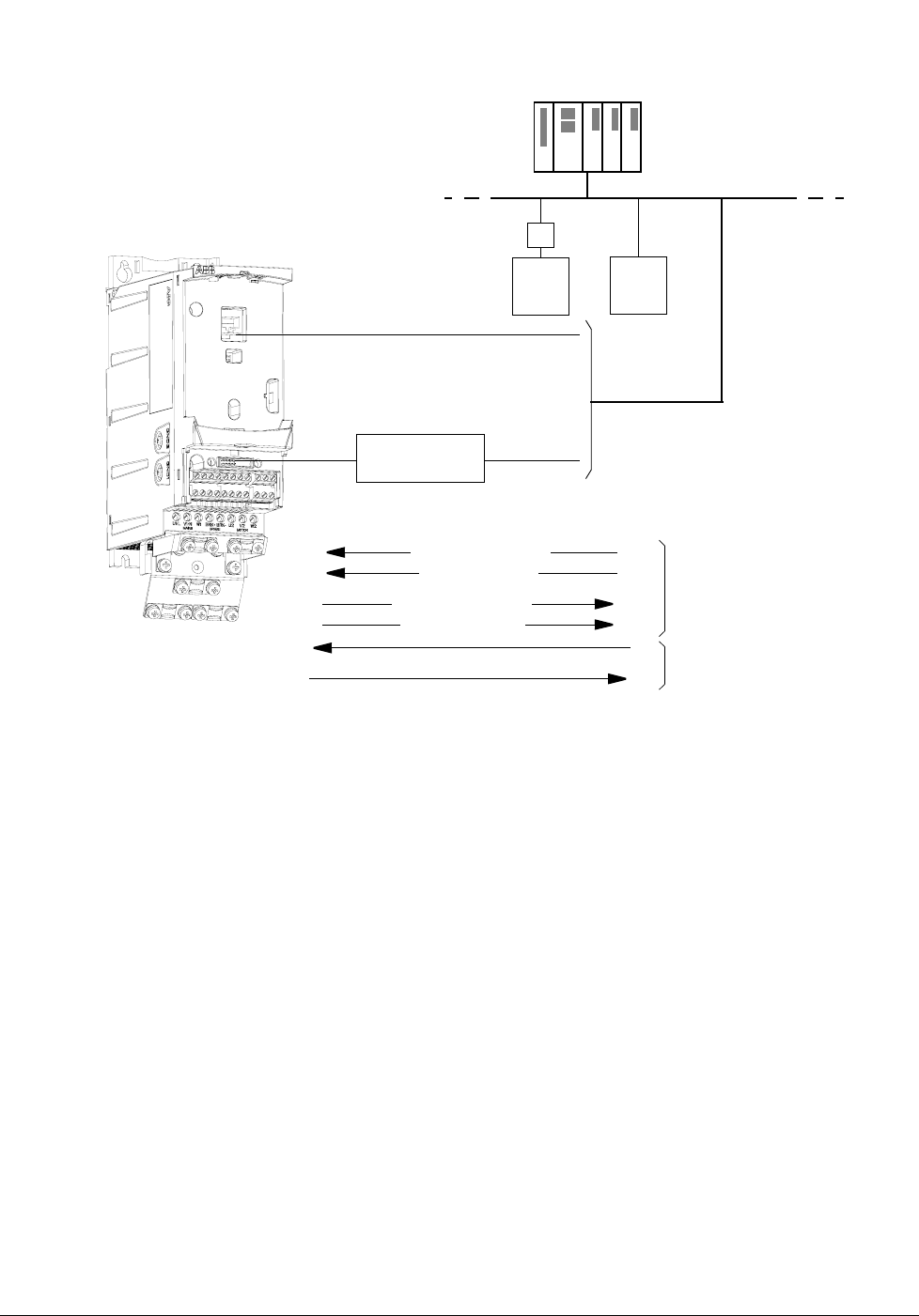
Control de bus de campo con bus de campo encajado
256
El convertidor puede ajustarse para recibir la totalidad de su información de control
a través de la interfase de bus de campo, o el control puede distribuirse entre dicha
interfase de bus de campo y otras fuentes disponibles, como entradas analógicas y
digitales.
Bus de campo
Otros
dispositivos
Regulador
de bus de campo
Cód. de control (CW)
Referencias
Flujo de datos
Cód. de estado (SW)
Valores actuales
Peticiones/Respuestas de L/E de parámetros
ACS350
E/S de proceso (cíclicas)
Mensajes de servicio (no cíclicos)
RS-232*
Conector del panel
*La conexión
del bus de campo
encajado (Modbus)
es RS-232 o RS-485.
X3 X1
RS-485*
Adaptador
Modbus FMBA
Control de bus de campo con bus de campo encajado
257
Configuración de la comunicación a través de un Modbus encajado
Antes de configurar el convertidor para el control por bus de campo, debe instalarse
mecánica y eléctricamente el adaptador Modbus FMBA según las instrucciones
facilitadas en la página 30 del capítulo Instalación mecánica y en el manual del
módulo.
La comunicación a través del enlace de bus de campo se inicializa ajustando el
parámetro 9802 SEL PROT COM a MODBUS EST ó MODBUS RS232. También
deben ajustarse los parámetros de comunicación en el grupo 53 PROTOCOLO BCI.
Véase la tabla siguiente.
Tras ajustar los parámetros de configuración en el grupo 53 PROTOCOLO BCI,
deben comprobarse y ajustarse los Parámetros de control del convertidor en la
página 258 si es necesario.
Los nuevos ajustes serán efectivos cuando vuelva a conectarse el convertidor, o
cuando borre y restaure el ajuste del parámetro 5302 ID ESTACION BCI.
Parámetro Ajustes
alternativos Ajuste para
control por bus
de campo
Función / información
INICIALIZACIÓN DE LA COMUNICACIÓN
9802 SEL PROT
COM SIN SEL
MODBUS EST
ABC EXT
MODBUS RS232
MODBUS EST
(con RS-485)
MODBUS RS232
(con RS-232)
Inicializa la comunicación con el bus de campo
encajado.
CONFIGURACIÓN DEL MÓDULO ADAPTADOR
5302 ID ESTACION
BCI 0 ... 65535 Cualquiera Define la dirección ID de la estación del enlace
RS-232/485. Dos estaciones en línea no pueden
tener la misma dirección.
5303 VEL TRANSM
BCI 1,2 kbit/s
2,4 kbit/s
4,8 kbit/s
9,6 kbit/s
19,2 kbit/s
38,4 kbit/s
57,6 kbit/s
76,8 kbit/s
Define la velocidad de comunicación del enlace
RS-232/485.
5304 PARIDAD BCI 8N1
8N2
8E1
8O1
Selecciona el ajuste de paridad. Deben utilizarse
los mismos ajustes en todas las estaciones en
línea.
5305 PERFIL CTRL
BCI ABB DRV LIM
DCU PROFILE
ABB DRV FULL
Cualquiera Selecciona el perfil de comunicación utilizado por
el convertidor. Véase la sección Perfiles de
comunicación en la página 270.
5310 ... 5317 PAR BCI
10 ... 17 0 ... 65535 Cualquiera Selecciona un valor actual para correlacionarlo
con el registro 400xx del Modbus.
Control de bus de campo con bus de campo encajado
258
Parámetros de control del convertidor
Tras configurar la comunicación del Modbus, deben comprobarse y ajustarse los
parámetros de control del convertidor mostrados en las tablas siguientes, siempre
que sea necesario.
La columna Ajuste para control por bus de campo facilita el valor a utilizar
cuando la interfase de Modbus sea el origen o destino deseado para esa señal en
particular. La columna Función/Información facilita una descripción del parámetro.
Parámetro Ajuste para el
control por bus
de campo
Función / información Dirección de
registro Modbus
SELECCIÓN DE LA FUENTE DE COMANDOS DE CONTROL ABB DRV DCU
1001
COMANDOS
EXT1
COMUNIC Habilita 0301 COD ORDEN BC 1, bits 0 ... 1 (MARCHA/
PARO) cuando se selecciona EXT1 como el lugar de
control activo.
40031
bits 0 ...
1
1002
COMANDOS
EXT2
COMUNIC Habilita 0301 COD ORDEN BC 1, bits 0 ... 1 (MARCHA/
PARO) cuando se selecciona EXT2 como el lugar de
control activo.
40031
bits 0 ...
1
1003
DIRECCION AVANCE
RETROCESO
PETICION
Habilita el control de la dirección de giro según se
define en los parámetros 1001 y 1002. El control de
dirección se describe en la sección Tratamiento de
referencias en la página 266.
40031
bit 2
1010 SEL
LENTITUD COMUNIC Habilita la activación del avance lento 1 ó 2 a través de
0302 COD ORDEN BC 1, bits 20 y 21. 40032
bits 20 y
21
1102 SELEC
EXT1/EXT2 COMUNIC Habilita la selección de EXT1/EXT2 a través de 0301
COD ORDEN BC 1, bit 5 (con perfil ABB Drives 5319
PAR BCI 19, bit 11).
40001
bit 11 40031
bit 5
1103 SELEC
REF1 COMUNIC
COMUNIC+EA1
COMUNIC*EA1
La referencia de bus de campo REF1 se usa cuando se
selecciona EXT1 como el lugar de control activo. Véase
la sección Referencias del bus de campo en la página
260 para obtener información acerca de los ajustes
alternativos.
40002 para REF1
1106 SELEC
REF2 COMUNIC
COMUNIC+EA1
COMUNIC*EA1
La referencia de bus de campo REF2 se usa cuando se
selecciona EXT2 como el lugar de control activo. Véase
la sección Referencias del bus de campo en la página
260 para obtener información acerca de los ajustes
alternativos.
40003 para REF2
SELECCIÓN DE LA FUENTE DE SEÑAL DE SALIDA ABB DRV DCU
1401 SALIDA
RELE SR1 COMUNIC
COMUNIC (-1)
Habilita el control de la salida de relé SR mediante la
señal 0134 COD SR COMUNIC. 40134 para la señal
0134
1501 SEL
CONTENID
SA1
135 Dirige el contenido de la referencia de bus de campo
0135 VALOR COMUNIC 1 a la salida analógica SA. 40135 para la señal
0135
ENTRADAS DE CONTROL DEL SISTEMA ABB DRV DCU
1601
PERMISO
MARCHA
COMUNIC Habilita el control de la señal invertida de Permiso de
marcha (deshabilitación de marcha) a través de 0301
COD ORDEN BC 1, bit 6 (con perfil ABB Drives 5319
PAR BCI 19, bit 3).
40001
bit 3 40031
bit 6
1604 SEL
REST FALLO COMUNIC Habilita la restauración de fallos a través de 0301 COD
ORDEN BC 1, bit 4 (con perfil ABB Drives 5319 PAR
BCI 19, bit 7).
40001
bit 7 40031
bit 4
1606
BLOQUEO
LOCAL
COMUNIC Señal de bloqueo del modo de control local a través de
0301 COD ORDEN BC 1, bit 14. -40031
bit 14
Control de bus de campo con bus de campo encajado
259
La interfase de control por bus de campo
La comunicación entre un sistema de bus de campo y el convertidor consiste en
códigos de datos de entrada y salida de 16 bits (con perfil ABB Drives) y códigos de
entrada y salida de 32 bits (con perfil DCU).
Código de control y código de estado
El código de control (CW) es el medio principal de controlar el convertidor desde un
sistema de bus de campo. El Código de control es enviado por el controlador por
bus de campo al convertidor. El convertidor cambia entre sus estados de
conformidad con las instrucciones codificadas en bits del Código de control.
El Código de estado (SW) es un código que contiene información de estado enviada
por el convertidor al controlador de bus de campo.
1607
SALVAR
PARAM
REALIZADO;
SALVAR Guarda los cambios de valor del parámetro (incluyendo
los efectuados a través del control por bus de campo)
en la memoria permanente.
41607
1608
PERMISO
DE INI 1
COMUNIC Señal invertida de permiso de inicio 1 (deshabilitación
de marcha) a través de 0302 COD ORDEN BC 2, bit 18. - 40032
bit 18
1609
PERMISO
DE INI 2
COMUNIC Señal invertida de permiso de inicio 2 (deshabilitación
de marcha) a través de 0302 COD ORDEN BC 2, bit 19. - 40032
bit 19
LÍMITES ABB DRV DCU
2013 SEL
PAR MINIMO COMUNIC Selección del límite de par mínimo 1/2 a través de 0301
COD ORDEN BC 1, bit 15. - 40031
bit 15
2014 SEL
PAR
MAXIMO
COMUNIC Selección del límite de par máximo 1/2 a través de 0301
COD ORDEN BC 1, bit 15. - 40031
bit 15
2201 SEL
ACE/DEC 1/2 COMUNIC Selección par de rampas de acel. y desac. 1/2 a través
de 0301 COD ORDEN BC 1, bit 10. - 40031
bit 10
2209
ENTRADA
RAMPA 0
COMUNIC Entrada de rampa a cero a través de 0301 COD
ORDEN BC 1, bit 13 (con perfil ABB Drives 5319 PAR
BCI 19, bit 6).
40001
bit 6 40031
bit 13
FUNCIONES DE FALLO DE COMUNICACIÓN ABB DRV DCU
3018 FUNC
FALLO
COMUN
SIN SEL
FALLO
VEL CONST 7
ULTIMA VELOC
Determina la acción del convertidor en caso de pérdida
de la comunicación de bus de campo. 43018
3019 TIEM
FALLO
COMUN
0,1 ... 60,0 s Define el tiempo entre la detección de la pérdida de
comunicación y la acción seleccionada con el
parámetro 3018 FUNC FALLO COMUN.
43019
SELECCIÓN DEL ORIGEN DE LA SEÑAL DE REFERENCIA DEL REGULADOR PID ABB DRV DCU
4010 / 4110 /
4210 SEL
PUNTO
CONSIG
COMUNIC
COMUNIC+EA1
COMUNIC*EA1
Referencia de control PID (REF2). 40003 para REF2
Parámetro Ajuste para el
control por bus
de campo
Función / información Dirección de
registro Modbus

Control de bus de campo con bus de campo encajado
260
Referencias
Las referencias (REF) son enteros de 16 bits con signo. Una referencia negativa (p.
ej., dirección de giro inversa) se forma calculando el complemento de dos a partir
del valor de referencia positiva correspondiente. El contenido del código de cada
referencia se puede utilizar como referencia de velocidad, de frecuencia, de par o
de proceso.
Valores actuales
Los valores actuales (ACT) son códigos de 16 bits que contienen valores
seleccionados del convertidor.
Referencias del bus de campo
Selección y corrección de la referencia
La referencia de bus de campo (llamada COMUNIC en contextos de selección de
señales) se selecciona ajustando un parámetro de selección de referencia (1103 o
1106) a COMUNIC, COMUNIC+EA1 o COMUNIC*EA1. Cuando 1103 SELEC REF1
o 1106 SELEC REF2 está ajustado a COMUNIC la referencia de bus de campo se
reenvía tal cual, sin ninguna corrección. Cuando el parámetro 1103 o 1106 está
ajustado a COMUNIC+EA1 o COMUNIC*EA1, la referencia de bus de campo se
corrige utilizando la entrada analógica EA1 tal como se muestra en los ejemplos
siguientes.
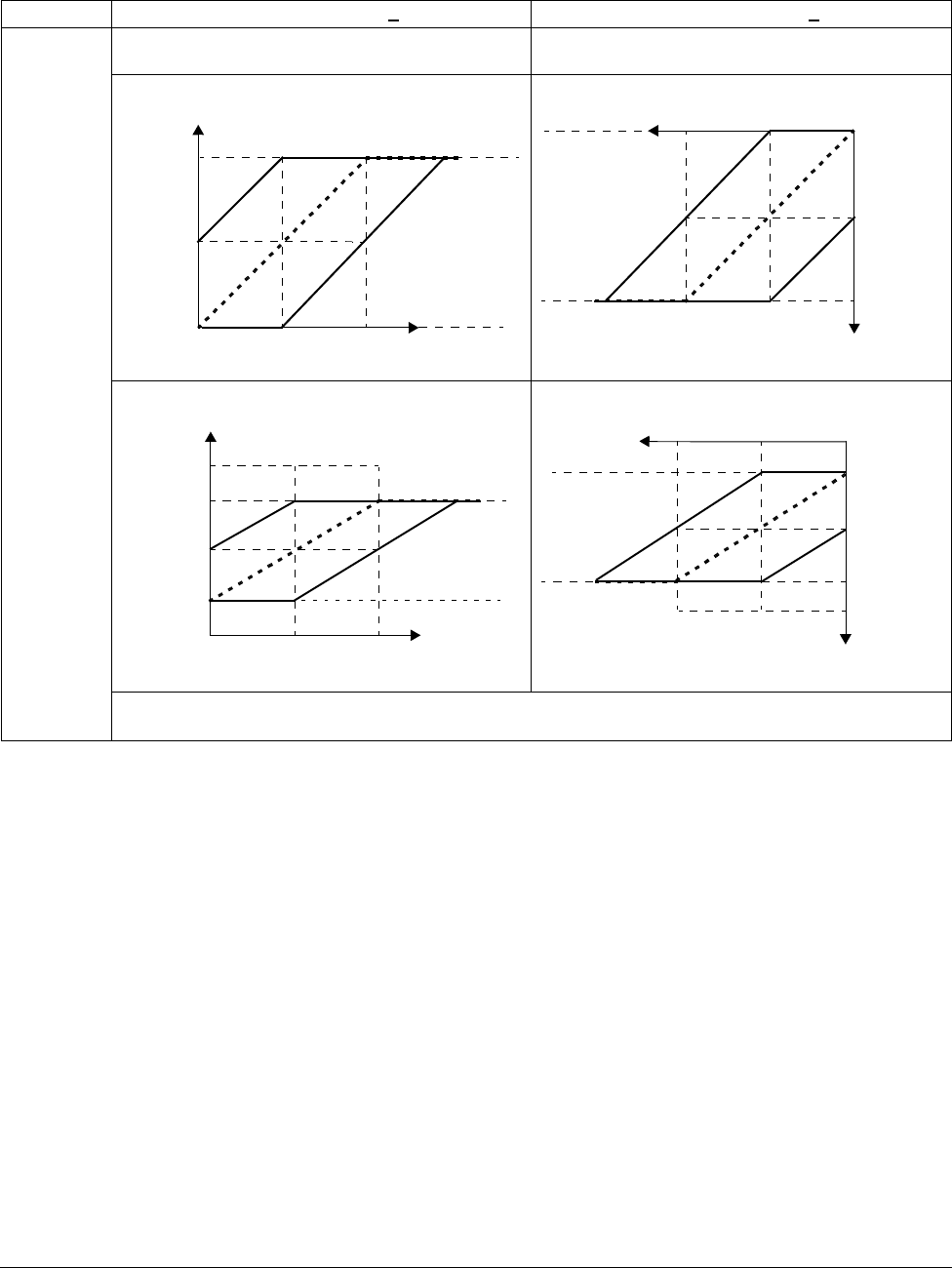
Control de bus de campo con bus de campo encajado
261
Ejemplos de corrección de referencia para el perfil ABB Drives.
Ajuste Cuando COMUNIC > 0 Cuando COMUNIC < 0
COMUNIC+
EA1 COMUNIC(%)
·
(MAX-MIN) + MIN
+ (EA(%) -50%)
·
(MAX-MIN) COMUNIC(%)
·
(MAX-MIN) - MIN
+ (EA(%) -50%)
·
(MAX-MIN)
El límite máximo está definido por el parámetro 1105 REF1 MAXIMO / 1108 REF2 MAXIMO.
El límite mínimo está definido por el parámetro 1104 REF1 MINIMO / 1107 REF2 MINIMO.
50%
1
.500 rpm
750 rpm
100% COMUNIC
EA = 50%
EA = 100%
EA = 0%
0% REF (%)
Límite mín.
Referencia
corregida
0 rpm
Límite máx.
-50%
-1.500 rpm
-7.500 rpm
-100%
EA = 50%
EA = 0%
EA = 100%
0%
COMUNIC
REF (%)
Límite máx.
Límite mín.
Referencia
corregida
0 rpm
50%
1.500 rpm
750 rpm
100%
EA = 50%
EA = 100%
EA = 0%
0%
1.200 rpm
300 rpm
COMUNIC
REF (%)
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
-50%
-1.500 rpm
-750 rpm
-100%
EA = 50%
EA = 0%
EA = 100%
0%
-1.200 rpm
-300 rpm
COMUNIC
REF (%)
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
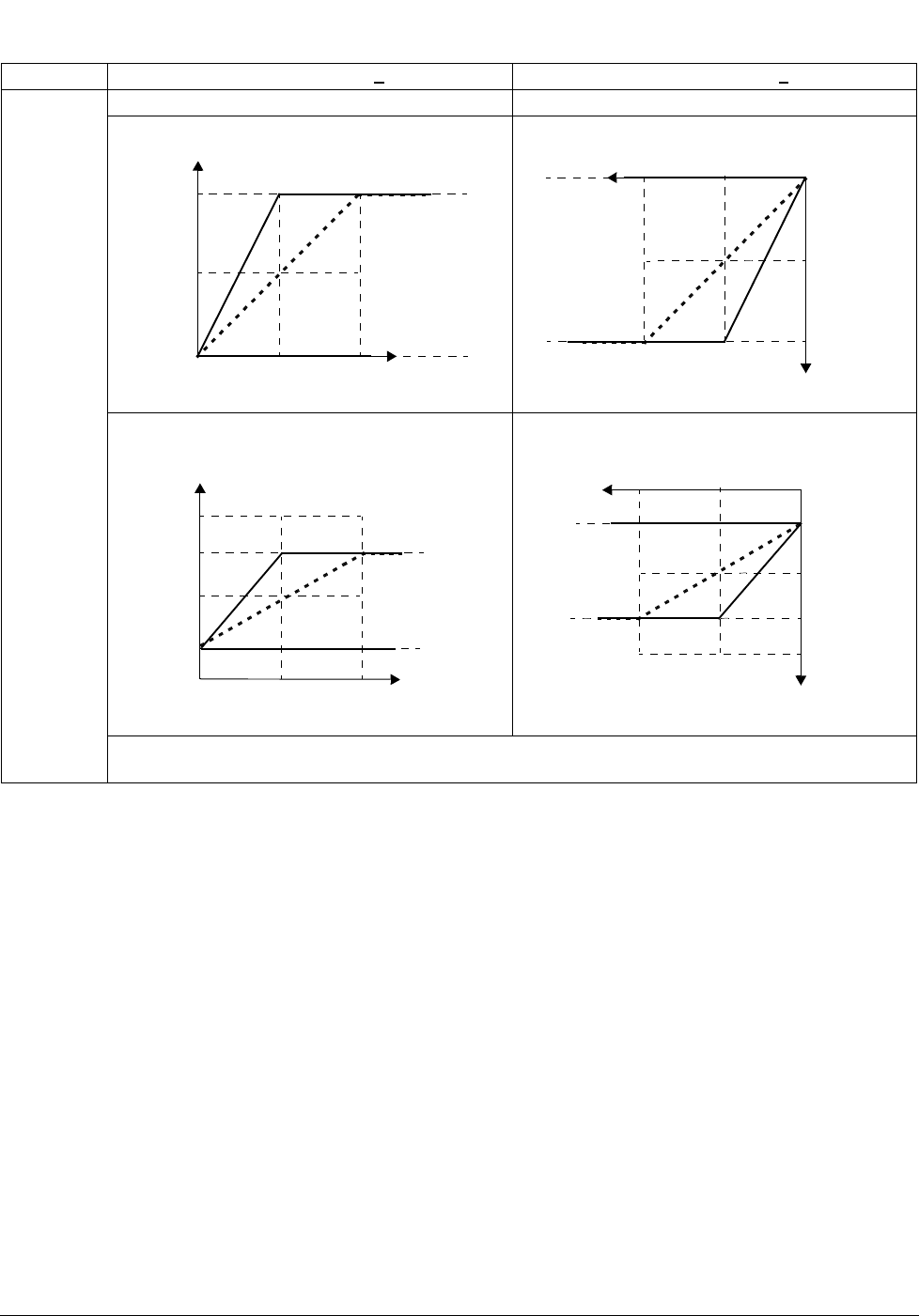
Control de bus de campo con bus de campo encajado
262
COMUNIC*
EA1 COMUNIC(%)
·
(EA(%) / 50%)
·
(MAX-MIN) + MIN COMUNIC(%)
·
(EA(%) / 50%)
·
(MAX-MIN) - MIN
El límite máximo está definido por el parámetro 1105 REF1 MAXIMO / 1108 REF2 MAXIMO.
El límite mínimo está definido por el parámetro 1104 REF1 MINIMO / 1107 REF2 MINIMO.
Ajuste Cuando COMUNIC > 0 Cuando COMUNIC < 0
0% 50%
1.500 rpm
750 rpm
100%
EA = 50%
EA = 100%
EA = 0%
COMUNIC
REF (%)
Referencia
corregida
Límite máx.
Límite mín.
0 rpm
0%
-50%
-1.500 rpm
-750 rpm
-100%
EA = 50%
EA = 0%
EA = 100%
COMUNIC
REF (%)
Referencia
corregida
0 rpm
Límite máx.
Límite mín.
0% 50%
1.500 rpm
750 rpm
100%
EA = 50%
EA = 100%
EA = 0%
1.200 rpm
300 rpm
COMUNIC
REF (%)
Referencia
corregida
Límite máx.
Límite mín.
0 rpm
0%
-50%
-1.500 rpm
-750 rpm
-100%
EA = 50%
EA = 0%
EA = 100%
-300 rpm
-1.200 rpm
COMUNIC
REF (%)
Referencia
corregida
Límite mín.
Límite máx.
0 rpm
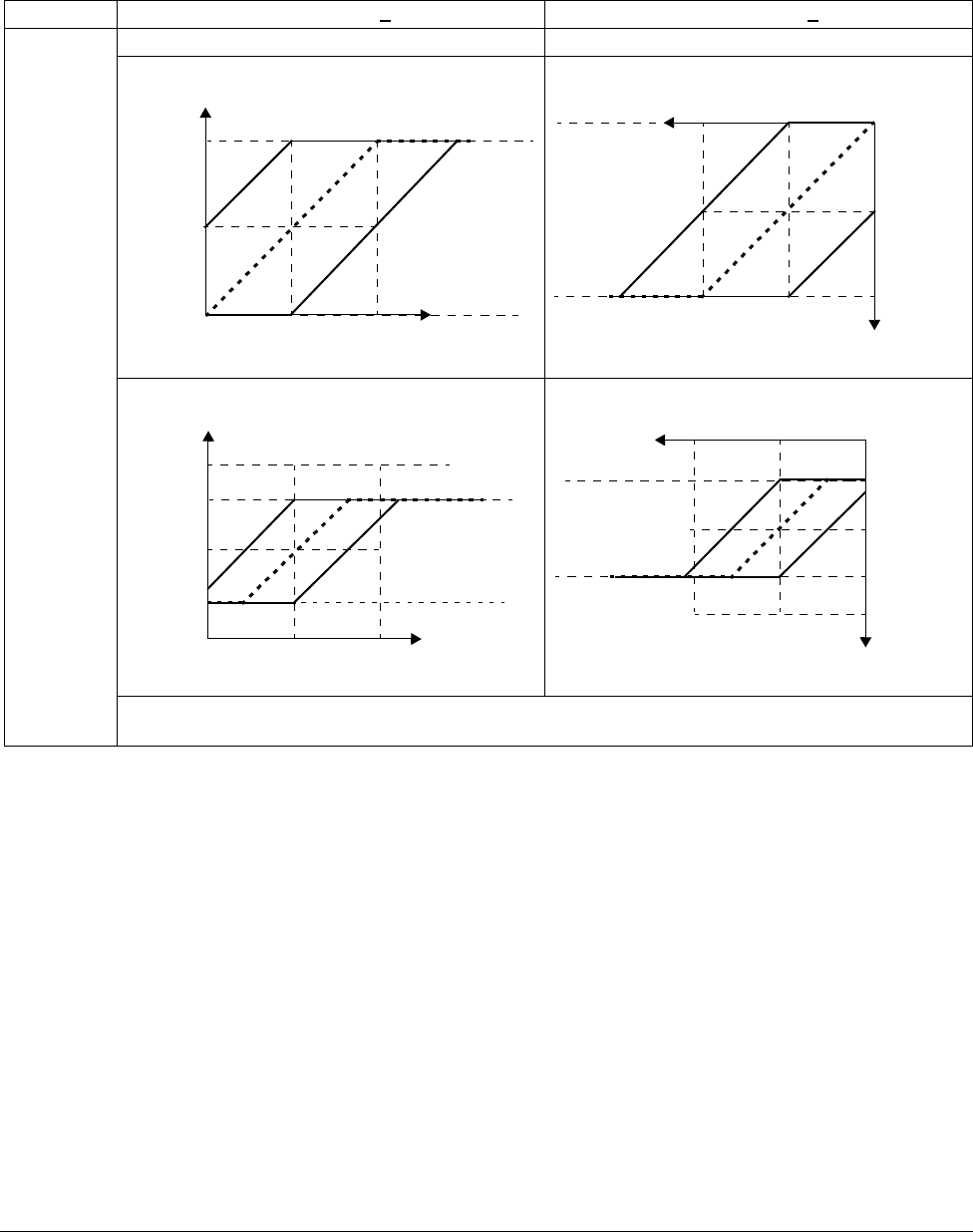
Control de bus de campo con bus de campo encajado
263
Ejemplos de corrección de referencia para el perfil DCU.
