Hardware Setup Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 8
Hardware Setup Information
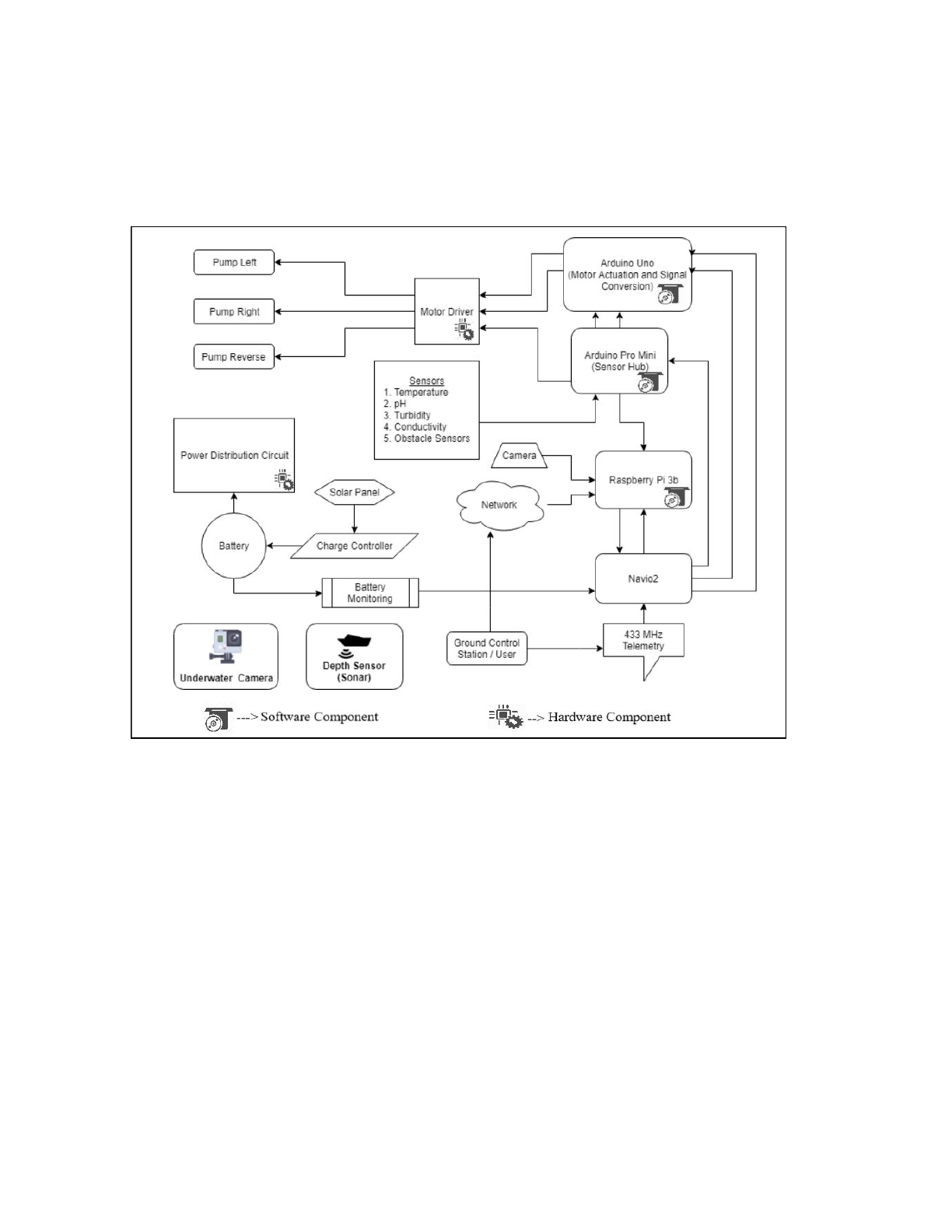
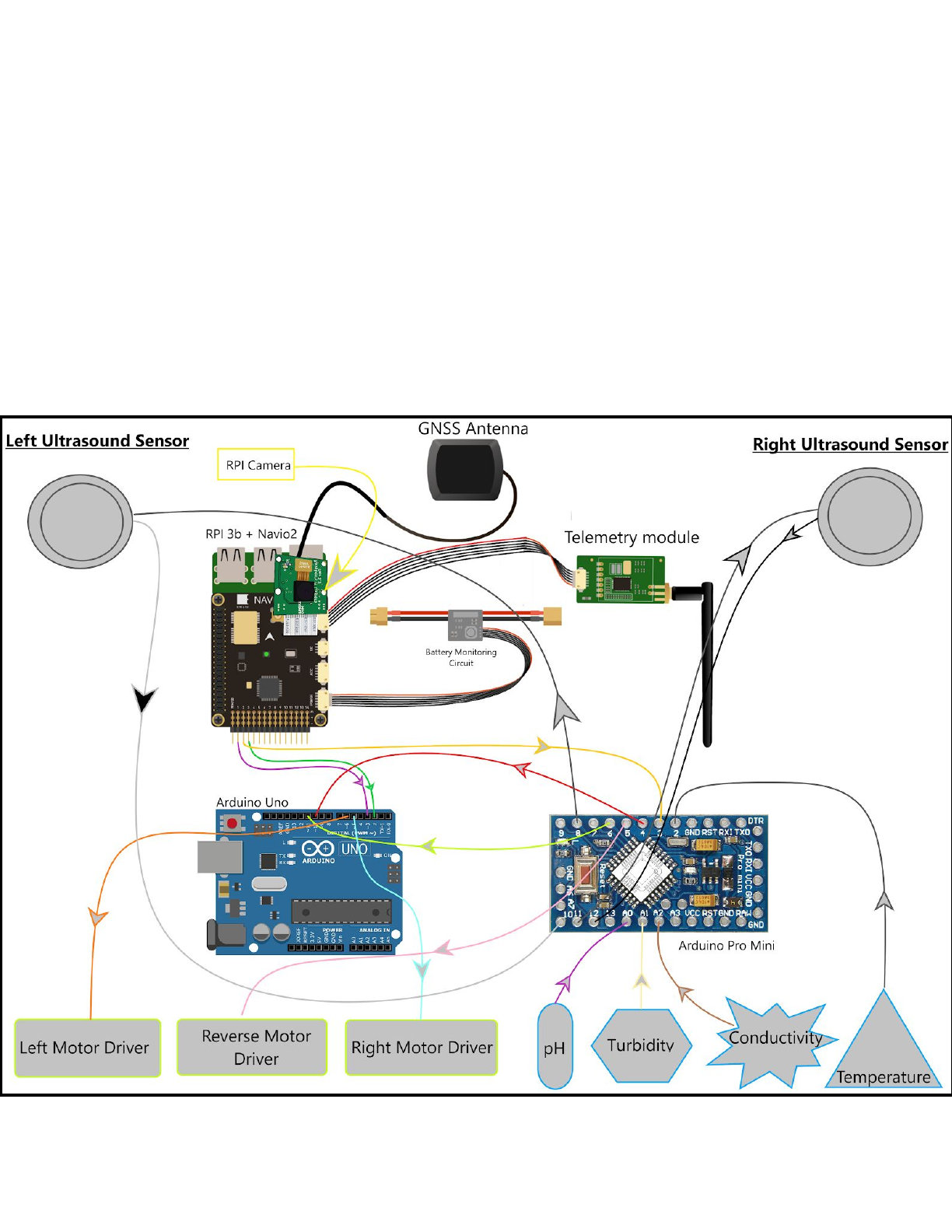
The system diagram of the Autonomous Water Rover is as follows :
Figure 1 System Diagram
The various components in the above figure are as follows :-
●Power System: The power generation, storage and distribution includes the following
main components :
○Battery : LiPo will be used to ensure operation of rover for over an hour on one
charging
○Solar Panel : A 50W Solar Panel is used to charge the 12 volt battery and also
increase the operation period

○Charge Controller : A 20A 12V waterproof solar panel charge controller will be
used
○Voltage regulation : Voltage regulators will be used to always keep the supply
voltage for the pumps constant i.e. 12V to obtain similar performance even at
different battery levels. Also 5V and 3.3V voltage regulators will be used for
obtaining required supply voltage for the Rpi controller board, Navio2, telemetry
and all installed sensors on the rover
●Raspberry Pi 3b : It is a single board computer which will be used for complex path
planning through ardupilot, hosting the web interface, providing live video streaming and
communicating with sensor nodes
●Navio2 : It is an autopilot Hat for Raspberry Pi 3b which simplifies autonomous
navigation by bringing multiple sensors on a single board and by seamless integration
with Raspberry Pi. It also has analog to digital converters along with pulse generators to