Con el perfil DCU el tipo de referencia de bus de campo puede ser en Hz, rpm o
porcentaje. En los ejemplos siguientes, la referencia está en rpm.
Ajuste Cuando COMUNIC > 0 rpm Cuando COMUNIC < 0 rpm
COMUNIC+
EA1 COMUNIC/1000 + (EA(%) -50%)
·
(MAX-MIN) COMUNIC/1000+ (EA(%) -50%)
·
(MAX-MIN)
El límite máximo está definido por el parámetro 1105 REF1 MAXIMO / 1108 REF2 MAXIMO.
El límite mínimo está definido por el parámetro 1104 REF1 MINIMO / 1107 REF2 MINIMO.
750.000
1
.500 rpm
750 rpm
150.000 COMUNIC
EA = 50%
EA = 100%
EA = 0%
0REF
Límite mín.
Referencia
corregida
0 rpm
Límite máx.
-750.000
-1.500 rpm
-750 rpm
-150.000
EA = 50%
EA = 0%
EA = 100%
0
COMUNIC
REF
Límite máx.
Límite mín.
Referencia
corregida
0 rpm
750.000
1
.500 rpm
750 rpm
150.000
EA = 50%
EA = 100%
EA = 0%
0
1
.200 rpm
300 rpm
COMUNIC
REF
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
-750.000
-1.500 rpm
-750 rpm
-150.000
EA = 50%
EA = 0%
EA = 100%
0
-1.200 rpm
-300 rpm
COMUNIC
REF
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
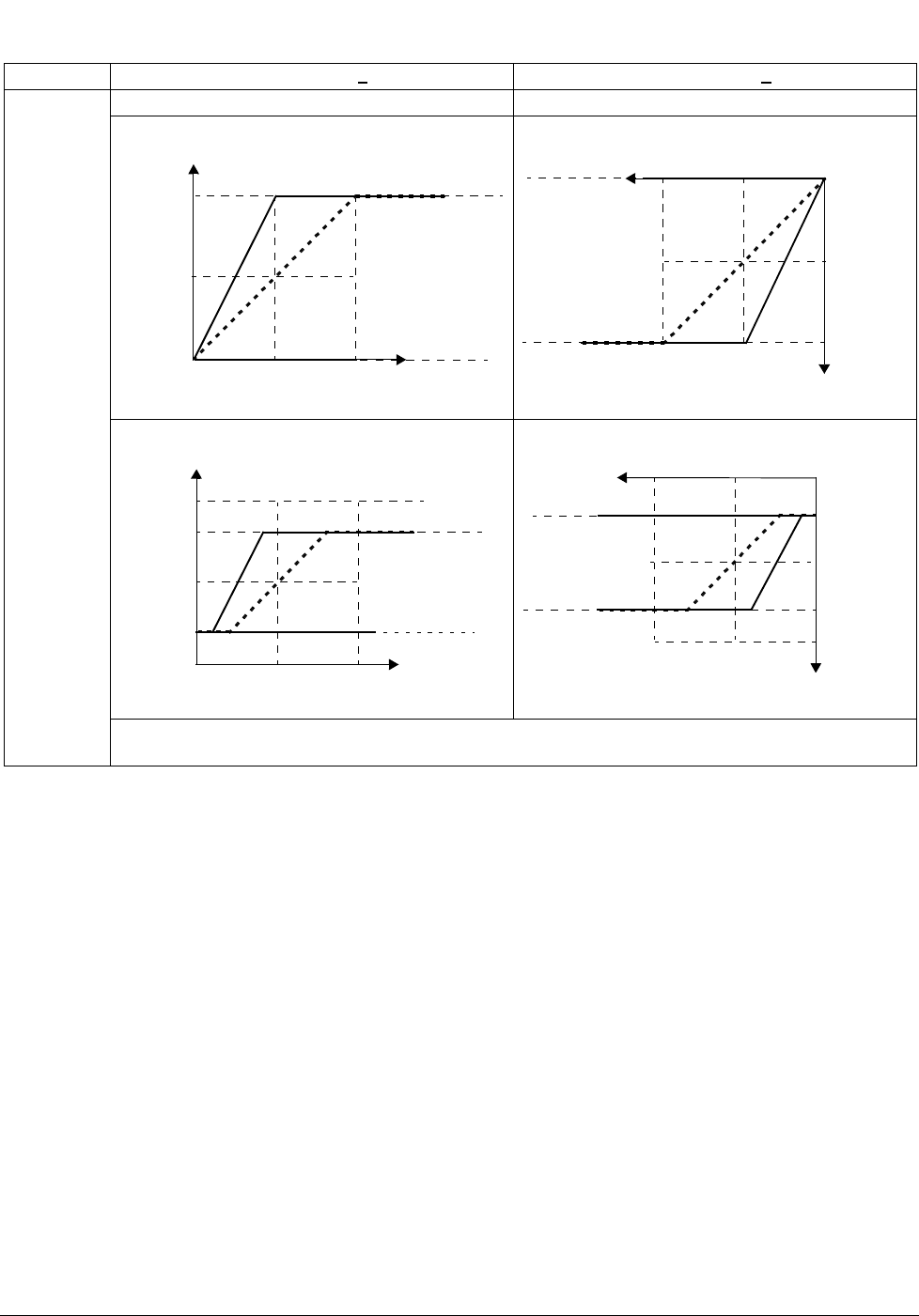
Control de bus de campo con bus de campo encajado
264
COMUNIC*
EA1 (COMUNIC/1000)
·
(EA(%) / 50%) (COMUNIC(%)/1000)
·
(EA(%) / 50%)
El límite máximo está definido por el parámetro 1105 REF1 MAXIMO / 1108 REF2 MAXIMO.
El límite mínimo está definido por el parámetro 1104 REF1 MINIMO / 1107 REF2 MINIMO.
Ajuste Cuando COMUNIC > 0 rpm Cuando COMUNIC < 0 rpm
750.000
1
.500 rpm
750 rpm
150.000 COMUNIC
EA = 50%
EA = 100%
EA = 0%
0REF
Límite mín.
Referencia
corregida
Límite máx.
0 rpm
-750.000
-1.500 rpm
-750 rpm
-150.000
EA = 50%
EA = 0%
EA = 100%
0
COMUNIC
REF
Límite máx.
Límite mín.
Referencia
corregida
0 rpm
750.000
1
.500 rpm
750 rpm
150.000
EA = 50%
EA = 100%
EA = 0%
0
1
.200 rpm
300 rpm
COMUNIC
REF
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
-750.000
-1.500 rpm
-750 rpm
-150.000
EA = 50%
EA = 0%
EA = 100%
0
-1.200 rpm
-300 rpm
COMUNIC
REF
Límite máx.
Límite mín.
0 rpm
Referencia
corregida
Control de bus de campo con bus de campo encajado
265
Escalado de la referencia de bus de campo
Las referencias de bus de campo REF1 y REF2 se escalan tal como se muestra en
las tablas siguientes.
Nota: cualquier corrección de la referencia (véase la sección Selección y corrección
de la referencia en la página 265) se aplica antes del escalado.
Escalado de referencia para el perfil ABB Drives.
Nota: Los ajustes de los parámetros 1104 REF1 MINIMO y 1107 REF2 MINIMO no
tienen ningún efecto en el escalado de las referencias.
Escalado de referencia para el perfil DCU.
Nota: Los ajustes de los parámetros 1104 REF1 MINIMO y 1107 REF2 MINIMO no
tienen ningún efecto en el escalado de las referencias.
Referencia
Rango Tipo de
referencia Escalado Comentarios
REF1 -32767
...
+32767
Velocidad
o
frecuencia
-20.000 = -(par. 1105)
0 = 0
+20.000 = (par. 1105)
(20.000 corresponde al
100%)
Referencia final limitada por
1104/1105. Velocidad
actual del motor limitada
por 2001/2002 (velocidad)
o por 2007/2008
(frecuencia).
REF2 -32767
...
+32767
Velocidad
o
frecuencia
-10.000 = -(par. 1108)
0 = 0
+10.000 = (par. 1108)
(10.000 corresponde al
100%)
Referencia final limitada por
1107/1108. Velocidad
actual del motor limitada
por 2001/2002 (velocidad)
o por 2007/2008
(frecuencia).
Par -10.000 = -(par. 1108)
0 = 0
+10.000 = (par. 1108)
(10.000 corresponde al
100%)
Referencia final limitada por
2015/2017 (par 1) o 2016/
2018 (par 2).
Referencia
PID -10.000 = -(par. 1108)
0 = 0
+10.000 = (par. 1108)
(10.000 corresponde al
100%)
Referencia final limitada por
4012/4013 (serie PID 1) o
4112/4113 (serie PID 2).
Referencia
Rango Tipo de
referencia Escalado Comentarios
REF1 -214783648
...
+214783647
Velocidad
o
frecuencia
1.000 = 1 rpm / 1 Hz Referencia final limitada por
1104/1105. Velocidad actual
del motor limitada por 2001/
2002 (velocidad) o por
2007/2008 (frecuencia).
REF2 -214783648
...
+214783647
Velocidad
o
frecuencia
1.000 = 1% Referencia final limitada por
1107/1108. Velocidad actual
del motor limitada por 2001/
2002 (velocidad) o por
2007/2008 (frecuencia).
Par 1.000 = 1% Referencia final limitada por
2015/2017 (par 1) o 2016/
2018 (par 2).
Referencia
PID 1.000 = 1% Referencia final limitada por
4012/4013 (serie PID 1) o
4112/4113 (serie PID 2).
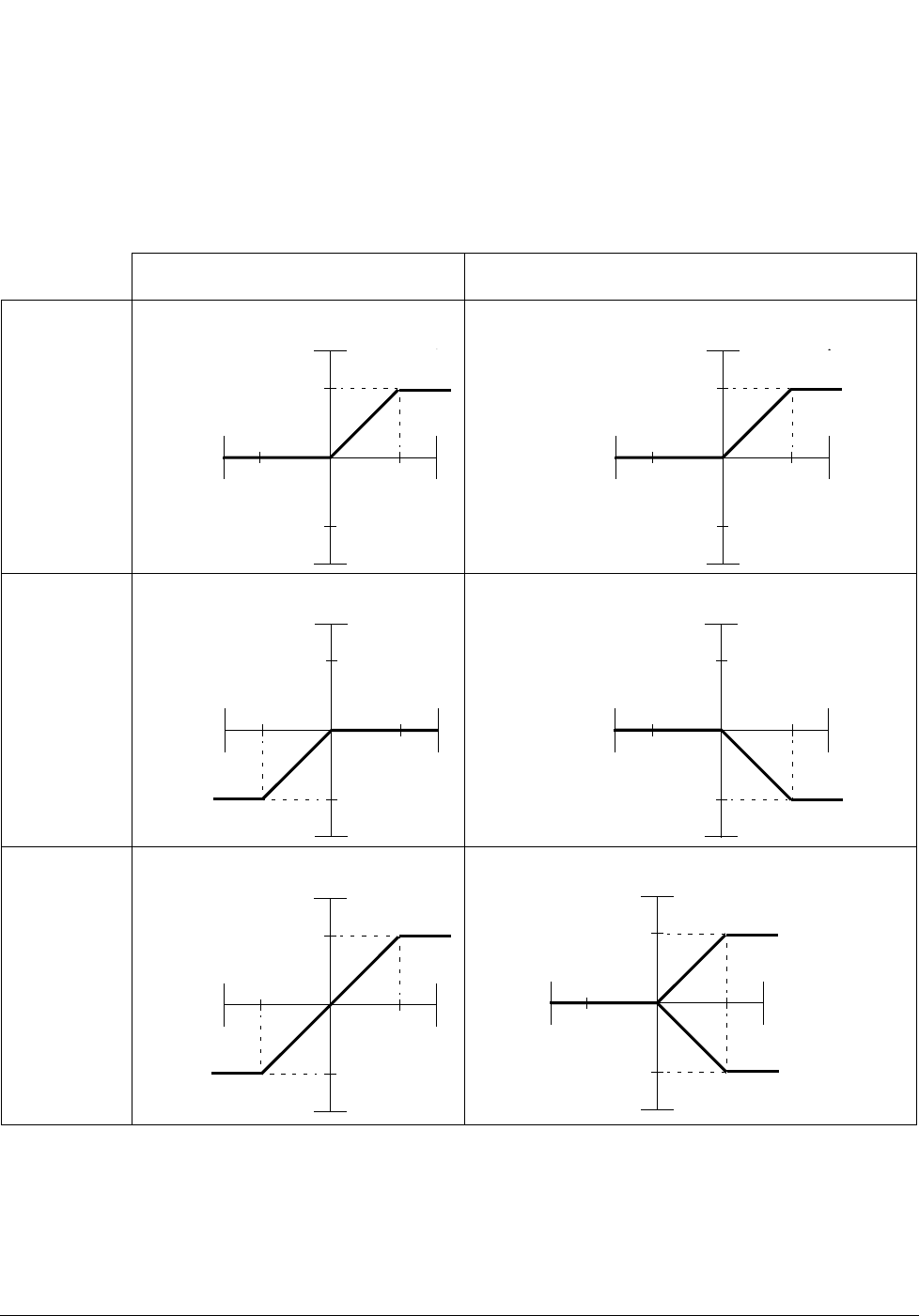
Control de bus de campo con bus de campo encajado
266
Tratamiento de referencias
El control de la dirección de giro se configura para cada lugar de control (EXT1 y
EXT2) empleando los parámetros del grupo 10 MARCHA/PARO/DIR. Las
referencias de bus de campo son bipolares, es decir, pueden ser negativas o
positivas. Los siguientes diagramas ilustran cómo los parámetros del grupo 10 y el
signo de la referencia de bus de campo interactúan para producir la referencia
REF1/REF2.
Adaptación a escalado del valor actual
El escalado de los enteros enviados al maestro como valores actuales depende de
la función seleccionada. Véase el capítulo Señales actuales y parámetros.
Dirección determinada por el signo de
COMUNIC Dirección determinada mediante comando digital,
p. ej. entrada digital o panel de control
par. 10.03
DIRECCION
= AVANCE
par. 10.03
DIRECCION
=
RETROCESO
par. 10.03
DIRECCION
= PETICION
Bus de
-163%
Ref. máx.
–[Ref. máx.]
-100% 100%
Resultante
REF1/2
163%
Ref. 1/2
campo Bus de
-163%
Ref. máx.
–[Ref. máx.]
-100% 100%
Resultante
REF1/2
163%
Ref. 1/2
campo
Bus de
-163%
Ref. máx.
–[Ref.Máx.]
-100% 100%
Resultante
REF1/2
163%
Ref. 1/2
campo Bus de
-163%
Ref. máx.
–[Ref.Máx.]
-100% 100%
Resultante
REF1/2
163%
Ref. 1/2
campo
Bus de
-163%
Ref. máx.
–[Ref. máx.]
-100%
100%
Resultante
REF1/2
163%
Ref. 1/2
campo Bus de
-163%
Ref. máx.
–[Ref. máx.]
-100% 100%
Resultante
REF1/2
163%
Comando de dirección:
AVANCE
Comando de dirección:
RETROCESO
Ref. 1/2
campo
Control de bus de campo con bus de campo encajado
267
Correlación Modbus
El convertidor soporta los siguientes códigos de función Modbus.
Correlación de registros
Los parámetros, códigos de control y estado, referencias y valores actuales del
convertidor se correlacionan con el área 4xxxx, de manera que:
• 40001 ... 40099 se reservan para el control y estado del convertidor, las
referencias y los valores actuales.
• 40101 ... 49999 se reservar para los parámetros del convertidor 0101 ... 9999 (p.
ej. 40102 es el parámetro 0102). En esta correlación los miles y las centenas
corresponden al número de grupo, mientras que las decenas y las unidades
corresponden al número del parámetro dentro del grupo.
Las direcciones de registro que no corresponden a los parámetros del convertidor
no son válidas. Si se intenta leer o escribir en direcciones no válidas, la interfase
Modbus devuelve un código de excepción al regulador. Véase Códigos de
excepción en la página 269.
Función Código
Hex.
(dec.) Información adicional
Leer varios
registros de
retención
03 (03) Lee el contenido de los registros en un dispositivo esclavo.
Los valores de las series de parámetros, control, estado y
referencia se correlacionan como registros de retención.
Escribir un único
registro de
retención
06 (06) Escribe en un sólo registro en un dispositivo esclavo.
Los valores de las series de parámetros, control, estado y
referencia se correlacionan como registros de retención.
Diagnósticos 08 (08) Proporciona una serie de comprobaciones para verificar la
comunicación entre los dispositivos maestro y esclavo o para
verificar diversas condiciones de error interno del esclavo.
Se admiten los siguientes subcódigos:
00 Devolver datos de consulta: Los datos facilitados en el campo de
datos de petición deben retornarse en la respuesta. El mensaje de
respuesta completo debe ser idéntico a la petición.
01 Reiniciar opción de comunicación: El puerto serie del dispositivo
esclavo debe inicializarse y restaurarse y se deben borrar todos sus
contadores de eventos de comunicación. Si el puerto se halla
actualmente en Modo Sólo escuchar, no se devuelve ninguna
respuesta. Si el puerto no se halla actualmente en Modo Sólo
escuchar, se devuelve una respuesta normal antes de reiniciar.
04 Forzar Modo Sólo escuchar: Fuerza al dispositivo esclavo
direccionado a entrar en Modo Sólo escuchar. Esto lo aísla de los
otros dispositivos de la red, permitiendo que sigan comunicándose
sin interrupciones procedentes del dispositivo remoto direccionado.
No se devuelve ninguna respuesta. La única función que se
procesará tras entrar en este modo es la función de Reiniciar
opción de comunicación (subcódigo 01).
Escribir varios
registros de
retención
10 (16) Escribe en los registros (de 1 a 120 registros aproximadamente) en
un dispositivo esclavo.
Los valores de las series de parámetros, control, estado y
referencia se correlacionan como registros de retención.
Escribir/leer
varios registros de
retención
17 (23) Realiza una combinación de una operación de lectura y una de
escritura (códigos de función 03 y 10) en una sola transacción
Modbus. La operación de escritura se realiza antes de la de lectura.
Control de bus de campo con bus de campo encajado
268
La tabla siguiente facilita información sobre el contenido de las direcciones de
Modbus 40001 ... 40012 y 40031 ... 40034.
Nota: Las escrituras de parámetros a través de Modbus estándar siempre son
volátiles, es decir, que los valores modificados no se guardan automáticamente en
la memoria permanente. Utilice el parámetro 1607 SALVAR PARAM para guardar
todos los valores modificados.
Registro Modbus Acceso Información
40001 Código de control L/E Código de control. Soportado sólo por el perfil ABB Drives,
es decir, cuando el ajuste de 5305 PERFIL CTRL BCI es
ABB DRV LIM o ABB DRV FULL. El parámetro 5319 PAR
BCI 19 muestra una copia del Código de control en formato
hexadecimal.
40002 Referencia 1 L/E Referencia externa REF1. Véase la sección Referencias del
bus de campo en la página 260.
40003 Referencia 2 L/E Referencia externa REF2. Véase la sección Referencias del
bus de campo en la página 260.
40004 Código de estado L Código de estado. Soportado sólo por el perfil ABB Drives,
cuando el ajuste de 5305 PERFIL CTRL BCI es ABB DRV
LIM o ABB DRV FULL. El parámetro 5320 PAR BCI 20
muestra una copia del Código de control en formato
hexadecimal.
40005
...
40012
Actual 1 ... 8 L Valor actual 1 ... 8. Utilice los parámetros 5310 ... 5317 para
seleccionar un valor actual y correlacionarlo con los
registros 40005 ... 40012 del Modbus.
40031 LSW del Código de
control L/E 0301 COD ORDEN BC1, es decir, el código menos
significativo del Código de control de 32 bits del perfil DCU.
Soportado sólo por el perfil DCU, es decir, cuando el ajuste
de 5305 PERFIL CTRL BCI es DCU PROFILE.
40032 MSW del Código de
control L/E 0302 COD ORDEN BC2, es decir, el código más
significativo del Código de control de 32 bits del perfil DCU.
Soportado sólo por el perfil DCU, es decir, cuando el ajuste
de 5305 PERFIL CTRL BCI es DCU PROFILE.
40033 LSW del Código de
estado L0303 COD ESTADO BC1, es decir, el código menos
significativo del Código de estado de 32 bits del perfil DCU.
Soportado sólo por el perfil DCU, es decir, cuando el ajuste
de 5305 PERFIL CTRL BCI es DCU PROFILE.
40034 MSW DEL CÓDIGO
DE ESTADO DEL
ACS350
L0304 COD ESTADO BC2, es decir, el código más
significativo del Código de estado de 32 bits del perfil DCU.
Soportado sólo por el perfil DCU, es decir, cuando el ajuste
de 5305 PERFIL CTRL BCI es DCU PROFILE.
Control de bus de campo con bus de campo encajado
269
Códigos de función
Los códigos de función soportados para los registros de retención 4xxxx son:
Nota: En un mensaje de datos de Modbus el registro 4xxxx se direcciona como xxxx
- 1. Por ejemplo, el registro 40002 se direcciona como 0001.
Códigos de excepción
Los códigos de excepción son respuestas de comunicación serie procedentes del
convertidor. El convertidor soporta los códigos de excepción de Modbus estándar
listados en la tabla siguiente.
El parámetro del convertidor 5318 PAR BCI 18 contiene el código de excepción más
reciente.
Código
hex.
(dec.)
Nombre de la
función Información adicional
03 (03) Leer registros 4X Lee el contenido binario de los registros (referencias 4X) en un
dispositivo esclavo.
06 (06) Preajustar un único
registro 4X Preajusta un valor en un único registro (referencia 4X). En modo
de difusión, la función preajusta la misma referencia de registro en
todos los esclavos conectados.
10 (16) Preajustar varios
registros 4X Preajusta valores en una secuencia de registros (referencias 4X).
En modo de difusión, la función preajusta las mismas referencias
de registro en todos los esclavos conectados.
17 (23) Leer/escribir
registros 4X Realiza una combinación de una operación de lectura y una de
lectura (códigos de función 03 y 10) en una sola transacción
Modbus. La operación de escritura se realiza antes de la de
lectura.
Código Nombre Descripción
01 Illegal Function Comando no soportado.
02 Illegal Data Address La dirección no existe o está protegida contra lectura/escritura.
03 Illegal Data Value Valor incorrecto para el convertidor:
• El valor se encuentra fuera de los límites máximo o mínimo.
• El parámetro es de sólo lectura.
• El mensaje es demasiado largo.
• No se permite la escritura en el parámetro cuando la marcha
está activa.
• No se permite la escritura en el parámetro cuando se ha
seleccionado la macro de fábrica.
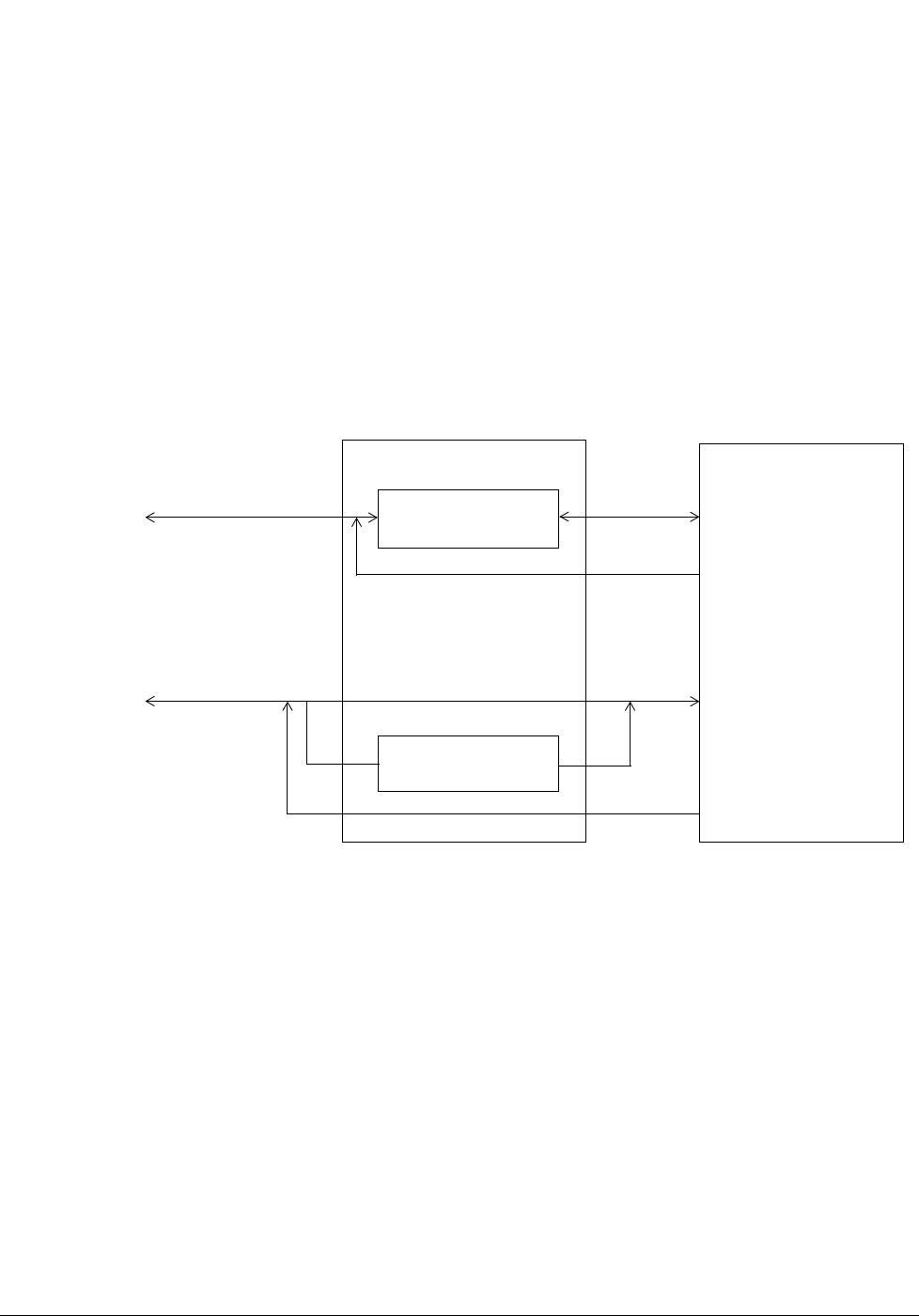
Control de bus de campo con bus de campo encajado
270
Perfiles de comunicación
El bus de campo encajado soporta tres perfiles de comunicación:
• Perfil de comunicación DCU.
• Perfil de comunicación ABB Drives Limited (limitado).
• Perfil de comunicación ABB Drives Full (completo).
El perfil DCU amplía la interfase de control y estado a 32 bits, y es la interfase
interna entre la aplicación de accionamiento principal y el entorno del bus de campo
encajado. El ABB Drives Limited se basa en la interfase PROFIBUS. El perfil ABB
Drives Full soporta dos bits de código de control no soportados por la
implementación ABB DRV LIM.
Perfil de comunicación ABB Drives
Están disponibles dos implementaciones del perfil de comunicación ABB Drives:
ABB Drives Full (completo) y ABB Drives Limited (limitado). El perfil de
comunicación ABB Drives está activo cuando el parámetro 5305 PERFIL CTRL BCI
se ajusta a ABB DRV FULL o a ABB DRV LIM. El código de control y el código de
estado para el perfil se describen a continuación.
El perfil de comunicación ABB Drives puede utilizarse a través de EXT1 y de EXT2.
Los comandos del código de control son efectivos cuando el parámetro 1001
COMANDOS EXT1 o el 1002 COMANDOS EXT2 (según qué lugar de control esté
activo) está ajustado a COMUNIC.
Convertidor
Conversión de datos Perfil DCU
Valores actuales
Perfil DCU Perfil DCU
Valores actuales
por los par. 5310 ... 5317
Red
Modbus Bus de campo encajado
RS-232/485
Códigos de control/estado
Conversión de datos
para REF1/2
ABB DRV FULL / LIMITED
DCU PROFILE
Perfil ABB Drives
por los par. 5310 ... 5317
seleccionados
seleccionados
Control de bus de campo con bus de campo encajado
271
La tabla siguiente y el diagrama de estado que figura más adelante en esta sección
describen el contenido de los Códigos de control para el perfil ABB Drives. El texto
en mayúsculas y negrita hace referencia a los estados mostrados en el diagrama de
bloques posterior.