produce pulses which can control servo motors. The following sensors will be used by
the Autonomous Water Surveillance Rover :
○GNSS Receiver : Tracks GPS, GLONASS, Beidou, Galileo and SBAS satellites
for accurate positioning
○Dual IMU : Accelerometers, gyroscope and magnetometer readings will be used
for orientation and motion sensing
○High resolution barometer : Senses altitude with 10 cm resolution and can be used
to relay accurate location information along with GPS
○Communication Ports : UART interface will be used to relay information through
telemetry radio
●Ground Control Station : It could be any windows based personal computer having
Mission Planner installed
●Local Area Network : A LAN is created to access the website hosted on the raspberry
pi. It is not needed for operation in autonomous mode
●Telemetry Radio : The mRo SiK Telemetry Radio V2 operates at 433Mhz and provides
300m range by default. This radio will be the link to relay localization details and
program missions for the rover remotely
●Underwater Camera : A GoPro hero is used to gather images of the underwater bed
upto three meters. As penetration of light at this depth is sufficient, an illuminating light
source will not be necessary. The light source can be fitted to the base of the rover for
illumination if surveillance is to be done in the absence of sunlight
●Camera : A raspberry pi camera version 2 is used to provide live first person view of the
rover to operator
●Sensor Node : Data acquisition from the environment will carried out and the