Código de control del perfil ABB Drives (parámetro 5319)
Bit Nombre Valor Comentarios
0OFF1
CONTROL 1 Entrar en READY TO OPERATE.
0 Paro por la rampa de deceleración actualmente activa (2203 / 2206). Entrar en
OFF1 ACTIVE; proceder a READY TO SWITCH ON a menos que haya otros
interbloqueos activos (OFF2, OFF3).
1OFF2
CONTROL 1 Continuar con el funcionamiento (OFF2 inactivo).
0 DESCONEXIÓN de emergencia, el convertidor se para por sí solo.
Entrar en OFF2 ACTIVE; proceder a SWITCH-ON INHIBITED.
2OFF3
CONTROL 1 Continuar con el funcionamiento (OFF3 inactivo).
0 Paro de emergencia, el convertidor se detiene en el tiempo definido por el par. 2208.
Entrar en OFF3 ACTIVE; proceder a SWITCH-ON INHIBITED.
Advertencia: Verifique que el motor y la máquina accionada puedan pararse con
este modo de paro.
3 INHIBIT
OPERATION 1 Entrar en OPERATION ENABLED. (Nota:La señal de Permiso de marcha debe
estar activada; véase el parámetro 1601. Si el par. 1601 se ajusta a COMUNIC, este
bit también activa la señal de Permiso de marcha.)
0 Inhibir el funcionamiento. Entrar en OPERATION INHIBITED.
4Nota: El bit 4 sólo está soportado por el perfil ABB DRV FULL.
RAMP_OUT_
ZERO (ABB
DRV FULL)
1 Entrar en RAMP FUNCTION GENERATOR: OUTPUT ENABLED.
0 Forzar a cero la salida del generador de función de rampa.
El convertidor se para siguiendo una rampa (con los límites de intensidad y tensión
de CC aplicados).
5 RAMP_HOLD 1 Habilitar la función de rampa.
Entrar en GENERADOR FUNCION RAMPA: ACCELERATOR ENABLED.
0 Detener la rampa (retención de la salida del generador de función de rampa).
6 RAMP_IN_
ZERO 1 Funcionamiento normal. Entrar en OPERATING.
0 Forzar a cero la entrada del generador de función de rampa.
7 RESET 0=>1 Restauración de fallos si existe un fallo activo. Entrar en SWITCH-ON INHIBITED.
Efectivo si el par. 1604 se ajusta a COMUNIC.
0 Continuar con el funcionamiento normal.
8 ... 9 No se usa.
10 Nota: El bit 10 sólo está soportado por el perfil ABB DRV FULL.
REMOTE_CMD
(ABB DRV
FULL)
1 Control por bus de campo habilitado.
0 Código de control 0 o referencia 0: conservar el último Código de control y
referencia.
Código de control = 0 y Referencia = 0: Control por bus de campo habilitado.
La referencia y la rampa de aceleración/deceleración se bloquean.
11 EXT CTRL LOC 1 Seleccionar el lugar de control externo EXT2. Efectivo si el par. 1102 se ajusta a
COMUNIC.
0 Seleccionar el lugar de control externo EXT1. Efectivo si el par. 1102 se ajusta a
COMUNIC.
12 ...
15 Reservados.
=
/
=
/
Control de bus de campo con bus de campo encajado
272
La tabla siguiente y el diagrama de estado que figura más adelante en esta sección
describen el contenido de los Códigos de estado para el perfil ABB Drives. El texto
en mayúsculas y negrita hace referencia a los estados mostrados en el diagrama de
bloques posterior.
Código de estado del perfil ABB Drives (BCE) (parámetro 5320)
Bit Nombre Valor ESTADO/Descripción
(corresponde a estados/cuadros en el diagrama de estado)
0 RDY_ON 1 READY TO SWITCH ON
0NOT READY TO SWITCH ON
1 RDY_RUN 1 READY TO OPERATE
0OFF1 ACTIVE.
2 RDY_REF 1 OPERATION ENABLED
0OPERATION INHIBITED
3 TRIPPED 0 ... 1 FAULT. Véase el capítulo Análisis de fallos.
0Sin fallo.
4 OFF_2_STA 1 OFF2 inactivo.
0OFF2 ACTIVE
5 OFF_3_STA 1 OFF3 inactivo.
0OFF3 ACTIVE.
6 SWC_ON_INHIB 1 SWITCH-ON INHIBITED
0 Inhibir encendido no activo.
7 ALARMA 1 Alarma. Véase el capítulo Análisis de fallos.
0Sin Alarma.
8 AT_SETPOINT 1 OPERATING. El valor actual iguala al valor de referencia (está dentro de los límites
de tolerancia, es decir, en control de velocidad el error de velocidad es menor o
igual al 4/1 %* de la velocidad nominal del motor).
* Histéresis asimétrica: 4 % cuando la velocidad entra en la zona de referencia,
1 % cuando sale de ella.
0 El valor actual difiere del valor de referencia (está fuera de los límites de
tolerancia).
9 REMOTE 1 Lugar de control del convertidor: REMOTE (EXT1 o EXT2)
0 Lugar de control del convertidor: LOCAL.
10 ABOVE_LIMIT 1 El valor del parámetro supervisado supera el límite superior de supervisión. El valor
del bit sigue siendo 1 hasta que el valor del parámetro supervisado caiga por
debajo del límite inferior de supervisión. Véase el grupo de parámetros 32
SUPERVISION.
0 El valor del parámetro supervisado cae por debajo del límite inferior de supervisión.
El valor del bit sigue siendo 0 hasta que el valor del parámetro supervisado supere
el límite superior de supervisión. Véase el grupo de parámetros 32 SUPERVISION.
11 EXT CTRL LOC 1 Lugar de control externo EXT2 seleccionado.
0 Lugar de control externo EXT1 seleccionado.
12 EXT RUN ENABLE 1 Señal de Permiso de Marcha externa recibida
0 No se ha recibido señal de Permiso de marcha externa.
13 ...
15 Reservados.
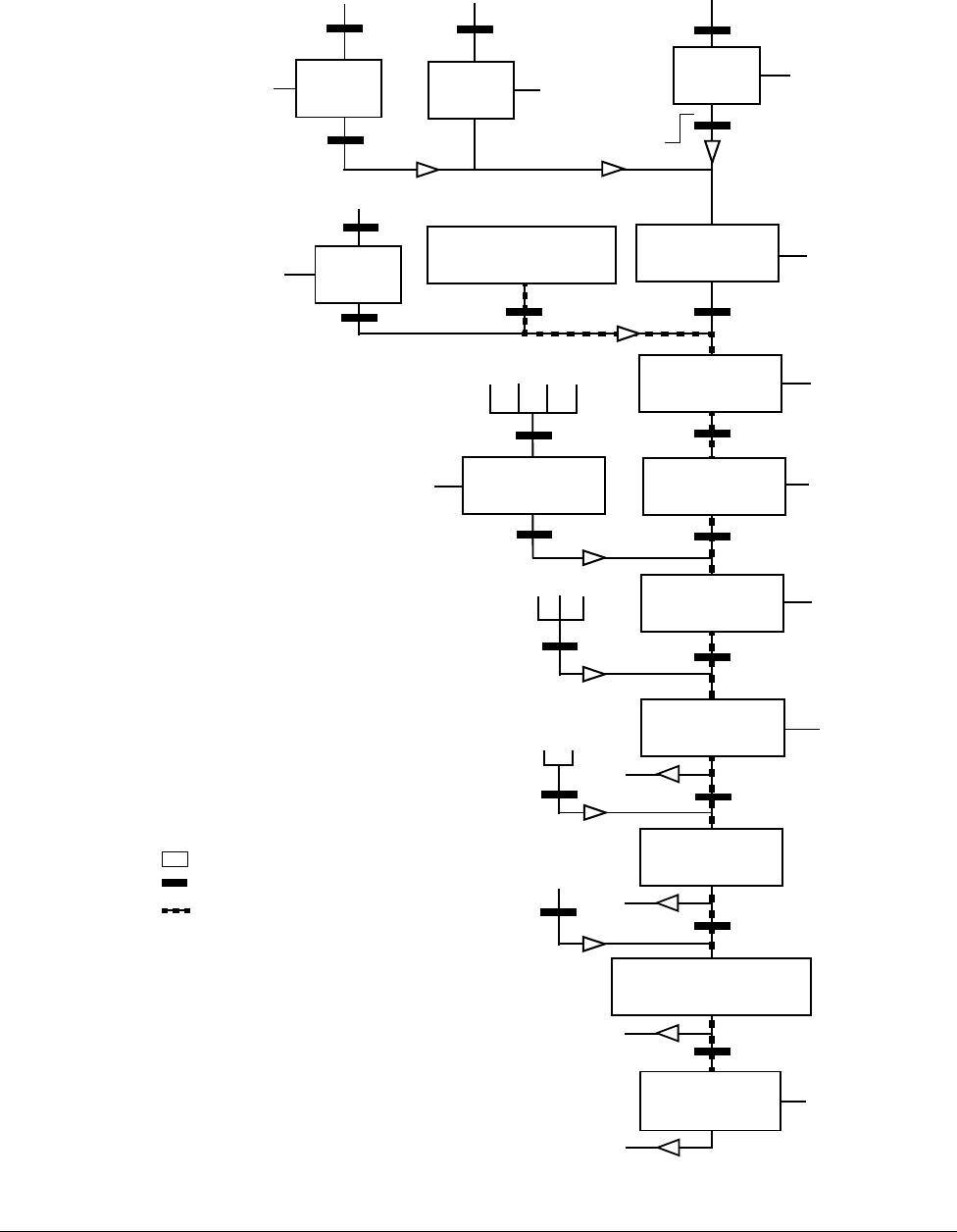
Control de bus de campo con bus de campo encajado
273
El diagrama de estado siguiente describe la función de marcha-paro de los bits del
Código control (CW) y el Código estado (SW) para el perfil ABB Drives.
(CW xxxx x1*xx xxxx x110)
INPUT POWER OFF
Power ON (bit 0 del CW = 0)
(bit 6 del SW = 1)
(bit 0 del SW = 0)
Desde cualquier estado
n(f) = 0 / I = 0
OFF1 (bit 0 del CW = 0)
ACD
(bit 3 del CW = 0)
(bit 2 del SW = 0) (bit 0 del SW = 1)
(CW= xxxx x1*xx xxxx x111
)
(bit 1 del SW = 1)
(bit 3 del CW = 1 y
(bit 4 del CW = 0)*
n(f) = 0 / I = 0
Desde cualquier estado
SWITCH-ON
INHIBITED
NOT READY
TO SWITCH ON
OPERATION
INHIBITED READY TO
SWITCH ON
READY TO
OPERATE
RFG OUTPUT
ENABLED*
C* D*
Desde cualquier estado
Paro de emergencia
OFF2 (bit 1 del CW = 0)
(bit 4 del SW = 0)
OFF2
ACTIVO
Desde cualquier estado
Fallo
(bit 3 del SW = 1)
FALLO
(bit 7 del CW = 1)**
(bit 5 del SW = 0)
Paro de emergencia
OFF3 (bit 2 del CW = 0)
bit 12 del SW = 1)
RFG: ACELERATOR
ENABLED
(CW=xxxx x1*xx xx11* 1111
(bit 6 del CW = 0)
C(CW=xxxx x1*xx x111* 1111
(bit 8 del SW = 1)
D
B*
D
OPERATING
OFF3
ACTIVO
Estado
Cambio de estado
Ruta descrita en el ejemplo
CW = Código de control
SW = Código de estado
RFG = Generador de función de rampa
I = Par. 0104 INTENSIDAD
f = Par. 0103 FREC SALIDA
n = Velocidad
* Soportado sólo por el perfil ABB DRV FULL.
** La transición de estado también se produce
si se restaura el fallo desde cualquier otro
origen (p. ej. la entrada digital).
(bit 2 del SW = 1)
OPERATION
ENABLED
(CW=xxxx x1*xx xxx1* 1111
A
(bit 5 del CW = 0)
CD
B*
B*
(bit 1 del SW = 0) OFF1
ACTIVE
OPERATION INHIBITED
o sea, bit 4 = 0)*
o sea, bit 5 = 1)
o sea, bit 6 = 1)
Control de bus de campo con bus de campo encajado
274
Perfil de comunicación DCU
Como el perfil DCU amplía la interfase de control y de estado a 32 bits, se necesitan
dos señales diferentes para los Códigos de control (0301 y 0302) y de estado (0303
y 0304).
Las tablas siguientes describen el contenido de los Códigos de control para el perfil
DCU.
Código de control del perfil DCU (parámetro 0301)
Bit Nombre Valor Información
0 STOP 1 Paro según el parámetro de modo de paro (2102) o las peticiones de modo de paro
(bits 7 y 8).
Nota: Los comandos MARCHA y PARO simultáneos dan lugar a un comando de
paro.
0 No está en funcionamiento.
1 START 1 Marcha.
Nota: Los comandos MARCHA y PARO simultáneos dan lugar a un comando de
paro.
0 No está en funcionamiento.
2 RETROCESO 1 Dirección inversa. La dirección se define utilizando el operador XOR en los valores de
los bits 2 y 31 (signo de referencia).
0 Dirección de avance.
3 LOCAL 1 Entrar en modo de control local.
0 Entrar en modo de control externo.
4 REARME -> 1 Restauración.
otro No está en funcionamiento.
5 EXT2 1 Cambio a control externo EXT2.
0 Cambio a control externo EXT1.
6 RUN_DISABLE 1 Activar la deshabilitación de marcha.
0 Activar el Permiso de marcha.
7 STPMODE_R 1 Paro por la rampa de deceleración actualmente activa (bit 10). El valor del bit 0 debe
ser 1 (STOP).
0 No está en funcionamiento.
8 STPMODE_EM 1 Paro de emergencia. El valor del bit 0 debe ser 1 (STOP).
0 No está en funcionamiento.
9 STPMODE_C 1 El convertidor se para por sí solo. El valor del bit 0 debe ser 1 (STOP).
0 No está en funcionamiento.
10 RAMP_2 1 Usar el par de rampas de aceleración/deceleración 2 (definidas con los parámetros
2205 ... 2207).
0 Usar el par de rampas de aceleración/deceleración 1 (definidas con los parámetros
2202 ... 2204).
11 RAMP_OUT_0 1 Forzar a cero la salida de rampa.
0 No está en funcionamiento.
12 RAMP_HOLD 1 Detener la rampa (retención de la salida del generador de función de rampa).
0 No está en funcionamiento.
13 RAMP_IN_0 1 Forzar a cero la entrada de rampa.
0 No está en funcionamiento.
14 REQ_LOCALLOC 1 Habilitar el bloqueo local. Se inhabilita la entrada en modo de control local (tecla LOC/
REM del panel).
0 No está en funcionamiento.
15 TORQLIM2 1 Usar el límite de par máximo/mínimo 2 (definido por los parámetros 2016 y 2018).
0 Usar el límite de par máximo/mínimo 1 (definido por los parámetros 2015 y 2017).
Control de bus de campo con bus de campo encajado
275
Código de control de DCU PROFILE (parámetro 0302)
Bit Nombre Valor Información
16 FBLOCAL_CTL 1 Modo local del bus de campo para el Código de control solicitado.
Ejemplo: Si el convertidor se halla en control remoto y el origen de los comandos
de marcha, paro y dirección para el lugar de control externo 1 (EXT1) es ED,
ajustando el bit 16 al valor 1, la marcha, el paro y la dirección se controlan
mediante el código de comando del bus de campo.
0 Sin modo local de bus de campo.
17 FBLOCAL_REF 1 Código de control del modo local del bus de campo para la referencia solicitada.
Véase el ejemplo en FBLOCAL_CTL, bit 16.
0 Sin modo local de bus de campo.
18 START_DISABLE1 1 Sin Permiso de marcha.
0 Permiso de marcha. Efectivo si el ajuste del parámetro 1608 es COMUNIC.
19 START_DISABLE2 1 Sin Permiso de marcha.
0 Permiso de marcha. Efectivo si el ajuste del parámetro 1609 es COMUNIC.
20 JOGGING 1 1 Activar el avance lento 1. Efectivo si el ajuste del parámetro 1010 es
COMUNIC.Véase la sección Avance lento en la página 132
0 Avance lento 1 desactivado
21 JOGGING 2 1 Activar el avance lento 2. Efectivo si el ajuste del parámetro 1010 es
COMUNIC.Véase la sección Avance lento en la página 132.
0 Avance lento 2 desactivado
22... 26 Reservados.
27 REF_CONST 1 Petición de referencia de velocidad constante.
Es un bit de control interno. Sólo para supervisión.
0 No está en funcionamiento.
28 REF_AVE 1 Petición de referencia de velocidad media.
Es un bit de control interno. Sólo para supervisión.
0 No está en funcionamiento.
29 LINK_ON 1 Detectado maestro en el enlace de bus de campo.
Es un bit de control interno. Sólo para supervisión.
0 Enlace de bus de campo no disponible.
30 REQ_STARTINH 1 Inhibición de marcha.
0 Sin inhibición de marcha.
31 Reservado.
Control de bus de campo con bus de campo encajado
276
Las tablas siguientes describen el contenido de los Códigos de estado para el perfil
DCU.
Código de estado del perfil DCU (parámetro 0303)
Bit Nombre Valor Estado
0 LISTO 1 El convertidor está listo para recibir la orden de marcha.
0 El convertidor no está listo.
1 ENABLED 1 Señal de Permiso de marcha externa recibida.
0 Señal de permiso de marcha externa no recibida.
2 ARRANCADO 1 El convertidor ha recibido la orden de marcha.
0 El convertidor no ha recibido la orden de marcha.
3 EN MARCHA 1 El convertidor está modulando.
0 El convertidor no está modulando.
4 ZERO_SPEED 1 El convertidor está a velocidad cero.
0 El convertidor no ha alcanzado velocidad cero.
5 ACCELERATE 1 La unidad está acelerando.
0 La unidad no está acelerando.
6 DECELERATE 1 La unidad está decelerando.
0 La unidad no está decelerando.
7 AT_SETPOINT 1 El convertidor está en el punto de consigna. El valor actual
equivale al valor de referencia (es decir, está dentro de los
límites de tolerancia).
0 El convertidor no ha alcanzado el punto de consigna.
8 LIMIT 1 El funcionamiento está limitado por los ajustes del grupo 20
LIMITES.
0 El funcionamiento está dentro de los ajustes del grupo 20
LIMITES.
9 SUPERVISION 1 Un parámetro supervisado (grupo 32 SUPERVISION) está fuera
de sus límites.
0 Todos los parámetros supervisados están dentro de los límites.
10 REV_REF 1 La referencia del convertidor tiene dirección inversa.
0 La referencia del convertidor tiene dirección de avance.
11 REV_ACT 1 El convertidor funciona en dirección inversa.
0 El convertidor funciona en dirección de avance.
12 PANEL_LOCAL 1 El control se encuentra en modo local del panel de control (o
herramienta PC).
0 El control no se encuentra en modo local del panel de control.
13 FIELDBUS_LOCAL 1 El control se encuentra en modo local del bus de campo.
0 El control no se encuentra en modo local del bus de campo.
14 EXT2_ACT 1 El control se encuentra en modo EXT2.
0 El control se encuentra en modo EXT1.
15 FALLO 1 El convertidor está en un estado de fallo.
0 El convertidor no está en un estado de fallo.
Control de bus de campo con bus de campo encajado
277
Código de estado del perfil DCU (parámetro 0304)
Bit Nombre Valor Estado
16 ALARMA 1 Hay una alarma activa.
0 No hay alarmas activas.
17 AVISO 1 Petición de mantenimiento pendiente.
0No hay una petición de mantenimiento pendiente.
18 DIRLOCK 1 Bloqueo de dirección activado (el cambio de dirección está
bloqueado).
0 Bloqueo de dirección desactivado.
19 LOCALLOCK 1 Bloqueo de modo local activado (el modo local está
bloqueado).
0 Bloqueo de modo local desactivado.
20 CTL_MODE 1 El convertidor está en modo de control vectorial.
0 El convertidor está en modo de control escalar.
21 JOGGING ACTIVE La función Avance lento está activa.
22... 25 Reservados.
26 REQ_CTL 1 Código de control solicitado desde el bus de campo.
0 No está en funcionamiento.
27 REQ_REF1 1 Referencia 1 solicitada desde el bus de campo.
0 Referencia 1 no solicitada desde el bus de campo.
28 REQ_REF2 1 Referencia 2 solicitada desde el bus de campo.
0 Referencia 2 no solicitada desde el bus de campo.
29 REQ_REF2EXT 1 Referencia externa PID 2 solicitada desde el bus de campo.
0 Referencia externa PID 2 no solicitada desde el bus de
campo.
30 ACK_STARTINH 1 Inhibición de marcha desde el bus de campo.
0 Sin inhibición de marcha desde el bus de campo.
31 Reservado.

Control de bus de campo con bus de campo encajado
278
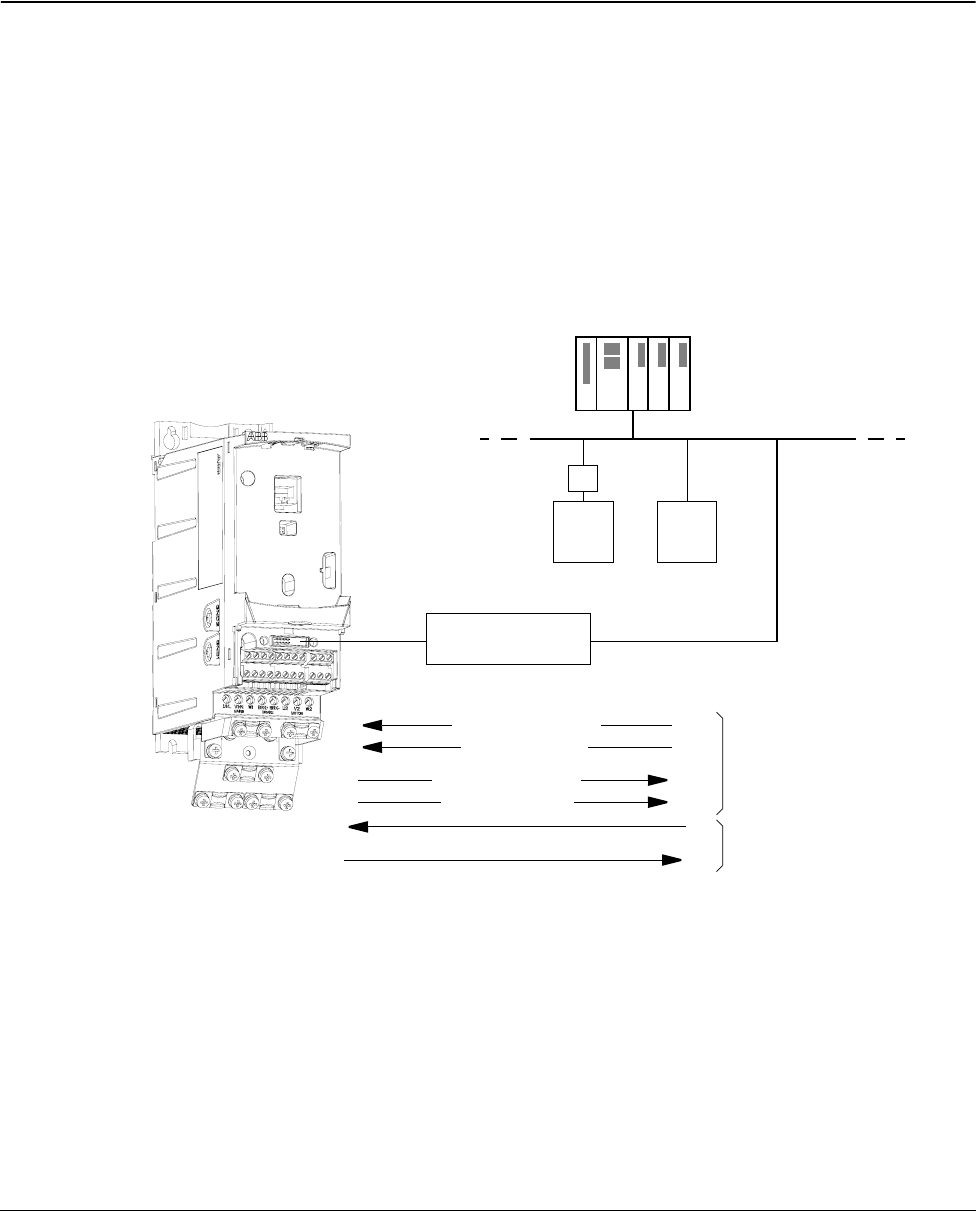
Control de bus de campo con adaptador de bus de campo
279
Control de bus de campo con adaptador de bus de
campo
Contenido de este capítulo
El capítulo describe cómo controlar el convertidor a través de dispositivos externos
mediante una red de comunicaciones utilizando un adaptador de bus de campo.
Descripción general del sistema
El convertidor se puede conectar a un sistema de control externo a través de un
adaptador de bus de campo o un bus de campo encajado. Para información acerca
del control con bus de campo encajado véase el capítulo Control de bus de campo
con bus de campo encajado.
El adaptador de bus de campo se conecta al terminal X3 del convertidor.
El convertidor puede ajustarse para recibir la totalidad de su información de control
a través de la interfase de bus de campo, o el control puede distribuirse entre dicha
interfase de bus de campo y otras fuentes disponibles, como entradas analógicas y
digitales.
El convertidor puede comunicarse con un sistema de control a través de un
adaptador de bus de campo utilizando uno de los siguientes protocolos de
comunicación serie:
– PROFIBUS-DP® (adaptador FPBA-01)
– CANopen® (adaptador FCAN-01)
– DeviceNet® (adaptador FDNA-01)
– Modbus® RTU (adaptador FMBA-01. Véase el capítulo Control de bus de
campo con bus de campo encajado)
Bus de campo
Otros
dispositivos
Controlador
del bus de campo
Cód. de control (CW)
Referencias
Flujo de datos
Cód. de estado (SW)
Valores actuales
Peticiones/Respuestas de L/E de parámetros
ACS350
E/S de proceso (cíclicas)
Mensajes de servicio
X3 Adaptador de
bus de campo
(no cíclicos)
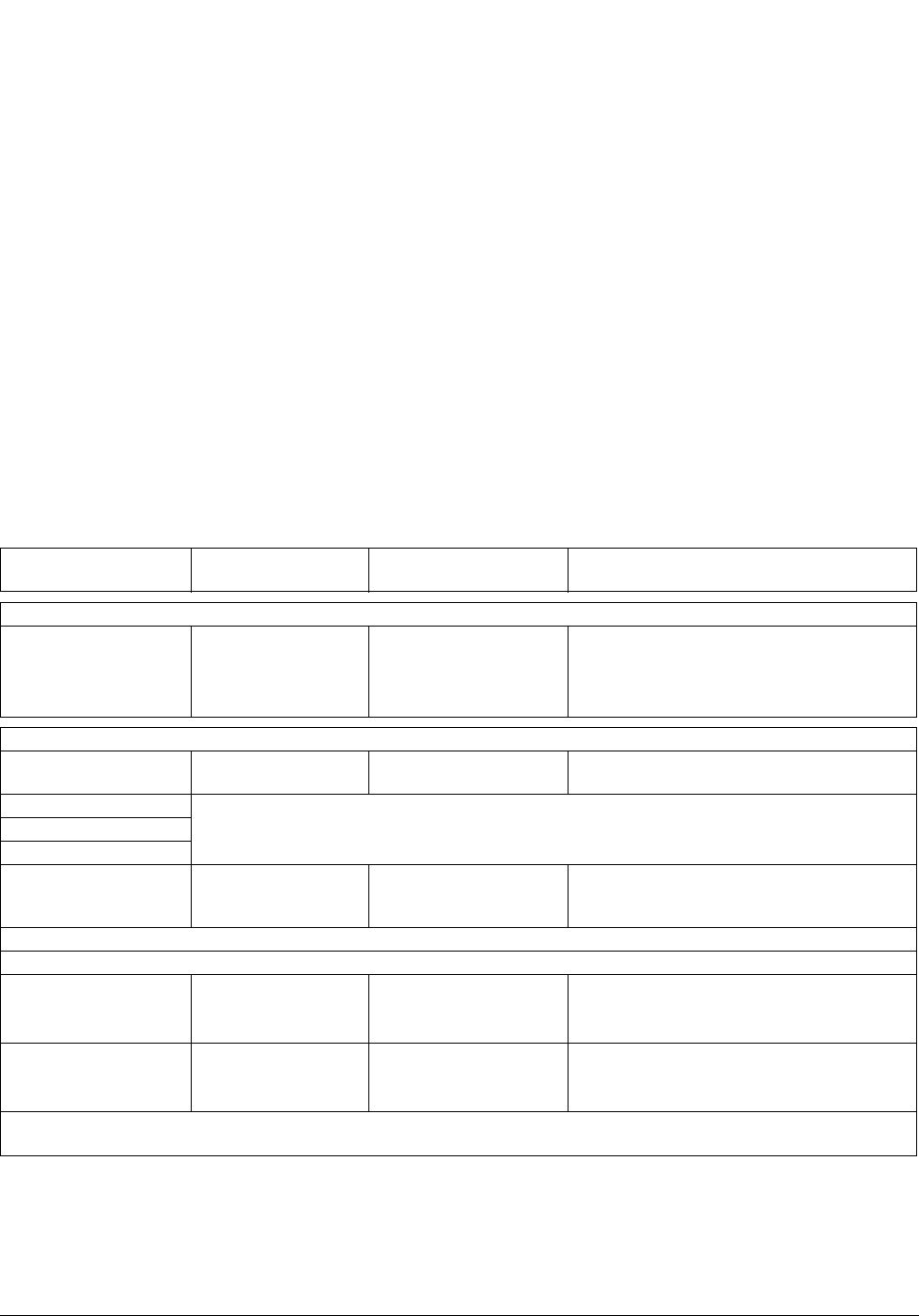
Control de bus de campo con adaptador de bus de campo
280
El convertidor detecta automáticamente qué adaptador de bus de campo está
conectado al terminal X3 del convertidor (excepción FMBA-01). El perfil DCU
siempre se usa en la comunicación entre el convertidor y el adaptador de bus de
campo (véase la sección
La interfase de control por bus de campo
en la página
282
).
El perfil de comunicación en la red de bus de campo depende del tipo de adaptador
conectado.
Los ajustes del perfil por defecto dependen del protocolo (p. ej. perfil específico de
ABB (ABB Drives) para PROFIBUS y perfil de convertidor estándar del sector (AC/
DC Drive) para DeviceNet)
Configuración de la comunicación a través de un módulo adaptador de
bus de campo
Antes de configurar el convertidor para el control por bus de campo, debe instalarse
mecánica y eléctricamente el módulo adaptador según las instrucciones facilitadas
en la página 30 del capítulo Instalación mecánica y en el manual del módulo.
La comunicación entre el convertidor y el módulo adaptador de bus de campo se
activa ajustando el parámetro 9802 SEL PROT COM a ABC EXT. También deben
ajustarse los parámetros específicos para el adaptador en el grupo 51 MOD
COMUNIC EXT. Véase la tabla siguiente.
Tras ajustar los parámetros de configuración del módulo en el grupo 51 MOD
COMUNIC EXT, deben comprobarse y ajustarse los parámetros de control del
convertidor (mostrados en la sección Parámetros de control del convertidor en la
página 281) cuando sea necesario.
Los nuevos ajustes serán efectivos cuando vuelva a conectarse el convertidor o
cuando se active el parámetro 5127 ACTUALIZ PAR ABC.
Parámetro Ajustes
alternativos Ajuste para control
por bus de campo Función / información
INICIALIZACIÓN DE LA COMUNICACIÓN
9802 SEL PROT
COM SIN SEL
MODBUS EST
ABC EXT
MODBUS RS232
ABC EXT Inicializa la comunicación entre el
convertidor y el módulo adaptador de bus
de campo.
CONFIGURACIÓN DEL MÓDULO ADAPTADOR
5101 TIPO DE ABC – – Muestra el tipo de módulo adaptador de
bus de campo.
5102 PAR DE ABC 2 Estos parámetros son específicos del módulo adaptador. Para más información, véase el
manual del módulo. Observe que no necesariamente se utilizan todos estos parámetros.
• • •
5126 PAR DE ABC 26
5127 ACTUALIZ PAR
ABC (0) REALIZADO;
(1) ACTUALIZAR – Valida cualquier ajuste modificado de los
parámetros de configuración del módulo
adaptador.
Nota: en el módulo adaptador, el número del grupo de parámetros es 1 ‘para 51 MOD COMUNIC EXT.
SELECCIÓN DE DATOS TRANSMITIDOS
5401...5410 ENTR
DATOS ABC 1 ... 10 0
1 ... 6
101 ... 9999
Define los datos transmitidos del
convertidor al controlador de bus de
campo.
5501...5510 SAL
DATOS ABC 1 ... 10 0
1...6
101...9999
Define los datos transmitidos del
controlador de bus de campo al convertidor.
Nota:
en el módulo adaptador, el número del grupo de parámetros es 3 para
54 ENTR DATOS DE ABC
y 2 para
55 SAL
DATOS DE ABC
.
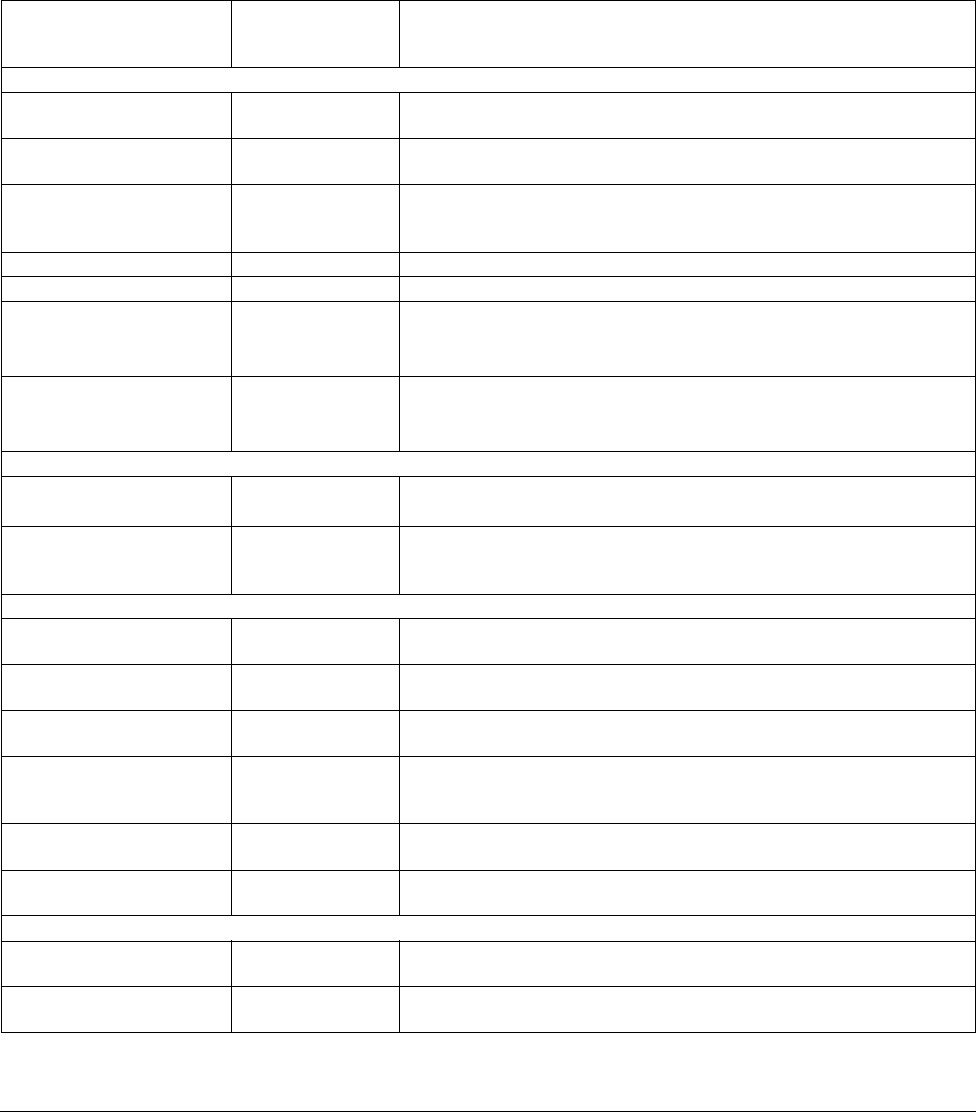
Control de bus de campo con adaptador de bus de campo
281
Parámetros de control del convertidor
Tras configurar la comunicación de bus de campo, los parámetros de control del
convertidor mostrados en la tabla siguiente deben comprobarse y ajustarse cuando
se requiera.
La columna
Ajuste para control por bus de campo
facilita el valor a utilizar cuando
la interfase de bus de campo sea el origen o destino deseado para esa señal en
particular. La columna
Función/Información
facilita una descripción del parámetro
.
Parámetro Ajuste para
control por bus
de campo
Función / información
SELECCIÓN DEL ORIGEN DE LOS COMANDOS DE CONTROL
1001 COMANDOS EXT1 COMUNIC Selecciona el bus de campo como el origen de los comandos marcha
y paro cuando se selecciona EXT1 como el lugar de control activo.
1002 COMANDOS EXT2 COMUNIC Selecciona el bus de campo como el origen de los comandos marcha
y paro cuando se selecciona EXT2 como el lugar de control activo.
1003 DIRECCION AVANCE
RETROCESO
PETICION
Habilita el control de la dirección de giro según se define en los
parámetros 1001 y 1002. El control de dirección se describe en la
sección Tratamiento de referencias en la página 266.
1010 JOGGING SEL COMUNIC Permite el avance lento 1 ó 2 mediante bus de campo
1102 SELEC EXT1/EXT2 COMUNIC Permite la selección EXT1/EXT2 mediante el bus de campo
1103 SELEC REF1 COMUNIC
COMUNIC+EA1
COMUNIC*EA1
La referencia de bus de campo REF1 se usa cuando se selecciona
EXT1 como el lugar de control activo. Véase la sección Selección y
corrección de la referencia (para el perfil DCU) en la página 260.
1106 SELEC REF2 COMUNIC
COMUNIC+EA1
COMUNIC*EA1
La referencia de bus de campo REF2 se usa cuando se selecciona
EXT2 como el lugar de control activo. Véase la sección Selección y
corrección de la referencia (para el perfil DCU) en la página 260.
SELECCIÓN DE LA FUENTE DE SEÑAL DE SALIDA
1401 SALIDA RELE SR1 COMUNIC
COMUNIC (-1)
Habilita el control de la salida de relé SR mediante la señal 0134
COD SR COMUNIC.
1501 SEL CONTENID
SA1 135 (es decir,
0135 VALOR
COMUNIC 1)
Dirige el contenido de la referencia de bus de campo 0135 VALOR
COMUNIC 1 a la salida analógica SA.
ENTRADAS DE CONTROL DEL SISTEMA
1601 PERMISO
MARCHA COMUNIC Selecciona la interfase de bus de campo como origen de la señal
inversa de Permiso de marcha (Deshabilitación de marcha).
1604 SEL REST FALLO COMUNIC Selecciona la interfasede bus de campo como origen de la señal de
restauración de fallos.
1606 BLOQUEO LOCAL COMUNIC Selecciona la interfase de bus de campo como origen de la señal de
bloqueo local.
1607 SALVAR PARAM REALIZADO;
SALVAR Guarda los cambios de valor del parámetro (incluyendo los
efectuados a través del control por bus de campo) en la memoria
permanente.
1608 PERMISO DE INI 1 COMUNIC Selecciona la interfase de bus de campo como origen de la señal
inversa de Permiso de marcha 1(Deshabilitación de marcha)
1609 PERMISO DE INI 2 COMUNIC Selecciona la interfase de bus de campo como origen de la señal
inversa de Permiso de marcha 2(Deshabilitación de marcha).
LÍMITES
2013 SEL PAR MINIMO COMUNIC Selecciona la interfase de bus de campo como el origen para la
selección del límite de par mínimo 1/2.
2014 SEL PAR MAXIMO COMUNIC Selecciona la interfase de bus de campo como el origen para la
selección del límite de par máximo 1/2.
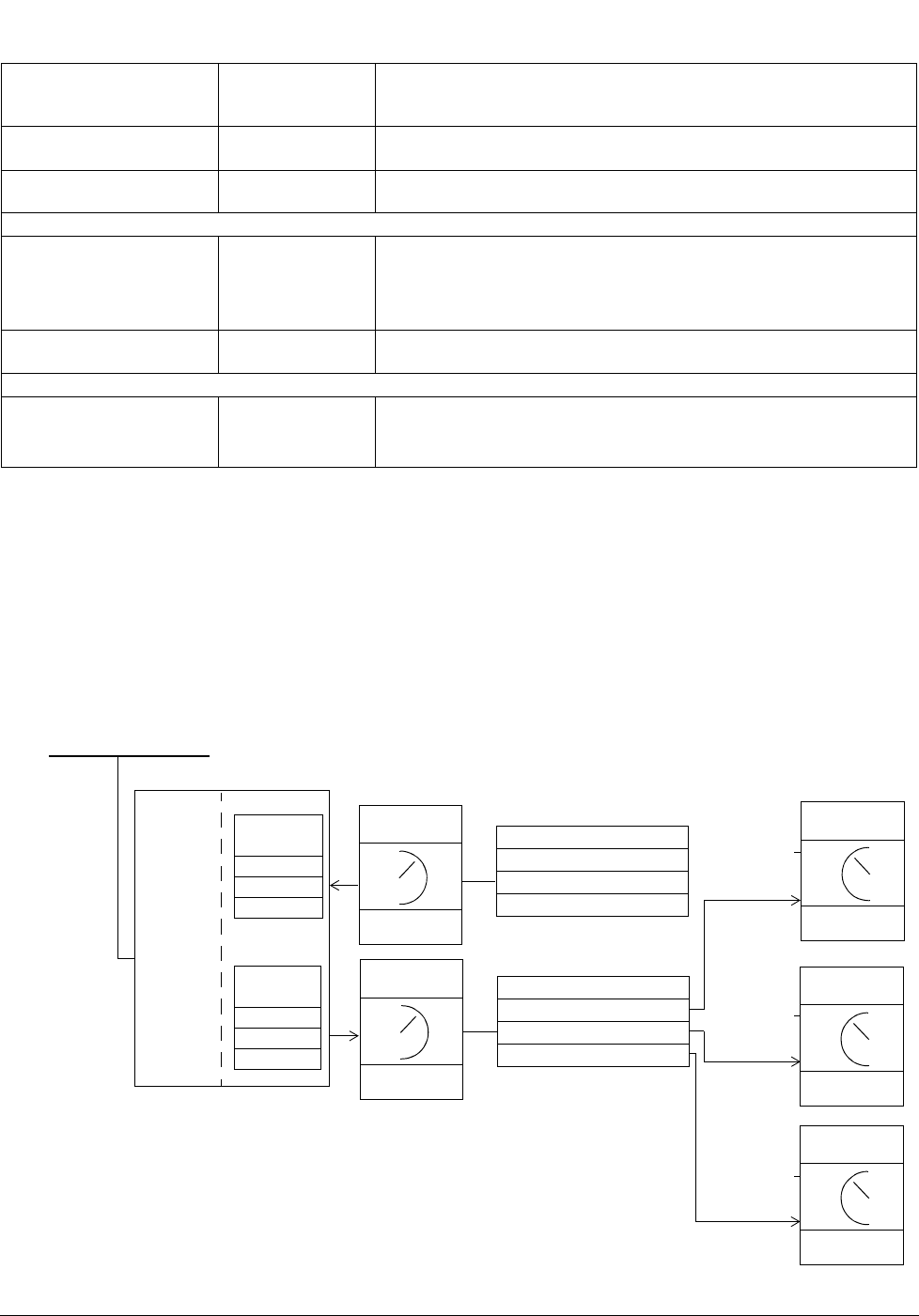
Control de bus de campo con adaptador de bus de campo
282
La interfase de control por bus de campo
La comunicación entre un sistema de bus de campo y el convertidor consiste en
códigos de datos de entrada y salida de 16 bits. El convertidor soporta el uso de un
máximo de 10 códigos de datos en cada dirección.
Los datos transformados del convertidor al controlador de bus de campo se definen
con el grupo de parámetros 54 ENTR DATOS DE ABC y los datos transformados
del controlador al convertidor se definen con el grupo 55 SAL DATOS DE ABC.
2201 SEL ACE/DEC 1/2 COMUNIC Selecciona la interfase de bus de campo como el origen para la
selección del par de rampas aceleración/deceleración 1/2.
2209
ENTRADA RAMPA 0
COMUNIC Selecciona la interfase de bus de campo como el origen para forzar la
entrada de rampa a cero.
FUNCIONES DE FALLO DE COMUNICACIÓN
3018 FUNC FALLO
COMUN SIN SEL
FALLO
VEL CONST 7
ULTIMA VELOC
Determina la acción del convertidor en caso de pérdida de la
comunicación de bus de campo.
3019 TIEM FALLO
COMUN 0,1 ... 60,0 s
Define el tiempo entre la detección de la pérdida de comunicación y la
acción seleccionada con el parámetro
3018
FUNC FALLO COMUN.
SELECCIÓN DEL ORIGEN DE LA SEÑAL DE REFERENCIA DEL REGULADOR PID
4010 / 4110 / 4210 SEL
PUNTO CONSIG COMUNIC
COMUNIC+EA1
COMUNIC*EA1
Referencia de control PID (REF2).
Parámetro Ajuste para
control por bus
de campo
Función / información
Módulo de bus de campo
Interfase 5401/.../5410
Selección
1)COMUNIC
Red de bus de campo
específica
de bus de
ENTR
DATOS
1
...
10
SAL
DATOS
1
...
10
4 = código de estado
5 = ACT1
6 = ACT2
Par. 0102 ... 9910
1 = código de control
2 = REF1
6 = REF2
Par. 0102 ... 9910
datos entr.
5501/.../5510
Selección
sal. datos
SIN SEL
...
1103
Selección
REF1
1106
Selección
REF2
PANEL
...
COMUNIC
PANEL
...
COMUNIC
1001 / 1002
Selec., marcha,
paro, direcc.
campo
1) Véanse también otros parámetros de selección COMUNIC.
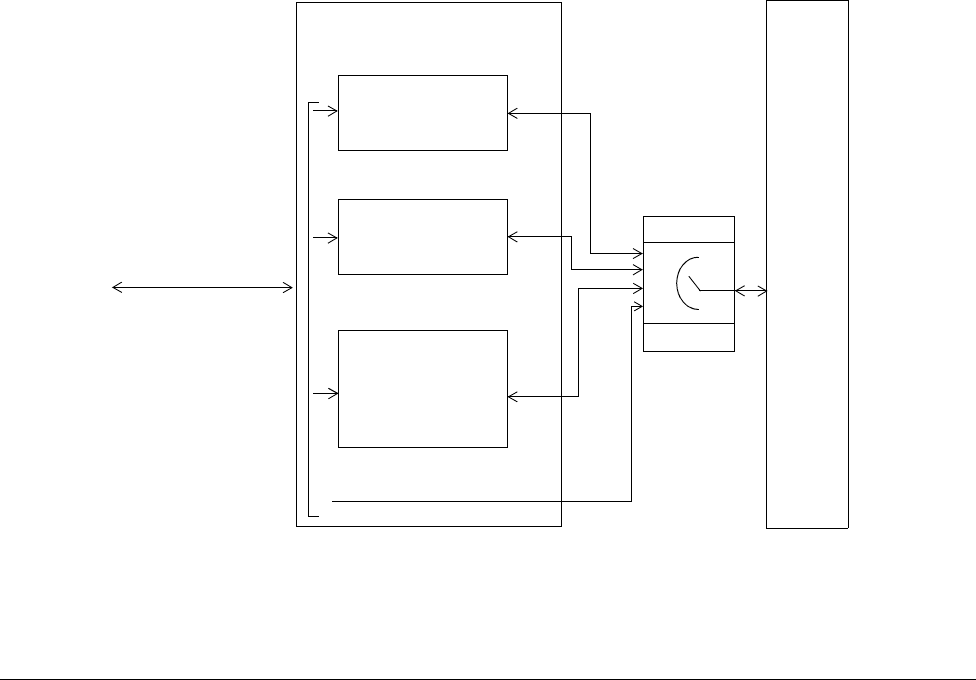
Control de bus de campo con adaptador de bus de campo
283
Código de control y código de estado
El código de control (CW) es el medio principal de controlar el convertidor desde un
sistema de bus de campo. El controlador de bus de campo envía el Código de
control al convertidor. El convertidor cambia entre sus estados de conformidad con
las instrucciones codificadas en bits del Código de control.
El Código de estado (SW) es un código que contiene información de estado enviada
por el convertidor al controlador de bus de campo.
Referencias
Las referencias (REF) son enteros de 16 bits con signo. Una referencia negativa
(que indica dirección de giro invertida) se forma calculando el complemento de dos
a partir del valor de referencia positiva correspondiente. El contenido del código de
cada referencia se puede utilizar como referencia de velocidad o de frecuencia.
Valores actuales
Los valores actuales (ACT) son códigos de 16 bits que contienen información
acerca de las operaciones seleccionadas del convertidor.
Perfil de comunicación
La comunicación entre el convertidor y el adaptador de bus de campo soporta el
perfil de comunicación DCU. El perfil DCU amplía la interfase de control y de estado
a 32 bits.
Conversión de
datos
Adaptador de bus de campo
Convertidores ABB
Transparente 16
Transparent 32
Convertidor
referencia
opcional,
adaptación a
escala del valor
actual
1)
1)
Conversión de
datos
Selecc.
2)
1) Perfil DCU
2) Selección a través de los parámetros de configuración del adaptador de bus de campo
(grupo de parámetros 51 MOD COMUNIC EXT)
Red de bus de campo
Perfil de convertidor estándar
del sector (p.ej. PROFIdrive)

Control de bus de campo con adaptador de bus de campo
284
Para el contenido de los Códigos de estado y de control del perfil DCU, véase la
sección Perfil de comunicación DCU en la página 274.
Referencias del bus de campo
Véase la sección Referencias del bus de campo en la página 260 para la selección
y corrección, el escalado y el tratamiento de referencias del perfil DCU así como el
escalado de los valores actuales.
Análisis de fallos
285
Análisis de fallos
Contenido de este capítulo
El capítulo lista todos los mensajes de alarma y fallo, incluyendo la causa posible y
las acciones de corrección.
Seguridad
¡ADVERTENCIA! Sólo los electricistas cualificados deben llevar a cabo el
mantenimiento del convertidor. Lea las instrucciones de seguridad en el capítulo
Seguridad al inicio de este manual antes de iniciar cualquier trabajo en el
convertidor.
Indicaciones de alarma y fallo
Los fallos se indican con un LED rojo. Véase la sección LED en la página 299.
Un mensaje de alarma o fallo en la pantalla del panel indica un estado anormal del
convertidor. La mayoría de causas de alarmas y fallos pueden identificarse y
corregirse con la información proporcionada en este capítulo. En caso contrario,
póngase en contacto con un representante de ABB.
El número de código de cuatro dígitos entre paréntesis tras la alarma/fallo se refiere a
la comunicación de bus de campo (véanse los capítulos
Control de bus de campo
con bus de campo encajado
y
Control de bus de campo con adaptador de bus de
campo
).
Método de restauración
El convertidor puede restaurarse pulsando la tecla del panel de control (Panel
de control básico) o (Panel de control asistente), mediante entrada digital o bus
de campo o bien desconectando la tensión de alimentación durante un momento. El
origen de la señal de restauración de fallos se selecciona mediante el parámetro
1604 SEL REST FALLO. Cuando se haya eliminado el fallo, podrá reiniciar el motor.
Historial de fallos
Cuando se detecta un fallo, éste se almacena en el historial de fallos. Los últimos fallos y
alarmas se almacenan junto con una indicación de la hora en que se produjeron.
Los parámetros 0401 ULTIMO FALLO, 0412 FALLO ANTERIOR 1 y 0413 FALLO
ANTERIOR 2 almacenan los fallos más recientes. Los parámetros 0404 ... 0409
muestran datos de funcionamiento del convertidor en el momento en que se produjo
el último fallo. El Panel de control asistente proporciona información adicional
acerca del historial de fallos. Véase la sección Modo del Registrador de fallos en la
página 80 para obtener más información.
EXIT
RESET
REARM
E
Análisis de fallos
286
Mensajes de alarma generados por el convertidor
CÓD. ALARMA CAUSA ACCIÓN
2001
SOBREINTENSIDAD
(2310)
0308 bit 0
(función de fallo
programable 1610)
Regulador de límite de
intensidad de salida activo. Compruebe la carga del motor.
Compruebe el tiempo de aceleración (2202 y 2205).
Compruebe el motor y el cable a motor (incluyendo las
fases).
Compruebe las condiciones ambientales. La capacidad de
carga disminuye si la temperatura ambiente en el
emplazamiento supera los 40 °C. Véase la sección
Derrateo en la página 303.
2002 SOBRETENSION
(3210)
0308 bit 1
(función de fallo
programable 1610)
Regulador de sobretensión
de CC activo. Compruebe el tiempo de deceleración (2203 y 2206).
Compruebe las sobretensiones estáticas o transitorias en la
alimentación de entrada.
2003 SUBTENSION
(3220)
0308 bit 2
(función de fallo
programable 1610)
Regulador de subtensión
de CC activo. Compruebe la alimentación de entrada.
2004 BLOQUEO DE
DIRECCIÓN
0308 bit 3
No se permite el cambio de
dirección. Compruebe los ajustes del parámetro 1003 DIRECCION.
2005 COMUNICACIÓN
ES
(7510)
0308 bit 4
(función de fallo
programable 3018,
3019)
Comunicación por bus de
campo interrumpida. Compruebe el estado de la comunicación de bus de
campo. Véase el capítulo Control de bus de campo con
adaptador de bus de campo/Control de bus de campo con
bus de campo encajado o el manual del adaptador del bus
de campo apropiado.
Compruebe los ajustes del parámetro de función de fallo.
Compruebe las conexiones.
Compruebe si el maestro puede comunicar.
2006 FALLO EA1
(8110)
0308 bit 5
(función de fallo
programable 3001,
3021)
La señal de la entrada
analógica EA1 ha caído
por debajo del límite
definido en el parámetro
3021 EA1 FALLO LIMIT.
Compruebe los ajustes del parámetro de función de fallo.
Compruebe que los valores de la señal de control analógica
sean correctos.
Compruebe las conexiones.
2007 FALLO EA2
(8110)
0308 bit 6
(función de fallo
programable 3001,
3022)
La señal de la entrada
analógica EA2 ha caído
por debajo del límite
definido en el parámetro
3022 EA2 FALLO LIMIT.
Compruebe los ajustes del parámetro de función de fallo.
Compruebe que los valores de la señal de control analógica
sean correctos.
Compruebe las conexiones.
2008 PÉRDIDA DE
PANEL
(5300)
0308 bit 7
(función de fallo
programable 3002)
El panel de control
seleccionado como el lugar
de control activo para el
convertidor ha dejado de
comunicar.
Compruebe la conexión del panel.
Compruebe los parámetros de la función de fallo.
Compruebe el conector del panel de control.
Vuelva a colocar el panel de control en la plataforma de
soporte.
Si el convertidor está en modo de control remoto (REM) y
está ajustado para aceptar una orden de marcha/paro o de
dirección o referencias a través del panel de control:
Compruebe los ajustes de los grupos 10 MARCHA/PARO/
DIR y 11 SELEC REFERENCIA.
2009 EXCESO TEMP
DISP
(4210)
0308 bit 8
La temperatura de los
IGBT es excesiva. El límite
de alarma es 120 °C.
Compruebe las condiciones ambientales. Véase también la
sección Derrateo en la página 303.
Compruebe el flujo de aire y el funcionamiento del
ventilador.
Compruebe la potencia del motor respecto a la potencia de
la unidad.
Análisis de fallos
287
2010 TEMP MOTOR
(4310)
0305 bit 9
(función de fallo
programable 3005
... 3009 / 3503)
La temperatura del motor
es excesiva (o parece
serlo). Puede deberse a
una carga excesiva, a
potencia insuficiente del
motor, a refrigeración
inadecuada o a datos de
partida incorrectos.
Compruebe las especificaciones, la carga y la refrigeración
del motor.
Compruebe los datos de partida.
Compruebe los parámetros de la función de fallo.
La temperatura medida del
motor ha superado el límite
de alarma ajustado con el
parámetro 3503 LIMITE DE
ALARMA.
Compruebe el valor del límite de alarma.
Compruebe que el número real de sensores corresponda al
valor ajustado por el parámetro (3501 TIPO DE SENSOR).
Deje enfriar el motor. Procure su correcta refrigeración:
compruebe el ventilador de refrigeración, limpie las
superficies de refrigeración, etc.
2011 BAJA CARGA
(FF6A)
0308 bit 10
(función de fallo
programable 3013
... 3015)
La carga del motor es
demasiado baja. Puede
deberse a un mecanismo
de liberación en el equipo
accionado.
Compruebe si hay problemas en el equipo accionado.
Compruebe los parámetros de la función de fallo.
Compruebe la potencia del motor respecto a la potencia de
la unidad.
2012 MOTOR
BLOQUEADO
(7121)
0308 bit 11
(función de fallo
programable 3010
... 3012)
El motor funciona en la
región de bloqueo debido,
por ejemplo, a una carga
excesiva o a una potencia
del motor insuficiente.
Compruebe la carga del motor y las especificaciones del
convertidor.
Compruebe los parámetros de la función de fallo.