information will be relayed to the Rpi. An arduino pro mini is used because of its small
form factor for interfacing the sensors and communicating with raspberry pi
●Distance Sensors : Two waterproof ultrasound (40 KHz) distance sensors i.e.
JSN-SR04T are used to detect obstacles on the surface of the water and in the forward
path of the rover
●Water Quality Monitoring Sensors : To measure the quality of water following
parameters are being measured :-
○pH : DFRobot Gravity : analog pH sensor is being used to measure the pH of
water. The pH measurements have a resolution of ± 0.1pH at 25 ℃
○Temperature : DS18B20 waterproof temperature sensor probe is used to get
±0.5°C accuracy in the range -10°C to +85°C. It uses 1-Wire interface i.e.
requires only one digital pin for communication
○Conductivity : A generic rain sensitive sensor module is used in analog mode to
get the conductivity readings. The accuracy of this module for measuring isn’t
high but can be used for thresholding purposes
○Turbidity : DFRobot Gravity : analog turbidity sensor is used to obtain the
turbidity readings which is later converted to NTU units.

●Fish Finder :ZEEPIN Fish Finder is a wireless & rechargeable sonar sensor along with a
smart portable LCD display which is used to get depth data, temperature data along with
the add on of identifying fishing areas
●Signal Converter : The output signal from the Navio 2 is in the form of RC pulses of the
duration 1ms to 2ms. The external interrupt pins of an arduino uno is used to measure the
pulse widths of these pulses and accordingly generate a PWM signal which drives the
motor driver circuit
●Motor Driver Circuit : The arduino uno will send control signals to the motor driver
which in turn will control the actuator i.e. pumps. The pumps will be operated at variable
speed according to navigation control using PWM to allow more precise control over the
rover
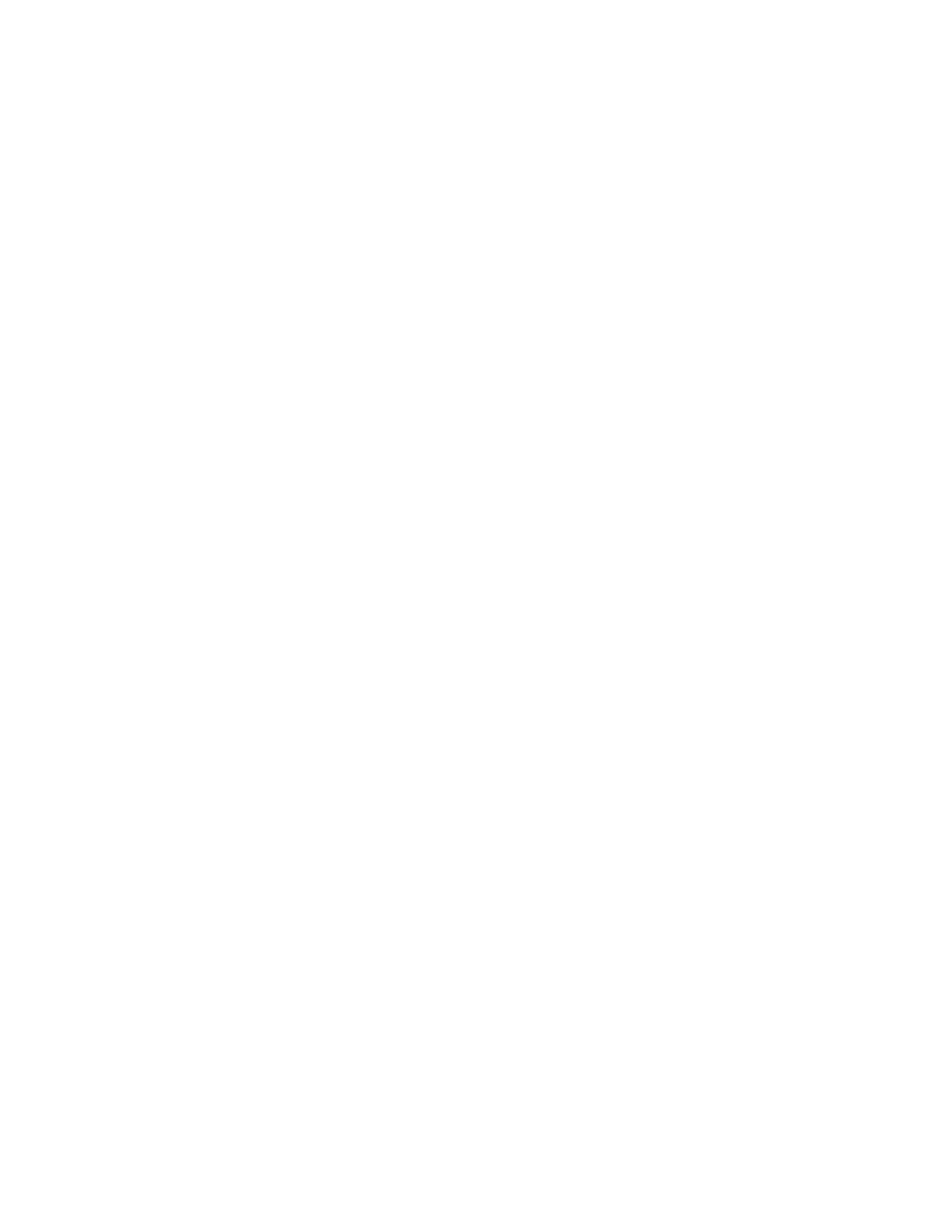
Hardware Design
Hardware design has three main components. They involve the power distribution circuit, the
motor driver circuit and other peripheral device connections. A circuit as shown below was
designed to reduce wire connections and also to simplify sensor interfacing. It includes the
power distribution system, the motor driver circuits and sensor input slots for the Arduino Pro
Mini.
Figure 2 Circuit Diagram
Step 1
● The foremost thing to figure out is the motor control on the right hand side of the
diagram. Since we are using bilge pumps, only unidirectional control is required
eliminating the need for a H-bridge configuration.
● The ULN 2803 has Darlington pair transistors which are being used to provide the Gate
of the n-channel Mosfets with the corresponding voltages. A point to remember is that
the ULN 2803 will complement the output, thus a 0v i/p is to be given for a high output
and vice versa.
● The Gate terminal is to be grounded with a high value resistor (10k ohms) since the
Mosfet is a voltage controlled device.
● The Resistor strip A103 helps to keep the output of the ULN 2803 at a stable output.
Thus, by giving complementary i/ps to the ULN 2803, we can control the pump motors.