2013 REARME
AUTOMÁTICO
0308 bit 12
Alarma de restauración
automática. Compruebe los ajustes del grupo de parámetros 31
REARME AUTOMATIC.
2018 DORMIR PID
0309 bit 1 La función dormir ha
entrado en modo dormir. Véanse los grupos de parámetros 40 CONJ PID
PROCESO 1...41 CONJ PID PROCESO 2.
2019 MARCHA ID
0309 bit 2 La Marcha de identificación
del motor está activada. Esta alarma forma parte del procedimiento normal de
puesta en marcha. Espere hasta que el convertidor indique
que se ha completado la identificación del motor.
2021 PERMISO DE
INICIO 1 NO
DETECTADO
0309 bit 4
No se ha recibido la señal
de Permiso de inicio 1. Compruebe el ajuste del parámetro 1608 PERMISO DE INI
1.
Compruebe las conexiones de la entrada digital.
Compruebe los ajustes de la comunicación por bus de
campo.
2022 PERMISO DE
INICIO 2 NO
DETECTADO
0309 bit 5
No se ha recibido la señal
de Permiso de inicio 2. Compruebe el ajuste del parámetro 1609 PERMISO DE INI
2.
Compruebe las conexiones de la entrada digital.
Compruebe los ajustes de la comunicación por bus de
campo.
2023 STOP
EMERGENCIA
0309 bit 6
El convertidor ha recibido
una orden de paro de
emergencia y se detiene
siguiendo una rampa
según el tiempo de rampa
definido con el parámetro
2208 TIEMPO DESAC EM.
Verifique que sea seguro proseguir el funcionamiento.
Vuelva a situar el pulsador de paro de emergencia en su
posición normal.
2024 ERROR ENCODER
(7301)
0306 bit 6
(función
de fallo
programable 5003)
Fallo de comunicación
entre el generador de
pulsos y el módulo de
interfase del generador de
pulsos y entre el módulo y
el convertidor.
Compruebe el generador de pulsos y su cableado, el
módulo de la interfase del generador de pulsos y su
cableado y los ajustes del grupo de parámetros 50
ENCODER
CÓD. ALARMA CAUSA ACCIÓN
Análisis de fallos
288
Alarmas generadas por el Panel de control básico
El Panel de control básico indica las alarmas del panel de control mediante un
código, A5xxx.
2025 PRIMERA
MARCHA
0309 bit 8
La magnetización de
identificación del motor
está activada. Esta alarma
forma parte del
procedimiento normal de
puesta en marcha.
Espere hasta que el convertidor indique que se ha
completado la identificación del motor.
2026 PÉRDIDA DE FASE
DE ENTRADA
(3130)
0306 bit 5
(función de fallo
programable 3016)
La tensión de CC del
circuito intermedio oscila
debido a la falta de una
fase de red o a un fusible
fundido.
Se genera la alarma
cuando el rizado de la
tensión de CC supera el 14
% de la tensión nominal de
CC.
Compruebe los fusibles de red.
Compruebe posibles desequilibrios en la alimentación de
entrada.
Compruebe los parámetros de la función de fallo.
CÓDIGO DE
ALARMA CAUSA ACCIÓN
5001 La unidad no responde. Compruebe la conexión del panel.
5002 Perfil de comunicación no compatible. Póngase en contacto con su representante
local de ABB.
5010 Copia de seguridad de los parámetros del panel
dañada. Vuelva a intentar cargar los parámetros.
Vuelva a intentar descargar los parámetros.
5011 El convertidor se controla desde otro origen. Cambie el control del convertidor a modo de
control local.
5012 Dirección de giro bloqueada. Habilite el cambio de dirección. Véase el
parámetro 1003 DIRECCION.
5013 El panel de control está desactivado porque la
inhibición de marcha está activa. Desactive la inhibición de marcha y reintente.
Véase el parámetro 2108 INHIBIR MARCHA.
5014 El panel de control está desactivado a causa de un
fallo del convertidor. Reinicie el convertidor y reintente.
5015 El panel de control está desactivado porque el
bloqueo del modo de control local está activo. Desactive el bloqueo del modo de control local
y reintente. Véase el parámetro 1606
BLOQUEO LOCAL.
5018 No se encuentra el valor por defecto del parámetro. Póngase en contacto con su representante
local de ABB.
5019 No se pemite escribir un valor de parámetro distinto
de cero. Sólo se permite la restauración de parámetros.
5020 El parámetro o grupo de parámetros no existe o el
valor de parámetro es incoherente. Póngase en contacto con su representante
local de ABB.
5021 El parámetro o grupo de parámetros está oculto. Póngase en contacto con su representante
local de ABB.
5022 El parámetro está protegido contra escritura. El valor del parámetro es de sólo lectura y, por
tanto, no se puede modificar.
5023 No se permite la modificación de parámetros
cuando el convertidor está en marcha. Pare el convertidor y cambie el valor del
parámetro.
5024 El convertidor está ejecutando una tarea. Espere hasta que complete la tarea.
5025 Se está cargando o descargando software. Espere hasta que se complete la carga o
descarga.
5026 El valor se encuentra en el límite mínimo o por
debajo de él. Póngase en contacto con su representante
local de ABB.
CÓD. ALARMA CAUSA ACCIÓN
Análisis de fallos
289
5027 El valor se encuentra en el límite máximo o por
encima de él. Póngase en contacto con su representante
local de ABB.
5028 Valor no válido. Póngase en contacto con su representante
local de ABB.
5029 La memoria no está lista. Reintente.
5030 Petición no válida. Póngase en contacto con su representante
local de ABB.
5031 El convertidor no está listo para el funcionamiento,
debido, p. ej., a una baja tensión de CC. Compruebe la alimentación de entrada.
5032 Error de parámetro. Póngase en contacto con su representante
local de ABB.
5040 Error en la descarga de parámetros. La serie de
parámetros seleccionada no está en la copia de
seguridad de parámetros actual. Ejecute la función de carga antes de la
descarga.
5041 La copia de seguridad de parámetros no cabe en la
memoria. Póngase en contacto con su representante
local de ABB.
5042 Error en la descarga de parámetros. La serie de
parámetros seleccionada no está en la copia de
seguridad de parámetros actual. Ejecute la función de carga antes de la
descarga.
5043 Sin inhibición de marcha.
5044 Error al restaurar la copia de seguridad de
parámetros. Compruebe que el archivo sea compatible con
el convertidor.
5050 Carga de parámetros cancelada. Reintente la carga de parámetros.
5051 Error en el archivo. Póngase en contacto con su representante
local de ABB.
5052 Fallo en la carga de parámetros. Reintente la carga de parámetros.
5060 Descarga de parámetros cancelada. Reintente la descarga de parámetros.
5062 Fallo en la descarga de parámetros. Reintente la descarga de parámetros.
5070 Error de escritura en la memoria de copia de
seguridad del panel. Póngase en contacto con su representante
local de ABB.
5071 Error de lectura en la memoria de copia de
seguridad del panel. Póngase en contacto con su representante
local de ABB.
5080 No se permite el funcionamiento porque el
convertidor no está en modo de control local. Pase al modo de control local.
5081 No se permite el funcionamiento porque hay un
fallo activo. Compruebe la causa y restaure el fallo.
5082 No se permite el funcionamiento porque se ha
activado el modo de sobrecontrol.
5083 No se permite el funcionamiento porque el bloqueo
de parámetros está activado. Compruebe el ajuste del parámetro 1602
BLOQUEO PARAM.
5084 No se permite el funcionamiento porque el
convertidor está realizando una tarea. Espere hasta que complete la tarea y vuelva a
intentarlo.
5085 Ha fallado la descarga de parámetros desde el
convertidor de origen al de destino. Compruebe que los tipos del convertidor de
origen y de destino sean iguales, es decir
ACS350. Vea la etiqueta de designación de
tipo.
5086 Ha fallado la descarga de parámetros desde el
convertidor de origen al de destino. Compruebe que los códigos de tipo del
convertidor de origen y de destino sean
iguales. Vea la etiqueta de designación de tipo.
5087 Ha fallado la descarga de parámetros desde el
convertidor de origen al de destino porque las
series de parámetros no son compatibles.
Compruebe que la información del convertidor
de origen y de destino sea igual. Véanse los
parámetros del grupo 33 INFORMACION.
5088 Fallo de funcionamiento a causa de un error en la
memoria del convertidor. Póngase en contacto con su representante
local de ABB.
5089 Fallo en la descarga a causa de un error CRC. Póngase en contacto con su representante
local de ABB.
CÓDIGO DE
ALARMA CAUSA ACCIÓN
Análisis de fallos
290
Mensajes de fallo generados por el convertidor
5090 Fallo en la descarga a causa de un error de
procesamiento de datos. Póngase en contacto con su representante
local de ABB.
5091 Fallo de funcionamiento a causa de un error de
parámetros. Póngase en contacto con su representante
local de ABB.
5092 Ha fallado la descarga de parámetros desde el
convertidor de origen al de destino porque las
series de parámetros no son compatibles.
Compruebe que la información del convertidor
de origen y de destino sea igual. Véanse los
parámetros del grupo 33 INFORMACION.
CÓD. FALLO CAUSA ACCIÓN
0001 SOBREINTENSIDAD
(2310)
0305 bit 0
La corriente de salida ha
superado el valor de disparo. Compruebe la carga del motor.
Compruebe el tiempo de aceleración (2202 y 2205).
Compruebe el motor y el cable a motor (incluyendo
las fases).
Compruebe las condiciones ambientales. La
capacidad de carga disminuye si la temperatura
ambiente en el emplazamiento supera los 40 °C.
Véase la sección Derrateo en la página 303.
0002 SOBRETENS. CC
(3210)
0305 bit 1
Tensión de CC del circuito
intermedio excesiva. El límite
de disparo por sobretensión de
CC es de 420 V para
convertidores de 200 V y de
840 V para convertidores de
400 V.
Compruebe que el regulador de sobretensión esté
activado (parámetro 2005 CTRL SOBRETENS).
Compruebe las sobretensiones estáticas o
transitorias en la alimentación de entrada.
Compruebe el chopper y la resistencia de frenado (si
se utilizan). Cuando se utilizan el chopper y la
resistencia de frenado se debe desactivar el control
de sobretensión de CC.
Compruebe el tiempo de deceleración (2203, 2206).
Modifique el convertidor de frecuencia con un
chopper de frenado y una resistencia de frenado.
0003 EXCESO TEMP
DISP
(4210)
0305 bit 2
La temperatura de los IGBT es
excesiva. El límite de disparo
por fallo es de 135 °C.
Compruebe las condiciones ambientales. Véase
también la sección Derrateo en la página 303.
Compruebe el flujo de aire y el funcionamiento del
ventilador.
Compruebe la potencia del motor respecto a la
potencia de la unidad.
0004 CORTOCIRCUITO
(2340)
0305 bit 3
Cortocircuito en el(los) cable(s)
a motor o en el motor. Compruebe el motor y el cable a motor.
0006 SUBTENS. CC
(3220)
0305 bit 5
Tensión de CC del circuito
intermedio insuficiente debido a
la falta de una fase de red, un
fusible fundido, un fallo interno
del puente rectificador o una
alimentación de entrada
demasiado baja.
Compruebe que el regulador de subtensión esté
activado (parámetro 2006 CTRL SUBTENSION).
Compruebe la alimentación y los fusibles de entrada.
0007 FALLO EA1
(8110)
0305 bit 6
(función de fallo
programable 3001,
3021)
La señal de la entrada
analógica EA1 ha caído por
debajo del límite definido en el
parámetro 3021 EA1 FALLO
LIMIT.
Compruebe los ajustes del parámetro de función de
fallo.
Compruebe que los valores de la señal de control
analógica sean correctos.
Compruebe las conexiones.
CÓDIGO DE
ALARMA CAUSA ACCIÓN
Análisis de fallos
291
0008 FALLO EA2
(8110)
0305 bit 7
(función de fallo
programable 3001,
3022)
La señal de la entrada
analógica EA2 ha caído por
debajo del límite definido en el
parámetro 3022 EA2 FALLO
LIMIT.
Compruebe los ajustes del parámetro de función de
fallo.
Compruebe que los valores de la señal de control
analógica sean correctos.
Compruebe las conexiones.
0009 EXC TEMP MOT
(4310)
0305 bit 8
(función de fallo
programable 3005 ...
3009 / 3504)
La temperatura del motor es
excesiva (o parece serlo).
Puede deberse a una carga
excesiva, a potencia
insuficiente del motor, a
refrigeración inadecuada o a
datos de partida incorrectos.
Compruebe las especificaciones, la carga y la
refrigeración del motor.
Compruebe los datos de partida.
Compruebe los parámetros de la función de fallo.
La temperatura medida del
motor ha superado el límite de
fallo ajustado con el parámetro
3504 LIMITE DE FALLO.
Compruebe el valor del límite de fallo.
Compruebe que el número real de sensores
corresponda al valor ajustado por el parámetro (3501
TIPO DE SENSOR).
Deje enfriar el motor. Procure su correcta
refrigeración: compruebe el ventilador de
refrigeración, limpie las superficies de refrigeración,
etc.
0010 PERD PANEL
(5300)
0305 bit 9
(función de fallo
programable 3002)
El panel de control
seleccionado como el lugar de
control activo para el
convertidor ha dejado de
comunicar.
Compruebe la conexión del panel.
Compruebe los parámetros de la función de fallo.
Compruebe el conector del panel de control.
Vuelva a colocar el panel de control en la plataforma
de soporte.
Si el convertidor está en modo de control remoto
(REM) y está ajustado para aceptar una orden de
marcha/paro o de dirección o referencias a través del
panel de control:
Compruebe los ajustes de los grupos 10 MARCHA/
PARO/DIR y 11 SELEC REFERENCIA.
0011 ERR MAR ID
(FF84)
0305 bit 10
La Marcha de ID no se ha
completado correctamente. Compruebe la conexión del motor.
Compruebe los datos de partida (grupo 99 DATOS
DE PARTIDA).
Compruebe la velocidad máxima (parámetro 2002).
Debe ser, por lo menos, un 80 % de la velocidad
nominal del motor (parámetro 9908).
Asegúrese de que la Marcha de ID se ha realizado
según las instrucciones de la sección Realización de
una Marcha de ID en la página 56.
0012 MOTOR
BLOQUEADO
(7121)
0305 bit 11
(función de fallo
programable 3010 ...
3012)
El motor funciona en la región
de bloqueo debido, por ejemplo,
a una carga excesiva o a una
potencia del motor insuficiente.
Compruebe la carga del motor y las especificaciones
del convertidor.
Compruebe los parámetros de la función de fallo.
0014 FALLO EXT 1
(9000)
0305 bit 13
(función de fallo
programable 3003)
Fallo externo 1. Compruebe si existen posibles fallos en los
dispositivos externos.
Compruebe el ajuste del parámetro 3003 FALLO
EXTERNO 1.
0015 FALLO EXT 2
(9001)
0305 bit 14
(función de fallo
programable 3004)
Fallo externo 2. Compruebe si existen posibles fallos en los
dispositivos externos.
Compruebe el ajuste del parámetro 3004 FALLO
EXTERNO 2.
CÓD. FALLO CAUSA ACCIÓN
Análisis de fallos
292
0016 FALLO TIERRA
(2330)
0305 bit 15
(función de fallo
programable 3017)
El convertidor ha detectado un
fallo de puesta a tierra en el
motor o el cable a motor.
Compruebe el motor.
Compruebe los parámetros de la función de fallo.
Compruebe el cable a motor. La longitud del cable a
motor no debe superar las especificaciones
máximas. Véase la sección Conexión del motor en la
página 308.
0017 BAJA CARGA
(FF6A)
0306 bit 0
(función de fallo
programable 3013 ...
3015)
La carga del motor es
demasiado baja. Puede
deberse a un mecanismo de
liberación en el equipo
accionado.
Compruebe si hay problemas en el equipo
accionado.
Compruebe los parámetros de la función de fallo.
Compruebe la potencia del motor respecto a la
potencia de la unidad.
0018 FALLO TERM
(5210)
0306 bit 1
Fallo interno del convertidor. El
termistor usado para la
medición de la temperatura
interna del convertidor está
abierto o cortocircuitado.
Póngase en contacto con su representante local de
ABB.
0021 MED INTENS
(2211)
0306 bit 4
Fallo interno del convertidor. La
medición de intensidad se
encuentra fuera de rango.
Póngase en contacto con su representante local de
ABB.
0022 FASE RED
(3130)
0306 bit 5
(función de fallo
programable 3016)
La tensión de CC del circuito
intermedio oscila debido a la
falta de una fase de red o a un
fusible fundido.
Se produce el disparo cuando el
rizado de la tensión de CC
supera el 14 % de la tensión
nominal de CC.
Compruebe los fusibles de red.
Compruebe posibles desequilibrios en la
alimentación de entrada.
Compruebe los parámetros de la función de fallo.
0023 ENCODER
(7301)
0306 bit 6
(función de fallo
programable 5003)
Fallo de comunicación entre el
generador de pulsos y el
módulo de interfase del
generador de pulsos y entre el
módulo y el convertidor.
Compruebe el generador de pulsos y su cableado, el
módulo de la interfase del generador de pulsos y su
cableado y los ajustes del grupo de parámetros 50
ENCODER
0024 SOBREVELOC
(7310)
0306 bit 7
El motor gira más rápido que la
mayor velocidad permitida
debido a una velocidad
máxima/mínima mal ajustada,
un par de frenado insuficiente o
cambios en la carga al utilizar
referencia de par.
Los límites del rango de
funcionamiento se ajustan con
los parámetros 2001
VELOCIDAD MINIMA y 2002
VELOCIDAD MAXIMA (con
control vectorial) o 2007
FRECUENCIA MIN y 2008
FRECUENCIA MAX (con
control escalar).
Compruebe los ajustes de velocidad mínima/
máxima.
Compruebe la idoneidad del par de frenado del
motor.
Compruebe la aplicabilidad del control del par.
Verifique que si se requiere un chopper y
resistencia(s) de frenado.
0026 ID UNIDAD
(5400)
0306 bit 9
Fallo interno de ID del
convertidor. Póngase en contacto con su representante local de
ABB.
0027 ARCHIVO CONFIG
(630F)
0306 bit 10
Error en el archivo de
configuración interna. Póngase en contacto con su representante local de
ABB.
CÓD. FALLO CAUSA ACCIÓN
Análisis de fallos
293
0028 ERR SERIE 1
(7510)
0306 bit 11
(función de fallo
programable 3018,
3019)
Comunicación por bus de
campo interrumpida. Compruebe el estado de la comunicación de bus de
campo. Véase el capítulo Control de bus de campo
con adaptador de bus de campo/Control de bus de
campo con bus de campo encajado o el manual del
adaptador de bus de campo apropiado.
Compruebe los ajustes del parámetro de función de
fallo.
Compruebe las conexiones.
Compruebe si el maestro puede comunicar.
0030 FORZAR DISP
(FF90)
0306 bit 13
Orden de disparo recibida
desde el bus de campo. Véase el manual del módulo de comunicación
apropiado.
0034 FASE MOTOR
(FF56)
0306 bit 14
Fallo del circuito del motor
debido a la falta de una fase del
motor o a un fallo en el relé de
termistores del motor (utilizado
en la medición de temperatura
del motor).
Compruebe el motor y el cable a motor.
Compruebe el relé de termistores del motor (si se
usa).
0035 CABLEADO SAL
(FF95)
0306 bit 15
(función de fallo
programable 3023)
Conexión incorrecta de la
alimentación de entrada y del
cable a motor (es decir, el cable
de alimentación está conectado
al motor del convertidor).
Compruebe las conexiones de la entrada de
alimentación.
Compruebe los parámetros de la función de fallo.
0036 INCOMPATIBLE SW
(630F)
0307 bit 3
El software cargado no es
compatible. Póngase en contacto con su representante local de
ABB.
0101 SERF CORRUPT
(FF55)
0307 bit 14
Error interno del convertidor Anote el código de fallo y póngase en contacto con
su representante de ABB local.
0103 SERF MACRO
(FF55)
0307 bit 14
0201 DSP T1 OVERLOAD
(6100)
0307 bit 13
0202 DSP T2 OVERLOAD
(6100)
0307 bit 13
0203 DSP T3 OVERLOAD
(6100)
0307 bit 13
0204 DSP STACK ERROR
(6100)
0307 bit 12
0206 MMIO ID ERROR
(5000)
0307 bit 11
1000 PAR HZRPM
(6320)
0307 bit 15
Ajuste del parámetro para el
límite de velocidad/frecuencia. Compruebe los ajustes de los parámetros.
Compruebe que se cumpla lo siguiente:
2001 < 2002,
2007 < 2008,
2001/9908, 2002/9908, 2007/9907 y que
2008/9907 estén dentro del intervalo.
1003 PAR ESCAL EA
(6320)
0307 bit 15
Escalado incorrecto de la señal
de la entrada analógica EA. Compruebe los ajustes del grupo de parámetros 13
ENTRADAS ANALOG. Compruebe que se cumpla lo
siguiente:
1301 < 1302, 1304 < 1305.
CÓD. FALLO CAUSA ACCIÓN
Análisis de fallos
294
Fallos del bus de campo encajado
Los fallos del bus de campo encajado se pueden analizar supervisando los parámetros
del grupo
53 PROTOCOLO BCI
. Véase también el fallo/alarma
ERR SERIE 1
.
Sin dispositivo maestro
Si no hay ningún dispositivo maestro en línea, los valores de los parámetros 5306
MENSAJ CORR BCI y 5307 ERRORES CRC BCI permanecen inalterados.
Acción:
• Compruebe que el maestro de la red esté conectado y correctamente configurado.
• Compruebe la conexión del cable.
Direcciones de dispositivos iguales
Si dos o más dispositivos tienen la misma dirección, el valor del parámetro 5307
ERRORES CRC BCI se incrementa con cada orden de lectura o escritura.
Acción:
• Compruebe las direcciones de los dispositivos. Dos dispositivos en línea no
pueden tener la misma dirección.
1004 PAR ESCALA SA
(6320)
0307 bit 15
Escalado incorrecto de la señal
de la salida analógica SA. Compruebe los ajustes del grupo de parámetros 15
SALIDAS ANALOG. Compruebe que se cumpla lo
siguiente: 1504 < 1505.
1005 PAR PCU 2
(6320)
0307 bit 15
Ajuste incorrecto de la potencia
nominal del motor. Compruebe el ajuste del parámetro 9909. Se debe
cumplir lo siguiente:
1,1 < (9906 INTENS NOM MOT
·
9905 TENSION
NOM MOT
·
1,73 / PN) < 3,0
donde PN = 1.000
·
9909 POT NOM MOTOR (si las
unidades son kW),
o PN = 746
·
9909 POT NOM MOTOR (si las
unidades son CV).
1007 PAR BUS C
(6320)
0307 bit 15
No se ha activado el control por
bus de campo. Compruebe los ajustes de los parámetros de bus de
campo. Véase el capítulo Control de bus de campo
con adaptador de bus de campo.
1009 PAR PCU 1
(6320)
0307 bit 15
Ajuste incorrecto de la
velocidad/frecuencia nominal
del motor.
Compruebe los ajustes de los parámetros. Se debe
cumplir lo siguiente:
1 < (60
·
9907 FREC NOM MOTOR / 9908 VELOC
NOM MOTOR) < 16
0,8 < 9908 VELOC NOM MOTOR / (120
·
9907
FREC NOM MOTOR / polos del motor) < 0,992
1015 PAR U/F ADAPTADA
(6320)
0307 bit 15
Ajuste de tensión incorrecto en
la relación de tensión a
frecuencia (U/f).
Compruebe el ajuste de los parámetros 2610 ...
2617.
1017 PAR SETUP 1
(6320)
0307 bit 15
No está permitido utilizar el
módulo de interfase del
generador de pulsos MTAC y
las señales de entrada y salida
de frecuencia simultáneamente.
Desactivar la salida de frecuencia, la entrada de
frecuencia o el generador de pulsos:
- cambie la salida del transistor al modo digital (valor
del parámetro 1804 = DIGITAL), o
- cambie la selección de entrada de frecuencia a otro
valor en los grupos de parámetros 11 SELEC
REFERENCIA, 40 CONJ PID PROCESO 1,
41 CONJ PID PROCESO 2 y 42 PID TRIM / EXT
- desactive (parámetro 5002) y quite el módulo de
interfase de generador de pulsos MTAC.
CÓD. FALLO CAUSA ACCIÓN

Análisis de fallos
295
Cableado incorrecto
Si se intercambian los hilos de comunicación (el terminal A de un dispositivo se
conecta al terminal B de otro), el valor del parámetro 5306 MENSAJ CORR BCI
permanece inalterado y el del parámetro 5307 ERRORES CRC BCI se incrementa.
Acción:
• Compruebe la conexión de la interfase RS-232/485.

Análisis de fallos
296
Mantenimiento y diagnóstico del hardware
297
Mantenimiento y diagnóstico del hardware
Contenido de este capítulo
Este capítulo contiene instrucciones de mantenimiento preventivo y descripciones
de las indicaciones de los LED.
Seguridad
¡ADVERTENCIA! Lea las instrucciones del capítulo Seguridad en las páginas
iniciales de este manual antes de efectuar cualquier tarea de mantenimiento en el
equipo. El incumplimiento de estas instrucciones puede producir lesiones o la
muerte.
Intervalos de mantenimiento
Si se instala en un entorno apropiado, el convertidor de frecuencia requiere muy
poco mantenimiento. Esta tabla lista los intervalos de mantenimiento rutinario
recomendados por ABB.
Ventilador
El ventilador de refrigeración del convertidor tiene una vida de servicio de 25.000
horas de funcionamiento como mínimo. La vida de servicio real depende del grado
de utilización del convertidor y de la temperatura ambiente.
Cuando se utiliza el Panel de control asistente, el Asistente de gestión de
notificaciones le avisa cuando se alcanza el valor definible del contador de horas de
funcionamiento (véase el parámetro 2901). Esta información también se puede
pasar a la salida de relé (véase el parámetro 1401) independientemente del tipo de
panel utilizado.
El fallo del ventilador se puede predecir gracias al ruido cada vez mayor que
producen los cojinetes del ventilador. Si el convertidor de frecuencia debe participar
en una parte crítica de un proceso, se recomienda la sustitución del ventilador
cuando empiecen a aparecer estos síntomas. ABB pone a su disposición
ventiladores de recambio. No utilice recambios distintos a los especificados por
ABB.
Mantenimiento Intervalo Instrucción
Reacondicionamiento de
condensadores. Cada dos años cuando se
almacena. Véase Condensadores en la
página 298.
Sustitución del ventilador de
refrigeración.
(bastidores R1 ... R4)
Cada tres años. Véase Ventilador en la página
297.
Sustitución de la pila en el
Panel de control asistente. Cada diez años. Véase Pila en la página 299.
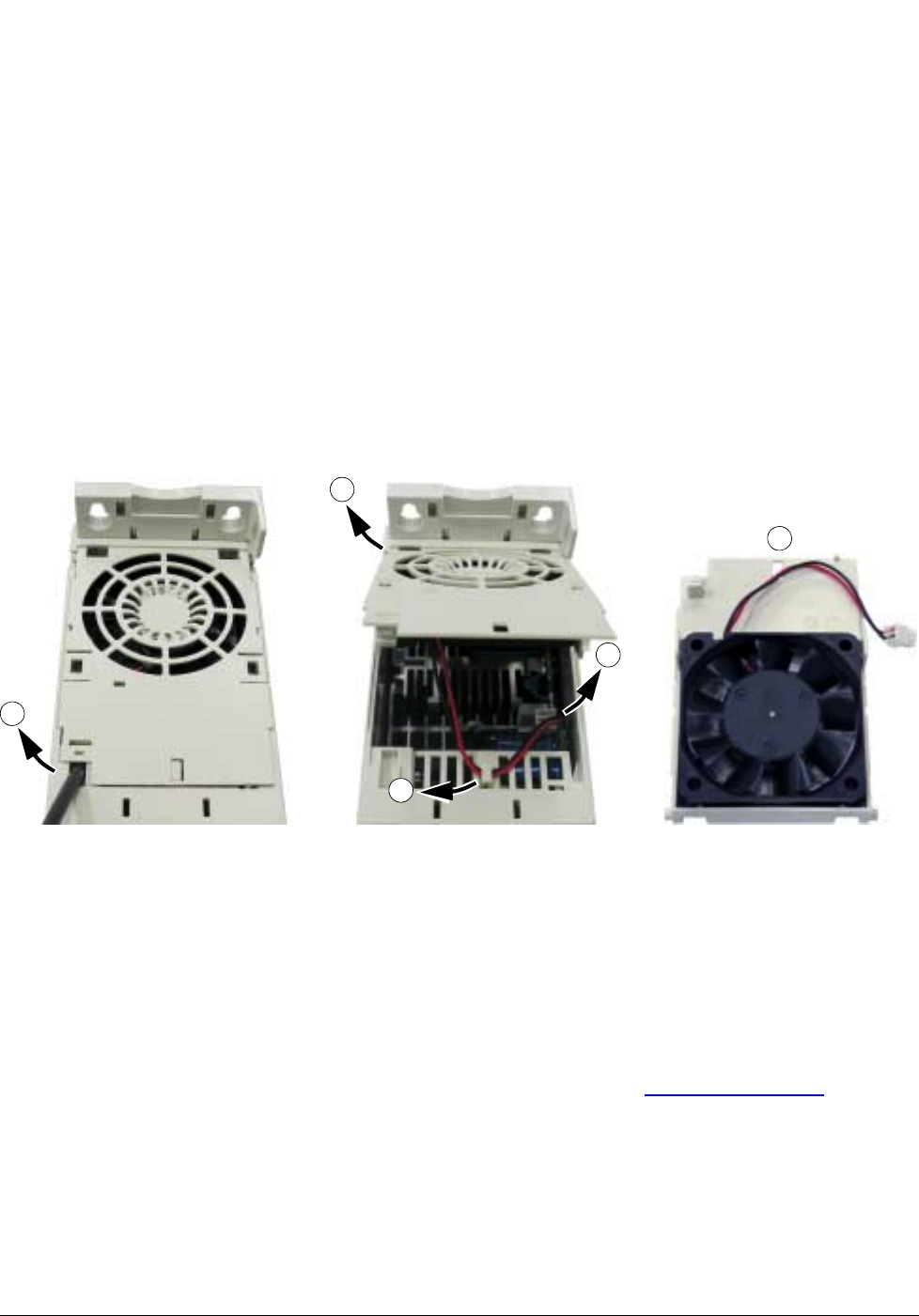
Mantenimiento y diagnóstico del hardware
298
Sustitución del ventilador (R1 ... R4)
Sólo los bastidores R1 ... R4 incluyen un ventilador; el bastidor R0 utiliza
refrigeración natural.
1. Pare el convertidor y desconéctelo de la fuente de alimentación de CA.
2. Retire la tapa si el convertidor dispone de la opción NEMA 1.
3. Saque el soporte del ventilador del bastidor, por ejemplo con un destornillador, y
levántelo ligeramente por su extremo delantero.
4. Libere el cable del ventilador de su presilla.
5. Desconecte el cable del ventilador.
6. Retire el soporte del ventilador de las bisagras.
7. Instale el nuevo soporte, con el ventilador incluido, siguiendo el orden inverso.
8. Vuelva a conectar la alimentación.
Condensadores
Reacondicionamiento
Los condensadores deben reacondicionarse si el convertidor ha estado almacenado
durante dos años. Remítase a la tabla de la página 28 para saber cómo encontrar la
fecha de fabricación a partir del número de serie. Para información sobre el
reacondicionamiento de los condensadores, remítase a la Guía de
reacondicionamiento de condensadores en el ACS50/150/350/550 [3AFE68735190
(inglés)], disponible en Internet (vaya a la página web http://www.abb.com e
introduzca el código en el campo de búsqueda).
3
6
4
5
7
Mantenimiento y diagnóstico del hardware
299
Panel de control
Limpieza
Utilice un paño suave y húmedo para limpiar el panel de control. Evite el uso de
limpiadores abrasivos que podrían rayar la ventana de la pantalla.
Pila
La pila sólo se utiliza en los Paneles de control asistentes que disponen de la
función de reloj y en los cuales se ha activado. La pila mantiene el funcionamiento
del reloj en la memoria durante las interrupciones del suministro eléctrico.
La vida de servicio prevista de la pila es superior a diez años. Para extraer la pila,
utilice una moneda para hacer girar su soporte en la parte posterior del panel de
control. Sustituya la pila por otra de tipo CR2032.
Nota: La pila NO es necesaria para ninguna de las funciones del panel de control o
el convertidor, exceptuando el reloj.
LED
En la parte frontal del convertidor hay un LED verde y un LED rojo. Son visibles a
través de la cubierta del panel, pero invisibles si se ha añadido un panel de control al
convertidor. El Panel de Control Asistente tiene un LED. La tabla siguiente describe
las indicaciones de los LED.
Ubicación LED apagado LED encendido y sin parpadear LED parpadeando
En la parte frontal del
convertidor.
Si se le ha añadido un
panel de control, cambie
a control remoto (si no lo
hace se producirá un
fallo) y después retírelo
para poder ver los LED.
Sin alimentación. Verde La alimentación en la
tarjeta es correcta. Verde Convertidor en estado
de alarma.
Rojo Convertidor en estado
de fallo. Para restaurar
el fallo, pulse RESET en
el panel de control o
desconecte la
alimentación del
convertidor.
Rojo Convertidor en estado
de fallo. Para restaurar
el fallo, desconecte la
alimentación del
convertidor.
En la esquina superior
izquierda del Panel de
control asistente.
El panel no recibe
alimentación o no está
conectado al
convertidor.
Verde Convertidor en estado
normal. Verde Convertidor en estado
de alarma.
Rojo Convertidor en estado
de fallo. Para restaurar
el fallo, pulse RESET en
el panel de control o
desconecte la
alimentación del
convertidor.
Rojo -

Mantenimiento y diagnóstico del hardware
300

Datos técnicos
301
Datos técnicos
Contenido de este capítulo
Este capítulo contiene las especificaciones técnicas del convertidor de frecuencia
como, por ejemplo, las especificaciones, los tamaños y los requisitos técnicos, así
como las disposiciones para cumplir los requisitos relativos a la marca CE y otras
etiquetas.
Datos técnicos
302
Especificaciones
Intensidad y potencia
A continuación se indican las especificaciones de intensidad y potencia. Los
símbolos se describen a continuación de la tabla.
Tipo Entrada Salida Bas-
tidor
ACS350- I1N I2N I2,1mín/10min I2máx PN
x = E/U 1) AAAAkWCV
Tensión monofásica UN = 200 … 240 V (200, 208, 220, 230, 240 V)
01x-02A4-2 6,1 2,4 3,6 4,2 0,37 0,5 R0
01x-04A7-2 11,4 4,7 7,1 8,2 0,75 1 R1
01x-06A7-2 16,1 6,7 10,1 11,7 1,1 1,5 R1
01x-07A5-2 16,8 7,5 11,3 13,1 1,5 2 R2
01x-09A8-2 21,0 9,8 14,7 17,2 2,2 3 R2
Tensión trifásica UN = 200 … 240 V (200, 208, 220, 230, 240 V)
03x-02A4-2 4,3 2,4 3,6 4,2 0,37 0,5 R0
03x-03A5-2 6,1 3,5 5,3 6,1 0,55 0,75 R0
03x-04A7-2 7,6 4,7 7,1 8,2 0,75 1 R1
03x-06A7-2 11,8 6,7 10,1 11,7 1,1 1,5 R1
03x-07A5-2 12,0 7,5 11,3 13,1 1,5 2 R1
03x-09A8-2 14,3 9,8 14,7 17,2 2,2 3 R2
03x-13A3-2 21,7 13,3 20,0 23,3 3 3 R2
03x-17A6-2 24,8 17,6 26,4 30,8 4 5 R2
03x-24A4- 2 41 24,4 36,6 42,7 5,5 7,5 R3
03x-31A0-2 50 31 46,5 54,3 7,5 10 R4
03x-46A2-2 69 46,2 69,3 2) 80,9 11,0 15 R4
Tensión trifásica UN = 380 … 480 V (380, 400, 415, 440, 460, 480 V)
03x-01A2-4 2,2 1,2 1,8 2,1 0,37 0,5 R0
03x-01A9-4 3,6 1,9 2,9 3,3 0,55 0,75 R0
03x-02A4-4 4,1 2,4 3,6 4,2 0,75 1 R1
03x-03A3-4 6,0 3,3 5,0 5,8 1,1 1,5 R1
03x-04A1-4 6,9 4,1 6,2 7,2 1,5 2 R1
03x-05A6-4 9,6 5,6 8,4 9,8 2,2 3 R1
03x-07A3-4 11,6 7,3 11,0 12,8 3 3 R1
03x-08A8-4 13,6 8,8 13,2 15,4 4 5 R1
03x-12A5-4 18,8 12,5 18,8 21,9 5,5 7,5 R3
03x-15A6-4 22,1 15,6 23,4 27,3 7,5 10 R3
03x-23A1-4 30,9 23,1 34,7 40,4 11 15 R3
03x-31A0-4 52 31 46,5 54,3 15 20 R4
03x-38A0-4 61 38 57 66,5 18,5 25 R4
03x-44A0-4 67 44 66 2) 77,0 22,0 30 R4
00353783.xls G
1) E=filtro EMC conectado, U=filtro EMC desconectado. El tornillo metálico del filtro EMC está instalado
en las versiones “E” y el tornillo de plástico en las versiones “U”.
2) Valor estimativo
Datos técnicos
303
Símbolos
Dimensionado
Las especificaciones de intensidad son iguales con independencia de la tensión de alimentación
dentro de un rango de tensión. Para alcanzar la potencia nominal del motor especificada en la tabla, la
intensidad nominal del convertidor de frecuencia debe superar o igualar la intensidad nominal del
motor.
Nota 1: La potencia máxima permitida del eje del motor está limitada a 1,5 · PN. Si se supera el límite,
la intensidad y el par motor se restringen de forma automática. La función protege el puente de entrada
del convertidor de frecuencia frente a sobrecargas.
Nota 2: Las especificaciones son aplicables a una temperatura ambiente de 40 °C (104 °F).
Derrateo
La capacidad de carga se reduce si la altitud del lugar de instalación supera los 1.000 metros
(3.300 pies) o si la temperatura ambiente supera los 40 °C (104 °F).
Derrateo por temperatura
En el rango de temperatura de +40 °C a +50 °C (de +104 °F a +122 °F), la intensidad nominal de salida
se reduce en un 1 % por cada 1 °C (1,8 °F) adicional. La intensidad de salida se calcula multiplicando
la intensidad indicada en la tabla de especificaciones por el factor de derrateo.
Ejemplo Si la temperatura ambiente es de 50 °C (+122 °F), el factor de derrateo es
100 % - 1 · 10 °C = 90% o 0,90. En consecuencia, la intensidad de salida es 0,90 · I2N.
Derrateo por altitud
En altitudes de 1.000 a 2.000 m (de 3.300 a 6.600 pies) por encima del nivel del mar, el derrateo es del
1 % por cada 100 m (330 pies).
Derrateo por frecuencia de conmutación
Derratee según la frecuencia de conmutación empleada (véase el parámetro
2606
) del siguiente modo:
Asegúrese de que el parámetro 2607 CTRL FREC CONMUT = 1(SI), lo que reduce la frecuencia de
conmutación si la temperatura interna del convertidor es demasiado elevada. Véase el parámetro 2607
para más detalles.
Entrada
I1N Intensidad de entrada eficaz continua (para el dimensionado de cables y fusibles).
Salida
I2N Intensidad eficaz continua. Se permite una sobrecarga del 50 % durante un minuto
cada 10 minutos.
I2,1mín/10min Se permite una intensidad máxima (sobrecarga del 50 %) durante 1 minuto cada
10 minutos.
I2máx Intensidad de salida máxima. Disponible durante dos segundos al arrancar, o
mientras lo permita la temperatura del convertidor.
PNPotencia típica del motor. Las especificaciones en kilovatios se aplican a la mayoría
de motores IEC de 4 polos. Las especificaciones en caballos de vapor se aplican a la
mayoría de los motores NEMA de 4 polos.
Frecuencia de
conmutación Especificaciones de tensión del convertidor
UN = 200…240 V UN = 380…480 V
4 kHz Sin derrateo Sin derrateo
8kHz Deratee I2N al 90%. Deratee I2N al 75% para R0 o al 80% para R1…R4.
12 kHz Deratee I2N al 80%. Deratee I2N al 50% para R0 o al 65% para R1…R4 y
deratee la temperatura ambiente máxima a 30°C (86°F).
16 kHz Deratee I2N al 75%. Deratee I2N al 50% y derratee la temperatura ambiente
máxima a 30°C (86°F).
%
°C
Datos técnicos
304
Requisitos del flujo de aire de refrigeración
La tabla siguiente especifica la disipación térmica en el circuito principal a carga
nominal y en el circuito de control con carga mínima (no se usan ni la E/S ni el
panel) y con carga máxima (se utiliza el panel, el bus de campo y el ventilador y
todas las entradas digitales están activadas). La disipación térmica total es la suma
de la disipación térmica en los circuitos principal y de control.
Tipo Pérdida de calor Flujo de aire
ACS350- Circuito principal Circuito de control
x = E/U I1N y I2N nominales Mín. Máx.
W BTU/h W BTU/h W BTU/h m3/h ft3/min
Tensión monofásica UN = 200 … 240 V (200, 208, 220, 230, 240 V)
01x-02A4-2 25 85 6,1 21 22,7 78 - -
01x-04A7-2 46 157 9,5 32 26,4 90 24 14
01x-06A7-2 71 242 9,5 32 26,,4 90 24 14
01x-07A5-2 73 249 10,5 36 27,5 94 21 12
01x-09A8-2 96 328 10,5 36 27,5 94 21 12
Tensión trifásica UN = 200…240 V (200, 208, 220, 230, 240 V)
03x-02A4-2 19 65 6,1 21 22,7 78 - -
03x-03A5-2 31 106 6,1 21 22,7 78 - -
03x-04A7-2 38 130 9,5 32 26,4 90 24 14
03x-06A7-2 60 205 9,5 32 26,4 90 24 14
03x-07A5-2 62 212 9,5 32 26,4 90 21 12
03x-09A8-2 83 283 10,5 36 27,5 94 21 12
03x-13A3-2 112 383 10,5 36 27,5 94 52 31
03x-17A6-2 152 519 10,5 36 27,5 94 52 31
03x-24A4- 2 250 854 16,6 57 35,4 121 71 42
03x-31A0-2 270 922 33,4 114 57,8 197 96 57
03x-46A2-2 430 1469 33,4 114 57,8 197 96 57
tensión trifásica UN = 380…480 V (380, 400, 415, 440, 460, 480 V)
03x-01A2-4 11 38 6,6 23 24,4 83 - -
03x-01A9-4 16 55 6,6 23 24,4 83 - -
03x-02A4-4 21 72 9,8 33 28,7 98 13 8
03x-03A3-4 31 106 9,8 33 28,7 98 13 8
03x-04A1-4 40 137 9,8 33 28,7 98 13 8
03x-05A6-4 61 208 9,8 33 28,7 98 19 11
03x-07A3-4 74 253 14,1 48 32,7 112 24 14
03x-08A8-4 94 321 14,1 48 32,7 112 24 14
03x-12A5-4 130 444 12,0 41 31,2 107 52 31
03x-15A6-4 173 591 12,0 41 31,2 107 52 31
03x-23A1-4 266 908 16,6 57 35,4 121 71 42
03x-31A0-4 350 1195 33,4 114 57,8 197 96 57
03x-38A0-4 440 1503 33,4 114 57,8 197 96 57
03x-44A0-4 530 1810 33,4 114 57,8 197 96 57
00353783.xls G

Datos técnicos
305
Tamaño del cable de potencia y fusibles
En la tabla siguiente se muestra el dimensionado de los cables para la intensidad
nominal (
I2N
), junto con los correspondientes tipos de fusibles para protección frente
a cortocircuitos del cable de potencia de entrada. Las intensidades de cortocircuito
nominales presentadas en la tabla son los valores máximos para el tipo de fusible
correspondiente. Si se usan unos fusibles de especificaciones inferiores, compruebe
que la especificación de intensidad eficaz de cortocircuito sea superior que la
intensidad
I2N
nominal presentada en la tabla de especificaciones de la página
302
.
Si se necesita un 150% de potencia de salida, multiplique la intensidad
I2N
por 1,5.
Véase también la sección
Selección de los cables de potencia
en la página
34
.
Compruebe que el tiempo de fusión del fusible sea inferior a 0,5 segundos
. El
tiempo de fusión depende del tipo de fusible, de la impedancia de la red de
alimentación y de la sección transversal, el material y la longitud del cable de
alimentación. En caso de que se exceda el tiempo de fusión de 0,5 segundos con
fusibles gG o T, en la mayoría de las ocasiones los fusibles ultrarrápidos (aR)
reducirán el tiempo de fusión a un nivel aceptable.
Datos técnicos
306
Nota: No deben emplearse fusibles mayores.
Tipo
ACS350-
x = E/U
Fusibles Dimensiones del conductor de CU en el cableado
gG UL Clase T
(600 V) Alimentación
(U1, V1, W1) Motor
(U2, V2, W2) PE Frenado
(BRK+ and BRK-)
AAmm
2AWG mm2AWG mm2AWG mm2AWG
Tensión monofásica UN = 200…240 V (200, 208, 220, 230, 240 V)
01x-02A4-2 10 10 2,5 14 0,75 18 2,5 14 2.5 14
01x-04A7-2 16 20 2,5 14 0,75 18 2,5 14 2.5 14
01x-06A7-2 16/20 1) 25 2,5 10 1,5 14 2,5 10 2.5 12
01x-07A5-2 20/25 1) 30 2,5 10 1,5 14 2,5 10 2.5 12
01x-09A8-2 25/35 1) 35 6 10 2,5 12 6 10 6 12
Tensión trifásica UN = 200…240 V (200, 208, 220, 230, 240 V)
03x-02A4-2 10 10 2,5 14 0,75 18 2,5 14 2.5 14
03x-03A5-2 10 10 2,5 14 0,75 18 2,5 14 2.5 14
03x-04A7-2 10 15 2,5 14 0,75 18 2,5 14 2.5 14
03x-06A7-2 16 15 2,5 12 1,5 14 2,5 12 2.5 12
03x-07A5-2 16 15 2,5 12 1,5 14 2,5 12 2.5 12
03x-09A8-2 16 20 2,5 12 2,5 12 2,5 12 2.5 12
03x-13A3-2 25 30 6 10 6 10 6 10 2.5 12
03x-17A6-2 25 35 6 10 6 10 6 10 2.5 12
03x-24A4-2 63 60 10 8 10 8 10 8 6 10
03x-31A0-2 80 80 16 6 16 6 16 6 10 8
03x-46A2-2 100 100 25 2 25 2 16 4 10 8
Tensión trifásica UN = 380…480 V (380, 400, 415, 440, 460, 480 V)
03x-01A2-4 10 10 2,5 14 0,75 18 2,5 14 2.5 14
03x-01A9-4 10 10 2,5 14 0,75 18 2,5 14 2.5 14
03x-02A4-4 10 10 2,5 14 0,75 18 2,5 14 2.5 14
03x-03A3-4 10 10 2,5 12 0,75 18 2,5 12 2.5 12
03x-04A1-4 16 15 2,5 12 0,75 18 2,5 12 2.5 12
03x-05A6-4 16 15 2,5 12 1,5 14 2,5 12 2.5 12
03x-07A3-4 16 20 2,5 12 1,5 14 2,5 12 2.5 12
03x-08A8-4 20 25 2,5 12 2,5 12 2,5 12 2.5 12
03x-12A5-4 25 30 6 10 6 10 6 10 2.5 12
03x-15A6-4 35 35 6 8 6 8 6 8 2.5 12
03x-23A1-4 50 50 10 8 10 8 10 8 6 10
03x-31A0-4 80 80 16 6 16 6 16 6 10 8
03x-38A0-4 100 100 16 4 16 4 16 4 10 8
03x-44A0-4 100 100 25 4 25 4 16 4 10 8
00353783.xls H
1) Si se requiere una capacidad de sobrecarga del 50%, utilice como alternativa fusibles mayores.
Datos técnicos
307
Cables de potencia: tamaño de los terminales, diámetros máximos de los
cables y pares de apriete
Dimensiones, pesos y ruido
Símbolos
Basti-
dor Diámetro máximo de cable
para NEMA 1 U1, V1, W1, U2, V2, W2, BRK+ y
BRK- PE
U1, V1, W1,
U2, V2, W2 BRK+ y
BRK- Tamaño de
terminal Par de
apriete Tamaño de la
grapa Par de
apriete
mm pulg. mm pulg. mm2AWG N·m lbf in. mm2AWG N·m lbf in.
R0 16 0,63 16 0,63 4,0/6,0 10 0,8 7 25 3 1,2 11
R1 16 0,63 16 0,63 4,0/6,0 10 0,8 7 25 3 1,2 11
R2 16 0,63 16 0,63 4,0/6,0 10 0,8 7 25 3 1,2 11
R3 29 1,14 16 0,63 10,0/16,0 6 1,7 15 25 3 1,2 11
R4 35 1,38 29 1,14 25,0/35,0 2 2,5 22 25 3 1,2 11
00353783.xls G
Bas-
tidor Dimensiones y pesos Ruido
IP20 (armario) / UL abierto
H1 H2 H3 W D Peso Nivel de
ruido
mm pulg. mm pulg. mm pulg. mm pulg. mm pulg. kg lb dBA
R0 169 6,65 202 7,95 239 9,41 70 2,76 161 6,34 1,2 2,6 <30
R1 169 6,65 202 7,95 239 9,41 70 2,76 161 6,34 1,2 2,6 50…62
R2 169 6,65 202 7,95 239 9,41 105 4,13 165 6,50 1,5 3,3 50…62
R3 169 6,65 202 7,95 236 9,29 169 6,65 169 6,65 2,5 5,5 50…62
R4 181 7,13 202 7,95 244 9,61 260 10,24 169 6,65 4,4 9,7 <62
00353783.xls G
Bas-
tidor Dimensiones y pesos Ruido
IP20 / NEMA 1
H4 H5 W D Peso Nivel de
ruido
mm pulg. mm pulg. mm pulg. mm pulg. kg lb dBA
R0 257 10,12 280 11,02 70 2,76 169 6,65 1,6 3,5 <30
R1 257 10,12 280 11,02 70 2,76 169 6,65 1,6 3,5 50…62
R2 257 10,12 282 11,10 105 4,13 169 6,65 1,9 4,2 50…62
R3 260 10,24 299 11,77 169 6,65 177 6,97 3,1 6,8 50…62
R4 270 10,63 320 12,60 260 10,24 177 6,97 5,0 11,0 <62
00353783.xls G
IP20 (armario) / UL abierto
H1 Altura sin sujeciones ni placa de fijación.
H2 Altura con sujeciones y sin placa de fijación.
H3 Altura con sujeciones y placa de fijación.
IP20 / NEMA 1
H4 Altura con sujeciones y caja de conexiones.
H5 Altura con sujeciones, caja de conexiones y tapa.
Datos técnicos
308
Conexión de la alimentación de entrada
Tensión (U1)200/208/220/230/240 VCA monofásica para convertidores de 200 V CA.
200/208/220/230/240 VCA trifásica para convertidores de 200 V CA.
380/400/415/440/460/480 VCA trifásica para convertidores de 400 V CA.
Por defecto, se permite un ±10 % de variación respecto a la tensión nominal del convertidor.
Capacidad de
cortocircuito La intensidad máxima de cortocircuito que se permite en la conexión de alimentación de
entrada, tal como se define en IEC 60439-1, es 100 kA. El convertidor es apto para ser
usado en circuitos que no proporcionen más de 100 kA eficaces simétricos a la tensión
nominal máxima del convertidor.
Frecuencia 50/60 Hz ± 5 %, tasa máxima de cambio de 17 %/s.
Desequilibrio Máx. ± 3 % de la tensión de entrada nominal entre fases.
Factor de potencia
fundamental (cos phi1)0,98 (con carga nominal).
Conexión del motor
Tensión (U2)0 a U1, trifásica simétrica, Umáx en el inicio de debilitamiento del campo.
Protección de
cortocircuito (IEC 61800-
5-1, UL 508C)
La salida del motor está protegida frente a cortocircuitos por IEC 61800-5-1 y UL 508C.
Frecuencia Control vectorial: se recomienda 0 ... máx. 150 Hz
Control escalar: 0 ... 500 Hz
Resolución de frecuencia 0,01 Hz
Intensidad Véase la sección Especificaciones en la página 302.
Límite de potencia 1,5 · PN
Punto inicio debil. campo 10 ... 500 Hz
Frecuencia de
conmutación 4, 8, 12 ó 16 kHz (en modo de control escalar)
Control de velocidad Véase la sección Cifras de rendimiento del control de velocidad en la página 117.
Control del par Véase la sección Cifras de rendimiento del control del par en la página 117.
Longitud máxima
recomendada del cable a
motor
R0: 30 m (100 pies), R1 ... R4: 50 m (165 pies)
Con reactancias de salida la longitud del cable a motor se puede ampliar a 60 m (195 pies)
para R0 y a 100 m (330 pies) para R1 ... R4.
Para cumplir con la Directiva europea EMC, utilice las longitudes de cable especificadas en
la tabla siguiente para una frecuencia de conmutación de 4 kHz. Se facilitan longitudes para
el uso del convertidor con filtro interno EMC o con un filtro externo EMC opcional.
Frec. de conmutación 4 kHz Filtro EMC interno Filtro EMC externo opcional
Segundo entorno
(categoría C3 1))30 m (100 pies) 30 m (100 pies) mínimo
Primer entorno
(categoría C2 1))- 30 m (100 pies)
1) Véanse los nuevos términos en la sección IEC/EN 61800-3 (2004) Definiciones en la página 312.

Datos técnicos
309
Conexiones de control
Entradas analógicas X1A:
2 y 5 Señal de tensión,unipolar 0 (2)…10 V, Rin > 312 kohm
bipolar -10…10 V, Rin > 312 kohm
Señal de intensidad,unipolar 0 (4)…20 mA, Rin = 100 ohm
bipolar -20…20 mA, Rin = 100 ohm
Valor de referencia del
potenciómetro (X1A: 4) 10 V ± 1 %, máx. 10 mA, R<10kohm
Resolución 0,1 %
Precisión ±1 %
Salida analógica X1A: 7 0 (4)…20 mA, carga < 500 ohm
Tensión auxiliar X1A: 9 24 VCC ± 10 %, máx. 200 mA
Entradas digitales X1A:
12…16
(entrada de frecuencia
X1A: 16)
Tensión 12…24 V CC con alimentación interna o externa
Tipo PNP y NPN
Entrada de frecuencia Serie de pulsos 0…16 kHz (X1A: sólo 16)
Impedancia de entrada 2,4 kohm
Salida de relé X1B: 17…19 Tipo NO + NC
Tensión máx. de conmutación 250 V CA / 30 V CC
Intensidad máx. de conmutación 0,5 A / 30 VCC; 5 A / 230 V CA
Intensidad máx. continua 2 A eficaces
Salida digital X1B: 20…21 Tipo Salida de transistor PNP
Tensión máx. de conmutación 30 V CC
Intensidad máx. de conmutación 100 mA / 30 V CC, protegida frente a cortocircuitos
Frecuencia 10 Hz …16 kHz
Resolución 1 Hz
Precisión 0,2 %
Dimensión del cable 1,5...0,25 mm2 16...24 AWG
Par 0,5 N·m / 4,4 lbf in.
Conexión de la resistencia de frenado
Protección de
cortocircuito (IEC 61800-
5-1, IEC 60439-1, UL 508C)
La salida de la resistencia de frenado dispone de una protección condicional frente a
cortocircuitos por IEC/EN 61800-5-1 y UL 508C. Para la selección correcta de fusibles,
póngase en contacto con su representante de ABB local. La intensidad nominal
condicionada de cortocircuito, tal como se define en IEC 60439-1, y la intensidad de prueba
de cortocircuito, según UL 508C, es 100 kA.
Rendimiento
Aproximadamente del 95 al 98 % a potencia nominal, según el tamaño y las opciones del
convertidor.
Refrigeración
Método R0: Refrigeración por convección natural. R1 ... R4: Ventilador interno, dirección del flujo de
abajo a arriba.
Espacio libre alrededor
del convertidor Véase el capítulo Instalación mecánica, página 29.
Grados de protección
IP20 (instalación en armario) / UL abierto: Armario estándar. El convertidor de frecuencia
debe instalarse en un armario para cumplir los requisitos de protección de contactos.
IP20 / NEMA 1: Se consigue con un kit opcional que incluye una tapa y una caja de
conexiones.