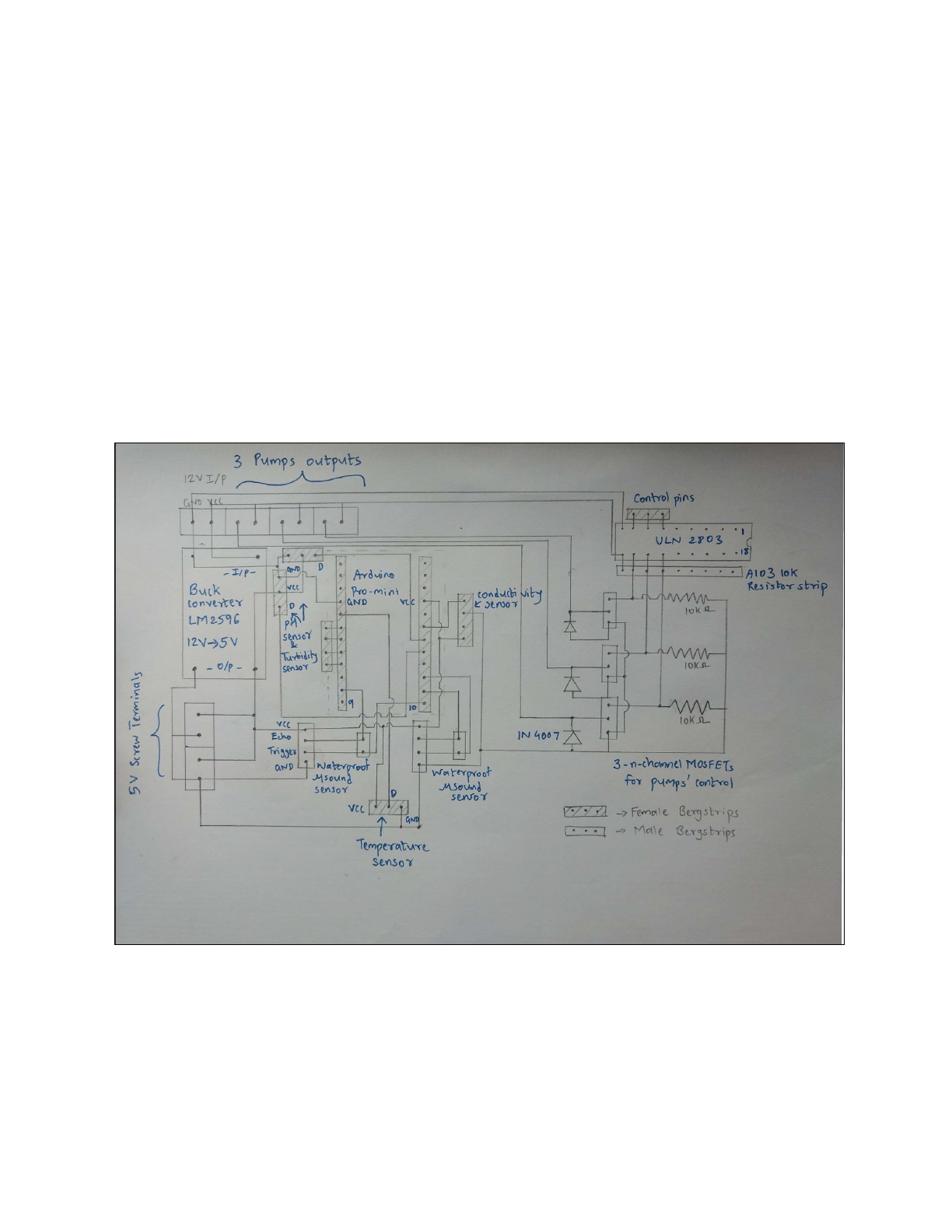
Motor Driver Circuit
Fig 3 MOSFET schematic
Fig 3 shows the basic controlling of a motor using a MOSFET.
The total cost for the board is Rs. 561/8.25$
Step 2
Power Distribution Circuit
The 12V Lipo battery is connected to a General Purpose Board on which different circuits of the
system are soldered. The voltage is stepped down for powering the sensors and the
microcontroller board, using a LM2596 buck converter which step downs the voltage from 12V
to 5V. The circuit is soldered on a General Purpose Board as shown in figure 2
Step 3
●The peripheral devices include the RPI 3b, Navio 2, Arduino Pro Mini, Arduino Uno and
sensors. After Navio2 is mounted on RPI we have to proceed and attach other peripherals
and wires for communication and sensors. The connection diagram is as follows :-

● Arduino Pro-mini shield in figure 2 is made using female bergstrips and the data pins of
all the 4 sensors are connected to the corresponding pins as shown in above figure.
● The ultrasound sensors are also connected with their echo and trigger pins. All the
sensors and the Pro-mini are powered by the LM 2596 buck converter which gives a
3A/5V output.