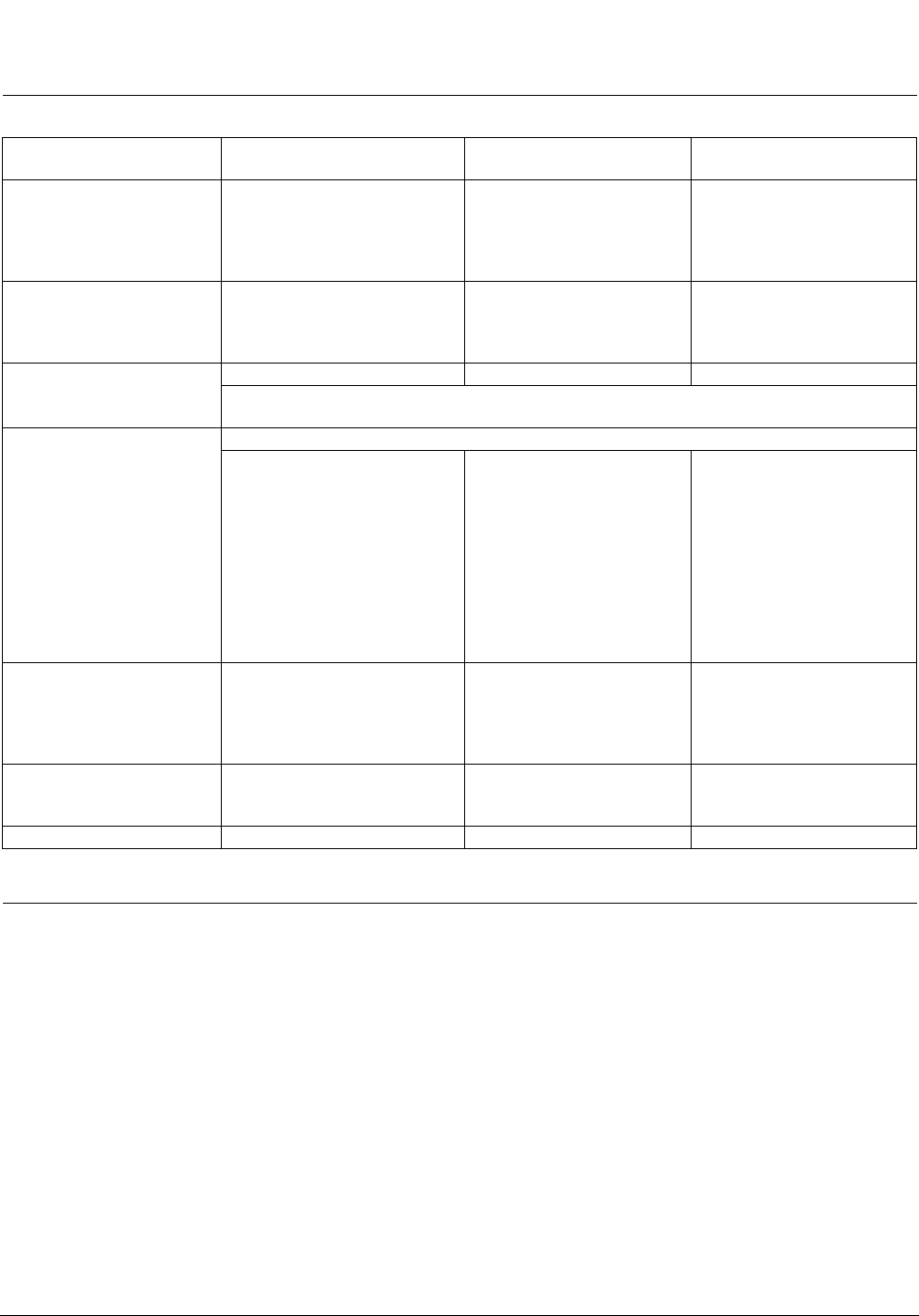
Datos técnicos
310
Condiciones ambientales
A continuación se indican los límites ambientales del convertidor de frecuencia. El
convertidor de frecuencia deberá emplearse en interiores con calefacción controlada.
Funcionamiento instalado
para uso estacionario Almacenamiento
en el embalaje protector Transporte
en el embalaje protector
Altitud del lugar de
instalación De 0 a 2.000 m (6.600 pies)
sobre el nivel del mar.
(por encima de 1.000 m
(3.300 pies), véase la sección
Derrateo en la página 303).
--
Temperatura del aire De -10 a +50 °C (de 14 a 122
°F). No se permite escarcha.
Véase la sección Derrateo en
la página 303.
De -40 a +70 °C (de -40 a
158 °F). De -40 a +70 °C (de -40 a
158 °F).
Humedad relativa De 0 a 95 %. Máx. 95 %. Máx. 95 %.
No se permite condensación. En presencia de gases corrosivos, la humedad relativa
máxima permitida es del 60 %.
Niveles de contaminación
(IEC 60721-3-3,
IEC 60721-3-2,
IEC 60721-3-1)
No se permite polvo conductor.
Según IEC 60721-3-3,
gases químicos: Clase 3C2,
partículas sólidas: Clase 3S2.
El ACS350 deberá ser
instalado en una atmósfera
limpia de conformidad con la
clasificación del armario. El aire
de refrigeración deberá estar
limpio, libre de materiales
corrosivos y polvo conductor de
electricidad.
Según IEC 60721-3-1,
gases químicos: Clase 1C2,
partículas sólidas: Clase
1S2.
Según IEC 60721-3-2,
gases químicos: Clase 2C2,
partículas sólidas: Clase
2S2.
Vibración sinusoidal
(IEC 60721-3-3)
Comprobada según IEC 60721-
3-3, condiciones mecánicas:
Clase 3M4
2 ... 9 Hz, 3,0 mm (0,12 pulg.)
9 ... 200 Hz, 10 m/s
2
(33 pies/s
2
)
--
Golpes
(IEC 60068-2-27, ISTA 1A) - Según ISTA 1A.
Máx. 100 m/s2 (330 pies/s2),
11 ms.
Según ISTA 1A.
Máx. 100 m/s2 (330 pies/s2),
11 ms.
Caída libre No permitida. 76 mm (30 pulg.). 76 mm (30 pulg.).
Materiales
Armario del convertidor • PC/ABS 2 mm, PC+10 %GF 2,5...3 mm y PA66+25 %GF 1,5 mm, todos en color
NCS 1502-Y (RAL 9002 / PMS 420 C).
• Lámina de acero galvanizado de 1,5 a 2 mm, grosor del galvanizado de 20 micrómetros.
• Aleación de aluminio extruido AlSi.
Embalaje Cartón ondulado.
Eliminación
El convertidor de frecuencia contiene materias primas que deberían ser recicladas para respetar
los recursos energéticos y naturales. El embalaje está compuesto por materiales reciclables y
compatibles con el medio ambiente. Todas las piezas metálicas son reciclables. Las piezas de
plástico pueden ser recicladas o bien incineradas de forma controlada, según disponga la
normativa local. La mayoría de las piezas reciclables cuentan con símbolos de reciclaje.
Si el reciclado no es viable, todas las piezas pueden ser arrojadas a un vertedero, a excepción de
los condensadores electrolíticos y las tarjetas de circuito impreso. Los condensadores de CC
contienen electrolitos, que están clasificados como residuos tóxicos en la UE. Estos elementos
deberán ser extraídos y manipulados según dispongan las normativas locales.
Para obtener más información acerca de los aspectos medioambientales e instrucciones de
reciclaje más detalladas, póngase en contacto con su distribuidor de ABB local.
Datos técnicos
311
Marcado CE
El convertidor de frecuencia lleva una etiqueta CE que certifica que cumple las disposiciones de la
directiva Europea de Baja Tensión y la directiva EMC (directiva 73/23/EEC, enmendada por 93/68/EEC
y directiva 89/336/EEC, enmendada por 93/68/EEC).
Cumplimiento de la Directiva EMC
La Directiva EMC define los requisitos de inmunidad y de emisiones de los equipos eléctricos utilizados
en la Unión Europea. La norma de producto EMC [EN 61800-3 (2004)] cubre los requisitos
especificados para los convertidores de frecuencia.
Cumplimiento de la norma EN 61800-3 (2004)
Véase la página 313.
Marcado C-Tick
Vea la etiqueta de designación de tipo para las marcas válidas en su equipo.
El marcado C-Tick es obligatorio en Australia y Nueva Zelanda. Cuando el convertidor de frecuencia
lleva etiqueta C-Tick, ésta verifica el cumplimiento de la normativa relevante (IEC 61800-3 (2004) –
Sistemas de accionamiento de energía eléctrica de velocidad ajustable – Parte 3: Norma de producto
EMC que incluye métodos específicos de prueba), según el Esquema de Compatibilidad
Electromagnética Transtasmano.
El Esquema de Compatibilidad Electromagnética Transtasmano (EMCS) fue presentado por la
Autoridad de Comunicación Australiana (ACA) y el Grupo de Gestión del Espectro de
Radiofrecuencias (RSM) del Ministerio de desarrollo económico de Nueva Zelanda (NZMED) en
noviembre de 2001. El objetivo del esquema es proteger el espectro de radiofrecuencias con la
introducción de límites técnicos para la emisión de productos eléctricos/electrónicos.
Cumplimiento de IEC 61800-3 (2004)
Véase la página 313.
Marcado RoHS
El convertidor de frecuencia lleva una etiqueta RoHS que certifica que el convertidor
cumple con las estipulaciones de la Directiva Europea RoHS. RoHS = la restricción
de utilizar ciertas sustancias peligrosas en equipos eléctricos y electrónicos.
Normas aplicables
El convertidor de frecuencia cumple las normas siguientes:
• IEC/EN 61800-5-1 (2003) Requisitos de seguridad eléctrica, térmica y de funcionamiento para convertidores c.a. de
potencia de frecuencia variable.
• IEC/EN 60204-1 (1997) +
enmienda A1 (1999) Seguridad en la maquinaria. Equipos eléctricos de máquinas. Parte 1: Requisitos generales.
Disposiciones que hay que cumplir: El ensamblador final de la máquina es responsable de
instalar:
- un dispositivo de paro de emergencia
- un dispositivo de desconexión de la fuente de alimentación
• IEC/EN 61800-3 (2004) Sistemas de accionamiento de potencia eléctricos de velocidad ajustable. Parte
3:Requisitos EMC y métodos de prueba específicos.
• UL 508C Norma UL para la Seguridad, Equipo de Conversión de Potencia, tercera edición.

Datos técnicos
312
Marcado UL
Véase la etiqueta de designación de tipo para las marcas válidas en su equipo.
Se ha asignado una etiqueta UL al convertidor de frecuencia para corroborar que la unidad cumple los
requisitos UL.
Listado de comprobación UL
Conexión de la alimentación de entrada – Véase la sección Conexión de la alimentación de entrada
en la página 308.
Desconexión del dispositivo (medios de desconexión) – Véase la sección Dispositivo de
desconexión de la fuente de alimentación en la página 31.
Condiciones ambientales – El convertidor de frecuencia debe emplearse en interiores con
calefacción controlada. Véase la sección Condiciones ambientales en la página 310 acerca de los
límites específicos.
Fusibles del cable de entrada
– Para instalación en los Estados Unidos, se deberá proporcionar la
protección de circuitos derivados, de conformidad con el Código Eléctrico Nacional de Estados Unidos
(NEC) y con cualquier normativa local aplicable. Para cumplir este requisito, utilice los fusibles con la
clasificación UL indicados en la sección
Tamaño del cable de potencia y fusibles
en la página
305
.
Para instalación en Canadá, se deberá proporcionar la protección de circuitos derivados, de
conformidad con el Código Eléctrico de Canadá y con cualquier normativa provincial aplicable. Para
cumplir este requisito, utilice los fusibles con la clasificación UL indicados en la sección Tamaño del
cable de potencia y fusibles en la página 305.
Selección del cable de alimentación
– Véase la sección
Selección de los cables de potencia
en la
página
34
.
Conexiones del cable de alimentación – Para consultar el diagrama de conexiones y los pares de
apriete, véase la sección Conexión de los cables de potencia en la página 40.
Protección contra sobrecarga – El convertidor de frecuencia ofrece protección contra la sobrecarga,
de conformidad con el Código Nacional Eléctrico de EE.UU.
Frenado
– El AVS350 dispone de un chopper interno de frenado. Cuando se aplican con resistencias de
frenado de tamaño adecuado, los choppers de frenado permiten al convertidor disipar la energía
regenerativa (asociada normalmente a la deceleración rápida de un motor). La selección de la resistencia de
frenado se comenta en la sección
Conexión de la resistencia de frenado
en la página
309
.
IEC/EN 61800-3 (2004) Definiciones
EMC significa Compatibilidad Electromagnética. Se trata de la capacidad del equipo eléctrico/
electrónico de funcionar sin problemas en un entorno electromagnético. A su vez, estos equipos no
deben interferir con otros productos o sistemas situados a su alrededor.
Primer entorno incluye establecimientos conectados a una red de baja tensión que alimenta a edificios
empleados con fines domésticos.
El segundo entorno incluye establecimientos conectados a una red que no alimenta directamente
instalaciones domésticas.
Convertidor de categoría C2: convertidor con tensión nominal inferior a 1.000 V y destinado a ser
instalado y puesto a punto únicamente por un profesional cuando se utiliza en el primer entorno.
Nota: Un profesional es una persona u organización con los conocimientos técnicos necesarios para
instalar y/o poner a punto sistemas de accionamiento de potencia; lo que incluye los aspectos relativos
a la compatibilidad electromagnética.
La categoría C2 tiene los mismos límites de emisión que la anterior clase de distribución restringida de
primer entorno. La norma EMC IEC/EN61800-3 ya no restringe la distribución del convertidor pero
define el uso, la instalación y la puesta a punto.
Convertidor de categoría C3: convertidor con tensión nominal inferior a 1.000 V, destinado a ser
utilizado en el segundo entorno y no en el primero.
La categoría C3 tiene los mismos límites de emisión que la anterior clase de distribución no restringida
de segundo entorno

Datos técnicos
313
Cumplimiento de la norma IEC/EN61800-3 (2004)
El rendimiento de inmunidad del convertidor cumple con las exigencias de IEC/EN61800-3, segundo
entorno (véase la página 312 para las definiciones del IEC/EN61800-3). El convertidor cumple los
límites de emisión de IEC/EN61800-3 con las siguientes disposiciones:
Primer entorno (convertidores de categoría C2)
1. El filtro interno EMC opcional se selecciona según la documentación ABB y se instala tal y como se
especifica en el manual del filtro EMC opcional.
2. Los cables de control y motor se han seleccionado según lo especificado en este manual.
3. El convertidor de frecuencia se instala según las instrucciones facilitadas en este manual.
4. máxima longitud del cable a motor de 30 m (100 pies) con una frecuencia de conmutación de 4kHz.
¡ADVERTENCIA! Este producto puede causar radiointerferencias en un entorno doméstico, en cuyo
caso puede ser necesario implantar medidas de mitigación suplementarias.
Segundo entorno (convertidores de categoría C3)
1. El filtro interno EMC está conectado (el tornillo de EMC está en su lugar) o se ha instalado el filtro
EMC opcional.
2. Los cables de control y motor se han seleccionado según lo especificado en este manual.
3. El convertidor de frecuencia se instala según las instrucciones facilitadas en este manual.
4. Con filtro EMC interno: longitud del cable a motor de 30 m (100 pies) con una frecuencia de
conmutación de 4kHz.
¡ADVERTENCIA! Un convertidor de categoría C3 no está destinado a ser usado en una red pública
de baja tensión que alimenta a instalaciones domésticas. Si el convertidor se utiliza en este tipo de
redes es probable que se produzcan interferencias de radiofrecuencia.
Nota: No se permite instalar un convertidor equipado con el filtro EMC E202 en redes IT (sin conexión
de neutro a tierra). La red de alimentación se conecta al potencial de tierra a través de los
condensadores del filtro EMC, lo que puede conllevar peligro o daños en el convertidor.
Nota: No se permite instalar un convertidor equipado con el filtro EMC en redes TN con conexión a
tierra por un vértice, puesto que se puede dañar el convertidor.
Protección del producto en EE.UU.
Este producto está protegido por una o más de las siguientes patentes estadounidenses:
4,920,306 5,301,085 5,463,302 5,521,483 5,532,568 5,589,754
5,612,604 5,654,624 5,799,805 5,940,286 5,942,874 5,952,613
6,094,364 6,147,887 6,175,256 6,184,740 6,195,274 6,229,356
6,252,436 6,265,724 6,305,464 6,313,599 6,316,896 6,335,607
6,370,049 6,396,236 6,448,735 6,498,452 6,552,510 6,597,148
6,741,059 6,774,758 6,844,794 6,856,502 6,859,374 6,922,883
6,940,253 6,934,169 6,956,352 6,958,923 6,967,453 6,972,976
6,977,449 6,984,958 6,985,371 6,992,908 6,999,329 7,023,160
7,034,510 7,036,223 7,045,987 7,057,908 7,059,390 7,067,997
7,082,374 7,084,604 7,098,623 7,102,325 D503,931 D510,319
D510,320 D511,137 D511,150 D512,026 D512,696 D521,466
Otras patentes pendientes.
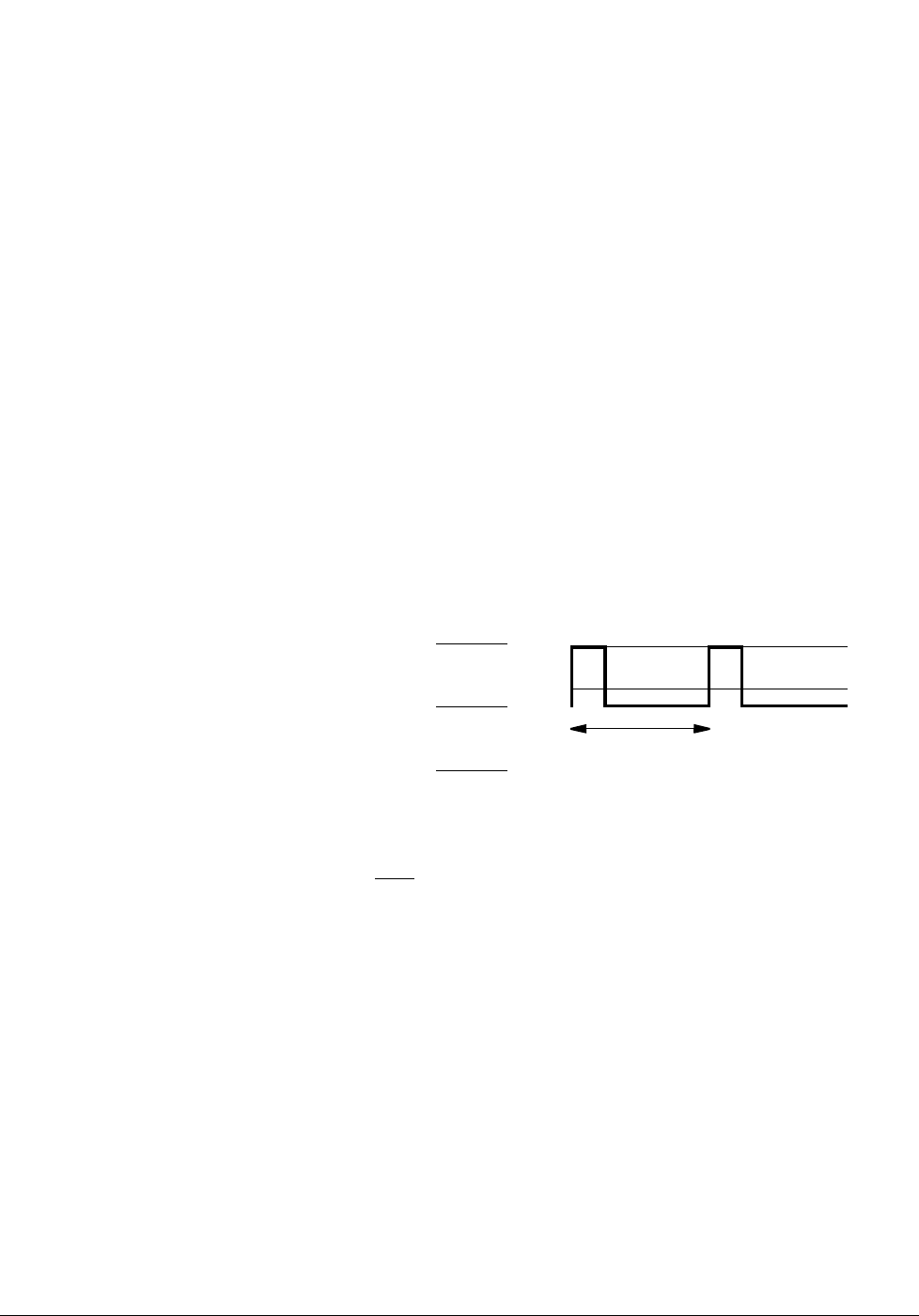
Datos técnicos
314
Resistencias de frenado
Los convertidores ACS350 disponen de un chopper interno de frenado como parte
de su equipamiento estándar. La resistencia de frenado se selecciona utilizando la
tabla y las ecuaciones presentadas en esta sección.
Selección de la resistencia de frenado
1. Determine la potencia de frenado máxima PRmáx necesaria para la aplicación.
PRmáx debe ser inferior a la PBRmáx facilitada en la tabla de la página 315 para el
tipo de convertidor utilizado.
2. Calcule la resistencia R con la Ecuación 1.
3. Calcule la energía ERpulse con la Ecuación 2.
4. Seleccione la resistencia de manera que se cumplan las condiciones siguientes:
• La potencia nominal de la resistencia debe ser superior o igual a PRmáx
• La resistencia R debe hallarse entre las Rmín y Rmáx facilitadas en la tabla
para el tipo de convertidor utilizado;
• La resistencia debe poder disipar una energía ERpulse durante el ciclo de
frenado T.
Ecuaciones para la selección de la resistencia:
donde
R= valor seleccionado de la resistencia de frenado (ohmios).
PRmáx = potencia máxima durante el ciclo de frenado (W).
PRave = potencia media durante el ciclo de frenado (W).
ERpulse = energía conducida en la resistencia durante un único pulso de frenado (J).
ton = duración del pulso de frenado (s).
T= duración del ciclo de frenado (s).
PRmáx ·
150000
PRmáx
PRave = ton
T
R= ton PRmáx
PRave
T
Ec. 1:
Ec. 3:
Para la conversión utilice 1 CV = 746 W.
45000
PRmáx
UN = 200…240 V:
UN = 380…415 V: R=
PRmáx · ERpulse = ton
Ec. 2:
615000
PRmáx
UN = 415…480 V: R =
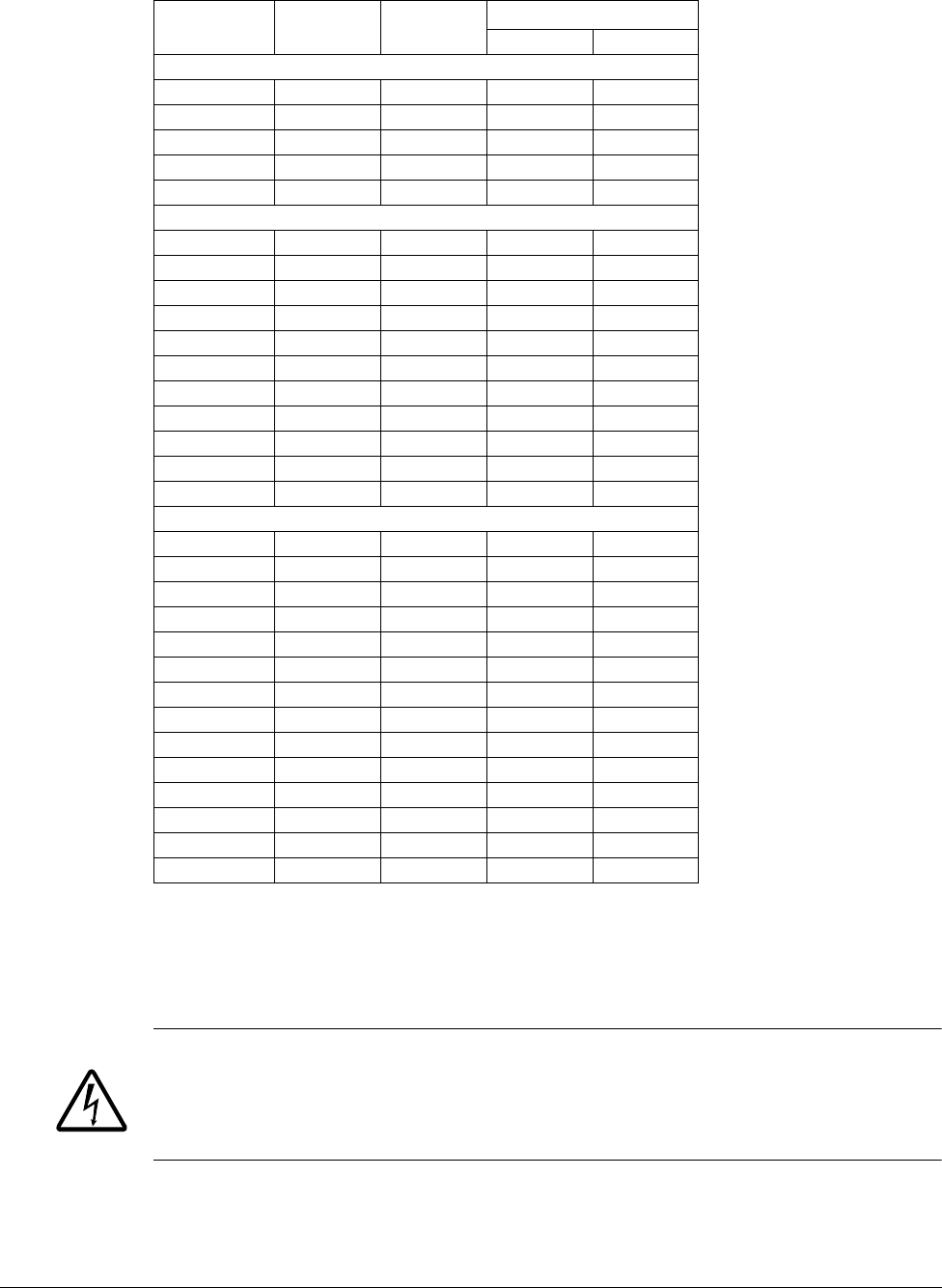
Datos técnicos
315
Rmín = Resistencia de frenado mínima permitida.
Rmáx = Resistencia de frenado máxima permitida.
PBRmáx = Capacidad máxima de frenado del convertidor; debe ser superior a la potencia de frenado
deseada.
¡ADVERTENCIA! No utilice nunca una resistencia de frenado con un valor por
debajo del valor mínimo especificado para el convertidor en concreto. El convertidor
y el chopper interno no pueden hacerse cargo de la sobreintensidad provocada por
el reducido valor de resistencia.
Tipo Rmin Rmáx PBRmáx
ACS350- ohmios ohmios kW CV
Tensión monofásica UN = 200 … 240 V (200, 208, 220, 230, 240 V)
01x-02A4-2 70 390 0,37 0,5
01x-04A7-2 40 200 0,75 1
01x-06A7-2 40 130 1,1 1,5
01x-07A5-2 30 100 1,5 2
01x-09A8-2 30 70 2,2 3
Tensión trifásica UN = 200 ... 240 V (200, 208, 220, 230, 240 V)
03x-02A4-2 70 390 0,37 0,5
03x-03A5-2 70 260 0,55 0,75
03x-04A7-2 40 200 0,75 1
03x-06A7-2 40 130 1,1 1,5
03x-07A5-2 30 100 1,5 2
03x-09A8-2 30 70 2,2 3
03x-13A3-2 30 50 3,0 3
03x-17A6-2 30 40 4,0 5
03x-24A4- 2 18 25 5,5 7,5
03x-31A0-2 7 19 7,5 10
03x-46A2-2 7 13 11,0 15
Tensión trifásica UN = 380 … 480 V (380, 400, 415, 440, 460, 480 V)
03x-01A2-4 200 1180 0,37 0,5
03x-01A9-4 175 800 0,55 0,75
03x-02A4-4 165 590 0,75 1
03x-03A3-4 150 400 1,1 1,5
03x-04A1-4 130 300 1,5 2
03x-05A6-4 100 200 2,2 3
03x-07A3-4 70 150 3,0 3
03x-08A8-4 70 110 4,0 5
03x-12A5-4 40 80 5,5 7,5
03x-15A6-4 40 60 7,5 10
03x-23A1-4 30 40 11 15
03x-31A0-4 16 29 15 20
03x-38A0-4 13 23 18,5 25
03x-44A0-4 13 19 22,0 30
00353783.xls G
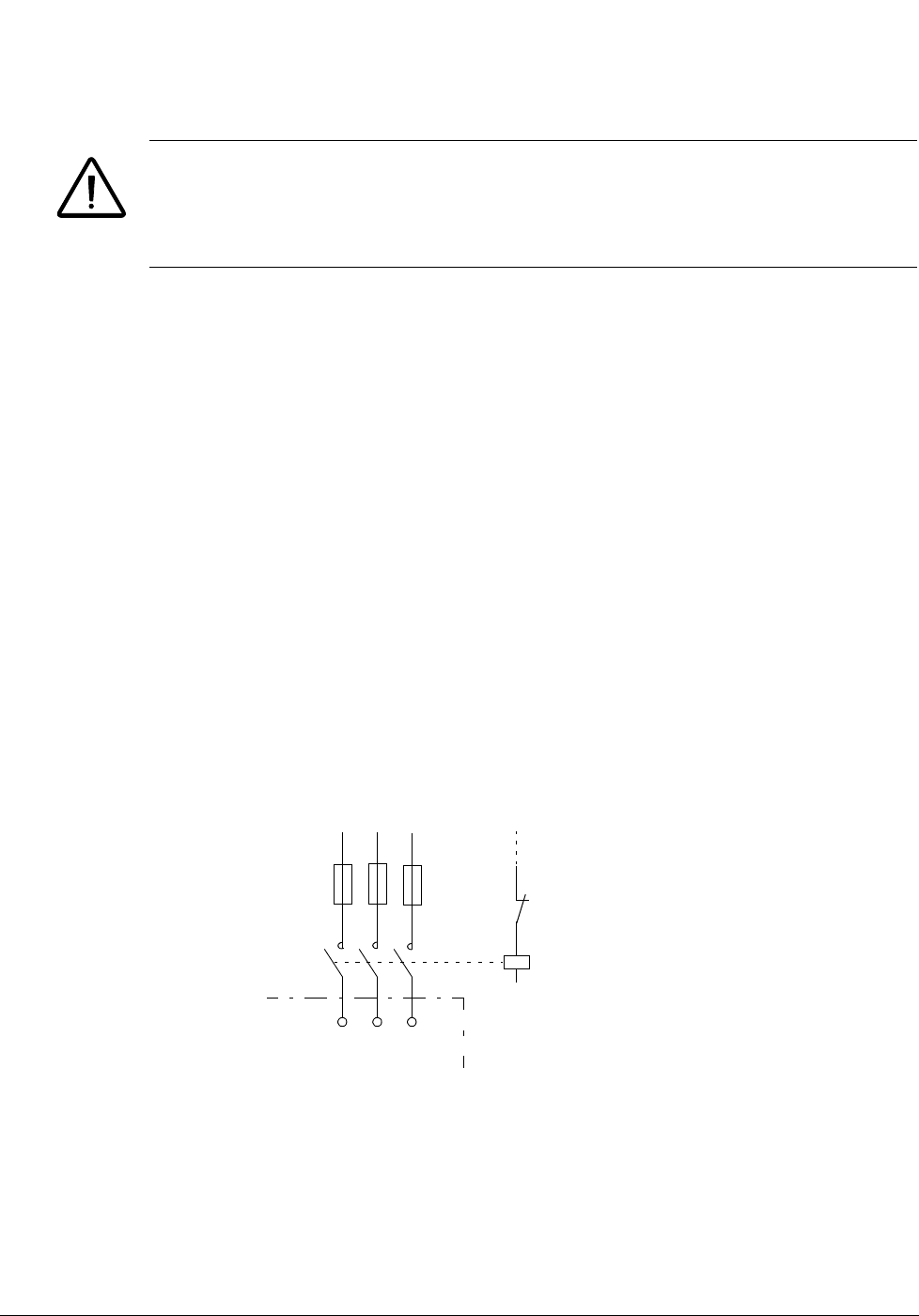
Datos técnicos
316
Instalación y conexión eléctrica de las resistencias
Todas las resistencias deben instalarse en un lugar en el que puedan enfriarse.
¡ADVERTENCIA! Los materiales cercanos a la resistencia de frenado deben ser
ignífugos. La temperatura de la superficie de la resistencia es elevada. El aire que
emana de la resistencia está a cientos de grados Celsius. Proteja la resistencia
contra posibles contactos.
Utilice un cable apantallado con el mismo tamaño de conductor que en el cableado
de alimentación del convertidor (véase la sección Cables de potencia: tamaño de
los terminales, diámetros máximos de los cables y pares de apriete en la página
307).Para la protección frente a cortocircuitos de la resistencia de frenado, véase
Conexión de la resistencia de frenado en la página 309. De forma alternativa, puede
emplearse un cable apantallado de dos conductores con la misma sección
transversal. La longitud máxima del cable o cables de resistencia es de 5 m
(16 pies). Por lo que respecta a las conexiones, véase el diagrama de conexión de
potencia del convertidor de frecuencia en la página 40.
Protección de circuitos obligatoria
La configuración siguiente es esencial para la seguridad, puesto que interrumpe la
alimentación principal en situaciones de fallo que implican cortocircuitos del
chopper:
• Equipe el convertidor con un contactor principal.
• Conecte el contactor de modo que se abra si se abre el interruptor térmico de la
resistencia (una resistencia sobrecalentada abre el contactor).
A continuación se presenta un diagrama de conexiones eléctricas sencillo como
ejemplo.
Configuración de parámetros
Para activar el frenado por resistencia, desconecte el control de sobretensión del
convertidor ajustando el parámetro 2005 a 0 (DESACTIVAR).
ACS350
U1 V1 W1
L1 L2 L3
1
2
3
4
5
6
K1
QInterruptor térmico de la
resistencia
Fusibles

Dimensiones
317
Dimensiones
A continuación se muestran los dibujos de dimensiones del ACS350. Las
dimensiones se indican en milímetros y [pulgadas].

Dimensiones
318
Bastidores R0 y R1, IP20 (instalación en armario) / UL abierto
El R1 y el R0 son idénticos, excepto por el ventilador en la parte superior del R1.
3AFE68488079-B Bastidores R0 y R1, IP20 (instalación en armario) / UL abierto
VAREMC
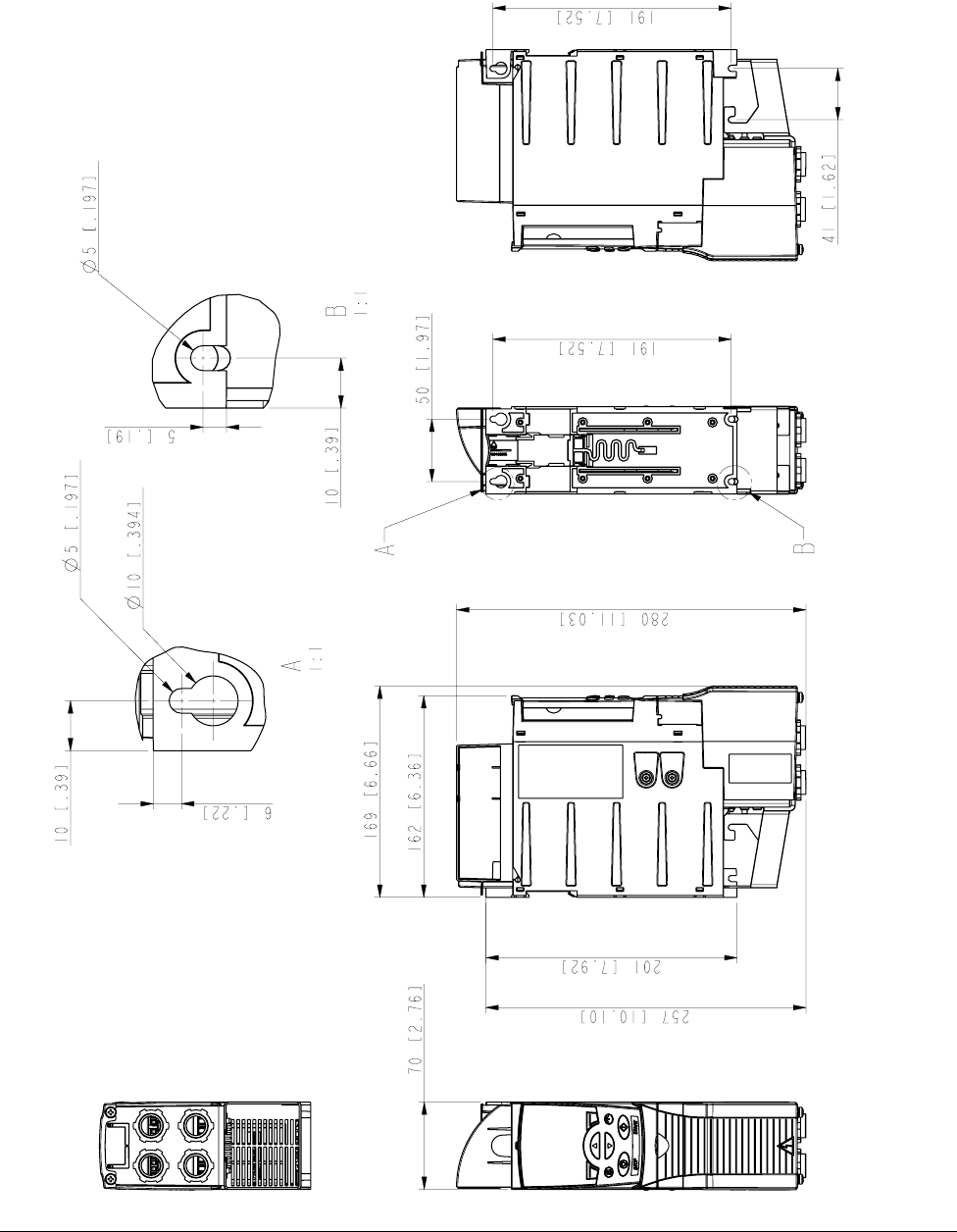
Dimensiones
319
Bastidores R0 y R1, IP20 / NEMA 1
El R1 y el R0 son idénticos, excepto por el ventilador en la parte superior del R1.
3AFE68577977-A Bastidores R0 y R1, IP20 / NEMA 1
VAREMC
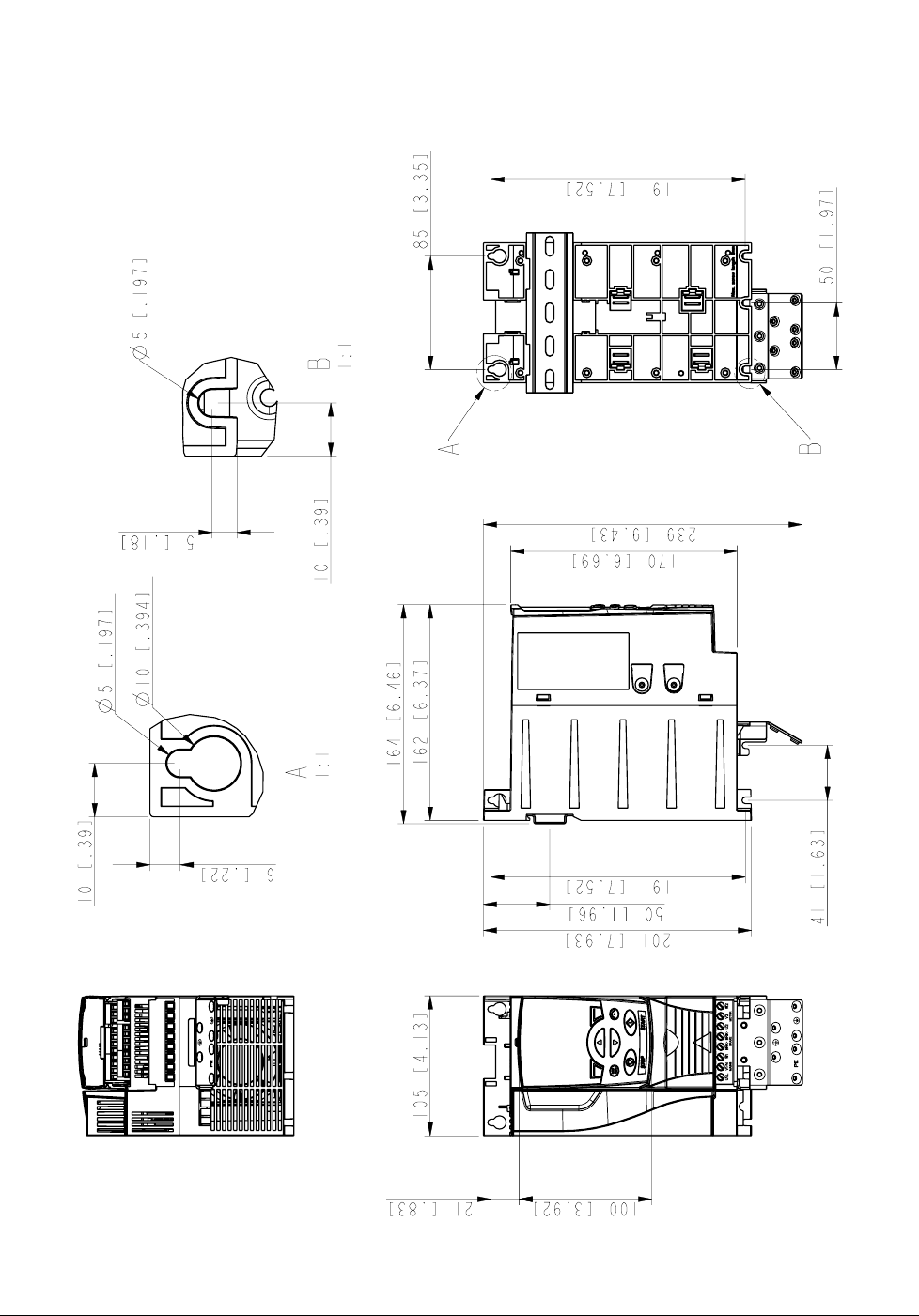
Dimensiones
320
Bastidores R2, IP20 (instalación en armario) / UL abierto
3AFE68585619-A Bastidores R2, IP20 (instalación en armario) / UL abierto
VAREMC
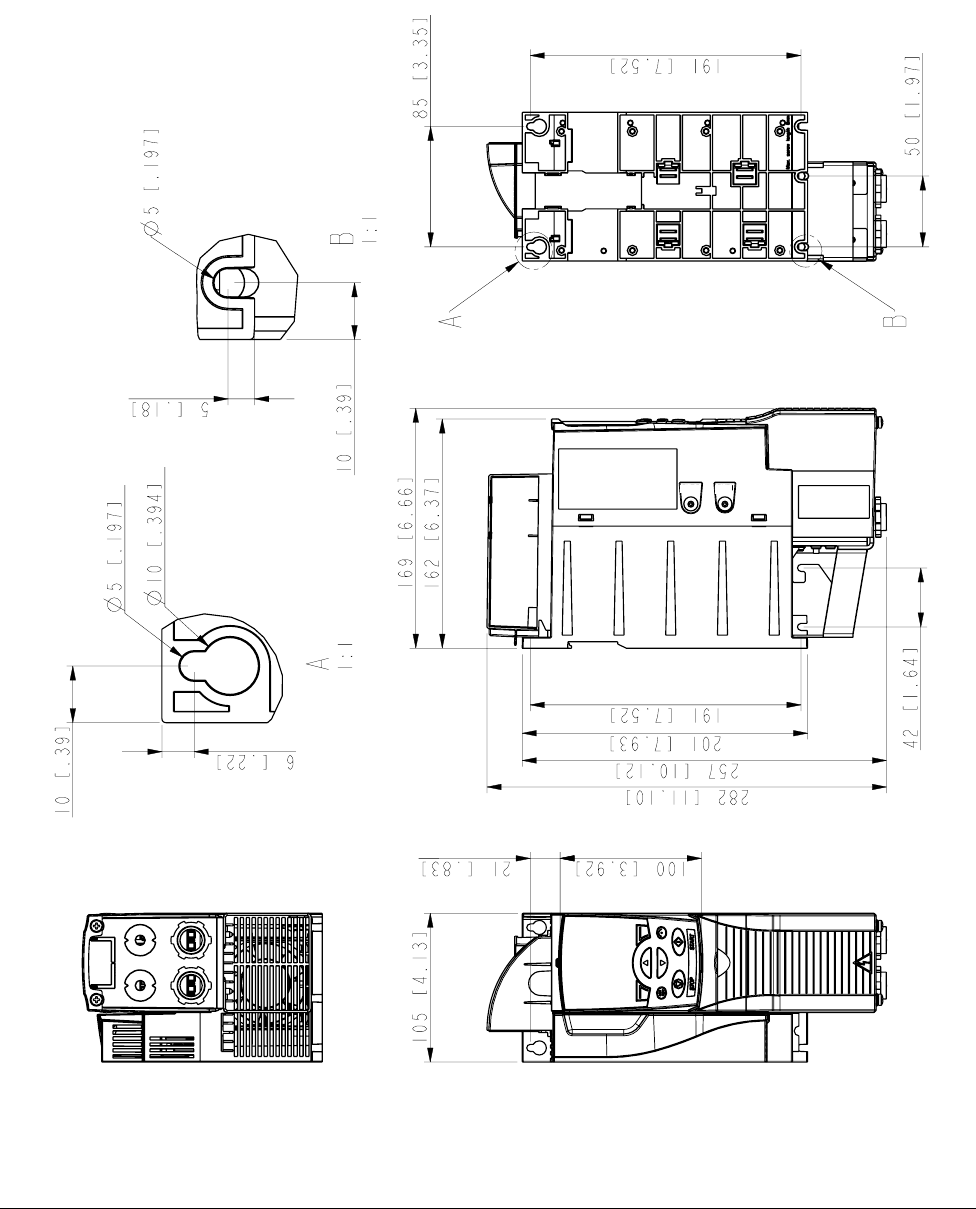
Dimensiones
321
Bastidores R2, IP20 / NEMA 1
3AFE68586658-A Bastidores R2, IP20 / NEMA 1
VAREMC
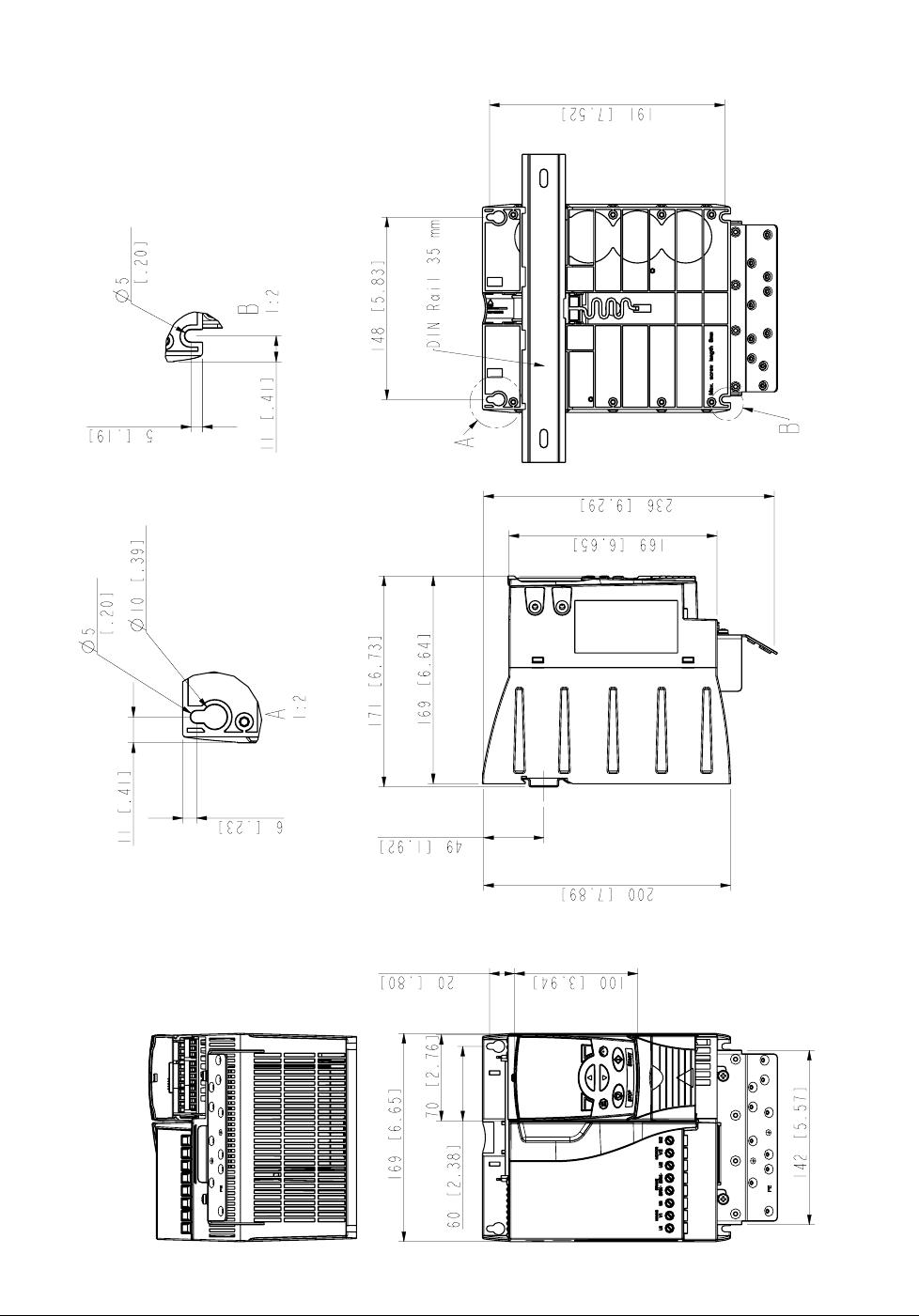
Dimensiones
322
Bastidores R3, IP20 (instalación en armario) / UL abierto
3AFE68487587-B Bastidores R3, IP20 (instalación en armario) / UL abierto
VAREMC
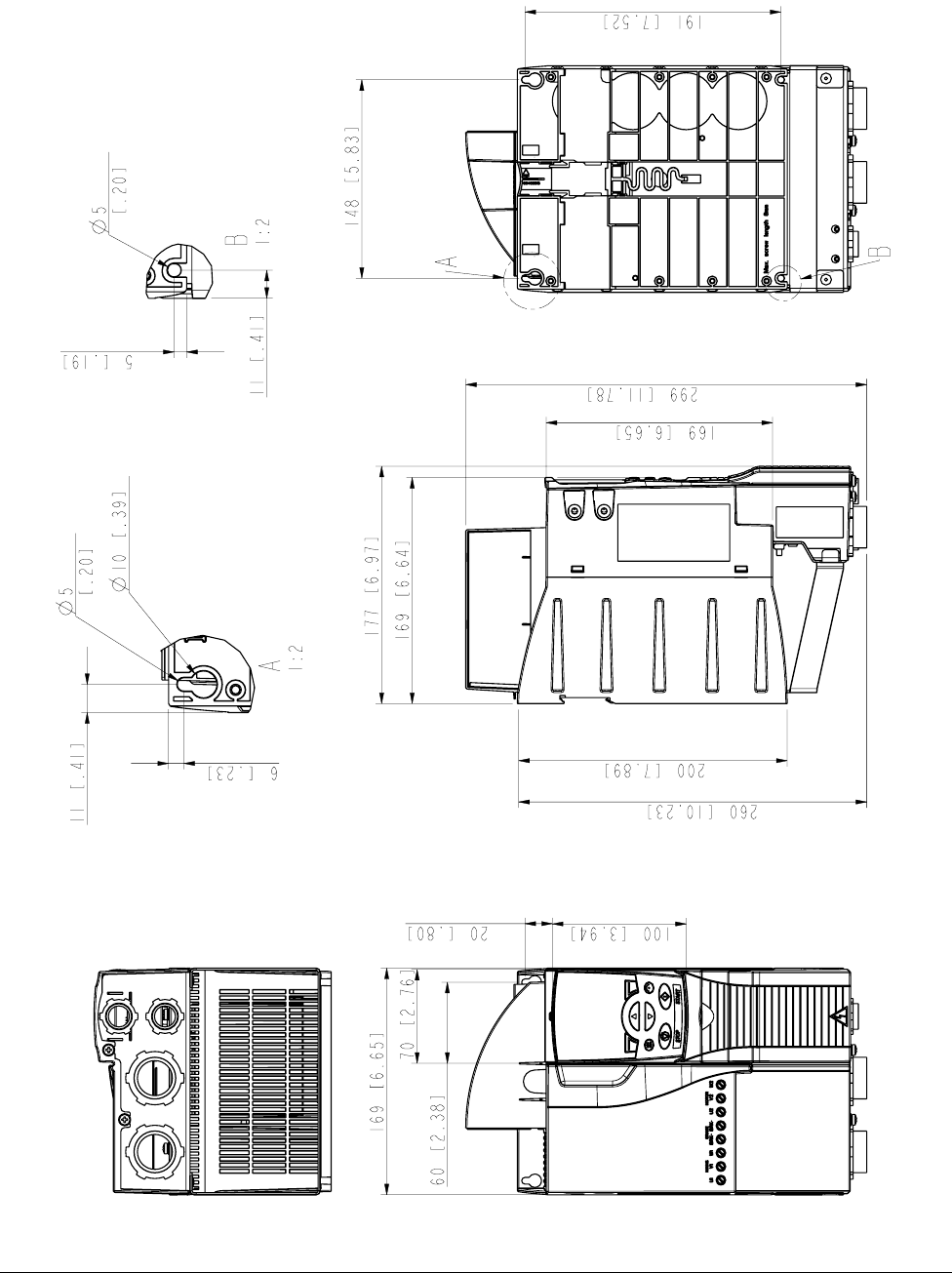
Dimensiones
323
Bastidores R3, IP20 / NEMA 1
3AFE68579872-B Bastidores R3 IP20 / NEMA 1
VAREMC
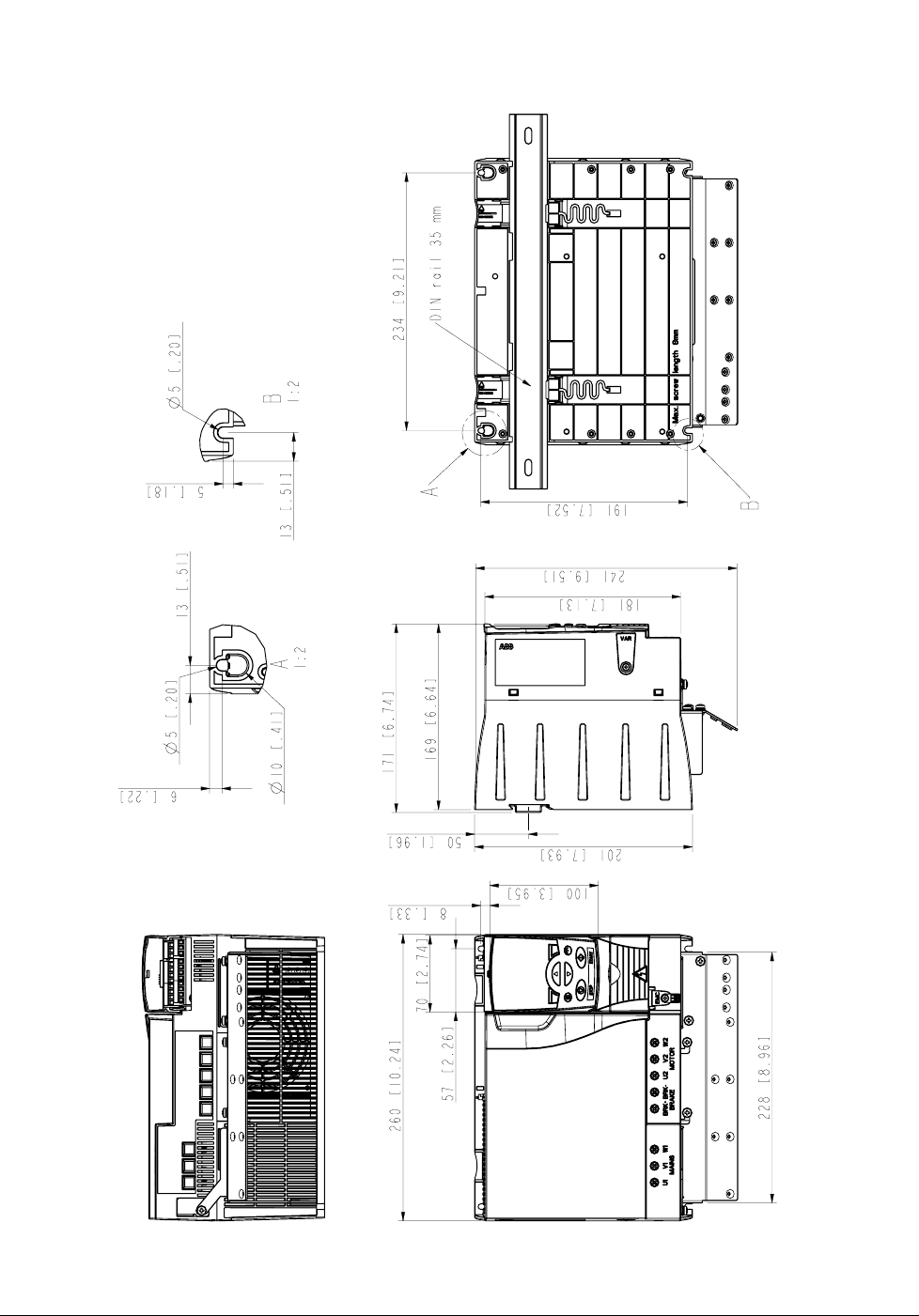
Dimensiones
324
Bastidores R4, IP20 (instalación en armario) / UL abierto
Bastidores R4 (instalación en armario) / UL abierto
3AFE68935644

3AFE68599458 Rev D / ES
EFECTIVO:30.09.2007
ASEA BROWN BOVERI S.A.
Polígono Industrial S.O.
08192 Sant Quirze del Vallès
Barcelona
ESPAÑA
Tel: 93 728 8700
Fax: 93 728 8743
Internet: www.abb.com/es
